/








































































Автор: Рабинович Б.И.
Теги: аэродинамика теория полёта ракеты военная техника издательство машиностроение техника полета
Год: 1966




Текст
Б. И. РАБИНОВИЧ
ИЗДАТЕЛЬСТВО
МАШИНОСТРОЕНИЕ»
Москва 1966
ВАРИАЦИОННЫЕ
РЕЖИМЫ ПОЛЕТА
КРЫЛАТЫХ
ЛЕТАТЕЛЬНЫХ
АППАРАТОВ
УДК 533.601.3 : 623.746-519
В монографии изложены методы решения отдельных экстре¬
мальных задач, которые в последние годы приобрели большое
значение в динамике полета и теории оптимального управле¬
ния летательными аппаратами.
Для рассматриваемых задач характерной особенностью яв¬
ляется «вырождение» соответствующих дифференциальных
уравнений Эйлера в конечные соотношения, что значительно
упрощает нахождение решений и их анализ.
Основное содержание книги: постановка вариационных за¬
дач динамики полета крылатых летательных аппаратов
с ЖРД, методы их решения, оптимальные программы управле¬
ния при движении по пологим траекториям при малом изме¬
нении массы и заданном режиме работы двигателя, режимы
двигателя, обеспечивающие максимальную дальность и продол¬
жительность полета, оптимальный режим двигателя при
наборе высоты по заданной траектории и наивыгоднейшие про¬
граммы управления при заданном режиме работы двигателя.
Рекомендуется для научных работников, инженеров-расчет-
чиков, преподавателей и студентов авиационных втузов.
Рецензент чл.-корр. АН СССР А. И. Лурье
3-18-6
242-66
ПРЕДИСЛОВИЕ
В последние годы как в СССР, так и за рубежом бурно разви¬
вается область механики, связанная с постановкой и решением
вариационных задач динамики полета летательных аппаратов.
Не претендуя на сколько-нибудь полное ее освещение, автор по¬
ставил перед собой цель рассмотреть некоторые возможности
исследования экстремальных режимов и профилей полета крыла¬
тых летательных аппаратов с ракетными двигателями в тех слу¬
чаях, когда соответствующие задачи динамики могут быть сведены
к вырожденным вариационным задачам определенного класса. При
этом оказалось возможным применительно к рассматриваемым
летательным аппаратам охватить достаточно широкий круг прак¬
тически интересных случаев движения, которые могут быть иссле¬
дованы при помощи сравнительно простого математического аппа¬
рата.
Не представляет труда обобщение изложенных методов на
случай летательных аппаратов с воздушно-реактивными двигате¬
лями. Однако в настоящей работе ввиду ограниченности ее объема
последние не рассматриваются. Точно так же совершенно не рас¬
сматривается обширный класс вариационных задач динамики бал¬
листических ракет и космических аппаратов, которые обычно не
удается свести к вырожденным задачам без существенного иска¬
жения механической сущности проблемы.
Этим задачам уделено много внимания в труде коллектива
авторов под редакцией Г. Лейтмана [70] и в вышедшей недавно
монографии Е. В. Тарасова [33]. В то же время тот особый класс
вырожденных вариационных задач динамики полета, которому
посвящена настоящая книга, в упомянутых работах рассматривает¬
ся менее подробно.
При изложении общих методов решения упомянутых задач
и при рассмотрении иллюстрирующих их примеров в основном
используются результаты исследований, проведенных автором. Эти
результаты сравниваются с полученными в отечественных и ино¬
странных работах, о чем более подробно говорится в соответствую¬
щих главах. Основное содержание настоящей книги составляет
постановка некоторых экстремальных задач динамики полета
крылатых летательных аппаратов как вырожденных вариационных
1821
3
задач определенного класса, изложение методики их решения и
применение этой методики к исследованию оптимальных режимов
и профилей полета в ряде случаев, характеризующихся наличием
только одной независимой варьируемой функции. Постановка ва¬
риационных задач в форме, допускающей получение приближен¬
ных решений, учитывающих главные факторы, позволяет выявить
основные характерные особенности экстремального движения.
В работе не нашли отражения многие важные исследования
советских ученых, относящиеся к смежной области, а также рабо¬
ты иностранных авторов, которые отличаются от советских метода¬
ми исследования, но не содержат существенно новых по сравнению
с отечественными работами результатов.
В списке литературы приведены только работы, наиболее близ¬
кие по тематике к содержанию настоящей книги. Из многочислен¬
ных иностранных работ, зачастую дублирующих одна другую, вы¬
браны наиболее типичные в смысле постановки задач и методов
решения.
В заключение необходимо отметить, что настоящая книга по¬
священа прикладным вопросам и поэтому содержит математиче¬
ское обоснование применяемых методов только в той мере, в какой
это представлялось необходимым, чтобы не нарушать ясность
изложения. Основные теоремы в гл. I приведены без доказатель¬
ства. При этом автор исходил из того, что читатели с подготовкой
в объеме программы втуза, на которых в основном рассчитана,
книга, могут в случае необходимости ознакомиться более детально
с математическими основами применяемых методов по одному из
курсов вариационного исчисления [1], [4], [8], [19], [37].
Основное внимание уделено механическому аспекту проблемы
и приведению основных результатов к форме, допускающей эффек¬
тивный качественный и количественный анализ экстремального
движения.
Большое внимание рукописи уделил чл.-корр.' АН СССР
А. И. Лурье. Автор глубоко благодарен ему за ряд ценных замеча¬
ний и советов.
Автор выражает также искреннюю признательность аспиранту
С. В. Черемных за помощь при подготовке рукописи к печати.
ОСНОВНЫЕ ОБОЗНАЧЕНИЯ
я— скорость звука;
с—скорость истечения продуктов сгорания из сота двигателя в пу¬
стоту;
Fa— площадь выходного сечения сопла;
V
М = ——число Маха;
а
т— масса летательного аппарата;
Р—тяга двигателя;
р—давление воздуха;
Ро—давление воздуха при у = 0;
Q—лобовое сопротивление;
R=P — Q— избыток тяги;
го— радиус сферической Земли;
S— площадь крыла;
5 — длина дуги;
t— время полета;
V — скорость полета;
Vн — наивыгоднейшая скорость;
У э—экономическая скорость;
Ус—круговая скорость;
у— высота полета;
— горизонтальная дальность;
а— угол атаки;
о
Р = —— — абсолютная величина изменения безразмерной массы в единицу
времени;
у — угол крена, константа изотермической атмосферы в выражении
д = д1 = 6>-™;
А = — безразмерная плотность;
ео
р
Aj = ——безразмерное давление;
Ро
0 — угол между касательной к траектории и линией местного гори¬
зонта;
5
V2
* = “2"—квадрат безразмерной скорости;
* г
т
Р-= ——безразмерная масса;
Щ
Q— массовая плотность воздуха;
Qo—массовая плотность при у = 0;
<р — угол разворота при вираже, угловое положение объекта в гео¬
центрической системе координат.
Индексы
,0“ — начало движения;
„к» — конец движения;
—переход на внутреннюю экстремаль;
„**“ — переход на внешнюю экстремаль.
ВВЕДЕНИЕ
Постановка прикладных задач связана всегда с той или иной
степенью идеализации, зависящей от желаемой точности и общно¬
сти предполагаемых результатов. Оба эти качества находятся
в известном противоречии, так как повышение требований к точ¬
ности неизбежно влечет за собой необходимость более строгого
учета второстепенных факторов и, как следствие, чрезвычайное
усложнение задачи и невозможность получения ее решения в обо¬
зримом виде. Вместе с тем попытка придать задаче форму, допус¬
кающую получение достаточно простого решения, приводит к не¬
избежному загрублению результатов. Одно время существовало
мнение, что широкое применение электронных вычислительных
цифровых машин сделает излишним упрощенный вариант поста¬
новки задачи. Однако опыт показал, что в ряде случаев краевые
задачи, к которым сводится экстремальная проблема при самой
общей ее постановке, оказываются настолько сложными, что при
решении их возникают трудности, непреодолимые при применении
всей мощи современной вычислительной техники. Это связано с от¬
сутствием алгоритмов эффективного решения на ЭВЦМ задач
оптимизации функции качества со сложным рельефом (наличие
многих экстремумов, включая экстремумы типа глубоких «овра¬
гов»), и необходимостью чрезвычайно больших затрат машинного
времени при решении краевых задач методом «пристрелки» при
отсутствии надежного исходного приближения. С другой стороны,
в благоприятных в этом смысле случаях простое и обозримое ре¬
шение, соответствующее достаточно тактичной идеализации и допу¬
скающее эффективный численный анализ, может оказать сущест¬
венную помощь в получении на ЭВЦМ численного решения задачи
в более точной постановке.
Вариационные задачи, сформулированные в рамках такого
рода идеализации, иногда приобретают такие специфические осо¬
бенности, что для их решения потребовалось разработать специ¬
альные методы. В общем случае оказываются наиболее плодотвор¬
ными общие методы, развитые Л. С. Понтрягиным [26], В. Ф. Кро¬
товым [13]—[18], а также различные варианты метода динамиче¬
ского программирования Р. Веллмана [2], [3]. Однако в некоторых
7
случаях можно получить решение, идя по пути известного обоб¬
щения классических методов вариационного исчисления, как это
было сделано в работах А. А. Космодемьянского [11], Д. Е. Охо-
цимского, Т. М. Энеева [24], [25], В. А. Егорова [7], А. Ми еле [71]—
[86] и др.
Рассматривая проблему выбора режимов и профилей полета,
обеспечивающих получение экстремальных характеристик крыла¬
тых летательных аппаратов с ракетными двигателями, необходимо
подчеркнуть, что в силу специфических особенностей этих лета¬
тельных аппаратов наиболее адекватными ей являются именно ме¬
тоды вариационного исчисления.
Результаты, полученные методом исследования экстремума
функции от некоторого параметра, приемлемые, например, для
самолетов с поршневыми двигателями, для реактивных летатель¬
ных аппаратов оказываются в ряде случаев ошибочными. Это
связано с тем, что при том упрощенном подходе, который характе¬
рен для большинства задач динамики полета самолетов с поршне¬
выми двигателями, движение рассматривается как квазистационар-
ное, т. е. состоящее из ряда последовательно сменяющихся равно¬
весных состояний. Так, режим полета с максимальной дальностью
отождествляется с режимом с минимальными мгновенными значе¬
ниями километрового расхода в любой момент времени, режим
подъема с минимальным временем набора некоторой высоты —
с режимом с максимальными мгновенными значениями вертикаль¬
ной скорости, а следовательно, избытка мощности и т. д. Тем са¬
мым игнорируется процесс изменения параметров, характеризую¬
щих движение, а рассматривается ряд последовательных состояний
с различными значениями этих параметров, фиксированных в каж¬
дый момент времени. Иными словами, при таком подходе произ¬
водные по времени от некоторых параметров, характеризующих
процесс изменения этих параметров, не учитываются. В то же вре¬
мя для летательных аппаратов с ракетными двигателями характер¬
но резкое изменение массы, скорости полета, числа М, плотности
и давления окружающего воздуха и т. д. В этом случае представ¬
ление о движении как квазистационарном может привести не толь¬
ко к грубым количественным ошибкам, но иногда и к качественно
искаженной картине экстремального движения.
Вариационные методы решения экстремальных задач динамики
полета такого рода летательных аппаратов свободны от этих не¬
достатков и позволяют в полной мере учесть сам процесс движе¬
ния, не прибегая к допущению о квазистационарности. Таким
образом, открывается возможность решения ряда новых задач и
получения объективной оценки точности и границ применимости
приближенных (невариационных) решений. При этом зачастую
обнаруживаются некоторые новые стороны этих, казалось бы, до¬
статочно полно изученных решений.
Необходимо иметь в виду некоторые обстоятельства, важные
для понимания роли и места вариационных методов. Прежде всего
следует подчеркнуть, что при правильном учете всех основных сил,
действующих на летательный аппарат, и ограничений, налагаемых
на искомое решение физическим существом задачи, вариационные
программы гарантируют в рамках используемой информации по¬
лучение оптимальных значений выбранного критерия по сравнению
с любыми другими физически реализуемыми программами.
Полученные таким путем численные результаты позволяют
с максимальной полнотой выявить и проанализировать наивыгод¬
нейшие программы управления и оценить тот выигрыш, который
можно от них ожидать по сравнению с различными упрощенными
программами. Кроме того, применение вариационных программ
управления или упрощенных программ, близких к ним, обеспечи¬
вает малую чувствительность того параметра, экстремума которого
мы добиваемся, к малым случайным изменениям программы и
внешних условий, неизбежным при реальном полете. Например,
при использовании вариационной программы управления траекто¬
рией, обеспечивающей получение максимальной скорости в конце
активного участка, на последней не отразятся с точностью
до малых величин первого порядка отклонения аэродинами¬
ческих характеристик и плотности воздуха от номинальных
значений.
Однако строгая постановка задачи с максимальной полнотой
учета всех факторов приводит обычно к таким сложным краевым
задачам, решение которых является чрезвычайно громоздкой и
трудоемкой операцией даже при применении современных быстро¬
действующих электронных вычислительных машин. Кроме того,
истинная цена полученных решений будет, конечно, зависеть от
степени достоверности использованной информации (характеристи¬
ки атмосферы, закон сопротивления и т. д.). В ряде случаев, на¬
пример, при эскизном проектировании, желательно получить
общее представление о предельных возможностях летательного
аппарата и характерных особенностях экстремального движения,
используя упрощения, соответствующие объему и уровню точности
имеющейся информации и возможности проведения расчетов в ог¬
раниченные сроки.
Как будет показано ниже, введение некоторых упрощающих
предположений позволяет получить более или менее приемлемые
приближенные решения соответствующих вариационных задач,
которые в ряде случаев удовлетворяют практическим требованиям
точности. Если полученные таким путем программы иногда и не
могут быть непосредственно реализованы, то их можно «сгладить»,
чтобы удовлетворить условиям управляемости, ограниченности нор¬
мальных перегрузок и т. д. Кроме того, эти решения позволяют по¬
лучить представление об общих свойствах экстремального движе¬
ния, найти достаточно тонкие оценки предельных возможностей
летательного аппарата и провести анализ влияния на них основных
аэродинамических и конструктивных параметров, используя весь¬
ма простые алгоритмы, вплоть до конечных формул.
9
Зачастую оказывается, что экстремум интересующей нас вели¬
чины (дальности, скорости и т. д.) является достаточно пологим,
т. е. варьирование программы управления в сравнительно широких
пределах ведет к относительно малому проигрышу. В этом случае
особеннно возрастает роль программ, соответствующих упрощен¬
ной постановке вариационных задач.
Резюмируя сказанное, следует подчеркнуть, что полученные ре¬
шения оказываются близкими к оптимальным в том смысле, что
они являются точными для приближенным образом поставленных
задач. Это гарантирует близость приближенного и точного экстре¬
мальных значений оптимизируемой величины или, по крайней мере,
надежную одностороннюю (а иногда и двустороннюю) оценку точ¬
ного экстремального значения.
В качестве основных объектов исследования в дальнейшем рас¬
сматриваются крылатые летательные аппараты с ракетным двига¬
телем, стартующие либо с самолета-носителя, либо с земли. При¬
мером их могут служить американские экспериментальные самоле¬
ты с жидкостными ракетными двигателями Х-1, Х-2, Х-15 [39] [100].
Рассматриваются также крылатые носители космических аппара¬
тов и гиперзвуковые летательные аппараты, совершающие в пре¬
дельном случае движение, близкое к орбитальному. Прообразом
их являются немецкая крылатая ракета периода второй мировой
войны (проект А-9, А-10) и ракетный бомбардировщик, проектиро¬
вавшийся под руководством Е. Зенгера [94].
В последние годы аналогичный летательный аппарат «Дайна
Сор» разрабатывался в США [99]. Примеры отыскания наивыгод¬
нейших программ управления такого рода летательными аппарата¬
ми, приводимые ниже, носят чисто иллюстративный характер, так
как оставляют в стороне ряд важных вопросов, в частности, об
управляемости, кинетическом нагреве и т. д., которые могут иметь
решающее значение для выбора программы управления.
Глава I
ЭЛЕМЕНТАРНЫЕ СВЕДЕНИЯ ИЗ ВАРИАЦИОННОГО
ИСЧИСЛЕНИЯ
1.1. ПОСТАНОВКА ПРОСТЕЙШЕЙ ЗАДАЧИ ВАРИАЦИОННОГО
ИСЧИСЛЕНИЯ
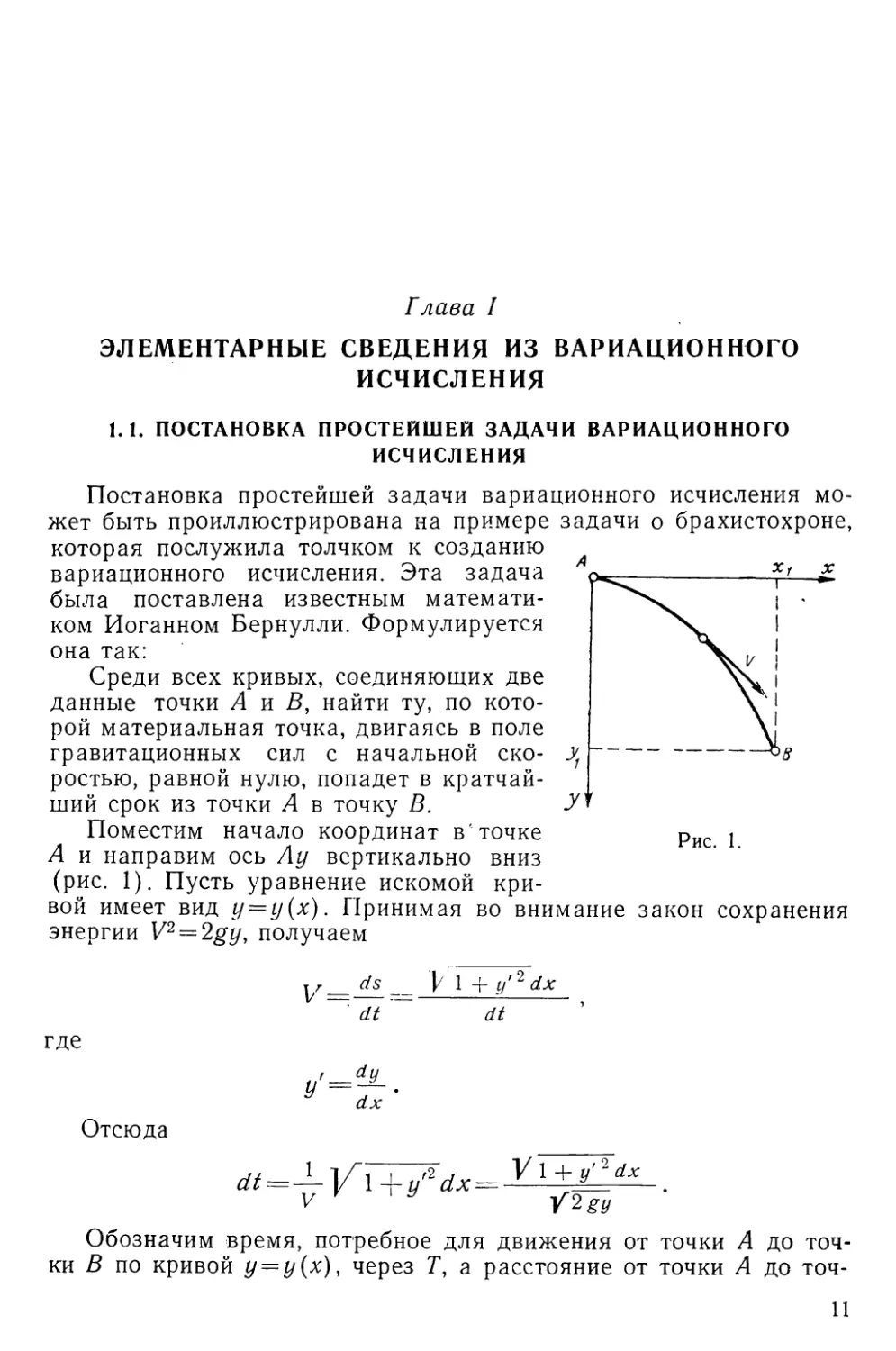
Постановка простейшей задачи вариационного исчисления мо¬
жет быть проиллюстрирована на примере задачи о брахистохроне,
которая послужила толчком к созданию
вариационного исчисления. Эта задача
была поставлена известным математи¬
ком Иоганном Бернулли. Формулируется
она так:
Среди всех кривых, соединяющих две
данные точки А и В, найти ту, по кото¬
рой материальная точка, двигаясь в поле
гравитационных сил с начальной ско- yf
ростью, равной нулю, попадет в кратчай¬
ший срок из точки А в точку В. У
Поместим начало координат в точке
А и направим ось Ау вертикально вниз
(рис. 1). Пусть уравнение искомой кри¬
вой имеет вид у = у(х). Принимая во внимание закон сохранения
энергии V2 = 2gy, получаем
у ds ]/ 1 + у'2 dx
~ dt ~ dt
dx
v V^gy
Обозначим время, потребное для движения от точки А до точ¬
ки В по кривой у = у (х), через Г, а расстояние от точки А до точ¬
где
Отсюда
11
ки В, измеряемое вдоль оси х, через Х\. Выполнив интегрирование
в пределах от 0 до Г и от 0 до х\ соответственно, получим
Т =
о
Требуется найти функцию у{х)у удовлетворяющую условиям
для которой Т принимает минимальные значения.
Не останавливаясь на решении этой задачи, заметим только,
что искомая кривая оказывается циклоидой.
Задача о брахистохроне является частным случаем следующей
задачи вариационного исчисления, имеющей большое значение для
приложений.
Среди всех кривых, выраженных уравнением у = у{х), где функ¬
ция у(х) непрерывка вместе с производной у'(х) в интервале
6, и проходящих через заданные точки А и В, определить
ту, вдоль которой интеграл
принимает наибольшее или наименьшее значение.
Эту функцию обычно называют экстремалью. Дальнейшее об¬
общение приводит к классу задач о выборе функций, обеспечиваю¬
щих экстремум выражений вида
которые называются функционалами от этих функций. Время Т
в задаче Бернулли является функционалом от функции у{х).
При разработке математического аппарата для решения тако¬
го рода задач появилась необходимость ввести некоторые новые
понятия, в частности понятие вариации функции, с которым также
тесно связаны задачи о возмущенном движении, устойчивости, точ¬
ности попадания и т. д.
Обычно функции у(х), среди которых ищется функция, обеспе¬
чивающая экстремум некоторого функционала, не являются вполне
произвольными, а подчинены некоторым дополнительным усло¬
виям, вытекающим из существа рассматриваемой задачи. Напри¬
У(0) =0, у(х\) =уи
ь
(1.1)
а
Ь
j ф I*. У\(X), у2 (X),у п(х), у[ (*), у'2 (*)... у'п(х)] dx\
а
} 0.2)
12
мер, можно потребовать, чтобы функции у(х) были непрерывными,
непрерывными вместе с первыми производными у'{х), соответст¬
вующие линии проходили через две заданные точки, не выходили
за пределы некоторой заданной области и т. д.
Таким образом, в каждой конкретной задаче должен быть стро¬
го оговорен класс функций, в котором ищется экстремаль. Кри¬
вая у(х) (а •<*<;&) принадлежит классу Сп, если в замкнутом
интервале [а, b] функция у(х) непрерывна вместе с первыми п про¬
изводными.
Приведем некоторые важные определения:
1. Расстояние п-го порядка между линиями у(х) n yi(x)y при¬
надлежащими классу Сп,— это наибольший из максимумов выра¬
жений
\уЛх)-у(х)\, \у[(х)-у'(х)I, ..., \у[п){х)-у^\х)\
на отрезке а<х^>Ь.
ь
Основную роль для функционалов j F(х, у, y')dx играет рас-
а
стояние первого порядка и кривые класса Сь Заметим, что из бли¬
зости нулевого порядка вовсе не следует наличие близости первого
порядка, так как линии могут быть очень «близки» друг к другу
по ординатам, но в каждой точке иметь резко различающиеся про¬
изводные.
2. e-окрестность п-то порядка кривой у = у(х) (а<х<Ь) — со¬
вокупность кривых у = У\(х), расстояние п-го порядка которых от
кривой у = у(х) меньше е.
3. Абсолютный экстремум /(уо) функционала J (у) в данном
классе линий у — экстремум, при котором для любой кривой у рас¬
сматриваемого класса
J(у) >/(у0) (абсолютный минимум),
J(y)<J(yo) (абсолютный максимум).
4. Сильный относительный экстремум /(уо) функционала /(у)
в данном классе линий у — экстремум, при котором для всех допу¬
стимых линий у, расположенных в некоторой е-окрестности нуле¬
вого порядка кривой у0,
7(у)-</(уо) (сильный относительный максимум),
/(у)>/(у0) (сильный относительный минимум).
Слабый относительный экстремум — то же, что и сильный, но
для допустимых линий, расположенных в е-окрестности первого
порядка кривой у0.
Всякий абсолютный экстремум является в то же время и сла¬
бым и сильным относительным экстремумом, а всякий сильный
экстремум — одновременно и слабым.
13
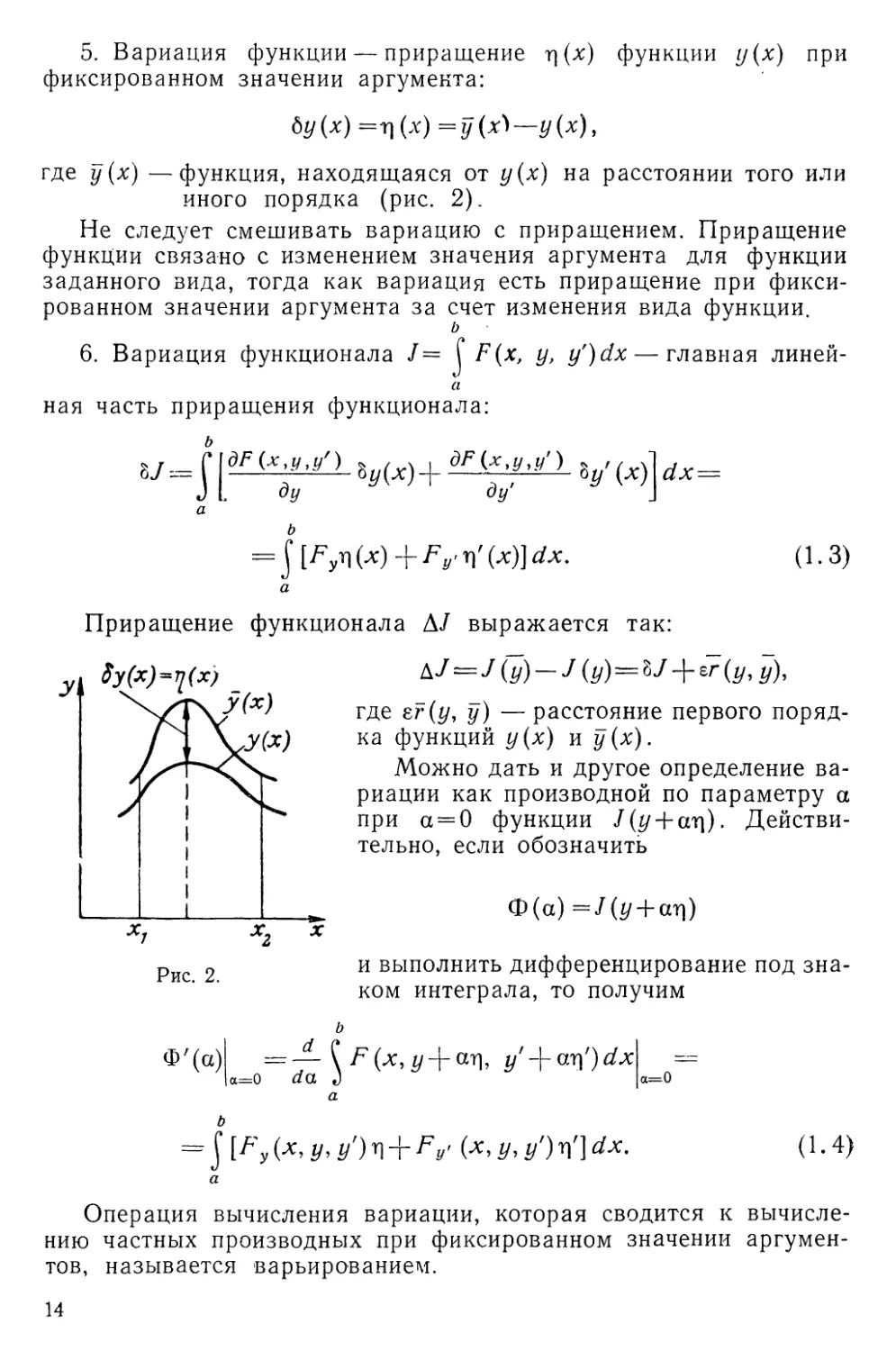
5. Вариация функции — приращение г| (х) функции у(х) при
фиксированном значении аргумента:
8у(х) =Ti(x) =у(х)—у(х),
где у(х) —функция, находящаяся от у(х) на расстоянии того или
иного порядка (рис. 2).
Не следует смешивать вариацию с приращением. Приращение
функции связано с изменением значения аргумента для функции
заданного вида, тогда как вариация есть приращение при фикси¬
рованном значении аргумента за счет изменения вида функции.
ь
6. Вариация функционала J= j* F(x, у, y')dx — главная линей-
а
ная часть приращения функционала:
8 J
а
b
= j [^vn W + F у л' (■*)]dx-
¥(*)
dx =
(1.3)
Приращение функционала А/ выражается так:
ДJ — J (у) J (y) = bJ + £Г (у>у)>
где гг (у, у) — расстояние первого поряд¬
ка функций у(х) и у(х).
Можно дать и другое определение ва¬
риации как производной по параметру а
при а = 0 функции J(y + ац). Действи¬
тельно, если обозначить
Ф(а) =J(y + ат])
Рис. 2.
и выполнить дифференцирование под зна¬
ком интеграла, то получим
Ф'(а) =— ^ F (х, y + arj, y'-\-ay)')dx
а=о da J
а
b
= j [/-'у (х, у, у) Т] + F у■ (х, у, у') п'] dx.
а=0
(1.4)
Операция вычисления вариации, которая сводится к вычисле¬
нию частных производных при фиксированном значении аргумен¬
тов, называется варьированием.
14
1.2. НЕОБХОДИМЫЕ УСЛОВИЯ ЭКСТРЕМУМА ПРОСТЕЙШЕГО
ФУНКЦИОНАЛА
Необходимые условия экстремума простейшего функционала
можно сформулировать в виде следующих теорем:
Теорема 1
Для того чтобы функция у(х) класса Сх обеспечивала минимум
(максимум) функционала
J(y) = ^F{x,y,y')dx (1.5)
а
при граничных условиях
У(а)=Уо\ У(Ь)=Уи (1.6)
необходимо, чтобы вариация
tJ = §[Fy(x,y,y')r](x) + F'y' (x,y,y')tf (x))dx (1.7)
а
обращалась в нуль для любой функции г](х) класса Сь для кото¬
рой г\ (а) = г] (Ь) =0.
Действительно, на классе функций у{х)~\-ац(х) функционал J
является функцией параметра а, которая достигает минимума при
а = 0. Следовательно, при а = 0 производная Ф'(а) должна равнять¬
ся нулю:
O'(0)=jVy'Hi-/vri,)^=0-
а
Теорема доказана.
Лемма Лагранжа
(Основная лемма вариационного исчисления)
Если непрерывная функция Ф(х) обладает тем свойством, что
для любой функции ц(х), имеющей непрерывную производную и
обращающейся в нуль в точках а и b, при всех х(а<х<Ь)
всегда
ь
j Ф (x)r\(x)dx = 0,
а
ТО Ф(х) = 0.
Доказательство этой леммы можно найти в любом курсе вариаци¬
онного исчисления.
15
Первая вариация и ее преобразование
Предположим дополнительно непрерывность функции Fy> . Вы¬
полняя интегрирование по частям, получаем
ъ ь
^ Fу'ьу'dx=[FуЪу}Ь^— ^ byj-Fv'dx.
Отсюда
ь ь
U (у) = Fy - ЬУ | + ^ (Fy Ц dx. (1. 8)
a a
Для линии y(x) с закрепленными концами 6у = 0 при х = а и
х = Ь. Следовательно, в этом случае
ь
*J{y) = \(Fy--^Fy.yydx. (1.9)
а
Дифференциальное уравнение Эйлера
Использовав теорему 1 и лемму Лагранжа, получим следующее
дифференциальное уравнение Эйлера простейшей вариационной
задачи:
Fy—fFu.= 0. (1.10)
у dx
В общем случае при F = F(x, у, у') оно будет второго порядка.
В том случае, когда допустимы только односторонние вариации
бу(х), например бу(х)>0 или ду(х)<0, необходимое условие
экстремума 1 теоремы 1 заменяется следующим при варьировании
от экстремали:
б/'<0 (максимум /),
б/>0 (минимум J) .
Уравнение (1.10) должно быть в этом случае заменено соот¬
ветствующим неравенством.
Теорема 2
Пусть функция F(x, у, уг) непрерывна со своими частными про¬
изводными до второго порядка включительно при а^х^Ь и лю¬
бых у и у\ Если кривая у = у(х) класса Сх обеспечивает слябый
относительный экстремум функционала
J--
--§F(x,y,y')dx, (1.11)
16
то функция у(х) удовлетворяет уравнению Эйлера
f F , Г)
у dx У
(1.12)
а функция у"{х) существует и непрерывна при всех х, для которых
Fyy ФО.
В случае функционала более общего вида
ъ
J — j F{x,y,z,y',z')dx (1.13)
а
выражение первой вариации при фиксированных концах кривых
у(х) и z(x) принимает вид
г f-Fz-
dx
bz
dx, (1.14)
что в силу независимости вариаций by и bz приводит к двум урав¬
нениям Эйлера, которым должны удовлетворять функции у(х)
и z(x), реализующие экстремум /:
d
dx
■F„.= 0:
Fz-j~Fz.= 0.
dx
(1.15)
Необходимые условия экстремума функционала J не исчерпы¬
ваются уравнениями Эйлера. Помимо них должно удовлетворяться
условие Лежандра, тесно связанное со второй вариацией функцио¬
нала, а в случае незакрепленных концов линии у(х) —условия
трансверсальности. Эти дополнительные необходимые условия
экстремума рассматриваются ниже.
Вторая вариация
Выражение
ЬЧ 2 \ (руу1У2+2руу'ьУьУ'+ру'У ьу‘ >dx
а
называется второй вариацией функционала / (у).
Оле)
Условие Лежандра
Если кривая у = у{х) класса С1 реализует минимум /, то для
любой функции г| (х), г|(а) = г](6) =0 класса С\ вторая вариация не
отрицательна: б2/>0. В случае максимума знак неравенства изме¬
няется на противоположный.
2 Б. И. Рабинович
17
Таким образом, мы пришли к следующим необходимым усло¬
виям экстремума функционала (1.5) на линиях у(х) класса С{:
1) функция у(х) должна удовлетворять уравнению Эйлера и
граничным условиям (1.6);
2) должно выполняться условие Лежандра.
Здесь имеется полная аналогия с обычной задачей исследова¬
ния экстремума функции. Однако исследование достаточных усло¬
вий максимума или минимума в задачах вариационного исчисле¬
ния гораздо сложнее. Для некоторых частных случаев этот вопрос
рассматривается в гл. III и IV.
Условия трансверсальности
Рассмотрим выражение первой вариации
ь ь
V = Fe*y\+\(Fy—£;Fy'yydx (1.17)
а а
и предположим, что концы линии у(х) не закреплены, а могут
варьироваться. Обозначим через б/, 6г/| =бг/(а), 6у\=6у{Ь) полные
\х=а \х=Ь
вариации на концах кривой, подсчитанные с учетом изменения у
в точках х = а, х = Ь и изменения самих значений а, Ь, а через [6/],
[6у]\х=аУ [6у]\х=ъ вариации, подсчитанные при а = const, b = const,
которые выше обозначались через 6/ и бу-
Связь между значениями б у и [6 у] определяется следующими
очевидными формулами (рис. 3):
8г/(а)=[8г/(а)] + г/'(а)8а; 1 ^
ЫЬ)=[Ъу(Ь)] + у'(Ь)ЪЬ. I
Кроме того, при варьировании функционала 1, выражающемся
в изменении а и Ь, появляются добавочные составляющие
— Ьа= —Fba, — bb = Fbb. (1.19)
да дЬ v '
Так как роль 6у в выражении первой вариации играет теперь
[бг/], а роль 6/ играет [б/], получим следующее выражение полной
вариации функционала J с учетом варьирования концов кри¬
вой у(х):
bj=(F-у'Fу,)Ъх \*zba + Fи. Ьу]^ +
ь
+Н/7у-^г Fy)bydx- (L20)
18
Предположим, что концы искомой экстремали могут скользить
по кривым, определяемым уравнениями
у = ф(х), г/=г|з(*).
В этом случае выражение для 6/ приобретает форму
bJ=-[F + W-y')Fs\\x=aba +
+ [F + W-y')Fyb=b*b-\-
(1.21)
Зафиксируем сначала произвольные точки кривых ф(х) и ф(х).
Тогда очевидно, что искомая экстремаль должна удовлетворять
уравнению Эйлера
■ 0 j (1.22)
т, е. экстремум функционала
с варьируемыми концами дости¬
гается при
+ (?/“ У')РУ'\х=а +
Учитывая независимость ва¬
риации 6а и 66, найдем условия
трансверсальности, которые по¬
зволяют из всего семейства
экстремалей, удовлетворяющих уравнению Эйлера, выбрать ту,
которая обеспечивает экстремум J в классе линий с концами, пере¬
мещающимися по кривым ф(х) и ф(я):
\F + W-y')F*]\x=a= 0;
\F-\-W-y')Fvb=b= 0.
(1.23)
Полученный результат можно сформулировать в виде следую¬
щей теоремы.
Теорема 3
Если кривая у, определяемая уравнением у = у{х), обеспечивает
экстремум функционала
J(y)= j F(x,y,y')dx
2*
19
на линиях класса Си соединяющих две произвольные точки двух
данных кривых у = ф(х), y = ty{x), то кривая у есть экстремаль,
причем на ее концах выполняются условия трансверсальности.
Условия Вейерштрасса — Эрдмана
Рассмотрим снова функционал
J(V) = $F(x,y,y')dx
а
при граничных условиях
У (а) =уо у{Ь)=уь
Предположим, что на линиях класса С{ экстремум этого функ¬
ционала не достигается. В этом случае экстремум может дости¬
гаться на линиях класса С0, т. е. экстремаль может оказаться
кусочно-гладкой линией. Не нарушая общности, можно считать, что
излом имеет место в некоторой точке М(х0, у0). Варьируя коорди¬
наты точки излома и используя выражение (1.20), а также учиты¬
вая, что точка М является конечной для первой экстремали и на¬
чальной для второй, получаем
bJ = iF-y'Fy') Ьх\х=х°0+1 + FУ ЬУ\х=х°о+0 +
+ \ [Fy-j;Fy)bydxJr \ {Fy-^Fy')bydx- о-24)
а Л'о-г-0
Концы экстремали х = а, х = Ь полагаем фиксированными.
Под значением функции в точке х0±0 понимается предел, к ко¬
торому она стремится, когда х = х0±&, где е—+0.
Учитывая независимость вариаций 6х и 6у, приходим к следую¬
щей теореме.
Теорема 4
Если среди всех кусочно-гладких кривых, соединяющих две дан¬
ные точки А и В, кусочно-гладкая кривая у, определяемая уравне¬
нием у = у{х)у обеспечивает экстремальное значение функционала/,
то у состоит из конечного числа дуг экстремалей и в каждой точке
излома М(х0, уо) кривой у выполняются условия
которые называются условиями Вейерштрасса — Эрдмана.
(1.25)
20
1.3. УСЛОВНЫЙ ЭКСТРЕМУМ, ИЗОПЕРИМЕТРИЧЕСКИЕ ЗАДАЧИ
Для приложений имеет важное значение случай, когда за класс
допустимых линий принимаются линии, удовлетворяющие некото¬
рой системе дифференциальных уравнений. Соответствующие ва¬
риационные задачи носят название задач на условный экстремум.
Эти задачи решаются методом функциональных множителей Лаг¬
ранжа, который проиллюстрируем на примере пространственной
задачи. Пусть требуется найти экстремум функционала
ь
/ = j F(x, у, z, у', z')dx (1-26)
а
в классе допустимых линий, представляющих собой пространст¬
венные кривые класса Сь удовлетворяющие дифференциальному
соотношению
Ф(*, У, г, у', г') =0 (1-27)
и некоторым добавочным условиям на концах х = а, х = Ь. Тогда
имеет место следующая теорема.
Теорема 5
Если кривая у0 обеспечивает экстремум функционала J при
условии (1.27) и вдоль этой кривой ни одна из производных сру>
или qv не обращается в нуль, то существует такая функция К(х),
что уо является интегральной кривой системы уравнений
Ну-±Ну.= 0;
dx
HZ-±'HZ.= о,
dx
(1.28)
где
Н = Р+Ц. (1.29)
Решая совместно уравнения (1.27) и (1.28), найдем неизвест¬
ные функции у(х), z(x), К(х). Для определения произвольных
постоянных достаточно задать четыре условия на концах. В общем
случае, когда имеется ряд соотношений вида (1. 27)
<р,. = 0(/=1, 2,. ..,£), (1.30)
роль И будет играть функция
H = F + (1.31)
7=1
где Kj(x) —некоторые функции х, называемые функциональными
множителями Лагранжа.
21
Число уравнений (1.28), (1.30), (1.31) будет совпадать с чис¬
лом независимых функций.
Рассмотрим частный случай задачи, сформулированной в этом
разделе, когда уравнение (1.27) заменяется условием
ь
K = ^G(x,y,z, y\z')dx, (1.32)
а
где К —некоторая константа.
Аналогом этой задачи для плоскости является следующая.
Даны две функции F(x, у, у') и G(xy у, у'). Среди всех кривых
у = у{х) класса Сь вдоль которых интеграл
$G(x,y,y')dx (1.33)
а
принимает заданное значение /С, определить кривую, для которой
интеграл
J = j F(x, У, y')dx (1-34)
а
имеет экстремум.
К этой задаче приводится, например, такая: среди всех замкну¬
тых кривых заданной длины найти ту, которая ограничивает наи¬
большую площадь (изопериметрическая задача).
Решение задачи, сформулированной выше, дается следующей
теоремой.
Теорема 6
Если кривая у = у{х) обеспечивает экстремум функционала
J = ^F(x,y,y')dx (1.35)
а
при условиях
j G (х, у, y')dx = K, (1.36)
а
у{а)=Уо, у{Ь) —у\ (1-37)
и если у = у{х) не является экстремалью функционала (1.36), то
существует такая константа X, что кривая у = у(х) есть экстремаль
функционала
L = $H(x,y,y')dx, (1.38)
а
где
H=F + XG.
22
Поскольку семейство экстремалей не меняется при умножении
подынтегральной функции на константу, функцию Н можно запи¬
сать в симметричной форме
H = X\F -j- %2 G»
где и %2 — некоторые константы.
Исключив случаи Xi = 0 и ^2 = 0, соответствующие безусловному
экстремуму, можно сформулировать следующий принцип взаим¬
ности.
Семейство экстремалей в задаче на экстремум функционала J
при К=const и функционала К при / = const будет одним и тем же.
1.4. ВЫРОЖДЕННЫЕ ЗАДАЧИ
Рассмотрим линейное дифференциальное уравнение
■^- + 'f(xty,z)-^-^(xty,z)==Q, (1.39)
dx dx
где ф и ф — функции, непрерывные вместе с первыми производ¬
ными по аргументам х, у, z и дважды дифференцируе¬
мые по у и 2, и два варианта начальных и граничных
условий:
(1.40)
(1.41)
(1.42)
(1.43)
Уравнение (1.39) и начальное условие (1.40) или (1.42) опре¬
деляют неявным образом zK как функционал от линии у(х) или ук
как функционал от линии z(x). Предположим, что функции ф и ф
не зависят явно от одного из аргументов, например 2. В этом слу¬
чае можно получить явное выражение функционала zu
переменные в уравнении (1.39) разделяются:
z = z0
при
II
*
о
о
II
^'
при
о
*
II
*
У = УК
при
х = хк;
II
о
при
*
II
*
о
Z = Zq
при
*
II
*
о
Z = ZK
при
хк
ZK~Z0=-[I [?(*, + у)
dx. (1.44)
*0
Полагая
z0 = 0, -у-=у', —(w'+’!?) = -F(x, у, у')
dx
и присоединяя к (1.44) граничные условия (1.41), придем к про¬
стейшей вариационной задаче, сформулированной в разд. 1.2. Осо¬
23
бенность этой задачи заключается только в том, что функционал
теперь является линейным относительно у'. Как будет показано
в следующей главе, линейность функционала приводит к тому, что
уравнение Эйлера вырождается в конечное соотношение вида
Это значит, что в данном случае семейство экстремалей сводится
к единственной экстремали, удовлетворяющей (1.45) (если тако¬
вая существует). При этом, конечно, невозможно удовлетворить
граничным условиям (1.41), так как значения у(х0) и у(хк) опре¬
деляются независимо из (1.45) и не могут быть заданы по произ¬
волу.
Аналогичной особенностью обладает экстремаль функциона¬
ла zK в более общем случае ф = ф(х, у, z), ф = ф(л:, у, z). В этом
смысле задачи об экстремуме функционалов zK или ук на соответ¬
ствующем классе линий являются вырожденными.
В дальнейшем будем называть вариационную задачу в случае
явного задания функционала основной вырожденной вариацион¬
ной задачей, а в случае неявного задания функционала — обобщен¬
ной вырожденной вариационной задачей. Эти понятия можно рас¬
пространить и на изопериметрические задачи разд. 1.3, если до¬
полнительное условие привести к виду
где К=const;
Ф°(я, у) и ф°(х, у) —функции, непрерывные вместе с первыми
производными по обоим аргументам.
Все задачи, рассматриваемые ниже, являются различными ва¬
риантами вырожденных задач, сформулированных в этом разделе.
Решение таких задач отличается рядом особенностей и требует не¬
которых специальных приемов, которые изложены в гл. III (основ¬
ная вырожденная задача) и гл. IV (обобщенная вырожденная за¬
дача).
Ф(х, у) =0.
(1.45)
(1.46)
Глава II
ПОСТАНОВКА ВАРИАЦИОННЫХ ЗАДАЧ
ДИНАМИКИ КРЫЛАТЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
С РАКЕТНЫМИ ДВИГАТЕЛЯМИ
2.1. ОСНОВНЫЕ ДОПУЩЕНИЯ О ХАРАКТЕРЕ ДВИЖЕНИЯ.
ВНЕШНИЕ СИЛЫ
Будем исследовать движение в атмосфере крылатого летатель¬
ного аппарата с ракетным двигателем. Условимся называть это г
аппарат самолетом, если его скорость, высота полета и протяжен¬
ность активного участка траектории таковы, что можно пренебречь
кривизной земной поверхности и изменением ускорения силы тя¬
жести с высотой. В том случае, когда движение летательного
аппарата носит характер, близкий к орбитальному (но происходит
в атмосфере, с работающим или выключенным двигателем), будем
называть соответствующий аппарат сателлоидом. Ясно, что при
рассмотрении его движения необходимо учитывать те факторы, о ко¬
торых говорилось выше.
Крылатый летательный аппарат, предназначенный для вывода
на орбиту искусственного спутника Земли или космического кораб¬
ля, в смысле методов анализа близок к сателлоиду. Между
этими летательными аппаратами нельзя провести жесткой грани¬
цы, так как последняя зависит от требований к точности описания
экстремального движения. Поэтому используемая терминология но¬
сит весьма условный характер и введена только для упрощения
изложения.
Введем следующие допущения, касающиеся общего характера
движения и внешних сил, действующих на аппарат.
1. Стабилизация относительно центра масс в любой момент
времени происходит мгновенно, причем управляющие силы пре¬
небрежимо малы по сравнению с прочими поверхностными силами.
2. Угловая скорость вращения мала в том смысле, что можно
пренебречь пропорциональными ей кориолисовыми и аэродинами¬
ческими демпфирующими силами.
25-
3. Движение газов в камере сгорания и сопле двигателя и ком¬
понентов жидкого топлива (в случае ЖРД) в баках и магистралях
стационарное.
4. Скольжение аппарата отсутствует, так что плоскость, в ко¬
торой лежат продольная ось аппарата и вектор скорости V, совпа¬
дает с плоскостью симметрии аппарата.
5. Траектории движения центра масс обладают одним из сле¬
дующих свойств:
а) угол наклона касательной к линии местного горизонта 0,
измеряемый в вертикальной плоскости, и соответствующая кривиз¬
на 1/0 малы (sin 0—0, cos 0 — 1, — — <Cl);
g dt
б) добавочное лобовое сопротивление, зависящее от угла ата¬
ки а, мало по сравнению с лобовым сопротивлением при а = 0.
6. Угол атаки, потребный для реализации программного движе¬
ния, мал (sin a —a, cos а— 1).
7. При рассмотрении движения самолета с ракетным двигате¬
лем Землю можно считать плоской, поле земного тяготения одно¬
родным и ускорение силы тяжести постоянным; при рассмотрении
движения крылатого носителя космических аппаратов и сателло-
ида — Землю сферической, но невращающейся, поле земного тяго¬
тения — центральным, ньютоновским.
8. Давление на срезе сопла больше давления окружающей сре¬
ды, в которую вытекает струя газов из сопла; скорость истечения
постоянна во всем рассматриваемом диапазоне высот и скоростей
полета и степеней дросселирования двигателя.
9. В условиях, соответствующих моменту выключения двигате¬
ля, донное давление близко к нулю.
10. Допустимы траектории с изломом в некотором конечном
числе точек (скачкообразное изменение угла 0). Реально прибли¬
зиться к таким траекториям можно, вводя вместо изломов пере¬
ходные участки с максимально допустимой по соображениям
управляемости и прочности кривизной.
Сделанные допущения позволяют исключить из рассмотрения
уравнение моментов и отождествить объект исследования с мате¬
риальной точкой, совпадающей с его центром масс. Приложенные
к этой точке силы сводятся к тяге двигателя, силе тяжести, лобо¬
вому сопротивлению и подъемной силе.
Переходим к непосредственному рассмотрению этих сил.
Тяга двигателя
Силу тяги двигателя можно считать параллельной продольной
оси аппарата. Абсолютную величину этой силы можно выразить
так [34]:
P=-c°^ + Fa(pa-p), (2.1)
at
26
где fa — площадь выходного сечения сопла;
с°—скорость истечения продуктов сгорания из сопла;
ра — давление на срезе сопла;
р — атмосферное давление на данной высоте.
Выражение (2. 1) удобно представить в иной форме, перейдя
к скорости истечения продуктов сгорания в пустоту с и относитель¬
ным величинам fx и Д|:
где
с = с°
Р——тЛс
dt
F аРа
т
, k
dm
то
dt
(2.2)
PoFa Д, = ^, (2.3)
щ Ро
га0— начальная масса;
Ро — начальное атмосферное давление (у = 0).
В силу допущения, сформулированного в п. 8 разд. 2. 1, с°=const,
dm , поэтому с = const. Это, конечно, справедливо в случае
а ра \м
постоянной площади критического сечения сопла и при умеренном
дросселировании двигателя (при глубоком дросселировании двига¬
теля с нерегулируемым соплом скорость истечения заметно падает
из-за увеличения диссоциации при понижении давления в камере
сгорания).
В момент выключения двигателя происходит дополнительное
скачкообразное изменение лобового сопротивления, на величину
Fa(p—рд) сверх изменения тяги, связанного с переходом от
сф0 к Р = 0 (рд —донное давление на данной высоте и при дан¬
ной скорости). Однако, опираясь на допущение п. 9, эту величину
можно считать пренебрежимо малой.
Сила тяжести
В случае самолета сила тяжести согласно допущению п. 7 пер¬
пендикулярна земной поверхности и равна весу
G = m0\\go, (2.4)
а в случае сателлоида направлена к центру Земли и составляет
G = mg(y) = m0\xg0(-^J, (2.5)
где
go=g(0) = 9>81 м1сек2\
г0 = 6371 км — радиус Земли;
у—высота полета.
27
Если рассматривать движение сателлоида во вращающейся си¬
стеме координат, одна из осей которой совпадает с геоцентриче¬
ским радиусом-вектором, а вторая параллельна касательной к дуге
большого круга, то роль G будет играть равнодействующая сил
тяжести и центробежных сил, действующих в упомянутой неинер-
циальной системе координат:
О'= 0(1- X) = m^g о ( -^М2(1 - х), (2.6)
\го+у/
где
= (2.7)
У с 'Д +у
Vc — круговая скорость на высоте у.
Лобовое сопротивление
Сила лобового сопротивления по определению параллельна век¬
тору скорости и противоположна по направлению. Величина этой
силы определяется известной из экспериментальной аэродинамики
формулой
= mQcxkk V2, (2.8)
2
где сх — коэффициент лобового сопротивления:
сх=см(ЬА,у)-\-гасу-,
схо(М, у) — сх0 (М)-|-kyy\
k = ^~; А = —;
2 т0
Со
(2.9)
q—массовая плотность воздуха;
qo — массовая плотность воздуха на уровне моря;
5 — площадь крыла;
е — некоторый параметр, зависящий от аэродинамической
компоновки крыла и аппарата в целом;
М — число Маха;
сх0 — коэффициент лобового сопротивления при нулевой подъ¬
емной силе;
су — коэффициент подъемной силы.
Коэффициент сх0 представляет собой сумму коэффициентов
профильного, волнового и донного сопротивления и сопротивления
трения. Первые три из них зависят в основном только от числа
Маха (это зависимость широко известна [22]), а коэффициент со¬
противления трения — от числа Рейнольдса, а следовательно, от
высоты (растет с увеличением у).
28
Подъемная сила
Подъемная сила по определению направлена перпендикулярно
вектору скорости в плоскости симметрии летательного аппарата.
Величина ее определяется формулой, аналогичной (2. 8):
Y:
CyQV^S
-m0cyk дК2,
(2.10)
где
Су = су(М, а)..
При дозвуковых и малых сверхзвуковых скоростях и малых
углах атаки зависимость коэффициента подъемной силы су от угла
атаки является линейной. В дальнейшем будем предполагать, что
установочный угол крыла близок к нулю, а профиль его близок
к симметричному. В этом случае при больших углах атаки и боль¬
ших сверхзвуковых скоростях зависимость су от а приближается
к квадратичной; при М— >оо су~а2 [36].
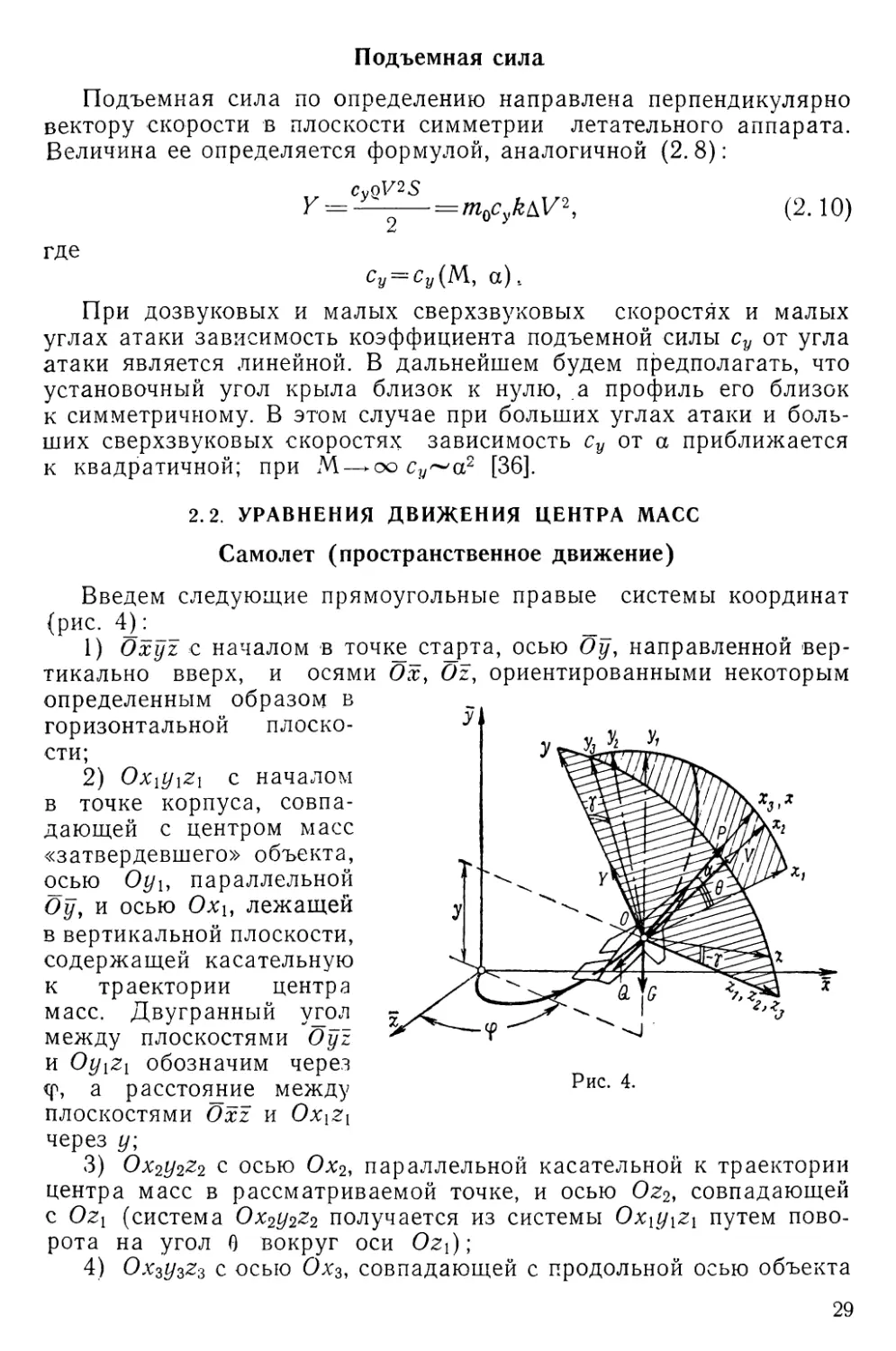
2.2. УРАВНЕНИЯ ДВИЖЕНИЯ ЦЕНТРА МАСС
Самолет (пространственное движение)
Введем следующие прямоугольные правые системы координат
(рис. 4): _
1) Dxyz с началом в точке старта, осью Оу, направленной вер¬
тикально вверх, и осями Ох, Oz, ориентированными некоторым
определенным образом в
горизонтальной плоско¬
сти;
2) OxiyiZi с началом
в точке корпуса, совпа¬
дающей с центром масс
«затвердевшего» объекта,
осью Оу 1, параллельной
Оу, и осью Ох 1, лежащей
в вертикальной плоскости,
содержащей касательную
к траектории центра
масс. Двугранный угол
между плоскостями Oyz
и Оу\Z\ обозначим через
Ф, а расстояние между
ПЛОСКОСТЯМИ OXZ И ОX\Z\
через у;
3) Ox2y2z2 с осью Ох2, параллельной касательной к траектории
центра масс в рассматриваемой точке, и осью Ог2, совпадающей
с Oz\ (система Ox2y2z2 получается из системы Ox\y\Z\ путем пово¬
рота на угол 0 вокруг оси Ozx)\
4) OxzyzZs с осью Ох3, совпадающей с продольной осью объекта
Рис. 4.
29
и осью Oz3, совпадающей с осью Oz2(Ox3y3z3 получается из систе¬
мы Ox2y2z2 путем поворота на угол атаки а вокруг оси Oz2);
5) Oxyz с осью Ох, совпадающей с осью Ох3, осью Оу, лежа¬
щей в плоскости симметрии объекта, и осью Oz, направленной
в сторону правого крыла (Oxyz получается из Ox3y3z3 путем пово¬
рота в положительном направлении на угол крека у).
Поскольку в силу допущения, изложенного в п. 4 разд. 2. 1,
скольжение отсутствует, углы а и у полностью характеризуют
угловое положение объекта относительно вектора скорости, а углы
Ф и 0 —направление вектора скорости. Положительные направле¬
ния отсчета этих углов показаны на рис. 4.
Учитывая допущения о характере внешних сил, сделанные вы¬
ше, получаем следующие три уравнения движения центра масс:
т -^— = р cos а — G sin 0 — Q;
dt
mV -^- = (Psin a-f K)cosy — Geos 6;
dt
(2.11)
mV cos i
dy
dt
-(Psin a-(-У)sin y.
К динамическим уравнениям (2.11) необходимо присоединить
выражение для сх (2. 9) и очевидные кинематические соотношения
dJL = y sin 6
dt
ds i г i
=[/ cos (
dt
(2.12)
где 5 — длина дуги проекции траектории на плоскость Oxz.
Принимая во внимание малость угла атаки и используя форму¬
лы разд. 2.1, из уравнений (2.11) и (2.12) получаем следующую
систему уравнений пространственного движения центра масс:
^+Ъ(с^дК2 + £1Д1) + £81п0 = О;
dt
db
(х dt
cosy
dt
d cp
vV
sin у
dt
dy
ca Yt~cy kkV2 + kxДio) + -£■ cos 6 = (
ca ^ - cvkД1/2.+ kx Aja) ='0;
dt
dt
ds
dt
С *r
\iV cos 6
-V sin 0 = 0;
-Vcos 0 = 0;
= сло(М> у)-\~гасу\
--cy (M, a),
(2.13)
30
где
р*=—; д = —;
Q0
Ai = -
т0
_q0S
Р о
kx -
_PqF а
т0
(2. 14)
системы (2. 13) уравнения движения
а при 0=0—в горизонтальной плос-
2т0
При у = 0 получим из
в вертикальной плоскости,
кости.
Уравнения движения на пассивном участке траектории полу¬
чаются из системы (2.13), если положить d[i/clt = 0 и заменить
соответствующей величиной коэффициент донного сопротивления,
входящий в выражение для сх0.
Сателлоид или крылатый носитель космических аппаратов
(плоское движение)
Введем следующие системы координат, лежащие в плоскости
траектории (рис. 5): _
1) Оху с началом в точке старта, осью Оу, являющейся продол¬
жением геоцентрического радиуса-вектора точки О, и осью Ох, со¬
впадающей с касательной
к дуге большого круга на
поверхности сферической
Земли;
2) Ох\у\ с началом в
центре масс «затвердевшего»
объекта и осью Оуи являю¬
щейся продолжением гео¬
центрического радиуса-век¬
тора точки О
осями Оух и
чим через ф;
3) Ох2у2 с осями Ох2 и
Ог/2, совпадающими с каса¬
тельной и нормалью к тра¬
ектории, соответственно;
угол между осями Охх и Ох2
обозначим через 0 ;
4) Оху с осями, жестко
скрепленными с корпусом
(ось Ох совпадает с про¬
дольной осью объекта); угол Рис. 5.
между осями Ох2 и Ох обо¬
значим через а.
На рис. 5 показаны положительные углы ф, 0 и а; угол 0 пред¬
ставляет собой угол между касательной к траектории и линией
местного горизонта на сферической Земле, а а — угол атаки.
Угол между
Оу обозна-
31
С учетом сформулированных выше допущений имеем следую¬
щие уравнения движения:
т = Р cos а — G sin G — Q;
dt
rnV
d 9
dt
(2.15)
-P sin a — 0(1 — x) cos0 + K.
При введении дальности £ = г0ф, измеряемой вдоль дуги большого
круга на поверхности сферической Земли, кинематические соотно¬
шения (2. 12) переходят в следующие:
— = 1/ sin I
dt
ds
rQV
COS I
dt r0 + у
Учитывая малость угла атаки и используя
(2.8), (2.10), получаем по аналогии с (2.13)
-f"+— ^+-№^ + *1A1) + ^sin0 = O;
dt p. dt {x
db ,
(2.16)
формулы (2.6),
d\L
dt
dy
dt
ds
[iV dt
■V sin6 = 0;
r0V
± (- CykД1/2 + kx Д,a) + COS 0 = 0;
dt
fo+ у
cos 0=0;
(2.17)
cx = cjco(№, y)-\-sacy;
cy = cy(M, a).
Уравнения движения на пассивном участке траектории полу¬
чаются из системы (2. 17) точно так же, как соответствующие урав¬
нения для самолета из системы (2.13).
2.3. ПОСТАНОВКА НЕКОТОРЫХ ВЫРОЖДЕННЫХ ВАРИАЦИОННЫХ
ЗАДАЧ ДИНАМИКИ ПОЛЕТА КРЫЛАТЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
С РАКЕТНЫМИ ДВИГАТЕЛЯМИ
Для иллюстрации постановки вырожденных вариационных за¬
дач, решению которых посвящены гл. III и IV, рассмотрим плоское
движение самолета.
Экстремумы дальности и продолжительности полета
при фиксированном режиме работы двигателя и заданных У0 и Vк
Выделим класс пологих траекторий, характеризующийся допу¬
щением п. 5,а разд. 2. 1, и предположим, что при изменении
32
скорости полета от Vo до Vк (где Vo и Vк — некоторые фиксирован¬
ные значения) секундный расход топлива является постоянным
cl^/(lt==—[3, а изменением массы объекта можно пренебречь.
Введя в систему (2. 13) в качестве независимой переменной ско¬
рость и используя предположенную пологость траекторий, получим
dt ,
(— с$ + а — cvkAV2 + pg = 0;
= 0;
= 0;
1Lz
dV
dx
■-V-
dV
dt
dV dV
^ = сЛ.0(М,г/) + еасу;
cy = cy{M, a).
Введем начальные и граничные условия:
t=0, х=0 при V=V0;
У=Уо ПРИ V = Va\
У=Ук при V = VK-
Кроме того, положим
dcv
с,= —а = с«(м)о.
(2.18)
(2.19)
(2. 20)
(2.21)
Исключив 0 из первого уравнения системы (2. 18) и а и су из
последнего, можно получить выражения для дальности хк и про¬
должительности полета tK при V=Vkb следующей форме:
yy'(V)\vdV
где
сх = Схо(М,у) + *
!г\У2 — /гЛ{
№
cfi—k^ + с*
Д(у) и Ai(у) —известные функции; ji = const.
"у'
(2.22)
(2. 23)
(2. 24)
Б. И. Рабинович
33
Дальность и продолжительность полета являются, таким обра¬
зом, функционалами, линейными относительно производной y'(V)
искомой функции. Теперь можно сформулировать следующие три
простейшие вариационные задачи.
В классе допустимых функций y(V) найти:
1) функцию y(V), обеспечивающую экстремум хк\
2) функцию y(V), обеспечивающую экстремум Ьк;
3) функцию у(V), обеспечивающую экстремум tK при заданном
значении хк или наоборот.
Эти задачи могут быть поставлены и в том случае, когда двига¬
тель выключен (с(3=0). Однако если при полете с работающим
двигателем наибольший интерес представляют траектории, обес¬
печивающие минимум хк или tK (разгон на минимальном пути
и в минимальное время), то при безмоторном полете важен мак¬
симум хк или tK (планирование с максимальной дальностью и с
максимальной продолжительностью).
Сопоставление функционалов (2.22) и (2.23) с функционалом
(1.44) показывает, что первая и вторая из сформулированных за¬
дач относятся к классу простейших вырожденных вариационных
задач (основная вырожденная задача), а последняя — к классу вы¬
рожденных изопериметрических задач.
Экстремумы дальности и продолжительности горизонтального
полета при варьируемом режиме работы двигателя
Рассмотрим случай горизонтального полета. Будем считать
начальную и конечную скорости I/о и Vк фиксированными. За неза¬
висимую переменную примем относительную массу, не предполагая
на этот раз, в отличие от предыдущего случая, что последняя ме¬
няется незначительно. При этом начальная относительная масса
равна единице, а конечную обозначим через рк. Далее, во втором
из уравнений (2.13) пренебрежем величиной (с -j-^AiJa по
сравнению с cykAV2, что, как показывает более подробный анализ,
в рассматриваемой задаче достаточно оправдано. Тогда уравнения
(2. 13) приводятся к виду
CykkV2 — ng=0;
^L — V —=0;
d)x d (x
(2.25)
cx-=cx0{M,y)-\-mc4\
cy = Cy(M, a),
34
а начальные и граничные условия принимают форму
/ = 0, л:—0 при [а=И;
V = V0 при (1= 1; )
V = VK при 1*= }хж. j
(2, 26)
(2. 27)
По аналогии с предыдущей задачей выражения для полной
дальности и продолжительности полета можно записать в следую¬
щей форме:
где в силу соотношения (2.24) и допущения, сделанного выше,
Во всех выражениях, приведенных выше, следует считать А =
= const, Ai = const. Функционалы (2.28) и (2.29) являются линей¬
ными, так же как (2.22) и (2.23). Для них можно сформулировать
следующие вариационные задачи.
В классе допустимых функций V(\i) найти:
1) функцию обеспечивающую экстремум хк\
2) функцию У(\ь), обеспечивающую экстремум tK\
3) функцию V(\x), обеспечивающую экстремум хк при задан¬
ном tK или наоборот.
Очевидно, что в рассматриваемом случае представляют интерес
режимы полета с максимальной дальностью и продолжительно¬
стью при заданном запасе топлива и режимы с максимальной даль¬
ностью хк при заданной продолжительности tK или с минимальной
продолжительностью tK при заданной дальности хк. Как видно из
сопоставления функционалов (2.28) и (2.29) с функционалом
(1.44), каждая из задач (1) и (2) представляет собой основную
вырожденную вариационную задачу, а задача. (3) —вырожденную
изопериметрическую задачу.
Введем теперь в рассмотрение класс траекторий, отвечающий
допущению п. 5,6 (см. стр. 26), и будем искать режим работы
двигателя, обеспечивающий экстремум конечной скорости VK.
(2. 29)
(2. 30)
Экстремумы скорости и времени
при движении по заданной траектории
3*
35
После преобразований, аналогичных использованным в преды¬
дущей задаче, уравнения (2. 13) можно привести к виду
dV , _c_j_(cx>
1 {cxk\V2 + Mi) dtj , jr_ dy_ = Q
1 T/u.sin6 d\)< V d\x
(2.31)
сx cxq (M, y) p eaCy;
ry = fy(M,a);
dy
) V sin 6
^0
(2.32)
В Данном случае начальные и граничные условия приобретают
В силу введенного ограничения второе слагаемое в выражении
для сх мало по сравнению с первым. Поэтому можно задаться
некоторой зависимостью а (у), не введя сколько-нибудь существен¬
ных погрешностей в выражение для сх, даже если выбор функции
а (у) очень груб (например, а=0). Таким образом, можно поло¬
жить сх = с,с (1/, у), считая эту функцию известной. В результате
первое уравнение оказывается независимым. Оно имеет вид (1.39),
так как 6 (у), А (у), А\ (у), cx(V, у) —известные функции. Конеч¬
ная скорость является, следовательно, функционалом, получить
явное выражение которого не удается. Тем не менее можно сфор¬
мулировать следующие вариационные задачи.
В классе допустимых функций у(\л) найти:
1) функцию, обеспечивающую экстремум функционала V,cJ за¬
данного неявно дифференциальным уравнением
Тд начальным условием (2.33);
2) функцию, обеспечивающую экстремум того же функционала
при заданном значении tK (2.32) или наоборот.
В силу линейности уравнения (2. 35) относительно производных
dV!d\i и dyfd\i первая задача совпадает с обобщенной вырожден¬
ной вариационной задачей разд. 1.4, а вторая — с соответствую¬
щей изопериметрической задачей.
Ясно, что в данном случае представляет интерес максимум ко¬
нечной скорости VK и минимум времени tK,
форму
V — Vq пРи ^=1;
У = Уо ПРИ !
У = УК при
(2.34)
(2.33)
dV
d\x
cx(V,y) +
V> sin 0
36
Экстремумы скорости и дальности
при заданном режиме работы двигателя
Предположим, что секундный расход топлива является некото¬
рой известной функцией относительной массы, так что
и будем искать форму траектории, обеспечивающую экстремум ко¬
нечной скорости Vк. После преобразований, подобных * использо¬
ванным выше (см. стр. 34 и 36), из системы (2.13) получим сле¬
дующие уравнения движения:
к которым надлежит присоединить начальное условие (2.33) и
граничные условия (2.34).
Для того же класса траекторий, что и в предыдущей задаче,
путем аналогичных рассуждений можно показать, что первое урав¬
нение может в первом приближении рассматриваться при решении
вариационной задачи как независимое, где cx = cx(V, у) — некото¬
рая известная функция.
Таким образом, можно сформулировать следующие вариацион¬
ные задачи.
В классе допустимых функций у(\х) найти:
1) функцию, обеспечивающую экстремум функционала Vк, за¬
данного неявно дифференциальным уравнением
и начальным условием (2.33);
2) функцию, обеспечивающую экстремум того же функционала
при заданном значении хк (2.38).
В данном случае также практическое значение имеют максимум
VK и максимум ^.Уравнение (2.39), как и (2.35), того же типа,
что и (1.39), так что мы снова пришли к обобщенной вырожденной
at
(2.36)
d\x р
(2. 37)
cx = cx0{h\,y)^tac.y-,
<?У = су(М,а);
(2.38)
(2.39)
37
вариационной задаче и соответствующей изопериметрической за¬
даче.
Следует подчеркнуть, что хотя по форме задачи, рассмотренные
на стр. 36 и 37, совпадают, по существу они совершенно различны,
так как в первом случае варьирование функции у(\х) связано с из¬
менением режима работы двигателя для фиксированной траекто¬
рии, а во втором — с изменением формы траектории при фиксиро¬
ванном режиме двигателя.
В заключение дадим более строгую формулировку вариацион¬
ной задачи, охватывающей обе эти задачи. Очевидно, что системы
дифференциальных уравнений (2.31) и (2.37) можно рассматри¬
вать как частные случаи следующей системы, отвечающей допу¬
щениям пп. 5 и 6 разд. 2.1:
где в —малый параметр;
/(а) —линейная или квадратичная функция;
ф, ф, /1}/2 —ограниченные функции, непрерывные вместе с пер¬
выми производными по всем переменным в интер¬
вале < [1 < 1 .
Присоединив к системе (2.40) начальные и граничные условия
можно сформулировать следующую вариационную задачу, содер¬
жащую задачи, рассмотренные на стр. 36—37, как частные случаи.
В классе допустимых функций у(\х) найти функцию обеспечи¬
вающую экстремум функционала Vк, заданного неявно дифферен¬
циальными уравнениями (2.40) и начальным условием (2.41).
Эта задача уже не является вырожденной, однако переходит
в последнюю при е = 0. Наличие малого параметра е позволяет
свести эту задачу с помощью методов теории возмущений (гл. IV)
к последовательности вырожденных задач.
^ + 9{\>,уМ)а-*-+Н\>'УМ) + ы/(a)f(ц, y,V) = 0;
а {л ct[x
(2. 40)
V = V0 при [а = 1;
У = Уо ПРИ :
У = Ун ПРН
(2.41)
(2.42)
Глава III
РЕШЕНИЕ ОСНОВНОЙ ВЫРОЖДЕННОЙ
ВАРИАЦИОННОЙ ЗАДАЧИ
Целый ряд экстремальных задач динамики летательных аппа¬
ратов, а также задач газовой динамики приводится к вырожден¬
ным вариационным задачам определенного класса, характеризую¬
щимся понижением порядка соответствующих уравнений Эйлера
или вырождением их в конечные соотношения.
Впервые такого рода задачи явились предметом рассмотрения
в работах Д. Е. Охоцимского и А. А. Космодемьянского [24] [И],
разработавших методы решения, учитывающие специфические осо¬
бенности этих задач, а также в работах Тзяна и Эванса [98] и
Миеле [71].
Формулировка одной частной задачи этого же класса была еще
раньше дана Гамелем [61].
В последующие годы появился целый ряд работ прикладного
характера, посвященных экстремальным проблемам динамики ле¬
тательных аппаратов с воздушно-реактивными и ракетными двига¬
телями. Решение вырожденных вариационных задач, встречающих¬
ся в этих работах, потребовало разработки новых специальных
приемов. В этом направлении ряд важных результатов был полу¬
чен в СССР Д. Е. Охоцимским и Т. М. Энеевым [25], В. А. Егоро¬
вым (решение одной частной задачи опубликовано в статье [7]);
за рубежом наиболее общие результаты, близкие в методическом
отношении к упомянутым выше, получены А. Миеле [71] —
[86]. Дальнейшее развитие методы решения вырожденных
вариационных задач получили в работах В. Ф. Кротова
[13] — [18].
Ниже решения основной (гл. III) и обобщенной (гл. IV) вырож¬
денных вариационных задач излагаются с соблюдением макси¬
мальной преемственности классических методов вариационного
исчисления (это, конечно, достигается ценой ограничения
общности постановки задачи, определяемого характером на¬
стоящей книги).
39
3.1. ДОПУСТИМЫЕ ФУНКЦИИ И ДОПУСТИМЫЕ ВАРИАЦИИ
Рассмотрим дифференциальное уравнение (1.39), определяю¬
щее вместе с соответствующим начальным условием функционал
zK = z(xK) в том случае, когда функции <р и ф не зависят от г:
= 0, (3.1)
dx dx
z — z0 при x = x0. (3. 2)
Механическим существом конкретной задачи обычно диктуются
некоторые ограничения, которые необходимо наложить на функ¬
циональные аргументы у(х) и фазовые координаты у'(х) = dy/dx.
В то же время приходится вводить в рассмотрение более широкий
класс функций у(х), чем в классических задачах вариационного
исчисления, а именно функции у(х) с разрывными производными.
В этом случае уравнение (1.39) характеризует функционал zK—
= z(xK) только при определенных условиях [9]. Наконец, возмож¬
ность использовать такое удобное средство анализа характера
экстремума, как вторая вариация, зависит от свойств дифференци¬
руемости функций ф и \р по их аргументам. Все это приводит к необ¬
ходимости дать математическую формулировку ограничениям,
налагаемым на рассматриваемые функции и их вариации. Задача
оказывается поставленной корректно в математическом отношении
и охватывающей все прикладные задачи, рассматриваемые ниже,
если наложить следующие ограничения на функции у(х), <р(х, у),
хр(х, у):
1. Функция у(х) однозначна и непрерывна в интервале
х0^.х^хк и удовлетворяет граничным условиям
У(хо) =1/о, у(хк) =ук. (3.3)
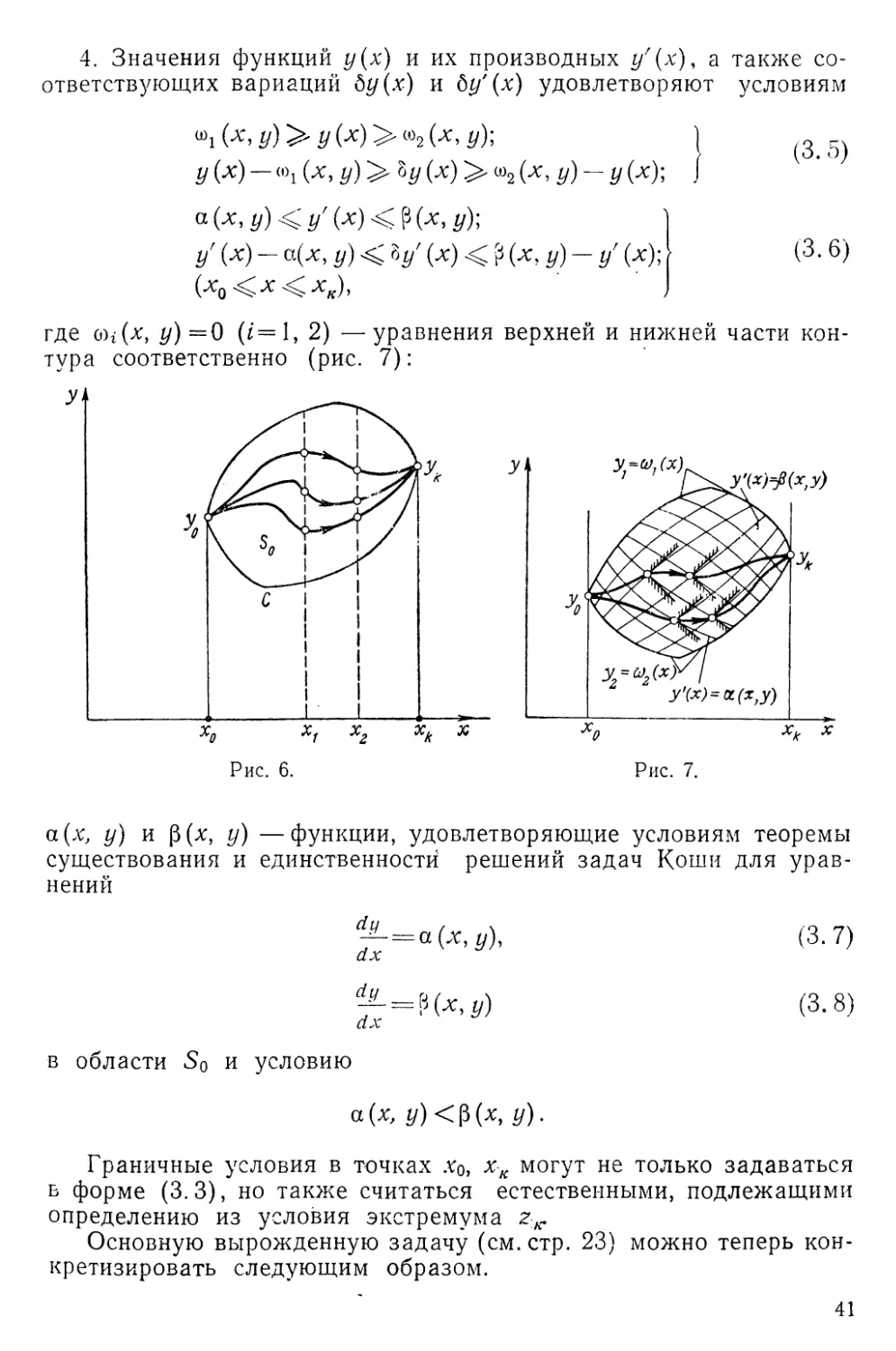
Значения функции у(х) принадлежат некоторой замкнутой об¬
ласти S0 плоскости х, у, образованной частью этой плоскости S и
ее границей С (рис. 6).
2. Производная у'(х) имеет в интервале х0^.х<^хк конечное
число разрывов первого рода в точках х = х*, в которых удовлетво¬
ряются условия
1/М|<г/;М при (3.4)
где Уг(х) —функция, интегрируемая на всем отрезке \х—х*\
3. Функции <р(я, у), ф(х, у) непрерывны вместе с первыми про¬
изводными по обоим аргументам в области S0 и дважды дифферен¬
цируемы по у в этой области.
40
4. Значения функций у(х) и их производных у'(х), а также со¬
ответствующих вариаций 6у(х) и бу'(х) удовлетворяют условиям
У)> у(х)>">2(х, у); j
у' М - <*(•*, */) < 8У' (*) < ? С*, г/) - ^ (■*); • 6)
С*Ь <■*<•*»). )
где о)i{x} у) = 0 (/=1, 2) —уравнения верхней и нижней части кон¬
тура соответственно (рис. 7):
a(x, z/) и p(x, у) —функции, удовлетворяющие условиям теоремы
существования и единственности решений задач Коши для урав¬
нений
d^ = a(x,y), (3.7)
dx
d^- = Hx,y) (3.8)
dx
в области S0 и условию
а(*, £/) <р(л:, у).
Граничные условия в точках дг0> х* могут не только задаваться
в форме (3.3), но также считаться естественными, подлежащими
определению из условия экстремума г:к.
Основную вырожденную задачу (см. стр. 23) можно теперь кон¬
кретизировать следующим образом.
41
В классе допустимых функций у(х), удовлетворяющих усло¬
виям (3.3) — (3.6), найти функцию, реализующую максимум (ми¬
нимум) функционала гк, определяемого уравнением (3.1) и началь¬
ным условием (3.2).
3.2. ВЫРАЖЕНИЯ ДЛЯ ПЕРВОЙ И ВТОРОЙ ВАРИАЦИЙ
ФУНКЦИОНАЛА 2К
В рассматриваемом случае можно получить из (3.1) и (3.2)
явное выражение функционала гк:
хк
zK=zo— j [4(x,y)y’ + '\i(x,-y)\dx. (3.9)
Имея в виду анализ экстремума zK на линиях у(х) с разрывной
производной и варьируемыми значениями на концах интервала х0,
хк, целесообразно получить общее выражение функционала zK от
линии с концами в произвольных точках хи Уи *2, У2 области 5.
Заменив в выражении (3.9) х0 и г0 значениями Х\ и %\у а хк и гк
значениями х2 и z2 и выполнив варьирование левой и правой частей
и интегрирование по частям, как при выводе уравнения Эйлера (см.
гл. I), получим следующее выражение первой вариации 6z(x2):
Зг(х2) = 8г(л:1) —®8«/U+<?oz/U,+j ф^ydx, (3. 10)
*1
где
dx ду ду
Поскольку
dy __ дер dy , дер
dx ду dx 1 дх
функция Ф не зависит от у\ а только от х и у:
ф = ф(Х,у) = р--д±, (3.11)
дх ду
что и оправдывает термин «вырожденная вариационная задача»,
введенный выше.
Предположим теперь, что координаты концов интервала Х\ и х2
также варьируются. Тогда вариации бy(Xi), бz(X{) в (3. 10) следует
считать частными вариациями, с которыми полные вариации
[бу (**)], [6z{Xi)] связаны следующими соотношениями:
[8z (л:,)] = bz (хг) + z' (л:,) (/=1,2).
Вводя для полных вариаций новые обозначения 6 у г и 6г*(/ = 1,2)
и подставляя значения частных вариаций by(Xi) и bz (х;) из (3. 12)
(3.12)
42
з (3. 10) , получаем общее выражение первой вариации функционала
hz2 в случае варьируемых начальных значений z{(xi) и граничных
значений у\(х\), У2{х2) и координат концов интервала xh х2:
bz2 = (z' -]- уу')\Хг- ср|ЖгТ,у, 4- (te, -!- -?>yl)\Xl —
Л' о
— (z' + «pr/OU, ?j*i Jr ( ф (х, у) Ц dx,
х 1
или с учетом (3.1)
bZ2r=:$Zi ф|лг2 _рф]jr 1 ^Х^
Л'о
— ?к + ?k S^I -г j ф (■*. у) ЬУ dx. (3. 13)
-**1
Если концы искомой экстремали фиксированы по обеим коор¬
динатам, т. е.
хг = х0 = const, Х2~ХК^ C011St,
yi = yo=cons^ Уч~=Ук = const,
и выполняются условия (3.2), имеют место следующие очевидные
равенства:
—г- 0^2 — 0, ^УI ~~~ У2 ~~~ ^5
0^! = — 0, Ъг 2 — 0ZK.
В этом случае выражение (3. 13) переходит в вариацию иско¬
мого функционала Ьгк при начал!ном условии (3.2):
хк
bzK = [ ф (•*> у) ЬУ dx. (3.14)
*0
Выведем теперь выражение для второй вариации рассматривае¬
мого функционала при варьировании от линии с фиксированными
концами. Проварьируем с этой целью уравнение (3.14), считая
по-прежнему у(х) варьируемой функцией, и введем в соответствии
с определением второй вариации коэффициент Ч2 перед интегра¬
лом. В результате получим следующее выражение для второй ва¬
риации 62гк:
Выражения (3. 13) — (3. 15) будут использованы ниже при иссле¬
довании необходимых условий экстремума функционала zK.
43
3.3. ВЫРАЖЕНИЕ ДЛЯ КОНЕЧНОГО ПРИРАЩЕНИЯ
ФУНКЦИОНАЛА zK
Выведем выражение для конечного приращения kzK при пере¬
ходе из точки А в точку D по двум произвольным допустимым ли¬
ниям AOD и ABOCD (рис. 8), имеющим общие концы, не накла¬
дывая на эти линии никаких условий близости (ни нулевого, ни
первого порядка).
Используя уравнение (3. 1)
—-4-сР ^—^^ = 0, (3.16)
dx^'dx
после интегрирования вдоль дуг AOD и ABOCD получаем
f (ydy+ydx) — j (с?dy-\-tydx) =
AOD ABOCD
= — (3.17)
L x Z2
где Lj—контур ABOA, охватывающий площадь Si;
L2 — контур ODCO, охватывающий площадь S2.
(Интегралы считаются положительными при обходе этих контуров
в направлении против часовой стрелки).
Используя формулу Грина, можно приращение AzK привести
к виду
&-£)"• <3-'«
5Т ‘ S2
или в соответствии с (3.11)
Агк=^Ф (х, y)dx dy —у) dxdy. (3. 19)
Мы пришли к формуле, полученной А. Миеле и приведенной,
в частности, в книге [70]. Аналогичным образом можно рассмотреть
более сложные случаи, когда произвольная допустимая линия пе¬
ресекает в области S0 линию ВС несколько раз, так же как AEOFD
на рис. 8. Формулу для конечного приращения функционала zK>
исчерпывающую все взаимно исключающие возможности такого
рода и являющуюся обобщением (3. 19), можно записать в форме
Д2я=2 Я ф (x,y)dxdy —
с (О
61
jJ Ф (х, y)dxdy, (3.20)
где S[l) и S{2J) — части области между произвольной линией и эта¬
лонной, лежащие выше и ниже эталонной линии
(ABOCD на рис. 8), соответственно.
44
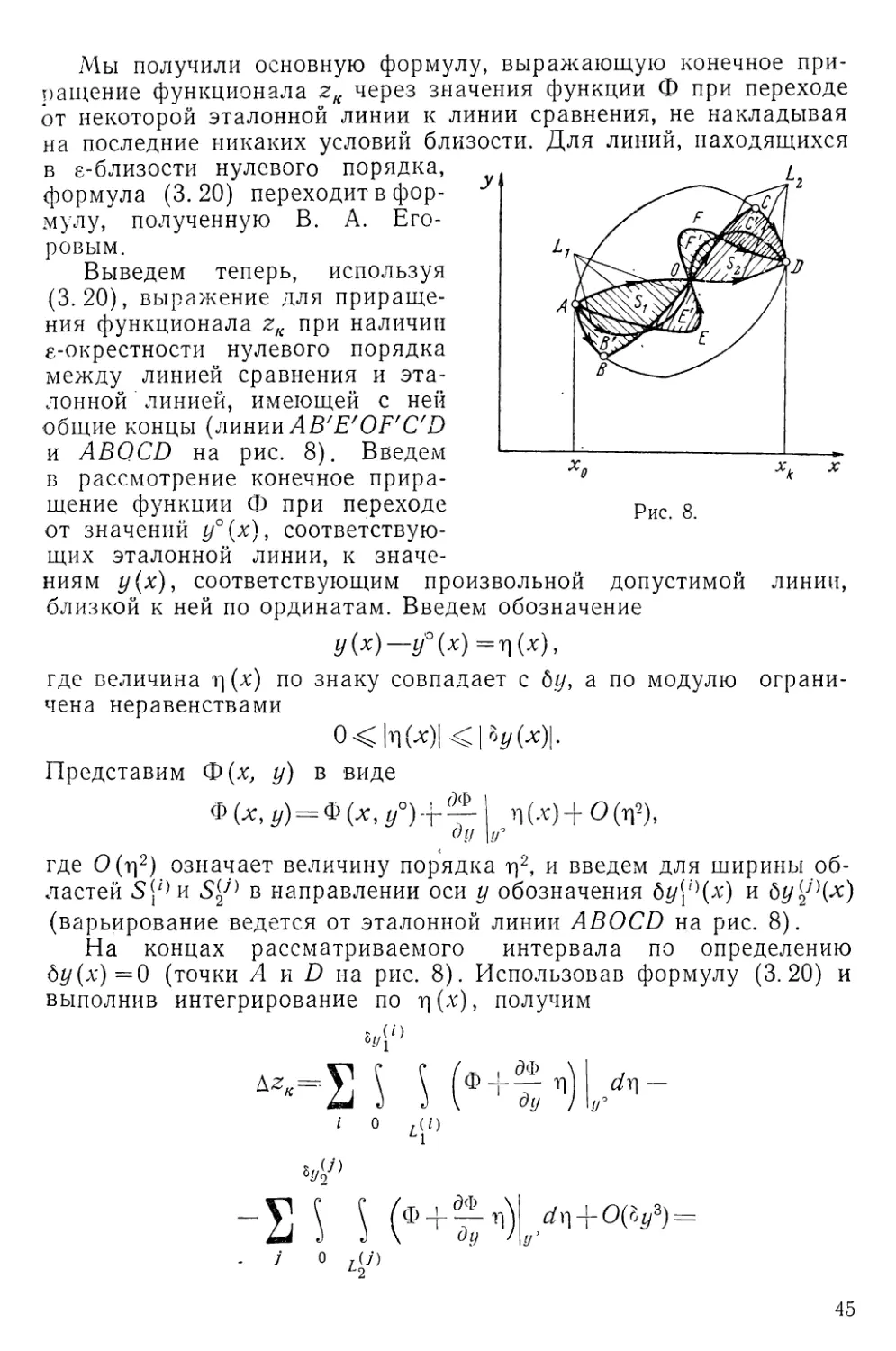
Мы получили основную формулу, выражающую конечное при¬
ращение функционала 2* через значения функции Ф при переходе
от некоторой эталонной линии к линии сравнения, не накладывая
на последние никаких условий близости. Для линий, находящихся
в e-близости нулевого порядка,
формула (3.20) переходит в фор¬
мулу, полученную В. А. Его¬
ровым.
Выведем теперь, используя
(3.20), выражение для прираще¬
ния функционала zK при наличии
г-окрестности нулевого порядка
между линией сравнения и эта¬
лонной линией, имеющей с ней
общие концы (линии AB/E'OF'C/D
и ABQCD на рис. 8). Введем
в рассмотрение конечное прира¬
щение функции Ф при переходе
от значений у°(х), соответствую¬
щих эталонной линии, к значе¬
ниям у(х), соответствующим произвольной
близкой к ней по ординатам. Введем обозначение
у(х)— у°{х)=х\{х),
где величина г|(х) по знаку совпадает с 6у, а по модулю ограни¬
чена неравенствами
o<hWKI^WI-
Представим Ф{х, у) в виде
Ф (X, у) = Ф(х, у°) + ^ I л И + о (Л0-),
дУ к
где 0(г]2) означает величину порядка г]2, и введем для ширины об¬
ластей 5^ и S(2J) в направлении оси у обозначения 6у[1){х) и 6y(2J)(x)
(варьирование ведется от эталонной линии ABOCD на рис. 8).
На концах рассматриваемого интервала по определению
6у(х)= 0 (точки А и D на рис. 8). Использовав формулу (3.20) и
выполнив интегрирование по г|(я), получим
Рис.
допустимой линии,
Т 5 (®+T37w,)w>‘'J:''
I L(i)
J r(J)
2
где L\l) и L(2] — части линии ABOCD, ограничивающие области Si*
и S(2J).
Пренебрегая величинами второго порядка малости и переходя
к более компактным обозначениям, получаем следующее выражение
для приращения функционала zK при переходе к линии, близкой
по ординатам к исходной:
хк хк
Д^ЛГ= ^ ф bydx-{- Д- oy2dx^- bzK-\-b-zK, (3.21)
где
оzK — j Ф by dx\ (3. 22)
-'"о
Д23)
Здесь бу(х) —вариация произвольного знака от линии ABOCD.
Формула (3.21) позволяет представить с точностью до малых вто¬
рого порядка приращение функционала AzK через первую и вторую
вариации 6zK и б2zK (3.22), (3.23). Формулы (3.21) и (3.20) будут
использованы в разд. 3.6 для анализа достаточных условий силь¬
ного и абсолютного экстремумов функционала zK на линиях рас¬
сматриваемого класса.
3.4. НЕОБХОДИМЫЕ УСЛОВИЯ ЭКСТРЕМУМА Z*
ПРИ СПЕЦИАЛЬНОМ ВЫБОРЕ ГРАНИЧНЫХ ЗНАЧЕНИЙ у0 и ук
Сузим несколько класс допустимых функций, полагая, что иско¬
мая экстремаль является на всем протяжении допустимой функ¬
цией в смысле выполнения условий (3.5) и (3.6) в усиленной
форме (т. е. со знаками неравенства) и, кроме того, граничные
значения у0, ук таковы, что удовлетворяют при х = х0 и х = хк урав¬
нению Ф(х, у) = 0.
Покажем, что при этих условиях имеет место следующая' тео¬
рема.
46
Теорема 1
Необходимые условия слабого максимума zK имеют вид
<0. (3.24)
ф = 0, —
ду
Ф=0
В случае слабого минимума гк смысл неравенства меняется на
противоположный.
Учитывая сделанные допущения, для доказательства можно
воспользоваться выражением вариации функционала zK (3.14) и
леммой Лагранжа [19], которые приводят к следующему уравнению
искомой экстремали:
Ф{х, у)= 0 (3.25)
(так как допустимы двусторонние вариации 6у{х)).
Полагая х = х0 и х = х^, получаем следующие уравнения для
определения значений у0 и у,0 лежащих на линии Ф = 0:
Ф(*о, Уо)=0, Ф(хк,Ук)=0. (3.26)
Уравнения (3. 26) накладывают определенную связь на началь¬
ные и конечные значения у0, ук, которые не могут быть независи¬
мыми, поскольку требуется прохождение экстремали через точки х0,
У о, Ук-
Таким образом, задание значений х0у хк исключает в рассмат¬
риваемом случае произвол в выборе у0 и ук.
Используя выражение (3.11), можно привести уравнение
экстремали (3.24) к виду
^ —^- = 0. (3.27)
дх ду
Уравнение (3.27) дает первое необходимое условие экстремума
функционала zK[. Второе необходимое условие сводится к неотри¬
цательности (в случае максимума) или неположительности (в слу¬
чае минимума) второй вариации вдоль всей экстремали:
о22/с<0 при Ф = 0 (максимум zK)\) ^
о22л>0 при Ф =0 (минимум zK). I
Чтобы расшифровать условия (3.28), воспользуемся выраже¬
нием второй вариации рассматриваемого функционала (3.15).
Учитывая, что 6у2 положительно определенная функция, полу¬
чаем из (3.28), (3.15) и (3.11) следующее второе необходимое
условие экстремума zK1 являющееся аналогом известного условия
Лежандра [19]:
дФ
ду
/ д2<р дЦ у
ф^о 'Av ду ду2/
дФ1 / д2у д2<\>
ду |ф=о \дх ду ду2
<0 (максимум zK);
Ф=0
0 (минимум zK).
Ф=0 '
(3. 29)
Таким образом, теорема доказана. Здесь мы имеем случай, ког¬
да решение вариационной задачи существует в классе непрерыв
ных функций с непрерывной производной.
3.5. НЕОБХОДИМЫЕ УСЛОВИЯ ЭКСТРЕМУМА г-к
ПРИ ПРОИЗВОЛЬНОМ ВЫБОРЕ ГРАНИЧНЫХ ЗНАЧЕНИЙ у0 и ук
В разд. 3.4 был рассмотрен случай специально подобранных
граничных условий, для которого оказалось возможным найти ре¬
шение в классе Сх допустимых функций, непрерывных и имеющих
непрерывную первую производную. Переходя к общему случаю
произвольно выбранных граничных значений у0 и ук в (3.3), преж¬
де всего обнаруживаем, что линия Ф = 0 либо пересекает границу
области S0, т. е. контур С, либо целиком лежит вне S0. Поэтому
искомая экстремаль должна включать элементы границы С обла¬
сти S0 [неравенства (3.6) полагаем по-прежнему выполненными
в усиленной форме во всей области S0]. Так как в точках сопряже¬
ния дуги Ф = 0 с границей области S0 непрерывность производной
у'{х) может утрачиваться, необходимо вернуться к более общему
классу С0 допустимых функций у(х) с производной уг{х), имею¬
щей конечное число разрывов первого рода.
Покажем, что в этом случае имеет место следующая теорема.
Теорема 2
Необходимые условия слабого максимума zK имеют вид:
— для части экстремали, лежащей в открытой области S:
— для части экстремали, состоящей из элементов границ С об¬
ласти S0:
где 6у—допустимая для данной границы вариация.
В случае минимума гк смысл неравенств меняется на противо¬
положный.
На контуре С допустимо только одностороннее варьирование,
поэтому необходимое условие экстремума функционала переходит
в следующее:
С другой стороны, в открытой области S, в которой допустимо
двустороннее варьирование линии у{х), необходимые условия
экстремума имеют, как показано выше, вид
ду |ф_=о
(3. 39)
Ф^-0 при 8г/<0;
Ф<0 при 8г/)>0,
(3.31)
(3.32)
ozK=0, 82zK<;0 (максимум
§2-^=0, b2zK > 0 (минимум
(3. 33)
Ту часть экстремали, для которой условия (3.5) и (3.6) вы¬
полнены в усиленной форме, будем в дальнейшем называть внут¬
ренней экстремалью, а ту часть, для которой какое-либо из усло¬
вий (3.5) или (3.6) выполнено со знаком равенства — внешней
экстремалью. В рассматриваемом случае, когда неравенства (3.6)
предполагаются выполненными в области 5, внешняя экстремаль
может включать только одну или несколько дуг контура С.
Предположим, что линия у(х)у удовлетворяющая уравнению
ф = О, дважды пересекает контур С в точках х = х\ и х = х2. Тогда
экстремаль, удовлетворяющая граничным условиям (3,3), в кото¬
рых уо и ук не являются корнями уравнений (3.26), состоит из трех
дуг: при Xq^x^Xi и х^х^х2— из элементов контура С, при
х{^х^х2 — из внутренней экстремали Ф = 0.
Составим выражение первой вариации функционала zK при
варьировании от этой экстремали. Воспользуемся с этой целью об¬
щей формулой (3. 13), которая справедлива для каждой из дуг
экстремали, поскольку все они имеют непрерывные производные
у'(х), тогда как экстремаль в целом может иметь изломы в точках
сопряжения х = х\ и х = х2. В результате, учитывая граничные усло¬
вия (3.3), получаем
Устремляя в к нулю, находим следующее выражение первой ва¬
риации для произвольно заданных граничных значений у0 и ук:
bZK + иа+8^2+Ф U2+e^2 +
+ J ф(*.y)*ydx — —
ЛГ,-е
~\г j ф (х< У) ^ydx-\-v U,+e8i/i + 4 |x.I+e8^i -}
х0
xs-t
+ j ф (х, y)^ydx — <o\X2_£by2~^\X!_-M2.
j‘ Ф(х,y)bydx-\-^ Ф (x, y)lydx4
+ J ф{x,y)bydx.
(3.34)
4 Б. И. Рабинович
49
В силу непрерывности функций ф и ф в замкнутой области S0
имеют место равенства
ib
jr,-0
= 0, ср
xi+°
= 0,
(3. 35)
играющие роль условий Вейерштрасса — Эрдмана [19], которые
в рассматриваемой задаче выполняются тождественно.
Поскольку можно подобрать такие вариации 6у(х), при кото¬
рых координаты точек сопряжения хи у\ и х2, У2 не варьируются,
можно построить односторонние вариации вдоль внешней экстре¬
мали (xq^x^Xi и Х2<Сх^хк) и Двусторонние вдоль внутренней
{Х\<Х<Х2).
Необходимые условия максимума zJO имеющие вид для
рассматриваемых вариаций (при варьировании от экстремали)
можно записать так:
*2
j ф (•*> у) ЬУ dx=0 (Xj < л: < х,);
*л
J ф(х> y)bydx<C0 (^с0<л:<х1);
*0
хк
j <b{x,y)bydx^Q (*2< *<.**).
(3. 36)
Поскольку каждой из дуг экстремали отвечает функция у{х),
непрерывная в соответствующем интервале и имеющая непрерыв¬
ную первую производную, справедлива лемма Лагранжа; следова¬
тельно, необходимые условия максимума zK сводятся к следующим:
Ф = 0 (xi<x<x2)\ )
Ф]>0 при Ьу<^0 (х0^х^.хг); 1 (3.37)
Ф<0 при Ьу^> 0 (x2<x<xj. J
Вводя вариации вида
6у = 0 при и
и рассматривая выражение второй вариации 62гКУ получаем допол¬
нительное необходимое условие максимума zK, являющееся анало¬
гом условия Лежандра:
дФ
ду
<5>2ср
дЦ
ф^о \ дх ду ду2
:о.
Ф=0
(3. 38)
Условия (3.37), (3.38) соответствуют приведенным в теореме 2
(см. стр. 48), которая тем самым доказана.
50
3.6. ДОСТАТОЧНЫЕ УСЛОВИЯ ЭКСТРЕМУМА z*
Используя выражение для приращения функционала zK (3.21),
можно получить достаточные условия сильного экстремума zK. Рас¬
смотрим допустимые в смысле, определенном выше, функции у(х),
значения которых при х = х0, х = хк удовлетворяют граничным усло¬
виям (3.3). Покажем, что имеет место следующая теорема.
Теорема 3
Достаточные условия сильного максимума zK имеют вид:
— для части экстремали, лежащей в открытой области,
ф=о, i®.
ду
<0; (3.39)
Ф=0
— для части экстремали, состоящей из элементов границ
области,
Ф>0 при оу<^ 0;
Ф<0 при 8^>0,
(3.40)
где ду — допустимая для данной границы вариация.
В случае минимума zK смысл неравенств меняется на противо¬
положный.
Таким образом, здесь требуется выполнение условия Лежандра
(3.29) и неравенств (3.31) в усиленной форме, т. е. без знака ра¬
венства. Не нарушая общности, можно ввести в рассмотрение
экстремаль того же вида, что и в разд. 3.5.
Для доказательства воспользуемся формулой (3.21), которая
при варьировании от экстремали, состоящей из внутренней и двух
отрезков внешней, приобретает вид
хк X<i хк
дгк=^ Qbydx + X-^^by'dx+^mydx. (3.41)
Л'о *1 -**2
Формула (3.41) справедлива в случае близости произвольной
допустимой линии к экстремали по ординатам, независимо от сте¬
пени близости по производным от этих ординат.
Таким образом, в отличие от классической задачи вариационно¬
го исчисления отрицательность второй вариации функционала при
варьировании от внутренней экстремали достаточна для сильного
максимума zK (положительность достаточна для сильного миниму-
ма гк).
4* 51
Рассмотрим теперь достаточные условия абсолютного экстрему¬
ма функционала zK. Покажем, что имеет место следующая тео¬
рема.
Теорема 4
Если линия Ф = 0 на плоскости х, у имеет не более одной точки
пересечения с любой прямой x = const при х0^х^хк и делит об¬
ласть х0^х^хк, Утт^У <Утах, включающую S0, на две части,
в верхней из которых Ф<0, а в нижней Ф>0, то на линиях, вклю¬
чающих внутреннюю экстремаль Ф = 0 и внешнюю экстремаль, со¬
стоящую из элементов границ С области S0, достигается абсолют¬
ный максимум zK в рассматриваемом классе допустимых функций
у{х)\ выполнение неравенств противоположного смысла отвечает
абсолютному минимуму zK.
Для доказательства воспользуемся формулой (3.34). Полагая,
что линия ВС на рис. 8 представляет собой внутреннюю экстре¬
маль, т. е. соответствующие ей ординаты у(х) удовлетворяют урав¬
нению Ф(х, у) = 0, мы придем, используя определение областей
и S{2J'\ к следующим условиям:
Сопоставляя формулу (3.20) с неравенствами (3.42), получаем
Это неравенство доказывает теорему, поскольку не подразумевает
никаких условий близости рассматриваемой допустимой линии
к экстремали. Ясно, что изменение смысла неравенств (3. 42) на
противоположный изменяет смысл неравенства (3.43), т. е. соот¬
ветствует абсолютному минимуму zK. В дальнейшем будем пола¬
гать для определенности, что имеет место максимум zK, и условимся
всегда штриховать области S[l) и52;)так, что направление штри¬
ховки слева вверх направо будет соответствовать Ф>0, а противо¬
положное направление Ф<0.
Рассмотрим теперь, сохранив в силе условия теоремы 4, наибо¬
лее типичные частные случаи, различающиеся соотношением фак¬
тических граничных значений yQ и ук и значений yl и у*, удовле¬
творяющих при х = х0 и х = хк уравнениям внутренней экстремали
I. Целиком отсутствует либо внешняя экстремаль, либо внут¬
ренняя.
Ф<0 в областях »
Ф]>0 в областях
(3.42)
(3.43)
ф(*о> «/о^0* Ф(Хк’У1) = 0-
52
Экстремалью является линия х0, у0\ хк, ук.
1. Уо = Уо’ Ук = у1 (Рис- 9- а).
х0, у0; хк, ук — внутренняя экстремаль (случай, рассмотренный
в разд. 3.3).
2. 0„<<Х УК<С у*; линия Ф = 0 лежит выше области S0
(рис. 9, б).
Х0, у0; хк, ук— верхняя часть границы области S0.
3- Уо^>Уо’ Ук^> Ук' линия Ф = 0 лежит ниже области S0
рис. 9, в).
х0, у0; хк, ук — нижняя часть границы области S0.
Рис. 9.
II. Экстремаль состоит из дуг внутренней и внешней экстре¬
мали.
Экстремалью является линия х0, у0; л**, у*; х**, у**; хк, ук.
х*, у*; х**, у** — внутренняя экстремаль;
•*o» Уо> •**> У* и х**> У**’ хк» ^ — внешняя экстремаль.
1- Уо<У1' Ук<У*н(Рис- 10, а).
хо> Уо> х*у У* и х**> У**у хк> Ук~ части верхней границы области 50.
2- Уо > Уо’ Ук>У1 (Рис- Ю, б).
Уо'> х\ у* и х**> У**\ хк'> Ук~~ части нижней границы области S0.
3- Уо>у1> Ук<у'ЛРис- 10. в).
хо> Уо< х*> У* — часть нижней границы области S0;
х**, г/**; хк, ук — часть верхней границы области 50.
4- Уо<у1< Ук>Ук (Рис- Ю, г).
хо> Уо} х*> У* — часть верхней границы области 50;
л:**, у**\ хк, ук — часть нижней границы области SQ.
Доказательство того, что на рассмотренных экстремалях дости¬
гается абсолютный максимум zKi можно получить с помошью тео¬
53
ремы 4, если сравнить последние с произвольными линиями, соеди¬
няющими точки х0, у0 и xKiyK (см. рис. 9—10), определяя знак
Агк в соответствии с направлением штриховки.
Рис. 10.
3.7. ПЕРЕСЕЧЕНИЕ ЭКСТРЕМАЛЬЮ ОДНОЙ ИЗ ВНУТРЕННИХ
ГРАНИЦ ОБЛАСТИ ЗНАЧЕНИЙ ДОПУСТИМЫХ ФУНКЦИЙ у(х)
До сих пор предполагалось, что условия (3.6) выполнены в уси¬
ленной форме вдоль внутренней экстремали и что последняя
является в области S0 однозначной функцией у = у(х).
Предположим теперь, что при движении вдоль внутренней
экстремали в некоторой точке С2 в одном из условий (3.6) знак
переходит в равенство, а при дальнейшем возрастании х имеет ме¬
сто знак > (пунктирная линия на рис. 11 и 12).
На рис. 11 представлен случай
»'(*)>Р(*. У), (3.44)
а на рис. 12 случай
*/'(*)< а(х, у) (3.45)
в предположении, что а<0, (3>0.
54
В точке С2 удовлетворяются уравнения
ф(*с„ ус,)~- 0;
*Р(*с„ ус,) (рис. И)
г/'(л:сг)=\1
а(*сг, ус,) (рис. 12).
(3.46)
Поскольку точка С2 принадлежит внутренней границе области
5, при х>хс2 соответствующая линия у(х) становится недопу¬
стимой.
Допустимой линии отвечает движение по внутренней границе
области S, т. е. по интегральной кривой уравнения (3.7) или (3.8),
проходящей через точку с координатами хуСо.
Пусть теперь при движении по кривой уг{х) = (3 или у'{х)= а
соответственно в точке D2 на рис. И и 12 удовлетворяется уравне¬
ние внутренней экстремали
ф yD2) = 0,
а условие (3.6) выполняется в усиленной форме, т. е. при x>xDz
у (х)<$ или а<у'(х). Тогда в точке D2 должен быть осуществлен
обратный переход ка внутреннюю экстремаль Ф(х, у)=0 и даль¬
нейшее поведение экстремали будет таким же, как в случаях, рас¬
смотренных в разд. 3.6 (линия D2EF на рис. 11 и 12).
Возможно, что в некоторой точке Dг одновременно будут удо¬
влетворяться уравнение внутренней экстремали и одно из условий
(3.6) со знаком равенства:
Ф (хОч уог) = 0;
УЭг) (рис. 11) .
угЫ=С
a(xDl, yDl) (рис. 12),
55
Тогда линия ABCXDXEF является экстремалью, точно так же,
как и построенная раньше ABC2D2EF. Наконец, экстремалью
является и любая промежуточная линия ABCDEF, отрезок CD ко¬
торой удовлетворяет уравнению (3.7) или (3.8) (см. рис. И и 12).
Действительно, подобрав такие допустимые вариации бу(х), чтобы
оставались фиксированными точки В и Du С2 и £, как на рис. 11
и 12, или, наконец, С и D, можно убедиться, что на каждой из этих
линий выполняются достаточные условия сильного относительного
максимума. Однако, чтобы решить вопрос о том, на какой из ли¬
ний реализуется абсолютный максимум гк, необходимо сравнить
приращения Дгк функционала zK при последовательном переходе
от линии ABCDE к ABCXDXE или ABC2D2E. Если при двусторон¬
них вариациях такого вида на одной из промежуточных линий
ABCDE выполняется условие Дг^^О, то абсолютный максимум гк
достигается на этой линии. Если это условие не выполняется, то
абсолютный максимум гк достигается на той из граничных линий
ABCXEF или ABC2D2EF, на которой AzK<0 при допустимом одно¬
стороннем варьировании.
Линии CD, С\Dj или C2D2 образуют в данном случае дополни¬
тельные отрезки внешней экстремали. В том случае, если условие
(3.6) не выполняется для всех значений хс^х^хк, внутренняя
экстремаль при х^хс^ отсутствует.
Предположим теперь, что функция у(х), удовлетворяющая
уравнению Ф(х, у) = 0, неоднозначна в некотором диапазоне зна¬
чений хх<х<х2.
Очевидно, что этот случай является естественным обобщением
рассмотренного выше, так как появлению неоднозначности обяза¬
тельно должно предшествовать нарушение одного из условий (3.6),
т. е. пересечение экстремалью одной из внутренних границ области
50. При этом получим картину, представленную на рис. 13 и 14,
являющихся аналогами рис. 11 и рис. 12. Поэтому все сказанное
56
выше применимо и к случаю нарушения однозначности функции
у(х) в области 50.
На рис. 11 —14 направлением штриховки, оговоренным выше,
показаны знаки функции Ф(х, у) в областях, ограниченных теми
или иными контурами.
Утверждения, сделанные выше о характере экстремума zKl9 мо¬
гут быть легко доказаны, если воспользоваться общей формулой для
конечного приращения функционала zK (3.20) с учетом знаков
ф(х, у) в различных точках области S0 (см. рис. 11—14).
3. 8. ЭКСТРЕМАЛЬ СО СВОБОДНЫМ КОНЦОМ
Рассмотрим необходимые условия максимума zK при z(x0)=Zo9
в случае, когда значение ук или хк является произвольным, т. е.
граничные условия для допустимых функций имеют вид
у = Уо при х = х0 (значение хк фиксировано); (3.47)
у = Уо при х = х0 (значение ук фиксировано). (3.48)
Первая вариация функционала zK для экстремали со свободным
концом выражается в соответствии с (3. 34) следующей формулой:
lzK= — ^\х=хкЬхЛ'?\х=х1ьу1()-гj ф{x,y)bydx. (3.49)
*0
Рассмотрим сначала случай граничных условий (3.47), для ко¬
торого получим
ъгк= — 'о\х=хЪУк-\-j Ф{x,y)lydx. (3.50)
-Го
Предположим, что область значений допустимых функций имеет
теперь вид, изображенный на рис. 15, где У,д<У*<у*2» Ф>0
(у* удовлетворяет уравнению Ф = 0 при х = хк).
Очевидно, что необходимое условие максимума zK не выполняет¬
ся для некоторых вариаций 6у(х). Например, для вариаций вида
6у*<0 (х = хк), 6у(х)= 0 (х0<х<л:/с) получим из формулы (3.50)
бгдс>0. В то же время для вариаций вида
5У1 = 0(х = хк), ду{х)^0(х0<х<х/с)
имеем
6zK = 0 при Ф = 0.
Это означает, что для* получения экстремали произвольную ли¬
нию, близкую на всем протяжении к линии х0у у0; **, у*; х:к9 у* и
имеющую с ней общую точку х = х0у у = уо, необходимо проварьиро-
вать в направлении линии х0, уо; х*9 у*; хк9 у* до совпадения с по¬
следней, исключая конец х = хк, на котором экстремаль должна
57
иметь нисходящий участок бесконечной крутизны у'{х)х--хк ——
чтобы получить yK\<.yl. Однако вариации такого вида недопусти¬
мы, так как для полученной в результате варьирования функции
нарушается одно из условий (3.6):
*/'(*)> а(*, у).
Поэтому допустимое варьирование линии x0j у0; х]ю у*к должно
заключаться в последовательном переходе вблизи конца х = хк на
линии с минимально допустимой производной у'{х). Таким обра¬
зом, получаются дополнительные элементы внешней экстремали
у'(х) =а{х, у). (3.51)
Соответствующие вариации представлены на рис. 15. В случае
граничных условий (3.48) имеем
8zK= —6 J* Ф (х, у) bydx. (3. 52)
*0
Предположим, что область значений допустимых функций соот¬
ветствует теперь рис. 16, где
*к\<К<Хк2- Ф>0
(л:* удовлетворяет уравнению Ф=0 при у — ук). Составив вариации
вида
8л:Л<0(х=л:*), Ъу(х)=в 0(х0<лг<х*),
получим из (3.52) 6<г/с^>0, тогда как для вариаций вида
Ъхк=0(х=х*к), Ьу(х)^0(х0^х<С.х*к)
58
имеем 6zK = 0 при Ф = 0. Это означает, что экстремаль должна
иметь на верхнем конце восходящий участок бесконечно большой
крутизны у'{х)\х=хк ->схэ, чтобы получить Хк<х*к. Однако такие
функции недопустимы, так как нарушается второе из условий (3. G)
У'(*)<Р(*. у)-
Поэтому допустимое варьирование линии хй, у0; х*, ук должно
заключаться в данном случае в последовательном переходе вблизи
конца х = х*к на линии с максимально допустимой положительной
производной у'(х)\
у'(х)= $(х, у), (3. 53)
Эти линии образуют, как и в предыдущем случае, дополнитель¬
ные элементы внешней экстремали (см. рис. 16).
Составим выражение бzK для экстремалей рассматриваемых
двух типов, обеспечивающих максимум zK при условиях (3. 47) или
(3. 48) соответственно. Пусть значение zK на интегральных кривых
уравнения (3.51) или (3.53) при z = zK выражается формулой
= У**)-
где х**, у** — параметры в точке перехода с внутренней экстрема¬
ли на внешнюю [вид функции z:tc(x**, у**) будет, конечно, различ¬
ным, в зависимости от того, какая конкретно экстремаль рассмат¬
ривается].
Варьируя эти параметры при неизменном виде функции
zk(x**> У**)» чт0 соответствует переходу от одной из интегральных
кривых уравнения (3.51) или (3.53) к другой, с новыми началь¬
ными условиями, получаем
Ьгк =-$£*_ by** -f-if* 8л:**. (3. 54)
ду** дх**
Но вариации б.г**, б у** не являются независимыми, а связаны
уравнением внутренней экстремали
Ф(х**, у**)= О,
из которого найдем
8/*=0. (3.55)
дх** 1 ду**
Из равенств (3. 54) и (3. 55) получим выражение для вариации
функционала zK на экстремалях рассмотренных двух типов:
Поскольку вариации 6х** могут быть двусторонними, необходи¬
мое условие максимума zK сводится для (3.56) к равенству 6гж=0.
Предполагая, что имеют место достаточные условия сильного
экстремума zK на экстремали с фиксированными концами, из
(3.56) получаем уравнение
F{x**) = 0, (3.58)
которое и определяет совместно с уравнениями внутренней экстре¬
мали параметры х**, у** в точке перехода.
Уравнение (3.58) играет роль естественного граничного
условия.
Глава IV
РЕШЕНИЕ ОБОБЩЕННОЙ ВЫРОЖДЕННОЙ
ВАРИАЦИОННОЙ ЗАДАЧИ
4 1. ПОСТАНОВКА ЗАДАЧИ
Рассмотрим теперь случай, когда функционал zK=z(xK) задан
дифференциальным уравнением
~ + <?(х,у,г)-^-+^(х,у,г) = 0 (4.1)
dx dx
и начальным условием
z=z0 при х = х0. (4.2)
Введем в рассмотрение класс допустимых функций у(х)\ удо¬
влетворяющих условиям, сформулированным в разд. 3. 1, включая
следующие граничные условия:
у(х0)=Уо, У(хк)=ук- (4.3)
Расширим одновременно понятие границ области значений до¬
пустимых функций, считая, что эти границы определяются в общем
случае не конечными соотношениями, как в гл. III, а некоторыми
дифференциальными уравнениями, накладывающими ограничения
на фазовые координаты системы у'{х) или z'(x). В этом смысле
утрачивается какое-либо различие между «внешними» и «внутрен¬
ними» границами области значений допустимых функций разд. 3. 1.
Потребуем, чтобы функции ф(х, у, г) и ф(х, у, z) удовлетворя¬
ли условиям непрерывности и дифференцируемости, сформулиро¬
ванным в разд. 3. 1, но по отношению ко всем функциональным
аргументам (непрерывны вместе с первыми производными по х, у, 2
и дважды дифференцируемы по у иг).
Область значений допустимых функций у(х) следует теперь, во¬
обще говоря, рассматривать как проекцию на плоскость хОу неко¬
торой трехмерной области в пространстве хуг.
Сохранив то же определение области S0 на плоскости ху, что
и в разд. 3. 1, следует принять во внимание, что кусочно-гладкая
линия С, образующая границы S0, является в данном случае по¬
движной, так как зависит от того, каким образом осуществляется
61
■выход на нее при движении вдоль некоторой линии, принадлежа¬
щей области 5.
На рис. 17 представлена схематично соответствующая картина.
Линии ABCF\ и ADEF2 в пространстве xyz соответствуют двум спо¬
собам перехода из точки А' в точку F' на плоскости ху. Дуги АВ,
AD, CFh EF2 соответствуют элементам границы области значений
допустимых функций в простран¬
стве xyz, а А'В', A'D', С F' и
E’F'—на плоскости ху.
Соответствующие элементы
определяются в каждом конкрет¬
ном случае условиями непрерыв¬
ности функций у(х) и г(х) в точке
перехода на границу, которые по¬
зволяют выбрать соответствую¬
щие постоянные интегрирования.
При ограничениях, наложен¬
ных на функции у(х), сформули¬
рованных в разд. 3. 1, уравнение
(4. 1) вместе с начальным усло¬
вием (4. 2) определяет единствен¬
ным образом функционал zK от
линий у(х).
Этот случай отличается от
рассмотренного в гл. III тем, что
теперь невозможно получить яв¬
ное выражение функционала zK.
Поменяем ролями функции у(х) и z(x) и введем начальное
условие
у(х0)=уо (4.4)
и граничные условия
z(x0)=z0, z(xK)=zKS (4.5)
Далее предположим, что функции 5 и обладают
С?(x,y,z) ty{x,y,z)
теми же свойствами, что и ср и ф, а функции z(x) подчиним со¬
ответствующим ограничениям, которые были введены для у(х)
(см. стр. 40). В этом случае можно считать, что уравнение (4. 1)
и начальное условие (4.4) определяют неявным образом функцио¬
нал ук = у(х[С) на линиях z(x) данного класса.
Сформулируем теперь следующую вариационную задачу.
В классе допустимых функций у(х) найти функцию, обеспечи¬
вающую максимум (минимум) функционала zK, заданного уравне¬
нием (4.1) и начальным условием (4.2).
Аналогичным образом формулируется сопряженная задача для
функционала ук при начальном условии (4.4) в классе допусти¬
мых функций z(x).
62
Заметим, что решения этих двух задач обладают важным свой¬
ством взаимности, о котором будет идти речь в разд. 4. 2 и 4. 3.
Как будет показано ниже, отыскание экстремума любого из
функционалов zK или ук приводит к дифференциальному уравне¬
нию Эйлера, вырождающемуся в конечное соотношение вида
ф(х, у, г) =0, чем и оправдывается термин «вырожденная» задача.
Этот случай отличается от рассмотренного в гл. III тем, что вме¬
сто единственной внутренней экстремали, определяемой уравне¬
нием Ф(х, у) = 0 (гл. III), появляется семейство внутренних экстре¬
малей, лежащих на поверхности Ф(х, у, г)=0. Какая из линий
этого семейства будет в каждом конкретном случае играть роль
внутренней экстремали, зависит от граничных условий-. Этот вопрос
подробно рассмотрен в разд. 4.3.
В настоящей главе в отличие от гл. III будет рассматриваться
исключительно задача о сильном относительном экстремуме изу¬
чаемого функционала. Вопрос об абсолютном экстремуме вообще
не ставится.
4.2. ВЫРАЖЕНИЯ ДЛЯ ПРИРАЩЕНИЯ И ПЕРВОЙ И ВТОРОЙ
ВАРИАЦИЙ НЕЯВНО ЗАДАННОГО ФУНКЦИОНАЛА z*
Используя результаты, полученные в гл. III, можем сократить
операции вычисления вариаций искомого функционала, отправ¬
ляясь непосредственно от выражения для его приращения при
переходе от одной допустимой линии у(х) к другой, близкой к ней
по ординатам и имеющей общие концы.
При таком подходе отпадают операции, связанные с переходом
от уравнения (4. 1) к соответствующему уравнению в вариациях и
решением его относительно неизвестной вариации 6-г.
Рассмотрим две произвольные допустимые линии в пространст¬
ве х, у, z, находящиеся на расстоянии, определяемом вектором
Ьг(х) с компонентами 6у(х) и 6г(х).
Совокупность векторов 6г(х) образует некоторую линейчатую
поверхность, натянутую между этими линиями. Рассмотрим проек¬
цию этой поверхности на плоскость ху.
Не нарушая общности, можно считать, что соответствующая об¬
ласть плоскости ху ограничена, как и в разд. 3.3, линиями ABOCD
и AB'E'OF'C'D (см. рис. 8).
Таким образом, мы пришли к той же задаче, что и в гл- III.
Используя уравнение (4. 1) и повторяя выкладки разд. 3.3, на¬
ходим следующую формулу для приращения функционала zK при пе¬
реходе от линии ABOCD к линии AB'E'OFfCfD\
A z =
2 j.[ ф (•*’ У'z) dxdy—'h Л ф (•*> у>z)dx dy> (4-6)
где
ду Jf—COllSt
(4. 7)
63
Обозначения 5} и S2 имеют тот же смысл, что и разд. 3.3.
Формула (4.6) является обобщением (3.20) на случай неявно
заданного функционала (с тем ограничением, что сравниваемые
линии близки по ординатам).
Выражение (4.7) лишь формально совпадает с (3. 11), так как
в данном случае значения функции Ф(,г. у, г) должны вычисляться
на поверхности, натянутой на контур, образованный двумя сравни¬
ваемыми линиями в трехмерном пространстве xyz.
Поэтому, если в формуле (3.11)
до
до
дх
f/=const, z=const
сЮ
^7
jc=const
ду
Jf=const, z=const
r/=const
то в формуле (4. 7)
до
дх
ду
= -?• (4.8)
дх t/=const ду .r=const
После соответствующих подстановок выражение (4.7) прини¬
мает вид
дер д<\> J ^ <(1 дер
дер
, дер dz
II
о
о
*1
*
у=сonst, z—const dz дх
1
у= const
_ д<\>
, дф dz
х= const ду
х= const, Z=COIlSt dz ду
jr=const
стороны, В
силу уравнения (4.1)
dz
dz
= — d
дх
dy
дф I
-сэ —1 Ф
dz dz
(4.9)
Как видно из выражения (4.9), функция Ф не зависит от про¬
изводных у'(х) или г'(х).
Выделим главную часть выражения AzK с точностью до членов
второго порядка малости относительно б у.
Введем обозначения
У(х)—У°(х)=ц(х);
z(x)—z° (*)=£(*).
где у°(х) и z°(x) соответствуют исходной линии, а у(х) и г(х) —
близкой к ней.
Значения функций г](х) и £(х) ограничены неравенствами
0<|C(*)|<|8z(*)|.
Представим Ф(х, у, z) в виде
Ф{х,у,г)=Ф\х, у, z,(y)] —
/ ° оч I д Ф
= ф (х,у >Z ) + —
ду
х= const, у=у°
ri(^) + 0(Q2),
64
где в соответствии (4.8)
дФ
ду
=(^| +
A'=COnst, у—1/° \ Оу |л'=const, 2=C0!lSt
. дФ
'~~dz
dz I \| / дФ в дФ
^=const, //=const dy |л* = const/ Ilj—y° \ dy dz
Q VV-: 'Л
.y=y°
Используя формулу (4.6), после выполнения тех же операций,
что и в разд. 3.3, получаем выражение для AzK с точностью до ма¬
лых второго порядка относительно ду:
л~, •(“ФЬуйх ; ’ ^(|^-ср *2-yy*dx=bzK+VZK. (4.10)
Л'о X о
Выражения для первой и второй вариаций функционала гк при
варьировании относительно произвольной допустимой линии у(х)
примут вид
Ьгк = ^ФЬуёх; (4.11)
*0
(4л2>
х о
Выражения (4.6) и (4.10) — (4.12) являются основными для
исследования необходимых и достаточных условий экстремума zK.
Нетрудно проверить, что, записав уравнение (4. 1) в форме
гх __ у tZ) Г (*, yt Z) = о (4.13)
dx dx
и присоединив к нему начальное условие (4. 4) и граничные усло¬
вия (4.5), можно получить следующее выражение для приращения
функционала ук:
yx=2jj ф*(x,y,z)d'xdz — '2lfj§ <&*(x,y,z)dxdz, (4.14)
by,
где
Ф *(х,у,г)==—\ф(х,у,г). (4.15)
m2
Эквивалентность выражений (4.6) и (4.14) является отраже¬
нием важного свойства взаимности рассматриваемых вариацион¬
ных задач.
5 Б. И. Рабинович 65
4.3. НЕОБХОДИМЫЕ И ДОСТАТОЧНЫЕ УСЛОВИЯ ЭКСТРЕМУМА Z*
Примем, как и в разд. 3.4, что допустимые функции удовлетво¬
ряют со знаком неравенства условиям, являющимся аналогами
(3.5) и (3.6), и, кроме того, граничные значения у0, ук\ z0> zK тако¬
вы, что концы искомой линии лежат на поверхности Ф = 0, т. е.
координаты их удовлетворяют уравнениям
В случае слабого минимума zK смысл неравенства меняется на
противоположный.
В рассматриваемом случае оказывается возможным найти ре¬
шение в классе непрерывных функций с непрерывной первой про¬
изводной.
В случае, если значения z0l у0, ук таковы, что граничные точки
искомой экстремали не лежат на поверхности Ф(х, у, z) = 0, т. е.
уравнения (4. 16) не выполняются, имеет место следующая тео¬
рема.
Необходимые условия слабого максимума zK имеют вид:
— для части экстремали, лежащей в открытой области 5,
— для части экстремали, состоящей из элементов границы С
области S0,
где ду — допустимая для данной границы вариация.
В случае минимума zK смысл неравенства меняется на противо¬
положный.
Теоремы 1 и 2 следуют из выражений для первой и второй ва¬
риаций zK [(4.11) и (4.12)].
Используя выражение (4.10), можно доказать следующую тео¬
рему.
Ф (-^о* ~о) = ^; 1
Ую '2'/с) = ^* 1’
В этом случае имеет место следующая теорема.
(4.16)
Теорема 1
Необходимые условия слабого максимума zK имеют вид
(4. 17)
Теорема 2
(4. 18)
Ф>0 при Ъу <С. 0;
(4.19)
Ф<0 при Ъу^> 0,
66
Теорема 3
Достаточные условия сильного максимума zK имеют вид:
— для части экстремали, лежащей в открытой области S,
— для части экстремали, состоящей из элементов границы С
области S0,
где б у — допустимая для данной границы вариация.
В случае минимума zK смысл неравенств меняется на противо¬
положный.
Эти теоремы полностью аналогичны рассмотренным в разд.
3.4—3.6.
Заметим, что условия (4.20) приобретают особенно компактную
форму в том случае, когда функция гр не зависит от х и у, т. е.
ф = ф(г):
Сопоставление выражений (4.6) и (4.14) позволяет сформули¬
ровать следующий принцип взаимности: максимуму zK при усло¬
виях (4.2) и (4.3) отвечает минимум ук при условиях (4.4) и (4.5)
и наоборот.
Проведем анализ влияния граничных условий на вид экстре¬
мали аналогично тому, как это было проделано в разд. 3.6.
При этом будем исходить из условий, при которых справедлива тео¬
рема 3. Примем также, что функция z = f(x, у), удовлетворяющая
уравнению Ф[х, у, f(x, у)] = 0, является монотонной функцией обоих
аргументов, причем Ф>0 выше поверхности z=f(x, у) и Ф<0 ниже
этой поверхности.
Далее примем, что границы области значений допустимых функ¬
ций носят характер ограничений, наложенных на фазовые координа¬
ты (3. 6), и что для всех допустимых функций у(х) соответствующие
им в силу уравнения (1.1) функции z(x) —монотонные. (Эти допу¬
щения приняты для всех рассматриваемых ниже задач динамики
полета.)
(4. 20)
Ф>0 при ог/<0; |
Ф при ог/>0, J
(4.21)
(4. 22)
(4. 23)
где
у ду dz ! ср dz
(4. 24)
67
Введем следующие обозначения:
y = yl —корень уравнения;
Ф(л'о, у, z0) =0;
(4.25)
У = У*.— значение, удовлетворяющее при х=хк частному решению
системы уравнений
Характер экстремального движения зависит от расположения
точек с координатами ,т0, Уо и хк> ук относительно точек с коорди¬
натами х0, у* и хк, у^ соответственно, т. е. в конечном счете при
фиксированных хк и ук—от положения начальной точки относи¬
тельно поверхности Ф = 0. В этом смысле имеется полная аналогия
со случаем, рассмотренным в гл. III, где характер экстремального
движения определялся положением начальной и конечной точек от¬
носительно линии
Принципиальное отличие, отмечавшееся выше, заключается
в том, что в данном случае имеется целое семейство линий, лежа¬
щих на поверхности Ф(х, у, г) = 0, каждая из которых может ока¬
заться внутренней экстремалью, в зависимости от начальных
условий.
При анализе вида экстремалей в каждом конкретном случае
можно просто пользоваться теоремой 3, что и делается без специ¬
альной оговорки в гл. VII и VIII.
Однако для большей наглядности результатов, касающихся
внешней экстремали, в настоящей главе будем опираться непосред¬
ственно на выражение приращения функционала zK (4. 10) при
движении по экстремали и по произвольной допустимой линии, на¬
ходящейся в г-окрестности нулевого порядка последней. При
этом, если обе сравниваемые линии не имеют общих точек с поверх¬
ностью Ф(лу у, 2)= 0, т. е. лежат на всем протяжении либо выше
ее, либо ниже (внутренняя экстремаль отсутствует), применение
формулы (4. 10) является тривиальным.
Действительно, предположим, например, что сравниваемые ли¬
нии лежат выше поверхности Ф(х, у, z) — 0(i/o>*/o\ Ук5>У*к)‘ Вве¬
дем в рассмотрение линию A'BrFr с наибольшими по абсолютной
величине допустимыми значениями производных в каждой точке,
удовлетворяющими ограничениям на фазовые координаты (3.6)
(рис. 18). Дуги А'В' и B'F' являются элементами внешней экстре¬
(4. 26)
соответствующему начальному условию
У = У о ПРИ х=х0, z=z0.
Ф(х, у) =0.
68
мали в смысле определения, данного выше. Рассмотрим наряду
с линией A'B'F' близкую к ней A'D'F*. В трехмерном пространстве
xyz этим линиям соответствуют линии типа ABFi и ADF2 (рис. 22),
на которые натянута поверхность, проектирующаяся на плос¬
кость ху в область Si (заштрихована на рис. 18). На этой поверх¬
ности вычисляются значения функции Ф в формуле (4. 10).
Из выражения (4. 10) в рассматриваемом случае получим
Дг* = Я <b(x,y,z)dxdy. (4.27)
$1
Если Ф<0 или Ф>0 во всех точках области Su то Az;. <0 или
Агк>0, что и решает вопрос о линии, на которой достигается экст¬
ремум гк того или иного смысла.
Рис. 18.
Несколько сложнее случай, когда сравниваемые линии имеют
общие точки с поверхностью Ф=^0. Из теоремы 3 следует, что на
участке между такими точками экстремаль представляет собой
линию, лежащую на поверхности Ф = 0, а вне этого участка — ли¬
нию, включающую элементы границ области значений допустимых
функций.
Непосредственный анализ приращения функционала zK при
варьировании от этих границ (т. е. при замене внешней экстремали
близкой к ней допустимой линией) сводится к исследованию кон¬
турных интегралов вдоль линии, включающей отрезки с максималь¬
но допустимыми по абсолютной величине значениями производной
в каждой точке, и близкой к ней линии типа линий A'B'C'F'
и A'D'E'F' на рис. 19. Эти линии представляют собой проекции на
плоскость ху линий типа ABCFX и ADEF2 (рис. 23—26); на послед¬
ние натянута поверхность, на которой следует вычислять значения
функции Ф при использовании формулы (4.10).
Пусть часть этой поверхности, ограниченная контуром ABD, ле¬
жит по одну сторону поверхности Ф = 0; часть поверхности, ограни¬
ченная контуром CFxF2E, расположена по другую сторону поверх¬
69
ности Ф = 0; наконец, часть, ограниченная контуром BCED, совпа¬
дает с поверхностью Ф = 0.
Формула (4. 10) в данном случае приводится к виду
Az* = jj ф(*>y,z)dxdy — Jj ®{x,y,z)dxdy, (4.28)
где Sx и S-2— области, заштрихованные на рис. 19 (противопо¬
ложные направления штриховки соответствуют тому, что Ф^О
в области Si и Ф^О в области Зг)-
Из формулы (4.28) получим ДгЛ<0, что и решает вопрос об
экстремуме zK того или иного смысла на линии A'B'C'F'.
Дальнейшее улучшение ли-
Максимум zK достигается в обоих случаях на линиях ABF{, со¬
стоящих из элементов внешней экстремали, проектирующейся на
поверхность ху в линию A'B'F'.
II. Экстремаль включает внутреннюю и внешнюю экстремали.
Экстремум достигается во всех случаях на линии ABCFU про¬
ектирующейся в линию A'B'C'F' плоскости ху.
Отрезки АВ и CF{ и соответственно А'В' и CF' отвечают внеш-
г
ний типа A'B'F' (см. рис. 18) и
A'B'C'F' (рис. 19) невозможно,
поскольку попытка такого рода
приводит к нарушению условий
типа (3. 6).
Используя результаты, получ
ченные выше, можно рассмотреть
все основные случаи взаимного
расположения поверхности Ф = 0
и экстремали и провести сравне¬
ние ее с произвольной допусти¬
мой линией, находящейся в е-ок-
рестности нулевого порядка экст¬
ремали.
Г'
Рис. 20.
I. Целиком отсутствует либо
внешняя экстремаль, либо внут¬
ренняя.
!• Уо = у1, Ук~У*к (Рис- 20)-
Экстремум достигается на
внутренней экстремали, целиком
лежащей на поверхности Ф = 0.
2- Уо<^Уо> Ук<Су1 (рис/ 21).
3- г/о>г/ц, Ук^Ук (рис. 22).
ней экстремали ВС и В'С'—внутренней.
!• Уо<у1> Ук<у1 (рис. 23).
2- Уо~> Уо’ Ук>У1 (рис. 24).
70
3. Уо>у1, Ук<у1 (рис. 25).
4- Уо<У*о, УК>У1 (Рис. 26).
Для наглядности на рис. 21—22 представлены близкие к экстре¬
мали линии ADF2 и A'D'P', получающиеся в результате варьирова¬
ния от экстремали, и области, соответствующие в формуле
(4.27), а на рис. 23—26 —ADEF2 и A'D'E'F' и области, соответст¬
вующие Si и S2 в формуле (4.28). Штриховка соответствующих
областей плоскости ху на рис. 21—26 нанесена с учетом знака
функции Ф (стр. 52).
До сих пор предполагалось, что любая прямая, параллельная
оси Оу или Oz} пересекает поверхность не более чем в одной точке
и, кроме того, любая линия, лежащая на поверхности Ф = 0, являю¬
щаяся частью экстремали, удовлетворяет в усиленной форме (со
знаками неравенства) условиям (3.6). В случае, если в некоторой
точке этой линии любое из условий (3.6) нарушается, соответст¬
вующая линия становится недопустимой (см. разд. 3.7).
Опираясь на результаты, полученные выше, можно доказать,
что сильный относительный экстремум гк достигается на линии,
включающей элементы внешней экстремали по схеме, соответ¬
ствующей G\DX и C2D2 на рис. 11.
Вопрос о характере промежуточных экстремальных режимов
типа CD на рис. 11 и 12 является в данном случае более тонким,
и требуется специальное доказательство того, что абсолютный
экстремум Z;K достигается на одной из линий типа CD на рис. 11
71
и 12. В дальнейшем ограничимся рассмотрением относительного
экстремума в классе линий, включающих не более двух отрезков
внешней экстремали в области нарушения условий (3.6).
В заключение рассмотрим вопрос об экстремуме функционала
zK на линиях со свободным верхним концом.
72
Решая непосредственно уравнение в вариациях, соответствую¬
щее (4. 1), и выполняя выкладки, аналогичные проделанным
в разд. 3.8, можно показать, что при варьировании от внутренней
экстремали со свободным концом при х = хк первая вариация
функционала гк определяется выражением
lzK = - (ф \х= хЬхк + с? \х=хЬУк) +Ф (х, у, z) bydx, (4. 29)
i'o
которое по форме совпадает с (3.49).
Таким образом, остаются в силе все результаты, полученные
в разд. 3.8.
4.4. ПРИМЕНЕНИЕ МЕТОДА ПОСЛЕДОВАТЕЛЬНЫХ ПРИБЛИЖЕНИЙ
Рассмотрим вариационную задачу, сформулированную в гл. II,
особенность которой заключается в том, что при приравнивании
нулю некоторого малого параметра е эта задача переходит в вы¬
рожденную.
Уравнениям (2.40) можно придать следующую форму:
z' Т <Р (•*> У> z) У' +1 . У> z) + Ч. (x,y,z,y', у") = 0, (4. 30)
, dz f dif
где z' = , и =—— ;
dx * dx
s —малый параметр;
X — функция, обладающая по отношению к своим аргумен¬
там теми же свойствами, что и функции ср и ф в рассмат¬
риваемой области значений этих аргументов.
Сохраним стандартную форму задания начальных и граничных
условий:
z = z0 при х~х§, (4-. 31)
У Уо при х \ ^ 22^)
У = Ук ПРИ * = ■**■ J
Как обычно, будем искать экстремум функционала zK в том же
классе допустимых функций у(х), который рассматривался выше.
Естественно ожидать, что в ряде практически актуальных слу¬
чаев влияние последнего слагаемого в уравнении (4.30), содержа¬
щего малый параметр, носит характер малых поправок к решению,
соответствующему е==0. Это дает основание для применения к рас¬
сматриваемой задаче аппарата теории возмущений, который позво¬
ляет получить искомые решения в форме рядов по степеням малого
параметра в вида
у С*)=у0 (■*) + £ Ух (х) + ^уч (х) +...; \
Эти ряды можно формально построить методом последователь¬
ных приближений.
Рассмотрим применение этого метода на примере отыскания
внутренней экстремали, считая, что при каждом шаге граничные
условия подбираются так, чтобы значения у0 и ук удовлетворяли
уравнению последней.
Для отыскания нулевого приближения положим е = 0. В резуль¬
тате получим следующую систему уравнений, определяющую внут¬
реннюю экстремаль нулевого приближения:
?у'-Н=0;
Ф°(д:, y,z) = u
^ д<? ^[^—0
dz ‘ dz ду дх
(4.34)
Обозначим через у°(х), z°(x) частное решение этой системы,
удовлетворяющее начальным условиям
где
у = Уо, z = z0 при х = х0, (4.35)
Ф°(*<ъ У о» ^о) =0.
Вычислив производные dy°!dx, d2y°Jdx2 и подставив их в (4. 30),
получим уравнение, аналогичное по структуре первому из уравне¬
ний (4.34), в котором роль функции ф(ху у, z) играет функция
ф(х, у, г) +г%(х, у, z} у0/, if") =
= ф(х, у, 2)+еф(я, у, z).
(4.36)
После проведения стандартных операций получим следующую
систему уравнений для определения внутренней экстремали перво¬
го приближения:
где
r,+w/+'t'T-j'=0; 1
Ф'!> (х, у, z) = Ф° {х, у, z) 4 еФ, (х, у, z), I
dz дх ду
(4. 37)
(4.38)
Функции у(1){х) и 2:0) (х), соответствующие первому приближе¬
нию и являющиеся частными решениями системы (4.37) при на¬
чальных условиях (4.35), имеют вид
уЫ{х) =y°{x)Jr&yl(x);
2(0 (х) =Z°(x) + 821 (я).
Начальные значения, входящие в (4.35), должны теперь удо¬
влетворять уравнению
Ф ’ ф(О(х0, Уо, 2о)=0.
74
Продолжая описанный процесс, получим формальное представ¬
ление решения вариационной задачи в виде (4.33).
Вопрос о сходимости рядов (4.33) требует специального анали¬
за в каждом конкретном случае. В гл. VIII приводится соответст¬
вующий численный пример, иллюстрирующий метод, описанный
выше.
Этими замечаниями заканчивается рассмотрение методической
стороны анализа того класса экстремальных движений, который
встречается в задачах динамики полета гл. V—VIII.
В последующих главах будем, как правило, использовать вы¬
ражения первой и второй вариаций соответствующих функциона¬
лов. Получаемые на этой основе условия экстремума, записанные
в усиленной форме, отвечают, как видно из глав III и IV, сильному
относительному экстремуму, что в дальнейшем не будет специально
оговариваться. В некоторых частных случаях экстремум оказы¬
вается абсолютным, что можно доказать с помощью выражения для
конечного приращения функционала (гл. III). В общем случае,
однако, вопрос об абсолютном экстремуме остается открытым; его
рассмотрение выходит за рамки настоящей книги.
Глава V
НАИВЫГОДНЕЙШИЕ ПРОГРАММЫ УПРАВЛЕНИЯ
ПРИ ЗАДАННОМ РЕЖИМЕ РАБОТЫ ДВИГАТЕЛЯ
В СЛУЧАЕ ДВИЖЕНИЯ ПО ПОЛОГИМ ТРАЕКТОРИЯМ
И МАЛОГО ИЗМЕНЕНИЯ МАССЫ ЛЕТАТЕЛЬНОГО
АППАРАТА
В настоящей главе рассматриваются простейшие задачи о наи¬
выгоднейших режимах и профилях полета крылатых летательных
аппаратов в случаях, когда траектории могут считаться достаточно
пологими, а изменение массы летательного аппарата незначи¬
тельно.
Экстремальные задачи такого класса, связанные с разгоном са¬
молета с реактивными двигателями, рассматривались И. В. Осто-
славским и А. А. Лебедевым [21], [22]. Постановка и решение неко¬
торых экстремальных задач для ракетоплана были даны В. П. Вет-
чинкиным [5].
Вариационные методы начали применяться для решения экстре¬
мальных задач, связанных с маневрированием самолета постоянной
массы в вертикальной плоскости, в работах Миеле [71], [72], Чика¬
ла и Миеле [48], Рутковского [91], Бэрбома [42] и других авторов.
Решения некоторых вариационных задач, связанных с горизон¬
тальным полетом и набором высоты, также рассмотрены в книге
И. В. Остославского и И. В. Стражевой [23].
Оптимальным маневрам самолета постоянной массы в горизон¬
тальной плоскости посвящено большое количество работ. Основ¬
ные результаты, касающиеся наивыгоднейшего виража, приведены,
например, в книгах Б. Т. Горощенко [6], И. В. Остославского и
И. В. Стражевой [23]; этому вопросу посвящены также работы
Сантанжело [92], [93].
Некоторые экстремальные задачи, связанные с маневрирова¬
нием в горизонтальной плоскости, рассмотрены в приближенной
постановке в работах Бэрбома [41] и Росса [90].
В настоящей главе для иллюстрации метода решения простей¬
ших вырожденных задач рассмотрены под единым углом зрения
несколько наиболее типичных задач упомянутого выше класса.
В частности, дано более общее решение задачи о наивыгоднейшем
76
вираже, чем в работах [6] и [92]. Приведено решение вариационных
задач об оптимальном планировании крылатых летательных аппа¬
ратов.
Следует заметить, что результаты, полученные для снижающе¬
гося орбитального аппарата, дают только некоторую оценку воз¬
можной предельной дальности и продолжительности планирования,
поскольку решающими при выборе оптимальной траектории сни¬
жения являются ограничения, связанные с кинетическим нагревом,
перегрузкой и управляемостью летательного аппарата, которые не
учитываются в разд. 5.4.
5.1. ПОСТАНОВКА ЗАДАЧИ О НАИВЫГОДНЕЙШЕМ РАЗГОНЕ
И ПЛАНИРОВАНИИ
Рассмотрим задачи о наивыгоднейшем разгоне и планировании,
сформулированные в разд. 2.3.
Соответствующие функционалы можно записать в виде
]К v [У, У'(V),V]VdV;
(5.1)
(5.2)
где
R(y, V) = P-Q(y, V);
Q(y,V) = [cx0(М, у) + ЦМ, у)^/\Ш- + к1^(у);
С.
X
(5.3)
■ ■ о
Iх с р Iх с р 2тср
мм, у)--
Функции y(V) удовлетворяют граничным условиям
У = Уо ПРИ
У=У,< ПРИ(5.4)
77
Функцию V(t) будем считать монотонной, а именно: монотонно
возрастающей при разгоне и монотонно убывающей при планиро¬
вании. Это дает нам право считать в выражении (5.1) и (5.2)
скорость V независимой переменной, изменяющейся в пределах от
V0 до VK, где V0<VK при разгоне и Vo>VK при планировании. Па¬
раметр ук связан с уо только условием возможности достижения
соответствующей высоты в каждом конкретном случае.
Таким образом, термин «планирование» здесь имеет достаточно
условный характер.
Выясним ограничения, налагаемые на функцию y{V) физиче¬
ским существом рассматриваемой задачи.
Условие пологости допустимых траекторий сводится к требова¬
нию малости величины sin 0, определяемой уравнением
• п 1 (ty dV y'R
smQ = ^ =—^ e (o. o)
V dV dt V + gy'
Обозначим минимально допустимое значение угла 0 через 0 i<0,
а максимально допустимое — через 0 2>0. Допустимые значения
функций y'(V) подчинены неравенствам
sin 02 sin 62, (5. 6)
V + gy'
соответствующим (3. 6).
Этими неравенствами определяются внутренние границы об¬
ласти значений допустимых функций y(V). Что касается внешних
границ, соответствующих (3.5), то они определяются интегральны¬
ми кривыми уравнений
7= ZsHQl ■ (5.7)
R — g Sin 0!
, V sin 0o / - n ч
У =■ъ ПГ (,э-7а)
R — ^sin02
при начальных условиях у = уо при V=V0 (5.7) и у = ук при V=V-K
(5.7а). Эти кривые образуют границы области значений допусти¬
мых функций S0 на плоскости у, V. Они представлены схематически
на рис. 27, а (разгон) и рис. 27,-5 (планирование).
Кроме того, существует дополнительное ограничение по углу
атаки:
<<Xi (V,y), (0.8)
Р — А1Д1+/гс*Д\/2
где аДК, у) —максимально допустимый угол атаки.
В дальнейшем будем полагать, что условия (5.8) и условия
(3.5) удовлетворяются автоматически, так что допустимыми
78
являются все линии области 50, соединяющие точки (у0, V) и
(Ую для которых производная y'(V) удовлетворяет усло¬
виям (5.6).
Сформулируем следующую вариационную задачу.
В классе допустимых функций y(V) найти функцию, обеспечи¬
вающую:
а) минимум хк при разгоне (разгон до заданной скорости на
минимальном пути) и максимум хк при планировании;
б) минимум tK при разгоне (разгон до заданной скорости в ми¬
нимальное время) и максимум tK при планировании;
в) минимум хк при заданном tK при разгоне (разгон в заданное
время до заданной скорости на минимальном пути) и максимум хк
при заданном tK при планировании (максимальная дальность пла¬
нирования при заданном времени).
5.2. УСЛОВИЯ ЭКСТРЕМУМА хк и tK
По своей форме задачи, сформулированные в разд. 5.1, отно¬
сятся к классу простейших вариационных задач, поскольку имеет¬
ся явное выражение функционала. Поэтому экстремали их являют¬
ся интегральными кривыми соответствующих уравнений Эйлера
(разд. 1.2).
Как видно из формул (5.3), подынтегральные выражения
в (5. 1) и (5.2) зависят линейно от производной варьируемой функ¬
ции y'(V). Это означает, что соответствующие вариационные за¬
дачи, как и более частная задача разд. 2.3, являются вырожден¬
ными.
Таким образом, мы пришли к простейшей вариационной зада¬
че, для решения которой можно воспользоваться математическим
аппаратом, развитым в гл. III.
79
Варьируя функции y(V) и y'{V) с учетом граничных условий
(5.4) и выполняя выкладки, описанные в гл. III, получаем
Vo
УФг (V, у) bydV
^Ф2(1S,y)bydV,
где
Ф2(^,У) =
dR
g dR , gR
dy
V dV
V2
Замечая, что
dR dR
dV
dR
dV
dR
dR dcy
с =const 1 dcy dV
dy dy
и учитывая (5.3), находим
d g d
I dR dcy
C =CO!lSt dCy dy
Ф
,(v> y)=r (~t~v lc>LV2
Cy=C011St
/ dc у о- dc у
+ ‘2cvk\V*{-^ —
y 1 ду V dV
“Г ^iAi
d
dy
~v [-p+(^o+^)£aP2 +
dcv
j- 2cyk\V2 ( —L —].
C =const y V ду V dV
A •
W2-
(5.9)
(5.10)
(5.11)
(5. 12)
В дальнейшем будем предполагать, что аэродинамическая
подъемная сила значительно превышает составляющую тяги дви¬
гателя в проекции на нормаль к траектории, т. е.
k/\V2 > P — k^u
(5.13)
и в знаменателе выражения для су (5. 12) можно пренебречь вто¬
рым слагаемым по сравнению с первым.
80
В этом случае выражения (5. 12) приводятся к виду
где
Ф t{V,y)=At(V, y) + cfCi (V, y)(i = 1, 2),
Аг = -~kbcx0V2 U-f 2 + — +
1 *0 1/2 V г с .-о с»М/ 1
С, = ktiV2
[V “ \ Сд-о
I М дсхо da 1 dk 1 _д_т dki
схоa дМ dy А tfy J 1 dy
JL / 2 — — М
i/2 I х <эм
)Х \ _М_ _дХ_ 1 дГА
М / 1а дМ dy A dy
А2 —
-шх0у2 Шг+Л. **)+
1у2 \ сд0 дМ 1
_М_ дсм da L_£A]^.^1^l_|_(p_^lAl)X_
сх§а дМ dy A dy J dy V2
Со = ШУ*
1/2
1_ M_ dl \ M dl da 1_ _dA_1 .
X dM) \a dh\ dy A dy J
Л _ S
Ml/2
(5.14)
(5. 15)
)
Внутренние экстремали рассматриваемых задач определяются
уравнениями
®i(K,y) = 0; Ф2(К,^/) = 0;|
®i(Vr,^) + X®2(^i/) = 0> j
(5.16)
где х — неопределенный множитель Лагранжа.
Первое уравнение соответствует экстремуму хк, второе — экстре¬
муму tK, третье — экстремуму хк<при заданном tKt.
В первых двух задачах эти внутренние экстремали являются
единственными, а в третьей существует семейство внутренних
экстремалей с параметром х> каждому из значений которого соот¬
ветствует определенное время tK.
В дальнейшем ограничимся рассмотрением первых двух задач.
Как видно из выражений (5.15), экстремум дальности полета
при сделанных допущениях определяется с точностью до члена
т~ dА| о о 1 о
— одной и той же функциональной зависимостью высоты от
dy
скорости полета как для разгона (РФО), так и для планирования
(Р= 0).
Что касается экстремума продолжительности, то соответствую¬
щие функциональные зависимости оказываются существенно раз¬
личающимися за счет члена, зависящего от значения Р в выраже¬
нии для А2.
Б. И. Рабинович
81
В частном случае изотермической атмосферы, когда А = А]=е~^у,
где Y = const, выражения (5. 15) существенно упрощаются:
Ai^—gkbCjaU V—') —Л,уД;
v g >
C1 = g-ftAXf-v-2+^);
g >
Л2=: gh\rx,{n 1 +-—) + -f- ( Y +^ ) д; 1
С2 = £*дх(-у-3 + ^;
II
— 9
Л1 дс
хО
сх о дЖ
.4,1
‘ X дЖ
(о. 17)
Если положить ki = О, С2 = 0, то уравнение внутренней экстрема¬
ли Л2 = Ос точностью до обозначений совпадает с полученным
Чикала и Миеле [48].
Обычные элементарные решения задачи о планировании с мак¬
симальной дальностью и продолжительностью получаются из урав¬
нений
Последним соответствуют следующие функции Ф°.:
Ф;(1/y)=jL^;
v ^ VdV
ФЩ/, y) = JLil + JL£,
4 ’ ^' V dV V2
(5. 19)
где
R=-Q=-(cJ[0+\cl)kbV*
Эти функции отличаются от (5. 10) отсутствием слагаемых, ха¬
рактеризующих скорость изменения высоты (процесс изменения
высоты как бы заменяется рядом последовательных состояний по¬
лета на постоянной высоте).
Для исследования характера экстремума необходимо распола¬
гать выражениями вторых вариаций 62хк и бЧк.
Принимая во внимание формулы (5.9) и (5. 16), получим в со¬
ответствии с определением второй вариации (гл. III):
(5. 20)
v
где
(5.21)
Поскольку мы ищем экстремум в классе траекторий, характе¬
ризующихся монотонным возрастанием скорости при разгоне и мо¬
нотонным убыванием при планировании, из выражения (5.21)
найдем следующие необходимые условия максимума хк и tK при
планировании (максимальная дальность или продолжительность)
и минимума хк и tK при разгоне (минимальный путь или минималь¬
ное время разгона):
Как показано в гл. III, искомые экстремали в рассматриваемом
случае являются кусочно-гладкими линиями, причем необходимые
условия в точках сопряжения (условия Вейерштрасса — Эрдмана)
выполняются автоматически в силу непрерывности всех функций
переменной V.
Таким образом, исследование характера экстремального движе¬
ния сводится к анализу закона движения по внутренней экстрема¬
ли и возможных вариантов расположения внутренней экстремали
на плоскости у, V относительно области 5.
Рассмотрим с качественной точки зрения изменение высоты при
движении по внутренней экстремали. Для этого вычислим полную
производную по V функции Фj(V, у) при тождественном выпол¬
нении уравнения (5.16), соответствующего тому же значению
индекса «/»:
Q,>0, &2>0.
(5.22)
5.3. АНАЛИЗ ЭКСТРЕМАЛЬНОГО ДВИЖЕНИЯ
Рассмотрим для простоты случай изотермической атмосферы,
для которого справедливы формулы (5. 17).
Используя (5.14), (5.16) и (5.17), получаем
О Л,гп — О Г*
'У''
(5.24)
Численный анализ показывает, что вне трансзвуковой зоны, где
производные дсх0/д!Л и дХ/дМ малы, имеют место неравенства
Поэтому из выражений (5. 24) следует, что в соответствующем
диапазоне скоростей необходимые условия экстремума хк и tK
(5.22) выполняются в усиленной форме, т. е. со знаком >. Можно
показать, что при тех же условиях
Следовательно, в силу (5. 23) производная dyldV вне трансзву¬
ковой зоны всегда положительна, т. е. вдоль внутренней экстремали
высота должна монотонно возрастать при разгоне и монотонно
убывать при планировании. Трансзвуковая зона требует специаль¬
ного исследования, которое будет подробно проведено в гл. VIII.
Это исследование показывает, в частности, что неравенства (5.26)
в некоторых случаях могут измениться на неравенства противо¬
положного смысла, так что внутренняя экстремаль будет иметь
нисходящий участок при разгоне и восходящий при планировании.
Рассмотрим более подробно случай планирования, поскольку
анализу разгона при более общих предпосылках посвящена
Полагая Д = е~^, ^=0, Р= 0, получим из выражений (5.14),
(5. 16) и (5. 17) следующие уравнения внутренних экстремалей:
Ci>0, С2> 0.
(5. 25)
(5. 26)
гл. VIII.
(5. 27)
84
Второе уравнение получается из первого в результате замены п
и v значениями п+ 1 и v+1 соответственно. Эти уравнения можно
привести к виду
где VH — наивыгоднейшая скорость планирования, отвечающая
При малых дозвуковых и больших сверхзвуковых скоростях,
когда cxo^const, A,~const, 2, v~—4, первая из формул (5.28)
дает
где До и VHo соответствуют начальной точке внутренней экстре¬
мали.
Формула (5. 30) означает, что индикаторная скорость постоянна
и совпадает с наивыгоднейшей.
Таким образом, в .этом случае точное решение задачи о мак¬
симально й дальности планирования "совпадает с известным прибли-
женным решением, не учитывающим скорость изменения высоты.
Однако для режима планирования с максимальной продолжитель¬
ностью такого совпадения не получается даже в рассматриваемом
ТГрбстейшем случае.
—-^йстШтелъш, из второй формулы (5.28) при ^ = const, сх0 =
= const получим
(о. 28)
максимальному качеству [22]:
(о. 29)
V V к, —Vн0 ]/Д0,
(5. 30)
4 Г -
(5.31)
где Vq9—экономическая скорость:
Следовательно, истинная «экономическая» скорость планирова¬
ния должна быть меньше, чем определенная приближенным мето¬
дом, причем разница тем больше, чем больше высота планирования
(так как абсолютная величина скорости при этом возрастает и
истинная «экономическая» скорость стремится к наивыгоднейшей).
4
Приближенные значения поправочного множителя |/ — для
неизотермической атмосферы с изменением плотности по закону
^ехр
Y dy
аппроксимирующему соответствующую зависимость для стандарт¬
ной атмосферы, при двух значениях скорости планирования, даны
в табл. 5. 1.
Таблица 5.1
У
м
Й
=200 м/сек
Т
,1/=250 м/сек
104. у 1\м
14 ООО
0,925
0,900
1,570
12 000
0,925
0,900
1,570
10 000
0,937
0,915
1,245
8 000
0,940
0,917
1,165
Переходим к исследованию возможных вариантов экстремалей
задачи в зависимости от граничных значений Уо, Уо и Vк, ук. Здесь
возможны все случаи, рассмотренные в гл. III, в зависимости от со¬
отношения между уо, Уои Ую У*с> гДе Уо и У*к — К0РНИ уравнений
Ф/К„, у)=0; )
Фj(VK,y) = 0. \
(5. 33)
(/=1 при ХЛ=А-Лтах; / = 2 при tK = tK max).
В силу монотонности функций Фj(y) каждый из этих корней
является единственным. Ограничимся рассмотрением основных
случаев экстремального движения при планировании.
1- Уо < г/о- Ук<У1 (Рис- 28> а)-
у0у*-набор высоты с максимально допустимым углом 0 = 62;
У*У** — движение по внутренней экстремали;
'у**ук —снижение с максимально допустимым углом 6 = 0!.
86
2. г/о > У о’ УК>У*Л Рис. 28, б).
у0у* — снижение с максимально допустимым углом 0 = 6.-,;
у*у** — движение на внутренней экстремали;
у**ук— набор высоты с максимально допустимым углом 0 = 0.2
3. Уо> У*о’ Ук<у1 (рис- 28>в)•
у0у*-- снижение с максимально допустимым углом 0 = 0ь
у*у** — движение по внутренней экстремали;
у**ук — снижение с максимально допустимым углом 0 = 01.
4. у0<у'0, yK>yl (рис. 28, г).
у0у* — набор высоты с максимально допустимым углом 0 = 02;
у*у** — движение по внутренней экстремали;
У** У к — набор высоты с максимально допустимым углом 0 = 0?.
Кинематические параметры К*, у* и К**, г/** в точках сопряже¬
ния определяются из совместного решения уравнения движения по
внутренней экстремали и соответствующему отрезку внешней
экстремали.
В частном случае может оказаться, что y0 = yl или ук~у*9
При этом исчезает соответствующий отрезок внешней экстрема¬
ли и движение либо сразу начинается по внутренней экстремали
(Уо = Уъ), либо заканчивается непосредственно на внутренней
87
экстремали (ук = у*к). Наконец, возможны случаи, когда полностью
отсутствует внутренняя экстремаль, а внешнюю образует либо
верхняя, либо нижняя граница области 50.
т Уо€у*0, У,с<у1 (рис. 29, а).
УоУ* — набор высоты с максимально допустимым углом 6 = 62;
у*ук — снижение с максимально допустимым углом 6 = 0!.
у0у* — снижение с максимально допустимым углом 0 = 0ь
у*у,с — набор высоты с максимально допустимым углом 0 = 02.
Закон движения по внутренней экстремали определяется урав-
В качестве примера рассмотрим выражение для максимальной
дальности планирования при cx0 = const, ^ = const:
2- Уо » У о’ У* » У'к (Рис- 29 > бУ>
У'
Рис. 29.
нениями
v
о
v
О'
(5.34)
—* *
Д = £ - г/о^г/о. Ук~Ук'
Из равенств (5.30) и (5.29) получим
(5. 35)
где /Стах —■ максимальное аэродинамическое качество.
88
шах
Подстановка выражений (5.3) в уравнения (5.34) при V=VK>
ki = 0 дает
х„ = -
2g -/ \cjcq }
(VdV + gdy) =
2g V tejco
g (Уо — У к)
v\-vl
(5.36)
или после замены V2 и ■—) соответствующими выражениями
2 у о
из (5.35)
xK=/Cmlx(y0-yK)-t-^- (е™° - е™*). (5. 37)
4kCjcO
В формулах (5.36) и (5.37) первое слагаемое — это дальность
планирования на наивыгоднейшем угле атаки в однородной атмо¬
сфере, определяемая изменением потенциальной энергии самолета
в интервале высот у0, ук, а второе — динамическая добавка, свя¬
занная с изменением кинетической энергии при падении скорости
от Vo до VK.
Выражение для дальности планирования в форме (5. 36) было
получено на основе энергетических соображений проф. В. С. Пыш-
новым [27].
В заключение следует заметить, что полученные выводы,
относящиеся к планированию, непосредственно переносятся
на случай разгона, если поменять ролями 1/0 и V к.
VI и V*K и> наконец, yl и у*, т. е. изменить направление движе¬
ния изображающей точки на плоскости у, V на противоположное.
5.4. НАИВЫГОДНЕЙШЕЕ ПЛАНИРОВАНИЕ С БОЛЬШИМИ
СВЕРХЗВУКОВЫМИ СКОРОСТЯМИ
Для летательного аппарата типа сателлоида, имеющего началь¬
ную скорость планирования, меньшую орбитальной, можно сфор¬
мулировать вариационные задачи, аналогичные поставленным
в разд. 5. 1. Отличие будет только в том, что необходимо принять
во внимание сферичность Земли, так как движение будет происхо¬
дить по геоцентрической спирали.
Воспользуемся уравнениями движения (2.27).
89
После преобразований, аналогичных проделанным выше, вы¬
ражения для дальности и продолжительности планирования при¬
мут следующий вид:
Уравнения внутренних экстремалей в данном случае имеют вид
Полагая атмосферу изотермической, а коэффициенты сх0 и X
при больших сверхзвуковых скоростях постоянными, уравнения
(5.40) можно записать в следующей форме:
Можно показать, как и в разд. 5.3, что функция y(V) является
монотонной, т. е. с уменьшением скорости высота, соответствующая
экстремальному движению, убывает.
Исследование граничных условий на концах внутренней экстре¬
мали дает те же в принципе результаты, что и в разд. 5.3.
Полагая 0=0, sina~0, cos a— 1, &i~0, получим из уравнений
(2. 13) следующие уравнения правильного неустановившегося ви¬
(5.38)
где
НУ)2; д=Ш^0+^);А=-у;
Vo 4- у/ 2т
(5.41)
5.5. ЗАДАЧА О НАИВЫГОДНЕЙШЕМ ВИРАЖЕ
90
ража, выполняемого на постоянной высоте с нулевым углом сколь¬
жения:
Пренебрежем, как и выше, составляющей силы тяги в проекции
на нормаль к траектории по сравнению с подъемной силой и будем
считать, что скорость при выполнении виража либо монотонно воз¬
растает, либо монотонно убывает. В этом случае уравнения (5.42)
можно привести к виду
и примем, что в начальный момент / = 0, ф = 0.
Выполняя интегрирование в пределах от 0 до tK и от 0 до ф*
соответственно в левой части первых двух уравнении (5.43) и от
Vo и VK в правой части, получим
Как видно, tK и фЛ являются некоторыми функционалами от ли¬
нии y(V).
Сформулируем теперь вариационную задачу о вираже, выпол¬
няемом в минимальное время, следующим образом.
— = Р-схк№;
dt х
V =(PaJrcykkV2)sin у;
(Ра -(- cykд!/2) cos у — g = 0.
(5.42)
dt
dV R(V, y) ’
dV VR(V,y)'
dy tg у
(5.43)
kbV* cos y
сх=сх0{Щ + ЦЩс1-
~R-.= P-cxIbV2.
Введем граничные условия
Y = Y0 ПРИ
Y = Y* при
(5. 44)
(5.45)
(5.46)
91
В классе допустимых функций y(V), удовлетворяющих гранич¬
ным условиям (5.44) и дополнительному условию (5.46), найти
функцию, обеспечивающую минимум функционала (5.45).
Таким образом, мы пришли к изопериметрической задаче, кото¬
рая является вырожденной, поскольку подынтегральная функция
не зависит от производной у'(У).
Рассмотрим вопрос о физических ограничениях, определяющих
в рассматриваемой задаче допустимые функции.
При выполнении виража с переменной скоростью имеется два
вида ограничений.
1. По коэффициенту подъемной силы.
где тах — максимально возможное значение су при данном
_ числе М;
су — максимально допустимое безопасное значение су (с
учетом запаса угла атаки до критического значения);
0^— значение су, соответствующее горизонтальному поле¬
ту (вираж бесконечного радиуса).
2. По нормальной перегрузке.
где Яшах — максимально допустимое значение нормальной пере-
В дальнейшем для определенности будем полагать, что второе
ограничение является более жестким. Тогда область S0 допусти¬
мых линий у (У) на плоскости У, у превращается в прямоугольник,
ограниченный прямыми У=Уо, V=VK, у = 0, у = утах. Допустимыми
линиями являются линии, заключенные в замкнутой области S0>
проходящие через точки уо, Vo и уЛ, У:/с и имеющие в области S0 не
более одной точки пересечения с любой прямой У=const.
На рис. 30 представлены соответствующие области для виража,
выполняемого с разгоном (рис. 30, а) и с торможением (рис. 30,6).
Какие-либо внутренние границы в форме ограничений, налагаемых
на производную у'(У) в области 50 при рассматриваемой упрощен¬
ной постановке задачи, отсутствуют (если не вводить ограничений
по управляемости относительно продольной оси). Однако имеются
дополнительные ограничения, определяющие допустимые пределы
изменения скорости: по смыслу рассматриваемой задачи всегда
должно выполняться неравенство
(5.47)
о < Y < Ymax = arc cos < -“Г .
И|11 9Y 2,
(5.48)
грузки.
Утт У]
max?
(5.49)
92
где I'min — минимально допустимая скорость горизонтального по¬
лета на данной высоте:
Цп.п =
(5. 50)
Vщах—максимально возможная скорость на той же высоте:
Ута*-—1/ =—. (5.51)
V ЪЬсх
Для решения вариационной задачи, сформулированной выше,
воспользуемся методом неопределенных множителей Лагранжа
Рис. 30.
(гл. I). В соответствии с этим методом задача на условный экстре¬
мум интеграла (5.45) заменяется задачей на безусловный экстре¬
мум интеграла
1 i 47-
Г 1 + —tgy
тк=\ —dv,
к J R{V,y)
Vo
где у — неопределенный множитель Лагранжа, определяемый для
каждого конкретного значения ср^ из условия (5.46).
Выражение для первой вариации бtK имеет следующий вид:
или после подстановки R и су (5. 3)
<W,y) = 2MgT(l+JftgT) J- +
+ ^-f^o + = — -1Тд1/21 —. (5.53)
' \ ^ 1 £2A2K4COs2 у) \ V
Отсюда после выполнения некоторых элементарных преобразо¬
ваний найдем
Ф(К,У) = -^-
Р — c^kbY2
Xg2
kAV2
(1 —tg2y)
2X^ tg y
MK2
(5. 54)
Необходимое условие минимума 6tK^0 приводит к следующему
уравнению внутренней экстремали:
4^0-tg2 у) + 2Х|дуУ=0- О-55)
Ml/2 ykkV
P — cx0kAV2
Рассмотрим теперь выражения для второй вариации:
v„
82Г JLC
к к 2 ) ду
Ф
Vo
R2 COS2 у
bfdV.
Учитывая, что вдоль внутренней экстремали Ф = 0, получаем
V.,
дФ
ЬЧ=^~ [ =-± — by W,
Л 2 J /?2 cos2 Y ду
где
г)Ф tgy
2lg 1
dy k\V3 cos3y &AI/2 cos2y &AK2cos2y
Необходимое условие минимума tK имеет вид 62У> 0, т. е.
-^->0 при Р^> 0 (разгон);
ду
-^-<(0 при Р<^ 0 (торможение).
ду
(0.56)
(5. 57)
(5. 58)
Выразим явным образом tgy через V, используя уравнение (5.55):
V
tg.Y= ±УА
gx
где
D--
Ь \ \/ 2 / — —
/ -P + cx0kt,V2-
lg2 X
kAV2
уШ
(5. 59)
(5. 60)
94
Сопоставление, формул (5.57) и (5.59) показывает, что произ¬
водную дф/ду можно представить в следующем виде:
—=+■ _ 2Х”2у-—-Yd. (5.61)
ду — МК3 cos2 у
Оценим допустимые пределы изменения скорости при движении
по внутренней экстремали (5.55), учитывая, что физический смысл
могут иметь только такие значения V, при которых tgy является
вещественным числом (D>0). Из уравнений (5.59) и (5.60) сле¬
дует, что величина V заключена в пределах
Vmin < V < Утах* (5. 62)
где V'min и l/max—■ вещественные и положительные корни уравне¬
ний
Р 4—гсЛ д1/2-Д^ = 0; (5.63)
х2М А0 ЙДК2
Я-сЛдК2--З^С=--0. (5.64)
kAV*
Легко видеть, что значение 1/*1ах совпадает с V"max> опреде-
ляемым из (5.51), т. е. l/;ax = l/max; в общем случае
При Vmin ^ V'min допустимые значения скорости ограничены
неравенствами (5.62), при \/*iln ^ Vmln — неравенствами (5.49).
В дальнейшем будем полагать, что \/^Jn > l/mIn. В этом случае ве¬
личина D заключена в пределах
0 < D <. (5.65)
g2m2
Поскольку по смыслу задачи tgy>0 tCM- (5.48)], из формул (5.59)
и (5.65) следует, что %<0, т. е. условиям минимума tK (5.58) при
разгоне отвечает знак «—» в (5. 61) и (5.59), а при торможении —
знак «+».
Рассмотрим сначала случай виража, выполняемого с разгоном
(VK>V0).
В соответствии со сказанным из формулы (5. 59) получим
tgy =—— У D. (5.66)
gx
Начальный и конечный углы крена у* и у*, соответствующие
движению по внутренней экстремали с данным значением %, опре¬
деляются по формулам
tgyS= — -\
gx 1
) (5.67)
%y:=-—-VD(vK).
gi
95
Поскольку функция D(V) монотонная, tgy при возрастании
У*
V от V*nin до 1/тах монотонно убывает от
mln
gX
до нуля.
В случае виража, выполняемого с торможением, из уравнения
(5. 59) получим
tgY =
V
g'X
-VD.
(5. 68)
Аналогом формул (5.67) являются следующие:
Го
.2JL + 1/D(l/0);
gX
Vk
--^ + VD( VK).
gx
(5. 69)
При уменьшении скорости от l/max до V^[n в диапазоне скоростей,
в котором D(V)~~ монотонная функция, tgy монотонно убывает
от 2
vn
gx
до
v:
gx
Положим, что вираж начинается и заканчивается режимом го¬
ризонтального полета:
Yo = Y*=0-
Граничные значения У0 и Vк удовлетворяют неравенствам
V^mln <С У о ^тах5
r^miii <Д ГД < Итах.
(5. 70)
Далее примем, что максимальное значение угла крена при дви¬
жении вдоль внутренней экстремали не превышает максимально
допустимого, определяемого из неравенства (5.48). В этом случае
минимум реализуется на линии уоУсХт* (рис. 31, а, 31,6):
YoY’o —скачкообразное увеличение угла крена;
YoV/J — движение по внутренней экстремали (5.66) при VK^>VQ
и по внутренней экстремали (5.68) при VK<^V0 до дости¬
жения Y —Y^;
Y^Y/C — скачкообразное уменьшение угла крена при постоянной
скорости до ук.
В случае виража с разгоном (У*>Уо)Уо и Y* удовлетворяют
уравнениям (5. 67) при подстановке в него значений V0 и VK соот¬
ветственно (см. рис. 31, а): в случае виража с торможением
(V K<V0)—уравнениям (5.69) (рис. 31,6).
Если допустить, что Ymax при движении по внутренней экстре¬
мали в некоторых точках превышает максимально допустимое зна¬
чение, определяемое условием (5.48), то часть экстремали будет
96
образована границей области S0, на которую должен быть осу¬
ществлен переход в момент достижения у=/Утах (5.48). В частно¬
сти, возможен случай, когда минимум tK реализуется на внешней
экстремали y=Ymax> если все значения у, удовлетворяющие (5.66)
или (5.68), превышают максимально допустимое значение
Ymax*
В заключение заметим, что обобщением рассмотренных выше
задач о разгоне и вираже в минимальное время является следую¬
щая задача о наивыгоднейшем боевом развороте.
В классе допустимых функций у(V) и y(V), удовлетворяющих
граничным условиям
найти функции, обеспечивающие минимум функционала tK\
Рис. 31.
Y=Y0. У=Уо при V = V0; )
Y = Y«. У=Ук ПРП v = Vk I
(5.71)
и дополнительному условию
(5.72)
(5. 73)
7 Б. И. Рабинович
97
Применение метода неопределенных множителей Лагранжа при¬
водит к следующим уравнениям внутренней экстремали:
dR , g dR - 4X3g tg2 у
ду ^ V dV kW*
0;
(5.74)
7?^ + 2XtgY(l+^-tgY)
Ж
v
_ g
kAV2
=o,
(5.75)
где x определяется из условия (5.72). Уравнение (5.74) является
обобщением первого из уравнений (5. 16) и отличается от него
только последним слагаемым, а (5.75) совпадает тождественно
с (5.55), если левую часть в (5.55) заменить соответствующим
выражением (5. 53).
Глава VI
РЕЖИМЫ РАБОТЫ ДВИГАТЕЛЯ,
ОБЕСПЕЧИВАЮЩИЕ МАКСИМАЛЬНУЮ ДАЛЬНОСТЬ
И ПРОДОЛЖИТЕЛЬНОСТЬ ПОЛЕТА ПРИ ДВИЖЕНИИ
ПО ПОЛОГИМ ТРАЕКТОРИЯМ
Задача о наивыгоднейшем режиме работы двигателя, обеспечи¬
вающем максимальную дальность или максимальную продолжи¬
тельность полета при движении по заданной пологой траектории,
представляет интерес при исследовании движения самолетов
с ЖРД, самолетов-снарядов и т. д. В литературе широко пред¬
ставлены решения этой задачи для ряда частных случаев.
Одна из первых работ принадлежит Гиббсу [62] (случай гори¬
зонтального полета). Позднее были опубликованы работы Бэрбома
[41] — [43], Чикала и Миеле [50], Миеле [73], [77], [79], Миеле и Ка-
воти [76], Г. Ф. Сивкова [29] и Е. В. Тарасова [32].
Ниже излагается решение вариационной задачи о режиме ра¬
боты двигателя, обеспечивающем максимальную дальность полета,
в форме, полученной автором в 1950 г. Наряду с обычными крыла¬
тыми летательными аппаратами с ЖРД в качестве примера рас¬
смотрен гипотетический управляемый искусственный спутник, дви¬
жущийся на малых высотах (порядка 100 км) по геоцентрической
круговой орбите.
6.1. ПОСТАНОВКА ЗАДАЧИ
Рассмотрим некоторую траекторию, заданную в форме
;7-=wO). (6-1)
d\JL
т
где ц — относительная масса: р = —.
т0
Примем, что эта траектория является пологой (bin 0 ~ 0,
cos 6 —1). Далее, как и в предыдущей главе, пренебрежем проек¬
цией силы тяги на нормаль к траектории и величиной feiAi и при¬
мем для сх простейшую зависимость в форме квадратичной функ¬
ции Су.
7*
99
При этих предположениях из уравнений (2.20) получим даль¬
ность и продолжительность активного участка в форме следующих
функционалов:
V v-V' (fi) + с + у- d\L
(6.2)
К
н-^,(.а) + с+ у
Q(V,y,v)
(6.3)
где
Q = cxkt± К2;
(6.4)
k = ^~- д=-2-:
2w0 Qo
с — скорость истечения продуктов сгорания в пустоту;
цк — конечное значение относительной массы (в начальный' мо¬
мент т = т0, ц = 1).
В выражениях (6. 2) и (6.3) принято, что при изменении се¬
кундного расхода скорость истечения с остается постоянной и что
статический член в выражении тяги (2. 1) пренебрежимо мал.
Введем граничные условия
и сформулируем следующие вариационные задачи.
В классе допустимых функций V(\x) найти функцию, обеспечи¬
вающую:
а) максимум функционала хк (6.2);
б) максимум функционала tK (6.3);
в) максимум функционала хк (6.2) при заданной величине
Эти задачи являются естественным обобщением задач, сформу¬
лированных в гл. II, на случай пологих траекторий.
Рассмотрим область допустимых функций У(р). Очевидно, что
допустимые функции V(p) в плоскости V, р, заключены внутри
криволинейного пятиугольника (рис. 32), верхняя граница которо-
V— I/о, У— У о
при у = 1;
(6.5)
tK (6.3).
100
го и левая часть нижней границы (до угловой точки) соответствует
полету с максимально возможной тягой двигателя:
d±.=f^L\ в
dt UJmax
правая часть нижней границы — полету при максимально допусти¬
мом значении су = су:
v=v-°=/t
и, наконец, правая и левая границы — полету с выключенным дви¬
гателем ^=®j-
Все допустимые функции V(p) должны удовлетворять до¬
полнительному условию, выражающему невозможность получе¬
ния ускорения, большего, чем при мак¬
симальном секундном расходе топ¬
лива:
\ dV \
оо> >
d{x
cPmax '
С0£ГРтах
V
-Q
P-Pmax
(6.6)
Рис. 32.
а также условию однозначности. Дей¬
ствительно, неоднозначным функциям
V(p) соответствует возрастание ц на
некотором участке полета, что физи¬
чески невозможно. Однако вертикаль¬
ные отрезки на линиях 1Др) в области
Sq, соответствующие полету с выклю¬
ченным двигателем в промежуточных
точках траектории, являются допусти¬
мыми [это отражено в формуле (6.6)].
Очевидно, что сформулированные тре¬
бования к функциям V(p) соответствуют частному случаю (см.
стр. 41), отвечающему поставленной технической задаче.
Следует заметить, что вертикальные прямые на плоскости V, р,,
соответствующие dV/d\i = oot не удовлетворяют условию однознач¬
ности допустимых функций. Однако с технической точки зрения
случаи нулевого расхода и исчезающе малого, но отличного от нуля,
идентичны, так что линии К(р) с dV/d\x = oo можно рассматривать
как предельные для линий с dV/d\\ = N при N-> оо.
101
6.2. УСЛОВИЯ МАКСИМУМА ДАЛЬНОСТИ И ПРОДОЛЖИТЕЛЬНОСТИ
Перепишем уравнения (6.2) и (6.3) в виде
н в дальнейшем функциям, соответствующим максимуму дально¬
сти, будем приписывать индекс «1», а максимуму продолжительно¬
сти— индекс «2».
Принимая во внимание граничные условия (6.5), получаем
следующие выражения первых вариаций:
(6.7)
(6.8)
где
(6.9)
(6.10)
Ф2 (V, d\i
W2
где
= Л1(К^^) + С1( v,y,^
(6.11)
= Аг(У,у^)Л-Сг(у,у^)с\.
Принимая во внимание, что
dQ_dQ дсу . dQ
ф дСу др ф cy=const’
dQ=dQ fcy_ , dQ
dV~~dcy dV ~r dV cy=const’
102
и используя (6.4), найдем выражения для коэффициентов Ау Су
Al=-kbV[cx0(v + c + 2J^-^^-) +
+ М (с+jkoM —) ^-1;
1 \ V dy} д М J
G\ = kAV ^К + Зс+^-^g-)-
\ и ау ) аж \
A1=~kbV[cM(v + 2c+^~^d±)+ ' <6-12)
+ M(c+Ef + (-M|)^];
C.-UV [х{у
-М(‘+Г+-МШ-
)
Если, как и в предшествующей главе, ввести показатель сопро¬
тивления п и функцию v, определяемые формулами
п . М дсуо
п = 2 А — , v =
Cjcq дЖ
Ж d\
х аж
(6.13)
то выражения (6. 12) несколько упрощаются. Например, для изо¬
термической атмосферы получим, полагая A = Ai = ^~^y:
А\ = — k Ac x0V2 [l +-^-(я —1) + ш (^ + ^y)] ;
Ci=— kAW2 [ ■-1 + f (v +1) - «ору + ^ (v+ 2)];
А2= — kAcx0V2 [l -j-я-j-“PY +^“ (ra + l)j 5
C2= - kA>V2 [ - 1 +-^ (v+2) - соцу + ^(v + 3)] ,
Из необходимого условия экстремума хк и tK
6хЛ=0 или 6^=0
и условного экстремума хк при фиксированном tK
М^л+Х^к) =0
(6.14)
103
(6.15)
получим следующие уравнения внутренних экстремалей:
= Ф2(Г» = 0;
<М^) + /Ф2(^) = 0,
где %—множитель Лагранжа.
Эти уравнения в силу вырожденности рассматриваемых вариа¬
ционных задач оказываются конечными соотношениями, и, следо¬
вательно, каждому значению массы должна отвечать вполне опре¬
деленная скорость.
Граничным условиям (6.5) можно в общем случае удовлетво¬
рить, если искомая экстремаль является кусочно-гладкой линией,
включающей отрезки внутренней экстремали (6. 15) и внешней,
состоящей из границ области 50. В дальнейшем ограничимся
рассмотрением первых двух задач (экстремум хк и tK).
Выражениям вторых вариаций соответствующих функционалов
62хк и 64,
к можно придать следующий вид:
1
«Ч--Н
Qj (У» 51/2 dp
Q2
_ Jf Q2(V»fiy2 d[i
o2t= —
Q2
где
Qi =
дФ1
dV
(6.16)
(6. 17)
Необходимые условия максимума хк или tK
62xK^G или б2^<0 (6. 18)
сводятся в силу (6. 16) к следующим неравенствам, каждое из ко¬
торых должно выполняться одновременно с соответствующим урав¬
нением (6.15):
Qi(V, р)<0, Q2(V, р)< 0. (6.19)
В дальнейшем будем предполагать, что условия (6. 19) выпол¬
нены в усиленной форме:
Qi{V, р) <0, Q2(V, р) <0. (6.20)
Это может быть неверным в трансзвуковой зоне, которая по¬
этому требует специального анализа.
Заметим, что решениям, найденным элементарным методом,
исходя из минимума километрового или часового расхода топлива,
т. е. из уравнений
д /т™ч „ <Ж
соответствуют уравнения, которые получаются из (6. 15) при заме¬
не функций <Dj следующими функциями Ф°:
С физической точки зрения решения, полученные вариационным
методом, отличаются ог приближенных учетом скорости изменения
массы объекта и высоты полета.
Полагая в выражениях (6. 14) со = 0, получим из (6. 15) урав¬
нения внутренних экстремалей для случаев горизонтального поле¬
та с максимальной дальностью и продолжительностью, совпадаю¬
щие с найденными в работах [50], [73], [32].
Следует подчеркнуть, что в каждой из первых двух задач, рас¬
смотренных выше, как и в задачах предыдущей главы, в плоскости
р, V существует единственная линия, удовлетворяющая уравне¬
ниям внутренней экстремали cDi = 0 или Ф2 = 0, в то время как
в третьей задаче, являющейся изопериметрической (максимум при
заданном tK), существует семейство внутренних экстремалей, па¬
раметром которого служит множитель Лагранжа %. При этом каж¬
дому значению % соответствует некоторая определенная продолжи¬
тельность полета tK,
6.3. ИССЛЕДОВАНИЕ ГРАНИЧНЫХ УСЛОВИИ
Придадим Vo ряд значений, удовлетворяющих условиям
где Vomin и Vomax — соответственно минимально допустимая и мак¬
симальная скорости при фиксированных значениях у = уо, ц=1 и
заданной функции
Характер экстремального движения зависит, как обычно, с од¬
ной стороны, от соотношения между начальной скоростью V0 и
скоростью VJ, с другой стороны, от соотношения между конечной
скоростью Vк и скоростью I/*, где VI и V* удовлетворяют урав¬
нениям
‘'“"I (6.23)
®,(V"„i4)=ol
(i= 1 в случае хк =хкшах, * = 2 в случае tK = tKmax)-
Ниже будет показано, что функция У(ц) является монотонной,
по крайней мере вне трансзвуковой зоны. Поэтому каждое из урав¬
нений (6. 23) определяет единственное значение V£ или V*.
(6. 22)
Vomin ^ ^Ошах)
105
Возможны следующие основные случаи экстремального дви¬
жения.
1. Vo<K V«<Vl (рис- 33^)-
V0V* — разгон, на режиме максимальной тяги при ^ = (o(jjl);
V*Vl~ движение по внутренней экстремали Фг = 0 или Ф2 = 0;
V*KVK — горизонтальный полет с выключенным двигателем.
Аг а) 1 ^ Ю 1 &
1 ^ Рис. 33.
2. V0>V0, VK>Vl (рис. 33, tf).
1/1/* —горизонтальный полет с выключенным двигателем;
1/*1/** — движение по внутренней экстремали;
V**VK — разгон с максимальной тягой при -^=со(р,).
3. V0>v0, VK<V: (рис. 33, в).
V0Vl — горизонтальный полет с выключенным двигателем;
1/^*-движение по внутренней экстремали;
V*VK — горизонтальный полет с выключенным двигателем.
4. V0<Vl, VK>Vl (рис. 33, г).
VQV* —разгон с максимальной тягой при -^=оо({л);
d\л
у*у** _ движение п0 внутренней экстремали;
V**V,с — разгон с максимальной тягой при — = со(|х).
d[x
106
Если во 2 и 4-м случаях внутренняя экстремаль пересечет не
левую, а правую часть внешней экстремали, то разгону на конеч¬
ном участке будет предшествовать движение с минимальной ско¬
ростью от К* до V*mln.
Кроме этих основных случаев, возможны, как и в задачах, рас¬
смотренных выше, дополнительные случаи, когда внешняя экстре¬
маль отсутствует либо частично (V0=V'q или К* = К*), либо пол¬
ностью.
Рис. 34.
Два последних случая представлены на рис. 34.
^>^*тах (рис. 34, а).
VoV^max — разгон с максимальной тягой при —=СО((J,);
d[j-
Vк maxVk — горизонтальный полет с выключенным двигателем.
2-V*0<V0mla (РИС. 34, б).
VoVomin — горизонтальный полет с выключенным двигателем;
^ominKmin — полет с минимально допустимой скоростью при
dy/d[x = co (jli) ;
VminV:fC — разгон с максимальной тягой двигателя при
dy/d\x = (i)(ix).
Заметим, что если рассматривать совокупность областей 5 при
увеличивающихся значениях параметров (Зшах и фиксированном р*.,
т. е. при возрастающих значениях максимальной тяги и неизменном
значении относительной конечной массы, то в пределе при Ртах ^ 00
придем к области S0, часть границ которой соответствует мгновен¬
ному сжиганию некоторого количества топлива. Очевидно, в рам¬
ках идеализированной постановки задачи, при которой не учиты¬
вается зависимость р/с от ртах, из всех режимов полета на участке
движения с максимальной тягой наивыгоднейшим будет мгновен¬
ное сжигание топлива. Действительно, в этом случае в уравнении
разгона можно пренебречь всеми силами, кроме реактивной, так
как при ее приложении импульс конечной величины получается при
107
бесконечно большой силе и движение будет описываться известным
уравнением Циолковского. Например, при начальной скорости
Уо(ц) =1.
V=V0—с1пц.
Так как это уравнение дает максимально возможную скорость
при заданном расходе топлива, то мгновенное сжигание позволяет
развить нужную скорость с минимальной затратой топлива.
Таким образом, для получения верхней оценки значений хкШах
и tK max можно при расчете разгона считать тягу бесконечной и
воспользоваться уравнением Циолковского.
6.4. ЗАКОН ДВИЖЕНИЯ
Опустим для упрощения записи индексы «1», «2» у функций,
соответствующих максимуму хк и tK, поскольку дальнейшие резуль¬
таты в равной мере справедливы для обеих задач.
Начнем с интегрирования уравнений движения по внутренней
экстремали. Из уравнений (6.4), (6.11) и (6.15) получим
МУ,у,у).
С<У,у,у)'
-у,
У = Уо-
\ ю М dy..
(6. 24)
Уравнения (6.24) определяют функцию p,(V). В случае горизон¬
тального полета из (6.24) получим явное выражение этой функции:
ti(V>
W2
S
А (V)
C(V)
(6. 25)
Считая эту функцию известной, можно в выражениях (6.2)
и (6.3) перейти к переменной V, В результате закон движения
будет полностью определен следующими параметрическими урав¬
нениями:
у*
V
(IV
Q
dV
Q
(6. 26)
где x* и t* — значения дальности и продолжительности к моменту
начала движения по внутренней экстремали.
Рассмотрим выражения производной р'(У) при движении по
внутренней экстремали.
108
Дифференцируя левую часть первого или второго из уравне¬
ний (6. 15) по Vf получаем
dV dV ‘ д[± dV
ИЛИ
(6.27)
где
Заметим, что в этих уравнениях полные производные отвечают
изменению параметров при движении вдоль внутренней экстрема¬
ли, а частные—варьированию параметра, по которому берется
производная при фиксированных значениях остальных параметров.
При уменьшении угла наклона траектории к линии горизонта
о)->0 D(V) стремится к предельному значению, соответствующему
случаю горизонтального полета:
Если выполнено в усиленной форме условие относительного
максимума х*. или tK (6.20) и условие
то р,'(Е)>0, т. е. функция р(Е) монотонно убывает, когда аргу¬
мент V проходит ряд последовательно убывающих значений.
Неравенство (6. 30) будет заведомо выполнено для случая гори¬
зонтального полета, по крайней мере, вне трансзвуковой зоны, так
как в этом случае С>0. В силу непрерывности изменения закона
движения при переходе от горизонтального полета к движению
с малым углом наклона касательной к горизонту выполнение не¬
равенства (6.30) при D, определяемом из выражения (6.29), в со¬
четании с условиями (6.20), будет гарантировать монотонное убы¬
вание функции (i(E) при уменьшении V. Иными словами, при по¬
лете, достаточно близком к горизонтальному, экстремальное дви¬
жение должно происходить с постепенным уменьшением скорости,
т. е. тяги. Монотонность функции р,(К) при движении по внутрен¬
ней экстремали делает законным выбор V в качестве независимой
переменной в уравнениях (6.26).
Это, вообще говоря, не относится к трансзвуковой зоне, кото¬
рая, как указывалось, требует специального анализа.
Закон изменения секундного расхода получим из уравнения
(6. 29)
D(V)> 0,
(6.30)
d
dt
Qp' (У)
(6.31)
109
Рассмотрим теперь вопрос об интегрировании уравнений дви¬
жения вдоль внешней экстремали.
На начальном участке разгона при — =—(3max (1^ц<р,*) урав-
dt
нения движения и начальное условие имеют вид
Уравнения (6.32) можно проинтегрировать только численно.
Однако в случае, когда значение р*, отвечающее переходу на внут¬
реннюю экстремаль, мало отличается от единицы, легко получить
приближенное решение, положив в правой части первого из урав¬
нений (6.32) p = const=l:
Решая это уравнение совместно с уравнением внутренней экстре¬
мали
получим значения У* и р* для первого из случаев экстремального
движения, рассмотренных в предыдущем разделе.
При горизонтальном полете летательного аппарата с постоян¬
ной массой (р = const = 1) уравнения движения можно проинтегри¬
ровать в общем виде. Так, для начального участка внешней
экстремали во втором случае экстремального движения, рассмот¬
ренного в разд- 6.3, получим
Параметр V* определяется непосредственно из уравнения внут¬
ренней экстремали (У* = Уо )•
(6. 32)
V=Vo при Ll — 1.
(6.33)
V
(6.34)
Ф(У, ,и) =0,
(6.35)
V
иу)=-\
dV
Q{V)\v^,y.
110
Аналогичные выражения можно получить для конечных участ¬
ков внешней экстремали, введя соответствующие пределы интегри¬
рования.
Приведенные формулы позволяют рассчитать закон движения
для всей траектории в делом.
6.5. ПРИМЕРЫ РАСЧЕТА НАИВЫГОДНЕЙШИХ РЕЖИМОВ
ГОРИЗОНТАЛЬНОГО ПОЛЕТА
В случае горизонтального полета функции |ы(У), определяемые
уравнениями (6.15), могут быть представлены в виде
}
J
Л— 1 +
V
V
— (V+ 1) +
С
V
V
V
— (v + 2) +
с
(Хк ^ max)’
i^K шах)?
(6.36
где VH — наивыгоднейшая скорость, отвечающая данной высоте
и данному значению относительной массы д:
л[№ i/A.
V kA У Cjc0
(6. 37)
Полученные функции отличаются от функций, соответствующих
максимуму километрового и часового расхода, слагаемыми Vjc
в числителе и знаменателе.
Таким образом, отличие вариационных режимов от режимов
полета с минимальным километровым расходом ск min тем больше,
чем больше скорость полета по сравнению со скоростью истечения
в пустоту. Интересно отметить, что при квадратичном законе со¬
противления (п = 2, v = —4) функция У(д) (6.36) для случая поле¬
та с tK шах совпадает с функцией, соответствующей минимуму часо¬
вого расхода топлива:
(** = *« max).
При хк = хктж такого совпадения не будет:
УЛ)=УЛ 1
У
3 + -
V
шах)*
(6.38)
ill
Рассмотрим расчет наивыгоднейших маршевых режимов на при¬
мере некоторых простейших случаев движения. Ограничимся при
этом режимами хк = хкШаху поскольку режимы tK = tKmах не имеют
принципиальных качественных отличий.
Полет с малыми дозвуковыми или большими
сверхзвуковыми скоростями
В этом случае можно принять в первом приближении
Cso^const, Я —const, п~2, V — —4.
Функции р(У) и р'(К), соответствующие x*max> определяются
из уравнений (6.38) и (6.37), функция Q(V) из выражения (6.4):
Q(V) =kcx 0л (v*
И+_с_,
К + Зс ’
(V + c)(V + Zc) J
Wlo
V2
НО ■
af
У V сл0
(6.39)
Для определения параметров l/о и V*K получим уравнения
Уп" , / Уп + С
V'L V VI + Зс
1 /—
V у; ч
_vf ,/
^ к у:
(6.40)
Подставив выражения p(V), p.'(V) и <?(V) из (6.39) в (6.26),
найдем
к
1 г V (6с3 + 12с2У + 6сУ2 + уз) rft/ _
(2с + У) ]/Зс2 + 4cV + У2 —
*(У) = ;с*-
2^/ с^оХ
I/*
= —1=- j'(2c + V) ]/"Зс2-{-4cV*-f- V*2 -j-
2с + У*
Т с2 Arch
-4с2 arc sin
2с +У
-(2с+ V) ]ЛЗс2 + 4с1/ + К*2 -
г2 Arch
V + 2C
-4 с2 arc sin
I/ +2с
(6.41)
112
= fJr-
V
-L=-\
V CwiX .!
(6c3 + 12cW + 6cV2 + 1/3) dV
^gV cxqI
-cl/3Arch 3c+?V
2^ / CrfA ^ (2c + V)V 3c2 + 4cK + V2
]/ 3c2-f- 4cV* 4- V*2 + 2c Arch 2c+1/*
carcsm
- | 3c2 + 4cV + l/2-26? Arch
3c-f2K
2c+/*
2c+V ,
Г
c\ 3Arch
V
-carcsm
2c + V
(6.42)
)
Выражение потребной тяги получим из (6.39) и (2.2) (при
k\=0):
2ксх0ЬсУЮ0 (2с + V) (21/2 + 9с1/ + 6с2)
Р( V)-
(6.43)
(Зс + V) (V* + бсК2 + 12с2К + без)
Уравнения (6.42), (6.43) дают в параметрическом виде закон
движения и закон изменения тяги для внутренней экстремали. Для
получения полной дальности и продолжительности на этом участке
надо в уравнениях (6.41) и (6.42) V заменить V*..
В качестве примера рассмотрим гипотетический самолет со сле¬
дующими параметрами:
G0 = 5950 кГ;
Сто = (Щ 5;
р.Л = 0,335;
>^ = 5,95.
5= 12,10. и2;
с = 2000 м/сек;
эф
Предположим, что самолет сбрасывается с самолета-носителя
мри £/ = 5000 м, 1/0 = V"*, после чего совершает горизонтальный по¬
лет до достижения скорости, равной наивыгоднейшей для данной
высоты:
VK = Vh.K=Vh(VK)-
Из формул (6.37) и (6.40) найдем
}/о = 205 м/сек, 1+ = 119 м/сек,
1+0 = 157 м/сек, V]ик = §\ м/сек.
Далее из (6.41) —(6.43) найдем, заменив в (6.41) и (6.42) х, t
u V значениями х*, t* и V*:
х* = 540 км, t* = 3250 сек,
К ' К '
Р0 = Р(1/^) = 365 кГ, Рк — Р (V*) = 128 кГ.
8 Б. И. Рабинович 113
Средние^значения тяги, скорости и километрового расхода со¬
ставляют Р = 248 кГ, V=162 м/сек, с,с = 7,4 кГ/км.
Лобовое сопротивление в конце активного участка полета со¬
ставляет QK = 138 кГ, т. е. на 8% больше тяги двигателя. Производя
аналогичные расчеты для у—-0; 2500; 7500 м и считая, что во всех
случаях 1/0 = const = 234 м/сек, a VK=VHK (торможение до наивы¬
годнейшей скорости), получим следующие значения дальности (см.
табл. 6. 1).
Таблица 6.1
У
м
Уо*
^ н.к
л:*
хк-*к
*к-х*
хк
м/сек
км
0
160
92
17,3
0
452
469
2500
179
104
15,0
2,4
493
510
5000
205
119
1,2
5,6
540
547
7500
234
136
0
8,8
595
604
Полная дальность хк в функции высоты полета, как видно из
графика на рис. 35, возрастает почти точно по линейному закону
при увеличении у.
v и/сек
X Kt
650
600
550
500
450
L
0,5 0,6 0,7 0,8 0,9 <и
Рис. 35. Рис. 36.
Проведем теперь сравнение функции ц(У), отвечающей вариа¬
ционному режиму полета (xK = xh.m3LX), и функции р°(У), соответст¬
вующей минимуму километрового расхода, на примере самолета со
следующими параметрами:
Go = 5000 кГ, 5 = 22,6 ж2, сх0 = 0,016,
Л = 0,094, р/с=0,5, с=1500 м/сек.
На рис. 36 представлены функции ц(У) и р°(У) при #=10 000 ж.
В данном случае У/с — 0,12 и максимальное отличие между значе-
114
нйями pi(V') и 11°(V) не превышает 4—5%. В разд. 6.7 будет рас-
сМотреи случай, когда эти функции отличаются более резко.
Полет с малыми сверхзвуковыми скоростями
Определим коэффициенты схо и К по формулам линейной
теории:
сх = схо (Щ + Л (М) с2;
схо —
4 d
/М2 —1
д(М) =
]/М2—1
(6.44)
где d— коэффициент, зависящий от формы профиля и формы кры¬
ла в плане, а в случае сверхзвуковой передней кромки — только от
формы профиля. Учитывая, что пример носит чисто иллюстратив¬
ный характер, сопротивлением фюзеляжа пренебрежем.
Закон движения по внутренней экстремали при Vo<V% опреде¬
ляется формулами
у Л
x(V) = x*~ j'VW{V)dV; j
У*
V
(6.45)
t(V) = f- ^Y(V)dV,
v*
где
VW(V):
V_[M-
J
QW)
g/d \ М2 — 1
X
ХУ [l'(Ma-l)-c][(V' + 2e)(M2-l)-c]-
C2 [K(M2— l)+2cM2]
[(М2 — 1 )(V + c) — c]Vv [(М2 —1) — c]'[(K + 2c)(М2 —1) —c]
Q{V) =
P(V) =
t(V) =
Z(V)-.
4 M VU [(.М2 — 1) (V + c) — c]
' j/ M2 —1 [(V+2c) (М2 — 1) — c] ’
O0C’/ (V)
gV{V)
gZ М2.
4MV2 Z~d
CL*/
—l V
V (М2 — 1) — с
(V + 2c)(M2— 1) — с
(6.46)
М2.
М2-
g / М2— 1
e[V(M2— 1)2 +2c М2]
-l/
-1 V
-М2) /'
c]2 У
V (М2 — 1) — С
(К + 2c) (М2— 1) — с
[(1/ + 2c)(M2 — 1)
(6.45) не
Интегралы в
Функции.
(V -г 2с) (М2 — 1) — с
Vr(M2— ]) — с
выражаются через
8*
элементарные
115
В качестве примера рассмотрим сверхзвуковой самолет со сле¬
дующими параметрами:
G0 = 5000 кГ; цк = 0,5; 5=15 ж2; с = 2500 м/сек; d = 0,0277.
Примем далее
Vq — Vq; г/0= 10000 м; VK = 3\0 м/сек.
гсек
180-
160-
140-
120
100
80^1
60
40
20
0 —
668 672 675 680 684 688 Vм/сек
Рис. 37.
Функция р,(У) имеет вид
X км
160
120
80
40
1 0
р(\/)=
Отсюда
0,0097
/-ПГ
/302\2
(2500 + 7) -7
/302\2 '
(7500 + 7) (— ) -(5000 + 7)
\/q = 692 м/сек, Vl = 663 м/сек.
Зависимость массы от скорости, как и для дозвукового самоле¬
та, почти линейная.
На рис. 37 представлены кривые jx(V), P(V)9 x(V), t(V) для
активного участка полета, рассчитанные по формулам (6.45),
и (6.46), а на рис. 38—кривые x(V) и t{V) для пассивного
участка:
/т/ч - С VdV •
x(V) = xK-v.K
т=‘;-ъ \ f.
1
(6.47)
116
!
х км t сек
Рис. 38.
Рис. 39.
117
Полная длина сверхзвукового пассивного участка 13 км, время
полета 26 сек. На рис. 39 все параметры представлены в функции
времени.
6 6. ТРАНСЗВУКОВАЯ ЗОНА
Случай, когда внутренняя экстремаль пересекает трансзвуковую
зону, является особым, поскольку возможно нарушение усло¬
вий (6.6).
Примем снова, что режим полета соответствует х-к = хкШ1ХХш
Основные уравнения, описывающие движение по внутренней экстре¬
мали, в силу (6.25), (6.27) и (6.29) можно привести к следующе¬
му виду:
„ Щ/2 /7rt~, /Г+(я-1)с.
g V х V V— (v + 1)с ’
^Х(^)
dV 2gkcy\V — (v+ 1)с] ’ (6.48)
x(V)=-kb {Cjc0[Vn + c(n-\y> + Vc^ +
+ XC2 | — 1/ (v -f 2) -f с (v -[-1 )2 -j- 1/c ^ j J .
Рассмотрим случай, когда начальный участок внутренней экст¬
ремали является сверхзвуковым.
По соображениям, приведенным выше, при сверхзвуковой ха¬
рактеристической скорости VI трансзвуковая зона должна быть
пройдена в направлении от больших скоростей к меньшим, так что
при дальнейшем анализе следует рассматривать убывающие зна¬
чения аргумента.
Обратимся сначала к асимптотической формуле
х « - £д [схо (2V + c) + lcl (2V+9с)], (6.49)
вытекающей из (6.48), при
о a dn /~\ rfv
/г —>2, V—> — 4, * 0, >0
dV dV
(малые дозвуковые или большие сверхзвуковые скорости).
Как видно из (6.49) %<0. Следовательно, необходимое условие
максимума хк выполнено в усиленной форме (6.20).
Переходя к трансзвуковой зоне, заметим, что при качественном
анализе в выражении %{V) (6.48) можно пренебречь вторым сла¬
гаемым по сравнению с первым, а также величинами порядка Vic.
Действительно, например, при у= 10000 м и М~1 можно принять
с,,*«0,01; Л«0,3; сЛ.0~0,04; - М),12ч-0,15.
С
118
Таким образом, в трансзвуковой зоне
х(Ю~ ^д^хКМ);
*'<УУ
2 glcy (v + 1)
X, (М);
(6.50)
Х1(М) = (я-1)2 + М
На рис. 40 схематически представлен для трансзвуковой зоны
график функции %i(M), соответствующей типичному изменению
коэффициента сх и показателя сопротивления п при М~1 (рис. 41),
а на рис. 42 — график функции К(ц) —типичному изменению коэф¬
фициента сх и показателя сопро¬
тивления п при М~1 (рис. 41).
При этом для определенности
принято, что VKVqi V*^>Vк.
X,
Рис. 40.
Из (6.50) следует, что функция ц(К) убывает с уменьшением
числа М при приближении к единице, сначала более резко, чем в об¬
ласти М»1, в связи с ростом производной |и/(К), а затем все мед-
ленее, пока ц'(К) не обратится в нуль, что соответствует наиболь¬
шему корню уравнения
Хх(М) = (/г-1)2 + М ^-=0. (6.51)
Как видно из рис. 40, уравнение (6. 51) имеет два корня в транс¬
звуковой зоне. Поэтому при дальнейшем уменьшении скорости
функция р(К) должна возрастать, пока V не достигнет значения,
равного второму корню уравнения (6.51) (линия cd на рис. 42),
а затем снова убывать. Поскольку в рассматриваемой задаче воз¬
растание массы физически невозможно, линия cd на рис. 42 не мо¬
жет отвечать какому-либо реальному режиму полета, а соответст¬
вующая функция ц(1/) является недопустимой.
119
Использование аналитического аппарата, описанного в разд. 3.7,
позволяет установить, что в рассматриваемом случае относитель¬
ный экстремум хк реализуется на линиях четырех видов:
\) У<У1\У1Ук (рис. 42, а);
2)V^K2K (Рис- 42,6);
3) VnVl2Vty\Viyк (рис. 42, в);
*)УbVlxVXv'Wl2V,с (рис. 42, г).
(V'\V\ на рис. 42, г —полет с выключенным двигателем,' a V\V\ на
рис. 42, в — полет с максимальной тягой двигателя).
Абсолютный экстремум может быть в принципе достигнут на
любой из этих линий. Это непосредственно подтверждено числен¬
ным анализом, проведенным в работе Чикала и Миеле [50]. Полу¬
ченный результат показывает, что существует два наивыгоднейши.х
в смысле максимума дальности режима полета: сверхзвуковой (см.
рис. 42, а) и дозвуковой (см. рис. 42,6), а также комбинированные
режимы, с переходом со сверхзвукового на дозвуковой с выклю¬
ченным двигателем (см. рис. 42, г) или с дозвукового на сверхзву¬
ковой с максимальной тягой (см. рис. 42, в).
Таким обоазом, кроме рассмотренного в начале этого раздела,
в принципе существует еще один экстремальный режим движения
120
в трансзвуковой зоне, характеризующийся увеличением скорости
от дозвуковой до сверхзвуковой.
Абсолютный экстремум рассматриваемого функционала на
экстремалях вида приведенных на рис. 42 можно найти методом,
описанным в разд. 3.8 (см. стр. 59).
6.7. НАИВЫГОДНЕЙШИЙ РЕЖИМ РАБОТЫ ДВИГАТЕЛЯ
САТЕЛЛОИДА, ДВИЖУЩЕГОСЯ ПО ГЕОЦЕНТРИЧЕСКОЙ КРУГОВОЙ
ОРБИТЕ
Рассмотрим задачу о программировании режима работы двига¬
теля сателлоида, движущегося по геоцентрической круговой орбите
при тех же допущениях, что и в разд. 5.4 (см. стр. 90).
Под наивыгоднейшими режимами будем понимать режимы, со¬
ответствующие либо максимуму пройденного пути, т. е.
максимуму полярного угла ср,., либо максимуму продолжительности
полета. Считая углы атаки малыми, можно записать s-K и tK в фор¬
ме следующих функционалов:
sK=r0VK=—r— \ W [I/, V' (!*), ц] аГц;
г 0 + У к .)
1
где
Q=(cjro+Уо=ук\
су = -^— (1 — -A Vc = ro\f g° •
у АДУП I Vc V r0+yo
Граничные условия, как обычно, записываются так:
V = V0 при (* = 1,
т г гг (6. 04)
V = VK при =
Область допустимых линий в координатах tu, V определяется
так же, как и в разд. 6.1.
(6. 52)
(6. 53)
121
Уравнения внутренних экстремалей имеют вид
^(-1 + Тг)+!Х|:-с|7==0
— C ^ = 0
1 г <?(Х dV
Ок ^к max)-
После вычисления производных dQ/d\li и dQ/dV
р*Я = 2 kMc2V2;
ду- у
V
1=2
где
-YL
~vl
выражениям (6.55) можно придать следующую форму:
®i(^,rt = 0; Ф2(1Лр) = 0,
где
®i(K,|i)=-(c + K)^ + ^ (у + с + 2с\±±у,
*г<У, Р)= -~(2С + П)^0 + )^(\/ + 2С
Вводя наивыгоднейшую скорость полета для орбиты
г о~\~Уо
v--V-ft/
cjcO
и решая уравнения (6.58) относительно VH\VC, получаем
1+—
у У 'У
—- = I/ у. .
У DX{V)
V
Yjl
Vr
(®к ТктахХ
(^/c max)’
где
Y D^)
A(V)=^(l-i-)-2«(l+i.)+l+f ;
D,(V) = ,?(\ _|-)-2x + l + |-.
122
(6. 55)
(6. 56)
(6.57)
(6'. 58)
радиуса
(6.59)
(6.60)
(6.61)
При — ->0 формулы (6.60) переходят в соответствующие фор-
V с
мулы для горизонтального полета с малыми дозвуковыми скоро¬
стями. Однако в отличие от последнего в рассматриваемом случае
функция V (jli) не является однозначной. Поэтому существуют два
экстремальных режима полета, один из которых отвечает движе¬
нию со скоростью, меньшей круговой (су>0), а другой — со скоро¬
стью, большей круговой (су<0). Это следует непосредственно из
анализа выражений, стоящих под знаком корня.
Биквадратные уравнения Di = 0 и D2 = 0 имеют по два вещест¬
венных положительных корня:
У.Ц—1, х12
21 '
1
1+-
3 с
V
'-V
(6.62)
При с ж 2500 м(сек, — 1/3 величина у. должна удовлетворять
следующим неравенствам:
1 + ^-
;i или *> |/ — (©*=?„П1ах); (6-63)
У
V
<Г 1 ИЛИ
к ^к max)*
(6.64)
Если эти неравенства не выполнены, то 0 или Z)2<0, что
не может отвечать какому-либо реальному режиму полета.
123
Двузначную функцию У.= / \^~ , можно получить в явном
виде, если решить уравнения (6.57) относительно у.:
1/M +{,+ v){
■-т-омхы
1 ±
2с / 2с \ IVс \4
'-7- +7fe
(6. 6о)
Заметим, что для высот порядка 100 км и более, на которых
имеет смысл рассматривать движение сателлоида, наивыгоднейшая
скорость Vн значительно превышает круговую Vc. Поэтому из фор¬
мул (6. 60) следует, что режим полета, при котором поддерживает¬
ся скорость, равная круговой, т. е. сх = сх0 (су = 0), не является
наивыгоднейшим.
Действительно, при х—*1 Уи->оо, что противоречит условию
ограниченности №н при у = у0 (6.59).
До сих пор был оставлен открытым вопрос о том, каков харак¬
тер экстремума ф* и t]K, отвечающего найденным режимам полета.
Для его решения необходимо составить выражения вторых вариа¬
ций 62ф* и 6Чк и исследовать их знаки. Необходимые условия мак¬
симума срк или tK совпадают с (6.19):
дФг -п /
—^*0 (со-~
дУ v ‘*
дФ2
дУ
0 {tK — шах)*
(6. 66)
Дифференцируя функции®*(У, р) по V при ft = const, получаем
дФг
дУ
дФп
2 lei
dV
(i+.f )<■-.)■
ьи+о+м-о+м
4 lei
2с_
У
)(1 -х)2
(6.671
124
При х-^1
дФг
дУ
121с
V
дФ2
дУ
8 Ас/ ^ \2
Из (6.68) видно в силу структуры функций dOJdV и дФ2/дУ,
что при выполнении первого из неравенств (6.63) или соответст¬
венно (6.64) эти функции остаются все время отрицательными, а
при выполнении второго из этих неравенств — положительными.
Следовательно, относительный максимум ф,с или tK достигается
на той из найденных внутренних экстремалей, которая соответ¬
ствует полету со скоростью, меньшей круговой [знак «—» в (6.65)].
Исследование граничных условий приводит к тем же результа¬
там, что и в разд. 6. 3, в зависимости от соотношения между V0 и
В частности, поскольку при Д->0 Vк—>оо, по мере увеличения
высоты полета непременно наступит момент, когда внутренняя
экстремаль исчезнет и экстремум и tK будет достигаться при
максимальной тяге двигателя.
Можно показать, как и в разд. 6.4, что при движении вдоль
внутренней экстремали скорость должна монотонно убывать по
мере уменьшения массы.
Глава VII
НАИВЫГОДНЕЙШИЙ РЕЖИМ РАБОТЫ ДВИГАТЕЛЯ
ПРИ НАБОРЕ ВЫСОТЫ ПО ЗАДАННОЙ ТРАЕКТОРИИ
Задача о наивыгоднейшем режиме расходования топлива при
наборе высоты летательными аппаратами с ракетными двигателя¬
ми была, по-видимому, первой из экстремальных задач динамики
ракет, для решения которой применялся аппарат вариационного
исчисления.
Точная постановка задачи о достижении максимальной высо¬
ты при вертикальном подъеме ракеты была впервые дана Годдар¬
дом [60]. Первая формулировка этой задачи как вариационной и-
общее решение ее без анализа каких-либо конкретных свойств
этого решения даны Гамелем [61]. Полное решение этой задачи
впервые было опубликовано в работах Д. Е. Охоцимского [24]
и А. А. Космодемьянского [11], а затем — Тзяна и Эванса [98].
Позднее появились работы, посвященные анализу экстремальных
режимов движения крылатых летательных аппаратов с ракетными
двигателями по траекториям с произвольным углом наклона к го¬
ризонту при учете индуктивного сопротивления. Наиболее общие
результаты получены Миеле [74] —[80], [83]. Близкие по постановке
задачи были рассмотрены Лейтманом [67]—[69], Фолкнером [53],
Г. Ф. Сивковым [29], Е. В. Тарасовым [32] и рядом других авторов.
Перечисленные работы отличаются в основном методами и фор¬
мой представления решений, степенью подробности анализа усло¬
вий экстремума и конкретными примерами.
В решении, приведенном ниже, основное внимание уделяется
иллюстрации общих методов, изложенных в гл. IV и качественно¬
му анализу полученных результатов.
7.1. ПОСТАНОВКА ЗАДАЧИ
Рассмотрим набор высоты по заданной траектории, определяе¬
мой функцией 0=0 (у), удовлетворяющей допущению п. 5 «б»
разд. 2. 1 (см. стр. 26). Будем считать варьируемым режим работы
двигателя, т. е. секундный расход топлива, предполагая при этом,
как и в гл. VI, что скорость истечения продуктов сгорания в пусто¬
ту остается в процессе дросселирования двигателя постоянной.
126
Уравнениям движения (2. 31) в рассматриваемом случае можно
придать следующий вид:
di.
dp V d\л
I* [V4' (y)tge + g] *M—Y(y,yiV.)%- + Vca tg 0 = 0;
d]x d\i
dt
1
dy
V sin 0
(7.1)
где
Y ■
CykkV? — k\^id
Q-
_cxk№+kxbx ,
COS 0
cx=c'm (M) + kyy+eacy;
cy = cy{M, a);
_Co-S .
2 m0
.FqPO .
m о
(7.2)
(7.3)
(7.4)
a = JL; д-JL.
Qo Po
Начальные и граничные условия зададим в форме
V = V0 при [л=1;
у=Уо при \
У —У к ПРИ !*■= IV \
Сформулируем следующую вариационную задачу.
В классе допустимых функций у(\х) найти функцию, обеспечи¬
вающую максимум конечной скорости Vк, заданной неявно диффе-
ренциальными уравнениями (7.1) и начальным, условием (7.3).
В силу принципа обратимости эта задача эквивалентна сле¬
дующей.
В классе допустимых функций V(\х) найти функцию, обеспечи¬
вающую максимум высоты укЧ
Начальные и граничные условия в этом случае приобретают
форму
У —У о при ^ = 1
V— Vn при «j. = 1
V = VK при (i = iv {
Можно показать также, что рассматриваемая задача эквива¬
лентна задаче о достижении заданной высоты с заданной скоро¬
стью при минимальном расходе топлива.
Следует подчеркнуть, что варьирование функции y(\i) в данном
случае соответствует изменению закона сжигания топлива (сте¬
(7.5)
(7.6)
127
пени дросселирования двигателя), а не изменению формы траек¬
тории.
Воспользуемся методом последовательных приближений, изло¬
женным в разд. 4.4. При этом первое приближение соответствует
предположению су=0, сх = схо(М, у). В этом приближении внут¬
ренняя экстремаль рассматриваемой задачи совпадает с внутренней
экстремалью задачи о режиме работы двигателя, обеспечивающем
достижение максимальной высоты при заданных величинах Vк и p/v..
Очевидно, что расчет первого приближения будет давать тем луч¬
шие результаты, чем ближе угол 0 к я/2, т. е. чем круче траектория.
При полете, близком к горизонтальному (0 —0), первое приближе¬
ние, вообще говоря, теряет смысл, и поэтому необходимо вернуться
к полной системе уравнений (7.1).
Верхняя и нижняя границы области значений допустимых ли¬
ний S0 в координатах у, р соответствуют движению с максималь¬
ным секундным расходом (|3 = |3тах), левая и правая границы —
движению с выключенным двигателем (предполагается, что значе¬
ния Vo и ук таковы, что достижение высоты ук при р = р* является
возможным).
Невозможность полета с тягой, большей, чем максимальная, и
меньшей, чем равная нулю, налагает на все допустимые функции
г/(р) ограничения вида
Ksin 0 ^ dif ^
5 >-У>-оо. (7. 7)
Ртах dp
При более строгой постановке задачи необходимо учесть зави¬
симость р/с от (3, так как при увеличении максимальной тяги двига¬
теля вес его увеличивается, что приводит к увеличению рЛ.
В отличие от задач, рассмотренных в предыдущих главах, в дан¬
ном случае границы области S0 не являются «неподвижными», а за¬
висят от истории движения, т. е. от того, с какой точки оно на¬
чалось.
Действительно, внешняя экстремаль, проходящая через некото¬
рую точку р*, у*, определяется теперь не только координатами этой
точки, как в задачах гл. V, VI, но и параметром V*. Последний,
в свою очередь, зависит от того, каким образом был осуществлен
переход в точку р*, у* (рис. 43—46).
7.2. УСЛОВИЯ МАКСИМУМА VK
Будем исходить из первого уравнения системы (7. 1), считая, что
составляющую лобового сопротивления, зависящую от су, можно
учесть методом последовательных приближений, выразив су через
у и V с помощью второго уравнения (7. 1) и соотношений (7.2).
128
Проделав выкладки, описанные в разд. 4. 2, получим следующее вы
ражение первой вариации Vк:
1
bVK = \<b{V,y,v)lyd}>., (7.8)
где _ _
ф (К, у, rt= [<? (■- 1 ) ■+ v §■- f g ■- 4 (7.9,
Поверхность, на которой лежит внутренняя экстремаль, опреде¬
ляется уравнением
®(VW) = 0
или
cMV> (! + A |j + А) + Ml ( _ , + A) - w sln 9 = 0, (7.10,
причем в первом приближении сх = сх0.
Уравнение (7. 10) при /г2 = 0 совпадает с точностью до обозначе¬
ний с полученным, например, в работах [79], [80], [32], а при &i=0,
зт
О = — —с соответствующим уравнением работы [24].
Уравнение (7. 10) можно записать также в следующей форме:
d Л?+^\ д (Q + iig\_Q /у.
fiy / с ф \ fxK / * '
Если решать задачу приближенно, определяя при каждом значе¬
нии р скорость, исходя из минимума километрового расхода, как
это в свое время сделал Г. Оберт [88], то соответствующее уравне¬
ние будет иметь вид
— (£±££) = 0 (7.12)
dV\ pV j
или
cxkb,V- (1 ^-А,д,-|ЛЯ sill 0 = 0. (7.13)
\ ' сх сЖ)
Таким образом, строгое решение отличается от приближенного
на величины, имеющие порядок V/c, т. е. при высоких скоростях
полета, когда V-+C, приближенный метод непригоден. На это обра¬
тил внимание А. А. Космодемьянский [11]. Уравнение (7. 10) опре¬
деляет наивыгоднейшее значение текущей массы как функции вы¬
соты и скорости:
^(„-1 + i)+M,(-f-.)
J771, • (7Л4)
где
сх = сх{М, у).
9 Б. И. Рабинович 129
В первом приближении сх = сх0(М, у), а в последующих при¬
ближениях сх отличается от ст0 на величину коэффициента индук¬
тивного сопротивления, который может быть определен из (7.2),
поскольку известна функция \x{V, у) первого приближения (под
индуктивным сопротивлением будем понимать ту часть лобового
сопротивления, которая зависит от угла атаки как при М<1, так
и при М]>1).
Для проверки того, соответствует ли найденная экстремаль
максимуму VK, необходимо исследовать вторую вариацию Vк.
Выполнив преобразования, описанные в разд. 2.4, получим следую¬
щее выражение 62VK:
Отсюда вытекает дополнительное необходимое условие слабого
максимума Vк> которое должно выполняться вдоль внутренней
экстремали (условие Лежандра):
Если предположить, что допустимо мгновенное сжигание части
топлива, то первое из неравенств (7.7) заменится менее сильным:
Из (7. 17) можно получить, используя первое из уравнений дви¬
жения (7.1), уравнение внутренней экстремали (7.10) и условие
Лежандра (7. 16), следующее условие допустимости искомых функ¬
ций у(\х), являющееся в то же время условием неубывания вы¬
соты :
Знакам равенства в (7. 17) и (7. 18) соответствует мгновенное
сжигание топлива (pmax = 00)-
Более детальный анализ показывает, что условие (7. 18) являет¬
ся более жестким, чем (7. 16), так что выполнение (7. 18) гаранти¬
рует автоматическое выполнение (7. 16) в усиленной форме, т. е. со
знаком <.
Введя обозначение
(7.16)
djL
d\L
<0.
(7.17)
Q±M—иг
130
можно записать условия (7. И) и (7. 18) в следующей симметрич¬
ной форме:
— — = 0; ^-^-^>0. (7.19)
dV с ди dV с d[i v
7.3. ИССЛЕДОВАНИЕ ГРАНИЧНЫХ УСЛОВИЙ
Полагая последовательно
UL=1, V = V0, Д = Д1 = £-Т0о;
получим из уравнения внутренней экстремали (7. 10) значения ха¬
рактеристических высот у'1 и у'к, определяющих характер экстре¬
мального движения:
Щ ^ sin 0
eVJK P-tcg sin 6
c^v'‘(n~l+v)+k^~
Вне трансзвуковой зоны каждое из уравнений (7.20) имеет
единственное решение. Наиболее типичные случаи экстремального
движения представлены на рис. 43—46, на которых схематически
изображены в координатах щ у, V поверхность Ф = 0 и экстремали
для каждого из этих случаев. В данном случае, как и в разд. 4.3
(рис. 20—26), Ф>0 выше этой поверхности и Ф<0 ниже ее.
Максимум VK достигается на линиях ABCF.
!■ Уо<у1- Ук<у1 (рис.43).
-)
(7.20)
131
АВ — движение с выключенным двигателем;
ВС — движение по внутренней экстремали;
CF — движение с максимальной тягой двигателя (Р = ртах)-
2. Уо>уЪ Ук>у1 (рис.44).
Рис. 44.
АВ—движение с максимальной тягой (р = (Зтах);
ВС — движение по внутренней экстремали;
CF — движение с выключенным двигателем.
3. Уо > Уо’ Ук<У*к (Рис- 45)'
АВ — движение с максимальной тягой двигателя ((3 = (3тах);
ВС — движение по внутренней экстремали;
CF — движение с максимальной тягой двигателя ((3 = |3тах)-
132
4- w0 < i/о. Ук >У* (рис. 46).
Рис. 46.
АВ — набор высоты с выключенным двигателем;
ВС—движение по внутренней экстремали;
CF — набор высоты с выключенным двигателем.
Параметры, соответствующие началу движения по внутренней
экстремали р*, у* и У*, можно найти из совместного решения
уравнений движения по внутренней экстремали и уравнения разго¬
на с Р = Ртах- Аналогичным образом можно определить р**, у**'
и У**.
На рис. 47 и 48 представлены случаи, когда внутренняя экстре¬
маль отсутствует и максимум VK достигается на внешней экстре¬
мали ABF.
ь yo'pyl’ У К 'уу1 (рис. 47).
Рис. 47.
133
АВ — набор высоты с выключенным двигателем;
BF — движение с максимальной тягой двигателя ((3 = (3тах)-
2- Уо^Су1’ Ук <,у1 (Рис- 48.)‘
Ф=0
Рис. 48.
АВ — движение с максимальной тягой двигателя (р = ртах);
BF — набор высоты с выключенным двигателем.
7.4. ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ ДВИЖЕНИЯ
Прежде чем перейти к интегрированию уравнений движения
вдоль внутренней экстремали, выясним некоторые качественные
особенности экстремального движения. Для этого вычислим пол¬
ную производную по [X от функции Ф(У, у, \х) и приравняем ее
нулю, поскольку по определению внутренней экстремали Ф =
= const = 0.
Имеем в силу (7. 10) и (7. 1)
dp dV dp 1 ду d^ dp
(7.21)
Решая совместно уравнения (7.21), получаем
с дФ дФ
(7.22)
134
Принимая во внимание условие Лежандра (7. 16) и считая, что
оно выполнено в усиленной форме, найдем следующие условия,
определяющие характер изменения скорости.
При
?<° (?-23)
И \ (х ,/ ду (X ду
V (у.) убывает с уменьшением ц.
При
V \ (л ) d[i (д. ду
О
(7.24)
1Др) возрастает с уменьшением (р).
Что касается у(р), то по смыслу задачи эта функция должна
быть убывающей при уменьшении р, что и было использовано при
получении условия (7.18).
Для фактического интегрирования уравнений движения вдоль
внутренней экстремали запишем первое из уравнений (7.4) в виде
?=0- (7-25)
dy \ (X dvj V \ у J у- ду
Решив это уравнение относительно dVjdy, придем к следующе¬
му уравнению первого порядка для определения функции V(y)\
dV__
dy '
1 / Q \ с dy.
V \ у J у dy
1 + ^-^
P dV
(7. 26)
Интегрируя уравнение (7.26) численно при начальных усло¬
виях V = V* при р = р*, получим функцию V{у), по которой можно
рассчитать закон движения и все параметры траектории.
Для изотермической атмосферы уравнение (7. 26) интегрируется
в квадратурах. В результате из (7.26) и (7. 1) найдем
v
У=У* +
4*
sin 0
(V + СП) [с (л - 1) + V) + cV ( 1 + с ^)
(уVc — g) [с (п — 1) + V] — eg
V
(К + СП) [с (л — 1) + V] + cv(\ + c
V{yVc~g) [с (я-1) + у]-с*}
dV-
dV.
(7.27)
При 0=я/2 выражения (7.27) переходят в соответствующие вы¬
ражения работы [24]. Для расчета по формулам (7.27) можно раз¬
делить высоту от 0 до 11 км на несколько слоев, в каждом из ко¬
торых считать температуру и параметр у постоянными.
135
Приближенные значения у, вычисленные для закона изменения
плотности с высотой, приведенного на стр. 86, даны в табл. 7. 1.
Таблица 7.1
у м
2000
4000
6000
8000
10 000
12000—40000
1
10-1-7 —
м
1,010
1,050
1,115
I
1,165
1,245
1,570
При движении по внутренней экстремали скорость может как
убывать, так и возрастать. Для крутых траекторий наиболее ти¬
пичным является движение с монотонно-возрастающей скоростью,
для которого полностью применимы формулы (7.27). Если при
движении по внутренней экстремали скорость сначала убывает до
некоторого значения 1/ь а затем начинает монотонно возрастать, то
весь диапазон скоростей можно разделить на два поддиапазона
l7<Vi и 17>Еь в каждом из которых формулы (7.27) остаются
справедливыми.
Результаты, получаемые методом, описанным выше, можно рас¬
сматривать как первое приближение, в котором не учитывается
зависимость сх от су. Дальнейшие уточнения могут быть получены
методом последовательных приближений.
Как отмечалось выше, в рассматриваемой задаче можно учесть
влияние индуктивного сопротивления и прямым методом, исклю¬
чив су с помощью второго уравнения (7.1).
На рис. 49 и 50 представлены наивыгоднейшие значения без¬
размерного ускорения V/g при движении по прямолинейным тра¬
екториям, заимствованные из работы [80].
Закон сопротивления принят в форме
с =^ + 0,2Мс2 .
Л М и
Роль параметра на рис. 49 играет угол наклона траектории
к горизонту 0, а на рис. 50 — величина М„ =—.
Задача, рассмотренная выше, являлась предметом многочислен¬
ных исследований как в СССР, так и за рубежом. При этом было
обнаружено, что экстремум Vк является относительно пологим, и
значение V к, полученное при полете с постоянной тягой, выбранной
из условий максимума Vк, очень близко к значению Vк, полученно¬
му при наивыгоднейшем законе сжигания топлива, найденном
выше. Так, например, для одной из высотных ракет в работе [87]
приведены следующие результаты:
а) при движении с 0 =45° оптимальная тяговооруженность со¬
ставляет 8,35, время активного полета £* = 29,9 сек, (3 = 0,0271 1/се/с;
б) при вертикальном движении с оптимальной тяговооружен-
ностью (3 = 0,0475 Мсек, £/с=17,0 сек;
136
в) при (3 = 0,0441 1/сек, ^ = 18,4 сек, 1/^=2980 м/сек, ук = ЪЪ 140 л*.
При применении оптимального закона сжигания топлива значе¬
ние Уд. увеличивается на 2%. Оптимальная тяговооруженность
определялась во всех случаях без учета ее влияния на параметр
Из этого примера можно сделать вывод, что при относительно кру¬
тых траекториях наивыгоднейшим режимом регулирования двига¬
теля (при фиксированном значении рЛ) в настоящее время прак¬
тически является режим |3 = const = (3max-
-0,2
6=0
70 М
Рис. 49.
Рис. 50.
В то же время в случае пологих траекторий результат может
быть существенно иным; для таких траекторий расчет первого
приближения может оказаться непригодным, так как индуктивное
сопротивление играет заметную роль.
С другой стороны, при движении в пустоте максимум Vк дости¬
гается при мгновенном сжигании топлива, так как импульс тормозя¬
щих сил равен нулю, и, следовательно,
V-K = c In ixк.
Следует заметить, что в момент выключения двигателя скачком
изменяется донное давление, что приводит к нарушению условий
Вейерштрасса — Эрдмана. Можно показать, что для выполнения
последних необходимо в момент выключения двигателя мгновен¬
но сжечь некоторое количество топлива. Однако, если учесть допу¬
щение п. 9 разд. 2. 1, этим обстоятельством можно пренебречь.
137
7.5. ТРАНСЗВУКОВАЯ ЗОНА
Рассмотрим в заключение вопрос об оптимальном прохождении
зоны трансзвуковых скоростей (М~1), полагая
A = e-w, сх — - сх0, А^даО.
Из уравнения (7. 10) получим
<b = cMkV2e~iy (п — 1 —) —g"(j.sin0;
■ ycx0kV2e-™(n — 14.^;
ЭФ
ду =
дЛ=w Г (л _ 1 + Z.) JL + _L + *L'
-*0 К с / К с 1 dV
дФ
ду.
= — g S1U I
Далее, после некоторых упрощений найдем
дФ 1 (г 1 Q У^ф_ К^2е~т/у[/„ 1 .Л
^ к (^Н ^/эк И_1 + _Д\
К'г_1+т)+т+1/^](т+/г)};
Y^2
ЭФ _с_ ЭФ = c^smO Г/ -Я.ул + X.U
ф • (JL dV I v \ [\ с )\ с )
("—т)
dn 1
dV J ’
“*+к(‘+т5)£“
+ - + v
у eg SI
/2-1 +
С
(7.28)
(7. 29)
(7.30)
При малых дозвуковых скоростях и больших сверхзвуковых
dti п
скоростях можно положить — =0; в этом случае в соответствии
Следовательно, необходимые условия максимума V к вне транс¬
звуковой зоны выполнены.
Переходим к трансзвуковой зоне. Из формул (7.30) видно, что
так как при 1/~300 м/сек, с — 3000 м/сек, уя^1,4-10-4 1/Х п^Ъ
числитель и знаменатель выражения в правой части последней из
формул (7.30) положительны.
Следовательно, типичным случаем прохождения трансзвуковой
зоны является движение с монотонным возрастанием скорости.
Предположим, что имеет место условие
няется. Далее, при знаке « = » в условии (7.33) выражение, заклю¬
ченное в фигурные скобки в первой из формул (7.30), удовлетво¬
ряет при типичных для настоящего времени значениях параметров
ЖРД неравенству
поскольку при К — ЗОО м/сек, с~3000 м/сек, п~5, у=1,4* 10-4 1/м
оба сомножителя в (7.34) положительны.
Следовательно, условие (7. 18) является более жестким, чем
(7. 16), и его выполнение гарантирует выполнение последнего в уси¬
ленной форме.
Вернемся к выражению (7.33), в котором с целью качествен¬
ного анализа пренебрежем членами порядка V/c, т. е. положим
На рис. 51 представлена функция %2(М), соответствующая зна¬
чениям сДМ), приведенным на рис. 41. Как видно из рис. 51, функ¬
ция Х2(М) имеет в трансзвуковой зоне два корня М = МЬ М = М2,
причем
Такому изменению функции Х2(М) соответствует в силу (7.29)
и (7.22) «волна» на кривой у(\х)7 представленная схематически на
(7. 32)
ь(*Нп+т)(п-1+т)+т+У%>°- Р-33»
Поскольку — -\-п—1>0, условие (7.18) в этом случае выпол-
Хг (М) ~ я (л — 1) + М Ду.
(7. 35)
/2(М)^0 при М -< Mi и Mi>M2
Х2(М)<0 при 1/2>\/>1/!.
рис. 52 (точки экстремумов отвечают значениям p = pi и р = |Ы2 со¬
ответственно).
Таким образом, в интервале \i2<\x<ii\ условие (7. 18) нару¬
шается, т. е. участок экстремали, показанный пунктиром на рис. 52,
не может отвечать какому-либо реальному движению. Здесь, как и
в предыдущей главе, мы сталкиваемся с пересечением экстремалью
внутренней границы области допустимых функций y([i).
Однако в отличие от случаев, рассмотренных в разд. 6. 1—6.4,
экстремаль y(\i) на плоскости у, ц не является единственной,
а имеется однопараметрическое семейство линий у{\л)> поскольку
каждой комбинации параметров у* и У*, определяемых началь¬
ными условиями уо и У0, отвечает своя внутренняя экстремаль у(\х)л
Семейству допустимых экстремалей, пересекающих трансзвуковую
зону без нарушения условия (7. 18), отвечают линии, образованные
двумя отрезками внутренней экстремали, соединенными отрезком
внешней ^ ^ р-*), соответствующей движению с максималь¬
ным секундным расходом (жирная линия на рис. 52). Параметром
семейства служит величина так что можно в принципе ре¬
шить задачу об относительном экстремуме Ук по параметру р*
в классе экстремалей описанного вида, которая в общей постановке
рассматривалась в разд. 3.7. (Вопрос об абсолютном экстремуме
VK при этом, вообще говоря, остается открытым).
Заметим в заключение, что естественным обобщением результа¬
тов, приведенных выше, является решение изопериметрической за¬
дачи о достижении максимума конечной скорости на заданной
высоте при заданном расходе топлива и времени полета или, что
эквивалентно,— минимума времени достижения заданной высоты
при заданном расходе топлива и конечной скорости.
Это решение может быть получено методом неопределенных
множителей Лагранжа.
Глава VIII
НАИВЫГОДНЕЙШИЕ ПРОГРАММЫ УПРАВЛЕНИЯ
ПРИ ФИКСИРОВАННОМ РЕЖИМЕ РАБОТЫ ДВИГАТЕЛЯ
Задача об оптимальной траектории летательного аппарата с ра¬
кетным двигателем, обеспечивающей максимум конечной скорости,
была впервые сформулирована и приближенно решена К. Э. Циол¬
ковским [35]. Аналогичная задача рассматривалась Г. Обертом [88],
а затем Е. Зенгером и И. Бредт [94] применительно к крылатому
ракетному бомбардировщику. Однако в этих работах вариационные
методы не применялись.
Отысканию наивыгоднейших, в смысле минимума времени и
максимума конечной скорости, траекторий набора высоты вариа¬
ционными методами посвящен целый ряд работ Миеле [72], [77],
Бэрбома [40], [43], Чикала и Миеле [49], Шиндлера [95], Теодорсена
[96]. В работе [45] для решения соответствующей экстремальной
задачи применены методы динамического программирования. Про¬
блеме отыскания оптимальной траектории выведения искусствен¬
ного спутника Земли на орбиту посвящены исследования Д. Е. Охо-
цимского и Т. М. Энеева [25], Доммаша и Баррона [51], [52], Фрида
[55], Кулаковского и Стэнсила [63], Лоудена [66] и ряда других
авторов. В работе Миеле [74] рассматривается интересная задача
об оптимизации теплового режима летательного аппарата, опреде¬
ляемого кинетическим нагревом при разгоне в атмосфере-
Ниже задача об оптимальной программе набора высоты крыла¬
тым летательным аппаратом с ракетным двигателем рассматри¬
вается несколько более полно, чем в работах, упомянутых выше.
В частности, подробно исследуется случай экстремали со свобод¬
ным верхним концом.
8. 1. ПОСТАНОВКА ЗАДАЧИ
Рассмотрим задачу о наборе высоты крылатым летательным ап¬
паратом с ЖРД при некотором вполне определенном режиме рабо¬
ты двигателя, определяемом программой изменения секундного
расхода топлива. В общем случае можно положить
0.
at
где / — заданная функция времени, высоты и скорости полета.
141
В дальнейшем, однако, ограничимся наиболее важным для
приложений случаем
dm
dt
= const= — Зш0.
Кроме того, будем предполагать, что справедливо допущение
п. 5,6 разд. 2. 1 (углы атаки, потребные для реализации програм¬
много движения, малы).
Будем искать программу управления, обеспечивающую при за¬
данном коэффициенте пассивной массы jli/c и фиксированном режи¬
ме работы двигателя получение на заданной высоте максимальной
скорости в конце активного участка {V к).
Поскольку дальность полета на пассивном участке летательных
аппаратов с растянутым участком планирования определяется
в основном величиной V\, такая программа может считаться про¬
граммой, обеспечивающей максимальную дальность полета.
Поставленная задача эквивалентна задаче об отыскании про¬
граммы управления, при которой заданная скорость на заданной
высоте достигается с минимальным расходом топлива и в мини¬
мальное время, что может быть доказано с помощью принципа
взаимности сформулированного выше (см. стр. 67).
Таким образом, программа, обеспечивающая решение постав¬
ленной задачи, является одновременно программой максимальной
скороподъемности.
Воспользуемся методом последовательных приближений, опи¬
санным в гл. IV. Пренебрежем в первом приближении индуктивным
сопротивлением (здесь, как и в предыдущей главе, под индуктив¬
ным сопротивлением понимается составляющая лобового сопротив¬
ления, являющаяся функцией су, как при М<1, так и при М^>1).
Будем исходить из уравнений движения (2.37)
pV'i — kxh.-l)o.Jrcykty2—■ jig cos 6=0; | (8.1)
dp ; Р
^_LJCsins = 0,
где
сх = сх0(М) + ЦМ)с1 + куУ; су = сЦМ)а; J
[X=l-rftf. J
Для построения первого приближения положим су = 0, сх~сх0
и найдем решение соответствующей вариационной задачи. Зная
функции V(t), y(i) первого приближения, получим из (8.1) функ¬
ции 0 (у) и а (у) первого приближения, по которым -можно рассчи¬
тать функцию сх(М, у) второго приближения и т. д.
142
Приведем соответствующие расчетные формулы для 0 и а:
(8.3)
(V20' (у) sin 0 + g cos 0) fx
2 —
Здесь для упрощения принято, что объект обладает двумя плос¬
костями симметрии и что коэффициент подъемной силы в рассмат¬
риваемом диапазоне а является линейной функцией угла атаки.
Очевидно, что эти допущения не носят принципиального характера.
Таким образом, если удастся получить решение первого прибли¬
жения, построение всех последующих приближений может быть
проведено по той же схеме, только в п-м приближении роль сх0 бу¬
дет играть функция сХу найденная из (п—1)-го приближения.
При этом значения суу полученные в первом приближении, со¬
ответствуют обычно достаточно малым углам атаки, так что точ¬
ность, которую дает второе приближение, как правило, оказывается
более чем достаточной для ориентировочных расчетов.
Перепишем первое из уравнений (8. 1) в форме
Сформулируем вариационную задачу следующим образом.
В классе допустимых функций у(ц)найти функцию, обеспечи¬
вающую максимум конечной скорости Vк, заданной неявно диф¬
ференциальным уравнением (8.3) и начальным условием (8.5).
Если ввести, как в гл. V, некоторые максимально допустимые
углы снижения Oi и набора высоты (J2(01<0, 0 2>0), причем, в част¬
ности, может быть |0 j| = |в2|= "тр т0 границы области S0 значений
допустимых функций г/(|л) будут отвечать набору высоты или сни¬
жению с максимально допустимыми углами 02 и 0Ь
Соответствующие условия, которые распространяются на все
допустимые линии, выражающие невозможность получения верти¬
кальных скоростей подъема или снижения, больших, чем при подъ¬
еме (снижении) с максимально допустимым углом, имеют вид
(8.4)
и будем считать cx(V, у) известной функцией.
Введем следующие начальные и граничные условия:
(8.5)
(8.6)
ср— /е:Aj—cxkAV~— fig-sin Oi dV
^ ixV sin 02
c$ — — cxkLV'* — sin 02
(8. 7)
143
Следует заметить, что, как и в задаче, рассмотренной в преды¬
дущей главе, границы области S0 в данном случае зависят от исто¬
рии движения.
Можно было бы ввести некоторые дополнительные ограничения,
например по максимально допустимым углам атаки, нормальной пе¬
регрузке, аэродинамическому нагреву и т. д. Однако мы этого де¬
лать не будем, считая, что все необходимые дополнительные огра
ничения целесообразнее ввести, если это необходимо, при переходе
ко второму приближению.
8.2. НЕОБХОДИМЫЕ УСЛОВИЯ МАКСИМУМА VK
Сформулированная задача по форме совпадает с задачей пре¬
дыдущей главы. Однако между ними имеется существенное разли¬
чие, заключающееся в том, что варьирование функций у(\х) и V(p)
соответствует теперь варьированию формы траектории при фикси¬
рованном режиме работы двигателя, тогда как в гл. VII—варьи¬
рованию режима работы двигателя при фиксированной траектории.
Выражения первой вариации функционала VK можно записать
в форме, аналогичной (7.8):
(8.8)
где
ф(^^)=Л(йд1/2
!-ф I
V2
дМ
_|_ М da дсх сх dk
a dy дЖ A dy
\ V2 du / V? |
dy
V2 j '
(В формуле (8.9) опущено слагаемое kkvkV2,
пренебрежимо мало по сравнению с kV2 — \.
dy J
(8.9)
которое
В случае изотермической атмосферы скорость звука постоянна и
Д! = Д = (8.10)
В этом частном случае из (8.9) получим
Ф (V,y,v.) = -^
№
e-w-Щ,
V2 J
(8.11)
где через п обозначен, так же как и в гл. VI*, VII, показатель со¬
противления.
144
Уравнение поверхности, на которой лежит внутренняя экстре¬
маль, имеет вид
Ф (V, у, jli) =0 (8. 12)
или
кьУ^с Г^-('з+— ^*') + — — — ^
1У2 \ сх дМ) a dy сх ам
—- *A]_«£?+aiAi ^Л=с
Д dy J V2 ' \У2 Д1 dy )
(8. 13)
Уравнение (8. 13) является основным для решаемой задачи, так
как определяет функцию V(y), соответствующую наивыгоднейшей
траектории. При k\ = 0y сх^сх0 оно совпадает с точностью до обо¬
значений с уравнением, полученным в ряде работ, например [49], [77].
Введя вспомогательные функции
/ /if v М дсх т / / \ 1 d А
сх(М>у)=— ттг. д (t/) = — —;
дМ Д rff/
Т' / \ 1 z/Ai / / \ 1 £/£7
л dy
(8.14)
и заменив У значением Ма, уравнение (8. 13) можно переписать
так:
(М, у, [А) = Йд (у) а2 (у) сх (М, у) |
К (А
Д1(г/)
Ф
'' " " М2о2 (;/)
X [3+ё; (М, г/)] + а'(^К (М, //) - д'Ц
_
+ £Д1 (г/)
М2а2 (у)
М2а2(у)
X
0.
(8.15)
В случае изотермической атмосферы уравнение (8.15) перехо¬
дит в следующее:
gkcx (V
1
e-w_^=0. ]
V2
I
или
V2
ew = —
gc$
gkcx (
п -4-1 4
yV''■
)+*■ (v + ^)
J (8.16)
I
I
При квадратичном законе сопротивления и .^—О выражение
(8. 16) переходит в следующее:
.CjckV*
ср
(8.17)
Если ввести в рассмотрение относительный избыток мощности
дЛГ = сЗ — cxk^V2 — (8.18)
10 Б. И. Рабинович 145
то уравнение (8. 13) можно записать так:
(8.19)
dV g ду v ’
Для решения вопроса о характере экстремума Vк (максимум
или минимум) необходимо исследовать знак второй вариации для
внутренней экстремали с закрепленными концами. Используя вы¬
ражение второй вариации из разд. 4.2, получим
_1г/дФ (8 20)
Л 2 )\ ду V dW
•V
Отсюда вытекает следующее необходимое условие слабого макси¬
мума VK, которое должно выполняться вдоль внутренней экстрема¬
ли (условие Лежандра):
дФ_ х
ду V dV
Используя (8. 18) и введя в (8. 19) обозначение AiV = xF, можно
записать необходимые условия слабого максимума Vk b следующей
симметричной форме:
——^-=0; (8.22)
dV g ду
д$__у_дФ_ ^о. (8.23)
dVgdy
При изменении в (8. 23) знака <! на < получим достаточное усло¬
вие сильного максимума Vк.
Рассмотрим более подробно неравенство (8.23), используя
внутреннюю экстремаль первого приближения (сх = сх0). Посколь¬
ку при сх = схо, Ф(У, у, р)=Ф(К, у), имеет место равенство
дФ дФ , дФ dy
~dV~ dv'dy ~~dV
В реальных условиях всегда — <0, поэтому условие (8.23)
ду
можно записать так:
1 + ^--^->0. (8.24)
V dV v ’
С другой стороны, условие допустимости траектории (8.7) мож¬
но привести к следующему виду:
По смыслу задачи
(8.26)
так как иначе невозможен был бы набор высоты.
Поэтому условия (8.25) оказываются более жесткими, чем
(8.23) даже при |0i| = i62l=Y и их выполнение гарантирует
удовлетворение необходимых условий слабого максимума VK.
8.3. ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ ДВИЖЕНИЯ
Вычислим полную производную ПО [X функции Ф = Ф (V, у, ц) и
приравняем ее к нулю, поскольку по определению внутренней экст¬
ремали <D = const = 0:
дФ г у , дФ • , дФ п
V н и- =и.
dV ду ф
(8. 27)
Решая совместно уравнения (8.27) и (8.4), получаем
дФ и.В^ дФ
V ф
dp
*У-
(сР-
/дФ g дФ
^Чд(/ V dV
дФ дФ
-cxk дка _ Aj) — — ,лЭ —
aV ф
(8.28)
V.dj/ V bv)
Как отмечалось выше, по смыслу задачи
cfi—cxkAV2—k 1 Ai >0.
Кроме того, для всех практически актуальных случаев обычно
имеет место неравенство
^ * ду Уф
* (С'р - с±ьУ2 - Mi) — < 0.
х ду
(8. 29)
Если учесть, что из условий допустимости внутренней экстрема¬
ли (8.25) следует выполнение условия (8.23) в усиленной фор¬
ме, т. е.
дФ g дФ ^ q
ду VdV
(8.30)
то придем к выводу, что вдоль внутренней экстремали скорость по¬
лета монотонно возрастает.
10*
147
Если, кроме (8.30), выполнено неравенство
(cl-cjib 1/2-м.) ?<0, (8.31)
ov
то возрастает монотонно и высота полета.
Как будет показано ниже (см. разд. 8.5), неравенство (8.31)
заведомо выполняется при малых дозвуковых скоростях, но нару¬
шается в трансзвуковой зоне.
Для интегрирования уравнений движения по внутренней экстре¬
мали воспользуемся тем, что уравнение поверхности внутренних
экстремалей первого приближения (сх = схо) дает конечную связь
скорости и высоты:
Ф(К у)= 0,
откуда
дФ дФ du
dV~~ ду dV’
что обеспечивает возможность разделения переменных в уравне¬
ниях (8.29) и получения решения в квадратурах:
к
U*
In = 3
(А
9
К*
где ц* и V*— начальные параметры внутренней экстремали.
Из выражения (8.32) особенно ясно видно, что выполнение
условий (8.24) и (8.26) означает монотонность убывания массы
при монотонном возрастании скорости, поскольку подынтегральное
выражение в этом случае всегда положительно.
Получение закона движения в форме (8.32) позволяет эффек¬
тивно использовать метод последовательных приближений, описан¬
ный в гл. IV. Для его реализации достаточно последовательно вы¬
числять с помощью (8.32) функции К(р) для каждого приближе¬
ния. При этом удобно поступать следующим образом.
1. Вычислить, используя значения функции сх0(М, у) и таблицу
стандартной атмосферы, вспомогательные функции
с'х(М,у), а'(у), Л7 (г/), А!(у).
2. Задаться последовательно возрастающими значениями М и
выбрать среднее значение y = Ycp Для рассматриваемого диапазона
высот 0^у^ук (см. табл. 7. 1 на стр. 136) и среднее значение ско¬
рости звука и рассчитать серию значений у(М) =у°(М) с помощью
уравнения (8. 15). (Зафиксировав скорость звука, можно однознач¬
но определить число М для каждого значения V, а следовательно,
и сх0(М, у), считая у = ус$.)
11
— —) dV
V dVj
C$—Cxk Д1/2 —fcjAj
(8,32)
148
3. Рассчитать значения функции Ф по формуле (8. 15) и соста¬
вить следующую таблицу:
Таблицав. 1
i
1
2
3
К
М
Ml
м2
М3
м.
у0 (М)
0
Уг
0
У 2
о
Уз
о
У*
Ф (М/, y,-_i)
—
Ф(М2,У1)
Ф (М3, Уд
Ф (Мк, ук-д
Ф (М,. уд
Ф(М иУг)
Ф (М2> у2)
Ф (М3, Уз)
Ф (Мд-, ук)
Ф(М/, yi+d
Ф(М иу2)
Ф (М2> Уз)
Ф (М3, Уд
—
У (М)
У1
Уч
Уз
У/с
4. Используя для каждого Мг- (кроме первого и последнего) три
значения Ф(Мг-, у^) (j = i—1, i, /+1), определить с помощью пара¬
болической интерполяции значение у, при котором Ф(М*, у) обра¬
щается в нуль; это и даст значение искомой функции.
5. По функциям у(М) и а (у) рассчитать для каждого у соот¬
ветствующее значение V(у) =а(у)М(у). В результате получим сле¬
дующую таблицу значений функции y(V) первого приближения:
Таблица 8. 2
/
1
9
3
к
У
У\
У2
Уз
Ук
м
Ml
М2
М3
. Мд
V
V'l
V о
^з
VK
Значение у = у^, при котором при V=Vo возможно движение по
внутренней экстремали, определяется интерполяцией.
6. По формуле (8. 32) рассчитать функцию 17(,и) первого при¬
ближения, принимая во внимание начальные условия (разд. 8.4).
149
7. По формулам (8.2), (8.3) рассчитать функцию сЛ(М, у) вто¬
рого приближения и повторить весь расчет, начиная с п. 1. Сходи¬
мость этого процесса рассматривается на конкретном примере
в разд. 8.7.
Поскольку функции y(V) и 1/(и) найдены, значения б (К) и
а(т/) определяются из (8.3).
Формулу (8.32) можно привести к следующему виду:
Очевидно, что (8. 33) является аналогом формулы Циолковского
Интеграл в формуле (8. 33) соответствует потере скорости по
сравнению со значением, определяемым формулой Циолковско¬
го, из-за наличия гравитационных сил и лобового сопротивления.
Для изотермической атмосферы и степенного закона сопротивления
этот интеграл выражается через элементарные функции. Например,
для квадратичного закона сопротивления (п = 2) получим, если
положить &1—0, ky~ О,
где q — нагрузка на квадратный метр крыла в начальный момент;
р — тяговооруженность при истечении из сопла в пустоту;
b — константа изотермической атмосферы.
Из формул (8. 33) можно сделать некоторые выводы, носящие
достаточно общий характер.
1. Основные параметры, определяющие закон движения по наи¬
v
V— V* = cln —-
2J_C_M йУ
’ ' V dV
(8.33)
— cxkbV~ —k^i
V — V = c\n
с ъ f=V -1/ + 3» (± - ±) -1 -2» (a,c tg
(8.34)
(i(K2 + 36)(1/4-l-7AK2 + 662) ’
2bp (2V2 + 36) (V2 4- 2b)
(8. 35)
150
выгоднейшей траектории и ее форму,— это тяговооруженность /7,
нагрузка на квадратный метр крыла q и характеристика атмо¬
сферы Ь.
2. Конечная скорость зависит от р и q через значение V*, при
котором начинается движение по внутренней экстремали, причем,
чем больше К*, тем меньше отличается конечная скорость от пре¬
дельной скорости, определяемой формулой Циолковского.
3. Характеристическая высота у*0 убывает при увеличении q и р
и растет при увеличении схо.
4. Увеличение b и р делает наивыгоднейшую траекторию более
пологой, а уменьшение этих параметров — более крутой.
Интересно сопоставить уравнение (8.13) с уравнением, полу¬
ченным приближенным способом, исходя из. максимума избытка
мощности AN по переменной V:
Значения скорости, определяемые из уравнения (8.37), отве¬
чают максимуму избытка мощности на любой высоте. Часто соот¬
ветствующий режим полета отождествляют с режимом, обеспечи¬
вающим достижение заданной высоты в минимальное время.
Программа управления, найденная выше, дает более строгое реше¬
ние той же задачи (конечно, при соответствующих граничных
условиях).
Поэтому сравнение выражений (8.19) и (8.36) или (8.13) и
(8.37) позволяет проанализировать, какие физические факторы
определяют различие между этими решениями. Из сравнения оче¬
видно, что при приближенном методе расчета игнорируется процесс
изменения высоты, характеризуемый производными д/ду (рассмат¬
ривается как бы ряд последовательных состояний, каждое из кото¬
рых соответствует постоянной высоте).
Оценим на простейшем примере диапазон, в котором строгое
решение начинает заметно отличаться от приближенного. При этом
сразу проведем приближенный расчет второго приближения.
С этой целью пренебрежем в уравнении движения в проекции на
нормаль к траектории производной — и заменим р средним значе-
d\i
нием. Это дает следующие формулы для су и сх:
(8. 36)
или
Pcpg
Cvz= ;
у kAV*
(8.38)
, ^ Рср82
151
Для изменения плотности с высотой примем зависимость
Д = ехр^—|\(y)dy j,
где значения функции у (у) приведены в табл. 7. 1 (см. стр. 136).
Положим далее
''Х О
= const-=0,016;
Рср
0,9;
/? = 0,54;
= const=0,094;
£j«0; ky^0;
q = 250 кГ\м2.
Тогда для расчета наивыгоднейшей функции V(у) можно вос¬
пользоваться уравнением (8.17), считая в нем величину у функ-
у м
Рис. 53.
цией у, определяемой табл. 7. 1. Это приводит к следующему выра¬
жению для функции V(y):
4 + V с2р + 12c^oXg8|i^6 (V ,у) Т1 {V, у)
ЬЬсх0Ьх\(у, у)
где
ЦУ,у)= 1+^Д r\(V, у) = \ + .
g 3g
Соответствующая функция для невариационного режима, кото¬
рой обычно пользуются при аэродинамическом расчете самолетов
с поршневыми двигателями, получается из выражения (8.39), если
положить 5=1, г) = 1. Поскольку подкоренное выражение в (8.39)
является функцией от V, расчет удобно вести методом последова¬
тельных приближений, приняв в качестве первого приближения
5=1, л = 1. В результате получим значения функции V°(y) для
режима/——) и V(у) для вариационного режима, представлен-
\ dt /щах
ные в табл. 8.3 и на рис. 53.
(8. 39)
(8. 40)
152
Таблица 8. 3
у км
0
2
4
6
8
10
12
V° (у) м/сек
214
236
262
292
327
370
426
V (у) м/сек
202
220
240
261
285
313
342
Последние три колонки имеют условный характер, поскольку
при таких скоростях нельзя, конечно, считать сх = const, ^ = const.
Таким образом, приближенный метод расчета начинает давать
Т\/2
существенные погрешности, когда величина соизмерима с еди-
3^-
ницей.
8.4. АНАЛИЗ ГРАНИЧНЫХ УСЛОВИЙ
Характер экстремального движения определяется, как и
в гл. VII, соотношением между начальной высотой у0 и характери¬
стической высотой у'1, удовлетворяющей уравнению CD(Vo, z/q) = О,
и между заданной конечной высотой ук и характеристической вы¬
сотой г/*, отвечающей значениям р = V=V/C при движении по
внутренней экстремали.
Основные характерные случаи представлены схематически в ко¬
ординатах у, V, (ы на рис. 54—57, на которых показаны поверх¬
ность Ф(у, У)=0 (су=0) и соответствующие экстремали.
В данном случае, как и в гл. VII, Ф>0 над поверхностью Ф = 0
и Ф<0 под этой поверхностью.
Максимум Vк достигается на линиях ABCF.
!• Уо<У*о> Ук<У*к (Рис- 54)-
153
АВ — набор высоты с максимально допустимым углом 0 2;
ВС — набор высоты в соответствии с уравнением внутренней
экстремали;
CF — снижение с максимально допустимым углом 9 ь
В частном случае уо = 0, начальные параметры р* и У* опре¬
деляются из уравнения внутренней экстремали при ,11=1, у = 0 и
уравнения горизонтального разгона от Уо до У*, решение которого
при начальном условии У=Уо при р=1 и имеет вид
v*
=\ т
dV
-kCKV 2
'/о
В частности, при сх = const
b+v0VWx)(i-vzVZcx)
(8.41)
С In а*
:1п
2 Ykcx (1- F0 Vkcx) (1 + V* Ykcx)
(8. 42)
Параметры точки перехода с внутренней экстремали на внеш¬
нюю г/**, У** можно определить из совместного решения уравне¬
ний движения по внутренней экстремали y{V) и уравнений движе¬
ния с углом набора высоты 0i = const, которые можно проинтегри¬
ровать численно, задаваясь различными значениями р** и соответ¬
ствующими им у*'* и У**, пока не получится у = ук при р = рЛ.
2- Уо > Уо> Ук>У1 (Рис- 55)-
Рис. 55.
АВ — снижение с углом б г,
ВС —движение по внутренней экстремали;
CF — набор высоты с углом 0 а.
154
Параметры у*, К*, р* определяются путем численного интегри¬
рования уравнений набора высоты при 62 = const с начальными
условиями y = yo, V=V0 (р=1) и решения полученного таким обра*
зом уравнения #* = #*(р*, К*) совместно с уравнением внутренней
экстремали y = y{V).
3- Уо> Уо’ ук<у*к (рис. 56).
АВ — снижение с максимально допустимым углом 6ь
ВС — движение по внутренней экстремали;
CF—снижение с максимально допустимым углом 6 ь
Параметры #**, р**, К** определяются, как и в случае 1, только
роль траектории набора высоты на конечном участке играет траек¬
тория снижения с углом 0i = con$t.
4- Уо<У(г УК>У*К (рис. 57).
155
АВ— набор высоты с максимально допустимым углом 02;
ВС — движение по внутренней экстремали;
CF — набор высоты с максимально допустимым углом 02.
В принципе возможны случаи, когда внутренняя экстремаль пол¬
ностью отсутствует.
При этом могут реализоваться следующие два варианта экстре¬
мального движения:
ь Уо^>Уо> Ук^у1 (рис. 58).
Рис. 58.
АВ — снижение с углом 0ь
BF — набор высоты с углом 02.
2- УоУо' Ук<^У*с (рис. 59).
Рис. 59.
АВ — набор высоты с углом 0 2;
BF — снижение с углом 0].
156
В заключение следует подчеркнуть, что программа, обеспечи¬
вающая получение максимума Vк при заданных значениях уо и
ук, обеспечивает одновременно минимум tK при заданных V:k,
Уо и ук.
Поэтому разгон до заданной скорости в минимальное время
является частным случаем рассмотренной выше задачи, которому
соответствует уо = ук. Если разгон является кратковременным, то
можно в первом приближении пренебречь изменением массы, т. е.
положить (Li = prp. Тогда
что соответствует частному случаю, рассмотренному в гл. V (см.
стр. 77).
Рассмотрим случай прохождения трансзвуковой зоны. Естест¬
венно считать, что движение в трансзвуковой зоне не может быть
связано с большими углами атаки. Поэтому при М->» 1 будем пола¬
гать су~0. Далее пренебрежем статическим членом в выражении
силы тяги (^ — О), зависимостью сх от числа Рейнольдса (&у«0) и
изменением температуры по высоте (Д = е-7У).
Наконец, примем 6^0, cos 0^1, = —.
Г ’У Ь\т/о
Очевидно, что эти допущения, упрощающие анализ, можно сделать
без ущерба для точности описания качественной картины экстре¬
мального движения в трансзвуковой зоне.
Основное уравнение (8. 13) приобретает при сделанных допуще¬
ниях следующий вид:
v
к
V,
8.5 ТРАНСЗВУКОВАЯ ЗОНА
= 0, (8.43)
где v и л определяются формулами (5. 17) и при М-->■ 1
Используя выражение (8.9) при y = const, получим
(8. 44)
В области малых дозвуковых скоростей и больших сверхзвуко¬
вых скоростей n~ const = 2, const = —4, так что и асимптотиче¬
ские выражения для и производных (8.44) имеют вид
Очевидно, что дф}ду<0, дф/дУ>0, дф/д\\<0, и, следовательно,
условия (8.26), (8.29) — (8.31) выполнены, т. е. как скорость, так
и высота полета монотонно возрастают.
Обращаясь к трансзвуковой зоне, положим в уравнениях (8. 43)
и (8.44), в соответствии со сказанным выше, су~ 0, т. е. перейдем
к уравнениям первого приближения.
Принимая ориентировочно при М~1 сх0~0,04, п^5, с^О (см.
рис. 40), из уравнения (8.41) получим, что при нагрузке на
квадратный метр крыла порядка 300 кГ/м2 и тяговооруженности
порядка единицы высота, соответствующая прохождению трансзву¬
ковой зоны при движении по внутренней экстремали, близка
к 15 000 м. Условию допустимости траекторий (8.25) можно при¬
дать форму
Поскольку при Су^О всегда дф/ду<0, выполнение условий
(8. 46) обеспечивает в силу соображений, приведенных в разд. 8. 2,
(8,45)
CjcokV-e '[lJ И dV
1 c$-cx 0kV2e-™
(8.46)
sin 62
gp sin 0j
158
монотонность функции 1/(ц) и отрицательность второй вариации
b2VK, т. е. выполнение необходимых условий максимума Vк.
Так как при — <0 знак производной-^- совпадает со знаком
ди dV
дФ
— , характер изменения высоты при движении в трансзвуковой зоне
» дФ п
определяется знаком производной —. Для последней из уравнении
(8.43) и (8.44) получим следующее выражение:
дФ cxnkge~^y Г / , , ,г dn , vK2 , . -."I
— =_м_ь \n(nJ LJ—(л+ 2)
dV V I dV 1 g v' ' !
(8.47)
Из выражения (8. 47) ясно, что может существовать узкая об¬
ласть скоростей, соответствующая резкому падению показателя
дФ
сопротивления п, в которой — <0.
Это подтверждается результатами
аэродинамического расчета.
Рис. 60.
Рис. 61.
На рис. 60 представлена функция
ь(М)»л(л + 1) + М^+^-(я + 2),
dm g
(8.48)
соответствующая значениям сх(М), приведенным на рис. 41.
Таким образом, функция %з(М) в трансзвуковой зоне последо¬
вательно меняет знак с положительного на отрицательный и снова
дФ
на положительный, так что уравнение — =0 имеет два корня.
Этому соответствует «волна», представленная пунктирной линией
на рис. 61 (резкий набор высоты, затем переход к крутому сниже¬
нию и, наконец, снова резкий набор высоты). Следует заметить, что
условия (8. 46) остаются выполненными вдоль всей «волны» толь¬
ко при очень большой тяговооруженности (/7^>1).
159
Практически при 1ч-2 оба они будут последовательно нару-
ния на рис. 61 между точками \x = \i\ и ц=р4). Следовательно,
трансзвуковая зона должна включать в общем случае три участка
внешней экстремали (жирная линия на рис. 61). Здесь, как и в
гл. VII, возникает задача о выборе оптимальных значений парамет¬
ров точек перехода ц*, |х*, jx*, обеспечивающих получение отно¬
сительного максимума V& Эта задача может быть решена либо
численно, либо методом вариаций. (Вопрос об абсолютном макси¬
муме Vк при этом остается открытым.)
8.6. НАИВЫГОДНЕЙШИЕ ПАРАМЕТРЫ ВЕРХНЕГО КОНЦА ТРАЕКТОРИИ
В разд. 8. 1—8.5 предполагалось, что параметры ук и \хк на
верхнем конце траектории являются фиксированными. В этом слу¬
чае справедлив принцип взаимности (гл. IV). Положение, однако,
существенно меняется, если какой-либо из этих параметров считать
варьируемым. При этом можно поставить следующие две задачи.
1. Выбор наивыгоднейшей программы управления и конечной
высоты ук, обеспечивающих максимум конечной скорости при за¬
данном коэффициенте \х,с.
2. Выбор наивыгоднейшей программы управления и конечной
скорости VKJ обеспечивающих максимум р/с (т. е. минимум tK) на
заданной высоте ук.
Для решения этих задач воспользуемся формулой (4. 29):
Примем для определенности у'о = у*0, что, конечно, не уменьшает
общности, и исследуем влияние параметров верхнего конца траек¬
тории на VK и 1хк.
Рассмотрим сначала первую задачу, т. е. положим, что
шаться при М—► 1, сначала первое (при — >0), а затем второе
(при ^ <0), даже если положить 1011 = | б21 = у (пунктирная ли-
8Ц<= — ('>Р«8#к +'!'«¥*) + j ф0Л*/>(*)8*/<^, (8.49)
где
p,^=const, 6^ = 0.
Выражение (8.49) переходит в следующее:
(8.51)
160
Очевидно, что условие максимума конечной скорости 6К]/С<0
(при варьировании от экстремали) не выполняется на внутренней
экстремали у^у* со свободным верхним концом, так как всегда
можно подобрать такую вариацию 6#<0, что интегральный член
в (8. 51) обратится в нуль с точностью до членов первого порядка
малости, а внеинтегральный будет больше нуля (с той же степенью
точности).
Таким образом, вариации вида
6г/*<0 соответствуют приближению
к истинной экстремали, а вариации
вида 6z/:*>0— удалению от нее.
Однако местные вариации 6г/*<0
(|Ll = ) при 6у =0 (р<р*<1) являют¬
ся недопустимыми, и, следовательно,
варьирование линии уоу* должно за¬
ключаться в переходе к линиям с наи¬
более крутым загибом вниз на верх¬
нем конце (рис. 62). Этому соответ¬
ствует переход в некоторой точке р**
от движения по внутренней экстре¬
мали к снижению с наибольшим допу¬
стимым углом 01. Наивыгоднейшую
точку перехода р** проще всего опре¬
делить исходя из максимума функции У*(р**), задавшись не¬
сколькими значениями р** и интегрируя численно уравнения нис¬
ходящего движения. Можно воспользоваться и методом вариаций,
составив выражение 61/* на линиях, показанных на рис. 62 при
варьировании р**, и приравняв нулю коэффициент при 6р** (см.
разд. 3.8).
Проиллюстрируем последний метод на частном примере, до¬
пускающем получение решения в замкнутом виде. Предположим,
что нисходящие маневры считаются недопустимыми, и примем
Сл; = const = ; п = const = 2; ky~0;
&i~0; Уо = 0; Vo = 0.
В этом случае начальный и конечный участки искомой экстре¬
мали соответствуют горизонтальному разгону от 0 до 1/* и от I/**
до V* соответственно, причем параметр V* определяется из пер¬
вой формулы (8.34) при у = 0:
Рис. 62.
V
•“I/-т‘ + / (т*Н
2 bqp
QoCjro
(8. 52)
а Cq* — из условия максимума Vк\
dVK
dV“~
= 0.
И Б. И. Рабинович
161
Заменив в формуле (8.42) kcx0 соответствующим выражением
через V*, получаемым из (8.34) при у = О, найдем
У у (а531
2 /b Узь-\-У*2 + /b
Аналогичным образом для разгона от V**(p = p**) до V^(м- = и«)
найдем
с In —
У**Узb + У**2 Jn {v**Y3b+V**2 + VKYT){Y3b + V**2 — /b)
%vrb (y** Узь + v**2 — vK /ь ){Узь + у**2 + ■/ь)
(8.54)
Представив clnpK в виде
с In u.K=с In — -4 с In -—[-с In р*
гк u** . ^ .
и полагая в выражении (8.34) V= V**, из формул (8.34), (8.32) и
(8.33), получаем
. v*y зь+v*2 . у зь+v*2— Уь
с in (»к = —-—j= in ■
2 V ь Yzb+v*2+ / ь
+V'-v"+^Y-YrvTb{^7k-!‘'^vmy
у*Узь + у**2 ]п(у**Узь+у**2-гУкУь){У зь + v**2-У J) ,R
2/Т (у**у'гь + v**2 — vK Vь){Узь + v**2 + УУ)'
Дифференцируя это выражение по V** и приравнивая нулю
dVK
производную , находим
л т Т:М:Т _
1 V VK ,
к**2 (зб + у**2) — У2Ь 1
1п (у** Узь + у**2 + ук Уь) {Узь + к**2 - Уь) __ Q
2 } ь(зь-: t >2) (у**Узь + у**2 — ук-/ь)(Узь + у** +Уь)
(8. 56)
Уравнения (8.55) и (8.56) определяют значения 1/** = У** и Ую
отвечающие в рамках сделанных допущений абсолютному макси¬
муму VK\ при этом соответствующие значения р* и р** определя¬
ются выражениями (8.53) и (8.54). Формулы (8.55) и (8.56) дают
верхнюю оценку максимально возможной скорости Vк при данных
значениях р/с и с более тонкую, чем формула Циолковского.
162
Рассмотрим вторую задачу. Положив ук— const, 6ук=0, из фор¬
мулы (8.49) получим
ЬУК= —[ ф ОЛ У. [*•) ЬУ dp ■
(8.57)
Условие максимума \хк, или минимума времени подъема tK,
имеющее вид 6[л1л:<0, не может выполняться на линии у0у* со сво¬
бодным верхним концом.
Соображения, аналогичные при¬
веденным выше, позволяют сделать
вывод о том, что варьирование ли¬
нии у0ук должно заключаться
в переходе к линиям с наибо¬
лее крутым загибом вверх на верх¬
нем конце, которым соответствует
переход в некоторой точке р**,
и подъему с максимально допу¬
стимым углом 62 (рис. 63). Наи¬
выгоднейшую величину ц** , ко¬
торой отвечает линия УоР** » так¬
же можно определить одним из
двух методов, упомянутых выше.
8.7. ПРИМЕР РАСЧЕТА
Из всех задач, рассмотренных выше, наиболее актуальной
является задача о выборе наивыгоднейших программ управления,
обеспечивающих достижение максимальной конечной скорости и
максимальной скороподъемности при постоянном секундном расхо¬
де топлива. Поэтому результаты; касающиеся этой задачи, про¬
иллюстрируем более подробно на численном примере.
Рассмотрим гипотетический экспериментальный самолет с ЖРД
класса американского ракетоплана Х-15 [100] со следующими основ¬
ными конструктивными параметрами:
Начальный вес Go • 12000 кГ
Конечный вес GK 6000 кГ
Тяга двигателя в пустоте Р0 21 600 кГ
Скорость истечения в пустоту с .... 2800 м/сек
- Go
Нагрузка на крыло Я=~^ 590 кГ/м?-
- Ро
Тяговооруженность р=~г 1,8
Go
Коэффициент пассивной массы \lk 0,5
Относительный массовый секундный расход р 0,0063 1/сек
Высота сбрасывания с носителя уо 12 000 м
Скорость в момент сбрасывания с носителя Vo 1000 км/час
11* 163
Су
Рис. 65.
164
На рис. 64 приведены характеристики сх0(М) для различных
высот, а на рис. 65 — поляры. При этом учтена зависимость сх0 от
числа Re с помощью функции у(М), рассчитанной для оптимальной
траектории первого приближения при сх = const.
Предположим, что рассматриваемый летательный аппарат сбра¬
сывается с самолета-носителя на некоторой высоте, после чего
включается двигатель и совершается набор высоты в целях дости¬
жения максимальной скорости.
Рассмотрим характер изменения высоты и скорости после отде¬
ления от носителя при различных программах управления, считая
секундный расход топлива постоянным. В рассматриваемом случае
при y£>yl скорость на высоте сбрасывания VjJ, отвечающая началу
движения по внутренней экстремали, составляет 740 м/сек. По¬
этому активный участок должен начинаться пикированием с мак¬
симально допустимым углом к горизонту, пока не будут достигнуты
скорость и высота V*, у*, соответствующие попаданию на внутрен¬
нюю экстремаль; дальнейшее движение должно заключаться в посте¬
пенном наборе высоты в соответствии с уравнением внутренней
экстремали. Если нисходящее движение на начальном участке по
каким-либо соображениям недопустимо, то движение после отделе¬
ния от носителя должно начинаться с горизонтального разгона до
скорости У*, которая в этом случае, конечно, будет уже иной,
чем У*.
Зависимости от времени скорости V, высоты у, осевой перегруз¬
ки пх и скоростного напора q для этого случая экстремального
движения, рассчитанные при су = 0, представлены на рис. 66. За на¬
чальный момент времени принят конец горизонтального разгона от
скорости У0 =280 м/сек, соответствующей отделению от носителя,
до скорости V'l =740 м/сек; конечный момент времени соответству¬
ет полной выработке топлива.
На рис. 67 представлены значения угла атаки a(t), обеспечи¬
вающего реализацию экстремального движения, и соответствующие
значения угла тангажа ^(t) и угла наклона касательной к траекто¬
рии 0 (/)='&—а. Как видно, внутренняя экстремаль не налагает
каких-либо исключительных требований на программу управления
углом тангажа, так как потребный угол атаки не превышает 8°
(в самом конце активного участка). При этом угол тангажа меняет¬
ся очень незначительно — монотонно убывает от 20° до 17°, а затем,
достигнув минимального значения, возрастает приблизительно до
19°. В этом смысле полученная программа близка к оптимальной
программе управления баллистическим объектом дальнего дейст¬
вия или носителем искусственного спутника Земли [54], [25].
На рис. 68 приведены результаты расчетов функции y(V) пер¬
вого и второго приближения, проведенных по методике, описанной
выше. Начальный участок этих кривых до У=740 м/сек соответ¬
ствует горизонтальному разгону. Кривая у (У) второго приближе¬
ния очень близка к соответствующей кривой первого приближения.
165
Отличие в значениях VK при р = .ц,, составляет примерно 60 м/сек,
т. е. ~3%. На этом же рисунке представлена для сравнения зави¬
симость y{V), соответствующая программе 0 = const = 40°. Такая
неоптимальная программа дает довольно заметный проигрыш
в конечной скорости по сравнению с оптимальной (порядка
420 м/сек), т. е. около 20%.
Для дальнейшего анализа функция сх(М) была заменена кон¬
стантой, подобранной так, чтобы получить при ц = ,ик значение VK,
совпадающее с полученным в результате расчета второго прибли¬
жения КЛ=194С м/сек. Это значение составляет =0,017.
На рис. 69 представлена зависимость конечной скорости Vк от
угла 0о на начальном участке разгона до достижения скорости Vк,
отвечающей выходу на внутреннюю экстремаль. При расчете пред¬
полагалось, что на всем участке разгона от V0 до К* сохраняется
постоянное значение 0=0о. Как видно из рис. 69, увеличение угла
166
I
167
О о приводит в полном соответствии с полученными выше результа¬
тами к монотонному возрастанию скорости. Однако это возраста¬
ние при увеличении 0О от 0 до 30° весьма незначительно и имеет
тот же порядок, что и потеря скорости за счет влияния индуктивно¬
го сопротивления (55 м/сек).
Рис. 69.
На рис. 70 показано влияние конечного участка разгона, кото¬
рый, как отмечалось в предыдущем разделе, должен включать
экстремаль со сзободным верхним концом. На этом рисунке At
означает абсолютную величину времени, отсчитываемого от конца
активного участка, характеризующего момент перехода на участок
горизонтального разгона. При этом принято, что на начальном
участке разгона G о = 0.
Как видно из рис. 70, имеется достаточно ярко выраженный
максимум VK при А^= 16 сек, которому соответствует значение
1/^—2185 м/сек, на 12,5% превышающее конечную скорость при
отсутствии дополнительного участка разгона (Л£=0).
На рис. 71 и 72 приведены зависимости угла наклона касатель¬
ной к траектории к горизонту при разгоне на конечном участке
168
с различными значениями 0*=const (0о = О, Д£=12 сек) от конеч¬
ной скорости и высоты. Как видно из этих рисунков, уменьшение 0Л
приводит к росту Vк (до 2275 м/сек при 0К=—30°). С другой сторо-
Рис. 70.
ны, при увеличении угла наклона конечного участка траектории
(в положительном направлении) возрастает высота ук, на которой
заканчивается активный участок (от 32 до 56 км при изменении О*
от 10° до 80'°). При фиксированной высоте это означает уменьшение
Vk м/сек
Рис. 71.
tK. Таким образом подтверждаются выводы предыдущего раздела
о форме конечного участка экстремали, обеспечивающей получение
абсолютного максимума Vк и минимума tK*
12 Б. И. Рабинович
169
Рис. 73.
170
На рис. 72 представлена также высота апогея эллиптической
части баллистического участка траектории. (Эта характеристика
при 0^=70° имеет максимум, равный 245 км).
На рис. 73 представлена зависимость высоты от скорости для
двух вариантов оптимальных программ с 0О =—30°, соответствую¬
щих V-K= V^max и у = ут^- Конечная скорость на оптимальной тра¬
ектории УЛ = 2325 м/сек превышает на 805 м/сек (т. е. 35%) конеч¬
ную скорость, отвечающую прямолинейной траектории с 0 =
= const = 40°.
. Рассмотренный пример показывает, что вариационные програм¬
мы могут давать существенный выигрыш как в максимальной ско¬
рости, так и в скороподъемности.
Следует заметить, что приведенные результаты относятся к тра¬
екториям, имеющим изломы, которые практически не могут быть
реализованы и должны быть сглажены, что связано с существенной
дополнительной потерей скорости; поэтому все численные резуль¬
таты этого раздела носят характер верхних оценок Vк или ук.
8.8 О НАИВЫГОДНЕЙШЕЙ ПРОГРАММЕ УПРАВЛЕНИЯ НА АКТИВНОМ
УЧАСТКЕ ПОЛЕТА КРЫЛАТОГО НОСИТЕЛЯ КОСМИЧЕСКИХ АППАРАТОВ
Рассмотрим активный участок горизонтального стартующего
крылатого носителя космических летательных аппаратов, предназ¬
наченного для получения конечной скорости, составляющей задан¬
ную долю второй космической скорости. Такой носитель может
представлять собой, например, крылатую отделяющуюся часть пер¬
вой ступени многоступенчатой космической ракеты, возвращаемую
на Землю после выработки топлива.
Подобный летательный аппарат может предназначаться также
для запуска гиперзвукового планера или превращаться непосредст¬
венно в такой планер после выработки топлива [94].
Будем считать режим работы двигателя заданным уравнением
(т — текущее, т0—начальное значение массы), а программу
управления в плоскости тангажа — варьируемой. Представим ко¬
нечную скорость в виде
где 'С—некоторая константа, определяемая конкретными требо¬
ваниями к носителю;
Vp — параболическая скорость на высоте у\
go — ускорение силы тяжести на высоте у = 0;
г0—радиус Земли.
(8.58)
(8. 59)
171
<1С << 1 — эллиптической, С = 1 — параболической и, наконец, С>1 —
гиперболической скорости.
Для рассматриваемого объекта задачу об оптимальной про¬
грамме управления естественно формулировать как задачу о дости¬
жении заданного значения £ с минимальным расходом топлива,
т. е. при максимуме [iK.
Будем рассматривать плоские траектории на невращающейся
Земле, полагая, что потребные для их реализации углы атаки малы
в том смысле, что можно пренебречь составляющей лобового со¬
противления, зависящей от угла атаки.
Введем максимально допустимые углы набора высоты и сниже¬
ния, измеряемые относительно линии местного горизонта, которые
обозначим ±0, где 0<0,< —. Можно показать, что в рассматри¬
ваемой задаче скорость полета должна являться монотонно возра¬
стающей функцией времени, так что ее можно принять за незави¬
симую переменную. Используя сделанные допущения, получаем
следующее уравнение движения в проекции на касательную к тра¬
ектории:
Естественное граничное условие при V-K=t,Vp определяют из
максимума рк.
Сформулируем вариационную задачу следующим образом.
В классе допустимых функций у(У) найти функцию, обеспечи¬
вающую максимум функционала \хк, заданного неявно дифференци¬
альным уравнением\ (8.60) и начальным условием (8.62).
dV
dV
(S. 60)
где
lE (V, у, p)^cri — cxkkV2 — kv\x',
(8.61)
Начальное и граничное условия при V=V0 имеют вид
(.1=1 при V=Vq\
у = 0 при V=Vq.
(8. 62)
(8.63)
172
Область значений допустимых функций 50 ограничена на плос¬
кости у, V прямой у = 0, кривой y(V), удовлетворяющей дифферен¬
циальному уравнению
sin &, (8.64)
d V у. d V v '
и кривой VK = tyv(y). Дополнительные ограничения, налагаемые
на допустимые функции y(V) внутри области 50, могут носить раз¬
личный характер. В том случае, когда эти ограничения сводятся
к недопустимости угла наклона касательной к линии местного гори¬
зонта, превышающего по модулю Ф, они выражаются следующими
неравенствами:
Vu.sin& ^ dy \ VjJLSinft /0
^ i ; ~^5)
W — uo-sinfr ' dV -f jx-g-sin
Первая вариация функционала \хк на линиях со свободным верх¬
ним концом имеет вид
\к
¥* = —(ЯкЬУк-г'1>кьук)-т j *(V,y9V.)bydV, (8.66)
где
Ф(У,у,\>.)=-У-У ^ + — (8.67)
dV g ду
ИЩ>0; ,8'68)
'\ = — ®*>0-
()'
Полные вариации 6VK и 6ук в данном случае не являются неза¬
висимыми, а связаны уравнением (8.59):
iv = _
к 2 (/*0 -г у к)
Таким образом, для первой вариации бы,,, получим следующее
окончательное выражение:
\к
0[ЛК=—(1 — j ®{Vty,\?.)bydV. (8.69)
Vo
Выполняя дифференцирование по У и у, можно придать функ¬
ции Ф(1Л у, ц) следующий вид:
^ /т г ч о , : \л дсх\ | V2 М da дсх ,
Необходимое условие максимума р* будет
Ф(V, у, ii) =0.
(8.71)
Если положить в выражении (8.70) p = const, g" = const, то
уравнение (8.71) переходит в уравнение (8.12).
Рис. 74.
Таким образом, вид уравнения внутренней экстремали не зави¬
сит от того, являются ли g и |3 постоянными величинами или задан¬
ными функциями высоты и массы:
g=g(y), Р=РЫ.
В соответствии с результатами, приведенными выше, к уравне¬
нию (8.71) следует присоединить необходимое условие слабого
максимума Vк\
/дФ дФ\
- с? —\
\ду др/\Ф=о
<0.
(8. 72)
Условие (8. 72), выполненное в усиленной форме (со знаком <),
переходит в достаточное условие сильного максимума \iK.
174
п
5-
3-
ОМ О
омо
0,030
о, ого
0,010
Естественное граничное условие на верхнем конце экстремали
может быть записано в форме £=1, т. е. VK=Vv.
Можно показать, как это было сделано в разд. 3.6, что при
\Ф1 условие максимума б[х]Л<0 при варьировании от внутренней
экстремали со свободным верхним кон¬
цом не выполняется, так что в некото¬
рой точке У**, у** необходимо пе¬
рейти на внешнюю экстремаль, кото¬
рая и образует конечный участок иско¬
мой экстремали. Легко видеть, что при
£<1, VK<VP этот участок представ¬
ляет собой свертывающуюся логариф¬
мическую спираль с углом наклона ка¬
сательной к линии местного горизон¬
та а при £>1, VK>Vp—аналогич¬
ную развертывающуюся спираль. Па-
раметры У**, у** можно определить
исходя из условия 6^ = 0.
10 11
12М-
Рис. 75.
Вид начального участка экстремали определяется соотношением
между начальной скоростью Уо и характеристической скоростью
V* являющейся наименьшим корнем уравнения (8.71) при р=1,
у = 0. При У<Уд начальный участок экстремали соответствует
движению по геоцентрической окружности, при Уо>Уо —движе¬
нию по развертывающейся логарифмической спирали с углом
подъема -О; при Уо = Уо движение должно сразу же начинаться по
внутренней экстремали.
Закон движения по внутренней экстремали можно получить
путем совместного интегрирования уравнений (8.58) и (8.70).
175
В случае g = const, (3 = const, Д = Ai = е_7У,где y = const, соответ¬
ствующее решение приводится к квадратурам, а при дополнитель¬
ном предположении, что закон сопротивления степенной, выражает¬
ся через элементарные функции.
На рис. 74 представлена для примера внутренняя экстремаль
y{V) для гипотетического крылатого летательного аппарата сЖРД,
аналогичного предложенному Зенгером [94], со следующими основ¬
ными параметрами:
G0 = 100 ООО кГ; 5=125 м2;
Р0= 100 ООО кГ; с = 3000 м/сек.
На рис. 74 отчетливо видна «волна» в трансзвуковой зоне,
в районе которой нарушаются условия (8.65). На рис. 75
представлены кривые ст0(М) и п(М)=2+ —— , использованные
сх дМ
при расчете.
ЛИТЕРАТУРА
1. Ахиезер Н. И., Лекции по вариационному исчислению, ГИТТЛ, 1955.
2. Беллман Р., Динамическое программирование, ИЛ, 1962.
3. Б е л л м а н Р., Процессы регулирования с адаптацией, изд. «Наука», 1964.
4. Б л и с с Г. Л., Лекции по вариационному исчислению, ИЛ, 1955.
5. Ветчин кин В. П., Избранные труды, АН СССР, т. I, 1956.
6. Гор о ще нк о Б. Т., Динамика полета самолета, Оборонгиз, 1954.
7. Егоров В. А., О решении одной вырожденной вариационной задачи
об оптимальном подъеме космической ракеты, ПММ, 1958, т. XXII, вып. 1.
8. Гюнтер Н. М., Курс вариационного исчисления, ОГИЗ, 1941.
9. К а м к е Э., Справочник по обыкновенным дифференциальным уравнениям,
Физматгиз, 1961.
10. Кожевников Ю. В., К исследованию некоторых задач аэромеханики,
Изв. вузов, «Авиационная техника», 1958, № 2.
11. Космодемьянский А. А., Экстремальные задачи для точки пере¬
менной массы, ДАН СССР, 1946, т. LIII, вып. 1.
12. Кротов В. Ф., Расчет оптимальной траектории для перехода ракеты
на заданную круговую траекторию около Земли, Сб. «Механика», 1955.
13. Кротов В. Ф., Разрывные решения вариационных задач, Изв. вузов
«Математика», 1960, № 5.
14. К р о т о в В. Ф., О разрывных решениях вариационных задач, Изв. ву¬
зов, «Математика», 1961, № 2.
15. Кротов В. Ф., Основная задача вариационного исчисления для про¬
стейшего функционала на совокупности разрывных функций, ДАН СССР,
1961, т. 137, № 1.
16. Кротов В. Ф., Об абсолютном минимуме функционалов на совокуп¬
ности функций с ограниченной производной, ДАН СССР, 1961, т. 140, № 3.
17. Кротов В. Ф., Методы решения вариационных задач на основе доста¬
точных условий абсолютного минимума, I, «Автоматика и телемеханика», 1962,
т. XXIII, № 12.
18. Кротов В. Ф., Методы решения вариационных задач, II, «Автоматика
и телемеханика», 1963, т. XXIV, № 5.
19. Лаврентьев М. А. и Люстерник Л. А., Курс вариационного
исчисления, ГИТТЛ, 1950.
20. Л е й т м а и Г., О максимальной длине полета ракеты в горизонтальной
плоскости, ПММ, 1963, т. XXVII, вып. 3.
21. Ост осл ав ский И, В. и Лебедев А. А., О расчете подъема ско¬
ростного самолета ТВФ, № 8—9, 1946.
22. О с т о с л а в с к и й И. В., Аэродинамика самолета, Оборонгиз, 1957.
23. О с т о с л а в с к и й И. В., С т р а ж е в а И. В., Динамика полета. Траек¬
тории летательных аппаратов, Оборонгиз, 1963.
24. Ох оц им ский Д. Е., К теории движения ракет, ПММ, 1946, т. X,
вып. 2.
25. О х о ц и м с к и й Д. Е. и Э н е е в Т. М., Некоторые вариационные за¬
дачи, связанные с запуском искусственного спутника Земли, УФН, 1957, т. XLIII,
вып. 1.
177
26. П о н т р я г и н Л. С., Болтянский В. Г., Г а м к р е л и д з е Р. В.,
Мищенко Е. Ф., Математическая теория оптимальных процессов, Физмат-
гиз, 1961.
27. П ы ш н о в В. С., Аэродинамика сверхзвуковых скоростей, «Вестник воз¬
душного флота», 1955, № 1, 4, 6, 9, 10; 1956, № 3—6, 8, 10.
28. Р у л е в В. А., О необходимых и достаточных условиях экстремума в ва¬
риационных задачах динамики полета летательных аппаратов, Изв. вузов, «Авиа¬
ционная техника», 1961, № 1.
29. С и в к о в Г. Ф., Наивыгоднейшие маневры в вертикальной плоскости
летательных аппаратов переменной массы, Изв. вузов, «Авиационная техника»,
1959, № 4.
30. С и н я р е в Г. Б., Добровольский М. В., Жидкостные ракетные
двигатели, Оборонгиз, 1957.
31. Смирнов В. И., Курс высшей математики, ГИТТЛ, 1953.
32. Тарасов Е. В., Оптимальное программирование тяги силовой установ¬
ки при заданной траектории полета, Изв. вузов, «Авиационная техника»,
1961, № 1.
33. Тарасов Е. В., Оптимальные режимы полета летательных аппаратов,
Оборонгиз, 1963.
34. Ф е о д о с ь е в В. И. и Синя рев Г. Б., Введение в ракетную техни¬
ку, Оборонгиз, 1956.
35. Ц и о л к о в с к и й К. Э., Труды по ракетной технике, Оборонгиз, 1947.
36. Черный Г. Г., Течение газа с большой сверхзвуковой скоростью, Физ-
матгиз, 1959.
37. Э л ь с ц о л ь ц Л. Э., Вариационное исчисление, ГИТТЛ, 1958.
38. Исследование оптимальных режимов движения ракет, под общей редак¬
цией И. Н. Садовского, Оборонгиз, 1959.
39. Сверхзвуковые самолеты, ИЛ, 1958.
40. В е h г b о h m Н., Brachystochrone Flugbahnen im Raum bei zeitUch
veranderlichem Fluggewicht, Jahrbuch der WYL, 1954.
41. Behrbohm H., Optimal Trajectories in the Horizontal Plane, Sve-
nska Aeroplan A. B. Linkaping, SAAB, TN33, 1955.
42. Behrbohm H., Optimal Trajectories in the Vertical Plane. Svenska
Aeroplan A. B. Linkaping, SAAB, TN34, 1955.
43. Behrbohm H. Zur Herleitung der Eulergleichungen des brachysto-
chronen Endpunktgebundenen Steigfluges in vertikaler Ebene bei verschiedenen
Endbedigungen, Ztschr. fur Flugwissenschaften, H. 12, 1956.
44. Breakwell L., The Optimization of Trajectories, Journal of the
Society of Industrial and Applied Mathematics, vol. 7, No. 2, 1959.
45. С a r t i a n о Т., D г e у f u s S., Application of Dynamic Programing to
the Airplane Minimum Time to Climb Problem, Aeronautical Engineering Re¬
view, vol. 16, No. 6, 1957.
46. С i с a 1 a P., Le Evolusioni Ottime di an Aero, Atti della Accademia
delle Scienze di Torino, vol. 89, 1954—1955.
47. С i с a 1 a P., Soluzioni Dicontinue nei Problemi di Volo Ottimo. Atti
della Accademia delle Scienze di Torino, vol. 90, 1955—1956.
48. С i с a 1 a P., M i e 1 1 e A., Brachistocronic Maneuvres of a Constant
Mass Aircraft in Vertical Plane, Journal of the Aeronautical Sciences, vol. 22,
No. 4, 1955.
49. С i с a 1 a P., Miele A., Brachistocronic Maneuvres of a Variable
Mass Aircraft in a Vertical Plane, Journal of the Aeronautical Sciences, vol. 22,
No. 8, 1955.
50. С i с a 1 a P., Miele, Generalised Theory of the Optimum Thrust
Programing for the Level Flight of Rocket Powered Aircraft, Jet Propulsion,
vol. 26, No. 6, 1956.
51. D о m m a s с h D., Barron R., Optimum Rocket Trajectories, pt. 1,
Aero/Space Engineering, vol. 19. No. 1, 1960.
52. Dommasch D., Barron R., Optimum Rocket Trajectories, pt. 2,
Aero/Space Engineering, vol. 19, No. 2, 1960.
178
53. F a u I к n е г F., The Problem of Goddard and Optimum Thrust Prog¬
raming, Proceedings of the American Astronautical Society, No. 4, 1956.
54. F г i e d D., Richardson L., Optimum Rocket Trajectories, Journal
of Applied Physics, vol. 27, No. 8, 1956.
55. Fried D., On the Powered Flight Trajectories of an Earth Satellite.
Jet Propulsion, vol. 27, No. 6, 1957.
56. F r a I i у s d e V e u b e к e B., Methodes Varaitionnelles et Performan¬
ces Optimales en Aeronautique, Bull. Soc. Math. Belgique, No. 2, 1956.
57. Ed elbaum Т., Comments on the Powered Flight Trajectory of a
Satellite Jet Propulsion, vol 27, No. 12, 1957.
58. Ehrike K., Flight Mechanics of the Satelloid. Aero Digest, vol. 73,
No. 1, 1956.
59. Gar be 11 М., Optimum Climbing Techniques for High-Performance
Aircraft, Garbell Aeronautical Series, No. 8, San-Francisco, 1953.
60. Goddard R., A Method for Reaching Extreme Altitudes, Smithsonian
Miscellaneous Collections, vol. 71, 1921.
61. Hamel G., Uber eine mit dem Problem der Rakete zusammenenhan-
gende Aufgabe der Variationrechnung, Zeitschrift fur Angewandte Matematik
und Mechanik, Bd. 7, 1927.
62. Hibbs H., Optimum Burning Programm for Horizontal Flight, Jet
Propulsion, vol. 22, No. 4, 1952.
63. К u l а к о w s к i L., Stancil R., Rocket Boost Trajectories for Ma¬
ximum Burnout Velocity, ARS Journal, vol. 30, No. 7, 1960.
64. Lawden D., Minimal Rocket Trajectories, Journal of the American
Rocket Society, vol. 23, No. 11—12, 1953.
65. Lawden D., Optimal Programing of the Pocket Thrust Direction.
Astronautica Acta, vol. 1, fasc. 1, 1955.
66. Lawden D., Optimal Launching of Rocket into an Orbit around the
Earth, Astronautica Acta, vol. 1, fasc. 4, 1955.
67. L e i t ni a n n G., A Calculus of Variation Solution of Goddards Pro¬
blem, Astronautica Acta, vol. 2, fasc. 2, 1956.
68. L e i t m a n n G., Stationary Trajectories for a High Altitude Rocket
with Drop-Away Booster, Astronautica Acta, vol. 2, fasc. 3, 1956.
69. L e i t m a n n G., Optimum Thrust Programing for High-Altitude Ro¬
ckets, Aeronautical Engineering Review, vol. 16, No. 6, 1957.
70. L e i t m a n n G., Optimization Techniques with Applications to Aero¬
space Systems, Academy Press, New-York, London, 1962.
71. Miele A., Problemi di Minimo Tempo nel Volo Non-Stazionario
degli Aeroplani, Atti della Accademia delle Scienze di Torino, vol. 85,
1950—1951.
72. Miele A., Optimum Climbing Technique for a Rocket-Powered Air¬
craft, Jet Propulsion, vol. 25. No. 8, 1955.
73. Miele A., An Extension of the Theory of the Optimum Burning
Program for the Level Flight of a Rocket-Powered Aircraft, Journal of the
Aeronautical Sciences, vol. 24, No. 12, Dec. 1957.
74. Miele A., Optimum Burning Program as Related to Aerodynamic
Heating for a Missile Traversing the Earth Atmosphere, Jet Propulsion, vol. 27,
No. 12. 1957.
75. Miele A., Generalized Variation Approach to the Optimum Thrust,
Programing for the Vertical Flight of a Rocket, pt. 1, Zeitschrift fiir Flugwis-
senschaften, H. 6, Nr. 3, 1958.
76. M i e 1 e A., Cavoti C., Generalized Variational Approach to the
Optimum Thrust Programing for the Vertical Flight, pt. 2, Zeitschrift fiir Flug-
wissenschaften, H. 6, Nr. 3, 1958.
77. Miele A. General Variational Theory of the Flight Paths of Rocket-
Powered Aircraft, Missiles and Satellite Carriers. Astronautica Acta, vol. 4,
fasc. 4, 1958.
78. Miele A., Stationary Conditions for Problems Involving Time Asso¬
ciated with Vertical Rocket Trajectories, Journal of the Aerospace Sciences,
vol. 25, No. 7, 1958.
179
79. Miele A., Extremal Problem for Arbitrarily Inclined Rocket Trajec¬
tories, Jet Propulsion, vol. 28, No. 7, 1958.
80. Miele A., Cavoti C., Optimum Thrust Programing along Arbitra¬
rily Inclined Rectilinear Paths, Astronautica Acta, vol. 4, fasc 3, 1958.
81. Miele A., Flight Mechanics and Variational Problems of a Linear
Type, Journal of the Aerospace Sciences, vol. 28, No. 9, 1958.
82. Miele A., Some Recent Advances in the Mechanics of Terrestrial
Flight, Jet Propulsion, vol. 28, No. 9, 1958.
83 . M i e 1 e A., On the Brachistochronic Thrust Programm for a Rocket-
Powered Missille Travelling in an Isothermal Medium, Jet Propulsion, vol. 28,
No. 10, 1958.
84. Miele A., On the Flight Path of a Hypervelocity Glider Boosted by
Rockets, Astronautics Acta, vol. 5, fasc. 6, 1959.
85. Miele A., Cappellari J., Topics in Dynamic Programing for Ro¬
ckets, Zeitschrift ftir Flugwissenschaften, H. 1, 1959.
86. Miele A., Interrelationship of Calculus of Variations and Ordinary
Theory of Maxima and Minima for Flight Mechanics Applications. ARS Journal,
vol. 29, No. 1, 1959.
87. Newton R., On the Optimum Trajectory of a Rocket., Journal of the
Franklin Institute, vol. 266, No. 3, 1958.
88. Obert H., Die Rakete zu den Planetenraumen., Berlin, 1925.
89. Perkins F., Flight Mechanics of Ascending Satellite Vehicles, Jet
Propulsion pt. 1, vol. 26, No. 5, 1956.
90. Ross S., Minimality for Problems in Vertical and Horizontal Rocket
Flight, Jet Propulsion, vol. 28, No. 1, 1956.
91. R u t к о w s к i E. S., Energy Approach to the General Aircraft Per¬
formance Problem, Journal of the Aeronautical Sciences, vol. 21, No. 3. 1954.
92. Santangelo G., Sulla Virata Correta, Brachistocrona L’Aerote-
cnica, vol. 33, 1953.
93. Santangelo G., La Virrata Correta Non-Stazionaria e Stazionaria
degli Aeroplani con Gruppo Propulsore di Qualsiasi. Tipo L'Aerotecnica,
vol. 34, 1954.
94. Sanger E., Bredt I., A Rocket Drive for Long-Range Bombers.
Deutsche Luftfahrtforschung, LLM 3538, 1944.
95. Schindler G., Minimum Time Flight Paths, ARS Journal, vol. 30,
No. 4, 1960.
96. The odor sen Т., Optimum Path of an Airplane-Minimum Time to
Climb, Journal of the Aerospace Sciences, No. 10, 1959.
97. Ting L., Approximating Technique for Variational Problems, Aero¬
space Engineering, vol. 20, No. 1, 1961.
98. Tsien H, Evans R., Optimum Thrust Programing for a Sounding
Rocket. Jet Propulsion, vol. 21, No. 5, 1951.
99. Aeroplane and Astronautics, vol. 100, No. 2584, 1961.
100. Flight. 24 Jan., 1963.
ОГЛАВЛЕНИЕ
Стр.
Предисловие . . 3
Основные обозначения . 5
Введение .... 7
Глава I. Элементарные сведения из вариационного исчисления . . 11
1.1. Постановка простейшей задачи вариационного исчисления ... 11
1.2. Необходимые условия экстремума простейшего функционала . . 15
1.3. Условный экстремум, изопериметрические задачи 21
1.4. Вырожденные задачи . 23
Г лава II. Постановка вариационных задач динамики крылатых летатель¬
ных аппаратов с ракетными двигателями 25
2. 1. Основные допущения о характере движения. Внешние силы ... 25
2.2. Уравнения движения центра масс 29
2.3. Постановка некоторых вырожденных вариационных задач дина¬
мики полета крылатых летательных аппаратов с ракетными дви¬
гателями 32
Глава III. Решение основной вырожденной вариационной задачи .... 39
3. 1. Допустимые функции и допустимые вариации 40
3.2. Выражения для первой и второй вариаций функционала zK . . . 42
3.3. Выражение для конечного приращения функционала гк ... . 44
3.4. Необходимые условия экстремума zK при специальном выборе
граничных значений уо и ук 46
3.5. Необходимые условия экстремума zK при произвольном выборе
граничных значений уо и ук 48
3.6. Достаточные условия экстремума zK 51
3.7. Пересечение экстремалью одной из внутренних границ области
значений допустимых функций у(х) 54
3. 8. Экстремаль со свободным концом ... 57
Глава IV. Решение обобщенной вырожденной вариационной задачи ... 61
4. 1. Постановка задачи 61
4. 2. Выражения для приращения и первой и второй вариаций неявно
заданного функционала гк 63
4. 3. Необходимые и достаточные условия экстремума zK 66
4.4. Применение метода последовательных приближений 73
Глава V. Наивыгоднейшие программы управления при заданном режиме
работы двигателя в случае движения по пологим траекториям и ма¬
лого изменения массы летательного аппарата 76
5. 1. Постановка задачи о наивыгоднейшем разгоне и планировании 77
5.2. Условия экстремума хк и tK 79
5. 3. Анализ экстремального движения 83
181
Стр.
5.4. Наивыгоднейшее планирование с большими сверхзвуковыми ско¬
ростями 89
5. 5. Задача о наивыгоднейшем вираже 90
Глава VI. Режимы работы двигателя, обеспечивающие максимальную
дальность и продолжительность полета при движении по пологим
траекториям 99
6. 1. Постановка задачи 99
6.2. Условия максимума дальности и продолжительности 102
6. 3. Исследование граничных условий 105
6. 4. Закон движения 108
6.5. Примеры расчета наивыгоднейших режимов горизонтального по¬
лета 111
6.6. Трансзвуковая зона 118
6. 7. Наивыгоднейший режим работы двигателя сателлоида, движуще¬
гося по геоцентрической круговой орбите 121
Глава VII. Наивыгоднейший режим работы двигателя при наборе высоты
по заданной траектории . 126
7. 1. Постановка задачи 126
7.2. Условия максимума VK . . . . 128
7.3. Исследование граничных условий .... 131
7.4. Интегрирование уравнений движения 134
7.5. Трансзвуковая зона 138
Г лава VIII. Наивыгоднейшие программы управления при фиксированном
режиме работы двигателя 141
8. 1. Постановка задачи 141
8.2. Необходимые условия максимума V,с 144
8.3. Интегрирование уравнений движения 147
8.4. Анализ граничных условий 153
8.5. Трансзвуковая зона 157
8.6. Наивыгоднейшие параметры верхнего конца траектории .... 160
8.7. Пример расчета 163
8.8. О наивыгоднейшей программе управления на активном участке
полета крылатого носителя космических аппаратов 171
Литература 177
182
Борис Исаакович Рабинович
ВАРИАЦИОННЫЕ РЕЖИМЫ ПОЛЕТА
КРЫЛАТЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Издательский редактор П. Б. Морозова Техн. ред. В. И. Ореилкина
Г-30301 Подписано в печать 5/V 1966 г. Учетно-изд. л. 9,84
Формат бумаги 60X907i6=5,75 бум. л.—11,50 печ. л.
Цена 82 коп. Тираж 2700 экз. Тем. план 1966 г. № 242 Заказ 1821/1972
Московская типография № 8 Главполиграфпрома
Комитета по печати при Совете Министров СССР
Хохловский пер., 7.