/






















Текст
Изм Лист № докум. Подп. Дата
ТУПК.360131.Мс46 КП ПЗ Лист
Введение
Машиностроение является основой научно-технического прогресса в раз-
личных отраслях народного хозяйства. Непрерывное совершенствование и раз-
витие машиностроения связано с процессом станкостроения, так как металло-
обрабатывающие станки вместе с другими видами технологического оборудо-
вания обеспечивают изготовление любых новых видов машин.
Совершенствование современных станков должно обеспечивать повыше-
ние скоростей рабочих и вспомогательных движений при соответствующем по-
вышении мощности привода главного движения. Исключительное значение
приобретает повышение надёжности станков за счёт насыщения их средствами
контроля и измерения, а так же введение в станки систем диагностирования.
Современные металлообрабатывающие станки обеспечивают высокую
точность и качество поверхности обрабатываемых деталей. Ответственные по-
верхности наиболее важных деталей машин и приборов обрабатывают на стан-
ках с погрешностью в долях микрометров, а шероховатость поверхности не
превышает сотых долей микрометра.
Изм Лист № докум. Подп. Дата
ТУПК.360131.Мс46 КП ПЗ Лист
1 Основные технические характеристики станка
1.1 Расчёт и обоснование режимов резания
Наибольший расчётный диаметр:
Dmax (8...12) B 8 200 110 мм;
Наименьший расчётный диаметр:
20
6
110
(4...6)
max
min
D
D мм;
Назначаем предельные глубины резания tmax , tmin :
tmin = 3 мм ,[1] стр. 201 табл. 35.
tmax = (2…5)мм=4 мм ,[1] стр. 284 табл. 35.
Назначаем предельные значения подач Szmax , Szmax :
Smax = 0,2 мм – при черновой обработке мягких сталей, чугунов, [1]
стр.284.
Smin = 0,01 мм – при чистовой обработке легированных сталей, твёрдых чу-
гунов,[1] стр. 284.
Определяем предельные скорости резания:
Umax соответствует фрезерованию минимальным диаметром твёрдосплав-
ной фрезы при наименьшей стойкости, глубине резания, подачи на зуб, ширине
фрезерования.
Umin - режущая часть фрезы из быстрорежущей стали, диаметр и стойкость
фрезы наибольшие, глубина резания, подача на зуб и ширина фрезерования
max.
u p v
v
y
z
m x
q
v K
T t S P B Z
C D
U
max
Сυ =235 ; D = 20 мм; q = 0,2; Т = 20;
m = 0,2; t = 3 мм; x = 0,17; Sz = 0,01 мм;
y = 0,1; B = 150 мм; u = 0,2; z = 10; P = 0.
Kυ = Kmυ* Knυ * Kuυ ;
Kmυ = (150/НВ)nυ = (150/220)1,25 = 0,6 ,[1] стр. 261.
Knυ = 0,8; Kuυ = 2,7 , [1] стр. 263 табл. 6.
Кυ = 0,6 * 0,8 * 2,7 = 1,3
1,3 141,6
20 3 0,01 150 10
235 20
0,2 0,17 0,1 0,22 0
0,2
max
U м/мин
Изм Лист № докум. Подп. Дата
ТУПК.360131.Мс46 КП ПЗ Лист
u p v
v
y
z
m x
q
v K
T t S P B Z
C D
U
min
Сυ =20 ; D = 100 мм; q = 0,25; Т = 180;
m = 0,2; t = 4 мм; x = 0,1; Sz = 0,2 мм;
y = 0,4; B = 120 мм; u = 0,15; z = 10; P = 0.
Kυ = Kmυ* Knυ * Kuυ ;
Kmυ = 1, [1] стр. 261.
Knυ = 1; Kuυ = 0,8 , [1] стр. 263 табл. 6.
Кυ = 1 * 1 * 0,8 = 0,8
0,8 15
180 4 0,2 120 10
20 100
0,2 0,17 0,4 0,15 0
0,25
min
U м/мин
Изм Лист № докум. Подп. Дата
ТУПК.360131.Мс46 КП ПЗ Лист
1.2 Определение частот вращения
Определяем минимальные предельные частоты вращения
Максимальная частота вращения шпинделя:
2254
3,14 20
1000 1000 141,6
min
max
max
D
U
n
мин -1 Принимаем nmax=2240 мин-1
Минимальная частота вращения шпинделя:
43
3,14 110
1000 1000 15
max
min
min
D
U
n
мин -1 Принимаем nmin=50 мин-1
Определяем диапазон регулирования коробки скоростей:
Rn = 45
50
2240
min
max
n
n
Определяем знаменатель геометрического ряда частот вращения. Получен-
ное значение округляем до ближайшего стандартного (1,06; 1,12; 1,26; 1,41;
1,58; 1,78; 2,0):
z1 121 45 1,41
Rn
Определяем частоты вращения шпинделя и округляем до стандартных:
n1 nmin 50 мин -1
n2 n1 50 1,41 71 мин -1
n3 n2 711,41 100 мин -1
n4 n3 100 1,41 140 мин -1
n5 n4 140 1,41 200 мин -1
n6 n5 200 1,41 280 мин -1
n7 n6 280 1,41 400 мин -1
n8 n7 400 1,41 560 мин -1
n9 n8 560 1,41 800 мин -1
n10 n9 800 1,41 1120 мин -1
n11 n10 1120 1,41 1600 мин -1
n12 n11 1600 1,41 2240 мин -1
Изм Лист № докум. Подп. Дата
ТУПК.360131.Мс46 КП ПЗ Лист
1.3 Определение сил резания и эффективности мощностей
Определяем наибольшие значения силы резания Pz max.
Наибольшее значение для фрезерных станков определяют при торцевом
фрезеровании твёрдосплавной фрезой.
Глубина резания, подача на зуб, а так же ширина фрезерования выбирают-
ся максимальными.
Максимальная окружная сила резания:
q w mp
y n
z
x
p
z K
D n
C t S B Z
P
10
Cp = 825; t = 4, мм; x = 1; Szmax = 0,2 мм;
y = 0,75; B = 100 мм; u=1,1; z = 10;
D = 110 мм; q = 1,3; n = 2240 мин-1; w = 1,2;
Кmр = (δb/750 )n = (750/750 )0,9 = 1 0,9 =1
1 3,312
110 2240
10 10 825 4 0,2 100 10
1,3 1,2
1 0,75 1,1
q w mp
y u
z
x
p
z K
D n
C t S B Z
P к/Н
Наибольшая эффективная мощность резания:
7,8
6 10
3312 141,6
6 10 4 4
max
P V
N z
эv кВт
Наибольшая мощность привода главного движения:
7,8
1,25 0,8
7,8
1,25
эv
nv
N
N кВт
р з п ;
р , з , п -КПД соответственно ременной, зубчатой передач, подшипника.
α,β,γ- число ременных, зубчатых передач, подшипников.
р 0,97...0,99 ;
з 0,99...0,995 -цилиндрическая прямозубая передача.
з 0,98...0,99 -цилиндрическая косозубая передача.
з 0,97...0,98 -коническая зубчатая передача.
п 0,9975...0,9985 .
0,981 0,996 0,99758 0,8
Фрезерные станки обычно имеют раздельный привод т.е. в приводе глав-
ного движения свой электродвигатель, в приводе подач тоже свой электродви-
гатель. Поэтому для фрезерных станков N=Nnv .
Выбираем электродвигатель приемлемый по мощности и частоте враще-
ния: 4A132S4У3 N=7,8 кВт n=1455 мин-1.
Изм Лист № докум. Подп. Дата
ТУПК.360131.Мс46 КП ПЗ Лист
2 Кинематический расчёт
2.1 Структурные формулы привода
Число ступеней частоты вращения шпинделя Z при наладке последова-
тельно включёнными групповыми передачами равно произведению числа пере-
дач в каждой группе. При заданном числе Z , число групповых передач, число
передач в каждой группе и порядок расположения групп можно выбирать раз-
личными. Этот выбор в основном и определяет конструкцию коробки скоро-
стей.
В станках с изменением частоты вращения по геометрическому ряду, пе-
редаточные отношения передач в группах образуют также геометрический ряд
со знаменателем φх, где Х-целое число, которое называется характеристикой
группы. Для последовательности получения все частот вращения шпинделя
сначала переключают передачи в одной группе, затем во второй и т.д.
Группа передачи которой переключают первой называют основной. Её ха-
рактеристика Х0=1 Р1.
Группа передачи, которой переключают во вторую очередь называют пер-
вой переборной. Её характеристика Х1=Р1 Р2.
Группа передачи, которой переключают в третью очередь называют вто-
рой переборной. Её характеристика Х2=Р1 ·Р2 Р3.
В задании задано, что Z=12. Запишем два варианта структурных формул.
1 вариант = Z12 = 6(1)·2(6)
2 вариант = Z12 = 6(2)·2(1)
Изм Лист № докум. Подп. Дата
ТУПК.360131.Мс46 КП ПЗ Лист
2.2 Структурные сетки
Для каждого варианта структурной формулы построим структурные сетки.
Z12 = 6(1)·2(6) Z12 = 6(2)·2(1)
Рисунок 1 – Структурные сетки
Выбираем оптимальный вариант. Для последней переборной группы
должно выполняться условие: φ(р-1)·хmax ≤ 8,
где р- число передач в последней переборной группе,
хmax- её характеристика.
1 вариант- 1,41(2-1)·6 ≤ 8,
7,8 ≤ 8.
2 вариант- 1,41(6-1)·2 ≤ 8,
31≤ 8 (Равенство неверно).
Выбираем вариант №1 построения структурной сетки:
Z12 = 6(1)·2(6)
Изм Лист № докум. Подп. Дата
ТУПК.360131.Мс46 КП ПЗ Лист
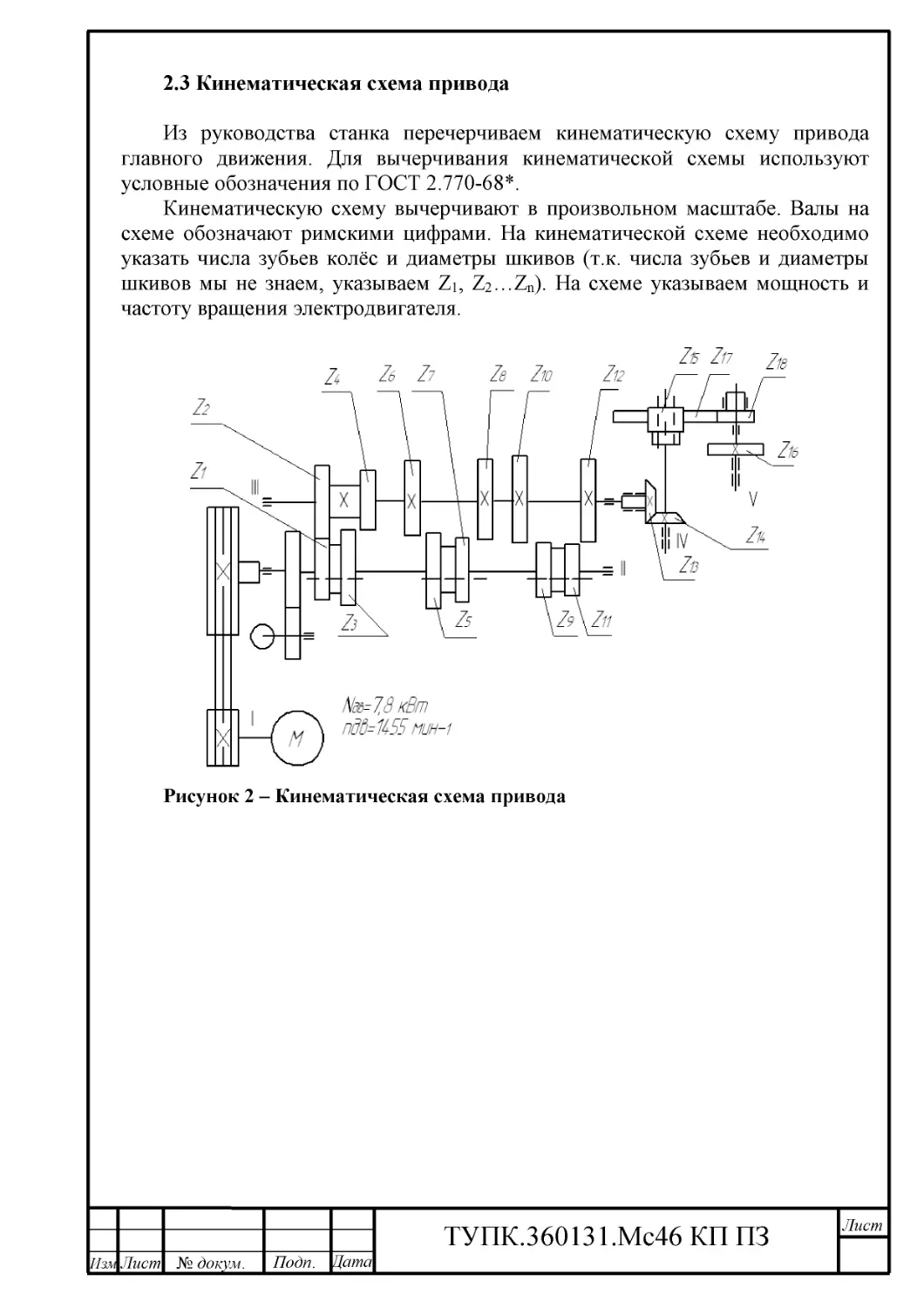
2.3 Кинематическая схема привода
Из руководства станка перечерчиваем кинематическую схему привода
главного движения. Для вычерчивания кинематической схемы используют
условные обозначения по ГОСТ 2.770-68*.
Кинематическую схему вычерчивают в произвольном масштабе. Валы на
схеме обозначают римскими цифрами. На кинематической схеме необходимо
указать числа зубьев колёс и диаметры шкивов (т.к. числа зубьев и диаметры
шкивов мы не знаем, указываем Z1, Z2…Zn). На схеме указываем мощность и
частоту вращения электродвигателя.
Рисунок 2 – Кинематическая схема привода
Изм Лист № докум. Подп. Дата
ТУПК.360131.Мс46 КП ПЗ Лист
2.4 График частот вращения
Согласно выбранного оптимально варианта структурной сетки производим
построение графика частот вращения шпинделя.
Заранее рассчитываем максимальные наклоны лучей при 1,41
Вверх на 2 интервала.
Вниз на 4 интервала.
Рисунок 3 – График частот вращения
Изм Лист № докум. Подп. Дата
ТУПК.360131.Мс46 КП ПЗ Лист
2.5 Определение передаточных отношений и чисел зубьев колёс
Передаточные отношения передач
i1 =D1/D2 . D1=90мм; D2= 204мм; i1=90/204=0,44;
i2 = z1/z2=φ0=1;
i3=z3/z4= φ1=1,41;
i4=z5/z6= φ-1=1/1,41;
i5=z7/z8= φ-2=1/2,0;
i6=z9/z10= φ2=2,0;
i7=z11/z12= φ-3=1/2,82;
i8=z13/z14= φ0=1;
i9=z15/z16= φ-4=1/3,98;
i10=z17/z18= φ2=1/2,0.
Определение чисел зубьев колес
z1+z2=z3+z4=z5+z6= z7+z8=z9+z10=z11+z12=∑z=102;
z1=51; z2=102-51=51;
z3=60; z4=102-60=42;
z5=42; z6=102-42=60;
z7=34; z8=102-34=68;
z9=21; z10=102-21=81;
z11=27; z12=102-27=75;
z13+z14=∑z=46;
z13=23; z14=46-23=23;
z15+z16=z17+z18=∑z=120;
z15=24; z16=120-24=96;
z17=80; z18=120-80=40;
Изм Лист № докум. Подп. Дата
ТУПК.360131.Мс46 КП ПЗ Лист
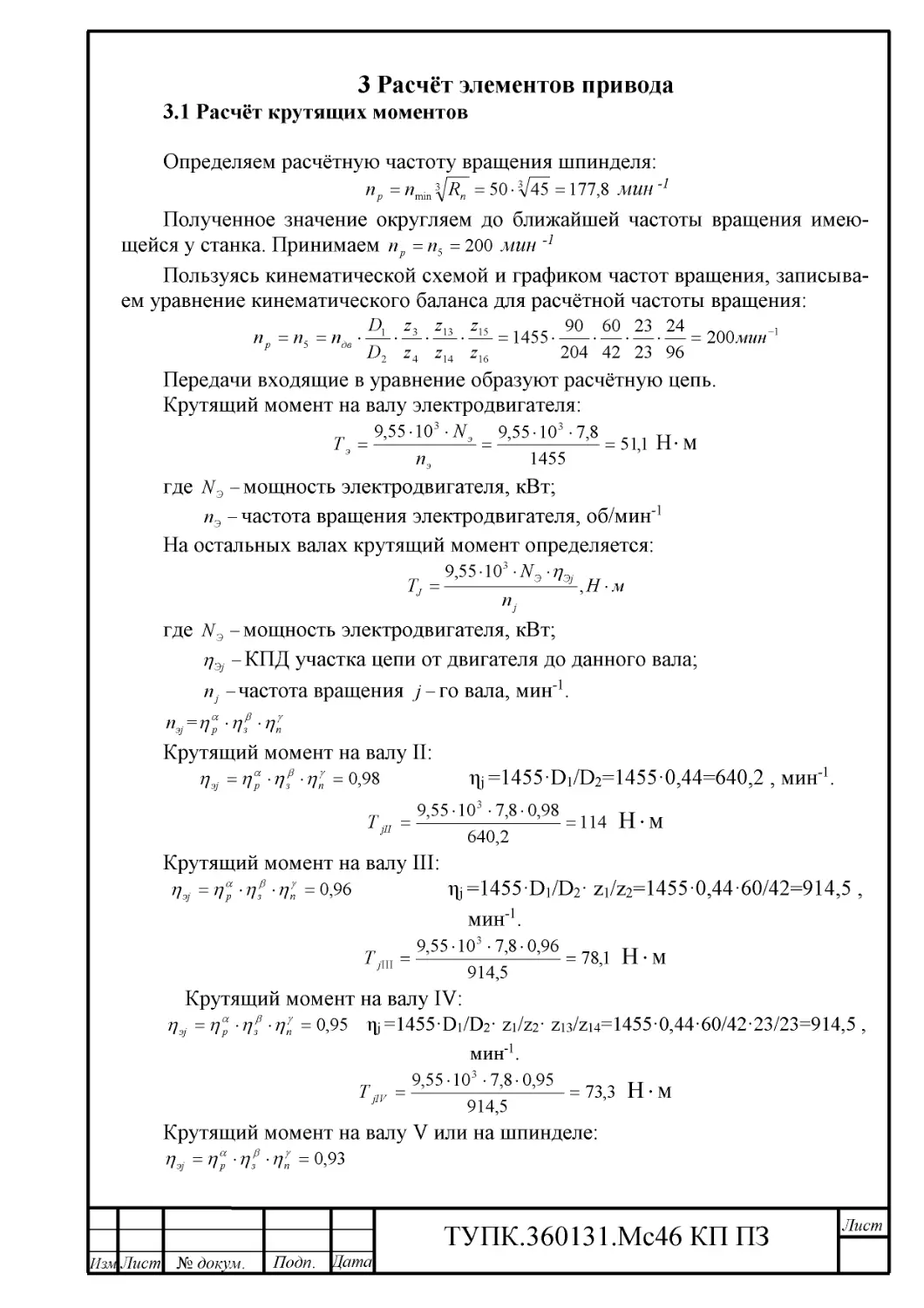
3 Расчёт элементов привода
3.1 Расчёт крутящих моментов
Определяем расчётную частоту вращения шпинделя:
3 50 3 45 177,8
n p nmin Rn мин -1
Полученное значение округляем до ближайшей частоты вращения имею-
щейся у станка. Принимаем n p n5 200 мин -1
Пользуясь кинематической схемой и графиком частот вращения, записыва-
ем уравнение кинематического баланса для расчётной частоты вращения:
1
16
15
14
13
4
3
2
1
5 200
96
24
23
23
42
60
204
90
1455 мин
z
z
z
z
z
z
D
D
n р n nдв
Передачи входящие в уравнение образуют расчётную цепь.
Крутящий момент на валу электродвигателя:
51,1
1455
9,55 103 9,55 103 7,8
э
э
э n
N
Т Н м
где N Э мощность электродвигателя, кВт;
nЭ частота вращения электродвигателя, об/мин-1
На остальных валах крутящий момент определяется:
Н м
n
N
T
j
Э Эj
J
,
9,55 103
где N Э мощность электродвигателя, кВт;
Эj КПД участка цепи от двигателя до данного вала;
n j частота вращения j го вала, мин-1.
nэj = р з п
Крутящий момент на валу II:
эj р з п 0,98 ηj =1455·D1/D2=1455·0,44=640,2 , мин-1.
114
640,2
9,55 103 7,8 0,98
Т jII Н м
Крутящий момент на валу III:
эj р з п 0,96 ηj =1455·D1/D2· z1/z2=1455·0,44·60/42=914,5 ,
мин-1.
78,1
914,5
9,55 103 7,8 0,96
Т j Н м
Крутящий момент на валу IV:
эj р з п 0,95 ηj =1455·D1/D2· z1/z2· z13/z14=1455·0,44·60/42·23/23=914,5 ,
мин-1.
73,3
914,5
9,55 103 7,8 0,95
Т jIV Н м
Крутящий момент на валу V или на шпинделе:
эj р з п 0,93
Изм Лист № докум. Подп. Дата
ТУПК.360131.Мс46 КП ПЗ Лист
ηj =1455·D1/D2· z1/z2· z13/z14· z17/z18=1455·0,44·60/42·23/23·24/96=228,6 , мин-1.
303
228,6
9,55 103 7,8 0,93
Т jV Н м
Изм Лист № докум. Подп. Дата
ТУПК.360131.Мс46 КП ПЗ Лист
3.2 Расчёт зубчатых передач
В курсовом проекте будем рассчитывать первую передачу входящую в
расчётную цепь. Выбираем для изготовления колёс и шестерен материал сталь
40Х и назначаем термообработку – улучшение.
Расчёт ведём для зубчатой пары:
42
60
4
3
3
Z
Z
i
Механические характеристики для колеса:
HBк = 230…260; вк 800 МПа; т к 590 МПа;
Механические характеристики для шестерни:
HBш = 260…280; в ш 950 МПа; т ш 700 МПа;
Определяем базовые пределы контактной выносливости:
нlim 2НВ 70 2 260 70 590
вк МПа
нlim 2НВ 70 2 280 70 630
вш Н/мм2
Допускаемые контактные напряжения определяем по формуле:
K МПа
S HL
H
H B
HP lim ,
где H lim B базовый предел контактной выносливости;
S H 1,1 коэффициент безопасности ,
K HL 0,9 коэффициент долговечности.
515( )
1,1
630 0,9
483( )
1,1
590 0,9
МПа
МПа
HPШ
HPK
Определяем предел выносливости материала зуба при сгибе:
F lim BK 1,8HB 1,8 260 468(МПа)
F lim BШ 1,8HB 1,8 280 504(МПа)
Определяем контактные допускаемые контактные напряжения изгиба:
lim K K , Н / мм 2
S FC FL
F
F B
FP
где F lim B предел выносливости материала зубьев при изгибе, соответ-
ствующей базовому числу отнулевых циклов;
K FL 1 коэффициент долговечности;
K FC 0,75 коэффициент нагрузки;
S F 1,75 коэффициент безопасности;
1,3 1 348( )
1,75
468
FPK МПа 1,3 1 374( )
1,75
504
FPШ МПа
Определяем ориентировочные значения диаметра начальной окружности
для шестерни z=42,
Изм Лист № докум. Подп. Дата
ТУПК.360131.Мс46 КП ПЗ Лист
мм
u
T K u
d K
bd HPШ
H H
W d ,
( 1)
3
2
K d 770 (прямозубые передачи)-вспомогательный коэффициент;
TH 78,1Н м -крутящий момент на валу шестерни;
K H 1,3...1,5 -коэффициент нагрузки;
1
ш
к
Z
Z
u ; u 60 / 42 1,42
bd 0,4 -отношение ширины венца к диаметру шестерни;
HPШ 515 -допускаемое контактное напряжение
90
1,42 0,4 515
78,1 1,3 (1,42 1)
770 3
2
dW (мм).
Определяем модуль из расчёта на контактную выносливость:
2,14.
42
90
z
d
m (мм).
Определяем модуль из расчёта на изгибную выносливость:
3 ;
1
Ш bт FPШ
F F F
m z
T K Y
m K
K m 13 -(прямозубые передачи)-вспомогательный коэффициент;
Т F TH 78,1Н м -крутящий момент на валу шестерни;
YF1 3,9; -коэффициент учитывающий форму зуба;
z Ш 42; -число зубьев шестерни;
FPШ 374; -контактные напряжения изгиба шестерни;
K F 1,3...1,5 -коэффициент нагрузки;
bт 0,4 -отношение ширины колеса b к модулю m;
5,1
42 0,4 374
78,1 1,3 3,9
13 3
m (мм).
Из двух рассчитанных модулей выбираем больший и округляем до стан-
дартного m=5 мм.
Проверочный расчёт.
Определяем расчётную окружную силу:
WНt=(2000 ×ТН/ bW × dw) ×K HV ×K Hβ × K Hα , Н
ТН -крутящий момент на валу шестерни,
bW-ширина венца, мм
dw-диаметр начальной окружности шестерни, мм
K HV-коэффициент учитывающий динамическую нагрузку в зацеплении
K Hβ- коэффициент учитывающий неравномерность распределения нагруз-
ки по ширине венца
Изм Лист № докум. Подп. Дата
ТУПК.360131.Мс46 КП ПЗ Лист
K Hα- коэффициент учитывающий при расчёте прямозубых передач распре-
деление нагрузки между зубьями
WНt=(2000×78,1/16×90) ×1,1×1,05×1,0=125
Определяем расчётное контактное напряжение
МПа
d u
W u
Z Z Z
w
Ht
н н м E ,
( 1)
;
Z н =1,2- коэффициент учитывающий форму сопряжённых поверхностей
зубьев в полюсе зацепления
Z м =274- коэффициент учитывающий механические свойства материалов
сопряжённых зубчатых колёс
Z E =1- коэффициент учитывающий суммарную длину контактных линий
н 505,8МПа
90 1,42
125 (1,42 1)
1,2 274 1
Проверка: н нр 505,8 < 515 МПа
Определяем расчётное напряжение изгиба зубьев:
МПа
m
YF YE Y WFt
F ,
YF =3,9- коэффициент формы зуба
YE =1- коэффициент учитывающий перекрытие зубьев при расчёте прямо-
зубых передач
Y =1- коэффициент учитывающий наклон зуба при расчёте косозубых пе-
редач
WFt WHt - расчётная окружная сила
F 97,5МПа
5
3,9 1 1 125
Проверка: F fр 97,8< 374 МПа
Изм Лист № докум. Подп. Дата
ТУПК.360131.Мс46 КП ПЗ Лист
3.3 Расчёт валов привода
Проектировочный расчёт.
При проектировочном расчёте определяем ориентировочные значения
диаметров валов. Этот расчёт ведётся только на кручение по известному кру-
тящему моменту, передаваемому валом (см. п. 3.1).
Диаметр выходного конца вала или промежуточного вала под шестерней
определяется по формуле:
;
200[ ]
100 3
k
T
d
мм
где Т- крутящий момент передаваемый валом (п. 3.1), Н·м ;
τк - допускаемое напряжение на кручение, МПа;
τк=20…25 МПа - d выходного конца вала;
τк=10…20 МПа - d вала под шестерню ;
Определяем диаметры всех валов и полученное значение округляем в
большую сторону до стандартного ряда.
23,3
200 20
51,1
100 3
1
d мм - диаметр вала электродвигателя; Принимаем 24
мм;
30,5
200 20
114
100 3
2
d мм. Принимаем 32 мм;
26,9
200 20
78,1
100 3
3
d мм. Принимаем 28 мм;
26,9
200 20
78,1
100 3
4
d мм. Принимаем 28 мм;
42,3
200 20
303
100 3
5
d мм. Принимаем 45 мм;
Проверочный расчёт.
Расчёт ведут на статическую прочность. Расчёт валов коробки скоростей
имеет специфические особенности, обусловленные конструктивным и кинема-
тическим их исполнением.
Для составления расчётной схемы необходимо иметь поперечное располо-
жение валов.
В курсовом проекте рассчитываем один вал, расчётной кинематической
цепи.
Рассчитываем вал IV.
Выполняем расчётную схему:
Изм Лист № докум. Подп. Дата
ТУПК.360131.Мс46 КП ПЗ Лист
Рисунок 4 - Расчетная схема
Колёса z13-z16 должны обязательно входить в расчётную цепь, которая за-
писана в п. 3.1.
С вала III на IV движение осуществляется через передачу Z13/Z14 , с вала IV
на V через передачу Z15/Z16 .
Определяем силы в зацеплении.
Окружные силы:
Ft 13, 14 = 1,3
115
2 2 73.3
14
W
v
d
T кН
dw=z14·m=23·5=115;
Ft 15, 16 = 0,3
480
2 2 73.3
16
W
v
d
T кН
dw=z16·m=96·5=480;
где Т- крутящий момент передаваемый валом, (Н·м);
dw- делительный диаметр колеса, (мм);
Радиальные силы:
Fr13,14 = Ft13,14· tgα = Ft13,14 · tg200 = 1,3· 0,364 = 0,5 кН.
Fr15,16 = Ft15,16· tgα= Ft15,16· tg200 = 0,3· 0,364 = 0,1 кН.
α=20º - угол зацепления
Рисунок 5 - Расчетная схема
Изм Лист № докум. Подп. Дата
ТУПК.360131.Мс46 КП ПЗ Лист
Определяем реакции опор:
Рассматриваем плоскость xz:
ΣM1 = 0
Fr 13, 14 l1 - Ft 15,16 ·(l1 + l2)+Rx2·(l1+l2+l3)= 0;
0,06
100 160 159
( ) 0,5 100 0,3 (100 160)
1 2 3
13,14 1 15,16 1 2
2
l l l
F l F l l
R r t
X кН ;
ΣM2 = 0
Ft 15,16 l3 Fr13,14 (l2 l3 ) RX 1 (l1 l2 l3 ) 0 ;
0,2
100 160 159
( ) 0,3 159 0,5 (160 149)
1 2 3
15,16 3 13,14 2 3
1
l l l
F l F l l
R t r
X кН
Рассматриваем плоскость yz:
ΣM1 = 0
Ft 13, 14 l1 - Fr 15,16 ·(l1 + l2) + Ry2 ·(l1+l2+l3) = 0;
0,2
100 160 159
( ) 1,3 100 0,1 (100 160)
1 2 3
13,14 1 15,16 1 2
2
l l l
F l F l l
R t r
Y кН
ΣM2 = 0
Fr 15,16 l3 Ft13,14 (l2 l3 ) Ry1 (l1 l2 l3 ) 0 ;
0,9
100 160 159
( ) 0,1 159 1,3 (160 159)
1 2 3
15,16 3 13,14 2 3
1
l l l
F l F l l
R r t
Y кН
Определяем изгибающие моменты:
Рассматриваем плоскость xz:
М3Y =-RX1 l1 0,2 100 20 Н·м;
М4Y = RX2 l3 0,06 159 10 Н·м;
Рассматриваем плоскость yz:
М3X = RY1 l1 0,9 100 90 Н·м;
М4X = - RY2 l3 0,2 159 31,8 Н·м;
Определяем эквивалентный момент для сечения с наибольшим изгибаю-
щим моментом:
2 0,75 2 ( 31,8) 2 102 0,75 73,32 72
4
2
М Э М 4 X М Y TIVвала
Н·м;
Определяем диаметр вала в рассчитанном сечении:
18
200 60
72
100
100 [ ]
1003 3
u
М Э
d
мм;
где- [σи]=50…60 МПа- допускаемое напряжение при изгибе.
Изм Лист № докум. Подп. Дата
ТУПК.360131.Мс46 КП ПЗ Лист
Рисунок 6 – Эпюры изгибающих моментов
Изм Лист № докум. Подп. Дата
ТУПК.360131.Мс46 КП ПЗ Лист
4 Смазывание и обслуживание станка
Смазочная система обеспечивается следующими системами:
-циркуляционная система смазки коробки скоростей главного привода. Эта
система включает в себя: резервуар, фильтр, магнитный уловитель, насос, рас-
пределитель, запорную горловину. Подаваемое насосом масло непрерывно по-
ступает через распределитель на зубчатые колёса, опоры валов и опоры гори-
зонтального шпинделя. Пройдя через смазываемые точки, масло стекает в ре-
зервуар. Контроль за работой насоса осуществляется визуально при помощи
маслоуказателя.
- циркуляционная система смазки коробки скоростей привода вертикально-
го шпинделя станка 6Т10. Система включает в себя резервуар, насос, встроен-
ный в корпус головки. С насоса масло непрерывно поступает на зубчатые колё-
са, опоры вертикального шпинделя. Контроль за работой насоса осуществляет-
ся при наличии масла на маслоуказателе.
- циркуляционная система смазки коробки подач, консоли, направляющих
салазок и стола. Подаваемое насосом масло поступает через распределитель на
смазку зубчатых колёс, опор валов и электромагнитной муфты. Переключате-
лем масло направляется на смазку вертикальных направляющих консоли и хо-
дового винта или на смазку стола и салазок.
Передняя опора шпинделя станка 6Т10 смазывается густой смазкой при
помощи шприца. Втулка подвески смазывается при помощи фитиля.
Перед пуском станка необходимо запомнить маслом все резервуары систе-
мы и при помощи шприца заполнить густой смазкой все пресс-масленки.
По окончании работы все наружные, незащищенные поверхности деталей
станка следует смазывать тонким слоем масла для защиты их от коррозии.
Изм Лист № докум. Подп. Дата
ТУПК.360131.Мс46 КП ПЗ Лист
5 Охрана труда и техника безопасности
На современных фрезерных станках возможна скоростная обработка заго-
товок из стали, чугуна, пластмасс и других материалов. Определенную опас-
ность для работающего и окружающих представляют вращающиеся инстру-
мент, отделяющаяся стружка, движущиеся столы, карусели и барабаны, за-
хламление рабочего места и м.д.
Инструмент на оправке вращается со значительной частотой, и захват
одежды, волос работающего может привести к серьезным травмам. В силу это-
го одежда и головной убор оператора должны соответствовать требованиям
безопасной работы (не иметь конусов, незаправленных тесемок и т.п.), а опера-
тор должен проявлять осмотрительность и не пытаться, что-либо делать в зоне
обработки руками, не выключив станок.
При работе на жестких режимах и с ударами возможна поломка тонких
разрезных фрез, режущих элементов и т.д. Следует поэтому выбирать зону
наблюдения за работой станка в стороне от траектории возможного полета
твердых частиц инструмента и вылета стружки. Стружка надлома при фрезеро-
вании чугуна и других материалов должна отсасываться специальными устрой-
ствами и не загрязнять воздух цеха, а оператор должен иметь средства индиви-
дуальной защиты (очки, щитки и т.д.). Часть фрезерных станков имеет быстро-
вращающиеся приводные валики; в этих случаях должны быть исправные
ограждения. Зоны, в которые могут перемещаться столы, барабаны и карусели,
должны иметь ограждающие барьеры, преграждающие доступ в эти зоны.
Приспособления для крепления заготовок должны быть исправными и
надежно закреплены на столе или барабане станка. Зажимные элементы таких
станков должны иметь конструкцию крепления, в которой бы учитывался
ударный характер процесса резания при фрезеровании: контакт зажимных эле-
ментов приспособления с заготовкой должен быть постоянным и с заданным
усилием.
При обработке на продольно-фрезерных станках громоздких заготовок
должны соблюдаться правила обслуживания подъемно-транспортных механиз-
мов.
Изм Лист № докум. Подп. Дата
ТУПК.360131.Мс46 КП ПЗ Лист
Заключение
В курсовом проекте разработан привод главного движения универсального
вертикально–фрезерного станка. Определены основные технические характери-
стики станка, выполнен кинематический расчет, расчет крутящих моментов,
расчет зубчатых передач, расчет валов привода станка. Описана система смазы-
вания и обслуживания станка, охрана труда и техника безопасности.
Изм Лист № докум. Подп. Дата
ТУПК.360131.Мс46 КП ПЗ Лист
Список используемых источников
1. «Справочник технолога─машиностроителя» ─ под редакцией
А.Г.Косиловой, Р.К. Мещерякова. М.: Машиностроение ─ 1985.
2. Н.Н. Чернов «Металлорежущие станки» М.: Машиностроение ─
1988.
3. В.Э. Пуш «Металлорежущие станки» М.: Машиностроение ─ 1986.
4. А.И. Кочергин «Конструирование и расчет металлорежущих стан-
ков и станочных комплексов» Мн.: Вышейшая школа, 1991.
5. «Проектирование металлорежущих станков и станочных систем» ─
под редакцией А.С. Проникова. М.: Машиностроение ─ 1995.
6. С.А. Чернавский «Курсовое проектирование деталей машин» М.:
Машиностроение
7. В.Н. Глубокий «Металлорежущие станки и промышленные робо-
ты» Мн.: Вышейшая школа, 1984.