








































































































































































































































































































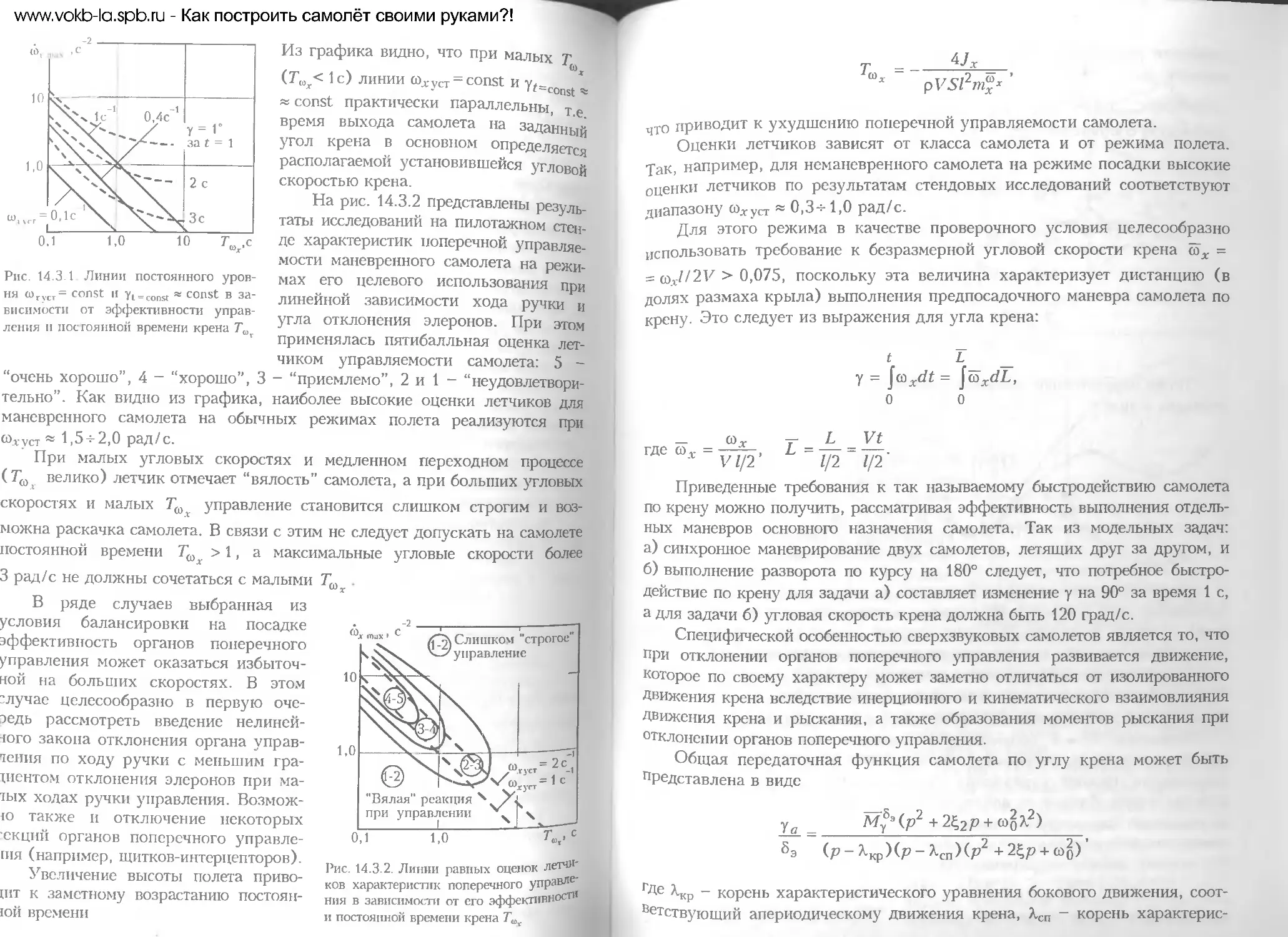









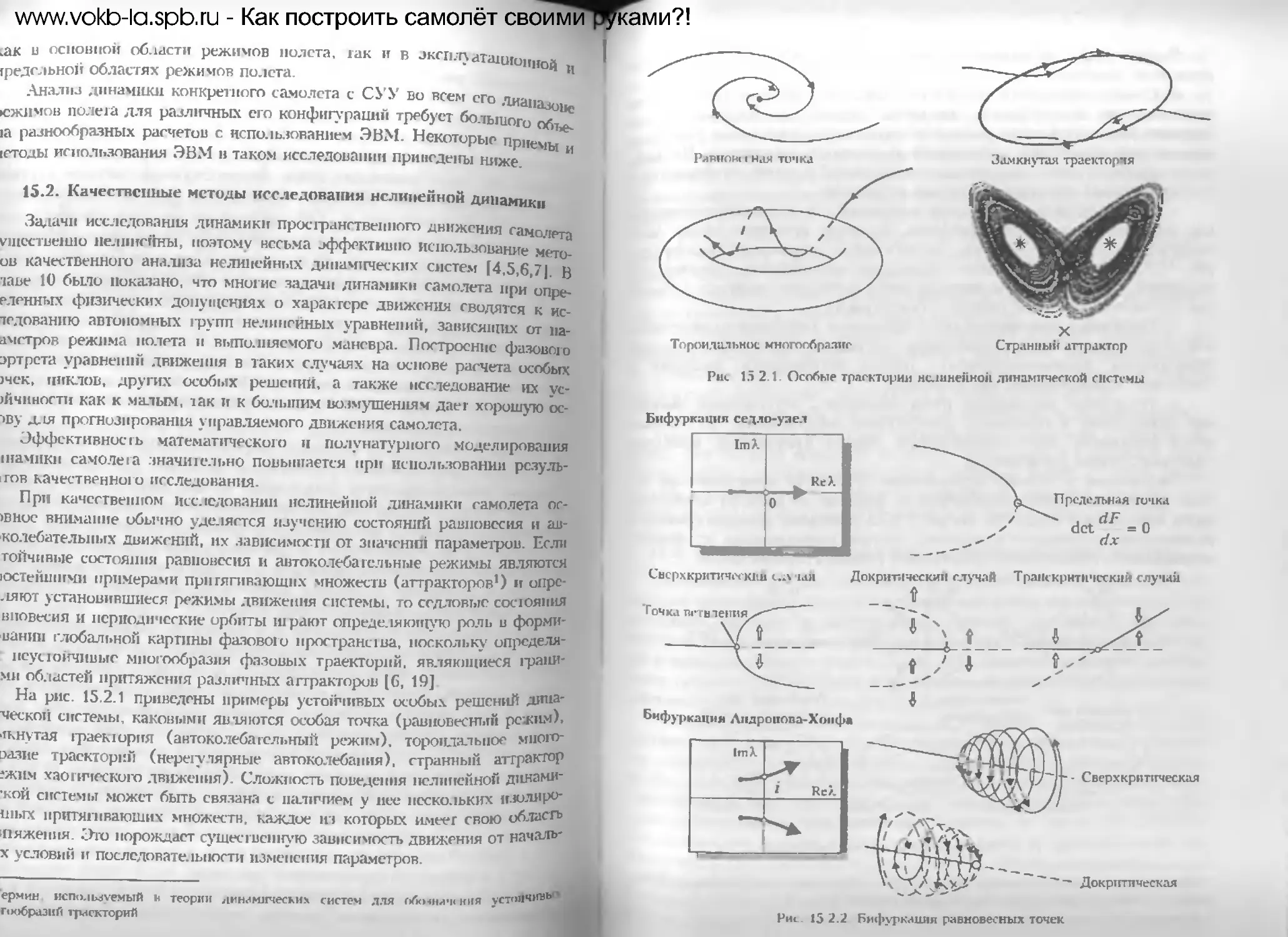






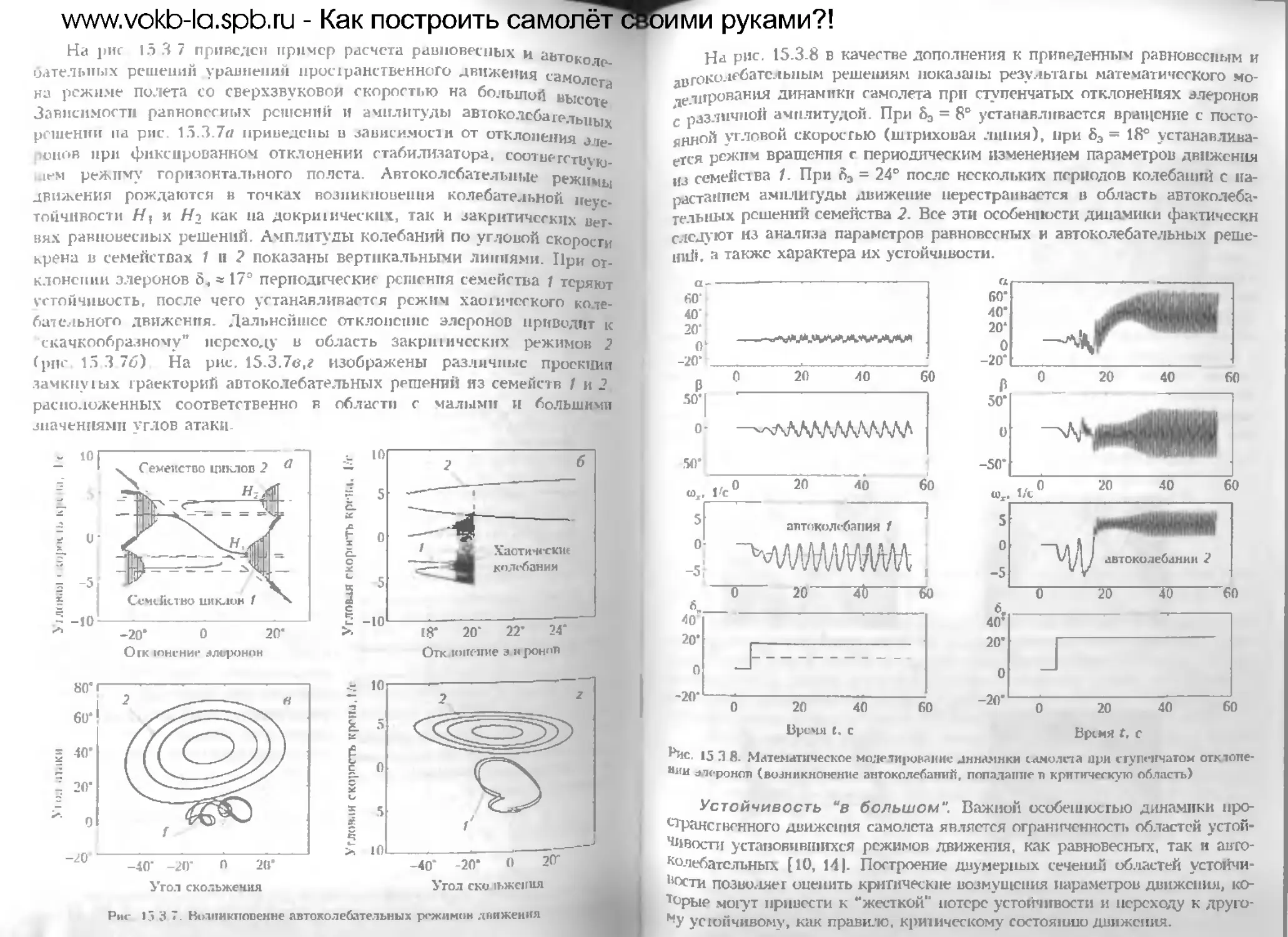









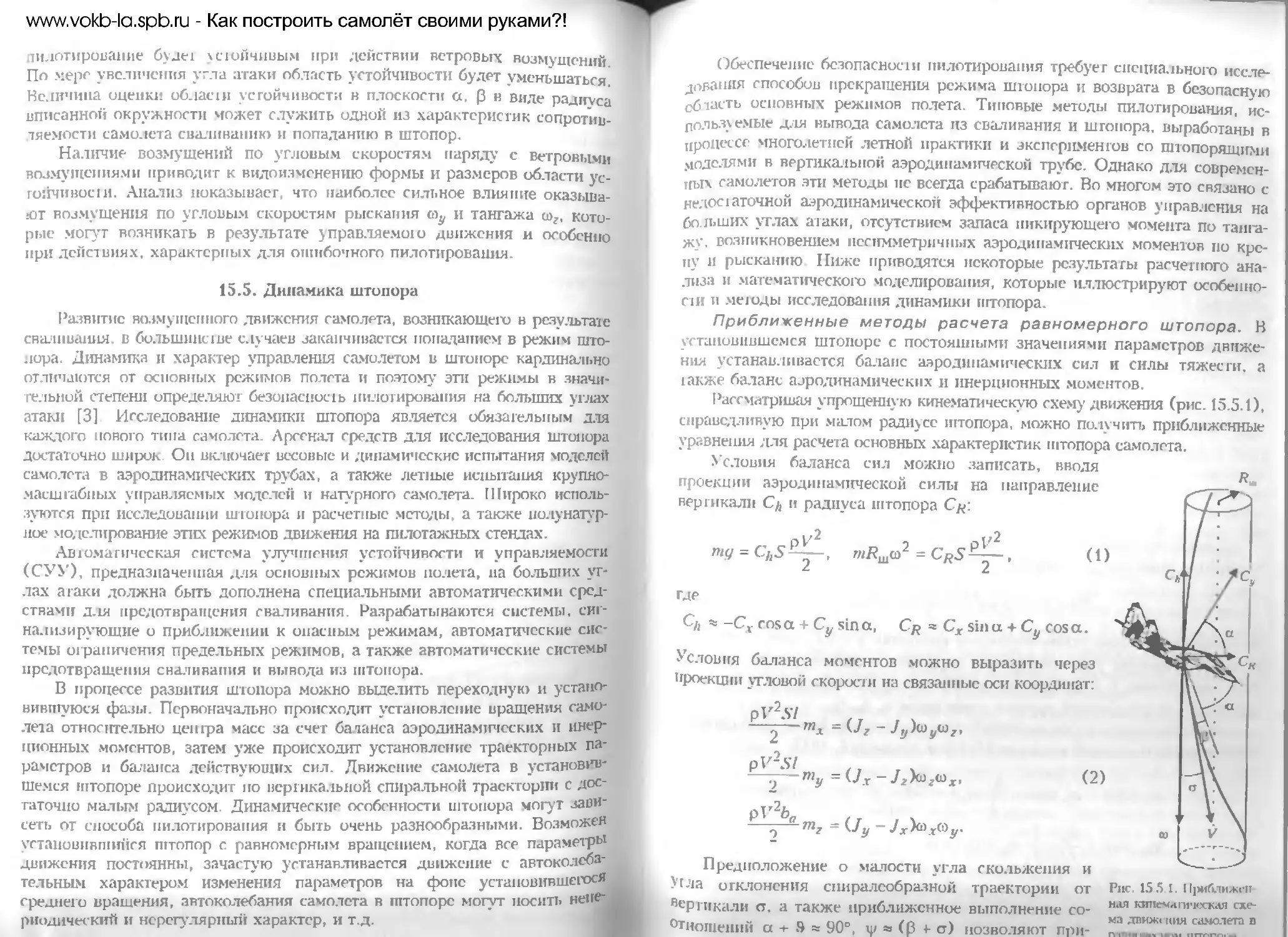






















































Автор: Бюшгенс Г.С.
Теги: авиация и космонавтика летательные аппараты ракетная техника космическая техника воздушный транспорт авиация и воздушные соединения воздушные линии и аэропорты авиатехника авиастроение
ISBN: 5-02-015111-4
Год: 1998




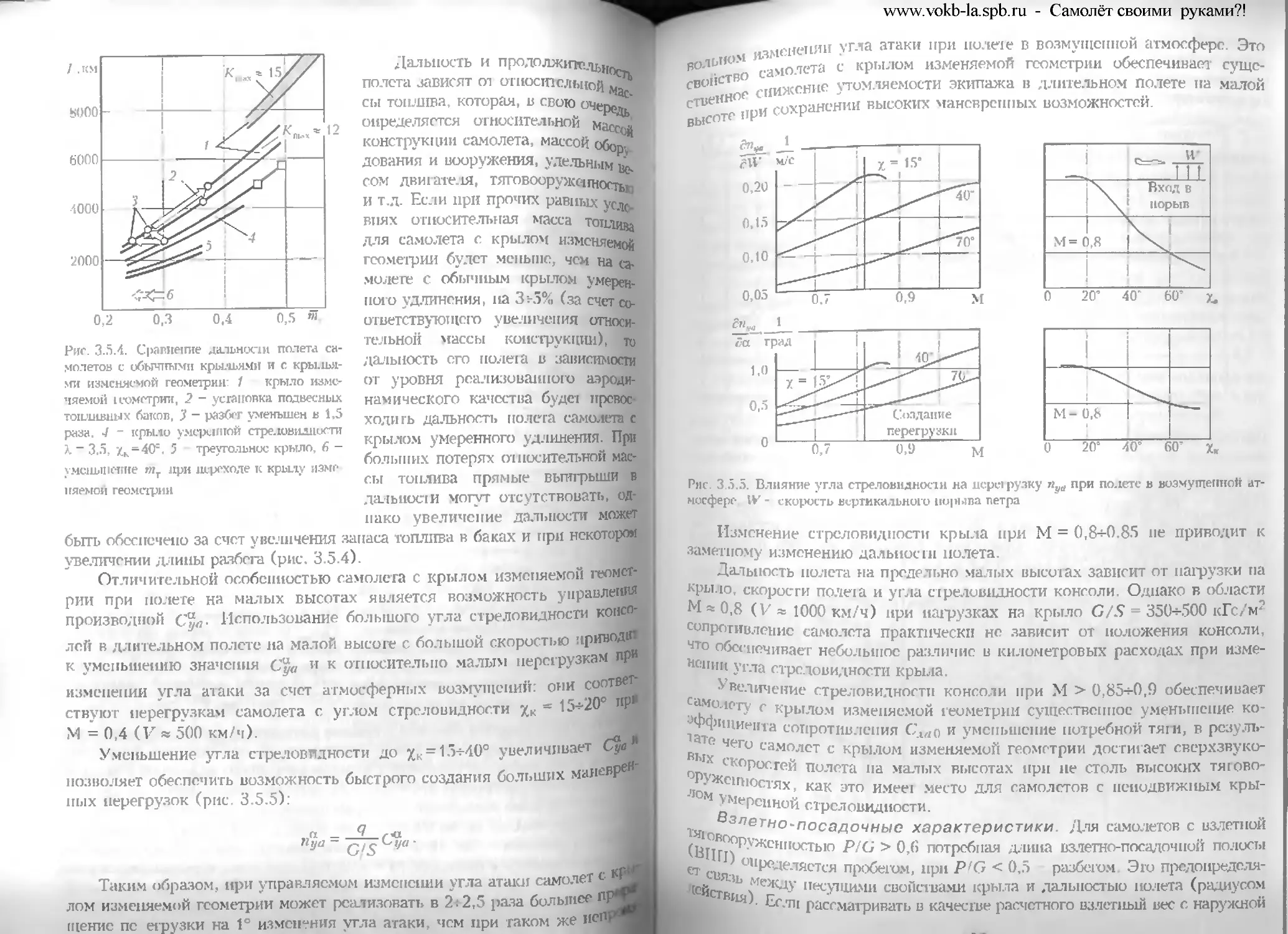
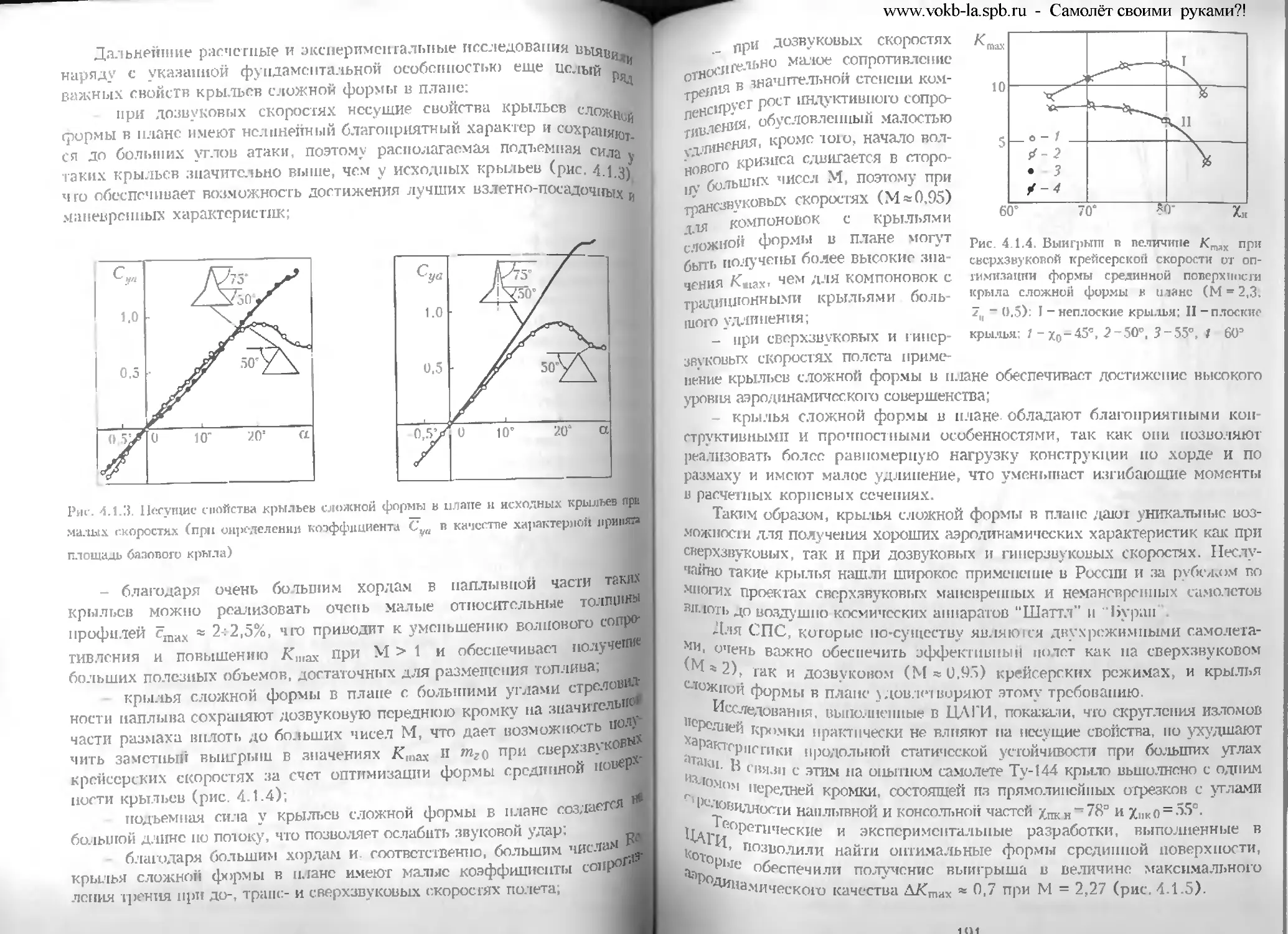
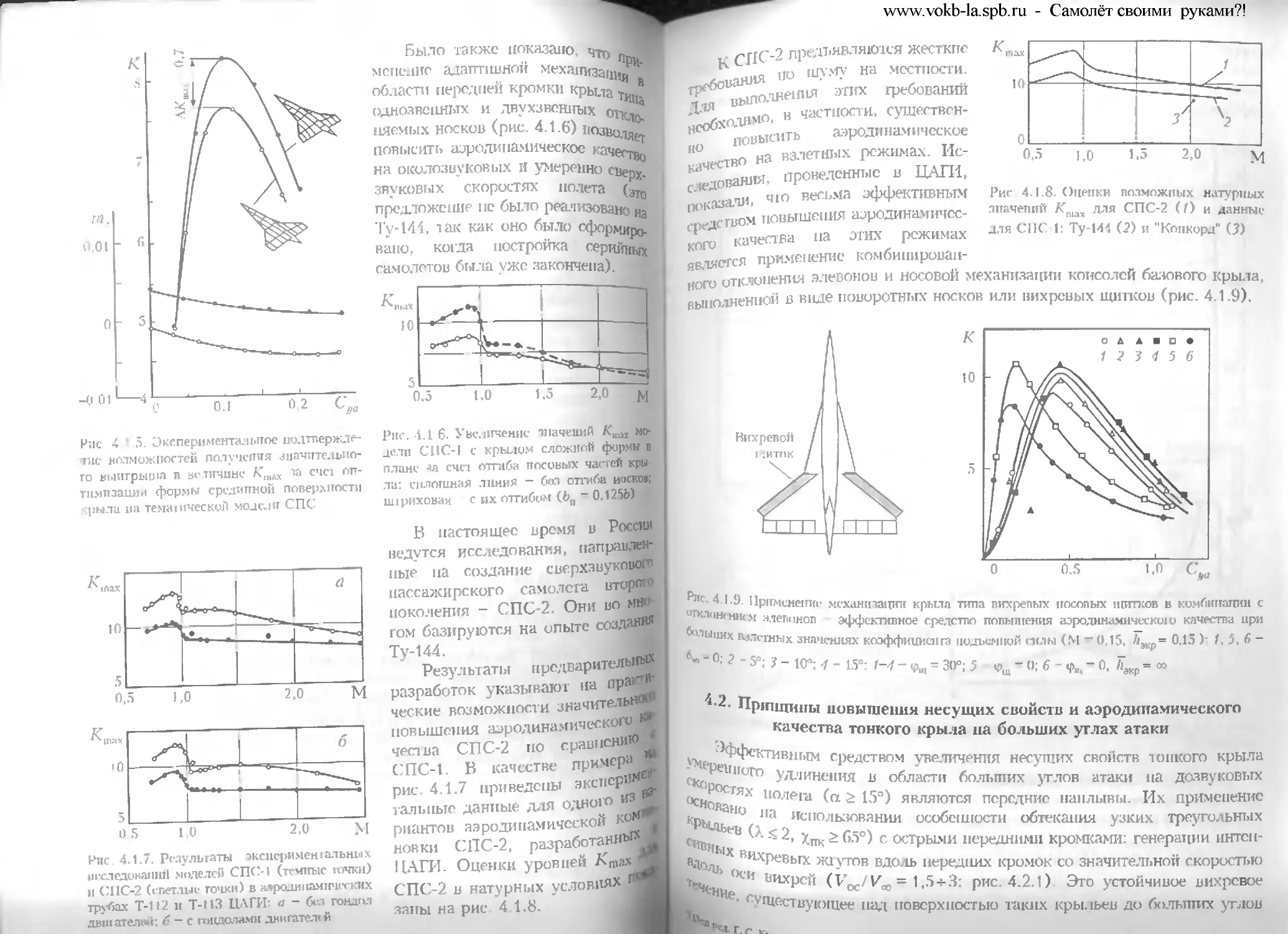
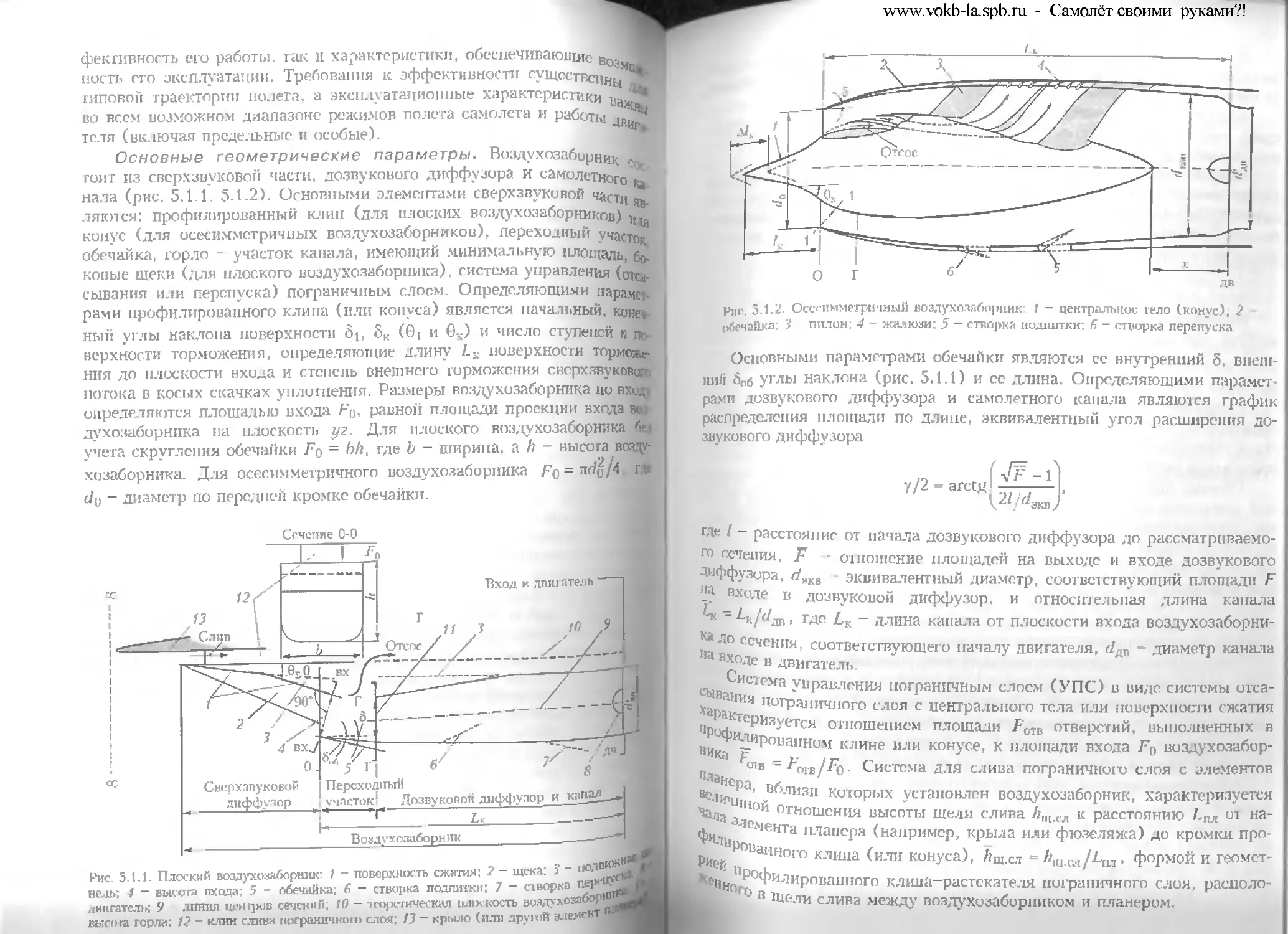
Аэродинамика,
устойчивость
и управляемость
сверхзвуковых
самолетов
Central Aerohydrodynamic Institute
named after Prof. N.E.Zhukovskv
•J
AERODYNAMICS,
STABILITY AND CONTROLLABILITY
OF SUPERSONIC AIRCRAFT
The publication is carried out under editorship
of G.S. Bushgens,
Academician of Russian Academy of Sciences
MOSCOW
NAUKA • FIZMATLIT
1998
www.vokb-la.spb.ru - Самолёт своими руками?!
Центральный аэрогидродииамический институт
имени проф. II.Е.Жуковского
АЭРОДИНАМИКА,
УСТОЙЧИВОСТЬ И УПРАВЛЯЕМОСТЬ
СВЕРХЗВУКОВЫХ САМОЛЕТОВ
Научный редактор и составитель
академик РАН
Г.С.Бюшгенс
МОСКВА
НАУКА • ФИЗМАТЛИТ
1998
Ь29 /
39 5
А99
Издание осуществлено при содействии
Китайской академии аэронавтики.
Руководите 1ь проекта В.Л-Суханов
Аэродинамика, устойчивость и управляемость сверхзвуковых самолетов ' Под
1. Г.С Бюп1пч1еа. М Наука. Физматлит, 1998 - 816 с. ISBN 5-02-015111-4
Книга написана ведущими специалистами НАГИ. Изложены основные вопросы
юдипамикн сверхзвуковых самолетов. элементов их компоновок. Рассмотрены пробле-
динамики полета сверхзвуковых самолетов, их устойчивости и управляемости, фор-
рования систем управления в том числе с учетом их реальных характеристик Осве-
щ<1 методы расчета летных данных и выбора основных параметров самолетов.
Для научно-технических работников, аспирантов и студентов авиационных спе-
альностей вузов.
Aerodynamics, stability and controllability of supersonic aircraft / Ed by
5.Bushgens. - Moscow: Nauka. Fizmatlit, 1998. - 816 p. - ISBN 5-02-015111-4
The book written by major IsAGl specialists summarizes comprehensive knowledge in
□dynamics of supersonic airplanes and their components Consideration is given to
lersonic airplane flight dynamics, stability, controllability and control system preparation
ing into account real features Methods for predicting flight performance and specifying
in parameters arc exposed.
The book is intendi d for aviation scientists postgraduates and students
Рецензенты:
технических наук Г.В.Александров, доктор технических наук Ю.В. Андреев.
98-П
1N 5-02-015111-4
© Центральный аэро! ндродипампчгский институт
нм проф Ц.Е.Жуковсксго, 998
© Г.С.Бюшгенс, составление. 1998
ПРЕДИСЛОВИЕ
www.vokb-la.spb.ru - Самолёт своими руками?!
Сверхзвуковая авиация успешно развивается свыше 45 лет. В мире
бьпо несколько “очагов” рождения сверхзвуковых самолетов - СССР,
С1ПЛ, Франция, Великобритания, Швеция, КНР, Исторически сложи-
юсь так, что в силу ряда причин деятельность в области сверхзвуковой
авиации в каждой из этих стран по существу проходила изолированно.
Обмен конкретной информацией практически был сведен к минимуму.
Видны были только конечные итоги работы, иногда неожиданные для
других. В каждой стране шли своим путем, но, тем нс менее, результаты
во "многих отношениях часто оказывались близкими.
Очевидно, что создание и развитие сверхзвуковой авиации немысли-
мо без проведения широких научных (теоретических и эксперименталь-
ных) исследований в различных областях, опытно-конструкторских ра-
бот, накопления и углубления опыта эксплуатации. Прогресс в области
сверхзвуковой авиации в большой степени определяется развитием аэро-
динамики, если считать, что в это понятие входит весь комплекс проблем
аэродинамического проектирования, рассмотренных в данной книге.
В настоящее время в области теории сформулированы подходы, даю-
щие возможность в основных случаях получать приближенные оценки в
аэродинамике и динамике полета. В последние десятилетия получили ин-
тенсивное развитие более точные методы, рассчитанные па использование
ЭВМ. Большое количество литературных источников по теории и методам
расчета, во многих из которых изложение ведется с большим мастерством,
привело нас к выводу, что достаточно ограничиться обзором этих методов
с указанием возможных областей их применения.
Вместе с тем нам казалось, что большое количество эксперименталь-
ных исследований, проведенных в течение последних десятилетий в
частности в ЦАГИ, полезно систематизировать и обобщить, сгруппировав
их по основным тематическим направлениям и в соответствии с этапами
технического прогресса сверхзвуковой авиации.
В последние два десятилетия проектирование сверхзвуковых самоле-
тов ведется с учетом концепции их систем управления, которые могут
определять основные параметры компоновки. Мы считали необходимым
отразить это положение в нашей книге и посвятить часть глав вопросам
устойчивости, управляемости и системам управления сверхзвуковых са-
молетов. Специальная глава посвящена основному вопросу аэродинами-
ческого проектирования - выбору параметров самолетов.
Настоящая книга написана научными сотрудниками ЦАГИ - непо-
средственными участниками основных исследований. Авторы сознают,
Чго в силу многообразия проблем некоторые вопросы не могли получить
Доетаточпо полного освещения, несмотря на большой объем монографии,
в°зможпы также отдельные упущения в изложении и стиле некоторых
5
....щк.ш’ц» и у j уи.1 с ihhj с держания данной книги, являю-
щейся по существу первым опытом подобного обобщения
Подготовка и издание настоящей монографии оказались возможны
благодаря поддержке со стороны Китайской академии аэронавтики (САЕ)
и в особенности академика Гу Сунфеня, которым авторы выражают глу-
бокую признательность, Авторы благодарны также руководству ЦАГИ и
особенно заместителю директора института В. JI. Суханову за оказанную
поддержку и помощь.
Большая работа по редактированию рукописи и соответствующему
оформлению ее для издания была проведена сотрудником ЦАГИ
К. Ю.Косминковым. По ряду глав в этой работе ему оказали помощь
Г.А.Федоренко и В.С.Берко. Для издания книги на русском языке кол-
лектив молодых специалистов ЦАГИ под руководством М.Л.Иванькина
подготовил макет монографии. Коллектив авторов выражает всем им
глубокую благодарность.
Академик РАН Г.С.Бкпигеис
--ииьдыНП^
www.voKb-la.spb.ru - Самолёт своими руками
развитие сверхзвуковой авиации основано прежде всего на решении
жч.ндамс1пальных проблем аэродинамики и успешном развитии турбо-
реактивных двигателей (ТРД). Эти двигатели, как известно, разраба-
мвались независимо в 40 х годах в ряде стран: в России (А М Люлька,
р В. Уваров), в Великобритании (Ф Уиттл, А. Гриффит) и в Гсрма-
1 ни (Г Охайн М Миллер) В США проблема создания ТРД долго
убеждалась в специальной комиссии НАСА, созданной в 1941 г. под
председательством известного профессора Дюранда, когда стали посту-
пать сведения о работах в этом направлении в других странах. Однако,
независимо от этого, в том же году генерал Арнольд, получив чертежи
двигателя и необходимые материалы из Великобритании, секретно дал
задание фирме Джеперал Электрик построить такие двигатели в США,
а фирме Белл - реактивные самолеты’.
В Германии и в Великобритании еще во время второй мировой
войны были разрабо!апы ряд вариантов ТРД и построены первые ре-
активные самолеты.
Годы войны и последующие 3-5 лет ушли на развитие ТРД и соз-
дание реактивных околозвуковых самолетов Только после 1950 г.,
когда благодаря реализации дожигания топлива за газовой турбиной
(форсажная камера), появилась возможность дополнительного уве-
личения тяги и, соответственно, скорости полета, была превышена
скорость звука.
При преодолении скорости звука определяющими, кроме наличия
тяги, были проблемы аэродинамики самолета - возможность суще-
ственного уменьшения волнового сопротивления и обеспечение ус-
тойчивости и управляемости.
Успешное решение указанных проблем - создание двигателя, ра-
циональной аэродинамики и обеспечение устойчивости и управляемос-
ти - создавало возможность увеличения скорости полета, маневра
для истребителей и дальности полета для тяжелых реактивных само-
летов. Первые сверхзвуковые самолеты, которые производились се-
рийно, появились в 1953-1954 гг.2 Это были Миг-19 (СССР) и F-100
(США», достигавшие скоростей, соответствующих М ж 1,2+1,35. К
Hansen. Engineer in Charge. The NASA History Series/NASA, 1987, Washington
(!Шв/Т0Г0 скорость звука была превышена в полете со снижением на самолете Ла-176
lfjd Ь г 11 1,а самолете МиГ-17. Кроме того, на ряде экспериментальных самолетов в
В- io]-V--17 X’1, Х"2> Дуглас П-558-11 и др.) при запуске самолета с носителя (В-29 и
в . /-1955 JT в ^-установившемся полете были достигт >ты скорости больше скорости
а.чв<а . И< 1,олсты Лали ряд ценных материалов по влиянию числа И на
амяку самолета, хотя и сопровождались рядом аварий и катастроф
7
М
-1*1 шдсМ iiv pvurnc.'ih v-'X > ч-^xj-lz v; sppturarrTr-n Uk ;ггп?гт^лч minn ди
ш ли скоростей, соответствующих М » 2 и даже более (рис. 1)
1940 1950 1900 1970 Годы
Рис. 1 Изменение максимальной скорости ( шела М) полета самолетоп
Благодаря совершенствованию газодинамических и термодинамических
1ктеристик ТРД интенсивно улучшались их выходные параметры. Для
хзвукового самолета важнейшими из них являются:
- удельная тяга (Роф/Оди) (рис. 2);
Рис 2 Увеличение удельной тяга турбореактивных двигателей
- полная эффективная тяга двигателя (Доф) с форсажом при нуле-
скорости на уровне земли:
степень форсирования (Роф(Л)а);
8
~ 'Дельные Р ex Д > Т ЛИНД Не» ш-пивишл Kjnriu-p,iwm -----------
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис 3. Снижение удельного расхода топлива турбореактивных двигателей (ш - степень
двухконтурпости)
- полная тяга, отнесенная к миделю двигателя (Роф/ ^м)‘>
характеристики изменения тяги по скорости полета (желатель-
но возможно более интенсивное нарастание тяги на сверхзвуковых
скоростях полета).
Введение форсажной тяги па ТРД одновременно с улучшением газо- и
термо- параметров позволило значительно увеличить тягу на единицу веса и
миделя двигателя. При этом на форсаже возрастает удельный расход топлива.
В дальнейшем улучшение внутренних параметров двигателей дало
возможность за счет повышения тяги двигателя и повышения аэродина-
мического качества самолетов при М > 1, использовать потребную для
крейсерскою сверхзвукового полета тягу без форсажа.
Первые такие двигатели были разработаны при создании дальних
самолетов, таких как М-50, Ту-144, "Конкорд”, Т-4 и др.
В настоящее время аналогичный подход применяется и для сверхзву-
ковых истребителей нового поколения. В этом случае форсажный режим
используется для маневра, разгона, набора высоты, укороченного взлета.
Таким образом, развитие двигателей и аэродинамики позволило сде-
лать три основных скачка:
- переход на сверхзвуковые скорости М-2 + 3;
~ полет на сверхзвуковых скоростях М = 1,7 + 3,0 на бссфорсажных
режимах;
- переход на крейсерские сверхзвуковые режимы полета на бесфор-
сажной тяге двигателя для маневренных самолетов.
Решающее значение в развитии сверхзвуковой авиации имела аэро-
динамика - выбор оптимальной формы крыла, оперения, фюзеляжа,
Виздухозаборпиков и т.п.
9
Принципиальной являлась проблема выбора формы крыла в плане и
его профиля.
В го время рассматривались следующие пути:
- уменьшение относительной толщины профиля крыла и создание
специальных скоростных профилей с острой кромкой па несгреловидном
крыле обычного удлинения (3 • 5 для истребителя);
- использование эффекта скольжения за счет стреловидности крыла;
- использование крыльев малого удлинения и большого сужения с
эффектом пространственности обтекания крыла: на таком крыле одно-
временно уменьшалась относительная юлшина профиля.
Первое направление длительно разрабатывалось в США сначала на эк-
спериментальных самолетах с ЖРД серии Белл Х-1, где относительные
толщины составляли Зч-5%, затем на истребителях США с ТРД F-84, Е-94
и. наконец, В-104. Последний выпускался в серии с 1960 до 1978 г.
В Советском Союзе, это направление было быстро оценено как бесперс-
пективное. Ряд самолетов с прямыми тонкими крыльями (с = 9 и 6%) нс
дали, по мнению ЦАГИ, оптимального решения - наблюдались резкие из-
менения характеристик устойчивости и управляемости, что требовало очень
сложной по тому времени автоматики. В дальнейшем опыт эксплуатации F-
104 из-за его огромной аварийности и большого количества катастроф под-
твердил правильность этого вывода.
Основные исследования ЦАГИ были направлены на разработку стре-
ловидных и треугольных крыльев малого удлинения1. Фундаментальные
проработки, проведенные в ЦАГИ. позволили создать сначала опытные,
а затем и серийные боевые истребители для околозвуковых и сверхзву-
ковых скоростей полета.
С ростом тяги двигателей возникла проблема перехода к сверхзвуко-
вым скоростям полета. В силу явно недостаточной изученности физичес-
ких явлений дальнейшее увеличение скорости требовало исследований в
области сверхзвуковой аэродинамики.
Возникла непростая, как оказалось, проблема моделирования сверхзву-
ковых потоков в аэродинамических трубах. Первая попытка получения
сверхзвуковых скоростей течения и перехода через М = 1 в специально по-
строенной аэродинамической трубе не увенчалась успехом. Скачек уплотпе-
В ЦАГИ руководителем работ по стреловидным крыльям до 1962 г. был В.В СтрумиискпЯ
По треугольным крыльям ипшитатором и руководителем исследований до 1965 г. был
П.П. Красильщиков.
В США возникла сложная стпуация вокруг ецхлопилного крыла (см. ссылку на с. 7).
Роберт Джонс иа основе своих, главным об]й.зом, теоретических работ щх-дставил в 1945 г
для опубликования в НАСА статью и целесообразности исиольаонаиня стреловидного крыла
как пути уменьшения эффекта сжимаемости воздуха. Однако глава редакционного комитета,
11инсх:ин,1й механик Теодор Теодорсен, нс счел убедительными доказательства автора и пазнал
его выводы “hocus-pocus". Дальнейшая дискуссия, материалы, поступившие из Германии и
Европы, проведенные эксперименты показали необходимость и целесообразность ]>а:г1<ития
•vrnrr. unnnannouun n irrninr и (ЧИА ппяпкя!1г1, »аэ»аботки экспеоиментального самолета
www.vokb-la.spb.ru - Самолёт своими руками?!
пня возникавший в канале труби, не позволял пройти через М - 1; поток в
аэродинамической трубе "запирался".
В 1946 г. в ЦАГИ было сделано открытие: введение перфорации в ра-
бочей части позволило реализовать трансзвуковые скорости потока от
vf 0.8 до 1,2. Это нововведение позволило организовать планомерные ис-
следования в аэродинамических трубах1. В дальнейшем каждому продви-
жению по скорости предшествовали подробные фундаментальные исследо-
вания в том числе моделей конкретных летательных аппаратов. Таким об-
разом. всегда было опережение в этих исследованиях по сравнению с лет-
ными испытаниями. Для этого создавались новые специальные установки.
На рис. 4 представлены соответствующие кривые, иллюстрирующие это
положение. На этой основе велись исследования аэродинамических компо-
новок ;ыя сверхзвуковых скоростей полета.
Исследования показали, что увеличение стреловидности крыла до
45° дает возможность безопасно, с допустимым волновым сопротивле-
нием пройти через скорость звука (М = 1). Еще лучшие результаты мог-
ли быть получены при крыльях с большей стреловидностью.
М
30.0
20.0
10.0
8.0
.0
3.0
2.0
1.0
0.8
0.0
0.4
0.2
Буран-
-<-.Т J AU ----
в.МиГ-21
Т-1061
цчесгив системы
-"Л-
___________________JHT
I ИТ 1*4
Аэродинамические •
тпибы к Т-12\Гаа ,
Як-15
1930 1950
1970 Годы 1990
Рис. 4. Числа М. реализованные в аэродинамических трубах
ЦАГИ и в полете на конкретных образцах летательной техники
~ Самолеты. —
крылатые
ракеты ______
Для контроля основных аэродинамических характеристик, получен-
ных в трубах при переходе через скорость звука, в 1947 г. был проведен
Ряд экспериментов в полете с участием ЦАГИ. Па летающей модели с
автоматическим уПравлс|1ием были получены обнадеживающие результа-
ты до М- 1,4- 1*45.
Однако увеличение стреловидности связано с рядом трудностей по
линии устойчивости, управляемости и прочности конструкции, поэтому
Увеличение стреловидности осуществлялось ОКБ постепенно.
13 1919-1950гг. после тщательных исследований к аэродинамических
трубах .1 анализа всех проблем устойчивости и прочности были разработаны
рекомендации ЦАГИ по аэродинамической компоновке сверхзвукового ис-
требителя СМ-2 (МиГ-19) со стреловидным крылом 55э. Интенсивная рабо-
та ОКБ А.II Микояна уже в 1952 г. позволила начать летные испытания
опытного СМ-2, ставшего прототипом истребителя МиГ-19 (рис. 5), способ-
ного в горизонтальном полете достигать скорости, соответствующей М® 1,35.
Рис. 5. Первый советский серийный сверхзвуковой истребитель МиГ-19 (М «1,35)
При создании первых сверхзвуковых самолетов ученые встретились с
рядом новых проблем.
Во-первых, па сверхзвуковых скоростях возникла проблема тормо-
жения потока, входящего в двигатель, до дозвуковых скоростей с мини-
мальными потерями. С указанной целью разрабатывалась специальная
геометрия воздухозаборника сверхзвуковых самолетов, все более услож-
нявшаяся но мере увеличения числа М полета.
Во-вторых, при стреловидности крыла х = 55° усложнилась задача
обеспечения продольной устойчивости. Для обеспечения безопасности по-
лета необходимо было иметь статическую продольную устойчивость во
всем летном диапазоне скоростей. Как показали детальные исследования,
указанного можно было достигнуть лишь при правильно выбранном ниж-
нем расположении горизонтального оперения вблизи гглоскости крыла.
В-третьих, было показано, что выход на сверхзвуковые скорости связан
со значительным увеличением продольных моментов, действующих на само-
лет вследствие сдвига назад аэродинамического фокуса самолета. Одновре-
менно гга сверхзвуковых скоростях резко уменьшается эффективность руля
высоты. Указанные причины делали необходимым применение полностью
управ-тясмого стабилизатора, что, в свою очередь, требовало применения
необратимого бустерного управления.
www.vokb-la.spb.ru - Самолёт своими руками?!
Переход на целиком управляемый стабилизатор привел к необходи-
мости детального исследования его аэродинамических характеристик.
Одной из главных задач было обеспечение выбором формы стабилизато-
.. у расположением оси вращения возможно меньшего шарнирного мо-
мента при его отклонении. Было показано, что управление стабилизато-
ром па дозвуковых скоростях можно и следует обеспечить при наличии
перекомпепсапии.
К сказанному следует добавить, что избыточная эффективность пол-
ност т»ю управляемого стабилизатора на дозвуковых скоростях требовала
введения систем автоматического регулирования по числам М и по ско-
ростному напору (или по высоте полета) связи хода ручки продольного
управления с отклонением стабилизатора, а также регулирования уси-
лий, возникающих при управлении.
Полет на больших скоростях (большие скоростные напоры q и числа
М) потребовал для сверхзвуковых самолетов разработки и внедрения
необратимого бустерного управления. Были разработаны основные прин-
ципы нового типа систем управления с использованием дополнительной
энергии. Тотько использование бустеров давало возможность осуще-
ствить управление самолетом при больших шарнирных моментах па
органах управления.
В 1949 г. были проведены летные испытания бустерной системы уп-
равления па специально переоборудованном самолете. Работы ЦАГИ по
бустерному управлению создали необходимый фундамент для внедрения
таких систем в практику конструирования околозвуковых и сверхзвуко-
вых самолетов.
Таким образом, проблемы устойчивости и управляемости при пере-
ходе па сверхзвуковые скорости стали определяющими.
Детальные исследования всех перечисленных проблем потребовали
разработки специальных методик экспериментальных исследований в
аэродинамических трубах и на пилотажных стендах.
Далее возникла проблема - каким крыльям отдать предпочтение.
Рассматривались по-прежнему тс же три варианта, только теперь они по-
лучили более детальное обоснование. Наиболее изученным был вариант
крыла со стреловидностью 35-5-60°. Как показали исследования, для ia-
ких крыльев можно использовать достаточно большие относительные
^лщины и удлинения. В этих условиях можно обеспечить и необходи-
мую прочность и жесткость крыла. Нестреловидные крылья для сверх-
звуковых скоростей должны иметь острый носок профиля, что резко
Ухудшало маневр самолета. Исследования ЦАГИ показали, что это на-
вравление дЛЯ истребителей нерационально.
Для уменьшения волнового сопротивления и, вообще, для получения
Приемлем!,тх аэродинамических характеристик необходимо, чтобы псре-
кромка крыла была дозвуковой (но нормальной к ней компоненте
С1одР°сти). Для выполнения этого условия при расчетном числе М»2 нс-
обходимо было выбрать угол стреловидности передней кромки примерно
60° В лом случае можно было принять профиль с круглым “полным”
носком, достаточно большой относительной толщины (с = 5%). что обеспе-
чивало приемлемые характеристики на маневре и на взлетно-посадочных
режимах. Кроме того, это обеспечивало достаточную жесткость и проч-
ность крыла. Все указанные соображения были обоснованы и подкреплены
большим объемом исследований, проведенных в ЦАГ11.
Два истребительных ОКБ А.И. Микояна и II.О. Сухого анали-
зировали преимущества и недостатки двух вариантов, предложенных
ЦАГИ для проработки сверхзвукового истребителя - с треугольным кры-
лом и крылом стреловидным. Оба варианта были вполне реализуемыми.
Окончательный выбор должны были сделать конструкторы.
Истребители всегда прокладывают новые пути для увеличения ско-
ростей, поэтому выбор был принципиальным и важным для дальнейшего
развития авиации.
Парадокс заключался в том. что конструкторы не могли решиться
сделать выбор без апробации этих вариантов в жизни. ОКБ приняли ре-
шение реализовать оба варианта.
Гак родились в 1953 г рекомендации ЦАГИ для двух самолетов
ОКБ А.И. Микояна: Е-2 со стреловидным крылом и Е-4 с треугольным
(первый вылет состоялся в 1955 г.). Двигатель, фюзеляж и многое дру-
гое на обоих самоле1ах были приняты одинаковыми.
Аналогичное решение сделать два самолета было принято в ОКБ
II.О. Сухого: Су-7 со стреловидным крылом х14 =60° и Су-9 с треу-
гольным крылом. Для обоих этих самолетов был выбран двигатель
АЛ-7Ф ОКБ А.М. Люлька с большей тягой и большего веса, чем па
самолетах А.И. Микояна. Первые вылеты самолетов ОКБ 11.0. Сухого
состоялись в 1955-56 гг. Б ЦАГИ совместно с ОКБ был проведен по
этим конкретным проектам весь необходимый комплекс исследований
по аэродинамике, прочности и динамике.
Завершающим этапом создания комплекса сверхзвуковых аэродина-
мических труб ЦАГИ явился ввод в действие в 1953 г. уникальной,
крупноразмерной, транс- и сверхзвуковой аэродинамической трубы Т-109
периодического действия, до настоящего времени не имеющей аналогов в
мировой практике.
Аэродинамическая 1руба Т-109 с квадратным поперечным сечением
рабочей части размером 2,25x2,25 м имела диапазон чисел Маха от 0,5
До 3.6 (в дальнейшем увеличен до М = 4,0).
Эта уникальная установка открывала возможность полноценных иссле-
дований аэродинамики проектируемых самолетов, на моделях которых при
их размерах можно было воспроизводить нее детали с высокой точностью.
Проведенные в Т-109 исследования моделей указанных выше опьп-
ных истребителей ОКБ А.И. Микояна и ОКБ П О. Сухого, показали
www.vokb-la.spb.ru - Самолёт своими руками?!
х плгть их основных характеристик для вариантов с треугольным и
бДИЗОС D
С греловидпым крыльями.
Вьщаиныс НАШ рекомендации по аэродинамической компоновке, ус-
тойчивости и управляемое!и, прочности и аэроупругости содержали все ос-
новные геометрические и другие определяющие данные. В них однозначно
быта выбрана нормальная схема истребителя с горизонтальным оперением.
В результате конструкторских проработок и летных испытаний в
ОКБ А.1'1 Микояна предпочтение было отдано самолету с треугольным
крылом. Дальнейшие работы ОКБ привели к созданию уникального
сверхзвукового легкого многоцелевого истребителя МиГ-21 с взлетным
весом всего 8-9 тс с форсажным двигателем С.К. Туманского Р-11Ф, а
затем Р-13. Первый вылет самолета МиГ-21 состоялся в феврале 1956 г.
В ОКБ П.О. Сухого в серийное производство были запущены оба
варианта, однако каждый из них имел свое назначение: Су-9 стал пере-
хватчиком, а Су-7 фронтовым истребителем-бомбардировщиком.
Кри разработке аэродинамики сверхзвуковых истребителей, рассчи-
танных на числа М = 2. обострились вопросы, связанные с разработкой
воздухозабор! I иков.
При числах М < 1,3-г 1,5 торможение потока на входе можно осущест-
вить в прямом скачке при приемлемых потерях давления и равномерности
потока и допустимом росте сопротивления и пульсаций. При больших чис-
лах М торможение приходится осуществлять при помощи косых скачков
уплотнения, образуемых поверхностью, расположенной под утлом к набега-
ющему' потоку’ (конус или клин). С увеличением числа И оказалось необхо-
димым создавать систему' таких скачков, обеспечивающих постепенное тор-
можение. Такое решение связано с использованием более сложной формы
поверхности торможения и ее перемещением в зависимости от числа М по-
лета, расхода воздуха через двигатель и внешней температуры.
Очень важно было обеспечить допустимый уровень равномерности по-
тока сто по сечению каната, а также возможно меньшую величину' пульсаций
в. Все эти условия можно реализовать при достаточно точной системе уп-
равления положением поверхности торможения. Учеными ЦАГИ были раз-
работаны принципы такого управления. Отступление от допустимых ве-
личин и с может' привести к потере газодинамической устойчивости дви
гателя с воздухозаборником. Методика согласования этих характеристик,
полученных для воздухозаборника па специальных моделях при исследова-
ниях в аэродинамических трубах ЦАГИ, с запасами устойчивости двигателя
ыла разработана совместно специалистами ЦАГИ и I (ИAM.
В процессе летных испытаний в одном из первых полетов самолета
У-7, на котором была реализована ручная система управления воздухоза-
°Рником, на сверхзвуковых скоростях достаточно неожиданно возникла
hobcui проблема - потеря устойчивости системы “двигатель-воздухозабор-
1К • Эго явление сопровождалось резкими изменениями давлений в каиа-
сильной тряской всего самолета и остановкой двигателя. Это явление
>лучило название “помпаж". Оказалось, что летчик нс в состоянии с не
•холимой точностью отслеживать рекомендованное положение конуса. £
дьпейшем на основе разработанных учеными ЦАГИ принципов была со-
ана высокоточная система автоматического управления воздухозабор ни-
iM (положением конуса и дополнительным и створками).
Этап поиска и создания сверхзвуковых истребителей нервото поколения
кончился к i960 г.
Первые сверхзвуковые истребители, созданные ОКБ на основе иссле-
вапий НАГИ и других НИИ, стали "долгожителями”. Так, МиГ-21
ис. 6) выпускался в серии около 30 лег в Советском Сою.зс, в КНР и дру-
х странах, и является едва ли не самым массовым истребителем в мире.
Рис. 6 Сверхзвуковой истребитель с треугольным крылом МиГ-21
Параллельно с истребителями, но как всегда с некоторым сдвигом по
емепи, велись детальные исследования но аэродинамике и прочности тя-
лых сверхзвуковых самолетов.
Вследствие больших расходов топлива па форсажных режимах ТРД
1 режимы могли быть достаточно кратковременными.
Сначала ЦАГИ провел проработку таких возможностей для легких и
:дпих бомбардировщиков. Конструкторским бюро было предложено ис-
тьзовать крылья большой стреловидности % = 55°ч-60°. Однако трсбова-
? получения заданной дальности и обеспечение взлета и посадки ограни-
чит поиск геометрических параметров соображениями прочности, аэро-
эугости и устойчивости.
Ряд вариантов привели к созданию опытных самолетов Ту-98, Ил-54,
-27 и др., которые не оправдали надежд. Только легкий бомбарди-
ЯИИК Як-28 с крылом % =45° был принят в широкую серию
Результаты дальнейших исследований ЦАГИ были использованы для
шиповки дальнего сверхзвукового носителя Ту-22 со стреловидным
ялом х - 55°. Однако, хотя принятая схема была более рациональной,
www.vokb-la.spb.ru - Самолёт своими руками
чем. например, у разработанного в США В-58 “Хаслср” того же класса,
нО в схеме бесхвостка, Tv-22 имел все-таки ограниченные возможности
на сверхзвуковых скоростях полета вследствие размещения двигателей за
крылом на вертикальном оперении. Исследования, проведенные в ЦАГИ,
настораживали специалистов в части обеспечения на сверхзвуковых ско-
ростях полета работоспособности двигателей, расположенных в зоне воз-
мчтнеинй от крыла и фюзеляжа. К сожалению, эги опасения подтверди-
лись в полете.
Следующим этапом в развитии реактивных бомбардировщиков бы.ш ис
следования ЦАГИ совместно с ОКБ В.М. Мясищева по созданию страте-
гического носителя М-50 со сверхзвуковым крейсерским режимом полета.
Эти работы стали реальными благодаря успехам ОКБ В./Х Добры-
нина в направлении создания двигателей, рассчитанных па бесфорсажпый
сверхзвуковой режим полета. Была рекомендована компоновка самолета с
треугольным крылом, с двигателями па концах крыла и на пилонах.
Крейсерский режим был выбран па М* 1,7 при дюралевой конструк-
ции самолета. Для уменьшения потерь аэродинамического качества па про-
дольную балансировку ЦАГИ рекомендовал такое размещение центра тяже-
сти, при котором па дозвуковых скоростях имела место статическая неус-
тойчивость около 10% САХ, а устойчивость полета обеспечивалась автома-
тической системой управления с датчиками перегрузки и угловой скорости.
Система управления интегрального типа, предложенная ЦАГИ, была пред-
варительно исследована и отработана в полете на дозвуковом самолете
В.М. Мясищева ЗМ. После большого комплекса исследований самолет М-50
был построен и в 1959 г. начались ею летные испытания. Была разработана
и построена модификация этого самолета - М-52 (1960 г.).
Проблема создания летательных аппаратов со сверхзвуковыми ско-
ростями потребовала интенсивной исследовательской работы в области
фундаментальной аэродинамики и динамики.
Еще в 40-х годах развивались методы линейной теории газовой дина-
мики применительно к обтеканию профиля крыла и осесимметричных
тел при околозвуковых (теория тонкого тела) п сверхзвуковых скорос-
тях. С 1944-1947 гт. получает широкое развитие линейная теория крыла
в сверхзвуковом потоке.
Решается линеаризованная задача об определении аэродинамических
характеристик треугольного крыла в сверхзвуковом потоке при дозву-
ковых и сверхзвуковых передних кромках.
Систематическое сравнение с результатами, даваемыми линейной тео-
рией, показало возможность ее использования для практических целей
авиационной техники в рамках известных ограничений.
Для расчета обтекания тел вращения и близких к ним фюзеляжей само-
Лс‘тов линейная теория нс давала удовлетворительных результатов и пеобхо-
было применять более точные методы. Отсутствие в то время быстро-
-'^йствуюшей вычислительной техники не позволяло использовать для
расчетов общий метод харакгериспгк, являющийся принципиально точным
методом. В связи с этим разрабатывается эффективный приближенный Ме-
тод расчета обтекания осесимметричных тел при нулевом угле атаки. Ре-
зу.штаты расчета по этому методу давали весьма высокую точность.
Экспериментальные исследования показали, что значительная часть
прироста волнового сопротивления, особенно на скоростях, близких к М = 1,
возникает за счет взаимодействия между фюзеляжем и крылом, оперением и
другими элементами конструкции самолета. Это привело также к теоре-1
тическим поискам оптимальных поверхностей крыла и фюзеляжа и их ком-
бинаций, дающих минимальное сопротивление.
Для уменьшения сопротивления от интерференции большое внимание]
уделялось теоретическим и экспериментальным исследованиям взаимодейст-
вия полей скоростей в области сопряжения крыла и фюзеляжа, крыла и
гондол двигателей. При этом при наличии цилиндрического отсека фюзеля-
жа в месте установки крыла интерференция оказывалась достаточно слабой. I
В дальнейшем в результате экспериментальных и теоретических иссле-
дований за рубежом было сформулировано гак называемое околозвуковое
"правило площадей”, согласно которому сочетание крыла и фюзеляжа бу-
дет иметь наименьшее волновое сопротивление, если распределение сече-
ний, нормальных к потоку, такое же, как у тела вращения с минимальным
сопротивлением. Эго простое правило создавало удобное геометрическое
представление при аэродинамическом проектировании. Сопротивление
крыла с фюзеляжем при использовании лого правила оказывалось за-
метно меньшим, чем у крыла, сопряженного с относительно толстым фю-
зеляжем, имеющим в области сопряжения выпуклую поверхность. Однако
поджатие на фюзеляже с исходным цилиндрическим обводом не давало
значительного выигрыша. Эффект поджатия проявлялся в сравнительно
небольшом диапазоне трансзвуковых скоростей, по при больших сверхзвуп
новых скоростях сопротивление увеличивалось.
Важны также вопросы влияния фюзеляжа на характеристики
подъемной силы и продольной и путевой устойчивости. Эта задача ре-
шается методом особенностей и с помощью модифицированной теории
топкого тела, использующей разложение по малому параметру.
Значительные усилия направлялись на экспериментальную проверку]
теоретических положений о возможности уменьшения сопротивления,
обусловленного подъемной силой, путем реализации эффекта подсасы-
вающей силы при дозвуковых передних кромках крыла. В ряде случаев
были получены положительные результаты, давшие заметное уменьше-
ние сопротивления, особенно с применением специальной деформации
передней кромки, так называемой конической крутки.
Развивались методы расчета в направлении полуэмпирических и
приближенных оценок аэродинамических характеристик отдельных эле-
ментов и компоновок различных летательных аппаратов.
В целом ряде случаев теоретические методы линейной теории стано-
вились недостаточными и возникла необходимость применения прибли-
жений более высокого порядка.
www.vokb-Ia.spb.ru - Самолёт своими руками?!
Разоаботка аэродинамических компоновок самолетов различного наз-
ния сопровождалась исследованием задачи выбора наилучшего рас-
Пс1-1ожсния гондол двигателей, число которых, особенно для дальних са-
?°четов возрастало. Рассматривались компоновки с гондолами, ------
шенными на концах крыльев, на пилонах под крылом и др.
развитие сверхзвуковой авиации было неразрывно связано с
размс-
разви-
тием аэродинамики силовых установок.
Существенное значение для увеличения скорости и дальности полета
имело создание специального сверхзвукового диффузора для каналов
двигателей. Были разработаны общие методы построения диффузора, в
котором сверхзвуковой поток тормозится в системе косых скачков.
При разработке воздухозаборников потребовались исследования по
установлению диапазона расхода воздуха, обеспечивающего его устойчи-
вую работу, роли геометрических параметров “горла” воздухозаборника,
изучению различных средств реализации сжатия потока.
При создании воздухозаборников возникла необходимость изучения
внутренних течений в диффузорах, в том числе и с отрывами.
Проводились также исследования механизации мпогорежимных воздухо-
заборников, способов управления сю, управления пограничным слоем и т.д.
Изучалось влияние неравномерности параметров потока перед компрес-
сором на его газодинамическую устойчивость.
Исследовалось взаимодействие внешнего потока с реактивной струей в
области хвостовой части фюзеляжа, зависимость донного давления и эф-
фективной тяги при различных конфигурациях хвостовой части и сопла.
Создание сверхзвуковых самолетов потребовало решения ряда прин-
ципиальных вопросов в области устойчивости и управляемости, изучения
нестационарных аэродинамических характеристик самолета и, в частнос-
ти, характеристик аэродинамического демпфирования.
Для экспериментальных исследований при сверхзвуковых скоростях
потребовалось создание специальной, весьма сложной аппаратуры, кото-
рая позволила при вынужденных колебаниях моделей и установившемся
вращении выделять малые моменты демпфирования. На основе этих ис-
следований созданы падежные методы расчета характеристик демпфиро-
вания для сверхзвуковых скоростей.
Переход к компоновкам сверхзвуковых самолетов привел к значи-
тельным изменением инерционных характеристик. Эллипсоид инерции
сверхзвукового самолета стал очень вытянутым (JylJx « 10 < 15). Выяви-
лась возможность потери устойчивости при резком креиении вследствие
инорци011ПОГО взаимодействия продольного и бокового движений. Иссле-
дования показали, что при угловой скорости крена свыше определенного
значения может возникнуть потеря устойчивости по углу атаки или по
>1лу скольжения. Проявление этой неустойчивости может выражаться в
апеРиодичесКом или 1<олебатсльном нарастании псретрузок. При этом об-
Ращается действие органов управления и пилотирование самолета затруд-
Для истребителей МиГ-21, Су-9 и др. были проведены соответ-
ствующие расчеты, а затем летные испытания. Была разработана теория
вопроса, указаны меры, устраняющие эту опасность.
Переход через скорость звука связан со значительным изменением
характеристик продольной статической устойчивости. В некоторых слу-
чаях эти характеристики также могут иметь нелинейный характер изме-
нения по углу атаки. Представлял интерес анализ динамики коротко-
периодических движений (в частности, устойчивости). Были развиты
асимптотические методы, поскольку скорость полета (или число И) яв-
ляется медленно изменяющимся параметром сравни! ельно с углом атаки.
Весьма важным направлением исследований явились также работы,
ио системам управления сверхзвуковыми самолетами Было широко ис!
пользовано необратимое бустерное управление с регулированием основ-
ных кинематических параметров системы управления и параметров сис-|
темы имитации усилий (загрузок) при управлении.
Большое значение для необратимых бустерных систем приобрели both
росы надежности, решение которых, помимо высокой надежности се эле-
ментов, требовало глубокого теоретического анализа структуры системы. I
Более широкое использование нашли также и другие элементы автома-
тизации управления - демпферы колебаний самолета, автоматические систе-
мы продольного управления изодромпого типа, даюшие возможность по-
лучить основные характеристики управляемости, практически не зависящие
от режимов полета, положения центра тяжести и других параметров.
Развитие сверхзвуковой авиации потребовало дальнейшего усовершен-
ствования методов расчета летных данных и создания методики выбора оп-
тимальных режимов полета. 'Гак, например, разгон самолета и его выход на
установившийся сверхзвуковой режим полета требуют значительной затраты
энергии и поэтому нуждались в детальном анализе. Для сверхзвуковых са-
молетов были изучены оптимальные программы изменения высоты и скоро-]
стп. Кроме того, большая кинетическая энергия сверхзвукового самолета да-
ла возможность получить динамические потолки, значительно отличающиеся
от статтгческих за счет преобразования части кинетической энергии в потен-
циальную. Была развита методика расчета этих движений.
В дальнейшем в связи с применением вычислительных машин полу-
чили большое развитие методы выбора оптимальных параметров само-
лета из условия получения заданных летных данных
Большая энерговооруженность самолета привела к повышению роли
псустаиовившихся режимов полета - различного рода маневров.
Одним из завершающих этапов развития сверхзвуковых истребите-
лей первых поколений являлся комплекс работ ОКБ А.И. Микояна сов-
местно с ЦАГИ по созданию истребителя-перехватчика с выходом на
большие сверхзвуковые скорости, соответствующие М = 3. При этом, ес-
тественно, значительно повышались и высоты полета.
На основании предварительных проработок, в ЦАГИ сочли цслесо-1
образным принять принцип компоновки крыла со сверхзвуковой передней
кромкой В этом случае можно было использовать стреловидность крыла ио
www.vokb-la.spb.ru - Самолёт своими руками?!
передней кромке примерно 40° но при этом максимальные толщины профи-
т должны быть достаточно малыми (с = 3.-4 %), а носок профиля - с
т гь малым радиусом. В этом случае при сверхзвуковой кромке можно бы-
ю получить допустимое волновое сопротивление крыла. Такая компоновка
позволяла получить также приемлемые взлетно-посадочные характеристики.
В соответствии с режимами полета были разработаны и регулируе-
мые воздухозаборники для двигателей. Значительный диапазон полетных
чисел М требовал регулирования панелей на входе в большом диапазоне,
поэтому ЦАГИ рекомендовал схему воздухозаборника со сжатием потока
горизонтальным клином, с образованием нескольких косых скачков, а
сам воздухозаборник выполнить в “ковшеобразном виде, прижатым к
фюзеляжу. Такая форма нозво.тяла осуществить высокие значения коэф
фипиента восстановления давления па входе в ТРД с форсажной каме-
рой с сто весьма большими расходами воздуха.
Предварительные разработки этого самолета начались в 1961 i. и
уже в 1964 г. опытный МиГ-25 совершил первый вылет.
В последующие годы ОКБ А.И. Микояна разработало ряд модификащпг
МиГ-25, в том числе была произведена замена двигателей, а в конце 70-х го-
дов ОКБ был создан существенно модифицированный вариант самолета -
МиГ-31 (рис. 7). Самолеты-перехватчики этого типа длительное время выпус-
кались серийно и не имели аналогов в мире. На таких самолетах выполнялись
выходы на динамический потолок, намного превосходящий статический.
Рис. 7. Истребитель-1щх:хпатчик МиГ-31 (фото В. Тимофеева)
При создании МиГ-25 впервые в отечественной авиации возникла
Проблема нагрева поверхности в полете. Температуры торможения при
^ = 3 па лобовых кромках достигали 300*350°С ОКБ А.И. Микояна
Первые разработало конструкцию с применением стали, титана и других
Материалов для обеспечения необходимой прочности и ресурса. В ЦАГИ
бЬ|ли проведены исследования прочности элементов конструкции при
видовом воздействии потока.
Таким образом, создание МиГ-25 и его последующих модификаций ц
его комплекса перехвату высотных и скоростных целей являлось круп-
1м достижением отечественной авиации. На этом самолете можно было
вершить длительный полет на сверхзвуковых скоростях и маневрировать
скорости 2500-5-3000 км/ч. Эти свойства позволили в период с 1965 Л
78 гг, установить 25 мировых рекордов, три из которых абсолютные,
.’которые из них, связанные с маневренностью и хорошими пилотажны
г характеристиками, удерживаются до сих пор - это динамический ното-
к (36240 м в 1973 г. и 37 650 м в 1977 г.), полеты по замкнутому' круп
рекорды скороподъемности на 20 км.
К этому же направлению развития высокоскоростной авиации следуя
пости и большой комплекс работ ЦАГИ совместно с ОКБ им. П.О. Сухо-
направлениып на создание дальнего самолета Т-4 ("100") с большой
ррхзвуковой скоростью, соответствующей М*3. Решение этой трудней-
’й задачи несколько облегчалось успехами, которые были достигнуты
игателнетами ОКБ В.А. Добрынина, создавшими ТРД для сверхзвука
lx скоростей полета при М-2 на бссфорсажном режиме. Об этом уж!
оминалось в связи с работами над самолетами М-50 и М 52. Двигатели
я Т-4 были доработаны для скоростей полета, соответствующих М = 3
они были еще недостаточно доведены.
Исследования ЦАГИ но аэродинамике Т-4 были направлены на полу-
тис высокого аэродинамического качества при М = 3; необходимо было |
лучить па крейсерском режиме аэродинамическое качество К-Су/Сл
менее шести. Для этого в 1962-196.3 гг. была разработана аэродипами-
жая компоновка с использованием тонкого треугольного крыла с боль-
»й стреловидное гыо но передней кромке (70° в центроплане и 60° на
соли) со специальной профилировкой и использованием конической
утки. Таким образом, в .значительном диапазоне скоростей полета ле-
тняя кромка была дозвуковой. Для уменьшения потерь аэродинамичес-
ю качества на продольную балансировку был также принят принцип
сныпения запаса продольной устойчивости для крейсерского режима и
имеисно переднее горизонтальное оперение. Основное продольное уп-
зление осуществлялось элевонами. Так как самолет был практически
юрежимным, ЦАГИ считал возможным использовать схему бесхвост]
с небольшим передним горизонтальным оперением для уравновешива
момента в длительном полете. Па этом самолете предполагалось так-
использовать статическую неустойчивость на дозвуковых скоростях
зета и интегральную систему управления. Было принято "пакетное”
положение четырех двигателей в гондоле под фюзеляжем. Разрабо-
тал профилировка гондолы давала дополнительное увеличение аэро]
гамического качестве! на сверхзвуковых скоростях. I
При создании самолета Т-4 (рис. 8) ЦАГИ проводился большой комти
:с исследований ио динамике, разработке системы управления, а также по
>аботке температурной прочности самолета па основных режимах полета,
вый почет самолет Т-4 совершил 22 августа 1972 г К сожалению, после
www.vokb-la.spb.ru - Самолёт своими руками?!
п полетов (около 10) с выходом на числа М* 1,7+1,8 финансирование
^абот по Т-4 было прекращено в 1973 г., хотя ЦАГИ предлагал перевести
исс тедования самолета в разряд экспериментальных pa6oi, которые дали бы
цепную информацию д,1я дальнейших исследований
Рис. 8. Сверхзвуковой дальний самолет Т-4 (“100”)
Успехи в развитии сверхзвуковой боевой авиации в 1950 1960 гг. со-
здали предпосылки для разработки сверхзвукового пассажирского само-
лета (СПС). Было весьма соблазнительно сократить в два с лишним раза
время перелета, а опыт, накопленный боевой авиацией, создавая основу
для решения вопросов безопасной эксплуатации такого самолета.
Исследования основных проблем связан пых с решением этой задачи,
были развернуты в СССР в начале 60-х годов по инициативе А.Н Туполева.
Обеспечение требуемых летно-технических характеристик (дальность
6500 км при 100-5-120 пассажирах с приемлемыми взлетно-посадочными
характеристиками) приводите к необходимости иметь при 2 т 2,2
значение аэродинамического качества /Стах»7,5 + 8, что было в 1,5-5-2
раза больше, чем у сверхзвуковых истребителей
Кроме того, полет на такую дальность в течение 2 + 3 часов пребыва-
ния на М = 2,0 потребовал исследований по обеспечению прочности кон
струкции при температуре примерно 100°С
Наконец, очень высокие требования предъявлялись к двигательной
Установке - это малые удельные расходы топлива на сверхзвуковом
крейсерском режиме, обеспечение регулирования расхода воздуха на
входе при минимуме аэродинамического сопротивления
Возникла потребность в изучении воздействия звукового удара па
Наземные сооружения и население, влияния выхлопа на озоновый
с'лой при полете на высотах 17-5-20 км. поиске средств уменьшения
°*УМа при взлете и т.п.
При создании первого СПС Ту-144 эти задачи подробно изучалис
учеными ЦАГИ, велись подробные обсуждения с ОКБ А,II Туполева
и с учеными других НИИ.
При создании Ту-144 были приняты два этапа работ. На первом эта
не был использован двигатель с форсажем на крейсерском режиме. Этот
двигатель нс мог обеспечить необходимые для требуемой дальности поте
га расходы топлива. Поэтому на нервом этапе дальность ограничивалась
W00-е 4500 км с последующим увеличением на втором этапе до 6500 км.
В результате исследований удалось на самолете Ту-144, выполнение]
по схеме “бесхвостка", обеспечить Ктах близкое к 8. Для этого было
принято греугольнос крыло, рассчитана оптимальная его форма в плане
(с изломом передней кромки) и особая профилировка крыла, составлен
пого из профилей малой относительной толщины - была применена таг
называемая пространственная деформация (кривизна) крыла.
Практически одновременно в Англии и Франции велась совместная ра-
бота но созданию аналогичного сверхзвукового пассажирского самолсп
“Конкорд" Ученые RAE и O5JERA, а также конструкторы двух фирм энер-
гично вели работы по изучению всех проблем, связанных с разработке
СПС. В то время было несколько встреч советских специалистов со специа-
листами Франции и Англии. При этом обсуждались только общие пробле-
мы , а детали и конкретные решения оставались закрытыми.
Создание и эксплуатация первых сверхзвуковых пассажирских
самолетов Ту-144 и 'Конкорд" являегся ценнейшим опытом для даль-
нейшего движения в этом направлении.
Работы по Ту-144 развернулись в начале 60-х годов, а первый его
полет состоялся 31 декабря 1968 г. - на 3 месяца раньше “Конкорда”.
В 1977 г. был оформлен сертификат на самолет с двигателями
НК-144, па котором начались пробные перевозки пассажиров на мар-
шруте Москва - Алма-Ата. Первые варианты двигателя НК-144 не
обеспечили на крейсерском режиме заданные расходы топлива. BwecJ
тс с тем расходы воздуха поставленного двигателя были меньше
расчетных, гак что воздухозаборники оказались псрсразмеренными,
что, естественно, создавало дополнительное сопротивление. Дальней
шис усилия ЦАГИ и ОКБ А Н. Туполева были направлены на созда-
ние Ту-144 второго этапа с бесфорсажпым двигателем РД 36 51П, со- j
здапным в ОКБ П.А Колесова. Работы по этому двигателю и его ус
тановке на Ту-144 были форсированы, и второй этап создания Ту-1^4
уже сулил получение заданной дальности.
В последнем варианте Ту-144 (рис. 9) прошел летные испытания в
конце 1981 г. Он мог перевозить 100 пассажиров на расстояние 6500 КМ
при нормируемом аварийном запасе топлива. При этом расход топлива
составлял примерно 100 г / (пасс.-км), а взлетный вес достигал 207 тс.
Ту-144 имел ряд прогрессивных технических нововведений, которые в
да.гьнейшем широко использовались в авиации. Так например, вся по-
верхность самолета, включая сложную форму крыла, имела отличную
www.vokb-la.spb.ru - Самолёт своими руками?!
малую волнистость и шероховатость, чго в значительной сгепе-
чивалось применением крупногабаритных панелей для обшивки.
гладк°сгт’
ни обеспе
Рис. 9. Сверхзвуковой пассажирский самолет ‘Гу-144
На самолете Ту-144 уже тогда была применена фактически дистанционная
система управления, в которой полпоходовые рулевые агрегаты отра-
батывали сигналы системы улучшения устойчивости и управляемости по
продольному и путевому каналу. Это дало возможность на некоторых ре-
жимах осуществлять полет при статической неустойчивости. Было введено
отклонение носка фюзеляжа при взлете и посадке для улучшение обзора.
Для продольной балансировки самолета на этих режимах использовалось
выдвижное переднее оперение для продольной балансировки самолета.
В 1982 г. самолеты Ту-144 с бесфорсажпыми двигателями Колесова
после государственных испытаний были подготовлены для эксплуата-
ционных испытаний. Однако в этот момент работы по введению самолета в
эксплуатацию в министерстве гражданской авиации были прекращены.
Следует указать, что катастрофа Ту-144 в Бурже во время выставки
по заключению аварийной комиссии не была связана с какими-либо тех-
ническими дефектами самолета.
Конкорд”, начав первые полеты несколько позже (21 марта 1969 г.),
более успешно прошел цикл летных испытаний и был принят в эксплу-
атацию в январе 1976 г. двумя авиакомпаниями “Эр Франс” и “Бритиш
Аэролайнс” с дотацией от правительства Франции и Великобритании.
Уровень топливной эффективности самолетов Ту-144 и “Конкорд
был примерно одинаков. Взлетный вес “Конкорда" 185 тс. он перевозил
100 пассажиров па дальность около 6200 км. Полная относительная весо-
вая отдача самолетов Ту-144 и “Конкорд” практически одинаковая. От-
личие во взлетных весах объясняется рядом конструктивных особеннос-
тей 1у-144, двигательной установки, оборудования и т.п.
В настоящее время в ЦАГИ и в различных фирмах и исследователь-
Ск»х организациях других стран идет предварительная проработка и об-
сУЖденис проблем, связанных с созданием сверхзвукового самолета вто-
рого поколения СПС-2.
Достижение высоких скоростей в авиации шло в какой-то степени зг
счет роста скоростей на взлетно-посадочных режимах и некоторого ухуд-
шения маневренных характеристик для истребителей В связи с этим бы.г
поставлен вопрос о необходимости улучшения взлетно-посадочных харак-
теристик самолетов и сокращения взлетно-посадочных дистанций.
В эти годы в ряде стран мира начались поиски возможных решений
этой проблемы. Решение указанной задачи виделось в двух направлениях.
Один путь - использование тяги двигателя Можно было пр г
большой тятовооруженности самолета, управляя вектором тяги, взле-
тать и садиться вертикально. Таким в конце 60-х годов был создан
дозвуковой самолет Як-36.
Как показали исследования ЦАГИ, принятый путь сокращения
взлетно-посадочной дистанции в то время оказался неприемлемым для
сверхзвукового самолета. Большие размеры двигательной установки
поворотными соплами создавали непреодолимое сопротивление при
переходе через скорость звука. Кроме того, вертикальный взлет и по-
садка "съедали” большую часть топлива.
В дальнейшем ЦЛГИ был исследован и предложен другой ком-
промиссный вариант компоновки такого самолета. Предлагалась
комбинированная силовая установка, состоящая из подъемно-мар-
шевого двигателя и подъемных двигателей. В этом случае вследствие
‘'чередования" миделей удавалось значительно уменьшить сопротив
ление (Як-38 и Як-41).
В начале 60-х годов был предложен вариант применения подъемных
двигателей в дополнение к основным на взлете с разбегом и на посадке
Таким путем, удавалось значительно сократить взлетно-посадочные дис-
танции. В ЦАГИ совместно с ОКБ А.И. Микояна и 11.0 Сухого были
проведены исследования компоновок опытных истребителей такой схе-
мы, которые были построены и испытаны в конце 60-х годов. Однакс
они не имели перспективы, так как нс решали вопроса улучшения манев-
ренных характеристик, а подъемные двигатели ухудшали весовую отдачу
самолета.
ЦЛГИ активно рекомендовал другой путь решения указанной про-
блемы - использование крыла изменяемой геометрии.
Исследования ЦЛГИ показали, что применяя малую стреловидность
крыла (10-5-15°) и большое удлинение при мощной механизации его,
можно значительно сократить взлетно-посадочные дистанции и умень-
шить скорости на этих режимах. Используя стреловидность 35-5-45°]
можно получить хорошие аэродинамические и маневренные характерис-
тики и высокое аэродинамическое качество на околозвуковых режимах
полета. Наконец, при стреловидности 60-г 75°, можно достигнуть боль-
ших сверхзвуковых скоростей полета при малом сопротивлении, эта же
конфигурация весьма благоприятна для полета на малых высотах при
больших приборных скоростях вследствие малых значений dCylda.. Та-
ким образом обеспечивалась miioi орежимность самолета.
www.vokb-la.spb.ru - Самолёт своими руками?!
Ветрегившиеся трудности при создании самолетов с крылом изме-
римой геометрии по линии устойчивости и управляемости были ус-
п пню решены, благодаря обнаруженному эффекту сохранения поло-
жения фокуса крыла при изменении угла стреловидности, если на нем
образовать наплыв в корневой части и расположить ось поворота
крыла в определенном месте наплыва
Рис. 10. Фронговой ударный самолет С изменяемой геометрией крыла Су-24 (фото
С. Скрынннкова)
Исследования, проведенные в ЦАГИ, привели к возможности создания
универсальной компоновки, дающей
Впервые эти результаты были
использованы ОКБ А.И. Микояна
при создании многоцелевого истре-
бителя МиГ-231 (первый полет -
апрель 1967 г.). Затем аналогичные
разработки были проведены ЦАГИ
совместно с ОКБ П.О. Сухого
Для фронтового ударного самолета
Су-24 (рис. 10).
В дальнейшем этот же прин-
цип был применен для разработ-
ки дальнего самолета с крылом
^Меняемой геометрии Ту-22М
(1970 г., рис. 11).
весьма благоприятные результаты.
Рис. И. Дальний самолет с изменяемой ico-
________ метрией крыла TV-22M3
Несколько раньше, но рекомендациям ЦЛ1 И совместно с ОКБ 11.0. Сухого была провс
‘fe,la опытная модификация Су 7 с использованием пошчютиых консолей крыла па части
l^Maxa (первый полег опытного С-22И состоялся в августе 1966 г ) Этот вариант, хотя и
Давал коренною решения, однако он позволил несколько улучшить взлетно-посадочные
^Мктеристикл самолета, который «. 1970 г. стал выпускаться в серии как Су-17.
Наконец, в середине 70-х годов основные идеи компоновки самолета
крылом изменяемой геометрии были заложены при создании стратегии
кого носителя Ту-160 (рис. 12). По сравнению с. Ту-22М размещение д|
гателей было выбрано более рациональным - под крылом. В этом слу^
значительно сокращалась длина каналов, однако возникали дополнит^
пыс грудноеги. связанные с ростом conpoiпиления, главным образом
счет ингерферепции с крылом.
Рис. 12. Ту-1С>0 - стратегический носитель с изменяемой геометрией крыла (фч
С Скрынникова)
Применительно к дальним и стратегическим носителям прсимущесга
крыла изменяемой геометрии на взлетно-посадочных режимах был
трансформировано в увеличение удельной нагрузки на крыло G/S
повышения дальности полета за счет увеличения веса топлива. |
Наиболее сложным требованием к стратегическому самолету в |
время было получение дальности 14000 ч-16000 км на дозвуковом рож пи
полете! с кратковременным выходом на сверхзвуковой режим.
Такое требование можно было выполнить лини» на многорежимна
самолете, г.е. при использовании изменяемой геометрии.
При создании самолетов с изменяемой геометрией очень г.ажни
роль играли вопросы устойчивости и управляемости. Приемлемые пил
тажиыс характеристики для всех конфигураций самолета удалось ”1
1учить лишь при введении ряда автоматических регуляторов в систем
управления, а в некоторых, более сложных случаях, были введены сщ
темы улучшения устойчивости и управляемости с ограничителями опя
пых режимов. I
Использование в системе управления автоматических средсл
улучшающих устойчивость и управляемость, повысило лстно-техничсс к!
характеристики самолета, уменьшило действующие ширузки и улучши!
пилотажные характеристики на всех режимах полета. Были показа™
возможности совмещенного управления, при котором комплектировала*!
система штурвальною управле1тя с автопилотом I
www.vokb-la.spb.ru - Самолёт своими руками?!
В 70-х годах в ЦАГИ уже проводились исследования дистанционных
1СТСм управления с электрическими связями рычагов управления и ис-
1 гщитс'льных органов (бустеров с электрическим входом). В после-
П юпхис годы это направление получило широкое развитие. В 1978 г.
издал сборник работ но автоматизации управления, доложенных
на специальной конференции, посвященной данным вопросам.
В конце 60-х годов в ЦАГИ и в ряде ОКБ начались проработки и
изучение новых направлений в развитии боевой авиации.
Рассматривались различные варианты замены серийных фронтовых
истребителей МиГ-21 и МиГ-23. Проводились обсуждения на разных уров-
нях возможной модификации этих самолетов и их дальнейшего развития.
В связи со значительным прогрессом в двигателестроснии, к концу
60-х годов появилась возможность существенного увеличения тяговоору-
женности истребителей. Новые двигатели значительно улучшили весовые
характеристики, стало возможным рассматривать их удельную тягу, рав-
ную 8-е-Ю, улучшились расходы топлива (см. рис. 2 и 3). Указанное вы-
ше сделало реальной тяговооруженность истребителя на взлете, ранную
РОф/6пм = 1 и более, что давало возможность значительно улучшить его
маневренные характеристики.
В декабре 1970 г. было проведено специальное совещание но про-
блеме создания фронтового истребителя нового поколения с большой тя-
говооружешюстыо и высокими маневренными характеристиками.
В аэродинамике были открыты новые возможности значительного уве-
личения несущих свойств самолета при достаточно малом приращении со-
противления. Это новое направление исследований ЦАГИ основывалось на
рациональном исполыювапии специально индуцируемых вихрей на верхней
поверхности крыла, т.е. на “управлении” вихрями Образование этих вих
рей производилось за счет заостренных наплывов, расположенных в корне-
вой части крыла. Вторым фактором являлось использование отклоняемых
носков крыла, - их отклонение постепенно увеличивалось с ростом угла ата-
ки. Кроме того, использовалась "уплощенная" форма фюзеляжа, что увели-
чивало его вклад в подъемную силу и уменьшало дестабилизирующее влия-
ние на устойчивость нуги (уменьшались моменты при скольжении). Рас-
СМатриваемая аэродинамическая компоновка носила “интетральный” харак-
тер в части сочетания крыла с фюзеляжем.
Проводились также исследования аэродинамических характеристик
Моделей при наличии угловых скоростей по всем трем осям. В этих ис-
^•'1еДованиях, которые потребовали разработки специальной аппаратуры
'1Ля аэродинамических труб, были получены характеристики демпфиро-
' “Ия, а также выявлены эффекты нестационарное™ обтекания крыла и
пи?0 самолета- Наличие угловой скорости, совпадающей по знаку с увс-
’ ' ‘нием утла атаки, затягивало срыв и разрушение вихрей, ипдуцируе-
( Л кРт,тле и фюзеляже. При изменении направления движения
Й0Нака й ) возникал динамический гистерезис в обтекании, который ири-
'JH-ч к резким изменениям аэродинамических характеристик при пря-
мом и обратном движении самолета. Были выявлены также зоны пои
демпфирования и образования автоколебаний по крену, тангажу и pi
канию на больших углах атаки.
Проведенные исследования ио нестационарной аэродинамике нозволи
разработать математические модели явлений и определить ряд мероприят
по устранению вредного влияния указанных выше эффектов па пилотажу
характеристики и устойчивость.
Исследования всех этих новых факторов позволили построить К.
пепцию истребителей следующего поколения с большой тяговооруже
постыо, обладавших высокой маневренностью (см. рис. 13, 14 и 15). ;
Vj, ,.м с
300
200
МиЕД
Е-15
11 5 КМ !F 15С МиГ-
100
*F-
Л» * “ М11Г-23МЛ
F-4E
1960 1970 1980 Годы
Рис. 13. Изменение энергетической скороподъ-
емности сверхзвуковых истребителей
F-22
< eF-18
-----------------<“
ГМиГ-23МЛ
• И МиГ ЛС
F-4E
Рис. 14. Изменение максимальной
вившейся перегрузки истребителей
0 _
1960 1970 1980 Годы
Конкретные работы в ЦАГИ
этом направлении были начаты
ОКБ им. А И Микояна в 1969
рекомендации ЦАГИ были выл
ОКБ в 1972 г. В конце 1977 г. с
стоялся первый вылет онытн
легкого маневренного истребил
МиГ-29 (рис. 16) с двумя двигат
ми Р-33, которые обеспечивали н
сокую тяговооруженность. Он
поступать па вооружение с 1983 г
Одновременно с ОКБ ПОС
хого велась аналогичная работ
но созданию более тяжелого М
нейронного истребителя с дву
двигателями АЛ-31.
Однако вначале это ОКБ в компоновке крыла выбрало другой nj
На первых экземплярах Су-27 (шифр Г-10) было применено пеплос!
крыло с переменной стреловидностью по передней кромке с псболыш
МиГ-21С
800
600
400
200
1960 1970 1980 Годы
Рис 15 Сокращение длины разбега сверх-
звуковых истребителей
МиГ-25
www.vokb-la.spb.ru - Самолёт своими руками?!
ом в корне (крыло оживальной формы). 11а этом крыле отсутст-
Напль1в [ изация передней кромки Су-27 произвел первый вылет в
ровала 11С'
Рис 16. Легкий маневренный истребитель МиГ-29 (фото С Скрыпникопа)
1977 г. Принятый вариант крыла оказался неудачным. Со стороны ЦАГИ
было выдвинуто предложение принять уже отработанную концепцию
трапециевидного крыла с корневым наплывом и с отклоняющимися нос-
ками. В результате всех дискуссий эта концепция была принята ОКБ.
Исследования в ЦАГИ всех вопросов по новой компоновке Су-27
проводились в основном в. 1978-1980 тт. Первый вылет этого варианта
был произведен в 1981 г. (рис. 17).
По результатам совместных проработок ЦАГИ и ОКБ на Су-27
были введены: дистанционное управление с системой улучшения ус-
тойчивости (СУУ), статическая неустойчивость на дозвуковых ско-
ростях, непрерывно нарастающее отклонение носков крыла но углу
атаки, заостренный наплыв на крыле и ряд других прогрессивных
Рутений.
Б начале летных испытаний Су-27 встретились трудности в обсс-
Псчении продольной устойчивости и управляемости самолета с листании
О11,|°й системой управления. Излишняя чувствительность продольного
Управления на больших скоростных напорах привела к катастрофической
Раскачке самолета.
Благодаря исследованиям динамики самолета с СУУ на стендах,
*Радеде1гным в ЦАГИ и ОКБ, был выявлен ряд новых принципиальных
й^Р°приятий по улучшению характеристик Су-27. Например, благодаря
Дению в систему дистанционного управления с СУУ специальных
Льтров, были получены вполне удовлетворительные пилотажные ха-
Теристики Су-27 на всех режимах.
После 1985 г. в процессе последующих работ ОКБ им. П.О. Сухою, у:
пол руководством Генерального конструктора М П. Симонова, дорабатьл
.пгеь конструкция и системы Су-27, создавались новые его модификации.
Рис. 17. Маневренный истребитель Су-27 (фото С. Скрынннкова)
Следует указать, что в США создание истребителя с большой тяго-
вооруженност ью Г-15 “Игл" было начато в 1969 г. и завершено в 1974 г.,
т.е. несколько раньше, чем в СССР. К 1984 г. их было поставлено в
ВВС, уже более 800. Однако этот самолет не имеет той совершенной
аэродинамики, которая была разработана совместно ЦАГИ и ОКБ и
обеспечивала высокие маневренные характеристики, значительно превос-
ходящие таковые у F-15. На самолете F-15 нет корневого наплыва, от-
клоняемых носков крыла, дистанционной системы управления, обеспечи-
вающей высокий уровень пилотажных характеристик Су-27 при малой
статической устойчивости и при статической неустойчивости, фюзетяж
F-15 имеет традиционную форму.
Лишь в последующие годы в середине 70-х годов в США были про-
ведены разработки прототипов легких истребителей F-16 и F-17, в кото-
рых были использованы близкие к нашим идеи (отклоняемые носки, на-
плывы). Серийный выпуск легких истребителей был начат: F-16 в
1978 г., a F-18 в 1982 г. Однако аэродинамика этих истребителей США,
а также летно-технические характеристики, как показывает опыт и оцеИ'
ка зарубежных экспертов, уступают этим данным самолета МиГ-29.
Таким образом, разработка F-16, F-18 и МиГ-29 велась практически
одновременно, а серийный выпуск легких истребителей начался нескоЛЬ’
ко раньше в США.
На новых советских маневренных истребителях были примсисНД
очень удачные компоновки мотогопдол для двух двигателей, разработан'
пые в ЦАГИ совместно с ОКБ. Воздухозаборники обеспечивали ффсК
тивное торможение потока при хорошей его равномерности в больше!
диапазоне чисел М и углов атаки. Специальные исследования иоказ&Я
www.vokb-la.spb.ru - Самолёт своими руками?!
что условия на входе обеспечивают работоспособность двигателя прак-
тически при любых положительных углах атаки.
Следует указать, что на самолете Су-27 впервые в полете был осущес-
твлен новый вид маневра - динамический выход на большие закри-
гическис углы атаки (а 2 90°), который впервые был публично продемон
стрироиан на Парижском салоне летчиком-испытателем 13. Г Пугачевым в
1989 г. и там получил название "Кобра Пугачева”. Исследования полета
па закритичсских углах атаки были начаты еще в 1980 г. до публикации
зарубежных работ на эту тему (например, работы Хербста) Предвари
тельные исследования возможности маневра тина “Кобра” были проведены
и ЦАГИ в конце 198G г. и в следующем году доложены на научной конфе
реннин. Эти проработки и первые испытания в полете, после проведенного
в НАГИ полуиагурного моделирования с летчиком, производились уже
при активном участии ОКБ им. П.О. Сухого и ЛИИ. Аналогичные иссле-
дования были проведены в ЛИИ и ОКБ им. А И. Микояна па летающей
модели МиГ-29. Летные испытания завершились удачным апробированием
этого маневра, а его последующая демонстрация на салопе в Париже в
1989 г. вызвала всеобщую сенсацию.
Маневренные истребители МиГ-29 и Су-27 демонстрировались на за-
рубежных выставках, а также на показательных полетах в ряде стран.
Рассматривая работы по боевым самолетам необходимо отметить
возросшую роль автоматизации управления при обеспечении устойчи-
вости, управляемости и боевой эффективности. Развитие этих исследова-
ний в ЦАГИ началось в 50-х годах.
Как уже указывалось выше, основа автоматизации была создана введе-
нием необратимого бустерного управления для всех органов управления.
Следующий шаг в развитии систем управления: введение некоторых
элементов автоматизации, таких как демпферы колебаний, регуляторы
загрузки усилий, регуляторы передаточных чисел.
Наконец па современном этапе наличие гидравлических приводов с
электрическим входом, наличие аналоговых и цифровых вычислителей
позволило ЦАГИ на основе проведенных исследований рекомендовать
более совершенные электродистанционные системы управления с алго-
ритмами управления, обеспечивающими удовлетворительные пилотажные
характеристики па всех режимах полета, даже при статической (момент-
ной) неустойчивости самолета. Впервые прототипы дистанционных сис-
тем управления были введены еще на Т-4 и Ту-144, а затем в полной ме-
ре реализованы па самолетах Су-27, Ту-160, Ан-124.
В этот период в ЦАГИ были развернуты работы но изучению упру-
1йх колебаний самолета с дистанционной и автоматической системой уп-
равления. Были разработаны теоретические методы исследования устой-
чивости упругих колебаний, разработаны экспериментальные методы оп-
ределения динамических характеристик приводов органов правления и
передаточных функций, описывающих колебания упругого самолета I
системой управления.
Помимо фундаментальных экспериментальных исследований в фор|
мировании облика самолетов нового поколения, их аэродинамики, прсй|
пости и динамики, большую роль последние 15-20 лет в ЦАГИ стали ин
рать расчетные методы и методы моделирования с использованием ЭВМ,
Для сверхзвуковых скоростей были созданы надежные программа
расчета аэродинамических характеристик крыльев, фюзеляжа, оперений
и всей компоновке самолета в целом.
Несколько позже такие же работы были проведены применится^
но к трансзвуковым скоростям полета. Были созданы системы автома-
тизации проектирования самолетов различного назначения, который
широко внедрялись в 80-е годы в ОКБ, оснастившиеся в 70-80-х го-
дах совершенными ЭВМ.
Расчетные методы, методы пересчета ог прототипа, по которому еся
экспериментальный материал, создавали фундамент для достаточно дос-
товерного широкого просмотра большого числа вариантов и для поиска и
отбора лучшего из них.
В монографии использованы материалы многочисленных эксперимен-
тальных, теоретических и расчетных исследований, проведенных ученым!
ЦАГИ за большой период от сороковых до девяностых годов. Руководим
этими исследованиями по тематическим направлениям, освещаемым в дан-
ной книге, в указанный период осуществлялось заместителями начальника
ЦАГИ по аэродинамике академиками С.А. Христиановичсм (1940-1954 гг.),
В.В. Струминским (1954-1962 гг.) и ГС Бюшгспсом (1961-1991 гг.) Рабо-
тами в области теоретических исследований в тот период руководи.™ акаде-
мик А А. Дородницын и член-коррсспондент В. В. Сычев, а в области аэро-
динамики силовых установок профессора Л.А. Симонов и А.В Николаев-
Этими учеными внесен большой вклад в формирование основных направле-
нии исследований ЦАГИ и получен ряд важных результатов но аэродинами-
ке сверхзвуковых самолетов.
Следует отметить большую роль в развитии аэродинамики сверхзвуко-
вых самолетов руководителей ЦАГИ А.И Макаровского (начальник ИН'
ститута в 1953-1960 гг.), В М. Мясищева (1960-1967 гг ) и Г.П. Свитисвч
(1967—1989 гг.). Общая координация работ, осуществляемая руководите-
лями ЦАГИ, организация строительства необходимой экспериментальной
базы, творческая связь с конструкторскими бюро играли большую роль Ч
успешном развитии работ по рассматриваемой тематике ЦАГИ
Настоящая монография имеет следующую структуру.
В первых семи главах содержится изложение материалов но аэроДШ
намикс сверхзвуковых самолетов с крыльями различных форм в план!
(прямых, стреловидных и треугольных крыльев, крыльев изменяемой
геометрии и крыльев сложной формы), по аэродинамике органов управ
ления, воздухозаборников, сопл и фюзеляжей.
www.vokb-la.spb.ru - Самолёт своими руками?!
Главы 8-15 посвящены вопросам обеспечения vr™-
ляемостл сверхзвуковых самолетов. В этой части If4HROCnr и управ-
новные требования, структуры систем управ тешш «™ТрМа10ТСЯ ос’
улучшения устойчивости и управляемости (СУУ) р. Ючая система
обеспечения устойчивости по всем каналам управления^вкТЛТ МСТ°ДЬ
чивость пространственных сложных движений Покачав И УСТ0*
связь аэродинамических характеристик свепх^Д» °Рганическая
структурой и параметрами его системы управления 7рГ° <самолета <*
анализа устойчивости и управляемости. Р Я‘ ^а,‘ °бзор Мет°Д01
Заключительные главы 16—18 со.тпп^.т .
СодеРжат методики оценки летно-
технических характеристик самолета, характеристик маневренности
Показаны основные закономерности их изменения в зависимости оч
основных параметров сверхзвукового самолета. Приведены сообвлже
ния по оптимизации параметров и дана .методика выбора основных
параметров самолета.
При написании монографии авторы избегали приводить детальные
выводы формул и различного рода соотношений.
В монографии не рассматривались вопросы, связанные с целевых
применением сверхзвуковых самолетов, так как это является специаль-
ной областью и потребовало бы анализа многих дополнительных аспек-
тов, выходящих за рамки поставленной авторами задачи
2*
Глава 1
ОСНОВНЫЕ МЕТОДЫ ОПРЕДЕЛЕНИЯ
АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК
1.1. Общий обзор расчетных методов
Применение ЭВМ полностью изменило состояние расчетных исследо
ваний в аэродинамике в последние десятилетия. Оно открыло широки
возможности “доведения до числа” как аналитических методов, так и мето-
дов численного решения уравнений теоретической аэродинамики. Хорони
известны достигнутые за эго время успехи. И все же, несмотря на большое
число работ, расчетные исследования аэродинамики пока не стали оспой
ным средством проектирования самолетов. С одной стороны, такое нолей
жение связано с многообразием явлений, возникающих при обтекании
сверхзвуковых самолетов во всем обширном диапазоне их применения -
обтекание сложных пространственных форм несжимаемым и сжимаемы!
газом, существенные нелинейности сверхзвукового обтекания, взаимодей
ствия ударных воли, влияние вязкости, явления при больших углах атаи
Рис 111. Классификация полей тече-
ния па стороне разрежения для тошенх
треугольных крыльев с острыми перед-
ними кромками (11- Светлые значки
«ютаетстпутот наличию скачка уплотне-
ния, зачерненные - его отсутствию; 1 -
<м-циипые и вторичные вихри, 2 - мест-
ные зоны счрына, 3 - отрыв потока,
иплупиропанныи скачками, 1 - присое
лиисппый поток; ах и Мх - угол знаки
и число Маха, взятью но норма, ш к
тах-мией коомке
и многое другое, еще непонятое и иеизу
чеппое. К тому же и непрерывное pal
витие аэродинамики самолетов ставит
новые задачи перед аэродинамической
теорией и предъявляет все новые требе!
вапия к расчетным методам Сложность
возникающих задач иллюстрируется
рис. 1.1.1 и 1.1.2, па которых показаны
возможные виды полей течения на сто-
роне разрежения тонких треугольных
крыльев с острой прямолинейной пере-
дней кромкой. Числа М и углы атак!
измеряют в сечениях, нормальных к пе.
родней кромке. Очевидно, что большая
доля усилий направляется на исследова-
ние отдельных частных проблем аэро*
динамики самолета и создание методе*
расчета его элементов
С другой стороны, существую! вну
1ренние проблемы вычислительной аэро
динамики. Есть принципиальная разниц
в получении численных результатов npi
решении аналитических и краевых за
дач. Точность получения первых в при
нятых при решении приближениях опрс
www.vokb-la.spb.ru - Самолёт своими руками?!
7СЯ только машинной точностью и,
?Хмоясно. структурой программы.
решение краевых задач, помимо раз-
аб и физической и математической мо-
чстей, включает в себя еще и дискретиза-
JOiK) задачи, го. переход от соотношений,
описывающих непрерывную (в смысле
континуума) среду и непрерывные крае-
ыс условия, к алгебраическим, как пра-
вило линейным, соотношениям, связываю-
ач.
40“ -
30“ -
20’ -
10’ -
О
Рис. 1.1.2. Классификация полей те-
чения на стороне разрежения д.тя
толстых треугольных крыльев с ост-
рыми передними кромками [2]: / -
область скачка в районе осевой линии
крыла; 2,3 - отрыв потока на пере-
дней кромке 4 - отрыв потока С об-
разованием скачка уилогнсиия; 5
отрыв потока нпдуттпропанный
скачком; 6 отрыв потока на пере-
дней кромке с. образованием скачка
уплотнения; 7 - граница Стэпбрука-
Сквайра, о\ и Му - угол атаки и
число Маха, взятые по нормали к иг-
редней кромке
щим параметры течения в отдельных точ-
ках выбранной в ноле течения сетки, а за-
тем решение повлеченной системы уравне-
ний относительно неизвестных парамет-
ров. Успех полученного решения определ-
яется выбором сетки, выбором уравнений,
связывающих параметры в дискретных
точках, и выбором метода решения. В ря-
де случаев применение неудачной расчет-
ной схемы может совсем не дать решения
вследствие его неустойчивости Добавляя
сюда ограниченную (машинную) точность
вычислений, приходим к выводу, что про-
цесс решения краевой задачи сопряжен с
появлением значите.тьного числа источни-
ков погрешностей, которые влияют на точ-
ность выполнения соотношений как явно используемых в методе решения,
так и явно в него нс входящих. Нарушение этих соотношений означает изме-
нение свойств среды ио сравнению с изначально заложенными в расчет.
Всякая погрешность, в том числе и локальная, приводит к подмене среды.
Вследствие этого в рассчитываемом поле течения могут появляться фиктив-
ные черты, не присущие действительной физической картине течения, и
пропадать особенности реальною течения. Причем, вследствие нелинейности
исходных уравнений, локальные возмущения среды могут проявляться в ви-
возмущений областей ниже по потоку; здесь достаточно напомнил», на-
пример, об энтропийных слоях или о вихревых образованиях. Не слишком
преувеличивая, можно утверждать, что каждый раз ЭВМ решает задачу о
ении некой своей среды, явно и неявно определяемой не только исходны-
Ми Уравнениями задачи, но и программными и аппаратными средствами ре-
‘Уения, и если не проводить проверку расчета, от задачи, которую наме-
тались решит!», в ряде случаев останется лишь название.
изложенного следует, что для получения надежного результата
Ст ’ ХХоДИма его проверка. По ряду причин основным средством проверки
г 411 кисленный эксперимент" и последующее сравнение его результа-
с аэродинамическим экспериментом, аналитическими решениями или
другими расчетами. Отсюда ясно то место, которое занимает численный
эксперимент в развитии численных методов, и связь развития этих мето]
дон с общим состоянием аэродинамических исследований.
Численные методы, как правило создаются под решение конкретно^
задачи, и их точность определяется но характеристикам, представляющим
интерес в рассматриваемой задаче. В качестве таких характеристик часто
используют силовые воздействия на обтекаемое тело и распределение дав-,
ления на теле, реже — распределение скоростей в выделенной области
Неявные величины, т.е. ие входящие явным образом в решаемые соигно
тения метода как правило, не используют. Хорошо зарекомендовавший
себя метод сохранит свою точность при решении близких задач тою
класса, ио при изменении этих условий может потребоваться адаптация
метола с новыми проверками и подгонками точности. Стремление к повьц
шению эффективности расчетных методов и охвату все новых задач обуя
лавливает наблюдаемое обилие методов и вместе с гем служит источником
материала для теоретических обобщений вычислительной математики.
Понятие эффективности расчета включает в себя и время, потребное
для его выполнения. По существу это время делит все методы расчета)
применяемые в аэродинамике, на две труппы — методы, практически
пригодные для проведения массовых расчетов, и методы, ис.пользуемЯ
для решения отдельных исследовательских задач. Граница между ним*
условна и зависит от состояния вычислительной техники, тем нс менв
она всегда существует и определяет уровень использования вычислитель-
ной аэродинамики в практике самолетостроения
В своей основе теоретическая аэродинамика предлагает для и» поль-
зования в численных расчетах несколько типов уравнений. Различие
между ними определяется ограничивающими наложенными условиями и.
соответственно, более или менее полным охватом явлений в течении
Наиболее полную информацию о движении газа, в принципе, может
дать решение уравнений Навье —Стокса, которые в стационарном случае
можно записать в виде
Fx+G +U = Действию молекулярной и турбулентной
у ' вязкости и теплопроводности,
здесь подстрочные индексы обозначают дифференцирование по соответл
ствующим координатам, a F G U представляют собой матрицы-столбцы
pu
ри2 --р pwn puw
F = put , G - 2 p’’’ - p . U = pea1
putw ptw pa “ + p
puff p " p« H
Такая форма записи включает в себя уравнения неразрывности, m
пульса и энергии Для замыкания системы к (1) добавляется тсрмичссК'
www.vokb-la.spb.ru - Самолёт своими руками?!
оо [риис состояния р - р/?Т и калорическое уравнение состояния в
d!op>te Л - ^/(ж 1)Р.Я = Л + («2 + г.'2*г^) 2.
4 Ес in взять для решения при дискретизации в области по 100 узло-
вых точек вдоль каждой координатной оси. то всего в области получим
10й узловых точек и каждый и элементов матриц F, G, U будет, в свою
очередь, матрицей порядка 10«. а число содержащихся в каждой из них
емеитов будет 1О'< Обычно в расчетах количество узлов вдоль каждой
координатной оси равно нескольким десяткам. Хотя матрицы получаются
разреженными вследствие того, что на каждый узел влияют узлы только
из непосредственной его окрестности, они остаются в достаточной степе-
ни г омоздкими. Определенные проблемы связаны и с постановкой крае-
вых условий на границах области счета.
Следует отметить, что при расчете обтекания сверхзвуковых самоле-
тов течение имеет существенно пространственный характер, и решение
двумерных задач не имеет того значения, как, например для крыльев
большого удлинения Поэтому случаи сведения задач к двумерным на-
много более редки.
Задача расчета упрощается, если не учитывать влияние вязкости. Тогда
из уравнений Павье Стокса (1) получаются уравнения Эйлера идеальной
жидкости. В общем случае решать их проще, чем уравнения Навье—Стокса,
вследствие того, что не нужно вычистить члены в правой части. Можно
также во многих случаях отбросить уравнение для энергии, заменив его со-
отношением Н - const. Существенное упрощение получается в случае сверх-
звукового течения вдоль одной из осей координат. Тогда течение в любой
плоскости, перпендикулярной к этой оси не зависит от течения ниже по
оси. и можно рассчитывать течение но слоям последовательно сверху вниз
по течешпо (так называемый “маршевый метод”). Кроме того в последнем
случае область расчета ограничивается естественным образом. В шяние вяз-
кости можно учитывать расчетом пшраничиого слоя.
С лсдующее упрощение может быть получено из уравнения Эйлера для
безвихревых течений. Практически — это случай, когда энтропия вдоль
качков уплотнения не меняется или ее изменением можно пренебречь,
например, в слабых скачках. Тогда можно ввести потенциал скорости
производи ле которого по переменным координат дают соответствующие
сбавляющие скорости, и вместо пяти дифференциальных уравнений, как
' получаем лишь одно — полное уравнение для потенциала
(а2 - <|2 )Ф гг + (с2 - о2 + (л2 - ф2)ф„ - 2ф.гфуфул. -
- 2ф;уфгфуг = О,
где л
“ - скорость звука
УравцГНОс11тельно этого 2 равнения также праведливо все сказанное об
юниц (1) в связи с его дискретизацией и о решении маршевым мето-
ДОМ Уравнения Эй аера
Дальнейшее упрощение можно получить для тел вносящих малья
возмущения в ноток — это тонкие тела под малыми углами атаки. Счед
тая, что сносятся малые возмущения относительно набегающего потока
и пренебрегая малыми величинами в (2), приходим к линеаризировав
ному уравнению для потенциала возмущений-
(1 - фгг <- ф^ f ф„ = 0, (3)
где Мо — число Маха набегающего потока. Его решение можно искать в
виде линейной комбинации элементарных решений уравнения. Раз!
деляется решение и для различных краевых условий, в частности дед
решения задач о влиянии толщины и угла атаки Для того чтобы nafiit
решение поставленной краевой задачи, но поверхности тела или внутри
нею задается распределение источников и стоков (в задаче с толщиной!
в вихрей или динолей (в задаче для угла атаки с интенсивностью, onpJ
деляемой в ходе решения задачи). Скорости в поле течения выражаются
в виде интегралов по поверхности с заданным распределением особенное!
тсн, а интенсивность особенностей находится из условий, выражающих
выполнение краевых условий непротекания в выбранных точках на по-
верхности тела. Таким образом, задача в этом случае сводится к peine!
пню ипгетрального уравнения. Распределение особенностей выбирают та!
ким, чтобы неизвестные интенсивности оказались коэффициентами при
интегралах, интегралы вычисляют и получают систему линейных алге!
браическпх уравнений относительно неизвестных.
Если распределение особенностей задастся по заданным небольшие
площадкам (панелям) на поверхности тела, изложенный метод решения
задачи носит название панельного метода. Для решения задачи с углем
атаки панельный метод, в частности, может быть построен непосредст-
венно относительно перепада давления на папе ш В зависимости от того*
больше или меньше единицы число Мо, получаем различные функиаЧ
в тияния одной панели на другую. При сверхзвуковом обтекании расчет
Производится быстрее вследствие того, что точки тежащие ниже по по-
току, не оказывают влияния на точки, лежащие выше Однако наиболее
принципиальное сокращение времени счета в этом методе нолучаегсЯ
вследствие того, что неизвестные, определяющие решение задачи, pacnoj
ложены на поверхности, а по в пространстве.
Изложенный подход к решению задачи может служить пллюстрв
цией тех ‘подводных камней”, которые таятся в численном решении ",а1
дач Так, если при решении задачи дозвукового обтекания располагать
особенности внутри поверхности тела, а выполнения условий нет р теКЭВ
ния требовать на самой поверхности, то при относительно небол ышЖ
числе точек, в которых выполняется условие ненротекания (контрольные
точек), можно полущить вполне гладкое решение описанным методом
Естественно ожидать, что при увеличении числа контрольных точен
должна увеличиваться точность решения. Однако, начиная с некоторойI
www.vokb-la.spb.ru - Самолёт своими руками?!
точек, решение принимает колебательный характер, не имеющий
41 о обшето с физическим решением, и сохраняет его при дальнейшем
,11^чичеиии числа контрольных точек Так прояв лястся в этом случае не-
’VBf тектная постановка задачи для интегрального уравнения, и для полу-
К ‘пня приемлемого решения нужно прибегать к использованию специаль-
ных методов решения некорректных задач для интегральных уравнений.
[инсаризованнос уравнение для потенциала возмущений применя-
ется ття расчетов в диапазоне чисел Мо = 2,5+3. При больших числах
yj слишком мал диапазон углов атаки или толщин, в котором по-
дучается приемлемое решение Неприемлемое решение получается и в
области чисел Мо около единицы, здесь действуют другие оценки отбра-
сываемых членов.
Если положить в уравнении (2) скорость звука равной бесконечноеги
подучим уравнение для несжимаемой жидкости — уравнение Лапласа.
Ф.гл + Фуг/ - Фгг = 0. (4)
Это уравнение, в отличие от уравнения (3), линейное но своей сути без
дополни тельных предположений о порядках величин параметров течения.
Такую же форму уравнения получим, если положить в уравнении (3) число
Маха Мо - 0. Здесь нс будем останавливаться на многочисленных методах
решения уравнения (4). Отметим только, что к нему применим и метод осо-
бенностей, указанный в связи с численным решением уравнения (3).
Можно свести уравнение (3) к виду (4), если использовать преобра-
зование П рандт ля — Глауэрта:
*1 = */Р- Vi = //. <1 = р = 7'1 - Мо
(5)
Оно позволяет свести задачу обтекания сжимаемой жидкостью, когда
отсутствуют сверхзвуковые зоны течения, к задаче обтекания нссжимас
мой жидкостью измененного тела
Наконец, последнее упрощение уравнения (4) или (3) получается
Дя гол, вытянутых вдоль продольной оси, или при числах Мо - 1, тогда
первый член в (4) и (3) выпадает и остается уравнение
Фугу + Фгг = 0 (6)
Метод решения задач аэродинамики, основанный на решении этого
1 авнення называют методом плоских сечений для тонких тел — течение в
и плоскости, поперечной к продольной оси, не зависит от течения в со-
и плоскостях. С его помощью было получено решение разнообразных
ач обтекания с испотьзованием методов теории функций комплексного
та< ИуС11Н°1Т> в 1о вРе-чя, когда ЭВМ только входити в практику расчетов
аиримср, как интерференция крыла с фюзе.тяжем или определение
jjpj °Сти зависимости Cyft(u) = лХа/2 для крыльев очень малого удлинения,
части *ЦаЯ Э 04 мегоДУ определенная ограниченность, приводящая, в
:ти, к тому, что решение теряет точность по мере удаления от про-
дольной оси тела, а зависимость от числа М совсем выпадает, искупается
простотой его использования Широкое применение метод нашел в аэроЫ
цамикс управляемых снарядов 131. но его возможности практического и«
пользования не исчерпываются юлько этим классом летательных аппаратов.
После появления ЭВМ этот метод использовался в соединении с мя
тодом дискретных вихрей для расчета вихревых систем, возникающих на
фюзеляжах, крыльях и наплывах с большими углами стреловидности и
их комбинациях, обтекаемых под большими углами атаки. Метод дис4
кретных вихрей имеет свои сложности, связанные с тем, что явления об,
раэования завихренных областей моделируются введением в ноток ст*
дельных вихрей, при этом наличие областей завихренности и места схода
вихрей постулируются; при малом числе вводимых вихрей они плохо
моделируют вихревые области, а при большом их числе значительно
возрастают вычислительные трудности, связанные с отслеживанием nrJ
ведения вихрей. Тем не менее, при выдерживании надлежащих условий
получаются вполне удовлетворительные количественные результаты и,
что в ряде случаев имеет большой интерес, получается качестве иное
представление картины течения.
Хронологически применение численных методов к решению задач
аэродинамики развивалось от простого к сложному в порядке, обратном
изложенному выше процессу упрощения уравнений от (1) к (6). Анали-
тическое решение отдельных линеаризированных задач, например, в тео-
рии крыла, было получено примерно в то же время, что и решения задач
для уравнения (6), или даже несколько раньше [41. Однако пик разви-
тия численных методов для уравнения (3) пришелся на период с коим
60-х до начала 80-х годов. В это время были созданы методы, позволя-
ющие рассчитывать полную конфигурацию самолета при обтекании era
дозвуковым и сверхзвуковым потоком. Эти методы позволяют получать
суммарные и распределенные характеристики самолета, а также no.w
скоростей вокруг него. Наиболее распространенным стал панельный меч
тод в различных ею формах. Точность расчетов но линейной теории в об
шем составляет 5 4-10%. Во м потом она определяется неучитываемыми
эффектами вязкости, такими как отрывы пограничного слоя, и влиянием
нелинейности. Точность получается более высокой при определении подъемН
ной силы, когда складываются воздействия на верхнюю и нижнюю по"
верхности летательного аппарата, становится меньше, для характеристик!
связанных с распределенными нагрузками, и еще меньше для волновога
сопротивления, когда воздействия на лобовую и хвостовую части новерХа
ности аппарата вычитаются — здесь существующие в реальности отклоч
нения от линейной теории сказываются больше. Точность резко адает!
когда прямые линии, характеризующис геометрию летательного auiiapai
та, совпадают с линиями Маха. В большой степени точность расчета зИ
висит от выбора числа панелей и их распределения по поверхности лета|
тельного аппарата. В общем случае число панелей составляет по крайняя
www.vokb-la.spb.ru - Самолёт своими руками?!
-f«ei по крайней мере несколько сотен. Необходимость исподьзова-
сГаВ большого числа панелей превращает подготовку геометрических дан-
д7Я расчета в стадию, требующую много времени и аккуратности.
НЬ1 7[;1я проведения массовых расчетов с вариацией конфигурации на
нпшх этапах проектирования в задаче о влиянии угла атаки более прак-
тичным становится использование плоско-пространственной геомстричес-
гой схемы, когда пространственные элементы поверхности летательного
шпарата заменяются плоскими, лежащими в средних плоскостях соот-
ветствующих элементов параллельно продольной оси аппарата [5].
Влияние вязкости в наиболее простом приближении можно учесть по
по люй омываемой поверхности летательного аппарата, взяв для коэффи-
циента трения его значение на пластине.
Линейная геория в настоящее время служит основным средством рас-
чета аэродинамических характеристик самолетов вследствие тех возмож-
ностей которые, она предоставляет как в отношении получаемых резуль-
татов, так и в отношении простоты их получения.
Программы, составленные в ЦАГИ на основе панельного метода, позво-
ляют рассчитывать не только аэродинамические характеристики самолета,
но и влияние на них упругости конструкции. Так на рис. 1.1.3 показаны ти-
пичные относительные изменения аэродинамических характеристик, обус-
ловленные упругостью самолета (программа Д.Д. Евсеева, А.С. Тимонина).
Область применения линейной теории может быть расширена введе-
нием в нес нелинейных поправок. На больших углах атаки, например,
это делается соединением линейной теории с методом дискретных вих-
рей. описанным выше.
Приемлемые времена счета при решении трехмерных задач обтекания
полной конфигурации самолета получаются также в случае решения урав-
нений Эйлера для полностью сверхзвукового обтекания. Решение может
быть получено, например, адаптацией метода предиктор-корректор Мак-
1 рмака к расчету’ самолетных конфигураций, и дает суммарные и раенре-
Де.теннь1е характеристики самолета. Подготовка исходных геометрических
Дангтых и в этом случае требует много времени и аккуратности, поэтому
М ’1,5
обусловленные
Р,,с 1 1 ч п
mpvr ’ относительные изменения аэродинамических характеристик
- °пью конструкции, н яаиисимости от скоростного напора
получение такого численного решения оправдано на более продвинул
стадиях проектирования. Па рис. 1.1.4 приведены результаты расчета
программе, разработанной в ЦАГИ на основе метода Мак-Кормака [6]. '
Рис 1.1.4. Расчет аэродинамических характеристик по прейрамме, описатпюй в |6] I
Определенные сложности представляет получение внутренних ударньи
волн течения. Есть два способа численного нахождения ударных волн J
улавливание “размазанных" по узлам сетки ударных волн, получаемы!1
непосредственно в процессе общего решения как областей с большими ip*
диеитамп параметров, и их выделение с помощью специальных приеме
вычислений. При этом для параметров течения на “скачке” могут по bi*
подняться соотношения Гюгонио, и в связи с этим неточно определяются
как положение ударных воли, так и параметры газа за ними. Выделение
ударных волн существенно увеличивает время счета и при сложной конфи«|
гурации ударных волн становится очень затруднительным. Кроме тог«
ряд численных методов, в том числе и метод Мак-Кормака, приводит I
появлению колебаний вычисленных значений параметров перед скачком и
за ним Обычно с пх существованием просто мирятся или же вводят спе-
циальные операторы сглаживания.
Численное решение уравнений Эйлера в общем случае проходит
только на суперЭВМ. В связи с этим решение уравнений Эйлера при об-
текании потоком с дозвуковыми скоростями проводится в большей -тепе-
ни для задач, связанных с исследованиями обтекания отдельных элемен-
тов летательных аппаратов. |
Линейная теория позволяет получить решение для нижнего диапазон»
сверхзвуковых скоростей. Можно получить решение, более простое, чеМ
решение полных уравнений Эйлера, “сверху” (для больших чисел Маха)!
если воспользоваться методом, разработанным в ЦАГИ для расчета гтшерз-
нуковьгх течений [7J. Как оказалось, область епт применимости может быт»
снижена до числа М ~ 2. Метод основан на предложенной А. А. ИлыошинвВ
нестационарной аналогии (гинерзвуковой закон плоских сечений), в когорэ!
рассматривается нестационарное течение в плоскости, движущейся вдоЛ1
тела с постоянной гиперзвуковой скоростью, равной скорости na6ei ающс<в
www.vokb-la.spb.ru - Самолёт своими руками?!
Смешение вдоль тела здесь играет роль времени. Угол атаки тела
считается небольшим, а само тело тонким. На большие углы атаки
йР” ' сятков градусов) аналогия была распространена В.В. Сычовым. Дву
д движение в плоскости рассчитывается численным методом
‘чСрНготунова. Помимо возможности расчета сложных форм (рис. 1.1.5),
С чтоже1П1ЫЙ метод расчета имеет то преимущество, что исключается
'^-чайное появление дозвуковых скоростей, приводящее к сбоям в счете при
С 'пользовании маршевых методов. Наличие больших дозвуковых зон трсбу-
,U специального рассмотрения, возможно, способом локальных поправок, а
псботыпие дозвуковые зоны, если они несущественны, просто игнорируют-
ся При гиперзвуковых скоростях явления на стороне разрежения тела, об-
текаемого пол большими углами атаки, существенного вклада в силовые воз-
теиствия не вносят, поэтому оправдано принятое гиперзвуковое рассмот-
рение обтекания без учета деталей течения па подветренной стороне для уп-
рощенного расчета обтекания самолета.
Влияние вязкости может вводиться в расчет либо через введение по-
граничного слоя, либо решением уравнений Навье —Стокса. Существуют
методы численного решения задач для трехмерного пограничного слоя,
которые позволяют в целом получать расчет течения с влиянием вязкости
быстрее, чем с использованием уравнений Павье -Стокса. Однако слож
пость геометрических форм самолета, многообразие аэродинамических
явлений при его обтекании, таких, например, как отрывы, взаимодей-
ствие пограничного слоя со скачками уплотнения, переход ламинарного
слоя в турбулентный, трудности построения взаимодействия погранично-
го слоя с внешним невязким потоком, в сильной степени осложняют рас-
чет полною самолета. Остаются и общие вопросы построения моделей
турбулентности. Поэтому подобные расчеты проводятся, в основном, для
относительно простых геометрических форм и для элементов самолета. В
этих случаях иногда можно даже обойтись без суперЭВМ.
В отношении численных решений полных уравнений Навье Стою
пока остается справедливой сдержанная оценка возможностей использован}
полных уравнешгй Навье —Стокса в качестве практического метода чи
ленного решения задач обтекания, сделанная несколько лет назад [9]. [<•
правило, рассматриваются различные упрощенные формы уравнений Ц
вье - Стокса, но даже и для них остаются многие из трудностей, уном:
нутых в связи с решением уравнений noipainriHoro стоя. К ним добавляю
ся еше и сложности решения уравнений. Неоспоримым преимущество
уравнений Навье —Стокса яв^тястся ю. что они могут дать падежную основ
решения задачи, и такие явления, как отрывы, вихревые образования, дол
жны получаться из них ‘'сами собой”. Тем не менее, выявить характерца
особенности сечения в численном решении — :?адача далеко не простая. Си
сюда следует и преимущественное применение уравнений Навье—Стокс]
лишь в области численного исследования отдельных видов течений и свя
данных с ними внутренних задач численной аэродинамики. Помпы
гочисленные примеры численного решения задач для самолетов лишь под-
тверждают общую тенденцию, хотя и являются обнадежтгвающими.
Существует определенная конкуренция между подходами к решению
самолетных задач, основанными на использовании уравнений погранич-
ного слоя и уравнений Навье —Стокса. Наряду с этим можно привеЯ
примеры взаимодополнения результатов различных подходов. Остана
вимся в качестве иллюстрации общего положения па расчете течений ирг
больших углах атаки. I
Эксперимент показывает три типичных формы отрыва на болыша
углах атаки при дозвуковых скоростях в зависимости or угла стрсловид
ности передней кромки крыла: при большом угле стреловидности проис
ходит замкнутый отрыв с образованием вихря вдоль передней кромки; за
крыльях умеренного удлинения, близких к прямым, происходит откры-
тый отрыв сложной пространственной формы; при умеренных угла
стреловидности па каждом полукрыле образуется мощный вихрь вблизи
центральной хорды, сходящий с крыла почти перпендикулярно его по-
верхности ("рогообразпый” вихрь),
В 80-е годы, когда численное решение уравнений Эйлера во мноия
работах применялось для исследования течения при больших углах атаке
вблизи передней кромки крыльев с большими углами стреловидное™
обтекаемых дозвуковым потоком, обнаружилось, что картина обтекания,
особенно при острых передних кромках крыла, хорошо представляе! те-
чение с вихревым отрывом. В ряде случаев получалось даже количест-
венное совпадение с экспериментом. Из уравнений Эйлера возможность
внхреобразования следует только при изменении энтропии в скачке уп-
лотнения, непостоянной вдоль скачка, тем нс менее в решении .завихрен-
ность появлялась и в отсутствие скачков. Позже выяснилось, что надеЖ
ность получаемого решения не особенно велика, его вид зависит от шаЛ
сетки, ряда других влияний, связанных с численным решением задачи
46
www.vokb-Ia.spb.ru - Самолёт своими руками?!
пяча других влияний, связанных с численным решением задачи,
сетки. * образом, оно фактически является ложным решением. Фи-
и> га надежное решение было получено только при численном реше-
3ll4et, .1Внений Навье —Стокса, хотя и при этом осталась некоторая зави-
111,11 > Р‘ оТ деТалей реализации численного решения.
СИ> Дтя крыльев с умеренным углом стреловидности и близких к пря-
ым расчеты пограничного слоя показали при увеличении угла атаки
Начато образования формы отрыва, наблюдаемого в эксперименте. По-
скотьку при этом вихревые системы не моделировались, сам отрыв по-
vhch не был, а суждение выносили по форме линий тока в пограничном
с'юе Для крыла с малым углом стреловидности оставалось сомнение,
нвтяется ли получаемая огибающая предельных линий тока действитель-
но основанием поверхности отрыва, влекущей за собой все изменения в
потоке, или же она представляет собой лишь локальное образование в
пограничном слое. Ответ на этот вопрос был получен численным реше-
нием уравнений Навье —Стокса в приближении тонкого слоя [11|. Он
оказался положительным.
Во всех случаях решение проводилось на суперЭВМ
Основным элементом, создающим подъемную силу самолета, служит
крыло [11, 121. Вместе с подъемной силой крыло всегда создаст сопротив-
ление и продольный момент. Эти три обстоятельства имели определяющее
значение в разительном изменении внешних форм самолета, произо-
шедшем после появления реактивного двигателя, обеспечившего возмож-
ность освоения сверхзвуковых скоростей полета. Наиболее эффективным
средством получения подъемной силы в несжимаемой жидкости до уме-
ренных углов атаки является профиль. Отсутствие поперечных скоростей,
позволяющее наиболее эффективно использовать движение газа для по-
лучения подъемной силы, сила сопротивления, определяемая только вяз-
костными явлениями, широкие возможности изменения формы, а вместе с
ней и распределения давления по профилю и зависимостей Суо(а), тпг(а),
делают профиль почти идеальным средством для этой цели.
Реализация идеи профиля на самолете в виде прямого крыла вносит
свои коррективы. Пространственность обтекания, обусловленная конеч-
ным размахом крыла, уменьшает эффективный угол атаки профиля; вих-
ри, сбегающие с крыла, приводят к появлению индуктивного сопротивле-
ния. Появляется зависимость подъемной силы от удлинения крыла,
причем уменьшение подъемной силы и индуктивное сопротивление тем
-тыне, чем меньше удлинение. Стремление увеличить удлинение стал-
геается с требованиями прочности, и па маневренных самолетах оно
становится компромиссной величиной.
Жиг Осипве аэродинамики прямого крыла при дозвуковых скоростях ле-
пи1 Искание профиля и проблемы обеспечения необходимых характе-
и Ик крыла решались подбором профилей и относительно небольшими
нениями формы крыла, что не вызывало принципиальных трудностей.
себя сжимаемость воздуха. Первые проявления сжимаемости па профц.^
сказываются в увеличении С“а, и непропорциональном изменения
давления с ростом скорости полета, В несжимаемом сазе давление меняет!
ся пропорционально скоростному напору q. Если ввесш безразмерный ко.1
зффнциент давления С,, = (р рх) q, то для сжимаемого газа по форму,
лам, которые следуют из преобразования Праидтля — Глауэрта, получим:
Суа = Суа иесж/Р' тг = песж/З •
Ср = ^р несж/Р' Р = ~ ^б' I
где Мц - число Маха набегающего потока.
Из эшх формул следует, что большие разрежения на профиле, а
следовательно и местные скорости, в сжимаемом газе с ростом скорости
полета получают тем больший прирост, чем меньше разрежения. Ро т
местных скоростей приводит к тому, что в некоторой точке профиля ско-
рость сгановшся звуковой. Число Мо, при котором скорость в какой-то
точке профиля достигает местной скорости звука, называют критическим
числом Маха. При дальнейшем увеличении числа Мо на профиле разви-1
ваются сверхзвуковые зоны, сначала на верхней стороне профиля, а по-
том и на нижней, закапчивающиеся скачками уплотнения и отрывами из-
под скачков. В этом случае формулы Прандтля Глауэрта становятся
неприменимыми. Потери в скачках приводят к появлению нового вида
сопротивления волнового, и общее сопротивление многократно!
(вплоть до порядка величины) увеличивается. Нсодновременность разви-
тия сверхзвуковых зон, перемещений скачков и отрывов на верхней и
нижней поверхностях профиля ведет к резким изменениям подъемной
силы и продольного момента но числам Мо. Только с выходом на сверх-
звуковые числа Мо полета и полным установлением сверхзвукового обте-
кания верхней и нижней поверхности профиля резкие изменения харак-
теристик по числам Мо прекращаются и наступает сверхзвуковой режим
обтекания со своими значениями и законами изменения подъемной силы,
сопротивления и положения фокуса. Так, для бесконечной тонкой плас-
тины теоретическая величина С”а меняется от 2л в несжимаемом газе Д<ч
4/р при сверхзвуковых скоростях, положение фокуса — от 1/4 до I 2
хорды, волновое сопротивление зависит от утла атаки как 4а2/р, а для
профиля оно пропорционально квадрату относительной толщины и убЫ
васт по числам И как 1/р (в случае сверхзвукового обтекания
р = -1 >-
Резкое возрастание сопротивления и изменение продольного момента
профиля в трансзвуковой области характерны и для прямого крыла. Все
исследования показывали, что самолеты с прямым крылом достаточнЧ
большого удлинения непригодны для полетов с трансзвуковыми и сверх*]
звуковыми скоростями, и это очень ючно отразилось в появлении термИ",
www.vokb-la.spb.ru - Самолёт своими руками?!
-критическое число Маха”, "звуковой барьер”. Усилия сгладить влия-
rf(>В . 1а Маха, направленные на увеличение критического числа Маха и
^-[бченпе скачков уплотнения, оставаясь в рамках концепции прямого
О< ria (тмсньшение толщины профиля, применение сглаженных сим.мст-
К|?чиых профилей без резких пиков разрежения), не привели к карди-
нальному изменению положения.
] Принципиальное решение проблемы заключалось в идее скользящего
ыта Если прямое крыло бесконечного размаха с постоянной хордой, со-
славюниое из одинаковых профилей, обдувать потоком со скоростью V’
под углом х к хорде, то это эквивалентно обтеканию прямого крыла со
скоростью V’cosy по нормали к передней кромке; составляющая Vsin/
вдоль размаха приводит лишь к изменению вязкого трения. Отсюда сразу
же следует возможность повышения критического числа Мкр профиля в
1/сочу раз. При достаточно большом угле % можно получить существен-
ный сдвиг но числу М начала проявления сжимаемости. При этом подъем-
ная сила скользящего крыла уменьшается по сравнению с прямым в cos2x,
а сопротивление в cos3x Ра:}-
В полной мере эффект скольжения проявляется на крыле бесконечно-
го размаха. На самолетах он реализуется в виде стреловидных крыльев
конечною размаха, на которых в корневой области и в концевых областях
влияние скольжения нарушается и, вследствие этого, его общая эффек-
тивность па крыле падает. Таким образом, для проявления в возможно бо-
лее полной мерс эффекта скольжения крыло должно быть большого уд
линения (вспомним здесь косое крыло Джонса) поэтому для возможно
большего продвижения по числам Маха нужен большой угол стреловидно-
сти. Здесь опять появляются требования прочности и д,1Я обеспечения не-
обходимой жесткости крыла при повышенных требованиях к его нагруз-
кам приходится уменьшать его удлинение. Так приходим к крылу малого
удлинения с полностью пространственным обтеканием. Впрочем, течение и
на скользящем крыле уже нельзя считать плоским - векторное сложение
переменной скорости течения вдоль профиля с постоянной вдоль размаха
скоростью V sin у даст искривленные .линии тока.
Применение крыльев малого удлинения обозначило окончательный
уход от концепции проектирования крыльев в виде набора профилей, на-
правленного прежде всего на обеспечение несущих свойств. Она смени-
лась концепцией рассмотрения целой несущей поверхности, обеспечиваю-
щей весь комплекс необходимых аэродинамических характеристик, и
особенно сопротивления на сверхзвуковых скоростях и на переходе к
ним. Существенно пространственный характер обтекания, характерный
д крыльев малого удлинения, способствовал устранению нежелатель-
ных пиков давления и общему сглаживанию его распределения, а также
лее гладкому ходу зависимостей аэродинамических характеристик от
^ислц Маха. Исследования крыльев малого удлинения начались вне за-
и1”"-ги of эффекта скольжения треугольные крылья оказалип
висимости от эффекта скольжения — треугольные крылья оказалцД
очень удобным объектом применения теории сверхзвуковых линейщЛ
конических течений. Особенность таких течений заключается в постоя!
стве параме1ров. характеризующих его, на лучах выходящих из вециц.
ны крыла. При этом срединная поверхность крыла может быть плоексц
или иметь коническую деформацию. Во всех сечениях, проведенных цД
постоянным углом к оси крыла, характер распределения параметров
течения остается постоянным, лишь растягиваясь подобно самому себе с
удалением от вершины крыла. Обтекание крыла получается сутествецЯ
различным в зависимости от характера — сверхзвуковою или дозвукэвJ
го — его кромок. Кромка считается сверхзвуковой, если опа нс попадает
в конусы Маха, выходящие из се точек, и дозвуковой, когда опа ежит
внутри конуса. В первом случае на кромку не попадают возмущения!
приходящие из-за нее сверху но течению, во втором — влияния ирихо!
дят и из-за кромки. В частности, обтекание дозвуковой передней кромки
сходно с обтеканием передней кромки дозвуковым потоком, а обтеканац
сверхзвуковой передней кромки напоминает обтекание клипа. За прямо
линейной сверхзвуковой передней кромкой в однородном потоке давле-
ние постоянно, а за дозвуковой меняется. Общие оценки сопротивления
самолета показывают, что желательны дозвуковые i
крыльев, поскольку па дозвуковых передних кромках происходит ..
тичная пли даже полная реализация подсасывающей силы.
Расчетное положение фокуса бесконечно топкого треугольного крыла
передние кромки
: происходит часе
па сверхзвуковых скоростях совпадает с центром масс площади плана
крыла независимо от числа Маха. Это является следствием линейности
распределения погонной нагрузки по центральной хорде.
Можно изменять распределение погонной нагрузки и положение фокуса
небольшими изменениями формы крыла в плане: отсечением боковых кон-
цов крыла, приданием углов стреловидности задней кромке, искривлением
передней кромки крыла (крылья "готические” — выпуклость контура вовне,
“серповидные" или "S-образные” — выпуклость контура внутрь, крылья с
изломом передней кромки). Так, отрезав концы крыла, получим положение
фокуса перед центром масс плана крыла и их сближение при увеличении!
числа Маха. Во всяком случае такие изменения формы крыла в плане пре-
доставляют свободные параметры, распоряжение которыми позволяет сме-
щать аэродинамические характеристики крыла в желательном нанравлеиии-
В связи с этим несколько подробнее остановимся па проблеме получения
крыла, Прит одного для полета и на сверхзвуковых, и на дозвуковых скорос-
тях. Ес ш, например, крыло должно использоваться вплоть до М = 2, угол
преловидност и крыла но передней кромке нс должен быть менее 60°, когда
кромка наловится звуковой. Удлинение чисто треугольного крыла с такн-'1
утлом стреловидности меньше 2,3 (л = 4cLg-/). Крыло с таким удлинение*1]
на дозвуковых скоростях полета может быть недостаточно эффективно.]
Лучшую эффективность будет иметь крыло, составленное из базовою крыла ।
www.vokb-la.spb.ru - Самолёт
своими руками?!
>сднсй кромки, меныиим 60’. п треугольного корневого наплыва на нем с
стреловидносni 60°. Суммарное удлш!ение такого крыла должно быть
межуточным между удлинениями трапециевидного и треугольного кры-
п^° Принятый прием представления крыла в виде дозвукового “базового”
ld 1( ••сверхзвукового" наплыва на нем может казаться искусственным,
К1? поверхность крыла обтекается как общее целое, однако изменение ролей
Т--Дозвуковой” и “сверхзвуковой” частей крыла с изменением числа М полета
щавдыраст такое представление. Детальный выбор геометрических пара-
метров крыла определяется как компромисс между требованиями к раз-
личным аэродинамическим характеристикам по всему диапазону скоростей
использования самолета.
Существенным режимом полета самолета, имеющим особое значение
пл крыльев малого удлинения, является полет на больших углах атаки.
Большие углы атаки можно определить как такие углы, при которых завн
симость Суя становится нелинейной. На профилях нелинейность проявля-
ется при углах атаки 10-И 2° и обусловлена отрывом потока. То же спра-
ведливо н для крыльев большого удлинения. На крыльях умеренного уд-
линения, вследствие влияния пространственного обтекания, отрыв сдви-
гается на большие углы атаки. На крылья малого удлинения с развитой бо-
ковой кромкой все большую роль по мере уменьшения удлинения оказывает
влияние обтекания концов крыла с образованием концентрированных вих-
рей вдоль по потоку. Так, на прямоугольных крыльях очень малого удлине-
ния С,/Л = дХа/2 + ла^/2, и линейный участок зависимости отсутствует
практически полноетыо. На крыльях с углом стреловидности передней
кромки около 55° уже при небольших углах атаки над поверхностью крыла
появляется вихревой жгут вдоль передней кромки, постепенно расширяю-
щийся с удалением от вершины крыла вследствие непрерывной подпитки его
с пе^днен кромки. Жгут сходиi с задней кромки крыла, а затем разрушает-
ся ("взрыв” вихря). Под собой жгут создает разряжение, тем более сил!,ное,
чем бо^1ьше угол стреловидное пт передней кромки и угол атаки крыла. Это
приводит к появлению “вихревой составляющей подъемной силы”, нелиней-
но изменяющейся по углам атаки. Такая вихревая составляющая характерна)
Для кръыьев с большим углом стреловидности и вносит существенный вклад
u йодьемную силу крыла. Причиной обра:ювания жгута является отрыв по-|
тока на передней кромке крыла. На острой передней кромке положение от-1
рыва зафиксировано па ней (см. рис. 1.1.1, 1.1.2), а на затупленной — за!
^исит от числа Рейнольдса обтекания крыла, т.е. определяется вязкостью!
а прямолинейных передних кромках (треугольные крылья) вихревой жгу!
Щ практически по лучу, выходящему из вершины крыла, почти вплоть дч
кР°Мки- и течение близко к коническому. Широкое применение при
’’едованип эшх явлении нашла теория дозвуковых конических течении
• ко в целом основное значение имеют экспериментальные исследования. I
ат °чка разрушения вихрей, уходящих с крыла, с увеличением угл|
4,1 смещается вперед, и при некотором его значении попадает на зги
нюю кромку кры ла Начиная с этого угла атаки, закономерности измеш
ния аэродинамических характеристик меняются с дальнейшим продв]1
жением точки разрушения вихря к вершине крыла происходит постелен-
ное сокращение области разрежения на крыле, подъемная сила умсньвЛ
ется, проявляется тенденция к увеличению момента на кабрированщ.
Когда точка разрушения вихря подходит к вершине крыла, происходит
переход к полностью отрывному обтеканию. Разрушение вихря опреде-
ляет и СуЛта)!, положение которого смещается на таких крыльях но уг-
лам aiaitu на несколько десятков градусов по сравнению с профилем.
На готических крыльях жгут, образующийся на передней кромке, от.
слаживает контур кромки крыла. На серповидных крыльях жгут в райо-
не резкого изменения наклона касательной к контуру отходит от нерод-
ной кромки и далее идет вниз по потоку, на передней кромке ниже но по-
току может появиться второй вихрь под большим углом к оси, чем пер-
вый. На крыльях с точкой излома передней кромки вершина нюрога
вихря фиксируется точкой излома. Наличие двух вихрей на крыле при-
водит к сложному взаимодействию вихрей, а затем к их размыванию.
Все эти процессы находят свое отражение на зависимостях аэродинами-
ческих коэффициентов от угла атаки.
Такова общая картина развития течения при больших углах атаки.
Она может различаться в деталях, и особенно в том, что касается коли-
чественных зависимостей. Развитие вихревых течений очень чувствительно
к различным влияниям и может существенно меняться в зависимости ог
факторов, которые кажутся малозначительными. Так, 1раницы пересече-
ния задней кромки областью разрушения вихрей (или достижения ею вер-
шины крыла) даже для крыльев одинаковой формы в плане могут раз-
личаться по углу атаки на 5ч-7°. Наконец, следует упомянуть о неодно-
значности кривых С,/Я(а). выражающейся в так называемом гистерезисе,
если начать уменьшать угол атаки на падающем участке кривой СуЯ(а)|
при а > цк зависимость С,/я пойдет ниже Суа тнх вплоть до выхода на вос-
ходящий участок кривой. Так сказывается предыстория развития течения.
Рабочим инструментом для восходящего участка кривой С,/Я(а) мо-
жет служить гипотеза Польгамуса при отрыве потока на передней
кромке крыла с большой стреловидностью подсасывающая сила, действо-
вавшая на носике крыла, становится вихревой подъемной силой. Гипоте-
за хорошо отражает также изменение сопротивления крыла (для плоско-
io крыла теперь С\я = C'^tg (ct) и его поляры. Согласно Польгамусу,
СуЯ = Kpcos2asin а + Kv cosasin2a.
Здесь Хр — коэффициент подъемной силы, рассчитываемый по тссм
рии потенциального обтекания, Kv — коэффициент вихревой подъемной
силы (равный коэффициент}’ подсасывающей силы). Это соотношение
показывает в основном, “геометрию" образования подъемной силы, ирО“
цсссы обтекания определяют коэффициенты и К,- Положение СуЯ(па|
www.vokb-Ia.spb.ru - Самолёт своими руками?!
геза Полыамуса дать не может, так как при постоянных коэффици-
”” v не учитывает разрушение вихрей. На восходящем участке кривой
рЦТНа 11 Ч
с раз-'южение COS(X и sma в Ряд с точностью до аэ дает
£a = a+i.a2
кр кр
6
Отсюда следует, что линейный член является основным при
a<0,1/<p/^v- и. например, при Ку/К{} « 10 зависимость С^„(о) практи-
чески целиком нелинейна, при Kv/Kp < 0,1 квадратичный член не шрает
роли, при Kv/Kv < 1 зависимость C?/rt(a) имеет при небольших а практи-
чески линейный участок и т.д. В принципе таким образом можно полу-
чить "универсальные" зависимости C,ytf(a)/Kp для различных отношений
Kv/Kp. При этом все же следует иметь в виду чувствительность обтека-
ния к другим факторам.
Выбор геометрических параметров крыла и в этой области подчиняет-
ся общим условиям компромисса обеспечения желательных аэродинами-
ческих характеристик но всем эксплуатационном диапазоне сверхзвукового
самолета. Достаточно указать, что, например, острые передние кромки
крыла позволяют фиксировать начало образования вихрей, что дает значи-
тельные преимущества на больших углах атаки, по приводит к невозмож-
ности реализации подсасывающей силы на малых углах атаки и, следова-
тельно, к соответствующему увеличению сопротивления и потере в КЛ1ах
при полете на дозвуковых скоростях. Этот эффект имеет место на дозву-
ковых передних кромках при полете на сверхзвуковых скоростях.
1.2. Определение аэродинамических характеристик самолета
по испытаниям его моделей в аэродинамических трубах
Аэродинамические характеристики (АДХ) самолетов обычно опреде-
ляют путем испытания их моделей на экспериментальных установках. Не-
смотря на существенный прогресс в области теоретической аэродинамики и
вычислительной математики, этот способ исследований остается основным
11 самым надежным средством получения АДХ при разработке, новых
млнюиовок и совершенствовании уже существующих: любые предложения
ПГ) формированию компоновок и рекомендации, направленные па улучитс-
пие АДх существующих самолетов, реализуются только после экснери-
-'ЩЦталъной проверки на моделях в аэродинамических трубах (АЛТ).
Результаты испытаний в АДТ тематических моделей (т.е. моделей,
пРеДНазиаченных для исследовательских целей) используются для срав-
1,,1тельного анализа АДХ различных компоновок самолетов и их элемен
Для расчета летно-технических и маневренных характеристик (ЛТ и
конкретных самолетов результаты испытаний в АДТ их геометри-
ями подобных моделей (в особенности аэродинамическое сонротивлс-
Hv,e>) приводятся к натурным условиям путем введения поправок. Вели-
чины поправок, их точность и методы определения завися! и от хараи
ристик АЛТ, и от особенностей компоновки самолета.
Аэродинамические характеристики самолета, полученные в резулы
те летных испытаний, также содержат методические поправки, ofiyd
вленные принятой схемой разделения результирующей силы, действу
щей на самолет в полете, на две составляющие: аэродинамическую си.г;
тягу двигателей.
В конечном итоге сопоставление АДХ, полученных в результа
испытаний моделей в АД1 и на основании обработки результатов лети
испытаний самолета, приводит к установлению АДХ самолета, который
сочетании с проспектными характеристиками двигателя принимаются
основу всех последующих анализов и расчетов ЛТ и MX
Ниже приведен анализ причин возможных расхождений АДХ Moj
лей сверхзвуковых самолетов, полученных в различных АДТ, меж
собой и с результатами летных испытаний.
Для того чтобы результаты испытаний моделей, полученные в АД
можно было перенести на натурные условия и использовать для оцсщ
аэродинамики самолета и в расчетах его ЛТ и MX, должны быть выпа
йены известные критерии подобия:
- геометрическое подобие (постоянство линейного масштаба);
- кинематическое подобие (постоянство масштабов времени, скорости
ускорений);
- динамическое подобие (постоянство масштабов сил различной прир
ды в сходственных точках) или, более подробно.
- подобие с учетом сжимаемости среды (постоянство чисел Maj
М = V/fl); ’
- подобие с учетом сил вязкости (постоянство чисел Рейноль»
Re = bV, v);
- подобие с учетом периодичности явлений (постоянство чисел Струхал
Sh = L/VT, Т характерное время нестационарного процесса)
- подобие с учетом аэродинамического нагревания (постоянство чпс.'
Прандтля Рг = СрЦ/Х, X — коэффициент теплопроводности)
К этим критериям следует добавить начальную турбулентность поп
ка, обтекающего модель в АДТ и самолет в полете, — е.
При скорос1ях потока, когда отсутствуют гермохимикокипешчо
кие эффекты (М < 5-5-6), зависимость любого аэродинамического кг ос]
фициента может быть представлена в виде функции от углов атаки
скольжения (а и р), конфигурации самолета (йг, о, — углы отклонени
подвижных элементов несущих поверхностей) и критериев нодоби!
Сл = F(геометрическое подобие, а, Р 5,, о,-, М, Re, Sli, с)
При выполнении всех условий подобия экспериментальные АДХ f
отличались бы от аэродинамических характеристик натурного самолета,
сожалению, полное моделирование нереально. В аэродинамических труба!
www.vokb-la.spb.ru - Самолёт своими руками?!
' возможно лишь геометрическое моделирование (с точностью до искажений
контура моделей, связанного с необходимостью кропления модели па весах
АДТ) Подобие но числу' Маха, что соответствует соблюдению подобия с
' учетом сжимаемости, реализуется в скоростных АДТ. Число Рейнольдса
[ оказывайся возможным моделировать только для взлетно-посадочных
режимов и для условий полета на больших высотах (рис. 1.2.1) в АДТ с
переменной плотностью воздуха.
В общем случае условия испытаний в АДТ не полностью соответ-
ствуют натурным и, следовательно, результаты экспериментальных ис-
следований требуют введения методических поправок для перехода от
АДХ модели, полученных на весах АД Г в условиях потока, ограниченно-
го стенками АДТ, к аэродинамическим характеристикам в условиях без-
граничного потока без влияния подвесных устройств кроме поправок для
перехода от АДХ модели в условиях безграничного потока к АДХ натур-
ного самолета в условиях полета. J1
Величины поправок зависят от степени отличия геометрических пара-
метров модели и самолета, способов крепления модели в АДТ и отличия
условий испытаний or условий полета. Для их определения разрабатя
каются и совершенствуются методика эксперимента в АДТ и метод
пересчета на натурные условия.
Отличия условий испытаний модели л АДТ от условий полец
определяются не только тем, что размеры модели существенно меньц^
размеров самолета.
- На модель действуют распределенные аэродинамические силы (й
моменты) и вес модели, которые воспринимаются подвесными устройства,
ми. жесткой державкой или лептами, т.е. уравновешиваются за счет седМ
доточенных сил (и моментов), приложенных в жесткой заделке, или сид
приложенных в грех точках (рис. 1.2.2). Самолет совершает свободна
полет под действием распределенных аэродинамических и массовых сил к
тяги сопла Иными словами, мотель в АДТ покоится при любых действую-
Сизы и моменты, действующие
на модель в АДТ
Аэродинамические весы фиксируют
силы и момент, дсГкгвуюшис гга
J юдцер ж л на юг циг устройства
Измерите лыгые приборы самолета
фиксируют линейные и угловые
ускорения к сказанной с самолетом
системе координат
Рис. 1.2.2. Силы, действующие иа модсун»
и АДТ п на самолет в полете
ших на нес силах и моментах, т.е. ис-
следуется в инерциальной системе ко-
ординат, а самолет приобретает ускт?
рения в направлении действующих на
него неуравновешенных силы и момен-
та т.е. система, связанная с самоле
том, иеинерциальна.
При одинаковой конфигурации
самолета и его модели деформации мо-
дели отличаются от деформаций само-
лета в полете нс только из-за различ-
ных упругих свойств модели и самоле-
та, но и за счет различий в уравпове-
пгивании аэродинамических сил. При
испытаниях с изменением числа М
(при а = const) деформация модели зг
висит от скоростного напора q (кто
рый растет с увеличенном числа М) 8
от числа М (за счет перераспределен»»
аэродинамической нагрузки). Деформа-
ции конструкции самолета зависят fl
действующих перегрузок (сила в#*
инерционные силы), числа М и уг-»
атаки (распределение аэродииамич»
ких нагрузок) и от скоростного палов
(в неявном виде).
- При испытаниях унругоподо*
ной модели в АДТ деформации моДС-Щ
только в одной точке на но
(Пу = 1) соответствуют дсформадив
самолета в полете, т.е. только на сд1^И
режиме. Для моделирования дру'1в
www.vokb-la.spb.ru - Самолёт своими руками?f
^пчов необходимы другие уцругоподобные модели. Особые трудности
iaJibi г моделированием упругих деформаций органов управления.
а Отсюда следует невозможность изготовления для испытаний в ЛДТ
,£НОй аэроупрутой модели, деформации которой были бы подобны
^формациям самолета на всех режимах полета.
Обычно исследуют жесткие модели с. деформациями для заданного
ежима полета, а результаты испытаний используются для корректи-
овки теоретических методов, применяемых для введения поправок на
^формации конструкции самолета при любых режимах полета.
Модель в АДТ находится в однородном потоке (с точностью до па-
раметров, которые характеризуются степенью равномерности потока по
гчавным осям рабочей части АДТ и вдоль продольной оси, а также уров-
нем турбулентности в ядре потока при отсутствии модели). Самолет в
полете проходит слои атмосферы с воздушными потоками различной
интенсивности, направления и турбулентности.
С изменением скорости потока в АДТ при постоянном давлении
одновременно изменяются числа М и Re, т.е. каждому числу И соответ-
ствует одно значение Re. Для самолета в полете такого однозначного
соответствия между числами М и Re нет.
Модель при обтекании с отрывом потока, а также при трансзвуко-
вых числах М может подвергаться интенсивной тряске, способной при-
вести к существенному' искажению результатов экспериментальных ис-
следовании. Частота и амплитуда колебаний модели определяются ее
массой, массой и упругостью поддерживающих устройств, демпфирую-
щими свойствами системы модель-державка и частотой воздействия фак-
тора, возбуждающего колебания, и нс соответствуют параметрам этого
явления на самолете (если оно наблюдается).
Геометрические отличия модели и самолета всегда имеют место,
поскольку, даже ишелючая отличия в размерах, геометрические обводы и
состояние внешней поверхности модели и самолета не тождественны.
- Внешний контур модели обычно искажен по сравнению с внешним
контуром самолета из-за необходимости крепления модели в АДТ па
крыле под Ленты или боковые кронштейны, на хвостовой части фюзе-
ляжа под ленты или хвостовую державку, на носовой части под ленты
И“1И носовую стойку и т.п.
_ Поверхность модели гладкая (в соответствии со стандартом высота
’Норкоц шероховатости поверхности модели не должна превышать 5 мкм).
Стояние поверхности самолета определяется технологией производства и
Пенями эксплуатации.
- На модели отсутствуют мелкие, выступающие в ноток детали (над-
Фойки), вспомогательные воздухозаборники бортовых самолетных систем,
с5'Тствую1- иди це моделируются щели между крылом и его отклоняемыми
' 'КЯпами. между фюзеляжем и отклоняемым стабилизатором и т.п
Моделирование протока воздуха через двигатель и ре I
тивной струи представляет собой отдельную задачу. у|
Суммарную силу, действующую на самолет в полете, трудно раЛ|
лить на “чисто” аэродинамическую силу и тяга двигателя, в которук
входили бы результаты взаимодействия обтекающего самолет попЛ|
воздухозаборника и сопла.
Тяга силовой установки отличается от стендовой тяги Двигате.цЛ1
представляет собой векторную сумму тяга сопла и импульса струи, вхэ»
щей в воздухозаборник: Риу - Рс + Рв. При определении тяга двш атедяЯ i
стенде, которая приводится в проспектах, линии действия этих векторов
падают между собой и с вектором скоросчи набегающего потока, а напрж |
лепия противоположны, поэтому "проспектпая” тяга двшателя определяете
как скалярная разность между тягой сопла (полной тягой) и noiepJ
импульса на входе силовой установки (Рп = inBV)
= гйв(й - V) + mrW + Fc(pc - р).
Здесь: — массовый расход воздуха, входящего в воздухе заборник
т'пг — массовый расход топлива, И7 — скорость струи на выходе из соп.ц
V — скорость полета, Fc — площадь выходного сечения сопла, рс «
статическое давление на срезе сопла, р — атмосферное давление.
Величина mBV = Хв физически представляет собой составляютлув
лобового сопротивления, связанную с образованием полной тяги.
Таким образом, в понятие тяга двигателя в его нроспектньи
характеристиках не входит сила, возникающая за счет поворота вектор,
скорости потока на угол (а + <эс), где фс — <рдп — угол между вектором
W и плоскостью хорд крыла. Поэтому вектор тяги силовой установки и»
по величине, ни по направлению не совпадает с вектором тяги сопл*
(рис. 1.2.3). Для выполнения требования соответствия аэродинамически
сил принятой схеме тяги, силу Айд относят к аэродинамическим силах
планера. Ее составляющие в подъемной силе и силе лобового сонрот^Н
лепия называются поправками на “поворот потока”. »
При экспериментальных исследованиях моделей с протоком воздух1
поправки на поворот потока фиксируются весами и входят в аэродинами-
ческие коэффициенты модели Cxa, Мг. Необходимо при этом, чтобы,
внешнее сопротивление модели и тяга двигателя самолета были опрсД^и
лены при одинаковых значениях относительных расходов воздуха через
протоки модели и двигатель самолета, что обеспечивает подобие вне^'
него обтекания модели в АДТ и самолета в полете.
Исключение из тяги силовой установки поправок на поворот потоХМ
и включение их в АДХ самолета приводит к зависимости аэродинамике®
ких характеристик самолета от режима рабо1ы двигателя. На задание"!
скорости величины поправок для самолета будут зависеть от yr-lJ«
www.vokb-la.spb.ru - Самолёт своими руками?!
) и расхода воздуха через двигатель, а для модели — от огноси-
(« + <рс хода цоздуха через канал. При малых углах атаки и низких
те.тыю1° ^озду'ха ЭТИ поправки малы, и ими можно пренебречь. С увели-
РагХ^а гдуатациониых углов атаки и расходов воздуха (особенно для
ЧС1ПХоИт\-риых ГТД) эти поправки возрастают.
ди’ V протоки, моделирующие силовую установку самолета, позволяют
" <цть характер внешнего обтекания, по не обеспечивают модслирова-
С0Х^вых юппой струи двигателей. Даже активный проток с эжектором
вентилятором не обеспечивает полное моделирование струи во всем
тиавазоне чисел М полета.
" Активный проток с моделированием струи требует подвода воздуха
извне Эта система подвода воздуха неизбежно приводит к искажению
внешних обводов модели.
Струя реактивного двигателя на самолете вызывает эжекцию и ускорение
внешнего потока в области расположения сопл. На моделях в АДТ струя
реактивного двшателя иногда моделируется жестким имитатором с геометри-
-
Двигатель на степде
Сопротнв.’вжше
воздухозаборника
Проспйгстная тяга двигателя: Р = Р. - Хп = (IV - V)
Двигатель на самолете
Дополнительная аэродинамическая сила, действующая
на самолет при повороте потока в силовой установке
-Лг v-m Vw
И’
Рис. 1.2.3. Тяга доюагеля на стенде и на самолете п полете
ческой ф<_эрмой. соотвегствуютцей форме струи; при этом должно выполнять^
равенство статического давления на донном срезе при наличии струи и f
имитатором. Для каждого режима работы двигателя свой имитатор.
Жесткий ими гатор и холодная струя не полностью отражают влця1
нис струи на распределение давления но хвостовой части модели. Поэто-
му при определении АДХ моделей с протоком воздуха моделирует^
лишь воздухозаборник (т.е. входная струя). Сопло и выходная стрл-д
как правило, не моделируются, а заменяются так называемым контроль
ним хвостовиком. Влияние струи на сопротивление модели оценивается
па специальных стендах, где исследуют хвостовую часть модели с сошод
и выходной струси, а затем хвостовую часть с контрольным хвостовиком
без струи. При этих испытаниях определяют потери тяги в сопле и
разность между лобовым сопротивлением хвостовой части с соплом и
струей и сопротивлением хвостовой части с контрольным хвостовиком
без струп. Эту разность называют лобовым сопротивлением сопла Хс и
включают в потери эффективной тяга сопла, т.е. часть лобового сопро-
тивления планера (Хс) условно относится к тяге. В принципе возможно в
потери тяги включать только внутренние потери сопла, а внешнее
сопротивление (А\.) сопла относить к аэродинамике планера.
Способ разделения движущей силы. т е. проекции суммарной силы
па скоростную ось А'. на тягу и сопротивление для самолета в принципе
нс имеет значения и не должен влиять па результаты расчета ею ЛТХ,
поскольку сумма аэродинамических сил планера и тяги двигателя при
любой схеме разделения равна одному и тому же фактическому значению
реально действующей па самолет суммарной силы.
При сравнентп! АДХ. полученных па основе экспериментальных исследо-
ваний моделей в АДТ, с аэродинамическими харакгеристиками, полученными
из летных испытаний, они должны быть приведены к сопоставимому ыЫУ-
т.е. должны содержать методические поправки, обусловленные одинаковой
схемой разделения результирующей силы, действующей па самолет в полете.
Если модель выполнена без протоков, то вместо воздухозаборников И
сопл устанавливаются обтекатели па входе и обтекатели (или сплошной
донный срез) на выходе, что заметно изменяет теоретические обводы мо-
дели и ее внешнее обтекание и, следовательно, требует введения соответ-
ствующих поправок к результатам эксперимента.
В частности, необходимо добавить поправки на влияние воздухо-
заборника:
АСуа - 2( /*в/S) sin a, AC“rt = 2( Гв/5") cos а,
АС'М = 2(?в/5)(1 - cos а), ДА,.- = 2(ЛВ/5)(.ТП/С^)сойа,
Атг - 2(FB/5)jFn sin а,
где Fn/S отношение площади входа в воздухозаборники к плошаДй
крыла модели (критерий подобия), хв координата входа в воздухозэ-
www.vokb-la.spb.ru - Самолёт своими руками?!
т > 0 , если вход располо-
борНИК. -In ‘
vc тонным центром масс моде-
жен -м
1И (рис- t
Величины поправок, учитывающих:
влияние искажений, связанных
с креплением модели в АДТ,
донное и внутреннее сопро-
тивление в зависимости от относи-
тельных расходов воздуха через
протоки модели,
- положение линии перехода ла-
минарною пограничного слоя в турбу-
лентный,
положения скачков уплотнения
Рис. 1.2.4. Поправки на влияние поадухоза-
борника &М,„ = -muV'(7B sin а + у* cos а),
(фдв =0); ^>»!и = -2(7^/.9(хв sinсс -г уп сова)
и отрывных ЗОН,
- влияние выходной струи на обтекание хвостовой части и т.д.
определяются с помощью дополнительных весовых и физических экспе-
риментальных исследований.
Для определения других поправок используют теоретические и инже-
нерные методы расчета, например, для учета влияния на аэродинамичес-
кие характеристики самолета деформаций несущих поверхностей, отли-
чий геометрических обводов модели от обводов самолета или отличия
состояния внешней поверхности модели и самолета и т.п.
Следует отметить, что учесть в полной мерс влияние всех отклонений
геометрических, физических параметров и условий испытаний моделей в
АДТ от параметров и условий полета самолета при переходе от результа-
тов трубных испытаний к натурным условиям практически невозможно.
Путем комплексного анализа поправок (точности методов их определе-
ния и влияние на результаты расчетов ЛТ и MX) выделены наиболее
важные. Это методические поправки, которые вносят в результаты испы-
таний каждой модели, а также поправки, обеспечивающие переход от
модели к условиям натуры и учитывающие:
- искажение па модели геометрии хвостовой части фюзеляжа и
в-’п<яние струи с учетом режима работы двигателя,
- отклонение геометрии воздухозаборника модели (при неполном
•м°лслировапии) и отличие относительных расходов воздуха,
- отличия деформаций модели в АДТ и самолета в полете,
- отличие полетных чисел Re от реализованных в эксперименте
с*1- гл. 15),
отличие состояния внешней поверхности модели и самолета -
(1°Правка на вредное сопротивление (см. 1.4)
Аэродинамические характеристики модели должны быть приведены к
^Данной центровке с учетом балансировки самолета
Широкий диапазон чисел М и Re, который реализуют сверхзвуковые
Толсты, требует испытания нескольких моделей одного самолета в трех-
четырех АДТ, отличающихся размерами, параметрами потока, типом ц0_
держивающих устройств, что приводит к различным искажениям элеодН
тов моделей при различных размерах самих моделей и т.п. (рис. 1.2.5).
Все это приводит к необходимости пересчитывать результаты испы.
таний в разных АДТ к аэродинамическим характеристикам моделей (п
безграничном потоке), приведенных к одинаковым числам Re, для сопо.
сдавления результатов и создания единой базы исходных данных д.ця
расчета ЛТ и MX.
Параметры Аэродинамическая труба ।
Т-108 Т-109 Т-112 Т-113 Т-114 1 116
М 0,5+1.7 0,5+3.6 0.6+1,8 1.8+6 0,5+4,0 1,7+io"
Размер рабочей части //хВ, м2 квадрат 1,0x1,0 квадрат 2,25x2,25 квадрат 0,6x0,6 квадрат 0,6x0,6 квадрат 0.6x0,6 квадрат 1,0x1,0
Площадь крыла S, м2 0,0834 0,465 0,048 0,048 0,048 0,115*1
Размах 1, м 0.355 0,836 0,269 0.269 0.269 0,418
С АХ 1>А, м 0,313 0,741 0,239 0,239 0,239 0,368
Re 10я (отнесено к Ь.,) 3—5 ;5 12+21,5 3,5+4,5 5+8 2,7+7,2 8,5+12.5 1,8+2,8
t> Т-109 •Т-112* Т-113 оТ-114 ♦ Т-116
Рис. 1.2.5. Сходимость аарещинамических характеристик моделей по испытаниям в И
пых АДТ ЦАГИ
www.vokb-la.spb.ru - Самолёт своими руками?!
1.3. Влияние условий испытаний в АДТ
на несущие свойства и индуктивное сопротивление
Основной критерий подобия — число Маха всегда выдерживается
испытаниях моделей в аэродинамических трубах. Вторым по значи-
мости критерием аэродинамического подобия считается число Рейнольд-
са однако существуют и другие безразмерные параметры, которые могут
в определенных условиях играть роль критериев подобия и оказывать
влияние на АДХ подобно числу Re
К таким параметрам относятся степень турбулентности набегающего по-
тока е и степень шероховатости обтекаемой поверхности Лш = Л//. Эти пара-
метры оказывают воздействие на состояние пограничного слоя обтекаемой
поверхности (на переход ламинарного пограничного слоя в турбулентный).
Относительные протяженности участков ламинарного, переходного и
турбулентного слоя влияют не только на профильное сопротивление (из-
за изменения сопротивления трения), но и на размеры и положение зон
отрыва на обтекаемой поверхности при изменении угла атаки, а также на
интенсивность и положение скачков уплотнения при трансзвуковых ско-
ростях. Все это в конечном итоге ведет к расхождениям АДХ самолета и
его геометрически подобных моделей, испытываемых в АДТ, и требует
введения соответствующих поправок при пересчете результатов трубных
испытаний на натурные условия.
В АДТ обычного тина АДХ моделей исследуются при малых числах
Re (за исключенном труб переменною давления и натурных) при турбу-
лентности потока (г-адт - 0,24-0,0%), заметно превышающей турбулент-
ность атмосферы (еатм « 0,1%), при этом поверхность моделей (степень
шероховатости /?,„ S 5 мкм) существенно более гладкая, чем внешняя по-
верхность самолета. Поэтому величины поправок зависят от степени раз-
личия всех этих параметров при испытаниях модели в АДТ и самолета в
полете и степени влияния различий на АДХ.
Для определения поправок проводятся дополнительные весовые и
физические исследования, связанные с определением линии перехода по-
грапичного слоя, положения скачков уплотнения и зон отрыва, а также,
возможно, испытания с фиксированным переходом.
Несущие свойства профиля (крыла, модели, самолета) могут быть
представлены зависимостью коэффициента подъемной силы от угла ата-
ки в пределах линейного участка
^'уП “ Суя(с1 а0)
” Максимальным значением коэффициента подъемной силы Суа тах, ко-
РЬ1й для крыльев сверхзвуковых самолетов достигается нри кри-
Ическом угле атаки акр * 35+40°.
Аэродинамические коэффициенты С“я и Суе] шах, а также утлы атаки
0(3 11 икр» характеризующие несущие свойства, в общем случае (при прочих
равных условиях) зависят от числа Re, степени турбулентности набегу
шсго потока в и степени шероховатости обтекаемой поверхности Лш
В соответствии с теорией обтекания профиля идеальной несжимае,
мой жидкостью коэффициент подъемной силы в зависимости от уГ1а
атаки составляет
Суд теор " sin(ct + 2 f ),
здесь f — относительная кривизна профиля в долях хорды. При малых
значениях а и [
Суа iwp ~ + 2f j, те — 2х,
ге0 = -2f [рад] = -114,6/ [град]
При обтекании поверхности реальной (вязкой) жидкостью значения
производной , коэффициента подъемной силы при нулевом угле ата-
ки и угла атаки при нулевой подъемной силе о0 всегда меньше теорети-
ческих из за отклонения обтекания профиля от идеального.
Испытания прямоугольного крыла (л. = 5) с профилем умеренной
относительной толщины (с - 12%) показали существенное влияние числа
Re на величину и некоторое влияние на ао, что соответствует обте-
канию с. ламинарным отрывом в носовой части, который имеет форму
замкнутой срывной зоны (отрывной пузырь) [13, 14]. При увеличении
угла атаки, если пузырь разрушается, происходит срыв с передней кром-
ки без последующею присоединения, что приводит к резкой потере
подъемной силы и к возрастанию сопротивления уже при относителыв
Рис. 1.3.1. Влияние числа Re на зави-
симость С„а(а) профиля
небольших углах атаки (в данном
примере акр = 14,5°)
С увеличением числа Re происходя
более ранний переход ламинарного ио-
граничного слоя в турбулентный, разме-
ры замкнутой срывной зоны умень-
шаются, она перемешается вперед, а
производная Сг“; уве шчпвастся. При
некотором значении числа Re передня^
линия отрыва ламинарного погра-
пичного слоя сливается с линией пере-
хода, восстанавливается безотрывное об-
текание верхней поверхности, а врой®'
водная Су,j и угол перестают зави-
сеть oi Re при его дальнейшем уя®-
личении (рис. 1.3.1 и 1.3.2).
www.vokb-la.spb.ru - Самолёт своими руками?!
Диапазон углов атаки, соответствую-
щий такому изменению характера обте-
ь пня, зависли от определенного интер-
на чисел Re, характера распределения
•(ал-юния, относительной толщины и
кривизны профиля, от степени шерохо-
оаюстн поверхности и турбулентности
потока (13]. Поскольку увеличение сте-
пени турбулентности и шероховатости
поверхности способствуют более ранней
турбулизации пограничного слоя, очевид-
но, что их влияние па С”д и а<\ качест-
венно будет таким же как увеличение
Рис. 1.3.2 Влияние числа Re па про-
изводную С^а и С1/аглх профиля
числа Re. С уменьшением относительной
годщяпы профиля линия перехода пограничного слоя приближается к пере-
дней кромке, а влияние перечисленных параметров на СуД снижается.
С увеличением угла атаки зависимость Cv„(cx) отклоняется от линей-
ной а коэффициент подъемной силы достигает максимальной величины
(Gw/шах) ПРИ некотором критическом значении угла атаки акр. Сул шах и
акр в значительной степени зависят от критериев подобия Re, в, Лш, и
ногут быть надежно определены экспериментальным путем.
Практически все профили с умеренной относительной толщиной и
кривизной (с < 12-5-13%; f < 0,02% ) обнаруживают увеличение Суе1тйХ с
ростом числа Re 115], что связано с более интенсивным переносом энер-
гии в турбулентный пограничный слой из внешнего потока, уменьшением
толщины пограничного слоя и затягиванием отрыва на большие углы
атаки. При малых числах Re, когда профиль обтекается с образованием
Глрывного пузыря на передней кромке, увеличение Re в некотором диа
иазоне будет сопровождаться не только увеличением Суа, но и уве-
личением Сув „-а* (рис. 1.3.1, 1.3.2).
Увеличение степени турбулентности набегающего потока оказывает влия-
ние на значение С^,/111ах, анакличнос увеличению числа Re (рис. 1.3,3а) [15].
Шероховатость обтекаемой поверхности, способствуя более раннему пе-
реходу пограничного слоя при малых числах Re, приводит к существенному
-Сличению толщины турбулентною пограничною слоя и отрыву потока при
'1еныцих углах атаки, что в целом приводит к увеличению сопротивления и
С11Ижепию величины С,/а тах. Влияние шероховатости на указанные аэроди
‘^Шческне коэффициенты зависит от степени отличия состояния внешней
^Верхности самолета и модели, (рис. 1.3.4) [16].
Таким образом, в результате совместного воздействия критериев по-
^бия числа Re, степени турбулентности набегающею потока е и сте-
гни u Горохова гости обтекаемой поверхности (Л,,,), происходит их
частичная компенсация, т.е. совместное влияние этих факторов мож<
быть меньше влияния каждого из них в отдельности: — малые числа
в АДТ снижают Суйюах,
а большая степень турбулентности поюка
И
меньшая степень шероховатости внешней поверхности увеличивают
Суа max мололи по сравнению с Clja тах самолета.
Рис 1.3.3. Влияние числа Rc и степени турбулентности потока в АДТ на Суата профиля
шероховатости по-
на максимальный
Рис. 1.3.4. Влияние
верхности профиля
коэффициент нормальной силы
На этом экспериментальном факте
основана идея использования при обра-
ботке материалов испытаний в разный
АДТ эффективного числа (Re^) [15],
учитывающего совместное влияние чис-
ла Re и степени турбулентности потока
(рис. 1.3.36). Эффективное число Рей-
нольдса вычисляется по формуле
К^эф — Re-ftT,
где Re — число Рейнольдса, вычислен-
ное по ус ю виям набегающего потока и
характерному размеру обтекаемого тел?
kj — коэффициент турбулентности; fer = Rec(e~O)/Rec(cAjT); Rec(e~O)-
= 385000 — критическое число Рейнольдса шара, при степени турбулентно!
ти е ~ 0 и коэффициенте сопротивления, равном Сх = 0,3; Рес(еддт) - ИН
тическое число Рейнольдса шара, соответствующее Сх = 0,3 и степени т рФ
лент! гости в АДТ.
Степень турбулентности и критическое число Рейнольдса для шира
Ref.(c) связаны эмпирической зависимостью, полученной обработкой Рс"
зультатов экспериментальных исследований сопротивления и обтекаяЯ^
шаров в разных АДТ и при свободном падении в атмосфере [1-1
е[%|- 5 |Rec-10 5| °-С5 - 2.
Индуктивная поляра. Согласно теории крыла коэффициент соир0'
тивлепия можно представить в виде суммы коэффициентов профильно^
и индуктивного сопротивления:
www.vokb-la.spb.ru - Самолёт своими руками?!
С га * Схар + С xfl { (1)
С _ коэффициент профильного сопротивления при докригичес-
числах М включает в себя сопротивление трения Сгдтр, сопротив
КИние давления л и вредное сопротивление.
je в общем случае коэффициенты Cxaiv и С\ЙД зависяг от чисел М и
ре положения линии перехода пограничного слоя А'т 1Кр и коэффицисн-
потъемной силы С„д. Как показано в [17], каждая из них может быть
оедставлена в виде квадратичной параболы. Если положение линий пе-
оехода пограничного слоя нс зависит от коэффициента подъемной силы,
то и коэффициент роста сопротивления “поляры трения” не зависит от
С и Re. а изменение коэффициента роста сопротивления профильной
поляры будет определяться изменением коэффициента роста сопротивле-
ния “поляры давления”
Для практического использования коэффициент сопротивления самоле-
та (крыла, модели) может быть представлен в виде суммы коэффициента
минимального сопротивления Схдт1П, содержащего независящие от Су(! со
сгавляютцие всех перечне генных коэффициентов сопротивления, и обобщен-
ною коэффициента индуктивного сопротивления самолета (крыла, модели),
содержащего все составляющие сопротивления, пропорциональные Суа\
/ \2
(2)
- с
уа уа
Здесь Ai = 1/(лХэо) — коэффициент роста индуктивного сопротивления;
8 - коэффициент учитывающий отклонение распределения давления по
размаху крыла от эллиптического; С'*о — коэффициент подъемной силы,
соответствующий минимальному значению коэффициента сопротивления.
характеризует смещение индуктивной поляры по оси Суа и связан с
Деформацией срединной поверхности крыла.
По линейной теории крыла конечного размаха в идеальной жидкости
КОэФфициент роста индуктивного сопротивления Ai не зависит от дефор-
мации срединной поверхности крыла (закона геометрической и аэродина-
мической крутки), а изменяется в зависимости от удлинения крыла,
рактически он зависит также от степени реализации подсасывающей
силы S, которая определяется как отношение подсасывающей силы, по-
^}чеццой в реальных условиях (при эксперименте в АДТ или в полете),
теоретическому значению, т.е. отношение разности коэффициентов
'Активного сопротивления самолета (крыла, модели) измеренного в
^перименте:
С = С
ха ха linn
Суа 1-Я а (Сха Cra niin)
По^Ности коэффициента индуктивного сопротивления при но.шом отсутствии
^сась1Ватощей силы и этого коэффициента при ее полной реализации
9 /
Cyn tga -C-a/rSn.
В первом линейном приближении ото отношение записывается в виде
уа
, где J2 = —— -
1/rtX - 1 С“а ^-зф
Из (3) следует, что
ь-4г
, или ----
C^ja
ЛА
<’а
'уа
Коэффициент 5 учитывает все причины, приводящие к отличию со-
противления от минимально возможною отрывы на любом участке
крыла, изменение коэффициента трения по углам атаки, интерференции
элементов аэродинамической компоновки самолета, а не только потери
собственно подсасывающей силы на передней кромке.
При полной реализации подсасывающей силы (5=1). А? = 1/(паЯ
т.е. Ааф = а; при се полном отсутствии (S = 0) Л2 = 1/С"а, “ ^уа/п-
Значение коэффициента 5 зависит от Rc, вычисленного по скорости
набесающего потока и радиусу закругления носка профиля (Rep), опреде(
лепных по перпендикуляру к передней кромке крыла, угла стреловидное»
передней кромки, числа М и коэффициента подъемной силы Суа [14, 18].
При безотрывном обтекании крыла в диапазоне коэффициентов подъ-
емной силы 0 < Суа < (1^1,3)СиДк„11У’ поляра является квадратичной пара-
болой с постоя иным коэффициентом роста индуктивного сопротивления А?
и, следовательно, с 5 = const. Величина 5 увеличивается с ростом Re, пр»
отклонении механизации передней кромки крыла, наличии крутки кры.га и
уменьшается с увеличением числа М. При числе М, соответствующем звуке*
вой передней кромке (М = l/coS"/1IK), имеем 5 = 0, Л2 ~
Особенностью изменения коэффициент a S при докритичсских числе
М является то, что с уменьшением Rep, величина 5 не уменьшается ДА
нуля, а достигает некоторого минимального значения, которое при ЛаЯ
нейшем уменьшении Rep остается постоянным [18] Это минимально'
значение для крыльев с хПк^50° составляет 5 = 0,5 и уменьшается с р°*Я
том угла стреловидности но передней кромке (рис. 1.3.5).
Влияние формы крыла в плане на коэффициент 5 для крыльев у-ЧД
ренного удлинения (2 < а < 5) и стреловидности (30 < хпк < 50°) незЯ
читсльно и не превышает 5%. Результаты расчетов [17| могут быть айв
роксимированы приближенной формулой: а
5 = (0,024 - 0,02 cos %ПК)Х. I
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис 1-3.5- Зависимость степени реализации подсасывающей силы от числа Рейнольдса и
ее влияние ла псляру
При обтекании несимметричных профилей (или крыльев с несимме-
тричными профилями) влияние вязкости приводит к некоторому смеше-
нию поляры вверх относительно оси С,/а и, очевидно, с увеличением чи-
сел Re (уменьшением вязкости) величина C'/tl будет уменьшаться.
Применительно к сравнению индуктивных поляр, полученных в
АДТ, следует ожидать, что при больших числах Re, соответствующих
полету, индуктивная поляра самолета будет иметь меныпие значения ко-
эффициентов Л 2 и С .
Примеры зависимостей С//в(сх) и Сдд(С,у(7) для моделей сверхзвуково-
го самолета с топким крылом умеренного удлинения и стреловидности
= 0,05; Х<5аз = 3,4; Хпк = 42°), которые получены в разных АДТ в диа-
пазоне чисел М = 0.15-5-2,5 приведены на графиках рис. 1.3.6.-1.3.10.
Сравнение результатов испытаний показывает удовлетворительную схо-
димость указанных АДХ, полученных при малых числах Re, характер-
ных для стандартных условий испытаний в разных АДТ (рис. 1.3.6“
3.8). Практическое совпадение индуктивных поляр в широком диапазо-
Н<? углов атаки при дозвуковых числах М = 0,13-5-0,8 (рис. 1.3.7) объяс-
няется тем, что числа Rc, вычисленные по радиусу передней кромки
крыльев моделей, не превышают величины 7-103 (lg Re,,« 3,85). При
-ч степень реализации подсасывающей силы минимальна и имеет но-
- оянную величину Хш11, = 0,5 (для Хпк < 50°) (рис. 1 3.5),
АДТ УВоли’,е1,ием чисел Re (испытания моделей при малых скоростях в
fa ”еРсмепной плотности и самолета в натурной АДТ) производная
Практически не меняется (крыло с профилем малой относительной
КоэФфициент максимальной подъемной силы увеличивается, а
СлУЧае ?1>1С1П И1|ДУКТИВНОГО сопротивления уменьшается, так как в этом
саГ1, ' xei,:> 7-103) значительно увеличивается степень реализации под-
С,’1в^щей силы (рис 1.3.7, 1.3.9)
X *
Xх
И = 0.8 X
X
2,3
•
АДТ
х Т-106
о Т-109
• Т-112
°пс. 1.3.6. Сравнение испытаний моделей
.•перх тукового самолета в разных АДТ
С тандартныс испытания
Повышенные (малые Re)
числа Rc
0,5
1,0
0.2
а ГЦ;
•1ТЧ)
атм
С -С
Рис. 1.3.7 Сравнение испытаний моделей
сверхзвукового самолета в разных АДГ
Т-101
Т-102
T-10G
Т-106
Т-106
Т-109
Т-112
м
0.15
0,15
0,15 (Ро = I
0.15 (Ро = .5
0.60 (Р,-, = 1
0,6:0.8
0,8
М= 1.78
0>1
М =
оД
Ле *
к
2,3*2,5
Л
Л
* *
,Д°
ff АДТ
° &Т-109
• Т-112
х Т-113
1 Т-114
0,2_________
С -С
ха ха пип
Рис. 1.3.9. Влияние числа Re па зависимосЛ)
СудСа) модели сверхзвукового самолета
Рпс. 1.3.8. Сравнение испытаний моделей
сверхзвукового самолета в разных АДТ
е- Т-102
о- Т-109
х— Т-106 (5 атм)
#- Т-101
• Т-112,113
Рис. 1.3.10. Коэффициент увеличения индуктивного сопротивления моделей сверхзвУ1
вого самолета по испытаниям в разных АДТ
www.vokb-la.spb.ru - Самолёт своими руками?!
отноврсмениом увеличении чисел М u Re происходит взаимная
ПР\ция влияния этих главных критериев подобия: с увеличением
компен^ стеие|1Ъ реализации подсасывающей силы увеличивается, а с
числа нисм числа М опа существенно уменьшается. В рассматриваемом
увелич. ПрИьОдП1 к тому, что индуктивное сопротивление (коэффи
примеру ) остасТСЯ ИрИ стандартных условиях испытаний (когда уве-
HJICHT - - происходит за счет скорости потока) практически оди-
личе разных моделей одного и гого же самолета и постоянным в
диапазоне чисел М = 0,15-н0,8 (рис. 1.3.10).
При определении летно-технических характеристик самолетов, особенно
об части небольших дозвуковых скоростей (М «Мкр), где наиболее суще-
ственно влияние числа Re и практически отсутствует влияние числа М на
степень реализации подсасывающей
силы, в индуктивное сопротивление
(коэффициент /Ь), полученное в АДТ
при малых числах Re, должны быть
введены поправки на переход к на-
турным условиям (см. гл. 15).
В заключение следует упомя-
нуть еще два параметра, коюрыс
могут оказывать влияние на состо-
яние пограничного слоя: уровень
шума (уровень звукового давле-
ния) и влажность воздуха.
Влияние этих параметров на
АДХ моделей исследовано недоста-
точно, хотя известно, что уровень
шума в АДТ даже с малой степе-
нью турбулентности выше, чем в
полете, и оказывает существенное
в-1и пне на переход пограничного
чоя [19, 201 (рис. 1.3.11). Увели-
чение влажности воздуха также
может оказывать значительное влия-
Ни₽ На аэродинамические характе-
ристики при транс- и сверхзвуковых
скорос1Ях
Рис. 1.3-11 Уровень п ibcamtft статического
давления на конусе при испытаниях в АДТ и
в полете
1 4. Пересчет аэродинамическою сопротивления моделей
на натурные условия
1 ^2 ^11Ста которые могут быть реализованы при испытаниях в АД1, на
СТВуют^^'1 * * * * мснь,,,е достигаемых в полете, причем Rcnwx > Ю8 соогвет-
С1К;Рхзвуковым самолетам больших размеров на дозвуковых скорое-
’-таП
0.05
0.04
0,03
0,02
0,01
0
0,5 1.0 1,5 2.0 2,5 М
Рис 1.4.1. Влияние числа Re па СтП самолета
гях и маневренным сверхзвуков]
самолетам на околозвуковых ckoj
стях при полете у земли (рис. 1.4 1)
Коэффициент лобового сопротивде
ния самолета (Сгд0 или Сгй1пЫ)
меню изменяется по высотам no.iera
(рис. 1.4.1) и при переходе от моде,
ли к самолету. Методика введения
поправок к коэффициенту coupon^,
лепия ACwrc хорошо известна, щ.
ложена в учебниках и монелрафиях [17] и заключается в расчете коэф,
фициептов сопротивления трения всех элементов модели л самолета
(консолей крыла и оперения, фюзеляжа, гондол двигателей) с учетом щ
геометрических особенностей (относительной толщины, формы профиля,
крыла и оперения, удлинения фюзеляжа и мотогондол), определении разно-
стей соответствующих величин и суммирования этих разностей, отнесенных
к плошали крыла
^С ха Re = Z IQ; „ад - Q-(,w S0M i/Sxp ,
где .S(1M площадь омываемой поверхности.
Так как предполагается, что все другие компоненты полного сопро-
тивления не зависят от числа Re, то поправка ДСхлре — это величина, на
которую необходимо уменьшить коэффициент сопротивления модели при
определении его значения для самолета, т е. экстраполяции сопротивле-
ния трения на натурные числа Re в условиях одинаковой гладкости по-
верхности модели и самолета.
Приближенный метод введения рейнольдсовской поправки па этапе
концептуального проектирования изложен в гл. 15.
Состояние внешней поверхности модели существенно отличается от со-
стояния поверхности самолета. На внешней поверхности самолетов имеется
значительное количество производственных неровностей, таких, как шеро-
ховатость и волнистость обшивки, выступающие головки заклепок и винтов,
уступы на стыках листов обшивки, панелях, крышках люков, мелкие детали
иди надстройки, необходимые .тля нормального функционирования самолет-
ного оборудования, приемники полного и статического давления, датчики
аэродинамических углов, антенны, вспомогательные воздухозаборники, а
также обтекатели, выпучины, качалки органов управления и т.п., больший’
ство из которых не воспроизводится на моделях при испытаниях в АДТ.
Задача введения поправок на увеличение сопротивления самолета Э|
счет производственных неровностей и других нарушений аэродинамичес-
кой гладкости внешней поверхности исследована значительно менЫ0<!
чем влияние числа Re. Ниже приводится краткое изложение рскомеН'
дуемой ЦАГИ методики введения этих поправок.
72
WWW.vokb-la.spb.ru - Самолёт своими руками?!
(^лстсмаптеские обследования внешней поверхности серийных и
1ГН1ях самолетов различного назначения показали, что число произ-
°пЬ твеЯ1П>1Х неровностей в первом приближении пропорционально пло-
в° пи омываемой поверхности самолета, а площадь миделя, создаваемая
Ul явностями, зависит от качества внешней поверхности (технологии
И юизводства) и изменяется в широких пределах: от 0,08 до 0,48% пло-
щади омываемой поверхности или от 0,5 до 2,3% площади крыла самоле-
та Статистические данные по относительной площади миделя производ-
ственных неровностей и мелких надстроек на омываемой поверхности са-
молетов приведены в таблице.
Ха ц/п м2
Заклепки Винты Уступы Накладки Детали Всего
стыки люки
1 23 0,0290 0.0290 0,0110 0,0067 0,0067 0,1.560 0.2140
2 40 0,023.5 0,0108 0,0170 0,0230 0,0036 0,0960 0.1740
3 34 0,0230 0.0098 0,0158 0,0188 0,0150 0,0750 0,1580
4 34 0,0284 0,01.38 0.0690 0,0174 0,0050 0,0670 0,2000
5 35 0,0340 0,0094 0,0200 0,0158 0,0158 0,1100 0,2050
6 60 0.0280 0,0440 0,0530 0,0125 0,0264 0,0770 0,2420
7 50 0,0290 0,0240 0,0440 0,0148 0,0204 0,1350 0,2660
8 157 0,0645 0,0200 0,0460 0,0500 0 0160 0.0605 0,2600
9 157 0.0205 0,0140 0.0290 0,0203 0,0160 0.1000 0,2000
10 32 0,0260 0,0510 0,0690 0.0410 0,0187 0.14G0 0,3500
J1 38 0.0129 0,0425 0.2090 0,2090 — 0,2100 0,4770
12 507 0,0026 0,0064 0,0206 0,0264 — 0,0257 0.0823
13 460 0,0092 0,0095 0,0880 0,0287 0,0007 0,0180 0,1540
14 150 0,0570 0,0286 0,1540 0,0756 0,0134 0,0288 0,3580
15 180 0.0710 0,0190 0,0224 0,0204 0.0120 0,0270 0,2040
16 330 0,0340 0,0030 0,0940 0,0200 0,0068 0,0212 0,1780
L№ 1+13 самолеты сверхзвуковые; X? 14+16 дозвуковые.
В среднем по всем сверхзвуковым самолетам (0,0023+0,0025) 5П„,
Представление о наилучшем состоянии внешней поверхности самоле-
достижимом при современном уровне технологии, дает сумма мини-
мальных значений площадей миделя различных производственных неров-
ностей и мелких деталей (по замерам па разных самолетах), равная
'^1Хтй,Я!0>00055'ом для всех обследованных самолетов и .9Mlnh ~ 0,001 lSnM
сверхзвуковых. Полученные минимальные значения в 2,5+5 раз ниже
среднего уровня. Неровности нарушают аэродинамическую гладкость об-
?екаемой поверхности и могут привести в зависимости от режима полета
и качества поверхности к существенному увеличению сопротивлении
ухудшению летко-тсхнических характеристик самолетов. 1
Воспроизведение перечисленных элементов на моделях самолсЛ
испытываемых в аэродинамических трубах, практически невозможно г
за малых размеров моделей и нс оправдано .методически, поскольку Л
стояние и относительные параметры пограничного слоя на моделях су Л
ственио отличаются от натурных. Поэтому сопротивление неровностеД
пограничном слое исследуется на специальных измерительных эле.че!
тах, вмонтированных в стенку аэродинамической трубы.
Систематизация и обобщение результатов подобных исследований J
базе теоретических представлений позволили выявить основные законИ
мерности изменения сопротивления неровностей различных типов.
Шероховатость поверхности приводит к увеличению couponing
ния. Области скоростей и высот полета, внутри которых следует учил*
вать увеличение сопротивления вследствие шероховатости с высотой (*.
горков, большей допустимой, представлены на рис. 1.4.2а. Особенно си,
ществеппо сопротивление шероховатости при полете па малой высоте!
предельно большими скоростями (рис. 1.4.26). |
Рис. 1.4.2. Дополнительное сопротивление шероховатости поверхности
Волнистость поверхности существенно увеличивает сопротивЖрЧ
иа около- и сверхзвуковых скоростях. Коэффициент сопротивления вэА
нистосги зависит от ее формы и меняется пропорционально квадрату
ношения высоты волны к ее длине (рис. 1.4.3а). Характер изменения
противления волн в зависимости от отношения высоты волны к толтЛЧ
пограничного слоя приведен на рис. 1.4.36. Это изменение можно прв
ближеппо аппроксимировать корнем третьей степени из отношения Л'З- J
Производственные неровности типа потайных головок заклепок и
тов, усгупов на стыках листов обшивки и люках создают сопротивление,
ределяюищм параметром которого является число Re*, = р^Л'.Л/р.^, ВЬ,И
74
www.vokb-la.spb.ru - Самолёт своими руками?!
по высоте неровности h и динамической скорости v* = y]xw/pw, где
qeinK*’
- напряжение трения, плотность и коэффициент вязкости у стенки.
Хи" Р« ‘
Рис. 1.4.3. Сопротивление производственных неровностей
Коэффициент сопротивления растет с увеличением Rc^ до некоторого
предельного значения, зависящего от числа М и типа неровности. При даль-
нейшем увеличении Rc*? рост коэффициента сопротивления прекращается.
На рис. 1.4.Зв,t в качестве примера приведены такие зависимости
лля прямого и обратного уступов. Для обратного уступа имеется ряд
точек, полученных в летном эксперименте на самолете Локхид YF-12 при
сверхзвуковых скоростях М = 2,2-2,85 и Кех я= 108.
и<п даи,и’1е п°Дгвсрждаюг закономерность, полученную в трубных
itimv ^Ы(::тпУП(1ЮЩис в поток детали требуют индивидуального подхода
вления в каждом конкретном случае. Оценка про-
расчетными методами или по результатам исныта-
сопротивлепия деталей уменьшается с увеличением
Щипы пограничною слоя пропорционально УЛ5 (рис. 1.4.4д).
как ь С'ш По °р1’анам механизации крыла и управления, расположенные
ХУ кры *Ь И0Тока секциями или но борту), так и поперек (по разма-
ны к п 13 11,111 ОПерения), конструктивно неизбежны и не могут быть отнссе-
изводственным неровностям. Однако наличие щелей с перетеканием
Види1с.я известными
ПИи К°эФфициент
75
воздуха приводит к значительному увеличению сопротивления. В.шяттие щр.
лей аналогично уменьшению эффективного удлинения крыла (рис. 1.4,46).
с,/с,
1.0
0,5
при /г/5 < 2
0
001
дсг
2
расчет Надстройки
ТУ
о
АС,
0.005.
0.25 0,50
Выступающие детали
3 Л/8
0 05
0 бол
0,02
Г
' о .Tmiwitt: испытания
• Данный испытаний и АДТ.
исрсс'ги-анныс на натурные
условия
'^Г Лр и
-
“ * Щели, надстройки
0 25 0,50 Си
Рис 1.4 4. Сопротивление надстроек и щелей (а.б,в) и сравнение CrzK1, полученного нз лет-
ных испытаний, с данными испытаний в АДТ, пересчитанных на на>уриме условия (г)
- Распет
х .
г
0_
0.5
1.0
2,0 М
а
в
о
1
Л___°
Перечисленные закономерности положены в основу методики расчета
поправки на сопротивление, обусловленной производственными неров-
ностями и мелкими деталями самолетов.
Приращение коэффициенте! сопротивления рассчитывается по еле
дующим формулам:
- шероховатости
^Сх ш
Ст тр.с»
где Сгтр.с - сопротивление трения самолета, если правая часть отрин:
тельна, следует считать ДСЛ ш = 0;
- волнистости
А^.ГВЛН — QrecB-TH
(Л//)2 Ifh(1.08 - 0,08(Я/1 Olr’^Sttw/s)
где Л, / — высота волны и се длина; 5пли — площадь поверхности, покр!
гая волнами; х — расстояние в меграх от передней кромки до середин
ВОЛНЫ; (^хо*ПЛ1! = Окх-КТН
противления волн, зависит от формы и вида волны (цилиндрическая и-'
пространственная) (рис. 1 4.5);
|2 предельное значение относительного ©
www.vokb-la.spb.ru - Самолёт своими руками?!
производственных неровностей
(прямой и обратный уступ, ци-шнлри-
чссклй выступ)
гяе #(М) _ Функция числа М и ти-
па неровности (рис. 1.4.6); .г — рас-
тояиие в метрах от передней кром-
ки до неровности; 5М.Н - площадь
миделя неровности,
- мелких деталей
дс -С
дг-хд - 'д-хд .
Рис. 1.4.3. Предельные значения коэффи
1ПКЧГГ0В сопротивления волн: 1 цилиндри-
ческая волна. 2 - пространственная волна
где Cxmi — предельный коэффициент сопротивления детали (при А/5 >со);
5 1 — площадь миделя детали; 8 - толщина пограничного слоя в месте ус-
тановки детали.
Л/5 , /?/6 ,
При ----> । считать - = 1.
Во всех приведенных формулах: h — высота неровности в метрах,
Н - высота полета в километрах, S — площадь крыла самолета.
Результаты расчета для обследованных самолетов показывают, что
производственные неровности и мелкие детали увеличивают коэффи-
циент сопротивления при нулевой подъемной силе на ДСг,;п = 0,00035*
*0,0058, что составляет от 3 до 28% Схяо самолета с аэродинамически
гладкой Поверхностью.
1-4 6 Кол<рфици<1пы В(М) для расчета сопротивления прямого и об
кто уступа, цилиндрического выступа
Д я большинства самолетов значение дополнительного сопротивЛ
ния составляет АС, = 7т 17 й а для самолетов с высоким качеством вц^Л
ней поверхности 3, 12, 16) ДО-- = 3-6%
Правильность методики расчета дополнительного ':опротивления ц0.
тверждена мноюкрашыми экспериментальными исследованиями самоЦ
та Х° И с исходным и улучшенным состоянием внешней поверхности
аэродинамической тр\бе Т-101 ЦАГИ Показано, что экспериментальна
значения приращении сопротивления производственных неровностей Я
мелких деталей близ1 и к расчетпь. м (рис. 1.4.4е)
И пользование мегодики для введения поправок на различие в еда
стоянии поверхности модели и самолета при пересчете коэффициента с>
противления амолета, определенного в условиях трубных испытаний, не
натурные условия приводит к хорошей сходимости коэффициентов с?>
противления при ну девой подъемной силе, полученных в аэродиц|и
мнческих трубах и летных испы аниях (рис. 1 4.4г).
Рис. 1.1.7. Вредное сопр..тивле ine сам пета: npoiлвидствег iwi- неровное- 1
ти и летали 'по результатам обследования)
Представление о величинах поправок на состояние поверхности сам
лета геометрические параметры которою приведены ниже, дает рис. 1 4д
Гео ч< трическис размеры
Крыло Фюзеляж ГО ВО
Площадь, м2 62 •^1., U|>я 58 12,25 15,4 + 2.5
Л uijia. м * 3.66 /ф ® 21.6 Лп,= 2 24 ,р«2.39^
Омываемые поверхности
Консоли крыла Фюзеляж Мотогон- ЛС’.ИИ го ВО Всего
$’ „. м .0.2 120 ' 54 24.5 35,8 305,2
•S'™. S’ 1.13 1 95 0 88 0,39 0,58 4 93
www.vokb-la.spb.ru - Самолёт своими руками?!
3
4
6
8
Список литературы к главе 1
Miller Ч М. Wood Leeside Flows over Delta Wings at Supersonic Speeds //
f 'Vircraft. 1984 V. 21 №9, P. 680-686.
J szodrufh. D-J Peake. Leeward Flow over Delta Wings at Supersonic Speeds Л
v/sA. 1980. TM-81187
- Нилсен. Аэродинамика управляемых снарядов. - M: Оборонгиз, 1962.
Ч^родинамнка частей самолета при больших скоростях - М: ИЛ, 1959.
( \ Ьл церковский, 11. А. Кудрявцева, С Л. Попыталов, В.Г Табачников. Иссле-
дование сверхзвуковой аэродинамики самолетов на ЭВМ М • Наука, 1983
у I" Koi.alenko, l.V Khlcmoy. Complex of Computer Codes for Calculating the
Supersonic Flow Field over Vehicles Proc, of the Second Sino-Russian Symposium on
Aerodynamics pp. 137-156, Bcdjing 1992
Д’ V. I oevodenko. Computation of Supersonic Hypersonic Flow near Complex
Configurations Proc of 19-th Congress ICAS. 1994, V. 1., P 406-412.
James C. Ellison. Investigation of the Aerodynamic Characteristics of Hypersonic
Transport Model al Mad Numbers to 6// NASA TN’D-6191 1971.
9. Аэродинамика ракет. Кн. 2 - M Мир, 1989
10. Т.С. Tai. Flow Separation Pattern over an F-14A Aircraft. Wing/ AIAA Paper №90-596, 1990.
11 Д. Кюлеман. Аэродинамическое проектирование самолетов. - M: Машиностроение, 1983.
12. К-ll. Петров. Аэродинамика aic-mcjikib клатечьиых ашгараюв - М: Машиностроение 1985
13 П. Чжан. Отрывные ечепия Г. 2. М: Мир, 1973.
14 А.К. Мартыны/. 11рикладиая аэродинамика. - М. Машиностроение, 1972
15. 77.//. Красильщиков Практическая аэродинамика крыла//Тр. ЦАГИ, 1973
16 M-U. Некрасова, А.А. Савинов. Влияние числа Рейнольдса и шероховатости на распределе-
ние дав. ения и Су 11йх профиля с относительной толпипюй с = 6 и 12% //Тр. ЦАГИ, 1970.
17. С.К. Игнатьев. К расчету поляры крыла большого удлинения при докритических
числах М Тр. ЦАГИ, 1978
18. Н’.Р Henderson. Studies of Various Factors affecting Drag due to Lift, at Subsonic
Speed; NASA TN, 1966. X, ND-3584.
19. EJ. Saltzman, T.G. Ayers. A Review of Flight to-Wiud Tunnel Drag Correction//AIAA-
81-2475
20 A'.S. Dougherty, Correlation of Transition Reynolds Number with Aerodynamic Noise
Levels in a Wind funnel at Mach Numbers 2+3// AIAA J, 1975, V 13, №12.
21 И.Н Торжков. Определение аэродинамических характеристик профиля, обтекаемого
влажным газом Технические отчеты ЦАГИ, 1959
- С.A. \put тианович. Обтекание тел газом при больших дозвуковых скоростях
й Гр. цА|-и 1£)40
7- 1. Симонов, С.А Кристианович Влияние сжимаемости па индуктивные скорости
И ви1,та- Прикладная математика и механика. 1944 Т.8, №2.
Никольский. О течах вращения с протоком обладающих наименьшим внешним
полисным сопротивлением в сверхзвуковом потоке // В сборнике теоретических работ
25 аэролинамике. - М.. Оборонгиз, 1957.
Расчет расп|В-делсиия давления по телам вращения в сверхзвуковом но
26 д Н Н сборнике теоретических работ по аэродинамике. - М,- Оборонгиз, 1957.
Ычс Расч г распределения давлений по телам вращения под углом атаки в
D6opo|,VK°l!™ 1ОТОКС газа И сборнике теоретических работ по аэродинамике. - М.:
Теория пространственного пограничного слоя на скользящем кры
28 f) \j ,ке теоретических работ по аэродинамике. М.. Оборонгиз, 1957.
Ск 'Уркиня. Обтекание крыльев с oik юненными элеронами при сверхзвуковых
1957°Стих В сборнике । isipci ических работ но аэродинамике. - М.: Оборонгиз,
Глава 2
/АЭРОДИНАМИКА СВЕРХЗВУКОВЫХ САМОЛЕТОВ
С ПРЯМЫМИ, СТРЕЛОВИДНЫМИ
II ТРЕУГОЛЬНЫМИ КРЫЛЬЯМИ
2 1. Обтекание прямых, стреловидных и треугольных крыльев
при малых углах атаки
Прямые крылья конечного размаха определяются двумя параметр^
ми, характеризующими форму крыла в плане — удлинением X и сужением
И и профилировкой. По своим аэродинамическим характеристикам и осо
бенпсхлям обтекания сечения такого крыла наиболее близки к профилю, за
исключением концов, где имеет моею пространственный характер обтека-
ния. На рис. 2.1.1 н 2.1.2 приведены результаты измерения сопротивления
шести изолированных прямых крыльев (а. = 0,5 :-3) с относительной толщи-
ной с = 4 и 8°о при а = 0. Уменьшение удлинения крыла приводит к уве-
личению Мкр и уменьшению прироста волнового сопротивления при около-
звуковых и сверхзвуковых скоростях. Сравнение результатов расчета но ли
нейной теории с экспериментом показывает, что линейная теория приводит к
существенному завышению сопротивления крыла малого удлинения (Х<2).
При удлинениях крыла л-3+4 волновое сопротивление, подсчитанное ио
линейной теории, хорошо сходится с результатами эксперимента (рис.2.1.3)
Рис. 2.1.1 Коэффициент сопротивления (при а - О) прямых крыльев ра;1-
личного удлинения с относительной толщиной с = 8%
www.vokb-la.spb.ru - Самолёт своими руками?!
Коэффициент сопротивления (при а - 0) прямых крыльев
с относительной юлщнноп с = 4%
Рис. 2.1.2
различно* о удлинения
В диапазоне околозвуковых
скоростей (М-D волновое сопро-
тивление прямых крыльев, скомпо-
нованных из профилей с острой пе-
редней кромкой, можно определить
по эмпирической зависимости, по-
лученной обработкой по параметрам
подобия (рис. 2.1.4):
^.ГВИН ~ 2,6 АС .
Влияние на коэффициент со
противления толщины и формы
профиля прямого крыла с постоян-
ной хордой (г] - 1) и прямою кры-
ла с сужением (г| 1) приведено на
рис. 2.1.5.
Рис. 2.1.3. Сравнение генетических и экспе-
риментальных значений волнового сонротив-
лепня прямых кры.ты-в (параболический про-
филь, а~0) при сверхзвуковых числах М
Нц._ 2 1 и тг
**ИЙ ** оти . ФФИЦИ1!11т сопрел пиления (при а = 0) прямых крыльев различных удлинс-
,,с*ителы1ых толщин при до- и трансзвуковых числах М
Рис. 2.1.5. Влияние относительной толщины и сужения на АДХ прямых крыльев гри
сверхзвуковых числах М
Применение1 малых удлинений, малых относительных толщин и ос
троносых профилей уменьшает волновое сопротивление прямых крыль-
ев. Однако с уменьшением удлинения прямого крыла уменьшаются и его
несущие свойства как при околозвуковых, так и при сверхзвуковых ско-
ростях, причем для крыльев очень малых удлинений (Л < 2) в измене-
нии характеристик подъемной силы по углу атаки наблюдается суще-
ственная нелинейность (рис. 2.1.6).
Рис 2.I.G. Влияние удлинения на несущие свойства прямых крыльев
www.vokb-la.spb.ru - Самолёт своими руками?!
Ветчины прямых крыльев при дозвуковых и сверхзвуковых
,гях могут быть подсчитаны известными теоретическими методами,
н нис данных расчета и эксперимента указывает на удовлетвори-
вшую их сходимость (рис 2.1.7).
Рис 2.1.7. Сравнение теоретических н экспериментальных значений произ-
полной СуЯ<М> Для прямых крыльев различных удлинении
Стреловидные крылья определяются профилировкой и тремя пара-
метрами: удлинением X, сужением г) и углом стреловидности по четвертям
хорд х(4; угол стреловидности по задней кромке ХзК > 0. Как известно,
для скользящих крыльев (X - оо) начало возникновения волнового кризиса
смещается в область больших чисел М (Мкрх = Мкр(% = 0)/cos р, где р —
угол скольжения), а сам кризис проявляется значительно слабее, чем на
прямых крыльях.
На стреловидных крыльях конечного размаха без сужения эффект
скольжения проявляется лишь в центральной области консолей. В кор-
невых (бортовых) и концевых сечениях стреловидных крыльев нрояв-
тлкнея гак называемые корневые и концевые эффекты, связанные с
'1еиьшснием эффекта стреловидности в корневых сечениях крыла и
возникновением пространственного характера обтекания концов крыла.
В корневой и концевой областях крыла линии равных давлений пово-
рачиваются в сторону уменьшения угла стреловидности и в некоторых
_^Учаях располагаются почти под прямым углом к направлению набегаю-
сеч^ П°Тока’ т-е- так же- как и на прямых крыльях (рис. 2.1.8) В этих
BOj^WUsix кРЫла раньше, чем в его центральной области, возникает волно-
Пп • К^И311С ПР11 околозвуковых скоростях и повышается коэффициент со-
н11я^ИВле1Г11Я- Возрастание коэффициента сопротивления в корневых сече-
с'греловидпого крыла частично компенсируется его уменьшением в
концевых сечениях, и у крыла в целом коэффициент сопротивленД
начинает возрастать при больших числах М, чем на прямом крыле, Цр1
сверхзвуковых скоростях на большей части размаха стреловидного крыя
постепенно устанавливается сверхзвуковое обтекание, при этом линии рац]
ных давлений на крыле располагаются практически параллельно кромка!
(рис. 2.1.8). а значение коэффициента давления в сечениях крыла сказы-
вается небольшой и соответствует его значениям на скользящем крыле.
Рис. 2.1.8. Влияние числа М на распределение давления и к<ж|н|лн1исн'1 сопротивления
стреловидного крыла
Для стреловидных крыльев с сужением уменьшение стреловидности
задней кромки приводит к уменьшению угла скольжения для линий рав-
ного давления при околозвуковых скоростях. Следствием этого является
менее полное использование эффекта скольжения у крыльев с большим
сужением, более раннее возникновение и более резкое развитие волново-
го кризиса при околозвуковых скоростях по сравнению с геми же явле-
ниями для крыльев с меныпим сужением.
Увеличение удлинения стреловидного крыла приводит к расширегг.по
области по размаху крыла, где проявляется эффект скольжения. При
сверхзвуковых скоростях изменение удлинения и сужения стреловидного
крьгла в меньшей степени влияет на характер распределения давления но
его поверхности (рис. 2.1.9).
Влияние угла стреловидности существенно сказывается на суммар 1
ных аэродинамических характеристиках крыла даже при небольших зяИ
чсниях удлинения и относительной толщины профиля (рис. 2.1.10). Иса|
больше угол стреловидности крыла, тем меньше прирост его колновоГв
www.vokb-la.spb.ru - Самолёт своими руками?!
отив-’1р111ГЯ ЛРИ сверхзвуковых скоростях. Изменение угла стрсловил-
СОП1-и в значительной степени сказывается на несущих свойствах и поло-
НОС1ИИ центра давления при дозвуковых и околозвуковых скоростях; при
рхзвуковых скоростях это влияние ослабевает (рис. 2.1.11).
Рис 2.1.9. Влияние числа М, удлинения и сужения крыла па распределение давления и
коэффициент сопротивления стреловидных крыльев
ст-*. 1- Влияние угла стреловидности па коэффициент сопрел инлепия (при и 0)
^'^идных крыльев; >. = 2; П = 4- с - 6%
Уменьшение относительной толщины профиля крыла существенно
уменьшает коэффициент сопротивления и мало влияет на несущие свой-
ства и характеристики продольной устойчивости крыла (рис. 2.1 12), а
увеличение сужения крыла приводит к незначительному возрастанию ко-
эффициента сопротивления при малых сверхзвуковых скоростях.
Рис 2 1 12. Влияние относительной толщины стреловидного крыла на его коэффиш,<ит
сопротивления (при а = 0)
Современные расчетные методы позволяют с большой точностью раг‘
считать аэродинамические характеристики стреловидных крыльев. Аиа
лиз расчетных и экспериментальных материалов показывает, что аэроЛ11'
намические характеристики стреловидных крыльев конечного размаха
при Х> 1,2-5-1,5 в широком диапазоне скоростей могут быть в перво-'1
приближении определены по линейной теории (рис. 2.1.13 и 2.1.14).
Треугольные крылья определяются профилировкой и одним из пара
метров — а или хП1с задняя кромка прямая, боковые кромки отсутствуй
(1/ц = 0), стреловидность ио передней кромке и удлинение связаны завися
мостыо л - 4ctg%nK. Эти крылья представляют собой носушие поверхноСв
в которых проявляется эффект пространственного обтекания и фФс '
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис. 2.1.13. Сравнение теоретических и зкспериментальных значений производ-
ной С“и стреловидных крыльев в параметрах подобия
Рис. 2.1.14. Сравнение теоретических и экспериментальных значений произвол
ной С“„(М) для крыльев с разными углами стреловидности
скольжсния, что приводит к существенному уменьшению их волнового
сопротивления при околозвуковых и сверхзвуковых скоростях и к плав-
ному изменению аэродинамических характеристик при переходе через
скорость звука.
Аэродинамические характеристики треугольных крыльев могут быть
Рассчитаны по линейной теории, хотя линейная теория в ряде случаев не
“озволяет достаточно полно учесть эффект пространственного обтекания
кРЫльев малого удлинения и эффект скольжения.
Для треугольных крыльев со сверхзвуковыми передними кромками
с*°ДИмость расчетных по линейной теории и экспериментальных значе-
Ни{* Схв0 и Су(1 вполне удовлетворительная (рис. 2.1.15-2.1.17) Несу-
11!*1е свойства треугольных крыльев могут быть достаточно точно подсчи-
ГаКы 1акже по методу линейной теории (рис. 2.1.18).
1,5 2,0 2 5 3,0 М
---- линейная теории
—♦— эксперимент
Рис 2 1 15 Влияние формы профиля на коэффициент сопротивления
(при а ~ О) треугольного крыла
Рис. 2.1 16. Влияние формы профиля на значение производной С^а(М) треугольного крЫ-13
www.vokb-la.spb.ru - Самолёт своими руками?!
------ линейная теория ПХпк ~ 45 : ^“4,0 •хпк-70"; X 1,45
□ оф - эксперимент ©У™ “ 60s; Х= 2,31 - 75"; л = 1,07
г «ПК 1**1К
Рис. 2.1.17 Сравнение теоретических и йксперимснтальных значений производной
для треугольных крыльев в параметрах подобия
Ряс. 2.1.18. Влияние угла стреловидности па значение производной С'“о трс-у-
,о-'1ьнъ|х крыльев
Характер обтекания треугольных крыльев показан на рис. 2.1 19 и 2.1.20
Рис. 2.1.19. Распределение давления (при й = 0) по поверхности треугольного крыла при
до- и сверхзвуковых числах
p-0
-0,05
Корневое У111[ = 60°
сечение
Среднее
сечение
-0.2
Корневое сечение
р — 0 е>—
0,2.5
0.50
0,75
Среднее сечение
Концевое
сечение
Кгищеное сечение
0
Рис. 2 1.20. Распределение давления и местного числа И' по поверхности тре
крыла при до- и сверхзвуковых числах И
----- М = 0,8
----- 1,0
----- 2,0
Профиль
0,25
~т-
0,50
0,7э
М'
Коицевне сечение
1,5
0,5
0
M
P
0
0
При дозвуковых скоростях, когда влияние сжимаемости проявляет^ J
еще слабо, эпюры давления в центральных и концевых сечениях консо*1 J
крыла соответствуют эпюрам давления исходного профиля, а в корИсВЬ*|И
www.vokb-la.spb.ru - Самолёт своими руками?!
,1Пях заметно от них отличаются — перестройка эпюры давления в
С<? юных сечейиях треугольного крыла происходит в значительно мень-
сТслеии, чем на стреловидном крыле, т.е. свойственный стреловид-
Ш ч крыльям корневой эффект проявляется и на треугольных крыльях,
ЯуТя и в более слабой степени. С увеличением числа М разрежения на
Х охней и нижней поверхностях треугольного крыла возрастают и дефор-
мация эпюр давления усиливается. При сверхзвуковых скоростях, когда
на всей поверхности треугольного крыла реализуется сверхзвуковое обте-
[-аН1«'. линии Равных давлений по верхней поверхности крыла имеют
ват. представленный на рис. 2.1.19. На большей части поверхности тре-
угольного крыла реализуются малые разряжения Местные скорости на
поверхности крыла (М') в корневых и центральных сечениях близки к
скорости набегающего потока (Мх) (рис. 2.1.20). Такой характер обтека-
ния треугольного крыла обуславливает малое волновое сопротивление
крыла при сверхзвуковых скоростях, а различный характер обтекания
корневых и концевых сечений приводит к неравномерному характеру из-
менения сопротивления но размаху крыла. Коэффициент сопротивления
концевых сечений крыла изменяется от отрицательных значений при до-
звуковых и околозвуковых скоростях до небольших положительных зна-
чений при сверхзвуковых скоростях и компенсирует повышенные значе-
ния коэффициентов сопротивления корневых сечений крыла. В результа-
те этого суммарный коэффициент сопротивления треугольного крыла ос-
тается небольшим в широком диапазоне скоростей (рис. 2.1.21).
?*гс 2 1.21. Коэффициент сопротивления треугольного крыла и его сечений в зависимос-
1 от числа М (« - о)
Но Э^’Псрнментэльные и расчетные исследования показывают, что волпо-
' с°ирогивлснис треугольного крыла с относительной толщиной с < 5%
/^гавляст менее половины общего сопротивления крыла при сверхзвуко-
х скоростях. Для более топких треугольных крыльев (с = 3%) в связи
с уменьшением волнового сопротивления еще больше повышается доля сЛ
противления трения в обтаем балансе сопротивления крыла.
Угол стреловидности но передней кромке у_пк треугольного крыла (идц
удлинение) существенно влияет на характер обтекания крыла и на
суммарные аэродинамические характеристики. В корневых сечениях три
угольных крыльев по мере увеличения угла %,1К усиливается эффект стре.
ловидпости и связанное с ним перемещение области максимальных ра^
режений к хвостику профиля. В концевых сечениях треугольных крыльев
по мерс увеличения х11К все в большей степени проявляется пространствен*
ный характер обтекания и вызванное им уменьшение разрежений по хорде
профиля. С увеличением уменьшаются разрежения по всей поверхнос-
ти крыла, чю приводит к уменьшению коэффициентов сопротивления
крыла, особенно при сверхзвуковых скоростях (рис. 2.1.22).
Рис. 2.1.22. Распределение давления по хорде и размаху треугольных крыльеп различ-
ного удлинения (при а = 0)
Па рис. 2.1.23 приведены коэффициенты серии изолированных
треугольных крыльев, скомпонованных из параболического профиля с отно-
сительной толщиной с = 0,04 по всему размаху крыла. Видно, что нр1'
сверхзвуковых скоростях сопротивление треугольных крыльев невелико,
существенно зависит от угла хпк и уменьшается при его увеличении. Одн^0
увеличение угла у]1К треугольного крыла приводит к уменьшению его неоУ"
щих свойств и к уменьшению крутизны поляры как при околозвуковых, тая
и при сверхзвуковых скоростях (рис. 2.1.24). Вследствие уменьшения прй
этом и коэффициента сопротивления, максимальное аэродинамическое
качество треугольных крыльев различного удлинения при сверхзвуковое
скоростях изменяется мало.
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис. 2.1 23. Влияние удлинения нн коэффициент сопротивления (при а - О)
треугольных крыльев профиль параболический, с ” 4%
Рис. 2.1.24. Влияние угла стреловидности на АДХ треугольных крыльев
Линия фокусов на треугольном крыле при дозвуковых и околозвуко-
вых скоростях располагается на большей части размаха крыла вблизи
линии четверти хорд и лишь в корневых сечениях смешается по направ-
лению к задней кромке. По мере увеличения числа М смещение линии
фокусов к задней кромке в корневых и центральных сечениях усиливает-
ся и при м S- 2 достш ает середин хорд крыла. Аэродинамический фокус
гРеуголыюго крыла смещается назад при переходе через скорость звука,
ПРИ сверхзвуковых скоростях положение фокуса треуюлыюго крыла ма-
Го зависит от VIла 7,.„ крыла и хорошо определяется расчетными мето-
аами (рИс. 2.1.25).
Сужение практически нс влияет на коэффициент сопротивления «ре-
)г°Льного крыла, но приводит к уменьшению несущих свойств и макси-
',альцого аэродинамического качества за счет уменьшения удлинения
Рис. 2.1.25. Влияние угла стреловидности на положение аэродинамичес-
кого фокуса треугольных крыльев
при дозвуковых и околозвуковых скоростях (рис. 2.1.26). Изменение уг-
ла стреловидности задней кромки треугольного крыла в пределах
Хзк = _ 10 + 15° не оказывает значительного влияния на основные аэроди-
намические характеристики таких крыльев при околозвуковых и сверх-
звуковых скоростях. Однако при /зк < 0 крылья, близкие по форме к
треугольным, имея меньшее удлинение, уступают последним в аэро-
динамическом качестве и коэффициенте подъемной силы при дозвуковых
и сверхзвуковых скоростях.
Тонкие стреловидные и треугольные крылья малого удлинения
имеют малое волновое сопротивление при переходе через скорость
звука и при сверхзвуковых скоростях и широко используются на
сверхзвуковых самолетах.
з • х = 2,3
2 о Х = 1,85
1 □ X = 1,65
Рис. 2.1.26. Аэродинамические характеристики треугольных крыльев с сужением
www.vokb-la.spb.ru - Самолёт своими руками?!
Xi < = 45*. X 4,
с = 5%
Рне. 2.1.27. Аэродинамические характеристики (СгаОи С’“а) крыльев различной формы в
плане с относительной пашиной с - 3 и 5%
На рис. 2.1.27 приведено сравнение коэффициентов Схо0 и Суа кры-
льев различной формы в плане при относительной толщине профиля
с = 5 и 3 %.
Наибольшие различия в аэродинамических характеристиках срав-
ниваемых крыльев наблюдаются в околозвуковом диапазоне скоростей.
Наибольшими значениями С“д и Схд0 в этой области обладают прямые
крылья. При сверхзвуковых скоростях несущие свойства и коэффи-
циенты сопротивления тонких прямых, стреловидных и треугольных
крыльев сближаются.
2.2. Влияние угла атаки па обтекание прямых, стреловидных
и треугольных крыльев
Расчет аэродинамических характеристик крыльев конечною размаха
Раз чинной формы в плане до углов атаки, соответствующих началу' ин-
1т” Ит,Иого отрыва потока, может бьнь выполнен с достаточной для
фактических целей точностью но известным теоретическим методам.
Равнение расчетных и экспериментальных зависимостей б?,?в(а) и т2(а)
Рис .]1^ЯМь,х> стреловидных и треугольных крыльев приведено па
1 Определение аэродинамических характеристик крыльев на
углах атаки а > 10-ь 15°, а также опенка эффективности мероп-
Воч ’ На11Р^влепных на улучшение обтекания крыльев, обычно произ-
я мс-1°дами аэродинамического эксперимента.
б°-'1Ылих
Рйятий.
Рис 2.2.1. Аэродинамические характеристики крыльев различной формы в плане
Прямые крылья. Для того чтобы сохранить величину волнового сопро-
тивления па сверхзвуковых скоростях на уровне волнового сопротивления
топких стреловидных и треугольных крыльев, прямые крылья должны
иметь малые относительные толщины е = 3.3,5% (см. 2.1). Это сушествсн-
но усложняет решение проблемы безотрывного обтекания прямых крыльев.
Величина Судп1ах прямого крыла с относительной толщиной с-3-4% па
30-5-40% ниже, чем у крыла с относительной толщиной профиля с = 10-5-12%.
и не превышается Cva max = 0,7 0,8, а сопоставление CV0I,iax прямого и
стреловидного крыльев показывает сложность проблемы обеспечения высо-
ких Суа maX для самолетов с прямым крылом (рис. 2.2.2).
Рис. 2.2.2 Влияние опгосшельной толщины и угла стреловвдности по передней крОНЯ
на OveJ max крыла
Систематические исследования аэродинамических характеристик пр 1
мых крыльев показывают, что величина Суа max при л > 2 практически
зависит от удлинения крыла (рис. 2.2.3). Для всех крыльев рассмотриИ
ных удлинений при увеличении коэффициента подъемной силы свЫ^
- 0.2ч-0.25 наблюдается интенсивный прирост профильного сопр°т11Ч
www.vokb-la.spb.ru - Самолёт своими руками?!
такое увеличение сопротивления прямых крыльев происхо-
еще на линейном участке изменения С//Д(а), что связано с ранним от-
'1ИГ м пограничного слоя с верхней поверхности крыла. Одним из воз-
р1Шпых способов повышения С,/дшах прямых крыльев является применс-
МПЖмеханизаиии передней кромки крыла в виде отклоняемых носков или
' "си рынков. В связи с восстановлением плавного обтекания носка крыла
"^увеличении числа М до 0,8-г 0,9 роль отклоняемых носков в усграис-
пни местных отрывов на крыле уменьшается.
Рис. 2.2.3. Влияние удлинения на АДХ прямых крыльев
Для обеспечения продольной и поперечной устойчивости и управ-
ляемое.! и самолета с прямым крылом и предупреждения сваливания на
крыло необходимо обеспечить большие несущие свойства концевым
течениям крыла но сравнению с корневыми его сечениями на больших
лах этаки. .')го достигается за счет применения более несущих про-
Ф»1лей в концевом отсеке крыла, дифференциальным отклонением по-
”ороцгых носков с увеличением углов их отклонения к концам крыла, а
суКЖс выбором геометрических параметров самого крыла (удлинения,
ки^еНия’ О11ЮситслЫ1ой толщины профиля). Результаты систе.матичес-
г ' И<"Слсдованив показывают, что от удлинения крыла зависит эффек-
60й 10С11> Меха,,пза,1пн. а величина тах крыла с отклоненными на
По5;а-1о',ными щитками имеет максимум при удлинении крыла X ~ 3
'пис. 2.2 4).
41,°лрс.ъ1.е. Бюшт-,,,-
Рис 2 2.4. Влияние удлинения прямых крыльев пн эффективное *ь посадочных щитков
Стреловидные крылья конечного размаха обтекаются на больших
углах атаки значительно сложнее скользящих крыльев бесконечною раз-
маха. так как перетекание воздуха вдоль размаха сопровождается утол-
щением пограничного слоя и накапливанием его в концевых сечениях, в
результате чего на стреловидных крыльях возникают ранние концевые
срывы потока, распространяющиеся по мерс увеличения углов атаки в
центральные сечения крыла. Эти явления проявляются особенно заметно
на крыльях с умеренными углами стреловидности. Возникновение конце-
вых срывов потока на больших углах атаки приводит к существенному
изменению аэродинамических характеристик крыла и к нарушению регу-
лярного изменения по а характеристик подъемной силы (рис. 2.2.5)- С
развитием срыва потока существенно ухудшаются характеристики про'
дольной устойчивости и снижаются несущие свойства всего крыла.
Развитие срыва потока на стреловидном крыле зависит от его гео-
метрических параметров. Уменьшение удлинения стреловидного кры-^
приводит к ослаблению интенсивности развития срыва потока в когше-
вых сечениях крыла и благоприятно воздействует на его аэродинамичес-
кие характеристики на больших углах атаки
При околозвуковых скоростях и больших углах атаки у сгрел<””^
ных крыльев неблагоприятно перераспределяется подъемная сила
размаху и наблюдаются еще более ранние концевые срывы потока. Д' 1
обеспечения благоприятных характеристик стреловидных крыльев на У1]
лах атаки, соответствующих режимам взлета, посадки и режимам -ча1,| 1
www.vokb-la.spb.ru - Самолёт своими руками?!
околозвуковых скоростях, необходимо применение специальных
ра при J_ (установка па крыле перегородок, концевых наплывов,
меропри' Нябора профилей с отогнутым лоском и др.).
специально*"
Рис 2.2.5. Распрсделягис давляпгя по сгрелопилтюму крылу при до- и трансзвуковых числах И
При сверхзвуковых скоростях картина обтекания стреловидц^И
крыльев на больших углах атаки существенно изменяется. Основан
часть крыла обтекается безотрывным потоком до больших углов атак» ’
перетекание воздуха к концам крыла существенно уменьшается, распреЯ
деление аэродинамической нагрузки по размаху крыла становится бод^ь
равномерным, а аэродинамические характеристики линейными в летном
диапазоне углов атаки (рис. 2.2.6)
Обтекания треугольных крыльев и крыльев, близких к ним лп
форме, характеризуются рядом особенностей, обусловленных очень
большим сужением крыла и большим углом стреловидности по передней
кромке при малых углах стреловидности задней кромки крыла. Эти гео-
метрические особенности крыльев способствуют увеличению несущих
свойств концевых сечений при малых и умеренных углах атаки и воз-
никновению поперечных градиентов давления, вызывают перетекание по-
граничного слоя вдоль передней кромки к концам крыла, что приводит к
возникновению ранних концевых срывов потока. В то же время, благо-
даря уменьшению перетекания пограничного слоя вдоль прямой задней
кромки крыла, отрывные явления па трсуюлт.пых крыльях происходи
'мягче", чем на стреловидных крыльях. Возникновение ранних концевых
срывов потока па треугольных крыльях при дозвуковых и околозвуко-
вых скоростях существенно уменьшает несущие свойства концевых сече-
ний при п > 10-: 20° (рис. 2.2.7), которые частично компенсируются уве-
www.vokb-la.spb.ru - Самолёт своими руками?!
м юдъемной силы в центральных и корневых сечениях крыльев.
_7ИчеН1 •• арные аэродинамические характеристики треугольных
11 ев изменяются по углам атаки вполне благоприятно.
КРЬ,'форМа профиля треугольного крыла оказывает существенное влия-
ла характер его обтекания па больших углах атаки. Применение в
НИС пинамической компоновке треугольного крыла с большим углом
аЭр аовидности передней кромки остроносых сверхзвуковых профилей
/Т1 поимср. параболического или ромбовидною) приводит к резкому на-
' щению обтекания крыла на больших углах атаки, изменению характе-
ра нрогскания но yiлам атаки коэффициентов подъемной силы концевых
сечений крыла (риг. 2.2.7, 2.2.8). Применение на концах крыла несущих
несимметричных профилей или симметричных профилей с вытянутыми и
отогнутыми вниз носками сдвигает начало возникновения срынпых явле-
ний в концевых сечениях крыла в область больших углов атаки, повы-
шает несущую способность концов крыла и улучшает его суммарные
аэродинамические характеристики (рис. 2.2.9).
КорчсПОС СГЧН1ИС (1)
сеч
Параболический профиль
Рс1.мЛопи,тпыЯ профиль
о Профиль П-50
Л Профиль С-9С
(с отогнутыми
носками)
Рис 2.2.8. В.1ИЯ1ЫГ с|юрмы профиля на ЛДХ сечений треугольного крыла
Улучшение обтекания крыла на больших углах атаки может быть il(s
лучсно также путем установки перегородок пли же осуществления це,
больших "пропилов" по передней кромке. Эффект от применения На
крыле "пропилов" аналогичен эффекту применения перегородок, но пр^
является сильнее.
Суммарные аэродинамические характеристики треугольных крыльев
с различными углами стреловидности передней кромки имеют различный
характер изменения по углам атаки. При малых углах атаки подъемная
сила треугольных крыльев возрастает при увеличении удлинения крыла
(уменьшении угла стреловидности передней кромки) за счет большей ве-
личины подъемной силы корневых и нейтральных сечений этих крыльев.
На больших углах атаки, наоборот, коэффициенты подъемной силы
крыльев с Хгк - могут превышать коэффициенты подъемной силы
крыльев с Хнк * 45+50° вследствие улучшения обтекания концевых
сечений крыльев большой стреловидности и малого удлинения. С уве-
личением угла Хпк треугольного крыла улучшаются его характеристики
продольной устойчивости па больших углах атаки. При увеличении угла
Хпк аэродинамический фокус крыла смешается назад (рис. 2.2.10).
Подъемная сила треугольного крыла создается, главным образом, корне-
выми и центральными сечениями. Уменьшение удлинения крыла за счет
отсечения его концов заметно уменьшает подъемную силу крыла в целом
на больших углах атаки. В связи с этим при равных удлинениях подъем-
ная сила оказывается большей у крыла с меньшим углом х„К1 но с от-
сеченными концами (рис. 2.2.11).
л «„„„„по /гпа стреловидности иа АДХ треугольных крыльев
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис 2.2.11. Влияние срезанных таконцозок на АДХ треугольных крыльев
Влияние угла Хпк крыла сохраняется во всем диапазоне дозвуковых
скоростей. При околозвуковых скоростях, когда заметно начинает прояв-
ляться влияние сжимаемости воздуха, усиливаются отрывные явления на
треугольных крыльях и связанные с ними значительные изменения но
углам атаки коэффициентов подъемной силы и продольной устойчивости.
При сверхзвуковых скоростях на всей поверхности крыла восстанавли-
вается плавное безотрывное обтекание, и аэродинамические характерис-
тики всех сечений крыла монотонно изменяются с ростом угла атаки.
Применением перегородок на верхней поверхности крыла, ‘'пропилов” у
носка или же компоновкой крыла из специального набора профилей с несу-
щим профилем в концевых сечениях удастся ослабить интенсивность конпс-
вых срывов потока и замедлить их распространение по размаху при уве-
личении угла атаки в дозвуковом и околозвуковом диапазоне чисел М.
Крылья обратной стрелов-идности Исследования аэродинамики
крыльев прямой и обратной стреловидности начались одновременно. В
х юлах были проведены первые систематические экспериментальные и
^г,,С1ные исследования. Вследствие больших трудностей в устранении
рП’°'?рУг°и дивергенции цельнометаллической конструкции крылья об-
‘ стРелоииЛНости нс нашли практического применения.
7q х Иг^рес к крыльям обратной стреловидности возродился в конце
Котс 10'7'Ои’ Чго было связано с появлением композиционных материалов,
Кру,. 1с за с'1ег использования направленной деформации изгиба и
KJ1X tbl могли обеспечить требуемые характеристики аэроупругости та-
Рьгльев при приемлемой массе.
ся ь г !ORllbIe особенности крыльев обратной стреловидности заключают-
I сл₽»<УЮ1цем:
при малых углах атаки крылья обратной стреловидности
более благоприятное распределение циркуляции по размаху, и с унедиЧе.
пнем удлинения крыла аэродинамическая нагрузка в концевых сечения!
\ меныпаегся; при средних и больших углах атаки породи и акическД
нагрузки в концевых сечениях меньше у крыльев прямой стреловидности-]
а “ 0, /и = 5, и " 1 X = 4, и 3
Рис. 2 2.12. Аэродинамические характеристики крыльев прямой и обратной стреловиЛ
тн без сужений
- волновой кризис на крьыьях возникает несколько позже, чем па
крыльях прямой стреловидности, вследствие ослабления “срединного эф-
фекта’’ и появления в центральной области крыла отрицательных значит!
интеграла давления, в результате чего крылья обратной стреловидности
имеют меньшее лобовое сопротивление и большее аэродинамическое качест-
во в трансзвуковом диапазоне скоростей (рис. 2.2.12), но большее сопротив-
ление на сверхзвуковых скоростях; кроме того, уменьшению сопротивления
самолета с крылом обратной стреловидности в трансзвуковом диапазоне
скоростей может способствовать применение в компоновке крыла тонких
умеренно сверхкритических профилей и более благоприятное распределение
поперечных сечений вдоль продольной оси фюзеляжа по сравнению с
компоновкой самолета с крылом прямой стреловидности;
- при больших углах атаки вследствие перетекания подторможенного
пограничного слоя из концевых сечений крыла в корневые на крыльях обрат-
ной стреловидности возникают центральные срывы потока, медленно распро-
страняющиеся но размаху при увеличении а. в результате этого сохраняются
высокие несущие свойства в средних п концевых сечениях крыла, что при-
водит к сохранению демфирующих свойств крыта и эффективности элеронов
до больших закритичсских углов атаки, но несколько ухудшает эффектна-
ность горизонтального оперения, расположенного за крылом:
- наиболее предпочтительной аэродинамической схемой самолета
крылом обратной стреловидности является схема “утка" Наличие в кФ
поновке самолета с крылом обратной стреловидности передних корневь!
наплывов и переднего горизонтального оперения (ПГО) частично воссг
навливает безотрывное обтекапи корневых и центральных сечений и гСЧ
самым повышает несущие свойства крыла и компоновки в целом до боДИ
ших закрнтических углов атаки (рис. 2.2 13). Таким образом роль наИ^
ва в компоновке крыла обратной стреловидности противоположна его p°J
для крыла маневренного самолета • прямой стреловидностью. НесуШ
www.vokb-la.spb.ru - Самолёт своими руками?!
.Ril и аэродинамическое качество компоновки самолета с крылом
cuolici^ сТрСЛОВцдцости находятся па уровне соответствующих харакгс-
современных самолетов с крыльями прямой стреловидности и обла-
цьк'окими значениями Суа max и Суц па режимах взлета и посадки.
Рис. 2.2.13. Лдролиналш'кч'кие характеристики модели самолета с крылом обратной стрело-
видности без балансировки: / фюзеляж *• крыло обратной стреловидности 2 то же с пере-
лив ми наплывами, 3 - модель с ПГО (А - 0,1), 4 8„ = 30е, = .30°, 8,,, = 40° (а) и ш-сущие
:во1 ста сечений крыльев прямой и обратной стреловидности: / - фюзеляж т крыло прямой
•тре 1НИДНОСП1 (xtlK=41E, X _ 3.2), 2 и 3~ фюзеляж + крыло обратной стреловидности и то
ж<- с передними наплывами (% ~ -30°, X = 1), 4 - модель с ПГО (б)
Крылья обратной стреловидности обеспечивают самолету благоприятные
характеристики продольной устойчивости и высокую эффективность органов
поперечного управления в широком диапазоне чисел М и углов атаки вслел-
!вие безотрывного обтекания концов крыла и более позднего возникновения
на крыле вол нового кризиса. С ростом угла атаки у крыла обратной cipe.no-
ВИЛИ0СТИ по сравнению с крылом прямой стреловидное ги (рис. 2.2.14) уве-
нчиваются изгибающие моменты. Кроме того, смещение фокуса самолета по
41 <ам М при использовании крыла обратной стреловидности существенно
^^ивается (рис. 2.2.15) В результате продольная балансировка значитель-
.меныиает аэро динамическое качество на сверхзвуковых скоростях.
ст ^Сслсдова1|ИС компоновки самолета в схеме “ тка” с крылом обратной
РСЛ01я>лнос.ти и оптимальными параметрами компоновки при наличии нс
ХВГ)ГГ> их пьюокоэффсктпвных управляющих поверхностей (ПГО, элевоны,
ио г ьге щитки) позволяют обеспечить продольную балансировку самолета
Hevc*^ Лст,10м Диапазоне скоростей и утлов атаки при наличии статической
КрЬ1 Го^ивос1 и на дозвуковых скоростях. Проблемы аэроунругости таких
cj.r ” (R UCe «те требуют дополнит единых исследований, особенно с учетом
мы управления и при наличии статической неустойчивости.
/ 45
0,2
О 5
С
0,25 0,50 0,75
0,4
0,5
0.2
Хп„=-35г40.
' _ / /, -
S. *' 1
0 10’ 20’ 30’
С
Ji4 сс и'*'
0,4 -
0,2 -
а = 2(Г
0 0,25 0,50 0,75 -
Рис. 2.2 14. Распределение аэродинамической нагрузки по размаху для крыльев прямой и
обратной стреловидности (положение фокуса вдоль размаха): а - расчет по распред!
л синю давления; б - измерения тензовесами (эксперимент А.И.Калинина); в - х11к - 45°
- 5, 1] “ 1; <? - х„к “ 45°, X = 5, п - 1
Рис. 2.2.15. Расположение аэродинамического фокуса самолета
требуемое положение центра тяжести, обеспечивающее
различны: омпоповок я
= U
=0.1
2.3. Влияние параметров крыла
на аэродинамические характеристики крыльев с фюзеляжем
При обтекании комбинации крыла с фюзеляжем линии равных ДаИ1
лений на большей части поверхности распо тягаются как и на изолир0'
ванном крыле. В бортовых сечениях стреловидных и треугольных крЫ'
льев линии равных давлений разворачиваются перпендикулярно потоку,
концы крыльев обтекаются пространственным потоком
Эффект стреловидности на треугольных крыльях проявляется л»11!
на сравнительно небольшом участке но размаху крыльев.
www.vokb-la.spb.ru - Самолёт своими руками?!
В сбором закона изменения площадей поперечных сечений фюзеляжа
acni расположения крыла (“правило площадей”) можно влиять на
° ° анис его бортовых сечений, па расположение линий равных давлс-
^^близи фюзеляжа и па аэродинамические характеристики комбипа-
11,1 кпьт1а с фюзеляжем. Например, фюзеляж, имеющий поджатие в об-
1111,1 расположения крыла, выполненное в соответствии с околозвуко-
правилом площадей, ослабляет корневой эффект крыла при около-
ВЫщовых скоростях, что приводит к снижению сопротивления в борто-
вых сечениях крыла. На дозвуковых скоростях поджатие фюзеляжа ока-
зывает влияние па все сечения крыла, включая и концевые; с увеличе-
нием скорости набегающего пот-ока область влияния поджатия фюзеляжа
на обтекание крыла уменьшается, при М > 1,7 поджатие фюзеляжа по
околозвуковому правилу площадей практически не влияет на обтекание
концевых сечении (J > 0,7) стреловидного крыла с удлинением X « 3.
Уменьшение сопротивления корневых сечений крыла приводит к
уменьшению сопротивления всей комбинации крыла с фюзеляжем, вы
полненным в соответствии с правилом площадей, по сравнению с сопро-
тивлением крыла с фюзеляжем - телом минимальною сопротивления.
Волновой кризис на крыло с цилиндрическим фюзеляжем наступает
несколько раньше, чем па изолированном крыле, но его развитие проте-
кает более мягко (рис. 2.3.1).
Htc. 2.3.1. Коэффициент сопротивления комбинации "крыло + фюзеляж"
Присутствие фюзеляжа увеличивает местную скорость обтекания
крыла вблизи борта фюзеляжа, что влечет за собой некоторое увеличе-
ние подъемной силы в бортовых и центральных сечениях но сравнению с
значением у изо шрованного крыла
Влияние фюзеляжа на обтекание крыла ослабевает в направлении к
^__пцам крыла и зависит от миделя фюзеляжа: тонкие фюзеляжи
мф < D5-5-O.O7) почти по изменяют характера обтекания концевых се-
, П,|Й кРыла; присутствие фюзеляжей с большими относительными ми-
Ч'и ^Мф > 0,1) изменяет картину обтекания крыла увеличивая раз-
'еиие на верхней и давление на нижней его поверхностях (рис. 2.3.2).
Ку й) ^ИсУтствие фюзеляжа существенно перераспределяет аэродипамичес-
На1РУзку j р -мах* крыла по сравнению с распределением нагрузки
ио размаху изолированного крыла: в сечениях, близких к борту фюзе.ъ]
жа, происходит увеличение аэродинамической нагрузки, а на части крыЛ
занятой фюзеляжем, наб подастся значительное се уменьшение.
z “ М
к
-0.5
-0,4
-0.3
-0,7
0,6
0,5
-0,4
-0,3
-0,2
а - 8’ I
= 8
— 0,4
г 0,2
1 0 -^z0.50 1.С
= 0.25
0,38
0.44
0 2
_ 0,50
-*ч<|1 = 035 -^мф
г.ф = 0'30 *бф
р 2 о,7
-0.6
-0.5
-04
-----0,4
/ 2
4-0,2
0,4
-0,3
-0,2
0,1
О
О 4
0,50 1.0
Изолированное
крыло
а - 8’|
4’1
0.50 1,0
\Ф = «Д’
he ~ °-’7
Влияние фюзеляжа на изобары треугольною крыла (М - 0,15; а = 4"; hji
с - 6% ). - 2,3)
Рис. 2.3 2.
филь С-9с;
Перераспределение нагрузки по размаху крыла при установке фюзелялЯ
тем значительнее, чем больше мидель фюзеляжа (рис. 2.3.2 и 2.3.3). При
больших миделях фюзеляжа (£мф - 0.05+0,07) “провалы” циркуляции в по>
фюзеляжной части крыла обычно компенсируются увеличением циркуляции в
бортовых и центральных сечениях, так что подъемная сила комбинации крыв
с фюзеляжем остается близкой подъемной силе изолированного крыла.
При больших миделях фюзеляжа (5мф > 0.1) подъемная сила комби*
нации крыла с фюзеляжем оказывается меньше подъемной силы изолЦ
рованного крыла вследствие меньшей подъемной силы фюзеляжа га
сравнению с подфюзеляжной частью крыла (рис. 2.3.3).
На больших учлах таки присутствие фюзеляжа на крыле малого уДЧ
нения либо почти не влияет на характер обтекания крыла, либо может 14
сколько улучшить обтекание. Так, например, если у изолированного прЯМ|
угольною крыла интенсивное развитие центрального срыва с ростом у^Я
атаки приводит к уменьшению несущих свойств крыла, то при ycraiioBj
фюзеляжа несущие свойства крыла увеличиваются, так как фюзеляж расЧ
латается в зоне срыва па крыле а сам обтекается безотрывным цото»яЯ
тем самым уменьшает общую зону отрыва.
www.vokb-la.spb.ru - Самолёт своими руками?!
М-0,15; профиль С-9с;
2,3; с = 6%
60'
М = 0,8
0,8
М= 1,7
М- 0,8; 1,7: профиль С-9с;
Х-2,3; с = 5-5,5%: 5„ф= 0,06
изолированное
крыло
крыло с
фюзеляжем
— — изолированное
крыло
------крыло с
L0 z фюзеляжем
Рис. 2.3.3. Влияние фозеляжа на распределение циркуляции по размаху треугольного крыла
Характер обтекания стреловидного и треугольною крыльев с большими
углами х„к мало изменяется на больших углах атаки при установке на них
фюзеляжа (рис. 2.3.4 и 2.3,5). так как срыв потока на таких крыльях воз-
никает в их концевых сечениях и медленно распространяется к борту фюзе-
ляжа по мере увеличения угла атаки. У стреловидного крыла с фюзеляжем
небольшого относительного миделя при атом не изменяются и несущие свой-
ства, так как подъемная сила подфюзеляжной части крыла примерно равна
подъемной силе фюзеляжа. У треугольного крыла х„к = 60° с. фюзеляжем
> 0,07 - наблюдается некоторое уменьшение несущих свойств за счет
провалов циркуляции в части крыла, занятой фюзеляжем.
р
с — 3.4 Влияние фюзеляжа ня АДХ и обтекание стреловидных кры-чьсв
Рис. 2.3.5 Влияние фюзеляжа на АДХ и обтекание треугольных крыльев
Систематические исследования моделей крыльев с фюзеляжем по
зволилл выявить рад закономерностей,
которые могут быть
полезны при
разработке конкретных аэродинамических компоновок самолетов и п >и
оценке их аэродинамических характеристик.
Влияние удлинения крыла. При дозвуковых скоростях увеличе-
ние удлинения трапециевидных и треугольных крыльев приводит к во>
растанию несущих свойств комбинация крыла с фюзеляжем (рис. 2.3.6).
Результаты исследований изолированных крыльев и комбинаций таких
крыльев с фюзеляжами показали, что при сверхзвуковых скоростях из-
менение относительной площади миделя фюзеляжа (5мф < 0,1) практи-
чески по изменяет несущих свойств крыла.
Риг 2.3.6. Влияние удлинения и угла прсловилтюстн крыльев па несущие спой<”>4
(произведшую С“ , ) и положение аэродинамического фокуса комбинации "крыло т -тя?
Влияние удлинения крыла на характеристики лобового сопротив-пе"
пия комбинации крыла с фюзеляжем проявляется гак же, как и на -4,
рактернстики изолированных крыльев.
www.vokb-la.spb.ru - Самолёт своими руками?!
х ныленис удлинения крыла приводит к увеличению МКр и к умснь-
У МС пиропа волнового сопротивления как при околозвуковых, так и
щсиию "P^B^0BbJX скоростях, но одновременно с этим вызывает умепьше-
,ПЯ1 сиды. Кроме того, уменьшение удлинения крыльев способ
лпе 11О^о1‘ес плавному протеканию по числу М характеристик лобового со-
ствуст J подъемной силы при переходе через скорость звука
S.7-2.3.10).
Рис 2.3 7. Влияние удлинения прямых крыльев на несущие свойства (С’“я) и коэффициент
соп|ютивлепия при нулевой подъемной силе (Cfo0) комбинации “крыло + фюзеляж’
1>Ис- 2 3 К п
%ец,.. и тянце удлинения прямых крыльев на индуктивное сопротивление и поло-
а'^Х)-'Л11амичсскоГо <]юкуса комбинации “крыло + фюзеляж’’
' 1,6 1,8 2,0 2,2 2,4 2,6 2,8 М Х = 3,0
Рис. 2.3.9. Влияние удлинения стреловидных крыльев на АДХ (Сгй<), С’”д, С.,, г,
комбинации 'крыло + фюзеляж’
Рис. 2.3 10 Влиятшс шлннения к|ц,цьев различной формы п плане на несущие споисгла (C^j
комбинации "крыло ь фюзеляж" ( с • 4%): «, в, г - прх|>иль параболический, б профи,Л> Н Я
Изменение удлинения приводит и к значительному изменению п°'
жепия фокусе! при околозвуковых скоростях. При сверхзвуковых ciwff
тях влияние удлинения на несущие свойства, индуктивное сонротнвл^Ч
аэрод11намтп1ескос качество и положение фокуса значительно ослабевает
www.vokb-la.spb.ru - Самолёт своими руками?!
Влияние сужения крыла. Исследования по влиянию сужения крыла на
г .,ро (пнамическпс характеристики комбинации крыла с фюзеляжем пока-
। * 1И что при сверхзвуковых скоростях изменение сужения крыла р от 1
J' 5 мало влияет на несущие свойства и индуктивное сопротивление пря-
и стреловидных крыльев. Небольшое уменьшение коэффициентов ло-
i ^jjpro сопротивления у комбинации прямых и стреловидных крыльев с
к^зеляжем при увеличении сужения крыла объясняется уменьшением
лошади консольной части крыла (при сохранении ею полной площади).
Обработка ио параметрам подобия линейной теории результатов ис-
пытаний моделей фюзеляжа с. трапециевидными, стреловидными и треу-
гольными крыльями различных удлинения и сужения указывает на
-.донлетворительную сходимость теоретической зависимости
4
луМ"
4
с экспериментальными данными для рассматриваемых крыльев (рис. 2.3.11-
2.3.13). Полученные зависимости можно использовать при оценке несущих
свойств комбинации крыла с фюзеляжем (5мф < 0,1) .
' 0,5 1,0 2,0 3,0
,3
L0
0,5 1,0 3.0
♦ ДО
для г] - 2 и л “ 3 1 5
о Д • X
Обработка по
* • ..........
параметрам
*l'*f е прямыми крыльями
подобия линейной теории шч.тцих спойсгж моделей
Рис. 2.3.12. Обработка по параметрам подобия линейной теории несущих свойств моделей
фюзеляжей со стреловидными крыльями
Рис. 2.3.13 Обработка по параметрам подобия лилейной теории несущих свойств моделей
фюзеляжей с треугольными крыльями
Влияние угла стреловидности крыла При дозвуковых скорое^
М <0,85 изменение угла стреловидности крыла мало влияет на коаффиЦ№яТ
Лобового сопротивления Схм, при М > 0,9 с ростом утла стреловидиосТ11
крыла прирост во.шового сопротивления комбинации крыла с фюзеляжей
снижается (рис. 2.3.14). С увеличением угла стреловидности крыла Я0-1#
волнового сопротивления в общем балансе сопротивления крыла СИЛЫ* j
уменьшается Относительное снижение коэффициента сопротивления К0*1
бинации крыла с фюзеляжем, обусловленное увеличением утла стреловйДи°1
сти крыла, сохраняется почти постоянной при сверхзвуковых скоростях.
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис. 2.3.14 Коэффициент сонротипления при нулевой подъемной силе моделей фюзеляжей
со стреловидными и треугольными крыльями
Увешчсние угла стреловидности крыла приводит к уменьшению его
несущих свойств Величина С”, претерпевает наибольшие изменения от
изменения утла стреловидности крыла в диапазоне дозвуковых и около-
звуковых скоростей начиная с И * 2, величина Су(1 изменяется по па-
раметр Хпк значительно слабее (рис. 2.3.15).
рис. 2 ч 1<х
сУШие” в'1Нинпе Угла стреловидности стреловидных и трсуп тьпых крыльев на не-
‘аойс.тиа комбинации “крыло + фюзеляж"
Т| ai,^d ^звуковых и окотозв новых скоростях несущие свойства прямых
еНиевидщ11х 1фЬ1льсв превышают несущие свойства стреловидных и гре-
угольных крыльев равных удлинении. При сверхзвуковых скоростях р
ца в несущих свойствах прямых и стреловидных крыльев уменьшается.
Угол стреловидности крыла оказывает существенное влияние и н
рактернстики продольной устойчивости самолета. Фокус комбинации!
зеляжа с треугольными или стреловидными крыльями большой стрел!
ности при переходе от дозвуковых к сверхзвуковым скоростям смсщ
назад значительно .меньше (в долях средней аэродинамической хорды
дого из крыльев), чем фокус комбинации фюзеляжа с крыльями уморе
стреловидности (рис. 2.3.16) или же с прямыми крыльями (рис. 2 3.8).
Рис 2.3.1G. Влияние угла стреловидности стреловидных и треугольных крыльев на
тожение аэродинамического фокуса комбинации “кры ю - фюзеляж'1
—•— 7,П1 = 45’
X 4
-*’--ZnK= 6u*j
X = 2,31
—Хпк“ ^51
а = 1.07
Влияние относительной толщины и формы профиля кры
Большое влияние на характеристики лобового сопротивления и велич
аэродинамического качества самолета оказывает относительная голи
профи,тя крыла.
Уменьшение относительной толщины профиля крыла любой форм,
плане приводит к существенному уменьшению лобового сопротивления *а
ла с фюзеляжем при сверхзвуковых скоростях (рис. 2.3.17) Так, напри*-
изменение относительной толщины профиля П-53 на прямом крыле X = 2
6 до 4% при числе М — 1,8 почти вдвое снижает волновое сопротивление.
Величина А'тах самолета также существенно зависит иг относите™
толщины профиля крыла с, причем в области чисел М < 1 величина А
возрастает с увеличением с, а в области чисел М > 1 величина Ктах Ум£
ищется (рис. 2.3.18). Наибольшее влияние относительная толщина проф
крыла оказывает на аэродинамические характеристики крыльев нсболн
стреловидности и особенно прямых крьшьев. с увеличением угла стрелой^
сти крыла влияние относительной толщины па коэффициент сопротивл
крыла уменьшается (рис. 2.3.19). Это позволяет в некоторых c-iV
значительно увеличить относительную толщину профиля в корневых сечи
крыла с большим углом стреловидности передней кромки без существе*
www.vokb-la.spb.ru - Самолёт своими руками?!
ня аиро/итпамического качества комбинации фюзеляжа с большой
f|oft пЛОшадыо миделя (5чф > 0,1) с крылом малого удлинения.
С „о
с,оз
Профиль П-53< 6
Х.л = 0: X = 2; П = 4;
Х,ь = 9.8: 0.06
2,2 2,6 3 0 3,4 3,8 ]У
Профиль СР 7с _ -
Zl = 60", X - 2.5: и - 4; S^= 0.06
0,02
0.01
об
Clfln
о.оа
0,01
о
0.6
Рис. 2.3 17. Влияние огносичельиой толщины профиля крыла на коэффициент сопротив-
ления при пулевой подъемной силе комбинации 'крыло + фюзеляж"
Профиль 11-53с
X, = 0; X ~ 2: t] = 4;
Хф = 9,8; Л...Г 0.06
Профиль параболический о с = 3%
Влияние относительной толщины профиля крыла
пвегво Комбинации "крыло < фюзеляж'
на паксимал аэгодина-
Относительная толщина профиля нс влияет на индуктивное соцр1
'.явление комбинации крыла с фюзеляжем рассмотренных параметр^
как при сверхзвуковых, гак и при дозвуковых скоростях (рис. 2.3.19).
Х1?-0:л-3; % = 55";Х’3: л= 2,31
г; = 4; .?wt,= 0,05 п “ 4; 5„ф= 0,05 0,05
Рис 2.3.19. Влияние относигслытпй толщины и угла стреловидности крыльеп на коэффя-
циснт сопротивления при нулевой подъемной силе и индуктивное сопротивление комби-
нации "крыло + фюлеляж” (профиль параболический)
Форма профиля крыла оказывает существенное влияние на аэро1
динамические характеристики комбинации крыла с фюзеляжем.
Применение профилей с острой передней кромкой на прямых крыльях
приводит к весьма существенному снижению сопротивления комбинации
крыла с фюзеляжем при сверхзвуковых скоростях, но вызываег увеличен»*
сопротивления в области околозвуковых скоростей; применение профилей с
острой передней кромкой на крыльях с большим утлом стреловидности
редней кромки в меньшей степени снижает прирост волнового сопроптвле
пня и повышает величину Ктях при сверхзвуковых скоростях (рис. 2.3.20)
Исследования комбинации треугольного крыла Хпк = 60° с фюзелЯ
жем для различных форм профилей крыла показывают, что изменен1»
формы профтыя практически нс сказывается на положении фокуса и d
ло влияет на величину С®
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис. 2.3.20. Влияние формы профиля на коэффициент сопротивления при нулевой
подъемной сил1 комбинации 'крыло г фюзеляж"
Влияние положения крыла по высоте. Изменение положения на
фюзеляже крыла по высоте мало влияет на несущие свойства, сопротивле-
ние, аэродинамическое качество и характеристики продольной устойчивости
самолета при сверхзвуковых скоростях, но оказывает значительное влияние
на характеристики боковой устойчивости (рис. 2.3.21).
Влияние миделя фюзеляжа. Как известно, лобовое сопротиЯ
нис комбинации крыла с фюзеляжем при малых дозвуковых, окодозьу
ковых и сверхзвуковых скоростях тем больше, чем больше мидель Ж
зеляжа (рис. 2.3.22); при этом, подъемная сила комбинации крыд| I
Изолированные крылья
0.061
0 к) Крылья с
0,15 фюзеляжем
0,20.
Профиль С-9с; с = 5+5.54; кф=7.5; Х1|Ч = 2.5; 5„ф- 0,06
С
.r«u
0.03
0.02
0 01
0
0,8 1.0 12 1/ 1,6 1,8 М
Рис. 2.3.22. Влияние площади миделя фюзеляжа на коэффициент сопригивлытя при
нулевой подъемной силе комбинации “крыло + фюзеляж"
фюзеляжем при небольших относительных площадях миделя фюзеляж»
(5мф < 0,1) остается близкой подъемной силе изолированного крыла
(рис. 2.3.23, 2.3.24) и С"окр.,ф = С”в1<зкр. Вследствие этого индуктив-
ное сопротивление комбинации крыла с фюзеляжем мало зависит от
величины 5Мф (рис. 2.3.25).
X.». = 60"
с =5%
М= 0,15
Крыло
о /
° 2
• 3
• 4
0,05
0,08
0,11
0.14
Рис. 2.3.23 Влияние «тощали миделя фюзеляжа на несущие свойств;! фюзеляж*1
с трсутльным крылом при малых скоростях
www.vokb-la.spb.ru - Самолёт своими руками?!
М - 3,0
М -- 2.0
М = 0,8
О,
0.4
10‘а
10
А. = 1.5 ц
П - 3,5 п
C = 3,5D д
f„ = 6.5D х
X 60>И
<Г7О Изолированные
крылья
*мф V5
0,06 0,6«
0,10
0,15
0.20
Крылья <:
o‘_5j фюзеляжем
0,59
0,45
~'У“
0.4
М = 2,0 М 3,0
0
ю° о
= 2.5\J
X = 3 0 ° ” изолированное крыло
ч - крыло с фюзеляжем
10’ а ^-0,06
0,21-
Рис 2 3.24. Влияние плошали миделя фюзеляжа на несущие свойства фюзеляжа со стре-
ловидными и треугольными крыльями при до- и сверхзвуковых скоростях
Изолированные
крылья
5'иф _
0,68 0,06 X Й
0.59 0,10 £ ?
0,51 0,15
0,45 0,20 Я
Ри,: 2.3.25. Влияние площади миделя фюзеляжа па индуктивное сопротивление фюзе-
ляжа со CTjKMOBiMHbiMH и треугольными крыльями при до н сверхзвуковых скоростях
При сверхзвуковых скоростях величину C.tdIo комбинации крыла с
Ф зеляжем можно определять из соотношения:
_ с
С Г” с _ /” к
.га0кр»ф “ *<гл0изфомф ~гл0изкр $
На рис. 2.3.26 приведено сравнение расчетных и экспериментальных
^чсимостей С\.я0, c"/t Сха -Схя0 = /"(^мф.М) для рассмотренной ком-
• Нии стреловидных крыльев с фюзеляжем. Видно, что при свсрхзву-
Ubix скоростях расчетные и экспериментальные значения СЛйо. Суа ,
п хорошо согласуются друг с другом.
О 0,05 0,10 0,15 0,25 £ .
Рис. 2.3.26 Сравнение расчетных и экспериментальных зависимостей СхМ, С^а, Сга -С^ь
- /'(S41М) ттл комбинаций сгратовидпых крыльев с фюзеляжем при М •= 2 и 3
Влияние формы поперечного сечения фюзеляжа. Модель са-
молета с фк зеляжем эллиптического поперечного сечения, высота которого
меньше ширины, обладает более высокими несущими свойствами не только
ио сравнению с несущими свойствами модели с фюзеляжем, высота которого
больше ширины, по также и по сравнению с несущими свойствами модели!
цилиндрическим фюзеляжем круглого поперечного сечения (рис. 2.3.27).
Рис 2 3.27 Влияние формы поперечного сечения фюзеляжа на несущие свойства (Ч
и положение аэродинамического фокуса комбинации треугольного крыла и фюзеляж»
www.vokb-la.spb.ru - Самолёт своими руками?!
фЮзглял<, большая ось эллипса поперечного сечения которого рас-
экепа в горизонтальной плоскости, участвует в создании подъемной
поЛ { Может быть назван несущим фюзеляжем.
СИЛЬ\{олель самолета с несущим фюзеляжем имеет меньшее индуктивное
Ufoc сопротивление как при дозвуковых, так и при сверхзвуковых
И постях- Вследствие этого максимальное аэродинамическое качество
1 те от с таким фюзеляжем при сверхзвуковых скоростях превышает
значение Ктах модели с фюзеляжем, высота которою больше ширины,
но близко к значениям JCmax модели самолета с цилиндрическим фюзе-
гяжем круглою поперечного сечения (рис. 2.3.28).
Рис. 2.3 28. Влияние фурмы поперечного сечения фюзеляжа па СЛ!10,
Сга “ ( тлП| ^пмх комбинации “крЫЛО + фюЗСЛЯЖ”
Положение фокуса модели самолета с эллиптическим фюзеляжем
при сверхзвуковых скоростях более переднее по сравнению с положени-
ем фокуса модели самолета с фюзеляжем круглого поперечного сечения,
причем перемещение фокуса вперед при увеличении числа М происходит
->олес интенсивно у модели самолета с фюзеляжем эллиптического попе-
речного сечения, большая ось эллипса которою расположена в горизон-
а-1ьнпй плоскости (рис. 2.3.27).
Характеристики путевой устойчивости модели самолета с сечением
Фюзеляжа в форме горизонтального эллипса при сверхзвуковых скорос-
х близки к характеристикам путевой устойчивости модели самолета с
’ляжем круглого поперечного сечения. Значение производной путе-
1 Устойчивости для модели с фюзеляжем эллиптическою поне-
^СЧ1,°го сечения, большая ось которою расположена вертикально, мснь-
<е аналогичных значении модели с фюзеляжами друюй формы,
объясняйся большим дестабилизирующим влиянием носовой части фЛ
зеляжа. а эффективность вертикального оперения выше. Эффективно^
горизонтальною оперения не зависит от формы фюзеляжа. “
Поперечная статическая устойчивость модели с фюзеляжем эллИ1и
тическото поперечною сечения, большая ось которого расположена в<>Л
икально, при сверхзвуковых скоростях выше поперечной статической
устойчивости модели с фюзеляжем эллиптического поперечного сечения
большая ось эллипса которого расположена горизонтально (рис 2.3.29) '
1.6 2.0 2,4 2,8 3,2 3,6 4,0 ДО
Рис 2.3.29. Влияние формы поперечного сечения фюзеляжа на характеристики путевой
и Поперечной устойчивости
2.4. Аэродинамика сверхзвуковых самолетов на больших углах атаки
Для обеспечения высоких маневренных характеристик самолета, ком-
поновка которого оптимизирована для сверхзвуковых скоростей поле1"
(малые А, большие хпк), он Должен реализовать весь диапазон коэфФ11"
пиентов подъемной силы, обеспечиваемый крылом.
На рис. 2.4.1 приведена типичная зависимость Сг/(7(а) модели амо.тета
при М = 0.9. Характер протекания коэффициента подъемной силы по хгЛ)
атаки определяет поведение самолета на больших углах атаки. ВозникДО|
вение срыва потока на крыле сопровождается уменьшением интенсивности
нарастания С.,,(а), т.е отходом от линейного закона изменения этой^Я
www.vokb-la.spb.ru - Самолёт своими руками?!
рактерясгики- В jroM Диапазоне углов атаки может возникнуть тряска са-
молета. Однако несмотря на возникновение отрывпых явлений на крыле
подъ^1,,ая сила "Р^Д^жает расти, и для интенсивного маневра могут быть
„спользованы Суа, превышающие значения Сув1р. При продвижении даль-
ше ио углам атаки отрывные явления па крыле усиливаются, что приводит
к нарастанию тряски самолета. которая затрудняет пилотирование В даль
иейшем рост подъемной силы практически прекращается и наступает сва-
ливание самолета. На рис. 2.4.2 приведены зависимости от чиста М коэсЬ
финиснтов подъемной силы начала iряски для ряда отечественных и зар
бежиых самолетов. Видно, что при числах М = 0,7 *0,9 диапазон значений
Суа гр лежит в пределах 0,5 ♦ 0,7.
Рис. 2.4.1. Типичная зависимость Cs„(a) модели сверхзвукового самслета
Р|1С 2.4.2. Коэффициенты подъемной силы начала лрягки самолетов с треуг
-Лреповиднымн крыльями
ио РИС‘ 2-4.3 приведены зависимости Сус1( ог числа М, полученные
етиым испытаниям. Видно. чго сваливание происходит при Су > 1,2,
" ''°огиегствуег углам атаки a[1( г « 15 25”.
самолет с полностьюOTKJiojiiiJ1Ilf)j.
ручкой по крепу
самолет с гребнем
самолет с гребнем, торможение
самоЛст с пеотклопеппымн
элеронами
ф,„ах ’ максимальное отклонение
стабилизатора
Рис. 2.4.3. Коэффициенты подъемной силы сверхзвукового самолета в связанной систВ
координат, соответствующие началу тряски Су ,р колебаниям по крену Суии< свалива-
нию С е,,, полученные из летных испытаний
Выход самолета на большие углы атаки (большие Су) не всегда воз-
можен, так как предельно допустимые для полета значения коэффициен-
та подъемной силы Су Д1>„ могут ограничиваться при дозвуковых и около-
звуковых скоростях не несущими свойствами крыла, а уменьшением
демпфирующих свойств крыла (т“л) и запасов путевой статической ус-
тойчивости самолета (w^). Поэтому при разработке аэродинамической
компоновки необходимо обеспечивать сохранение несущих и демпфи-
рующих свойств крыла, продольной и боковой устойчивости и эффектив-
ности органов управления до больших углов атаки в сочетании с. мероп-
риятиями, направленными на повышение С,/тах, СуДОН и аэродинамичес-
кого качества самолета при Ctja > Суа Ктп.
Задача увеличения несущих свойств сверхзвуковых самолетов при
дозвуковых и околозвуковых скоростях на больших углах атаки решает-
ся применением в аэродинамической компоновке крыла наплывов - несу-
щих поверхностей малого удлинения в бортовых сечениях перед крылом
- в сочетании с деформацией срединной поверхности крыла и исполь-
зованием механизации крыла (закрылков, предкрылков, отклоняемы!
носков), т.е. путем создания новых, более сложных компоновок крыла.
На рис. 2.4.4 и 2.4.5 приведены аэродинамические характеристик*1
и ?пг = Да) моделей самолета с треугольным крылом (х«к * 55 <1
X - 2,8) и с пеплоским крылом умеренной стреловидности (Хик = I
X = 3,2) в диапазоне чисел М = О 6-И,0 и углов атаки а = -4-5-40°- ДИ I
модели самолета с треугольным крылом линейный характер нзмсяенЯ I
Суа и = Да) сохраняется до утлов атаки а = 10-5-15°, а С,/а - I
достигается при а - 35:40°. У модели самолета с неплоским крылом
репной стреловидности линейный характер изменения СуД(а) сохраИЯ^д |
СЯ при больших дозвуковых И околозвуковых скоростях ДО а = 10-5-1- ’
CtJU max - 1,4= 1,55 достигается также при а ~ 35-5-40°
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис 2.4.4 Зависимости CJtf(a) и m.(a) модели самолета с треугольным крылом
На рис. 2.4,6 приведено сравнение аэродинамических характеристик
' ДСЛей самолетов с тремя крыльями. треугольным, плоским умеренной
^•^илности и пеплоским умеренной стреловидности (крыло с дефор-
к Л1сй срединной поверхности). Видно, что переход от треугольного крыла
^’-Юскому крылу умеренной стреловидности и увеличенного удлинения
, СПс'1,,Ьаег повышение несущих свойств и аэродинамического качества как
хадых и умеренных, так и при больших углах атаки (Д/СтйХ - 1,0), а
реформация срединной поверхности и небольшой передний наплыв в бо
цых сечениях приводят к дополнительному приросту коэффициента под
ной силы (ЛС,/Д 111ЙХ = 0,1:0.2), максимального аэродинамического кач^Н
(ДКтах _ 1,5) и аэродинамического качества на больших углах атаки.
Рис. 2.4.6. Влияние деформации средняпой поверхности и формы крыла В плане на Г
миделей (центровка 30-25% САХ) |
Все рассмотренные крылья обладают несущими свойствами вил
до больших углов атаки, величины С,/о тлх достигаются при а ~ 3(Я
(рис. 2.4.7). Наибольшими значениями CI/(I тах обладают крылья умер
ной стреловидности и удлинений (у_пк ~ 40-5-45°, Л =3-3,5).
На рис. 2.4.8 показаны зависимости C,Jfl 111ИХ(М) для треугольного к
ла в диапазоне дозвуковых, околозвуковых и сверхзвуковых скоростей-
Несущие свойства сверхзвукового самолета при больших углах ай
на дозвуковых скорое г х полета м тут быть тич пы путем прИ>1Г
www.vokb-la.spb.ru - Самолёт своими руками?!
в бортовых сечениях крыла дополнительных несущих поверхностей
НИчоЮ удлинения с большими углами стреловидности по передней кром-
МЭ относительно небольшой площади (5Н *0,1) - корневых наплывов,
оздаюших дополнительную подъемную силу на больших углах атаки за
^^•интенсивного внхреобразования.
На рис. 2.4.9 приведены для примера аэродинамические характерис-
тики моделей с крыльями умеренной стреловидности с передними на-
плывами. Выбором формы и размеров наплывов можно существенно по-
высить несущие свойства самолета при углах атаки а > 10°, увеличить
значение Суа тах (см. гл. 4).
4 Влияние площади наплыва на АДХ модели самолета при больших угла атаки
це1правка 25% САХ)
и.щ диапазоне углов атаки, в котором проявляется положительное
ilOe наплывов па подъемную силу крыла, уменьшается и индуктив
с ’Ротпвленис при заданной подъемной силе, т.е. при больших зна-
S,It4Dn„ „
чениях Суа, соответствующих режимам маневра, возрастает аэродинаЛ]
чсскос качество самолета (рис. 2.4.9),
Вследствие улучшения обтекания на больших углах атаки и перер^
нределения нагрузки по размаху на крыльях с наплывами повышав
Су начала тряски, увеличивается эффективность элеронов и закрылков.
Наплывы приводят к перемещению аэродинамического фокуса МодД
ли вперед примерно па 0,5% САХ на каждый процент относительна
площади наплывов в потоке и к возникновению значительных моментц
на кабрирование па больших углах атаки. Приемлемые характеристики
продольной устойчивости самолета с наплывами на крыле во всем диапа-
зоне углов атаки вплоть до Сг/(1 тах могут быть обеспечены выбором
ложения горизонтального оперения относительно крыла. При нижнем
расположении горизонтального оперения кабрирующие моменты от на-
плывов компенсируются подъемной силой горизонтального оперений
увеличивающейся но углам атаки и создающей моменты на пикирование.
Эффект от применения наплывов на крыле уменьшается при чи тах
М > 0,8 и практически исчезает при М > 1,1.
Другим способом улучшения обтекания крыльев на больших углах
атаки и повышения несущих свойств и аэродинамического качества само-
лета, как уже было сказано выше, является использование в аэро-
динамической компоновке крыла деформации срединной поверхностт
заключающейся в изменении вдоль по размаху крыла относительной вог-
нутости профиля в сочетании с геометрической закрученностью сечений
(рис. 2 4 10). Деформация срединной поверхности для каждого кры.а
выбирается расчетным путем для заданного режима полета; наибольшее
влияние деформации срединной поверхности проявляется при дозвуко-
вых скоростях.
Рис. 2.4.10. Пример деформации срединной поверхности крыла Д,1ах - отлосить»4
погнутость профиля, <р - геометрическая крутка, - средняя линия профиля- I
относительная координата сечения по размаху крыла I
www.vokb-la.spb.ru - Самолёт своими руками?!
Пяияние деформации крыла приводит к перемещению поляры вверх
г ) и вправо, т.е. к увеличению максимального аэродинамического
(п° ва и аэродинамического качества на больших Суа (рис. 2.4.11 и
^12) к затягиванию линейного изменения СуО(а) до больших углов ата-
Ри1.2.4.11 Влияние деформации срединной поверхности крыла па аэродинамическое качество
модели самолета = 40’ X = 3,2): 1 - плоское крыло 2 - крыло с деформацией и затуп-
ленной передней кромкой, 3 - крыло с деформацией и заостренной передней кромкой
КИ (рис. 2.4.13). Тем самым увеличивается Суадоп крыла (рис. 2.4.14), а
юометричсская закрученность сечений создает кабриру тощий момент, об-
ПеР^Ней '4° ' “ 3.2): 1 - плоское крыло, 2 крыло с деформацией и с затупленной
кРомкой, 3 - крыло с деформацией и с заостренной передней кромкой
летающий условия балансировки самолета, что особенно важно п
сверхзвуковых скоростях. Положительное влияние деформации средд^
Рис 2Л. 13. Влияние деформации срединной поверхности крыла на записимости С^ц)
и гп.(.С,^)\ 1 - плоское крыло; 2 - крыло с деформацией и с затупленной передней
кромкой 3 - крыло с деформацией и с заостренной передней кромкой (zm 40";
л-3.2; .г, - 25?iCAX)
поверхности крыла проявляется в тем большей степени, чем меньше vj
стреловидности консоли, в диапазоне чисел И, где
пидности является оптимальным (рис. 2.4.15).
данный угол стрела
Рис 2.4.15. Влияние деформации срединной повер-
хности крыла и угла стреловидности на j
1 - плоское крыло, 2 - пеплоское крыло
Рис. 2.4.14. Влияние деформации
срединной поверхности крыла па
С^МНх.,* =40-; >. = 3.2)
Сочетание деформации срединной поверхности консоли крыла с и
плывами в бортовых сечениях обеспечивает почти линейное изменен
г' („з пг, пи^нв больших углов атаки (рис. 2.4.16).
www.vokb-la.spb.ru - Самолёт своими руками?!
Риг. 2 4.16 Влияние деформации срединной поверхности на АДХ крыла с наплывами: 7 -
плоское крыло. $„-0 04 2 - нсплоскос крыло, 5Н=О; 3~ неплоское крыло, $в-0,11;
4 плоское крыло, $„ = 0; 5,6 - плоское крыло, $„ - 0,04 и $„ - 0 1 соответственно; 7 ~
нешкк-кое крыло, 5н = 0,11
Отклонением механизации крыла на малые углы (8 as 5 10°) можно
повысить несущие свойсчва и аэродинамическое качество самолета па
режимах дозвукового маневра (М - 0,8) в диапазоне умеренных и боль-
ших значений Суа (рис. 2.4.17).
Рис- 2л 17 r
Де ь' °’,ияние отклонения закрылков
крылом z - 4з«
на аэродинамическое качестве модели, МО-
Аналогичные исследования применительно к моделям сверхзвуковьп.
самолетов с крыльями умеренной стреловидности показали, что совме(.т
ное отклонение закрылков по всему размаху и носков на крыле с нацдЬь
вами обеспечивает повышение аэродинамического качества самолета на
режимах Суа > СуаКя^ на 242,5 единицы (рис. 2.4.18).
Рис. 2 4.18. Совместное влияние отклонения закрылков и носков на аэро-
динамическое качество модели (И = 0,8)
Прирост аэродинамического качества на больших Суп от отклонения
механизации крыла на малые углы па плоском крыле больше, чем на
крыле, имеющем деформацию срединной поверхности (рис. 2.4.19).
Влияние носков
Рис. 2.4.19 Влияние отклонения механизации на аэродинамическое качество плоского Ч1*1®
и крыла с деформацией срединной поверхности- / плоское крыло, 2 — неилоское крыло
На рис 2.4.20 приведены характеристики путевой и поперечной VCT04
чивости для компоновки самолета с крылом умеренной стреловидно^!
Видно, что при а > 20° наступает резкое уменьшение запаса пулевой
тической устойчивости , а при а > 22.25° - полная потеря путевой УЧ
тойчивости из-за потери эффективности вертикального оперения (ВО)-
www.vokb-la.spb.ru - Самолёт своими руками?!
-0.002
о
₽
-0.002
о
0,002
0,004
0,006
Рис 2.4.20. Характеристики путевой »п&(сх) и поперечной пг*(а) устойчивости мелели с
крылом умеренной стреловидности (6„ = 8Я - Ф1О = 8Й = 0; ДР = 10°)
Характеристики боковой устойчивости на больших углах атаки мож-
но существенно улучшить:
Рис 2.4.21 Влияние наплыва на характеристики >л^(а) и »и^(а)
JT л
^ 2 4.22.
0,174
Влияние носовых ребер на характеристики и »и^(а);
Чо = 1,69, S ’- 0,042; Х,р = 0,43: хт = 32% СЛХ
X = 4““40',
установкой наплывов вдоль носовой части фюзеляжа (рис.2.4 21); |
установкой перегородок на крыле или отклонением механизации НерЛ
ной кромки крыла, т.е. мероприятиями, улучшающими обтекание крыла л
больших углах атаки;
- установкой узких ребер в носовой части фюзеляжа (рис. 2.4.22), qJ
позволяет уменьшить дестабилизирующий момент рыскания;
- увеличением относительной площади и удлинения вертикального orjj.
рения и подфюзеляжных гребней (рис. 2.4.23). что позволяет увеличить эд.
пасы путевой устойчивости самолета при малых и умеренных углах атаки|
отодвинуть начало возникновения путевой неустойчивости в область боль
тих углов атаки.
Рис 2.4.23. Влияние размеров ВО и подфюзеляжных гребней па характеристики и
Совместным примененном вертикального оперения большого удлини*1 j
и относительной площади, наплывов или перегородок на крыле или У31^
ребер в носовой части фюзеляжа можно обеспечить путевую устойчиво!
сверхзвукового самолета во всем диапазоне углов атаки вплоть до I
Возникающие на крыле срывы потока являются причиной уменьшав
на больших углах атаки демпфирующих свойств крыла с последующ^ Д
псиерей, особенно при больших дозвуковых скоростях (М > 0,8) Мер<Я*Ч
www.vokb-la.spb.ru - Самолёт своими руками?!
направленные па улучшение обтекания концевых сечений крыла
ЯТ11^. OHCIBIC механизации передней кромки крыла, установка перегородок на
(о1’1^ применение в концевых сечениях крыла удлиненных по хорде и ото-
крыле’ носкОВ), повышают его демпфирующие свойства (рис. 2.4.24).
rH.vl^xKaqeCTue органов поперечного управления используются элероны или
шеиторы на крыле, а также дифференциально отклоняемый стаби-
11НГе Известно, что эффективность элеронов при углах атаки а> 12+15°
сниж ?тсЯ пРимеРпо вдкос 110 сравнению с их эффективностью па малых
углах
кроме
атаки (рис. 2.4.25), а эффективность интерцепторов уменьшается
того, и при увеличении угла стреловидности крыла. Улучшение обте-
гя крыла па больших углах а гаки путем отклонения механизации пере-
дней кромки, установки па крыле перегородок и в особенности путем выду-
вания сжатого воздуха, отбираемого от двигателя, из передней кромки кри-
па позволяет существенно повысить эффективность элеронов на больших
Риг 2 4 25. Эффективность элеронов в зависимости от угла атаки
углах атаки (рис. 2.4.26). Эффективность дифференциально отклоняем^
стабилизатора сохраняется в широком диапазоне углов атаки (а * 30°) Грй
дозвуковых и сверхзвуковых скоростях.
Ряс 2.4.26. Способы увеличения эффективности элеронов; Смн, Свд - коэффициенты
расхода воздуха при выдуве на передней и задней кромке крыла соответственно, SH, 8а -
углы отклонения носков и закрылков соответственно
2.5. Влияние близости земли на аэродинамические характеристики
сверхзвуковых самолетов
Рис. 2.5.1 Схема модели самолета вблизи
экрана
Аэродинамические характеристи-
ки самолета при взлете, посадке и
при движении вблизи земли от-
личаются от аэродинамических харак-
теристик в полете на значительных
удалениях от поверхности земли. С
приближением к земле аэродина-
мические характеристики самолетов
изменяются следующим образоМ-
подъемиая сила увеличивается, ин-
дуктивное сопротивление уменьшает
ся, запас продольной устойчивости
возрастает, а скос потока за крыло**]
самолета уменьшается.
На рис. 2.5.1-2.5 3 в качеств
иллюстрации приведены схема МОД
ли самолета с треугольным КРЬ1Л°^
основные аэродинамические характеристики модели и изменение с
потока в области расположения горизонтального оперения без экран3 J
присутствии экрана, имитирующего близость земли. За характерное
стояние взято отношение расстояния от задней кромки бортовою сече»
крыла до экрана к квадратному корню из площади крыла (Л = ЛД/? М
www.vokb-la.spb.ru - Самолёт своими руками?!
рис. 2.5.2. Влияние экрана на АДХ модели самолета С треугольным крылом
Рис. 2.5.3. Влияние экрана на скосы потока вблизи горизонтального оперепия модели
дс
'Л
0,4
А
X |К
57°
°’2 0,4 0,6
Крылья
0.2
О
дс;,
0,4
32
32
30
20
54°
42°
^•кк
2„22
2,15
1,93
2„80
0,23
О 22
0,22
0,2
%СЛХ
О
0.4 0,6
х-, Крылья
37
32
34
32
Хнк
58°
60°
60°
G0°
^•нк
3,10
2„12
2,25
2,30
03
0,24
0,2
0,22
Рис 2,5.4. Влияние экрана на несущие свойства модели (а = 10‘)
Экспериментальные материалы систематических исследований Л
влиянию близости земли па аэродинамические характеристики чоде1е).
самолетов с треугольными и стреловидными крыльями малых удлинещд
(Хпк = 40-5-60°; X - 2-5-3) показывают что прирост коэффициента подт^Я
ной силы за счет влияния экрана для всех рассмо! репных моделей с
нсотклоненной и отклоненной механизацией крыла оказывается пример,
но одинаковым, несмотря на то, что сами значения коэффицИС11та
юдъемной силы для различных моделей значительно отличаются Друг от
друга (рис. 2.5.4).
Па рис. 2.5.5 даны осреднснные зависимости приращения ко ффи.
циепта подъемной силы от влияния близости земли (ACyfl = /(/?)) при
фиксированном значении угла атаки (а - 6, 10 и 12е) для моделей само-
летов с крыльями, имеющими удлинения л = 2 и 3. С увеличением упа
атаки (с увеличением С'уй) прирост коэффициента подъемной силы от вли-
яния
А Суд
экрана возрастает. У модели с отклоненной механизацией прирост
от влияния экрана оказывается выше, чем у модели без механизации
Рис. 2.5.3 Осреднснные значения прпрашспия
ния близости земли
коэффициентов подъемной силы от влнЯ
С приближением модели к экрану возрастает также коэффициент
продольного момента при фиксированных углах атаки (как при «ч " в
так и при 5Ч т- 0). Для исследованных моделей с крыльями малых уД-1И
нений (%гк == 40-5-60°, а. = 2-s-3) приращение продольного момента 1ГРЧ
а ~ const лежит в довольно узком пучке кривых, величина Лтг возрас j
ст по мере увеличения угла атаки (по мере увечичепия Су,}, а также ПР
отклонении механизации крыла (рис. 2.5.6 и 2.5.7).
www.vokb-la.spb.ru - Самолёт своими руками?!
Рш 5.6. Влияние экрана на ки(*|фщиент продольного момента (обояиачешя см. на рис. 2.5.4.)
Рис. 2.5.7. Влияние экрана на приращение коэффициента продольного момента (обозначения
см. на рис. 2.5.4.) h ~ 0,25+0,32
Рис 2.5 R и - , \
влияние экрана иа смещение аэродинамического фокуса (обозначения см. на рис. 2 ЭЛ.)
зГ1д , 1,рибдижении к экрану фокус моделей самолетов смещается на-
ци-VlC -3-8), а эффективность стабилизатора при значении коэффи-
кия < Татичсского момента омываемой площади горизонтального оперс-
>о О,15-:-0,23 несколько возрастает.
Изменение угла скоса потока от влияния близости земли в области р;
ложения горизонтального оперения приведено на рис, 2.5.9. С приб.тиже]
к земле на всех углах атаки скос потока за крылом резко уменьшается, J
приводит к возрастанию эффективности горизонтального оперения.
По приведенным выше материалам могут быть определены коэффи-
циенты подъемной силы самолета с учетом балансировки вблизи земли.
Рис. 2.5 10. Осредненныс значения прироста балансировочного
силы от влияния близости земли
коэффициента
птьеН11^
www.vokb-la.spb.ru - Самолёт своими руками?!
На РиГ' 2-5-Ю приведены осредненныс значения прироста баланси-
< ного значения коэффициента подъемной силы в зависимости от от-
РоВ ыюго расстояния до экрана для моделей самолетов с различными
114,1 ья.ми. Изменение угла атаки (а = 64-12°) мало влияет на величину
кРь1‘ прИ неосклоненной механизации крыла. При отклоненной ме-
, vVuUin крыла, когда интенсивность прироста коэффициента продоль-
хаН момента от влияния земли превышает интенсивность прироста ко-
Ня«Ьяпиента подъемной силы при фиксированных углах атаки, уве-
чичение а может приводить к уменьшению ДС^бал-
Приведенные графики ЛСуа h ) могут быть использованы для
ОаСчета балансировочною значения коэффициента подъемной силы са-
молета вблизи земли.
Список литературы к главе 2
1 Й.Н. Струминский. Аэродинамика стреловидных крыльев // Тр. ЦАГИ. 1947
2 В.В- Струмпнский, Н.К. Лебедь, Т.Н. Окерблом. Расчет аэродинамических характе-
ристик прямых и стреловидных крыльев //Тр. ЦАГИ. 1954
3 . Н.П- Красильщиков, Л.Н. Омъкова. Исследование аэродинамических характеристик
моде left самолетов с треугольными крыльями при сверхзвуковых скоростях полета на
больших углах атаки (а - 25°) // Тр. ЦАГИ. 1960
4 ПН. Красильщиков, Н.К. Лебедь, В. В. Смирнова. Аэродинамические характеристики
1реугольных п ромбовидных крыльев при около- и сверхзвуковых скоростях полета.
Технические отчеты ЦАГИ 1957
5. МА. Алексеев, М Ф. Притуло, Влияние формы профиля на аэродинамические характе-
ристики изолированных крыльев при сверхзвуковых скоростях полета // Тр. ЦАГИ 1959.
6 - В.В Смирнова, Г.С. Емельянова. Слияние формы фюзеляжа иа аэродинамически*
характеристики самолета с треугольным крылом на около- и сверхзвуковых скорос-
тях Технические отчеты ЦАГИ 1963
7 П. II. Красильщиков, В. В. Смирнова. Исследование по уменьшению сопротивления
интерференции на моделях самолета с треугольным крылом при около- и сверхзвуко-
вых скоростях. Технические отчеты ЦАГИ 1958.
°- В.Д. Иродов, А.II. Матвеев Влияние земли на аэродинамические характеристики
9.
10
самолетов с треугольным и стреловидным крылом на взлетнопосадочных режимах. //
Тр ЦАГИ. 1958.
В-И. Ламкин, Л.Г. Тюрина. Исследования аэродинамических характеристик моделей
самолтов с тонкими прямыми крыльями // Тр. ЦАГИ. 1959.
И. Штейнберг, А И. Старина Определение подъемной силы прямого крыла с
1 р°п усом при сверхзвуковых скоростях. Технические отчеты ЦАГИ. i960.
"Ч Провов, А /7 Матвеев. Основные аэродинамические характеристики моделей
самолетов со стреловидным и треугольным крыльями в диапазоне а = 0^-50° при ма-
12.//1мД°эт-т’вых скоростях//Тр. ЦАГИ. 1956.
Ле{. ' _ сбедь, Т И Соловьева Исследования аэродинамических характеристик моде-
< - <п° стреЛовнл,1ЫМ11 11 треугольными крыльями на больших углах атаки (до
13 ц V ],ри околозвуковых скоростях //Тр. ЦАГИ, 1974.
нами, . °е^ь' Г'Е- Ощепков, Л.Н. Онькова, К.И. Оводкова, 3.К.Дорохова Аэроди-
Ст ,wKie характеристики сверхзвуковых самолетов с прямыми, треугольными и
14. я ^'О7в^НЫм'« крыльями // Тр ЦАГИ. 1968
•966 J Исследования по аэродинамике высокоскоростных самолетов // Тр. ЦАГИ.
1473 красильщиков. Практическая аэродинамика крыла. (Сборник статей) // Тр. ЦАГИ.
Глава 3
АЭРОДИНАМИКА СВЕРХЗВУКОВЫХ САМОЛЕТОВ
С КРЫЛОМ ИЗМЕНЯЕМОЙ ГЕОМЕТРИИ
3.1. Особенности аэродинамических характеристик самолета
с крылом изменяемой геометрии
В 1946-1953 гг. для полетов с околозвуковыми скоростями и прсодс-
1ения звукового барьера в ЦАГИ были разработаны стреловидные крылья
достаточно большой относительной толщины. Главное достоинство стрело-
видных крыльев - увеличение критических чисел М и обеспечение плав-
ного (н относительно небольшою) изменения всех основных аэродинами-
ческих характсрисшк при переходе самолетом скорости звука.
В 1950-19G0 гг. для сверхзвуковых самолетов широкое применение
нашли тонкие треугольные и стреловидные крылья малого удлинения,
позволившие значительно уменьшить волновое сопротивление самолета.
Однако использование таких крыльев привело к ухудшению аэродинами-
ческих характеристик самолета на дозвуковых и взлетно-посадочных режи-
мах полета и к ухудшению ряда летных данных (главным образом, дальнос-
ти) на дозвуковых скоростях полета. Малые несущие свойства треугольных
к стреловидных крыльев (*хпк = 50*60°) на взлетно-посадочных режимах
затрудняют эксплуатацию лих самолетов при достаточно высокой нагрузке
на крыло и, гем самым, нс нозво.1яют значительно увеличить дальность
полета при ограниченной длине взлегиых полос. Самолет с таким крылом на
маневре имеет малое аэродинамическое качество, поэтому установившийся
маневр с большими перетру зками (на малых высотах) возможен только при
большой 1ЯГОВООруЖСННОСТ и.
Совмещение це юго ряда качеств - большой дозвуковой дальности по-
лета на крейсерской высоте и у земли, большой дальности на сверхзвуковой
скорости полета, большой максимальной скорости при полете у земли с воз-
можностью длительного полета па режимах больших приборных скоростей- |
высокой маневренности на дозвуковых скоростях полета и малыми длинами
разбега н пробега - в одном самолете с неподвижным крылом оказалось
невозможным без значительною компромисса но некоторым из них. так как
каждому из перечисленных режимов полета соответствует свое оптимально»]
крыло (рис. 3.1.1 и 3.1.2):
полет на больших дозвуковых скоростях (М ~ 0,7*0 9) на высотах t
Н = 7:11 км (крейсерский режим). Для обеспечения высокого аэродина>и1ЧС•
кого качества (минимума километрового расхода топлива) крыло долж I
иметь достаточно большое удлинение и достаточно бо 1ьшую толщину;
полет на сверхзвуковых скоростях (И-1,8*2,5). Достижение сверх j
звуковых € коростой и минимума километрового расхода топлива в свор J
звуковой области обеспечивает гонкое крыло малого удлинения (60-1Я
шой стреловидности); Л
www.vokb-la.spb.ru - Самолёт своими руками?!
Н км
</ = 2000 кГс/.м’
Взлет посадка
Сверхзвуковой
крейсерский
режим
Большая скорость
у земли
Дозвуковой
крейсерский \90
режим \
2000
Область высот и скоростей
установившегося иолета
3000 V, Км/ч
— q = 10000 кГс/М
ри . 3 1 |. Область оптимальных режимов полета самолетов различных компоновок
Дозвуковая реактивная
авиация
(1947-1952 и )
Д
Прямые крылья
У..4 0
= 900 км/ч I
II = 10 км
-. Излет посадка
Околозвуковая 1 Сверхзвуковая реактивная авиация
реактивная авиация I (1955-1970 гг.)
(1948-1955 гг.)
С реповидные
крылья
Хч -35:55'
Топкие треугольные и
стреловидные крылья
Х„« 35<65
Многоцелевой самолет с крылом изменяемой геометрии
= 1400 км/ч; П =0
I
%Г1.« 35-55
= 2000-2500 км/ч; И 20 км
X™ а /0"______________
1 2 М
Рис-3.1э г
сег>г,„„ ^хемы компоновок самолетов и их характерные режимы полета (Л™ - креи-
КЭЯ Ярость полета)
0
У., * 20'
длительный полет на малой высоте со скоростью V =5
900 км/ч (М = 0,65-5-0,75). Оптимально крыло умеренного удлини
большой удельной нагрузкой:
взлет и посадка на аэродромах с малой или относительно М4л
длиной взлетно-посадочной полосы Для обеспечения этого ребованД
самолет должен иметь крыло с высокими несущими свойствами во взцр*
ной и посадочной конфигурациях - оптимально механизированное кры Е
большою удлинения при достаточно малой удельной нагрузке; '1г'
высокие маневренные возможности во всем диапазоне дозвуковьц
скоростей полета. Необходимо крыло с высокими несущими свойс вами
высоким аэродинамическим качеством на больших углах атаки;
кратковременный сверхзвуковой полет на малой высоте со скорост-
ным напором, близким к максимальному. Оптимально крыло малого уади-
нения (большой стреловидности) относительно малой площади с низкими
несущими свойствами.
Удовлетворения всем режимам полета можно достичь с иомощьи
крыла изменяемой геометрии, удлинением и углом стреловидности кото-
рого летчик может управлять в полете. Несущая площадь крыла при
изменении угла стреловидности консолей изменяется мало, поэтому
нагрузку на крыло необходимо выбирать, исходя из наиболее полной
реализации возможностей аэродинамической компоновки самолета на
всех режимах полета и использования высоких несущих свойств крыла в
развернутом положении. В этом случае при выборе достаточно большой
нагрузки на крыло самолет обеспечивает большую крейсерскую даль-
ность при полете с малыми углами стреловидности (достаточно толстое
крыло большого удлинения), длительный полет на малой высоте и дости-
жение сверхзвуковых скоростей при предельно больших углах стрело-
видности (вместе с увеличением угла стреловидности и уменьшением
удлинения уменьшается относительная толщина консоли). Хорошие
взлетно-посадочные характеристики самолета могут быть обеспечены
выбором мощной механизации крыла большого удлинения - механизи-
руется передняя и задняя кромки крыла.
Для поворота крыла в полете необходим шарнир, обладающий высокой
прочностью и надежностью, и мощный силовой привод. Кроме того, консо.'гь
и центров тан должны иметь специальный силовой набор, обесточивающий»
передачу усилий от консоли к фюзеляжу в основном через шарнир.
Эги обстоятельства приводят к увеличению массы конструкции саМ°
лета с крылом изменяемой геометрии на З-е-5% по сравнению с взлети^
массой самолета с крылом умеренной стреловидности, что вызывает некО"
торую потерю прямых выш-рышей в дальности полета. Однако высок
эффективность механизации на крыле малой стреловидности и бс ьпЮ -
удлинения позволяют самолету с крылом изменяемой геометрии nP 1
прочих равных условиях увеличивать нагрузку при заданной длине взлчИ
но-посадочной полосы. В результате при использовании подвесных то1,-®,т|
www.vokb-la.spb.ru - Самолёт своими руками?!
. ,ло 61 увеличении запаса топлива во внутренних баках) самолет с
нЫ* вменяемой геометрии может иметь крейсерскую дальность полета
Kpi>i.ic' ю большую, чем самолет с крылом умеренного удлинения, бази-
С'1ЦеСийся на аэродроме с взлетно-посадочной полосой той же длины.
Ил-76. т
ПС-9-10
Фантом"'
10—
8—
6"
Як-30
6
8 -
та
ДС-8-5*/д-у.Ю4—
। х
’Интрудер" X.
Строительное
удлинение крыла
Лн-8
Дн-24
О
^"Трекер"
Ил 14; Ил-18
"Як-25РВ
Бе-30 Т
Як-40 J
Йл-28 "Боинг-72?
-Tv-134--------------
\ БОИНГ-707-320В"
\ "БОИИГ-720В"
—Ч-Ту-16
Ду-124
“X—"Трайдент-1Е'
-Трайдент-1 С"
\ МиГ-17
VX Як-28
ГХ/ Х?"Си ВиксгГ
XtSv-{-Ил-54
X.^R^X‘Ty’22
. Х.СХХ1Як 140
\ X. Х-Х МиГ-19
ю
(''Белфаст'
А-Трансэл’
МиГ-15 ^41
'Фиат G-91"
"Корсар-2" — —
"Баксиир1
Е-155—0
Рис. 3.1.3. Связь геометрического и строительного удлинений стреловидного крыла
Таким образом, компоновка самолета с крылом изменяемой геомет-
’ 5’1'л°м стреловидности которого можно управлять в полете, обеспе-
м ст Удовлетворение целого ряда противоречивых требований к совре-
сверхзвуковому многорежимному самолету.
влено ЗМснепИе геометрии крыла в полете в принципе может быть осушест-
Пово ПОВоРОТом к°нсоли относительно оси, расположенной в фюзеляже.
КОПСОЛ11 при постоянном строительном удлинении Хк = X/cos2x
н°стиЛЯеТ 1,0Jiy‘niTb изменение удлинения крьиа при изменении стреловид-
- i5^2HcoJU1 в широком диапазоне от А = 1,5 при % = 70° до А = 7-г8 при
О (рис. 3.1.3 и 3.1.4). Одновременное изменение удлинения, отно-
’Лайтнинг’
сителыюй толщины и угла стреловидности крыла (рис. 3 1.5) приводит 1
значительному изменению несущих свойств крыла и всех аэродинами’ ecjqf*
характеристик самолета. Производные С“„ и аэродинамическое качество
дозвуковых скоростях полета изменяются в 2^2,5 раза (рис. 3.1.6 и 3 ]
Таким ибраюм, летчик в полете получает возможность управлять азродиц. I
мическими характерно! и ками самолета. изменяя их в соответствия
режимом Полега.
с
Рис 3.1.4. Связь относительных олщин сечений крыла по потоку и по нормали к 1/4 х<4!|
Относительная толщина крыла по нормали к липни 1/4 хорд: / - с01 - 18% ; 2- col = ।
Рис 315. Изменение уд.иигсиня и относительной толщины крыла в зависимости от J1'13
lipWIOBH-IHOCTH j
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис. 3.1 6 Диапазон изменения производной С“„(М) самолета с крытом изменяемой Ш1мегрии
3 1.7. Диапазон изменения Л'111вх(М) самолета с изменяемой геометрией
ЭКсг1 ^еп^хслимсх7гь обеспечить высокие маневренные характеристики и
прс’п?аТаЦИ10 на аэР°Дромах с взлетно-посадочной полосой малой длины
РЫр ЯВЛЯет повышенные требования к несущим свойствам крыла, кого-
длп Довлетиоряются при обычной механизации крыла, характерной
Рхзвуковых самолетов (рис. 3.1.8).
Лвухщиииой закрылок и
выдвижн й предкрылок
Простой закрылок с УПС и
отклоненный носок
Рис. 3-1-8- Сравнение эффективности взлетно-посадочной механизации самолета с кры-
лом изменяемей геометрии и самолетов с неподвижным крылом
выдвижной предкрылок
Уже первые исследования компоновок самолетов с крылом изменяе-
мой геометрии показали, что простой поворот консоли относительно оси
находящейся в фюзеляже, позволяет существенно улучшить несущие
свойства и аэродинамическое качество самолетов (рис. 3.1 9-3 1.12), н<
приводит к значительному смещению назад аэродинамического фокуса
Рис. 3.1.9. Влияние положения оси крашения консолей крыла па зависимости <^(<4
и Суи(Сти) при дозвуковых скоростях
www.vokb-la.spb.ru - Самолёт своими руками?!
0.6 0,« 1,0 1,2 1.4 1,6 м
Рис 3.1.10. Влияние положения оси вращения консолей крыла па зависимосп. Ctu0 (М, хк)
Рис. 3 1.11. Влияние положения оси вращения консолей крыла на зависимость
^(М, хк) (обозначения см. иа рис. 3.1.10.)
Рис з j
Влияние положения оси вращения
** • ZK) (обозначения см. на рис 3.1.10.)
консолей крыла на зависимое»
крыла (рис. 3.1.13). которое с переходом к сверхзвуковым скорОсД
склады пае 1СЯ со сдвигом назад фокуса крыла за счет влияния сжХЯ
мости. Диапазон изменения положения фокуса оказался настолько бу1ъ'
шим. ню возникли трудности с балансировкой самолета и обеспечещЯ
приемлемых характеристик устойчивости и управляемости на всех
мах полета. Для обеспечения приемлемых смешений фокуса при новоро
•.е консоли крыла потребовалось применение неподвижной пентроцддл.
лой части крыла (рис. 3.1.13, 3.1.14), которая несколько уменьшила
несущие свойства компоновки и ее аэродинамическое качество на дозву.
ковых скоростях полета (см. рис. 3.1.9 и 3 1.12).
Ряс 3.1 13. Влияние положения оси вращения консолей крыла па зависимость -ip(M хв)
(обозначения см па рис. 3.1.10.)
Рис 3 1.14. Влияние размеров центроплана на геометрическое удлинение крыла И '*
смещение аэродинамическою фокуса при дпзпуковых скоростях
Для реализации оптимальных для каждого режима полета аэроДИ’Ч
мических характеристик самолета с крылом изменяемой стреловидно
потребовалось решить целый ряд сложных проблем аэродипам1ГГесК
компоновки. Основные из них: *
- выбор аэродинамической компоновки крыла, обеспечиваю!11
достаточно малые коэффициенты сопротивления при нулевой подъем111’-
www.vokb-la.spb.ru - Самолёт своими руками?!
околозвуковых и сверхзвуковых скоростях (при больших углах
силе на н0СТц)‘ И высокие аэродинамическое качество и несущие свой-
ИРС •< дозвуковых скоростях (при малых углах стреловидности и на
углах атаки):
_ выбор положения оси вращения консоли крыла и формы нсподвиж-
ие11Тронлана, обеспечивающих минимальное смещение фокуса самолета
[ овороте крыла от малых углов стреловидности до максимальных;
*^’Н __ выбор механизации крыла, обеспечивающей максимально возмож-
ные несущие свойства самолета и повышение аэродинамического качества
на взлетно-посадочных режимах;
выбор параметров и расположения органов поперечного управле-
ния с учетом того, что вся задняя кромка крыла занята взлетио-посадоч
лой механизацией;
- обеспечение высокой эффективности стабилизатора для возмож-
ности балансировки самолета при высоких коэффициентах подъемной
силы на всех режимах полета;
- обеспечение удовлетворительных характеристик устойчивости и
управляемости при изменении угла стреловидности крыла с учетом расши-
рения диапазона эксплуатационных режимов полета по приборной скорости;
- выбор рациональных параметров самолета, обеспечивающих
наиболее полную реализацию возможностей, заложенных в аэродинами-
ческой компоновке самолета с крылом изменяемой геометрии.
Результаты систематических экспериментальных и расчетных иссле-
дований аэродинамических характеристик крыльев изменяемой геомет-
рии, анализ возможных лесных данных и выбор основных параметров
самолетов с крыльями изменяемой геометрии изложены ниже.
Систематические экспериментальные исследования проводились па
моделях самолетов различного назначения в аэродинамических трубах
Г-102 Т 106М, Т-108 Т-109, Т-113 ЦАГИ и на крупноразмерных макс-
ах и натурных самолетах в аэродинамической грубо Т-101 ЦАГИ.
3.2. Выбор профилей для крыльев изменяемой геометрии
Важной особенностью крыла изменяемой геометрии является измене-
ние параметров профиля при повороте консоли крыла. Это изменение
-Чагоцриятно с точки зрения удовлетворения требованиям различных
Режимов полета. Так, если для крыла малой стреловидности применить
^фили достаточно больших относительных толщин и умеренной кри-
я гы (Что обеспечивает высокое аэродинамическое качество на докриги-
, СК11Х числах И, высокие несущие свойства и необходимые запасы
Т( 4г’ечной силы при больших углах атаки в концевых сечениях крыла),
_ 1,Т)И увеличении угла стреловидности консоли за счет поворота сечений
п лУ*°йдет заметное уменьшение относительных толщин и кривизны
°Кс> ,ЛЯ’ ГТО благоприятно для получения приемлемых характеристик на
к Ло" и сверхзвуковых скоростях полета.
Исходя из указанных соображений, для компоновки консоли kd,И
изменяемой геометрии могут быть выбраны профили, обладающие ьысэкцЯ
несущими и скоростными свойствами и используемые в компоновках конИ
вых отсеков крыльев околозвуковых самолетов. Относительная толцл?!
консоли в развернутом положении = 15°) может быть 8-И0%, а относи
тельная вогнутость должна быть f = 1,5-г- 2,2% с тем, чтобы в сложенном по-
ложении (%к » 70°) крыло было малопогпутым. Для профилировки нсподшЛ
ной части крыла (центроплана) следует использовать тонкие (с =4+45^
симметричные профили с носком малого радиуса (рн » 0,25%). Для обеспе-
чения устойчивого обтекания крыла па больших углах атаки, особенно при
околозвуковых скоростях, консоль крыла следует компоновать с нарастаю-
щей вогнутостью к концу крыла.
С целые? повышения аэродинамического качества самолета с крылом
изменяемой геометрии при больших дозвуковых скоростях могут* быть
использованы:
- пространственная деформация и геометрическая закрученноаь крыла,
обеспечивающие уменьшение сопротивления при заданном значении Суо и
снижение потерь аэродинамического качества на балансировку:
механизация передней кромки крыла (поворотные носки или вы-
движные предкрылки), отклоняемая на малые углы (5Н * 5;-8°);
- профили с несколько большей относительной вогнутостью и повы-
шенными значениями Мкр;
- увеличение местной кривизны в носке профиля крыла.
Использование пространственной деформации и геометрической закру-
ченное™ сечений крыла приводит к изменению поляры самолета таким
образом, что при значениях С,/а, соответствующих происходит
значительное уменьшение индуктивного сопротивления, а следовательно, И
повышение аэродинамического качества. Кроме того, происходит прирост
Рнс. 3.2.1. Схема ирис гранп ненкой деформации сечений крыла, средняя линия ПР0-
филя крыла хк * 70'
www.vokb-la.spb.ru - Самолёт своими руками?!
। а кабрирование в результате чего уменьшаются потери на
„омент а аэродинамическое качество на крейсерском дозвуковом
балаНм^олета возрастает (рис 3.2.1 и 3.2.2).
Рис 3 9 2 Влияние пространственной деформации крыла на зависимость /<1вах(М) при
v лах 1-тр«-лонидности консолей хк - 40 и 70°
Механизация передней кромки крыла в виде отклоняемых на малые
углы носков или предкрылков с небольшим выдвижением приводит к
значительному увеличению аэродинамического качества при околозву-
ковых скоростях (рис. 3.2.3).
Ниже приведены результаты исследований влияния па аэродинами-
ческое качество формы профилей, установленных в сечениях консоли
крыла при сохранении постоянного профиля в сечениях центроплана:
- профилей серии СР-16 с небольшим отгибом носков (ЛГ1ТГ =-1%)
с целью уменьшения отвала поляр за счет ослабления вихрей вблизи
передней кромки крыла:
- профилен с “полкообразным" распределением давления, с увеличен-
ной вогнутостью, малым радиусом носка и более задним положением
максимальной толщины и вотутости - профили серии СР 15 (fmdX = 2,2%,
*<--42,5%, xj -47,5%). Такие профили обладают высоким значением
МКр вследствие благоприятного сочетания достаточно большой вотутос-
П1 с малой напряженностью диффузора;
- профилей серии 11-128 с “пикообразным” распределением давления,
приводящим к ослаблению замыкающего скачка уплотнения в диапазоне
околозвуковых чисел М и, следовательно, к уменьшению волнового сопро-
ГИи синя. Профили серии П-128 харак
геризуются большим радиусом носка
Рн - 1,4% при с = 9%) с резким из-
цо^С1П1Рм кривизны на верхней поверх
ги вблизи передней кромки.
Ко\ ГлоЛ1,зование в аэродинамической
«ерии консоли крыла профиля
де1 с “нолкообразным'' распрс-
I1Vr Давления, относи 1ельной вог-
> *°стыо ( f п .„л
'/max = 2,2%) и малым рздИУ-
Рис. 3.2.3. Влияние отклонения носков
на зависимость К ц,х(М)
сом кривизны носка (рн - 0.8% при относительной толщине с = 9% ) j^l
днт к наибольшему возрастанию вслиштны А'П]ах модели с крыльями мадЗ
умеренной стреловидности (%к = 15^35°) в дозвуковом диапазоне скор<3
(рис. 3.2.4 и 3.2.5). Прирост аэродинамическою качества происходит за Сч
реализации почти безотрывною обтекания консоли на режимах крсйссрск **
полета. Величина Сха модели при этом несколько повышается (рис. 3.2.6)
Рис. 3.2.4. Влияние формы профиля на зависимость A'nlJX(M) при - 15°
СР-16, = 1,5% (исходный)
CP-16, hm =-1,0%, fm„ 1.5%
CP-15, fmax = 2,2%
П-128,= 1-4,2%
1,2 М
Рис. 3.2.5. Влияние формы профиля па зависимость К1пак(М) при = 35° (обозначения
гм на рис. 3.2.4.)
При увеличении угла стреловидности консоли от 15 до 70° отно"
сительная толщина профиля с уменьшается от 10 до 4,2%, а относительна
вогнутость fmax становится 0,4-гО,9% вместо 1э-2,29ь. Таким образом, значЧ
ния относительной толщины и вогнутости крыла в сложенном положстпч
становятся тою же порядка, что и на сверхзвуковых самолетах с нсподв*13*
ными крыльями, и рекомендованная профилировка консоли крыла обесн<
чивает вполне удовлетворительные аэродинамические характеристики д
лета с крылом большой стреловидности как при дозвуковых, так и
сверхзвуковых скоростях (рис. 3.2.7).
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис. 3.2.G. Влияние формы профиля па зависимости СгоО(М) и (обозначения
см на риг 3.2.4.)
Рис 3 2.7. Влияние формы профиля на зависимость 7С11ЛХ(М) при Хк - 52 и 72°
Hbie А',Р°'’1и1,амичсские компоновки крыльев с профилями СР-15 и расчет-
эшоры р(.г) этих профилей для относительных толщин с - 10, 8 и 6%
1род^-№ на рис. 3.2.8.
раз,п «ССЛеДОВани<? 1СРЫЛ,,СВ> скомпонованных из профилей серии СР-15
1’ной относительной толщины, показало, что при малых дозвуковых
скоростях (М < 0.7-г0,8) максимальное аэродинамическое качестио у0 I
ли больше при большей относительной толщине консоли крыЛа _
другой стороны, уменьшение шносительной толщины крыла до с tgo
позволяет отодвинуть начало возникновения волнового кризиса до чИср
М « 0,85 при хк = 15" и до И ® 0,9 при у_к - 35°. 4
на распределение давления по хорде
Профили консоли крыла с = 10,8 л 67ь
Рис 3.2 8. Влияние относительной толщины
профиля СР-13
Таким образом, уменьшение относительной толщины при сохранении
относительной вогнутости профиля СР-15 консоли крыла изменяемой
геометрии значительно повышает- величину Ктах модели с крыльями малой
и \ меренной стреловидности при больших до- и околозвуковых скоростях.
Другим способом улучшения аэродинамических характеристик самолета
с крылом изменяемой геометрии на средних и больших углах атаки при
больших дозвуковых скоростях является увеличение местной кривизны
консоли крыла путем отгиба носка вниз, возрастающего к концу крыла.
Отгиб носка, т.е. придание сечению местной кривизны, создает бла-
гоприятный градиент давлений на большей части верхней поверхности
профиля, улучшает обтекание крыла и тем самым способствует повы-
шению аэродинамического качества при дозвуковых скоростях.
Увеличение отгиба носка к концу крыла улучшает обтекание концевых
сечений крыла, наиболее подверженных возникновению отрыва потока.
Уменьшение радиуса кривизны отогнутого носка способствует умснь
шению возмущений вблизи передней кромки профиля, что также приво-
дит к улучшению обтекания крыла на больших углах атаки.
Вместе с том увеличение отгиба носка с. возрастанием общей эфф6^
тивпой вогнутости профиля вдоль размаха крыла дает при дозвуковых
околозвуковых скоростях некоторое повышение лобового сопрогивле
модели.
Па рис. 3.2.9 приведены два сечения консоли крыла изменяв»*
геометрии (сечение но излому передней кромки и концевое сеченнв/’
которых установлены профили СР-16М. Эта консоль характеризуем
меньшей относительной толщиной (за счет увеличения хорды к°нс°'д
с = 8,3% (с = 10% на исходном крыло), малым радиусом закрУгле1Ж
www.vokb-la.spb.ru - Самолёт своими руками?!
_ л 7% (на исходном крыле с профилями серии СР-16 рп = 1,4% )
носка Рп —
аюнюй к концу консоли величиной отгиба носка ВНИЗ (Лип = -1,5-г
и возрастав
-> ) ’(тя качественной оценки приводится сравнение расчетных эпюр
° ' с;е11ИЯ давления но профилям СР-16 и СР-16М, установленным в
^'(евом сечении консолей крыла. Уменьшение относительной толщины и
отгиб носка па /w = -2,5% на расчетном режиме (Суя = 0,3) привели к
щотидании ,‘ника” разрежения на верхней поверхности профиля, к созда-
нию благоприятного с точки зрения обтекания крыла градиента давления на
бо’ыпей части верхней поверхности, к повышению Мкр.
Резельтаты испытаний модели показали (см. рис. 3.2 9), что использо
ванне в сечениях консоли крыла изменяемой геометрии профилей СР-16М с
ботыной местной кривизной привело к значительному увеличению аэродипа
мического качества в дозвуковом диапазоне скоростей при всех конфигу-
рациях крыла, причем аэродинамическое качество возросло как при
С,/а - 0,3-7-0,4, соответствующих режимам дозвуковой дальности полога, так
и при Су = 0,8-М. соответствующих режимам маневра самолета, т.е.
переход к новой консоли крыла с увеличенной хордой и отгибом носков
приводит к значительному росту подъемной силы и уменьшению индуктив-
ного сопротивления при дозвуковых и околозвуковых скоростях, что обеспе-
чивает выигрыш в аэродинамическом качестве при малых и умеренных
углах стреловидности консоли. На режиме больших сверхзвуковых ско-
ростей в конфигурации крыла с максимальным углом стреловидности
(Хк = 70°) значения /Стах модели практически не изменяются.
° —г------—1-----1-----------1 0,25 ----------------1
' О 0,4 0 0,4 0,8 Концевое сечение
^-3.2 9 п,-
11₽^ДелеНие . ,я,,ие увеличения хорды и отгиба носков консольной части крыла на рас
ДаплсНця и зависимость К(Суа) при разных углах стреловидное ги консоли
Таким образом, наибольшее максимальное аэродинамическое Ka<ieJВ
самолета в дозвуковом диапазоне скоростей обеспечивают крылья измен
.мой геометрии, в компоновке которых использованы профили с бодЬ11 °"
общей относительной вогнутостью (типа СР-15) или профили с болы.]
местной кривизной (типа СР-16М). *'и
Дальнейшее улучшение аэродинамических характеристик самолетов
крылом изменяемой геометрии при высоких дозвуковых скоросЛ
полета обеспечивается путем применения па консольной части крыда
специально разработанных для компоновок такого типа высоконесу1Щ№
сверхкритических профилей. Такие профили обеспечивают повышение
критических чисел М (Мкр), сохраняют высокие значения ХП1ИХ крыдд
изменяемой геометрии при стреловидности консоли - 15-5-25° ш
М = 0.85 и до М » 0,92-5-0,94 при Хк = 40-5-50° (рис.3.2.10), а также
улучшают аэродинамические характеристики па больших углах атаки и
повышают C'v ДС1П самолета.
www.vokb-la.spb.ru - Самолёт своими руками?!
Аэродинамика самолета с крылом изменяемой геометрии
на больших углах атаки
тгхснепие угла стреловидности крыла самолета позволяет обеспе-
высокие маневренные характеристики в широком диапазоне рсжи
мов полета (чисел М).
TIdh углах стреловидности консолей крыла порядка 40° самолет
обтачает наибольшим аэродинамическим качеством на околозвуковых
скоростях и имеет большие значения С^атах»1,5 (рис. 3.3.1 и 3.3.2),
которые достигаются при а = 35:40°.
Рис. 3.3 1. Влияние угла стреловидности консолей крыла на зависимости С?й(а) и п?.(<х)
1.6
1.2
0,8
0,4
%.
Оттчхчю к площади основной гралеции крыла
соответствующей стреловидности
|f nux
A-
Отнесено к площади крыла при у, = 70
4О'_“(С
20"
Ри‘ 3 3.2 J
Г*” путевой
| ред *.с. Бюцпенса
о
10’ 20’ 30"
Ктнипие угла стреловидности консолей крыла па С'уап|лх и критические углы
— л устойчивости ( m jj • О ) и по демпфиронанню Kjxuia ( /л“г - О )
ya nwx
Опыт летных испытаний маневренных самолетов показывает, Я
предельно допустимые для полета значения коэффициента подъем^
силы Суа доп лежат значительно ниже Сг/в тах. Выход самолета на уЛ
атаки, соответствующие Суа mdX, как правило, затруднен из-за ухудшеД
ряда характеристик устойчивости и управляемости (рис. 3.3.2-3.3.4).
атаки, числа М и угла стреловидности консолей
Рис. 3.3.3. Изменение демпфирующих свойств модели по крену в зависимости от ,тда
Рис. 3.3 4. Зависимость Суа До11 от угла стреловидности консолей крыла при М - М
Одной из причин, определяющих сваливание самолета, может ЭД
потеря демпфирующих свойств крыла по крену при больших yi тах ат
Демпфирующие свойства крыла тесно связаны с его несущими свойстиЧ
При малой стреловидности крыла раннее развитие срывов на консЧ
выражающееся в появлении существенной нелинейности в изменении СулЧ
обычно приводит к обращению знака производной тп“’(сс) (рис. 3.3.3)-
www.vokb-la.spb.ru - Самолёт своими руками?!
ч спреловидносгях крыла срывныс явления выражены слабее, и
-Т* ^лостт» зависимости Сг/<7(а) менее выражена; отсюда и падение
ошИХ свойств крыла также менее интенсивно. Улучшение обтекания
Де> , 1е.и крыла на больших углах атаки для этой стреловидности - прямой
К°Н* Наивнейшего повышения демпфирования движения крена.
П Др}т0Й причиной сваливания самолета может быть уменьшение путевой
vcroiiHiiBocn1 вплоть до изменения знака производной т$ > 0, которое также
южет происходить при меныпих углах атаки, чем а(Суатях) (см. рис. 3.3.2).
' Основная причина этого - увеличение боковых скосов в районе вср-
пипыюго оперения, в результате чего его эффективность существенно
уменьшается. Появление значительных боковых скосов на больших углах
таки определяется структурой потока за крылом с наплывом. Использо-
ваний перегородок па неподвижной части крыла уменьшает интенсив-
ность вихрей и позволяет сохранить эффективность вертикального опере-
ния до больших углов атаки. Наиболее эффективным средством улучше-
ния путевой устойчивости самолета является расположение вертикальных
пей фюзеляжа и применение вертикального оперения большой пло-
щади и большого удлинения.
Очень важно сохранение на больших углах атаки достаточного
момента крена органов поперечного управления Для крыла малой
стреловидности основной вклад в поперечную управляемость вносят
интерцепторы. На больших углах атаки из-за срыва на крыле интерцен-
юры теряют свою эффективность. Ликвидация срыва за счет механиза-
ции передней кромки сохраняет эффективность поперечного управ тения
до больших углов атаки. Сохранению поперечной управляемости до
больших углов атаки способствует использование дифференциального
илнзатора, эффективность которого практически не изменяется до
больших значений а (см. гл. 7).
Таким образом, сваливание самолетов с крыльями изменяемой гео-
,е ии определяется в итоге характеристиками боковой устойчивости и
nPaR мости, а первопричиной появления особенностей в этих характс
^‘к КИК ,1Раьило’ является образование отрывов потока при обтска-
крыла самолета и изменение структуры потока за крылом на
61 ™ ИХ углах атаки. '
По 1ъ ‘ 3.3.5 приведено типичное изменение но а коэффициентов
Вознц-'1НОИ Г1ЬТЬ1 самолета при числе М - 0,8 с указанием областей
г, ъ,Во^Овения срыва потока (начало тряски) и зоны с развитым на крыле
у и ютока (зоны сваливания и штопорного движения самолета)
п°'Юка^ Самолста м°жет совершаться до начала сильного развития срыва
И -- о кРЬ1Ле- На рис. 3.3.4. приведены изменения Суа д0П(Хпк) ИРИ
*«ха 11Я само-'гста с крылом изменяемой геометрии без использования
МиЧес И'П1ИИ На ма11свРе> полученные по испытаниям моделей в аэродина-
Ма-чь1х и rW'6ax и но результатам летных испытаний. Видно, что при
мер< гньсх углах стреловидности консоли С&,;доп составляет
0.5-s-O 6 (a ~ 12-: 14"): при больших углах стреловидности консоли ведичЛ
Су„ доп и угол атаки, при котором она достигается, уменьшаются. На
Рис. 3.3.5. Зоны начала тряски И сваливания самолета на типичной зависимости Суд(яД
Из рассмотрения зависимостей Суа, тг = /‘(а) модели самолета с крылом
изменяемой геометрии при больших дозвуковых скоростях (рис. 3.3.6)
видно, что в конфигурации крыла с консолями при малых и умеренных
углах стреловидности ~ 15т-45с) при углах атаки а ~ 10.12° наблюдается
появление нелинейности изменения С’уй(а), т.е. уменьшение интенсивности
прироста подъемной силы при увеличении угла атаки. У модели самолета I
крылом большой стреловидности (%к « 70°) нелинейность изменения С^/а)
Положительное влияние вихрей
вдоль передней кромки крыла
Рис. 33.6. Влияние vma стреловидности консолей крыла на Cw начала i ряски
www.vokb-la.spb.ru - Самолёт своими руками?!
стоя при меньших углах атаки (а»7ч-83) и сопровождается
наб’1К^инсм интенсивности прироста значения Cytl по мере увеличения угла
во3раС что связано с развитием на крыле вихрей от передней кромки крыла.
аГаки. 1отока на крЫле определяет методом измерения распределения
^тения в Точках, расположенных вдоль задней кромки подвижной
ЛаВ ти крыла, или с помощью спектров обтекатшя верхней поверхности
К°ПСJ полученных методом масляной жидкой пленки которые дают
*' k fliv распространения отрыва потока по поверхности крыла по мере
Хс.игюиия скорости и угла атаки,
Из рассмотрения спектров обтекания следует, что при скорости,
соответствующей числу М = 0,8, на крыле с консолью малой стреловид-
ности (хк ~ 1<>о) Уже ПРИ а ~ возникает отрыв потока из-под скачка.
По мере увеличения угла атаки срыв потока распространяется как по
хорде, так и по размаху крыла. Наиболее интенсивный срыв потока
наблюдается в концевых сечениях крыла.
На крыле со стреловидностью консоли 40° при М -0,94 срыв пото-
ка. возникающий па концах крыла, медленно распространяется к корню
по мерс увеличения угла атаки.
Увеличение числа Рейнольдса от 4-106 до 10-106 улучшает аэродинами-
ческие характеристики модели с крылом малой стреловидности, отодвигая
начало возникновения интенсивного отрыва потока в область больших углов
атаки (рис. 3.3.7). Следовательно, характер изменений С^/а) и щл(а) дтя
крыльев с малыми углами стреловидности консоли в натурных условиях
благоприятнее, чем при испытаниях моделей в аэродинамических трубах.
Однако с увеличением утла стреловидности консоли влияние числа Re на
аэродинамические характеристики крьтла уменьшается, а при %к - 70п
практически отсутствует. Влияние числа Re на характеристики самолета
уменьшается также и при увеличении числа М полета (рис 3.3.7)
Наиболее эффективно повышает несущие свойства, Су„ ,р и аэроди-
намическое качество самолета с крылом изменяемой геометрии при боль-
ших Дозвуковых скоростях и больших углах атаки (на режимах маневра
амолеча) отклонение механизации крыла на малые углы (предкрылков,
орогных носков и закрылков), применение но всему размаху консоли
poJ,acraiOfIlcro к концам крыла отгиба носка профиля вниз. Эти же ме-
ытия приводят и к повышению значения критических углов атаки
До путевой ’
. ин устойчивости самолета и к повышению демпфирования крена.
' 8-1()ГКЛО1,еиИС аакРЬ1лков и предкрылков на малые углы 5Н = 8Пр =
РИИ П ВсемУ размаху поворотной консоли крыла изменяемой геомст-
сВойсП0Ь >Ш1ает в широком диапазоне дозвуковых скоростей несу шие
7к -= 4Q - кРЬ1ла с умеренными углами стреловидности консоли
ЧИя 3. Иа « 0,13:0,15, сохраняет линейный характер измспе-
3эРодцЯИСИМо(;те1* тг ~ До больших углов атаки и повышает
чамическое качество при больших значениях С^а
-Г. = -13% САХ' М = О IS
Рис 3.3.7. Влияние чисел Re и М па АДХ модели сверхзвукового самолета с крылом Ч
меняемой геометрии
Благоприятный эффект от отклонения на малые углы механяза11’1
крыла сохраняется и при конфигурации крыла с малыми углами стр^д
вндности консоли (*/к = 15-5-20°). но ослабляется при конфшураняя КР 1
ла с большими углами стреловидности консоли (/к * 70°).
www.vokb-la.spb.ru - Самолёт своими руками?!
мснепие на консоли крыла увеличивающегося к концам отгиба
/профи. 1Я вниз также приводит к сущее шейному улучшению аэро-
цоска 1 кИХ харакгеристик самолета на больших углах атаки. Такая
дина-'П^ ка крила ПрИВодит к улучшению обтекания концевых сечений
ироф’1' о6.гаст11 больших углов атаки и смешает начало возникновения
КРЬ1' т потока в центральную часть крыла. Все это позволяет сохранить
oTpbl;jHoCTb изменения зависимостей Суа(и) и тг(а) до больших углов
•1ИИ, в 103BVK0BOM диапазоне скоростей, особенно при дополнительном
^-к юнении поворотных носков крыла на малые углы (рис. 3.3.8).
0,4 0,8 0 0.4 0,8 0 0,4 0,8 C,JH
Влияние отгиба поскок и сиклопспия передней кромки консолей крыла на
‘ ЛХ модели. 1 - исходит крыло без наплыва; 2 крыло с наплывом, увеличенной хор-
дой Консоли п отгибом носков 8И = 0 и 8 ( - 10*
‘ исличсние коэффициента Суа начала тряски (Сувтр) на самолете с
рьцом изменяемой геометрии в случае отклонения предкрылков или
само°В па (МаЛ1>ю углы хорошо подтверждается летными испытаниями
Уве-тиченне кривизны передней части профиля крыла измс-
ЧсскогН геомегРии приводит к значительному возрастанию аэроднпами-
диаПа.° Ка'1еГ1’ва самолета при больших углах атаки во всем дозвуковом
°собр 5ОПС СКоР°стей и ПРИ различных конфигурациях консоли крыла,
Ко,, Но 1!РИ конфигурации крыла с малыми углами стреловидности
рас 1И И ОтКлоиении на малые углы (8П а 8;-10 е) поворотных носков,
Коц11е1 >5ке1,ных по всему размаху консоли крыла. Отгиб носка только в
°м отсеке крыла приводит к существенно меныпему эффекту.
Рис. 3.3.9 Влияние отклонения предкрылков на коэффициент подъемной силы начал,,
тряски С„„ т„
исходное крыло
крыло с увеличенной
хордой И ОГГИЙОМ ней,коп
исходное крыло с
отк, юнс и п । <1 м предкрылкоц
3.4. Взлетно-посадочная механизация крыльев изменяемой геометрии
Рис 3 4.1. .Эффективность закрылков в за-
висимости от относительного размаха (/3)
при бэ = 50” (с УПС н предкрылками)
Ik’
Па самолетах с крыльями изменяемой геометрии взлетно-посадочную
механизацию размещают по всему размаху подвижной консоли крыла, а
поперечное управление выполняют в виде интерцепторов и дифферен-
циально отклоняемого стабилизатора (см. гл. 7).
Механизация задней кромки крыла. Для самолета с крылом из-
меняемой геометрии могут быть использованы простые поворотные, од
нощелевые, двухщелевые выдвижные закрылки с малым и увеличен-
ным дефлектором, двухщелевыс с
малым выдвижением и осью вра-
щения, расположенной внутри зак
рылка поворотные с выдувание*
сжатого воздуха, отбираемого от
двигателя, па их верхнюю поверх-
ность (с системой управления
i-раничным слоем - УПС).
Использование на крылья И
меняемой геометрии закрылков
всему размаху подвижной консОЛМ J
развернутом положении повыи13®]
их эффективность по сравненная
эффективностью закрылков, Pattl
ложенных на части размаха кр^
(рис. 3.4.1). Кроме того, увсЛ’14 .
ние размаха закрылков у.меНЫ1-
индуктивное сопротивление КР*Д
па больших углах атаки (рис. 3-Л
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис 3.4.2. Влияние угла отклонения и огносгпсльного размаха закрылка на поляру и
аэродинамическое качество модели (М - 0 15)
Приращения коэффициентов
силы or отклонения механи-
Рис. 3.4.4.
подъемной
.заш’н задней кромки крыла при а _ 10°
На рис. 3.4.3 в качестве црц^И
приведены сравнения аэродинамичЗ
ких характеристик Суа, тг * Да)
дели самолета с тремя видами MeyJ
пизации по всему размаху крыла й
развернутом положении (/к -15^20' ).
с простыми поворотными закрыдД
ми, с двухтцелевыми закрылками и г
закрылками с системой УПС.
рис. 3.4.4 даны соответствующие прИ.
росты коэффициентов подъемной си-
пя от отклоненной механизации кры-
.ча ДСуДП
изменения
чеппые по
же макета
кой трубе Т-101 ЦАГИ. Все коэффициенты на
графиках отнесены к площади 5кр и средней аэродинамической хорде
-Д<%) па линейном участке
зависимости Суа(а), поЯ
испытаниям одного и того
самолета н аэродпнамичес-
этих и приведенных шок?
крыла в сложенном положении (хк= 70°).
Простые поворотные закрылки, расположенные но всему размаху по-
воротной консоли, обеспечивают прирост коэффициента подъемной силы
при а = 10° (область линейного характера зависимости Сув(а)), равны®
« 0,4 при 53 = 25° и ДС^Я * 0,33 при 53 = 30°. Простые поворогны*.
закрылки целесообразно отклонять лишь до углов - 30-5-35°, при даль-
нейшем увеличении угла их отклонения интенсивность прироста подъем-
ной силы крыла значительно уменьшается вследствие возникновения на
закрылках срыва потока.
Щелевые закрылки обладают большей эффективностью. Палтг’в
щелей позволяет предотвратить срыв потока па закрылках, восстановит»
их плавное безотрывное обтекание до бо.дьших углов отклонения и, тс--»
самым, существенно повысить прирост коэффициента подъемной сил11
крыла. При оптимальных углах отклонения двухщелевых закрыл*®
(б, ~ 40ч-50°) прирост ДС^д составляет 0,9-5-0,95 (рис. 3 4.4).
Эффективность двухщелевых закрылков существенно зависит от г<Я
метрических параметров закрылка и дефлектора, от взаимного оти°сй >
тельного расположения дефлектора, закрылка и основной части кры-1
Наличие щелей между дефлектором и закрылком ~ 1% Ьсеч и щели Мс ।
ду дефлектором и основной частью крыла ~ 1.576 Ьсеч повышает эфФ^Я I
тивпость двухщслсвых закрылков по сравнению с эффективностью
стых поворотных закрылков. Увеличение степени выдвижения сисг^Ви|
дефлектор-закрылок относительно основной части крыла также пр®
дит к возрастанию прироста коэффициента подъемной силы от заКрЧ® *
www.vokb-la.spb.ru - Самолёт своими руками?!
стоянной относительной хорде эффективность двухщелевых зак-
Пр11 по стие11НО зависит от относительной хорды дефлектора и его
вноситетьной толщины
°Т Наиболее приемлемые параметры двухтцслсвых закрылков:
Относительная хорда закрылка Ья
Относительная хорда дефлектора Ья
Выдвижение закрылков Ar,
Угол отклонения 83
0,2бч-0,28 6сеч
0,28+0,3 Ь3
0,1 ЬКр
45+50°
Высокий прирост коэффициента подъемной силы при меньших при-
ростах продольного момента на пикирование обеспечивает закрылок с
малым выдвижением и дефлектором, расположенным над носком основ-
ного закрылка Такой закрылок (рис. 3.4.5) обеспечивает примерно те
же приросты коэффициента подъемной силы крыла, что и двухщелевой
закрылок с большим выдвижением (рис. 3.4.G), но создает при отклоне-
нии несколько меньший прирост моментов па пикирование.
Двух щелевой закрылок
ъ - S,= 25’; 8пр = 19’
* - 53 = 40'; Snp= 19’
Простой закрылок
. -5,-0; 5,1р- 0
М - S,= 25°; <5Пр = 19’
Дг б," 50"; 8П„= 19'
носков"Э ’^f^xl’eKrHHH0CTb двухщелсвых закрылков с дефлектором, расположенным нал
* основного закрылка, и предкрылками (.vT =32% САХ)
}I|t3ain* Х1Г1елевь,е закрылки рассмотренных вариантов при наличии меха-
д°Чдъ ПсРедпей кромки крыла обеспечивают самолету на взлетно-поса-
У4ета УГлах атаки (ст » 10+12°), коэффициент подъемной силы (без
П еРЬ на балансировку) С/в®1.4+1,5 (С 3 к 1,7+2 в параметрах
развернутого крыла), Суа тах 1,6+1,7 (соответственно Cyem
+2,5) (рис. 3.4.5 и 3.4.6).
Рис. 3.4.6. Эффективность двухтцелепых закрылков с большим выдвижением и повор!
пыми носками ( хт ~32% САХ)
Простые закрылки с использованием системы VJIC являются эффл
тивным видом взлетно-посадочной механизации крыла изменяемой ice
метрик, обеспечивающим наибольшие приросты коэффициентов подъл*
ной силы при отклонении на большие углы.
Выдувание сжатого воздуха, отбираем но от двигателя, может 6«J
использовано не только для ликвидации отрыва потока на верхней М
верхности отклоненного закрылка, но и для организации донолшпелъиВ
циркуляции практически по всей поверхности поворотной консоли кРу
ла. Выдувание сжатого воздуха характеризуется значениями коэфф»
циента импульса Ср, равными
Q 1П
И <7ос^0 ’
где Св - массовый расход воздуха; V’ni - скорость истечения из Ш
при полностью адиабатическом расширении; - скоростной напор, 4
площадь крыла, обслуживаемая УИС. j
На рис. 3.4.7 приведено влияние коэффициента импульса Ср на ”4
ращение коэффициента подъемной силы от закрылков системой
отклоненных на различные углы, по и пытаниям в аэродинамичв^
www.vokb-la.spb.ru - Самолёт своими руками?!
р-101 ЦАГИ- Видно, что при малых углах отклонения закрылков
тр-'6 ддя восстановления безотрывного обтекания их верхней по
требуется интспсивштсть выдувания Сц » 0,05, При даль-
Ве -ч увеличении интенсивности выдувания прирост ДСуя от УПС за-
НС1 \яется. При углах отклонения закрылков 83 > 50° повышение иптсн-
** jocTii выдувания сопровождается монотонным увеличением прираще-
И 4 что свидетельствует о неполном восстановлении безотрывного
HJU * -уо' „ ' ,
бтнаиия их верхней поверхности даже при сравнительно больших
значениях коэффициента импульса Сц.
Рис 3.4.7. Влияние коэффициента импульса С^ла эффективность закрылков с системой
> П 1 1; 2 - I-II-I11+1V - закрылок с УПС. С„ л ’ 0,1; 7 - 1111-ITI+1V (дпухщелсвой
акры к / IV
При интенсивности выдувания ( м = Сид где С(1д - интенсивность вы-
Дувания. необходимая для лпкви ;ацпи отрыва потока на закрылке, зак-
рыл) и можно отклонять на большие ’ г ты (б3 - 75-г80°) с сохранением до-
статочно высокой их эффективности Однако оптимальными углами от-
клонения закрылков на крыле изменяемой геометрии в развернутом поло-
жит являются S3 » 50-5-60° так кат при .дальнейшем их увеличении ин-
генсивность прироста \Суаз уменьшается, а приросты моментов на пики-
оованис от отклоненных закрылков возрастают. Наличие системы УПС
’Рзкгически удваивает величину ДСу) от отклоненных простых закрылков.
1 ветвенное повышение несущих свойств крыла изменяемой гео-
Ры-1 1 ПРН отк-Г1°нен1Ш на большие углы простых, двухщелевых и зак-
>в с системой УПС сопровождается возрастанием продольных мо-
1,,R па пикирование (см. рис 3 4.3)
вИжц ИС1,Ользовании закрылков, расположенных но всему размаху под-
"Даегс 1 ,,асти крыла, основной прирост коэффициента подъемной силы со
Мещ Я За СЧет отклонения корневых и центральных секций закрылка и, в
tojpj Си ет^пепи, за чет отклонения концевых секций закрылка, при этом
-'Пис корпевои секции сопровождается значительно меньшими при-
ростами продольного момента на пикирование но сравнению с природ,
от отклонения концевой секции. Это обстоятельство позволяет испоц
вать дифференциальное отклонение секций закрылков и получить бод!
приросты ДСуд при мепыпих приростах \т?. При этом корневые секЯ
закрылков следует отклонять на большие углы.
Механизация передней кромки крыла. На крыле измсняе>10.1
геометрии в развернутом положении с малыми углами стреловидности Ко^1
соли (%к = 15-5-20°) развивается ранний по углам атаки срыв потока, как Я
обычном прямом крыле большого удлинения. Плавное безотрывное обтска*
пне сохраняется только до углов атаки а «г 8-: 10°. При дальнейшем yj
личенпи угла атаки срыв потока возникает сначала в центральных сече,
пнях крыла вблизи излома передней кромки, а затем распространяется Л
степенно па нею консоль. Отклонение закрылков, как простых, так и деух-
щелевых, приводит к возникновению срыва потока на верхней иоверД
пости крыла при тех же или меньших углах атаки.
В связи с этим для крыльев изменяемой пеометрии в развернутом
положении целесообразно применять механизацию всей передней кромки
крыла, включая и неподвижную часть - центроплан.
В качестве механизации передней кромки крыла изменяемой геомет-
рии используются выдвижные и скользящие предкрылки, распол жея
пые вдоль передней кромки подвижной консоли. Основное влияние па
эффективность механизации оказывает степень выдвижения и опускания
предкрылков, а также размеры щели между предкрылками и основной
частью крыла. Возможно также использование поворотных носков ня
консоли крыла и профилированных и ^профилированных шитков, рас
положенных вдоль передней кромки центроплана.
Схемы различных видов механизации передней кромки крыла изме-
няемой геометрии показаны па рис. 3.4.8.
На консоли, сечение Б-Б
Скользящий предкрылок
Предкрылок с малым
выдвижением
Предкрылок с большим
выдвижением
Поворотный носок
Щиток на центроплане,
сечение А-А
I ^профилированный iiU11’--
Рис. 3.1.8. Виды механизации передней кромки крыла
Отклонение механизации передней кромки крыла восстанав^11
плавное безотрывное обтекание верхней поверхности крыла на больШ^
www.vokb-la.spb.ru - Самолёт своими руками?!
jt При отклонении предкрылков
лаХ а1а’чопП< щитков на центроплане и
на К° свых закрылков или закрылков с
двухш< • рся верХ11ЯЯ поверхность
с11СГеМо6гекасгся плавно до больших углов
KPbl'Id приводит к сохранению высоких
атаК1оСТов коэффициентов подъемной силы
^'механизации до углов атаки а > 20°
(рис- 3.4.9).
Выдвижение предкрылков смещает
iniK разрежения с основной части крыла па
предкрылок и персраспредетяет давление
по основному крылу, в результате чего ли-
со-
пейный характер изменения ^4(0)
хранясгся до больших углов атаки.
Отклоните закрылков приводит к су-
щественному возрастанию разрежений на
верхней и давлений на нижней поверхности
крыла по всей хорде сечений, обуславливая
увеличение коэффициента подъемной силы
Рис. 3.4.9 Влиягше положения пред-
крылка па эффективность двухшеле-
вого закрылка: 1 - 1 положение
предкрылка. 2-11 положение пред-
крылка, 3 - без предкрылка, 4
двухщелевой закрылок
сечения и крыла в целом до углов атаки,
соответствующих безотрывному обтеканию.
Совместное отклонение закрылков и пред-
крылков существенно перераспределяет
эпюру давления но сечениям крыла и обес-
печивает повышение несущих свойств крыла до больших углов атаки.
Параметрические исследования эффективности выдвижных и сколь-
зящих предкрылков и поворотных носков, расположенных вдоль перед-
нем кромки консоли, а также профилированных и ^профилированных
Щитков, расположенных на центроплане, показали, что эффективность
выдвижных предкрылков со щелью существенно зависит от степени вы-
движения, степени опускания предкрылка относительно основной части
ОтноС|1тель,,°и ширины щели между носком крыла и предкрылка-
н . . и Уиеличепии степени выдвижения и опускания предкрылков от-
ших1ТеД111° 0сн0инпй части крыла эффективность предкрылков па боль-
CRo. “Глах существенно повышается (рис. 3.4.9). Выдвижение
п ЛьзяШих предкрылков (без щели) нс обеспечивает линейного прогека-
По зависимостей С^сеч(а) самолета до больших углов атаки При ис-
МоДЬу^1,П1И На саМилстс двухщслсвых закрылков и закрылков с систс-
гает ( эффективность предкрылков на больших углах атаки возрас-
*,г*ль ^•^-^). При отклонении двухщелевых закрылков на опти-
1И 1Ь1С “1711,1 (*3*40.50°) щелевые выдвижные предкрылки улучшают
имость С^Да). поляру самолета и его аэродинамическое качество
при больших значениях
жимов взлета и посадки
что является весьма существенным
3.4,10 и 3.4.11).
р^.
Рис. 3.4 10. Влияние шелевых выдвижных лредкрылкоп и профилированных щитков (вй
пентронлапе) на эффективность дпухшслсвых закрылков: / - без предкрылков, 2 - с
предкрылками, 3 с предкрылками и со щитками па центроплане (6,,, ~ 75°) 7 - вь'.Т
вижпой предкрылок. 5 профилированный шпгок
Для многорежимных маневренных самолетов в качестве механизация
передней кромки крыла могут быть использованы вместо выдвижных ще-
левых предкрылков поворотные носки крыла (рис. 3.4.12). Эффектив-
ность поворотных носков несколько ниже эффективности щелевых вы-
движных предкрылков. Отклонение поворотных носков по всему Раз-*а’
ху подвижной консоли крыла изменяемой геометрии обеспечивает n*W’*
линейное протекание зависимостей Сув(а) с пеотклопенной и отклонен
ной механизацией крыла до больших уз лах атаки (ex =s 20е) (см. рис. 3.4Л
Линейные характеристики Суа и тг - f(a) мри углах атаки а > 5е ояИ
печиваются при отклонении поворотных носков по всему размаху
соли; отклонение поворотных носков по части размаха не обеспечили
плавного обтекания на участке крыла вблизи излома передней кромки
тем самым нс обеспечивает линейного изменения С^в(сх) на больших Я
лах атаки Поворотные носки крыла на взлетно-посадочных реЖИ^Ч
обычно отклоняют па углы 25-5-30°, дальнейшее увеличение угла откл<в
пня поворотных носков не повышает их эффективности.
При больших углах отклонения закрылков, особенно при испо*г,~д
ванин системы У11С на закрылках, выдвижение предкрылков на копеЯ
не обеспечивает линейного изменения характеристик подъемной сИ-1Нд
продольного момента до больших углов атаки, так как выдвиЖ^Я
www.vokb-la.spb.ru - Самолёт своими руками?!
^крылков восстанавливает безотрывное обтекание консоли крыла, по
’’^чиквидируег влияние вихревого жгута, сходящего с центроплана, на
Я^£асгь крыла, примыкающую к центроплану.
f> предкрылки
Ч - предкрылки
прижаты
01 клопепы
Рис 3.4.11 Влияние щелевых выдвижных предкрылков па поляру и аэродинамическое
качество самолета (М - 0,15)
Крыло с дпухпв'лсвыми закрылками
и предкрылками
1 2 3 4 5 6
6а" 0 0 25° 25° 40“ 40°
. Snp’J 0 19° о 19° 0 19°
12 Сравнение эффск! пвпости щиы
Крыло с двухпп-левыми закрылками
и поворотными носками
/ 2 3 1 5 6
6,-0 0 25' 25° 40е 40°
6„ ~ 0 20° 0 20° 0 20°
и поворотных носков ( х -32% САХ)
Для ликвидации срыва потока на участке крыла вблизи излома ПсЛ
ней кромки целесообразно применять механизацию передней кромки щЗ
роплана. Отклонение щитков на передней кромке центроплана обес
пинает улучшение обтекания корневых и центральных сечений крыла «-
больших углах атаки, особенно в случае отклонения на большие утлы
крылков с системой У ПС. Эффективность щитков па центроплане оп.рД
.'1яегся утлом их отклонения и почти не зависит от их профилировки, цри
чем оптимальными углами отклонения щитков являются углы a 6O-r70c
Эффективность щитков зависит также от величины щели между
ми и основной частью крыла причем щитки без щели обеспечивают бо.т^
ший критический угол атаки на крыле с отклоненными закрылками, чем та-
кие же щитки со щелью.
Таким образом, на взлетно-посадочных режимах для самолетов с
крыльями изменяемой геометрии в развернутом положении при испоц,
зовании в качестве механизации двухщелевых закрылков и закрылков ।
системой УПС с одновременным отклонением предкрылков или поворот-
ных носков па консоли и щитков на центроплане можно получи^
значения коэффициентов подъемной силы (без учета потерь на баланси-
ровку) С^шах ~ 2:2,5; Суа(а = 12°) » 1,6+2,1.
Рис. 3.1.13. Эффективность различных видов механизации передней и задней kjjomok
/ -5,-0: 2 - закрылки двухшемепые, 5,-50°, 5,,. = 60°; 3 ~ закрылки г. УПС, 5, "в
5„( - 60°, Сиз = 0,!; 4 - закрылки с УПС, 5, = 50°, 5Ш = 60°, 6„ ~ 15°, С„, - 0,1, См„ ' W
(.1-3 <- предкрылками, 4 без предкрылков) I
www.vokb-la.spb.ru - Самолёт своими руками?!
пис. 3.413 приведены зависимости С,/Я(а) и rw,-(a) для самолетов
j пом изменяемой геометрии с различными вадами механизации, от-
с кры. * к |1араМстрам крыла в развернутом и сложенном положении.
Н<?ССрасчеты показывают, что для самолета с крылом изменяемой геомег
1И при значениях = 0,25*0,3 можно получить следующие баланси-
^^вочные значения коэффициента подъемной силы Ct/a бал при 53 = 50 и
_ 10° (с учетом влияния близости земли):
простыми закрылками
1.2.
с дв\хщелевыми закрылками 1,4-М,5,
с закрылками с системой УПС (Ср «0.1) 1,7< 1,9.
3.5. Аэродинамические компоновки самолетов
с крыльями изменяемой геометрии
Как отмечалось выше, изменение угла стреловидности консоли по-
зволяет в широких пределах изменять геометрическое удлинение крыла и
том самым изменять несущие свойства самолета (в 1,5*2,5 раза) в зави-
симости ог режимов полета. Крыло изменяемой геометрии обладает бла-
гоприятным с точки зрения полетов на сверхзвуковых скоростях изме-
нением относительных толщин по потоку при максимальной стреловид-
ности крыла его относительные толщины становятся минимальными.
Исследования показали, что соответствующим подбором относитель
него размаха неподвижного центроплана и соотношения параметров по-
движной и неподвижной частей крыла можно обеспечить приемлемые пе-
ремещения аэродинамического фокуса крыла в широком диапазоне изме-
нения углов стреловидности и чисел М, в том числе и практически по-
ст°янное положение фокуса по углам стреловидности консоли
При минимальном угле стреловидности консолей паилучшие харак-
теристики получаются при минимальном относительном размахе непо-
дяижпого центроплана вследствие наибольшего удлинения крыла. Макси-
йальное аэродинамическое качество самолета нри углах стреловидности кон
солей -ук = 15-35е монотонно уменьшается с увеличением относительного
ва^'1аХа 11е|ГГРОПлана! однако при больших углах стреловидности (хк > 45°)
Мн> dl°r сказь,ва'ГЪся большие потери подъемной силы и аэродина-
XoJCCKoro ка'Тества на продольную балансировку самолета с малым разма-
йещроцдана. вследствие чего при %к “ 55° /Стах бал оказываются наи-
1ЬШи.мц при относительных размахах центроплана 0,2540,35.
3онтал1ПО'1О111Ь10 СООГ1,стгтвУюшего выбора параметров и расположения гори-
Гельнь*е1О1.° ОПере11ИЯ относительно крыла можно обеспечить удовлетвори-
ма>. ХаРЯктеристнки продольной устойчивости самолета на всех режи-
РедСтк>'1Сга применения традиционных для стреловидных крыльев
- лУ1Пления этих характеристик (перегородки, пропилы и др.).
Крыло изменяемой геометрии, составленное из несущих профцЛс|
развернутом положении позволяет реализовать па дозвуковых и 01<
звуковых скоростях высокие значения подъемной силы и адродинщц^Ц
кою качества, близкие соответствующим величинам дозвуковых само .—д
Вследствие благоприятного изменения относительных толщин ij
липепия по углам стреловидности такое крыло при свер: звуковых
ролях позволяет обеспечить самолету лобовое сопротивление, не Преьос
ходящее сопротивление сверх звуковых самолетов с тонкими крыльям
малого удлинения. **
На режимах взлета и посадки крыло изменяемой геометрии позволяй,
при использовании мощной взлетно-посадочной механизации передней и
задней кромок получить высокие значения коэффициен тов подъемной си«ц
соизмеримые со значением Суа ||1к; дозвуковых самолетов с крыльями боль-
шого удлинения. Высокое аэродинамическое качество самолета па дозвутл
вых режимах полета и хорошие несущие свойства на взлетит-посадочтпд
режимах обеспечиваются выбором формы крыла в плане, характеризуют^
ся наличием неподвижного центроплана с углом стреловидности по нсреднеп
кромке %к = 654-70°, с относительным размахом центроплана 2Ц - 0,25+0,35
(в долях размаха развернутого крыла с утлом стреловидности %к = 15+2(Г) и
поворотной консоли, угол стреловидности которой изменяется в предел
Хк = 15+75°, с осью вращения, расположенной па расстоянии г - 0,2+0,3
полуразмаха крыла от плоскости симметрии самолета.
Удлинение крыла в развернутом положении по основной трапеции
составляет л = 7+8, что соответствует удлинению а - 5+6 по полной пло-
щади с учетом центроплана и его подфюзеляжной части.
Уменьшение размеров центроплана и перенос оси поворота консоли
ближе к фюзеляжу вызывают увеличение смещения фокуса самолета на-
зад при увеличении утла стреловидности поворотной консоли, уве-
личение массы крыла и приводит к трудностям с. размещением полезней
нагрузки на внешних углах подвески.
Увеличение размеров центроплана и перенос осп поворота консоли
дальше от фюзеляжа вызывают уменьшение несущих свойств крыла в р*1
вернутом положении, а также усложняют проблему обеспечения прием»-
мых характеристик продольной устойчивости па больших углах атаки.
Консоль крыла компонуется из несущих профилей, используемых •
концевых отсеках крыльев околозвуковых самолетов, с относитсльЯ°^
толщиной 8-т-Ю/о и относительной вогнутостью f = 1,54-2% , возрастаю»^
к концу консоли. Для центроплана используется симметричный профи
с относительной толщиной с - 44-5% со сравнительно небольшим
сом носка ( рн = 0,25% )
Крылья, выполненные в указанной аэродинамической компоНОЦ
могут обеспечить на дозвуковых режимах полета максимальное аэроД^,
мическое качество А’|||ЦХ = 12+13 при относительной плошали мидсДсЧ’
сечения фюзеляжа самолета F-8 + 9%. /< = 18+19 при относи1®
www.vokb-la.spb.ru - Самолёт своими руками?!
26-28"о
- 28ч-30% b3,
- 10% ь3,
- 45-5-50’:
ЮШЯДН миделевого сечения F = 1,5-5-2% и достаточно высокое аэро-
и0*’ П скОе качество на сверхзвуковых скоростях полета.
дина' обсспечения высоких несущих свойств развернутого крыла на
стцО-посадочных режимах необходима механизация всей задней и пе-
редней кромки крыла:
закрылки - двухщелевые со следующими параметрами:
хорда закрылка
хорда дефлектора
вы,хвижение закрылка
угол отклонения
6) "предкрылки - т следующими параметрами,
хорда предкрылка 12-5-15% Ьссч.
выдвижение - 5-5-7% Ь^.ч,
опускание — 4-5-7% 6ССЧ:
в) на неподвижной части центроплана - щитки.
Подобная механизация позволяет обеспечить практически линейную
зависимость несущих свойств крыла от угла атаки до а = 20° и получить
максимальные коэффициенты подъемной силы Суа тах =1,8-2 и коэффи-
циенты подъемной силы при взлете и посадке Суа - 1,2-1,5. Использо-
вание механизации со сдувом пограничного слоя позволяет повысить
Суа пог до 1.8 • 119.
Для обеспечения высокой эффективности продольного управления
применяется управляемый стабилизатор.
/(ля балансировки коэффициентов подъемной силы, обеспечиваемых
мощной механизацией крыла, коэффициенты статического момента пло-
щади горизонтального оперения имеют величину:
Аги = 0.25 + 0,3 , .$'го = 0,25 - 0,3
уменьшение площади горизонтального оперения может быть достиг-
ло путем увеличения его плеча.
Для обеспечения приемлемой эффективности поперечного управле-
ния, если практически вся задняя кромка крыла занята механизацией,
^'Пользуется иптерцепторное управление в сочетании с дифферспнналь-
НЫм стабилизатором.
Те ^Ля обеспечения удовлетворительной поперечной управляемости ин-
с х еут?^Ъ1 На верхней поверхности поворотной части крыла выполняют
с°ставляющей 0,12-0,15 хорды крыла в сечениях, нормальных
Кр ^РаШения интерцептора, размах интерцептора (на одной консоли
кло"а сг>С1апляст 0,35-0,4 полуразмаха крыла, максимальный угол от-
Кры П'И,Я ИнтсРПепгора 45:50° Интерцепторы располагают перед за-
ч<ми и могут состоять из нескольких секций.
X - 11слико.м поворотного стабилизатора используются удлинения
“'°’ сужения г) = 3-4 и стреловидность но передней кромке до 55-:G0°.
Для поперечного управления дифференциальное™ (разница между yi-qfl
отклонения консолей стабилизатора) составляет \<р < 5-тЮ°. С точки зрей
аэродинамических характеристик (эффективности, характеристик штопоги
предпочтительнее ось вращения стабилизатора выполнят!. пестрсловнчной ’
Летно-технические и маневренные характеристики. KomiIo.
пивка самолета с крылом изменяемой в полете стреловидности обесцечц
вает улучшение летно-технических характеристик за счет оптимизации
ла стреловидности консоли по режимам полета. При каждом фиксировав
ном положении поворотных консолей самолет обладает определенными
преимуществами в летно-техпических характеристиках (рис. 3.5.1): при
минимальных углах стреловидности (ук= 5-к30°) - максимальной продол-
жительностью и дальностью полета и наилучшими взлетно-посадочными
характеристиками; при максимальных углах стреловидности (/к~70с) ре.
ализуются максимальные скорости полета, максимальные установившиеся
перегрузки и максимальные высоты на сверхзвуковых скоростях и обес-
печиваются минимальные перегрузки при полете у земли в возмущенной
атмосфере- при средних углах стреловидности (%к ~ ЗО-И50) реализуются
максимальные установившиеся перегрузки и максимальные высоты при до-
и околозвуковых скоростях полета.
В результате изменения угла стреловидности крыла при переходе от
режима к режиму самолет с крылом изменяемой геометрии может реализо-
вать существенно более широкий
комплекс летных данных и мане-
Рис. 3-5.1. Область режимов горизонталь-
ного установившегося полета, дальность
(/.) и длили 1 казбеги (/р) многоцелевого са-
молета с крылом изменяемой геометрии: a -
P'CKV,-0fi5: б С/$=-450кГс/м2, в -
т7 = 0,23 (»iT- относительная масса -гоп-
чина mT = mt/mc, — масса самолета)
вренных характеристик, чем самолет
с неподвижным крылом, оптимизи-
рованным на один основной режим
крыла изме-
полета, т.е. применение
нясмой геометрии придает самолет}'
свойство многорежимпости
Представление о режимах макси-
мальной дальности и продолжит®*’
ности полета самолета с крылом и3'
меняемой геометрии дают зависимое"
ти от числа М полета максимально*®
аэродинамического качества Кли*
произведения /СтнхМ и эффини®*^
подъемной СИЛЫ GyoK^x’ ПРИ К010Р°‘
достигается максимальное качество-
Па рис. 3.5.2 и 3.5.3 показаны
личные зависимости от числа И
малыюго аэродинамического кзчес**#
компоновок маневренною Кпых* \
и транспортного (/Ст.1Х~ 18) самолов
с крылом изменяемой геометрий ’’
различны утл зв счреловидиост11 1
www.vokb-la.spb.ru - Самолёт своими руками?!
„ части крыла в сравнении с аэродинамическим качеством самолетов с
крылом и крылом умеренного удлинения. Видно, что самолет с
м изменяемой геометрии позволяет па дозвуковых скоростях реализо-
|CPW‘ .^родинамическое качество, которое па 6070% превышает качество само-
с треугольным крылом и на 204-30% качество самолета с крылом умерен
ной стре. ювидности.
Модель маневренного самолета
£ис. 3.5.2 Зависимости К'пак, КгаахМ п
°г числа М моделей маневренных
самолетов. / - самолет с крылом у.черсн-
,10Й 'тре-Ювилности л = 3,5, /1Ж - 40°, 2 -
самолет с треугольным крылом X = 2.2.
Xns '* 60°
Модель транспортного самолета
Рис. 3.5.3. Зависимости Кпжх, и
от чиста М модели траискарптого
самолета; обозначения, используемые на
обоих рисунках: о • Д х - модель само-
лета с крылом изменяемой геометрии
О □ - (КгалхМ)га1к. ® - ктах
л аКС1,М' м качества самолета с крылом изменяемой геометрии достигается
Чем .'Ia'’u,lx Углах сгрсловвдности и, следовательно, при меньших скоростях,
То Wj и'1Сет моею для самолетов с крытом умеренного удлинения и самоле-
Сах,О1(ГРе"10‘,ГЪ,1Г>™ кРЬ1Лом (М = 0,64-0,7), поэтому произведение К111йхМ для
тр™,. г кРЬ1-юм изменяемой геометрии превосходит АС||1ахГ^ «1-'1я самолета с
1Х*} крмлоьт не па 60;-70%, а на 304-40%, а самолета с крылом умс-
М° ^Длине11Ия “ на 104-20%. Весьма пологий максимум произведения
соли \ '^-гигаегся в диапазоне М = 0,754-0,85 при углах стреловидности коп-
•МоЛега Г 154-35° в зависимости от аэродинамической компоновки крыла и са-
°1}1Ос1ггиТО'1и1ИНЬ1’ 1ЮЛ0ЖСНИЯ осн поворота консоли по размаху, удлинения,
-чьного >шделевого сечения фюзеляжа и т.д.)
Рис. 3.5.4. Сравнение дальности полета са-
молетов с обычными крыльями и с крьыья-
ми изменяемой геометрии: 1 крыло изме-
няемой тсомстрии, 2 - установка подвесных
топливных баков, 3 - разбег уменьшен в 1,5
раза, -I ~ крыло умеренной стреловидности
X ~ 3.5, хк=40=. 5 треугольное крыло, 6 -
у.мсныпопне отг три переходе к крылу изме-
няемой геометрии
Дальность и продолжитсдьц^И
полота зависят от относительной м
сы топлива, которая, и свою
сРчДь
определяется относительной массой'
конструкции самолета, массой обо •
дования и вооружения, удельным^
сом двигате.ш, тяговооружснность»
и т.д. Если при прочих равных ус^
впях относительная масса топлив
для самолета с. крылом изменяемой
геометрии будет меньше, чем на q.
моле те с обычным крылом умерен-
ною удлинения, иа Зг5% (за счет со-
ответствующего увеличения относи-
тельной массы конструкции),
дальность его полета в зависимости
от уровня реализованного аэроди-
намического качества будет превос-
ходи гь дальность полета самолета с
крылом умеренного удлинения. При
больших потерях относительной мас-
сы топлива прямые выигрыши в
дальности могут отсутствовать, од-
нако увеличение дальности может
быть обеспечено за счет увеличения запаса топлива в баках и при некотором
увеличении длины разбега (рис. 3.5.4).
Отличительной особенностью самолета с крылом изменяемой геомет-
рии при полете на малых высотах является возможность управления
производной С“д. Использование большого угла стреловидности консо-
лей в длительном полете иа малой высоте с большой скоростью привод11-
к уменьшению значения Суа и к относительно малым перегрузкам при
изменении угла атаки за счет атмосферных возмущений: они соответ
ствуют перегрузкам самолета с углом стреловидности = 15*20° прч
М =0,4 (V» 5*00 км/ч).
Уменьшение утла стреловидности до %к = 15*40° увеличивает Суа
позволяет обеспечить возможность быстрого создания больших манечИ
пых перегрузок (рис. 3.5.5):
пп - - Q С*1
Пуа ~
Таким образом, при управляемом изменении утла атаки самолет с
лом изменяемой геометрии может реализовать в 2.2,5 раза большее
щенис перегрузки на 1° изменения угла атаки, чем при гаком же неПР1
www.vokb-la.spb.ru - Самолёт своими руками?!
изменении угла атаки при полета в возмущенной атмосфере. Это
вольп са>1ОЛСТа с крылом изменяемой геометрии обеспечивает сущс-
сво1'стВО ‘ижсННР утомляемости экипажа в длительном полете на малой
ственн°^ сохранении высоких маневренных возможностей.
Рис. 3 5.5. Влияние угла стреловидное!и на ucpei рузку пуе при полете в возмущенной ат-
мосфере IV - скорость вертикального порыва петра
Изменение стреловидности крыла при М = 0,8-5-0.85 не приводит к
заметному изменению дальности полета.
Дальность полета на предельно малых высотах зависит от нагрузки па
крыло, скорости полета и угла стреловидности консоли. Однако в области
М * , (V а 1000 км/ч) при нагрузках на крыло G/S = 350-5-500 кГс/м
ротивленис самолета практически не зависит от положения консоли,
что обеспечивает небольшое различие в километровых расходах при изме-
Нснцц угла стреловидности крыла.
’ величение стреловидности консоли при М >0,85-5-0,9 обеспечивает
»сЬн°ЛС Г^ С кРь,Лом изменяемой геометрии существенное уменьшение ко-
1ат? 11ИИ,1а сопРОТИь'1СПия Слдо и уменьшение потребной тяги, в резуль-
RliJx Че'° самолет с крылом изменяемой геометрии достигает свсрхзвуко-
Пилета па малых высотах при не столь высоких тяюво-
-том v П110С1Ях> как это имее! место для самолетов с неподвижным кры-
^Мерснной стреловидности.
^^ЛеТНО'Посадочныс характеристики. Для самолетов с взлетной
(ВПГП^У>КСН1,ОСТЬ|о 0,6 потребная длина взлетно-посадочной полосы
ет сиязь П*х>'лелЯстся пробеюм, при Р/G < 0,5 разбегом Эго предоиределя-
Лейсгв, ?Те>кДУ несущими свойствами крыла и дальностью иолета (радиусом
Если рассматривать в качестве расчетного взлетный вес с наружной
подвеской грузов или топливных баков, то потребная длина ВПП из уС11 Ч
взлета становится равной се длине из условий посадки. Чем выше нссм л
свойства самолета во взлетной конфигурации, тем большую дальность по-^
он может иметь, юм большую нагрузку он может нести (рис. 3.5.6),
0.8 1,0 1,2 1,4 1,6 1.8 Т „
* ризб
Рис 3.5.6 Зависимость относительной дальности полета от отпоситогнюй длины разбега самоле-
та J
Крылья изменяемой геометрии обладают высокими несущими свой-
ствами на взлете и посадке они могут обеспечить значение Суа =
1,2-5-1,6, что позволит поднять с полосы, обеспечивающей посадку, са-
молет весом, превышающим нормальный взлетный вес (без подвссньн
баков и грузов) па 20-5-25% (рис. 3.5.G и 3.5.7)
Рис 3.5.7 Взлетно-посадочные характеристики (Vnot„ Vorp, /|хий) самолетов с кр,л-,‘^*е
ьяемон геометрии (летные испытания): / - самолет с неподвижным крылом, Xk'"w ’1
сам<1ЛС1 е крычом изменяемой геометрии, Хк=30°
www.vokb-la.spb.ru - Самолёт свойми^укаш^?
кис несущие свойства во взлетной конфигурации не менее важ-
Dbl<? высокое" аэродинамическое качество в крейсерском полете. Уве-
,lbl Ч°с располагаемых коэффициентов подъемной силы на взлете имеет
личсни сгм?нное значение не только для сокращения длины разбега при
псРв‘Х1ьпоМ ВзЛетиом весе, по и для увеличения радиуса действия само-
норма- поцЫШсНИЯ Всса нагрузки при увеличении взлетного веса.
лстацо1Пое использование несущих свойств механизированного крыла
изменяемой геометрии на взлете приводит к тому, что самолет с таким
ытом может иметь крейсерскую дальность полета в 1,5+2 раза боль-
шую, чем однотипный самолет с крылом малого удлинения, базирующий-
ся" на аэродроме с взлетной полосой такой же длины, или поднимать до-
полнительную шнрузку, составляющую примерно 20% взлетного веса.
Маневренные возможности самолета определяются располагаемой
продольной пм и нормальной пуа перегрузками и перегрузкой в устано-
вившемся вираже под уст- При сопоставлении самолетов определяют мак-
симальную вертикальную скорость (энергетическую скороподъемность) и
максимальную установившуюся перегрузку.
Максимальная энергетическая скороподъемность и максимальная ус-
тановившаяся перегрузка обычно рассматриваются на высотах 1 и 5 км.
При малых высотах перегрузки могут быть ограничены прочностью.
При дозвуковых скоростях полета сопротивление самолета, соответ-
ствующее нулевой подъемной силе, практически нс зависит от положения
поворотной консоли, поэтому и располагаемая продольная перегрузка при
пуи ~ 1 для больших дозвуковых скоростей на малых высотах (большие
скороепгые напоры) при тяговооружснности, характерной для современных
самолетов, практически не зависит от утла стреловидности консоли. Потреб-
ные значения установившихся вертикальных скоростей на этих режимах ио-
лета могут быть обеспечены только выбором тяговооруженности.
Самолет с крылом изменяемой геометрии может при каждой ко
in полета использовать го положение консоли, которое обесцеЧ1/Ш
максимальную установившуюся перегрузку (рис. 3.5.8). 61
На малых высотах полета при разгонах и вертикальных маневрах г
больших нормальных перегрузок целесообразно использовать при
мол стреловидности консоли хк»25к30°. при М > 1,1:1,2 - угол у>к » 70°. п'
маневрах с большими перегрузками целесообразно увеличивать угол сгре^
Рис. 3.5.9. Область максимальных значений установившейся перегрузки
ул в зависимости от числа И и угла стреловидности консолей крыла
лидности с возрастанием скорости полета, как это показано на рис. 3 5.9, или
маневрировать со средними углами стрслови/цюсти консоли ук ~ 40°
Список литературы к главе 3
1
2.
3
4
5
6.
11 К.Лебедь, А.Ф.Грг/здов, З.К.Дорохова, К.И.Оводкова Влияние параметров KPbL"’fJ
фюзеляжа па аэродинамические характеристики моделей самолетов с крылом изменяв.'.
геометрии // Тр. ЦАГИ 1969.
Н.К.Лебедь, ~7.Н.Опъкова, Г.Б.Огцвтсов, А.В.Петров. Исследования аффект»™ скти^рт^
.'Ш'шых видов взлетно-посадо'той механизации и продольная балансировка само. I
крылсы изменяемой геометрии И Тр. ЦАГИ, 1969 .илЛИ
Й-П.Догмюв, Г.Л.Якимов Расчетные и экспериментальные исследования аэро®11
ких характеристик н.еплоских крыльев с изменяемой стреловидностью при околоэвс
и сверхзвуковых скоростях //Тр. ЦАГИ, 1969 п0-
Р.И.Штейнберг, В.А.Терехоаа Крылья изменяемой геометрии с малым изменен)«|
ложепия фокуса при повороте консоли // ТВФ 1970, № 4
Г.Г./У/тплыкуоа, Р.Д.ИроЛов, Л.Л.Медвежкикова. Режимы полета, основные . епгые • '
и маневренные возможности самолетов с крылом изменяемой геометрии //Тр. ЦА1Т1 У^дов.
1 .С.Бюшгенс, Г.В.Александров, С.М Нелоцеркоаский, Г.И.Загайнов, Р Д-
Н.К.Лебгдъ, В.Г.Мике.шдзе, К.С.Николаева, РII.Штейнберг, Г.Л.Якгсчов. АэроЯй^и
самолетов с крыльями изменяемой пометрпи. (Мапоцйфия)//Тр. ЦАГИ, 1980
www.vokb-la.spb.ru - Самолёт своими руками?!
Глава 4
АЭРОДИНАМИКА сверхзвуковых самолетов
А*с крыльями сложной формы в плане.
УПРАВЛЕНИЕ ВИХРЯМИ
1 Аэродинамика крыльев сложной формы в плане, их применение
для сверхзвуковых пассажирских самолетов
В начале GO-x юдов в ЦЛ1 И начались интенсивные исследования но-
вою класса несущих поверхностей крыльев сложной формы в плане.
Такие крылья представляют собой комбинацию исходного крыла умерен-
ного удлинения и вытянутого вперед наплыва с очень малым удлинением
(рнс?4.1.1). При этом формы в плане исходного крыла и наплыва могут
быть различными, например, исходное
крыло можег иметь трапециевидную,
стреловидную, треугольную формы, а
наплыв может быть треугольным, готи
веским, прямоугольным и г.д.
Путем соответствующего выбора гео-
метрических параметров исходного крыла
и наплыва можно построить несущие по-
верхности с заданной, в том числе и с
нулевой, разницей в положениях аэроди-
намическою фокуса при малых дозвуко-
вых скоростях и при заданной сверх-
Рис. 4.I.I. Крыло с южной формы -
комбинация исходного крыла и наплы-
ва - в плане
звуковой крейсерской скорости
(рис. 4.1.2). Тем самым может быть
’’О 1,5 2,0 2,5 М
р«с. 4 1 •) и
1иП11 llePWe экст1еримпггалы1ые ргзуль-
Внущ(.(!1ОдгпсР‘аш,ш,1{' принцип ТЮСТроСМИЯ
Чад, ' * П0Не1’х’10ст'1 с заданной разницей в
п1>и 111ЯХ аэР"д,п,йМического фокуса лу.
4Озп>коных скоростях и сверхзву-
,*Й-Ч’ской скор<к-щ (1960)
решена проблема продольной балан-
сировки без значительных потерь
аэродинамического качества при
сверхзвуковых скоростях для ЛА,
выполненных в бесхвостой схеме или
в схеме с очень маленьким юризон-
гадьным оперением.
Дальнейшие расчетные и экспериментальные исследования выяь 1
наряду с указанной фундаментальной особенностью еще целый
важных свойств крыльев сложной формы в плане:
при дозвуковых скоростях несущие свойства крыльев сложи
формы в плане имеют нелинейный благоприятный характер и сохраняй
ся до больших углов атаки, поэтому располагаемая подъемная сила I
таких крыльев значительно выше, чем у исходных крыльев (рис. 4j
чго обеспечивает возможность достижения лучших взлетно-посадочных й
маневре!птых характеристок;
Риг. 4.1.3. Несущие сиойства крыльев сложной формы в плане и исходных крыльев при
малых скоростях (при сире-делении коэффициента Суя п качестве характерной принята
площадь базового крыла)
- благодаря очень большим хордам в наплывной части таких
крыльев можно реализовать очень малые относительные толщины
профилей стах = 2:2,5%, чго приводит к уменьшению волнового сопро-
тивления и повышению /С11|ах при М > 1 и обеспечивает получеНи
больших полезных объемов, достаточных для размещения топлива;
крылья сложной формы в плане с большими углами стрел°вИ
ности наплыва сохраняют дозвуковую переднюю кромку на значительи
части размаха вплоть до больших чисел М, что дает возможность ноли
чить заметный выигрыш в значениях АГ1пах и тго при сверхзв)
крейсерских скоростях за счет оптимизации формы срединной новер-
пости крыльев (рис. 4.1.4); В
подъемная сила у крыльев сложной формы в плане создается I
большой длине по потоку, что позволяет ослабить звуковой удар; Я
благодаря большим хордам и соответственно, большим числа-'1 W
крылья сложной формы в плане имеют малые коэффициенты соЦр^И
линия трения при до-, транс- и сверхзвуковых скоростях полета;
www.vokb-la.spb.ru - Самолёт своими руками?!
при дозвуковых скоростях
\пГе-и,но малое сопротивление
°ТН0< я в рачительной степени ком-
тРеЯ fpver рост индуктивного сопро-
пе11С итгм обусловленный малостью
кроме -Ю1О, начало вол-
'ового кризиса сдвигается в сторо
больших чисел М, поэтому при
Трансзвуковых скоростях (51^0.95)
КОМПОНОВОК с крыльями
с южной формы в плане могут
бьггь получены более высокие зпа-
чем для компоновок с
боль-
Рис 4 1.4 Выигрыш п величине Ктдх при
сверхзвуковой крейсерской скорости от оп-
тимизации формы срединной поверхности
крыла сложной формы в шанс (М = 2,3;
_ 0.5): I -неплоские крылья; II - плоские
крылья: 1 -х0-45с, 2-50°, 3~55°, I 60’
гинср-
приме-
чения АС11ах,
традиционными крыльями
того удлинения;
- при сверхзвуковых и
звуковых скоростях полета
пение крыльев сложной формы в плане обеспечивает достижение высокого
уровня аэродинамического совершенства;
- крылья сложной формы в плане обладают благоприятными кон-
структивными и прочностными особенностями, так как они позволяют
реализовать более равномерную нагрузку конструкции по хорде и по
размаху и имеют малое удлинение, что уменьшает изгибающие моменты
в расчетных корневых сечениях.
Таким образом, крылья сложной формы в плане дают уникальные воз-
можност для получения хороших аэродинамических характеристик как при
сверхзвуковых, так и при дозвуковых и гинерзвуковых скоростях. Неслу-
чайно такие крылья нашли широкое применение в России и за рубежом во
многих проектах сверхзвуковых маневренных и неманевренных самолетов
вплоть до воздушно космических аппаратов "Шаттл" и Буран
Для СПС, которые ио-существу являются двух режимными самолета-
ми, очень важно обеспечить эффективны)! полет как на сверхзвуковом
*2). так и дозвуковом (M«U,95) крейсерских режимах, и крылья
ожпой формы в плане удовлетворяют этому требованию.
Исследования, выполненные в ЦЛГИ, показали, что скругления изломов
Ха кГ*>мки практически не влияют па несущие свойства, по ухудшают
. ;‘1ГпгР|>стики продольной статической устойчивости при больших углах
из 1,1 C|bI311 с этим на опытном самолете Tv-144 крыло вьшолнено с одним
л°мом передней кромки, состоящей из прямолинейных отрезков с углами
•югзидности наплывной и консольной частей Хпк.н””^° и ХпкО = э-’>°-
1{А1'гл°Рег11'1еские и экспериментальные разработки, выполненные в
Кото ’ Г1О:}ьолили найти оптимальные формы срединной поверхности,
аэТ)п1')1‘1с °беспечили получение выигрыша в величине максимального
комического качества Д/Стах к 0,7 при М = 2,27 (рис. 4.1.5).
1 (11
Рас 4 5. Экспериментальное иодтверж.те-
тис ло.зможпостей получения зцачптельио-
то выигрыша в зепгчинс Л’.пах та счет оп-
тимизации формы срединной поверхности
крыла ня тематческой модели СПС
Рис 4.1.7. Результаты жсисрименгальных
игследонаиш! моделей СПС-1 (темные точки)
и СПС-2 (светлые точки) в алродинамических
трубах Т-112 и Т-113 ЦАГИ: а - без гондол
двшателей; б — с гондолами двигателе й
Было также показано чт
Лпц
мепс.шс адаптивном механизации
области передней кромки крыла т В
однозвенных и двухзвенпых опц*
няемых носков (рис. 4 1.6) позвоц,
повысить аэродинамическое качест
на околозвуковых и умеренно сверх
звуковых скоростях полета (ЭТо
предложение не было реализовано на
'Гу-144, так как оно было сф°рмиро.
вано, когда постройка серийных
самолетов была уже закончена).
Рис. 4.1 6. Увеличение значений /(U1U мо-
дели СПС-1 с крылом сложной формы т
плане М счет отгиба посовых частей кры
ла: сплошная линия - баз отгиба носков;
штриховая с их отгибом (£>„ ~ 0.125b)
В настоящее время в России
ведутся исследования, направлен-
ные па создание сверхзвукового
пассажирского самолета второй
поколения - СПС 2. Они во мно-
гом базируются на опыте создай®1
Ту-144.
Резу л ы аты предваритеЛьИЦ
разработок указывают на пра,гГЙ
ческие возможности значительней
повышения аэродинамического
честна СПС-2 по сравнению^
СПС-1. В качестве примера
рис. 4.1.7 приведены экспсри^
зальные данные для одного и3 д-
риантон аэродинамической komj
новки СПС-2, разработанньЛЦ
ЦАГИ. Оценки уровней Aniax
СПС 2 в натурных условиях Я*
заны на рис 4 1.8. ||||
www.vokb-la.spb.ru - Самолёт своими руками?!
1*1 iX
10
2,0
м
Рис 4.1.8. Оценки возможных натурных
значений КП|ах для СПС-2 (/) и данные
для СПС 1: Ту-144 (2) и "Конкорд" (?)
0,.з |,0
СПС-2 предъявляются жесткие
я ио шуму на местности.
'грг6°и^1олнения з’Л1х требований
'^Длмо. в частности. существен-
нсс/)Х< повысить аэродинамическое
н° на взлетных режимах. Ис-
Xдованяя, проведенные в ЦАГИ,
('казали, чю весьма аффективным
'Хдсгвом повышения аэродинамичес-
кого качества иа этих режимах
явтяегся применение комбинирован-
ного отклонения элевонов и носовой механизации консолей 6а.ювого крыла,
выполненной в виде поворотных носков или вихревых щитков (рис. 4.1.9).
Plfc. 4.1.9. Применение механизации крыла типа пихрепых пооопых щитков в комбинации с
1,ткл(1Н( нжм нлег«1ноп эффективное средство повышения аэродинамическою качества при
взлегных значениях коэффициент подъемной омы (М т О 15, Лэкр= 0.15 ); 1,5,6-
- °: 2 ‘ 5°: у “ 10°: 1-4 ~ ФИ1 = Зо°; 5 фш - о; 6 - ф... - о. лэкр = со
Принципы повышения несущих свойств и аэродинамического
качества тонкого крыла иа больших углах атаки
уме0> |ВНГ>ГМ средством увеличения несущих свойств топкого крыла
с*с>п П°ГО УЛЛИНе,1ИЯ ь области больших углов атаки па дозвуковых
с>сИолэ ЯХ 11Олр1'а (« S 15°) являются передние наплывы. Их применение
^Рьцц, J На Ис,Юльзовании особешюсти обтекания узких треугольных
cug еВ s 2, %пк > С>5°) с острыми передними кромками: генерации интсп-
ЧДсъ-ц. К11хГевьгх жгутов вдоль передних кромок со значительной скоростью
т"ЧециГКИ ВихРсй = 1,5ч-3: рис. 4.2.1) Это устойчивое вихревое
уществукицее над поверхностью таких крыльев до больших углов
Нмчг.г
атаки (а = 25+ 30° при Х = 1,54-1,0) и распространяюгцееся по пот
оказывает в области больших углов атаки определяющее Щтиящ^И
силы и моменты, действующие как на само крыло, так и на элем»
аэродинамической компоновки самолета, расположенные за крылом
Рис. 4.2.1 Влияние утла стреловиднпсти треугольных крыльев на угол атаки разрыв
ЛИЯ вихрей
Па крыле возникает нелинейное по углам атаки приращение поЛ^И
ной силы, которое при а •=- 25^-30° соизмеримо с подъемной силой
тенпиальном обтекании (без вихревых отрывов на передней кромке)-^И
менсние коэффициента подъемной си ты крыла малого удлинения в Д1
зоне углов атаки, при которых точка разрушения вихря лежит за заж
кромкой крыла (рис. 4.2.2). может быть определено по методу “аналог|
подсасывающей силой”, хорошо согласующемуся с экспериментом-
www.vokb-la.spb.ru - Самолёт своими руками?!
4-2.2. Влияние закругления передней кромки и удлинения на зависимость С (а)
^.'•"льных крыльев
я гРсУГольных крыльев
^уа ~('уап ^Суав = п sin а cos2a + л Sin2a cosa,
г4с-. С
уап и ь^яп - потенциальная и вихревая составляющие коэффицисн-
°ЛЪемной силы; Суац - производная при угле атаки а = О и
1111111 ьном обтекании;
С'уа в Jt 2 И
- ----tgas=—tgcx.
!«u суЯИ л W
После того как точка разрушения вихря достигает задней кроки кть
ла и начинает приближаться к ею вершине, темп нарастания
циента подъемной силы уменьшается; максимальное значение достигает I
на углах атаки a = 30 + 40°. Наибольшие значения Суятах (-1,3) сооТВе
гсгвуют треугольным крыльям с удлинением л-1 + 2 (%пк = 75 + 63
рис. 4.2.2). Затупление передней кромки крыла приводит к еуД
ственному уменьшению вихревой составляющей подъемной силы. д,.а
логичные закономерности имеют место и для узких крыльев других форк
в плане (готическая, оживальная, S образная и др.).
Использование узких треугольных крыльев или других форм в пла-.
в качестве наплывов, устанавливаемых перед тонким крылом умеренного
удлинения и стреловидности (с - 5 + 6%, X. = 2,5 4, хпк - 30; 40°), изм?.
няет характер обтекания консоли при углах атаки, превышающих крити-
ческие для крыла без наплыва (рис. 4.2.3); кромочный вихрь (вихрь,
сходящий с передней кромки консолей крыла) под воздействием вихря с
наплыва смещается к концевым сечениям крыла, в результате чего зона
безотрывного обтекания консолей существенно расширяется. На частя)
консоли и центроплана, лежащих под вихрем с наплыва, возникают зоны
разрежения; разрежение имеет место и на частях консоли, подверженных
влиянию кромочного вихря. Регулярное течение на большей части верх-
ней поверхности крыла наблюдается до a - 24°.
Следует подчеркнуть, что передняя кромка наплыва должна быть ос-
трой. Затупление приводит к уменьшению завихренности и осевой ско-
рости в ядре вихря и снижает коэффициент подъемной силы крыла с
наплывом на больших углах атаки как из-за снижения несущих свойств
самого наплыва, гак и из-за уменьшения разрежений па консолях крыла.
Расчетные и экспериментальные исследования распределенных М
грузок показали, что па малых углах атаки при установке наплыва
грузка в корневых сечениях крыла (на ширине наплыва) распределяет»
по большой хорде, пики разрежений на передней кромке уменьшавши
При больших углах атаки па крыле с передним наплывом резкие
разрежения в области передней кромки пропадают, однако градиентД
лепия вдоль хорды становится небольшим и зона повышенного Pa3P*v
иия распространяется практически до задней кромки крыла. К°ЭФЧ I
цненты подъемной силы сечений увеличиваются па большей части п "'
размаха крыла. Лишь в концевых сечениях ( z i 0,6 ) наблюдается 1
крашение роста Суа сеч при a - 12+14°. С увеличением углов атаки л^И
нагрузки, приходящаяся па центральные сечения крыла, возраС‘Я
(рис. 4.2.4). В итоге приращение коэффициента подъемной силы ПР1^,
тановкс наплыва перец крылом умеренных удлинения и стрслоВИД^
превышает па больших углах атаки (а _ 20 + 40°) коэффициент по,*
ной силы, возникающей на изолированном наплыве (рис. 4.2.5). i
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис 4.2 3. Положение вихрей иа крыле умеренной стреловидности с наплывом и распределение скорисги в ядре вихря
Рис. 4.2.4. Распределение нагрузки по раз-
маху консоли крыла с наплывом
Рис.. 1.2.5. Елиятше форг-гы наплыва на *е-
супгие свойства и поляр}' модети (модель
без ГО) (тк - тре}гольнос крыло)
Рассмотренная структура обтекания крыла умеренного удлинения
наплывом - генерация вихрей на острых передних кромках наплыва, Л
распространение над поверхностью крыла за наплывом и далее, смеше-
ние кромочного вихря и зоны сорванного потока на консолях к копны31*
сечениям сохраняется вплоть до больших околозвуковых скороегя
(рис. 4.2.3 и 4.2.6).
Подъемная сила при установке наплыва па крыло умеренного ул*
нения может увеличиваться па больших углах атаки на несколько ДсСЯ
ков процентов (рис. 4.2.5 и 4.2.6), Приращение коэффициента
нои силы, обусловленное установкой наплыва, практически не измен--
ся до чисел М = O.6-5-O.8 и может уменьшиться па 20-5-30% при
М = 0,9 (рис. 4.2.6). Ж
Влияние наплывов па несущие свойства при малых углах атаки^^и
консоли обтекаются безотрывно (а < 10°), па дозвуковых и грансзв;
вых (М < 1,2) скоростях невелико. Расчетные и экспериментальны0
следования показывают, что для крыльев с малым или умеренным У- ,
пением (X < 4) производная С“я (отнесенная к площади базового Kp^’j
практически нс изменяется при изменении относительного размах'*3 .
плыва и его относительной площади в достаточно широких предела*-
www.vokb-la.spb.ru - Самолёт своими руками?!
Рпс. 4 2 Б В тиянис наплыва готической формы на записпмости Gv„(cx) и wi.(a) модели
при разных числах Маха
Относительное изменение производной С*в нс превышает 0,05
при изменении относительного размаха и площади наплывов до
ги - 0,3 -5- 0,4 и - 0,5 . Увеличение площади компенсируется
уменьшением удлинения. Приближенно сохраняется известная для крыльев
маною удлинения закономерность: несущие свойства (подъемная сила при
заданном угле атаки, С^я5) пропорциональны квадрату размаха:
лХ к/2
Т‘ ~
С" S =
При больших сверхзвуковых скоростях производная Суа (отнесен
п-,10,иади базового крыла) при установке наплывов увеличивается
Ся ‘ Учения несущей плошали самолета. Соответственно умеиьшает-
’’Роти ^ИЦИ011Т поляры Л2> определяющий значение коэффициента со-
ления, связанного с подъемной силой: Л2 » при М > 1,5.
Ти бК^Ффициснт сопротивления, связанный с подъемной силой, в облас
( ”Х УГлои атаки, где влияние наплыва па несущие свойства сущест-
Q - 15°), близок к определяемом)' формулой (см. рис. 4.2.5):
Cxti = Суа tgw- ИЛИ К ’ Cig а,
что соответствует случаю, когда действующая на крыло сила норм^И
к его поверхности (нет подсасывающей силы на передней кромке) {?•
скольку на больших углах атаки при заданном коэффициенте подъ^^И
силы углы атаки крыла с наплывом меньше, чем крыла без нап.ц.]
коэффициент сопротивления крыла с наплывом будет меньше, а аэРо 1
намическое качество больше, чем у крыла без наплыва (см. рис. 4.2.5) '
На дозвуковых скоростях при установке наплывов в области углов апц™
начиная с угла, примерно соответствующего максимальному аэрод11я^И
четкому качеству (Cf/(7j<n ), и до угла, соответствующего развитию отръ^И
консолях (Сгуд»1). наблюдается некоторое увеличение сопротивления
уменьшение аэродинамического качества, что связано с утратой подсасываву
щей силы на части передних кромок крыла, закрытых наплывом.
В целом передние наплывы в корневой части крыла являются эффек-
тивным средством увеличения подъемной силы самолета на больших vr®x
атаки и аэродинамического качества при больших коэффициентах подъем,
ной силы. Увеличение несущих свойств и аэродинамического качества
обусловлено образованием вихревых жгутов на острых передних кромках
наплывов. Чем интенсивнее это вихревое течение, тем дальше распро-
страняется оно за пределами наплыва и тем большее влияние оказывает на
элементы аэродинамической компоновки самолета, расположенные в след'
корневые и средние сечения консолей крыла, верхняя поверхность центро-
плана, консоли 1 оризонтального и вертикатъного оперений. Значительное
взаимное влияние элементов аэродинамической компоновки является одной
из основных особенностей самолета с передними натыывами крыла.
С целью изучения особенностей вихревого обтекания крыла с тре-
угольными наплывами были проведены визуализация обтекания и измере-
ние распределения статического давления в ядре вихря по траектории д’*
жения вихревых жгутов, сбегающих с наплывов, с. помощью шарового
пневматического насадка. Визуализация течения осуществлялась методе*
“водородных пузырьков" в гидродинамической трубе на специальной схе-
матизированной модели, геометрически подобной моде пи для весовых
испытаний. Мелкие пузырьки водорода, появляющиеся при электролиз
воды и стекающие с передних кромок крыла или наплыва, захватываю^
потоком, что позволяет наблюдать и фотографировать картину обтекай®
При небольших углах атаки (а < 10°) сформировавшийся на на,к
ве вихревой жгут небольшой интенсивности распространяется над КР
лом разрушается за пределами задней кромки крыла и не вызЫ
заметного приращения подъемной силы модели. При умеренных У ’
атаки (а > 12°) формируется вихревой жгут с достаточно высокой И>
снвностью, что способствует существенному приращению коэффиШ1С '
подъемной силы, но при а > 14° вихрь в области задней кромки йрЩ
разрушается, что является одной из причин существенного умеИЫ^ЧИ
производной Суа (рис. 4.2 7 и 4.2.8). •
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис. 4.2.7 Влияние угла стреловидноеп« треугольного наплыла на несу-
щие слойгтла модели самолета без ГО
Рчс 4.2.8 Слияние относительного размаха треугольного наплыпа на
несущие свойства модели самолета без ГО
жгутов определяется углом атаки и при определенных углах
Достигается максимальное разрежение в ядре вихря. Вихревые
— г интенсивности появляются при больших углах атаки
Данные измерений статического давления на оси вихря pmjn позво-
ря^ н^>1еС 1ОЧНо* нежели визуализация, отметить начало разрушения вих-
с ' рис. 4.2.9 приведены зависимости pmjn от угла атаки а для крыла
Сс,'сне1Г 7ЬНЬ,М папль1Вом наименьшего удлинения 1 - 0,62 в четырех
вихре,,! И0 Л'п,Не фюзеляжа. Видно, что в каждом сечении интенсивность
атаки —
жгуТЬ1 - -
(а > 1()га°Л1'ПТо^ интенсивности появляются при больших углах атаки
^°рвоц-,.' од,такс устойчивая часть вихревого жгута ограничена по длине.
кР°Мкц"11аДЬН° РазрУ’нснис вихревого жгута происходит в области задней
lVl,i;uioxfKPW',a (Рис- 4-2.9, сечение /). Начало разрушения определяется
ЖгуГа ^^зрастания давления в ядре вихря. В зоне разрушения вихревою
‘'додается резкое расширение ядра и беспорядочное движение
водородных пузырьков (явление “взрыва вихря"). С увеличением Я
атаки зона разрушения вихревых жгутов перемещается к Налли»
происходит уменьшение длины устойчивой части вихревых жгутов.
Рис. 4.2.9. Статическое давление па оси вихря (рш|п), сходящего с треу
голыюю наплыла, п зависимости от угла атаки
Сопоставляя результаты аэрометрических исследований рш,и в ядре
вихря и соответствующих весовых испытаний, можно выделить четыре
характерных режима обтекания (рис. 4.2.10):
- безотрывное обтекание - диапазон малых углов атаки (а < 6е),
влияние наплыва практически отсутствует;
- обтекание с разрушением сбегающего с наплыва мощного вихрево-
го жгута в области задней кромки крыла, определяемое характерным У’
лом атаки cq, при а > а* наблюдается первоначальное резкое умею»’
щснис производной С“о, связанное с явлением "взрыва вихря” в пре-
делах консоли крыла;
- обтекание с разрушением вихревого жгута в области пересечения
передних кромок крыла и наплыва, определяемое характерным углом о,
- обтекание при Су£, тах, характеризуемое разрушением вихрсМИ
жгута в передней части наплыва и определяемое углом ашах; протязЯ
ность устойчивой части вихревого жгута при этом незначительна.
При атах происходит наибольшее приращение несущих свойств МД
ли самолета, вызванное установкой наплывов, дальнейшее уве.'П *»
угла атаки (а > ашах) вызывает уменьшение приращения коэффицй Я
подъемной силы. Значения углов cq и а2, характеризующие разруШ^И
вихревых жгутов, определяют уровень приращения кОэффиШ1сВ
подъемной силы иа больших углах атаки.
Для обеспечения высоких несущих свойств наплывов на
необходимо увеличить углы а Г и ct2> используя геометрические пар ’д
www.vokb-la.spb.ru - Самолёт своими руками?!
илва т с. сместить начало разрушения вихревых жгутов, особен-
РЫ HiU1 пасти задней кромки крыла, па большие углы атаки и устранить
1,0 Б Уменьшить нелинейности в зависимости Суа = Да) при больших
1,3,1 ' я-пкн (« > Плавность в изменении зависимости С.а = f(a)
обеспечить формированием вихревои структуры, разрушение
м0* сй при больших углах атаки происходило бы без проявления эф-
K°i'V> "взрыва вихря” и без резкого перестроения.
Рис. 4.2.10. Зависимость С^и(а) с характерными режимами обтекания крыла умеренной
сгргловидности с треугольным наплывом
Особенности вихревого обтекания передних корневых на-
ывов различной формы в плане. С целью изучения возможностей
снечения более плавного изменения коэффициента подъемной силы но
аки и уменьшения резко выраженной нелинейности зависимости
ya(a.) при углах атаки а > а* были проведены комплексные исслсдова-
1ИЯ ^апль1ВОв готической (X = 0,46) и S образной (X = 0,73) форм в плане,
кого Сс'Юдования показали, что вихревые жгуты, сбегающие с готичес-
КрЬ1л?апЛыва’ б°Лес устойчивы к разрушению в области задней кромки
разру/ ВИхРевме жгуты, сбегающие с треугольного наплыва. Угол
еНИИ ВИхРСВ0Го жгута у задней кромки крыла для модели с готи-
(pitc Напл,’1Вом «1 на Да = 3-5-4° выше, чем у треугольного наплыва
Нце "И) Однако угол атаки а->, при котором происходит разруше-
на, ,хРев°го жгута в области пересечения передних кромок крыла и
К ^а2 - 22°), меньше, чем у треугольного наплыва (а? = 26°).
Рис. 4.2.11. Вчияние формы наплыва на угол атаки разрушения вихря
В гидродинамической трубе была выполнена визуализация обтекав
модели самолета с треугольным и т отческим наплывами при различий
углах атаки. При малых углах атаки (а - 10°), в начальный момент фор-
мирования вихревого течения вихревая картина потока у модели
треугольным и готическим наплывами практически одинакова. Для моде-
ли с обоими вариантами характерно наличие двух вихревых течений
одно из которых сформировано на наплывах, другое начинается в зо»
пересечения передних кромок крыла и наплыва.
При увеличенном угле атаки (а ~ 15°) вихревые жгуты, сбегающие
треугольного наплыва и из точки пересечения крыла и наплыва, разру
шаются над крылом. Вихревые жгуты, сбегающие с готического нап.тмм
и из точки пересечения крыла и наплыва, распространяются пад крыл*
раздельно, не взаимодействуя друг с другом, и разрушаются за пр₽Х
лами задней кромки крыла.
При угле атаки а - 20° над крылом с треугольным наплывом суш*
ствует один разрушающийся вихревой жгут над крылом с готичсскЖ
наплывом сохраняются два раздельных вихревых жгута, сформир0^
шиеся на наплыве и в точке пересечения крыла и паплыва, причем з<»1*
разрешения вихревого жгута готического паплыва расположена блиЛ
задней кромке, чем у треугольного. Область нестационарного отрыв*1'
течения формирующегося в результате разрушения вихря, па крыж
т отческим наплывом занимает меньшую площадь крыла.
Наличие над крылом с готическим наплывом на больших Уж
атаки двух вихревых течений и большая устойчивость второго из
чяются благоприятными факторами в создании дополнительной
пой силы и более плавною протекания зависимости С^в(а) при 6c-lbW
углах атаки (рис. 4.2.12). JH
На рис 4.2.13 4.2.15 приведены параметрические зависимости д
дельных углов атаки разрушения вихрей сци а 5 и соответствуя |
www.vokb-la.spb.ru - Самолёт своими руками?!
. 1ЦИеПтов подъемной силы (С*Я|,С*д2). а также величины при-
I я коэффициента максимальной подъемной силы (ДСу„ тах) от
раШ?111’ геО1метрических параметров и формы наплывов в плане
измене зВ01Я1()Т определить несущие свойства компоновки самолета
углах аЯк».
Рис. 4.2.12. Влияние формы наплыва на зависимости Cyt!(a) и I - готический на-
плыв. 2 треугольный наплыв, 3 - S-образный наплыв 4 - без наплыва
Влияние числа М в дозвуковом диапазоне скоростей. Зависи
мскти С,/Я(а) д.1я модещ! самолета с. го-
ризонтальным и вертикальным опере-
ниями с готическим нанлываом при
разных числах М показаны на рис. 4.2.6.
ак видно из представленных матсриа-
при переходе от малых дозвуковых
1зы.м°ЛЬ111ИЧ дозвУК0ВЬ1М и околозвуко-
в ‘ Ск°Р°стям качественно сохраняется
нисм,1Ие пагкп’1ВОВ' связанное с увеличе-
j-j’ ПоДьемной силы модели самолета.
вами^1113011 /1ля -'нуюли с наплы-
НсйносС°ХРаНЯК)ТСЯ хаРактеР11Ые исли-
Охо-1Гч,ТИ «Только сглаживаемые при
'^вуковых скоростях.
р 1,1.Ко Г1Г’И переходе от дозвуко-
,виогся °1'°ЛозвУковь1м скоростям изме-
<х‘ х. ЛНачспия предельных углов aj,
^ризующих разрушение виХ1>е-
Риг 4.2.13. Влияние геометрических па-
раметров и формы наплывов на предель-
ные углы атаки разрушения ппхрей: / “
^м-угольпый наплын, 2 - S-t>6]>a3iibiii на-
плыв, 3 - готический наплыв
вых жптов у задней кромки крыла и в области пересечения передних
мок крыла и наплыва п соответственно приращение подъемной сиды
званное установкой наплывов.
К1Х>
BU
Рис 4 2.13 Прярашспнс ко?н|в|>ициентов
подъемной силы, создаваемое наплывами
различной формы в плане (обапгачеж
см. па рнс. 4.2.14)
Рис 4 2 14 Влпятпге гепметргческпх парамет-
ров и формы наплывов на предо шине значе-
ния кмНфпцисптоп подъг>п:ой силы разруше-
ния nnxpeir. f - треугольный нан.ыв. 2 S-
образный наплыв, 3 готический наплыв
Рис. 4.2 16. В.ШЯШП- числа М на приращение
коэффициента подъемной силы, создаваемо-
го наплывами различной формы в плане: а -
S-образный паплын, “0,73; б - готичшкнй
наплын, Лц ж 0,46; в треугольный нан ты а,
*и 0,62, ДС\ик - С„,сн “
Наибольшее значение угла а* для
модели с исследованными наплывами
готической, треугольной и S-образно!
форм, а также максимальное прира-
щение несущих свойств ДС^н моде-‘*
наблюдается при умеренных дозвукьг
вых скоростях при числе М ~ 0 ’
(рис. 4.2.16). При дальнейшем уве*’
чении числа М происходит умепьицЯ
угла a.j и приращения коаффши1^'
подъемной силы, при околозвуков,‘)'
скоростях (М = 0,95) влияние нал-1*^
вов в получении дополнителЫ^,
нодьемной силы значительно -’
шастся. Отмеченное ciuoKcinie нес')п
свойств при переходе к окодозвуков
скоростям связано с возникновений
крыле кризисных явлений. При оК
звуковых скоростях (М > 0,7)
ле возникают местные свсрхзвУ^^И
зоны залпякающисся скачками
пения. Наличие на крыле зон с
www.vokb-la.spb.ru - Самолёт своими руками?!
ав-юняем воздействует на вихревую структуру и влияет на разре-
даваемое вихревыми жгутами на крыле, что вызывает уменьшение
ясе»,,с’ «<пя С,,,, моде.ш самолета.
,Ч’1 яктсристики продольной устойчивости. Передшю корневые
I наряду с приращением подъемной силы, вызывают перемещение
г1ал.'1ь1В*^ 1Jlia’MirleCKOiTo фокуса модели самолета (рис. 4.2.12 и 4.2.17)
Й*^11Ъ1Х углах атаки наплыв, как крыло малого удлинения, обтекается
ПРЙ ' 1 безотрывно и создаст собственную, небольшую по величине, подъ-
плаиНО п, перемещение центра давления вперед за счет наплывов неболь-
d С выходом на большие угла атаки, когда существенно возрастает соб-
ШОСнная подъемная сила наплыва, происходит значительное перемещение
С оед центра давления модели самолета. У модели самолета с готическим
наппывом наблюдается более переднее положение аэродинамического фоку-
са чем у модели с треугольным и S-образным наплывами (рис.4.2.17)
Pin 4.2.17. Влияние числа М на зависимость гн.(<1)_м°Де-'1и с наплывами различной фор-
мы в плане, ,7Г = 025- 1 - готический наплыв. S1IH=13,3%; 2 - S-образный наплыв.
$ш,=8%; 3 треугольный наплыв, 5Ш1 -9,4%; 4 - без наплыва
4.3. Аэродинамика самолета с передними наплывами
в корневой части крыла (управление вихревым обтеканием)
Использование наплывов в аэродинамической компоновке самолета
тик VeT RcecTOPOHHei'° изучения комплекса аэродинамических характерис-
1,0 СЛсдуюпшм основным направлениям.
p0R ’ вь,бор основных геометрических параметров наплывов и парамег-
Чяюи^'?ГИХ элементов аэродинамической компоновки самолета, онредс-
11х ’фиращенис подъемной силы на больших углах атаки;
Шенн- Г*ССледовап1’е влияния наплывов на поляру и поиск путей умень-
ь °бла С°ПРО1ИВлепия и 11О13ЫШения аэродинамического качества самолета
Сги матых и умеренных углов атаки;
Хв<Х:Го Из.УЧение взаимодействия наплывов с элементами компоновки
Ристцр/°И Час1и самолета и поиск путей достижения требуемых характе-
В И *т-°'*'Т11ВО(?1 и и Управляемости относительно всех трех осей.
Моду 1 подобные исследования были выполнены на серии моделей
11°й Конструкции (рис. 4.3 1).
Рис. 4.3.1. Схемы моделей сверхзвуковых самолетов для научных нситедоващл ,i
Систематические исследования наплывов в аэродинамических комп^В
ках показали, что обусловленное ими приращение подъемной силы самокуц.
на больших углах атаки определяется как параметрами самих наплыв*
(относительная площадь, форма в плане, радиус скругления передней крои
10'
20
“ДС?Й ц
С,а
1,0
X™ = 00°
Xnx-^°
= 30’
' = 0.27
0
0.1
08
30
Треугольный наплыв
X х= 4,05 *1-2
о 3,2 « 4
2,36 А 8
П = 4
0,25
M-//a it
0 20" 40’ 0
3,2
20' ₽
0 10е 20 0 10’ 20° 0 W 20’ а
Рис 4 3 2 Влияние геометрических najjaMripoB и формы наплывов в плане на fec_yuitfe
с гни моделей само.'ктов: а - Zh-74°, 51Ш = 0,115, 7Н -0,33; б - “68”, ^нп ' 1
ф = 0.33; в - Хн - 74°, = 0.08, 7„ = 0,295: г - Л№1 = 0,115, г„ ~ 0,27
www.vokb-la.spb.ru - Самолёт своими руками?!
яК)рма срединной поверхности),
кИ’ ° 1Ирамстрами консолей крыла,
гаК й и шириной хвостовой части
^озедажа. компоновкой горизонталь-
ной и вертикального оперений. Так,
Н0)И уветинешп! стреловидности пере-
чней кромки базового крыла свыше
= 50е ею иесушие свойства на боль-
ших углах атаки (в том числе и
г- "„) увеличиваются, а в варианте
|ПаХ' - о
с наплывом изменяются в меньшей
степени. В результате различие между
HecvuBLMH свойствами крыла с наплы-
вом и без нею, т.е. приращение коэф-
фициента подъемной силы наплыва,
уменьшается. Для крыльев с умерен-
ной стреловшностт,ю и удлинением
<Х = 30-5-40°, 1 = 3,2; 4,5) зависимость
приращения несущих свойств or 4ЮР*
мы в плане незначительна (рис. 4.3.2).
Систематические исследования
влияния геометрических параметров
наплывов на приращение коэффи-
циента подъемной силы самолета
проводились па моделях в аэродина-
мических трубах при малых дозву-
ковых скоростях в диапазоне углов
атаки до а ~ 38:- 58°. Исследования
охватили широкий спектр парамет-
ров: крылья с 1 3,2 + 4.5, q = 2-J-8,
Хн _ 68^-76 готические, S-образные, \
Рис -1.3.3- Зависимость приращения коэффи-
циента подъемной силы от угла атаки и пло
шал треугольного наплыва- 1 - с наплывом
без ГО и ВО; 2 - без наплыва. с ГО и ВО
Х=30-42°: наплывы треугольные с
ни = 0,07-5-0,2 (в потоке)
^1,алпз результатов исследований показал, что интенсивное увеличе-
п и 1ЮДЪсмнои силы при установке наплывов начинается с утла атаки а„
ный К°ГиР°-м лля крыла без наплыва зависимость Суя(а) теряет линей-
ДИи Ха >актсР. а коэффициент сопротивления в связанной системе коор-
Потиг- имеет минимум, что соответствует началу развития отрывов
KpJlt, d Па ВеРХНеи поверхности крыла (рис. 4.3.3). Для рассматриваемых
1Ьев этот угол атаки лежит в пределах а = 8-5-14°.
Веко-pdUleHHr коэффициента подъемной силы ттанлывов ДС(уян при
оцре заданном угле атаки изменяется в зависимости от их площади,
Hv ЛС1,1<ой с учетом подфюзеляжной части (5Н) (рис. 4.3.3), по зако-
лизкому к швейному.
Рис 4.3.4. Влияние формы наплыва в плане
на приращение коэффитиента подъемной
силы: а - полная модель, х ~ 42°, а - 3.2; б -
модель без ГО х = 42°, а = 3,2; в - мотель
без ГО и ВО, х-^' <0, X “ 30" С?); ?
модель бал ГО и ВО, х “32*-35°, л ~ 3,2-г4.5-
д - модель без ГО и ВО х " 3(М2°
Эти экспериментальные p^y
юты иос.1ужили основанием w*
сравнения эффективности налльгво ’
различной формы в плане и анал^Я
влияния геометрических параметров
других элементов аэродинамической
компоновки самолета на их эфф^
тивность. Прирашения коэффициен-
тов подъемной силы нап лывов при-
водились к условно выбранной отно-
сительной площади SH = 0,2, и рас-
сматривались их зависимости от раз-
ности углов атаки а - а л = Да л г.е
зависимости АСув H0,2/.SH = /(Да,).
Влияние формы наплывов
в плане при малых дозвуковых
скоростях сводится к следующему
(рис. 4.3.4).
Готические наплывы позволяют
получить большее примерно на 0 15
значение приведенного к SH = 0,2
прирашения коэффициента подъем-
ной силы, чем треугольные при а-
а,,,>12°. При а - ал£10° готичес-
кие наплывы менее эффективны.
При установке наплывов с S-
образной передней кромкой достигаются менее высокие, чем для тре-
угольных наплывов, прирашения коэффициентов подъемной силы (прм
а - а,> 14° примерно на 15%).
Скругленный (плавный) переход от передней кромки наплыва
передней кромке крыла приводит к уменьшению на 20 ь25% приращен^
коэффициента подъемной силы по сравнению с его значением пр
треугольном наплыве.
Влияние горизонтального оперения проявляется в уменыле»
приращения коэффициента подъемной силы в диапазоне значений ct
84 10° до 20 : 25° на ДС^п, = 0.05-5-0,10 (рис. 4.3.5), т.е. па 25-5-30%. т
Кроме того, при установке горизонтального оперения усилив3
влияние ряда параметров аэродинамической компоновки па знаЧ<^уЛ
приращения коэффициента подъемной силы: возрастает различие мС' J
вариантами <: одно- и двухкилевым вертикальным оперением, коротка-
длинным фюзеляжем, заметнее становится различие между- вариа’ГгаМ
различными удлинением и стреловидностью крыла.
www.vokb-la.spb.ru - Самолёт своими руками?!
Рш 4.3.5 Влияние горизонтальных и вертикальных оперений на приращение коэффициен-
те тиьемной силы, обусловленной наплывом- 1 - ДСИ„ - полная модель, 2 - ЛС^В -
модель без ГО. ? — -v н.с« «>
Влияние вертикального оперения Па моделях без вертикаль-
ного оперения и с однокилевым вертикальным оперением значения при-
ращения коэффициента подъемной силы при установке наплыва пример-
но одинаковы. Установка двухкилевого вертикального оперения приво-
дит к уменьшению приращения коэффициента подъемной силы при
углах атаки, соответствующих о - > 12-е 19°, на ДС„„ н|, 0,2/SH ® 0,1,
т.е, примерно на 25% (рис. 4.3.5).
Влияние фюзеляжа. Увеличение длины фюзеляжа на модели без го-
ризонтального оперения приводит к увеличению приращения коэффициента
подъемной силы примерно на АСг/д ф 0,2/SH ~ 0,05 в диапазоне углов а -
л-( *-15°. На полных моделях увеличение длины фюзеляжа ведет к более
заметным изменениям приращения коэффициента подъемной силы.
На значение ЛС^Д н 0,2/5,т оказывает некоторое влияние также и
Ф°Рма поперечного сечения хвостовой части фюзеляжа. Установка зад-
'*'Х Нап-,1ывов крыла (хвостовых балок) и увеличение ширины хвостовой
ц Ти Фюзеляжа приводят к уменьшению прирашения коэффициента
Urc. >Смной силы, возникающего при установке передних наплывов. Су-
^ебс- е1111Ь1М являегся т0 обстоятельство, что задние наплывы сами по
С11 г°3Дают подъемную силу, поэтому в целом коэффициент подъемной
'Ь* самолета увеличивается.
111Ь1к ^иР31исние коэффициента подъемной силы самолета при установке на-
^еличивается при переходе к уплощенной верхней поверхности фюзе-
’Давно переходящей в крыло, г.с. к схеме с нссупщм фюзеляжем.
ЛИяние чисел М на коэффициент подъемной силы ряда моделей с
’ми наплывами крыла показано на рис. 4.3.G.
Рис. 4.3.6. В.।ияпне числа М на приращение
коэффштпепта подъемной сиш oi наплывов
различной формы п плайе (модель без ГО)
Рис. 1.3.7. Влияние naiLibwoB на значение*,
эффиппеита полъемтюй силы, nwniq*
щеге началу тряски: / - с перештми наплы-
вами, 2 - без наплывов, 3 - летные испытали.
При увеличении числа М в дозвуковом и трансзвуковом диапазоне
различие в значениях приращения коэффициента подъемной силы па
больших углах атаки для наплывов различной формы становятся мене*
заметными.
\ становка передних наплывов крыла изменяет практически все аэр»
динамические характеристики самолета. Обусловленное вихревыми жгу-
тами наплывов улучшение обтекания консолей крыла приводи! к увел»
чению коэффициента подъемной силы, соответствующего началу ipwW
(рис. 4 3 7), увеличению эффективности элеронов и закрылков на боль ,
ших vr.iax атаки при дозвуковых скоростях.
Коэффициент сопротивления при нулевой подъемной силе на
ковых скоростях при установке наплывов практически нс изменяется- Д'
полнительная поверхность трения невелика. На сверхзву! вых скор'*^
коэффициент сопротивления уменьшается из за уменьшения отнО<-1ГГ{У
ной толщины корневых сечений крыла. При М =1,5 ^2,3 это умсШ»,1,е,|
может составить 10-5-15°» волнового сопротивления самолета, что эквв
лептно увеличению максимального аэродинамического качества на ?=• ч
Положение аэродинамического фокуса при установке нал’№
сдвигается впсрст на дозвуковых скоростях - незначительно, на боЛгИ
сверхзвуковых скоростях - в большей степени. Расстояние между пи-
тыми фокусов на околозвуковых (М ~ 0,8) и сверхзвуковых (М
www.vokb-la.spb.ru - Самолёт своими руками?!
- ях уменьшается. что приводит к уменьшению потерь азродипамичес-
сК°Р(К' ' в условиях балансировки в сверхзвуковом полете.
кого к бо;11,ших углах атаки на дозвуковых скоростях установка неред-
•ш тывов на крыло приводит к возникновению кабрирующих момен
НИХ Увеличивающихся с увеличением угла атаки. В зависимостях тг(а)
то1*’ 1ЯЮТСЯ нелинейности типа "ложка”, устранение которых требует
"^тйчсния несуших поверхностей в хвостовой части самолета: увсличе
'Ве"п пощади горизонтального оперения, установка боковых ребер в хвос-
товой части фюзеляжа.
Из примера, приведенного па рис. 4.3.8, видно, что для компенсации
курирующих моментов, создаваемых наплывами на больших углах
чтаки. может потребоваться с учетом интерференции наплыва и оперения
увеличение площади горизош ал итого оперения.
v О1<овая устойчивость самолета существенно изменяется при
обтсг'-)13КС ПСРСД11ИХ наплывов крыла, поскольку изменяется характер
вИХп*<11П1Я Носов°й части фюзеляжа: вихри с наплыва более стаби.тьны, чем
•leciafii Торгующиеся на носовой части фюзеляжа, что ведет к уменьшению
крьт^1'^^11»- М(-’мс"тов рыскания носовой части фюзеляжа. След за
тц,1е Ск ? на11яьгвом, характеристики которого (вертикальпыс и поризопталь-
атакн °tbr По1ока> торможение потока) сложным образом зависят от углов
РИзо11та. Скольжения, определяет силы и моменты, действующие на го-
п 1Г’н°е и вертикальное оперение и хвостовую часть фюзеляжа.
пр1( у я,Гие вихрей от наплыва на вертикальное оперение проявляется
Рей ’ атаки а > 18:20°. Наиболее сильно подвержено влиянию вих-
Ван.тыва двухкилевое вертикальное оперение. В том диапазоне
углов атаки, в котором вихри наплыва проходят вблизи верхней коп
килей с их внешней стороны, возможна потеря статической устойчивгъС1
пути = 0). Это связано с появлением дополнительного дсстабитц^
рующего бокового скоса поюка в области между вихрями при вызван
скольжением смещении вихрей относительно консолей вертикалы»
оперения. Вне вихрей дополнительный боковой скос потока при скольж^
пни приводит к появлению стабилизирующего момента рыскания
(рис. 4.3.9) Если в некотором диапазоне углов атаки вихри проходят
между килями, устойчивость пути в этом диапазоне обеспечивается При
больших углах атаки большое влияние на эффективность вертикального
оперения оказывает и торможение потока.
Таким образом, применение передних наплывов крыла в аэродинамичес-
кой компоновке обеспсчинаш высокие несущие свойства и аэродинамическое
качество в области больших углов атаки (а < 15°) и, кроме того, позволяет:
увеличить коэффициент подъемной силы, соответствующий началу
тряски;
- уменьшить коэффициент сопрошвления при нулевой подъемной
силе на сверхзвуковых скоростях:
- сместить положение аэродинамического фокуса вперед на больших
сверхзвуковых скоростях и гем самым увеличить аэродинамическое ка-
чество в условиях балансировки в этом диапазоне скоростей полета;
повысить эффективность элеронов (элевонов) и закрылков на
больших углах атаки при дозвуковых скоростях.
Смешение вихрей относителыю ВО при р > О
18,2е
14 6
р = 0
Вихри с
Р=10°.
0.001
о
Кпнштвыг 10,8’
пихри
^5
Дестабилизирующий
момент рыскали
10,8'
Риг. 4.3.9 Схема pat положения вихрей, сходящих с наплыва относительно .тву*10’' j
го ВС) и их влияние на устойчивость пути
ап ль в.
ДеБ> 0 *
Стабилизирующий
момент рысканья
www.vokb-la.spb.ru - Самолёт своими руками?!
с тем установка наплывов приводит к некоторым нежелатель-
^Тлсктам: возникновение кабрирующих моментов, уменьшение аэро-
ны4 , .ог0 качества в области умеренных углов атаки.
устранения кабрирующих .моментов необходима тщательная
я увязка геометрических параметров наплывов и несущих тто-
ЯЗа”носгсй в хвостовой части самолета.
ЯеР\чя повышения аэродинамического качества необходимо совершен-
овтгь аэродинамическую компоновку крыла, использовать отклоняе-
м\чо в полете механизацию.
4.4. Аэродинамические характеристики самолета
с механизацией крыла
Характерной особетшостью обтекания тонких ( с < 5 ; б% ) крыльев ма-
лого и умеренного удлинения, используемых в аэродинамических компонов-
ках сверхзвуковых самолетов, является развитие местного отрыва потока у
передней кромки. Этот отрыв снижает разрежение в области передней кром-
ки, что приводит к уменьшению подсасывающей силы и проявляется при
малых и средних ут тах атаки в увеличении сопротивления (рис. 4.4.1). С
увеличением углов атаки кромочный вихрь, как указывалось в 4.2, отры-
вается от поверхности крыла, объединяется с концевым и вызывает отрыв
ногока на концах крыла. В результате уменьшаются коэффициенты под-^
ной силы и возникают кабрирующие моменты.
Степень реализации подсасывающей силы для плоского крыла мЛ
быть определена по результатам эксперимента с помощью соотношу/*
(см. гл. 1): ™
5 1 Л2С°Д
(1)
Коэффициент /Ъ на дозвуковых скоростях лежит в предедах
Д-> = 1,5-^2.0/пХ (рис. 4.4.2), что связано в основном с упомянутыми
выптс отрывами потока, перераспределяющими распределение давления
вдоль хорд крыла и уменьшающими степень реализации подсасывающей
силы. Отличие распределения циркуляции по размаху крыта от эллип-
тического может привести, как показывают систематические расчетные
исследования, к увеличению индуктивного сопротивления не более чем
па 5 : 10% (рис. 4.4.2).
1 - Дракон
2 - Су-15
3 - Мг.Г-21
Л - Як-28
5 - МнГ 25
6 - Фантом
7 Ягуар
8 - МиГ-19
9 -Ту-28 ,
10 - F-16
11 - F-18
12 -F-5E
13 - МиГ-17
14 - МиГ-15
15 Ил-28
Риг 4.4.2. Зависимость коэффициента увеличения индуктивное сопротивления
пения крыли
Дтя моделей сверхзвуковых самолетов коэффициент S на >ia'l,blX Д
звуковых скоростях изменяется от 0,4 до 0,7, увеличиваясь с ,
личецием параметра .
Rem = pIIOC j.(V cosxmc/v) ,
rvea KPU
г.е с уменьшением стреловидности крыла и увеличением ради? fJi)!
визны носка профиля, определенного перпендикулярно передней 1 J
www.vokb-la.spb.ru - Самолёт своими руками?!
тя дозвуковых самолетов с крыльями большего удлинения па
крЫЛа- ' •‘ ^_11Ичивается до 0,9. поскольку самолеты этого тпа имеют
ранет Р ‘1еНЬшсй стреловидноегыо и большей относительной толщиной
0.5
1.0
Упсли-к-инс р,„к.
Уменьшение
I--4 МиГ 15
I-
МиГ-П
МиГ-2
-F-I6
YF-17r'-5,;
Д[ акЦ /М» Г 25
2 4 10 20-{О'* 1%,__________________
Ил-28 1 jj
0.5
2,0 М
0
2 4 6 X
"'ПК
Риг 4.4.3 Влияние числа Рейнольдса и параметров крыла на степсы» реалхзш ни ппдсасы-
иающеЙ силы I ~ толстый профиль, с=10-12%; 2 - тонкие профили, с = .Ч-=-5%, 3~ г <икло-
I енвем элементов мехыппации (по огибающей 4 - элементы механизации не отклонены
Таким образом, основным путем улучшения аэродинамики гонкого
крыла умеренного удлинения является улучшение обтекания его передней
кромки, чп> может быть достигнуто увеличением радиуса кривизны носка
профиля и подбором такого распределения крутки и кривизны срединной
поверхности, при котором для заданного коэффициента подъемной силы
критическая гонка (точка торможения потока) смещается в носик профиля
сечений и обеспечивается плавное безотрывное обтекание передней кром-
ки. В окрестности этого расчетного значения коэффициента подъемной си-
лы при закругленной передней кромке пики разрежений снижаются,
уменьшается вероятность возникновения отрыва, а при отрыве - уменьша-
йся изменение аэродинамических характеристик. Па отогнутой вниз части
передней кромки крыла появляются составляющие сил давления нанрав-
л**нные вперед, которые, подобно подсасывающей силе, реализующейся на
•’средней кромке плоского крыла при безотрывном ее обтекании, частично
компенсирую! направленные назад составляющие сил давления в средних
Хв°^°шчх частях сечений крыла. Очевидно, что подобная настройка
кв 1111И K^hL,a возможна лишь с помощью механизации передних и задних
атаки**’ ОТклоне1ГИе которых регулируется в полете в зависимости от угла
Кромк*1 1ИСЛа Уменьшение потерь подсасывающей силы па передней
^гся е применения отклоняемой в полете механизация крыла явля
тивт^СПО131П>1М Ре3оРиом уменьшения связанного с подъемной силой сопро-
Лозй,, и шеличения аэродинамического качества на дозвуковых и око-
^Ковых скоростях полета.
и м Яние отклонения носков и закрылков на подъемную силу
Ь|0-1еля НГ 7ангажа показано на рис. 4.4.4. Отклонение механизации на
с Крылом умеренного удлинения и пе]юдним наплывом позво-
•Ч’чмок,
Рис. 4.4.4. Влияние отклонения носкоп и за-
крылков на зависимости C^tn) и mj.a)
ляет увеличить коэффут„т w
подъемной силы на болыциу
л Угла*
атаки при малых дозвуковых с^*
ростях на ДСуя»0,15. ОтклонЛ
носков приводит к появлению 6
кирукнцих моментов в диапаао*1'
углов атаки до а~ 204-25°. Иры v
лах атаки а > 25° проявляется
тенденция к появлению нелиней-
ности типа “ложка" Увеличение
отклонения носков до 8НОг=3(р
+40° по всему размаху или толь
в корневых секциях сглаживает
эту пел иней пост!..
подъемной силы при отклонении
носков крыла сохраняется до числа
М=0,9. Обеспечение гладкости об-
Увеличение
водов поверхности крыла при от-
клонении механизации улучпта г
характер зависимостей С|/Я(а) паи
больших углах атаки при дозвуко
вых и околозвуковых скоростях.
Поляра крыла с отклонен-
ной механизацией может быть
представлена в следующей форме:
= <:хМ - Л,С9„ + Л2с1„ +1 Ц z С^'6,8; - £
1=1 “ i,j=l i=l
ИЛИ
Qr<? “ Or<7 min ^2^'ya
А X _ 1 У С 5.5 (4
'x<7min°« и 2- Сг a jmn •
г=1 2 «,/=1
Здесь верхними индексами 5, и бф обозначены первые и вторые
изводные аэродинамических коэффициентов но углам отклонения
тов механизации крыла и органов продольною управления. ВозмоЖ»
и точность (ох - среднеквадратичная погрешность) подобной аппроК
ции поляр иллюстрируется рис. 4.4.5. Такая же форма записи поляр
текаст из линейной теории крыла. Коэффициенты и производные.
шие в приведенные выше формулы, могут быть определены из аэрО*3|
мического эксперимента. Коэффициенты С^я. и At и их произвоДНЫ^^Н
ределякэт мешение поляры относительно оси абсцисс (асимметрий 1
www.vokb-la.spb.ru - Самолёт своими руками4.''!
. а коэффициенты ^х«0> Qrmnin и их производные смещение поляры
tn«b>.0 «И ординат.
Рис. 4.4 5. Пример аппроксимации поляр с отклоненной механизацией зависимостью (4)
Отклонение носков (предкрылков) и закрылков вниз ведет к смещению
поляры вверх (лСуп.) и вправо (ACXfllllin). Для любого заданного (расчетно-
го) значения коэффициента подъемной силы Суа р существуют оптимальные,
обеспечивающие минимум коэффициента сопротивления, yijibi отклонения
элементов механизации крыла, которые определяются из системы уравнений:
v'reO°jopt _ '-yap '-хаО'
(5)
При наложении соответствующих дополни тельных условий могут
пять определены оптимальные значения углов отклонения элементов ме-
ханизации в условиях балансировки, при заданном распределении на-
njJ'3Kii по размаху крыла и т.п.
Поляра для заданного расчетного значения коэффициента подъемной
1ги представляется формулой
сла - Схд0 + Д/ЬС^др - (Л, + 2A^2Cytfр)Суд +
величина АД? зависит от производных, входящих в запись поляры (3).
дица^И зпачсниях коэффициента подъемной силы Су„ > 0,5Суйр аэро-
Качесщ еСК°е качсство крыла с отклоненной механизацией превышает
Ния bjfJ кРЫла при 5, = 0. При непрерывном изменении углов отклоне-
но коэгьТИЗаЦИИ к1>ь,ла u соответствии с (5), т.е. прямо пропорциональ-
со»ротХФИЦИС1,т* 11Одьсмной силы (углу атаки), связь коэффициентов
Ства и,-, и подъемной силы дастся уравнением огибающей семей-
,1ОЛЯР (3) (рис. 4.4.6).
хе от “ (- .гОс А\Суа
(7)
Рис 4 4.6. Схема огибающей семейства поляр с отклоненной механизаций
В идеальном случае разность Лэ ЛЛэ достигает значения 1/(яЛ)
(полная реализация подсасывающей силы).
Таким образом, использование управ.тяемой н полете механизации
крыла эквивалентно уменьшению коэффициент zb поляры, т.е увели-
чению эффективного удлинения крыла
Анализ форму;! (G) и (7) показывает, что при использовании ненлосЛ
го крыла, рассчитанного на максимальное аэродинамическое качество, с ме-
ханизацией имеющей 2-е 3 фиксированных положения, можно рса.1изовап>
значения сопротивления, отличающиеся от сопротивления по огибающей иг
более, чем па 5-И0%. При этом, однако, увеличится коэффтщиент сопро
тивления при нулевой подъемной силе. Для плоскою крыла, обеспсчиват®
щего минимум сопротивления при нулевой подъемной силе, число фиксиро-
ванных положений механизации должно быть не менее 3-5-4. Нолес точи»*
настройка и, следовательно, большее число положений элементов хеханлВ
пии требуется в случае применения крыла с острыми передними кромками.
Анализ результатов экспериментальных исследований влияния УгЛ*
отклонения и геометрических параметров элементов механизации кры
на поляру моделей самолетов позволил установить ряд характерных я|
кономерносгей (рис. 4.4.7-4.4.11):
при отклонении носков крыла
увеличение коэффициента асимметрии поляры Ct/a, близко к
ному при < 20°: при больших углах отклонения носков коэфФипИ ,
Суй. изменяется мало;
минимальный коэффициент сопротивления изменяется по ква.ЧЯ
тичиому закону; jj
увеличение максимального аэродинамического качества достав
ся при небольших углах отклонения носков (Sllac « 5°): J
www.vokb-la.spb.ru - Самолёт своими руками?!
больших значениях коэффициента подъемной силы (Су„=0,7^1,0)
ш тпкпинамичсскою качества может составить ЛК= 1,5 :-2,0;
уие.ц1чение
Рис 4 4.7 Влияние отклонения носков и закрылкои на коэффициент несиммегрни поляр С^.
_От*л°нении простых закрылков
<Кгкл(л"ВСлиЧ(П,Ис коэффициента асимметрии поляры меньше, чем при
Суа«(б Носкив; зависимость Cj,„.(53) может быть, как и зависимость
ал,,Р°ксимирована ломаной линией;
й°льц1е“е личение коэффициента сопротивления примерно такое же или
гем при отклонении носков;
Пе‘м При Ли'1снис максимального аэродинамического качества меньше,
Илы £ ’lk-roHciiHn носков, а качества при коэффициентах подъемной
Ь,7 1 о примерно такое же
Рис. 4.4.9. Влияние отклонения носков и закрылков на поляру и аэродинамическое качет
модели самолета при числах М = 0,6, 0,9 и 1,2: / - 811ис = 0, 83 = 0; 2 - 3Ч1Х = 2(Р, 8а_ О
6^-0, б, = 20°
коп н закрылков на коэффициент
увеличения индуктивного сопротив-
ления Аг (полная модель)
Увеличение максимального аэродинамического качества как при tft
клонении носков, так и при отклонении закрылков наблюдается видна
до максимальных значений коэффициентов подъемной силы и может ф
ставить при этом ЛК «s 1. В обоих случаях в экспериментах обнаружив
ется незначительное увеличение коэффициента Дз (рис. 4.4.10).
Качественный характер изменения :т>
1яр и зависимостей К(Су0) при отклонен»
носков и закрылков сохраняется до чмМБ
М = 0,8-:-0,9. Начиная с чисел М»0,7 »
тенсивно изменяются коэффициенты
(уменьшается) и Схв1Н111 (увсли,шваРЯ*
тем больше, чем больше углы отклони®
носков или закрылков. Уменьшаются
гимальные (обеспечивающие минимум
противления) утлы отклонения эдея^в
механизации. При числах М £ 0,9 °тК^И
пис механизации практически нс нривчМ
к увеличению максимального аэро^^И
мического качества при больших значе
коэффициента подъемной силы.
Па рис 4.4.11 представлен нр^^И
закона изменения углов отклонений
ков и закрылков в зависимости от
атаки и числа М, при котором обеСЖ-
вается минимум сопротивления.
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис 4 4 11 Законы отклонения носков и закрылков в зависимости от утла атаки и числа М
Увеличение относительной площади носков и закрылков (за
счет увеличения размаха) приводит при малых дозвуковых скоростях к уве-
личению коэффициентов Cxeuiiii’ и А > (при заданных 51И1<. и 53) и их
производных и А^х, Л&3 примерно пропорционально площади.
Увеличение относительной хорды носков слабо влияет на аэродина-
мическое качество.
Изменение радиуса кривизны носка профиля р)|(Х от 0 до
0,5% приводит к уменьшению коэффициента Л2 11 увеличению аэродина-
мического качества па дозвуковых скоростях при неотклоненных носках.
Аэродинамическое качество модели с отклоненными носками крыла
практически нс изменяется. На сверхзвуковых скоростях изменение ра-
диуса кривизны носка в диапазоне = 0-г 0.23% практически нс изме-
няет аэродинамической) качества как с отклоненными, так и с псоткло-
иенными носками. При рпое = 0,5% значительно увеличивается коэффи-
Utein сопротивления при нулевой подъемной силе.
ла - с*зг^С!КТИВНосТь применения отклоняемой в полете механизации кры-
ж КаК с1,СДСТва увеличения аэродинамического качества самолета, а так-
ль д Чтимых и максимальных значений коэффициента подъемной си-
плаПОВЬШ1аегся’ если при отклонении механизации крыла сохраняется
‘Вноси, обводов его поверхности (рис. 4.4.12).
плыц^ЛеТН°'посаА°чная механизация на крыльях с передними на-
ХаРак-МИ ИМес1 на режимах взлета и посадки (а =10-5-15°) такие же
Даете Истики, как и на крыльях без наплывов При а > 12° наблю-
гпецНь ^Величе1,ие эффективности закрылков, обусловленное повы-
KpoM,.?f разРеже,1Ием. связанным с образованием вихря на передних
УПели, 1ганлыва. Применение щелевой и многозвенной механизации
Швает ее эффективность.
Ряс 4.4.12. Влияние плавности обводов при отк.юшчпш носков (гибкая механизация) м
авридниамнчссксх': качество модели самолета: 1 - гибкая механизащгя, 2 - обычная ме&цц*
кия, .? - огибаюпгие; 811ог “ 20п (в icx случаях, когда он отклонен)
Таким образом, несущие свойства и аэродинамическое качество само-
лета могут быть существенно повышены в широкой области углов ащкъ
на дозвуковых и околозвуковых скоростях при использовании сочетания
узкого наплыва достаточно большой площади (5'Ш1 = 0,1+0,13) с остргтии
передними кромками (обеспечивает высокие несущие свойства и аэ»>
динамическое качество в области больших углов атаки) с крылом уме-
ренного удлинения и стреловидности (Х = 3:-4, %цК ~ 30-5-40"), имеющим
отклоняемую в полете в зависимости от угла атаки и числа М механизм
цию. Это обеспечивает максимизацию аэродинамического качества в а>
ласти малых и умеренных углов атаки и дальнейшее повышение несущи»
свойств и качества в области больших углов атаки.
4.5. Аэродинамические характеристики самолета
с адаптивным крылом
Дальнейшим развитием идеи применения отклоняемой в полете MW
низании является адаптивное крыло - многофункциональный орган»
вижные элементы которого отклоняются специальной системой упраы
ния, непрерывно при изменении условий полета: числа М, угла эта»
перегрузки, характера выполняемых маневров, атмосферных
ний. Для повышения эффективности адаптивного крыла цслесообрав
сохранить плавность обводов его поверхности при отклонении 1ЮД
вых элементов.
Адаптивное крыло позволяет:
- обеспечить высокое крейсерское качество и качество при м' ’Н
нутом придания срединной поверхности крыла оптимальной формы» Ч
деляемой из условий митшмума сопротивления в условиях балансиров* ' Я
- уменьшить сопротивление при полете с большой скорое
плоская срединная поверхность;
www.vokb-la.spb.ru - Самолёт своими руками?!
-iv4Uihh* поперечную управляемость на больших углах атаки
синхронною несимметричного отклонения подвижных элементов в
ИУТ<?М [ хВосговых частях консолей крыла (носков и элеронов);
К х'0В,’^бсС11СЧигь прямое управление подъемной силой путем синхронного
” ,JCH1W кривизной крыла и отклонением горизонтального оперения;
чирав- сНьШИТЬ изгибающие моменты при полете с большими перегруз
путем преимущественного отклонения корневых сечений закрылков;
каМ” снизить нагрузки при полете в неспокойной атмосфере путем
-юнсния секций закрылков в зависимости от внешних возмущений.
° Уменьшение сопротивления самолета может быть достигнуто за счет
оверЛ1енствования крыла в двух направлениях. Во-первых, па совре-
нных самолетах применяются крылья с незначительно деформиро-
ванной срединной поверхностью. Использование адаптивного крыла с
плоской срединной поверхностью позволяет уменьшить сопротивление
самолета при нулевой подъемной силе. Во-вторых, на больших углах
атаки в месте излома верхней поверхности крыла, возникающего при от
клонспии обычной механизации, происходит о1рыв потока, что приводи!
к падению ее эффективности Применение на адаптивном крыле носков с
большой относительной хордой и введение в конструкцию гибких эле-
ментов обшивки для сохранения плавности обводов поверхности позво-
ляет затянуть эти нежелательные явления до больших углов атаки.
Эффективность указанных мероприятий проверена па тематической
модели нормальной аэродинамической схемы с крылом X = 4, Т] - 4, со
стреловидностью Хпк = 38е (рис. 4.5.1). Модель испытана с исходным
крылом, имеющим умеренную, характерную для современных самолетов
Деформацию (относительная кривизна изменяется от корневого сечения к
’ ондевому от 0,6 до 1,3% местной хорды, крутка составляет -2°) и отно-
итсльную толщину 5%, крылом с плоской срединной поверхностью и
четырьмя крыльями, моделирующими адаптивное крыло с идсализиро
Рис. 4.5 1. Схелм модели сверхзвукового самолета
ванной (гибкой) механизацией. Этим крыльям была придана деф0
ция, рассчитанная по линейной теории при заданных локрцТиЧ(/Ма*
числе М и коэффициенте подъемной силы в результате решения см(Яг. М
ной задачи аэродинамики. По консолям крыла задавалось распредолИ
нагрузки, характеризующееся отсутствием особенности у передней кту
ки и эллиптическим распределением циркуляции по размаху, т.е. выц0-
пились условия минимальности сопротивления давления тонкого КрцПа I
дозвуковом потоке газа. Фюзеляж с наплывом моделировался плоски
пластиной, угол атаки которой подбирался таким образом, чтобы и ра„
пределении циркуляции по размаху не было провала. В одном из вд)1(
антов дополнительно накладывалось условие балансировки модели без
горизонтального оперения, которое выполнялось за счет смещения вп
ред задаваемой в расчетах линии центров давления сечений крыл
Расчеты проведены при числе Мр = 0,6 набегающего потока и коэффщщ
Рис, 4.5 2 Влияние умеренной деформации срединной поверхности крыли на АЛ
ли. 1 - крыло с плоской срединной поверхностью, 2 крыло с умеренной дефор^аи И
Сравнение аэродинамических характеристик модели с исходным
лом и с крылом, имеющим плоскую срединную поверхность, показа.^
различия касаются в основном сопротивления (рис. 4.5.2). Придали-
.ту умеренной деформации приводит к существенному увеличению
малыюго аэродинамического качества, но вместе с том сопровождав
желательным увеличением сопротивления при пулевой подъемной
Таким образом, применение адаптивного крыла с плоской срсДИ^
верхноегью, деформация которого на режиме максимального каче
дет доспи ат ься за счет отклонения механизации, позволяет умеИьиПЯ
эффшшеш сопротивления самолета при нулевой подъемной силе 1 PJ
но на 0,005 при дозвуковых скоростях и на 0,0025 при сверхзвуковая
www.vokb-la.spb.ru - Самолёт своими р;
Рнс. 4.5.3. В паяние степени деформации срединной поверхности крыла па зависимости
С,„(а) К(С\„) и гл/С^), модель без ГО, М - 0,6
На рис. 4.5.3 показана возможность повышения аэродинамического ка-
чества модечи за счет увеличения масштаба деформации консолей крыла.
Данные получены при дозвуковых скоростях набегающего потока на м^ели
без горизонтального оперения с крылом с расчетным значением коэффици
eina подъемной силы 0,5 и с двумя крыльями с увеличенным в 1,6 и _. раза
масштабом деформации, что формально соответствует расчетным цоэффици
сигам подъемной силы 0,8 и 1. По сравнению с плоским крылом приросi
аэродинамическою качества ХК ~ 4-г 5 при С!/а = 0,5+1
Результаты сравнения огибающей кривых аэродинамического качеш
Ва модели с. идеализированным адаптивным крылом с уровнем. дос1ижи
мым на модели с крылом, имеющим умеренную деформацию и обычною
'юханизацию, приведены на рис. 4.5.4. Здесь представлены две огибаю-
Щи₽: одна для идеализированной адаптивной механизации (/)• вторая
Огибающая кривых аэродинамического качества, соответствующих раз^
углам отклонения механизации крыла с умеренной деформацией
с Выигрыша в максимальном аэродинамическом качестве в данном
м Чае нет. поскольку крыло специально спрофилировано под режим
бопх ИМа'1Ьпого аэродинамического качества. На режиме маневра при
oGbp,11111- значениях коэффициента подъемной силы, где отклонение
‘-а м°ханизации не может предотвратить образование отрыва пото
вредней кромки, приращение аэродинамического качества за счет
11гНия адаптивного крыла составляет 1,5 + 2 единицы.
Рис. 4.5.4. Эффективность адаптивной механизации: 1 идсадизнрованная адаптивная
ханизашш, 2 - крыло с умеренной деформацией и обычной механизацией,, 3 крыло с »*•
рентой деформацией без механизации, 1 Cxtt - Cm(s + (7^/лад 5 - Ста=Сто0-г С*й/с£
механизацией (М - 0,6)
На рис. 4.5.5 приведены экспериментальные данные, демонстрй^М
тпие возможность балансировки адаптивной механизацией без
качества Сравниваются аэродинамические характеристики модели
мя деформированными крыльями с одинаковыми расчетными значении
числа Мр ~ 0,6 и коэффициента подъемной силы 0,5 и различны?1
жением задаваемой в расчетах линии центров давления сечений. ® уяИ
www.vokb-la.spb.ru - Самолёт своими руками?!
она располагалась па .линии 43% хорд. Расчеты показали, что в
с.1УчаС^£ае точка перегиба средней линии профиля находится у задней
этом и- "1ла н искривлена преимущественно носовая часть крыла, по-
кроМК еГ можно условно трактовать как адаптивное крыло с отогнутой
эТС)М? едией кромке механизацией. Во втором случае накладывалось ус-
1,о пср^а 1ансировки модели без горизонтального оперения. Оно выпол-
ловпе^ сдвига вперед линии центров давления крыла до ноложе-
11Я1°соответствующего 29% местных хорд. Изменение срединной поверх-
1ИЯ и заключается в увеличении угла отклонения носка и появлении S-
Ибпазности профиля, которая может быть достигнута отклонением вверх
механизации задней кромки. Видно, что аэродинамическое качество двух
кпь(1ьсв примерно одинаково при различных значениях момента танга-
жа Анализ линий равного наклона оптимальной срединной поверхности
позволяет сделать вывод о рациональной форме в плане подвижных эле
ментов адаптивного крыла.
С = 0,5, М, = 0,6; .гпл(Г) = 0,29
Рис. 4.3 6. форма отклоняемых иоскоп для адаптивного крыла / - адаптивное крыло, 2 -
xiunoe крыло, 3 -линии равного наклона срединной поверхпемти по отношению к СТФ
бти , СЧС1и 1,оказали (рис. 4.5.6), что в передней части крыла изоклины
• ‘ зки к прямым линиям, параллельным передней кромке. Поэтому для
Xv . ?Нта алап,ииного крыла рекомендован носок с неизменной но разма-
носка °ЛЮТНО^ ХоРА°й' Увеличенной по сравнению с хордой исходного
де г‘ и кубическим законом увеличения угла отклонения носка но хор-
круткГ ОТкло,,е1,ии такого носка крыло приобретает отрицательную
ионные И * ВеличииакяцУюся к концам крыла кривизну. Расчеты, выпол-
еггогцу 110 Мст°АУ декретных вихрей, показали, что в месте сочленения
НИя и г ° lI<JCKa с кессонной частью крыла нет резких изменений давле-
ется Ню- Г ОТК1ОИении такого носка плавное натекание потока реализу-
т^Вного >П> RCe^ 11Г-РеДНей кромки. Если хорда поворотных носков адап-
3”аЧец1Ь[ РЬ1Ла НР будет выдержана постоянной ио размаху, оптимальные
Разли,1И У1Лов 01 клонения секций носков по размаху крыла окажутся
"Риведуд И' Ь1СЛ11 между секциями, отклоненными на различные углы,
к Увеличению сопротивления.
Таким образом, экспериментальные исследования показывают, чт0
моделях с крыльями, имеющими оптимальные срединные повсрхиОсти ,1а
ализутогся выигрыши в сопротивлении. близкие к теоретически
ним (S =: 0,8). Для самолета с крылом умеренного удлинения и стрр*'
вндносги (к - 4, 7_п:; * 40°) можно ожидать увеличения аэродинамич<^И
качества по сравнению с самолетом, имеющим плоское крыло, ДКШа
на крейсерском дозвуковом режиме и ЛК * 4 на режиме маневра'
С(/а = 1,0 (рис. 4.5.4) с
4 6. Статическая устойчивость сверхзвукового самолета
на больших углах атаки
Значительное взаимодействие несущих, стабилизирующих и управ-
ляющих поверхностей самолета с передними наплывами крыла привело к
необходимости скрупулезных исследований по выбору формы, размсяд
и положения органов стабилизации и управления совместно с выбором
параметров наплывов, по отработке средств местной аэродинамики, изме-
няющих в нужном направлении структуру обтекания крыла, наплыва,
носовой и хвостовой частей фюзеляжа (перегородки, вихры енераторы,
ребра, гребни и т.п.), а также но выявлению возможностей использова-
ния механизации крыла в целях обеспечения устойчивости и управляе-
мости относительно всех трех осей в широком диапазоне уыов атаки (в
том числе и закритических).
Основными путями обеспечения продольной статической устойчивости
на больших углах атаки при дозвуковых скоростях являются, как было
указано выше (см. 4.2), увеличение площади и удлинения горизонтального
оперения и/нли увеличение ширтгны хвостовой части фюзеляжа (боковые
ребра, схема с несущим фюзеляжем) Результаты систематических иссле-
дований этих элементов показывают следующее (рис. 4.6.1 и 4.6.2).
- Пикирующие моменты от несущих поверхностей, располагаемых в
хвостовой части фюзеляжа, том больше, чем больше удлинение и
щадь лих поверхностей. При одинаковых площадях пикирующие момы
ты от боковых ребер в хвостовой части фюзеляжа меньше, чем от горип
зонтального оперения. J
Пикирующие моменты, создаваемые горизонтальным опере’0’
увеличиваются при опускании оперения ниже плоскости хорд крыла
при увеличении его отрицательной V-образности.
Моменты тангажа крыла с фюзеляжем зависят от формы попереу^И
сечения фюзеляжа. Переход от эллиптического сечения к круьтоМУ с
выми ребрами но всей длине приводит к появлению кабрирующих моме
- Моменты ташажа изменяются в сторону кабрирования при Ус1аУ"^И
разнесенных гондол двигателей иод плоским несущим фюзеляжем, а Иа . i
ших угтах а ки - при установке двухкнлевою вертикального онсрс’°ЧЯ J
www.vokb-la.spb.ru - Самолёт своими руками?!
Риг. 4 6 1 Влияние размеров и положения ГО, ширины хвостовой части фюзеляжа па
ро юльпую статическую устойчивость модели: / -Sro -0,2 <-2,7; 2 -5го = 0,25, = 3>2;
У - р<<рс -Vp = 0, 07; 7 ребро Sp = 0,168
При выборе компоновки хвостовой части высокоманевреппого самолета
следует учитывать, что установка на пей несущих поверхностей ведет к из-
менению характера зависимости поло-
жения аэродинамического фокуса са-
молета от числа М В аэродинамичес-
ких схемах с широким фюзеляжем
(или с боковыми ребрами в хвостовой
части фюзеляжа) наблюдается тенден-
ция к сдвигу фокуса назад в сверхзву-
ковом диапазоне, а в схемах с обыч-
ным фюзеляжем - вперед.
остановка гондол под несущим
Фюзеляжем приводит на дозвуковых
к ^Оль,иих сверхзвуковых скоростях
аэР°Динамического фокуса
киле ^)ИС 4-6 2) Установка двух-
Незпа«ОГи ВеРТикального оперения
аэпт/,ИГеЛ1’П0 вменяет положение
Динамического фокуса
СвойсГв 1ИЗ МатеРиалов по несущим
тов 1а* 1 и ХаРактерис гикам момеи-
Р^ли-щГ^3 Молелей самолетов с
к°нфи1 МИ Вариантами наплывов и
ф1с^ляжаЦ,1ЯМИ. хвостовых частей
WblCf,KMc 1, Показал> что достаточно
"?МЫе *1СсУ1пие свойства и прием-
Тодольные характеристики
Рис. 4 6 2. Влияние формы фюзеляжа па
закисимость го,(а) и положение аэродина-
мического фокуса от числа М
Рис. 4.6.3. Влияние геометрических парамет-
ров ВО ла путевую устоичтиичь модели: / -
сднокилсиое ВО. 5ВО=0,27, Хви=1,5; 2-
Л-То -0.27. 7W- 1.5; 3 - =0.19, - 1,3;
4- -S^-0,17. /w-l,0;5 влияние увели-
чения иющадк и удлинения ВО (Л'^-
= 0.17-^0,27, I 1.5)
могут быть обеспечены при относительной площади наплывов в г, ’
5ц п = (),1-г-0.13 (.Slin - 0.18-5-0.25 с учетом подфюзеляжной части)
рине хвостовой части фюзеляжа - 0,25=0,35 размаха крыла (ехоцД
несущим фюзеляжем). При обычной для однодвшагельного или -нк.
двигательного самолета ширине хвостовой части фюзеляжа нриемЛем“Х"
значения площади и удлинения горизонтального оперения могут варъи*
ваться в пределах S т= 0,25-5-0,38, '-го = 3:3,5.
Анализ характеристик боковой статической устойчивости моделей
гов с передними наплывами крыла показал, ’по при малых дозвуковых ско
ростях диапазон углов атаки, в котором обеспечивается боковая устойчивое^
расширяется при увеличении площади и удлинения вертикальною оперения t
достигает а *30° при = 0,25-5-0,3 и 1,4-5-1,7 (рис. 4.6.3) Вертикаль-
ное оперение может быть как однокилевым, так и двухкилсвым.
Для самолета с двухкилевым вертикальным оперением устойчивость
нуги при больших углах атаки опре-
деляется расположением вихрей I
наплыва между килями (рис. 4.6.4 -
4.6.5).
Моменты крена и рыскания ва
больших углах атаки зависят от
формы в плане сочленения крыла с
наплывом. В случае резкою пере-
хода (передняя кромка наплыва »
месте соединения с. передней кром-
кой крыла параллельна плоскости
симметрии самолета, как, например
в случае готического наплыва) по
ложенис вихря с наплыва являете»
стабильным, зависимости пь/а.р) •
»^(а,0) носят достаточно регуМ*"
ный характер обеспечиваются етР*'
нательные значения производных
и в широком диапазоне У1^
атаки. В случае плавного перс^И
положение вихря нестабильно,
внешности wx(a, р) и Шу(а., Р' ™
ко изменяются.
Существенную роль игра0*J
филировка наплыва: скругл^^^Д
редких кромок ухудшает о°*у^И
устойчивость. Для мапевренйО
молота необходимо заострение
дпих кромок наплыва (рис. 4.»Я ।
www.vokb-la.spb.ru - Самолёт своими руками?!
Риг. 4.6.5. Влияние утла развала килей на
путевую и поперечную устойчивость модели
Рис. 4.6.4. Влияние положения двухкиле-
в<>г<1 ВО по ширине фюзеляжа на путевую
и поперечную устойчивость модели
такжеЛ¥Чше1ГИе боковой устойчивости па больших углах а гаки достигается
Пе1*’1И7Ме^°1Г^ИЯП1я’'П1[’ УЛУчшаю,11ИМИ обтекание консолей крыла: скругление
ПеР,.” J* KiX)MOK> установка перегородок в средних сечениях консоли, откло-
носков крыла.
льве Угла отклонения носков крыла до 5|ИХ- - 40° приводит на ма-
ки а > ^^ОВЬ1Х скоростях к улучшению боковых характеристик на углах ата-
°г’Оюце7 Хорошие результаты дает дифференцированная настройка углов
Не»Ых у Я Носков: малые углы отклонения концевых секций и большие кор-
•^висим ЧевЬ1,1С11ие утла отклонения кошювых секций приводит к улучшению
5Тлов ;ir. Г И Мом«гга крена от угла атаки и скольжения гих(а,0) в диапазоне
'^ег за, Г ° ~ 1 ^19°. а увеличение утла игклонешгя корневых секций улуч-
Игл.мости (а) и п?у(а) при углах атаки а > 23-е26° (рис. 4.6.7).
Рис 4.6.7 Влияние отклонения носков крыла па путевую и поперечную устойчивость модс^
Влияние формы носопой части и подфюзеляжных гребней па путевую и поп
Pin. 4.6.8
речную устойчивость модели
При околозвуковых скоростях отклонение носков на углы
5НЛ(- ~ 203 не приводит к улучшению характеристик боковой устойчивости-
Расширение диапазона углов атаки, в котором обеспечивается усто
вость пути (< 0) может быть достигнуто применением гребней на
ней поверхности хвостовой части фюзеляжа, а также переходом от
формы поперечного сечения носовой части фюзеляжа к эл.тилтйч^И
(рис. 4.6.8). Подфюзеляжные требни являются эффективным ерс;
улучшения боковой устойчивости на больших сверхзвуковых скоростям
4,7. Некоторые выводы по аэродинамике сверхзвукового само-1еТа
с крылом сложной формы
Комплекс исследований по аэродинамике самолетов с передни*11’
пдывами крыла показал, что для таких самолетов характерно, сильное 1
модействие элементов аэродинамической компоновки и многозначно01
www.vokb-la.spb.ru - Самолёт своими руками?!
аЭрОдипа>пг1еские характеристики Так, наплывы крыла служат
высоких несущих свойств, гак и для улучшения боко-
как ЛпЯ 71ИВОСТ11 в области больших углов aiaiui: отклонение носков крыла
рой устои увеЛ11чение аэродинамического качестве! в широком диапазоне
цбесшчи я' позволяет улучшить устойчивость и управляемость самолета.
углов а; ^ики как продольной, так и боковой устойчивости зависят от иа-
Характ 1 11аПЛ1ЛЬОЦ горизонтального и вертикального оперений. Установка
ра 'Лтевого вертикального оперения изменяет и моменты тангажа, а уста-
ДВ'Х'1 горизонтального оперения - моменты крена и рыскания. Боковая ус-
Н°гчивость изменяется и при отклонении горизонтального оперения.
Т° Изучение всего многообразия аэродинамических связей между элемен-
тами аэродинамической компоновки позволило установить следующее:
1 Передний узкий, гонкий, с острой передней кромкой наплыв в
корневой части крыла обеспечивает высокие несущие свойства и аэроди-
намическое качество в области болыних_углов атаки.
Относи тельная площадь паплыва S,, (в потоке) может быть в пре-
делах от 0,1 до 0,13 0,15. Уменьшение площади снижает подъемную си-
лу, увеличение ее ведет к возрастанию кабрирующих моментов.
2. Базовая трапеция крыла при умеренных значениях удлинения и
стреловидное!и до и Хак баз “40° обеспечивает достаточно высокое
аэродинамическое качество в крейсерском полете па дозвуковых скоростях.
Срединную поверхность крыла желательно иметь плоской для обес-
печения высоких скоростных характеристик в трансзвуковом и сверх-
звуковом диапазоне скоростей.
3. Крыло должно иметь механизацию передних и задних кромок, от-
клоняемую в полете.
Назначение механизации - повышение аэродинамического качества в
крейсерском полете и при маневре на дозвуковых скоростях и улучшение
Устойчивости и управляемости при больших углах атаки.
4. Для компенсации кабрирующих моментов, создаваемых наплывами, в
квехловой части фюзеляжа целесообразно размещение несущих поверхностей.
f «эможные схемы: с несущим фюзеляжем (широкий несущий центро-
маха ИЛ>1 ФГОзеляж с боковыми ребрами с шириной не менее 0,3+0,35 раз-
крыла) и с обычным фюзеляжем и горизонтальным оперением уве-
«Шой площади и удлинения - не менее Sro = 0,25 + 0,38 и Хг0 " 3 + 3,5.
коСТя ^иРпзон1альнос оперение целесообразно располагать ниже плос-
тацав .РД кРЬ!ла. Возможна отрицательная V-образность. Чем ниже ус-
MtHbii е аеТся гоРн^онтальпос оперение по отношению к крылу, тем
6 ^^абРиРУКлти1с моменты на больших углах атаки.
агНоси оперение может быть однокилевым или двухкилевым с
_ сельцо» площадью и удлинением не менее = 0,25 + 0,3 и
311,4 17т
' 1 акое оперение позволяет обеспечить сохранение боковой ус-
На Дозвуковых скоростях до утлов атаки по мопсе а - 25 : 30°.
Двухкилевос вертикальное оперение предпочтительнее для Сх ’
несущим фюзеляже.'!, однокилевое - для схемы с обычным ф’Юзеляж *
При двухкилсвом вертикальном оперении расстояние между ки> 1
в их верхней части должно быть больше, чем размах наплыва. ИСс,ЯМ11
вапия показали, что для компоновки с несущим фюзеляжем ц0 Ср ' Jt>"
нию с компоновкой, имеющей обычный фюзеляж, можно ожидать: °
- небольшого увеличения несущих свойств на сверхзвуковых СКс
ростях и соответствующего улучшения поляры из-за некоторого увещрць
ния площади плановой проекции;
- некоторого увеличения волнового сопротивления - расчленение
объемов самолета в схеме с несущим фюзеляжем на отдельные элементы
(головная часть с фонарем, гондолы двигателей) обусловливает увели-
чение площади и углов наклона к строительной горизонтали самолета
поверхностей, ограничивающих эти объемы; возможна неблагоприятная
интерференция этих объемов;
- некоторого увеличения сопротивления трения и сопротивления
производственных неровностей (заклепки, винты и т.п.); это сопротив-
ление пропорционально площади омываемой поверхности самолета, а в
схеме с несущим фюзеляжем омываемая поверхность фюзеляжа при том
же объеме больше из-за большей ширины фюзеляжа н поперечных
сечений, имеющих более сложный контур; кроме того, как и па сверх-
звуковых скоростях, возможна неблагоприятная интерференция элемен-
тов компоновки с несущим фюзеляжем;
- большего различия в положении аэродинамического фокуса на дозву-
ковых (М = 0,8) и больших сверхзвуковых (И = 2+2,5) скоростях из-за
увеличения ширины хвостовой части фюзеляжа; это различие в условиях
балансировки компенсируется отмеченным вьппс улх чтением поляры.
В обоих рассмотренных вариантах компоновки с передними наплы
вами крыла достигаются значительно большие несущие свойства при
больших у г чах атаки и дозвуковых скоростях, чем в компоновке без на
плывов, большие значения производной С“й при дозвуковых скоростях-.
При равных относительных площадях миделя фюзеляжа сравниваемая
вариантов меньший коэффициент сопротивления при нулевой подъем
силе на сверхзвуковых скоростях може! быть получен в компоновке
передними наплывами крыла и обычным фюзеляжем. В этом же ваи_
те достигаются паиболыпи; значения максимального сбалансирован!
аэродинамического качества на сверхзвуковых скоростях
Список литературы к главе 4 *
1. Некоторые вопросы аэродинамики деформированного крыла произвольной
плане. Сборник работ //Тр. ЦАГИ, 1970. с,цолеТ*
2. А.Л. Пмленко Оптимизация параметров адаптивного крыла маневренною
нормальной схемы И Тр ЦАГИ, 1989 Зцгл”“
3. В. А Песецкий. Исследование топологии обтекания моделей самолетов I ‘ I
схем на больших ' чах атаки //Тр. ЦАГИ, 1989. Л
www.vokb-la.spb.ru - Самолёт своими руками?!
Глава 5
орпДИНАМИКЛ ВОЗДУХОЗАБОРНИКОВ И СОПЛ
AJ СВЕРХЗВУКОВЫХ САМОЛЕТОВ
.„динамика воздухозаборников (ВЗ) и реактивных сопл (PC) яв-
/ , 1 им из самостоятельных и важных разделов общей аэродинами-
ЯеГСЯоХ (BVKOBbix самолетов. Она включает в себя исследование течения
ЬИ С ai iv воздухозаборников и реактивных сонл, вопросы согласования
П 1jxf работы воздухозаборников и сопл с режимами работы двига
^етя вопросы интерференции входящего потока и выходящей из двига-
тетя струи с обтеканием планера самолета.
Непрерывный рост энерговооруженности сверхзвуковых самолетов
предопределяет все большую роль силовой установки и ее элементов -
воздухозаборников и реактивных сопл — в обеспечении высоких лстно-
1ехнических данных самолетов. В связи с этим все большее значение
приобретают вопросы оптимизации силовой установки ее интеграции с
планером. Решение этих вопросов требует большого объема эксперимен
тальных и расчетных исследований.
5 1. Характеристики воздухозаборников
Сверхзвуковой воздухозаборник самолета - это устройство, предназ-
наченное для забора и подвода к двигателю необходимого количества
воздуха из окружающей среды и осуществления эффективного его тормо-
жения до дозвуковой скорости за счет преобразования кинетической
энергии в потенциальную энергию давления. Более широким понятием
является входное устройство - это часть силовой установки, включаю-
щая воздухозаборник, средства его регулирования, защитные устройства.
с Процесс сжатия потока в воздухозаборнике относится к наиболее
ложным гроцессам газодинамики. Сложность возрастает с увеличением
вослоСТИ 11а^Р1 аюи1СГ0 потока и определяется не только возрастанием не
апазоп'1ИМЬ1Х Поте,зь энергии в воздухозаборнике, но и уменьшением ди-
Н а С1° Уст°й,,Ииг)й работы, который ограничен сильными колсбания-
сУЩсстт"1С П1Л По?,11,аясом) воздухозаборника и двигателя Процесс сжатия
40лета 1,1,0 заиисит ог условий полета самолета и обтекания частей са-
Акт**,ИЯ,Ои1ИХ 1Ш Поток ПРРел воздухозаборником
к°в, ос ^’1Ьность проблемы компоновки и разработки воздухозаборни
Рсделя Ино Лля НОШ,1Х типов летательных аппаратов и двигателей, оп
м°Нно пРеж'1е всего тем, что в воздухозаборнике (который одновре-
’Фи 1ЯРТся элементом и самолета, и двигателя) обеспечивается а за-
COr-,iacoR. 1ОДСЛЬНЬ1Х и натурных испытаниях проверяется правильность
При н,1я характеристик самолета и двигателя.
*l*tKa ца ( динамическом проектировании и компоновке воздухозабор-
СаМолете \ чшываются как характеристики обеспечивающие эф-
фективность сто работы, так и характеристики, обеспечивающие во -1
иость его эксплуатации. Требования к эффективности существсцНЬ1 Л
типовой траектории полета, а эксплуатационные характеристики и.
во всем возможном диапазоне режимов полета самолета и работы ,
теля (включая предельные и особые). г’
Основные геометрические параметры. Воздухозаборник
гонг из сверхзвуковой части, дозвукового диффузора и самолетного^
нала (рис. 5.1.1. 5.1.2). Основными элементами сверхзвуковой части
ляклся: профилированный клип (для плоских воздухозаборников)
конус (для осесимметричных воздухозаборников), переходный участок
обечайка, горло - участок канала, имеющий минимальную ллоищдь
ковые щеки (для плоского воздухозаборника), система управления (отс*.
сывания или перепуска) пограничным слоем. Определяющими парами-
рами профилированного клипа (или конуса) является начальный, коне,
ный углы наклона поверхности dj, 5К (0| и Gs) и число ступеней и по-
верхности торможения, определяющие длину /_к поверхности торможе-
ния до плоскости входа и степень внешнего торможения сверхзвуковое
потока в косых скачках уплощения. Размеры воздухозаборника но вход,
определяются площадью входа равной площади проекции входа в<ю
духозаборнпка на плоскость yz. Для плоского воздухозаборника f'us
учета скругления обечайки Го = 6Л, где Ъ - ширина, a h - высота возду-
хозаборника. Для осесимметричного воздухозаборника Го=^о/4 глг
- диаметр по перед пен кромке обечайки.
Рис 5.1.1. Плоский воздухозаборник: I ~ поверхшх'ть сжатия; 2 - щека: 3 11°ДВ“*Я
не,ц.; 1 ~ высота входа; 5 - обечайка; В - створка подпитки; 7 - «норка пер'*_• Ч
двигатель; 9 линия uctiqxJB сечений; 10 — тео;хггическая илх-кость воялухозабор*^^И
высота горла; 12 - клин слива пограничной» слоя; 13 - крыло (или другой элемент “Ч"
www.vokb-la.spb.ru - Самолёт своими руками?!
Риг. 5.1.2. Осесимметричный воздухозаборник' 1 - центральное тело (конус); 2
обечайка, У пилон: 4 - жалюзи: 5 - створка подпитки; 6 - створка перепуска
Основными параметрами обечайки являются ее внутренний 5, внеш-
ний углы наклона (рис, 5,1.1) и ос длина. Определяющими парамет-
рами дозвукового диффузора и самолетного капала являются график
распределения площади по длине, эквивалентный угол расширения до-
звукового диффузора
у/2 = arctg
\21 /
где / - расстояние от начала дозвукового диффузора до рассматриваемо-
го сечения, F отношение площадей на выходе и входе дозвукового
Диффузора, <УНКЗ эквивалентный диаметр, соответствующий площади F
_'.1 ВХ(-’ле в дозвуковой диффузор, и относительная длина канала
-к где LK - длина капала от плоскости входа воздухозаборни-
^Ло сечения соотвеютвуюшего началу двигателя, d п - диаметр канала
’’•‘«ходе в двигатель
СЪ1 Система управления пограничным слоем (УПС) в виде системы отса-
х ‘ игя пограничного слоя с центрального тела или поверхности сжатия
Пр/,<ГеРизуется отношением площади F0TB отверстий, выполненных в
«Икд ~ИР°1,апно'1 клине или конусе, к площади входа Fq воздухозабор-
а /лв -^агв/^о- Система для слива пограничного слоя с элементов
Велич* ’ .,’ЛИзи которых установлен воздухозаборник, характеризуется
Чйда э’н°й отношения высоты щели слива Лщ.гл к расстоянию /-Пл 01 на‘
Фит ЛС‘чента планера (например, крыла или фюзеляжа) до кромки про-
Рйег P°UailHoro клина (или конуса), Лщ.сл =Лш.Сл/Ли> формой и геомет-
*еНнс сФИлиРова1нюго клииа-растекателя нограничногр слоя, располо-
г° в Щели слива между воздухозаборником и планером.
Воздухозаборник может быть снабжен системой регулирования "
филированного клипа (конуса) и обечайки, стартовой механизацией
да (например, в виде створок подпитки) тт створок перепуска.
Аэродинамические характеристики. Основными характеры 1
ками, определяющими аэродинамическую эффективность сверхзвуупцД
воздухозаборника, являются следующие.
Коэффициент восстановления полного давления, характеризует |
потери полного давления подводимой к двигателю массы воздуха 0ц
определяется как отношение среднего полного давления заторможенное
потока в мерном сечении канала на входе в двигатель РОдп к нотноад*
давлению в невозмутцетптом набегающем потоке Рр*:
~ •^Ьдп/^Ьо' •
Коэффициент расхода воздуха f, характеризующий величину pacxegj
воздуха, забираемого воздухозаборником. Он определяется как отношена
тлощади струйки воздуха в невозму щепном набегающем потоке которая
проходит через воздухозаборник, к плошади его входа Го: f = Кл Fq.
Коэффициент внешнего сопротивления воздухозаборника. Он опре-
деляется как отношение силы внешнего сопротивления воздухозаборника
А\н к скоростному напору набегающего нсвозмущенного потока q„. и пло-
щади входа воздухозаборника Fq: Сл - Хвз/(<7*Г0).
Обычно при испытании аэродинамических моделей в трубах, с пол-
ной имитацией протока воздуха через воздухозаборник и наличии систе-
мы слива пограничною слоя, величина внешнего сопротивления воздухо-
заборника входит в аэродинамические характеристики и его поляру. При
частичной имитации протока воздуха через воздухозаборник (напрш<Ф
при имитации только при одном, например, максимальном значении )Я
эффициента расхода, отличном от рабочего значения) в аэродипамичв
кие характеристики самолета нужно вносить поправки, связанные с но
полным соответствием обтекания возд; хозаборника ( м 5 4).
Основные составляющие суммарного коэффициента внешнего сопрОд
ления воздухозаборника следующие коэффициент сопротивления по Жу-
ком-’ контуру струнки потока, входящей в воздухозаборник С1Ж. коэфЧ
циент внешнею волновою сопротивления обечайки Сд коэффиш№*4И
противления системы отсасывания Схатг и перепуска СЛ Кл.сл пограяИИ
слоя, коэффициент сопротивления трения мотоюндолы Сг 1р (рис. 5.1-
I!ротивопомпажныв запасы воздухозаборника ККу и Л/. харакг,
зутощие запасы соответственно по расходу воздуха и ходу ре гул и ргЧН
органов воздухозаборника от рабочего режима до режима помпажа
на течения) вохздухозаборника или компрессора двигателя Вел»
\К/ и Л/ определяются следующими выражениями:
Л/<
-(лу/ртб) 100‘Л.
www.vokb-la.spb.ru - Самолёт своими руками?!
Р1К
ни
113- Составляющие суммарного коэффициента внешнего сопротивления поздухозабор-
.' (; - коэффшгиен! сопротивления по жилкой линии контура струйки потока, пх< щ-
п воздухозаборник; Сдо6 - коэффициент ппеппгего полпопого сопротивления обечашси;
- коэффициент сопротивления еистехгы отсасывания пограничного слоя с поверхности
гор'м кен><я воздухозаборника, С11И|а1 - коэффициент сопротивления кнтна слипа, т.е. сме-
ни .1 перепуска пограничного слоя с поверхности гыансра; Сгтр - коэффициент сопротив
<енл трогня М0Т0Г01ЩОЛЫ С, кр - коэффииисиг сопротивления nejx-пуска воздуха из кана-
ы в< внешний поток
где (/7v)flll и (/7 v)n - отношение коэффициентов f и v соответственно на
рабочем режиме и на границе помпажа воздухозаборника; /ра<, рабочее
положение регулируемого органа; А/ - максимальное отклонение регу-
лируемого органа, при котором сохраняется устойчивая (беспомпажная)
работа воздухозаборника и двигателя.
Неоднородность потока в канале на входе в компрессор двигателя.
Неоднородность потока определяется (более подробно см. ниже) стацио-
1 рн i неравномерностью потока и крупномасштабной турб тентностыо
потока Стационарная неравномерность характеризуется интегральными
параметрами окружной дйп и радиальной дйр неравномерностями и ве-
личинамн зон фо и [р, ими занятыми. Турбулентность потока характери-
^еТся амплитудой А и среднеквадратичным значением пульсаций иолно-
поток'ВЛеН11Я F СУммаРным интегральным параметром неоднородности
прес * ВП М1,огом определяющим газодинамическую устойчивость ком
ОК|П °ра ДВигате;|Я ’ является величина №=Дсо+с. включающая в себя
К) неравномерность потока дй() и пульсационную составляющую е.
^Рак^0 Сельнэя характеристика в тздухозаб трника Дроссельная
Фиииен^ИС1ИКа ВоздУхоза<5°Р11Ика представляет собой зависимость коэф
(Р«с 5 Восстанопле11ия полного давления v or коэффициента расхода f
^Ленн- Нди ог иРивеДеиного расхода воздуха </(Хдв), где л(1( - при
Г1. сЛ°Р^ь в канате на входе в двигатель, а <7(л01) газодина
фу11К11Ия.
Г !/(*-!)
JII
Различают четыре типичных режима работы воздухозаб^В
сверхкритический, критический, докритический, режим помпажа
критический режим характеризуется положением замыкающего
уплотнения за плоскостью входа. В этом случае реализуется макси^^Я
ный расход воздуха. При уменьшении приведенного расхода
на этом режиме коэффициент расхода воздуха сохраняете^
стоянным, а коэффициент восстановления полного давления вецр'
вается, что связано с тем, что замыкающий скачок уплотнения acn I
гается в области меньших сверхзвуковых скоростей. * ('л*
Критический режим работы воздухозаборника соответствует полои^Н
замыкающего скачка уплотнения
8
Рис. 5.1 4 Дроссельная характеристика
воздухозаборника- 1 - дроссельная харак-
теристика воздухозаборника; 2 - сверх-
критический режим; 3 - критический
режим; 4 - докршическин резким; 5 -
расходная характеристика двигателя; 6 -
режимы устойчивой работы ноздухоза
борника и двигателя; 7 - расчетный ре-
жим toBMeci ной работы воздухозаборника
и двигателя; 8 - граница помпажа возду-
хозаборника: 9 - граница устойчивой ра-
боты двигателя; /0 область помпажных
режимов работы воздухозаборника
в плоскости входа воздухозаборника j
этом случае коэффициент расхода в ?
духа f остался максимальным. Пи,
дальнейшем дросселировании, т.е. прч
уменьшении с/(Хдв) замыкающий щ.
чок уплотнения перемещается ырст»,
потока и располагается перед па-
костью входа, приводя к тополнтпел-
по.му перепуску воздуха перед плос-
костью входа (докритичсские режимы
работы воздухозаборника) Коэффи-
циент расхода воздуха при эт»
уменьшается, а коэффициент восг-..-
повления полного давления сначала
немного возрастает в связи с умень-
шением потерь в канале из-за умел-
шения скорости по тракту канала, з st-
тем остается примерно постоянны»
При глубоком дросселировании
чина коэффициента v может уме*
шаться за счет разрушения зам1'
кающим скачком уплотнения расчет*
системы косых скачков уп.ютие!
Помпаж воздухозаборника
ся па докритических режимах ра
когда при некоторой степени
рования наступают периодически0
лсбания потока в канале и персД
костыо входа с выбросом части В'I
ха из капала через вход. При^^И
картина течения и давление в
натурных воздухозаборников лср^^И
чески меняются с частотой *- ' |
Длительные помпажные режим1» 1 |
www.vokb-la.spb.ru - Самолёт своими руками?!
1П’<
по газодинамической устойчивости силовой установки, так по
‘'^ГНКОНСТРУКПШ!.
11р0Ч> хочная характеристика двигателя в координатах v и f изобра-
^рячой линией: f/v = Gl,1,/(242Fo6/ (Мх)), здесь Спр - приведен
*асТ'. ход воздуха через двигатель, кг/с; Fo - площадь воздухозабор
иь1И 1 2- 942 - размерный коэффициент, кг/(мс).
tIllK Точка пересечения расходной характеристики двшагсля с дроссель-
Г характеристикой воздухозаборника определяет режим совместной ра-
боты воздухозаборника и двигателя.
Диапазон устойчивой работы двигателя па дроссельной характерис-
тике воздухозаборника отраничен. Границы устойчивой работы зависят
как от свойств воздухозаборника, так и от устойчивости двигателя к воз-
мущениям со стороны воздухозаборника. На свсрхкртическом режиме
работы воздухозаборника причиной помпажа двигателя является возрас-
тание неоднородности потока, а на докритичсском режиме - помпаж воз-
духозаборника. Следует отметить. что при небольшой интенсивности
помпажа (например, при числах Мл < 1,7) он может по вызвать помпа-
жа двигателя. Поэтому граница помпажа двигателя на дроссельной ха-
рактеристике воздухозаборника нс всегда совпадает с границей помпажа
самого воздухозаборника.
Оптимальным режимом совместной работы воздухозаборника и дви-
гйтсля из соображений эффективности силовой установки, является кри-
тический режим. Критический режим приближенно определяется по от
истлению /tnax/vnax, т.е. по гак называемой условной угловой точке дрос
сольной характеристики.
Па практике, из соображений потребных запасов устойчивости сило-
вой установки, упрощения регулирования воздухозаборника, устранения
гряски конструкции и нр., а также вследствие разного рода неточностей,
режим совместной работы воздухозаборника и двигателя может огличать-
гя от критическою
Вес 'ГипоВые зависимости характеристик воздухозаборников.
егэл^11110 гииовь1х зависимостей позволяет использовать их на начальной
По- ’проектирования и выбора типа воздухозаборника и в целом сило-
рактс/ГГаНПиКИ' а ,акжс ПРИ анализе получаемых результатов по ха
тичио 1С1Икам ВозДУх°эаборников вновь разрабатываемых самолетов раз-
РУемых 1,азна,,е"Чя. Зависимости v(M*) для регулируемых и перегули-
Раз.тцч\ В°'зл-ГХОЗа^°РНикпв при сверхзвуковых скоростях существенно
^оту110.^51 u СВязи с различной эффективностью торможения свсрхзву-
GoTllI 1,игока и различной возможностью оптимального согласования ра-
На>3'1'Хоза^°РИика и двигателя.
ВосгТановИС '5 пРИВеДены типовые зависимости для коэффициента
е,1П1его СН11Я Полн°го давления для регулируемых воздухозаборников
”РИ с 11 с*чешанното сжатия (см. 5.2). Они реализуются в основном
«Ухлдих условиях:
Рис. 5.1.5. Типовые (стандартные) зависи-
мости коэффициенте восстановления пол-
но») давления v и расхода отсасываемого
воздуха 1 - воздухозаборник внеш-
него сжатия; 2 воздухозаборник смешан-
ного сжатия
- воздухозаборник работает
крейсерском угле атаки самож^и
нулевом угле скольжения; **-
перед возду xo3a6opHjri(Q^j
ществляется слив пограничного
с поверхности планера летатсльИ
аппарата;
- воздухозаборник имеет систе-
му слива пограничного слоя;
- возмущения от элементов 1Ца.
нера летательного аппарата, вызываю-
щие ухудшение характеристик возду-
хозаборника (скачки уплотнения. вих-
ревые следы и т.д ), не попадают во
вход воздухозаборника;
воздухозаборник регулируется Во всем рассмотренном диапазоне
чисел М полета и снабжен стартовой механизацией входа.
На рис. 5.1 5 приведены также значения коэффициента расхода отсас -
Рис. 5 1.6. Прирост КО ' “ s ,,
внешнего сопротивления ^ли-
берийка из за щ-]>епуска <’ ‘ри
мого воздуха чптез жалюзи-
духозаборпик; 2 - жалюзи
ка; 3 ~ для н«>'. тлсотаборШ^’^И
utro сжатая; 4 - для
ника < мешанного сжатая дЦ
ваемого или перепускаемою воздуха Д/’пн; = ЛЛ\)/А'о, необходимого для реа-
лизации типовых значений коэффициента восстановления полного давления
Величина A/iIlc возрастает с увеличением числа МЛ. Для воздухоза-
борников смешанного сжатия опа примерно в два раза больше, чем для
воздухозаборников внешнего сжатия.
Перепуск воздуха связан с ростом внешнего сопротивления переписка.
При этом величина прироста сопротивления зависит от организации сис-
темы перепуска. Для оценочных расчетов могут быть использованы рап-
ные, приведенные на рис. 5.1.G, получен-
ные на основании экспериментальных дан-
ных при выпуске перепускаемого воздуха
через жалюзи под углом е » 154-20°. При
ближеппо при числах М< = 1.5 4-3,0 ве-
личина ЛСгпер«0,03 для воздухозаборни-
ков внешнего сжатия и ДСХ11(Т»0,06 - для
воздухозаборников смешанного сжатия.
Особенностью нерегулируемых возду-
хозаборников сверхзвуковых самолетов с
одноконтурными турбореактивными (ТРД)
и турбореактивными двухкоптурными дви-
тателями (ТРДД) с малой степенью двух-
коптуриости является го, что па сверхзву-
ковых скоростях полета режим согласова-
ния с двигателем реализуется (рис. 5.1.7а,б)
на пологой ветви дроссельной характерис-
тики с перепуском большого количества
www.vokb-la.spb.ru - Самолёт своими руками?!
в замыкающем скачке уплотнения,
ценном перед плоскостью входа, (до-
РаС,1<^ский режим работы воздухозаборни-
КрИГЯ с большим внешним волновым сопро-
^’счшем по жидкому контуру. Потери пол-
ТИВЛ давления при гаком режиме работы скла-
НОГ°Ю1СЯ нз потерь в косых скачках уплотне-
От клина (или конуса) и в замыкающем
,nW4K₽ перед плоскостью входа, а также по-
X, полного давления во внутреннем канале.
В связи с тем, что с увеличением сверхзвуко-
вой скорости полета доля эффективного тормо-
жения (с малыми потерями полного давления)
и косых скачках уплотнения уменьшается, а
потери полного давления в замыкающем скач-
ке растут, величина коэффициента восстанов-
ления полного давления для нерегулируемых
воздухозаборников при числах М.л>1,3-М,5
дтя большинства исследованных воздухоза-
борников резко уменьшается (рис. 5.1.8).
На основании опыта эксперименталь-
ных исследований на начальной стадии
выбора тиа и компоновки воздухозабор-
Рис 5 17. Режимы согласова-
ния регулируемого и нерегули-
руемого поздух «заборника и
двигателя: / - регулируемый
воздухозаборник, 2 - нерегу-
лируемый воздухозаборник
пика для нерегулируемых воздухозабор-
ников без управления пограничным слоем для оценки коэффициента
v а * 0 : .Т, р - О
о
,tMl'yesnJLX *,,’лнг>10 давления для нерегу-
J3J-хозабпрников: 1 гиноная
"’'РКИков- •> Ъ1Я Г^О’лируемых воздухоза-
запи'-имость v(Mj для не-
к воздухозаборников
v может быть принята зависимость
2, показанная на рис. 5.1.8.
Предполагается, что для обеспече-
ния высоких характеристик на взлетно-
посадочных режимах полета (Mz<0,4)
нерегулируемый воздухозаборник снаб-
жен стартовой механизацией входа.
Виды возмущений потока в
воздухозаборниках. Определяю-
щие параметры Поток в воздухоза-
борнике в результате процессов тор-
можения, трения о стенки и внешнею
обтекания влияющих па пего частей
самолета становится неравномерным и
нест ационарным
Стационарная неравномерность.
Стационарная неравномерность потока
по характеру воздействия па компрес-
сор разделяется на окружную и ради-
альную (рис. 5.1 9).
В общем случае для хараЛ
стики каждого вида неравном *4
ти используются два парам^^Я
носительная величина потерь °*
него давления в зонах с за< П|
жениым потоком и отноеитель₽М°*
размер этих зон. Окружная не^
номерность характеризуется гт '
метрами Айо и оО1 радиальнад^
Дйр и fp. При смешанной неравно.
мерности сперва определяются па-
раметры окружной неравномернос-
ти, а йотом - радиальной, причем
Рис. 3.1.9. Окружная (а) и радиальная
(б) стационарная неравномерность потока
ДОр рассч итывастся относительно среднего полного давления в секторе г
заторможенным потоком (а не относительно среднего по сечению):
До0 = До0/¥Ср <р0 - <р0/2л , ДОр = AOp/Vy , /р - (1 - Ff)/(1 - Fpr),
1
где До0 = v(:p - v„, ф0 = Ф2 “ ФЬ vcp = — Jvrd<p;
О
---Ц- [v 2rdr;
'-4 i
1 -
Vo =— fvrrfo:
Фо
° Ф1
Дар = v0 - vp;
1 1 ! <Р2
Jv,2r<ff; v.P = — /«?ф.
r> >, °" Ф,
При наличии двух и более секторов пониженного давления парамет-
ры \о0 и фо вычисляются для каждого сектора. При ф0 > 60° в качео*
нс определяющего принимается максимальное из значений До0 для Р33’
пых секторов. Если ф0 < 60°, сравниваются значения Даофо/б0 и выбг
рается максимальное из них.
С целью уменьшения числа измерений и упрощения вычислен^
некоторых случаях используются другие параметры, характеризую
неравномерность потока. Примером такого параметра является парами
/-> = (/Jo»>axr - ^0minr)//J0«p. который характеризует максимальную^
равномерность полных давлений на характерном для данного Дц,п
относительном радиусе г, отнесенную к среднему полному давлению
мерительном сечении. Для воздухозаборников с удлиненными KaI,a'oC<f
и характерным радиусом г = 0,6 (ТРДД со степенью двухкоИТ}'Р,(и
т а 2) D « ЗДсго
К стационарной неравномерности относится за к ру ценность ПотС
канале. Она возникает при наличии неравномерности статическое
www.vokb-la.spb.ru - Самолёт своими руками?!
поисречном сечении канала. Образующиеся вторичные потоки
чел1’51 иосо6еГ1НО значительными вблизи горла воздухозаборника и при
бываю ’ Под действием наружного обтекания воздухозабор-
»,сиР1,^)ЗЧО5К1га п обтцая закрученноегь потока, например, при работе па
и1*1 1 ноского воздухозаборника с горизонтальным клипом, если рядом
'^^тст второй воздухозаборник или расположена боковая поверхность
Ра ,яжа. При агом УГЛЬ1 скоса потока в ядре мопт достигать 2-6°.
Фюзе’ 11НОСП, потока может заметно влиять па работу7 двигателя, не
^меюгцего входного направляющего аппарата.
Турбулентность. Турбулентное течение представляет собой псупоря
ученное движение по потоку вихреобразований различных размеров.
Влияние турбулентности потока на работу двигателя сводится к не-
равномерности потока, которая образуется путем сложения стационарно
i-o поля скоростей и поля скоростей, вызываемого наиболее крупными
вихреобразоваинями. Характерно, что в воздухозаборниках крупное вих-
реобразоваиие может пройти через любую точку сечения в ядре потока.
При L < 10 пульсации давления могут иметь значительную неравномер-
ность по поперечному сечению капала воздухозаборника.
Турбу.четность потока в воздухозаборниках измеряется с помощью
специальных приемников и аппаратуры, амплитудно-частотные xapaicie-
рпстикп которых подбираются таким образом, чтобы фиксировать круп-
номасштабные вихреобразования и сглаживать мелкомасштабные. При
подборе приемников и аппаратуры
частоты процесса:
используется понятие характерной
Vid,
- диаметр капала.
^хир
где V' - с редняя скорость в канале, d .... г _____
Основные характеристики крупного вихреобразования’ максималь-
ная относительная интенсивность (амплитуда) А|11ах = Л/’>о1цах/2А>оСр, про-
вихрей
хольный
«Ь = 1 /тн
пах АР() max
размер (масштаб) ZB = Т7сртв> частота следования
(рис. 5.1.10).
^ис. 5.1.10. Осциллограмма колебаний полного давления
в канале воздухозаборника
Ъто ^Дольный Ра:,МеР крупных вихреобразований, имеющих
т'"* Их с >Т°КУ форму, обычно бывает порядка диаметра канала,
с-1аб 3Ледо1,ания _ нерегулярной. Продольный масштаб, как правило,
1сит от режима работы воздухозаборника и положения его регу-
вытяпу-
а часто-
лируемых элементов. Нс обнаружено влияния па работу двигателя '
лнчества прошедших вихрей. Поэтому наиболее существенной вец^И
характеризующей турбулентный поток в воздухозаборнике, являет **** W
тепсивность крупномасштабных пульсаций (Атах). Интенсивность - *
лентпых пульсаций полного давления связана с интенсивностью лул^*"
ций продольной составляющей скорости. Приближенно эта связь от
лястся соотношением: АР0/2Р0ср - . где “ср” обозик
значения стационарных величин.
Интенсивность пульсаций, из соображений автоматизации проц
обработки результатов измерения, удобно характеризовать срсднекв^И
тичпым значением
е 5Р0)" /ро гр, 1ДС (ЬРп )2 = у J[5Р0 (т)]2 dx
о
В случае нормального закона распределения пульсаций е=Аши/,Я
Однако этот закон нс всегда имеет место в воздухозаборниках вследствие
неизотроппости и возможной неоднородности турбулентного течения в них.
При специальных исследованиях широко используются другие статисти-
ческие величины, характеризующие турбулентное течение, в том числе вре-
менной масштаб и спектральная плотность мощности случайного процесса.
Одномерные возмущения. Одномерные возмущения потока при устойчи-
вой работе воздухозаборника могут быть апериодическими и колебательными.
Апериодические возмущения представляют собой быстрые изменения
полного давления как в сторону его уменьшения, так и в сторону его воз-
растания. Этот вид возмущений может вызываться быстрыми нерсмеш
пиями регулируемых элементов воздухозаборника (коррекции програм-
мы регулирования, открытия створок перепуска и т.п.) или быстрым Я9
менением углов атаки и скольжения самолета при интенсивном маневри-
ровании, при полете в турбулентной атмосфере и пр. Колебательные в<Д
мущепия при устойчивой работе воздухозаборника могут наблюдать^
например, вблизи критического режима на вертикальной ветви дроес^
пой характеристики. Частота этих колебаний имеет порядок собстве!ИИ
акустической частоты канала воздухозаборника. Кромке того, к°' .
тельные возмущения могут возбуждаться в воздухозаборнике раздаче
ми подвижными элементами, например, авторсгулируемымн ciFA
подпитки. Следует отметить, что периодические колебания давлений, -
блюдаемые на отдельных участках канала, например, вблизи
вс тедсгвис значительной турбулентности потока в воздухозаборнике,
гут рассеиваться и пс фиксироваться в конце капала.
Автоколебания и разрывы характеристик. Неустойчивая
воздухозаборника связана с появлением новых видов возмущен1*!’
рые могут приводить к автоколебаниям н разрывам характеристик, т
www.vokb-la.spb.ru - Самолёт своими руками?!
агтсрпым видом колебании в воздухозаборниках с внеш
Наиболее
ёрхзвукового потока является помпаж. Помпаж наблюдаете;
ним сжатием ви3духозаборнтша па докритичсских режимах работы
при др1’сселир происходит периодически!! выброс части воздуха из капал*
При 1К’'П1а^здухо-чаборпика. Помпаж относится к релаксационному виду
через ВХОД р|нт"исИВНость помпажных колебаний зависит от особенностей
к?;±о"^озлркп- и возрастает с увеличением числа И набегающего
дан"оГО га 1<Олсбаний при помпаже определяется объемом газовоздущ-
погока. 1ас с11ЛО|ЮЙ установки, возрастая при его уменьшении, и для натур-
ной) тра‘^1 и1й находится в диапазоне Зч-Ю Гц. По мерс дросселирования
ных коНСа^) ника частота помпажных колебаний увеличивается.
В°ЗД1Ги‘работе воздухозаборника с внешним сжатием сверхзвукового но-
на пологой ветви дроссельной характеристики могут возникать коле-
1°Кая давления, близкие к гармоническим, примерно той же частоты, что
6а"”и помпаже но с. существенно меньшей амплитудой. Эти колебания
И/впения получили название малой неустойчивости воздухозаборника.
Малая неустойчивость может плавно переходить в помпаж. В этом слу-
чае за границу помпажа воздухозаборника принимают точку, в которой
амплитуда колебаний приводит к помпажу двигателя (условно А « 20%).
Разрывы характеристик воздухозаборника могут наблюдаться при рез-
ком изменении условий внешнего обтекания. Характерным примером яв-
ыется так называемое явление пелены (подробнее см. 5.2). Характеристики
воздухозаборника в этом случае изменяются скачком. Воз/тухозаборнттк пе-
[теходнт на новый режим работы, при котором значения v и f ниже, а нео-
днородность потока выше, чем до возникновения пелены. Аналогичное из-
мсненис характер,™ -от - »
сжатием при срыве сверхзвукового т_ де^(}ие возМущений иа двига-
Параметры, характеризующие в _ возмущений ттото-
тель. По харак теру воздействия на д» * - ’ па три типа: не-
ка в копие воздухозаборника целесообразно р и Турбулснтнос ть),
однородность потока (стационарная по равномерность и туроу
одномерные возмущения, тепловые возмущеният. параметром
_ Неоднородность потока характер”Т^ использоваться иной
Ло0 + £. Вместо интегрального параметра темого дви-
нараметр, найденный при стендовых испытаниях11араМетр не-
гатоля и воздухозаборника. Примером иослед п йся при доводке
инородности IV --=2/1 + D, широко использовавшийся при
ТрДД и воздухозаборников с удлиненными каналами. режимов
Для каналов с длинами 4 ч-10 калибров (т е ' Т'1 У ровни инте-
полета самолета без перегрузок и скольжения jeapa ’ наличии тте-
Ра-и>ного параметра неоднородности Доо + с - ° нролпород-
Р^РУз,^, скольжения и изменений температуры атмос ер> к
"> потока может возраста". в 1.5*2 раза (рас.
£зУОД<>в а и р самолета, так и от применяемых систем рог. г
'-охозаборпика и двигателя.
Рис '111 !кидкородпость потока IV в каналнх воздухозаборников при
различной их компппопке на самолете: 1 - осесимметричные воздухоза-
борника: 11 плоские воздухозаборники: 111 - нерасчетные режимы по
а, р. г,с: 1, И: и = 0+3’. ₽ “ О
Одномерные колебания характеризуются частотой и интенсивностью.
Интенсивность одномерных возмущений задается величиной огносшсгь-
ного понижения полного давления па входе в двигатель Ррдв и tE<’
ростыо его изменения dP^ldx.
5.2. Типы сверхзвуковых воздухозаборников
Типы сверхзвуковых воздухозаборников различаются по сносЯ
сжатия с.всрхзвуково!о потока, по форме поверхности сжатия и Ф°Р*\
входного сечения, по количеству ступеней поверхности сжатия и с00Г^
сюеино по количеству косых скачков уплотнения, по способу РеО’'
роваиия, по компоновке воздухозаборников на летательном аппарате и
На современных сверхзвуковых самолетах используются возДУ^И
борпики внешнего и смешанного сжатия сверхзвукового потока. В JKKre
хозаборпиках внешнего сжатия торможение сверхзвукового потока i
лизуется в косых и замыкающем скачках уплотнения до плоское?11
да, при этом режим согласования воздухозаборника соответствует Д^Я
тическому режиму, когда замыкающий скачок уплотнения Pacn°L,^e
вблизи плоскости входа воздухозаборника (рис. 5.2.1). В воздухо*^И
нике смешанного сжатия торможение сверхзвуков >Г' потока Л .
www.vokb-la.spb.ru - Самолёт своими руками?!
В<hay х плаб при и к
с смешанным сжатием
Воздухозаборник
с внутренним сжатием
Рис 5 2 1. Типы сверх звуковых воздухозаборников в зависимости от способа
сжатия сверхзвукового потока: 1 - положение замыкающего скачка на режиме
v ; 2 - дроссельная характеристика при запуске воздухозаборника; 3 - дрос-
сельная характеристика при незапуске воздухозаборника, а - автозанускаемый
воздухозаборник, б с. пусковым регулированием
•твляется частично перед плоскостью входа в косых скачках уплотнения,
частично за плоскостью входа в косых скачках уплотнения и в замыкаю-
щем скачке уплотнения, расположенном в горле воздухозаборника, т.е. в
этом случае согласование воздухозаборника и двигателя реализуется на
сворхкритическом режиме. При дросселировании воздухозаборника со
смешанным сжатием сразу за сверхкритическим режимом возможен срыв
сверхзвукового течения, сопровождающийся резким уменьшением коэф-
фициентов v и f и колебаниями полного давления в канале. Если при от-
крытии дросселя расчетная система внутреннего торможения сверхзвуко-
вого потока восстанавливается, то воздухозаборник называется автоза-
пускаемым. Если для этого требуется специальное регулирование, то та-
кой воздухозаборник называется воздухозаборником с пусковым рогули
1 в нисм или принудительным запуском.
В воздухозаборнике внутреннего сжатия торможение сверхзвукового
потока реализуется полностью за плоскостью входа, во внутреннем капа-
31 v Тип возДухозаборника не нашел широкого применения в сверх-
ния О13-Ь1Х самолстах в связи с трудностями их регулирования и обеспсче-
режима согласования работы воздухозаборника и двигателя
ни в с^Юр?ь,е поверхности сжатия и входного сечения широкое примене-
метрцчСВСрХ:,В^КовЬ1Х самолстах различного назначения получили осесим-
>1G> плоские, полукруглые и пространственные воздухозаборники.
!Ия Сссси'1л,етричных и полукруглых воздухозаборниках для торможс-
п°ловц ^звУКОВО1'о потока используется профилированный конус (его
СсЧецце * ИЛ11 вырезка, а в плоских - профилированный клин. Входное
С11Мметп 1ГЯоских воздухозаборников имеет прямоугольную форму, осе-
3 пгых - и виде КруГа (сго половины или часта).
х с В-'имости от формы поверхности торможения различают одно-,
нИкц «-ступенчатые плоские и осесимметричные воздухозабор
3д^Хозаб°р11ики с криволинейной поверхностью торможения,
а1ощие изоэнтропическое торможение сверхзвукового потока
Воздухозаборники могут быть регулируемыми с использованиеJB
регулирования профилированных конусов и клиньев и нерегудцп
Регулируемые воз;1ухозаборники, как правило, выполняются ос bIe
тричпыми, плоскими или полукруглыми. Наибольшие возможности ,
гулирования могут быть реализованы в плоских воздухозаборник^
нерегулируемых воздухозаборников вполне успению могут быть йен
ваны 1акжс воздухозаборники различной пространственной формы ЛЬэ°‘
СХЕМЫ КОМПОНОВКИ ВЗ
Лобовые ВЗ Боковые ВЗ Подфюзеляжные ВЗ
Подкры.и-пыс ВЗ Боковые ВЗ Надфюзеляжные
с. горизонт, клином (падкрыльевыс ВЗ)
Рис. 5.2.2 Схемы компоновок воздухозаборников па самолете
Но компоновке на самолете (рис. 5.2.2) воздухозаборники подразл?
ляюгся па лобовые осесимметричные; боковые плоские или полукруглые
подфюзеляжные плоские или полукруглые; подкрыльевые плоские, осе*
симметричные падкрыльевыс (надфюзеляжные) плоские, или осесиммс
тричпыс; боковые плоские, полукруглые или иной формы входа, рапК
ложепные под наплывами крыла и т.д.
www.vokb-la.spb.ru - Самолёт своими руками?!
Л _ । g -2,3. При расположе-
ОТДС.ТЫ1ЫХ гондолах воздухоза-
такого типа позволяют по-
мини-
. «поим особенности работы воздухозаборников для ряда типич-
. компоновок (рис. 3 2.3).
I,hI И ивсденные ниже материалы относятся к воздухозаборникам с
сжатием сверхзвукового потока, которые обладают наиболее
ннепгним 1ИапазоНО>( устойчивой работы, особенно по углам атаки.
и'ИР/<ругль/е воздухозаборники (рис. 5.2.4) широко использовались на
верхзвукиВЬ'х самолстах первого поколения, рассчитанных на полеты до
чисел М
нии в *—
борникл
!^игь силовую установку с
.матьпым весом и высокими характе-
ристиками на расчетном режиме. Од-
нако с увеличением углов атаки ха-
рактеристики круглого воздухозабор-
ника резко ухудшаются, особенно на
сверхзвуковых скоростях. Для обес-
Рис 3 2 1. Сверх.шуковои самолет с лобо-
вым осесимметричным воздухозаборником
печения работоспособности силовой
установки использовались удлинен-
ные каналы с расположением воз-
духозаборников в носовой части фюзеляжа (компоновки Су-7, МиГ-21 и
др ). На рис. 5.2.5 приведены результаты испытаний моделей разработанно-
го в ЦА1И осесимметричного воздухозаборника при двух характерных
числах Мл набегающего потока: 0,9 и 2. Воздухозаборник имеет длину, рав-
ную трем диаметрам входа в двигатель. При а = 0 значения коэффициента
восстановления полного давления соответствуют типовым значениям для
воздухозаборников смешанного сжатия (зависимость 2 на рис. 5.1.5), псо-
ДН0|х>д1юсгь потока мала и составляет 7 : 13% по величине 2/1 + D. При
М ~ 7
2 - допустимые значения неоднородности потока сохраняются до
'^Ля обеспечения устойчивой работы силовой установки на больших
' ах атаки необходимо применять дополнительное регулирование двигателя
рекеЛЬК> K^arKCuPeMCHH(JI'° увеличения запаса устойчивости и вводить кор-
пию в систему регулирования воздухозаборника по углу атаки.
V
? 2 1 °-9
2,1 +
30
10
0 а
баРИвкч. f ^е1УЛ1>таты испытании модели разработанною в ЦАГИ осесимметричного поздухоза-
***• 3 - косд-’и*-10™ по схеме "Х” (для выравнивания потока. при а >15’), 2 - створки подпит-
f качок. 4 - йо.шы сжатия, 5 - изогирымческий контур, б - конус, 7 - OIIC
Боковые воздухозаборники (рис, 5.2.6. 5.2.7) характеру. 1
сверхзвуковых самолетов второго поколения. Основной особенностью яН
ковых воздухозаборников является увеличение среднего угла атаки в
расположения воздухозаборника в 1,3-е 1,5 раза по сравнению с
ки носовой час i n фюзеляжа. В связи с этим среди боковых возду
борников наиболее эффективны в аэродинамическом отношении пто-
воздухозаборники с горизонтальным расположением клина. Тииичн
примерами такой компоновки являются самолеты МиГ-25 и МиГ-3(
также Г-14 и F-15 Другие типы воздухозаборников - плоские с Бортика* *
ным расположением клина и полукруглые - в боковой компоновке
худшие характеристики по коэффициентам восстановления полного дав»,
пия и неоднородности потока на углах атаки. Для уменьшения пеоднород
пости потока в воздухозаборниках с вертикальным клином использую*]
удлиненные каналы или специальные мероприятия по выравгпшанию по-
тока, например, в виде продольных перегородок (компоновка МиГ-23),
Рис. 5.2.6. Сверхзвуковой самолет с боковыми
плоскими немцу хознборпикйми, снабженными
юризоп сальными клиньями торможения
Рис. 5.2.7. Ноконой плоский воялухозиб Р
ник с вертикальным клипом торможсш<я
Зависимость от угла атаки основных характеристик бокового возД*
хозаборника с горизонтальным клином и длиной канала Lid = 4,5 npW
дена на рис. 5.2.8. При дозвуковых числах М полета воздухозаборники
горизонтальным расположением клина обладают более высокими и -м
бильпыми характеристиками как по коэффициенту восстановления .
иого давления, так и по неоднородности потока в широком диапазоне^
тов атаки. При числах М» > 2 при использовании воздухозаборник®™
кого типа возможен отрыв потока с боковой и нижней поверхности
зс.тяжа на больших углах атаки, так называемое явление “ пелены -Te
возникновении “пелены” в воздухозаборнике скачком падает коэфЧ*^И
еш восстановления полного давления и возрастает неоднородности _
ка. Причиной возникновения "пелены" является возрастание
личснии угла атаки интенсивности скачков уплотнения в воздУ*
нике перед плоское гью входа. Скачки воздействуют на noi-раничнь
фюзеляжа и вызывают его отрыв. Чем выше число И полета, т I «М
www.vokb-la.spb.ru - Самолёт своими руками?!
vriax атаки может возникнуть это явление. Возможным сред-
McHblU,*X '111Чеиия угла атаки апел, на котором возникает “пелена", явля-
ство.м 'В^аН11е воздухозаборника относительно фюзеляжа. Это позволяет
еТгЯ оП'а11рЯжсниу10 область по перепадам давления - кромку обечайки
саМУ10 ,борНцка - отодвинуть от пограничного слоя фюзеляжа и тем
возДУх ‘eW411Tb допустимые перепады давления в скачках уплотнения,
с^МЬ*п иади результаты экспериментов, смещение воздухозаборника
1чЗК • О 1 высоты воздухозаборника позволяет на 2-5-3° сместить начало
В’И икР вения “пелены" в сторону больших углов атаки (рис. 5.2 8)
Рис 5 "? R V
। ' * “°- лдракгерис7ики плоского бокового воздухозаборника с горизонтальным
положением клина торможения, Lid = 4,5
Гм недостатком плоского бокового воздухозаборника с горизон-
ка L1M КЛИ1,ОМ ПРИ числах Мл > 1 является рост неоднородности пото-
3Bw^ а < ара<ч> что обусловлено уменьшением внешнего сжатия свсрх-
Жового потока.
По УГпу3аН11Ь,е В1,1Шс недостатки устраняются введением регулируемого
Ник бы- атаки 11О-1Ожепия горизонтального клина. Такой воздухозабор-
^СзУ-Чьт- П^елложсн ЦАГИ в 1961 г. и подробно исследован на моделях.
Чвление »Ы Исслсдовапия показали, что поворот всего клина устраняет
ленця пелены" При этом коэффициент восстановления полного дав-
Ьсем Исс Г1аРа^етры неоднородности потока почти нс изменяются во
ЛеДованном диапазоне углов атаки Несмотря па конструктив-
ную сложность воздухозаборник такого типа был применен на
капском истребителе F-15. а^ерц~
Подкрыльевое расположение воздухозаборников (Dlt
5.2.10) использовано на сверхзвуковых пассажирских самолетах
Concorde и истребителях четвертого поколения Су-27, МиГ-29 По
лом воздухозаборник находится в более стабилизированном по НД К₽ы
лепию ноле местных скоростей, чем у боковой поверхности фюзеляж^'
Рис 3 2.9 Сверхзвуковой высокоманеврен-
пый самолет Су 27М <• нодкрыльсвыми
плоскими воздухозаборниками, спабжеппы
ми горизонтальными клиньями торможения
Рис. 5.2.10. Полкрыльсвые плоские bi
хозаборники с горизонтальным расположе-
нием клиньев торможения на сэмпл
МиГ 29
11спользование крыла в качестве первой ступени сжашя потока цозво
.1яе1 получить еще одно преимущество - мспыпсс изменение дроссельных
характеристик воздухозаборника по углам атаки, чем у бокового возд,
хозабх>рпика с горизонтальным расположением клина. Результаты испы-
таний (см. рис. 5.2.3 и 5.2.11) показывают, чго характеристики плоского ।
под крыльевого воздухозаборника с горизонтальным расположением клине-
на положительных углах атаки достаточно стабильны, заметное ухудшени*-’
характеристик наблюдается при скольжении и отрицательных углах атаки- i
Изменение характеристик по углам атаки и скольжения соответствует .
изменению пород воздухозаборником средней скорости потока, положу
вихревых следов и юлщины пограничного слоя на крыле (или фюзеляжу I
В подкрыльевой компоновке наибольшие трудности возникают с
печением работоспособности силовой установки при отрицательных у
атаки. При а < 0 с передшгх кромок крыла сбе1ают вихри (рис-
которые, с учетом углов скольжения, занимают область iipifMcP110^^
ную полуразмаху местного сечения крыла (Zq ~ 0,5 -5-1). Вихри, 1
в воздухозаборник, приводят к резкому ухудшению всех его хар
тик. При дозвуковых скоростях и удлиненных каналах ^ухуди16 ^
рактеристик еще находится в допустимых пределах (рис. 5.2.11)
при небольших дозвуковых скоростях удастся обеспечить работав
ность силовой установки даже при круговой обдувке воздухоз д
(а - 0-г 360°). Однако чем выше число тем меньше возмоЖН!»0*
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис. 5.2.11. Характеристики нодкры iM-ROro поздухгааборника
Выбором места расположения воздухозаборника относительно перс-
Р”с- -5.2.12. т .
L °ЧХ|)я J Р^тирия кромочпо-
f-0 U»™' М--'.7. —
In. I Л ПовсРхчость крыла)
дней кромки крыла сверхзвукового само-
лета можно устранить попадание кромоч-
ного вихря во вход. Эта область примерно
соответствует Zo ~ 0 4- 0,5
Некоторое улучшение характеристик
воздухозаборников с уменьшением углов
атаки может быть достигнуто при верти-
кальном расположении клина (компоновка
а на рис. 5.2.11).
В случае осесимметричного воздухо-
заборника (компоновка б на рис. 5.2.11)
начальный момент попадания вихря в воз-
духозаборник не приводит к сокращению
протпвопомпажного запаса воздухозабор-
ника и сопровождается звуковыми и тря-
сочными явлениями, которые предупреж-
дают о приближении опасных режимов.
Местными мероприятиями (изменением
формы носка профиля крыла, формы на-
плыва, установкой специальных перегоро-
док - интерцепторов и вихреотводящих уст-
ройств) удается сдвинуть начало резкого ухудшения характеристик
заборника при отрицательных углах атаки па 2ч-4° или приблизить
заборник к кромке крыла.
>ОЧ-Хо.
Bft4vxo.
Одной из сложных задач в нодкрыльевой компоновке является
та двигателя ог частиц грунта на режимах взлета и посадки. Из 3аЯ1>1'
различные пути решения этой задачи, например, полное перскпьгп^ТД
да воздухозаборника и организация подвода воздуха с верхней п< ВХ°
ности крыла (что требует дополнительного регулирования воздухо^"
бор ника на взлетно-посадочных режимах), установка убирающейся" За'
лете решетки в канале.
и 110-
Рис. 5.2.13. Относительное изменение тяги двиганеля (Р) и неоднородности
канале перед ним (24-ZJ) к зависимости от угла атаки для типичных компоновок
хоаабпрпика на самоленг
www.vokb-la.spb.ru - Самолёт своими руками?!
5.2.13л приведены сводные графики относительного измсне-
‘ Р чвигателя и неоднородности потока перед ним в зависимости от
”’,я ГЯ'”ки для основных рассмотренных компоновок воздухозаборников
угла а у |( 2 Наилучпгими аэродинамическими характсристи-
нри Ч1,СгиИ’рОКОм диапазоне углов атаки обладают плоские боковые возду-
1'аМ,’арники с регулируемым положением горизонтальною клина. Для
хоза • компоновок воздухозаборников неоднородность потока при боль-
Г,уг ?ах атаки (в основном, отрицательных) может превышать допус-
Ш мый г™ двигателя уровень. Поэтому для использования этих воздухо-
Т11ГОРН1ПСОВ на маневренных самолетах требуется введение в систему ре-
агирования двигателя кратковременного увеличения запасов устойчи-
вости с приближением к опасным режимам или ограничение углов атаки.
В этом случае, как видно из рис 5.2.3 и 5.2.136, наибочьшая стабиль-
ность характеристик воздухозаборника и эффективной тяги двигателя в
широком диапазоне положительных углов атаки обеспечивается в нод-
крыльсвой компоновке воздухозаборников.
5.3. Регулирование воздухозаборников
Программа регулирования. В результате испытаний модели воз-
духозаборника в аэродинамической трубе и последующего анализа выяв-
ляется программа регулирования воздухозаборника.
Методика построения программы регулирования заключается в следую-
щем. Характеристики воздухозаборника при заданных условиях внешнего
обтекания (М«, a, fl) и различных положениях регулируемых элементов
рассматриваются в зависимости от параметра, характеризующего положение
точки на дроссельной характеристики воздухозаборника. На практике ис-
пользуется несколько параметров, характеризующих положение точки на
Дроссельной характеристике- параметр дроссельной характеристики а, рас-
ход через двигатель с учетом отбора воздуха из канала (приведенный удсль
//v^ или пРивеДышый Glip) и параметр дроссельной характеристики
v- Параметры а. и Gup выражаются через параметр f/v:
а -_ L
v /-г
Gnp=242^<7(MjO)F0,
v Лхв 1 V
где I-
чыдь’1" 11Лпи1аД’> канала па входе в компрессор двигателя, Fr - пло-
^г°рла воздухозаборника.
jvjohi* ПаРаметра зависит от решаемой задачи и специфики после-
П'и а,,ализа-
Фрески И Пользовапии параметра а выбор программы проводится гра-
ной ха]Ир ,1-’1Оск°сги aFr, куда наносятся основные параметры дроссель-
и ак1еристики, т.е. значения п на границах помпажа воздухозабор-
р^т11КиДВг\’агеля и в угловой (оптимальной) точке дроссельной харакге-
ри этом учитываются потребные противопомпажные запасы,
9»
необходимые для обеспечения устойчивой работы силовой устав И
эксплуатационном диапазоне режимов работы воздухозаборник
грамме регулирования. После выбора программного значения парам^
«гогл программа регулирования находится из уравнения расхода j
1 Gnp
^согл 242
где площадь горла Гг однозначно связана с положением регулируема
элементов воздухозаборника. 1-4
В случае значительного изменения режима согласования воздухозд.
борника и двигателя по условиям внешнего обтекания (например, по 1
лу атаки а) дополнительно рассматривается зависимость а = /'(а) и опре-
деляется потребная коррекция значения ясогл в зависимости от угла атак*
Значение <7С0ГЛ близко к единице и слабо зависит от положения регули-
руемых элементов воздухозаборника. Эго обусловлено тем, что параметр а
есть отношение приведенного удельного расхода в горле воздухозаборника к
коэффициенту восстановления иолиога давления на участке между город
воздухозаборника и двигателем, а - </()T)/vr.aB, где v, Л1, - коэффитщент вос-
становления полного давления на участке канала от горла до двигателя. В
оптимальной точке дроссельной характеристики обе величины и их отноше-
ние близки к единице. Уменьшение значения а соответствует докритичсским,
а увеличение - сиерхкритическим режимам работы воздухозаборника.
Использование параметра а сводит всю программу регулировали
воздухозаборника к обеспечению постоянного или слабо изменяющего я
значения с?(Лг). Это позволяет строить программу регулирования по ми-
нимальному числу экспериментальных точек, использовать опыт по ранее
исследованным воздухозаборникам, контролировать результаты.
При использовании параметров f/v, <7(/.лв) или Сир сначала строям
характеристики воздухозаборника по этим параметрам. Затем отмечаете
потребная расходная характеристика двигателя и с учетом потребив
протиноиомпажных запасов определяется положение регулируемого
мента воздухозаборника. Окончательно выбор программы регулировки
проводится в плоскости ZC-jp, где I - положение регулируемого эЛвМ^3
воздухозаборника, Gnp - приведенный расход воздуха через ЛВИГ‘^Д
или параметр, однозначно с ним связанный (например, привел
частота вращения ротора или степень сжатия компрессора). Пл с-
/Gnp используется при натурных исследованиях по доводке иро’Т >
регулирования воздухозаборника в полете. а
Эксплуатационный диапазон режимов работы ВОЗБУДИ
борника. В условиях полета программное значение положения Р*^И
русмых элементов воздухозаборника выдерживается неточно- ,
иия обусловлены неточностями определения приведенного расхода g
таповки положения регулируемых элементов. Возможные отКЛ°не j
www.vokb-la.spb.ru - Самолёт своими руками?!
ксПЛуатадиоиный диапазон режимов работы воздухозаборника
сГавля10Т регулирования. На рис. 5.3.1 и 5.3.2 показан эксплуата-
по 11Р°’ ? иапазо11 режимов работы воздухозаборника при заданных ус-
по юта в координатах /. Спр и v, f.
довия- iJa „0-rpe6iioro эксплуатационного диапазона определяется сле-
У<!ми факторами: статическими и динамическими погрешностями уц>
воздухозаборником Д/Ст, Д/ли„; производственными отклонепия-
РавРазмеров воздухозаборника Л1Ц}ЮКШ; отклонениями приведенного рас-
МИ ' воздуха через двигатель, вызванными погрешностями систем его ре-
Х?Ятования и технологическими погрешностями изготовления элементов
Проточной части.
Опьп эксплуатации систем управления воздухозаборников, а также
анализ перспектив их развития позволяют указать следующие величины
предельных погрешностей А/Ст = ±2% полного хода регулируемого элемента,
д/аия = хЗ">. Точность изготовления воздухозаборников, выраженная ве.ти-
чиной перемещения регулируемой) элемента составляет ±2% полнот хода.
ис. 5.3.1. Эюзиуатационный диапазон ре-
жимов работы воздухозаборника: 1 - потреб
’ акгц.т\аташтонный диапазон, соответ-
вчюцщй режиму работы и точке А; 2 - но-
*61 й ' 1рО|тамма Рсгу-тароваиия; 2 - ио-
мен экс,1л}'атациопиьш диапазон роки-
Вра^тыво)духОзабор11Ика
Рис 5.3.2. Эксплуатационный диапазон ре-
жимов работы воздухозаборника: 1 - по-
требный эксплуатационный диапазон, со-
ответствующий режиму работы в точке А
иТРт пИЧИНа ^^бросов расходов воздуха 5Gnp для существующих ТРД
®°лыиихСОГТаВЛЯеТ -* КРОМС того- следует учитывать, что в полете на
Черед л» Ьь,СОТах возможно уменьшение приведенного расхода воздуха
pj Патель из-за влияния числа Re на характеристики компрессора.
*Имов велишгны потребного эксплуатационного диапазона ре-
А/1[ров иоз*,3''хозаб(зрпика следует иметь ввиду, что noi'peiiiHOCTu Д/(Т,
°GnP являются случайными, а погрешность Д/лин - систематической.
Ус л °и'1ено' ,ГГо располагаемый цротивономиажный запас должен во
Р°,3аццо Иях эксплуатации превышать потребный па величину 1аранти-
запаса, равного 2% хода регулируемого элемента воздухозаборника.
Для уменьшения потребного эксплуатационного диапазона D
работы воздухозаборника используется дополнительный замкнуть -
тур регулирования, который осуществляет коррекцию положения r, j
руемого элемента. Сигнал для коррекции выбирается в результатТ^Д
циальпых исследований воздухозаборников Обычно это отнотиени С
давлений в характерных точках воздухозаборника или в насадке
рующем число М вблизи горла воздухозаборника. v К|’и'
1
-t—
•5ГП
__________
* ♦ Т ♦ » ’ ’ * * ’
- с
_t Т-М_« « » f f I
I-il
wjz.
cV, + (P -?.)F
Рис. 5.4 1. Схема разделения В1, ™~
аэроципшчических сил и ЯИ1
гателя: 1 - сиш, действующие •* *4
долу двигателя; 2 - силы,
ющие тягу двигателя, J “ с,,лЫ
дсляюшш* внешнее соп]»тидив
гондолы двигателя. 4 - 1 < *
иротивлгпяе воздухозаборник®
силы действующие на гондсЛУ
геля при углах атаки; 6 ~
двигателя; 7 - внешни»
ческие силы; 8 - сила, обут.*»
поворотом вектора mV., ла
5.4. Внешнее сопротивление воздухозаборников
Принцип разделения внешних аэродинамических сил и
двигателя. Внешняя и внутренняя аэродинамика сверхзвуковых лета^дГ.
пых аппаратов с ВРД тесно связаны между собой. При этом отнесение и/
моментов к внешним аэродинамическим характеристикам или к характера*
тикам двигателя является условным.
Принято к внутренним характерис-
тикам относить характеристики, связан-
ные с изменением количества движения
в трубке тока, проходящей через двига-
тель, а к внешним - характеристики,
связанные с изменением количества
движения во внешнем к этой трубке
течении. Такое разделение следует из
принятого понятия силы тяги:
Р - mcVc - + (Рс - PK)Ft;,
где количество движения в
трубке тока на выходе из сопла: -
количество движения невозмущеппого
течения в трубке тока, втекающей в дви-
гатель; Рс, Ра, - статическое давление в
трубке тока па выходе из сопла и в пе-
возмущенном течении соответственно; Fc
- площадь выхода из сопла.
Следует отмстить, что принятое поня-
тие силы тяги допускает достаточно про-
стое ее определение экспериментальным
путем в стендовых условиях. На всех ре-
жимах полета самолсза, включая разные
углы атаки, скольжения и крена, пргшято
считать, что вектор силы тяги, определяе-
мый по указанной выше формуле, прило-
жен в центре выходного ссчештя сопла и
направлен по оси сопла в сторону, проти-
воположную скорости истечения.
www.vokb-la.spb.ru - Самолёт своими руками?!
С1счае к внешнему сопротивлению должны быть отнесены нс
В Э1°^а приложенная к твердому наружному контуру гондолы двига-
то,чьК° <>’• ia действующая на жидкий контур, а также силы и моменты,
те'1Я' И° нние попоротом вектора количества движения на наира-
«ММСИ (РИС 5'41>' <
рлени реальном дозвуковом обтекании гондолы двигателя внешнее со-
1с равно нулю, т.е. сопротивление жидкой трубки тока компсн-
"Р01^ сяПодсасывающей силой, действующей па твердый контур гондолы.
с11рустЖуковых скорое 1ЯХ потока сопротивление жидкой трубки тока
С быть значительным, а подсасывающая сила отсутствовать.
'"^^оставляющие сопротивления силовой установки Коэффи
сопротивления гондолы двигателя, расположенной вблизи поверх-
ности планера летательного аппарата, может быть представлен в виде
О ммы коэффициентов:
Сх = Схтр + ^.ГД + + Сд-Пер + Схсл + Сх интерф»
тле СГТ) - коэффициент сопротивления трения по внешней поверхности
пищолы; Схл ~ коэффициент сопротивления давления по внешней по-
верхности гондолы при коэффициенте расхода f= 1; Сх[- коэффициент
расходного сопротивления воздухозаборника; СГПер ~ коэффициент со-
противления перепуска воздуха из канала во внешний ноток (сюда отно-
сится сопротивление системы отсоса noi-раиичного слоя из воздухозабор-
ника, створок перепуска и сопротивление, возникающее вследствие не-
гермстичносгн канала и отбора воздуха из капала); Схсл - коэффициент
сопротивления системы слива пограничного слоя перед воздухозаборни
ком; Сл ||11Т€рф коэффициент сопротивления интерференции, обуслов-
ленный взаимным влиянием гондолы двигателя и планера самолета.
Моделирование условий внешнего обтекания воздухоза-
борников. Втекающая в воздухозаборник струя воздуха влияет па обтс-
капис планера самолета. Силы, действующие па жидкий контур воздухо-
^борпика, МО1-уТ д£цзать составляющие вдоль всех трех координатных
С1 и создавать дополнительные моменты, влияющие на устойчивость
амолета. иОЭТОМу ПрИ исследоиант1 аэродинамических моделей следует
Г вилъно моделировать условия внешнего обтекания воздухозаборника,
лейс Испь1та1,ии аэродинамических моделей с протоком воздуха силы,
ныеTR"НЭ жилк’™ контур, а также силы и моменты, обусловлсн-
чаютП°В0^0Т0м и°ктора количества движения tn^Vx на ось сопла, вклю-
KoiB ПоляРУ самолета.
сМодел ДЭ КОэФФИГ1Ие11ты расхода и внешнее обтекание воздухозаборника
по-пнИгсРО13а1,Ь' 1,Равильио' то ПРИ расчетах летных данных никаких до-
нУЖц0 QIIblx поправок в аэродинамические характеристики вводить не
кают а Л1,ако при моделировании обтекания воздухозаборника возпи-
й<'ль11(и^0‘:1Инам,1ческие и конструктивные трудности, обусловленные не-
Размерами модели и отсутствием двигателя. При испытаниях
аэродинамических моделей числа Re обычно значительно ниже Я
пых, что .может приводить к существенному изменению характера
ния воздухозаборника. Кроме того, возникают значительные Гри
по воспроизведению системы отсоса пограничного слоя и различйь^Я
гулируемых элементов воздухозаборника, а без них также изме
характер обтекания воздухозаборника. При небольших дозвуковых^
лах М нс удается пропустить через воздухозаборник и канал модепцЗ
требнос количество воздуха. Ьг>
Обычно на аэродинамической модели выполняются только первыеЯ
пени поверхности сжатия, существенно влияющие па внешнее обтекЛ
воздухозаборника, а горло делается перерасширенпым. Отсос погр^З
ного слоя в воздухозаборнике не воспроизводится или воснроизнптЗ
частично. В связи с этим для обеспечения соответствия между обтекаци»
реального воздухозаборника и его модели проводятся специальные иг-т
тания. На выявленные отличия в их обтекании вносятся обычно расчепЯ^
путем поправки в аэродинамические характеристики модели. Для уш
нения величины поправок проводятся исследования специальных модс.к
5.5. Проектирование воздухозаборников
Требования к воздухозаборникам. При аэродинамическом про-
ектировании и компоновке воздухозаборника на сверхзвуковом саме.ите
учитываются как характеристики, обеспечивающие его эффективно®
(восстановление полного давления, внешнее лобовое сопротивление, мае *
так и характеристики, обеспечивающие возможность его эксплуатащи
(регулирование, против оном паж пые запасы, неоднородность потока w-
ред двигателем, защищенность от попадания инородных тел на взлетяо-
посадочных режимах, влияние нарушения нормальной работы воздух
заборника на характеристики самолета и двшателя, возможность выис''
нения специальных функций и требований, таких как пуск ракет, гм®
ритные ограничения и пр.).
При проектировании воздухозаборника должны быть заданы:
- приведенные расходы воздуха через двшатель по траектории
лета и возможные их от клонения при дросселировании двигателя и 4
изменения температуры атмосферы;
- условия полета, включающие основные режимы (числа М*, УЧ
атаки, скольжения) и их изменения в эксплуатационном диапазоне
условиям управляемости самолета и из-за турбулентности атмосфер
также предельные их значения.
Следует отмстить наиболее важные потребные характеристики.
рыс могут быть разными для различных режимов, как, например,
мальная экономичность па крейсерском режиме и максимальная
тивпая тяга на режимах набора высоты и разгона самолета.
Условия устойчивой работы двигателя должны быть согласо»
между конструктором двигателя и самолета.
www.vokb-la.spb.ru - Самолёт своими руками?!
ипо. не удается удовлетворить всем требованиям, нредъяв-
^воздухозаборникам, и решение ищется в виде компромисса
„^емым * *ьнь;ми требованиями.
,межЛ?гОЬ пзаборники внешнего сжатия. Воздухозаборники внеш-
Б°31Я применяются благодаря достаточно хорошим эксплуатацион-
него с*а1И” риСТИкам. Они мотут быть как плоскими (рис. 5.1.2), так и
ны» хаР , 11ЧНЫми (рис. 5.1.1) или секторными вырезками из них.
оСеси»»е1Р преимуществами осесимметричного воздухозаборника по
ОсН с плоским являются его меньшая масса и компактность, а пс-
ср2ВН ’ ш - трудности с обеспечением режимов работы на больших уг-
ДОСТатаки и конструктивные трудности при регулировании. Кроме того,
1аХ ше воздухозаборники часто обеспечивают лучшее сопряжение с фю-
S^eM и крылом, чем осесимметричные.
Основные принципы проектирования плоских и осесимметричных
воздухозаборников совпадают. Ниже проектирование рассматривается на
примере осесимметричного воздухосборника с указанием имеющихся
огтичий для плоских воздухозаборников, течение в которых по условиям
отрыва потраничпого слоя яв.тяется более напряженным.
Схема воздухозаборника. Схема сверхзвукового регулируемого воз-
духе заборника гондольного тина приведена на рис. 5.1.2. Стремление
иметь небольшую длину канала способствует увеличению неоднородности
потока перед двигателем, особенно при наличии угла атаки. Необходи-
мость выравнивания потока учитывается при проектировании дозвуковой
части воздухозаборника и выборе ее длины. Воздухозаборники должны
иметь плавный поворот потока в области горла, сочетаемый с интенсив-
ным отсосом пограничное слоя с центрального тела.
Выбор основных размеров. При выборе основных размеров воздухоза-
борника и положения регулируемых элементов используются значения пло
пищи струи перед воздухозаборником и в его критическом сечении (горле):
+ -^СПр отб ) v Grip + AGjip ujf')
' rf — Г —— а /*,. — “ .
242 а
242
м Здесь Г„. - площадь сечения входящей в воздухозаборник струи невоз-
' еННО1° ВозД?'ха> протекающей через критическое сечение, м2; Спр -
Расх°Д воздуха через двигатель, кг/с; AGup.ort “ увеличение
(11а* да ЧеРез критическое сечение вследствие отбора воздуха из канала
- Ko^kr,1^^’ охл^депие, кондиционирование, негерметичность и пр.); v
9(N1 ) ИЦИСНт ВОсстанои-'1е11ИЯ полного давления на входе в двигатель;
Горла 2 п^ИВеленный расход перед воздухозаборником; FT - площадь
ц’ М ' а ~ нормированный параметр дроссельной характеристики.
РаеГсяЛ°1Цад|> ц°адухозаборника Го больше площади струи Гст, и выби-
° Расчетному сверхзвуковому режиму:
Го - тг^/4 = Г,,//,
здесь f - 1 - Л/оТС - A/iiep. А/ох- " коэффициент расхода воздуха,
наемого перед горлом воздухозаборника; А/пср ~ коэффициент рас
воздуха, перепускаемого за скачками и волнами сжатия перед Л
етыо входа (а также через обечайку перед горлом воздухозаборник £
Отсос пограничного слоя (ОПС) и перепуск воздуха выполняются М
улучшения эффективных и эксплуатационных характеристик вов-р,^^
борника. При проектировании значения v, Afm, Дбпер и а выбирахй!
соответствии с типовыми зависимостями (рис. 5.1.5) и результатами ил«!
танин воздухозаборников - прототипов. Обычно A/ncp~0,02j. 0,05, с=»0 9 "*
Общая относительная длина воздухозаборника гондольного
обычно L!dw * 2-е4 и зависит от .максимальных углов атаки и дотг^-т*
мой неоднородности потока перед двигателем. Для плоских воздух»
борпиков /,/</двс4-е-10.
20'
10'
0к
ЗУ
мв
Рис. 5.5.1. Рекомендуемые максима,1ьныц
углы наклона центрального тела (поверх-
ности торможения) 0г воздухозаборника
Центральное тело. Центральное
воздухозаборника выполняется в виде п
иенчатого конуса (каина) или в виде ко-
нуса (клина) с последующим криволщ^
ным контуром, обеспечивающим изпжь
ропийпое сжатие сверхзвукового полна
('истома скачков и волн сжатия при рк
чстно.м сверхзвуковом числе М полета еь
полпяется так, чтобы обеспечить небслэ-
шое растекание потока перед плоскспта
входа (А/цер ~ 0,02-г 0,05). Такое проек-
тирование центрального тела позваяю
увеличить нротивопо.мпажныс запасы м»
духозаборника, особенно при онсюнепяД
от расчетного режима. Максимальные Ре-
комендуемые утлы центрального тела
(рис. 5.5.1) позволяют получать значения v,nax, соответствующие титю**
кртгвой v(M<) для воздухозаборников внешнего сжатия до чисел М* « 3
Переходный участок. Переход-
ный участок воздухозаборника про-
ектируется следующим образом.
Внутренний контур обечайки об-
разуется путем вписывания ломаной
линии в дугу, образованную радиу-
сом r!h\ « 3,5 (рис. 5.5.2). При этом
начальный угол наклона обечайки 5
выполняется таким, что разность уг-
лов GK-5s 12-5-15°. На центральном
теле конец участка поворота (точка
D, рис. 5.5.2) находится из условия
«п Гг S J- пх, где Л'гзап “ площадь
г = 3,311,
Средняя линия £ J
D
Динни р”
ило*
\ J
Рис. 5.5.2 Схема п<м-гр<х:ииЯ пе
го участка воздухозаборника
www.vokb-la.spb.ru - Самолёт своими рук;
aiivcKe воздухозаборника; FBX - площадь входа (сечение “вх”
гОрЛ« прн Зио‘пмали к средней линии, а сечение 1 - по нормали к цент-
бер₽тсЯ п” 4V.‘fuxSFi). Обычно FrIFm = 0.95ч-1 Контур АД выполня-
paitfioM) моЖНО было фиксировать замыкающий скачок уплотно-
стей так, з плосКОСТЯМИ входа и горла воздухозаборника, т.е. чтобы
нця меЖ'ср11ения канала была близка к постоянной. Это позволяет из-
n.’(’uiaJ^R ,1епиЯ неустойчивости замыкающего скачка уплотнения в нере-
6С5Кном участке воздухозаборника.
XtU Построенный контур переходного участка корректируется по сообра-
иям регулирования воздухозаборника в диапазоне чисел Мя. Для
Ж**го строятся линии равных площадей относительно обечайки и нахо-
ЭТ°'°Й положения центрального тела в соответствии с потребными значе-
ниями площади горла, входа и потребными коэффициентами расхода.
устранения возникающих противоречий используются различные
аэродинамические и конструктивные решения. В частности, на участке
АД допускают разрыв контура, сочетаемый с отсосом пограничного слоя,
и выполняют центральное тело раздвижным, с цилиндрической наклад-
кой в области горла.
Дозвуковой диффузор. Дозвуковой диффузор осесимметричного возду-
хозаборника, регулируемого путем продольного перемещения элементов
центрального тела, образуется путем увеличения площади канала со стороны
обечайки (6кГ1Я ь 8°, рис. 5.5.2). Расширение площади продолжается до
значения, соответствующего площади горла на дозвуковых режимах полета,
которая выбирается в соответствии с
рис. 5.5.3. Рис. 5.5.3 позволяет по за-
данному значению коэффициента по-
терь полного давления (например, ти-
повому или стандартному 5П) и рас-
считанному (или взятому но прототи-
пу) зпачсщ1Ю коэффициента соиротив-
- гения дозвукового диффузора найти
величину G/Fr и затем F,.. Обычно
^0 1. Gnp/Fr --- 220 кг/(м2-с).
Далее канал должен иметь не-
вьшо^ расшиРсние (на 20-5-40%) и
кг,1.°ЛПЯГься с Двойной кривизной
вд"’\ра <г/А > 4/5).
тело и-г°ны, крепящие центральное
ЬасМс|И СЛ'5кая1ие для отвода отсасы
г*бразГ° ЛогРаи1,чного слоя, целссо-
Однак° ^сганавливать но схеме “X”
На положительное влияние их
гвтслС1^НиРодность пот°ка перед дви-
Нез11ачительно и проявляется
Рис. 5.5.3. Зависимость коэ4’Фи,Р,ента пгь
терь 8 - t - v п дозвуковом диффузоре от
приведенного расхода воздуха через двига-
тель, отнесенного к площади горла ("на-
рузка на горло”); См коэ<|)фицяеит со-
противления дозвукового диффузора; Мг -
число М поюка в горле воздухозаборника
11с*Ш
С НгЛ-,.. 1
Для улучшения условий работы газотурбинного двигателя
но непосредственно перед ним иметь цилиндрический участок
поджатием канала к фланцу двигателя (х/7/лв ~ 1, dKW/dnTi = 1-ц 05)1
Стартовая механизация. Сверхзвуковые воздухозаборники при
на месте имеют значительные потери полного давления, вызванные
вами потока с острых передних кромок (рис. 5.5.4). Для уменьшения т^|
используется специальная стартовая механизация воздухозаборник
Эффективным типом стартовой м»
низации являются створки ПОДПИТКИ o'
новными геометрическими параметра
определяющими уменьшение потерь в
духозаборнике при работе па месте, як*»
ются относительная площадь выреза в стц
ко капала /"вир — ^"выр / ^"г огпоситель^^
толщина (коллекторность) задней кро^,
выреза в обечайке /£выр. Эмпнг»
Рис 5.5 4. Зависимость коэффици-
ента потерь полного давления от
отношения Gnp/Fr на режиме рабо-
ты на месте (М, -0)
закрытых створках). Величина
ческая зависимость 8/8© =Л^’пыр>Лоб) л»
оптимального угла открытия ство^л
Ф = 254-30° дана па рис. 5.5.5 (8р - к ф-
фициент потерь в воздухозаборнике ж
£выр находится по потребному значеши.
коэффициента потерь 5. Число створок определяется из условия получим
- 0,34-0,4. При ^06=0,3 и Спр/Гг-220 кг/(м2 с) для получения ф
М = 0 типового значения v = 0,9 требуется площадь Гпыр - 0,6.
11о соображениям уменьшения массы и удобстве! эксплуатации сдаз!**
подпитки целесообразно выполнять
самоустанавливающимися, т.е. без
принудительного управления. Макси-
мальный угол открытия (фа30°) ог-
раниуивается с помощью специальных
упоров. Для устранения автоколеба-
ний используются демпферы греши.
Из других типов стартовой ме-
ханизации на осесимметричных воз-
духозаборниках применяется смеща-
емый носок обечайки, а на плоских
поворот носка обечайки.
Доводка воздухозаборника и
выбор программы регулирования.
Спроектированный воздухозаборник
исследуется на моделях в аэродина-
мических трубах с целью < «пределе-
www.vokb-la.spb.ru - Самолёт своими руками?!
актсрис1ик и их соответствия расчетным значениям. По ре-
ния ег0 ха испытаний уточняется программа регулирования воздухоза-
ульгата-'1 ^носЯТСя коррективы в геометрию воздухозаборника.
Уорника и совершенствования воздухозаборника Главными на-
р}апра(*_^ гицСршенствования воздухозаборников являются умсньше-
праВ-1СН1' х уГЛОВ обечайки и уменьшение длины воздухозаборника.
н,,е наР\опее значительное уменьшение наружных углов обечайки воз-
112 путем перехода от внешнего к смешанному сжатию сверхзвуково-
М°Я<Н°ока Это направление рассмотрено ниже.
1X5 "Уменьшение длины воздухозаборника прежде всего приводит к росту-
породности потока перед двигателем (рис. 5.1.11), особенно на пре-
Не° ных режимах, и. следовательно, к сужению области устойчивой ра-
боты силовой установки. В этом случае обеспечение устойчивой работы
ситовой установки может быть достигнуто путем более строгого соответ-
ствия между режимами работы двигателя, воздухозаборника и условиями
полега (М. а, р, Т), т.е. путем усложнения системы регулирования сило-
вой установки. Это направление предполагает совместное регулирование
воздухозаборника и двигателя с использованием бортовой ЭВМ.
Воздухозаборники с нерегулируемым сверхзвуковым диф-
фузором. При создании некоторых типов летательных аппаратов ста-
вится задача разработать воздухозаборник с нерегулируемым сверхзвуко-
вым диффузором.
Характерные особенности. Воздухозаборник с нерегулируемым
сверхзвуковым диффузором выбирается под увеличенный при расчетном
сверхзвуковом числе bL расход воздуха, который соответствует макси-
мальному приведенному расходу воздуха через двигатель Сир,||1ах. Раз-
ность расходов AO.Ip.IIi;i, = G„p max - GIip м (где G„pM - приведенный
расход воздуха через двигатель при рассматриваемом числе Ми), пере-
пускается из канала воздухозаборника во внешний поток.
Постоянный расход воздуха через канал даст возможность иметь по-
стоянную площадь горла и нерегулируемый сверхзвуковой диффузор.
- Нако площадь воздухозаборника Fq оказывается персразмсренной, что
Го ,Еоднг к увеличению внешнего сопротивления воздухозаборника тако-
МапИПа ^ЛЯ '•ме1,ьшения внешнего сопротивления ограничивают макси-
Нию* 40 Всл,гчинУ углов центрального тела Ок. Это приводит к уменьше-
на bi *<^>И1и,е11ТОь восстановления полного давления (по сравнению с
1 и ЗНачрннями для регулируемых воздухозаборников) при числах
ек' ГЛе число М« определяется по зависимости 0Ksf(M»),
введение- к
Рету4и °И На Р,1С’ 1 Ирн проектировании воздухозаборника с не-
кое ре, С М1>1Л< СиеРхзвуковым диффузором обычно ищется компромисс-
НпВлеНи ИС МС>КДУ Внешним сопротивлением и коэффициентом восста-
Пол*»о давления воздухозаборника, особенно при больших
1 Полета.
Нерегулируемая геометрия сверхзвуковой части позволяет йен
вать для выравнивания потока в горле воздухозаборника цилицдри^*
или слаборасгпиряюшиеся участки канала. Но несмотря на это, R
хозаборпике с нерегулируемым сверхзвуковым диффузором Цел
но применять отсос воздуха, что дает возможность получить Потреб*'
противопомпажные запасы воздухозаборника в эксплуатационном ди 4,1
зоне режимов работы. Кроме тою, использование отсоса пограничЗ
слоя с центрального тела увеличивает коэффициент воссганов тения гш
него давления воздухозаборника при числах Mrf >1. А
Перепуск воздуха из канала. Для перепуска воздуха могут бьл
применены створки перепуска, жалюзи и отверстия в стенке капала с 2
следующим выбросом воздуха через подкапотное пространство двигать
в сопло или кормовую часть гондолы
Расчет систем перепуска ведется но уравнению расхода с иенользе^
нием экспериментальных данных о коэффициенте истечения ц
Д^т<Я>.пер — 242 ЦпрбуС^цер)^, ГДС ЦПр (-Ропер' -Родв^М
Здесь Д^пр.пер _ приведенный расход перепускаемого воздуха, х, 1С1
242 - размерный коэффициент, кг/(м2с): 7(Хпер) - приведенный распад
для приведенной скорост в ядре вытекающего ноюка; Рооср. Ро-
полное давление в перепускаемом воздухе и в измерительном сечении л
ответственно.
Коэффициент расхода перепускаемого воздуха Afuq, = р(Ро ten
х<7 (лпер)^/Ро<7 ( Мк))-
Дроссельная характеристика воздухозаборника, определяемая по '»
чснию, соответствующему входу в двигатель, при наличии перепускает*
новится па сверхкритическом режиме наклонной (рис. 5.5.6) Нак/.*’*
дроссельной характеристики прежде всего обусловлен изменением w
чины Punei/Pf), входящей в соотИОЙЯД
для -Упер. Кроме того, вследствие зависни
сти коэффициента ц от характера течения
зоне перепуска, возможны отклонения ‘
линейной зависимости. Вертикальная
на дроссельной характеристике в0'?М<\<ц
только после прохождения замыкаю
скачка внутрь канала за систему черепу
В случае перепуска воздуха через
ки (рис. 5.5.6) характерной площадью
ется площадь критического сечения ^Р^А
сверхзвуковых скоростях внешнего 11
перепад давления обычно больше
кого и <7(л11ер) = 1. Для створки с боКО^И
стенками при увеличении угла <р 4°
эффициент истечения изменяется в "
Рис 5.5.6. Дроссельная характе-
рней ика воздухозаборника при
перепуске воздуха из канала
www.vokb-la.spb.ru - Самолёт своими руками?!
О 85 У створок без боковых стопок количество перепускаемого
,ветичивается с ростом ср. Эффективность боковою вытекания
р<рЛУха gc,KOBbic поверхности a h с d а) соответствует значениям
(через ^03 g случае возрастания неравномерности потока перед створ-
рбок " _1,ьиииснт М уменьшается (например, при прохождении замыкаю-
Г^скачка примерно на 20%).
mere зН со сложной формой проточной части и влиянием нсравно-
тл потока эффективность створок перепуска проверяется экс-
ме^(1$1СИ7-ально. В результате экспериментов находятся зависимости
11<^ = f((i)) и оцениваются величины коэффициентов истечения отпо-
AGnO.nep '
тьно принятых значении площади критического сечения створки.
с С «елью уменьшения нагрузок па привод створок и сокращения их
моров, створки выполняют в виде жалюзи Коэффициент истечения р.
через жалюзи ниже - р. = 0,8-5-0,5. Уменьшение коэффициента р приво-
дит к pocrv внутреннего сопротивления при перепуске воздуха, которое
определяется комплексом pv = w^. Составляющая наружного сопротивл-
ения для жалюзи обычно также больше, чем для створки с боковыми
стенками и с тем же углом открытия <р.
При перепуске воздуха через прямоугольное отверстие в стенке кана-
ла в качестве характсрноГт площади
(рис, 5.5.7) Приведенная скорость в
отверепги Х||1;р определяется из отно-
шения Р(лаер) = Рт/Рщ, где Р-2 - ста-
тическое давление в камере за отвер-
стием, Р01 - полное давление в пере-
пускаемом потоке. Коэффициент ис-
течения ц - Рэф/Р зависит от скорости
в капало ?ч и отношения давлений
VPi. Для круглых отверстий при
критическом значении Рг1Р\ « 0,528 величина ц изменяется примерно от
'н = 0,4) до 0,2-г0,3 (при Xi = 1). При одинаковой площади
“Ч’фективпостъ продольных отверстий выше, чем поперечных. Так, при
Э(1С^Ичснии относительною удлинения отверстия lib от 7,2 до 23,7 ко-
л^ИЦиенг М возрастает с 0,6 до 0,67 (Xi = 0,45; Рг!Р\ = 0,6). Уве-
иие Р2/Р] до о приводит к снижению ц с 0,6 до 0,4.
тетр 11еРспУСК0 воздуха ДС|[р.пср неоднородность потока перед двига-
° расходом ^»р- характеризуемая величинами Дсо и е, обычно
де Р к гой, которая быта в воздухозаборнике до перепуска при расхо-
Рощ^п AGiip.ncp. Небольшие отклонения отмечаются в ту и другую сто-
Ярои- неравномерном потоке в канале уменьшение неоднородности
1рч . °ДИ1 цри перепуске низконапорной части воздуха, а увеличение -
^Ускс высокопапорпого воздуха на диффузорном участке. Коэф-
Г Нг восстановления полного давления в воздухозаборнике с пере-
берегся площадь
отверстия F
Рис. 5.5.7. Схема перепуска воздуха
из канала
hvckom воздуха выше, чем в воздухозаборнике без перепуска, вс, И
уменьшения скорости в канале, воздействия на noi-раничный
вода пизконанорной части воздуха (Avmax » 0,005-0,03). 1 11 ljr
Условия разработки нерегулируемого воздухозаборника. Во.зду
борник с нерегулируемым сверхзвуковым диффузором должен Иметь****
тему перепуска воздуха из канала, регулируемую по закону до c,tr-
= ДСпр), где G,ip обычно является функцией приведенных оборотов’**
гатсля 72„р или степени сжатия компрессора лк.
Эффективность воздухозаборника с полностью нерегулируемой
метрией зависит от расходной характеристики двигателя и режимов
лета летательного аппарата Регулирование не требуется, если в поэд.
ном диапазоне чисел Мл приведенный расход через двигатель СПр сохрз
няется постоянным и исключено снижение оборотов двигателя при сверх
звуковых скоростях полета. Небольшое уменьшение Gllp может быт
обеспечено пологой ветвью дроссельной характеристики, получение к т.
рой том легче, чем меньше число Мо. и угол атаки.
Особенности воздухозаборников смешанного сжатия.
Сравнительная характеристика воздухозаборников смешанного в
внешнего сжатия. Воздухозаборники со смешанным сжатием сверхзвук»
вого потока отличаются от воздухозаборников внешнего сжатия прежде
всего меньшими углами наклона контура центрального тела и обечайки
В воздухозаборнике с внешним сжатием максимальное значение коэффи-
циента восстановления полного давления v достигается на докритическс*
режиме, а в воздухозаборнике со смешанным сжатием - на сверхкрип.
песком (рис. 5.2.1). При дросселировании воздухозаборника со смешан-
ным сжатием сразу за сверх критическим режимом возможен срыв тсч!
пия внутри воздухозаборника, сопровождающийся резким падением и ко-
лебаниями полного давления и расхода воздуха в канале.
С учетом восстановления полного давления и внешнего сопротивлая*
воздухозаборники со смешанным сжатием сверхзвуковою потока позволЩ
получить наиболее высокую эффективность при числах Mx,>2-s-2,5. Их
тая длина примерно такая же, как у воздухозаборников внешнего сжая*
но масса несколько возрастает, в основном, в результате большей стек
механизации но сравнению с воздухозаборниками внешнего сжатия.
На расчетных режимах в воздухозаборниках, использукнпих •
греннее сжатие, удается получить достаточно небольшую неоднородней
потока, даже меньшую, чем у воздухозаборников внешнего сжатия.
типа воздухозаборников равноценны п ио соображениям защиты от
дания посторонних предметов на взлетно-посадочных режимах. ,
Однако такие эксплуатационные характеристики, как пробив
пажныс запасы, регулирование и влияние нарушения нормальной Pat^J
воздухозаборника на характеристики самолета и двигателя (“реакцией
отказ"), у воздухозаборника смешанного сжатия хуже, чем у возДУ-'в
борника внешнею сжатия Поэтому при проектировании ДОЛЖНЫ
www.vokb-la.spb.ru - Самолёт своими руками?!
>101рены мероприятия по аэродинамике и конструкции, нозволяю-
пРс'^'С -щсстрить эксплуатацию воздухозаборника смешанного сжатия на
щие 0(4 13 результате значения коэффициента восстановления полного
принимаемые при расчетах тяги двигателя (рис. 5.1.5), ниже,
^^tieci’BO отсасываемою воздуха выше, чем это достигнуто в гемати-
а к°" исСлсдоваииях воздухозаборников этого типа.
^^Обеспеиеии^ эксплуатационных характеристик. IIротивопомпаж -
запасы. Воздухозаборник летательного аппарата должен обладал»
,|ЫГ няоломпажным запасом как по расходу воздуха, так и по ходу рсгу-
‘’pveMb.x элементов.
Противопомпажные запасы в воздухозаборнике внешнего сжатия на
оптя>1альПОМ (кРитическо>1) режиме работы, обеспечиваются пологой
ветвью дроссельной характеристики. Аналогичный пологий участок дол-
жен быть получен и для воздухозаборника, использующего внутреннее
сжатие сверхзвукового потока.
физической основой для получения пологого участка в воздухозабор-
нике смешанного сжашя является изменение количества отсасываемого воз-
духа на режиме сверхзвукового и дозвукового течения в канале с отводом
воздуха через стенки Увеличение расхода пропорционально возрастанию
давления за прямым скачком, так как на выходе из системы отсоса, как
правило, 'кс = 1. Отношение статических давлений после прямого скачка
(Pj) и до пего (Pj) при числах М > 1,24 превышает отношение давлений
(Рэ/Р’^кр, вызывающее отрыв пограничного слоя. Однако при управлении
пограничным слоем (УПС) значение Рэ/Р^, соответствующие прямому скач-
ку. могуч быть реализованы до чисел М = 1,9 В среднем для типовых зна-
чешш чисел М в горле воздухозаборника можно считать, что Р->1Р\ “ 2
(PW 5.5.8). Следовате^гьно, для воздухозаборника относительное количест-
во отсасываемою из области горла воздуха примерно должно равняться ве-
личине потребного нротивопомпажного запаса воздухозаборника
G~Pl
G -р2
В
Ряс-5 5
Физическая «к.иопа получения пологого участка дроссельной характеристики в
‘‘'"’рлике смешанного сжатия с помощью управления пограничным слоем (УПС)
Потребный противопомпажный запас воздухозаборника мо^н
дать и при наличии крутой дроссельной характеристики, выбирая ° '
ния коэффициента восстановления полного давления на режиме п
вапня с двигателем vt.„rJI < vmax (точка В на рис. 5.5.8). Однако кат^
казывают расчеты, такой нуль обеспечения потребных иротивопом! П
пых запасов приводит к большим потерям в характеристиках само
чем увеличение отсоса noi-раничного слоя из горла воздухозаборника^
Для обеспечения запаса по ходу регулируемых элементов (a
по отношению к внешним возмущениям) в воздухозаборниках смешанно,
го сжатия используется нерераепшрепие площади горла и увсличеннти!
перепуск в области горла. Эти мероприятия также снижают эффсК;Ив<
ность воздухозаборника смешанного сжатия. Ухудшение характерист»
может быть тем меньше, чем выше точность и быстродействие систему
управления воздухозаборником.
Регулирование. Особенности системы управления силовой упанор
кой с воздухозаборником смешанного сжатия обусловлены возможных
нарушением ее нормальной работы из-за срыва сверхзвукового втекания
в воздухозаборник.
Внутреннее сжатие зависит от числа М перед входом. С другой сто-
роны, при заданном числе М площадь горла воздухозаборника завш гл
от расхода воздуха через двигатель. Поэтому для устойчивой и эффш-
1НВНОЙ работы силовой установки должны быть обеспечены:
1) однозначная зависимость геометрии воздухозаборника от чх’са»
Mtf набегающего потока (эта зависимость может несколько корректиро
ваться в сторону увеличения относительной площади горла вследстиж
влияния углов атаки (скольжения) и внешней неравномерности потока):
2) однозначная зависимость расхода воздуха через двигатель и new
му перепуска воз/^ха из капала от числа М*. набегающего потока СпряЛ
+ ДППр.пер “ /"(М«) (эффективная работа силовой установки при вьлкл
нении данного условия возможна, если дополнительный перепуск Дбпрл
в основном будет осуществлен нс через створки перепуска, а, напряг
через прямоточный контур турбопрямоточного двигателя);
3) возможность повторного запуска воздухозаборника после его сры»
с этой целью должна быть разработана специальная система повторно’10
пуска воздухозаборника, которая включает управление ио программ^
гелем и рогу тируемыми элементами воздухозаборника; система повг< г
запуска нс нужна, если воздухозаборник выполнен как автозапуска»-
Влияние срыва воздухозаборника на устойчивость са-молема-
воздухозаборника приводит к появлению сил и моментов,
относительно всех трех координатных осей и являющихся резулът* |
изменения эффективной тяги двигателя;
- изменения силы, которая обусловлена поворотом протек*
через гондолу двигателя массы воздуха и которая учитывав
внешних характеристиках самолета;
www.vokb-la.spb.ru - Самолёт своими руками?!
• симметрией вНСШНег0 Обтекания самолета при срыве потока перед
пом в воздухозаборник.
вХ больше разность коэффициентов расхода воздуха на режимах до
Че' та воздухозаборника (т.е. чем больше внутреннее сжатие),
и 1 X, 1ШС плечо действия сит и чем больше угол атаки, тем сильнее
ИР срыва воздухозаборника на устойчивость самолета, что особенно
влияв1 • дцу^дингательных компоновок. Величины сил и моментов,
она^скаюших при срыве воздухозаборника, определяются эксперимен-
1,03 но'лри испытаниях модели в аэродинамической трубе.
Та" Последствия срыва работы воздухозаборника следует учитывать при
выборе воздухозаборника и его компоновке на самолете.
5.6. Интеграция воздухозаборника и планера самолета
Создание эффективно работающей силовой установки сверхзвуковых са-
молетов различного назначения во многом определяется успешным решением
ряда проблем, возникающих при интеграции воздухозаборника с. планером.
Среди наиболее важных проблем следует выделить следующие
- учет влияния местных параметров потока при обтекании планера
на работу воздухозаборника.
- организация системы слива пограничного слоя, возникшего на
поверхности планера перед воздухозаборником.
- интерференция вихревых следов, идущих с элементов планера, с
течением в воздухозаборнике.
- поиск способов управления вихревыми системами с. целью расши-
рения диапазона эффективной работы воздухозаборника по числу Мл,
углам атаки и скольжения.
взаимовлияние при помпаже одного из рядом расположенных
воздухозаборников.
проблема попадания в воздухозаборник посторонних предметов с
поверхности аэродрома при взлете и посадке самолета и др.
ещеиие этих проблем является общей задачей при создании компо-
н ок с,'1ловых установок для сверхзвуковых самолетов различного иаз-
ет4ИЯ: «Бирских, административных, боевых маневренных и г.д.
на зиестс11 целый ряд компоновок сверхзвуковых воздухозаборников
тельном аппарате (см., например, некоторые из них на рис. 5.2.2)
эабо местиых параметров в области расположения воздухо-
Г)°РникНИ*а ОКоло планера. При выборе места установки воздухоза-
I PitMeur Ь ncPR-|О очередь необходимо определить расчетным или эксие-
ния n Л1’Н1’1>т путем обтекание носовой части планера с целью выясне-
Я Устных чисел М, углов скоса потока перед воздухозабор
'tVxojac, 1акжс средних параметров потока в области расположения воз-
О ЛРИМеРы такого расчета приведены на рис. 5.6.1, 5.6.2.
“Пты ВЦЬ1С принципы, которые должны быть выдержаны при учете
। параметров следующие
Рис. .5.6.1. Раски обтекания воз-
духозаборника методом установ-
ления (линии рапного местною
числа Mf)
Рис 3.6.2. Зависимости
и утла атаки асо потока
угла атаки и самолета
воздухозаборников
Компоновц» 1
1 подкрылье ь.
J подфюзеляжные В
боковые ВЗ
средних зпачепий чисел Ц
перед воздухозаборники* м
для различных кимиоиншж
- Недопустимо попадание скачков уплотнения от носовой части ф»
зсляжа, крыла, фонаря, переднего горизонтального оперения и др»пи
элементов планера в воздухозаборник.
- Воздухозаборник должен быть расположен с учетом местных у
лов скоса в вертикальной и горизонтальной плоскостях, по крайней *
ре, на расчетном крейсерском угле атаки и нулевом угле скольжения
этой целью сверхзвуковая часть боковых и лобовых воздухозабор»^
заклиниваются вниз на угол Да» 2 ч-4°, примерно равный крейсерски
углу атаки полета самолета.
— 1 [елссообразно располагать воздухозаборники в области пред1
гельно заторможенного элементами планера (крылом или его наПЛя
фюзеляжем) сверхзвукового потока.
Организация системы слива пограничного слоя. Для
чсния или ослабления влияния пограничного слоя, наросшего »а &
ности планера перед воздухозаборником, он должен быть отодв» -
планера на величину Лщ, примерно равную или большую мест11
щине пограничного слоя. Обычно величина hm при установке п-
воздухозаборников равна приблизительно (0,01 ч-0,015)£, где 7-
элемента планера (фюзеляжа, крыла) от его начала до воздухоза 1
В щели слива между воздухозаборником и планером устанав?
профилированный клин-pacгекагель. Течение в щели носит сЛ
www.vokb-la.spb.ru - Самолёт своими руками?!
•щсгвенный характер с отрывом потока и вихреобразованисм. Кар-
и распределение давления по длине клипа слива зависит не
ти,,а от формы и угла наклона клина, но и от формы щели слива, гсо-
тОльК° сверХЗВуковой части воздухозаборника, геометрии планера на
Клип бесконечного размаха
Р-
ОЛ
О
М.
-J-------к—
Клип слипа
0^2 0.4 0,6 0,8 х
0 - ,8,5
Рис. 5.6.3. Гипичное распределение коэффи-
циапа = (pi - по лтине клина
слива при М£ = 2,51 и нолууглс клина 0 - 8,5°
расстояния л/2с возмущенной кли-
Рис. 5 6.4 Экспериментальная зависимость
относительного расстояния х/2с возмущен-
ной клином зоны отрыва <гг полуугла 0 при
вершине одноступенчатого клина-растекате-
ля в системе слива (А/811хл - 0,854-1, h = 2г;)
На рис. 5.6.3 приведено типич-
ное распределение коэффициента
давления = (р, - p^/q^ по длине
клина с постоянным полууглом
0 = 8,5° при вершине симметричного
клина. Уменьшение давления вплоть
до величины, меньшей статического
давления в певозмущенном потоке в
кормовой части клина, связано с
эжектирующим влиянием внешнего
потока. Распределение давления в
начальной части клина с 0 > 15° ти-
пично при отрыве турбулентного
пограничного слоя. При коротких
клиньях слива (0> 25-5-30°) возможно явление незануска щели слива,
когда отрывная зона располагается перед началом клина торможения
воздухозаборника. В этом случае характеристики воздухозаборника мо-
гут существенно ухудшиться из-за попадания возмущенной части зоны
отрыва во вход воздухозаборника. На рис. 5.6.4 приведена эксперимен-
тальная зависимость относительного
1,054 зоны отрыва от полуугла 0 при
вершине одноступенчатого клина-
Растекателя при М„ » 1,6-г 2,5. Из
х зависимостей следует, что вс-
личина допустимого нолуугла О,
гает КоТорим Зона отрыва распола-
до> СЯ За началом клина слива, нс
ЦелГНа ,1ревы,пать 0*15ч-2О0. С
слива' УлУ'1Шепия течения в щели
Щеп' ЦеЛ0с°образно расширение
ВнеИВЭ П° Се ЛЛИ11С-
к-'гйЦд^еи1Нес воли°вос сопротивление
аваЧи. Текателя в системе слива
Е°Вечлс^Ь11 Нижс, чем клипа бес-
рис ширины (рис. 5.6.5). Дап-
'°йаиь С б '*’ м°гут быть исноль-
ВКъ О11енки внепгнего волно-
Р^тгвления системы слива.
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис. 5-6.5. Сравнение коэффициентов волнового сопротивления тспига-растекатсш! в сипе*
г лива нограни'шиго слоя (пртг относительной величине высоты клпна-растекателя М„о-
= 0,85-е-1, где 811Х_, ~ толщина тклракичпого слоя перед к.шном) и клина бесконечной ширины
Ударно-вихревое взаимодействие в сверхзвуковых возду-
хозаборниках. Важной задачей, стоящей при разработке сверхзвуково-
го самолета с нелобовым воздухозаборником является необходимое!»
учета влияния на характеристики воздухозаборника вихревых систем О
элементов планера, расположенных впереди воздухозаборника. Зкспер»
ментально установлено, что расположенные на поверхности планера («*
пример, па фюзеляже) впереди воздухозаборника различные выступа»
тис надстройки, например, датчики скорости, антенны и др., iiecMOfl
па их малые по сравнению с воздухозаборником размеры и большие,
ления от пего, могут на сверхвысоких скоростях значительно ухудш *
внутренние характеристики (рис. 5.6.6). При этом значительно
шается коэффициент восстановления полного давления и проТй^че^|
пажныс запасы воздухозаборника, резко могут увеличиться udpa^Blj(^r
неоднородности потока в канале перед двигателем, от которых 8^
газодинамическая устойчивость работы двигателя. Физическая 'Р^Г
этого влияния сводится к неблагоприятным эффектам ударно в*
взаимодействия, т.е. взаимодействия вихревых следов, идущих < .
тов планера в том числе и самолетных надстроек, со скачками
ния воздухозаборника, в результате которого происходит Pd,*P’1
расч тной схемы скачков уплотнения перед плоскостью его вход*
Существенным является то, что взаимодействие вихревых
чением в воздухозаборнике происходит в условиях больших п0,п^в„р,л|
пых 1радисптов давления перед плоскостью входа, характерных
коным воздухозаборникам, особенно внешнего сжатия когда рсЯ° 1
Рис. 5.6.6. Влияние вихревых следов, идущих с впереди расположенных элементов
планера на дроссельную характеристику воздухозаборника
сованиой работы с двигателем соответствует докритическому режиму рабо-
ты воздухозаборника, и замыкающий скачок уплотнения пасполат-ается пе-
ред плоскостью входа. Под воздействием интенсивных скачков уплотнения
происходит разрушение развитого вихревого течения (например, в виде
вихревого шнура, вихревой пелены фюзеляжа, кромочного вихря крыла и
т д.) с образованием висящей в потоке рециркуляционной зоны, окружен-
ной коническим скачком уплотнения (рис. 5.6.6, 3.6.7) 15,7.101. Приве-
денные па этих рисунках теневые снимки и схемы течения соответс твуют
трехскачковому (рис. 5.6.66), одпоскачковому (рис. 5.6.7«) и простейшему
воздухозаборнику в виде трубки Пито (рис. 5.6.76). Измерения давления
° поперек зоны взаимодействия косвенно подтверждают схему течения с
°бр*1зова1гием рециркуляционной зоны с пониженным в пей полным давле-
нием Pq, примерно соответвующим (рис. 5.6.8) критическому
давлений при ударно-вязком взаимодействии скачка уплотнения с
лснтиым пограничным слоем Аналогия ударно-вихревого и ударно-о^^4
взаимодействия прослеживается не только по виду репиркуляциош^^И
и уровню давлений в них, но и по величинам угла наклона конич^У
скачка уплотнения, образованного около рециркуляционной зоны.
Рис. 5-6.fi. Схема течения при ударнс-вихревом взаимодействии
Эффекты взаимодействия во многом определяются типом вихре»**
следа, его интенсивностью (i.e. отношением тангенциальной скорости
осевой) и интенсивностью скачка уплотнения, характеризуемом ловЦР
нием давления в нем [7, 8, 101 1
Для вихревых следов малой интенсивности, например, следов
турбулентного следа за телом, установленным пол нулевым или 1
углом атаки, и достаточно удаленного от тела-генератора следа, •_ .
шение вихря и образование рециркуляционной зоны не наблюда ^с.
этом случае реализуется промежуточный тип взаимо, йс вия (ри< f
с искривлением исходного прямого скачка уплотнения. ДавлеНИ^ЛШ
зоне интерференции также ниже, чем за исходным скачком упл
ио значительно выше, чем при разрушении вихря Переход от оЛ ер. I
па взаимодействия при изменении интенсивности вихря, наПр’^^^И
счет изменения угла установки генератора вихря крылообразно i
может носить скачкообразный характер. В переходной обтастЧ * j
самопроизвольный колебательный пр це .. с перес троением lfc " |
одного вида взаимодействия к другому. ЧИ
www.vokb-la.spb.ru - Самолёт своими руками?!
рис ’> С- 9. Влияние интенсивности вихря, полученное в эксперименте ла счет изменения
п остановки итератора вихря, па картину течения и минимальное значение огноси
ельн о давления Р в области интерферегщии вихря и скачка уплотнения
В то же время разрушите вихря и образование репиркуляционн й зоны
происходит только при высокой интенсивности косого скачка уплотнения при
I рспадах давлений в скачке, отличном от перепада давления в прямом качке
уплотнения не более, чем па ~2(к-30% (рис. 5.6.10). Это соответствует при-
мерн моменту, когда реализуется отсоединенный от клина скачок уплотнения
с местными дозвуковыми зонами, через которые и происходит передача про
пшодавления вперед против потока. При меньших перепадах в скачке уплот-
нения (светлые точки на рис. 5.6.10) в месте пересечения вихря и скачка уп-
вд пения разрушения вихря не набшодастся. Вихрь свободно проходит через
-качок 'плотнв1шя, при этом происходит только некоторая ею деформация.
* к
• 1
0 2
0.1
о
.’ЧМоП11'ИЯ,,И< nHTe’,CHD,,ot:ni скачка уплотнения (отношения давлений а и до
Г₽51 и : на размеры рециркуляционной зоны в области взаимодействия
'1 ’отнеппя: М, = 2,5; * относительное давление, при котором
_ j, I» ТЧч, .IIHXJJM
’Ушсние вихря: Ротрпс ~ относительное давление при отрыве турбулент-
• Р — шн давлени • г м i скачке ^ндотн ния
Пьг?анич1|ог
Ишраничный с ion Зина „трына
Рис. 5.6.11. Ударно вязкое («) и ударно-вихревое (6) вааимодейшвис в воз з
\<«заборниках при сверхзвуковых скоростях '
Таким образом, при попадании в воздухозаборник интенсивного вд.
ря он свободно может пройти через косые скачки уплотнения пер,
давления в которых, как правило, меньше перепада, необходимого дяя
разрушения вихря. При этом произойдет лишь местное искажение koci р
скачков уплотнения. Вследствие этого па сверхкритических режимах
боты воздухозаборника картина ючепия па его входе может изменить я
мало, а коэффициент расхода воздуха может быть близким к его значе
нию при отсутствии вихря. На докригических режимах работы воздухо-
заборника, когда перед плоскостью входа реализуется замыкающий
скачок уплотнения высокой интенсивности, происходит разрушение ви
ря и образование висящей в потоке рециркуляционной зоны, анало'йч-
11ой отрывной зоне при взаимодействии замыкающего скачка уплотняло
с турбулентным пограничным слоем па поверхности клипа (рис. 5.6.11)
Степень влияния попадающею в воздухозаборник вихря зависит пе й
ко от интенсивности вихря, но и от его размера и места в воздухом1
нике, куда он попадает, а также режима работы воздухозаборника.
большее ухудшение характеристик имеет место при попадании вюр
вблизи передней кромки обечайки, особенно при расчетном числе М I
лета, когда косые скачки уплотнения концентрируются у кромки оое
ки и суммарный перепад давления в этом место получается очень
ким, значительно превышающим уровень, необходимый для Ра3РУт^||
вихря. В таком случае возможно значительное ухудшение характеров
воздухозаборника за счет возникающей в плоскости входа репир j,
ционной зоны, которая может практически полностью разрушить .
ную схему исходных скачков уплотнения, перепуская большую ‘
воздуха мимо входа, как это имело место при испытании трехст ул I
го плоского воздухозаборника, показанного па рис. 5.6.6.
Одна из важных целей интеграции воздухозаборника и плаНИ
стоит в исключении попадания вихревых следов от элементов Л-> ‘
различных самолетных надстроек и приборов во вход воздух
па основных режимах полета самолета.
www.vokb-la.spb.ru - Самолёт своими руками?!
ггИВНые сопла силовых установок сверхзвуковых самолетов
питое сопло является необходимой принадлежностью воздуш-
^.еа1 явного двигателя (ВРД). В сопле завершается преобразование
но-РеаК\ эНерГии, подведенной к проходящему через двигатель воздуху,
тСпдовои ^kVJ0 энергию реактивной струи, создающей при своем истечс-
Б кинст1 соП‘,га так как тяга ВРД представляет собой разность между
НИИ/шной тягой сопла и входным сопротивлением воздухозаборника
РеакП тО О1 того, насколько совершенным, с точки зрения газовой
‘^^МНКИ выполнено сопло, в значительной степени (с коэффициентом
пропорциональности, большим единицы) зависит экономичность силовой
установки в целом.
Особенно усложняется проблема разработки реактивного сопла для
твпгагелей сверхзвуковых самолетов. О увеличением скорости полета
увеличивается коэффициент пропорциональности между потерями тяги в
сопле и потерями тяги двигателя Для обеспечения высокой эффектив-
ности сопла его приходится делать регулируемым минимум по двум наг
раметрам. В условиях большого давления и высокой температуры в про
текающих но соплу выхлопных газах ВРД это является достаточно слож-
ной конструкторской задачей. Решать ее приходится, как правило, отыс-
кивая компромисс между противоречивыми требованиями прочности, на-
дежности, массы и газодинамическою совершенства в условиях полета.
Существенным для сопл ВРД оказывается взаимодействие внешнего
потока и реактивной струи. Силы этого взаимодействия настолько связа-
ны с характеристиками собственно сопла, что методологически оказалось
необходимым включать их в составляющие реактивной тяги сопла, вводя
понятие эффективной тяги - тят и сопла в условиях полета. Эффективная
тяга зависит- уже нс только от схемы и конструктивных особенностей са-
мою сопла, но и от особенностей компоновки сопла на самолете формы
хвостовой части гондолы, расположения сопла относительно элементов
с^11еРа самолета (фюзеляжа, крыла и оперения). Поэтому разработку
Bajj‘na и1,ИХОди’гсЯ вести в увязке с общей Компоновкой самолета, отысКИ-
. здесь компромиссные решения
нЬ1Х сопуС1°Я,ЦС>1 разделе кратко представлены характеристики реактив-
терисг И '1СТоДоЛ01ия учета их эффективности при определении харак-
на свеп ЛС7а1с'1,,Ного аппарата, тины реактивных сопл, использующихся
жимах В?КОВЬ1Х самолетах, и особенности течений на характерных р₽-
’,осгт» 1ЮТЬ1 ДВИ1ателя, влияние компоновочных схем на эффектив-
на с у! ТИвн,’1х сопл, а также характеристики плоских сверхзвуковых
Газ *1>авляеиь1м вектором тяги и реверсом.
РеаКтивн^ИНамичес*‘ие характеристики сопл ВРД. В аэродинамике
МеРньгр Сопд используются следующие осредненныс или безраз
Р - всдщ1И1ГЬ1; ' ‘
И7и в Генное тго расходу полное давление в потоке на входе в сопло
РИтическом сечении; '
Таг - осредпенная по расходу и теплосодержанию но..1ная температура а
лср ~ Рос Р-- ~ располагаемая степень понижения давления в сопЛо. 1
Л)2 ^02 =-Ро2/^ос “ относительное полное давление во
контуре эжекторного сопла;
Рд = РЛ>Р„. ~ относительное полное давление в срывных зонах;
Gc = IpV’cospdF ~ массовый расход газа через сопло;
Г
/ 7 ^(ж-1) Л;Рос
GP - к --- ----------- - расчетный предельный расход газа через соипп-
* к Я» + 1 / /7. * ‘'Л
внешне
u = Gc/Gp - коэффициент расхода сопла;
f)C2 = G2<t«2/Gc - приведенный относительный расход воздуха через
второй контур сопла;
./с - J(p V 2 cos2 [3+ Р)с!Г - импульс сопла ([3 - угол вектора скорости в
Fe.
сечении среза сопла по отношению к оси сопла);
2
Jp = -—- цЛ^г(Хс) - расчетный импульс сопла, где приведенная
скорость определяемая из соотношения ^(ае, Хс) = ц?»/^с ’ = >< +
- Jc/Jv ~ коэффициент импульса сопла;
Vc = 1 - Jс ~ потери импульса:
Рс ~ Jc ~ FcPc ~ тяга сопла;
/ 2 уЛ»-’)
Рг ил - идеальная тяга сота, Рс и~ - ае« --- л.-р?.
V х - 17
/’с = Рс/Рс ил _ коэффициент тяги сопла;
ДРС - 1 - Рс - потери тяги сопла;
(:
Ятф - Рс ~^г.с + Хг ~ эффективная тяга сопла;
A'j-c ~ внешнее сопротивление гондолы с соплом;
Xt - - \(Р - PjdF - внешняя аэродинамическая продольная cltl
ствуюгпая па контрольную гондолу (фюзеляж) без сопла, вх а
аэродинамическую продольную силу планера самолета. гй
Важнейшей из перечисленных характеристик является его э
пая тяга (1), представляющая собой разность между тягой соллэ
ним сопротивлением мотогондолы с соплом в присутствии Ре Л
струи. Для того чтобы методологически правильно учесть вЛИЯч
www.vokb-la.spb.ru - Самолёт своими руками?!
Р)к. 5 7. t Аэродинамическая модель
самолета и модель хвостовой части
тинной струи при определении аэродина-
мических характеристик самолета, из
эффективной тяги вычитается взятое с
противоположным знаком внешнее со-
противление хвостовой части конт-
рольной аэродинамической модели. Это
позволяет избежать двойного учета од-
них и тех же сил, действующих на аэро
динамическую .модель и модель хвосто-
вой части. Рассмотрим этот вопрос ве-
ско 1Ы<о подробней.
Д тя определения аэродинамических
характеристик самолета используется ба-
зовая, или контрольная модель, которая
представляет собой как можно более пол-
ную маенпабную модель самолета
(рис. 5.7.1). Однако в этой модели, как
правило, двигатели .моделируются про-
точными гондолами с фиксированной гео-
метрией Такие проточные гондолы не могут моделировать располагаемую
степень понижения давления в сопле и геометрию сопла. Поэтому при ис-
следованиях аэродинамической модели самолета с протоком, ио которым
определяется его аэродинамические коэффициенты, из измеренной силы
иьгчитается сопротивление протока и сопротивление торца модели гондо-
1ы. Для учета влияния реактивной струи двшателя на аэродинамические
характеристики используется специальная модель хвостовой части самолс-
с Легальным моделированием регулируемой геометрии сопла и иарамст-
1 в реактивной струи. Эффективная тяга сопла определяется как разность
411 лду силами, действующими в присутствии струи на хвостовую часть са-
^олега с соплом, и силами действующими при отсутствии реактивной
fiou КОН1РОЛЬ11У,° модель хвостовой части самолета, повторяющей об-
У|)^Т ^a3ORoi’ аэродинамической модели самолета В принятой методике в
и <ъНеНИИ л,,ИЖСНИя самолета при сложении тяги двигателя по проспекту
ДругР°д,п,амических сил, действующих на самолет, не требуется никаких
тягц Г1ПпР^ьок, кроме поправки на отлично эффективной тяги сопла от
Фу СогЪ1а> учтенной в проспекте двигателя.
-ТетаТе И &еактивнь,х сопл. Для силовых установок сверхзвуковых
со11л аппаратов используется широкий спектр регулируемых
Явленис большого количества типов и схем реактивных сопл во
1еТате и *^й;1сляегся и многообразием существующих и разрабатываемых
Н11° -icq Г аппаРа1ов» и их функциональными особенностями. Пазначе-
^’’'‘ДЫва t IbHO1° аппарата и тактико-технические требования к нему Ha-
lt нлп опРеделснный отпечаток па тип, схему регулирования и фуи-
^гивного сопла.
Основные функции реактивного сопла состоят в следующем-
обсспсчшь разгон и пока с минимальными потерями >
давления:
согласовать давление на срезе сопла с условиями вп „
- обеспечить форсирование двшателя, pciy nip я критическое
пне сопла, с<?Че
- обеспечить охлаждение стенок;
обеспечить управлени всктсром тяги и реверс,
- снизить заметность в инфракра ном и радиотокациоином диадам
не длин волн;
подавить шум реактивной струи
Все перечисленные функции сопла должны быть выполнены при ми-
нимуме веса и стоимости, минимальном внешнем сопротивлении, а также
удовлетворять требованиям по надежности и ресурсу. В каждом конк-
ретном случае по мере необходимости тс и ти иные функции сопла моги
быть ослаблены или усилены.
II всего спектра регулируемых сверхзвуковых сопл наиболее широ-
кое практическое применение находят суживающиеся-расширяющиег
сопла, сен ia с центральным телом и эжекторные сопла. Ниже будут
•/ачественнс рассмотрены режимы течения в таких соплах и их вцутрчи
пне характерней!! и. Более i шробио д.ш более широкого класса coin -и
вопросы представ юны в работе: | И].
Суживающиеся-расииряющиеся сопла. На рис. 5.7.2 нршдо-
ны режимы
течения
Put.. 5 2 Режимы тем i ия в пжи
наюшемся-]>ас ширяющемся сопле
в уживаг шихс.я-расширяющихся (сверхзвуковых
оптах шпа сопла Лаваля. При небо-
п их значениях л р так же как и в су ж»
вающемся сопле, па всем протяжении
1 та, вктк чая трансзвуковую и сверхЛ?
к вую ча ть имеется непрерывная 3,wn
1озв 1 очых скоростей. Течение в сел*
неавт м< цельно т е. характеристики п‘
jaiH ят от величины лср- В области^
гического ечепия сопла возможны
ныс зоиь сверхзвуковою течения, и
тор ыми при достаточно болыиих У
степенях расширения сопла '1оЖ _
1 з и i трыв потока. Отрыв Э' ’ JtV
I р и.то, имеет i олсбатеЛиый *арв
и ?ни олсбания распространяю
весь тозв ковой канал двшателя-^^И
т да колебаний увеличивается
приближения к режиму выхода
моде внос течение в дозвуковой длв
нла, копа поверхность нереХ^-
www.vokb-la.spb.ru - Самолёт своими руками?!
F звука распространяется на всю проточную часть сопла в кри-
сечении. Исс тсдования натурных двигателей показали что эти
иля становятся недопустимыми для прочности твигателя, если угол
образующей сверхзвуковой части сопла вблизи критического
ьг' .я больше 0 ~ 0,02 рад. и тыопии1ь_выходного сечения сопла, отне-
ь пло,цади кРИгического сечения F - Г Г* > 1 1.
J ПсП’Ч111,а 71 л” ИРИ которой наступает автомодельное течение в дозву-
Л части сопла, зависит- нс только от конт ра дозвуковой части сопла,
и от контура верхзвуковой части Признаком наступления этого рс-
^[Ма является н< изменное ть коэффициента расхода сопта ц при даль-
лептием увеличении лс Коэффициенты импульса Jc и тяги Рс при этом
LvHfg; от яср. Коэффициент импульса J оказывается больше единицы,
^ффтшшнт тяти Рс - меньше единицы.
По мере увеличения лгр (при тгср > л**) отрыв потока в сверхзвуко-
вой час и 'мешается к срезу сопта Пульсации потока, шум струи и виб-
рации конструкции уменьшаются Когда точка отрыва потока достигает
«ыходной т ромки сопла наступает автомодельный режим течения и в
сгерхзв ковой части сопта. Начало итого режима обозначается .
Признаком выхода сопла на автомодельное течение в сверхзвуковой час-
ти яшястоя независимость коэффициента импульса сопла Jcot яср.
Выход на сверхзвуковой автомодельный режим сопл с внутренним
Нштрснисм тина сопта Лаваля происходит при максимуме нсрсрасши-
JfHiTH пот ка, когда вблизи выходной кромки сопла имеет место область
Со Магическим давлением, меньшим атмосферного Сопло оказывается
^расширенным для располагаемого значения я(:р, появляются так на-
аемые потерн тяги па псрерасширение. На расчетном режиме при
'гр = и1’ тат ическос тав тсние сравнивается с атмосферным и коэффи-
тяги дс стигает своего максимума (В более строгой постановке,
ТОГо- ’’то коэффициент импульса сопла оказывается меньше
ЧЫ и зависит от геометрической степени расширения сопла, макси-
к°зффициента внутренней тяги достигается при , по эго
Чие незначительно.) При л..„ > л*' статическое давление по всей по-
РХНости 1 ср ср
чи септа оказывается выше атмосферного. Степень расширения
0 ** ывается недостаточной, чтобы полностью использовать потен-
)НгРгию иотока, появляются так называемые потери па иедо-
Потери тяти на недорасширение и перерасти прение зависят
01 разности располагаемого и расчетного относительного давления
И ''иределястся по одномерным соотношениям газовой динамики.
РРнИис ПО1еРи тяги в еопле включают в себя не только потери
' * неюрасширс1тис и перерасширсиие, но и потери на трение и кон-
турныс потери, зависящие от формы сверхзвуковой части con I
оценки внутренних потерь тяги в наиболее часто встречающихся На
тике конических сверхзвуковых соплах используются номограмЧь
которые позволяют быстро определять потери тяги таких соп_ *Я|
рис. 5.7.3 представлена номограмма для оценки внутренних потерь
в конических сверхзвуковых соплах для холодного воздуха (а =. ] 4Г)1ЯГи
В правой части номограммы приведены контуры семейства кон !
ких сопл, рассчитанных в диапазоне полууглов раствора а =2-5-20° Пуп
тиром нанесены линии равных внутренних потерь тяги д/>1 коТорьи>
представляют собой сумму контурных потерь тяги и потерь тяги на
ние потока о стенки сопла на расчетном режиме, когда давление па
сопла равно атмосферному давлению: АРВ = - \1\р
В левой части номограммы приведены потери тяги на нерасчипостъ
рассчитанные в диапазоне относительных давлений в реактивной ст| .»
лср = 2+40 Таким образом, при любых заданных значениях нолуугла ра-
створа и длины сверхзвуковой части сопла (линейные размеры отнесены и
радиусу критического сечения сопла) из рассчитанной области в itpai.on
части номограммы определяются внутренние потери тяги сопла, а в ле-
вой потери тяги сопла на нерасчетное!ь. Полные потери тяги сопл,
представляю! собой сумму внутренних потерь тяги и потерь тяги на не
расчетпость сопла: ЛРС - \РВ т ДР„.
www.vokb-la.spb.ru - Самолёт своими руками?!
ча получена для безударных течений в конических соплах,
Н°>’< ^v iapHOCTH течения показана на рис. 5.7.3 сплошной линией
Гранина ’'к1'О1метПТь, что для сужающихся-расширяющихся сопл па
1-1- С'1С‘^1ГЫХ режимах течения внутренние характеристики нрактичсс-
автомвде т от впешних условий, и поэтому расчетные оценки внутреи-
ки не за ь ХОрО1П0 совпадают с экспериментом и в условиях полета.
,,,1Х сопла с центральным телом. На рис. 5.7.4 приведены
с течения в сверхзвуковом сопле с центральным телом с полностью
^вним расширением, когда плоскость перехода через скорость звука рас-
Риг 7 4 Режимы течения п сверхзву-
ковом сопле с центральным телом
Рис. 5.7.5. Сравнение внутренних потерь тя-
ги в коническом сверхзвуковом сопле и
сверхзвуковых соплах с центральным телом
В этом сопле, так же как и в сопле Ла
полагается на срезе обечайки сопла. В лом сопле, так же как и в сопле Ла
валя, после выхода на режим автомодельною течения в дозвуковой части
сопла на центральном теле происходит отрыв потока. Этот отрыв в соплах с
гмчесdЛЫ,Ь1М Телом не вызывает заметных вибраций конструкции. Ста-
r,Je Давление за точкой отрыва близко к атмосферному, поэтому в со-
зацц Е^К1ИчесКи отсутствуют потери на перераептирение. На рис. 5.7 5 иока-
conji ci НСНИе Г1ОТсРЬ тяги в коническом сверхзвуковом сопле и трех типах
емешащ 1ГГРалг’1,1’1М голом, а именно: с чисто внутренним расширением 2, со
Доли внСЦ11 ^ас1ииРснием 3 и чисто внешним расширением 4. Увеличение
Тери тя1ц НС1° PacuniPfJHHn ведет к тому, что существенно уменьшаются по-
p.'icflU1 Гу1а на псрерасш прение и несколько возрастают потери па педо-
Как 11 Ко1п'е -’TPCH1II,e характеристики сопл с центральным телом, также
ганъ1 мОтоГ1еских сперхзвуковых сопл, могут быть достаточно точно рассчи-
В соцг^'1 хаРактеР1,С1ИК с учетом потерь па трение.
»>ии п . с ЦС1[1ральпым телом, обеспечивающим при расчетном зпаче-
^И.Т""МТНЫЙ и направленный по осн сопла поток за срезом
| Ч,^Иы.м dqJ 1Х°Д ,1а автомодельный безотрывный режим совпадает с рас-
ИШ ’-мом. г е прн л > л1>р коэффициент импульса сохраняется
постоянным (рис. 5.7.4), а коэффициент тяги уменьшается лет
увеличения потерь на нсдорасширенис. J Лете
Сверхзвуковые эжекторные сопла. Сверхзвуковые сопла
торного тина находили широкое применение на двигателях сам Э^'
предыдущего поколения (рис. 5.7.6). В настоящее время вновь По Лет'в
стоя интерес к использованию эжекторных сопл, в частности >1Ша‘
.. ’ '1"1Я ДВИга
гелей сверхзвуковых пассажирских самолетов нового поколения с
уменьшения шума на местности. ’’'Lbi0
На рис. 5.7.7 приведены режимы течения в эжекторном сопле В
личис ог рассмотренных выше сопл без разрыва контура, в эжекторн°Т*
сопле появляется четвертая характеристика - относительное давление во
втором контуре Р02 И-1И Л>2 и дополнительный параметр - относит^И
ный расход воздуха во втором (внешнем) контуре &G2, поступающего в соп-
ло из подкапотного пространства гондолы. Все Эго усложняет картину те-
чения в сопло. Приведенные па рис. 5.7.7 схемы соответствуют нулевым
пли небольшим расходам во втором контуре.
Рис. 5.7.6. Хвостовая часть самолаа МиГ-23
с регулируемым соплом эжекторного типа
Рис. 5.7.7. Режимы течения в < «еР
пом эжекторном сопле с короткими -
звуковыми надстворками
Если разрыв контура в эжекторном сопле начинается с критик
сечения, то выход на автомодельный режим в дозвуковой час1 рс.ц1
происходит относительно плавно, без заметного колебания г1ОТ°ь‘х.од И3
в сопле установлены короткие сверхзвуковые надстворки, т0-.^иа,^,
автомодельный режим может, как это наблюдается и в сопле » с
провождагься значительными колебаниями потока.
www.vokb-la.spb.ru - Самолёт своими руками?!
вная струя па участке от среза внутреннего насадка до выход-
РеаКТ иЯ сопла подсасывает в свой пограничный слой воздух из вто-
ного^4* понижая давление в нем. Выбрасываемый с пограничным
ро!-о koi р03ДуХ из второго контура восполняется из атмосферы через
слоем стр. МРЖДу обечайкой сопла и реактивной струси и из гюдка-
ки-^^Одр^транства гондолы, если оно соединяется с атмосферой. По
0071,01 исЧпчения относительного давления в сопле интенсивность эжекти-
Ме,е то действия струи увеличивается, давление во втором контуре
Р'К)1ьи1ается все значительнее и, наконец, наступает режим, при котором
'^активная струя полностью перекрывает второй контур, присоединяясь
^обечайке сопла. При нулевом и небольшом расходе вторичного воздуха
К(оп<с процесс присоединения струи к обечайке сопла, так называемый
запуск второго контура, происходит скачкообразно и с гистерезисом
(отрыв струи при уменьшении относительного давления в сопле происхо-
дит при меньших значениях чем ее присоединение при увеличении
По мере увеличения расхода вторичного воздуха запуск второго
контура происходит все более плавно, исчезают и гистерезисные явления.
Если второй контур сопла не связан с атмосферой или связан через ;юны
сверхзвуковых потоков, то после запуска течение во втором контуре ста-
новится автомодельным, отношение давления в нем к давлению в реак-
тивной струе становится постоянным.
После запуска второго контура на обечайке сопла перед выходным
сечением может иметь место вторичный отрыв потока, и коэффициент
импульса остается переменной величиной в зависимости от я,
кистью автомодельное течение в сопле наступает при
потока смещается иа выходную кромку обечайки. Начиная с этого режи-
ма, постоянным становится и коэффициент импульса сопла.
Отличительной особенностью эжекторных сопл является значитель-
ное У-мепыпеиие потерь тяги на перерасшнренис сопла. На режимах
трР V Лс|> они составляют 2-: 4% идеальной тяги, в то время как в соплах
* 8аля тех же размеров они достигают 20+30%. Характеристики эжек-
Г,1Х СО11-т, за исключением отдельных режимов, практически не под-
‘Я расчету и определяются в основном экспериментально 116].
5.8. Эффективная тяга осесимметричных сопл
сверхзвуковых самолетов
Разби^Ра6°ТкУ реактивных сопл сверхзвуковых самолетов условно можно
с°бстве На этапа- Первый этап - выбор шиа и схемы регулирования
c,Jri-ie Ю Сопла* обеспечивающий минимальные внутренние потерн тяги в
Чецця- в 1 НРоь,с°ком его весе и возможно простейшей схеме его унрав-
°бесПеЧир.’рг’1^ ат°1Г “ выбор рациональной компоновки сопл иа самолете,
“^гате- минимум неблагоприятного воздействия реактивных струй
1 И По;южсния регулируемых поверхностей сопла на аэродина
характеристики самолета, минимум потерь эффективной тяги.
\:Р- Иол-
, когда отрыв
Первый man обычно начинается 1
лиза зависимости расчетной площади
сопла от площади критического сечей
основных режимах полета самолета с*
регулирования сопла должна обсспеч^^
оптимальные характеристики в г
диапазоне высот и скоростей полета д °М
же режимов работы двигателя, т.е. nix>Л
ла1аст регулирование критического сече^
площади среза сопла, а также виешНИх
водов мотогондолы. Таким образом опти
должно иметь три набора створок (створк^
Пришщ Привод основной
коррекции Г-* связи F -Ь.
Рис. 3 8.1 Схема регулирования
гвсрхзнукотii’o сопла
мальнос сверхзвуковое сопло
звукового сопла, створки сверхзвуковой части и внешние створки) и *тп"
соответствующие системы управления.
Однако на практике, кинематически связывая три венца створок, уда-
стся ограничиться двумя системами управления (рис. 5 8.1). Причем ос-
новная системе! управления одновременно с регулированием площади кри-
тического сечения осуществляет и регулирование площади среза сопла по
некоторому закону Fc = FC(F.), максимально соответствующему основным
режимам полета самолета. Как правило, такая однозначная связь позволя-
ет устранить потери тяги па исрасчстность на сверхзвуковых скоростях
полета, однако на режимах взлета и дозвукового разгона площадь среза
сопла, зшшваемая такой связью, оказывается перерасширепной. Перерас-
ширение сопла на этих режимах ведет не только к повышенным потерям
тяги, но может вызвать отрыв потока в сверхзвуковой части соила, из-за
чего может появиться повышенная вибрация конструкции. Поэтом}’ в сис-
теме управления такого сопла предусмотрена вторая система управления,
система коррекции площади среза сопла для дозвуковых скоростей полет
В качестве примера на рис. 5.8.2 приведено сравнение потерь эффс»--
тивной тяги двигателя с соплами, имеющими различные законы регулярок
ния в одиночных мотогопдолах. Рассмотрены трехстворчатыс сопла с двумя
системами регулирования, так наливаемые “ирисовые” соила с одной систе-
мой регулирования, а также сопло с нерегулируемым срезом и перемен’
площадью критического сечения.
На бесфорсажных режимах потери тяга двигателя для трехстворчэт
сопла не превышают 2% идеальной тяга. Двигатель с “ирисовым
имеет несколько меньшие потери тяти. На режимах форсированного Р03 _
потери тяги составляют 2,5+3,5% и только при числах М > 2 потери т
“ирисовом” сопле начинают увеличиваться вследствие потерь на исД°Р^ м
репие потока в сопле. Потери эффективной тяги двигателя с Просте
соплом с нерегулируемым срезом на Зт5% выше во всем рассматр1
диапазоне скоростей полета. Таким образом, уже на нервом этапе р<
ки сопла сверхзвукового самолета, выборе его схемы ретуглир^вЗНЗ
обеспечения максимальной эффективности необходимо, во-первЫХ. 1 1
292
^ww/vokb-la.spb.ru - Самолёт своими руками?!
Рис. 5.8.2. Сравнение потерь эффективной тяти сверхзвуковых сопл
с различными законами регулирования
1>оватъ критическое сечение, площади среза и внешних обводов, во-вторых,
учитывать потребный диапазон высот и скоростей полета, который опреде-
ляет диапазоны регулирования элементов соила. Рассмотренный пример ка-
сается одиночной компоновки сопл на самолете. Компоновки сверхзвуковых
самолетов, как правило, mhotoiондольные. На рис. 5.8.3 показана в качестве
примера фотография хвощовой части самолета МиГ-29. Исследования пока-
зывают заметное влияние на тяговые характеристики сопла особенностей
компоновочной схемы хвостовой части самолета. Особенно острой эта про-
блема становится па маневренных сверхзвуковых самолетах с двухдвига-
тельными силовыми установками, когда сопла приходится распологать ря-
дом так что появляется их взаимное, часто неблагоприятное влияние. Не-
благоприятное влияние компоновочной схемы особенно значительно на ре-
_ _ когда для обеспечения минимума
жимах дозвукового крейсерскою
потерь сто створки максимально
крыты. Поэтому второй важный '
разработки сопла направлен на hoi
рациональных компоновочных Реи1С
ний, обеспечивающих минимальные по^
гери эффективной тяги сопл с учетом
их внутрентпгх характеристик и внеш
него сопротивления хвостовой части в
присутствии реактивной струи.
Основным критерием совершен
ст»а сопла и компоновочного решепи
Хв°стовой части является наличие и
6..................-
Рис. 5.8.3. Компоновки хвостовой части
самолета МиГ-29
наружной поверхности и на элементах хвостовой части самолет ЯI
обширнее эти зоны отрыва, тем выше потери эффективной тяги. Cg ’ej1
это с гем. что при безотрывном обтекании наружной поверхности со^1
области его кромки в присутствии реактивной струи образуется зона 8
вишенного давления, в результате чего сопротивление сопла уменъи П<>
ся. В определенных вполне реальных условиях это сопротивление стэ^
внтся даже О1рииатслы<ым - возникает дополнительная подталкивают
сила одного знака с реактивной тягой сопла. При появлении в обЧа
среза сопла отрывной зоны, во первых, само давление в этой обтас™
оказывается ниже, чем в случае безотрывного обтекания, и, во-вторьщ
реактивная струя, эжектируя воздух из отрывной зоны, понижает давд^
пне в ней. что приводит к значительному росту сопротивления хвостощ!
части самолета, если отрывные зоны распространяются и на ее элементы
Если отрывные зоны значительны, нестационарные течения в них ищут
вызвать недопустимые низкочастотные вибрации конструкции.
Такие явления, как отрыв потока па наружной поверхности сопл
пока нс поддаются численному моделированию. Поэтому основным иг
точпиком информации но выбору рациональной компоновки сопла яв-
ляется экспериментальные исследования. Рассмотрим некоторые харак-
терные компоновочные решения па примере исследований осесиммшрм
ных сипл в спаренной компоновке.
Были исследованы три компоновочные задачи - определение влия-
ния уступа между хвостовой частью гондолы и соплом, определение вли-
яния уступа между кромками наружного и внутреннего сверхзвуков!!?
венпов створок сопла и выбор рациональных законцовок, так назывгг
мых силовых балок, в которых размещаются силовые агрегаты управле-
ния вертикальным и горизонтальным оперением.
Па рис. 5.8.4 приведены эпюры давления вдоль поверхности хвосто-
вой части и наружной суживающейся поверхности сопла. Анализ эшор жг
называет, что в случае, когда сопл
устанавливается в гондоле с )'•
пом, во-первых, появляется Л01Ч
сопротивление самого уступ3
данном случае донное разре»
на уступе ДРЯ - 0.03Р») и«
рых, нз-за увеличенного гра®
восстановления давления за J -
па поверхности сопла раньп^^И
ступает повторный отрыв
обширнее становится огрЫВН’
в области сто среза со всеми
кающими из этого последетВ1
71а рис. 5.8.5 приведен^1
эффективной тяги на реЖН^^^И
серского дозвукового полета Ч
8,5’ Уступ
т
S
1 04
10'
1,00
0,96
!8>
Мс = 0.8
Без реактивной струи
Без уступа
С уступом
Точка
отрыва
Рнс. 5.8.4. Распределение стати'нч-кого
давления вдоль образующей поверхности
хвост оиой части
0,92
0,88
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис 5.8.5. Влияние угла сужения наружных
п порок на эффективную пи у сопла при не-
ивнеимоы и связанном их реп.пировании
которых отрывная зона на наруж-
ной поверхности уменьшается зг
счет более полного раскрытия на-
ружных створок при сохранении
неизменным положения сверхзвуко-
вых створок (гак что между створ-
ками образуется торцевой уступ), и
у сопл, в которых наружные створ-
ки открываются одновременно со
сверхзвуковыми. Как видим, в пос-
леднем случае, хотя при раскрытии
наружных створок их сопротив-
ление и уменьшается, увеличение
внутренних потерь тяга сопла на
иерсрасширение оказывается па-
столько интенсивным, что говорить
о какой-либо оптимизации в этом
направлении ис приходится. В пер-
вом случае, наоборот, в определен-
ных конфигурациях оказывается выгоднее допустить па срезе сопла торце-
вой уступ. Приращение его сопротивления оказывается меньше уменьшения
сопротивления наружных створок при их раскрытии. Оптимальная площадь
этого уступа примерно равна площади критического сечения сопла па бсс-
форсажпом режиме.
Па рис. 5.8.6 приведены результаты
исследований выступающих за срез сопл
закоццивок силовых балок. Здесь и ниже
из измеренной эффективной тяги вычи-
тается измеренное без реактивных струй
внешнее сопротивление модели с элемен-
тами оперения и разного рода надстроек,
тот ЧТ° В эффективную тягу входит
^ивн<У Влиянир яа эта элементы рсак-
риант'х СТр' Наихудшим оказался ва-
закощ В КО1ОРОМ обращенная к соплу
п_та u 0Ека п-тоская и отклоняется от со-
Обр;13°? НРк°т°Рым углом (вариант 4)
ба.тКи моклу такой законцовкой
Раняе1сяС°Плом °трывная зона распрост-
ДоцНое иа значительную часть сопла.
Меиьщс .давлеНие в этой зоне всегда
То-’гько а1Мосферного и действует оно не
p,JXf'0c ' 1гоьеРХпость сопла, но и па по-
1СКО1ие1Гн°й законцовки балки.
‘ dfe Потери эффективной тяти в
Рис. 5.8-6. Влияние закон цонок сило-
вых балок на эффективную тягу сопла
Рис. 5.6.7. Влияние компппопкн сопл ни
их .тффективную тип
сои с оказываемся примерц0 I
выше, чем в компоновке без
Оптимальным можно с'пцать ва0*
/, в котором обращенная к connPIlaJn
верхностъ балки заострена. в -
случае отрывная зона сводиТс/Т°’1
минимума и потери аффективной тя*'
сопла превышают потери исходи/1*
варианта без балок па 0,5т1% в
симости от числа полета.
На рис. 5.8.7 приведены потери
эффективной тяги одиночной гон-
долы с соплом, тесной снарки сопл
и тесной снарки сопл с горизонталь-
ным и вертикальным оперением на
форсажных режимах, когда наруж-
ные створки сопла занимают почти
цилиндрическое положение, отличие
потерь эффективной тяги во всех
трех компоновках незначительное Максимум при = 1 не превышает
1% идеальной тяги. На бесфореэжных режимах при М, ~ 0,8 потери тя-
ги снарки сопл превышают потери тяги в одиночном сопле па ~4%, в
присутствии оперения потери 1яги увеличиваются ешс на 1,5%. Источник
потерь - образование срывных зон в межсопловом пространстве и рас
ширение этих зон за счет турбулентных следов за элементами от рения.
Рассмотрим вопросы оптимизации компоновок спарок сопл располс
ження элементов оперения и размещения спепподвссок в хвостовой части
самолета.
Рис. 5-8.8. Приращение потерь ,-)с|и|>екп1Вной
тяги в зависимости от разшх епня мотогон-
5 |(.Д
Рис. 5 6.9. Эффективней ть заклинл
в спаренной компоновке
дол в снастной кошюиивке J
На рис. 5.8.8 5.8.10 приведены приращения потерь эффсКТИВН г
спарок сопл в зависимости от разнесения гондол, заклииения сопл в
сти Х2 и установки подвижных стскателей между соплами. По мере Р
пня гондол от исходного предельно тесного расположения
тори эффективной тяж сначала увеличиваются за счет увеличения •
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис. 5.8.10 Влияние установки под-
вижных .межсопловых стекателсй в
спаренной компоновке
ЭЬ1СНОЙ ЗОНЫ, достигая макси
диво’’ 1 ZXC' 1,3-: 1.4. а затем пачи-
му»а ^ц^аться поскольку обтекание
ця°т У'1 Tb]UC приближается по харак-
«,лЛ В обтеканию одиночной гондолы.
теР' п заданном разнесении сопл дос-
чно эффективным оказывается зак-
ТЙнекие ошл в плоскости _vz внутрь
п'я1 углах заклипения 0с.зкл = 2,5° умснь-
ш1пие потерь эффективной тяти состав-
ляет примерно 2% как вследствие умень-
шения собственно межсонловой отрывной
зоны, так и из-за повышения
давления в ней за счет обратных токов, появляющихся при такой несоос-
иой встрече реактивных струи.
При тесном расположении сопл эффективным оказывается примене-
ние подвижных стека гелей, подвешенных на срезе спаренной гондолы
.между соплами Стекатели касаются наружной поверхности сопл как в
прикрытом, так и в раскрытом их положении. Применение стекателсй
позволяет свести до минимума срывные мсжсопловые зоны.
Па рис. 5.8 11-5.8.13 приведены потери эффективной тяги сопл в
зависимости от положения вертикального оперения и гребней.
Рис. 5 8 11 и
'ТЧ1ла Изменение эффективной гвги
Рени„ В 3а,1И| имости от расположения опе-
П|ос'ительно пси сопла
Рис. 5.8.12. Изменение эффективной тят
сопла в зависимости от расположения опе-
рения относительно среза сопла
ЧфП.г° >1Сре с*меи1ения вертикального оперения по оси г от положения на
Исччу a’"J>Uo^ плоскости симметрии гондолы и сопла = 0) к 1юризоиталь-
Макси ' peHlUo потери эффективной тяги сначала увеличиваются, достигая
>,а Г,ри гно ® 0,5/\с> когда оперение располагается на касательной к
* 11овсРХ11°сти гондолы плоскости, и затем уменьшаются. При
1 ияимиие оперения становится пренебрежимо малым (рис. 5.8.11)-
гЧ-Ммт, задпяя кромка вертикального оперения, находясь в плоскости
1 тоцдолы и гопла1 располагается до сопла, то влияние оперения
на эффективную тягу практически отсутствует. Если оперение и- 1
нал соплом и ее обращенная к соплу кромка плоская, потери эффСКт^сй?г
тяги резко увеличиваются (вариант 2 па рис. 5.8.12). При Мч % g
увеличение составляег - 3"о идеальной тяги сопла. Достаточно эфф. 310
ным здесь оказывается местный вырез в оперении, причем обращсЛ1СГ,,в’
соплу кромки выреза заострены (вариант 3 на рис. 5.8.12). 'е к
Гребни, которые иногда устанавливаются внизу на горизонтат
оперение для повышения устойчивости самолета, если они располагают^
вблизи сопла, так что идущие от них турбулентные следы попадают в *
ну действия реактивных струй, приводят к увеличению потерь эффекту
ной тяги. К этому же приводит и размещение вблизи сопл разного рл^
спсцподвесок (рис. 5.8.13).
Стекатель Вертикальное оперение
Wf
Гребень Горизонтальное оперение
о
АР,^,
о, си
Без подвесок
0.02 -
Ракета
Бак
о
Бак с
контейнером
О -
о
о
"о - без гребней
о - с гребнями
-0,02
о
Рис. 5.8.13 Влияние установки аэродинамических гребней и различных подвесок и»
эффективную тягу сопл в спаренной компоновке (М = 0,8; лгр “ 3,5; без форсажа)
На рис. 5.8.14 приведены эскизы грех моделей хвостовых частей*
молетов и потери эффективной тяги двигателей этих самолетов вс.л
сгвие потерь эффективной тяги их сопл. В качестве масштаба выбран-
аметр критического сечения сопла двш агелей на максимальном режиму
Наиболее полно рекомендации ио оптимизации компоновки хвоСГ0 -I
части учтены на самолете №2. Эта модель имеет наибольшее разнесу
сопл, горизонтальное и вертикальное оперение максимально про’Ш1 -
вперед, отсутствуют гребни, хвостовая часть гондолы двигателей
плавные обводы без верхних “вздутий”, которые имеются па моде^
и нижних - у модели №3. В результате на бссфорсажных режимах л°
тяги двигателей па модели №2 на 6% ниже, чем на модели №1 и w
ниже, чем па модели _\уЗ. На форсажных режимах потери тяги на •' ! Ж
№2 выше чем па модели №1. Объясняется это главным образом
на двигателе система управления сверхзвуковыми створками сопла Я I
www.vokb-la.spb.ru - Самолёт своими руками?!
Г11е1шым диапазоном регулирования, поэтому на дозвуковых
lfa с сопло оказывается несколько персрасширснным, а на боль-
скоРсСТЯХ,.111ГКовых скоростях - недорасширенным.
OJM
И,
Рис 5.8.14. Сравнение потерь эффективной гиги двигателей в компоновках со спаренны-
ми соплами
-0,04
0,6
5.9. Аэродинамические характеристики плоских
сверхзвуковых сопл с управляемым вектором тяги и реверсом
Для перспективных сверхзвуковых самолетов существенное улучше-
ние характеристик может быть достигнуто за счет применения плоских
сопл с управляемым вектором тяги и реверсом. Улучшение характерис-
гик достигается за счет:
- оптимальной ориентации вектора тяги сопла и реверсирования тяги,
- увеличения аэродинамического качества самолета при наличии ре-
активной струи (эффект суперциркуляции),
уменьшения потерь тяги на нерасчетных режимах работы сопл,
уменьшения внешнего сопротивления,
Уменьшения потерь тяги вследствие утечек газа,
“Уменьшения заметности в ИК и РЛ диапазонах.
пряду с этими преимуществами плоские сопла имеют и недостатки
Увеличивается масса сопла
' величиваются потери на охлаждение и трение.
ц0 св ,а Имостг’ отмеченных достоинств и недостатков плоских сопл тес-
ПоНовКе1Па С УСЛ°Виями компоновки их на самолете. В конкретной ком-
илств и Мо>Кс1 произойти как усиление, так и ослабление этих досто-
1|Р0Два 110достатков- принятия оптимального решения необходимы
В и- е,,ьные широкие модельные и расчетные исследования.
ГОяи1см параграфе представлены результаты исследования ха-
₽ехОдН1 ИК ПлоскПХ сопл, включающих в себя определение потерь в пе-
,,аг';рь н Ка1,£1Лах от круглото поперечного сечения к прямоугольному.
Плоских соплах па нерасчетных режимах, на режимах с откло-
пением вектора гиги и реверса, определения внешнего coiipOTjJ I
хвостовых частей с плоскими соплами, в том числе и на углах
наконец, приведено сравнение эффективной тяги плоских и
тричных сопл в компоновках на самолете.
При применении плоских сопл необходимым элементом являете 1
реходпый канал, в копиром сечение от осесимметричного за турбин^ I
няется на прямоугольное на срезе звукового сопла Натичие персхо **
капа та увеличивает внутренние потери тяги плоского сопла по сравтт
с осесимметричным. На рис. 9 1 приведено изменение потерь
плоского звукового сопла с ра ичными оттп шепиями ширины к вьт
в ави им ели от располагаемой степени понижения давления л__
плоском сопле потери тяги в дозвуковой части выше, чем в осел^И
тричном, и возрастают с увеличением относительной ширины iltocv»
сопла. В основном это объясняется уве ичеттием площади омываемое ,
верхпости. Приращение потерь тяти в дозвуковой части плоских соЛ
относительной шириной b h ~ 2-7 но сравнению с осесимметричные
соплами составляет 0,3-=-0,7% идеальной тяги. Обращает на себя rhhi>
нис тот факт, что при фиксированной геометрии плоского сопла прп|»
Iцснис потерь остается практически постоянным при различных растя*
гасмых стонет я : понижения дав тения в реактивном сопле
Рис. 5.9.1 Потери тяги звукового сопла при переходе от круглот поперечного сев
прямоугольному в зависимости от располагаемой степени понижения давления U
относительной ширины плоскости среза (б); дД = др j. бдр, где здр дополнит?
потери на переход, др - звуковое сопло
Для оценки потерь тяги в переходных каналах можно испол
зависимость:
А7>. - 0,0035я(Мр )М?г ч + 0,003 у Ь-
где Мд число М на входе в переходный апа т Д5Пк “ прир*
площади омываемой поверхности в плоском канале по сравнению 1
симметричным; F. - площадь критического сечени т; D - диаметр Ч
на входе; L - длина переходного канала: . Л. - ширина и высотаг
гическсм сечении ]
www.vokb-la.spb.ru - Самолёт своими руками?!
р 2 Вн’-трюшие «'«ттери плоского сопла
,1'LTpa.7hH>™ клнно- в зависимости от сп;
пени понижали .давления в реактивной струе
Рассмотрим поведение потерт,
на нерасчетное! ь в плоских и осе-
симметричных соплах. На рис. 5.9 2
приведены результаты исследований
потерь тяги плоского сопла с лент
ральным клином в зависимости от
ра полагаемого перепада давления в
реактивной струе. Рассматриваемое
сопло имеет степень расширения
А Г, = 2 4 что соответствует рас-
четному истечению реактивной струи
при лср= 13. На режимах перерас-
пшрения потери тяги сопла суще-
ственно зависят от степени расши-
рения обечайки сопла Ffl Fa/F. Чем
больше степень расширения обечай-
ки, тем заметнее увеличение потерь
тяги. В сото с небольшой степенью
расширения (? - 1,2) потери тяги
сохраняются неизменными в широком
диапазоне. изменения лср. По сравне-
нию с осесимметричным соплом с гой
же степенью расширения в плоском
соп те с центральным клином тютери
Рис 5.9.3. Втияние установки боковых
щек на вн ренине характеристики плос-
ко! : сопла i центральным клином
доводить до задней кромки кли-
гяги меньше на режимах нерерасши-
рения и больше на 2.5ч-3% па расчет-
ном режиме и режимах нсдорасшире-
ния. В п тоских соплах с централь
,гым клином ж аатсльно боковые щеки „__„___ „
1,а В сопле без боковых щек за счет nonepevHoro растекания потока на
‘^РХНости центрального клипа потери тяги больше на 0,54-0,7% идс-
н°’’ ТЯГи *,см в соплах с боковыми щеками (рис. 5.9.3). Увеличение
ина с 0к) = 10 до 0КЛ - 21 приводит к увеличению потерь на ре-
1м»х иерерасширсния па 1,0 3,0%.
1и'1ных РИС показаны потери эффективной тяги плоских сопл раз-
КруМ(/ Хем и осесимметричного сопла на режиме полного форсажа.
ссп1Ло СО|1“',а с Центра тытым клипом рассмотрено суживающееся плоское
Расцщ. 3 Также плоское сопло с косым срезом и плоское суживающееся
18]. ц Я1О1иееся сопло, данные по которому приведены в работах [17,
6 осеси Ри яги псех плоских соплах превышает уровень потерь тяги
сопле. Наиболее заметное повышение наблюдается в
,10СуВе Кос1»1М срезом и центральным клипом. По-видимому это связа-
11 И-Нисм омываемых поверхностей в плоских соплах
www.vokb-la.spb.ru - Самолёт своими руками?!
Осесимметричные сопла
Птоскяс сопла
10°
10*
М.. . = 0 rv -3
8«|, 0
др 3,8%
2,2'
6%
3,8%
Q0.
U. о
35'
“ I ’
Реверс
ковшовый рсли.тмагый
Решетчатый реверс.
^рсв
0.7
Рис. 5-9.5. Зависимость
реверса плоских сопл
внешнего потока
0.6
0,5
Ковшовый
0.4 ------------V
0 0,2 0,4 0,6
0,8 1,0 М
коэффициента
от числа М
ри'шых сопл различных схем (8 - угол поворота вектора тяги)
Одним из преимуществ плоских сопл является относительно прог^^
в конструктивном отношении организация реверса тят. Па рИс 5 Я
приведены коэффициенты реверса тяги для плоского сопла с Централь-
ным клипом. Было исследовано ди
варианта реверса: решетчатый реверс
в дозвуковой части сопла и реверс с
помощью раскрывающихся nanejci
на центральном клине. В полей 6а
лее эффективным оказывается рсш,
решетчатого типа. Коэффициент ре-
верса в нем при степени понижен»»
давления в сопле л1р=3 и Мя=0.6-
*0,9 составляет 0,65. С увеличение-
лср коэффициент реверса уменьшает-
ся. Коэффициент реверса с помош *
раскрывающихся панелей на цс<*’
ральном клине в тех же условиях
ставляет 0,42
Эффективность отклонения веь J
ра тяги сопла при отклонении папе I
показана на рис. 5.9.6, При числе Мя = 0, в условиях взлета отклоюу
центрального клина на 10° приводит к отклонению вектора тяги на
при этом потери модуля тяги увеличиваются на 0,4% от идеальной
сопла с косым срезом за счет его несимметричности при нсотклоН
нижней напели угол наклона векторе! тяги составляет 3,5°, oTKJloH^j^
нижней панели на 10° приводит к увеличению эффективного угла
вектора тяги до 14° Потери модуля тят увеличиваются при этом на^ Л|
потери продольной составляющей тяги увеличиваются на 3% идеаль^^^И
ги. Результаты исследовании показывают, что в условиях взлета о *
нис панелей плоских сопл от 0° до 15° приводит практически к
повороту- вектора гаги, причем в соплах с косым срезом поворот J
тяги сопровождается большими потерями модуля тяги, чем в соплаЗг
тральным клином. ДИ
0
МЛ = 0,8
12’
5%
Рис. 5 9.7 Сравнение внешнею сопротивле-
ния спаренной компоновки осесимметрич-
ных п плоских сопл
Рис 5-9.6. Влияние числа М внешнею потока па эффективный
угол отклонения вектора тяги
На режиме крейсерского полета (Мв - 0,8) эффективность отклоне-
ния управляющих панелей исследованных сопл возрастает более чем в
2 раза. Отклонение центрального клина на 10° приводит к повороту век-
тора тяги на 22°. Такой же примерно эффект оказывает и поворот панели
на 10° в сопле с косым срезом. Большие углы отклонения вектора тяги
(8С - 22*35°) сопровождаются высоким уровнем потерь эффективной тя
ги (6*7% идеальной тяги).
Внешнее сопротивление плос-
ких и осесимметричных сопл, из-
меренное без реактивной струи,
приведено на рис. 5.9.7. В качестве
параметра на рис. 5.9.7 использо-
вана величина Тс = FJF* нред-
^ющая собой отношение нло-
за п МИЛс,11Л с°пла к площади сре-
в* ’ РИ Лозв)’1СОВЬ1Х числах М, со-
Ко ИЛлс1,Ие плоских сопл песколь-
эТо-с—е. чем осесимметричных,
rL,ocj^,3aiI° Б основном с тем, что
СОпла лучше сочетаются с сужающимся к хвосту фюзеляжем са-
УМсикп . сверхзвуковььх скоростях, когда влияние краевых эффектов
Тече1ГИе становится близким к плоскому на значительной по-
'•етрич) И С0Пла> и его сопротивление превышает сопротивление осесим-
Вз-1Ь1Х С0Пл-
аим°^сйствие реактивных струй с внешним потоком оказывает су
"Ис. 5д^°° влияние на аэродинамические характеристики самолета. На
Показано влияние утла атаки на приращение нормальной силы,
Рис. 5.9.8. Влияние угла атаки на приращение нормальной силы
в присутствии реактивной струи
действующей на модель самолета от реактивной струи, при различи^
числах Мх внешнего потока (здесь и далее все аэродинамические коэф
фициспты отнесены к площади миделя хвостовой части самолета) [],
мере увеличения угла атаки приращение нормальной силы возрасту
практически линейно. Наиболее заметное изменение ДС^ имеет место «р,
небольших значениях числа М„. Приращение нормальной силы,
ствующсй на модель самолета от наличия реактивных струй (эффект
нерциркуляции) зависит не только от угла атаки самолета, но для сенлг
управляемым вектором тяги и от угла отклонения реактивной труп »
приближенно может быть представлено в виде:
ДСу s^=0 + ЛСу • а + ДСус • 8С
Влияние числа NL на величину коэффициента ЛС“ показано на р»
5.9.9<7. Что касается коэффициента ДС^с, учитывающего влияние упр»
ления вектором тяги, то при его определении необходимо учитывать ю*
факт, что в зависимости от типа устройства для отклонения реактияч^
Рис. 3.9.9. Зависимость коэффициентов ДС“ (а), ДС, и ДСу (б) модели самолета Ч
www.vokb-la.spb.ru - Самолёт своими руками?!
узкому будет изменятся геометрия хвостовой части. А от фор-
сТрУ11 Л°?цОй части существенно зависят приращения как нормальной
чЫ хВ°С,,очьной аэродинамических сил от наличия отклонений реактив-
так и рис. 5.9.96). Поэтому влияние управления вектором тяги
ной елр? амическис характеристики самолета необходимо определять
на а?Р‘' каждого конкретного типа устройства отклонения реактив-
оГЛелЬ ' Оптимальным будет являться тот тип устройства, который
|<оИ. С,цйиает нр" отклонении реактивной струи максимальный прирост
0661 тянамичсского качества, максимальное приращение нормальной си-
^ьГпр” минимальном увеличении внешнего сопротивления. Ниже приве-
тна приближенная численная оценка влияния формы хвостовой части
на эффективность отклонения реактивной струи.
Влияние отклонения реактивной струи на аэродинамические характе-
ристики плоских хвостовых частей фюзеляжа и сопл самолетов при дозву-
ковых скоростях оценивалось с помощью приближенной методики. Для
расчетов коэффициентов нормальной и продольной составляющих сил ис-
пользовался метод местной линеаризации при наличии турбулентного по-
граничного слоя. Реактивная струя за срезом хвостовой части имитируется
жесткой непроницаемом поверхностью (рис. 5.9.10), форма которой изме-
няется в зависимости от угла отклонения реактивной струи и располагае-
мого перепада давления в сопле. В случае, если пограничный слой отрыва-
ется от поверхности хвостовой части, его расчет прекращается в точке от-
рыва. Для определения положения точки отрыва пограничного слоя ис-
пользовался критерий Г.М. Бам-Зсликовича. За точкой отрыва нреднола-
1ается, что толщина вытеснения постоянна и равна своему значению в
точке отрыва. Граница зоны отрыва принимается прямолинейной и отхо-
дит от поверхности тела под углом в 12ч-14° в зависимости от числа .
На рис. 5.9.10 в качестве примера использования разработанной ме-
тодики приведена оценка влияния формы хвостовой части на эффсктив-
АС,
М, - 0,6
" 3
« = О
Неи ,/влияние формы плоской хвостовой части на эффективней:'! i> откло
'* Реактивной струи
иость отклонения вектора тяги плоской хвостовой части, имеюГ11е- 1
пень сужения /др///ч = 0.63, при числе М„ = 0,6 и пср ~ 3 (см И
Изменение нормальной силы, действующей на хвостовую часть 11ИЗКе^
место при любом нарушении симметрии даже при нулевом откл
реактивной струи и нулевом угле атаки. Причем, в зависимости от аЯ
мы хвостовой части, приращение нормальной силы из-за HGC№
ричности может быть как положительным, так и отрицательным п.4161
пение реактивной струи существенно увеличивает прирост нормадывЯ
силы. В зависимости от формы хвостовой части этот прирост может*101*
нровождаться увеличением или мспыпснисм сопротивления. с
Проведенное сравнение компоновок показывает, что для получения
максимального увеличения подъемной силы за счет суперциркуляции
задание й степени сужения хвостовой части необходимо иметь небольшие
углы сужения вблизи среза на верхней поверхности (0ср = 4°) и относи-
тельно большие углы сужения нижней поверхности (0гр = 16е). Этот вы.
вод справедлив для всех углов отклонения вектора тяги в диапазоне от 0
до 15°, гак как зависимости коэффициентов C,f и Сх от 8С в этой облаг-'
близки к линейным.
Представляет интерес сравнен»
потерь эффективной тяги осссимм»
гричпых и плоских сопл в комп
новках. В проведенных исследова-
ниях рассматривались 5 различных
компоновок сопл (рис. 5.9.11). Трк
компоновки имели сдвоенные разне-
сенные сопла следующих типов: осе-
Рис. 5.9.11. Рассмотренные спаренные ком- симметричные сверхзвуковые сОиЯЗ»,
циновки осесимметричных н плоских сопл плоские сужающиеся сопла и плос-
кие сопла с центральным клином, »
две компоновки имели плоские одиночные сопла с косым срезом и пе1П
ральным клином. Сравнение потерь эффективной тяги сопл в комионовж!
на режимах крейсерского дозвукового полета и разюна на полном Ф0^
же приведено на рис. 5.9.12. Плоское суживающиеся сопло па ,
крейсерского дозвукового полета обеспечивает наименьшие потери ЭФ^_.
тинной тяги, которые на 1,2/i меньше, чем в осесимметричном соЩй^^И
фективные тяги плоских сопл суживающегося-расширяющегося с ь
срезом и с центральным клином практически совпадают с эффект11В I
гой осесимметричных сопл. ,
На режиме разгона на полном форсаже до чисел М = 1.2 ria,t
тис потери эффек шиной тяги имеет плоское суживающееся cOlI‘ 5Ке t
га 1ьпые плоские сопла имеют на сверхзвуковых числах М такие д
тери тяги, как и осесимметричное сопло, а на дозвуковых скор^ТЯ
1+2% идеальной тяги больше
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис. 5.9.12. Сравнение потерь эффективной тяги сопл в спаренных ком
поиовках: 1 ~ осесимметричное сопло, 2 - плоское сужающееся сопло, 3 ~
плоское сужаюте-расшириющссся сопло, 4 плоское сопло с косым сре-
:«iM, 5 - плоское сопло с центральным клипом
Следует отметить, что рассмотренные выше компоновки плоских
сопл представляли собой простую замену осесимметричных сопл плос-
кими без соответствующей модификации планера самолета. По-видимо-
му. преимущества плоских сопл могут проявиться более существенно в
гак называемых интегральных компоновках, когда плоские сопла орга-
нично сочетаются с планером самолета.
Список литературы к главе 5
2 w" lil'4tlca' ТеоРи« авиационных двигателей. - М ВВИЛ, 1990
* -В. Николаев. Течение во входном участке канала сверхзвукового диффузора при
В л/*Ве U ра,,и'шогу слоя головной волной // Ученые записки ЦАГИ. Т 1. N 1, 1970.
Васильев. Вопросы проектирования и расчета воздухозаборников сверхзвукового
4 р ^’Чкииго само лета И Тр. ЦАГИ. 1973.
. II.А. Юдеикав, В.В. Богданов. Исследование интенсивности турбу-
3 е ^"за ПУЛьсаиий пот°ка в воздухозаборниках // Тр. ЦАГИ 1971
Ми аП1ОЛОк(1, А.К. Иванюшкин, А.В. Николаев. Интерференция вихрей со скачка-
Т.уГГГ”51-15 возлухозаборникс. Разрушение вихрей /' Ученые записки ЦАГИ.
6 Vot; с (Также I luid Mechanic Soviet Research. V. 7, No 4. 1978).
д. Ве?Г " “Pers°nic An Intake for the Supersonic Transport Plane Tu-144.
Pr<*'eed' r MIG-29 Aircraft Supersonic Air Intakes.
I niver_ ?^S . AFOSR Workshop on Fluid Dynamics of High Speed Inlets. Rutgers
7 Hc'a, KeW Bn,nswick. NJ. 24-25 May 1994.'
Пил n<a^”4iKl<4' K).B. Коротков, А.В. Николаев. II-кот ыс особеннос ти интерферен-
u Хх v Ллс™снпя с аэродинамическим следом за телом // Ученые записки ЦАГИ.
J-Defa,: ,989-
г. ’^rbi'lo 1- О. Leu liter, J, Solmgac. Studes foundamentals sar les e’couleinents
d.tf. /r.v74,lrE) 4* Recherche Aerospatiale No 2, 1984.
^•ty, ' Bavlyukoo. Aerodynamic Problems of Propulsion System Ojxiration
1*14Ь-,52 П| flight Safety Conference. Zhukovsky, Russia, August 31 - September 5 1993,
10. А.К, Ivanynshkin. Aerodynamic Problems of Interference of Power P[ant . . 1
Super-Sonic Aircraft Airframe Components. Proceedings of the Sino -Russian S° tts 'Uifl
on maneuverable aircraft engine integration, 15th 17th December 1994, Beijin
11. B.1I. Васильев, К.В. Жустрип. Н.Х. Ремеса, И.С. Самоно«, Н.П. Ситников, IQp^^-
ский. И.Л. Юаенхов. Харакгсрнстики воздухозаборпнков сверхзвуковых самадетов
их ощнмеления в аэродинамических трубах. РДК. Ивдатсльский отдел 11ДГИ. Т '*Т|Х5ы
выл. 1, 1978. ’ й{-1
12 ВИ. Васильев, В.Г. Гурылсв, С.II. Елисеев, II.Д. Гончарук. Осе< имметрцчныс
звуковые воздухозаборники. РДК. Издательский отдел ЦАГИ 'Г II, кн. 1, Btlln
13. А. В. Николаев, И.С. Симонов, ВИ Васильев, Л.К. Ипанюижин, Н.Х. Ремесе. Н„л
ков, Е В. Александрович. Плоские сверхзвуковые воздухозаборники. РДК. Издательские
дел ЦАГИ. Т. II, кл. 1, вып. 4, 1981 ’
14. Б.II. Михайлов, Е.В. Павлюков, В.Д. Соколов. Аэродинамическое проекгигюйал,
сопл ВРД. РДК. Издательский отдел ЦАГИ. Т. II, кн. 2, выи. 1, О11ТИ ЦАГИ, ИЗЮ*
15. Е.В. Павлюков. Номограммы для опрсделегптя тяги евсрхзвутсопых сопл // Тр. ЦАГИ, 1973"
16 В. И. Горкун, Б. И Михайлов. В.Д. Соколов. Лародинамические грубы для исглм^,,.
сопл РДК. Издательский отдел ЦАГИ Т. II, кн. 2, вып. 5, ОНТИ ЦАГИ, 1981.
17. J.A. Lauyhrcy, D.J. Drape, Р.Е Hiley. Performance Evaluation of an Air Vihrlr
Utilizing Konaxisymmetric Nozzles ! AIAA Paper No 79-1811.
18. F.J. Capone, \T.S. Gouxidia, IV.H. Woten. Performance Characteristics of Nonaxisymmetnc
Nozzles Installed on F-18 Airplane // ALAA Paper No 79-0101.
www.vokb-la.spb.ru - Самолёт своими руками?!
Глава 6
АЭРОДИНАМИКА ФЮЗЕЛЯЖЕЙ
СВЕРХЗВУКОВЫХ САМОЛЕТОВ
6.1. Предварительные замечания
^родииамичсские компоновки
оальных ^'1- затрудняют предел
Стылого удлинения (или близкого
иибнны летчика) и кормовая
современных самолетов, особенно inner
явление фюзеляжа как тела вращения
к нему). Только носовая часть (до фо-
часть (на которой расположено верти-
"атьное и горизонтальное оперение) могут быть близкими к телу' вращения
по форме и характеру обтекания. Поэтом}- аэродинамические характеристи-
ки фюзеляжа трудно выделить из общих характеристик всего самолета. Од-
нако чтобы иметь общее представление о возможном влиянии этих элемен-
тов на аэродинамические характеристики самолета в целом, представляется
целесообразным рассмотреть особенности обтекания изолированных тел
вращения, носовых и кормовых частей.
В общем случае форма тела вращения
содержит носовую часть с плавным конту-
ром, цилиндрическую среднюю часть и
кормовую сужающуюся часть.
При малых углах атаки (меньше 5+7°)
рсашзуется осесимметричное обтекание те-
ла вращения, так как величина нормальной
иол являющей скорости (Vsincx) весьма
мала рис 6.1.1а). Па различных участках
T^-ia вращения (при правильной круювой
Фирме поперечных сечений) обтекание бу-
дет’отличаться только состоянием и толщн-
м П01Раничного слоя, нарастающего по
наРе 'далсния от его носика. Длина лами-
01 4ir° У’1астка пограничного слоя зависит
Х11(ч.^,а степени шероховатости повер-
1 и формы контура носовой части.
от у ри Укропных угтах аьаки (примерно
1хХлцД° нормальная составляющая ско-
Тср |,а,,1и,ает оказывать влияние па харак-
Г1оФацщКа1Г^Я 1СЛа ”Рая™: утолщенный
•1<>гъ Чньп’ с-юй по в состоянии прсодо-
Давления при поперечном об-
?}’я /(R Огрывдется от поверхности обра-
гимметрич1|ыс и стационарные вих-
Рис. 6.1 I. Влияние угла атаки на
характер обтекания тел враще-
ния: я - малые углы атаки, при-
соединенный поток: б ~ умерен-
ные углы атаки, система двух
симметричных вихрей; а - боль-
шие углы атаки, система двух не-
симметричных и нестационарных
вихрей; г — поперечное обтекание
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис 6.1.2. Схима обтекания фюзеляжа
при малых углах атаки: 1 - утолщение
пограничного слоя па подветренной
стороне, 2 - отрыв пограничного слоя,
3 ~ сворачивание оторвавшеюся по-
граничного слоя
рсвыс системы, которые сносятся I
оси (рис. 6.1.16, 6.1.2).
Расстояние от носа, на v,.
к°топИ
начинается отрыв пограничного И
(Л'|)Тр) и сворачивание в ВихреВЫе
ты, в значительной степени завися J
угла атаки, чисел М и Re, а также (К?*
мы контура тела вращения. Увечичеп^
угла атаки и числа М способствует п
ремещению точки отрыва к носо^
части тела вращения, причем это пер^
мешение оказывается наибольшим в г/,
ласти транс- и сверхзвуковых скорости*
(рис. 6.1.3).
При ботьших углах атаки (пример
по от 20 до 60°) поперечная и предоть-
пая составляющие скорости обтекания
тела вращения становятся соизмеримыми, возрастающее количество во?
духа, перетекающего па подветренную сторону, приводит к нестационар
пости поперечного обтекания и несимметричному сходу вихрей по обе
стороны гела, которые индуцируют значительные боковые силы при от-
сутствии угла скольжения
(рис. 6.1. 1в).
зависимости от угла а
по исследованиям распределения давления (модель с конической г ?
оптическим исследованиям (модель с конической головной част
Рис. 6.1.3. Положение начала отрыва пограничного слоя в
чисел М.: /
частью), 2 - ПО оптическим исследованиям ^модель С mninieiiwn iwiv—™ ' я) 1
модель с оживальной головной iacTMo (по исследованиям распределения тавлени
В диапазоне углов атаки, больших 60° (рис. 6.1.1г), по
имеет место поперечное обтекание тела вращения. В этом случач^И
нис и аэро инамическис характеристики определяются норм 'll
ставляюшей скорости. v
Отмеченные особенности являющиеся весьма характерными
наблюдаться при обтекании тел с более сложной формой п0ПС^,дл.|й
< ечсний и являться причиной соответствующих изменений
мичсских характеристик сверхзвуковых самолетов в зависимо^В * * 11
лов атаки, чисел М и Re.
6 2. Особенности обтекания тел вращения
ание носовых частей. Форма носовой части фюзеляжа
0 ок ьзывать ь-Г1ИЯ,,ие на аэродинамические характеристики свсрх-
може'1 саМОлетов. Кроме влияния на сопротивление, оно может про-
звукс®ыК ‘измеНении нормальной и боковой силы, моментов тангажа и
яв-1ЯТЪСЯ НОсовых частей малого удлинения в виде полусферы с
рЫСКа нием 0,5с/ и оживала с удлинением 1с/ характерны резкие измсне-
.vA*“ в пения в месте перехода носовой части на цилиндрическую, кото-
н,,я 1 юзвуковых скоростях являются причиной возникновения отры-
Р^потока место и протяженность которого по длине цилиндрической
чзсти зависят от числа Re и состояния пограничного слоя.
При больших дозвуковых скоростях из-за образующихся на поверх-
ности местных сверхзвуковых зон возникает нестационарное обтекание с
чередованием отрыва и присоединения оторвавшеюся потока. Это нри-
1Т к знакопеременным нагрузкам большой амплитуды на обтекаемой
поверхности и соответствующему перемещению центра давления.
На носовых частях с большим удлинением отсутствуют высокие
значения разрежения и резкие градиенты давления, при которых могут
возникать отрывы.
Обтекание кормовых частей. Аэродинамическая компоновка кормо-
вой части сверхзвуковых самолетов является весьма сложной и в первую
очередь зависит от количества двигателей и их взаимного расположения,
а также от формы и количества сопл двигателя. Тем не мопсе, основой
любой компоновки кормовой части сверхзвуковою самолета является
участок фюзеляжа, заканчивающийся сужающейся кормовой частью. В
гом простейшем случае, так же как и в более сложных компоновках,
арактср обтекания кормовой части зависит от ее формы, чисел М и Re,
состояния пограничного слоя, oi аэродинамической интерференции с
Расположенными в непосредственной близости крылом, оперением и
стРУями газов, истекающих из сопл двигателей.
Чес аспРе;1е“,снис давления по кормовой части и, значит, аэродинами-
11ПиКИХ с,,л» Действующих на нее, в большей мере определяются наличием
°г тствисм отрыва потока с ее поверхности
нИя елях исследования характера обтекания и распределения давле-
с Мот КоРМОвЬ1М частям при нулевом угле атаки были проведены опыты
Час и 21'10 1П1ЛиЧдричсского тела вращения с тремя формами кормовой
Для и О11,1,геской, эллиптической и образованной дугой окружности
Частъю *Чепия различной толщины пограничного слоя перед кормовой
Та,1аЬ11пИЗМеНЯ'1асг’ длина Цилиндрического участка модели Модель ус-
м алась на хвостовой цилиндрической державке с диаметром, рав-
1МальномУ диаметру кормовой части. Такая державка в опрсде-
Гс,-Тя и-» Г1е‘Ии соответствует случаю расчетного истечения струи двига-
л сопла.
Рис. 6.2.1. Влияние числа МЛ на точки от-
рыва и присоединения потока и распреде-
ление давления по кормовой части фюзе-
ляжа, образованной дугой круга
На рис. 6.2 1 Д
влияние числа М„ иевоЖ-
потока на положение начала
и распределение давления
новой части, образованной
круга со средним углом каг-/^8
ной в 16°. При переходе
ни шпдрической части на CV)K J
щуюся кормовую, наблюдается ?^
разрежения с последующим pei
положительным градийгтом ла^
ния, свидетельствующий о падении
скорости и торможении потока, об-
текающего кормовую часть, что в
итоге приводит к его отрыву.
С ростом числа Mw точка от-
рыва перемещается вверх но пог
ку, а точка присоединения шщ
по потоку. (Точка присоединения,
представляет собой крайнюю тога
расположенная па державке модели, _______
области отрыва.) Область отрыва имеет большую протяженность и охва-
тывает около 1/3 кормовой части при всех исследованных числах М,
Внутри зоны отрыва имеется участок практически постоянною давления
примерно равного дав пению в невозмущенном потоке.
При анализе влияния толщины пограничного слоя на явление отрыва
следует иметь в виду две противоположные тенденции. С одной сторон»
hoi раничный слой большой толщины и меньшей энергии при неблгч-
прпятном (положительном) градиенте давления способствует отрыву-
другой стороны, пограничный слой с большой толщиной выгесиеиия^
бы сглаживае! эффективный контур кормовой части, омываемыйHt*
ким потоком, уменьшая неблагоприятный градиент давления, и
ствует отрыву. В результате этих двух противоположных влиянии
жение точки отрыва практически не меняется при изменении тоД1; _
пограничного слоя В проведенных исследованиях толщина вытеснсч-
конце цилиндрического участка модели, отнесенная к максимальней
диусу кормовой части, изменялась в диапазоне б’ R = 0,9-5-0,14-
Влияние формы кормовой части на распределение давления И ь
нис точек отрыва и присоединения показано на рис. 6.2.2. Гри
тура - коническая, эллиптическая и по дуге крута - имели tw
средний угол между осыо кормовой части и касательной к ^’’^У'^урс
16°. Наибольший пик разрежения имеет место на коническом w ^о11^
посредственно за изломом. При плавном изменении формь1 цл/рн»-
(эллиптическая форма и форма душ крута) при переходе ли-
рической части к кормовой разрежения оказываются меньшими
пикает в области контура, где градиент давления оказывается В
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис. 6.2.2. Влияние формы кшгтура кормо-
вой части фюзеляжа на точки отрыва и при-
соединения потока и распределение давления
при среднем угле наклона касательной к
контуру, равным 1Б° и числе М„ = 0,5
пиитической формы он распо-
Д-^3- в задней трети кормовой
-заГЗСТС ъчя Ф°Р-мЫ 15 иИДе КРУ’
чЗСП';^но на половине длины
та - чаСти, а для коническом - в
корм01’0 ‘ корМЬ1. На кормовой
W ДУ» «
ча^Хнности на аллилтической фор-
В рХбина зоны отрыва оказывается
наибольшей, а у конической формы -
«пылей. Поэтому в первых двух
, тучаях в срывных зонах образуется
возвратное течение с примерно по-
стоянным давлением. При этом дав-
чение в зоне отрыва прямым образом
связано с давлением перед отрывом.
На конической кормовой части об-
ласть отрыва имеет по только наи-
большую длину, но и наименьшую
глубину. Поэтому на ней не образует-
ся сколь-нибудь протяженного обратного течения. В связи с этим в характе-
ре протекания зависимости С; (х) отсутствует участок с. постоянным давле-
нием. На основании этот можно сделать вывод, что форма контура кормо-
вой части оказывает влияние не только на положение точки отрыва, но и на
давление в области отрыва.
Влияние среднего угла между осью кормовой части и касательной к
контуру (р) на область отрыва и распределение давления но кормовой
части конической и эллиптической формы показано на рис. 6.2.3. Следу-
ет Иметь в виду, что значение среднего утла аналогично значению удли-
нения кормовой части. Максимальный диаметр модели в два раза пре-
ходил ее минимальный диаметр (диаметр хвостовой державки). Для
кг.”ИЧсск°й формы значения углов 8, 16 и 24° соответствуют удлинениям
^Рмовой части 1,78, 0,87 и о',56.
нисм Соп°ставления приведенных зависимостей видно, что с увеличс-
]ГРИ сРе;1ИеГо угла наклона касательной к эллиптическому контуру (или
ввер^ С,1Ъ1ие,,ии Удлинения кормовой части) точка отрыва перемещается
•Учение* ПотокУ’ а точка присоединения смещается вниз по потоку. У не-
му, что ГРа^Иенга давления, связанное с изломом контура, приводит к то-
1го-1ожсчИЗМе,1еНие Уг-1а конической кормовой части весьма мало влияет на
'teiiocpp, ТоЧки отрыва, которая для исследуемых углов располагается в
СТи по ^ГВеин°й близости за изломом контура. Увеличение утла конуелго-
?foi-o 1-п <е1ДаеТ Толькп точку присоединения вниз по потоку. В результате
” Г)б-тастц "Иа Зонь1 отрыва увеличивается и при определенных утлах (24°)
°тР|,1ва образуется возвратное течение с характерным участком
Glо давления в зависимости Ср(.г) (рис. 6.2.3).
Рис, 6.2.3. Влияние среднего угла между осью фюзеляжа и касательной к копгуру к
мовой части конической и эллиптической форм на положение точек отрыва и нрисо-ди-
нсиия потока и распределение давления
Рис. 6.2.4. Влияние формы контура и удлинения на распределение давления по kohtjtj
кормовой части фюзеляжа при а _ О; рассматривались: контур - дуга круга (/), контур ’
дуга круга + конус (2). профилированный контур (?)
На рис. 6.2.4 приведено сравнение распределения давления но кормовым
частям имеющим различную форму и различное удлинение. Эпг явления
гут усиливаться или ослабляться с изменением чисел М и Rc, а также/л.
воздействии струй газов, истекающих из сопла двигателя. Влияние этих
торов может различаться по силе воздействия па обтекание и носиг про
положпый характер Поэтому при определении оптимальной формы корм0
части фюзеляжа следует оценивать всю совокупность влияющих причин-
6.3. Сопротивление фюзеляжа
В общем случае аэродинамическое сопротивление фюзеляжа
звукового самолета зависит от режима полета и геометрических- гм
ров носовой, центральной и кормовой частей.
Сопротивление носовой части. При пулевом угле атаки и t-'™
вых скоростях на передний участок носовой части действует давлен110**
талы тую часть контура - разрежение, т.е. продольные составляю I |
мальных сил на этой части поверхности направлены навстречу потоку
www.vokb-la.spb.ru - Самолёт своими руками?!
Мкр
При
коНТУР°м
ni ieiDio носовых частей большого удлинения при дозвуковых скоро-
му сопр011 асгся (jecj.Mti малым - основная доля сопротивления приходится
стях оказ! которые могут составлять до 95% суммарного сопротивления
на силы пгеггие' носовой части оказывает решающее влияние на величину
^Д’П^едовате.-п>по, на волновое сопротивление фюзеляжа (рис. 6.3.1).
И’ анном удлинении наибольшее значение Мкр имеют носовые части с
заЛ<' определяемым уравнением:
_ 2г
Г D
1 гп
4 — 1- —
2ZH \ 2ZH,
и v пj
(1)
Ьк 6.3 1. Зависимость коэффициента волпо-
вого сопротивления фюзеляжей с различными
удлинениями носовых частей от тела Мя
Рис. 6-3.2. Влияпие удлинения носовой
части фюзеляжа аи на величину М,ф
Здесь /н - длина носовой части; D - максимальный диаметр носовой
части, равный диаметру цилиндрической части; х - текущая координата
вдо.ц, продольной оси от носа; г - радиус поперечного сечения носовой
асти ПРИ координате х.
Гем больше удлинение носовой части при заданной форме контура,
4a(.1.J^bIUre ^кр- ,ела вращения с тупой и заостренной формой носовой
Ких . с Р^ным удлинением, но с одинаковым значением Мкр (при высо-
чие».?1^46111151'4 Мкр) имеют одно и то же волновое сопротивление до
Как ' 1,02 (рн?-6'3-3)-
сит ог ' казьгиал°сь выше, сопротивление носовых частей существенно зави-
этцх па** ^Ллине,1Ия и формы контура. При дозвуковых скоростях влияние
тРаНсзв Рамс1Ров оказывается минимальным (рис. 6.3.3 и G.3.4). В области
^КОБЬгх чисел Ма происходит резкое увеличение сопротивления, свя-
Прц 11оявлением и последующим нарастанием волнового сопротивления.
*!*‘К)1цИх 1 01,0 Вьгзывается потерями в прямых скачках уштотнения, замы-
°ТсоЗД1 н с^РХзвуковые зоны па поверхности носовой части, при NL, > 1 _ в
1°и юловной волне. Величина Сдо носовых чашей возрастает до
www.vokb-la.spb.ru - Самолёт своими руками?!
чис ia М , соответствующего присоединению головной волны к носойгИ
оживала. При дальнейшем увеличении числа М„ происходит монотощ jl
ватте величины Си). Однако при больших углах при вериги-де
(свыше 30° при исследованных числах Мк, ?.н < 2) присоединение
волны тге происходит и продолжается возрастание значения Cw.
Рис. 6.3.3. Влияние формы носовой части фюзеляжа (при одина-
ковом значении Мкр) на его сопротивление
На рис. 6.3.4 приведены результаты экспериментальных иссЯдоза-
ний коэффициента лобового сопротивления (сопротивление давления и
трение) заостренных носовых частей оживальной формы разного уыв
нения при нулевом угле атаки в диапазоне чисел Рейнольдса а
Rcj - 6.05-106 при Х1„ = 0.6 до Кегу = 19,5-10е при Мл 4,0 При измере-
нии лобовою сопротивления носовых частей за ними присутствовали ци-
линдрические части с удлинением л.ц - Id. Ниже приведены осповны
геометрические параметры исследованных носовых частей
/.. = 7 а
1 'и 0 R/d
2,57 22:,0' 6,80
2 04 30'0' 2,62
1,07 49п37’ 1.4
0.865 боту 0 999
0,714 70*0' 0,76
0,5 9(H)' полу- сфера
0,5
-------О"
— — 0>Л‘
19’
!,Я
М
1,0 _________
ТВ Фю’
Рис. 6.3.4. Влияние формы и удлинения носовой ча
лижа (а„ _ 7d) на коэффициент ее лобового .. У.
(сопротивление давления н грсния) в зависимости от
На рис. 6.3.5 приведено влияние радиуса затупления на лобовое cool ;
.'leiuie носовых частей оживальной формы при сверхзвуковых скоро* -
-27) Исходная носовая часть оживальной формы имела контур гС-
м п тъного волнового сопротивления при адапной относи тельной то.-ти
2
У2 - ’
- t~ + arccos(-r) ,
,, z/) _ j, г ' радиус донного
где ^'расстояние, измеренное вдоль
сре3а’ 'Гпвой части от ее передней точки,
<*" ‘ л исходной носовой части, рав-
лГ/острым носком. Три другие мо-
,,аЯ „ч.гти относительные значения ра-
дели и. - = о,25, 0,5 и 0,75. Ес-
пн ,-са носка Гн"д«ч
а оаД1ПС притупления носовой части
м ньше четверти радиуса дна модели,
то сопротивление нарастает незначи-
То1ьно (рис. 6.3.5) Однако при даль-
нейшем увеличении радиуса носовой
части оно быстро возрастает. Заметим,
что сопротивление модели конуса с ди-
оптром приблизительно того же объема,
что и исходная модель оживальной фор-
мы с острым носом, при сверхзвуковых
скоростях незначительно превышает с.о-
п}юпгвлсннс тела минимального сопро-
тивления с гн/гдон = 0,25. Такие носовые
части используются па беспилотных ле-
тательных аппаратах, так как коническая форма конструктивно и техноло-
гически является более простой.
Оптимальными по сопротивлению являются степенные формы носо-
вь'х частей. Одной из таких форм является оживало Кармана, контур
которого задается в виде
(2)
Рис. 6.3.5. Зависимость коэффициен-
та лобового соЛ|хггнвлепия (а ~ 0)
при М„, - 2,72 <>г притупления носо
пой части фюзеляжа (Rcrf - 0 7310е)
а - тя/Тдоц - 0, б 0, п 0,25, г -
0.5, д - 0,75
— larcsiii -Jx
(3)
г -
гДс г - rtr
/ .юп>
Стспенная
^ъема конуса
ти’^ ’е гие в —
т^Ю6. Е,
* j "сличение показателя игиисии ли « — w,.j илфинилчдекиьл
(ныиением сопротивления тела степенной формы, то при п > 0 5
х - x/l,
форма тела г = при п = 0,75 имеет объем, больший
с гем же удлинением в 1,2 раза, и меньшее лобовое сопро-
! Диапазоне М.с от 1,75 до 3,0 по сравнению с рядом других ана
JM. Использование для фюзеляжей сверхзвуковых самолетов
- затупленных форм носовых частей (вместо параболических)
снизить Коэффициент лобового сопротивления носовой части на
а рис. 6.3.6 приведены зависимости, показывающие влияние
степени г? на сопротивление тел вращения степенной формы с
= 6,63 при М.с = fi в диапазоне чисел Рейнольдса от 4,37-106
ли увеличение показателя степени до п - 0,5 сопровождается
Рис. R..3.G. Зависимость коэффициента ло-
бового сопротивления (« - 0) носовой части
<|> ОЛ1'.чяжа от формы ее контура при NL ~ 6
сопротивление практически
иястся. хотя объем тела Не Не.
уменьшается (минимальны^И
мом обладает конус п = 1) °^Ъе.
Сопротивление коп
части. Основные закономеп°в0'’
обтекания и распределения Т**8
пия но контуру кормовой часп,*
соответствующие значения ее™ “
противления рассматриваются
примере простейшей формы ко^
мовой части, представляющей
бой сужающееся продолжение ад
лиидрнческой части тела вращения
Близость крыла и наличие опе-
рения приводят к пространственно,
му обтеканию кормовой части. ’Гем нс менее, сопротивление кормовой
час ти ( так же как и носовой) в значшелыюй степени oi ределястся се уд-
линением и формой.
Силы давления, действующие нормально к поверхности тела, в зави-
симости от формы контура дают составляющие в направлении нсвозму
щеииого поюка, образуя силы тяги или сопротивления. На рис. 6.3.7 при-
ведено распределение давления но радиусу тела вращения для конкретий
формы контура. Зависимости показывают, что на носовой части тела силы
сопротивления расположены в центральной, а силы тяги в периферийной
его чаши. На кормовой части картина распределения сил оказывается про-
тивоположной. Тяга расположена в центральной, а сопротивление но пери-
ферийной части. Неблагоприятный градиент давления вдоль контура кор-
мовой части будет приводить в реальной жидкости (из-за существования
ио1раиичного слоя) к неполному восстановлению давления или даже к о
рыву потока, что уменьшит силы тяги и увеличит сопротивление.
www.vokb-la.spb.ru - Самолёт своими руками?!
П{ОМ х'длннении UK) мспыпис значения коэффициента сопро-
При ^^ця’ССгд) получаются для контуров, выполненных по урав-
тнв-1с,н^?п ’ ??2 = ] :-0.8 (при т < 0,8 вследствие влияния вязкости воздуха
нен>л° ' , JIf Трсбуемого восстановления давления в кормовой части конгу-
нс п^’,1С^гиснИс л"к вызывает рост разрежения и положительных градисн-
ра). 5 ме" я обусловленное этим уменьшение Мкр и возможность возник-
тов даВЛогрЫва потока ограничивает нижний предел Хк.
нове»1^ иррдОГВращсиия возникновения отрыва и уменьшения сопротив-
' давления при больших дозвуковых числах М«, удлинение кормо-
1Cfl части фюзеляжа следует выбирать нс меньше 3,5.
U° в' конкретных случаях компоновки фюзеляжа сверхзвукового самоло-
ве всегда удается придавать оптимальные формы кормовым частям. На
рис 6 3.8 приведены зависимости коэффициента сопротивления в функции
чиста Мл для ряда кормовых частей (распределение давления по которым
тано на рис. 6.2.4). Видно, что кормовые части, имеющие меньшую кри-
визну но большей части контура (и, следовательно, более благоприятный
градиент давления), обладают и меньшим сопротивлением в широком диа-
пазоне дозвуковых чисел Увеличе-
ние кривизны контура кормовой части
при одновременном уменьшении ее уд-
линения, естественно, сопровождается
увеличением разрежения в области пе-
рехода цилиндрической части фюзеля-
жа к сужающейся (рис. 6.2.4). При
увеличении числа разрежение в
этой области возрастает, что ведет к об-
разованию местной сверхзвуковой зоны
с возникновением и последующим уве-
личением волнового сопротивления,
гому соответствует характер нротска-
иия зависимости Сх0(Мо) на рис. 6.3.8
knv,K°/PMr>I30fi Части с малым удлинением
р-1а (сплошная линия).
^°Пр°ТИвление сР°Дней части. Сопротивление средней части
му ’ПЯИ<а R области, когда она имеет правильную цилиндрическую фор-
йёрхц елсляется сопротивлением трения в зависимости от состояния по-
ло еГдСГИ (1ЛаДкость, шероховатость, вошистосгь) и пограничного слоя
т°’Шой адине’ Величина сопротивления трения средней части с доста-
31гС1С;Пенью точности может быть определена расчетным путем.
аом и d 1Итсльная часть фюзеляжа сверхзвукового самолета занята кры-
,Ч'и.чЫк,"*рени«- К нижним или боковым частям фюзеляжа обычно
Со11Ротив, 1 Возлухозаборники двигателей. Эти обстоятельства вызывают
Ление интерференции, которое в зависимости от компоновки са-
^ожст быть определено только экспериментальным путем. Увс-
0,05
0
0,5 0,6 0,7 0,8 0.9 1.0 М„
Рис. 6.3.8. Влияние формы и удлине-
ния кормовой части фюзеляжа па ее
сопротивление в зависимости от числа
Mz, рассматривались: контур - дуга
круга (/), контур - дуга круга * конус
(2), профилированный контур (3)
, контур «агорой образован дугой
личивают сопротивление н различные выступающие иадслро^^
латаемые па фюзеляже. ’
К ним, в первую очередь, относится фонарь кабины
Сопротивление фонаря кабины летчика при трансзвуковых сксГ'^’
может достигать 50% сопротивления фюзеляжа (при отношении п-
миле левых сечений фонаря и фюзеляжа Лф,,,,/5фЮЯ = 0,10-5-0,15).
основным требованием, предъявляемым к аэродинамической комп
фонаря кабины летчика сверхзвукового самолета, является малое *****
тивлепие при обеспечении хорошего обзора. Со,1Р&
Наибольшее значение коэффициента сопротивления фонаря достщ-1етг
з области трансзвуковых скоростей. Начиная со сверхкри гических чисечМ
па поверхности фонаря возникают местные сверхзвуковые зоны, закончи
Бающиеся прямым скачком уплотнения. Резкое возрастание давления за
скачком уплотнения совместно с диффузором в задней части фонаря может
привести к отрыву потока, поэтому малое сопротивление может бып
получено за счет такого изменения контура фонаря и площади поперечнъп
сечений по его длине, при которых не возникает резкого изменения
давления и отрыва потока. Равномерное изменение аэродинамической
нагрузки по контуру фонаря благоприятно и для безопасного открытия и
сбрасывания фонаря при большой скорости полета.
При анализе сопротивления фонаря удобно рассматривать его состо-
ящим из хвостовой и носовой части. Эквивалентное удлинение фонаря
хак тела вращения г площадью мндслсвого сечения, равного 25ф0Н, и эн
Бивалентным диаметром - ^’45^/л определяется по формуле;
_ 4|юп I л (41
'-Ф™ " 9 M9S',
“ \ ~*’фс>Н
Форма контура меридионального обвода и форма поперечных сечений
угол наклона и относите явный размер переднего плоского стекла и соиряж*
ние его с основной поверхностью фонаря оказывают решающее влияли
сопротивление, особенно на сверх критических для фонаря скоростях поТ°^
С увеличением удлинения поток при обтекании фонаря имеет меньшее F~ _
жение на его поверхности, волновое сопротивление возникает при
числах М* и нарастает медленнее, а коэффициент сопротивления фонаря
-*___(г г . У1
х ф" '
оказывается меньше (рис. 6.3.9). пинес-^
Закон изменения площади поперечных сечений фонаря по его проп5
дуст выбирать таким же, как и для гела вращения с минимштьнььм с
ленисм. Чтобы избежать нежелательной интерференции полей »
зеляжа и фонаря, последний целесообразно размещать по длине
местах наименьшего разгона cKojxxrrn, т.е. в местах с меньшим разр*^
www.vokb-la.spb.ru - Самолёт своими руками?!
уменьшение угла установки пе-
го плоского стекла с осью
хотя и сопровождается
фЮ пением сопротивления фоиа-
>-мС,^нако заметно ухудшает обзор.
РЯ лонное сопротивление.
внешний поток, обтекающий тело
а'Хния, эжектирует воздух из об
эсги за донным срезом. В итоге за
‘тонной частью тела вращения обра-
зуется разрежение, которое обуслаи-
niBaer часть сопротивления тела,
называемую донным сопротивлени-
ем. Дошюс сопротивление тела вра-
щения может достигать 30% полною
СОНрОТИВЛСПИЯ.
Возникновение разрежения за
доштьгм срезом тела вращения явля-
ется сложным явлением, существен-
но различающимся при дозвуковых и сверхзвуковых скоростях обтекания.
В том и в другом случаях оно существенно зависит от состояния потра-
Рис. 6.3 9. Распределение коэффициента дав-
ления по короткому (о) и длинному (б) фо
парю н зависимое гь сопротивления короткого
и длинного фонаря в функции числа МЛ
ничлого слоя перед донным срезом и ттюмегричсскнх параметров самого те-
ла. Кроме того, оно пропорционально скоростному напору внешнего набе-
гающею потока. Влияние числа Re наиболее сильно проявляется при лами-
нарном пограничном слое и в области чисел Re, соответствующих переходу
ламинарного слоя в турбулентный. В случае турбулентного пограничного
с юя донное давление практически не зависит от числа Re. При рассмотре-
нии вопросов, связанных с донным давлением, следует иметь в виду, что но-
граничныи слой охватывает область донного разрежения, отделяя ее от
внешнего потока. В результате эжектирующее действие наружного потока
ослабляется и разрежение за дном уменьшается. Поэтому, чем толше погра-
Гсм*?>1И Г ЮИ “ Донного среза (длинное тело или бо.'тьшая шероховатость),
вания lbUIt ДОНИОе Давление и тем меньше донное сопротивление. Исслсдо-
атак 1,0Казыиают’ ,гто У тел вращения большого удлинения увеличение угла
ния сПРИМеРио ло а * 5° практически не влияет на значение донного давле-
П Р°СгОм температуры тела донное давление возрастает .
безп Р 1 Из^Чс11ИИ Донного давления оно обычно представляется в виде
КОЭ(№ициснт0Ь срд<ш = и Д.’Юп = /’д<н,/Р’” ,де
hm^'j ав-1снис па донном срезе тела вращения, рк - статическое давле-
В ,мУи1е*<ого потока, q - скоростной напор.
в фущКаЧРС1ВС пР11МСРа на рис. 6-3-10 приведены оба эти коэффициента
Й°совой Ч11сла для модели тела вращения с оживалытой формой
ЙРбул СГИ Исследования были проведены при наличии па модели
"Ио- е11Г1,Ого пограничного слоя.
Г • Бютгснса
Выражение коэффициента донного давления в виде Ср,а
-}>*)(] - удобно для вычисления сил (ив частности сопротцй ^Л01’'
действующих на тело. Зависимость Ср ЛоИ(>Ю имеег максимум в
трансзвуковых скоростей, что свидетельствует о наибольшем
онто донного сопротивления в этом диапазоне скоростей. При
ковых скоростях величина С^л<>11 непрерывно убывает с рост)МРХЗВ-*
Мл, что в большой мере определяется возрастанием скоростного иЯЧИСЛа
Эю обстоятельство затрудняет изучение донного давления в сверх В°Р
вом диапазоне чисел М*>. В этом отношении более удобным представ
пнем величин дойного давления является выражение его в виде ко.эфаЛ
циента относительного донного давления рдон = Ржн/Ръ. ‘ ? ’
Следует имен» в виду, что при испытаниях в аэродинамической трубе
весьма трудно получить правильные значения донною давления. Цо
рис. 6.3.10 видно, что как в случае боковой, так и хвостовой державки
имеет место существенный разброс экспериментальных точек. Это является
следствием влияния на течение в донной области как самих поддерживаю-
щих устройств, гак и их взаимодействия с внешним потоком и со стенками
рабочей части трубы. Искажения донного давления достигают наибольшей
величины обычно в трансзвуковом диапазоне чисел МЛ. Наиболее надеж
ным способом экспериментального исследования донного давления являет-
ся определение его в свободном полете. Однако при этом возникают свои
трудности, осложняющие широкое использование этого метода.
О
Рис. 6.3.10. Зависимость отца си тельного донного давления и коэффициентов в0
давления or числа МЛ: 1,2- соответ ст пенно увеличение и уменьшение Мм paC1!°"i
изменяющиеся М„): 3 дискретные числа М„; < 5 - влияние боковой держа /
ложеннон соответственно под углами 0 - /5° и 40° й
На некоторых сверхзвуковых самолетах в донной части расп
сопла реактивных двигателей. При их работе донное давление В
www.vokb-la.spb.ru - Самолёт своими руками?!
зависеть от параметров внешнего потока, газодинамических па-
мере 6Уде*й, режима работы двигателей, от количества и их взаимного
раметр^ ' (гМ. гл. 5) и будет существенно отличаться от давления, ко-
расл0-10* о £bI b сЛучае отсутствия струй работающих двигателей.
уорое 6bUMV аэродинамические характеристики моделей самолетов с дон-
зом преДстарля10Т яа вычетом Донного давления, измеренного во
йЫМ ^Эксперимента в аэродинамической трубе. При переходе к ЛДХ са-
время яние работающих двигателей вводится как поправки к резуль-
2ХиРХ6яь1х ясттаний ,
Простейшим случаем будет являться плоская донная часть с оди-
юй центральной струей- Обтекание тел вращения сопровождается воз-
Н новепнем спутной области течения с тороидальным вихрем, располо-
женным непосредственно за донным срезом. Появление струи приводит к
tomv чГО тороидальный вихрь распадается на два вихря - внешний и
внпрепний. При этом внешний тороидальный вихрь, связанный с вне-
шним потоком сохраняет направление вращения исходного вихря, суще-
ствовавшего при отсутствии струи, а внутренний тороидальный вихрь,
связанный со струей, приобретает противоположное направление враще-
ния. Увеличение импульса струи и связанное с этим изменение газодина-
мической структуры струи сопровождается изменением размеров вихрей и
лонного давления. Сначала донное давление растет (донное сопротивление
падает), достигая максимума при рд/р,, = 0,15 (р0 - статическое давление
в струе), а затем начинает уменьшаться (дойное сопротивление растет)
Дальнейшее увеличение импульса струи вновь сопровождается увеличе-
нием дойного давления (или уменьшения донного сопротивления). Типич-
ные зависимости изменения коэффициента относительного донного давле-
пил в широком диапазоне степеней нсрасчетиости струи привел I
рис. 6.311 Наиболее сильное возрастание донного давления (и На
дящее значение рлсн-р^ = 1,0) наблюдается при больших значениях В°СХг'’
Это связано с коренной перес тройкой обтекания кормовой части тета
тения. при котором сильно нсдорасширенная струя вызывает отрыв
ка с поверхности тела вращения (рис. 6.3.11). 1 110т,>
Как уже от мечалось выше донное сопротивление может зависеть Ог л
мы тела перед донным срезом. Па рис. 6.3.12 приведены результаты исс-^Х
валин донного сопротивления для одпосоиловой н двухсопловой компо1ЮВКи
тел вращения в зависимости от числа М„; при различных значениях огн01ие_
ния давления торможения в струе (р,) к статическому давлению нсвозмс’щен-
ного внешнего потока. Обе модели имели практически одинаковую форму 11е.
род дойным срезом, что дало возможность в неискаженном виде сравнивать
влияние количества струй на значение донною давления. При отсутствии
струй донное сопротивление (определено но среднему давлению в ряде точек
донного среза (рис. 6.3.12)) нс зависит от числа М«. в исследованном диапазо-
не и почти одинаково для обеих компоновок. Значение донного давления ка-
чественно согласуется с результатами приведенными па рис. 6.3.10. При на-
личии струй донное сопротивление возрастает по мере увеличения отношения
рр рх. Наибольшее увеличение донною сопротивления наблюдается ири ма-
лых дозвуковых скор<х-гях двухсопловой компоновки.
Распределение давления по радиусу
дна тела вращения при наличии сгруи ока-
зывается существенно непостоянным. В
ряде случаев максимум давления наблюда-
ется вблизи сопла, а сто минимум - в пе-
риферийной части донного среза. Особенно
сложным распределение давления оказыиа
ется при наличии в донной части нссколь
ких струй. В этом случае при малых p<t Ра
внешний ноток засасывается в просгр31
ство между струями. При больших ре Р^
особенно после того, как на некотором Р
стоянии до дотшого среза струи ,|а'^'яСду
смыкаться, воздух в пространстве м
струями начинает вытекать во внеш
ток. Такое перестроение течения 01 ^не-
заметное влияние на донное сопрш “WI
пне: при малых ра1рт па-'отчме
гагеля увеличивает донное
а на режимах, соответсгвуюших и}<гРЯЯ|
в<?л1П1инам ра!рк, палтпие стрУ11 *
лей уменьшает доппое сопротивл^*11 т
Рис. 6.3.12. Зависимость донного со-
противления для сопловой и двух'-
соплопой кохтоновки кормовой части
фюзе^шжа от числа NL при раз-
личных отношениях даплешы тормо
женин к струе к статмшткому давле?
нию нежимущенного потока
www.vokb-la.spb.ru - Самолёт своими руками?!
я формы продольного контура фюзеляжа на его аэро-
ВЛ^янИ характеристики. Форма продольною контура носовой
динзМ^чеС1< и в (х-обснности области перехода носовой части в цилин-
части фюЗС- оВНО>1, определяет подъемную силу фюзеляжа,
дричсскую, Р
Рис G.3.13. Зависимости Cv„(tx). m/a) при различных числах Мх для носовых частей
«Тин иной формы контура «.-’круговым и эллиптическим поперечными сечениями
В качестве примера на рис. 6.3.13 и 6.3.14 приведены основные
аэродинамические характеристики носовой части, меридиональный коп
тур которой выполнен по степенному закону
(6)
Г =лчил(х/£)в,
,Де г - текущий радиус поперечного сечения; /?МИд _ радиус милелевого
Зления; х - текущая координата но продольной оси носовой части.
-Тчина носовой части; п - показатель степени, равный 0,5.
Исследования выполнены в диапазоне чисел М от М» - 0,5 до .
1Д2, числа Re (вычисленные по скоростному напору и длине мод .,
рядись от Re = 6,25-106 д0 Re = 9,00106. а при сверхзвуковых
^слах Мж Re = 5 73406. переход пограничною слоя фиксировался ис-
CtT*niHo с помощью кольцевых полос (0,16) из зерен корунда с номи-
на.тьным диаметром, равным 0,03 ем, приклеенных на рассгояН1ти ) ,.1
за носком у каждой модели. --54
контура с крутовым н эллиптическим поперечными сечениями
Для эллиптического поперечною сечения приведены два случая с от-
ношением большой (с/) и малой (6) полуосей а/b = 2 и 3. Ординаты
большой и малой полуосей изменялись по тому же степенному закону,
что и в случае круговой формы сечений. Исследуемые модели имели
одинаковые длины и объемы. Аэродинамические коэффициенты относи
лись к плошали проекции тела в плане, коэффициент продольного мо-
мента вычислялся относительно условного центра масс, обозначенного на
схемах рис. 6.3.13, 6.3.14. Сравнение зависимостей, приведенных на этих
рисунках, показывает, что с помощью эллиптичности можно увеличить
подъемную силу, действующую на носовую часть фюзеляжа. Увеличение
подъемной силы передней части фюзеляжа может быть достигнуто ‘i
счет уменьшения удлинения, по это ведет к увеличению сопротивления.
Чго касается подъемной силы кормовой части фюзеляжа, го ири д
личин угла атаки она может быть отрицательной. Как можно видеть &
графика на рис. 6.2.4, в области перехода средней части фюзеля
кормовую часть имеет место разрежение, тем большее, чем меньше
нение кормовой части. При наличии утла атаки разрежение па наве
поп стороне кормовой части будет расти, а на подветренной lia*iaib сТ
малых значениях удлинения может образоваться обширная облас
рыва с постоянным давлением в нем). В этом случае, в отличие
зой части разность давлений, действующих на наветренную и
ренную поверхности, будет создавать отрицательную подъемную
Близость расположенного на фюзеляже крыла, наличие i
талыюго оперения и, в особенности, струи газов, истекающих
двигателей, могут существенно изменить картину обтекания
час ти при наличии угла атаки.
www.vokb-la.spb.ru - Самолёт своими руками?!
-новение отрицательной подъемной силы на кормовой части
В зН,1К моЖет наиболее отчетливо проявляться на компоновках
фю^1 Ж^вь1Х самолетов типа “бесхвостка". В этом случае на кормовой
сверх3*3'к е тяжа располагается только вертикальное оперение, которое не
части Ф ‘ ofoK на нижней подветренной стороне.
,tcKg ияние формы поперечного сечения фюзеляжа на его аэро-
бические характеристики. Поперечные сечения фюзеляжа и в
ости средней его части, выполняются в форме, отличающейся от
ЧЗС ..-иного круга- На рис. 6.3.15 приведены результаты исследова-
тгпЗВИ-Ы’** ,
я влияния формы поперечного сечения фюзеляжа па значение ко-
эффициента подъемной силы при дозвуковых и сверхзвуковых числах
М (В качестве характерной площади при вычислении коэффициента
подъемной силы была принята площадь поперечного сечения средней
части модели.) Были исследованы круговая и эллиптическая формы
поперечного сечения. При этом последняя была исследована в двух
вариантах В одном - плоскость больших диаметров располагалась
горизонтально (нормально к плоскости
(в плоскости углов атаки).
углов атаки), а в другом -
вертикально
пе^чиого^ ^ав1,ГИМО1ТИ буЯ(а) для фюзеляжа с. кривой и эллиптической формами по-
УГ’юв^И ^асположеиии модели в плоскости, перпендикулярной к плоскости
особеня^101’ с-у1цестве1*ио увеличивается коэффициент подъемной силы. Это
силы в ° замеТио ПРИ больших углах атаки. Факт увеличения подъемной
Г1Роизр ЭТ°1^ с;1УЧае связан не только с большем удлинением (увеличением
Сос^ ДНои ) тела, имеющего эллиптическую форму, но и с нелинейной
На бок.У11011101"1 "Темной силы, которая возникает за счет вихревых систем
U ,Ь1Х поверхностях исследуемых тел.
CG4eHli °пРеДслснии производной Су фюзеляжа с эллиптическим
3,<ачг>1.,К1 ванном числе М можно пользоваться соответствующим
1 С ''V- о
у для круговой формы, умноженным па отношение а/Ь
6.4. Асимметричное и нестационарное обтекание фюзеляж
на больших углах атаки без скольжения 5
Как отмечалось выше, при умеренных углах атаки поперечное
канне воздуха под действием возрастающей нормальной составляющей^^
рсх?ти приводит к образованию па боковых сторонах фюзеляжа двух
дольных вихревых систем, симметричных относительно птоскости
атаки. Имеет место не только симметричное по и стационарное обтекащ^06
При переходе к большим углам атаки и связанным с этим еще боль
шим ростом нормальной составляющей по сравнению с осевой составу
ющей скорости набегающего потока происходит нс только количсст
венное изменение АДХ фюзеляжа, но и их качественное изменение.
Причины возникновения поперечных сил при больших углах
атаки в отсутствии скольжения. Исследования показывают, что при
достижении углов атаки а > 20° одновременно с наличием нормальной
силы возникает значительная боковая сила.
Осциллограммы, приведенные на рис. 6.4.1, свидетельствуют, что
при постоянном угле атаки а ® 35“ достигается определенное значение
нормальной силы, около которого наблюдаются небольшие колебания,
вызванные пестационарностью вихревой системы, охватывающей боко-
вые поверхности фюзеляжа. Одновременно с этим возникает и попе-
речная сила того же порядка, что и нормальная сила; ее значение перио-
дически изменяется отражая периодически срывающиеся то с одной, гос
другой боковых сторон фюзеляжа вихри.
(?) С0-^'
Рис 6.4.1. Схема обтекания и осциллограммы нормальной (2) и поперечно *4
действующих на фюзеляж при больших углах атаки. I - угол атаки при опытах
Этот факт отражает изменение характера обтекания пр11 лереХ
большим углам атаки 11Cv<
Все вихревые образования, связанные с отрывом потока, BeCbjjoafO'1'
тойчивы и чувствительны к малейшим внешним воздействиям- ЛЯ
незначительная геометрическая несиммстрия правой и левой сГС)^111Сц?Г''
зеляжа относительно плоскости углов атаки может оказать суп!
влияние па состояние вихревой системы, а при больших углах а1
www.vokb-la.spb.ru - Самолёт своими руками?!
1(еСиммсгрии уже с носовой части, один из вихрей (с правой или
доЫ'ЯХ пЫ) отрывается от поверхности и сносится вниз по потоку. На
девой < подтекаЮ1ИИЙ через пограничный слой воздух способствует воз-
его >,сС нового вихря. На противоположной боковой стороне фюзеля-
11,,к1,°уТО jjpp'jH нарастает симметричный ему вихрь, но с большей интсн-
D тыо. Это порождает несимметрию скоростей и связанную с этим
СИВН ть давлений на правой и левой сторонах фюзеляжа, что в итоге и
Р33 т к возникновению поперечной силы. Достигнув определенных
11,>1Черов. этот вихрь также отрывается. Процесс развития и отрыва вих-
Lа на противоположных сторонах фюзеляжа является периодическим и
яражеп характером осциллограммы на рис. 6.4.1. За вихрем, сворачиваю-
щимся на носовой части, формируется последующая система вихрей по
цлине фюзеляжа, также периодически развивающихся и отрывающихся.
При этом угол, под которым они сносятся после отрыва, оказывается та-
ким же, чю и у первого вихря.
Таким образом, при больших углах атаки вдоль фюзеляжа на подветрен-
ной его стороне образуется целая система вихрей. Они последовательно нарас-
тают] отрываются и сносятся по потоку (рис. 6.4.1). Экспериментальные ис-
следования, проведенные при дозвуковых скоростях, показывают, что при
углах атаки а >20° возникает значительная боковая сила и момент рыскания
(рис. 6.4.2). Боковые силы отнесены к площади поперечного сечения моде-
ли, момент рыскания - к той же пло-
щади п диаметру и вычислен отпоси-
гслыю точки, расположенной на поло-
вине длины модели Возникновение
боковой силы и момента обусловлены
описанным выше характером течения,
аблюдасмый существенный разброс
Зкснерммснталы1ых точек (рис. 6.4.2)
увязан как с особенностями опыта, гак
* с ^стационарностью точения. Тем по
Jtu<Iee Можн° наблюдать определенную
^°1,о>’^ть изменения коэффипи-
б°Ков°й силы и момента при
км ц ,Ч?^и1и )’1ла этаки. При углах ата-
С1<Му\" е ~ досчитается первый мак-
Heftuiee КОВОЙ сили 11 -момента. Даль-
b05K.Tv "Величе,ГИс углов атаки сопро-
11 У-',сн,,шснием боковой силы
601101съ'СНИ”4 зиака момента на проти-
110 с иГ* ^ГО’ по-видпмому, связа-
Boii ‘,е,,ением интенсивности вихре-
^-Вьццр * МЬ| Моль тела вращения.
а 45° боковая сила вновь
ти
4,0
О
-4,0
Рис. 6.4.2. Изменение коэффициента нор-
мальной силы и момента рыскания фюзе-
ляжа при переходе <п умеренных к боль-
шим углам атаки
начинает возрастать, а момент стремится к изменению знака. При I
а > 60° преобладает поперечное обтекание тела вращения, при кого 'ТЛа*
перемещения вихревой системы вдоль тела. Для этих углов атаки ха 4 Нет
по постепенное уменьшение как боковой силы, так и момента. Поск
боковая сила и момент рыскания обязаны весьма сложному харакгеру°^И
кания и образующейся при этом вихревой системе, то они сушествешгы.0^
разом зависят от конфигурации тела вращения и в особенности носовой
части (см. также гл. 8). ег°
Рис. 6.4.3. Зависимоегь коэффициента
поперечной силы от угла атаки фюзе-
ляжа при различных углах крепа при
трансзвуковых скоростях
Влияние геометрических пара
метров фюзеляжа, чисел Re и м
состояния пограничного слоя
боковую силу и момент рыскания
Исследования, проведенные до углов
атаки а = 40ч-45с, т.е. для области "поре-
хода от умеренных к большим углам
атаки, позволяют сделать более подроб-
ный анализ влияния различных факто-
ров па боковую силу7. Небольшое от-
клонение от осевой симметрии межа
бьнь причиной образования несюгмет-
ричной вихревой системы. Угол крена
(угол поворот вокруг продольной оси
у) может усиливать влияние даже не-
большой асимметрии, расположенной в
области формирования вихревой систе-
мы. Первоначальное направление боко-
вой силы, как правило, неопределенно.
так как это связано с малыми нр0113"
вольными отклонениями формы коНД
ра фюзеляжа. Однако когда возникает несимметрия обтекания и опреД0-®
егся направление боковой силы, оно уже не изменяется при увеличении уг.га
атаки. Изменение утла крена влияет не только на коэффициент поперек
силы, но и на изменение его знака (рис. 6.4.3). 1
В данных исследованиях коэффициент боковой силы был оп<есе
скоростному напору и площади поперечного сечения тела BPa,ueIIll^jjOe
зависимости от температуры и скорости потока число Re (вычисли,
по диаметру цилиндрической модели) изменялось в пределах от 0,
до 0,387-106. Следует иметь в виду, что в реальных случаях на фЮ
всегда имеются надстройки и выступы, представляющие собой С.
ствснныс отклонения контура от осевой симметрии, в этих услов» из-
менение угла крена может оказывать большое влияние па значение
ракгер изменения поперечной силы.
Исследования, проводимые при больших дозвуковых и трапс31^^
числах М, указывают на большую тенденцию уменьшения поперечно
www.vokb-la.spb.ru -
<х?гом М На рис. 6.4.4 приведены
с ^и-ямос™ максимальных значений
г”» области углов атаки а 30ч-40° в
зависимости от числа М набегающею
потока. Указанная тенденция в боль-
шей мерс зависит от затупления носо-
вой части и оказывается различной для
тет вращения, имеющих различную
длину носовой части. Из рис. 6.4.5
видно, что увеличение удлинения ост-
рой носовой части сопровождается рос-
том поперечной силы. В то же время
для затупленной носовой части уве-
личение ее удлинения приводит к
уменьшению поперечной силы.
Данные исследования были прове-
дены при наличии па поверхности мо-
дели ламинарного слоя. Для оценки
влияния, которое оказывает состояние
пограничною слоя, были проведены
Рис. 6 4.4. Зависимость изменения мак-
симальных значений коэффициента по
перечной силы по числам Мч от затуп-
ления Носовой части фюзеляжа
исследования тех же .моделей с турбу-
лизатором (турбулизатор - это полоска шероховатого материала шириной
0,12 см. наклеенная на подветренную сторону вдоль всего тела вращения).
Сравнение зависимостей для этих двух случаев дало на рис. 6.4.6. Известно,
что турбулентный noi-раиичный слой имеет большую энергию, чем ламинар-
ный; он в состоянии преодолеть болыпий неблагоприятный градиент давле-
> - 0.5 л
'i— •
| 1
ния. Поэтом у турбу птзированный
граничный слой отрывается по /
расположенной ближе к сере1ИПсПи,11>
ветрспиой стороны, в результат П°Д’
ширина полосы срыва «жрац^^
что приводит к уменьшению норма?'
нои силы, действующей на тело (В*Я
нс отрыва действует разрежение, олп^
де.тяющес часть нормальной силы)
Поскольку интенсивное!ь вихрей сбе-
гающих с тела вращения, зависит от
нормальной силы, то она становится
меньше, что и влечет за собой умень-
шение поперечной силы. Иными сло-
вами, при переходе от умеренных к
большим углам атаки наличие турбу.
лептного пограничного
ственно
речной силы по сравнению с тем, что
наблюдается при наличии ламинарного
т юграшгч г г ох о слоя.
Механизм воздействия состояния
нохраничпого слоя (точнее, турбулент-
на боковую силу и момент рыскания.
слоя суше-
уменыиает значение поис-
Рис. 6.4 6- Сравнение величины и ха-
рактера изменения по углу атаки коэф-
фициента поперечной силы фюзеляжа
при различных числах Мл. и состояниях
j.oj рагпгчного слоя: а с турбулизато-
ром б - бея турбулизатора
носги), чисел Рейнольдса и Маха
связан с условиями отрыва и присоединения потока, точно так же, как и
при поперечном обтекании бесконечно длинного цилиндра.
В данном случае (при больших углах а1дки) условия отрыва опреде-
ляются нормальной к оси составляющей скорости. При дозвуковых скоро-
стях набегающего невозмущенного потока и докритических числах КС
(вычисленных по нормальной к оси фюзеляжа скорости) отрыв потока н
ступает на подветренной стороне до продольного миделя фюзеляжа,
этом случае ширина зоны отрыва будет превосходить мидель фюзеля
что вызовет большие значения боковой силы и момента рыскания.
При сверхкритических числах Re (вычисленных по нормально»
ставляющей скорости) и турбулизации потока линия отрыва персМв'^И
ся за продольный мидель фюзеляжа. Зона отрыва па подветренно»
ронс сузится, что будет способствовать малым значениям боковой ж
момента рыскания
Эти два фактора в сочетании с формой контура носовой части
влиять па величину и характер изменения боковой силы и момента “1
капля при изменении угла атаки.
При сверхзвуковых скоростях полета нормальная к осп фК>3^-
составляющая скорости может достигнуть трансзвуковых яначеНИ^^И
повлечет за собой образование местных сверхзвуковых зон в облас-
www.vokb-la.spb.ru - Самолёт своими руками?!
огледуюшп.м присоединением потока к поверхности фюзеляжа,
рЬ1Ва С окра,цспП1° 301 IbI OTPMRil на его подветренной стороне. В резуль-
ц.ч»’ * Счспия боковой силы и момента рыскания будут уменьшаться, что
тате зна ’ аеТСЯ результатами исследований.
п°дТ. п1з результатов проведенных исследований показывает, что для
прения или устранения боковых сил па больших углах атаки при
умень, скОльжения необходимо, чтобы обтекание фюзеляжа отиоси-
П° 'elQ плоскости углов атаки было симметричным. Это может быть дос-
гелЬ за счет фиксации линии отрыва на фюзеляже с правой и левой
стороны. Наиболее простым средством для этого является установка
продольных ребер в передней части фюзеляжа в области возможного от-
рыва потока.
Приведенные выше результаты исследований являются качественны-
ми проявлениями особенностей обтекания тел вращения при переходе от
умеренных к большим углам атаки. В условиях конкретного летатель-
ного аппарата, имеющего свои особенности внешнего контура, значения
коэффициентов поперечной силы могут несколько отличаться, и для их
определения необходимо проведение экспериментальных исследований
Список литературы к главе 6
I К.П Петров. Алродииампка тел простейших форм М Факториал, 1997.
2. К.П. Петров. Аэродинамика элементов летательных аппаратов. - М.: Машиностроение,
1985.
3. Н.,1. Терехова. Подъемная сила корпусов с некруговым поперечным сечением при
околозвуковых скоростях//Тр. ЦАГИ, 1981.
_ К.П. Петров. Аэ|юлинамика ракет.-М.- .Машиностроение, 1977.
J Г-П Свнщев. Г В Александрович. П. С. Полядский и др. Аэродинамическая компо-
новка фюзеляжей н мотоготиол Руководство для конструкторов. Т. 1, вып. V. -
М «НИ ЦАГИ, 1952.
www.vokb-la.spb.ru - Самолёт своими руками?!
Глава 7
АЭРОДИНАМИКА ОРГАНОВ УПРАВЛЕНИЯ
Создание сверхзвуковых самолетов со сравнительно тонкими кпьг
умеренного и малого удлинения, необходимость обеспечения управляет*01
при сверхзвуковых скоростях потребовали новых подходов к разработке*111
танов управления такими самолетами. Проведенные в течение ряда лег
даметпальные и прикладные исследования позволили разработать опт»
управления сверхзвуковыми самолетами различных аэродинамических схе>/
определи ть характеристики их эффективности и шарнирных моментов
7.1. Аэродинамические характеристики рулевых поверхностей
на профиле
Физическая картина обтекания профиля с отклоненным рулем, снаб-
женным аэродинамической осевой компенсацией, дает возможность изу-
чил. влияние сжимаемости потока при переходе от дозвуковых к сверхзву-
ковым скоростям Фундаментальные исследования физической картины
обтекания профиля с отклонением рулей до околозвуковых скоростей
были проведены Г.П.Свищевым.
На рис. 7.1.1 показано, как меняется распределение давления по профи-
лю с отклоненным рулем при изменении числа Маха от М ж 0,6 до М * 2,0.
При докритичсских числах М набегающего потока отклоните руля
приводит к приращению разрежения и давления по всей хорде профиля
При числах М больше критических на профиле возникают зоны со сверх-
звуковыми скоростями, которые замыкаются скачком уплотнения. Отклопе-
Рис. 7.1.1. Эпюра распределения давления по хорде П|хк|>иля с отклоненным рулем^1?1^
звуковых и снерхзнуковых скоростях (|цхх|)||ль NACA 00М. с =0.1, Ьр- 0,3,
(“ 1арабола70")): /,2 - верхняя и нижняя поверхшх-ni соответственно 3- С-ркркт- *
я при эТОМ НР вызывает изменения давления па части профиля,
itjre Р>дЯ ой перед скачком. При сверхзвуковых скоростях отклонение
расгк’Л0 1(П. перераспределение давления лишь на самом руле. При
рул* В ^тИ числа М перепад давления на отклоненном руле уменьшается.
•VBe1Ha самом руле при переходе к сверхзвуковым скоростям центр
явления смешается назад.
Л Эти изменения обтекания профиля с отклоненным рулем при перс-
к сверхзвуковым скоростям приводят к уменьшению эффективности
Увеличению шарнирных моментов руля.
И ' На эпюре распределения давления при сверхзвуковых скоростях паблю-
я петля на носике осевой компенсации, которая также способствует
имению шарнирных моментов. Анализ этого явления будет дан ниже.
7.2. Органы продольного управления
Рис 7.2.1. Влияния числа М па поло-
жение аэродинамического фокуса са-
молета и несущие свойства шриэоп-
та.|1ЫЮ1’о ит трения с рулем высоты
Д.тя продольного управления сверхзву-
кового самолета, как правило, используется
целиком поворотный стабилизатор. Объяс-
няется это тем, что при переходе к сверхзву-
ковым скоростям аэродинамический фокус
самолета смещается назад, что приводит к
увеличению запаса продольной статической
устойчивости, а эффективность руля высоты
существенно уменьшается (в 2,5-г-З раза),
что приводит к недостаточности продоль-
ного управления. В то же время эффектив-
Измспение угла отклонения
ность целиком поворотного стабилизатора
при проходе к сверхзвуковым скоростям
меняется незначительно (рис. 7.2.1).
Объясняется это различием в законах
текания оперения с отклоненным рулем
При дозвуковых и сверхзвуковых скоростях ...... —......
соли управляемого стабилизатора приводит к изменению распределения
ления по всей хорде консоли как при дозвуковых, так и сверхзвуковых
ле1)^СТЯХ' ^ри этом JI1,oPa распределения давления по хорде коттсоли
<тРаивается от близкой к треугольной с пиком в носовой части к фор-
’ Приближающейся к прямоугольной (рис. 7.2.2).
Иры к?1слоненис руля высоты на горизонтальном оперении или элевонов на
Давл 11ри ЛОЗ|ВУКО|ВЫХ скоростях потока сопровождается изменением
На с, Я как на самим руле, так и по всей хорде стабилизатора или крыла.
г,Рофи^ХЗВуковьгх скоростях, так же, как и бьтло показано выше па
ДИддр/ с РУлем, отклонение руля приводит к изменению распределения
1,я УГИ,иг’ на поверхности руля (рис. 7.2.3).
1цИгь Реход к целиком поворотному стабилизатору позволяет также умспь-
BL качества самолета от балансировки, так как лобовое сопро-
опсрения с отклоненным рулем больше лобового сопротивления
Рис. 7.2.2. Эпюра распределения давле-
ния ио хорде поворотного стабилизатора
при до и сверхзвуковых скоростях
Рис 7.2.3. Эпюра распределения давления по
хорде стреловидного оперения с. уклоненным ру-
лем высоты при до- и сверхзвуковых « ростах
целиком поворотного оперения при той же подъемной силе оперения. Разни-
ца эта особенно велика при сверхзвуковых скоростях (рис. 7.2.4).
Расчет эффективности управляемого
стабилизатора выполняется по формулам:
- для стабилизатора, расположенного на
киле
- для стабилизатора, расположенного на
фюзеляже
Рис. 7.2.4. Поляра горизонтального
оперения при <5Ь = 0, фс, = var и
<ргт =0, 8„ = var при до- и сверх-
звуковых скоростях
п7г —К.го Суаго Ап’
где С^’го - производная для изо-'Пф°в^|
ного горизонтального оперения по
атаки горизонтального оперения. При
положении управляемого стабилизатор
фюзеляже С“я”р определяется ДЛЯ о1£*^
ния, составленного из консолей упр4^И
мою стабилизатора, Кга _ коэфф1011 J®
учитывающий торможение потока у
горизонтальным оперением.
www.vokb-la.spb.ru - Самолёт своими руками?!
сния> расположенного на киле, Кго = 0,95 при М < 1 и
Для >л 1 cBCpX3BvicoRbix скоростях. Для оперения на фюзеляже
д- = С® < 1 а при сверхзвуковых скоростях его значения даны
* ~ < 9 пр
Кго
на Р*« - 7‘2’ '
"О
0.5
—
О_____
1,5 2.0 2,5 3,0
Рис 7.2 5 Зависимость коэффициента торможения К1С от числа Маха
Статический момент стабилизатора Лгг = (.Ser/-CT)/(Sb0), где 5СТ- пло-
щадь стаби.газатора, L„- плечо стабилизатора (отсчитывается от центра
тяжести самолета до 1/4 САХ стабилизатора), Ьа - средняя аэродинамическая
хорда кры-ia, - производная по углу отклонения
гориэошаптяюю оперения, - экспериментальная поправка, учитывающая
влияние числа М (рис. 7.2.G), - коэффициент, учитывающий взаимную
интерференцию оперения и фюзеляжа (рис. 7.2.7; здесь d - диаметр
фюзеляжа в месте расположения оперения, I - габаритный размах оперения).
ЦО
0.5
1
3,0
Рис 7.2 6 Зависимость колффицпеп
та К от числа Маха
Рис. 7.2.7. Зависимость коэффициента ин-
терференции К,„„ от отношения диаметра
фюзеляжа к размаху оперения rf /1
стабилизатора важен выбор положения
будет показано ниже, оказывает большое
Для Целиком поворотною
вращения Этот выбор, как ...........................—. —......
ИЯ|,Ир на шарнирные моменты. Однако и эффективность стабилизатора
Jun or выбора стреловидной или нсстрсловидной оси вращения.
Но ЯК, Ьидно 113 Р1,с- 7.2.8, при больших углах отклонения эффектив-
осью' СЛа^1,ЛизатоРа со стреловидной осью вращения ниже, чем с прямой
стаби Ь',а1ЦС11Ия (за счет щелей, возникающих между корневой хордой
^изатора и фюзеляжем при отклонении стабилизатора).
llfio6x 1Я ВЬ1^°Ра положения стреловидной оси вращения стабилизатора
Так и '1ПМ ЗНать положение аэродинамического фокуса как по хорде,
размаху консоли и г.. , поскольку при смещении фокуса по
Размаху " " '
ЧЛмиц/ КопсОл11 уменьшается расстояние от точки приложения аэроди-
Свя.зи с К°и СИЛы консоли до стреловидной оси вращения (рис. 7.2.9), в
см Могут быть уменьшены шарнирные моменты
Рис. 7 2-6. Сравнение эффективности с та
билияатора с прямой и стреловидной осью
вращения
Рис 7.2.9. Положение аэродинамическсго
фокуса ио хорде и размаху оперения в
функции числа М
Ось вращения консоли управляемого стабилизатора обычно выби-
рается таким образом, чтобы обеспечить необходимый запас по гяге
бустера на режимах псрскомненсации при отказе одной камеры бустера.
Для примера па рис 7 2.10 показано влияние положения песгреловилной
оси вращения на шарнирные моменты управляемого стабилизатора.
Видно, что при положении оси вращения хов=46% на сверхзвуковых
скоростях шарнирные моменты малы однако при дозвуковых скоростях
наблюдается сильная перекомненсация. При более переднем положении
оси вращения (_гов=40%) перекомпепсацня на дозвуковых скоростях
уменьшается при одновременном росте шарнирных моментов при
сверхзвуковых скоростях. При достаточно переднем положении
вращения шарнирные моменты могут быть уменьшены за счет усгано
переднего наплыва в корневой части консоли, стреловидность I Р°
превышает па 15 20° стреловидность базовой консоли (рис. 7.2.11/-
и
Рис. 7.2.10. Заппеимость производной шарнирного момента дбилизатора г»,,, т
положения осей ношения и фокуса от числа М
www.vokb-la.spb.ru - Самолёт своими руками?!
. -ег иметь в виду. ,|то ”РИ около-
Сл^ скороп ЯХ могут иметь место гак
звуков’’1- 11J[V 1евь1с" шарнирные моменты
^^рнирШ.^ '10меНТЬ1 K°’ICO-™ nP”
Ш “ подъемной силе па консоли). Эги
1П-чсвон я^11Я10ТСЯ следствием несимметрии
м°ме^во*. частц относительно плоскости
хиС,донт<ът1эНого оперения за счет наличия
Хикального оперения.
На рис. 7.2.12 видно, что без верти-
кального оперения нулевой шарнирный
.момент (m,uo) мал. На величину т^о су-
щественно влияет положение вертикаль-
но -о оперения по длине фюзеляжа. Вели-
чина Шшо> определяемая эксперименталь-
но оказывает существенное влияние па
выбор потребной тяги и мощности бустер-
ной системы, так как проявляется при
полетах сверхзвуковых самолетов на транс-
звуковых скоростях вблизи земли с
максимальными скоростными напорами.
Рис. 7.2.11. Влияже наплыва в
корневой части стабилизатора на его
шарнирные мпмопы
числа М:
^ис 7 2 12 1 ,
2 j ’зависимое.гь "нулевое" шарнирного момента стабилизатора от
е. 2-е и 3-е положения однокилепого ВО соотв тетвенно
зоПа.^"1Я '1апевРе|п<Ь1х самолетов, кроме нормальной схемы могут исполь
РИс 7*2' ?ХС!МЫ “угка” и так называемый трехплан. В качестве примера на
Нйгчц, 13 1,окааан общий вид моде.1и самолет трехплатгной схемы, аэроди-
ЦИец-r гКИе хаРа1<тгРИСТ11ки которой представлены на рис. 7.2. И. Коэффи-
С’аби- ,/я °п,сссн к площади крыла. Эффективность консолей управляемого
эФфе^ИЗатоРа- консолей переднего горизонтального оперения (ПГО) и их
Пру. Кг1,1’НосГЬ при совместном отклонении показана в виде приращения
1ьНого момента от утла отклонения консолей.
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис. ’2.13 Общий вид
модс.л самолета трех-
тлаттнпй схемы
Put. 7.2.14. Зависимость . ффектинпости стабилизатора в
нормальной схеме (/), схемах “утка” (2) и трехплан (Лот
угла отклонения стабилизатора
а = 0 эффективность консолей управляемого
С}!> ог°
20
. М=0.2
1 э
1.0
0,5
с
= О
20 50'а
7 7 t5 1 lecvnui* свойства переднего го-
ХпГишного оперения в функции угла
‘"лК. J - с крылом и стабилизатором, 2-е
крылом без стабилизатора, .7 - б<'з крыла и
стабилизатора
т.,
О
-0,05
0.10
0,15
Рис. 7.2.16. Шарнирные моменты переднего
горизонтального оперения в функции утла
атаки: 1 - с крылом п стабилизатором, 2 - с
крылом без стабилизатора, .7 - без крыла и
стабилизатора
На ряде сверхзвуковых самолетов (например, в схеме “бесхвослка”)
управление но тангажу и крену осуществляется элевонами - рулевыми
органами управления, расположенными вдоль задней кромки крыла.
При угле атаки
стабилизатора и консолей ПГО сохраняется до углов их отклонения
= 30а. При угле атаки а = 27° эффективность консолей управляемого
стабилизатора для создания прирашения момента на пикирование
заметно уменьшается,
резко
то же
даже
углы,
мента
жет быль существенно увеличена при одновременном
стабилизатора и ПГО. Переднее горизонтальное оперение при Д°
ковых скоростях испытывает существенное влияние крыла за ’
положительного скоса потока.
Особенно эго влияет на характеристики шарнирных момешоВ'
[ривсденпых па рис. 7.2.15 и 7.2.16 зависимостей Суа пгсХа) 11 WQirCn3
видно, что крыло, расположенное за передним горизонтальным^^
рением, приводит к дополнительной нагрузке, особенно хВ°_
части ПГО, что вызывает увеличение подъемной силы и сушее|И
увеличение шарнирных моментов отрицательного знака.
в то время как эффективность консолей ПГО
— 7(1° В
возрастает и сохраняется до углов отклонения Ф-т "
время при а = 27° происходит полная потеря эффективности и
обращение действия ПГО при отклонении па положительны*
Эффективность продольного управления для обеспечения
на пикирование при больших положительных vi пах атаки
1 1 “отклонен^
Мещед ^^сские исследования элевонов проведены па модели с нерс-
Наибо 1еСТрсловидностью по передней кромки %11К = 65 и 55° (рис. 7.2.17).
ЭФФек1 явными в качестве органов продольного управления яв-
Корневые и центральные секции элевонов (рис. 7.2.18).
Рис. 7.2 18. Эффективность различных секций элевонов в функции углов отклонения
Известно, что при переходе к сверхзвуковым скоростям шарнирные
моменты рулевых поверхностей (рулей, элеронов, элевонов) существен»
возрастают а осевая аэродинамическая компенсация, эффектвно рабо-
тающая при дозвуковых скоростях, не уменьшает шарнирных моментов
при сверхзвуковых скоростях (рис. 7.2.19).
Рис. 7.2.19. Зависимость производной шарнирного момента элевона при различно
ни осевой компенсации от числа М 1 конструктивная компенсация, 2, 5. 4
компенсация, с 5(Ж = 0.1 0,15 и 0,30 соответственно
АПССТр^^*
Увеличение шарнирных моментов при М > 1 объясняется пеР*0*
нием эпюры распределения давления на руле со смещением назад
де центра давления, а потеря эффективности осевой компенсации
няется гем, что, согласно законам сверхзвуковых течений, разгон •
вблизи носика осевой компенсации отклоненного руля приводит к
четно давления вблизи носика осевой компенсации образуется 1'
распределении давления, вследствие чего осевая компенсация Нс
нс уменьшает, но даже может и несколько увеличить момент.
www.vokb-la.spb.ru - Самолёт своими руками?!
дробное экспериментальное изу-
П Физической картины обтекания
чсние <Р на управления с различ-
Р>'леВ°1^11Мп осевой компенсации при
иЫ>11'Жуковых и сверхзвуковых ско-
o,<oJ 'было проведено на модели
Р** ма1о1О удлинения с переменной
КрЬХвитностью по передней кромке в
f’L.ioil 'сверхзвуковой аэродинамичсс-
11А1Т т-109 (рис. 7.2.20).
Н- характеристик распределения дав
тения (рис. 7.2-21-7.2.23) видно что
При дозвуковых скоростях (И =0.6) на
часги элерона перед осью вращения
(осевая компенсация) создается перепад
давления приводящий к компенсации
шарнирною момента, а на сверхзвуко-
вых скоростях (М- 1,78 и 2,3) на носи-
ке осевой компенсации создастся петля
давления, уменьшающая эффективность
осевой компенсации. При М>1,5 осевая
компенсация обьгнюго типа практически
Рис 7.2.20 Схема модели для иссле-
дования распределения давления по
крылу с отклоненными элевонами
по уменьшает шарнирных моментов. В то же время, если осевая компенса-
ция будет выполнена в виде клиновидного носка при клиновидном заостре-
нии задней кромки неподвижной части крыла перед элевоном, уменьшение
шарнирных моментов от такой компенсации происходит и на сверхзвуковых
скоростях (рис. 7.2.23). Клиновидная компенсация реализована на ряде
сверхзвуковых ракет.
Ис 7-2 2i
уд Определение давления по
с Уклоненным элевоном на
' « нижней (?) поверхностях
Рис. 7.2.22 Распределение давления и шар-
нирные моменты эленопа с осевой компенса-
цией М = 2,3, а- 0, сеч. V (/ и 2 рис.7.2.21)
Рис. 7.2.23. Распределение давления и
шарнирные моменты ллепопа г клнповнд-
|Ц>й осевой компенсацией. М = 2,3, а “ О,
и-чепие V (обозначения рис. 7.2.21)
Рис. 7.2.24. Шарнирные моменты Э1[ев(ив
в комбинации с интерцептором в фун*
числа М- 1 - без ингерцситора, 8Э *
2-е интернет ором, 8, = -ю°- j
терцентора с S3 равной эфсЬективности
Поскольку клиновидная компенсация не только уменьшает шарнир
чые моменты, но и увеличивает эффективность органа управления, то
три равном эффективности могут быть получены существенно меньшие
шарнирные момешы при сверхзвуковых скоростях потока. Опасение, чт
компенсация “клин-клин” приводит к существенному росту лобового со-
противления, преувеличено. Эксперимент показал, что сопротивление
крыла при всех испытанных вариантах практически одинаково.
Еще один способ уменьшения шарнирных моментов связан с исполь-
зованием комбинации: осевая компенсация-интерцептор па оси враще-
ния. Создаваемый отклоненным интерцептором момент, действующий на
осевую компенсацию, приводит к существенному уменьшению шарнир-
ных моментов при сверхзвуковых скоростях (рис. 7.2.24). Эффектив-
ность элевона в комбинации с. интерцептором растет, в связи с этим ™аР"
пирный момент элевона без интерцептора при эффективности комбина
ции элевон-интерцептор будет еще больше. На сверхзвуковых скорое*
комбинация осевая компенсация-интерцептор позволяет при равной эф
фсктивности уменьшить шарнирный момент в 2,5*3 раза.
7.3. Органы поперечного управления
В качестве органов поперечного управления для сверхзвуковых
летов используются элероны, элевоны, интерцепторы и дифФеРсни
ныи стабилизатор
Элероны. Выше было показано, что переход к сверхзвуковь*-1
ростям полета сопровождается существенным изменением хараК* t
гекапия крыла с отклоненной рулевой поверхностью. Если при
вых скоростях эффективность элеронов пропорциональна относ**
му размаху, корню квадратному из относительной хорды и кваДМ-
синуса угла с i релошщнос ги но оси вращения т*
www.vokb-la.spb.ru - Самолёт своими руками?!
. меНение.м характера обтекания при переходе к сверхзвуковым
грязи с ,13> Lj,eKTHBHocTi> элерона пропорциональна относительной хор-
скороСтЯМ_Э_?4
6Э а Хз
дс; 7,,х e^eiflIbIC систематические экспериментальные исследования эф-
Провс гронОв при сверхзвуковых скоростях подтверждают эти
♦SSS» (рис 7.3.1).
Рис. 7 3 1. Эффективность элеронов в зависимости ОТ относи тельного размаха и относи-
тельной хорды при сперхппукопых скоростях: Ьэ' - относительная хорда элерона от оси
вращения до хвостика
Как известно, влияние упругой деформации приводит к уменьшению
эффективности элеронов. При увеличении скорости полета (скоростного
напора) может наступить полная потеря эффективности элеронов. Ско-
рость (скоростной напор), при которой наступает полная потеря эффек-
тивности элеронов, называется скоростью реверса элеронов. При увели-
чении стреловидности крыла скорость реверса, как правило, умспьшает-
я О ним из способов уменьшения влияния упругой деформации крыла
На эФФективность элеронов является использование корневых элеронов,
чае,Ю;ТаГа10111ИХСЯ В КОР11СВОЙ или Центральной части крыла. В этом слу-
возможно использование корневого элерона и в качестве закрылка на
’ ’ етно‘Погадочных режимах. Эффективность корневого элерона па
го Лоиил11Ом крыле у = 55° в сопоставлении с эффективностью обычно-
’ Gpoiia равного относительного размаха и относительной хорды при
на рис. 7.3.2 и 7.3.3.
гак случаев на крыльях малого удлинения могут применяться
Цевые •,иасмЬ1С концевые элероны, представляющие поворотные кон-
ла атак7К,1ИИ кРЬ1Ла- Исследования показали, что при увеличении уг-
ЭФФекТиВ11Ость концевого элерона, отклоненного па положи-
ПОди Угол* сУН1естве11но уменьшается, а при углах атаки а ~ 15-5-17°
г0Цп^„ТЬК> Утрачивается. Отклонение закрылков усиливает этот небла-
1риятный зффекТ1
Рис 7 3.3. Эффективность корневого элерона в функции числа М (индекс пнт “ инпрч 'J
Эффективность концевого элерона, отклоненного на отриизте^
угол атаки, сохраняется до больших углов атаки (рис. 7.3.4).
www.vokb-la.spb.ru - Самолёт своими руками?!
Ри< 7 3.4 Эффективность концевых элеронов в функции угла атаки
В связи с этим при использовании концевых элеронов необходимо
дифференциальное отклонение - большие отрицательные углы и мень-
шие положительные При дозвуковых скоростях эффективность обычно-
го элерона выше, чем концевого той же относительной площади, а при
сверхзвуковых скоростях эффективность обоих вариантов элеронов ста-
новится близкой (рис. 7.3.5).
Гис 7 3.5. Эффективность концевых элеронов в функции числа М
^нност! 1а11евРеннь1Х самолетов важно обеспечить достаточную эффек-
пРИпед ' 1 1еРечного управления до больших углов атаки На рис. 7.3-6
кРьсц>ях характерце i ики эффективности элеронов на треугольных
МалЬ1х _ ТРН ’вменении стреловидности в диапазоне /Пк = 50-70°. При
*фм Уве аХ атаки и иеотклоненном закрылке эффективность элеронов
ичеиип угла стреловидности крыла по передней кромке Хпк при-
Рис 7.3.6 Эффективность элеронов на треугольных крыльях; Гэ = 0.45, х = 14
S' -0 07 - относительная площадь элерона от оси вращения 40 хвостика
водит к уменьшению производной mxJ для элеронов с одинаковыми отно-
сительными размерами. Однако при уменьшении Хпк концевые срывы
приводящие к снижению эффективности элеронов, возникают при мень-
ших углах атаки и уменьшение производной 7п£:‘по углу атаки тем силь
нее, чем меньше угол Хпк- Отклонение закрылков приводит к еще более
резкому падению эффективности элеронов на треугольных крыльях с
меньшими углами Хпк- .Эффективность элерона, отклоненного на большой
положительный угол, быстрее снижается по углам атаки, чем эффектив-
ность элерона, отклоненного на большой отрицательный угол. .Это под-
тверждается также результатами испытаний натурного макета самолета с
треуюльным крылом х11К = 60° в аэродинамической трубе Т-101 ЦАГИ.
Видно, что эффективность элерона, отклоненного на большой положи-
тельный угол (8Э= 26°), при отклоненных закрылках существенно сни
жается с увеличением угла атаки, а эффективность элерона, отклоненно*
го на большой отрицательный угол (5;> ~ -29°), повышается с увси^
нием угла атаки до а = 10т 11е, а затем медленно снижается (рис. 7.3.
Рис. 7.3.7. Эффективность элеронов на макете самолета <: Т1>еуголы1ым крыл*’*’
вращения закрылка 2 ось вращения элерона
www.vokb-la.spb.ru - Самолёт своими руками?!
механизации передней кромки на эффективность элеронов
Б-И1ЯНИе гПах атаки показано на примере исследовании стреловидно-
му бо-11>и1ИХ - умеренного удлинения А. = 3,5 с нес1реловидной зад-
i-o крь1ла (рлс. 7.3.8). Исследования показали, что наплыв в конце
ней кроМК01 а. поворотный носок и предкрылок существенно повы-
рой чаффеКуииность элеронов на больших углах атаки.
о.оз п
^’40', Х=3,5
‘ -4.4. 5В=25",
S =-т25*
0,025 - -
О >0'
- чистое крыло
- с поворотными носками
Рис. 7.3.8. Эффективность элеронов на стреловидных крыльях в функции угла атаки
ж с концевыми наплывами
Рис. 7.3.9. Э<|>фектившх.ть элеронов при наличии выдува из носовой
чш-п! элерона (а - 8’. 8, - 30°, М - 0,2)
з01г^Ля Увеличения эффективности элеронов было исследовано исноль-
отк?™.? Ъ1,1дУва из носовой части элерона. Из рис 7.3.9 видно, что при
на поло-
*iMTcOfieiln^ меха11изации эффективност ь элерона, отклоненного
^иъ'й угол, может быть увеличена более чем в 2 раза.
ПИРНЬССЛсдовапия 11а крыльях малого удлинения показали, что
• на шар-
ма цС м°менты существенно влияет форма законцовки крыла и элеро-
yi’°-ri>HdftC11Ma"'IbHbIC значе11,1я шарнирных моментов получены при тре-
Uiext *.° зак°пцовкс элерона, а минимальные - при элероне, нс доходя-
(рцс 7 j Конча крыла, и наличии неподвижной законцовки крыла
Г1,аРни Ю) При этом наименьшая эффективность элерона на единицу
. 1010 момента С^"-' получается у варианта с треугольной закон-
как при дозвуковых, так и при сверхзвуковых скоростях.
Рис 7.3.10. Шарппрпыс моменты элеронов на треугольных крыльях
Увеличение относительного размаха элерона на треугольном крыле
практически не влияет на производную 7Пщээ, а отрицательная производ-
ная Мщ.э с увеличением размаха уменьшается. Увеличение относитель-
ной хорды элерона приводит к увеличению по модулю производных
7ЛщЭ и 772^3 , причем 7?2„j э растет быстрее (рис. 7.3.11).
Рис. 7 3.11. Зависимость производных
элерона (конструктивная компенсация, х1Ж -
и та1 от относительной хорды и размай
60°. & - 0, М = о.2)
Интерцепторы. Интерцепторы обычно используются как д0^'н}1Я
тельные к элеронам органы поперечного управления для
эффективности поперечного управления на взлетно-посадочных Ре
а также на крейсерских режимах полета, где проявляется влияние
гости на уменьшение эффективности элеронов при больших зн j
скоростного напора. pjuMB
Влияние числа Маха на характер обтекания крыла с откл
интернетором при околозвуковых и сверхзвуковых скоростях i
на рис. 7 3 12.
www.vokb-la.spb.ru - Самолёт своими руками?!
_ 3 1 Распределение давления по хорде крыла с отклопеппым интерцептором при
Хюзпукопых и сверхзвуковых скоростях (h^, = 0,032)
При трансзвуковых скоростях давление перед интерцептором возрастает
с увеличением числа М, ио до числа М = 0,97 возрастает также и раз-
режение за интерцептором. При сверхзвуковых скоростях с увеличением
числа Маха давление перед интерцептором уменьшается, распространяется
все на меиыпую часть хорды крыла перед интерцептором. За интерцептором
при увеличении числа Маха степень разрежения тоже уменьшается и при
больших числах Маха уменьшается вблизи интерцептора.
Па крыльях изменяемой геометрии в случае размещения закрылков
вдоль всего размаха крыла интерпепторнос управление становится основ-
ным управлением по крену. При этом нужно иметь в виду особенности
работы интерцептора - резкое уменьшение эффективности по углу атаки
и по углу стреловидности крыла.
Как показали исследования, эти неблагоприятные явления могут
быть частично уменьшены при использовании щелевых интерцепторов
(рис. 7.3.13).
C<r П-11
Сеч. 11-11
Сеч
Лр.л в/и
70/35
70/0
п' И б,
* 70/35
' 70/0
Х„,= 40
42/70
0/70
Сеч. II Сеч I-I
Сеч. I
7 з 13
'г-тах атаК1^ФФекгнвно< гь шелепых интерцепторов в функции числа М
ч> Концед1* " п':Рхний/нижний, бкор.л - корневой левый, бср
при различных
- средний левый,
'РОСТ.
Дифференциальный стабилизатор ДиффсреНци_
ныатор нашел применение на сверхзвуковых самолетах . ГТабк7
эффективность элеронов существенно уменьшается при больш*3 Кот<
пых напорах, и на самолетах с крыльями изменяемой Юометриц СКо1
рых эффективность интернеторного управления Уменьшается *1а во-
пием угла стреловидности консолей. При максимальной стрею^ В<?Л1,Че>
консолей крыла уП| = 72° эффективность интерцепторов становитс 43001,1
малой, и эффективность дифференциального стабилизатора отк,ЯОЧе,,ь
го на ма тые углы ±3,3°, оказывается вдвое выше эффективности
цепгоров обычного типа (рис 7.3.14). И1,тс-р-
Рис 7.3.14. Эффективность интерцепторов (/, 2) и дифференциального стабилизатора
(?, Ао - ~3,3°) п функции числа М при различных углах отклонения консолей крыл*
изменяемой геометрии
Поскольку дифференциальный стабилизатор является органом уп-
рав тения и по тангажу, и по крену, это вызывает необходимость совмест
ного анализа характеристик продольной и поперечной управляемости,
особенно при больших yriax отклонения стабилизатора как органа нр®"
дольного управления.
Специфической особенностью дифференциального стабилизато^^^
ляется необычное соотношение моментов рыскания и крена. Этот Jff1
связан с большим плечом горизонтального оперения от центра .
оси X при сравнительно небольшом плече консолей стабилизатора
сигсльно плоскости симметрии f са-
На рис. 7.3.15 и 7.3.16 приведены результаты испытаний мод
молота с крылом изменяемой стреловидности с двумя вариантами^
нин. различающихся углом стреловидности оси вращения (%он " 1ТСчьЯ°
При отклонении дифференциального стабилизатора на срав ,
малые угты (+5 и 10э) его эффективность мало меняется по yi _ jp
до углов a = 15 ч-16° при неот клоненных закрылках и до углов
www.vokb-la.spb.ru - Самолёт своими руками?!
uciHfbix закрылках. Эффективность дифференциального стаби-
при °тьД маЛО зависит- от угла стре ювидпости его оси вращения Мо
дцзат°Рг ‘ а1(иЯ 7Пу от отклонения дифференциального стабилизатора
яешь’ Р абгочютиом\' значению по углам атаки особенно интенсивно
раГГУт "У уициалт,цом стабилизаторе со стреловидной осью вращения
при р
Мп
-0,03
-0,02
-0,01
0
5. - °
-0,02
-0.01
О
= ±447-1
> у = 45°
= +9°38' Г Лов
Рис 7.3.13 Приращение моментов крена и рыскания при малых углах отклонения
Лиффере1 циалыгого стабилизатора в функции угла атаки (И - 0.2. фср = 0, уик = IP)
- -10° -20°
- 10° -30°
X пи 45
= -9°38' -1948’
’ст = -9п38’ -ЗГОЙ’
хв - о
1*Ис. ?-3 16 п
ДиФфере]1П1 ри1’ащенис моментов крепа и рыскания при больших углах отклонения
Щ.т.,11ого стабилизатора п функции угла атаки (у1к = 16°, М = 0,2)
Чальц^И п-'1ОНс)>ии дифференциального стабилизатора от ненулевого на-
2Ца ' ГПа на^Л1°даегся заметное влияние угла атаки на эффективность
дРел Г. с
Cl0|nrcirca
Так. при (рст --10е /-30° эффективность стаби. и. атора при м
лах атаки практически совпадает с эффективностью при <pCT ->=-ioo/ jo 9
связи со срывом с отклоненной на большой отрицательный Vr . ”
одной половины стабилизатора. При больших утл ах атаки" «
уменьшения аго и ликвидации срыва эффективность лифференщ1альСЧег
стабилизатора при <эст = -10°/-30° вдвое больше, чем при = -iq^
Момент рыскания при стреловидной оси вращения много выше Чем
прямой оси вращения, как при нотклоненпой, так и при отклонена^
механизации крыла
7.4. Органы путевою управления и стабилизации
В качестве органов путевого управления и стабилизации сверхзвуко-
вых самолетов используется вертикальное оперение с рулем направления
или без него (при полностью поворотном вертикальном оперении)
Сверхзвуковые самолеты выполняются с однокилевым и с двухкилсвым
вертикальным оперением.
При переходе к сверхзвуковым скоростям эффективность вертикаль-
ного оперения в районе трансзвуковых скоростей может 'гоняться нерегу-
лярно, а при сверхзвуковых скоростях и малых углах атаки изменяться в
первом приближении по закону (рис 7.4.1). Интенсивности
падения эффективности руля направления существенно больше, и па
сверхзвуковых скоростях величина лф' составляет 20-5-25% т этой вели-
чины при дозвуковых скоростях и 10-5-15% от величины что в ря-
де случаев приводит к необходимости на сверхзвуковых скоростях ис-
пользовать целиком поворотный киль.
ЧИС-’'
М <Хп.,.ж = 60°. Хи ~ -Ч90. - 0.782, = 0,335 п,,,, = 2.64
..ж ат*
Так же как и при дозвуковых скоростях, увеличение у-
вызывает уменьшение »фф окт ив ноет вертикального оперения
сверхзвуковых скоростях (рис 7 4.2).
www.vokb-la.spb.ru - Самолёт своими руками?!
жс время эффективность вертикаль-
fl W ?нИя, расположенного снизу фюзе-
иого о,к^ учением угла атаки растет.
зяжа. ИЗучения эффективности верти-
С’о" оперения и руля направления при
ка-1ьН х vMax атаки были проведены экспе-
6°-,blUM [bllJ,ie исследования аэродинамичес-
ристик модели с подвижным вер-
г^пьны-м оперением. Анализ полученных
зуты-агов показывает (рис. 7.4.3), что пе-
^мсщсни вертикального оперения вниз на
больших углах атаки способствует повыше-
нию эффективности руля направления
Для повышения эффективности путевого
управления на больших углах атаки могут
быть использованы генераторы вихрей, уста-
новленные па носовой части фюзеляжа.
Рпс. 7.4 2. Эффективность вер-
тикального оперения, располо-
женного сверху (/) и снизу (2)
фюзеляжа в функции угла ата-
ки (с горизонта ьиым опере-
нием, ^ = 0,78, 4^ =
= 1,9, М-3,27)
ис. 7.4 фиктивность подвижного вертикального оперения до очепь больших vr. iob
атаки ( п 29°)
Приведенные на рис. 7 4.4 результаты получены при установке гене-
°Р° । вихрей, выполненных в виде плоских пластинок относительной
ющади = 0,002, S2 ~ 0,004, .Sjj = 0,006 на левой стороне носовой
Ч'К1И Фюзеляжа.
£ -»
Upj,' 1 Эффективность генераторов вихрей, установленных в косо
| части фюзеляжа. ао с«е.иь ( iwbhx yi юв атаки
При малых углах атаки исследованные вихрегенсраторы Пра
не дают прироста момента рыскания, но с увеличением угЛа атаКиИ-ЧССк11
10° эффективность вихрегенсраторов растет. Наиболее эффОкти CBhInie
регенератор, расположенный в самой передней части фюзеляжа ВИх'
Список литературы к главе 7
2
3.
1.
5.
6
8.
9
Аэродинамика и динамика полета магистральных самолетов Под ред г С Бк»
Москва-IIckwi: ЦАГИ, Авиа - изд. КНР, 1995. ’’
Аэродинамика органов продольною уп|>авл«шя. Руководство для конструкторш / С
витыи А.И. Калинин, В.Г. Микмадзе, А.Ж. Рскстин. - №.: ЦАГИ, 1969 °С1а"
Аэродинамические характеристики органов поперечного управления. Руководство
конструкторов i Составители Л.Е. Васильев, Г.Г. Зыкова, В.Г. Микеладзе А Ж
тип. М.: ЦАГИ. 1996.
Аэродинамические характеристики вертикальных оперений / Составитель Г.И. Луков
М- НАГИ, 1969.
В. Г. Микемизе. Исследования аэродинамических характеристик элеронов на треугольны!
крыльях " Тр. ЦАГИ, 1957.
E.U. Богачев. Л.Е. Васильев. В.Г. Миксладза и др. Исследование способов уменьшения
шарнирных моментов органов управления при сверхзвуковых скоростях. Технические
отчеты ЦАГИ.
В.Г. Микеладзе. И.З. Рахова. Физическая картина обтекания крыла с отклоненными
элевонами / Тр. ЦАГИ, 1971
В. Г. Микеладзе Аэродинамика органов управления истребителей//Тр. ЦАГИ, 1978.
А.Б. Лотов. ГП.Свишев, А.Ж.Рскстии, В.Т.Ждстов. Аэродинамика органов управления
околозвуковых самолетов//Тр. ЦАГИ. 1949.
www.vokb-la.spb.ru - Самолёт своими руками?!
Глава 8
орОДИНАМИКА СВЕРХЗВУКОВОГО САМОЛЕТА
А ПРИ НЕУСТАНОВИВШИХСЯ ДВИЖЕНИЯХ
еде'1еЮ1е аэро/щнамичсской реакции при неустановившсмся движе-
С 'icTBini возмущений необходимо как для моделирования инамики са-
так и исследования его устойчивости на всех возможных режимах по-
М°’?СТ>1атемати’1ескос моделирование аэродинамических нагрузок необходимо
1Лета‘е и т1рИ синтезе алгоритмов автоматических систем управления самолега.
такЖ£|а режимах полета с малыми углами атаки, когда сохраняется бе-
obiBHoe обтекание, проблема описания нестационарных нагрузок су-
щественно упрощается, поскольку достаточную точность обеспечивает так
называемая" концепция нестационарных аэродинамических производных.
31 и производные могут быть получены расчетным и экспериментальным
путями, взаимно дополняющими друг друга.
На больших углах атаки движение маневренного самолета имеет вы-
раженный неустановившийся характер. Поэтому определяющее значение
могут иметь нестационарные эффекты, связанные с запаздыванием раз-
вития отрывного и вихревого обтекания. Заметное запаздывание уста-
новления аэродинамических нагрузок из-за инерционности развития от-
рывного обтекания крыла имеет существенное значение при моделирова-
нии динамики самолета при сваливании. Достоверное ясе моделирование
возмущенного движения самолета в области срывцого обтекания и свали-
вания имеет огромное значение для обеспечения безопасности полета са-
молета на предельных режимах.
Освоение управляемого полета на больших сверхкритических углах
атаки требует при проектировании самолета использования адскватых
моделей описания аэродинамических характеристик в условиях отрывно-
и вихревою обтекания, порождающего значительные нелинейные и
Wcciaiinoiiapubie аэродинамические нагрузки, существенно зависящие от
11РкЛЬ1стории движения самолета.
8.1. Расчетные и экспериментальные методы
определения аэродинамических производных
Ра-'1ках линейного приближения вращательные и нестационарные
*<Иях чНамичсскис производные самолета в продольном и в боковом движе-
^могуг быть получены как расчетным, так и экспериментальным путем.
аэРОди Реж’1мах полета с малыми углами a rami обтекание крыла и других
ПРи Нам,1Чсских поверхностей, как правило, носит безотрывный характер.
Жег ис 1 Рас,,ота нестационарных аэроцгнамичсских производных мо-
Га'Го,»ю °ЛЬ30ВатЬся МСТ°Д Дискретных вихрей, позволяюпшй получать дос-
^яниЛЧНЬ1с оие|1КИ нес гаци парных производных и проводить анализ
Разли<п1Ь1х геометрических параметров компоновки [2,3].
Для экспериментального определения нестационарных аэроЧ111г
кпх производных используются специальные установки в аэро\Яа'1'1И'1ес’
ких трубах, которые реализуют вынужденные или свободные ко '1ИЧет'
модели самолета по тангажу, рысканию и крену с малыми амплиту *^анИя
Расчетные методы. На этане предварительного аэродимамии 1
проектирования компоновки самолета представляется возможны К0Г°
пользование простых инженерных методов расчета, которые в си™ И'
помичности позволяют проанализировать достаточно подроб^
личные варианты компоновки, изучить влияние различных ее частей
найти приемлемое с инженерной точки зрения решение. и
К такому сорту программ относится, в частности, программа L'NST
[4]. Эта программа предназначена для расчета статических и нестаод.
нарпых аэродинамических производных самолетов любых компоновок на
режимах безотрывного обтекания. Получаемая информация достаточна
на предварительном этапе проектирования для оценок характеристик ус
тойчивостн и управляемости самолета
Возмущенное движение самолета характеризуется рядом кинемати-
ческих параметров: углами атаки и скольжения -аир, угловыми скоро-
стями вращения по крепу, рысканию и тангажу - сог, и ы,;, углами
отклонения рулевых поверхностей - 5П, 8Э, 8Н. Нестационарные аэроди-
намические силы и моменты в рамках квазистационарного приближения
также зависят от скорости изменения углов атаки и скольжения - а, р.
Программа позволяет рассчитать частные производные коэффициентов
аэродинамических сил и моментов Су, Сг ,тх ,ту и тг по любому из вы-
ше перечисленных параметров.
Исходные данные задачи - геометрическая схема самолета и тип оп-
ределяемых производных - задаются пользователем при помощи удобно-
ю интерфейса. Имеющиеся графические средства позволяют контроли-
ровать правильность задания геометрической компоновки.
В принятой расчетной схеме полагается, что несущие поверхности са
молета (крыло, горизонтальное и вертикальное оперение) могут быть аПИ
роксимированы тонкими срединными поверхностями, параллельными Пр^
дольной оси самолета. Фюзеляж также аппроксимируется двумя то,£^1
поверхностями, пересекающимися “крест-на-крест”. В свою очередь, I
выс поверхности разбиваются но хорде и размаху на необходимое »
тичество панелей, на каждой из которых располагается ирисоедин
подковообразный вихрь и контрольная точка, где должно быть вЫНО-^И
условие иенротекания. Пример представления компоновки самолета
ром базовых вихревых поверхностей представлен па рис. 8.1.1-
После замены поверхности самолета набором дискретных вихрей а
дится расчет необходимых статических и нестационарных произвол
также эффективностей рулевых поверхностей посредством выполне
отвстсгвующнх грантгчных условий по базовым поверхностям и истю-1
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис 8 I 1 Представление несущих поверхностей самолета набором дискретных вихрей
(vKiuanM контрольные точки, где удовлетворяется условие иепротекания)
имя статического и нестационарного выражения для скорости, индуцируемой
подковообразным вихрем. Учет сжимаемости производится путем соответ-
ствующею аффинного преобразования базовых поверхностей самолета.
Опыт использования программы L’NST в ЦАГИ показал, что совпа-
дение резулыатов расчетов с данными эксперимента достаточно хорошее
для режимов безотрывного обтекания самолета в диапазоне И = 0,2-s-0,7.
Точность получаемых оценок аэродинамических производных вполне до-
статочна для предварительного этапа проектирования самолета. В после-
дующих разделах будут представлены некоторые сопоставления расчет-
ных и экспериментальных результатов.
Экспериментальные методы. Одной из основных установок, ис-
пользуемых в ЦАГИ для исследования нестационарных аэродинамичсс-
ких характеристик моделей самолетов, является установка О ВП-10215.
И ATI Редназначсна Д-чя работы в аэродинамических трубах Т-102, Т-103
. и и Реализует метод вынужденных гармонических колебаний как с
гимн, так и с большими амплитудами.
м ыполнена она по модульному принципу - из нескольких базовых
схем feCKI,x узлов можно собрать три разновидности кинематических
Монц^рСГаНОВК11' Каждая схема позволяет реализовать вынужденные гар-
Из трехСКИ\К°Лс^апия ИС1,111тУсм°й модели самолета относи гельно одной
по ». °€Си координат, связанных с моделью - по тангажу, по крену и
0 РЫ«аГО,к> (р,)с. 81.2).
fl° ки 10 ^О'1Ь в эффективности эксперимента шрает методика обра-
Ис,,олЬ: 1с^яемьгх данных. Цифровая вычислительная машина позволяет
^Рений КаГЬ иь,СокоуФФективные алгоритмы обработки результатов из-
Г° пРеоб которых в первую очередь следует назвать метод быстро-
ПозВц. азования Фурье и методы регрессионного анализа. Последние
получить не только производные устойчивости и демпфирова-
ния но и оценивать ио одной реализации доверительный
Рис 8 1.2. Схематически: изображение установки вынужденных колебаний ОВП-Ю2Б
На рис. 8.1.3 приведен пример обработки результатов испытаний
треугольного крыла при колебаниях но тангажу с различной частотой в
трубе малых дозвуковых скоростей. Этот пример наглядно иллюстрирует
особенное!и измеряемых сигналов и получаемый результат. Хорошо вид-
но чго в об 1Эсти больших углов атаки где из-за динамических эффектов
развития разрушения вихрей над крылом возникает расщеплите комп-
лекса производных но частоте, разброс величин вычисляемых производ-
ных заметно возрастает. Высокочастотные компоненты в составе изме-
ренного момента тангажа связаны с возбуждением упругих тонов колеба-
ний державки модели и всей механической системы экспериментальной
установки. Но в силу зпачшелыюй разнесенности упругих топов с опор-
ным сигналом изменения угла атаки (1-5-2 Гц) выделение полезного сиг-
нала осуществляется с достаточной достоверностью.
При колебаниях относительно связанных осей из-за фиксированности
центра масс модели возникаю! кинематические связи между значениями
проекций угловой скорости и скоростями изменения углов атаки и скольже-
ния Поэтому но результатам вынужденных колебаний модели по кРсН^
рысканию и гангажу на становке ОВП-102Б могут быть получены т°- Я
комплексы вращате 1ьных и нестационарных производных (см. ' н.
разделения производных необходима друтая схема проведения экспер
та щнуткающая также и подвижность центра масс модели. й
Для исс тедования особенностей процессов установления отры ^рка
вихревою обтекания в ЦАГИ была разработана специальная ис-
СКАД (Свободные колебания и апериод1гческие движения) [Ю]. и
пользует стандартные поддерживающие устройства установки ОБ jaxBaT
об щдаст дополнительным элементом, позволяющим осуществлять оТ.
(остановку) модели в момент достижения ее максимального yTj
клонсния. В процессе движения модели и после ее остановки Р ynjed
ся измерения сил и боковых моментов, момент тангажа при эТ
www.vokb-la.spb.ru - Самолёт своими руками?!
» 8 1’ С|1е1 тральный анализ входного сигнала (изменения угла атаки) и выходного
«епения коэфф щиепта момента тангажа) и комплекс нестационарной и вращательной
бан полученный методом линейной регрессии по результатам вынужденных коле-
1 Моде- и в потоке аэродинамической трубы
"ь Восстановлен по переходному процессу. Пример получаемых ре-
-“Ьтаюв приведен ниже па рис. 8.3.5.
Детей C*Ie;iORaH,lc нестационарных аэродинамических характеристик мо-
лых Сам°лста в диапазоне больших дозвуковых, трансзвуковых и ма-
вРемяЬе^ХЗВ" КОВЬ1Х скоРост<?й представляет собой актуальную и в то же
на бо СЛОЖ11У10 задачу. Использование метода вынужденных колебаний
защл^1иих СКоР°стях потока наталкивается на серьезную проблему, свя-
И э " с ^благоприятным влиянием упругих свойств державки модели
ЧастоТц1ГиВ экспсрименталы!ой установки. Как правило, при повышении
Г‘°льц и Колсбапий, необходимом для моделирования числа Струхаля па
скоростях полета, возникают вредные колебания, связанные с
упругими деформациями самой установки, проводки управлени ]
держивающих устройств. я 11 U
Для преодоления этого противоречия в ЦАГИ была разработан'
дена в эксплуатацию специальная установка, основанная на свобо- ** И Вь^
лебаниях модели на упругом шарнире - СКМ [5J. Модель самолета
ляется в рабочей части трубы на хвостовой державке при помощи ci 3аК**11'
ного упругого элемента (упругого шарнира), позволяющем мод ЦИа‘|
шать малые угловые колебания по тангажу, рысканию или крену Прик^
баниях осуществляется регистрация переходных процессов по углу огктд|
ния и показаний внугримодельпых тепзовссов. Упругие шарниры и 'Г*'
компонентные тспзовесы выполнены в виде единою целою. Это сделано Л
того, чтобы избежать дополнительных соединений, которые приводят к уве
личепию конструкционного демпфирования в шарнире Своим задним
цом весовой элемент закрепляется па передней цилиндрической части хвос-
товой державки, а на передней части элемента устанавливается модель, та.
что ось колебаний модели совмещается с осью колебаний шарнира. Способ
закрепления модели на установке СКМ показан на рис. 8.1.4.
Рис. 8. 1.4. Схематическое изображение модели на упругом шарнире установки гпобслиъ®
колебаний СКМ НАГИ 1 - упругий шарнир и 5-ти компонентные тепзовесы. 2 - диггаи-
цпонло управляемый фиксатор модели
Математическая обработка результатов измерений позволяет но-
лучить необходимые производные аэродинамического демпфирования.
Установка предназначена для проведения исследований с моделями,
имеющими следующие геометрические и инерционные характеристику
5М0Д < 0,1 м2, СЙод«10:-1.) кг, «0,24-0,5 кг-м2, 1у «0,24-0.7 кг-.м- /г*
* 0,024-0.15 кг-м2. Диапазон исследуемых чисел Маха: М = 0,34-1,6.
зон установочных углов атаки и скольжения: а = - 304-30°, Р
Установочный угол крена модели может быть любым. Амплитуда уг<
, г Часготь: v
колебании модели по тангажу, крену или рысканию. У < z,.t .
ловых колебаний модели но тангажу, рысканию и крену: со/. f ~ *
f = 104-25 Гц, ю/ f~ 10:35 Гц. 1 JJfl
Проведение динамического эксперимента осуществляется и
тематическом режиме. Управление режимами работы АД Г _ Т|<-
пис заданного числа Маха потока, перевод стойки механизма Р с1—
бусмос по программе испытаний положение, регистрация значе
ростного напора - осуществляется оператором АДТ при пом°п
www.vokb-la.spb.ru - Самолёт своими руками?!
-щние работой динамической установки - возбуждение коле-
дДТ ' ^^’ллформании с датчиков в процессе колебаний, гашение ко-
6ai»”V5 ?„югократное повторение цикла измерений - осуществляется
’^помощи передвижного ИВК.
g 2 Характеристики демпфирования на малых углах атаки
гтрстдционарные и вращательные аэродинамические производные как
^тьного, так и бокового движения на малых углах атаки при безот
продо^ > бтс’кании достаточно точно могут быть определены расчетным
йутем с использованием программ, основанных на линейных моделях
аэродинамики [2,31-
* Существующие R ,,аст0Я111ес время программы для ЭВМ в силу ми-
нимальных затрат времени на расчет в полной мере заменяют прибли-
женные аналитические методы оценок аэродинамических производных
при аэродинамическом проектировании компоновки самолета. Они обес-
печивают возможность легко изменять геометрические характеристики
крыла, горизонтального и вертикального оперений, их относительное
расположение и таким образом варьировать компоновку самолета и т.д.
Для получения представления о значениях аэродинамических произ-
водных продольного и бокового движений, характерных для различных
компоновок самолетов, в таблицах 1 и 2 представлены, в качестве при-
мера, результаты расчетов по программе UNST. Вид рассмотренных
компоновок на рис. 8.2.1. Наряду с расчетами полной компоновки в таб-
лицах даны результаты и для усеченных конфигураций без горизонталь-
ного или вертикального оперения.
Комиотюпка 3
Комполопка2
Компоновка 1
Йк. 8 2.1 р
Лепия ц* Пличные компоновки маневренных самолетов, рассмотренные для сопосткв-
нсегациотгарных аэродинамических характеристик
Но, сог1о”И1Ь 1ОЧНость получаемых аэродинамических характеристик мож-
Годом в тавив Их с экспериментальными результатами, полученными ме-
с:вЯ1Цсн) ' ^'^еппых колебаний с малой амплитудой. В разделе 8.3, ПО-
р11ментг^’ большим углам атаки, практически на всех графиках с экспс-
Ма-1Ых v ЩЬ1Ми зависимостями нестационарных производных в области
*!Ь]х зн.., '10в а'1аки жирной пунктирной линией показаны значения расчет-
с '^ний ио программе UNST.
www.vokb-la.spb.ru - Самолёт своими руками?!
Гйб.1И!|
Продольные нестационарные аэродинамические производные (М = о 2)
Модель v У '(J* (0 > V
сдм 3,102 1,146 -2,17 1 “758
СДМ без ГО 1,822 1,024 0,876 -0 262
ЛИ 3,608 1,447 -2.25 -1,023
Л&1 без ГО 2.577 0,389 -1,219 0,074
№2 4,837 1,365 -4.386 0.082
№2 бел ПГО 4,906 0,315 -3,874 0,283
№3 3,474 1,644 -2,498 -0,999
№3 без ИГО 3.489 1,035 -2,403 -0,811
Таблица
Боковые нестационарные аэродинамические производные (М - 0.2)
Модель fl) - тх (Огу тТ* mJ (0 SI с Пр
СДМ -0,293 -0,080 -0,009 0.039 -0,523 -0,035
СДМ без ВО -0.272 0,027 0,018 0.002 -0,206 -0,041
-0,319 -0.046 0,021 -0,012 -0.290 0,020 )
№1 Лез ВО 0,308 0,00 0,00 0,00 0,047 0,024 ;
Лл>2 -0,325 -0.181 -0,014 -0,074 0,439 -0,0211
№2 без ВО 0,287 0,00 0,00 0,00 -0,080 0.079
ЛАЗ -0.302 -0,155 -0,022 -0,031 -0,706 -0.076 J
ЛАЗ без ВО -0,290 0,018 -0,013 -0,006 0,145 -0,010
На рис. 8.2.2. приведены результаты экспериментального определив
комплексов врашатольных и нестационарных производных по тажа .
рысканию и крену для стандартной динамической модели (СДМ) 113 )'
новке свободных котебаний СКМ в аэродинамических трубах ЦАГИ
и Т-128 в диапазоне чисел Маха 0,3-И,1. Для сопоставления flPinje^blS
также экспериментальные результаты, полученные в различных наг
центрах - в Германии (DFVLR), в США (AEDC) и Индии
fjxSl "
зультаты расчета аэродинамических производных по программе
казаны пунктирной линией. Т1а малых числах Маха имеется вполне
смлемое соответствие между расчетными и экспериментальными рс-Ъ
тами (исключение составляет только движение по рысканию, чю Ч
-остаточно точным учетом влияния фюзеляжа). Следует от-
1 вполне приемлемое соответствие между экспериментальными
метить 1ак*е пУЧе|1Ными на различных экспериментальных установках
^зулътатам”- • -
ПА ГН (Т-108)
+ НАГИ (Т-128)
V ЛЕПС
fi • DFVLK
• NAL
— _ распет по
программе
UNST
О 0,25 0,50 0.75 1,00 М
О 0.25 0,50 0,75 1,00 М
Рис. 8.2.2. С?|нндартная динамическая модель матнретшого самолета (fl) и результаты эксис-
риметнально! о определения шхтаииопарных и врашатслыгых производных при различных
телах Маха на установке свободных колебаний с упругим шарниром СКМ ЦАГИ (б)
Влияние сжимаемости при приближении к трансзвуковым режимам
поле1а проявляется в значительном увеличении демпфирования но тан-
гажУ и рысканию, в меньшей степени по крену, а при переходе к сверх-
звуковым скорое!ям происходит резкое падение этих характеристик.
8.3. Аэродинамика на больших углах атаки
Лов ^Р*1 иолете с большими числами Маха эксплуатационные значения уг-
впо ЭГакИ ОТ11Осительно невелики и для моделирования динамики само пета
рас^*1** могут использоваться аэродинамические производные, получаемые
иС1ДСГ11Ь1м 11ЛИ ЭкспеРиментальным путем. На этих режимах полета (за
гонением трансзвуковых режимов) обтекание практически безотрывно.
Г1гЧцг а Режимах посадки, при действии ветровых возмущений, при эпер-
Можцг "Р^Рачствснном маневрировании с реализацией предельных воз-
тИ1о самолега вероятна реализация углов атаки, приводящих к разви-
ч0аццГРЬ1ВНО1 ° Икания. Потеря устойчивости движения на таких режимах
I приводил, к сваливанию и попаданию в штопор, при которых разви-
www.vokb-la.spb.ru - Самолёт своими руками?!
вается значительное вращение и значительное возрастание уГло
скольжения. Движение в таких ситуациях носит существенно И
итийся характер с реализацией больших амплитуд изменения нС^10131!
Д.1Я адекватного описания аэродинамических характеристик на татГ^^1^!
мах движения необходимо достаточно детальное представление о* к-?
ных и динамических особенностях обтекания и возникающих -аЧсстве,*‘
мических нагрузках. с1ЭР<МлЯ
Нелинейные и нестационарные особенности аэроп
ческих характеристик самолета на режимах отрывного об^^'
ния. Ноет анионарные аэродинамические характеристики маневреннот
молета на больших углах атаки в значительной степени связаны с особе Л
стями возникновения отрывного и вихревого обтекания (см. на рис
приближенную схему об1 екания). У самолетов нормальной схемы вихоен °
структуры обтекания на больших углах атаки в основном формируются на
удлиненной носовой части самолета и наплывах крыла большой стреловид-
ности. Консоли крыла с умеренной стреловидностью в большей степени
подвержены процессам развития отрыва потока с гладкой поверхности
свойственных крыльям большого удлинения. Таким образом, возникает вза-
имовлияние вихревых и отрывных зон потока, порождающее сложную то-
пологическую картину обтекания на больших углах атаки.
Рис. 8.3.1. Особенности обтекания на больших углах атаки: вихревые системы и отрыв
потока (а) и влияние несимметричного разрушения вихрей над крылом на нелинейные
особенности поперечной устойчивости (б)
Существенное влияние на нелинейные и нестационарные особенности
аэродинамических характеристик маневренного самолета на болыли-4 -
лах атаки оказывают процессы разрушения вихревых структур над кр
лом. Разрушение наветренных вихрей, сходящих с наплывов и nePe^JB
кромок крыла, приводит к потере поперечной устойчивости, аэроД^Я
мическая производит меняет знак в некотором диапазоне углов П
ки. В этом же диапазоне наблюдается нелинейная зависимость 110
скольжения, обуслов тонная процессом разрушения наветренного
(рис. 8.3.16). При колебаниях по рысканию в области развития Ptj^B
шеиия вихрей будет проявляться значительное запаздывание в в°31
вении аэродинамических нагрузок, приводящее к сильной завис
нестационарных производных от амплитуды и частоты колебали’1-
з характерных нелинейных особенностей на больших углах
Одной 113 • гистерезис аэродинамических характеристик, проявляю-
атаки являс ционарНЬ1Х( так и u нестационарных условиях обтекания,
щийся каК условиях вследствие существования различных структур
р сгаи,,он'^вух "или более) возможен так называемый статический гис-
обтекания иР'оДЯщИй к неоднозначной зависимости аэродинамических на-
терс3^’ ^Рематических параметров, например, от углов атаки, скольже-
грузок от сКОрОСТи конического вращения и т.д. Зона неоднозначности,
ния, -v^™piecKOI-o гистерезиса, порождаемого отрывом потока, в частности,
иди ст» может существенно зависеть от числа Рейнольдса.
ла кРы^тацииНарпых условиях статический гистерезис существенно транс-
s щтется, расширяя .зону неоднозначности нагрузок, при этом ширина
*°1’м^.,„.трпрзиса начинает значительно зависеть от числа Струхаля, а имеп-
от степени нсаационарпости движения. Явление динамического гистере-
зиса ярко проявляется при колебаниях с большими амплитудами и высокой
частотой в области отрывного обтекания даже при отсутствии статического
гистерезиса. Возникает этот эффект вследствие запаздывания развития от-
рыва потока на крыле или разрушения вихревых структур над крылом при
пеустановившемся движении самолета. Естественно, эти особенности аэро-
динамики могут существенно повлиять па динамику самолета на больших
vi-лах атаки и поэтому требуют правильного их описания.
Статический аэродинамический гистерезис является результа-
том возможности существования при одних и тех же кинематических пара-
метрах- различных устойчивых структур обтекания, например, о!рывной и
безотрывной, или отрывного обтекания с различными зонами отрыва, или
отрывного обтекания с различной топологией течения и т.д. В интегральных
аэродинамических характеристиках - в полных аэродинамической силе и
моменте гистерезис может проявляться в виде неоднозначных зависимостей.
Примеры аэродинамического гистерезиса такого рода, полученные в эк-
сперимепге, содержатся во многих работах и, в частности, в [6,8,9,7]. В
ПеРвых трех предет авлены эксперимен-
тальные данные исследования крыльев
лыного удлинения на больших углах
атак1’ при дозвуковых скоростях. На
на.С , ВЗятом из 16]. четко видно
Го чие статического аэродинамическо-
fc™-Pe-a в подъемной силе крыла
'ЛЛИ11СНИЯ в области отрыва и
уГлаТгигОи-Т1С1111я потока при изменении
Pakyrtv11?»ЬО?РЯМОМ 11 обРатном Х°ДС- в
бдютё приведены примеры на-
м 3011 неоднозначности на пря-
Ния съ>1и>,х крыльях большого удлинс-
°гРЫвно^е'1Я -'Уг°й,ГИВЬ1МИ структурами
Рис. 8.3.2 Зависимость ширины зоны
гистерезиса от числа Рейнольдса (про-
филь NACA-23012)
При этом отмечается существенная зависимость ширины петли
зиса от числа Рейнольдса (в работе. [6] исследовался диап^зо^01^
= 1,08106-г4,28-106). С увеличением числа Re зона безотрывного пГ* ]
при возрастании утла атаки расширяется, а восстановление безотрыв KaiUl*
тскапия происходит практически при одном и том же угле атаки. °
В рабою [7] приведены результаты исследования отрывного обт.
прямых крыльев малого удлинения с различной относительной тади
Измерения полного аэродинамического момента при прямом и обратном I
де показали существование статического гистерезиса, в частности, для Крь^
с относительной толщиной с = 0,09 в диапазоне 17<а<2Г. Визуализация
потока показала, что безотрывное обтекание крыла сменяется отрывным об-
теканием, при котором над крылом возникает замкнутая зона с возвратным
течением. Смена структуры течения приводит к скачку в величине момента
ташажа тг. Восстановление же безотрывного обтекания происходит уже при
меньшем значении угла атаки и также сопровождается скачком в величине
тг. На значение и положение зоны аэродинамического гистерезиса в этом
случае относительная толщина профиля крыла оказывает влияние анало-
гично влиянию числа Рейнольдса. На рис. 8.3.3 приведены зависимости
комплекса нестационарной и вращательной производной по тангажу, по
лученные методом вынужденных колебаний с различной амплитудой. Наи-
более резкое изменение этих характеристик происходит при охвате амшшту-
дой колебаний зоны статического гистерезиса. Поскольку наличие» статичес-
четкого г-иегерсзиса (зависимость от амплтуды колебаний)
www.vokb-la.spb.ru - Самолёт своими руками?!
• гса может приводил. к значительному изменению аэродина-
кОго iV3OK у зависимости от амплитуды колебаний и характера пре-
ч1ЙчесЮ х н‘ ^сНйя его учет и адекватное описание представляется чрезвы-
дыстт’р"11 пои изучении динамики самолета на больших углах атаки.
' хчп важным up
чаЙИ мический гистерезис аэродинамических характеристик.
'^^Г-гчповившемся движении самолета в окрестности углов атаки,
При ‘юШЙХ Сушах, наблюдаются значительные изменения аэроди-
соответ^^ моментов Су, тпг по сравнению с их статическими зави-
намич« • „ астание величины Cvmax при этом пропорционально ско-
ГК увеличения угла атаки a > 0 (а < 0,02).
р Определяющими факторами, влияющими на затягивание отрыва потока
ао восстановление, являются уменьшение градиента статического давле-
ния на задней кромке при увеличении угла атаки a > 0, способствующее
предотвращению отрыва пофаиичного слоя, а также эффект сноса вихрей,
сходящих с передней кромки крыла, который проявляется при больших
значениях приведенной частоты со > 0,01 Отмечается идентичность затяги-
вания отрыва потока по углу атаки при нестационарном движении с d > 0 и
с аналогичным процессом, обусловленным увеличением_числа Re. При этом
возможно донушение, что изменение величины Cymax(d) при пеустаиовив-
шемся движении может изменяться в пределах (С’у тах)ке_>00-5-(Сутах)ке..>о ,
наблюдаемых в статических испытаниях. Возможность для динамического
«истсрезиса имеется как при малых Re (в аэродинамических трубах), гак и в
условиях полета при больших числах Рейнольдса.
Из-за запаздывания возникновения отрывною обтекания при уве-
личении угла атаки может возникать значительное приращение в ве-
личине Су тах. В обратном направлении при уменьшении угла атаки бу-
дет сказываться эффект запаздывания восстановления безотрывного об-
гекания. Изменения аэродинамических нагрузок, возникающие при неус-
тановивщемся движении на больших углах атаки, естественно, будут
оказывать значительное влияние на характер возмущенного движения
ипг°ЛеТа В расс'1а1Риваем°й области, в частности, при сваливании. Для
не'л1ИьНого описания аэродинамических характеристик в этой области
НИя Олимо учитывать динамические эффекты запаздывания возникнове-
п восстановления отрывного обтекания |16|.
С инамический гистерезис в области углов атаки, соответствующих
Редстп' Иа^Л1°;1аетСя как в аэродинамическом эксперименте, так и нспос-
намич ПИО R Полете- При этом, как показывает опыт, моделирование ди-
ПодучцС*010 гистерезиса в условиях аэродинамической трубы позволяет
Нт ' резУЛЬ1аты, очень близкие к условиям натурного полета.
Sta“IbHojjPHC' 8'3-4 приведены примеры изменения коэффициентов нор-
Т|>Ю де СИльг и момента тангажа у треугольного крыла со стреловидное
•к>й ь ™1.ней кромки 70и при изменении угла атаки с большой амилиту-
‘' Родинамической трубе. При быстром выходе в область углов
атаки, где происходит разрушение вихрей над крылом, возни
ный динамический гистерезис в аэродинамических характеристик^1 Зй!<ет
Рис 8.3.4. Динамический гистерезис в коэффшшеигах нормальной силы и момента тан-
гажа треугольного крыла со стреловидностью передней кромки 70°: 1 - ц# - 15/
Да - 15s; 2 - аи - 38°, Да = 15°; ? - «о = 30°, Да = 25е
На рис. 8.3.5 приведены результаты измерения коэффициента нор-
мальной силы Су в процессе динамического выхода модели маневренного
самолета на большой закритический угол атаки а = 70е (результаты по-
лучены авторами [ 10]). Сопоставление коэффициента нормальной силы,
измеренною в процессе переходного процесса, с его значением в стати-
ческих условиях показывает, что наблюдается значительный динамичес-
кий заброс но величине АСугпах а 0,8 После фиксации модели на угле
атаки a st 70° отчетливо виден апериодический процесс установления ста-
ционарного отрывного обтекания, в течение которого значение коэффи
циепга нормальной силы выходит на уровень его статического значения.
По результатам таких исследований можно непосредственно оценивать
характерные времена установления отрывно-вихревого обтекания.
Динамические эффекты развития отрывного обтекания крыла 1 610
аэродинамическая интерференция с горизонтальным оперением может пря
водить к возникновению антидемпфирования по тангажу. Па рис. 8-3- •
приведены характерные для такого случая зависимости комплексов вр
тельной и нестационарной аэродинамической производных козффииие1
нормальной силы и момента тангажа (самолет общего назначения
мальной схемы с крылом большого удлинения) Как видно, в зоне Р
тия отрывного обтекания (а» 15-г 20°) степень возникающего “annv
фировання” существенно зависит от частоты колебаний, при ко гор0 ।
водились испытания методом вынужденных колебаний.
При установке модели этого самолета в аэродинамической ГР5-М
своботный ио таншжу шарнир вследствие наличия зоны антидемпфш^И
Рис. 8.3.5. Динамическое изменение коэффициента нормальной силы при быстром апери-
одическом выходе модели самолета па большие углы атаки (па фотографиях показаны
pcsv платы иизуализации обтекания поверхности методом шелковинок для трех переход-
пых значений угла ашкн 10, 20. 42°)
—1—j—l_j_1 i 1 | । > । j | । । t । Я ь <—»—1—1——।—14—1 —।—1 » * I *
РИ1. g ° ,0° “ 0 10“ 20' а
•ipu ’’ Возрастание нестационарной производной коэффициента нормальной силы
|,чТИя 'Л|К,108ении отрыва потока («), “антнде.мнфнрование" ио тангажу в области раз-
*-'>ацНя 1Ы1”,О’° обтекания (б), динамический гистерезис в нормальной силе (»), автоко-
1,0 Та,1гажу, охватывающие зону “аптидемпфиропания (г)
ния устанавливаются автоколебания модели со значительной ами Л1
но углу атаки, охватывающей эту зону (рис. 8.3.6в,г). При Э1'о^1ИТ^'1ой
заметные отличия в значениях подъемной силы, измеренной в
движения модели, по сравнению с зависимостью, определенно^01160^
тических условиях. Эти результаты говорят о значительной транс к Ст*
пии аэродинамических нагрузок в зоне развития отрывного обтека
зависимости от характера самого движения.
Метод свободных колебаний является эффективным средству Я
следования нестационарных аэродинамических характеристик мо-
самолетов на больших углах атаки. Для этого необходимо но измене^**
кинематических параметров восстанавливать изменения моментов ла
ствующих па модель, и проводить идентификацию как структуры'мате"
магической формы описания аэродинамических характеристик, так й
оценивать входящие в них значения параметров.
Па рис. 8.3.7, 8.3.8 приведен пример исследования поведения сво-
бодной по креп}- модели треугольного крыла на больших углах атаки
(стреловидность передней кромки крыла 70°). Существует диапазон*уг-
лов атаки, где в силу неустойчивости положения с ну левым креном у = О
возникают автоколебания крыла. При этом фазовый портрет динамичес-
кой системы выявляет существование двух устойчивых режимов колеба-
ний, а именно хаотического режима автоколебаний с. малыми амплитуда-
ми и периодического режима с большой амплитудой. Хаотический режим
движения у крыла с одной степенью свободы возможен только в том
случае, если аэродинамические нш рузки возникают с запаздыванием т.е.
имеют собственную динамику. Это очень важный вывод для построения
адекватной модели описания момента крена.
Рис. 8.3.7. Автоколебательные режимы движения во крену - хаотический с мал
литудами и периодический с большой амплитудой («) и динамические изменен»
крена на фоне статической зависимости (6)
www.vokb-la.spb.ru - Самолёт своими руками?!
пПИНамическая асиммет-
АЭРбольших углах атаки. Для
рия ”3 коч11Оповок современных ма-
мно’И* к саМоЛстов характерно воз-
неврснн^е ‘симметричных аэродипа-
никнове^ jwrpy30K иа больших углах
„ическьа“Эр0ДИ11амическая асим-
ТХ проявляется даже в условиях
Х-трично набегающего потока.
Ппичияой этого является установле-
ние несимметричного отрывного об-
текания. вызванного асимметризацией
вихревых структур, зарождающихся
на носовой части и наплывах, или не-
симметричное развитие отрыва пото-
ка с поверхности крыла. Асимметрия
Рис. 8.3.8. Фазовый портрет динамики
свободных колебаний по крену - хаоти-
ческие автоколебания с малой амгглиту
дой и устойчивые периодические коле-
бания с большой
в обтекании даже при нулевом угле
скольжения может приводить к образованию значительных .моментов по
крену и рысканию, значения которых на разных углах атаки могут суще-
ственно изменяться вплоть до смены направления действия.
Физическая природа возникновения асимметрии тесно связана с по-
терей устойчивости симметричного отрывного обтекания, при котором
асимметричные нагрузки отсутствуют. При снижении степени устойчи-
вости симметричной структуры обтекания возникает ее повышенная
чувствительность к малым геометрическим искажениям формы самолета,
особенно в его носовой части в областях, критических с точки зрения за-
рождения отрыва. Поэтому как для непосредственною анализа результа-
тов, получаемых в аэродинамическом эксперименте, так и для построе-
в КоНечиом итоге рациональных моделей описания аэродинамических
ДимоКТОВ асимме1Рии 1ХРИ рассмотрении задач динамики полета иеобхо-
чо более глубокое понимание физической природы возникновения
Ролинамической асимметрии.
Ного Работе [И] црИ рассмотрении простейшей конфигурации удлинен-
ия ПЙ С кРЫлом большой стреловидности показано, что установивше-
а*р 2ТРЬ1ВНОе °бт екание такой компоновки на углах атаки а > акр, где
критическая величина, зависящая от удлиненности обтс-
Режимо\Т<?Ла’ МО5КСТ стать не единственным - наряду с симметричным
асИмМо. ВихРевого обтекания появляются два зеркально отраженных
При дЧНЬ1х молния отрывного обтекания.
Р^ого атом рассматривались две различные но сложности модели вих-
^Меце п Гекания- Первая (простейшая) заключалась в приближенной
и^ется с Г1РеЛе-'1снной вихревой пелены дискретным вихрем. Он соеди-
кромкой крыла математическим разрезом, па котором условие
отсутствия нормальной силы заменяет условие непрерывности -
на распределенной вихревой полоне (гак называемая модель урВде1<11я
Брауна). Вторая модель, более сложная, моделировала в потоке
деленную спиральную вихревую пелену’. Эффект возникновения^dCnpe*
мстрии был обнаружен при рассмотрении обеих моделей. ОТ11 Иес1°>-
только численное значение критической величины акр (при viipoi?dq0Cb
рассмотрении величина акр была больше). Моделирование же ст
ной вихревой пелены и получение ее равновесного состояния метода
таповления (заключающемся в итерационном перестроении геомет/*
вихревой пелены вплоть до удовлетворения условиям стационарности*1^
непрерывности давления на поверхности тангенциального разрыва скоро*1
сти) позволило получип. величину акр, которая значительно ближе к гик
зулыагу, получаемому в эксперименте (рис. 8.3.9).
Особенности возникновения асимметрии в динамических системах
хорошо известны из нелинейной теории устойчивости и связываются с
бифуркационными условиями, при которых одновременно с потерей ус-
тойчивости симметричного состояния возникают устойчивые "зеркально
отраженные" несимметричные состояния. Таким образом, превышение
критического значения угла атаки может приводить к качественному пе-
рестроению обтекания - от симметричного к несимметричному, при этом
знак несим.мстрии будет зависеть от малых возмущающих факторов. Та-
кими возмущениями, в частности, могут служить скольжение самолета
или выступающие элементы
рождения вихревых структур
конструкции, установленные в местах за-
обтекания
г-БраУ”?
1ЧМ1 - - пИР]
ьтипсйной системе УРа
Рис. 8.3.9. Возникновение асимметричного вихревого обтекания
Приближенное описание вихревой системы (модель Майкла
позволяет свести задачу к конечномерной нелинейной системе ур с
бифуркационные особенности которой могут быть эффективно из
помощью численных методов. Па рис. 8.3.10 представлена поверх чура-
веденных значений коэффициента момента крена тх/Е2, где с “ Уг0Л
www.vokb-la.spb.ru - Самолёт своими руками?!
wcVro/ibiioi-o крыла, для случая,
створа конического фюзеляжа в
когда Д1’м НЬ111С размаха крыла а = 0,5.
два часги рисунка показана бифур-
В НП*ииСпя диаграмма в плоскости пара-
При»-0 и
их значениях а решение едииствсн-
Ма И соответствует устойчивой симметрич-
ной вихревой структуре- ПРИ достижении
критического угла атаки сх^, 55 5,18
(точка Л) происходит изменение структу-
ры решения. Симметричное решение ста-
новится неустойчивым и одновременно
появляются два устойчивых асиммст-
piniibix решения, которые продолжают
существовать при больших значениях
угла атаки. В области 2 параметров
а и Р существует три решения, дна из
которых устойчивы и одно неустойчиво.
В области неединственности решения
Рас. 8.3.10. Неоднозначная записимисгь
момента крена в области критических
утлой атаки
ФУРкацией
возможен аэродинамический гистерезис при изменении утла скольжения.
При рассмотрении задачи отрывного обтекания удлиненного тела,
приведенного выше, нс принималась во внимание хорошо известная
из эксперимента возможность разрушения или взрыва вихрей. Учет
этих эффектов при теоретическом анализе отрывного обтекания компо-
новки представляется достаточно сложной проблемой из-за отсутствия
приемлемого метода описания явления взрыва вихрей.
Таким образом, естественно предположить, что реальный меха-
низм возникновения асимметрии в основе своей связан с, потерей ус-
Аг?,1ВОСТИ СИММСТРИЧ|,ОГО вихревого обтекания и сопутствующей би-
>стояния. При развитии
Футоры,
ветвления решений, которая н порождает несимметричные
i же асимметрии приобретают значимость
Итоге влияющие на разрушение вихрей, и поэтому в конечном
Рим 'Ста11авлИнается обтекание с несимметрично разрушенными вих-
[lljHj flP11 ЗТом изменяется характер бифуркации ветвления. В работе
РУШрП^И РассМотРе11ни математической модели без учета эффекта раз-
тёр 1 ИЯ ВихРе1* ветвление решений носило сверхкритический харак-
(рц„Когда несимметричные состояния существуют только при а > а1(р
' 3.10). В эксперименте же [12] выявлен другой механизм воз-
Ф?Г) .,UpHnsi асимметрии, соответствующий случаю докритическон би
Дсц. когда несимметричные состояния могут существовать и в
к ™чсскоп области возникновения неустойчивости.
ot = 38‘
Рис. 8.3.12 Несимметричное разрушение вих-
рей при увеличении угла атаки с нулевым уг-
лом скольжения (визуализация в гидродина-
мической трубе. третовидность передней
кромки кры >а 70°)
Рис. 8.3.11. Возникновение асиммегрии прм
разруш нии вихрей (а) и аэродинамики-
кий гистерезис при изменении угла скан,-
жеиия (6)
Поэтому обтекание компоновки,
рассмотренной е работе выше, было
исследовано экспериментально в
гидродинамической трубе посред-
ством визуализации возникающих
вихревых структур [12| Экспери-
мент подтвердил эффект возникно-
вения асимметрии, по показал, что
он сонрово кдается несимметричным
разрушением вихрей. Значения же
критических глов атаки аКр> хотЯ и
отличаются тем не менее они Д04*13
чно близки к теоретическому. ’•°'
тучепному при рассмотрении заД
без счета эффекта разрушения-
На рис 8.3 Ш приведены F
чьтаты по тученпые в
мен ге и показывающие вс-^ '
асимметрии в положении точек
руш ни вихрей при Р33’^ 101j-
значениях j а < гаки [12|- $
р 1 тче I й об части а также
лас и с нес n\fNfCTpH4HbiM Р‘1
нисм обоих вихрей обттару^11
п вы т ся ч tjci 11ительнос'1’ь
www.vokb-la.spb.ru - Самолёт своими руками?!
естационариым возмущениям. В проведенном эксперименте та-
кацця к Н шаюшим фактором являлся повышенный уровень высо-
ким °3*'1' вибраний от двигателя для перекачки воды гидротрубы.
кОчасто1 ь £3 ПрИвсдена зависимость асимметрии положения точек
На Рис „воГО и левого вихрей при изменении скольжения и
раэр о Отчетливо виден аэродинамический гистерезис, порожденный
«'1ЬНостыо состояния в некотором диапазоне изменения угла
биота и- ’ приведенные результаты соответствуют стационарным ус-
ек0*1* иесТатц1онарных же условиях при охвате рассматриваемого ди-
ловиям. ля стаТИческого гистерезиса будет значительно расширяться
8Н<^ инерционности перестроения вихревого обтекания. На рис. 8.3 12 и
и3’ £ з приведены фотографии визуализированной картины обтека
пня ко пученные в эксперименте и показывающие характер развития не-
симметричного разрушения вихрей.
1 '^Родиггамичсскнй гистерезис вихревого обтекания при изменении скольжения
1 ня в шпродинамической трубе, сптелойидпость передней кромки крыла 80°)
®°зник ^инамическая асимметрия самолетной компоновки.
Hog ко °ВС11Ие асимметричного отрывного-вихревого обтекания на по I
HbiY ,т 1 >Ноике маневренного самолета может быть следствием различ-
“РИЧИН И ттгч w
на Уд пин - гаспюсти, описанный выше механизм может проявляться
ловИд, носовой части самолета, на носовой штанге 11ВД и стре-
и на щт 1нгВИХРе1С1,сраторах устанавливаемых как на носовой части, так
Влияет идГС Возникающая асимметрия в дальнейшем развивается и
обтекание всей компоновки самолета.
Удлиненная носовая часть самолета может порождать
метричную вихревую структуру обтекания другого рода г1С1**
возникновением множества изолированных вихрей, сходящИх г
сторон носовой части. Такой механизм достаточно детально °
описан в работах, посвященных исследованию аэродинамики^4011 и
Стационарная асимметричная пространственная система вихрей ^Кег.
случае поддерживается нестационарным характером обтекания8 310iI
речных сечений удлиненной носовой части по схеме дорожки К- n0llcs
Каждый поочередный сход вихрей с одной из сторон текущего Р‘Чана-
порождает новый стационарный в пространстве вихревой жгут Ac^
метртгчная вихревая система, порождаемая удлиненной носовой час ***
индуцирует аэродинамические нагрузки на фюзеляже, крыле Bei
кальном оперении, других поверхностях самолета, которые привод
возникновению асимметричных моментов но крену и рысканию.
Устранение аэродинамической асимметрии в общем случае задача
сложная, поскольку асимметрия обусловлена самой природой отрыв-
но-вихревою обтекания. Тем не мопсе известны различные приемы
симметризации течения, в частности, за счет устранения малых асим-
метричных надстроек, или с и .'(метризации линий отрыва потока с
гладкой носовой части фюзеляжа посредством установки небольших
боковых ребер и т.д.
Несимметричное разрушение вихрей над крылом приводит, в ос-
новном, к возникновению асимметричных моментов по крену. Как
правило, это характерно для диапазона углов атаки а ~ 30-г40!.
Асимметричная вихревая система, сходящая с носовой части фюзе-
ляжа, порождает несимметричные моменты по рысканию в диапазо-
не более высоких значений угла атаки а « 50-г-70°. При сохранении
тина асимметрии вихревой структуры индуцированный момент по
рысканию может изменяться вплоть до смены направления действия
асимметричного момента.
Аэродинамическая асимметрия на больших углах атаки, как правя
ло, обнаруживается при весовых- испытаниях в аэродинамических тр.
бах, а также отчетливо проявляется при визуализации вихревых стрУ*
тур в гидродинамических трубах. В последние годы проблема возня
повения несимметричных аэродинамических моментов изучала»
летных испытаниях. Такие исследования были проведены в J
(В.И. Ахрамесв, М.Г. Гоман, С.Л. Тыртышников. 1986) по рсзуль^^^И
летных испытаний самолета Су-27 на больших углах атаки и п°3- ,а.
Центре им. Драйдена в США при испытаниях экспериментального
молота Х-31 [181. н3.
Для оценки адекватности описания несимметричных аЭР
мнчсских нагрузок в обоих случаях использовалась простейшая
дура сопоставления результатов летных испытаний н весовых »
ний в аэродинамических трубах (рис. 8.3.14).
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис 8 3 14 Процедура обработки результатов лстых испытаний и оценки нссимметрич
пых аэродинамических моментов но рысканию
Математическая модель аэродинамических сил и моментов самолета
была построена на основе данных аэродинамических испытаний, при
этом аэродинамическая асимметрия из математической модели была ис-
ключена (?п;/о - 0). Измеренные в полете изменения углов атаки a(t)
скольжения 0(t) и скорости полета \'(0, углов ориентации Эйлера 6(/),
<р(г). у(0 и угловых скоростей тх(£), т^(£), саг(£). а также перщрузок
nx(t), ny(.t), пг(г) использовались для восстановления текущих значений
аэродинамических коэффициентов, в частности, коэффициента момента
рыскания. Для восстановления момента рыскания tio результатам летных
испытаний использовалась процедура обращения уравнений динамики
углового движения самолета. При этом в первом случае требовалось
также выполнение процедур согласования кинематических параметров по
Уравнениям Эйлера и восстановления изменений скорости полета, углов
агаки и скольжения в гех случаях когда датчики для измерения этих
параметров находились на ограничениях. Сопоставление восстановленпо-
по результатам летных испытаний и предсказанного с помощью мате-
^^гической модели изменений коэффициента момента рыскания позво-
аси ПолУчить представление о характере изменения аэродинамической
м**тРИи ПРИ выходе па большие углы атаки.
Ричног 8-3.15 приведены примеры изменения коэффициента несиммег-
таиий ° MoWciITa рыскания, восстановленного по результатам легных испы-
01 изм^^ Изменение величины представлено в зависимости
с°хранс еНИЯ ^Тла атакн- Самолетом выполнялись режимы торможения при
ГальцогоИИ 110РМальн°й перегрузки, требуемой для выполнения горизоп-
Уведичет Полета- Приведено два случая торможения с различным темпом
^Чммет Я УГЛЙ атаки- В обоих случаях значительная аэродинамическая
1*SMenGj11,j^a ,П° Рь,ска1,ию возникает при а ~ 40-^45°, при а > 50° происходит
«ния пл НапРавления действия асимметрии. Отчетливо виден эффект вли-
1сторци движения, то есть направления и 1емна изменения утла
60°
a---
60° —
30° —
0^
a
40°
20° г
-0,04 0 0 04 т„
W)
5 io 15 t, C
Pur. 8 3.15. Аэроднна\гическая асимметрия по рысканию при выходе
на большие утлы атаки (торможение в горизонте самолета Су-27)
Разрушение вихрей
Поздний отрыл
приводит к
более низкому
расположению
вихря
Ранний отрыв
приводит к
более
Сечение А-А
Рис. 8.3.16. Схематическое изображение
возникновения вихревой асимметрии
атаки. Возникновение такого динами-
ческого гистерезиса может бьпь связано
с инерционностью установления вихре
вого обтекания.
В работе |18] приведены резулыи
ты исследования особен ногтей возник
новения аэродинамической асимметрии
по рысканию на больших углах атаки
(а < 72°) у экспериментального самоле-
та X 31 (некоторые результаты из .то#
работы приведены на рис. 8.3.1fi_
8.3.18). Были проанализированы и со-
поставлены результаты эксперимен-
тальных исследований, получении? в
гидро- и в а родинамической трубах, а
также непосредственно в летных ИСПА₽
таниях На рис. 8.3.16 приведен*1
магическое изображение обтекания
совой части самолета и механизм
иикновения боковой силы на фюзе-'
вс бедствие вихревой асимметрии м
Диапазон углов атаки, в
возникает значительная аси.ммегр^
рысканию, достаточно хорошо
делается как в аэродинамическо
бе, так и гидротрубе. Однако Н
асиммстрии, наблюдаемый в h
оказывает< я выше, чем в аЭг
www.vokb-la.spb.ru - Самолёт своими руками?!
ибо (рис. 8.3 17) Установка же в аэродинамической трубе на
мцчсск° модели самолета одностороннего рсбра-вихрегеисратора
нОсоР°й .^становлению асимметрии, уровень которой близок к уровню,
nPSS^MV « полетс
HaoJKW» аЭродинамичсскои асимметрии при динамических маневрах
- Р° ’ пИ равен значениям, наблюдаемым при медленном торможении
был н,1>ке _ на большие утлы атаки (около 60°). Таким образом, уровень
с ВЫХ ли полученный в условиях близких к установившимся, может
асиммел! в качестве наихудшего Из-за динамических эффектов боль-
6ьГГЬ Учения асимметрии могут наблюдаться на малых углах атаки.
..„,п п«Ьиииоованпая носовая часть
Рнс. 8.3 17 Сопоставление уровней асимметрии но рысканию, получаемых в аэродина-
мической трубе и в полете (а) и влияние числа Рейнольдса на величину боковой силы,
возникающей на больших ччлах атаки ла удлиненном овальном теле (б)
Было отмечено, что возникновение аэродинамической асимметрии по
рысканию в значительной степени иосит нерегулярный характер. При этом
- пгмодифицировапная
носовая часть
0,05 т
Vn
—«---носовая часть с турбулизующнми
полосами из наждачный бумаги
0.05 тп
-0,10 0,05
Диапазон
асимметрии
-0,05
Рис-8-3.18 л ,
|**1>лета X пг,3он вмМожных значений асимметричных моментов по рысканию у
1,а Зачной f ^3 тУрбулизаторов (д) и при установке гурбулизнрующих полог из
/Маги вдоль штанги ПВД и носовой части самолета (б)
вырисовывается вполне определенная область возможных изменений Я
метрик (рис. 8.3.1&/). Установка на носовой части и штанге ПВД tv JC*W
зирующих полос из наждачной бумаги привела к более регулярной к
возникновения асимметрии, область возможных значений значительно^1*
лась, выделив четкую зависимость асимметрии от угла атаки (рис.83 кЗ?*
Важным выводом проведенною исследования является также устав '
ныи факт определяющего влияния па уровень аэродинамической
налтгчия на носовой части фюзеляжа штанги ПВД. Именно уд-_-
штанга ПВД провоцирует возникновение значительной вихревой асиммет
и больших асимметричных моментов по рысканию. !
^ано^.
й[ 1етРии
^^нениая
-рии
Нестационарные характеристики продольного и бокового
движения. Нестационарные аэродинамические характеристики на боц>
тих углах атаки в значительной степени зависят от аэродинамически
компоновки самолета, а также от отклонения управляющих поверхностей
Для иллюстрации этого ниже рассматриваются три различные компоновки
самолета, уже приведенные выше на рис. 8.2.1 (результаты, приведенные
ниже, получены в ЦАГИ Г.И. Столяровым с сотрудниками)
Компоновка I. Демпфирование по тангажу у самолета нормальной
схемы возрастает на больших углах атаки (а 20ч-35°), более значи-
тельно это возрастание в диапазоне а « 35 ч-45°. В диапазоне а «ь 45ч-55е.
наоборот, возникает “ангидемпфирование”, величина которого зависит от
частоты колебаний (левый график на рис. 8.3.19). Эффект “антидемпфи-
рования" скорее всего связан с интерференцией отрывною обтекания
крыла с горизонтальным оперением. Отклонение носков крыла ослабляет
этот эффект, по не устраняет полностью (правый график на рис. 8-3.19).
Риг. 8.3-19. Вшянпе частоты колебаний и отклонения носков крыла на де'П<Ь”Р°
ио тангажу (компоновка I) .а|
Компоновка 2. У компоновки с передним горизонтальным oirepc |
эффект “ангидемпфировапия” по тангажу возникает па меныяи*
атаки и существует в более широком диапазоне, а именно при
Также наблюдается значительная зависимость аэродинамически*
www.vokb-la.spb.ru - Самолёт своими руками?!
т зстогы колебаний, реализованных в методе вынужденных ко-
воДЧ,,1Х целый график на рис. 8.3.20). Эффект “антидемпфирования”
„ебаний у1 \Ь1ванием как развития отрыва потока на переднем горизон-
снязан с Зс’ При увеличении угла атаки, так и запаздыванием вос-
пгльнс»1 ° 1 безотрывного обтекания при уменьшении угла атаки.
стайов71011 „ pjpQ в возникновении “антидемпфировапия” наглядно видна
-Виной*11 ,рафике рис. 8.3.20, где приведены экспериментальные резуль-
на пРаВ”М 0Л11Од компоновки и компоновки без ПГО Удаление ПГО при
чаты Л ьосСта1ювлению демпфирования на больших углах атаки.
со = 0 8^ = 20*
Рис. 8.3.20. Нестационарные аэродинамические производные продольного движения
(компоновка 2)
Компоновка 3. Компоновка с крылом обратной стреловидности и пе-
редни I горизонтальным оперением также имеет проблему7 “аптидемпфп-
рования по тангажу па углах атаки а « 30°. Это происходит при нулевом
уклонении П1О, если его отклонить но потоку на угол бпго —30°, эффект
^ТНдем11фирования” исчезает. Отклонение ПГО на угол 5ШЮ= 30° как
tdh УСт^а1,яст °трыв потока на ПГО в области а «а 30°, что и объясняет ус-
11еНИ(? “антидемпфировапия” (рис. 8.3.21).
На всех приведенных рисунках в области малых углов атаки J
ны для сопоставления результаты расчета аэродинамических цпп
но программе UXST (жирная пунктирная линия). Как видно онц^^^И
точно хорошо согласуются с экспериментальными данными. Несг ^°СТа*
ные аэродинамические характеристики бокового движения на бол!^1*01*^
лах атаки 1акже в значительной степени определяются аэро^хинами^
компоновкой самолета. В определенных диапазонах углов атаки они'*1'0*
сят от частоты колебаний и отклонений аэродинамических новерхпост^
носков крыла, угла поворота горизонтального оперения. Ниже также
сматриваются три различные компоновки, приведенные на рис. 8.2 1 РЭе
Компоновка 1. Комплексы нестационарной и вращательных произв
ных по крену7 и рысканию для нормальной схемы самолета приведешь
рис. 8.3.22, 8.3.23. На рис. 8.3.22 приведены демпфирующие характерце
тики по крону и рысканию, полученные методом вынужденных колебаний
при различных частотах. Расщепление по частоте наблюдается при углах
атаки а > 30°. Имеются достаточно узкие зоны 11 антидемпфирования” как
по крену (а ® 40 + 45°), так и по рысканию (а = 50-5-55°).
Рис. К.3.22. Комплексы нестационарной и врашатслыюй производной по крс’в
рысканию (компоновка 1)
На рис. 8.3.23 приведены результаты, позволяющие оценить влИ^,те_
отклонений носков крыла на нестационарные аэродинамические хар $
ристики бокового движения па больших углах атаки. В зиаЧ1ГГ -
степени возникающие изменения связаны с затягиванием на боль j'
лы атаки и ослаблением эффектов развития отрывною обтекания-
Компоновка 2. У компоновки самолета с передним горизон
оперением в диапазоне углов атаки а ® 30 + 40° из-за развития 311ачН'
процессов на ПГО возникает всплеск демпфирования по крену
гельная зона “антидемпфирования” по рысканию (рис. 8.3.24).
влияние частоты колебаний (также как и амплитуды) в этом ЯдаП *
лов атаки очень значительно. Увеличение частоты колебании
значительному уменьшению пиков демпфирования и ‘•антИДе> I
О 10” 20 30‘ 60* 50‘ а 0 10“ 20° 30° 40° 50° а
Рис. 8.29. Влияние отклонения носков крыла па нестационарные производные по крену
и рысканию (компоновка 1)
intM Таким образом, для моделирования динамики самолета на подобных
режимах полета необходимо построение более адекватных моделей неста-
ционарных аэродинамических характеристик, поскольку использование
представления с аэродинамическими производными заведомо некорректно.
^^nOHnov,, -j гг
ч°вка кпь а 1ри нал1Г111И переднего горизонтального оперения уста-
>госГи аа,С ^РитаоЙ стреловидностью вносит новые качественные осо-
•^-26 приве с1эрОдИ11а-микУ нсустаповившихся движений. На рис. 8.3.25,
Лбны комп 'тексы нестационарных и вращательных производных
1 *Ьо1П1г».
fl
mr + mt sin a
«д . в .
m 1» sin a
LI I iyi । i-i-rrp-r l"l | I I I I | I I I I
0 10° 20° 30° 40‘
Рис. 8.3.25 Нестационарные производные бокового движения (компоновка 3)
бокового движения. На рис. 8.3.25 приведены результаты, дсмонстрир;
щие влияние отклонения ПГО и носков крыла. Так, например, отклонения
ПГО по потоку блго = -30° и SH0C = -20°, которое благоприятно сказыва. 1>
на характеристиках демпфирования но тангажу (устранение зоны анти»
демпфирования" - см. рис. 8.3.21), приводит к устранению зоны “апто*®-
фировапия’’ но рысканию (см. верхний правый i-рафик на рис. 8.3—
создают высокую степень пеусго чг
восги ио крену (см. верхний левЬ
Рис 8.3.26. Влияние отклонения передне-
го горизонтального оперения на демпфи
рпнанне по крену (компоновка 3)
i-рафик на рис. 8.3.25).
На рис. 8 3.26 приведены Г
зультаты для двух различными
ложений ПГО при различных
тах колебаний. Влияние 4^oW<
колебаний, как и ранее. 1
значительно в диапазон л
возникающих из-за дина'^1Я
эффектов отрывного обтека Tt-
Аэродинамические ха^еГлС^
ристики при установи
вращении необходимы ПРЙ^^М
ровапии динамики амолста
www.vokb-la.spb.ru - Самолёт своими руками?!
- атаки, особенно при сваливании и в штопоре. Вращение па боль
Уг^ атаки может значительно повлиять на характер отрывного и них
щих -^^екання и привести к существенным изменениям его аэродина
и моментов.
мическ еозмущец!юм движении вращение самолета происходит прак
Г относительно вектора скорости набегающего потока, при это>
тпчесКИ11ИЯ от этого направления в ряде случаев могут считаться малы
°ТК Поэтому для изучения особенностей аэродинамики самолета на боль
•мИvr-jax атаки уже многие годы (ранее только для исследования што
lUI,XHbix режимов движения), в том числе и в настоящее время, широкг
П°Р чьзуется метод установившегося вращения модели самолета в аэро-
И^аМичсской трубе. В ЦАГИ такие установки разработаны и использу-
ются в вертикальной аэродинамической трубе Т-105. В частности, на ус-
тановке Ш-5 реализуется установившееся вращение модели самолета от-
носительно набегающего потока. При этом дистанционно с помощью
компьютера модель устанавливается под заданными значениями утлое
атаки и скольжения, а также задастся требуемая угловая скорость вра-
щения. Безразмерная величина угловой скорости со = ®//2V может из-
меняться в диапазоне со = -0,5-ь 0,5, что вполне обе почивает подобие с
натурным полетом при выходе па большие углы атаки. Следует отмстить
что в случае, когда вектор угловой скорости вращения модели совпадает с
направлением набегающего потока, реализуются стационарные условия об-
текания, т.е. углы атаки, скольжения и угловая скорость вращения постоян-
ны. В принципе, существует возможность модернизации та сото эксперимен-
та, когда ось вращения модели отклоняется от направления потока. Прь
этом наряду со стационарными
аэродинамическими нагрузками мо-
гут быть измерены и нестационар-
ные реакции.
Д-'Bi иллюстрации особенностей
аэродинамики при установившемся
вращении на рис. 8.3.27 и 8.3.28
Ривсдены соответственно аэроди-
-юльн^Ие < ^Р^истики про-
Разти?Г° И ^ОКовог0 движений при
Пения 1Г?Х -ГЛовьгх скоростях вра-
HoDM * авис’1мости коэффициента
зка силы и момента т анга-
Иий с "редслыпях отклоне-
СКо-чьж(д и'1ИаатпРа при нулевом
Г1О11овКа1Ши 'Рассматривается ком-
' ?Ы НоРМа-Тьной схемы) нриве-
8-3.27 Рассмешены
<• сутствия вращения и до-
Рис. 8.3.27. Влияние установившегося вра-
щения на коэффициенты нормальной силы и
момента тангажа (компоновка 1)
вольно значительного вращения в двух противоположных напрдв
Видно, что вращение практически не оказывает заметною влияния 1е1,1131х-
дольные характеристики при пулевом скольжении. При наличии к
пня это влияние будет более значительным, что позволяет в частности oi^
делить вращательную производную момента тангажа т™' (а).
На рис. 8.3.28 приведены зависимости коэффициентов мом
крепа тх и рыскания ту, а также коэффициента боковой силы с от В
повой скорости вращения модели. Наиболее характерной особенностью'
аэродинамики самолета является наличие зоны аэродинамической авто-
ротации по крену на больших углах атаки. .Эффект аэродинамический I
авторотации возникает вследствие развития процесса несимметрично
разрушения вихрей над крылом на углах атаки а > 25 При а « 50'
когда вихри уже полностью разрушены и нс могут оказывать заметного
влияния на аэродинамику, эффект авторотации исчезает. Следует отме-
ни ь, что вертикальное и горизонтальное оперения также
Рис. 8.3.28. Влияние устиппнишиегося вращения на коэффициенты
(компоновка 1)
бокового
www.vokb-la.spb.ru - Самолёт своими руками?!
чиянис в этом диапазоне а. В правой колонке графиков па
оказъ^31^ приведены аналогичные результаты для компоновки без гори-
рис 8-3 и вСргнкальною оперений. Видно, что .зона авторотации по
3онтаЛЬН°. ,1ЬКО сузилась, но возникла аналогичная проблема (зона ней-
крсну ПоС1'р.1КЦии па вращение) в моменте по рысканию. Характерным
тра-*н°И с^ека зпака в коэффициенте боковой силы при увеличении угла
явЛ«е ся 0О а также реакция Сг на вращение.
атаки а •
8 4 Способы описания нестационарных аэродинамических
характеристик
Аэр тинамичсские нагрузки действующие на движущийся в атмос-
. ' 1етатслъный аппарат, в общем случае зависят от всей предыстории
его движения. Это связано с тем, что в процессе движения он создает за
(обой вихревой след, который в свою очередь индуцирует дополнитель-
ные скосы потока и тем самым изменяет и аэродинамические нагрузки
(иодные и распределенные силы и моменты). На больших углах атаки
при отрыве потока возникающие вихревые структуры и циркуляционные
зоны создают еще более значительное обратное воздействие на обтекание
тела, что может приводить к аэродинамическому гистерезису (неединст-
венности структуры обтекания) даже в стационарных условиях. При не-
усгановившемся развитии отрывного обтекания аэродинамические на-
грузки значительно изменяются и могут существенно отличаться от их
значении в стационарных условиях (динамический гистерезис).
Аэродинамические нагрузки при пеустановившемся движении в общем
случае могут быть выражены в виде функционалов от изменения кинема-
тических параметров движения, таких как углы атаки и скольжения а, 0;
угловые скорости вращения тт, т^, ®л; отклонения ортанов управления и
T-Д., например, выражение нормальной аэродинамической силы может
1>1Ть представлено в следующем виде - Y(i) У(сс(т), 0(т), ®г(т),...], -
1 S т S t.
I При решении задач динамики полета наиболее широко используется
висиИ1С11ИС’ Связаннос с заменой приведенного функционала конечной за-
u Чос1Ь1° °'г кинематических параметров и ряда их производных по
t 1,апРимеР» У(О = У(а,с1,а,...), где а,а,а,... - значения в момент
немд^ ПР°111ени° связано с возможностью аппроксимации изменения ки-
•Чом -ро.е€ко1° параметра с учетом предыстории движения сходящимся ря-
мени П° ТскУП1ИМ значениям параметра и его производных ПО вре-
ПреДс “ + (т - /)a(i) + 1/2(t - т)2d(i)+- В результате задача
аг1пРокс еНИЯ аэродинамических сил и моментов может быть сведена к их
1,еРвЫм 1а11,1и членами ряда Тейлора по кинематическим параметрам и их
1Т^Г>И*111ОЛНЬ1М, приближенно определяющим нестационарные аэро-
Ческцс нагрузки - ДУ(() = УаДа + У“Да + У,хДа+.... Концепция
v ISco/'_ А (1)
о ах
аэродинам1гческих производных (или производных устойчивее I
вастся достаточно точной и широком диапазоне режимов 01^И
чрезвычайно важно при решении практических задач нроскп/101^' Что
тагельпых аппаратов [1,17]. Такой квазистационарный подх0дР0ВаШ1я
однако неприменимым в случаях обтекания с возникновением СТа1|°Вится
тока, разрушением вихрей, с движущимся скачком упчотненИя°Т^Ь1Ъа во-
ющим отрыв, и т.д ’ ГенеРМру
На малых углах атаки при безотрывном обтекании трогое
тичсское описание нестационарных аэродинамических нагр з0к с Мс1ГС1ча-
зованием функционалов может быть представлено в линейной л^СП°Ль'
существенно упрошено введением запаздывающего аргумента (д-щ И
мера опять рассматривается только коэффициент нормальной силы) рд]
Cy(t) = С'^(О) + (t - т)-^-а(т)с/т +
о °
В линейном случае аэродинамические переходные функции при сту-
пенчатом изменении кинематических параметров С„ (/- т) и С’ (г-т)
’О
зависят от разности текущего времени t и внутреннего временного пара-
метра т, необходимого для суммирования влияния от предыстории дви-
жения. При этом для определения аэродинамической реакции при произ-
вольном изменении кинематических параметров необходимо знать только
аэродинамические переходные функции (наряду с начальными
значениями нагрузок). Они могут быть приближенно определены в аэро-
динам ичссжом эксперименте или определены расчетным образом из ре-
шения нестационарной задачи обтекания 12,3].
Расширение маневренных возможностей у современных и перспек-
тивных самолетов приводит к значительной проблеме в динамике полета,
связанной с разработкой адекватных методов моделирования и предска-
зания нелинейных аэродинамических нагрузок. Проблема эта в основном
связана с предсказанием аэродинамических нагрузок при наличии отрнь
ного обтекания, разрушения вихрей при больших углах атаки и ск
жения, больших скоростях вращения, а также при возникнем
скачков уплотнения на трансзвуковых режимах полета. ощени*
Ранее при проектировании самолетов в силу возможности >ЛР м0Г-
описания аэродинамических нагрузок было допустимо, например.
рение задач динамики полета и аэродинамики раздельно. Освоег ^110Г0
ремальных областей полета выдвигает необходимость взаимосвя ’
рассмотрения задач механики полета, нестационарной аэрол ‘
гироупругости и синтеза автоматических систем управления с пе» »
адекватной постановки и решения задачи проектирования само '1сла^ аГмос'
В общем случае для изучения неустановившегося движени.
фсрс необходимо рассматривать уравнения Эйлера, опясыва
жспие самолете! как твердого тела, совместно с динамически.411 Я
возникновении
www.vokb-la.spb.ru - Самолёт своими руками?!
попарного обтекания, граничные условия для которых форми-
я>Ц1 h,ecl‘3 уравнений динамики самолета. Несмотря на значительные дос-
рук>тсЯ ,К вычислительной аэродинамике, имеющиеся в настоящее время
тйжеяия
чечета нестационарного обтекания еще весьма дорогостоящих и
метод1’1 ^еПраКгичиы. В ряде ситуаций они пока не могут отразить адск-
цоэг°м- И311КУ процессов обтекания.
БаТНи")бы избежать решения динамических уравнений нестационарного
ния и при этом замкнуть уравнения движения летательного аппа-
°бТеКнеобходима отдельная математическая модель для получения пол-
аэродинамических сил и моментов, действующих па движущийся ле-
1,14 тьный аппарат. Такая аэродинамическая модель должна быть при-
га па дчя моделирования аэродинамических реакций при произвольном
неустановивП1емся движении самолета и строиться па основе огра-
ниченного объема экспериментально измеренных или теоретически рас-
считанных аэродинамических откликов на тестовые изменения кинема-
тических параметров.
Нелинейный подход к моделированию аэродинамических характери-
стик развивался с начала 60-х юдов [19,20,21]. Линейный метод пере-
ходных функций был модифицирован посредством введения понятия не-
1ИНСЙНОГО переходного отклика и обобщенного интеграла суперпозиции,
который но сути является обобщением линейной копволюционной модели
(конвелюцпонного интеграла Дюамеля) (1).
Нелинейный переходный отклик учитывает изменения, индуциро-
ванные всей предысторией движения самолета, и но сути сам уже явля-
ется функционалом:
d
(2)
d
Cy(t) С^(0)~ |Суа[с1(^),тг(§),^т]—-а(т)<Ут +
° '
„ К “еЛИнейн™ случае необходимо построить целое функциональное
ния _^а,Ктьо иерсходных аэродинамических функций для воспроизведе-
двиисеш>ЛиНаМНЧеско^ Рсакиии ПРИ произвольном изменении параметров
иальы -1Я ^р1,меР построения нелинейной модели на основе фупкцио-
в раб(-)трИгП^С^Поля,1ип переходных аэродинамических реакций приведен
НерСх Теория нелинейных переходных откликов полагает, что
Фу11Кции (базовые отклики) должны быть определены или
₽азРабо 1М МОделиРова,,исм динамики обтекания, или в эксперименте.
ИИй гребКа 11 пР°всрка модели на основе нелинейных переходных фупк-
,,Ьгх- йоэт^ °1РОМ,,0,'° объема нестационарных аэродинамических дан-
Фуикций Му ДЛя практических целей метод нелинейных переходных
^одоц Нрсдставляет значительные трудности. Он требует специальных
°пРсдслепия нелинейных переходных функций и организации их
функциональной аппроксимации. Конечная матсмапгческая м<)
намики полета при этом формулируется в классе интегро-д^?’Ш
циальных уравнений, что ведет к существенному усложнению
нация динамики, исследования устойчивости и синтеза управления
Альтернативный подход для моделирования нелинейных ач
мических характеристик был Предложен и 113,14,1.5,16,231.
Для описания динамических эффектов обтекания, проявляют
аэродинамических нагрузках (интегральных и распределенных)
ности, в |16,23] вводятся дополнительные динамические переменны ьЯ
торые можно назвать внутренними переменными, поскольку в отлнчиД
кинематических параметров движения самолета они предназначены С 01
описания состояния отрывно-вихревого обтекания. Поведение этих
полнительных переменных, как предпола! аегся, может быть описало*
помощью некоторой нелинейной динамической системы, размерность к<>
торой соответствует вектору внутреннего состояния .г, описывающего хаё
рактер отрывного и вихревого обтекания: 1
= g(t.x). х 6 R”
dl
Аэродинамические характерце гики при этом будут уже конечным обра-
зом зависеть как от текущих кинематических параметров движения с, так и
от параметров внутреннего состояния отрывно-вихревого обтекания х:
(4)
В работах [16,23] было показано, что на больших углах атаки в ус-
ловиях возникновения отрывного обтекания и разрушения вихрей экспе-
риментально измеряемые нестационарные аэродинамические нагрузки
могут быть аппроксимированы с помощью некоторого нелинейного ото-
бражения и решений простейшей динамической системы первого порядка
для скалярной внутренней переменной. Эта динамическая система со-
держит характеристические постоянные времени описывающие npoucfCbI
установления обтекания и условия развития критических состояний, свя
запных со сменой структуры обтекания. Структура динамической сис
мы была получена из анализа экспериментальных данных и нрименс
методов идентификации.
Подход с введением внутренней динамики был апробирован в Р а
тах [24,25,26,27] и успешно применен к ряду задач динамики сг^И
Было показано, что использование нелинейных динамических сис
зволяет достаточно просто и точно моделировать во временной о ..
нелинейные аэродинамические нагрузки на больших углах атаки -
виях развития отрывного обтекания. Такой подход может ест
моделировать бифуркации равновесных состояний обтекания в
статического гистерезиса, воспроизводить автоколебательные Резк " ,
тскапия, привлекать физические соображения типа описания ”
www.vokb-la.spb.ru - Самолёт своими руками?!
„ чяпмодействия между различными аэродинамическими по-
„нонпого в-*"
l*f Устями и т Д- .. .
Bepx,f0 ”нод проблемой в методе нелинейных переходных функций яв-
еделеиие пространства переходных функций и организации их
;1ястся °' 1 од Ш1гсрполяции для возможности моделирования аэроди-
фУяК11,1О”й реаКццН из каждого текущего состояния Для получения хо-
нами' ’ пшроксимашш тРе^Уетгя определение достаточно большого ко
р°шс у переходных функций, что приводит к необходимости накопле-
Л,ГЧ "тмерно большого объема предварительной информации Это яв-
ния чрбольшим недостатком метода, который к тому же дополняется и
1 мной сложностью определения самих переходных реакций.
601 Основная сложность применения нелинейных динамических систем
вязана с неопределенностью их структуры, размерностью вектора впут-
С ннсго состояния и формой нелинейного отображения для выражения
интегральных нагрузок. Отличительной чертой этого подхода является
то что вместо накопления семейства возможных нелинейных реакций
обтекания строится нелинейная динамическая система, решения которой
хорошо аппроксимирую! изменения аэродинамических нагрузок при раз
личных начальных условиях и изменениях кинематических параметров
Рассмотрение физических особенностей обтекания и анализ дина-
мических особенностей аэродинамических нагрузок могут значительно
облегчить формирование структуры динамической системы. Параметры и
функции, формирующие математическую модель, должны при этом оп
редсляться с помощью методов идентификации на основе эксперимен-
тальных или численно полученных аэродинамических реакций.
Разработка и использование нелинейных нестационарных моделей
аэродинамики в условиях отрывных режимов обтекания находятся в на-
стоящее время в стадии первоначального развития. На практике же при-
ходится компромиссно использовать располагаемые экспериментальные
Данные для построения математических моделей аэродинамики, о чем
подробнее изложено в следующем разделе.
8.5. Представление аэродинамических характеристик при
исследовании динамики сваливания и штопора
СИ1ПРИ 'Кодировании динамики самолета описание аэродинамических
Иь,х м°ментов традиционно строится на основе экспериментальных дап-
зу.Ч'т О;1^'1аемь1Х н аэродинамических трубах (АДТ). При этом исполь-
испыг Эк511еримснтальные методы как статических, так и динамических
^‘ювной целью динамического эксперимента является реа-
Из^сеи^араКГернЪ1Х Ф°рм возмущенного движения модели самолета и
Пп 1С Соо1ветствующих им изменений аэродинамических нагрузок.
Условие 'Ча‘1Ь1Х возмущениях относительно исходного режима полета в
Рьпзе г. Х 6сзотрывного обтекания, а также при полностью развитом от-
°Ка> как уже отмечалось, возможно исноаьзование концепции
аэродинамических производных. Нестационарная аэродинамиче•
акция может быть представлена пропорционально параметрам » СКая Pcs
ного движения, к которым относятся безразмерные скорости
углов атаки и скольжения (а = аЬ.л/У, р = p//2V) и безразмерные
нии угловой скорости (ё)х = а)х//2Г, = ау1/2У, р) "РОе,{‘
му допустима следующая форма представления безразмерных а-,п
мических коэффициентов: и‘,!а
с. = с, (а, р, 5) + с;“’о)г + с^иа.. + c.“; m. + c;“d + c.^p,
т, = nij(о., р, 5) + т^х^х 4 т,-Л,»шу + т,(Л'аг + m,ud 4- тгрр, i -х у г
Нелинейные зависимости сг(а,р,Й), mf(a,p,8) на малых углах атаки
могут быть представлены в линейной форме с использованием частных
производных относительно позиционных параметров движения.
В эксперименте, проводимом методом вынужденных колебаний, из-за
кинематических связей параметров движения модели могут быть выделе-
ны только неразделенные комплексы нестационарных и вращательных
аэродинамических производных:
= m<ir sinao “ т?
в л 2b., . _
mi в.к = 1Пг + Wi COSa0 ” ГП*
т^г = тн-°г + т?,
» В.К I 1
(5)
/ = х, у. z, в.к - вынужденные колебания.
Аналогичные формулы справедливы и для коэффициентов аэроди
панической силы. Соотношения (5) упрощаются, если испытания ирои°'
дягся при нулевом значении угла скольжения Ро = О-
Поскольку метод вынужденных колебаний при неподвижном поле
женин центра масс модели не позволяет получить раздельно значения
вращательных и нестационарных производных, при математическое
представлении аэродинамических коэффициентов допускается замена «
ходпого представления упрощенным описанием-
= »2;,„(а,р,6) 4- т?х to 4- nr”' +
' г‘.г : в к -г г в К 'J 1 В-К
г = .г, г/, 2, ст стационарная. нсуче-
Некоррекпюсть, возникающая при использоваюто (6). связана
том подвижности центра масс в свободном полете под действием Р^пцс-
мпческой п травитациошюй сил, а также под действием ветровых -
НИЙ 111 В большей степени такая замена справед-тива при апа.л1зе
возмущенного движения, в меныпей при анализе продольного двиЖ 1
www.vokb-la.spb.ru - Самолёт своими руками?!
изованпе нестационарных и вращательных производных, по-
Цсло- ^т0дОМ вынужденных колебаний в виде (5), наиболее уместно
1учае',ь х ‘пП1ета по почти прямолинейным траекториям, когда сред-
для >*-' угловой скорости мала, а радиус кривизны траектории дос-
нял ведП еаИК' При этом в качестве невозмущеипых значений аэродина-
таточн° н моментов естественно принимать их значения, получае-
м',че методом статических испытаний (6).
мЬ,евыходе на большие углы атаки и быстром вращении самолета в
иях развития отрывного обтекания может возникать значительное
УсЛ° не угловой скорости как на характер самого обтекания, так и на
^сплчины аэродинамических сил и моментов. Мерой этого влияния мо-
жет служить безразмерная угловая скорость =<o//2V, которая в
жимах штопора и при полете с малой скоростью может достигать
значений юг = 0,2 + 0.4, в то время как на виражах и пологих спиралях,
а также при энергичных вращениях самолета по крону при больших ско-
ростях полета эта величина существенно меньше - < 0,2.
Для описания аэродинамических сил и моментов при вращательном
движении самолета на больших углах атаки, в частности, при штопоре, в
качестве нсвозмущенных их значений используются данные, получаемые
методом установившегося вращения. Наиболее распространенная схема
проведения такого эксперимента соответствует случаю, когда угловая
скорость вращения совпадает с направлением набегающею потока
(<о х v - 0). В этом эксперименте, так же как и при проведении ста-
тического эксперимента, величины углов атаки и скольжения остаются
постоянными. Безразмерная угловая скорость ®Го является дополнитель-
ным параметром, от которого коэффициенты аэродинамических сил и
Моментов могут также зависеть нелинейным образом. Для описания воз-
Мущенного движения выделяется ряд кинематических параметров, харак-
теризующих спиральность движения, т.е. величину рассогласования вск-
То]юв со и v, а также степень нестационарности обтекания. В качестве
Ких параметров можно принять безразмерные проекции угловой скоро-
На скоростные оси координат , coZ(j, а также безразмерные ско-
₽ СГУ вменения углов атаки и скольжения - а, р.
_ ^аЕисимость аэродинамической реакции от значений параметров
Р можно считать линейной:
,ni - пцу B(a,p,®Xa,S) + пг( w,coyi - ?«“?айга + mfa + mf p, (7)
i * x
Член ~ (5в,бэ,5„), у.в - установившееся вращение, 1де первый
ный индексом у.в, определяет невозмущенные значения
намических коэффициентов, а вращательные гп?‘п 11 неста-
цнонарные производные , т'5 зависят от режима обтекания
первую очередь определяется параметрами а и ”а
Основной вклад в величину аэродинамических сил и моменто
сит первый член в (7). обычно получаемый метолом установив^ ЬН°'
вращения при коллинеарности векторов со и V. еГо°*
В ряде случаев нелинейные зависимости удается упростить в
ности, как показывает опыт, зависимости от утла скольжения p Vr Част
скорости йг и отклонений органов управления 5 можно ппелст'т,, В°”
' д “ 1 av- 1 ciKpfTb лд.
пейпым образом:
т1уТ1 = + ^(а)Р + ги“ХаюХо + Amt(a,5), ! -Г, у, г,
Частная производная момента по проекции скорости вращения относи-
тельно вектора скорости может быть связана с частными производны-
ми коэффициента момента по проекциям угловой скорости на связанные
оси координат
ni"x° = т™л cosa cos р - sin a cos р + mfz sin р, i = х, у, г. (9)
1 _
Гибридная форма представления аэродинамических коэф-
фициентов. На практике метод вынужденных колебаний проводится,
как правило, при оюутствии у модели установившегося вращения а ме-
тод установившегося вращения - при коллинеарности векторов вращения
модели и скорости набегающего потока. С возможностями метода устано-
вившегося вращения при отклонении оси вращения от направления набе-
гающего потока можно познакомиться в работе [28].
Поэтому' для описания аэродинамических характеристик в условиях
пространственного движения самолета со значительным вращением при
ходится использовать только данные, получаемые методом усгаковивше
гося вращения и комплексы нестационарных и вращательных произвол
пых (5), получаемых методом вынужденных колебаний. При этом пР^
изводные коэффициентов по проекциям угловой скорости на связан^
оси координат, пересчитываются к производным по проекциям угл
скорости на скоростные оси координат
nij = т. (а, р,й,- ,S) + + т?гпш, , i = x,y,z,
У» лч ’в.к У» 1н к г<>
где
- т^х sin а + тгну cos а - ггц1 sin а + пцу cos а + Wf- >
гв.к *в,к гм к 1 1
z Сй • ч о
т a = — a тп 9 cosa - \т- * cosa - ??? у sin a)sin р -
‘□к I 1 нс гв к к
—т-°г cos р - (м‘й J cos a sin a) sin Р + =yL
(10)
www.vokb-la.spb.ru - Самолёт своими руками?!
I представления коэффициентов в виде (10) получила название
Ф°Р‘ма л,орЧЬ1 описания. Гибридная форма позволяет наиболее опта
гьзовать имеющиеся в распоряжении данные, ио обладает есте-
малья° 11 недОС1атками. При колебаниях без установившеюся вращения
с1цениы'Я^^'^ может отличаться от режима обтекания при установив
Р*313114 мщении .модели. Немаловажно также, что данные, как правило, пи-
шемся 1 раЗЛ1Р1НЬ1х установках и с использованием различных моделей,
п 1аютсяi я диана:юны углов атаки, в которых динамические эффекты
‘ я отрЫнно-вихрсвого обтекания становятся столь значимыми, что
pa3Bf гая выше форма описания аэродинамических коэффициентов ста-
ПР* лея неприемлемой. Необходимость учета влияния предыстории дви-
Нсния на характер развития аэродинамических нагрузок на больших уг-
лах атаки, в частности, эффекта динамического гистерезиса, приводят к
необходимости уточнения математического описания аэродинамики.
8.6. Моделирование динамического и статического гистерезиса
Проблема адекватного математического моделирования аэродинами-
ческих характеристик па больших углах атаки, при возникновении от-
рывною и вихревого обтекания является очень важной задачей при мо-
делировании динамики самолета, исследовании устойчивости движения, а
также для правильной оценки возникающих аэродинамических нагрузок.
Ниже освещаются особенности построения динамических моделей
описания нестационарных и нелинейных аэродинамических нагрузок па
больших углах атаки в условиях развития отрывного и вихревою обте-
кания Рассмотрены примеры отрывного обтекания профиля и треуголь-
ного крыла. Апробированная структура математической модели далее
применяется к полной компоновке самолета.
Отрыв потока на профиле. Для получения простейшей модели
Развития динамического отрыва на профиле рассмотрим следующую схе-
му этого процесса Будем предполагать, что профиль достаточно юл-
СТЬ,И’ так что отрыв потока с его гладкой поверхности развивается от
задней кромки. При этом не будем учитывать процессы образования
Так?СВ1>1Х ЗОП И схода изолированных вихрей с носовой части профиля.
и.ч образом, состояние отрывного обтекания может быть задано ио-
нием точки отрыва, которое может быть выражено с помощью отпо-
1 льпой координаты хе [О I].
соотв Х ~ 1 гочка отрыва находится на задней кромке профиля, что
Рыва СГ8'ет Фактически безотрывному обюканию При х = 0 точка от-
с°отв Т°Гока "водится на передней кромке профиля, что в свою очередь
сУ1цесГС1В^еТ ПолНомУ отрыву. Аэродинамические нагрузки па профиле
дещ. 1еНн° зависят от координаты точки отрыва потока х Ниже приве-
Мом 1 Ли>ическис выражения для коэффициентов нормальной силы и
Та1,гажа, полученные в предположении, что отрывная зона мо-
жег быть смоделирована с помощью зоны постоянного дав пени
гофа и стандартных предположений линейной теории кавитации-Я
С“(а, .г) = у sina( 1 + л/т)2.
5(1 ~ J)
2 16
(It)
Соотношения (11), полученные для стационарных условий отпы
го обтекания, демонстрируют одинаково сильную зависимость как от "°
ла атаки профиля, так и от координаты х, которую можно считать^'
качестве дополнительной внутренней переменной, характеризующей со"
стояние отрывного обтекания.
Зависимость коэффициента нормальной силы от угла атаки при со.
хранении стационарных условий обтекания (а ~ 0) может быть связана с
изменением положения точки отрыва соответствующим этим стационар-
ным условиям обтекания:
С^(а) = С”(а.л0(а)).
(12)
где Л'о(а) положение точки отрыва в стационарных условиях.
Таким образом, соотношение (12) в сочетании с (11) позволяет выде-
лить зависимость изменения точки отрыва в стационарных условиях ло(а).
При рассмотрении нестационарных условий обтекания следует пред-
положить. что аэродинамические нагрузки также будут зависеть от угла
атаки и текущего положения точки отрыва, которое в силу инерционнос-
ти процессов развития отрывного обтекания может значительно от-
личаться от его положения в стационарных условиях. Известны раз
личные факторы, влияющие на процесс развития отрывного обтекания, I
их можно условно разбить па две группы К первой группе можно с'Нес-
ти так называемые квазистапионарныс эффекты, такие, как эффекты ус-
тановления состояния в hoi рапичпом слое, а также эффект улучпення
состояния пограничного слоя и затягивания момента возникновения о*
рыва потока вследствие пестационарности угла атаки а > 0. Ве.'ПП1111''
затяшвапия но углу атаки момента отрыва или момента восстановл
безотрывн го обтекания примерно пропорциональна скорости изме’
угла атаки сс. Таким образом, перечисленные выше эффекты могу^^Н
описаны с помощью введения смешенного аргумента в зависи>
Ко второй группе факторов следует отнести эффекты, связанн
посредственно с развитием отрывного обтет ания. Этот процесс или 1
восстановления безотрывного обтекания характеризуется некоторым
терным временем развития или установления. Развитие состояния
пого обтекания, его установление (например после действия иск |
www.vokb-la.spb.ru - Самолёт своими руками?!
) при постоянном значении угла атаки может быть описано с
возМУшеН’неКОТОрой динамической системы, в простейшем случае с помо-
rioMoUlbK) ,„аиИонного уравнения первого порядка С учетом вьппесказан-
щью PeJaKneiaKCанионное уравнение будет иметь следующий вид:
ного такое р
т-----х = х0(а-т2а), (13)
dt
- характерная постоянная времени релаксационного процесса.
Ije (1-ооп1Оше11ИЯ (И) и (13) образуют замкнутую математическую мо-
дая аэродинамических коэффициентов нормальной силы и момента
дк1Ь, ’и учитывающую динамические эффекты развития отрывного об
текания на профиле.
Основные качественные особенности описанной математической модели
наглядно представлены на рис. 8.6.1 В верхней части рисунка приведена
статическая зависимость коэффициента нормальной силы С^(а) (сплошная
линия) на фоне сетки зависимостей коэффициента нормальной силы при
различит,lx положениях точки отрыва. В нижней части рисунка показаны
изменения положения точки отрыва, соответствующие стационарным усло-
виям (сплошная шния) и двум случаям нестационарного движения с уве-
личением а > 0 и уменьшением утла атаки а < 0 (пунктирные линии). Со-
ответствующие изменения коэффициента нормальной силы в верхней части
рисунка (пунктирные линии) демонстрируют значительный динамический
гистерезис в величине аэродинамической силы.
Таким образом, приведенная выше матсмашческая модель описывает
основные нестационарные и нелинейные особенности возникновения от-
рывного обтекания на профиле и крыле большого удлинения, наблюдае-
мые в аэродинамическом экспери-
менте Она содержит в качестве
^известных две характеристичес-
кие постоянные времени Т| и т2, а
также в общем случае нсизвесг-
Нь‘е функции xo(ct) и CjJ(a,x),
Которые должны быть определены
матР011ССС^ идентификации мате-
чием Молели с использова-
нье - ЭКС1,е1,Имсн,ал,>но измерен
НИоц^аННЬ1Х ^ля О11Исання поста
wdP*lbIX характеристик нрофи-
ТеРезиИ НалИчии статического гис-
для ? 3 Лииамическое уравнение
Жц0 6 гРенпей переменной дол-
•’1ИтгейцГГЬ М0лиФиНировано к ,,с"
Рис 8 6. t. Динамический гистерезис при
развитии отрывного обтекания на профиле
- F(a,,.r).
dt
(14)
где в случае двух устойчивых ветвей статическою гистерезиса
пая функция в (14) может быть выбрана в виде полинома третьейЛИНе{’*
пи с коэффициентами, зависящими от угла атаки и era производной^6"^
Н.г,а.) = <73(а.)х3 + + f/i(a.)x + <7о(а.), а. =- а _
Наблюдаемые ветви статического гистерезиса и бифуркацит
точки Л и В, ограничивающие зону неединственности (рис. 8 6.2) до «
цы описываться решениями нелинейного уравнения
F(x,a) = 7з(а).г3 - д2(аУх2 + pi(a)x + ?^(а) = 0.
(15)
Рис. 8.6.2 Вид функции л(а) при нали-
чии статического гистерезиса
Для нахождения функций д3(а)
.?i(a) *7о(а) внутри зоны ста-
тического. гистерезиса х s [Л,В] ис-
пользуются условия, задавас»гые н.
наблюдаемых, т.е. устойчивых вет-
вях гистерезиса:
1) уравнение (15) должно быть
справедливо соответственно на двух
ветвях гистерезиса xj(a) и х2(а),
2) в то время как частная про-
изводная дГ/ дх на этих ветвях определяет обратную величину времени
релаксации - (1/тр.
^(ahj3 + 02(а)г2 + 0i(a)xi + #о<«) - °-
,73(а)х2 + ^2<a>-v2 + ^i(«)^2 + 0О<а> = 0
3<73(а)х12 + 2$г2(а)х1 -»• ^(а) = -1/т1(.
3//З(а)х2 + 2д2(а)х2 + ^(а) = -1/и, .
При приближении к бифуркационным точкам [ад,а«1 постоянны
времени соответственно стремятся к бесконечности: Т] -> 03 при а
а также rj -> « при а -> ад. 1И.
Экспериментальные исследования обтекания прямою крыла с , <
пением а - 5 и профилем NAC А 0018 выявили наличи< статического
терезиса в нормальной силе и моменте тангажа в зоне углов ат а
происходит развитие отрывного обтекания. Петля динамического
резиса значительно расширяется при колебаниях крыла по vl7r' jpi
охватывающих зону неединственности в статических услови
рис. 8 6 3 приведены примеры изменения коэффициента нормаль
лы Су, измеренные в эксперименте как при колебаниях крыла с
www.vokb-la.spb.ru - Самолёт своими руками?!
охватывающей зону с этического гистерезиса с различной
туД01 « (сплошная линия), гак и при сохранении состояния на одной из
ча<‘г01,° щтриховой линией показаны зависимости, полученные при мате-
ветве моделироваиии с использованием нелинейного уравнения
411 )' сн’кяиной линией - экспериментальные зависимости.
Рис. 8 6.3. Динамические измепгпня коэффициента нормальной силы Cv(u) при наличии ста-
таческого гистерезиса (сплошная линия - эксперимент, штриховая - моделирование)
Разрушение вихрей над треугольным крылом Для описания
Нсст?д1иОварных аэродинамических нагрузок треугольного крыла на режи
Ма Отекания с разрушением вихрей может быть использована анало-
Пвщая математическая модель. В этом случа в качестве внутренней дина-
^сской переменной может быть принято относительное положение точек
,.аз 'Шелия вихрей х е 10,1], изменение которого также подчиняется
1PdRl’CUllI° (13). Пригодность такой простейшей динамической модели бы
•к. °°сновапа посредством сопоставления результатов моделирования с
7ъ,1екРИЛ1СИТаЛЬНЬ1МИ на^людениями На рис. 8.6.4 приведены положения
•1ови ^РУШсния вихрей над поверхностью треугольного крыла со стрс-
лностью передней кромки х = 70°, совершающего движения по танга-
jit). ПеРиодическим и линейным изменением угла атаки Визуализация
<ейия взрыва вихрей осуществлялась в гидродинамической трубе по-
ц- м впрыска красителя в ядра неразрушенных вихрей Как видн ,
[ Шиая динамическая моде ль (13). содержащая двг временные кон
станты Т| и *2- достаточно точно описывает процесс разрущеНия
над крылом и тем самым может быть использована для описания ВИхР°в
ния и аэродинамических нагрузок. Существенный вклад в
ческис нагрузки, индуцируемый вихревой системой, практически ^Илами-
при разрушении вихрей. Поэтому будет наблюдаться значительная СЧ(?3ает
мость аэродинамических нагрузок от текущего положения точек
ния вихрей. Таким образом, уравнение (13) дополненное зависимоСт^Ше’
эффициепта аэродинамической силы от угла атаки а и внутренней
менной х, образуют замкнутую математическую модель: ПеРе-
С - Си(п г) + Cw*
Tj + .г = .Хд(а - Tjd),
(it
(17)
где линейные члены с постоянными производными С’“2, С? введешь ды
учета нестационарных эффектов, не связанных с процессом разрушения
вихрей. На малых углах атаки эти члены будут определять нестационарную
реакцию при безотрывном обтекании и неразрушенной вихревой системе
Как уже отмечалось выше, нестационарные аэродинамические произ-
водные на больших углах атаки, определяемые экспериментально методом
вынужденных колебаний, проявляют значительную зависимость как от
частоты, так и от амплитуды колебаний. Предложенная математическая
модель может быть использована для анализа этого явления. С этой целью
осуществим линеаризацию (17) относительно се статического состояния.
Рис. 8.6.4. Положения точек разрушения вихрей, полученные методом визуализ,
гидродинамической трубе при угловых движениях треугольного крыла X - ’ )Керй.
тпчеекая зависимость - сплошная толстая линия, возмущенные положения даН
математическое моделирование - сплошные гонкие липни (а) и эксперимента- > ^D.
пые (маркеры) и линеаризованная математическая модель (сплошные линии
лекеа нестационарной я вращательной проиавпдпых треугольного крыла (о)
Для малых отклонений от положения точки разрушения я
стационарных условиях = .г(т) - .то(а(т)) динамическое УРаВ
(17) может быть линеаризовано и представ тено в следующей фор1, |
в
www.vokb-la.spb.ru - Самолёт своими руками?!
= -(Tj +T2)-72La-
«а
Преобразование Лапласа уравнения (18) приводит к виду
$. _(,,. „)ф> “
da 1 + тр'
(18)
(19)
= j- оператор дифференцирования.
ГДе .Линеаризация первого уравнения в (17) и учет того, что Су(а, .г0(а)) =
= Су сг<«> да10Т
г -г (a) + ^“-C^^A + Cd
ctJ -суегш;+ дх ъ +с^
Подставляя (19) в (20), получаем окончательную форму линеаризо-
ванной магматической модели:
(20)
(21)
где
Ka) = -(tj - т2)
дСу dxQ
дх da
Нестационарные аэродинамические производные, определяемые мето-
дом вынужденных колебаний, могут быть связаны с параметрами линеа-
ризованной математической модели. Изменение коэффициента пормаль-
чой силы при периодическом изменении угла атаки a = ao + as sin coi,
w? “ a может быть представлено первыми членами ряда Фурье:
Су - CyCT(a0)-C“n.Ka., sincot + C“n KasmcoscoL (22)
Сопоставление уравнений (22) (21) даст следующие соотношения
ааР°ЛИ1гамичес1сими производными и параметрами математической
Сувлс^а>®) ~ CIJCT
С“вк(а.Ю) = С^
—/е(сс) Ю
1 + ю2т|
a fe(a)
У- 1 . „2,2 •
(23)
fipajjj,3 РИс- 8.6.46 приведены зависимости комплекса нестационарной и
пдГСДЬНо” производной коэффициента нормальной силы треугольного
11а больших углах атаки, полученные методом вынужденных коле-
баний при различных частотах, со = ofea/V = 0,015, 0,144, 0,306 (
ментальные гички отмечены маркерами). Адекватный выбор фуцк-
и постоянной времени tj в (21) позволяет полущить хорошее C001lIUl
линеаризованной математической модели экспериментальным рез^01^’1'
(рис. 8.6.46 - сплошные линия). '
Компоновка самолета обладает крылом сложной сЬоомм »
г в планр
горизонтальным оперением и т.д. Тем не менее для описания измен
аэродинамических нагрузок на больших углах атаки в условиях цеуИ,1Я
повившегося маневрирования может быть использована математичёск
модель, описанная выше для простейших случаев.
Так, например, для коэффициента нормальной силы Су (а дакже и
для коэффициента момента тангажа) может быть испстьзована сле?\то-
щая форма представления, задающая зависимость от угла атаки и вн
ренней динамической переменной х, которая в этом случае уже выст?ш-
ет в виде обобщенной переменной и не имеет, как раньше, определенного
физического смысла:
~ Ч\ ^а* 0)1 С У»
-i C„o(a,p)-C’
^ + c,s S, »(х) +
:* + г 5п](1-<7(х)),
«/ez0 р У8„о R J
где 6, - отклонение стабилизатора нормирующая функция д (д <1
зависит от внутренней динамической переменной х (также нормирован-
ной |х| < 1) и играет роль весовой функции для аэродинамических ха
рактеристик, соответствующих различным режимам обтекания. Гакям
образом весовая функция д(а, х) управляет изменением аэро;итамич«
ких характеристик при изменении структуры обтекания и приближена
может быть представлена в следующем виде:
д = (1 - ц)х2 + Ц-т,
где параметр ц для общности может рассматриваться как функция f
атаки и скольжения.
Поведение внутренней динамической переменной .г описываете
стейшим релаксационным уравнением:
Т] — -I ,г - хо(а - Т2Й.Р- т.зР-Зв - т45п),
dt
где хо(а,р,5в) “ статическая зависимость координаты х от У,ла
скольжения и отклонения стабилизатора. Вполне возможна заЫ
характерных постоянных времени т,, i = 1, 2, 3, 4 от структуре
ция, а именно от величины внутренней переменной .г
www.vokb-la.spb.ru - Самолёт своими руками?!
f еделение параметров математической модели Одним из
практических вопросов применения рассмотренных выше- ма-
важн<? ких моделей является выбор неизвестных параметров и функ-
те>,ат1 а10ШИХ модель, при которых реализуется наилучшее военроизве-
1,,Й наблюдаемых в эксперименте аэродинамических реакций при раз-
еН" х типах движения. Математическая модель должна быть справед-
^,Ч-1 как в стационарных, так и в нестационарных условиях, при колеба-
'1,,Ва с малой и большой амплитудами.
,1УЯ>д1Я определения функции .т0(а,р), может быть использовано соот-
ошение, вытекающее из выполнения условия стационарности:
CjXa.P) = Су (а)^(х0(а, р)) + С//о(а,р)(1 - j/(.r0(a р))) (27)
Выбор оставшихся параметров и функций может быть осуществлен с
мощью метода минимизации рассогласований между экспериментально
полученными аэродинамическими реакциями и прогнозируемыми реак
циями. получаемыми при математическом моделировании. Для того
вводится функция ошибок, являющаяся суммой квадратов рассогласова-
ний по каждому переходному процессу (k - номер переходного процесса,
i - номер интервала разбиения процесса но времени)
4 m п
/«(« + 1)^
-жат / > у ^мод
'Vk Щ)~ №
(28)
Выбор параметров математической модели осуществляется из усло-
вия минимизация функции ошибок (28) Для этого могут быть использо-
ваны прямые численные методы минимизации, такие, как метод градиен-
та метод сопряженного градиента, покоординатного спуска и т.д. Следу-
ет отметить, что поверхность функции ошибок оказывается достаточно
сложной, с большим количеством локальных минимумов, овраюв и т i
которые значительно усложняют задачу нахождения глобального мини-
м)ма ДлЯ более удачною выбора начального приближения для искомых
параметров могут использоваться непосредственные физические измере-
например, времени релаксации процесса установления отрывного
екания (см. рис. 8.3.5) поочередная настройка параметров но раз-
ным группам переходных процессов, и т.д.
а РИс 6 3 приведены примеры идентификации математической мо-
экСПе'гХЛЯ коэффициента нормальной силы самолета Су-27 по результатам
Со свободно движущейся по тангажу модели самолета в дозву-
пьггаи ,родш,амической трубе (рисунок слева) и по результатам летных ис-
Ноц сам°лета при выполнении динамического маневра "Кобра’ (рису-
ЧтгрихП^ава^ Сплошной линией указаны экспериментальные процессы, а
Чц.Та1 Мирной результаты математического моделирования. Степень
•to Х'> /опаРНости приведенных процессов наглядно видна в обои лучаях
Г4 d«icpy изменения внутренней динамической переменной.
Рнс, 8.6.5. Свободные колебания но тангажу модели самолета (Су-27) в аэреди>
мической трубе («) и выполнение динамического маневра "Кобра" (б)
Список литература к главе 8
1 ГС. Бюшгехс. В. В. Студнев. Аэродинамика самолета. Динамика продольного и бо-
кового движения. - М/ Машиностроение, 1979. 349с.
2. С. М. Белоцерковский, Б.К. Скрипач, В.Г. Табачников. Крыло в нестационарной
потоке газа. - М . Наука. 1971. 767с.
3 С.М. БелоиерковскиИ. Б. К. Скрипач. Аэродинамические производные летателъпс’л
аппарата и крыла при дозвуковых скоростях. - М Наука. 1975.
4. А.Н. Храбров, К.А. Колгтъко. Программа расчета статических и н “гационарных
аэродинамических производных самолета. - М.; ЦЛГИ, 1994.
5. В.И. Бежоаиит, С.В. Кабин, К.А. Котцько и др. Метод свободных ко-тебши
упругом шарнире для исследования нестационарных аэродинамических производим
на трапезпуке И Ученые записки ЦЛГИ, 1996. Т. XXYII, №3-4. «ых
6 А.И. Курьянов, Г.И. Столяров, Р.П. Штейнберг О гистерезисе аэродинаямч
характеристик // М., Ученые записки ЦАГИ, т. X. №3. 1979. I
7. В.Я. Нейяанд, Г.И Столяров, В.Г. Табачников. Влияние относительной TOj й.
прямоугольного крыла малого удлинения и числа Рейнольдса па режимы пер»
ки структуры обтекания И Ученые записки ЦЛГИ, 1985. Т XVI, №3. .
8. .'ЛА Караваев, Ю.А. Прудников, В.А. Часовников. Особенности формирояиШ
четкого гистерезиса аэродинамических характеристик прямоугольного крыла-
записки ЦАГИ, 1986. 'Г. XYII, №6. стиля-
9 И. В. Колин, Н.П. Мамров. Б.К. Святодух и др. Множественный I'Hcrepe^jB
онарпых аэродинамических характеристик самолета с прямым крылом о
лннения при малых числах Рейнольдса. Препринт ЦЛГИ, №87. 1996. а3роД>*}*
10 В. К. Святодух, И. В. Колин, К.Ф. Лацоев и др. Способ определения
мичегких сил и моментов при апериодическом перемещении модели и . J
для его осуществления. Роспатент СССР, SU 1779961 Al, G 01 М Э^Ю. tfpi*
11. М.Г. Гоман. С.Б. Захаров, А.Н Храбров. Аэродинамический гнетерви
рывном обтекании удлиненных тел // ДЛИ АН СССР, 1985. Т- 282, №1 вП’-Т**
12. XI,Г. Гоман. Л И. Задорожний, А.Н. Храбрив Несимметричное разруш
и аэродинамический гистерезис при обтекании крыла малого удлинения л
ж ем Ученые записки ЦЛГИ, 1988. Т. IX, .№1
www.vokb-la.spb.ru - Самолёт своими руками?!
13-
м
15.
16
17
0
19
20
чан Математическое описание аэродинамических сил и моментов на псуста-
М Г. _ йи£имах обтекания с неединствепной структурой//Тр ЦАГИ, 1983-
’*ОВИВ“?Й с М-27.
Вып “17 гидников, В.И. Нетоипт, Е.Л. Часовников. Математическое моделирование
Ю •’1- 'нарЕ1,1Х аэродинамических характеристик 1реугольного крыла на больших
нс-стани Вопросы аэродинамики и динамики иолета летательных аппаратов:
Shuk научных трудов - М.: ИНТИ Волна, 1985.
ctl°* дтОдаев. В.К- Святодух. Математическое описание нестационарных нелипей-
4 4 аэродинамических характеристик дли задач динамики полета Тр. ЦАГИ,
Выл. 2449, с- 4-27.
V/' Гоман, Г. И- Столяров, С.Л. Тыртышников и др. Описание продольных аэро
амических характеристик самолета на больших углах атаки с учетом дина-
мических эффектов отрывного обтекания. Препринт ЦАГИ, №9, 1990.
п 1 tkin, Dynamics of Atmospheric Flight, John Wiley A- Sons, Inc., N.Y., 1972.
PR ('obl&gh, M-А. Croom, B.F. Tamrat PRC Inc. & NASA Langley & Rockwell
International Comparison of X-31 Flight. Wind-Tunnel, and Water-Tunnel Yawing Moment
Asymmetries at High Angles of Attack. Paper HA-AERO-06, High Alpha Conference D
Electronic Workshop. NASA Dryden Flight RcSeeiv^ Center, July 12-14, 1994, URL.
http: www.dfrc.nasa.gov / Workshop / HighAlphaIV ' highalpha.html
M Tobak and I..B. Schiff. On the Formulation of the Aerodynamic Characteristics in
Aircraft Dynamics, NASA TR R-456, 1976.
M. Tobak, G.T. Chapman and I..B. Schiff. Mathematical Modeling of the Aerodynamic
Characteristics in Flight Mechanics. Proceedings of the Berkeley-Aimes Conference on
Nonlinear Problems in Control and Fluid Dynamics, Math Sei Press, Brookline, MA,
1985, pp.435-450, also NASA TM-85880. Jan. 1984.
21 W. Tobak and A. Unal. Bifurcations in Unsteady Aerodynamics. NASA TM-88316.
June 1986-
22 Р.Ц. Reisenthel Development of a Nonlinear Indicia! Model For Maneuvering Fighter
Aircraft. AIAA Paper 96-0896, 34th Aerospace Sciences Meetiiig&Kxhibit, Jan 1996-
Rt no, NV.
M. Coman and A. Khrabrov. Stale-Space Representation of Aerodynamic Characteristics
of an Aircraft at High Angles of Attack. Journal of Aircraft, Vol.31, No.5, Sept-Oct.
п НИМ, pp.1109-1115. '
L 1). Fishcnbeg. Identification of an Unsteady Aerodynamic Stall Model from Flight Test
,, Data AIAA Paper 96-3438-CP
•’ J- bitiyh and R.V. Jatcgoankar. Flight Determination of Configurational Effects on
Aircraft Stall Behavior. AIAA Paper 96-3441-CP
F- ban and l-.H. I.utzc. Identification of an Unsteady Aerodynamic Model at High
27 v1S’0eof Attack. AIAA Paper 96-3407-CP.
F- Klein and K.D. \Todcrer. Modeling of Aircraft Unsteady Aerodynamic Characteristics.
L 1 ‘ Postulated Models. NASA TM 109120, May 1994; Part 2 - Parameters Estimated
F'f>m Wind Tunnel Data, NASA TM 110161 April 1995: Pail 3 Parameters Estimated
rronj Flight Data NASA TM , lf)2S9 May iy(J6
otary-Balance Testing for Aircraft Dynamics. Oscillatory Coning. AGARD Advisory
KePort No.265, 1990. pp.69-76.
www.vokb-la.spb.ru - Самолёт своими руками?!
Глава 9
СИСТЕМЫ УПРАВЛЕНИЯ СВЕРХЗВУКОВЫХ
САМОЛЕТОВ
В развитии системы управления особое значение имеют Два
которые существенно повлияли на ее структуру и открыли больипиЗИ
можности в авгоматизации управления самолетом.
Первый этан связан с созданием необратимого бустерного vnpaan
(НБУ) без перехода на непосредственно ручное управление. НБУ позвот
.то обеспечить летчику приемлемые характеристики управляемости во
диапазоне режимов полета независимо от юйствующих аэродинамичеерд
шарнирных м \ dhtof на поверхностях управ тения.
Второй этап связан с заменой механической системы передачи vnpag
ляющих сигналов к приводам поверхностей управления на электродистаи
ционную (СДУ) и введением на этой основе автоматических систем, в том
числе и систем, обеспечивающих искусственную устойчивость самолета.
В данной главе рассматриваются системы управ гения сверхзвуком,
ми самолетами. Современные скоростные дозвуковые магистральны са-
молеты ('Гу-204, А-320, Ан-124, А 330, А 340 Ил 86, Ил-96, В-757.
В-767, В-777 и др.) также имеют необратимое бустерное управление и
СДУ. Поэтому основные положения по формированию структур систем
управления, используемых на магистральных самолстах, особенно ш
обеспечению высокой надежности и безопасности поле!а, также пре.,
ставляют интерес [1]
Освоение сверхзвуковой области режимов полета характерна ется
рядом новых особенностей, влияк щих па структуру системы управления
Наиболее существенными из них являются:
- исключительно большой рост аэродинамических шарнирнь-
моментов (Д/|П ;1зр) органов управления 1
- уменьшение эффективности управления по всем каналам (raiff3*
крен, к р ) в обла< тиь сверхзвуковых скоростей;
- значительная “перебалансировка” органов продольного управл®1
- значительное ухудшение демпфирующих св( йств самолеТ^аМС.
больших высотах и сверхзвуковых скоростях и ухудшение реакции
лета па управляющие команды летчика.
Таким образом, для осуществления сверхзвукового полета ТР
лась особая система управ ген , с помощью которой МО1ЛИ быть •1
лены отмеченные трудности. !
При рассмотрении вопросов, связанных со структурами сИС
равления сверхзвуковых самолетов, основное внимание уделен
особенностям системы управления. Структуры систем управл® Л
каналов имеют много общего, поскольк автоматизированная!
построена на одних и тех же принципах
Crp'KTVpa и opiaiibi управления сверхзвукового самолета
I 9 еменных самолетах для создания управляющих моментов при-
СО р основном, органы управления трех видов - аэродинамические,
1ЯКЯхЯ’(ипИ газодинамические) и орган управления в виде управляемой
гр ,;Н1’. стОйки шасси, используемого во время пробега по земле.
1 реТС-аны управления, использующие струйные (или газодинамичсс-
J и in отклонсни ш вектора тяга для создания управляющей силы
K,It ’ нта) требуют значительных энергорссурсов. Струйные органы
(моме < ]1СИ0;1ЬЗуЮТСЯ на малых и ш вообще нулевых скоростях
' "пета, а также на очень больших высотах
,ю‘ ррН пробеге по земле эффективным органом путевого управления
вдется управляемая передняя стойка шасси, с помощью которой обес-
печивается управление самолетом на взлетно-посадочной полосе и осу-
щес вляется рулежка на аэродроме.
Органы продольного управления самолетом. Из приведенных
в таблице 1 видов органов продольною управления на сверхзвуковых
ам< летах подучили наибольшее применение следующие:
- управляемый стабилизатор,
дифференциальный стабилизатор,
переднее оперение,
- элевоны,
- управление вектором тяги,
- комбинации перечисленных видов opianon управления.
Эффективность органа продольного управления самолета обычной
схемы характеризуется производной
= -Сф V 7
"'z ^iv’ro'
•Де го - коэффициент подъемной силы горизонтального оперения по
УГлУ отклонения оперения, Sro=St .S - относительная площадь гори
3°ита.чыюГо оперения; 7ГО = /го ЬА расстояние от точки положения
'Родннд? ического фокуса стабилизатора до центра масс самолета
яцая?аМ°Леть1 схемь1 '‘утка”, у которых органом продольного управления
h.jcti ТСЯ ,,еР®ЛНсе горизонтальное оперение (ПГО), имеют эффектив-
’ пР°до; ьного управления, близк ю к самолетам нормальной схемы,
го 1 bOflhl традиционно использовались для продольного и иопсречно-
ВЛОП1,Я На самолетах бесхвостой схемы. Однако эти органы управ-
Флале 1’асп°ложенные по задней кромке крыла (в том числе элероны,
*1°ЛетаЗПНЬ1^’ 1СРЯЮТ значительную часть эффективности при полете са-
113 сверхзвуковых скоростях.
Органы управления сверхзвуковых самолетов
Та6л««иа
Канал управления Тип орган<л^-_ управления По тангажу По крену Но курсу Подъемной силой "*'°РМОЖ(Ч наем
1 Управляемое ГО (переднее или заднее) •
Дифференциальное ГО • •
3 Концевые рули •
4 Элевоны • •
5 Элероны •
6 Флапероны • •
7 Интерцептеры (спойлеры) • • •
8 Предкрылки •
9 Поворотные носки крыла •
10 Закрылки •
11 И&ЧС11С11 и<! < .ТрСЛ ОВИД “ пости крыла •
12 Руль направления • •
13 Управляемое ВО • •
14 Поворошый <|юркиль (гребель) •
15 Струйные рули • • • _—•——
16 Управление вектором тяги • •
17 Управление передней йогой •
18 Расщепляющиеся ртли •
19 Носовые рули • •
20 Адаптивное крыло • •
21 Тормозные щитки
22 Реверс тяги
23 Тормола
v ,.Р1{ЦЦ0НИ1^
На некоторых самолетах бесхвостой схемы, имеющих ь сеКдии«
ванные органы управления по задней кромке крыла, частЬс сЯ д,"я
расположенных ближе к корневой части крыла, использу »
продольного управления (как руль высоты), а другая часть (ь1)«
концам консолей крыла для поперечного управления (как элср
www.vokb-la.spb.ru - Самолёт своими руками?!
Г .сМах самолетов последнего времени можно видеть применение
В сх ‘ _. ного управления комбинации различных органов унравле-
д.пя ПнанрИ>1еР’ ПГО - ГО, ИГО I элевоны, ИГО + ГО - управление
веКт°РоМ^с отМечалось, па сверхзвуковых самолетах основной системой
^ния является НБУ, которое обеспечивает приемлемый уровень
управу управлении самолетом путем применения специальных
УсилИ1ств имитации усилий независимо от характера действующего
устро органе управления. На современных сверхзвуковых самолетах
"°аны управления имеют, в основном, конструктивную компенсацию
компенсацию вообще не применяют при "шомпольной” навеске руле-
вых поверхностей (например, Су-27, F-104, F-4 и др.).
Углы отклонения элевонов обычно нс превышают величин бэв = ±25°.
Этот диапазон углов распределяется между каналами тангажа и кре-
на в соответ твии с ограничениями, установленными па рычагах управле-
ния (ограничения по ручке), общими ограничениями по приводам. При
наличии автоматики к сигналам ручного управления добавляются также
сигналы автоматики СУУ по тангажу и крену. При этом должно выдер-
живаться соотношение:
5ЭВ > 5В + 51; + Д5В суу “ Лбк СУУ.
где 5ЭВ - суммарный угол отклонения элевона; 5В - отклонение элевона
по тангажу; 8К - отклонение элевона по крену; А8всуу и Д8К суу “ от-
клонение элевона по сигналам автоматики тангажа и крена.
На сверхзвуковых самолетах обычной схемы основным органом про-
дольною управления является управляемый стабилизатор, состоящий из
-1вух консолей, каждая из которых крепится на опоре, обеспечивающей
независимый поворот консоли относительно се оси вращения с помощью
отдельного привода. Такая конструкция позволяет осуществить как син-
хронное отклонение консолей, если стабилизатор используется в качестве
Р*ана продольного управления, так и дифференциальное (создание так
' аемьгх “ножниц” в отклонении консолей), если стабилизатор одно-
оконно применяется для управления но крену.
’’очьзу Г1Я КонстГУкНия управляемого стабилизатора, которая чаще ис-
рез11/<\Г<Я НИ 1,емаисвРе«”ых самолетах, представляет единую (не раз-
ков йа КопстРУКЦИ1о, которая целиком поворачивается относительно уз-
Тора т- еС^.И’ ^Р^ленных внутри фюзеляжа. Весовая отдача стабилиза-
ция °И Ко,,СгРУкции лучше, но его использование возможно только
Управп ' Оль1,ого управления (например, самолета Ту-160, у которого для
яизатоп-! П0 Кре11у применены флапероны). Для управляемого стаби-
^VreN( ' имеются широкие возможности влияния на величину Л7шаэр
Ш" В<?ГствУюи*сго выбора положения его оси вращения по хорде
гатора, а также выбора угла стреловидности оси.
Для уменьшения потребной тяги приводов стабилизатора н
cio оси желательно выбирать внутри диапазона перемещени”0 ь*е1111е
стабилизатора. В резулыате на дозвуковых режимах колета >°k-Vcob
тор будет псрскомпенспровап по Д/ш аэр- Для самолетов с НБУ 0илИза-
туация вполне допустима. Однако с точки зрения безопасности Си'
режимах иерскомпснсашш стабилизатора необходимо пред см^3 Иа
чтобы запасы по тяге приводов были несколько больше, чем на г.
где стабилизатор скомпенсирован, на случай возможных отказов в
ме управления (например, одной из гидросистем) Практически залад1^
таге привода управления стабилизатором маневренного самолета п U°
казс одной гидросистемы на режиме перекомпепсации стабилизатора
жен быть не менее 1,25 Л,5 по отношению к Мш на этом режиме
аэродинамически неустойчивого самолета запас по тяге должен быть
большим из-за необходимости обеспечения более высокой скорости от-
клонения стабилизатора.
Па первых серийных сверхзвуковых самолетах (МиГ-19 МиГ 21
Су-7 и др.) широкое распространение имели стабилизаторы с косой
(стреловидной) осью крепления (рис. 9.1.1). Это давало некоторый
выигрыш в уменьшении >/„, аэр и, соответственно, в уменьшении тяги
приводов по сравнению с прямой осью крепления. Констр} ктивно ось
стабилизатора может быть закреплена либо на фюзеляже, либо
внутри стабилизатора. При этом косая ось обычно устанавливается в
зоне сечений стабилизатора, которые имеют достаточную строитель-
ную высоту. Однако соединение привода стабилизатора с косой осью
является ботее сложным из-за необходимости применения ботьшего
числа механических звеньев в силовой передаче привода вносящих
упруюсть и люфты в проводке.
Рис. 9.1.1. Схемы крепления оперения с косой осью: а -ось жестко закреплена _да.
нпи. 6 - ось жестко закреплена на фюзеляже; 1 - диапазон перемещения
мических фокусов по числу М
Конструктивные преимущества, которые имеют место при
привода с прямой осью, преобладают над увеличением Мщаэр*
больппгнетво отечественных и последних зарубежных самолетов
ференциальным стабилизатором (С -24, МиГ-27, Су-27, МиГ 29, F'
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис. 9 1.2. Схемы креплении оперения i
прямой осью, / - 25% САХ, 2 50% САХ
- и то ) имеют прямые оси.
<р,,г 9-, 2)
ПР” "^дадаяы большие утлы от-
6ьГГЪ w стабилизатора. Для уирав-
^^гакими стабилизаторами трс
1C,flW учснь мощные рулевые при-
6у,°Т1(гак дня ряда самолетов мощ-
д^хкамершях приводов одной
Н°\опИ’ стабилизатора составляет:
с i t - 55000 кГс; F-111 - 45360 кГс:
’Торпадо" - 31400 кГс). Тяга иршто-
1Ов стабилизаторов самолетов превы-
шает их собственный взлетный вес. Естественно, для установки приводов с
такой тягой, на самолете требуется мощная силовая конструкция постамента,
KoToim бы исключала просадку привода под нагрузкой. При прямой оси
проще обеспечить жесткость конструкции силовой передачи.
Необходимо очень внимательно подходить к случаю, кот да одна по-
ловина стабилизатора останавливается из-за превышения аэродинамичес-
кого шарнирного момента над располагаемым, эго относится к
полета на больших скоростях.
режимам
+10*
+21
Д^-Упор по приводу
+Ф„| Дф, „у (4*)
^«атором
р системы продольного и поперечного управления с дифференциальным
Угловые отклонения обычных управляемых стабилизаторов
ся в диапазоне фст-10°-: -30°. Углы отклонения Дифференпиальн* °;1Ят'
билизатора имеют больший диапазон (рис. 9.1.3) - <р^иФ=.
Скорости отклонения стабилизатора изменяются в широких ппг I
зависимости от запасов устойчивости самолета и степени автомэ 13Х в
управления. Ориентировочно ©(Т = 35-г-60 град/с (для само юти ЦИи
в мал0го
размера).
Управление тягой и вектором тяги, струйные рули К э
виду дополнительного (вспомогательного) продольного управления в '
следнес время появился большой интерес в связи с освоением маневр0'
ными самолетами новых режимов полета, где аэродинамические рваны
управления становятся мало эффективными. Это, в основном, полеты на
закритических углах атаки, при выполнении специальных пилотажных
режимов тина “Колокол”, "Кобра", полет на предельно малых скоростях
и др. режимах.
Управление вектором тяги накладывает определенные трсбоватпы к
компоновке двигателей на самолете. Наиболее полно отвечает этому виду уп-
равления интегральная компоновка самолета с двигателями, разнесенными
на некоторое расстояние от продольной оси самолета (например, Су-27,
МиГ-29. F-14. F-15, F-18). Благодаря такому разнесению двигателей, может
быть осуществлено управление самолетом как по тангажу, так и по крену.
Органы поперечного управления. Органами поперечного управ-
ления сверхзвуковых самолетов могут быть (см. табл. 1)’
- элероны (внешние или внутренние, или тс и другие вместе);
- элевоны, выполняющие функции элеронов,
- флапероны, выполняющие функции элеронов;
- интерцепторы (спойлеры);
- дифференциальный стабилизатор:
- поворотные концевые консоли крыла;
- поворотные сопла двш атслей или струйные рули;
дифференциальное изменение кривизны крыла (при адалп
крыле).
Наиболее распространенными органами управления по кре
сверхзвуковых самолетах являются элероны, элевоны флаперо
терцепторы и дифференциальный стабилизатор. гвец-
Элероны, флапероны, элевоны конструктивно не имеют СУ oV ур-
ных отличий друг от друга. Полный угол отклонения этих °Р,£
равления йэ. ЭВ1 фл » ±25°. оСущссп
Распределение углов отклонения этих органов управления
в аяется в соответствии с их функциями. Эта задача может peUIr
ханически, если применяется смеситель механических сигПй-'
элсктрически ос in суммирование сигналов осуществляется на • j
яг
www.vokb-la.spb.ru - Самолёт своими руками?!
еиторы (спойлеры) являются весьма распространенными ор-
ИнТ’1 авлепия по крену. Интерцепторы, как правило, состоят из
гаца>111 ' ‘ссКПИй, каждая из которых отклоняется отдельным приво-
неск°дЬ _ иторы относятся к многофункциональным органам унравле-
дом- ^ПТ^ак используются для управления но крену, торможения в воз-
ния таК .ожеНия па земле во время пробега, а также в качестве органа
ДУХ системы НУПС. При функционировании системы ПУПС
uPaB лоры отклоняются симметрично относительно некоторого выну-
Иешгого положения (например, Д5И(1Т « -НО’)
Ш Наличие аэродинамической зоны нечувствительности вблизи убран-
по'Тоже1П1Я ограничивает возможность их использования при малых
сигналах управления (например, для демпфирования колебаний по кре-
ну) К этому следует добавить, что постоянное использование иптерцеп-
з в полете даже при умеренных сигналах снижает аэродинамическое
качество. Поэтому па некоторых самолетах, особенно при совместном
использовании интерцепторов и элеронов, в системе управления интер-
цепторами вводится зона нечувствительности с том, чтобы в пределах ма
чых сигналов (например, сигнал демпфирования) интерцепторы нс рабо-
тали т.е. демпфирование но крену осуществлялось либо через канал эле-
ронов, либо через канал дифференциального стабилизатора.
Практически все приводы интерцепторов являются однокамерными
Питание приводов симметрично расположенных секций интерцепторов
обычно осуществляется от одной и той же гидросистемы. В случае отказа
питающей гидросистемы интерцепторы под действием отсасывающих сил
могут отходить от убранного положения.
На самолетах с изменяемой стреловидностью элероны обычно не
применяются. Отсутствие элеронов объясняется необходимостью приме-
нения закрылков по всему размаху крыла. Поэтому для управления по
Крену используются, в основном, интерцепторы и дифференциальный
етабпдизагор Однако при большой стреловидности крыла (% > 50’)
ИН1сРИсг1горы становятся малоэффективными и они обычно отключают
я- После этого управление по крену производится только дифферен-
Щ’а.тьным стабилизатором (МиГ-23, Су-24, F-ttl, F-14)
Следует отмстить, что дифференциальный стабилизатор, как орган
!ения по крепу, играет весьма важную роль на высокоманевренных
Men ЛеТах’ которые используют для маневров большие уг !Ы атаки (напри
з^’ Су-27 МиГ-29, Г-16, F-15 и др.). На этих самолетах при выходе на
(ф ™Чсскис углы атаки эффективность канала управления элеронами
уменьшается, и по сигналам утла атаки их отклонение ста
год1^СЯ пГ>актичсски нулевым, а управление на этих режимах производится
0 с н< мощью дифференциального стабилизатора и руля направления.
ЛеНл^РГань| путевого управления В качестве органов путевого управ-
I на сверхзвуковых самолетах могут применяться (см. табл. 1)
- руль направления. На большинстве современных высокг
пых самолетов (МиГ-29, Су-27, F-14, F-15, F-18, Г 22 и д M)dHeUpeH'
няются два киля и два руля направления. Для таких самолетов ПрИМе'
дпмо эффективное путевое управление, для чего требуется знач Необх°-
площадь вертикального оперения; 4ьная
целиком управляемый киль (например, Ту-160) ЭффсКТ
равляемого киля такой же, как и при управляемом стабилизаторе- °Т ^П*
дополнительные неподвижные или управляемые (повороГНЫе)
всрхности в нижней части фюзеляжа;
- расщепляющиеся рули (В 2, “Буран", Спейс Шаттл”);
- струйные рули;
- носовые рули (по крену и рыскапыо)
Угол отклонения руля направления обычно ограничивается диапазо-
ном бр н = х30°.
Следует отмстить, что указанный диапазон углов отклонения руля
направления, в основном, реализуется на малых скоростях полета. На
больших скоростях полета диапазон углов отклонения руля направления
существенно ограничивается по условиям прочности.
Для компоновок сверхзвуковых самолетов характерно ухудшение
путевой устойчивости из-за дестабилизирующего влияния удлиненной
носовой части самолета.
Наиболее эффективный путь повышения путевой устойчивости это
введение автоматики и переход на целиком управляемый киль (Ту-160)
аналогично переходу на управляемый стабилизатор или управляемые кили
(Локхид SR-71). В этом случае возможный диапазон углов отклонения
киля может быть фк = ±20°. При этом необходимо иметь в виду что часть
этого диапазона должна использоваться системой СУУ (<ркСУУ*-^'
Кроме того, для компоновок самолетов на которых двигатели разнесены
эффективность килей должна быгь достаточной для обеспечения
a. ai -up j и само., е а при отказе одного двигатемя (SR- 1)
Потребная скорость отклонения киля зависит от многих фактор
Ориентировочно ее величину можно принят!, равной (без учета нагр.
па привод) фк _ ±20 град / с.
Органы управления используемые для повышения
технических характеристик (ЛТХ). К таким органам унрав-
можно отнести следующие.
- управляемые носки крыла или предкрытки,
- управляемые закрылки или флапероны;
- крыло с изменяемой стреловидностью;
- интерцепторы;
- тормозные щитки (воздушные тормоза)
- реверс тяги.
www.vokb-la.spb.ru - Самолёт своими руками?!
стреловидности крыла в основном, 1 редназначено для
11 вз детно-посадочных характеристик самолета и повышения его
у.чучШеН ического качества в длительном полете путем оптимизации
аЗроЛиН< остИ крыла по числам М полета. Эта система достаточно
стрс-' в j и ддя изменения конфигурации крыла требуется достаточно
пнсрШ ’ /СКОрОСТЬ изменения стреловидности крыла (у) близка к
V1I1C11 ВРС .
гклопеиия обычных закрылков, где полная перектадка от xuiin
скорое ocvuJCCTBлястся за 20-5-30 с).
Д°ХНа ©временных маневренных самолетах (МиГ-29, Су-27 F-16, F-15,
и гц,) носки (предкрылки) крыла и закрылки, помимо выполнения
, 1ИЦИОИНОЙ функции но снижению взлетно-посадочных скоростей
самотста, стали широко использоваться для повышения маневренных
возможностей самолета. В связи с этим была значительно увеличена
скорость их отк гонения, которая стала соизмеримой со скоростью откло-
нения основных орунов (в темпе короткопериодического движения
самолета) и расширен диапазон их применения по числам М полета. Эти
органы управления обычно отклоняются автоматически но сигналам угла
атаки и перегрузки, г.е. йпр 3 - f(a, п7)
Структ ура системы управления сверхзвукового самолета.
НБУ сверхзвуковых самолетов имеют достаточно сложную структуру,
которая была обусловлена возложением на автоматические системы важ
ных с точки зрения безопасности полета функций по обеспечению устой
чнвости, управляемости и летных данных этих самолетов [2). При этом
но условиям надежно ти управления и безопасности полета эти автомати-
ческие системы должны быть многократно резервированными. В связи с
этим структура автоматизированной НБУ современных самолетов опре-
деляется составом достаточно большого числа различных функциональ-
ных снегом, наиболее существенными среди которых являются'
Рычаги управления самолетом и система создания на них усилий.
Механическая (МГУ) и или электродиетанционная (СДУ) системы,
связывающие рычаги управления с приводами рулей. При осуществлении
^^^ДИетанщюнной связи используется передача управляющих сигналов
лгю В aHtUIoroB011 так и цифровой формах, включая передачу сигналов по
Леп^°Дам и во Юконно-онтическим шинам При электродистанцнонной
npeofi340 "водимо применение исполнительного устройства,
_ Р^У^Него электрический сигнал в механический.
дени ЫчИслитслИ СУУ, обеспечивающие: формирование закона управ-
0,paHHiCdMO;iCTOM Улучшение устойчивости и управляемости самолета;
иия (п^С1,Ие нРСДельНь1х режимов полета по углам атаки (а), скольжс
РегУ’П1 ПеРегРУ3кс («Д скорости (V), числу М и др. параметрам;
И р Знание коэффициент передачи (кш) между рычагами управления
СосТоян1И’ ^пРав-|ение балансировкой самолета, осуществление контроля
д°бной*Я СИСТем и представление информации о состоянии систем в
л Л1Я ЭК1,пажа форме.
- Датчики рычагов управления, угловых скоростей
углов атаки и скольжения, скорости и числа М полета и Друппс-^''3*11’
ров, используемых в системе управления. ПаРамет>
Эти датчики обычно выдают аналоговые сигналы. ДЛя м
вания этих сигналов в цифровой форме необходимо их преобпаз 1,0Льз°‘
аналоговой формы в цифровую. Часть сигналов в цифровой фопи 113
раметрах полета поступают в вычислитель системы управления от ° Па"
мы воздушных сигналов (СВС), например, угла атаки и rvm. СМсТе'
скорости и числа М полета.
Указанные элементы (1)4'4) составляют управляющую часть си
мы управления. ™е'
- Исполнительные устройства - сервоприводы (СП) и рулевые un
воды (РП), включая их блоки управления и контроля (БУК). и
СП и РП обеспечивают отработку сигналов систем, непосредственно
воздействующих на рули самолета. В системах управления самолета находят
применение различные исполнительные устройства: электромеханического
электрогидравлического и i идромеханического типов. На ряде самолетов’
имеющих электродистанционное управление (СДУ), используются, в
основном, элекгрогидравлические приводы, в которых СП и РП объединены
в одном агрегате. Такие приводы получили название приводов интегральной
компоновки. Взаимодействие СДУ с приводом осуществляется с помощью
специального электронного блока - блока управления и контроля (БУК).
Эти системы обычно находятся в тесном взаимодействии друг с дру-
гом, поэтому в общем случае разделение системы управления на отдель-
ные функциональные системы в известной мере условное.
Кроме того, нормальное функционирование этих систем зависит от
взаимодействующих с системой управления подсистем, к которым
прежде всего относятся:
- система автоматического управления (САУ), включая директор»*»
и совмещенное управление тягой двигателей;
- система воздушных сигналов (СВС);
- система электрического снабжения (СЭС):
- система гидравлического питания
В последнее время наблюдается тенденция интегрирования с &
комплексом систем управления двигателями и вооружением л- 1
отдельных задач дау
На рис 9 14 показана структура автоматизированной систем
современн го самолета, содержащей необходимые фупкниональ »
понеигы, обеспечивающие работоспособность НБУ
В 60-70 гг. (см. таблицу 2) во входной части системы ир
механическая проводка (МПУ) которая по сути дела связ
компоненты отдельных систем в единую систему' управления- ptj-
Осповпое достоинство механической проводки заключалось Jfrejfc-
сокои надежности, стабильности характеристики, в малой чу ne«j^
пости к параметрам внешней среды (например, температуре- А
электромагнитным излучениям различного рода и т.д.)
этим
КОМ-
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис. 1.1.4. Структура автоматизированной ИВУ современного самолета
Однако с усложнением алгоритмов системы обеспечения устойчивос-
т» и управляемости (СУ У), а также из-за наличия свойственных мсхани-
весТ*^ 11Роводке ,,сблагонриягных факторов, таких как инерционность,
км. а) трение упругость, люфты и др., естественным последующим
тпи«°М ^Ыла замепа механических связей на электродистанщюнныс элек-
си СКИе связи. Они обеспечивали более точную отработку (передачу)
гибко-°Ь 'ПРавлсния> лучшие динамические характеристики, большую
уП|^ ~1Ь в Формировании характеристик, возможность создания легкого
ковь^1 НИЯ ВПЛоть Л° использования в качестве рычагов правления бо-
Вьедени”К°ЯТОК’ )'uPOUlCHI,e задачи комилексирования бортовых систем и
вьгх и . ЙМчислитслей системы управления различных типов - аналого-
ОднаСМ 11ИФР°ВЬ1Х с соответствующими алгоритмами
большого*0 ВнелРСН11с такого' управ тения потребовало осуществления
h ,КоМплекса работ по совершенствованию элементной базы, разра-
Р°Ля С0( ₽ 1 Т11В1,,’1х методов резервирования, глубокою и надежного копт-
i4. ЗДння системы, надежного энергетического обеспечения системы.
i^HWBxXd игоиоаэ xairomj - nrqdsB[-qqoAMMM
X Й "0 МиГ-25 z s N-) МиГ-21 Су-27 Су-24 Су-17 Гч2 самолет
-□ страна
IbHvI S с* 5 1%6 •А. первый вылет прототип.
• f 2500 2.75 о орсг 1850 ^1 максимальная скорость (км/ч)
I^MCy МСУ МСУ МСУ АСДУ МСУ МСУ СТ) тип основной системы
>** — — — "-J число каналов
1 1 1 1 1 1 1 X тип резервной системы
1 ACyyw/iitKn» 1 (РАУ-107) АСУУсвдп^ц (РАУ ,07) UOl-AVcD "(р’и'одлэу АСУУ<в;о>, (РАУ 107) о < =г 5 ’< if АСУУсо^и^вт, (РАУ 107) го тип СУУ (сервопривод,
— — — Ль — — х число каналов
9 APYGj.H) у-ПЗ;НМ (интерцепт ) 4i ИЗ 171.13 (n.n.) 9-AP3(q.H); Kai(q.H) t пз v ПЗ'ЯПЗ (n.n.) 9 ЛРЗ.Н.М 7 113;HM (miTcpijciiT.) Ф-113+Ш13 (n.n.) »-АРУ(<7.//) Т-ПЗ:П.М у. ПРУ S АРЗ(</.//): OUP otn, 7 ПЗ у ПЗ ДПЗ □ 3 > S3 и 73 9-ЛРЗ(г/,//):НМ 7-ПЗ Ч> ПЗт-ДПЗ — тип за1рузки рычагов управления р<я улированис передаточных чисел
ГМРП2 ГМРП2 ГМРП2 ГМР112 ГМРП1 ЭРГИ 2 КЛУ 2 ГМРП2 ГМРП2 1ип привода число силовых камер
NS NJ n; NJ CaS ю n; □S число тидросистеи
О C N? го NJ X О S NJ О давление в i идросистсмс (кГс/кв.см]
Л О A A о о ±> А о л о с» запас устойчивости т.
дифф 'абл.'ш.чатор f крыло J uiiTrpiieiil (2 секции) x .-.ir / I’" / J
(HlllDUJ c) 11(1 l4lt<Xf.1t'C dolVLUl'IiyV.L.l cjxpliv дифф. стабилизатор ни терцент. (2 секции) Р» стабилизатор ллеропы рц дифф стабилизатор флаперины рп (2 секции) ;uh|kJ>. стабилизатор Hint-piieiiT. (-1 секции) рп ml счпо(Г>|.т: chUBLKll'lipEl.T органы управления
крыло Z var .Mill -Л1'ит><1||.( JOlihAd крыле X var крыло X V»J примечания
ионыупи'и.) K>tmw»i>du/i nhwu^nj
2 3 1 5 6 7 8 9 10 11 12 13 14 13 16 17 1
F-20 С 1980 М=2,0 (11= =13км) ЦСДУ 2 мс у ЦСУУа,»^ (СП) 2 г из »из ,1-113 ГМРП 2 2 21U <0 i-ratHi чнзатор Ullrp-llll.l рп
II1A с 1964 2330 МСУ 1 АСУУн.аа ,<»(, (СП) 3 з из < ПЗ 8- - ГМРП 2 2 2111 <0 дифф стабилизатор ннтерш пторы (6) рп Крыли X=-v;n
BIB с 1974 М 1.2 МСУ 1 АСУУо>г«1ш#п„ (СП) 3-4 Э-НЗ;ВГ> Y-ПЗ;ВЬ Чг-ПЗ; ютр.РН ГМРП 2 4 280 <0 дифф, стабилизатор нптерцинторы (8) рп Itphbll) у.-var
В-2 с 1989 1010 ЦСДУ 4 — ЦСУУо/о^ИцМу «л 4 0-ПЗ у ПЗ Чг-И3 31 РП 2 4 280 >0 11 секций рулей. 2 концевые n.i них расщепляются ЛСГ.1Н) крыл»
Спейс Шаттл с 1979 косми- ческая ЦСДУ 4 ЦСУУсч/ИгШцДу а 4 Si 113 у 113 м из .МРИ 1 3 280 >0 элевоны (4 «• кипи) рп б.( XBIW ГК")
Мираж III ф 1961 2350 (Н= =12км) МСУ ACyy<i>/ou (СП) 1 9 1131 ДПЗ(Унр); UM НЬ у 113,11М;ВБ у из ГМРП 2 2 210 <0 2 балансир. секции элевоны (4 секции) рп бег Х’ШХТКЛ
Мираж Г-1С ф 1969 2340 МСУ СДУ. АСУУо, 9 АУ; ОПРга.и ВЬ."Кш f У ГМРП 2 2 210 <0 с 1абпллз<пт>|> элероны рп
Мн раж IVA ф 1959 2340 МСУ ЛСУУ®,», 9-АУ уЛУ у-АУ ГМРП 2 2 210 <0 элевоны (4 секции) рп бее XfKjrlXel
Мираж 2000 <[> 1978 >2340 ЛЦСД У 1 - ЦСУУсо/о^По а 9-ПЗ; ОПР-п^а у-ИЗ чг-ПЗ ЭГРП 2 2 280 >0 элевоны (4 секции) рп бег хшхгка
11 Рафаль А ф 11»( i 2100 <»= 1 -ЮЛ км) 1 ЦСД 11 3 АС ДУ ЛСУУ 3 9-ОПР-н„и Г ЭГРП 2 2 210 >0 малое НГО ЭЛСВ1МП.1 (4 секции) рн I бге- xriurjKif
Z.4 \Кги<корд Ф 1969 2150 АСДУ А <М-2) З^МС У АСУУи»л>ж ‘ 2 1 Ъ-лу ,ЛУ КЛУ 2 3 280 <0 жжшы (о секций? I Лег- / ш / Х1ПСГКЛ I
1 2 7 3/ 4 1 5 / 6 J-LM J ” 11/ 11 12 131 14 15 16 \ П \
J0 Ягунр Н Ф 1.971/ 17<К> > Л (И / / (=нкч); 1 1 А<*УУадгг-1 2 9 А Уб?) у ПЗ yi ИЗ ГМРП 2 2 20 <0 -ифф стабилилатор 1 1 интерцент. (2 секции) 1 рп 1
31 Гор».ЪК 1 (мисл) л г 197. II 2350 АСДУ 3-4 МО ACyyafo>,«>tf 3-4 й АУ(г?.//,М.А') у П.Ч;НМ ч> из ЭГРП (КЛУ) 2 280 <0 .'1ис||ф етабилиэаюр интернет. (4 секции) рп крыло 7=vai
12 SAAB .137 "Вшей* III 1.467 МСУ 9 у сл ГМРП 2 210 >0
и JAS-39 “Грин- iich" ш 18/ ЦСДУ 3 ПС ДУ э г 41- ЭГРП 2 2 2 >0 малое ПГО элевоны (4 секции) рн бс< мккчка
14 IA1 -Кфир" и 1983 2440 (Н= 11 км) СДУ 2 МСУ АСУУщ,п„а... (СП) .9 - А У ((п,п vap,); П 3 (ana р.) » чл 1МРП 2 2 2111 <0 малое ПГО элевоны (4 секции) рп 6.4 Х1дч'-1ка
ь IA1 Ланн и 1986 1480 ЦСДУ 4 ПАСУ У 3 у- и ЭГРП 2 2 210 >0 малое ПГО э.ченопы (4 секции) РН б«- хнигтка
30 1-АР А 1986 М>2,0 ЦСДУ 4 ЦСУУ 4 9- 7- ЭГРП 2 2 210 >0 (8?..) б«.т- xhckti ка
37 LJ VI- 23 А С ЦСДУ 4 ЦСУУ 4 3- 1- у- ЭГРП 2 3 280 >0 д|ц|>ф. стаби.'пиатор ifi'iaiicpoHu
Сокращения, принятые а таблице
ЛУ - автоялт усилий
АСДУ лылогоалн СДУ
ЛСУУ - ямлигпкая СУУ
АРЗ - ,«1<1М!П peivjispoitaiiiK мгруякн
АРУ автомат рсгу.чирпкапия управлении
В!» - псипмигагельпый бустер
ГЦ 1идрпцичи11др
ГМРП гидрп.мсха'1ичсский руленой привод
С - груз
дпз - лппи.тпап'чыыя гоуисаплал т.мрузка
КЛУ ки.чнлскснын ш регат у|цмялепия
ИСУ - хехлиичоими система упранш-ння
НМ 11ел-.1Не1Ым№ мгх.чииам
ПРУ - iK-ucxpcjK няшно ручнэе ynpan.iamre
ОПР - ограничитель пог.тельных режимов
ПЗ пружинная я.-и рулен
СДУ - система MCKTpruiKirmniiHiiiiiiuio уи|мклег.ии
СУУ - сиг-тема улучшения yciu&wuiiirrii и у||р.и<ленля
ЦСУУ, ЦСДУ цифровые сиг темы СУУ и СДУ
ЛРП - рулений ирнни.ч
А-Лшлия, Г Германии И Ияраиль,
Р-Poriия, С США, Ф - Франция. III - Шш-ция
www.vokb-la.spb.ru - Самолёт своими руками?!
KOTOpofl
-I с Этим
сймолетах
устройств
мсханичес-
Вместе с тем. когда рассматривается комплекс вопросов ка
перехода к СДУ, следует иметь в виду, что этот переход нре^?Ц1Их''я
связан с заменой механических “сигнальных” связей на элемп ВСег°
По существу, СДУ представляет только часть системы гптупв Чоские
управления (СП1У) самолета, являясь се управляющей-частью. алън°Го
Необратимое бустерное управление явилось той основой, на к
в дальнейшем было создано СДУ современных самолетов. В связи
опыт применения НБУ на отечественных и зарубежных
является весьма пенным.
Структуры первых систем НБУ в качестве основных
содержали:
- гидромеханический руленой привод:
- загрузочное устройство рычагов управления;
систему гидравлического питания, рычаги управления и
кую проводку, связывающую рычаги управления с рулевым приводом.
Б дальнейшем к этим устройствам добавились сервоприводы
различных автоматических систем, вспомогательные приводы, регу-
ляторы передаточных чисел, устройства ограничения предельных
режимов и некоторые другие устройства. Комнлексирование всех этих
устройств в систему НБУ осуществлялось на основе механической
системы управления (МСУ).
По мере совершенствования сверхзвуковых самолетов структура
НБУ насыщалась новыми устройствами и системами, необходимость ко-
торых была обусловлена особенностями статических и динамических ха-
рактеристик новых компоновок самолетов и развитием новых требований
к их пилотажным характеристикам, надежности управления и безопас-
ности полета. С существенным усложнением структуры системы управлэ
ния механическая система уже не могла служить эффективным средством
комплексирования систем на уровне современных требований к системам
управления, Эту задачу могла лучше выполнить система электродистан-
циопного управления при условии обеспечения требуемого УР°внЯ .
надежности, по крайней мере, нс хуже надежности МСУ. Поэтому Д£1-
нейшие исследования и разработки в области автоматизированных сИС
НБУ были связаны с внедрением резервированных СДУ инаЧа а
ках структур систем с разнородным резервированием (СДУ + **
затем по мере отработки СДУ - практически полное исключение
как функциональной системы. время
Несмотря на большое разнообразие созданных за пос-'1С*1НССвесТи к
(примерно45 лет) самолетов, их системы управления возможно с^-а1СИМц
нескольким основным типам обобщенных структур систем-
системами являются (рис. 9.1.5): и ав«г
- система управления с механической связью и минималь
матизацией (рис. 9.1.5с);
- система управления с механической связью и ЭВТОМ’Я
определяющей уровень характеристик управляемости (рис. 9.1j
Цифровая шипа управления
Рис. 9.1.5. Основные типы (ZcZineiiHux структур систем
электродпстанционная система управления с резервной
нической связью (рис 9 1.5е);
- электродпстанционная система управления без меха1щЧеС1юд
использующая: аналоговую (рис. 9.1.5г) и цифровую технику (рИс g
Таким образом, систему управления современного саме лета им
го автоматизированное необратимое бустерное управление, можн
но представить состоящей из двух основных частей - управляют^8"
исполнительной (см. рис. 9.1.4). и
9.2 Управляющая часть системы управления
В функции управляющей части входят:
- создание па рычагах управления требуемых характеристик управ-
ляемости по усилиям и перемещениям;
- осуществление связи (механической, электрической или иной
другой) между рычагами управления летчика и приводами рулей;
- формирование заданного закона управления самолетом на основе
сигналов управления летчика и сигналов обратных связей от параметров
движения самолета (а, со2, сог, сог/, nv);
- создание ограничений, затрудняющих непроизвольный вывод са-
молета летчиком па запредельные режимы по era;
- комплексирование сигналов различных автоматических систем са-
молета с последующей их отработкой на рули и др.
Все эти функции реализуются на основе применения электронных,
электрических, гидравлических и механических цепей и их исполнитель-
ных механизмов. Внедрение электроники в управляющую часть истемы
сделало управляющую часть более гибкой при реализации необходимых
характеристик устойчивости и управляемости самолетом, а также при
модификации системы управления в процессе эксплуатации самолета. В
связи с постоянным прогрессом в электронном оборудовании наблюдает-
ся тенденция уменьшения веса оборудования управляющей части, его га
баритов и энергопотребления, особенно при переходе к оборудованию.
использующему цифровую технику.
В управляющую часть системы входят устройства и системы, вь
няющпе перечисленные ранее функции. Функциональный сгк:тавйС^исТе-
управляющен части может меняться в зависимости от особенностей
мы управления и требований, пред7>являемых к пей. иоУШ
На первом этапе внедрения автоматизации в качестве коМП’'1е^(;У).
щей системы использовалась мехашгчсская система управления
Применению МСУ способствовала также высокая ее надежное71’’
твержденная летной эксплуатацией. пе깑
Возможности механической системы, применительно к пер' ю1ПЙ-
ным самолетам, фактически уже исчерпаны. Это обусловлено с.1 -
ми обстоятельствами. мсУ
- Использование для передачи управляющих сигналов **
тюбЬтами. упругостями, трением и другими нелинейностями ПРЙ
www.vokb-la.spb.ru - Самолёт своими руками?!
к точности и быстродействию в отработке большою спектра
требой’ ' сигналов от летчика и автоматических систем нс позволяет
упР3®' необходимое качество управления неустойчивым самолетом
обесп • тя управления неустойчивым самолетом летчиком при сохранении
' ой системы между рычагом управления и приводом руля
цачитсльпая корректировка выходного сигнала МСУ с помощью
^магической системы, чтобы сохранить для летчика привычный стсрео-
* появления, свойственный устойчивому самолету. При отказе коррекги
ИП пей автоматической системы управление самолетом, несмотря на
Р' МСУ, становится практически невозможным. Поэтому’ в этом
1К1-чае целесообразно использование резервированных электронных цепей
(без МСУ) имеющих надежность эквивалентную механической системе.
При совершенствовании самолета происходит постоянное наращива-
ние функций, выполняемых системой управления. Реализация этих функ
щи! практически всегда связана с усложнением механической системы (при-
менение дополнительных механических звеньев, смесителей, сервоприводов
и д[ утих устройств). Поэтому объединение функций проще производить на
уровне электрических цепей (сигналов) В этом случае может был, получен
весовой выигрыш, особенно па самолетах больших размеров.
- При переходе на полностью электрическое управление приводы
должны иметь только электрический вход для приема управляющих
сигнатов. В связи с этим между рычагом управления и приводом пол-
ностью исключаются механические элементы и соответственно, все
свойственные им недостатки (трение, люфты, инерционность и др.).
При исключении МСУ оправляющая (входная) часть системы управ-
ления может быть построена с использованием типового электронного
оборудования (вычислите чей, цифровых шин данных, блоков управления и
контроля, датчиков и другого оборудования). С помощью этого оборудо-
ьания можно весьма оперативно менять структуру системы входной части.
Переход к электрической системе дистанционного управления (СДУ)
ыл подготовтон предыдущими разработками в области автоматизирован-
ных систем управления Разработка и внедрение систем улучшения
Устойчивости и управляемости (СУУ) повышенной эффективности
л Гу-154, Ан-124 Ил-96), а также дистанционной системы управ-
бадуЯ С рс3сРв™м механическим управлением (Т-4) создали падежную
С11/ ’ На основе которой была создана СДУ в качестве уже основной
осн0СМЬ1 У11Равлсния рулями самолета. В первых структурах СДУ в
Рой Л >М Использовалась аналог овая элементная база надежность кото-
цЬ1х ,Ыла подтверждена летной эксплуатацией. Применение эффектив-
1Цде *1ет°Яов резервирования, глубокого контроля состояния системы
Чо.чет- ° ЭлектР°" и 1 идропитапия позволило обеспечить безопасность
Эдем, и самолста с СДУ при практически любых возможных отказах
д I в ДУ и взаимодействующих с ней систем.
Тц ц^ЛЯ °^есиечепия требований к надежности управления и безопаснос-
• °Та аналоговые СДУ (АСДУ) имели уровень резервирования не
менее 4-кратного, что позволяло сохранить работоспособность СДу
минимум, после 2-х последовательных отказов. Были также разработаны
С ЧУ в 6-канальном исполнении, когда но соображениям живучести бьью
принято целесообразным разделение системы на две 3-канальные авто-
омные подсистемы, которые размещались по разным бортам самолета.
Такая система способна функционировать после полного отказа подсисте-
мы одного борта и еще одного отказа в подсистеме другого борта или
после трех последовательных отказов в двух подсистемах СДУ.
Вместе с тем увеличение сложности унрав,1яющси части современных
само ютов главным образом из-за увеличения числа поверхностей упро-
чения и их приводов, расширения функций системы управления, а также
ужесточения требований к динамике систем точности отработки их
сигна юв и надежной и управления, обусловило необходимость повыше|
ния эффективности управляющей части системы за счет использования
достижений в области электронных систем управления. W
При сохранении аналоговых электрических связей затрудняется обес-
печение необходимой точности отработки сигналов и интеграция управ-
ляющей части системы из-за необходимости применения большого числа
проводов для соединения каждого функционального сигнала с оборудо-
ванием, входящим в систему управления.
Поэтому более рациональной структурой является структура управ-
ляющей части, использующая цифровую технологию (рис. 9.2.1.).
www.vokb-la.spb.ru - Самолёт своими руками?!
енение цифровой вычислительной машины в системе управле-
1 та имеет целью более эффективно, по сравнению с аналоговой
ння саМ? обеспечить обработку данных и управление вычислительным
и< ГСМ м в системе управления, включая
пглцесс и Храненис больших массивов информации от датчиков раз-
систем самолета и командных рычагов управления,
1И нЫ^6работку большого объема информации и представление ее в
, ziueunoM виде на индикаторах в кабине;
)0<х формирование командного сигнала высокой точности при унравле-
аМолетом с учетом изменения его характеристик и режимов полета
)чая наличие ограничений в аэродинамических характеристиках и
прочности самолета;
контроль состояния системы; осуществление перестройки структу-
ы системы при отказах; введение приоритета для систем наиболее важ
и >i с точки зрения безопасности.
Возможности цифровой техники при выполнении перечисленных функ-
ции в значительной мере зависят от степени совершенства применяемой
цифровой машины. При оценке степени совершенства цифровой машины
обычно оперируют рядом параметров се микропроцессора (МП) Его приня-
то оценивать тремя основными харакгерисгиками: длиной слова данных
количеством адресуемых слов памяти и скоростью выполнения команд.
С увеличением длины слова возрастает мощность МП и повы-
шается точность вычисления. В настоящее время в авиации находят
применение 16-разрядныс и 32-разрядныс МП например фирм INTEL
MOTOROLA. Z1LOG и др.
Другим важным параметром мощности является объем основной памя-
ти, содержащей количество слов данного разряда, к которому МП может
адресовываться. В основную память входят постоянная память (ПЗУ)
которая энергонезависима и оперативная (ОЗУ). В ПЗУ хранится наиболее
важная информация, ее объем обычно не превышает 1 Мбайт. Характерной
особенностью основной памяти являются очень малые временные затраты
1рн обращении к ней, которые в среднем составляют 50-S-150 нс. Вычислите-
’ фирмь Лир Зиглер" (США) разработанные для систем управления
(щ Г-16 (цифровой вариант системы) “Лави” (Израиль) и JAS-39
^ЦИя), имеют обьем основной памяти, приведенный ниже [3|.
F-16 Чави JAS-39
16/12 К 24/18 К 32/20 К
2/1,2 К 3/2 К 4 К
,, Самолеты
•2£^£Ь_(Кбайт)"~'~----__
(общая / пспольпулмая)
С-—Ljyfiuiaa / используемая)
С ко
^Осгь выполнения команды яв^тяется следующей, третьей характерис-
BblfloiHlf,IllH?CT11 Она оценивается продолжительностью цикла “выборка-
Йчстоио НИс ЛЛЯ 0;шоГо шага профаммы. Это время цикла зависит от
и Частоты МП Для современных МП она составляет 25, 33, 66 МГц.
Возможности МП могут быть реализованы только при уСЛо.
кой надежности вычислителя. Поэтому вычислители с точки Выр
пасности полета имеют 3+4-кратпое резервирование. При этом ,
резервирования сохраняется работоспособность системы после Kaj^pCiJlj€
мум, 2-х последовательных отказов цифровых каналов (упомянут 1',ИЯй'
числители фирмы "Лир Зиглер" самолетов F-16 и “Лави" имеют 4- Ebl
ное резервирование, а самолет JAS-39 - 3-кратное. крал
Соврсмеиныс цифровые системы управления имеют как апиапа
ное, так и программное резервирование (например, самолеты A-^?0
В-777). Эго вызвано необходимостью уменьшения вероятности отказа
системы до уровня практически невероятного (т/ < 1-10’9).
Представляют интерес в связи с этим некоторые данные по Цифровой
системе управления пассажирского самолета Боинг-777. Этот самолет
имеет 3-кратное резервирование цифровых шин данных и 9-кратноо
резервирование МП. Управление самолетом осуществляется по трем
независимым каналам - правому, центральном}' и левому, каждый из
которых имеет 3-кратно резервированный МП и свой язык программи-
рования. В левом канале применен МП типа AMD 29000 с языком
программирования С и тактовой частотой 16,5 МГц, в центральном кап;
ле используется МП чипа MOTOROLA 68040 с языком ADA и тактовой
частотой 25 МГц, в нравом канале применен МП типа INTEL 80486
языком программирования PL/М и тактовой частотой 33 МГц. Все МП
яв^тяются 32-разрядными с языками высокого уровня. Пропускная сн
собность МП составляет 12,5-е 13,0 миллионов операций в секунду. По-
стоянная электрически программируемая память модуля МП составляет
256 Кбайт Время доступа к памяти - 70 нс.
При переходе к цифровой форме сигнала может быть осуществлена пере-
дача множества сигналов функциональных систем по одной шине, состоящей
из двух скрученных, экранированных проводов, но с определенной дискрет’
ной частотой и последовательное! ью. Причем эта частота должна быть очень
высокой - от 50-5-100 МГц, чтобы обеспечивалась скорость передач!
l-j-2 Mbit/с. Для волоконно-оптических связей скорость передачи
может достигать 20 Mbil/c. Цифровая шина данных является одним из
11 -о С ПОМОЩЬЮ
нетппих элементов интеграции электронных систем самолета.
шипы данных могут быть объединены свыше сотни (до 120) раз- <
источников оггналов (терминалов). расположенных в разных местах <
лета. В общем случае используемое число терминалов зависит от “Р01 - зТИ>1
способности шины данных, быстродействия вычислителей, управляю |
процессом, и пропускной способности связей оборудования с термина- - • в
В настоящее время уделяется большое внимание вопросу внс'^
системы управления цифровых шин данных. Например, стандар
MIL-STD-1553В (введена в действие в 1978 г.) применяется пр’^юр1
типах военных самолетов США от В-52 и F-4 до F-18/A и AV-8B, а
4 .. .....Сл.,.-^,„_ГЪРГ).
www.vokb-la.spb.ru - Самолёт своими руками?!
.„аданской авиации аналогом шины MIL-STD-1553B в известной
Е ляется шина ARING-429, которая также представляет экранирован-
мер^ яВ' чегПГу.ю пару проводов. Шина имеет быстродействие порядка
н'ю, С/сн обеспечивает передачу до 30 различных сигналов. Такая шина
1 ов пена па транспортных самолетах В-757 и В-767, А-300/А-310/А-320.
устан’ отеЧеСТВСНЙЫх самолетах применяются шины, близкие по струк-
и параметрам шинам MIL-STD-1553B и ARING-429
туРе011Ь1Т использования цифровой шины данных непосредственно в кон-
е управления самолетом пока ограничен небольшим числом самолс-
т' Ре Поэтому в качестве основных мер обеспечения надежности системы с
цифровой шиной рассматриваются меры, широко применяемые в жизнен-
но важных электронных системах. Это прежде всего:
- применение резервирования шипы; шина, выполняющая критичес-
кие с точки зрения безопасности полета функции, должна иметь
3+4-кратное резервирование, обеспечивающее сохранение работоспо-
собности после двух последовательных отказов;
- эффективная зашита шины от отказов типа "общих точек" как
аппаратурных, так и по линии программного обеспечения.
Внедрение цифровых шин в контур управления самолетом знаменует
новый этап автоматизации управления. Датчики и приводы современных
электрод истанционцых систем управления пока используют, в основном,
аналоговые сигналы, которые подлежат преобразованию цифро-аналого-
выми и аналого-цифровыми преобразователями при обмене данными
между шиной и этими устройствами. Эти операции вносят дополнитель-
ное запаздывание в передаче сигнала.
Уже в точение многих лет у нас и за рубежом ведутся работы по соз-
данию волоконно-оптической техники. В этом направлении значительный
сделан фирмой Боинг, применившей иа пассажирском самолете
г777 цифровую шину AR1NG-629 с 3-кратным резервированием. Эта
Шина выполнена в двух вариантах - электронном и волоконно-оптичес-
ком. 1 Тина ARINIG-629 обеспечивает возможность многочисленного до-
^Опа терминалов (до 120 шт ) при передаче со скоростью 2 Mbit/c на
остодпие около 100 м по скрученному кабелю.
связь ''Г°й ваРиант шины ARING-629 использует волоконно-оптическую
Ность в 4-канальпом исполнении, позволяющем сохранить работоспособ-
п°слс 2-х последовагельных отказов. Эта шина имеет быстродей-
^ие 20 Mbit/c.
Точи Гвязд с тем, что в системе управления может применяться доста-
ла 1° ^°Л!,шос число приводов рулей (до 35 + 40 шт ), возникает пробле-
ск 'С11рс?делепия СИ1’налов управления от шипы к рулевым приводам.
Лгц,/ е отмечалось, между шиной и приводом должен быть блок управ-
£ои контроля (БУК). "
K')jfn 3MojKho несколько вариантов использования блоков управления и
I Ро-тя приводов.
Аналоговые
вычислители
“тангаж
ЛВКрен
Блоки
управления
и контроля
Загрузка
— Тангаж
>4
Креи
Датчики
АСДУ S
Рулевые
ПРИ1ЮДЫ
э2п
э31’
И in
^211
ЙЗП
и"
и™
п“
3,
с™
р2П
Qti
Pl
р2
сзп
^411
С3Д
Сдд
р3
р<
БУК
БУК
В,
В
БУК.
БУК
В
БИНС
САУ
СВС
СУМК
БУК
Информация
о состоянии
систем
Датчики
ЦСДУ
□'Тангаж
Крен
Загрузка
Вычислители
управления
полетом
Взаимодейству-
ющие системы и
оборудование
БУК,
И4.1
И;Л
Им
И7л
П2
Обозначения;
II
3
И
Э
Р
ГС
- Привод Предкрылков:
- привод закрылков;
- привод нигерцев горо»:
привод элеронов;
- привод стабилизатора;
- привод руля направления;
- гидросистема.
Индексы: Ли П - соответственно
левая и пряная консоль крыла.
Цифровая
шина
данных
Аналоговые
связи
Эи
Э2д
Эзд
И1Л
Ии
Рис. 9.2.2. Пример управляющей части системы управления тяжелого
www.vokb-la.spb.ru - Самолёт своими руками?!
вариант структуры содержит электронные блоки, каждый из кото-
^у^п-живает группу модулей приводов самолета, в которую могут
ры* ^'^одули приводов различных каналов управления (тангаж, крен,
вХ<)Д’гГ^ часуНОСти, такой вариант структуры реализован на самолете В-777.
Н 1рУгОМ ваР,мнтс структуры каждый модуль привода имеет свой
,,управления и контроля.
°" Ття сокращения числа электронных блоков модулей привода воз-
/ их объединение в единый электронный блок, обслуживающий все
>10*П и привода конкретного органа управления (например, элерона или
М°терценторов на данном полукрыле). Такая схема управляющей части
представлена па рис. 9.2.2.
Т ким образом, из всех ранее перечисленных систем, входящих в
управляющую часть системы управления, поддаются интеграции болыпин-
ство электромеханических и электрогидравлических систем. Их функции
полностью берут на себя электронные системы. Наиболее консервативная
часть этих систем, которая претерпела мало изменений при эволюции
систем управления (см. таблицу на стр. 420) - это рычаги управления с
устройствами их загрузки и триммсрными механизмами. На маневренных
самолетах и даже стратегических бомбардировщиках (В-1, Ту-160), в
основном, применяются рычаги управления в виде центральной ручки и
педалей с пружинными затружагелями. Это фактически га силовая меха-
ническая часть системы, которая осталась в управляющей части.
Кроме того, имеются три функции, реализация которых еще не полу-
чила всеобщего однозначного решения.
1. Осуществление балансировки по усилиям. В одном случае балан-
сировка может производиться таким образом, что рычаг управления бу-
дет устанавливаться в нейтральное положение (Рв * 0) за счет “перекач-
ки сигнала с ручки на рулевой привод. В другом случае балансировка
обеспечивается механизмом триммирования при положении рычага
Управления, отличном от нейтрали с помощью триммерного механизма.
2. Предотвращение непроизвольного вывода самолета летчиком на
предельные режимы полета Здесь также возможны два варианта сис-
рСМ По предотвращению попадания самолета па эти режимы. При первом
УврИаНГе На Рг,гчагах управления создаются усилия в виде ступеньки или
1ет<111ЧС11НОГ° *РадиеНта> которые извещают пилота о приближении само-
Ст ’ к а'г°му режиму. Возможно использование принудительного воздей-
Ма i/1 Иа рЬ1чагп управления с помощью специального силового механиз-
ме j НалРЯвле1*ии, например, уменьшения учла атаки или перегрузки са-
Фоп ГЭ ЬгоР°'’ варианте эта задача решается вычислителем, который
^прует и посылает к рулям сигнал летчика.
Ком . ^сУигествленис “отработки” рычагов управления при автоматичес-
Дени ПРавле1гИИ самолетом, т.е. синхронизация положения рычага управ-
стц, с Рулевой поверхностью. В некоторых системах управления отсут-
^"^аботка рычагов управления или имеет место так называемая
работка, i.e отрабатываются только медленные сигналы на ры-
чаги управления. В других системах осуществляется полная
рычагов управления при автоматическом управлении В Этом с раб°тка
вопривод САУ непосредственно перемещает рычаги управления“и Сер'
няет рулевые приводы ('Г-4, "Конкорд"). °п<ло-
Из рассмотренных особенностей систем ясно, что все зти
могут вписываться в концепцию интеграции систем. Исключение 'HKllи,,
ляст только система загрузки рычагов управления, имитирующая
цню самолета па управляющее действие летчика. р
В заключение следует отметить что для реализации высоких
ных данных самолета и его боевой эффективности необходима интег
рання системы управления с управлением тягой силовой установ и
управлением вооружением. Рассмотренная цифровая СДУ наибо
полно отвечает этим целям
Ввиду того, что в состав ЦСДУ входят электрогидравлические ус-
тройства (например, электрогидравлические рулевые приводы, электро-
гидравлические клапаны и др.), го для обеспечения их работоспособнос-
ти необходимо надежное электричещ ос и гидравлическое питание.
СДУ с точки зрения безопасности полета относятся к особой катего-
рии функционально значимых систем В пей не допускаются даже крат-
ковременные перерывы в питании, особенно это относится к цифровым
элементам системы. Поэтому разработчик СДУ вынужден принимать
меры ю исключению возможности перерывов в питании СДУ.
Рычаги управления летчика и устройства их загрузки. Рыча-
ги управления с устройствами загрузки представляют важнейший комплекс
устройств, который обеспечивает летчику чувство управления самолетом.
Характеристики рычагов управления но усилиям и перемещениям выби-
раются из условия обеспечения летчику точного управления самолетом (без
раскачки самолсга) и создания ему чувства режимов полета с целью предот-
вращения непреднамеренного вывода самолета па недопустимые по условиям
безопасности режимы полета (например, превышение адоп> Пу доп и
Наибольшее распространение получили рыча! и управления в вил
центральной ручки (управление по тангажу и крену) и педалей
ленис по курсу) В процессе эво ноции самолета кинематические пар •
ры и конфигурация рычагов управления, их расположение в ка _111е
ли, в основном, стандартизованы Это облегчало освоение летчика,
молотов разных сипов. Д**
Для создания необходимых усилии па рычагах управления на и в
ковых самолетах применяются различные устройства как отдельно
комбинации друг с другом: пружины и гидравлические автоматы ^tM'coJ iaiO-
томаты регулирования загрузки электромеханического типа; 1 Р)зь^ке. огрЗ'
щие дополнительные усилия по угловому ускорению или neperp)-
шпинели скорости перекладки рычагов управления (через уси.'Ц дсрз.
пщравличсских или электромеханических демпферов и ряд Други* яц-
Наиболсе простым загрузочным устройством рычагов упраи- -pyjK»"
пп х'пАя^тнпистика усилий, создаваема 1
www.vokb-la.spb.ru - Самолёт своими руками?!
ной, является, как правило, нелинейной, особенно в продольном канале
Не «шейным характер зат-рузки обусловлен наличием предварительного
затя1-а пружины и излома характеристики по ходу рычага управления
(рис- 9 Зб)-
Предварительный затяг в пружине вводится для обеспечения центом
ротания ручки при наличии трения в системе (от проводки и золотников
приводов и Д-та иск печения “отдачи’ на рычаги управления движений
сервопривода системы О у, если в системе управления не установим
вспомогательный привод. J
Обычно для легких сверхзвуковых самолетов приемлемая вечичинз
предварительного затяга составляет не более 1,0 кГс. Летчик при уппав-ге-
нии самолетом в стриммированном положении рычага управления прикла-
дывает к рычагу так называемое усилие
страгивапия Рсгр, которое равно сумме
усилий от трения Р1р и предвари тельного
затяга пружины Рмт.
Pcip - Р р + Рзат-
в известной мерс,
страгивапия (РСТр)- В
что минимальное зна-
обеспсчсния легкого
При этом важно отметить, что мини-
мальное значение показателя продольной
управляемости г -,
связано с усилием
практике принято,
чение P"v > ЗР^р
Поэтому для
управления желательно иметь усилие стра-
гивания как можно меньше. Фактически
ото означает уменьшение трения в проводке
и приводах. Учитывая что от величины
реггия непосредственно зависит величина
Усилия страгивапия ручки и, соответствен-
11°, минимальное значение показателя про-
Мтыюй управляемости было принято
Целесообразным в требованиях к системе
Управления ввести нормирование донусти-
Величипы усилия от трения в системе,
л^тр^паииях обычно нормируется величи-
От Усилия страгивапия Например, усилие
В0>р>е11ия На ручке управления в продоль-
ны ^аналс легкого самолета тте должно
больше Ртр < 0,225 кГс. Обеспечить
^пгчину усилия от трения при меха-
сКой системе управления не всегда
Рис 9.2.3. Характеристики загру-
зочных устройств рычагов управле-
ния: а - пружинная загрузка, б -
пружинная загрузка с “изломами”,
« - регулируемая загрузка в зави-
симости от Р = f(q, НУ, Р - усилие
на ручке, X - ход ручки, 1 - пред-
варительный затяг
удается обычными технологическими меюдами. Поэтому на некого
leiax (например, F-15. F-111, Мираж III Е и др.) эта проблема1 *
путем установки в механической системе вспомогательного привода
Необходимость введения “излома” в характеристики загруз^ б
вана тем, что на больших дозвуковых скоростях полета, где
малые отклонения стабилизатора и, соответственно, ручки, управлевде^01
слишком леысим по усилиям и стро|им, создавая опасность нсироизВо 'Лет
раскачки самолета летчиком или превышения им допустимого зн- ilB
перегрузки. Для устранения этого недостатка применяют sai пузп°Ш,Я
устройство с характеристикой, имеющей "излом (примерно на 30° у
ручки), облегчающей продольное управление на малых скоростях п
больших отклонениях ручки (малый градиент Р^',) и затяжеляюгцей его на
больших околозвуковых скоростях при малых отклонениях ручки (большед
градиент загрузки Р^ах)- При этом для избежания раскачки самолета при
переходе с одного градиента загрузки па другой рекомендуется, чтобы
отношение градиентов па “изломе" было не более
РХ» _ рА в /рАи а: 30
Г --nnax/'min а’и-
В системах управления некоторых самолетов вместо характеристики
с ' изломом” применяются загрузочные устройства, состоящие из двух
пружин. Одна пружина обеспечивает загрузку рычага управления на ре-
жимах взлета и посадки, а другая пружина подключается после взлета
самолета но сигналу уборки шасси или закрылков. После этого загрузка
рычага управления обеспечивается совместно двумя пружинами с более
высоким градиентом РА |.
Рассмотренные пружинные загрузочные устройства могут в ряде слу-
чаев обеспечить приемлемые усилия на рычагах управления
Однако для самолетов с широким диапазоном режимов полета и
значительным изменением массы во время полета требуются более слож
ные загрузочные устройства. Как уже отмечалось, показатель прола
ной управляемости Рп является одним из важнейших. С точки зрей
™ р у мал"
характеристик управляемости желательно иметь величину * •
меняющуюся по режимам полета.
Для легких сверхзвуковых самолетов показатели управляемости
и должны находиться в пределах [8р
Р’1у = 1-5-3 кГс/сд псрегр ,
Хпу > 12 мм/сд. нсрегр.
Для тяжелых самолетов эти значения параметров рекоменЛ,
обеспечивать в пределах:
рпу 5=10-5-25 кГс/ед. нерегр
X"v > 40 мм/ед. псрегр.
www.vokb-la.spb.ru - Самолёт своими руками?!
минимальные значения отвечают ручке управления
ЗД-ССу а т исрегр-)> а максимальные для штурвальной колонки (Р”*'*
= - .. рс / ед • nepei р.).
= ^цем случае для обеспечения требуемых показателей управляе-
3 ^обходимо применение более сложных загрузочных устройств или
’*°стИ3 васмЫ-Х автоматов усилий, которые осуществляют одновременное
таК ^’рованис параметров РА" и кшв по режимам полета (например,
Прости полета V, высоте полета Н).
С Показатель управляемости Р связан с параметрами РХв и ХПу
известным соотношением
п dP dP dXB с/ср пИ(. 1 пи
dtiy dXB <Z<p driy n
где dPjdX^ = PX“ ~ градиент усилий, создаваемый загрузочным устрой-
ством по перемещению рычага управления, кГс/м; d<p/XB = kmR =
-^(шп)0 +(^ф/^п)суу “ коэффициент передачи продольного управле-
ния, м6(ш.в)0_ исходный коэффициент передачи, м’1; dq>/dny -
характеристика продольной управляемости самолета.
На легких сверхзвуковых самолетах с механической проводкой обычно
применяются автоматы усилий двух типов. Один автомат регулирования
загрузки (ЛРЗ) применяется в сочетании с нелинейным механизмом, а дру-
гой автомат регулирования загрузки одновременно изменяет как загрузку
ручки управления РГк, гак и передаточное число /г1ив. Этот автомат полу-
чил название автомата регулирования управления (ЛРУ)
Оба автомата ЛРЗ и АРУ изменяют характеристику загрузки ручки
правления в зависимости от скоростного напора а и высоты полета II
(рис. 9,2,3)
Особенность автомата ЛРЗ состоит в том, что при его работе, благодаря
^инейности, сохраняется полный диапазон отклонения стабилизатора на
зап Р<?Жимах полета, в том числе при отказах в системе регулирования
^Руэки. Однако изменение передаточного числа при его работе произво-
^НС В заБнсимости от режима полета, а от положения ручки управле-
ХаРактГа °С0^е11НОСТ1> сужает возможности АРЗ в обеспечении оптимальных
Нач; Gpiic'niK управляемости во всем диапазоне режимов полета. ЛРЗ
ШиР°ко применяться в системах управления самолетов Су-7 и Су-9.
Одцо * •'П1Чие от АРЗ автомат регулирования управления осуществляет
C|,ciej4JjMeHHoe изменепие градиента загрузки PXr и передаточного числа
Bl>lc07bi'J ^D,B °ЛНИМ приводом в зависимости от скоростного напора q и
1г°лста Н. В связи с этой особенностью диапазон отклонения ста-
св °Ра Изменяется по режимам полета путем изменения кинематичес-
ки CajL|1' Чго может в ряде случаев ограничить маневренные возможпос-
-Чета, а также требует принятия мер безопасности в случае отказа
АРУ в положении, которому отвечают малые углы отклонения
затора от ручки, т.е. могут быть проблемы завершения полета
ничепном диапазоне отклонения стабилизатора. Обычно диапаз н 0Гра’
нения передаточного числа /?Ш14 с помощью АРУ ограничиваемся ,ИЗМь
ниями /еш в = «7*ш.в а 2>°- АРУ позволили обеспечить хорощад^
рактсристики управляемости сверхзвуковых самолетов "МиГ” На
от самолетов МиГ-19 и МиГ-21. чииая
Для расширения возможности ЛРУ па новом поколении самолетов т
МиГ-29 автомат этою типа был усовершенствован путем применения “лома
ной” загрузочной пружины РХ* и нелинейной характеристики £1UI1. Poxy™
рование этих параметров примерно в 2.5 раза в зависимости от скоростного
напора q и высоты полета II позволило обеспечить выполнение требований к
значениям показателей продольной управляемости РПу и ХПу практически
па урон ie оптимальных во всем диапазоне режимов полета самолета.
Ниже приведены примеры некоторых данных по рычагам управления и
характеристикам их загрузки современных отечественных самолетов.
—Самолет |Параметры рычага управления Су-27 Ми1 29
Управление по тангажу ход. мм усилие при макс, ходе, кГс усилие предварительной затяжки, кГс градиент Р’р вблизи нейтрали кГс .'мм 160 +100 14,5 т-10,5 0 0.17 140 +60 -6,4++4 0 0.12
Управление по крену ХОД, мм усилие при макс, ходе, кГс усилие предварительной затяжки кГс +(120+ 140) 8,0 0 +100 ±3.0 _+1.3
Управление по курсу ход. 'f>f усилие при макс, ходе, кГс усилие предварительной затяжки, кГс градиент Р*в вблизи нейтрали, кГс/мм ±100 ±40 0 0,5 ±85 ±20 +1.5
На самолетах с СДУ загрузка рычагов управления осуществляет
основном, простыми пружинными механизмами. Требуемые хар«
тики управляемое!и по усилиям, например, Р”» обеспечивается не
регулирования градиента РХв, а более глубоким регулированием
фипиепта передачи системы 7ешв по режимам полета в соот
выражением
_ рЛ'„ ---------1,--------- (п"-*.
*ш.в (7, Н,М,ХТ,...)
В СДУ загрузочное устройство рычага управления те
ставляет простую пружину с триммерным механизмом. Ввиду |
www.vokb-la.spb.ru - Самолёт своими руками?!
ской проводки усилия иа рычаге управления создаются только
механИ характеристики которой могут определяться физиологически-
прУ*,,НО^н0(.тяМи, например, руки или кисти летчика.
ми во3‘ч° 1ение СДУ даст возможность использовать для управления
его. I рычаги в виде, например, боковых ручек управления
^Применение боковой ручки имеет целью:
повысить способность летчика осуществлять более эффективное
управление в условиях больших перегрузок;
УЛУЧШИТЬ обзор приборной доски;
снизить вес рычагов управления и др.
Вместе с тем опыт применения боковых ручек в качестве основных
ыагов управления пока oi раничен несколькими типами самолетов, на-
пример Н-16 и А-320. На таких самолетах с СДУ, как "Торнадо"
MRCA), F-18/A (имеющих резервное механическое управление), приме-
нены обычные рычаги управления в виде центральных ручек.
При внедрении боковой ручки в качестве рычага управления само-
летом необходимо учитывать ряд особенностей, специфичных для такого
рычага управления:
- боковое расположение ручки в кабине требует от летчика новых
навыков по управлению самолетом только одной рукой;
- управление боковой ручкой с малым уровнем усилий возможно
только при наличии системы ограничения от непроизвольного вывода
самолета летчиком на предельные режимы полета;
- иа больших самолетах (например, Ту-160 В-1), на которых по ус-
ловиям безопасности необходимо применение двух боковых ручек (у
первою и второго летчиков), должны быть решены проблемы взаимодей-
ствия между двумя летчиками, особенно при электрической связи между
Реками; электронная логика должна гарантировать управление само-
•TcioM любым летчиком в любой ситуации;
для боковых ручек должны быть разработаны новые нормативы
усилиям и перемещениям с учетом кистевого управления.
йт 1радииионные рычат управления в виде штурвальной колонки ухо-
I в прошлое. Их применение во многом было связано с непосредствен-
Р ным управлением, когда летчику приходилось прикладывать боль-
Сду^Силия при управлении самолетом. С внедрением НБУ и особенно
тРал применение становится проблематичным Опыт применения цси-
^’’Пой ручки вместо штурвала па больших тяжелых сверхзвуковых
этогЛегах (Ту-160 и В-1) подтвердил эффективность рычага управления
В11ла- Поэтому на самолетах с СДУ будет наблюдаться тенденция
Уменьшения размеров рычагов управления. Однако это нс
Что ь ближайшем будущем центральная ручка управления
1Ит Место боковой ручке.
9.3. Исполнительная часть системы управления
Структура исполнительной части системы управЛе
полнительпая часть отрабатывает сигналы управляющей части р ^с'
частности, входят силовые рулевые приводы и системы их эиевгоп^’ в
(электрические и гидравлические системы), которые рассчитаны на D-rS?1*
условиях больших аэродинамических нагрузок на рулях самолета. t001^ в
Исполнительная часть непосредственно связана с конструкцией сам
(сю силовой схемой). На эту часть приходится основная часть веса сист*^
управления. Исполнительная часть в соответствии с требованиями обеси^
пия надежности управления должна быть резервирована. В резервировав^
силовой системе может возникать силовое взаимодействие между каналами
рулевых приводов, что отражается на ресурсе приводов и сказывается на
увеличении веса конструкции приводов и связей между ними.
Некоторое уменьшение веса исполнительной части системы может быть
достигнуто благодаря применении! более экономичных рулевых приводов.
Исполнительные части первых НБУ обычно имели гидромеханичес-
кие рулевые приводы, выполненные но так называемой тандемной схеме,
т.е. привод состоял из двух независимых камер, в каждой из которых
имелся свой поршень, закрепленный на общем штоке. Управление расхо-
дом жидкости в каждой камере осуществлялось отдельным золотником,
перемещаемым механической проводкой, связанной с рычагами управле-
ния летчика. Обратная связь на всех приводах была механической.
Для тяжелых самолетов, к которым предъявлялись повышенные тре-
бования к надежности управления рулями, применялись, например, по
два параллельно установленных двухкамерных привода на каждую по-
верхность управления. Управление такой поверхностью обеспечивается
после отказа даже двух гидросистем и заклинивания одного золотника
(например, Ту-144, ‘’Конкорд”, Ту-160, В-1). Камера привода с отказав-
шим золотником создает дополнительную к Мшаэр нагрузку на дру!иС
исправные части приводов, что может ухудшить характеристики управу
ния секцией. Поэтому на некоторых самолетах (например, ‘Конкорд I
Л-300) при отказе золотника производится отключение гиДросистоИ**»
питающей отказавшую камеру. Эти меры позволили обеспечить высок»
надежность управления аэродинамической поверхностью па уровне пр**
тически невероятного события (10‘9 на час полета).
На самолетах, в системах управления которых используются г1\
механические приводы, для отработки сигналов автоматики примени
отдельные исполнительные устройства - сервоприводы. МехаииЧ^И
выходной сигнал сервопривода суммируется с механическим сИГй^И
летчика с помощью дифференциального механизма, и затем суыМЭР
механический сигнал поступает на вход гидромеханических приводо^^
В этих автоматических системах в качестве исполнительных ycrp^W
широко использовались достаточно простые по конструкции электро-^*-
ческис сервоприводы (например, сервоприводы типа РАУ-107)
www.vokb-la.spb.ru - Самолёт своими руками?!
сИСТем наращивалась путем установки последовательно нескольких
эП \.анИчес.ких сервоприводов (например, демпфер ДТ-105 на Ту-22).
37ieKTp°M уве,П1Чении эффективности автоматики (увеличение углов откло-
111 И хностм управления) потребовались новые подходы в обеспе-
неН11Я ясности работы автоматических систем, включая сервоприводы.
че,п01 циояИрОвания таких систем требовались большие углы отклонения
Для ф. > +10°), превышающие допустимые но условиям безопасности
Р ния в случае увода сервопривода автоматики в крайнее положение.
Д чя решения проблемы безопасности полета при возможных отказах
авт магических системах в 60-х годах были созданы многоканальные
В|ектрогидравл1П1ескис сервоприводы типа РА-56, РА-57 и РА-58, кото-
’ с затем были установлены на самолетах с автоматизированными систе-
мами управления Ту-154, Ту-144, Т-4. Эти сервоприводы обладали хоро-
шими динамическими характеристиками и обеспечивали сохранение рабо-
тоспособности автоматической системы после одного (РА-56) и двух
(РА-57, РА-58) последовательных отказов как в электрической, так и
гидравлической частях системы.
Применение указанных сервоприводов позволило значительно расши-
рить возможности автоматических систем в обеспечении характеристик
устойчивости и управляемости самолета, включая компоновки самолетов с
небольшой аэродинамической неустойчивостью. Помимо отработки сигналов
автоматических СУУ отрабатывались также сигналы САУ, например, при
автоматическом заходе на посадку самолета по категории III IKAO (Ту-144).
В СДУ самолета Ту-160, как и в автоматических системах самолетов
Ту-154, Ту-144, Ту-22М, В-1 и других, использовалась так называемая
каскадная схема отработки управляющего сигнала (рис. 9.3.1). Первым
каскадом в этой схеме являлся многоканальный сервопривод со своими
позиционными электрическими обратными связями, а в качестве второго
каскада служили гидромеханические приводы рулевых поверхностей,
вязь между первым и вторым каскадом осуществлялась с помощью
механической проводки.
Механический вход_
обращая
связь РП
Рис. 9.3.1. Каскадная схема отработки управляющего сигнала
ДНако для каскадной схемы свойственны нежелательные особенности
точность отработки сигнала автоматики определяется ошибками
1 Дв-Ух каскадов;
ХХ1
- при несоответствии скорости сервопривода (СП) и рулевого
(РП) возможно нагружение проводки значительными усилиями от
- сервопривод должен иметь большой ход. Обычно ход с •
вода, применяемого в этой схеме, составляет примерно ±35 мм
Несмотря на некоторые недостатки, каскадная схема успешн
нялась и продолжает применяться на самолетах, па которых и i 1риМе'
ся механическая проводка, особенно на самолетах, имеющих досгИИ
большое число органов управления (например, секций) и рулевыхТ°ЧНО
водов. При работе системы в режиме СДУ необходима синхрониз"^
всех секций рулей. В каскадной схеме, использующей единый мноиЛ
пальный сервопривод, эти вопросы решаются существенно проще
На самолетах с электродистаиционным управлением функции меха
нической системы свелись, в лучшем случае, к обеспечению резервного
управления, а фактически - аварийного управления на случай непредви-
денного полного отказа СДУ. Например, такие самолеты как Ту-160
"Торнадо" (MRCA), F-18/A имеют механические системы, используемые
в качестве резервного или аварийного управления на случай полного
отказа СДУ. Поэтому в системах управления этих самолетов имеются
специальные устройства, обеспечивающие быстрый переход на МСУ с
последующим согласованием положения рычага управления с рулевой
поверхностью. Указанные самолеты должны обладать аэродинамической
устойчивостью на основных режимах полета. Несмотря на эту ограничен-
ную функцию механической системы в обеспечении характеристик управ-
ляемости, ее ропь в обеспечении безопасности почета самолетов пока
остается весьма значительной.
С переходом к компоновкам самолетов, имеющих аэродинамическую
неустойчивость, недопустимо усложняется управление летчиком таким са-
молетом без применения СУУ. Поэтому СУУ такого самолета используют
в своей структуре электрические сигналы летчика, обратных и перекрест-
ных связей для обеспечения требуемою закона управления самолетом.
Исключение механических связей для передачи управляющего сигнала от
летчика к приводам и для комп леке ировагшя различиях подсистем позволя _
- создать более гибкую систему формирования законов управ ле
самолетом, включая ограничение предельных режимов полета;
- улучшить статические и динамические характеристики сис
управления;
- упростить вопросы комплексирования системы управлет л,
- уменьшить вес системы управления ескиМ11
В этом случае все приводы выполняются только с электрич
входами (рис. 9 3.2 и 9.3.3). Это позволяет упростись коИСТРр1Ч)Вой
привода и строить его структуру с широким использованием ана.
и цифровой электроники например, для.
- замыкания следящих контуров привода;
- коррекции динамических характеристик;
ААЭ
www.vokb-la.spb.ru - Самолёт своими руками?!
беслечения устойчивости контура:
" к0 эрекпии рассогласования между каналами:
' К0^1Цествления контроля работоспособности привода,
прЯМеиения электронных моделей для создания самоконгролирус-
мых каналов;
осуществления реконфигурации структуры;
введения ограничений по скорости движения и нагрузок.
Btiixoj
Электричсвкая обратная связь
Общая электрическая обратная связь привода
Рис 9.3.2 Отработка управляющего сигнала в схеме привода с общей обратной связью
На рис. 9.3.3 показан пример структурной схемы автоматизированно-
го РП для систем СДУ. Наличие аэродинамической неустойчивости у
объекта управления предъявляет к приводу СДУ повышенные требова-
ния к частотным амплитудно-фазовым характеристикам, к точности отра-
ботки сигнала, к уровню возмущений при отказах каналов, к сгабиль-
носди характеристик как при отказах, так и внешних воздействиях.
Положение; штока
^Ис" 9.3.3 Схема автоматизированного рулевого приводя для систем СДУ
443
С исключением механических связей между сервоприводом
ьым приводом появились условия для их интеграции. Первою .И рУ*-
приводов СДУ состояли из многоканального сервопривода ( _ ' Иавть<
него) со своей позиционной обратной связью и рулевого силовог каналь>
та. состоящего из золотникового устройства и силового цилинт аГрега’
эта 1 руппа устройств была охвачена общей обратной связью %
привод был применен для управления стабилизатором первых сам
Cv-27, оснащенных электродистанционным управлением |5,6] JeT°B
В дальнейшем развитие привода было направлено на боле? гег
интеграцию сервопривода с рулевым агрегатом.
Все эти схемные и конструктивные усовершенствования привода поз
водили обеспечить высокую точность и хорошую динамику при озработ
ке управляющих сигналов аэродинамически неустошгивого самолета в ус-
ловиях больших аэродинамических нагрузок (25000 ч- 30000 кГс) Ниже
приводятся типовые значения выходных параметров приводов органов
управления маневренных самолетов.
'"хЦараметры привода ‘ч. Орган упоавления \ Углы от- клоне- ния, град Скорость отклонения (при aw* град Ход привода, мм Сдвиг по фазе на частоте 1 Гци" подъем АЧХ в диапазоне частот 5-е-10 Гн при амплитуде входною сигнала, соответствующей переме- щению выхиднпго звена прим»
1,0 мм 0,1 мм
ИГО + 15 ч- 60 80 300
го 115 ч -25 60 220
ГО (дифференциаль- ное) -20 ч- -30 70 250 10’ 35’
Элерон -25 ч- -30 80 80 1.5 дБ 3,0 jG
Элевон +20 ч- -40 75 100
Флаперон +40 ч- -25 80 120
Интерцен юры 0 ч- 60 150 70
Попоротттый киль ±20 40 220 45° 3,5 дБ
Руль направления ±30 50 100 15°
Поворотный гребень ±30 40 200 2,0 дБ
Управление вектором тяги =15 30 150
Управление передней ногой ±20 20 150
Предкрылок 4-25 ч. 0 15 60
Поворотные носки +35 ч-О 25 60
Закрылок 0 ч- -40 25 100
Изменение стреловидности крыла 16ч-72 3 500
Тормозные щитки 0-60 100 250 я
Такие приводы позволяют обеспечить в структуре СДУ; f
- позиционную точность в отработке сигнала, при которой УР°3
остаточных колебаний самолета не выходит за значение перегруз0!
тангажу < ±0,02;
www.vokb-la.spb.ru - Самолёт своими руками?!
дЪе.м амплитудно-часто гной характеристики привода в диапазо-
гОт 0.5+Ю Гн при амплитудах управляющего сигнала, соответ-
не чаС перемещению выходного звена: 1,0x0,1 мм - нс более 1,5 дБ
с<01 " нс 6олее 2,0 дВ:
,f ° * ^фазовое запаздывание выходного звена привода на частоте 1 Гц
не более:
1 _ при значении входного сигнала, соответствующего амплитуде по-
мещения выходного звена привода 1,0 ±0,1 мм - минус 20°,
Ре‘ при значении выходного сигнала, соответствующего амплитуде
смешения выходного звена привода 0,1 + 0,01 мм - минус 35°.
и Указанные параметры обеспечиваются:
при добротности внутреннего контура - 100 с-1,
- при добротности внешнего контура - 30 с-1.
Увеличение подъема амплитудной характеристики привода и фазово-
го запаздывания выходного звена привода при малых входных сигналах
вызвано нелинейными эффектами в приводе.
Сохранение указанных характеристик привода должно обеспечи-
ваться после:
- двух последовательных отказов в электронной части;
- отказа одной гидросистемы;
- комбинации последовательных отказов - одного в электронной
части и в одной из гидросистем
Работоспособность привода при этой группе отказов должна обеспе-
чиваться структурными методами (прежде всего резервированием) неза-
висимо от вероятности возникновения этих отказов.
Есть ipynna существенных отказов, относящихся к весьма редким или,
точнее, к практически невероятным событиям, подтверждение вероятности
которых производится расчетными методами и выполнением специальных
мероприятий (испытания, контроль па разных этапах создания привода).
г°> в основном, единичные отказы механических элементов пша разру-
шил, рассоединения, заклинивания подвижных элементов:
нию"" ВсРОЯгноеть отказа, приводящего к самопроизвольному перемеще-
выходного звена, на час полета должна быть нс более 10-9;
сВязи Первдтность отказа, приводящего к нарушению кинематической
привода с поверхностью правления, на час полета не более 10-9
ноСГ11 РсГоятност1> отказа, приводящего к нарушению внешней герметич-
0 обоих каналов привода с утечкой рабочей жидкость более
на час полета - 1(Г9;
На llD ВсРоятность отказа, приводящего к заклиниванию выходного зве-
Э^ЕГ>Л£1’ На час но-яста не более Ю-8.
соВре^м Не исчерпываются требования к характеристикам привода. К
б°вани{'Н11°МУ ПРИВ°ДУ системы СДУ предъявляется много и других тре-
*’ РСгламснтирутощих его работу. Например, требования к новеде-
РИвода при отказах’ к допустимой величине перерегулирования’ к
декременту затухания; к условиям установки на самолете- к
кой жесткости; к жесткостям крепления; к жесткостям связей1ИИа,<ИЧес‘
ностью управления; к устройствам встроенного контроля- С lf0BePx-
электрического и гидравлического питания и др. СисТеМам
Исполнительная часть системы управления с сек
ванными рулями. На сверхзвуковых самолетах больших ИОниРо
например, Ту-160, В 1, органы управления на крыле обычно раз^3'1^08,
па секции. При этом каждая секция отклоняется одним ити
числом приводов (модулей). Применение секций является весьмаЛЬШИМ
ным решением, и оно направлено на достижение следующих цепей УЛач’
- обеспечить высокую надежность управления;
- уменьшить вес и габариты приводов;
- обеспечить равномерное распределение нагрузки от больших М
Секционирование позволяет сохранить работоспособность системы
управления при любом отказе одной или более секций в ре. ультат
электрических, гидравлических и механических отказов.
Секционирование органов управления наибольшее распространение
получило в системах управления интерцепторами, где число секций может
составлять до 14 + 16. Подтвердили свою высокую надежность системы
управления элевонами сверхзвуковых самолетов Ту-144, “Конкорд”, кото-
рые использовались для управления по тангажу и крепу. Эти самолеты
имели элевоны, разделенные на 8 (Ту-144) и 6 ("Конкорд”) секций
Структура исполнительной части системы управления
подъемной силой. Для управления подъемной силой на сверхзвуко-
вых самолетах используются системы:
- система управления закрылками (флаперонами) и предкрылками
(носками);
- система управления интерцепторами;
- система изменения стреловидности крыла.
На тяжелых сверхзвуковых самолетах традиционной схемы для управ
лепия подъемной силой обычно применяется система, состоящая из «р^
крылков и закрылков. Эта система используется, главным образом,
взлетно-посадочных режимах полета. Управление предкрылками и
ками обычно осуществляется отдельными вращательными электрогяДР"''
ческими приводами, которые передают момент через вращателы^ю
миссию к механизмам выпуска и уборки предкрылков и закрылки®-
из систем может работать независимо друг от друга по заданной прол
или совместно. Синхронизация работы предкрылков и закрылков акТер-
вается механической трансмиссией. При этом для таких самолетов *аР
по наличие ограничения в отклонении механизации по скорости п
избежания разрушения этих поверхностей. Обычно это делается •
чески: начиная с некоторой скорости, закрылки начинают 'просаж з
т.е. уменьшать отклонение под действием на1рузки.
ЛАК
www.vokb-la.spb.ru - Самолёт своими руками?!
1ТрЙВаемые средства механизации обычно имеют небольшие
| расе. оТ1<ло11СНИЯ1 например, время полной перекладки из одного край-
сКОр°ст^о>ке1П1Я в другое составляет 30-е 40 с. Скорость перекладки механи
него по чивастся энергетикой приводов. За это время летчик имеет
3311101 - ость компенсировать изменение балансировки самолета, вызванное
8035,0 нием его конфигурации. Диапазон углов отклонения предкрылков и
цзмеН обычно составляет соответственно 8пр = 0-?20°; 5, = 0-е-35°. Для
^"ния наибольшего прироста подъемной силы закрылки часто выпол-
ПОЛ^ я многозвенными - двух и трехзвенпыми. Выпуск таких закрылков
няЮ 31}ОЧИТся в несколько приемов во время захода на посадку самолета.
Так процедура облетает компенсацию летчиком разбалансировки само
чега. вызванную выпуском закрылков.
На легких сверхзвуковых самолетах средства управления подъемной
ежтой - предкрылки (носки) и закрылки (флапероны) - используются как
на взлетно-посадочных скоростях для снижения посадочной скорости и
уменьшения взлетной дистанции, так и па больших скоростях полета, па
которых они улучшают маневренные возможности самолета. В связи с этим
скорости отклонения средств управления подъемной силой приближаются к
скоростям отклонения основных органов управления (8пр 3 ~ 20 град/с)
Соответственно и структура управления этими органами строится во
многом похожей па структуру управления основными рулями (секциони-
рование; резервирование, при котором система сохраняет работоспособ-
ность после отказа). Например, самолет Су-27 имеет системы управления
носками и флаперонами, использующие поступательные приводы в виде
группы цилиндров, установленных по размаху носков и флаперонов,
имеющих вынесенные золотниковые распредел1ггсли. Гидравлическое пи-
тание приводов этих поверхностей производится от двух систем, каждая
из которых питает половину группы цилиндров носков и флаперонов.
На некоторых зарубежных самолетах (F-5, F-16, F-18 и др.) откло-
нение носков осуществляется малогабаритной механической трансмис-
ИуИ СодсРжащей планотарные редукторы с большим передаточным чис-
•°м- Для привода трансмиссии используется гидромоторпый привод,
сгановленный в фюзеляже.
авт ТКЛо1,е,,не носков при выполнении маневра производится обычно в
Hoi dril4cCK°-4 режиме по сигналам скоростного напора q, числа М
Повыш' "ГЛа атаки а: ^Пр = Д<7, М а). При этом отклонение средств
(Су-27Ъ1ИЯ Подъемной силы может осущесгвляться в следящем режиме
ж' ИЛИ 8 Ш1скРстном (МиГ-29).
5г^-20°Па'!°Н ОТКлоне1,ия носков на самолете МиГ-29 составляет 5пр=
И "к°рость отклонения 51Ц,шах =20 град/c. На самолете F-14 диапа-
= о°ТчХ,НеиИя пРсЛКрылков составляет 611р = 0+17°, а закрылков-
|^КрЬ1л' ’ время маневра предкрылки выдвигаются на угол 5пр = 7°,
Могут зашвмать положение 53 - 0-=-10°.
Часто для управления подъемной силой служат ингерце1Гг
цепторы выдвигаются из убранного положения на промедсутг .
(-10°), относительно которого они симметрично отклоняются ।4
системы НУПС в пределах углов ±10° для коррекции траектории г ИгналаМ
глиссады. Этот вид управления подъемной силой, в основном. цс 1 Илй
при заходе на посадку (на аэродром или авианосец). Интерцептоп ЛЬЗУ(?ТСя
отклоняются электрогидравличсскими приводами, на которые помимоЬГ,Но
лов сишемы ПУПС могут поступать сигналы штурвального управ •Ю|(ИГНа*
крену и сигналы торможения в воздухе. Скорости отклонения юпгорц^0
ров обычно высокие и могут составлять 5}ШТ = 100 град /с и выше v
>Т’ЛЬ]
отклонения интерцепторов составляют 5^ ~ 55 ч-60°.
В зависимости от класса самолета в системе управления интерцепто
ми могут применяться от 4 до 12 секций на крыло. Меньшее число секций
в основном, применяется на маневренных самолетах (МиГ 23, Су-24, F 14
F ill, “Торнадо”. “Ягуар”), па тяжелых самолетах число секций состав-
ляет: Ту-160 12 секций на крыло, В-1 - 12 секций, Ту-22М - 10 секций
Каждая секция интерцепторов обычно отклоняется однокамерным приво-
дом с электрическим или механическим входом. При электрическом управ-
лении д.1Я сохранения симметрии в управляющем моменте по крену ис-
пользуется попарный контроль работы секций. В случае отказа какой-либо
секции производится отключение обеих секций. При управлении гидро
механическими приводами секций от общего резервированного сервопри
вода через механическую проводку в случае отказа какого-либо привода
секции эта секция "пересиливается" остальными секциями интерцепторов.
Устранение асимметрии в этом случае может быть сделано путем отключе-
ния гидросистемы привода секции на другом полукрыле, если для этой
операции имеется объективная информация.
В системе управления интерцепторами обычно вводится зона не-
чувствительности, которая нс позволяет отклоняться интерцепторам при
малых сигналах, например, при работе системы демпфирования 11
ну. Однако эта зона нс оказывает влияния на работу системы Н-
поскольку эта система работает относительно выдвинутого положе
интерцепторов (примерно 10°). также
К системе управления подъемной силой можно отнести
систему изменения стреловидности крыла. сама-
Системы управления изменением стреловидности крыла этил яТ:
летов имеют весьма близкие между собой структуры В нее в.
дублированный вращательный гидравлический привод; враШ рцдто-
механическая трансмиссия, связывающая привод с шариковым’1
выми силовыми подъемниками; шариковые винтовые подъемники,
рыс поворачивают консоли крыла на заданный угол; сипхрониз! р
вал, обеспечивающий одновременный поворот обеих консолей кр 11оРцд
ханизм обратной связи; блок координированного изменения |
пости и отклонения мехами >ации крыла и другие компоненты.
www.vokb-la.spb.ru - Самолёт своими руками?!
изменения стреловидноеш крыла - это довольно мощная сис-
чимср. привод изменения стреловидности крыла самолета F-111
теМа- 1 . ,-цдромотора мощностью 100 л.с. каждый и производительностью
имеег т ‘ усиЛИС винтового подъемника составляет 230 тс. Д.1я самолета
|50Д м иЛце уЖС составляет 450 тс. хотя при этом скорость поворота
I ' не более 3 град/с. Полная перекладка стреловидное!и из одного
коне0-1 -inyroe - 20 с. Важно отмстить то, что система изменения
положения ' Е.-
1 овлдиости работает в течение всего времени полета и ее потребные
СТсхоДьг гидравлической жидкости суммируются с потребными расходами
вводов основными органами унравлешы.
Р Отработка сигналов систем улучшения устойчивости и управ-
ляемости. Восприятие пилотажных характеристик автоматизированного
само чма летчиком должно быть таким же, как если бы эти характерис-
тики обеспечивались традиционными средствами (например, увеличением
стабилизирующих и рулевых поверхностей) Поэтому работа системы
СУУ нс должна ощущаться летчиком. Для того чтобы работа системы
СУУ была "незаметной”, должны быть обеспечены определенные усло-
вия ее функционирования.
При механической проводке система СУУ включается но так назы-
ваемой последовательной схеме, т.е. сигнал системы СУУ суммируется с
механическим сигналом летчика. Исполнительным элементом системы
СУУ служит сервопривод (электрогидравлический или электромехани-
ческий). Суммирование упомянутых механических сигналов летчика и
сервопривода СУУ производится па дифференциальной качалке. Далее
суммарный сигнал с качалки поступает на вход рулевого привода.
При функционировании СУУ рычаги управления должны оставаться
неподвижными, или. иначе говоря, при работе СУУ нс должна возникать
отдача’1 на рычаги управ тения. Отдача, как известно, возникает из-за повы-
шенного трения в проводке и золотниках привода, которые должен пре-
одолевать сервопривод. Для устранения отдачи обычно принимаются меры:
создание предварительного затяга в загрузочном устройство рыча-
гов управления;
~ установка вспомогательного привода (ВИ) при механической системе.
л *" Величепие предварительного затяга ведет к затяжелению управ-
* снижению точности пилотирования.
Ври установке ВП:
в Н-Щежно исключается отдача на рычаги управления, в том числе и
НОс^Чае’ Ко1да происходит, например, заклинивание какой-либо поверх-
_ и необходимо обжатие пружинной тяги;
пРНь С1,ижаются на рычагах управления усилия от трения в золотниках
случае В И °Т Сжатия центрирующих пружинных тяг, применяемых па
2 Рассоединения проводки;
Иц ]JCi| У-чУчгиастся точность работы СУУ за счет "отсечки" части провод-
могатсльным приводом;
1о4₽'л.гсь
Ьюпггоиг... Z Z П
- ограничивается скорое ib перекладки при ручном vnn,
исключается силовое противодействие между сигналами летчика И И
СУУ при несогласованности их суммы скоростей перекладки. И
Для высокоэффективных СУУ основной проблемой является rrfvv
нис ее высокой надежности. В этом направлении много было сделано Л1еЧ<к
уровне элементной базы, так и при отработке различных структурных^
дон обеспечения надежности. Например, многолетний опьп (около 3^°'
применения систем СУУ на самолете Ту-154 показал жизненность зал
ных принципов обеспечения высокой надежности. Для эффективной cyv
должен быть прежде всего исключен непроизвольный увод сервопривода J
крайнее положение, поскольку для компенсации этого увода у летчика
практически нет эффективных средств. В качестве основной меры обеспече-
ния безопасности в этом случае должно рассматриваться применение резер-
вирования СУУ с полным разделением каналов, включая также разнесение
каналов по двум бортам самолета таким образом, чтобы в худшем случае
такой отказ не распространялся более чем на один борт, а система другого
борта могла бы противодействовать этому отказу. Такой подход, в частнос-
ти, осуществлен на самолетах Ан-124 и Ил-96-300.
Отработка сигналов системы автоматического управления
(САУ). Принципы включения САУ в СШУ менялись в процессе эволюции
системы управления. Первые СЛУ, или автопилоты, выполняли вспомога-
тельные функции, которые состояли в разгрузке пилотов во время длитель-
ного пилотирования самолета, в основном, на крейсерском режиме полета. В
функции этих автопилотов входила стабилизация угловых почожений само-
лета, высоты и скорости полета. Для выполнения этих функций на аэроди-
намически устойчивых самолетах требовались незначительные утлы отклоне-
ния рулей и соответственно небольшие усилия исполнительных устройств
(рулевых машинок). С точки зрения значимости для безопасности полета
такие автопилоты относились к категории комфортных, или вспомогатель
ных, систем, т.е. в случае неисправности автопилота и его отключения полеТ
самолета мог продолжаться бе.з изменения плана полета. Такой аВТ0’^'10Т
обычно выполняется как автономная система, которая содержит ,гс0(>‘_
димый состав функциональных элементов (датчики, вычислители, исп0,
тельные устройства, пульты, указатели и др.). .
Включение САУ по параллельной схеме. При установке автопи. I
на самолет его исполнительное устройство, или рулевая маш’ппса
соединялось к проводке управления по так называемой иара^!-^-^^
схеме, в соответствии с которой при работе автопилота вся Щ
управления вместе с рычагами управления и рулями перемета
же, как при управлении самолета летчиком (рис. 9.3.4). ц ,,
Рычаги управления являются в этом случае как бы пндикатор0,^^
вилыюсти работы автопилота. За время эксплуатации самолета У je
выраба1ывается в известной мерс стереотип исправной работы айТ°
/ГГ\
www.vokb-la.spb.ru - Самолёт своими руками?!
спучас отклонения от него летчик должен иметь возможность
та 11 вЗЯГЬ управление на себя путем нажатия кнопки быстрого отклю-
бЫст^стоТ[ИЛОТа и/или "пересиливания" его рулевой машинки Для вы-
чсНИ ния этого требования рулевая машинка подключается к проводке
1,01 1СНИЯ через муфту расцепки, рассчитанную на определенное усилие
^^омент). Это усилие, приведенное к штурвальной колонке, состав-
ит « рИ>1СРн0 кГс. Выбор этого усилия связан прежде всего
ЛЯСТ, с обеспечением функционирования автопилота в заданной области
режимов полета;
н _ с возможностями летчика преодолевать усилие от муфты.
СВС
Трим-чирование
Зш
'TM- ‘
Датчики
режимов
полета
-т-
-#г-
-W-
СП СУУ
। Датчики
I перемещений
7) д' Нелинейный мехапм;»
Г " пли регулятор "К,,"
[м
Муфта
1’ежмы а
епвмеще.шог ’
управления I-
Датчики
усилий
Автотр цитирование
•т СУМК
4* '
Е ?
Псрскреет. связь
Й1Р
Вспомогательный
гс.
СП С,ХУ
> Вычислитель
САУ
С «вбили.затор
Рулевой привод
ГСг
пои 9'3-Система продольного управления с СА^ , включенной ио параллельной схеме
Наличии вспомогательного привода
11Ых^С13<?Х°Л Па f’V4Itoc управление не должен сопровождаться значитель-
Прим~ Усилии па рычаге управления самолетом. Для этой цели
няются ручная или автоматическая балансировка.
реЖим Ши₽е11Ис области режимов применения автопилота, включая
ТелЫ1 1 авг0матичес1{от[ посадки, уход па второй круг, привело к значи-
Г1°лного^ УВеличенИ1° углов отклонения рулей от автопилота (до 50%
струКт Лиапазопа отклонения рулей). Это потребовало применения в
По-1ега 3 Х автоиилота специальных мер для повышения безопасности
Мер в v слУЧаях возможных отказов в автопилоте Одной из основных
Точки °М слУ‘гас являлось 3-г 4-кратное резервирование критических, с
°6ecnau.еПия безопасности полета, трактов управления автопилота, что
ало автоматическую посадку при возн1гкновении в критической
/41
факс полета как минимум одного отказа. Однако, несмотря на mii 1
ное резервирование автопилота, для летчика предусмотрены кнопка^3*'
грого отключения автопилота и возможность его пересиливания ^Ь1с'
С точки зрения функциональных характеристик автопилота сто
вая машинка (сервопривод) должна устанавливаться в системе уп.₽УЛе*
ния как можно ближе к рулевым приводам органов управления В В
случае уменьшается влияние на характеристики автоматического
.тения таких параметров проводки, как упругость, тюфТы, иперадо '
ность, трение. На некоторых самолетах (например, Су-24) рулевая '
шинка (сервопривод) автопилота непосредственно объединяется с -
вым приводом (по схеме комбинированного привода). Включение г
пилота в СШУ производится муфтой, которая соединяет входную меха-
ническую проводку так, что во время работы автопилота эта проводка
ма*
c руле-
авто-
перемещается рулевым приводом, и соответственно инерционность про-
водки, трение, усилие от загрузочного устройства системы преодолевают-
ся рулевым приводом, а не сервоприводом.
Следует отметить, что включение автопилота в СШУ не должно при-
водить к снижению надежности СШУ при всех возможных отказах в
автопилоте. Поэтому выбор схемы включения автопилота должен быть
увязан прежде всего с требованиями обеспечения безопасности полета,
предъявляемыми к основному управлению самолетом.
Включение С/1.У по последовательной схеме. Включение автопилота по
последовательной схеме (рис. 9.3.5) впервые было применено в системах
управления самолетов, которые имели в своем составе системы улучшения
_________Режим совмещенного управления
Отработка балансировочных положении ручки
Вычислитель
Рис. 9..3.5. Схема продольного управления <: САУ “включенной" по последовательной
www.vokb-la.spb.ru - Самолёт своими руками?!
,.гИ и управляемости (СУУ). СУУ полностью интегрировалась с
устой4! и характеристики самолета могли рассматриваться только
сам°-1£?т ’г сУУ При этом степень резервирования СУУ определялась
гоВ,ме<да!Я>ш к системе штурвального управления, а не автопилота.
тре**а ие в СУУ сервопривода, установленного по последовательной
^ренциалъиой) схеме, обусловило желание использовать его для
Лпгки сигналов автопилота. В противном случае необходимо было бы
Емвшть два сервопривода - один для СУУ, а другой - для автопилота,
‘ пивепо бы к усложнению системы управления и увеличению ее веса.
41X5 Поскольку СУУ имеет независимый oi летчика выход на рули, то опа
должна мешать ручному пилотированию самолета (фактически это
означает, что на рычагах управления, но крайней мере, должна отсут-
ствовать “отдача” при работе сервопривода СУУ). Включение сигналов
автопилота в сервопривод СУУ, с одной стороны, приводит к увеличению
хода сервопривода, что усложняет проблему обеспечения отказобезопас-
ности системы, а с другой стороны, пропадает признак работы автопилота
в виде движения рычагов управления, что также отражается на безопас-
ности полета при включенном автопилоте. Таким образом, увеличение
хода сервопривода СУУ и отсутствие отработки рычагов управления яв-
ляются факторами, которые напрямую связаны с безопасностью полета
самолета. Частично проблема отработки рычагов управления решается
путем введения сигналов САУ в сервопривод триммерного механизма за-
фузки рычагов управления. Учитывая, что этот сервопривод имеет малую
скорость отработки, выбранную из условий ручной балансировки усилий
летчиком па установившихся режимах полета, положение рычага управле-
ния будет согласовано с рулем только на установившихся режимах полета.
К важным особенностям этой схемы включения автопилота следует
отнести то, что включение сигналов автопилота в сервопривод СУУ
требует увеличения его хода. Основной мерой защиты самолета от отка-
300 является только эффективное резервирование, при котором обеспечи-
вается полное разделение каналов управления, высокая степень (или глу-
контроля работоспособности автопилота и быстрая реакция па
каз по его обнаружению и изоляции.
Уст того, что сигналы автопилота включаются в исполнительные
Чног С а качество функционирования автопилота будет во
зависеть от функционирования исполнительных устройств СУУ
^ДУ) ^ение в системУ электродиспшнцииниого управления
RK.iiO4' На самолотах с СДУ (рис. 9.2.1) возможно несколько вариантов
Но<.Гяхе1Г1,я автопилота. Выбор того или иного варианта связан с особен-
Резер^11 С'ДУ (например, СДУ без МСУ или СДУ с МСУ), уровнем
°Илот1И^0ВаНИЯ аит011илота- значимостью автоматических режимов для
в Сду °Вания самолета и т.д. В целом, включение сигналов автопилота
11е Должно приводить к снижению надежности основного управ-
депия (СДУ), так как обычно эти системы имеют разные
значимости с точки зрения безопасности полета. ГоРИи
В одном варианте (Т-4, "Конкорд") сигналы автопилота вво I
СДУ с помощью специального сервопривода автопилота, который пег ГСЯ В
ствепно воздействует па рычаги управления летчика. При отюю^'
рычагов управления сигналы с датчиков перемещений рычагов управ,
поступают на вход рулевых приводов СДУ Для обеспечения псресщтмваНИв
автопилота сервопривод соединяется с рычагом управления с homoi*
муфты или пружинной тяги с предварительным затягом. При работе
пилота его сервопривод преодолевает усилие от загрузочного устройства
рычага управления СДУ Д.1я обеспечения безударного перехода в этой
схеме включения автопилота может потребоваться автобалансировка усилий
Этому варианту включения сигналов автопилота в СДУ свойственны
следующие особенности:
- работа автопилота, как и при параллельной схеме включения
находится под контролем летчика;
- уровень резервирования автопилота может устанавливаться неза-
- больший вес оборудования, а также большее запаздывание в про-
хождении сигналов автопилота на рули.
Другой вариант включения сигналов автопилота относится к СДУ, в
которых используются только рулевые приводы с электрическими входа-
ми. Система СДУ имеет наиболее высокий уровень резервирования из
всех систем самолета. При включении сигналов автопилота непосред-
ственно в СДУ должны быть приняты меры безопасности на случай воз-
можных отказов в автопилоте.
Вычислители автопилота должны иметь надежные средства контро-
ля, исключающие попадание в СДУ ложного сигнала
Особенностью включение автопилота в этом варианте системы являете
отсутствие отработки рычагами управления сигналов автопилота, иеобходи
мость которой в системе СДУ рассмотренного типа является спорной- Неко-
торые фирмы (например, Боинг), следуя традиции, применяют оГР^6а1л
рычагов управления с помощью специальных приводов, другие ФИР
(например Эрбас Индастри) не считают ее целесообразной.
9 4. Надежность систем управления
В процессе эволюции самолета и его систем происходило та
вершенствовапие требований к системам управления. Расширение у
ти режимов полета самолета (по скорости, высоте, углам атаки и
освоение пилотирования в новых условиях (например, полеты в
пых метеоусловиях, на малых высотах), применение новых коМ { cJtc-
самолетов, конфигурация которых выбирается с учетом структ>1 1еция
темы управления ~ все это требует от разработчиков систем упр у11р,;Я'
поиска эффективных мер по обеспечению высокой надежности -Ж
www.vokb-la.spb.ru - Самолёт своими руками?!
и безопасности полота самолета. Наиболее высокий показатель в
1еция г надежности имела механическая система управления, по ко-
оГ1,П" имелись вполне достоверные данные о функционировании в раз-
торои .тЛОр11ЯХ эксплуатации в течение многих лет на обширном парке
^lt4l*ieioB Поэтому при переходе к автоматизированным системам эта
саМ° ма и ее показатель надежности на первом этапе могли быть приняты
с,’Г«эга11он” надежности, который вполне можно было использовать для
33 пки надежности других функционально значимых систем иной струк-
°11С>. По дчя этого необходимо было иметь количественный показатель в
"ис вероятности отказа или вероятности исправной работы механи-
ческой системы на час полета, полученный на основании анализа статис-
пгческих данных объектов эксплуатируемых в схожих условиях.
Для поучения этого количественного показателя использовались
статистические данные об авариях самолетов с механическими системами
управления. В СШЛ аварии гражданских самолетов по причине отказа
механической системы управления происходили с частотой 2,3-10-7 на
час полета в 1952-1959 гг. и 1,19 10“ - в 1962-1969 гг. Аналогичные ан-
глийские данные имеют тот же порядок. Затем этот показатель для само-
летов транспортной категории снизился до 1 -10“7 па час полета. Для во-
енной авиации США за период 1964-1973 гг. было установлено, что из-
за отказа системы управления происходили аварии бомбардировщиков с
частотой 5,5-10“ на час полета, а истребителей - 5,4-Ю-6 на час полета
[7]. Таким образом, на основании этих данных был принят прогнозируе-
мый уровень вероятносш отказа СДУ, равный 2,3-10“7 па час полета.
Поскольку доверие к МСУ в отношении надежности было очень вы-
сокое, то было принято, что все другие системы такой же функциональ-
ной значимости должны иметь вероятность отказа по крайней мере не
выше указанной. Нерезервированные электрические, электронные и гид-
равлические системы не могли обеспечить такой показатель надежности,
поэтому необходимо было их резервировать. Цифра 2.3-10“' на час по-
лета дала возможность разработчику систем установить такой уровень
резервирования системы, при котором вероятность полного отказа резер-
в«ровапной системы была бы не выше указанной величины.
было показано, что при располагаемом уровне надежности элементной
ь а-'1СКтромехани носких и электрогидравличсских систем, существо-
вРемя внедрения первых СДУ в 1960-1970 гг. (например, само-
’*> Ту-144), вероятность отказа нерезервированного электрогидрав-
^ого канала оценивалась величиной с/клнала * Ю 3 па час полета.
Резс-i Г° 1Качепне вероятности отказа позволило выбрать требуемый уровень
,,сХдь Ирования электродистанционной системы, исходя из того, что вероят-
2,3-10-7П<аза Р^фьированпой системы не должна быть выше величины
отКазч __,а ,,ас полета. Так, например, приближенные оценки вероятностей
Кываг Х И 4'ка,,алЬ|1ЫХ систем (при условии, что 3-канадьная система от-
З'го ц* Л UOCJIC 2-го последовательного отказа канала, а 4-канальная - после
елеАователыю[и отказа), соответственно имеют значения:
455
Qcqy «ЗЮ 6 на час полота,
~ 4 • Ю"9 на час полета,
т.е. С?сду < Qvjcy < С?сду •
При создании аналоговых электродистапциоппых систем (ДС1у\
самолетов Т-4 и Ту-144 (1965-68 гг.) было принято целесообразным* не-
смотря на наличие резервной механической проводки управ
(МПУ), применять 4-канальную систему но следующим соображениям-
- значение вероятности отказа 4-капальной системы было меньше
вероятности отказа МСУ (имея в виду значение вероятности 2,3 10 7 Hd
час полета), так что был некоторый “запас” надежности на незнание
особенностей многоканальной системы;
- при 4-канальной системе экипаж имеет возможность не менять план
полета при первом отказе любого канала системы, т.е. при отказе, который
наиболее вероятен в многоканальной резервированной системе, при после-
довательном отказе второго капала (в 4-капальпой системе) состояние
системы оценивается как состояние, в котором система не имеет резерва.
Таким образом, “отсутствие резерва" в системе обязывает экипаж
изменить план полета с целью его завершения в ближайшем аэродроме.
Вероятность такого события приближенно оценивается величиной
ss 6 Ю-6 па час полета,
где Qop-' - вероятность отсутствия резерва в 4-капальной системе Как
можно видеть, эта величина достаточно мала при 4-канальной системе.
Как показала практика, применение резервирования явилось наибо-
лее эффективной мерой повышения надежности управления и безопас-
ности полета при отказах в функционально значимых системах самолета.
Резервирование позволяет сохранить работоспособность системы управ-
ления при определенном числе и видах отказов. Однако ввиду того, что
каждый вид отказа (электрический, гидравлический, механический) оК
зывает определенное воздействие на работоспособность системы. Г0^)Н_
его компенсации и изоляции требуется применение соответствующих .Я
сгруктивных мер, например, секционирование рулей, применение -
проводок с устройствами расценки и пружинными звеньями, ,1С
зовапие определенных методов резервирования, при которых pacCJ
ваемый отказ не является критичным для системы (рис. 9.4.1)-
Эти обстоятельства привели к необходимости уточнения суШ
щих требований к системам управления в направлении учета [1рвеДеН
стомы управления в условиях возникновения в ней и взаимодеиству ^ра.
ней системах отказов и их влияния на безопасность полета. ГакДО1 “
зом, эти измененные требования обязывали разработчика системы
тверждать работоспособность системы управления при различных
www.vokb-la.spb.ru - Самолёт своими руками?!
9-4.1. Основные схемы резервирования приводов: по схеме суммирования коростеи
а’1‘,в С/), по схеме :«1М1и11ед1ия каналов (б) и по схеме суммирования усилий каналов (л)
отказов, которые оговариваются в требованиях, включая подтвори I
их в летных испытаниях, если разработчик системы не в состоянии
показать, что такие отказы являются практически невероятными (q < jn-g
на час полета). В противном случае разработчик системы был обязан 1
менять структурные меры (например, резервирование), которые таран!
ровали бы безопасность полета самолета в случае возникновения отказов
В связи с ат им с начала 70-х голов проектирование систем граждански
самолетов уже велось с учетом новых положений требований норм летнсЛ ’
годности самолетов - НЛГС (в последствии авиационных правил - АП-Эз)
ФАР-25, BCAR. а военных самолетов - с учетом специальных требований
Информация по этому вопросу содержится в упомянутых источниках
АП-25, ФАР-25 18]. Здесь обращено внимание на два принципиальных
положения требований, которые имеют существенное значение для выбо-
ра структуры системы управления:
а) структура системы управления должна рассчитываться на один
любой отказ (за исключением заклинивания), без учета вероятности еп
возникновения. При этом это требование рассматривает также механичес-
кий отказ типа рассоединения (несмотря на его достаточно малую веро-
ятность) как отказ, по которому необходимо принятие структурных мер,
например, дублирования, для сохранения работоспособности системы не-
зависимо от вероятности его возникновения. Поэтому все системы управ-
ления последних самолетов с механической проводкой имеют дубли-
рующую проводку или какое-либо средство альтернативного управления
(например, управление через другой канал):
б) практическая невероятность (г/ s 1-10-9 па час полета) возникновения
комбинации двух последовательных отказов (в которую включается отказ
типа рассоединения) или единичного отказа типа заклинивания согласно
требованиям может быть подтверждена расчетными методами.
Однако использование расчетных методов дает в лучшем случае диана-
зон значений вероятностей отказа (надежности) системы, в котором слсДИ
ожидать значение фактической вероятности отказа (надежности) системыД
Проведение таких расчетов целесообразно прежде всею для установления
“слабых” в отношении надежности элементов, надежность которых нсобхЯ
димо повышать (например, используя для этого их резервирование).
При наличии неопределенностей в статистических данных о нг
пости элементов (arpeiaroB, систем) разработчик системы для повыШ-
ее надежности часто вынужден идти по пути применения резервирI
пия, хотя за это приходится “платить” увеличением веса системы, ее
имости и сложности. По это окупается повышением безопасности
как при рассматриваемых отказах, так и при разного рода ошибка*!
торые возможны при эксплуатации системы или при возникиовеШJ
самолете особых случаев, которые могут вызвать повреждение сИС
управления (разрушение агрегатов смежных систем, возникнешь*1
кальньгх пожаров, взрывы баллонов и т.д.).
www.vokb-la.spb.ru - Самолёт своими руками?!
гт гченение резервирования систем во многих случаях связано с не-
1 -ностьто демонстрации улучшенной надежности. Проверка надеж-
р03''*0^ истсМы с вероятностью отказа 140 7 па час полета потребовала
н°гтИ оголетней непрерывной работы системы. Поэтому количественное
' тие надежности системы нельзя с уверенностью подтвердить стен-
ЗНЗ tn и летными испытаниями. Для этого потребуется информация но
Л?Вмт парку самолетов с новыми системами. Однако в оценке сгруктур-
В< Г надежности стендовые испытания имеют важное значение.
Н В этом отношении показательна тенденция, которая имеет место при
вменении ответственных механических систем, ранее традиционно считав-
шихся высоконадежными. Несмотря на это, была признана необходимость
резервирования механической проводки и других ответственных меха-
нических элементов. В этом можно убедиться, если обратиться к системам
управления таких, например, самолетов, как Ил-86, В-1В, В-747 и др.; ме-
ханизмам управления балансировочным стабилизатором многих самолетов
(д’.-б.тированные шестерни, винтовые механизмы, карданы и т.д.).
По вполне попятным причинам резервирование механических систем
было осуществлено позже всех других систем. Основная причина, сдер-
живающая применение резервирования механических систем, - это зна-
чительное увеличение веса системы. Па определенном этапе развития си-
стем управления применялись, в основном, нерезервированные механи-
ческие системы (элементы), которые ввиду большей функциональной
значимости для безопасности полета получили статус особо отеетствен-
ных, что обязывало соответствующие службы, ответственные за безопас-
ность полета, осуществлять контроль за их состоянием на всех этапах
жизненного цикла (проектирование, изготовление, сборка, эксплуата-
ция). Резервирование позволило сиять с них статус особо ответственных.
Важно отметить, что когда встает вопрос о резервировании механи-
ческих систем, то необходимо иметь ввиду следующее.
Как отмечалось рапсе, на большинстве самолетов механические сис-
»уИЫ1Сл^Жат ЛЛя передачи управляющего сигнала от летчика к приводам
зы например, такую функцию выполняет проводка управления, свя-
йая 1X1:151 Рычаги управления с приводами рулей. Эта функция иесило-
соогт?И °На Можст быть успешно выполнена электрической системой при
етству ющем резер в ировани и.
Жат ’ - Мсханические системы выполняют силовые функции, т.е. слу-
^°ЛЬщ'ие 11епосРсДствепного отклонения рулей, на которые воздействуют
бует в- аэ^ОДИ|1амичсские нагрузки. Резервирование силовых связей гре-
Сек11ИоЛ°ЗКеНИЯ ^ольшого веса. Поэтому там, где возможно применение
Учения °ВаНия ^пшов управления, можно избежать значительного уве-
111111 Из-- Ьеса От применения такого резервирования, поскольку потеря сек-
Как технического отказа в этом случае может не рассматриваться
»айлениЧеСКОе’ С точки 3Рения безопасности полета, событие, а привод
я секцией и сама секция как особо ответственные элементы.
Эффективность применения резервирования какой-либо <hv
пально значимой системы может быть достаточно просто продам
рована на специальных функциональных стендах в процессе
самолета путем имитации отказов, в том числе таких отказов, которы"1^
условиям безопасности полета не могут быть воспроизведены в п*
(например, кратковременное обесточивание системы питания, выход Л**
темы па предельные по условиям устойчивости режимы и т.д.) Кро^
того, может быть прослежен процесс влияния отказов на выходные Я
рактеристики системы и самолет (характер возмущений при отказе)
В настоящее время резервирование является также одним из мощных
средств повышения живучести системы управления в условиях нсблагоприят
ных или даже критических внешних воздействий на систему управления
При разумной компоновке резервированной системы управления на
самолете можно одновременно решить вопросы обеспечения высокой на-
дежности и живучести системы управления как в условиях отказов соб-
ственно в самой системе, так и воздействия неблагоприятных факторов.
Поэтому при компоновке системы управления на самолете необходи-
мо выполнение требований как по надежности, так и живучести, которые
направлены на повышение неуязвимости системы управления к воздейст-
вию отмеченных ранее неблагоприятных факторов.
В общем случае резервирование является универсальным сред-
ством повышения надежности и живучести системы управления. Од-
нако это нс означает, что резервированная система не должна изме-
нять свои характеристики при возникновении в ней отказов или по-
вреждении функциональных элементов Важно, чтобы эти изменения
характеристик не выходили за пределы, определяемые условиями бе
зопасности полета. В современных требованиях к системе управления
степень влияния па ее характеристики отказов или повреждений нор-
мируется в зависимости от того, является ли самолет транспортным
(пассажирским) или военным, видом ситуации или уровнем характе
ристик устойчивости самолета.
Для транспортных (пассажирских) самолетов рассматриваются четы
рс вида ситуаций, которые различаются тяжестью последствий, вы
ных отказными состояниями. К таким особым ситуациям относятся.
- усложнение условий полета (УУП),
- сложная ситуация (СС),
- аварийная ситуация (АС),
- катастрофическая ситуация (КС). !{О|Ть
’Гак как эти особые ситуации непосредственно влияют на боопаС
полета, то частота их возникновения нормируется в требованиях но^Н
пой годности [8]. Например, катастрофическая ситуация, вызванная
ными состояниями (функциональными отказами) но самолету в
должна возникать чаще, чем с вероятностью КГ7 на час полета. В н
www.vokb-la.spb.ru - Самолёт своими руками?!
наблюдается тенденция дальнейшего повышения безопасности полета
ВРС> транспортных самолетов) путем практически полного исключения ката-
q 1 9 па час полета) При этом все перечисленные ситуации
С1 магрпваются в ожидаемых условиях эксплуатации (ОУЭ) самолета, ко-
Ра оГовариваю1ся также в нормах летной годности.
т0^ р военной авиации принято, что пилотажные характеристики самоле-
м )ivT иметь различные уровни в зависимости от того, в какой области
Джимов полета (основной, эксплуатационной и предельной) находится
РамОдет и каково состояние системы управления самолетом (нормальное
или с отказами). С точки зрения безопасности полета имеются три при-
емлемых уровня - Ур.1, Ур.2 и Ур.З.
Несмотря на различие в обозначениях степени изменения характе-
ристик управляемости при отказах, выраженных особыми ситуациями
(транспортные самолеты) и уровнями (военные самолеты), между ними
существует тесная взаимосвязь, поскольку они оцениваются степенью
снижения эффективности выполнения задания и изменением нагрузки на
экипаж во время полета, снижающей его способность противодействия
отказам и внешним возмущениям.
Обычно в требованиях применительно к системе управления рас-
сматриваются несколько состояний системы, которые характеризуются
степенью изменения характеристик системы под воздействием отказов.
Эти состояния имеют градацию от 1 до 5. Первые три состояния - 1,
2 и 3 эквивалентны уровням характеристик устойчивости и управляе-
мости - 1, 2 и 3, а состояния 4 и 5 применимы только к военным са-
молетам, у которых имеются средства покидания самолета. Система
управления в состоянии 4 и 5 не обеспечивает безопасное продолже-
ние полета, а может служить для управляемого снижения с целью по-
пытки совершения аварийной посадки, либо для обеспечения возмож-
ности покидания самолета (с помощью катапульты)
Изложенный до этого подход по оценке структурной надежности
систем самолета касается всех систем, независимо от характера вы-
полняемых ими функций. При таком общем подходе "теряются" сис-
темы, которые призваны выполнять наиболее ответственные, с точки
•Рения безопасности полета, функции В то же время эти системы
к ’Жны подвер! аться наиболее тщательному анализу и применительно
Печ*™ ДОЛ>1СНЬ1 вырабатываться наиболее эффективные меры, обес-
м сохранение их работоспособности с учетом всех возмож-
fJI ‘Рс11(Юров (отказы, внешние воздействия, ошибки экипажа и об-
П Ваю1Цс1° персонала, дефекты производства и др.).
тРм ОЭ1°му далее акцепт сделан на функциональную значимость сис-
Куц^ЛЯ Опасности полета. В связи с этим целесообразно всю сово-
м”од ° ТЬ СИстсм> участвующих в той или иной мерс в управлении са-
разделить на три группы функциональной значимости, а за-
гем изложить требования к безопасности каждой группы систем
ответствии с их функциональной значимостью. Со'
Таким образом, значимость функции систем для безопасности
лета должна служить критерием для градации систем по груП|3
функциональной значимости. Например, есть функциональные сисЗ
мы, потеря функции которой в любом случае недопустима по услови
ям обеспечения безопасности полета. Основная задача при создани^
таких систем - это обеспечение их работоспособности в течение всего
времени полета самолета или если смотреть более широко, в течение
всего жизненного цикла самолета. В то же время есть системы, функ-
ция которых может быть потеряна, но при ее потере не должны о-
здаваться критические для безопасности полета и посадки самолета
условия. Для такой группы систем меры обеспечения безопасности
должны быть направлены на создание условий отказобезопасности. И
наконец, последняя группа систем предназначена i тя повышения
комфорта экипажа и пассажиров, и эти системы не оказывают суще
ствеппого влияния на безопасность полета как с точки зрения потери
самой функции, так и возможного влияния отказа.
Ниже перечисляются требования к надежности систем с учетом их
фу п к циона ль но й знач имости.
Системы группы /. Вероятность отказа систем группы I должна
быть менее 110“9 на час полета, т.е. отказ системы должен рассматри-
ваться как событие практически невероятное Такие высокие 1ребования
по надежности (или вероятности отказа) могут быть обеспечены много-
кратным резервированием функциональных систем при котором функ-
циональная система сохраняет работоспособность, но крайней мерс, пос-
ле двух пли более последовательных отказов ос каналов. Для обеспече-
ния тако/i надежности необходимо 3^-4 кратное резервирование системы.
При этом после перехода системы (в результате возникновения i исП
ранностсй) в состояние "пет резерва” экипаж должен прекратить выло*
непис плана полета и завершить полет на ближайшем аэродроме.
Системы группы II Вероятность отказа систем группы II должн
быть менее 1-10 5 на час полета. Надежность систем этой группы дол**13
обеспечиваться 2-s-3 кратным резервированием, при котором
нальная система сохраняет работоспособность, по крайней мере,
одного отказа канала. Система должна обладать свойством °'гказ0°^д
пасносгп, г.е. прекращение функционирования системы не должно* «м
провождаться недопустимыми возмущениями в движении самолета
казавшая система не должна препятствовать безопасному завершен
лета и совершению посадки. Для обеспечения отказобезопасности
мы этой труппы должны быть самоконтролнрусмыми до возникИ°**т|
последней неисправности пос., е которой система прекращает фунК-
www.vokb-la.spb.ru - Самолёт своими руками?!
После отказа системы должны накладываться ограничения на об-
Р°ВЭГ пежимов полета и действия экипажа при пилотирования самолета.
-iaC1^K 7НеЛ!Ы группы III. Вероятность отказа таких систем должна быть
1-10-3 па час полета При их отказе нс должно возникать проблем
>1С^ее печением безопасности полета. Системы этой группы должны быть
С язобсзопаспыми Полет может быть продолжен в соответствии с при-
нты'! планом полета. В качестве основной меры обеспечения отказобе-
опасности рассматривается ограничение эффективности системы или ог-
аличение (чаще механическое) хода ее исполнительного устройства.
1 Ниже даны основные требования к структурной надежности системы
управления каждого канала (тангаж, крен, курс)
Группы систем функций нальной значимости Условия обеспечения надежнос- ти управления и беЗопасяюсти полета Основные меры обеспечения надежности И безопасности Требуемая вероятное! ь отказа [па ч«с полета] Приме- чание
Системы группы I (I) Сохранение работоспособ- ности гиг.темы управления пос- ле 2-х последовательных отказов • в электронной части сис- темы или одного и электронной части и одной системы питании (ГС или ЭС) или • двух cucivm питания (ГС пли ЭС или их комбинации)* (2) Сохранение работоспособ- ности при одном отказе типа рассоединения или разрушения механической связи. (3) Завершение полета при от- сутствии резерва в системе • Резервирование: • Л кратное но электронике, 2+4-кратное по гидравлике и электрике • Секционирование рулей • Дублирование механичес- ких связей от рассоединения • Введение, при необходи- мости. ограничения в пи- лотировании самолета с отка- зами < I-IOA.-IO’1 ♦Для тяжелых само- летов
Игтемы П>)ппм II Системы Гр>"пы ][[ (1) Сохранение pafiorocnoct/iiKxmi после отказа в электронной части =и<т*«ы и отказа одной системы питания (ГС или ЭС) (2) Обеспечение отказобезопас- Н1х ти после второго отказа • Резервирование: 3 кражое по элек фонике, 2 кратное но гидравлике и электрике • Введение о|раничсний ни пилотирование самолета после отказа системы < t-tO’5 to*
(0 Обеспечение отказобезопас Чости при первом отказе • '‘Жесткое" ограничение эффективности системы • При необходимости 2 красное резервирование < I-IO’4
www.vokb-la.spb.ru - Самолёт своими руками?!
Список литературы к главе 9
1. Аэродинамика и динамика полета .магистральных самолетов / Под ред Г.С Е
Москва-Некин: ЦАГИ, Авиа изд. КНР, 1995. ’Ощгенса. ~
7 Г.С. Гюшгенс. Полная автоматизация управления самолетами к Х\Т по,. ’
1993. №1. ' У ТВ«Ь
3. Jant's Avionics. T-ondon, 1988.
4. Г.С. Бюиегенс, Р В Студнев. Аэродинамика самолета. Динамика Тфодольного
koboiо движения. - М.. Машиностроение, 1979. I
5. Вопросы автоматизации управления самшитами Под ред. Г.С. Бклагенса - м м
построение, 1978. ' ,ашн-
6. Техника воздушного флота (ТВФ), 1990, Л’»2.
7. Техническая информация ЦАГИ, 1980, .4'21-22.
8. Авиационные правила, часть 25. Нормы летной годности самолетов транспортной 1Д
тегории. - М.: МАК. 1994. Ка’
Глава 10
осНОВНЫЕ МЕТОДЫ АНАЛИЗА ДИНАМИКИ ПОЛЕТА
Метод математического моделирования с использованием ЭВМ явля-
одним 113 саМЬ1Х эффективных способов исследования, применяемых в
CTC*iMHi<c полога. При этом для моделирования пространственного движс-
А11Падательного аппарата (ЛА) и исследования особенностей его дипами-
^яспользуются различные модели как самого ЛА, так и форм его движе-
КИ В зависимости от цели решаемой задачи детализация описания может
быть различной. В каждом конкретном случае осуществляется выбор:
механической модели ЛА (жесткое тело или упругое, наличие
подвижных масс, жидкого топлива и т.д )
- систем координат и форм описания состояния ЛА (положения в про-
странстве, угловой ориентации, упругих мод деформации конструкции и т.д ),
- математического описания аэродинамических сил и моментов,
возникающих в процессе полета,
описания силового и моментного воздействия двигателей их
зависимость от режима полета, и взаимовлияние с аэродинамическим
обтеканием ЛА,
- описания элементов автоматических систем управления и законов
их функционирования и т.д.
При рассмотрении отдельных форм движения могут использоваться
упрощенные подсистемы уравнений, которые наиболее эффективны для
выявления особенностей динамики самолета.
Качество моделирования движения зависит от точности описания аэро-
динамических сил и моментов при произвольном неустановивгпсмся про-
странственном движении. Традиционно в динамике полета представление
аэродинамических коэффициентов строится на основе данных аэродина-
мических испытаний моделей самолета в аэродинамических трубах. Для ре-
жимов полета с малыми углами атаки (основная область режимов полета)
Допустим- представление аэродинамических коэффициентов с использовани-
ем их частных производных по кинематическим параметрам движения. Для
льщих углов атаки (область эксплуатационная и предельная) такая форма
^сания становится непригодной из-за динамических эффектов отрывного
М(>е1<аНИЯ В процессе моделирования и анализа устойчивости и управляе-
Стик 1 СВеРхзвукового самолета устанавливается соответствие его характери-
ньтг- 1^ЮВаниям, разработанным на основе опыта стендовых и летных ис-
R КотоРых выявлена зона благоприятных оценок летчиком ко-
;-уГи енных показателей характеристик устойчивости и управляемости.
и п ХаРактсРИстики составляют две группы — статические и динамические,
УрОв1^аЗДелЯ1ОГСИ по классам самолетов, по этапам полета (категориям) и
C11cjjw М ОЦеики пилотажных свойств. Комплексу этих вопросов посвящен
ТЬ11Ь1п раздел в конце главы.
10.1. Математические модели динамики
(уравнения движения) жесткого самолета
Системы координат, используемые в механике полета тт
получении уравнений движения используются следующие системы 1ри
динат с началом в центре масс движущегося объекта (условная Л°°Р'
OxtyiZi предполагает, что оси Ох,, Oyit Oz, образуют правую трой?
кривизна поверхности земли не учитывается [1,2,3]) у
OxgygZg — нормальная система координат, оси которой парад
дельны осям фиксированной относительно земли инерциальной системы
отсчета OgXgijgtg, при этом ось Oy(J направлена вертикально вверх;
- Oxkyk^k ~ траекторная система координат, ось Oxfe которой
направлена но вектор}7 скорости движения объекта относительно инер-
циальной системы отсчета ОдХчУдУд, ось Оук лежит в вертикальной
плоскости и направлена вверх при горизонтальном движении объекта в
направлении оси Oxk\ ориентация Oxkyktk относительно Охду-г
определяется углами Эйлера 6, Т ( 1615я/2, | Т | < я);
- Oxyz связанная система координат, оси которой фиксированы
относительно рассматриваемого объекта, плоскость Оху обычно связы-
вается с плоскостью симметрии самолета, если такая существует; ориен-
тация Oxyz относительно OxqyqZq определяется углами 9, у, w
(1$ <я/2, |у| < я, |ф| п);
Oxayaza — скоростная система координат, ось Оха которой
направлена по вектору воздушной скорости объекта, а ось Оуа лежит в
плоскости Оху и совпадает с осью Оу при совпадении осей Ох и О.г6.
ориентация Oxayazu относительно Охдудгд определяется углами Эйлера
9fl, уй, ( I 9а|<я/2, II < я, |уя|^я); а относительно Oxyz углами a,P
(la < я, |p < я/2). В отсутствие ветра оси Ох^ и Оха совпадают,
= Т, 9rt = 6, траекторная система координат переходит в скорости}7»
при повороте па угол уя вокруг оси Оха{Ох^).
Переход от одной системы координат к другой производится с исиоль
г,' „ AXiy^^XjyjZj
зованием матрицы направляющих косинусов. Величина Л
значаег матрицу перехода от системы координат OxtyiZi к OxjyjZj, при эт I
AXiyiZi-^XjyjZj _ ^XjyjZj^XiyiZfyi _ ^X^-Zj^XitJiZiy
Для перечисленных выше систем координат матрицы перехода выгД^И
следующим образом:
cos ц/ cos 9
AW*-^(9,y,v) =
sin v sin у -
- cos v sin 9 cosy
sin ф cosy +
- cos ф sin у sin 9
sin 9
cos 9 cosy
-cos 9 sin у
- sin ф cos 9
cos \|/sin у +
+ sin vpsin
cosу cosу -
- sin у sin
Sees?
9 sit'
www.vokb-la.spb.ru - Самолёт своими руками?!
0О5\уя0°6$«
ЙП»й
-sini|/ccosOc
51ПЧ/Дапуй
-cosц/йsin&flcosye ccsSflcosye cosv«sinyfl+sin\pcsin»eccsyc
+cos\pttsinyflsin&tt -ccsSttsinyrt cosvflcosyfl-sinyflsin%sinyc
Ary-’->.W«^(a,p) =
в отсутствие ветра
cos a cos P -sin a cos P sinp
sin a cos a 0
-cosasinp sin a sin P cosp
(4/ 0) =
cos4'cos0 sinO -sinTcosO
- cos T sin 6 cos6 sin 4х sm 6
sin T 0 cos T
Ахуг >х*//Аг4(а р уд) =
cos a cos p
= sinacosye + cosasin Psinye
sin a si n у й - cos a sin p cos у a
-sin a cosp sinp
cosacosytf -sinasinpsinytt -cospsinyfl
cos a sin у a + sin a sin P cos у a cos P cos у a
1 0 0
АхаУаг„->х1,1/к21.
(y«) =
0 cosуй -sinyc
0 sinyc cosyc |
Уравнения движения летательного аппарата, рассматрива-
емого как твердое тело. Они включают в себя:
°бъс ^И|,ема1ическис уравнения для описания движения центра масс
' кинематические
сРИемтации объекта:
уравнения д тя
описания изменения угловой
Уравнения динамики поступательного движения (уравнения сил);
В Уравнения динамики вращательного движения (уравнения моментов).
РазДеле представлены уравнения движения при отсутствии
вслп-Ь1Х Возмущений (изменения, связанные с учетом ветра, приведены
ДУЮщем разделе).
Чзмец11исМа1'и,1ескис Уравнения поступательного движения определяют
СНИе Сложения центра масс летательного аппарата в инерциаль-
СЯХ°?-»5:
™ = v
dt
где R = (xg.yg.Zg)' — вектор положения центра масс самолета v
ЦУ!?Л’;.,)Т - вектор скорости полета в проекции на оси Ох
Они могут быть записаны с использованием различных перемен
частности, следующая форма наиболее естественна при исследовании* В
дач траекторного движения-
Ду = VA cos 0 cosT,
У у = vk sin^
z„ = -V. cos0sin Т,
у к
где Vk скорость движения в 1раекторной системе координат.
Кинематические уравнения углового движения, описывающие ориен-
тацию объекта, могут быть записаны с помощью уравнений Эйлера, оп-
ределяющих изменение углов 9, у, задающих ориентацию связанной
системы координат Oxyz относительно нормальной Охду^д-.
0 =--------(w„ cosy - со, siiiy),
cos 9 у
9 = &у sin у + сог cosy,
у = со ,. - tg Э (еду cosy - о)г siiiy).
(2)
Эти уравнения имеют особенность при 9 - ± 90°.
Аналогичные уравнения могут быть использованы для описания ори-
ентации скоростной системы координат относительно нормальной (при
этом выражения для производных углов 9^, yfl, у/о будут выражаться через
компоненты вектора угловой скорости вращения системы коордима
Охауага относительно нормальной Oxsy{JZg). Из этих уравнений
быть выражены проекции вектора Ой на оси скоростной системы коор.
нат (со,- ,о)„ ,св, ):
Уа
'v« sin 9fl + уд
фв cos 9fl cosyfl + Эдяшуд .
cos9flsinye 9fl cos yfl
г цект^
С другой стороны, вектор может быть выражен в виде суть р.
ров угловых скоростей летательного аппарата (или связанной систем
дннат) относительно нормальной системы координат ОхдУдЗд и °т1,с
ного движения скоростной Охауага и связашюй Охуг систем коорД,лиI
www.vokb-la.spb.ru - Самолёт своими руками?!
со
-d snip
(4)
“zj
-acosp
Сопоставление (3) и (4) позволяет получить кинематические соот-
ношения для Производных углов а, р, уд:
___cos ci — (£>у sin a) tgP т со2 — (уд cos 9Д sin yfl — 9Д cos у fl) ,
р = w r sin а + соу cos а - уд cos 9Д cos yfl - 9Д sin у й,
=(Wrcosa -owsina)—Ц- - yfl(tgpcos 9Д siiiyт sin 9Д) + 8Д tgpcosye.
' a ' -T » COS P
Следует иметь ввиду, что при отсутствии ветровых возмущений
Vn = ф 9„ = 0 (уравнения для Т,0 представлены ниже).
Компоненты матрицы направляющих косинусов ЛЛ’^г?^Х',/г(9,у,у)
являются проекциями единичных ортов инерциальной системы коорди-
нат OsxgygzL — l,h,s на связанные с самолетом оси координат Oxyz [5].
I
(»,7,у) =
h
11/
hy
‘z
sz
sy
5.t
Поскольку ориентация ортов I, h, s в
неизменна ю их полные производные по времени равны нулю
/ п
— + о) х / - О,
dt
dh .
— + со > h = Q,
dt
ds Л
----r co x $ = О,
dt
инерциальном 11ространс гве
(5)
Где л
dt ОГюзнач<ает производную относительно выбранных вращающихся
°Гей.координат.
to им Образом, уравнения (5) определяют изменения девяти направля-
*^$<beKOCllHycO13 По вРс*(ени ” ПРИ этом не имеют особенностей. Размерность
ЬЫчи • Ре1щиалЪ1Гы* уравнений может быть понижена, если фетии орт
лять с помощью векторного умножения первых двух ортов: s = I h.
Векторные уравнения имеют следующую скалярную фОп
сгавлепия: пред-
£7/а. di - 1у(Лг
dlu
dt - lxw?
dl.
dt — — 1 yd) x
В процессе интегрирования кинематических уравнений (5) необходим
осуществлять коррекцию направляющих косинусов, поскольку должны вы°
подняться шесть условий нормировки и ортогональности:
(/•/) = 1, (Z Л) = 0, (/ -«) = О,
(h hi) = 1, ($$) = 1, (h я) - 0.
При описании ориентации самолета в пространстве с помощью кватер-
нионов устранение особенности в кинематических уравнениях достигается
введением лишь одного дополнительного параметра. Кватернион задастся с
помощью четырех величин - трехмерного вектора q - (qi,qz,qi) и скаля-
ра qo. Они удовлетворяют условию нормировки
2 7 2 2 л
+ </f + </2 + *7з = 1
Компоненты кватерниона изменяются в соответствии со следующими
дифференциальными уравнениями:
*7о = 2 + «^*72 + ®z*73>-
1, X
*?1 = +шг^2
1, х
Я'1 = + ®х*7з -®2*7т)
1 / X
*?3 = 2 - “^/2>.
которыс в векторной форме можно записать компактнее:
*70 <?)
1 / х
q -= --(ш х q-qo ш)
где (от • q) — скалярное произведение векторов, (со х q) ~~
произведение векторов.
Для определения начальных значений параметров кватер1<и0Чв
жпы использоваться следующие соотношения:
вектор**
ДО.Ч-
www.vokb-la.spb.ru - Самолёт своими руками?!
и 9 у . v . 9 . Y
90 = cos у cos—cos—-sin у sin у sin—
ш . 9 Y V 9 • Y
= siny sm—cos cos—cos — sin—
. и 9 Y V . 9 . у
72 = siny COS-COSy + COSySiny sin-,
ц/ 9 y • V 9 Y
<73 = cos—smу cos -f- - sin у cos—sin -,
L L Lj it
также соотношения для вычисления в случае необходимости текущих
значений углов Эйлера:
tgv =
2(<7о72-717з>
2<7о+712)-1 ’
sin 9 - 2(^0 г?з -7ИУ2).
гр.. _2<7о71 72 7.3>
2<7о +72)- 1
В процессе интегрирования уравнений (6) необходимо осуществлять
коррекцию вычисляемых параметров кватерниона с целью выполнения
условий нормировки.
Наиболее компактно уравнения динамики поступательного движения
выглядят в векторной форме:
т dt ^ + P-B+Pnp-G. <7>
гДе Fa - вектор аэродинамической силы, РПр, лев — векторы тяги право-
1Т) 4 левого двигателей, G — сила тяжести, т — масса самолета.
Вид дифференциальных уравнений (7) в координатной форме во
Многом зависит от выбора системы координат, который связан с особен-
остями решаемой задачи.
с " Рав,1еш,я поступательного движения могут быть записаны отно-
°льно связанных с самолетом вращающихся осей координат Охуг.
dV
/п^Х + сох V) = Ftf+ P£+G,
dt.
(8)
1.
dt оператор дифференцирования относительно выбранных осей.
''Ка.1ярцой форме уравнения (8) имеют вид
www.vokb-la.spb.ru - Самолёт своими руками?!
,dVt
m(—— + ro,V.
dr
((iV2 xr
m{+cDrV„
dl y
pV2
_ От 2 ~
. PV2
“ Mxvz> = Су -J-5 - Р%у - mi
2
— k г ) = Сг ~ 5 + Py? — т>к
где hx = sinS, hy = cosycosS, h, = - sinycosB; Cx, Cy, Сг - коэффИ11Ие
ты полной аэродинамической силы; V скорость полета; р - , ,
воздуха; ?п масса самолета; S — площадь крыла самолета; д'
рение свободного падения.
Уравнения в форме (9) достаточно экономны при вычислениях на
полета, углы атаки и
коэффициентов могут
У'
(9)
rfp + (F« +G)^
dt r ' ni\
вычислены в проекции на скоростные оси Oxayaza.
гДсСч-я рассмотрения задач, связанных с исследованием траекторного
Д,1Я 1 . .Z.. „...«./.тппмии <rnoT>untiuu тап»гпия ПРНТПЯ масс н linn-
явижепия,
екни** на
ЭВМ. При этом необходимые значения скорости
скольжения для определения аэродинамических
быть вычислены но формулам.
v = Vv? + v2 + v2,
наиболее естественны уравнения движения центра масс в про-
оси неподвижной земной системы координат ОдХууугу.
V7, - — /?Гь - <7 sin 0,
R т *
0 = —— /?„ - (J cosO,
mVk Ук vk
ф =-------1----R
mVh cos 0 к
Р - arcsin(—7),
- arcsin
Yjl
= Ахуг^ХкУкг,>
R
a -
sign(Vv) -л + arcsin
vx > о,
V' < 0.
э Л
+ vy)
Для аналитических исследований наиболее удобна запись уравнении
(7) относительно скоростных осей координат Oxayaza.
Используя выражения для проекций угловой скорости скоростной сис-
темы координат £)й, уравнения могут быть записаны в следующем виде
mVw,
т Ио „
У а
n
= (Fa + P, + G)ya
= (Fa + A + G\
ИЛИ
da .
—— = {£>.,- (to - cosa
dt
оз У sina)tg(3 -
(Fa +
------------>
m V cos 0
к?
(10)
гце проекции полного вектора сил (исключая гравитационную составля-
ющую) R на оси траекторной системы координат Oxyt/k^k выражаются
через его компоненты, заданные в связанной системе координат Oxyz,
следующим образом-
Rrk
Ryk
_ и.адл-»адн*(у )Л-Г’гг_*х*’^в(а,р)
Уравнения динамики углового движения, определяющие изменение
вектора момента количества движения К, можно записать относительно
связанной системы координат Oxyz в следующей форме:
1Z
— - + (1) X К - Ма + х (Рпр - Рт), К = Jm + K
гДе Af й - полный вектор аэродинамического момента, ВДв= (я-дв.^дВ1 <ц>) —
^К10Р эксцентриситета двигателей, J матрица тензора инерции, /Сдп —
’диетический момент роторов двигателей.
Координатная запись уравнений динамики углового движения (10), на-
1]^Ва°мых также моментными уравнениями, без каких либо упрощающих
Положений относительно тензора инерции, имеет следующий вид:
Mi J
M:/ + Jxywywz
-Jxz^y^z
I/ + (Jy J z^wy^z + J yz(rji'y
- Jy;03xWy ~ U2 ~ H J.^i ~ ’
+ Jt/Z^x^z ~ + Jxy^'x ,
www.vokb-la.spb.ru - Самолёт своими руками?!
где Mx, Mv, Мг — компоненты полного вектора момента, состо ’
аэродинамического момента и момента от двигателей. и
ГДе
J
•>ху
~Jxz
.гу
у
'у*
J XZ
~^уг
J г
В случае наличия у ЛА плоскости симметрии моментные упаш
значительно упрощаются, так как JXz=Jyz = ®> а с главных осях ипе ГИЯ
матрица тензора инерции приобретает диагональный вид, гак как и J Р=^
Таким образом, уравнения (7) и (10), если определены зависимо—
векторов аэродинамической силы Fa, аэродинамического момента Af
тяги двигателей Рпр лев. образуют замкнутую систему уравнений двенад.
цатого порядка.
Учет ветровых возмущений. Ветровые возмущения задаются в
виде потя скоростей WCr,,, Уд, zfJ, t), изменяющегося в пространстве и
во времени. Ниже рассматривается случай, когда летательный аппараг
является жестким телом, учет же упругости конструкции приводит х,
необходимости анализа распределенных аэродинамических нагрузок и
совместного решения задачи нестационарной аэродинамики и динам»
ки конструкции.
Вектор воздушной скорости Va может быть выражен через I мт •
скорость и скорость ветра V = V^-W, при этом его проекции на оси
нормальной системы координат Охдудгд имеют следующий вид:
= Va cos фд cos 9Я - Vk cos Т cos 9 - ,
= Vttsin9fl = V*sinO-%9,
= - cos ц/я cos So = cos T cos 9 -
Для целей моделирования вычисление а, Р возможно по ком^И
там воздушной скорости, заданной в связанной системе координат.
«±-
ч
ч.
V = lv2 + V2 -r V2 ,
a \ Ox
Va
p = arcsin —-
V
~l'og
arcsin i
+ Vl
Va ।
uy;
(arcsin
V2 + V2
«т ау
Va
ч
%
ч
агд
Изменения касаются также процедуры получения компонент полного
гит R (исключая гравитационную составляющую)
вектор*1
Ч J
_ ^y2-^XktJk2k
R
*У
Rz_
при вычислении которых необходимо производить переход от связанной
Oxyz системы координат к траекторной Ох^у^Ь через нормальную OxgygZg'.
K/i!/kzk = дх<)Удгд'^хкУкгк (g, ip) дХуг-+хдудгд у, у).
Безразмерные уравнения движения. Подобие в динамике само-
лета обеспечивается как за счет выполнения аэродинамического подобия
компоновки и режима полета, так и динамического подобия, обусловлен-
ного сходством динамических процессов движения.
Воспользуемся уравнениями движения в векторной форме, записан-
ными относительно связанных с самолетом осей Oxyz:
dV х, Fa t,
—----------------------------co x V = —- - gh,
dt m
rd& , **
J —— + co x J(f> = M„ ,
dt
+ co x h = О, l/?| = 1.
dt 1 1
dH ,T ,
dt
(И)
гДе р
Aj “ суммарный вектор аэродинамической тяги и тяги двигателей;
гКорОс Г10ЛНЬ1й исктор аэродинамического момента; со — вектор угловой
само.гС1И' — °Г)Т местной вертикали; J, т — тензор инерции и
d* 0 ~ ускорение свободного падения; II — высота полета.
Dbi0 бу ^e3PajMepnbic переменные и ряд параметров подобия,
к -Дут полезны как при анализе движения самолета, так и для
масса
кото-
опре-
деления условий его динамического подобия. При преобразовании 1
размерной форме уравнения (11) принимают следующий вид. К
dia ia dV — . cu,
dr V dx и a 2 Fr
;zdC0 CO dVx _
J(—— + -——) + p co x J co = m,
dx V dx
dh -to
dx
dH ia h
dx p
(12)
Л =1,
I I ’
где x = (.pSV/m)t - безразмерное время, co = wl/2V — вектор безразмер-
ной угловой скорости, ia — единичный орт, направленный вдоль вектор^
скорости, V — скорость полета, Н = — приведенная высота по-
лета, p = 2m/pSl — относительная плотность самолета. j = ^j!ml2 -
приведенная матрица тензора инерции, Fr = 2V-lyl число Фруда,
с —вектор безразмерных коэффициентов аэродинамических и газодина-
мических сил, т — вектор безразмерных коэффициентов аэродина-
мического и газодинамического моментов.
Динамическое подобие свободного движения самолета и, например, его
модемы будет реализовано, если в обоих случаях будут идентичны безраз-
мерные параметры подобия, входящие в уравнения (12) — ц, J, Fr.
Таким образом, динамическое подобие требует соблюдения: относи-
тельной плотности самолета ц, откуда вытекает соотношение для массы
самолета и массы модели (т?):
Ш = Pl.vf3,
lfl2 Р2
приведенной матрицы моментов инерции J, подразумевающее идентично^
распределение масс модели по аналогии с натурным самолетом и
масштаб модели самолета). С учетом соотношения масс модели и сам
отношение их моментов инерции можно выразить следующим образом-
А = £1М5,
h Р2
у! ijOBt*
а также числа Фруда, определяющего соотношение линейных И
скорост ей,
A = A/1/2i
о>2 J
www.vokb-la.spb.ru - Самолёт своими руками?!
ение характерных времен, определяющих динамику псреход-
ОтН° сСОВ движения самолета и модели (например, периодов коле
нЫ* 1 , ке определяется масштабом модели
6аЯцй> га '
Th = д/ V'2
Ъ
10.2. Уравнения движения самолета
с учетом упругости его конструкции
Следует выделить два аспекта влияния упругости конструкции само-
„ега на его динамику:
влияние статических деформаций на характеристики устойчивости
и управляемости самолета,
влияние упругих колебаний конструкции на устойчивость движс
пия системы “самолет - система управления’.
Для определения влияния упругих деформаций па устойчивость и уп-
равляемость самолета проводятся расчеты статических деформаций и рас
предсления аэродинамических сил для различных установившихся режимов
полога (различных значений веса, нормальной перегрузки, числа Маха,
скоростного напора и т.д.) Для самолетов нормальной схемы с крылом,
имеющим а > 4, используется балочная схематизация конструкции самолета,
согласно которой отдельные элементы самолета (крыло, фюзеляж, горизон-
тальное оперение, вертикальное оперение и т.д.) заменяются балками с со-
ответствующими жссткостными и масс-иперционными характеристиками.
Упругость проводки от силового привода к органу управления, упругость
самого привода и его кропления к корпусу самолета моделируется пружиной
f эквивалентной жесткостью. Затем составляются уравнения совместных из-
Щбно-крутильных деформаций данных балок и отклонений органов управ-
ления под действием аэродинамических и инерционных сил. Решение задачи
Распределении аэродинамических сил, деформации балок и отклонении
органов управления позволяет получить зависимости аэродинамических ко-
^Whuuqhtob от режимов полета [61 Для самолетов более сложной формы,
исцоКОТО Ь1Х Палочная схематизация неприменима, при решении этой задачи
эффщ*3^^ Мстод K01ie4lII>ix элементов. Зависимости аэродинамических ко-
1гпг,?Г11ИС11Тои от Упругих деформаций конструкции определяются с помощью
"Р^гых множителей:
^упр - (М,с/)
Су ,/
^учр =^ws(A/,<7) ™*>к,
Gy ynp ’ У) ‘ V ж •
^xyiip =
а для запаса статической устойчивости определяется его приращС1)
wfynp ’ + ^y{M,q\
Для современного истребителя с треугольным крылом с на
ми влияние упругих деформаций конструкции па аэродинам ,1ЛЬ1Ва'
коэффициенты является следствием изменения аэродинамических'*1*12
от изгиба, кручения и деформации хорды крыла и оперения СИл
в свою очередь зависят от распределения аэродинамического дав тещ.
(числа М). Для режимов полета с М < 1 уменьшение эффект^,, *
угла атаки концевых сечении крыла за счет изгиба практически ко>
пенсируется его увеличением за счет кручения, в результате коэффи
циент подъемной силы практически нс зависит от величины скорост
ного напора, а фокус с возрастанием q может незначительно переме
щаться назад, соответственно возрастает запас статической
тойчивости (Дте^сО) (рис. 10.2.1, 10.2.2). На режимах полета
М > 1 за счет перемещения центра аэродинамического давления назад
кручение крыла меняет знак, что уменьшает эффективный угол атаки
его концевых сечений. Это приводит к уменьшению коэффициент
подъемной силы и к смешению фокуса вперед (уменьшению запаса
Q
статической устойчивости - Д?и2 у > 0) с возрастание q Эти же эф-
фекты обуславливают более существенное снижение коэффициентов
эффективностей стабилизатора и элеронов и демпфирования крепа с
возрастанием скоростного напора на режимах полета с М > 1 п
сравнению с режимами, где М < 1 (рис. 10.2.2, 10.2.3). Упругие де-
формации крыла приводят к тому, что при некотором значении ско
роспюго напора изменяется знак
элеронов (рис. 10 2.3).
www.vokb-la.spb.ru - Самолёт своими руками?!
исследования взаимодействия упругих колебаний конструкции с
ДчсСКой системой управления, использующей в качестве обратных
автома ^нал1>1 да-( ЧИКОв нормальной и боковой перегрузок, угловых ско-
связей с нс0бходимо иметь динамическую модель упругого самолета.
,адача состоит из двух частей:
^Та определении собственных частот и собственных форм упругих
vn«бани» конструкции в пустоте;
к° _ с0СТавлснии уравнений движения упругого самолета в потоке.
В этом случае как и при расчете статических деформаций для самолетов
(альной схемы используется балочная схематизация конструкции само-
н01 затем составляются уравнения совместных изгибно-крутильных коле-
багшй данных балок и определяются собственные частоты и собственные
(Ьормы*Упругих колебаний конструкции в пустоте. Для решения этой задачи
догут использоваться различные методы расчета (Ритца, Бубнова-Галер-
кина, проюнки [7,8,9]). Для самолетов
балочная схематизация неприменима
при решении этой задачи использу-
ется метод конечных элементов [10]
Задача определения собственных
частот и собственных форм упру-
гих колебаний конструкции в пус-
тоте решается раздельно для про-
дольного (симметричные формы)
ко:
более сложной формы, для которых
Рис. 10.2.3. Зависимости 4 m.<M.g), £ s,(M,<?)
Иг' "h'
0,8
1
0,9
М- 0,8
0,7
0,6
эффективности элеронов - ровер
м=
Ли/
0,06
0,05
0,04
0,03
0,02
0,01
0
-0,01
М = 0,8
___--—7 Я
4000 <7’
мы) движения
Раскладывая линейные и угло-
вые перемещения конструкции в
ряд по собственным формам упру-
1их колебаний которые являются
полной ортогональной системой координатных функций, и определяя, на-
пример, по гипотезе квазистационарности [8] аэродинамические силы при
vnipymx деформациях и отклонениях управляющих поверхностей, можно
получить уравнения возмущенного продольного движения упругого само-
Лета 13 следующем виде:
С^ =
~ I + +
2
<7+^-
0,5-------------------------------*—,
О 2000 4000 6000 q кГс/м
Рис. 10.2 1 ЗависИМСХ.ТИ Ф(М, q)
Я>!
Рис- 10.2.2. Зависимое™ Д^г
Г Дс п „
г0 4 " иектор обобщенных координат симметричных колебаний упруго-
Олега; q л соответствует вертикальному перемещению ц.м. самоле-
6==1^0 " Повороту самолета как жесткого тела вокруг оси Oz\ qi
ЧцСд’о~~ симметричным упругим колебаниям конструкции, № _
Шу у‘1итьгьаемых симметричных тонов упругих колебаний конструк-
11 ~ ’ г = Л\+1 ,...,А'5-£Л) соответствуют отклонениям управляю-
тих поверхностей. используемым для управления в продольном I
(рули высоты или поворотный стабилизатор, переднее горизоитальн
рение и т.д.): у, - вектор отклонений штоков приводов симметрией
равняющих поверхностей размерности /_5; а' - вертикальная состад^
скорости ветра, м/с Г - скорость полета, м/с; р - плотность воздуха-
матрица инерционных коэффициентов: GS,D^ - матрицы конструктиву
жесткости и конструктивного демпфирования соответственно; _
рицы аэродинамической жесткости и аэродинамического демпфирования^*
ответственно; Rs матрица воздействия отклонения ттттоков приводов
органы управления; Ra, вектор воздействия ветрового порыва.
Данная система уравнений получена для связанной системы коорда,
нат, оси которой совпадают с главными центральными осями инерция
самолета (ось Ох направлена назад, ось Оу - вверх, ось Ог - по право-
му крылу); в качестве невозму щепного рассматривается горизонтальный
полет с постоянном скоростью и нулевым углом атаки, при вычислении
форм органы управления считаются неподвижными. В дальнейшем для
простоты будем считать, что используется только один орган управле-
ния. соответственно вместо матрицы Rs имеем вектор Rs, вместо векто-
ра г/, имеем скаляр ух. Соответствующей нормировкой обобщенных
форм матрица С5 может быть приведена к виду
т
0 cs
-1,Лг,+1
о с*
со,лт,+1
с5 = 0 0 1 о- l.A'i-’
0 0 0 .. 1
с _ zVs+1-l C.VS+1,0 cs \V,+1,1 CArs + l.Ns Jps
где Jp.? - момент инерции управляющей поверхности относительно
вращения.
С голбец с;).. (г =-1..N\.) определяет инерционное возДеИ
’ ’ СГР**3
движения управляющей поверхности на колебания конструкции, ,^1Яц
Сд, ч1 { (г = - 1,..,,AS) - инерционное воздействие колебаний констру
на движение управляющей поверхности. _
Коэффициенты матриц Bs, Ds зависят от загрузки самолета в
М, матриц Gs и - от загрузки и имеют следующий вид:
www.vokb-la.spb.ru - Самолёт своими руками?!
Го л 0 0 0 0 0 0 0 0 '0 0 0 0 0 С) 0 0 0 0
V 0 0 0 0 : D{ = 0 0 -М51 0 0
Cs о 0 0 0 к 6 0 0 —MjlV, 0
0 0 0 0 0 0 0 0 -Mp.s
где f*i ~ собственная частота г-го юна симметричных упругих колебаний
конструкции: /<чг - коэффициент конструктивного демпфирования i-ro
топа симметричных упругих колебаний конструкции; kps - коэффициент
жесткости пружины, которой моделируется упругость Проводки от при-
вода к органу управления, упругое гь самого привода и его крепления к
корпусу самолета: коэффициент, характеризующий момент сил
трения относительно осн вращения руля. Вектор воздействия отклонений
„пока привода через проводку на управляющий орган имеет вид
О
О
О
о
где rs - плечо качалки управляющей поверхности.
Аналогичный вид имеют уравнения бокового возмущенного движения
упругого самолета:
Сяр= р2_D"-Dak р + \^Ва+ Ga р + ^-В^ + ^Уа- (2)
.... .,™имметоичньк колебаний упру-
где р - вектор обобщенных коордал пгпРМещепи1о нм. самолета, р-1
того самолета; рз соответствует боковому _ повороту1 самолета
повороту самолета как жесткого тела вокру j ^НП1сиММСТр|Г1НЫМ упру"
как жесткого тела вокруг оси Оу. Pi <антисимметричных
Г»1М колебаниям конструкции; ш , ,\г.4/.д) "
тонов упругих колебаний конструкции. /« j-.\a управ тения в
°тююнеиия управляющих поверхностей, иснользу •> _ вектор отклонений
^’Ковом канале (руль направления, элероны и. т'.Д ‘ * хпОСТСй размернос-
‘Поков приводов антисимметричных управ.
™ La< и - боковая составляющая скорости ’ ст юг ацалогич-
Матрицы Go.D£, Ва. D“- Ra 11 UCKT°P К,‘
” 1ч^’атрццам и вектору для пРодоль’’2^я1Всамолета как жесткого тела
вМг71ри анализе возмущенного движ атаки а и угловую скорость
ЬМ^о иерсменпмх б/_;и г/0 используют угол атаки а и у
*ГЬ*Нл Т.е г
со,- для продольного движения и вместо переменных р_2( _
скольжения Р и уг товые скорости <ИХ, Ыу ДЛЯ бокового дЙИж уг°л
Учитывая, что элементы первого столбца ма1рицы равны C1UlJ1'
(обобщенные силы не зависят oi вертикального смешения) и ciipa^410
вы соотношения: й"
V,. , , . о« я
q 1 = ,Л = = v(& -а)«: ^овр- = 0)г: ?о=7г = 8,
f\ J /Ох /бх
^Ы.^Ь/0=0 i = -1,0,1,...,Л'
Л1 /йх
где /_| = 1 - форма вертикальных перемещений точек конструкции, соот-
ветствующая обобщенной координате c/-i, /Ь = (х-хц м) - форма верти-
кальных перемещений, соответствующая обобщенной координате q0, сис-
тему уравнении (1) можно привести к следующему виду:
U Л
т Г(со? - с» = Уа(а + —) • У°фг + д— £ ^-iy£/у +
I 2 7=1
т-2 i
* Ц- ^-МЧ! * Y - y"’‘S-’ -<и^15'’
2 7=1
V 2 X
= -V“(a - 5 - М^0)г - X d^qj + +
V ~ 7-1 2 7-1
+ М^54.+М^5£-^л>18х
\г
<7« = ^-fofo<a + у?) + idi}^} + '
2 12 2 Л1 2 ;=1
+ Ms«£/i +—-^v +i^ +Цгб?/л;+А ”
i = 1..Л\
4\ . I -lV(w2 - a) + СЛ'1 + 1.о“г + X = +
7 = 1
_ЧшИ
~ 7=1 2 7=1
+ (AZ® -И|„)6,
где Fri,y“...M°, - производные проекций аэроДИва>0^Я|
силы на ось Оу и аэродтшамического момента па ось Ог по соо-
www.vokb-la.spb.ru - Самолёт своими руками?!
м переменным; - “ производные аэродинамического шар-
101 го момента на управляющей поверхности по соответствующим пе-
|ПФН°
Р* диалогично для бокового движения систему .уравнений (2) можно
привести к следующему виду:
иг(Р - .р - Ар ♦ ♦ z*4», ♦ «.
7=4
nV2 V"
- V Z l>^Pi ♦ 2% + Z% - cf, 6„ ,
j=4
/Л = м?<р - p> - №'<>, * s <Q>/ *
y=4
‘ ₽f- 2«v₽/ * >&. - Mf’8. - c‘iN tis„,
7-4 ’ a
- Mj<₽ b Xd‘jPj +
7=4
О I '2 V" «
*— Z%P>-c0“,ViMSo.
7 = 4
Л -^-^(Р^) +£,z"p. +
7=4
+ £i“ +~d"N +^a *
7 = 4 z
9
P_____Kfl e _ a s>
2 tN0^a ~ C:,.vfl+15'
Ч.1,-2^(р-<Оу) + с^+11<Ьд. +С«й+1ОЙУ I /рЛ =л/£р + ^(0Х +
7=1 7-1
|k +(-^ш “ Мрд)5д + (jVy/ - Цра)8д + kparaya ,
Ний К01к-СО(Г>СГВе,,Ная ,,acioTa i-ro гона антисимметричных упругих колсба-
! тР>кции; - коэффициент конструктивного демпфирования
мо топа антисимметричных упругих колебаний конструкции' k
фициспт жесткости проводки от привода к органу’ управления; д
эффициспт. характеризующий момент сил трения относительно оси\
ним руля: га - плечо качалки руля: Z11, Z“J...М^, М®*,.. Jm?*
У’ J Jy* -
производные проекций аэродинамической силы па ось О? и аэро хи
мического момента па оси Ох и Оу но соответствующим Перемени
Д/“. Мщ,... - производные аэродинамического шарнирного момента^
справляющей поверхности но соответствующим переменным.
Системы уравнении возмущенного движения упругого самолета по
зволяют определить влияние упругих деформаций па характеристики vc.
тончлвости и управляемости самолета. Для определения влияния yup,
тих деформаций па характеристики продольной устойчивости и управтя-
емости самолета в системе уравнений (3) полагаем «у, =- qt = 0, г -
что соответствует статическим деформациям, и из уравнений для упругих
колебаний выражаем обобщенные координаты q, через а„ <уг, Под-
ставляя полученные выражения в первые два уравнения системы, опре-
делим приращения производных аэродинамических сил и моментов
Д У u, Д Vй’,..., V7“, ДМЙ-’.... и поправочные множи гели
. ,w , У“+ДУС , ... ._У5*+ДУ8«
'•'у у u ''-'у у >
ууА _ ад#8*
£ 5(Л/.^)- Y 2
ту \,[^3
и изменение запаса статической устойчивости
Sm^’1 (М, q)
напор* '
харак^
для рассматриваемого режима полета (числа И и скоростного
Аналогично можно определить влияние упругих деформаций на
ристики боковой устойчивости и управляемости мегэЬ1
Сигналы датчиков системы управления и контролируемые пара- 1в
движения уа в общем случае содержат составляющие, описывают’16
женис самолета как твердое тело т и линейные комбинациями
щенных координат упругих колебаний, их первых или вторых промз
dka чd Pj
и, = yl° T - Т.1'у<-х’У’2>—Гь • Ус - У™ + "j
k ~ 0 - обобщенное перемещение (линейное перемещение, пово J
тятций или изгибающий моменты, перерезывающая сила), Р = 1
www.vokb-la.spb.ru - Самолёт своими руками?!
скорость (линейная или угловая), k = 2 - обобщенное ускорение
UiCHl йнос или угловое); hij(x,y,z) - коэффициенты, характеризующие
'11,1 тонов упругих колебаний в сигнал т/;. В частности, сигналы скоро-
вК танга>ка > а также нормальной перегрузки пу, измеряемые датчи-
системы управления в точке на фюзеляже с координатами хЛат,
каМ,_ иьГ1ИСдяются по следующим формулам.
;=1 аХ
дат
п#-гдат) = ^С(®г-а) +
где Д(х) - форма /-го юна упругих колебаний фюзеляжа; df,(x)/dx -
угол поворота фюзеляжа к оси Ох при деформациях самолета по /-му
упругому тону, рад; хц м - координата центра масс, самолета.
Как видно из зависимостей па рис. 10.2.4, учет упругости конструк-
ции приводит как к изменению характеристик короткопериодического
движения самолета (f « 0,3 Гц), так и к возникновению дополнительных
резонансных пиков на частотах упругих колебаний конструкции. Введе-
ние поправочных коэффициентов, зависящих от скоростного напора и
. читывающих влияние статических упругих деформации конструкции на
10.2л. Вт1,
упругости конструкции на частотные характеристики самолет: / - жест
' - ” Упру ий самолет 3-е поправками на статические де4х|рмации конструкции
аэродинамические характеристики планера, позволяет Получить
точно точные динамические характеристики упругого самолета до
ты порядка 1,5 ч- 2 Гц, используя структуру уравнений движения f
та как жесткого тела (рис. 10.2.4).
Число топов упругих колебаний при формировании динамич J
схемы (уравнений движения) упругого самолета выбирается гак
обеспечить адекватность описания аэроупругих характеристик само^*
(амплитудно-фазовые частотные характеристики по любому парамет^И
изгибающему моменту, перегрузке, угловой скорости и т.п. в любой гочк'
самолета - на крыле, иа фюзеляже и т.п.) в заданном диапазоне частот
Для целей моделирования динамики самолета с летчиком в уравнениях
упругих колебаний могут быть сделаны дополнительные упрощения При
этом задается предельная частота, до которой требуется обеспечить адек
ватность математической модели, а в качестве контролируемых характери-
стик выбираются частотные характеристики самолета по перегрузке и уг-
ловым скоростям в различных сечениях фюзеляжа к отклонению органов
управления и ветровым воздействиям. Затем производится исключение от-
дельных топов упругих колебаний гак, чтобы изменение рсюнансных пи-
ков контролируемых амплитудных частотных характеристик и изменение
соответствующих фазовых частотных характеристик в районе данных пи-
ков нс превышало заданных пределов (например, ДА < 10%, Аф < 30D)
при этом динамические и статические характеристики управляемости само-
лета практически нс должны изменяться.
10.3. Методы анализа устойчивости и управляемости самолета
Основными задачами теоретического исследования динамики самолета
являются вопросы, связанные с изучением устойчивости и управляемости
его движения Традиционно такое исследование проводится с выделение*
определенных форм движения. Так например, приближенно рассматривай*
ся раздельно продольное и боковое движение самолета, траекторное ДВЯЗ№
нис и движение относительно центра масс, формы движения могут
разделены на длиннопериодическое (траекторное) и короткопериод^^И
(угловое) движение, и т.д. В каждом таком случае выделяются пРи6‘
ные уравнения различной размерности, которые в силу принятых п*)^тсг
ложений на ограниченном интервале времени могут рассматриваться
номпом виде (с независящими от времени коэффициентами), в ряДе '•
допустимо рассмотрение этих уравнений в линеаризованном виде.
Современный сверхзвуковой самолет немыслим без шзтомаГ тре6у
системы управления полетом, предназначенной как для обеспечения^ fl*"
смых характеристик устойчивости и управляемости в контуре Р)1 ^^пи-
лотирования, так и для управления траекторным движением, < оГр*-
аэродинамических нагрузок при полете в турбулентной атмосферу
пичения предельных режимов полета и т.д. С учетом нелиней
ничений сервоприводов аэродинамических органов управления Я
www.vokb-la.spb.ru - Самолёт своими руками?!
я движения уравнения для описания функционирования автома-
цзмрРс й сиСТемы управления и в целом замкнутой системы (самолет + си-
тн4^ уПрдвлсния) будут существенно нелинейными. Поэтому для исследо-
стеМа устойчивости и управляемости используется широкий арсенал ли-
ва'/1 я ‘ и нелинейных методов как приближенных аналитических, так и
HC1 * ых методов, реализуемых численно с помощью современных компью-
Т° о В частности, используются широко известные методы исследования
теР ейных систем (алгебраические и частотные критерии устойчивости, ме-
1 построения корневых траекторий характеристического полинома, ме-
тоды синтеза управления как во временной, так и в частотной области
пре тст явления математической модели объекта управления и т.д.).
Качественные методы оказываются эффективными при исследовании
не питейных моделей динамики самолета. Успешно применяются прибли-
женные аналитические методы, такие как .метод гармонического баланса
для исследования автоколебательных режимов работы автоматтптсских сис-
тем управления, обусловленных нелинейностями ее элементов.
Методы математического и нолунатурного моделирования динамики
самолета прекрасно дополняют все используемые теоретические методы
анализа, поскольку позволяют рассматривать задачу' в максимально об-
щей постановке и дают возможность подключить в контур управления
самолетом летчика-оператора, что вносит принципиально новые и важ-
ные особенности при решении задачи.
В качестве основы для “инженерного" исследования устойчивости
движения самолета обычно принимается понятие асимптотшгсской ус-
тойчивости движения по Ляпунову. Следует, однако, помнить, что спра-
ведливость или пригодность использования приближенных уравнений
движения возможна только па некотором ограниченном промежутке вре-
мени, пока выполняются принятые предположения о характере движения
^например, постоянство скорости полета, малость углов атаки и т.д.).
аким образом, концепция асимптотической устойчивости, удобная с
т°чки зрения применения известных математических методов, должна
кии раз оцениваться с точки зрения масштабов времени, характери-
J них сходимость переходных процессов.
мо аК анализ Устойчивости, так и синтез управления движением воз-
иовк*-11 ° пРИмепснИем метода функций Ляпунова. В этом случае поста-
сВойс ЗЭЛачи осУШсствляется с учетом нелинейных и нестационарных
Chia TR *1в,1ЛСе11Ия без использования упрощающих предположений, рас-
•1ец 1Ваются полные неавтономные уравнения движения Ниже приве-
дем ?.ИМеР такого подхода в задаче о стабилизации произвольной реали-
4обнЬ1йПрОСТраис1иснной траектории движения В силу ряда причин no-
li I,Qax°A пока не получил широкого инженерного использования.
1приведены различные приближенные подсистемы уравнений
Р^КтеСНИЯ' КотоРь,е обычно используются при анализе динамических ха-
Рисгик самолета [1-4J.
Уравнения движения в вертикальной плоскости. Особ
быть выделена группа уравнений для исследования движения в
кальмой плоскости. При атом предполагается, что движение дл Верти'
со, * О, а соА- = сьу = у = Р = 0. Выполнимость такого предположен! '
зана с условием отсутствия аэродинамического и гироскопическою СВя"
модействия с боковым движением, т.е. Сг = тх= ту - К a = q Взаи'
возможностью пренебречь таким взаимодействием. Либ°
d V (Г* + Р) cos а - Fy sm а
—— = - - -------------tfsinO,
dt т
de
dt
J9
dt
(Fr + P)sina + F„ cosa
___ J__ .
mV
- cos 9,
(1!
dti), pV2Sh„
---— —-------m
dt 2JZ
где угол 9 - 9 - а является углом наклона траектории.
Система (1) описывает продольное короткопериодическос (условно
угловое) и длиипопериодическое (условно траекторное) движение само-
лета и может использоваться при исследовании динамики полета в вер-
тикальной плоскости с учетом больших возмущений параметров движе-
ния (режимы “Кобра”, “К локол", и т.д.).
При этом по сравнению с пространственным случаем диапазон изме-
нения утла тангажа будет другим - 180 < 9 < 180°.
Существенное различие времен, характеризующих изменение относитель-
ного и траекторною движений (при полото с достаточно 6о тыной скоростью)
позволяет, в принципе, сделать и следующий шаг ~ разделить уравнения (1)
на две приближенные подсистемы для “короткою1 и “длинного пориста.
Уравнения бокового возмущенного движения. Для анализа
бокового возмущенного движения самолета обычно используются уравне
ния, следующие из полных уравнений в предположении о постоянстве
скорости полета V, угла атаки a ~ а0 и ташажа 9 ~ 9о, наличии У самол
плоскости аэродинамической, массовой и инерционной симметрии и т,д’ х
В этом случае можно использовать следующие приближенны6-
ные уравнения с постоянными коэффициентами относительно киНе‘кЦ]51~)
чсских параметров бокового движения - угла скольжения (р). у
угловой скорости па связанные оси координат (сох, ©у) и угта крс11а
Р «= <о„ cosao + cor sinao ~ % Р + Z "б,, + y^-siny,
J • V
<i>Л- = м? Р + У(£>у + -Чг’8э + *Чгн8н -
ci) „ - М? Р + + ^нб« 1
у -сог -lg9oco„ cosy,
www.vokb-la.spb.ru - Самолёт своими руками?!
ии моментов пересчитаны с учетом обращения матрицы инерции
где ПР*** вычислены с использованием комплексов безразмерных аэроди-
(сМ 1 х производных, полученных методом вьшужденных колебаний.
на-'”*4 *^ма уравнений 5-го порядка При рассмотрении простран-
СИС у аневров с быстрым вращением - бочек, переворотов через
сТвенЯ’»’х д011уСТИмы упрощения уравнений поступательного движения
крЫЛ И! тх осях И уравнений динамики углового движения (см 10.1).
в скрьп 1 фактором при вращении самолета относительно вектора
Q-щссгв ^аяегся уСтаНовлсние баланса по моментам, в то время как ба-
КСР° цт сш'с нс возникает и влиянием искривления траектории полета па
ЛаН мику относительного движения можно пренебречь. В этом случае
'^«тпочагастся, чго скорость полета неизменна, V - const, а влияние си
’'РСтяжес1И отсутствует (условно g ~ 0). Тогда из полной системы урав-
пепии следует сохранить лишь следующие пять-
pb’.s(-Cx I С )sina
-~- = toz +tgp((Oy sin a -torcosa)-
</Р . Ра* Г/ z-
— = co у cos a + cox sm a +• -— I (-Cr -
dt
' “J‘®“ 2] г
p(M'2Sl
p(H)V -Sha
--------- 7W ,--
2т cos Р
Cf)) cos а + Су sin aj sin р +
+ — C.cosp,
(Bip -^тев ) Удв (3)
(Оу
^лв
Jy
у ~ J2
(Иу(лг
J x
ту+ (й2
£Jy Jy
p(II)V2Sl
~
2Л
(^р -Р'ЮВ ) гш
У
c/m
dt
do3t
"dt
da}
dt
Эта приближенная система уравнений может рассматриваться при
исследовании особенностей динамики углового движения при ыстр
вращениях самолета по крену и выходе на большие углы атаки, при ана
,изо особенностей сваливания. Система (3) при малых значениях уг юв
атаки и линейных зависимостях аэродинамических коэффициентов но
Робно Исследовалась в [2|.
Система уравнений 8-го порядка Из полных уравнении просгран-
?™П’ого движения можно выделить взаимодействующую группу уравнении,
пРе'геля101цую изменение параметров V, a, р, Гоу (|)г’
det
dt * “2 “
ах - sin р) sin а + (л7/ + (o.r sin р) cos а| cos1 р ,
(it ~ COS Р - («Г S«n Р - “у )cosa + ((1У Sin Р + x>sin а >
= V(ax cos P cos ct - a у cos p sin a -* az sin p),
d<02 Jx~Jy dt J2 x y J,-Jx — - — CD rCD - dt J, d(£>J и _ j 2 rft Jx ‘ p(H)V7Sb(, (% + PeB)v, V, 1, > ~г p(H)V7SI l:=, <₽np - + m,. -r co, + Eg—tjg 2A Jy (4) p(H)V~Sl 1 772 r , 2Jx
rf9
---= co„ sin у l сог cosy ,
dt
- — = ® r - Ly 9 (co „ COS у - CD, sin y),
dt x //
- lrx sin 9 + V' cos 9 cos у + F„ cos 9 sin у =
dt y
- V(cospcoset sin 9 - cos P sin a cos 9 cos у - sin p cos 9 sin у),
где
ax - \т Cx + CP>> V Sm&’
pVz5‘ q
a.. = --C„ - — cos 9 cos у,
y 2m y V
pVSz, q Q .
аг = —— C, + —cos 9 sin у .
2m I
Оставшиеся переменные v, xg, zg вычисляются как интегралы от ре-
шений системы (4) Взаимодействие в системе (4) с последним уравнени-
ем для изменения высоты II достаточно слабое. Оно проявляется через
зависимость аэродинамических сил, моментов и тяги двигателей от плот-
ности воздуха р(Н). Если предположить, что плотность р при полете из-
меняется незначительно, го первые восемь уравнений (4) можно рас
сматривать отдельно и при фиксированной конфигурации самолета
(постоянных отклонениях органов управления) они образуют автоном-
ную систему уравнений:
^ = НХ,5),
dt
где X = (V, а, р,(от,<Оу,со2,9, у)' 5 = (6в,бЭ15,„Р)' g R5 - вектор сР
стояния и вектор управления.
Система (4) используется при исследовании пространственного
жения, когда существенно взаимодействие траекторного и относитеЛ1» ,
www.vokb-la.spb.ru - Самолёт своими руками?!
.л р частности, при выполнении виражей-спиралей и в режимах
равновесные режимы движения, для которых выполняются ус-
сил и моментов (особые точки уравнений (4)), соответ-
довйя ^ииЖСНИ1О самолета по спиральным траекториям, когда устанав-
сТВ'1°сЯ сиНХрОНИаацИя углового и поступательного движений при вра-
тира оТНОситеЛ1>ио вертикальной оси спирали. Вертикальность оси спи-
шеНН которая совпадает с направлением вектора угловой скорости, сло-
пали, 1 Ал.
vct и’ условия стационарности углов тангажа у = 0 и крепа у = 0, в
тгом стучав ч1 = Если вращение отсутствует (со = 0), то движение проис-
чо1ЯГ1ТО прямолинейной траектории.
Математическое описание автоматической системы управ-
ления Современные самолеты оснащены автоматическими системами уп-
равления движением, которые способны радикально изменить его дина-
мические характеристики. Самолет с системой управления - это уже но-
вый динамический объект значительно большей размерности, чем сам са-
молет. Даже на 1аких режимах полета, когда допустимо рассматривать
уравнения движения изолированного самолета в линейном приближении,
математическая модель замкнутой систолы будет существенно нелинейной
в силу физических ограничений в сервоприводах (гидравлических бусте-
рах) аэродинамических органов управления, таких как ограничение по хо-
ду и насыщение по скорое нт отклонения. При больших возмущениях не-
линейные эффекты проявляются также и в датчиках, измеряющих состоя-
ние параметров движения самолета.
Исследование характеристик устойчивости и управляемости совре-
менного самолета должно проводиться с учетом функционирования авто-
маптческой системы управления. Для этого используются математические
модели описания всех ее элементов - датчиков для измерения парамет-
ров движения, силовых приводов ортанов управления, дискретности бор-
товой цифровой вычислительной машины (БЦВМ), формирующей алго-
управления и т.д. Обычно модели датчиков и силовых приводов
ос 4 иР-ЮТСя в виде передаточных функций с наличием в случае пе-
.iee°fW'fOCTH Нсл111,сйных элементов. Такая форма представления наибо-
'ло6на иРи анализе устойчивости с использованием линейных мето-
го1Ном *1ст°Да гармонического баланса. В общем случае, наиболее при-
гичегК0^ЛЯ Математического Моделирования, функционирование автома-
и системы может быть представлено в следующем виде:
^ = G(x^,8.s),
„ dt dt
ГДе s = (
^•Чяютс 1”Хэ,Хн'хД,«>-- ' ~ вектор управления, компонентами которого
УИраь Я °1 Клонсние ручки управления и педалей, положение рычага
3аКс)нам1ИЯ Явигатслем- Вектор-функция G определяется используемыми
* травления и математическими моделями датчиков и приводов
(5)
органов управления. Система уравнений (5) должна рассматриВат
вместно с уравнениями динамики самолета. В частности, слепх^ С°'
объединенная система уравнений должна использоваться для расчет
лапсировочных режимов полета самолета: а
F(x,8)= О,
G(x,0,8.s)= 0.
(6)
В системе (6) компоненты векторов х и 8 являются неизвестным
параметрами, подлежащими определению, а компоненты вектора s явад
ются набором управляющих параметров.
Специфической особенностью уравнений (5 и 6) является наличие ог-
раничений у вектора состояния, т.е. у отклонений аэродинамических орга
нов управления 8(8^ < 8„ < 8Ппих;|8э| < 8Эшах;|8„| < 8Нтах). В подобных
нелинейных системах с ограничениями фазовых переменных возможно воз-
никновение дополнительных равновесных состояний при выходе органов
управления па ограничения. Такая ситуация возможна при выполнении
энергичных пространственных маневров.
Применение линейных методов анализа устойчивости. Ис-
пользование рациональных упрощающих предположений во многих
случаях приводит к линейным системам уравнений, пригодным для ис-
следования динамических особенностей самолета:
х - Ах - Ви,
(7)
где х - w-мерный фазовый вектор, А - (п*п) - матрица с постоянными
коэффициентами, В - матрица эффективностей органов управления, и~
вектор управления.
Характеристики устойчивости и управляемости движения самолета i
подобных случаях могут быть эффективно изучены с использованием шир^
ко известных линейных методов анализа динамики и синтеза управления,
первую очередь следует упомянуть алгебраические критерии устойчивое™!
именно критерий Рауса-Гурвица, а также метод передаточных функли •
кованный па применении к линейной системе преобразования Лапласа,^
нейные методы синтеза управления как в частотной, так и во врем
форме представления исследуемой системы уравнений. К последним
отнести метод корневого годот-рафа и модальный синтез [12]
Метод передаточных функций Применив к уравнению <
образование Лапласа, можно получить:
(рЕ - А)х(р) = Ви(р),
где Е - единичная матрица а р - dldt - оператор Лапласа. J
Из уравнения (8) может быть выражен вектор состояния Х\.рР
х(р) ~ (РЕ. А)~'Ви(р),
www.vokb-la.spb.ru - Самолёт своими руками?!
ма Р1Ша = - Л) ’В определяющая связь преобразований
rJC jaca фазового сек гора х и вектора управления и. называется переда-
Л311' 1 й матрицей. Элемстами матрицы W(p) являются передаточные фун-
,,{°и от различных параметров управления к характеристикам движения
^'использование таких передаточных функций, во многих случаях пред-
чяемых в явном виде от характеристик самолета и режимов полета, по-
СТа^яет решать широкий спектр задач устойчивости и управляемости (2,4].
3Bt В знаменателе передаточных функций содержится определитель мат-
ицы рЕ являющийся характеристическим многочленом системы
(7) который в общем виде может быть представлен в следующем виде:
Рп + ап-\.РП +ап-1Рп~2+-+ахр + а{} =0, (10)
где коэффициенты г = 1,2......п -1,п вычисляются через коэффициен-
ты матрицы А и могут быть в ряде случаев представлены в виде точных
или приближенных зависимостей от ее коэффициентов. При исследовании
динамических характеристик и устойчивости возмущенного движения са-
молета осуществляется расчет корней характеристического уравнения (10),
как численными, так и приближенными аналитическими методами.
Алгебраический критерий Рауса Гурвица позволяет получить
необходимые и достаточные условия устойчивости возмущенного движе-
ния в форме конечных соотношений, накладываемых па коэффициенты
характеристического уравнения: at>0, i = 1,2,...,«, Д2 >0, i = 1,2,...,п-2,
где последние соотношения относятся к специально формируемым детер-
минантам. В частности, весьма эффективным критерием возникновения
апериодической неустойчивости является смена знака свободного члена
характеристического уравнения: «о = 0, а критерием возникновения ко-
лебательной неустойчивости старший детерминант Рауса:
"й-1 1 0 0 ...
А«-1 - °п-3 °я-2 ^м-1 1 = 0
«и-5 °п-4 tfn-3 "л-2 ...
ч ,егод корневого годографа представляет собой графо-аналити-
ма ИИ ‘'.’етил построения траекторий корней характеристического полино-
СИС|СМЫ (Ю) при изменении одного из входящих в него на-
Р°в- Этот метод наиболее эффективен па первоначальном этане про-
«Ых . dI,Wl законои управления, при этом один из коэффициентов обрат-
еКГ( Сввве11 выступает в качестве параметра при построении корневых тра-
1 И ХаРакгеРистического полинома замкнутой системы. На комплскс-
к°рНе^1ОСКоСТИ с использованием нулей и полюсов передаточной функции
гак CRbIC траектории имеют наглядную интерпретацию с использованием
‘ Ь11заемой “гидродинамической аналогии”. Нули и полюсы переда-
www.vokb-la.spb.ru - Самолёт своими руками?!
точной функции приобретают свойства стоков и источников в цоле '
жидкости. Наиболее исчерпывающе этот метод представлен в [12]
Метод гармонического баланса и аналогичные ему методы
возможность приближенного определения параметров автоколсбани“
рсходных процессов нелинейных систем. Их использование оказь **
очень эффективным при исследовании динамики и качества автомати
систем управления полетом с учетом реальных характеристик силовых
водов аэродинамических органов управления. Сочетание принципа П^И'
мического баланса при рассмотрении режима периодических колебаний01*1
гемы и уравнений корневого годографа позво.гяст во многих случаях доста
точно просто и эффективно провести приближенное исследование нслиней
ной замкнутой системы (самолет + система управления). В качестве пара-
метра корневого годографа в подобных случаях выступает амплитуда авто-
колебаний, что позволяет определить как амплитуд}', так и характер у(.
тойчивости автоколебательных решений системы уравнений ио типу пере-
сечения корневой траектории мнимой оси на комплексной плоскости. Под-
робное описание Методов гармонической линеаризации нелинейных элемен-
тов системы управления и идеи rap.Moinnicc.Koro баланса можно найти в [12].
Применение метода функций Ляпунова. В работе [И] рассмот-
рен метод нелокальной стабилизации движения летательного аппарата,
определяемого целью управления. Особенностью метода является воз-
можность синтеза алгоритмов управления, которые обеспечивают устой-
чивость произвольного реализуемого движения, включая и иеустановив-
шссся пространствен пос движение. Получаемые алгоритмы и программы
обладают свойством универсальности и не изменяются при изменении
цели управления, режима полета и динамических параметров объекта
управления. Подобные системы в наибольшей степени соответствуют на-
значению летательных аппаратов, которые по существу являются
режимными объектами многоцелевого назначения.
Рассматриваются полные нелинейные уравнения сил и моментов в
векторной форме:
m{V -г со х V) - R(v со, г, 9, u,t), (11)
К + со х К. = Ma(v.(b.r,8,u,t). K=Ju>,
дополненные кинематическими соотношениями:
(12)
r-/l(9)D, 9 = B(S)co ; 9 = (9,y,V)T
Допустимые управления u - (,U\,U2....ипУ в (11),(12), где при51Я1
стандартные обозначения, довлетворяют неравенствам:
I щ | < Hi, Hj - const > 0, i - 1,2.n.
Пехотная цель управления системой (11,12) состоит в том, чтобы
v скорости центра масс ЛА и его угловая скорость со изменялись
®efKor°fBeTCTBHH с заданной программой:
v - v*(t), со = со*(£),
(13)
может быть реализована при располагаемом ресурсе управления
К<со ранением некоторого запаса ht для целей стабилизации невозмущеп-
ного движения
- | щ I £ Н, -/ц, /ц = const > 0, i ~ 1,2.n.
Таким образом, задача состоит в том, чтобы построить законы уп-
ав гения стабилизирующие любые реализуемые программные движе-
ния Общее решение задачи синтеза управления осуществляется с ис-
пользованием метода функций Ляпунова, которые для задачи стаби-
щзапии скоростных движений имеют вид типа кинетической энергии
и задают общую меру отклонения движения системы от заданного не-
возмущенного движения:
1т 1т
G = - AcoJAco + — mAv Ad,
2 2
\V - V - D*(t),
Aco = co - co’(i).
Функция G является положительно определенной по отношению к
переменным Ad, Лео и из равенства G = 0 непосредственно вытекает вы-
полнение условия (13). Допустимый закон управления I и, I < Hi) вы-
бирается из условия:
G(м, Ad, Дсо, D*(Z), co*(i),i) < О,
(14)
которое понимается в смысле отрицательно определенных по Ляпу-
”ов Функций, зависящих явно от времени. Через G обозначена
Г1Роищ}(-)дНая функции G в силу уравнений движения (И). Неравен-
° (14) цо существу выражает собой принцип выбора допустимых
Правлений ‘
ОтНос°ЛНаЯ пРОИЗиолная Функции G в силу уравнений (И), записанных
гелыю отклонений к протраммпой траектории, имеет вид
С - то*(«)(А<о х Ad) - со*(()(Дсо х i\Kc)~ Ad A/? + Aco • AMrt . (15)
ТиЧсс „Отношение выражает теорему механики об изменении
Вце сГЛ” ЭНеРГии ЛА для уравнений в отклонениях. С учетом (15)
а Илизирусмости движется ЛА можно записать в форме:
кинс-
усло-
min G = ?nr*(t)(A<o x Ar) + g)*(O(Ag) x AR.,.) +
|«Ф".
+ inin (Ar ДЛ-г Дсо-дД/ (1
Таким образом, проблема существования решения задачи снят
равлепия ЛА своди!ся к алгебраической задаче проверки неравен Л
(16), которое будет также определять область устойчивости программ^
ю движения. При линейно входящем управлении, что общепринято в”0"
дачах динамики полета, может быть полущено аналитическое решение Н
дачи. Решение в классе релейных законов управления обеспечивает неза
висимоегь от динамических параметров объекта управления. Аналогия"
ным образом решается и задача стабилизации заданного программном
изменения фазовых координат ЛА, в частности его ориентации.
Приведенные выше методы анализа характеристик устойчивости и
управляемости (включая и переходные процессы при управлении) по-
зволяют составить достаточно полную картину динамических свойств са-
молета с системой СУУ. Более детально ряд вопросов оценки устойчи-
вости рассмотрен в главах 13-15. Для получения оценки летчиком дина-
мических свойств самолета чрезвычайно полезно проведение нолунатур-
ного моделирования динамики самолета па основных режимах полета па
пилотажных стендах (см. гл. 11).
10.4. Требования к устойчивости и управляемости
В настоящее время уже сложились некоторые общие принципы фор-
мирования требований к устойчивости и управляемости, достаточно об-
щие для самолетов всех типов и назначений. Их дополняют требования,
связанные со специальным назначением самолетов.
Такими общими вопросами являются:
- ограничение усилий при управлении, как максимальных их зна-
чений так и градиентов усилий по управляемому’ параметру;
- лимитирование хода рычагов управления и эффективности орга
нов управления;
- нормирование динамических свойств самолета, таких как инТ^
сивпость затухания колебаний, частоты колебаний, переходных про
сов при управлении; J ;aCJ
- требования ограничений или предупреждения о выходе на ‘I
ные режимы полета; сса
- требования к надежности системы управления и вс.его ком
обеспечения устойчивости и управляемости.
В настоящее время все сверхзвуковые самолеты имеют пеобрат
бустерные системы управления, как правило гидравлические, а та
тематические средства обеспечения устойчивости и управляемости
лета. Эти средства мслут быть различного характера и сгруктуЯ
www.vokb-la.spb.ru - Самолёт своими руками?!
1? 13) и представляют вместе с исполнительными сервоприво-
г.тавЫ ।'те' аМ1{) достаточно сложную динамическую систему, как пра-
дам* ,инейнук). Вследствие этого ее влияние на динамику самолета яв-
ви.ю 'fe-цеГГвеНцым и должно быть также отражено в требованиях к
•1ЯеТ^1Ии‘осГи и управляемости самолета в целом с учетом управляющих
обычно требования к устойчивости и управляемое!и качественно фор-
vjotcm заказчиком на основе опыта летных испытаний. Для военных са-
'^егов зти требования разрабатываются военным заказчиком каждой стра-
м Дтя дозвуковых гражданских самолетов существуют международные
1<Ь1’мы, разработанные в России, США и в Европе (ФАР и ЕАР и др.).
И Дтя сверхзвуковых пассажирских самолетов в СССР при создании
•pv.144 были разработаны временные требования. Конкретные количест-
венные требования формулируются в зависимости от класса самолета,
целевых задач самолета и этапов полета.
Качество выполнения требований к устойчивости и управляемости
также классифицируется па несколько уровней, что связано с возможными
различными техническими решениями при выборе путей обеспечения безо-
пасности полета (в частности способов резервирования систем управления)
и допускает некоторые усложнения пилотирования при отказах.
Градация требований. Прежде всего требования к управляемости
и устойчивости разделяются количественно в зависимости от класса са-
молета. Используется следующая классификация самолетов всех видов и
назначения на основе учета их основного назначения и массы. Такая
классификация была введена раньше всего в прочности. В ее основу по-
ложили величину эксплуатационной перегрузки.
Классификация, используемая при формировании требований по ус-
тойчивости и управляемости, более общая. Вводятся следующие классы:
Класс I - маневренные самолеты. К этому классу должны быть отне-
сены прежде всего самолеты-истребители, учебно-тренировочные, спортив-
кые самолет, имеющие максимально эксплуа1дцио1шые перегрузки Пу в
пределах -(7-5-9) и даже выше и -(2 ч-4).
Класс II - ограниченпо-мансврсппые самолеты с максимальной поло-
житеЛЬНой перегрузкой Пу = 4 ч-5. Сюда могут быть отнесены сверхзву-
Ковь,е самолеты фронтовой авиации.
Самолеты класса I и II, как правило имеют взлетные массы до
^60 т, а большая их часть даже меньше.
Класс III - пеманевренные самолеты. К этому классу могут быть от-
в°енныс самолеты с большой дальностью полета и сверхзвуковые
ЧщСа>КиРСКИе 11 транспортные самолеты. Специфика характеристик устой-
°СТи и управляемости показывает на необходимость в этом классе ввес-
1 Ротацию по взлетной массе самолета, выделив тяжелые сверхзвуковые
Галеты класса Шб, имеющие перегрузки = 2,5 и взлетную массу бо-
лее 100 т. Эти тяжелые самолеты могут иметь отличия в характе
устойчивости и особенно управляемости от более легких (класс Illa)СТИках
Основные различия в требованиях к характеристикам управляем
указанным классам для сверхзвуковых самолетов заключаются в увст П°
усилий при управлении по мере роста веса, что должно служить йрепя Ч<?НИ11
ем для легкого выхода па перегрузки, близкие перегрузки ?za \ СГВ1Ь
//max. а таила.
более вялых проходных процессов при управлении. При более легком
равлении необходимо иметь систему ограничения выхода на перегрузки И3’Л"
Кроме разделений требований по классам самолетов в настоящее /
мя общепринято разделение в зависимости от целевых задач само тега
этапов конкретного полета на следующие категории: 11
Категория И - включает тс этапы полета, па которых требуется
точное слежение, быстрое маневрирование с точным управлением траек-
торией. Для военных самолетов это задачи боевого применения, дтЯ
гражданских самолетов это может быть, например, выдерживание режи-
ма при аэрофотосъемке или нечто аналогичное.
Категория Б - взлетно-посадочные этапы полета, па которых необ-
ходимо иметь достаточно точное управление траекторией полета, доста
точно быстрое реагирование в этих условиях на внезапно возникшие ус
ложпепия условий полета. К этой категории относятся, например, взлет
посадка, уход на второй крут и т.д.
Категория В - включает те этапы полета, на которых не требуется
быстрое маневрирование и точное слежение. Примерами таких этапов
полета сверхзвукового самолета являются: крейсерский полет, набор вы-
соты и снижение.
Качество выполнения требований к устойчивости и управляемости
самолетов на различных этапах полета также разделяются па различные
уровни оценки пилотажных характеристик:
Уровень 1 - характеристики устойчивости и управляемости хорошо
соответствуют рассматриваемому этапу' полета и пилотажные характерис-
тики самолета оцениваются летчиком по высшему баллу.
Уровень 2 - характеристики устойчивости и управляемоеги обоспечи
вают выполнение задач данного этапа полета при некотором снижении ои _
кп выполняемой задачи и при удовлетворительной опенке пилотажных ха
рактеристик, связанных, например, с увеличением нагрузки на летчика.
Уровень 3 ~ характеристики устойчивости и управляемости ис
почивают эффективного выполнения задачи на данном этапе по ста а
ею выполнение требует от летчика чрезмерной нагрузки при ги,л0П‘1ГТ
ваггии. Опенка пилотажных характеристик летчиком в этом случае -
на грани допустимого.
Введение трех уровней оценки пилотажных характеристик ПОЗВ^ДИ
рассматривать некоторые ухудшения характеристик при введении 1>езер
и аварийных систем в управлении и в средствах обеспечения устоиЧ
сверхзвукового самолета.
www.vokb-la.spb.ru - Самолёт своими руками?!
р ряде случаев полезна более детальная градация условий полета,
ме трех категорий Л, Б, Б, приведенных выше, целесообразно при
м\’лиронкс требований разделить режимы полета на три области, оп-
^°^тяем1>1Г скоростью, высотой полета и перегрузкой.
Р^1 0СИовлая область - режимы полета па которых должны выполняться
горные задачи целевого назначения самолета. Например, для истребителя
W -п-шный бой; для сверхзвукового пассажирского самолета режимы пря
идейного установившегося полета (например, крейсерский полет).
Эксплуатационная область - режимы полета, допустимые в массо-
вой эксплуатации, которые охватывают все возможные при нормальной
эксплуатации самолета в соответствии с его назначением, комбинации
скорости, высот полета, перегрузки и углов атаки.
Предельная область — режимы полета, выход за которые является
недопустимым по условиям безопасности полета. Здесь имеется ввиду
недопустимость выхода за пределы значения угла атаки, скорости полета
н перегрузки, оговоренные в руководство по летной эксплуатации (РЛЭ)
данного самолета.
Приведенная выше детализация требований к характеристикам ус-
тойчивости и управляемости приводит к необходимости подробного ис-
следования всей гаммы условий полета расчетными методами, методами
математического моделирования, моделирования на пилотажных стендах
и, наконец, детальной проверки в летных испытаниях.
На первой стадии при проектировании используются в основном
первые два метода, в основу которых кладутся результаты исследований
аэ[Х)динамичсских характеристик.
Требования к характеристикам продольной устойчивости
и Управляемости самолета. Существенными источниками ощуще-
ний летчиком режима полета являются изменения усилий и переме-
щения рычагов управления, которые необходимы при выполнении
маневра. Усилия при управлении и перемещения рычагов управле-
ния удобно характеризовать, приводя их к изменению перегрузки,
е. величинами dPIdn: dXpldn; или к изменению скорости полета,
Т‘е- к величинам dPldV и dXp/dV. При слишком легком управле-
^и’ КО1да требуются малые усилия дтя создания перегрузки, летчик
жег раскачать самолет. Слишком большие усилия утомительны
* пилотирования
Параметры dPIdn (dXpldn) являются одними из существенных ха-
' С;РИстик самолета, поэтому их максимальные и минимальные значения
^миРУются в “Нормах летной годности”. Такие требования обычно
л Р‘ч^-гируются па основе анализа статистики и результатов анализа экс-
1Ме1,ГОв па самолетах — летающих лабораториях и пилотажных стем-
•Мог ^lH,MePT’i нормируемых требований к dPIdn для самолета, управляс-
с помощью центральной ручки, приведены ниже
т.е.
Параметр Англия Франция СШ4
Минимальное значение (c/P/cf«)10111, к Гс ед.перггрузки 1,56 1,00 ~~К37
Максимальное значение (dP/d«)lnilI, кГс/ ед.11сре1рузки 3,60 4,00 3,70
Отношение (dP 'dn),,,^ / (r/P/</n)min 2,27 4,00 2,67
(rfP/</w)max | (</P/</n)min 1,27 3.00 1,67
Как видно, значения dP/dn ио нормам различных стран лежат ц
весьма узких пределах.
Очевидно, чю требования к величине
dP!dn зависят от типа рычага управле-
ния. В настоящее время основным явля-
ется управление через штурвал для пас-
сажирских и транспортных самолетов и
через центральную ручку — для манев-
ренных и спортивных самолетов. В пос-
ледние годы для маневренных самолетов
Рис. 10.4.1. Зависимость jiaj-рузки Р
01 перемещения А' при различном
управлении- 1 - центральная ручка;
2 - боковая ручка; X - перемещение
ручки в долях максимального
начали применяться системы управ 1еиия
с использованием боковой ручки управ-
ления. На рис. 10.4.1 приведены приме-
ры зависимости усилия от отклонения
центральной и боковой ручек (Р(Хр))
Кроме величины dP/dn, для вос-
приятия самолета существенно переме-
щение рычага управления на единицу
перегрузки dXp/dn. Обычно нормирует-
ся минимальное значение величины
Рис. 10.4-2. Области равных оценок са-
молета летчиком (по шкале Куиера-
Харпера) при управлении центральной
ручкой (для самолета с характеристика-
ми 2,4<wn<2,81/c; 0,56 <£<0,68)- /-
неприемлемо, 2 удовлетворительно,
i - отлично
dXpidn. Например, для маневренных
самолетов согласно некоторым ребова
ниям должно выполняться неравенство
dXp!dn > 10ч-12 мм/ед.пер На рис.
приводятся результаты исследовании
определению оптимального соотноше
между’ dX-pIdn и dP/dn для мапевренн^
самолетов. Из рисунка видно, что 11аи®И1
шие оценки самолет, управляемый c^i
мопгью цешралыюй ручки, получит
случае, когда имеется определенное
ношение между dXp/dn и dPldn. В 4 «
пости, при переходе к тензометрии
www.vokb-la.spb.ru - Самолёт своими руками?!
управления, для которой dX^Jdn «0, управление самолетом не-
Р'ЧК ко усложняется по сравнению с обычной ручкой. Трудность нормиро-
г требований к величине dXp!dn обусловлена, в частности, сложной за-
10111 ТЬЮ усилий от перемещения рукоятки Р(Х). Наличием усилий
кивания", предварительного “затяга” по усилию и т.д. Эти факты мо-
Существенно влиять на удобство пилотирования самолета летчиком
:{пя наиболее простой характеристики загрузочной пружины — линей-
ft величина dPIdn пропорциональна эффективному (с учетом действия
Автоматики) запасу устойчивости по перегрузке. В этом случае диапазон до-
щгстимых значений dP/dn в какой-то степени определяет минимальный до-
пустимый запас устойчивости самолета при заданном расчетном диапазоне
его центровок, а также потребную степень регулировки системы управления.
Узкий диапазон допустимых значений dPIdn приводит к необходимо-
сти принимать специальные меры к его реализации на практике. Pei-ули-
рованисм параметров системы управления и Рх молено некоторые из
этих изменений dPIdn компенсировать. Например, если ввести увеличение
нагрузки пружины Рх пропорционально скоростному напору, то значи-
тельную часть изменений dPIdn можно скомпенсировать. Аналогичного
эффекта можно достигать регулированием по скоростному напору
Дтя сверхзвукового самолета диапазон изменения dPIdn расширяется
вследствие влияния числа М на моментные характеристики самолета, вы-
ражающиеся прежде всего в смещении назад фокуса самолета при перехо-
де через трансзвуковой диапазон от М = 0,8 до М = 1,2. Коме того,
обьигно для сверхзвуковых самолетов реализуется большой диапазон ско-
ростных напоров, что также, через влияние упругости конструкции, уве-
личивает диапазон изменения эффективности продольного управления. В
этом случае величина dPIdn будет функцией двух основных переменных:
числа М и скоростного напора. Это
изменение можно в основном компен-
сировать, если ввести регулирование
и Р в функции этих параметров.
В существующих нормативных до-
куметах требования к dPIdn и dX-pkin
ьтчпо задаются независимо от дина-
мических характеристик самолета. Од-
Уако эксперименты на пилотажных
ендах показывают, что минимально
‘Опустимад величина dPIdn зависит
фи5X710 Ьсего от характеристик демп-
^°Ва1,Ия продольного движения са-
Пример соответствующих за-
Впц1МОСГе^ д’1я манеЕРенного самолета
ЧТоВе^ен на рис. 10.4.3, откуда видно,
Фи снижении демпфирования ни-
Рис. 10 4 3. Заннсимсхггь опенок самолета
летчикам от соотношения величин dP dn и
декремента продольного демпфирования
Ея : а - категирия Л - бькщюе маневри1Ю-
вашге, точное пилотирование; б - катоп»
рия С - взлетно-посадочные режимы полета
Режимам
чрезмерной
же -- 0,6 -г 0,7 необходимо уве.чинить загрузку ручки управления М
мальпая загрузка центральной ручки управления допустима при обеспе
декремента затухания > 0,7 ЧенИц«
По вопросу оптимального изменения зависимости dPidn по пеж
полета нет единого мнения. Несомненно то, что сохранение нешм
величины dPIdn на всех режимах полета может приводить к чрезме
чувствительности управления на режимах полета с малыми величин И
скоростных напоров q, где для изменения перегрузки требуются большие
изменения угла атаки. Это режимы полета, где летчик пилотирует само
лет, в основном ориентируясь по изменению угла тангажа самолета в
отличие от режимов с большими величинами q, где пилотирование осу-
ществляется по перегрузке. В связи с этим при выборе величины dp/dn
желательно ее некоторое увеличение при малых значениях пу .
Be шчипа dX?!dn, по-видимому, также должна существенно изменяться
ио режимам полота принимая минимальное значение на больших скоростях
полета и существенно возрастая на режимах полета с малыми приборными
скоростями. Граничным значением . разделяющим режимы полета, от-
личающиеся видом пилотирования самолета по углу 0 и перетрузке пу, как
показывают исследования па пилотажных стендах, является величина
/г“~15 1/рад. Пример нормируемой зависимости dP/dn от пу , иллюстри-
рующей высказанные выше соображения приведен на рис. 10.4 4.
Для получения хорошей оценки управляемости самолета важен также
благоприятный характер изменения усилий по времени при отклонении
рыча! а управления. При необратимом бустерном управлении и при отсут-
ствии в системе управления неуравновешенных грузов усилия, создавае-
мые пружинным зат-ружителем, пропорциональны отклонению рычага уп-
равления, т.е. при ступенчатой даче руля приращение усилия в начальный
момент равно значению усилия на выходе самолета на установившееся зна-
чение перегрузки. Если в истему
управления включен иесбалапсн
рованный груз, то — это равеист
во нарушается. В начальный м°
мент приращение усилия >''
определяться только пру^1пгя
загрузкой, а после возникновен
перегрузки Дп», являющейся
кцией времени, усилие оуд-
ристать на величину, пролор
нальную перегрузке Grp Ди/1 й к,
Grp — вес груза, приведение
усилию на ручке управления.
www.vokb-la.spb.ru - Самолёт своими руками?!
Требования к характеристикам статической управляемости по скоро-
которую можно характеризовать величинами dXp/dV и dPtdV, ме-
^'лсесткие. В отношении потребного хода рычага управления при изме-
,)Cf ш скорости обычно нс вводятся какие-либо ограничения, кроме гре-
анИя связанного с сохранением эффективности продольного управле-
которая должна с определенным запасом перекрывать все возмож-
1,1Р условия изменения продольной балансировки. Безусловно, нежела-
вЬ н иметь слишком большие изменения положения ручки (или пттур-
рача) <ФИ изменениях конфигурации самолета (например, при выпуске
посадочной механизации г.д.)
Градиенты усилий по скорости желательно иметь такими, чтобы усилия
при изменении скорости на ±(50-6-100) км/ч были больше, чем усилия, обу-
словленные трением в проводке управления. Вместо с тем, чрезмерно боль-
шие градиенты усилия будут требовать частого изменения положения трим-
мируюшего устройства.
В области трансзвуковых скоростей (обычно для различных аэродинами-
ческих компоновок самолета это диапазон чисел М от 0,8 до 1,2) имеет место
статическая неустойчивость по скорости и, как следствие, величины dP/dV и
dXp/dV изменяют знак па отрицательный, сели в системе управления не при-
няты специальные меры. В этой ;юпе скоростей, если она является ‘‘проход-
ной", считается возможным допускать приращение усилия в сторону неустой-
чивости, если оно носит плавный характер с градиентом ДР «2-5-5 кГс на
AM = 0 01 при управлении центральной ручкой и 2-6-7,5 кГс при управлении
штурвалом (для первого и второго уровня характеристик); для третьего уров-
ня 3-5-9 кГс и 4-5-12 кГс соответственно. Общее отрицательное усилие не долж-
но быть больше 10 кГс для ручки и 12-е 15 кГс для штурвала.
Д-1я большинства задач пилотирования оценка самолета летчиком зави-
сит от параметров переходного процесса изменения перегрузки п, при от-
К-ЮНрнии ручки управления, и от характеристик управляемости самолета
при стабилизации утла тангажа. Как показывают исследования, требования,
вытекающие из анализа задачи стабилизации угла тангажа, обычно
включают в себя требования к характеристикам управляемости по псрегруз-
с' Поэтому в основной массе работ по исследованию требований к характе-
стикам продольного движения самолета рассматривается, главным обра-
‘ > задача стабилизации угла тангажа самолета при постоянной скорости
-ета. Применительно к таким задачам динамика продольного движения
лета описывается следующей передаточной функцией:
о,=_ У?(р±С0)
Ф р1 + 2с,(1^ар + соц ’
где
- C$uqS тр - р qSb2A
и , 2£ttcoa mV y
2 / а c, ,qSb.{
ml z I(t
В передаточную функцию в качестве параметров входят четыре
ременные: М?,Са,ан,£а. Величина характеризует эффективное^
органов управления и предполагается достаточной для выполнения необ
холимых маневров самолета (связь между ручкой и ф и .загрузка п
предполагаются выбранными).
Исторически впервые требования к характеристикам продольное
движения самолета начали формулироваться в виде 1рсбований на доп
стимые значения частоты собственных колебаний ©а и декремента зату-
хания £,и При формировании таких требований па плоскости парамет-
ров к,,, или 2£аиа, чтобы охватить и случаи анализа неустойчи-
вого самолета, строятся области равных оценок самолета летчиком. При
этом граница оценок, равных 3,5 балла по шкале Купера-Харпера, вы-
деляет область параметров самолетов, имеющих хорошие пилотажные
характеристики, а граница с оценкой 6,5 балла разделяет области прием-
лемых и недопустимых характеристик.
Удобство использования таких областей приемлемых и неприемле-
мых характеристик обусловлено как простотой расчетов характеристик
самолета для проверки их выполнения, так и их прямой связью с харак-
теристиками переходных процессов.
На рис. 10.4.5 приведено сопоставление областей равных оценок для
крейсерского режима полета для самолетов различных классов — манев-
ренного, ограниченно маневренного тяжелого транспортного самолета.
Из рисунка видно, что требования существенно различаются но ве-
личинам частот, что обусловлено необходимостью различного быстродей-
ствия при управлении. Однако для самолетов всех классов имеется ми-
нимальное значение декремента зат хания Е,и « 0,4, при снижении кото-
рого самолет не получает хорошей оценки. Необходимо также отмстить,
что в рассматриваемом случае имеется минимально допустимое значение
частоты продольных колебаний «а = 1 с-1, ниже которой даже тяжелы11
самолет получает неблагоприятную оценку летчика. На рис- 10.4.5 также
приведены комментарии летчика к оценкам пилотажных характерней
самолета в зависимости от его параметров.
Следует отметить, что к требованиям, построенным в виде гран-1^
опенок па плоскости двух параметров соа и , необходимо относиться
большой осторожностью в связи с тем, что они верпы только при -
вин сохранения всех остальных параметров самолета неизменными
отношению к значениям в эксперименте. Стоит измени! ь какие-ли
рактеристики например ^ш.С^в,С^п и т.д., как соответствующие
ницы могут существенно сместиться.
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис 10.4.5. Границы областей хороших оценок самолета летчиком для трех типов само-
летов: I - маневренный самолет: II - ограниченно маневренный самолет; III - траттспор
тпый самолет. Комментарии летчика ДЛЯ ограниченно маненренного самолета: / - повы-
шенная чувствительность к петровым возмущениям слишком легкое управление, слиш-
ком быстрая реакция; 2 - раскачка самолета летчиком; 3 -опасная колебательность само-
лета; 7 колебательность; 5 - вялость самолета; 6 - вялость, очень большие усилия при
управлении; режим полета lzHe( ~ 370 км/ч; dPldn = 30 кГс
Привединтыс выше примеры относятся к крейсерскому режиму' полета.
Как показывает опыт моделирования, на режиме захода на посадку требова-
ния к динамическим характеристикам самолета практически нс зависят от
Размеров и массы самолета. Это, по-видимому, обусловлено 1ем, что при
близких значениях посадочных скоростей у летчика имеется одинаковое
чремя на выполнение корректирующего маневра, не зависящее от типа са-
молета. Пример границ равных оценок дня режима захода на посадку для
самолетов всех классов приведен па рис. 10.4.6. На этом же рисунке нриве-
Дены комментарии летчиков, объясняющие причины выставления самолету
той или иной оценки.
Выбор в качестве основных параметров (coftl характеризующих
уценку самолета летчиком, нс является единственно возможным. В после-
ДИие годы в качестве основных параметров были предложены величины
* (cW/S)/c и сои .
Физический смысл таких границ заключается в том, что они опредсля-
Допустшчос при ручном управлении соотношение между' угловым 3 и
111сЙ1гым Лп ускорениями самолета при изменении угла атаки.
Рис. 10.4.6. Границы областей равных оценок самолетов
всех типов для условий захода на посадку. К мм шарни
летчика об особенностях пилотирования самолета: I -
плохо триммируется, летчик должен демпфировать дви-
жспис самолета; 2 - быстрое изменение тангажа, посто-
янно необходимо управлять самолетом: 3 - не трихпчиру-
ется быстрая неустойчивость, раскачка самолета летчи-
ком; 4 - не триммируется. апериодическая неустойчи-
вость; .5 - управление невозможно; 6 - плохое гриммиро-
вание; большие перерегулирования; чрезмерная загрузка
летника; 7 - плохое триммирование; вялость, плохо воз-
вращается к стрцммированному положению; 8 - не трин-
мирусгея. непрогнозируемая реакция, 9 - чрезмерно быс-
трая апериодическая потеря устойчивости
Рис. 10.4.7. Границы областей
хороших характеристик
Действительно, из уравнения продольных моментов следует прибли-
женное соотношение дэ ® Да. откуда, поделив левую и правую част
этого равенства на соответствующие приращения перегрузки Ап^, получим
Д§ ~ <Вд
Лпу (А /Да)
Из этого соотношения видно, что постоянным значениям параметра
ДЭ/Д??у на плоскости ш0, Дп^Аа при построении в логарифмическом масШ
табс соответствуют прямые линии.
Пример границ хороших характеристик Мсшсврешюго самолета,
ствующих оценке 3,5 но шкале Купера-Харпера, приведен на рис. ЮЛ-У’в
двух различных фаз полета. Категория Л соответствует фазам полога,
тощим точного пилотирования и быстрого маневрирования. Категория В
зам полета, соответствующим взлетно-посадочным режимам.
Следует, однако, признать, что 1ребоваиия в виде границ на плос
двух параметров не всегда соответствуют опыту летной эксплуата11™*^^.
ним из недостатков таких требований является, в частности. неВ<Х раз-
ность учета характеристик тракта управления, дополнительных а<
тических устройств, изменяющих динамические характеристики сам°-
www.vokb-la.spb.ru - Самолёт своими руками?!
(1)
(2)
используемые при построении огибающих
С-критсрия
точный учет динамических характеристик самолета (только два napa-
rt liC. J|3 чегь1рех). Поэтому была предложена новая группа критериев. В
^^^рцтериях рассматриваются некоторые огибающие переходных про-
эТ1С< а управляемых движениях (при ступенчатом отклонении рычага
тения) и формулируются требования к их виду для положи! ел ьной
'ценки самолета летчиком. Эго так называемый С*-критерий, дающий гра-
0 ые зависимости функции C'(t) на ступенчатое отклонение рычага уп-
втения. В качестве функции C'(t) берется линейная комбинация пара-
метров движения самолета (перегрузки в место расположения кабины
четчика Дй^к.л и угловой скорости со?), вычисляемая по формулам
С (t) =
Ап.ук.л ~ &пу “1‘ ^кабтг'
гце А'[ = Vo/ff, ^каб _ расстояние от центра масс самолета до кабины летчика.
Величина Vo берется как некоторая постояшшя угловая скорость полета,
разграничивающая всю область режимов полета па две: в одной основное
управление осуществляется по перегрузке, в другой - по угловой скорости
тангажа со,- (V'o= 120 м/с). С'-критерий получается путем построения огибаю-
щей нормированного (т.е. отнесенного к установившемуся значению С') пере-
ходною процесса по С*, определяемого следующей передаточной функцией:
С* (0% (р + G1,1)(/j + 2,9)
8„ 177,2 р2+2£о(0ар + ю2
Значения ^n, та берутся из рис. 10.4.8 (они отмечены точками) и затем
строится огибающая для всех полученных процессов (рис. 10.4.9). Ис-
пользование (/-критерия заключается в сравнении переходного процесса
исследуемого самолета для параметров после ступенчатого отклонения
Ручки управления с построенными огибающими процессов. Если исследуе-
мый процесс не выходит за границу огибающих, то из (/-критерия следу-
ет. что самолет имеет хорошие для ручною пилотирования характсристи-
Wl- Критерий в гаком виде удобен для
моде тирования и выбора параметров си-
стемы управления. Однако просто оги-
бающая С*(г) может оказаться иедоста-
То'1ной, поэтому вводится дополнитель-
нее условие на dC/dt (рис. 10.4.96).
' И требования сформулированы для
^Р^пссрского режима полета, исключая
4ст. посадку, предельные углы атаки
Дополнительно к (/-критерию
’ иится условие отсутствия в процессах
,сокочастотпых, плохо задемпфиро-
составляющих движения.
Рис. 10.4.9. Огибающие С*-крнтерия (а) и огибающие производной <lC*/di (б)
Сформулированный выше критерий оценки пилотажных характерис-
тик самолета весьма удобен дтя использования, особенно при проведении
исследований на моделирующих машинах, когда выходными результата-
ми являются переходные процессы. Однако этот критерий фактически не
содержит новых результатов, по сравнению с критериями, основанными
на построении границ областей допустимых характеристик самолета па
плоскости ^а, сои (см. рис. 10.4.5 и 10.4.G), поскольку он основан на их
использовании и его применимость также является ограниченной.
В частности, из выражения (2) следует, что_границы С’*-критсрия по-
строены для достаточно большой величины Са(Си * 2,8). Изменение
(уменьшение) величины Са может существенно повлиять па оценки само-
лета летчиком и сместить области оптимальных значений £а, та.
Удобство использования С-критсрия заключается в том, что в ряде
случаев с его помощью можно оценивать характеристики самолета с систе-
мой управления с более сложной передаточной функцией, чем просто корот-
копериодическое движение самолета Однако такая возможность не является
очевидной, и пределы применимости С-критерия ис сформулированы.
В ряде работ приводятся примеры несоответствия оценок самолета
летчиком с оценками, следующими из С*-критерия. Чаще всего это обуслов-
лено существенным различием процессов на начальной стадии движений-
например, из-за более высокого порядка уравнений системы самолет - кон-
тур управления. В ряде случаев полезно использовать гребоваиис к характе-
ру переходною процесса, описываемого двумя параметрами - временем Ра
батывания (время первого выхода на установившуюся перегрузку), которое
для основных режимов полета обычно регламентируется в пределах’^
t(p=1,5c (для маневренных самолетов), и забросом но перо РУ
max
Многочисленные экспериментальные исследования па 1--------- ч
стендах и в полете влияния характеристик самолета на оценку его летч
показали, что имеются фундаментальные трудности в согласовании
требований к продольной устойчивости и управляемости самолета и
нии их к немногим параметрам (в частности, к двум'.
необходимости разработки иных методов анализа взаимодействия
самолег в наиболее сложных режимах
п1/усг > который задается в пределах до 0,2 с-0,3.
па пилотаяид
j всех
среде-
гости самилс|“ - к
.0 Этот факт пр^е_
- -[ лсТЧИ!
режимах стабилизации сам°л'
www.vokb-la.spb.ru - Самолёт своими руками?!
рсе приведенные выше требования формулировались в понятиях ко-
-опериодического движения, одпако они часто основывались на иссле-
Р01^н11Ях полных уравнений движения самолета. Допустимость формули-
Л°В 'И требований к короткопсриодическому движению основана на воз-
^жносп1 разделения движений и малом влиянии в большинство случаев
М • К1‘с1’истик фугоидного движения на оценки самолета летчиком. Одна-
в тех случаях, когда самолет обладает малым запасом устойчивости, та-
^ое разделение может оказаться недопустимым.
h Рассмотрим некоторые требования к устойчивости самолета по ско-
сти для установившегося горизонтального полета. При этом исключим
из рассмотрения диапазон трансзвуковых скоростей полета. Как правило,
в области трансзвуковых скоростей длительный крейсерский режим по-
тета отсутствует и эти режимы являются “проходными".
Наличие статической устойчивости по скорости, т.е.
является необходимым условием устойчивости фугоидных движений са-
молета. Контроль этого условия осуществляется наиболее просто ио пра-
вильному знаку градиента:
с/ф Л dP Л
—— > 0 или -— > О
dV dV
(для необратимою бустерного управления они обычно связаны коэффи-
циентом пропорциональности). Следовательно, главное требование, ко-
торое можно указать в данном случае, состоит в том, что при фиксиро-
ванном рычаге управления, а также при освобожденном управлении
(^ - 0) при отклонении в величине скорости не должно возникать тен-
денции к апериодическому увеличению этого отклонения от сбалансиро-
ванного начальною значения.
Обычно это условие проверяется цо характеру изменения усилий,
’Фикладываемых летчиком к рычагу управления, при условии пу = 1 и при
вменении скорости полета в пределах ±100 км/час. (или 15% Убал)-
Тоичмвое движение, как уже указывалось, соответствует тянущим усилиям
111 Уменьшении скорости и перемещению рычагов управления на себя.
-^сра статической устойчивости по скорости состоит из двух слагае-
• • одна из них характеризует статическую устойчивость по углу атаки
dm, | dm, | т,
-г-*- ИЛИ-г—2- при V = const,
да ( дСу)
пп^Р'1ая связапа с изменением моментов но скорости (или числу М) и
11оР,ию!1альна
отиг
~dV
дтг |
С гички зрения летчика нс безразлично, как обеспечиваете
тическая устойчивость но скорости СТа
(1тпг
dCy
nv=l
Так, при увеличении положительного значения т™ (или тп^), возра
стает час юта фугоидных колебаний, увеличивается реакция по тангажу
на горизонта тьные порывы ветра и летчики могут плохо оценивать так ю
комбинацию параметров.
Как показывают летные испытания, летчики в состоянии управляй,
самолетами, имеющими недостаточное демпфирование длиннопериоди-
ческих колебаний и даже определенную степень неустойчивости. Однако
в последнем случае самолет требует постоянного внимания, трудно осу-
ществлять балансировку по усилиям и т.п., что вызывает замечания
летчиков. В некоторых случаях такая неустойчивость может быть поме-
хой для выполнения основного задания.
В области трансзвуковых скоростей полета приходится иметь дело со
статической неустойчивостью по скорости, т.е.
! ..
77^1 > °'
с/С„
В связи с этим, как правило, есть некоторый диапазон чисел М по-
лета, где градиенты усилий и перемещений по скорости имеют обратный
знак. Указанные особенности принято считать допустимыми если они
имеют плавный характер и не вызывают возражений у летчика Эти ос-
лабления требований (во всяком случае, для первого уровня) в случаях
полета с продолжительным пребыванием в трансзвуковой области скоро-
стей вряд ти могул считаться приемлемыми.
Применение автоматических устройств делает возможным удов
летворсние всех приведенных выше требований, однако это можс*
бьп ь связано с усложнением систем самолета, требует определенн^-
мер безопасности при отказе и приводит в обычных случаях к
легчению условий пилотирования. лI
Требования к характеристикам боковой устойчивости И
равляемости. Также, как и в случае продольною движения, зд.^ь
обходимо регламентировать: усилия при управлении, градиенты ле
щепий органов управления при выполнении управляемых движеШ0
ственно устойчивость бокового возмущенного движения, хаРаК]\? I
мущешюго движения, и, наконец динамику управляемых движении-
www.vokb-la.spb.ru - Самолёт своими руками?!
~Г1Я сверхзвуковых самолетов наметилась тенденция к уменьшению пре-
величин усилий при управлении. Так, при управлении по крену
,ъПом усилия не должны превосходить 10+15кГс, а при управлении
гуобой формы ~ в пределах до 6+8 кГс. Максимальное усилие на пе-
при управлении по рысканию теперь составляет до 30 кГс. Таким обра-
'13^ уевлия при управлении в установившихся скольжениях при заходе на
с боковым ветром, при парировании несимметричной тяги будут на-
"оДИп,’ся в приемлемых пределах. При этом всегда следует помнил, о гармо-
infii усилий по крену и тангажу’, особенно при управлении ручкой. Следова-
тельно главные вопросы нормирования характеристик будут связаны с дина-
микой управляемых боковых движений и боковой устойчивостью.
В настоящее время при помощи средств автоматики практически все-
гда можно удовлетворить требованию к устойчивости боковых колеба-
ний, к интенсивности их затухания. Эго требование ограничивает ухуд-
шение затухания 4 + 5 колебаниями (до практически полного затухания).
Спиральное движение обычно ограничивается при неустойчивости удвое-
нием начального возмущения за 20 + 30 с.
Этап полета самолета, связанный с выполнением посадки, является одним
из наиболее ответственных, и требования к динамике самолета на этом этапе
поле i а формулируются особо. Специфика управления при заходе на посад-
ку обусловлена близостью земли отпосше.тьно малой скоростью полета (и
соответственно пониженной эффективностью органов управления) и наличием
лимита времени, за которое следует ликвидировать имеющиеся ошибки.
Требования к эффективности поперечного управления на режиме за-
хода на посадку обычно фомулирустся из условий обеспечения балансиро-
вок самолета в различных условиях, например, при полете с боковым вет-
ром, при отказе двигателя и т.д. В связи с развитием радионавигационных
средств, позволяющих выполнять посадку в сложных метеоусловиях, по-
явился новый расчетный слушай для поперечного управления. Этот случай
связан с решением летчиком следующей задачи. Когда самолет выходит из
облаков и летчик начинает видеть взлетно-посадочную полосу (ВВП), он
обнаруживает, что находится сбоку от оси ВВП с ошибкой Zq и летит с
ошибкой по курсу Ду (рис. 10.4.10), которую за оставшееся до приземле-
ния время надо ликвидировать.
t = 0
At = Т,
,2
дг = т2
СОбозначения, используемые при анализе движения самолета при ком пенса
|'1’ена°К"П°*’ <>шнбки: а - траектория самолет относительно ВВП; б изменение угла
ПРИ ликвидации боковой ошибки Zq
КПц
Рис. 10.4 11. Пример переходных
процессов но основным параметрам
движения сздюлаа при ксмиенса-
«пи бокопой ошибки на посадке
Рассмотрим требования к поперечтв
равляемости самолета, вытекающие из Mg
посадки. Учитывая, чю посадочные ско
современных самолетов различных клас<
статочно близки и,
следовательно, Bpejd
выполнение корректирующих маневров I
плески не зависит от типа самолета, ц.
считать, что формулируемые требования 1
стродействию поперечного управления гЛ
сачке являются общими как для пемаим
ных, так и маневренных самолетов.
Характерная манера пилотирования
молота летчиком при посадке с ликвида!
боковой ошибки видна из рис. 10.4.11
компенсации боковой ошибки летчик в]
няет S-образпый маневр, при котором и
нение угла крепа по времени y(t) близка
двум полуволнам синусоид с разными 4
литудами (рис. 10.4.106). Важна зап
мость величины времени Т выполним
образною маневра от компенсируемой
личины начальной боковой ошибки Zq-
При малых дальностях до края ВВП располагаемая величина vr
вой скорости крона может начинать о1раничивать реализуемый в пол
угол крена. При этом максимальное значение угла крепа и угловая с
рость крена для рассматриваемого гармонического закона управле»
связаны соотношением
' ы.гшах
У max “ •
2л
Учитывая, что I уо I =Утах> можно полущить:
-11/3
2 7
шхшах^0
0-2л
Ушах —
На рис. 10.4.12 дано сравнение оценок расчета величины ущ^ по 1
муле (4) с результатами летных испытаний. Видно, что в полете летчи
лизовывал углы крепа, в среднем близкие к определяемым формулой \
т.е. использовал близкую к максимальной угловую скорость крена. ВК
жение (4) совместно с (3) может быть использовано для получения ода
времени мапсвра Т, необходимого для ликвидации боковой ошибки Zq:
4k2Z0
уз
9ылшах
www.vokb-la.spb.ru - Самолёт своими руками?!
р W 4.12. Сравнение расчетных значений
адал»т?Л >т-"а кр€11а’ 1«-1,ользУемого ПРН
компенсации боковой ошибки Zo, с Резуль-
татами летных испытаний
Рис 10 4.13. Зависимость времени маневра
7'. необходимого для ликвидации боковой
ошибки Zo, для различных значении угло
пой скорости крена
Эго выражение позволяет построить зависимость 7'(Zq) Д-^ различных
величии m.r max (рис. 10-4.13). На этом же рисунке нанесена граница, соот-
ветствующая Ушах = 30°- Это тот максимальный угол крена, который обычно
используется летчиками на тяжелых самолетах при маневрах на посадке.
На основании материалов летных испытаний было получено, что со-
отношение (5) позволяет хорошо оценить .чинима 1ьное время выполне-
ния маневра, особенно если внести небольшую поправку:
7, - Т + 1 с.
На рис. 10.4.14 дано сравнение расчетных оценок минимальною вре-
мени с результатами летных испытаний. Из анализа кривых, приведенных
на рис. 10.4.13, можно сделать выводы о требованиях к угловой скорости
крена самолета на посадке. Можно ожидать, что в тех случаях, когда
летчик не может реализовать нужный ему угол крена у « 30° из-за малого
быстродействия но крену’, он оценивает характеристики самолета как не-
приемлемые. В частности, из рис. 10.4.13 следует, что для того чтобы угло-
вая скорость крена по лимитировала выход
На угол у » 30°, необходимо выполнение
Со°тношения
®r max -15 20 град/с.
г_ *^Та °иснка достаточно хорошо со-
м'т7ъ.'РТСЯ с требованиями, формулируе-
в Других работах.
сТцк ОЦснке пилотажных характери-
ПростСаМад°Га лля летчика существенна
цОп °Га Ьь,По-'111Сния двух типов задач
Чц ст0/11010 У,1Ра®-*сния, а именно, зада-
Чцк ‘ Иллза1ши угла крена, когда лет-
П)1 Клоняет элероны, стремясь ликви-
’•=TPetI _ _
Рис. 10.4.14. Сравнение расчетных оце-
нок минимального времени выполнения
маневра ликвидации боковой ошибки с
1>елультатами летных испытаний
дировать появляющиеся ошибки но крену, и вторая задача - управ
углом крена, когда летчик управляет почти ио разомкнутому iimr6 я
оценивает самоле! по времени выполнения разворота по крену и 110 ' ”
стоте закона отклонения элеронов по времени Управление самолетомЯ
рысканию (создание или ликвидация скольжения) обычно явчае/10
вспомогаге тьным и имеет самостоятельное значение, ио-видимому т
ко па посадке, для балансировки самолета при действии бокового вет Ъ*
Необходимость вмешательства летчика в путевое управление возница '
также при компенсации различных возмущений, связанных с несиммет
рией самолета, включая отказ двигателя.
Рассмотрим зависимость оценок самолета летчиком от характеристик
поперечного управления, а затем - влияние на его оценку характеристик
бокового возмущенного движения.
Движение самолета при поперечном управлении, близкое к изолиро.
ванному крепу, реализуется при полете на малых углах атаки. Для более
обшпх условий управления, в частности, поперечного управления при
балансировке самолета па большом угле атаки, исследование изолиро-
ванного движения крепа является недостаточным и дает только частич-
ную информацию. Сначала ограничим рассмотрение анализом изолиро-
ванного движения крепа самолета и определим влияние параметров са-
молета на оценку его пилотажных характеристик летчиком, после чего
перейдем к анализу общего случая. Как известно, изолированное движе-
ние самолета по крепу описываекя следующей системой уравнений:
йг. = Л^сох + АЛбэ5э,
7 = со,..
Решение этой системы уравнений зависит от двух параметров, в
качестве которых обычно принимаются: Т(а постоянная времени крена
(Т^ - -|/м"г); (-Л/®’ )5этах- максимальное ускорение по крену, Реа"
лизуемос при отклонении органов поперечного управления на макси
малыгый угол 8Э max. J
Для анализа пилотажных характеристик самолета в общем сДр
необходимо еще зшиь кинематическую связь между отклонением РУ4
управления и элеронами и характеристики загрузки РУ 4
(Ра = Рэ(АрЭ)). В
Динамика изолированного движения крена самолета и анализ ПИ-’
тажиых характеристик исследуется во многих работах, где по пучен j
основном близкие результаты. Как иллюстрация этих результатов.,
рис. 10.4.15 приведены области равных оценок но шкале КуП Р
Харнера пилотажных характеристик самолета по крону в функции в
ленных выше параметров. Приведенные на рисунке зависимости
лучены как при стаби. и ации, так и в управ пении крепом самолета-
www.vokb-la.spb.ru - Самолёт своими руками?!
птнако при движении крена (осо-
и небольших сод) развивается
как под жЙСТБИСМ силы
c^rtI -гак и за счет моментов рыс-
тяжсст11’ .
ЩИЯ Р°3,ШКаГОП1ИХ ИРИ оИ<Л<>
ш элер°11ОВ- Вследствие развития
НС1П1ЫКСНия через поперечную стати-
CK°KVJO устойчивость может возникнуть
Чонй’пи1гсльный момент крепа, обычно
противодействующий кренению. Пеоб-
xovimo обеспечить возможно меньшее
вредное влияние этого аффекта. В
х-у’тигем случае возможно так называе-
мое зависание по крену (т.е. <ох—> >),
что совершенно недопустимо
(подробнее об этом см. гл. 14).
Неблагоприятное влияние избы-
точной поперечной статической устой-
чивости может проявляться при боко-
вых колебаниях в виде значительного
увеличения угловых скоростей крепа
ли отношению к движению рыскания
так, что ш r шах to у шах = ж Be.личи-
на ге нс должна быть более Зч-4 для
легких самолетов и 1 <-2 для тяже чых.
Рис. 10.4.15. Линии рашгых оценок харак-
теристик поперечного управления самолета
летчиком по пткале Купера-Харнера в зави-
симости от эффективности управления и по-
стоянной времени крепа Та
Список литературы к главе 10
б. С. Бюшганс, Р.Н. Студнев. Аэродинамика самолета. Динамика продольного и бо
колото движения. - М.: Машиностроение, 1979. - 349 с.
7 С. Бюшгенс, Р.В. Студнев. Динамика самолета. Пространственное движение. - М
Мапипюстроепне, 1983.
^Etkin. Dinamics of Atmospherik Flight. Stability and Control. -NY: John Wiley & Sons, 1972.
•J- < i lycbKoe, Г.И. Загайшм. Управление полетом самолетов. - М/ Машиностроение, 1991
А. Шилов. Об исключении особенности В общих уравнениях движения летательного
зпиарата // Инженерный сборник 1962. Том III пып. 3.
л. Амиръянц, В.А. Транопич. Теоретическое исследование влияния упругости конст-
р На эффективность органов управления самолета // Тр. ЦА1И 1980. Вып. 2088
Биспяингхвфф' X. Эшли, P.JI. Халфмэн. Аэроупругость. - М.: ИЛ, 1958. - 799с.
ти В.Н. Сухов. Упругий летательный аппарат как объект автома
ф <0,1° Правления. - М. Машиностроение 1974 - 267с.
К Веление в теорию аэроупр^тости. - М.: Физматлит, 1959.
vtdo O6Pa3t<0°> Л.М. Савельев, Х.С. Хазанов. Метод конечных элементов в за ачах
г я-. и1рльпой механики летательных аппаратов. - М. Высшая пткола, 1985. - 392с.
,... J'енс, М.Г. Гоман, В.И. Матюхин, Е.С. Пятницкий. Стабилизируемость и
’2 .)/^их воздействий // ДАН РФ. 1995. Том 342. No 1. С. 49 52.
tg?2 • Метод кирнево годографа в теории автоматических систем - М.' Наука
17»
1.
3.
4.
5.
6.
7.
8.
9.
If.
И ф
1] ^£УИ1е“лы1
,» . ... 1. j UJ4UH, и.и. £vlUmnjAUnt ИЛ/ИПИЦПии. Viaim,inonpj.nuv*o ял
К] ‘Р^ьныс законы управления движепиием твердого тела при учете аэродина-
2
Глава 11
МОДЕЛИРОВАНИЕ ДИНАМИКИ САМОЛЕТА
НА ПИЛОТАЖНЫХ СТЕНДАХ
Моделирование на пилотажных стендах является основным цн
рументом исследования и разработки систем ручного и полуавтомат/
ческого управления самолетов. Причем за этим 1ермином стоит цельг
ряд технологий:
математические модели динамики самолета с системой управления-
- технические средства имитации условий полета;
- вычислительные системы;
- методика проведения эксперимента.
Достаточно подробный обзор технических средств моделирования по-
лета приведен в книге [ 1|. Основными техническими компонентами пило-
тажных стендов, облик которых наиболее изменился за прошедшие с мо-
мента издания агой книги годы, являются:
- система подвижности;
- система визуализации;
система загрузки рычагов управления;
- аналого-цифровые вычислительные комплексы.
В части систем подвижности практически доминирующей стада опор-
ная схема с шестью степенями свободы. По этой схеме выполнен и соз-
данный в ЦЛГИ в 1983 г. в рамках программы "Буран” пилотажный
стенд ПСПК-102, который, благодаря ряду модернизаций, и до настоя-
щего времени остается наиболее совершенной установкой такого класса в
России (рис. 11.1.1).
Благодаря впечатляющему прогрессу вычислительной техники
практически все современные системы визуализации строятся на прин-
ципах компьютерного синтеза изображения впекабигпюй обстановки
варьируются лишь технические решения, связанные с коллимание
изображения па бесконечность.
За последние годы существенное продвижение получили проблем^
связанные с методикой проведения экспериментов на пилотажных с
дах и с оценкой различных конфигураций исследуемых систем-
раньше практически единственным средством для этого была ткала
лотажпых оценок Купера-Харпера, то в настоящее время разраоО
количественные, вполне объективные методы, основанные на измерь
частотных характеристик системы “самолет-летчик” и соответству
этим методам программные средства [2].
Уже давно очевидной стала мысль о том, что без моделировав
пилотажных стендах невозможно создать хороший самолет, а C>1
происшествий испытать его.
www.vokb-la.spb.ru - Самолёт своими руками?!
Вычислитель
снс гемы
подвижности
Компьютер
инженера
)нхледо№псш
Головной
компьютер
(динамика)
Устройство
сопряжения
оборудования
Компыгттеры-
ими1 агоры
бортовых
Компьютеры
слетсмы
визуализаппп
Рис. 11.1.1. Пилотажный стенд ПСПК-102
шГг,./111лотажнь!с стенды еще до стадии летных испытаний позволяют ре-
’ Проблемы:
Hi.lv О1рабогки характеристик устойчивости и управляемости па основ-
Рржимах полета;
цы* Разработки методики пилотирования самолета в сложных и отказ-
л Условиях:
выбора характеристик и параметров рычагов управления:
www.vokb-la.spb.ru - Самолёт своими руками?!
отра6откц
- эргономической оптимизации системы отображения индю
се элементов (индикатор па лобовом стекле, многофуцКцИу ,ации и
индикаторы и т.д.); На-1ьные
выбора рационального уровня автоматизации полета и
задач взаимодействия ручного и автоматического контуров;
- отработки программы и методики летных испытаний.
Специальная разновидность пилотажных стендов, так назыв-
полноразмерные стенды отработки (ПРСО), дают возможность иссп^'0
вать и испытать в условиях, приближенных к реальным, штатный бе °
вой комплекс, включая Б ЦВМ, датчики и привода под нагрузкой Р °
При грамотной организации стендового сопровождения процесса
проектирования самолета удается свести к минимуму объем его летных
испытаний и существенно уменьшить их риск. В этом смысле весьма
поучительными явились программы по созданию и отработке СУУ для
самолетов МиГ-29 и Су-27, а также воздушно-космического самолета
“Буран”. Благодаря уникальному по масштабам объему стендовой отра-
ботки весь цикл летных испытаний "Бурана" свелся к 24 полетам сред-
ней продолжительности примерно 30 минут каждый, причем ни один из
полетов не принес никаких “сюрпризов”, а лишь подтверждал расчетные
и экспериментальные данные, полученные в аэродинамических трубах и
на пилотажных стендах.
Важным элементом комплекса средств полупатуриого моделирования
яв.1яется математическая модель динамики объекта с системой управления.
Д.1я аппаратов рассматриваемого класса проблема создания такой модели
является особенно сложной, поскольку для сверхзвуковых самолетов ха-
рактерна многонараметрическая, существенно нелинейная аэродинамика,
охватывающая широкий диапазон чисел М. Заметную (1015%) экономию
быстродействия при расчете модели динамики дает принятая форма записи
уравнений движения в направляющих косинусах в сочетании с алгоритма-
ми их оптимальной коррекции, что было введено в практику отечествен-
ного моделирования после публикации работ [3] и |4]. К тому же такая
форма записи освобождает от проблем с особенностями кинематических
соотношений при сложных маневрах.
Существенных затрат ресурсов ЭВМ требует храпение банка аэроди
намических характеристик и выполнение операций по миогопарамстри
ческому поиску и интерполяции. Однако при современных возможно
компьютеров эти проблемы перестали быть критическими. Практика
рокой кооперации при создании современного сверхзвукового сам^^ Я
показала преимущество подхода, в рамках которого ОКБ-разра
самолета и ЦАГИ разрабатывают и сопровождают упифидирова
банк аэродинамических данных и предоставляют его всем предпр Т
участвующим в разработке. «
Серьезным препятствием на пути обеспечения реального времсни^^в
грирования модели движения или, что то же самое, увеличения шага
анмя, является налтгчие в динамической схеме объекта высокочастот-
3BeIfbcB, к числу которых принадлежат отдельные элементы системы
,1Ъ1Х /енил (датчики угловых скоростей, акселерометры, фильтры упругих
' ^ебаний) и, при исследовании из юга и посадки с участком движения по
1<° р надвижные элементы шасси. Замена этих звеньев их квазиста-
аналогами (см‘ нижс^ позволила довести шаг интегрирования до
О 02-0 04 с и обеспечить функционирование модели в реальном масштабе
’ мепи ьля современных персональных компьютеров. Важным требовани-
ем к математическому обеспечению пилотажного стенда как исследовательс-
ки средства является его гибкость и возможность воспроизведения фраг-
ментных режимов полета наряду со сквозным м< де шроваписм. Эти требо-
вания удовлетворяются благодаря исполнению основных модулей модели,
наиболее подверженных изменениям, на языках высокого уровня.
11.1. Исследование взлетно-посадочных характеристик
Традиционно в авиации серьезное внимание уделяется взлетно-поса-
дочным режимам, для чего разработаны весьма сложные математические
модели взаимодействия шасси самолета с поверхностью ВПП [5], учиты-
вающие все существенные конструктивные особенности шасси. Ниже
предлагается квазистатичсская модель взаимодействия шасси с поверх-
ностью ВПП, предназначенная для задач моделирования в реальном вре-
мени. При определении вертикального нагружения стоек шасси эта мо-
дель исходит из пренебрежения подвижными массами подвески по срав-
нению с общей массой самолета, при этом в диаграмму статического на-
гружения воздушной камеры стойки (рис. 11.1.2) вводится участок, соот-
ветствующий обжатию пневматика.
Действующая на самолет со стороны подвески, определяется по
ЦИцу освобождающейся связи как функция перемещения штока и
к СКоростц;
р = Ф ~ С*всад^шт^ + ^Агт s*SnAirr ~ ^цп Х1РИ Ф О,
О при Ф < 0.
В свою очередь, ход штока может 6ь,ть вычислен из
условия качения колес по ВПП:
геомс1р1ГЧсск^
II + (.Уп - Л) cos У cos и л„ sin о - гп sin 7 cos и - rK - с,
где £ - высота неровностей ВНП, отсчитываемая от некоторой базовой
поверхности. Ход штока в итоге вычисляется как разница обжатого и И
обжатого положения подвески (рис. 11.1.3):
не-
^ШТ — ^0-
т
М
Рис 11.1 3. l eo.MCjpu'KCK.iM схема шасси (W часть массы самолета, приходящаяся на
дан гую .пору, wz масс? подвижных элементов шасси)
Сила бокового уно ia на колосе является функцией угла бокового
увода [3.,-, нормальной нагрузки на колесо и коэффициента торможения
и Для определения угла бокового увода и ориентации сил нормальней
реакции сил трения и бокового увода при пространственном движении
само чета вводятся понятия единичного вектора k. и нормали v. к диск;,
колеса (рис 11.1.4). Зависимости коэффициента бокового увода опреде-
ляются для конкретного пневматика в результате прокатки колес на спе-
циальных стендах и выдаются соответствующими организациями анало-
гично аэродинамическим характеристикам.
-- 0,04
0,50
Рис. 11.1,4 Схема боковых сил, действующих на шасси
Носовое колесо в трехстоечной схеме шасси в зависимости ог скойЯ
ги движения по ВПП работает в двух режимах, режиме самоориеНТйРЯ
вания, когда положение колеса 5^ определяется условием равенства <
www.vokb-la.spb.ru - Самолёт своими руками?!
бокового увода 0К - 0, и в режиме управления когда угол от-
дю -'глЛ носового колеса пропорционален отклонению руля направле-
к.тону пе}кцмы объединяются соотношением:
НИЯ гм- 1
^нк — Кпк^ — Мик^н "г М-нк^нк
= 0 в режиме управления, цнк = 1 в режиме самоориентирования.
1Де -г аты мотелирования динамики приземления по описанной квази-
• Оческой модели и полной модели, учитывающей динамику нодвиж-
СТЯ -цементов подвески, показывают, что динамические параметры са-
TiblX ч
юта (угловые и линейные скорости, координаты и углы) как твердого
тега воспроизводятся с точностью до 10%, несколько хуже (точность
30-40%) воспроизводятся пиковые значения nai-рузок.
Другим высокочастотным элементом динамической схемы является
ангнюзоный автомат торможения. Как известно, он предназначен для
удержания текущего значения проскальзывания (VV- 1 - юк/?/У) в ли-
нейном диапазоне зависимости коэффициента трения ог проскальзывания
цт = цт(Н ) (рис. 11.1.5) в зоне его максимальных значений.
Ри< 1115. Характеристики торможения
Уравнение раскрутки колеса
имеет вил
7,,сок +
К Л Л
1 — ,ц’1:
Hr >
У-М,
где
Т V —
1 = —— Mr =
к мк>2. IV ’ т
Лес Цг
MTV
~ угловая скорость вращения колеса, цк - коэффициент трения каче-
ния без торможения. 5/т - момент, создаваемый
Нт наклон характеристики цт=цт(И/)
Как видно из приведенного уравнения,
«ля его численного иитетрирования требуст-
ся весьма малый шаг (0,001 с), тем меныпий,
,ом меньше скорость поступательного дви-
жения самолета.
Анализ уравнения раскрутки совместно с
-’ейньгм законом управления тормозным мо-
iuwr?M По пороговым значениям нроскгыьзыва-
И0м показывает, что при значигель-
HoJ, т°Рмозпом моменте и умеренной нормаль-
но нагрузке на колесо реализуется цикличес-
кие торможения с частотой 10-5-20 Гц
Иг* H i'6), в противном случае проскаль-
cUUl принимает стационарное значение.
тормозной системой,
КИЙ
Рис. 11.1.6. Циклический режим
торможения
Принимая и первом случае среднее по циклу значение коэсЬЛ
получим ' ’ ч’И1111еПтв
Цт = ' К т2 Х11 _ - ц MR 2 ^к’
NR Т| + ‘ гк при
где Ч = И Мт ^2 Мк Мт^Ч-Мк’ = 1п w Л/т Рт И 2 - Цк - — к NR Wttz А/т Мт Wi - р1С -—1 NR
Эффективность описанной модели подтверждается сопоставлением с
расчетами по полной модели, учитывающей уравнение раскрутки, в раз-
личных расчетных случаях: пробст а с боковым ветром и в условиях не-
ровностей на ВПП.
Описанные выше квазистатические модели функционирования шасси
не только дают возможность интегрировать уравнения движения само-
лета с шагом, определяемым частотой коротко-периодического движения
самолета как твердого тела, но и являются удобным средством анализа
особенностей динамики самолета на взлетно-посадочных режимах.
Для некоторых самолетов классической схемы известны яв ления пу-
тевой неустойчивости при движении на трех стойках птасси и продольной
неустойчивости при качении на главных опорах.
В частности, компоновочные особенности, характерные для схемы бес-
хвостка”, а именно элевоны большой площади и значительный вынос глав-
ных колес шасси за центр тяжести, приводят к обострению этих явлений.
Анализ продольного статического момента в этом случае с учетом сил
взаимодействия шасси с ВПП при качении на главных стойках показывает,
чго характеристика Afj’(a,5£t) (рис. 11.1.7) имеет параболический вид.
причем рабочему7 диапазон}7 углов атаки соответствует неустойчивая ветвь.
Рис. 11.1.7. Суммарный продольный момент при качении по ВПИ
Характеристическое уравнение продольного канала с автоматом
fl + —
www.vokb-la.spb.ru - Самолёт своими руками?!
егом обжатия стоек имеет четвертый порядок. Соответствующие ему
и '^«вые траектории изображены на рис. 11.1.8, откуда видно, что демпфер
^,ка может лишь снизить степень апериодической неустойчивости, а для
^р-чения устойчивого контура необходимо введение ст нала по тангажу.
11.1.8. Корневые! траектории
Im
ё 4
2
f
Rc
Кй/Каг = 0,5, КЮг
Стендовые эксперименты показали, что при соответствующей техни-
ке пилотирования и тренировке летчиков ручное управление при подъеме
и опускании носового колеса возможно и без этого сигнала.
Результаты летных испытаний в сопоставлении со стендовыми мате-
риалами (рис. 11.1.9) подтверждают эти соображения, а также демон-
стрируют эффективность проведенных на стенде ПСПК-102 тренировок,
после которых выполнение скоростных рулежек с подъемом носового ко-
леса перестало вызывать у экипажа трудности.
До тренировки
После тренировки
- летные испытания
- ПСПК-102
Ие- 11.1.9. Влияние наземной тренировки на качество выполнения скоростной рулежки
В режиме управляемого носового колеса при его чрезмерном нагру-
УС, В * * 11 и°:’можно возникновение путевой нсустойчтгвости. Приближенным
-Ювисм устойчивости является неравенство:
(Oo772V2/y = Aq2 + Bq + С > 0,
гДе
4 S7 । cfrn^Sl
. р + 2
.• ) к ^1 - Si2 (2ni О >
* = (Vi + ^•2M'75 +------7^-----x — *• «Js/ (/г1Х1 ъ
C = kfaixi - x2 )2, A, - Ад f?, k2 = 2№ f.f ,
где A'I И X2 - нормальные нагрузки на передние и задние слойки шасси
и $ “ коэффициенты сил бокового увода колес, т, и х2 - продоль-
ные координаты точек приложения этих сил.
Из выражения для В и рис. И 1.10 видно, что устойчивость
фиксированной компоновке определяется распределением нормальных
натрузок между передней и задними опорами, т.е. в конечном счете игкъ
дольным аэродинамическим моментом. В тех случаях, когда из-за чрез-
мерных отклонений руля высоты па пикирование, характерных для ре-
жима пробега, дестабилизирующий момент от носового колеса превышает
стабилизирующий момент от главных колес, условие устойчивости нару-
шается и возможно выкатывание самолета за пределы ВИЦ
Рис. 11.1.10. Условие путевой устойчивости при качении по ВПП
Моделирование показало, что проблема легко может быть решена
введением соответствующих ограничении на отклонение руля высоты
координатах 3B(V) (рис. 11.1.11).
Использование алгоритмических средств, т.е. функционалов управ-
ления носовым колесом и рулем направления на пробеге вида
Рис. 11.1.11. Рекомендации по
iv-хнике пилотирования (выше
кривых - зона устойчивости,
ниже - зона неуегтой'швости)
5Н = + klf\t + кхп'^ж Siik - ^не-
существенно обле1чае1 летчикам процесс стаби
лизании самолета на осевой линии ВПП, в час
пости, потому что приближает стереотип управ
лепия па ВПП к привычному на воалушк»
участке, когда отклонение рычага опреде-
скорость изменения контролируемого парам
При этом передаточная функция от откло ]
педалей к боковой скорости имеет вид
J С()р2 1 BipAj_____
V
1 Z —— '?
Др/г + Л]// ч А2р + Лз
www.vokb-la.spb.ru - Самолёт своими руками?!
н ЬЛектнвиосТЬ тако1° усложнения алгоритмов подтверждена экспе-
на пи ютажнътх стендах и положительно оценена летчиками,
насгроек функционала управления носовым колесом и рулем на-
рыбор осуществляется экспериментально на основе пилотажных оце-
"opi"lo. rabng (PR) (рис. 11.1.12)
Рис. 11.1.12. Улучшение путевой устойчивости на ВПП средствами автоматики
11.2. Стендовая отработка характеристик
короткопериодического движения
Наиболее существенным с точки
зрения восприятия летчиками и не-
посредственного влияния на безопас-
ность полета является качественное
воспроизведение на стендах и трена-
жерах характеристик коротконерио-
лического движения.
Синтез алгоритмов обеспечения
устойчивости и управляемости (СУУ)
осуществляется в соответствии со спе-
циальными требованиями, в которых
как известно, нормируются классичес-
кие характеристики устойчивости и
Управляемости. такие как £Ср,
АЙ . Ч'
У' , 1 ге и другие. Опираясь
На перечисленные параметры, уточпе-
°Ис стендовой модели естественно осу-
. еств.тять но ним же (рис. 11.2.1) в
согласованных точках области режи-
J13 полета. На разных этанах разра-
самоЛета основой для такого
Тих 0101,1,51 являются данные матема-
е<’Кого моделирования по снсци-
Продольный канал Боковой канал
о результаты летных
Рис 11.2.1. Подтверждение модели по
классическим характеристикам устойчи-
вости и управляемости
альным подробным моделям, корректно учитывающим динамику
тракта управления (датчики, фильтры. АЦП, цифровую реализацию
вод и др.). После начала летных испытаний для этих целей прищ1ек’ При‘
данные специальных тестовых режимов, предусмотренных программ •°Гся
легов для подтверждения заявленных характеристик. °и п<>
Для современных самолетов, как аппаратов с высоким уровнем а
матизации и цифровой реализацией СУУ, выявилась большая важщ Т°
нормирования и соответственно, контроля в стендовом исполнении а ТЬ
литудцо-фазовых частотных характеристик (АФЧХ) наиболее суще-
ственных трактов управления и Агэ->сох. Связано это с тем что
силу перечисленных особенностей, а также из-за ограниченного быстро
действия приводов, фазовое запаздывание в продольном канале находит-
ся на грани допустимого, поэтому качественное воспроизведение АФЧХ
трактов управления на пилотажных стендах решающим образом влияет
на достоверность результатов моделирования и правильность приобре-
тенных в ходе тренировок навыков.
Поскольку реальный шаг интегрирования модели динамики конечен
все высокочастотные звенья тракта А'п -> а>г (аналогично A's -> юх) пока-
нально заменяются некоторым суммарным запаздыванием (рис. 11.2.2),
а конкретные величины этих запаздываний определяются в результате
минимизации функционала:
2 2
где су4 и - весовые коэффициенты, отражающие степень доверия к
имеющимся экспериментальным данным, под величинами Ал/(с);), Фл/(®Р
понимаются АФЧХ стендовой модели динамики, а индекс “э” соответствует
Рис 112 2. Процедура частотного уточнения модели
www.vokb-la.spb.ru - Самолёт своими руками?!
оиной модели, либо данным летною эксперимента. Определение
дцбо э поьОй модели осуществлялось с помощью гармоническою анали-
. каждой расчетной точке области режимов iio.'ieia.
зат°ра ч.ч'1СеТСЯ1 решающим подтверждением соответствия стендовой модели
, -’ исследования являются отзывы летчиков-испытателей, данные ими
°^1’еКультатам реальных полетов по программе летных испытаний.
П° х алые, а на некоторых режимах отрицательные запасы продольной
гческой устойчивости, и ограниченные располагаемые скорости при-
07 /этИ особенности характерны для современных самолетов) являют-
Вя причиной наличия у самолета с системой управ тения неустойчивого
СостеЛ1>иого цикла, выход за границы которого приводит к необратимой
'аскачке и потере самолета в результате разрушения или сваливания
(см. гл. 13).
Задача анализа устойчивости в большом заключается в определении
области притяжения положения равновесия автономной системы в фазо-
вом пространстве и анализе действующих на систему возмущений с точки
зрения возможности выведения ее фазовых координат за границы облас-
ти притяжения. Границей области притяжения для системы “СУУ-
самолет” является неустойчивый предельный цикл, параметры которого
нетрудно рассчитать методом гармонического баланса. В плоскости
сечения а, цикл имеет форму, близкую к эллипсу:
Да = sm(cDp£ + ф), сог = cos dipt,
где Юр - частота предельного цикла.
Очевидно, что если неустойчивый предельный цикл существенно пре-
вышает реализующиеся в системе отклонения фазовых координат, то систе-
ма в инженерном понимании устойчива. Для оценки ее склонности к неус-
тойчивости в большом предлагается ввести меру опасности этого режима как
величину, обратно пропорциональную площади цикла в координатах (а,о2):
(атах — ^iiiin)(®2 max ~
гДе приведенные в скобках значения со-
ответствуют диапазонам измерения соот-
тствующих датчиков. Использование
Их множителей имеет целью сделать
параметр S безразмерным.
введенный параметр позволяет
счетным путем исследовать область
П0ЛСТа лля выявления зон,
| J °Лее опасных с точки зрения иеус-
та>1^1Ивости в большом (рис. 11.2.3), а
Ра.^СС О1,еРативно оценивать влияние
см И‘1Нь1х параметров системы на рас-
агРИваемое явление (рис. 11.2.4).
Рис. 112 3. Степень риска выхода в
область неустойчивости “в большом"
па различных режимах полета
риска выхода в область нсустойчивоега “в большом" (о - расчетные точки
области режимов полета, см. рис. 11.2.3)
Совместный анализ линий равных значений параметров системы уп-
равления и границ области устойчивости в плоскости коэффициентов об-
ратных связей km, и k„y даст возможность целенаправленно выбирать на-
стройки с учетом компромиссных соображений наилучших характеристик
линейной устойчивости и обеспечения .минимальной склонности к неус-
тойчивости “в большом” (рис. 11.2.5).
Рнс. 11.2 3. Компромиссный выбор коэффициентов усиления
Важным вопросом при создании системы управления является опреде-
ление типа и амплитуды возмущений, выводящих изображающую точку на
фазовой плоскости за неустойчивый предельный цикл. Анализ реакции си-
стемы па неограниченный по длительности гармонический сигнал по мак-
симальной вертикальной составляющей ветра, мажорирующий нормируе-
мые возмущения, показывает, что амплитуды реализующихся колебашл.
как правило, в несколько раз меньше размеров предельного цикла, чТ°
объясняется относительно малыми несущими свойствами планера данного
класса самолетов. Таким образом, основным расчетным случаем станов
ся возмущение по входному сигналу7 от летчика или автоматической с11СТ<^
мы. Исходя из достаточных условий устойчивости переходных процесс01J
нелинейной системе (со скоростным ограничением управляющею сЯГ»
|йв|< ёП|ПЛХ X наихудшим видом управляющего сигнала будет ре.чеМИ
управление понижающейся частоты, переключающее максимальный Н° 3 ‘
www.vokb-la.spb.ru - Самолёт своими руками?!
,че входной сигнал в момеш достижения экстремальных значений
"'"Те А'в = Хвп>ах biglWn (рис. 11.2.6).
< 1 в
образом, расчетным слу-
ем ПР’1 нр°всРкс системы на "сус-
ЧайчИВость в большом следует нрини-
г0 знакопеременный входной сиг-
X понижающейся частоты, а не пи-
лообразный или гармонический сиг-
нал, как это делалось ранее.
Применение критерия устойчивости
вынужденных колебаний в нелинейных
системах [6] в рассматриваемой задаче
приводит к выводу о том, что вынуж-
денные колебания будут устойчивы, сс-
Рис 11.2,6. Профиль наихудшего с точки
зрения устойчивости “в большом” входно-
го сигнала
ли при управлении используется только
«инейная часть скоростной характеристики. Исходя из этих соображений, в
[7] предложено нелинейное корректирующее устройство на входе в систему.
Самонастраивающийся префильтр (СНФ) управляет подвижными ограниче-
ниями скорости входного сигнала в зависимости от степени близости теку-
щей скорости сигнала обратных связей йос к предельной величине овтах.
Тем самым при дефиците раснола1аемой скорости привода приоритет отда-
ется обратным связям, а сигналы с ручки, могущие усугубить ситуацию, в
систему не пропускаются. Структура СНФ иллюстрируется рис. 11.2.7. По-
мимо обеспечения устойчивости контура по входному воздействию такое ре-
шение обладает рядом преимуществ по сравнению с известными ранее:
- отпадает необходимость увеличивать располагаемую мощность
привода сверх значений, диктуемых требованиями линейного синтеза
(время срабатывания, декремент затухания и т.д.);
- обеспечивается полное использование скоростных возможностей
привода, в отличие от варианта с настраиваемыми по режимам полета
параметрами неадаптивного префильтра;
_±к_
Тр + 1
Рис 11.2.7. Структура СНФ
характеристикам приближается
Эффекта требует повышения расп^
- разделяются задачи линейного синтеза СУУ и обеспечения
чивости в большом, чс1 о не удается достигнуть при адаптивном
лении настройками СУУ; >прав-
- тракт управления по своим
линейному, достижение аналогичного
латаемой скорости привода на 30%. _____
Описанная схема СНФ прошла всестороннюю проверку при Мат
тическом и стендовом моделировании с учетом ветровых возмущений
упругих иомех. Результаты летного эксперимента па летающей лаборато*
рии Ту-154 ЛЛ подтвердили заявленные характеристики СНФ, а летчи-
ки-испытатели в своих отзывах отмечали повышение уровня линеариза-
ции (рис. 11.2.8) и устойчивости контура (рис. 11.2.9) при резком знако-
переменном пилотировании.
со, с
<р
Рис. 11.2.8. Фазовая характерис-
тика тракта Хв —> со. (А = 40 мм)
Рис. 11.2.9. Режимы преднамеренной раскачки при
включенном (о) и выключенном (<5) СНФ (ПСПК-102)
Как уже творилось, запасы устойчивости по фазе в продольном канале
часто находятся на пределе, что является следствием особенностей компоно-
вок ряда современных самолетов (особенно это касается "бесхвостки , с
большим значением С?“, рис. 11.2.10) и цифровой реализации СУУ. Эти
Рис 11 2.10. Эпюра мгновенных ускоре-
ний при ступенчатом отклонении эленонов
обстоятельства явились причиной по-
явления в требованиях ограничени*
на величину чистого запаздывания в
терминах эквивалентного представ-40'
ния продольного канала:
(,г + j
А'в р2 + 2с,сс>0 +®о
Указанные особенности ПР°^_
ляются в ходе летных испыташп, g
пример, при выполнении полет0 J
www.vokb-la.spb.ru - Самолёт своими руками?!
сложных метеоусловиях и при переходе с автоматического управления на
ручное при посадке (рис. 11.2.11). Эти ситуации объединяет увеличение ко-
^ффипяеша усиления летчика и выход замкнутой системы “самолет-
летчик" на границу устойчивости. Следует отметить, что в стендовых усло-
виях когда отсутствует реальная мотивация действий экипажа, воспроизве-
дение подобных режимов требует специально поставленных экспериментов
до решению искусственно усложненных задач пилотирования.
Рис 11,2.11. Фрагменты полетных записей
Рис. 11.2 12. Задача компенсаторного
слежения
В качестве таковой можно предложить задачу компенсаторного сле-
жения за углом тангажа, для чего на систему визуализации в канал 9 по-
дается иолигармоничсскип сигнал с драйденовским спектром, соответ-
ствующим атмосферной турбулентности. Обработка характеристик систе-
мы “самолет-летчик” с помощью специального пакета программ частот-
ного анализа |2], основанного на быстром преобразовании Фурье, пока-
зала наличие на АФЧХ замкнутой системы резонансного пика на часто-
тах 3-:-4 рад/с, характерных для режимов колебаний, индуцируемых
летчиком (по американской терминологии Pilot Induced Oscillations -
РЮ), зафиксированным при летных испытаниях самолета (рис. 11.2.12)
11.3. Методика отработки пилотирования в отказных ситуациях
В ходе подготовки и проведения летных испытаний необходимо про-
ведение определенного объема наземной отработки отказных ситуаций.
С учетом высоких динамических характеристик стендов типа
ПС.ПК-102 основное внимание следует уделять исследованиям таких от-
казов, для которых аксслсрационпые ощущения могут заметным образом
сказаться па процессе распознавания и парирования их последствии эки-
пажем. К этой группе нештатных ситуаций в первую очередь относятся
Отказы двигателей, отказы СУУ и отказы системы выпуска шасси.
Циклу таких испытаний предшествовали исследования но формиро-
ванию методики организации экспериментов но оценке нештатных ситуа-
^1й полета на пилотажных стендах. Одно из положений этой методики
с°стоит в том, что зачетная реализация должна случайным образом при-
водиться на 7-5-10 фоновых. Причем в процессе как тех, так и других
летчик должен быть достаточно плотно загружен выполнением сфп I
рованного "полетного ’ задания.
Стендовую отработку отказов элементов двигательной установки
лесообразно проводить но трем основным направлениям: 11е'
- анализ непосредственных последствий отказов и возможности их на
рования как на воздушных участках полета, так и при разбеге по ВГ1П
оценка возможности возвращения па аэродром вылета после отказа и
рациональная компоновка маршрута и полетного задания для повышения
надежности выполнения задания;
- тренировка штатных экипажей к пилотированию в условиях отказов
Ниже приведены результаты экспе-
риментов на пилотажном стенде для
конкретного самолета. Благодаря хвос-
товой компоновке двигательной установ-
ки (малые эксцентриситеты векторов тя-
ш) и высокой эффективности органов
аэродинамического управления даже
при отказах критических двигателей на
разбеге самолет может быть удержан на
полосе шириной 80 м, причем матема-
тическое ожидание боковой ошибки и
м.
М;
3
?1к'. 11.3.1. Статистические харакшриаикл
ipepHriiiuuru взлета при отказе кри-
тического двигателя
о
загрузка летчика линейно возрастают с
ростом скорости, на которой происходит
отказ. На рис. 11.3.1 показано среднее
значение и дисперсия но множеству экс-
lepiiMcirroB максимального отклонения от оси ВПП и необходимой до оста-
товкн длины ВПП при выполнении прерванною взтета при отказе двигатс-
чя па разных скоростях разбе! а.
По существующим требованиям при отказе кришческого двигателя
ia скорости, превосходящей скорость отрыва носового колеса, взлет сле-
дует продолжить. Тог факт, что летные испытания, как правило, ирово-
тятся с внеклассного аэродрома, дает возможность пересмотреть это по-
ложение. Совместно с летным составом разработана методика заверше-
гия излета через подлет, эффективная в том случае, если отказ наступил
Ю момента нажатия кнопки “уборка шасси”. Основным положением эт0
методики является инструкция до завершения уборки шасси не форспр0
зать отход от ВИП (V?/ < 2-е-З м/с) с тем, чтобы на случай отказа сохра
1ить надежный визуальный контакт с ВПП.
На рис. 11.3.2 приведен пример траектории полета с выделенньь
/чистками, откуда невозможно возвращение на аэродром вылета при отк* _
1вух форсажных двигателей. Исходя из результатов таких экспериме’ ’
{юрмируегся почетное задание, предусматривающее манипуляции с РУ1^ н„
<ами управления двигателем на безопасном участке траектории Суше0 I
iyio роль в обеспечении безопасности испытательных полетов играсТ
•отовка летного состава к нештатным ситуациям. Средняя наработка Л Ч
www.vokb-la.spb.ru - Самолёт своими руками?!
и3 шести летчиков па нилотаж-
сГендс ПСИ К-102 в период под-
Я°^)ЬКи и проведения летных исны-
Г-ний данного самолета составляла
Хло 600 ,|асоь-
Вниду отсутствия элемента нео-
жиДаяности при отказах системы вы-
пуска шасси в ситуациях такого типа
на передний план выходят разработ-
ка оптимальных приемов пилотиро-
вания и их наземное усвоение летны-
ми экипажами. Эксперименты на пи-
Рис. 11.3.2 Отказ двух форсажных двига-
телей иа траектории первого вылета
лотажном сгендс показали, что при
односторонних отказах главных стоек
невозможно избежать резкого крене-
пня аппарата после касания исправной стойкой в результате чего на основа-
нии отзывов летчиков и объективных показателей (V“PbLia ss -7 м/с' посадка
с нсвышедшей основной стойкой расценивается как катастрофическая.
Для случая невыхода носовой стойки шасси н данном примере разработана
методика пилотирования, обеспечивающая умеренную вертикальную скорость
касания носовой части фюзеляжа поверхности ВПП (Vv«-1 м/с). Ме-
тодика рекомендует плавное опускание носа до углов атаки а * 2-гЗ° на тех
скоростях пробега, пока органы продотьного управления не потеряли свою
эффективность (рис. 11.3.3) (Vnpo6 » 2.50 км/ч), и выпуск тормозного
парашюта перед началом неуправляемого опускания ( Vnpo6 * 200 км/ч)
Рис. 11.3.3 Посадка с невыпущенной передней стойкой
На современных самолетах из соображений безопасности иногда уста-
навливается резервная аналоговая система улучшения устойчивости и унрав-
•яемости (СУУРА) (рис. 11.3.4). В качестве ее алгоритмов, как правило,
Р пинаются упрощенные (без сигналов по неретрузке и некоторых пере-
Рестпых связей) функционалы штатной системы с фиксированными значе-
мц настроек, соответствующих среднему режиму полета.
Рис 11.3.4 Структура взаимодействия штатного и реаервного контуров
Как правило, аналоговая система обеспечивает приемлемые пило-
тажные характеристики в основном по первому и частично по второму
уровню специальных требований. С учетом этого особое внимание
должно быть уделено особенностям пилотирования при переключении
контуров управления, инициированных отказами. Для этих исследо-
ваний были приняты несколько модельных отказов, наибольший инте-
рес из которых представляет "обрыв” обратной связи но угловой ско-
рости тангажа. Этому отказу - 0) соответствует режим колеба-
тельной неустойчивости продольного движения. Использование крите-
рия о приемлемом уровне изменения частотных характеристик канала
управления до и после переключения контуров [8|, согласно которому
эти отличия нс должны превышать АЛ = 7 дБ при <р = -180°, наиболее
благоприятным режимом для переключения является скорость Vlipo6»
Рис. 11.3.5. Рекомендации по методи-
ке перехода на СУУРА
а 450 км/ч, причем в первые секунды
после перехода на СУУРА следует
воздерживаться от вмешательства в
управление с большими амплитудами
отклонения ручки, особенно это суше*
ствснно при отказах гидросистемы,
приводящих к снижению распола1ас
мой скорости приводов. Указанные
о1раничения связаны со стремлением
максимально уменьшить расхождение
в АФЧХ тракта до и после пер
ключения (рис. 11.3.5). В результа^
этой серии экспериментов было соч
но целесообразным информирова^
экипаж об отказе типа “обрыва
нала сог в виде светового табло,
кового сигнала и мерцания центр4 j
ного огня.
www.vokb-la.spb.ru - Самолёт своими руками?!
tf.4. Исследовательские, обучающие и тренажные средства
п0 ^-натурного моделирования на базе персональных компьютеров
Полученный в результате исследовательских работ на пилотажном
нде ПСПК-Ю2 задел в области методики эксперимента и создания бы-
С эотействук>ших динамических моделей реального времени позволил
с сПрОГ гранить эти результаты в область создания компьютерных
остств исследования и тренажеров. Это техническое направление суще-
ственным образом влияет на безопасность полетов. Учет экономических
соображений показывает, что при создании этой, как и любой совре-
менной, технологии должен максимизироваться показатель эффектив-
ность! стоимость и обеспечиваться массовость поставок.
Опыт исследований режимов ручного управления и подготовки летного
состава показывает, что для технически и экономически эффективного ре-
шения этих задач необходимо наличие эшелонированного комплекса аппа-
ратных и программных средств моделирования различной степени сложнос-
ти и достоверности имитации условий полета. Такая иерархия учебных и ис-
следовательских средств позволяет выбирать конкретную систему адекватно
квалификации обучаемого или характеру исследовательской задачи. Рацио-
нальная архитектура такой системы представлена на рис. 11.4.1.
Серьезным фактором повышения экономической эффективности систе-
мы подготовки или исследований является унификация программных и
аппаратных средств, используемых в ней, а также применение серийной
вычислительной техники. Ориентация на IBM-совместимые персональные
компьютеры нс только существенно удешевляет разработки в области та-
ких систем, по и обеспечивает им вы-
сокую надежность, компактность и
предельную простоту обслуживания.
За последние годы в ЦАГИ разра-
ботаны опытные образцы всех элемен-
тов показанной на рис. 11.4.1 системы.
Рассмотрим их более подробно.
Мини-тренажеры (MINISIM -
Mini-Simulator). Помимо компьютера
K;iacca Pentium мини-тренажер осна-
щается имитаторами рычагов управле-
11Ия Умолотного или вертолетного ти-
па, которые монтируются на обычным
фИсном столе с помощью струбцин,
’итаторы выполнены по стандартам,
РШгятым в авиационной промышлен-
и, и имеют достаточно высокие
1^Хаш1ческие характеристики [9]. Ис-
ьзо ainic имитаторов помимо стои-
тпых соображений преследует цель
I Комплексные тренажеры
с реальным интерьером и
приборным оснащением
Тренажеры с реальными
рычагами управления И
дисплейной приборной
доской
Процедурные тренажеры
с реальными рычагами
управления
Мини-тренажеры с имитаторами
рычагов управления
Обучающие компьютерные системы
и дисплейные классы
Рис. 11.4.1. Рациональная архитектура
системы стендовых исследований и
тренажеров
становить барьер д.1я зашиты от ложных навыков в сснсо-могориой оЛ
та. Соответственно, а клеш при обучении делается па развитие интет аС'
и и,пых способностей и тактическою мышления летчиков. Общий
ловки показан на рис 11.4.2 I
Риг. 11.4.2. Общий пил мини-тренажера
Перемещения рычагов управления измеряются с помощью потенцио-
метрических угловых датчиков и через плату7 аналого-цифрового преобразо-
вания (шкала измерений =5 В 12 разрядов, 5 каналов) вводятся в память
компьютера. Плата совместно с драйвером обеспечивают автобалапсировку
нулей датчиков н выставку эталонных коэффициентов усиления.
В основном задачи обучения реализуются за счет развитого пакета
программного обеспечения, часть разделов которого носит информацион-
но-справочный характер (компьютерный учебник), а часть использует
режим моделирования в реальном времени.
В настоящее время в ВВС России п ряда других стран эксплуа-
тируется более 150 мини-тренажеров такого типа для самолетов Су-27,
МиГ-29, МиГ-31, Су-24 и вертолетов Ка-50 и др. палубного и наземного
базирования. Эти мини-тренажеры прошли аттестацию соответствуюши
ми контрольными органами и оцениваются летным и командным соста-
вом, как эффективное средство обучения, переучивания нредполетяо
подготовки и послеполетною анализа.
За четыре года серийного производства и эксплуатации мини-тре,1аЖ<г
ров отработаны достаточно совершенные версии программною обеспечь
(ПО) и документации, обеспечивающие эффективную работу7 на м1П1И-тре,та
жере любого летчика без дополнительной помощи технического персонала^
Существующий технологический арсенал программных средств ,
воляет создавать аналогичные пакеты обучающих программ для ^Р-1
летательных аппаратов в достаточно короткие сроки. ,^-гве
Как исслсдоватсл1>ское средство мини-тренажер используется в ка _
лабораторного стенда для предварительной оценки характеристик У1 г
пости и управляемости и эрюномических исследований видов представ,
питотажно-навигационпой информации
www.vokb-la.spb.ru - Самолёт своими руками?!
цроцедурпый тренажер (PARTSIM -
r 1'а& S/mutator). На процедурном гре-
га)Кере в отличие от мини-тренажера ycia-
наи пинаются реальные рычага и пульты
,а1}дения и воспроизводится их располо-
жение в штатной кабине. Однако вся ИН-
дикаиия (ннекабинное пространство, при
борная доска) по-прежнему выполняется на
дисплее персонального компьютера [10].
Общий вид процедурного тренажера
представлен на рис. 11.4.3.
Программное обеспечение процедурно-
го тренажера содержит динамическую мо-
дель самолета с системой управления для
всех эксплуатационных режимов полета.
Летчик имеет возможность отработать
Рис. 1 1.4.3. Общий вит процедур-
ного тренажера
на тренажере все режимы пилотирования,
навигации и задачи целевого применения.
Благодаря использованию штатных рычагов управления с механиз-
мом три мм пронация летчик приобретает навыки в сснсо-моторной облас-
ти, т.е. представление о правильной дозировке отклонении рычагов па
различных маневрах и соответствующих им усилиях на рычагах
Процедурный тренажер имеет расширенные возможности и в классе
исследовательских задач: появляется возможность исследования характе-
ристик управляемости с учетом реальных характеристик загрузки рыча-
гов управления (особенно в случае установки поста с изменяемой загруз
кой) и эргономики пультов управления
Тренажеры а 'дисплейной приборной доской (MID IS IМ - Midi-
Simulator). Принципиальным отличием установки MIDISIM от пре-
дыдущих моделей ян [ястся разделение визуальной информации о
ьнекабинпой обстановке и приборной индикации на два отдельных
Дисплея. Кроме того, применение коллимационной шизы Френеля
Pl
1 И.4.4 Общий вид установки MIDISIM
позволяет создать у пстчика ил-
1юзпю удаленности па бесконеч-
ность что с точки зрения физио-
логии человеческого зрения ближе
к реальной ситуации.
Реализация вычислительно! о
комплекса MIDlSIM'a па грех ком-
пьютерах с выделенным местом ин-
структора существенно расширяет
обучающие возможности установки.
Общий вид макета кабины и ее
интерьер показаны па рис. И 4.4.
Тренажер удовлетворяет условиям мобильности, поскольку габа
кабины не превышают 2000x1600x1200 мм, а масса 200 кг. Тр
ет функционировать в обычном офисном помещении нлощадЬК)
;е 10 м2 от бытовой сети электропитания 110/220В, 50Гц, потребу
мощность не более 750 Вт, прочие требования аналогичны требова"
,1 к условиям функционирования персональных компьютеров.
Высокий уровень универсальности тренажера достигается за счет
:о заменяемого НО, имеющего высокий уровень преемственноеги с
мини-тренажеров и процедурных 1ренажеров, а также реализации
'торной доски моделируемого самолета па большом (диагональ 20”)
jA мониторе типового lBM-совмссгимого компьютера.
Аналого-цифровой комплекс тренажера построен по схеме, приве-
юй на рис. 11.4.5.
Рис. 11.4.5. Схема вычислительного комплекса установки M1DISIM
НО головного компьютера в реальном масштабе времени обеспе-
ает решение следующих задач:
- моделирование пространственного движения самолета на всех
плуатационных режимах полета;
- имитацию работы радио-навигационных систем;
- имитацию работы двигательной установки;
- моделирование атмосферных условий (давление, температура, по
янный и градиентный ветер, турбулентность);
- имитацию работы шасси;
архивацию результатов тренировки для последующего анализа
иоко.тировання. '
Рабочее место инструктора с рычагами управления, аналопгпв
ни-тренажеру, обеспечивает решение следующих задач:
- наблюдение в ходе тренировки за состоянием самолета (виД |
|роны, траектория полета, переходные процессы и т.д.);
- демонстрация обучаемому правильных приемов пнтотироьаН
>ректировка его действий;
www.vokb-la.spb.ru - Самолёт своими руками?!
ввод отказов:
задание условий полета (начальные условия, конфигурация само-
еТа или вертолета, заправка, подвески, день/ночь, облачность и т.д.):
имитация со стороны инструктора действий самолета-противника
ИТЛ самолета-партнера.
Универсальный вычислительный комплекс полноразмерного трена
^ера (Fl'LLSIM - Full Scale Simulator'). Изложенные выше принципы
построения аналого-цифровых комплексов успешно применены при мо-
дернизации ряда полноразмерных стендов с подвижной кабиной в ЦАГИ
(ПСПК-102, ПСПК-1, -2, -3).
Заложенные в предлагаемый комплекс принципы допускают широ-
кий выбор возможностей, определяемых характеристиками моделируемо-
го самолета от легкомоторных с простейшим приборным оснащением до
современных, оснащенных пилотажными дисплеями и индикатором па
лобовом стекле. Усложнение сводится лишь к наращиванию количества
периферийных компьютеров, соединенных с головным через однотипные
сетевые платы типа NE-2000.
Предлагаемая для таких случаев архитектура вычислитель пито ком-
плекса аналогична представленной на рис. 11.4.5. Наиболее развитый
вычислительный комплекс, реализованный но описанным выше принци-
пам, установлен на пилотажном стенде ЦАГИ ПСПК-102 и содержит 8
IBM-совместимых компьютеров, 3 из которых обслуживают задачу син-
теза изображения внекабинного пространства (угол зрения по курсу
130е), 3 компьютера типа Book-size с 10-дюймовыми SVGA-мониторами
используются как имитаторы бортовых дисплеев (рис. 11.1.1).
Таким образом, базовыми унифицированными аппаратными компо-
нентами описанных технологий являются:
- IBM-совместимые компьютеры,
- имитаторы рычагов управления,
- сетевые адаптеры типа NE-2000,
- звуковые платы Sound-Blaster в качестве имитаторов шума,
интерфейсные платы АЦП / ЦАП и ввода / вывода ра:ювых команд,
йз которых, собирается вычислительный комплекс тренажера любой
степени сложности от MINISIM до FULLSIM
Общепризнано, что существенным элементом современного трена-
жера является программное обеспечение. Базовыми программными ком-
°ненгами компьютерных тренажеров являются.
графические программы синтеза и представления двухмерных и
Р) Мерных объектов на дисплеях компьютера, так называемая 2D- и
Графика реального времени (не менее 24 кадров в секунд}7);
Динамические модели реального времени самолетов и вертолетов с
Темами управления полетом и вооружением;
интерактивные средства обучения или исследований;
- драйверы реального времени, обеспечивающие связь програ» J
обеспечения с различными аппаратными средствами. с‘ ‘IlfOro
Разработанные программы 2D- и SD-графики обеспечивают iipue^
мыс для класса недорогих систем характеристики разрешения (G «Л
256 цветов. 1100 текстурированных полигонов на шаге, день/ночь
в облаках сложных метеоусловиях и другие спецэффекты). Такие
ракгеристики достигаются благодаря использованию специальных п '
емов прсяраммирования на языках С и Ассемблера и сформированное'
на .этой основе пакета служебных программ.
Созданная графическая система позволяет индицировать на экране
компьютера приборную лоску моделируемого самолета, внекабинпую
обстановку, а также различные вспомогательные виды (юпографи
четкое изображение траектории, вид в плане на траекторию, изолиро
вано и в составе приборной доски экран пилотажного дисплея и др.)
Подсистема обьемной графики обеспечивает изображение внекабинпого
пространства, включая линию горизонта, землю с нанесенной па нее
текстурой и деталями рельефа (типа гор, лесов, озер, строений и т.д.)
и небо с текстурой облаков. Для формирования такой информации ис-
пользуются специально ориентированные ускоренные алгоритмы проек-
тивной геометрии, переносящей внешние образы на экран дисплея с
наименьшими визуальными искажениями. Эти алгоритмы обеспечивают
непосредственное и, тем самым, быстрое обращение к SVGA-видео-
схемам и работу с их специальными функциями.
Математические модели динамики самолета, реализованные в со-
ставе компьютерных тренажеров, включают в себя традиционные бло-
ки, имеющиеся в составе любых современных тренажеров (банк аэро-
динамических характеристик самолета, уравнения пространственного
движения, математическую модель системы управления, модель ат-
мосферы с учетом ветровых возмущений, модель сил и моментов эт
шасси и др )
Ввиду того, что при реализации подобных задач на персональном
компьютере имеются существенные oiрапичения по быстродействию и
подобному объему памяти, используются нестандартные подходы к
представлению данных (банк АДХ) и к их обработке (интерполяция
сверхбыстрыми методами). В итоге, например, полный банк АДХ совр^"
меппого самолета имеет объем примерно 120 Кбайт, при этом доетжае
многократный выигрыш в быстродействии при его использовании
сравнению с традиционными методами. г
Широкое распространение персональных компьютеров открыв
возможное! ь для оперативного включения в состав моделей тренаже!
наиболее продвинутых разработок других коллективов. Удачные Р
меры такой интеграции: модели систем управления вооружением,
аэродинамических характеристик для больших углов атаки и несга1
нарных режимов [11]
www.vokb-la.spb.ru - Самолёт своими руками?!
При использовании персональных компьютеров как средства модслиро-
1ИЯ, по сравнению с вычислительными системами, традиционно использу-
pm в составе 1ренажсров, открываются практически пео1раниченные ин-
С адкгпвчыс возможности организации взаимодействия обучаемого или ис-
1С10вателя с тренажером. Особенно эти возможности оказываются плодо-
творными при создании обучающих программ. Интерактивный режим стро-
ится по определенным сценариям, которые, как правило, создаются с
\частисм специалистов в области эксплуатации авиационной техники па базе
"р’1Э (Руководство по летной эксплуатации) и других документов. Как цра-
С11по аги сценарии базируются па классической триаде из области психоло-
гии обучения “демонстрация + обучение + контролт>
Интерактивное моделирование существенно повышает и эффектив-
ноегь работ на пилотажных стендах, благодаря возможности имитации
как сквозного полетного задания, гак и отдельных его фрагментов, оста-
новки режима, его просмотра и оперативного изменения характеристик
самолета и системы управления, а также видов индикации.
По сути дела первой программной системой, специально созданной для
поддержки исследований на пилотажных стендах была САПР ДИНАМИКА
[121. широко известная в авиационных институтах и ОКБ России Приме-
нительно к описанным многокомпыотерпым системам создана переработан-
ная версия этого программного комплекса, получившая название DOMCRIS
(Dynamic Object Creation & Research Interactive System)
Аналогичная программная система разработана в ЦАГИ для под-
держки исследований в области эргономики различных видов борто-
вых индикаторов (многофункциональных дисплеев и индикаторов на
лобовом стекле) и компоновки приборных досок в целом и получила
название SEGAMBIS (Swift EGA Module Based Interactive System).
Эта система предоставляет возможность инженеру-эргономисту, име-
ющему среднюю компьютерную квалификацию, достаточно быстро из
Укрупненных элементов (шкалы, счетчики, цифры, буквы, символы,
с1ре.чки и т.д.) создавать любые виды пилотажно-навигационной, бое-
ь°й и другой индикации и целые приборные доски, редактировать их,
оценивать в режиме математического моделирования на фоне типовых
залач пилотирования и, наконец, оптимизировать с участием летчиков
ь Режиме полунатурного моделирования.
Список литературы к главе 11
' ^-С. Бюшгенс, Р.П. Студнев. Аэродинамика самолета. Динамика продольного и бо-
2 Копого движения. - М.: Машиностроение. 1979.
д.Е. Ефремов, Л.В Оглоблин, В.В. Родченко, Л.Н. Предпиччшский. Летчик как ди-
3 Чамидеская система. - М.: Машнносцихшие, 1992.
-1.Ф. Васильев, /|.Я. Шилов. Программа расчета движения в атмосфере ехгесиммет-
4 Ричного аппарата , Тр. ЦАГИ. 1968.
/7/и.юа Оптимальная коррекция ма1рнпы направляющих косинусов при расчетах
крашения твердого тела Ученые записки ЦАГИ. 1977 Т. VIII К? 5.
В.Ф. Брагалин. А.Н. Бобылев, А.Г. Бюшгенс. Устойчивость продольного
самолета по вз.кчио-иосадочиой полосе И Тр. ЦАГИ. 1986. Вып. 2324. ^’’’’ЖеЯ
F..B. Попов, И.И. Палътов. Приближенные методы исследования нединейн
матичсскпх систем. - М/. Фцз.матгиз. 1960. Ых ав'го
.4.Г Бюшгенс, Л.Н. Дасов, Т.Л- Муравлева, Ю.А. Поливанов,
ся префильтр Авторское свидетельство № 237798. 1984.
амонастраиъаюгций.
1 Tarasov, / Fedotov. К. Tatarnikov. Aircraft Handling Qualities Research an<i
Criteria Development for Nonstationar / Nonlinear Situation. Final Report Contract
No. SPC-91-4002 EOARDC
А.Г. Бюшгенс, В-И. Желонкин, К.С. Смирнов и др. Мини-тренажер авиационный
Патен! РФ № 41679 на промышленный образец, 1993. WM
4 Г Бюшгенс, Ю.Н. Желмин, В.П. Кочетков и Др- Мипи-трснажер с реальными
рычагами управления. Патент РФ № 38580 па промышленный образец, 1992.
>/.Г. Гоман, Г.И. Столяров. C.JI. Тартышников и др. Описание продольных аэро-
динамических характеристик самолета на больших углах атаки. Препринт 1ЪХ1*Ц
№ 9, 1990.
В-А. Бобцов, Я. А. Шумилов. Интерактивная система коллективного пользования для
автоматизации процесса моделирования динамики летательных аппаратов и систем
управления .1 Сб. Вопросы кибернетики. - М.г Изд. АН СССР, 1984.
www.vokb-la.spb.ru - Самолёт своими руками?!
Глава 12
ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ И УПРАВЛЯЕМОСТЬ
СВЕРХЗВУКОВЫХ САМОЛЕТОВ
12.1. Общие положения
Переход к сверхзвуковым скоростям полета приводит к ряду суще-
ственных особенностей в аэродинамических характеристиках продольной ус-
тойчивости и управляемости, значительно осложняющих обеспечение в нор-
мальных пределах пилотажных характеристик. Кроме того, в последние го-
ды возникш новые требования, направленные на обеспечение приемлемых
пилотажных характеристик на больших и сверхбольших углах атаки.
Наиболее существенными особенностями продольных аэродинамических
характеристик сверхзвуковых самолетов являются следующие:
- нелинейность зависимости продольного момента от угла атаки,
особенно на больших а, когда возникают участки, где имеется статичес-
кая неустойчивость (mf*>0);
- уменьшение эффективности продольного управления при М > 1, а
также на больших углах атаки при околозвуковых скоростях:
- сдвиг назад фокуса самолета при переходе к М > 1, достигающий в
некоторых компоновках 20-5-25% САХ. Эго явление приводит при наличии
даже минимального запаса статической устойчивости при М < 1 к большим
потерям в аэродинамическом качестве за счет продольной балансировки;
- образование продольной статической неустойчивости по скорости
((1тг/с1Су> О') в области околозвуковых скоростей. По этой причине при
торможении и переходе со сверхзвуковой скорости па дозвуковую при
постоянном положении рычага управления (на самолете без СУУ) может
возникать приращение перегрузки. Ситуация может усугубляться за счет
неблагоприятного изменения m.Q в области М ® 1;
~ уменьшение продольного аэродинамического демпфирования на боль-
углах атаки, а также продольного демпфирования на больших высотах;
- образование вибрации и колебаний с большой амплитудой на больших
Клах атаки при приближении к С,уя тах вследствие срыва потока на крыле.
осе указанные выше особенности аэродинамических характеристик в
Родильном движении (без скольжения) могут служить препятствием для
р гменештя рациональных с других точек зрения компоновок. Поэтому7
' ОИЧИВосгь и управляемость современных сверхзвуковых самолетов обсс-
Ме ИЬаотся’ в соответствии с существующими требованиями за счет при-
ения систем улучшения устойчивости (СУУ) средствами автоматики
Го Лолжна быть обеспечена необходимая эффективность продольно-
йий Г1Равления> Достаточная для компенсации любых возможных возмуше-
1 1 продольной балансировки во всем летном диапазоне углов атаки.
Как указывалось в гл. 9, необратимая бустерная система ynDa
;НБУ) и электродистанциоштая система управления (СДУ) тюзв0 ПЯ1^еН11я
тлмзонать путем введения сигналов от специальных датчиков
х) независимо от летчика дополнительные отклонения органов пп
юго управления, которые корректируют динамику самолета даже ппДОЛЬ"
•Н1ЧИИ статической неустойчивости или недостаточного демпфирования НЭ
В настоящей главе рассматриваются основные принципы обеспече
продольной устойчивости и управляемости при помощи СУУ формиШЯ
зание ее вычислителя при идеальной работе всех элементов системы vi
давления и общепринятой линеаризации уравнений движения самолета
Влияние собственных динамических характеристик датчиков и других
элементов системы управления, влияние упругости конструкции, а также
эяда нелинейных эффектов будет' рассмотрено в следующей главе.
Для реализации системы управления с использованием СУУ необхо-
димо отклонение рулевых поверхностей тта максимальные углы, что тре-
зует разработки соответствующих структур систем управления самолетом
т высокой степени надежности. Большие отклонения рулевых поверхнос-
тей от автоматической системы могут быть обеспечены как в механической
:нстеме с рулевой машиной большого хода, так и в электродистанциотшой
^проводной) системе управления (СДУ), которые разрабатывались в пос-
теднис годы. В СДУ механическая связь между рычагами управления лст-
птка и аэродинамическими поверхностями управления самолета заменена
электрическими связями. Основные этапы эволюции систем управления
тодетом от систем с механической проводкой к СДУ покачаны в гл. 9.
Основные преимущества СДУ:
- удобство введения любых дополнительных сигналов;
повышение точности управления за счет существенного уменьше-
1ия влияния деформаций конструкции, уменьшения трения тюфтов и
юн нечувствительности, поскольку большая часть механической провод-
си заменяется электрической;
- повышение живучести;
- простота взаимодействия с автопилотом;
- экономия массы (особенно па больших самолетах).
Структура СДУ в общем виде приведена в гл. 9 На ручке управ
тения летчика установлены электрические датчики, измеряющие при-<
конные к ней усилия или се перемещения. Сит налы поступают в
санальный аналоговый или цифровой вычислитель. Вычислительное у
гройсгво вырабатывает сигнал, который поступает на многоканаль
тсполнительпьтй привод. юсти
Применение СДУ с системой улучшения устойчивости и управляе.
•амолета обеспечивает следующие возможности: пбпат-
- преобразование управляющею сигнала от летчика и сигналов
п.гх связей для получения потребной реакции самолета при уиравлеии
- создание необходимых перекрестных связей между каИ
травления;
www.vokb-la.spb.ru - Самолёт своими руками?!
.стоматическую балансировку самолета при изменении конфигура-
1М|( и режима полета;
и*11 оГраничение сигналов, идущих от летчика, что позволяет предот-
. т Ь ВЫХОДЫ на опасные режимы полета.
ВР Ос1(оВной проблемой создания элсктродистанционных систем яв-
,я обеспечение надежности, которая должна быть но крайней ме-
1ЯС^толЬ же высокой, как у механической системы управления экви
патентного назначения
Необходимость обеспечения характеристик устойчивости и управля-
емости самолета, удобных для ручного пилотирования, накладывает оп-
ределенные требования па выбор конструктивных схем, алгоритмов
(законов управления) и параметров соответствующих автоматических ус-
тройств. входящих в систему управления самолета летчиком, отличные
от соответствующих требований к автопилотам. Поэтому прежде чем ис-
ходить к анализу различных вариантов систем обеспечения устойчи-
вости и управляемости самолета, сформулируем некоторые общие требо-
вания к таким системам
1. Требования, обусловленные необходимостью учета характеристик
летчика. Основные из этих требований следующие.
- Характеристики управляемости самолета должны быть удобны
для летчика как по показателям чувствительности в ответ на приклады-
ваемые к ручке (штурвалу) управляющие усилия, так и перемещения.
- Динамические характеристики самолета с СУУ должны быть прием-
лемыми для летчика. В частности, недопустимо пи чрезмерное быстро-
действие (широкая полоса пропускания), ни малое быстродействие (малая
полоса пропускания), так как в обоих случаях тегчик должен вводить шш
запаздывание (фильтрацию сигналов), или опережение, что снижает его
оценку пилотажных характеристик самолета. Для оценок самолета летчиком
часто весьма существенной является реакция самолета на начальной стадии
развития движения. Если самолет обладает большим запаздыванием на
начальной стадии движения, то им трудно управлял» при точном пилоти-
ровании. Такие динамические характеристики могут быть приемлемыми для
самолета с автопилотом, но недопустимы для режима ручною управления.
Самолет с СУУ должен обладать достаточной полосой пропускания в
пРодо.тьном канале, чтобы могли проходить высокочастотные пробные им-
0 ьсы, которые летчик создает при осуществлении точного пилотирования
, некоторых режимах полета. Большинство летчиков на заключительном
посадки осуществляют небольшие колебательные отклонения стабили
По1Т>^а (рУ-,1я высоты) с частотой 1 + 1,5 Гц для создания колебаний самолета
u 1ангаЖу с угловым ускорением 6 + 7 град/с2. Цель пробных импульсов,
п_?1ИЛИ1''1ПМУ> заключается в постоянном анализе характеристик самолета и
Пия Н0зиР°вании сго реакции на низкочастотную составляющую управле-
3 ’ 11о'гребную для управления траекторией. Отсутствие такой возможности
Т\, ДИяет пилотирование самолета на этих этапах полета.
’«Иол-----
- Когда движение самолета сопровождается остаточными лепи 1
кими колебаниями вызванными работой системы автоматического Д1Р1ес|
ления, уровень таких автоколебаний должен быть в допустимых поел ^1,Рав'
2. Система управления самолета летчиком в отличие от системы с^
пилотом должна быть рассчитана па работу- во всей возможной облает
жимов работы самолета, включая предельную и даже критические оеж 3
полета. Это делает необходимым соответствующий выбор функционалов^
стемы управления и регулирования передаточных чисел по режимам полета/
3. Система управления самолета летчиком должна быть рассчитана
на условия успешного функционирования при произвольном маиевриро
вании самолета, в то время как автопилот обычно рассчитывается па ра
боту только при малых отклонениях от некоторых номинальных условий
полета. Это требование делает необходимым анализ ряда вопросов, кото-
рые обычно нс учитываются при создании автопилотов.
Необходимо исследовать функционирование СУУ и оценивать возмож-
ные изменения динамических характеристик самолета при произвольном ма-
неврировании с существенным изменением ориентации (у, 9), перегрузок,
угловых скоростей и ускорений (особенно для маневренных самолетов).
Сложное пространственное движение самолета может приводить к
перекрестному взаимовлиянию, обусловленному как свойствами датчиков
СУУ, так и перекрестным взаимодействием, вызванным паразитными
эффектами, которые связаны с влиянием установки датчиков в самолете,
в результате чего они замеряют более сложные составляющие движения,
чем предполагалось при выборе параметров соответствующего изолиро-
ванного канала управления. Необходимо также анализировать прак-
тически произвольные отклонения рукояток управления, в частности,
резкие ступенчатые отклонения ручки, действие больших внешних воз-
мущений и т.д., которые могут привести к потере устойчивости самолета
с СУУ “в большом" (см. гл. 13).
Таким образом, из перечисленных требований следует, что при анализе
и синтезе СУУ кроме обычных соображений об обеспечении потребных ди-
намических характеристик самолета с СУУ как объекта управления необхо-
димо проведение анализа функционирования системы в различных условиях <
поле! а. Соответствующие иллюстрации такого анализа на примере системы
продольною управления самолета приводятся далее.
Задачи продольного управления самолетом могут быть условно пред
ставлены как задачи двухконтурпого управления, где внешним контур •
является движение самолета по траектории (изменение V, L, ।
т.д.), т.е. движение его центра масс, а внутренним контуром - движе ।
самолета относительно центра масс. В настоящей главе анализ оГР^
ничивается только исследованием внутреннего контура управления
применительно к этим задачам осуществляется исследование автомат
ции ручного управления. При этом рассматриваются системы, пояВ°~дI
ющие улучшать устойчивость и управляемость самолета и облегчать j i
www.vokb-la.spb.ru - Самолёт своими руками?!
ванне самолета летчиком. Специфика рассматриваемых систем уп-
логир заключается в том, что они обычно являются необходимой
РаВЛ£\, самолета и выбор их схемы и параметров существенно зависит от
ЧаС1оетных аэродинамических характеристик самолета. В этой связи вы-
1<О1П 1IX параметров является естественной частью анализа динамики и
б°^5е11постей управления самолета летчиком.
°С При выборе алгоритмов и структуры системы управления обычно
емятся создать оптимальную в том или ином смысле систему. Примени-
тельно к проектированию реальных систем управления, в связи с важнос-
тью обеспечения высокой надежности и безопасности полета, это обычно
сводится к выбору рациональных источников информации и структуры
СУУ на основании существующего опыта и оптимизации передаточных
чисел и их регулирования но режимам полета. В тех случаях, когда авто-
матические устройства улучшения устойчивости и управляемости суще-
ственно изменяют характеристики самолета, необходим подход с рассмот-
рением характеристик замкнутой системы самолет - СУУ - летчик как
единого целого. Поскольку для большинства классов самолетов ручное уп-
равление по-прежнему является основным (это, в частности, относится к
маневренным самолетам), то требования к самолету с СУУ можно сфор-
мулировать, только учитывая летчика в контуре управления.
Можно выделить следующие основные этапы при разработке сис-
темы управления:
- выбор чувствительных элементов и основных обратных связей в СУУ;
- оптимизация параметров для отдельных режимов полета и конфи-
гураций самолета;
- оптимизация законов настройки параметров для всей области
режимов полета и конфигураций самолета.
При выборе внешних обратных связей в СУУ необходимо опреде-
лить основные недостатки в пилотажных характеристиках самолета и па
основе имеющегося опыта успешных разработок принять определенную
структуру СУУ. При оптимизации параметров СУУ для отдельных ре-
жимов полета существенно уточнение ее структуры и оценка необходи-
Мьгх настроек параметров СУУ по режимам полета.
Удовлетвори тельные динамические характеристики самолета могут быть
достигнуты при различных технических решениях по конструкции и алго-
ритмам СУУ. ПрИ разработке учитываются следующие основные факторы:
простота реализации;
стоимость разработки и реализации;
общность элементов и настроек параметров для различных режи-
работы СУУ;
" малая чувствительность к нежелательным входным воздействиям
Уклонениям параметров СУУ от поминальных значений;
мдчая чувствительность к месту установки датчиков в самолете;
)g, ~ надежность и простота эксплуатации.
В связи с большими трудностями создания новых датчиков
перечня параметров движения самолета имеется достаточно огранив
количество вариантов СУУ, которые реально могут быть разработ-CllJ10e
установлены на самолете. В настоящее время при автомат изацш^,,Ь1 И
зольного управления самолетом .можно использовать датчики HepernU₽<>
угловой скорости сог и углов a, Sk и
Уровень автоматизации управления самолетом может быть раз
1ым. Фактически он задается на начальной стадии разработки самоа
В связи с этим рассмотрим различные схемы автоматических смете
улучшения устойчивости и управляемости, обращая основное внимание
а следующие вопросы:
- характеристики устойчивости и управляемости самолета с СУУ-
- диапазон передаточных чисел, допустимый из условий обеспе-
1ения устойчивости;
- влияние изменения характеристик самолета па работоспособность
*УУ, в частности, возможность ее использования па статически'неустой-
чивом самолете;
- выбор и настройка передаточных чисел по режимам полета. i
При анализе СУУ в основном будем рассматривать возможность вы-
5ора ее параметров из условия выполнения простейших требований к ве-
тчинам демпфирования £;ы и частоте колебаний соа самолета с СУУ.
Н скоторые соображения по методу оптимизации параметров системы уп-
равления с использованием модели летчика приведены в конце главы.
12.2. СУУ для улучшения продольного демпфирования
Простейшим устройством для улучшения характеристик демпфиро-
вания продольных колебаний (при наличии статической стойчивости),
Юлучившим широкое распространение, является демпфер продольных
колебаний - демпфер тан ажа.
Функциональная схема системы управления самолета, оснав(енного
[емпфером тангажа, приведена па рис. 12.2.1 В демпфере тангажа в
качестве чувствительного элемента исиольз/егся датчик угловой скорости
*и<’- 12.2.1 Функциональная схема сами-
ета с демпфером тангажа
(ДУС) презстав шюший собой ско
ростной I ир )скоп, peaгиpyIolU,, |
только па одну i оставляющую векго'
а угловой скорости движения сам0*
. ста. В качестве исполнительного М
тр< и гва обычн используется Р
движная тяга или рулевая MaUI’ I
(РМ) т pt включается в
водку правт ния и имеет воз.
ность в дополнение к управ-161^,.
четчига ос щеетв 1ять малые O1
нения стабилизатора Д<р состав-1®
www.vokb-la.spb.ru - Самолёт своими руками?!
^ьшно 5-^ 16% общего хода стабилизатора. Такой демпфер колебаний с
ШиС <> ходами является отказобезопасным, что позволяет делать сто одно-
Ка * Есчи ,1С учитывать динамические характеристики исполнительных
яггв ю введение в систему управления демпфера тангажа эквива-
vcTpo1R* ’ “ -
'еНТ1(О изменению производной аэродинамического демпфирования пг“г,
позволяет улучшить характеристики демпфирования самолета Ис-
т «ьзование демпфера тангажа несколько увеличивает потребное откло-
нение ручки управления для создания единичной перегрузки (хПу) что
ряде случаев желательно. Однако в тех случаях, когда нет избытка в
эффективности стабилизатора, эти изменения могут сказаться нежела-
течьпыми, поскольку демпфер тангажа как бы снижает эффективность
стабилизатора на маневр . Недостатком демпфера тангажа с малоходовой
рМ (рис. 12.2.2d) является то, что в установившихся маневрах пн может
выходить на ограничения по ходу. Избежать этого можно различными
способами. В настоящее время наиболее распространенным является и
пользование фильтра, пропускающего только высокочастотный сигнал,
идущий с ДУСа (так называемый виражный механизм)
Схема системы управления самолета с демпфером такого тина изобра-
жена на рис. 12.2.26. При наличии виражного механизма демпфер сохра-
няет свои свойства на маневре, несмотря па малый ход рулевой машинки.
При анализе динамики самолета с демпфером тангажа будем рас-
смагривать только короткопер поди веское движение. Такое упрощение
авали; продольного движения допустимо, поскольку рассматривается
Динамика устойчивого самолета, для которого допустимо разделение
РМ Виражным
механизм
Рис. 12.2.2. Структурная схема самолета с демпфером тангажа (о) и
демпфером ганга жа с миражным механизмом (6)
глиннопериодического и короткопериодического движений. расс
(инамику самолета с демпфером тангажа, схема которого привет °Три>1
1ис. 12.2.2а. В случае учета динамических характеристик силовых^ На
юдов (РМ и бустера), которые для наших целей можно аппрокСИмПри'
5ать передаточными функциями первого порядка, передаточная фуНк Р°
разомкнутой системы имеет вид
И'а, ------—.
' р2 + 2^ааар + ю2 Ttp +i Т6р + 1
Здесь: Са = Cj/mV; ®а - частота короткопериодического движения-
;о -декремент затухания; /гаг, Tj и - параметры системы управле-
ния (рис. 12.2.2).
Рассматривая величину kM как переменный параметр, который
(может принимать значения от 0 до со, и используя метод корневого годог-
| афа, получим траектории корней замкнутой системы самолет-демпфер
тангажа (рис. 12.2.3). Для самолета, оснащенного демпфером тангажа с
виражным механизмом (рис. 12.2.26), соответствующие корневые траекто-
рии построены на рис. 12.2.36. Из рис. 12.2.За,6 видно, что наличие на
самолете демпфера тангажа влияет прежде всего на декремент затухания
продольных колебаний. В случае, если исполнительные привода имеют
'чрезвычайно малое запаздывание, при использовании демпфера тангажа
^возможно существенное изменение корней характеристического уравнения
продольного движения вплоть до получения пары действительных корней.
|Для реальных динамических характеристик исполнительных устройств
(РМ и бустера) максимальное демпфирование, которое может быть обес-
печено при использовании демпфера, ограничено.
, Соответствующим выбором коэффициентов демпфера возможно удов-
летворение требований к демпфированию, при котором самолет будет бла-
гоприятно оцениваться летчиком. Однако в связи с тем, что корни харак-
теристического уравнения системы самолет-демпфер зависят от произве-
дения (/?ю m^qSb^)llz, при изменении режима полета необходима на-
стройка коэффициента kw в зависимости от скоростного напора. Требова
ния к необходимой степени настройки коэффициента можно снизить.
Рис 12.2 3. Корневые траектории для самолета с демпфером тангажа: а - демпфер танга»'
(см. рис 12 2.2с); б - демпфер тангажа с виражным механизмом (см. рис. 12 2.2б)
j дополнительно ввести в схему демпфера корректирующий фильтр ви-
eCJlil('r р+ 1)/(Тзр + 1) (рис. 12.2.4). Динамика самолета с таким демпфе-
Да уже значительно меньше зависит от режима полета, что иллюстриру-
РоМ фис. 12.2.5. Из этого рисунка видно, что при введении корректирую-
еТ?0 фильтра появляются области “притяжения” в виде нулей переда-
^шюй функции корневых траекторий, выходящих из комплексных полю-
Т°в что стабилизирует динамические характеристики самолета.
Рис 12 2.4 Схема системы с корректирующим фильтром (Т?р+ 1)/(Тзр + 1)
в демпфере тангажа: Тх = 0,1; Т2 = 0,5; Т6 = 0,05; Т3 = 0,2; Т4 = 4
Из анализа выражения для передаточной функции разомкнутой сис-
темы самолет-демпфер тангажа и годографов корней можно сделать сле-
дующие выводы:
- параметры системы самолет-демпфер тангажа зависят от режима
полета и, следовательно, параметры демпфера необходимо настраивать
по режимам полета;
- при больших передаточных числах демпфера тангажа при полете
самолета на больших скоростных напорах наступает высокочастотная не-
устойчивость, обусловленная динамикой исполнительных устройств (сило-
вых приводов);
- использование демпфера тангажа не позволяет обеспечить удовлет-
ворительные пилотажные характеристики статически неустойчивого само-
лета во всей области режимов полета;
наличие виражного механизма несколько ухудшает демпфирование са-
молета и приводит к появлению дополнительного малого корня 0 <|Х| < I/T4.
РИс 12 э г
а - гКорневые траектории для самолета с демпфером тангажа (см. рис. 12.2.4):
' ая высота полета; б - большая высота полета
12.3. СУУ для статически неустойчивого самолета — общие принци
Более общим направлением автоматизации продольного управления
юлета является использование автомата стабилизации с сигналом по п СЭ
рузке (по углу атаки), который работает в соответствии с функционалом*^
2 + кпу^Пу + kluXB , <
де Дп„ = пу - 1 - сигнал датчика перегрузки.
’ис. 12.3.1. Функциональная схема авто-
ата улучшения продольной устойчивости
Соответствующая функциональ-
ная схема приведена на рис. 12 3 1
Функционал (1) позволяет решить
две задачи: улучшить Демпфирование
и увеличить степень статической ус-
тойчивости самолета. Реализация та-
кой системы, также как и демпфера
тангажа, может осуществляться путем
использования раздвижной тяги (ру-
левой машины; рис. 12.3.1.). Автомат
улучшения продольной устойчивости
озволяет улучшить характеристики устойчивости самолета и повысить дем-
[фирование. Характеристики управляемости также изменяются.
Рис. 12.3.2. Схема самолета с автоматом улучшения продольной устойчивости
Рис. 12.3.3. Схема самолета с автоматом улучшения продольной ус-
тойчивости с рис. 12.3.2, преобразованная к одноконтурному виду
А
Ддя анализа динамических характеристик самолета с автоматом улучше-
продольной устойчивости (1) целесообразно определять значения корней
н11ЯкНугой системы. Для того чтобы воспользоваться методом корневого го-
За> афа. схем)7 на рис. 12.3.1 необходимо привести к одноконтурному вид}7
12.3.2). Передаточная функция разомкнутой системы будет иметь вид
__• <
%аз = 2 Д7 С1ТТ’ <2)
Р + 2^аСОар + ®а + 1 1
(рпс.
где Са
k,
а
На рис. 12.3.4 приведены примеры траекторий корней для ус-
тойчивого и статически неустойчивого самолетов. Из анализа вида корне-
вых траекторий на рис. 12.3.4 можно сделать выводы о характеристиках
динамики самолета с системой управления рассматриваемого типа:
- при использовании СУУ можно обеспечить устойчивость движения
статически неустойчивого самолета, если в системе используются доста-
точно большие отклонения стабилизатора;
- в зависимости от степени статической устойчивости самолета тре-
буется различная настройка параметров системы управления;
- на функционирование системы управления существенно влияют
изменения режимов полета;
- для обеспечения малых изменений Х^(Р?1у) и при изменении ха-
рактеристик самолета (положение центра масс, подвески и т.д.) требуется
специальная настройка передаточных чисел в зависимости от режима
полета и характеристик самолета.
Рис. 12.3.4. Корневые траектории для самолета с автоматом улучшения продольной ус-
тойчивости (см. рис. 12.3.2)
Достаточно сложная настройка параметров и особенно ее зависи-
мость от характеристик самолета, естественно, нежелательны, что застав-
ляет искать функционалы иного типа. Это привело к необходимости раз-
работки астатических систем и статических систем с большими коэффи-
циентами усиления при РМ большого хода.
Возможность использования статической неустойчивости для сверх-
кового самолетг1 создает ряд существенных преимуществ, связанных с
его продольной балансировкой. Реализуя при дозвуковых скорос.
тях полета, можно на сверхзвуковых скоростях уменьшить запасы стати-
ческой устойчивости, которые, как известно, увеличиваются на 10+20% С АХ.
Кроме того, при М < 1 и реализации т^у>0 уменьшается потеря подъем-
ной силы за счет балансировки самолета по продольным моментам,
уменьшается нагрузка на горизонтальное оперение и снижается сопро^
тивление за счет балансировки, уменьшаются потери аэродинамического
качества при балансировке самолета. Все отмеченное выше иллюстриру-
ется на рис. 12.3.5 и 12.3.6.
Указанные эффекты могут дать ощутимое уменьшение взлетного веса
сверхзвукового самолета при прочих равных условиях. При переходе к
величине >0, равной примерно 10% САХ, снижение взлетного веса
может составить 5+10%. Следует иметь в виду что увеличение
при М < 1 ограничивается потребной максимальной эффективностью
продольного управления на пикировании, где должна быть обеспечена
возможность возвращения самолета с предельно допустимых на малые
углы атаки (рис. 12.3.56).
Рис 12.3.5. Продольные моменты статически устойчивого (я) и неустойчивого (б) самолета
Рис. 12.3 6. Влияние запаса продольной устойчивости самолета на значения потре’111^
сил при его балансировке (Да - изменение угла атаки крыла для компенсации подъем11 .
силы ГО - AYro)
12.4. Гироскопическая СУУ астатического типа
Астатические системы улучшения устойчивости и управляемости обла-
jot тем несомненным достоинством, что позволяют обеспечить статические
актеристики управляемости самолета (Хв*, Р *) практически не завися-
щими от его аэродинамических и весовых характеристик и центровки. В на-
сюяшем разделе рассмотрим некоторые типы астатических систем продоль-
ного управления, основанных на использовании как сигналов гироско-
пических датчиков, так и датчиков перегрузки. В СССР такие системы
vnyчтения устойчивости и управляемости в виде полуавтоматических систем
продольного управления исследовались В.Н. Матвеевым, Г.С. Бюшгенсом,
Ю.И. Сидоровым, Ю.А. Борисом и др. еще в 1955-1960 гг.
Различные вопросы построения таких систем рассматриваются в ряде
работ. В настоящем разделе основное внимание уделяется оценке влия-
ния астатической системы управления на пилотажные характеристики
самолета. Рассмотрение начнем с анализа астатической системы продоль-
ного управления самолетом с датчиком угловой скорости со2, так называ-
емого гироскопического автомата продольного управления (АПУ).
Рассмотрим динамические характеристики самолета, оснащенного си-
стемой управления в виде гироскопического АПУ:
t
ср = ^(сог - КХВ) + k$ |(сог - KXB}dt.
о
Из выражения (1) следует, что летчик управляет самолетом через АПУ.
Сигнал, пропорциональный отклонению или усилию на ручке управления
КХВ, поступает в вычислительное устройство АПУ, где формируется функ-
ционал (1). Выходной сигнал вычислительного устройства поступает на
вход исполнительного привода, состоящего из РМ и бустера, который и
осуществляет отклонение стабилиза-
тора самолета или бустера с элект-
рическим входом (на СДУ).
Конструктивная реализация АПУ
может быть различной. Наличие ин-
теграла от сигнала рассогласования в
функционале управления приводит к
тому, что пропадает однозначное со-
ответствие между положением рычага
Управления (ручки или штурвала) и
стабилизатором, характерное для са-
‘ лета, не оснащенного системой ав-
томатического управления. В связи с
м ПРИ конструктивной реализации
темы с сохранением связи между
н ^онением ручки и стабилизатором
оходимо использование тензомет-
(1)
Рис. 12.4.1. Функциональная схема гирос-
копического АПУ с тензометрической руч-
кой управления и механической провод-
кой: 1 - тензометрическая ручка; 2 - дат-
чик усилий; 3 — механическая проводка
www.vokb-lo.spb.ru - Как построить самолёт своими руками?!
Рис. 12.4.2. Функциональная схема гироскопического АП У в ва-
рианте системы дистанционного управления
рической ручки, т.е. ручки, выходной сигнал с которой пропорционален
усилию, приложенному к ней летчиком (рис. 12.4.1). В этом случае входя-
щий в функционал (1) сигнал КХВ представляет собой сигнал, пропорцио-
нальный усилию, приложенному летчиком к ручке. В такой схеме, однако,
имеются определенные противоречия между перемещениями и усилиями на
ручке, особенно существенные на неустойчивом самолете.
Прямая реализация функционала (1) возможна в варианте дистанцион-
ной системы управления, когда отклонение стабилизатора <р не связано с от-
клонением ручки управления (рис. 12.4.2). Очевидно, что требования к на-
дежности элементов такой системы выше, чем в первом случае.
При анализе динамики самолета с системой управления (1), струк-
турная схема которой приведена на рис. 12.4.3, рассмотрим следующие ос-
новные вопросы:
- статические характеристики управляемости самолета (Хв , Р у) с
системой управления;
- динамические характеристики, зависимость корней системы само
лет-ДПУ от его параметров;
- устойчивость самолета с АПУ, допустимый диапазон выбора пере-
даточных чисел;
- особенности динамики самолета с АПУ.
Рис. 12.4.3. Структурная схема гироскопического АПУ
0з соотношения (1) следует, что в установившемся горизонтальном
е самолета с АПУ КХВ = 0. Когда летчик не вмешивается в управ-
110 АПУ работает как автопилот вида
пенпс>
Д<р = /гшсог + /гэдЗ.
(2)
17рл отклонении ручки управления, соответствующем постоянной вели-
чине КХВ, АПУ до тех пор будет отклонять стабилизатор, пока не обеспечит
о^удение подынтегрального выражения, т.е. пока не выполнится условие
КХВ = (3)
Это соотношение должно удовлетворяться независимо от параметров
самолета, естественно, если органы управления обладают достаточной
эффективностью для реализации этого условия.
Выполнение равенства (3) и является одной из задач астатической
системы управления. Учитывая, что в установившемся движении выпол-
няется соотношение
Ди £7
°г0 = —77“
(4)
получим, что АПУ позволяет обеспечить следующие характеристики ста-
тической управляемости самолета (независимо от его аэродинамических
характеристик и центровки):
пу - 9
в KV
(5)
Необходимую зависимость Х^у(У,Н) можно обеспечить, введя регу-
лировку коэффициента передачи К = по режимам полета.
При анализе динамики самолета с гироскопическим АПУ удобно рас-
сматривать корневые траектории, примеры которых для короткоперио-
дического движения статически устойчивого и неустойчивого самолетов
приведены на рис. 12.4.4. При построении корневых траекторий рас-
сматривается изменение эффективного коэффициента усиления
12.4.4. Корневые траектории самолета с гироскопическим АПУ: а - устойчи-
Вый самолет; б - неустойчивый самолет
www.vokb-lo.spb.ru - Как построить самолёт своими руками?!
Неизменном соотношении коэффициентов k^/k^ = k^. ВарИацИя
И соотношения коэффициентов k$ позволяет дополнительно в ЗНй
La корневых траекторий. Ть
Трежде чем переходить к анализу влияния передаточных коэ<Ь(Ь
( ЛПУ на динамику самолета, рассмотрим условия устойчивости дЦИ
я самолета с системой управления, т.е. определим области значен^
Даточных чисел, которые следует анализировать. Как видно из копн”
Траекторий на рис. 12.4.46, неустойчивость движения самолета может
обусловлена или малым значением передаточного коэффициента ес
1молет статически неустойчив, или большим - из-за влияния динамики
зого привода. По-видимому, наиболее удобным методом нахождения
цц области устойчивости является метод Д-разбиения. Суть метода Д-
тения заключается в том, что прямую задачу нахождения корней в за-
мости от значения передаточных коэффициентов СУУ заменяют на
гную - задаются значениями корней и находят соответствующие этим
ям передаточные коэффициенты.
Лусть имеется характеристическое уравнение самолета с СУУ:
Д0(р) = аоР" +а\РП~' +--- + ^п-\Р + ап = 0, (6)
|?г- - функции коэффициентов и или большего числа переда-
^ix чисел СУУ. Наиболее простой случай, когда параметров СУУ
ко два и они входят в коэффициенты характеристического уравнения
йпо. Пусть мы имеем некоторый набор корней характеристического
нения (G) и начинаем изменять передаточные числа k\ и k^. В этом
ре изменение количества устойчивых корней может происходить од-
,из следующих способов.
I. Обращение в нуль действительного корня; в этом случае обраща-
в нуль коэффициент ап, который по теореме Виета равен произведе-
всех корней. Это является критерием изменения знака действитель-
корня, и соответствующей границей является уравнение
I «„(/?!, Л2) = 0. (7)
2. Вещественный корень может изменить знак, пройдя через беско-
рсть, что возможно при обращении в нуль коэффициента ао ПРИ Р в
вни п. Условием устойчивости является: а$(к\, k^) = 0 (такое равен
при анализе задач динамики самолета обычно не реализуется).
j). Обращение действительной части комплексно-сопряженного корня
ль - колебательная неустойчивость. Критерием этого является BbI
1ение равенства До(гсо) = 0, которое распадается на систему ДВУ*
нений для действительной и мнимой частей оператора До(?®) = О-
Х(а>, kt, Л2) = 0; У-(ю,62) = О
Ьдесь ю - частота комплексного корня, значение которой при на
Ьении границы устойчивости может пробегать все значения °т 1
оо. Из (8) можно получить систему уравнений для коэффициентов
а границе устойчивости.
При построении границы устойчивости необходимо пользоваться
авилом штриховки, которое заключается в следующем.
' При перемещении вдоль границы по направлению возрастания часто-
ты со от 0 до + со область устойчивости находится слева, если А > 0, и
справа, если А < 0. Пересечение границы означает изменение количества
корней с положительной действительной частью, однако внутри границы
могут быть неустойчивые корни, которые не изменяются при вариации
рассматриваемых параметров. Это делает необходимой проверку полу-
ченных границ контрольным расчетом для любой внутренней точки обла-
сти. Если в ней все корни соответствуют устойчивым движениям, то по-
лучена граница устойчивости.
Рассмотрим теперь устойчивость самолета с гироскопическим АПУ.
Из анализа схемы, приведенной на рис. 12.4.3, можно получить переда-
точную функцию замкнутой системы, знаменатель которой является ха-
рактеристическим уравнением:
А0(р) = р(р2 +о1^ + а0)(7'бр + 1)(7'1р + 1) + (рЛ{й + kQ)(p + Са), (9)
где Выполнив необходимые преобразо-
вания, получим характеристическое уравнение пятого порядка, а подставив
в характеристическое уравнение р = йо и сгруппировав члены в выражени-
ях для действительной и мнимой частей, будем иметь два уравнения:
Re = 0: + 7} + Гб] - + Гб)я0 + ах + =0, (10)
Im = 0: - ю2[1 + + (7} + ][о0 + ^ + С^] = 0. (11)
После простых преобразований получим выражение для передаточ-
ных коэффициентов СУУ на границе области устойчивости:
т АСа + Вы2
3 " (C2+cd2) ’
СаВ-А
(С? +со2)
(12)
где
А со4[г717'1Т6 + Т} + Тб] + а>2[(Л + Т6)а0 + ах],
В = -ю4Т1Гб + со2[1 + а0ТхТ6 + (Л + 76)О1] - а0.
Из выражения (12) следует, что /гэ = О при со = 0, поэтому граница
Устойчивости выходит из точки = 0, kM = -а^/Са, в которой два корня
Характеристического уравнения равны нулю.
обл Выражепие (12) позволяет численным расчетом построить границы
сти устойчивости. Однако для получения явных зависимостей гра-
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
1щ области устойчивости от параметров АПУ получим приближ
тт генные
—1 Для гра-
И больших
—г Для ма-
галитические соотношения. Для этого рассмотрим выражения
ты области устойчивости по отдельности для малых г
(ачений частоты со. Рассмотрим границу области устойчивости
их частот (со —> 0). В этом случае:
А ® czico2, В ~ -д0 (при »(Г] + Гб)с7о).
Отсюда
со2 ( ~ \ г «о ю2
(cZjCa C2fl), ka ~ — CZj .
са са Са
Учитывая, что
(13)
,.2 г
С? щСа - а0 ’
элучим
ао а\ г
----+ —/г8.
С?1 С7о
Это уравнение прямой в координатах /?8, ka . Соответствующая грани-
1 показана на рис. 12.4.5а для устойчивого и неустойчивого самолетов.
с. 12.4.5. Области устойчивости самолета с гироскопическим АПУ; а - границы облас
устойчивости для малых значений со; 6 - границы области устойчивости для боль
ачений со; — - приближенный расчет:-- точный расчет
Рассмотрим границу области устойчивости для больших частот, гДе
>жно приближенно принять:
А « -co4(r, + Т6), В * + со2,
куда после простых преобразований получим
k$ « -<я*7\Т6 + co2, «co2(7i +Т6). (14)
Из соотношений (14) легко получить выражение для границы ус-
тОйч11В°сТП в виде функциональной связи &8(/ги):
[л9-----—1
I S 47iT6}
Т{Г6 ТХ+Т6У
Ъ+ТеХ® 2Т(Г6)
(15)
Это уравнение параболы на плоскости передаточных чисел
(рис. 12.4.56). Выбрав постоянные значения k&, при изменении q от
<7пш1 Л° б/тах. получим, что фигуративная точка перемещается и может
выйти за границу области устойчивости. Выражение (15) удобно, в
частности, тем, что позволяет быстро оценить приближенные максималь-
ные значения передаточных чисел, при которых движение может быть
устойчиво. Эти значения оцениваются из неравенств
Тб
Характеристики управляемости самолета удобно анализировать, рас-
сматривая передаточную функцию, например, {со2/(/СЛгр)}:
<0г = )(р + Лд)(р+Са)
А0(р)
(16)
Характеристический определитель Ло(р) обычно имеет пару комп-
лексно-сопряженных и один действительный доминирующий корень, ко-
торые определяют динамические характеристики самолета. Учитывая,
что действительный корень близок по величине к Са , соотношения (16)
можно упростить с учетом сделанных выше оценок влияния близких
операторов в числителе и знаменателе и привести к виду
ДХВ] (р2 +2^acDap + (o2 )
(17)
Для определения передаточной функции для угла атаки можно вос-
п°льзоваться передаточной функцией
1___
р + Са
Произведя преобразование, из соотношений (16) и (17) получим
а
а
—
сог
P + ks_________
(р2 + 2£асоар + со2 )(р + X)
(18)
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
Из соотношения (18) следует, что на переходный процесс по углу
ущественно влияет значение действительного корня X. Из рис. 12 4 и атакИ
то для статически устойчивого самолета |Л| < Са При малых X, характ *
ых для этого случая, переходные процессы при управлении затянут₽
[ля статически неустойчивого самолета корень |Х| > Са и процессы
глу атаки а и перегрузке при управлении обычно достаточно xodoi
аким образом, использование на самолете АПУ рассматриваемого т
риводит к принципиальным изменениям динамики и переходных п Э
ессов самолета при управлении, которые теперь описываются иными
равнениями, чем движение самолета без СУУ. Данные для сопоставле-
Из этих данных следует, что по сравнению с самолетом без автома-
ических устройств самолет с АПУ обладает хорошими переходными
эоцессами по угловой скорости <вг, однако в ряде случаев имеет более
стянутые переходные процессы по углу атаки (перегрузке).
Характеристики переходных процессов изменения перегрузки в су-
щественной мере определяются значением действительного корня X. Рас-
иотрим зависимость значения действительного корня X от параметров
ПУ. Для этого удобно воспользоваться модифицированным методом
•-разбиения, рассматривая упрощенное характеристическое уравнение
пя идеальных динамических характеристик исполнительных устройств,
•чевидно, что в этом случае полученные результаты будут применим
>лько внутри области устойчивости движения самолета с А1
читывая сделанные замечания, получим приближенное характерно
щеское уравнение в виде
о у — — __ —. _— /19)
Р + р («1 + /?ш) + р(а0 + /?9 + Ca/?w) + Cak§ = 0 .
Определим кривые, на которых существует действительный КОреН |
= -X (X > О для устойчивого движения). Подставим это выражение
.9) и, сгруппировав члены, получим
— — X >
&МХ - ftg =-----~ ^°\ + йо) = •
X - Са
Это уравнение прямой, коэффициенты которой зависят от значения
я X. Расположение прямой на плоскости , ka существенно зависит
оТ величины &(Х). Пример такой функции приведен на рис. 12.4.6о. Из
„г l^A.Ga видно, что для X < Са функция Ь(Х) - отрицательная ве-
pjiv.
111ЧПна и, следовательно, линии X = const проходят через интересующий
нас первый квадрант плоскости /?д, (рис. 12.4.66). При Ь(Х) > 0 линии
У .. const сосредоточены в окрестности оси /гю, т.е. соответствуют большим
значениям и малым значениям fcg . В этой области значений , ka ха-
рактеристическое уравнение имеет три действительных корня.
Поскольку параметры АПУ выбираются обычно так, чтобы пара корней
была комплексно-сопряженной, то эта часть плоскости k$, представляет в
основном теоретический интерес. Пример соответствующих расположений
линий X = const для устойчивого самолета приведен на рис. 12.4.6.
12.4 6. Линии постоянных значений действительного корня характеристического
уравнения самолет-АПУ (устойчивый самолет): а - зависимость Ь(Х); б — положение
линий X = const на плоскости /?э,
Аналогичные зависимости для статически неустойчивого самолета
приведены на рис. 12.4.7. В этом случае Ь(Х) принимает отрицательные
значения при X <Са < X* (рис. 12.4.7) и, следовательно, квадрант (&э > О,
> 0) заполнен линиями X = const для значений действительного корня,
Удовлетворяющих этому неравенству.
Этот результат позволяет конкретизировать выводы о зависимости
значения действительного корня от степени аэродинамической устойчивос-
или неустойчивости самолета, полученные ранее при анализе корневых
Д°графов. Особенно наглядно видно, что для статически устойчивого са-
Лета значение действительного корня меньше, а для неустойчивого -
ЛьШе, чем параметр Са . Затянутые во времени переходные процессы по
110РМальной перегрузке Лпу могут неблагоприятно оцениваться летчиком.
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
Рис. 12.4.7. Линии постоянных значений действительного корня характеристического
уравнения са.молет-АПУ (статически неустойчивый самолет): а - зависимость Ь(1) £ _
положение линий 1 - const на плоскости к$,1га
Для ускорения переходных процессов по перегрузке сигнал с ручки
летчика можно предварительно пропускать через форсирующий фильтр
вида (Т*р + 1)/(Г2*р +1), где Т* > Т?- Параметры фильтра должны подби-
раться таким образом, чтобы обеспечить удовлетворительную управляе-
мость самолета по перегрузке. Недостатком такой коррекции является
необходимость настройки параметров фильтра по режимам полета. Кро-
ме того, использование форсирующего фильтра может оказаться нежела-
тельным из условия обеспечения устойчивости самолета “в большом”,
т.е. при “резком” пилотировании самолета.
Оснащение самолета гироскопическим АПУ приводит не только к
существенным изменениям динамических свойств самолета в продольном
движении, но и к изменениям его свойств при пространственном манев-
рировании. Рассмотрим в квазистатическом приближении динамику са-
молета при выполнении медленной бочки, т.е. переворота по крену на
у ~ 360°, без вмешательства летчика в продольное управление.
При выполнении этого маневра на самолете с гироскопическим АПУ, из
условия функционирования АПУ получим, что при Хр = const = 0 в процес-
се движения будет выполняться условие а>г = 0. С другой стороны, из урав-
нения равновесия проекций сил на плоскость симметрии самолета следует.
- —Дп„ +оэ, - —(1 - cosy) = 0.
V У V
Учитывая, что = 0, получим, что перегрузка в процессе разворот9
по крену будет меняться в соответствии с соотношением
&ntJ = cos у - 1,
т.е. при у = 90° перегрузка изменяется на величину Д?^ = -1 11 ^Уде
равняться нулю, а при у = 180°, Лпу = -2 и Лпу = - 1,0.
Из последнего соотношения, в частности, следует, что благодаря Р
те гироскопического АПУ самолет при выходе на угол крена у = 180° 6УД
миться выполнить горизонтальный перевернутый полет. Из этого при-
видно, что свойства самолета с СУУ кардинально изменились.
>ie результаты моделирования на пилотажном стенде динамики самолетов,
1аШенных системами типа гироскопического АПУ, показали, что для ма-
^вренных самолетов полученные выше особенности пространственного дви-
жения являются нежелательными, так как приводят к необходимости более
энергичного отклонения ручки Хр при пространственном маневрировании.
Гироскопический АПУ, по-видимому, в большей степени удовлетво-
пяет требованиям к системам управления неманевренных самолетов.
Гироскопический АПУ содержит интегрирующее звено в цепи сигнала
ошибки. Это создает определенные особенности в работе системы при
движении самолета по земле на режимах взлета и посадки. В тех случаях,
когда самолет является статически неустойчивым или обладает неудовлет-
ворительными характеристиками устойчивости, система устойчивости и
управляемости должна постоянно функционировать на всех этапах полета.
Наличие в системе интегрирующего звена при движении по земле, когда
самолет не изменяет параметры движения юг, пу в ответ на отклонение
ручки управления, приводит к возможности выхода стабилизатора на мак-
симальные углы отклонения любого знака, что может привести к непроиз-
вольному “козлению” самолета на посадке или затруднить взлет. В связи с
этим использование астатической системы управления с момента касания
земли и при пробеге по полосе является нежелательным.
12.4.8. Структурная схема системы управления с изменением функционала на взлет-
° Посадочных режимах
Для реализации управления при движении самолета по земле в СУУ
Ма ХОДИЛ1° предусмотреть специальный режим работы, в котором систе-
Делается статической. Для получения удовлетворительных значений
\у(Рпу) при таком движении дополнительно осуществляется увеличение
*]еРедаточных коэффициентов в канале демпфирования и стабилизации
пажа Возможный вариант такой структурной схемы изображен на
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
12.4.8. На взлетно-посадочных режимах по сигналу, наприме
ка/уборки шасси, закрылков и т.п. осуществляется изменение ре
юты СУУ путем переключения сигнала ошибки на интегрируЮщее Има
гическое звено. При этом в статическом режиме работы СУУ ,, ИЛИ
>ующее звено переводится в режим синхронизации выходного сиг
о с текущим значением отклонения стабилизатора (р для обеспечен
зударных” переходов с режима на режим.
12.5. Перегрузочная астатическая СУУ
На тех же принципах, что и гироскопический АПУ, может быть
троен автомат продольного управления с датчиком нормальной
•сгрузки пу:
t
Аср = + ktl(&ny - КХЪ) + kitl - KX^dt,
О
(1)
ДИу = 72^-1.
Рис. 12.5.1. Структурная схема самолета с перегрузочным АПУ: а - структурная
схема АПУ; б - структурная схема (д), преобразованная к одноконтурному виду
Конструктивно система может быть реализована на основе тех
нципов, что и гироскопический АПУ. Структурная схема перетру30**
о АПУ приведена на рис. 12.5.1. Из функционала системы упраВ
ия видно, что если летчик отклонит ручку управления и в систе*'
тупит сигнал КХр, стабилизатор <р будет отклоняться до тех пор, по
буцет создана перегрузка Диу, которая скомпенсирует управляющий
Н^гНат, т.е. пока не будет выполняться соотношение
= Лпу.
Цз этого соотношения следует, что система позволяет обеспечить
характеристики статической управляемости самолета в виде
Хпу = -L
Лв г/
Если значение передаточного коэффициента К постоянно, то и
упу - const, т.е. не зависит от режима полета и характеристик самолета,
в горизонтальном полете Лпу = 0, и для обеспечения этого условия лет-
чик должен держать рычаг управления (ручку, штурвал) в нейтральном
положении (Лр = 0).
Использование в обратной связи сигнала по перегрузке делает систему
чувствительной к месту установки датчика перегрузки в самолете, а также
чувствительной к упругим колебаниям конструкции. Последнее особенно
важно при анализе динамики тяжелых самолетов. Ограничим исследование
влияния СУУ па характеристики устойчивости и управляемости, рассматри-
вая только самолеты, имеющие достаточно высокие частоты упругих колеба-
ний. Однако и в этом случае часто необходимо учитывать место установки
датчика перегрузки в самолете. При установке датчика перегрузки в плос-
кости симметрии самолета на расстоянии хд от центра масс самолета будет
измеряться следующая комбинация параметров движения самолета:
СО,ХЛ
Дпуд = Дпу +----,
где Д?гуд — приращение перегрузки, измеряемое датчиком; Лпу — прираще-
ние нормальной перегрузки в центре масс самолета (хд — положительная
величина, если датчик расположен перед центром масс самолета).
Приращение перегрузки Лпу может быть выражено через изменение
Угла атаки Да и величину отклонения стабилизатора Дер:
л С№ А С№ ,
Дт?.. = — -Да + —----Дф .
у G G
Учитывая приближенное выражение для <йг, которое можно запи-
сать в виде
<йг = Да + Дф ,
а также соотношение in'f
Вать к виду
-C^Lro, соотношение для пуд можно преобразо-
Си
_ т,у
хаЧ—
л
А/2'/Д “ G
1
л ctj4s
Ла +
G
X I,
1 дго
Дф ’
www.vokb-la.spb.ru - Как построить самолёт своими руками
е i = I /»1ЬА < тд = -1д/Ь.1-
При установке датчика в точке
д
то
фажеппе в скобках, являющееся множителем перед Д<р, обратится в нуль
меряемая перегрузка будет зависеть только от приращения утла атаки Да
C^qS
G
1 т2У *
1 + Да.
Lro )
ЛяУд|(х
При установке датчика перегрузки впереди этой точки (хд > х*)
отучим дополнительно стабилизирующее влияние члена (cbzxj )/<; в из-
ряемой перегрузке В случае, когда лд<хд, имеется некоторый
стабилизирующий эффект от силы, действующей на стабилизатор.
Будем считать, что датчик перегрузки установлен вблизи точки хд.
этом случае схема на рис. 12.5.1д можег быть преобразована к одно-
нтурному виду (рис. 12.5.16) и с ее помощью можно построить
рневые траектории для замкнутой системы. При построении корневых
аекторий в качестве переменного коэффициента будем рассматривать
онзведение ka(-M2), а величины kn=kn/ka и kin = к1П/ка будем
итать постоянными, т.е. предполагать, что одновременно с изменением
пропорционально изменяется kin.
Re
-1 Г,
-\П\ Л'2 л,
' 12 5.2 Корневые траектории для самолета с перегрузочным АПУ а - устойчивы®
олет б - неустойчивый самолет
На рис. 12.5.2 построены примеры корневых траекторий для стати
гки устойчивого самолета <0, рис. 12.5.2л) и для статически
с
'стопчивого самолета ( т2у >0, рис. 12.5.26).
Из сравнения корневых траекторий на рис. 12.4.4 и 12.5.2 видно,
i отличаются прежде всего тем, что в случае применения перегрУ3
о АПУ соответствующим выбором передаточных коэффи1ШеН
влиять на величину нуля ЛД, т.е. обеспечить нужное значение
м° гтвнгельного корня. В случае применения гироскопического АПУ это
-1С ю невозможно и приводило к затянутым переходным процессам ио
"'грузке при управлении. Из рис. 12.5.2 также следует, что с исполь-
ванием перегрузочного АПУ можно стабилизировать как статически
стопчпвый, так и неустойчивый самолет.
' Оиеним динамические характеристики самолета с перегрузочным АПУ
при продольном управлении. Передаточная функция {а/ХХв} имеет вид
{а
ХА,
_ P) t
&0<P>
где — kin/kn
Нуль числителя обычно близок к меньшему полюсу и его компен-
сирует Используя этот факт, после преобразований получим
1 а I ~ с0______________ (2)
[КХВ J р2 + 2^<эр + со2
где Со = (/со2/иСа — константа;.
Путем соответствующего выбора параметров передаточной функции
(2) могут быть обеспечены управляемые процессы самолета по углу
атаки (перегрузке) с достаточно хорошими динамическими характеристи-
ками как для статически устойчивого, так и неустойчивого самолета.
Характеристики управляемости самолета с перегрузочным АПУ, как
видно из передаточной функции (2), близки к обычным характеристикам
самолета. Это обусловлено тем, что основной составляющей движения,
которую замеряет датчик перегрузки, является угол атаки самолета, т.е.
тот же параметр, который в основном определяет аэродинамическую
устойчивость самолета. По этой причине характеристики динамики само-
лета с перегрузочным АПУ при выполнении пространственных маневров,
в частности, при переворотах по крену, такие же, как у обычного
статически устойчивого самолета, при условии, что датчик перегрузки
Установлен в плоскости симметрии самолета.
В общем случае установки датчика перегрузки Ак^ характер про-
странственного движения самолета с АПУ может существенно услож-
Няться в связи с тем, что датчик перегрузки, установленный в точке с
°°РДинатами (хд, ул, гд) относительно центра масс самолета, измеряет
Сдожную комбинацию параметров движения:
= Ьпу + -[(<о2хд -йх2л) + (ы22д + соххд)<о^ - (со2 + со2)#д|
Для исключения воздействия побочных сигналов на функцнонирова-
е АПУ датчик перегрузки необходимо устанавливать в плоскости
чметрии самолета, в его носовой части.
www.vokb-la.spb.ru - Как построить самолёт своими руками?
Использование в качестве чувствительного элемента датчика пепег
делает необходимым существенную перенастройку передаточных чисел Anv
по режимам полета. Действительно, для обеспечения постоянной степени
гойчнвости самолета по углу’ атаки необходимо, чтобы коэффициент при
в уравнении моментов был постоянной величиной. Легко видеть, что зг
коэффициент выражается через параметры АПУ следующим образом- Т
k .. m^SbA C*gS
п К G
(3)
Для обеспечения приближенного постоянства выражения (3) необхо-
димо изменение передаточного коэффициента kn АПУ пропорционально
]/q- Естественно, что такая степень перенастройки коэффициента k
сложна в реализации для самолетов, рассчитанных на существенные
изменения условий полета.
Следует отметить, что использование в обратной связи в АПУ только
сигнала перегрузки может приводить к большим амплитудам авто-
колебаний по углу тангажа.
Определенной особенностью перегрузочного АПУ является по-
стоянство зависимости Хви по скорости полета. На малых приборных
скоростях это приводит к чрезмерной чувствительности самолета на
управление по угловой скорости тангажа. Устранение этого недостатка
возможно при введении дополнительного регулирования коэффициента
К по режимам полета.
Рассмотренные два варианта астатических систем являются частными
случаями систем продольного управления самолетом. На практике в ряде
случаев рационально использовать в обратной связи комбинацию сигна-
лов Az/j, и ыг. В результате мы приходим к необходимости анализа целого
класса систем управления, которые могут быть описаны функционалом
t
ср = kx[kolyny + спг(1 /г0)~ КА’В1 + kz J[fe0A«y + сог(1 - k0)~ KXB]dt
О
Из этого функционала можно, как частный случай, получить гиро-
скопический АПУ (feo = 0) и перегрузочный АПУ (без демпфирующего
члена) при kg = 1. Рассмотрим некоторые общие свойства и особенности
динамики самолета, стабилизируемого с помощью такого типа автомата
продольного управления.
Характеристики управляемости. Характеристики управляемости
самолета для установившихся режимов определяются значениями произ
водных Х"!/(Р"!')1 Х“г(Р“г), причем в зависимости от условий полетай
задач, которые должны решаться на рассматриваемом этапе полета,
требования к значениям этих производных будут различны. Учитывая,
что на установившемся режиме движения выполняется соотношение
Ьпуд
о, = ,,
и КХЪ = kohny + сог(1 - k0),
получим
'«У -Ife. I
в К *° V
dX
da2
1 *°К + (1-А0) .
К 9
Пример зависимости x”v от V при k = const приведен на рис. 12.5.3.
Возможность превышения до-
пустимых углов атаки, ограничение
угла атаки а. Принудительное ограни-
чение угла атаки на самолете может осу-
ществляться или изменением реализуе-
♦. мых ходов рычага управления, или из-
) мснением коэффициента передачи сигна-
Рис 12 5.3. Зависимость д”* от ско-
рости полета при различных соотноше-
ниях сигналов по пу и со, в СУУ:
------------ гироскопический АПУ;
- - - - - - перегрузочный АПУ
лов с рычага в систему управления (ре-
гулировка коэффициента /?ш). Степень
сложности создания системы ограниче-
ния угла атаки (или вероятность превы-
шения допустимого угла атаки при
отсутствии ограничителя) в рамках рас-
сматриваемых АПУ зависит от необходимой меры изменения (ослаб-
ления) сигнала с рычага управления при его отклонении до упора так,
чтобы самолет не выводился на угол, превышающий допустимый угол
атаки а » адоп. Максимальный угол атаки, который может быть реализо-
ван при достаточной эффективности органов управления самолета,
определяется из соотношений
атах Аатах + агп, ДсСщах/ан, ДИу — -^тах/^в7’
гДе ZnidX - максимальное отклонение рычага управления. Отсюда получаем
атах
^тах
Иллюстрации соответствующих зависи-
мостей ccmax(V) приведены иа рис. 12.5.4.
Из рисунка следует, что при обеспечении
Постоянной величины Х^у в широком диа-
Пазоне скоростей полета упрощается воз-
МОЖцость введения ограничения и, следо-
отельно, уменьшается вероятность превы-
шения допустимого значения угла атаки.
То характерно для перегрузочного АПУ.
чля гироскопического АПУ положение зна-
Рис. 12.5.4 Зависимость макси-
мального угла атаки атах от ско-
рости при полном отклонении
рычага при различных соотноше-
ниях сигналов по пу и со, в СУУ:
-------- гироскопический АПУ;
------перегрузочный АПУ
9
цельно лучше: здесь превышение допустимого угла атаки возм
шее узкой зоне скоростей полета самолета. Но в
Пространственное маневрирование самолета с дп
яполнение условия
КХВ = k0^ny + юг(1 - /е0),
как отмечалось ранее, приводит к ряду особенностей в динамике самолета
при пространственных маневрах, например, при выполнении переворотов
крену при невмешательстве летчика в продольное управление, т.е. при поле
те с зажатым в нейтральном положении рычагом. Рассмотрим более подроб-
но этот случай. Пусть самолет сбалансирован в горизонтальном полете и вы-
полняет переворот по крену (маневр “бочка”). Тогда приближенно выпол-
няется квазистатическое уравнение балансировки сил по оси Оу самолета
~у Lny + (йг - ^-(1 - cosy) » 0 . (4)
Из условия КА’В = 0 следует, что АПУ обеспечивает моментную
балансировку самолета таким образом, что выполняется соотношение
k^iiy + (1 - /го)сог = О,
>ткуда получаем
сп2 =--——Ди„- (5)
2 1-*0 у
Подставив (5) в (4), получим
1 + —------
1-&0 9
Из этих соотношений следует, что при рассматриваемом движении
амолета по крену происходит изменение нормальной перегрузки, причем
но наиболее существенно для гироскопического АПУ (/го = 0) В этом
лучае в зависимости от угла крепа перегрузка даже может поменять знак,
ак как самолет с АПУ стремится сохранить режим движения с = 0. в
астности, горизонтальный полет. Для перегрузочного АПУ (/го ~ О Дина
:ика самолета с АПУ близка к обычной, т.е. перегрузка при крене практи
ески не изменяется (рис. 12.5.5).
ис. 12.5.5. Изменение перегрузки пу при вращении по крену самолетов с гироскопическим
:регрузочным АПУ:-----------------гироскопический АПУ;--------------------- перегрузочный АПУ
устойчивость самолета с учетом переменности скорости.
псем ранее выполненном анализе предполагалось, что скорость полета
io'ieTa неизменна (V = const). Рассмотрим, как влияет использование
уЛУ на характеристики самолета в длиинопериодическом движении, т.е.
сГо устойчивость по скорости. Устойчивость самолета по скорости
иближенно определяется двумя обстоятельствами :
_ изменением моментов в зависимости от скорости, т.е. изменением
балансировки самолета при разгоне и торможении;
изменением равновесия сил при отклонении скорости от номиналь-
ной величины.
Известно, что самолет будет устойчив, если при отклонении скорости от
сбалансированного положения он стремится вернуться к исходному движе-
нию при А'бал = const. Это будет, если dX^/dM > 0. Действительно, напри-
мер, при AV > 0 перегрузка возрастает и самолет начинает набирать высоту,
т.е. увеличивать угол наклона траектории 6. Увеличение угла наклона
траектории приводит к торможению самолета, и отклонение (увеличение)
скорости ликвидируется Типичная зависимость Хбал(М) для маневренного
сверхзвукового самолета имеет вид, приведенный на рис. 12.5.6.
Там же приведена соответствую-
Рчс. 12.5.6. Типичная зависимость Л’<Ш(М)
Для сверхзвукового маневренного самолета
щая зависимость Х^/М) для самолета
с АПУ. Из рисунка следует, что само-
лет с астатическим АПУ рассматри-
ваемого типа нейтрален по скорости
Рассмотрим другой характерный
режим движения, для которого анали-
зируется устойчивость самолета по ско-
рости, а именно, рассмотрим устойчи-
вость самолета при стабилизации пере-
грузки Пу = 1. В этом случае самолет устойчив, если при изменении скорости
Движение развивается таким образом, что величина скорости возвращается к
исходному значению. Таким условием которое для оценок может рассматри-
ваться в приближенном виде является:
(сх1/су1)>(асх/асу)^
Из этого соотношения следует, что самолет устойчив, если на рассмат-
риваемом режиме полета он летит на угле атаки, меньшем Исполь-
зование на самолете АПУ рассматриваемого типа не приводит к появлению
особенностей в этой составляющей полного движения самолета.
Рассмотренные выше астатические АПУ обладают рядом положитель-
НЬ1Х качеств, основным из которых является реализация с их помощью неиз-
нных статических характеристик управляемости самолета практически
ПРИ любых его аэродинамических характеристиках и центровках. Однако в
спязи с наличием в функционале управления интегрирующего звена такие
С11стемы достаточно сложны в реализации. Это, в частности, существенно
i реализации многоканальной резервированной системы. Действит
1ичие параллельно работающих интегрирующих звеньев в многокаЛЬН°’
1 системе управления может приводить к тому, что даже при небол
1ЛИЧИИ сигналов на входах интегралов ошибка будет интегрировать
кдом канале по-разному, что приведет к последовательному отключен* &
шлов и, в конечном счете, к выходу системы из строя. ’ 'Пъ
Использование цифровых вычислений в значительной степени chi
ет трудности реализации астатических систем.
12.6. Статические СУУ продольного движения
Рассмотрим принцип действия одного из вариантов статической системы
щольного управления на основе схемы, приведенной на рис. 12.6.1. Кон-
уктивиая реализация системы может быть выполнена на принципах
логичных рассмотренным ранее применительно к гироскопическому и
егрузочному АПУ. Для обеспечения характеристик статической управ-
мости самолета в системе управления формируются сигналы обратных
зей в виде комбинаций сигналов А?2?у и сог, которые суммируются с сигна-
I рычага управления самолета летчиком. Соотношение между сигналами
, и сог выбирается из условия достаточно малых изменений перегрузки
г пространственном маневрировании, получения необходимого быстро-
ствия в переходных процессах и обеспечения возрастания величины Х^у
[ полете с малыми приборными скоростями. Соотношения между
ффициентами kn и /?(9 обычно лежат в диапазоне 0,02 < kn/k® < 0,08.
же приведены характеристики управляемости самолета Хвал и с
личными вариантами СУУ, откуда следует, что для обеспечения малой
чсимости Х„у от параметров самолета в прямой цепи системы должен
ь реализован достаточно большой коэффициент усиления &д.
иант с
олет с
Я
олет со
ической
тичес-
СУУ
kQm
олет без
к
у G/S тп*г
тг0 । тгу G/S
”1г0 . тгУ G/S
ф
т
т/ G/5 тг' 9Ьл
<р + <р »г2
< т? q т.
9ьл
Одним из существенных вопросов при синтезе структуры систем^1
вления является обеспечение малой чувствительности динамическ
ктеристик самолета с СУУ к вариациям параметров самолета и
Ха^снениям режима полета. В рассмотренных выше астатических вариан-
изМ суУ таких специальных мер не принималось, в результате их дина-
т цческие характеристики существенно зависели от режима полета. Преж-
> чем переходить к анализу конкретных примеров обеспечения малой
^вствительности системы улучшения устойчивости и управляемости к
вариациям параметров самолета и режима полета, рассмотрим некоторые
общие закономерности и возможные пути решения этого вопроса. В на-
стоящее время основным средством обеспечения требуемых характерис-
тик динамики самолета с системой управления является программная
настройка передаточных коэффициентов в функции параметров режима
полета. Такой метод, однако, обладает следующими недостатками:
- необходимо достаточно точное определение зависимости между из-
меряемыми величинами и динамическими характеристиками самолета в
различных конфигурациях, с различным составом внешних подвесок, что
обычно требует чрезвычайно большого объема летных испытаний;
- с увеличением количества параметров (изменяемая геометрия; рас-
ширение диапазона режимов полета и т.д.) усложняется программа и
увеличивается объем летных испытаний;
- программная настройка всегда осуществляется под некоторые
расчетные, а не под действительные условия и характеристики самолета.
В настоящее время работы по созданию “грубых” систем управле-
ния, мало чувствительных к вариации параметров самолета и режима по-
лета, ведутся в двух основных направлениях - в направлении создания
самонастраивающихся систем и в направлении создания обычных систем
управления, но с принятием соответствующих мер по снижению их чув-
ствительности к вариации параметров объекта регулирования.
Системы с пониженной чувствительностью к вариации параметров
самолета реализуются, в частности, следующим образом. В структуру
системы вводятся дополнительные фильтры, которые позволяют сформи-
ровать необходимое положение нулей разомкнутой передаточной функ-
ции, такое, при котором корневые траектории будут кончаться в этих
нулях, а динамика самолета в этом случае будет удовлетворять предъяв-
ляемым к ней требованиям. В схеме на рис. 12.6.1 это достигается уста-
новкой фильтра в цепи сигнала &.пу и соответствующим подбором его
параметров. Действительно, можно показать, что схема на рис. 12.6.1
может быть преобразована к виду рис. 12.6.2, где является как бы
инверсной “идеальной моделью” процесса.
2 — 2
р +2^1ю1^ + ш1
п м —
Тр + 1
..2 _ 1 са
а>1 = —-----------
Т д
www.vokb-lo.spb.ru - Как построить самолёт своими руками?!
Рис. 12.6.1. Схема статической системы продольного управления
Рис. 12.6.2. Схема системы, преобразованной к виду рис. 12.6.1,с инверсной моделью UZM
обратной связи
Отсюда следует, что параметры инверсной “идеальной модели” WM зави-
сят от коэффициентов системы управления (/гл/Лю; Т) и характеристик несу-
щих свойств самолета, т.е. несколько изменяются по режимам полета. Степень
демпфирования в числителе WM, характеризуемая членом 2^(01, в основном
определяется величиной 1/Г и мало меняется при изменении режимов полета.
Для уменьшения степени изменения частоты wj “идеальной модели можно
использовать настройку отношения kn!ka по режимам полета.
—м—
-1 /Т
Рис. 12.6.3. Траектория основных кор-
ней при изменении коэффициента k0
для самолета с СУУ (см. рис. 12.6.2)
при Г, = Т2 = Т3 = Ti = О
Наличие “модели” в числителе пере-
даточной функции разомкнутой системы
самолет-СУУ “стабилизирует” картин)
системы
(рис. 12.6.3), что позволяет упростить на
стройку параметров СУУ в функции рс
жимов полета. Введение фильтра сигнал^
Дпу полезно также для повышения
мехозащищенности системы управления
снижения влияния на ее функционир0
ние упругих колебаний конструкции с
корневых траекторий этой
Ниже иллюстрируется изменение вида корневых траекторий замк-
дета- с11Стемы самолет-СУУ по мере совершенствования структуры
системы управления.
ф\ нкция СУУ Устойчивый самолет Неустойчивый самолет
Im Im
0 Rc -ca Re
li^Tp + 1)сог X Im Im
-1/т 0 Re X-1 ° -cj 0 XRe
+ k„^ny 1 Im Im —►
V&1 + £ ) Re Re
ka(xp + 1)ю, + k,^ny X m Rc SZ Im
Re
/?ы(тр + 1)«г + k„^ny Тр + \ Im -и X/ V— Im -4-x— / Re
1 X -1/Т Re
-1/Г
Для обеспечения приемлемых характеристик управляемости в систе-
ме рассматриваемого типа (рис. 12.6.1) необходимо обеспечение доста-
точно большого коэффициента усиления k^. При этом для обеспечения
Устойчивости необходима установка в прямой цепи корректирующего
фильтра с передаточной функцией И7ф типа:
w = (д/4 + 1)(;?/27 + 1)
ф (р + 1)(р/80 + 1) ‘
Пример частотной характеристики такого фильтра приведен на
*1с’ 12.6.4. Фильтр позволяет повысить коэффициент усиления на низких
У°Тах’ Улучшить статические характеристики системы и уменьшить за-
-Дыванце по фазе на высоких частотах. Эти свойства фильтра позво-
Ют поднять коэффициент усиления k0 в системе управления в 6 + 8 раз и
^лучить удовлетворительные характеристики самолета с системой управ-
Лет 1я- Корневые траектории для короткопериодического движения само-
а с СУУ без
корректирующего фильтра (см. рис. 12.6.1) приведены на
www.vokb-lc.spb.ru - Как построить самолёт своими руками?!
>ис. 12.6.5. Такая картина расположения корневых траекторий при из
&ии коэффициента /?о соответствует статически неустойчивому само еНе"
Зидно, что при достаточно большом коэффициенте усиления /?0 уда^'
обеспечить значения корней, близкие к желательным значениям ппп СЯ
гяемым параметрами комплексных нулей.
Рис. 12.6.4. Частотные характеристики корректирующего фильтра 1Уф: а - амплитудная
Характеристика в децибелах; 6 - фазовая характеристика
В прямой цепи сигнала с ручки летчика в СУУ введен фильтр
<рис. 12.6.1), который служит для “сглаживания” входного сигнала,
юступающего от летчика (так называемый “префильтр”). Из схемы,
триведенной на рис. 12.6.1, можно получить передаточную функцию
[сс/Хв}, характеризующую управляемость самолета:
1 /гэф(Г1^ + 1)(Г3р + 1)(Тр + 1)
Лр + 1 &о(р)
'де оператор Л0(р) имеет корни, отмеченные на корневых траекториях
[рис. 12.6.5) треугольниками. Из рис. 12.6.5 видно, что введенные в систе-
му фильтры, в частности, сигнала перегрузки, привели к появлению опере-
жения в реакции самолета на отклонение
:татически неустойчивого самолета
ручки управления Хв, что ухудшает оцен-
ки летчика, так как самолет становится
слишком чувствительным к управлению.
Это и заставляет вводить дополнительный
фильтр 1/(Т.р +1) в цепи сигнала летчика
для компенсации опережения от фильтров.
Как отмечалось выше, цель установки
этого фильтра в цепи сигнала от летчика
состоит также в снижении интенсивности
: СУУ (см. рис. 12.6.1), получен- _______
ie из анализа короткопериоди- нарзстания входного сигнала для преДО"
°дв,,жения твращения выхода стабилизатора на пре"
ппивести v м Дельные скорости перекладки, что может
, ривести к потере устойчивости системы самолеЛуу при больших
зозмущениях (устойчивость “в ботыном”).
При анализе динамики статически неустойчивого самолета рассмо Р
тие короткопериодического движения не во всех случаях является пр
мочным. Это делает необходимым анализ полных уравнений продольн
еНИЯ самолета с учетом переменности скорости. В результате карти-
Я корневых траекторий в окрестности нуля несколько изменится и для
На аметров самолета, которые использовались при построении корневых
^аекторий на рис. 12.6.5, приобретает вид, показанный на рис. 12.6.6.
£ рис. 12.6.6 следует, что для статически неустойчивого самолета с
системой управления при анализе полных уравнений продольного движе-
ния значения корней, соответствующие быстрой составляющей движения,
анапогичны величинам, определяемым при исследовании короткоперио-
~ 5 и 12.6.6).
дпческого движения (ср. рис. 12.6.5
Корни фугоидного движения,
которые для статически неустойчи-
вого самолета были положительны-
ми, не изменили своего знака при
использовании на самолете СУУ,
т.е. самолет, как и ранее, имеет не-
устойчивые корни, соответствую-
щие неустойчивости по скорости.
Однако корни фугоидного движе-
ния самолета с СУУ могут быть
сделаны малыми по модулю, и по-
12.6.6).
Рис. 12.6.6. Корневые траектории для того же
случая, что и на рис. 12.6.5, полученные по
полным уравнениям продольного движения
лет на самолете не вызывает
замечаний летчика. При оснащении само-
лета астатической системой управления таких неустойчивых фугоидных
корней пе возникает и самолет нейтрален по скорости.
Одним из вопросов, который возникает при создании статической
системы управления статически неустойчивым самолетом, является обес-
печение его управления на всех этапах полета, начиная от разбега и
взлета и кончая посадкой. При этом на этапе разбега по земле до отрыва,
как это отмечалось выше, перегрузка самолета хотя и неизменна в
среднем (равна 1,0), но колеблется, что не позволяет использовать ее в
качестве сигнала обратной связи в системе управления Управление при
Движении по земле и на этапе подъема носового колеса и отрыва можно
осуществлять по сигналам ДУСа со2. В связи с этими соображениями в
системе управления, которая рассчитана на непрерывную работу на всех
этапах полета, при пробеге по земле отключается сигнал и изменяет-
коэффициент передачи по сигналу со2. Это позволяет уменьшить воз-
действие “шумов” па систему управления при пробеге но земле и обеспе-
чить удовлетворительное управление самолетом. Подключение сигнала
Перегрузки в систему осуществляется по какому-либо признаку оконча-
Ия взлета (аналогично осуществляется переключение для посадки),
1апример, по сигналу выпуска (уборки) шасси, закрылков и т.д.
В качестве иллюстрации изложенных выше общих принципов фор-
Р°вания управления можно сослаться на большой комплекс исследований
СИстемы дистанционного управления, проведенных на самолете Су-27,
'г-
www.vokb-lc.spb.ru - Как построить самолёт своими руками?!
Приведенные материалы позволяют сформулировать некоторые I
воды о перспективах развития систем автоматизации ручного управлен^*
самолетом.
1. Наиболее перспективными системами управления, позволяющие
эффективно использовать возможности автоматизации, являются дистан1
ционные системы управления, основанные на использовании в обратной
связи комбинации сигналов Лпу и со.
2. Спецификой СУУ статически неустойчивого самолета является
использование на всех этапах полета от взлета до посадки, что требует
включения соответствующих элементов в функционал управления.
3. Использование СУУ на всех этапах и режимах полета делает
необходимым исследование динамики самолета с СУУ во всей области
режимов полета, включая предельные условия пилотирования, устой-
чивость “в большом” и т.д. (см. гл. 13).
ее
Список литературы к главе 12
1. Г. С. Бюшгенс, Р.В. Студнев. Динамика продольного и бокового движения. - М,-
Машиностроение, 1979.
2. Г. С. Бюшгенс, Ю.И. Сидоров. Исследования по автоматическому демпфированию бо-
ковых колебаний И Тр. ЦАГИ, 1968. Вып. 1098.
3. Э.Г. Удержан. Метод корневого годографа в теории автоматических систем. - М.:
Наука, 1972.
4. Вопросы автоматизации управления/Под ред. Г.С. Бюшгенса. - М.: Машиностроение,
1978.
5. Г.С. Бюшгенс, Г.В. Ветчинкин, А.Н. Предтеченский, Ю.И. Сидоров. Система полуавто-
матического продольного управления с гироскопическим автоматом // Тр. ЦАГИ, 1966.
6. В.Ф. Брагазин, Ю.И. Диденко, В.К. Святодух, Ю.Ф. Шелюхин. Устойчивость и
управляемость по скорости неманевренного самолета с интегральной системой штур-
вального управления//Тр. ЦАГИ, 1994. Вып. 2516
I
Глава 13
ВЛИЯНИЕ РЕАЛЬНЫХ ДИНАМИЧЕСКИХ
ХАРАКТЕРИСТИК СИСТЕМЫ УПРАВЛЕНИЯ НА
УСТОЙЧИВОСТЬ И УПРАВЛЯЕМОСТЬ САМОЛЕТА
в настоящей главе рассматривается устойчивость и управляемость
сверхзвуковых самолетов с учетом реальных характеристик элементов
системы управления, влияния упругости конструкции, введения фильт-
ров и использования цифровых вычислителей в СУУ.
Рассматриваются нелинейные задачи, обусловленные наличием в ис-
полнительной части системы управления зон пониженной чувствитель-
ности при малых входных сигналах, ограничений на скорость отклоне-
ния управляющих поверхностей и других факторов, определяющих не-
линейную динамику самолета.
Выбор схемы и параметров СУУ существенно зависит от конкретных
аэродинамических характеристик самолета. Наметившаяся в последние го-
ды тенденция к использованию компоновок самолетов, имеющих аэроди-
намическую неустойчивость на дозвуковых режимах полета, приводит к
повышению требований к надежности системы управления и ее энергетике.
Большое значение приобретает также рациональный выбор алгоритмов
управления и динамических характеристик исполнительной части, которые
должны обеспечивать:
- заданные статические и динамические характеристики устойчи-
вости и управляемости самолета с учетом разброса массово-инерционных
и аэродинамических характеристик (влияние числа М, угла атаки, неста-
ционарное™ обтекания и упругости конструкции самолета);
- необходимые запасы устойчивости самолета как твердого тела, так
и с учетом влияния упругих колебаний конструкции;
- устойчивость при больших управляющих воздействиях и дей-
ствиях порывов ветра;
- отсутствие автоколебаний самолета с СУУ или их снижение до
приемлемого уровня;
- плавность регулировок параметров СУУ по режимам полета.
Как показывает опыт создания сверхзвуковых самолетов, успешное
Решение общей задачи разработки систем управления достигается при
комплексном подходе к перечисленным выше проблемам и на основе
компромиссных решений.
В настоящей главе рассматриваются, в основном, системы дистанци-
°ННого управления (СДУ) продольным движением самолета, в которых
Управление от летчика и обратные связи реализуются передачей электри-
г,еских сигналов. Эти системы используются на многорежимных самоле-
Тах и для них перечисленные выше проблемы наиболее актуальны [1-4].
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
13.1. Динамические характеристики элементов системы
Управления
Сигналы, отрабатываемые исполнительной частью системы сЬо
руются вычислителем СУУ на основе сигналов датчиков обратных свя “
и сигнала отклонения рычага управления или усилия на нем. Обпатн ”
связи в продольном канале управления обычно осуществляются по сиг
налам скорости изменения тангажа, углу атаки и перегрузки. Сигналы
скоростного напора, статического давления и числа М используются для
коррекции коэффициентов управляющих сигналов и обратных связей а
также для задания балансировочного положения рычага управления.
Динамические характеристики датчиков отклонения рычагов управ-
ления, скоростного напора, статического давления и числа М прак-
тически не оказывают заметного влияния на динамику самолета с СУУ
На сигналах, поступающих с датчиков скорости изменения тангажа, угла
атаки и перегрузки, следует остановиться отдельно.
Сигналы датчиков обратных связей. Сигналы, соответствующие
параметрам движения самолета и используемые в СУУ в качестве обрат-
ных связей для обеспечения требуемых характеристик движения самолета
как твердого тела, во-первых, содержат составляющие, вызванные упру-
гими колебаниями конструкции самолета, и, во-вторых, искажаются в со-
ответствии со статическими и динамическими характеристиками датчиков.
При расчетных исследованиях влияния упругих колебаний конструкции
на продольное движение самолета используется следующая методика [5].
1 Вертикальные перемещения любой точки конструкции самолета
представляются в виде ряда
N
y(x,z,t)= ^fk^,z)qk(t),
k=-i
где Д (х, z) - базисные функции, в качестве которых обычно используются
формы колебаний самолета в “пустоте”, т.е. при нулевой скорости набегаю-
щего потока и при отсутствии механических связей самолета с другими фи-
- обоб-
фюзеляжа
зическими объектами; qk
щенные координаты.
Индекс k = -1 соответствует
плоскопараллельному вертикально-
му перемещению самолета; индекс
k = 0 - повороту самолета относи
тельно центра масс; индексы k S 1
упругим колебаниям конструкции
самолета (рис. 13.1.1). При выбор6
первых двух форм в виде f-x " '
h = - х. (х„ „ - координата
центра масс самолета); угол ата^
и тангаж самолета связаны с
щенными координатами 7-1
обоб'
и <?о
соотношениями:
« = 70-^7-. S = 70-
где
у - скорость полета.
2 Изменение обобщенных координат описывается системой уравнений:
||С||q + ||Г>’ + Г>|| ? +1|А + В||q = Лф хшт,
(2)
где
т 0 0 0 C-i,N
0 Ц 0 • 0 C0,N
|С|| = 0 0 Си • 0 CIN
сМ-1 CN,0 CNA ’ •• CN,N-1 CN,N
(3)
- матрица инерционных коэффициентов, D* и D - матрицы конструк-
тивного аэродинамического демпфирования, А и В - матрицы конструк-
тивной и аэродинамической жесткости,
^<р
0
0
о
aN(p
(4)
- вектор-столбец воздействия штока привода на орган управления через
проводку, .гшт - перемещение штока привода.
Вид матриц (3) и (4) соответствует базисным формам колебаний, оп-
ределяемым при неподвижном относительно конструкции органе управ-
ления или, в случае использования целиком поворотного стабилизатора,
его корневой хорды. В этом случае = <р - угол поворота органа управ-
ления (корневой хорды стабилизатора). Последний столбец матрицы ||С||
соответствует инерционному воздействию органа управления на колебания
конструкции, последняя строка - инерционному воздействию колебаний
конструкции на орган управления. Указанное инерционное взаимодействие
колебаний конструкции и органа управления особенно существенно при
использовании в СУУ поворотных стабилизаторов и несбалансированных
в весовом отношении элевонов.
Влияние упругости конструкции на устойчивость и управляемость само-
Лета проявляется двояко: через непосредственное изменение аэродинамичес-
ких характеристик за счет квазистатических эффектов и через датчики СУУ,
СИ1 Надь1 которых зависят от деформаций конструкции в местах их установки.
Определение форм и частот колебаний конструкции, обеспечение нор-
мируемых запасов устойчивости самолета в области частот упругих колеба-
ний как без СУУ (флаттер), так и с СУУ являются специальными задача-
ми, входящими в комплекс проблем аэроупругости (подробно см. гл. 10).
www.vokb-lo.spb.ru - Как построить самолёт своими руками?!
Ниже рассматриваются только тс вопросы, которые непосредстве
касаются формирования алгоритмов СУУ. В первую очередь это отно°
сится к сигналам, поступающим с ее датчиков
Датчик скорости изменения тангажа. Сигнал датчика угловой ско
ти, установленного на упругой конструкции, может быть представлен в виде
“г _ Як^>
k=\ ОХ*
где дД(хд)/д.г» - производная формы упругих колебаний в месте уста
новки датчика.
Для сигнала датчика, устанавливаемого обычно на фюзеляже самолета
максимумы откликов на колебания органов управления соответствуют соб-
ственным частотам изгибных колебаний фюзеляжа.
Ну(га)/<р|
Рис. 13.1.2. Влияние упругости конструкции
на частотные характеристики самолета по
скорости изменения тангажа (а), по пере-
грузке (б), по углу атаки (в): 1 - жесткий
самолет, 2 — упругий самолет, 3 - с поправ-
ками только на статические деформации
конструкции
На рис. 13.1.2« приведен пример
частотных характеристик сог/ф для
самолета как твердого тела, с квази-
статпческпми поправками на упру-
гость конструкции и для полной уп-
ругой модели самолета. Как правило,
наибольшие трудности вызывает обес-
печение устойчивости колебаний пер-
вого фюзеляжного тона. Поэтому пред-
почтительным является расположение
датчика скорости изменения тангажа
вблизи пучности его формы. Это не
всегда удается как по конструктивным
условиям, так и из-за разброса форм
упругих колебаний конструкции по
режимам полета. Поэтому в систему
вводятся специальные фильтры, по-
давляющие эти сигналы упругих ко-
лебаний конструкции самолета.
Наиболее распространенные в на-
стоящее время датчики угловой ско-
рости основаны на использовании ги-
роскопов с пружинными и демпфи
рующими связями. По своей природ6
это - колебательные звенья, но их
собственные частоты более чем на п0"
рядок превышают частоту короткой6"
риодического движения самолета,
этому при анализе устойчивости и уп
равляемости самолета их можно РаС
сматривать как идеальные звенья.
уПрУгой
датчик перегрузки. Сигнал датчика перегрузки, установленного на
конструкции, может быть представлен в виде
1Г.. N
&ПуВ, ~ ^Ц.М + >
/г=1
- вертикальное ускорение центра масс самолета, 1Д - расстояние
оТ центра масс самолета до места расположения датчика, /^(хд) - значе-
ние формы колебаний в месте установки датчика.
Следует отметить, что сигнал, измеряемый датчиком перегрузки,
пропорционален вторым производным по времени от обобщенных коор-
инат, т.е. сигналы местных перемещений конструкции усиливаются
пропорционально квадратам собственных частот колебаний. Соответ-
ственно частотная характеристика &пуд1 ср содержит ряд значительных
амплитудных пиков (рис. 13.1.26), и задача обеспечения устойчивости
пругих колебаний конструкции при использовании датчика перегрузки в
СУУ решается выбором места расположения датчика перегрузки и филь-
трацией его сигнала. Рациональным является размещение датчика пере-
грузки вблизи узла первого тона вертикального изгиба фюзеляжа, нахо-
дящегося впереди центра масс самолета.
По конструкции датчик перегрузки представляет собой массу с пру-
жинными и демпфирующими связями. Собственная частота его почти на
два порядка превышает частоту короткопериодического движения само-
лета, поэтому при анализе устойчивости и управляемости самолета он
может рассматриваться как идеальное звено.
Датчик угла атаки. Сигнал датчика угла атаки, расположенного на
упругой конструкции, может быть представлен в виде
ад=а-^-£
V а^(*д\7/г(£), ,
дх,
Це а - угол атаки, отсчитываемый по базовой линии (строительная го-
ризонталь фюзеляжа, корневая хорда крыла и т.п.).
Сигнал датчика угла атаки содержит сравнительно меньше составля-
ющих, соответствующих упругим колебаниям конструкции (рис. 13.1.2в),
°ДНако при его использовании в СУУ необходимо иметь в виду следующее:
- при размещении датчика угла атаки на фюзеляже его показания
определяются местным обтеканием и требуется тарировка их зависимости
°т Истинного угла атаки;
~ датчики угла атаки флюгерного типа представляют собой колеба-
тельные звенья с собственными частотами, на порядок превышающими
стоту короткопериодического движения самолета; этот сигнал содер-
т высокочастотные помехи, вызванные характеристиками местного
т ка, аэродинамическими и динамическими характеристиками датчика,
оэтому требует фильтрации;
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
- при использовании систем измерения угла атаки, основанных
анализе распределения давления на фюзеляже или на специально ввод^
мых в поток тел, необходимо учитывать запаздывание пневматических
трасс и время на обработку сигналов датчиков давления.
Как показывают примеры частотных характеристик упругого самолета
по рассматриваемым сигналам, на первичной стадии синтеза СУУ доста-
точно использовать модель самолета как твердого тела с квазистатическимд
поправками аэродинамических характеристик на упругость конструкции.
Датчики сигналов обратных связей могут при этом моделироваться
как идеальные звенья, но при этом необходимо учитывать фильтры
СУУ, используемые для подавления сигналов упругих колебаний конст-
рукции и высокочастотных помех.
Фильтрация сигналов датчиков СУУ. Фильтры СУУ могут быть
условно разделены на две группы - функциональные фильтры, исполь-
зуемые для обеспечения требуемых характеристик короткоперио-
дического движения самолета, и фильтры подавления высокочастотных
сигналов. Параметры этих фильтров выбираются такими, чтобы при дос-
таточно высокой эффективности в области высоких частот фазовые ис-
кажения, вносимые ими в диапазоне частот короткопериодического дви-
жения, лежали в допустимых пределах. Рассмотрим амплитудные и фа-
зовые характеристики типовых фильтров СУУ:
1. Апериодический фильтр с передаточной функцией Мф/р) -----—.
7ф1Р + 1
1
2. Фильтр второго порядка п
* ^2/,2+2Сф2Гф2р+1
3. Фильтр-пробка И'фз(р) = ГУР7 + 2;=Фз7ФзР *1.
* ^3р2 + 2^ф37фЗР + 1
Будем сравнивать частотные характеристики фильтров при условии,
на заданной частоте со. они обеспечивают заданную степень ослабле-
сигнала А, = |w^(zco.)| «: 1.
Исходя из этих условий, а также из условия отсутствия пиков в ам-
плитудных характеристиках, параметры фильтров определяются след}-
ющим образом:
что
т 1
Гф1“* = дГ;
= 0,6; Тфзо, =1; =Л"'
V ЧфЗ
принимаем СфЗ = 0,6.
Примеры амплитудных и фазовых характеристик трех рассматрива
емых фильтров при А» - 0,2 приведены на рис. 13.1.3. Если считать,
со. соответствует первому тону изгиба фюзеляжа, то частота коротко11
одического движения обычно находится вблизи &>о ~ 0,1со., а кри-
тическая частота самолета с СУУ, т.е. частота, на которой происходит
потеря устойчивости замкнутой системы “самолет-СУУ” при увеличении
коэфФицпентов обратных связей СУУ, сокр ~ (0,3 н-0,5) со*.
Ниже приводится сравнение характеристик фильтров
'<\^Фильтр Частота4^^ 1 2 3
1 Ф А Ф А Ф
0,1ю. 0,84 27° 1,02 16° 0,99 6°
0,4(о. 0,45 63° 0,95 82° 0,87 25°
со. 0,2 79° 0,2 145° 0,166 0
2(0. 0,1 84° 0,05 166° 0,78 155°
Фильтр 1 существенно ослабляет сигналы в широком диапазоне
частот, начиная с со = О.Зсо», но вносит значительные фазовые искажения
на частоте короткопериодического движения самолета.
Фильтр 2 также значительно ослабляет амплитуды сигналов с частотами
со >0,6 со*, но вносит значительное фазовое запаздывание на критической
частоте самолета с СУУ при амплитуде, близкой к единице.
Фильтр 3 ослабляет сигнал только
вблизи частоты со* и вносит минимальное
по сравнению с другими фильтрами запаз-
дывание на низких частотах.
В зависимости от интенсивности высо-
кочастотных составляющих в сигналах
датчиков обратных связей СУУ и влияния
вносимого в них запаздывания на ус-
тойчивость и управляемость самолета ис-
пользуются различные фильтры.
Для сигналов угла атаки и перегрузки,
содержащих широкий спектр высокочастот-
ных сигналов, используются фильтры пер-
вого или второго порядка. Для компенса-
нии вносимого ими запаздывания необхо-
димо дополнительно увеличивать коэффи-
циент обратной связи по скорости изме-
нения тангажа. Наибольшие трудности вы-
зывает фильтрация сигнала скорости из-
менения тангажа, так как вносимое в этот
тРакт управления запаздывание существен-
*И> влияет на запасы устойчивости самолета
с СУУ Как показывает опыт создания
СвеРхзвуковых самолетов с малыми запа-
и аэродинамической устойчивости или
е1°Щими небольшую степень неустойчи-
-200"-I
arg И'ф(кй)
Рис. 13.1.3. Амплитудные и фазо-
вые частотные характеристики кор-
ректирующих фильтров:
1
к (2,3р)2 + 1,2 2,3р +1
„ , р2 + 0,2р +1
www.vokb-lo.spb.ru - Как построить самолёт своими руками?!
вости, необходимая степень ослабления сигнала скорости тангажа
частоте первого тона изгиба фюзеляжа по сравнению с низкочастотной оТ
ластью составляет 10-5-15. Поэтому в этом канале часто используютс
фильтры-пробки в сочетании с фильтрами второго порядка.
Особенности реализации алгоритмов СУУ на бортовой
цифровой вычислительной машине (БЦВМ). Применение БЦВМ
позволяет решить ряд труднопреодолимых для аналоговой техники проблем
Во-первых, на БЦВМ с достаточной точностью и стабильностью можно реа-
лизовать более сложные алгоритмы управления, включая их реконфигура-
цию по режимам полета. Во-вторых, БЦВМ позволяет осуществлять конт-
роль и селекцию входных промежуточных и выходных сигналов, оценивать
состояние оборудования и взаимодействующих систем и т.д.
Однако использование БЦВМ в СУУ приводит к ряду статических и
динамических эффектов. Блок-схема СУУ с БЦВМ приведена па рис
13.1.4. БЦВМ включает цифровой вычислитель (ЦВ), преобразователи
аналоговых сигналов в цифровой код (АЦП) и цифрового кода в анало-
говый сигнал, поступающий на исполнительную часть СУУ (ЦАП) [6].
Д , Ф __ АЦП , ЦВ ______________ ЦАП . ф ________ ИЧ
Рис. 13.1.4. Блок-схема СУУ с БЦВМ; Д - датчики, Ф - аналоговые фильтры, АЦП -
аналогово-цифровой преобразователь, ЦВ - цифровой вычислитель, ЦАП — цифроана-
чоговый преобразователь, ИЧ - исполнительная часть СУУ
АЦП осуществляет квантование аналогового сигнала по времени и по
уровню. Дискретность по уровню определяется числом разрядов АЦП, и
для обеспечения приемлемой точности воспроизведения сигнала СУУ
желательно, чтобы разрядность была не менее 12. Для оценки динами-
ческих эффектов квантования по времени обычно используется модель
входного устройства, состоящего из импульсного элемента (ИЭ) и экст-
раполятора (Э) (рис. 13.1.5).
Преобразование Лапласа выходного сигнала ИЭ определяется формулой.
/(р) = 7~ +
О /{=-со
где г/(р) - преобразование Лапласа входного сигнала; То - период кван
тования; = 2л/То - круговая частота квантования.
Передаточная функция экстраполятора имеет вид
1 -
= —-------,
Р
что соответствует амплитудной характеристике:
• “To
sm—
---=A- и фазе: argW3(tco) =
®£0
2
2
На рис. 13.1.5 показан характер преобразования спектра моногармо-
шгческого входного сигнала с частотой coq- Спектр выхода импульсного эле-
мента представляет собой периодическую функцию. Если <о0 < cos/2, то в
r(t) =Лсо5®0г
co=fc = |/ги>, ± ц>01> Л =1,2,...
Рис. 13.1.5. Преобразования сигнала управления входными устройствами БЦВМ, где
ИЭ - импульсный элемент, x3(ico), х(гсо) — спектры выходных сигналов ИЭ и экстра-
полятора при моногармоническом входном сигнале
спектре выхода экстраполятора высокочастотные составляющие подавляются
в соответствии с его амплитудной характеристикой; если <os/2 < <oq < k>s> то в
спектре выхода импульсного элемента появляется комбинационная частота
®о ~ cos; на выходе экстраполятора амплитуда сигнала комбинационном
частоты больше, чем амплитуда сигнала с частотой cdq- Этот, так называе-
мый, эффект транспонирования частот должен быть в СУУ исключен, что
Достигается установкой на входе в БЦВМ фильтров, подавляющих высо-
кочастотные помехи. Как следует из фазовой характеристики экстраполято-
Ра. его запаздывание оценивается величиной Tq/2. С учетом времени на при-
см и обработку входного сигнала, расчета по основному алгоритму и конт-
роля вычислений, суммарное запаздывание, вносимое в систему собственно
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
БЦВМ, составляет величину (0,8-ь 1.5) То в зависимости от циклограмму
вычисли тельного такта. ес
Эти факторы совместно с фильтрами защиты БЦВМ могут вносить
[значительное фазовое запаздывание в СУУ и существенно влиять на ха
рактерпстики устойчивости и управляемости самолета.
Исполнительная часть СУУ. Как указывалось в гл. 9, исполни
дельная часть О 5 может быть выполнена как по схеме каскадной уста-
новки сервопривода и силового привода, так и по схеме с их общей об-
ратной связью. Последняя схема обладает рядом преимуществ, суще-
ственных для обеспечения требуемых динамических характеристик
сверхзвуковых самолетов, поэтому она и будет, в основном, рассматри-
ваться при анализе устойчивости и управляемоеги самолета с СУУ.
Структурная блок-схема такого привода приведена на рис. 13.1.6.
Электрические сигналы вычислителя СУУ преобразуются электрогид-
равлическим устройством (ЭГУ) в механическое перемещение золотника
сервопривода и затем последовательно - в перемещения штока сервопри-
вода, золотника силового привода и его
штока.
Рис 13.1.6 Блок-схема рулевого привода с общей обратной связью
Скоростные характеристики сервопривода Сс11(ес11) и рулевого при-
вода F(e) имеют нелинейный характер. В них можно выделить участки
'небольших значений производных функций Fcn(scn) и F(s) в области
малых входных сигналов, участки с приблизительно линейными харак-
теристиками и зоны насыщения, определяющие максимальные скорости
сервопривода и рулевого привода. При исследованиях динамики привода
часто используются линейные аппроксимации скоростных характеристик
1^сп(есп) ~ J^cnScn и ^(е) « где Dcn и D соответственно добротности
сервопривода и силового привода.
Нагрузка на шток рулевого привода влияет на его характеристики
двояким образом:
- через изменение скоростной характеристики; для дроссельного
(привода функция
Г(ФН) = 1 + Фн signs,
V Фщах
где Фн действующая на шток привода нагрузка со стороны органа уп-
равления, Фта.\ “ максимальная тяга привода;
через сжимаемость рабочей жидкости в полостях привода, дефор-
мацию элементов его конструкции, вытекание жидкости и перегечку ее
меЖДу полостями цилиндра.
Обеспечение устойчивости собственно привода и привода с органом
управления является специальной задачей, решаемой как выбором пара-
метров в рамках приведенной структуры, так и введением дополнитель-
ных связен. Условие обеспечения достаточно больших запасов устойчи-
вости приводит к ограничению величин добротностей рулевого привода и
сервопривода, однако их рабочие значения должны обеспечивать прием-
лемые характеристики привода при отработке сигналов СУУ.
При исследовании устойчивости и управляемости самолета в линей-
ной постановке может быть использована упрощенная модель привода,
которая описывается передаточной функцией:
— = ” рДЛ =
Фвх W +p + D
где ТСГ1 = 1 Dm.
Эта модель достаточно точно отражает динамику привода в области
средних по уровню сигналов в диапазоне частот от со = 0 до со = D и на-
грузках до 0,2Фтах.
13.2. Динамика самолета с СУУ
с учетом характеристик элементов системы управления
Характеристики самолета со статическими и астатическими СУУ
предварительно рассмотрены в гл. 12, где были отмечены цели использо-
вания каждого сигнала и основные закономерности их регулирования по
режимам полета. Учет реальных характеристик системы управления
приводит к необходимости решения более сложных задач, охватывающих
более широкий круг вопросов.
Обобщенная блок-схема продольного канала статической СУУ пред-
ставлена па рис. 13.2.1. Сигнал отклонения рычага управления хв прохо-
дит через специальный фильтр (префильтр), который является обычно
нелинейным динамическим звеном. В линейной постановке его динами-
ческие характеристики соответствуют передаточной функции И7Пр(р).
Сигналы датчиков обратных связей по скорости изменения тангажа, пе-
регрузке и углу атаки, проходя соответственно через фильтры с переда-
т°чными функциями Wo(p), Wn(p), И7а(р) и регулируемые по режимам
полета коэффициенты р.г, kn, ka, суммируются на входе в рулевой про-
В°Д, образуя сигнал фвх. Связь между входным сигналом и углом откло-
нения органа управления в линейной постановке описывается переда-
нной функцией И7р„(р).
www.vokb-lo.spb.ru - Как построить самолёт своими руками?!
Рис. 13.2-1. Обобщенная блок-схема продольного канала статической СУУ
С учетом подъемной силы от органа управления передаточные функ-
л самолета по скорости изменения тангажа (<о2), перегрузке в центре
:с САпу) и углу атаки (а) имеют следующий вид:
— Ср) =
. ф J
Р (М? - М?) + Z/a-^ М“>
^-Ср) =
ф
2 7
р +dop + wo
v У^р\р- (ма2 + мТО] + (мТ
9
-Ср) =
_ф
руа-У^М°2)
7 7
р +dop + a>o
мУ -уЧр-м®*)
2 7
Р +doP + <i>Q
do = уа - МСгг - Мг", = ~Mz ~ Уам^г ~ квадрат собственной
готы самолета без СУУ; при достаточно большой степени аэродина-
(еской неустойчивости «о < 0. Основные особенности короткоперио-
еского движения самолета проявляются в переходном процессе по пе-
узке в центре масс при ступенчатом отклонении рычага управления,
орый определяется передаточной функцией:
W^(p)Wpn(p) -Чр)
сот
—Ср) +knwnCp)
ф
ф J
—— (р) +kaWaCp) -Ср)
ф 1ф
1Ф
Хр)
~ ВСр)’
АСр) и ВСр) ~ полиномы, определяемые конкретными коэффмЦИеН
и обратных связей и передаточными функциями фильтров
Рассмотрим случай, когда используются только сигналы ДПу и ®г
этом считаем, что =0, 1д - 0, WnCp) = ^/Тпр + 1, WaCp) = 1-
Характеристический полином может быть представлен в виде
В(.р) = (р2 + dQp + <оо)(Гспр2 + р + D)(Tnp + i)-p.z Dx
х (р + уа)(Тпр + 1) + — — уа .
M-z 9
Будем исследовать корни этого полинома, варьируя р2, при фикси-
рованном отношении kn/\iz. Характеристическое уравнение для этого
случая может быть представлено в виде: 1 + p2WM(p) = 0, где
M^D (р + уа)(.Тпр + Г) + ^ — уа
P-z 9
W.Xp) =------------5--------5------5-------
(Т„р + 1)(р2 + dop + сооХТ’епГ + P + D)
Корневой годограф в значительной мере определяется нулями и по-
люсами функции W^p) [7].
Положение нулей П7и(р) определяется уравнением:
1 + —---у ----------------= 0.
Иг 9 (р + уа)<Тпр + 1)
На рис. 13.2.2я приведены траектории нулей W^p) при варьирова-
нии отношения knl\Lz. Если kn! р2 = 0, то нули располагаются в точках
Р01 = ~Уа. P02 = ~Утп
При /?„/ц2 • V/g уа = Тп/^уа (уа + 1/Т„)2 -1 имеется р01 = Рог =
= -l/2Q/a + 1/Т„). Если далее увеличивать отношение kn!\xz, то нули бу-
дут располагаться на вертикальной прямой в левой полуплоскости, от-
стоящей от мнимой оси на величину 1/2-(уа +1/Гк), и тем меньшую, чем
больше постоянная времени фильтра сигнала
Тп. Это в
перегрузки
Р*’с 13.2.2. Годографы корней для самолета со статической СУУ: а - нули W^p)
ПРП &„/ = var; б, в - корни замкнутой системы при k„! р? = const, щ = var
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
значительной мере предопределяет значение действительной части ко н
самолета с СУУ при замыкании всей системы через коэффициент ц И
Корневой годограф системы при kn!= const и варьировании
приведен на рис. 13.2.26,в. Полюсы располагаются в точках:
Р*\>Р*2 = ~^0/2 ± 7^0 А ~ “О - корни самолета без СУУ;
Р*3>Р*4 = “У^сп ± 7<У2гсп)2 - О/Т’сп “ корни рулевого привода;
/?»5 - ~\!Тп - корень фильтра сигнала перегрузки.
Если со о < 0> то один из корней самолета без СУУ находится в пра-
вой полуплоскости и существует нижнее критическое значение = рн
при котором соответствующий ему корень замкнутой системы пересекает
мнимую ось (рис. 13.2.26)
И” =
При больших значениях Тп нижняя граница по цг может определять-
ся комплексными корнями (рис. 13.2.2в). При увеличении р2 доминиру-
ющие корни системы стремятся к указанным выше нулям, корень, выхо-
дящий из полюса соответствующего фильтра, уходит влево по действи-
тельной оси, а корни, соответствующие приводу, стремятся в правую по-
луплоскость и пересекают мнимую ось при верхнем критическом значении
= р”, что означает потерю устойчивости замкнутой системы.
Одной из важнейших характеристик самолета с СУУ являются запасы
его устойчивости по параметрам СУУ. В частности, запас устойчивости по
верхней границе определяется как отношение верхнего критического значе-
ния параметра к его номинальному значению. Запас устойчивости по ниж-
ней границе соответственно равен отношению номинального значения па-
раметра к его нижнему критическому значению. Кроме того должны конт-
ролироваться запасы устойчивости системы по фазе или допустимому Д0'
полнителытому запаздыванию элементов системы управления.
Номинальные значения системы должны располагаться достаточно
далеко от и ц2 для обеспечения необходимых (обычно не менее Дв>
кратных) запасов устойчивости самолета с СУУ. Если это условие вЫ
полняется, то влияние характеристик привода иа устойчивость и упраВ
ляемость самолета мало. При обычно используемых для разных типов
самолетов значениях Тп = 0,14-0,5 с, этот параметр оказывает более с)
шественное влияние на доминирующие корни системы.
В рассматриваемой постановке влияние постоянной времени Тп м°
жет быть оценено следующим образом. Предположим, что для систе*
“a-
з фппьтра сигнала перегрузки (Тп - 0) за счет коэффициентов цг0 и
/г 0 выбраны доминирующие корни рх2 = ± Л/1-<Й
Для сохранения этих значений при введении фильтра сигнала пере-
V3KH с постоянной времени Тп коэффициенты ц2 и kn должны изме-
ниться на следующие величины:
knO~yaTn . т2 2
Др2 =---------; А/е„ =------------.
1 + 7],(Fa-2Ca«a) l + W*-2^(0a)
Дополнительный сигнал скорости изменения тангажа тем больше, чем
больше постоянная времени фильтра и чем больше роль сигнала перегруз-
ки в обеспечении статической устойчивости самолета с СУУ.
Существует предельное значение Тп = l/(2£acoa - pa), при котором
компенсация влияния фильтра на доминирующие корни за счет измене-
ния коэффициентов ц2 и kn невозможна.
Фильтр сигнала перегрузки вносит еще один эффект в динамику са-
молета. Этот сигнал используется как основной для обеспечения ста-
тической устойчивости самолета. Поэтому, если помимо запаздывания,
вносимого собственной динамикой самолета, в позиционную связь СУУ
вводится дополнительное запаздывание, то это вызывает тенденцию к
забросам в переходных процессах.
Передаточная функция кПу/ЬХ^ для рассматриваемой упрощенной
модели СУУ может быть представлена в виде
_ v__________мТ уаР<тпр + 1)н;,р (р)_______
9 (р2 + 2^a(0ap + со2 )(р - Р3)(р2 + 2£3со3р + <н3)
гДе ^а, соа - параметры доминирующих корней; ^3, со3 - параметры кор-
ней, соответствующих приводу; р3 - корень, соответствующий фильтру;
в зависимости от коэффициентов ц2 и kn он может значительно сместить-
ся влево от исходного значения р3 = ~МТп. Как уже указывалось, при
Достаточно больших запасах устойчивости по верхней границе, корни,
соответствующие приводу, мало влияют на характеристики переходного
процесса. Поэтому динамика самолета определяется главным образом
Доминирующими корнями и соотношением нуля передаточной функции
Ро 1/7\ и полюсом р = р3. Если |р3| » \/Тн, то переходной процесс
имеет тенденцию к забросу (рис. 13.2.3). Для компенсации этого эффек-
та используется префильтр - фильтр сигнала отклонения рычага управ-
ления (см. рис 13.2.1). Его передаточная функция выбирается в виде:
' пр(р) = (ХпрГпрр + 1)/(Гпрр + 1); Хпр < 1. При Лпр = 0 ориентировочное
значение 7пр » Тп. Префильтр указанного типа уменьшает заброс, не-
Ск°лько увеличивая время срабатывания (рис. 13.2.3).
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
Рис. 13.2.3. Влияние префильтра на пе-
реходные процессы в управляемо.'!
движении самолета: 1 - без префильт-
ра. 2 - Гг|р = 0,4с
Приемлемое качество перехо
процессов сверхзвукового самолетТ*
СУУ может быть обеспечено только °
условии, что система имеет достатоПРИ
большие запасы устойчивости по п °
метрам СУУ. Как правило, наименьший
запас устойчивости по верхней границ'
замкнутая система “самолет-СУУ” имеет
по коэффициенту ц2, и определяющим»
запасы устойчивости факторами являют-
ся динамические характеристики приво-
дов и корректирующих фильтров сигна-
ла обратной связи по скорости изменения
тангажа. Эффективность этого сигнала
по увеличению демфирования возмущенного движения самолета может быть
ограничена запаздыванием, вносимым в систему фильтрами и приводом.
Рассмотрим частотные характеристики типичного привода, построен-
ного по схеме с общей обратной связью, и типичного фильтра подавле-
ния сигналов упругих колебаний в канале скорости тангажа, состоящего
из фильтра-пробки и звена второго порядка с передаточной функцией:
+ , ( ( )
(ТфЗР + 2^фЗ?фзР + 1)(Тф4р + 2£ф47ф4/? + 1)
три соотношении параметров Гф3 =1/софз; Тф4 = 0,6бГфз; £ф3 = Сф4 = 0,6;
эфЗ = ОД, где (Офз _ собственная частота первого тона изгиба фюзеляжа. Рас-
сматриваемые элементы до частоты со = 0,5соф3 имеют амплитудные характе-
шстики, близкие к единице, и примерно одинаковые фазовые запаздывания.
Оценим влияние этих факторов на упрощенной модели самолета с
^УУ, включающей только обратную связь по скорости изменения тангажа,
[спользуя для рассматриваемого диапазона частот аппроксимацию переда-
очной функции этого канала через звено запаздывания:
Wzpn(p)W^yK(p) = е’Рт.
Характеристическое уравнение самолета с СУУ в этом случае может
ыть записано в виде:
"а)е'р; - о.
Р + ^оР + “о
о
Так как исследуется поведение корней системы в области сравнитеДЬ
высоких частот, то упростим модель самолета, полагая = уа =0.
Перейдем к новым параметрам: р = рт/2; со0 = соо1/2! Йг - “Иг х
-^Фт/2 и, используя аппроксимацию Падэ: е рт » (1 - рт/2)/(1 + рт/2),
пОлучИМ + + 1^ + - р) = 0.
Р зависимости от величины соц возможны два типа корневых годог-
рафов при варьировании цг:
с превращением всех трех корней в отрицательные вещественные
при «о .
с ограничением демпфирования комплексных корней при соц > и,1.
Граница устойчивости определяется коэффициентом ц2В = 1 - со о и
критической частотой сокр = 1. Эта частота соответствует фазовому за-
паздыванию в канале скорости изменения тангажа, равному 90°.
Определим максимальное демпфирование, вносимое в систему демп-
фером тангажа. Для действительной и мнимой частей корня системы
(р = X + гео) справедливы соотношения
X3 - Зш2Х + (X2 - со2)(1 - ЙР + X(coq + ЙР + «о = °;
ЗХ - со2 + 2Х(1 - ц2) + соц + =0.
При некоторых значениях параметра X = Х„ цг = ц* и со = со* про-
изводная с/Х/<7цг = 0. Эти значения определяются формулами.
л,
1 - Зсо2 - 2^2(1 + соц)со0
8Х^ + 2Х* + coq — 1.
2(2Х. -1)
со2 — ЗХ2* + 2Х» (1 — ц*) + соц + р*.
На рис. 13.2.4 приведены зависи-
мости безразмерного коэффициента
Демпфирования ^» = + Х^ и
коэффициенты усиления р2В от пара-
метра й0. Граничное для удовлетво-
рительных характеристик переходных
процессов самолета - 0,35 возмож-
но лишь при соц < 0,28.
Величина 2соц = сорт определяет
Фазовое запаздывание канала танга-
жа на частоте колебаний самолета
Рис. 13.2.4. Влияние запаздывания в кана-
ле демпфера тангажа на его эффектив-
ность: / - С«> максимальный коэффициент
демпфирования самолета, 2 — граница ус-
тойчивости по ; т — запаздывание в ка-
нале демпфера тангажа, соо — собственная
частота самолета без демпфера тангажа,
т/2
г
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
з СУУ, и для обеспечения необходимого демпфирования
паздывание не должно превышать 30°.
самолета это
Следует отмстить, что значения ^>0,35 соответствуют запасам
вости по параметру цг, большим 2,8.
Устой-
Одппм из способов повышения запасов устойчивости канала
। изменения тангажа по верхней границе является введение
Ультра с передаточной функцией:
скорос-
в него
(2)
,е < ГО2-
Зпачения Д.,2 должны удовлетворять условиям: Ги1соКр»1
|>2 “кр » 1 • гДе юкр ~ критическая частота системы. В этом случае верхний
1аничный коэффициент увеличивается в раз. Отмеченные законо-
крности справедливы и для реальных СУУ, в которых используются об-
1ТНЫС связи по скорости изменения тангажа, углу атаки и перегрузке. Кри-
1ческая частота канала скорости изменения тангажа практически совпадает
частотой, на которой его фазовое запаздывание достигает 90°; для оценки
Оптического значения цг может быть использовано соотношение:
w____________юкр_________
г~
|с. 13.2.5. Границы устойчивости само-
jra с СУУ при различных корректиру-
1ШХ фильтрах: / IV^p) = IV„(p) =
I 2 - \Vn(p)=\/(THp+l), IVjp) =
~ lVn(p)= l/(T„p + l);
Цр)=лрф(р) 1Уф%к(р)
На рис. 13.2.5 приведены примеры
границ устойчивости самолета с СУУ
при различных фильтрах. Исходный
самолет имеет аэродинамическую неус-
тойчивость. и существует обусловлен-
ная ею нижняя граница устойчивости
по параметрам системы.
Для обеспечения достаточных за-
пасов устойчивости системы необходи-
мо, чтобы верхние и нижние гранич-
ные коэффициенты отличались более,
чем в 4 раза. В рассматриваемом слу-
чае с учетом приемлемости характери-
стик переходных процессов это удает
ся достичь использованием сложного
фильтра в канале со/
= й'ф(р)Н'фук(Р> (3)
с передаточными функциями (1)> (2)-
Для оценки качества СУУ с точки
зрения рационального выбора фильт^
ров канала скорости изменения танга
представляет интерес сравнение СУУ с некоторой эталонной систе-
мой выполняющей тс же функции, что и рассматриваемая СУУ. В
„ачёстве эталонной будем рассматривать систему с фильтрами, имеющи-
ми передаточную функцию:
п
п
w^p) = П
л=1
,т2р2 +КЛР+К
_____________1_____________
(0,66Тр2р2 + 2^0,667^ +1 ’
где Q? ~ ^>k ~
Допустим, что на частоте упругих колебаний конструкции со/, заданы
требования по ослаблению сигнала управления в А/. раз по сравнению с
его уровнем на низких частотах
№»(«>*)! S -С
Это условие определяет число фильтров-пробок “г?” с постоянными
времени 7'^= 1/со^. Рассматриваемой эталонной системе соответствует
критическая частота со^, и критическое эталонное значение ц^,. При
сравнении систем с эталонной критериями их совершенства являются по-
казатели СОКр ={йкр/ШКр и Ркр ~ М-кр/р-кр-
Ниже приводятся указанные характеристики систем управления ряда
сверхзвуковых самолетов различных классов.
Объект 1 2 3 4
25 50 24 14
/ эт Юкр / ®Кр 0,8 0,58 0,4 0,28
/ эт Н Кр / И кр 0,76 0,52 0,37 0,22
В первой строке таблицы приводятся значения параметра Ак - по-
требной степени ослабления сигнала в канале скорости изменения танга-
жа (от датчиков до органа управления), наиболее критичного для данно-
го самолета тона упругих колебаний конструкции. Для объектов 1,3,4
критичным является первый тон вертикального изгиба фюзеляжа, для
объекта 2 увеличение параметра Ак объясняется близостью частот изгиба
фюзеляжа и стабилизатора.
Наиболее близка к эталонной СУУ система самолета 1, структура
фильтра которой совпадает с (3). Фильтр самолета 2 содержит фильтр-
пробку и звено второго порядка с постоянной времен, много большей,
Чем 1 / соК| что отражается на качестве системе. Для СУУ самолета 3 тре-
буется примерно такая же степень ослабления сигнала, что и для самоле-
Та 1. однако несмотря па использование в ней фильтров-пробок качество
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
системы в рассматриваемом смысле значительно ниже. Это объяс}
тем, что СУУ самолета 3 включает БЦВМ. Запаздывание вни™,. 1ЯеТся
совместно с аналоговыми фильтрами подавления помех, существе
влияет на критическую частоту и границу устойчивости самолета с СУу°
Сравнительно низкое качество СУУ самолета 4 объясняется использов
иием в ней только фильтров первого порядка.
Рис. 13.2.6. Критерии выбора парамет-
ров статической СУУ: 1 — коэффициент
демпфирования = 0,5, 2 - запас устой-
чивости упругих колебаний, 3 - запас
устойчивости по верхней границе, 4 -
заброс по перегрузке 20%, 5 - запас ус-
тойчивости по нижней границе, 6 -
tcp = 1 с, 7 - допустимое отношение па-
раметров ХПу
Выбор параметров СУУ стати
ческого типа заданной структуры
Процесс выбора параметров СУУ за^
данной структуры осуществляется по-
следовательными приближениями с
учетом на каждой стадии комплекса
требований к СУУ. Например, для си-
стемы, блок-схема которой приведена
на рис. 13.2.1, для каждого варианта
параметров фильтров на плоскости
kn - наносятся (рис. 13.2.6):
- границы нормируемых запасов
устойчивости упругих колебаний кон-
струкции k„ = /'/цг);
- верхняя граница области устой-
чивости самолета как твердого тела с
заданным запасом —AeJ;
- нижняя граница области устой-
чивости с заданным запасом ;
- граница заданного диапазона
изменений статических характеристик Х"у для предельно передней
и предельно задней X„f Центровок самолета /?* = Х^{/Х”|;
- граница заданного уровня демпфирования системы, т.е. отображе-
ния границы допустимых значений доминирующих корней на плоскость
=Л<Цг>
Далее процедура выбора параметров может быть построена
следующим образом:
- из прямых /г” и /г* выбирается соответствующая большим значе
йиям и цг;
- используя точки этой прямой как начальные, строится зависимость
~ соответствующая заданному времени срабатывания;
- по аналогичной процедуре строится зависимость k„ - fa 6рД соответ
ртвующая допустимой величине заброса но перегрузке; на этой стадии опреД6'
Пяются характеристики префильтра сигнала отклонения рычага управления-
Таким образом определяется область параметров, внутри которой
требования к динамике самолета удовлетворяются при разбросе характерис-
тик СУУ и самолета на данном режиме. Эти области должны быть
достаточно большими для обеспечения плавности регулировок парамет-
ров по режимам полета.
Полученный вариант настройки параметров проверяется по другим
критериям оценки характеристик устойчивости и управляемости и в
случае необходимости проводится новая итерация.
Как следует из описания процедуры выбора параметров статической
СУУ, такая процедура должна производиться в диалоговом режиме
работы с ЦВМ при помощи соответствующего комплекса программ.
Как указывалось в гл. 12, использование астатических законов уп-
равления позволяет обеспечивать:
- заданные статические характеристики управляемости ХПу и №;
- заданное балансировочное положение рычагов управления;
- ограничение угла атаки и перегрузки путем соответствующего ог-
раничения сигнала отклонения рычага управления.
Однако обеспечение приемлемых динамических характеристик само-
лета с астатическими СУУ приводит к необходимости повышения коэф-
фициентов передачи по сигналам скорости изменения тангажа, перегруз-
ки и угла атаки по сравнению со статическими СУУ и, следовательно,
осложняет задачу обеспечения устойчивости самолета с СУУ как в обла-
сти частот движения его как твердого тела, так и в диапазоне частот уп-
ругих колебаний конструкции.
13.3. Ограничители предельных режимов в СУУ
Одним из важнейших элементов СУУ, повышающих безопасность полета
и позволяющих летчику максимально использовать маневренные возможности
самолета, являются ограничители предельных режимов (ОПР), ограничиваю-
щие заданными значениями угол атаки или перегрузку. Для статических СУУ
ОНИ могут быть основаны на различных принципах действия [14]:
- системы, использующие регулирование по углу атаки коэффи-
циента передачи от рычага управления по тангажу до органа управления;
- астатические и статические системы, отклоняющие орган управле-
ния по сигналам дополнительных обратных связей по углу атаки или
перегрузке, включаемые вблизи их допустимых значений;
- астатические системы с включением в контур ОПР сигнала от
Рычага управления летчика;
- системы, основанные на активном силовом воздействии на рычаг
Управления по сигналам обратных связей.
Для самолетов с астатическими СУУ заданные ограничения обеспе-
чиваются автоматически при соответствующем выборе алгоритмов управ-
Ления; проблемы возникают лишь при переходе от одного контролируе-
мого параметра к другому.
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
Для ограничителей со статическими дополнительными обратными
связями, как и для системы с регулированием коэффициента передачи от
рычага к органу управления, значительные трудности представляет дос-
тижение компромисса между требованиями к точности выдерживания за-
данного параметра (что достигается использованием больших коэффИЦи.
ентов усиления) и устойчивостью системы. Для устранения статических
ошибок целесообразно использовать интегральные связи. Если эта связь
осуществляется только по ошибке между заданным ограничением и те-
кущим значением контролируемого параметра, то при значительном раз-
бросе центровок самолета в характеристике его управляемости а(Хв) или
п (Л'п) возможно появление зон нечувствительности вблизи адоп(ну доп)
при полете с задней центровкой. Этот эффект устраняется введением в
интегральную связь сигнала перемещения рычага управления.
дая переключения системы со статического закона управления на инте-
гральный может быть использована схема, приведенная на рис. 13.3.1. Ос-
новными сигналами, определяющими статические характеристики системы,
являются разности Ав Ав max rr ct ссДоп> где птах максимальное откло-
нение рычага управления в сторону увеличения угла атаки. Для обеспечения
необходимых динамических характеристик в систему вводятся фильтрован-
ные производные сигналов угла атаки, скорости изменения тангажа и вы-
хода префильтра.
На вход привода
СУУ
Рис. 13.3.1. Структура ограничителя угла атаки астатического типа
рассмотрим статические соотношения системы при изменении угла
т/и от нуля до алоп, считая, что характеристики самолета со штатными
°, птными связями линейны и нулевом}' отклонению рычага управления
нетчика соответствует нулевой угол атаки. Тогда а = а 1 , где а пр -
характеристика, определяемая с учетом обратных связей СУУ (а₽пр <0).
В установившемся состоянии выход сигнала блока максимума <рм ра-
дей нулю. Это может быть в двух случаях:
<Ро < 0 11 <Р0 = °.
где <ро = &0 — -\втах) + Ct — ссдоп].
В первом случае реализуется статический закон управления, во вто-
ром - интегральный. Каждому случаю соответствуют свои зависимости
а = ДАВ) (рис. 13.3.1).
Для статического закона управления
а = аФпр/?шАв,
для интегрального
Ct Ct доп — /?г-(Ав — Ав тах^ ИЛИ Ct - Ctg ~ kxX^,
где Ct(j — а.дОП + kxXв 1Пах •
Значение ао определяется коэффициентом kx, который целесообраз-
но выбирать таким образом, чтобы при интегральном законе управления
обеспечивались приемлемые значения Ав . Переключение со статического
закона управления на интегральный происходит при
v* _ а доп + ^zYB max
-^в ~ ~ ‘
kx + аФпр/гш
Для существования точки переключения при выбранном значении
*b<0 необходимо, чтобы kx + а<₽"р/?ш <0, т.е. чтобы при статическом
законе управления максимальному отклонению рычага соответствовало
значение угла атаки, превышающее его допустимое значение.
Таким образом, рассматриваемая схема ОПР не изменяет характери-
стик самолета с СУУ при малых отклонениях рычага и обеспечивает в
} становившемся состоянии точное соответствие между максимальным от-
к гонением рычага управления и допустимым значением угла атаки.
Оценка эффективности работы ОПР проводилась на пилотажном
СТенДе при выполнении следующих маневров:
~ выход из пикирования с углом тангажа S - -45° путем резкого
Г1еремещения рычага управления “на себя” до упора;
~ виражи с различными темпами перемещения рычага управления
По Тангажу от его балансировочного положения в горизонтальном полете
самолета до максимального перемещения рычага “на себя”;
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
- виражи со ступенчатым увеличением перемещения рычага
тения по тангажу до упора “на себя” (ДА'В = 20 мм, время затух РЭВ
процесса Дг = 5 с) и таким же шагом его уменьшения; “
- перекладки рычага по крену на вираже с углом атаки а = п
, - ' '-‘ДОП,
- вращение по крену на больших углах атаки а.
Сравнительная оценка статических и астатических систем огра
ничения о. показала, что астатический ОПР более точен и обеспечивает
выход на адоп с забросом
Attmax Ctmax ССдОП <1°
практически на всех расчетных режимах. При использовании огра-
ничителя угла атаки без астатических связей на большинстве режимов
обеспечивается выход на адоп. с перерегулированием (Датах < 5°) и уста-
новившейся ошибкой Да < 3°. Время выхода на адоп с астатической сис-
темой ограничения практически такое же, как со статической системой
управления.
Таким образом, сочетание статического закона управления в основ-
ном диапазоне эксплуатационных значений угла атаки и астатического на
больших углах атаки обеспечивает эффективное ограничение а с сохра-
нением приемлемых характеристик управляемости самолета.
Использование астатических СУУ позволяет ограничивать статичес-
кие предельные значения перегрузки и угла атаки при равенстве на входе
в интегрирующее звено сигналов от максимального отклонения рычага
управления и соответствующего ограничиваемого параметра.
Существует некоторое значение скоростного напора q - q*, при ко-
тором /\Пу доп = ДПуСадоп). Если q > q* , то необходимо ограничивать
только перегрузку, если q < q* , то требуется переключение с режима уп-
равления перегрузкой на управление углом атаки или их комбинацию
При переключении с одного функционала управления на другой не-
обходимо, чтобы статические и динамические характеристики управляе-
мости самолета изменялись в допустимых пределах. Кроме того, нужно
учитывать, что это переключение происходит, как правило, на неустано-
вившихся режимах полета.
13.4. Влияние нелинейностей исполнительной части СУУ
на устойчивость самолета
Реальные системы управления имеют нелинейные характеристики и
общие оценки устойчивости и управляемости самолета с СУУ в значитель
ной мере определяются их влиянием на движение самолета во всей обла
режимов полета. По физической природе и степени влияния на безопас
ность полета различаются два типа нелинейностей в системе управления.
- ограничения, зоны насыщения в элементах системы, определ
щие движение самолета с СУУ при больших возмущениях;
зоны нечувствительности элементов, люфты, элементы с упругостью и
т. ьМ трением, определяющие характеристики системы при малых сигналах.
С' К ним также относятся аналого-цифровые преобразователи (АЦП) ци-
о ;ых СУУ; однако при достаточно большом числе их разрядности (не ме-
^ее 12) эффектом квантования сипгалов СУУ по уровню можно пренебречь.
Для СУУ, выполненной на основе СДУ, наиболее существенными
нетииейностями являются скоростные характеристики сервопривода и
силового привода (см. рис. 13.1.6), имеющие зоны пониженных накло-
нов в области малых входных сигналов и зоны насыщения. Для предва-
рительного исследования динамики самолета с нелинейным приводом ис-
пользуем метод корневого годографа [7].
Рис. 13.4.1. Характеристики элемента с зонами нечувствительности и насыщения, где А^ = Aj&
Для элемента, имеющего зону нечувствительности величиной А и зо-
ну насыщения величиной At (рис. 13.4.1а), эквивалентный коэффициент
гармонической линеаризации k(AE) зависит от входного сигнала. Если
£ = Ае sin cot, то F(e) « Ас k(AE) sin cot.
Вид зависимости k(AE) приведен на рис. 13.4.16. Предположим, что
характеристики сервопривода линейны, а скоростная характеристика сило-
вого привода имеет зоны нечувствительности и насыщения. Тогда характе-
ристическое уравнение самолета с СУУ может быть записано в виде:
1 + £)
Мр')
51<Р>
= 0,
гДе для статической СУУ
А1(р) = (р2+dop + ^Wn(P)Wa(p)-M^^2(p + ya)Wri(p)^p) +
+ kn-ya^n{p)W^p) ;
9 J
B1<P) = (p2 + dQp + со§)(Тспр + 1)Й>„(р)Й>,(р)р;
%(p), WQ(p), Wn(p), Wa(p)~ соответственно знаменатели и числители
Г1еРедаточных функций фильтров сигналов перегрузки и скорости изме-
нения тангажа:
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
и ;(/?)’
^ю(р)
и;(р)'
Следует отметить, что zl((p) является характеристическим Полино
чом самолета с СУУ с идеальным приводом и определяет нули корневого
годографа при варьировании добротности силового привода D Ест
ствепно, они все должны находиться в левой полуплоскости. Один из
полюсов корневого годографа, т.е. корень уравнения В((р) = 0, распола
гается в начале координат, два полюса определяются характеристиками
самолета без СУУ, остальные - характеристиками сервопривода и филь-
тров. На рис. 13.4.2 приведены типовые траектории определяющих кор-
ней. Считаем в этом случае, что D - Dok(AE).
Для статически неустойчивого самолета ( < 0 ) один полюс распола-
гается на действительной оси в правой полуплоскости. С ростом коэффи-
циента k(Ac) корни замкнутой системы, выходящие из этого полюса и из
Рис. 13.4.2. Корневые годографы само-
лета со статической СУУ при изменении
эквивалентной добротности привода
начала координат, двигаются навстречу
друг другу, затем становятся комплекс-
но-сопряженными и при некотором ко-
эффициенте &G4e)i переходят в левую
полуплоскость, пересекая мнимую ось
на частоте оц (рис. 13.4.2а). Это обстоя-
тельство означает, что в замкнутой не-
линейной системе возможны стационар-
ные периодические движения с частотой
сщ при коэффициенте /г(Ае) = /г(Ае)1-
Как видно из рис. 13.4.1, каждому
значению коэффициента HAe)i соответ-
ствуют два значения амплитуды сигнала
е(£) ~Ац и Л12, которые являются ам-
плитудами предельных циклов.
Амплитуда предельного цикла органа
управления определяется соотношением:
.ф _ /г(лс),Л0 .
Aij ~ со,
Зная амплитуду А?- и передаточ-
ные функции самолета Anylty и Ыг'Ф»
можно определить амплитуды автоко
лебаний самолета по углу тангажа и
перегрузке.
Условие устойчивости предельного
цикла можно сформулировать в вИ1Це
следующего неравенства:
<78 dk(Ar)
dk(Ac) dAe
< 0.
A
дня малых амплитуд колебаний системы (б7А,(Ле)/с?Ле|
Здесь 3 - действительная часть корня характеристического уравне-
ния. Поскольку для исследуемых структур СУУ на границе устойчивости
замкнутой системы “статически неустойчивый самолет - нелинейная
СУУ” выполняется условие d^ldkiA^) < 0, то предельный цикл устойчив
> 0) и неус-
тойчив для больших (dk(A.)/dAf.\ . . < 0).
’ZiE —/1|2
Таким образом, зона нечувствительности рулевого привода на ста-
тически неустойчивом самолете приводит к возникновению автоколеба-
нии в системе с устойчивым предельным циклом; ограничение скорости
перекладки привода порождает неустойчивый предельный цикл большой
амплитуды колебаний.
На рис. 13.4.3 приводятся фазовые портреты предельных циклов
в плоскости Пу,^>. Первый предельный цикл характеризуется амплиту-
дой колебаний органа управления порядка величины зоны нечувстви-
тельности привода, “мягким” возбуждением, т.е. возникновением при
любых малых возмущениях. Допустимый уровень таких колебаний
определяется из условий обеспечения комфорта экипажа и пассажи-
ров и выполнения целевых задач.
1!с 13.4.3. Предельные циклы статически неустойчивого самолета с нелинейным приво-
дом СУУ: а - устойчивый предельный цикл “в малом" при наличии зоны нечувствитель-
ности в скоростной характеристике привода; б - неустойчивый предельный цикл “в
ольшом” при наличии насыщения в скоростной характеристике привода
Второй предельный цикл характеризуется “жестким” режимом воз-
УЖдения. Выход на этот предельный цикл возможен путем резких пере-
КлаДок рычага управления или при воздействии на самолет порывов вет-
Ра большой интенсивности. Возникновение такого предельного цикла не-
допустимо с точки зрения безопасности полета, так как это приводит к
www.vokb-lo.spb.ru - Как построить самолёт своими руками?!
выходу самолета на большие углы атаки или перегрузки. Когда само
является статически устойчивым, полюсы, соответствующие самолету бе
СУУ, расположены в левой полуплоскости (рис. 13.4.26,в). Корневые
годографы С увеличением коэффициента /?(АЕ) выходят из доминирую
щпх полюсов по направлению к правой полуплоскости и при /?(Ае) = )
и частоте ©2 могут пересечь мнимую ось, т.е. система становится неус^
тойчивой. По мере дальнейшего возрастания k(Az) корни замкнутой сис-
темы снова переходят в левую полуплоскость при Ъ(Аг)\ и частоте о
(рис. 13.4.26). Такой вид корневого годографа характерен для самолетов
с малым запасом статической устойчивости.
Таким образом, на статически устойчивом самолете с нелинейной си-
стемой управления возможны предельные циклы при двух значениях
/?(АЕ). Поскольку каждому значению коэффициента /г(Ае) соответствуют
две амплитуды автоколебаний (рис. 13.4.1), то для статически устойчи-
вого самолета с нелинейной системой управления возможны четыре пре-
дельных цикла. Предельный цикл с малой амплитудой колебаний С<21. ®г)
является неустойчивым и характеризуется жестким режимом возбужде-
ния. Возбуждение этого предельного цикла происходит при очень малых
начальных возмущениях, которые приводят к возрастанию амплитуды
колебаний системы, до тех пор, пока не сформируется устойчивый пре-
дельный цикл с амплитудой автоколебаний Ац и частотой сор Этот пре-
дельный цикл по своим характеристикам близок к первому предельному
циклу статически неустойчивого самолета.
Предельные циклы (А21, «2) и (Ац, cdj) порождаются зоной нечув-
ствительности рулевого привода. При достаточно больших начальных
возмущениях замкнутая система может выйти на третий предельный
цикл (Ai2, <x>i), аналогичный второму предельному циклу статически не-
устойчивого самолета. В этом случае колебания в системе будут нарас-
тать до тех пор, пока не сформируется четвертый предельный цикл
(А22, W2). Хотя этот предельный цикл является устойчивым, тем не менее
он характеризуется большими амплитудами автоколебаний, превышаю-
щими предельно допустимые.
Следует подчеркнуть, что четыре предельных цикла на статически
устойчивом самолете с нелинейной СУУ могут реализоваться только при
определенных параметрах самолета и СУУ. Эти параметры могут быть и
такими, что корневой годограф полностью располагается в левой полу
плоскости, т.е. автоколебания в системе отсутствуют (рис. 13.4.2).
Приведенные выше результаты получены при упрощенной схемати
зации нелинейного привода. Они указывают на необходимость решения
задач об устойчивости самолета с СУУ “в малом” и “в большом
учетом реальных характеристик элементов системы управления и Де11
ствующих на самолет возмущений.
Устойчивость самолета с СУУ “в малом". Параметры автокод^
баний самолета с малыми амплитудами определяются алгоритмом упра®
смия и характеристиками привода в зоне малых входных сигналов.
Здесь, помимо зон нечувствительности или зон пониженных наклонов ско-
остных характеристик сервопривода и силового привода, существенную
Р ь играют люфты, взаимодействие подканалов многоканального привода
и т Д Поэтому целесообразно формулировать требования к характеристи-
кам исполнительной части СУУ в целом, независимо от ее схемы [8].
Автоколебания “в малом” влияют на комфорт летчика и возможность
выполнять целевые задачи. Поэтому рационально требовать не полного
устранения автоколебаний, а снижения их до приемлемого уровня.
Обычно это приводит к ограничению амплитуд колебаний по перегрузке
Люп (0.02-н0,05) и по углу тангажаАдОП (0,1-г0,2°).
Рассмотрим блок-схему системы, представленной на рис. 13.2.1. Пе-
редаточную функцию разомкнутой системы можно представить в виде
U/pc(p) = U7pn(p)W^(p),
где TVpil(/>) = <р/<рвх “ передаточная функция привода; 1Улч(р) = фвх/ф ~
передаточная функция линейной части системы, включающей самолет,
датчики и вычислитель СУУ. Условие возникновения периодических
движений в системе можно записать в виде
И рп(г®) — И/рП(г<о)е
«Ррп
= И'л'Цко) = е_‘флч[и/лч(,<о)|-1
или I И7рп(гсо) | = | Т-Улч(гсо) | 1 при
Фрп = ~ Флч-
Пользуясь частотными методами,
можно определить требования к час-
тотным характеристикам привода в
области малых входных сигналов по
Допустимым значениям амплитуд ко-
лебаний по перегрузке и углу тангажа.
Если их значения заданы, то частот-
ные характеристики линейной части
системы определяют уровень допусти-
мых амплитудных и фазовых частот-
ных характеристик привода, пример
которых приведен на рис. 13.4.4. Сле-
ДУет отметить, что эти требования
формулируются для входных сигна-
лов, составляющих десятые и сотые
Доли процента от максимального хода
Щт°ка привода, и для их выполнения
тРебустся достаточно высокий уровень
конструкторских проработок и техно-
логии изготовления привода.
Рис. 13.4.4. Границы частотных харак-
теристик рулевого привода, соответ-
ствующие допустимому уровню автоко-
лебаний самолета с СУУ (Со = 20 т,
т^У = 0,1): ( — верхняя граница требова-
ний к АЧХ привода; 2 - ат ^5 - 10-4<ртах;
3 - ат > 1- 10-2<pmax; 4 - нижняя граница
требований к АЧХ привода; 5 - требо-
вания к ФЧХ привода
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
Устойчивость самолета с СУУ при больших возмущениях
Как показал предыдущий анализ, ограничение скорости привода СУ у
создает опасность появления в системе неустойчивого предельного цикла
при больших возмущениях. Такими возмущениями могут стать резкие
управляющие воздействия со стороны летчика и ветровые воздействия
При попадании в экстремальные ситуации летчик может совершать
рефлекторные движения рычагом управления, близкие к периодическим
и с большими амплитудами. Поэтому задача об устойчивости самолета с
СУУ “в большом” может быть сформулирована как задача об устойчи-
вости вынужденных колебаний нелинейной системы с элементами, име-
ющими зоны насыщения [9].
Рассмотрим обобщенную систему с одним нелинейным элементом
стоящим на входе в интегратор, выход которого является управляющим
сигналом для объекта (рис. 13.4.5с).
Рис. 13.4.5. Зависимость между амплитудами входного сигнала системы и сигнала на
входе элемента с зоной насыщения
Уравнение движения системы можно привести к виду
Е + W{p)f{z)/p = Хвх-
Применяя обычные методы гармонической линеаризации для гарм°
нического входного сигнала Хвх = Лвх51па>£, получим приближенное вЫ
ражение для сигналов на входе и выходе нелинейно! о элемента:
Ео = Ае sin(cot + фЕ), Део) = £)(ЛЕМе sin(cot + фе),
где Ае определяется из уравнения для амплитуд
1 +-------D(Ae)
ia>
1----------О(ЛЕ)
гео
А2 =А
2
ВХ’
Рассмотрим вариант статически неустойчивого объекта. В этом
сЛучае в системе существует предельный цикл с параметрами coj, ЛЕ, оп-
ределяемыми из уравнения
1 + И7(гю1)д(^) = 0.
Если построить зависимость ЛВХ(ЛЕ) для вынужденных колебаний
при частоте coj, то она будет иметь вид, представленный на рис. 13.4.56.
Можно выделить три участка этой зависимости:
- участок АВ: Авх и Аг монотонно изменяются от нуля до локально-
го максимума Л*х; здесь вынужденные колебания устойчивы;
- участок ВС: Авх изменяется от локального максимума до нуля,
точка “С” соответствует неустойчивому предельному циклу; на этом
участке вынужденные колебания неустойчивы;
- участок СЕ: Авх монотонно возрастает с увеличением Ае; вынуж-
денные колебания - неустойчивы.
Таким образом, изменение характеристик вынужденных колебаний
системы на частоте со = coi по мере увеличения амплитуды Авх происхо-
дит в следующем порядке: после прохождения участка линейности ха-
рактеристики /'(е)(Ае/Д1 ^1) производная dABX/dAB уменьшается до нуля
(точка Ax/Aj , AAi) и происходит срыв вынужденных колебаний, пе-
реход на участок СЕ и дальнейшее увеличение амплитуды колебаний.
Следует отметить, что неустойчивость вынужденных колебаний на-
ступает при Ле/Д) ~ 2, т.е. при ам-
плитудах, значительно меньших
амплитуды предельного цикла ав-
тономной системы (A^/a^ « 12,3).
Аналогичный характер носят за-
висимости Авх(Ае) при частотах вы-
нужденных колебаний, отличающих-
ся от Ю1.
Устойчивость вынужденных ко-
лебаний может быть обеспечена пу-
Тем ограничения скорости входного
сигнала. Если для каждой частоты
°пРеделить значения и постро-
ить в зависимости от частоты со от-
13.4.6. Зависимость допустимой ско-
Рпс.
роста входного сигнала в систему, имею-
щую элемент с зоной насыщения, от
частоты входного сигнала
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
ношение соответствующей скорости входного сигнала к максимальной ско-
рости сигнала, управляющего объектом Л*х«/<ртах = Хвх (рис. 13.4.6) То
минимальные значения Хвх определяют допустимую максимальную ско-
рость входного сигнала. Для статически устойчивых объектов X
больше единицы, для статически неустойчивых объектов - меньше едини
цы, и ее значение уменьшается по мере роста степени статической неус-
тойчивости объекта.
Примеры схем устройств, реализующих в СУУ ограничение скорости сиг-
налов от перемещения рычагов управления, приведены на рис. 13.4.7 ([10-
12]). Это - префильтры с ограничениями сигналов на входе в интегратор.
В схеме рис. 13.4.7a ограничение регулируется по скоростному напору
Одновременно регулируется постоянная времени префильтра при сигналах
не превышающих зону насыщения префильтра. В схеме рис. 13.4.76, регу-
лирование максимальной скорости сигнала префильтра производится по
уровню скорости суммарного сигнала обратных связей СУУ, т.е. ему отдает-
ся предпочтение по сравнению с управляющим сигналом от летчика.
Рис. 13.4.7. Структуры префильтров с ограничением скорости выходного сигнала
В процессе стендовых и летных испытаний была подтверждена эф
фективность указанных схем префильтров по обеспечению безопасно
полета при больших управляющих воздействиях со стороны летчика.
Следует отметить, что ограничение скорости сигнала управления
летчика с помощью указанных префильтров увеличивает время вых
самолета на большие перегрузки и углы атаки при ступенчатом откл
in рычага управления. Поэтому задача выбора параметров префильтра
скорости отклонения органа управления должна решаться комплексно
учетом требований к маневренности самолета и всех факторов, влияю-
щих на устойчивость самолета с СУУ “в большом”, в частности, с учетом
вОздействия порывов ветра большой интенсивности.
устойчивость самолета с СУУ при ветровых возмущениях.
Воздействие порывов ветра большой интенсивности - один из расчетных
случаев для проверки устойчивости самолета с СУУ “в большом”. Раз-
работчиками норм прочности самолетов накоплен богатый опыт по обра-
ботке статистических данных о вероятности попадания самолета в поры-
вы ветра, их формах и интенсивности. В результате введены понятия о
типовых порывах, которые имеют следующие формы:
_ градиентный порыв (рис. 13.4.8с);
- вихревой порыв (рис. 13.4.86);
- порыв “единица минус косинус” (рис. 13.4.8в).
Степень воздействия порывов на
самолет в значительной мере опреде-
ляется его временными характерис-
тиками, что при заданной скорости
полета эквивалентно величине участ-
ка нарастания скорости порыва и ее
убывания (Л1Г). Для статически неус-
тойчивых самолетов с СУУ наиболь-
шую опасность представляют вихре-
вые порывы и порывы формы “еди-
ница минус косинус”, так как их воз-
действие в какой-то мере вызывает
эффект вынужденных колебаний с
соответствующими последствиями.
Рассмотрим упрощенную модель
самолета с приводом, обеспечивающим
постоянную скорость отклонения орга-
на управления:
IV,
Рис. 13.4.8. Профили дискретных по-
рывов ветра, a - градиентный порыв,
б - вихревой порыв, в - “единица ми-
нус косинус”
а-М“(а + а„.) = Мф<р; ф = ±фтах; а„. = W/V.
При действии ступенчатого порыва ветра и отработке приводом коман-
ды на уменьшение возмущения решение системы при > 0 имеет вид
a = a„.fchJMft -11 + shJwf t _ МгФ<Ртах t
Для того чтобы привод мог остановить нарастание угла атаки само-
лета, необходимо, чтобы выполнялось условие:
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
Фтах >
Таким образом определяется минимально необходимая скорость при
вода для парирования ступенчатого порыва ветра с интенсивностью
IV = а1( V.
Для вихревого порыва и формы “единица минус косинус” необходи-
мая величина <ртах зависит от длины участка нарастания скорости поры-
ва Ли- и может значительно превышать ее допустимое значение для сту-
пенчатого порыва. При этом сохраняется основная тенденция - необхо-
димость увеличения максимальной скорости привода по мере увеличения
степени статической неустойчивости самолета.
Если требования к скорости привода по условиям устойчивости при
ветровых возмущениях превышают требования по условиям управляемос-
ти, то их можно свести к одному уровню выбором алгоритмов СУУ [13].
Рассмотрим движение самолета со статической СУУ с обратными
связями по Ally и юг:
(р + У?)а = (аг - yaa\V, (р-М^>г')(ог - Mfa = Mfcp +
Фвх ~
Ф = %п(р>Фвх- &пу =— ya(ct + aw).
Тогда передаточная функция <рвх/а1Г будет иметь вид
р (p-M^-y^W^ + M^W^p)
Н'»х<р) = ^ =
а„,
(д2 + dop + (о0)2 - MfW^p) рг(р + ya)W^p~) + k„Wn(p>^У1
—Ct
Как следует из выражения для числителя И/Вх(р)> его высокочастот-
ная часть определяется параметрами обратной связи по перегрузке, т.е.
быстрые сигналы на входе в привод при действии порывов ветра будут
идти по каналу сигнала перегрузки.
Введем альтернативную систему, в которой сигнал перегрузки
частично заменен сигналом скорости тангажа, пропущенным через соот-
ветствующий фильтр:
VI 1
ДЯ„ =--------(о,, Тп -----.
J д Тар + 1 уа
Тогда Апу = V/g ya(a + aw/(Tap + i)), т.е. ветровая составляющая
этого сигнала пропускается через апериодический фильтр с постоянной
времени Та.
Рассмотрим закон управления следующего вида:
9вх = ^Я[ИГ„ (р)Ьпу (1 - X) + XAnJ + ц2Н/0(р)йг.
При X = О мы имеем исходную систему, при X = 1 - систему с пол-
ной заменой Ьпу на kiiy .
Передаточная функция И гвх(р) будет иметь вид
|W=—=
ВЛ ! Q
J (р - )- yak,^p)<S - X) + +
9
$Wp)
Тр+Х
(р2 + ^0Р + «0)2-М^И^п(р) Pz(p + ya^M + kn^W-ya
L 9
Знаменатель И7вх(р) не изменился, т.е. управляемое движение будет
иметь исходные характеристики, а высокочастотная часть числителя
убывает по мере приближения X к единице.
В результате во втором варианте системы при ветровых воздействиях
темп изменения сигнала на входе в привод будет более медленным и выход
его на ограничения по скорости будет достигаться при больших возмущени-
ях. На рис. 13.4.9 приведена зависимость потребной максимальной скорости
привода от параметра X для статически неустойчивого самолета с
с
тгу - +0,1. При X - 1, т.е. при полной замене сигнала перегрузки сигналом
скорости тангажа, пропущенной через фильтр уа /(р +уа), она уменьшает-
ся на 30 ч-35%. При этом увеличивается реакция самолета по тангажу.
На рис. 13.4.9 приведена также зависимость среднеквадратической
величины отклонения самолета по тангажу при воздействии непрерывной
турбулентности. При X - 1 она увеличивается примерно в два раза.
Аналогичные результаты получаются и при замене сигнала угла ата-
ки, измеряемого датчиком флю-
герного типа, на фильтрованный
сигнал датчика скорости измене-
ния тангажа.
Как уже указывалось, такие за-
мены сигналов не влияют на харак-
теристики изолированного продоль
ного короткопериодического движе-
Н11я самолета при точном соответст-
ВИИ = 1/^а-
Если это соответствие не вы-
держивается, то переходные про-
цессы при управлении могут выйти
За Допустимые границы по времени
срабатывания и забросам. Поэтому
Указанная замена сигналов цсле-
Рис. 13.4.9. Зависимость потребной скорости
привода <ртах от степени замещения сигнала
перегрузки сигналом фильтрованной скорос-
ти изменения тангажа; a9(VP) - среднеквад-
ратическое отклонение тангажа при воздей-
ствии порыва турбулентной атмосферы с ин-
тенсивностью olv= 1 м/с
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
сообразна только при воздействии порывов ветра. Для этого может б
использована схема управления, основанная па окаймлении сигнала
регрузки двумя фильтрованными сигналами скорости изменения тангажа'
Д'М =
дйу2 =
V2
9 Та7р + \'
9 TaiP + 1 ’
Параметры Ц, V2, Tai> и Ta2 выбираются такими, чтобы при воз-
можных ошибках определения номинальных текущих значений V и Та
величина Д?гу находилась между Дггу1 и Дйу2 (рис. 13.4.10a).
Управляемое движение
Рис. 13.4.10. Формирование сигналов блока компенсации ветровых возмущений
При действии ветрового порыва из рассматриваемых трех сигналов
средним окажется Ьпу\ или Дйу2. Следовательно, если в СУУ посылается
Рис. 13.4.11. Эффективность блока ком-
пенсации вихревых возмущений (БКВ)
средний из сигналов Апу, Дпу1 и Ьпу2, то
управляемое движение сохранит исход-
ные характеристики, а для парирования
ветровых возмущений потребуется мень-
шее значение максимальной скорости.
Схема такого устройства (блока ком-
пенсации ветровых возмущений), в кото-
рой влияние статических ошибок и взаи-
модействия продольного и бокового дви-
жения самолета сведено к минимуму,
представлена на рис. 13.4.106. Пример за-
висимости потребной скорости привода
для статически неустойчивого самолета с
1,5 раза
4
3
2
1
С
0,5 1,0 t„ с
Рис. 13.4.12. Требования к характеристи-
кам привода п префильтра в зависимости
от времени срабатывания по сигналу пе-
регрузки самолета с СУУ при малых
возмущениях; tm - время выхода на мак-
симальную перегрузку; <ррп - потребная
скорость привода для устойчивости при
ветровых возмущениях; фпр - ограниче-
ние скорости сигнала префильтра
астатической СУУ от длины участка нарастания вихревого порыва приведен
на Р11С- 13.4.11. Для наиболее неблагоприятного значения hw потребная мак-
симальная скорость снижается примерно в 1,5 раза
Существует определенная связь
между динамическими характеристика-
ми самолета с СУУ и требованиями к
скорости отклонения органов управле-
ния. На рис. 13.4.12 приведены приме-
ры зависимости ряда определяющих па-
раметров СУУ стапгчсски неустойчивого
самолета от параметра tn — времени сра-
батывания по перегрузке в зоне линей-
ности характеристик привода. Измене-
ние этого параметра достигается выбо-
ром коэффициентов прямых и обратных
связей в пределах области заданных за-
пасов устойчивости самолета с СУУ по
верхней и нижней границам. Потребная
скорость отклонения органа управления
по условиям устойчивости при больших
ветровых возмущениях ((ppiI) монотон-
но возрастает по мере повышения быст-
родействия самолета с СУУ. Допусти-
мая скорость сигнала префильтра имеет максимум, после которого уменьша-
ется с уменьшением параметра tn .
В связи с этим время выхода самолета на максимальную перегрузку
(^т) существенно превышает время tn при его малых значениях. В таких
случаях окончательное решение принимается на основе компромисса между
требованиями к маневренным характеристикам самолета и минимизации ве-
са и энергетики его системы управления.
Комплексирование задач обеспечения устойчивости, управ-
ляемости самолета и безопасности его полета. В настоящей главе
изложена только часть задач по выбору структуры и параметров канала
продольного управления самолета. При этом определяющими факторами
являлись запасы устойчивости самолета с СУУ, динамические характе-
ристики самолета во временной области и безопасность полета при боль-
ших возмущениях. Это можно рассматривать как предварительный этап
выбора структуры и параметров СУУ с последующим их уточнением на
основе других критериев устойчивости и управляемости самолетов -
частотных, временных и параметрических.
Как первый этап следует рассматривать также анализ изолированного
Г1Р°дольного движения при фиксированной скорости полета. Результаты это-
г° этапа должны уточняться при моделировании полного пространственного
Движения самолета как чисто математическими методами, так и на пилотаж-
ных стендах с участием летчиков, а также в процессе летных испытаний.
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
Достаточно полно должно быть проведено исследование взлетно
посадочных режимов, которые являются одними из расчетных слудаев
для определения потребной скорости отклонения органов управления
необходимости реконфигурации СУУ.
Первоочередными задачами при разработке системы управления са-
молета также являются:
- выбор исполнительной части с учетом требований к максимальной
скорости отклонения органов управления при воздействии на них шар-
нирных моментов;
- выбор структуры системы управления и средств контроля для обес-
печения требуемой ее надежности и отказобезопасности (см. гл. 9);
- выбор загрузки рычагов управления;
- обеспечение заданного уровня пилотажных характеристик само-
лета при отказах элементов системы управления.
Список литературы к главе 13
1. Г.С. Бюшгенс, Р.В. Студнев. Аэродинамика самолета. Динамика продольного и бо-
кового движения. - М.: Машиностроение, 1979.
2. Г.С. Бюшгснс, Р.В. Студнев. Динамика самолета. Пространственное движение. - М..
Машиностроение. 1983.
3. Ю.П. Гуськов, Г.И. Загайнов. Управление полетом самолетов. - М.‘ Машинострое-
ние, 1991.
4. Аэродинамика и динамика полета магистральных самолетов / Под ред. Г.С. Бюшгенса. -
Москва-Пекнн: ЦАГИ, Авиа - изд. КНР, 1995.
5. К. С. Колесников, В.Н. Сухов. Упругий летательный аппарат как объект автоматичес-
кого управления. - М.: Машиностроение, 1974.
6. Б. Куо. Теория и проектирование цифровых систем управления. - М.: Машиностроение,
1986.
7. Э.Г. Удерман. Метод корневого годографа в теории автоматических систем. - М.:
Наука, 1972.
8. М.А. Клюев, С. В. Константинов, Б. С. Манукян и др. Возможности реализации по-
вышенных требований к динамической точности электрогидравлического привода в
области малых входных сигналов. Сб. докладов XVI Всесоюзного совещания по гид-
равлической автоматике. - Киев, 1983.
9. В. С. Берко, Ю.Г. Живов, А.М. Поединок. Приближенный критерий устойчивости
вынужденных колебаний регулируемых объектов с нелинейным приводом. Ученые
Записки ЦАГИ, 1984, т. 15, № 4.
10. Yu.G. Zhivov, V.S. Berko, A.M. Poyedinok. Aircraft Stability and Control at High
Disturbances. AGARD, International Conference on Aircraft Flight Safety. Zhukovsky,
Russia, 1993.
11. Ю.И. Шенфинкелъ. Система управления самолета СУ-27 // Техника Воздушного
Флота, 1990. № 2.
12. Л.Г. Бюшгснс. А.Н. Дасов, А.В. Ефремов и др. Использование самонастраиваюшег°сЯ
префильтра для улучшения характеристик продольного движения самолета при огра
пиченной скорости отклонения рулевых поверхностей // Тр. ЦАГИ, 1990.
13. В.С. Берко, Г.С. Берко, Ю.Г. Живов, В.Л. Филиппов. Блок уменьшения потребной ско
рости привода при воздействии порывов ветра на самолет с СДУ // Тр. ЦАГИ, 1990.
14. В.С. Берко, Г.С. Берко, Ю.Г. Живов и др. Астатическая система ограничения угла ата
ки самолета // Техника Воздушного Флота, 1988. № 4-5.
Глава 14
боковая устойчивость и управляемость
СВЕРХЗВУКОВЫХ САМОЛЕТОВ
Исследование бокового движения самолетов, как правило, проводит-
ся в условиях разделения полного пространственного движения на два
изолированных движения: продольное и боковое. Такой подход обуслов-
лен следующими причинами:
- существование у самолета плоскости симметрии является физичес-
кой основой для разделения полного движения на два изолированных;
- многие задачи пилотирования, такие как стабилизация самолета
по крену и рысканию, изменение курса, ликвидация боковой ошибки при
заходе на посадку и т.д., выполняются при квазипостоянных высоте,
скорости полета и балансировке самолета в продольном движении;
- снижение порядка исследуемой системы дифференциальных урав-
нений дает возможность аналитического анализа особенностей характе-
ристик устойчивости и управляемости.
Настоящая глава посвящена анализу свойств бокового возмущенного и
управляемого движений самолета при использовании автоматических
устройств для улучшения устойчивости и управляемости. Вначале рассмотрим
особенности аэродинамических характеристик самолета в боковом движении.
14.1. Особенности аэродинамических характеристик устойчивости
и управляемости в боковом движении
К основным аэродинамическим характеристикам, влияющим на устой-
чивость и управляемость в боковом движении, относятся следующие:
- степень путевой статической устойчивости, ,
- степень поперечной статической устойчивости, ,
_ - вращательные производные демпфирования крена и рыскания,
CD,,
тх и туу,
~ перекрестные вращательные производные, тху и тух ,
~ эффективность органов поперечного управления, nfy и туэ ,
~ эффективность органов путевого управления, т^н и ту" .
Эти характеристики зависят от аэродинамической компоновки само-
лета, упругости конструкции, параметров движения самолета, таких как
Угол атаки, число М, угол скольжения.
Устойчивость пути. Суммарный запас устойчивости пути современ-
11Ь1Х сверхзвуковых самолетов получается как разность двух больших вели-
Чин: неустойчивости без вертикального оперения ^убво| ^убво > и Ус‘
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
тойчивости, создаваемой вертикаль
ным оперением |??г|во| (?/2₽во < 0)
(рис. 14.1.1). При этом величина
™£бво практически не изменяется
по числам М, тогда как эффектив-
ность вертикального оперения
в сверхзвуковом диапазоне суще-
ственно уменьшается с ростом числа
М. Кроме того, при М> 1,74-1 8
наблюдается уменьшение эффектив-
ности вертикального оперения с рос-
том угла атаки, обусловленное ско-
сами потока в горизонтальной плос-
Рис. 14.1.1. Зависимость запаса путевой устой-
чивости от числа М и угла атаки
кости из-за вихрей, сходящих с фюзеляжа, и отрывом потока с фюзеляжа.
Положение вихрей на фюзеляже существенно изменяется при установке в
передней части фюзеляжа небольших горизонтальных ребер. Установка
таких ребер или изменение формы фюзеляжа в ряде случаев может суще-
ственно увеличить эффективность вертикального оперения при больших
углах атаки. Кроме того, при широкой хвостовой части фюзеляжа использо-
вание двухкилевого вертикального оперения также в ряде случаев может
привести к улучшению устойчивости пути самолета.
Значительное влияние на эффективность вертикального оперения
оказывает положение крыла по высоте фюзеляжа, увеличивая тп^ в0 при
его низком расположении и уменьшая при верхнем. Этот эффект
оценивается, в среднем, в 20 : 30% в0 .
В случае, если конструктивные или компоновочные трудности не
дают возможности обеспечить приемлемую устойчивость пути самолета,
следует использовать нижние подфюзеляжные гребни, которые можно
убирать или отгибать на взлете и посадке.
На современных сверхзвуковых самолетах используются двигатели с
большими расходами воздуха при сверхзвуковых скоростях полета. Поэтом}'
уменьшение устойчивости пути за счет поворота струи на входе в двигатель
является существенным на всех режимах полета (рис. 14.1.2).
Заметное влияние на устойчи-
вость пути могут оказывать изгиб-
ные деформации фюзеляжа и стре-
ловидного вертикального оперения.
Для современных сверхзвуко-
вых самолетов влияние деформаций
наиболее сильно проявляется в
области высот полета Н = 114-15 км,
Т’ггл тлпч mmппт/'ст гтишэгхокллТПТ/^ л
. = 50008000 кГс/м2) и числа М, близкие к 2, при которых особенно
(flmax
0 уменьшается устойчивость пути по указанным выше причинам.
Изменение устойчивости пути самолета за счет упругости фюзеляжа
зависит от безразмерного коэффициента
Сф = -
Хф L
"Ly во
^во >
и заметно при значениях Сф > 0,05 (рис. 14.1.3) (%ф - жесткость фюзе-
ляжа [кГс/граД, численно равная силе, приложенной на оперении на
расстоянии £во от центра тяжести самолета, которая вызывает угловую
девиацию фюзеляжа в один градус в месте крепления вертикального
оперения). Потеря устойчивости пути за счет упругости фюзеляжа
составляет обычно 5-г 10% от эффективности жесткого оперения.
Изменение эффективности верти-
кального оперения за счет изгиба са-
мого оперения тем больше, чем боль-
ше угол стреловидности оси жесткос-
ти %£ (пропорционально величине
tgx£/cos%£) и чем больше произведе-
ние скоростного напора на безразмер-
ный коэффициент S^q/Ыъо (£7 во ~
осредненная изгибная жесткость вер-
тикального оперения). Потеря эффек-
тивности вертикального оперения при
Хво = 55° за счет изгиба оперения со-
Рис. 14.1.3. Влияние упругости фюзеляжа
на запас путевой устойчивости
ставляет приблизительно 104-15% от эффективности жесткого оперения. С
этой точки зрения использование вертикальных оперений большой стреловид-
ности невыгодно и рациональные утлы стреловидности вертикальных опере-
ний составляют %во = 304-40°. Дальнейшее увеличение угла стреловидности
приводит к резкому падению эффективности за счет изгибных деформаций.
В результате внесения необходимых поправок на эффективность вер-
тикального оперения суммарная устойчивость пути самолета существенно
отличается от расчетной в идеальном случае и зависит от режимов
полета. Пример такого изменения показан на рис. 14.1.4.
Необходимо отметить, что на устойчивость пути может оказывать
оущественное влияние внешняя подвеска снарядов, бомб, баков.
При выборе запаса путевой устойчивости для предельных чисел М
Необходимо в первую очередь четкое представление о том, в каких усло-
виях эти предельные режимы будут использоваться, насколько возможен
вьгход самолета на эти режимы, насколько легко их превысить. Тогда на
•основании общих требований к самолету и его использованию необходимо
в каждом конкретном случае отдельно решать вопрос о целесообразности
введения автоматических устройств обеспечения устойчивости пути.
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
>пс 14.1.4 Влияние деформаций конст-
укций (2) и двигателя (1) на запас пу-
евой устойчивости
Если указанные предельные ре
жимы редко встречаются на самолете
и стоит вопрос только об обеспечении
безопасности пилотирования на этих
режимах, возможно введение соответ-
ствующих ограничений по режимам
полета (М и а). Ориентировочно
можно принимать, что запас по чис-
лам М до обращения в нуль устой-
чивости пути при всех углах атаки
должен составлять не менее ДМ =
= 0,154-0,2, а минимальная допусти-
мая величина не должна быть
менее -0,005.
На устойчивость пути современного сверхзвукового самолета существен-
юе влияние оказывает увеличение угла атаки на дозвуковых и трансзвуко-
вое скоростях. Это влияние обусловлено потерей несущих свойств верти-
:ального оперения, а также интерференционным взаимодействием вихревой
истемы, образованной носовой частью фюзеляжа и крыла, с аэродинами-
еской компоновкой самолета. Повышение путевой устойчивости на боль-
ших углах атаки может достигаться увеличением размеров и изменением
сложения вертикального оперения, установкой специальных несущих ребер
носовой части фюзеляжа, применением отклоняемых носков передней
ромки крыла (рис. 14.1.5). Для обеспечения путевой устойчивости на
ольших углах атаки эффективными являются так называемые средства
малой” аэродинамики. Эти средства включают использование небольших
:есущих поверхностей или малых изменений аэродинамических форм для
эормирования устойчивой по углам атаки и благоприятной, с точки зрения
нтерференцпи, структуры вихревых течений.
Поперечная статическая ус-
ойчивость. Поперечная статичес- т*
ая устойчивость самолета обеспечи-
ается, в основном, крылом и верти-
альным оперением. Вклад от фюзе- _0 002
яжа и горизонтального оперения
ренебрежимо мал, и его можно не
читывать.
Поперечная статическая устой-
ивость крыла обусловлена измене- 0
нем эффективного угла стреловид-
ости консолей крыла при возник-
овении угла скольжения. При этом
0,002
зависимости от угла стреловид- _
ости Крыла поперечная устойчи- Р,1С- 14.1.5. Влияние перегородок и о
ость будет увеличиваться с ростом носков крыла на запас пу
J J г вой устойчивости
-гла атаки (или коэффициента подъемной силы Су) при %кр > 0 и умень-
шается при Хкр < 0. В линейной постановке запас поперечной устойчи-
вости, > пропорционален CyKpsinxKp. В области чисел М, где имеют
место резкие изменения в несущих свойствах сечений крыла, изменяется
и запас поперечной устойчивости по М.
На величину оказывают влияние:
- V-образность крыла (приближенно dntfjdy =
у кр > гДе
У — угол V-образности крыла),
- установка перегородок на крыле,
- механизация передней кромки крыла (носки, предкрылки),
- положение крыла по высоте относительно фюзеляжа.
Следует отметить, что современные сверхзвуковые самолеты со стре-
ловидными крыльями и развитой механизацией крыла обладают высоким
уровнем поперечной устойчивости, особенно на больших углах атаки
(рис. 14.1.6).
Рис.14.1.6. Влияние стреловидности крыла на запас поперечной устойчивости
Положение фюзеляжа относительно крыла может изменить величину
,?г.гкр- При верхнем расположении крыла относительно фюзеляжа имеет
место дополнительное возрастание в отрицательную сторону. При ниж-
нем расположении крыла влияние фюзеляжа приводит к уменьшению отри-
цательных величин Это изменение, являющееся результатом интерфе-
ренции крыла и фюзеляжа, практически постоянно по углу атаки. Пере-
мещение крыла по высоте фюзеляжа эквивалентно изменению поперечного
И крыла. При переходе от среднеплана к высокоплану тп^. изменится на ве-
личину, соответствующую изменению утла поперечного V на Зч-4°.
Установка вертикального оперения также меняет величину rrQ. Это
изменение связано с тем, что боковая сила, возникающая на вертикальном
°Перенни при скольжении, имея плечо относительно оси х, создает момент
кРена. Это изменение существенно при малых углах атаки. На больших
Углах атаки главный вклад в запас поперечной устойчивости вносит крыло.
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
Аэродинамическое демпфирование (см. также гл. 8). Демпфц
рование крена самолета равно сумме демпфирования крыла и хвостовог
оперения. Демпфирование, обусловленное фюзеляжем, пренебрежимо мало
Демпфирование крена при вращении крыла относительно продольной
оси самолета возникает вследствие перераспределения нормальной
нагрузки по размаху крыла. Оно зависит, в основном, от удлинения
сужения, угла стреловидности крыла. В линейной постановке величина
кр пропорциональна несущим свойствам крыла С”. Для оценки
влияния сжимаемости на т®*р можно использовать зависимость отноше-
ния С“у -“несжим от числа Маха. На больших углах атаки, где несущие
свойства крыла ухудшаются вследствие срывных явлений, имеет место и
падение демпфирования крена (рис. 14.1.7).
Демпфирование крена от хво-
стового оперения складывается из
демпфирования, обусловленного
вертикальным и горизонтальным
оперением. Величина его обычно
составляет 10% от демпфирования
крена от крыла.
Демпфирование рыскания са-
молета создается крылом, фюзе-
ляжем и, главным образом, вер-
тикальным оперением.
Рис. 14.1.7. Зависимость коэффициента подъем- Демпфирование рыскания от
ной силы и деформирования крена от угла атаки крыла создается за счет изменения
индуктивного и профильного со-
противлений крыла при вращении его относительно оси у самолета. Величи-
на демпфирования рыскания от крыла зависит от сужения и угла стреловид-
ности и пропорциональна квадрату коэффициента подъемной силы ( Су кр )
Демпфирование рыскания самолета, обусловленное вертикальным
оперением, происходит за счет изменения угла скольжения вертикаль-
ного оперения при вращении самолета относительно оси у. В линейном
постановке величина демпфирования пропорциональна запасу путе-
вой устойчивости вертикального оперения, во .
Демпфирование рыскания фюзеляжа мало по сравнению с демпфирова-
нием крыла и вертикального оперения, и им можно пренебречь.
Эффективность органов поперечного управления (см. гл. 7)-
Традиционными органами поперечного управления для самолетов являют
ся элероны. При их отклонении возникают моменты крена и рыскания
(7»^э и тр ). Наибольший вклад дает производная тиу» . Эффективность
-jcpoiioB должна обеспечивать приемлемую управляемость самолета по
крену на вссх режимах полета. При использовании крыльев малой
тоЛщпны, в особенности стреловидных, упругость крыла значительно
ченьшает эффективность элеронов на больших приборных скоростях, и
может наступить явление реверса (см. гл. 7).
При увеличении угла атаки возрастает величина моментов рыскания
от элеронов, и они могут оказывать значительное влияние на поперечную
управляемость. В линейной постановке отношение моментов рыскания и
крена от отклонения элеронов ( т^3 /т*3 ) приближенно пропорциональ-
но углу атаки. Следует отмстить, что существует оптимальное соотноше-
ние между углами отклонения элеронов на правой и левой консолях
крыльев для реализации их максимальной поперечной эффективности по
крену на заданном угле атаки.
Для обеспечения поперечного управления самолета на режимах
больших приборных скоростей, а также на сверхзвуковых режимах полета
применяется, кроме элеронов, дифференциально отклоняемый стабилиза-
тор. Особенность этого органа управления заключается в том, что момент
крена создается силами, имеющими сравнительно малое плечо. В то же
время даже небольшая боковая сила, приложенная в области оперения,
создает значительный момент рыскания, поскольку ее плечо достаточно
велико. Другая особенность использования дифференциального стабилиза-
тора связана с применением его в качестве органа продольного управле-
ния. Это приводит к тому, что в зависимости от угла атаки и балансиро-
вочного положения стабилизатора существенно изменяются его моменты
крена и рыскания при дифференциальном отклонении консолей.
На больших углах атаки широко используются интерцепторы для
повышения эффективности поперечного управления.
Эффективность органов путевого управления. В качестве орга-
на путевого управления, как правило, используется руль направления или
полностью поворотное вертикальное оперение. Следует отметить, что при
его отклонении наряду с моментом рыскания, niyu, возникает и момент
Крена, Эффективность руля направления должна обеспечивать балан-
сировку самолета по рысканию при отказах одного из двигателей и балан-
сировку бокового ветра при посадке. В последнее время важной задачей
РУля направления становится обеспечение координированных маневров по
Крену на больших углах атаки. С этой точки зрения необходимо сохранение
эффективности руля направления по рысканию на больших углах атаки.
14.2. Приближенный анализ устойчивости
бокового движения самолета
Система уравнений, описывающих боковое возмущенное движение в
Предположении малости угловых скоростей и угла скольжения при полете в
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
спокойной атмосфере относительно связанной системы координат, совпадаю
щен с главными осями инерции, может быть записана в виде (см. гл. Ю)-
Р = соЛ. sina + cosa + Ср р + -^-cos 9 sin у + ДС2 ,
со v = Л/Р р + Мхха> г + + АЛД.,
<&у = Му Р + мух^х + ^у'^у + ^у .
у - ох - tg 9(co^ cosy - siny),
ф - —(co„cosy -cdxsiny),
COS У V J '
z = -Vcos(9 - a) sin(vp - p),
(1)
где p - угол скольжения, 9 - угол тангажа, z - боковое отклонение от
исходного направления полета, у - угол курса, a - угол между главной
осью инерции Ох и вектором скорости, у - угол крена, АЛД, ЛМу, &CZ -
моменты и силы, обусловленные отклонением органов управления и
действием внешних возмущений, Мг = MjJJi (Ji - момент инерции).
В правой части уравнений (1) члены ЛМт, ЛМу, АСг представляют
собой управляющие воздействия за счет отклонения органов управления,
которые приближенно можно записать в общем виде:
ЛСг«С>8н,
ДМХ « + Мгн5н ,
-А -A VZ e.V П *
ЛМу^М^5э+М^^.
При этом в свою очередь отклонение органов управления может быть
за счет перемещения летчиком рычагов управления
*Э = АШ.3ХЭ, = ^ш.н-^н
или вследствие работы автоматической системы улучшения устойчивости и
управляемости (СУУ) в боковом канале. Сигналы СУУ на современных
сверхзвуковых самолетах в общем виде могут быть приближенно (без
учета ограниченности скорости привода и других нелинейных характерис-
тик) записаны в виде:
S3 = + 5н > J
5П = + К(й^(пу + К3 5Э + Кп^пг
(вместо сигнала пг может быть использован сигнал угла скольжения)-
Последние три уравнения системы (1) определяют ориентацию и
положение самолета относительно Земли. В тех случаях, когда парамет-
Ы а, Н являются заданными функциями времени, система уравне-
ний полностью описывает боковое движение самолета. Из нее следует,
что угол курса кр и боковое отклонение z на собственное движение
относительно центра масс не влияют. Это означает, что самолет является
нейтрально устойчивым по координатам у и г. Следовательно, при
анализе устойчивости уравнения для кр и z могут не рассматриваться.
Уравнения бокового движения (1) целесообразно использовать при
анализе влияния автоматических устройств. Для исследования характе-
ристик устойчивости и управляемости бокового движения аналитически-
ми методами удобно представить уравнения движения в полусвязанной
системе координат.
Введем обозначения:
cosa + cor sin a, Qy = cox cosa - со^ sin a, yfi=ycosa.
Тогда, линеаризуя уравнения системы (1) и проводя преобразования
в соответствии с обозначениями, получим
Р = Ср р + у а ,
= йр Р + + M^Qy , (2)
Qy = йу р + + My°Y Qy ,
Y а = >
где
ср = cosa + sin а,
cL = cosa - sin а,
Му41, МцУ, , М^у - эффективные демпфирующие моменты в полу-
связанной системе координат,
= М„у cos2 a + + М~у} sin a cos a + M*x sin2 a,
= Мух cos2 a + (М*х - Муу) sin a cos a - М*у sin2 a,
www.vokb-lc.spb.ru - Как построить самолёт своими руками?!
Анализ общей системы уравнений (с учетом воздействия CPV'i
удобнее всего проводить на ЭВМ. При этом рационально начать ана
тлз с построения годографа корней характеристического уравнения
(поскольку уравнения линейны). Примеры такого анализа будут Пр
ведены в следующих параграфах.
Для исследования устойчивости бокового движения без СУУ можно
воспользоваться критериями Рауса-Гурвица, которые могут быть пред-
ставлены в виде
Во >0,В}> О, В2 > О, В3 > О, R = (В3 В2 - В})ВХ - в} BG > О,
где Bq, В], В2. В3 - коэффициенты характеристического уравнения:
р^ + В3 + В2 р^ + В\ р + Bq = 0.
Этот подход является традиционным и не дает глубокого представле-
ния о природе устойчивости бокового движения.
Боковое движение состоит, как правило, из трех составляющих форм
движения:
- боковое колебательное движение,
- апериодическое движение крена,
- медленное спиральное движение.
Эти движения имеют ясную физическую интерпретацию. Боковое
колебательное движение характеризует совместное движение самолета по
углам скольжения и крена. Движение крена является основным при
выполнении маневров по крену и сопровождается достаточно быстрым
изменением угла крена. Спиральное движение является результатом
влияния на боковое движение гравитационных сил.
Проведем качественный приближенный анализ этих движений.
Рассмотрим движение самолета по углу скольжения, пренебрегая демп-
фированием и влиянием гравитационных сил. Приближенное уравнение для
угла скольжения имеет вид
3-йр р = о.
Отсюда следует, что апериодическая устойчивость движения по сколь-
жению определяется величиной ор, которую можно назвать коэффициен-
том динамической устойчивости самолета. Она зависит от соотношения
моментов инерции Jx и Jy и запасов путевой и поперечной статической
устойчивости. Приближенное условие устойчивости по углу скольжения
может быть представлено следующим образом:
_ q SI I q Jу в . I Л
Or = ---- cos а + tn'i since < 0.
Р т I У Iх I
Jy k Jx '
Отсюда следует, что на больших углах атаки движение по угяУ
скольжения может быть устойчивым при пгу > О и т^: < 0, а такЖе
неустойчивым при <0 и тп% > 0.
рассмотрим учет демпфирования при приближенном анализе движе-
ния по углу скольжения. Если демпфирование невелико, то можно
считать, что Оу » Qy/fiv ~ оу /ар = ае . Тогда уравнение для движе-
ния самолета по углу скольжения будет иметь вид
₽-ар Р = 0.
Отсюда следует, что для колебательной устойчивости движения
рыскания необходимо выполнение неравенства:
м”’ ± ® < 0.
В колебательном боковом движении при различных возмущениях
(боковой ветер, импульсное отклонение руля направления) важно, чтобы
соотношения максимальных значений угловых скоростей крена и рысканья
не превышало определенной величины (2-5-3 для легких самолетов и 1ч-2
для тяжелых самолетов. Величина отношения ыттах/сортах определяется
соотношением:
При анализе движения самолета по крену необходимо учитывать изме-
нение угла скольжения р, обусловленное угловой скоростью При этом
приближенно считаем, что демпфирование мало, и, следовательно, считая,
что и - малые величины, можно приближенное выразить Р через О/
1 1
СР
оу.
Тогда получим приближенное уравнение для Qy :
/
Qy =
ТтОу /-у
~ у + Му у О.у.
СР
Из этого уравнения следует, что процесс изменения угловой скорости
является апериодическим и характеризуется корнем уравнения
Снижения крена
ov —о —о
X «______L м у + М у
ЛКр —Д
www.vokb-lo.spb.ru - Как построить самолёт своими руками?!
Движение самолета по крену устойчиво, если выполняется неравенство-
My°Y - аг М^' < 0.
Рассмотрим медленную составляющую движения самолета, так пазы
заемое спиральное движение. Поскольку рассматриваемая составляющая
юответствует медленному движению, то
Р = - 91у =0.
В результате имеем приближенное линейное уравнение для измене-
зия угла крена:
V — V T7°y nA
Op Му Y - оу Му1 - х М^у
Спиральное движение устойчиво, если
У _ 9
ЛСП “ т, -Q __Q
v МуУ
При Х.сп > 0 движение самолета происходит по пространственной спира-
ш и сопровождается уменьшением высоты полета. В этом случае имеет мес-
о спиральная неустойчивость самолета. В тех случаях, когда спиральный
:орень мал, этот вид неустойчивости является несущественным для летчика.
Проведенный выше анализ с разделением бокового движения на
оставляющие является в определенной мере приближенным.
В общем случае характеристическое уравнение системы уравнений боко-
юго движения самолета имеет четвертый порядок и представляется в виде:
(р2 + 2£р + со§)(р- А-крИд-Хсп) = 0.
Приближенные значения для Хкр, Хсп, 22, и сод даны ниже. Применяя
>азличные методы решения уравнений (например, метод Ньютона),
южно уточнить эти значения для различных сочетаний аэродинами-
еских характеристик самолета.
В случае, если выполняются следующие условия:
«|Бр|,
«|йу|, CpMyfiv
Ср
pi.
2)
3)
йу (м£у
<0,4Л^у Ер
имеют место следующие выражения для корней характеристического
уравнения:
2 -
юо ~ >
2^-Ср-М^ + £),
„ д7°'1' - я- Л?^4'
, д му Х1У1ч
сп ~ V тА
1 Му у -геМ^у
Отсюда следует, что а>о зависит не только от запаса путевой устой-
чивости m^j, но и от запаса поперечной устойчивости т£. Причем эта
степень зависимости тем больше, чем больше угол атаки и отношение
моментов инерции JyIJx- Что касается влияния режима полета, то частота
бокового колебательного движения соо уменьшается на режимах полета с
большими числами М, а также на больших углах атаки, где имеет место
потеря запаса путевой и поперечной устойчивости.
Из выражения для демпфирования бокового колебательного движения
следует, что при сильной взаимосвязи движений крена и рыскания (ж»1)
демпфирование боковых колебаний существенно зависит от эффективных
вращательных производных М^у и весового члена д/V. Здесь возможно
как значительное увеличение демпфирования (при + g/V < 0) по
сравнению с изолированным движением рыскания (2 » -Ср - ), так
и его уменьшение вплоть до потери колебательной устойчивости. Такая
ситуация может возникнуть на режимах полета с малыми скоростями и
большими углами атаки. Демпфирование бокового колебательного движения
Уменьшается на больших высотах полета или при малых скоростях.
Влияние взаимосвязи движений крена и рыскания проявляется и в
Демпфировании движения крена, определяемого корнем Хкр. Перераспре-
деление демпфирования между боковым колебательным движением и дви-
жением крена из-за комбинации (М^у + g/V) может приводить к умень-
шению демпфирования движения крена при росте демпфирования боко-
вого колебательного движения и наоборот.
В случае, если условие (2) не выполняется, следует применять
Другие выражения для 2 Лкр и Хсп:
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
2^-Ср-Л^
Хкр « , Хсп
+ <7 V
Ж1-(М^)2/ор’
дМ^ -ХМ^
V Мр*
Если нарушается условие (3), то в этом случае возможно образова-
на новой формы движений, когда вместо апериодических движений
срена и спирального движения возникает новый вид колебательного
1вижения и характеристическое уравнение имеет вид
(р2 + 2 £ р + {р2 + 2 р + со2) = 0.
Для этой ситуации имеем следующие выражения:
2 + аг (м2У + ~1.
» V ф v)
-зеМ^).
Этот случай является достаточно редким. Он обусловлен сильной
заимосвязыо всех форм движения (колебательной, крена и спиральной),
роявляется при аг 1 и оценивается летчиком как неудовлетворительный.
Полученные выражения позволяют оценить влияние аэродинамичес-
их параметров самолета и режима полета на корни характеристического
равнения бокового движения. Однако они являются приближенными и
ля окончательной оценки боковой устойчивости следует проводить расчет
эбственных корней характеристического уравнения по полным уравне-
иям бокового движения с пересчетом всех входящих параметров в урав-
гние движения в зависимости от угла атаки, числа М полета и т.п.
14.3. Управляемость самолета в боковом движении
Поперечная управляемость самолета. Управление самолета по
эену является основным видом в боковом движении и осуществляется с
эмощыо органов поперечного управления, таких как элероны, интерцеп-
>ры, дифференциально отклоняемый стабилизатор и т.п. Особенностью
их органов управления является существование перекрестных аэродина-
гческих моментов, что приводит к возникновению при их отклонении не
лько движения крена, по и движения по углу скольжения и рыскания.
При оценке поперечного управления сверхзвуковых самолетов неоо-
>димо решать следующие задачи:
- выбор эффективности органов поперечного управления (из усЛ°
й балансировки и быстродействия по крену),
- обеспечение приемлемого переходного процесса по крену ПРИ
давлении,
- обеспечение высокоточной стабилизации самолета.
Одним из основных требований, определяющим выбор эффективности
^перечного управления, является обеспечение балансировки самолета по
Kpcifv при посадке с боковым ветром. При этом расчетная величина боковой
составляющей ветра 10-^15 м/с. Следует отметить, что при наличии мо-
ментов рыскания от органов поперечного управления может усложниться ба-
лансировка угла скольжения рулем направления, а именно при /nfy < 0
потребные для балансировки углы отклонения руля направления увеличи-
ваются. Можно рекомендовать, чтобы пг^/т^ < 1,5 -н 2,0. Расчетным случаем
является режим малых скоростей с отклоненной механизацией.
Другими ситуациями для выбора эффективности поперечного управ-
ления являются балансировка самолета при отказе одного двигателя при
многодвигательной схеме и балансировка самолета при несимметричной
конфигурации, например, несимметричном расположении подвесок на
консолях крыла. Следует отметить, что расходы органа управления для
балансировки не должны исключать возможность выполнения самолетом
маневров по крену.
Помимо условий балансировки самолета по крену поперечное управ-
ление должно обеспечивать определенную угловую скорость крена. Это
условие может быть сформулировано в виде величины угла крена,
достигаемого за заданное время (например, за 1 или 2 с) при ступен-
чатом отклонении органов поперечного управления. Однако практически
это требование можно приближенно свести к требованию к величине
установившейся угловой скорости крена.
Передаточная функция самолета в изолированном движении крена
имеет вид
У У ®xmax^0>t
— = —-— ------, или =- = — -------Г ,
Зэ Д(р-^кр) Зэ р(ГЮх/2 + 1)
СО г _ ихтах ^<од. _
~ ~ ТС’ уст “ ю-гтах 7<вх’
5э <Гс>хР+1'
где бэ=5э/5зтах - относительное отклонение элеронов, cbxmax =
= m-ax^Jx ~ максимальное угловое ускорение самолета при отклонении
органов поперечного управления, » -/х/мхг - постоянная времени
Движения крена, характеризующая время выхода самолета на устано-
вившуюся угловую скорость при ступенчатом отклонении элеронов.
Таким образом, движение крена самолета определяется двумя
параметрами: cbrmax и .
На рис. 14.3.1 в координатах сохтах и приведены линии сохуст =
s const и линии у^ = const ~ const, полученные из решения уравнения движе-
ния крена при ступенчатом отклонении органов поперечного управления.
www.vokb-lc.spb.ru - Как построить самолёт своими руками?!
Рис. 14.3 1 Линии постоянного уров-
ня <Dry(;T= const и yt = const ® const в за-
висимости от эффективности управ-
ления п постоянной времени крена 7'„v
Из графика видно, что при малых Т
(ТЮг< 1с) линии wxycT = const и Yf=COnst^
« const практически параллельны, т е
время выхода самолета на заданный
угол крена в основном определяется
располагаемой установившейся угловой
скоростью крена.
На рис. 14.3.2 представлены резуль-
таты исследований на пилотажном стен-
де характеристик поперечной управляе-
мости маневренного самолета на режи-
мах его целевого использования при
линейной зависимости хода ручки и
угла отклонения элеронов. При этом
применялась пятибалльная оценка лет-
чиком управляемости самолета: 5 -
очень хорошо”, 4 - “хорошо”, 3 - “приемлемо”, 2 и 1 - “неудовлетвори-
ельно”. Как видно из графика, наиболее высокие оценки летчиков для
таневренного самолета на обычных режимах полета реализуются при
Куст ~ 1,5^2,0 рад/с.
При малых угловых скоростях и медленном переходном процессе
Ты велико) летчик отмечает “вялость” самолета, а при больших угловых
гях и малых Ты управление становится слишком строгим и воз-
раскачка самолета. В связи с этим не следует допускать на самолете
гной времени Та > 1, а максимальные угловые скорости более
рад/с не должны сочетаться с малыми
В ряде случаев выбранная из
условия балансировки на посадке
эффективность органов поперечного
управления может оказаться избыточ-
ной на больших скоростях. В этом
случае целесообразно в первую оче-
эедь рассмотреть введение нелиней-
ного закона отклонения органа управ-
1ения по ходу ручки с меньшим гра-
[иентом отклонения элеронов при ма-
1ых ходах ручки управления. Возмож-
ю также и отключение некоторых
скцнй органов поперечного управле-
шя (например, щитков-интерцепторов).
Увеличение высоты полета приво-
дит к заметному возрастанию постоян-
юй времени
Т
•'(О
Рис. 14.3.2. Линии равных оценок ле™11
ков характеристик поперечного управ716"
ния в зависимости от его эффективно6
и постоянной времени крена ТМг
4Л _
pVS/2rc“* ’
что приводит к ухудшению поперечной управляемости самолета.
Оценки летчиков зависят от класса самолета и от режима полета.
Так, например, для неманевренного самолета на режиме посадки высокие
оценки летчиков по результатам стендовых исследований соответствуют
диапазону сОгуст ~ 0,3“ 1,0 рад/с.
Для этого режима в качестве проверочного условия целесообразно
использовать требование к безразмерной угловой скорости крена сох =
= a>xll2V> поскольку эта величина характеризует дистанцию (в
долях размаха крыла) выполнения предпосадочного маневра самолета по
крену. Это следует из выражения для угла крена:
t L _
у = Jcoxdt = Jcoxd£,
0 0
где со г. =
Г- —= —
" 1/2 ~ 1/2
V //2 ’
Приведенные требования к так называемому быстродействию самолета
по крену можно получить, рассматривая эффективность выполнения отдель-
ных маневров основного назначения самолета. Так из модельных задач:
а) синхронное маневрирование двух самолетов, летящих друг за другом, и
б) выполнение разворота по курсу на 180° следует, что потребное быстро-
действие по крену для задачи а) составляет изменение у на 90° за время 1 с,
а для задачи б) угловая скорость крена должна быть 120 град/с.
Специфической особенностью сверхзвуковых самолетов является то, что
при отклонении органов поперечного управления развивается движение,
которое по своему характеру может заметно отличаться от изолированного
Движения крена вследствие инерционного и кинематического взаимовлияния
движения крена и рыскания, а также образования моментов рыскания при
отклонении органов поперечного управления.
Общая передаточная функция самолета по углу крена может быть
Представлена в виде
yQ _ MY§3(p2 +2^2р + сор^2)
5э (р-^кр)(р-^сп><^2 + 2^9 + С0§)’
Где ^кр ~ корень характеристического уравнения бокового движения, соот-
ветствующий апериодическому движения крена, Хсп - корень характерно-
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
гического уравнения, соответствующий спиральному движению (ввиду его
____прп анализе управляемых движении его влиянием можно
2 _ ^2 _ корни характеристического
малости
пренебречь: g/V^O),
уравнения, соответствующие колебательному движению;
2^ = -Ср-Л/^+Му^
Му 3
Му* = Му cosa + Л/S’ since,
Му3 = Мх3 cos a - Му3 sin a,
x2 = |_m^sl
My 3
Тогда передаточная функция самолета по крену может быть пред-
ставлена в виде
У а
зэ
Му3
2^2 Р , ?2
ю0 w0
р(^-Чр)
\р?|2 + 12
<(D0J (00 Ю0
+ 1
Для того чтобы характер движения по крену был близок к изоли-
рованному (что соответствует первому 1множителю передаточной функ-
ции), следует уменьшать влияние второго множителя, определяющего
взаимосвязь бокового колебательного движения с движением крена.
Для сверхзвуковых самолетов, имеющих большую величину отноше-
ния Jy!Jx и повышенный запас поперечной устойчивости, основным
параметром, связывающим движение крена и рыскания, является А2.
Значению Л2 « 1 соответствует взаимная компенсация влияния
движения крена на рыскание с имеющимися моментами рыскания от
отклонения органов управления. В этом случае управляемые движе-
ния по крену близки к изолированному движению крена. По мере
уменьшения параметра А2 крснение самолета сопровождается возник-
новением углов скольжения, препятствующих через поперечную ус'
тоичивость действию управляющего момента по крену (рис. 14.3.3,
где юр = M^i + MP/ , cb5 = M^i + M*~j , Мх = М*8, i и j - oPTbI
связанной системы координат).
Рис. 14.3.3. Геометрическая иллюстрация развития движения самолета по углу скольже-
ния при поперечном управлении в зависимости от параметра X2
Поскольку движение по углу сколь-
жения носит колебательный характер,
то и в движении крена возникает ко-
лебательная компонента. При X2 < 0,5
она становится настолько заметной,
что возникают явления типа “зависа-
ние” по крену (рис. 14.3.4), когда в
какой-то момент времени движение
крена прекращается, а затем разви-
вается в обратную сторону. При Х2<0
самолет имеет обратную реакцию по
крену на отклонение органов попереч-
ного управления. При X2 > 1 возни-
кающие при кренении углы скольже-
ния способствуют развитию движения
Ис- 14.3.5 Зависимость оценок летчи-
ков поперечного управления от пара-
метра X2
Рис. 14.3.4 Переходные процессы по
крену при поперечном управлении в
зависимости от параметра X2
крена, но так как образование р проис-
ходит с запаздыванием, то при X2 > 1
управление получается слишком строгим
и вмешательство летчика в поперечное
управление может вызвать раскачку
самолета по крену.
На рис. 14.3.5 приведены оценки лет-
чиков на пилотажном стенде характерис-
тик поперечной управляемости самолета в
зависимости от параметра X2. Из этих дан-
ных видно, что для обеспечения удовле-
творительных характеристик поперечной
управляемости в данном случае необ-
ходимо обеспечить значения параметра в
пределах 0,5 < X2 < 1,2, при этом наиболее
www.vokb-lo.spb.ru - Как построить самолёт своими руками?!
Рис. 14.3.6. Линии равных значений пара-
метра X2 в зависимости от соотношения
rtfy/nfy и угла атаки: А - зона возмож-
ной раскачки самолета, Б - наиболее
благоприятные оценки летчиков, В - зона
обратной реакции самолета по крену
высокие оценки соответствуют
случаю, когда управляемые движем^
по крену близки к изолированно^
(X2 ~ 1). Пример изменения потребног
соотношения управляющих моментов
по рысканию и крену при различный
значениях параметра X2 в зависимости
от угла атаки приведен на рис. 14.3.6
На больших углах атаки при боль-
шой разнице в моментах инерции J и
Jx UylJx ~ Ю) и повышенных запасах
поперечной устойчивости для обеспече-
ния приемлемых характеристик попе-
речного управления, т.е. чтобы Х2 = 1
необходимо, чтобы органы поперечно-
го управления, помимо моментов крена,
создавали и значительные моменты
рыскания, которые через угол сколь-
жения “подкручивали” бы самолет.
При отсутствии моментов рыска-
ния или при моментах рыскания дру-
гого знака (что характерно для обыч-
ных элеронов) управляемые движе-
ния по крену могут оцениваться лет-
чиками как неудовлетворительные.
На рис. 14.3.6 показан также пример изменения отношения ?Пуэ /ту1
для обычных элеронов. Как видно из приведенных данных, появление до-
полнительных моментов рыскания от отклонения элеронов на больших уг-
лах атаки значительно ухудшает поперечную управляемость самолета даже
эез учета уменьшения эффективности элеронов по крену на этих режимах.
При малых углах атаки существенное влияние на поперечную управ-
ляемость оказывает наклон главной оси инерции. Большой отрицатель-
ный наклон главной оси инерции может привести к слишком “строгому
/правлению даже при малых “подкручивающих” моментах рыскания на
чалых углах атаки.
Помимо основного параметра X2, определяющего характер управляю-
цих движений по крену на малых скоростях полета, заметное влияние на
>то движение может оказывать образование угла скольжения, вызванное
юковой составляющей веса самолета, которая усугубляет “зависание
амолета по крену.
Путевая управляемость. Расчетными случаями для выбора эф
[активности руля направления являются-
- балансировка бокового ветра при посадке,
- отказ двигателя для самолета с разнесенными двигателями.
При оценке характеристик управляемости самолета при отклонении
,пЯ направления необходимо учитывать следующие обстоятельства.
р}’ я
1. Отклонение руля направления вызывает не только момент Шу", но и
момент крена. Этот момент крепа (для руля, расположенного сверху фюзе-
ля>ка) направлен в сторону, противоположную той, которая необходима для
ввода в координированный разворот. В результате при малых величинах
поперечной устойчивости суммарный момент крена самолета при отклонении
руля направления может быть направлен в сторону, противоположную
погребному. Это явление, известное как “обращение реакции самолета по
крен}' при отклонении руля направления”, воспринимается летчиком как
поперечная неустойчивость самолета; оно затрудняет пилотирование и
недопустимо при малой эффективности элеронов.
Условие отсутствия “обратимости” имеет вид
rr^j т^н
Это накладывает ограничение на минимально допустимую величину
запаса поперечной устойчивости. Расчетным случаем “обратимости” яв-
ляются режимы, на которых реализуется минимальная поперечная устой-
чивость самолета, т.е. обычно режимы малых углов атаки (больших q).
2. Для сверхзвуковых самолетов, в особенности на больших углах
атаки, характерной является большая поперечная устойчивость. Для само-
летов новых схем можно ожидать дальнейшее увеличение поперечной
устойчивости (например, за счет перехода к высокопланным схемам). В
этих условиях действие руля направления по крену может иметь слишком
большую интенсивность. Даже небольшие углы скольжения, возникающие
при отклонении руля направления, вызовут резкое кренение самолета.
Такое явление может наблюдаться на режимах малых скоростей, в
особенности при отклоненной механизации. В условиях уменьшения эф-
фективности элеронов на больших углах атаки это приводит к таким
особенностям пилотирования самолета, которые в некоторых случаях
могут заставить специально ограничить минимальные скорости самолета.
Соотношение отклонений элеронов и руля направления, при которых не
нарушается поперечная балансировка самолета (при линейных зависимостях
Углов отклонения рулей от хода рычагов) определяется выражением
Хэ Зэ ^ишах *пх1
5Э тах гп^ Шуп
и> следовательно, зависит от всех основных параметров боковой устой-
чивости и управляемости самолета. Для нормального пилотирования
можно рекомендовать, чтобы при минимальных скоростях V - Vmjn
неличина 53 /5Н < 3
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
3. На режимах больших скоростей допустимые углы скольже
становятся очень малыми, поэтому необходимо принимать меры к ИЯ
ограничению. Простейшим средством улучшения характеристик путевой
управляемости самолета является применение изменяемой загрузки педа
лей. На посадочных режимах необходимо использовать устройство загруз
ки с малым градиентом dP^!dXn, а на режимах полета, соответствующих
большим значениям скоростного напора, необходимо иметь более тяжелую
загрузку. В некоторых случаях для ограничения углов скольжения можно
использовать ограничение тяги бустера руля направления, но это каждый
раз требует специального анализа.
14.4. Характеристики устойчивости и управляемости сверхзвукового
самолета с СУУ в боковом движении
Обычно характеристики устойчивости и управляемости сверхзвуко-
вого самолета не удовлетворяют во всем эксплуатационном диапазоне
скоростей требованиям, предъявляемым к ним летчиком с точки зрения
обеспечения удобства и простоты пилотирования. Эти характеристики
могут быть улучшены путем использования на самолете соответствующих
автоматических устройств в каналах крена или рыскания либо в обоих
каналах управления самолетом одновременно. Основными причинами,
заставляющими автоматизировать управление самолета в боковом движе-
нии, обычно являются следующие.
- Недостаточное демпфирование, особенно при полете на больших
высотах. Снижение эффективности аэродинамического демпфирования
самолета обусловлено уменьшением плотности атмосферы при увели-
чении высоты полета. Относительный декремент затухания определяется
высотой полета и убывает пропорционально д/р (где р - плотность
воздуха на рассматриваемой высоте полета).
- Уменьшение путевой устойчивости на больших числах М.
- Ухудшение характеристик поперечной управляемости самолета.
Ухудшение поперечной управляемости может быть обусловлено снижением
демпфирования крена, приводящим к уменьшению корня крена при полете
на больших высотах. Кроме того, при полете самолета на большом угле
атаки, в частности, на посадке или на маневре, при поперечном управлении
существенно возрастает перекрестное взаимодействие крена и рыскания,
обусловленное как кинематическим взаимодействием, так и аэродинамичес-
ими “тормозящими” моментами органов поперечного управления (элеро,
нов, интерцепторов и т.д.). Это взаимодействие приводит к “зависанию
самолета по крену, к появлению запаздывания реакции самолета на откло-
нение элеронов, затрудняющего пилотирование.
- Необходимость обеспечения боковой устойчивости и управляемое
ги самолета на больших углах атаки, значительно превышающих УгоД
атакп горизонтального полета. Эта проблема, прежде всего, связана с ма-
невренными самолетами. Трудность решения проблемы заключается в
том, что для современных маневренных самолетов требуется реализация
полета на углах атаки, при которых возможна потеря устойчивости
самолета, однако и в этих условиях необходимо обеспечение удовлетво-
рительных пилотажных характеристик маневренного самолета.
Решение всех этих проблем только аэродинамическими средствами не-
возможно, что делает необходимой соответствующую автоматизацию управ-
ления. Наиболее высокие требования к автоматизации поперечно-путевого
управления в настоящее время формулируются для маневренных самолетов,
рассчитанных на полет в широком диапазоне углов атаки и чисел М.
При автоматизации управления сверхзвукового самолета необходимо
обеспечить удовлетворение ряда требований, основными из которых являются:
1) обеспечение удовлетворительных характеристик поперечной уп-
равляемости (значения постоянной времени крена необходимого
соотношения между установившейся величиной угловой скорости крена и
отклонением ручки управления da>xldX3 (или усилием diHx/dP^, малого
взаимодействия движений крен-рыскание, т.е. 0,7 < Л2 < 1,2 и соответ-
ственно малых углов скольжения при поперечном управлении);
2) обеспечение удовлетворительных характеристик колебательной
составляющей бокового движения самолета (показатель демпфирования
колебательной составляющей > 0,35, частота боковых колебаний
со > 1 рад / с на всех режимах полета;
3) обеспечение достаточной эффективности управления для балан-
сировки самолета при отказе двигателя и при посадке с боковым ветром;
4) обеспечение удовлетворительных характеристик спирального
движения |ХСП| < 0,05.
Для удовлетворение данным требованиям в системе улучшения ха-
рактеристик устойчивости и управляемости (СУУ) самолета в общем
случае могут быть использованы следующие подсистемы:
- демпфер рыскания;
- демпфер крена;
- перекрестная связь от элеронов к рулю направления (сигнал с
Ручки управления по крену в канал руля направления);
- автомат устойчивости пути;
- уменьшение коэффициента передачи с ручки управления к элеронам.
Для анализа целесообразно использовать полную систему прибли-
женных линеаризованных уравнений, приведенных в 14.2.
Рассмотрим воздействие каждого из элементов автоматизации
Управления.
Демпфер рыскания. Демпфер рыскания является одним из важ-
нейших элементов автоматики бокового канала управления. Он предназ-
2Р
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
1ачен для повышения демпфирования колебательной составляющей бо
сового движения. В качестве органа управления, реализующего функци"
шал демпфера рыскания, используется, как правило, руль направления
Зам функционал демпфера рыскания включает сигнал датчика угловой
корости и в общем виде имеет вид
cos v + toх sinv),
5 ц
де v - угол между осью чувствительности датчика угловой скорости и
вязанной осью Оу.
В случае, если ось датчика ориентирована по оси Оу то v = 0 и фун-
:ционал демпфера рыскания имеет вид
Проведем анализ работы демпфера рыскания в этом случае, исполь-
уя упрощенную недемпфированную систему уравнений:
3 = 0)^ cos a + cd-t sin a,
i>a = Mfp + M«"8„ ,
6x = m£₽ + M?“5h.
Характеристическое уравнение замкнутой системы “самолет-демпфер
искания” имеет вид
1 =
4р2+®о)
со о = -М $ cos a - sin a,
.2 _
Лд-Р - 2 ’
соо
М8”
a>i=-sina ,
I J)
7сист(р) “ передаточная функция исполнительной и измерительной
детей системы управления.
В зависимости от параметра X д р будут реализовываться различные
гды корневых траектории. На рис. 14.4.1 приведен корневой годограф
эи 0 < Хд р < 1. В этом случае обеспечивается устойчивость бокового
зижения. При Z.д р > 1 или ? д D <0 имеет место неустойчивость замкну-
Рис 14.4.1. Корневой годо-
граф самолета с демпфером
рыскания (0 < Лд р < 1)
той системы “самолет-демпфер рыскания”. Гра-
-2
ничные значения параметра Х.д р соответствуют
следующим ситуациям. При X др = 0 происходит
демпфирование колебательной составляющей бо-
кового движения без влияния на демпфирование
крена. В этом случае ось чувствительности
датчика угловой скорости ортогональна вектору
скорости (а = 0). При X2 р - 1 происходит дем-
пфирование только движения крена, а демпфи-
рования колебательной составляющей не имеет
места. Это происходит вследствие того, что коле-
бания происходят относительно оси Ох, а ось
датчика ориентирована по оси Оу.
Для анализа влияния ориентации оси чувстви-
тельности датчика угловой скорости на работу демпфера рыскания рассмот-
рим характеристическое уравнение замкнутой системы “самолет—демпфер
рыскания” для функционала 5Н - Ka^tJcosv + cousinv):
cos v + M8“ sin v (p2 + Х2Д Dco2)
—--------------7 5----------------1 W^cr(^) = 1.
P\P +®o
где
sin(a - )
cosa + sinajlMy" cos v + sin v
Рассмотрим, по аналогии с выше
приведенным анализом, граничные
значения для X2д р , а именно: Х2др = 0
и Х*д.р = 1- Случай, когда X2 д р =0, со-
ответствует равенству v = а, т.е. ориен-
тации оси чувствительности датчика уг-
ловой скорости ортогонально вектору
скорости полета. Если X2 др =1, то
v = -arcig^A/P/A/Pj , т.е. ось чув-
ствительности датчика угловой ско-
рости ортогональна вектору углового
Ускорения боковых колебаний Мр =
+ (рис. 14.4.2).
Рис. 14.4.2. Геометрическая иллюстрация
ориентации датчика рыскания относи-
тельно векторов V и Mf,
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
Отсюда следует, что степень демпфирования боковых колебаний демпгЬл.
ром рыскания зависит от ориентации оси датчика угловой скорости относи
телыю вектора скорости полета V и вектора углового ускорения боковых ко-
лебаний Мр. При этом наибольшая эффективность демпфера рыскания обес
печивается при ориентации оси чувствительности датчика угловой скорости
ортогонально вектору скорости полета (или путем обеспечения соответствую
щего соотношения сигналов ид- и а>у в функционале демпфера рыскания).
Следует отметить, что полученный результат имеет простой физичес-
кий смысл. Колебательная составляющая бокового движения в первую
очередь проявляется через колебания самолета по углу скольжения. По-
этому естественно для эффективного демпфирования колебательной со-
ставляющей использовать в демпфере рыскания сигнал, пропорциональ
ный производной углу скольжения:
5Н ~ ^со^Р»
где В = — п, + co,. cosa + cor sina + — cosS sinv.
17 с 'J л Т7 '
Анализ показывает, что в этом случае работа демпфера рыскания направ-
лена на демпфирование колебательной составляющей бокового движения, и не
оказывает существенного влияния на демпфирование крена, а также не зат-
рудняет выполнение длительных виражей с постоянной угловой скоростью.
Учет весовой составляющей в сигнале целесообразен для тяжелых
самолетов, где углы крена ограничены.
Демпфер крена. При установке демпфера крена как правило ре-
шаются две задачи: повышение демпфирования движения крена для
улучшения характера переходных процессов при управлении по крену и
увеличения демпфирования колебательной составляющей бокового дви-
жения. В качестве органа управления, реализующего функционал демп-
фера крена, используются как правило элероны или дифференциальный
стабилизатор. Сам функционал демпфера крена использует сигнал датчи-
ка угловой скорости и в простейшем случае имеет вид
Используя, как и в случае демпфера рыскания, упрощенную недем-
пфированную систему уравнений, запишем характеристическое уравне-
ние замкнутой системы “самолет-демпфер крена”:
КтхМ$>(р2 + А.2л.к«о)
/2 2\ "
Р\Р + “0
^/сист(а?) >
где
Муэ
cos a
М® cosa + sina
Рис. 14.4.3. Геометрическая иллюстра-
ция ориентации датчика крена относи-
тельно векторов Мъ и Afp
В зависимости от параметра имеет место различное влияние демпфе-
ра крена на устойчивость бокового движения. При 0 < X2Д к < 1 демпфер
крена демпфирует как колебательную составляющую бокового движения,
так и движение крена. При Xд к < 0 и X2Д р > 1 возникает неустойчивость
замкнутой системы "самолет-демпфер крена” причем при ХдК > 1
уменьшается демпфирование колебательной составляющей бокового дви-
жения. При Xд к <0 работа демпфера крена приводит к уменьшению
демпфирования движения крена, что связано с обратной реакцией само-
лета по крену на отклонение органов поперечного управления.
Из рассмотрения граничных значе-
ний Хд р следует, что при X2Д к = 0 имеет
место соотношение =^у!^х,
а при Хд К= 1 имеем Му^М*3 =-tga.
Это означает, что для простейшего функ-
ционала 5Э - эффективность рабо-
ты демпфера крена определяется ориен-
тацией управляющего момента относи-
тельно вектора скорости и вектора угло-
вого ускорения боковых колебаний Мр.
На рис. 14.4.3. дана геометричес-
кая интерпретация расположения век-
торов ЛГ6 ЛГр V и оси датчика угло-
вой скорости.
Рассмотрим более общий случай функционала демпфера крена
5Э = ./^(cDxCosp. + lOySinp),
где ц - угол между осью чувствительности демпфера угловой скорости и
осью Ох.
Характеристическое уравнение замкнутой системы "самолет-демпфер
крена" будет при этом иметь вид:
Ka>SMx3 c°s И + sin ц)(р2 + Х2дксо§)
1 = --
Р\Р
где
2 - My3M0)cos(a + ц)
cosa + М* sinaV-Mx3 cosц + Му* sinц)
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
Можно показать, что значениям л.*д к = 0 и Х*д к = 1 соответствуют те
; соотношения, что и для рассмотренного выше функционала 8Э = Кш о
Важность ориентации управляющего момента для эффективной ра-
ты демпфера крена объясняется взаимосвязью движений крена и рыс-
ния и возникновением углов скольжения при отклонении органов попе-
чного управления. В случае Х»д к = 1 при отклонении элеронов прак-
ческп не возникает углов скольжения, а следовательно не возбуждает-
колебательная составляющая бокового движения. При этом демпфер
ена увеличивает демпфирование движения крена, не влияя на демпфи-
вание колебательного движения. Если ?ЛД к > 1, то при отклонении
еронов образуются углы скольжения, направленные на увеличение уг-
вой скорости крена. Однако из-за запаздывания между управляющим
ментом крена М^Э8Э и моментом м£р возникает неустойчивость зам-
утой системы "самолет-демпфер крена”.
При О < ^»д.к < 1 демпфируется не только движение крена, но и ко-
5ательная составляющая бокового движения. Степень демпфирования
лебательной составляющей зависит от соотношения между путевой и
перечной устойчивостью и угла атаки. При >1 демпфер
ена весьма эффективно демпфирует колебательное боковое движение.
При Х*д к < 0 при отклонении элеронов развиваются углы скольже-
я, момент крена от которых направлен против управляющего момента
ена. В результате демпфер крена уменьшает демпфирование движения
ена и повышает демпфирование колебательной составляющей.
Демпфер крена уменьшает по модулю собственное значение корня,
угвстствующего спиральному движению. Поэтому, если имеется неус-
зчийость спирального движения, эффективным средством ее снижения
тяется применение демпфера крена.
Демпфер крена снижает взаимосвязь движение крена и рыскания в
змущенном движении. Реакция самолета по крену уменьшается при
зличных видах возмущений в путевом канале, таких как односторон-
й отказ двигателя, отклонение руля направления, возмущения от тур-
тентности атмосферы.
Существует ряд особенностей в управляемом движении самолета по
щу при включении демпфера крепа в систему управления. Во-первых
з сохранения управляемости в установившемся движении целесообраз-
использовагь закон управления в виде
к „ f Кх
Ч Тр + и
Хэ - отклонение ручки управления по крену.
Рациональным выбором постоянной времени Т~ 0,2 ч-0,5 с и передаточ-
ного числа Кх возможно обеспечить сохранение располагаемой угловой ско-
рости крена при удовлетворительном качестве переходного процесса по крену.
Во-вторых, в задачах стабилизации самолета по углу крена включе-
ние демпфера крена расширяет область удовлетворительных оценок
летчика при X2 ~ 0.
Перекрестная связь руля управления с органами попереч-
ного управления. Одним из факторов, существенно влияющим на качест-
во переходных процессов самолета по крену, является возникновение углов
скольжения при отклонении органов поперечного управления. Причинами
возникновения углов скольжения являются как кинематическое взаимодей-
ствие движений крена и рыскания, так аэродинамическое взаимодействие
этих каналов из-за наличия у органов поперечного управления не только
моментов крена, но и моментов рыскания. В этих условиях эффективным
средством ослабления аэродинамического взаимодействия движений крена и
рыскания является формирование желаемого соотношения управляющих
моментов крена и рыскания путем использования руля направления совмес-
тно с органами поперечного управления, например элеронами.
Для определения функциональной связи между рулем направления и
элеронами, обеспечивающей управляемое движение по крену при угле
скольжения, близком к нулю, можно воспользоваться передаточной функ-
цией 5н/5э(р). Эта функция получается из линеаризованной системы уравне-
ний бокового движения при угле скольжения, равном тождественно пулю, и
при использовании двух органов управления - элеронов и руля направления.
Передаточная функция 5н/5э(р) имеет вид
(Ь2Р2^.Р^)
5Э Р=о Му" + Я\Р + до)
где
a-) = cosa + -о-sin а. о? = sin a + - cosa.
У
, \ —8 Г / х
°1 - —М cos a + Г Мху + -yj sin a + -M yy sin a + Г M “х + cos a ,
My" L J
M*y cosa + Mxx sin a
* [ M^y cosa + M„x sin a
M8„ k У J ,
(п \ м 83 f n A
Myx + — cos a + -Mxx cos a + M^y + — sin a
И7 Mx3 L \ w
£
V
b0 --
My'J cosa + Myx sin a
/V/83 z_ __
—I Mxy cosa + Mr x sin a
M^ k -
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
При реализации этой связи приближения передаточная функция по
iy крена будет иметь вид:
8Э(5Н * 0) р[р-М*х^
Таким образом, реализация приведенной выше функциональной свя-
органов управления в принципе решает поставленную задачу.
Следует одпако отметить, что реализация такой функциональной связи
таточно сложна, а в ряде случаев принципиально невозможна из-за его
стойчивости. Кроме того нет необходимости обеспечения условия Р = 0 на
ггельном интервале времени. Для обеспечения координированного пово-
а по крену на начальном этапе управляемого движения возможно ис-
гьзовать два вида связи между элеронами и рулем направления:
1) “жесткая” связь
—я , тиэ cos a + — sin a
= Mj-bj = у Л
5э Му <02 cosa + —sina
У т х
J X
2) “изодромная” связь
5н Т\Р
5Э Т2р +1
“Жесткая” связь дает определяющий эффект: обеспечение координа-
движения крена в “быстром” управлении при близком к нулю угло-
ускорении по углу скольжения (р » 0).
Однако если руль направления должен использоваться для баланси-
<и в путевом канале, то рационально использовать “изодромную
|ь”. В этом случае расход рулей направления сохраняется в режимах
шсировки несимметрии или бокового ветра.
Следует отметить, что связь между рулем направления и элеронами
кна регулироваться по углу атаки. Наиболее существенной она ста-
гтся на больших углах атаки. На малых углах атаки она уменьшается
же может изменять знак.
Автомат путевой устойчивости. Для сверхзвуковых самолетов
ктерным является существенное уменьшение путевой устойчивости на
.ельных режимах полета (Мгаах, атах, дтах) Обеспечение путевой ус-
ивости аэродинамическими средствами является в ряде случаев нера-
[альным, что приводит к необходимости использования автомати-
их устройств, таких как автомат путевой устойчивости. В качестве
на управления, реализующего функционал автомата путевой устой-
чпвости, применяется руль направления, а датчиками сигналов для функ-
ционала является датчик угла скольжения или датчик боковой перегрузки.
функционал автомата путевой устойчивости имеет вид
8Н — ~Кппг + К(& <£)у,
или
8Н = — КрР + К^у.
Наиболее часто на практике используется функционал с сигналом боко-
вой перегрузки. Это связано с тем, что измерение угла скольжения является
достаточно сложной технической задачей. Для измерения боковой перегруз-
ки используется датчик линейных ускорений. Однако при использовании
сигнала пг серьезной проблемой становится реализация больших переда-
точных чисел Кп и необходимость их регулирования по режимам полета (в
частности, по скоростному напору). Кроме того, необходимо применять спе-
циальные меры по подавлению высокочастотных составляющих в сигнале
боковой перегрузки, обусловленных упругостью конструкции.
Рис 14 Л Л Блок—схема системы улучшения боковой устойчивости и управляемости
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
Выбором соотношения можно добиться желаемого располо
ения нулей передаточной функции разомкнутой системы с автомате,
утевой устойчивости. Следует отметить, что для обеспечения колеба
щьной устойчивости самолета целесообразно в функционал вводить п *
гкрестную связь по угловой скорости крена:
5Н = КрР + КЫ!/((Лу cosa + coxsina).
При этой структуре автомат путевой устойчивости не оказывает влия-
ия на управляемое движение крена.
Рациональная схема системы управления бокового движения сверх-
зукового самолета, включающая рассмотренные выше элементы, приве-
тна на рис. 14.4.4.
Список литературы к главе 14
Г.С. Бюшгенс, Р. В.Студнев. Динамика продольного и бокового движения. - М. Ма-
шиностроение, 1979.
Ю.П.Гуськов, Г.И.Загайнов. Управление полетом самолетов. - М.: Машиностроение
1991.
Г.С.Бюшгенс, Р.В.Студнев. Динамика самолета. Пространственное движение. - М.:
Машиностроение, 1983.
Глава 15
ДИНАМИКА ПРОСТРАНСТВЕННЫХ ДВИЖЕНИЙ
15.1. Общие положения
В общем случае возмущенное или управляемое движение самолета яв-
ляется пространственным, поскольку одновременно происходит изменение
параметров, определяющих как продольное движение (угла атаки, угла тан-
гажа, угловой скорости тангажа), так и боковое движение (угла скольже-
ния, угла крена, угловых скоростей крена и рыскания). В тех случаях, ког-
да амплитуды изменения параметров движения самолета малы, уравнения
продольного и бокового движения приближенно исследовались раздельно.
При больших изменениях параметров движения разделение уравнений
начинает приводить к недопустимо большим ошибкам, и поэтому необходи-
мо рассмотрение полной системы уравнений пространственного движения.
К задачам динамики полета, в которых существенным является рас-
смотрение полных уравнений движения, можно, в частности, отнести ис-
следования динамики самолетов при выполнении ряда маневров с враще-
нием относительно продольной оси, широко используемых в летной
практике в основной области полетов. К таким маневрам можно отнести
вход/выход из виража, боевой разворот, перевороты через крыло в го-
ризонтальном полете и входе в пикирование, быстрые и медленные
бочки, вираж с переменой направления разворота (восьмерка) и т.д.
На рис. 15.1.1 приведена диаграмма, где в плоскости основных кине-
матических параметров, характеризующих пространственное движение са-
молета - угла атаки а и угловой скорости вращения со, выделены области
с различным характером движения. Выделены области основных и кри-
тических режимов полета. Эксплуатационная область полета современного
маневренного самолета может частично перекрываться с областью, где
ухудшаются характеристики устойчивости и управляемости, возникает
тенденция к сваливанию. Допустимо также выполнение быстрых дина-
мических маневров на больших углах атаки с возвратом в область основ-
ных режимов (маневр “Кобра”). Стремление к расширению маневренных
характеристик и реализации предельных возможностей современного са-
молета неизбежно приводит к выходу за границы области основных режи-
мов полета. Поэтому при изучении пространственного движения важную
роль играет исследование так называемых критических режимов полета,
таких как сваливание, штопор и инерционное вращение.
Для исследования перечне ленных задач необходимо анализировать
Управляемые движения самолета при одновременном действии летчика
органами продольного, поперечного, а в ряде случаев и путевого управле-
ния. В этой связи изучение пространственного движения самолета факти-
чески приводит к необходимости анализа наиболее общих случаев его дви-
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
Режимы
инерционного
вращения
Область х
возникновения
сваливания
Маневры
при целевом
применении
Основные 25-г 30
Крутой штопор
Плоский штопор
Маневры на больших а
50 -г 60° Предельные Угол атаки a
ы полета
Эксплуатационная область
режимы
. 15.1.1. Классификация режимов полета в плоскости основных кинематических параметров
ия, устойчивости и управляемости. Физический смысл особенностей,
гикающих при пространственном движении самолета, заключается во
1нии на динамику самолета инерционных моментов, возникающих при
цении относительно осей, не совпадающих с главными осями инерции.
цние таких моментов на динамику самолета весьма существенно для
)Г0 ряда движений, когда они сопровождаются быстрыми вращениями
•лета относительно продольной оси. В эксплуатационной и предельной
стях полета (около- и закритические углы атаки) также требуется ана-
цросгранственных движений. Такие движения, как сваливание и што-
ости и пя колокол (крутой подъем практически до полной потери
ся лейгт^еНИе На хвост)’ К°бра Пугачева также во многом опреде-
ш г ИеМ На самолет инерционных моментов. Особенность этих
КР0Ме того» в определяющем влиянии сложных нелиней-
гя остей аэродинамических сил и моментов от параметров дви-
, и vivr 6 сначала рассматриваются движения в области полета с ма-
ч гы и Реннь1ми значениями углов атаки и скольжения, когда зависи-
и моментов от параметров движения являются линейными, а за-
адачи сваливания и штопора.
Задача исследования динамики пространственного движения самол
общем случае является сложной и может быть исследована доста
) полно только расчетным путем с использованием ЭВМ. Однако и
г анализ наталкивается на существенные трудности, обусловленные
зтвенно нелинейным характером исследуемых уравнений. Это при
к неоднозначной зависимости параметров движения самолета
•нения органов управления.
Математически эта неоднозначность выражается в существовании мно-
состояний равновесия самолета - особых точек, реализация движения
окрестности которых зависит от предыстории движения. В этой связи
ресьма существенно получение представления о возможных видах движе-
ния самолета, чтобы на основе этих знаний можно было правильно орга-
низовать численные исследования на ЭВМ. Эта задача решается путем вы-
деления некоторых модельных задач, соответствующих частным случаям
соотношений параметров самолета - критических скоростей крена движе-
ний тангажа соа и рыскания сор. Обычно большое внимание уделяется ана-
лизу динамики самолета при попадании в режим инерционного вращения.
Этот режим, наряду с режимами сваливания и штопора, является основ-
ным критическим режимом, характерным для маневренных самолетов.
В настоящее время для обеспечения пилотажных характеристик
сверхзвуковых самолетов широко используются автоматические системы
улучшения устойчивости и управляемости (СУУ). Основные направле-
ния развития автоматизации управления современных самолетов были
изложены выше. Оснащение самолета СУУ, особенно с исполнительны-
ми приводами большого хода, существенно отражается на свойствах его
пространственного движения.
Одной из задач СУУ является устранение возможности попадания
самолета на так называемые критические режимы. Как правило, кри-
тические режимы являются результатом потери устойчивости в полете
или возникают как следствие потери эффективности какого-либо органа
управления (например, поперечного управления при сваливании).
Задача СУУ состоит либо в устранении потери устойчивости, либо в
ограничении возможности выхода в зону критических режимов. При
случайном попадании в область критических режимов СУУ должна
обеспечивать вывод самолета из этой области.
Характер потери устойчивости при выходе за границу устойчивости
может быть качественно различным. Он может иметь мягкую или жест-
кую форму потери устойчивости, процесс может быть управляемым или
неуправляемым. Могут быть режимы устойчивых установившихся дви-
жений в виде штопора, в которые, например, переходит движение после
сваливания, или потеря устойчивости при установившемся вращении по
Крену, которая может привести к попаданию в режимы инерционного
вращения с большими угловыми скоростями крена (см. рис. 15.1.1). В
Указанных примерах, как правило, возникают определенные трудности с
Управлением (в частности, явление обращения действия рулей и т.п.).
Условия существования таких критических режимов, их предотвраще-
ние, а также поиск способов вывода из них являются одними из главных
в°просов изучения пространственной динамики.
В связи с указанным должен быть проведен анализ реальных аэро-
динамических характеристик самолета, изучено влияние выбранной СУУ
www.vokb-la.spb.ru - Как построить самолёт своими^ками?!
tax и основной области режимов полета, гак и в зксплуататшонной
Предельной областях режимов полста. и
Анализ динамики конкретного самолета с СУУ во всем его диант
Джимов полета для различных его конфигураций требует большого об^
а разнообразных расчетов с использованием ЭВМ. Некоторые приемы
Методы использования ЭВМ в таком исследовании приведены ниже ”
Замкнутая траектория
15.2. Качественные методы исследования нелинейной динамики
Задачи исследования динамики пространственного движения самолета
кшсственно нелинейны, поэтому весьма аффективно использование мето-
ов качественного аня.тиза нелинейных динамических систем 14,5,6,7] в
Заве 10 было показано, что многие задачи динамики самолета при опре-
еленных физических допущениях о характере движения сводятся к ис-
тедованию автономных групп нелинейных уравнений, зависящих от иа-
амстров режима полета и выполняемого маневра. Построение фазового
эртрста уравнении движения в таких случаях на основе расчета особых
•чек, циклов, других особых решений, а также исследование их ус-
•йчиности как к малым, так и к большим возмущениям дает хорошую ос-
Фу для прогнозирования управляемого движения самолета.
Эффективное । ь математического и полунатурного моделирования
намикн самолета значительно повышается при использовании резуль-
(тов качественною исследования.
При качественном исследовании нелинейной динамики самолета ос-
иное внимание обычно уделяется изучению состояний равновесия и ав-
колебательных движений, их зависимости от значений параметров. Если
тойчнвые состояния равновесия и автоколебательные режимы являются
ЮСТешничи примерами притягивающих множеств (аттракторов1) и опрс-
.тяют установившиеся режимы движения системы, то седловые состояния
вповесия и периодические орбиты шрают определяющую роль в форми
вании глобальной картины фазового пространства, поскольку опрсделя-
нсустойчивые многообразия фазовых траекторий, являющиеся т'ратш-
ми областей притяжения различных аттракторов (6, 19]
На рис. 15.2.1 приведены примеры устойчивых особых решений дтпта-
ческотт системы, каковыми являются особая точка (равновесный режим),
(ткнутая траектория (автоколебательный режим), тороидальное миого-
Ьазне траекторий (нерегулярные автоколебания), странный аттрактор
Ьким хаотического движения). Сложность поведения нелинейной динами-
Гкой системы может быть связана с наличием у нее нескольких изолиро-
шых притягивающих множеств, каждое ич которых имеет свою область
(пяжения. Это порождает существенную зависимость движения от началь-
х условий it последовательности изменения параметров.
ермин используемый в теории линимических систем для г/кымыж кия устоичивь
Ьюбразий траекторий
X
Странный аттрактор
Рис 15 2.1. Особые траектории нелинейной динамической системы
www.vokb-la.spb.ru - Как построить самолёт своим
На рис 15.2.2 приведены наиболее часто встречающиеся случаи (
фсркаций2 равновесных состояний движения. " Я
- Слияние устойчивой точки с неустойчивой и их исчезновение (и
возникновение при обратном изменении параметра). Бифуркационн-*11
сипания называется седло-узловой и соответсвует предельным точкам •
равновесной кривой при отображении на плоскость параметров. Прохо™
дение подобных точек сопровождается "жесткой” потерей устойчивости и
скачкообразным переходом к другому аттрактору.
- Потеря устойчивости в точке ветвления, где происходит пересече-
ние двух различных ветвей решения. Характер ветвления может быть
различным - сверхкритическим, докрнтическич п транскритически» (е,м
рис 15.2.2), ситуация является структурно неустойчивой, поэтому при
малейших возмущениях параметрон точка ветвления исчезает (первые
дна случая соответствуют системе с симметрией).
- Устойчивая равновесная точка становится колебательно неустойчи-
вой с одновременным возникновением устойчивой замкнутой траектории
(бифуркация Андронова-Хопфа). Потеря устойчивости приводит к
’ мяжому" возникновению автоколебаний.
- Устойчивая равновесная точка сливается с неустойчивой замкну-
той траекторией и становится колебательно неустойчивой. Устойчивая
точка равновесия имеет ограниченную область притяжения, возможна
“жесткая" потеря устойчивости.
Бифуркации устойчивой периодической траектории происходят при вы-
ходе мультипликаторов3 периодического решения за пределы единичного
круга комптексной плоскости. На рис. 15.2.3 приведены примеры слияния и
исчезновения устойчивого и сед юного циклов, возникновения устойчивого
тороидального многообразия траектории и удвоения периода цикла.
Рис. 15 2 3. Бифуркации замкнутых траекторий
1 Кашчтвснное изменение структуры решений уравнений в частности, характера устой’0’,
ногти отдельного решения, возникновение новых решений и т.д.
Характерш гика локальной устойчивости. аналог собственных чмгел
Качественное исследование уравнений пространстве!того движения с при-
еиением аналитических средств и общем случае практически невозможно из-
да высокой размерности уравнений и произвольных нелинейных зависимостей
^родянамичееких коэффициентов от параметров движения. В последние годы
появился ряд пакетов программ для ЭВМ, которые осуществляют качеспюн-
кое исследование нелинпшых динамических систем с использованием числсн-
jyx методов [10,11,12]. 'Гак например, пакет программ КРИТ [11] адаптиро-
рзп непосредственно к изучению нелинейных задач динамики самолета. Он со-
держит набор алгоритмов, позволяющих эффективно исследовать:
- равновесные или балансировочные режимы движения, характерис-
тики их локальной устойчивости (устойчивости к действию малых возму
щеипй), влияние изменения параметров;
- автоколебательные режимы движения и характеристики их локаль-
ной устойчивости, влияние изменения параметров;
- бифуркационные особенности установшихся режимов движения при
изменсшш параметров задачи (возникновение “подхватов” и автоюыебанпи);
- области притяжения установившихся режимов движения и уровни
критических возмущении, приводящих к потере устойчивости;
- динамику самолета посредством .математического моделирования
Ниже приводятся некоторые результаты исследования динамики са-
молета при быстром вращении по крепу, сваливании и в штопоре, кото-
рые подучены с использованием пакета программ КРИТ. С одной сторо-
ны они демонстрируют особенности нелинейной динамики самолета, а с
другой стороны иллюстрируют возможности пакета программ КРИ Г.
15.3. Особенности динамики при энергичном вращении по крену
Возможность hoi ери устойчивости и управляемости движения при
быстром вращении по крену у сверхзвуковых самолетов с вытянутым эл-
липсоидом инерции в значительным уровнем поперечной аэродина-
мической устойчивости отмечена уже давно как в теоретических работах,
так и непосредственно в полете [2, 18, 20]. Основной причиной возника-
вших особенностей являются инерционное и аэродинамическое взаимо-
действие продольного и бокового движений.
Анализ взаимодействия продольного и бокового движений, а также
критических режимов инерционного вращения является важным элемен-
Гом исследования динамики каждого современного маневренного самоле-
ta- Режимы движения, сопровождающиеся потерей устойчивости, могут
гУШествснно ограничить возможности самолета при выполнении про-
СтРанстненпых маневров с быстрым вращением по крену. На практике
Иногда приходится вносить в инструкцию летчику по пилотированию ряд
игРаннчений для избежания возникновения критических ситуаций.
Для выявления основных особенностей взаимодействия продольного
’’ бокового движений можно воспользоваться следующей приближенной
СиГГсм<>й уравнений:
www.vokb-la.spb.ru - Как построить самолёт свои
ками?!
=со2 -Рсох'- У“а-УУ
at
^ = «J/-a®±]-ZP₽-Ze«6ll,
Таким образом, задача сводится к решению системы нелинейных ал-
ебраических уравнентпт относительно а, р, со,, <оу, тох, зависящих от ва-
рметров управления углов отклонения органов управления о, 8Л, 8Н.
111 Решение этой задачи может проводиться численными методами с по-
=[-Лсохсо,/1» А/“а + А/“'сог + У’<Р ,
= -Всохсог L Мр{3 + М“-ау + + Л/®*8Н _ ду8.5э
Г1-^Г- = ~Сч>уаг + М.РП + л7^'ых - 57“ "ш + 57®-6, ,
at —±у * d
Лршыо ЭВМ, в частности, может эффективно использоваться метод не-
прерывною продолжения решений. Однако при тех упрощающих пред-
положениях, которые были приняты выше, очень наглядным способом
решения задачи является графо-аналитический метод, позволяющий выя-
вить основные качественные особенности динамики.
где
B = Л - Л
h /7
vP <%<1S
mV ' mV ’
Vfy _ mfqSb'; X7P _ mx<lSI
z Л Г Jx '
Vo, _ rny'qSl2 V<ox
2VJ4 ’ У 2VJ4
У J Jy TJ8, _ m^3qSl * J ’ Jy
c = Jy__!± Jx ya mV ’
- CZH(1S mV 77P _ mPdisi X Jx ’ 4- VJ,
Vю» - mxy<lSl2 2VJv ’ _ rn^qSl2 2VJy ’
= mT^SI 1 Jx ' w6 _^qsi Mx ~ Jx
Графо-аналитический метод на первом этапе решения задачи
л <едполагает, что угловая скорость крена тох является параметром. Тот да
первые четыре алгебраические уравнения, получаемые из системы (1),
являются линейными уравнениями относительно переменных а, р, <-эг,
о) Посредством решения следующей линейной системы уравнений
(здесь предоплатается отсутствие перекрестной аэродинамической произ-
водной Му3 = 0 ):
-©x 1 0
zp 0 1
0 M?3 -Xa>x
"% Bax 'Ту
-л7?ф_
-М*’пх-М^>п
В v равнениях (1) выделены нелинейные члены, которые определяют
кинематическое и инерционное взаимодействие продольного н бокового
движений. При выводе этих приближенных уравнений предполагалось,
что скорость полета постоянна — V = const, углы атаки и скольжения от-
носительно малы (сх, р «1), допустимо линейное представ 1ение аэроди-
намических коэффициентов, влияние искривления траектории под ДеИ‘
сгнием силы веса на динамику вращения мало, что справедливо при вь1'
могут быть найдены зависимости кинематических параметров от отклонении
органов управления <р, 6Э, 8Н и угловой скорости крена <ох. Ниже приведены
формулы для зависимостей углов атаки и скольжения:
аст(шх) =
Pct(wx) -
-ATfyC.wf, 4- В<ф-(М,^<од + Л^8„)Л#Юх
Лд(их)
+(Л/“"<ох - Л/^ВцХАГ", +
(2)
полпенни условия а>х »g/V.
Анализ равновесных решений уравнений (1) при различных от-
клонениях органов управления и анализ их устойчивости при малых
возмущениях (в линейном приближении) существенно дополняет метод
математического моделирования при исследовании динамики самолета
быстрым вращением [2].
Стационарные или равновесные решения уравнений (1) определяю1
ся <. тсдуюшнмн условиями:
^}(ax) = - ftaj) + My'M“'4,
57" = >7" + ya57“>. mp. = Л/P -zp57“»,
= 57“' + AZP My.' = My» - BYa.
da _ dp dit>2 _ da у _
dt dt dt dt dt
Если знаменатель в выражениях (2) Д)(шх) принимает нулевые зна-
чения, то в этих точках величины а^, Рет становятся бесконечно боль-
111 1и и зависимости tI(cor) Рс,( ) имеют разрывы
www.vokb-la.spb.ru - Как построить самолёт своимирукВми?!
Значения угловой скорости крена, при которых знаменатель в
ражспнях (2) обнуляется, являются критическими значениями угтовой
скорости ш„, <эи:
ио.а = {«х: Ао(ь>г) = 0).
Если пренебречь аэродинамическими вращательными производными
(производными демпфирования) Л/”' =0, Afj0/ =0, то выражения для
критических угловых скоростей приобретают достаточно простой вид
i-m?c/Sba l~m^Sba
yjy-J. ₽ II л-л
Демпфирование приводит к изменению значений критических скоро-
стей таким образом, что они сближаются - меньшая по величине увели-
чивается, а большая - уменьшается. При некотором достаточно высоком
уровне демпфирования критические угловые скорости мбгут исчезнуть
На рис. 15.3.1 приведены примерные зависимости значения угла ата-
ки в равновесном режиме вращения от угловой скорости для двух
случаев соотношения критических угловых скоростей (для простоты
предполагается, что 5Н = 0, Af*'r » 0). Соотношение соа > сор характер-
но для сверхзвуковых режимов полета, а соотношение ton < - дтя
дозвуковых. Сплошной линией изображен случай продольной баланси-
ровки с положительным углом атаки при отсутствии вращения ао > 0,
о < 0. Штриховой линией изображен случай продольной балансировки
при c>i = 0 с отрицательным значением угла атаки ао < 0, <₽ > 0 При
критических значениях угловой скорости крена приведенные зависимости
претерпевают разрыв и изменяют свой знак При “ значения углов
атаки стремятся к нулю.
Изменение равновесных значении угла скольжения в зависимости от
угловой скорости крена будет но характеру идентично как при соп > и1!|
так и при wu < сор.
Инерционное взаимодействие продольного и бокового движении мо
жет привести к возникновению "обратной" реакции самолета на отклоне-
ние органов управления. На рис 15.3.1 этот эффект продемонстрирован
стрелками, указывающими направление изменения угла атаки при взя
ручки управления “на себя”, т.е. при отклонении стабилизатора от
ложительпых значений к отрицательным при докритических и за р
U14CCKHX значениях угловой скорости крена.
На втором этапе решения задачи графо-аналитическим методом
тученные аналитические зависимости оу-г(<ох), Рст(к>х) > а также otycr-
гут быть использованы для выполнения условия баланса моментов но крс -
Рассмотрим пятое алгебраическое уравнение, получаемое из системы
CmJ/CT(ox)ia7Cr(raJ) + AfJfpcr(ox) + Vx*o»x +А/х-6, =0.
Из этого уравнения мы можем вычислить значение управляющего
„омента по крену ДА/Х = А/рБэ, необходимое для поддержания враще-
нйя с заданной угловой скоростью сох:
А.\/х = -С<а1/сг(шх)(оХС1(шх)-л7Ррст(ьэх)-ЛГ‘’'сох
На рис. 15.3.1 также приведены примерные зависимости потребного
значения управляющего момента по крену ДА/Х от угловой скорости
крена сох. Здесь цренебрегается действием инерционного .момента в силу
его относительной малости, влияние члена С<дуаг может быть учтено.
Это влияние наиболее существенно проявляться только в непосредствен-
ной окрестное!и критических значений угловых скоростей и может при-
води! ь к возникновению дополнительных решений.
Рис. 15.3 1. Графоаналитический метод определения статических решении
• - статически устойчивый режим
о - статически неустойчивый режим
Из приведенных зависимостей видно, что при одном и гом же откло-
ениц органов управления по крену, а именно значении АА/Х, может
СЬгтк ~
До пяти равновесных режимов вращения с различными значениями
гл вой скорости. Сплошной линией изображена зависимость при оса > 0,
Штриховой - при О<) < 0.
При ц0 > 0 имеет место так называемая
’^КОСТН l imOHOR Пл ЧГРГъО ппий ЛИ -
“кажущаяся” потеря эффск-
!ТЛГ%Г»оЛ ----LL
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
скорости из-за инерционного и аэродинамическою взаимодействий
зольного и бокового движений возникают углы скольжения, которыеПР°
дают тормозящий момент по крену. Действительно, при сот > о возник
юг положительные углы скольжения р > 0 и в силу того, что Х7Р а
__" ‘х <О
создается тормозящий момент по крену М j- р .
При од < 0 возникает “подхват” по крену, поскольку из-за отрица
телыюсти углов скольжения создастся подкручивающий чо.меит но крену
(штриховая линия). В этом случае существует некоторая опасная величина
угловой скорое! и и уирав.1як)1цего момента, при котором исчезают равно-
весные режимы вращения с докритической угловой скоростью. Эти пара-
метры можно назвать параметрами “подхвата" <ог подхв. при
превышении критического отклонения элеронов возникает потеря устойчи-
hoci и и непропорциональная раскрутка само чета в область критических
режимов вращения (штриховая ветвь решений с ыг > max {ыа, ыр}). Эта
ветвь соответствует режимам инерционного вращения.
Так например, даже при отсутствтш управляющего момента шш откло-
нении этеролов на торможение ДА/, < С, вращение с закритической углчаой
скорое|ью существует. При этом, если угловая скорость приближается к ве-
личине критической угловой скорости, то существенно возрастают значения
утлов атаки и скольжения, а следовагелыю - нормальная и боковая пере-
грузки. Значение нормальной перегрузки в режиме инерциошюго вращения
может достигать десяти единиц, а боковой - единицы-двух, при этом они
могут превысить предельно допустимые но прочности значения Так нанрв-
мер, известны многочисленные случаи разрушения вертикального оперения
самолета при попадании в режим инерционного вращения.
Если критические угловые скорости со,,, сор у самолета отсучствутот,
то есть знаменатель Ло(сог) не имеет нулей, а такие ситуации на ряде ре-
жимов полета возможны, характер зависимостей несколько изменится,
они не будут содержать разрывов. В подобных случаях будет наблюдать-
ся гистерезисный характер зависимости угловой скорости крена от ве-
личины управляющих? момента.
Анализ устойчивости равновесного режима вращения проводится
с использованием линеаризованных уравнений движения, получаемых
(1) при рассмотрении малых отклонений параметров движения от
равновесных значений:
а = асг т Да, со7 = о;гг + Дсл2 ,
[3 — Р, + др, о = со+ Лсо^ со т — со гсг + Дсох
При этом об устойчивости равновесно! о режима можно суД,1ТЬ
корням характеристического полинома пятого порядка:
А? - Ь<А? ЬА2 + £>,>. сЬп = О,
-эффшшсигы которого зависят от инерционных и аэродинамических
ч цтактеристик само iera, а также от параметров самого равновесного рс-
^лча вращения. Выражения для коэффициентов характеристического
110линома можно найти в [2]. Остановимся только па рецепте, полезном
npU ана.тизе апериодической устойчивости в рамках рассмотренного вы-
ше графо-аналитического метола.
Свободный член характеристического полинома может быгь выражен
следующим образом:
Ь0=Д|(сод) —х.
?тх
Необходимым и достаточным условием устойчивости является поло-
жительность коэффициентов характеристического полинома и выполне-
ние условий Рауса-Гурвица. Если свободный член Ьо становится отрица-
тельным, то можно утверждать, что равновесный режим становится апе-
риодически неустойчивым (нечетное число положительных действитель-
ных корней). Поэтому приведенное выражение для дц является простым
и наглядным критерием апериодической неустойчивости получаемых
графо-аналитическим методом равновесных решении.
Использование графо аналитического метода позволяет проанализи-
ровать задачу и в более сложной постановке, в частости, оценить влия-
ние отклонения руля направления и несимметричных моментов но рыс-
канию при помпаже одного из двигателей, влияние изменения аэродина-
мические производных от угла атаки (в основном это относится к
VP(a), M“’(a)), в швине автоматической системы управления и т д
Однако в общей постановке задача исследования равновесных режи-
мов пространственного движения наиболее эффективно может быть ре-
шена с использованием ЭВМ и численных методов расчета. Наиболее
Плодотворным методом решения подобных задач является метод непре-
рывного продо тженпя решений по параметрам.
Нелинейная зависимость момента по тангажу вносит дополни-
тельные особенности в условия балансировки самолета при быстром вра-
щении. Для проведения приближенного анализа можно не учитывать вли-
яние бокового движения. Это возможно, когда путевой капал самолета об-
ладает значительно более высоким запасом устойчивости, чем продольный,
то есть сор »соц. В этом случае можно считать, что из-за взаимодействия
движений пс вошикаст значительных углов скольжения, а следовательно
’Фактически отсутствует угловая скорость тангажа: р ~ 0, ® 0.
Пусть самолет вращается относительно вектора скорости с угловой
скоростью со под учлом атаки а. В силу кинематики такого движения
’’РОекиии угловой скорости на продольную и нормальную оси выражают-
ся следующим образом: <or - cocosa, <0j, - -co sin а (рис. 15.3.2).
'.vokb-la.spb.ru - Как построить самолет своими рук;
Риг. 15 3 2 Приближенная схема впалита установившегося прошения
Поэтому в равновесном режиме полный момент по тангажу, состоя-
щий из аэродинамического и инерционного моментов должен быть рав-
ным н\лю, можно записать следующим образом:
= гаг(а,ф) qSba + - Д) sin a cos a co2 = 0.
В тинейном случае, когда т2 - ra“a, sin a.-a, cosa~1, критичес-
кая угловая скорость вращения <oa может быть получена из условия
^ = 0.
da
В случае нелинейной зависимост т2(а,ф) условия балансировки
можно проанализировать графически. На рис. 15.3.3 приведены зависи-
мости коэффициента момента тангажа от угла атаки при двух различных
отклонениях руля высоты (стабилизатора). Эти зависимости имеют нели-
нейную особенность типа “ложки". На этом же рисунке изображены кри-
вые, задающие изменение приведенного значения инерционного момента,
взятого с обратным знаком, для двух значений угловой скорости.
Видно, чго существуют критические значения угловой скорости, прп ко-
торых ПОЯВ.1ЯЮТСЯ дополнительные у становившиеся режимы на больших уг-
лах атаки <0.2. а также исчезает режим вращения с малыми углами атаки шч
_ I -г»г(а.,<р)<75бд
у (.Jy - Лг) sin a. cos a«
угла ата-
а гаки бу
В этих точках будут возникать скачкообразные изменения
ки, а при прямом и обратном изменении угловой скорости угол
дет изменяться гистерезисным образом.
Если вторая устойчивая балансировка существует на больших У1”13^
атаки даже при со - 0. вращение самолета может привести к попаданию
режим глубокого сваливания (рис. 15.3-3). II в этом случае при прекраШ®”'
ннн вращения самолет уже не вернется в область малых узлов атаки
рве 15-3.3 Налапс инерционного и а-эрчдинамического моментов при устпцскиьшемся враще-
нии (а) Подхват самолета Ио тангажу иа-за Пг.ишеиности азродинамичеасого момента (б)
Режимы
Рис 15 3 4. Поверхность установивших-
ся значений угловой скорости крена и
бифуркационная диаграмма в плоскости
параметров Управления
Численный анализ уравнений пространственною движения позво-
ляет исследовать статические решения без использования упрощающих
предположений относительно линейности аэродинамических характерис-
тик Критические ситуации, возникающие при пространственном манев-
рировании, особенно при полете с большой скоростью, в большинстве
случаев удается связать с бифуркационными особенностями стационар-
ных решений уравнений (1), когда происходит изменение характера ус-
тойчивости или исчезновение условия равновесия. Отклонения органов
управления при проведении бифуркационного анализа естественно рас-
сматривать в качестве параметров.
На рис. 15.3.4 приведен пример расчета поверхности значений устано-
вившейся угловой скорости крена самолета при совместном управлении
с помощью стабилизатора <р и элеронов
8.. Расчет проведен с использованием
метода непрерывною продолжения [10,
20] для дозвуковою режима полета на
малой высоте. “Сборки” поверхности
соответствуют критическим значениям
отклонений органов управления, при
которых возможны различные режимы
вращения самолета. В плоскости пара-
метров управления <р, 5Э выделены об-
ласти с различным числом установив-
шихся режимов вращения. Как видно
113 приведенной бифуркационной ди-
аграммы, число установившихся ре-
жимов вращения может изменяться от
Одного до пяти (полученная поверх-
ность по классификации теории катас-
троф соответствует особенности типа
бабочка” [8J)
www.vokb-la.spb.ru - Как построить самолёт своими ।
Представление результатов рас
жения в форме поверхности дает
анализ особенностей управляемого
маневра по крепу с положительным
водит к попаданию в критические [
области режимов инерционного вращения с помощью элеронов невозм(>
жен, поскольку удается изменить только направление вращения. Прекра
щение же вращения и возврат в область с малыми значениями угла атаки
реализуется при отклонении стабилизатора на кабрирование <р < 0 (см
рис. 15.3.4), чю не свойственно для нормального пилотирования, посколь-
ку режимы инерционного вращения сопровождаются резким возрастанием
угла атаки и соответственно нормальной перегрузки. Таким образом, пост-
роение и анализ поверхностей установившихся параметров движения по-
зволяет определить области безопасного отклонения органов управления, а
также способы выхода из области критических режимов движения.
гнета установившихся параметров
возможность очень наглядно Провес^
движения. Так например, Выполнени*
отклонением стабилизатора о > 0 пп
эежимы вращения. При этом выхпп '
Рис 15 3 5. Зависимости установившейся угловой ckojmmth крепа от отклонения стабили-
затора (л) и злероноп (б) (сплошная шши - устойчивые режимы, пунктирная шпия -
апериодически неустойчивые режимы, птгрих-пупитирпая линия - ко.тебзтетьно иеустой-
чивые режимы)
На рис. 15.3.5 приведены количественные зависимости угловой скоро-
сти крена от отклонения стабилизатора и элеронов для приведенного выше
случая. На левом графике (а) показаны сечения поверхности при Р33"
личных значениях угла отклонения элеронов (S3 = ±10с, =5°, ±2° и 0). При
положительных отклонениях стабилизатора возможно возникновение ре-
жимов инерционного вращения. Точка ветв. ения при 5Э = 0 приводит к
жесткой потере устойчивости и "скачкообразному” попаданию в режим
инерционного вращения (направление вращения зависит от знака возМ)
щающего воздействия). Реакция па управление стабилизатором в этом Д11
апазонс имеет гистерезисный характер. На нравом графике (б) приведе1
сечения поверхности при различных значениях стабнлизагора, на 1Ра
фпке выделены зависимости <вс(8,) для балансировок по тангажу с ПОД0"
ими?!
^цтелшплми пача ьными перегрузками (п^ц>0. <р < 0) и отрицательными
(н„о < 0. <р > 0). В последнем случае возможно возникновение “подхва-
ти" по угловой скорости крена. На графиках указаны также значения
критических угловых скоростей Ыд, гор, вычисленных по приближенным
формулам без учета демпфирующих членов.
На рис. 13.3.6 приведен пример расчета динамики при импульсном
управлении элеронами (продолжительность импульса 4 с) и начальной
балансировке по тангажу с нулевой перегрузкой п^о = 0. При гаком уп-
равлении происходит попадание в режим инерционного вращения, кото-
рый сохраняется даже при снятии управляющего воздействия.
Возникновение автоколеба-
ний. При управлении наряду с из-
менениями параметров установивше-
гося вращения изменяется и харак-
тер возмущенного движения. Воз-
можно возникновение колебательной
неустойчивости и установление дви-
жения с периодическим изменением
параметров относительно некоюрых
их средних значений. Такая форма
движения наблюдается часто как при
математическом моделировании про-
странственного движения, так и в
полете.
Колебательность параметров дви-
жения с большой амплитудой может
значительно ухудшить управляемость
самолета, а также привести к попа-
данию в критические режимы вра
щеппя Полому анализ особенностей
возникновения автоколебаний и их
развития при изменении параметров
управления необходим для опреде-
ления допустимых отклонении opia-
пов управления. Локальный анализ
устойчивости равновесных режимов
движения позволяет выде.ииь точки,
где происходит потеря устойчивости
(комплексно-сопряженная пара соб-
с Венных чисел переходит в правую часть комплексной плоскости).
агчег амплитуд периодических решений, которые возникают при таком
Тракторе noiepii устойчивости, может осуществляться численно с ис-
1 •ьзованием метода точечных отображений Пуанкаре [18, 19, 20. 12]
а
',00 10 20 30
Р
20‘
10-
0
15 3 Ь. Математическое моделиржа-
,,,й Динамики самолета при импульсном
‘^Юнешт элеронов (попадание п режим
МнерЦй<лпн1го вращения)
Кл 'ебаэельной формы движения
www.vokb-la.spb.ru - Как построить самолёт ёв&ими руками?!
На риг 15 3 7 приведен пример расчета равновесных и автоко.
дательных решений уравнений пространственного движения само
на режиме полета со сверхзвуковой скоростью на большой высоте
Зависимости равновесных решений и амплитуды авгоколсбагечьиых
решении па рис. 15.3.7а приведены в зависимости от отклонения j,Ie
юнов при фиксированном отклонении стабилизатора, соответствую
,ем режиму горизонтального полета. Автоколебательные режимы
движения рождаются в точках возникновения колебательной неус-
тойчивости /7, и Hi как на докршических. так и закритичсских вет-
вях равновесных решений. Амплитуды колебаний по угловой скорости
крена в семействах 1 и 2 показаны вертикальными линиями. При от-
клонении элеронов 5, « 17° периодические решения семейства 1 теряют
устойчивость, после чего устанавливается режим хаотического коле-
бательного движения. Дальнейшее отклонение элеронов приводит к
скачкообразному” переходу в область закршических режимов 2
(рис 15 3 76) На рис. 15.3.7с,г изображены различные проекции
замкнтчых траекторий автоколебательных решений из семейств / и 2
расположенных соответственно в
значениями углов атаки.
области с малыми и большими
На рис. 15.3.8 в качестве дополнения к приведенным равновесным и
авгоко.'1ебатс.'1ы1ым решениям показаны результаты математического мо-
нтирования динамики самолета при ступенчатых отклонениях элеронов
с различной амплитудой. При 8Э = 8° устанавливается вращение с посто-
янной угловой скоростью (штриховая линия), при 6Э = 18° устанавлива-
ется режим вращения с периодическим изменением параметров движения
из семейства 1. При 8Э = 24° после нескольких периодов колебаний с на-
растанием амплитуды движение перестраивается и область автоколеба-
тельных решений семейства 2. Все эти особенности динамики фактически
следуют из анализа параметров равновесных и автоколебательных реше-
ний. а также характера их устойчивости.
а - - — - — ----———
60'
40'
-20’____________*_______________:
р 0 20 40 60
5°-|
<>• —
.W
И 7^ 20 « 60
5Г^ 5
зптпколсбаиия 1
_°5
б 20 4& 50
______ __________________
40
0 20 40 60
Бремя t. с время t. с
15 3 В. Математическое молетироьаиис анна.чнкн енмолпа при ступенчатом отктоне-
Иии алсроноп (возникнонение автоколебаний, попадание т) критическую область)
Устойчивость “в большом". Важной особенностью динамики про-
странственного движения самолета является ограниченность областей устой-
чивости установившихся режимов движения, как равновесных, так и авто-
колебательных [10, 14). Построение двумерных сечений областей устойчи-
вости позво.тяег оценить критические возмущения параметров движения, ко-
торые могут привести к “жесткой" потере устойчивости и переходу к друго-
му устойчивому, как правило, критическому состоянию движения.
www.vokb-lo.spb.ru - Как построить самолёт сво
На рис. 1.13.9. 15 3.10 приведет.! примеры расчета сечений обпчС|Л
асимптотической устойчивости или областей притяжения устойчивых
чов движения. Сечения показаны в различных плоскостях параметров двиЗ
/Кения (а. Р>, (ш,, р). (щи, р). На рис. 15.3.9 рассмотрен случай нейтраль
него положения злеронов 6,-0 и отклонения стабилизатора. соответствую,
щего режиму горизонтального полета с = 1 (точка Л). Наряду с pcixii-
мом .4 существую! еще две точки В и С, соответствующие устойчивым ре-
жимам инерционного вращения с противоположным направлением враще-
ния (рис. 15.3 9?). Точки I) и Е ЯВ.1ЯЮТСЯ апериодически неустойчивыми
решениями (седловыми точками), которые формируют границы областей
1 ! шяжения На рис. 1.13.9а. б, в съет.чые зоны соответствуют области при-
тяженпя режима горизонтального полета, т.е. точке Л. Темные зоны оот-
ветствуют области притяжения режима инерционного вращения с г южи-
тсльным направлением вращения точке В. Зоны с промежуточной интен-
сивностью определяют область притяжения режима инерционного вращения
с отрицательным направлением вращения - точки С. На рис. 15.3.10 анало-
гичные сечения областей притяжения приведены .щя случая балан ировки
но тангажу, соответствующей прямолинейному полету- с отрицательной нор-
мальной перегрузкой п^о = -1. Характер ранповссных решений при отклоне-
нии элеронов в этом случае отличается (рис. 15.3.10г) но по-прежнему при
5.-0 существуют три устойчивых режима движения Л (прямо-вшейиый по-
Рис 15 3 9 Дну .черные сечения пблштсй притяжения устойчивых режимов лпижения: Г0',ка
горизонтальный паяет с - 1, точки В,С р жимы ашершюнного и^кпценкя при — v
и руками?!
крашения) и два режима инершюшюто вращения В. С. Как видно,
^Ljcpw области устойчивости исходного режима А (светлые зоны) стали
^ччгпсльно меньше Следовательно, уменьшаются и критические возмущения
ио *Т1) скольжения, угловым скоростям крона и рыскания, превышение кото-
bi< будет приводить к попаданию в режимы инерционного вращения.
а
30
го-
нг
о
ТО’
д
Оу,1/с
0,5
0
-0,5
-1.0
в
Рис 15 3 10 Двумерные сечения областей П|Ш1ЯЖ<*Ш1Я устойчивых режюшв вращения ючка
Л прямо.тинейпый полет с = -1; точки В.С - режимы инерпюпного грашения при 5^= О
Приведенные области притяжения были получены с помощью прямо-
го метода расчета, основанного на непосредственном интегрировании урав-
нений движения и контроле захвата траектории движения одним из атт-
ракторов 112]. Набор двумерных сечений позволяет судить о глобальном
поведении динамической системы, дает возможность прогнозировать по
ведение самолета при действии больших возмущающих воздействий
Исследование областей режимов полета, опасных с точки
Зрения проявления инерционного взаимодействия, может быть основано
на анализе бифуркационных особенностей равновесных и автоколеба-
тельных режимов движения, анализе их устойчивости при действии как
м<иых, так и больших возмущений. Такой анализ позвочяст выделить
об части режимов полета, где энергичное вращение может бычь крншчно
[9J, однако он достаточно трудоемок.
Поэтому наряду с точными расчетами Могут быть использованы прибли-
женные оценки характеристик движения. Такими характеристиками мочуч
Тужить критические угловые скорости <ьм, сор, ско|»ости крена при “подхва-
www.vokb-lo.spb.ru - Как построить самолёт своими руками?!
ie располагаемая угловая скорость (приближенно она может быть
без учета взаимодействия движений), характеристики движения самоа^и
режиме инерционною вращения На рис. 15.3.11 приведены примеры т^ ”
приближенного анализа, коюрый позволяет представить в области режи\°1°
полш а линии равных значений параметров движения и опасные с точки з*
ния взаимодействия движений области полета. Критичность режима иот^
будем определя1ься по соотношению располагаемой угловой скорости и v
левой скорости "подхвата" (скорость крена, при которой исчезает равновес"
ный устойчивый режим вращения) или критическими угловыми скоростями
ыЛ, сор. Выделяемые области режимов Полега опасны с точки зрения воз-
можности возникновения больших перегрузок и попадания в режимы инер-
ционною вращения. Поскольку существование режимов инерционною вргь
щепия и возможность попадания в него ограничены областью сверхзвуковых
режимов полета на больших высотах, то прекращение режима инерционного
вращения возможно, в частности, за счет резкого торможения (при умень-
шении тяги двигателей или отклонении тормозных щитков).
Критические уг.п>ные
ckii|hicih крепа
Влияние автоматической системы улучшения устойчивости
гуу на динамику пространственною движения самолета может быть
1Чц ельным. В принципе, средствами авюматики может быть осуше-
^рдсно полное разделение каналов управления продольным и боковым
Движением И обеспечены требуемые динамические характеристики в обо-
их каналах, для агою необходимо использовать нелинейные законы в
обратных связях 1151.
Однако синтез СУУ продольного и бокового каналов управления,
как правило, осуществляется с использованием линейных моделей без
Ччета инерционного и нелинейного аэродинамического взаимодействия.
Поэтому, естественно, должна проводиться оценка влияния СУУ на осо-
бенности динамики при быстром вращении по крену аналогично тому,
как это делалось выше для самолета
____Режимы иперциоппого__
1 j вращения
о,, гр.
300
Н.км, i
э
10 1
2.0
С0а = СОНК1
. CDj = СОНМ
о 0,5 1.0 1,5 2,0 М
Параметры режима инерционного
Н.км
15
10
5
2
3
Угловая скорость крена
при "подхвате" <otnw.
----“nSt
0,5 1,0 1.5 2,0 М
0
Располагаемая углопая
Рис 15 3 11 Области (хжимов полета с сильным проявлением инерционного взаимилерств*1^
Л.1я повышения безопасности пилотирования в выделяемых критичес-
ких областях полета необходимо или вводить ограничения по углам атаки и
утновой скорости крена при энергичном маневрировании, или возделсТВ0'
вать на динамические характеристики самолета средствами автоматики
о
п>
5
0
.00
160
"Ппдхпат
______L -
I
»,ЛаЛ=-’
0 20 40
- Л,.ММ
Рсжимь инерционного пращепия
’гг
1
о
40 60
Рж 15.3 12 Завис имо< ти рапноисс пых значений параметров движения маневренного са-
молета при установившемся вращении по креп}'
На рис. 15.3.12 приведен пример расчета установившихся значений
параметров движения при быстрых маневрах но крену с учетом функци-
онирования СУУ. В рассмотренном примере маневренный самолет был
оборудован СУУ, которая располагала ограниченными диапазонами от-
клонения элеронов, руля направления и стабилизатора:
СУУ ~ 0,2.1 5Э max, 5Н СУУ = 0,3 5Н max» ФСУУ — 0,1 фщах-
В левой части графика приведены зависимости значений угловой
скорости крена и нормальной перегрузки в установившемся маневре от
отклонения боковой ручки Л'э. Приведено три случая с различным
значением исходной нормальной перегрузки бал = -1, +1, +3 на режи-
ме полета со сверхзвуковой скоростью Н = 15 км, М = 1,7.
www.vokb-lo.spb.ru - Как построить самолёт своими руками?!
Сплошная линия обозначает устойчивый режим вращения
пунктирная - колебательно неустойчивым режим, и пунктирная' тп ^ИХ'
апериодически неустойчивый режим вращения. ~
В правой части рисунка приведены зависимости установившихся Зна
ний угловой скорости крена, нормальной и боковой перегрузок на режиме
полета М-0,9, /7 = 10 км, пу(^ - -1,5, иллюстрирующие влияние СУУ
Как видно, функционирование СУУ устраняет апериодическую потерю ус
тоГгчивости и “подхват" по угловой скорости, но при этом сохраняется коле-
бательная неустойчивост ь у режима вращения при А'э < -80 мм.
Рис. 15 3 13 Угловая скорость крена и боковая
ть-регрузка мапепр/нного самолета up.i макси-
мальном отклонении боковой ручки (ба.ынси-
ровка по тангажу i минимальной перегрузкой)
На рис. 15.3.13 приведены расче-
ты максимально возможной угловой
скорости крена с учетом функциони-
рования СУУ при максимальном от-
клонении боковой ручки Аэтах и
балансировке по тангажу, соответ-
ствующей минимальной нормальной
перегрузке пу mm- Расчеты прово-
дились с использованием метода не-
прерывного продолжения решений
ио параметру и пакета программ
КРИТ на режимах с различными
высотами полета и числами М Па
приведенных графиках черные точки
соответствуют устойчивым режимам
вращения, белые точки обозначают
режимы вращения с колебательной
неустойчивостью, приводящей к ус-
тановлению автоколебаний. Полечен-
ные зависимости позволяю 1 прогно-
зировать особенности динамики само-
лета, а именно, выявить режимы, на
которых проявляется взаимодействие
движении (большие значения пг);
определить режимы с неудовлетворительной управляемостью но крену
“т < ^rmirJ выявить колебательно неустойчивые режимы вращения; опреде-
лить режимы с большими градиентами параметров вращения по числу М.
т.е. когда возможно резкое изменение параметров вращения при выполнении
разгонов или торможении.
Математическое моделирование динамики самолета являет-
ся хорошим дополнением к результатам анализа равновесных режимов
вращения. Наиболее подробное моделирование должно проводиться в об-
частях полета, выделенных но результатам качественного исследования.
По результатам численного моделирования динамики самолета кри-
тические области могут быть уточнены. Так например, на рис. 15.3.14 вы
делены подобласти режимов полета, где возможно попадание в режя>г
||[е.рлионпого вращения при выцолпе-
otH одной "бочки" (переворота через
, ,ь1до) при продольной балансировке
само-1сГа с огрипательной единичной
пернрузкой н7б^( = -1 Граница А оп-
педе.ьяет подобласть, в которой попада-
jiife |} Р^ЖИМ инерционного вращения
происходит при полном отклонении бо-
ковой ручки, граница В соответствует
случаю полного отклонения боковой
ручки и педалей в сторону подкрутки
(результаты приведены для самолета с
работающей СУУ). Подобласть С
включает режимы полета, где может
возникать колебательная неустойчи-
вость установившегося вращения при
полном отклонении боковой ручки
(A'j max = ± 120 мм ). Ш гриховые линии
указывают значения угловой скорости
подхвата по крену сод |и>ДХ9. а также значение прироста нормальной пере
грузки при полном отклонении боковой ручки.
В заключение отмстим, что использование качественных мстодот
анализа в сочетании с математическим моделированием динамики и воз
можностеи, предоставляемых пакетом программ КРИТ |12|, позволяет
аффективно изучить особенности взаимодействия продольного и боковой
движений самолета, у которого аэродинамические коэффициенты суще
ственно нелинейно зависят от параметров движения, а функциопирова
ние автоматической системы управления значительно изменяет собствен
ные динамические характеристики.
Рис. I5-3-14. Области режимов полета,
которых возможно попадание в режщ
инерционною вращения при выполпснщ
одного разворота по крену (“бочки”) .1 -
максимальное отклонение беконом ручки
В — .максимальные отклонения боковой
ручки и педалей в строну иодкрупзт С
- границы подобласти с колебательно не
устойчивыми режимами вращения
15.4. Динамика сваливания
Увеличение угла атаки до значений, соответствующих области Су max
может приводить к возникновению сваливания самолета. Это связано с тем
что аэродинамические характеристики устойчивости и управляемости манев
Репного самолета на больших углах атаки значительно ухудшаются, что т-
Чриводит к развитию разнообразных форм неустойчивости движения. обра
Шсчпио реакции на упрагыяюпше воздействия. Относится эго как к цродоль
Ному, гак и к боковому движению.
Автоматические системы улучшения устойчивости и управляемое™
(( УУ) на больших углах атаки могут заменю ослабить или затянуть нсбла
г°приятные явления. При наличии достаточной эффективности органов уп
Руления возможность сваливания самолета может быть полностью устране
На Большие возможности для анюмаги.заиии управления па больших угла>
dTaKu открываются в связи использованием па перспективных самолетах от
www.vokb-lo.spb.ru - Как построить самолёт своими руками?!
клоттеттия вектора тяги и различных средств управления вихревой систе^Л
(установка генераторов вихрей и выдува воздуха в носовой части самолета)
Использование новых средств управления позволяет реализован. значите-^
ные управляющие моменты по тангажу, крену и рысканию
Исследование особенностей динамики самолета в области сваливания
имеет большое значение как для повышения маневренных возможностей
так и для обеспечения безопасности пилотирования на больших углах атаки'
Важной частью этой проблемы является улучшение динамических характе-
ристик в области больших углов атаки за счет автоматизации управления
что требует использования специальных алгоритмов управления, отличных
от тех, которые используются в области основных режимов полета.
Сваливание в продольном движении, как правило, связано с не-
линейной зависимостью момента тангажа по углу атаки, характерной для
компоновки типа “бесхвостка” или д.тя самолета нормальной схемы, но с
большим запасом статической неустойчивости (см. рис. 15.3.3). “Подхват
по тангажу возникает из-за недостатка пикирующего момента тангажа при
отклонении стабилизатора на кабрирование или действии внешних возмуще-
ний. Одним из требоватпш к аэродинамической компоновке самолета в таких
случаях является необходимость создания па больших углах атаки пикиру-
ющего момента при полном отклонении стабилизатора ие ниже некоторого
уровня mz 1UIK а -0,05. Использование отклонения вектора тяги практически
полностью решает эту проблею' д.тя самолетов любой конфигурации.
Сваливание в боковом движении является наиболее характер-
ным для современных маневренных самолетов. Это объясняется тем, что
зависимости коэффициентов аэродинамического момента от утлов атаки и
скольжения, угловой скорости вращения, как правило, становятся нели-
нейными. при этом для малых отклонений параметров могут возникать:
потеря статической устойчивости пути ш^>0, потеря поперечной ста-
тической устойчивости > О, потеря аэродинамического демпфирования
крена Наряду с этим изменяются и нестационарные аэродина-
мические производные , которые также зависят от угла атаки и
могут существенно изменять свою величину в узком диапазоне его
значений. Причиной сваливания может также быть возникновение несим-
метричных аэродинамических моментов по крену- и рысканию при отсут-
ствии скольжения (см гл. 8).
На рис. 15.4.1 приведены характерные для маневренного самолета нор*
малыюп схемы зависимости коэффгпшентов поперечной и путевой устойчи'
вости //г“(а), а), эффективностей элеронов ли®», , вратцагелып»1-4
и нестационарных производных м*™, v°, myva (зД^*
uxa • 10 ya ~ проекции угловой скорости на полусвязанные осп координат)! ।
Рис 15.1.1 Заппспмости основных аэродинамических производных устойчивости и угг
равлисмосги бокового движения от угла атакп
Перечисленные выше изменения аэродинамических характеристик по от-
дельности и в совокупности могут приводить к интенсивному возмущенному
движению, развивающемуся без участия летчика. Причиной является возник-
новение различных форм потери устойчивости, в частности, дивергентного на-
растания угла скольжения, автоколебательного движения по крену, и т.д.
Характер воз мутен но го бокового движения самолета и его устойчивость
к малым возмущениям можно оценить с помощью линеаризованных уравне-
ний, при этом значение угла атаки, определяемую балансировкой самолета
по тангажу, можно рассматривать в качестве параметра. Такой приближен-
ный метод анализа позволяет определить критические значения углов атаки,
когда возникают условия д.ы развития неустойчивых процессов, и сформу-
лировать достаточно простые инженерные критерии начала сваливания.
Дальнейший прогноз развития движения в рамках линейного подхода ста-
новится уже невозможным, необходим анализ нелинейных особенностей
Уравнений пространственного движения на больших углах атаки, в частнос-
ти структуры и характера устойчивости равновесных и периодических рс-
пенцй, формирующих динамику самолета в штопоре. Качественное исследо-
вание уравнений нрос гранствсшюго движения на больших углах атаки позво-
ляег выявить такие особсгшосги и построить нелинейную теорию сваливания.
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
Возможности доработки аэродинамической компоновки само чета
целью устранения неблагоприятного изменения характеристик, приводя*
ши\ к сваливанию, весьма ограничены. Поэтому в настоящее время боЛь*
итая роль возлагается на автоматическую систему управления (СУУ) р
зависимости от целевого назначения самолета она должна либо обеспе-
чить ограничение угла атаки, либо устранить указанные выше опасные
проявления динамики самолета без ограничения диапазона маневра.
Критерии сваливания в рамках линейного подхода В инже-
нерной практике на стадии проектирования самолета и доработки его аэро-
динамической компоновки широко используются приближенные критерии
определения углов атаки, при которых возможно сваливание самолета
Эти критерии следуют из приближенных аналитических соотношений, оп-
ределяющих условия устойчивости и управляемости бокового движения
самолета на основе линеаризованных уравнений движения. И что наиболее
существенно, эти условия используют ограниченный набор данных аэро-
динамического эксперимента, получаемых традиционными методами
Б дем рассматривать упрощенные уравнения для быстрых составля-
ющих бокового движения, пренебрегая изменением скорости (Г = const)
и подвижностью центра масс самолета под действием боковой аэродина-
мической силы и силы тяжести (С'j’ ~ 0, g/V*O), при этом положим.
чю угол атаки постоянен a = const. Могул бьпь использованы уравнения
бокового движения, записанные относительно полусвязанных осей коор-
динат, без четвертого уравнения относительно угла крена, которые при-
ведены в гл. 14 (уравнения (2)).
Собственные числа рассматриваемой системы уравнений определяют-
ся характеристическим уравнением:
2.3 + АгА? + А|Х Ад - О,
(1)
коэффициенты которого следующим образом выражаются через аэроди-
намические производные и безразмерные параметры самолета:
, J-Ч В В Ц
Л । = - — нги cos a + sina —— = - — Сн,
Ji/ x JX' Jу
C2)
1л —---—- f—4- =----—O
• 4) - I "lU,rlX y.B + Jlx,!tx v.n I u«l»
JxJy \ v } - ! ]x]y
где lt = —- относительная плотность самолета; jr- —r-,y— ; индексы
Р5/ 'У rM/2)2
в.к обозначает “вынужденные колебагшя”, у в - “установившееся вращение".
В выражении для At отброшены члены, состоящие из произведении
урзщагельных производных. Аналогично принятому в литературе [11 опре-
..рдсиию для Ок, в (2) введены два дополнительных безразмерных нарамет-
ра
и Все три безразмерные величины up, Ср и и^ будем называть
коэффициентами динамической устойчивости самолета в боковом движении.
Эти коэффициенты динамической устойчивости доели очно просты
для вычисления и определяются частными производными коэффициентов
аэродинамического момента, которые, как дано ниже, традиционно по-
дучают в аэродинамических экспериментах.
Коэффициент Необходимые аэродинамические производные Метол эксперимента в АДТ
в = тхх + ,WX мпа "22 вк^а) “ ~ n/w COS а У 15 л у у Метод вынужденных колебании относительно осей ОХ и ОУ
ар ти£(а). Иу(а) Статические испытания
а,„ и Метод установившегося вращения
Условия устойчивое!и возмущенного движения могут быть определе-
ны с помощью алгебраического критерия Рауса-Гурвица:
/1о 0, Aj > О, Л-/ > 0, AjAi - Ag > 0.
Эти соотношения приводят к следующим критериям устойчивости
относительно безразмерных коэффициентов Ср , ио и :
Up < 0, ср < 0, ив < 0, R = и ,up + иш > 0 или up < (3)
Коэффициенты устойчивости up, Up и ит , так же как и аэродина-
мические производные, зависят от угла атаки, и могут значительно изме-
няться в области больших углов атаки. Нарушение одного из условий (3)
может служить критерием потери устойчивости и, следовательно, воз-
никновения сваливания, а угол атаки, при котором это происходит,
считается углом сваливания сц_в
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
Рис 13 4 2 Типы потери боковой устойчивости при свалипачни
Нарушение условий (3) приводит к качественно различным типам по-
тери устойчивости (рис. 13.4.2). Так, например, при нарушении условия
о(й < 0 происходи! перемещение действительного корня характеристичес-
кого уравнения (1) в правую полуплоскость (рис. 15.4.2л). При этом си-
туация соответствует точке ветвления в нелинейных уравнениях бокового
движения, в которой исходный режим без вращения становится аперио-
дически неустойчивым, но при этом возникают два симметрично отражен-
ных относительно нулевой оси устойчивых равновесных режима вращения.
Нарушение условия R = +оы >0 приводит к перемещению па-
ры комплексно сопряженных корней характеристическою уравнения (2)
в правую полуплоскость, и если при этом не происходит снижения
частоты боковых колебаний coq = ^-ср (рис. 15.4.26), то в нелинейной
системе создаются предпосылки для возникновения автоколебательного
режима движения. Такая ситуация, в частности, возникает при уменьше-
нии модуля величины ст^ .
При изменении знака сгр переход комплексно-сопряженной пары кор-
ней в правую полуплоскость сопровождается резким палением частоты
колебаний си0 (рис. 15.4.2в), которое может дополняться разбеганием
корней по действительной оси и возникновением точки ветвления
(ош = 0). Из-за особенностей изменения основных аэродинамически*
производных на больших углах атаки такое поведение
корней может происходить в узком диапазоне изменения угла агакм
Да ~ 1 ч-2°. что делает характер потер!! устойчивости движения близким к
случаю, приведенному на ри< . 15.4.2а.
Нарушение условии Ср < 0 и о { < 0 можно считать признаками но*
тери динамической устойчивости движения по рысканию, нарушение же
условия < 0 является признаком потери устойчивости движения н°
крену или возникновения аэродинамической авторотации
Критерии управляемости. Важным фактором оценки самолета
1етчнком на больших углах атаки является его управляемость в боковом
* р11деенми. Традиционные органы управления - элероны, руль направле-
ния, дифференциальное отклонение стабилизатора, интерцептор - на
5отьгних vr.’iax атаки уже только условно можно разделить на органы
поперечного и путевого управления. Это связано с тем, что у всех этих
аэродинамических органов управления возникают перекрестные аэроди-
намические моменты тп^г , соизмеримые с основными. Поэтому при
их использовании на больших углах атаки управляемое боковое движе-
ние является существенно взаимосвязанным по крепу и рысканию. Для
устранения этого взаимовлияния в СУУ обычно вводится перекрестная
связь между отклонениями элеронов и руля направления, которая пред-
назначена для устранения перекрестной аэродинамической эффективнос-
ти поперечного органа управления.
Привычная для летчика управляемость самолетом сохраняется, пока
имеется однозначная связь между отклонением элеронов и угловой ско-
ростью вращения соп/ (или угловым ускорением шсД).
Установившаяся величина угловой скорости при небольших
отклонениях элеронов может быть оценена с помощью уравнения, оп-
ределяющего условия равновесия аэродинамических и инерционных мо-
ментов. Рассматривая управляемое движение с малой угловой скоростью,
можно пренебречь действием инерционных моментов (нелинейных
членов в полных уравнениях прос!ранственного движения). При этом
будет справедливо следующее приближенное соотношение
(“>х«)с « "f—К •
(4)
1Де иб =.
Таким образом, при сохранении устойчивое!и возмущенного движе-
ния но крену (ои < 0) реакция самолета при всех углах атаки будет од-
нозначной, если будет выполняться условие og < 0. Безразмерный пара-
метр os назовем параметром управляемое!и бокового движения. В англо-
язычной литературе аналогичный параметр получил сокращенное назва-
ние LCDP (Lateral Control Departure Parameter) [22]
Этот параметр тесно связан с проблемой сваливания, поскольку обраще-
ние реакцшг самолета по крену на отклонение элеронов (изменение знака с^)
Может привести при пилотировании к развитию неустойчивых процессов.
Если летчик стабилизирует угол крена посредством управления элсро-
ипми, то приближенно можно лолатагь, что осуществляется идеальная ком-
пенсация аэродинамических моментов по крену, возникающих при возму-
Шетшом колебательном движении, и обеспечивается тождественное равенство
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
) = со и, = 0 . Из уравнения дгя углового ускорения в уравнениях боково-
о движения (см. гл 14) можно определить требуемые отклонения элероне
Яри обеспечении такой стабилизации. После исключения из первых двух
уравнений величины S, может быть получено уравнение, определяющее вёз
'пшенное движение самолета по рысканию:
(3 - HiP + ц.42Р - 0 ,
(5)
где
~>Пхуапф
) m6t3 coset + jrnfy sin а
c’oso “ 7хгау‘ sina
где од = -(.т^тн*
Из уравнения (5) видно, чго параметр управляемости сг5 в дтом
случае определяет часюгу возмущенною движения по рысканию. Подто-
чу при обращении реакции на управление в рассмотренном случае воз-
нпкае! апериодическая потеря устойчивости
Полученные выше приближенные критерии потерн устойчивости и уп-
равляемости могут использоваться при определении угла атаки, при котором
может наступить сваливание самолета Эта величина будет определяться
наименьшим значением нулей функций, формирующих критерии сваливания.
Нелинейные особенности сваливания. В целом динамика про-
цесса сваливания может быть выявлена с помощью анализа цолнтях
уравнений движения с учетом действия нелинейных аэродинамических и
инерционных моментов. В значительной степени динамику сваливания
определяют равновесные и автоколебательные режимы движения, суще-
ствующие в области углов а » агв.
Исследование установившихся режимов движения и анализ их устойчи-
вости на больших углах атаки (а * «<п) может проводиться как по уравне-
ниях! пространственного движения пятого порядка (аналогичные уравнения
использовались при исследовании динамики быстрых вращений), так и по
полтям уравнениям восьмого порядка (см гл. 10), учитывающим спираль-
ность траекторного движения. Результаты, как правило, сохраняют каче-
ственные особенности, по при этом могут иметь количественные отличия.
Ветвление равновесных решений уравнений движения возможно в случае
отсутствия асиммегричных аэродинамических моментов по крену и рысканию
(при наличии симметрии в уравнениях) Необходимым условием является
возникновение апериодической неустошгивосш балансировочного режима без
вращения или условия ои(а)>0. Если коэффициент ow(u) зиакопосгояда-
при всех значениях а, го ветвления равновесных режимов по происходит.
При наличии поперечной и пулевой неустойчивое hi тх > О, tn >0,
.^родинамической авторотации тхла >0 (см. рис. 15.4.1) может возпи-
,ь зона апериодической неустойчивости равновесного режима при
= «^=0). Р,1С- 15.4.3 приведены зависимости равновесных
значении угла атаки и угловой скорости вращения в области сваливания,
потЛченные с помощью пакета программ КРИТ с использованием пол-
ных уравнений пространственного движения.
Рис. 15 4 3 Особенности равновесных режимов вращения в области апериодического
сва шваиня (петвтсние решений в точках Н и С)
На оси (лха - 0 (рис. 15.1.36), возникают две точки ветвления В и С,
формирующие семейство равновесных решений с правым и левым враще-
нием (сплошная линия обозначает устойчивые режимы вращения, а пунк-
тирная линия - апериодически неустойчивые). Авторотационные режимы
вращения при 6Э ~ 0 существуют в широком диапазоне отклонения стаби-
лизатора ф = -(33+10)°, при этом соотвстовутощие им значения углов
атаки (рис 15.4.3d) остаются на уровне а » 45°.
Характер динамики в области сваливания при управлении стабилиза-
тором следует из особенности изменения равновесных решений. На оси
(ОХ61 = 0 расположены три особые точки А, В, С В точке Я возникает
обратная реакция на управление элеронами (происходит смена знака па-
раметра 05). В точке В и в точке С возникает ветвление равновесных
Решений, вследствие смены знака параметра <лв. Достижение точки ветв-
ления В при отклонении стабилизатора приводит к скачкообразному уве-
личению угла атаки и раскрутке самолета (попаданию в режим D). На-
правление возникающего вращения может быть как положительным, так
и отрицательным в зависимости 01 знака действующего возмущения. Об-
ратное отклонение стабилизатора приводит к исчезновению авторотаци-
онного режима только в точке Е, после чего вращение прекращается и
Угол атаки уменьшается до балансировочного значения.
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
Таким образом, при управлении счабилиза тором в области ветвпп
решений возникает гистерезис Сваливание развивается в некотором ътап^
зоне отклонений стабилизатора (и углов атаки) между точками В и С
этом величина угловой скорости «г0 в авторотационном режиме увеличи
ваегся при отклонении стабилизатора на пикирование от точки С к D i г
Точки ветвления Н и С исчезают при отклонении элеронов (5Э = 40)
Линии равновесных режимов распадаются на два семейства, одно - .замк-
нутое. сужающееся При ю1Я < 0, и второе расширяющееся при cJx<3 > q
Ослабление авторотационных режимов с отрицательным вращением и уси-
ление режимов с положительным вращением происходит из-за обращения
реакции на отклонение элеронов (оа > 0), возникающего в точке А.
Автоколебательные режимы движения на больших углах атаки
связаны с возникновением колебательной неустойчивости равновесных ре-
жимов движения. Такой характер неустойчивости может возникать как на
основной ветви с w = 0, так и на авторотационных ветвях равновесных
решений. Колебательная потеря устойчивости бокового движения на ос-
новной ветви наступает при нарушении условия R > 0 (.линейного крите-
рия сваливания). Возникновение автоколебаний на больших углах атаки
характерно для современных маневренных самолетов. Па рис. 15.4.4 при-
веден пример расчета динамики самолета при возникновстпш автоколеба-
ний на больших углах атаки. Такие автоколебания воспринимаются
летчиком в основном как колебания но крену, хотя колебания имеются и
ио тангажу, и по рысканию, по с меныией амплитудой.
Риг. 15.4 4 Параметры антоколебаи-льного режима (нижемпя маневренного самол‘'п* И*
больших углах атаки (математическое моделирование)
Причиной возникновения авюколсбаиий в рассмотренном случае яв-
1}Кгся но 1 еря поперечной устойчивости самолета по крену в области
^чыних углов атаки, где возникаю! процессы разрушения вихрей над
крыдом. Зависимость коэффициента момента крена от угла скольжения
имеет нелинейный характер, так что при больших значениях угла сколь-
жения поперечная устойчивосiь восстанавливается. Таким образом, уста-
новление автоколебаний, порождаемых колебательной неустойчивостью
равновесного режима полета, происходит при амплитуде, когда восста-
навливается поперечная устойчивость.
Автоматическая система управления, в частности СУУ, может суще-
ственно повлиять на характер динамики самолета. Важную роль при
этом траст эффективность органов управления, требуемая для создания
стабилизирукицего управления. При использовании линейных обратных
«.вязей по угловым скоростям, боковой перегрузке (или углу скольже-
ния) выбор передаточных чисел может быть осуществлен исходя из тре-
бования устойчивости равновесною режима полета на большом угле ата-
ки. Функционирование СУУ будет приводить к эффективному измене-
нию аэродинамических производных устойчивости и управляемости и тем
самым к изменению динамических критериев сваливания, коюрые удоб-
ны лтя оперативного выбора коэффициентов в законах управления.
Выбор законов управления исходя только из локальною рассмотре-
ния равновесного режима недостаточен, поскольку на больших углах
атаки возможно с\ шествование также и устойчивою автоколебательного
режима движения. Важно настроить законы СУУ таким образом, чтобы
наряду со стабилизацией балансировочною режима поле!а автоколеба-
тельный режим движения был полностью устранен.
В случае, приведенном на рис. 15.4 4, для устранения колоба тельной
неустойчивости бокового движения самолета средствами автоматики было
использовано дифференциальное отклонение стабилизатора Дф, поскольку
•эффектвности элеронов и руля на-
правления на рассматриваемых углах
атаки значительно снижаются. Мак-
симальное отклонение дифференциаль-
ного стабилизаюра ограничено рядом
факторов, в частност, снижением
влияния на продольный капал уп-
равления. При этом из-за малости
скорости полета в закон управления
с сигналами угловых скорос-
г,-й вводится сигна. г ио углу скольже-
ния Др = К - К 9(arsin «о + (D^coscq?)
Выбор коэффициенте Кц и А’ осу-
Шеств.1яегся исходя из требования ста-
билизации равновесного режима. Па
Рис. 15.4 .5 приведена область усгойчи-
0
0 1 2 3 4
Рис 15 4.5. Область устойчивости 1>авнов<<-
нопо режима полета самолета с СУУ в плос-
кости папаметоов чакона управления Кк И /<„
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
вост равновесного режима в плоскости параметров Л'ц и (а^ = 45э) и
граничении максимального отклонения дифференциального стабилизато^**
сохранятся возможность возникновения автоколебательного режима дви;к
ния при действии возмущений, которые превосходят некоторый критически"
уровень Внутри области устойчивости равновесною режима на рис. 15 4 -
указаны также линии равных значений для криттгческого возмущения по \т
ту скольжения [1кр - 5 10, 12°, превышение которого приводит к установле-
нию автоколебаний.
Размеры области устойчивости стабилизируемого режима полета за-
висят от отклонения дифференциально!о стабилизатора Доогр, которая
выделена СУУ Па рис 15.4 6 приведена зависимость амплитуды авто-
колебатс чьно! о режима движения, а также граница области притяжения
•равновесного (W) и автоколебательного (.4) режимов движения от угла
отклонения дифференциального стабилизатора, выделяемого для стаби-
лизации движения в СУУ. Увеличение размера области притяжения рав-
новесного режима полета сопровождается уменьшением амплитуды авто-
колебаюльною режима, так что при некотором значении Aq>Oip режим ав-
токолебании полностью исчезает.
Рис. 15.4.6 Влияние диапазона отклонения дифференциального стабилизатора. выделя<“
мого СУУ, па амплитуду автоколебаний и область устойчивости (В) равновесного режи-
ма полета j) ~ tor - О
В принципе, такая величина Д9„п> и должна приниматься в рассмот-
рение при проектировании СУУ.
Сопротивляемость самолета сваливанию и входу в штопор мо-
жет быть рассмотрена с позиции качественных методов анализа динамики.
при этом возможно установить также и количественные характеристики-
Вьтход самолета на большие углы атаки и приближение к границе ус"
юйчивого пилотирования может характеризоваться тем, что при действии
внешних возмущений размеры области устотгчивости будут уменьшаться,
уци размеры фактически определяют критический уровень возмущении,
превышение которых будет приводить к удалению от исходного режима по-
чета и попаданию в режим штопора. Для иллюстрации подобной ситуации
на рис. 15 4.7 приведен пример, соответствующий устойчивому балансиро-
вочному режиму полета при Q - -20°. Наряду с устойчивым режимом
с5 гД = 0 существуют еще два устойчивых равновесных (или автоколебатель-
ных) режима движения с правым и левым направлением вращения. Эта ре-
шения соответствуют режимам крутого штопора, о которых более подробно
будет сказано ниже Существуют некоторые критические возмущения, при-
водящие к попаданию в режимы штопора. Уровень этих возмущений может
едз'жить мерой приближения к сваливанию
Рис. 15 4.7 Оценка критических возмущений при с вал тын „и
Па рис. 15.4.7 наряду е положением устойчивого режима полета Л
(а % 24°, р “ 0) и устойчивого режима штопора В приведены результаты
расчета границы области притяжения режима штопора В (сх»37э,
Р s 6°), соответствующие различным начальным значениям угловой ско-
рости тангажа того —0,15; 0; 0,15 1/с. Выбранная плоскость возмуще-
ний по углам атаки и скольжения характерна для оценки влияния ветро-
вых возмущений. В зависимости от ориентации порыва относительно са
молота будут возникать различные возмущения но углам атаки и сколь-
'Кепия. Учитывая, что при пространственном маневрировании угол крена
может изменяться, критическую величину ветрового порыва ахг можно
^Ценить по радиусу окружности, касающейся границы области притяже-
ния критического режима вращения. Если задаться нормированной вели-
чиной ай , то можно определить предельный угол атаки, при котором
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
пилотирование буде1 чстойчивым при действии ветровых возмущений
По мере увеличения угла атаки область устойчивости будет уменьшаться
Величина оценки облает устойчивости в плоскости а, р в виде радиуса
вписанной окружности может служить одной из характеристик сопротив-
ляемости самолета сваливанию и попаданию в штопор.
Наличие возмущений по угловым скоростям наряду с ветровыми
возмущениями приводит к видоизменению формы и размеров области ус-
тойчивости. Анализ показывает, что наиболее сильное влияние оказыва-
ют возмущения по угловым скоростям рыскания и тангажа ыг, кото-
рые могут возникать в результате управляемою движения и особенно
при действиях, характерных для ошибочного пилотирования.
15.5. Динамика штопора
Развитие возмущенного движения самолета, возникающею в результате
сваливания, в большинстве случаев закапчивается попаданием в режим што-
пора. Динамика и характер управления самолетом в штопоре кардинально
отличаются от основных режимов полета и поэтому эти режимы в значи-
тельной степени определяют безопасность пилотирования на больших углах
атаки [3] Исследование динамики штопора является обязательным для
каждого нового типа самолета. Арсенал средств для исследования штопора
достаточно широк Он включает весовые и динамические испытания моделей
самолета в аэродинамических трубах, а также летные испытания крупно-
масштабных управляемых моделей и натурного самолета. Широко исполь-
зуются при исследовании штопора и расчетные методы, а также полунатур-
ное моделирование этих режимов движения на пилотажных стендах.
Автоматическая система улучшения устойчивости и управляемости
(СУУ), предназначенная для основных режимов полета, на больших уг-
лах атаки должна быть дополнена специальными автоматическими сред-
ствами для предотвращения сваливания. Разрабатываются системы, сиг-
нализирующие о приближении к опасным режимам, автоматические сис-
темы ограничения предельных режимов, а также автоматические системы
предотвращения сваливания и вывода из штопора.
В процессе развития штопора можно выделить переходную и устано-
вившуюся фазы. Первоначально происходит установление вращения само-
лета относительно центра масс за счет баланса аэродинамических и инер-
ционных моментов, затем уже происходит установление траекторных па-
раметров и баланса действующих сил. Движение самолета в установи*'
шемся штопоре происходит по вертикальной спиральной траектории с дос-
таточно малым радиусом. Динамические особенности штопора могут зави-
сеть от способа пилотирования и быть очень разнообразными. Возможен
установившийся штопор с. равномерным вращением, когда все параметры
движения постоянны, зачастую устанавливается движение с автоколеба-
тельным характером изменения параметров на фоне установившегося
среднего вращения, автоколебания самолета в штопоре могут носить непе-
риодический и нерегулярный характер, и т.д.
Обеспечение безопасности пилотирования требует специального иссле-
дования способов прекращения режима штопора и возврата в безопасную
область основных режимов полета. Типовые методы пилотирования, ис-
пользуемые для вывода самолета из сваливания и штопора, выработаны в
процессе многолетней летной практики и экспериментов со штопоряиигми
.моделями в вертикальной аэродинамической трубе. Однако для современ-
ных самолетов эти методы нс всегда срабатывают. Во многом это связано с
недос1аточной аэродинамической эффективностью органов управления на
больших углах атаки, отсутствием запаса пикирующего момента по танга-
жу, возникновением несимметричных аэродинамических моментов но кре-
пу и рысканию Ниже приводятся некоторые результаты расчетного ана-
лиза п математического моделирования, которые иллюстрируют особенно-
сти и мегоды исследования динамики штопора.
Приближенные методы расчета равномерного штопора. В
установившемся штопоре с постоянными значениями параметров движе-
ния устанавливается баланс аэродинамических сил и силы тяжести, а
1акже баланс аэродинамических и инерционных моментов.
Рассматривая упрощенную кинематическую схему' движения (рис. 15.5.1),
справедливую при малом радиусе штопора, можно получить приближенные
уравнения для расчета основных характеристик штопора самолета.
Условия баланса сил можно записать, вводя
проекции аэродинамической силы на направление
вертикали Сд и радиуса штопора CR:
pl'2 > р1/2
mg = ChS1—. mR^2 = CRS^- , (1)
где
Qi * _CV cosa + Cy sin a, CR = Cx sin a + Cy cosa.
Условия баланса моментов можно выразить через
Проекции угловой скорости на связанные оси координат:
~ Шу = J 2 2^ X ’ (2 )
Р\6<7 тг = Uy - Jx)<i\x(i>y.
Предположение о малости угла скольжения и
Угла отклонения спиралеобразной траектории от
Рис. 15 5.1. Приближен
пая кяпемапгюская схе-
ма движ< ния самолета в
ГХ i Гн и -ьапж< rwr-rv-iTTi-i.-—
Пер гикали ст. а также приближенное выполнение со-
отношений a + S = 90°, ц/ а» (р г ст) позволяют при-
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
блпжсипо вырази! ь проекции угловой скорости на связанные оси <аг,
ю- через полную угловую скорость со-
(•'1Л - tocosa, =-cosma, ь>2 = шСР + о).
(3)
Угол отклонения траектории от вертикали может быть получен с
учетом второго уравнения в (1):
I
о = arcsin —ш—
V
* р57С/?
\ 4/ncJ
(4)
Подстановка значения (1.5.10) в уравнения баланса моментов (2)
приводи! к следующим безразмерным уравнениям, правые части которых
с учетом (4) зависят только от углов атаки и скольжения, а также от
безразмерной угловой скорости:
т
/«,/
- Уг/)(Р + u)sina,
pSr у
to2(Jx - J2 )(p - a) cos a,
m, = ——©2(J„ ~ 7r)sinacosa.
y
(5)
Совместное решение полученных трех нелинейных уравнений при
известных зависимостях безразмерных аэродинамических коэффициентов
гпх.,/.г ~ таД11/,2(а.Р.ы.«>.5э,81|),
получаемых методом установившегося вращения в АДГ, позволяет опре-
делить параметры установившегося штопора, а именно, угол атаки а-
угол скольжения р и безразмерную величину угловой скорости со в за-
висимости от отклонении органов управления <р, 8Э, 8Н
Возможна другая форма записи этих уравнений, более свободная от
зависимости от угловой скорости [ 1 В] (см. также [17, 18]):
Ьо п э
тх cos a - stn а + -f- = —-—5— «Ср sin za,
I mr
Jy-L
т х cos a - -р—— т у sin a * О,
J 2 ~ J X
тг---ё>2 sin 2a = 0.
р5/2/^
(6)
Приближенные уравнения (6) позво.тяют достаточно точно оценивз
значения параметров движения в равновесном штопоре, определять в<
чожпость существования различных режимов, при этом подучаемые р
зудьтаты хорошо согласуются с решениями полных уравнений.
Угол скольжения в штопоре, как правило, мал, поэтому допусти;
линейное представление аэродинамических моментов крепа и рыскав
по углу скольжения:
тх - »i^(a)p + Дшх(а,со,63,5н),
ти = ш^(а)р- Лтиу(а,(0,8э,бц),
что дает возможность исключить р из первых двух уравнении в (6). В р
зу.тьтатс задача преобразуется к нелинейной системе второго порядка,
которой одно уравнение отвечает за условия баланса по тангажу, втор<
отвечает за условие баланса по крепу и рысканию. Эта система может бы
решена методом сканирования в плоскости переменных а, <п посредстве
построения линий нулевого уровня для каждого пз этих уравнений Пер
сечение этих линий и дает все множество возможных стационарных реш
нии исследуемых уравнений Количество решений у приближенных ура
нений при фиксированных отклонениях органов управления может бы
различным. Число их зависит от характера зависимостей аэродтш.
мичсских характеристик. Выделение же возможных режимов штопора i
получаемою набора решений связано с исследованием устойчивости реш<
нии, а также определением их областей притяжения. Такой анализ ул-
должен проводиться с использованием полных динамических уравнений.
Па рис. 15.5.2 приведены примеры расчета параметров равновесны
режимов штопора с использованием приближенных моментных уравн*
иий. Для различных отклонений органов управления в плоскости значс
ний угла атаки а и безразмерной угловой скорости ыхо строятся линит
при которых выполняется баланс моментов по тангажу (сплошные ли
нии) и по крену-рысканию (штриховые линии). Пересечение этих лини
определяет значения параметров в равновесном штопоре.
Верхний ряд графиков иллюстрирует влияние стабилизатора на харак
ТеР получаемых решений (случаи а, п, в). Даже при нейтральном положе
пни элеронов, рутя направления и отсутствии аэродинамической асиммстри;
отклонение стабилизатора к нейтральному положению (ф =-7,-5-2е) при
водит к возникновению тта больших углах атаки (а =е 70°) двух пар ренте
ним с противоположным направлением вращения. Это связано с тем что I
Приведенном примере у самолета па больших углах этаки ттри врашенш
возникает подкручивающий момент по рысканию из-за затенения верти
Ильного оперения стабилизатором. Белые кружочки определяют ат ерио
ДИчески неустойчивые решения, а черные определяют потстщиальныс ре
’ки.мы штопора. Окончательный ответ о характере возмущенного движение
'-’ожег быть получен по результатам ана тиза устойчивости с использова-
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
- линеаризованных уравнений пространственного движения. Во многих
аях режимы, соответствующие черным точкам, могут быть устойчивы*
при определенных условиях колебательно неустойчивыми.
. 15 .5 2. Пример расчета параметров равновесного штопора с помощью приближенных
внепий баланса моментов: а. 6, 0 - влияние отклонения стабилизатора па усюпич
шкновенля плоского авторотационного штопора (6, = 5П = 0); г, д, е плняпне уров-
лэроднпамнческой асимметрии по рысканию на условия возникновения плоского што-
а при о = -30е, 8, = -20°. 8„ = -20’
Нижний ряд графиков ил.нострируст влияние уровня аэродинамичес-
г асимметрии по рысканию на возможность возникновения устойчивых
кимов плоскою штопора (случаи г, д, е). Отклонение элеронов и руля
травления при полностью отклоненном стабилизаторе на кабрирование
= -20°, Б„ - -20°, <р = -30°, случай г) приводит к режиму штопора с па-
чстрами a = G3°, т => -0,09 (отметим, что при этом отсутствует аэроди-
мичсская асимметрия mvac). При т^ж = -0,035 (случай е) возникает до-
лин 1ельная пара решений с проттгвоиоложньтм направлением вращения,
рный кружок определяет параметры плоского устойчивого штопора
двести самолет из этою режима сложно. Это связано с тем, что лот ре-
...----- нгтлпг-кгэ может существовать при всех возможных откломе*
нпях органов управления. Эффективным методом вывода из штопора в
подобных случаях является использование метода раскачки узлового дви-
жения, в частности, по тангажу [191
Pin 15 5 3. Пример расчета парамецюв штопора по полным уравнениям лпиженмя с ис-
но.ть топа ином метода непрерывного продолжения- а - зависимость равновесного vi га
атаки от отклонении органов поперечного управ к-ния, 6 - бифуркационная диаграмма в
плоскости отклонений элероппн и руля направления
На рис. 15 5.3 приведен пример расиста параметров самолета в равно-
весном штопоре при изменении отклонении элеронов и руля направления.
Расчет проведен с использованием метода непрерывного продолжения
[12|, что позволило получить связное семейство решений для плоских
(а - 65-г75°) и крутых (а = 40-5-55°) режимов ш гонора. Тип устойчивости
Режима штопора отмечен различными линиями (сплошная линия - устой-
чивые режимы штопора, штриховая линия - апериодически неустойчивые
Режимы, штрих-пунктирная линия - колебательно неустойчивые режимы
Штопора) Как видно, режимы плоского пттопора устойчивы, а режимы
Крутого штопора могут быть колебательно неустойчивыми, что будет при-
водить к установлению колебаний параметров движения. В правой части
рисунка приведена бифуркационная диаграмма в плоскости отклонении
Элеронов и руля направления, которая иозво.тяст наглядно выделить обла-
чи существования различных режимов штопора - плоского или крутого,
бифуркационная диаграмма может быть, в частности, полезна д.тя выбора
-''Правления, приводящего к выводу из штопора.
Математическое моделирование динамики самолета на боль-
ших углах атаки существенно дополняет результаты расчешото исследо-
вания, использующего качественные методы анализа. В свою очередь,
Предварительное качественное исследование динамики помогает более
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
.«фс^егливно провести и магемсиическое моделирование, выбрать наибо-
лее критические ситуации, отклонения органов управления, начальные
. ловия движения и i д. Особенно ценно проведение полунатуриого чо.
делироваиия динамики самолета на режимах шюлора с участием лет-
чика-испытателя На подвижных пилотажных стендах со сферической
визуализацией внекабинной обстановки (пилотажные стенды ЦАГИ
ПСПК-1,2) моделирование режимов сваливания и штопора может прово-
дили с высокой степенью досюверности, необходимым условием этого
является наличие адекватной математической модели аэродинамических
сил и моментов на больших углах атаки.
Полунатурнос моделирование динамики самолета является также
эффективным средеином д.тя Проектирования автоматических систем уп-
равления предназначенных для предотвращения сваливания и штопора и
вывода самолета из режимов штопора. Поскольку из-за сложности за-
дачи штопора практически отсутствуют регулярные методы синтеза уп-
равления, полупагурпое моделирование динамики самолета с системой
управления является единственным средством отработки законов управ-
ления и выбора их параметров
Как правило, результаты экспериментальных исследований в АДТ и
расчетный анализ позволяют получить хороший прогноз характеристик
штопора и выработать предложения по технике пилотирования, которые
чрезвычайно полезны при проведении полуиагурного моделирования дина-
мики самолша. Проведение полунатуриого моделирования наиболее уместно
на этапе подготовки и проведения специальных летных испьнаний самолета
на больших углах атаки Такие совместные исследования существенно по-
вышают безопасность проведения испытаний самолета на штопор.
На рис. 15.5.4 приведен пример математического моделирования
динамики, иллюстрирующий возможность возникновения сложного ко-
тебательного поведения самолета в штопоре. На рис. 15.5.4а приведены
переходные процессы по углам скольжения, aiaKii и угловой скорости
рыскания па продолжи тельном интервале времени. Видны два харак-
терных времени изменения параметров движения, это высокочастотные
колебания с периодом Т » Зэ-4 с и низкочастотные изменения с перио-
дом XT = 160 с. При этом, если рассматривать динамику на коротких
шпервалах времени, то можно видеть как затухающие процессы, так и
расходящиеся, хотя приведенный процесс является установившимся.
Объяснением такой сложной динамики явтяется наличие устойчивого
юрондального многообразия траектории, который может возникать на
больших углах атаки при определенных условиях. Качественный ана
тиз особых решений уравнений движения показал, что наблюдаемо
явление следует после последовательного возникновения колебательно
неустойчивости сначала у равновесного режима штопора, а затем и .
автоколебательного. На рис. 15.5.46 приведены различные проекии*
фазовых траекторий, которые наглядно вырисовываю! образование то
рондалыюй структуры траекторий
Plic 15.4 4 Нерегулярная динамика самолета п штопоре (переходные П|юцессы, слева) и
устойчивое тороидальное мигиообразие траекторий (проекции ф.тювого портрета, справа)
Летные испытания подводят окончательный итог в процессе иссле-
дования штопора. Они представляют наиболее сложный и опасный вид
испытаний, поэтому экспериментальный самолет, как правило, оборуду-
ется специальными техническими средствами для обеспечения безопасно-
сти проведения летных испытаний. К ним относятся противоштопорные
пороховые ракеты различного типа и противоштопорной парашют. Ос-
новной целью летных испытаний является опенка сопротивляемости са-
молета сваливанию, исследование штопорных режимов и отработка мето-
дов вывода из штопора.
На рис. 15.5.5 приведены примеры записей изменения параметров дви-
жения маневренного самолета, полученные в летных испытаниях, В левой
Части рис. 15.5.5 приведен пример ввода в штопор: при нейтральном поло-
жении элеронов (5Н = -25°, <р = -30°) самолет входит в режим крутого што-
пора (а а 45-а-50°) с повышенным уровнем колебательности всех параметров
Движения. Эти результаты хорошо согласуются с результатами качественно-
Го исследования, нриведе1пюго на рис. 15.5.3, поскольку при отклонении
Только руля направления равновесные режимы штопора оказываются коле-
бательно неустойчивыми. При отклонении рулей в нейтральное положение
йгтопор прекращается за время АГ ~ 4 с. R правой части рис. 15.5.5 приве-
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
ден пример ввода в штопор носредсшом совместного отклонения руля на-
правления и элеронов (бй_-25°, 6Э --15е, <р - 30“). Оцслонепие элеронов
против вращения при сваливании и входе в нпонор нровоцируег развитие
м човои скорости ры< камня до ©ч = 1 рад/с. Самолет входит в плоский што-
пор (п « 60°), при лом наблюдается очень высокий уровень колебательнос-
ти но угловой скорости крена. Отклонение стабилизатора па пикирование
(с = 0) приводит к затуханию колебании и одновременно к увеличению ин-
тенсивности штопорного вращения (ыу ~ 2 рад/с). Штопор становится еще
более плоски'!. Приведенный пример показывает, что для вывода самолета
из режимов плоского штопора сначала необходимо остановить вращение, а
\же затем опешишь стабилизатор для уменьшения утла атаки.
Рас 15.5.5 Примеры изменения параметров движения самолета в штопоре из летных испытаний
Результаты расчетного анализа, их качественного исследования и ма-
тематического моделирования динамики штопора, примеры коюрых при-
ведены выше, оказываются крайне полезны при анализе и объяснении
результатов летных испытаний, в которых зачастую наблюдаются слож-
ные и нс всегда повторимте динамические особенности поведения. Так
например, результаты расчета параметров штопора, коюрыс приведены
на рис. 15.5.2 а, 6, в, хорошо согласуются с наблюдаемой в легных ис-
пытаниях раскруткой самолета по рысканию при отклонении стабилиза-
тора в плоском штопоре в нейтральное положение.
Автоматизация вывода самолета из штопора. Типовые методы
пилотирования, используемые для вывода самолета из сваливания и
штопора, отрабатываются в процессе экспериментальных и теоретически-
исследований и окончательно проверяются в специальных летных испы-
таниях. Опыт таких исследований, в частности, показал, что для манев-
ренных самолетов последнего поколения традиционные Mei оды выв°-'1а
из штопора (установка органов управления в нейтральное положение.
отклонение стабилизатора и руля направления “против штопора”; откло-
нение стабилизатора и руля направления "против штопора”, а элеронов
по штопору") не всегда приводят к успеху. Во многом это связано с не-
достаточной эффективностью аэродинамических органов управления на
больших углах атаки, отсутствием запасов пикирующего момента по таи-
гажу, возникновением значительных несимметричных моментов по рыс-
канию. Для эффективного управления на больших углах атаки прихо-
дится подключать через СУУ дополнительные средства управления, та-
кие как дифференциальное отклонение стабилизатора, использовать ста-
билизатор для раскачки углового движения, а также применять разнотя-
говое управление двигателями. При наличии у самолета отклоняемых со-
пел двигателей с целью создания посредством отклонения вектора тяги
(ОВТ) управляющих моментов проблема предотвращения штопора и вы-
вода из него может быть решена наиболее эффективно.
Сложность и необычность динамики и управления существующих са-
молетов на режимах сваливания и штопора привели к необходимости раз-
работки специальных рекомендаций по пилотированию на случай возник-
новения критических ситуаций, а также проведения специальной подю-
товки летчиков. Однако, как показывает анализ статистики летных проис-
шествий, подавляющее большинство строевых летчиков, как правило, не
справляется с выводом самолета из критических режимов на больших уг-
лах атаки. Во многих случаях они неадекватно определяют возникающую
ситуацию, связанную с потерей управ.гяе.мости, неправильно оценивают ее
последствия и ошибочными действиями только усугубляют се.
Одним из возможных путей повышения безопасности пилотирования
является использование автоматических средств для ограничения предель-
ных режимов (в частности, ОПР по углу атаки) с целью недопущения
развшия сваливания и штопора. Такие системы неизбежно приводят к ог-
раничению маневренных возможностей самолета, при этом нс обеспечивая
полной гарантии непопадания в штопор. В последнее время рассматрива-
ются также и специальные автоматические системы управления, предназ-
наченные для режимов больших углов атаки. Они предоставляют самолету
возможность реализовать его предельные маневренные характеристики, но
при этом обеспечивают Предотвращение развития сваливания, а также эф-
фективный вывод самолета из штопора в случае его возникновения.
Некоторые результаты исследования по разработке автомата вывода
из штопора (АВШ) приведены в [19]. В основу законов управления в
ЛВШ положен метод вывода, отработанный в процессе летных исследо-
ваний самолета, который также хорошо согласуется с результатами ма-
тематического моделирования движения. Суть метода вывода из штопора
заключается в том, чю вначале осуществляется отклонение органов уп-
равления для остановки вращения — 5Н = бн IIiaxSigncoy, = SjmaxSigncoj,,
= A(pindXsignio^, а уже затем стабилизатор отклоняется на пикирование
для уменьшения угла атаки. Реализация такого “позиционного" управле-
ния может быть осуществлена но достаточно простой блок-схеме [19].
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
При возникновении R полете на больших углах атаки высокого уров
ня аэродинамической асимметрии ио рысканию из-за возникновения
асимметричной вихревой структуры обтекания (см. гл 8) “позиционный”
метод вывода можег не обеспечить остановки вращения и вывода само че-
та из режима плоского штопора (см. рис 15.5.2г). В подобных случаях
\BLL1 может использовать дополнительное управление стабилизатором
посредством раскачки углового движения по тангажу. Для этого в конту-
ре управления подключается изодромпый “аптидемнфер”, реализуемым
но следующему закону:
Р(Л2
= О0 * «Я» у,—.
(7)
де параметры Т, <ро, <ра выбираются из условия обеспечения наилучшей
раскачки углового движения по тангажу и крену и зависят от макси-
мальной скорости перекладки стабилизатора.
Подключение алгоритмов управления для вывода из штопора может
происходи!ь автоматически или после включения тумблера летчиком.
Для автоматического подключения в ЛН11Г необходим специальный блок
распознавания попадания самолета в режим штопора. В нем могут ис-
пользоваться простые алгоритмы, основанные на опенке длительности
пребывания параметров движения в области штопорных значений
(например, условия а > ашг, 'cfyl > Особо должны быть выделены
случаи зависания самолета на больших углах атаки без вращения (что
возможно при отсутствии в некотором диапазоне а пикирующего момен-
та). Вывод из этих режимов, получивших название “глубокого свалива-
ния" или "падения листом", может быть осуществлен только с использо-
ванием алгоритма раскачки угловою движения по тангажу (7).
Идея метода раскачки .может быть проиллюстрирована с помощью
аналогии, использующей понятие “потенциальной энергии”. На рис. 15.5.6
состояния А'2 соответствуют режимам плоского штопора и глубокого сва-
ливания. Если позиционное отклонение opiauoB управления, направленное
на вывод из критического режима движения, не приводит к его устране-
ние. 15.5.6 II 1лкмт]ыция к чс-тоду
динамической раскачки
нию, то раскачка движения, приводящая
к увеличению кинетической энергии уг-
лового движения, может вывести состо-
яние из области притяжения критическо-
го режима и привести к возврату' в об-
ласть режимов с малыми углами атаки
Х}. На рис. 15.5.7 приведен пример ма-
тематического моделирования динамики
самолета при автоматическом выводе его
из штопора. Первоначально самолет О
помощью отклонения стабилизатора и
руля направления вводится в режим
плоского ле.в<жо штопора. После этого
отклонение стабилизатора и руля направления "прошв штопора” (ф = О,
51( — 20J), а элеронов “по штопору" (б4 = 20°) не приводят к прекращению
вращения и уменьшению угла атаки (интервал £ = 60+ 75 с). Включение
ABU Г = 75 с) с использованием динамической раскачки угловою движе-
ния приводит к выводу самолета из штопора за время порядка 10 с. В ус-
товиях нехватки эффективности органов управления метод раскачки
значительно сокращает время вывода из плоского штопора при совместном
использовании с “позиционным" методом управления.
Рис. 15 5 7. Математическое моделирование динамики самолета при автоматическом вы-
воде его ил плоского nnvuopa
Описанные способы управления были использованы при разработке
экспериментальной системы АВШ и прошли успешную проверку непос-
редственно в летных испытаниях самолета.
Список литературы к глаие 15
1 Г.С Нюшгенс, Р.В. Ступне/ Аэродинамика самолета. Динамика продельною и бо-
ковою движения - М Машиностроение, 1979 349 с.
Г С, Июгшенс, P.R. Студнев. Динамика < ачолета. Пространственное движение М '
Машиностроение, 19R3.
М.Г. Котик Динамика штопора самолета — М Машиностроение, 1476
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
4 ЮН I И Загайнив Управление полетом самолетов - М Машиностроение
I'.RjU.
” .1 I Андропов. .1.1. Питт. С Э. Хайкин Теория колебаний М • Физмат лит. 195g
«, Н1! Арма<ы/ . 1ополните..ьные I швы теории обыкновенных ."’’‘Ьфсренциальтл*
равнений М Наука 197А
7 /О И Нейчарь. Меки точечных отображений в теории нелинейных колебаний ~М
1аука 1972
ъ Р 1 нлмор Прикладная теория KaiacTjXxf. п 2-х томах М Мир, 1984.
М.1 Гочам. R .7 Суханов Рас чет птаимодейсгвия щи мольного и боковою движении
амо и га при маневрах но крену Руковод< гво для конструкторов но проектированию
i амулетов. ЦЛГИ 1979. Том 1 Книга 6. вып. 1
р) V ./ Гоман, U-.1 Суханов Автоколебательные режимы движения самолета по крену
У ченые (лппгкп ЦАГИ 1953 Том XVI hi 2
11 1 Doalrl and J.Г Kernevez \IJTO Soitware for continuation and bifurcation problems in
rclin r.' ci.Lrcniial equations California Institute of Technology Pasadena, 1986.
•2 M I Гочам. Г. H Милаш, AB Храмиоаский Диалоговая система программ КРИТ
. _я ни 1едопания нелинейной динамики самолета // Информационный сборник паке-
тов прикладных upoipaMM по аэромеханике самолета. ЦАГИ, 1986. Вып. 4.
13 Р Gntcheteau Notice d'utilisaton du code ASDOB1 // Preprint ONIERA. 1992.
14 V Г Гочам, AR. Храмцовскии Расчет границы области асимптотической устойчивос-
ти динамической системы Ученые записки ЦАГИ, 1990 Том XXI, hi 3. С 79 87.
15 М I Гочам. Л С Клу.чов. ЛЕ .Меркулов Компенсация инерционного и кинема
.ического взаимодействия продольного в бокового движений самолета средствами ав-
томаткг Гр. ЦАГИ, 1957 Вып 2319
16 11II Аолжеико Об шследовании установившегося штопора самолета // Тр. НАГИ.
•968 Выпуск 8Ы 7
17 П К. Святодух Метод расчета ус гапопппгиегося движения самолета по спирали
Ученые шпики ЦАГИ. 1984 Том XV, hi 6 С 51-62
18 4 4 Шалое Расчет м. шпопишпегося виража // Ученые записки ЦАГИ, 1984. Том XV,
hi 6 С 63-70
19 И 11 Ахрачееи. М Г Гоман и др. Автоматизация вывода самолета m режимов пттспора
Техника Воздушного Флота 1991 hi 3
20 R К Mehtai В’.С. К^.ч1, J.V. Carrol. Global Stability and Control Analysis of
\inralt al High Angles-of-AtUick// ONR CR 215-248-(l)(2)(3),1978 1980.
21 P Guuheteau Bifurcation theory applied to the study of control losses on combat
aircraft V 1д Recherche Aerospatiale, No 2. 1982, pp 61-73.
22 Cl Zagaynoi, M.G. Goman. Bifurcation analysis of critical aircraft flight regimes
K’AS Procccdliigs,vol.l, 1984, pp 217 223.
23 Hsiao Deny Chiang, W.Hirsh Moms. F. Н’и Felix Stability Regions of Nonlmer Autonomous
Dynamical Systems H IEEE trans on Automatic Control, vol 33, No. 1, Jan 1988.
21 Manoeuvre Limitations of Combat Aircraft H AGARD Advisory Report No. AGARD-AR-155A
25 Rotary-Balance Testing for Air< rntt Dynamics // AGARD Advisory’ Rcport^N’o. 265, 1990
Глава 16
ЛЕТНО-ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
СВЕРХЗВУКОВЫХ САМОЛЕТОВ
16.1 Общие положения
Расчет летно-технических и маневренных характеристик (ЛТ и MX)
самолета сводится к решению ряда задач, которые можно условно разде-
лить на три группы:
- Расчет параметрон, характеризующих режим полета самолета в
заданный момент времени без рассмотрения предыстории и последую-
щего движения. Это задачи определения максимальных и минимальных
скоростей на заданных высотах полета, максимальных высот полета при
заданных скоростях, скорости отрыва при взлете и скорости касания
ВПП при посадке, скорости захода на посадку, предельных и установив-
шихся вертикальных скоростей и угловых скоростей разворота в
горизонтальной плоскости при заданных высотах и скоростях полета и
т.д Для определения этих параметров необходимо аналитическим или
графическим способом найти решения алгебраических уравнений.
- Расчет параметров, характеризующих процесс перехода самолета
от одного режима иолета к другому (траекторные задачи). Это расчет
времени расхода топлива и траектории перехода от одной высоты и
скорости полета к другой высоте и скорости (частные случаи - набор
высоты с заданной скоростью и разгон на постоянной высоте), расчет
дальности и продолжительности полета на заданной высоте с заданной
скоростью или на заданной скорости с постоянным коэффициентом
подъемной силы, расчет разбега и пробега и т.д. Эти и подобные им
задачи требуют интегрирования системы дифференциальных уравнении
при заданных управляющих функциях или дополненных таким количест-
вом связей между переменными, которые уравнивают число неизвестных
функции и число уравнений (замыкают систему).
- Расчет параметров, характеризующих оптимальный процесс пере-
хода самолета от одною режима полета к другому. К этой группе задач
относятся расчет максимальной дальности и продолжительности полета,
расчет динамического потолка (предельно-достижимой высоты полета),
расчет минимального времени выхода на заданную высоту полета, расчет
набора высоты с минимальным расходом топлива и т.д. Эти задачи
сводятся к определению управляющих функций или недостающих связей
Между переменными, обеспечивающих экстремальные значения соответ-
ствующих показателей, и последующему расчету этих показателей, т.е. в
общем случае к решению вариационных задач, поставленных на базе
Уравнении движения самолета.
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
Рис 16 11 Сита, действующие па са-
Ч'ЛКТ в ио.птт
Целью расчетов может быть либо по-
лучение конкретного результата, либо по-
лучение общих закономерностей. В пер-
вом случае используются точные уравне-
ния и расчеты на ЭВМ, во втором - пре-
дельно упрощенные уравнения и общие
зависимости, отражающие основные свя-
зи между неременными.
Основная ('‘точная”) система урав-
нений, используемая при расчете ЛТ и
MX, это система пяти дифференциаль-
ных уравнений первого порядка, кото-
рая описывает движение центра масс са-
молета без скольжения в вертикально»
плоскости (рис. 16.1.1), Ее удобно пред-
ставить в виде
уравнения движения центра масс самолета
т = G (пха - sin 0), т V ~ = С (nw - cos 6),
dt dt v
уравнения дифференциальных связей
dH . . л dL .. л
—- = I sin 9, — = VcosG,
dt dt
уравнения расхода массы
dm 7S (1G r-FT
— = -w Qt »vn« — = -G Qt.
dt di
(1)
В этих уравнениях пы = (Рха -Xa)tG - тангенциальная перегрузка -
сумма проекций аэродинамггческих сил и силы тяги па касательную к 1раск-
торни самолета, измеренная в долях ею веса, Рх(1 = Pcos(a + <рт)« Ха =
- CxaqS; nV{2 = {Pyi: + Ya)/G - нормальная перегрузка - сумма проекции
аэродинамггческих сил и силы тяги на нормаль к траектории, измеренная в
до.гях веса самолета, Pv-Psin(a + ФД ~ GtjaqS: Qt = (P/GjCe^ - массо-
вый расход топлива в единицу времени, измеренный в дотях массы самолета
(б'е^ф - эффективный удельный расход топлива), Ce^(F,//,P) _ ДР00'
сельная характеристика двигателя, Р - Р/Ррмп -
Функции ntn, пуа, Qt могут быть использованы для сравнения само-
летов различных компоновок, размеров и массы. В них сосредоточена
вся информация о самолете, необходимая для решения траекторных за
дач с учетом ограничений. Для любого заданного полетного веса самоле-
га эти функции зависят от переменных V', Н, Р, а, <рт
Система содержит восемь переменных: I
- пять функции состояний (“фазовых координат”) Г(0. ©(f)
L(t) и G(0:
- три управляющих функции P(t); <рт(/); а(г) -
Если цвести в рассмотрение полною удельную механическую
энергию самолета E = W + V2/(2p) и ее первую производную dE!dt =
= dHIdt + \Vlg) (dV/dt), го первое и третье уравнения системы (1)
позволяют получить соотношение dEldt - rtxaV (и, следовательно,
dE/ds = пла, где .?- длина дуги траектории). Оно может заменить
первое уравнение, поскольку силы, действующие на самолет (тяга
силовой ycianoBKn и аэродинамические силы), существенно завися!
от плотности воздуха, т.е. от высоты полета, и присутствие в систе-
ме третьего уравнения Н = VsinO необходимо - оно связывает вы-
coiv полета со скоростью и углом наклона траектории.
Силы, действующие на самолет, не зависят явно от длины пути в про-
екции на поверхность земли (£), поэтому присутствие кинематической
связи L = Vcos0 (четвертое уравнение) в системе нс трсб\стся Можно се
рассмотреть отдельно после решения системы и определения Ir(t) и (5(7) и
использовать дчя нахождения пройденного самолетом пути.
Масса самолета из-за расхода топлива изменяется достаточно мед-
тенпо. Поэтому при рассмотрении кратковременных маневров прису i-
ствне пятого уравнения dm]dl = -mQt в системе не обязательно - массу
самолета в этом случае можно считать постоянной, а расход массы опре
Делить после решения задачи.
Таким образом, основными уравнениями системы (1), определяющи-
ми параметры кратковре ченного движения самолета, можно считать три
первых уравнения системы - уравнения движения самолета и уравнение
дифференциальной связи между скоростью полета, углом наклона траек-
тории и высотой полета.
К системе необходимо добавить определение скорости ноле!а
V = /2<7(Ь - Н), если в качестве функций состояния приняты Е, 0, Н
Ускорение свободного падения g считается постоянным и равным дс -
ускорению свободного падения у поверхности Земли
При расчете дальности и продолжительности полета необходимо
использовать два последних уравнения, полагая cost) = 1
К легло-техническим характеристикам (JI'IX) самолета традиционно
относя। максимальные и минимальные скорости полета, максимальные
высоты полета, наивыгоднейшие скорости и высоты полета, дальность и
продолжительность полета, параметры, определяющие взлет и посадку.
Как правило, это режимы полета, соответствующие области, в которой
Подъемная сила (и продольный момент) линейно завися! от угла атаки и
Угла отклонения поверхностей управления:
Суа “ ^уа а “ + •
а полное сопротивление самолета при любом числе М можно записать в
Виде квадратичной iiapa6i ль
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
и ~ lam.n ~ . И’"111 —
* У°’
f 2 А2
С л С va Г -Г Я1
<“.гдО * . '-дгглшн ~ '-'ха О . ч •
ПЛэф 4Д2
А
2Л2’
где .40= 1/(ял.эф) - показатель роста индуктивного сопротивления;
Хэф - 1/(п.12) - эффективное удлинение (Адф < л).
Коэффициенты Сха$ и Л] или CX(7min и Суа (зависящие от <р) опре-
деляют положение поляры в координатах Сха, Суа, а коэффициент Д2
или эффективное удлинение определяют форму поляры в области линей-
ной зависимости Cy/l(tx).
Таким образом, несущие свойства самолета и его про юльные момент-
ные характеристики заданием рядом чисел, зависящих от М и Re, а но-
1яра в этой области для каждого числа М задается тремя числами
(\а *т11п* 11 (или ?чф), которые определяю! максимальное аэроди-
намическое качество (Хтах) 11 коэффициент подъемной силы, ему соот-
ветствующий (Суахап)'
г - 1 г' _______1____.
V ,12 К^~2^Л2-аС j
или
/- _ ~ 2 JZ Я?*эф
^yaKr.iX = ул\»фОгдггнп ~ ^уа • ^тах 7 « \ •
2(СУоКтзх ~CV«)
Для расчета ДТХ необходимо (и, как правило, достаточно) задать:
- аэродинамические характеристики самолета (модели) в линейной
области, представленные величинами C^fJ, сх0, Cxe0, lj и (вместо по-
следних трех могут быть заданы Crflmiu, Суа, Х^ф), определенные с
учетом балансировки для заданной центровки Хх, т.е. при = О, в
зависимости от числа М при числах Rc эксперимента;
- высотно-скоростные и дроссельные характеристики двигателей f
нроспектны.ми (стандартными) потерями в воздухозаборниках и соплах;
- несущие свойства и сопротивление самолета (модели) с учетом
влияния земли (экрана) при числах М, соответствующих отсутствий
сжимаемое! и.
На рис. 16.1.2-16.1.5 представлены примеры подобных характеристик
Рис. 16 1 2 Высотно-скоростные характеристики ТРД (пример)
Характеристики расхода топлива . ы ТРД (пример), Се =
Се(Р)
Се(Р*1)
Рис. 16 1.3
16.1 4 Задание сх-ниниых аэродинамичес
riI* характеристик самолета н линейной области
Рис 16.1 5 Аэродинамические характеристи-
ки самолета н посадочной конфигурации
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
Перед расчеюм ЛТХ необходимо в эти харак эристики внести поправки
на переход к натуре”. те. на переход от модели к конкретному самолету
которому эта модель геометрически подобна, но отличается от него состоя-
нием поверхности, воздухозаборниками и соплами и т.д. и числами Re. (;-уТи
вопросы обсуждены в 1.1. 1 и в следующем разделе).
16.2 Аэродинамические характеристики,
необходимые для расчета летных данных самолета* 1
Для расчета летно-технических характеристик самолета необходимо
иметь данные ио его силовой усчановке, размерам и весу и его аэродина-
мические характеристики - сведения о несущих свойствах и сопротвлс-
нип во всем диапазоне высот и скоростей полета. Самый падежный спо-
соб определения аэродинамических характеристик самолета - экспери-
ментальные исследования в аэродинамических трубах сто геометрически
подобных моделей, которые позво.ъчют получить зависимости основных
аэродинамических коэффициентов от угла атаки, углов отклонения по-
верхностей управления, чисел М и Re.
При наличии результатов испытаний моделей в аэродинамических
трубах для получения исходных данных для расчета летно-технических
характеристик (ЛТХ), необходимо внести поправки я результаты испы-
таний, учитывающие различие в числах Re и сосюянии поверхности мо-
дели и натуры, а также различие в положении линии перехода ламинар-
ною пограничного слоя в турбулентный на модели и самолете.
Если результаты испытаний моделей исследуемого самолета отсут-
ствуют, расчет его поляры можно произвести приближенно, исходя из
обработки систематических параме1рическнх испытаний моделей в аэро-
динамических трубах.
Коэффициент поляры Аз (или обратная ому величина зависит
от удлинения, формы крыла в плане и числа М и для изолированных
тонких крыльев может быть определен по линейной теории.
Для комбинации фюзеляжа с крыльями конечной толщины произ-
вольной формы в плане коэффициент Л> (или л?-*],) при околозвуковых и
сверхзвуковых скоростях может быть определен на основе система-
тических экспериментальных исследований:
' -• \2
IСиа ~ )
= с -с •
ха '-'дм пип
Г* У2
Как показала обработка ряда экспернмснюв, зависимости (Суг.
от fCx//-Cwinill) практически линейны в диапазоне 0 <Cye< (1
(рис 16 2.1) и, слсдова1ельно, величина Аз (или лХэф) постоянны для Л-111
пого числа М
1 В ряцеле нспотьяонапы резулыаты экспери.чешазыгых исапмопыпш Н К ЛебеДь *
1 Н Онышвой
Треугольное крыло = 60', к = 2,3 Стреловидное крыли у_14 = 55"; л 3; п = 4
с =3*о
6%
8 “о
с = 3\
6%
8 %
Изолированное
крыле»
5мф =0.025
« с =3*.
< 6 “о
Л 8".
= 0,075
Нис 16 2 1 Влияние огносительнои площади миделя фюзеляжа и формы крыла п плане
Сравнение осрсдненных экспериментальных значений коэффициента
я^-эф для комбинации фюзеляжа (Л*мф - 0,05) с треугольными крыльями
различной гтреловндногти по передней кромке для чисел М = 0,7-4 при-
ведено на рис. 16.2.2. На рис. 16.2.3 приведены графики эксперименталь-
ных зависимостей п/^ф - /ХМ) для комбинации стреловидных крыльев с
фюзеляжем, построенные в диапазоне М = 0,8ч-2,5. По этим зависимостям
можно при отсутствии результатов испытаний в аэродинамических трубах
геометрически подобных моделей оценить индуктивную поляру самолета с
заданными параметрами для всего диапазона скоростей полета.
Индуктивная поляра самолета при сверхзвуковых скоростях зависит
главным образом от величины удлинения и угла стреловидности крыла;
изменение сужения мало влияет на величину коэффициента
С увеличением удлинения и уменьшением угла стреловидности ве-
личина плЭф возрастает (рис. 16.2.4-16.2.6). Однако но мерс увеличения
Числа М различие в значениях лХЭф при изменении к и у крыла умень-
шается и при М > 3 становится несущественным.
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
Рис. 16 2 2 Влияние чглоб стреловидности передней кромки треуюльиых крыльев
Рис. 16 2 3. Влияние услан < цк-довидиости трапециевидных крыльев
Изменение относительной толщины профиля крыла в пределах
- 3 8°» практически нс влияет на индуктивную поляру комбинации
фюзеляжа с прямыми, стреловидными и треугольными крыльями при
околозвуковых и сверхзвуковых скоростях (рис. 16.2.1).
Форма профиля крыла не оказывает существенного влияния на кру-
тизну индуктивной поляры изолированного крыла и крыла с фюзеляжем
при сверхзвуковых скоростях, а при дозвуковых и околозвуковых скоро-
стях крутизна поляр увеличивается при применении в компоновке дозву-
ковых профилей с малым радиусом кривизны носка.
Форма миле левого сечения фюзеляжа приводит к некоторому изме-
нению наклона индуктивной поляры вплоть до больших чисел М.
Изменение относительной площади миделевого сечения фюзеляжа в
пределах 5^ - 2,5 + 7,5% и при М > 1 практически не оказывает влия-
ния на крутизну поляры комбинации фюзеляжа с трапециевидными,
стреловидными и треугольными крыльями (рис. 16.2.1).
Рис. 16.2.4 Стрекшидное крыло. Влияние удлинении
Рис 16 2 5 Влияние угла СТпсижи «ногти
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
Рис 16 2 6 Влияние уггапопки горизонтальною оперения
Наличие горизонтального оперения уменьшает индуктивное сопротив-
ление комбинации фюзеляжа с рассмшривае.чыми крыльями (рис. 16 2.6).
Подвеска хорошо обтекаемых грузов под крылом практически нс
влияет на крушзну индуктивной поляры самолета. Однако при размеще-
нии грузов на концах крыла крутизна поляры при околозвуковых и
сверхзвуковых скоростях возрастает.
Приведенные зависимости = /’(М,Х,с,5м ф) могут быть исполь-
зованы д.1я оценки индуктивной поляры сверхзвуковых самолетов без
Рис 16 2 7 Пример бадансироночпой зависимости C„u(n) и балансировочной поляры
9 с
самолета при -мнасе продотьной < 1атической устойчивости т * 0,2
х-чега балансировки Отклонение стабилизатора значительно изменяет по-
тярУ самолета. особенно при М > 1, поэтому для расчета ЛТХ необходимо
И1 пользовать поляру с учетом продольной балансировки самолета (тп2 - 0)
IJO режимам полета. Имея из экспериментальных исследований моделей в
аэродинамических трубах значения аэродинамических коэффициентов
можно рассчитать балансировочную ноляру самолета в нужном диапазоне
значений Cu,t и чисел М.
Балансировочную поляру самолета можно построить графическим
способом на основании результатов эксперимента (рис. 16.2.7).
Определение коэффициента сопротивления при нулевой
подъемной силе. Коэффициент сопротивления самолета Сгдо в общем
слечае может быть записан в виде суммы следующих слагаемых:
- сопротивления консольной части крыла - Сгокр(5конс/5);
- сопротивления фюзеляжа - Схоф(5м,ф/5);
- сопротивления омываемой площади горизонтального оперения -
о ro(Srn/S):
- сопротивления омываемой площади вертика тьного оперения -
б Г (.1 во(«Ун ) •
- сопротивтения фонаря кабины летчика - АСгофон!
- дополнительного сопротивления грузов, подвешенных под крылом
или фюзеляжем (с учетом интерференции с самолетом) - \СХ о гр5
- дополнительного сопротивления за счет отличия поверхности
самолета от аэродинамически гладкой (щели, заклепки, люки, сварные
швы и др.) и сопротивления неучтенных деталей - ДСхо BpexH;
- дополнительного сопротивления трения самолета за счет измене-
ния скорости и высоты полета - ДСХ Re.
Первые шесть членов этой суммы представляют собой сумму сопро-
тивления трения, вызванного вязкостью воздуха, и волнового сопротив-
ления, обусловленного формой тг толщиной элементов самолета.
Для приближенной оценки Схд о наиболее распространенных форм
крыльев (тонких прямых, стреловидных и треугольных) и типичных ДЛЯ
°Д под в ига тельных схем сверхзвуковых самолетов размеров и форм фюзе-
яжей (.S'Mxj, - 0,05 + 0,1; Хф = 10-^13) можно воспользоваться экспери-
ментальными зависимостями Сгдо = /’(М) комбинации крыла с фюзеля-
жем, полученными из систематических экспериментальных исследований.
В гл. 2 приведены экспериментальные зависимости Cx„q - /(М) серий
топких прямых, стреловидных и треугольных крыльев с осесимметричны-
ми фюзеляжами, которые могут быть использованы для приближенной
°пснки Схя о рассчитываемой комбинации крыла с фюзеляжем
В случае отличия параметров крыльев для рассчитываемой комбина-
ции крыла с фюзеляжем от параметров крыльев, приведенных в этих
гЛавах, пересчет Crtfo на другие удлинение, сужение, угол стреловидное-
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
, относительную толщину или радиус кривизны носка профиля можно
по соответствующим зависимостям
в тл. 2.
0 “ А^-кр- Л Хпк> Скр) (
Оценка влияния изменения площади или формы милелевого сечения
на С\йО комбинации крыла с фюзеляжем может быть проведена
графику зависимости \СХйОфу = ДМ), приведенной на рис. 16.2.8.
с - испытания изолированного ^юнаря,
• • - из испытании моделей с треугольными крыльями
- Из испытаний моделей со стреловидными крыльями
нс. 16.2 8 Влияние числа М и относительной плошали миделевого сечения фюзеляжа
4?) и фонари (фон) на коэффппиепт сопротивления самолета при С„ = О
В главе 2 приведены зависимости Сгло = ДМ) комбинации трапецие-
идных и треугольных крыльев с цилиндрическими фюзеляжами Эти ма-
ериалы могут быть использованы для оценки влияния изменения формы
иделсвою сечения фюзеляжа на CX(7q комбинации крыла с фюзеляжем.
Коэффициенты сопротивления горизонтального и вертикального
перений с выбранными параметрами могут быть определены по тем же
стодам, что CrfiQ изолированных крыльев.
Пересчет коэффициентов сопротивления хвостового оперения на дру-
ге относительные площади можно производить на основе зависимости
(-'ха О ом го+во
S'
• во
- ДМ)
Пересчет Сжя0го(во для других значений огносительной толщины хво-
ового оперения, имеющего близкие к типовому параме1ры, производится
топорциопалыю квадрату относительной толщины профиля (М > 1)-
Сопротивление фонаря кабины летчика оценивается но материалам
пытаний в аэродинамических трубах изолированных сЬопаоей И носо-
ъых частей фюзе.тяжа с фонарями, имеющими различные углы наклона
смотровых стекол и различные относительные милели.
Для применяемых на сверхзвуковых самолетах форм и размеров фона-
рей кабины летчика на рис. 16.2.8 дана зависимость Схофон ~ ДМ), где
Ci о фон отнесен к относительному миделю фонаря в до^тях площади крыла
Опенка сопротивления самолета за счет подвески иод крылом различ-
ных 1рузов может быть произведена па основе зависимостей ^СхОс1|^инт =
= ДМ) и ДСхОпкл = ДМ), приведенных в гл. 2.
Прирост сопротивления от подноски грузов можно также прибли-
женно рассчитать но эмпирическим формулам гл. 2.
Точные методы расчета всех составляющих сопротивления и допол-
нительного сопро1ивлсния за счет отличия поверхности самолета от
аэродинамически гладкой (волнистость и шероховатость, головки закле-
пок и винтов, стыки листов обшивки, щели и т.п.) и наличия на самолете
мелких, выступающих в поток деталей (антенны, узлы и агрегаты систе-
мы управления, воздухозаборники системы охлаждения и т.п.) весьма
сложны, трудоемки, требуют наличия подробной информации о самоле-
те, в частности данных о состоянии пограничного слоя и распределения
давления по его поверхности.
Использование этих методов необходимо при поиске путей улучшения
обводон уже спроектированного самолета, модели которого испытаны в
аэродинамических трубах Для определения ДСла, связанного с переходом
к натуре, на ранних стадиях проектирования самолета при проведении си-
стематических расчетов по выбору его компоновки и основных параметров,
при сравнительной оценке различных вариантов достаточны более простые
методы. Ниже предложен подход, позволяющий путем исключения или
осреднения влияния второстепенных параметров получить простые зави-
симости изменения сопротивления трения при изменении основных опре-
деляющих компоновку самолета параметров и режимов его полета. В ос-
нове этого подхода лежат хорошо изученные законы сопротивления трения
плоской пластины. Обтекание самолет предполагается безотрывным, пре-
небрсгается влиянием угла атаки и пространственности течения, погра-
ничный слои полагается турбулентным.
В практике расчетов коэффициента сопротивления турбулентного тре-
ния наиболее употребительны эмпирические законы для плоской пласти-
ны. Все формулы в диапазоне чисел Re = 106-МО9 дают достаточно близ-
кие результаты, лежащие в пределах разброса экспериментальных зпаче-
г 1 Влияние сжимаемости на коэффициент сопротивления трения обычно
^итывастся введением множителя, зависящего от числа М полета.
Формула для расчета среднего коэффициента трения Ср плоской
пластины, учитывающая влияние сжимаемости воздуха, имеет вид
0,0306 1 ...
Cf- ~ 71-- ---------> j х (Л/
(1 + о,1м2)34
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
Коэффициент сопротив.гения грения самолета Сгатр является, очевидно
суммой коэффициентов грения его элементов (крыла, оперения, фюзеляжа'
гондол двигателей и др.)
Использование степенною закона трения позволяет представить ко-
эффициепг грения самолета в виде трех сомножителей, первый из кото-
рых зависит лишь oi геометрических параметров самолета, второй - от
высоты полета, а третий - от числа М В сомножителе, в котором собра-
ны все геометрические параметры самолета, можно выделить характер-
ный линейный размер самолета - хорду эквивалентной пластины. Эта
условная величина представляет собой хорду такой пластины, омываемая
поверхность и коэффициент трепля которой равны омываемой поверхно-
сти и коэффициенту трения самолета. Для принятого (степенного) зако-
на трения хорда эквивалентной пластины определяется формулой
•$ом/**
у- -Sqm k $
Рис 16 2 У К определению хорды
жнива, icht пой пластины - характер
пого швейного размера самолета
Анализ геометрических параметров
ряда сверхзвуковых самолетов различ-
ного назначения показал, что хорда эк-
вивалентной пластины близка по ве-
личине к хорде прямоугольной пласти-
ны с площадью, равной площади гори-
зонтальной проекции самолета 5||р, и
размахом, равным размаху крыла /
(рис. 16.2.9).
Используя хорду эквивалентной пла-
стины в качестве характерного линейного
размера самолета и нормируя множители,
зависящие от числа М и высоты полета,
получим для коэффициента сопротивле-
ния трения самолета следущую формул?’,
пригодную для анализа основных законо-
мерностей изменения этого коэффициента
от его геомсгрическгтх параметров и ре*
жимов полета:
0,00315 . f -som
(2)
Функции
f -
сЕ(Л = 11км)
(pg *-0/7=11 км
(pa и)//
r q.-(M) 1,065 V/4 0,8^ V7
M“rF(M = 0,8) 1-0,1M2J
(3)
представлены на рис. 16.2.10. Величина рл/ц, входящая в первую из
формул (3), представляет собою число Рейнольдса при числе М « 1 и
характерном линейном размере / = 1 м.
Рис. 16.2.10. Функции /Н(М) п /м(М) необ-
ходимые для рас сета коэффициента треи ся
самолета
Рис. 16 2.11 Пример зависимости коэффи-
циентов сопротивлении трения от чиста М
и высоты полета
Использование формул (2) и (3) позволяет пересчитывать коэффици-
ент сопротивления трения самолета заданной конфигурации, определенный
Для /У = И км и М * 0,8. к произвольной высоте и числу М полета.
Такой пересчет может быть выполнен и и тех случаях, когда коэф-
фициент трения па заданной высоте и скорости определяется способом,
отличным от указанного выше.
Пример зависимости коэффициентов трения от числа М и высоты
полета для дозвукового и сверхзвукового самолетов, полученные пе-
ресчетом с использованием формул (3), приведены на рис. 16.2.11.
В формулу (2) входят два геометрических параметра самолета: хорда
эквивалентной пластины и отношение площади омываемой поверхности са-
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
монета к площади крыла. Основным параметром, определяющим различие в
коэффициентах сопротивления трения различных самолетов, является от-
ношение полной площади омываемой поверхности самолета к площади его
крыла, которое входит в формулу (2) линейно. Это отношение, а, следова-
тельно, и коэффициент сопротивления трения зависят от аэродинамической
схемы и нагрузки на крыло и могут изменятся в 1,5-2 раза: от ^ОМ/5*3
для самолетов, выполненных в схеме ' бесхвостка", до StM/S = 4-^6 для са-
молетов нормальной схемы (рис. 16.2.12).
Рис. 16 2.12 Зазисимость коэффициентов сопротивления трешгя от соотношения площа-
ди омываемой поверхности самолета (.9ПМ) и площади крыла (S)
Линейные размеры самолетов оказывают меньшое влияние на значение
коэффициентов трения: при изменении хорды эквивалентной пластины ЬжВ
от Зм до &чКВ= 15-20 м коэффициент сопротивления изменяется на
20-30%. Обработка результатов расчета коэффициентов трения для ра*-
личных самолетов показала, что поправка на относительную толщину с
элементов самолета изменяется в первом приближении линейно в зависимое*
ти от параметры с/50м (рис. 16.2.13)
г _ \
Сх ,р * ^'.ттр(с=О) 1 +
\ 13 ом 2
Увеличение сопротивления может составить 1< -г 15% для сверхзвуки
иых самолетов и 25-г-30% для дозвуковых.
Рис. 16 2 13 Поправка к Сттр „а иттюгитмъпую толщину элементоп самолета
Рассмотрение коэффициентов сопротивления трения э «ментов самолеп
показывает, что отношение сопротивления грсния крыла и оперения к со-
противлению трения самолета в среднем на 25% больше, чем отношение
омываемой поверхности этих элементов к омываемой поверхности самолета
Отношение сопротивления трения фюзеляжа к сопротивлению трения само-
лета примерно на 25% меньше отношения омываемой поверхности фюзеля-
жа к полной омываем» й поверхности самолета. Это обусловлено тем, чтс
крыло и оперение имеют меньший характерный размер, чем фюзечяж л
также различным влиянием относительной толщины.
При наличии ламинарных участков сопротивление трения уменьшает-
ся. Для гладкой пластины уменьшение сопротивления трения составляет
лам
где хп = хи/1 - положение точки перехода ламинарного пограничного
слоя в турбулентный в долях характерного линейного размера.
Расчеты показывают, что в диапазоне чисел Re = 10(’-н 108 характер
изменения коэффициента грешш в зависимости от положения точки пе-
рехода ламинарного слоя в турбулентный близок к линейному.
В среднем при увеличении протяженности ламинарного участка на
Л.тп =0,1 хорды коэффициент сопротивления пластины уменьшается на
7j-9% по сравнению с сопротивлением при полностью турбулентном по-
граничном слое в диапазоне чисел Re = Ю^-е 10н.
При расчете разности коэффициентов трения модели и самолета для
полностью турбулентного пограничного слоя можно использовать фор-
мулу (2), пренебрегая в первом приближении влиянием толщины и про-
странственности обтекания.
После элементарных преобразований па основании (2) получим
^Сх тр = х гр мол ~ ^гтр.нат = Qi тр нат
бт? V7
Кепат
<^<-'мод>
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
> слои пишись приводить коэфнриштеш сопротивления самолета к высоте
// 11 км, можно существенно облегчить расчеты, построив заранее
.рафика. Первый из них - функция отношения ^сНЙТ(Я-11 км)/^емо
(рис. 16 2.14).
Рис 1ti 2 11 Переход <л коэффи-
циента гремим модели к коэффн -
iGieirry трения самолета н адннси-
Ч1>| nt 01 (яношсиия чисел Re на-
туры и модели
Re =
здесь ReHdT(H= 11
ReHdr V''
п« I 1
<^емол>
км) = 7,57 10б Mft.
Второй - зависимость коэффициента тре-
ния пластины на высоте И= 11 км от числа
М полота и характерного линейного размера:
0,030(3_________1
(1-0,1М2)34М17 (р</ ц)^7 нб’.7 ‘
Тогда поправка па переход от модели к
самолету определится как произведение этих
двух функций на отношение площади омыва-
емой поверхности самолета к площади крыла
или к той условной площади, к которой отне-
сены его аэродинамические коэффициенты:
-^-х гр - f Re^Fll -
Влияние относительной толщины крыла и оперения может быть
учтено введением в формулу' коэффициента I’^(c/S0M) , определяемою
но статно и четким данным (см. рис. 1G.2.13)
Самолет отличается от своей геометрически подобной модели состоя-
нием поверхности и наличием немо-
делирурмых выступающих в поток
детален. Это приводит к увеличению
коэффициента сопротивления само-
лета по сравнению с его значением,
полученным после введения реи пол ь-
дсовской поправки.
Для расчетов на стадии выбора
компоновки можно принять средние
статистические значения вредного со-
противления и полагать па основе ре-
зультатов экспериментальных и расчет
ных исследований, что увеличение ко
Рис 16 2 т5.
Осредненное
значите ирв
jMiiiritiix кс1-и|и]>ншк’нта сопротивления Щ
переходе от модели к самолету
В результате суммарная поправка для перехода от коэффициента со-
противления модели, полученного в аэродинамических трубах при нулевой
подъемной! силе, к натурным условиям на высоте Н « 11 км составит
5
^Стнат ~ “ f Re^rn^c) $ •
Поправка для пересчета коэффициента сопротивления трения само-
лета о! высоты Н — 11 км к произвольной высоте можег быть определена
с помощью графиков двух заранее вычисленных функций:
s
ЛСХ тр Н ~ ^'.гтр Л ~ Схтр И = H^F Ц^с ‘_£
где С/г ц определяется по рис. 16.2.16, a Afjj = -1 - по рис. 16.2.17.
Ри< 16.2 16. Зависимость коэффициента тре-
ния самолета иа высоте 11 км от числа М при
рал.шчных характерных размерах самолета
Piu 16.2.17. Зависимость Л//Д//), исполь-
зуемая при ццхх'чете кол]>фпиисита трепня
Саматета от высоты полета // = 11 км к про-
изволыюй высоте
Дальнейшее упрощение рассчетных формул и анализ составляющих
сопротивления самолета показывают, что грубая оценка коэффициента
сопротивления самолета при нулевой подъемной силе на дозвуковых
скоростях может быть сделана по формуле следушей структуры:
Сга л = 1.35(Cf + 0,0003) — + 0.03F + —;
ши г s s
здесь первое слагаемое представляет собой коэффтпиюш 1]>ения и “вредного”
сопротивлащя (С/г определяется по рис. 16.2.16). второе и Т]>етъс учшывают
'.vokb-lc.spb.ru - Как построить самолёт своими руками?!
Рис 16 2 18 Зависимость коэффициента
(\т1Р(М). отнесенного к плошали омывае
мой поверхности SOft: I - самолет с крылом
изменяемой геометрии 2 - самолеты со
стреловидным крылом; 3 — cawijier с треу-
гольным крылом; - шероховатая поверх
ностъ (пластина) h!b = 0,00046 , h - вы-
сота бугорков шероховатости, Ь - хорда
"нерасчетное" влияние голщщгы не-
несущих элементов самолета (F -
суммарная относительная площадь
фюзеляжа и других ненесувшх эле-
ментов), сопротивление фонаря и
других плохообтскаемых элементов.
Коэффициенты формулы 1 го. п йены
статистической обработкой резу.гъта-
тов испытании моделей самолетов
различных компоновок в аэродина-
мических трубах ЦАГИ.
На рис. 16.2.18. показаны ко-
эффициенты минимального сопро-
тивления для Н = 11 км, отнесенные
к площади омываемой поверхности.
д.тя ряда сверхзвуковых самолетов
И диапазон коэффициентов сопро-
тивления трения этих же самолетов.
Для оценок на рис. 16.2.19 при-
ведено усредненное дополнительное сопротивление фюзеляжных тормозных
щитков сверхзвукового самолета, отнесенное к площади этих щитков
Рис 16 2 19 Коэффициент сопротивления Слитп1(М) тормозных щиткоп, расположенных нэ
фюзеляже без цк’.ш между щитком и поверхностью самолета (отнесен к площалн щитков.
= 5(F)
На рис. 16.2.20 приведено сопоставление дополнительного сопротив
лепия самолета за сче1 числа Re при Н *11 км, определенного прибли-
женным способом и точным расчетом.
Рис 16 2 20. Влияние высоты иолста на зависимость дополнительного сопротивления са-
молета ЛС,ц(М)
16.3 Установившийся горизонтальный полет
(пха — О, Н = const, Пуа = 1)
Установившийся горизонтальный полет (cos 0 = 1 или “квазигори-
зонтальиый”) - основной режим немансвренных (транспортных) само-
летов. Аэродинамические компоновки таких самолетов формируются,
исходя из обеспечения заданных параметров, характеризующих этот
основной режим, а взлетно-посадочные характеристики обеспечиваются
выбором механизации крыла или введением специальных средств,
обеспечивающих увеличение подъемной силы при взлетно-посадочных
углах атаки (Ту-144). Для маневренных самолетов установившийся го-
ризонтальный полет также один из основных режимов. Для этого ре-
жима определяются максимальные и минимальные скорости и высоты
полета, продолжительность и дальность крейсерского полета. Расчет и
анализы этих режимов обычно не отделяются от расчетов и анализа
других характеристик, их проводят на базе единого комплекса про-
грамм с единой системой исходных данных по аэродинамике, силовой
установке, весовым и геометрическим характеристикам самолета. Этот
комплекс программ включает в качестве первого этапа расчет показате-
лей, характеризующих самолет ntu, Qt, а в функции от Г, Н, Р,пуа,
от для заданного набора его полетных весов.
Рис 16 3 I. Расчет границ области установившихся режимов шризонтального полета
www.vokb-lo.spb.ru - Как построить самолёт своими руками?!
Максимальная и чинима:1ънам скорости установившегося горизонталь,
ного нолста „а заданной высоте для заданного полетного веса традиционно
опрел» тяются путем сопоставления потребной тяги, г е. сопротивления са-
молета в горизонтальном полете (А’й = G/К) и располагаемой тят и силовой
установки (Pjmch) во всем возможном диапазоне скоростей полета. Макси-
мальная и минимальная скорости соответствуют условиям (рис 16 3.1):
Ррасп = G/K И.1М ^рагц/С = 1 /К ИЛИ Пха j = (P/G)paeH - 1 /К = 0.
Точек, удовлетворяющих этим условиям (если они существуют), мо-
жет быть две (одна) на всех высотах или четыре (три) на больших высо-
тах. Дополнительные точки появляются за счет резкого изменения аэроди-
намических характеристик при переходе через скорость звука
(М - 0,8* 1,2). Геометрическое место точек Vmin(//) и V,nax(H) на плос-
кости Г, Н образует границу области режимов установившегося горизон-
тального полета Верхней части границы соответствуют максимальные вы-
'оты установившегося полета. Максимальные скорости полета достигаются
три больших скоростных напорах (малых углах атаки), поэтому коэффи-
циент подъемной силы, потребный для юризонтального полета Суа га и
шредсляющий аэродинамическое качество самолета К = Суаи1/Сха, не за-
И1СИ1 от тяги силовой установки. При дозвуковых скоростях Гтш и /7,пдх
[осгигаются па малых скоростных напорах (при больших углах атаки),
йитому при их расчете обычно учитывают зависимость коэффициента
годье.мной силы, потребного для горизонтального полета, от составляющей
яти на нормаль к траектории, и для а < 25° используют формулы
G S 1 -^расп 1
уя ч
При определении максимальной и минимальной скоростей и высот
олета (на сверхзвуковых скоростях существуют не только максималь-
ые, но и минимальные высоты нолста) учитывают ограничения по рабо-
* силовой установки, которые связаны с числом М, углом атаки, темпе-
агурой торможения, скоростным напором или давлением в каналах воз-
тхозаборников, тто безопасности нолста, связанные с несущими свой-
вами, устойчивостью или управляемостью самолета, обеспечением не-
водимого давления в герметичных кабинах и т.д.
В качестве максимальной скорости полета па каждой высоте принп-
стся наименьшая из скоростей, соответствующих ограничениям, если
ia Меньше скорости, отвечающей пха = 0, // = const, пуа = 1.
В качестве минимальной скорости полета на каждой высоте прини-
1скя наибольшая из этих скоростей, если она превышает скорость, со-
ветствующую пга = О, Н - const, пуа = 1.
Максимальная н минимальная ско-
рости полета сверхзвуковых самолетов,
как правило, определяются ограниче-
ниями (рис. 16.3 2 и 16.3.3).
Наибольшую из максимальных
скоростей полета при различных вы-
сотах II = const называют максималь-
ной скоростью самолета. Точки (точка)
границы облает установившихся ре-
жимов полета, в которых максималь-
ная и минимальная скорости совпа-
даю!, называют теоретическим ста-
тическим потолком самолета.
Наличие зависимостей nre(V) при
Р = 1, Н = const, пуа = 1 позволяет
Рис. 163 2. Максимальные, минимальные
скорости самолета и максимальные пысо
ты определяются ограничениями (пример)
рассчитывать разгоны самолета в го-
ризонтальном полете в заданно*! диапазоне скоростей:
( ’ 'рг а l« -V4
'll
Риг. 1Ь 3.3 Облас ib установившегося горизонтального полета дли снерхзвуково
го пассажирского самолета (пример)
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
Обычно для целей сравнительного анализа время разгона определяется
для некоторого заданного диапазона скоростей на заданной высоте. Прини-
мая Ги - 600 км/ч и Гк = 1100 км/ч, на высоте II = 1 км, полч’чим
^разг
14,15
^пха\^ср
Для сверхзвуковых самолетов с высокой взлетной тяговооруженнос-
тью эта величина составляет 12 + 16 с.
Экономическая и наиеъмоднейшая скорости горизонтального устано-
вившегося полета. Кроме максимальной и минимальной скоростей па
каждой высоте полета интерес при анализе представляют:
V^K - экономическая скорость, которая на высоте соответствует мини
малыюму расходу топлива в единицу времени (минимум часового расхода);
Гн. _ наииыгоднейшая скорость, которая па этой высоте соответ-
ствует минимальному расходу топлива на единицу пройденного пути
(минимум километрового расхода).
Расход топлива в единицу времени Qt и на единицу пройденного пу-
ти Qv определяются очевидными формулами:
- Се Р
'ранг
Се G - Qt Се
- \Рт К 1 G 1 - Д1
Се G ^*езф
----=---~ ИЛИ Оу = -----,
де ДРг - относительные потери тяги, дополнительные к
.е. учтенным в тяге двигателя, заявленной в его проспекте. Эти потерн
•проделаются путем испытания моделей воздухозаборника и сопел на
пениальных стендах (см. гл. 5). Возможный характер зависимости Д/V
•оказан на рис. 16.3.4.
проспектным,
Удельный расход топлива Се зависит
от скорости полета (числа М) и параметра
управления тягой силовой установки
( Р - Gy/ (КРр1НСп) < 1). который, в свою
очередь, зависит от потребной и распола-
гаемой тяг, опреде.сяемых скоростью по-
лета (рис. 1G.3.5).
В предположении, что поляра само-
лета и удельный расход топлива нс за-
висят от скорости (числа М), а поляра
аппроксимируется квадратичной пара-
болой, могуг быть получены прибли-
женные формулы, справедливые в диа-
пазоне скоростей, в котором отсутствует
влияние сжимаемости;
^еэф
Рис 16 3 5 Улелъиы!» расход топлива в установившемся горизонтальном полете
- режим минимума расхода топлива в единицу времени (Qr):
Cyani - CjwK „д’ “ ^max- ^эк
G/S
max
yaKmxJ
- режим минимума расхода топлива на единицу пути Qy:
Д
yam ~ г.
Д-
3 c,
\2
3 c,
^пил ’
I J
j/o }
MB
1
2
у fl ^uux
л к'-'^лтах;
В слунас симметричной поляры (C,*w = 0) формулы для расчета ре-
жима минимума расхода топлива на единицу пути существенно упрощают
ся. Для оценочных расчетов полезны следующие соотношения:
С:
i'<;rn = 4зС^Ктлх ~
ni = ^тах = 0»866Кгаах,
www.vokb-lc.spb.ru - Как построить самолёт своими руками?!
1 ш. - ^31 ’к = 1,316 Гк = 1.3161',
"" *'гих
maxl ~ 1’14Kf'axrA'max
Важно отмстить, чю при отсутствии влияния сжимаемости минимум
километрового расхода па заданной высоте no.ieia достигается на скорос-
ти заметно превышающей скорость, иа которой реализуется Kmav и Qt
Эго объясняется тем, что аэродинамическое качество вблизи К ма-
ло изменяется ио скорости полета, и влияние последней в произведении
KV становится определяющим. Слабой зависимостью аэродинамического
качества от скорости полета вблизи KindX объясняется и характерный вид
зависимости ихв(Г) (см. рис. 16.3.1). Подобный режим реализуется толь-
ко при полете на малых высотах (рис 16.3.6). С увеличением высогы по-
чета экономическая скорость, соответствующая полету на Кгаах, уве-
личивается. Опережая се на З0‘'о, увеличивается и Г||н, первой вступая в
область влияния сжимаемости и падения Кголх. Увеличение нагрузки на
крыло и уменьшение СуаК способствует этому (увеличение параметра
{£•>$)/Суака!^- Увеличение скорости полета для увеличения произведе-
ния A'I11dXM становится невыгодным при достижении числа М, начиная с
которого максимальное качество уменьшаегся интенсивнее, чем возрастав
скорость (рис. 16.3.6).
Реально режим Qimin соответ-
ствует несколько меныпему числу М,
поскольку Се с увелггчением скорости
увеличивается (см. рис. 16.3.5). Ре-
жим Qrmm достигается в области от-
сутствия влияния сжимаемости па
меньших скоростях и высотах полета.
Таким образом, реально оба ре-
жима соответствуют полету на Klftax>
но минимальный часовой расход до-
стигается при /Стах пне влияния сжи-
маемости, а минимальный километ-
ровый расход - при /<П1ах> соответствующем максимуму произведения
Ктах-Ч1 в области начала влияния сжимаемости (М1)11Г на рис. 16.3.6).
В каждом конкретном случае режим 0Гш1ц и Qvmin нетрудно опредо*
лить прямым расчетом часовых и километровых расходов в зависимости
от высоты и скорости полета. Пример результатов расчета показан на
рис. 16.3.7.
Дальность полета на крейсерском режиме определяется километро-
вым расходом топлива и относительным запасом топлива на самолете
весовой отдачей самолета по топливу Ст:
Рис. 16 36 Onpc,i<vji кие оптимального числа
XI крейсстххого полна (первое приближение)
XV. Gji XV. 1 im
-----In —— =----In 7 -=-г — .
CC чф GK (1 + CT CH ) “ ^T
[дс GTHB — относи тельный расход топлива при наборе высоты (до нача-
ла крейсерскою полога), GTO, — относительный расход топлива при
снижении (после окончания крейсерского полета).
Рис 16 3 7 Часовой ((?,) (й) и километровым (Qi ) (б) расходы топлива (пример),
т ~ 25 т, Р(.£ G^,., = 1,2, ТРДД, бесфорсажный режим
Формула получена в результате точного решения уравнений движения,
при Н к 11000 м в предположении, что тяга силовой установки направ-
лена по касательной к траектории, полет проходит при постоянном
значении коэффициента подъемной силы с постоянной скоростью. В этих
Допущениях число М, режим работы двигателей и удельны»! расход топ-
лива постоянны и не изменяются по мере выгорания топлива, поскольку
уменьшение полетного веса компенсируется увеличением высоты полета.
Увеличение дозвуковой дальности noacia на этане формирования
аэродинамической компоновки достигается уменьшением километрового
расхода топлива и увеличением запаса топлива па самолете. На этапе до-
водки самолета - выбором оптимального режима набора высоты и скоро-
cni при выходе на крейсерский режим.
Если полет проходи! на постоянной высоте с постоянным коэффици-
ентом подъемной силы и уменьшением скорости полета но мере выгорания
топлива, то дальность может быть определена по приближенной формуле:
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
КреПС' Сеср ОМ'
При Се = Const полег на постоянной высоте с уменьшением скорости
при Суа - const привел бы к заметному уменьшению дальности, но ре-
ально Се гр < O(GM), Кср > Кн, что сокращает различие.
Ниже приводятся формулы для расчета рассматриваемых режимов
крейсерского полета (индексы п, к обозначают начало и конец крейсерс-
кого полета соответственно).
I' = const; Н = var V = var; H = const
1 н W„ + 6341.6 In fr{ V
I. А’Г , GH г—ln7^ L 2KcplH [frT <4 1 VJ
t X . fr, <*♦ С, t c * e
k' — lie te Г' — Gh
4^-д(нпун)
Если сопла двигателей поворотные и направление вектора тяги в по-
лете может быть изменено, то их оптимальное положение соответствует
направлению этого вектора по касательной к траектории, т.е. реализации
допущения, сделанного при выводе формулы Бреге.
Отклонение вектора тяги вниз на угол фт = -а (что соответствует откло-
нению сопел вверх) обеспечит дополнительный момент на кабрирование
Суа т
&Пг = ~^~1са
Балансировка этого момента потребует для самолета нормальной
схемы отклонения стабилизатора вверх, что приведет к увеличению аэро-
динамического качества - эффек!, аналогичный влиянию т2о > 0 для
статически устойчивого самолета
Л _ А/Д 1са
ф
Дальность полета на сверхзвуковом режиме определяется но форму-
лам и соотношениям, приведенным выше, за тем исключением, что на
сверхзвуковых скоростях в общем случае нет максимума зависимости
КпахМ = ДМ), обусловленного аэродинамикой самолета, хотя может
иметь место максимум из условий работы силовой установки и ее регули-
ровки. В общем случае Мопт и Нн задаются, что и определяет потребные
(P/G)rt<1, и (G/5)M<1 показанным выше способом. Существенное различие
заключается в том, что расход топлива на выход на сверхзвуковой крей-
серский режим полета составляет не 3-г5%, как это было для дозвуко-
вого режима, а 10-г15% от взлетного веса (рис. 16.3.8, 16.3.9). За-
висимость скорости полета от высоты здесь играет заметную роль и
выбирается на базе решения вариационной задачи, которая ставится
н зависимости от назначения самолета и цели полета. Основные из
них - минимум расхода топлива, минимум времени, максимум уда-
гения от аэродрома взлета к моменту выхода на крейсерский режим
Рис. 16 3.8 Относительный расход
топлива до начала креВсерского
полета (дтя оценок)
Pin. 16 39. Отоситедьнос увс.шкнне дальности по-
-ета п процентах njw увеличении относительного за-
паса топлива на 1% взлетного веса / - G* 10- 15 тс,
2 40 -50 гс. 3- 100-120 гс
16.4 Взлетная и посадочная дистанции самолета
Взлетная дистанция. Различают два этана взлета - разбег и воз-
душный участок (рис.16.4.1).
Взлетная дистанция (£„)_____
Участок разбега Воздуптиын уча-
(L ) сток излета (/.„)
Захгр1пспие взлета
Начало ралбега Отрыв носового
V 0 колеса .¥„ = 0
Отрыв самолета, Г = 1'^, .V., = 0
Рис 16 4 1 Силы, действующие па самолет при разбеге, и схема ш iera
www.vokb-lc.spb.ru - Как построить самолёт своими руками?!
Разбег выполняется при угле наклона траектории 0 = 0; самолет тви
жется прямолинейно с предельно возможным ускорением, обеспечиваемым
располагаемой тягой силовой установки Р, до достижения скорости отрыва
Г„,р. Bbicoia расположения взлетно-посадочной полосы (ВПП) задается
плотностью воздуха (р).
Воздушный участок взлета начинается при Н = 0, 0 = 0, И = Г,
После оIделения от ВПП самолет продолжает разгон с набором вы-
соты до достижения заданных значений и 17кч, обеспечивающих бе-
зопасность дальнейшего полета, в ходе которого самолет должен изме-
ни 1Ь конфигурацию (убираются шасси и закрылки).
Суммарная длина разбега и воздушного участка взлета определяет взлег-
nvio дистанцию - расстояние по горизонтали, которое проходит самолет при
взтете от момента страгивнния до набора высоты и скорости Vfic3.
Ташенциальная перегрузка (ускорение) сверхзвукового самолета при
взтете определяется располагаемой тяговооруженностыо и мало изменя-
ется в процессе взлета (рис. 16,4.2 и 16 4.3).
Рис 16.4 2 Сооттюпкшю смы тяги и
conpoTHD-viniM при взлете (пример)
Рис. 16.4.3- Запись ряда параметров, характсризу»
шпх взлет самолета и летных испытаниях (пример)
Поэтому для анализа взлетной дистанции на этапе аэродинамическо-
го проектирования самолета могут быть предложены простые формулы
для расчета всех ее элементов.
В результате решения системы дифференциальных уравнении, опи-
сывающих движение самолета при разбеге, в ряде упрощающих предпо-
ложений получены расчетные формулы для определения основных пара-
метров, характеризующих разбег:
скорость отрыва
_ 2 I G S
’ отр — Л1 , Т’ * л- ипгр
V Р । Gij(l иф \ G )
- время разбега
__l_ 2 I С,5 V1 (Ротр/б)а.л? , 11 - (Poiy/Gjajnp CJqp -f Cyav
!/\Р\С,,„„ф Pv'C,-f [ 3 Рр C-f Cjocn),
- длина разбега
1 G-S 1 (-^пр ^)^отр
Р9 Cr/</уф PyjG-f
[^отр/С)с1оф СГОр - [Суау
С — f Суд уф
1 1
2
В формулах для /р и £р множители перед скобками показывают
время и длину пут, потребные для разгона материальной точки с массой
равной массе самолета, до скорости, равной скорости отрыва. Второе
слагаемое в скобках показывает влияние аэродинамического сопротивле-
ния на время и длин}’ пути разбега.
Полагая C,ja р - О, можно полупить простейшие формулы для расчета
времени и длины разбега с учетом аэродинамического сопротивления:
f __ J_ IT | G/S____\^~^arp ejatnp
9 NP\ Cyaarp Pv/G - f - (Слдо/ЗСудоф)
1 G/S ~(Лир/С)аотр
P9 CyO уф Pp G- -(c^q 2Судуф^
В л их формулах: Рр, CTop, Судр - средние значения тяги и коэффи-
циентов СГд, C,ja при разбеге; Р„тр, СудОтр, аотр - значения тяги, коэф-
фициента Суд и угла атаки а при О1рыве; д — ускорение свободного па-
дения; р - плотность воздуха; G = тд - полетный вес самолета; S
площадь крыла; f- коэффшincur сопротивления качению.
Основные параметры, определяющие разбег (G/S)/C'yfl отр и (P/G),
не зависят о1 характерной площади, к которой отнесены аэродинамичес-
кие характеристики.
Движение самолета на воздушном участке взлета описывается си-
стемой уравнении (1) (см. 16.1). После упрощения лих уравнений,
интегрирования и ряда преобразований получим систему четырех ал-
гебраических уравнении, решение которой удобно записать в следую-
щем виде:
www.vokb-lo.spb.ru - Как построить самолёт своими руками?!
- длина воздушного участка излета:
Ибез+^;
______2*7
2 бсЛ огр
IJ Г&3 “ 'игр
**без + п
средняя перегрузка:
= 1 +
flua ср
2 ^без' беП игр
- время полета:
В3 " Па. Г
у ’ без1 отр
- конечный угол наклона 1расктории:
. 2Нбе3
L
^-вв
В этих формулах: К<р - среднее аэродинамическое качество на воз-
душном участке взлета; Кср=Л(Г11Т'к ~ средняя скорость самолета на
атом участке; H(Ki, V6e3 - высота над ВПП и скорость полета в конце
воздушного участка взлета, обеспечивающие безопасность.
Коэффициент kT учитывает переход от взлетной тяги силовой уста-
новки к ее значению при средней скорости полета Vcp и потери тяги, до-
полнительные к нроспектным, т.е.
/’ср ~ ^т^взл •
пхаср
=^cL'
flya ср
/'"ср
Среднее значение коэффициента подъемной силы определяется по
формуле
у а ср
у а отр
где
т <р
’ без
2 ^без^белКггр ^отр
О 1^в , ^бгз
И -
В предположении, что в реа.тьном движении коэффициент подъемной
силы изменяется монотонно, значение и = Суа cvICya (rq, качественно опрсде-
тяет закон управлештя коэффициентом подъемной силы (перегрузкой),
обеспечивающий достижение скорости 1'о. при достижении высоты
- при и ~ 1 среднее значение коэффициента подьемной силы равно
его значению при отрыве, т.е на воздушном участке взлета коэффициент
подьемной силы постоянен, перегрузка возрастает, ручка управления -
ио взлетном положении;
- при и > 1 коэффициент подъемной силы после отрыва увеличивается,
перегрузка возрастает, ручка управления должна перемещаться “на себя";
- при и < 1 коэффициент подъемной силы после отрыва уменьшает-
ся. ручку управления следует отдавать “от себя". Это - взлет с
выдерживанием, nyt2 а 1 (см. рис. 16.4 3).
Следует подчеркнуть, что дос-
тжение заранее заданной скорости
на высо1е Н^.л нс всегда возможно.
Если при l'K - Vfrj значения Суа гр
ц.щ пу(! ср превышают допустимые,
го конечная скорость должна быть
увеличена до значения, при котором
Cy{7cp 11 иуаср соответствуют oipa-
иичениям (рис. 16.4 4). Подобные
случаи характерцы для самолетов
с большой тяювооружсппостью на
взлете.
Существует, очевидно, макси-
мальная скорость отрыва Forplliax,
при которой самолет достигает на
высоте НСез заданной скорости
Гбез, выходя при этом на ограни-
чения по Суа ИЛИ Пуа »а ВОЗДУШ-
НОМ участке взлета.
Существует также минималь-
ная скорость отрыва V0TpmIn, кото-
рая соответствует предельно до-
пустимому углу атаки при отрыве,
т е. достижению ограничения по
Суа или а в конце разгона по ВПП
(рИС. 16.1.5). 1 отр mtn 11 огр шах
Характеризую! взлетные свойства
самолета при заданном взлетном
весе и заданной безопасной скоро-
Рис. 16.4 4 Параметры, характеризующие воз-
душный участок взлета при скорости отрыва
30.5 км/ч (84,7 м/с) в аанисимосш от X к на вы-
соте 7/fc.j = 10,7 м (штриховая линия соответ-
стпует С^, > Cjkijuo = 1-15)
сти взлета.
Расчеп»т показывают, что для сверхзвуковых самолетов с достаточно
большой тяговооруженностьк) длина взлетной дистанции при VOTj>min(ajon) £
^отртахС^без'С’улдоп) практически не зависит от скорости отрыва
(рис. 16.4.6). Существенное влияние на нее оказываю! только безопасная
скорость взлета и взлетная тяговооруженностъ самолета. Это объясняется
гем, что ускорение самолета при движении по ВПП в основном определяется
www.vokb-lo.spb.ru - Как построить самолёт своими руками?!
разностью Р/G - f, а при разгоне в воздухе - разностью Р/С -пуа/К, причем
значения / и пуа К б.шзкн (оба порядка 0,1) и существенно меньше взлетной
.яговооруженностн сверхзвуковых самолетов.
а .vx-тнгастся агпп догти-аетея нанемдуш-
мочеит отрыва ном папке вллста и > 1 -
V < I
Минимальная Максимальная
-корпеть отрыва скорость отрыва
Результаты расчетов соответствую!
результатам летных испытаний.
Анализ материалов летных испы-
таний самолетов показывает, что раз-
брос значений утла атаки при отрыве
достаточно велик и составляет G-H2°
Рпс 16 1 5 Схема возможною движения
самолета при пэ цте
раметры, обеспечивающие безопасность
взлета и ~ величины, зала-
при практически одинаковых у боль-
шинства современных самолетов зна-
чениях угла тангажа, соответствую-
щих касанию поверхности ВПП хвос-
товой опорой 3KdC = 13+140. Таким
образом, основные параметры, опре-
деляющие взлетную дистанцию само-
лета с высокой тяговооруженностью
это, во-первых, взлетная тяговоору-
женность (P/G)nxi и, во-вторых, па-
ваемые нормативными документами.
Если взлетная нагрузка на крыло
выбрана из условий обеспечения ми-
нимального километрового расхода в
крейсерском полете (дозвуково.м или
сверхзвуковом), то разделение взлет-
ной дистанции па разбег и воздушный
участок опреде.тястся выбором взлет-
ной механизации (Р(ттр), эффектив-
ность которой для самолетов малых
размеров не может быть слишком вы-
сокой (малые хорды и малые толщи-
ны крыла). При этом центровка само-
лета и эффективность продольного
управления должны обеспечить отрыв
носового (переднего) колеса при ско-
рости, меньшей скорости отрыва ог
ВПП самолета (см. рис. 16.4.1).
Посадочная дистанция. Разли-
чают два этана посадки - воздуш-
ный участок и пробег (рис. 16.4.7).
Воздушный участок начинается
при 0 = 0: V — Г„, тта высоте II = Нт,
8, /"=0,05, 11^=25 ч, РГ1>=415км'ч
260 280 300 320 Г^.км/ч
70 80 ^0 Г^.м/с
Рис 16 4 6. Пример зависимости взлет-
ной дистанции от скоргхти отрыва и тя-
говооружетпкк ч и
он включает в общем случае продолжение планирования до достижения вы-
соты начала выравнивания //Ныр и выравнивание - движение с уменьшением
угла наклона траектории до 0 = О, скорости до V = и высоты до Н = О
Рис. 16Л.7. Схема движения самолета на воздушных участках взлета и посадки
Пробег происходит при Н = 0, 0 = 0, самолет движется прямолиней-
но с предельно возможным торможением, обеспечиваемым энергоемкос-
тью тормозной системы самолета, реверсированием тяги двигателей и
। другими средствами уменьшения скорости.
Суммарная длина воздушного участка и пробе! а определяет посадочную
дистанцию - расстояние по горизонтали, которое проходит самолет при по-
садке от момента пересечения входной кромки ВПП па высоте Нпл со скоро-
стью 1'11Л и утлом наклона траектории 0|1Л до полной остановки самолета.
В результате решения системы дифференциальных уравнений, опи-
сывающих движение самолета при пробеге, в ряде упрощающих предпо-
ложений получены расчетные формулы для определения основных пара-
метров, характеризующих пробег:
- посадочная скорость
24 Пол юсл. Г. С 1>юшгепеа
wwwvokb-la.spb.ru - Как построить самолёт своими руками?!
- длина пробега
ln(1+z)
2 1 IKX •
ие
_ ^ха проб ~ f Суа проб + С ха т n-Vr п
G)llrB -г
V3an - время запаздывания, промежуток времени от касания колесами по-
верхности ВПП до начала эффективного действия средств торможения, в
1еченис которого скорость самолета остается практически постоянной,
(Р/Орен = -(P/G)npo6, (Р/ОпРоб ~ тяговооружепиость самолета при про-
беге (режим малого газа - (Р/Окр0б > 0> реверс тяги - (P/G),lpo6 < 0)
Cytl ши “ коэффициент подъемной силы при касании полосы главными
колесами шасси с учетом влияния земли; Сха проб, С1/а проб - коэффици-
енты Сха и Суа самолета при пробеге; Сготп - коэффициент сопротивле-
ния тормозного парашюта (отнесен к площади купола); 5ТП - площадь
купола тормозного парашюта, отнесенная к площади крыла.
Для расчета пробега без применения реверса тяги и тормозного па-
рашюта могут быть использованы простейшие формулы, аналогичные
простейшим формулам для расчета разбега:
1 12 I G!S 1
^пгхЛ ~ J I,, . (* _ f f + ^зап»
i7VPVCvflnoc f /л r-\ 1 ‘-хйпрб / ‘-'ьспроб
’ * / - (Р Сг;приб + ------—------ —
J ''уа пос
На основании результатов летных испытаний при расчетах посадки
воздействие на движение самолета тормозных параметров (реверса тяги,
воздушных тормозов, интерцепторов, колесных тормозов) рекомендуется
учитывать не ранее, чем через две секунды после касания, если их при-
менение разрешено до опускания носового колеса.
На рис. 16.4.8 показаны результаты расчетов но приведенным выше
формулам длины пробега при использовании реверса и тормозного пара'
шюта, с учетом и без учета вымени запаздывания. Точки левее /рП = ®
соответствуют посадке с двигателями, работающими на холостом ходу,
(P G) - (р О)Проб -- - 0,05. (Влияние реверса тяги и времени запазды-
В.1ННЯ реверса показано для самолета без тормозного парашюта.)
Ри<. 16.4 В Влияние ид длину пробега реверса иии, торм»иного параппотд и времени чапад-
дывапия введения в действие тормозных устройств (G/S - 416 кГс/см2, 1'|ИС = 81,5 м/с,
[ = 0,2. С„ „,хй = 0,0715, С„ =- 0,33)
Видно, что при коэффициентах реверсирования тяги = 0,4 + 0,5
реверс в два-три раза уменьшает длину пробега и что учет запазды-
вания весьма существенен при определении длины пробега с ревер-
сом. Пренебрежение запаздыванием приводи! к заметному заниже-
нию длины пробега.
Формулы для расчета параметров, характеризующих воздушный
участок посадки, наиболее просто и наглядно получаются при прямом
использовании энергетических и геометрических соо1ношений, харак-
теризующих расчетную схему (см рис 1G.4.7). Они могут бьиь запи-
саны в виде:
- длина участка выравнивания
^выр ~
(^-^•)-2^УпОс^е1П
- ®пл/2 — (^ср “ ®ил)^т
>0,
- высота начала выравнивания
0 гл
Я = —— L
11 выр 2
при 0 < 7/щцр < ,
- перегрузка при выравнивании
24*
, ^ПОС^Ш^ПЛ . п I ПОСБИЛ ^НЫр
пиа ныр “ 1 + - 1 - 2 ~2
9 Авыр д 7-выр
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
- длина воздушного участка посадочной дистанции
прохождения
и время его
^-нп
Нпл in 000 ) 1ЮС^ пл^пл
^IL1 ^9 •kep _611Л/2-(кср
?вп ~
Значения £зыр и /,вм определяются неоднозначно - они зависят от
парам» ра управления двигателем kT, который определяет долю тяги си-
ловой установки, потребную для планирования при и 0|1Л, реализо-
ванную (в среднем) во время выравнивания. Минимум длины воздушно-
го Участка соответствует k7 = 0, т.е. случаю выравнивания без тяги.
Наличие решений, не удовлетворяющих неравенствам (см. с. 739),
означает, что исходные данные 0ПЛ. V„ „ Vnoc заданы некорректно -
задача не имеет решения, исходные данные необходимо изменить (как и
в случае расчета взлетной дистанции).
На базе приведенных выше соотношений можно получить ряд упрощен-
ных формует для стандартных оценочных расчетов путем введения стандарт-
ных условий д.1я сокращения числа исходных данных. Можно задать:
- параметр управления тягой,
высоту начала посадки,
- отношение посадочной скорости к скорости планирования (захода
на посадку) и отношение среднего аэродинамического качества самолета
при выравнивании и выдерживании к аэродинамическому качеству при
планировании (К(р//<пл < I).
Тогда в формулах останутся только два параметра, характеризующие са-
молет: Гпл - скорость захода на посадку (планирования), - аэроди-
намическое качество при п тонировании, и одни параметр,характеризую-
щий систему посадки: 611Л - угол планирования.
Формулы для расчета посадки записываются в этом случае в виде:
Обеспечение безопасности взлета. При расчетах разбега самолета
на этапе его проектирования обычно проводят расчет минимальной ско-
рости разбега, при которой возможен отрыв переднего колеса шасси.
Очевидно, чго эта скорость соответствует обращению в нуль силы ре-
акции на носовое колесо при заданном коэффициенте продольного мо-
мента т2. Она должна составлять не более (0,7-5-0,8) Vorp. Обеспечение
этого соотношения может быть расчетным случаем для выбора макси-
мального угла отклонения поверхности управления при создании про-
дольного момента на кабрирование
Кроме того, рассматривается взлет при отказе одного двигателя.
При отказе двигателя однодвигатсльного самолета на разбеге летчик
применяет все средства торможения, для того чгобы остановить самолет.
При отказе двигателя на многодвигательном самолете летчик может
либо применить все средства торможения, для того чтобы остановить са-
молет либо завершить разбег и произвести взлет при одном неработаю-
щем двигателе.
Обычно рассматриваются:
- длина прерванного разбега - сумма длины разбега самолета до
скорости отказа двигателя (Готк) и тормозного пути при торможении
самолета без аэродромных задерживающих устройств.
- длина завершенного разбега - сумма длины разбега самолета до
скорости отказа (1'1ГГК) при работе всех двигателей и длины его разбега от
I ’отк скорости отрыва при одном отказавшем двигателе (рис. 16.4.9а).
Скорость разбега, Разбег при одном
при которой отказал отказавшем
Рис 16 1 Ч К oiqx-.iivK-iimo критичес кой ckojxxth отказа одного из дпигап-лгй при разбеге
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
Безопасность взлета однодвигатсльного самолета обеспечивается при
аком сочетании взлетного веса и длины взлетной полосы, при котором
летчик в случае отказа двигателя на разбеге при любой скорости
VOTK < V0-p может прекратигь взлет, так чтобы длина прерванного разбе-
га оставалась меньше суммарной длины взлетной полосы и концевой по-
лосы безопасности.
Безопасность взлета многодвигательного самолета обес ючивается при
гаком сочетании взлетного веса и длины взлетной полосы, при котором
летчик в случае отказа двигателя при разбеге на любой скорости
Г(ПК < Vorp может либо прекратить взлет, так чтобы длина прерванного
разбега оставалась меньше суммарной длины взлетной полосы и концевой
полосы безопасности, либо продолжить взлет на работающих двигателях,
так чтобы длина завершенного взлета оставалась меньше или равной длине
взлетной полосы. Очевидно, что существует некоторая скорость отказа
двигателя, называемая критической скоростью отказа (Укрит), при которой
разность длины прерванного взлета и длины концевой полосы безопаснос-
ти совпадает с длиной завершенного взлета (рис. 16.4.96).
Если отказ двигателя произошел па скорости разбега меньше кри-
тической (V0TK < VKpKT), летчик должен прекратить взлет.
Если отказ двигаге,1я произошел на скорости разбега больше кри-
тической, летчик продолжает взлет.
Длина завершенного взлета, соответствующая критической скорости
отказа двигателя, определяет минимальную длину летной полосы, кото-
рая обеспечит безопасный взлет самолета с заданным взлетным весом.
Список литературы к главе 16
1 Е.И.Колосов. Влияние изменения тяговых, расходных и конструктивных характерис-
тик ТРД на основные летные данные самолета '/Тр. ЦЛГИ, 1950.
2 Р.Д.Иродсм, Л. 4.Курочкин, И.И.Шшдоиа Методы исследования движения само чета
применительно к аэродинамическому расчету // Тр. ЦАГИ, 1963
3 В.Г.Микг1 niche, В.М.Титов. Основные геометрические и аэродинамические характе-
ристики самолетов и крылатых ракет. - М. Машиностроение, 1971
4 . Р.Д. Иродов. Общие принципы расчета летно-техническнх характеристик самолета
ПАП1, 19«3
5 . .1 Sfue.ic. Механика полета Пер. г англ. — М.: Наука, 1965.
Глава 17
МАНЕВРЕННЫЕ ХАРАКТЕРИСТИКИ
СВЕРХЗВУКОВЫХ САМОЛЕТОВ
17.1 Общие положения
Для расчета маневренных характеристик самолета недостаточно знать
его аэродинамические коэффициенты и производные в линейном диапазоне
углов атаки (см гл. 16). Необходимо задать аэродинамические характера
стики во всем диапазоне возможных в эксплуатации углов атаки, чисел М
и высот полета и характеристики силовой установки в этом же диапазоне.
Маневренные возможности самолета определяются параметрами, ха-
рактеризующими его способность изменять энергию, направление полета,
положение в пространстве и расположение опюешельно траектории.
Способность изменять энергию характеризуется производной dEfdt -
энергетической скороподъемностью, т.е. по физическому смыслу удельной
избыточной мощностью dE/dt = nX(lV = V*(V,H,nya). При V = const
значение V* совпадает с вертикальной скоростью, если итс<1. Эту спо-
собность можно характеризовать и производной dEfds = nxa(V,H,пуа), где
s - длина дуги траектории, т.е. удельной избыточной тягой, численно рав-
ной тангенциальной перегрузке пха (при Н = const, dE/ds = V/g).
Если поляру самолета аппроксимировать квадратичной параболой, то
в линейной области iixa(V, II, пуа) определится соотношением:
Р ,lya Р (CxaQ G yrt
ха G К G V C/S 7 1 уа 2 5 Ц
Способность самолета изменять направление полета обычно ха-
рактеризуют установившимися и предельными угловыми скоростями в
горизонтальной и вертикальной плоскостях:
dy д Гэ ; dQ д .
dt -уК» '• dt - 17 (V СО5в)
При О = О — = \—---------- < 1, (пуа > 1);
\ пус + 1
О пиа - 1
при е = 180° — = ----> 1,
V "wrt - 1
где Пуа — либо предельная располагаемая
бо установившаяся нормальная перегрузка пуа )СГ
~ доп /(О/1^)) Я ’ ,|1И’
** (С у а уст / (fii ^)) Я
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
Размер пространства, необходимого для изменения направления
полета, характеризуют радиусом виража (разворота) - мгновенного иди
становившегося
о V _ Р . к , V _ Р
9<.-Jnya ~1 ® 0c<«ye-COSe)‘
Пр„е = О = 5“Л>1. п„>1;
r R V 1 г'“
/хгор у иуа ~~ 1
Iip„ е = iso» = Ы~1 < I.
^,р ^уа "* 1
т.е. при одинаковых нормальных перегрузках и 6 = 0 радиус разворота
(радиус кривизны траектории) в вертикальной плоскости всегда больше,
чем в горизонтальной, при 0= 180° имеет место обратное соотношение.
Способность самолета изменять расположение относительно тра-
ектории, не изменяя последней, относится к полету при малых скорост-
ных напорах и в зарубежной англоязычной литературе обозначается спе-
циальным термином “agility
сматриваегся ниже в 17.4.
(поворотливость). Эта способность рас-
Риг 17.1.1 Перегрузочная поляра
1 - dE'dt < 0, 2 - dEfdl > 0;
-М = const, 11 - const, Р = 1
Маневренные возможности само-
лета характеризуются в конечном счете
набором зависимостей пха(пуа) для
различных высот и скоростей полета
(рис. 17.1.1).
Каждая кривая пха • f(nya) опре-
деляется тремя точками:
- лг<71 - значение «Гй в оризонталь-
ном полете, т.е. значение пха при пуа = 1,
_ пха уст _ установившаяся нормаль-
ная перегрузка, т.е. значение пуа при
НХа ~
- Пуа* - нормальная перегрузка,
которая соответствует максимальному значению пхо, т.е. предельному
ускорению самолета I 'max = дс пХЯЛ в горизонтальном полете.
Тогда в линейной области
пха ^pwy«yvr “ ^««) (^уа ~~Пуа*' J1
1ДС
_ rtxal_____________
^Л,.ууст — 1 — 2п^д»)
ИЛИ
2
(Яуа уст ~ М у а уст + -пуа*^уа ~ ^уа
^пуа уст ~ ‘2-пуа*>)Пуауст ^пуал ~ !
Зависимость »хв(л^в) при оценке маневренных возможностей самоле
и имеет определяющее значение - не меньшее, чем поляра для модели
Поэтому се называют перегрузочной полярой.
Для каждого режима полета (V7, Н) три опредетяющих перетру
зочную поляру значения перегрузок могут быть приняты в качестве ос
новных общих показателей маневренных возможностей самолета:
”хд1 = £ " + Л1 - Л2 ^-(итти Vy1 = яхв1Г>«
G G/S S q 3
(для симметричной поляры ny.t, = 0).
К ним следует добавить. Пу - эксплуатационная перегрузка (в ско-
ростной или связанно!! системах), которую запрещено превышать при
эксплуатации самолета (зависит от числа М почета и почетного веса са-
молета); пу1Цхл = 0,7(cyejoII/(G 5)]р(Я)М2 = 0,5(СуйЛПП (Ст 5)]р(Я)Г2 -
предельная перегрузка по возможностям безопасного создания подъемной
силы (С^доп), и ряд других ограничений на перегрузку и скорость по-
лета (<7П)4Х, давление в каналах между воздухозаборником и двигателем
Р'-тл> и ДР->-
На рис. 17.1.2-17.1.8 показаны эти зависимости для типичного манев-
ренного сверхзвукового самоле!а с высокой взлетной тяговооруженностью
В приведенных выше формулах как и во всех последующих, самоле!
характеризуется комплексными параметрами Р G, Сдво (G 5) A2(G6‘),
.Ц, (G/S)/Суа доп), которые отделены от параметров, характеризующих
режим полета: Н М, пуа.
В соответствии со сказанным в требованиях к маневренным характе-
ристикам самолета обычно задаются:
- максимальная энергетическая скороподъемность (для фиксиро-
ванных высот);
- максимальная установившаяся перегрузка (для фиксированных
высот);
- располагаемая перегрузка, определяемая несущими свойствами
(для фиксированных высот и скоростей полета);
- ограничения максимальной скорости (по прочности самолета и
элементов силовой установки);
- эксплуатационная перегрузка
В примере, приведенном на рис 17.1 2, максимальные скорости по-
лета на высоте Н < 17 км определены ограничениями по прочности
(<711 ,х давление в каналах, температура на входе двигателя). Минималь-
www.vokb-lc.spb.ru - Как построить самолёт своими руками?!
НчЯ скорость па высоте Н < 10 км также определена допустимым знача-
щем коэффициента подъемной силы.
Рш 17 1 2 Установивший я ш-рструзкм (д) и ограничения перегрузки (б)
При сравнении маневренных самолетов обычно сопоставляют облас-
ги (в координатах М, Н), в которых они способны энергично маневри-
ровать, считая, что для этого необходимо располагать некоторой мини-
мальной перетрузкой, с которой можно .маневрировать без потери энер-
ии и иметь возможность выполнять виражи с радиусом 7?доп, равным
половине расстояния, на котором другой самолет виден “невооруженным
1 лазом” (примерно 4 км? Область энергичного маневрирования в плос-
кости М.// определится следующими соотношениями:
р(Я)-
2 G S 1 t 1
V ^увдон ^доп (V
- верхняя граница,
। / 2 /
— 1 \S^aon пус раса
- правая граница,
р(И) =
пу a min GfS
0,7\Р кладов
z rr\ пуа min I G/S
или р(Я) = —------г- —-------
0,51- VСуд дои,
левая граница, на которой достигается установившаяся перегруз-
ка, соответствующая реализации Суа Л(1П, т.е. это - линия, на которой
достигается пуа т1П при CV„>1OII, если она находится в плоскости М»Я
правее и ниже кривой пуа угт = 1.
Представляет также интерес расположение кривой, соответствующей
достижению максимальной угловой скорости на каждой высоте полета.
Рис. 17.1.4 Установившаяся нормальная
(мтруэка при £ - const, т е пы - О
Рис 17.1 3 Удельная избыточная тяга
при м„0 ~ 1
Рис 17.1 5 Установившиеся угловые ско-
рости виражей в горизонтальной плоскости
Рис 17 1.7. Радиус установившегося вира-
жа В горший иЛЬПиЙ плоскости
Риг 17 1 8 Связь радиусов разворотов
горизонтальной и вертикальной п.тоскосп
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
Максимальная угловая скорость разворот и горизонтальной плоскости
соответствует достижению эксплуатационной пере рузки пу при Суа доп:
р(Н)=
О, / м2 \Суя дои;
или р(Я) = —-
G S
0.5И2 ДОП >
Расположение области энергичного маневрирования для сверхзвуко-
вою самолета в качество примера показано на рис. 17.1.2 вместе с ру-
гими его .маневренными характеристиками.
Сопоставление перегрузочных поляр маневренных самолетов позволя-
ei составить представление о соотношении их маневренных возможностей.
Если пт<71 и nycvcT одного самолета превосходят эти величины друго-
го (рис. 17.1.9), то первый самолет, очевидно, можно считать более ма-
невренным на рассматриваемом режиме полета (Vх, Н).
Рис. 17.19. Перегрузочные поляры различных компшгоник са.мозста (Н~3км
М = 0,9)
Если первый самолет по nX(Ji, превосходит второй, а по пуа уст ему
уступает, это означает, что он превосходит второй в вертикальных и вос-
ходящих маневрах и уступает ему при маневрировании в горизонтальной
плоскости. При сопоставлении этих самолетов первый условно может
быть назван скоростным, а второй - маневренным.
Сопоставление маневренных характеристик самолетов с помощью таб-
лиц или графиков дает лишь общее представление о соотношении их ма-
невренных возможностей. Вместе с тем для практики представляет наи-
больший интерес выяснить какое преимущество в тех или иных характери-
стиках и в какой степени достаточно для безусловного превосходства ново-
го самолета над серийным. Подобного рода количественные оценки мот
быть получены в результате анализа взаимосвязанного движения двух са-
молетов при условии их взаимного противодействия. При этом различие в
маневренных характеристиках самолеюв будет проявляться, очевидно, в
изменении их относительного положения в процессе движения.
Формирование управления самолетом в процессе описанного движе-
ния является одним из наиболее сложных аспектов его моделирования. В
насюящее время существуют два подхода: игровой и эвристический.
Для игрового подхода характерно сведение дайной задачи к некото-
рой дифференциальной игре, при которой каждая из сторон (самолетов)
осуществляет оптимизацию целевого функционала. При этом возникают
значительные трудности как вычислительного, так и принципиального
характера. Последние обусловлены гем обстоятельством, что точное ре-
шение, если оно получено, существенно зависит от постановки задачи -
целевого функционала, выбор которого, всегда априорен.
Эвристический подход основан на понимании особенностей маневри-
рования самолетов и физической сущности задачи исследования "воздуш-
ного боя”. Соответственно, задание логики управления самолетами по-
зволяет создать имитационные модели, в которых могут быть учтены
различные факторы: качественный характер оптимальных траекторий
движения, соотношение маневренных возможностей самолетов, инфор-
мация о движении самолета противника, способы пилотирования.
17.2. Общие и частные показатели маневренности-
Для определения ускорений и угловых скоростей, темна изменения
полной механической энергии, высоты и направления полета самолета
используются уравнения движения и уравнения дифференциальных свя-
зей. Основные из них приведены в 17.1.
Эффективность маневра, как способа изменения направления полета,
определяется нормальной перегрузкой Пуа, а изменение располагаемой
энергии - тангенциальной перегрузкой nza, которая зависит от тяговоо-
ружепности и нормальной перегрузки. Обе перегрузки могут быть опре
делены по результатам испытаний модели самолета в аэродинамической
трубе при задании управлений Р, а, <рт.
Нормальная перегрузка пуа при расчете маневров с изменением на-
правления полета обычно задается в качестве управляющей функции с
учетом ее ограничений ио безопасности полета (прочность, несущие свой-
ства) и возможностям реализации (балансировка).
Тангенциальная перегрузка nxa = P!G — nyaIK = dElds определяет энерге-
тические возможности самолета, в том числе максимально возможное прира-
щение его полной удельной механической энергии (Е= Н + У-Пд) на единицу
длины траектории в зависимости от реализованной нормальной перегрузки.
Для горизонтального полета перегрузка пха определяет продольное
ускорение в долях д
V = дпха\ при пХ{1 =1 V = д, при пха =0 V = const.
При вертикальном наборе высоты условие пха = 1 соответствует по-
лету с постоянной скоростью, при этом увеличивается только потенци-
альная энергия.
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
Энергетическая скороподъемность самолета Vnxa = dE/dt = I ’* - это
ззность между удельной мощностью силовой установки и удельной рабо-
той аэродинамических сил препятствующих движению.
Знаки пга и V* показывают направление изменения энергии самодо-
а, т е приобретает или теряет энергию самолет во время маневра.
При расчете маневренных характеристик на ЭВМ, определение энер-
гетических возможностей самолета удобно объединить с определением
максимальных и минимальных скорое юн (чисел М) и определением мак-
симальных высот полета, построив па плоскости V, Н линии пх„ - const,
V* = const , vrr = const. Кривые, которые соответствуют пха - О, V* - О
и «г,т. у< । = 1, очевидно совпадаю! и образуют границу области устано-
вившихся режимов полета. Граница состоит из максимальных высот и
максимальных и минимальных скоростей полета, обеспеченных энерге-
гически работой силовой установки па данном режиме. Абсолютная ве-
личина энергетической скороподъемности ( U *) в полете может превос-
ходить скорость по траектории при пха > 1, что соответствует вертикаль-
ном1. набору высоты с разгоном (V - Г, U > 0).
Для того чтобы получить связь между энергешческои ( V*) и гео-
метрической скороподъемностями самолета достаточно продифференци-
ровать по времени соотношение, определяющее полную удельную энер-
гию самолета, что и даст возможность записать
У dH
При Вертикальном наборе высоты эю соотношение устанавливает ве-
личину производной dVtdll, т.е. определяет изменение скорости с уве-
личением высоты почета:
При движении с постоянной подпой механической энергией вдоль
линии Е - const на плоскости V, Н выполняется соотношение
— т.е. V = J2g(E-H) .
dH V V У '
Поэтому в случае V* = О (Е = const) формулой связи V* и V'v
пользоваться нельзя, движение происходит с установившейся перегрузкой
fiya уст
расп
Анализ уравнений движения как формул для расчета м гневен in>ix
,1 .повой скорости и радиуса разворота в горизонтальной плоскости но-
дезно провести с учетом составляющей тяги на ось Yа, которая была
опущена в 17 1, для того чтобы сделать обозримым уравнение перегру-
зочной поляры, связывающее пха, режим полета (V, Н, Пуа) и комплекс-
ные параметры самолета:
^расп Суо AjG
G ’ G/S‘ S ' V
Если сопла двигателей во время маневра не поворачиваются (<рт = 0),
Vi ты атаки нс превышают а * 25°, подъемная сила при а = 0 отсутствует,
ю nvaG = Ya PpdCn мп а « Ус + Ра. В этом счучае-
- коэффициент Суа и угол атаки, потребные для реализации нор-
мальной перегрузки пуа (управление) определяется по формулам 16.1.
при уменьшении скорости палета мгновенная угловая скорость
разворота в горизонтальной плоскости уменьшается, если разворот совер-
шается с постоянным значением коэффициента подъемной силы, и увеличи-
вается, если разворот совершается с постоянной перегрузкой. Поэтому при
скорости, соответствующей одновременной реализации Суа и Пуа, мгновен-
ная угловая скорость достигает своего максимального значения:
- mi повеиный радиус разворота в общем случае достигает минималь-
ного значения при меньших скоростях - в области полета с предельным
значением коэффициента подъемной силы. Полагая, что при изменении
скорости полета все параметры, определяющие мгновенный радиус
разворота, не изменяются, получим
www.vokb-lQ.spb.ru - Как построить самолёт своими руками?!
р
/хгор
Р9 ^уа доп
р
'jMCll
2 G,S
Р9 ^ydjon
Достижению минимального mi новенного
cruveT нормальная Пере1рузка
радиуса разворота соотвег-
,1уа (-^торпип
г v Си Га
о .1 ya _ v уа
СУ«ДОП ^расп -Ь (^расп/С)С\0доп
Для самолетов с малыми полетными тяговооружеиностями
р z-«
урасп *- уд
С пэ С
"и г-уа доп
минимальные значения мгновенного радиуса разворота достигаются одно-
временно с достижением максимального значения угловой скорости раз-
ворота и составляют:
^гор пин
3 I Gib
"уа г'
2 ^уетжи!/ С у(> 2 G/5
Р.9 |/ а 7 Р9 С у» дон
vlпуа I ~1
Примеры расчетов приведены на рис. 17.2.1,17.2.2.
Рис. 17 2 1 Заниснхость радиуса тцэажа в
горизонтальной п.кхкехти от тягопоору-
женксх-ти и скорости полета
Рис. 17.2.2. Зависимость угловой скорос-
ти разворота в гори.яошальной плоскости
от тяговооруженности ы числа М попета
В дополнение к мгновенным ускорениям и угловым скоростям
(V, 0. ф), уравнения движения позволяют определить мгновенные
угловые скорост и радиусы разворотов в вертикальной плоскости,
соответствующие пха - 0:
V~
- cose), ««рт = 9(„9о;гг_сгае)
и угловые скорости и радиусы установившихся виражей в горизонталь-
ной плоскости
“гор уст ~ ,7 \пуа уст ~ 1' ^горугг ~ г~^----•
9 \nyaycj ~
Установившаяся нормальная перегрузка, определенная с учетом
нормальной составляющей тяги, может быть рассчитана по формуле:
С ( Р
'-'yaver . 7 рагп 1
Важно отметить, что произведение установившейся нормальной пере-
грузки на полетный вес самолета постоянно и что нссиммстрия поляры
> 0) заметно увеличивает установившуюся перегрузку.
При расчете установившихся перегрузок, соответствующих достаточ-
но большим углам атаки (С^я > (Д,5 + 2)Суа необходимо учитывать
отличие поляры самолета от квадратичной параболы.
Предельные мгновенные угловые скорости и радиусы виражей опре-
деляются предельной эксплуатационной перегрузкой или предельными
несущими свойствами самолета или Суа доп) при Р = 1.
Для пуа = пуа угловые скорости и радиусы разворотов могут быть оп-
ределены по приведенным выше формулам, для Суа = Суа ДОП при расчете
нормальной перегрузки следует использовать формулы, учитывающие
проекцию вектора тяги на нормаль к траектории.
Для получения предельных отрицательных величин пха, которые ха-
рактеризуют максимальный темп уменьшения полной механической энер-
гии самолета, в приведенных выше формулах следует положить Р - 0
или Р - Рт1П, а коэффициент сопротивления самолета принять равным
его величине с предельно возможной (дня рассматриваемого режима)
эффективностью тормозных устройств.
Обычно рассматривают зависимости nxa(V ,пуа) при Р = 1 для
различных высот полета и полетных весов самолета. Кривые пха(пуа)
при Р = 1 и Р = 0 ограничивают область возможных нормальных и
тангенциальных перегрузок самолета для каждой высоты и скорости
полета и полетного веса самолета (рис. 17.2.3).
15 Под ред Г С Парни гига
www.vokb-lo.spb.ru - Как построить самолёт своими руками?!
Рис 17 2 3 Ограничения нормальной и
иы спинальной пха перегрузок
Полное представление об энер-
гетических возможностях самолета
дают зависимости пАЙ(^,Г) иди
Д'*я различных высот
полета, определенные с учетом
всех ограничений по несущим
свойствам, числу М и прочности,
или набор перегрузочных поляр
для ряда высот и скоростей поле-
та. Пример подобных зависимос-
тей представлен на рис. 17.2.4.
Рис 17 2 4 Зависимость ташенциальных перегрузок (удельной избыточной тяги) от
числа М и нормальной перегрузки с учетом 01раничений по Суа, q и М
В зависимостях содержи 1ся вся информация о самолете, необходимая
для расчета на ЭВМ его маневренных возможностей с помощью уравнений
движения, записанных в приращениях, г.е расчета всех классических
плоских маневров - разгонов, виражей, горок, пикирований, петли Несте-
рова (замкнутая кривая в вертикальной плоскости) и пространственных
фигур высшего пилотажа:
- иммельман (нолупстля с поворотом по К]»ену на 186° в верхней точке),
- перепорот (поворот по крепу па 180° и выход в горизонтальный
полет вниз полупетлей),
- переворот на юрке (в верхней части горки поворот по крену на
180° и выход по.тупетлей вниз па высоту исходного полета),
- ранверсман или поворот на горке (в верхней части горки разворот
на 180° в наклонной плоскости и выход пикированием на высоту исход-
ного полета, пространственный маневр),
- боевой разворот (разворот на 180° в процессе выполнения горки,
пространственный маневр).
Эти и другие фигуры представляют собой комбинации горок, пики-
рований, нисходящей и восходящей ветвей петли Нестерова, виражей и
поворотов по крену на 180°
Для их выполнения требуется в начало маневра реа-ызация нормальных
перегрузок, существенно превышающих единицу-, запас кинетической энер-
гии или возможность ее поддержания или приобретения в процессе выпол-
нения горки или восходящей ветви пет пи (пЛ(1 > 0), высокая эффективность
поверхностей управления. При маневрировании самолет не выходит за прс-
де.гы ограничений, практически во всех точках траектории он сбалансиро-
ван, полностью управляем и статически устойчив относительно всех трех
осей (возможно, с применением автоматики в системе управления).
17.3 Особенности маневренных характеристик
на сверхзвуковых скоростях полета
В общей механической энергии самолета wV-fl + GH доля кине-
тической энергии с увеличением скорости интенсивно возрастает. Уве-
личение высоты полета, приходящееся на единицу потери скорости при
Е-Н + V2/2g, линейно возрастает с увеличением скорости полета:
<77/1 __Г
nV 1 у
но реальные возможности изменения направления полета без потери
скорости (горизонтальный маневр) или энергии (вертикальный маневр)
при сверхзвуковых скоростях полета существенно уменьшаются (см.
рис. 17.1.5-17.1.8).
Вертикальные маневры относятся К неустановившимся, поскольку
скорость и высота полета обычно изменяются в значительных пределах
(для пространственного маневра пГ/Я vrT - это нормальная перегрузка, соот-
ветствующая Е = const). Наиболее благоприятны для маневрирования в
вертикальной плоскости до- и околозвуковые скорости, при которых реа-
лизую гея максимальные установившиеся перегрузки (рис. 17.3.1) и энер-
гетические скороподъемности (рис. 17.3.2). Для самолетов со взлетной тя-
говооруженностъю, превышающей единтп1у (РЮ > 1), установившиеся пе
регрузки больше эксплуатационных, угловые скорости развороюв доходят
до 30 град/с, а радиусы установившихся разворотов измеряются сетями
метров и достаточно малы но сравнению с диапазоном высот, который мо-
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
жст быть использован для маневра (рис 17.3.1). Поэтому на малых высо-
гах и околозвуковых скоростях сверхзвуковой маневренный самолет вы-
полняет вес классические фигуры высшею пилотажа при условии сохра-
нения безопасного расстояния oi поверхности Земли.
Рис 17.3.1 Связь с станопнпптепся нормальной Перегрузки с высотой скоростью и скоро-
стным напор! iM
И км
30
20
10
\\\\\
О 200 100 600 800 V' , м/с
500 1000 2000 2500 3000 км/ч
Рис. 17 3.2. Линии ранных удельных мощностей (энергетических < ко|юпотьеч»тостеи) н-*
плоскости Н, V
При больших сверхзвуковых скоростях возможности классического
перинеального маневра в области установившихся режимов полета (ниже
статического потолка) значительно сужаются и ограничены выполнением
горок и разворотов в наклонной плоскости, поскольку радиусы разворогов
при реальных nlja vrr здесь изменяются десятками километров, а угловые
скорости - единицами градусов в секунду (см. рис. 17.1.2-17.1.8). При
М > 2 радиусы установившихся разворотов (или близких к ним) уже су-
щественно превышают вертикальный размер пространства, в Котором еще
возможен набор энергии при n,JU > 1. Поэтому сверхзвуковой самолет не
может реализовать угол наклона траектории 6 «90° без значительной по-
тери энергии, т.е. практически без перехода в дозвуковой диапазон скорос-
тей. Вместе с гем, сверхзвуковой самолет, используя свой значительный
уровень кинетической энергии может выходить на высоты, превышающие
статический потолок на несколько километров, т.е. выполнить иеустано-
вившийся маневр типа горки с потерей скорости вплоть до выхода на ми-
нимально допустимый скоростной напор (т/тщ) с последующим переходом
в пикирование и возвращением в область установившихся режимов полета
в общем случае с достаточно малой потерей кинетической энергии.
Подобный маневр необходимо начинать значительно ниже статическо-
го потолка для того, чтобы самолет в режиме набора высоты существенно
увеличил угол наклона траектории, поскольку только кинетическая энер-
гия, соответствующая вертикальной составляющей скорости (VHsin0H),
может быть переведена в приращение высоты полета:
V2 . ,
S’n” '
Выше статического потолка (Нстат) полег происходит по баллис-
тической кривой, но без потерь энергии только при работающих двигате-
лях, если 0 < ПуЛ < 1:
//(подуст) = ^стат(^7н) — 6341,61а (Иуяуст).
Максимальную высоту, которую в динамическом наборе может дости-
гать сверхзвуковой самолет, называют динамическим потолком (АЛ,(И)
Для выхода на Яли„ маневр начинается в области высот и скоростей с мак-
симальными установившимися угловыми скоростями 0, т.е. на 6-^8 км ни
же статического потолка (рис. 17.3.3, 17.3.4), для того чтобы на границу
области установившихся режимов полета выйли с максимально возможны-
ми полной механической энергией и углом наклона траектории.
Скорость по траектории при достижении динамического потолка
(0К = 0) нс превысит при этом горизонтальную составляющую скорости
при проходе статического потолка (VHcos0u). Поэтому UHcos0u опреде-
лит скоростной напор на динамическом потолке, который не должен
быть меньше qmm 10П:
0,5р(Нднн)1 HCOS 0(1 i t/nini/*л| •
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
Рис 17.3 3 Зависимость угловых скоростей И ра-
диусов ппражей в горизонтальной плоскости от
скорости и располагаемой нормальной перегрузки
Рис 17 3.4. Начальные условия для рас
чета динамического потолка самолета,
6 = 1.7 град/с, R * 22 км (пример)
Приведенные соображения позволяют определить теоретическое значе-
ние 77_нн в зависимости от начальной скорости и угла наклона траектории
при проходе статического потолка (Нн).
Решение задачи состоит из двух этапов.
1. Найти yi ол наклона траектории 0Н в заданной точке границы области
установившихся режимов полета на линии Е = Пн + (v2/2^j = const,
при реализации которого самолет, двшаясь с постоянной полной мсха-
ничсскоп энер1ией (по баллистической кривой) достигает минимально допу-
стимого скоростного напора одновременно с достижением динамического по-
юлка (6К =0). В этом случае теоретический динамический поток составит
Z/дин = Нк = Ни + (l7j2/2g)sin2 0Н, а псустановившаяся скорость в верхней
точке траектории Г(НДИ11) = Гк= VEcos0H. Для определения 0Н и Ик нужно,
очевидно, решить систему двух уравнений с двумя неизвестными:
р(л,) =
Нк = //и *
sin2 0Н,
2<?min лоп
К2 cos2 0н
Л л
Система решается графически (рис. 17.3.4) или с помощью элемен-
тарной программы па ЭВМ.
2. Найти способ реализации потребного угла наклона траектории 0Я
в точке учитывая, что с увеличением скорости при постоянной
перегрузке радиус разворота возрастает, а установившаяся перегрузка
уменьшается с высотой по закону:
•> *
Пуа уст ~ ехР
^стат Н
6311,6
При Н S Н(-1ЛТ Пуа уст 1, й при Н > 77стат liya уст *• 1-
Возвращспие в область установившихся режимов полста происходит
с увеличением скорости по нисходящей ветви баллистической кривой
Реально на обеих ветвях траектории произойдет некоторая потеря пол-
ной энергии, поэтому скорость полета при возвращении па исходную вы-
соту б\дет меньше начальной.
Таким образом, достижение динамического потолка сверхзвуковым са-
молетом требует предварительного выбора оптимального управления само-
летом, обеспечивающею достижение максимума суммы Нн + (Г„/2^)sin20H
на границе области установившихся режимов полета с учетом всех огра-
ничений по самолету и его силовой установке.
Формально область динамических высот полста обычно считают ог-
раниченной двумя кривыми (рис. 17.3,4): Е= const, касательной к обла-
сти установившихся режимов, и т/т1Пдац = const.
Точка пересечения этих кривых - теоретически динамический пото-
лок - может быть достигнута только при реализации угла наклона траек-
тории внС^'и^нХ/ппа до») на статическом потолке. Это не всегда возмож-
но без предварительного выхода самолета за ограничения по М^х-
Маневр достижения динамического потолка в примере на рис. 17.3.4
начинается на высоте II = 11-М2 тем при скорости V =s 2200 км/ч. Самолет
выполняет набор высоты с разгоном (1 <nv,t <Пуау„\ увеличивая одновре-
менно угол наклона траектории (0>О). Максимальный угол (0» 48°) дости-
гается при проходе максимальной для Текущей скорости 17н =- 2550 км/ч вы-
соте установившегося полета Нк - 16 км т.е. при пх = 0. Далее полет проис-
ходит по баллистической кривой (ил<7= 0). Максимальная высота полета
составляет ЯД1|Н = Нн - ХН ~ 30 км и достигается через одну минуту после
прохода статического потолка. Ско-
рость полста, соответствующая дости-
жению динамического потолка, состав-
ляет Гк = Vn cos 6 * 1700 км/ч, т.е. ди-
намический потолок достигается на
сверхзвуковой скорости полста. Скоро-
стной напор при этом составляет
q - (V cos9)2p(HK)/2 * 200 кГс/м2,
т.е. соответствует минимально допус-
тимому из условии обеспечения уп-
равляемости и работы силовой уста-
новки. Траектория полета показана на
рис. 17.3.5. Высота дштамического по-
толка Ндин = 30 км примерно соответ-
Рис 17.3 5- К определению динамнчю
кою ноготка (пример)
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
cinvei мировому рекорду, установленному майором ВВС США Смитом в
1975 г. на самолете F-15- В 1977 г. полковник ВВС СССР А.В. Федотов ус-
тановил на самолете Е-266 новый абсолютный рекорд Нлп„ - 37650 м, что
соответствует Гн % 3000 км/ч и б/ДйП * 100 кГс/м2.
17.4 Использование для маневра закрнтических углов атаки
Движение самолета на закрнтических углах атаки обладает рядом
особенностей, связанных с его центровкой и аэродинамическими харак-
теристиками на этом режиме, которые для анализа удобнее всего пред-
ставить в связанной системе координат (рис. 17.4.1), Кривые гаг(а) при
различных центровках практически эквидистантны. Самолет, даже ста-
тически неустойчивый при малых углах атаки (.гт >0,37), получает ба-
лансировку в статггчески устойчивом режиме в закритической области.
Создание на малых углах атаки момента на кабрирование с помощью
отклонения рулей выводит самолет в крайнюю точку балансировки на ста-
тически устойчивом режиме с заметной угловой скоростью (со % a ), что
приводит к дальнейшему увеличению угла атаки за счет расходования на-
копленной кинетической энергии (Л<йг2). В процессе движения “по инер-
ции" самолет реализует утлы атаки, в 1,5-ь2 раза превышающие а^алтах-
Рис. 17.4.1. .\эролипамич<?ские характеристики са-
молета в скорктнон и связанной системах координат
Рис. 17.4 2. Влияние центровки на
характер зависимости т,(а.<р)
После достижения аП1лх самолет возвращается к углу атаки «бал шах за
счет пикирующего момента, обеспеченного компоновкой независимо от от-
клонения поверхностен управления, которые в этой области не эффектив-
ны. В ходе этого возвращения поверхности управления переводятся на ут-
лы отклонения, создающие момент на пикирование в гой области углов
атаки, в которой их эффективность восстанавливается (рис. 17.4.3), и са-
молет, достигнув «бал max- продолжает уменьшать угод атаки до того его
значения, которое соотвек'твует новому углу (рст. Все движение совершает-
ся за 5+ 10 с в зависимости от центровки самолета, эффективности повер-
хностей управления, момента инерции самолета и манеры управления
(рис. 17.4.4, 17.4.5).
Рис 17.4 3 ГХ|фекпгвностъ стабилизатора сверхзвукового самолета в диапазоне а - 0-90°
Маневр назван “Кобра Пугачева" но имени одною из первых летчиков-
испытателей его освоивших, который продемонстрировал эту фигуру высше-
го пилотажа на аэрошоу в Ле Бурже летом 1989г. Для возможности безо-
пасного выполнения Кобры Пугачева самолет должен обладал» сгатической
устойчивосл»ю пути, управляемостью по крепу и иметь запас пикирующих
моментов при всех узлах атаки Критической здесь является область а вбли-
зи Cl)0 mdX, в которой прекращается увеличение нормальной силы на крыле и
на поверхностях управления. На рис. 17.4.2 это при хт =0,45 область меж-
ду а = 28° и а = 54° , в которой при отах = 10° пет балансировки.
В этом случае при отклонении стабилизатора на угол <р = -20° самолет
легко выходит на углы атаки, превышающие а = 90°, однако при возвраше-
тпш в “'линейную область" он должен, двигаясь по инерции, преодолеть
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
Рис 17 4 4 Возможности блинснровки сверхзву-
кового самолета в зависимости от тп2 * при a - О
Рис 17.4.5. Динамический выход самая?
та в закривгчсскую область углов атаки
критическую область с отсутствием пикирующих моментов. Перемещение
центровки назад и переход к статической неустойчивости в области малых
углов атаки увеличивает моменты на кабрирование в начальной части рас-
сматриваемого маневра, увеличивает cq-1iVS за Си 1Пах, но уменьшает восстанав-
тивающие пикирующие моменты в закритической области и при некоторой
степени неустойчивости приводи! к дефициту восстанавливающих пикиру-
ющих моментов при a - 30-50°. Требуется увеличение диапазона углов от-
клонения стабилизатора, введение управления вектором гяги в полете. В
этом случае возможно дальнейшее развитие маневра "Кобра Пугачева", т.е.
“поворотливости" самолета относительно траектории, - выход на углы атаки
более 270°, т.е. продолжение движения по инерции до достижения следую-
щей области моментов на кабрирование при a > 180°. Самолет опять попа-
дает в область малых углов атаки, но при обтекании “с хвоста” в переверну-
том положении. При a = -90° (270е) сила веса самолета направлена вниз по
вектору тяги, что дает возможность под воздействием этой силы и тяги си-
ловой установки iiepcirni в пикирование и резко изменить направление полета.
Список л»ггературы к главе 17
1 Г.С. Нхнигснс, Р. В.Студнев Динамика щмнтранственного дпнжения самолета. - М‘
Машиностроение, 1967
2 К.К.Васильченко, В.И Bud. И.П.Вогк и др. .'Irtitiiic исследования мапенренных само-
летов па больших и сверхбольших углах атаки // ТВФ, 1992. N° 4-6
3 Р-Д.Иродов. Расчет перегрузок и углов крена самолета при движении по простран-
ственной траектории - М: Оборонгиз, 1957
4 В И.Колосов, И И.Шкавова, Л.А.Медиежнчкооа. Методы расчета вертикальных ма-
непрои ca.Mo.ieta Тр ЦАГИ, 1956.
Глава 18
ВЫБОР ПАРАМЕТРОВ СВЕРХЗВУКОВОГО САМОЛЕТА
18.1. Общие положения
Формирование компоновки самолета в ее первом приближении, т.е.
выбор аэродинамической схемы, основных размеров и параметров прото-
типа при заданных требованиях к нему, производится на нервом
(концептуальном) этапе проектирования. Этот этап включает согласова-
ние размеров, взлетной массы самолета, нагрузки, номенклатуры обору-
дования и количества топлива, размещенного во внутренних баках.
При этом проводится неоднократный поверочный расчет возможных
летных данных и маневренных характеристик проектируемого самолета
для определения его соответствия техническому заданию (ТЗ).
Выбор рациональных параметров самолета всегда производится и
при разработке перспективных аэродинамических компоновок, поскольку
необходимо сопоставлять основные параметры не моделей, а самолетов,
и их возможность удовлетворять предварительным требованиям.
Для этих целен используются упрошенные формализованные мето-
дики формирования самолеш, которые обеспечивают увязку его пара-
метров в треугольнике "масса - геометрия - аэродинамика” на основе
соответствующим образом обработанных статистических данных по се-
рийным самолетам и общих законов подобия.
Пз требований к летно-техническим и маневренным характерношкам
самолета (ЛТ и MX) выделяются основные, приоритетные требования.
Обычно это максимальная скорость, дальность или радиус действия,
взлетно-посадочные характеристики и параметры, определяющие манев-
ренные возможности самолета.
Используются две основные методики формирования облика прото-
типа и определения его основных параметров, которые дополняют друг
друга и основаны на одних и тех же соотношениях аэродинамики само-
лета и механики полета:
- первая (“прямая") - от компоновки, исследованной в аэродинамичес-
ких трубах, и характеристик силовой установки к параметрам самолета (про-
тотипа); анализ возможностей выполнения приоритетных гребовашш ТЗ;
- вторая ("обратная") - от приоритетных требований ТЗ к общим
требованиям к аэродинамическим характеристикам, размерам, взлетной
массе самолета и взлетной тяге двигателей.
В обоих случаях предполагается, что требования, не отнесенные к
числу приоритетных, могут быть удовле1ворены в рамках выбранной для
прототипа компоновки.
В первой методике использованы общие связи, обеспечивающие
согласование аэродинамической компоновки и силовой установки, вы-
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
соты и скорости крейсерского полета и нагрузки на крыло, взлетной
тяговооруженности (PG)33jl и располагаемой (PG) на различных ре-
жимах полета. Проводятся прямые расчеты ЛТ и MX, результаты ко-
торых сопоставляются с ТЗ.
Во второй методике использован ‘’обратный счет” - расчеты от за-
данных ЛТ и MX к параметрам компоновки, т.е. от ТЗ к исходным дан-
ным для расчета ЛТ и MX. Задача не имеет однозначного решения - за-
данные ЛТ и MX можно обеспечить в различных компоновках (в общем
случае) или они могут оказаться недостижимыми. Поэтому здесь можно
говорить только о требованиях к компоновке, т.е. о переводе техническо-
го задания в требования к аэродинамическим характеристикам, взлетным
тяговооруженности и массе самолета. Выбор аэродинамической схемы
(или схем), в которой зги ТЗ можно реализовать, выполняется на основе
имеющегося научного задела
Этим завершается первый этап формирования проютипа самолета.
На втором этапе производится уточнение и оптимизация компоновки, по-
ско тьк\ объект оптимизации уже выбран.
По способам подхода к формированию компоновки и по составу при-
оритетных требований все самолеты можно условно разделить на две груп-
пы. тенденции развития которых и принципы выбора параметров различны.
I. Сверхзвуковые самолеты, выполняющие транспортную задачу -
доставка груза из точки базирования в пункт назначения с заданной
скоростью и посадкой в этом пункте (или без посадки) и возвращением
после сброса груза (пли без сброса). Аэродинамические компоновки та-
ких самолетов выбираются из условий обеспечения заданной макси-
мальной скорости полета, заданной дальности (радиуса действия) при
использовании наиболее экономичного сверхзвукового (или дозвуково-
го) крейсерского режима полета. Сверхзвуковая максимальная скорость
как правило реализуется в достаточно узком диапазоне высот. Обес-
печение приемлемых взлетно-посадочных характеристик достигается
выбором механизации.
К этой труппе сверхзвуковых самолетов можно отнести серийные
Ту-144, “Конкорд”, SR-71, В-58, Ту-22 и Ту-22М, Ту-160, В-1, и опыт-
ные М-50, Т-4, XR-70 и ряд других (рис. 18.1.1).
Это пеманевренньте самолеты, их эксплуатационные перегрузки не-
велики тт ограничены условиями прочности конструкции, утлы атаки _
условиями безопасности полета. Для них характерны достаточно боль-
шая взлетная масса, большие размеры (G > 80 + 100 т) и относительно
небольвтой диапазон летных углов атаки.
Взлетная тяговооруженность не маневренных самолетов обычно со-
ставляет P/G - 0,4+ 0,5.
Развитие этой группы самолетов происходит по линии увеличения
дальности полета и полезной нагрузки, повышения экономичности и бе-
зопасности их эксплуатации.
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
'ис. 18 1 2д. Аэродинамические схемы маневренных и ограниченно маневренных свсрх-
вукнных сам эетов периода 1953 1963 гг
Рис 1N 1 26.Л-фолинамнческис схемы маневренных и otpaitименно маневренных сперх-
«вукиных самолетом периода 1964-1995 гг.
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
II Маневренные сверхзвуковые самолеты, которые реализуют сверх-
звуковую скорость в горизонтальном полете на всех высотах, обладают
высокими маневренными характеристиками на дозвуковых скоростях и
могут перевозить значительную по массе и номенклатуре нагрузку на
внешних узлах подвески.
Аэродинамическая компоновка и тяговооруженность этих самолетов
обеспечиваю! достижение больших сверхзвуковых скоростей, маневры с
выходом на закритичрекие углы атаки на дозвуковых скоростях и взлет-
но-посадочные характеристики, соответствующие требованиям эксплуа-
тации этих самолетов на аэродромах с достаточно короткой взлетно-
посадочной полосой.
К этой группе сверхзвуковых самолетов относятся истребители и близ-
кие к ним по маневренности боевые самолеты: МиГ-21, МиГ-23, МиГ-29,
Су-7. Су-9, Су-15, Су-17, Су-27, F-lOi, F-4, F-5, F-15, F-16, F-18, F-22, J-35,
J-37, семейство “Миражей" (III, 5, 50, 2000 и F-1) и многие другие. Как
видно, они отл1гчаются большим разнообразием аэродинамических схем,
форм и компоновок (рис. 18.1.2<7 и б), большим диапазоном углов атаки,
скоростей и высот, реализуемых в полете, высокой эксплуатационной пе-
регрузкой («уд =8ч-9). Характерная особенность этой группы - наличие
(P/G)BV
1.0
0,5
F-22
О
К. Г ™ АМИГ-29Л Ярафлль
МиГ-29 ->q ®МиГ-29М
r.u_. МпГ-23МЛ гЬ1ГдС ° СУ'37
МиГ-ПЗС МиГ_21 х О F-16A
®' F-HBCP' 18OOFM 18
o cv-ioQ)
Су-7Б® © F-14A0^ Мира
МиГ-17Ф@ F-э Cyf'[pa 0 Мира
° О © ®
® F-100 F-105 МиГ-2511 О
О Мира * п 4 zx
® F-86H <
МиГ-15
О
F-86A
о°
Мира
О
В 70
Jbi50°
® Ту-144
О
Конкорд
1440 1950 1960 1970 19«0 1990 2000 Голы
Piic. 18 1 3,Динамика изменения взлетной тя!<мк>сруже1шсх.ти реактивных самолетов
больших областей нсустановившихся ре-
жимов, используемых в летной практике
(динамический выход на высоты, суще-
ственно превышающие статический пото-
лок, достижение больших закритических
углов атаки на малых скоростях полета и
т.д.) Эти режимы обеспечиваются путем
использования кинетической энергии само-
лета в его посту нательном движении и вра-
щении относительно центра масс.
Взлетная тяговооруженность маневрен-
ных сверхзвуковых самолетов непрерывно
увеличивалась по мере уменьшения отноше-
ния сухою веса двигателя к его взлетной
тяге (удв) и при у-в » 0,12-5-0,11 достигла
P/G = 1 -г-1,2 (рис. 18.1.3 и 18.1.4).
Рис 18 1.4. Связь вэ.ъ'тной тягиво-
оружснпости с удельным весом ТРД
Развитие этих самолетов происходит по вполне определенному направ-
лению - повышение маневренных возможностей и радиуса действия от по-
коления к поколению в сочетании с поиском возможностей обеспечить кроме
дозвукового еще и сверхзвуковой крейсерский режим, т.е. достаточно эко-
номичный полет на умеренных сверхзвуковых скоростях.
Число М полста, как правило, о1раничено не располагаемой 1ягой ТРД
па сверхзвуковых скоростях, а материалом конструкции и соображениями
безопасности полста, скоростным напором, давлением в каналах воздухоза-
борника и т.д. (см. гл. 16), взлетная масса обычно не превышает 50-5-60 т.
Совершенствование этой 1руппы сверхзвуковых самолетов основано иа
развитии всех аспектов аэродинамики: повышение несущих свойств,
уменьшение сопротивления, обеспечение линейности аэродинамических
характеристик и эффективности поверхностей управления и балансировки
в возможно большем диапазоне чисел М, углов атаки и углов отклонения
подвижных элементов несущих поверхностей. В конечном счете - обес-
печение предельно-возможных маневренных характеристик на дозвуковых
скоростях при достаточно большой сверхзвуковой максимальной скорости.
Отличительная особенность выбора napaneipoB маневренных самоле-
тов - необходимость удовлетворения ряду противоречивых требований.
Здесь принципиально нельзя выделить один (единственный) показатель
эффективноеги, поскольку ДЛЯ маневренных самолетов требования но
перевозимым грузам, дальности и скорости полета, взлетно-посадочным
характеристикам дополняются набором требований к маневренным ха-
рактеристикам, которые противоречивы сами по себе и вступают в про-
тиворечие с требованиями но дальности и продолжительности полета.
В принципе, можно выделить и промежуточную третью группу
“отраниченно” маневренных сверхзвуковых самолетов, которые но всем
параметрам занимают среднее положение между “тяжелыми” иемансв-
ренными и “легкими” маневренными. Это фронтовые бомбардировщики
www.vokb-lo.spb.ru - Как построить самолёт своими руками?!
и разведчики, которые выполняют транспортную задачу, но после осво-
бождения or нагрузки или ее существенного уменьшения приобретают
многие черты самолета маневренной группы. К ним можно отнести Су-24
и Як-28 (СССР), Fill (США).
В последние годы место этих самолетов занимают маневренные при
значительном увеличении нагрузки на внешних узлах подвески (в том
числе подвесные топливные баки) и во внутренних специальных отсеках.
Суммарная масса полезной нагрузки при максимальной взлептой массе до-
ходит до массы пустого самолета. Это так называемые истребители-бомбар-
дировщики. взлетные масса и тяговооружсиность, эксплуатационные пере-
грузки и отраттичсния по безопасности полета которых определяются номен-
клатурой функциональной нагрузки. Происходит как бы размен высокой
взлетной тяговооружснности (.РЮ > 1), относительно низкой нагрузки па
крыло и эксплуатационной перегрузки = 9 на массу грузов.
18.2. Выбор аэродинамической компоновки сверхзвукового самолета
Важнейшими параметрами, определяющими аэродинамическую ком-
поновку самолета, являются максимальное и крейсерское числа М поле-
та. В зависимости от Мтах, на которое рассчитан сверхзвуковой самолет,
выбирается аэродинамическая компоновка крыла - его форма в плане,
удлинение и набор профилей, и определяется тип воздухозаборника (см.
гл. ,5). В некоторых случаях, если крейсерское число М < 1,5 + 1,6, воз-
можно использование нерегулируемых воздухозаборников. При больших
крейсерских числах М необходимо использовать регулируемые заборни-
<и, тип которых следует выбирать, исходя из остальных требований к
амолету (см. гл. 5). При выборе основных пропорций компоновки учи-
тывается назначение сверхзвукового самолета. Сверхзвуковой пассажир-
ский самолет требует такой аэродинамической компоновки, которая обес-
точила бы высокое аэродинамическое качество, комфортное размещение
тассажиров, достаточно большие объемы для топлива, размещаемого в
срыло, удовлетворительные взлетно-посадочные характеристики и повы-
цепную безопасность полета. Компоновка маневренного самолета в
начительиой степени фюрмируется под требования получения высоких
становившихся перегрузок, малого времени разгона и других снепи-
энческих требований. Компоновка крыла такого самолета, как это было
доказано в главах 2-4, подчинена получению высоких значений СутлХ
ри малом сопротивлении на околозвуковых скоростях полета, где в ос-
новном происходит маневрирование.
Особые требования предъявляются к аэродинамической компоновке
।ногоцелевых самолетов. Необходимость удовлетворить требованиям по-
учения большой дозвуковой дальности, сверхзвуковой скорости полета на
сех высотах и приемлемых условий базирования делает целесообразным
спользование в этом случае крыльев изменяемой геометрии (см. гл. 3).
Назначение сверхзвукового самолета определяет выбор типа двигате-
.еп, их размещения на самолете, необходимость использования реверса и
управления вектором тяги.
Стремление получить большую дальность на сверхзвуковых ско-
ростях полета приводит к использованию ТРД и ТРДД с малой степе-
нью двухконтурности с бссфорсажным режимом на крейсерской ско-
рости полета.
Маневренные или огрантгченпо маневренные самолеты при современ-
ных величинах удв = Сдв/РУф *0,1-4-0,12 требую! применения двигателей
с форсажем, использование которого необходимо на маневре, на взлете и
режиме разгона и набора высоты. Расположение двигателей и их коли-
чество выбираются в процессе разработки аэродинамической компоновки.
Принципиально важным вопросом остается выбор аэродинамической
схемы сверхзвукового самолета. В настоящее время аэродинамические схе-
мы сверхзвуковых самолетов нс укладываются в три классические схемы:
нормальная - поверхности управления и балансировки обособлены и
расположены позади центра масс самолета (за крылом);
бесхвостка - поверхности управления и балансировки расположены
позади центра масс самолета и выполнены как отклоняемые несущие
элементы крыла (элевоны);
утка - поверхности управления и балансировки обособлены и рас-
положены перед центром масс самолета (перед крылом).
Сегодня значительное распространение получили “гибридные' схемы,
поверхности управления и балансировки которых расположены по обе
стороны от центра масс - позади и впереди:
схема бесхвостка с передним горизонтальным оперением (ПГО),
управляемым или жестко закрепленным (дестабилизатор),
нормальная схема с дополнительным ПГО.
В обеих схемах основное управление самолетом в продольном канале
осуществляется поверхностями, расположенными за центром масс.
Установка ПГО позволяет существенно расширить диапазон чисел М
и углов атаки, при которых обеспечиваются балансировка и статическая
управляемость самолета. Кроме того, появляется возможность обеспечить
оптимизацию режима балансировки (удовлетворение двум требованиям -
минимальное сопротивление при - 0).
Сверхзвуковых самолетов в классической схеме “утка”, у которых
ПГО использовалось бы в качестве единственной управляющей поверх-
ности. сегодня нс существует. Переднего оперения недостаточно для ба-
лансировки и безопасною управления самолетом на всех режимах поле-
та. В частноеги, срыв с ПГО, который по углам атаки наступает раньше,
чем на крыле, в схеме “утка” весьма опасен - опускание носа самолета
(тг < 0), следующее за этим, приводит к дальнейшему увеличению углов
атаки ПГО в закрптичсской области и трудностям восстановления и ста-
билизации исходного режима полета, если других поверхностей уцравле-
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
иля нет hoiому что 0 в ^критической области уменьшает нормаль-
1VR) ситу ПГО, и сачолет юряет управление. Поэтому ПГО следует рас-
, MaipuFkiTb юлько как дополнительную поверхность управления, которая
предоставляет исходной компоновке дополнительные возможности.
Установка ПГО н.« самолетах нормальной или бесхвостой схемы не
изменяет общих пропорций компоновки и решает следующие задачи:
- Если дополни!ельное НГО фиксировано, то оно за сче! смещения
аэродинамического фокуса вперед уменьшает запас продольной статичес-
кой чегойчивости или переродш самолет в класс статически неустойчи-
вых Если запас устойчивое! и остается неизменным (центр масс смещает-
ся вперед), ю увеличивается эффективность поверхностей продольного if
путового управления.
- Если дополнительное НГО управляется, т.е в полете может пзмс-
1Я1ь свое г.товое положение (с> ” var), то оно, кроме сказанного выше, .за
счс! допо тигельных продольных моментов увеличивает эффективность
продольной системы управления. Эю (х:обснно важно дтя ста1ически
неустойчивых самолетов, поскольку основное (хвостовое) горизонтальное
оперение (или элевоны) па гаком самолете для балансировки рано но
там атаки теряет эффективность, а ПГО, которое для создания момента
на пикирование отклоняется вниз (на меньшие углы атаки), обеспечивает
запас моментов (см. гл 6). Полому дтя неустойчивого самолета без
дополнительного ИГО балансировочные утлы атаки обычно ограшгчены.
Скоростные напоры при реализации закригических углов атаки
очень малы что сводит к нулю аэродинамическую эффективность повер-
хностей управления. Полому для управления и балансировки самолета в
закрптическон области при предельно малых скорое! пых напорах необ-
ходим поворот вектора тяги (см. гл. 12). Без использования поворота
вектора тяги практически возможны только динамические выходы в зак-
ритпческую область при соответствующим образом выбранных и согласо-
ванных степенях продольной статической устойчивости и эффективности
поверхностей управления, как об этом было сказано выше.
Дополнительное ПГО можно выпускать и убирать только на опреде-
ленных, заданных режимах полета. Если ПГО находится в потоке только
при М > 1, то оно смещает аэродинамический фокус вперед и тем самым
уменьшает или ликвидирует его сдвиг назад за счет влияния сжимаемос-
ти воздуха при переходе через скорость Звука.
Если ПГО выполнено в в it де разрезного крыла и работает, будучи в
потоке, на больших углах атаки, то в этом случае производная не-
велика и > 0 практически не зависит от угла шаки. Такое выдвиж-
ное дополнительное ПГО использовано на пассажирском самолете
Гу-144, для обеспечения отклонения механизации задней кромки крыла
(элевоны) вниз (.Vw- < 0) и увеличения подъемной силы самолста-
бесхвосткн на взчетно посадочных режимах
Практически все сверхзвуковые маневренные самолеты, выпол-
ненные в бесхвостой схеме, в окончательном варианте были оборудо-
ваны дополнительным ПГО - либо в процессе разработки, либо при
подготовке модификаций
Таким образом, рациональными схемами для сверхзвуковых самоле-
тов могут быть:
- для дальнего одпорежимного сверхзвуковою самолета - схема
бесхносгки с дополнительным выдвижным передним горизонтальным
оперением,
- для самолетов маневренных - тябридные схемы с передним и
задним расположением управляющих поверхностей.
Для этих основных типов сверхзвуковых самолетов существует риз-
ничный подход к выбору аэродинамической компоновки крыла.
В первом случае (для неманевренных самолетов) для получения сверх-
зв> ковой дальности полета обычно используют крылья, близкие к треуголь-
ным (см. рис. 18.1.1) с дозвуковой передней кромкой (при М «2 этому со-
ответствует у ~ 60е. подробнее см главы 2-4), которые позволяют получить
ятачительный эффект в увеличении максимального аэродинамического
.•отчества за счет использования пространственной крутки и кривизны про
филей - деформации срединной поверхности крыла (см. главы 2 тг 4)
Во втором случае (для маневренных самолетов) обычно используют
крылья умеренной стреловидности по передней кромке, которые обес-
печивают высокие значения К|1ЫХ на дозвуковых скоростях полета.
Как было показано в гл. 4, использование наплывов на крыле
способствует получению высоких аэродинамических характеристик
таких компоновок.
Передние корневые наплывы смещают аэродинамический фокус
крыла вперед, причем это смещение на сверхзвуковых скоростях больше,
чем на дозвуковых. Поэтому установка корневых наплывов перед несу-
щей поверхностью была использована на самолете бесхвостой схемы для
уменьшения смещения фокуса при переходе через скорость звука. В ито-
ге было скомпоновано и рекомендовано для Ту-144 треугольное крыло с
изломом передней кромки Наплывы с острой передней кромкой нашли
применение для стабилизации обтекания трапециевидных крыльев на
больших углах атаки (см. гл. 4) на самолетах различных аэродина-
мических схем. Оптимальная относительная площадь наплыва, которая
обеспечивает практически линейное изменение подъемной силы до углов
атаки 25 + 30°, составляет 0,1 +0,12 (см. тл. 4).
Передний крыльевой наплыв па самолете нормальной схемы суще-
ственно влияет также на обтекание хвостового горизонтального оперения.
Эффективность ГО как поверхности управления при этом не изменяет-
ся, если положение центра масс самолета (центровка) осталось неизменным.
Большую роль ш-рагт механизация крыла, которая помимо улучшения
взлетно-посадочных характеристик обеспечивает значительное увеличение
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
С 1П, \ на маневре и уменьшает па этих режимах сопротивление Адаптив-
ные консоли крыла, т.с. консоли с механизацией задней и передней кро-
мок которая управляется в полете специальной системой, интегрирован-
ной с системой управления самолета, в принципе при заданной программе
управления (см. гл. 4) обеспечивают д.тя калетою значения подъемной си-
лы минимум сопротивления и, том самым, максимально возможное аэро-
динамическое качество для каждого режима полета. При неотклонепной
механизации адаптивное крыло близко к плоскому, что заметно уменьшает
сопротивление при отсутствии подъемной силы по сравнению с сопротив-
лением крыла с фиксированной оптимальной деформацией поверхности,
которая применяется д.гя олнорежимпых самолетов
.Адаптивные консоли крыла существенно изменяют аэродинамические
характеристики самолета, оставляя неизменными ею аэродинамическую
хомпоновку и основные пропорции.
Влияние на аэродинамические характеристики самолета обычной ме-
ханизации передней и задней кромок крыла хороню известно и в ком-
ментариях не нуждается (см гл. 4).
Компоновки маневренного сверхзвукового самолета в нормальной
хеме в последнем поколении разрабатывались в двух направлениях:
Компоновки с обособленным фюзеляжем, аналогичные компоновкам
тредьщушего поколения, но с тонкими корневыми наплывами значительной
тротяжепттости на крыле (F-18, США) и хвостовыми балками, на коюрых
станавливались консоли стабилизатора (F-16, США, рис. 18 1.26).
Новые, так называемые “интегральные”, компоновки с иссушим
мозеляжем (рис. 18 2.1). Центральная и хвостовая части такого фюзе.тя
<а представляют собой широкую (до 1/3 размаха) профилированную
осушую платформу, коюрая охватывает его переднюю, “стандартную"
асть с кабиной летчика. Ее передняя профилированная часть имеет угол
1рсловидностп порядка 73° и работает как наплыв. Под несущей частью
«озеляжа могут быть усыновлены гондолы с воздухозаборниками,
вш Этелями и реактивными соплами, а на "бортах” этой несущей плат-
формы - консоли крыла, поворотные консоли стабилизатора и двух-
нлевое вертикальное оперение. Оптимальные параметры трапецисвидно-
> крыла ). ~ 3.2 -г3,6, х -40-5-45°, Г) «4-5-6 Передняя кромка консолей
элжна быть снабжена отклоняемыми секционированными носками, на
тдней кромке расположены элероны и закрылки. Подвижные элементы
мяла могут отклоняться в зависимости от режима поле1а но сигналам
гениальной вспомогательной системы, интегрированной с системой
травления самолетом, т.е. автоматически приспосабливаться (адаитиро-
ггься) к нему. Объемосодержащие элементы планера - носовая часть,
ттдолы двигателей - распределены так, что эпюра поперечных сечений
кмгтоповки достаточно гладкая, что обеспечивает относительно нсболь-
ое волновое сопротивление самолета (рис. 18.2.1).
Рис 18.2.1. Пример интегральной схемы маневренного сверхзву-
ковиго самолета. Распределение площадей поперечных сечений
Использование несущего фюзеляжа или установка передних наплывов и
хвостовых балок при рациональном выборе их конфшуращш позволяет обес-
печить практически „шлейную зависимость С^й(а) вплоть до а = 30°, при
Суа , соответствующем удлинению и площади базового крыла (см. гл. 4).
Компоновкам с несущим фюзеляжем или с крыльевыми наплывами
при обособленном фюзеляже свойственны повышенные коэффициенты со-
противления и коэффициенты подъемной силы поскольку отношение пла-
новой проекции к площади крыла (т с. несущей поверхности 5пр к б'кр) и
отношение омываемой поверхности 5\)М к площади крыла (т.е. поверхнос-
ти, создающей сопротивление трения, профильное и волновое сопротивле-
ние, к 5кр) у этих схем больше, чем у обычных. По этой же причине ко-
эффициенты СГйо, Cyfl у самолетов бесхвостой схемы меньше, чем у стан-
дартных нормальных схем с крылом одинаковой или близкой формы в
плане, поскольку в этой схеме отношения 50M/SKp и inpASjcp меньше, чем у
классических нормальных схем. Малая величина Смо нс всегда является
показателем совершенства аэродинамической компоновки и при сравнении
двух самолетов меньшее значение Слац у одною из них нс означает, что он
имеет меньшее сопротивление. Сопоставлять можно только величины ко-
эффициентов (Cuiq/(G/S)). Меньший коэффициент или большее эф-
фективное удлинение не означают, что самолет имеет меньшее индук-
тивное сопротивление. Сопоставлять можно только показатели (G/S)/А^,
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
с. 6/7^|, Величина С‘иа для возможности сравнения должна быть псро-
отпессна к квадрату эффективного размаха
Чдантивные консоли крыла в сочетании с автоматизированной системой,
которая непрерывно управляет отклоняемыми элементами, обеспечивают оп-
тимизацию аэродинамических характеристик при изменяющихся условиях
полета (число М, угол атаки, перегрузка, характер выполняемого маневра,
возмущения в атмосфере) При "интегралыюй” аэродинамической компо-
новке решена задача комплексною подхода к выбору компоновки и струк-
туры автоматизированной системы управления. Увеличение несущих свойств
и уменьшение индуктивного сопротивления позволяет реализовать повы-
шенную тяговооруженность (результат совершенствования двигателей) не
только для увеличения пха и Г“, но и Д.1Я существенного повышения рас-
полагаемых установившихся нормальных перегрузок (рис. 18.2.2).
’яс 13.2 2, Устаттнившиеся нормальные перегрузки для сверхзвуковых маневренных
•амолегов пьшо1ненных в различных аэродинамических схемах (11 - 5 км, М - 0,9)
Таким образом, в современных условиях аэродинамическая комно-
ювка формируется одновременно с системой управления. Многие вопро-
сы обеспечения устойчивости и управляемости сверхзвукового самолета
вешаются введением автоматической системы улучшения устойчивости и
правляемости (СУУ). Выбор структуры этой системы, ее параметров
(о.1жсн производиться параллельно с формированием аэродинамической
сомпоновкп (см. главы 9, 12-15).
Наличие статической неустойчивости исходной компоновки (как про-
[ольпого, гак и бокового движения) допустимо юлько при условии вве-
дения СУУ соответствующей структуры. Обязательным условием при
этом является наличие эффективности поверхностей управления. Во мно-
гих случаях (для немансврспных самолетов, особенно пассажирских)
при формировании аэродинамической компоновки должны быть учтены
вопросы обеспечения высокой надежности, например, через секциониро-
вание органов управления и введение резервирования систем управления.
18.3. Выбор параметров сверхзвукового самолета
Аэродинамическая компоновка сверхзвукового самолета выбирается
из условии удовлетворения требований по дальности полста, маневрен-
ным возможностям и взлетно-посадочным характеристикам, так называе-
мым приоритетным требованиям, как об этом было сказано выше.
Первая ("прямая”) методика при наличии результатов исследований
в АДТ выбранной аэродинамической компоновки и характеристик новою
двигателя дает возможность определить основные параметры и ЛТ и MX
самолета, выполненного в этой компоновке с этим двигателем, для того
чтобы составить суждение о целесообразности практического использова-
ния компоновки и о направлении дальнейших работ над пей. Компоновок
и двигателей может бьпь несколько. Выбор параметров самолета удобно
начать с определения связи тяги силовой установки и площади крыла, ко-
торая обеспечила бы реализацию минимально возможного относи тельного
расхода топлива па единицу пути (Qv llljn), соответствующую выбранным
аэродинамической компоновке и типу силовой установки. В идеальном
случае для реализации Qrinin самолет должен лететь иа высоте И = И км
на режиме максимального аэродинамического качества со скоростью, соот-
ветствующей числу М = Мош. т.е. (К]ПахМ)тах (см. гл. 16, рис. 16.3.6).
Двигатель должен работать иа крейсерском бесфорсажном режиме, т.е.
Р - (0,5-г 0,75) f’max. с минимальным удельным расходом топлива, т.е. на
минимуме дроссельной характеристики (см. рис. 16.1.3 и 18-3.1). Сказан-
ное определяет общую связь между «ягой силовой установки и сопротив-
лением самолета при полете на Qc 1п1п :
Т5 — А*д, т.е. ^ги г, ”
^мпах
В этом соотношении объединены параметры, характеризующие аэро-
динамическую компоновку самолета (Ктлх и СуЛ^и%м) и параметры, ха-
рактеризующие силовую установку:
- Роф - стендовая (проснскгная) тяга двигателей без учета потерь в
воздухозаборниках и соплах;
- kt |, = РрапУ^Оф “ отношение располагаемой тяги на режиме
(М; Н) к стендовой тяге двигателей (рис. 18.3.2);
- ^крейс ~ ^креис^расп ~ ОТНОШСПНС ГЯ1И СИЛОВОЙ ушаНОВКН В КреЙ-
серском полете, в частности, соответ с твующей минимуму дроссельной
характеристики или транш сам крейсерского режима двигателей, к
располагаемой тяге (рис. 18.3.1).
/vw.vokb-la.spb.ru - Как построить самолёт своими руками?!
Оптимальное согласование аэродинамической компоновки и силовой ус-
тановки (двигателя) определяется отношением взлетной стендовой тяги дви-
гателей к площади крыла самолета:
(7>0фА.^)вхч — 1 ^креис)^/ ^И|)(Суй К'иш/^тах^
Для 11 км < Н <, 20 км отношение (q!kLn) не зависит от высоты начала
крейсерского полета 7/н, поскольку скоростной напор и тяга силовой уста-
Рис 18.3л Принцип сот тасования аэродинамической компоновки и си-
ловом установки самолете при выборе его параметров
новки, представленная коэффициентом Лгн, пропорциональны плотности
воздуха. С точностью до влияния числа Re величина (Роф/5)взл зависит
только от Мопт-
Взлетная нагрузка па крыло должна обеспечить самолету' начало
крейсерского полета на заданной высоте Нн с числом М = Мопт с учетом
расхода топлива и уменьшения полетного веса самолета до выхода на
кр( йсерский режим (Орасч ~ GB3- - Gthd^
(G/S )взл = — Суа к'q , q = 0,7МОИГ^( Ни ).
1 <-'тш
Потребная взлетная тяговооруженность в cooiueiciBiin с получен-
ными соотношениями составит:
v i *’ /тл "-креме"™ max
Таким образом, зависимость (Роф/5)ззл ~ const -задаст связь между
взлегной нагрузкой на крыло, взлетной тяговооруженностыо и высотой
начала крейсерского полета (Нн) для самолета, выполненного в исследу-
емой аэродинамической компоновке, с принятым в рассмотрение типом
двигателя. Это позволяет определить основные параметры, характеризу-
ющие взлет и посадку, а также маневренные возможности самолета на
высоте и скорости (числе М) полета, которые приняты в качестве опор-
ных в области энергичного маневрирования (см. гл. 17). Обычно прини-
мают М = 0,9; Н = л км или II = 1 км. По высотно-скоростным характе-
ристикам силовой установки определяйся коэффициент kVB ман, т е. рас-
полагаемая тяговооруженность на форсажном режиме в точке расчета
маневренных характеристик с заданным относительным остатком топлива
во впутрешгах баках (GiiCT/Gr - /ет):
^гпмап
1-GT(1 -£т)
Взлетно-посадочные характеристики l'0Tp, Vncic, /рнлб, /11р1,б - опреде-
ляются по формулам гл. 16.
В качестве основных параметров, характеризующих маневренные
возможности самолета, удобно приняв удельную избыточную тягу пха\
или удельную избыточную мощность Т'Л и установившуюся нормальную
перегрузку пуа VCt> когорые нетрудно рассчитать по формулам гл. 17.
Размеры и взлетный вес самолета в этих расчетах еще не определе-
ны. Получены только возможные взлетно-посадочные и маневренные ха-
рактеристики самолета при таком отношении взлетной тяги двигателя к
площади крыла, которое обеспечивает 01Пнп
Рис. 18 3 2 Бпразмерная располагаемая тяга силовой установки (пример’*
Пример зависимости Лм,(М, Н), т.е. безразмерных характеристик дви-
гателя, приведен на рис. 18.3.2, а пример аэродинамических характеристик
модели нормальной схемы с треугольным крылом для натурных условий -
www.vokb-lo.spb.ru - Как построить самолёт своими руками?!
на рис. 18.3.3 Результаты расчетов показаны па рис. 18.3.4-18.3,6. На пер-
вом из них показаны области на плоскости основных параметров G/S и P/G
соответствующие согласованию аэродинамической компоновки и характерис-
тик двигателя и работе двигателя в крейсерском полете на крейсерском ре-
жиме, о способе построения которых было сказано вьппе. Необходимые по-
яснения приведены на рисунке. Чем больше высота крейсерского полета при
оптимальном соотношении (Роф)Пг1 и 5 и чем, следовательно, больше взлет-
ная тягонооружеппость и меньше нагрузка на кры ю, тем выше маневренные
возможности самолета в принятой расчетной точке Н = 5 км, М * 0 9
(рис. 18-3.5) и тем проще обеспечить потребные или приемлемые взлетные и
(W>„
О 8.
Риг 18 3.3. Аэриивамические характеристики минепремкли самолета нормальной схемы с треу-
гольным крытом (/,„ = 37°) при тг - О
Область
о-,-
V =
> т.'лнчепис размеров у
0,4
10 км
у1*" 9 км
Повышение .маневренных
ВО.1МОЖП1И тей
Увеличение далыижли полета
13 км |
12 км
Крейсерский режим работы ТРД
самолета
Высота начала
крейсерского полета
Диапазон (C/S) ,
KpOtc
Границы крейсерского режима
k = 0,75
Точный минимум дроссельной характеристики (^k?dk”0,67)
рассмотренный па рис 18.3.5 18.3 7
юо 200 зоо юо 500 (GS) ,кГс/м2
1 2
О
Рис 18 3 4. Сш |а< <1кя>1>1< аэродинамическом компоновки и сильной установки самолета
нормальной схемы < грсуто н>ным крытом
посадочные характерце гики самолета (рис. 18.3.6). Задания (Роф/S) и
(G/S)aw достаточно для определения в первом приближении мансвренлых i
взлетно-посадочных характеристик самолета, сети известны дополнительные
условия, при которых эти характеристики должны быть рсализовань
(С\ пос. Су отр> коэффициент трения fit т.д., см. гл. 16).
м
Л|ММ> •
G„ = 0.8GM
Ь« тормозное, , 0 3 (6стон)
парашюта ' л -
,шрт'п) /
500
Раскрытие парашки
в момент касания
ВПП главными
колесами шасси
= О
ТЗ
250
300
350 G/S,kVc!*
Рис 18 3 5 Зависимость установиншейея нор-
малыюй перегрузки и .энергетической скоро-
цоды’чшх 1И «л взлетной удельной нагрузка на
крыло (к вьбору геомсгриче» кич и массовых
характеристик самолета, см также рш 18 3 7)
Рис. 18 3 6 Завис им<х1Ъ длины разбега
пробега от (G 5)^, (к выбору |еометрич<
ких и .массовых характеристик самолета, а
также рис. 18.3 7)
www.vokb-lo.spb.ru - Как построить самолёт своими руками?!
Рис. It 3.7. Выбор ттометрнчгскнх и массовых характеристик самолета (пример):
- 6500 кГс, Сфн = 1500 кГс, ус — плотность комппповки
Для расиста дальности полета (L) необходимо знать относительный
запас топлива (GT), который зависит от взлетного веса самолета и за-
данного веса функциональной нагрузки (Сфн), т е. суммы веса экипажа,
оборудования и коммерческой, платной, полезной, боевой и прочей на-
грузки. Укрупненная весовая сводка самолета содержит веса этой на-
грузки, топлива (GT), силовом установки (Gtv) и конструкции (GK), ко-
торые в сумме составляют его взлеты» вес:
GU1J| ~ Сфн + GT — Ссу ~ GK.
Вес системы управления, который пропорционален взлетному весу
самолета, включен в GK.
Обычно вводя! в рассмотрение:
Gcv = ‘G-y^Otb/^Kvi “ относительный вес силовой установки, где
Усу ~ Gry/Ррф = •+ kCy,
GK = ^к/^взл ~ относительный вес конструкции, зависит от разме-
ров самолета и его конфигурации, GK = </s50M, где qs - вес конструкции,
приходящийся на 1 м2 омываемой поверхности самолета. При варьиро-
вании параметров он может быть в нервом приближении принят посто-
янным, характерным для самолетов рассматриваемого класса.
Таким образом,
, _ 1
где SOM/5 - безразмерный параметр, нризнак_ компоновки - отношение
омываемой поверхности к площади крыла; Gr = G^jG^ - относитель-
ный вес топлива - определяется соотношением, правая часть которою
зависит от компоновки (50к/5) и oi "технологических коэффициентов"
Ycv и qx, принятых в расчете:
— — — Сфь
Gr - I - Gcv - GK - — .
Задание любой из трех определяющих размеры самолета величин -
взлетный вес, взлетая тяга двигателей, площадь крыла - определяет и
две остальные, поскольку (Роф/С)в« и (G/5)B+ известны. Объем само-
лета (Ис) определяется соотношением:
«о, Ф)*2
' б^я
где Ф - безразмерный параметр (коэффициент формы), признак компо-
новки - отношение омываемой поверхности самолета к поверхности сфе-
ры, равного с ним объема.
При известных Рофизт GSJJl, S расчет приобретает конкрешость - каж-
дой точке области Qf. min могут быть поставлены в соответствие вес пара-
метры, опрсде.тяющис самолет и сю ЛТ и MX, представляющие интерес, в
том числе площадь омываемой поверхности (5ОМ) и объем (Гс) самолета,
CR, Gl4 ,GT(G(|XI) , плотность его компоновки (GB3.y Г[:) и коэффициент со-
www.vokb-lG.spb.ru - Как построить самолёт своими руками?!
лроигвлсния, отнесенный к 5сМ (С/г- см. рис. 16.2.18). Сопоставление
значений лих параметров с реально осуществимыми определит область на-
грузок на крыло, в которой можно выбирать параметры самолета, полагая в
дальнейшем, что они в первом приближении увязаны в треугольнике “масса
- геометрия - аэродинамика"(“область существования”). Дальность полста
в зависимости от относительного запаса топлива и, следовательно, от разме-
ров самолета и веса функциональной нагрззки (6фн), может быть определе-
на по формулам, приведенным в гл. 16.
В результате получены все параметры, характеризующие самолет,
для каждого сочетания высоты начала крейсерского полета, взлетных тя-
ювооружспностн и нагрузки па крыло, взлетно-посадочных и маневрен-
ных характеристик. Этого достаточно для оценки возможностей самоле-
га, выполненного в рассматриваемой компоновке. Эту часть расчетов
удобно выделить в отдельную элементарную программу, которая позво-
ляет проводить анализы принципиальных возможностей аэродинамичес-
ких компоновок применительно к самолетам любого назначения.
Пример расчетов массовых и геометрических характеристик самолета с
треугольным крылом приведен на рис. 18.3.7 для случая задания взлетной
гяги двигателя. Па рис. 18.3.8 приведены итоги аналогичных расчетов для
самолета, выполненного в интегральной схеме (см. рис. 18.2 1).
0.8-
_j------------------------1--------
300 400 (О/5),х,,кГс/м2
Pi и 18 3 8 Определение основных параметров самолета методом “прямого счета”. .А^родина-
.чичп кая компоновка и тпнгагсль заданы (fc^^ = 0.5-0,75 - грагпщы крейсерского режима
работы двигателей): Л/ - максимальные маневренные возможности (больше задашгых) при
дальностях полета у земли и на высоте, соответствующих ТЗ, .4 — максимальные дальне 1W
(больше заданных) при характеристиках маневренности, соо'гвсгствуюишх ТЗ
Точка А - “максимальная дальность при заданных характеристиках
маневренное!и" расположена в области (Л min Для дальнейшего Увелгн
чения маневренных возможностей самолета пусть даже за счет погерь в
дальностях полета, которые в данном примере в точке Л превышают за-
данные, можно пойти на увеличение гяговооружепиости с выходом из
области Qt mill в точку М - “максимальные маневренные возможности
при заданной дальности”. Увеличение нагрузки на крыло в этом случае
О1раничиваю1 заданная нормальная перегрузка ус1. = 6,5) и мини-
мальная скорость горизонтального полета. В результате получена область
существования самолета в рассматриваемой компоновке, в которой обес-
печивается удовлетворение ТЗ. Дальность полста па сверхзвуковой ско-
рости не задана. Максимальное число М определяется ограничениями по
скоростному напору и температуре торможения.
В методике “прямого счета" раз-
меры самолета обычно определяют-
ся заданием взлетной гяги двига-
телей Роф и массы функциональ-
ной нагрузки.
В качестве дополнения к “области
сущее г новация" полезны соотношения
лига приведенных на рис. 18.3.9, ко-
торые показывают характер зависи-
мости взлетного веса от взлетной тя-
говооруженности, удельного веса
двигателей и общего веса функцио-
нальной нагрузки и позволяют су-
дить об эффективности выбора тех
пли иных параметров и "степени
риска" при этом.
На рис. 18 3 10 представлена
схематическая блок-схема расчета
Вторая (“обратная") мегноди-
Рис 18 3.9. 3dBncHMiKTb взлетного веса
от потребной тя] ^вооруженности н функ-
циональной нагрузки
ка предназначена для перевода ТЗ в требования к аэродинамической
компоновке, размерам, взлетному весу самолета и взлетной тяге ею си-
ловой установки, как об этом было сказано выше, не задаваясь предвари-
тельно какой-либо конкретной аэродинамической компоновкой самолета.
Методика предназначена для использования при первоначальном
определении размеров и веса самолета и его потребных аэродина-
мических характеристик, обеспечивающих выполнение приоритетных
требовании при заданной массе полезной нагрузки я принятом уровне
технологии. Этот уровень задастся набором “технологических коэф-
фициентов" и дополнениями к ТЗ, регламентирующими, например,
связь между заданными маневренными характеристиками, остатком
топлива во внутренних баках и номенклатурой грузов, при которых
мн характеристики реализуются.
www.vokb-lc.spb.ru - Как построить самолёт своими руками?!
Т
Параметры самолета и его ЛТ и MX
Рис 18 3 10 Блок-схема программы “прямого счета”
Поляра самолета считается квадратичной параболой, при Суа> 1,5СуДк1Пах
вводится поправка на влияние отрывов и отход поляры от параболы.
“Технологические коэффициенты" определяются на основании статис-
тического анализа основных параметров и пропорций самолетов массово-
го выпуска в предположении, что статистика содержит опыт авиастрое-
ния, поскольку каждый самолет был создан в результате рационального
выбора его параметров под сбалансированное ТЗ на пределе возможного
по технологии.
К основным технологическим коэффициентам относятся следующие:
- минимальное сопротивление самолета, отнесенное к скоростному
напору и площади омываемой поверхности (С^);
- доля топлива, оставшегося во внутренних баках, при которой
определен расчетный вес (£т);
- отношение располагаемо!! тяги силовой установки на расчетном
режиме к взлетной стендовой тяге двигателя (или двигателей), Аун;
- расход топлива в долях взлетного веса самолета за время от за-
пуска двигателей до выхода на крейсерский режим полета и длина этого
участка (С?П1 и /_н);
- расход топлива в долях взлетного веса за время от начала сниже-
ния до выключения двигателей после посадки в сумме с остатком топли-
ва в баках, который определяется соответствующими нормативными до-
кументами; длина участка снижения (GT , £сн );
- удельный расход топлива на крейсерском режиме полета (Се крС||с);
- отношение максимального аэродинамического качества самолета в
крейсерском режиме к максимальному аэродинамическому качеству на
режиме маневра (k^# );
- удельный вес силовой установки - отношение веса силовой
установки к стендовой тяге двигателей, усу = удв + fecv, где удв = СД^РДЗ,
— (Gcy — Сдп)/Рдв.
Часть этих коэффициентов используется и в методике “прямого счета”.
Результаты расчетов представляются в виде общепринятых и ряда
обобщенных параметров, характеризующих перегрузочную поляру самолета:
(P/Gp); Cxe0/(Gp/S); Ль Л2(Ор/5).
Они объединяют полетный вес, размеры и аэродинамические харак-
теристики самолета, и зависят от потребного максимального аэродина-
мического качества и коэффициента формы
Задание коэффициента формы и плотности компоновки (ус = 0^/1^)
позволяет согласовать массу конструкции, объем, полетный вес самолета и
аэродинамические характеристики.
К числу параметров, определяющих облик самолета, относятся взлетная
тяговооруженностъ, взлетный вес, укрупнен пая весовая сводка, площадь
омываемой поверхности (5ПМ), объем самолета (Vc), эффективный размах
крыла (Ц = индекс сопротивления (CxeminS) и т.д. По-
лученные материалы можно трактовать как описание набора компоно-
вок, каждая из которых:
- характеризуется коэффициентом Ф и максимальным аэродинами-
ческим качеством Ктлх,
- удовлетворяет всем приоритетным требованиям,
- внутренне непротиворечива, т.е. ее объем, вес и потребное мини-
мальное сопротивление сотласованы.
20*
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
Таким образом ТЗ переведено в требования к размерам, весу и
родинамике самолетов, которые этому ТЗ удовлетворяют.
Ограничение области поиска происходит в случае задания отношения
ощади крыла S, т.е. площади, к которой отнесены аэродинамические
эффициенты, к площади омываемой поверхности S/S0M (или обратной
личины 5иМ<5)
В этом случае вместо обобщенных параметров, которые нс зависят от
ошади крыта (или в дополнение к ним), рассматриваются и аиализи-
ются аэродинамические коэффициенты и нагрузка на крыло, т.е. дри-
1чныс характеристики самолета, выполненного в конкретной аэродпна-
[чсской ком попонке, н зависимости от одного из параметров - взле про-
веса, площади крыла, .максимального аэродинамического качества, не-
полезной нагрузки, взлетной тяги силовой установки и т.д.
Сопоставление полученных результатов с содержимым банка данных по
мпоповкам и существующими или возможными граничениями но взлет-
му весу самолета, по его размерам или по реально достижимому уровню
эодинамических характеристик позволяет выбрать одну или несколько
мпоновок дтя дальнейшего анализа и оптимизации “от про 1 опта".
Для каждой из выбранных компоновок проводится анализ влияния па
тик самолета введенных в расчет технологических параметров при бечус-
впом удовлетворении всех приоритетных 1ребовапий. Возможен также
тлиз влияния поэлементного изменения ТЗ на облик самолета при задан-
м уровне технолоиш и его вероятном повышении в перспективе.
В методике “прямого счета” внесение изменений в исходные данные
гелыо приведения в соответствие с ТЗ одной из .IT и MX изменяет и
? остальные характеристики самолета. Использование программ фор-
рования аэродинамической компоновки по методу “обратного счета”
шочяет определить потребные изменения исходных данных, которые
"спечат выполнение всех остальных ТЗ. Таким образом, прямой и об-
гнып счет дополняют друг друга, позволяя сформировать компоновку
толста, удовлетворяющую ТЗ, И обеспечить согласование требований,
гтьного уровня технологии производства и аэродинамики.
Анализ результатов подобных расчетов позволяет выбрать компоновку
этотппа, определить площадь крыла и потребные значения всех аэроди-
лических коэффициентов, которые должны быть сопоставлены с резулъ-
ами исследований соответствующих моделей в аэродинамических трубах
• с материалами расчетных исследований. При варьировании площади
яла или формы крыла в плане с целью оптимизации или для приведе-
i значений аэродинамических коэффициентов, полученных в экспери-
ITO, к потребным, происходит изменение коэффициента формы Ф. Это
>сход к новой компоновке и, соответственно, появление новых потреб-
х значений всех параметров, характеризующих прототип. Они, очевид-
определяются простым переходом от одного значения Ф к другому с
ПОМОЩЬЮ заранее построенных сеток без дополнительных расчетов. Если
изменение площади крыла произошло в результате появления нового
принципа се определения (например, путем включения площади наплыва в
площадь крыла), то пропорции компоновки при этом остаются постоян-
ными и изменение потребных величин аэродинамических коэффициентов
происходит при Ф = const, соответствующим этой компоновке.
Анализ требований к аэродинамическим характеристикам, полученным
и результате перехода от ТЗ, позволяет оценить степень их взаимного соот-
ветствия и определить параметры компоновки, которые необходимо дорабо-
тать, либо элементы ТЗ, которые полезно или необходимо изменить в ту ши
иную сторону. В ходе расчетов задаются и варьируются около десятка пара-
метров, характеризующих уровень технологии и возможного аэродинамичес-
кого и конструктивного совершенства самолета, и определяются “области
существования", каждая точка в которых соответствует вполне определен-
ному набору допущений о принятом в проектировании уровне технологии.
Методика может быть усовершенствована путем введения уточнен-
ных расчетных формул и дополнительных технологических параметров.
Она применима и в случае, если приоритетными считаются ЛТХ на
сверхзвуковом режиме полета.
Алгоритм можно условно разделить на четыре блока (рис. 18.3.11):
Первый - определяет относительные потребные параметры самолета
(показатели сравнения, см. гл. 16) в зависимости от ЛСтах.
Второй - согласованные размеры, взлетный вес, укрупненную весо-
вую сводку и комплексные параметры, объединяющие аэродинамические
коэффициенты, размеры самолета и потребное аэродинамическое качество.
Третий - аэродинамические коэффициенты, площадь крыла и иа-
трузку на крыло при дополнительном задании соотношения площади
крыла и омываемой поверхности самолета.
Четвертый - сопоставление потребных параметров с банком данных
(статистика по самолетам и моделям, научный задел); выбор аэродина-
мической компоновки.
Требования задаются параметрами:
пха\', ~ Для Яр, Vp (или Мр), расчетный режим.
I. - для Нкр, У^рейс (или Мкрейс). Крейсерский режим
Пфи “ вгг функциональной нагрузки (оборудование, полезная на-
грузка, экипаж).
На рис. 18.3.12, 18.3.13 представлены для примера результаты
расчетов по методике “обратного счета”. Требования:
- маневренные возможности на высоте Н = 5000 м при М = 0,9 с
остатком топлива во внутренних баках 0,5 GT:
Нун уст 6,5, I = 200 м/t , tlxa\ — О,/.
- L = 2600 км, чему соответствует (£О/Г)крс1-к = 2,э, = 4 гс.
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
1
Комплексные параметры сравнения
6 мп G 5 ВЫ
Укрупненная весовая сводка
GT ; ; G. : G*.
I
Расчет стандартных характеристик
самолета и его аэродинамики в
зависимости от Ф и 5
5; (G5)„,; (P^S)n„.
G,oO' G^-e. Gyff»
______ V
Выбор компоновки прототипа:
сопостап леппс потребных параметров с банком
данных по самолетам и моделям
Рис. 18.3 11. Блок-схема программы “обратного счета”
На рис. 18.3.12 показаны потребные значения комплексных парамет-
ров и составляющих укрупненной весовой сводки в зависимости от ко-
эффициента формы компоновки Ф. Перемещение объемов из фнозеляжа в
крыло и другие несущие элементы (увеличение Ф) приводит к уве-
личению потребного взлетного веса и относительного весг1 конструкции,
небольшому возрастанию потребной взлетной тяговооруженности и
уменьшению погребного максимального аэродинамического качества
Рис. 1Я 3 12. Результаты расчетов в блоках 1 и 2 (пример)
Рисунок 18.3.13 показывает общую зависимость погребных для удов-
летворения ТЗ традиционных аэродинамических коэффициентов от площади
крыла самолета (5) и коэффициента формы (Ф) для принятых техноло-
гических коэффициентов (результаты расчетов в блоке 3, см. рис. 18.3.11).
Эти зависимости позволяют определить требования к основным параметрам
самолета в аэродинамической схеме, заданной величинами Ф и 5ОМ :
Ф - 2,8; А'о^, = 4,2 - нормальная схема с треугольным крылом X = 2,15;
www.vokb-lo.spb.ru - Как построить самолёт своими руками?!
Ф - 3,2; Sa4 = 3 - бесхвостка с треугольным крылом X - 1,9;
Ф = 3,5: 5СлМ = 4,7 - нормальная схема, стреловидное крыло X = 3;
ф =- 4,0; = 4,9 - нормальная интегральная схема со стреловид-
ым крылом X = 3,5,
ВОЗМОЖНОСТЯМИ которых можно сопоставлять полученные требования,
(идно, что для компоновок с треугольным крылом требования к аэроди-
амическим характеристикам, обеспечивающим выполнение ТЗ по даль-
Инс. 18 3 13 Результаты расчетов в блоках 3 и 4 (пример) Заданы Ф п Sнм 1 Опре-
дели ЮЩИС основные пропорции симолстз
ностп и маневру, практически невыполнимы. Нормальная схема с кры-
лом А = 3 соответствует требованиям. Интегральная схема может обес-
печить более высокие 1ребоваиия - реальное максимальное аэродина-
мическое качество при М - 0,9 превышает Х1пах = Ю-
18.4. Краткий анализ аэродинамических схем
Каждой из аэродинамических схем соответствуют свои проверенные
практикой оптимальные формы крыльев в плане (главы 2-4).
Для нормальной схемы эго крылья с углом стреловидности по пере-
дней кромке 40-5-15°, задняя кромка выполнена с небольшой положитель-
ной, близкой Хз.к = О или небольшой отрицательной стреловидностью,
с = 4 5%. При заданном размахе угол стреловидности задней кромки
определяет удлинение крыла, которое обычно составляет л = 3-5-3,5. При
взлетной нагрузке на крыло, характерной для этих аэродинамических
схем (G'S ~ 350-5-450 kI'c/m2), оптимальные размеры крыла согласуются
с размерами фюзеляжа, обеспечивают размещение горизонтального опе-
рения за крылом и необходимую центровку самолета (см. рис. 18.1.2).
Для бесхвостки используются крылья, близкие к треуюльным малого уд-
линения (А < 2), малой относительной толщины (2-^4%) и большого сужения
(т] > 12). крылья с изломом передней кромки, вытянутые вдоль фю.1еляжа
(см. рис. 18.1.1). При отсутствии горизонтального оперения площачь крыта
практически не ограничена сверху, что позволяет выбрать ее оптимальной, тс.
обеспечить достаточно малую нагрузку’ на крыло (GAS’ <250кГс/м2 при нор-
мальном взлетном весе) и компенсировать относительно небольшие несущие
свойства (С'уа ) подобных крыльев (см. рис. 18.1.2). То же самое можно ска-
зать и о коэффициенте роста индуктивного сопротивления G1?) или об эффек-
тивном удлинении (a^j,), которое у трсуго.тьного крыла существенно меньше,
чем у стреловидного, но опять-таки компенсируется увеличенной площадью.
Это обстоя гсльство нашло о1ражение в приведенных выше (см. гл. 17) комп-
лексных параметрах сравнения
Cx0/(G/5); Л2(С/5): или (G/5)/A^ = g/Z^ ; или С^Дэф-
Если у двух сама тегов различных компоновок и размеров комплексные
коэффициенты сравнения соответственно одинаковы, то в первом приближе-
нии для крыльев небольших удлинений (А^ пропорционально АГ1.„Ч) разма-
хи крыльев бесхвостой и самолетов нормальной схемы со стреловидными
крыльями при одинаковых взлетных весах должны быть близкими Пло-
щадь треугольного или близкого к нему крыла с удлинением А < 2 будет при
этом в 1,5-5-2 раза превосходить площадь стреловидного крыла с удлинением
А-3-5-3.5. В лом случае отностггсльный мидель фюзеляжа бесхвостки будет
соответственно во столько же раз меньше, т.е. не 8-5-10%, как это имеет мес-
то у маневренных самолетов относительно небольшого взлетного веса, а
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
Я
Ту-144
6
1
2
Убран фонарь
Увеличение уллишни
носовой части-----
Рис 1Ь 4 1. Влитие относитель-
ной площади миделя фюзеляжа,
>а.,.чсров и компоновки самолета
ia .максимальное аэродинамичес-
кое качество в условиях бятанси-
ювки (М = 1,5)
0,025 0,05 0,075
5-^6%, что обеспечивает заметно меньшее
различие в максимальных аэродинамических
качествах, чем это имеет место при срав-
нении аэродинамических характеристик те-
матических моделей, полученных по испы-
таниям в аэродинамических трубах при
= const (рис. 18.4.1 и гл. 2).
Принципиальным недостатком бесхвост-
ки оказываю 1ся не низкие значения и
'"'эф' а Увеличенные размеры по сравнению с
самолетом нормальной схемы того же на-
значения и взлетного веса (удвоенная пло-
щадь крыла) со всеми вытекающими по-
следствиями и трудности продольной балан-
сировки самолета па взлете и посадке для ре-
ализации располагаемой подъемной силы.
Посадку с элевонами, отклоненными
шиз, и увеличение плеча поверхности управления для бссхвостки может
обеспечить дополнительное переднее оперение. Оно внедрено прак-
ичсски на всех бесхвостках последних лет (см. рис. 18.1.2) как допол-
тительпая поверхность управления и балансировки. Если самолет ста-
ически устойчив, то для бесхвостки балансировка всегда сопряжена с
югерей аэродинамического качества.
Если самолет в нормальной схеме со стреловидным крылом П в бес-
постой с треугольным выполняется на базе уже скомпонованного сдино-
о фюзеляжа (мидель фюзеляжа определен двигателями, воздухозабор-
икэми и кабиной летчика), ю самолет в бесхвостой схеме в принципе
меет больший объем и может отличаться большим запасом топлива.
Эднако при реализации дополнительных объемов в крыле нагрузка на
рыло увеличится, а взлетная тяговооруженноегь уменьшится, что умень-
пп начальную высоту крейсерского полета и маневренные возможности
а.молета в области энергичного маневрирования.
. При сохранении взлетного веса и запаса топлива уменьшается вссо-
ая отдача по топливу и дальность полета.
На рис. 18.4.2 показаны области min , рассчитанные по первой
прямой) методике предыдущего раздела, для бесхвостки (Б) и кор-
альной схемы (Н) с двигателем, безразмерные характеристики кото-
эго приведены на рис. 18.3.2. Рисунок 18.4.3 демонстрирует зависи-
ость маневренных характеристик от нагрузки па крыло. Дополни-
>льно для общности показана область Q. |ШП для самолета интег-
1ЛЫЮЙ схемы (II), выполненного в компоновке типа Су-27 с теми же
зигателя.ми (см. рис. 18.3.2).
(PG)^
1,4
1.2
1,0
0,8
0.6
0,4
О 2
100 200 300 400 500 (G/S).„, кГс/м
Рис 18 4 2 Спязь параметров (P G)^, и (G/S)KW для серийных сверхзвуко-
вых самолетов различных аэродинамических схем Б - бесхвостки, II - ин-
тегральная Н - нормальная, С и СД - пеманевренныс самолеты
В зависимости от веса функциональной нагрузки и топлива точка на
плоскости G!S, PiG, соответствующая самолету любой аэродинамической
схемы, может занимать любое положение на линии (Роф^)взл = const
между нормальной и максимальной взлетными нагрузками па крыло.
Для крейсерского полета эта точка смещается вверх и влево до PIG и
G/S. соответствующих концу крейсерского полета.
Можно отметить что области Qomin самолетов нормальной схемы со
стреловидным крылом или бесхвостой с треугольным заметно отличаются
по (Роф/5)Н4Л и, следовательно, по взлетным нагрузкам на крыло и тяго-
вооруженное гям. Оптимальное отношение взлетной тяги и площади кры-
ла составляет (РофЛ5)в*д:
- 1Н0-: 220 кГс/м2 для бесхвостой с треугольным крылом,
- 280-?-320 кГс/м2 для нормальных фюзеляжных схем,
- 380-420 кГс/м2 для нормальных, интегральных и близких к ним схем.
Области “Б”,"Н”,”И" рис. 18.4.3 построены для средних значений
www.vokb-lc.spb.ru - Как построить самолёт своими руками?!
Рис. 18 13 Маневренные ппэчижности самолетов бесхвостой (Б) нормальной
(Н) н интегральной (И) <.хсм при пыбо[Х- параметров в области Q,,,njll
[вшателсй, поэтому их положение, вообще говоря, показывают только
гриншишалыпяе отличия рассматриваемых компоновок. Однако точки всех
ерийных самолетов бесхвостой схемы с треугольным крылом находятся в
юс троенной области, либо вблизи нее, точки самолетов нормальной схемы
ижс группируются около “своих" областей mui.
Основные параметры компоновки самолета и двигателя, опрсдсляю-
1ие область потребных взлетных 1яговооружеиностей и нагрузок на
рыло, объединены соотношением
1 <711
' изд ^К]м.мс ^гн ^тлх.
Величина параметра (Роф 5’)KW определяется скоростным напором на
ысоте Н = И к.м (</ц), зависящим от числа М крейсерского полета, и ко-
ффициентами Суа Кпвх, _К,П.ЧХ и ktu, определенными для Н = 11 км при
kpefa- Коэффициент Ацрейг соответствует области СеП1Ш (см. рис. 18.3.1).
Максимальное аэродинамическое качество определяет дальность полета,
основные усилия аэродинамиков направлены на его увеличение. Поэтому
сложение области Qtmju на плоскости G/S, PG "регулируется” значе-
ния и Суа и Мот- по линии аэродинамики и kVK по линии двигателей.
Параметры всех без исключения сверхзвуковых маневренных само-
лов выбирались из условия обеспечения дозвукового крейсерского но-
:та, для которого <7 и (Мопт) = 1000+1300 кГс/.м2. Реализация свсрхзву-
звого крейсерского режима, для которого 9(МКрспг) увеличивается нро-
)рционалыю М2, а АГтах существенно уменьшается (см. рис. 18.4.2), т.е
минимизация СЛ ПРИ М = (f/n “ ^00 кГс/м2), приводит к (РО1НП и
(GAV)^-, которые в рассматриваемых компоновках не реализуемы.
Поэтому для обеспечения сверхзвукового крейсерского режима поле-
та требуется не только существенно увеличить максимальное аэродина-
мическое качество при М > 1, что возможно только при значительном
уменьшении относительных миделя фюзеляжа и толщины крыла, по и
у менынить Суа к - Это обеспечивается только переходом к крылу мало-
го удлинения треугольному или близкому к нему. Необходимо также
значительно увеличить коэффициент Лсн, т.е. изменить соотношение фор-
сажной и бссфорсажнои тяг дшпателя в пользу последней, что возможно
только при повышении рабочих температур двигателя.
Эти требования расходятся с условиями обеспечения дозвукового
крейсерского полета.
Для сверхзвуковых транспортных самолетов возможны две аэроди-
намические схемы:
бесхвостка с треугольным крылом,
- нормальная с крылом изменяемой стреловидности.
Первая - для самолетов с основным сверхзвуковым крейсерским ре-
жимом (Ту-144, Т-4, “Конкорд", ХВ-70). Вторая - для самолетов с ос-
новным дозвуковым крейсерским режимом (Ту-160, В-1, Ту-22М).
На сверхзвуковом крейсерском режиме полета при регулируемой
форсажной тя1е дроссельная характеристика не имеет минимума, поэто-
му облапь согласования компоновки и двигателя для самолета (отмечена
на рис. 18 4 2 буквой "С"), рассчитанного на число М = 2,24-2,3 в крей-
серском полете, построена для Акренс - 0,75. Она соответствует
(РОс/5)в<1Л = 190 кГс/м2 и вполне согласуется с (P/G)B4., и (О/5)взл пе-
речисленных выше самолетов Аэродинамические характеристики компо-
новки и безразмерные характерце i ики силовой установки, принятые в
расчете, показаны на рис. 18.4.4 и 18.4.5.
Рис 18 4.4 Аэродинамические ха-
paKTCi'iii пгки сверх тиукопого пасса-
жи]х кого самолета
Рис. 18.4.5. Беэра ън-риая pacuo.iaiнемая тяга ситовой
установки < ш-рхлнукопого пассажирского самолета
(пример)
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
Если выбрать эту область для тех же компоновок, но для дозвуково-
э крейсерского режима, то отношение (Poq/S)bu1 составит 115кГс/м2
линия СД на рис. 18.4.2), т.е. сверхзвуковой и дозвуковой режимы и
тссь не согласуются. Для реализации оптимального дозвукового полета
□требовалась бы существенно меньшая нагрузка на крыло, как это име-
i место у бесхвосток - маневренных самолетов.
Большие размеры крыла и его вытянутость вдоль фюзеляжа, отсут*
гвис требований полета при больших скоростных напорах позволяют
ффрктивно использовать деформации срединной поверхности крыла для
овышения аэродинамического качества на режиме крейсерского полета,
рачительные абсолютные толщины /тают возможность организовать не-
Зходимую механизацию задней кромки, а выдвижное переднее горизон-
ыьное оперение - обеспечить значительный кабрнруюший момент, по-
юлякиций использовать эту механизацию для существенного повышения
эдъемной силы на взлете и посадке, если это окажется необходимым.
Кроме юго, транспортным самолетам свойственен большой относи-
льный запас топлива - порядка половины взлетного веса, что суше-
венно облегчает посадку.
Следует учитывать, что интенсивность звукового удара на земле при
юлстс тяжелого сверхзвукового самолета достаточно нолика и уменьшается
•лько при уменьшении нагрузки на крыло и увеличении высоты крейсерс-
»го полета. Неприемлемость этого явления для населения существенно ог-
ншчивает возможные маршруты сверхзвуковых пассажирских самолетов
>летом над океанами или полетом над сушей только с дозвуковой скорос-
ю. Второй существенный недостаток СПС - высокая стоимость эксплуата-
[и. Расход топлива на пассажирокилометр для самолетов Ту-144 и
Сонкорд” составлял около 100 г/(пасс-км), у СПС второго поколения он
>жет стать вдвое меньше. Этот параметр для современных дозвуковых ма-
стралъных самолетов равен 18+25 г/(пасс км).
Таким образом, бесхвостка с треугольным крылом нс имеет преиму-
?ств перед нормальной схемой для маневренного сверхзвукового само-
та с дозвуковым крейсерским режимом полета, но для транспортного
маневренного сверхзвукового самолета со сверхзвуковым крейсерским
жимом полета она представляется приоритетной.
Список литературы к главе 18
Г.С. Бюшгенс. /Увиацня XXI века//ТВФ, 1990, №1.
-1Л. Огородников, М.М.Цховребов. Авиационные двигатели XXI пека//ТВФ, 1990. №1.
-/..V Шкадоя. Авиации XXI века Прогнозы и перспективы//ТВФ, 1994, М»1-2
Н.И. Антонов, Л. И. Кнышев, МП. Симонов. Ос новные требования к истреби тио IV поко-
ления и их реализация в конструкции истребителя ш-рсхвагшка Су-27 ft ТВФ, 1990, Ь*2.
ОС. Сачойлович. Методология формирования облика летательных аппаратов // ТВФ,
1991, Х«4
.1 Г. Колоколова. Метод обобщенных моделей свойств самолета для этапа раннего
проектирования // ТВФ, 1995. >й5-6.
Н.А. Фочин. 1 [роектиропаиие самолетов. — М: Обсцхппиз, 1961.
Г. Креи. Исследование с южных систем по частям / Пер с англ. - М. Паука, 1972
Список дополнительной литературы
f ФИ Франк in, С А Христианович, Р Н. Алексеева. Основы газовой динамики // Тр
цлги, 19за
2. С..1. Христианович, Я.М Серебрийский. О волновом сопротивлении // Тр. ЦАГИ, 1944.
j Cui. Христианович, В Г. Гальпари» Физические основы околозвуковой аэродинамики //
Тр. ИМ И, 1918.
4 С. А. Христианович. Механика сплошной среды. Сборник работ. - М : Наука, 1984
5. С. А Христианович О сверхзвуковых течениях газа//Тр ЦАГИ, 1941.
b ••! -1- Никольский. Теоретические исследования ио мсхаггике жидкости и газа / ЦАГИ, 1981.
7 Прикладная газовая динамика / Под ред. С А.Христиановича / ЦАГИ, 1948.
8 Руководство для конструкторов Т Аэродинамика и динамика / ЦАГИ, выпуски 1970-1980
9 В.В Стру.чинский. Аэродинамика стреловидных крыльев средних и малых удлнпе
ний. - М : Наука, 1983.
10 В. В Струминский. Скольжение крыла в вязком и сжимаемом газе /I Доклады АН
СССР, 1946
II . В.В. Стру.чинский, НК. Лебедь Расчет аэродинамических характеристик стреловид-
ных крыльев / НАГИ, 1947.
12 . В.В. Стру.чинский, Г.С Бюшеенс, К.К. Костюк и др.. Исследования по аэродина-
мике сверхзвуковых самолетов и крытатых ракет и разработка рациональных аэроди-
намических компоновок // Отчет НАГИ, 1961.
13 С.А Христианович. В Г. Гальперин, МА. Миллионщиков, Л.А. Симонов Приклад-
ная газовая динамика / НАГИ, 1948
11 П II Ярасп тьшмкоя. Практическая аэродинамика крыла//Тр. ЦАГИ, 1973.
15. Р Rebuffer. Aerodynamique Experimentalc. ~ Paris, 1968.
16 К.П Петров. Аэродинамика элементов летательных аппаратов. - М.: Машинострое-
ние, 1985
17. С.М. Белоцерковский, Н.А. Кудрявцева. С.А. Потапалов, В.Г. Табачников. Иссле-
дование сверхзвуковой аэродинамики самолета на ЭВМ. - М Наука, 1983-
18. С.М. Белоцерковский, Б.К. Скрипач, В.Г. Табачников. Крыто в нестационарном по-
токе газа. - М.: Науки, 1971.
19. Н. Schhchting, Б. Truckenbrodt. Aerodynamics of the airplane / Пер. с немецк. - New
York. 1979
20 R.T. Jones. Wing theory. - Prington, 1990
21.. V. Эшли, M. Лэндл. Аэродинамика крыльев к корпусов летательных аппаратов Пе-
ревод г англ / Под ред Штейнберга Р.И. - М.: Машиностроение, 1969.
22 . Устойчивость, управ тяемость и динамика самолетов (Сб. работ) // Тр ЦАГИ, 1968-
23 ГС. Бюииет, Р.В. Студнев. Аэродинамика самолета. Динамика продольного и бо-
кового движения — М Машиностроение, 1979
24 .Л..1. Красовский Системы автоматического управления полетом пилотируемых лета-
тельных аппаратов / ВВИЛ нм. Жуковского, 1971
25 Г.С. Бюшгснс, Р В Студней. Динамика самолета Пространственное движение - М
Машиностроение, 1983
26 L.K Loftm. Quest for performance. The evolution of modern aircraft. - NASA. 1985
27 . J.R. Hansen Engineer in charge A history of the Langly Aeronautical laboratory 1917-
1958 - NASA, 1987.
28 R E. Btlstein A history of the NACA and NASA 1915-1990 - NASA 1992.
29 Г.С. Бюшгенс, Е.Л. Бедржицкий ЦАГИ - центр авиационной пауки. — М.: Наука, 1993.
30 ЦА1 И - основные этапы нау’шой деятельности. 1968-1993 - М : Наука Физматлит, 19%
31 Аэродинамика и динамика полета м-н астральных само тегов / Под ред Г.С. Бюшгенса -
М<х кпа~П<-ки1Г ЦАГИ, Авиа - над. КНР, 1995
32 . В Etkui Dynamics of Atmospheric Flight. - Johnwiley, 1972
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
33 -I Мчеп Механика полета М Нагка 1965
?4 :) Г Уиерчаи Mr-и корнепшо годографа в Корин агиоматнчг. ких синем
.-Гаекя, 1979
.15 .1 f/J Бочкарсч. Н В. .ЬиТреелслм и др Алромсхиника самолета - М. Машипостоос-
। не. 1963
В У! .Зкичо'/, В II Ьакулсл, P.II. Курзинср и др. Теория по.тдчшнсцтг-активных
..питателен Пол jx-.i С У1 II/ иатенкь. - М Мащмностр<и-ние, 19Я7
37 Л' О'« Инженерные исследования лиательных аппаратов Пер. с англ. - М.: Ма
шшки'троеииг, 19*0
3* I.C Бюыгсм. Е. С Вожоаеа. Г. И Загаинив и др, Г.Л. Яъичов, IQ.B Лндрсев.
О Г Калибабчук. В К. Ми/упов. Атрольчамика высокомаиезоетгых Фронтовых пстреби-
п -ей Тр ЦДП1 19*6
'3 I С Бюшм'пе, ГВ. Алекса»/раз. С.У! БелпцерковскиЛ и др Аародипамика самолетов с
ктылья.мн изменяемой пео'^трии Тр ЦАГИ, 1930
Копирайты
Введение
<g I С БюШ|.и* 144b
Основные методы определения аэродинамических характерна тик (глава 1)
И АЛ I чддкои, Р Д Иродов, Г А Федоренко. 19fi8
Хэродинамика сверхзвуковых самолетов с пряными, стреловидными и
треугольными крыльями (глава 2)
©ПК Лебедь. Л Н Онькоца 199ft
Аэродинамика сверх звуковых < а полетов с крылом изменяемой геометрии
(глава 3)
S3 Р Д Иродов. Н h Лебедь. ГЛ Якимов. 1998
Аэродина ника сверхзвуковых самолетов с крыльями сложной формы с
плане. Управченн! вихрями (глава 4)
© Л Ь Васильев Р Д Иродов. Л А Курочкин. А.А Павленко, Г.Л Федоренко, 1998
Аэродинамика воздухозабортиков и сопл сверхзвуковых самолетов (глава 5)
У В И Васильев, Л К 11ьйИЮ1Икин, Е В Павлюков, В Д Соколов, 1998
Аэродинамика фюзеляжей сверхзвуковых самолетов (глава 6)
С К 11 Негрон, 199b
Аэробика ника органов управления сверхзвуковых самолетов (г тага 7)
1 В Г Микеладзе 199b
Аэродинамика сверхзвуковых са полетов в неустановиошемся движении
(глава 8)
С М 1 Гоман, 1998
Ст темы управления сверхзвуковых с а полетов Слава 9)
; В Я Бочаров. 199Н
Основные методы анализа динамики полета (глава 10)
©ГС 1>юи1гс1к. М Г Гоман, А С Устинов, 1998
Моделирование диначики само лепил на пилотажных стендах (глава 11)
©АГ Бюниеис, 1994
Продольная устойчивость и управляемость сверхзвуковых самолетов (глава 12)
©ГС Бюшгснс, 1498
Влияние рлеалъных динамических характеристик системы управления на
устойчивость и управляемость (глава 13)
© В С Берко, Ю Г Живов, 1998
Боковая устойчивость и управляемость сверхзвуковых самолетов (пава 11)
© В Л Суханов 1998
Динамика прхттрмнетвенных движений сверхзвуковых самолетов (гланд 15)
С М Г. Гоман. 1994
Ле тио технические характеристики сверхзвуковых самолетов (глава 16)
Р Д Иродов, Л А .Медвежникова, ГА Федоренко, 1998
Маневренные характеристики сверхзвуковых самолетов (глава 17)
© Р Л Иродов. 199ft
Выбор параметров само terna (глава 18)
' Р .1 Иродов 1998
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
ОГЛАВЛЕНИЕ
.еди< товис ... ................ 3
едение Г.С Бюшгенс ..........................7
ana 1 Основные методы определения аэродинамических характеристик.
1..1 Гладков, Р.Д.Иродов, Г.А.Федоренко............................ 36
1 1 Общин обзор расчетных методов ...................................... 36
1 2 Ощх’Дсдсние аэродинамических характеристик самолета по испытаниям
его мод< н?й в аэродинамических трубах ........................... .53
1 3 Влияние условий испытании п АДТ на несущие свойства и индуктивное
conjWTHB/it-Hjie...... ............. ...................... ,G3
14 11ер<.счс1 аэродинамического сопротивления моделей на натурные условия .. 71
ва 2 Аэродинамика сверхзвуковых самолетов с прямыми, стреловидными
и треугольными крыльями. Н.К.Лебедъ, Л.Н.Онъкова ...........................80
2 1 Обтекание прямых, стреловидных и треугольных крыльев при малых
углах атаки ..... ............ ........................80
2 2 Влияние угла атаки на обтекание прямых, стреловидных н треугольных
крыльев ............... ................ 93
2 3 В шянле параметров крыла на аэродинамические характеристики крыльев
с фюзеляжем ....................................... ............... 106
2 4 Аэродинамика сверхзвуковых самолетов на больших углах атаки..........124
2 5. Влияние близости земли на аэродинамические характеристики
сверхзвуковою самолета .............................................138
та 3 Аэродинамика сверхзвуковых самолетов с крылом изменяемой
геометрии. Р.Д Иродов, Н.К.Лебедъ, Г.Л.Якимов . .... ... . 144
3 1. Особенности аэродинамических характеристик самолета с крылом
изменяемой геометрии ............................................. 144
3 2 Выбор профилей для кры ня в изменяемой геометрии .............. . 153
3.3. Аэродинамика самолета с крылом изменяемой геометрии па больших
углах атаки .. ...................................... .......161
3 4 Взлетно-посадочная механизация кры.шев изменяемой геометрии .. 168
3 5. Аэродинамическая компоновка самолетов с крыльями изменяемой геометрии ... 179
а 4 Аэродинамика сверхзвуковых самолетов с крыльями сложной
формы в плане. Управление вихрями Л.Е.Васильев, Р.Д.Иродов,
Л.А.Курочкин, Л.Л Павленко, Г.А.Федоренко ..........................189
4.1 Аэродинамика крыльев сложной формы в плаце, их применение для
(.верх.звуковых пассажирских самолетов .............................189
4-2. Ириншшы повышения несущих свойств и аэродинамическою качества
тонкого кры та на больших углах атаки ............................... .. 193
1.3 А.цюдинамика самолета с передними наплывами в корневой части крыла
(управление вихревым обтеканием) ....................... 207
4 4 Аэродинамические характеристики самолета с механизацией крыла ......21.5
1 Г> Статическая устойчивость «верх звукового самолета на больших углах
атаки ... ...................................................... 230
4 7 Некоторые выводы по аэродинамике сверхзвукового самолета с крылом
с южной формы ......................................................... 235
Глава 5 Ллродипамика воздухозаборников и сопл сверхзвуковых самолетов.
В. И. Васильев, А.К.Иваюошкин, Е.В.Пав люков, В. J.Соколов ...........237
5 1 Характеристики воздухозаборников ... .................... 237
5 2. Типы сверхзвуковых воздухозаборников .............................250
5 3- Регулирование воздухозаборников ..................................Z59
5 .4 Внешнее сопротивление воздухозаборников ..........................262
5 .5. Проектирование воздухозаборников ................................ 264
5. 6. Интеграция воздухозаборника и планера самолета ...........-........275
5. 7 Реактивные сопла сверхзвуковых самолетов . .......................— 283
5 8 Эффективная тяга осесимметричных сопл сверхзвуковых самолетов ......291
5. 9 Аэродинамические характеристики плоских сверхзвуковых сопл с
управлением вектором тяги и реверсом - -...........................299
Глава 6 Аэродинамика фюзеляжей сверхзвуковых самолетов. К. П. Петров.............309
6 1 Предварительные замечания ................. ........................— 309
6 2 Особенности обтекания тел вращения .....................................311
6 3 Сопротивление фюзеляжа......................-........................314
6 4 Асимметричное и нестационарное обтекание фюзеляжа на больших узлах
атаки без ско.1ьжепня ................................................328
Глава 7 Аэродинамика органов управления сверхзвуковых самолетов.
В. Г. Михеладзс ............................................................. 334
7 1. Аэродинамические характеристики рулевых поверхностей на профтию ..334
7 2. Органы продольной) управления.....................................335
7 3. Органы поперечного управления .................................. 344
7 4. Органы путевого управления и стабилизации . ............ 354
Глава 8 Аэродинамика сверхзвуковых самолетов в неустаповившсмся
движении. М. Г. Гоман......... ....... .................... . .. 357
8 1. Расчетные и экспериментальные методы определения аэродинамических
производных . . .. ................................ — .357
8 2- Характеристики дсмифи]>оваипя на малых углах атаки . ...............363
8-3 Аэродинамика па больших углах атаки ....................—-..........365
8.4. Способы описания нестационарных аэродинамических ха,>актеристик ... 389
8 5 Представление азродинамичегких характеристик при исследовании
динамики сваливания и штопора ........................................ 393
8 6 Моделирование динамического и статического rnciqieaHca .. 397
Глава 9 Системы управления сверхзвуковых самолетов. В. Я.Бочаров .108
9-1. Структура и органы управления < нерхзвуковыми самолетами ...........409
9 2- Управляющая часть системы управления . ...... .......... 426
9 3. Исполнительная чагп. системы управления . 440
0 3 Ипв.илгтк гн, 1ГМЫ vnnanпения ...................................455
www.vokb-la.spb.ru - Как построить самолёт своими руками?!
Глава 10 Основные методы анализа динамики полета Г.С. Бюшгепс,
М.Г.Гоман. А. С.Устинов ' 46S
Ю 1 Млп-мзгическж* модели динамики (здеднения движения) жесткого самолета____4G(j
10 2 Уравнения движения самолета с учетом упругости его конструкции ................................ 477
>0.3 Методы анализа устойчивости и управляемости самолета .......................................... 4gg
|0 4 Требования к устойчивости и управляемости ..........
Глава 11 Моделирование динамики самолета на пилотажных стендах.
А.Г.Бюшгенс ......................... ..........................................,..516
II 1 Исследование взлетно-посадочных характеристик ... 5iq
11 2. Стендовая отработка характеры тик коротконериодиыхкого движения..........525
11.3 Методы отработки пилотирования в отказных ситуациях.................... . 531
114. Исследовательские, обучающие и тренажные средства иолунатурного
моделирования на базе персональных компьютеров . .........535
Гла?а 12 Продольная устойчивость и управляемость сверхзвуковых самолетов.
Г.С.Бюшггнс ........... ............543
l2 1 Общие положения............................................................................. .543
12 2 СУУ для улучшении продольною демпфирования .................................................. 348
12.3. СУУ для статически неустойчивого самолета общие принципы ..................................... .552
12.4 Гироскопическая СУУ астатичсткого типа 555
12 3 Перегрузочная астатическая СУУ . ... ................ 55b
12 6 Статическая СУУ продольного движения . . ... _______ ... . .574
Глава 13 B.niHinic [ж.тлыгых диняьппсских характеристик системы усыпления
на устойчивость и управляемость. В.С.Берко, Ю. Г. Живов.......................... 583
13 1 Динамические характеристики элементов системы управления ........................................584
13 2 Динамика самолета с СУУ с учетом характеристик элементов системы
управления ............................................................ 593
13 3. Ограничители предельных режимов в СУУ.................... . 603
13 4 Влияние нелинейности исполнительной части СУУ на устойчивость
самолета ............................................................. 606
Глава 11. Боковая устойчивость и управляемость сверхзвуковых самолетов.
В.Л.Суханов ............................................................................... 621
14 1. Особенно»ти аэродинамических характеристик, устойчивости и
управляемости в боковом движении .......................................................... 621
14 2. Приближенный анализ устойчивопи бокового Движения самолета 627
14.3. Управляемость самолета в боковом движении ................................................. 634
14 4 Характеристики устойчивости и управляемости сверхзвукового самолета
с СУУ в боковом движении ........................................... 653
Глава 15 Динамика пространственных движений сверхзвуковых самолетов.
М.Г.Гоман ................................................. ...................... 653
15 1. Общие положения ... ............................-..................................653
15 2 Качественные м»-и>ды исследования нелинейной динамики . . 656
15 3 Особенности динамики при энергичном вращении по крепу ...................................... 659
15 4. Динамика сваливания .......................................................................... 677
15 5 Динамика itnoiuipa ......................................................................... 690
Г iana 16 Летно-технические характеристики сверхзвуковых самолетов
Р.Д.Иродов. Л.А-Медвежникова. Г.А.Федоренко . 703
16 1 Общие положения .............................................. - . -703
16 2 Аэродинамические характеристики, необходимые для расчета летных
данных самолета...............-........-.............................. 708
16 3 Установившийся горизонтальный полет О; И ~ const’ п^~ 1) — 723
16 4. Взлетная и посадочная дистаптши самолета ....................... 731
Глава 17. Маневренные характерце гики сверхзвуковых самоле юв.
Р.Д. Иродов ...... ........ ............................... 743
17 1. Общие положения................................................. 743
17 2 Обшие и частные показатели маневренности ....................... 749
17 3 Особенности маневренных характеристик на сверхзвуковых скоростях
полета.................................................................755
17 4 Использование для маневра закригических углов атаки............. 760
Глава 18 Выбор параметров самолета. Р.Д.Иродов ...................... .76,3
18 1 Общие положения................................................ 7G3
18 2 Выбор аэродинамической компоновки сверхзвуковою самолета ........770
18 3 Выбор парамерхта сверхзвукового самолета ........................7/7
18 4 К]таткпй анализ аэродинамических схем ........................ 793