




































































































































































































































































































































































Автор: Огородова Л.В.
Теги: фигура земли и ее определение сфероидическая геодезия физическая геодезия и геодезическая гравиметрия геодезическая (полевая) астрономия науки о земле (геодезические, геофизические, геологические и географические науки) астрономия гравитация геодезия учебник для студентов прикладная геодезия геодезкартиздат системы координат
ISBN: 5-86066-076-6
Год: 2006



Л.В. оrОРОДОВА
ВЫСШАЯ rЕОДЕЗИЯ
Часть 111
ТЕОРЕТИЧЕСКАЯ rЕОДЕЗИЯ
Рекомендовано УМ О по образованию в области rеодезии
и фотоrpамметрии в качестве учебника для студентов
высших учебных заведений, обучающихся по направлению
подrотовки дипломированных специалистов
650300
rеодезия (специальности 300100
Прикладная
rеодезия, 300200
Астрономоrеодезия,
300500
Космическая rеодезия)
Москва
rеодезкартиздат
2006
Y.JK 528.2
ББК 26,11
O 39
РЕЦЕНЗЕНТЫ:
докт. техн. наук В.Н. Баранов
(rосударственный университет по землеустройству),
канд. техн. наук А. Н: Зуева
(29 Научно исследовательский институт
Министерства обороны Российской Федерации)
Оrородова Л.В.
O 39 Высшая rеодезия. Часть III. Теоретическая rеодезия: Учебник
дЛЯ вузов. М.: rеодезкартиздат, 2006. 384 с.: ил.
ISBN 5 86066 076 6
Рассмотрены принципы определения поверхности и rравитационно
ro поля Земли при совместном использовании астрономо rеодезичес
ких, rpавиметрических и спyrниковых наблюдений. Дана краткая xapaK
теристика поверхности Земли и поля силы тяжести. Значительное место
уделено определению нормальноro потенциала и фундаментальным [eO
дезическим постоянным. Приведены сведения о современных моделях
нормальноro поля и общеземных системах координат. Освещены вопросы
редуцирования результатов rеодезических измерений к эллипсоиду. Впервые
в учебной литературе затраrивается методика определения нормальной
высоты с использованием спyrниковых измерений и вытекающие из нее
понятия аномалии высоты, начала счета высот и rеоида. Описана MeTO
дика вычисления rpавиметрических уклонений отвеса и аномалии BЫCO
ты, ynомянyrа возможность их определения по дискретным измерениям.
Изложены этапы построения rосударственной rеодезической сети Poc
сии, приведены сведения о системе КООРДинат CK 95, а также о созда
нии высотной основы. Даны принципы водноro и океаноrpафическоrо
нивелирования. Уделено внимание влиянию неоднородности поля силы
тяжести на инженерно rеодезические измерения.
ДrlЯ студентов rеодезических вузов и факультетов.
ISBN 5 86066 076 6
Л.В. Оrородова,2006
rеодезкартиздат, 2006
ПРЕДИСЛОВИЕ
Учебник «Теоретическая rеодезия» заключает серию учебни
ков и учебных пособий по высшей rеодезии (<<Основные rеодези
ческие работы», «Сфероидическая rеодезия», «Теоретическая reo
дезия»), подrотовленных коллективом кафедры высшей rеодезии
мииr АиКа. Первая из названных частей Н.В.Яковлев, «Bыc
шая rеодезия» опубликована в 1989 [.; вторая Е.r.Бойко, «Bыc
шая rеодезия, часть 11. Сфероидическая rеодезия» в 2002 r.
В настоящее время теоретическую rеодезию изучают по учеб
ному пособию Л.П.Пеллинена «Высшая rеодезия (теоретическая
rеодезия)>>, 1978. За четверть века в высшей rеодезии произошли
значительные изменения, среди которых можно назвать появле
J
ние rлобальных спутниковых систем определения местоположе
ния, завершение уравнивания астрономо rеодезической сети СССР
и введение новых систем координат, создание международной служ
бы вращения Земли (МСВЗ). В той или иной степени эти измене
ния нашли отражение в предлаrаемом учебнике. По сравнению с
учебным пособием Л.П.Пеллинена изменено расположение MaTe
риала; сначала рассмотрены общие вопросы rеодезическоrо ис
следования Земли как планеты, а затем локальные и реrиональ
ные исследования. Блаrодаря этому удается более последователь
но придерживаться принципа постепенноrо введения новых
понятий. Основное внимание уделено астрономо rеодезическому
методу изучения Земли, поскольку спутниковый и rравиметричес
кий методы рассматривают в курсах космической rеодезии, [eoдe
зической rравиметрии и теории фиrуры Земли.
Проблемы изучения временных изменений поверхности и rpa
витационноrо поля Земли и их интерпретаций ныне выделены в
самостоятельную дисциплину rеодинамику. Поэтому в настоя
щем учебнике эти вопросы затронуты только в связи с установле
нием системы rеодезических координат.
Учебник рассчитан на студентов специальностей «Приклад
ная rеодезия», «Астрономоrеодезия» и «Космическая rеодезия».
3
С целью учета потребностей прикладной rеодезии большее вни-
мание уделено локальным исследованиям поверхности и поля силы
тяжести по сравнению с rлобальными. В частности, сравнительно
подробно изложены методы вычисления местных rравиметричес-
ких уклонений отвеса и аномалии ВЫСОТЫ, что ИМеет ныне боль-
шее значение в связи с использованием спутниковых определений
rеодезической высоты.
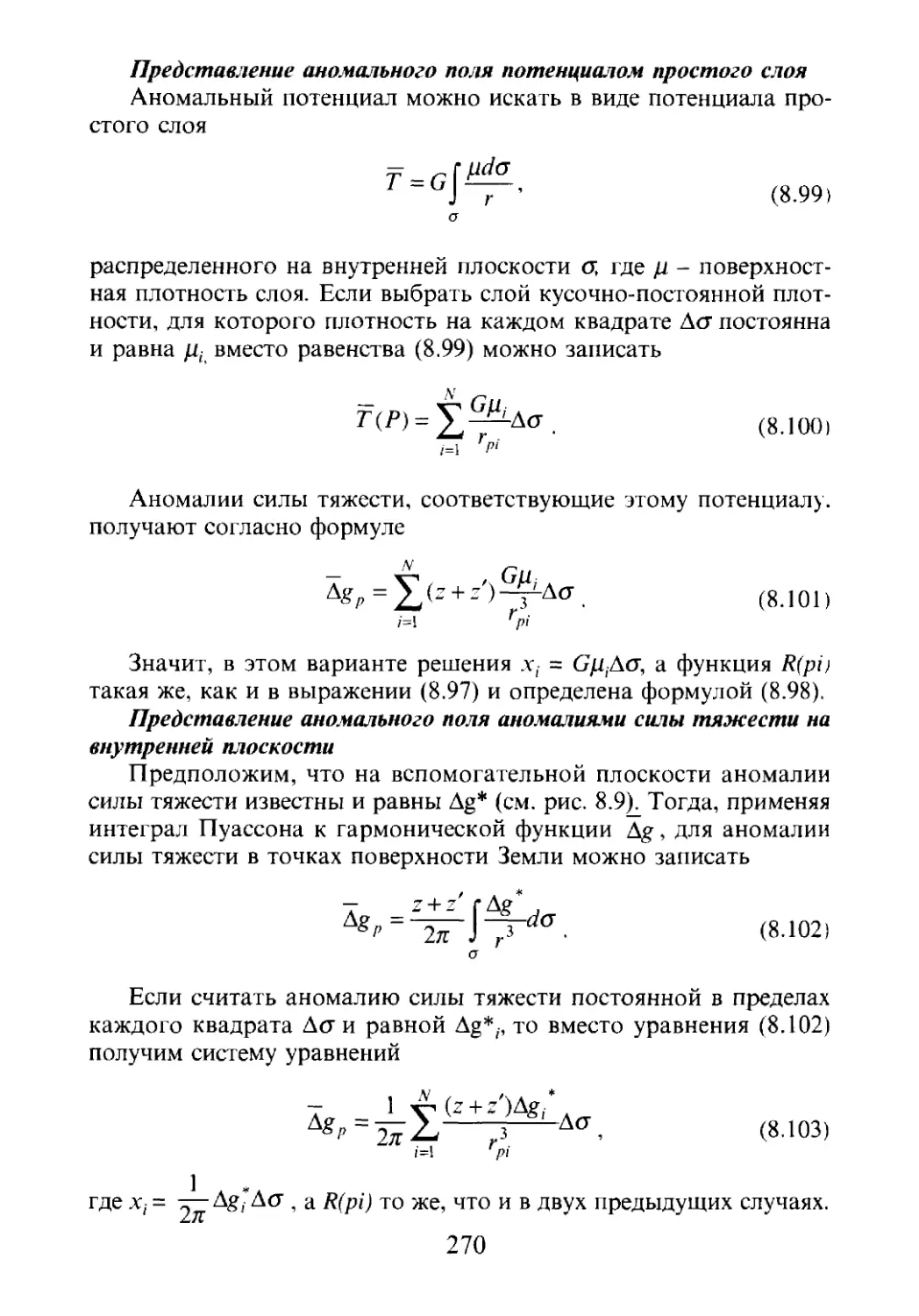
В rлаве 1 учтены соображения, высказанные Д.Т.Н., профессо
ром f АИШ MfY В.В.Броваром при обсуждении структуры учеб
ника по высшей rеодезии.
Автор блаrодарен проф. кафедры А.П.Юзефовичу, мноrие цен-
ные замечания KOToporo способствовали значительному улучше
пию учебника.
Автор признателен профессору МИИЗ В.Н.Баранову и сотруд-
никам 29 НИИ МО РФ, взявшим на себя труд рецензирования
учебника.
Автор выражает блаrодарность Е.В.Журавлевой и Е.П.Шил
киной за помощь в подrотовке рукописи к изданию.
ВВЕДЕНИЕ
ПРЕДМЕТ И ЗАДАЧИ ТЕОРЕТИЧЕСКОЙ rЕОДЕЗИИ
Теоретической zеодезией называют раздел высшей rеодезии в
котором рассматривается решение ее основной научной задачи
определение поверхности и внешнеrо поля силы тяжести Земли на
основании совокупности различных видов измерений земной по
верхности и силы тяжести.
Отличительной особенностью теоретической rеодезии по cpaB
нению с друrими разделами rеодезии является TO что на всех эта
пах решения названной задачи rеодезические измерения paCCMaT
ривают в реальном rравитационном поле. Если в топоrрафии и
инженерной rеодезии земную поверхность определяют относитель
но сферы или плоскости в сфероидической rеодезии решают за
дачи на поверхности эллипсоида вращения то в теоретической
rеодезии изучают физическую поверхность в действительном поле
силы тяжести.
Представление о поверхности Земли изменялось по мере раз
вития rеодезии. Около двух с половиной тысячелетий назад пер
вобытное понятие плоской Земли сменила мысль о шарообраз
ной Земле и появилась задача определения радиуса R Земли. Со
времен Исаака Ньютона (l643 1727) под фиrурой Земли понима.
ли сжатый эллипсоид вращения а задачей rеодезии стало опреде.
ление двух ero параметров большой полуоси а и сжатия а. В
конце ХУН! начале XIX в. в работах мноrих астрономов и reo.
дезистов появилась мысль об отличии уровенной поверхности
земноrо поля силы тяжести от поверхности эллипсоида. Задачу
rеодезии стали отождествлять с задачей изучения одной уровенной
пoвepXHocmи близкой к поверхности Мировоrо OKeaHa которую
позднее назвали zеоuдом.
Современный период rеодезии начался работами Михаила
Серrеевича Молоденскоrо (1909 1991) сформулировавшеrо OCHOB
ную задачу rеодезии как задачу определения физической поверх.
5
ности И внешнеrо rравитационноrо поля Земли и их изменений
во времени. Эту задачу в мировой литературе называют задачей
М олодеНСКО20. Отметим, что содержание понятия «физическая
поверхность Земли» неоднозначно; ero пояснению посвящена пер
вая rлава. Задача Молоденскоrо является более полной по cpaB
нению с задачей определения rеоида, поскольку по Молоденско
му определяется rравитационное поле вне Земли, Т.е. форма всех
уровенных поверхностей в их совокупности, а не одной единствен
ной поверхности (rеоида). В то же время в отличие от задачи Ha
хождения rеоида задача Молоденскоrо допускает CTporoe реше
ние, поскольку в этом случае объектом изучения является только
внешнее rравитационное поле. rеоид же На коНтинентах распо
ложен внутри Земли и принципиально не определим по измерени
ям на ее поверхности.
Практически определение поверхности Земли сводится к YCTa
новлению в единой системе координат положения закрепленных
тем или иным образом на Земле опорных пунктов. Поэтому зада
чей теоретической rеодезии является установление систе-мы коор-
динат и создание опорной zеодезической сети носителя этой систе
мы. В настоящее время для решения этой задачи с наивысшей точ
ностью привлекают все виды rеодезических измерений. В связи с
этим возникает проблема совместной обработки разнообразных
rеодезических данных, которая осложняется orpoMHbIM массивом
исходной информации.
Пространственное положение точек опорной сети задают их
плановыми координатами и высотами над отсчетной поверхнос
тью. В силу мноrих причин высоты имеют принципиальное отли
чие от плановых координат, и проблема установления системы
высот представляет собой отдельную задачу, которую также pe
шает теоретическая rеодезия.
Любую систему rеодезических координат ориентируют OTHO
сительно оси вращения Земли и ее центра масс. Но ось вращения
изменяет свое положение внутри Земли. Поэтому координаты
опорных пунктов в системе координат, привязанной к MrHoBeH
ной оси вращения Земли, будут изменяться со временем. Выход
из положения находят в том, что rеодезическую систему коорди
нат жестко закрепляют внутри Земли, приняв в качестве ОПОрНО
ro направления осредненное положение ее оси вращения за опре
деленные интервалы времени.
Большая часть поверхности Земли покрыта океаном, на повер
хности KOToporo невозможно создание опорной сети. Поэтому на
океане используют принципиально иные методы определения ero
6
поверхности, основанные на изучении физических свойств и дина
мики океана и спутниковых технолоrиях. Изучение поверхности
МировО20 океана также относят к задачам теоретической rеодезии.
В rеодезии и поверхность Земли, и ее rравитационное поле
принято представлять их отклонениями от выбранной модели,
называемой НОРо\;lQЛЬНОЙ Землей. Параметры, задающие Нормаль
ную Землю и ее rравитационное поле, называют ФундаментШlЬ
НЫМи zеодезическu.ми постоянным.. Их определение также входит
в задачи теоретической rеодезии.
Поверхность Земли изменяется с течением времени в силу раз
личных причин, что проявляется как изменения координат пунк
тов rеодезических сетей. е целью изучения движений земной коры
rеодезические наблюдения повторяют через определенные проме
жутки времени, что позволяет определять скорость и направле
ние этих движений. Изучение современных движений земной коры
также относят к задачам теоретической rеодезии.
Таким образом, проблема определения поверхности и rрави
тационноrо поля Земли предусматривает:
изучение вращения Земли и установление систеМЫ координат;
определение фундаментальных rеодезических постоянных;
создание опорной rеодезической сети на суше;
создание единой системы высот;
rеодезическое изучение Мировоrо океана;
изучение изменений поверхности и поля силы тяжести во
времени.
Обобщая сказанное, можно сформулировать современную за
дачу теоретической rеодезии как задачу изучени" поверхности и
внешнеrо rравитационноrо поля Земли по всей совокупности [eo
дезических измерений, рассматриваемых в реальном поле силы
тяжести и реальном времени.
МЕТОДЫ ОПРЕДЕЛЕНИЯ ПОВЕРХНОСТИ
И rРАВИТАционноrо ПОЛЯ ЗЕМЛИ
Для определения поверхности и rравитационноrо поля Земли
привлекают результаты всех ВlЩов rеодезических измерений, к KOTO
рым относятся: 1) астрономические определения; 2) трианrуляция и
полиrонометрия; 3) измерение зенитных расстояний; 4) rеометри
ческое нивелирование; 5) измерения силы тяжести; 6) наблюдения
С"
иcfку9fвенных спутников Земли (иез) и космических объектов.
На разных этапах развития rеодезии роль отдельных видов
измерений и методов изучения Земли изменялась. Однако для наи
7
более полноrо и точноrо решения задачи изучения Земли необхо
димо использовать результаты всех видов измерений, поскольку
недостатки одноrо компенсируются достоинствами друrоrо.
Рассмотрим основные методы определения поверхности и
rравитационноrо поля Земли.
Относительные и абсолютные определения положения пунктов.
Положение пунктов земной поверхности издавна находили
двумя методами. Один из них определяет только плановое взаим
ное расположение близких пунктов, например, от Москвы до
Петербурrа на северо запад 660 км, в 400 км К востоку от Москвы
находится Нижний Новrород. TaKoro рода задачу решают oтHO
сительные спутниковые определения, трианzуляция или полиzоно
метрия. Названные методы фактически являются дифференциаль
ными (разностными, относительными) и определить положение
Москвы на поверхности Земли они не MorYT. Друrие методы дают
возможность определить положение пункта относительно эква
тора и начальноrо меридиана при помощи абсолютных спутни
ковых или астрономических определений. Эти методы можно Ha
звать абсолютными, если для всей поверхности Земли использо
ван один и тот же экватор и начальный меридиан.
В соответствии с измерениями, которые иrрают rосподствую
щую роль в том или ином способе, методы изучения поверхности
и rравитационноrо поля Земли принято разделять на классичес
кие наземные и методы спутниковой или космической rеодезии.
К классическим наземным методам относятся астрономо-zеодези-
ческий и zравu.метрuческuй.
АстРОНОМО 2еодезический метод основан на использоваНии
измерений первых четырех видов из перечисленных выше. Он вклю
чает несколько этапов: определение отсчетноrо эллипсоида, ero
ориентирование внутри Земли и определение положения rеодези
ческих пунктов относительно эллипсоида. Для этоrо метода Xa
рактерно раздельное определение плановых координат (широты
и долrоты) и высоты.
Астрономо rеодезический метод или метод 2радусных измерений
является старейшим методом определения поверхности Земли. Пер
воначально этот метод заключался в измерении дуrи S меридиана
(рис. 1), на поверхности Земли и разности дер широт конечных точек этой
дуrи. Эти измерения позволяли найти радиус R Земли, Т.е. радиус кри
визны меридиана, по формуле
R = S / дер,
(1)
rде дер разность широт.
8
Рис. 1. П ринцип rрадусных измерений: 1 и 2 точки поверхности
Земли, лежащие на одном меридиане, lfJ) и CfJ2 широты этих точек,
cp = CfJ2 ср), s длина дуrи меридиана между ними,
R радиус сферической Земли
'"
Первое исторически достоверное определение радиуса Земли выпол
нено Эратосфеном Киренским (ок. 276 194 п. до н.э.) В III веке до Ha
шей эры по измерениям разности широт rородов Александрии и Сиены
(Ассуан), лежащих на одном меридиане. Для нахождения этой разности
Эратосфен использовал наблюдения Солнца. Бьшо известно, что в Сие
не в день летнеrо солнцестояния в полдень Солнце находится в зените. С
помощью солнечных часов Эратосфен измерил высоту Солнца в Алек
сандрии в этот же момент и установил по длине тени, что зенитное pac
стояние Солнца составляет 1/50 окружности или приблизительно 7°12',
Расстояние между Сиеной и Александрией, т.е. длина дуrи меридиана,
оценена Эратосфеном по времени движения ToproBbIX караванов меж
ду этими rородами и скорости верблюда, отличающейся постоянностью.
Таким образом, Эратосфен для линейных измерений использовал COBpe
менный принцип, коrда расстояние измеряют временем распростране
ния периодических колебаний paBHoMepHoro шаrа верблюда в дpeB
ности, электромаrнитных колебаний сейчас. Впоследствии определения
размеров Земли по измерениям ДЛИНЫ дуrи и соответствующеrо ей цeH
тральноrо уrла получили название 2радусных измерений, поскольку для
нахождения радиуса Земли измеряли дуrу меридиана, соответствующую
разности широт в 1°. Эратосфен использовал дуrу, соответствующую
rораздо большей разности.
Спустя примерно тысячу лет после Эратосфена, в 827 r., весьма
точно дуrу меридиана измерили арабские ученые по приказанию 6ar
дадскоrо халифа Аль Мамуна (786 833) (сына rероя сказок «Тысячи и
одной ночи» халифа rapYH аль-Рашида (763 или 76 809). Заметим, что
арабское измерение было буквально rрадусным, поскольку разность
широт конечных точек дуrи равнялась в точности одному [радусу. Apa
бы нашли для дуrи меридиана протяженностью в 1 о на широте 350
значение 111,8 км, что близко к точному (110,95 км). Радиус земноrо
9
шара по арабским измерениям составил в переводе на современные
меры 6340 км. Таким образом, уже в древности размеры Земли были
известны достаточно хорошо.
В 1528 [. французский врач Жан Фернель (1497 1558) выполнил
измерение дуrи от Парижа до Амьена, соответствующей разности
широт 1022'55". Для измерения длины Фернель использовал счет обо
ротов колеса экипажа, а разность широт нашел по измерениям высоты
Солнца при прохождении ero через меридиан. Дуrа Фернеля позднее
(l6б9 1670 r.) измерена с большей точностью французским ученым
Жаном Пикаром (l62 1682).
В измерении Пикара замечательны три обстоятельства: во первых,
Пикар впервые применил в [радусных измерениях метод трианrуляции
для измерения длины дуrи меридиана; BO BTOpЫX, определение Пикара
было последним определением радиуса шарообразной Земли; в TpeTЬ
их, полученное Пикаром значение радиуса использовал Ньютон для
проверки закона всемирноrо тяrотения.
На широте ер радиус кривизны меридиана можно определить из BЫ
ражения (2). Вычислив радиусы кривизны по формуле О), из решения
системы двух уравнений (2) находят полуось а и сжатие а
R=a[ 1 2a( 1 3I2siп2f{J)].
(2)
Для проверки rипотезы Ньютона о сплюснутости Земли Пикар cocтa
вил проект rрадусноrо измерения, реализацию KOToporo начал французс
кий астроном Жан (Джан) Кассини (l б25 1712) и завершил в 1718 [. ero
сын Жак Кассини (l677 1756). Были измерены две дуrи Парижскоrо
меридиана: северная от Парижа до Дюнкерка с разностью широт 2012' и
южная от Парижа до Коллинпура протяженностью 6019'.
П ринцип определения сжатия Земли по [радусным измерениям ил
люстрирует рис. 2. Для сплюснутой Земли кривизна меридиана убыва
ет в направлении с юrа на север, что вызывает увеличение длины дуrи
Экватор
Рис. 2. К определению сжатия из rрадусных измерений:
S 1 и S2 дуrи меридиана под средними широтами ер 1
И ер 2 соответственно; R 1 радиус кривизны меридиана на широте ер 1;
R 2 то же для широты <+'2
10
в 1 о, поэтому из сравнения дуr S 1 и 52' лежащих на разных широтах,
можно оценить и размер эллипсоида и полярное сжатие. Соrласно из
мерениям Кассини, длина дуrи меридиана к северу убывала, Т.е. OKa
залось, что Земля вытянута вдоль полярной оси. Чтобы установить
истину сжата Земля или вытянута вдоль полярной оси (<<oblatum
sive obloпgum» (лат.») Французская академия наук орrанизовала
две экспедиции. Одна из них под руководством Пьера Луи Мопертюи
(l698 1759) измерила в 173 37 п. дуrу протяженностью 57'30" в Лап
Ландии, на севере Скандинавии (на rранице теперешних Швеции и Фин
ляндии) под средней широтой 66019'. Вторая экспедиция, которой py
ководили Пьер Буrе (l698 1758) и Шарль Лакондамин (l70l 1774),
продолжалась с 1735 по 1742 r. Она измерила дуrу меридиана от
002,5' с,ш. до 304,5' Ю.ш. в Перу, на территории нынешнеrо Эквадора.
Результаты Великих Французских rрадусных измерений эксперименталь
но подтвердили правоту Ньютона и дали правильное представление о
сжатии Земли.
В 1792 1797 п. в разrар Французской революции под руководством
Жана Деламбра (l749 1822) проведено Большое Французское rрадус
ное измерение, целью KOToporo было установление новой единицы дли
ны метра. Дуrа Деламбра протяженностью по широте 9040' частично
совпадает с дуrой Кассини и пересекает всю Францию от Дюнкерка на
береrу пролива Па де Кале до Барселоны на средиземноморском побе
режье Испании. Так как средняя широта этой дуrи равна 450, измере
ния Деламбра позволили найти четверть дуrи парижскоrо меридиана,
не зависящую от размеров эллипсоида [14, с. 53)]. В качестве метра была
принята 1/1 О 000 000 часть четверти дуrи парижскоrо меридиана.
Результаты Лапландской экспедиции (частично проведены заново в
1801 r. по поручению Шведской Академии Наук Енсом Сванберrом
(1711 1851») и измерения Деламбра дали для сжатия значение 1 :300. Этот
результат надолrо стал общепринятым.
Позднее астрономо rеодезический метод использовали для опреде
ления земноrо эллипсоида по измерениям не только дуr меридиана, но и
дуr параллели. rpaAycHoe измерение вдоль параллели впервые выпол
нил Кассини в 1734 I'.
Методом rрадусных измерений были установлены отсчетные эллип
со иды и созданы опорные rеодезические сети разных стран. Последним
выводом размеров и сжатия земноrо эллипсоида астрономо rеодезичес
ким меТодом было определение Феодосия Николаевича KpacoBcKoro
(1878 1948) и Александра Александровича Изотова (l907 1988), завер
шенное к 1940 r. Более подробные сведения о выводе этоrо эллипсоида
эллипсоида KpacoBcKoro и построении астрономо rеодезической сети
нашей страны даны ниже.
rрадусные измерения выявили отличие поверхности rеоида от
эллипсоида вращения и в течение долrоrо времени с начала XIX
дО середины ХХ в. использовались для изучения rеоида.
1 1
Травиметрический (или астРОНОМО 2равuметрический) метод
также с давних пор применяют как для rлобальных, так и для реrи
оналЬНых исследований Земли. В этом методе основную роль иrра
ют измерения силы тяжести, rеометрическое нивелирование и acт
рономические определения. rлобальные исследования основаны на
установленной еще Ньютоном зависимости силы тяжести от ши
роты и знаменитой в rеодезии теореме Алексиса Клода Клеро (1713
1765), связывающей закон изменения силы тяжести на Земле с ее
формой. Теорему Клеро можно записать тремя равенствами
р = а(1 asin2 ф);
У = У е (1 + jЗ sin 2 ф);
5 о/а
а+jЗ= ,
2 Уе
(3)
[де р радиус вектор земноrо эллипсоида, У и % сила тяжести на
поверхности эллипсоидальной модели Земли на широте ер и на эква
торе соответственно; jЗ коэффициент, определяющий изменение
силы тяжести с широтой; (J) уrловая скорость вращения Земли.
Соrласно равенствам (3), если отношение центробежной силы
cJa к силе тяжести Уе на экваторе известно, можно по измерениям
силы тяжести найти коэффициент fЗ и затем вычислить сжатие а
по последнему из равенств (3). Однако размеры эллипсоида rpa
виметрический метод не определяет.
Впервые сжатие Земли на основании теоремы Клеро опреде
лил Пьер Симон Лаплас (1749 1827) в 1799 r., использовав значе
ния силы тяжести Bcero в 15 пунктах. Сжатие оказалось равным
1:330. Позднее (1901 r.) Фридрих rельмерт (1843 1917) по 1603
пунктам нашел для сжатия значение 1 :298,2, что удивительно точ
но совпадает с современными определениями.
Началом rравиметрическоrо метода детальноrо исследования
поверхности Земли можно считать 1849 [., коrда анrлийский фи
зик Джордж rабриэль Стокс (1819 1903) получил формулу, опре
деляющую высоту rеоида над эллипсоидом по значениям силы
тяжести на rеоиде. Причем в решении Стокса предполаrается, что
rеоид является внешней уровенной поверхностью Земли. Однако
практическое применение формула Стокса получила только в Ha
чале 30 x rr. ХХ в., коrда появилось достаточное число измере
ний силы тяжести. К этому же времени относятся интенсивные
исследования условий применимости формулы Стокса к реальной
Земле, rеоид которой частично проходит внутри ее тела и над
12
ним возвышаются материки и острова. В результате этих иссле
дований М.С.Молоденским в 1945 r. была доказана принципи
альная невозможность определения rеоида по измерениям на по
верхности Земли и решена задача определения внешнеrо rравита
ционноrо поля и физической поверхности. С этих пор задача
определения rеоида потеряла свое значение, а теория М.С.Моло
денскоrо новая теория rеодезии применяется и в aCTpOHOMO
rеодезическом и в rравиметрическом методах изучения Земли.
В астрономо rравиметрическом методе координаты пунктов
и rравитационное поле определяют совместно. Причем плановые
координаты, Т.е. широты и долrоты, получают по астрономичес
ким наблюдениям и поправкам, учитывающим особенности rpa
витационноrо поля. Однако точность определения плановых KO
ординат в этом методе значительно уступает точности aCTpOHO
мо rеодезическоrо метода.
Методы космической 2еодезии зародились во второй половине
XVIII в. Прообразом 2еометричеСКО20 метода космической 2еодезии
можно считать предложенный в 1768 r. Дж.А.Эйлером, сыном Ле
онарда Эйлера, способ определения сжатия Земли по наблюдениям
зенитноrо расстояния Луны. Динамический метод космической 2eo
дезии впервые применил Лаплас, оценивший сжатие Земли по Hepa
венствам в движениях Луны, Т.е. по отклонениям наблюдаемоrо
HepaBHoMepHoro движениях Луны от равномерных средних движе
ний. Этим методом Лаплас получил для сжатия значение 1:305.
Современный этап космической rеодезии начался в конце 50 x
rодов ХХ В., после запуска в СССР 4 октября 1957 r. первоrо
искусственноrо спутника Земли (ИСЗ). Уже в 1958 r. по наблюде
ниям первых советских ИСЗ было получено сжатие Земли с точ
ностью, значительно превышающей точность астрономо rеодези-
ческоrо метода.
Ныне основным методом космической rеодезии является дина
мический метод, позволяющий определять одновременно поверх
Ность и rравитационное поле Земли. В этом методе ИСЗ являются
носителями координат и образуют подвижную систему опорных
пунктов, координаты которых на любой момент времени известны
В единой системе, задаваемой координатами сети пунктов, ведущих
непрерывные наблюдения ИСЗ. Это позволяет по наблюдениям
таких спутников получать координаты практически любой точки
поверхности Земли. rравитационное поле изучают по вариациям
орбит ИСЗ. Поскольку над Землей детали rравитационноrо поля
сrлаживаются вследствие увеличения расстояния до неравномерно
распределенных в ее теле притяrивающих масс, наблюдения спут
13
ников позволяют изучать общие особенности поля сипы тяжести.
Детальные исследования rравитационноrо поля на поверхности
Земли надежнее выполняет rравиметрический метод.
Различают спутниковые абсолютные определения, коrда Ha
ходят координаты пунктов относительно центра масс Земли, и
относительные спутниковые определения, при которых получают
разности координат двух точек поверхности Земли. Точность аб
солютных определений координат лимитирована точностью KO
ординат иез, определенных динамическим методом. Точность
спутниковых относительных определений превосходит точность
астрономо rеодезическоrо метода.
К методам космической rеодезии относится также метод cпyт
никовой альтиметрии, позволяющий непосредственно изучать по
верхность океана по измерениям расстояния от иез, положение
KOToporo известно, до этой поверхности. Если отождествлять по
верхность океана с уровенной, можно рассматривать метод спут
никовой альтиметрии как метод изучения поверхности rеоида.
Помимо наблюдений иез, в космической reодезии используют
наблюдения искусственных и естественных небесных тел косми
I
ческих летательных аппаратов, Луны, квазаров. Этими методами
определяют массу Земли и изучают особенности ее вращения.
Поверхность Земли и внешнее rравитационное поле являются
объектом изучения не только теоретической rеодезии, но и Teo
рии фиrуры Земли, rеодезической rравиметрии, космической [eo
дезии. Роль Toro или иноrо вида измерений различна в отдельных
дисциплинах и определяет их специфику и методы. В теории фи
[уры Земли и rеодезической rравиметрии основными являются
измерения силы тяжести, rеометрическое нивелирование и aCTpo
номические определения. Космическая rеодезия основана на Ha
блюдениях иез и космических объектов.
В теоретической rеодезии используют первые четыре из пере
численных выше видов измерений, Т.е. теоретической rеодезии
принадлежит астрономо rеодезический метод. Но кроме этоrо
теоретическая rеодезия использует также и результаты, получен
ные друrими методами, и иrрает объединяющую, синтезирующую
роль. Можно сказать, что теоретическая rеодезия венчает здание
rеодезии, фундаментом которому служат астрономо rеодезический,
rравиметрический и космическо rеодезический методы, и создает
одно из этих оснований aCTpOHOMO rеодезический метод.
1 Quasar (анrл.) quasi stellar radiosource квазизвеЗДные источники pa
диоизлучения.
rпasa 1
ПОВЕРХНОСТЬ ЗЕМЛИ И СИЛА ТЯЖЕСТИ
Определение поверхности и rравитационноrо поля Земли oc
новано на rеодезических измерениях различных величин. Все они
выполняются в поле силы тяжести, и во мноrих случаях результат
определяется особенностями этоrо поля. Поэтому для понимания
сущности выполненных в rеодезии измерений и их правильной
обработки необходимо иметь сведения об особенностях поля силы
тяжести Земли. Не случайно в своей известной книrе 1 А.Клеро
пишет: «Вопрос о фиrуре Земли основан на законе действия силы
тяжести».
9 1. СИЛА ТЯЖЕСТИ И ЕЕ ПОТЕНЦИАЛ
Силой тЯ.жесmи g называют равнодействующую силы притя
жения единичной точечной массы Землей и центробежной силы,
возникающей вследствие ее вращения вместе с Землей. На матери
альную точку действует не только притяжение Земли, но и притя
жение всех масс Вселенной, в основном Солнца, Луны и планет, а
также притяжение атмосферы. Обычно влияние этих масс исклю
чают из наблюдаемой величины силы тяжести g.
На поверхности Земли сила тяжести возрастает от 978 rал на
экваторе до 983,2 rал на полюсе. Среднее значение силы тяжести
на Земле составляет 979,8 rал. 2
Сила тяжести имеет nоmенциал W: равный сумме потенциалов
притяжения V и центробежной силы Q
w V + Q.
(1.1)
I Клеро А. Теория фиrуры Земли, основанная на началах rидростати.
КИ. М.: Издательство АН СССР, 1947. 358 с.
2 1 rал = 1 см . с 2 .
15
Напомним, что потенциалом вектора называют скалярную
функцию координат, частные производные которой по любому
направлению равны проекциям вектора на это направление. В
произвольной прямоуrольной системе координат связь силы тя
жести и потенциала определяет выражение
aW 7 aW aW k
g= l + J+ ,
дх ду az
(1.2)
rде т, J, k единичные векторы в направлениях осей координат.
Таким образом, в соответствии с формулой (1.2) сила тяжести
является 2радие1lтом потенциала
g = gradW.
(1.3)
Тело подверrается действию силы тяжести в том случае, если
оно участвует в суточном вращении Земли. Поскольку не суще
ствует точек, бесконечно удаленных от Земли и участвующих в ее
вращении, область существования потенциала силы тяжести or
раничена.
Разность потенциалов силы тяжести в двух точках равна pa
боте, совершаемой в поле силы тяжести при перемещении еди
ничной массы между этими точками. При перемещении на беско
нечно малое расстояние dl (рис. 1.1) работа определяется выраже
нием
dW = gcos(g, dl)dl.
(1.4)
W+ dW= С'
w=c
g
Рис. 1.1. К определению уровенной поверхности
16
Соrласно этому выражению, изменение потенциала зависит от
направления перемещения, и при смещении перпендикулярно Ha
правлению силы тяжести это изменение равно нулю
dW= О,
(1.5)
отсюда следует, что
W=c
,
(1.6)
[де С произвольная постоянная, равная значению потенциала в
точке 1 (см. рис. 1.1). Равенство (1.6) это уравнение поверхно
сти, в каждой точке которой сила направлена по нормали к ней.
Такая поверхность называется уровеююй или эквипотенциальной.
Соrласно формуле (1.6), потенциал на уровенной поверхности
постоянен. Уравнения (1.5) (1.6) получены на основании Bыpa
жения (1.4) при условии cos(g,dl) = О без каких либо предположе
ний о поведении силы тяжести. Это означает, что сила тяжести
на уровенной поверхности может изменяться.
Определим расстояние dh между бесконечно близкими ypOBeH
ными поверхностями (см. рис. 1.1). Произведение cos(g, dl)dl
является проекцией отрезка dl на направление силы тяжести.
Будем отсчитывать расстояние dh в направлении возрастания
высоты, противоположном направлению силы тяжести, тоrда
dh = cos(g, dl)dl и
dW = gdh,
(1.7)
откуда
dh = dW .
g
(1.8)
Сила тяжести по величине Bcer да оrраничена, следовательно,
расстояние между уровенными поверхностями не может равнять
ся нулю. При перемещении вдоль уровенных поверхностей из за
изменения силы тяжести расстояние между ними меняется обрат
но пропорционально модулю силы тяжести и уровенные поверх
ности в общем случае не параллельны. Потенциал силы тяжести
является функцией однозначной. Поэтому уровенные поверхнос
ти не касаются и не пересекаются, и через каждую точку простран
ства проходит только одна уровенная поверхность.
Уровенные поверхности поля силы тяжести имеют сложную
форму, а их кривизна различна в разных точках одной и той же
поверхности. В каждой точке поверхности кривизна различна в
17
разных направлениях. Средняя кривизна lIр уровенной поверх
ности в точке определяется выражением
! ( a2W + a 2 W )
р g дх 2 д у 2
(1.9)
rде производные вычислены по касательным к уровенной поверх
ности во взаимно перпендикулярных направлениях.
Нарисуем семейство уровенных поверхностей потенциала силы
тяжести и проведем отрезки dh, перпендикулярные к каждым двум
соседним бесконечно близким поверхностям (рис. 1.2).
в
Рис. 1.2. Уровенные поверхности ( ) и силовая линия (............)
Очевидно, что направление dh совпадает с направлением силы
й. Пусть dh О, тоrда в пределе получим КРИВУЮ, проходящую
перпендикулярно ко всем уровенным поверхностям, в каждой точке
которой касательная к ней совпадает с направлением силы. Эта
кривая называется силовой или векторной линией. Касательную к
силовой линии называют отвесной линией.
Определим кривизну К силовой линии. Рассмотрим отрезок
силовой линии между близкими точками 1 и 2 (см. рис. 1.2). В
общем случае силовая линия пространственная кривая, xapaKTe
ризуемая кривизной и кручением. Но ее малые отрезки можно
рассматривать как отрезки плоских кривых. Если считать на OT
резке 1 2 СИЛОВУЮ линию дуrой ds ОКРУЖНОСТИ радиуса р, кривиз
1 Е
ну К = 11 Р этой дуrи можно выразить зависимостью = , rде
р ds
18
Е центральный уrол, соответствующий дуrе ds (рис. 1.3) . Про-
ведем касательные к силовой линии в точках 1 и 2. Их направле
ния совпадут с векторами gt и g2 силы тяжести в этих точках.
Вектор кii кривизны кривой это производная единичноrо BeK
тора i касательной по s
K di
п
ds '
rде п единичный вектор rлавной нормали.
п 1
-r
ds
п gl
2 Z
Рис. 1.3. Кривизна силовой линии
Выберем систему координат в произвольной точке силовой
линии: ось z направим по направлению силы тяжести, оси х и у
расположим в rоризонтальной плоскости, ось х направлена на
север, ось у на восток. Запишем единичный вектор касательной
в виде r == g и выполним дифференцирование, учитывая, что в
g
v aW
принятои нами системе координат g = , и на основании вы-
дz
ражения (1.2),
Кп = ( K ) = ( g ) = ag e dg =
ds g dz g g az g2 dz
1 ( a 2 W 7 д 2 w a 2 W k ) 1 ( aw 7 aw aW k ) ag
= I+ J+ I+ J+ .
g axaz ayaz az 2 g2 дх ду az az
19
Выбор координат определяет значения производных
поэтому
aW =0 aw :;::o a 2 W ag
дх ' ду , az 2 az '
a2W k aW k ag =0
g az 2 g2 az az
и
K 1 ( a 2 W 7 a 2 W )
п= l + J
g axaz ayaz
(1.1 о)
Вы жение в скобках представляет собой rоризонтальный rpa
диент G силы тяжести, поэтому кривизну силовой линии запи
сывают также в виде
Кп = .
g
(1.11)
Соrласно равенству (1.10), силовая линия поля сш1ы тяжесТИ в
общем случае является пространственной кривой. Она не лежит в
плоскости меридиана или первоrо вертикала. Вектор ее кривизны
соrласно формуле (1.11) изменяется скачком в точках, rде вторые
производные потенциала терпят разрыв, Т.е. там, rде скачком Me
няется плотность масс. В этих точках вектор кривизны меняет свой
модуль и скачком поворачивается BOKpyr отвесной линии. В связи
с этим ход силовой линии внутри Земли неизвестен.
Средний rрадиент СШIы тяжести, обусловленный изменением СШIы
тяжести с широтой, не превосходит 0,8 мrл/км, поэтому модуль cpeд
Hero вектора кривизны СШIовых линий не превышает 8' 10 7KM I. Наи
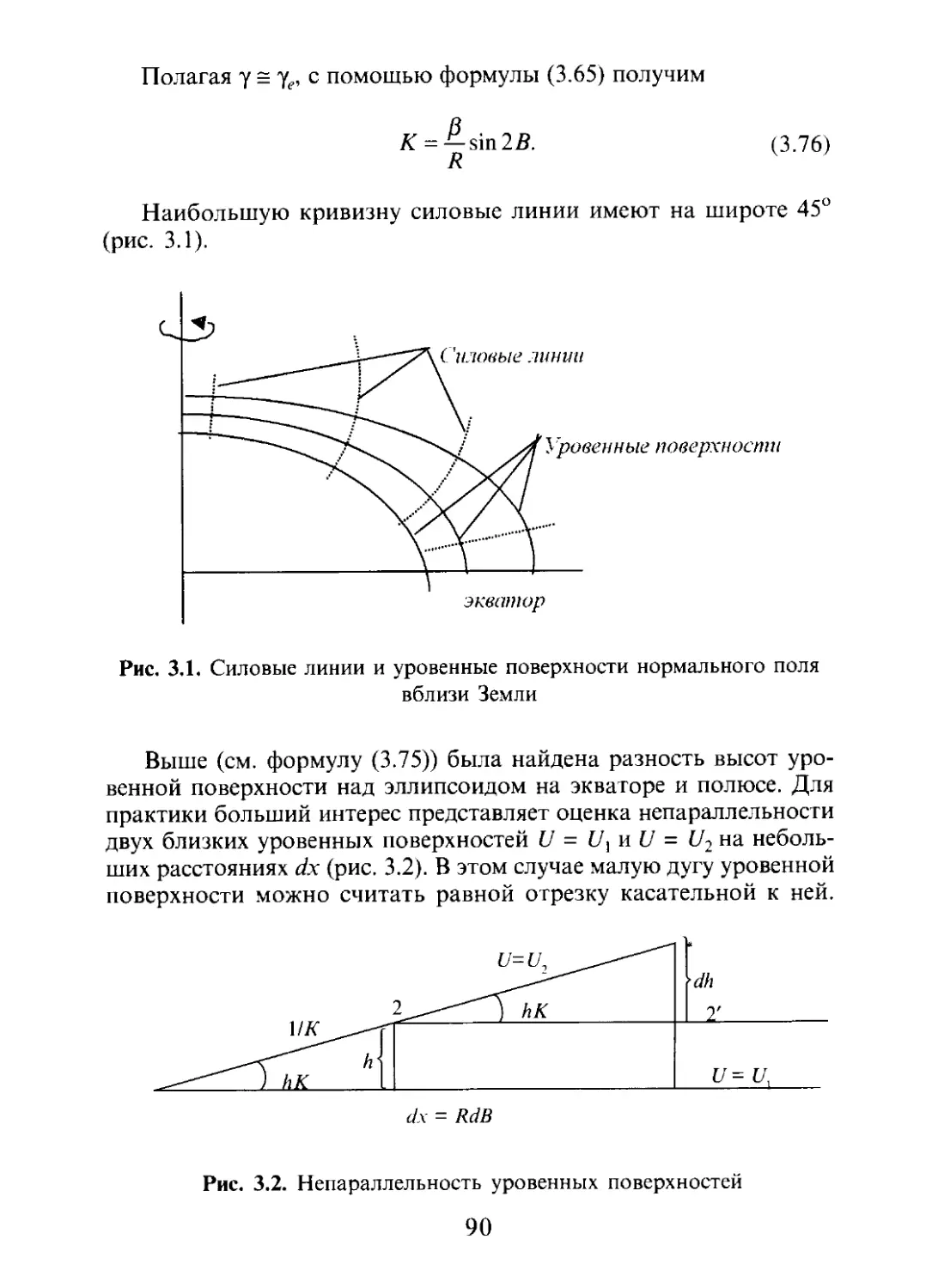
большую кривизну и, следовательно, наименьший радиус кривизны
силовая линия имеет на широте 450, rде радиус кривизны состамяет
1,2 млн. км. Средний вектор кривизны направлен в сторону ближай
шеrо земноrо полюса. Реальный вектор кривизны не имеет KaKoro
либо преимущественноrо направления, а ero модуль может на один
два порядка превосходить среднее значение.
Найдем длину h отрезка силовой линии между удаленными
уровенными поверхностями, проходящими через точки А и В
(см. рис. 1.2). Складывая элементарные расстояния (1.8), получим
в в
h= Jdh= J dW :;:: W A WB ,
А А g gm
(1.] 2)
20
rде gm среднее интеrральное значение силы тяжести на отрезке
АВ. Формула (1.12) имеет фундаментальное значение при опреде
.1.ении высоты в поле силы тяжести.
Выражения (1.4) и (1.7) определяют полный дифференциал
потенциала W, поэтому разность потенциалов между удаленны
IИ точками можно найти, интеrрируя по любому пути, соединя
ющему эти точки
в в
W A W B f gcos(g,dZ}iz = f gdh.
А А
(1.13)
Положим, что точка А лежит на уровне моря, а точка В
произвольная точка поверхности Земли. Тоrда W A = W o И
в
W o W B = J gdh.
А
(1.14)
Разность W o W потенциалов силы тяжести называется 2eo
nоmенциальны.М ЧИСЛО/Н или 2еопоmеltциалыlOЙ величиной.
2. ФИЗИЧЕСКАЯ ПОВЕРХНОСТЬ ЗЕМЛИ И rЕОИД
Понятие «поверхность Земли» неоднозначно и допускает раз
ные толкования. Под поверхностью Земли можно понимать по
верхность ее твердой оболочки, Т.е. поверхность суши и дна OKe
анов. Однако дно океана скрыто под толщей воды, а деятельность
человека протекает, в основном, на поверхности суши и океана.
К тому же эта поверхность является видимой rраницей Земли как
физическоrо тела, изображаемой на аэро и космических снимках
и картах. Поэтому под поверхностью Земли (или физической по
верхностью Земли) в настоящее время понимают поверхность суши
на материках и поверхность Мировоrо океана.
Мировой океан занимает большую часть (70,80/0) поверхности
Земли. Однако поверхность океана не постоянна во времени. Это
связано с малой вязкостью и большой подвижностью водной тол
щи, перемещающейся под воздействием мноrих сил. Колебания
свободной поверхности океана мноrообразны и различны по пе
риодам и амплитудам. Эти колебания делят на три rруппы: при
ливные колебания; колебания атмосферноrо происхождения (rло
бальные изменения климата, изменения атмосферноrо давления,
ветры, атмосферные осадки); колебания, связанные с твердой Зем
21
лей (неравномерное вращение Земли, rеолоrические процессы, из
меняющие объем океанических впадин, подводные извержения
вулканов и землетрясения). Некоторые сведения о колебаниях
поверхности океана приведены в таблице 1.1 [11].
Таблица 1.1
Колебания поверхности океана
Причина колебания Период Амплитуда, метр
Ветровые волны От 1 до 20 30 секунд 30 40
Штормовые HaroHbI От 2 до 20 суток 1 5
Колебания атмосферноrо 5 7 суток Около 1
давления
Изменение положения Месяцы Около 1
и скорости океанических
течений
Изменение общей массы Свыше [ода до 100
воды в океане (климати
чески е колебания уровня)
П риливные колебания 0,5 1 сутки 2
в открытом океане
м ожно исключить ветровые волны, выполнив, например, oc
реднение поверхности океана за значительный интервал времени.
Поверхность океана, свободную от ветровых волн, называют MOp
СКОЙ топО2рафической поверхностью (МТП). Положение морской
топоrрафической поверхности зависит от мноrих факторов, свя
занных с физическими свойствами морской воды. Так, например,
на поверхности океана обнаружены как бы холмы из воды. Счи
тается, что это пресная вода, сохранившаяся после таяния айс
берrов и вытесняемая более плотной морской водой.
Одним ИЗ основных факторов, формирующих поверхность
океана, является плотность морской воды, зависящая от темпера
туры и солености, а также сжимаемости морской воды ее вышеле
жащими слоями; вследствие этоrо плотность зависит от rлубины
океана и формы океаническоrо дна.
Для равновесия жидкости с IШотнocrью д в элементарном стол
бе высотой dh необходимо, чтобы ее вес g&ih уравновешивался си
лой выталкивания, равной изменению dp давления р в этом столбе,
g&ih + dp = О.
22
Соrласно выражению (1.7) про изведение gdh равно разности
потенциала
8 dW== dp.
(1.15)
Это дифференциальное уравнение Эйлера для жидкостей и ra
зов, находящихся в равновесии. Оно содержит полные дифферен
циалы потенциала силы тяжести и давления и справедливо при
перемещении в любом направлении. Поэтому, если при смещении
в некотором направлении dp = О, то dW = О и
W = coпs!.
Таким образом, при равновесном состоянии воды и при по
стоянном внешнем давлении поверхность моря и все внутренние
поверхности paBHoro давления будут уровенными поверхностями
потенциала силы тяжести. Так как во всех точках уровенной по
верхности сила тяжести направлена по нормали к ней, то, если
бы океан находился в состоянии I'идростатическоrо равновесия,
течения океанической воды отсутствовали бы.
Сила тяжести является основной силой, определяющей rло
бальные особенности поверхности океана. Поэтому, хотя океан и
не находится в rидростатическом равновесии, морская топоrра
фическая поверхность близка к уровенной поверхности поля силы
тяжести; отличия между ними менее 3 метров.
Поверхность океана является естественной поверхностью, от
которой отсчитывают высоты и I'лубины. Точнее счет высот
ведут от некоторой уровенной поверхности потенциала силы тя
жести.
Уровенную поверхность, близкую к морской пlOnО2рафической
поверхности и проходящую через начало счета высот, называют
2еоuдом.
Поверхность океана не является уровенной, поэтому исход
ные пункты счета высот, лежащие в разных точках побережья и
тем более на разных континентах, располаrаются на различных
уровенных поверхностях. Следовательно, rеоидом может считаться
любая уровенная поверхность из семейства уровенных поверхно
стей потенциала силы тяжести, пересекающих морскую топоrра
фическую поверхность. В настоящее время появилась реальная
возможность определения разности потенциалов методами спут
никовой rеодезии и, тем самым, возможность приведения изоли
рованных нивелирных сетей в единую систему высот с одним Ha
чалом, а также выбора единой поверхности rеоида.
23
Поверхность rеоида используют для характеристики обобщен
ной поверхности Земли как планеты. Установлено что rеоид бли.
зок к эллипсоиду вращения с параметрами
а = 6 378 137 .м; Ь= 6 356 752 м; а = (а Ь)/а = 1/298,257,
rде а, h большая и малая полуоси эллипсоида соответственно;
а полярное сжатие.
Средний радиус эллипсоида составляет 6371 км. Отступле
ния rеоида от эллипсоида не превосходят 100 м. Характерно, что
рельеф rеоида не повторяет рельеф физической поверхности Зем
ли и формируется под действием масс земной коры и верхней
мантии.
Остановимся на краткой характеристике отступлений твердой
поверхности Земли от rеоида. Диапазон изменения высот и rлу
бин составляет 19 км: от 11 034 м (Марианский желоб, западная
часть Тихоrо океана) до 8 850 м (r. Эверест, Большие rималаи).
Однако площадь, занимаемая rлубоководными впадинами и BЫ
сокими rорами, невелика, и свыше 95 0 А) поверхности Земли имеют
высоты и rлубины в интервале от 6 до +2 км. Около 21 % площа
ди земной поверхности заняты континентами с высотами до 1 км
над уровнем моря и около 53</';) океаническими впадинами с rлу
бинами от 3 до 6 км. Средняя высота континентальной части co
ставляет 840 м, средняя rлубина океана около 3 800 м. PaCCMOT
рим rипсоrрафическую кривую, отражающую основную особен
ность рельефа Земли деление ero На континентальную и
океаническую части (рис. 1.4).
Крупные формы рельефа обусловлены отличием в строении земной
коры на суше и на море (рис. 1.5). Нижней rраницей земной коры явля
ется поверхность Мохоровичича поверхность, при пересечении KOTO
рой скорость распространения упруrих сейсмических волн меняется
скачком. Континентальная кора состоит из rранитноrо и базальтовоrо
слоев и имеет мощность от 20 30 км в равнинных районах до 6 75 км
в [орах. Океаническая кора не имеет rранитноrо слоя, ее толщина co
ставляет б IО км. Рельеф океанической коры резко отличается от рель
ефа суши. Основными формами рельефа дна океана являются мелко
водная зона океанов с rлубинами от О до 200 м (материковая отмель,
или шельф), материковый склон с rлубинами 200 3000 м, ложе океана
(абиссаль) с rлубинами от 3 до б км, срединно океанические хребты,
возвышающиеся над ложем на 3 км, И rлубоководные желобы (ульт
раабиссаль) с rлубинами свыше б км.
24
Площадь земной поверхности, 1 ()6 км 1
О 1 2 3 4 5
1 О 000 1 О 000
8000 8 000
-i 6000 6000
Е
....
;w 4000 4000
...
==
2000 840 м 2000
Уровень моря
О О
2000 2000
...1.8 00.м 4 000
4000
...
...
::z
6000 6000
::..
....
--.
8000 8000
1 О 000 1 О 000
О 10 20 30 40 50 60 70 80 90 100
Процент земной поверхности
Рис. 1.4. rистоrрамма площади поверхности твердой Земли для
интервалов 1 км по высоте и rипсоrрафическая кривая, показывающая
площадь поверхности, находящуюся выше заданноrо уровня*.
Пунктиром по казаны средние уровни суши (840 м) и дна океана ( 3800 м).
10 км
...
...
...
, '.
, \
, ',.gOPA I
\ база::Т :ili ;о .....''''' 't
'.........
rранитный слой
35 км
65 км
МАНТИЯ
"
\
\
I
I
...../
Рис. 1.5. Схематической разрез земной коры;
.... .... ........ поверхность Мохоровичича
* По книrе Ф.Стейси Физика Земли. М., Мир, 1972.
25
Срединно океанические хребты образуют непрерывную rлобальную
цепь длиной около 75 тыс. км и занимают около трети площади океана.
Система срединно океанических хребтов показана на рис. 1.6
11
t!It;f. ol)
!22J 1
02
. 3
,.-.] 4
Рис. 1.6. rлавные тектонические структуры океана:
I контуры срединно океанических хребтов; 2 рифтовые долины;
3 поперечные разломы; 4 rлубоководные желобы. 1 Тихоокеанско
Антарктический хребет; II Срединно Атлантический хребет;
III Индийско-Атлантический хребет; IV Марианская впадина
Срединно океанические хребты имеют ширину до 2000 км, их скло
ны И rре6ни сильно расчленены. Вдоль оси хребта про стирается rлубокая
рифтовая долина провал с крутыми стенами, на дне KOToporo поверх
насть Мохоровичича выходит на поверхность дна.
Срединно океанические хребты расчленены мноrочисленными попе
речными разломами (рис. 1.7). В отличие от [орных хребтов на суше,
сложенных, как правило, осадочными породами с проявлениями склад
ЧатостИ, возникшей в результате сжатия, срединно океанические хреб
ты имеют преимущественно вулканическое происхождение и такие oco
бенности структуры, которые можно объяснить растяжением.
Специфической формой океанической коры являются также rлубо
ководные желобы. Их ширина измеряется Bcero десятками километров,
а длина сотнями и тысячами километров. rлубоководные желобы pac
положены, как правило, в окраинных частях океанов и отделены от
континентов островныМи дyrами. Над желобами наблюдается уменьше
ние силы тяжести, что объясняется их заполнением водой, имеющей
меньшую плотность в сравнении с плотностью земной коры.
26
Сl)'бина,
км
Сейсмичная Медианная долина,
зона или риф т
о
1
2
3
4
5
О
100
200
300
400
500
Расстояние, км
Рис. 1.7. Профиль Срединно Атлантическоrо хребта
Происхождение океанических хребтов и желобов объясняет rипоте
за разрастания океаническоrо дна. Соrласно этой rипотезе, в мантии
происходит непрерывное течение вещества, поднимающеrося у рифто
БЫХ долин И поrружающеrося у желобов. Вследствие этоrо океани
ческая кора перемещается от срединно океанических хребтов к жело
бам, [де она поrружается под континенты. Скорость течения вещества
мантии составляет несколько сантиметров в [од, поэтому для переме
щения океанической коры от срединно океаническоrо хребта через весь
океан на расстояние в тысячи километров потребуется около 200 млн.
лет. Этим можно объяснить отсутствие на дне океана мощноrо слоя
осадков, а также то, что на дне океана не находят пород древнее
150 млн. лет.
Что же касается физической поверхности Земли в целом, Т.е.
поверхности суши на континентах и морской топоrрафической
поверхности на океанах то из приведенных сведений следует,
что в rлобальном масштабе она близка к уровенной поверхности
потенциала силы тяжести; почти 930/0 ее площади имеют высоты
до 1 км над уровнем моря; средняя высота физической поверхно
сти составляет 230 м. На океанах наклоны морской топоrрафи
ческой поверхности относительно rеоида не превышают 2" и в
среднем составляют 0,1" 0,2". В равнинных районах наклоны
физической поверхности равны долям rрадуса. И только в rop
ных районах, на 1,6 0 /u площади, высоты превышают 3 км, повер
хность сильно расчленена и уrлы наклона MorYT превосходить 900.
Эти особенности земной поверхности приводят к необходимости
разработки специфических методов ее исследования на океанах, в
равнинных районах и в ropax.
27
3. ИЗМЕНЕНИЯ ПОВЕРХНОСТИ ЗЕМЛИ
И СИЛЫ ТЯЖЕСТИ ВО ВРЕМЕНИ.
ЗЕМНЫЕ ПРИЛИВЫ
Поверхность Земли и сила тяжести не постоянны во времени.
Это вызвано мноrими причинами, а основной является влияние
ближайших небесных тел Луны и Солнца. Притяжение Луны и
Солнца изменяется во времени вместе с положением этих тел. Это
служит причиной океанических приливов, возникающих из за Toro,
что свободная поверхность моря постоянно следует за уровенной
поверхностью. Кроме Toro, поскольку Земля не является абсо
лютно твердым телом, приливные силы деформируют всю ее
толщу. Деформация в свою очередь меняет силу тяжести и, вместе
с тем, приводит к смещению Земли относительно ее оси враще
ния. Это явление, т.е. движение полюса и изменение уrловой
скорости вращения Земли, приводит к новым rлобальным пере.
мещениям земных масс и изменениям поля силы тяжести. Этот
очень сложный процесс является предметом изучения физики Зем
ли. Ниже дается представление лишь о приливной силе абсолют
но твердой Земли.
Будем считать небесное тело материальной точкой, Землю аб
солютно твердым (недеформирующимся) телом. Построенная в
таких предположениях теория приливов называется статической.
Рассмотрим рис. 1.8.
°1
Рис. 1.8. К статической теории приливов
Здесь приняты следующие обозначения: О центр масс Земли;
р радиус вектор произвольной точки Р земной поверхности;
01 небесное тело; Z ero rеоцентрическое зенитное расстояние.
Потенциал V (Р) притяжения, создаваемый телом 01 в точке Р,
равен Gm в центре О масс Земли V ( O ) = Gm rде G постоян
I ' 1 '
1
ная тяrотения, т масса небесноrо тела; 1, 11 расстояния до
28
небесноrо тела. Из треуrольника OOIP можно получить такую
зависимость между расстояниями / и /1
1 1 Р р2 2 1 I "" ( р ) П
= + cosZ+ (3cos Z I)+...= Р (cosZ)
/ / /2 2/3 / / n '
] O
r де Р п( cosZ) основной полином Лежандра. Потенциал притяже
НЕЯ небесных тел значительно меньше потенциала Земли, поэто
чу в предыдущем выражении оставляют только первые три чле
на. Тоrда потенциал притяжения небесноrо тела в точке Р будет
равен
Gm Gm 2 2
V(P)=V(0)+ 2 pcos2+ p (3cos 2 1).
/ 2/
Gm
Рассмотрим силу притяжения небесноrо тела в точке Р.
/'2
Определим составляющие Fp и Fz этой силы вдоль радиуса векто
ра р и в перпендикулярном (rоризонтальном) направлении:
av(P) Gm Gm 2
Fp = = cos2 + ----з p(3cos 2 1),
др / /
F = д V = Gm sin 2 Gm р sin 22.
paz /2 2 /3
Первые слаrаемые правых частей этих равенств COOTBeTCTBY
Gm
ют члену pcos2 в выражении для потенциала и являются co
/ Gm
ставляющими постоянной силы Fo = притяжения небесноrо
/
тела в центре О масс Земли. Под действием этой постоянной силы
Земля совершает поступательное перемещение без изменения вза
имноrо положения масс. Силу тяжести и земную поверхность Ta
кая сила изменить не может; обнаружить ее можно только по
возмущениям земной орбиты. Постоянный потенциал V( О) не
создает силовоrо поля и не вызывает деформации Земли. В связи
с этим в приливный потенциал П(Р) не включают члены нулевоrо
и первоrо порядков и записывают ero в виде
П(Р) = G р2 (зсоs 2 2 1),
2/
(1.16)
29
а приливной силой 8F называют разность силы F притяжения
небесноrо тела в точке Р и центре Земли
8Р = F РО '
На рис. 1.8 показано распределение приливной силы на по м
верхности Земли. Эта сила стремится растянуть Землю вдоль ли м
нии 001' Для абсолютно твердой Земли под действием прилив.
ной силы смещаются уровенные поверхности, а сила тяжести из
меняется по величине и направлению.
Соrласно выражению (1.8) смещение dh уровенной поверхнос
ти определено потенциалом П(Р)
dh = П(Р)
,
g
изменение 8g модуля силы тяжести равно составляющей прилив
ной силы В направлении, противоположном радиусу вектору, Т.е.
дП(Р) Р 2
8g = = Gm (3cos 2 1),
др [3
( 1.17)
а изменение 8д направления силы тяжести, Т.е. направления OT
весной линии, определяется составляющей силы 8F в rоризон
тальном направлении
t} = дП(Р) = Gm sin 22.
gpдz 2 g [3
GM
Примем g = -------т' м масса, R средний радиус Земли, тоrда
R
dh = R 4 ( ) 2 (Зсоs2 2 1). (1.18)
2М [3 R
д = ;; ( J sin 22. ( 1 .19)
Оценим приливные изменения уровенной поверхности и силы
тяжести. Расстояние [ до небесноrо тела и ero зенитное расстоя
ние 2 непрерывно изменяются. В таблице 1.2 приведены пределы
изменения коэффициентов формул (1.17) (1.19) в зависимости
от изменения расстояния [ от Земли до Луны и Солнца. Соrласно
30
.:ре..J.ним значениям этих коэффициентов получаем, что при изме
:fе'НИИ зенитноrо расстояния от 90 до 00 уровенная поверхность
:id Земле может подниматься на высоту 54 см из за влияния Луны
ii на 24 см из за влияния Солнца, а сила тяжести изменяться при
ЧерНО на 165 мкrал и 75 мкrал соответственно. Это максимально
воз южные на всей поверхности твердой Земли приливные коле
бания уровенной поверхности и силы тяжести.
т а б л и ц а 1.2
Влияние изменения расстояния до Луны и Солнца на приливные
изменения уровенной поверхности и силы тяжести
Коэффи 1 т R 4 R 3 т R 3
см Gт з , мкrал с дуrи
циент 2М [3 ' 1 2М [3 '
тzп тах тzп тах min тах
Для Луны 15,06 20,94 46,42 64,54 0,015 0,020
Для Солнца 7,80 8,62 24,03 26,56 0,008 0,008
Приливные изменения силы тяжести обратно пропорциональ
ны кубу расстояния до небесноrо тела и зависят от зенитноrо
расстояния. Эти изменения в каждый момент времени различны в
разных точках Земли и имеют два минимума при Z = 0° или 180°,
Т.е. КОJ'да небесное тело находится в зените и надире, максимум
при Z = 90°, коrда небесное тело находится на rоризонте, и paB
ны нулю при Z = 54,7°.
Зенитное расстояние зависит от координат небесноrо тела и
точки поверхности Земли. Обратимся к рис. 1.9. Здесь Р и О(
проекции на небесную сферу точек поверхности Земли и небесно
м Полюс
О)
Рис. 1.9. Связь зенитноrо расстояния со склонением и широтой
(параллактический треуrольник)
31
ro тела; М полюс; t часовой уrол светила. Из треуrольника
РМО] находим
cosZ = sinepsin8 + cosepcos8cost,
rде ер широта точки Р, 8 склонение светила. С учетом этоrо
выражения формулу (1.16) можно преобразовать к виду
П(Р) ::;
= р2[З (sin 2 о ) (sin' <P }COSISin20Sin2l/HCOS2Jcos 2 OCOs' <р J.
Три члена этоrо выражения соответствуют трем типам при
ливных волн: независящим от часовоrо уrла долrопериодическим;
суточным, содержащим множитель cost, полусуточным, содержа
щим cos2t.
Рассмотрим долrопериодические волны. Используем средние
значения переменных и положим
р = R, 1 = '('Р' 8 = О,
rде 'ер среднее расстояние до небесноrо тела.
т оrда
3 GMR 2 . 2 1 1 GMR 2 . (l 20)
По(Р)::; 4 13 (sш ep 3)= 2 Р 2 (sшер). .
(
Потенциал По(Р) зависит только от широты точки Р и посто
янен во времени, поэтому ero называют постоянным приливным
потенциалом.
Если бы Земля была абсолютно твердой, она не испытывала
бы никаких деформаций. Если бы она была идеально упруrой, то
амплитуды приливных деформаций ее поверхности в точности
соответствовали бы приведенным в таблице 1.2. Физические свой-
ства Земли лежат между этими двумя идеальными случаями. По
этому наблюдаемые смещения уровенной поверхности относитель
но физической поверхности и изменения силы тяжести деформи-
руемой Земли отличаются от приведенных. Если бы Земля была
покрыта невесомой жидкостью, ее физическая поверхность следо
вала бы за уровенной поверхностью, и смещения уровенной по
верхности относительно поверхности жидкости были бы равны
нулю, а потенциал на этой поверхности оставался постоянным.
32
Поэтому на континентах смещения уровенной поверхности будут
ч ньше, чем указано в таблице 1.2, поскольку физическая поверх
ность также смещается под воздействием приливной силы. На море
высота прилива зависит от конфиrурации береrа и рельефа дна и
\южет достиrать у береrов десятков метров; так, в заливе Фанди
на Атлантическом побережье Северной Америки приливы дости
rают 18 м.
Изменения силы тяжести будут иметь, напротив, большие, чем
приведенные в таблице 1.2 значения, так как приливная сила pac
тяrивает Землю в направлении на небесное тело, что вызывает
У lеньшение силы тяжести в точке А (см. рис. 1.8), которое скла
..1ывается с приливной силой.
Наблюдения силы тяжести и наклонов физической поверхнос
ти свидетельствуют, что наблюдаемые изменения силы тяжести
примерно в 1,2 раза больше, а наклоны уровенной поверхности
относительно физической поверхности Земли составляют около
0.7 от статическоrо прилива. Отличие наблюдаемых приливов и
наклонов от статических используют для изучения BHYTpeHHero
строения и упруrих свойств Земли.
Помимо действия приливной силы, изменения земной повер
хности и силы тяжести вызываются нереrулярными движениями
воздуха и воды, а также rеотектоническими и антропоrенными
перемещениями масс в земной коре. Эти изменения носят локаль
ный характер, поэтому их качественно леrче описать.
Неприливные изменения поверхности Земли и поля силы тя
жести характеризуют величиной и скоростью изменения силы тя
жести, изменением направления отвесной линии или наклонами
уровенной поверхности относительно физической поверхности
Земли и деформациями физической поверхности. Последние обыч
но раскладывают на составляющие вдоль отвесной линии, KOTO
рые называют верmикаЛЬНЫ}vlИ движениями земной коры, и в пер
пендикулярном направлении, называемые 20ризонmа.льными движе
ниями зе)wной коры.
Вариации поля силы тяжести и поверхности Земли взаимосвя
заны сложным образом. Например, при реrиональных вертикаль
ных перемещениях сила тяжести на поверхности Земли изменяет
ся вследствие изменения высоты приблизительно на 0,3 мrл/м, хотя
взаимное расположение масс в этом районе сохраняется. Уrлы
между уровенной поверхностью и физической поверхностью Зем
ли MorYT изменяться из за наклона как уровенной, так физичес.
кой поверхности. В действительности при изменении формы pe
льефа и перемещениях масс внутри Земли поле силы тяжести Me
33
няется, а изменения силы тяжести вызывают новые деформации
Земли.
Теоретические расчеты и экспериментальные данные дают Ta
кие оценки неприливных изменений силы тяжести и поверхности
Земли:
rлобальные явления, связанные с изменением параметров
вращения Земли и смещениями центра масс, вызывают изменения
силы тяжести, не превосходящие нескольких микроrалов в rод;
изменения, вызываемые тектоническими движениями, различ
ны в активных и спокойных областях. В тектонически спокойных
районах вертикальные движения не превышают нескольких мил
лиметров в rод, а изменения силы тяжести нескольких микроrа
лов в rод
rоризонтальные движения, вызванные взаимным смещением
литосферных плит], достиrают нескольких сантиметров в rод; пе
рестройка земной коры на краю литосферных плит сопровожда
ется вертикальными движениями со скоростью до сантиметров в
rод и изменениями силы тяжести до десятков микроrалов в rод;
в сейсмически активных районах после сильных землетрясе
ний изменения поверхности Земли MorYT составить несколько MeT
ров, а изменения силы тяжести десятые доли миллиrалов.
Сезонные изменения в атмосфере вызывают изменения силы
тяжести до 5 мкrал, уровенной поверхности до 0,5 см, наклона
уровенной поверхности до 0,0015". Резкие колебания атмосфер
Horo давления MorYT вызвать изменения этих величин на порядок
большие: до 25 мм в уровенной поверхности, до 20 мкrал в силе
тяжести и до 0,01" в наклоне уровенной поверхности. Сезонные
изменения уровенной поверхности за счет влияния снежноrо по
крова MorYT достичь 1 см.
Пожалуй, наибольшими по величине являются TexHoreHHbIe
изменения поверхности и поля силы тяжести Земли. Так, вслед
ствие забора [рунтовых вод происходят оседания поверхности
Земли вблизи мноrих крупных [ородов; например, по этой при
чине поверхность земли в Мехико (население свыше 9 млн. чел.)
опустилась на 8,5 м. Эксплуатация нефтеrазовых месторождений
сопровождается опусканиями поверхности со скоростью до 1 О см/
rод и rоризонтальными смещениями до 6 см/rод. Изменения ypOB
1 Литосферная плита крупный блок земной коры и части подстилаю
щей мантии, перемещающийся как единое целое в соответствии с rипотезой
rлобальной тектоники плит. Земная кора состоит из (т7 основных плит; rpa
ницами между ними являются, в частности, срединно океанические хребты.
34
ия воды в водохранилищах крупных rэс приводят к вертикаль
ным смещениям уровенных поверхностей в несколько сантимет
ров и наклонам этих поверхностей до 0,001" и изменениям силы
тяжести до 10 мкrал. Правда, TexHoreHHbIe изменения поверхнос
тв Земли всеrда охватывают небольшую территорию и не оказы
вают существенноrо влияния на поверхность и поле силы тяжес
тв всей Земли.
Обобщая сказанное, заключаем, что для предельных величин
иеприливных изменений поверхности и поля Земли можно при
нять значения 1 м для вертикальных и rоризонтальных смещений
относительно центра масс Земли, 100 мкrал для изменений силы
тяжести и 0,02" или 1 0 7 радиана для наклона уровенной поверх
ности. Изменения пространственноrо положения точки и измене
ния силы тяжести в сравнении с радиусом R = 6,4 . 106 м Земли и
силой тяжести g = 9,8 Mc 2 составляет (1 2)10 7. Это означает, что
поверхность и поле силы тяжести можно считать неизменными
во времени, если точность rеодезических измерений не превышает
10 10 7. Дальнейшее повышение точности измерений поверхно
сти Земли и силы тяжести требует учитывать их изменения для
получения правильноrо решения.
rлава 2
СИСТЕМЫ КООРДИНАТ, ИСПОЛЬЗУЕМЫЕ
В ТЕОРЕТИЧЕСКОЙ rЕОДЕЗИИ,
И ИХ ПРЕОБРАЗОВАНИЯ
4. rЕОДЕЗИЧЕСКИЕ прямоуrОЛЬНЫЕ СИСТЕМЫ
КООРДИНАТ
в rеодезии используют прямоуrольную систему координат, Ha
чало О которой находится в центре масс Земли, ось Z направлена
по оси вращения Земли, ось Х совмещена с линией пересечения плос
костей экватора и начальноrо (rринвичскоrо) меридиана, ось У
дополняет систему до правой. Такую систему координат называют
zеоцентрuческой или общеземной. В общеземной системе коорди
нат определяют положение пунктов на всей поверхности Земли.
Если система координат введена для определения положения
точек на части земной поверхности, например на территории oд
Horo rосударства, ее начало О может быть значительно (до сотен
метров) смещено относительно центра масс. В этом случае rOBo
рят о референцной системе координат.
Из за неизбежных ошибок измерений при практическом задании
общеземной системы возможно несовпадение ее начала с центром масс
Земли и повороты осей. В связи с этим существуют несколько реали
заций общеземной rеоцентрической системы координат, и возникает
необходимость перехода от одной системы координат к друrой. Зада
ча преобразования координат возникает также при переходе от рефе
ренцной системы координат к общеземной и обратно.
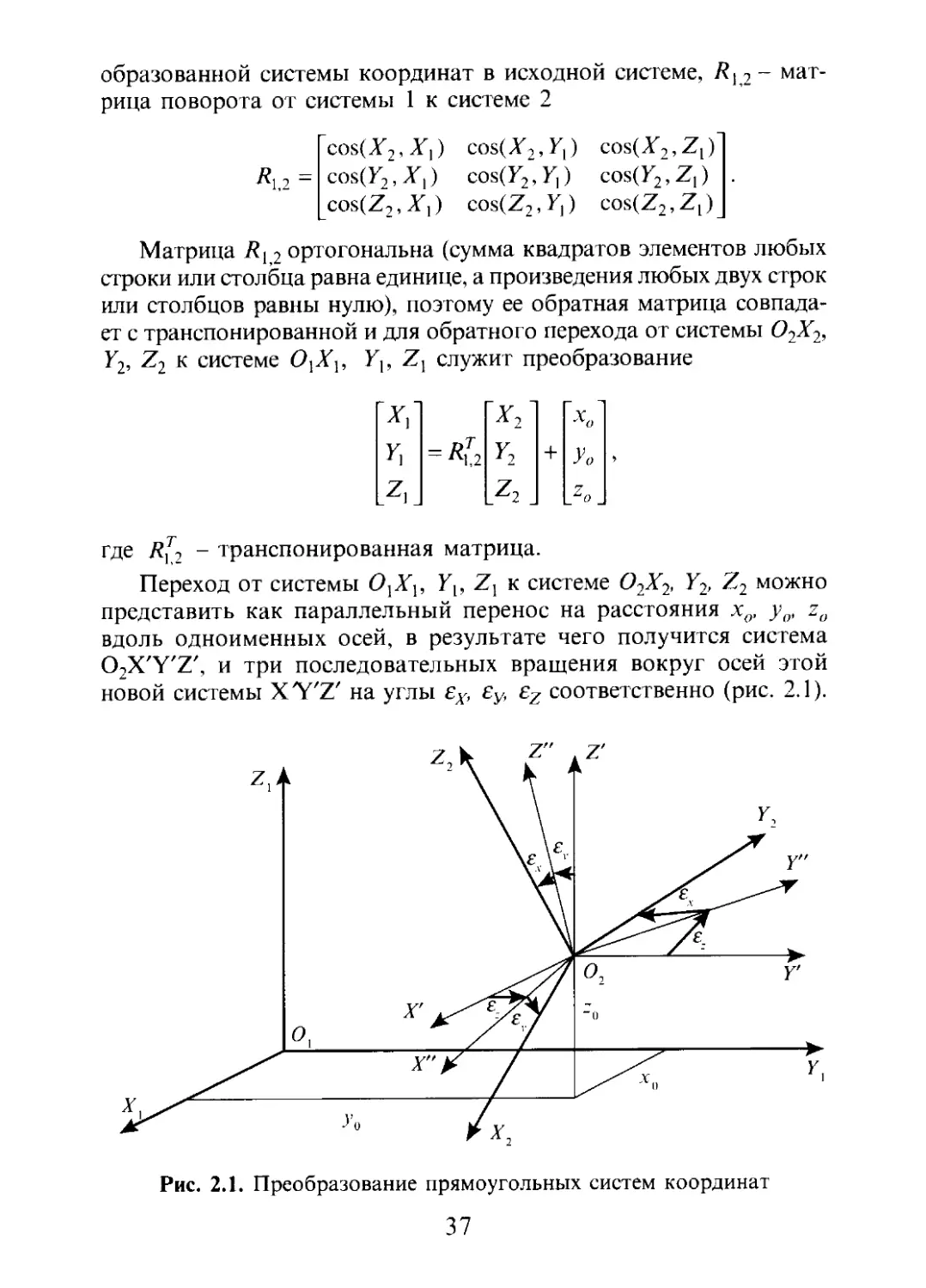
Переход от одной прямоуrольной системы координат к дpy
rой при одновременном переносе начала системы и повороте осей
выполняют по известному правилу
[ Х 2 ] [ Х1 х о ]
У 2 = R!,2 у; :o '
Z2 Zl o
rде Х 1 , У], Z], Х 2 , У2' Z2 координаты точки в первой и второй
системах соответственно, Х(), У О ' 20 координаты начала 02 пре
36
образованной системы координат в исходной системе, R j 2 MaT
рица поворота от системы 1 к системе 2 '
l COS(X 2' Х,) COs(X 2' У,) COs(X 2' Zl ) 1
R1,2::::; cos(Y 2 , Х,) cos(Y 2 , У] ) cos(Y 2 , Z,) .
COS(Z2' Х]) COS(Z2' YJ) COS(Z2' Zl)
Матрица R 12 ортоrональна (сумма квадратов элементов любых
строки или столбца равна единице, а произведения любых двух строк
или столбцов равны нулю), поэтому ее обратная матрица совпада
ет с транспонированной и для обратноrо перехода от системы 02 Х 2,
У 2 , 22 К системе 0IХ1, Y j , 21 служит преобразование
[ X J ] [ Х2 ] [ Ха ]
i, R{2 i, + , '
[де R] 2 транспонированная матрица.
Переход от системы 0IХ1, Y l , ZI К системе 02 Х 2' У 2, 22 можно
представить как параллельный перенос на расстояния Х О ' уо' 20
вдоль одноименных осей, в результате чеrо получится система
02X'Y'Z', и три последовательных вращения BOKpyr осей этой
новой системы XY'Z' на уrлы Ех, Еу, Ez соответственно (рис. 2.1).
Х'
У)
ZI
О)
)'0
Рис. 2.1. Преобразование прямоуrольных систем координат
37
В результате этих действий получаем
[ :]=
COSEyCOSE z
coseysine:
siney
= coSExsinez +sinexsineycose Z COSExCOSE: +sinexsineysine Z sinexCOSE y х
sinexsine z +cose xsin Eycose z sinexcosez +cosexsineysine Z cOSEXCOSE y
[ Х; хо ]
х }) Уо .
Zo
(2.1 )
Уrлы поворота между осями rеодезических систем не превыша
ют 1 2", поэтому матрицу преобразования обычно упрощают, по
лаrая sine = ё, cOSE = 1, (sine)2= О, и записывают формулу (2.1) в виде:
[ ;" ] = (1 + т)r ,
2 l ё у
ё
1
EY ll X\ xo J
Ех У\ Уо .
1 \ Zo
(2.2)
ёx
В выражении (2.2) учтено также отличие т масштабов двух
систем, вызванное систематическими ошибками линейных изме
рений. Так как для современных систем т является малой величи
ной, можно не учитывать про изведения тё и записать формулу
(2.2) в виде
Х 2 Х] = Xo + т (Х] хо) + ё:(У, УО) ёyC ] Zo),
У 2 У] = Yo Ez(X, хо) + т(У] Уо) + ёX< , Zo), (2.3)
2 2, = Zo + ёуСХ, хо) E,-iУ, УО) + т( , z).
Вследствие малости всех членов в правой части можно pac
сматривать разности Х 2 Х" У 2 У" 22 2] как дифференциалы
dX, dY, d координат. Пренебреrая про изведениями координат
хо' У о' Zo на т, ё х , ё у ' E z , запишем их в виде
dX = Xo + тХ] + EzY, ё у 2"
dY = Yo EzX] + тУ, + Ех2],
d = Zo + ё7] ЕхУ] + mZ"
(2.4)
38
или в матричной форме
[ ;] [=::]+l ;, l[ J
(2.5)
Координаты Х О ' Уо' Zo начала референцной системы координат
в общеземной системе и уrлы е х , e " Е: называют внутренними эле
.иентаJИИ ориентирования референцной системы.
5. rЕОДЕЗИЧЕСКАЯ ЭЛЛИПСОИДАЛЬНАЯ
СИСТЕМА КООРДИНАТ
Теодезическая ЭШlипсоидальная система координат В, L, Н связа
на с эллипсоидом (рис. 2.2). Координатными линиями в этой сис
теме являются нормали к эллипсоиду. Теодезическая широта В
это уrол между нормалью РРаО р К эллипсоиду И плоскостью эква
тора; zеодезическая дОЛ20та L уrол между плоскостью У = О Ha
чальноrо меридиана и плоскостью ZOP меридиана точки Р. Teoдe
зическая высота Н отрезок Р аР нормали к эллипсоиду.
z
р
у
Рис. 2.2. rеодезические прямоуrольная и эллипсоидальная
системы координат
39
Отсчетный ЭЛЛИПСОИД может располаrаться внутри Земли по
разному. Если центр эллипсоида совмещен с центром масс Земли,
а ero поверхность близка к поверхности rеоида, то эллипсоид
называют общим земным. Если эллипсоид близок к rеоиду на or-
раниченной площади, а центр ero смещен относительно центра
масс, ero называют референц-эллuпсоuдом. Референц эллипсоид за
конодательно устанавливается для использования в rеодезических
работах в той иЛИ иной стране, отсюда и ero название (референ-
ция, Т.е. рекомендация).
rеодезические прямоуrольная и эллипсоидальная системы со-
rласованы дру! с друrом. Центры этих систем совмещены, ось Z
прямоуrольной системы проходит вдоль малой оси эллипсоида,
оси Х и У совпадают. Связь систем соrласно рис. 2.2 устанавли
вают формулы
Х = (N + mcos BcosL,
У = (N + mcos BsinL,
Z = (N + Н Ne 2 )sinB,
(2.6)
rде N радиус кривизны первоrо вертикала, равный отрезку ОрРа
на рис. 2.2; е эксцентриситет.
Из курса сфероидической rеодезии известно, что
N= а ,
.J 1 е 2 sin В
(2.7)
rде а большая полуось эллипсоида.
Обратный переход от rеодезических эллипсоидальных коор-
динат к прямоуrольным выполняют следующим образом: опреде-
ляют долrоту L и радиус Q параллели точки Р (на рис. 2.2 он
равен отрезку OP l ). Это возможно сделать разными способами,
например,
tg L = У/Х, Q = XcosL + YsinL,
(2.8)
или
Q= .J X 2 +y 2 ,
. L У
S1П = ,
Q
Х
cosL= .
Q
(2.9)
Для широты из выражений (2.6) находят
В Z+Ne2sinB
tg =
Q
40
(2.1 О)
Широту В вычисляют методом приближений, причем в началь
нам приближении можно использовать разные ее значения. Наи
более удобно найти в первом приближении прuведенную широту
и точки P 1 отсчетноrо эллипсоида, лежащей на пересечении ero
поверхности с радиусом вектором внешней точки Р (рис. 2.3)
Z
tgи = J .
Q 1 е 2
(2.11 )
Напомним, что приведенной широтой точки Р 1 эллипсоида
называют rеоцентрическую широту точки Р', являющейся проек
цией точки P 1 на вспомоrательную сферу радиуса а нормалью к
плоскости экватора (см. рис. 2.3). Приведенная и rеодезическая
широта связаны равенством
tgu = J l е 2 19B.
(2.12)
z
,.,. .. ",.. ."..' Р
............ Р'..
, .,
:.........\
а
Экватор
Рис. 2.3. Приведенная широта
После вычисления приведенной широты rеодезическую широ
ту находят по формуле Боуринrа
. 3
Z 2 а sш и
+е
' 1 2 (2.13)
19B = v е
Q e 2 acos 3 и
rеодезическую высоту Н вычисляют по формулам
н = Q/cos В N
или
н = QcosB +ZsinB a (l е 2 sin 2 В).
(2.14)
41
Высоту и широту можно вычислить совместно, используя BЫ
ражения
tgB o = Z2 ,Ho=QcosBo+ZsinBo a l e2sin2 ВО'
(1 е )Q (2.15 )
а
N o = ,
2 J l е 2 sin 2 Во
tgB = ( У ' н = Q cos В + Z sin В a l е 2 sin 2 В.
1 е 2 N o
N o +Но
Формулы (2.8) (2.15) позволяют найти rеодезические KOOp
динаты одной и той же точки для разных эллипсоидов. Диффе
ренцируя равенства (2.8), (2.10) и (2.14), найдем формулы для из
менения dH, dE, dL rеодезических координат при переходе от oд
Horo эллипсоида к друrому
dH = (dX cosL+ dY sinL)cosB +dZsinB da+ (e 2 da +ade 2 )sin 2 В,
(М +H)dB= (dXcosL+dYsinL)sinB+dZcosB+ (e 2 da+ade 2 )sin2B,
(N +H)cosbdL=dYcosL dXsinL.
(2.16)
Здесь М радиус кривизны меридиана,
м = а(1 е 2 )
(1 е 2 sin 2 в)3/2 .
(2.17)
Дифференциалы dX, dY, dZ rеодезических прямоуrольных KO
ординат определены формулами (2.4) (2.5). Подставив выраже
иие (2.4) в (2.16), находим
dH = m[(Х, cosL + У1 sin L)cosB + Z, sin В]
(x()cosL+ УО sinL)cosB z()sinB da+ (e 2 da+ade 2 )sin 2 В+
+ t x (Zl sin Lcos В У 1 sin В) t у (21 cos Lcos В Х 1 sin В);
42
(М + H)dB = m[(X[ cosL + У 1 sin L)sin В ZI cosB] +
+ (х() cos L + уо sin L)sin В + (e 2 da + ade 2 )sin 2В (2.18)
Е х (Z[ sin Lsin В + У] cosB) + t у (Z] cosLsin В + Х] cos В);
(N + Н)соsВdL = xosinL yocosL + Z] (tysinL + txcosL)
t z (Y}sinLX}cosL).
Формулы (2.18) позволяют найти изменения rеодезических эл
.1ИПСОИДальных координат при изменении размера и формы эллип
СDида и ero ориентирования внутри Земли. Заметим, что для эл
.lипсоида вращения изменения широты и высоты не зависят от
поворота BOKpyr оси Z, поэтому в первые два уравнения (2.18) уrол
Е: не входит. А изменение долrоты не зависит от масштаба т.
6. СФЕРИЧЕСКАЯ СИСТЕМА КООРДИНАТ
Рассмотрим сферическую систему координат.
Сферические координаты " Ф, L (или r, О, L) по казаны на
рис. 2.4: f полярный радиус вектор; Ф rеоцентрическая широ
та; О полярное расстояние, являющееся дополнением широты
до 90°; L долrота
о = 90° Ф.
(2.19)
z
r
z
.'
..- у
X
. __ _ __ . . . . _...". __. .... ___ _ .... . .. ... __. ___. ... _ ____ _ .. .: :..J...:..'
-',
.-'
у
Рис. 2.4. Сферическая система координат
43
Сферические координаты связаны с прямоуrольными COOTHO
шениями
х = rсоsФсоsL, У = rсоsФsiпL, Z = rsiпФ
или
(2.20)
х = rsin8 cosL, У = r rsin8 sinL, Z = rcos8.
Обратный переход от координат Х, У; Z к координатам r, Ф,
L выполняют с помощью преобразований
r 2 =х 2 +у2 +z2,
Z
tgФ=
x2 +у2 '
у
t g L =
х'
(2.21 )
7. СПЕЦИАЛЬНАЯ СИСТЕМА КООРДИНАТ
СЖАтоrо ЭЛЛИПСОИДА ВРАЩЕНИЯ
в специальной эллипсоидальной системе координат (рис. 2.5)
положение точки Р определяется малой полуосью Ь проходящеrо
через эту точку эллипсоида, софокусноrо отсчетному, приведен
ной широтой u и долrотой L. Соrласно рис. 2.5 радиус Q парал
лели определяется выражением
Q=acosu,
(2.22)
а с помощью уравнения меридианноrо эллипса
Q2 Z2
+ =1
а 2 ь 2
можно найти
Z = bsinu.
(2.23)
Введем лuнейный эксцентрuсuтет Е = ае, равный половине фо
кальноrо расстояния, и запишем выражение для большой полу
оси в виде
а 2 =ь 2 + Е 2 .
(2.24)
44
z
.... .. ...h..........
Ь О
р'
ь
Фокус а о
Экватор
Рис. 2.5. Специальная эллипсоидальная система координат
Так как Х = QcosL, У = QsinL, получаем формулы связи пря
\!оуrольных координат со специальными эллипсоидальными
x= J b 2 +в 2 cosucosL,
у = J b 2 +в 2 cosusinL,
(2.25)
Z = ь sin и.
в дальнейшем нам потребуются элементы d'r объема и da по
верхности
dT = hlh2hзcosudbdudL, da = h2hзcosududL,
(2.26)
b2 + Е 2 sin 2 u
111 = , h 2 = J ь 2 + Е 2 sin 2 и, h з = J ь 2 + Е 2 cosu. (2.27)
а
Система координат Ь, и, L при Е = О переходит в сферическую
систему координат r, Ф, L.
Связь координат Ь, u с rеодезическими можно установить, при
равняв правые части равенств (2. 6) и (2. 25),
(N + H)cosB = J b 2 + в 2 cosu,
(N + Н Ne 2 )sin В = bsinu.
(2.28)
Долrота в обеих системах одинакова.
45
8. НАТУРАЛЬНАЯ СИСТЕМА КООРДИНАТ
Силовые линии и уровенные поверхности создают естественм
ную опору для определения положения в пространстве. При reo
дезических измерениях приборы почти всеrда ориентируют с по
мощью отвесов и уровней по вектору силы тяжести (отвесной
линии), поэтому результаты практически всех измерений зависят
от структуры поля силы тяжести. Для определения земной повер
хности в большинстве случаев измеряют не просто уrлы и paCCTO
ян ия между пунктами этой поверхности, а их проекции на повер
хности, ортоrональные вектору силы тяжести.
В rлаве 1 установлено, что через любую точку проходит одна
силовая линия и одна уровенная поверхность потенциала силы
тяжести, поэтому естественно определять положение точек как
пересечение силовой линии и уровенной поверхности. Направле
ние силовой линии определяют астрономические координаты
широта ер и долrота л.. Астрономическая широта это дополне
ние до 900 уrла между линией, параллельной оси вращения Земли,
и отвесной линией (рис. 2.6). Долrота равна двуrранному уrлу
между плоскостями начальноrо астрономическоrо меридиана и ac
трономическоrо меридиана данной точки. Напомним, что aCTpo
номическим меридианом называют плоскость, про ходящую через
отвесную линию и линию, параллельную оси вращения Земли. Си
z.
р
."...
w=w
р
о
у
g
Плоскость экватора
Рис. 2.6. Натуральная система координат
46
.lовая линия поля силы тяжести линия двоякой кривизны, по
этому отвесная линия и ось вращения Земли являются в общем
случае скрещивающимися прямыми. Из за этоrо астрономический
меридиан не проходит через ось вращения Земли.
Напомним также, что астрономическим азимутом а называ
ют уrол между плоскостью астрономическоrо меридиана и плос
костью вертикала, содержащей отвесную линию и наблюдаемый
предмет. В rеодезии астрономический азимут отсчитывают от
направления на север по ходу часовой стрелки.
Сложнее обстоит дело с определением третьей координаты,
определяющей положение уровенной поверхности, потому что нет
методов измерения потенциала. Принципиальную возможность
измерения разности потенциалов открывает равенство (1. 7): нуж
но измерить по любому пути между исходной и текущей точками
силу тяжести g и расстояние dh между уровенными поверхностя
ми. Предположим, что от исходноrо пункта, лежащеrо на rеоиде
w= W o ,
(2.29)
проложен нивелирный ход, вдоль KOToporo измерены превыше
ния dh и сила тяжести g. Тоrда в любой точке этоrо хода можно
вычислить rеопотенциальное число (1.14).
Триада <р, л', W o W образует натуральные координаты в поле
силы тяжести. В натуральной системе можно определять положе
ние точек непосредственно по измерениям и решать механические
задачи, связанные с работой в поле силы тяжести. Однако слож
ность и, rлавное, неизвестность формы уровенных поверхностей и
силовых линий не позволяет использовать эту систему для решения
rеометрических задач. Даже задача вычисления расстояния между
J.вумя точками, определяемыми координатами <р!, л'!, (W o J.V)!
И ({J]., , ( ) J.V)2, становится неразрешимой. Для решения любых
rеодезических задач вводят более простую систему координат, по
возможности близкую к натуральной.
9. СВЯЗЬ НАТУРАЛЬНОЙ И rЕОДЕЗИЧЕСКОЙ
СИСТЕМ КООРДИНАТ
Установим связь астрономических и rеодезических широт и
J:олrот. Их отличие вызвано несовпадением направлений OTBec
ной линии и нормали к эллипсоиду. Рассмотрим рис. 2.7. Здесь
р точка поверхности Земли, Рп нормаль к референц эллипсои
ду, g направление силы тяжести (отвесная линия), О центр
47
эллипсоида, OXZ плоскость начальноrо меридиана, ОХУ плос
кость экватора. Нормаль к эллипсоиду пересекает плоскость эк
ватора в точке n, отвесная линия в точке Q2' У20Л nPQ2 = u Ar
между нормалью к эллипсоиду и отвесной линией называется acт
РОНОМО 2еодезическuм уклонением отвеса.
Про ведем BOKpyr Р сферу единичноrо радиуса и продолжим
нормаль рп к эллипсоиду и отвесную линию PQ2 дО пересечения с
этой сферой. Нормаль пересечет вспомоrательную сферу в точке
Zr rеодезическоrо зенита, отвесная линия в точке ZA aCTpOHO
мическоrо зенита. Уrол между направлениями pZr и pzA и дуrа
U Ar Ф
единичнои с еры также являются астрономо rеодезическим
уклонением отвеса.
Z
Z'
900
Плоскость 20ризо. та
точки Р
у
р
х
Рис. 2.7. Астрономические ф, А, rеодезические В, L
и топоцентрические rоризонтные х, у, z координаты
и астрономо rеодезическое уклонение отвеса
48
Проведем через точку Р линию pPZ', параллельную оси Bpa
ения Земли и малой оси референц эллипсоида: эта линия пересе
кает вспомоrательную сферу в точке Z', а плоскость экватора в
точке р. Плоскость Zr pZ ' это плоскость rеодезическоrо мери
Лlaна точки Р, она пересекает плоскость экватора по линии рО:
тол ХОр rеодезическая долrота L, уrол Рпр rеодезическая
:.uирота В точки Р, дуrа Zr Z' равна дополнению rеодезической
широты В до 900. Плоскость ZApz' является плоскостью aCTpo
номическоrо меридиана, она пересекает плоскость экватора по
.1ИНИИ PQ20, Уrол Хор астрономическая долrота А точки Р;
П.lОСКОСТИ начальноrо астрономическоrо и rеодезическоrо мери
ЛIaНОВ считаем совпадающими. Уrол Pq2P астрономическая
широта ер точки Р, дуrа ZZA равна дополнению астрономической
широты ер до 900.
А А
Из точки Z астрономическоrо зенита проведем дуrу Z q, пер
пендикулярную меридиану Zr Z '. Дуzа Zr q = ;;лr называется cocтaв
1Яющей астро1tомо zеодезическоzо уклонения отвеса в плоскости
.\tеридuана, дуzа ZA q = Т}АТ составляющая в плоскости пepBOZO
вертикала.
Установим соотношения между уклонением отвеса и ero co
ставляющими. Рассмотрим треуrольник Zr ZAq. Уклонения отвеса
на Земле не превышают 1', поэтому ero можно считать плоским.
Этот треуrольник изображен на рис. 2.8, rде показаны также Ha
правления Zr N меридиана и ZrE первоrо вертикала. Из треуrоль
ника ZrZAq
(U Ar )2 = (; АТ)2 + (Т}АТ )2,
; АТ = UATcosB, Т}АТ = UATsinB,
(2.30)
[де В rеодезический азимут плоскости ZrpZA , содержащей OT
весную линию.
Уклонения отвеса задают как величиной уrла u АТ и азимутом
В, так и составляющими ;, т} уклонения отвеса. Знаки составляю
щих уклонения отвеса устанавливают по правилу: если acтpOHO
.нический зенит уклоняется к ceвepo вocтOKY от zеодезическоzо,
составляющие уклонения отвеса положительны. На рис. 2.7, 2.8
уклонения отвеса положительны.
Составляющую дА уклонения отвеса в произвольном азимуте
А удобно находить через компоненты r, ryAr астрономо rеоде
зическоrо уклонения отвеса в плоскостях меридиана и первоrо
49
вертикала. Спроектируем отрезок ZrZA на линию, проходящую В
азимуте А. Дуrа на единичной сфере, соответствующая отрезку
Zr d, является составляющей дА уклонения отвеса в этом азимуте.
Соrласно рис. 2.8 запишем
д А = UArcoS(6 А) = UArcos6 cosA + U Ar sin6 sinA,
или, с учетом формул (2.30),
дА = r cosA + 17 Ar sinA.
(2.31)
q
N
A!'
Zf'
rt!
Е
Рис. 2.8. Составляющие уклонения отвеса
Выразим составляющие уклонения отвеса через астрономичес
кие и rеодезические координаты. Из прямоуrольноrо сферическо
[о треуrольника q Z'ZA (см. рис. 2.7) получаем
. АТ
sш 17 . (90 () )
== sш ер
sin(A L) ,
соs(л L) = tg(90° B ,;AT)ctg(90° ер).
Так как 17 Ar и А L малы, положим COS(A L) ;;: 1, sin(A L) ;;:
;;: А L , sinifT ;;: r(T. Тоrда
,;АТ = ер В,
(2.32)
17 Ar = (А L) cosep.
50
Формулы (2.32) поясняют способ вычисления aCTpoHoMo reo
.Jезических уклонений отвеса: чтобы получить эти уклонения, нуж
но измерить в точке с известными rеодезическими координатами
астрономические координаты. Разности координат дадут COCTaB
.lяющие уклонения отвеса. Напомним, что на рис. 2.7 линия PZ'
параллельна оси вращения Земли и малой оси эллипсоида. Поэто
\IУ формулы (2.32) верны только в том случае, если это условие
выполняется, Т.е. если малая ось референц эллипсоида параллель
на оси вращения Земли. С друrой стороны, если rеодезические
координаты выбрать с соблюдением условий (2.32), тем самым
будет rарантирована параллельность малой оси референц эллип
соида и оси вращения Земли.
Соrласно выражению (2.32), аcrрономо rеодезические уклоне
ния отвеса зависят не только от направления отвесной линии, но
н от направления нормали, Т.е. выбора эллипсоида. В одной и
той же точке поверхности Земли астрономо rеодезическое укло
нение отвеса будет различным для разных референц.эллипсоидов.
Поэтому уклонение отвеса, вычисленное относительно нормали к
референц эллипсоиду, называется относительным. Уклонение OT
веса от нормали к общему земному эллипсоиду, центр KOToporo
совпадает с центром масс Земли, называется абсолютным.
Найдем связь rеодезической высоты с нивелирным превыше.
нием h. На рис. 2.9 Р и Р 1 точки поверхности Земли, между
которыми измерено превышение h, Т.е. расстояние между про
ходящими через эти точки уровенными поверхностями поля силы
тяжести. В rеометрическом нивелировании расстояние между пе
реходными точками невелико, поэтому можно считать уровенную
поверхность W = с плоскостью. Линия РР 2 параллельна касатель.
ной к поверхности эллипсоида, Рп нормаль к поверхности эл
.lипсоида, Рр отвесная линия.
Уrол ?tr между нормалью к эллипсоиду и отвесной линией
является составляющей астрономо rеодезическоrо уклонения OT
веса в точке Р в азимуте линии РР l' Уrол наклона уровенной по
верхности в точке Р также равен составляющей уклонения отвеса
(уклонения отвеса считают отрицательными, если наклон ypOBeH
ной поверхности к эллипсоиду положителен; на рис. 2.9 уклоне
ние отвеса отрицательно).
Соrласно рис. 2.9 для отрезка Р 1 Р 2 нормали к эллипсоиду, paB
Horo разности H rеодезических высот, можно написать
Р\Р2 = дН = дDsin (а tЗAf) = ДD (sina соstЗA r cosa siпtЗAf).
51
р
п
Физическая поверхность
.kюu
, Уровеиная
рхность
Р2
Рис. 2.9. Связь приращения rеодезической высоты с превышением
Уклонение отвеса не превышает нескольких секунд, а расстоя
ние /),D 1 O 150 м, поэтому cos r :: 1, sin ut r ::ut r , bl)sina == Ыz,
bl)cosa == /).1. Тоrда
/),Н = /).h ut r /).1.
(2.33)
т аким образом, измеренные в rеометрическом нивелировании
превышения ыz можно редуцировать в rеодезическую систему KO
ординат, если на каждой нивелирной станции известны aCTpo
номо rеодезические уклонения отвеса, Т.е. выполнены астрономи
ческие определения и известны rеодезические координаты.
10. ТОПОЦЕНТРИЧЕСКИЕ СИСТЕМЫ КООРДИНАТ
Топоцентрической системой координат называют систему, Ha
чало которой помещено в какой либо точке Р поверхности Земли
(рис. 2.1 О). Прямоуrольная топоцентрическая система координат
РХ', У', Z', оси которой параллельны осям общеземной системы
Х, У, Z, называется ZРИ1l6ИЧСКОЙ экваториальной. В этой системе
прямоуrольные координаты любой точки равны приращениям /),Х,
/). У, I1Z общеземных координат относительно точки Р. В ZОрИЗОН
52
z'
z
Плоскость .нерuдиаuа
точки р
Х'
Плоскость парШ7Лелu точки Р
zp
z
о
Рис. 2.10. Топоцентрические системы координат:
РХ'У2' rринвичская экваториальная,
Рх, у, z rоризонтная rеодезическая
Х"
тной (или ZОрU30llтальной) топоцентрической системе Рх, у, z
ось z совмещают с отвесной линией или нормалью к эллипсоиду,
а оси х и у расположены в rоризонтальной плоскости; при этом
ось х лежит в плоскости астрономическоrо или rеодезическоrо Me
ридиана и направлена на север, а ось у на восток.
Переход от rеоцентрической прямоуrольной системы коорди
нат Х, у; Z к топоцентрической экваториальной PX y Z' BЫ
полняется переносом начала системы в точку Р. Связь экватори
альных PX Y 2' и rоризонтных Рх, у, z координат соrласно
рис. 2.1 О осуществляется следующими преобразованиями: пово
ротом BOKpyr оси Z' на уrол 1800 + L и переходом к системе KOOp
;1Инат РХ"У"2'; поворотом BOKpyr оси УН по часовой стрелке на
53
уrол (90° В); переходом к левой системе координат (изменение
направления оси у" на 1800).
Для получения х, у, z применим преобразование (2.1), исполь
зуя для координат центра преобразованной системы х о = Хр,
у о = у р, Zo = Zp, а .для уrлов поворота значения ё-х = О, е у = (900
о .
В), Е:;; = 180 + L. В результате получим
[ Х ] [ sin cos L
У sш L
z cos Bcos L
sin В sin L
cosL
cos В sin L
cosB
О
I = : J. (2.34)
sinB
Во второй строке матрицы преобразования знаки элементов
изменены на противоположные для перехода к левой системе KO
ординат (для поворота оси У" на 180°). Таким образом, для то-
поцентрических rоризонтных координат находим
Х = (L1XcosL + d YsinL) sinB + dZcosB,
у = AX sinL + d У cosL,
(2.35)
z = (AXcosL + d YsinL) cosB +dZ sinB,
[де dX = Х Х р, d У = У У р, dZ = Z Z р.
Если в матрице (2.34) использовать астрономические коорди
наты, то преобразования (2.34), (2.35) позволят получить прямо
уrольные топоцентрические координаты, связанные с отвесной
линией. Соответствующую систему координат называют 20рИЗОН
p AAA B
тнои астрономическои х у Z. этои системе
хА = (дхсоsл. + d Уsiпл.)siпср + дZсоsср,
уА = АХsiпл. + d усоsл.,
z1 = (AXCOSA + d YsinA)cosqJ + dZsincp.
(2.36)
Наряду с rоризонтными прямоуrольными часто используют
rоризонтные полярные координаты D) А, Z (рис. 2.11). На ри
сунке D радиус вектор (расстояние текущей точки Q от начала
координат Р); А азимут (Двуrранный уrол между плоскостью
меридиана точки Р и вертикальной плоскостью, проходящей че-
рез точку Q), Z зенитное расстояние уrол между осью z и
54
z
р
х
у
Рис. 2.11. Полярные топоцентрические координаты
отрезком D. Связь rоризонтных полярных и прямоуrольных KO
ординат устанавливают соотношения:
х = D sinZ cosA;
у = D sinZ cosA;
z = D cosZ.
(2.37)
Для обратноrо перехода от rоризонтных прямоуrольных KO
ординат к полярным служат формулы
у AX sin L + дУ cosL
tgA:::: Х :::: (АХ cosL + дУ sin L)sin В + ДZ cosB '
Z z (АХ cosL+ ДУ sin L)cosB + ДZ sinB
cos D D '
(2.38)
D:::: J AX 2 +ду 2 +дz2.
в уравнениях (2.38) учтены выражения (2.36) для координат
х, у, z. Формулы (2.37) (2.38) можно использовать для связи
rоризонтных координат, связанных как с нормалью к эллипсои
.J.y, так и с отвесной линией. В первом случае нужно использовать
rеодезические координаты В, L, rеодезическое зенитное расстоя
ние Zr и rеодезический азимут; во втором астрономические KO
ординаты ф, ..1., астрономический азимут а и астрономическое зе
нитное расстояние ZA. Расстояние D инвариантно к преобразо
ванию координат.
55
Система топоцентрических координат D, А, Z используется
для задания положения точек в локальной области. Для определе
ния точек на всей поверхности Земли применяют полярную Kpивo
линейnую топоцентрическую систему координат А, ljI (рис. 2.12).
Азимут А в этой системе совпадает с азимутом топоцентрической
системы D, А, Z, но вместо линейноrо расстояния D введено yz
ловое расстояние 1/1, равное уrлу между нормалями к эллипсоиду,
проходящими через полюс Р системы и текущую точку Q. HopMa
ли к эллипсоиду являются скрещивающимися прямыми; уrол меж
ду ними определяется из соотношения
cos ljI = liq + трт ц + nрnц,
[де 1, т, п направляющие косинусы нормали к эллипсоиду, ниж
ние индексы указывают на принадлежность к точкам Р и Q. Co
rласно уравнениям (2.6)
1 = cosB cosL,
т = cosB sinL,
n = sinB,
поэтому
cosljl = sinBpsinB q + cosBpcosBqCcosLpcosL q + sinLpsinL q ),
или
cosljl = sinBpsinB(j + cosBpcosB(jcos(L q L p )'
(2.39)
Меридиан точки Р
z (полюс)
Рис. 2.12. Полярные топоцентрические координаты А, 1jf
56
Если не учитывать сжатие эллипсоида. уrол ЦI будет уrлом
\Iежду радиусами векторами фиксированной точки Р и текущей
точки Q поверхности сферы или дуrой PQ на поверхности еди
ничной сферы.
11. ВЛИЯНИЕ ДВИЖЕНИЯ ПОЛЮСА
НА КООРДИНАТЫ
Выше (см. 4) отмечено, что в общеземной системе координат
ось Z совмещена с осью вращения Земли, а начало этой системы
с центром масс. Положение центра масс Земли в ее теле стабиль
но и по разным оценкам может изменяться в пределах лишь He
скольких миллиметров, что не ощутимо при нынешней точности
rеодезических измерений. Поэтому условие совмещения начала
общеземной системы координат с центром масс Земли не вызыва
ет неопределенности.
Иначе обстоит дело с осью Z. Ось вращения Земли изменяет
свою ориентировку в пространстве из за явлений прецессии и
нутации, а Земля смещается относительно оси вращения, что при
водит к перемещению оси вращения в теле Земли. Изменение по
ложения оси вращения в пространстве не имеет значения для yc
тановления земной системы координат; в этом случае взаимное
положение точек поверхности Земли и оси вращения остается He
изменным и изменения координат не происходит. А изменение
положения оси Z вращения внутри Земли проявляется как движе
ние полюсов по ее поверхности и вызывает изменение координат
точек.
Рассмотрим влияние движения полюса на пространственные
прямоуrольные и астрономические координаты.
На рис. 2.13 z положение полюса в некоторый начальный
момент; z' мrновенный полюс; о начало счета долrот; Р про
извольная точка поверхности Земли, ф, 1 координаты этой точ
ки относительно полюса z и начальноrо меридиана oCz; С центр
масс Земли; ф', l' MrHoBeHHbIe координаты, связанные с полю
сом z'; PQ произвольное направление в точке Р.
Спроектируем точку z' на начальный меридиан в точку ZI'
Переход от прямоуrольной системы координат с осью CZ к сис
теме с осью CZ' осуществлен поворотом на €x = z'zl BOKpyr оси
Х и на €., = zz\ BOKpyr оси У; уrол €x на рис. 2.13 отрицателен.
Найдем изменения прямоуrольных координат точки Р с помощью
выражений (2.4) (2.5). Начало систем координат совмещено с
центром масс С и не изменилось, поэтому Ха = У а = Zo = О, масш
57
таб также не изменяется и т = О. Тоrда для изменении прямоу
rольных координат находим
Х' X = €::Y €yZ,
У У = €:: Х + €xZ,
(2.40)
Z' Z = в\.Х €x у:
[де Х, у: Z относятся к полюсу z; Х'; У; Z' к MrHoBeHHoMY
полюсу z'; B уrол поворота BOKpyr оси Z (на рис. 2.13 не пока
зан). Выясним смысл этоrо уrла. При равномерном вращении Земли
BOKpyr оси Z с постоянной уrловой скоростью уrол В:: считают
равным нулю. Значит, В:: выражает колебания уrловой скорости
вращения. Кроме Toro, этот уrол является следствием смещения
точки Р вдоль параллели, вызванноrо rоризонтальными движени
ями земной коры, а также изменения начала счета долrот.
Найдем разности астрономических координат. Амплитуда дви
жений полюса составляет 12 м или около 0,4", поэтому уrлы в'( и В\,
малы; уrол к также не превышает десятых долей секунды. Поэтому
при определении разности координат можно не учитывать сжатие
х
Рис. 2.13. Изменение координат из-за смещения полюса
58
Земли и считать Землю шаром радиуса R. Тоrда связь прямоуrоль
ных и астрономических координат выразят зависимости (2.20)
Х = R соsсрсоsл.. У = R соscpsiпл..
Z=R sincp
н аналоrично дЛЯ Х', у', Z'. Подставив эти выражения в формулы
12.40) и выполнив пре06разования, найдем
qf qJ = е у соs..1. tхsiп..1.,
..1.' л. = (; + (Е у siп..1. + Ехсоs..1.)tgqJ.
(2.41 )
(2.42)
Формулу (2.41) впервые получил астроном Пулковской обсер
ватории С.К. Костинский (l867 1936) в 1893 [.
Соrласно (2.41) (2.42), разность широты зависит только от
.:юлrоты точки поверхности Земли, поэтому для всех пунктов, ле
жащих на одном меридиане, полярные изменения широты одина
ковы. Разность долrот, кроме члена, зависящеrо от координат ф,
А, содержит постоянную для всех станций величину Ez. Для точки
на экваторе tgqJ = О и
л.' л. = E .
Этот член выражает изменения долrоты, не связанные с движени
ем полюса или неполярные изменения долrоты. Формулу (2.42) за
пишем в виде
..1.' л. = E;: + (..1.' ..1.)т
(2.43)
[де (..1.' л.)п полярные изменения долrоты, Т.е. изменения, выз
ванные движением полюса.
Изменение оси вращения вызывает смещение астрономичес
Koro меридиана точки Р и изменение астрономическоrо азимута.
Для начальноrо положения полюса азимут а линии PQ равен уrлу
zPQ (см. рис. 2.13), в системе MrHoBeHHoro полюса уrлу z'PQ.
Найдем разность азимутов из треуrольника РР ОР о'; Р о' Р о' точ
ки пересечения начальноrо и MrHoBeHHoro меридианов точки Р с
экватором соответственно. Если не учитывать наклон MrHoBeHHO
[о экватора (на рис. 2.13 он не показан) к ero начальному поло
жению, можно считать дуrу Р ОР о' равной мrновенной широте qf
и из прямоуrольноrо треуrольника РР аР о' написать
sin(a' а)
siп(л.' ..1.)
1
=
. , .
SШqJ
59
Вследствие малости разностей а с:х.; л.' л. упростим это BЫ
ражение. Разложим синусы малых уrлов в ряд, оrраничимся только
,
первыми членами разложения и заменим мrновенную широту Ф
на широту ф. Тоrда
а а ::: (А' л.)СОS ес ф.
Подставляя это выражение в (2.42), находим
а а = CZ cos ес Ф + (Су siпл. + С, соsл.)sесф. (2.44)
Следовательно, на основании формул (2.40) (2.44) заключа
ем, что для определения мrновенной оси вращения Земли можно
использовать измерения прямоуrольных координат или aCTpOHO
мических координат и азимута. Первоначально для определения
положения полюса использовали широтные наблюдения.
12. МЕЖДУНАРОДНАЯ СЛУЖБА ШИРОТЫ
И МЕЖДУНАРОДНОЕ УСЛОВНОЕ НАЧАЛО
До начала ХУН! в. считалось, что широта места не изменяет
ся и ось вращения внутри Земли занимает постоянное положе
ние. Однако уже Ньютон, рассматривая вращательное движение
Земли, пришел к заключению, что полюсы вращения Земли долж
ны перемещаться по ее поверхности. В 1758 [. Л.Эйлер получил
дифференциальное уравнение вращения абсолютноrо твердоrо
тела BOKpyr неподвижной точки и применил это уравнение к Зем
ле, считая ее абсолютно твердой и изолированной в простран
стве. Эйлер установил, что мrновенный полюс вращения Земли
движется BOKpyr полюса инерции с периодом 305 звездных cy
ток. Этот период получил название периода Эйлера. Работа
Эйлера о вращательном движении Земли была опубликована в
1790 [., уже после ero смерти. Наблюдения с целью определения
уrла между осью вращения Земли и полярной осью инерции нача
лись в XIX в. В Пулковской обсерватории такие наблюдения Ha
чаты в 1842 [.
В 1892 [., спустя 100 лет после выхода работы Эйлера, амери
канский астроном Сэт Чандлер (1846 1913), обработав наблюде
ния, выполненные в 17 обсерваториях с 1837 по 1891 [. YCTaHO
вил, что в наблюдаемых изменениях широт выделяются два пери
ода: 428 суток (или 1,2 [ода) и rодичный. rодовое движение
полюсов объясняется сезонными изменениями в атмосфере и rид
росфере. Причиной чандлеровскоrо колебания полюса являются
60
перемещения масс внутри Земли, изменяющие ориентировку эл
шпсоида инерции. Движение полюса с периодом 428 суток эквива
.1eHTHo эйлерову движению для упруrой Земли.
Из механики известно, что для описания вращательноrо движения
тела необходимо определить ero моменты инерции. Существуют шесть
незаВИСИМblХ моментов инерции три осевых А, В, С и три центробеж
ных D, Е. F
А = f (/ + =2) dm, В= f (х 2 + i) dm, С = f (х 2 + у2) dm,
D = f у= dm, Е = f xz dm , F = f ху dm,
(2.45)
(2.46)
[де dm элемент массы тела; х, у, z координаты этоrо элемента в
произвольной прямоуrольной системе координат с центром в любой
точке тела, интеrрал вычислен по всем массам тела. Осевые моменты
IIнерции всеrда положительны, а центробежные MorYT иметь любой знак.
Если начало координат поместить в центр масс тела, а оси расположить
так, чтобы центробежные моменты равнялись нулю, оси координат co
впадут с 2лавньиwи центральными осями инерции тела. Центральные
\юменты инерции тела характеризуют ero динамическую фиzуру эл
.1ИПСОИД инерции. Оси этоrо эллипсоида обратно пропорциональны KOp
НЮ из осевых моментов инерции
1
a=
м'
1
b=
JВ
1
с ,
JC '
(2.47)
[де а, Ь экваториальные, с полярная оси эллипсоида инерции.
В 1895 r. на ХI Международной rеодезической конференции в
Берлине по предложению Ф.rельмерта было принято решение об
орrанизации международной службы изучения движения полюса,
получившей название Международная служба широты (МСШ).
В октябре 1898 r. ХН Международная конференция Международ
ной комиссии по измерению Земли приняла решение о выборе на
широте 39008' С.ш. пяти станций, достаточно равномерно распре
деленных на этой параллели (рис. 2.14). Наблюдения широты Ha
чались с 1899 r.
После двух первых лет работы М СШ выяснилось, что на всех
станциях наблюдается одно и то же изменение широты с [одовым
периодом, не связанное с движением полюса. Поэтому в формулу
(2.41) Костинскоrо добавляют еще один член и записывают ее в виде
qI ({J = €y cos А €x sin А + z
rде z неполярные изменения широты.
61
Мидзусава
л. = 141008'
Рис. 2.14. Расположение станций Международной службы широты
в результате деятельности МСШ было установлено фиксиро
ванное положение полюса на поверхности Земли так называе
мое Международное условное начало МУН (Conventional Interna
tional Origin CIO). В 1969 r. МУН закреплено решениями XIV [eHe
ральной ассамблеи Международноrо rеодезическоrо и rеофизичес
Koro союза (MrrC). в резолюции Комиссии по вращению Земли
Международноrо астрономическоrо союза (МАС) было сказано:
«Координаты MrHOBeHHoro полюса будут относиться к началу
координат, определенному по следующим исходным координатам:
Мидзусава + 39008'03,602";
Китаб 01,850;
Карлофорте 08,941;
rейтерсберr 13,202;
. Юкайя 12,096.
Это начало координат называется Международным условным
началом».
62
Широты станций определены как простые средние за шесть
.1ет (1900 1905). Шестилетний интервал включает шесть rодичных
н пять чандлеровых периодов, поэтому при таком осреднении
КО.lебания с соответствующими периодами в значительной степе
ни исключаются и средние координаты близки к координатам
:lолюса инерции. Широты всех пунктов с учетом движения полю
..:а. вычисленноrо в соответствии с резолюцией МАС, автомати
чески относятся к МУН.
Положение MrHoBeHHoro полюса z' относительно Международ
Horo условноrо начала определяют в полярной системе коорди
нат s, -\ или прямоуrольной системе х, у (рис. 2.15). Ось х Ha
правлена по касательной к начальному меридиану, ось у по Kaca
тельной к меридиану 2700 ( 900). Между прямоуrольными х, у и
полярными s, Ар координатами MrHoBeHHoro полюса (см. рис. 2.15)
существуют зависимости
х = s cos Ар'
у = s sin Ар.
у
у
МУН
х
, .__._._.........._-&..-_& .. ."
Z
х
Рис. 2.15. Координаты мrновеииоrо полюса в системе МУН
Координаты полюса в системе МУН выражают в уrловой
epe. Из сопоставления рис. 2.13 и рис. 2.15 следует, что уrлы Су и
с" соответственно равны координатам х и у полюса
Су = Х, €. х = у,
(2.48)
поэтому формулы (2.41) (2.42) обычно записывают в виде
qI ({J = х cos А у sin А + z,
А' А = C:: + (х sin л. + y COSA) tg ({J.
63
(2.49)
(2.50)
Формулы (2.49) и (2.50) позволяют перейти от измеренных
астрономических координат, относящихся к MrHoBeHHoMY полю
су, к координатам в системе МУН, если известны координаты х,
у MrHoBeHHoro полюса.
В 1961 r. Международная служба широты с включением боль
шоrо числа новых станций получила название Международной
службы движения полюса (медп).
е повышением точности определения долrоты появилась воз
МОжность определять координаты полюса также и с помощью
равенства (2.50). е этой целью в Международном бюро времени
в 1968 r. была создана служба вращения Земли. Разность долrот,
вызванную изменением скорости вращения Земли, интерпретиру'
ют как поправки
ИТl итс.
(2.51)
Здесь
ИТl = иro (л А)п,
ито наблюдаемое Всемирное время (ИТ = Ипivеrsа! Tiтe);
(А л')п полярное изменение долrоты, итс (Ипivеrsа! Time
Coordiпated) Всемирное координированное (соrласованное) Bpe
мя. После перевода разности долrот из секунд дуrи в секунды Bpe
мени для исправленноrо Всемирноrо времени ИТl можно напи
сать
ИТl = ито J... (х sin л, + у cos л, )tgcp.
15
Для станций, лежащих на экваторе, поправка к наблюдаемому
Всемирному времени равна нулю.
13. МЕЖДУНАРОДНАЯ СЛУЖБА ВРАЩЕНИЯ ЗЕМЛИ
В 1987 r. для определения параметров вращения Земли COBMe
стным решением МАе и Mrre создана Международная служба
вращения Земли МСВЗ (Iпterпatioпal Earth Rotatioп Service /ERS),
начавшая свою деятельность 1 января 1988 r. мевз заменила
Международную службу движения полюса и службу вращения
Земли Международноrо бюро времени (МБВ).
Прямоуrольные координаты х, у MrHoBeHHoro полюса в сис
теме МУН и поправки UТl ИТС носят название параметры вpa
щения Зе.мли (ПВЗ). Кроме Toro, для определения положения оси
вращения Земли в пространстве относительно неподвижных He
64
бесных объектов и установления небесной системы координат в
параметры вращения включены эйлеровы уrлы прецессии и HYTa
uии, определяющие направление осей эллипсоида инерции в звез
.J.ной системе координат. МСВЗ определяет параметры вращения
Земли по наблюдениям, полученным методами РСДБ (радиоин
терферометрия со сверхдлинной базой), лазерной локации и доп
.1еровским наблюдениям ИСЗ, а также лазерной локации Луны.
Оперативные определения параметров вращения Земли находят
по непрерывным лазерным и доплеровским наблюдениям НСЗ,
выполняемым с нескольких сотен станций. Это позволяет опреде
.1ИТЬ координаты полюса и поправки (2.50) дважды в сутки. Me
тод РСДБ используют для окончательноrо определения коорди
нат полюса, а также уrлов прецессии и нутации и разности UТl
uтс.
Направление оси Х общеземной прямоуrольной системы KO
ординат выбирают по международной доrоворенности, фиксируя
астрономические долrоты некоторых обсерваторий, которые они
.J.олжны иметь после введения поправок за движение полюса. Ta
ким образом, начало счета долrот общеземной системы коорди
нат задается принятыми долrотами в системе МУН дЛЯ обсерва
торий, сотрудничающих в рамках Международноrо бюро BpeMe
ни. Начало счета долrот располаrают на экваторе и считают, что
оно не зависит от движения полюса (см. формулу (2.50», а ось Х
общеземной системы координат является линией пересечения эк
ватора и rринвичскоrо меридиана в системе МУН. MrHoBeHHbIe
астрономические долrоты станций, не лежащих на экваторе, в том
числе и rринвичской обсерватории, меняются со временем из за
движений полюса (см. формулы (2.42) и (2.50». :"
Рекомендациями Международной службы вращения Земли
введено исправленное положение МУН Условный земной полюс
(стр Coпveпtioпa! Terrestrial Pole).
В рамках сотрудничества с МСВЗ Институт метролоrии Bpe
\fени и пространства РФ выполняет определения параметров Bpa
щения Земли с использованием астрономических определений на
нескольких обсерваториях, лазерных и радиотехнических наблю
.J.ений ИСЗ и РСДБ. Пункты rосударственной службы времени и
определения параметров вращения Земли расположены в MeHдe
.1еево (Московская область), Новосибирске, Иркутске, Хабаровс
ке, Петропавловске Камчатском.
По данным МСШ и МСВЗ выявлена тенденция смещения cpeд
Hero полюса в направлении меридиана 2850 со скоростью 0,003"
0,006" в [од. Эти смещения интерпретируют как вековое движе
65
ние полюса. На рис. 2.16 приведена кривая движения полюса
полоида за шестилетний период (1989 5 1995,4). Мrновенный
полюс за этот интервал времени описал пять кривых BOKpyr cpeд
Hero полюса G, что наrлядно иллюстрирует чандлеровский пери
од в 1,2 rода. Средний полюс эпохи 1990 1995 rr. сместился OTHO
сительно полюса МУН на 0,328" (на 10 м) в направлении мериди
ана 2770, а средняя за 90 лет скорость движения полюса составила
0,0036"/rод.
у
0,600" 0,500" 0,400" 0,300" 0,200" 0,100"
0,300"
0,200"
o, 1 00"
МУН
91.0
о, 100"
0,200"
0,300"
0,400"
х
Рис. 2.16. Движение полюса за 1990 1995 rоды. G средний полюс
эпохи 1990 1995
Определение координат полюса позволяет установить с необ
ходимой точностью общеземную систему координат. Ее практи
ческой реализацией является система опорных точек, закреплен
ных на поверхности Земли. Вследствие неизбежных ошибок изме
рений на практике существует несколько общеземных систем
координат которые будут описаны в rлаве 4.
rлава з
НОРМАЛЬНАЯ ЗЕМЛЯ И ФУНДАМЕНТАЛЬНЫЕ
rЕОДЕЗИЧЕСКИЕ ПОСТОЯННЫЕ
14. НОРМАЛЬНЫЙ ПОТЕНЦИАЛ И НОРМАЛЬНОЕ
ПОЛЕ. СПОСОБЫ ВЫБОРА
При изучении rравитационноrо поля Земли обычно использу
:от фиктивное поле силы тяжести или притяжения, уровенные по
верхности которых близки к уровенным поверхностям реальноrо
земноrо поля, но имеют более простую по сравнению с ними фор
чу. Такое поле и описывающие ero потенциал и силы тяжести
;L1И потенциал Vf/ притяжения называют нормальными. После BBe
.Jения нормальноrо потенциала действительный потенциал силы
тяжести можно записать в виде
W=U+T,
(3.1)
.1 потенциал притяжения
V = Vf/ + Т.
(3.2)
Смысл введения нормальноrо потенциала заключается в пере
ходе от изучения потенциала W силы тяжести (или V силы притя
:.кения) реальной Земли к изучению малой величины
T=W U,
(3.3)
[де Т шюмальный или возмущающий nоmенциал.
Введение нормальноrо потенциала преследует две цели: в oд
ном случае нормальное поле рассматривают как модель, прибли
женно представляющую реальное поле; во втором нормальное поле
используют как отсчетное, относительно KOToporo находят aHO
мальный потенциал. Т.е. в первом случае речь идет об использо
вании нормальноrо поля вместо реальноrо, а во втором об оп
ределении реальноrо поля. В обоих случаях стараются выбирать
нормальное поле так, чтобы аномальный потенциал был мал.
67
Тоrда в первом случае величиной Т просто пренебреrают, а во
втором появляется возможность строить теорию ее определения
в линейном приближении. В качестве нормальноrо всеrда CTapa
ются выбрать потенциал, который можно описать по возможно
сти простым и аналитическими выражениями, с тем, чтобы в HOp
мальном поле леrко решались задачи rеодезии, rеофизики, небес
ной механики. Таким образом, нормальный потенциал можно
определить как потенциал достаточно пpocmozo вида, по возмож
пасти б./1ИЗКИЙ к дейсmвиmелыlO_'1у.
Существует несколько способов задания нормальноrо потен
циала. В одних используют понятие Нор.налыюй 3е.,или модели
Земли, обладающей теми или иными свойствами. Так, в rеофизи
ке задают поверхность и модель BHYTpeHHero строения нормаль
ной Земли. Подобная модель впервые была введена А. Клеро,
который полаrал, что Земля состоит из однородных слоев и Ha
ходится в состоянии rидростатическоrо равновесия.
В rеодезии обычно используют Нормальную Землю в виде иде
альной планеты, имеющей форму эллипсоида вращения, причем
эта поверхность является уровенной поверхностью ее потенциала
силы тяжести. Такой эллипсоид называют уровенны.И. Использо
ванне поля силы тяжести ypoBeHHoro эллипсоида в качестве HOp
мальноrо поля удобно В rеодезии потому, что в этом случае одна
и та же поверхность является отсчетной при решении и rеометри
ческих и физических задач. Изучение поля ypoBeHHoro эллипсоида
составляет основное содержание настоящей rлавы.
В топоrрафии и прикладной rеодезии Землю часто считают
плоскостью, в небесной механике материальной точкой или
шаром. В друrих способах нормальное поле представляют полем
притяжения системы материальных точек; такое представление
удобно для решения задач баллистики и космической rеодезии.
Возможно построить нормальное поле на основании разложения
потенциала притяжения в усеченный ряд шаровых функций, CYM
мируя конечное число членов этоrо ряда.
Остановимся вкратце на основных формах представления HOp
мальноrо потенциала.
В топоrрафии и инженерно rеодезических работах не очень
высокой точности поле силы тяжести полаrают однородным все
уровенные поверхности считают параллельными плоскостями, а
силовые линии параллельными прямыми. Это означает, что по
тенциал силы тяжести является линейной функцией
и = UO yh
(3.4)
68
высоты h над исходной уровенной плоскостью и = UO а HOp
\Iальная сила тяжести
дU
Y=
ah
постоянна по величине и направлению.
Если нормальная Земля шар с центрально симметричным pac
пределением плотности или материальная точка, то ее потенциал
притяжения имеет вид
(3.5)
V G/'v/
H
r
(3.6)
[де r расстояние от центра шара (или от материальной точки)
.:10 той точки, в которой вычисляют потенциал.
Потенциал в форме (3.6) используют, в частности, в тех слу
чаях, коrда расстояние до притяrиваемой точки велико по cpaB
нению с размерами Земли. Например, так был представлен потен
uиал Луны и Солнца в rлаве 1 при рассмотрении земных при
.1ИВОВ.
В спутниковой rеодезии широко используется нормальное поле,
,.:оздаваемое системой материальных точек, расположенных на оси
вращения Земли, причем и массы этих точек и расстояние между
ними MorYT быть выражены комплексными числами. Кроме Toro,
lЯ более полноrо приближения к реальному полю в модель HOp
чальноrо поля включают точечные массы, распределенные на по
верхнасти или внутри Земли в соответствии с особенностями ее
rравитационноrо поля. Потенциал притяжения
V H = t Gт i
i==1 r i
(3.7)
в этом случае представляет собой потенциал системы материаль
ных точек, rде т i масса точки с номером i; r i ее расстояние до
притяrиваемой точки; п число точечных масс. При аппроксима
uии нормальноrо поля точечными массами понятие Нормальной
Земли не используется.
Еще один способ введения нормальноrо поля основан на раз
.lожении потенциала притяжения в ряд шаровых функций, KOTO
рое в сферических координатах r, Ф, L имеет вид
"" 1 11
k k. k
V(1",Ф, L) = (А п cos kL + В п sш kL)P fj (Ф),
11==0 r k==O
(3.8)
69
[де Р :'( Ф) присоединенная функция Лежандра первоrо рода CTe
пени п и порядка k. Коэффициенты А: и в: определены выраже
ниями:
при k = О
A =G JJJ <5r'Р п (siпФ')dт,
r
(3.9)
Рп(siпФ') основной полином Лежандра степени п,
при k ::/. О
A k
п
cos kL'
= 2 (п k)! G fJf <5r,n pnk (Ф')
(п + k)!
r
dT,
(3.10)
B k
п
sin kL'
rде r',Ф',L' координаты текущей точки внутри Земли, <5 плот
ность, интеrрирование выполняется по объему r Земли. Коэффи
циенты А о, А к и В к являются стоксовЫАtи постоянными Земли, оп
ппп
ределяющими ее механические свойства. Как известно, стоксовы
постоянные это интеrралы по объему тела от произведения плот
ности на произвольную rармоническую функцию r 1 . Эти постоян
ные соrласно тождеству д. rрина (1793 1841) однозначно опреде
ляются по значениям на поверхности тела потенциала и ero HOp
мальной производной
4яG ШБrdТ 2(О2 Ш rd 1"+ JJ[r d d : w :; }й:. (3.11)
r r
rде r произвольная rармоническая функция, п внешняя HOp
маль к физической поверхности L Земли.
Сток совы постоянные первых порядков имеют смысл:
при п = о, r = 1
A = Gfff&lT =GM.
(3.12)
r
I rармонической называют непрерывную функцию [, удовлетворяющую
a 2 r a 2 r a 2 r
уравнению Лапласа + + ---------т ::: д.r ::: о; Д. оператор Лапласа.
дх ду az
70
Произведение GM постоянной тяrотения G на массу Земли Ha
зывается zеоцентрической zравитациоююй постояююй.
При п = 1, k = О, r = z
А{! = G ff5 0r 'SiПФ'dТ::::С ff5oz'dT ::::GMzo'
т
т
k=lr=x
Ai = с 5f50r'СОSФ'соsлL'dТ = G 55} ох' dT = СМХ О '
т
т
r=y
B j j = с Jff 8r'соsф'siп L'dT = G fff 8y'dT = СМУО,
(3.13)
r
т
[де хо' уо, Z() координаты центра масс Земли.
Стоксовы постоянные второй степени связаны с моментами
инерции Земли. Используя выражения rармонических функций BTO
poro порядка, получаем
х2 + У 2
при п = 2, k = О, r = z2
2
А; = G f[J 0,,2 ( sin' ф' )dT = G ц{ z,' х" ;У" )=
= G fff б(у,2 +z,2 )dT + G fff о[х,2 +z,2 ] dT G fff о(х,2 +у,2 )dT::::
r r т
(3.14)
:::: С(А т С),
[де А т средний экваториальный, С полярный моменты инерции
Земли соответственно;
при п = 2, k = 1, r = yz
Ai = с fffr'2 соsф'siпф'соsL'dт = G fffбу'Z'dТ,
r т
r=xz
Bi =с JfJr'2 соsф'siпф'siплLdт =с JJfx'Z'dT,
т т
(3.15 )
71
k = 2 r = ху
B :::: : Gfffr'2 со. ,2ф'siп2Ldт:::: GfffOX'y'dT,
т т
rде Ai, Bi, Bi центробежные .ио.менты инерции,
2 2
l::::х у
А;:::: : G fffr'2 соs 2 Ф'соs2L'dт::::
т
(3.16)
:::: : Gfff8(XI2 y'2 )dT:::: : G(B A),
т
rде А, В моменты инерции относительно экваториальных осей.
В формулах (3.13) (3.16) учтены зависимости (2.20) прямоу
rольных и сферических координат.
Если в разложении (3.8) оставить конечное число членов, мож
но получить нормальный потенциал. Оставляя только член нуле
Boro порядка, получим потенциал шара в виде (3.б). Обычно в ряде
(3.8) оставляют только четные зональные члены. Тоrда нормаль
ный потенциал притяжения получит вид
N
V н :::: L 2 +1 A пP2п (sin Ф)
п O r
(3.17)
и будет симметричен относительно оси Z и плоскости экватора.
Соrласно (1.1) для получения нормальноrо потенциала силы
тяжести к потенциалу тяrотения добавляют потенциал Q цeHTpo
бежной силы. Для нормальноrо поля равенство (1.1) примет вид
U::::V+Q
(3.18)
или
U :::: f 2 +I A пP2п (sin Ф)+ Q .
п O r
(3.]9)
Потенциал в форме (3.19) также можно не связывать с Hop
мальной Землей. Однако если выбрать какую либо уровенную по
верхность потенциала (3.19), близкую в том или ином смысле к
поверхности rеоида, можно рассматривать ее как поверхность
Нормальной Земли.
72
В rеодезии обычно используют Нормальную Землю в виде иде.
альной планеты, имеющей форму эллипсоида вращения, причем эта
поверхность является уровенной поверхностью ее потенциала силы
тяжести, Т.е. на поверхности эллипсоида выполняется условие
и= ии'
(3.20)
[де Ии постоянная. Такой эллипсоид называют уровеllllЫМ. Ис
пользование поля силы тяжести ypoBeHHoro эллипсоида в каче.
суве нормальноrо поля удобно в rеодезии потому, что в этом слу
чае одна и та же поверхность является отсчетной при решении и
rеометрических и физических задач.
Особенно удобно объединение двух последних подходов к BЫ
бору нормальноrо поля, коrда потенциал ypoBeHHoro эллипсоида
представляют в виде ряда шаровых функций, а коэффициенты раз
.lожения (3.17) подбирают так, чтобы одна из уровенных поверх
ностей потенциала (3.19) силы тяжести была эллипсоидом враще
ния. Это позволяет построить непротиворечивую модель нормаль.
но['о поля, объединяющую rеометрический и физический подходы
к изучению Земли.
Рассмотренные способы задания нормальноrо поля YCTaHaB
.lивают математическую форму потенциала силы тяжести или
силы притяжения. Однако открытым остается вопрос о критериях
близости модельноrо поля к действительному. Очевидно, что одна
и та же математическая модель при разных значениях входящих
в нее параметров будет с различной точностью аппроксимировать
реальное поле Земли. Поскольку эти параметры получают по pe
зультатам измерений, точность подбора нормальноrо поля за
висит от набора исходных данных и точности их определения.
Например, при использовании концепции ypoBeHHoro эллипсои.
.Ja значения ero полуоси и сжатия заметно различаются при раз.
ных исходных данных и разных критериях близости к реальной
Земле. Развитие теории нормальноrо поля дано В.В. Броваром 1
11918 1999), предложившим выбирать нормальное поле так, что.
бы во всем внешнем относительно Земли пространстве поле возму.
щающей силы gradT достиrало наименьшеrо значения.
1 В.В. Бровар, Оптимизация модели нормальной Земли // rеодезия и Kap
:-оrрафия. 1995. NQ 9. C.10 13.
73
15. ВНЕШНИЙ ПОТЕНЦИАЛ YPOBEHHOrO
ЭЛЛИПСОИДА
Потенциал ypoBeHHoro эллипсоида находят из решения Kpae
вой задачи).
Рассмотрим предварительно центробежный потенциал. Этот
потенциал пропорционален квадрату расстояния до оси вращения
и в прямоуrольных rеоцентрических координатах имеет вид
2
W ( 2 2 )
Q=2 X +у ;
(3.21)
оси х и у лежат в плоскости экватора. Используя связи (2.20),
получим потенциал Q в сферических координатах
ю 2
Q = r2 cos 2 Ф.
2
(3.22)
Соrласно этим выражениям, центробежный потенциал возрас
тает при удалении от оси вращения.
Введем в выражение (3.22) полиномы Лежандра Рп(siпФ). По
скольку В (3.22) входит соs 2 ф :::: 1 siп 2 ф, это выражение должно
содержать только полиномы нулевой и второй степеней. Так как
Р/siпФ) = 1, а
Р2(siпФ) :::: 3/2 siп 2 ф У2 ,
из (3.22) после небольших преобразований находим
2
Q = r2[I Р2(siпФ)].
3
(3.23)
(3.24 )
Наконец, в эллипсоидальных координатах Ь, и, учитывая зави
симости (2.25), запишем
или
Q = ю 2 (Ь 2 +Е 2 )cos 2 и
2
(3.25)
ю 2
Q= (b2 +Е2) [1 P2(sinu)].
3
1 Краевая задача заключается в определении функции, rармонической в
не которой области, по тем условиям, которым она удовлетворяет на rрани
це области cBoero существования.
74
Полученные выражения позволяют сделать некоторые заклю
чения об аналитических свойствах центробежноrо потенциала.
Функция Q удовлетворяет дифференциальному уравнению
дQ :::: a 2 Q + д 2 Q + д 2Q :::: 2т2
дх 2 д у 2 az 2
(3.26)
и не является rармонической; формулу (3.26) можно про верить диф
ференцированием выражения (3.21). В центробежный потенциал
входит квадрат расстояния r или Ь, поэтому на бесконечности Фун
кция Q неоrраниченно возрастает.
Таким образом, центробежный потенциал не удовлетворяет
уравнению Лапласа и не реrулярен на бесконечности.
Такими же свойствами обладает и потенциал силы тяжести.
Поэтому ero нельзя определить непосредственно из решения Kpae
вой задачи.
Возможность нахождения внешнеrо rравитационноrо поля по
форме уроненной поверхности основана на теореме Стокса:
Если известна форма внешней уровенной поверхности, масса, зак
.7юченная внутри этой поверхности и У2ловая скорость вращения,
то внешнее 2равитационное поле определено независuмо от pacпpeдe
.7ения масс внутри поверхности.
Определение внешнеrо rравитационноrо потенциала н COOTBeT
ствии с теоремой Стокса часто называют проблемой Стокса. Пояс
ним принцип решения проблемы Стокса для эллипсоида вращения.
Сформулируем задачу: известно, что уровенная поверхность (3.20)
является поверхностью эллипсоида вращения
2 2 z2
ХО + Уо +........!:!.... = 1
а(; Ь(7
(3.27)
[де Х , У коо р динаты точки пове р хности эллипсоида; а , Ь ero
о о о о
большая и малая полуоси соответственно. Заданы масса М, заклю
ченная внутри эллипсоида, и уrловая скорость m вращения. Опре
делить внешнее rравитационное поле.
Прежде Bcero из потенциала силы тяжести нужно исключить
uентро5ежный потенциал и перейти к определению rармоничес
кой функции потенциала уэ притяжения эллипсоида. На поверх
ности эллипсоида (3.27) потенциал U постоянен и равен и о , поэто
'\1)' потенциал притяжения должен удовлетворять уравнению
Y =U Q
о о о'
КIИ, учитывая формулы (3.21) и (3.22),
75
2 2
(J) 2 2 (J) 'J 2
V o = и о 2 (х о + у о) = и () 2 r() cos Ф
rде ro радиус вектор поверхности эллипсоида. Из этоrо выраже
ния видно, что потенциал V o притяжения на уровенном эллипсои
де не постоянен и изменяется в зависимости от широты. YpaBHe
ние (3.28) является краевым условuе)и для потенциала притяжения.
На бесконечности потенциал притяжения удовлетворяет ypaB
нениям
lim V J = О ,
limrV J = GM,
lim Ь V э = G М .
b oo
r oo
r oo
b oo
(3.28)
(3.29)
Таким образом, потенциал притяжения нужно искать из реше
ния краевой задачи с условиями (3.28), (3.29). Для построения pe
шения достаточно взять заведомо rармоническую функцию и выб
рать ее параметры с соблюдением этих условий.
Найдем решение в системе координат Ь, и. Запишем краевое
условие (3.28) в этой системе, используя (3.25)
2 2
(J) 2 2 (J) 2 2 .
V o = и о (bo + Е ) + (bo + Е )Р2(SIllИ).
3 3
(3.30)
Краевое условие (3.30) содержит полиномы Лежандра только
нулевоrо и BToporo порядков, поэтому решение задачи можно за
писать в виде
v' = А"Д"(; )+ A 20 Q{i !, (sin и) ,
rде Qo(i ). Q2(i ) функции Лежандра BToporo рода,
Qй(i ) = iarctg ' Q{ ) = iq,
[( 3 +I } rctg E 3 ]
q 2 Е 2 Ь Е'
(3.31)
(3.32)
(3.33)
rде Аоо, А 20 неизвестные коэффициенты. Для их определения ис
пользуем условия (3.29),(3.30).
76
Для нахождения коэффициента А 00 найдем предел произведе
ния Ь V J при Ь -----? ос. Используя разложения
Е QQ ( l)п ( E ) 2п+1
arctg == L,. ,
ь n=о 2п + 1 Ь
(3.34 )
QQ п( 1)11+1 ( Е ) 2n+1
q 2
(2п + 1)(2n + 3) Ь '
(3.35)
получим
Iimb Q { )= О,
Ь-----?ос
limhQo(i ; )= iE,
Ь-----?ос
поэтому
lim Ь V э == iEAoo
Ь-----?ос
н с учетом выражений (3.29) находим
iAoo == G М .
Е
Для нахождения А 20 используем краевое условие (3.30). На по
верхности эллипсоида при Ь = Ь о потенциал соrласно равенству (3.31)
H eeT вид
V, = АД{ )+ A 20 Qz(i у, (sin и).
Сопоставляя коэффициент при полиноме Лежандра Pisiпu) в
лом равенстве и в уравнении (3.30), находим
m 2 ь 2 + Е 2
А,о =3 Q:(i J
Подставив найденные коэффициенты А 00 и А 20 В выражение
13.31), находим
GM Е m 2 q.
V J == arctg + (b; +Е2) Р2(SШU)'
Е Ь 3 qo
77
(3.36)
Здесь функция Q2 (; ) заменена ее выражением соrласно (3.31 ),
qo значение функции q при Ь = Ь(}, На поверхности эллипсоида,
коrда q = qo' потенциал притяжения определен уравнением
СМ Е oi 2 2 .
V(} =таrсtgъ+з(Ьо +Е )Р2(SlПИ). (3.37)
()
Обратим внимание, что соrласно уравнениям (3.36) и (3.37) пo
тенциал притяжения зависит от У2ловой скорости вращения ЭШlUп
сои да. Этот парадоксальный факт объясняется тем, что на поверх
ности эллипсоида (3.27) потенциал И О силы тяжести должен быть
постоянен, и изменение потенциала центробежной силы должно
компенсироваться изменением потенциала притяжения.
Добавляя к (3.37) центробежный потенциал (3.25), получаем BHe
шний потенциал силы тяжести ypoBeHHoro эллипсоида вращения
СМ Е oi 2
U= arctg + (b2+E )+
Е Ь 3
., 2 (3.38)
+{ ю (ь; +E2)!L (b2 +Е2) }Р2(siпи).
3 q(} 3
Т аким образом, для определения потенциала силы тяжести ypo
BeHHoro эллипсоида (Нормальной Земли) нужно знать четыре по
стоянные СМ, ь(}, Е,ш; постоянная qo соrласно (3.33) является
функцией Ь о и Е.
Получим потенциал И() силы тяжести на поверхности эллипсо
ида. Полаrая в (3.36) Ь = Ь , находим
(1
СМ Е ш 2 2 2
И О = arctg + (b(J +Е ). (3.39)
Е Ь О 3
На любом друrом эллипсоиде при Ь '# Ьп потенциал зависит от
широты и. Это означает, что только одна уровенная поверхность
И = И О будет эллипсоидальной.
16. ПРЕДСТАВЛЕНИЕ ПОТЕНЦИАЛА YPOBEHHOrO
ЭЛЛИПСОИДА В ВИДЕ РЯДА
Выше потенциал притяжения ypoBeHHoro эллипсоида получен
в замкнутом виде (3.36) в системе координат и, Ь. Потенциал при
тяжения реальной Земли в 914 представлен в виде бесконечноrо ряда
(3.8) в сферической системе координат r, Ф, L. Это вызывает зат
78
руднение при сопоставлении реальноrо и нормальноrо потенциа
лов и нахождении аномальноrо потенциала. Для TaKoro сравнения
удобнее использовать нормальный потенциал в форме (3.17).
Найдем коэффициенты ряда (3.17) для случая, коrда потенциал
V н является потенциалом притяжения ypoBeHHoro эллипсоида. П ри
равняем выражения V н и V J
v н = VЭ,
1 А О Р . Ф) G М Е ai Ь 2 Е 2 ) q Р ( .
.t..t 2-;;+т 2п 2п(SШ :::: arctg + ( о + 2 sши).
п=О r Е Ь 3 qo
(3.40)
в левой части бесконечное множество параметров A п KO
эффициентов разложения потенциала, являющихся стоксовыми
постоянными Нормальной Земли. Справа четыре параметра СМ,
Ь о ' Е, (n. Это означает, что коэффициенты A п не MorYT быть зада
ны произвольно и являются функциями параметров эллипсоида.
Преобразование, устанавливающее связь коэффициентов A п и
постоянных СМ, Ь(), Е, т, выполнено Хейсканеном и Морицем [30].
Преобразуем левую часть формулы (3.40). Выделим в V H член
нулевоrо порядка, учитывая, что A( = GM,
GM [ 00 А() ]
V H :::: 1+ L 2п 2 Р2п(siпФ) .
r I GMr п
(3.41)
Введем новые коэффициенты J 2n по правилу
А О
J 2п
2/1 GMa;n .
(3.42)
В формуле (3.42) в знаменателе можно использовать не только
большую полуось а и ypoBeHHoro эллипсоида, но и любую друrую
постоянную линейной размерности; этот множитель вводится для
Toro, чтобы получить безразмерные коэффициенты в разложении
потенциала притяжения. После введения коэффициентов J 2п потен
uиал притяжения примет вид
G М [ "" ( ) 2п l
V H =7 1 J2n а; Р2n(,iПФ)J'
(3.43 )
79
Теперь преобразуем правую часть (3.40). Вынесем отношение
GM
Ь
за скобки и запишем потенциал (3.36) эллипсоида в виде
GM ( Ь Е oia 2 b )
v э = arctg + о q P2(sinu) ,
Ь Е Ь 3GM q о
rде соrласно выражению (2.24) выполнена замена а; = Ь; + Е 2 .
Используем ряд (3.34) и разложение (3.35) и напишем
GM { 00 ( 1)n+l [ 2п Qia 2 Е ]( Е ) 2n }
V Э = 1 L 1 о P2(sinu) . (3.44)
Ь п=l 2п + 1 2п + 3 3G М q о Ь
Сопоставим потенциалы (3.43) и (3.44). Возьмем произвольную
точку на оси Z вращения эллипсоида: Для такой точки rеоцентри
ческая широта Ф совпадает с приведенной широтой и, причем
обе они равны n12, а полуось Ь совпадает с радиусом вектором r
(см. рис. 2.4 и 2.5)
ф = u = п12 r = Ь.
Приравняв потенциалы (3.43) и (3.44) для этоrо случая, находим
00 J 2 ( а о ) 2n = 00 ( 1)n+[ [ 1 2п m 2 а;Е ]( Е ) 2п
n Ь 2п+l 2n+33GMqo Ь J
Е а о
или, так как Е = аое о и поэтому Ь = ьео ,
00 00 ( 1) n+l [ 2 2 З ]
LJ 2n = L 1 п т аое о (е о )2n
n=l n=1 2п + 1 2п + 3 3GMqo .
Введем в это выражение отношение
(j)2 аЗ
m= о
GM
(3.45)
и получим уравнение для определения коэффициентов J 2n :
J 2n = ( 1)n+l [ 1 2п т е о ] (е о )2n.
2п + 1 2п + 3 3Qo
(3 .46)
80
Это выражение имеет принципиальное значение. Оно связыва
;;"Т коэффициенты 1 2п , являющиеся стоксовыми постоянными ypo
&HHOrO эллипсоида, с ero rеометрическими параметрами эксцен
триситетом е и постоянной qo И уrловой скоростью вращения
. т ,е. параметром т ).
Использование параметра q() неудобно на практике. Значения
коэффициентов разложения действительноrо потенциала получа
ют из наблюдений. Поэтому разумно ввести в число исходных по
':тоянных наибольший по величине параметр второй степени 12'
Полаrая в (3.46) п = 1, найдем
1 ::: e2 ( l 2 т е о J
2 3 () 5 3 .
qo
(3.47)
Соrласно этому выражению те о ::: 5 1512 , И для коэффици
3 qo e
.:нтов 1 2п находим
3 ( l)n+l 2п 2 (5 1 1 2 )
1 2п = е о п 2 (п )е о
(2п + 1)(2п + 3) .
(3.48)
Параметр 12 называют зональным zармоническuм коэффициен
тО.\1 второй степени.
Выясним физический смысл параметров т и 12' Запишем пара
\1етр т в виде
w 2 а
m= GJ .
2
а о
Про изведение w 2 a() это центробежная сила на экваторе ypo
GM
BeHHoro эллипсоида, а сила притяжения массы М, находя
а о
щейся в центре эллипсоида, также на ero экваторе. Произведение
\1ao2 представляет собой момент инерции массы М относительно
оси вращения эллипсоида. Это максимально возможное значение
полярноrо момента инерции, которое было бы в том случае, если
бы вся масса эллипсоида находилась на ero экваторе, на расстоя
нии а о от оси вращения. Таким образом, т это отношение цeHт
робеЖ:1l0Й силы к силе притяжения на экваторе; 12 отношение раз
81
ности пОЛЯРНО20 и экваториалЬНО20 моментов инерции к максuмаль
НОМУ моменту инерции
J G(C A)
2 GMa
(3.49)
Добавив к потенциалу (3.43) притяжения эллипсоида цeHTpo
бежный потенциал (3.24), для потенциала силы тяжести получаем
G М l 00 ( ) 2п l 2
и I .I2" а; Р,"(siпФ) + " cos' Ф
или (3.50)
и G [1 .I,"( а; J" Р," (siпФ)+ ; ( :., J {I Р, (siпФ )}J
Подчеркнем, что выражение (3.43) справедливо для любоrо по
тенциала, обладающеrо симметрией относительно оси Z и плоско
сти экватора. Потенциал силы тяжести ypoBeHHoro эллипсоида
получится только в том случае, коrда коэффициенты ряда, входя
щеrо в (3.43), определены формулой (3.48).
Коэффициенты 1 2п содержат множитель е;п и быстро убывают
при возрастании п, вследствие чеrо ряд (3.43) сходится очень быст
ро. Поэтому при вычислении нормальноrо потенциала редко учи
тывают члены выше степени п = 5.
Найдем выражение для потенциала и о силы тяжести на поверх
ности эллипсоида. Так как в этом случае потенциал постоянен, для
нахождения и о достаточно вычислить потенциал (3.50) в любой точке
эллипсоида. Если выбрать точку на экваторе, то r = а о , Ф = о и
GM [ 00 т ]
и о = 1 LJ2пP2п(0)+ .
а о п=l 2
(3.51)
Поскольку коэффициенты 1 2п зависят от 12 и е о , для нахождения
потенциала на поверхности ypoBeHHoro эллипсоида нужно знать
постоянные GM, а о , 12, е о . Выше (см. формулу (3.39)) для потенциа
ла и о было получено замкнутое выражение, содержащее постоян
ные СМ, Е, Ь О ' (J).
82
Коэффициенты А 2п (} можно выразить непосредственно через
параметры GM,G(C А), Е, не вводя коэффициенты 1 2п . В этом
лучае
3GM [ O п)Е 2п + 5пE2п 2 G(C А) ]
А О = l)п GM
2п ( (2п + 1)(2n + 3) .
(3.52)
Это соотношение позволяет получить потенциал притяжения
и силы тяжести ypoBeHHoro эллипсоида в сферических коорди
натах, используя разложения (3.17) и (3.19) и постоянные GM,
С(С А), Е, ltJ. Выражения (3.52) и (3.46) эквивалентны.
17. СИЛА ТЯЖЕСТИ НА ПОВЕРХНОСТИ
YPOBEHHOrO ЭЛЛИПСОИДА
Чтобы найти силу тяжести Уа на эллипсоиде, нужно получить
производную потенциала и по нормали п к уровенной поверхнос
ти эллипсоида
дU
у =
(} дп Ь=Ь О
(3.53)
Знак «минус» в этой формуле означает, что дифференцирова
ние потенциала выполняют по направлению внешней нормали, про
тивоположному направлению силы тяжести.
Найдем экваториальную и полярную силу тяжести в сферичес
ких координатах. Для точек полюса и экватора эллипсоида направ
.1ения нормали к ero поверхности совпадают с радиусом вектором
" поэтому силу тяжести можно найти, дифференцируя выражение
(3. 50) потенциала по направлению, противоположному r,
ди GM [ ]
У е = =-------т 1 (2n+l)J2nP2n(0) т ,
ar ,=а о a
ф=о о п=1
(3.54)
у = ди = GM [ 1 (2п + 1) ( ) 2n J2п ] .
Р ar '==Ь о ь 2 Ь
Ф=7r 12 О п=l ()
(3.55)
83
В системе координат Ь, и, L элемент нормали к эллипсоиду
Ь = Ь о имеет вид dn = h1db, поэтому для силы тяжести можно напи
дU
сать Уа = h дЬ . Коэффициент h l определен формулой (2.26),
1 Ь=Ь()
ь 2 + Е 2 = а 2 , поэтому
() а а дU
У о = о')
' ь 2 + E sin 2 u дЬ Ь=Ь
'\j о о.
После дифференцирования выражения (3.38), запишем
GM 2 2
(J) а Ь +
3 а о
а u
1
У О =
ь 2 + Е 2 sin 2 u
1 Ьо Е
arctg
4 2 Е Е Ь о Р ( . ) ( 3 56 )
+ 3" (J) а о ( ) 2 sш U .
1 3 Ь; Е 3 Ь U
+ Е 2 arct g b Е
о
По этой формуле при и = О получаем значение силы тяжести на
экваторе ypoBeHHoro эллипсоида
1 Ьu Е
2 arctg
GM 2 2 2 (J) аа Е Е Ь а
У е = (J) ао 2 '
аоЬ u 3 3 Ь о ( 1 + 3 Ь О ) arctg 3 Ь О (3.57)
Е 2 Ь Е
а
п
при и = 2" значение этой силы на полюсе
1 ЬU Е
arctg
Ур= ro'Ь о + : ro' Е ( ь' J ;0 ь
и 1+ 3 arctg 3
Е Ь{) Е
Используя выражения (3.57) и (3.58), для силы тяжести Уо в про
извольной точке эллипсоида с широтой u можно получить
1 [ 1 2 2 . ]
Уо = J aaYp + boYe + (aaYp Ь()Уе)Р2(SШU) . (3.59)
Ь + Е 2 sin 2 u 3 3 3
о
84
(3.58)
Это выражение преобразуется к виду
. 2 Ь 2
У ра о sш И + у с о cos и
Уо::::: I '
"\ja; sin 2 и+Ь cos 2 и
(3.60)
или, с использованием связи (2.12) между приведенной и rеодези
ческой широтой,
Уеао cos 2 В+УрЬ о sin 2 В
Yo J a;cos2B+b sin2B .
(3.61 )
Формула (3.61) получена в 1929 r. итальянским rеодезистом
К. Сомильяна (186 1955). Ее часто записывают в виде
1 + k sin 2 В
Уо ::::: Ус I 2. 2 ' (3.62)
" 1 е slП В
ЬоУ р аоус
k:::::
аоУ е
(3.63)
Введем в формулу (3.61) сжатие а ypoBeHHoro эллипсоида и KO
эффициент , равный отношению разности силы тяжести на полю
се и экваторе к силе тяжести на экваторе
= У р Ус .
Уе
(3.64)
Используя зависимости Ь о = а о (1 а), rp::::: rc. (1 + ), получим
приближенную формулу
Уо :::::Ye(1+ sin2 B lsin22B+...), (3.65)
rде
1 ? 1
l::::: a + af3.
8 4
(3.66)
Формулы (3.60) (3.62) и (3.65) называют формулами распреде
,1ения нормальной силы тяжести или нормальными формулами. За
кон изменения силы тяжести на поверхности Земли с точностью
порядка сжатия был известен уже Ньютону и Клеро. Член BToporo
порядка относительно сжатия в нормальную формулу включил
rельмерт.
85
Из формул (3.60) (3.62) и (3.65) следует, что на поверхности
ypoBeHHoro эллипсоида нормальная сила тяжести не постоянна и
зависит от широты, она максимальна на полюсе эллипсоида, rде
она достиrает значения 983,2 rал, и минимальна на экваторе, rде
она равна 978,0 rал.
18. НОМАЛЬНАЯ СИЛА ТЯЖЕСТИ ВО ВНЕШНЕЙ
ТОЧКЕ. КРИВИЗНА СИЛОВОЙ ЛИНИИ
Формулы (3.59) 3.62) и (3.65) позволяют получить силу тяжес
ти только на поверхности эллипсоида. Во внешнем пространстве
силу тяжести можно найти, дифференцируя выражение (3.38) по
нормали к внешней уровенной поверхности. Однако в этом случае
уровенная поверхность не является эллипсоидальной. Во внешней
точке потенциал (3.38) на поверхности координатноrо эллипсоида
зависит от широты, а направление силы тяжести не совпадает с
направлением нормали к эллипсоиду. Поэтому нормальную силу
тяжести вне эллипсоида следует находить из выражения
(у f = ( J + ( :' и J ·
(3.67)
rде h 1 и h 2 заданы формулами (2.27).
Для вычисления нормальной силы тяжести на физической по
верхности Земли, вблизи эллипсоида, удобнее использовать ряд
Тейлора
У = У + ( iL ) н + ( fl J н2 +...
() дН 2 дН 2 ,
и о
(3.68)
[де Н высота точки над эллипсоидом, производные относятся к
поверхности эллипсоида. Если оrраничиться только первыми чле
нами ряда, для внешней силы тяжести можно написать
у=уо+( :; 1 н .
(3.69)
ду
Производную дН называют вертикальным zрадиентом нормаль
ной СШlЫ тяжести.
86
Оценим приближенное значение вертикальноrо rpадиента, при
няв за нормальную СЮ1у тяжеcrи СЮ1у притяжения сферической Земли
GM
y:::: .
r
Для сферической Земли направление высоты Н совпадает с Ha
:lравлением радиуса вектора r, поэтому для вертикальноrо rpади
HTa можно написать
ду
дН
ду
= =
ar
2GM
3
r
::::
2у
r
(3.70)
Вертикальный rрадиент зависит от расстояния r до центра
Земли. На поверхности Земли для средних значений у = 980 rал,
ду
r = 6371 км дН = 0,308 мrл/м.
Найдем точное значение rрадиента на поверхности эллипсои
да. Используем прямоуrольную топоцентрическую систему KOOp
динат Х, у, z. Если направить ось z по касательной к силовой линии
нормальноrо поля, противоположно высоте Н, то вертикальный
rрадиент будет второй производной нормальноrо потенциала
ду
дН
ду
= =
az
д 2 u
2 .
az
Нормальный потенциал вне эллипсоида удовлетворяет диффе
ренциальному уравнению
д 2 u д 2 u д 2 u 2
+ + =2m ,
дх ду az
(3.71 )
из KOToporo получим
ду д 2 u д 2 u 2
= + 2m .
дН дх 2 д у 2
Вторые производные потенциала в rоризонтальных направле
ниях связаны с кривизной уровенной поверхности. Если ось х Ha
правлена по касательной к меридиану на север, а ось у по касатель
ной к параллели на восток, то
д 2 u д 2 u ( 1 1 )
дх:! + д у 2 = yo М + N '
87
rде М и N радиусы кривизны меридиана и первоrо вертикала
соответственно. Используя эту формулу, получаем для вертикаль
Horo rрадиента силы тяжести на поверхности эллипсоида
( ) = Y ( + ) 20/.
ан () м N
()
(3.72)
Радиусы кривизны меридиана и первоrо вертикала определены
формулами (2.7) и (2.17).
Оценим величину члена 201. Приняв (}) = 7,292 х 10 5 c l, полу
чим 201 = 10,6 х 10 9 c 2 или 10,6 Е (Е этвеш единица измерения
вторых производных потенциала; lЕ = 10 9 c 2 = 1 мrл / 10км).
Нормальная сила тяжести Уа и радиусы кривизны М, N на по
верхности эллипсоида изменяются с широтой, поэтому вертикаль
ный rрадиент также зависит от широты, изменяясь оТ 3084Е на
полюсе дО 3088Е на экваторе. Сила тяжести на полюсе медленнее
убывает с высотой, чем на экваторе, rде, помимо убывания силы
притяжения, возрастает пропорционально высоте центробежная
сила.
Приближенно для средних значений силы тяжести и радиусов
кривизны
( :; 1 '" 0,3086 мrлJм = 3086 Е. (3.73)
Таким образом, нормальную силу тяжести на высоте Н над эл
липсоидом можно найти по формуле
У = У О 0,3086Н.
(3.74)
Здесь высота выражена в метрах, сила тяжести в миллиrалах.
Формула обеспечивает вычисление нормальной силы тяжести с
точностью выше 0,1 мrл для высот, меньших 1 км. При более точ
ных вычислениях следует в ряде (3.68) удерживать член, содержа
щий н 2 , и учитывать зависимость rрадиента (3.72) от широты. На
значительных расстояниях от эллипсоида нормальную силу тяжес
ти нужно находить с использованием формулы (3.67).
Изменение силы тяжести вызывает непараллельность ypOBeH
ных поверхностей нормальноrо поля. Представим соrласно Bыpa
жению (1.7) разность t1и потенциалов между эллипсоидом и близ
кой к нему уровенной поверхностью в виде
t1и = 'УоН,
88
::.1е Н высота уровенной поверхности над эллипсоидом. Так как
?азность потенциалов постоянна для двух уровенных поверхнос
тей, для точек на полюсе и экваторе можно написать
Y!lp =: УДе'
JllИ
Не := У р
Нр Ус'
[.1е Нр и Не высота уровенной поверхности на полюсе и экваторе
,,:оответственно. Образовав производную пропорцию, найдем для
аз енения высоты уровенной поверхности
Н H = Yp Ye H
е р р'
У е
(3.75)
Используя численные значения силы тяжести на полюсе и эква
торе, запишем
Не Нр = 0,О053Н р '
Для Н = 100 м Не Нр = 0,53 м, Т.е. уровенная поверхность,
проходящая на полюсе на высоте 100 м над эллипсоидом, на эква
торе находится на 53 см выше. Т.е. напряженность поля выше на
полюсе, и здесь расстояние между уровенными поверхностями MeHЬ
ше, чем между этими же поверхностями на экваторе. Из за более
быстроrо убывания с высотой силы тяжести на экваторе по cpaB
нению с силой тяжести на полюсе разность полярной и экватори
а..с'lьной силы тяжести возрастает. Вследствие этоrо с возрастанием
высоты растет разность расстояния между двумя близкими ypo
венными поверхностями на полюсе и экваторе и сжатие нормаль
ной уровенной поверхности увеличивается. Поэтому силовые ли
нии нормальноrо поля обращены воrнутостью к оси вращения эл
.lипсоида.
Для определения кривизны силовой линии нормальноrо поля
воспользуемся формулой (1.1 О). Нормальный потенциал и нормаль
ная сила тяжести не зависят от долrоты, поэтому нормальная си
.lовая линия это плоская кривая, лежащая в плоскости меридиа
на, и ее кривизна определяется выражением
к 1 д 2 u 1 ду 1 ду
у axaz у дх у RaB '
89
Полаrая У == Уе' С ПОМОЩЬЮ формулы (3.65) получим
к = lsin 2В.
R
(3.76)
Наибольшую кривизну силовые линии имеют на широте 450
(рис. 3.1).
..,
Си"1Овые .ШНИll
J, ровен н ые паве рхноспш
экватор
Рис. 3.1. Силовые линии и уровенные поверхности нормальноrо поля
вблизи Земли
Выше (см. формулу (3.75» была найдена разность высот ypo
венной поверхности над эллипсоидом на экваторе и полюсе. Для
практики больший интерес представляет оценка непараллельности
двух близких уровенных поверхностей U = и ! и U = и 2 на неболь
ших расстояниях dx (рис. 3.2). В этом случае малую дуrу уровенной
поверхности можно считать равной отрезку касательной к ней.
dh
и= u
dx = RdB
Рис. 3.2. Непараллельность уровенных поверхностей
90
Уrол между касательными к уровенным поверхностям U = и\ И
L' = и 2 , проведенными в точках 1 и 2, равен отношению расстояния
" между этими точками к радиусу l/K кривизны силовой линии,
h дуrа силовой линии. Про ведем линию 2 2', параллельную Ka
.:ательной к уровенной поверхности U = и\, И С помощью рис. 3.2
lЯ превышения dh найдем
dh = dx hK
н после подстановки выражения (3.76) радиуса кривизны силовой
.1ИНИИ получим
dh = ({3/R) h sin2Bdx.
На широте 450 при h = 1 О м dh = 0,008 мм даже для paCCTO
яния dx = 1 км. В rеометрическом нивелировании расстояние
\iежду рейками не превышает 1 oo 150 м, расстояние h между ypo
венными поверхностями (нивелирное превышение) 3 м. В этом
случае превышение dh одной уровенной поверхности над друrой
составит 0,0003 мм. Поэтому при нивелировании на каждой стан-
uии нормальные уровенные поверхности можно считать парал
.1ельными. Однако непараллельность нормальных уровенных по-
верхностей вызывает систематическое изменение высоты точки
уровенной поверхности над эллипсоидом. Этот эффект учитыва
ют введением специальной поправки в результаты rеометричес
Koro нивелирования.
19. СИСТЕМА КООРДИНАТ В НОРМАЛЬНОМ ПОЛЕ
Силовые линии и уровенные поверхности нормальноrо поля
\южно использовать в качестве координатных линий и поверхно-
стей, аналоrично тому, как это было сделано в натуральной си-
стеме координат ф, л, W(} W. Назовем координатами точки в
нормальном поле нормальную широту вУ, долrоту L и нормаль-
ное rеопотенциальное число и () и. Дадим определение этих
понятий:
нормальная широта вУ уrол между направлением нормальной
силы тяжести и плоскостью экватора;
дОЛ20та L уrол между плоскостью начальноrо меридиана и
меридиана данной точки; поскольку нормальная силовая линия
.1ежит в плоскости rеодезическоrо меридиана, долrота в нормаль
ном поле совпадает с rеодезической;
91
нормальное zеопотенциалыюе число U о и разность нормаль
ных потенциалов между эллипсоидом и данной точкой.
Наряду с rеопотенциальным числом в качестве третьей KOOp
динаты можно использовать высоту в нормальном поле отрезок
нормальной силовой линии от точки Р 1 пересечения силовой ли
нии с поверхностью ypoBeHHoro эллипсоида до точки Р.
Высота и широта в нормальном поле и rеодезические широта и
высота показаны на рис. 3.3. Из за кривизны нормальной силовой
линии широта и высота в нормальном поле отличаются от rеоде
зических. Сравним эти координаты.
Обратимся к рис 3.3. Нормальная широта как внешний уrол
треуrольника РРР2 равна сумме rеодезической широты В и уrла Е
между нормалью РР о к эллипсоиду и отвесной линией РР2' Оценим
уrол Е. Будем считать отрезок Р \ Р = н н силовой линии от эллипсо
ида до точки Р дуrой окружности радиуса 1/ К. П роведем касатель
ную р\р; к этой окружности в точке Рl пересечения силовой линии
с эллипсоидом; эта касательная является нормалью к эллипсоиду в
точке Р \. Уrол между касательной р\р{ и вектором нормальной силы
тяжести отличается от уrла Е из за отличия направлений нормалей
к эллипсоиду в точках Рои Р \. Поскольку точки Рои Р 1 близки
между собой, можно не учитывать это отличие и считать уrол меж
ду отвесной линией РР2 и линией р\р; равным Е. Так как уrол меж
о
р
Рис. 3.3. Кривизна силовой линии и система координат
в нормальном поле
92
JY касательными равен центральному уrлу окружности, COOTBeT
:твующему дуrе Н н' получаем
Е = Нн К = Нн/3 sin2B.
R
(3.77)
Для среднеrо значения радиуса кривизны
f = O,171"Hsin2B,
(3.78)
высота Н выражена в километрах. Поскольку уrол е мал, в этой
формуле вместо высоты Н н использована rеодезическая высота Н.
Соrласно формуле (3.78), уrол между нормальной силой тяжес
тн и нормалью к эллипсоиду достиrает значения 0,2" на широте
..\50, если высота точки над эллипсоидом равна 1 км.
Используя полученное для е выражение, находим связь широ
:-ы в нормальном поле с rеодезической
вУ = в + O,171"Hsin2B.
(3.79)
Нормальная широта всеrда больше rеодезической. Их отличие
.:-ущественно и учитывается при точных вычислениях.
Рассмотрим отличие rеодезической высоты от высоты в
:юрмальном поле. Установим предварительно связь высоты в
:юрмальном поле с нормальным rеопотенциальным числом. На
IIC. 3.4. dH н отрезок силовой линии РР 1 между двумя близкими
уровенными поверхностями нормальноrо поля. Соrласно Bыpa
ению (1.7) между разностью dU потенциалов на этих поверхно
:тях, нормальной силой тяжести r и расстоянием dH н существует
зависимость
dU = }fiHH'
(3.80)
р
u=и
р
н н У dH н
Эллипсоид
и:::: U о
Рис. 3.4. Высота в нормальном поле
93
Интеrрируя это выражение вдоль силовой линии РР l' получим
р р р
f dU = (Uи U)= J ,инн = Yт J dH H = YтHH'
l't
откуда
нн=
и U
о
Ут
(3.81)
rде Уm среднее интеrральное значение нормальной силы тяжести
на отрезке РР 1 силовой линии.
Определим разность rеодезической высоты и высоты в нормаль
ном поле. Считаем опять отрезок РР! силовой линии дуrой окруж
ности, тоrда
с
H H =
К'
н = sin е ,
К
поэтому
е З 2 НЗ . 2
НН H= = 2 SlП 2В.
3!К 6R
(3.82)
Максимальной величины разность высот достиrает на широте
450. Но даже в этом случае отличие высоты в нормальном поле и
rеодезической высоты составит Bcero 0,01 мм при Н = 1 О км, поэто
му практически можно считать высоты одинаковыми.
Оценим расстояние между точками рои Р! (см. рис. 3.2). Если
не принимать во внимание несовпадение точки Рои точки пересе
чения нормали к эллипсоиду с линией оР!, то
е 2
рор! = оР! ОРо = elK 1/Kcose == 2К '
rде о центр кривизны дуrи РР l' Подставив сюда выражение для
уrла е, найдем
1 H2 .
РОР! = SlП2В.
2 R
(3.83)
Для среднеrо радиуса Земли R = 6371 км
РОР' = 0,392 н 2 ,
rде высота Н выражена в километрах, а расстояние Р аР! В милли
метрах. Для высоты в 1 км расстояние между пересечением HopMa
94
.1И К эллипсоиду И силовой линией составит Bcero 0,4 ММ, а для MaK
симально ВОзможной на Земле высоты 10 км 4 см. Поэтому прак
тически проекции точки Р на эллипсоид по нормали к ero поверх
ности и по силовой линии нормальноrо поля неразличимы.
Таким образом, долrота и высота в нормальном поле совпада
ют с rеодезическими, а для перехода от одной системы широт к
друrой следует учитывать поправку (3.78) за кривизну нормальной
силовой линии и пользоваться формулой (3.79).
20. СООТНОШЕНИЯ МЕЖДУ ПАРАМЕТРАМИ
YPOBEHHOrO ЭЛЛИПСОИДА
в результате решения проблемы Стокса для эллипсоида враще
ния было установлено, что для нахождения нормальноrо потенци
a."la силы тяжести нужно задать четыре постоянные GM, Ь О ' Е, со.
Этот результат следует из теоремы Стокса. Две постоянные Ьо и
Е определяют размер и форму уровенной поверхности, осталь
ные задают массу Нормальной Земли и уrловую скорость ее Bpa
щения.
Однако в дальнейшем при нахождении потенциала и силы тя
жести появились иные параметры: большая полуось аО' сжатие а,
эксцентриситет е о эллипсоида, потенциал Ии на ero поверхности,
ила тяжести У(' и Jp на экваторе и полюсе эллипсоида, разность
I С А) моментов инерции и связанный с нею коэффициент J 2 , па
раметр т , коэффициенты /3, /3l' k нормальных формул, коэффици
HTЫ 1 2п И A2 разложения нормальноrо потенциала в ряд шаровых
функций. Для определения потенциала ypoBeHHoro эллипсоида дo
.:таточно знать четыре постоянные. Это означает, что перечислен
ные постоянные должны быть связаны между собой и не MorYT Ha
значаться произвольно.
Постоянные, определяющие Нормальную Землю и ее поле, дe
.1ЯТСЯ на ?еометрические и физические. Параметры rеометрические
определяют размер и сжатие ypoBeHHoro эллипсоида. Эти парамет
ры и связи между ними известны из сфероидической rеодезии. При
8eJ;eM основные соотношения
Е 2 = а 2 Ь 2. е = Е/а ' е / = Е/ Ь . а (а Ь )/а .
о о , О' О' О О О'
Ь О = a6 E2 = ao .J l e2 = аоСl а);
е 2 = 2а rJ; (3.84)
е? = е 2/( 1 е 2 ),
95
а= 1 .J 1 e2.
к физическим параметрам относятся постоянные, имеющие
физический смысл и определяющие поле Нормальной Земли. Это
стоксовы постоянные А 2п И уrловая скорость вращения, потенциал
и сила тяжести на поверхности эллипсоида.
В соответствии с представлением потенциала в виде ряда пара
метры Нормальной Земли классифицируют следующим образом.
Паршнетры нулевО20 порядка, определяющие массу и размеры
Нормальной Земли:
rеоцентрическая rравитационная постоянная GM;
потенциал И() силы тяжести на поверхности Нормальной Земли;
полуоси а о , Ь о ypoBeHHoro эллипсоида;
значения У е И Jp силы тяжести на экваторе и полюсе Нормаль
ной Земли соответственно;
Паршнетры порядка сжатия (паршнетры втОрО20 порядка). К
этой rруппе относятся безразмерные постоянные, имеющие поря
док сжатия, связанные с коэффициентом при полиноме Лежандра
второй степени в разложении потенциала:
зональный rармонический коэффициент второй степени 12;
2 /2
сжатие а и квадраты е и е эксцентриситетов YPoBeHHoro
эллипсоида;
коэффициенты и k нормальных формул;
(jJ2a (jJ2a 3
параметры q =............... и т = о , связанные с уrловой ско-
у GM
ростью вращения. е
Паршнетры высших порядков. К этим постоянным относят KO
эффициент l нормальной формулы и коэффициенты 1 2п разложе
ния потенциала.
Чтобы определить нормальное rравитационное поле нужно
задать две постоянные нулевоrо порядка одну, связанную с Mac
сой, а вторую, задающую размер уровеиноrо эллипсоида, и две
постоянные порядка сжатия одну, определяющую сжатие эллип
соида, а вторую, связанную с уrловой скоростью вращения. Oc
тальные параметры можно вычислить, исходя из соотношений,
которыми связаны параметры уровеиноrо эллипсоида. Некоторые
из этих соотношений уже получены. Так, формулы (3.5) и (3.39)
дают потенциал И О на поверхности эллипсоида, формулы (3.54),
(3.55) и (3.57), (3.58) определяют экваториальную % и полярную Jp
силу тяжести, формулы (3.63), (3.64) связывают параметры поряд
ка сжатия с постоянными нулевоrо порядка, формула (3.66) позво
ляет вычислить постоянную I по известным параметрам порядка
сжатия. Получим еще некоторые соотношения, иrрающие важную
роль в rеодезии.
96
Из выражений (3.57) и (3.58) можно найти соотношения, связы
зающие rеометрические (а о ,. Ь о , Е) и физические (GM, %. 'Р) пара
..reTpbl ypoBeHHoro эллипсоида и уrловую скорость W ero вращения
1 2 СМ 2 ')
aoyp + b()Ye == Ф аоЬ(}
3 3 а и 3
(3.85)
1 Ьо Е
arctg
Ь 2 2 Е Е Ь(}
aoyp оУ е = та и ( ') )
1 3 Ь; Е 3 Ь(}
+ arctg
Е 2 Ь О Е
(3.86)
Формула (3.85) получена М.е. Молоденским. Тождество (3.86)
:--:ринадлежит П. Пицетти (l860 1918) и имеет смысл формулы Кле
;'о (см. введение, последняя из формул (3)).
Формулу (3.85) можно также получить с помощью тождества
3.11), применив ero к потенциалу ypoBeHHoro эллипсоида. В этом
-':'l:'чае интеrрал по поверхности преобразуется к виду ff ryoda,
dU (т
.lK как на поверхности а эллипсоида dn = y () , а
ff u dr da = и ff dr da = О
и dn () dn
а а
3 силу свойств rармонической функции. Тождество rрина для
.10тенциала ypoBeHHoro эллипсоида примет вид
4п- fff r&17: = 2т 2 fff rd7: + ff ryoda.
r r (т
(3.87)
Интеrрирование по этой формуле удобно выполнять в системе
;,:оординат Ь, и, L, используя выражение (3.60) для Уа и формулы
. :.26), (2.27), с помощью которых можно получить
dT = [Ь' + Е' + Е' Р, (sin U )]со, ш/udЬdL,
da = а() Ь; + Е 2 sin 2 u cos ududL.
97
При r = 1 тождество (3.87) дает формулу (3.85).
Найдем разность С А полярноrо и экваториальноrо MOMeH
тов инерции эллипсоида. Выберем для этоrо rармоническую функ
цию в виде
х 2 + у2 2 1 2 1 2 2 .
Т= 2 z =-з Е -з(3Ь +Е )Р2(SШU).
Выполняя интеrрирование, получим
G(C A)=
= GME2 oia2E3 1
3 45 () ( ь2 } Е Ь
1+3 rctg 3
Е 2 Ь Е
()
(3.88)
Эта формула также получена П. Пицетти в 1913 r. Ее удобнее
использова ть в виде
m2а2Е=15GМ [ I з G(С А) ] ( l)n+lп ( E ) 2n+l,
о GME 2 =r (2п + 1)(2п + 3) Ь
(3.89)
применив разложение (3.33). Так же как и (3.47) формулы (3.85)
(3.86) и (3.88), (3.89) иrрают фундаментальную роль поскольку они
устанавливают связь rеометрических и физических параметров
ypoBeHHoro эллипсоида. С помощью этих формул определяют yc
ловия, при которых возможно существование ypoBeHHoro эллип
соида для заданных значений разности моментов инерции и уrло
вой скорости вращения.
Полученные соотношения между параметрами ypoBeHHoro эл.
липсоида являются точными равенствами и позволяют вычислять
параметры нормальноrо поля при различных наборах исходных
постоянных. Возникает вопрос какие из этих постоянных выбрать
в качестве исходных для задания нормальноrо поля ypoBeHHoro
эллипсоида вращения. Это связано с измерениями, поскольку HOp
мальное поле следует выбирать так, чтобы параметры Нормаль
ной Земли были равны соответствующим параметрам реальной
Земли. Здесь мы подходим к понятию фундаментальных rеодези
ческих постоянных.
98
21. ФУНДАМЕНТАЛЬНЫЕ rЕОДЕЗИЧЕСКИЕ
ПОСТОЯННЫЕ
Фундаментальными 2еодезическuмu постоянными называют па
раметры, однозначно определяющие отсчетное поле YPoBeHHoro
Э.lлипсоида 1.
Различают первичные и проuзводные фундаментальные постоян
ные. К первичным относят постоянные, которые существуют для
реальной Земли. Это стоксовы постоянные GM, G(C А) и уrловая
скорость m вращения Земли, которая является также астрономи
ческой фундаментальной постоянной. К первичным относят также
параметр 12'
Для определения нормальноrо поля необходимо иметь, поми
\10 трех первичных постоянных GM, G(C А)(или 12), Ю, еще одну
постоянную, определяющую размер Нормальной Земли. В качестве
четвертоrо параметра можно задать большую полуось а и ypOBeH
Horo эллипсоида, потенциал Ии на ero поверхности, экваториаль
ную силу тяжести 'Уе. Однако у Земли нет никакой полуоси, нет и
вещественной уровенной поверхности с постоянным потенциалом
\V o ' поскольку морская топоrрафическая поверхность отличается
от уровенной. Поэтому большую полуось земноrо эллипсоида по
.lучают под теми или иными условиями из rрадусных измерений.
Потенциал Ии можно принять равным среднему потенциалу W o на
уровне моря; значение 'уе выводят по измерениям силы тяжести на
поверхности Земли.
Принципы определения фундаментальных постоянных нулево
[о порядка изложены в rлаве 5.
Таким образом, исходными параметрами MorYT быть или GM,
(10' G(C А) (или 12') m или GM, Ии' G( С А), ю.
Остальные постоянные, например, сжатие а ypoBeHHoro эллип
соида, ero первый е и второй е' эксцентриситеты, коэффициенты f3
и k нормальных формул называют производными или вторичны
\fИ фундаментальными постоянными.
Производные фундаментальные постоянные получают для
Нормальной Земли, исходя из соотношений между параметрами
ypoBeHHoro эллипсоида. Например, при задании постоянных GM,
а о , G(C А), m можно с помощью выражения (3.88) или (3.89) оп
ределить линейный эксцентриситет Е, а затем все остальные. Pac
смотрим случай, коrда исходными являются GM, Ии' G(C А), ю.
1 Бурша М, Фундаментальные rеодезические постоянные 11 rеодезия и
картоrрафия. 1996. NQ 5. С. 15 22.
99
Для нахождения полуоси а о объединим формулы (3.39) и (3.88)
и найдем
GM 3Jl Е 2 / а(; ш2а 3 ( 4 GME 4 )
а о == и() 3 2Е 2 / а; + ЗU{:J 1 + 5 (GME 2 3G(C А))(За; 2Е2) , (3.90)
а для линейноrо эксцентриситета Е непосредственно из формул
(3.84) запишем
Е2==з G(С А) + 4 ш2а{;Е5
GM 15 GM 3 2 2 2 Е J 2 2
( а о Е )arctg J ') ') 3Е а{) Е
a E
о
(3.91)
Эти формулы представляют собой точные замкнутые выражения
для полуоси и эксцентриситета эллипсоида. Однако они неудобны
для практическоrо применения. Если же в выражении (3.39) потен
циала на поверхности эллипсоида использовать разложение (3.34),
а формулу Пицетти записать в форме (3.89), то для полуоси Ь О и
эксцентриситета Е можно получить
Ь О = GM r 1+ f ( 1)n ( J 2n + ш 2 ь о (ь; +E 2 ) l ,
и о п=! 2п + 1 Ь о зс М
(3.92)
[ ] 00 п+! ( J 2n+l
Е 15 GM 1 3 G(C А) ( 1) п Е
ai (Ь; + Е2) GME 2 (2п + 1)(2п + 3) Ь О
с помощью этих выражений полуось и эксцентриситет леrко
определяются совместно методом итераций.
После вычисления значений полуоси Ь О и линейноrо эксцентри.
ситета Е остальные rеометрические параметры определяются с по
мощью известных в сфероидической rеодезии соотношений (3.84).
Экваториальную и полярную силу тяжести можно найти с помо-
щью равенств (3.57) (3.58).
Отношение
GМЮ о = Ro
называют 2равитационным масштабным множителем.
100
Обычно в rеодезии исходными фундаментальными постоянны
\Ш являются СМ, а о , 12' т. Для нахождения друrих параметров ypo
BeHHoro эллипсоида в этом случае так же прежде Bcero нужно най
111 эксцентриситет е. Можно использовать формулу
4 е 3 е ,2
2 3J
е = 2 + m
15 (3 + е,2 )arctge' 3е' ,
(3.93)
вытекающую из фундаментальной формулы Пицетти (3.88). Пара
четр т определен по формуле (3.45), связь первоrо е и BToporo е
эксцентриситетов приведена в выражениях (3.84).
С известными исходными значениями GM, а о , 12, т и эксцентри
,:итетом е о можно получить остальные постоянные. Большая полу
ись а() и эксцентриситет е{) позволяют найти все rеометрические па
раметры эллипсоида соrласно (3.84). После этоrо потенциал на
поверхности эллипсоида находится по формуле (3.39), а сила тяже
сти на экваторе и полюсе эллипсоида по (3.57) (3.58). Можно
также получить тождества, определяющие потенциал и силу тяже
сти по четырем исходным параметрам и эксцентриситету:
и о = Gм { зJh[ + т [ l+ 24 е4 0 ]} ,
а о 3 2e() 3 5(е о 3J2) (3 2e20)
r :::: GM 1 2I02ao ( l e2+ GM(e 3J2) J
е а; D 3 2e; () 4 о}а 3 D ' (3.94)
vl eo ovl eo
:::: GM 2т 2 а о ( D GM(e 3J2) J
r р 2 3 2 2 V 1 е о 2 2 3 .
а() ей т а о
Однако точные равенства не всеrда удобны, поэтому обычно
производные постоянные находят, используя разложения по сте-
пеням параметров 12 и m . Прежде Bcero следует определить экс
центриситет е о , соответствующий заданным 12 и т. Используем
lЯ этоrо ряд (3.35) и формулу (3.33), с помощью которых найдем
(3 + е,2 )arctge' 3е' :::: 4e,2:t n( 1)n+! е ,2n+] = e'S ( 1 е,2 +... )
n=] (2n+l)(2n+3) 15 7
При выводе этой формулы учтено, что Е/Ь = е'.
101
Запишем теперь выражение (3.92) в виде
е 3
е 2 = 3] 2+ m ( ) .
,3 1 6 2
е e
7
в знаменателе этой формулы в скобках оставлен только член
порядка е 2 , причем отличием первоrо е и BToporo е' эксцентрисите
тов пренебреrаем. Запишем соrласно формулам (3.84)
е' 2 = е\ 1 +3/2 е 2 +. .. ).
Тоrда с удержанием в поправочных членах величины порядка
е 2 найдем
2 1
е = 3J 2 + m 9
1 + e2
14
Эксцентриситет е входит и в левую, и в правую части этоrо
выражения, поэтому ero находят приближениями. В начальном
приближении в правой части членом ( :4 е' ) пренебреrаем, Torдa
е 2 = 312 + т .
Подставив это значение в правую часть, находим
2 2
е о = 312 + т 27/141 2 т 9/14т +... ,
(3.95)
отсюда сжатие ypoBeHHoro эллипсоида с учетом формул (3.84) равно
3 J 1 9 J 2 3 J 11 2
а = 2 + т + 2 2т т +... (3.96)
2 2 8 14 56
с помощью выражений (3.48) и (3.51), получаем
GM ( т J 2 27 2 9 9 2 )
и = 1+ + + J2 + mJ2 m +... (3.97)
о а о 2 2 40 70 280 '
а из формул (3.54), (3.55) и (3.48) найдем
G М (1 3 J 27 J 2 9 J 9 2 )
v + 2 т+ 2 + 2m m +...
le а 2 2 8 14 56 '
о
(3.98)
102
GM (1 3 J 1 2 )
У = +т 2т т +...
р а 2 14 14
о
(3.99 )
Эти выражения позволяют найти параметр fЗ нормальной фор
\f\'ЛЫ
А = У р УI;' = 3 J 2 9 J 2 75 J 117 2
.... = = 2" 2 + т 8 2 14 2 т + 56 m +..., (3.100)
Уе
.l С помощью равенств (3.66) получить
А' 9 J 2 3 J 9 2
....I= 2+ 2т+ т.
З2 4 З2
(3.10'1)
Постоянные G(C А) и 12 подвержены приливным изменениям.
Если бы Земля была идеально упруrой, то приливные деформации
полностью соответствовали бы приливному потенциалу, и потен
ииал деформированной Земли был бы равен сумме потенциалов
силы тяжести и приливноrо. Деформации реальной Земли отлича
ются от этоrо идеальноrо случая и изменение БV потенциала силы
притяжения деформированной Земли относительно потенциала
притяжения Земли, изолированной в пространстве, связано с при
.1ИВНЫМ потенциалом соотношением
8V = k 2 П( Р),
(3.102)
[де k 2 число Лява.
Соrласно ряду (З.43)
G М r 00 ( J 2n J
БV=7 l Ы2' а; Р,,(siпФ),
[де 8J 2n изменения коэффициентов 1 2п под воздействием прилив
ной силы.
Оценим изменение второй зональной rармоники 12' COOTBeT
ствующее постоянному приливу (1.20). Подставив в соотношения
(3.102) выражения дЛЯ 8V при r = R и ПоСР)
1 GmR 2 .
По(Р) = 3 Р2(SШФ)
2 lcp
103
и приравняв коэффициенты при полиноме Лежандра второй CTe
пени в левой и правой частях получившеrося равенства, найдем
( ) 3 2
Ы 2 = 2 : ': ( ).
(3.103)
При k 2 = 0,3, R = 6371 км, а() = 6378 км, для Луны m/M = 1/81,
lcp = 384400 км Ы 2 = 8,4 . 10 9.
Влияние постоянноrо лунно солнечноrо прилива исключают из
значения постоянной 12' полученноrо по наблюдениям. При этом
учитывается также изменение центробежноrо потенциала.
Ныне действующая система фундаментальных rеодезических
постоянных rеодезическая референц система 1980 [. (rpC 80)
принята на ХУН rенеральной ассамблее Международной ассоциа
ции rеодезии (MAr) MrrC (Канберра, 1979 r.). В число фундамен
тальных постоянных этой системы включены также rеоцентричес
кая rравитационная постоянная атмосферы GMa и скорость света
в вакууме. Включение скорости света в фундаментальные rеодези
ческие постоянные обусловлено тем, что современные линейные
измерения основаны на определении времени распространения элек
тромаrнитных волн, и скорость света устанавливает линейный Mac
штаб rеодезических построений (табл. 3.1).
В ссср и России в rеодезических работах принят эллипсоид
KpacoBcKoro, а rравиметрические наблюдения обрабатывают с ис
пользованием формулы rельмерта, Т.е. исходными постоянными
являются а о = 6 378 245 м, а = 1 :298,3, Ус = 978 030 мrл, = 0,005302,
! = 0,000007. Включение постоянной [ высшеrо порядка в число
исходных параметров излишне, поскольку эта постоянная OДHO
значно определяется ПОсТоянными нулевоrо и BToporo порядков.
Оценим остальные параметры. Из формулы Пицетти (3.79) можно
получить
5«/ а о ( 17 1 2 )
a+ = 2Уе 1 35 a 245 а +...
откуда для уrловой скорости находим
(() = 7,292 165 . 10 5paд/c.
rеоцентрическую rравитационную постоянную найдем по фор
муле Молоденскоrо (3.85), введя в нее сжатие а и коэффициент :
GM = 'Yea2[1+ /3 2а/3 + 2m2a o O а)/3'Уе] = 398 612,8797 KM3c 2.
104
Таблица 3.1
rеодезическая система относимости 1980 r.
Параметр [pC 80 WGS 84
Исходные постоянные
Экваториальный радиус ао, м 6378 137 6378 137
rеоцентрическая rравитационная 3986005.108 3986005. 108
постоянная (включая атмосферу)
СМ M3c 2
, С 2О = J/J5 =
Зональный коэффициент второй J 2 = 108 263 . 10-8
степени без постоянноrо прилив = 484, 16685. 10-6
Horo влияния
Уrловая скорость вращения 7292115.10-11 7292115.10 "
Земли Щ рад/с
Скорость света в вакууме с, м/с 299 792458 299792458
rеоцентрическая постоянная 3,5. 108 3,5 . 108
атмосферы GMa' м 3 с 2
Проuзводные постоянные
Полярный радиус Ь О ' м 6356752,3141 6356752,3142
Сжатие а 1 : 298,257 222 1 О 1 1 : 298,257 223 563
Потенциал на повеRХНОСТИ 62 636 860,8497
Э.'IЛипсоида И О ' M2c 2
ЭкваТ Fиальная сила тяжести 9,7803267715 9,7803267714
У", м с
Полярная сила тяжестиJp, м с- 2 9,832 1863685 9,832 1863685
Коэффициенты нормальной
формулы k 0,001931851353 0,00 1 931 851 38639
f3 0,005 302 440 114
fЗ1 585. 10-8
Квадрат эксцентриситета е 2 0,006 694 380023 0,006694 379 99013
.lинейный эксцентриситет Е, м 521 854,0097 521 854,0084
Пояснения к последнему столбцу таблицы 3.1 даны в rлаве 4.
Значения rеоцентрической rравитационной постоянной и yr
.10ВОЙ скорости вращения, вытекающие из cOBMecTHoro использо
вания эллипсоида KpacoBcKoro и формулы rельмерта, заметно OT
.lнчаются от современных определений.
С совершенствованием методов и средств измерений значения
фундаментальных rеодезических постоянных постоянно уточняют
н исследуют их изменения с течением времени.
rлава 4
АНОМАЛЬНОЕ ПОЛЕ.
УКЛОНЕНИЯ ОТВЕСА И АНОМАЛИИ ВЫСОТЫ
в rлаве 3 введено понятие аномальноrо потенциала Т как раз
ности потенциалов действительной и нормальной Земли
T=W U.
(4.1 )
Этот потенциал образует аномальное rравитационное поле
разностное поле, возникающее из за отличия поля реальной Земли
от нормальноrо. Наряду с аномальным потенциалом аномальное
поле представляют и друrие величины, используемые в rеодезии.
Рассмотрим некоторые из них.
22. СВЯЗЬ СИСТЕМЫ КООРДИНАТ
В НОРМАЛЬНОМ ПОЛЕ С НАТУРАЛЬНОЙ
Натуральная система координат, описанНаЯ в 8, связана с си
ловыми линиями И уровенными поверхностями реальноrо поля
Земли. Система координат в нормальном поле связана с нормаль
ной силовой линией и нормальной уровенной поверхностью, про
ходящими через данный пункт. Так как нормальное поле не совпа
дает с действительным, координаты в нормальном поле отличают
ся от натуральных. Установим связь этих систем.
Рассмотрим рис. 4.1: Р точка поверхности Земли, через KO
торую проходит нормальная уровенная поверхность И = Ир;
Ир нормальный потенциал в точке Р. Нормальное rеопотенци
альное число И О Ир точки Р в общем случае, конечно, не совпада-
ет с ее rеопотенциальным числом W o W p '
Установим связь нормальноrо rеопотенциальноrо числа (И О Ир)
с действительным (W o W p )' Напишем для потенциалов в точке Р
W p = W o (W o W p );
Ир = И О (И О Ир)
106
Р
u = и = w (W u )
ру р о ()
и=u
о
Р 1
Рис 4.1. К связи координат в реальном и нормальном поле
и образуем разность W p Ир' Учитывая, что эта разность равна
аномальному потенциалу Тр, найдем
(Ий Ир) = (W(} W p ) + Тр (W o Ио)'
(4.2)
Действительное и нормальное rеопотенциальное число разли
чаются на величину аномальноrо потенциала в точке Р и разность
W o И О потенциалов на rеоиде и уровенном эллипсоиде.
Если бы rравитационное поле Земли совпадало с нормальным,
и потенциал W o на rеоиде был бы равен потенциалу И О на ypOBeH
ном эллипсоиде, нормальное и действительное rеопотенциальное
число точки Р тоже совпали бы. В действительности этоrо не про
исходит. Однако на силовой линии PjP нормальноrо поля, прохо
J;ящей через точку Р, всеrда найдется такая точка РУ, в которой
нормальное rеопотенциальное число тождественно равно действи
тельному
И О ИрУ == W o W p '
(4.3)
Причем, поскольку нормальный потенциал всеrда выбирают
близким к действительному, точка РУ будет расположена недалеко
от точки Р.
Точка РУ делит дуrу PtP силовой линии на две части: отрезок
ptPY от эллипсоида до точки РУ И отрезок Р'Р. Первый из них опре
деляет в нормальном поле высоту точки, в которой выполнено yc
.10вие (4.3). Если бы поле Земли совпало с нормальным, действи
107
тельное rеопотенциальное число было бы равно нормальному и
точки Р и рУ совпали. Поэтому отрезок нормальной силовой линии
р 1 рУ от эллипсоида то точки рУ называют нормальной высотой точ
ки Р и обозначают НУ; индекс r указывает на принадлежность к
нормальному полю. Нормальная высота была бы равна rеодези
ческой, если бы поле Земли было нормальным.
Подчеркнем отличие высоты в нормальном поле и нормальной
высоты. В 19 высота в нормальном поле определена как отрезок
РР 1 нормальной силовой линии от эллипсоида до любой точки Р
(см. рис. 3.3 и 4.1). Она отличается от rеодезической высоты толь
ко из.за кривизны нормальной силовой линии; как показано в
19, практически это отличие не ощутимо. Высота в нормальном
поле это расстояние, измеряемое вдоль силовой линии нормаль
Horo поля от эллипсоида до любой точки Р, а нормальная высота
расстояние вдоль нормальной силовой линии от той же точки Р 1
эллипсоида, но не до точки Р, а до точки рУ, В которой выполняется
тождество (4.3).
Смысл нормальной высоты более понятен, если принять, что
W o = И О ' Т.е. считать действительный потенциал на rеоиде равным
нормальному потенциалу на эллипсоиде. Тоrда нормальная BЫCO
та это высота над эллипсоидом такой точки, в которой действи.
тельный потенциал равен нормальному,
weB, L, н) = И(В, H ,
rде В, L, Н и В, НУ координаты точек Р и рУ соответственно.
Таким образом, отрезок рУр = появляется из.за несовпадения
действительноrо и нормальноrо поля и является элементом aHO
мальноrо поля. Ero называют аномалией высоты.
Нормальная высота и аномалия высоты были введены M.C.Mo
лоденским в 1945 r.
Аномалию высоты получают как расстояние между ypOBeHHЫ
ми поверхностями нормальноrо поля, проходящими через точки
Р и рУ. Соrласно формуле (3.80), полаrая dИ = Ир ИРУ И dH H = ,
находим
= и рУ U р ,
r
rде r среднее значение нормальной силы тяжести на отрезке .
Для получения аномалии высоты определим значения Ир и ИРУ'
Соrласно выражению (4.1) в точке Р
( 4.4 )
Ир = W p Тр'
108
(4.5)
1 В точке рУ на основании тождества (4.3)
Иру = W p (W() И(}).
(4.6)
Поясним смысл этих формул: в точке Р физической поверхнос
тв Земли нормальный потенциал отличается от действительноrо в
ШlOй же точке на величину аномальноrо потенциала Тр, а в точке
рУ нормальный потенциал отличается от действительноrо потен
uиала в точке Р физической поверхности Земли из за отличия по
Iенциалов на уровне моря и отсчетном эллипсоиде.
Вычитая выражение (4.5) из (4.6), находим разность нормаль
ных потенциалов точек Р и рУ
Иру Ир = Тр (W o И о ).
(4.7)
Следовательно, если потенциал на уровенном эллипсоиде pa
зен потенциалу на уровне моря w o = И(), то разность нормальных
'JOтенциалов в точках Р и рУ равна аномальному потенциалу Тр'
Вернемся к равенству (4.2) и перепишем ero в виде
(И О Ир) (W() W p ) = Тр (W() И о ).
Сравнивая это выражение с (4.7), убеждаемся, что разность HOp
чальных потенциалов в точках Р и рУ равна разности нормальноrо
it действительноrо rеопотенциальноrо чисел.
Подставив формулу (4.7) в (4.4), находим для аномалии высоты
, == Тр W o и о .
у у
(4.8)
Эта формула устанавливает зависимость между аномалией BЫ
':ОТЫ и аномальным потенциалом в одной и той же точке земной
Jоверхности. Ее называют обобщенной формулой Брунса (r.Брунс,
1848 1919).
Соrласно рис. 4.1, высота Н н = р 1 Р равна сумме нормальной
зысоты и аномалии высоты
HH=HY+ .
(4.9)
Так как высота в нормальном поле практически совпадает с [eo
.1езической, это выражение справедливо и для связи rеодезической
11 нормальной высот
н = ](у + .
109
Сравним широту и долrоту в рассматриваемых системах. В Ha
туральной системе широта и долrота определены направлением
действительной силы тяжести, в нормальной системе нормаль
ной. Нормальная сила тяжести в точке Р не совпадает с действи
тельной ни по величине, ни по направлению. Уrол между направ
лениями реальной и нормальной силы тяжести называют cpaвuмeт.
рическuм уклонением отвеса, а разность модулей этих сил аНОМШlией
сШlЫ тяжести.
Составляющие rравиметрическоrо уклонения отвеса определя.
ют по формулам, аналоrичным (2.32) для астрономо rеодезических
уклонений
r = qJ вУ ,
т{ :::: (А L)cosB.
(4.1 О)
Таким образом, разности широт и долrот в нормальном и pe
альном поле являются составляющими rравиметрическоrо уклоне
ния отвеса.
23. СВЯЗЬ ЭЛЕМЕНТОВ АНОМАльноrо ПОЛЯ
с АНОМАЛЬНЫМ ПОТЕНЦИАЛОМ
Связь аномалии высоты и аномальноrо потенциала установле.
на в 22 и выражается формулой Брунса. Найдем зависимость меж.
ду аномалиями силы тяжести и аномальным потенциалом.
Аномалии D.g силы тяжести обычно получают, вычитая из зна
чения действительной силы тяжести gp в точке Р значение нормаль
ной силы тяжести /ру в точке рУ
D.g = g р У рУ ;
такие аномалии называют смешанными. В точке рУ нормальную силу
тяжести находим по формуле (3.69)
ду
У рУ = r р дН '
и для смешанной аномалии получаем
ду
D.g=gp Yp + (.
дН
Найдем связь смешанных аномалий с аномальным потенциа
лом. Учитывая, что аномальный потенциал и аномалии силы тяже
110
сти являются малыми величинами, будем при этом считать направ
.lение РI}> совпадающим с направлением радиуса вектора r точки Р,
Т.е. не будем учитывать сжатие Земли. В сферическом приближе
нии соrласно формуле (3.70) вертикальный rрадиент нормальной
илы тяжести имеет вид
ду 2
= y.
дН r
Разность gp ?р действительной и нормальной силы тяжести в
точке Р называют чистой аномалией силы тяжести. С принятой
точностью для чистой аномалии можно получить
поэтому
дТ
g р у р = ar '
дТ ду
f..g = ar + дН ' '
(4.11 )
JШИ С учетом формул (4.8) и (3.70) находим
f..g 2 (W o и о) = д т 2 Т .
r ar r
На поверхности Земли при r = R
дg 2(W o и о) = д Т 2Т
R ar r
(4.12)
r=R
rравиметрические уклонения отвеса также связаны с аномаль
ным потенциалом:
r = дТ ,
У raB
r 1 дТ
1] =
у rcosBaL
(4.13 )
Эти формулы получают в курсе rеодезической rравиметрии и
теории фиrуры Земли.
Таким образом, составляющие уклонения отвеса и аномалии силы
тяжести являются первыми производными аномальноrо потенциала,
а задача перехода от натуральных координат к координатам в HOp
\fальном поле сводится к определению аномальноrо потенциала.
Рассмотрим некоторые виды уклонений отвеса и аномалий BЫ
сот и способы их определения.
111
24. УКЛОНЕНИЯ ОТВЕСА В rЕОМЕТРИЧЕСКОМ
и ФИЗИЧЕСКОМ ОПРЕДЕЛЕНИЯХ
При определении уклонения отвеса выбирают в качестве OT
счетноrо направления или нормаль к эллипсоиду или направление
нормальной силы тяжести. В первом случае rоворят об уклонении
отвеса в 2еометрическом определении, во втором об уклонении
отвеса в физическом определении. Поясним эти понятия с помощью
рис. 4.2, преДставляющеrо фраrмент рис. 2.7.
rеодезический эллипсоид можно рассматривать как уровенную
поверхность потенциала силы тяжести. Про ведем через точку Р
касательную Ру* к силовой линии (на рисунке она Не показана) поля
эллипсоида. Эта линия лежит в плоскости rеодезическоrо меридиа
на пРр, а касательная к ней пересекает экватор в точке qj' Уrол
q I PQ2 = u ф между направлениями у* и g наЗЫвают уклонением oтвe
са в физическом определении.
z
р
х
у
Рис. 4.2. Уклонения отвеса в rеометрическом
и физическом определениях
Направления нормали к эллипсоиду и нормальной силы тя-
жести не совпадают из за кривизны нормальной силовой ли-
нии. Силовая линия нормальноrо поля плоская кривая, лежащая
в плоскости меридиана. Поэтому выбор за отсчетное направле-
ние нормали к эллипсоиду или отвесной линии скажется только на
112
составляющей уклонения отвеса в плоскости меридиана; COCTaB
.1яющая 17 в плоскости первоrо вертикала одинакова в обоих
случаях. Плоскости астрономическоrо и rеодезическоrо мери
J.ианов близки между собой, уrол между ними равен разности
астрономической и rеодезической долrот. Можно считать поэто
МУ, что уrол между проекцией отвесной линии на плоскость [eo
J.езическоrо меридиана равен астрономической широте, и полу
чить уклонения отвеса в rеометрическом и физическом определе
ниях (рис. 4.3)
= ffJ B Ф = ffJ вУ.
а
б
Силовая линия
нормалЬНQZQ поля
р
р
у g
Рис. 4.3. Составляющая уклонения отвеса в плоскости меридиана
в rеометрическом (а) и физическом (6) определениях
Эти уклонения отвеса отличаются на величину уrла € из за OT
JИЧИЯ rеодезической широты и широты в нормальном поле.
В rлаве 3 (см. ФОРМУЛЫ 3.77) для уrла е между нормалью к эл
.1IШСОИДУ И касательной к нормальной силовой линии получено
зыражение
LnPqj = е = НfЗ sin 2В,
R
н высота над эллипсоидом; fЗ коэффициент нормальной форму
.1Ы, R средний раДИУС Земли.
Поэтому для связи rеометрической и физической ;Ф составля
:.Jщих уклонения отвеса справедливо равенство
Ф ffJ в е ::::; е = НfЗ sin 2В.
R
113
Коэффициент fЗ I R этой формулы мал, ero можно считать оди
наковым для всех применяющихся формул нормальноrо распреде
ления силы тяжести и равным 0,171"/км, поэтому связь уклонений
отвеса выrлядит так
Ф = 0,171" Hsin2B.
(4.14)
Составляющая t! уклонения отвеса в физическом определении
в произвольном азимуте А соrласно выражениям (2.31) и (4.14)
находится по формуле
t! = gФсоsА +1] sinA = 6 0,171" Н км sin2B cosA =
== iJ е cosA, (4.15)
rде iJ составляющая уклонения отвеса в rеометрическом опреде
лении. Для полноrо уклонения отвеса получаем:
в rеометрическом определении
и := g 2 + 1]2 ;
в физическом определении
и Ф := Ф2 + 1]2 = (g 0,171" Н sin 2в)2 + '1]2 .
Отличие уклонений отвеса в rеометрическом и физическом оп
ределениях для высоты 1 км над эллипсоидом составляет 0,2" и Bce
rда учитывается.
25. АстРономо rЕОДЕЗИЧЕСКИЕ
и rРАВИМЕТРИЧЕСКИЕ УКЛОНЕНИЯ ОТВЕСА
в зависимости от способа получения и используемых измере
ний различают астрономо zеодезические и zравU/l1етрические УКЛО
нения отвеса.
Астроно.мо-zеодезические уклонения отвеса находят как разно
сти астрономических и rеодезических координат. Соrласно Bыpa
жениям (2.32) запишем
T ==cp B,
1]АТ == (л L)cosB.
114
Это уклонения отвеса в rеометрическом определении (см.
рис. 2.7). Они использованы (см. rлаву 2) при связи натураль
ной системы координат с остальными системами. В дальнейшем
именно эти уклонения отвеса будем называть астрономо rеодези
ческими.
Величина астрономо rеодезическоrо уклонения отвеса зависит
от выбора отсчетноrо эллипсоида. Если при ее вычислении исполь
зованы координаты в системе референц эллипсоида, уклонение OT
веса называется относительным. Уклонение отвеса от нормали к
общему земному эллипсоиду, центр KOToporo совпадает с центром
'.шсс Земли, называется абсолютным.
Относительное уклонение отвеса зависит как от астрономичес
ких координат, Т.е. от направления отвесной линии, так и от раз
\1еров и ориентировки эллипсоида. Для разных значений rеодези
ческих координат В, L, Т.е. для разных референц эллипсоидов, YK
.lонение отвеса в одной и той же точке поверхности Земли будет
различным, и в одном и том же пункте поверхности Земли возмож
ны разные значения относительных уклонений отвеса.
Составляющая астрономо rеодезическоrо уклонения отвеса в
плоскости меридиана в физическом определении это разность
астрономической широты и широты в нормальном поле
или
Ф = ер вУ
r! = ер в 0,171" Н sin2 В.
Уклонения отвеса и Ф , Ф, t! будем в дальнейшем называть фи
зическими астрономо rеодезическими уклонениями отвеса.
Астрономо rеодезические уклонения отвеса нужно знать во всех
измерительных точках для приведения измерений, выполненных в
натуральной системе координат, в rеодезическую или простран
ственную прямоуrольную системы. Однако их непосредственное оп
ределение как разности астрономических и rеодезических коорди
нат возможно только на астропунктах. Астрономические опреде
ления Из за их трудоемкости выполняют только на небольшом
числе пунктов, поэтому возникает задача вычисления aCTpOHOMO
rеодезических уклонений отвеса в тех точках, rде нет астрономи
ческих наблюдений. Для этой цели используют друrие виды укло
нений отвеса.
rрави.метрическое уклонение отвеса это уrол между действи
тельной и нормальной силой тяжести. Это уклонения отвеса в
физическом определении. Их вычисляют по смешанным аномали
115
ям (g 11 силы тяжести. Формулу для вычисления rравиметричес
ких уклонений отвеса в 1927 r. впервые получил rолландский reo
физик и rеодезист Ф.Венинr Мейнес (1887 1966):
{ С; ['Р } = f 7r 2 f 7r (g у) dS(V') { C?S A } sin V'dV'dA,
17 ТР 4пу Ц!=,О А='О dV' sш А
( 4.16)
rде '1'; А полярные координаты текущей точки поверхности Зем
ли относительно точки вычисления;
dS(V') sin 1./f = cos2 11'
d 1./f 2
cosec i + 12sin i + 3
1 + sin i
4 sin 2 i [ 8 + 31n( si n i +si n 2 i )]
5('1') функция Стокса.
CTporoe решение задачи определения аномальноrо потенциала
и уклонений отвеса на физической поверхности Земли получено
М.С. Молоденским в 1945 r. в виде ряда, начальному члену KOTO
poro соответствуют формулы (4.16). Поэтому формулы Венинr
Мейнеса часто называют ФОРАIУЛ(LИИ flулевО20 приближения. В этом
приближении не учитывается сжатие Земли и наклоны физической
поверхности.
Так как при вычислении смешанных аномалий силы тяжести дей
ствительная сила тяжести относится к точке Р поверхности Земли, а HOp
мальная к точке рУ (см. рис. 4.1), то вычисленное по этим аномалиям
уклонение отвеса также будет являться уrлом между действительной си-
лой тяжести в точке Р и нормальной силы тяжести в точке рУ. Такие укло
нения отвеса называют уклонениями отвеса по Молоденскому.
Обычно при использовании выражений (4.16) интеrрирова-
ние выполняют не по всей поверхности Земли, а только по Kpyro
вой области сферическоrо радиуса '1'0 с центром в вычислительной
точке. Тоrда уклонение отвеса будет обусловлено влиянием aHOMa
лий силы тяжести только в окрестности точки вычисления, Т.е. вли
янием ближних зон. Такое уклонение отвеса называют иноrда
местным.
116
При вычислении местных rравиметрических уклонений отвеса
вместо формул (4.16) можно использовать формулы Венинr Мей
неса для плоской отсчетной поверхности, которые имеют вид
{ ; I P } = L J r! 2 J 1r (g у) { C S A } drdA,
1] J Р 2пу r sш А
о о
( 4.17)
[де r расстояние от вычислительной до текущей точки, к которой
относится аномалия силы тяжести; r[ радиус учитываемой при
ннтеrрировании области.
Сопоставим физические астрономо rеодезические и rравимет
рические уклонения отвеса. Они отличаются на величину уrла меж
.1у направлениями i связанной с референц эллипсоидом отвесной
.1ИНИИ и нормальной силой тяжести общеrо земноrо эллипсоида.
Если при вычислении астрономо rеодезических уклонений отвеса
использован тот же самый эллипсоид, что и при задании нормаль
Horo поля (т.е. при вычислении нормальной силы тяжести), физи
ческие астрономо rеодезические уклонения отвеса совпадут с rpa
виметрическими. Так как нормальный эллипсоид совпадает с об
Щим земныМ эллипсоидом, rравиметрические уклонения отвеса
являются абсолютными.
В формулах (4.16) для получения абсолютноrо (полноrо) rpa
виметрическоrо уклонения отвеса интеrрирование нужно выпол
нять по всей поверхности Земли. Если же учтено влияние только
ближних зон и уклонение отвеса вычислено по формуле (4.17), то
оно не совпадет с астрономо rеодезическим.
Таким образом, в зависимости от принятоrо отсчетноrо Ha
правления, способа вычисления и использованных измерений раз
.lичают три вида уклонений отвеса.
А стРОНОJl40 2еодезические уклонения отвеса уrол между направ
.lением нормали к референц эллипсоиду и отвесной линией. Это
относительные уклонения отвеса, определяемые как разности aCT
рономических и rеодезических координат.
FравUА1етрические уклонения отвеса уrол между направлением
.]ействительной и нормальной силы тяжести или между касатель
ной к силовой линии нормальноrо поля и отвесной линией. Это
абсолютное уклонение отвеса, вычисляемое по rравиметрическим
данным.
Физическое астРОНОМО 2еодезuческое уклонение отвеса уrол
\fежду отвесной линией и касательной к силовой линии нормаль
Horo поля, вычисленный по астрономо rеодезическим данным.
117
Если при вычислении физическоrо астрономо rеодезическоrо
уклонения отвеса использован общий земной эллипсоид, это укло
нение отвеса совпадет с rравиметрическим. Таким образом, абсо
лютное физическое астРОНОМО 2еодезическое уклонение отвеса это
2равu.метрическое уклонение отвеса, вычисленное по астрОНОЛЮ 2ео
дезическuм данным.
26. топоrРАФИЧЕСКИЕ УКЛОНЕНИЯ ОТВЕСА
ТопО2рафическuм уклонением отвеса называют уклонение OTBec
ной линии, вызванное притяжением топоrрафических масс. PaCCMOT
рим топоrрафическое уклонение для простейшей модели. Положим
нормальную Землю плоской и однородной, а аномальное поле
созданным однородной rорой, возвышающейся над этой плоско
стью (рис. 4.4). Нормальная сила тяжести у направлена по HopMa
ли к плоскости. Вследствие притяжения F ropbI сила ТЯЖести Moдe
ли, являющаяся равнодействующей сил у и F, не совпадет с HOp
мальной силой тяжести r и образует с ней уrол д Т , являющийся
топоrрафическим уклонением отвеса.
Усложним модель, добавив к ней аномальные массы т!, т 2 , тз.
плотность которых отличается от плотности 8. В этом случае сила
тяжести будет равнодействующей нормальной силы тяжести у, силы
F притяжения однородной ropbI и сил F 1 , F 2 . F3 притяжения внут-
ренних аномальных масс, а уrол между нормальной силой тяжести и
этой равнодействующей составит rравиметрическое уклонение отве-
са. Следовательно, топоrрафическое уклонение отвеса отличается от
rравиметрическоrо из за притяжения внутренних аномальных масс.
F2
.
т 2
8 = coпst
'т
3
y+F
у у.........
Рис. 4.4. Топоrрафическое уклонение отвеса
118
Принцип вычисления топоrрафическоrо уклонения отвеса по
ясtIИМ с помощью рис. 4.5. Здесь начало координат Р совмещено с
вычислительной точкой, плоскость хРу с уровенной поверхнос
тью точки Р, ось х направлена на север, ось у на восток. Выделим
элемент dm = &1hda топоrрафических масс, da площадь основа-
ния, dh высота элемента объема, занятоrо массой dm. Для проек-
uий dFx, dP" силы dF притяжения точки Р элементом массы dm за
пишем выражение
df'.-.; = dFcos(F,x) = G d cos(r',r)cos(r,x) =GБ cosAdhda;
r r .
dF y = dFcos(F,y) = G dr; cos(r',r)cos(r,y) = GD з sinAdhda,
r r
fJ.e " расстояние от точки Р, в которой вычисляется уклонение
JTBeCa, до элемента массы dm; r проекция r' на rоризонтальную
rпоскость; А азимут.
Чтобы получить топоrрафическое уклонение отвеса, нужно про
tНтеrрировать формулы (4.18) по всем массам, возвышающимся
:iад уровнем точки Р,
(4.18)
" "
;Т = L J dF-.;; 11 Т = L J dF".
У т У т
( 4.19)
Ak
у
Рис. 4.5. К вычислению топоrрафическоrо уклонения отвеса
119
Знаки в последних равенствах приняты в соответствии с прави
лом счета астрономо rеодезических и rравиметрических уклонений
отвеса (см. 99): уклонение отвеса положительно, если вектор силы
тяжести отклоняется к юrо западу от нормали к эллипсоиду. Bы
полнив по формулам (4.19) интеrрирование по h, получим
{ } нУ
T = p" G8 dh r cosA dcr=
l1 Т r J J (r 2 + h')3/2 Cin А }
а НХ
Ij 2п r у { }
= P" ] J H Ho c sA drdA,
у r sш А
о о
(4.20)
[де dcr = rdrdA плотность 8 постоянна j{f высота текущей точки
поверхности Земли; Hr высота точки Р, r j радиус учитываемоЙ
области.
Так как при постоянной высоте H интеrрал по азимуту равен
нулю, а для малых превышений
IHr HII<r
можно считать r' == r, формулу (4.20) обычно записывают в виде
{ Т } Ij 2п у { }
L = p" G8 J J H c sA "drdA.
17 т У r sш А
о о -
(4.211
Топоrрафические уклонения отвеса используют при вычисле
нии местных rравиметрических уклонений отвеса. Использование
формул (4.16) и (4.17) предполаrает, что BOKpyr точки вычисления
имеется сплошная rравиметрическая съемка. Но реальные измере
ния всеrда дискретны, поэтому возникает необходимость интерпо
ляции аномалий силы тяжести между rравиметрическими пункта.
ми. Для повышения точности их интерполяции используют
косвенную интерполяцию через аномалии Буrе (g iJБ' Т.е. пре;r.
ставляют аномалию в свободном воздухе в виде
g у= (g iJБ + 2п С8НУ,
(4.22,
[де 2пG8HY поправка за промежуточный слой; 8 плотность [ор-.
ных пород.
120
После подстановки выражения (4.22) в формулы (4.17) Венинr
Мейнеса получим, считая плотность постоянной,
{ ТР } р" J '1 2 J lf (g у) Б { COSA }
drdA
ТР 2пу r sinA
17 о о
р"С8 J '1 2 J lf нУ c?s А drdA.
у r sш А
о о
(4.23)
Первый член правой части формулы (4.23), вычисляемый по
аномалиям Буrе, отражает влияние внутренних аномальных масс в
земной коре; второй член учитывает влияние топоrрафических масс
н совпадает с формулой (4.20) топоrрафическоrо уклонения OTBe
са. При спокойном поле аномалий Буrе первый член в (4.23) бли
зок к нулю; если в то же время рельеф достаточно сложный и коле
бания высот значительны, влияние топоrрафических масс будет
основным и можно считать, что топоrрафические уклонения OTBe
са равны rравиметрическим
rp == T,
17 rp == 17 т.
В равнинных районах, наоборот, влияние топоrрафических масс
пренебреrаемо и уклонение отвеса определяется в основном при
тяжением аномальных масс земной коры, Т.е. первым членом пра
вой части выражения (4.23).
Вычисления по формулам (4.21) и (4.23) выполняют численным
интеrрированием.
27. топоrРАФО-ИЗОСТАТИЧЕСКИЕ УКЛОНЕНИЯ
ОТВЕСА
Уклонения отвеса открыл П.Буrе во время Перуанской экспе
.1иции 1735 1742 rr. Измерив зенитные расстояния одной и той же
звезды в моменты ее прохождения через меридиан с противопо
.10ЖНЫХ сторон высочайшей вершины эквадорских Анд Чимбора
со (высота 6310 м) и расстояние между пунктами наблюдения, Буrе
получил астрономо rеодезическое уклонение отвеса. Затем Буrе
вычислил уклонение отвеса, вызванное притяжением этой ropbI, и
обнаружил, что астрономо rеодезическое уклонение отвеса значи
тельно меньше топоrрафическоrо. Это привело Буrе к мысли, что
121
ropa является оболочкой, внутри которой имеются пустоты. Сто
лет спустя поиски причин расхождений астрономо-rеодезическоrо
и топоrрафическоrо уклонения отвеса привело к 2ипоmезе изосmа
ЗИИ, которая стала наиболее заметным вкладом rеодезии в изуче-
ние BHYTpeHHero строения Земли.
rипотеза изостазии началась с исследований Пратта, посвящен-
ных анализу обнаруженных Дж. Эверестом (l790 1866) уклонений
отвеса в Индии. Эверест приписал уклонения отвеса воздействию
rималаев. в середине XIX в. по просьбе руководителей rеодезичес
кими работами в Индии архидиаконом Калькутты Джоном r.Прат
том (1809 1871) были вычислены меридиональные составляющие
топоrрафическоrо уклонения отвеса для трех пунктов на севере
(пункт Калиана), в центре (пункт Каланпур) и юrе (пункт Джамар
rида) Индии, причем учитывалось притяжение топоrрафических
масс на оrромной территории, включающей rималаи и Тибет на
севере и Индийский океан на юrе. По вычислениям Пратта оказа
лось, что в пункте Калиана меридиональная составляющая топоr
рафическоrо уклонения отвеса равна 34,033", а астрономо rеоде
зическоrо 5.236". Значения меридиональной составляющей для тех
же пунктов по более поздним вычислениям приведены в таблице
4.1. Разности астрономо rеодезических и rравиметрических укло
нений отвеса значительны и составляют 35 O", но плавно изменя
ются при изменении широты пунктов.
т а б л и ц а 4.1.
Топоrрафические и астрономо rеодезические уклонения отвеса
Название Широта AT moп AT mйп
пункта
Калиана 29°31' 7 00" --47)" 40,3"
,
Каланпур 24 07 О 37,6 37,6
Джамарrида 18 03 2,73 38, 1 35,4
Для объяснения различия между астрономо rеодезическим и
топоrрафическим уклонениями отвеса в 1855 r. анrлийский aCTpo
ном, директор rринвичской Королевской обсерватории Джордж
Б. Эри (1801 1892), и несколько позже Пратт независимо друr от
друrа предложили rипотезу изостазии. Соrласно этой rипотезе,
избытку масс в ropax соответствует недостаток масс внутри Земли
под rорами, а недостаток масс в океане компенсируется избытком
масс ниже ero дна, и, начиная снекоторой rлубины Т, называемой
2лубиной изостатической компенсации, поверхности paBHoro дaB
122
.lения (изобарические поверхности) совпадают с уровенными. Зто
означает, что между уровнем моря и поверхностью компенсации
распределены массы, компенсирующие давление земной коры, и вес
.lюбоrо вертикальноrо столба высотой Н + Т и paBHoro попереч
Horo сечения одинаков.
Впервые мысль о существовании компенсации топоrрафичес
ких масс высказал Леонардо да Винчи (1452 1519) на основании
.Jбщих соображений о развитии Земли. В дальнейшем существова
ние изостатическоrо равновесия земной коры было подтверждено
:--равиметрическими и rеофизическими данными, а rипотезы Зри и
Пратта развиты мноrими rеодезистами. В частности, американс
кий rеодезист Д. Хейфорд (1868 1925) использовал видоизменен
ную rипотезу Пратта при выводе параметров земноrо эллипсоида.
Схема изостатической компенсации по Пратrу Хейфорду дана
на рис. 4.6. Соrласно этой rипотезе, плотность возвышающихся над
:. -равнем моря топоrpафических масс постоянна и равна средней ПЛОТ
насти 80 земной коры, а между уровнем моря и поверхностью KOM
:lенсации расположены компенсирующие массы с разной плотностью.
юры
н
20рЫ
уровень моря
r
н
8 -::.
. I
80 82 > 80 80
nоеерхностькомпеНсации
Рис. 4.6. Схема изостатической компенсации по Пратту Хейфорду
Условия равенства масс в любом вертикальном столбце paBHO
ro поперечноrо основания можно записать в виде:
для суши
И8 0 +Т8] = Т80'
(4.24 )
для моря
r \1 + (Т r) = Т80'
rде w плотность морской воды; 8\ плотность масс между ypOB
нем моря и поверхностью компенсации для континентальных уча
стков; 8z плотность масс под дном моря; r rлубина моря.
123
Соrласно формуле (4.20) дополнительная плотность, обеспечи
вающая компенсацию, составляет
для суши
/18 = 81 80 = )H/Т,
(4.25)
для моря
/18 = 80 = (80 8 H )r/(T [).
(4.26 )
Для суши при положительных высотах величина /18 отрицатель
на и плотность 81 меньше средней плотности земной коры. На море
/18 положительна и плотность масс под дном моря больше cpeд
ней плотности 80'
Топоrрафо изостатические уклонения отвеса, учитывающие яв
ление изостазии, находят следующим образом: раздельно вычисля
ют притяжение топоrрафических и компенсирующих масс, а затем
находят их разность. В обоих случаях используют формулы, анало
rичные формулам (4.21) для сферической Земли. Хейфорд разрабо
тал методику численноrо интеrрирования и в 1909 1910 rr. выпол
нил обширные исследования топоrрафо изостатических уклонениЙ
отвеса на территории США, результаты которых бьши использова
ны при выводе параметров эллипсоида, названноrо ero именем.
Топоrрафические и компенсирующие массы оказывают разное
влияние на уклонение отвеса. Компенсирующие массы в ближай-
ших окрестностях вычислительной точки не оказывают влияния
на уклонение отвеса, поскольку эти массы находятся под точкой
вычисления и их притяжение направлено вниз, а rоризонтальная
составляющая притяжения при постоянной плотности равна нулю.
На расстоянии около 1 километра компенсирующие массы умень-
шают влияние топоrрафических масс примерно на 1 О/о; на расстоя-
ниях от 20 до 70 км притяжение топоrрафических масс почти вдвое
больше притяжения компенсирующих, а на расстоянии около 1000
км от точки вычисления притяжение топоrрафических и компенси-
рующих масс примерно равны. При дальнейшем увеличении рас-
стояния притяжение компенсирующих масс больше, поскольку эти
массы расположены ближе к точке вычисления. При этом, поскольку
отличие в расположении топоrрафических и компенсирующих масс
относительно точки вычисления при увеличении расстояния ста-
новится пренебреrаемым, разность притяжений топоrрафических
и компенсирующих масс убывает и влияние дальних зон на топоr
рафо изостатические уклонения отвеса близко к нулю. В связи с
этим при вычислении топоrрафо изостатических уклонений OTBe
са можно оrраничиться учетом масс в радиусе около 5 тыс. км.
Таким образом, опыт вычисления топоrрафо изостатических по-
правок свидетельствует о необходимости учета притяжения KOM
124
:1енсирующих масс в том случае, коrда притяжение топоrрафичес
!l:ИХ масс учтено на большой территории. Если же учтено притяже
:ше топоrрафических масс в радиусе 1 OO 200 км, поправки за KOM
:-:енсацию можно не вводить и оrраничиться вычислением топоr
;:,афических уклонений отвеса. Это соrласуется с реrиональным
\арактером изостазии: изостатически компенсированными являются
;,-рупные формы рельефа и явление изостазии начинает проявлять
Я на расстоянии свыше сотен километров.
В изостатически компенсированных районах rравиметрические
:.Кl0нения отвеса равны топоrрафо изостатическим. Поэтому при
.:отсутствии rравиметрической съемки вместо rравиметрических YK
.lонений отвеса можно использовать топоrрафо изостатические.
28. Actpohomo-rЕОДЕЗИЧЕСКАЯ
И rРАВИМЕТРИЧЕСКАЯ АНОМАЛИИ ВЫСОТЫ
Соrласно выражению (4.9), аномалию высоты можно определить
aK разность высоты в нормальном поле и нормальной высоты
= н н нУ.
Так как высота в нормальном поле практически равна rеодези
1ССКОЙ, это равенство можно написать в виде
;;;:;H j{f,
( 4.27)
1ТО при водит К определению аномалии высоты как разности 2eoдe
?l,ческой и нормальной высоты. При переходе к друrому эллипсоиду
..шомалия высоты изменяется так же, как и rеодезическая высота.
На рис. 4.7 показана аномалия высоты относительно общеrо зем
:1Оrо и референцноrо эллипсоидов. На рис. 4.7 приняты следующие
)бозначения: ptPY = p\oPJ'O= НУ нормальная высота; рУр рефе
хнцная, pJOp общеземная аномалии высот.
Референц
Э_'L7Uп('оид
Общий земной ЭJUlипсоид
/'
Рис. 4.7. Аномалия высоты относительно общеrо земноrо
и референц эллипсоида
125
Если в равенстве (4.27) использовать rеодезические высоты от-
носительно общеrо земноrо эллипсоида, то будет определена ано-
малия высоты относительно этоrо эллипсоида, которую по анало-
rии с уклонением отвеса можно назвать абсолютной
1;3 = н ОЗ нУ.
Для референц эллипсоида получаем аналоrично
AT = нреф нУ.
(4.28)
(4.29 )
Аномалию высоты относительно референц эллипсоида будем
называть астРОНОJ\Ю 2еодезuческой. В формулах (4.28), (4.29) t;3, ,АТ:
ИН; нре ф аномалии высоты и rеодезические высоты относитель
но общеrо земноrо и референц эллипсоида соответственно.
В курсе теории фиrуры Земли для аномалии высоты приводит
ся выражение
w u R J R J
,Ar = о о 4 дgdro + 4 !:J.gS(tJf)dro +
у пу пу
w w
(4.311
+(x()cosL+ yosinL)cosB+z()sinB,
rде дg смешанная аномалия силы тяжести; у среднее по всей
Земле значение нормальной силы тяжести; R средний радиус Зем
ли; ro поверхность сферы единичноrо радиуса; хо, у О' Zo коорди
наты центра масс Земли в rеодезической системе координат, S( ЧJ)
функция Стокса
2п + 1 Чf. tJf
S(tJf) = Рп(соstJf)=соsес +1 6sш
п=2 п 1 2 2
со. "'[5 + 31n( sin +sin 2 )}
(4.321
PicostJf) полином Лежандра; tJf уrловое расстояние между точ-
ками, к которым относятся значения' и дg; интеrрал
f дgdro
4п
w
постоянен и определяет среднюю на Земле аномалию силы
тяжести.
126
Формула (4.31) позволяет найти аномалию высоты как относи
тельно общеrо земноrо, так и референц-эллипсоида.
Выясним смысл входящей в уравнение (4.31) постоянной
,о == W() u() f дgd(O.
у 4лу
(J)
(4.33)
Нормальное поле обычно выбирают так, чтобы центробежный
:-ютенциал действительной и нормальной Земли бьш одинаков. Т Ol a
НЗ разности W и потенциалов центробежный потенциал исключает
.:-я и аномальный потенциал равен разности потенциалов притяже
НJIЯ действительной и нормальной Земли. Возьмем потенциал притя
жения Земли в виде ряда (3.8), а потенциал притяжения Э1U1ипсоида
ряда (3.34). Найдем постоянную часть То аномальноrо потенциала
как разность членов нулевой степени этих рядов. Учтем при этом, что
.:оrласно выражению (3.12) коэффициент Аоо нулевой степени в ряде
13.8) является rеоцентрической rравитационной постоянной GM, и
положим в формулах (3.8) и (3.34) радиус-вектор постоянным и paB
ным среднему радиусу Земли р == r :::: R. При ЭТИХ условиях находим
т :::: G(M Mo)
о R '
(4.34)
[.1е М() масса эллипсоида.
Соrласно выражению (4.8), постоянную часть o в аномалии
высоты можно выразить через постоянную То
t' == То W o и о
o '
у у
(4.35)
поэтому
t' == G(M Mo) Wo Uo
o .
Ry У
( 4.36)
Сравнив равенства (4.33) и (4.36), получим
( 4.37)
W o Uo f !1gd(O== G(M Mo) W o Uo ,
у 4лу Ry У
(()
Следовательно, постоянная часть (т.е. член нулевой степени) в
.iномалии высоты появляется из за несоответствия массы и разме
ров эллипсоида полю реальной Земли.
127
Для общеrо земноrо эллипсоида потенциал на ero поверхности
равен потенциалу на уровне моря, масса эллипсоида равна Mac
се Земли, а центр ero расположен в центре масс, Т.е. выполнены
условия
w и R f
о о I1 g dm == О х == У == Z == О
r 4пу , о о о .
(iJ
(4.381
в этом случае соrласно формуле (4.31) можно записать выражение
, == '03 == f дgS(V1)dm
4пу
(iJ
(4.39)
и аномалию высоты найти по одним rравиметрическим данным.
Поэтому аномалию высоты относительно общеrо земноrо эллип
соида называют zравuмеmрuческой. Следовательно, rравиметричес
кая аномалия высоты ,Т является абсолютной ,Т ==, 03.
Формула (4.39) получена в 1849 r. анrлийским физиком д. CTO
ксом (1819 1903).
Подставим выражение (4.37) в (4.31). Тоrда для аномалии BЫ
соты относительно референц эллипсоида запишем
Ar G(M М) W и
у == о () о +(х c osL+ y sinL)cosB+
Ry У о ()
+ 2, sin В + 4 J "'gS(V/)dm.
(iJ
(4.40 )
Вычтя из равенства (4.40) выражение (4.39), найдем разность
абсолютной (rравиметрической) и референцной (астрономо rеоде
зической) аномалий высот или разность rеодезических высот над
референц эллипсоидом и общим земным эллипсоидом, Т.е.
, А [' ,T == Н реф Н 03 == G( М М о)
Ry
+ (х() cosL + уо sin L)cosB + Zo sin В.
W o И О
+
у
(4.41 )
Формулы (4.31) и (4.41) эквивалентны и отличаются лишь тем.
что в первую из них включены постоянные W() U() и f I1gdm , а во
вторую G(M Ми) и W() И о ' (iJ
Свободный член ,АТ ,Т == )еФ ?;З == нреф F З уравнения
(4.41) получают по aCTpOHOMO rеодезическим, rравиметрическим.
спутниковым измерениям, используя их в разных сочетаниях.
rлава 5
ПРИНЦИПЫ ОПР ЕЛЕНИЯ
ФУНДАМЕНТАЛЬНЫХ ПОСТОЯННЫХ.
rЛОБАЛЬНЫЕ МОДЕЛИ ЗЕМЛИ.
ОБЩЕЗЕМНЫЕ СИСТЕМЫ КООРДИНАТ
Фундаментальные постоянные, задающие нормальную Землю, и
,:токсовы постоянные реальной Земли находят по результатам раз
:-1Оrо вида измерений астрономических, rеодезических, rравимет
lIческих. Рассмотрим основные методы определения этих величин.
29. ОПРЕДЕЛЕНИЕ ФУНДАМЕНТАЛЬНЫХ
ПОСТОЯННЫХ НУ ЛЕвоrо ПОРЯДКА
Как установлено в rлаве 3, фундаментальные постоянные нуле
зоrо порядка задают массу и размеры Нормальной Земли. Из этих
.lостоянных только rеоцентрическая rpавитационная постоянная
С.И является стоксовой постоянной Земли и поэтому однозначно
,)пределяется по измерениям. Остальные постоянные нулевоrо по
;Jядка полуоси а и Ь эллипсоида, сила тяжести УС! на ero экваторе,
.lотенциал и(! на поверхности эллипсоида не существуют у реаль
:-1Ой Земли имеющей сложную и неуровенную физическую поверх
:-юсть, которую невозможно описать одним единственным пара
\leTpoM. Обычно стараются получить эти постоянные так, чтобы
Нормальная Земля была близка к rеоиду.
Рассмотрим принципы определения ОСНОвных постоянных HY
.1eBoro порядка.
Определение zеоцентрической zравитационной постоянной
rеоцентрическую постоянную можно определить как по назем
:-IbIМ измерениям, так и методами космической rеодезии.
Использование наземных измерений основано на формуле (3.11)
rрина для потенциала силы тяжести. Положив в этой формуле [ap
\lоническую функцию r равной единице, находим
7 5 f dW
4nGM = 2ш ат ,
т L
129
производная потенциала W вычислена по нормали к физическо
поверхности Земли и является проекцией силы тяжести на направ
ление внешней нормали
dW
= gcos(g,n).
dn
Для rеоцентрической постоянной получаем
4л:GМ = 2w 2 f dT f gcos(g,n) dL.
т L
(5.1
Соrласно выражению (5.1), для нахождения GM нужно знать
поверхность L Земли и значения силы тяжести g во всех точках этоЙ
поверхности.
Способ определения rеоцентрической постоянной по наблюде.
ниям космических летательных аппаратов (КЛА) основан на зако
не сохранения энерrии. Если расстояние КЛА от Земли достаточ
но велико, можно для потенциала земноrо притяжения использо
вать выражение (3.6), Т.е. считать Землю материальной точкой или
шаром с центрально симметричным распределением плотности. По
ложим, что влияние друrих небесных тел и возмущающих эффеI\
тов исключено, тоrда для энерrии КЛА, рассматриваемоrо как эле
ментарная частица, справедливо выражение
Mv 2 GM
=const,
(т+М)2 r
rде т масса КЛА; v ero скорость. Поскольку масса КЛА пре
небрежимо мала по сравнению с массой Земли, последнее выраже.
ние записывают в виде
V 2 GM
= const.
2 r
Измеряя расстояния r до летательноrо аппарата и ero скорость
v в два момента времени, можно найти
1 2 2
GM = V 2 v t
2 1 l'
(5.21
r 2 r 1
Этим способом получены наиболее точные значения GM.
130
Принцип определения rеоцентрической постоянной по наблю
Jениям спутников Земли поясним с помощью рис. 5.1. Предполо
жим, что спутник движется в центральном поле по круrовой орби
те радиуса r С уrловой скоростью п. Сила F притяжения Земли, yдep
живающая спутник, равна центробежной силе Р, вызванной
вращением спутника BOKpyr Земли
GM 2
=п r,
r
JllИ
СМ 23
= п r.
(5.3)
р
Рис. 5.1. К определению rеоцентрической rравитационной постоянной
Это равенство является третьим законом Кеплера для круrовой
орбиты. Поскольку поле Земли не является центральным, орбиты ее
спутников сложные траектории, а на спутники Земли действуют
также притяжение друrих небесных тел и неrравитационные силы,
равенство (5.3) для реальных условий имеет очень сложный вид. При
ближенно ero можно написать в виде соотношения
G 2 3 А\З
М=п ас (1 + и) ,
(5.4)
r.J,e п средняя уrловая скорость движения спутника, которую Ha
зывают средним движением; ас большая полуось ero орбиты;
8 поправочный член, учитывающий все отклонения в движении
спутника от движения в центральном поле.
Уравнение (5.4) лежит в основе определения СМ как по наблю
.Jениям ИСЗ, так и по наблюдениям отражателей, установленных
на поверхности Луны.
Определение потенциала W o на уровне .моря
Потенциал W o можно определить как интеrральное среднее зна
чение потенциала, вычисленноrо на морской топоrрафической по
верхности (МТП).
131
Добавим к потенциалу притяжения (3.8) потенциал цeHTpo
бежной силы (3.24) и запишем формулу для потенциала силы тяже
сти в виде
w GM
/"
( J 3 ( J 3
т r m r .
1+ Р2(SШФ)+
3 а о 3 а(}
"" ( ) 11 11
+ ; (С", coskI" + S"k sin kL)P"k (Ф)
(5.51
rде C l1k ' Sflk безразмерные коэффициенты, связанные с коэффициен
тами А К в К соотношениями
п' 11
А";
с = 11
11"- СМ а l1
k
в п
S
I1k GMa fl
(5.6)
параметр m определен формулой (3.45).
Интеrрируя по МТП S, находим
) fWdS
s
m ( r ) 3 m ( r ) 3 .
l+ Р2(SШФ)+
= GM f ! 3 а(} 3 а о
dS.
S s r + ( J (C", coskl"+s"k sinkl")P"k (Ф)
(5.7)
Если бы океан покрывал всю поверхность Земли, после интеr
рировании вследствие ортоrональности сферических функций oc
тался бы только член нулевой степени и выражение (5.7) приняло
бы вид
) = см f ! r 1 + m ( J 3 l dS.
S r 3 а()
s
(5.8)
Следовательно, для нахождения W(} необходимо знать постоян
ную СМ, уrловую скорость (i) вращения Земли, входящую в пара.
132
четр т , и радиус вектор r морской топоrрафической поверхнос
ТИ. Первые две величины известны в настоящее время с высокой
точностью, поэтому основная сложность нахождения потенциала
на уровне моря связана с определением поверхности s Земли.
Высоты МТП в настоящее время определяют уверенно методом
('путниковой альтиметрии. Сложнее обстоит дело на континентах.
З,::{есь rеоид не является внешней уровенной поверхностью. Внутри
Земли потенциал силы тяжести описывают иные аналитические BЫ
ражения, и применение формул (5.5) (5.7) означает, что на суше ис
пользован не реальный потенциал силы тяжести, а ero аналитиЧес
кое продолжение. Высоты rеоида также в этом случае не определи
\lЫ. Приближенно их можно оценить по аномалиям высоты . Тоrда
.l1Я радиуса вектора поверхности S на суше получим
r = р + ,
(5.9)
[,::{е р радиус вектор эллипсоида.
При определении потенциала W o возможно в выражении (5.7)
оrраничиться интеrрированием только по поверхности океана. В
этом случае сферические функции не ортоrональны и для вычисле
ния потенциала нужно знать коэффициенты Cnk' Snk разложения по-
тенциала а точность определения потенциала на уровне моря бу
,::{ет зависеть от площади S осреднения.
Определение большой полуоси а
В rлаве 3 было показано, что поле ypoBeHHoro эллипсоида вра-
щения полностью определяется четырьмя параметрами и все фун
,::{аментальные постоянные связаны между собой. Поэтому полуоси
а, Ь земноrо эллипсоида после нахождения фундаментальных по
стоянных СМ, OJ, и о = W o можно вычислить по формулам (3.90) (3.92).
В этом случае они определяются независимо от линейно уrловых
rеодезических измерений на поверхности Земли.
Друrой способ определения большой полуоси [радусные из
\1ерения. Принцип [радусных измерений и исторические сведения
о них изложены в rлаве 1. Рассмотрим определение большой полу
оси из [радусных измерений подробнее.
Пусть в исходном пункте астрономо rеодезической сети [eoдe
зические координаты B[J; Li( и азимут Af исходной стороны в си
стеме известноrо референц эллипсоида равны астрономическим
В О .
I = (fJl'
Lf = At ; А {! = а( .
(5.1 О)
Решая прямую rеодезическую задачу, по измеренным длинам S
и азимутам А rеодезических линий можно найти приращения дЕ,
133
м rеодезических координат и rеодезические координаты пунктов.
суммируя приращения М, М по тем или иным линиям
B = В{) + IdВ; L = L + LM,
(5.111
верхний индекс «О» указывает, что все координаты относятся к
принятому эллипсоиду. После этоrо для всех астропунктов опреде-
лены астрономо rеодезические уклонения отвеса
1=.0 = 1/1. В? Т] . = ( Л. L( ) cosB.
/ 't'/ /' 1 / 1 /'
(5.121
в формулах (5.11), (5.12) i номер астропункта.
Найдем теперь rеодезические координаты на новом эллипсои-
де, подлежащем определению. Результаты измерений при этом счи-
таем неизменными. Это означает, что одну и ту же rеодезическую
сеть укладывают (развертывают) на поверхности двух разных Э.1-
липсоидов сначала на эллипсоиде с известными значениями боль-
шой полуоси а о и сжатия ао, а затем на эллипсоиде с параметрю.ш
а = а о + da; а = а о + da.
(5.13
Такой метод обработки rеодезических измерений называют Me
тодом развертывания.
rеодезические координаты B i ; L i при переходе к новому эллип
соиду изменятся:
и d В О дВ..} дВ d
В. =В. + В= . + иa+ а,
I 1 1 да да
L. =L +dL=L + aL da+ aL da.
1 / / да да
aL aL
вычисляют с HC
да' да
пользованием параметров исходноrо эллипсоида; выражения ,1.1.1
вычисления этих коэффициентов известны.
Найдем уклонения отвеса i; 17; относительно нормалей к нове-
му эллипсоиду
дВ дВ
Значения коэффициентов да ; да ;
о ( дВ J ) ( дВ J O
J:. =ПJ. B. ::;;:1/1, B. da da
l 't'l 1 't'/ I д д '
а . а .
134
( aL ) 0 ( aL ) 0
17; = (А; L;)cosB; = (А; L )cosB,. да ,. da да ,. da.
Введем в эти выражения уклонения отвеса относительно HOp
\lалей к исходному эллипсоиду
О ( дВ ) 0 ( дВ ) 0
; = ,. da da,
да. да .
I 1
(5.14)
( aL ) O ( aL ) O
17,. =17:) da da.
да. да .
I 1
(5.15)
Эти уравнения являются уравнениями поrрешностей, а уклоне
ния отвеса ,.O, 1]i ) свободными членами уравнений. Решая их под
... словием
[ ? + 1]} 1 = min,
(5.16)
находят поправки к первоначально принятым значениям сжатия и
5о.1ЬШОЙ полуоси.
Уравнения (5.14) (5.16) не обязательно решать под условием
5.16). Если вычислить топоrрафо изостатические уклонения OTBe
':3 и вычесть их из обеих частей уравнений (5.14), (5.15), то вместо
)Тих уравнений получим
, iТИ = io iТИ ( J da ( = J da,
(5.17)
ти О ти ( aL ) 0 ( aL ) 0
1],. 17,. = 1],. 17; да ; da да ,. da.
Свободными членами теперь являются разности
(5.18)
&; = gлт ТИ, 817 = 17 АТ 17 ТИ,
(5.19)
J которых влияние местных уклонений отвеса ослаблено. Поэтому
-:редположение о случайном характере разностей уклонений OTBe
.:з является более обоснованным по сравнению с предположением
:- С,1учайном характере астрономо rеодезических уклонений OTBe
..:а. и можно надеяться, что найденный под условием
[8 2+8172]=min (5.20)
i.1.1ИПСОИД будет в целом лучше представлять поверхность rеоида.
135
в 1909 r. таким путем параметры эллипсоида определил Хей
форд по rрадусным измерениям США. Им были вычислены топоr
рафо изостатические уклонения отвеса для трех значений (113,7.
120,9, 162,2 км) rлубины компенсации и для каждоrо случая найде
ны параметры эллипсоида. Кроме Toro, Хейфорд нашел парамет
ры эллипсоида по астрономо rеодезическим уклонениям отвеса, что
соответствует rлубине компенсации Т = О, и разностям aCTpOHO
мо rеодезических и топоrрафических уклонений, Т.е. для Т = 00. Pe
зультаты исследований Хейфорда приведены в таблице 5.1.
Таблица 5.1
Топо['рафо изостатические уклонения отвеса и параметры эллипсоида
rлубина Па раметры эллипсоида
компенсации L( 8f! + БТ]2), (,,)2
Т, км а, м 1: а
ос 6383 042 255,1 107235 i
О 6378062 298,2 18880
,
I
]62,2 6378493 296,3 10297
120,9 6378388 297,0 1 О 063
113,7 6378370 297,1 10 077
Оказалось, что параметры эллипсоида практически не зависят
от rлубины компенсации. Существенно отличные результаты дают
две первые строки таблицы 5.1. Соrласно выражению (4.25) rлуби
на компенсации Т = 00 означает, что плотность компенсирующих
масс равна нулю, Т.е. поправки за компенсацию не вводится, и в
уравнениях rрадусных измерений использованы разности aCTpo
номо rеодезических и топоrрафических уклонений отвеса, Т.е. из
астрономо rеодезических уклонений отвеса исключено притяжение
всех топоrрафических масс Земли. Неудовлетворительные значения
полуоси и сжатия, полученные в этом случае свидетельствуют о
наличии изостатической компенсации земной корь!.
Значение Т = О соrласно выражению (4.24) означает, что про
изведение Н80 равно нулю, Т.е. влияние топоrрафических масс OT
сутствует, и никакие поправки в астрономо rеодезические уклоне
ния отвеса не вводятся. Этот вариант наиболее близок COBpeMeH
ным значениям параметра эллипсоида. Тем не менее Международная
ассоциация rеодезии в 1924 [. на rенеральной ассамблее в Мадри
де рекомендовала в качестве международноrо эллипсоид Хейфор
136
.1а. соответствующий Т= 120,9 км. Этот эллипсоид до недавнеrо
зремени использовали как отсчетный эллипсоид в Европейской
,:истеме координат.
Топоrрафо изостатические уклонения отвеса использованы TaK
же А.А. Изотовым (1908 1989) при выводе эллипсоида KpaCOBCKO
O. К этому времени (к середине 30 x rr. ХХ в.) уже появилась воз
чожность вычисления rравиметрических уклонений отвеса: в 1927
, Венинr Мейнес получил необходимую формулу (4.16), и в СССР
'-1dСТИЧНО уже была выполнена rравиметрическая съемка. В ypaBHe
ЮIЯХ (5.17), (5.18) Изотов использовал rравиметрические уклоне
ння отвеса для тех астропунктов СССР, BOKpyr которых была [pa
ВИ 1етрическая съемка, и в качестве свободных членов использовал
;"dЗНОСТИ
Д =: i ir , Д17 = 17i 17;
(5.21)
lстрономо rеодезических и rравиметрических. ir, 17i r уклонений
,)твеса. Для остальных астропунктов использованы топоrрафо изо
:татические уклонения отвеса. Уравнения (5.17) и (5.18) решают
:lОД условием
[(д )2 + (Д17)2] = min,
(5.22)
.Je Д и Д17 определены или формулой (5.19), или формулой (5.21).
Если строение земной коры известно и тщательно учтено при
зычислении топоrрафо.изостатических уклонений отвеса, они дол
жны совпадать с rравиметрическими, которые опытным путем yc
танавливают влияние всех масс Земли. Поэтому совместное исполь
30вание при выводе параметров эллипсоида rравиметрических и
топоrрафо изостатических уклонений отвеса оправдано.
Вывод Изотова был последним определением параметров зем
Horo эллипсоида по линейно уrловым наземным измерениям. В Ha
.:тоящее время такой метод определения эллипсоида не применяют.
Впоследствии в уравнениях rрадусных измерений в качестве
':вободных членов стали использовать не уклонения отвеса, а aHO
\lалии высоты. В число неизвестных этих уравнений кроме вели
чин, определяющих форму и размер эллипсоида, включали коорди
наты ХО' У О ' ZO центра масс, задающие ориентировку референц эл
.lипсоида внутри Земли. Уравнением rрадусных измерений TaKoro
типа является выражение (4.41).
Координаты Х(), У(), Z() называют внутренними элементами орие1J
rllированuя референцной системы.
Разность астрономо.rеодезической и rравиметрической aHOMa
.1ИИ высоты МОЖНО получить с помощью формулы (2.16) преобра
137
зования rеодезических координат. rеодезическая высота равна CYM
ме нормальной высоты и аномалии высоты, а нормальная высота
не зависит от выбора эллипсоида, поэтому разность rеодезических
высот относительно общеrо земноrо и референц эллипсоида равна
разности аномалий высот
lfPе ф w з = (НУ + еф)
(НУ + С: З ) = (JlY + AT) (JlY + T) = реФ ОЗ = AT T. (5.23)
Примем в формуле (2.16) dH = AT T; dx = Ха; dy = Уа; dz = Za'
тоrда
AJ' T = (a a)+ [e\a a)+a(e2 e2)]sin2 В+
2
+ (Ха cos L + у о sin L)cosB + Zv sin В.
(5.24)
Сравнение выражений (4.41) и (5.24) позволяет связать посто
G(M M) W u
янные v v о С разностью полуосей (а а) .
Ry У
В уравнениях (4.41) и (5.24) свободные члены разности aCTpo
номо rеодезических и rравиметрических аномалий высот получа
ют по наземным измерениям. Посмотрим, как будут выrлядеть эти
уравнения при использовании спутниковых наблюдений.
Рассмотрим принцип определения полуоси общеrо земноrо эл-
липсоида. Сжатие а и эксцентриситет е 2 общеrо земноrо эллип
соида надежно определяется по значениям параметров С(С A) или
J 2 на основании соотношений (3.85) и (3.87), (3.88) между парамет-
рами нормальной Земли, поэтому считаем их известными.
rеодезическую высоту над общим земным эллипсоидом можно
получить как сумму нормальной высоты и rравиметрической ано.
мал ии высо ты. Спутниковый метод дает rеоцентрические координа-
ты Х, у , z станции наблюдения ИСЗ, зная которые можно вычис
лить rеодезические координаты относительно любоrо эллипсоида.
Выберем приближенное значение а полуоси и найдем rеодези-
ческую высоту Н точки с координатами Х, у , z над общим зем-
ным эллипсоидом с параметрами а, ё 2 . Соrласно формуле (2.14)
запишем
H= Q cosB+ Z sinB a 1 e2sin2 В.
(5.25 I
Величина Q расстояние точки от малой оси эллипсоида
определена формулой (2.9).
138
Запишем теперь выражение для rеодезической высоты Н над
оощим земным эллипсоидом с параметрами а, е
н = Q cos в + Z sin В a .J 1 е 2 sin 2 В .
(5.26)
При фиксированном значении сжатия эллипсоида, Т.е. при по
uоянном значении е, широта практически не зависит от величи
ны полуоси. Действительно, положив в формуле (2.16) dX = dY =
= dZ = de 2 = О и М + Н == а, найдем
dB = ! е 2 da .
2 а
(5.27)
Даже для da = 300 м изменение широты составит Bcero 0,03".
Поэтому в выражениях (5.25), (5.26) первые два члена будем счи
тать одинаковыми и для разности rеодезических высот одной и той
же точки над двумя эллипсоидами получим
H H =(a a) .J l e2sin2 в.
(5.28)
Это уравнение также является уравнением rрадусных измере
ний. Соrласно ему, поправку (а а) к принятому значению полу
с>си общеrо земноrо эллипсоида можно найти по наблюдениям Bce
[О в одной точке поверхности Земли. В действительности полуось
Э.1Липсоида определяют из совместной обработки измерений на всех
н еющихся станциях наблюдения НСЗ, рассматривая формулу
(5.28) как уравнение поrрешностей.
Сопоставим уравнения (5.24) и (5.28). Перепишем предваритель
но уравнение (5.28) в виде
Н Н С )(1 2 . 2 в) 1/2 С (1 1 2 . 2 В )
= а а е sш == а а ) 2' е sш
При такой записи становится ясно, что у авнение (5.28) яв
.1яется частным случаем уравнения (5.24) при Се ( 2 ) = о; ХО = Уо =
= Zo = о. Существенное отличие уравнений (5.24) и (5.28) обуслов
.1ено их свободными членами: если в первом из них это разность
..4.Т {F
". ; определяемая только по наземны данным, то во втором
свободным членом является разность Н Н rеодезических высот,
найденных по спутниковым данным и наземным измерениям в co
vтветствии с равенством (4.9).
Такова эволюция rрадусных измерений за два с четвертью тыся
челетия. С середины 111 в. до Н.э. И до конца ХУI в. Землю считали
шаром, а ее уровенную поверхность сферой, поэтому для опреде
139
ления поверхности Земли бьшо достаточно одноrо параметра ра-
диуса R (см. рис. 1 и формулу (1)). В течение Bcero XVllI в. уровенная
поверхность считалась эллипсоидом и уравнения [радусных изме
рений включали два параметра большую полуось а и сжатие а В
конце XVIII в. стало ясно, что уровенная поверхность отличается от
эллипсоида и в rеодезию вошел rеоид. На протяжении XIX в. и пер
вой половины ХХ в. основная задача rеодезии состояла в определе
нии rеоида, а в уравнения [радусных измерений стали включать Be
личины, характеризующие отступления rеоида от эллипсоида YK
лонения отвеса или высоты rеоида. е появлением иез отпала
необходимость определения сжатия по [радусным измерениям и
ныне в эти уравнения вновь входит только один параметр боль-
шая полуось эллипсоида. Однако теперь это стало возможным не
из за упрощенноrо представления поверхности Земли, а потому, что
сложная поверхность Земли уже известна и речь идет только об ее
аппроксимации простой поверхностью эллипсоида вращения.
30. ОПРЕДЕЛЕНИЕ СТОКСОВЫХ
ПОСТОЯННЫХ ЗЕМЛИ
(КОЭФФИЦИЕНТОВ РАЗЛОЖЕНИЯ ПОТЕНЦИАЛА)
Коэффициенты С пК ; SnK разложения потенциала притяжения
GM OQ ( ) п п
V = 7 й; (Cпk coskL+ 'пk sin kL)рпk(ф)
(5.29)
находят или по спутниковым данным, или по наземным измерениям.
Первый способ основан на зависимости элементов орбиты иез
от особенностей rравитационноrо поля. Если бы поле Земли было
центральным и потенциал определен выражением (3.6) спутник
двиrался бы по кеплеровой орбите с неизменными элементами.
Отличие
8V::::V GM
r
(5.30)
потенциала притяжения от центральноrо вызывает возмущения
элементов орбиты с течением времени, по наблюдениям которых
можно наЙТИ коэффициенты С пК ; SnK разложения вО3Л1ущающе20
потенциала
GM GM OQ ( ) п п
8V::::V :::: L:!:.!... L(СпkсоskL+SпksiпkL)Рпk(Ф).(5.301
r r п=2 r k=O
140
в этом ряде суммирование начинается сп = 2 потому, что фо
t.:yc орбиты иез находится в центре масс Земли, а в rеоцентричес
I\ОЙ системе координаты центра масс, определяемые стоксовыми
:lОСТОЯННЫМИ первой степени, равны нулю.
Поскольку соrласно выражению (5.30) влияние членов ряда при
зозрастании п убывает обратно пропорционально ,.п+l, члены BЫ
,:оких порядков на больших высотах над Землей пренебреrаемы.
Поэтому, с одной стороны, для проrнозирования орбит высоких
,:путников достаточно оrраничиться учетом сравнительно низких
,:тепеней разложения, а с друrой стороны, по спутниковым дaH
ным возможно найти только коэффициенты разложения началь
ных степеней. В связи с этим спутниковые модели описывают об
:..:rие (rлобальные) особенности поля и MorYT быть даже ориенти
раБаны на обеспечение проrнозирования движение KOHKpeTHoro
":путника.
Точность определения коэффициентов разложения по сфери
еским функциям или zаРАюнических коэффициентов неодинакова.
Наиболее уверенно определяются четные зональные коэффициен
-:-ы низких степеней, вызывающие вековые возмущения уrловых
).leMeHToB орбиты. Так, например, изменение долrоты восходяще
O узла Q связано с коэффициентом 12 соотношением [15]
( ) 2
dQ 3 G М а ') 2
= J 2 7: (1 е ) cos 1 ,
dt 2 а 3 а
:.1е а полуось земноrо эллипсоида; а, ё, i большая полуось,
эксцентриситет и наклонение орбиты нез соответственно; g
:rрямое восхождение восходящеrо узла.
В настоящее время коэффициенты низких степеней определены
..: высокой точностью. Поэтому первичные фундаментальные по
..'Тоянные С(С А) и параметр 12 можно считать известными.
Для практическоrо удобства в ряды (5.29), (5.30) вводят норми
;х1ванные полиномы Лежандра Р п (sin Ф), p n k (Ф), определяемые по
:lравилу
ри k = О
I (sin Ф) = J 2n + lР п (sin Ф),
(5.31)
:iрИ k;t. О
Р/ (Ф) =
2(2п + 1)(п k)! pk (Ф).
(п + k)! п
141
Коэффициенты при нормированных полиномах будем обозна-
чать чертой сверху. Соrласно выражениям (5.31) имеем
[ ] 1/2
с по С nk (п + k) ! с nk
С пО J 2n + 1 ' Snk 2(2п + 1)(п k)! Snk'
(5.32)
Вывод коэффициентов разложения потенциала притяжения
по наблюдениям ИСЗ детально изложен в курсе космической [ео-
дезии.
Рассмотрим второй путь получения коэффициентов разложе
ния потенциала, основанный на измерениях силы тяжести. При ис
пользовании наземных измерений исходными величинами служат
смешанные аномалии силы тяжести, получаемые как по rравимет
рическим наблюдениям, так и выводимые методом спутниковой
альтиметрии по измерениям высот морской топоrрафической по-
верхности. Представим на поверхности Земли, принимаемой за
сферу радиуса r = а е , аномалии силы тяжести рядом сферических
функций
00 00 п
Llg= LLlgn:::: LL(апkсоskL+ЬпksiпkL) Рп k(ф),
п=о п=О k=O
(5.331
п
Llgn = L(апkсоskL+Ь/iksiпkL) Рп k(ф),
k=O
(5.34 f
[де Llgn сферическая функция степени п в разложении аномалии
силы тяжести; a пk , b пk коэффициенты разложения. Для их нахож-
дения можно составить уравнение (5.33) для каждой точки с извес-
тным значением аномалии Llg, оrраничившись выбранным число\!
удерживаемых членов, и, рассматривая эти уравнения как уравне-
ния поrрешностей, найти искомые коэффициенты. Такой метод не
требует измерений по всей поверхности Земли. Формально доста-
точно иметь столько значений исходных аномалий Llg, сколы\с
определяемых коэффициентов. Но полученный результат буде:
сильно зависеть от выбора исходных точек и не позволит пол -
чить коэффициенты, характеризующие rравитационное поле Bce}
Земли. Такой метод вывода коэффициентов применяли, коrда не
было мировой rравиметрической съемки.
Друrой принцип определения коэффициентов разложения ис-
пользует свойство ортоrональности сферических функций, на ос-
новании KOToporo получают такие выражения
142
a nk cos kL
= Jf1g k (5.35)
Р п (Ф)dw,
4п
w
b nk sin kL
f..1e w поверхность единичной сферы. Коэффициенты разложе
ЮIЯ в этом случае определяют независимо друr от друrа, но для
:lрименения формулы (5.35) необходима rравиметрическая съемка
всей поверхности Земли. При практическом определении коэффи
uиентов интеrрал вычисляют численно и используют осредненные
:-ia трапециях f1щ выбранных размеров аномалии f1g i
ank
cos kL i
1 N
= L f1 gi
4п i=;l
k
Р п (Фi )f1w i ,
(5.36)
b nk
sin kL i
.1e N число трапеций.
Установим связь коэффициентов разложений потенциала и aHO
ча.тшй силы тяжести. Исключив из потенциала 8Vнормальное поле,
:-iапишем для аномальноrо потенциала
T (;; f ( :e J ni(C:kCOSkL+Snk siпkL) Р/ (Ф),
п=2 k=O
(5.37)
: Je C':k = ё по ё 1 дпя четных зональных коэффициентов, C: k = Cnk
':'1Я всех остальных, ё: о коэффициенты разложения нормальноrо
:10тенциала.
Соrласно выражению (4.12), смешанная аномалия силы тяжес
И связана с аномальным потенциалом равенством
f1g 2(W(} uo) = дт 2Т
R ar r r=R
Используя выражение (5.37), образуем функцию
д: 2Т = G f(п l { ae ) п I(С:kсоskL+Sпksiпk L'JPпk (ф). (5.38)
r r=R R п=2 R k=n
143
Положим GM/R2= у; QeIR =1 и сопоставим ряды (5.33) и (5.381.
Приравнивая коэффициенты при сферических функциях одинаковоЙ
степени и порядка, находим искомую связь коэффициентов разложе
иия смешанных аномалий силы тяжести и аномальноrо потенциала
Qnk ( l ) Cnk
yп .
b nk Snk
(5.39
Это соотношение коэффициентов справедливо в том случае, eC.l
при вычислении аномалий силы тяжести и аномальноrо потенциа.
ла использовано одно и то же нормальное поле. Из формул (5.39'
видно, что в разложении смешанных аномалий силы тяжести от.
сутствует сферическая функция первой степени. Сферическая фун
кция нулевой степени в разложении аномалии может присутствv.
вать, если используемое при вычислении аномалий силы тяжесп
значение экваториальной постоянной ус' не соответствует приня.
тому при вычислении аномальноrо потенциала значению GM.
ДЛЯ нахождения коэффициентов разложения потенциала иноr.
да используют представление потенциалом системы материальны,"
точек
8V = ! Gm i ,
i l r i
( 5 ,40
[де m i масса точки с номером i; r i ее расстояние до точки, [.];:
определяется потенциал 8\1; j число точечных масс (рис. 5.2).
m.
I
8V
Рис. 5.2. Потенциал точечной массы
Точечные массы можно помещать как на поверхности, так 1-
внутри Земли. Разложив функцию 1/ r i в ряд по степеням отноше
ния '/r, можно получить
. п (5АI
8V = GM ! Gm i L ( ) n ( ) 1 i p / (Фj) Рп k (Ф)соsk(L L.
r 1=\ GM п=О r ае 2п + 1 k=O
144
Сопоставляя коэффициенты при одинаковых степенях в рядах
15.30) и (5.41), получим
Cnk
coskL i
j ( ) f1 k
= L Gmi !L Р п (Фi)
[=1 GM а е 2п + 1
(5.42)
Snk
sin kL i
де /j;Фj; Lj rеоцентрические координаты точечной массы.
Обычно для определеНИя коэффициентов разложения потенци
.l.la используют как наземные, так и спутниковые данные. Суще
,:твует целый ряд процедур комбинации этих данных. При этом
З0ЗМОЖНЫ два принципиально разных подхода. В одном из них
z.iаземные и спутниковые измерения сразу обрабатывают COBMeCT
:-ю. Во втором сначала получают раздельно коэффициенты разло
жения по каждому виду измерений, а затем про водят совместное
: равнивание. Поясним принцип обеих методик.
Совместная обработка результатов измерений. Запишем резуль
-:-аты измерений в виде:
.1Ля наземных данных
gi = Р] (L1C oo C п k' Snk)'
'1я спутниковых
q j = F 2 ( Э о; Х. У, z; с nk , S nk ).
Вид функции Р] определен формулой (5.33) и зависимостью (5.39)
чежду коэффициентами разложения аномалий силы тяжести и по
:- нциала, при этом L1c oo разность коэффициентов нулевой степе
И действительноrо и нормальноrо потенциалов, определяющая
::оправку к принятому при вычислении аномалий силы тяжести
шачению экваториальной постоянной t. В функции F 2 эо эле
\о{снты орбиты; Х, У, Z координаты станции наблюдения исз; qj
;-езультат измерения. Используя приближенные значения коэффи
иентов разложения, элементов орбиты и координат станций, co
::авляют уравнения поправок:
llЯ наземных измерений
V i = Fj (СО!), Cnk' SlIk) gi + Р] (8С оо , дC nk , дS пk ),
145
для спутниковых
дР 2 дР 2 дР 2 дР 2 дР 2 дР 2
У } = д 3 830 + д Х иХ + д У 8У + a z 8Z + д DCпk + д 5Snk +
2 C nk Snk
+F 2 [3Q, Х, У, Z, C nk , Snk] qj'
Неизвестные 8 С()(), 8 C nk , 8 Snk' 8 30,8 х, 8 У, 8 Z делятся на три
rруппы: 8 С оо относится только к наземным измерениям; 8 Х, 8 У.
8 z только к спутниковым; 8 C n k,8 snk И К наземным, и к спут
никовым.
Записанные уравнения решают совместно под условием
[Pv 2 ] = min,
применяя методику двухrрупповоrо уравнивания, и находят по
правки к приняты м значениям величин.
Совместное уравнивание коэффициентов разложения. В этом
способе сначала раздельно находят коэффициенты разложения по
тенциала или аномалий силы тяжести по спутниковым и по назем
ным измерениям. Затем эти коэффициенты обрабатывают COBMec
тно. На этом этапе также возможны два варианта решения. В од-
ном из них поправки к полученным раздельно на первом этапе
коэффициентам определяют как для спутниковоrо, так и для Ha
земноrо решения. Во втором спутниковые коэффициенты оставля
ют неизменными, а уравнивают только коэффициенты наземных
выводов.
Поясним принцип объединения коэффициентов разложения.
Пусть имеется система коэффициентов ank, b nk ' выведенных соrлас
но формуле (5.36) по осредненным на площадках ДФ выбранноrо
размера аномалиям силы тяжести дgj, и система коэффициентов
C nk , sпk' полученных по спутниковым данным; с использованием
формул (5.39) от коэффициентов 5nk 'Snk' разложения потенциала
переходят к «спутниковым» a , b коэффициентам разложен ия
аномалий силы тяжести. Аномалии дgi и коэффициенты a, , b: k
рассматривают как измеренные.
Введем поправки 8дgi' Бii , 8b к измеренным величинам и на-
пишем уравнение связи их исправленных значений для коэффици
('
ентов ank
N
L (дgi + 8Дg, ) P n k (Ф)соs kLДW i (a, k + 8ii k) = О.
4п i l
(5.43)
146
Аналоrичное выражение можно написать для коэффициентов
b llk . Равенство (5.43) рассматривают как уравнение поправок, Ha
писав ero в виде
N
L 8Llg J J k (Ф) cos kL1HU j + 1 :;;:: бii ,
47t' ,=1
(5.44)
r де l свободный член, равный разности коэффициентов ank' по
.1ученных по наземным и спутниковым измерениям, т .е.
N
1 1 k k ('
= LlgiPII (Ф)соs LLlOJ j a llk .
4п ,=1
(5.45)
Решая уравнения (5.44) по методу наименьших квадратов под
словием
2 2 .
[p8ii llk + p8b llk ] = mш,
находят поправки к средним значениям аномалий силы тяжести и
путниковым коэффициентам разложения.
В уравнении (5.44) коэффициенты начальных степеней, полу
ченные спутниковым методом, можно считать безошибочными.
т оrда неизвестными будут только поправки к значениям аномалий
илы тяжести, а в правой части уравнения (5.44) будут стоять слу
чайные ошибки коэффициентов.
31. rЛОБАЛЬНЫЕ МОДЕЛИ ПОТЕНЦИАЛА.
РЕЗУЛЬТАТЫ ОПРЕДЕЛЕНИЯ ФУНДАМЕНТАЛЬНЫХ
ПОСТОЯННЫХ. СОВРЕМЕННЫЕ МОДЕЛИ
НОРМАльноrо ПОЛЯ
Первое определение коэффициентов разложения аномалий силы
тяжести и потенциала выполнено в 1886 r. профессором MOCKOBC
",oro университета Ф.А.Слудским (1841 1897). По 39 значениям силы
тяжести Слудский нашел коэффициенты потенциала второй и Tpe
тьей степени. Приведенные к современным нормированным функ
uиям коэффициенты Слудскоrо даны в таблице 5.2.
Значения коэффициентов Слудскоrо заметно (на порядок) боль
ше современных. Однако эти определения позволили Слудскому
Lделать правильный вывод об общих особенностях поверхности
rеоида и утверждать, что на океанах rеоид проходит в общем выше
Э.lлипсоида, а на континентах ниже.
147
Таблица 5.:
Нормированные коэффициенты потенциала (по Слудскому)
п k C пk . 106 sпk . 106 п k c nk .106 S nk . 1 06
3 О 2,5
2 2 35,3 3,2 ] 1,9 12,8
2 8,0 23,8
3 5,3 5,6
в дальнейшем подобные вычисления выполняли неоднократно
мноrие ученые. Большое значение в методическом отношении имело
разложение, полученное в 1952 [. в Институте теоретической астро-
номии АН СССР астрономом и rравиметристом И.Д.Жонrолови
чем(1892 1981). Им были получены коэффициенты разложения CMe
шанных аномалий до 8 й степени и порядка по 26 тысячам значений
аномалий. Поверхность Земли в методе Жонrоловича разделена на
41 О равновеликих по площади трапеций, равных трапеции 100 х 1 о:
на экваторе, а коэффициенты разложения аномалий получены по
формуле, аналоrичной (5.36), как средние из произведений ocpeд
ненных на этих трапециях аномалий силы тяжести на средние для
трапеции значения нормированных rармонических функций.
В цнииrАиКе в 1955 1962 rr. под руководством Л.П.Пелли
нена (1922 1992) получены коэффициенты разложения аномалиЙ
силы тяжести до 16 й степени и порядка. Для этоrо вывода исполь-
зованы аномалии силы тяжести в трапециях 1 ОХ 10. Так как к TOM
времени такие аномалии были известны только в 250/0 одноrрадус-
ных трапеций, основная сложность, как и в выводе Жонrоловича.
была связана с получением средних значений аномалий внеизучен.
ных районах. Большая полуось эллипсоида и координаты центра
масс Земли были найдены с использованием формул (5.24) по раз
ностям астрономо rеодезических и rравиметрических аномалий
высоты и уклонений отвеса. Это позволило найти экваториаль.
ную постоянную % и коэффициент {3 нормальной формулы и опре
делить сжатие общеrо земноrо эллипсоида.
Для нахождения экваториальной постоянной Л.П.Пеллинен предло
жил такой способ. Представим rравиметрическую аномалию силы тяже
сти в виде
/1 00
дgr = а оо + Lдg/1 + Lдgп + Бg.1,
/1'=2 /1=n+!
148
[де а{)():=Ду" поправка к принятому при вычислении аномалий дg значе-
нию экваториальной постоянной 'Ус' 8g ' ошибка вычисления, дgп сфе
рическая функция степени п в разложении аномалий. Найдем среднее
шачение аномалии силы тяжести, выполняя осреднение в Kpyre радиуса
RIf. Пеллиненом установлено, что при выполнении условия
1800
l/f>
п
3.1ияние сферических функций степени выше п в значительной степени
L1Слабляется, и можно принять для осредненных аномалий
(5.46)
со
Lдgп = о.
п+l
Сумму сферических rармоник до п = п можно получить ПО спутни
io:OBbIM коэффициентам разложения
11
Lдg = Дg(
2
\ затем представить осредненные аномалии в виде
r с
дg := Д Уе + дg + V,
:- Je v суммарная ошибка rравиметрических и спутниковых аномалий.
Последнее уравнение можно записать в виде уравнения поrрешностей
(' r
ДУе + (дg дg ) = v,
а которых свободным членом является разность аномалий силы тяжести,
:1Олученных по спутниковым и rравиметрическим данным. rравиметри
:,н ские аномалии вычислены с осреднением в радиусе 200.
Определение постоянной У е позволило уточнить массу Земли.
Полученные постоянные получили название Параметры Земли
1962 2. (ПЗ 62).
Первые модели спутниковых коэффициентов разложения по
явились в середине 60 x r. ХХ в. В Смитсоновской астрофизичес
кой обсерватории (Smithsonian Astrophysical Observatory) США были
.:озданы модели SAO SE (SE Standard Earth), в университете штата
Оrайо (Ohio State University) модели OSU. Ныне существует боль
шое число моделей полученных различными учреждениями.
Отметим некоторые модели, рекомендуемые как международ
ные, а также модели, используемые в нашей стране.
149
rравитационная модель мировой системы координат 1984 2.
WGS-84 EGM ( W orld G eodetic System 1984 E arth G ravitational M odell
Министерства обороны США. Эта модель получена с использова
нием как спутниковых, так и наземных данных и содержит коэффи.
циенты разложения потенциала до 180 й степени и порядка.
Модели 2равuтациОННО20 поля общеземной системы координат
1990 2. ПЗ 90 ( Пар а)'vtетры lемли 1990) Министерства обороны РФ:
СТМ.320 система 320 точечных масс;
СТМ.60 система 60 точечных масс;
rПЗ.36 модель коэффициентов потенциала до 36 й степени
и порядка (rпз r равитационное поле Земли);
rПЗ.200 модель коэффициентов до 200 й степени и порядка.
Модели ПЗ 90 получены в результате использования спутни
ков комплекса rЕО ИК ( rеод езический И сследовательский К омп
лекс) в период 1980 1990 r. и средних аномалий силы тяжести в
трапециях 5 0 х5 0 .
Коэффициенты модели rПЗ.200 найдены методом приближе
ний. Для ее построения использована модель rПЗ.36 и коэффици.
енты, полученные по аномалиям силы тяжести в одноrрадусны:\
трапециях соrласно выражению (5.35). Затем образованы разно
сти БС пk = C nk C , БS пk =: Snk S И вычислены поправки к значе
ниям средних аномалий силы тяжести
N п
8Ilgi =УL(п I)L(БСпk coskL i +БS пk siпkLi) рп k(Фi)'
п=2 k=o
Процесс повторялся, пока не было выполнено условие 8Ilgi < 0.1
мrл. Коэффициенты потенциала до 36 й степени и порядка модели
rПЗ.200 равны коэффициентам спутниковой модели rПЗ 36.
Модель EGM 96 ( Ea rth G ravitatioпal Mo del 1996) получена COBMe
стно как развитие серии моделей OSU Национальным areHTCTBO!\t
по аэронавтике и космическим исследованиям США (NASA) н
Национальным картоrрафическим areHTCTBOM (National Imagery and
Mapping Agency NIMA) и в настоящее время по разным оценка!\t
наиболее адекватно представляет внешнее rравитационное ПО.IС'
Земли. При ее выводе использованы как спутниковые, так и назем
ные данные. Исходными данными при выводе модели EGM 96 слу
жили три вида исходной информации:
rравиметрические данные в виде результатов rpавиметричес-
ких съемок на суше и в Мировом океане, представленные ocpeДHeH
ными на трапециях 30' х 30' значениями аномалий силы тяжести;
150
альтиметрические данные в виде средних аномалий силы тя
жести для трапеций 3' х 3' и 30' х 30', вычисленных по спутнико
БЫМ альтиметрическим измерениям с иез «GEOSAT» и «ERS I»;
спутниковые орбитальные данные в виде системы коэффици
ентов чисто спутниковых моделей потенциала; полученных из aHa
.lиза возмущений орбит иез.
Из 259200 всех трапеций 30' х 30' для примерно 70 тыс. на KOH
тинентальную часть земноrо шара и 27 тыс. на акватории Миро
80ro океана средние аномалии получены по rравиметрическим Ha
блюдениям, для 157 тыс. трапеций по альтиметрическим данным.
Прuнцuп определения аномалий силы тяжести по альтuметри
ческu.м даННhL'И
Для расчетов используют формулы (рис. 5.3):
( = h u3Л1 hвыч дh,
Д g = У(о L f ( (od a
о R 2" уЗ '
[де ( высота над общим земным эллипсоидом; h uзм высота иез
над МТП; h выч вычисленная высота над общим земным эллипсои
дом, дh сумма поправок в измерения.
иез
мтп
Рис. 5.3. П ринцип определения аномалий силы тяжести
с помощью спутниковой альтиметрии
Модель содержит коэффициенты до 360 й степени и порядка.
Модель r А 0-98.
В цнииr АиКе получена серия моделей r АО ( r равиметрия,
Ал ьтиметрия, О рбитальные данные). Эти модели предназначены
JJlЯ точноrо определения rравитационных характеристик на зем
ной поверхности.
151
Исходными для модели r AO 98 были те же данные, что и Д-1Я
модели EOM 96, частично исправленные для некоторых районов
акватории Мировоrо океана; на территорию СССР использованы
аномалии из каталоrа цнииr АиКа.
Коэффициенты аномалий силы тяжести получены с использо-
ванием методики, описываемой формулами (5.43) (5.45). Поправ-
ки введены как в исходные средние аномалии силы тяжести, так и в
коэффициенты, полученные спутниковым методом. Модель содеrr
жит коэффициенты до 360 й степени и порядка.
Сложность rравитационноrо поля Земли, неизбежные методи-
ческие и теоретические упрощения при выводе основных соотно-
шений, неполнота rравиметрической изученности Земли приводят
к неизбежным ошибкам получаемых моделей и вызывают расхож-
дения коэффициентов даже начальных степеней. В таблице 5.3 при-
ведены коэффициенты до 4 й степени и порядка лучших современ-
ных моделей WGS 84 и ECM 96. Уже для п = 4 расхождения коэффи
циентов достиrают 1 %.
Сравнение различных моделей можно наrлядно выполнить, ис-
пользуя степенные дисперсии потенциала или аномалий силы тя-
жести. Степенной дисперсией называют среднее квадратическое
значение сферической функции степени п в разложении какой либо
функции. Например, для аномалии силы тяжести степенная дис-
персия имеет вид
1 f 2
п п = [дgп] dw,
4п
ro
[де w поверхность единичной сферы.
Подставив в это выражение сферическую функцию (5.34) и вы-
полнив интеrрирование, для степенной дисперсии получаем
п
D n = L(a;k + Б}k)'
k=O
Т.е. степенная дисперсия равна сумме квадратов нормированных
коэффициентов разложения. Степенные дисперсии аномалий силы
тяжести указанных выше четырех моделей приведены в таблице 5.4.
В последней строке этой таблицы даны средние квадратические
значения аномалий силы тяжести (в миллиrалах), вычисленные с
учетом членов до п=16. Заметим, что модель TAO 98 заметно отли
чается от остальных, поскольку она предназначена для вычисления
элементов rравитационноrо поля на физической поверхности Зем-
ли и при ее выводе вводились поправки в полученные спутнико
вым методом значения коэффициентов.
152
Таблица 5.3
Коэффициенты разложения потенциала моделей WGS 84 и EGM 96
п k Cnk .106 Snk .; 06
WGS 84 EGM 96 WGS 84 EGM 96
, О ----484,16685 ----484,165371 736
1 ,OOO 186 988 0,00 1 195 280
2 2,439 579 6 2,439143524 1,3979548 1,4OO 166836
3 О 0,95706390 0,957254174
1 2,031 8729 2,029 988 822 0,250857 59 0,248 513 159
2 0,906661 13 0,904 627769 ,621 024 28 ,619 025 944
3 0,717 703 52 0,721072657 1,4152388 1,414356270
О 0,536995 87 0,539873 864
1 ,535 48044 ,536321617 4),47420394 ,4 73 443 266
2 0,347975 19 0,350694 106 0,65579158 0,662671 572
3 0,99] 72321 0,990 771 804 ,199 12491 ,2OO 928 369
4 , 186 861 24 , 188 560 803 0,309531 14 0,308 853 169
Таблица 5.4
Степенные дисперсии аномалии силы тяжести.
Использована нормальная форму ла rpC 80
п WGS 84 П3 90 ECM 96 r А O 98
2 7,6 7,59 7,59 3,34
3 33,9 33,37 33,87 10,77
4 19,2 19,51 19,78 10,85
5 21,0 20,99 20,99 16,08
6 19,4 19,30 19,67 20,00
7 19,3 19,57 19,59 14,99
8 10,9 10,94 11,21 8,32
9 11,5 11,38 11,21 8,90
10 9,7 9,13 9,82 12,74
11 6,4 6,74 6,60 7,04
12 2,6 2,89 2,69 2,95
13 7,4 7,25 7,95 11,36
14 3,2 3,45 3,53 4,59
]5 3,4 3,50 3,67 3,36
16 3,9 4,08 4,05 4,17
r.D I! 179,4 179,69 182,22 130,56
I LDп 13,4 13,4 13,5 ] 1,4
153
Соrласно выражению (5.30), при выводе коэффициентов раз-
ложения возмущающеrо потенциала понятие ypoBeHHoro эллип
соида и ero поля притяжения не используются; в (5.30) входит
только одна постоянная rеоцентрическая rравитационная посто
янная СМ, а произвольная постоянная ас введена лишь для перехо
да к безразмерным коэффициентам разложения. Однако для разло
жения аномальноrо потенциала, определяемоrо как разность по
тенциалов силы тяжести Земли и ypoBeHHoro эллипсоида.
необходимо задать параметры Нормальной Земли, Т.е. фундамен
тальные rеодезические постоянные. Некоторые результаты опре-
деления этих постоянных приведены в таблице 5.5. В первом стол
бце этой таблице приведены параметры, полученные Л.П. Пелине
нам в 1962r.
Таблица 5.5
одели нормальноrо поля
WGS 84 Отчет MAr
Параметр ПЗ 62 (rpC 80) ПЗ 90 за 1991
1995 п.
с, км/с 299792 458 299 792 458 299792458
т. 10' 'C I 7 292 115 7292115 7 292 115
GM, кмЗс 2 398 600,4 398 600,5 398 600,44 398 600,4418
6 1082,63 1082,6257 1082,6359*
J 2 . 10
С 2О .109 ----484 166,85 ----484164,953 ----484 165,38*
W 2 2 62 636 860,8497 62636861,074 62 636 85"6,5
о' м С
а, м 6378 137 6378 137 6378 136 6378 136,5
Уе, мrл 978032,4 978 032,6772 978032,8 978032,78
1: а 1 :298,25 298,257 222 298,25784 298,257
* Исключено приливное влияние.
Значение rеоцентрической постоянной
см = (398 600 441,8 :t 0,8) 106 M3c 2,
выведенное к 1992 r., используют в настоящее время как исходныЙ
параметр во всех моделях нормальной Земли. Для среднеrо значе
ния потенциала на поверхности моря коллективом специалистов
154
Чешской Республики и США I по результатам альтиметрии спут
ника т опекс/Посейдон получено
W() = (62 636 856,0 :t 0,5) M2c 2.
Первичным постоянным и
J 2 = (1082 635,9 :t 0,1)10 9 (без постоянноrо прилива)
соответствуют такие значения производных парамеТРОБ при уrло
вой скорости вращения (() = 7 292 115 . 10 I]c ]:
а = (6 378 136,696 1: 0,050) м,
GM
Ro = = (6363672,58:!: 0,05) м.
)
Для наrлядноrо представления моделей rравитационноrо поля
используют rрафическое изображение смещения уровенной повер
хности, вызванное аномальным потенциалом. Подставим в разло
жение аномальноrо потенциала радиус вектор r поверхности выб
paHHoro эллипсоида и примем и()= W(J' тоrда для смещения 1; ypo
венной поверхности получим
N ( ) n n
g = т = GM L а(' L(C: k coskL+s nk siпkL) рп k(ф),
у ry п=2 r k=O
(5.47)
[де y среднее значение силы тяжести на поверхности эллипсоида.
Величины 1; приближенно оценивают высоты rеоида над эллипсо
IЩОМ.
На рис. 5.4. приведена карта высот t; над эллипсоидом WGS 84,
параметры KOToporo приведены в таблице 3.1. В системе WGS 84
номинально использован эллипсоид rpC 80. Однако после норми
рования зональноrо коэффициента J 2 коэффициент С 20 получен с
окруrлением, вследствие этоrо эллипсоид WGS 84 незначительно
отличается от эллипсоида rpC 80.
Карта построена с удержанием rармоник до п = k = 18. Оrрани
чение ряда (5.47) соответствует осреднению высот 1;, причем раз
1 Бурша М., Ватрт В., Коуба Я. и др. Определение общеrо земноrо эл
.1ипсоида при условии В.В.Бровара (Доклад на научном семинаре, посвящен
ном 80wлетию ЛЛ.Пеллинена). rеодезия и картоrрафия. 2002, NQ 11, С. fr9.
155
! ...........'
1 1 1 j
1\ I '/ I
1 '1 ............ I
I I 1\ ! 11 1 I I
I \ 11 У 1"'1--. I
\ '-'1" I . \ I V, '/ ........, I \
1 , I ""- 1 1\ \ I i М I I "!
\ ' . 1 'А'""'\ v I 11 I I 1'.1
1 'J.I l' I f'. 1 . '.А I ! \ , А i 11 I А 1 I I \1
'11 / I h ,/1 1/ 11111 I '1 I 1
'\ ,"1 '\.1("1"" 0.1111' '! r I 1\ I 1\
1 ,'-, l' "" .J , 1'" I 1 I 1 \!
II1 1'-1 ''J 'A ,I I IIII\.
I , I I '\ , ''.!. 1 1, 1 '1 1 I I
f! 1.11" t I I / i ,.,:/: V I
1, ,..,. I I f /1 1'\01 I 1 I1 ,
i /Л, L'I.. ["lo( 1 1/ . N 11'1"1 " 1 I I ',!'
1 .:'\ ' .'- I 1 ' -,... 11 1 I 1/1 /,
1 .....:.. ..I .........f I i 11 (11 I /;
1 1 l' 1'. 1 ," \ 1 I I 1 ., t ''-! ; 1 1" 1
i 1 I 1 1 I..---..L I 1 3.! / 1 ":\'. 1 \ I 1 \ I \ 1 1'\1, """" 1 11
I i f I I I I I , " I ' 11 I I 1 I \
1 I . I .. . I 'r!l.. 1\ 1 1 ,"""'-1 1 А I I 1, I V
\ , I I tJ I I ! I I! ! I } I N I I I {f i 1!
1; 1,II..k 1 I , I ,........... 11,'1, ' : 1 \1 I l' 1/ '
I I 1 I !\ 111, Irl 1,.;...' I 1 1 j \ 1 ,.......... .... ,.
'1 1 \ 1 ,,", \ 1 1 1 11" '! 11 1/1 , , 1\", 1 I : \
I I I \ \ I l:i (j V * I ! 1 j I !."".. j I '" i 1 I
., 1 1: I '............. j.. -/ /,,А' ____, , 1'\.' ',1 1 '-, ,. 1;' ,
I j 1........ I ,,... ' /A "ЛХ I 1,...... ,... 1'j I 1 I 'j,! I \1 1,
I ! ""]-1 /" ." I I '-' I l i J I : I I! i i
11 11'1 .i'.""",- I<IХ.i"j' 1,
, 1 "1 -А L;7I:j l/ I I 1"'1- , ", ,- "..! ,/ 1I
I 1 и. 1 I .. /1" 1 '1--. I ,...
I JJ 11\ / I111 I I'>"<i. I"""'N " "
\"',А" . .. \ I 1 ..,.. r 1 'о '1 '." 1, '1
' 8 "Y.1U, )а: .' ..... , ..... I I 1: {": \/ 1 / I
: 'J. "т i JI 'I(J "'" 1 ,11: '1 1 : I 1 r, 1 ,.
I 1:' IJ\",I; 1/ .'""'"' { ......, /1 '! i 1/ 1 1 1/ 1 : ! V 1
I 1 1.., ' /\d',' I 1"'...... 1 V I I I .,...., I 1 А 1""""""'" t /' ' '-
1 :1, , У I I ,....) 1 I 1 I I 1 I I 1 1 1 iI V '1 У I
11 .;..L У I )1 I.J"':. , 1 ,,, 1 I 1 I 1 I 1 1, 1 1 ')--"" I
11111 1 ').1 У '1/1 .IiIfr ,", ", I \ I 1 ,.( I 1 1 \ ! 1 '/ I 1
f.II, , I А ,(,/. j I \1 f 1 I f 11 1--..;-' 1 :1 /1 1 I 1
1 ...... I 1 1, '! 1 'А 1 I I 1 I : , ..r" 7'--... 1
,....с., I1 \ r:1' I I I 1 1 I I I 1 I 1 l' 1
'I0Il.... 1 , . ./ / I I 1 I I 1 '1 11 I 1 \ I
' \ \ 1 \ У VA...I. 1 СI 1 А" 1 I I '" 1 \'
'\ '\. I о I с I 1 I 1 I /1 со 11 I \
" А 1 I/'. 1 \ 1 1 А '1 I 1 "1' \1
...., 1/ r. ::..L1.....Ll'. ' o. 1 , I L.i......L.....'
\,Т": V I 1 ,Т 1 i I 11 11 11 I I tL. I
Ii 111 j .1 1" 11 11 " V f 14 \ 11
! 1; i I \ 11 '1 А l' l' ", '\
11 I 1 I I Y'I/f" \l1! I! 1\ 11 I 1, l'
/1 11 111,1/1/111. 1; \"\\1\ \1, 1,1 1 ., '1
I I I
1I
11
11
11
111'.1\/, (1 1\1,1'
! I I ; /.. 'У I f:::' 11
, ,1 '-"'-1;" I ;>'J,
, " у
11 1"'1/ I
.. I /1/ ...,
И ,..,.
11 1
I r
I ,
, I '11
. I
NI
I
I
н
1 Ii
11'
..У!
I ,
1 1
"
\,
'- 1
............ ,
'.':' '" ,
.1--.. ..,....
, '.....
l'
\ 1< '1
\ \ IJ \1
1\
\ \ 1 '..
n
I
>-"'"'
i
1
\,
'"
I1
1 ,
A\
#, ,"
'"
V
1........
',", I
, I
у
I 1.....
01
....
......,....
"'"
,(
/1
r/
.........
11
,
1,
11
'\
,......
,
1
I
I
r
;",.,
&,
I'J ...
/ ,.
\.
1
, ,
1,
I
o.n О
00 00
о
'-D
о
о
N
о
о
N
I
о
I
156
11 ,1
1 I I 1
, '\;.; [11 I
.,..,
\
11
11
1
'1
, , !
1 1
1 , 1
1 I I
1
V
' !
1 I
I I
""" I
I "1
1 ...
...... ..... 1\
'" I '\. 1\ \
1 ,',\1 \
1, 11 \ I ;
,\ l' , \ I 1
I I \ 1 j i
!\ \: \
\; \' \ j
,i" I I I
, . 1, I 1 ,
'i '" \
/1 I I I
l' I I ,
J I I 1 :
. 11 t i !
I1 1"
1 1
,........,
I I
I ' 1/1
" I
'Ч I I
1 I
" :>; I
I I !
, .........
f 1
1.' :
I
/, 11
. 1 1
" , \ I
J' '"
'" i
'" ,
I I
"
о
'-D
,
о
00
I
'1
1,
,1
!
/
,
I ,
. ,
II
1
10
'
10
'о
, ......
I
i
, I
I
I '
i i
10
I
li
I
1
1: О
'-D
" ,
11 О
I
100
о
G\
I
о
00
ro
@
:::
::r
:r:
v
Е--<
О
i:::
О
О
:I::
..Q
@
о..
О
:r:
:ас
Е--<
:I:: v
Il) ::
:::
::r (j
::: .
.-&u
.-&l.
("!')
ОХ
;.::
::Е 11
:r: :..:
(\)
::r 11
9 :::
С
(.)
:s: ::
..q- ::
00 ...
I
v') с
.
О
t::( (j
::: f-o
О :-
>.
::: .
I"":S
("!') 11
t::( :::
ro
:r: g
ro ""'
О
v
::Е
Е--<
О
(.)
::Е
о
\о
о
о
N
о
о
о
00
о
'-D
о
о
N
о
о
N
I
о
I
о
'-D
I
о
N
......
I
t()
=
\lepbI Д\V площади осреднения связаны со степенью N учитываемых
ч.rrенов соотношением Пеллинена (5.46).
Следовательно, карта на рис. 5.4 соответствует высотам reo
нда, осредненным на площадках 100 х 100, и отражает общие rло
бальные особенности rеоида. Такой rеоид принято называть пла
неmарным.
На карте rеоида можно выделить три простирающиеся в Me
ридиональном направлении области. Большую часть Азии, BOC
точную часть Индийскоrо океана и прилеrающую часть AHTapK
тиды занимает область отрицательных высот. В этой области к
юrу от Индостана расположено максимальное понижение rеоида,
превышающее 100 м. Вторая область отрицательных высот зани
\шет Северную Америку, Мексиканский залив, восточную часть
Тихоrо океана. В этой области в море Росса у побережья AHTapK
тиды расположен второй по величине минимум высоты, превы
шающий 60 м. Европа, большая часть Африки, Индийский океан
к юrу от Африки и Атлантический океан находятся в области
положительных высот. Максимальные высоты расположены в
Северной Атлантике (свыше 60 м) и Индийском океане (свыше
-1.0 м). Положительным высотам rеоида соответствует также цeHT
ральная часть Тихоrо океана, [де в районе rавайскоrо архипе
.lara расположено повышение свыше 50 м. Практически на всей
поверхности Антарктиды высоты rеоида отрицательны. В общем
поверхность rеоида не повторяет форму физической поверхности
Земли и сформирована распределением масс в rлубоких слоях
Земли.
Средняя квадратическая высота rеоида, осредненная на площад
ке 1 ох 1 О, получаемая суммированием в выражении (5.47) до 180 й
.:тепени и порядка, равна 30,6 м.
32. rЛОБАЛЬНЫЕ МОДЕЛИ РЕЛЬЕФА
Для обобщенноrо описания поверхности Земли используют
каталоrи значений высот или разложение рельефа по сферическим
функциям
N п
h:::: L L ( a n k cos kL + п k sin kL) P/ (Ф),
(5.48)
l1""fI r""()
[де a l1k ; nk коэффициенты разложения по нормированным фун
кциям.
157
Разложение высот рельефа до 1 6 й степени и порядка первым выпол
нил в 1922 [. австрийский rеодезист А. Прей. 1 Степенные дисперсии Dп,h
разложения Прея приведены в таблице 5.6.
В rеодезических приложениях часто используют разложение амери-
KaHCKoro rеофизика Каула.
Таблица 5.6
rлобальные модели рельефа. Степенные дисперсии D n h'
Дисперсия 404 275 м 2 '
Прей Каула GLOBE 98, м 2
1922 [., 1967 r., Морская топо
') м 2
M rрафическая
п 2
поверхность, см
Точечные 50 х 50 7,5' х 7,5' l О х l О Рапп,1998
значения
О 50 715 48400 53670 53 685
1 16144 18 857 1 О 591 10588 654,34
2 13 624 17 006 19 506 19516 1624,09
3 23 809 30960 37556 37569 289,00
4 21796 39 61 3 33719 33 720 29,27
5 23 198 34 848 38 952 38 952 44,89
6 19 821 24 340 37 145 37 136 275,89
7 9336 17 357 19214 19 202 158,76
8 9325 14318 1 3 830 13818 196,56
9 1 О 309 20 123 20097 104,65
10 7134 13788 13 759 79,21
11 7048 7989 7972 14,98
12 5325 9303 9271 13,47
13 3362 8319 8280 6,92
14 3915 3782 3766 6,76
15 3721 4767 4739 6,92
16 3844 8296 8249 10,57
8
IDn 137053 197399 21 0512 210501 3272,797
1
16
IDn 181711 286881 286634 3516,262
1
I Prey. А. Darstellung der Hohen und Tiefenverhaltnisse der Erde durch eine
Entwiclung nach Kugelfuntionen bis zur 16. Ordnung. «Abhaтiluпgeп der Gesel/
schaft der Wisseпschafteп», У.l 1, No; 1, 1922, 1 29, Gettingen,
158
Продолжение табл. 5.6
Прей Каула GLOBE 98, м 2
1922 [., 1967 [., Морская топо
м 2 м 2 rрафическая
п поверхность, см 2
Точечные 50 х 50 7,5'х7,5' 10x 10 Рапп,1998
значения
30
IDn 335 853 335 123 3563,556
1
JD: 225 м 220 м 232 м 232 м
JF
Dn 624 м 623м 0,60 М
Наиболее полная современная rлобальная цифровая модель
высот земноrо рельефа The Global Land One kilometer Base Elevation
I GLOBE 98) создана международной rруппой специалистов в
1990 1998 rr. Эта модель содержит средние значения высот на paB
новеликих по rеоrрафической сетке трапециях размером 30" х 30",
что соответствует 1 х 1 км на экваторе.
В таблице 5.6 приведены степенные дисперсии высот модели
GLOBE 98 в двух вариантах разложения: при осреднении высот на
трапециях 7,5' х 7,5' и 1 ОХ 10. Разложение выполнено до 360 й сте-
пени и порядка.
Средняя высота поверхности Земли над уровнем моря, равная
J Do' составляет для модели GLOBE 98 232 м. Среднее квадратичес
кое значение высоты суши над уровнем моря при учете rармоник до
11 = 30 составляет 623 м, при учете rармоник до п = 360 845 м.
В разложении Прея и модели GLOBE 98 высоты морской TO
поrрафической поверхности равны нулю. Применение метода спут
никовой альтиметрии позволяет найти высоты МТП над эллипсо
ндом, а после вычитания из них высот rеоида, описываемых Bыpa
жением (5.47), получить высоты морской топоrрафической
поверхности над rеоидом. Степенные дисперсии высот морской то-
поrрафической поверхности также приведены в таблице 5.6. Cpeд
няя квадратическая высота морской топоrрафической поверхнос-
ти над rеоидом равна 0,60 м.
159
На рис. 5.5 приведены высоты морской топоrрафической по
верхности над rеоидом модели EOM 96. Высоты меняются в преде-
лах от 2 до + 1 м, наклоны МТП объясняют rлобальные океани
ческие течения. Так, r ольфстриму соответствует понижение высот
морской поверхности от +0,3 м у восточноrо побережья ЦeHT
ральной Америки до ,5 м в Северной Атлантике, а течению Ку-
росио понижение высоты вдоль побережья Японии примерно на
1 м. Значительно понижается поверхность океана к побережью
Анта рктиды.
90
75
60
45
30
15
О
-15
зо
А5
60
-75
90
о 30 60 90 120 150 180 210 240 270 300 330 О
Рис. 5.5. Морская топоrрафическая поверхность относительно rеоида
EOM 96. rоризонтали проведены через 0,1 м.
33. ОБЩЕЗЕМНЫЕ СИСТЕМЫ КООРДИНАТ
Общеземной системой (см. rлаву 2) называют систему, начало
которой находится в центре масс Земли, а ОДна из осей совмещена
с ее осью вращения. Из за изменения оси вращения в теле Земли
за ось Z прямоуrольной rеоцентрической системы координат вы-
бирают направление на Международное условное начало (МУН).
ось Х этой системы лежит в пересечении плоскости экватора в сис-
теме МУН и rринвичскоrо меридиана, ось У дополняет систему до
правой.
160
Понятие земной системы координат имеет двойной смысл:
теоретически это система, центр которой точно совмещен с выб
раиной точкой, а одна из осей также точно совмещена с выбраи
ным направлением. Практически любая система координат pea
.1изована координатами опорных точек на поверхности Земли,
которые получены с неизбежными ошибками]. В связи с этим воз
ожно существование нескольких реализаций одной и той же иде
альной системы, Т.е. нескольких общеземных систем координат.
В настоящее время как международную общеземную исполь
зуют систему WGS 84. В этой системе принято положение по
.lюса на эпоху 1900 1905 rr., исправленное в 1984 r. МБВ (Между
народное бюро времени) соrласно новым формулам для HYTa
ции, принятым Международным астрономическим союзом (МАС)
в 1979 r. Такое положение МУН называют Условны.м земным полю
сом (CTP Coпveпtioпal Terrestrial Pole). Оси системы WGS 84 пока
заны на рис. 5.6
В Российской Федерации используется, наряду с WGS 84 , [eo
центрическая система ПЗ 90.
МУН [СТР (1984,0) МБВ]
Z
WGS Х4
х WGS 84
w
центр масс
ЗеJwли
нулевой
Меридиаll
МБВ(1984,0)
у WGS 84
Рис. 5.6. Общеземная система координат WGS 84
I В анrлоязычной литературе первую (идеальную) систему называют Tep
\шном Systeт, вторую (практическую) Frame.
161
Системы WGS 84 и ПЗ 90 получены динамическим методом
космической rеодезии по разнородной информации с OДHOBpeMeH
ным выводом моделей rравитационноrо поля Земли. При выводе
этих систем использованы постоянные:
с= 299792458 Mc l,
GM = 398 600,44 мЗс 2,
(J) = 7292115 . 10 llC I.
Как уже упоминалось, в системе WGS 84 использован эллипсо
ид [pC 80. Параметры эллипсоида, определенные при выводе
ПЗ 90, приведены в таблице 5.7; ДЛЯ сравнения здесь же даны пара.
метры эллипсоида WGS 84.
Таблица 5.
Оараметры эллипсоида в системе 03-90 и их сравнение с WGS 84
Параметр ПЗ 90 WGS 84
СМ, м c 2 398600,44 . 109 398 600,5 . 109
а, м 6378136 6 378 137
l:a 298,257 839303 298,257223563
и 2 2 62636861 ,074 62б3686О,8497
О' м с
J 2 . 108 108262,57 108263
с 20 .10 6 84,164953 84, 16685
Системы П3-90 и WGS 84 являются базовыми для r ЛОНАСС
( rло бальная На вU2ацuонная Сп утниковая С истема) и GPS ( G lobQ.
P ositioпs Systeт) соответственно.
Система WGS 84 реализована пятью постоянно действующи
ми станциями GPS, достаточно равномерно распределенными П(l
долrоте. Кроме Toro в 1991 r. основана международная сеть GPS
дЛЯ rеодинамики Iпterпatioпal GPS Service for Geodyпaтics (IGS,I.
Несколько пунктов этой сети расположены на территории России
На территории СССР система WGS 84 закреплена 162 пунктаМЕ
ДО1Vlеровской 2еодезической сети (дrс) , созданной в 198 1993 п
с использованием ИСЗ доплеровской спутниковой системы ТRANSП
т очность воспроизведения системы WGS 84 сетью дrс по каждOl
из осей 1 1,5 м.
С 1989 r. проводятся наблюдения на пунктах rеоцентрическоР.
координатной системы /TRS (/пterпatioпal Terrestrial Refereпce System
162
Международной службы вращения Земли IERS (IпterпatioпaZ Earth
Rotatioп Service). На пунктах ITRS IERS выполняют наблюдения
спутников системы GPS, а также используют методы РСДБ, лазер
ной локации ИСЗ, ДОРИС. Точность определения пунктов этой
сети оценивают поrрешностью менее 10 см. Так как координаты
пунктов сети от одной эпохи к друrой изменяются вследствие reo
.::l,Инамических эффектов и ошибок измерений, каталоrи периоди
чески обновляют с указанием rода наблюдений, начиная с катало
ra ITRF 89 (ITRF lпteтatioпaZ TerrestriaZ Refereпce Fraтe).
Система ПЗ 90 реализована координатами следящих станций
системы rЛОНАСС и пунктами Космической 2еодезической сети
(KFC), созданной в 1985 r. топоrрафической службой Вооружен
ных сил СССР. На территории Российской Федерации находятся
около 30 пунктов этой сети при средних расстояниях между ними
1 3 Tы.кмM и ошибкой взаимноrо положения 20 см. Таким образом,
существуют два варианта ПЗ 90 ПЗ 90 (KrC) и ПЗ 90 (rЛОНАСС).
Точность реализации системы ПЗ 90 (средняя квадратическая ошиб
ка отнесения к центру масс) около 2 м.
В таблице 5.8 указаны реализации общеземных систем координат.
Таблица 5.8
Реализации общеземных систем координат WGS-84 и 03-90
Система WGS 84 ПЗ 90
Сеть ITRS ДОРИС GPS IGS ETRS дrс rло KrC
IERS НАСС
Реали IТRF 89 и т.Д. EUREF дrС 93 флrс KrC 85
зация
Примечания. В таблице приняты сокращения:
ETRS Europeaп Terrestrial Refereпce Systeт Европейская земная
референцная система;
EUREF Europeaп Refereпce Fraтe Европейская референцная сеть;
IGS /пternatioпal GPS Geodyпaтics Service (Международная служба
изучения rеодинамики с помощью GPS);
ITRF IERS (земная rеодезическая сеть МСВЗ);
ДОРИС Доплеровская орбитоrрафическая радиопозиционная ин
теrрированная спутниковая система;
флrс фундаментальная астрономо rеодезическая сеть.
в настоящее время точность реализации общеземной системы
координат Международной службы вращения Земли составляет
несколько сантиметров.
163
Переход от системы WGS 84 к ПЗ 90 выполняют по формула!оt
(2.4), используя определенные по измерениям параметры перехо.
да. По состоянию на 2001 [. установлено:
хо = 1,1 м; У О = 0,3 м; Zo = 0,9 м; €x = €у:=б о; €z = ,82 . 10 радиан;
m = ,l2 . 1 О ,
[де хо' у О, ZO координаты центра системы ПЗ 90 в системе WGS
84; €z уrол поворота системы ПЗ 90 BOKpyr оси Z.
Соrласно этим данным центр системы WGS 84 смещен на
1,45 м относительно центра системы ПЗ 90, а разворот BOKpyr ОСII
Z составляет 0,17" (рис. 5.7).
Zпио
А
У ПНО
e_
:-...Уо-....;:- Плоскость экватора ПЗ 90
: .
.'
, .'
ХО )..,
..... (zo
___ ___ _ _ . .. 0.0 . . . " . " ""'."'"
: e_
у WGS-84
Плоскость экватора WGS 84
Рис. 5.7. Взаимное положение систем WGS 84 и ПЗ 90
Так как системы WGS 84 и ПЗ 90 близки между собой, можно
считать
тх о = тУи = mzo = о; €ZXo = EzYo = о,
(5.49)
тоrда формулы (2.4), (2.5) примут вид
X WGS Х пз 1 € О Х пз ХО
Y WGS У пз =т €;: 1 О У пз У о (5.50)
ZWGS ZПЗ О О 1 Zпз Zo
164
X WGS Х П3 = Xo + тХ пз + ЕzУ пз ,
Y WGS у пз = Yo + тУ пз Е z Х пз ,
(5.51 )
ZWGS Z пз ::;;; Zo + mZ пзз.
Подставив значения параметров перехода, получаем формулы
.::{ля перехода от П3-90 к WGS 84:
l X J { 1 0,82.10 O ]l X J [ 11 ]
У =(1 0,12.10 0,82.1crб 1 О У 0,3 .
Z WG 84 О О 1 Z Л3-90 0,9 (5.52)
Для обратноrо перехода от WGS 84 к П3 90 следует использо
вать транспонированную матрицу:
r J =(1+0,l2,1(f> { 0,8 ,]0--" 0,82/0--" ] r J + [ \ ] . (5.53)
l Z П 90 О О 1 l Z WG 84 0,9
в этих формулах поправки в координаты выражены в метрах,
уrлы в радианах.
Изменение rеодезических координат в системах WGS-84 и
ПЗ 90 следует оценивать по формулам (2.18), используя получен
ные по (5.50) или (5.51) разности прямоуrольных координат. В ре-
зультате выражение (2.18) примет вид
Н WGS Н П3 = т[ (Х Пl cos L + У Л3 sin L) cos В + Z пз sin В]
(х о cos L + уо sin L)cosB Zo sinB
1 2 2 2 . 2 ( 5 .54 )
(aWGS аПЗ)+2[апз(еWGS епз)+епз(аWGS аЛl)]SШ В,
(М + H)(B WGS В лз ) = т[(X лз cosL + Улз sinL)sinB ZПЗ cosB] +
+(xocosL+ yosinL)sinB zocosB+
1 2 2 2 .
+ [алз(еWGS елз)+епз(аWGS апз)]sш2В,
2
(N + fficos B(L WGS L пз ) = хо sinL Уо cosL еiХпз cosL + УпзsiпL).
165
Подставив в эти формулы численные значения парамеТР08 пе-.
рехода, получим
H WGS Н пз = ,12 . 10 [(Хпз cosL + У пз sinL)cos В + Zпз sinB]
(1,1 cosL + 0,3sinL)cosB 0,9sinВ 1 + O,047sin 2 B;
(М + ffl(B wGS В пз )= 0,12 . 10 [(Хпз cosL + У пз sinL)sin В
Zпз cosB] + (1,1 cosL + 0,3sinL)sinB 0,9cosB + 0,047sin2B
(N + fflcosB(L WGS L пз )= (5.5
=1,lsinL O,3cosL + 0,82 . 10 Z<Хпз cosL + У пз sinL).
Подсчет по этим формулам дает изменения координат для ПУ.l
КОВО (В = 59,7720; L = 30,3280; Н = 71 м):
H WGS Н пз = 3,060 м; (М + Н)(В WGS В пз ) =
=0,542 м; (N + Н)соsВ(L wGs Lпз) = 2,936 м.
rлава 6
РЕДУЦИРОВАНИЕ РЕЗУЛЬТАТОВ
rЕОДЕЗИЧЕСКИХ ИЗМЕРЕНИЙ
rеодезические измерения выполняют в различных координат
ыx системах. Так, при уrловых измерениях вертикальную ось ин
:rpYMeHTa совмещают с отвесной линией в пункте наблюдений, а
;начит, выполняют измерения в rоризонтной астрономической
.,lcтeMe координат. Измеренный базис в трианrуляции это про
кция образованной ero пролетами ломаной линии на уровенную
OBepXHOCTЬ; rеометрическое нивелирование определяет расстоя
ие между близкими уровенными поверхностями; во всех этих
..:.:ryчаях, а также при астрономических определениях координат и
.iJимута используют натуральную систему координат. TaxeOMeT
::,ическую съемку выполняют в топоцентрической полярной acтpo
:iомической системе. Спутниковые определения дают прямоуrоль
:lbIe rеоцентрические координаты пунктов или их разности. HaKO
:lец, из дальномерных измерений получают расстояние между
:-очками в пространстве, инвариантное к системам координат. Со.
З\fестная обработка результатов измерений, выполненных в раз.
:lbIX системах, вызывает необходимость их редуцирования в единую
,:нстему координат.
Сложность формы уровенных поверхностей не позволяет по
:троить простую методику обработки измерений в натуральной
,,:-истеме координат и затрудняет возможность уравнительных BЫ
1:ислений в этой системе, поскольку условия, накладываемые на
результаты измерений, почти всеrда неизвестны. Поэтому rеодези
1:еские измерения обычно обрабатывают в rеодезических (прямоу
;ольной Х, У, Z или криволинейной В, L, н) системах. Классическим
J.строномо rеодезическим методом плановые координаты В, L и
высоту Н определяют раздельно. Это вызвано как невозможнос
rью равноточноrо определения плановых координат и высот из за
В.1ИЯНИЯ вертикальной рефракции, так и стремлением упростить
\штематическую обработку, уменьшая число определяемых вели
чин с трех (В, L, н) до двух (В, L). При этом точки на поверхности
167
эллипсоида соединяют rеодезическими линиями. В связи с ЭТИМ воз
никает задача нахождения на эллипсоиде длин rеодезических ЛИА
ний и уrлов между ними по соответствующим величинам, измерен
ным на поверхности Земли. Эту задачу называют редукционной за
дачей zеодезии.
Развитие методов rеодезических измерений изменило содержа
ние редукционной задачи. Проrресс дальномерных измерений при
вел к тому, что уrловые измерения утратили свою доминирующую
роль, а основным видом измерений в rеодезии стали линейные. Эти
измерения не зависят от поля силы тяжести, но для их при ведения
к эллипсоиду нужно знать координаты В, L, Н. rеодезические кри
волинейные координаты В, L, Н можно получить спутниковым
методом, используя преобразования (2.8), (2.9) и (2.13) (2.15).
Плановые координаты В, L пространственных точек и их проек
ций на эллипсоид по нормали к ero поверхности одинаковы, по
этому при GРS определениях задача редуцирования на эллипсоИ,,1
не возникает. По иному обстоит дело с высотами. rеодезические
высоты служат только как третья координата, дополняющая сис-
тему В, L до пространственной. Однако для решения задач, связан
ных с работой в поле силы тяжести, эти высоты неприrодны. ПО А
этому одной из rлавных задач редуцирования является переход от
спутниковых rеодезических высот к высотам в натуральной систе-
ме координат. Эта задача будет рассмотрена в rлаве 7.
Необходимость решения редукционной задачи возникает и в
тех случаях, коrда выполняют сравнение и совместную обработку
классических линейно уrловых и спутниковых измерений. Поэто
му редукционная задача актуальна и ныне.
Возможны два варианта редуцирования. В одном из них полу
чают соотношения между измеренными величинами на Земле и со-
ответствующими им элементами на эллипсоиде непосредственно.
Во втором находят поправки (редукции) к результатам измерений.
Общим требованием к редуцированию является условие coxpa
нения в редуцированных величинах той точности, с которой были
выполнены измерения. В связи с этим ошибки редукций и их влия
ние должны быть в несколько раз меньше ошибок измерений. Bы
бор эллипсоида, к поверхности KOToporo выполняется редуциро
вани е, не имеет принципиальноrо значения. Однако практически
удобно, чтобы поверхность эллипсоида была, по возможности.
близка поверхности Земли и параллельна уровенным поверхнос
тям силы тяжести. Тоrда редукционные поправки будут малы по
величине, и их можно получать по приближенным координатам и
по более простым формулам, а редуцированные на эллипсоид Be
168
.1ИЧИНЫ будут близки к соответствующим им величинам на поверх
ности Земли.
Необходимо также учитывать характер влияния редукций. Если
это влияние носит систематический характер, в отдельное измере
ние нужно вносить редукционные поправки даже в том случае, если
они существенно меньше ошибок измерений.
Редуцирование включает в себя три последовательных этапа.
Если измерения выполнены в натуральной системе, сначала нужно
перейти к rеодезической системе координат. Затем в rеодезической
системе перенести измерения из внешнеrо пространства на поверх.
ность эллипсоида, причем все пункты нужно спроектировать по
нормалям к ero поверхности. Наконец, нужно соединить точки на
эллипсоиде rеодезическими линиями, Т.е. перейти к полярной сис-
теме криволинейных координат S, А. Таким образом, в результаты
измерений вводят поправки трех видов:
за уклонение отвесной линии, Т.е. за переход от натуральной
системы координат к rеодезической;
за высоту над поверхностью эллипсоида;
за переход от элементов, получившихся после введения первых
.:!вух поправок, к соответствующим элементам rеодезических линий.
Рассмотрим редуцирование измерений разных видов.
34. РЕДУКЦИЯ Уrловых ИЗМЕРЕНИЙ
РЕДУКЦИЯ rОРИЗОНТАЛЬНЫХ НАПРАВЛЕНИЙ
Fоризонтальным направлением называют направление линии пе
ресечения вертикальной плоскости, проходящей через отвесную ли-
нию (вертикальную ось теодолита) и наблюдаемый пункт, с rори
зонтальной плоскостью (плоскостью лимба теодолита). Рассмотрим
рис. 6.1. Здесь Р, Q, с пункты на поверхности Земли; р, q, с их
проекции по нормалям на эллипсоид; Pg отвесная линия, Pq'c'
точки на rоризонтальной плоскости, u уrол между отвесной лини-
ей Pg и нормалью Рр к эллипсоиду астрономо rеодезическое укло
нение отвесной линии. Пусть измерен уrол q'Pc', нужно найти уrол
qpc между rеодезическими линиями pq и ре. Переход от измеренноrо
уrла к редуцированному выполняют введением ряда поправок.
Поправка за уклонение отвесной линии. Про ведем BOKpyr пункта
р вспомоrательную сферу произвольноrо радиуса (рис. 6.2), нор-
маль Рр к эллипсоиду пересеqет эту сферу в точке Z rеодезическоrо
зенита, отвесная линия в точке zg астрономическоrо зенита, на-
правление на наблюдаемый пункт в точке Q.
169
\
\
\
\ и
\
\
Лимб теодолита \
Q
с
I
I
I
,
I
,
I
,
,
I
,
,
,
с
Рис. 6.1. П роектирование измеренноrо уrла на поверхность
референц эллипеоида; pq, ре rеодезичеекие линии
Итак, ось теодолита совмещена с отвесной линией pzg, измере-
но направление zgQ, нужно получить редуцированное направле
ние ZQ.
Про ведем через Zg линию, параллельную дуrе ZQ; уrол д) между
этой линией и направлением zgQ и есть искомая поправка в rори
зонтальное направление.
Разложим уклонение отвеса u на составляющие дА = Zn в ази-
муте редуцированноrо направления и дА+90 = Zgn в перпендикуля
ном направлении; дуrа Zgn перпендикулярна ZQ. ИЗ прямоуrоль
Horo треуrольника ZgQn получим
cos(90° д,) = tgд м90 сtgz а ,
rде Za = zgQ астрономическое зенитное расстояние точки Q. YK
лонение отвеса обычно не превышает нескольких секунд, поэтому
можно принять tgд А + 90 == д А + 90 , cos(90° д.) == д. и записать
д. = д А : 90 сtgz а . (6.1)
Составляющую д А + 90 удобно находить через компоненты l; 1fl ас-
трономо-rеодезическоrо уклонения отвеса в плоскости меридиана
170
g
z
р
Рис. 6.2. К определению поправки в rоризонтальное направление за
уклонение отвесной линии
Q
и первоrо вертикала. Применив формулу (2.31) для азимута
А + 900, найдем
дА+90 = 1f"cosA f;:" sinA.
(6.2)
Подставляя формулу (6.2) в (6.1), напишем окончательное выраже-
ние поправки за уклонение отвеса
8[ = ( ; ас sin А + 17 и ? cos A)ctgz a ,
(6.3)
[де А азимут направления.
Таким образом, поправка за уклонение отвеса зависит от зе-
нитноrо расстояния наблюдаемой точки. В трианrуляции зенит
ные расстояния, как правило, близки к 900, поэтому поправка за
уклонение отвеса мала и не превышает 0,1 дА+90 при I Za 900 1<30'.
В инженерно rеодезических сетях возможны уrлы наклона, дости
rающие ЗОО 400, для которых ctgz a = 0,584),84. Поэтому уклонения
отвеса нужно знать по крайней мере с той же точностью, с кото-
рой измеряют rоризонтальные уrлы.
171
Поправка за высоту наблюдаеМО20 предмета. Рассмотри\!
рис. 6.3. Здесь РО и QO нормали к эллипсоиду; О центр эллип-
р q
соида; QO Р плоскость прямоrо в точке Р нормальноrо сечения.
Р " р
q измеренное направление, исправленное поправкой и\ за YK
лонение отвеса; pq нормальное сечение, проходящее через проек-
цию q точки Q на поверхность эллипсоида. Поправка 82 за высоТ)
наблюдаемоrо предмета это уrол между измеренным pq" и реду-
циpoBaHHыM pq направлениями. Уrол ё между нормалью к эллип
соиду в точке Q и прямой QO мал, поэтому можно считать, ЧТО
" Н ' Н р Q д ..
qq == SШЕ, rде высота точки над эллипсоидом. yra qq
о
q
о
q
Рис. 6.3. К определению поправки в rоризонтальное направление
за высоту наблюдаемоrо предмета
172
.lежит в плоскости меридиана точки Q. Найдем ее проекцию qn на
направление перпендикуляра к линии pq". Соrласно рис. б.3
" . А
qn = qq slП ,
q
r де А азимут линии qp в точке q.
q
Поправка 82 из треуrольника qpn равна
qп qq" sin Aq Н sin Е sin Ач
82 = =
pq pq pq
(б.4)
Найдем sinE. Из треуrольника О QO имеем
р q
. OpOqcosB q
slП Е =
QOp
[де В широта точки Q.
q
в курсе сфероидической rеодезии доказывается, что нормаль к
Э.lЛипсоиду пересекает малую осью на расстоянии e 2 NsinB от цeHT
ра эллипсоида, поэтому
О О = д = е 2 (N sinВ N sinВ ),
q р q q р р
(б.5)
rде В широта точки Р; N радиус кривизны первоrо вертикала
определен формулой (2.7). Длины сторон в трианrуляции не пре
вышают нескольких десятков ЮUIометров, а высоты точек поверх
ности Земли над эллипсоидом нескольких километров.
Положим поэтому радиусы кривизны N и N в точках Р и Q и
р q
отрезок QO одинаковыми и равными N. Тоrда
р
2 В B В +В 2
О О = N е sin q р cos р q == N е (B q В р ) cos В
р q 2 2
и
sinE = е 2 (B q Bp)cosB т CosBq,
rде Вт средняя широта.
С учетом этоrо выражения запишем
2Bq Bp .
82 = Не sш Ач cosB т cosBq'
pq
(б.6)
173
П б В Ч В Р COS А .
ри не ольших расстояниях между точками
cos В ::: cosB , поэтому pq М .
q т
i" Не 2 . 2А 2 В
и2 = sш COS т'
2М
(6.71
rде М радиус кривизны меридиана; А азимут измеряемоrо Ha
правления.
Если использовать среднее для Земли значение радиуса кривиз-
ны М, поправку за высоту наблюдаемоrо предмета можно вычис-
лять по формуле
82 == 0,108" Н sin2A cos 2 B,
(6.8
[де высота Н выражена в километрах. Соrласно (6.8) эта поправк<.i
для максимальной высоты на Земле не превышает одной секунды.
Запишем формулу (6.4) в ином виде. Положим Н = ctgZ, sine == Е.
pq
тоrда
8, = ё sin А ctg Z,
q
rде Z зенитное расстояние точки Q в точке р поверхности эллип-
соида.
Эта формула аналоrична формуле (6.1), а произведение ё sinA есть
q
составляющая уrла между нормалями к эллипсоиду в точках Р и Q в
азимуте направления, перпендикулярноrо линии pq". Поэтому поправ--
ки 81 и 82 имеют один и тот же физический смысл и учитывают наклон
вертикальной оси инструмента относительно нормали к эллипсо .
Причем в первом случае учитывается отклонение оси инструмента
(отвесной линии) от нормали к эллипсоиду в точке наблюдения, в('
втором от нормали в наблюдаемой точке. Такой же ВИД, как по-
правки 8, и 82' имеет и поправка за наклон вертикальной оси инстр -
мента из за ero неточной установки по уровням. Поэтому поправю
Б) и Б 2 имеет смысл вводить только в том случае, если инструмент при
наблюдениях бьш тщательно установлен по уровням.
Поправка за переход от нор.мальноzо сечения к zеодезической ..,.
нии. Нормали к эллипсоиду, проведенные через две точки ero по-
верхности, не лежащие на одном и том же меридиане или паралле-
ли, не лежат в одной плоскости и являются скрещивающимися пря
мыми. Поэтому линии pnq и qop пересечения поверхносп
эллипсоида плоскостями Ppq прямоrо и Qqp обратноrо нормаль..
ных сечений не совпадают (см. рис. 6.1). Для устранения неопре.1е-
ленности точки на поверхности эллипсоида соединяют rеодезичес
174
кими линиями, для чеrо в полученные после редуцирования на эл
.1ИПСОИД уrлы между прямыми нормальными сечениями вводят по
правки. Поправка 8з за переход от нормальноrо сечения к rеодези
ческой линии имеет вид [14].
,2
.. е 2 2. S
8з = р 2 S cos Вр sш Ар (cos Ар tgBp)'
6N p 4N p
Соrласно этой формуле, поправка 8з пропорциональна KBaдpa
ту отношения длины s линии к радиусу N кривизны первоrо Bep
р
тикала, поэтому при небольших расстояниях ее вычисляют по уп-
рощенной формуле
,2
"е 2 2 . 2А
и 3 = Р 2 S cos В р sш р'
12N
Для эллипсоида KpacoBcKoro
8, = 0,0282" S2cos 2 B sin2A,
, р р
(6.9)
[де s выражают в сотнях километров.
Соrласно формуле (6.9) поправка за переход от нормальноrо ce
чения к rеодезической линии составляет 0,00 1" при ДJlине линии 20 км.
Таким образом, для редуцирования rоризонтальноrо направ
.lения к эллипсоиду в измеренное значение нужно ввести сумму по
правок 8( + 82 + 'j'
РЕДУКЦИЯ АСТРОНОМИЧЕскоrо АЗИМУТА
Азимут это двуrранный уrол между плоскостью меридиана
и вертикальной плоскостью, проходящей через местный предмет.
Это одна из топоцентрических rоризонтных полярных координат
I см. 9 1 О, рис. 2.11). Чтобы перейти от астрономическоrо азимута к
rеодезическому, следует учесть уrол между плоскостями астроно-
lИческоrо и rеодезическоrо меридианов, а также поправки 8] + 82 +
+ О'! в направление, азимут KOToporo определяется. Поправку за
переход от астрономическоrо меридиана к rеодезическому полу
чим с помощью рис. 2.7, соrласно которому уrол между их плоско
стями равен разности л. L астрономической и rеодезической дол
[от. Но азимут лежит в rоризонтальной плоскости хРу, которая
наклонена к плоскостям экватора и параллели на уrол 900 ф. Про
екция уrла Л. L на rоризонтальную плоскость равна (л. L)sin<p,
поэтому для редуцирования азимута получаем
А = а + 8, + 82 + 8з (л. L )sin ер.
175
(6.10)
Поправку в астрономический азимут можно найти также как
разность поправок (81 + 82 + 8,) для MecTHoro предмета и (8'1 + 8'2 +
+ 8'з) для оси Мира. Для оси Мира А = O Z = 900 ф, поэтому
соrласно (6.3) 81 = 17 tgqJ, а из (6.6) и (6.9) следует 82 = 81, = О. Таким
образом, для rеодезическоrо азимута можно записать
А = а +8 ,+ 82 + 8} 1] tgB.
(6.11)
Если не учитывать поправки в направление на местный пред
мет, вместо формул (6.10) и (6.11) получаем
А = а (А L)sinqJ;
А = а 17 tgB.
(6.12\
(6.13 )
Уравнения (6.10) (6.13) называют уравнениями Лапласа, а BЫ
численный по ним азимут А азимутом Лапласа.
Таким образом, азимут Лапласа можно найти, если измерены
астрономические координаты ф, А и азимут а. Астропункт, на KO
тором выполнены все эти измерения, называют пунктом Лапласа.
Для перехода от астрономическоrо азимута к rеодезическому нуж-
но также знать rеодезическую долrоту L. Поскольку rеодезическиС'
координаты известны с большей точностью, чем астрономические.
можно считать азимут Лапласа независящим от ошибок долrоты.
Поэтому азимут Лапласа рассматривают как rеодезический азимут.
полученный независимо от rеодезических измерений, и использу
ют для контроля уrловых измерений в трианrуляции.
РЕДУКЦИЯ ЗЕнитноrо РАССТОЯНИЯ
Рассмотрим рис. 6.2. Из прямоуrольноrо сферическоrо треу-
rольника ZgQn имеем
cosZ a = COS (6 м90 0) cosQn.
Уклонения отвеса всеrда малы, поэтому можно считать, чт('
cos (6А+90 0 ) == 1, а дуrа Qn равна разности rеодезическоrо зенитно[('
расстояния Zr И уклонения отвеса 6 л в азимуте измеряемоrо напра1У
ления, Qn = zr t}л, и для rеодезическоrо зенитноrо расстояни!
получаем
Zr = Z{J + 6 л .
(6.1
Поправка в зенитное расстояние одинакова для всех напраВ.lе
ний, лежащих в одной вертикальной плоскости по одну сторону о:
зенита, и не зависит от зенитноrо расстояния.
176
35. РЕДУКЦИЯ ЛИНЕЙНЫХ ИЗМЕРЕНИЙ
В rеодезической практике существуют два вида линейных изме
рений базисы на поверхности Земли и отрезки между точками
пространства. В трианrуляции использовали, в основном, измере
ния базисов. В настоящее время основным видом линейных изме
рений являются измерения пространственных отрезков (наклон
ных дальностей). Рассмотрим методику редуцирования обоих ви
,]ОВ линейных измерений.
Редукция пространствеННО20 отрезка. Пусть измерено расстоя
ние PQ = D (см. рис. 6.3), нужно получить длину pq rеодезической
.1ИНИИ. Ред уцирование выполняют в два этапа: сначала находят xop
.1у pq = D эллипсоида и затем переходят от хорды к rеодезической
.1ИНИИ.
Редуцирование длины отрезка к хорде эллипсоида можно BЫ
полнить так. Длина D связана с прямоуrольными координатами
Х , У, Z , Х , у , z точек Р и Q известным соотношением
р р р q q q
D 2 =(X q Xp)2 +(Y q Yp)2 +(Zq Zq)2.
(6.15)
Используя зависимости (2.6) между прямоуrольными Х, Z и
rеодезическими В, L, Н координатами, можно выразить длину D
.J-трезка через rеодезические координаты точек
D 2 =:(N p +Нр)2 +(N q +Hq)2 2(Np +Hp)(N q +Hq)cOSVf+
2 (6.16)
+ (e 2) 2 (HqsinBq HpsinBp),
е
"Де Vf уrол между нормалями к эллипсоиду в точках Р и Q, опреде
rяемый формулой (2.39); определена формулой (6.5).
Поскольку плановые ко ор динаты точек и их проекций на эл
:ипсоид одинаковы, длину D хорды можно получить, положив в
равнении (6.16) Н = Н = О
р q
2 2 2 д? 2
D =N p +N q 2NpNqcOsVf+2(e 2).
е
(6.17)
Вычитая выражение (6.17) из (6.16) и используя тождество
cos vf = 1 2sin 2 V'/2,
(6.18)
177
получим зависимость между длиной D пространственноrо отрезк;
и хордой D эллипсоида
2 2 2
D = D (Н Н ) 2(Н Н )( N N )
q р q р q р
4kNpNq sin 2 i +2Д(Н ц sinB q HpsinBp)'
(6.19
Нр Нч HpHq
k= + +
N p N q NpN q
(6.2(11
Исключив из выражения (6.16) cos IJI с помощью равенств..:.
(6.17), находим иную запись формулы для перехода от простран*
cTBeHHoro отрезка к хорде эллипсоида
2 2 2
(1+k)D =D (Hц Hp) 2(Hq Hp)(Nq Np)+
2 f1 2 (6.21
+2f1(HqsinBq HpsinBp)+k[(Nq Np) + (e 2)].
е
Соrласно уравнению (6.21) для нахождения длины хорды нуж.
но знать rеодезические высоты и широты точек Р и Q.
Получим приближенную формулу редуцирования простран.
cTBeHHoro отрезка. Заменим эллипсоид сферой, радиус которой
равен среднему радиусу р кривизны эллипсоида в точках Р и Q в
азимуте А измеренноrо отрезка
1
Р=2(РР+РЦ)'
(6.221
N p
Р р = '2 2 2 '
1 + е cos В cos А
р
N q
Р q = '2 2 2 '
1 + е cos В q cos А
(6.23,
rде е' первый эксцентриситет.
Для сферы уравнения (6.20) и (6.21) примут вид
2 2 2
(1+k o )D o =п (Hq Hp)'
(6.241
Нр Bq HpHq
k() = + + 2
Р Р Р
178
(6.251
.)ткуда
2 D 2 (Н Ч Нр)2
Do == Н Н '
(1+ )(1+ )
р р
( 6.26)
Оценим точность формулы (6.26). Введем обозначение
2 2 2
Dl == D (Н q Н р) ,
(1 + k ) D 2 == D12.
(6.27)
(6.28)
Лоrарифмируя и дифференцируя выражение (6.28), получим
dD == dD 1 dk.
D Dl 2
Таким образом, ошибка формулы (6.26) возникает из за заме
ны хорды эллипсоида хордой окружности и замены радиусов кри-
визны первоrо вертикали средним радиусом кривизны при вычис-
.1ении величины k.
Н Н
Оценим поrрешность dk. Так как Н« N, k == .......J!.... + и
N p N q
Нр Hq
dk = -----тdN р dNq'
N p N q
Ошибки dN и dN возникли из за замены эллипсоида сферой
радиуса р, поэтriму dN = р N , dN = Р N . Используя выражения
р р q q
(2.7) ДЛЯ радиуса кривизны nepBoro вертикала и (6.22) (6.23) для
радиуса сферы, с точностью до членов порядка е 2 получим
р N == Ne2[ sin(Bm B)sin2B cos2 Вт cos 2 А],
2
rде Вт средняя широта отрезка.
Таким образом,
н е 2 1
dk= ["2sin(Bm Bp)sin2Bm COS2 Bmcos2 A]
р
н че 2 1 . . 2 2
N [ 2 sш(в т Bq)sIll2Bm cos Bmcos А].
q
179
Положим N ==N , sin(B В ) = sin(B В ) = sin(B В )/2, тоrда
р q р т q q р
н H ( В B )
dk = q р е 2 sin q Р sin 2В.
2N 2
Соrласно этой формуле, ошибка dk зависит от превышения и
длины линии (разности широт). Максимальной она будет на ши
роте 450, поскольку в этом случае радиусы кривизны эллипсоида
изменяются наиболее быстро. На этой широте
(6.29)
dk = 0,5 . 10 6 (Н Н )sin(B В )/2,
q р q р
rде превышение Н Н выражено в километрах.
q р
для линии ДJIиной 2000 км (В В )/2 == 90) dk = 0,078 . 10 6 (Н Н )
q р q f'
И даже при Нч Нр = 10 км ошибка редуцирования будет меньше 1(J-6,
Оценим разности длин хорды эллипсоида и окружности. Эта
разность равна нулю, если точки Р и Q лежат на одной параллели и
максим ал ьна, коrда они лежат на одном меридиане. Вычитая из
длины D () хорды окружности радиуса Мер длину хорды эллипсоида
(6.17), при \fI = В В , найдем максимальное отличие
q р
2 2 2 2. . 2
Do D = е (2 е )( N q Ыn В q N р sш В р)
2 . 2 Bq В р 2
4(NрNч Мср)sш 2 (Nq Np) ,
rде Мер средний радиус кривизны меридиана.
Оценка по этой формуле дает такой результат:
D(J' км 200 1000 1700 2000
Do D, м 0,0031 0,425 1,668 2,692
Do D 1 ,6 . 1 0 8 4,2 . 10 8 1,0 . 10 6 1 3 . 1 0 6
,
Do
Таким образом, для расстояний до 1700 км ошибка из за заме.
ны хорды эллипсоида хордой окружности меньше 1 O и ею можн('
пренебречь.
Для редуцирования с точностью 10 формулу (6.26) можно ис.
пользовать, если расстояние не превышает 1500 км, а превышение
меньше 1 О км.
180
Переход от хорды D эллипсоида к длине cr дуси НОРМШlьноzо
сечения Шlи длине s zеодезической линии. Будем считать, что а и s
равны между собой и равны длине дуrи окружности радиуса р, оп
ределенноrо выражениями (6.22), (6.23). Тоrда
3
. D D
s = а = 2R arсsш == D + .
2 Р 24 Р 2
(6.30)
4
D
Эта формула имеет точность порядка , поэтому, если ошиб
р4
ка редуцирования не должна превышать 10 , ее можно использо-
вать для расстояний до 200 км.
Найдем также зенитное расстояние Z и азимут А хорды D.
рц рц
Обратимся вновь к РИС. 6.3. Спроектируем ломаную PQO О на за
q р
\fыкающую РО .
р
DcosZ pQ = (N + Н)Ч cos1jl (N + Н)р ilsin Вр,
(6.31)
r.J,e zPQ зенитное расстояние пространственноrо отрезка D, Нр и
Н rеодезические высоты точек Р и Q; cos", определен формулой
q
16.14), а функция il формулой (6.5).
Поскольку rеодезические широты и долrоты точек и их проекций
на эллипсоид одинаковы, для хорды эллипсоида, полаrая Н = Н = О,
р q
получим
D cos Z pq = N q cos '" N р il sin В р .
Исключая отсюда с помощью выражения (6.31) про изведение
sinВ Р' найдем выражение, связывающее зенитное расстояние про
upaHCTBeHHoro отрезка и хорды эллипсоида
D cos Z PQ Н q cos'" + Н р
cos Z рч
D
(6.32)
Эта формула позволяет найти rеодезическое зенитное расстоя
:-ше хорды эллипсоида, если известны длина пространственноrо OT
зка и rеодезические высоты ero концов.
Получим азимут А хорды, соединяющей проекции точек Р и Q
рц
:-i.a эллипсоид. f'еодезический азимут А хорды D отличается от
рц
.1Jимута ApQ измеренноrо отрезка D вследствие отличия плоскости
PQO , в которой лежит D, от нормальной плоскости PQO , про
q р
181
ходящей через нормаль к эллипсоиду в точке Р и точку Q. Поэтому
для редуцирования азимута можно воспользоваться поправкой Б.
(6.4) за высоту наблюдаемоrо предмета. Соrласно рис. 6.3
" . e2(NqsinBq NpsinBp) !J.cosB q
qq == Hq SlOE == Hq QOp cosB q == Hq QOp .
QOp== N p ; pq == D, дЛЯ поправки в азимут получим
qq" sin Aq Н q!J. sin Aq cos Вч
Арч ApQ =Б 2 :::: pq == NqD
(6.331
Точная формула редукции азимута А PQ пространственноrо от
резка к азимуту А хорды эллипсоида имеет вид [20]
pq
sin(A pQ A pq ) == sin д 2 ==
Н
= e'2 N q cosB p sin ApQ(cosBpcosApQ +sinBpctgz pq )'
q
(6.34,
Если исключить из этой формулы зенитное расстояние, то
. Н q е 2 !J. cos В р ..
SlO д 2 == N (N Н) В' (L L) SlO A pQ SlO Apq' (6.35
q + q COS q 810 q р
Редуцирование по этим формулам требует последовательны\
приближений, поскольку в правую часть формулы (6.35) входи}
редуцированный азимут А . Поскольку поправка д 2 мала, выраже.
pq
ние (6.35) можно упростить. Положим N == N == (N + н) == N, А :=
р q q р.;
::: ApQ == А, cosB p == cosBq' тоrда
н . 2 А
. i' q ( . В . В SlO
SlOU2 == N SlO q sш р) . .
sш(L q L p )
Но sinВ q sinВp :::(B q Bp)cosВ т , ВЧ Вр == cosA D, sin(L q L p ) =
м
Dsin А
== Lq Lp == N cosB ' sin д 2 == д 2 , поэтому при сделанных преДПО 1
жен иях формула (6.32) совпадает с (6.7).
Формулы (6.19), (6.26) и (6.32) (6.35) решают задачу peдyиH
рования пространственноrо отрезка к хорде эллипсоида.
182
Редукция базиса к поверхности эллипсоида. Базис в трианrуля
иии является ломаной линией, звенья которой пролеты W бази
са пространственные отрезки малой длины (при измерениях ба
зиса обычно использовали инварные проволоки длиной 24 м). На
рис. 6.4. изображен один пролет базиса.
P 1
р
ыz
w=c
р
н
R
Рис. 6.4. К редуцированию базиса на поверхность эллипсоида
Базисные измерения сопровождали rеометрическим нивелирова
нием и получали проекции !11 измеренных отрезков W сначала на
уровенную поверхность, а затем находили длину Ы О отрезка РР 2 , па
раллельноrо эллипсоиду. После этоrо проектировали базис на эллип
.:оид и находили хорду М. Получим формулу для вычисления М.
Так как точки Р и Р) близки между собой, можно не принимать
во внимание непараллельность нормалей к эллипсоиду, проходящих
через эти точки, и считать треуrольник РР)Р 2 прямоуrольным. Тоrда
!11 = Wcos(a f)Al) = W(cosa cosf)AT sina sintЭAl),
()
rде а уrол наклона; tJAT составляющая астрономо rеодезическо
O уклонения отвеса в азимуте отрезка РР),
183
Соrласно рис. 6.4 произведение Wcosa равно dl, а W sina
это превышение М. Положив cos tJAr == 1, sin tJAT == tJAr, получим
dl = dl tJArM.
а
Хорду db найдем из пропорции
дl / (Н + R) = ды R,
о
откуда
дЬ = dl дl (Н /R (Н /R)2),
о о
rде Н rеодезическая высота пролета; R радиус кривизны эллип-
соида.
Введя в последнее выражение значение dl o , получаем форму.l
для редуцирования пролета базиса к хорде эллипсоида
дЬ = дl T М дl(Н /R (Н /R)2).
Поправку за переход от хорды к дуrе можно не вводить, пот
му что для малых расстояний эта поправка пренебреrаема. Для pe
дуцирования Bcero базиса нужно найти сумму проекций ero проле
тов. Таким образом, для редуцирования измеренноrо базиса полу-
чаем
b LM LJJArbl1 L Ы+ L(l: )'Ы,
или, если использовать С р едние вдоль базиса значения д уклоне-
т
ния отвеса и Н rеодезической высоты,
т
b L M JJтLbl1 b(l l т )
(6.36)
Соrласно формуле (6.36) для определения длины Ь базиса на
эллипсоиде нужно знать rеодезическую высоту и уклонение OTBec
ной линии.
В настоящее время базисы не измеряют. Формулы (6.26), (6.30)
и (6.36) используют для сравнения измеренноrо ранее базиса и на-
клонной дальности.
184
36. ПРИВЕДЕНИЕ ЛИНЕйно..Уrловой СЕТИ
В ЕДИНУЮ СИСТЕМУ КООРДИНАТ
Рассмотрим редуцирование пространственной (тахеометричес
кой) сети. На рис. 6.5 Р, Q, R пункты сети, в которых измерены
rо р изонтальные уrлы и.. и зенитные Р асстояния Z". Положим, что в
v v
исходном пункте Р, кроме Toro, измерены астрономические коорди
наты ф, А, азимут а и длина отрезка PQ. rеодезические координаты
В, L, Н исходноrо пункта известны. Покажем, что этих измерений
достаточно для определения rеодезических координат точек Q и R.
z
"
у
р
"
I
" I
"" I
" I
"
у
Рис. 6.5. Пространственная rеодезическая сеть
Измерение астрономических координат и азимута в исходном
пункте Р определяет ориентировку топоцентрической системы KO
ординат Pxyz относительно rеодезической, астрономические KOOp
.J,инаты определяют положение оси z (отвесной линии), а вычис
.1енный соrласно формуле (6.1 О) rеодезический азимут ориенти
ровку осей Рх иРу. Измеренные rоризонтальные уrлы и зенитные
расстояния позволяют вычислить направляющие косинусы /.\ т.\
v 1]
п.. k линий в системах всех пунктов
1]
/"k = sinZ..cosU..,
1] u 1]
k . nz . и
т.. SI ..S1П ..,
1] 1] J]
n.. k = cosZ..,
1] J]
185
индекс k указывает на принадлежность к системе Toro или иноrо
пункта, индексы i, j определяют линию. Далее можно найти уrлы
плоскоrо треуrольника PQR по известным формулам
Р [ Р [ Р + р р + р р
cos рц ру m РЧ m pr п pq пр,. ,
Q [ Ч [ Ч + ч q + q q
cos чр qr mqpmqr nqpn qr ,
R [ У [ r /. r r r
COS = ур rq + mrpm rq + nrpn rq .
и решить этот треуrольник. После этоrо леrко определить прира
щения прямоуrольных координат точек R и Q в системе Pxyz. Для
распространения системы Pxyz начальной точки на остальные пунк
ты сети нужно определить ориентировку систем Qx'y'z' и RX"Y"Z"
относительно исходной. Это возможно сделать из сопоставления
направляющих косинусов линий в исходной и определяемой систе
мах. Так, направляющие косинусы стороны QP в системе коорди-
нат исходноrо пункта Робозначены
IP [Р т Р т Р пР пР
цр pq' цр рц , цр рч'
а в системе пункта Q их можно найти по rоризонтальным и верти
кальным уrлам соrласно формуле (6.33). Известно, что направляю
щие косинусы при повороте системы координат определены выра-
жениями
[ Ч [ Р [ Р + р р р р
qp qx цр тчхтчр + пqхп чр ,
q [ Р [ Р + р р р р
mqp qy цр тцут цр + nqyn qp '
(6.371
ц [ Р [ Р Р Р Р Р
п цр ч= qp + mq=mqp + niJ=n qp '
Такие уравнения можно написать для каждой пары точек, KO
ординаты которых известны в системе координат точки Р, и опре-
делить направляющие косинусы
1 т п
чх чх чх
l т п (6.38,
qy ЧУ ЧУ
l т п
Ч Ч ц,-
осей системы Qx'y'z' в системе Pxyz. Для определения девяти неиз
вестных (6.38) достаточно иметь направляющие косинусы двух CTO
186
рон В исходной и определяемой системах, так как величины (6.38)
связаны соотношением
[2 + т 2 + п 2 = 1.
(6.39)
Если же используется большее число сторон, появляется воз
\fОЖНОСТЬ уравнительных вычислений.
Таким образом, можно свести местные топоцентрические сис
темы координат к системе исходноrо пункта и найти приращения
прямоуrольных координат всех пунктов пространственной сети.
Развитию линеЙН06уrловых сетей препятствует влияние верти
кальной рефракции, из за которой точность измерения зенитных
расстояний по крайней мере на порядок ниже точности rоризон
тальных направлений. Поэтому такие сети создают только в спе
uиальных случаях, к которым относятся, например, измерения в
ropax при хороших условиях видимости или в прикладной rеоде 6
зии, коrда расстояния между пунктами невелики и уrлы наклона
значительны. В обоих этих случаях точность измерения rоризон
тальных и вертикальных уrлов соизмерима.
37. ТРЕБОВАНИЯ К ТОЧНОСТИ rЕОДЕЗИЧЕСКИХ
КООРДИНАТ ДЛЯ РЕДУЦИРОВАНИЯ
Для вычисления найденных выше поправок в измеренные вели
чины необходимо знать rеодезические координаты точек наблюде
ния и уклонения отвесной линии. Так как сами измерения выпол
няют с целью определения координат, cTporo rоворя, редуцирова
ние можно провести только последовательными приближениями,
используя на первом этапе приближенные координаты измеритель
ных точек Требования к точности приближенных координат за
висят от вида и точности измерений и вида редукции. Рассмотрим
эти требования.
Поправки 8) и 82 В rоризонтальные направления зависят от зе 6
нитноrо расстояния и высоты. Требования к точности высоты в
формуле (6.4) невысоки: ошибка высоты в 1 км вызывает ошибку
поправки в 0,1". Будем исходить из ошибки измерения rоризон
тальноrо направления, равной 0,7", и потребуем, чтобы ошибки
т), m 2 поправок 8) и 82 не превышали 0,1", Т.е.
m) :::: тд ctgZ < 0,1",
т 2 :::: 0,I"m H sin2A cos22Bm < 0,1".
187
Видно, что условие т 2 < 0,1" будет выполняться при любых зна
чениях азимута и широты, если т н < lкм. Нахождение высоты с
точностью сотен метров не вызывает затруднений, поэтому поправ-
ку 82 всеrда можно вычислить с необходимой точностью. Точность
вычисления поправки за уклонение отвеса зависит от зенитноrо
расстояния направления.
При ведем значения допустимых ошибок то уклонения отвеса.
обеспечивающих вычисление поправки д l с ТОЧНОСТЬЮ 0,1":
Зенитное расстояние, [радус
Допустима ошибка
уклонения отвеса, секунда
5 80
0,I O,5
80 85
O,5 1,0
85 87 87 89
1 2
2 5
Если зенитные расстояния находятся в пределах 89,5 90,50, по
правка д l может быть вычислена точно при сравнительно rрубы.\
определениях уклонения отвеса; в этом случае может оказаться, что
величина уклонения отвеса меньше необходимой точности ero оп
ределения, поэтому поправку 8) вводить нецелесообразно. При ма-
лых значениях Z точный учет поправки 81 ставит очень жесткие Tpe
бования к точности уклонений отвеса.
Чтобы установить допустимые ошибки высоты и уклонения от-
веса при редуцировании линейных измерений, обратимся к равен-
ству (6.27), лоrарифмируя и дифференцируя которое получим (С
учетом выражения (6.28»
dD
D
dD
D
Ыld(Ыl)
п 2
dk
2'
rде ыf = Н Н .
q р
дНd(дН) 6
Если потребовать, чтобы 2 s; 0,1.10
D
dk dH
то, так как 2 = N' дЛЯ ошибки высоты находим dH s N . 1 0 6 = 6 \f.
2
а для ошибки превышения d(ДН) s .10 6. Таким образом, дo
дН
пустимые ошибки превышения зависят от длины и наклона изме-
ряемоrо отрезка; при дН = D d(bll) = D . 1 O .
Требования к точности высот и уклонений отвеса при редуuи-
ровании базиса установим, исходя из формулы (6.36). Выразим при-
ближенно превышение конечной точки базиса относительно на-
и dk S;0,1.10 б.
2
188
чальной через зенитное расстояние, Ldh = bcosz, после чеrо, диффе
ренцируя получившееся выражение, найдем
db dH т
::::df} cosz .
Ь т R
Базисы измеряют с точностью 1 . 1 O , поэтому необходимо,
чтобы вЬ!полнялисъ условня d т <110 6, d;::. cosz <1106,
diJ m cosz <J 0,2". Это приводит к требованию определения rеодези
ческой высоты базиса с ошибкой не более 6 м. Требования к точ
ности определения уклонения отвеса такие же, как и для редуциро
вания rоризонтальноrо направления.
Таким образом, требования к точности определения высот над
эллипсоидом одинаковы при редуцировании базиса и простран
CТBeHHoro отрезка. В последнем случае кроме высот нужно знать
превышение конечных точек отрезка с точностью, зависящей от
ero длины.
38. РАЗВЕРТЫВАНИЕ ACTPOHOMO
rЕОДЕЗИЧЕСКОЙ СЕТИ НА ПОВЕРХНОСТИ
РЕФЕРЕНЦ-ЭЛЛИПСОИДА
в 9 37 установлено, что для редуцирования результатов изме
рений к поверхности референц эллипсоида rеодезические коорди
наты измерительных точек должны быть известны с высокой точ
ностью, хотя сами эти измерения выполняют с целью определе
ния rеодезических координат. Почти до середины ХХ века
экспериментальных данных, необходимых для редуцирования
уклонений отвеса и rеодезических высот не было, поэтому при
ходил ось исходные данные исправлять лишь по приближенным
высотам над уровнем моря. Это приводит К редуцированию из
мерений не на поверхность эллипсоида, а на какую то иную близ
кую к нему неизвестную поверхность. Тем не менее предполаrа
.10СЬ, что редуцированные таким несовершенным способом вели
чины относятся к эллипсоиду. Блаrодаря тому, что поправки в
rоризонтальные направления за уклонения отвеса в сетях триан
rуляции малы (зенитные расстояние в этих сетях близки к 900),
основная поrрешность редуцирования относил ась к редуцирова
нию базисов и выходных сторон.
189
Тем не менее, дальнейшая обработка ведется так, как будто бы
было выполнено точное редуцирование на эллипсоид, Т.е. проис-
ходит, как rоворят, развертывание астрономо-rеодезической сети
на референц-эллипсоиде, в результате KOToporo находят rеодези
ческие координаты пунктов сети последовательным суммировани
ем разностей широт и долrот от исходноrо пункта. Возникающие
при этом искажения в сети будут вызваны не только ошибками
высот и уклонений отвеса, но и влиянием ошибок плановых коор-
динат и высот смежных пунктов. Так, если в исходном пункте Р
линии PQ высота известна с ошибкой dHu, то линия PQ будет peдy
цирована не на поверхность L референц эллипсоида, а на поверх
ность L, (рис. 6.6). Если проекцию p,q, = Ь, линии PQ отложить
(развернуть) на поверхности L эллипсоида, то вместо проекции q"
точки Q по нормали к L получим точку Q2' Значит, высота точки Q
получит ошибку dH" а плановое положение ошибку db, и вместо
rеодезических координат точки Q будут получены координаты точ
ки Q'. Разность астрономических координат точки Q и rеодезичес
ких координат точки Q' определит смешанное уклонение отвеса (.
зависящее не только от характера rравитационноrо поля, но и от
ошибок rеодезических координат.
р
ь
Рис. 6.6. К влиянию ошибки высоты на плановые координаты
190
Поверхность 1:., при малых значениях уrловоrо расстояния \.f1
можно считать параллельной эллипсоиду; отрезок Q,q2 равен ошибке
dH(J высоты в исходном пункте, поэтому смещение точки Q из за
развертывания можно оценить по формулам
dH J = dH cos \.f1,
(J
db = dH sin \.f1.
о
(6.40)
Заметим, что в трианrуляции зенитные расстояния направле
ний обычно близки к 900 и влияние ошибок уклонений отвеса на
редукции базисов и rоризонтальных направлений пренебреrаемо.
Поэтому влияние развертывания вызвано только ошибками peдy
цирования базисов из за неточноrо знания rеодезических высот. В
XlX в. для редуцирования базисов вместо rеодезических высот ис
пользовали высоты пунктов над уровнем моря и трианrуляцию
редуцировали на поверхность rеоида. В связи с этим методом раз
вертывания обычно называли такой метод обработки rеодезичес
кой сети, при котором спроектированную на rеоид по отвесным
.1ИНИЯМ и высотам над уровнем моря сеть обрабатывали так, как
будто бы она была отнесена к референц эллипсоиду.
После Toro, как rеодезические высоты были определены, по
явилась возможность редуцирования сети непосредственно на по
верхность эллипсоида. Метод обработки, при котором пункты
астрономо rеодезической сети проектируют на поверхность рефе
ренц эллипсоида по нормалям к нему, носит название метода пpo
t!кmuрованuя.
CTporo rоворя, из за неизбежных ошибок rеодезических BЫ
сот всеrда используют метод развертывания, и обработку aCTpo
номо rеодезической сети производят последовательными прибли
Jl\ениями, уточняя высоты по найденным после редуцирования с
их использованием плановым координатам и затем выполняя HO
вое редуцирование.
Помимо ошибки из за неточности высот на редуцирование дей
.:твует и систематическая поrрешность: вследствие волнистости reo
ида длина дуrи между одними и теми же точками на поверхности
r- оида всеrда больше дуrи на эллипсоиде (рис. 6.7).
Поверхность проектuрованuя
7ипсоид
Рис. 6.7. Сравнение дуr эллипсоида и rеоида
191
Таким образом, последовательность вычислений в астрономо--
rеодезической сети складывается из следующих этапов:
измерение астрономических (натуральных) координат ер, л в
исходном пункте, редуцирование базисов по приближенным высо-
там и вычисление приближенных rеодезических координат;
вычисление смешанных уклонений отвеса и аномалий высот;
редуцирование измерений по смешанным уклонениям отвеса
и приближенным rеодезическим высотам;
развертывание сети на эллипсоиде, уравнительные вычисле
ния и определение rеодезических координат;
определение разностей приближенных и уточненных rеодези
ческих координат и вычисление поправок за развертывание.
Полученные в результате этоrо rеодезические координаты бу
дут соответствовать координатам, которые получились бы при
проектировании измерений на поверхность эллипсоида.
Методы проектирования и развертывания дополняют друr дpy
ra: вычислить дуrу ряда трианrуляции после проектирования МОЖ
но только методом развертывания.
Разности приближенных и уточненных координат можно по--
лучить из сопоставления координат пунктов, общих для астроно--
мо rеодезической и спутниковой rеодезических сетей. Это позво
лит учесть поправки за развертывания, избеrая последовательны,"
приближений.
rлава 7
СИСТЕМЫ ВЫСОТ
Понятие высоты, несмотря на кажущуюся очевидность, явля
:тся одним из наиболее сложных и тонких понятий rеодезии. Это
,:вязано с двойственным смыслом высоты: с одной стороны, это
;оасстояние между точками в пространстве, Т.е. чисто rеометри
еское понятие; с друrой стороны, в физическом понимании, это
з.е.lичина, определяющая энерrетический уровень той или иной
:-очки в поле силы тяжести. Если две точки лежат на одной OTBec
ОЙ линии, rеометрическую высоту можно измерить непосредствен-
"iO как расстояние между ними; так измеряют высоты различных
:;редметов (высота rеодезическоrо сиrнала, инструмента над цeH
:-ром, высота человека, дерева, дома и т.д.). Очевидно, что rеоде
нческую высоту, Т.е. высоту в rеометрическом смысле, так изме
;,нть нельзя: в точке поверхности Земли неизвестны ни направле-
:iие нормали к эллипсоиду, вдоль которой нужно измерять высоту,
:1:.11 положение отсчетной точки на эллипсоиде, которая к тому же
нзически недоступна, поскольку эллипсоид проходит, как пра-
ЗК10, внутри Земли.
Физическое понятие высоты связано с работой в поле силы
:-яжести. Так, если точки лежат на одной уровенной поверхности,
:iапример, на поверхности какоrо либо водоема, rде отсутствуют
:-.:чения, естественно считать, что высоты этих точек одинаковы.
Ес..1И же вода течет от одной точки к друrой, rоворят, что высота
::ервой точки больше. В этом случае мерой высоты выступает ра-
'XJTa, которую совершает сила тяжести при перемещении водной
lo{accbI, Т.е. разность потенциалов между указанными точками. По
.:to:ольку потенциал на уровенной поверхности постоянен, разность
::,отенциалов любых точек, лежащих на двух различных уровенных
..:оверхностях, всеrда постоянна. Поэтому разность потенциалов
Ui..lяется мерой высоты или высотой в физическом понимании. Как
,!3вестно, разность потенциалов можно получить в результате reo
wстрическоrо нивелирования и измерений силы тяжести.
193
Можно связать две системы высот в rеометрическом и фнз}',
ческом понимании Т.е. перейти от разности потенциалов к B
соте как расстоянию в линейной мере, если известна напряжеЕ
ность поля силы тяжести. В однородном поле, коrда сила тяж .
постоянна, rеометрическое и физическое понятия высоты совп.;
дают. В реальном поле Земли для связи двух систем высот нужн,,:
знать силу тяжести всюду вне отсчетной поверхности (эллипсо
да или rеоида). Поскольку сила тяжести внутри Земли по измер;-
ниям на ее поверхности однозначно не определяется, используК'
различные модели поля силы тяжести. Можно рассматривать ра7
ность потенциалов в нормальном rравитационном поле, что п-::
зволяет достаточно просто перейти от измеренной разности п-::
тенциалов к высоте в rеометрическом понимании. Известны и ины:
способы задания поля силы тяжести, приводящие к друrим сист=
мам высот; основные из них будут рассмотрены ниже.
Еще одной причиной, по которой высоту рассматривают l
изучают отдельно от плановых координат, является различие J
методах получения этих величин: до недавнеrо времени плановы:
координаты находили из обработки линейных и уrловых изме
ний, выполненных на поверхности Земли, а высоты преимуш
ственно из rеометрическоrо нивелирования, сопровождаемоr
измерениями силы тяжести. Определение высоты по измереЮln!
расстояний и вертикальных уrлов затруднено из за влияния вет--
тикальной рефракции, из за чеrо вертикальные уrлы измеряК'
со значительно меньшей точностью, чем rоризонтальные.
Спутниковые методы позволяют определить прямоуrольнь.J
координаты точек поверхности Земли, по которым, используя з.=
висимости (2.8) (2.15), можно найти rеодезические координаПL
Однако так можно найти только высоту в rеометрическом ПОНИ t:.
нии, поскольку прямоуrольные координаты не содержат инфор:\{.:,
ции о поле силы тяжести. Кроме Toro, из за тропосферных в.'п
ний и методических особенностей высота и в этом случае опре.Jё
ляется с несколько меньшей точностью, чем плановые координатъ:..
39. rЕОДЕЗИЧЕСКАЯ ВЫСОТА и МЕТОДЫ ЕЕ
ОПРЕДЕЛЕНИЯ
в rлаве 2 rеодезическая высота некоторой точки определеf-1..1.
как отрезок нормали к эллипсоиду от ero поверхности до этС' '
точки. Совместно с плановыми координатами В, L rеодезическ.l.I
высота Н определяет пространственное положение точки OTHOCj
тельно заданноrо эллипсоида. Очевидно, что rеодезическая вью........
194
та как расстояние от не существующей в природе поверхности не
имеет физическоrо смысла и не может быть непосредственно из
tepeHa. Определить rеодезические высоты или их при ращения
возможно с помощью спутниковых наблюдений, из обработки
пространственных линейно уrловых сетей, триrонометрическоrо
}f астрономическоrо нивелирования. Рассмотрим принципы этих
методов.
Спутниковые .методы позволяют определить пространствен
ные прямоуrольные координаты Х, У, Z точки. Эти координаты
вязаны с rеодезическими формулами (2.6).
Для перехода от координат Х, У, Z к rеодезическим коорди
натам В, L, Н в системе выБRанноrо эллипсоида с большой полу
осью а и эксцентриситетом е 2 служат формулы (2.8) (2.15).
rеодезические высоты спутниковым методом определяются с
точностью до нескольких метров.
В относительных спутниковых определениях, коrда измерен
ными являются приращения М, У, дz пространственных KOOp
..1инат, можно получить разность rеодезических высот непосред
ственно по этим приращениям. Если расстояние между точками
невелико, в пределах нескольких километров, можно для этоrо
пользоваться формулой (2.16), считая, конечно, t-..a = t-..e 2 = О,
H = ( XcosL + YsinL)cosB + ZsinB.
Для координат В, L нужно брать средние значения координат
точек, для которых вычисляется приращение H, или средние зна
чения триrонометрических функций широты и долrоты.
Определение zеодезической высоты из обработки пространствеи-
НЫХ сетей
В этом методе rеодезическая высота определяется вместе с пла
новыми координатами после приведения результатов линейно
уrловых измерений в единую систему координат и перехода от
прямоуrольных координат к rеодезическим (см. рис. 6.5). Такой
.;пособ определения разности rеодезических высот реализуется при
тахеометрической съемке. Из за влияния вертикальной рефрак
:.ши точность измерения зенитных расстояний значительно ниже
точности измерения rоризонтальных уrлов, поэтому rеодезичес
!с.:ие высоты рассмотренным методом определяют только в специ
.l.lbHbIX случаях, коrда уrлы наклона в сети велики и точность
измерения rоризонтальных и вертикальных уrлов примерно оди
накова.
195
Определение zеодезической высоты из дальномерных измерен.
В rлаве 6 получены формулы (6.27) и (6.28), связывающие пrx.....
странственный отрезок D с хордой эллипсоида. Запишем их в ВlU
(1+k) D 2 =Df =D 2 (Hq Hp)2,
откуда
? ?
Hq=Hp+ D (1+k)D ,
(7.1
Нр Нч НрНч
k= + +
N p N q NpN q
Так как параметр k зависит от определяемой высоты, rеодези-
ческую высоту по формуле (7.1) приходится определять после..](\-
вательными приближениями.
Рассмотренный метод нахождения rеодезической высоты H
имеет большоrо практическоrо значения, поскольку выполнять
линейные измерения между точками с известными rеодезическимF.
координатами нецелесообразно. Больший интерес представляет
случай измерения расстояний от трех точек с известными коор':щ-
натами до определяемой.
Определение zеодезической высоты из пространственной лине;;"
ной засечки
Пусть на рис. 7.1 А, В, С исходные пункты, Р определяе
мый пункт. Измерены расстояния от всех исходных пунктов .JC
пункта Р. Найдем расстояния АВ и АС между исходными пункта-
ми и решим треуrольники РАВ и РАС. Направляющие косинусь.;:
1 АР' т АР, ПАР линии, соединяющей исходный пункт А с определя-
емым, связаны с уrлами треуrольника равенствами
cos а = IABIAP + mАвm Ар + пАвпАР;
cos {3 = IAclAP + тАстАР + пАспАР'
Добавляя к ним условие
IA/ + т А / + пА/ = 1,
получаем три уравнения для получения неизвестных 1 АР, т АР, ПАР'
После этоrо леrко вычислить прямоуrольные координаты точки
Р и, используя формулы (2.8) (2.15), перейти к rеодезически .
координатам.
196
в
А
с
р
Рис. 7.1. К определению rеодезической высоты пространственной
линейной засечкой
ИСХОДНЫМИ пунктами А, В, е MorYT быть как наземные точ
H. так и нез.
Определение zеодезической высоты из триzоно.метрическоzо ни-
l.e lирования
Рассмотрим двустороннее триrонометрическое нивелирование.
В этом методе по измеренным зенитным расстояниям Z PQ и ZQP
:-iаходят разность Нч Нр rеодезических высот (рис. 6.3). Для ее
:-iахождения обратимся к формуле (6.31). Поменяем в этой форму
:е местами точки Р и Q, тоrда
Dcosz qp =(N +H)pcoslJI (N +H)q ДsiпВq'
Вычтем это равенство из уравнения (6.31)
D(cosz pq cosz qp ) = (N q N p)(l + coslJI) +
+(Н ц Нр)(l СОSIJI) Д(siпВр +sinB q ),
:--де COSIJI определен формулой (2.39). Введем в последнее ypaBHe
ие косинус половинноrо уrла
1 + COS IJI = 2 cos 2 1J1 /2
. решим. ero относительно разности высот. Получим
COS Z Р{! COS ziJp д(siп В Р sin Вч)
Hq Hp=D (Nq Np)+ ,
2cos 2 IJI cos 2 IJI (7.2)
2 2
де Вр и Вц rеодезические широты точек Р и Q соответственно.
197
Если положить
N p N q + д(siпВ р + sinBq)/cos 2 1Jf == О,
(7.3
то
COSZ РЧ СОSZ чр
Hq Hp=D .
2 COS 2 1Jf
2
(7"+ "
Соrласно полученным формулам, если известно расстояние D
между точками Р и Q поверхности Земли, rеодезические зенитные
расстояния zРЧ и zqp отрезка PQ, координаты В, L обеих точек.
можно найти разность rеодезических высот этих точек. Практн
ческому применению формул (7.2), (7.4) препятствует невозмож
ность измерения rеодезических зенитных расстояний. В триrоно
метрическом нивелировании измеряют уrол между отвесной ЛII-
нией и касательной к рефракционной кривой. Для перехода от
измеренных уrлов к rеодезическим зенитным расстояниям нужнС"
знать уклонения отвесных линий в точках Р и Q и ввести поправ-
ки за влияние вертикальной рефракции. Так как rеодезическое Z
и астрономическое Za зенитные расстояния связаны равенство!-!
(6.14) Z = Za + д и cosZ = cos(Za + д) = cosZ a t) sinZ a , д.1Я
разности rеодезических высот можно написать
COSZ pq СОSZчр
Hq Hp D
2 cos 2 1Jf
2
др sin Z РЧ д ч sin Zqp
D (N N )+
21Jf q р
2 cos 2:
(7.5
sin В + sin В
+ д Р Ч + влияние вертикальной рефракции.
cos 2 1Jf
2
Определение zеодезической высоты из астрономическоzо (ио-
метричеСКО20) нивелирования. В rлаве 2 установлена связь (2.331
разности ДН rеодезических высот и нивелирноrо превышения bll.
Разность rеодезических высот удаленных точек получается сум.
мированием по ходу элементарных разностей (2.33)
Вч Bp = fM ftЭ Ar Д/.
р р
(7.6)
198
Первый член этой формулы иноrда называют измеренной BЫ
,:отой.
Формула (7.6) поясняет принцип астрономическоrо нивелиро
вания физической поверхности Земли: если вдоль нивелирноrо хода
азмерять на каждой станции не только превышение, но и aCTpo
номические координаты, можно редуцировать измеренные превы
:.uения в rеодезическую систему координат и определить разность
;еодезических высот конечных точек нивелирноrо хода.
Формулу (7.6) можно получить из уравнения (7.5), полаrая
расстояние между Р и Q равным д]), 1ft = О, COSZ pq = OSZqp = cosz,
sinz p sinz qp = sinz и принимая условие (7.3). Тоrда
I1.Н == Н ц Н р == I1.D cos z I1.Dдsiп z == ыz дl1.!.
Астрономическое нивелирование физической поверхности Зем
.1И на практике не применяется из за трудоемкости астрономи
ческих определений.
Таким образом, из рассмотренных методов определения [eo
.1езической высоты практически реализован метод точноrо опре
.1еления высоты по дальномерным измерениям и метод триrоно
\lетрическоrо нивелирования для приближенноrо определения
высот.
Как уже упоминал ось, rеодезические высоты нельзя использо
вать для решения задач, связанных с определением уровенных
поверхностей. Основной величиной, определяющей положение
точек в поле силы тяжести, является приращение потенциала. Раз
ность rеодезических высот точек содержит информацию не толь
ко о разности потенциалов, но и зависит от положения выбран
Horo эллипсоида. В связи с этим rеодезическую высоту разделяют
на две части. Обоснование TaKoro разделения приведено в [21] «...
применение rеоида имело одну несомненно положительную CTO
рону: из единой, очень сложной физической поверхности Земли
выделялась наиболее неправильная часть, представление о KOTO
рой дают почти только одни нивелировки (высоты над уровнем
\юря), и оставалась вторая часть, несравненно более rладкая (BЫ
,,:оты rеоида над эллипсоидом). Такое разделение вполне eCTeCTBeH
НО и рационально, а rеоид обеим разделяемым величинам прида
ет простой физический смысл» и делит высоту на 2uпсомеmрuчес
ую и zеоuдальную части. rипсометрическая часть описывает
физическую поверхность Земли относительНО уровенной или близ
кой к уровенной поверхности; это более сложная часть в rеодези
ческой высоте. rеоидальная определяет форму уровенной поверх
199
ности относительно эллипсоида. Уровенные поверхности ПО.1Я
силы тяжести имеют более rладкую форму по сравнению с физи
ческой поверхностью, поэтому rеоидальная часть описывает плав
ные изменения rеодезической высоты.
В зависимости от способа определения rипсометрической час
ти различают несколько систем высот.
40. ОРТОМЕТРИЧЕСКАЯ ВЫСОТА
И ВЫСОТА rЕОИДА
Ортометрической высотой называют высоту Р 2 Р точки Р на..:
rеоидом (рис. 7.2). Напомним, что rеоидом называют уровенную
поверхность потенциала силы тяжести, проходящую через начале
счета высот. Рассмотрим рис. 7.2. Точка О исходный пункт HH
велирной сети (футшток); Р точка поверхности Земли (пункт
нивелирной сети); Р 2 ее проекция по силовой линии на ypOBeH
ную поверхность W::: W o rеоида, W() потенциал силы тяжести в
исходном пункте О. Между точками О и Р выполнено [eOMeTpH
ческое нивелирование, Т.е. измерены расстояния dh между ура.
венными поверхностями W = С, проходящими через точки сто.
яния реек. Так как уровенные поверхности не параллельны, pac
р
W::::W
р
dh
g dHK
W::::C
W::::W
Ii
Р2
Теоид
,
Р 1
Э.1Лuпсоuд
Рис. 7.2. Ортометрическая высота и высота rеоида
200
стояние между двумя уровенными поверхностями в разных их
точках различны, а сумма измеренных превышений зависит от пути
нивелирования и не может определить высоты точек.
Пусть на каждой нивелирной станции измерена сила тяжести
g. Тоrда возможно вычислить разность dW потенциалов между
уровенными поверхностями, проходящими через переходные точ
ки, Т.е. работу, которую нужно совершить при переходе от oд
ной реечной точки к друrой
dW = gdh.
(7.7)
Суммируя элементарные разности dW, получаем разность по
тенциалов между уровнем моря и точкой Р физической поверхно
сти Земли
р
W o W::: f gdh.
(7.8)
о
Разность потенциалов W o W rеопотенциальная величина
или rеопотенциальное число равна работе, которую нужно co
вершить при подъеме от точки О к точке Р. Величина W o W не
зависит от пути нивелирования и определяется только положени
ем точек Р и О в поле силы тяжести. Поскольку на уровенной
поверхности потенциал постоянен, очевидно, что rеопотенциаль
ное число одинаково для всех точек, лежащих на одной ypOBeH
ной поверхности.
Определим ортометрическую высоту. На поверхности rеоида
потенциал постоянен, поэтому разность потенциалов в точке Р и
.lюбой точке rеоида одинакова и равна rеопотенциальному чис
:lY. В силу этоrо для разности потенциалов в точке Р и в точке Р 2 ,
.1ежащей на rеоиде на одной силовой линии с точкой Р, можно
написа ть
W o W = W p W p .
2
Разность потенциалов точек Р2 и Р запишем в виде
р
W P2 Wp = fйdНК,
Р2
rде d/P измеряемое по силовой линии точки Р расстояние меж
ду близкими уровенными поверхностями; Й значение силы
201
тяжести на отрезке d1P. При меняя к интеrралу f gdHg теорему
о среднем, получим
Р Р
W P2 W p = Йт f dHg = gm Hg = W o W = f gdh,
о
rде Йт среднее значение силы тяжести вдоль силовой линии Р2 Р '
Таким образом, для ортометрической высоты получаем
Р
Hg=W:) W = f dh
g .
gm gm О
(7.9)
Входящее в уравнение (7.9) значение g т силы тяжести можно
выразить через силу тяжести g на поверхности Земли и rлубину }I
Йт = g ag h.
дН
В ag
ертикальныи rрадиент дН силы тяжести как вторая произ
водная потенциала меняется скачком при скачкообразном измене
нии плотности. Поэтому силу тяжести внутри Земли нельзя вычис
лить без знания плотности в каждой точке вдоль силовой линии от
поверхности Земли до rеоида. Следовательно, ортометрическая
высота принципиально не определима по измерениям на физичес
кой поверхности Земли и для ее вычисления приходится использо
вать ту или иную rипотезу строения земной коры. Непосредствен
ное измерение силы тяжести внутри Земли также невозможно.
Установим связь ортометрической и rеодезической высот. В
rлаве 3 показано, что длина отрезка нормали к эллипсоиду r.:paK-
тически не отличима от дуrи силовой линии, поэтому можно счи
тать, что
н = 1P + /;,
(7.1 О)
rде /; = Р[Р2 высота 2еоuда, Т.е. отрезок силовой линии от эл
липсоида до rеоида (см. рис. 7.2).
Высоту /; rеоида над эллипсоидом расстояние между точка-
ми Р[ и Р2 можно рассматривать как в реальном, так и в HOp
мальном Поле. В первом случае
r g = W 1 W o
I 2'
gm
202
во втором
rg= U{) U2
\ 2'
У m
в этих формулах W\ действительный потенциал на эллипсо
иде в точке Р\; и 2 нормальный потенциал на rеоиде в точке Р2;
gm\ 2, Ym\ 2 среднее значение действительной и нормальной силы
тяжести на отрезке Р\Р2 соответственно.
Используя связи W\ И и 2 С аномальным потенциалом, запишем
W\ = и{) +Tj, и 2 = W() Т 2 ,
.1Ля высоты rеоида получим
1'К = 'т1 + (W{) U ()) ::= Т 2 (W{) и о )
g 2 y 2'
(7.11)
rде Т) и Т 2 аномальный потенциал в точках Р\ и Р2'
Таким образом, для нахождения высоты rеоида следует найти
аномальный потенциал и действительную силу тяжести внутри
Земли. Это невозможно сделать по измерениям на ее поверхнос
ти. Поэтому rеоид нельзя определить по наземным измерениям.
В формуле (7.10) обе величины в правой части и ортометри
ческая высота и высота rеоида связаны с rеоидом и поэтому не
MorYT быть найдены по измерениям на Земле. По этой причине ее
нельзя применить для точноrо определения rеодезической высоты.
Найдем приближенное выражение для ортометрической BЫCO
ты. Для этоrо надо найти приближенно среднюю силу тяжести BHYT
ри Земли вдоль линии РР 2 . Пусть В точке Р поверхности Земли
(см. рис. 7.2) сила тяжести равна g. В точке Р 2 rеоида сила притяже
ния будет меньше, чем в точке Р, из за Toro, что притяжение топоr
рафических масс, расположенных между rеоидом и поверхностью Зем
ли, в точке Р направлено вниз, а в точке Р 2 вверх. Поэтому YMeHЬ
шение силы тяжести из за этоrо эффекта равно удвоенной силе
притяжения этих масс, Т.е. удвоенной поправке Буrе 47rG8/P, rде
8 rшотность топоrpафических масс. Но из за приближения к цeH
тру масс Земли в точке Р 2 притяжение будет больше. Объединяя оба
этих влияния притяжения топоrpафических масс и изменения силы
тяжести с высотой, ДJIя силы тяжести go на rеоиде получим
g = g 41rGбнg dg Hg
() dH '
rде последний член учитывает изменение силы тяжести с высотой.
203
Считая gm равной среднему значению из g и go' имеем
g = g 2nG8H<r; dg НК
т dH 2 '
[де 2пС = 0,0419 cM 3 /r мrл/м.
Как видно, для нахождения силы тяжести 'йт нужно знать
плотность 8, вертикальный rрадиент dg/dH силы тяжести и OpTO
метрическую высоту 1P. Ни одна из этих величин по измерения !
На поверхности Земли не определяется.
Положим вертикальный rрадиент реальной силы тяжести paB
ным нормальному
(7.121
dg = dy = o 3086 мrл/м,
dH dH '
плотность 8 равной средней ПЛОТНости земной коры 2,67 [/см 3 .
тоrда
Hg
'йт = g 0,04198НК + 0,3086 = g + 0,0424НК,
2
и для ортометрической высоты получаем
р
Н g = 1 J dh.
g + О,О424НК о g
(7.131
Вычисленные по этой формуле высоты называют высота.ни
rельмерта.
При перемещении по уровенной поверхности, на которой по
тенциал постоянен, rеопотенциальное число также будет посто
янно. Однако сила тяжести на уровенной поверхности изменяет
ся. Поэтому ортометрическая высота на уровенной поверхности
не постоянна.
41. НОРМАЛЬНАЯ ВЫСОТА И АНОМАЛИЯ ВЫСОТЫ
Понятие нормальной высоты было дано в rлаве 4 при YCTa
новлении связи натуральной и нормальной систем координат как
высоты над эллипсоидом такой точки, которая лежит на одной
силовой линии к эллипсоиду с точкой поверхности Земли и д.1Я
204
которой нормальное rеопотенциальное число и() u равно дей
ствительному. Поясним это определение. В основе системы HOp
мальных высот лежит условие
и() и::::::: W() W,
(7.14)
которое означает, что в нормальном rравитационном поле Haxo
.JЯТ такую точку, в которой приращение нормальноrо потенциа
.1а от эллипсоида равно rеопотенциальному числу.
Рассмотрим рис. 7.3. Здесь нормальная высота точки Р это
отрезок р\рУ нормальной силовой линии от эллипсоида до ypo
венной поверхности нормальноrо поля, на которой потенциал U
принимает значения
р
u = u () f gdh.
о
Иными словами работа, которую нужно выполнить в HOp
чальном поле, чтобы подняться от эллипсоида к точке рУ, в точ
ности равна той работе, которую нужно выполнить в реальном
поле силы тяжести при перемещении по поверхности Земли от
точки О к точке Р. Поскольку нормальный потенциал всеrда
выбирают близким к действительному, точка РУ находится Heдa
.1eKo от точки Р и расстояние рУр аномалия высоты будет
\fалой величиной.
р
нУ
Р]
Рис. 7.3. Нормальная высота и аномалия высоты
205
Получим формулу для нормальной высоты НУ. Аналоrичнс
формуле (7.7) для элементарной разности нормальных высот MOiК
но написать
dU = }fiHY,
rде dH У расстояние между уровенными поверхностями нормаль
Horo поля; у нормальная сила тяжести.
Разность нормальных потенциалов точек Р 1 И рУ
рУ рУ
и() и = f }fiHY = Ут f dHY = Ут НУ ::: W:) W,
Р} l'J
откуда
р
НУ ::: W o W = f gdh.
Ут У т О
(7.15 I
Эта формула получена в 1951 r. В.Ф.Еремеевым (l90 1985). В
двух последних формулах Ут среднее интеrральное значение си.lЫ
тяжести на отрезке P1PY. Соrласно выражению (3.69), при неболь.
ших высотах над Землей нормальная сила тяжести меняется п(\
линейному закону, поэтому интеrральное среднее у,п равно значе
нию нормальной силы тяжести в точке РУт' В середине отрезка
р 1 рУ на высоте НУ/2 над эллипсоидом
У т = Уа + (д У / д Н)О НУ/2,
(7.16 I
rде Уа нормальная сила тяжести на эллипсоиде в точке Р:.
(д У / д Н)О вертикальный rрадиент нормальной силы тяжести,
Соrласно этой формуле, для вычисления У т нормальная высо.
та уже должна быть известна, поэтому вычисления по фОРМУ.lе
(7.15) выполняют приближениями.
Подчеркнем, что нормальная высота определяется только по
результатам измерений на физической поверхности Земли; в свя.
зи С этим ее можно рассма трива ть как измеренную величину. От
распределения масс внутри Земли эта высота не зависит. Если бы
rравитационное поле Земли совпадало с нормальныI,, нормаль.
ные высоты были бы равны rеодезическим. Соrласно рис. 7.3 сумма
нормальной высоты и аномалии высоты = рУр дает rеодезичес.
кую высоту точки поверхности Земли
H=HY+ .
206
(7.171
Напомним, что в соответствии с выполненной в 19 оценкой
при определении высоты мы не делаем различие между нормалью
к эллипсоиду и нормальной силовой линией.
Для аномалии высоты, в rлаве 4 получено выражение (4.8),
в котором среднее значение нормальной силы тяжести на OT
резке рУр
У=Уо + ( д У ) (НУ +, /2).
дН о
(7.18)
Если от кажДОЙ точки поверхности эллипсоида отложить вверх
по направлению нормали к нему нормальную высоту, получится
поверхность, которую называют поверхностью Земли первО20 пpи
ближения, теллуроuдом (от латинскоrо «tellus (tеllиris))) Земля)
или 2uпсо.wетрuческой поверхностью (от rреческоrо «hypsoS)) BЫ
сота).
Если же нормальные высоты отложить по нормали к эллипсо
иду от каждой точки поверхности Земли вниз, то rеометрическое
место точек концов этих отрезков образует поверхность, KOTO
рую называют ква3И2еоuдОАt 1 . Очевидно, что высота квазиrеоида
над эллипсоидом равна аномалии высоты.
Нормальная высота и аномалия высоты лоrически связаны
между собой. В теории Молоденскоrо сначала по измеренным
нормальным высотам, откладывая их по нормалям от поверхно
сти эллипсоида, определяют поверхность Земли первоrо прибли
жения (теллуроид). Затем находят аномальный потенциал из pe
шения краевой задачи, в которой краевой поверхностью является
теллуроид, а краевым условием служит выражение (4.12).
Нормальные высоты, так же как и ортометрические, изменя
ются на уровенной поверхности из за изменения нормальной
силы тяжести. Однако, так как нормальная сила тяжести не зави
сит от долrоты, нормальные высоты на уровенной поверхности
постоянны вдоль параллели и изменяются только при изменении
широты. Ортометрические высоты на уровенной поверхности
изменяются при смещении в любом направлении.
I От латинскоrо quasi якобы, как будто; в сложных словах означает
«почтю), «ненастоящий)). Квазиrеоид «почти rеоиД», высота над квазиrео
идом почти ортометрическая (квазиортометрическая).
207
42. СВЯЗЬ rЕОДЕЗИЧЕСКОЙ ВЫСОТЫ
с НОРМАЛЬНОЙ ВЫСОТОЙ И АНОМАЛИЕЙ
ВЫСОТЫ
в формуле (7.17) все величины можно определить независи {с
друr от друrа по измерениям на поверхности Земли: rеодезическук
высоту находят по спутниковым наблюдениям, нормальную и::
rеометрическоrо нивелирования и наблюдений силы тяжести, aHL
малию высоты по rравиметрическим данным. Зная любые две и::
них в какой либо точке поверхности Земли, можно по ним вычнL
лить третью. Так, если известны rеодезическая высота и aHoM lHA
высоты, можно найти нормальную высоту
HY=H (,
(7.19
не выполняя rеометрическоrо нивелирования. А определив reo.1e
зическую и нормальную высоты, получаем аномалию высоты
(=H HY
(7. O '
независимо от rравиметрических данных.
Соrласно выражению (7.17), rеодезическая высота равна cy {.
ме нормальной высоты и аномалии высоты. Однако члены этоf
формулы MorYT иметь разный смысл в зависимости от Toro, каки;;
измерения использованы для их получения.
В классическом методе определения поверхности и поля Зе l.
ли измеренными величинами являются rеопотенциальное ЧИС.1С
и сила тяжести; известны также уrловая скорость вращения r!:
астрономические координаты. Смысл нормальной высоты r!:
аномалии высоты в этом случае определен в предыдущем пара.
rрафе.
Выясним смысл нормальной высоты в случае, коrда rеодезн.
ческая высота рассматривается полностью, без деления ее на HOp
мальную и аномальную части. Таким путем находят rеодезичсХ.
кую высоту относительно выбранноrо эллипсоида по измерениfil.
прямоуrольных rеоцентрических координат, используя преобра.
зования (2.14). Считая отсчетный эллипсоид уровенным, можн,:
представить rеодезическую высоту в поле этоrо эллипсоида чере::
разность нормальных потенциалов
и о Ир
Н=
r
208
Заменим нормальный потенциал Ир в точке Р разностью дей
ствительноrо W p и аномальноrо потенциала Тр и получим [eoдe
зическую высоту в таком виде
И О Wp Тр
Н;;;;; +
у у
(7.21)
Первый член справа в этом выражении содержит потенциал
а и при перемещении точки Р по поверхности Земли изменяется
8 зависимости от изменения высоты и соответствует быстро из
\Iеняющейся rипсометрической части высоты, а второй, связан
:fЫЙ с аномальным полем, соответствует ее плавной rеоидальной
"-{асти. Следовательно, выражение Т/у является аномалией BЫCO
:Ы, а отношение (и о Wp)/Y получает смысл нормальной BЫCO
:ы. Обозначим эту новую аномалию высоты через 1' а нормаль.
:fУЮ высоту через JfY 1 , и выясним смысл этих понятий.
Рассмотрим аномалию высоты (1' Соrласно (7.21), она связа
:ia с аномальным потенциалом следующим образом
Тр
l ::: .
у
(7.22)
Проведем в нормальном поле через точку Р уровенную повер
\Ность И = Ир и поверхность, на которой нормальный потенциал
;\1вен действительному потенциалу в этой же точке (рис. 7.4). По
pXHOCTЬ и = W p пересечет нормаль Р ОР к эллипсоиду в точке
р
l f
Р/
Р()
Рис. 7.4. rравиметрическая (<<чистая») аномалия высоты
209
рУ.. Расстояние рУ.р между рассматриваемыми уровенными повер
хностями равно отношению разности И Руl Ир потенциалов 1\
среднему на отрезке pYIP значению нормальной силы тяжести. Но
ИРУ! = W p , а Ир = W p Тр, поэтому
ИРУ l Ир = Тр,
и, следовательно,
Т
Р! Р =
у
Это выражение совпадает с (7.22). Значит, аномалия высоты
(1 это расстояние между уровенными поверхностями нормаль
Horo поля, разность потенциалов между которыми равна аномаль
ному потенциалу. Если аномальный потенциал определяется толь-
ко по rравиметрическим данным, величина (1 является rравимет
рической аномалией высоты и относится к общему земному
эллипсоиду и
(1 = (ТР,
(7.23 )
а для (1 можно дать такое определение: аномалия высоты 2рави
метрическая расстояние в точке Р между нормальной уровенной
поверхностью, проходящей через эту точку, и той нормальной ypo
венной поверхностью, на которой нормальный потенциал равен дeй
ствительному потенциалу в точке Р. Ее можно также определить
как аномальный потенциал, выраженный в линейной мере.
Рассмотрим нормальную высоту Щ. ИЗ равентва (7.21) имеем
(рис. 7.5)
у И О W p
НI =
У
(7.24 )
у в этой формуле равно среднему значению нормальной силы
тяжести на отрезке рору. Входящая в выражение (7.24) разность
И О W p имеет смысл разности нормальных потенциалов, поэто.
му высота Hr получает такое определение: нормальная высота H
точки Р это высота над ЭJUlипсоидом точки, лежащей на одной с
ней нормали к ЭJUlипсоиду, в которой нормальный потенциал равен
действительному потенциалу в точке Р.
Использование в формуле (7.17) rеодезической высоты как ис
ходной величины приводит к введению новых понятий. Нормаль
ная высота получена не по результатам нивелирования, а как раз
ность rеодезической высоты и rравиметрической аномалии BЫCO
210
ты. Аномальный потенциал определяется не только на поверхнос
ти Земли, но И во внешнем пространстве, поэтому аномалия BЫCO
ты ! И нормальная высота J{fl также определены во всем внешнем
пространстве и являются элементами rравитационноrо поля.
р
и= w т
р р
,
'1
и= w (W И )
р о о
нУ
1
нУ
Рис. 7.5. Два типа нормальной высоты и аномалии высоты
Если же рассматривать разность И О W p потенциалов в pe
альном поле, получаем новое понятие rеопотенциальноrо числа и
rеоида. rеопотенциальным числом становится разность действи
тельных потенциалов между уровенной поверхностью W = И О и
точкой поверхности Земли, а 2еоид уровенная поверхность реаль
lЮ20 поля, на которой действительный потенциал равен пoтeHциa
.1У на эллипсоиде.
Наконец, введение нормальной высоты &! позволяет вычис
.1ЯТЬ действительный потенциал в точке с координатами В, L, Н
как нормальный потенциал в точке с координатами В, L, &1'
Сравним аномалию высоты и нормальную высоту в обоих
определениях. Так как в обоих случаях их сумма дает rеодезичес
кую высоту, можно написать
нУ + ,= IfY 1 + '1
и
& &1 = '1 ,.
211
Используя для и l выражения (4.8) и (7.22), находим
нУ HT = W() u()
у
(7.25)
Если в ИСХОДНОМ пункте нивелирной сети потенциал W(} равен
потенциалу на эллипсоиде, нормальная высота в обоих определе
ниях одинакова.
43. НОРМАЛЬНО-ОРТОМЕТРИЧЕСКАЯ ВЫСОТ А
И ВЫСОТА коrЕОИДА
Ортометрическая высота обладает несомненным преимущеСТВО!\1
наrлядности перед всеми друrими системами высот; интуитивно ясно.
что высоты следует отсчитывать от уровня моря. В этом случае высота
имеет простой физический смысл. Однако вычислению ортометрической
высоты препятствует невозможность точноrо определения действителъ
ной силы тяжести внутри Земли. Поэтому иноrда в формуле (7.9) вмес.
то среднеrо значения Действительной силы тяжести между rеоидом и
поверхностью Земли используют среднее значение нормальной силы
тяжести на отрезке нормальной силовой линии между точкой Р поверх
ности Земли и такой точкой рз (рис. 7.6), для которой разность и" С.
нормальных потенциалов относительно точки Р равна rеопотеюiиаль
ному числу репера
ИЗ Ир = W o W p '
(7 .26
[де ИЗ значение нормальноrо потенциала в точке рз.
Такие высоты называют нормально орmомеmрuческuмu.
Найдем нормально ортометрическую высоту нНО. Соrласно опре.
делению высоты
НО Из Ир W o Wp f
н ] 1 ] gdh,
Ут Ут Уm ОР
(7.271
rде Уm l среднее значение нормальной силы тяжести на отрезке рзр нор..-
мальной силовой линии
y , У, +( ;; 1 и н ТЮ +(, )
(7.28!
Для ее вычисления нужно знать высоту точки Р т середины отрез-
ка РзР над эллипсоидом, которая складывается из половины нормаль.
но ортометрической высоты и отрезка р]рз = (2'
212
р
ННО
Р) нормаЛЫIO ортометрuческuй
КО2еоuд
о
W:=W
О
р 2 2еоuд
,g
Р]
Э.ыuпсоuд
Рис. 7.6. К понятию нормально ортометрической ВЫСОТЫ
Представим себе, что нормально ортометрические высоты отложе
ны вдоль нормали к эллипсоиду вниз от каждой точки поверхности Зем
.1И, аналоrично тому, как это было сделано при построении поверхнос
ти квазиrеоида по нормальным высотам. Тоrда концы Р3 этих отрезков
uбразуют некоторую поверхность. По предложению анrлийскоrо rеоде
JИста Дж.де rрааф Хантера (l882 1967) получаемая откладыванием
вниз по нормали к эллипсоиду любой высоты поверхность названа K02e
lJидом (от латинскоrо со с, вместе + rеоид). I В соответствии с этим
квазиrеоид является одним из коrеоидов, а поверхность, полученную в
результате откладывания нормально ортометрической высоты, можно
назвать нормально ортометрическим косеоuдом.
Найдем высоту (2 точки Рз над эллипсоидом. Имеем
у И() ИЗ
2 ,
УI
(7.29)
де YI среднее значение силы тяжести на отрезке Р I Р 3'
Найдем разность потенциалов И О И 3 ' Из разности И() Ир нормаль
ных потенциалов между эллипсоидом и точкой поверхности Земли для
1 Джеффрис r. Земля, ее происхождение, история и строение. М.: Изд.
J Iностранной литературы, 1960. 485 с.
213
получения точки рз мы исключили rеопотенциальное число W o W p '
поэтому
и о ИЗ = и о Ир (W() W p ) = Тр (W o Ир),
rДе Тр = W o Ир аномальный потенциал в точке Р физической повер
хности Земли.
Отсюда следует
'2 =: Тр W o и о ,
Уl Уl
(7.30)
rде
1 ( ду )
YI=:Yo+ 2 дН 0'2'
Сравним высоту (2 с аномалией высоты. Заметим, что при опреде
лении аномалии высоты и нормальной высоты из разности нормальных
потенциалом между точками Р поверхности Земли и Р I эллипсоида TaK
же исключено rеопотенциальное число W o W p ,
И Р И Р = И И З = Т ( W И )
У о р о р'
поэтому разность потенциалов между точками рУ и Р И точками Р I иР,:
одинакова, а аномалия высоты ( и высота (2 нормально ортометричес
Koro коrеоида не совпадают только из за отличия нормальной силы
тяжести в формулах (7.18) и (7.30), причем при положительных нормаль
ных высотах аномалия высоты больше, чем высота (2' потому что ано--
малия высоты лежит на большей высоте над эллипсоидом, rДе нормаль
ная сила тяжести меньше.
Сравним высоты rеоида
,g = Т Р2 W o и о
Уl Уl
(7.311
и нормально ортометрическоrо Коrеоида. Из за близости высоты rеоюа
и коrеоида в этой формуле использовано то же самое значение Yl нор..-
мальной силы тяжести, что и в формуле (7.30). Вычитая из выражения
(7.31) равенство (7.30), найдем
(g (2 = (Т р2 Т р)/ YI'
Отличие rеоида и нормально ортометрическоrо коrеоида зависит ОТ
разности аномальноrо потенциала на rеоиде и на физической поверхнос-
ти Земли и не может быть определено без знания плотности внутри Земли
Аномальный потенциал в точках поверхности Земли не по
стоянен, поэтому ни квазиrеоид, ни нормально ортометрический
коrеоид не являются уровенными поверхностями.
214
44. СРАВНЕНИЕ ОРТОМЕТРИЧЕСКОЙ,
НОРМАЛЬНОЙ И НОРМАЛЬНО..
ОРТОМЕТРИЧЕСКОЙ ВЫСОТ
Сравним ортометрическую (7.9) и нормальную (7.15) высоты.
Формально они различаются тем, что в выражении (7.15) вместо
действительной силы тяжести g т использована нормальная сила
ТЯЖести У т , Существенно, что в (7.15) осреднение нормальной силы
тяжести выполняется в нормальном поле на отрезке РI РУ от эл
липсоида до вспомоrательной точки рУ. Для вычисления этой Be
личины никакой информации о внутреннем строении Земли не
требуется.
Оценим разность ортометрической и нормальной высот. Bы
читая из выражения (7.15) равенство (7.9), находим
НУ Hg:= gm:Ym НУ.
gm
Нормальную силу тяжести на высоте НУ/2 над эллипсоидом
находим по формуле (7.16).
Используя для 'йт выражение (7.12) и полаrая вертикаль
ный rрадиент реальной силы тяжести равным нормальному и
dg Hg =:: dy НУ напишем
dH dH'
Йт Yт ==g 21CG8Hg Yo dy НУ =(g У)Б'
dH
rде (g J1Б аномалия Буrе.
Таким образом
НУ н g == (g = у) Б НУ.
gm
Так как земная кора в целом изостатически компенсирована,
аномалии Буrе на суше, особенно в [орных районах, как прави
.10, отрицательны. Поэтому нормальные высоты в общем меньше
ортометрических.
Формула (7.32) и приведенные в таблице 7.1 значения оценива
ют также разность аномалии высоты (и высоты rеоида (g. Дей-
ствительно, вычитая из выражения (7.17) равенство (7.1 О), получим
(7.32)
g ==НУ Hg == (g=У)Б НУ.
gm
(7.33)
215
Оценим разность нормальной и нормально ортометрическоЙ
высоты. Вычитая из (7.15) (7.27), найдем
I
НУ HHO = Ут Yт нУ
I '
Ут
1
и, используя полученные ранее значения Ут И Уm ' получим
нНО HY = ду (НУ = 0,3086 'НУ.
У т дн У т
(7.34)
Такой же будет и разность аномалии высоты и высоты HOp
мально ортометрическоrо коrеоида.
В таблице 7.1 приведена оценка разностей высот по получен-
ным формулам для характерных значений высот и элементов aHO
мальноrо поля Земли. Соrласно этой оценке, отличие ортометри
ческих и нормальных высот составляет в равнинных районах ме-
нее 1 см, в [орах достиrает 1 м. Предельное значение этой разности
не превосходит 3 м. Разности нормальной и нормально ортомет
рической высоты значительно меньше и составляют для средних
квадратических значений высоты и аномалии высоты менее 1 см.
Это означает, что квазиrеоид и нормально ортометрический ко-
rеоид одинаково представляют поверхность rеоида. На океане.
коrда нормальная высота равна нулю, все эти поверхности со-
впадают. Таким образом, из рассмотренных трех систем высот:
ортометрической по rельмерту
1 р
я g = Jgdh,
gm о
g = g 2пG8Hg ду Hg
т 2 дн '
нормальной
НУ = J P g dh, У У + ду НУ
т о 2 дН
Уm о
и нормально ортометрической
р
HHO= I Jg dh, I дY HHO
У т у 2 дН '
Уm о
только нормальная высота получается по результатам измерениЙ
и не требует предварительноrо определения аномальноrо поля.
216
Таблица 7.1
Оценка разности высот в различных системах
Средние Макси
Параметр Равнин KBaдpa rорный мальные
ный район тические район зна чения
значения
i Высота, м 200 845 5 000 1 О 000
Аномалия Буrе, мrл (20 30) 50 200 300
Аномалия высоты, м 30 40 50 150
нК ну мм 4 6 43 1020 3061
,
нНО ну мм 2 1 1 79 472
,
в этих формулах g и У действительная и нормальная сила
тяжести в точке Р поверхности Земли; Уа нормальная сила тяже
сти на эллипсоиде в точке Р l'
р
Во все высоты входит rеопотенциальное число W a W = J gdh
о
также измеряемая величина. Отличие систем высот определено раз
.lичием множителя перед rеопотенциалЬНЫМ числом.
rеодезическая высота имеет только rеометрический смысл как
расстояние между точками. Остальные высоты имеют и reoMeT
рический и физический смысл и вместе с rеоидальной частью дают
rеодезическую высоту
Н = W + ?;J = 1fY + = н но + l'
Нормальная высота определяется cTporo по измерениям толь
ко на Земле. Для ее вычисления не нужно знать аномалию BЫCO
ты. Эти высоты практически не зависят от выбора эллипсоида,
так как параметры эллипсоида входят только в коэффициенты
нормальной силы тяжести Уо. Для вычисления нормально орто
\fетрической высоты нужно знать высоту l коrеоида.
При измерении нивелирных превышений и вычислении rеопо
тенциальных чисел в разных странах используют различные ис
\одные пункты. Каждая изолированная нивелирная сеть, разви
тая от какоrо ли60 футштока, определяет разности потенциалов
точек этой сети относительно уровенной поверхности W = W o ,
:lроходящей через исходный пункт данной сети. Поскольку
уровень моря в разных районах Земли различен, исходные пунк
ты связаны с разными уровенными поверхностями, и по измере
217
ниям В изолированных сетях нельзя получить rеопотенциальные
числа для всей Земли в единой системе. Чтобы подчеркнуть это.
rоворят, что на данной территории развита система высо:
от определенноrо футштока. Так, в СССР была создана Балтий-
ская система высот, в которой исходным пунктом служит Крон-
штадтский футшток. Здесь термин «система» имеет иной смыс::
по сравнению с вышеизложенным и устанавливает не тип высо:
(нормальная, ортометрическая, динамическая), а ту уровенную
поверхность, относительно которой вычисляют разности потен-
циалов.
Система нормальных высот принята в России, странах CHr '
некоторых европейских странах (Швеция, rермания, Франция '
др.). Ортометрические высоты по rельмерту используют мноrие
европейские страны, Турция и страны Американскоrо континен-
Та. В Австрии, Боснии И rерцеrовине, Норвеrии, Юrославии при-
няты нормально ортометрические высоты.
В случаях, коrда высоты определены с не очень высокой точ-
ностью, все высоты, кроме rеодезической, называют высотами HQl
уровнем моря, или абсолютными высотами, а разность высот
относительныJt;tu высотами. Это аналоrично названию координат
приближенно все координаты (астрономические, rеодезические,
rеоцентрические) называют rеоrрафическими.
Численное значение любой высоты называют отметкой.
45. ОПРЕДЕЛЕНИЕ РАЗНОСТИ НОРМАЛЬНЫХ
ВЫСОТ
Для вычисления нормальных высот формула (7.15) не Bcer':Ia
удобна, поскольку из измерений получают не rеопотенциальное
число W o W, а разность rеопотенциальных чисел, которую на-
ходят из rеометрическоrо нивелирования и rравиметрических оп-
ределений. На практике обычно вычисляют разности нормальны,
высот между реперами, добавляя необходимые поправки к cYM le
измеренных превышений. Методика вычисления разности нор-
мальных высот разработана В.Ф.Еремеевым. Получим неоБХОДlI-
мую для таких вычислений формулу.
Найдем элементарную разность d1fY нормальных высот, диф-
ференцируя выражение (7.15),
dHY = gdh drm нУ.
У т Ут
218
Преобразуем первый член правой части
1 dh g у у у
gdh = (у т + g у + у у т) = dh + dh + т dh.
Ут Ут
Нормальную силу тяжести Уm вычисляем по формуле (7.16), У
по аналоrичной
У = У + dy НУ
о dH '
поэтому
dy НУ dy dHY
У Yт dH 2 ' dYт=dyo+ dH 2'
Для элементарной разности нормальных высот теперь полу
чаем
dHY =dh dyu НУ + g y dh+ dy НУ (dh dHY).
Ут Ут dH 2Ут
Последний член этоrо выражения не превышает 0,004 мм даже
.:щя Н = 10 км И g у = 500 млr, поэтому с достаточной точнос
ТЬЮ можно положить
dHY =dh dyo НУ + g y dh.
Ут Ут
(7.35)
Интеrрируя выражение (7.35), получаем разность нормальных
высот между удаленными точками
Q Q НУ Q
Н% H = J dh J Yo + J g у dh .
р р Ут р У т
(7.36)
Второй член в правой части равенства (7.36) учитывает Ha
клон уровенных поверхностей нормальноrо поля к поверхности
эллипсоида, третий несовпадение уровенных поверхностей ре-
альноrо и нормальноrо поля. Сумму первых двух членов называ
ют приближенной высотой; для ее нахождения достаточно выпол-
нить rеометрическое нивелирование и учесть влияние непараллель-
ности нормальных уровенных поверхностей. Для перехода от
измеренных превышений к разности нормальных высот нужно
знать, cTporo rоворя, аномалии в свободном воздухе в каждой
219
точке нивелирноrо хода. Так как нивелирные линии прокладыва
ют по возможности по трассам с малыми уклонами, превышение
dh обычно невелико и можно использовать аномалии силы тяже
сти, осредненные на каком либо интервале нивелирной линии. Ча
стота rравиметрических пунктов вдоль нивелирной линии зави-
сит от сложности rравитационноrо поля, величины превышений
и точности нивелирования.
Оценим точность вычисления поправки (J = f g r dh в зави-
r
СИМ ости от точности вычисления аномалии силы тяжести. Заме-
нив интеrрал суммой, для ошибки та поправки (J получим
т 2
2 = K y А 1 2
та L..i 2 L.1f1 .
У
Пусть нивелирная линия состоит из п участков, на каждом из
которых получена аномалия g у, длина s участков одинакова.
превышение bl1 заменим произведением stgfЗ, [де fЗ средний yro.l
наклона.
Тоrда, полаrая уrол наклона и ошибку аномалии одинаковы-
ми на всех участках, получим
та = mg y tgfЗ.J;fL.
у
(7.3 71
rде L = пs длина линии.
Случайную ошибку rеометрическоrо нивелирования выража
ют зависимостью
m=1}fL.
(7.381
rде 1} ошибка на 1 км хода.
Потребуем, чтобы ошибка та поправки (J была меньше сл:.
чайной ошибки нивелирования. Тоrда из сравнения выражениЙ
(7.37) и (7.38) находим
mg y tgf3J; 5:1}.
У
(7.391
Под ошибкой аномалии будем понимать ошибку интерпо-
ляции по rравиметрической карте. Ошибка интерполяции в раз
личных районах Земли неодинакова, поэтому выполним при
220
ближенную оценку влияния ошибок аномалий силы тяжести на
точность нивелирования. Для ошибки интерполяции Ю.М. Ней
ман (мииr АиК) получил выражение
s2JD
тK Y :::: 0,3 2 ' (7.40)
d
используя которое можно записать такое условие для расстояния
\1ежду rравиметрическими пунктами
5/2 < 31]d 2 yl 0 6
s JDtg/3 (7.41)
в выражениях (7.40) (7.41) D дисперсия аномалий силы
тяжести; d расстояние корреляции. В формуле (7.41) 1] выраже м
но в MM/ .JKM ; d и s в километрах. Результат оценки по формуле
(7.41) для разных районов при характерных значениях D и d дает
таблица 7.2. Соrласно ЭТОЙ оценке, в [орных районах rравимет
рические пункты должны располаrаться с интервалами 1 2 км для
нивелирования высокой точности; поэтому вдоль нивелирных ли
ний приходится выполнять измерения силы тяжести. В холмис
тых И равнинных районах можно получать аномалии силы тяже
сти по rравиметрическим картам.
Таблица 7.2
Результаты оценки районов
Район tg f3 JБ, d, 17 = 0,5 17=1 17 = 3 17 =5
мrл км ММ ММ ММ мм
r орный 0,03 40 1 1,1 км 1,4 КМ 2,2 КМ 2,7 км
Холмистый 0,01 20 5 8 КМ 11 КМ ]6 КМ 20 КМ
Равнинный 0,005 10 10 24 КМ 32 КМ 50 КМ 6l КМ
Оценка необходимой частоты расположения rравиметричес
ких пунктов вдоль нивелирных линий выполнялась неоднократно
разными авторами. Для примера в таблице 7.3 приведены CBeдe
иия О частоте rравиметрических пунктов; рекомендуемой по ис
.lедованиям цнииr АиКа при выполнении ВЫСОКоточноrо ни
велирования в ropHbIx районах. Соrласно этим рекомендациям в
BbIcoKoropHoM районе при нивелировании 11 класса также необ
\одимо измерять силу тяжести через 1 2 км; увеличение расстоя
ния между rравиметрическими пунктами до 6 км возможно при
У\1еньшении значения tg/3 до 0,1 0;04.
221
Таблица 7.3
Требования к rYCToTe rравиметрических пунктов
вдоль нивелирной линии в ropHLIX районах
Класс П ревышение, м Расстояние между rрави
нивелирования метрическими пунктами, км
1 500 200 1 2
II lOOO 500 1 2
III 500 2OO З 6
Прuмечанuе. Длина секции 5 км.
Вернемся к формуле (7.36). Поскольку поправки в измеренное
превышение малы, можно заменить высоту нУ в текущей точке
средней высотой НУ ер между реперами и использовать среднее зна
чение Уm силы тяжести для всей секции. Заменяя дифференциалы
конечными разностями, получим формулу для вычисления разно
сти нормальных высот между реперами Р и Q
Q р q (g у) Q
н; H = 'L bl1 + Уо Yo H + ер 'L bl1 .
р Ут У т р
(7.42/
По этой формуле можно оценить изменение нормальной вы.
соты при перемещении по уровенной поверхности. В этом случае
сумма f м превышений равна нулю и
р
У Р Y q
HY HY= о о нУ
q р у т ер'
(7.43 I
Соrласно выражению (7.43) при Н = 1 км И разности широ:
1 о разность нормальных высот точек уровенной поверхности на
широте 450 составляет 92 мм. Нормальные высоты водной повер.-
хности озер, вытянутых в меридиональном направлении, измеНЯ
ются. Так, разность высот южной и северной точек озера Байка::
составляет 175 мм, озер Севан и Иссык Куль около 75 мм. Эп
величины примерно на порядок превышают ошибки точноrо ни-
велирования.
Теоретическая cY.мAfa превышений в замкнутом нивелирном по-
лиzоне. Вследствие непараллельности уровенных поверхностей су'!-
ма превышений зависит от пути нивелирования и в замкнуто
полиrоне не будет равна нулю. Получим выражение для СУМ\Н.
222
превышений замкнутоrо полиrона. В формуле (7.42) при COBMe
щении точек Р и Q левая часть будет равна нулю, поэтому
f п q р п ( Y i )
М= Уо Yo нУ g ер дh.
lep ,.
р ;=1 у т ;=1 у т
(7.44)
в правой части суммирование выполняется по всем секциям
замкнутоrо полиrона.
Точное выражение для суммы превышений замкнутоrо поли
rOHa можно получить из выражения (7.7). Выполняя интеrри
рование (7.7) вдоль замкнутой линии и учитывая, что fdW = О,
получим
fgdh = f(g go)dh+ gofdh = О,
откуда
dh = (g go)dh,
go
(7.45)
[де go произвольная постоянная, в качестве которой удобно ис
пользовать минимальное значение силы тяжести вдоль нивелир
ной линии.
Теоретическую сумму превышений следует вычислять и учи
тывать для правильной оценки точности нивелирования.
46. ДИНАМИЧЕСКАЯ ВЫСОТ А
Выше отмечалось, что для определения положения точки в поле
силы тяжести можно пользоваться естественной системой коорди
нат астрономическими широтой и долrотой и разностью потен
uиалов. Попытаемся использовать rеопотенциальное число в ли
нейной мере для определения положения точек. Разделив rеопотен
uиальное число на любое постоянное значение С силы тяжести,
формально получаем некое число, которое можно назвать BЫCO
той. Эти высоты называют динамическими. Можно дать такое
определение динамической высоты: динамическая высота I-f' это
;еопотенциальное число, переведенное в линейную меру
d 1 р 1
Н = С f gdh = С (W o W).
о
(7.46)
223
Выбирая в качестве С разные значения постоянной, можно
построить разные системы динамических высот. Динамические BЫ
соты были введены К.Ф.rауссом (1777 1855), который преДЛОЖИ-l
рассматривать высоты как rеопотенциальные числа, Т.е. принять
С = 1. Если rеопотенциальное число выразить в кrал.М, то при
С=1
H, := (W o W)k?йДIl'
(7.47
Динамические высоты по rayccy существенно отличаются от
ортометрических и нормальных. Оценим разность динамически.\
и нормальных высот
р
нУ Hd =( I)fgdh=O,02HY.
Ут о
В равнинных районах при высотах порядка сотен метров раз
ность нормальных и динамических высот raycca составляет He
сколько метров.
rельмерт ввел систему динамических высот, в которой пост
янная С в формуле (7.45) равна значению нормальной силы тяже-
сти на эллипсоиде на широте 45°
d 1 р
Н = f gdh. (7.4
Уо о
Динамические высоты по rельмерту несколько ближе к HOj:'--
мальным, но все равно их отличие существенно. Используя фор.-
мулы (7.15) и (7.48), найдем их разность
45
нУ Hd :::: Уо /т нУ.
Уо
(7.49
Разность нормальной и динамической высота зависит от ши-
роты и высоты точки. Ее значения для разных широт и вЫСО:'
приведены в таблице 7.4.
Отличие динамической высоты от нормальной даже дЛЯ Ш} -
роты 45° достиrает величин, значительно превышающих точнC>I:'7"'.::
их измерения.
Динамические высоты как разность потенциалов постоянн=-
во всех точках одной и той же уровенной поверхности. Поэто ,
их используют при изучении уровенных поверхностей воздушнь.: 1 .
масс в метеоролоrии, водных масс в океанолоrии, при решеНЕ!-
224
Таблица 7.4
Разность нормальных и динамических высот (в метрах)
Высота, км
Широта, о
1 2 3
О 2,8 5,9 9,3
45 0,2 0,6 1,4
90 2,5 4,7 6,5
разноrо рода энерrетических задач. rеометрическоrо смысла как
расстояния точки поверхности Земли до какой либо отсчетной
поверхности динамические высоты не имеют. Поэтому их нельзя
использовать в качестве координаты при определении положения
точек в пространстве и для редуцирования измерений на эллипсо
ид. В rеодезии динамические высоты используют в тех случаях,
коrда при передаче высот расстояние между уровенными поверх
ностями непосредственно не может быть измерено и полаrается
равным нулю (в rидростатическом и барометрическом нивелиро
вании). Переход от разности динамических высот к разности HOp
\fальных выполняется с помощью равенства
45 ( 45 ( )
НУ Н у = H d н(I У(} У т) I H d + У () У т 2 H d (7. 50)
2 I 2 I (Ут)1 I (Ут)2 2'
Если же точки 1 и 2 лежат на одной уровенной поверхности,
"':"0 Hf = Hf, и формула (7.50) совпадает с формулой (7.43).
Применение динамических высот в инженерной rеодезии рас.
,:\ютрено в rлаве 11.
rлава 8
ВЫЧИСЛЕНИЕ УКЛОНЕНИЯ ОТВЕСА
И АНОМАЛИИ ВЫСОТЫ
Уклонения отвеса и аномалии высоты, связывающие HOPM(LLi--
ное поле с действительным, появляются во мноrих задачах reo.J':
зии. До недавнеrо времени их использовали для определения p;i:-
меров референц эллипсоида и ero ориентирования внутри Зем. и-
Ныне эти величины нужны при редуцировании измерений из o.:
ной системы координат в друrую, определении высот, баллисТl
ческих расчетах.
В классическом астрономо rеодезическом методе определеЮ J
поверхности Земли относительные уклонения отвеса и анома.1И
высоты нужны во всех пунктах сети для редуцирования измереНИL
к эллипсоиду. Однако непосредственное определение уклонениi-
отвеса по формулам (2.32) возможно только в астропунктах.
Абсолютные и относительные аномалии высоты находят ce}
час по спутниковым и rеодезическим измерениям, образуя разнс
сти (4.28) или (4.29) rеодезической и нормальной высот. Очеви,,:-
но, что это возможно выполнить только на пунктах нивелирнС''-''
сети, являющихся одновременно и пунктами спутниковых опрс
делений.
Абсолютную аномалию высоты, связанную с общим зеМНЫ}l
эллипсоидом, можно также найтИ по rравиметрическим данны\с
используя формулу Стокса (4.39). Однако точность определеНИi
аномалий высоты этим способом составляет в лучшем случае десsr.
тые доли метра, что недостаточно для точноrо нахождения высо:-
Поэтому для получения уклонений отвеса и аномалий высот !
любой точке земной поверхности приходится использовать paj,
личные косвенные методы их определения. В частности, поскольJ...
уклонения отвеса и аномалия высоты связаны друr с друrом ка}:
элементы аномальноrо поля, возможно получать одну из этих вe
личин через друrую. Прежде чем рассматривать основанные на это
зависимости методики, установим связь уклонений отвеса и ан(\--
малии высоты.
226
47. СВЯЗЬ УКЛОНЕНИЯ ОТВЕСА
И АНОМАЛИИ ВЫСОТЫ
В rлаве 4 для аномалии высоты получено выражение (4.8).
Возьмем произвольную точку поверхности Земли и введем TO
поцентрическую систему координат: ось z направим по направле
нию, противоположному направлению нормальной силы тяжести,
ось х по касательной к меридиану на север, ось у на восток
Найдем изменение d' аномалии высоты при переходе от точки
поверхности Земли, являющейся началом выбранной системы KO
ординат, в бесконечно близкую точку с координатами dx, dy, dz
1 ( дТ дТ дТ J
d' = dx+ dy+ dz
у дх ду az
T (Wo UO) ( aY d aY d aY d )
x+ y+ z
у2 дх ду az
(8.1)
Выясним смысл входящих в это выражение величин. Нормаль
ная сила тяжести не зависит от долrоты, Т.е. от у, поэтому произ
водная ду равна нулю. Переrруппируем члены в выражении (8.1)
ду
и запишем ero в виде
d' == ( 1 дт , ду x+ 1 дТ dy+ 1 ( дТ ,дY \z.
у дх у дх [' у ду у az az J
Производные потенциала в rоризонтальном направлении это
составляющие уклонения отвеса. Можно показать, что
! дТ f ду =! дТ = ;Ф, ! дТ =! дТ = 1J,
У дх у дх у RaB У ду у RcosBaL
(8.2)
[де ;;Ф составляющая уклонения отвеса в плоскости меридиана в
физическом определении. Коэффициент при dz соrласно формуле
(4.11) равен смешанной аномалии Дg = g у силы тяжести
дТ д у , == (g y),
az az
(8.3)
поэтому
d' = ;; ф dx 1Jdy g у dz.
у
(8.4)
227
Введем полярные координаты 1, А в rоризонтальной плоскости
ху, [де 1 расстояние; А азимут. Тоrда
dx = dl cosA, dy = dl sinA,
(8.5,
приращение dz заменим превышением dh. В результате получаем
d = (;ФсоsА+1JsiпА)dl g r dh.
r
(8.61
Выражение в скобках соrласно формуле (4.15) является состав.
ляющей уклонения отвеса в азимуте отрезка dl, поэтому
d' = д ф d! g r dh.
r
(8.7 "
Посмотрим, как изменяется аномалия высоты при перемеше.
нии по уровенной поверхности. В этом случае превышение dh рав.
но нулю и из равенства (8.7) получаем
d' -= i}Фdl, (8.S
или
t9 Ф = а, .
дl
Положим в формулах (8.2) нормальную силу тяжести постоян.
ной, тоrда
i}ф= lдТ а ( Т J = а,,
r дх дх r дх
1 дТ д ( Т J д
1]
r ду ду r ду .
Следовательно, если считать нормальную силу тяжести пост
янной или рассматривать изменение аномалии высоты на ypoBeh.
ной поверхности, то уклонение отвеса является производной aH
малии высоты. Если же аномалии высоты известны не на уровен.
ной поверхности и dh ;j:. О, уклонения отвеса следует получать К:
соотношения
a Ф д' g r ah
и дi yдi'
(8.4
Таким образом, знание уклонений отвеса позволяет найти pa
ность аномалий высоты, а разности аномалий высоты уклонеНi 1
отвесной линии.
228
Во всех полученных соотношениях уклонения отвеса и aHOMa
лии высоты должны быть соrласованы между собой. В зависимости
от Toro, какие уклонения отвеса использованы, определяется изме
нение аномалии высоты как относительно общеrо земноrо, так и
референц эллипсоида. В случае использования астрономо rеодези
ческих уклонений отвеса соrласно выражениям (4.14) и (4.15) имеем
f)Ф=( r O,171Hsin2B)cosA + ryATsinA (8.10)
и
d(Ar = [( Ar 0,171Hsin2B)cosA+1JAr sjnAJdl g;r dh. (8.11)
Если в фоgмуле (8.7) использовать rравиметрические уклоне-
ния отвеса f} =и, то, поскольку они являются абсолютными, бу
дет определено изменение аномалии высоты относительно общеrо
земноrо эллипсоида
d(03 =d(r = йT dl g r dh.
r
(8.12)
Отличие формул (8.11) и (8.12) только в том, что в первой из
них использованы относительные, а во второй абсолютные YK
.lонения отвеса.
Найдем разность дифференциалов астрономо rеодезической
(относительной) и rравиметрической (общеземной) аномалий BЫ
соты. Член g у dh из этой разности исключится и
у
d(AT d(r= ( T tJ) dl,
l1И
d«(AT (Т) = Aдdl,
1 для разности Ад астрономо-rеодезическоrо (в физическом опре-
Jелении) и абсолютноrо rравиметрическоrо уклонений отвеса мож-
но написать
Ад = d(,AT ,T)/dl .
(8.13)
Это означает, что разность уклонений отвеса является произ
водной разности аномалий высоты.
Для нахождения разности аномалий высоты между удаленными
:lунктами А и В следует проинтеrpировать выражение (8.11) или (8.12)
r B Ai ' Т" А АТ = f f)Ф dZ J g r dh ,
у (8.14)
A B A B
.Je tJP определена формулой (8.10).
229
Определение разности аномалий высоты по формуле (8.14) Tpe
бует знания астрономо rеодезических уклонений отвеса и aHOMa
лии силы тяжести во всех точках линии A B. Основное затрудне.
ние связано с определением уклонения отвеса, поскольку аномалии
силы тяжести можно найти с необходимой точностью по rрави
метрической карте. Заметим, что поскольку d(Ar является полным
дифференциалом, разность аномалий высот не зависит от пуп
нивелирования и определяется только положением начальной i
конечной точек.
48. МЕТОДЫ ОПРЕДЕЛЕНИЯ АСТРОНОМО-
rЕОДЕЗИЧЕскоrо УКЛОНЕНИЯ ОТВЕСА
Существует несколько способов определения aCTpoHoMo reo.Je
зических уклонений отвеса: линейная интерполяция, KOCBeHHaSi!
интерполяция с использованием rравиметрических или топоrра-
фических уклонений отвеса, передача уклонений отвеса по зенит-
ным расстояниям, определение уклонений отвеса по аномалию.
высоты. Рассмотрим эти способы.
Линейная интерполяция астроно.мО 2еодезических уклонений от-
веса. Положим, что уклонения отвеса между астропунктами меня-
ются по линейному закону. Тоrда при интерполировании меЖ.J
двумя астропунктами в любой точке соединяющей их линии co
ставляющая T будет равна
r д л лr + [(д в лr дАлr)ll]х,
(8.15 I
rде д л лr и д в лr уклонения отвеса в начальном А и конечном В
пунктах; 1 длина линии; х расстояние текущей точки, к котороЙ
относится от астропункта А.
В астрономо-rеодезической сети СССР расстояния между аст.
ропунктами в среднем равны 80 90 км. Поэтому предположение о
линейном характере изменения уклонения отвеса между ними не
обосновано и может привести к значительным ошибкам интерпо.
лированных уклонений. Опытным путем установлено, что ошибка
mд линейной интерполяции астрономо rеодезическоrо уклонения
отвеса в равнинных районах составляет
т{) = 0,17" JТ,
(8.161
rде 1 расстояние между астропунктами в километрах. Из выраже.
ния (8.16) следует, что при расстоянии в 100 км ошибка интерполи
230
рования составит 1,7"'. Соrласно данным (см. с. 188) это превос
ходит допустимую ошибку уклонения отвеса для редуцирования
rоризонтальноrо направления для зенитных расстояний, меньших
85 870. Полная ошибка интерполирования с учетом ошибок aCT
рономических определений mq> = 0,3'" и m А = 0,5 '"
m = (о,17")2! + 2(0,з"2 + 0,5"2) = (0,68 + 0,17"2Z)
(8.17)
Таблица 8.1
у клонении отвеса в районе Московской аномалии
Пункт 1, T. ТИllm' (8.;)\, (Р, . Иlfm' Tp + ( 8 )2'
КМ " " " " " " + И/lm' "
'"
Троицкое О 0,6 0,6 2,6 2,0 2,0 0,6 О
Останкино 1 3 5, 1 0,5 4,6 6,3 + 1,2 + 1,5 4,8 0,3
Колокольня
Ивана
Великоrо 21 7,5 0,4 7,1 8, 1 +0,6 + 1,2 6,9 0,6
Коломенское 30 0,0 0,3 0,3 2,0 +2,0 +0,8 1 ,2 + 1,2
Суханово 46 8,1 0,2 8,3 +4,1 +4,0 +0,2 +4,3 +3,9
Матвеевское 68 0,0 0,0 +0,7 0,7 0,7 0,0 0,0
и при 1 = 100 км составит 1,9' Эта оценка относится к спокойным
районам и может быть в несколько раз больше для районов с резко
аномальным rравитационным полем. Так, в районе Московской
аномалии при спокойном рельефе уклонения отвеса на меридиане
Кремля меняются от 7,5'" до +8,1 ''''на расстоянии Bcero 45 км, при
чем это изменение нелинейно (см. таблицу 8.1). Ошибка ( )1 ли
нейноrо интерполирования достиrает 7 8 "'
Приведенный пример показывает, что даже в равнинном райо
не при интерполировании на расстояние около 70 км уклонения
отвеса MorYT иметь ошибки, превосходящие их значения. В ropHbIx
районах ошибка интерполяции в несколько раз больше.
Интерполирование астроно-мо zеодезических уклонений отвеса с
исnользование-м zравuметрических данных. Как уже отмечалась, ac
трономо rеодезические и rравиметрические уклонения отвеса OT
личаются из за кривизны нормальной силовой линии и несовпаде
ния референц эллипсоида и нормальной Земли. При вычислении
231
уклонения отвеса обычно всю поверхность Земли разбивают на две
части: ближнюю зону, сферическую шапку (Оа радиуса 1/10 с центро\,
в вычислительной точке, и дальнюю зону. Если же rравиметричес
кие уклонения отвеса вычислены с учетом влияния только БЛИЖНll\
зон, появится дополнительное различие между aCTpoHoMo reo;Ie-
зическими и rравиметрическими уклонениями отвеса из за влия
ния дальних зон.
Референц эллипсоиД и Нормальная Земля (общий земной эллип
соид) близкие поверхности простой формы, поэтому уrол меЖ,.])
нормалями к их поверхностям невелик, плавно изменяется при пе
ремещении по Земле от одноrо астропункта к друrому и ero МОЖН(I
линейно интерполировать. Дальние зоны также дают плавную часть
в уклонении отвеса и их влияние сравнительно просто учесть aHa
литически или надежно интерполировать между астропунктами.
Быстро меняющаяся часть в уклонениях отвеса обусловлена влия
нием близко расположенных аномальных масс земной коры, Т.е.
аномалиями силы тяжести в ближних зонах.
Пусть А, В, С астропункты, между которыми на площади (J
нужно выполнить интерполирование астрономо rеодезических YK
лонений отвеса (рис. 8.1). Вычислим местные rравиметрические
уклонения отвеса rf по формулам (4.17) Венинr Мейнеса с учетом
аномалий силы тяжести в области ; целиком заключающей а. rpa
виметрические уклонения отвеса rr представим в виде
[{ =rf+rf',
(8.181
rде rf' влияние аномалий силы тяжести за пределами области 1
(влияние дальних зон).
Область
интерполирования
"L' дальние
зоны
Рис. 8.1. К косвенной интерполяции астрономо rеодезических
уклонений отвеса
232
rраницу области L выберем на таком расстоянии от а, чтобы
влияние rf дальних зон в пределах области (J менял ось по линей
ному закону. Образуем разность определенноrо формулой (8.101
физическоrо астрономо rеодезическоrо tfP и rравиметрическоrо rI'
уклонений отвеса. Эта разность равна составляющей 1( уrла между
нормалями к референц эллипсоиду и общему земному эллипсоиду:
дФ дr = к.
Внесем сюда rравиметрическое уклонение отвеса (8.18) и перене
сем в получившемся равенстве неизвестное влияние rf' в правую часть
дФ rf = 1(+ rf'.
Обе величины в правой части неизвестны, но являются линей
ными функциями расстояния. Значит, разность д Ф rf уклонений
отвеса также линейная функция.
Введем обозначение
тоrда
iliJ = д Ф rf,
д Ф = rf+iliJ.
(8.19)
(8.20)
На этих двух соотношениях основана методика косвенной ин
терполяции астрономо rеодезических уклонений отвеса, заключа
ющаяся в следующем: на астропунктах вычисляют разности iliJ ac
трономо rеодезических и местных rравиметрических уклонений
отвеса, которые затем линейно интерполируют на определяемые
точки. Затем вычисляют rравиметрические уклонения отвеса tf в
определяемых точках с учетом аномалий силы тяжести в области L
и прибавляют к ним интерполированные разности il д инт ,
( дАr ) Ф=д L + iliJ
инт
(8.21)
для астрономо rеодезических уклонений отвеса в физическом оп
ределении и
r = rf + ilд инт + 0,171 NH cos А sin2B
(8.22)
для уклонений отвеса в rеометрическом определении.
Полученные по формулам (8.21) (8.22) астрономо rеодези
ческие уклонения отвеса называют иноrда астРОНОМО 2равuметри
ческuмu.
Разность iliJ астрономо rеодезических и rравиметрических co
ставляющих уклонения отвеса в произвольном азимуте леrко най
233
ти через разности составляющих уклонения отвеса в плоскости
меридиана и первоrо вертикала
д i) = д; cosA + .1.1] sinA.
(8.23 )
Косвенная интерполяция позволяет значительно уменьшить
ошибки интерполирования. Так, для примера в таблице 8.1 ошиб
ка интерполированноrо уклонения отвеса при косвенной интер
поляции уменьшается до 1' Исключение составляет пункт Cyxa
ново, rде разность 8;2 непосредственно измеренной и интер
полированной составляющей уклонения отвеса достиrает 4", что
может свидетельствовать об ошибке астрономической широты этоrо
пункта.
Описанная методика интерполирования уклонений отвеса раз
работа на в 1934 r. М.С. Молоденским по инициативе Ф.Н. Kpa
cOBcKoro. Это был первый опыт практическоrо применения rрави
метрической съемки для решения задач rеодезии. К этому времени
(с 1932 r.) в Советском Союзе быстрыми темпами создавалась сплош.
ная маятниковая съемка, одним из инициаторов проведения KOTO
рой был выдающийся астроном и rравиметрист А.А. Михайлов
(1888 1983). Наличие rравиметрической съемки страны явилось
важнейшим стимулом развития теории и практики rеодезическоЙ
rравиметрии и в значительной степени способствовало созданию
М.С. Молоденским новой теории rеодезии. С середины 30 x rr. ХХ
в. rравиметрический метод изучения поверхности и поля Земли как
в rлобальных, так и в локальных исследованиях стал неотъемлемой
частью rеодезии.
Основное условие применимости метода косвенной интерпо.
ляции уклонений отвеса выбор размеров области L, rарантирую--
щий линейное изменение влияния дальних зон на участке (J' интеrr
полирования. М.С. Молоденским доказано, что для выполнения
этоrо условия достаточно выбирать радиус области L в 1 ,5 2 раза
больше расстояния между астропунктами. Так, при расстоянии
между астропунктами 70 км нужно учесть аномалии силы тяжести
в радиусе 105 140 км.
В формуле (8.19) вместо местных rравиметрических rf уклоне
ний отвеса можно использовать топоrрафические дТ или топоrра
фоwизостатические. Показательна в этом отношении таблица 4.]"
Линейное интерполирование астрономо rеодезическоrо уклонения
отвеса пропорционально разности широт дает для пункта Калан-
пур ,56"и значительно отличается от измеренноrо, paBHoro нулю.
Интерполированная также линейно разность ;rtr ;Т для этоrо
234
пункта оказывается равной 37,5"и практически совпадает с изме
ренной разностью.
Оценку точности интерполированных уклонений отвеса выпол
няют по методике оценки точности двойных измерений, образуя
вторичные разности c .'c1J величин Д , Д1J между соседними aCTpo
пунктами
Д i+1 Д i = c '
Д1Ji+1 Д1Ji = C1J'
rде i номер астропункта.
Тоrда средние квадратические ошибки
п
L(Д i+l Д i)2
i+1
2п
п
L (Д1Ji+1 Д1Ji)2
2 i+1
т t11] =
(8.24 )
J
т;;
2п
rде п число разностей c . или C1J'
ИЗ выражений (8.24), считая Д , Д1J, д19 равноточными, Ha
ходим
2 1 2 2
m t1tЭ = 2 (m t1 ; + m t1 1]) .
(8.25)
Вторичные разности с;, СТ] при перемещении по поверхности
Земли меняются IШавно; на небольших расстояниях их можно счи
тать постоянными. Поэтому по колебаниям этих разностей судят
о точности астрономических определений.
В астрономо rеодезической сети СССР ошибка интерполиро
вания составляла O,3 O,5" в равнинных районах, 1 1,4" в ropHbIx.
Передача астрономо-zеодезических уклонений отвеса mPUZOHO-
..,етрическим нивелированием. Измеряемые в триrонометрическом
нивелировании зенитные расстояния можно использовать для пе
редачи астрономо rеодезических уклонений отвеса. Вернемся к рис.
6.3. Если пренебречь несовпадением плоскостей POpQ и QOqP пря
Moro и обратноrо нормальноrо сечений, можно считать, что нор-
мали к эллипсоиду пересекаются в точке О. Тоrда из треуrольника
PQO (рис. 8.;) можно написать
1800 (zpq + Zqp) + 1fI = О.
Уrлы Zpq и Zqp показаны на рис. 6.3.
Измеренное зенитное расстояние отличается от rеодезическоrо
из-за уклонения отвесной линии и влияния рефракции. На рис. 8.2
rеодезическое зенитное расстояние Zpq это уrол между линиями 00
235
и PQ, измеренное Z H уrол между отвесной линией РР) и KacaTe..т:..
ной РР2 к рефракционной кривой в точке Р. Соrласно рис. 8.2
,nн aAT
Z РЧ = Z pq + r р + Ир'
а
.аАТ IIj/и
Ир =Zpq Zpq rp'
rде rp влияние рефракции; др АТ астрономо rеодезическое ук..ТL
нение отвеса в точке Р. ДЛЯ разности аСТРОНОМО f'еодезических };'.
лонений отвеса получим
aA[, .а АТ = '7U3 tt + lIз 1t 180 0 + ( + ) I/F
И Ч И Р pq "" чр rp r ч "t' '
(8. f:'
aAT aAT
['де И q , Ир составляющие астрономо rеодезическоrо уклоне.
ния отвеса в азимуте линии PQ.
о
Q
Рис. 8.2. Схема передачи уклонений отвеса с помощью зенитных
расстояний
Возможность передачи аСТРОНОМО f'еодезических уклонений
отвеса по измерениям зенитных расстояний лимитируется влияни.
ем вертикальной рефракции.
Определение уклонений отвеса по аномалиям высоты. Если име-
ются каталоrи или карты аномалий высоты, уклонения отвеса мож-
но найти численным дифференцированием. Соrласно равенств:
(8.7), переходя от дифференциалов d', dl, dh к конечным раЗНОСТЯ i
д,, дl, дh для уклонения отвеса получаем
i)Ф д, g у дh
д! У д(
236
(8.271
Если наклоны D.hlbl физической поверхности невелики, после
.lНий член можно отбросить. При D.hlD.1 = 0,01 и аномалии g Y= 30
М[Л ero величина не превышает 0,1' Тоrда для уклонения отвеса
МОЖНО пользоваться формулой
й Ф = D.'
D.! '
(8.28)
оторая следует также из выражения (8.8). В холмистой и rорной
честности следует использовать формулу (8.27).
Рассмотренным способом можно найти только сrлаженные YK
.10нения отвеса, осредненные на отрезке D.l. Они MorYT существен-
!-ю отличаться от уклонений отвеса в конкретной точке.
49. СПОСОБЫ ОПРЕДЕЛЕНИЯ АНОМАЛИИ ВЫСОТЫ
Аномалию высоты можно найти по спутниковым определе-
ниям, астрономо rеодезическим измерениям и rравиметрическим
.1анным.
По спутниковым данным определяется аномалия высоты над
общим земным эллипсоидом как разность rеодезической и нормаль-
ной высот
r:З=Jr З ](У.
(8.29)
rравиметрическая съемка также позволяет получить абсолют
ную аномалию высоты по формуле Сток са
'03 =, т = ff (g y)S(IjI)dw.
47l'У
(J)
(8.30)
rравиметрическую аномалию высоты на поверхности Земли
можно представить в виде ряда шаровых функций. Возьмем для
этоrо формулу (5.37) и положим а = r = R, у= GM/R, т.е. не будем
т
учитывать сжатие Земли, тоrда, поскольку' r = ,
у
00 п
,Т = RL. L.(C:k coskL+s пk siпkL)Рпm(Ф),
п 2 k O
(8.31 )
[де R средний радиус Земли.
237
в rлаве 4 для астрономо rеодезической аномалии высоты по.,:-.
чена формула (4.40)
G(M M) W и
yAr = () о о +(х c osL+ y sinL)cosB+
yR У о о
+ 20 sin В + 4 Y 5J (g У)S('I')dю.
w
(8.3:
Эту же аномалию можно найти, используя формулы (2.16) }
(2.5),
,АТ = t;з (xocosL + yosinL)cosB +
+ Zo sinB + Да 112(аде 2 + dai)sin 2 B.
(8.33
в обеих формулах для нахождения астрономо rеодезически""
аномалий высоты нужно знать массу и размеры эллипсоида, то есть
постоянные G(M MJ, W() и о , а, е 2 , координаты Х(), У()' ZO центра
масс и аномалию высоты относительно общеrо земноrо ЭJ(ЛИПСОИ
да или rравиметрическую аномалию.
Перечисленные способы нахождения аномалии высоты имеют
недостатки при практическом применении. Спутниковые изме-
рения позволяют найти аномалию высоты только в тех точках.
rде известны нормальные высоты. Формулы (8.30) и (8.32) тре-
буют измерений силы ТЯЖести на всей поверхности Земли. Кроме
Toro, для нахождения астрономо rеодезической аномалии высоты
по rравиметрическим данным должны быть известны постоянные
М м э о ' W o и о , хо' Уа' Zo' Ряд (8.31) оrраничивают конечны.\!
числом членов, что ведет к сrлаживанию, осреднению аномалии
высоты.
В связи с этим основным методом получения аномалии высоты
до настоящеrо времени остается способ, основанный на использо-
вании связи (8.7) и (8.14) разности аномалий высот и уклонений
отвеса. Причем в зависимости от способа получения уклонения
отвеса вдоль линии нивелирования различают методы acmpOHOMи
чеС1<.О20 и асmроно.мО 2равuмеmричеСКО20 нивелирования.
Способ, позволяющий объединить формулы (8.30) и (8.31) и
повысить точность вычисления аномалии высоты, будет описан
ниже.
238
50. АСТРОНОМИЧЕСКОЕ НИВЕЛИРОВАНИЕ
Метод астрономическоrо нивелирования предложен Ф.rельмер
том как дифференциальный метод определения превышений reo
lua. Так как rеоид уровенная поверхность и превышения dh paB
ны нулю, в этом случае следует использовать формулу (8.8), выпол
нив интеrрирование между астропунктами
( T (1T = fдФdl= дml,
АВ
r де д т среднее интеrральное значение уклонения отвеса, l pac
стояние между астропунктами.
Для нахождения д т уклонения отвеса д Ф нужно знать во всех
точках линии нивелирования АВ; их получают методом линейной
интерполяции. Тоrда среднее интеrральное значение уклонения
отвеса совпадает со средним арифметическим и превышение
rеоида
( T ( T = д; +д: 1.
2
(8.34)
Это формула rельмерта астрономическоrо нивелирования
rеоида. Как видно, превышение rеоида определяется только по ac
трономическим и rеодезическим данным. Однако, чтобы по этой
формуле получить превышения rеоида над эллипсоидом, нужно
использовать уклонения отвеса на 2еоиде. При использовании укло
нений отвеса в точках физической поверхности Земли эта формула
позволит найти разность аномалий высоты точек уровенных по
верхностей, проходящих вблизи Земли.
Разность аномалий высоты методом астрономическоrо ниве
лирования получится после интеrрирования выражения (8.11) TaK
же в предположении о линейном характере изменения уклонений
отвеса
{ АТ rAr = д; +д l J g r dh
":JB A 2 '
АВ r
(8.35)
rде l длина линии.
Формулы (8.34) и (8.35) называют формулами астрономическо
20 нивелирования.
Оценим ошибку передачи аномалий высоты методом aCTpo
номическоrо нивелирования, обусловленную ошибками уклоне
239
ния отвеса. Если передавать разности аномалий высоты после,.]о
вательно от одноrо астропункта к друrому, для конечной точки Р
получим
п 1 п
( T =(;ir L,.О;Ф/,. L,.(g y);Ыz,.,
;=1 У m ;=1
(8.36.
rде п число звеньев; 1,. длина звена; tJ,.Ф среднее значенИе со-
ставляющей астрономо rеодезическоrо уклонения отвеса в азиму-
те звена li' (g J1,.; дh,. средняя аномалия силы тяжести и превыше-
ние на звене; У m среднее вдоль Bcero хода от А до Р значение нор-
мальной силы тяжести.
В формуле (8.36) влияние последнеrо члена при оценке точнос-
ти учитывать не будем. Ero значение даже при (g YJ = 100 мrл в
дh = 100 м во всех звеньях составит около 1 О см при п = 10.
Положим расстояния l,. одинаковыми и равными [, аномалию
(;iT В исходном пункте безошибочной, тоrда вызванная неточно-
стью уклонений отвеса ошибка аномалии высоты
п
2 2 / 2 2 / 2 2 1L
т = .L..J тд = пт д = т д '
i=1
rде mб ошибка уклонения отвеса; L = nl длина линии АР.
Таким образом
т = тй fi ..JL.
(8.371
Введем ошибку J.1 на 1 км хода. Полаrая L = 1 км, получим
J.1 = т д Л.
Используя формулу (8.16) ошибки интерполяции астрономо-
rеодезическоrо уклонения отвеса и среднее расстояние между пунк
тами [= 100 км, находим
и
017"
J.1 =' 1 = 8,5см / J км
р"
(8.38)
т( = J.1JL = 8,5Л.
240
(8.39 )
Отсюда для L = 1000 км т = 2,7 м, Т.е. в самых блаrоприятных
условиях равнинноrо района при передаче на сравнительно неболь
шие расстояния ошибка аномалии высоты может быть больше
допустимой для целей редуцирования. Передача аномалий высот
от исходноrо пункта (Пулково) в восточные районы страны при
L = 10000 км вызовет ошибки в аномалиях высот не менее 8 9 м.
Астрономическое нивелирование применяют в случаях, коrда
расстояния между астропунктами составляют не более 1 O 20 км.
Если же расстояния между пунктами велики, этот метод приводит
к значительным ошибкам и поэтому при больших расстояниях меж
ду астропунктами ero не используют.
51. АстРономо rРАВИМЕТРИЧЕСКОЕ
НИВЕЛИРОВАНИЕ
в астрономо rравиметрическом нивелировании используют
интерполированные по rравиметрическим данным aCTpoHoMo reo
.Jезические уклонения отвеса. Подставляя в выражение (8.14) укло
нения (8.20), получим
( T ( T =: f f}L dl f g r dh fd1Эdl.
АВ АВ r АВ
Первые два интеrрала правой части совпадают с правой часть
равенства (8.14) и определяют поэтому разность rравиметричес
ких аномалий высоты {i., обусловленных влиянием области r.
(L В ( =: f lЭ L dl f g r dh .
АВ АВ r
Вычислим f AfJdl. Так как разность Ай уклонений отвеса меня
АВ
(8.40)
ется линейно, получим
f lЭ L dl =: АЙА ; Айв [.
АВ
Таким образом, формула астрономо rравиметрическоrо ниве
лирования принимает вид
уАТ yAT =:YL YL Af}A +Айв f.
B A B A>o
2
(8.41)
241
Введем в формулу (8.41) разности (8.19) астрономо rеодезичес.
ких и местных rравиметрических уклонений отвеса
i' А r r А r й: + й: 1 r L r L lЭ LA + lЭr.B fi
B A + B A + с
2 2
(8.42)
Формулам (8.41) и (8.42) соответствуют два способа aCTpOHO
мо rравиметрическоrо нивелирования, разработанные М.С. Mo
лоденским и О.М. Остачем. В способе Молоденскоrо формула (8.42)
астрономо rравиметрическоrо нивелирования представлена суммой
формулы (8.34) астрономическоrо нивелирования и 2равuмеmричес
кой поправки
r r. i' r. lЭ LA + lЭr.B f!
B A+ {;,
2
(8.43 )
учитывающей нелинейное изменение уклонение отвеса. Способ
Остача основан на формуле (8.41). В этом способе к разности [ра.
виметрических аномалий высоты добавляется поправка, в которую
входят разности астрономо rеодезических и rравиметрических ук.
лонений отвеса. Иными словами, в этом способе к rpавиметричес
кой разности аномалий высоты добавлен член, учитывающий не.
совпадение А( астрономо rеодезических и rравиметрических aHO
малий высоты
( T (1 Т = (; ( + А( в А( А'
( 8.44 )
Вычисления местных rравиметрических уклонений отвеса и aHO
малий высоты в формулах (8.41) и (8.42) и поправок (8.43) и А'
нужно выполнять с учетом аномалий силы тяжести в одной и той
же области r. для обоих астропунктов. Для вычислений rравимет
рической поправки (8.43) Молоденским разработана методика чис.
ленноrо интеrрирования, которая формально сводится к нахожде
нию суммы произведений AjAgj аномалий Ag; силы тяжести в выб
ранных точках на рассчитанные заранее коэффициенты A i , rде i
число точек, равное в методике Молоденскоrо 140.
Способ Молоденскоrо астрономо rравиметрическоrо нивелирования
обладает высокой точностью, однако не очень удобен практически, по
скольку достаточно трудоемок, не обладает rибкостью и дает разность
аномалий высоты с точностью, зависящей от расстояния между пункта
ми. В этом методе использована система координат, полюсы которой
находятся в астропунктах, а положение несущих точек i задано точками
242
пересечения софокусных эллипсов и rипербол. Масштаб системы опре
делен расстоянием l между астропунктами. Это при водит к тому, что
фактическое расстояние между точками i и астропунктами неОДинаково
для разных пар астропунктов и при больших l вблизи них может полу
читься редкая сеть несущих точек. Поскольку на rравиметрическое YK
лонение отвеса наиболее сильно влияют ближайшие окрестности точки
вычисления, это приводит к снижению точности вычисления уклонения
отвеса для более длинных сторон l по сравнению с более короткими. Kpo
ме Toro, rравиметрическая поправка вычисляется для каждой пары aCT
ропунктов отдельно, поэтому, если какой либо астропункт входит в He
сколько линий нивелирования, вычисления для Hero нужно про водить для
каждой линии отдельно.
Эти неу добства применения способа Молоденскоrо побудили
цнииr ЛиК к поискам более рациональной методики.
rравиметрические уклонения отвеса и аномалию высоты по
формулам (4.16) и (4.39) удобнее вычислять, интеrрируя аномалии
силы тяжести по круrовой области с центром в астропункте. Такие
вычисления выполнены на всех астропунктах астрономо-rеодези
ческой сети СССР, независимо от Toro, входит ли этот астропункт
в линию астрономо rравиметрическоrо нивелирования или нет. Это
сделано с целью интерполирования астрономо rеодезических YK
лонений отвеса и контроля астрономических определений, ошиб
ки которых выявляются по нелинейным, резко изменяющимся раз
ностям A , А1] астрономо rеодезических и rpавиметрических укло
нений отвеса.
Но при вычислениях аномалий высоты и уклонений отвеса с
учетом аномалий силы тяжести в круrовой области связи (8.7), (8.8)
и (8.14) нарушаются. Остач доказал, что если аномалию высоты
вычислять по видоизмененной формуле Стокса
R 11'0 2л
r = 4п f f Аg[S(Ч') S(1Jf(}) ]sin Ч'dЧ'dА,
r 11'=0 А=О
(8.45)
то зависимости между уклонениями отвеса и аномалиями высоты
восстановятся, и можно находить разность аномалий высоты по
формуле (8.41), S(Ч'о) значение функции Стокса на rранице Ч'о'
разделяющей ближние I. и дальние I.' зоны.
Выразим разности Ад соrласно формуле (8.23) через разности
A , А1] составляющих уклонения отвеса в меридиане и первом Bep
тикале. После этоrо в последнем члене (8.41) появятся произведе
ния lcos А, lsin А, связанные с приращениями координат астропун
243
ктов. Так как превышения (в (А ВДОЛЬ одноrо звена невелики и не
превышают нескольких метров, при вычислении коэффициентов
lcos А, lsin А можно использовать приближенные выражения
1 cos А = RM, 1 sin А = R cosBтM.
Тоrда разность д(в д(А будет равна
Д(в Д(A::: R [(Д;"A+Д "B)Ы1'+(Д17 +Д17;)соsВтдL'], (8.461
2р'р"
а формула (8.41) астрономо rравиметрическоrо нивелирования
примет вид
у АТ yAT
':JB ':JA
(8.4 7 I
;; " 2p P' [(Д + Д ; )дn' + (д11 + Д1j; )cos ВтдL'l,
rде В А' LA' В В' L B rеодезические координаты астропунктов А и В
соответственно; ы1 = В в В А; M=LB L л ; Вт ::: В А ; В В ; R cpe.]
ний радиус Земли.
Работы по астрономо rравиметрическому нивелированию
(ArH) начаты в СССР в 1934 r., коrда Ф.Н. Красовский высказа.l
идею KOCBeHHoro интерполирования астрономо rеодезических YK
лонений отвеса и поставил задачу использования результатов Ha
чатой в 1932 r. общей маятниковой съемки страны в rеодезически:\
целях. Метод ArH предложен и разработан М.С. Молоденским, и
уже в 1935 36 rr. было выполнено астрономо rравиметрическое
нивелирование по дуrе меридиана Пулково Николаев и дуrе па.
раллели Орша Челябинск. Первоначально ArH предусматривало
про ведение полевых астрономических определений и rравиметри
ческих наблюдений. Так, вдоль линий ArH повышенной точности
астропункты располаrали через 40 50 км, а rравиметровую cъeMK
сrущения, дополняющую маятниковую съемку, проводили в ради
усе 50 км BOKpyr каждоrо астропункта. Это обеспечивало точность
вывода rравиметрических уклонений отвеса на астропунктах с
ошибками не более 0,5". В настоящее время с развитием rравираз
ведочных съемок надобность в дополнительных съемках сrущения
отпала, а ArH стало чисто камеральным методом определения раз-
ности аномалий высоты. С 1969 r. ArH выполняли по способ\
Остача с использованием KpyroBbIx палеток.
244
В астрономо rеодезической сети СССР линии aCTpoHoMo rpa
виметрическоrо нивелирования образовывали систему замкнутых
полиrонов с периметрами от 2 000 км ДО 4000 км, которые уравни
вали так же, как полиrоны rеометрическоrо нивелирования. Так
как первый член в выражениях (8.44) и (8.47) это разность !;'I. в
А rравиметрических аномалии высот, вычисленных отдельно для
каждоrо астропункта, то при суммировании по замкнутому поли
[ону сумма этих разностей всеrда равна нулю и не влияет на невяз
ку полиrона. Поэтому уравнивали только вторые члены д!;в д!;А'
обусловленные влиянием разности уклонений отвеса. Было выпол
нено несколько циклов ArH (l969 1980,1987 и 1993 rr.), в которых
использованы уточненные после уравнивания и HOBoro редуциро
вания rеодезические и астрономические координаты. Таким обра
30М, обработка астрономо rеодезической сети СССР выполнена
соrласно методике, изложенной в 38.
52. ТОЧНОСТЬ ACTPOHOMO
rp АВИМЕТРИЧЕскоrо НИВЕЛИРОВАНИЯ
В астрономо rравиметрическом нивелировании используют
результаты астрономических, rеодезических и rравиметрических
наблюдений, поэтому точность метода зависит от ошибок всех этих
измерений.
Влияние дальних зон I.' на rравиметрические аномалии высоты
и уклонения отвеса линейно интерполируют между астропункта
ми, и потому их фактическое нелинейное изменение в области (J
вызовет методическую ошибку астрономо rравиметрическоrо ни
велирования (области (J и I.' показаны на рис. 8.1). Эта ошибка
оценена М.С. Молоденским. Предельная случайная ошибка д'
влияния аномалий силы тяжести в области I.' на разность aHOMa
.1ИЙ высоты в одном звене определяется из условия
Iд'l:::; 0,533. 1 0 3 f5 1,
Р 1
[де D дисперсия аномалии силы тяжести на rранице областей I. и
2,' (в миллиrалах); 1 расстояние между астропунктами в километ
рах; р отношение радиусов областей I. и cr, д'" в метрах. rрави
метрические уклонения отвеса на пунктах астрономо rеодезичес
кой сети СССР вычислены, как правило, с учетом области радиуса
305,4 км, а среднее расстояние между астропунктами равно 80 км,
поэтому отношение р равно примерно 7 8. При D = 400 мrл 2 ,
245
l = 100 км И р = 71 д'" 1 <0,02 м и ошибка из за нелинейности влия
ния дальних зоН пренебреrаема. В случае необходимости ее леrк(\
уменьшить, увеличив радиус области, учитываемой при вычисле-
нии rравиметрическоrо уклонения отвеса.
Точность астрономо rравиметрическоrо нивелирования зави-
сит поэтому только от ошибок вывода местных rравиметричеСЮL\
аномалий высот и уклонений отвеса и астрономо rеодезически.\
уклонений отвеса.
Оценим точность астрономо rравиметрическоrо нивелирова-
ния, используя выражение (8.47).
В настоящее время rравиметрические съемки позволяют вы-
числить местные rравиметрические ('I с сантиметровой точ-
ностью, поэтому ошибку разности ('I в ('I А при оценке точност}
разности астрономо rеодезических аномалий высоты можно не
учитывать.
Рассмотрим влияние ошибок местных rравиметрических и аст-
рономо rеодезических уклонений отвеса на точность вычисления
последнеrо члена правой части формулы (8.47). Положим анало-
rично (8.37)
т( == mлдJiJL,
(8.48,
rде т, ошибка передачи rравиметрической аномалии высоты.
вызванная ошибками mлй разности местных rравиметрических н
астрономо rеодезических уклонений отвеса,
222
m Лд == т д 1: + тдАТ,
rде т-д'I, т/Т ошибки MecTHoro rравиметрическоrо и acтpOHOM
rеодезическоrо уклонения отвеса соответственно.
т очность вычисления местных rравиметрических уклонениЙ
отвеса на астропунктах ArC СССР составила 0,22"' Если не учи-
тывать ошибки rеодезических координат, для ошибки aCTpOHOM
rеодезических уклонений отвеса получим при т({l== 0,3......, тА = 0,5......
т T == т + mi == 0,58"'.
(8.49
Эта ошибка в три раза превышает ошибку MecTHoro rравимет-
рическоrо уклонения отвеса, поэтому основным источником оши-
бок астрономо rравиметрическоrо нивелирования являются оши6
ки астрономо rеодезических уклонений отвеса. При т/ = 0,22"
246
ошибка тдд разности .119 астрономо rеодезических и rравиметри
ческих уклонений
(т )2 + (mJT)2 = J (0,22/1')2 + (0,58.')2 = 0,62"'.
Ошибка передачи аномалии высоты на расстояние L соrласно
выражению (8.48) составит
0,62'"
т = mдt}JiJL = '" JiЛ,
р
(8.50)
и при 1 = 100 км L = 10000 км получим т,= 3,0 м, значит аномалии
высоты определяются с точностью, удовлетворяющей целям peдy
цирования на всей территории России.
Формулу (8.50) записывают обычно в виде
т = I1Л, 11 = т дд Ji,
(8.51 )
[де 11 ошибка на 1 километр хода.
Соrласно априорной оценке 11 = 3,2 см/ J км , поэтому
т = 3,2 JL см,
(8.52)
и при L = 1 О 000 км т, = 3,2 м, что совпадает с оценкой по формуле
(8.50).
Сопоставляя оценки (8.39) и (8.52), убеждаемся, что косвенная
интерполяция астрономо rеодезических уклонений отвеса уменьша
ет ошибку передачи аномалии высоты по крайней мере в три раза.
53. СВЯЗЬ ПРИРАЩЕНИЙ rЕОДЕЗИЧЕСКОЙ
ВЫСОТЫ, НОРМАЛЬНОЙ ВЫСОТЫ
И АНОМАЛИИ ВЫСОТЫ
в rлаве 2 получена формула (2.33), связывающая разность [eo
дезических высот с превышением. Запишем ее в виде
dH= dh rtrdl.
в этj формулу входит астрономо rеодезическое уклонение OT
веса rt в rеометрическом определении, Т.е. составляющая уrла
между нормалью к эллипсоиду и отвесной линией.
247
rеодезическая высота равна сумме нормальной высоты и aHO
малии высоты.
Дифференцируя формулу (7.17) rеодезической высоты, получим
dH = dHY + d .
Соrласно равенству (7.35) разность нормальных высот связана
с нивелирным превышением dh, а разность аномалий высоты опре
деляет формула (8.7).
Разности нормальных высот и аномалий высоты содержат Be
личины, связанные с rравитационным полем (аномалия силы тяже
сти, уклонение отвеса, нормальная сила тяжести); разность reоде
зических высот с rравитационным полем не связана.
Преобразуем формулу для dHY. Используя выражение (3.65), Ha
пишем
dУо=fЗУе sin2B dB,
dHY = dh + g у dh НУ fЗ sin 2BdB,
У т
в последнем члене принято 'Х, == r,rl' Соrласно формуле (3. 77) произ
ведение НУfЗ sin2B равно RE, Е уrол между нормалью к эллипсоиду
и силовой линией нормальноrо поля. Произведение RdB это эле
ментарная дуrа меридиана,
RdB = dl cosA.
Поэтому разность нормальных высот можно записать в виде
dH У = dh + g у dh Е cos А dl.
У т
(8.531
Сложим выражения (8.7) и (8.53)
dHY + d = dh + g у dh Е cos Adl iJdl g у dh.
У т у
Но соrласно формуле (4.15 ) уrол ЕСОsЛ + f) является составля
nAT
ющеи v астрономо rеодезическоrо уклонения отвеса в rеометри
ческом определении, поэтому
dHY+ d = dh &1 Т dl.
248
(8.541
Таким образом, из суммы dHY + d' влияние rравитационноrо
поля исключается, а формула (8.54) является формулой астрономи
ческоrо нивелирования физической поверхности Земли. Значит,
физическая поверхность Земли определяется только rеометричес
кими элементами.
Формулы (8.7), (8.53) и (8.54) поясняют невозможность нахож
дения нормальной высоты по измерениям rеодезической высоты
без информации о rравитационном поле. В равенстве (7.17) rеоде
зическая высота определяется только выбором отсчетноrо эллип
соида. Нормальная высота связана с разностью потенциалов (reo
потенциальным числом) и не зависит от выбора эллипсоида, а aHO
малия высоты зависит как от выбора эллипсоида, так и от
rравитационноrо поля.
54. ОПРЕДЕЛЕНИЕ РАЗНОСТИ НОРМАЛЬНЫХ
ВЫСОТ ПО СПУТНИКОВЫМ НАБЛЮДЕНИЯМ.
(ACTPOHOMO-rp АВИМЕТРИЧЕСКОЕ
НИВЕЛИРОВАНИЕ ТЕЛЛУРОИДА)
Представим измеренную спутниковым относительным методом
разность Н В НА rеодезических высот соrласно формуле (7.17) в
виде суммы приращений J{fB ]{YA НОjiМальных высот и aCTpOHO
мо rеодезических аномалий высоты , т в ,АТ А:
Н В НА = НУ В ]{УА + ,АТв ,АТА-
Разность нормальных высот тоrда можно получить таким об
разом
НУ В J{lA = Н В НА (,АТ в ,АТА)'
(8.55)
Входящую сюда разность (,АТ В ,АТ А) астрономо rеодезичес
ких аномалий высоты можно найти методами астрономическоrо
или астрономо rравиметрическоrо нивелирования. В случае aCT
рономическоrо нивелирования имеем для разности аномалий BЫ
соты формулу (8.35), поэтому
Н У НУ Н Н + й: + д 1 + f g у dh
в А В А 2 . (8.56)
АВ У
Применим астрономо rравиметрическое нивелирование, ис
пользовав метод Остача (8.44)
НУ В J{fA = Н В НА (,r. B ,r. A ) ( 'B А'А)' (8.57)
249
Это формула астРОНОМО 2равUJWетричеСКО20 нивелирования HOp
мальных высот или астРОНОМО 2равиметричеСКО20 нивелирования
теллуроида. Отличие этой формулы от (8.47) астрономо rравимет-
рическоrо нивелирования разности аномалий высоты в том, чт('I
здесь разности астрономо rеодезических и местных rравимет
рических аномалий высоты получают не по уклонениям отвесноЙ
линии, а вычисляют непосредственно для пунктов нивелирной сети.
совмещенных с пунктами спутниковых наблюдений. То есть BMec
то формулы (8.46) нужно использовать равенство
( B (A) = Н В НА (НУ В НУ А ) ( 'I. В I:A)'
(8.581
Разность ( B A) астрономо rеодезической и местной [ра-
виметрической аномалий высот пунктов, не являющихся пункта ш
нивелирной сети, можно получить интерполированием.
Таким образом, мы рассмотрели такие виды нивелирования:
а) астрономическое нивелирование:
астрономическое нивелирование физической поверхности Зе ,-
ли (формула (7.6»
астрономическое нивелирование поверхности rеоида или л
бой уровенной поверхности (формула (8.34»;
астрономическое нивелирование теллуроида (8.56);
(Формулы (7.6) и (8.56) в сумме дают формулу (7.36), если учесть
связь уклонения отвеса в физическом и rравиметрическом опреде-
лении.)
б) астРОНОМО 2равUJWетрическое нивелирование:
определение разности аномалий высоты методом Молоденско
[о (формула 8.42»;
определение разности аномалий высоты методом Остача (фо
мула (8.41);
определение разности нормальных высот (формула 8.57».
в астрономо rравиметрическом нивелировании нормальных
высот классические астрономические определения широты и ДО:I
rOTbI заменены астрономическими наблюдениями нез.
Разности аномалий высоты в классическом астрономо rрави-
метрическом нивелировании или разности нормальных высот в
спутниковом астрономо rравиметрическом нивелировании можно
найти только для тех пунктов, на которых выполнены и астроно-
мические и rеодезические измерения. Для всех остальных пунктов
астрономо rеодезические аномалии высот нужно определять ин
терполированием.
250
55. ИНТЕРПОЛИРОВАНИЕ ACTPOHOMO
rЕОДЕЗИЧЕСКОЙ АНОМАЛИИ ВЫСОТЫ
Интерполирование астрономо rеодезических аномалий BЫCO
ты на промежуточные пункты выполняют методом косвенной ин
терполяции, аналоrичным методу косвенной интерполяции укло
нений отвеса. Плавную составляющую , аномалии высоты ли
нейно интерполируют между пункта ми с известными значениями
аномалии высоты и затем добавляют к местной rравиметрической
аномалии высоты.
Косвенная интерполяция астрономо rеодезических аномалий
высоты широко применялась при обработке астрономо rеодези
ческой сети СССР [25]. В этом случае опорными являлись aCTpo
пункты, входящие в линии астрономо rравиметрическоrо нивели
рования. Для всех астропунктов составляли разности
, == , ,r.
астрономо rеодезических ,И местных rравиметрических ,Х анома-
лий высоты. Внутри полиrона ArH эти разности интерполирова
ли на пункты астрономо rеодезической сети и затем прибавляли
интерполированные разности 'инт К rравиметрическим аномали
ям высоты
,АТ инт == ,I + 'инт'
(8.59)
Так были получены астрономо rеодезические аномалии высоты
для всех пунктов ArC СССР. Карта аномалий высоты на террито
рию СССР, полученных по результатам астрономо rравиметричес
Koro нивелирования и косвенной интерполяции аномалий высоты с
использованием 2897 астропунктов, представлена на рис. 8.3.
Как видно, аномалии высоты на большей части СССР не "ре-
вышают по абсолютной величине 10 м. В северо восточной части
страны (Чукотка) аномалии высоты убывают до зо + O м, В юrо
восточной части они возрастают до 40 50 м. В целом эллипсоид
KpacoBcKoro хорошо представляет rеоид на территории СССР.
Ошибки аномалий высот относительно Пулкова не превышают
1 м и только в наиболее удаленных северо восточных районах
(Чукотка, Камчатка) возрастают до 1,5 м.
Косвенная интерполяция аномалий высоты в спутниковом Me
тоде выполняется аналоrично. Отличие только в способе получе
ния опорных разностей, получаемых в этом случае по формуле
,== (Н Jff) ,1..
(8.60)
251
l ; " 1 - 1 1 i
. '!\ I
I i I f ';' .
. -P 11j]
Ij iH iН
111.. j ',!
' .ll r "
,gJr/ i I J
::
:::
,..
...,
...
i:..
:='
.
t QC
=
252
После нахождения интерполированных разностей (Иllт В оп
ределяемых пунктах можно найти интерполированные aCTpOHOMO
rеодезические аномалии высоты
(н н у ) Иllт ::::: L + инт
(8.61)
н, если rеодезические высоты Н известны, получить нормальные
высоты любых пунктов спутниковых определений, не выполняя
rеометрическо [о нивелирования,
нУ = Н L + ИНТ'
(8.62)
Точность местных rравиметрических аномалий высоты и ин
терполированных величин иl/tп должна соответствовать точнос
ти rеометрическоrо нивелирования.
Покажем, что современная изученность rравитационноrо поля
позволяет получить местные rравиметрические аномалии высоты с
точностью порядка миллиметров. Для плоской отсчетной поверх
ности формула Стокса (4.39) имеет вид
L = f g dI.
2пу r
L
(8.63)
или, введя сюда известное выражение dL = rdrdA элемента поверх
ности в полярной системе координат,
2тr R!JIo
'L = f f gdrdA.
2пу
A O r O
(8.64 )
Применим метод численноrо интеrрирования. Разделим область
L интеrрирования Kpyr радиуса R1JIv на п кольцевых зон равной
ширины r, а каждую зону на 'i секторов с разностью азимутов
ДА =2п/l i (рис. 8.4). Тоrда для аномалии высоты получим
п I ri Ak
(L = LL gik f f drdA
2пу i l k l /i l Ak l
1 п I
= LL д gikд1-М,
2пу i l k l
rде gik средняя аномалия силы тяжести на трапеции, оrраничен
ной соседними окружностями и радиусами.
253
Рис. 8.4. К точности вычисления аномалии высоты
Введем выражение ДА и вынесем за знак суммы r
п f.
'L = t1r L !t1g ik .
У 1,
,=1 / k=1
Оценим точность вычисления по этой формуле. Для ошибки т;
аномалии высоты имеем
т, = ( м ) 2 t ( ) ' т;'.
у ,=1 1/
Кольцевую зону разобьем на криволинейные по возможности
равносторонние трапеции. Число li трапеций в зоне с номером i
составит
1 2Jr(r m )i (2 ' 1)
j l п,
t1r
rде (r m)" средний радиус кольцевой зоны.
Ошибку т Ag средней аномалии во всех трапециях считаем
одинаковой. Теперь ДЛЯ ошибки т; вычисления аномалии высоты
найдем
( ) 112
t1rmi1g п 1
т; = уБ 2i 1
254
Число п кольцевых зон равно R'IIfjdr. Если область интеrриро
вания разбита на 15 20 зон, можно принять
20 1 1 1 1 1
L =1+ + + +...+ ,,=,2,5.
i=l 2i 1 3 5 7 39
.J 2,5
Таким образом, ошибка аномалии высоты m i = Jii drm 8g .
При dr = 1 О км И mt!,.g = 1 мrл т = 1 мм. r 7r
Для применения метода косвенной интерполяции нужно ycтa
новить радиус R'IIo области учитываемых аномалий силы тяжести
(радиус ближних зон), rарантирующий линейное изменение вели
чины d( на всей площади интерполирования. Оценим этот радиус,
используя подход М.С.Молоденскоrо [20].
Пусть нужно выполнить интерполирование астрономо rеоде-
зических аномалий высоты в круrовой области (j радиуса р с цeHT
ром в точке О (рис. 8.5). Используя формулу (8.63) Стокса для плос
кой отсчетной поверхности, запишем для разности влияния даль-
них зон I' на аномалии высоты в точках Р на краю и О в центре
круrовой области
'р ,o = f d g ( ! 'k.',
2q r' rp r [
rде rp' r расстояния от точек Р и О до текущей точки Q области I'.
р
о
Q
R IJI O
Рис. 8.5. Косвенная интерполяция аномалий высоты
255
Из треуrольника OPQ можно получить
1 lС<> ( ) n
= L.f Pn(cosa),
'р , n""О '
(8.65
rде PnCcosa) полином Лежандра; а уrол между радиусами вект(\
рами точки Р и текущей точки Q области 1:'. Выделим в этом рЯ.1
первые два члена, тоrда
1 1 Р 1 0.0 ( р ) n
= +2cosa+ L Pn(cosa).
, р " , n",,2 '
с помощью этоrо выражения напишем разность аномалий в
виде
1 <.>Q n
р o = f g 1,2 cosad'L'+ f g[L +l Pn {cosa}]dL'.
2пу , 2пу 2 '
r r'
При линейном интерполировании первый член правой части.
пропорциональный р, будет учтен, а второй составит ошибку Ь
интерполирования. Оценим эту ошибку, оrраничиваясь учето {
только члена, содержащеrо расстояние р во второй степени,
р2 f дg I
8= зР2(соsа)d'L.
2п у ,
r'
Элемент dL' поверхности L' в полярных координатах "а имеет
вид dL' = rdrda, поэтому
2 <.>Q 2:л
8 = f d; f gP2{COsa}da.
2пу r
R'I'o о
Оценим предельное значение интеrрала по а. Используя извес-
тное неравенство, получим
1
f g Р 2 { cos а} da [ f дg 2 da f [Р 2 { cos а} ] 2 da] 2" = 4 п g т '
О О О
256
1 2к
rде дgт = [ f дg2daP среднее квадратическое значение aHOMa
2п
о
лии силы тяжести на окружности радиуса r. Теперь для 8 получаем
s: < L J22 f "" А dr
и 7L ug m 2'
2"1 4 r
R'I'o
дg
Подинтеrральное выражение убывает при возрастании r
r
и при r 00 обращается в нуль. Чтобы не преуменьшать значение
ошибки, примем за дgт среднее квадратическое значение аномалии
силы тяжести на rранице областей I и I' ближних и дальних зон,
соответствующее минимальному значению радиуса r = R1fI(}.
Окончательно для ошибки интерполирования получим
<5 J 22 Р 2 дg .
8у R1fIo
(8.66)
Положим р = 20 км, дgт = 40 мrл, R1fIo= 1000 , тоrда <5 1 см.
Таким образом, если расстояние между пунктами с известными
астрономо rеодезическими аномалиями Н нУ высоты составляет
20 км, возможно их интерполирование с ошибкой меньше 1 см,
если при вычислении rравиметрических аномалий высот учтена
область радиуса 1000 км.
При точных вычислениях нельзя оrраничиться формулой CTO
кса, а аномалии в свободном воздухе нужно интерполировать KOC
венно с использованием карт аномалий Буrе и рельефа.
56. ВЫЧИСЛЕНИЕ rРАВИМЕТРИЧЕСКОЙ
АНОМАЛИИ ВЫСОТЫ
Выше было показано, что для нахождения разности нормаль
ных высот ПО спутниковым измерениям нужно знать разность Me
стных rравиметрических аномалий высоты. Если же речь идет об
определении полноrо значения высоты, то возникает необходимость
вычисления полной rравиметрической аномалии высоты. Однако
вычисление rравиметрических уклонений отвеса и аномалии BЫCO
ты встречает ряд трудностей, связанных с отсутствием непрерыв
ных измерений силы тяжести на поверхности Земли и особеннос
тями функции Стокса. Рассмотрим эти вопросы подробнее.
257
Поведение функции S(tJl) Стокса (4.32) в зависимости от pac
стояния 1.JI иллюстрирует рис. 8.6. Вблизи вычислительной точки
при 1.JI ----+ О функция S( 1.JI) неоrраниченно возрастает, а на большеЙ
части поверхности сферы она меняется плавно; так, на интерва..lе
270 < 1.JI < 1800 ее значения меняются в пределах 13. Поэтому влияй
ние аномалий силы тяжести вблизи точки вычисления и в удален
ных от нее точках учитывают по разному.
S( ЦI)
15
\
S(O)=oo
S(38,96 0 )=0
S(71 ,60)= 2,307 (min)
S( 117,66°)=0
S( 180°)=3,079
20
10
5
600 'Ю о
1200 1500 1800 Ijf
(f
Рис. 8.6. Функция Стокеа
Влияние ближней зоны w o учитывают обычно методом численн
[о интеrрирования с использованием rравиметрических и топоrра-
фических карт разных масштабов и каталоrов средних значений aH
малий силы тяжести на трапециях малых размеров. Влияние анома-
лий силы тяжести на остальной части т -----то поверхности Земли, Т.е.
влияние дальних зон, представляют в виде быстро сходящеrося ряда.
Преобразоваlluе формулы Стокеа
Преобразование формулы Стокса, приводящее к удобным как
для вычисления аномальноrо потенциала Т, так и для точностны\
оценок выражениям, выполнено М.С. Молоденским в 1945 [. [20].
Позднее подобные преобразования формулы Стокса были ВЫПО.l
нены В.Ф. Еремеевым, М.И. Юркиной, r. Джеффрисом, О.М. Ос-
тачем и друrими. Рассмотрим принцип преобразования формулы
Стокса по методу Остача.
Представим формулу (8.30) Стокса суммой двух интеrралов
,r = f дgS(1.JI)dm + f д g S (1.JI)dm,
4пу 4лу
то т тo
258
(8.67 I
первый из которых вычислен по круrовой области (00 радиуса f//o С
центром в точке вычисления, второй по остальной части (О (00
поверхности сферы w. Влияние дальних зон удобно представить в
виде ряда сферических функций. Но сферические функции на части
(О (00 поверхности сферы не ортоrональны. Чтобы восстановить
ортоrональность, добавим ко второму интеrралу в правой части
(8.67) интеrрал f dgS(f//o)d(O; а для сохранения равенства выч
4лу
W o
тем ero из первоrо интеrрала, rде S(f//o) значение функции Стокса
на rранице, разделяющей ближние и дальние зоны. Тоrда выраже
ние для аномалии высоты получит вид
(r = f дg[S(f//) S(f//o)}i(O + f дgF(f//)d(О,
4лу 4пу
W o CIJ
(8.68)
rде F("Cj/) вспомоrательная функция (рис .8.7), обладающая свой
ствами
Р( ) = S(f//o) о f// f//o'
f// S(f//) f//o f// л.
Первый член формулы (8.68) совпадает с формулой (8.45).
F(I/i}
10
5
000
1800 ч'
S( ц!о)
<Ю О
Рис. 8.7. Преобразованная функция Стокеа
259
Функцию F( 1./1) раскладывают в ряд по полиномам Р п( cos 1(1
Лежандра
2п + 1
F(1.f/) = L.J 2 Q nPn(cos1.f/),
п=О
(8.691
тоrда
R R oo
J дgF(1.f/)dm = LQпдgп,
4п (iJ 2 о
rде коэффициенты Q n определены выражением
(8.70,
11:
Qn = f F(1.f/)Pn(cos1.f/)sin1.f/d1.f/,
о
дgп сферическая функция степени п в разложении аномалии СlL1Ы
тяжести.
Используя свойства функции F( 1.f/), находим
IJI о 11:
Qп =S(1.f/o) Jpn(cos1.f/)sin1.f/d1.f/ + fS(1.f/)Pп(Cos1.f/)sin1.f/d1.f/ (8.711
о Ч'о
и для аномалии высоты получим
R R 00
,Т = J дg[S(1.f/) S(1.f/оНim+ LQпдgп.
4пу (00 2у п=О
(8.72,
При 1.f/o = О
11: 2
Qп = J S(1.f/)Pп (cos 1.f/) sin 1.f/d1.f/ = ,
п 1
о
при 1.fIC) = п Qп = О, поэтому формула(8.72) объединяет ряд и фор.
мулу Стокса.
При практических вычислениях суммирование ряда в выраже.
нии (8.72) выполняют до HeKoToporo конечноrо значения п = т, а
сферические функции нулевой и первой степеней исключают и фор-
мулу для аномалии высоты записывают в виде
R R т
,Т = f дg[S(1JI) S(1.f/oHiйJ+ LQпдgп +е(,
4пу (00 2у п=2
260
(8.73)
[де е( ошибка, вызванная оrраничением ряда степенью п = т,
R ею
e = LQпдgп'
2у п=т+l
(8.74)
Во втором члене формулы (8.73) суммирование можно выпол
нять до сравнительно низких степеней т. Это объясняется тем, что
члены высоких степеней в ряде Стокса связаны с быстроменяю
щейся короткопериодической частью в аномалиях силы тяжести и
обусловлены влиянием ближайших окрестностей вычислительной
точки. Выделение интеrральноrо члена, учитывающеrо влияние
ближних зон, существенно повышает сходимость ряда. Влияние
дальних зои выражает общие особенности rравитационноrо поля
и поэтому соответствует членам низких степеней. Приближенно.
зависимость между радиусом 1./10 ближних зон и степенью т учиты
ваемых членов разложения выражают формулой
1800
т= .
о
lJIo
(8.75)
Соrласно этой формуле, если радиус ближних зон составляет
100 км (lJIu =:: 1 О) т = 180, для радиуса 300 км (1JI0 ::::: 3 О) т ::::: 60.
Формулы для уклонений отвеса можно получить дифференци
рованием (8.73)
{ } = Ч' f О 2 f 1r Д dS(lJI) sin { cos А } d dA
1] 4пу g d(lJI) 1JI sin А lJI4
о о
(8.76)
1 т
2 y LQп
п=2
ддgп
дВ
ддgп
cos BaL
e
+ ,
e1J
rде элемент dm поверхности единичной сферы выражен через KOOp
динаты 1JI, А текущей точки; dm = sinlJldlJldA; e , е'1 ошибки COOT
ветствующих величин из за оrраничения ряда.
Формулы (8.73) и (8.76) получены на основании одноrо и Toro
же преобразования и поэтому соrласованы друr с друrом. Интеr
ральные члены этих формул отражают влияние ближних зон и ис
261
пользованы для вычисления местных аномалий высоты и уклоне
ний отвеса в методе астрономо rравиметрическоrо нивелирования
в ссср! и при косвенной интерполяции астрономо rеодезически\
аномалий высоты. Также можно оrраничиться только интеrра.1Ь
ным членом (8.73) при интерполировании нормальных высот с ис
пользованием спутниковых наблюдений. Если же необходимо най
ти полное значение аномалии высоты, следует учитывать и влия
ние дальних зон.
Местные rравиметрические аномалии высоты, выражаемые
интеrральным членом в выражении (8.73), получают обычно чис
ленным интеrрированием, заменяя аномалии силы тяжести Дg их
средними значениями Дgik на выбранных площадках. Можно ис
пользовать криволинейные трапеции, показанные на рис. 8.3, или
разделить область интеrрирования на площадки, оrраниченные
меридианами И параллелями. Рассмотрим первый способ, приме
няющийся при ручном счете.
Функция Стокса и ее производная при 1JI = О имеют особеннос
ти (1im S(lJI) :::: 00,
IJI O
lim dS(lJI) :::: 00)
dlJl
IJI O
и интеrралы в формулах (8.73).
(8.76) являются несобственными. Однако для функции Стокеа oco
бенность в нуле устраняется, так как произведение S( lfI)sin 'fI
оrраничено на всем интервале изменения 1JI, поэтому влияние всей
области радиуса lJI o на аномалию высоты учитывают по единой
методике.
Разделим область интеrрирования на п зон, оrраниченных pa
диусами lfIi !' lJIi, и k секторов, разделенных азимутами A/{ \ и А/{.
Примем разность А" A/{ I постоянной для всех секторов и равной
М. Тоrда для местной аномалии высоты получим
RM п Ч'i
'L ::::',/:o:::: L2./ g;k J[S(lJI) S(lJIo)]sinlJldlJl,
4пу ;=\ k=\ .
Ч'I I
(8.77)
1 rn
Но при одинаковой ширине секторов М = 2тr/q, а LДg";k =Дg";,
q k=\
1 Остач О.М. К методике астрономо rpавиметрическоrо нивелирования
I Реф. сборник цнииrАиК, 1970. NQ 6. С. 28 3З.
262
rде Иi средняя аномалия силы тяжести в кольцевой зоне с HOMe
ром i. Выполнив интеrрирование по 1.fI, получим
L R п
" :::: L gi[J(l.fIi) J(l.fIi I)+S(I.fIO)(COSl.fli COSI.fIH)]' (8.78)
2у 1
rде
J (1.fI):::: f S(I.fI) sin I.fIdl.fl:::: cos 2 l.fI cos l.fI + sin i (3cos l.fI + 1)
3 ,2 1 . l.fI .21.f1 )
2 sш l.fI п(s1П 2 + S1П 2'
(8.79)
Радиусы l.fIi кольцевых зон можно выбирать так, чтобы влия
ние всех зон на аномалию высоты было одинаковым, Т.е. чтобы
коэффициенты при gi в формуле (8.78) были равны.
Для повышения точности определения средних аномалий gik
силы тяжести применяют косвенную интерполяцию этих aHO
малий через аномалии Буrе или внеполной топоrрафической pe
дукции.
Описанная методика вычисления rравиметрической аномалии
высоты позволяет находить ее с необходимой точностью. Кроме
Toro, точность вычисления леrко повысить, уменьшая ширину коль
цевых зон и секторов. Однако она достаточно rромоздка и требует
ручноrо счета, поэтому при меняется только для учета ближайшей
окрестности точки вычисления. Разработаны аналитические MeTO
ды учета влияния ближних зон, основанные на использовании MO
делей аномалий силы тяжести в виде системы материальных точек
или представлении аномалий интерполяционным полиномом. Эти
методы описаны ниже. Однако все эти методы уступают по точно
сти рассмотренной методике.
rравиметрические уклонения отвеса используют, как правило,
для интерполирования астрономо rеодезических уклонений и учи
тывают поэтому влияние только ближних зон. rравиметрические
аномалии высоты также используют для интерполирования aCTpo
номо rеодезических аномалий высоты и нормальных высот и в этом
случае тоже можно оrраничиться учетом только ближних зон. Для
нахождения значения rеодезической высоты, связи изолированных
нивелирных сетей, вычисления значения потенциала нужно знать
полное значение аномалии высоты, Т.е. учитывать также влияние
дальних зон.
263
Учет влияния дШlьних ЗОН на аНО,МШlию высоты
В ( r.' ( JC
лиянию '=' = '=' '" дальних зон соответствует второи член в
"'()
правой части формулы (8.73)
R т
r'
, = QпДgп'
2у п=2
(8.80)
Как видно из выражения (8.80), чтобы найти влияние дальних
зон, нужно вычислить коэффициенты усечения QIl и сферические
функции
11
дgп = апО Р Il (sin В) + L (a nk cos kL + b nk sin kL) P ll k ( В ), (8.81)
k=1
rде Р п (sin В), P nk (В) нормированные полиномы Лежандра, свя
занные с полиномами Лежандра Pn(sinB), Р; (В) соотношениями
.J k (n k)' k
Р Il (sin В) = 2п + lР п (sin В), Р п (В) = 2(212 + 1) . Р п (В);
(п + k)!
а по , ank' b nk нормированные коэффициенты разложения анома-
лии силы тяжести; В, L координаты вычислительной точки.
Нормированные полиномы Лежандра удобно вычислять по
формулам I
Р/ (В) = P cos k В, P =
(2п+1)!!
f ,
п (2п)!!
п l
Рп =
(2п + 1)!! . В
f sш
п 1 (2п 2)!! '
P = ..) 1 {2( €k )(k+l)sjnBp +l
(n k)(n+k+l) fk+l
[ (n+k+2)(n k I)]cos2 Вр;+2},
E k + 2
k = (п 2), ..., О, (2п)!! = 2 х 4 х 6 х 8...,
(2п + 1)!! = 1 х 3 х 5 х 7.. ., Ео = 1, Ek = 2 (к '" О).
I Чуйкова НА., Макси.'lОва т-т. [армонический и статистический анализ
rлубин поверхности Мохоровичича I Труды rАИШ. т. LXY, М. 1996.
С. 33 50.
264
Точность вычисления lравuметрической аНО'мШlUи высоты
Ошибка вычисления аномалии высоты вызвана ошибками m j
средних аномалий д.g) силы тяжести в кольцевых зонах, ошибками
коэффициентов ank' b nk разложения аномалий и оrраничением ряда,
представляющеrо влияние дальних зон.
Ошибка т) влияния ближних зоН соrласно формуле (8.78) co
ставит
2 L 2 2
т ) = с.т.
I l'
i
(8.82)
R
rде C i = [J(lJIi) J(lJIi )) + S(V/o )(COSlJli COSlJli ) )]; mi ошибка aHO
2у
малии в кольцевой зоне. Среднее значение дgi аномалии силы тя
жести в кольцевой зоне удобнее находить не для всей зоны сразу, а
после разделения зоны на отдельные трапеции и нахождения cpeд
них аномалий сначала по трапециям, а затем уже определять об
щее среднее значение в зоне. Выразим ошибку m i через ошибку m jk
аномалии в отдельной трапеции
2
2 тik
т i = ,
qi
(8.83)
rде qi число трапеций в зоне.
Практически удобнее использовать по возможности paBHOCTO
ронние трапеции. При оценке точности вычисления влияния ближ
НИХ зон будем считать Землю плоской. Тоrда из условия равенства
средней ширины 27rrC/!Qi трапеции ширине r i ri 1 зоны
у. + у. )
q .=1[ 1 ,
I '
r; rH
rде ri l' r i внешний и внутренний радиусы зоны; r(p =(ri + rj ))/2.
Положим ошибку m jk равной ошибке представительства
Е = JD 0,525(r i "' ))/ d
J l + (O,525(r; ri ) / d)2 '
(8.84)
[де D дисперсия, d расстояние корреляции.
Эта формула основана на полученных Ю.М. Нейманом значе
ниях ошибки представительства. Для трапеций малых размеров при
265
(r j rj l) < d вместо формулы (8.84) можно использовать прибли
женное выражение
Е = 0,5JD (r i ri 1 )/ d ,
(8.851
тоrда
0,5Б (r j rj l )3
т.=
I r;; d
-..Jn ri+r H
(8.861
Оценим ошибку т2 аномалии высоты, вызванную влиянием даль
них зон. Будем понимать под т2 интеrральное среднее ошибки € в
отдельной точке по поверхности Q) сферы единичноrо радиуса
2 1 i 2 1 f R 2 R 2 2
т 2 = 4 E:;dQ) = 4 [ 2 8gnQn] dQ) = ( 2 ) dnQn ( 8.87)
nш nт У2 у 2 '
rде d n степенные дисперсии; 8g n ошибка сферической функции
дgп В разложении аномалий силы тяжести.
Поскольку при вычислении аномалии высоты учтены только
на чальные члены ряда, для оставшейся части ряда при оценке точ
ности следует вместо дисперсий d n ошибок использовать степен
ные дисперсии D n аномалий силы тяжести. Таким образом, ошибка
аномалии высоты, вызванная влиянием дальних зон, получает ви,}
2 R 2 2 R 2 2
т2 =(2) dnQn +(2) DnQn'
у 2 У 7
Суммируя ошибки т] и т2' найдем полную ошибку вычисления
rравиметрической аномалии высоты
(8.88 )
2 2
т:; = т\ + т 2
(8.89)
rравиметрические аномалии высоты нужно определять с точнос
тью до сантиметра для получения (совместно с нормальными BЫCOTa
ми) rеодезических вЫсот. В настоящее время такая точность еще не
достиrнута. Это вызвано сложностью учета так называемых средних
зон. Ближайшие окрестности точки вычисления до расстояния около
100 км можно вычислить С необходимой точностью, используя rpави
метрическую съемку высокой rтотности и тщательно учитывая влия
ние рельефа. Влияние дальних зон при их внутреннем радиусе 200
3000 км также вычисляют с высокой точностью при использовании
современных моделей rравитационноrо поля (EGM 96, r А O 98).
266
57. ВЫЧИСЛЕНИЕ АНОМАльноrо ПОТЕНЦИАЛА
ПО ДИСКРЕТНЫМ ИЗМЕРЕНИЯМ СИЛЫ ТЯЖЕСТИ
При нахождении аномальноrо потенциала по дискретным из
мерениям реальное аномальное поле заменяют полем, создаваемым
распределенными на некоторой внутренней поверхности массами.
Возможность такой замены основана на следующем: известно, что
аномальный потенциал Т реальной Земли с точностью до любоrо
сколь уrодно малоrо Е можно представить потенциалом Т , rapMo
ническим вплоть до некоторой поверхности внутри Земли и YДOB
летворяющим условию
maxlT (Р) т (p)1 Е,
(8.90)
rде Т(Р) и Т(Р) значения реальноrо и аппроксимирующеrо по
тенциалов в точке Р поверхности Земли соответственно. Соrласно
этому в 1963 rоду независимо друr от друrа российский rеофизик
В.И. Аронов и шведский ученый А. Бьерхаммар разработали Me
тод определения аномальноrо поля по дискретным измерениям на
поверхности Земли, в котором это поле аппроксимируется Macca
ми, лежащими на внутренней поверхности. В качестве такой по
верхности в методе Аронова использована плоскость, в методе
Бьерхаммара сфера.
Рассмотрим принцип метода Аронова. В точке Р (рис. 8.8) по
верхности S Земли измерена аномалия z1.g p силы тяжести, t ошибка
измерения. В точках i вспомоrательной плоскости 0", проходящей
на rлубине z"под точкой с наименьшей высотой, расположены при
тяrив аю щие массЫ. Эти массы создают аппроксимирующий потен
циал т . Для плоской отсчетной поверхности аномалия силы тяже
сти связана с аномальным потенциалом равенством
дТ
z1.g = az = Tz, (8.91)
и также является функцией rармонической вне масс; ось z направ
лена противоположно направлению силы тяжести. Производная
Т/Р) аномальноrо потенциала Т(Р) может быть с точност ью до
любоrо сколь уrодно малоrо д представлена производной Т;: (Р)
потенциала Т (Р) , создаваемоrо расположенными на внутренней
плоскости о" массами. Поскольку измерения всеrда проводят с He
которой ошибкой д н можно считать, что на поверхности Земли
выполняется условие
тах Т:(Р) Т;: (Р) $; д н ,
(8.92)
267
,
z
(j
Рис. 8.8. Положение вспомоrательной плоскости внутри Земли
в точках поверхности Земли аномалии дg р можно представить
линейной функцией
дgр = LxiR (p,i)
,
i
(8.93 )
rде x i неизвестные постоянные, определяющие массы несущих TO
чек i R(p, i) функция расстояния между элементом да плоскости
о; на котором расположена точка i, и точкой Р, в которой произ
ведены измерения.
Постоянные X i нужно определить так, чтобы rравитационный
эффект распределенных на плоскости а (рис. 8.9) масс с заданной
точностью 80 совпал с измеренными значениями Т/ Р) на множе
стве пунктов Р наблюдения
maxIT::JP) Т:: (p)1 $; 80'
(8.94 )
РДg
р
Рис. 8.9. Подбор эквивалентноrо аномальноrо поля
268
При практической реализации метода в качестве элементов Да
удобно использовать сетку квадратов со стороной h, равной cpeд
нему расстоянию между пунктами наблюдений, а значения неизве
стных Х,. определять из решения системы линейных уравнений
F=AX,
(8.95)
rде F= Т, ( Р) измеренные значения; Х матрица неизвестных х,.;
А матрица, элементами которой являются известные функции
R(p,i).
В качестве измерений T (P) можно использовать значения любых
<-
элементов аномальноrо поля. Поскольку чаще Bcero в распоряжении
имеют аномалии силы тяжести, применим описанный метод к этому
случаю. На внутренней плоскости можно расположить несущие TO
чечные массы, простой слой с кусочно.постоянной rтотностью или
систему аномалий силы тяжести. Рассмотрим эти варианты.
Представление аНОМШZЬНО20 поля системой точечных Масс. На
плоскости а под поверхностью Земли равномерно распределяют
несущие точки, массы т; которых неизвестны (см. рис. 8.8 8.9). На
поверхности Земли измерены аномалии дgр' Потенциал, создавае
мый точечными массами, имеет вид
Т (Р)= f Gm;
L...t у, '
;;:;1 р'
(8.96)
rде N число точечных масс; r pi расстояние от измерительной
точки до несущей точечной массы; G постоянная тяrотения.
Для плоской отсчетной поверхности аномалии дg силы тяжес
ти связаны с потенциалом соотношениями
N
дт L Gm; ,
дg = = (z+z)
р дz у3 .
,.;:;) р;
(8.97)
Уравнение (8.97) аналоrично (8.93), неизвестными х,. являются
произведения Gm,., а коэффициенты таковы
z+z'
3
У р ;
R (pi) =
(8.98)
Уравнение (8.97) можно написать для всех точек Р с измерен
ными значениями аномалий дgр и получить систему линейных ypaB
нений, аналоrичную (8.95), для нахождения неизвестных масс Hecy
щих точек.
269
Представление ано.мальноzо поля потенциало.м пpocmozo слоя
Аномальный потенциал можно искать в виде потенциала про
cтoro слоя
т = G f j1 a ,
(J
(8.99)
распределенноrо на внутренней плоскости о; [де J.1 поверхност
ная плотность слоя. Если выбрать слой кусочно постоянной плот
ности, для KOToporo плотность на каждом квадрате дО" постоянна
и равна J.1i вместо равенства (8.99) можно записать
N
Т (Р) = L J.1i д а .
i 1 р/
(8.100)
Аномалии силы тяжести, соответствующие этому потенциалу.
получают соrласно формуле
N
" ' GJ.1.
дgр = (z +z ) Дa.
i 1 'р;
(8.101)
Значит, в этом варианте решения Х,. = GJ.1iда, а функция R(pi)
такая же, как и в выражении (8.97) и определена формулой (8.98).
Представление ано.малЬНО20 поля аномалиями сшы тяжести на
внутренней плоскосtnи
Предположим, что на вспомоrательной плоскости аномалии
силы тяжести известны и равны дg* (см. рис. 8.9!: Тоrда, при меняя
интеrрал Пуассона к rармонической функции дg, для аномалии
силы тяжести в точках поверхности Земли можно записать
, *
д = z+z j дg d
g р 2п r 3 а.
(J
(8.102)
Если считать аномалию силы тяжести постоянной в пределах
каждоrо квадрата да и равной дg*i' то вместо уравнения (8.102)
получим систему уравнений
N , *
дg = " (2+Z )дg; да
р 2л ,3, (8.103)
;::01 р;
] *
rде Х ; = 2п дgi да , а R(pi) то же, что и в двух предыдущих случаях.
270
Системы (8.97), (8.101) и (8.103) эквивалентны. Соrласно этим
системам между массами несущих точек, плотностью простоrо слоя
и аномалиями на внутренней плоскости существуют соотношения
*
дg i
Gmi GJ1iД(j Д(j, (8.104)
а плотность слоя и аномалии силы тяжести связаны равенством
Дg*,.
GJ1i .
(8.105)
Системы (8.97), (8.101) и (8.104) аналоrичны (8.95), являются
линейно независимыми и MorYT быть решены любым способом.
В случае, коrда число N определяемых неизвестных равно числу
измеренных аномалий, из решения систем будут найдены такие зна
чения искомых величин, для которых вычисленные аномалии точ
но совпадут с измеренными. Поскольку исходные аномалии coдep
жат ошибки, эти ошибки полностью войдут в определенные таким
образом значения постоянных и решение будет зависеть от набора
исходных данных.
Решение системы (8.95) встречает серьезные трудности при
практической реализации, поскольку приводит к необходимости
обращения больших матриц, а коэффициенты системы (элементы
матриц) при плотной съемке близки между собой, особенно если
съемка расположена в равнинном районе и высоты z над плоско
стью постоянны. Это приводит К тому, что система (8.95) является
плохо обусловленной. Поэтому преимущество имеют итерацион
ные методы решения системы. Возможно построить процесс BЫ
числений по такой схеме
Х\ = F, Б\ = F AX 1 '
(8.106)
Х n + 1 = Хn+Б n , Б n +\ = F АХ n +\ .
Соrласно этой схеме в начальном приближении искомые неиз
вестные полаrают равными измеренным и находят поправки Б\,
соответствующие такому предположению. Затем получают уточ
ненные значения неизвестных с учетом этих поправок. Процесс
приближений продолжают до тех пор, пока разность измеренных
и вычисленных аномалий силы тяжести не достиrнет HeKoToporo
значения Б о , назначаемоrо по правилу
Ба == Б н , IБоl .$" 1 Бнl,
(8.107)
rде Б н ошибка измерения аномалии.
271
Таким образом, при итерационных методах на внутренней плос
кости подбирается такая функция, которая при аналитическом
продолжении в точки наблюдения совпадает с измеренными значе.
ниями.
Величина точечных масс и число приближений зависят от rлуби
ны z"плоскости. Чем больше z", тем rлубже массы и тем больше они
должны быть для объяснения наблюденных аномалий силы тяжес
ти; но при увеличении масс растет их взаимное влияние друr на дpy
[а, поэтому при изменении даже одной исходной аномалии все Hecy
щие массы изменяются, то есть решение становится неустойчивым.
Если же несущие массЫ помещать на небольшой rлубине, то массы
будут меньше, и взаимным влиянием масс можно пренебречь. OДHa
ко притяжение таких масс будет соrласовано только с точками на-
блюдений, а в промежуточных пунктах возможны значительные от
клонения от реальноrо поля. Расстояние между точечными массами
и их число определяются площадью rравиметрической съемки и ее
плотностью. Опыт применения метода свидетельствует, что наибо-
лее надежный результат, не требующий большоrо числа итераций.
достиrается в случае, коrда rлубина плоскости и сторона h квадрата
da примерно равны расстоянию между исходными пунктами. В рай
оне со сложным рельефом несущие точки целесообразно распола
raTb не на плоскости, а на ступенчатой поверхности, проходящей
всюду на одной и той же rлубине z" + z под точками наблюдения.
Такая модификация метода предложена Л.П. Пеллиненом.
Метод Аронова позволяет не только найти соrласованные с
наблюдениями параметры моделей (8.99), (8.102), (8.105), но и Час
тично исключит!? ошибки наблюдений, а также получать значения
аномалий силы тяжести в тех точках, rде не было измерений. Ta
ким образом, этот метод можно рассматривать как метод интер-
поляции аномалий силы тяжести с одновременной фильтрацией
случайных ошибок. Этот факт наrлядно объясняется в MOHorpa-
фии [5J: "Аномалии силы тяжести в формуле Стокса рассматрива
ют на плоскости, и между ними нет никакой необходимой связи,
Но здесь аномалии рассматриваются в пространстве и в этом ос-
новное различие. Блаrодаря представлению через несущие массы
потенциал (8.96) и ero производные необходимо rармоничны вне
масс и реrулярны на бесконечности. Отсюда и появляется возмож
ность хорошей пространственной интерполяции плавных rapMo
нических функций аномалий силы тяжести, уклонений отвеса.
вторых производных потенциала. Одновременно происходит филь
трация быстро изменяющейся части, и снимаются случайные ошиб
ки измерений".
272
58. ВЫЧИСЛЕНИЕ АНОМАЛИИ ВЫСОТЫ
И УКЛОНЕНИЯ ОТВЕСА ПО ДИСКРЕТНЫМ
ИЗМЕРЕНИЯМ СИЛЫ ТЯЖЕСТИ
rравиметрические аномалию высоты и уклонения отвеса после
определения параметров (8.97) моделей можно вычислять двумя
способами. В первом случае используют связи искомых величин с
аномальным потенциалом. В прямоуrольных координатах эти свя
зи имеют вид
т
r; == ,
у
== дТ
}дх'
дТ
17==
}ду'
(8.108)
если ось х направлена на север, ось у на восток; производные
вычисляют по координатам вычислительной точки Р. Дифферен
цируя выражение (8.96) и учитывая зависимости (8.105), можно
получить
(р == f Ст; == f GJ.1i'1/j f .1g; * Дсу ,
У , . y ,. 2п у ,.
;=:1 pl ;=:1 pl ;=:1 р'
(8.109)
V N
1 Gm; ( ) 1 GJ.1;ДСУ ( )
p== xp x; == 3 Xp X; ==
У ;=:1 'р; у ;=:1 'р;
(8.11 О)
1 N дg *;
2L 3 (Xp X;}
:ry i=1 r p ;
1 N G 1 N
т; С ) J.1; С )
1JР== у З----\УР Уi == у здсу\ур у; ==
;=1 'р; i=1 'р;
1 N Дg *;
2пу L 3 дсу(у Р у;)
;=1 'р;
Во втором способе учитывается то обстоятельство, что aHOMa
лии Дg* распределены на плоскости, над которой нет притяrиваю
щих масс, и потенциал Т над плоскостью функция rармоническая.
273
Поэтому условия задачи Стокса выполнены и уклонения отвеса и
аномалии высоты определяют формулы Стокса
1 Ро ( 1 1 )
== f dg* rdrdA
р 2пу о r р о
и Венинr Мейнеса
(8.111 )
p (х р х)
р'" Ро дg * da; (8.112)
2пу f r 3
о
Ч р (yp y)
для аномалии высоты использована преобразованная формула
Стокса. Формулы (8.112) (8.113) совпадают с формулами (8.15).
(8.16). Но если в последних r расстояние между двумя точками
поверхности Земли, то в выражениях (8.111), (8.112) r Р'!fСТ.Qяние
между точкой поверхности Земли, к которой относятся р , Р' 17 Р .
и точкой i плоскости ст. Поэтому в (8.111) (8.112) расстояние r
не может принять равные нулю значения и интеrралы не имеют
особенностей. Это является преимуществом рассматриваемоrо Me
тода.
Формулы (8.111) (8.112) совпадут с (8.109) (8.110), если при
менить к ним метод численноrо интеrрирования.
Уравнения (8.109) (8.110) можно записать в виде
N
".; *.
Р .LJЬiДgi'
i=l
N
" *.
P .LJb i .:).gi '
i=l
N
b 17 *
1J p ==.LJ i дgi
i=!
(8.113 I
или в матричной форме
Z В;Х Е == B X Н == в'1Х.
, ,
(8.114)
Если определить Х соrласно выражению (8.95)
Х == A lF
,
(8. 115)
можно найти аномалию высоты и уклонения отвеса по измерен
ным аномалиям силы тяжести, не определяя их на вспомоrатель
ной плоскости. В этом случае
z == B;A lF
,
Е == B A lF, Н == B'1A !F
(8.116)
274
и процедура нахождения аппроксимирующих аномалий и вычис
ления элементов аномальноrо поля объединяются.
В формулах (8.116) элементы аномальноrо поля представлены
линейными функциями аномалий силы тяжести. В общем случае
аномальный потенциал можно представить линейной функцией
N
т == "а'"
р L.J 11
i=1
(8.117)
измерений 1, причем под измерениями можно понимать не только
аномалии силы тяжести, но и результаты любоrо rеодезическоrо
измерения, поскольку все они связаны с аномальным потенциалом,
a i неизвестные коэффициенты. Если определить эти коэффициен
ты под условием
М[ё 2 ] == min,
(8.118)
для аномальноrо потенциала получим
I
Т ==CTLCL;L,L.
.1
(8.119)
В выражениях (8.118), (8.119) ё = T Т ошибка вычисления
потенциала; С ТL вектор ковариаций потенциала Т и измерений
1; С 4 } обратная матрица ковариаций измерений; L вектор из
мерений.
Вычисление потенциала соrласно формуле (8.119) называют
методом средней квадратuческой коллокацuu. Этот метод для нахож
дения потенциала позволяет использовать совместно измерения
разной природы. Однако для ero применения необходимо предва
рительно определить ковариационные функции элементов аномаль
Horo поля.
rлава 9
rОСУДАРСТВЕННАЯ rЕОДЕЗИЧЕСКАЯ СЕТЬ.
ПОСТРОЕНИЕ И УРАВНИВАНИЕ
59. ИСТОРИЧЕСКАЯ СПРАВКА О ПОСТРОЕНИИ
rОСУДАРСТВЕННОЙ rЕОДЕЗИЧЕСКОЙ СЕТИ
РОССИИ
Началом построения rосударственной rеодезической сети на-
шей страны являются работы К.И. Теннера и В.Я. Струве. В дe
кабре 1815 r. начальник rенеральноrо Штаба (rШ) и директор
Военно топоrрафическоrо депо (ВТ Д) rенерал фельдмаршал князь
Петр Михайлович Волконский (l772 1852) приказал начать триrо
нометрическую съемку Виленской rубернии Российской империи
(ныне Литовская Республика). Управляющим Виленской съемки БЫl
назначен rенерал Карл Иванович Теннер (1783 1860).
В 1816 1819 rr. Василий Яковлевич Струве (l793 1864), впос-
ледствии академик, первый директор Пулковской обсерватории, по
поручению Лифляндскоrо экономическоrо общества выполнил ac
трономо rеодезическую съемку Лифляндии (территория нынешнеЙ
Эстонии и Латвии). Виленская и Лифляндская .съемки ПОЛОЖК1В
начало русско скандинавской дуrе меридиана, которую называю;
дуzой Струве. Дуrа Струве проходит вблизи меридианов Дерпта
(ныне Тарту, Эстония) и Вильно (ныне Вильнюс) и имеет протя
женность 25020', собственно русская дуrа 20031', скандинавская
4049'. Южная часть русской дуrи от 55020' с.Ш. до 45 0 20'с.ш. изме.
рена Теннером, ее начальная точка связана с обсерваторией в Виль
но. Северная часть от университетской обсерватории в Дерпте д('
Фуrленеса (север Норвеrии) измерена под руководством Струве ,
при ero участии. В 1830 r. северная и южная части были соединены
На конечных точках дуrи Струве установлены пирамиды, на кот('--
рых высечены памятные надписи. Пирамида, установленная H
южном конце дуrи, показана на рис. 9.1.
Теннер составил первую инструкцию по трианrуляции и вве..-:
деление трианrуляции на 1, 2 и 3 классы. Трианrуляция 1 клас -....:.
состояла из рядов треуrольников, трианrуляции 2 и 3 классов об...
разовывали сети сrущения внутри рядов 1 класса.
276
" .- .
Текст надписи:
ЮЖНЫЙ предел
ДУ2И меридиана 25°2(/
от Реки Дуная
до
Океана ЛедовитО20
через
РОССШ0. Швецию и
Норве2ИЮ
по повелению
Авzустейших Монархов
И_иператоров
Адександра 1 20
Николая 1 20
и
Короля
Оскара l ?O
nостОЯ1f1Ю трудясь
с MDCCCXVI ?O по МDСССХLII й
< oд
измерели
FeoMempbl трех народов
Широта 45°2(/2,8"
.
< .. . ...' ,
, .
. . ,
Рис. 9.1. Памятный обелиск в с. CTapo HeKpaCOBKe
На южном конце дуrи Струве
В 1822 [. ПОД эrидой ВТ Д был учрежден Корпус военных топоr
рафов (КВТ), одной из Основных задач KOToporo было ВЫполне
ние трианrуляции на территории западных rуберний Российской
империи. Эти трианrуляции ВЫполняли разрозненно, по разным
проrраммам, с использованием различных исходных пунктов, а
обработку измерений выполняли на разных эллипсоидах. COBMec
тная обработка rубернских трианrуляций на эллипсоиде Бесселя
была начата в 1887 [. военным топоrрафом Константином Василь
евичем Шарнrорстом (184 1908). За исходный пункт принята aCT
рономическая обсерватория в Дерпте.
Уравнительные вычисления разрозненных трианrуляций были
сопряжены со значительными техническими трудностями, приво
.J,или К большим (до 20 зй") поправкам в уrлы и выявили необхо
277
димость проведения трианrуляционных работ по единому плану
на всей территории съемки.
В конце XIX в. военный rеодезист Иллиодор Иванович Поме
paHцeB(1847 1921), начальник КВТ, предложил первую проrрамму
rосударственной трианrуляции:
трианrуляция 1 класса образует сеть полиrонов, созданных
рядами треуrольников, ориентированными вдоль меридианов и
параллелей; расстояние между рядами составляет 300 500 км, пе
риметры полиrонов от 1300 до 2200 км;
в каждом стыке рядов трианrуляции 1 класса выполняют Из
мерения базисов, астрономических координат и азимута;
обработка трианrуляции выполняется на эллипсоиде Бесселя:
за исходный пункт принят центр круrлоrо зала Пулковской
обсерватории, rеодезические координаты KOToporo приняты paB
ными астрономическим;
астрономический азимут в Пулкове служит для ориентирова
ния линий, примыкающих непосредственно к Пулкову.
Реализация проrраммы Померанцева была начата КВТ в
19081 r., но была прервана Первой мировой и rражданской война
ми. Корпус военных топоrрафов за 100 лет существования (l822
1923) определил 3650 пунктов трианrуляции 1 класса, 63736 пунк
тов трианrуляции 2 и 3 классов, 3900 астрономических и около 270
rравиметрических пунктов.
Помимо Корпуса военных топоrрафов трианrуляционные pa
боты и съемки местности выполняли rидроrрафическое управле.
ние (по береrам морей), Межевое и rOpHoe ведомства, Русское reo
rрафическое и Вольно экономическое общества, Переселенческое
управление, Ведомство путей сообщения и друrие. В результате
деятельности всех rеодезических орrанизаций к началу 20 x rодов
ХХ в. сети трианrуляции покрывали европейскую часть Российс.
кой империи, Кавказ, Финляндию.
После rражданской войны работы по созданию опорной [e
дезической сети страны возобновились под руководством образ
BaHHoro в 1919 r. Высшеrо rеодезическоrо управления (BrV). Схе.
ма и проrрамма rосударственной трианrуляции были разработа
ны Ф.Н. Красовским (проrрамма 1928 r.). Их основным отличие
от схемы и проrраммы Померанцева является знаЧИтельное со.
кращение длины звена, которая в схеме KpacoBcKoro составляе:
I Изотов А.А. Форма и размеры Земли по современным данным. М
rеодезиздат, 1950. 204 с.
278
20 250 км. Уменьшение пери метра полиrона вдвое позволяет оп
редел ять координаты ero вершин в два три раза точнее и упрос
тить уравнительные вычисления. Схема KpacoBCKoro подробно опи
сана в учебнике [29].
Уже к 1930 r. в европейской части СССР по новой схеме бьmо
построено 14 полиrонов 1 класса. Эти полиrоны для облеrчения
уравнительных вычислений были объединены в 8 полиrонов eBpo
пейской части, к которым добавили Уральский полиrон. Уравни
вание девяти полиrонов на эллипсоиде Бесселя привело к YCTaHOB
лен ию Пулковской системы координат 1932 r. (CK 32).
Если положить в исходном пункте rеодезические координаты
Во' Lo равными астрономическим СРо' ..1.0' (т.е. считать уклонения OT
веса ;0, Т1 0 равными нулю), rеодезическую высоту Но исходноrо пун
кта равной ero нормальной высоте НУ О (т.е. считать аномалию BЫ
соты ((} равной нулю) и принять В()= СРо' Lo = ..1.0 (или o = О, 170 = О),
Но = НУ(} (или 'и = О) И малую ось эллипсоида направить параллель
но оси вращения Земли, референцная rеодезическая система KOOp
динат будет установлена. Такой способ называется ориентирова-
нием по одному астрономическому пункту.
При ориентировании по одному астропункту существенное вли
яние на положение референц эллипсоида оказывают местные укло-
нения отвесной линии и ошибки астрономических определений.
rеодезические координаты исходноrо пункта aCTpoHoMo reo
дезической сети называют uсходНЬLtlи zеодезическuми датами. В ИС-
ходном пункте системы 1932 r., за который принят иентр круrлоrо
зала Пулковской астрономической обсерватории, rеОДезические
координаты приняты равными астрономическим, а высота rеоида
равной нулю [14]. Система ориентирована по астрономическому
азимуту одной из сторон трианrуляции, при мыкающей к Пулково.
Поскольку высоты rеоида не были известны, обработку триан
rуляции выполняли методом развертывания, Т.е. принимали peдy
цированные к уровню моря базисы равными их проекuиям на эл
липсоид Бесселя.
Наряду с ПУЛКОБСКОЙ системой 1932 r. из за отсутствия единой
астрономо rеодезической сети страны применялись и местные сис
темы координат: Свободненская на Дальнем востоке, Ташкентская
в Средней Азии и друrие.
Распространение CK 32 в южные и восточные части СССР про
.::{олжалось рядами трианrуляции 1 класса соrласно схеме 1928 r.;
rеодезическими работами руководило rлавное управление [eoдe
зии и картоrрафии (rYrK), созданное в 1938 r. К 1940 [. было пост
279
......
...:
(j)
...
,:;; :". 1-'-
11 '" Ф
m '" -.с'
о.
;>. ф :< "
Е ):
ф , >-
с: "
r ;>. 1-'-
:s:: с'< ф L.. I!)
"" :t:
Е-< <), <: ф
Q " :ii
с :t:
с> D. о r
::r: u "!- '"
" "
u .. '" :!:
,..Q u '" <>
t:I <:
'" '" "
f:iI ,,; :t: "
Е-< ... J!
:r
tx: 2 >--
о
f:iI "" " '"
.. '"
I:!:( '" .. {" "
1: " ф
:t: '" 11
.. :t:
" '"
Е- '" <>
3- "
i: a::t'>ta;:: \>. :1
:t...... .{'r)
??
:Cl:lm >,10:1
o.....;s,; L.
;.. ",0.0 Q.
. ::;:tп...с::.........
j I I i!:.
I
I
I
I
....
::а
Е-<
С
ЦI
::а
/:rI
/:rI
с
:s::
:::1'
....
/:rI
c:r:
:s:
Il,
Е-<
. ....
u ......
.. . . ....
280
u
u
r:;
::::
::;:
:=
CI:
;;.,
'--
:t
:-=
::;:
!:...
....
а::
С
51,
е
=
с
t:
:i
u
;><:
с....
::
роено 87 полиrонов 1 класса, связавших все местные системы в еди
ную сеть. Схема 87 полиrонов приведена на рис. 9.2.
В 1932 r. в стране была начата общая rравиметрическая (маят
никовая) съемка. Использование этой съемки в rеодезических цe
лях стало возможным блаrодаря разработанному М.С. Молоден
ским методу астрономо rравиметрическоrо нивелирования.
К концу 30 x rr. в СССР построена астрономо rеодезическая
сеть, образовавшая, по словам Ф.Н. KpacoBcKoro, новый тип 2pa
дусных измерений, включающих астрономические, rеодезические и
rравиметрические наблюдения.
К 1940 r. Александр Александрович Изотов (1907 1988) под
руководством Ф.Н. KpacoBcKoro определил параметры эллипсои
да, наиболее подходящеrо к rеоиду на территории СССР. HeKOTO
рые детали вывода параметров эллипсоида, получившеrо название
эллипсоида KpacoBcKoro, приведены в 9 61. Применение aCTpOHO
мо rравиметрическоrо нивелирования позволило найти rеодезичес
кие высоты над эллипсоидом KpacoBcKoro и редуцировать базисы
к ero поверхности.
В 1942 1945 rr. в цнииrАиКе выполнено уравнивание 87
полиrонов на эллипсоиде KpacoBcKoro с применением метода
проектирования. Полученные в результате уравнивания KOOp
динаты пунктов трианrуляции образовали Систему координат
1942 [. (CK 42). Исходным пунктом CK 42 также был выбран центр
круrлоrо зала Пулковской обсерватории. В 1947 1948 rодах был
издан Каталоr пунктов трианrуляции 1 класса.
Проrрамма построения rосударственной rеодезической сети per
ламентировалась Положениями о rосударственной rеодезической
сети СССР. В Положении 1939 r. закреплены схема и проrрамма,
разработанные ранее Красовским. Это положение ориентировано
на обеспечение топоrрафических съемок масштаба 1: 1 О 000. Перво
начальный проект новой схемы и проrраммы построения rосудар
ственной rеодезической сети (I"TC) разработан в rYTK и опублико
ван в 1948 r. С целью повышения точности передачи координат пред
полаrалось уменьшить по сравнению с положениями 1939 r.
периметры полиrонов 1 класса до 800 км, а стороны треуrольников
.10 2 25 км. Последующие изменения в схеме и проrрамме построе
иия rосударственной rеодезической сети закреплены в Положениях
о rrc 1954 r. и 1961 r., описанных в учебнике [29] и Инструкции о
построении rосударственной rеодезической сети СССР, 1966 [.
Построение сети 1 класса было завершено к 1960 rоду. Это
обеспечивало картоrрафирование страны в масштабе 1: 100 000.
к 1985 [оду на всей территории СССР завершено построение сетей
.2 класса.
281
Современная астрономо zеодезическая сеть (ArC) образова
на, в основном, трианrуляцией 1 и 2 классов; из 164 тысяч пунктов
ArC полиrонометрию представляют Bcero 340 пунктов и трилате
рацию 280 пунктов. Длина звена трианrуляции 1 класса составля
ет 15 200 км, в среднем 167 км. Звенья образуют систему полиrо
нов 1 класса с периметрами 800 1 000 км.
На ceBepO BOCTOKe страны на Чукотке и Камчатке трианrу
ляция 1 класса проложена в виде сплошной сети треуrольников с
длинами сторон 50 70 км.
Сети 2 класса построены в виде сетей треуrольников, заполня
ющих полиrоны 1 КЛасса. В середине полиrона измерены базисные
стороны с азимутами Лапласа на концах. Помимо этоrо, в райо
нах, rде не было полиrонов 1 класса, сети 2 класса создавались в
виде самостоятельных сплошных сетей. Длины сторон в сетях
2 класса колебались от 7 до 20 км, составляя в среднем 12 13 км.
Практически одновременно с завершением построения класси
ческой астрономо rеодезической сети методами космической reo
дезии были созданы доплеровская и космическая rеодезическая сети.
ДОlUlерО8СКая zеодезическая сеть (дrс). Для укрепления астра.
номо rеодезической сети в ее слабых местах, к которым относили
реrион Каспийскоrо моря, северные районы и остров Сахалин, в
198 1993 rr. создана каркасная спутниковая rеодезическая сеть.
При ее построении использованы наблюдения ИСЗ американской
навиrационной (доплеровской) спутниковой системы TRANSIT
спутниковыми rеодезическими приемниками типа CMA 722В н
СМА 7бl. Эта сеть состоит из 162 пунктов, 136 из которых COBMe
щены с пунктами Arc. Расстояние между пунктами дrс в средне\!
составляет 500 км. На территории России расположены 110 пунк
тов дrс, на территории стран Восточной Европы 31 пункт.
Космическая zеодезическая сеть (KrC). Топоrpафическая служба
Вооруженных Сил в 1985 r. создала постоянно Функционирующ) 1(1'
космическую rеодезическую сеть. Krc основана на фотоrpафичесКlL\..
доплеровских, радиодальномерных, лазерных и альтиметричеСКIIХ
наблюдениях rеодезическоrо спутника rЕо ик(rЕОдезический 11
мерительный Комплекс), а также наблюдениях спутников rЛОНАСС
и ЭТАЛОН. На территории бывшеrо ссср закреплены 30 ПУНКТОБ
KrC, из них на территории России 26 пунктов. Расстояние мец.
пунктами Krc составляет в среднем 1000 км.
Таким образом, к концу ХХ в. на территории России разны\н
методами созданы сопоставимые по точности независимые reoJe
зические сети астрономо rеодезическая, доплеровская rеодезичес.
кая и космическая rеодезическая.
282
Отметим некоторые отличия спутниковой и астрономо-rеоде-
зической сетей. Астрономо rеодезическая сеть создается в течение
длительноrо времени по результатам наземных астрономических,
rравиметрических, rеодезических измерений, выполняемых в eCTe
ственной системе координат ф, л., W o \-v. При обработке результа-
тов наземных измерений обычно используют rеодезическую эллип-
соидальную систему координат В, L, Н, связанную с отсчетным ре-
ференц эллипсоидом, центр KOToporo не совмещен с центром масс
Земли. ArC обеспечивает высокую точность взаимноrо положе
ния пунктов, но В общем случае не имеет данных для установления
как взаимных связей между изолированными участками, так и для
отнесения их к общеземной системе координат.
Спутниковая сеть создается в короткие сроки по результатам
наблюдений ИСЗ или космических объектов. При обработке спут
никовой сети не используется какая либо отсчетная поверхность и
положение пунктов этой сети определяют в общеземной простран
ственной прямоуrольной rеоцентрической системе координат Х,
У, Z, не связанной с rеометрией поля силы тяжести Земли. rеодези
ческую сеть, построенную с максимальной точностью методами KOC
мической rеодезии, можно рассматривать как сеть HeKOToporo «HY
левоrо» класса, являющуюся исходной по отношению ко всем дpy
rим rеодезическим построениям. Дальнейшее ее сrущение возможно
различными методами как спутниковыми, так и наземными. При
этом возникает задача объединения сетей, построенных разными
способами, и совместной их обработки.
60. ТОЧНОСТЬ ИЗМЕРЕНИЙ В rОСУДАРСТВЕННОЙ
rЕОДЕЗИЧЕСКОЙ СЕТИ
При полиrональном построении сети 1 класса ОСНОВНым эле
ментом является звено трианrуляции, а стороной полиrона счита
ют длину L rеодезической линии (замыкающую звена), соединяю
щей проекции ero конечных пунктов на эллипсоид. В звене триан
rуляции измеряют уrлы всех треуrольников или иных фиrур, ero
образующих, а на концах звена базисы Ь) и Ь 2 И астрономические
азимуты а) и СХ:2. Из самостоятельной обработки (уравнивания)
отдельноrо звена получают разность координат ero конечных пун
ктов или длину И азимут замыкающей rеодезической линии. Точ-
ность этих величин определяется точностью измерения базисов,
уrлов и азимутов.
Смещение конечноrо пункта звена характеризуют составляю
щи ми вдоль замыкающей (продольный сдвиr Pik) и в поперечном к
283
звену направлении (поперечный сдвиr Qik)' Продольный сдвиr яв
ляется следствием ошибок измерений базиса и связующих уrлов, а
поперечный ошибок азимутов и промежуточных уrлов, поэтому
продольный и поперечный сдвиr звена независимы и, следователь
но, длину и азимут замыкающей rеодезической линии можно pac
сматривать как непосредственно измеренные величины. Независи
мость продольноrо и поперечноrо сдвиrа обеспечивает независи
мость приращений Ах, ДУ координат ОДноrо звена. В самом деле.
представим ошибки dдx, dду приращений .координат в виде
dдx =pcosa qsina,
dду = psina + qcosa,
rде а азимут замыкающей.
Обозначим
ox ( t) (:) A ( f:
sina )
cos а '
тоrда
8х = д8р,
а ковариационная матрица М этоrо вектора будет
М(8х8х Т ) = дврдТ,
rде Вр ковариационная матрица вектора 8р
Вр = М [( Р } р q) ] = М ( р2 pq 1=: ( М(р2)
q qp q2) M(qp)
M(pq) 1.
M(q2) )
Так как р и q независимы и имеют по предположению одинако
( 1 О )
выи вес, то В = , поэтому
р О 1
М(8х8хТ) =: ДДТ =: ( c?sa sina X co.sa
sша cosa sша
sina ) =: ( l О )
cos а О 1
Таким образом, ошибки приращения координат независимы.
Оценим продольный и поперечный сдвиrи звена и зависимость
ошибок приращений координат соседнИХ звеньев, используя коор-
динатные невязки полиrонов. Оценка точности измерений в три-
284
анrуляции 1 класса выполнена в цнииr АиКе Анатолием Захаро
вичем Сазоновым (1929 1999) 1.
Рассмотрим три полиrона с общим узловым пунктом О (рис. 9.3).
Выберем полиrоны, стороны которых ориентированы по меридиа
ну и параллели парa.rшельно осям Х и У. Возможны три варианта
взаимноrо положения полиrонов: они MorYT иметь общую сторону,
ориентированную по меридиану (полиrоны 1 и П), общую сторону,
ориентированную по параллели (полиrоны 11 и IlI) или общую Bep
шину (полиrоны 1 и ПI). Выразим координатные невязки W x ' y че
рез продольные и поперечные сдвиrи звеньев:
невязки ординат
W\'j= q\ + Р2 + %, Р4'
W,ll = Р 4 + q:, Р б q7'
W\"lll = q7 Р Н q!) + РН)'
невязки абсцисс
W)'l = P\+q2+P7i q4'
\'11 = q 4 + Ps qб Р7 '
W,'))I = Р 7 q 8 Р9 + q\o'
(9.1)
Невязки составлены при обходе каждоrо полиrона по ходу ча
совой стрелки, индексы внизу соответствующих величин означают
номера полиrонов и их сторон (номера указаны на рис. 9.3).
х
Р, q Р + 1 q + 1
I
3 5
(7) 4 (?) 6
1 О 7
]0 8
2
9
у
Рис. 9.3. Схема полиrонов с общим узловым пунктом
I Сазонов А.3. Точность элементов астрономо rеодезической сети СССР/!
rеодезия и картоrрафия, ]969. NQ 5. С. 3 5.
285
Образуем квадраты и произведения невязок. Они будут coдep
жать квадраты продольноrо и поперечноrо сдвиrов, про изведения
одноименных сдвиrов соседних звеньев, а также произведения про
дольных и поперечных сдвиrов и одноименных сдвиrов звеньев, не
имеющих общих узлов. Найдем средние значения квадратов и про
изведений невязок всех полиrонов сети, имеющих показанное на
рис. 9.3 взаимное расположение.
Введем обозначения:
для дисперсии продольноrо и поперечноrо сдвиrов
1 11 2
Dp LP ,
п 1
1 п
D(j = Lq2,
п 1
(9.2)
для ко вариации произведения одноименных сдвиrов смежных зве
ньев i и i + 1
1 п
COV(PiPi+l) LPiPi+l'
п I
1 11
соv(qЛi+I);;;;;; п LQiqi+l'
1
(9.3)
ДЛЯ ковариации про изведений одноименных сдвиrов не связанных
звеньев
1 п
COV(PiPj)= LPiPj =0,
. п I
1 11
COV(QiQj) q/qj = о,
п "'- .
1
(9.4 )
ДЛЯ взаимной ко вариации продольноrо и поперечноrо сдвиrов, [де
п число соответствующих про изведений
1 п
cov(pQ) LpQ=O,
п I
(9.5
Ковариации (9.4) равны нулю как ковариации независимы.\
случайных величин. Условие (9.5) является приближенным.
Выполняя преобразования формул (9.1) и учитыва я выраже
НИЯ (9.2) (9.5), находим ДЛЯ дисперсий
1 11 2 1 I! 2
Dp+Dq= LW = LW)"
2п I 2п I .
(9.6
286
Для ковариаций
1 п 1 п
Dq +2COV(qiqi+l) = п LWxlrv 11 = п LWYllWYIIP
l I
1 п 1 п
Dч + 2 COV(PPi+l) = LWYIWYII = LWx'lrv'\:lll' (9.7)
п l п l
1 п 1 п
COV(PiPi+I) COV(qiqi+I)= Lrv lrv,\:111 = LWyIWyIII'
п l п l
1 п 1 п
COV(Pi Pi+l) + COV(Qiqi+l) = L W\:I W Yl11 = L W Y1 W. III'
п l п I
Равенства (9.7) позволяют определить ковариации. Сложив два
последних выражения (9.7), найдем
1 п
COV(PiPi+I)= 4 п L[(W.\"1 + \!])(W,III + \!III)]' (9.8)
I
Соrласно этому выражению, ковариацию продольноrо сдвиrа
соседних звеньев можно найти по сумме координатных невязок
полиrонов, имеющих одну общую вершину и ориентированные по
меридиану и параллели стороны.
Образуем разность двух последних выражений (9.7). Тоrда
1 п
cov(QiQi+l) = 4 L[(W.\:l W y ] )(W.,II! W ylll )]. (9.9)
п I
Следовательно, ковариацию продольноrо сдвиrа можно оп
ределить по разностям невязок тех же полиrонов. По 186 узлам
А.3. Сазоновым получены такие значения
COv(PPi+I) = 0,084 м 2 ,
COV(QiQi+l) = 0,324 м 2 .
(9.1 О)
Оценка дисперсий Dp' Dq продольноrо и поперечноrо сдвиrа
получена по двум первым из равенств (9.7) с использованием KOBa
риации (9.10) и произведения невязок полиrонов, имеющих общие
стороны, ориентированные по меридиану или параллели. Оценка
287
по 75 парам полиrонов с общей меридиональной стороной и 72
парам полиrонов с общей стороной по параллели дала значения
Dp = 0,288 м 2 , Dq = 0,888 м 2 , cov(pq) = 0,084 м 2 . (9.11)
Дисперсия поперечноrо сдвиrа существенно больше, чем про
дольноrо. Взаимная ко вариация продольноrо и поперечноrо сдви
ra мала, что подтверждает независимость продольноrо и попереч
Horo сдвиrа и обоснованность предположения (9.5). Сумма дис
персий продольноrо и поперечноrо сдвиrа составила 1,176 м 2 .
Соrласно (9.11) средний квадратический продольный сдвиr
(р = J D р ) звена трианrуляции 1 класса составил 0,54 м, попереч
ный (q = J Dq ) 0,94 м, СУ,ммарное смещени е конечной точки звена
относительно начальной, равное J D + D '. 1,08 м.
Суммарная дисперсия продольноrо и поперечноrо сдвиrа oиe
нена также по формуле (9.6) с использованием координатных невя
зок полиrонов, близких по форме к квадратам со сторонами, ори
ентированными по меридиану и параллели
1 2 2 2
Dp + Dq = . ../w.>; + W y ) = 1,26 м ,
4п 1
J D + D = 1,12 м.
Если считать соотношение дисперсий таким же, как в выраже-
нии (9.11), то
Dp = 0,31 м 2 , Dq = 0,95 м 2 .
(9.121
Оценка дисперсий по формулам (9.11) и (9.12) практически оди-
накова. Соrласно равенству (9.12) средний квадратический продоль-
ный сдвиr, равный J D р = 0,56 м, в два раза меньше поперечно-
ro JDq = 0,98 м.
Приведем общие оценки дисперсий и ковариаций продольнон'
и поперечноrо сдвиrов трианrуляции 1 класса ArC CCCl>:
Сдвиr Р; qj Pi+1 qi+l
м 2 м 2 м 2 м 2
2 0,30 ,OO8 0,084 О
Pi' М
2 0,084 0,92 О 0,324
qi' м
288
Ошибки измерения базисов и азимутов найдены по невяз
кам базисных и азимутальных условий. Запишем невязку W b ба
зисноrо условия для двух сторон 1 2 и 2 3, имеющих общий базис
(рис. 9.4),
W,:2 =k[( 1 ( 1]+И'] 2(U)'
W; 3 =k[( д: 1 ( - l]+и'23(U)'
rде b ошибка измерения базиса Ь; w(u) влияние ошибок изме
рения уrлов на базисную невязку, k коэффициент.
.
.
.
2
3
Рис. 9.4. Схема смежных звеньев с общим базисом 2
ь h 2 ( flb У
Найдем произведение невязок W' 2W2 J = k h + произве
дение независимых величин.
flb
Найдем дисперсию отношения
Ь
1 L п ь ь
Db = W i W i +].
k п .
1
(9.13)
Дисперсия продольноrо сдвиrа, вызванноrо ошибкой измере
ния базиса,
D = DhL2.
2
(9.14)
ь
Если исключить D р из дисперсии продольноrо сдвиrа, то будет
выделено влияние ошибок измерения уrлов на продольный сдвиr
D =Dp D
(9.15)
289
Оценим влияние ошибок измерения азимута. Для смежных CTO
рон получим аналоrично невязки азимутальных условий
ИI\ 2 = д да! + w(u),
'IV\ З:::: да з д + w(u),
rде w(u) влияние ошибок уrловых измерений на азимутальную
невязку.
Для дисперсии азимутальной невязки найдем
1 а а
Da = """' +!'
п I
Отсюда для влияния ошибок азимутальных определений на
поперечный сдвиr имеем
а 1 2
Dq = DaL ,
2
а для влияния ошибок уrловых измерений на поперечный сдвиr
найдем
D U q = Dq D a q .
(9.16)
Результаты оценки качества измерений в трианrуляции 1 клас.
са представлены в таблице 9.1. Сведения о точности уrловых изме
рений в астрономо rеодезической сети приведены на с. 299.
Таблица 9.1
Точность измерений в звене трианrуляции 1 класса
Па раметр Точность Исходная информация
Базисные 1: 500 000 :::: 2 . 1 O По внутренней сходимости из
измерения уравнивания 730 базисных сетей
1: 345000:::: 3. 10 Координатные невязки 376 пар
полиrонов
] : 325 000 :::: 3 . ] O 1 016 невязок базисных условий
Азимутальные 0,5" (2,4.1 O ) По внутренней сходимости
определения
1,17" (5,7. 1 о---б) Координатные невязки 376 пар
полиrонов
1, 14" (5,4.1O ) Невязки 743 азимутальных
условий
290
Продолжение табл, 9, J
Сдвиr Влияние ошибки: Корелляция
соседних звеньев
Продольный базиса J D = 0,36 м 0,084 = 028
JDp = 0,55 м JD; ;:: 0,41 м 0,30 '
уrлов
Поперечный азимута D; = 0,81 м I
0,324 =035
уrлов J D% :::: 0,52 м 0,92 '
JDq ::::O,96 м
Соrласно данным таблицы 9.1 взаи мное полож ение конечных
точек звена определяется с ошибкой o,552 + 0,962 :::: 1,10 М, И для
длины звена 200 км соответствует точности 5 . 1 O .
Установлена значительная корреляция ошибок соседних звень
ев ,28 для продольноrо сдвиrа и 0,35 для поперечноrо.
Точность измерений в космической rеодезической сети xapaK
теризуют такие оценки:
ошибка измерения расстояния от пункта наблюдения до
спутника 1 2 м;
ошибка радиальной скорости движения спутника 1 см/с;
ошибка измерения высоты спутника над морской топоrра
фической поверхностью менее 1 м;
ошибка измерения направления на нез 1".
Положение пунктов KrC относительно центра масс Земли оп
ределено с ошибкой около 2 м. Средние квадратические ошибки
определения взаимноrо положения пунктов составляют 20 см. При
расстоянии между пунктами KrC в lOO 3000 км это соответствует
точности 1 2 . 1 o 7. Таким образом, точность спутниковой сети на
порядок выше точности ArC.
Точность измерений в доплеровской rеодезической сети незна
чительно уступает точности Krc.
291
61. ОПРЕДЕЛЕНИЕ ЭЛЛИПСОИДА KPACOBCKOrO.
СИСТЕМА КООРДИНАТ 1942 r.
Определение размеров эллипсоида, подходящеrо к территории
России, неразрывно связаНо с именем KpacoBcKoro. Еще будучи
воспитанником Межевоrо института Красовский определил пара
]
метры TaKoro эллипсоида.
По мере развития трианrуляции 1 класса стала очевидной
неприrодность эллипсоида Бесселя для обработки трианrуляции
России. Как показал Красовский, высоты rеоида над эллипсоидом
Бесселя в системе 1932 r. достиrают в восточных районах страны
400 м. Поэтому возникла практическая неодходимость введения HO
Boro эллипсоида для уравнивания 87 полиrонов (см. рис. 9.2), из.
меренных к концу 1930 x rr.
Работа по выводу HOBoro эллипсоида выполнена в ЦНИИr АиКе
в 1937 1940 rr. А.А.Изотовым под руководством Ф.Н.Красовскоrо.
Для вывода параметров эллипсоида Изотов использовал наблю
дения по состоянию на середину 1938 r. К этому времени трианryля
цией 1 класса бьmа покрыта почти вся европейская часть СССР, Cpeд
ний и Южный Урал, Казахстан, Западная Сибирь южнее 56 й парал
лели до Новосибирска и проложена дуrа параллели Новосибирск
Хабаровск. Параметры эллипсоида KpacoBCKoro выведены с привле-
чением rpaдYCHbIX измерений Западной Европы и США. Для Запад
ной Европы использовано rpaдycHoe измерение по 52 й параллели от
юrо западных береrов Ирландии до rpаниц СССР и западноевропей
скому меридиану от Северо Шетландских островов до Алжира. Дуrи
по западноевропейскому меридиану и параллели связаны между со-
бой, а дуrа по параллели имеет связь с астрономо-rеодезической ce
тью СССР. Из трианrуляции СССР и западноевропейских rpaдYCHbIX
измерений бьmа образована единая сеть в Пулковской системе коор.-
динат 1932 [. Полуось и сжатие эллипсоида определены Изотовым из
совместной обработки этой сети и изолированной сети США.
Параметры эллипсоида найдены из решения уравнений (5.17) и
(5.18). Такой вид [радусных измерений называют методом пшJща
дей. В этом случае параметры эллипсоида получают не по д,лине и
центральному уrлу отдельных дуr, а по измерениям, покрываЮЩИ!\i
некоторую часть поверхности Земли. Поскольку сеть развертывают
на эллипсоиде последовательным откладыванием редуцированных к
] Красовский Ф. Н. Определение размеров земноrо TpexoCHoro эллипсоида
из результатов русских [радусных измерений. Памятная книжка КМИ за
1900 1901 [., с, ]9 54.
292
уровню моря замыкающих звеньев, начиная от исходноrо пункта
сети, rеодезические координаты астропунктов искажаются вследствие
отличия уровенной поверхности (rеоида) от эллипсоида. Поэтому
rеодезические координаты и уклонения отвеса зависят от пути, по
которому они бьши переданы от исходноrо до текущеrо пункта сети,
аналоrично тому, как это происходит в нивелировании при сумми
ровании измеренных превышений. Для ослабления этой зависимос
ти А.А. Изотовым использован такой прием: сначала по каждому
звену (т.е. по каждой rеодезической линии) устанавливают зависи
мость изменения dB k , dL k , dA k rеодезических координат конечноrо
пункта линии от изменений координат начальноrо пункта и пара
метров эллипсоида, а затем подставляют изменения координат Ha
чальной точки линии, определенные из предыдущеrо звена. В pe
зультате в уравнениях остаются только изменения dBo, dLo, dA o KO
ординат исходноrо пункта и параметров ЭJШипсоида
dB k = р! dBo+ Р2 dLo + Р4 dAo + psda + P6 da ,
dL k = q1dB(I+ q2dLo+ q4 dA (I+ qsda + Q6 da ,
(9.17)
dA k = r]dB()+ r2dL(I+ r 4 dA o + rsda + r6da,
rде коэффициенты Р, Q, r являются частными производными B k , L k ,
Ak по соответствующим переменным Во' Lo, А и , а, а.
Уравнения (5.14) и (5.15) [радусных измерений составляют в виде
k =;% dB k = % pJdBo P4 dA () psda Р6 а ,
17k sec ({>k = 17% secqJk dL k =
= 1J%k sec ({>k q]dB() q2 dL () q4 dA o qsda q6 da ,
(9.18)
1J:tgqJk = (17:k)Otg({>k dAk = (17:)()tgqJk r]dB() r2dLo r4dA() rSda r6da.
Составляющую уклонения отвеса в первом вертикале можно
получить как по измерениям долrоты, так и по измерениям азиму
та, используя уравнение Лапласа (6.12). В методе развертывания
J.олrотные и азимутальные уравнения рассматривают как незави
симые, поскольку вызванные развертыванием искажения по раз
ному влияют на долrоты и азимуты. К тому же измерения и долrо
ты и азимуты выполнялись не на всех астропунктах. Поэтому BMe
293
сто двух уравнений (5.14) и (5.15) в определении эллипсоида уча
ствовали три уравнения (9.18).
В астрономо-rеодезической сети СССР к середине 1938 r. име-
лось 449 астропунктов, расположенных примерно через 7 100 км
друr от друrа. Все 449 пунктов имеют измерения широты, 433
долrоты и 396 азимута, в 125 случаях астропункты совпадают с
двумя, а в одном случае даже с тремя пунктами базисных сетей. Для
этих близко расположенных пар астропунктов (расстояние между
ними не более 30 км) коэффициенты уравнений rрадусных измере
ний примерно одинаковы; уклонения отвеса в парах базисных aCT
ропунктов являются следствием одних и тех ж аномальных масс.
Поэтому каждая пара астропунктов базисных сетей Былa объеди-
нена в один, и в уравнении rрадусных измерений свободные члены
приняты равными средним уклонениям отвеса, а коэффициенты BЫ
числены по координатам одноrо из астропунктов в паре. Таким
образом, по измерениям в СССР составлено 322 широтных, 306
долrотных и 274 азимутальных уравнений.
По дуrе параллели 520 имеется 41 астропункт, причем широта
определена на всех пунктах и долrота на 34, причем одно опреде-
ление долrоты относится к дуrе Струве. Определение долrот на
мноrих астропунктах выполнено русскими rеодезистами КВТ. После
объединения парных астропунктов и исключения долrотноrо пун-
кта на дуrе Струве, входящеrо в сеть СССР, дЛЯ параллели 520 ос-
талось 39 широтных и 33 долrотных уравнения.
Западноевропейская дуrа меридиана содержит 38 астропунктов.
на которых измерена только широта. Три из этих определений вхо-
дят в дуrу параллели 520. Для составления уравнений [радусных
измерений использованы 29 астропунктов. Таким образом, д.lЯ
объединенной сети СССР и Западной Европы составлены 390 ши
ротных, 339 долrотных и 274 азимутальных уравнения.
В астрономо rеодезической сети США использованы 54 широт-
ных, 58 долrотных и 89 азимутальных условий, причем каждое из
них выведено осреднением rрупп астропунктов.
Уравнения (9.18) предполаrают, что поверхность rеоида явля-
ется поверхностью эллипсоида и уклонения отвеса возникают толь-
ко вследствие несовпадения формы и расположения двух эллипсон
ДОВ И случайных ошибок измерений. Если бы это было так, уравне-
ния (9.18) можно было бы решать под условием (5.16). Однакс
уклонения отвеса носят не случайный характер, а являются OTpa
жением BHYTpeHHero строения Земли и описывают отступления по--
верхности rеоида от эллипсоидальной. Чтобы исключить влияние
этих неправильностей и «выровнять» rеоид, в правую часть урав-
нений (9.18) при выводе эллипсоида KpacoBcKoro добавлены чле-
294
ны, учитывающие трехосность Земли, а из свободных членов ис
ключены местные уклонения отвеса. Иными словами, чтобы из
любых имеющихся rрадусных измерений определить размеры и
ориентировку общеrо земноrо эллипсоида, необходимо aCTpOHO
мические координаты и азимуты пунктов rрадусных измерений
превратить в rеодезические. Это можно сделать введением попра
вок за абсолютные уклонения отвеса.
Для всех 449 астропунктов СССР вычислены топоrрафо изоcrа
тические уклонения отвеса соrласно rипотезе Пратта. Топоrрафи
чески е массы учтены в радиусе 1024 км, rлубина компенсации 96 км.
Для аcrропунктов США использованы топоrрафо изостатичес-
кие уклонения отвеса, вычисленные Хейфордом при выводе обще
['о земноrо эллипсоида. В этом случае учтена область до 4126 км.
Имевшаяся к 1938 r. rравиметрическая съемка позволила BЫ
числить rравиметрические уклонения отвеса на 298 астропунктах
СССР, находящихся западнее Новосибирска, с учетом области до
60 1000 км. Для этих астропунктов топоrрафо изостатические YK
лонения отвеса заменены rравиметрическими.
По описанным уравнениям rрадусных измерений параметры
эллипсоида и ero ориентирование определены раздельно. Вначале,
положив dB о == О, dLo == О, dA o = О, получили уравнения для TpeXOCHO
[о ЭJШипсоида, аналоrичные (5.17) и (5.18)
8;k == 8;; psda P6 da Р7 А Е Р8 е ,
81]k sec ({Jk == 81] sеСФk qsda q6 da q8 A E q8 e ,
(9.19)
81]:tgФk ==(81]A) tg({Jk r5da r6da r8AE r8e.
в этих уравнениях &; == ; ;Т, 81] == 1] 1], ;Т; 1]Т топоrрафо-
изостатические или rравиметрические уклонения отвеса, 1]А co
ставляющая астрономо rеодезическоrо уклонения отвеса, BЫBeдeH
ная по азимутальным наблюдениям на основании уравнения Лап
ласа, Ае долrота наибольшеrо меридиана, е сжатие экватора.
Из решения уравнений (9.19) под условием
L(d +d1]2) = miп
(9.20)
получены параметры TpexocHoro эллипсоида. Затем найден эллип-
соид вращения, аппроксимирующий этот трехосный эллипсоид. Ero
экваториальная полуось получена как среднее арифметическое эк-
ваториальных полуосей трехосно['о эллипсоида, полученноrо из
295
решения уравнений (9.19) ПОД условием (9.20). В результате полу
чен эллипсоид с параметрами а = 6378245 м; 1: а = 298,3, полу
чивший название эллипсоида Красовскосо.
Для ориентирования референц эллипсоида KpacoBcKoro исполь
зованы астропункты только ArC СССР по состоянию на 1940 r.
Причем оставлены только те из них, BOKpyr которых была rрави
метрическая съемка и можно было вычислить rравиметрические
уклонения отвеса. Исключена также дуrа параллели Красноярск
Хабаровск, поскольку она удалена от исходноrо пункта и не BXO
дИТ в замкнутый полиrон, а также часть предrорных .пунктов на
Кавказе. С учетом этих исключений по состоянию на 1940 r. было
487 астропунктов. После объединения парных астропунктов было
составлено 319 широтных, 307 долrотных и 277 азимутальных ypaB
нений. Эти уравнения отличались от уравнений (9.19) только
свободными членами, поскольку поправки da, da уже были получе
ны. Получены уклонения отвеса для исходноrо пункта Пулково
o = dB(}= 0,16", 170 secB = dL(I = 3,54", 170= 1 ,78".
С этими поправками rеодезические координаты Пулково paB
ны Во= 59046'18,55", L(}= 30019'42,09".
Высота rеоида над эллипсоидом в Пулково принята равной нулю.
Исходные rеодезические даты Во и Lo и rеодезический азимут
Ао= 121040'38,79" исходной стороны Пулково сиrнал Буrры были
приняты для уравнивания 87 полиrонов ArC СССР, в результате
KOToporo получена система 1942 r. Эта система введена в 1946 r.
Постановлением Совета Министров СССР. Центр круrлоrо зала
Пулковской обсерватории не является пунктом трианrуляции.
Поэтому исходными rеодезическими датами соrласно этому по
становлению приняты координаты сиrнала А, находящеrося
приблизительно в 250 метрах от Пулково, Во= 59046'15,359",
Lo= 30019'28,318", Ао = 121006'42,305" на пункт Буrры.
Эти исходные rеодезические даты включены в Положение о по
строении rrc 1954 [. Однако при использовании метода проекти
рования включение rеодезическоrо азимута в исходные rеодезичес
кие даты излишне, поскольку условие равенства астрономическоrо
и rеодезическоrо азимута дублирует условие 170= О, как это следует
из формулы (6.13).
На сиrнале А установлен солидный четырехrранный столб, в
верхнее основание KOToporo вмонтирована бронзовая марка с Haд
писью: «Трианr.rУ[К ООl». На северной стороне столба укрепле
На памятная металлическая доска с надписью «[лавное управление
rеодезии и картоrрафии при Совете Министров СССР «Сиrнал А».
построен в 1886 r. восстановлен в 1981 r. Охраняется rосударством»).
296
62. УРАВНИВАНИЕ rОСУДАРСТВЕННОЙ
rЕОДЕЗИЧЕСКОЙ СЕТИ
Уравнивание rосударственной rеодезической сети РОССИЙСI\(Ч
Федерации проводилось в несколько этапов. Первоначально ypaB
нивали раздельно ее компоненты ArC, дrс и Krc.
Раздельное уравнивание АТС, ДТС, KrC
Уравнивание А те
Задача уравнивания обширной астрономо rеО..1езической сети
является одной из самых сложных задач высшей rеО..J.езии. OTMe
тим некоторые ее особенности:
астрономо rеодезическая сеть создается в течение lительноrо
периода; так Arc ссср создавал ась на протяжении Bcero
ХХ В., с 1908 по 1990 [. Тем не менее, для практических целей
координаты пунктов нужно знать сразу же ПОС.lе вып.lне
ния полевых работ;
как правило, с задачей общеrо уравнивания связана Ja..J.ача
установления размеров и ориентирования рефереНU Э.l.1ИП
соида;
для оперативноrо распространения координатной CII Te\lbl
на территорию страны на первом этапе развития aCТpoHO
мо rеодезической сети создается и уравнивается сравните.1ЬНС\
редкая каркасная сеть; дальнейшее развитие и сrущение ArC
приводит к существенно большему объему измерений по
сравнению с использованными при установлении KOOP.JJI
натной системы. Это, однако, не приводит к повышению
точности распространения координатной системы, ПОСКОль
ку она фиксирована каркасной сетью по результатам поли
['ональноrо уравнивания. Это противоречие может быть
устранено лишь последующим новым уравниванием всех из
мерений.
Таким образом, астрономо rеодезическая сеть всеrда по необ
ходимости уравнивается в несколько этапов, что и предусмотрено
проrpаммой построения сети. Первым этапом является уравнива
ние каркасной сети полиrонов 1 класса. Для уравнивания сети
1 класса применен метод KpacoBcKoro поэтапноrо полиrональноrо
уравнивания, заключающийся в следующем:
1. Проводится уравнивание отдельно каждоrо звена за все воз
никающие условия и вычисление длины и прямоrо и обрат
Horo азимутов rеодезической линии, заменяющей звено.
297
2. Уравнивание полиrонов, образованных замыкающими зве
ньев. При этом уравнивании длина и азимут замыкающей pac
сматриваются как непосредственно измеренные, т.е. ошибки
ДJIин и азимутов считают независимыми.
3. Проводится новое уравнивание звеньев между узловыми пунк
тами полиrонов (см. пункт 2), координаты которых счита
ют неизменными. Этот этап называют вставкой звеньев меж
ду вершинами полиrона.
4. Вычисление координат всех пунктов звена' l
Метод полиrональноrо уравнивания обеспечивает возможность
с минимальными затратами средств и времени распространить еди
ную координатную систему на значительную территорию. После
этоrо по мере выполнения полевых работ проводится уравнива
ние сплошных сетей, заполняющих каждый полиrон, в жестких rpa
ницах, установленных пунктами, координаты которых получены
из полиrональноrо уравнивания звеньев. Однако при этом не ис
пользуются оrромные объемы измерений в сплошных сетях для
установления общей координатной системы. Отсюда следует, что
последующее уравнивание сплошной сети внутри полиrона при
фиксированных в результате полиrональноrо уравнивания коор-
динатах rраничных пунктов не только не способствует повыше-
нию точности определения координат сплошных сетей, но приво-
дит К их деформации.
Полиrональное уравнивание Arc СССР выполняли три раза
(табл. 9.2).
Полиrональное уравнивание 1985 1986 rr. предназначалось не
только ДJIЯ получения новых координат пунктов, но, rлавным об..
разом, для астрономо-rравиметрическоrо нивелирования и уточ-
нения аномалий высоты. В местах, rде не было полиrонов 1 класса.
последние образовывали искусственно из двойных-тройных цепо--
чек треуrольников 2 класса и по ним определяли длины звеньев.
В 1989 [. с исследовательской целью проведено дополнительн
полиrональное уравнивание по измеренным элементам на 32 тыся
чах пунктав. За измеренные элементы принимали уrлы, образован-
ные смежными направлениями, азимуты Лапласа и базисы. Это
уравнивание использовано при построении уточненной карты ано--
малий высот.
Система CK 42 бьmа представлена сначала в виде каталоrов КС\-'
ординат пунктов 1 класса 87 полиrонов, а затем, по мере уравнива-
НИЯ заполняющих сетей 1 классов, составлялись каталоrи KOOp.1J!
нат rеодезических пунктов на листы карты масштаба 1 : 200 000. Эr.:.
работа Пр080дилась с 1946 по 1990 rод.
298
Таблица 9.2
Полиrональное уравнивание ArC ссср
rоды 193 1932 1941 1946 1985 1986
уравнивания
Орrанизация цнииr АиК цвч МАrп* МАrп
Руководитель Красовский Ф.Н. Ларин Д.А. Ефимов r.H.
Эллипсоид Бесселя KpacoBCKoro KpacOBCKoro
Число:
полиrонов 9 87 403
звеньев 47 310 978
пунктов 703 4733 40000
базисов 33 226 1600
азимутов 37 723 2434
Результат Система 1932 [. Система 1942 [. Распространение
СКА2 на всю Tep
риторию СССР
* ЦВЧ центральная вычислительная часть.
в 40 e 80 e rr. ХХ в. проводились уравнительные вычисления
разными методами отдельных фраrментов ArC как в практичес
ких, так и в научно исследовательских целях. В результате этих ис
следований, в частности, получены средние квадратические ошиб
ки (СКО) элементов сети и были установлены необходимые для
уравнивания веса.
Точность измерения эле.wентов астрономо ?еодезической сети
(средние квадратические ошибки)
1 класс
2 класс
r оризо нтальные направления:
по невязкам треуrольников
0,44"
(18 000 невязок)
0,52"
( 11 000 условий)
] ,20"
0,59"
(353 000 невязок)
0,76"
(454 000 условий)
по свободным членам
полюсных условий
Астрономические азимуты по
свободным членам азимутальных
условий
Общее уравнивание сети 1 и 2 классов начато в 1982 r. со сбора
информации об измерениях и подrотовки банка данных. Приведем
сведения о числе уравниваемых величин в сети 1 2 класса:
299
Число:
пунктов
в том числе:
полиrонометрии
трилатерации
спутниковой трианrуляции
рядов 1 класса
треуrольников:
1 класса
заполняющих сетей
элементов:
измеренных
избыточных
базисов
в том числе базисных сетей
164 306
340
280
162
12425
18 034
353355
азимутов
1 134676
591466(52%)
7882
2757
3584
После сбора данных, уточнения астрономо rеодезических YK
лонений отвеса и аномалий высоты по результатам полиrонально
[о уравнивания 1985 1986 rr. и редуцирования измерений на эл
липсоид KpacoBcKoro уравнительные вычисления были выполне
ны в короткий срок с июня 1990 по май 1991 ['. Сеть уравнена как
свободная с началом в Пулкове в rеодезических координатах В, L.
В результате уравнивания получены следующие основные xa
рактеристики:
относительная средняя квадратическая ошибка стороны 1 клас
са 1 :377 000, стороны 2 класса 1 :246 000;
относительная поправка в длину линии 1 :269 000;
среднее смещение сети (в линейной мере) по широте 7,89 м; по
долrоте 4)3 м;
средние квадратические ошибки:
Единицы Направ Направ Измере Поправ Поправ Поправ
веса ления ления ния ки В ази ки в абс ки в op
1 класса 2 класса азимута мут циссу динату
1,061 0,52" 0,75" 1,27" 1 ,36" 11,17м 8,26 М
При средней длине стороны сети 2 класса 12,5 км ошибка вза.
имноrо положения пунктов составила 5 см, в сети 1 класса 7 см.
СКО передачи координат от Пулково до Беринrова пролива co
ставила по ширине 1,02 и по долrоте 1,10 м.
300
Расхождение с координатами системы 1942 [. систематически
растут по мере удаления на восток от исходноrо пункта Пулково и
достиrают 24 м по широте и 27 м по долrоте. Это наrлядно свиде
тельствует об оrромной роли влияния методов обработки на по
лучаемый результат, поскольку в обоих случаях использованы одни
и те же измерения. .
Уравнивание дтс u КТС
Создание сетей дrс и KrC было завершено к 1994 [., после
чеrо проведено их уравнивание как самостоятельных rеодезичес
ких построений.
Доплеровская rеодезическая сеть построена в два этапа. На пер
вом этапе определены взаимные положения близко расположен
ных пунктов и уточнены их координаты в системах WGS 72 или
WGS 84. На втором этапе отдельные фраrменты объединены в еди
ную сеть. Уравнивание дrс выполнено в системе WGS 84; средние
квадратические ошибки координат пунктов составили 1 1,5 м по
каждой из осей. Уравненная доплеровская rеодезическая сеть по
крывает всю территорию СССР и восточно европейских стран.
Для уравнивания KrC было использовано 26 пунктов, COBMe
щенных с пунктами дrс или ArC. Ошибка определения коорди
нат пунктов KrC от осительно центра масс Земли составила 2 м, а
взаимноrо положения пунктов 0,2-4),3 м.
Несмотря на то, что дrс и Krc уравнены в общеземной систе
Ме Координат, их начала не совпали на величины, превосходящие
ошибки координат пунктов. Поэтому потребовалось уравнивать
их как сети, созданные в разных квазиrеоцентрических системах
координат, после чеrо приводить систему координат дrс к систе
ме координат KrC.
Несовпадение начала прямоуrольной системы координат с цeH
тром масс Земли по абсолютной величине не превышало 1,5 м по
каждой оси.
Совместное уравнивание Arc, KrC и дrс
После завершения раздельноrо уравнивания ArC, дrс и KrC
с целью создания единой rосударственной rеодезической сети
в цнииrАиКе в 1993 1994 rr. выполнено их совместное уравни
вание. 1
1 Бовишн НА., ЗуБUllСКUЙ в.и.. Осmач О.М. Совместное уравнение об
щеrосударственных опорных rеодезических сетей 11 rеодезия и картоrрафия,
1995. NQ 8, С. 17,
301
Принцип cOBMeCТHoro уравнивания rеодезических сетей, создан
ных наземными и спутниковыми наблюдениями, изложен в [18].
Возможны два варианта уравнивания. В первом находят как поправки
к измеренным элементам сетей, так и параметры преобразования
систем координат. Во втором сети сначала уравнивают раздельно, а
затем находят поправки к первоначальным элементам преобразова
ния систем под условием минимума поправок к координатам.
В цнииr АиКе использован второй подход. Таким образом,
совместное уравнивание фактически выполнено для установления
взаимной ориентировки сетей KrC, дrс и Arc.
Совместное уравнивание выполнено в прямоуrольной [eoцeH
трической системе координат Х, У, Z. В уравнивание включены 26
пунктов KrC, 136 пунктов Arc, совмещенных или привязанных к
пунктам KrC и дrс. Так как ArC уравнена в rеодезической систе
ме координат В, L, для перехода к пространственным прямоуrоль
ным координатам для всех участвующих в общем уравнивании пун
ктов Arc были определены rеодезические высоты Н как сумма
нормальных высот, полученных методами rеометрическоrо или
триrонометрическоrо нивелирования и аномалий высот, найден
ных методом астрономо rравиметрическоrо нивелирования, выпол
HeHHoro в 1993 [., а затем получены прямоуrольные координаты
по формулам (2.6).
Помимо сетей Krc и дrс, в уравнивание входили определен
ные методом GPS в 1991 r. связи rеодезической сети острова Саха-
лин с материком. Точность связи любой пары пунктов этой при
вязки принята равной 15 см.
Кроме Toro, в совместное уравнивание включены 35 пунктов
KrC/ дrс, в которых получены rеодезические высоты над общим
земным эллипсоидом с использованием rравиметрических данных.
С этой целью на всех выбранных пунктах по формуле (8. 73) вычис
лены rравиметрические аномалии высот относительно общеrо зем-
Horo эллипсоида, для чеrо использованы аномалии силы тяжести.
осредненные на трапециях 5 х 7,5' и модель r AO 95 цнииr АиКа
с включением rармоник до 60 й степени и порядка. Точность BЫ
числения аномалий высот составила О, 7 2,O м. Для образования
прямоуrольных координат этих 35 пунктов привлечены широты
и долrоты, полученные в Krc или дrс. Использован эллипсоИ,.J
ПЗ 62. Чтобы плановые координаты не влияли на результат ypaB
нивания, им была формально приписана ошибка 20 м. Эти пункты
получили при уравнивании название rB (rравиметрические BЫCO
ты). Сеть rB введена для независимоrо контроля rеоцентричности
систем координат.
302
Число исходных пунктов сетей, привлеченных к совместному
уравниванию, приведено в таблице 9.3.
Таблица 9.3
Совместное уравнивание
астрономо rеодезической и спутниковых сетей
Сеть Число Координаты Система Принятая
ПУНКТОВ точность, см
KrC 26 х, у; Z ПЗ 90 20
дrс 162* Х, у; Z WGS 84 55
[В 35 н ПЗ 62 7Q.--.200
ArC 162 B,L,H CK 42 95
Сахалин 7 АХ, у; t..;z WGS 84(GPS) 15(относительная)
* Из них 131 на территории СССР.
Из cOBMecTHoro уравнивания определяли прямоуrольные KOOp
динаты пунктов и параметры Ех, Ev, Ez, т, Ха, У о Zo связи систем
координат. Исходными были приняты координаты KrC, реализу
ющей систему ПЗ 90. В качестве уравнений ошибок (условных ypaB
нений) использованы уравнения (2.4) или (2.5) которые в этом слу
чае имеют вид
(Л (l+т{ :
[
1
ex
e l[ Х XO ] ( V J
е.: у Уа + < '
1 Z za V z
(9.21)
rде v x ' V)" V z поправки в координаты.
До про ведения общеrо уравнивания была установлена предва
рительная связь систем координат, использованных при раздель
ном уравнивании KrC, дrс и Arc. Оценка точности преобразо
ваний координат позволила установить веса раздельно ypaBHeH
ных сетей. Для их назначения принято такое соотношение ошибок
(см. табл. 9.3): KrC 20 см, дrс 55 см, ArC 95 см.
Условные уравнения в общем виде можно записать так
'4'i = '4' + 6.'4' + AiQi' P i ,
(9.22)
rде '4'i координаты (Х, У, Z) пунктов rеодезической сети; i HO
мер сети; '4', 6.'4' исходные значения координат и поправки к ним;
Qi определяемые параметры преобразования; A i ;;;;; д'4' ; P i Beco
дQ
вая матрица.
303
Уравнивание выполнялось в системе координат спутниковой
сети KrC. в результате cOBMecTHoro уравнивания получены KOOp
дина ты 136 пунктов, покрывающих всю территорию ссср при
среднем расстоянии между ними в 400 500 км и ко вариационная
матрица ошибок координат.
Приведем значения средних квадратических ошибок координат
пунктов после уравнивания (они близки к предварительно приня
тым для назначения весов значениям, см. таблицу 9.3):.
Средние квадраmические ошибки из c08MecmHOZo уравнивания
Оценка........... Krc дrс Arc Arc
Высоты Н Плановые KOOp
динаты B,L
0', (')И... ....... ..... 20 51 76 56
rB
61
Усредненные по всем пунктам rrc формальные ошибки соста-
вили по широте 39 см, по долrоте 52 см и высоте 47 см или 46 см в
среднем по всем координатам. При этом прослеживается правило.
что большинство слабых пунктов расположено вдоль rраниц сети
(в основном, северных и восточных).
Точность взаUМЛblХ положений пунктов rrc:
по высоте в пределах 25 100 см;
в среднем 50 60 см независимо от расстояния;
по широте, см: 25 35 } на расстоянии 55 65 } на максимально !
ЗОО ОО км расстоянии
по долrоте, см: 4 О 7 О
Основным результатом cOBMeCTHoro уравнивания являются
параметры связи систем координат, реализуемых KrC, дrс и Arc
Их окруrленные значения приведены в таблице 9.4.
Таблица 9.":'
Параметры преобразования системы П3-90(кrс) и их точность
Система ХА, М У О ' М ZO' м Ех Еу E т, рпт:
дrс .....0,3 2,2 1,0 .....0,049" .....0,01" 0,07" .....0,06
0,6 0,7 0,6 0,03 0,02 0,02 0,09
Arc 22,7 128,9 83,8 0,11 0,07 0,02 .....0,42
0,8 0,7 0,8 0,02 0,02 0,02 0,1:-
[В 1,2 0,1 0,0 .....0,15
0,5 0,5 0,5 O.O
304
Установлено, что начало системы ПЗ 90 совмещено с центром
масс Земли со средней квадратической ошибкой 1 м и предельной
ошибкой 1,5 м. Единые для всей сети ArC параметры ориентиро
вания относительно rеоцентрической системы ПЗ 90 определяют
ориентировку Arc, Т.е. устанавливают исходные rеодезические
даты астрономо rеодезической системы.
Параметры преобразования кrс дrс являются параметрами
связи ПЗ 90 и WGS 84 На территории rосударственной rеодезичес
кой сети. Приведенные выше значения этих параметров с учетом
их ошибок совпадают с современными определениями этих вели.
чин (см. с. 164).
Окончательное уравнивание AFC. Система координат 1995 l.
Окончательное уравнивание Arc выполнено в 1996 r. в МАrп l .
Для этоrо как опорные использованы координаты 134 пунктов Arc,
полученные из COBMOCТHoro уравнивания ArC, дrс и KrC. Среднее
расстояние между пункта ми ArC 1 12 км, ошибка взаимноrо поло.
жения смежных пунктов 2 см.
63. СИСТЕМА КООРДИНАТ 1995 r.
Система координат 1995 [. получена в результате окончатель
Horo уравнивания Arc по 134 пунктам, координаты которых най.
дены из cOBMecTHoro уравнивания. При окончательном уравнива.
нии взаимное положение пунктов Arc по сравнению с уравни
ванием 1991 [. практически не изменилось. По существу оконча
тельное уравнивание выполнено для определения ориентировки
ArC 1991 [. относительно rеоцентрической системы координат
П3.90 и оценки точности сетей. По сравнению с ориентированием
системы 1942 r. изменен принцип установления исходных rеодези
ческих дат. Если прежде при их назначении старались ориентиро
вать референц эллипсоид так, чтобы ero поверхность была по воз
можности близкой к поверхности rеоида, то при современной Me
тодике получают параметры преобразования, входящие в
уравнения (2.4) и (2.5) связи систем по всем 134 пунктам.
Одним из принципов, положенных в основание системы CK 95,
бьmо минимальное изменение координат в этой системе по cpaBHe
I А.В,Бородко, r.Н.Ефu.мов. Об орrанизации работ по введению rеодези.
ческой системы координат СК.95 // rеодезия и картоrрафия, 2001. NQ 1.
С. 2(r 32.
()')
нию С системой 1942 r. Именно поэтому сохранен в качестве отсчет
Horo эллипсоид KpacoBcKoro. Уравнивание 1991 1996 r. устранило
ошибки в координатах CK 42 и дало возможность привязки к reo
центрической системе.
Параметры преобразования системы координат CK 95 к
rеоцентрической системе ПЗ 90 выбраны с соблюдением двух yc
ловий:
оси систем параллельны, масштабы одинаковы ( \"= E , = Ez= О,
т = о;) -
прямоуrольные координаты Х П ' У П ' ZП исходноrо пункта Пул
ково сохраняют свое значение, соответствующее полученным из
cOBMecTHoro уравнивания параметрам преобразования .
Применив уравнения (2.5) или (9.21) и учитывая эти условия,
получаем параметры ориентировки CK 95 относительно системы
ПЗ 90
Хт90=Х95 + 22,736 м + 0,424 . 10 (Хп хо) 0,092 . 10 \Уп Уо) +
+ 0,354 . 10 6 (Zп Zo) + 0,19 м,
У т90 = У 95 128,884 м + 0,092 . 10 6 (Х П х) +
+ 0,424' 10 (Уп Уо) 0,524' 10 6 (Zп zо) 0,13 м, (9.23)
ZШ90= Z95 83,807 м 0,354 . 10 6 (Хп хо) + 0,524 . 10 6 (Уп УО) +
+ 0,424 . 10 6 (Zп Zo) 0,15 м.
Последние члены в правой части этих уравнений это поправ
ки в координаты Пулково из cOBMecTHoro уравнивания. Подстав
ляя значения прямоуrольных координат Пулково, получаем ypaB
нения связи систем координат ПЗ 90 и CK 95:
Хт90=Х95 + 25,90 м, У т90=Y95 130,94 м,
Zт90=Z95 81,76 м.
(9.24 )
Для преобразования rеодезических эллипсоидальных коорди-
нат служат формулы (2.16).
Система CK 95 введена в России с 1 июля 2002 r. постановлени
ем Правительства Российской Федерации.
306
ПРАВИТЕЛЬСТВО РОССИЙСКОЙ ФЕДЕРАЦИИ
ПОСТАНОВЛЕНИЕ
от 28 июля 2000 r. NQ 568 r. Москва
Об установлении единых rосударственных систем координат
В соответствии с Федеральным законом «О rеодезии и KapTor
рафии» Правительство Российской Федерации постановляет:
1. Установить следующие единые rосударственные системы KO
ординат:
система rеодезических координат 1995 rода (CK 95) для ис
пользования при осуществлении rеодезических и картоrрафичес
ких работ начиная с 1 июля 2002 r.;
rеоцентрическая система координат «Параметры Земли 1990
rода» (ПЗ 90) для использования в целях rеодезическоrо обеспече
ния орбитальных полетов и решения навиrационных задач.
2. Федеральной службе rеодезии и картоrрафии России осуще
ствить орrанизационно технические мероприятия, необходимые для
перехода к использованию системы rеодезических координат 1995
rода (CK 95).
ДО завершения этих мероприятий используется единая систе
ма rеодезических координат, введенная постановлением Совета
Министров СССР от 7 апреля 1946 r. NQ 760.
3. Министерству обороны Российской Федерации обеспечить в
установленном порядке федеральные opraHbI исполнительной влас
ти по их запросам сведениями, необходимыми для использования
rеоцентрической системы координат «Параметры Земли 1990 rода»
(ПЗ 90), и осущестrдевлять контроль за состоянием и развитием пун
ктов космической rеодезической сети для этой системы координат.
П редседатель П равительства
Российской Федерации М.Касьянов
Для перехода на новую систему координат нужно получить
координаты всех пунктов rосударственной rеодезической сети в этой
системе. Используя формулу (9.21) и таблицу 9.6, установим связь
систем координат CK 42 и ПЗ 90:
( Х42 ] ( 1
У42 =(1 1,24.10 7) 0,019
242 0,073
0,019
1
0,108
0'073 I X90 22,736 ] ( vx )
0,108 У90 + 128,884 + v у
1 290 + 83,807 V z
307
Выделим справа в явном виде координаты Х 9О ' У90' Z90 В систе-
ме П3-90, а в оставшемся после этоrо выражении не будем учиты-
вать про изведения малых величин. Тоrда
( Х 42 ) ( Х90 ) ( 22'730 ) ( 4,24 +0,921
У42 == У90 + 128,884 + 1 O 7 0,921 4,24
Z42 Z90 83,807 + 3,539 5,236
З ,539 I Х90 ) ( У Х ]
+5,236 У90 + У у .
4,24 290 У=
Здесь уrлы между осями координат выражены в радианах. Под
ставив в это выражение уравнения (9.24), находим
( Х 95 ) ( Х42 ) ( 2'970 ) ( 4,24 +0,921 3'539 I X 1 ( Ух ]
У95 == У42 + 1,928 1 O 7 0,921 4,24 + 5,236 У + У у .
Z95 242 2,195 + 3,539 5,236 4,24 2 v =
При такой ориентировке прямоуrольные координаты Пулково
в обеих системах совпадают.
Ориентировки эллипсоида KpacoBcKoro в системах координат
1942 [. и 1995 [. отличаются незначительно. Расхождение координат
пунктов в этих системах обусловлено, в основном, искажениями KO
ординат системы 1942 r. Из за уравнивания. Поэтому для введения
CK 95 следует определить на основании поправок vx'V y ' V z пунктов
астрономо rеодезической сети аналоrичные поправки для всех пун-
ктов [осударственных rеодезических сетей. Эта задача осложняется
из за большоrо числа пунктов, координаты которых нужно опре-
делить и неизвестным распределением ошибок координат 1942 [.,
существенно различным в разных районах сети.
Число пунктов российской rrc
Число Число пунктов
трапеций трианrуляции crc** .
масштаба I
1: 200000 II IV* 1 и 2 15, 30,
1 класс 2 класс 3 класс 4 класс класс разряды 60
4615 9580 109 270 79 860 19014 52 716 91 887 2381
* Классификация дана соrласно Основным положениям 1939 [.;
** crc специальные rеодезические сети.
В странах CHr до настоящеrо времени действует референцная
система координат 1942 [. (СК-42).
308
64. ПЕРСПЕКТИВЫ РАЗВИТИЯ rОСУДАРСТВЕННОЙ
rЕОДЕЗИЧЕСКОЙ СЕТИ РОССИИ
Введение системы координат СК-95 не решает полностью про
блемы перевода всей системы rеодезическоrо обеспечения на со-
временные спутниковые технолоrии. Использование rлобальных
навиrационных систем предъявляет иные по сравнению с класси
ческими наземными методами требования к размещению и закреп
лению на местности пунктов опорной сети, а изучение изменений
поверхности Земли с течением времени требует периодическоrо
повторения rеодезических измерений. Для rеодезическоrо обеспе
чения территории России разработана nporpaMMa создания [ocy
дарственной rеодезической спутниковой сети, состоящей из пунк
тов фундаментальной астрономо.сеодезической сети (ФАrс), вы-
сокоточной сеодезической сети (BrC) и спутниковой сеодезической
сети 1 класса (CrC l).
Основное назначение флrс подп.ержание на должном ypOB
не и воспроизведение общеземной rеодезической системы коорди
нат, обеспечение ее стабильности во времени. Эта сеть должна обес-
печивать исходными rеодезическими данными средства наземной,
морской и аэрокосмической навиrации; аэрокосмическоrо мони
торинrа природной и технической среды; изучение фиrуры и rpa
витационноrо поля Земли и их изменений во времени; изучение [ео-
динамических явлений; метролоrическое обеспечение высокоточ
ных технических средств, их местоположения и ориентировки.
флrс представляет собой rеодезическое построение, состоя-
щее из системы распределенных равномерно по территории стра-
ны 50 70 пунктов, удаленных друr от друrа На 600 lOOO км. Взаим
ное положение смежных пунктов должно быть определено с ошиб
кой 1 2 см или с точностью (l 2). 10 8. Часть пунктов флrс (20 30)
будут постоянно действующими обсерваториями, совмещенными
с пунктами Krc, комплексом «Квазар», обсерваториями Службы
вращения Земли. На остальных пунктах флrс планируется по-
вторять наблюдения каждые 5 8 лет, включая определения абсо-
лютных значений силы тяжести и нормальных высот. В сейсмичес
ки активных районах частота повторных измерений на пунктах
флrс будет выше.
Все пункты имеют или будут иметь:
rравиметрические аномалии высоты;
высоты из rеометрическоrо нивелирования;
абсолютные значения силы тяжести.
309
Следующей по точности ступенью rrc явится высокоточная
rеодезическая сеть. Ее основным назначением будет орrанизация
связи с флrс и распространение системы координат последней на
всю Arc. BrC тоже должна представлять собой однородное по
точности пространственное построение с расстояниями между смеж
ными пунктами 15 300 км. Таких пунктов на территории России
потребуется около 500 700. Взаимное положение пунктов BrC дол
жно определяться с точностью 1 . 10 7 что позволяет получать CTaH
дартная спутниковая аппаратура при уточнении орбит наблюдае
мых спутников.
Каждый пункт сетей ФАrс и Brc должен быть связан BЫCOKO
точными спутниковыми измерениями с двумя пунктами rrc и ДBY
мя пунктами rосударственной нивелирной сети (rHC) 1 или II класса.
Кроме Toro, каждый пункт флrс и BrC будет связан с пунктами
[НС нивелированием II класса. Такое построение ФАrс и BrC
позволит в будущем обеспечить взаимное положение опорных пун
ктов rrc с ошибкой не более 1 2 см.
crc 1 предназначена для дальнейшеrо распространения систе
мы координат, созданной сетями ФАrс и BrC и должна обеспе
чить оптимальные условия для реализации возможностей спутни
ковой аппаратуры. Расстояние между пунктами сети crc 1 COCTaB
ляет 25 35 км.
По отношению к спутниковым сетям ФАrс, BrC и CrC 1 cy
ществующие наземные rеодезические сети 1 4 классов будут фак
тически являться сетями сrущения.
Началом реализации проrраммы построения сети постоянно
действующих пунктов ФАrс явились выполненные в рамках меж
дународноrо проекта IGEX (Intemational GLONASS Experiment) Ha
блюдения на 5 станциях GPS (Санкт Петербурr Екатеринбурr,
Якутск, Маrадан, Петропавловск Камчатский). Эти наблюдения
выполнены в период с декабря1998r. по февраль 1999 [., причем с
15 января по 9 февраля велись одновременные наблюдения на всех
пяти пунктах. Целью наблюдений были исследования возможнос
ти использования системы rЛОНАСС для высокоточных rе6дези.
ческих определений и установление параметров взаимноrо ориен
тирования двух rеоцентрических систем координат ПЗ 90(rло
НАС С) и WGS 84(GPS). Из анализа выполненных измерений
установлено, что линейные параметры ориентирования систем име.
ют величину порядка 1 м по каждой координате. Однако существу
ет разворот системы ПЗ 90 относительно WGS 84 BOKpyr оси Z
около 0,15" или сдвиr по долrоте на 3 м (см. параметры перехода
на с. 164 и рис. 5.7).
310
.
. . ...
.
. .
.
.
<4
311
u
u
<
e
::Е :Е
r-<
::.::
:t :I:
;;.....;;.....
t::t::
... .
....
8
N
e<:j
:I:
Q
:=:
:t
О
Е-<
U
О
u
О
1::
u
a:I
О
::<
::s::
::r:
Е-<
>-.
r:::
u
::r:
=-
о
Е-<
О
О
u
:1i
tti
="
(,i
=
Летом 1999 r. были выполнены измерения на 15 пунктах Brc в
центральном реrионе России BOKpyr Москвы. Таким образом, пос
ле первоrо rода наблюдений высокоточная спутниковая сеть co
держала 5 пунктов ФАrс и 15 пунктов BrC. в последующие rоДЫ
работы по построению спутниковой сети были продолжены, в ча.
стности, выполнены измерения на Курильских и Командорских
островах и острове Сахалин. К 2004 r. ФАrс содержала 33 пункта,
Brc 176 пунктов. Схема их расположения дана на рис. 9.5. Пун
кты распределены неравномерно по территории России, большее
их число находится в Европейской части рф. Наибольшую плот
ность сеть Brc имеет в экономически развитых районах, rде по
требность в современных методах GPS/r ЛОНАСС измерений выше.
Уравнивание результатов выполненных измерений подтверди
ло соответствие фактической точности новой rrc запланирован
ной: точность плановоrо положения пунктов ФАrс и BrC xapaK
теризуется средними квадратическими ошибками 1 2 см, по BЫCO
те 3.-4 см.
Работы по развитию сетей ФАrс, BrC и CrC-I продолжаются.
rлава 10
СОЗДАНИЕ ВЫСОТНОЙ ОСНОВЫ.
УРАВНИВАНИЕ НИВЕЛИРНОЙ СЕТИ
65. НАЧАЛО СЧЕТА rЕОПОТЕНЦИАЛЬНЫХ ЧИСЕЛ
И ВЫСОТ
Естественным началом счета высот является поверхность моря.
Однако физическая поверхность моря непрерывно изменяется,
поэтому отсчет высот и rеопотенциальных чисел ведут от HeKOTO
poro условноrо среднеrо уровня моря. Исходным пунктом ниве
лирной сети обычно является репер, непосредственно связанный
с ypoвHeMepHы.м, постом, на котором ведут непрерывные наблюде
ния уровня моря. Уровнемерный пост снабжается устройством
для реrистрации колебания уровня моря, в качестве KOToporo ис
пользуют водомерную рейку (футшток), мареоrраф или сваи с
переносной рейкой. Так, в СССР на постах rосударственноrо
комитета по rидрометеоролоrии и контролю природной среды
устанавливали металлические рейки длиной 2,8 м или деревянные
рейки длиной 4 5 м. Точность отсчета уровня моря по рейкам
составляет 1 см.
Средним уровнем моря называют величину, полученную в pe
зультате осреднения значений уровня моря за определенный ин
тервал времени суточный, месячный, rодовой, мноrолетний.
Причем средний уровень за более длительный интервал времени
выводят как среднее арифметическое из средних уровней за MeHЬ
шие интервалы. Так, суточный уровень получают как среднее из
отсчетов в течение суток, месячный как среднее из суточных,
rодовой средний из месячных, средний мноrолетний среднее
арифметическое из среднеrодовых уровней моря. Ошибка опреде
ления среднеrо уровня уменьшается при увеличении интервала
осреднения; средний мноrолетний уровень моря оценивают с точ
ностью нескольких миллиметров:
Высотная основа ypoBHeMepHoro поста включает не менее трех
реперов: двух основных и одноrо рабочеrо. Один из основных
реперов должен быть фундаментальным. Основные реперы слу.
313
жат для про верки рабочеrо репера и закрепления нуля поста.
В качестве OCHoBHoro может быть использован репер rосудар
ственной нивелирной сети, наХDДЯЩИЙСЯ не далее трех километ
ров от поста. Рабочий репер, предназначенный для систематичес
Koro контрольноrо нивелирования измерительноrо устройства,
располаrают в непосредственной близости от этих устройств и
вне зоны затопления. Отсчет уровня моря на уровнемернам
посту ведут от нуля поста, за который обычно принимают нуль
установленной на посту рейки. Схема ypoBHeMepHoro поста дана
на рис. 10.1.
1 w= W\
1
w= w 2
II
d]
h\
средний уровень h 2
W = vv: o "
= о моря
2
d 2
нул поста 1
Рис. 10.1. Устройство водомерноrо поста и принцип водноrо
нивелирования: 1 водомерная рейка (футшток); 2 рабочий репер
Некоторые посты оборудованы приспособлением для непре-
рывной реrистрации колебаний уровня моря мареоrрафом. Схема
мареоrрафа приведена на рис. 10.2.
Поплавок 4 колеблется вместе с уровнем моря и вместе с тpo
сиком 5, натянутым противовесом 6, передает СБое движение на
блок 7. Шестеренка 8, закрепленная на одной оси с блоком 7,
приводит В движение зубчатую рейку 9, связанную с самописцем
10. Барабан 11 вращается часовым механизмом 12. Поплавковая
камера 1, защищенная от волнений моря, льда, занесения песком.
соединяется с морем 3 трубкой 2.
Уровнемерные посты появились в конце ХУН начале
ХУIII в. (Амстердам, 1682; Кронштадт,1703; Швеция,1774; Брест.
Франция, 1807). Первый мареоrpаф установлен в Анrлии (1831):
на Кронштадтском уровнемерном посту мареоrраф установлен в
314
1898 r. Сейчас уровнемерных постов свыше 1500, из них большая
часть расположена в северном полушарии. В нивелирную сеть
СССР входило около 200 постов, в Объединенной Европейской
нивелирной сети UELN 73 (United European Levelling Network)
76 постов, в США 125, в Австралии 30. Ныне на территории
России действуют 107 морских уровнемерных постов.
В каждой нивелирной сети
началом счета высот является
средний мноrолетний уровень
моря в каком либо ypOBHeMep
ном посту. В России до 1945 r.
использовали различные ис
ходные пункты в разных рай
онах. В 1840 r. М.Ф. Рейнеке
вывел средний мноrолетний
уровень Балтийскоrо моря за
15 лет (1825 1839 rr.) в ряде
пунктов Финскоrо залива;
этот уровень был зафиксиро
ван rоризонтальными MeTKa
ми, выбитыми на rраните. В
Кронштадте прежний нуль
футштока был опущен OTHO
сите ьно первоначальноrо по
ложения на 17,5 см и COBMe
щен с rоризонтальной чертой,
выбитой на каменном устое Рис. 10.2. Поплавковый мареоrраф
Синеrо моста через Обводной
канал. С 1840 r. понятия «нуль Кронштадтскоrо футштока» и
«средний уровень Балтийскоrо моря (за 1825 1839)>> являются си
нонимами.
Схема Кронштадтскоrо ypOBHeMepHoro поста приведена на
рис. 10.3.
Для контроля BbICOTHoro положения нуля Кронштадтскоrо
футштока с 1886 r. используют в качестве рабочеrо репера rори
зонтальную высечку буквы «П» в слове «ПОЛЬЗА» на памятнике
исследователю Новой Земли П.К.Пахтусову.
Островное положение Кронштадтскоrо футштока затрудняет
ero использование в качестве исходноrо пункта нивелирной сети.
Первая связь Кронштадтскоrо футштока с двумя марками, зало
женными в здании железнодорожной станции Ораниенбаум (ныне
r. Ломоносов) выполнена Н.Я. Цинrером в 1872 r. С тех пор ни
3
r
.j
i
}.
..
...
315
А 11
,., 8
KPOH "'.""
Рис. 10.3. Кронштадтский пост:
1 футшток; 2 мареоrраф
ФК\\С 1\
м
А
з
",C'f1I2II Ао......,.
110.0/
велирование между Кронштад
тским футштоком и материком
выполнялась неоднократно,
последние работы проведены
по дамбе Ленинrрадских за
щитных сооружений. В 1947 r.
вместо разрушенной во время
Великой Отечественной войны
марки в Ораниенбауме была
заложена марка NQ 1 в r. Ло
моносове, которая является
фактически исходным пунктом
нивелирной сети СССР. Bыco
та этой марки над нулем KpOH
штадтскоrо футштока равна
5,571 м. Нуль Кронштадтско
ro футштока официально при
нят в качестве начала отсчета
высот Постановлением Совета
Министров СССР.
Наблюдения за колебания
ми уровня моря в Кронштадте
осложняются из за строитель
ства защитных сооружений, Ha
рушающих естественный rидро
rеолоrический режим. В связи
/
Рис. 10.4. Схема расположения уровнемерных постов
316
с этим создан новый уровнемерный пост (мареоrраф) в Шепелево
в 40 км западнее Ломоносова. Здесь с ноября 1987 r. ведутся на-
блюдения за уровнем Балтийскоrо моря, синхронные с наблюде
ниями в Кронштадте и Ломоносове. Расположения постов в Крон-
штадте, Ломоносове и Шепелеве показано на рис. 10.4.
Наблюдения на уровнемерных постах позволяют определить
превышение между ними методом водноrо нивелирования.
66. ВОДНОЕ НИВЕЛИРОВАНИЕ
Рассмотрим рис. 10.1. На двух уровнемерных постах получе-
ны превышения h] и h 2 реперов 1 и 11 над средним уровнем моря
h[ = d] 11, h 2 = d 2 12'
Обозначения d 1 , d 2 , 11, 12 ясны из рис. 10.]. Соrласно формуле
(1.14) по известным превышениям h 1 , h 2 и значениям gl' g2 силы
тяжести на реперах можно получить rеопотенциальные числа ре-
перов над средним уровнем моря на этих постах
W o ' W[ = glhl, W o " W 2 = g2h2,
rде W o ', W()" значения потенциала силы тяжести на среднем уров-
не моря; W 1 , W 2 то же на уровне реперов для постов 1 и 11
соответственно.
Найдем разность rеопотенциальных чисел
(Wo" W 2 ) (W o ' W 1 ) = g2 h 2 glh 1 = gl(h 2 h 1 ) + (g2 g[)h 2J
откуда
W 1 W 2 =W o ' W o " + g](h 2 h 1 ) + (g2 gl)h 2 .
(l 0.1)
Уровнемерные наблюдения и измерения силы тяжести позво-
ляют найти разность W 1 W 2 потенциалов между постами, если
известна разность W o ' W o " потенциалов на уровне моря на по
стах 1 и 11.
Получим теперь разность нормальных высот. Используя (7.15),
найдем
НУ HY = W o W2 W o W[ = ( и;; w ) + yr Y; НУ
21т т т [2 т 2'
rде н{, н! нормальные высоты, Yl т , у; нормальная сила
1 1
тяжести на высоте н{ , н! на реперах 1 и 11 соответственно;
2 2
317
W o потенциал в начале отсчета нормальных высот. Подставим
в формулу для разности высот выражение (10.1)
,
W W" т m
НУ HY = о о +lL. ( h h ) + g2 g\ h + У\ Y2 нУ.
2 J m т 2 \ т 2 т 2
У\ У\ У\ YI
Положим В правой части этоrо равенства НI = h 2 , а yn пред
ставим в виде
НУ
уm =y k2'
rде У значение нормальной силы тяжести на высоте нУ; k ее
вертикальный rрадиент.
Выполняя преобразования, получим
,
Н У Н У W o W; h h
2 \ m +2 1+
YI
+ [(g Y)2h2 (g Y)lhl]+ k(h 2 h\) h m , (10.2)
Y y
rде (g J11 И (g J12 смешанные аномалии силы тяжести на репе
рах 1 и 11 соответственно, h m =1J2(h\ + h 2 ) средняя высота репе
ров над уровнем моря.
Оценим величину последнеrо члена правой части равенства
(10.2). Высоты реперов уровнемерных постов над уровнем моря
составляют, как правило, несколько метров. При h 1 =10 м, h 2 = 15 м
k(h 2 h\ )h m = 0,02 мм и этот член можно не учитывать. Тоrда
Y
HI HT = : ; +h 2 h\ + [(g Y)2h2 (g Y)lhl]' (10.3)
у\m у\m
Это формула водноrо нивелирования. Соrласно (10.3) раз
ность нормальных высот реперов уровнемерных постов можно
найти по измеренным BыотамM h 1 и h 2 , аномалиям силы тяжести
W ' W "
на реперах и известнои разности о о потенциалов.
Оценим влияние последнеrо члена в формуле (10.3). Для высот
над средним уровнем моря примем h 1= 1 О м, h 2 = 15 м, а для aHO
малий силы тяжести возьмем значение 40 мrл, причем положим
(g J11 = (g J12' Тоrда
1
[(g Y)2h2 (g Y)lhl]=lMM.
У;п
318
Таким образом, этот член сравним с точностью измерения
высот h I и h 2 И ero следует учитывать, если аномалии силы тяже
сти на постах имеют разные знаки, а высоты h( и h 2 значительны.
Методом водноrо нивелирования определяют или разность
нормальных высот или разность потенциалов. Заметим, что BC.leд
ствие близости потенциалов W o ' и W o " можно считать, что
W; W; = 8НУ
т '
УI
[де 8НУ разность нормальных высот уровня моря на постах 1 и
П. Таким образом, методом водноrо нивелирования находят или
разность нормальных высот реперов, или разность нормальных
высот уровня моря. В первом случае полаrают
W' W"=O
о о '
(10.4)
Т.е. считают, что уровень моря на постах 1 и П лежит на одной и
той же уровенной поверхности. Во втором случае разность HOp
мальных высот реперов находят из rеометрическоrо нивелирова
ния, и приращение потенциалов получают по формуле
(10.5)
=у{1I8НУ =Ylт(H{ H{) yr(h2 hI) (g Y)2h2 +(g r)Ihl'
: W;=
Сопоставление результатов водноrо и rеометрическоrо ниве
лирования показало, что предположение (10.4) не всеrда оправда
но и поверхность моря не является уровенной, причем отклоне
ния между ними MorYT быть значительными. Так, в Австралии
уровень моря на ceBepO BOCTOKe на 1,75 м ниже, чем в остальных
районах побережья. Разность высот уровня моря вдоль побере
жья Европы и России приведена в таблице 10.1.
Как видно из таблицы 10.1, уровень морей Тихоrо океана ниже
уровня моря в Кронштадте примерно на 5 0 см, уровень морей
CeBepHoro ЛеД08итоrо океана на 50-----80 см. Средний уровень моря
от Ботническоrо залива Балтийскоrо моря до Средиземноrо моря
понижается на 60 см. На рис. 1 0.5 приведен rрафик среднеrо уровня
морей, омывающих северные и восточные береrа России по резуль
татам rеометрическоrо нивелирования. По этим данным средний
уровень моря вдоль побережья колеблется в диапазоне 1 О см.
319
Т а б л и ц а 10.1
Разность высот среднеrо уровня моря (СУМ).
БНУ от СУМ 8J{1 от СУМ
Море в Кронш Порт В AMCTep
тадте, м даме, м
АЗОВСКое 0,17 Хельсинки 0,217
Черное 0,25 Турку 0,230
Карское 0,44 Кеми( Финляндия) 0,278
Белое 0,46 Стокrольм 0,141
Баренцево O,46 Копенrаrен o, 015
Японское 0,46 Шербур o, 174
Море Лаптевых 0,57 Брест (Франция) O,O 15
Охотское O,66 Каскиас (Портуrалия) o, 143
Беринrово 0,74 Аликанте (Испания) 0,035
Восточно Сибирское O,75 Марсель o, 173
Чукотское O,78 rенуя 0,336
Триест o, 337
о 2000
О
'i .20
.!...,
t -'о J
! -10
! ..-( "О ЪаРQjще80 1
АСО".
.120 .
.1-10
4000 8000 8000 10000 12000 14000
SlпollCJWe
....оре
O O
.110'"
Р8ССТОЯНие по береr080А nМНИИ ''''1
Рис. 10.5. Средний мноrолетний уровень морей CeBepHoro Ледовитоrо
и Тихоrо океанов в Балтийской системе высот 1977 [.
I Высоты над СУМ в Кронштадте даны по статье Л.А. Борисова «От
чеrо ведется отсчет высот?» Человек и стихия, 1976. Л.: rидрометеоиздат.
1975; над СУМ в Амстердаме по [16].
320
Таким образом, средний мноrолетний уровень моря в разных
пунктах побережья не лежит на одной уроненной поверхности.
Приближенно можно считать, что вдоль побережья океана cpeд
ний уровень моря, выведенный по наблюдениям на уровнемер-
ных постах, относится к одной уровенной поверхности, если pac
стояние между постами не превышает 500 км, вдоль побережий
морей 70 100 км. Поэтому можно использовать водное нивели-
рование для нахождения разностей нормальных высот реперов
только в том случае, если расстояние между уровнемерными по
стами не превышает этих значений. При этом условии водное
нивелирование по точности будет сравнимо с нивелированием
II класса.
Средний мноrолетний уровень моря изменяется с течением
времени. Длительные наблюдения на мноrих постах, охватываю
щие интервал от 2 3 до 360 лет, позволили установить тенденцию
уровня моря к повышению (табл. 10.2).
Таблица 10.2
Изменение уровня Мировоrо океана за 1900 1975 rr.
Океан Площадь Количество Изменение уровня, мм
млн. км 2 постов Полное За rод
Тихий 178,7 77 +68,4 +0,9
Атлантический 91,6 11 8 + 144,4 + 1,9
Индийский 76,2 22 +45,6 +0,6
Сев. Ледовитый 14,8 70 + 114,0 + 1,5
Мировой 361,3 287 + 106,4 + 1,4
Таким образом, использование в нивелирных сетях в качестве
начала отсчета rеопотенциальных чисел и высот неизменноrо во
времени среднеrо уровня моря приводит К тому, что каждая ни
велирная сеть связана со своим rеоидом уровенной поверхнос
тью W = W o ' проходящей через начало отсчета высот, а потенци
алы W(} в разных нивелирных сетях не совпадают. Для создания
единой мировой высотной основы нужно определить разность
потенциалов силы тяжести в исходных пунктах нивелирных ce
тей. В пределах одной нивелирной сети, включающей несколько
уровнемерных постов, нужно соrласовывать разности потенциа
лов между всеми уровнемерными постами с результатами нивели
рования. Разность потенциалов в исходных пунктах нивелирных
сетей можно определить из совместной обработки результатов
rеодезических, океаноrрафических и спутниковых измерений.
321
67. ОКЕАноrРАФИЧЕСКОЕ НИВЕЛИРОВАНИЕ
Океаноrрафическим нивелированием называют определение
поверхности океана как поверхности нулевоrо rидростатическоrо
давления, а также определение rлубинных изобарических поверх
ностей. Рассмотрим принцип океаноrрафическоrо нивелирования.
Запишем уравнение (1.15) в виде
dW= а dP.
(l0.6)
Величину а = 1/8, обратную плотности, называют удельным объе
мом. Интеrрирование уравнения (10.6) от уровня моря, [де давле
нне воды равно нулю, до уровня, на котором rидростатическое
давление равно Р, позволяет найти разность потенциалов (rеопо
тенциальное число)
р
W p ) = fadP.
(l 0.7)
о
Таким образом, для определения разности потенциалов НУЖ
но знать закон изменения удельноrо объема в зависимости от
давления. Разность потенциалов в океанолоrии и метеоролоrии
называют динамическим расстоянием или динамической высотой
(zлу6иной).
Удельный объем морской воды зависит от солености s, темпе
ратуры t и давления Р. Соленость и температура на больших rлу
бинах меняются в сравнительно узких пределах, поэтому удель
ный объем представляют в виде
aa.t.P = аЗ5.0,Р + .1 а,
[де а З5 о Р значение удельноrо объема при стандартных усло
. . о
виях (j = 350/00, t = О С и давлении Р. Аналоrично можно преоб-
разовать разность W p W o потенциалов, выделив из нее часть
(W p W о )З5.0,р, соответствующую стандартным условиям соленос
ти и температуры
W p W o = (W p W о )З5,О.р + д W.
Подставив выражения удельной плотности а и разности
W p W o потенциалов в выражение (10.7), найдем
р р
(W p W(J35,O,p + dW = f а з5 . о . р dР + f dadP. (10.8)
о о
322
р
Величину д W = f дадР называют аномалией динамической 2ЛУ
о
6ины или динамической аномалией.
Предположим, что rлубинные слои океана находятся в rидро
статическом равновесии, тоrда изобарические поверхности
Р = С 1
(10.9)
совпадут с уровенными
W p = с 2'
(10.10)
Динамическое расстояние поверхности океана от поверхнос
тей (10.9) и (10.10) определяет равенство
W p W o = (W p W о )З5,О.Cl + dW,
или
С 2 W o = (С 2 Wо)зs.о.Сl + dW.
Для разности динамических расстояний двух точек поверхно
сти океана при постоянных С 2 И (С 2 W о )З5,О,Сl
(С 2 Wo)l (С 2 W o )2 = (W o )2 (Wo)l= dW] dW 2
или
р р
(W o )2 (W()] = (f dadP) 1 (f dadP)2'
О О
(10.11)
Т.е. разности динамических высот точек поверхности океана paB
ны разности динамических аномалий.
В уравнениях (10.7), (10.8) и (10.11) можно выполнять интеr
рирование не от поверхности океана, [де Р = О, а от любой изо
барической поверхности. Тоrда по этим формулам будет опреде
лена разность потенциалов на любых двух изобарических повер
хностях. Этот случай не представляет интереса для rеодезии.
Для вычисления динамической аномалии нужно измерить вдоль
вертикальноrо профиля до выбранноrо значения давления Р фи
зические характеристики морской воды (соленость и температу
ру) и вычислить ПО ним аномалии да удельноrо объема. Измере
ние давления часто заменяют измерением rлубины z. Это можно
323
сделать блаrодаря введенной норвежским rеофизиком Бьеркнесом
в 1902 r. системе единиц давления и динамической rлубины: дaB
ление измеряют в барах
1 бар = 105 Па = 105 HM 2 = 105 Kr M lC 2,
а разность потенциалов (динамическую rлубину) в диншиичес
ких Jweтpax (дин. м)
1 дин. м = 10 M2c 2.
Установим соотношение этих единиц с единицами линейноrо
расстояния. Интеrрируя выражение (10.6) и применяя теорему о
среднем, найдем
Р = bmfJmZ, W p W o = gmz,
rде 8,,,, gm средние значения плотности и силы тяжести на отрез
ке Z. В системе СИ Ь т == 1,025 . 103 Kr M 3, gm == 9,8 м c 2, bmfJm=
=10,04 . 103 Kr M 2c 2 == 104 Kr м.-2с.- 2 , поэтому
Р(дбар) = Z(M),
(10.12)
(W p W O ) (дин. м) = 0,98 Z (м),
Т.е. изменению rлубины на 1 м соответствует изменение давления
на 1 дбар (децибар) и разности потенциалов примерно на один
динамическиий метр. Формальное совпадение численных значений
давления в децибарах и rлубины в метрах используют для замены
одной величины на друrую, в частности, в формуле (10.7) можно
использовать зависимость удельной плотности от rлубины.
В rеодезии (см. 46) разность потенциалов выражают в кило-
zалах на метр (кrал м)
1 кrал м = 103 rал м = 10 M2c 2
,
Т.е. 1 кrал м = 1 дин. м.
Оценим возможную точность определения разности потенци
алов методом океаноrрафическоrо нивелирования. На основании
(10.6) можно написать
( :; J =( :: J +( ' J,
rде тw, т ф тр ошибки разности dW потенциалов, удельноrо
объема и давления соответственно.
324
В настоящее время удельный объем определяют с точностью
LO 10 5, rидростатическое давление с точностью 5 . 10 4, поэто
му можно считать, что разность потенциалов определяется с точ
ностью около 10 3. Так как динамические аномалии не превыша
ют 1 2 дин. м, точность определения динамических расстояний не
превысит нескольких дин. мм, а точность определения поверхно
сти океана нескольких миллиметров.
До сих пор мы предполаrали, что на поверхности океана дaB
ление постоянно и равно нулю. В действительности уровень OKe
ана изменяется при изменении атмосферноrо давления, ветра, стока
рек. Например, соrласно формуле (10.14) повышению давления на
1 мбар соответствует понижение уровня моря на 1 см. Для ис
ключения этих эффектов вычисляют поправки, обусловленные
колебаниями атмосферноrо давления и croHHo HaroHHoro эффек
та преобладающих ветров.
Основная сложность океаноrрафическоrо нивелирования свя
зана с выбором отсчетной поверхности. Для rеодезии в качестве
отсчетной нужно использовать уровенную поверхность (10.1 О),
тоrда соrласно (10.11) можно найти разность потенциалов на
поверхности океана. Океан не находится в состоянии равновесия,
однако с возрастанием rлубины скорость океанических течений
уменьшается и можно считать, что на достаточно больших rлу
бинах уровенные поверхности совпадают с изобарическими. Для
постоянной С, в уравнении (10.9) используют значения 100, 200
или 400 бар, Т.е. поверхности, проходящие на rлубинах 1, 2 или
4 км. Для rлубины 2 км предположение о равновесном состоя
нии океана является достаточно обоснованным. Однако вблизи
береrовой линии применение океаноrрафическоrо нивелирования
затруднительно.
При вычислении разностей (W o )2 (W o ) 1 в открытом океане
можно использовать не общую для всеХ точек отсчетную поверх
ность, а выбрать одну и ту же поверхность только для каждой
пары точек, между которыми вычисляют превышение.
Океаноrрафическое нивелирование позволило установить, что
отличия поверхности океана от уровенной колеблются в преде
лах около 2 метров. Это означает, что при современной точности
rеодезических измерений поверхность океана нельзя рассматри
вать как уровенную поверхность потенциала силы тяжести. Cxe
ма динамической поверхности Мировоrо океана приведена на
рис. 10.6. Сравнение этой схемы с картой (см. рис. 5.5) морской
топоrрафической поверхности, полученной по спутниковым дaH
ным, показывает хорошее соrласие между ними.
325
326
\
jJ
ro
:с
ro
(l)
о
о
j;...,
о
о
о...
==
:Е
:s::
с)
о
::r:
><:
О.
(1)
о
1::
,::
о
::r::
u
(l)
::т
:::
:::2:.
со::
:t
:::
r::::.
:<::
:::2:.
(1)
с....
d
..
=
=-
68. ОПРЕДЕЛЕНИЕ ПОТЕНЦИАЛА
В НАЧАЛЕ СЧЕТА ВЫСОТ
При современной точности rеодезических измерений становится
ощутимым несовпадение поверхности моря с уровенной поверх
ностью и отличие потенциалов в исходных пунктах различных
нивелирных сетей и уровнемерных пунктах, включенных в одну
сеть. Для определения этих отличий используют совместно резуль
таты rеодезических, океаноrрафических и спутниковых измерений.
Рассмотрим принципиальную возможность определения потенциа
ла W o на уровне моря по этим измерениям.
Действительный потенциал W p в любой точке Р поверхности
Земли, в том числе и в уровнемерном пункте J, принятом за ис
ходный пункт нивелирной сети, можно вычислить с помощью (5.5),
используя ту или иную модель rравитационноrо поля и rеоцент
рические координаты точки. Однако точность TaKoro определе
ния будет невысока из за неизбежноrо оrраничения ряда (5.5)
конечным числом членов и ошибками ero коэффициентов. Влия-
ние оrраничения ряда можно ослабить, вычислив потенциал W!
как сумму найденноrо с помощью выражения (5.5) потенциала W p
репера и ero rеопотенциальноrо числа ( ! W p )
W j ::= W p + (W j W p ) = W p + f gdh.
(10.13)
Если нивелирная сеть покрывает обширную территорию, cpeд
нее из значений wj', полученных по всем реперам, будет в зна
чительной степени свободно от влияния высокочастотной части
ряда (5.5).
Равенство (10.13) содержит только величины, определяемые по
измерениям: коэффициенты ряда (5.5) и координаты реперов Ha
ходят по спутниковым измерениям, rеопотенциальное число из
rеометрическоrо нивелирования с привлечением rравиметрических
данных. Нормальное поле при этом не используется.
На практике удобнее находить не потенциал W j в исходном
. u
П у нкте, а Р азность W} И потенциалов в начале отсчета высот
(1 ()
и на отсчетном эллипсоиде. Вычтем из обеих частей (1 0.13) по
тенциал U() на эллипсоиде, тоrда
/ U() = W p (U() J gdh).
327
Но стоящая справа в скобках разность (И о fgdh) это по
тенциал ИРУ в точке рУ (см. рис. 4.1), высота которой над эллипсо
идом является нормальной высотой репера, поэтому
/ и() :::::W p Иру'
(10.14)
Это равенство непосредственно вытекает из условия (4.3)
Молоденскоrо, определяющеrо нормальную высоту.
Таким об р азом, Р азность wj и потенциалов в исходном
() ()
пункте отсчета нормальных высот и потенциала на эллипсоиде
можно получить как разность действительноrо и нормальноrо
потенциала в любой точке нивелирной сети. На реперах с извест
ными нормальными высотами нормальный потенциал вычисляют
по формуле (3.41), причем следует использовать наиболее точные
значения фундаментальных постоянных GM, J 2 , OJ, а постоянную
а и находить по принятому значению И О '
В таблице 10.3 приведены результаты оценки величины
W j и и соответств у ющие ей смещения дr
() ()
дr::::: (W j И())/у
уровенной поверхности описанным способом, rде у нормальная
сила тяжести. Для вычисления потенциала W p использована MO
дель EGM 96. Соrласно этим оценкам, начало счета высот в США
и Канаде лежит приблизительно на O,5 O,6 м ниже, чем в Европе.
Однако ошибка оп р еделения Р азности W j и сопоставима с ее
() ()
зна чением.
Таблица 10.3
Смещение исходной уровенной поверхности счета высот
от поверхности rеоида иv = и о
Реrион США Центральная Канада
Европа
Число использованных 1830 220 963
точек
! и (). кrал.М 0,519 :!: 0,447 0,181 :!: 0,188 0,634 :!: 0,346
Смещение 8r, м 0,530:!: 0,456 0,185:!: 0,188 0,646 :!: 0,352
Примечание. Использована модель ECM 96. 1
1 Бурша М., Ватрт В., Войтишкова М, и др. Оценка точности rеопотен
циальных моделей EGM Х 01 X 05, EGM 96 М 11 rеодезия и картоrрафия.
1998. N9 8, С. 10 13.
328
Потенциал обычно представляют суммой нормальноrо Ир и
аномальноrо Тр потенциалов
W p = Ир + Тр'
Заменив в формуле(lО.14) потенциал W p соrласно этому пред
ставлению, находим
Wj ио = Тр (ИРУ Ир).
Это равенство можно получить также из (4.2), переrруппиро
вав ero члены.
Для нахождения разности (Иру Ир) нормальных потенциалов
в точках рУ и Р (см. рис. 4.1), определяющей аномалию высоты,
нужно знать нормальную и rеодезическую высоты репера. Дей
ствительно, в нормальном поле ypoBeHHoro эллипсоида rеодези
ческую высоту Н р можно выразить через разность нормальноrо
потенциала на эллипсоиде и в точке Р
Н И(} и р
p ,
У т
(10.15)
[де У rn среднее интеrральное значение нормальной силы тяжести
на отрезке Н р
н ( ) ( д 2 )
1 h 1 ду Н 1 У н 2
У", Н I}tl (У,,)р +2 ан " + 6 ан 2 " '
значения Т1роизводных относятся К поверхности эллипсоида
И = Ий, (r;)p нормальная сила тяжести на поверхности эллипсои
да в точке, находящейся на одной нормали с точкой Р, значения
(Уи)Р и производных ( ду ) , ( д2 J должны быть соrласованы
дн о ан
о
с параметрами эллипсоида. Разность нормальных потенциалов с
помощью (10.15) примет вид
Ий Ир = УтНР'
Нормальная высота соrласно формулам (7.14), (7.15) позволя-
ет найти разность Ий И рУ нормальных потенциалов на эллипсо-
иде и в точке РУ
Ий ИрУ = уНрУ,
[де y среднее значение нормальной силы тяжести на отрезке нУ.
329
Вычитая из разности потенциалов между эллипсоидом и точ
кой поверхности Земли разность потенциалов между тем же эл
липсоидом и rипсометрической поверхностью, находим
(Иру Ир) = (И о Ир) (И о Up'f) = УmНР уН/,
следовательно, если не учитывать отличие Уm И у;
wj ио = Тр y(Hp H ).
(10.16)
Таким образом, для вычисления разности потенциалов на уров-
не моря и на отсчетном эллипсоиде нужно вычислить аномаль
ный потенциал Тр и измерить rеодезическую и нормальную BЫCO
ты в любой точке поверхности Земли. Если в выражении (10.16)
под точкой Р понимать исходный уровнемерный пункт J, то HOp
мальная высота обратится в нуль и уравнение (l0.16) примет вид
W:! ио = . yтHj'
т.е. для определения разности (wj ИО) достаточно измерить
спутниковым альтиметром высоту Н}' определить аномальный по
тенциал 1J и вычислить нормальную силу тяжести, индекс «j» оз-
начает принадлежность соответствующей величины пункту J. При
чем все величины нужно находить с высокой точностью, посколь-
ку колебания разности w o И() невелики и не превышают 1,5 3
дин. м (кrал. м) (см. рис. 10.6).
Аномальный потенциал Т р находят или с помощью разложе
ния (5.37) или по интеrральной формуле (8.30), являющейся реше
нием краевой задачи. Более перспективно использование преобра
зованной формулы (8.73), позволяющей при вычислении ряда orpa-
ничиться сравнительно малым числом членов, а при интеrрировании
учесть только ближайшие окрестности точки вычисления. Этот путь
был опробован для связи нивелирных сетеЙ Европы и США. Ис-
пользуя rеоцентрические координаты 4 станций в Европе и 14 в
США и учитывая аномалии силы тяжести в радиусе 1 о, дЛЯ разно
сти потенциалов США Европа было получено значение 46 дин,
см (46 кrал. см) Правда, ошибка этой разности сравнима с ее вели
чиной и составляет 45 дин. см. Тем не менее этот результат каче
ственно совпадает с результатом, приведенным в таблице 10.3.
Для определения аномальноrо потенциала с учетом отличия потен-
циала в исходных пунктах изолированных нивелирных сетей, использ -
емых для определения поверхности Земли первоrо приближения, през-
ложено несколько вариантов составления KpaeBoro условия задаЧl
330
Молоденскоrо. Один из первых вариантов рассмотрен М.И. Юркннс,;
В.В. Бровар2 определял аномальный потенциал по смешаННЫ!'.1 aHC»).!..:.
лиям силы тяжести
( дУ )и r 1 ( а 2у ) у
gs YE g Yи дН J 2 дн2 Н J,
причем для поверхности моря нормальные высоты НУ можно ПО.lучать
как разность rеодезической высоты, определенной методом СПУТННJ\О-
вой альтиметрии, и аномалии высоты, найденной с помощью раз 'юже.
ния по сферическим функциям. Краевое условие для нахождения Т?
имеет вид
дТ ( 1 ду r 1 ду
I := [ g y ,<,] (W u )
дН r дН S S L. r дН о о ,
(10,17)
[де S физическая поверхность Земли, L. поверхность Земли первоrо
1 ду
приближения. Коэффициент при разности W o И О потенциалов
удЯ
следует считать переменным, а сами эти разности постоянны в преде
лах каждой нивелирной сети, опирающейся на один футшток.
Приближенно решение задачи с краевым условием (10.17) можно
записать в виде
R 1 п
Тр = J (gs YL)[S(V') l]da> L(W ' uo)/ J [S(V') l]da>,
4 y 2 1
W Ы,
[де п число реrионов площади (О! с постоянным значением разности
(Wo Ио)j, принятой в каждом реrионе. Подставляя выражение для Тр в
(10.16), находим уравнение для нахождения разности потенциалов
. 1 . J
(W: uo)+ (W uo) (S(чr) l]dа>=
2п /=1 ш.
I
= f (g\. УL)[S(чr) l]dа> r/(Нр HpY)i'
4;ry ,
Q)
(10.18)
1 Юркина М.И. Потенциал в начале счета ВЫСОТ и контроль rеометри-
ческоrо нивелирования 11 fеодезия и картоrрафия. 1981. NQ 10. С. 11 15.
2 Бровар В.В. Потенциалы начальных пунктов изолированных нивелир
ных сетей 11 fеодезия и картоrрафия. 1988. NQ 2. С. 21 24.
331
Как уже подчеркивал ось, такие уравнения можно составить для
каждоrо пункта нивелирной сети с известной rеодезической высотой в
rеоцентрической системе координат. Из cOBMeCTHoro решения этих ypaB
нений можно определить одновременно разности потенциалов в началь
ных пунктах изолированных нивелирных сетей.
Для определения аномальноrо потенциала перспективно исполь
зование чистых аномалий (g " силы тяжести, являющихся разно
стью действительной и нормальной силы тяжести в точке поверх
ности Земли. В этом случае повеРХНОL.lЬ Земли при решении Kpae
вой задачи считается известной, и нет необходимости использования
rеопотенциальных чисел для построения поверхности Земли перво
[о приближения. Однако реализация этоrо способа потребует оп
ределения rеодезических высот всех rравиметрических пунктов, He
обходимых для вычисления нормальной силы тяжести в точках
поверхности Земли. Метод определения аномальноrо потенциала
по чистым аномалиям силы тяжести изложен в учебнике [28].
69. УРАВНИВАНИЕ НИВЕЛИРНОЙ СЕТИ
Исходными данными для установления BbIcoTHoro положения
точек поверхности Земли являются результаты rеометрическоrо,
rидростатическоrо и океаноrрафическоrо (водноrо) нивелирова
ния и измерения силы тяжести, повторяемые с той или иной час
тотой. По этим данным находят высоты пунктов в принятой си
стеме высот, а также изменения этих высот с течением времени. В
rлаве 7 отмечалось, что высотное положение точек в поле силы
тяжести однозначно определяется rеопотенциальным числом
W o W р = f gdh,
Т.е. той работой, которую нужно выполнить в поле силы тяжести,
перемещая единичную массу сотсчетной уровенной поверхности
W = ) на уровенную поверхность W = W p точки Р. Зная Jr:J W p ,
можно перейти к любой системе высот соrласно формулам (7.13),
(7.15), (7.27). Так как полученные из rеометрическоrо нивелирова
ния превышения зависят от пути нивелирования, уравнивание ниве
лирных сетей выполняют с использованием или разностей нормаль
ных высот или rеопотенциальных чисел. rеопотенциальное число
непосредственно не измеряют, а выводят по измеренным превыше
ниям dh и значениям силы тяжести g. В дальнейшем уравнивании
интеrрал f gdh считают непосредственно измеренной величиной, при-
чем полаrают, что ошибки разности rеопотенциальных чисел и HOp
мальных высот обусловлены только ошибками нивелирования.
332
Так же как и плановая астрономо rеодезическая, нивелирная
сеть создается в течение длительноrо времени. В России определе
ние высот начали на пунктах дуrи Струве в 1816 [. методом три
rонометрическоrо нивелирования. Первая линия нивелирования
rоризонтальным лучом от Кронштадта до Москвы проложена в
1873 1876 rr., а в 1894 r. закончено уравнивание нивелирных ли
ний, выполненных в 1871 1893 rr. Это уравнивание выявило OT
личие уровней Балтийскоrо и Черноrо морей. Однако в результа
те уравнивания их приняли одинаковыми и таким образом была
установлена балтийско черноморская система высот.
Второе уравнивание нивелирной сети СССР выполнено в
1933 r. Из за значительноrо расхождения высот в европейской и
восточной частях страны в каталоr высот 1934 r. включены толь
ко европейские пункты. На востоке страны началом нивелировок
был уровень Тихоrо океана. С 1934 r. действовала балтийско
тихоокеанская система высот.
В 1946 r. Постановлением Совета Министров в СССР введена
CK 42 и балтийская система высот. Практически балтийская сис
тема введена в 1949 1952 rr., коrда по результатам завершенноrо
к 1950 r. HOBoro уравнивания нивелирной сети издан каталоr BЫ
сот. Уравнивали ортометрические высоты.
Проrрамма цнииr АиКа нивелирования разработана в
1967 r. под руководством И.И.Энтина и одобрена Научно техни
ческим советом ryrK 29 января 1968 r. К проrрамме приложен
список 274 уровнемерных постов СССР, в том числе 80 станций,
ведущих наблюдения за вековыми изменениями уровня моря.
Протяженность линий нивелирования 1 и 11 классов к этому
времени составила 367 тыс. км (табл. 10.4).
Таблица 10.4
Протяженность линий высокоточноrо нивелирования
NQ [од Протяженность Высоты Система высот
линий, км
1893 13 752 Балтийско
Черноморская
1 1933 69 450 Ортометрические Балтийско
Тихоокеанская
1946 171 000 Ортометрические Балтийская
1967 367 000 Нормальные Балтийская
51 000 (1 класс)
316 000 (11 класс)
333
Уравнивание нивелирной сети СССР выполнено в системе HOp
мальных высот. Для cOBMeCТHoro уравнивания сети 1 и 11 классов
территория страны была разделена на два блока «Запад» и «Boc
тою>. Разделительная rраница между блоками выбрана по линии
1 класса АрхаН2ельск Кuров Казань Аральск.АРblСЬ. Первым уравня
ли блок «Запад», ero уравненные высоты служили исходными для
блока «Востою>. Нивелирование 1 и II классов уравнено совместно,
оба блока образовали сеть из более 500 полиrонов. В полиrонах,
состоящих из линий нивелирования 1 и II классов, линиям нивели
рования 1 класса приписывался в три раза больший вес. Уравнива
ние в западном блоке выполнено коррелатным, а в восточном
параметрическим способом. Веса назначали по формуле
с
р= L '
rде L длина секI}.ИИ, постоянная с равна 1 для нивелирных сетей
1 класса и 1/3 для II класса.
Приведем значения ошибок нивелирования на 1 км хода:
Блок t, мм/& (2, мм 2 /км
1 класс 11 класс 1 класс 11 класс
«Запад»
«Восток»
1,6
2,1
2,7
3,6
2,56
4,41
7,29
12,96
Ошибки нормальных высот возрастают с увеличением paCCTO
яния от исходноrо пункта (Кронштадтский футшток) и не превы
шают 15 см в северо восточной части страны.
Более подробные сведения об уравнивании нивелирной сети
СССР приведены в [13] и [29].
Средние квадратические ошибки передачи высот от нуля Крон.
штадтскоrо футштока для разных пунктов составили (в мм):
Сухуми 53
Астрахань 49
Красноводск 71
Арысь 64
Новосибирск 62
Тикси 102
Якутск 93
Маrадан 106
Владивосток 112
Певек 142
Амrуэма
(Беринrов
пролив) 149
В результате уравнительных вычислений получены разности вы-
сот мноrих уровнемерных пунктов от нуля Кронштадтскоrо футш-
тока. Уровни всех морей оказались ниже уровня Балтийскоrо моря:
Черное море: Севастополь 0,25 м, Сочи 0,25 м, Сухуми
0,26 м;
334
Каспийское море: Баку 28,59 м, Красноводск 28,76 м, Форт
Шевченко 28,57 м;
Тихий океан: Бухта Золотой por Владивосток 1,00 м, Ta
тарекий пролив Советская raBaHb 0,66 м, Охотское море
Маrадан 0,52 м, Анадырский залив Эrвекинот 0,34 м;
Северный Ледовитый океан: Чукотское море мыс Шмидта
0,36 м, Восточно Сибирское море Амбарчик 0,79 м, Карское
море Диксон 0,73 м, YCTь Kapa 0,46 м, Белое море ApxaH
rельск 0,3 м.
С завершением уравнительных вычислений создана ныне дей
ствующая Единая система Балтийских нормальных высот 1977 [ода.
Рассмотрим принцип уравнивания rеопотенциальных чисел.
Предположим сначала, что rеопотенциальные числа всех реперов
сети измерены от одной и той же уровенной поверхности и для
всех пунктов сети W() постоянно. Будем также считать, что изме
ренные разности потенциала неизменны во времени. Нивелирные
сети уравнивают по методу наименьших квадратов коррелатным
или параметрическим способом. В коррелатном способе ДЛЯ каж
доrо замкнутоrо полиrона или хода между двумя футштоками,
находящимися по предположению на одной и той же уровенной
поверхности, можно написать условие
N N
L(W i Wj)т (WN W\)+ L[vи]т =0,
1110::1 m=1
(10.19)
[де (W i W)m измеренная разность rеопотенциальных чисел
между соседними реперами; y W j известная разность rеопо
тенциальных чисел начальноrо и конечноrо пунктов хода; (Vi)т
поправка в разность rеопотенциальных чисел; N число линий,
входящих в полиrон или ход.
Напомним, что в замкнутом полиrоне сумма приращений [eo
потенциальных чисел должна равняться нулю. Поправки Vj j Haxo
дят из cOBMeCTHoro решения уравнений (10.19) для всех полиrо
нов под условием
'f.pv 2 = min,
(10.20)
[де р веса.
Уравнение (10.19) можно составить в том случае, если в сети есть
замкнутые полиrоны или линии, опирающиеся на уровнемерные
посты. Неудобство уравнивания нивелирных сетей коррелатным спо
собом связано с тем, что одна и та же сторона входит в разные
полиrоны; кроме Toro, обширные нивелирные сети, покрывающие
335
значительные территории, создают в течение ДJ1ительноrо времени, а
уравнивание выполняют до Toro, как будут замкнуты все полиrоны.
Поэтому обычно нивелирные сети уравнивают параметрическим спо
собом, принцип KOToporo состоит в следующем. Сначала находят
приближенные значения (W o )' rеопотенциальных чисел репе
ров, а затем образуют ДJ1я каждои секции уравнения поправок
Б(w о ) Б(W о WJ + /ij = vij' (10.21)
rде 8(W o JV) поправки к приняты м предварительным значениям
rеопотенциальных чисел, V ij поправки к их измеренным разно
стям, /jj свободный член, равный разности вычисленных по при
ближенным значениям и измеренных приращений rеопотенциаль
ных чисел,
lij = (JlI;) )' (W o JlI;)' (W;. ).
Решение уравнений (10.21) выполняют под условием (10.20) по
обычным правилам метода наименьших квадратов МНК.
Одна из основных особенностей уравнивания нивелирных сетей
связана с определением весов. Для их назначения используют резуль
таты анализа точности rеометрическоrо нивелирования. Ошибки
rеометрическоrо нивелирования принято представлять в виде
т 2 = ry2L + d-L 2 , (10.22)
rде m ошибка превышения по линии длиной L; 17 случайная,
(j систематическая ошибки на 1 км хода. Значения 17 и (j находят
из анализа избыточных измерений на станции, расхождения пря
Moro и обратноrо превышения, невязок полиrонов. Методика оп
ределения 17 и (j описана в [29]. В последнее время методами MaTe
матической статистики находят дисперсию D измеренноrо превы
шения, не прибеrая к rипотезе (10.22).
Веса измеренных превышений и разностей rеопотенциальных
чисел вычисляют по формулам
с с
р = или р = 2'
D m
rде с постоянная. Если же ошибка m и дисперсия D неизвестны.
веса назначают обратно пропорционально длине линии или чис
лу штативов.
Уравнительные вычисления с условиями (10.20), (10.21) OCHOBa
ны на предположении о неизменности поверхности Земли с течени
ем времени. На самом деле существуют вертикальные движения зем
ной коры (ВДЗК), а также изменения силы тяжести. Это при водит К
изменению rеопотенциальных чисел с течением времени. Для исклю--
336
чения ВДЗК все измерения, включаемые в уравнительные вычисле
нмя, должны относиться К одной эпохе. Очевидно, что это условие
невыполнимо, поскольку обширные нивелирные сети, покрывающие
территории целых континентов, создают в течение длительноrо Bpe
мени. Поэтому нужно специально исслеJl.овать ВДЗК по данным Ha
блюдений на уровнемерных станциях и повторным нивелировкам.
Это позволяет, совместно с привлечением rеофизической информа
ции, построить достоверную модель движений земной коры в том
или ином реrионе и редуцировать на основании этой модели к выб
ранному моменту времени результаты измерений.
Для иллюстрации методов уравнивания нивелирных сетей при
ведем некоторые сведения по уравниванию Объединенной EBpO
пейской нивелирной сети UELN. Основу этой сети составляет сеть
UELN 73, уравненная в 1981 r. и включающая нивелирные сети
14 европейских стран. Сеть содержит 768 пунктов и 76 ypOBHe
мерных станций. Общая протяженность нивелирных линий 90 522 км.
Сеть уравнена как свободная с опорой на исходный пункт, свя
занный с Амстердамским футштоком. Данные океаноrрафическо
ro нивелирования не использованы. В уравнивание 1981 r. не вклю
чены нивелирные сети Скандинавских стран (Норвеrия, Швеция,
Финляндия), rде наблюдается заметный подъем земной корь!.
Нивелирные сети остальных 11 стран уравнены параметрическим
способом. Априорные веса измеренных разностей rеопотенциаль
ных чисел вычислены по формуле
200
p:::: ,
( L
(10.23)
r де ( ошибка на 1 км хода, найденная из анализа национальных
нивелирных сетей. Значения (2 приведены в таблице 10.5.
Таблица 10.5
Точность измерений в Объединенной Европейской нивелирной сети
Страна (2, мм2/км Страна (2, мм2/км
Австрия 2,74 Великобритания 1,41
Бельrия 3,64 И талия 1,17
Ш вейца рия 0,65 Нидерланды 0,32
фрr 1,16 Портуrалия 3,83
Дания 0,72 Швеция 2,74
Испания 3,23 Финляндия 0,41
Франция 4,00
337
В результате уравнивания получены rеопотенциальные числа
471 реперов с их стандартными ошибками, которые возрастают
по мере удаления от исходноrо пункта от 0,004 кrал. м в Нидер
ландах до 0,047 кrал. м в Портуrалии. Статистический анализ
поправок в измеренные приращения rеопотенциальных чисел
позволил выявить ненадежные измерения и установить, что поправки
Vij не подчиняются нормальному распределению.
Сравнение приведенных выше данных свидетельствует о COOT
ветствии точности нивелирования 1 класса СССР и западноевро
пейских стран.
В последующем сеть UELN неоднократно переуравнивалась с
включением нивелирных сетей стран Скандинавскоrо полуостро
ва и Восточной Европы. Использованы также данные oKeaHorpa
фическоrо нивелирования и GPS. Объединенная Европейская ни
велирная сеть по состоянию на 2000 [. показана на рис. 10.7.
Рис. 10.7. Схема Объединенной Европейской нивелирной сети
... Пункты EUREF . Узловые пункты
L\. Постоянно действующие пункты GPS Линии нивелирования
. Приливные станции
338
В результате уравнивания создана Европейская система BЫ
сот European Vertical Reference System (EVRS) в реализации
EVRF 2000, относящаяся к Амстердамскому футштоку. Для пере
хода от европейской (амстердамской) системы вЫсот к кронштад
тской рекомендуется соотношение
h А.истердам h Кронштадт = О, 15 м.
Европейская система вертикальных данных содержит ypaBHeH
ные rеопотенциальные числа. Для перехода к высотам в различ
ных странах используют различные системы высот. Нормальные
высоты приняты во Франции, rермании, Швеции, странах Boc
точной Европы, входивших в состав СССР. Ортометрические
высоты по rельмерту используют Бельrия, Великобритания, Дa
ния, Испания и Портуrалия, Италия, Нидерланды, Турция, Фин
ляндия, Швейцария. Нормально ортометрические высоты BBeдe
ны в Австрии, Норвеrии, Юrославии.
rпasa 11
ВЛИЯНИЕ Н ЕОДНОРОДНОСТИ ПОЛЯ
СИЛЫ ТЯЖЕСТИ НА РЕЗУЛЬТАТЫ
ИНЖЕНЕРно..rЕОДЕЗИЧЕСКИХ ИЗМЕРЕНИЙ
rеодезические измерения, проводимые для обеспечения строи
тельства и эксплуатации различных сооружений, обычно считают
выполненными в однородном поле плоской Земли. Это предполо
жение означает, что сила тяжести в районе работ постоянна по
величине и направлению, силовые линии параллельные прямые,
а уровенные поверхности перпендикулярные к ним плоскости
(рис. 11.1). Иными словами, предполаrается, что измерения BЫ
полнены в прямоуrольной системе координат, а одной из KOOp
динатных линий является направление отвеса. Обработка наблю
дений в такой системе координат не требует предварительных
редукций и не вызывает затруднений.
Qo
w= }
Р()
gp
Рис. 11.1. Однородное поле: gp = gq; PQo = PoQ; РРО = QoQ
Но поле силы тяжести Земли не однородно (рис. 11.2). В rлаве 1
отмечено, что силовые линии это пространственные кривые,
касательные к ним отвесные линии не параллельны (см. рис. 1.2);
уровенные поверхности имеют сложную форму, кривизна их не
340
постоянна и расстояние между уровенными поверхностями меня
ется в зависимости от величины силы тяжести. Обработка изме
рений, выполненных в этой (натуральной) системе координат,
представляет определенные сложности и требует предварительно
ro изучения поля силы тяжести.
Q
gq
Qo
Рис. 11.2. Неоднородное поле: gp #- gq; PQo #- PoQ; РРО #- QoQ
в предыдущих rлавах изложены методы обработки результа
тон rеодезических измерений, выполненных в натуральной систе
ме координат на всей поверхности Земли или ее значительной
части. Инженерно rеодезические сети имеют ряд особенностей по
сравнению с астрономо rеодезической сетью:
занимают небольшую территорию;
MorYT не иметь связи с астрономо rеодезической сетью;
имеют высокую точность определения взаимноrо положе
ния пунктов;
имеют значительные уrлы наклона и одинаковую точность
измерения rоризонтальных и вертикальных уrлов;
выполняются как на поверхности Земли, так и под землей
(в тоннелях, скважинах, подводных сооружениях);
341
располаrаются в зоне значительных колебаний уклонения
отвеса TexHoreHHoro происхождения, вызванных притяжением
массивных сооружений и водных масс водохранилищ:
MorYT располаrаться в предrорной и rорной местности со
сложным rравитационным полем, rде возможны значительные
разности уклонений отвеса на небольших расстояниях.
Эти особенности обуславливают специфику вычислений в ин
женерно rеодезических сетях. Конечно, можно и в этом случае
использовать традиционную методику редуцирования на поверх
ность референц эллипсоида, описанную в rлаве 6. Однако целесо
образнее выбрать локальную отсчетную поверхность сферу или
плоскость, достаточно близкую к уровенной поверхности в пре
делах rеодезической сети. Это позволит уменьшить редукционные
поправки и вычислять их по более простым формулам.
70. НЕОБХОДИМОСТЬ УЧЕТА rЕОМЕТРИИ ПОЛЯ
СИЛЫ ТЯЖЕСТИ В СПЕЦИАЛЬНЫХ
rЕОДЕЗИЧЕСКИХ РАБОТАХ
в современной rеодезии существует специфическая область
применения rеодезических измерений обеспечение монтажа, юс
тировки, метролоrических исследований и эксплуатации сложных
уникальных сооружений и их оборудования. К таким сооружени
ям относятся синхрофазотроны и линейные ускорители, радио и
оптические телескопы, радиоинтерферометрические комплексы,
плотины крупных rидроэлектростанций и Т.П. rеодезические pa
боты, выполняемые на таких объектах, требуют нетрадицИОННЫХ
при боров и методов измерений и их обработки; они получили
название специальных zеодезических работ (стР). Как правило,
crp выполняют с высокой точностью; так, уrлы измеряют с точ
ностью 10 (0,2 0,4"), линии 10 , взаимное положение пунктов
определяют с точностью до 0,1 мм на расстоянии до 100 м, Т.е.
также с точностью 10 . В этом случае становится обязательным
учет неоднородности поля силы тяжести.
Инженерно rеодезические работы всеrда проводят на сравни
тельно малой территории, поэтому можно предполаrать, что в
этом случае при определенных условиях допустимо использовать
концепцию плоской Земли. Рассмотрим эти условия.
На рис. 11.1 11.3 Р и Q две точки инженерно rеодезической
сети. Проведем через точку Р уровенную поверхность W = W p
потенциала силы тяжести, р средНИЙ радиус кривизны этой по
342
верхности в точке Р. rоризонтальная плоскость, проходящая че
рез точку Р, перпендикулярна вектору gp (отвесной линии); в од.
нородном поле эта плоскость была бы уровенной ПОВерхностью.
Введем прямоуrольную топоцентрическую систему координат
с началом в точке Р (см. рис. 11.3). Ось z направим по отвесной
линии вверх, противоположно направлению силы тяжести, ось х
на север, ось у на восток (на чертеже ось у не показана). Положе
ние точки Q в этой системе определ ено коо рдинатами х, у, z или ro
ризонтальным расстоянием PQl = x2 + у2, азимутом А = arctg у/х
и превышением z; Ql проекция точки Q на rоризонтальную плос
кость по нормали к последней.
W::::W
р
Рис. 11.3. К влиянию неоднородности поля силы тяжести
на результаты измерений
в реальном поле направления силы тяжести в точках Р и Q в
общем случае не совпадают и отвесная линия QQo не совпадает с
нормалью QQl (Qo проекция точки Q на уровенную поверх
ность W = W p по отвесной линии gq)' Уrол tfI между направле
ниями силы тяжести в точках Р и Q можно рассматривать как
уклонение отвеса. Положение точки Q относительно Р в реаль
343
ном поле определяется расстоянием QoP = So между проекциями
точек на уровенную поверхность W = W p , азимутом а и превы
шением QQo = hlf' Точно также положение точки Р относительно Q
можно определить расстоянием QPo= SI между точкой Q и проек
цией Роточки Р на уровенную поверхность точки Q и превыше
нием РР о = hp. Уровенные поверхности, проходящие через точки
Р и Q, не параллельны, расстояние между ними для точек Р и Q не
одинаково, поэтому превышения hp и 11ц не равны между собой.
Кривизна уровенной поверхности не постоянна, поэтому pac
стояния S1 и So между проекциями точек на уровенные поверх
ности W = W p и W = W q различны. Таким образом, расстояние
между точками Р и Q характеризуется длинами отрезков PQ = S и
QP 1 = Q I Р И длинами лежащих на уровенных поверхностях линий
So и SI' Длина отрезка PQ как расстояние между точками в про
странстве инварианта к системам координат и сохраняется неиз
менной в реальном (неоднородном) и в однородном поле.
Различие расстояний между точками в однородном и в Heo
днородном поле обусловлено кривизной (1.11) силовой линии и
кривизной (1.9) уровенной поверхности. Обе- эти величины связа
ны со вторыми производными потенциала силы тяжести. При
перемещении вдоль силовой линии на расстояние h направление
отвесной линии изменится на уrол Д \jI
h G
Д\jI = = h,
Р g
rде р радиус кривизны силовой линии; G модуль rоризонталь
Horo rрадиента силы тяжести (см. рис. 1.3 и формулу 1.11).
В линейной мере смещение конечной точки отрезка h силовой
линии от отвесной линии составит
hД\jI = G h 2 .
g
При перемещении вдоль уровенной поверхности на расстоя
ние S отклонение от плоскости, касательной к уровенной поверх
ности в начальной точке,
')
S 1 2
bl1 = = (W xx + WVY)S .
2р 4g .
в обоих случаях смещение определяется вторыми производ
ными потенциала.
344
Оценим возможную величину отличия расстояний, превы
шений и уrлов в реальном и в однородном поле. Реальное поле
обычно разделяют на нормальное и аномальное. В простейшем
случае в качестве нормальноrо используют центральное поле
сферической Земли. Тоrда уровенные поверхности W = W p
и w= W Cj будут концентрическими сферами, расстояние h между
которыми в точках Р и Q одинаково, а расстояния S] и So про
порциональны радиусам р + h и р соответствующих окружностей
(см. рис. 11.2)
s( p+h s] so h
:= := .
So Р So Р
Проведем из точки Q линию QP], перпендикулярную РР О' Pac
стояние p(Q = (р + h) sinV'A практически совпадает с дуrой s]=
= (р + h)V'A
. р + hp 3 sf
s) Q := (р + h р )Ч' А (р + h р ) Slll V' А := 6 V' А := 2 S ( ,
6( Р + h р )
откуда
S( Q sf
:=
S) 6( Р + h р ) 2 .
При s] = 1 км это отношение составит 4 . 10 9, что не ощутимо
при нынешней точности линейных измерений в rеодезии. Поэто
МУ можно считать, что Р] Q = S] и
s
Q So := s) So := h p .....2.....
Р
(11.1)
Относительная разность длин линий в однородном и HeOДHO
родном поле составит
PlQ so S] so hp
So
So
р
(11.2)
что при hp =10 м дает 1,6 . 10 6. Следовательно, при значительных
превышениях нужно учитывать отличие расстояний между проек
циями точек Р и Q на уровенных поверхностях этих точек.
345
Рассмотрим разность превышений в однородном и централь
ном поле. Соrласно рис. 11.4
(р + h)costJf А = Р + z.
РО
51
h = Iz
р
р
w=w
ч
р
Рис. 11.4. rеодезические измерения в центральном поле
Разложим cos V'A в ряд, оrраничиваясь членами порядка 'Ц' ,
и учтем, что Sl = (р + h)VIA,' тоrда
S2
h=z+ !
2(р + h)
(11.3)
При S! = 1 км h z = 78 мм. Эта разность является поправкой
в превышение за кривизну Земли.
В оценках (11.1) (11.3) кривизна нормальной уровенной по
верхности считалась постоянной, Т.е. уровенные поверхности
отождествлялись со сферами. В действительности уровенные По
Верхности не параллельны, а их кривизна в разных точках одной
и той же уровенной поверхности различна и определяется BTOpЫ
ми производными потенциала силы тяжести. Непараллельность
346
нормальных уровенных поверхностей и ее влияние на высоту оп
ределена формулой (7.26)
р q
нУ HY = Уо Yo ну
q р '
У т
rде У:, У% нормальная сила тяжести на эллипсоиде на одной
широте с точками Р и Q соответственно; Н;р средняя высота.
Для близких точек можно написать
q р дуо А В Р {3 . 2В А В
У о У о + ti Уо + У е SШ ti,
дВ
поэтому
У: У%
У m
р q
= У О Yo = f3sin2BЫJ,
Уе
rде Уе' f3 коэффициенты нормальной формулы; ДЕ разность
широт точек Р и Q; У т значение нормальной силы тяжести, BЫ
численное по средней широте точек Р и Q и высоте Hb. Заме
няя разность широт расстоянием, после несложных преобразова
ний получим
'НУ H( ! l НУ S sin 2В::= 0,83. 1 0 6 нУ S КМ sin 2В.
р
(11.4)
При S = 1 км И Н g = 200 м
\H н%\ 0,2 мм'
rоризонтальные направления в однородном и в центральном
поле одинаковы, поскольку нормали к уровенным поверхностям
лежат в одной плоскости. Однако в эллипсоидальном нормаль
ном поле эти нормали будут скрещивающимися прямыми и ro
ризонтальные направления не совпадут.
Разность lоризонтальных направлений можно оценить по фор
муле (6.7) поправки за высоту наблюдаемоrо предмета, используя
в этой формуле превышение h вместо rеодезической высоты Н и
заменяя радиус М кривизны меридиана средним радиусом кри
визны р уровенной поверхности
he 2
82 = sin2Acos2 В.
2р
347
Поправка в rоризонтальное направление, так же, как и OTHO
сительное искажение длин (см. формулу (11.2)), пропорциональна
отношению h/p. Но так как i ::::: 1/150, даже при sin2A и cosB paB
ных единице
h
82 $; 10 2.
Р
(11.5)
При h = 1 О м 02 = 0,002". Это влияние пренебреrаемо и при
измерении rоризонтальных направлений нормальное поле можно
считать однородным.
Таким образом, соrласно формулам (11.1) (11.5) нормальное
rравитационное поле можно считать однородным, если точность
линейных и уrловых измерений не выше 1 0 5. Непараллельность
нормальных уровенных поверхностей нужно учитывать только при
высокоточных нивелировках, значительных высотах над уровнем
моря и больших уrлах наклона измеряемых линий.
Оценим влияния неоднородности ано.малЬНО20 поля. П peДCTaB
ляя аномальный потенциал Т в виде Т = )(, rде ( аномалия BЫ
соты, а реальный потенциал силы тяжести потенциалом притяже
ния W = GM/R :::: ур, получим отношение аномальноrо потенциа
ла к потенциалу силы тяжести
т
W
(
=
р
(11.6)
Аномалии высоты на Земле не превышают 150 м, р == 6,4 .1 об м,
поэтому
т $;2,4.10 5.
W
Эту оценку можно считать верхним пределом влияния ано-
мальноrо поля.
Найдем разность уклонений отвеса в точках Р и Q, Т.е. yro.l
между направлениями силы тяжести в этих точках. Уклонения
отвеса связаны с производными аномальноrо потенциала; так, д.1Я
составляющей g уклонения оТвеса в плоскости меридиана можно
написа ть
g g = J.. r( дТ ) ( дT ) 1 .
р q r дх дх
q р
348
Представим производную в точке Q рядом Тейлора
( : ), =( : 1 + (Тп)рХ+ (Тх))ру +(Тх,)р' +...,
rде Т,х,т\у,т.с вторые производные по координатам х, у.
т or да
1
p ц = [(T\"Jpx+(T"(y)pY+(Tc)pz].
у
(11.7)
Аналоrичное равенство можно написать для составляющей
уклонения отвеса в плоскости первоrо вертикала.
Таким образом, разность уклонений отвеса определяется BTO
рыми производными аномальноrо потенциала.
Кривизна уровенной поверхности также определена BTOpЫ
р
ми производными потенциала (см. формулу (1.9»)
1 1
Р = 2g (W\".\" + W yy )'
Выделяя нормальную часть, найдем аномалию кривизны
д( )= 2 (Т" + Т))').
На поверхности Земли аномалии кривизны обычно не превы
тают нескольких десятков этвеш (Э), аномалия Tzz вертикальноrо
rрадиента силы тяжести может достиrать 1000 1500 Э. Но на cтpo
ительной площадке вблизи массивных сооружений аномалии кри
визны также MorYT быть значительны, так как вторые производ-
ные чувствительны к близко расположенным массам. Принимая
ДЛЯ производных Trx' Т(у значение 100 Э, дЛЯ Тх: 1000 Э и считая
х = у = 100 м, превышение z = 10 м, для разности уклонений OTBe
са получим
p q = 3 . 10 = 0,6".
Разность аномалий высот в точках Р и Q можно оценить с
помощью формулы (8.34) астрономическоrо нивелирования, oc
тавляя только rлавный по величине первый член этой формулы,
q 'Р = (дp + tJq)s /2.
349
(I 1.8)
Для gp gq = 3 . 1 O и s =' 100 м I;q I;р = 0,3 мм.
Выполненные оценки свидетельствуют, что при точности из
мерений выше 1 О 5 1 О б поле силы тяжести нельзя считать OДHO
родным и нужно учитывать изменения направления отвеса и кри
визны уровенных поверхностей на результаты измерений.
71. ОСОБЕННОСТИ РЕДУКЦИОННЫХ
ВЫЧИСЛЕНИЙ В СПЕЦИАЛЬНЫХ rЕОДЕЗИЧЕСКИХ
РАБОТАХ
Оценим возможные поправки в результаты измерений, выз
ванные влиянием неоднородности rравитационноrо поля. Выбе-
рем в качестве поверхности относимос.ти плоскость, проходящую
перпендикулярно отвесной линии в какой либо точке сети. Поло
жение исходноrо пункта сети на Земле определяется eCTeCTBeHHЫ
ми координатами ФО' А и , Н% или прямоуrольными rеоцентричес
кими ХО' Уо' Zo. Определим при ращения х хо' у Уо' z 20
координат произвольноrо пункта Р сети относительно исходноrо
О в местной системе координат Oxyz.
Уклонениями отвеса в местной системе координат будут уrлы
между отвесной линией и нормалью к отсчетной плоскости. На-
правление отвесной линии определено астрономическими KOOp
динатами, поэтому в исходном пункте сети, rде отвесная линия
совпадает с нормалью к отсчетной плоскости, составляющие o'
170 уклонения отвеса равны нулю
o = О, 170 = О,
(11.9)
а во всех остальных пунктах сети они равны разностям aCTpOHO
мических координат относительно исходноrо пункта
= qJ ФО' 17 = (А Ao)cosqJ.
(11.10)
Приращения плановых координат находят по известным фор
мулам
х хо = socosA, у уа = sosin А.
(11.11)
Расстояние So определяется соrласно выражению (11.1), а reo
дезический азимут А соrласно (6.12)
А ==а (А Ao)sinqJ.
350
(11.12)
Подставив равенства (11.1) и (11.12) в формулы (11.11), най
дем связь приращений прямоуrольных координат с измеряемыми
величинами
Х Ха s{ 1 + }osra (А Aa)sin '1'],
у Уа s{ 1 + }inra (А Aa)sin '1'],
rде р средний радиус кривизны уровенной поверхности в райо
не съемки, который можно найти по формуле
(11.13)
p=- .JМN +Н т ,
(11.14)
rде М и N радиусы кривизны меридиана и первоrо вертикала,
вычисленные по средней широте; Н т средняя высота.
Превышения Z Zo найдем методом астрономическоrо нивели
рования rеодезической высоты, используя формулы (8.8), (8.9).
Применим этот метод для определения превышения dz между ДBY
мя близкими точками Р! и Р 2 сети. Соrласно рис. 11.5 запишем
dz = ds sin( а д) = ds sina cos д ds cosa sin д,
rде [) среднее значение составляющей уклонения отвеса в азиму
те линии Р I Р 2; а уrол наклона физической поверхности Земли;
ds длина линии.
Р.,
..
оmсчеmная плоскосmь
g
Рис. 11.5. К определению превышения над отсчетной плоскостью
Соrласно рис. 11.5 ds sina = dh, ds cosa = ds 1 , поэтому
732 tЭ3
dz = dh cos д ds, sin д =- dh iJds, dh + ds ,.
2 6
351
Оценим величину двух последних членов в этом выражении
Уклонения отвеса в местной системе, Т.е. разности астрономичес
ких широт и долrот, при расстоянии от исходноrо пункта сети.
paBHoro 1 О км, составят около 300" или 1,5 . 1 o 3 радиана. Инжс
нерно rеодезические сети редко покрывают такие территории, по
этому можно считать, что
f) < 1,5 . 10 3 рад.
Превышение dh, измеренное на одном штативе, не превышает
3 м, а расстояние между рейками, Т.е. между точками Р} и P
(см. рис. 11.5) 100 м, поэтому
д2 dh s 3.10 3
2
3
f) d < 10 4'
мм, s мм,
6
и можно считать, что dz = dh iJds}.
Суммируя превышения dz от исходной точки О сети до лю
бой точки Р, находим превышение этой точки над отсчетной плос
костью
р
z zo = L(dh iJds}),
(11.15)
rде
о
д = (ср СРо) cosA + (А Ao)coscp sinA.
(11.16)
Формулы (11.12) и (11.15) решают задачу определения KOOp
динат в местной системе по измерениям на физической поверхно
сти Земли. Однако для их применения нужно во всех точках сети
иметь астрономические координаты. Точность измерения aCTpo
номических координат составляет 0,34),5". Этоrо достаточно для
вычисления уклонения отвеса по формулам (11.1 О). Однако опре-
деление астрономических координат требует значительных затрат
времени. Поэтому целесообразнее определять астрономические
координаты только в исходном пункте сети, а во всех остальных
находить их с помощью равенств (2.32)
ср = в + T; А = L + rtrseccp,
rде rеодезические координаты В, L и астрономо rеодезические YK
лонения отвеса r, 17 Ar относятся к одному и тому же референц
эллипсоиду. Используя такое представление астрономических KO
352
ординат, уклонения отвеса в местной системе можно найти по
формулам
;=B Bo+;AT ;:T,
(11.1 7)
L L ) АТ А r
17=( () COSq>+17 170'
Разности; АТ ;( [', 17 АТ 17:T можно найти по rравиметри
ческой съемке.
Заметим, что инженерно rеодезические измерения можно об
рабатывать как пространственную сеть описанными в rлаве 6
методами. В этом случае также сохраняются требования опреде
ления уклонения отвесных линий во всех пунктах сети для приве
дения топоцентрических координат измерительных точек в еди
ную систему.
72. РЕДУЦИРОВАНИЕ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ
В МЕСТНУЮ пРямоУrольнУю СИСТЕМУ
КООРДИНАТ
Поправка в 20рuзонтальное направленuе. Поправка д.и в rори
зонтальное направление для редуцирования к поверхности эллип
соида получена в rлаве 6 (см. формулы (6.1), (6.8), (6.9». в инже
нерно rеодезических сетях при редуцировании на плоскость HOp
мали к отсчетной поверхности во всех точках параллельны и
поправки и 8з равны нулю, поэтому
д.и = 81 = дA + 90 ctgZ,
[де дА + 90 составляющая уклонения отвеса в азимуте, перпенди
кулярном измеренному направлению. Используя формулу (6.2)
составляющей уклонения отвеса в произвольном азимуте и фор
мулы (11.17), получим
дА + 90= ;siпA + 17cosA = (В Bo)sinA + (L Lo)cosB cosA
(; ;о)А] sinA + (17 17o)ArcosA.
Для небольших расстояний разности широт и долrот можно
находить приближенно
р (В Во) = s cosA, p(L Lo)cosB = s sinA,
353
(11.18)
тоrда содержащие эти разности члены исключаются из последнеrо
равенства и поправка в rоризонтальное направление принимает вид
дU = [ ( o)AT sinA + (1] 17o)ArcosA] ctgZ.
(11.19)
Поправка в астрономический азимут. Эту поправку нужно учи
тывать при переходе от астрономическоrо азимута, измеренноrо
rиротеодолитом или астрономическими при борами к азимуту в
локальной системе координат. Используя формулу (6.11) и считая
в ней поправки 81 и равными нулю, получим
да = А а = 81 17 tgB = ДU 17 tgB.
Введем сюда выражения для поправки Д И и составляющей
уклонения отвеса 17 в местной системе координат. Тоrда для по
правки да в астрономический азимут получаем
да = [ ( o)AT sinA + (17 17o)ArcosA] ctgZ [(L Lo)cosB +
+( 17 17о)Аl] tgB. (11.20)
Перепое азимута в шахту рассмотрен в моноrрафии [5]. Пусть
нужно перенести азимут А линии PQ, приведенный поправкой
(11.20) в локальную прямоуrольную систему координат, в шахту
на rлубину 2 20' Для этоrо нужно спроектировать точки Р и Q
вниз по координатным линиям РР О И QQ О (рис. 11.6). Практичес
ки проектирование выполняют с помощью оптическоrо центрира
или нитяноrо отвеса. Вследствие отличия направления силы тя
Q
Z ",:
"a
gq
р
.\...
Z 20
" ,
. . "
Рис. 11.6. Перенос азимута в шахту
354
жести от координатных линий локальной системы в таком случае
проекции Р', Q' не совпадут с точками РаИ Qa' Кроме Toro, из за
кривизны силовой линии проекции с помощью отвеса и оптичес
Koro центр ира не совпадут между собой. Поясним это с помощью
рис. 11.7. Здесь Р] проекция точки Р на отсчетную плоскость
Р аР' по силовой линии поля силы тяжести; оптический центрир
ориентирует инструмент по направлению g] силы тяжести в изме
рительной точке Р (по отвесной линии), в этом случае точка Р
будет спроектирована в точку Р'; нитяной отвес РР.... расположит
ся по направлению силы тяжести в точке, rде находится rpуз это
ro отвеса; это направление практически совпадает с направлени
ем отвесной линии в точке Р ,.
р
."
Р"
,"
РО
.. ... Ыр ..............:.......
..... . - . .' . . ..' . . -' .
....'. ...... _.. . . . . .
.' . .' ..,
. .,-'-
.. .....
Рис. 11.7. Влияние кривизны силовой линии
на положение проекции точки
Вернемся к рис. 11.6. Здесь Р aQa проекция линии PQ по HOp
малям к отсчетной плоскости, поэтому азимут А этих линий оди
наков. При проектировании по отвесным линиям прямая Р' Q'
будет иметь азимут А + М, отличный от исходноrо азимута на
поверхности Земли. Найдем поправку в азимут. Проведем плос
кости через нормали РР а И QQo, перпендикулярные линии Р oQo;
они пересекут линию Р" Q' в точках р и q соответственно. PaCCTO
яния Р аР и Qoq можно определить через составляющие уклонения
отвеса в азимуте А + 900:
Р аР = (дА + 90)/Z Zo), Qoq = (дА + 90)q (z Zo)'
355
Если rлубина Z Zo шахты в точках Р и Q одинакова, поправ
ку в азимут можно найти из соотношения
м = Pop ooq .
pq
Подставив сюда значения Qaq И р аР и выражение для COCTaB
ляющей уклонения отвеса, получим
А А [( ): J: Ar . А ( ) Ar A] z zo
= p () slП f1h f1o cos .
So
(11.21 )
в фО,Емуле (11.21) нужно использовать разности ( p ;о)АТ и
(17 р 170) r уклонений отвеса в точках Q и р поверхности Земли,
если использованы оптические центриры, и в точках Q' и р' шах
ты, если использованы отвесы.
Поправка в зенитное расстояние соrласно (6.14) равна COCTaB
ляющей 'д уклонения отвеса в азимуте измеряемоrо направления
=1Э = ;cosA + 1]sinA.
Учитывая формулы (11.17) составляющих уклонения отвеса в
локальной системе, для поправки t1Z в зенитное расстояние по
лучим
t1Z=( Ar :r)cosA+(17Ar 1]:r)sinA+
+ (В Bo)cosA + (L Lo)cosBcosA.
Если использовать равенство (11.19) и учесть что s /р = 'IJI, то
t1Z = ( Ar ;:r) cos А + (1] Ar f1: r ) sin А + 'IJI.
(11.22)
Створные наблюдения. Оценим влияние наклона вертикальной
оси инструмента на определение нестворности. Назовем створом
плоскость, проходящую через отвесную линию 00 в точке О и точ
КУ р (рис. 11.8). Из за непараллельности отвесных линий в точках
О и р плоскость, проходящая через отвесную линию рр в точке Р и
точку О не совпадет со створом и пересечется с ним по линии ор.
При наблюдении с точки Р все точки створа, не лежащие на этой
линии, будут казаться не лежащими в створе с точкой О. HecтBOp
356
ностью 8 = МоМ является расстояние от точки М створа до точки
Мо проекции точки М на плоскость РрО. Соrласно рис. 11.8
8 = VJh,
(11.23)
rде VI составляющая уrла между отвесными линиями в точках О
и Р в перпендикулярной к створу плоскости; h расстояние точки
М ДО линии ОР. Если VI = 1", h = 10 м 8 = 0,05 мм и влияние
непараллельности уровенных поверхностей можно считать пре
небреrаемым.
р
Рис. 11.8. К ВЫВОДУ поправки в створные наблюдения
Редуцирование линейных измерений можно выполнять по фор
мулам (11.1) или (11.11), если измерено расстояние от исходноrо
пункта сети. Кроме Toro, эти формулы получены в предположе
нии постоянства кривизны уровенной поверхности. Получим фор
мулу для редуцирования расстояния между любыми пунктами Р \
И Р 2 сети, причем примем во внимание, что в инженерно rеодези
ческих сетях обычно измеряют малые расстояния порядка несколь
ких десятков метров. Соrласно рис. 11.5
ds o == dscos(a д) == dsсоsасоsд АТ + dssinasin дАТ == ds] + дАТ dh,
rде 1.'t T среднее значение составляющей уклонения отвеса на OT
резке ds в азимуте этоrо отрезка
4(1 1 АТ 1 А .
И=="2(д\ +д 2 ) == 2 [(СР2 cp])cosA+('11 l)соsсрsшА]==
1 t t АТ АТ .
=="2[("'2 "'l) соsА+(lЪ 171) sшА]+VI,
357
индекс «1» означает принадлежность соответствующей величи-
ны точке Р 1, индекс «2» точке Р 2; уrол 'V между нормалями к
эллипсоиду можно вычислить по формуле (2.39) или приближен
но как s/p.
Если дальномером измерено расстояние между двумя точками
в пространстве, то редуцирование к отсчетной плоскости выпол
няются по формуле
so = P2 sin(Z + д),
рис. 11.4. Здесь Z зенитное расстояние отрезка P 1 P 2 , измеряемое
от отвесной линии; д составляющая уклонения отвеса в ero
азимуте.
Таким образом, при редуцировании результатов и линейных,
и уrловых измерений во всех измерительных точках нужно знать
разности астрономо rеодезических уклонений отвеса и превы-
шения.
73. ВЫСОТЫ В ЛОКАЛЬНОЙ СИСТЕМЕ
КООРДИНАТ
Как известно, rеодезической высотой называют высоту над
референц-эллипсоидом. В локальной системе координат роль reo
дезической высоты иrрает разность Z Zo' Т.е. высота над отсчет
ной плоскостью. Эта высота нужна для редуцирования результа
тов измерений в прямоуrольную систему координат и удобна для
определения пространственноrо положения точек инженерно rео-
дезической сети. Установим связь местных высот Z Zo с rеодези-
ческими высотами.
Рассмотрим рис. 11.9: Р исходный пункт сети, Q определя-
емый, РС и QC 1 нормали к эллипсоиду, Ир и И q rеодезические
высоты точек Р и Q, И rш rеодезическая высота точки Ql' лежа
щей на отсчетной плоскости. Отсчетная плоскость ориентирова-
на перпендикулярно отвесной линии в точке Р; в этой точке уrол
наклона отсчетной плоскости в азимуте линии PQ равен состав-
ляющей до астрономо rеодезическоrо уклонения отвеса. Высота
Z Zo точки Q равна проекции разности h = И q И rш rеодезичес-
ких высот точек Q и Q 1 на направление нормали к плоскости
Z Zo= (H q Нrш)соs(V' до),
rде уrол 'V определен равенством (2.39).
358
Q
о
н
п'!
z
g
с
(N + Н )sinB
ч п1
в !
С] ",':::.:: _:::/-м..........-.ш....j.ш.-.....::..,:/ q 2
" : ".//
"""';/Q]
Рис. 11.9. Высоты над референц эллипсоидоМ и плоскостью;
о центр эллипсоида
Найдем rеодезическую высоту Н пл точки Q!. Спроектируем ло
маную PQ!C1C на направление замыкающей РС. Предварительно
отрезок Q!C] заменим ломаной Q!Q!Q2C!, звенья которой явля
ются проекциями этоrо отрезка на оси пространственной прямо
уrольной системы координат XYZ, ось Z которой совмещена с
малой осью эллипсоида, а ось Х расположена в плоскости мери
диана точки Р. Имеем
РС == PQI sinf)() + Q1C! [sinBsinB p +cosBcosB p cos(L Lp )] CCl sinB p '
359
Учитывая, что РС = N p + Нр, Q,C, = N q + Н ш !' СС, = e 2 (N q sinВ
NpsinBp) = .1 и выполняя некоторые преобразования, получим
Нrш=Н р + PQj siпд о + 2(N q + Н IIЛ ) sin 2 1Jf/2 + (N p N q + .1sinB p )'
Поэтому высота точки Р над отсчетной плоскостью
z '7 = [ Н Н P Q , sin д 2 ( N + Н ) sin 2 111/"2
o q р о q rш r
(N p N q + .1sinB p )] cos(1Jf д(}
В этом равенстве поправочные члены 2( N q + Н пл) sin 21Jf/2 и
N p N q + .1sinB o можно вычислять по приближенным значениям
плановых координат, а разность Нч Нр rеодезических высот Ha
ходить любым из методов, описанных в rлаве 7. Если предста
вить rеодезическую высоту в виде выражения (7.17), то
Нч Hp =Н; H; +,ч 'p'
(11.24)
причем разность Н; н; нормальных высот определяется из [eo
метрическоrо нивелирования соrласно (7.36), а разность !;ц !;р
аномалий высоты методом астрономо rравиметрическоrо ниве
лирования соrласно формуле (8.44). В результате для высоты над
плоскостью получим
2 20= [J{lq J{lp + (!;ц !;р PQj siпд о ) + 2(N q + Н п1 ) sin 2 1Jf/2 +
+ (N p N q + .1sinB p )] cos( lJf до).
(11.25)
Выражение !;ц !;р PQl siпд о представляет собой разность
аномалий высоты, полученных по разностям ( o)AT, (17 17)АТ
астрономо rеодезических уклонений отвеса, исправленных поправ
кой PQ, siпд о за переход от уклонения отвеса относительно HOp
мали к эллипсоиду к уклонениям отвеса относительно нормали к
отсчетной плоскости в начальном пункте сети.
Локальные rеодезические высоты Z Zo имеют четкий reoMeT
рический смысл как расстояние точек инженерно- rеодезической сети
от отсчетной плоскости. Однако они не связаны с rравитацион
ным полем и не приrодны для решения энерrетических за
дач, связанных с работой в поле силы тяжести. Например, ypo
вень воды в любом водоеме будет совпадать с уровенной поверх
ностью W = с потенциала силы тяжести, а не с поверхностью
Z Zo = С ! равных высот. Поэтому высоты Z Zo нельзя использо
вать для определения площади водохранилища, участков подъема
360
и спуска при проектировании различных трасс и продуктопрово
дов, при передаче высот методом rидростатическоrо и баромет
рическоrо нивелирования. В этих случаях нужно использовать
динамические высоты. В локальной сети неудобно использовать
общие ДI1Я всей Земли динамические высоты (7.48), поскольку раз
ности этих высот MorYT сильно отличаться от измеренных превы
шений из за отличия силы тяжести в районе работ от нормаль
ной силы тяжести 'К)45 на эллипсоиде.
Рассмотрим систему местных динамических высот. Разность по
тенциалов двух точек определяется по измерениям сIШЫ тяжести g и
расстояния dh между уровенными поверхностями (превышений)
W\ W 2 = J gdh.
Введем среднее значение gm силы тяжести на площади съемки,
тоrда
W\ W 2 = g т J dh + J (g g т) dh.
Отсюда получаем формулу для определения разности динами
ческих высот
Н! Hld = W, W2 = Jdh+ J g gт dh.
gm 1,2 1,2 gm
Если использовать среднее по ходу значение (g gm)(P разно
сти g g т' то
Н! H]d = .i ыz + (g g т) ер .i Ыz.
1 gm 1
Если участок работ невелик, rравитационное поле спокойно и
колебания высот малы, можно не учитывать последний член этой
формулы и разность динамических высот считать равной сумме
превышений
2
Hf Hf == L Ыz ,
1
что соответствует определению высоты в однородном поле. Пере
ход к разности нормальных высот можно выполнить по формуле
1 2 2
НУ HY =H d Hd + Yo Yo Н + g y М
2 1 2 1 ер '
Уm Уm]
rде Нср средняя высота.
361
Разность нормальных высот в методе rидростатическоrо ни
велирования можно получить по формуле (10.3) водноrо нивели
рования. Полаrая на уровенной поверхности, задаваемой ypOB
нем жидкости, W(; w; = О, получим
1
Н{ HT =h 2 hl + l(g r)2h2 (g r)lhl]'
У т
rде h 1 и h 2 отсчеты в точках 1 и 2; (g 111 И (g 112 аномалия
силы тяжести в этих точках.
74. ОПРЕДЕЛЕНИЕ УКЛОНЕНИЙ ОТВЕСА
В МЕСТНОЙ СИСТЕМЕ
Для редуцирования в местную систему координат во всех точ
ках сети нужно знать разности астрономо rеодезических уклоне
ний отвеса любоrо пункта сети и начальноrо пункта или двух
пунктов сети. Рассмотрим возможность их определения. В rлаве 7
для разности астрономо rеодезических и rравиметрических укло
нений отвеса было получено выражение
tt r {f'P = 1( + O,171Hsin2BcosA,
[де 1( составляющая уrла между нормалями к референц эллипсо
иду и общему земному эллипсоиду в азимуте А, в котором вычис
лены составляющие T и {/'Р. Представим rравиметрическое YK
лонение отвеса в виде иР =191: 191:" rде й1: влияние аномалий
силы тяжести в области L, целиком содержащей инженерно rеоде
зическую сеть; й1:' не учитываемое влияние дальних зон. Если
влияние дальних зон и уrол 1( будут постоянны в пределах сети,
то разности астрономо rеодезических и rравиметрических укло
нений отвеса совпадут
(19 'д 0 )АТ = (д й а )1:' (11.26)
Определим условия, при которых 1( и 191:' можно считать по
стоянными. Составляющие L1 , L11] уrла 1( в плоскостях меридиана
и nepBoro вертикала соrласно формулам (2.18) можно написать
в виде
L1 = (Ха sin BcosL + уо sin Bsin L Zo cosB),
R
L11] = (Ха sin L уо cOS L).
R
362
Дифференцируя ЭТИ равенства по координатам В и L, полу
чим изменение составляющих уклонения отвеса на участке съемки
d(t'J.;) = (Xo cos В cos L + у о cos В sin L + Zo sin В)М,
d(L17]) = (Xo cos L + у о sin L)L1Lcos В.
Координаты Хо' Уо' 20 центра 06щеrо земноrо эллипсоида в
референцной системе не превышают 200 м. Полаrая ХО = Уо= 20 =
100 м, получим оценку изменения уrла наклона
Id(L1;)1 $; 300 м дВ,
R
200м
]d(L17])1 $; .bl3cos L
R
и для съемки площадью 10 х 10 КМ, коrда.bl3 = 1,6 . 10 3, М cosB =
= 10 3
Id(L1;)1 $; 7 . 1 0 8 = 0,01#,
Id(L17])1 $; 3 .10 8 = 0,006#.
Уклонение отвеса вычисляют обычно с меньшей точностью,
поэтому при сделанных предположениях уrол J( можно считать
постоянным.
Предположение о постоянстве влияния дальних зон вызовет в
разностях ; ;0' 7] 7]0 ошибку 8, которая оценивается HepaBeH
ством
181 $; 0,2 ( .fi5 ,
lr.
(11.27)
[де D дисперсия аномалии силы тяжести на rранице области L
учитываемых аномалий, lr. радиус области L; 1 расстояние точ
ки, для которой выполняется оценка, от начала координат в Mec
тной сети. Положим, что условие (11.27) выполнено и уклонения
отвеса в местной системе можно находить по формуле (11.26), и
вычислим rравиметрические уклонения отвеса ;Е' 7]Е' ДЛЯ их Ha
хождения нужно располаrать rравиметрической съемкой, плот
ность которой определяется необходимой точностью вычисления
уклонения отвеса. Принципы расчета rравиметрической съемки для
целей прикладной rеодезии изложены в [6], [23]. При расчетах Ta
кой съемки прежде Bcero соrласно формуле (11.26) устанавливают
радиус области, на которой нужно иметь аномалии силы тяжес
363
ти. Если в этой области есть равномерная rравиметрическая съемка,
то уклонение отвеса в любой точке сети можно вычислить с
точностью
то = О, 15"m g у'
rде т о ошибка уклонения oTBeca,m g у ошибка аномалии силы
тяжести в миллиrалах.
Если уклонение отвеса нужно вычислить с большей точнос
тью, чем определяется по этой формуле, приходится производить
дополнительные измерения силы тяжести. При этом целесообраз
но rравиметрические пункты располаrать не равномерно, а co
здавать съемку большей плотности (съемку сrущения) BOKpyr вы.
числительных точек, причем плотность этой дополнительной cъeM
ки убывает по мере удаления от точки, rде вычисляют уклонение
отвеса. Это объясняется характером влияние аномалий силы тя.
жести на уклонения отвеса: при равномерной съемке ошибка 80
уклонения отвеса, вызванная влиянием аномалий силы тяжести в
кольце шириной s (рис. 11.10), равной расстоянию между rрави
метрическими пунктами, и центром в точке вычисления определя
ется по формуле
8 = 6 0,16п т
о 100п g r'
(11.28)
Соrласно выражению (11.28) влияние кольцевых зон убывает
в зависимости от номера п зоны (п = 1,2,..., 37), при п = 1 BHYT
ренний радиус кольцевой зоны равен sl2.Специально созданная
инженерно rравиметрическая съемка позволяет вычислить MeCT
ные уклонения отвеса с точностью ДО сотых долей секунды. Ha
пример, для обеспечения строительства Серпуховскоrо ускорите
ля была создана съемка плотности 1 пункт на 0,06 км 2 на площа
ди 20 км 2 , что позволило вычислить rравиметрические уклонения
отвеса с точностью 0,01".
При обработке результатов инженерно rравиметрической cъeM
ки нормальную силу тяжести приходится вычислять в большом
числе близко расположенных пунктов. В этом случае использова
ние нормальной формулы в rеодезических координатах нецелесо
образно. Удобнее пользоваться формулой для нормальной силы
тяжести в координатах rаусса Крюrера. Инженерно rравиметри
ческая съемка занимает обычно небольшую площадь. Поэтому
364
Рис. 11.10. К выводу формулы ошибки уклонения отвеса
по равномерной rравиметрической съемке:
s расстояние между пунктами и ширина кольцевой зоны
можно найти нормальную силу тяжести Ус) в каком либо одном
пункте сети по формуле
УоСВо) = (1 + siп2Bo ]sin22Bo)'
(11.29)
а в остальных пунктах вычислять приращение ДУ = уо(в) Уо(Во)
силы тяжести, которое можно написать в виде
ду = Yt, (sin2B sin2Bo) % 1(sin22B sin22Bo).
Используя ряд Тейлора, можно получить
sin 2 B sin2Bo = М sin2B o + Дliсоs2В о ,
sin 2 2B sin22Bo= 2М sin4B o + 4M2cos4Bo.
с учетом этих равенств формула для разности нормальной силы
тяжести получает вид
ду = Ye (sin2Bo + дв 2 СОS2Во)ДВ 2Ye l(sin4Bo +
+ 4дв 2 соs4В)Дв. (11.30)
365
Разность д.в широт можно найти по прямоуrольным коорди
натам. rеодезическая широта В связана с координатами х, у в
системе raycca Крюrера формулой [14]
2 { 2
В в' :;: 2;'N" tgB' 1 I:N,2 (5 + 3tg 2 в' + 1J'2tg 2 в') +
+ у4 4 ( бl+90t g2 В'+45t g4 В') } ,
360N'
rде В' широта, вычисляемая по дуrе меридиана длиной х; 1'1'2 =
e,2cos2B,; М' и N' радиусы кривизны меридиана и первоrо Bep
тикала, вычисленные по aprYMeHTY В'. Разность широт двух точек
можно написать в виде
В , { 5 3 2 В ' '2 on'Z Z n'
В В = 13' В' tg о 2 Z + tg о + 1J л I tg п о ( 4 4 )
о о 2М' N' У Уо 1 2N 'z У У о +
о о о
2tgВ;) +tg4B ( 6 6 )}
+ 8N' у у о .
о
Если точка лежит на краю зоны и у у о = 300 км, тоrда на
широте 550 влияние последнеrо члена в фиrурных скобках вызовет
в нормальной силе тяжести ошибку, меньшую 0,01 мrл, поэтому
этот член можно не учитывать и для разности широты написать
LV1 = В В = в' в' tgB [ 1 5 + 3tg 2 ВО ( 2 + 2 ) J ( 2 Z).
о о 24N 12N Z У Уа У Уо
Разность широт в' в' о можно найти по ДJ1ине Х дуrи меридиана
в' B' = J dX = x xo ( + 1 + )
() . М 6 МО 4М ср М
.\0
rде Мо, Мр и М радиусы кривизны меридиана в точках с широ
тами В' о' в' И на середине дуrи х Х о'
Если разность Х хо не превышает 20 км, можно вычислять
разность широт с постоянным значением радиуса кривизны ме.
ридиана
в' B == х х о .
М(}
366
Используя это выражение, для разности широт дв получаем
ДЕ = Х ХО tgBo (2 2 )[ 1 5 + 3tg 2 Во 2 + 2 ]
М 2N М У уо 12N 2 (у уо)' (11.31)
о о о о
Формулы (11.29), (11.30) позволяют вычислять нормальную
силу тяжести, не прибеrая к вычислению rеодезических коорди
нат rравиметрических пунктов, которые обычно бывают неизвес
тны. Эти формулы имеют высокую точность и позволяют вычис
лять ду С точностью 0,01 мrл для расстояний до 100 км. Если
съемка выполнена на меньшей площади, можно находить разность
нормальной силы тяжести по упрощенной формуле
ду = 1(1(Х хо) 1(2(у2 у}),
(11.32)
rде 1(1 И 1(2 постоянные в пределах всей сети коэффициенты, оп
ределяемые выражениями
k ( =k ( Asin2B 2A 1 sin4B ) , k 2 = Ye t g B o sin2B o .
М ...,..., 2NM
о о о
в [орных районах в случае невозможности выполнения rpa
виметрической съемки разности астрономо rеодезических уклоне
ний отвеса можно заменять разностями топоrрафических уклоне
ний отвеса, вычисляемых по rипсометрическим картам.
Таким образом, обработка результатов высокоточных инже
нерно rеодезических измерений требует обязательноrо изучения
неоднородности поля силы тяжести в районе работ и введения
в необходимых случаях соответствующих поправок в измерения.
В противном случае высокая точность измерений не обеспечит
высокой точности окончательных выводов. Ф.Н. Красовский пи
сал, что «.. . бесцельны усилия в получении высокоточных резуль
татов полевых rеодезических работ, если эти результаты в даль
нейшем будут подверrаться искажениям из за производительнос
ти методов обработки rеодезических сетей» [14].
СПИСОК ЛИТЕРАТУРЫ
1. Абалакин В.К., КраснорьиlOв И.И., Плахов Ю.В. rеодезичес
кая астрономия и астрометрия. Справочное пособие. М.: KapT
rеоцентр rеодезиздат, 1996. 435 с.
2. Баранов В.Н., Бойко Е.Т, КраснорьиlOв И.И. и др. Космичес
кая rеодезия. М.: Недра, 1986. 407 с.
3. Бойко Е.Т Высшая rеодезия. Часть П. Сфероидическая reo
дезия. М.: Картrеоцентр rеодезиздат, 2002. 144 с.
4. Бойков В.В., rШlaЗИН В. Ф., Каплан Б.Л. и др. Опыт создания
rеоцентрической системы координат ПЗ 90 // rеодезия и KapTor
рафия, 1993, N2 11. С. 17 21.
5. Бровар В.В. rравитационное поле в задачах инженерной reo
дезии. М.: Недра, 1983. 112 с.
6. Бровар В.В., Масницкий В.А., Шимбирев Б.П. Теория фиrу
ры Земли. М: rеодезиздат, 1961. 256 с.
7. rШlaЗИН т Ф., Каплан Б.Л., Лебедев М.Т и др. Система reo
дезических параметров Земли «Параметры Земли 1990 r.» (ПЗ 90)
(Справочный документ) / Под ред. В.В. Хвостова. М.: Коорд.
научно инф. центр, 1998.
8. rерасимов А.П. Уравнивание rосударственной rеодезической
сети. М.: Картrеоцентр rеодезиздат, 1996. 216 с.
9. Единая rосударственная система rеодезических координат 1995
rода (справочный документ). М.: ЦНИИr АиК, 2000. 28 с.
10. Еремеев В.Ф., Юркина М.И. Теория высот в rравитацион
ном поле Земли. М.: Недра, 1972. 145 с.
11. Иванов С. С Переменное rравитационное поле океана. М.:
Ин т океанолоrии АН СССР, 1987. 124 с.
12. Инструкция по нивелированию Т, П, 111 и ТУ классов. М.:
Недра, 1990.
13. Кашин Л.А. Построение классической астрономо rеодези
ческой сети России и СССР, (l81 1991). М.: Картrеоцентр rео
дезиздат, 1999. 192 с.
14. Красовский Ф.Н. Избранные сочинения, т. ТУ. М.: rеоде
зиздат, 1965. 574 с.
15. Крылов В.И. Космическая rеодезия. М.: УПП «Репроrра
фия», МИИr АиК, 2002. 168 с.
16. Лакомб А. Физическая океаноrpафия. М.: Мир, 1974. 496 с.
17. Мамаев О.И. Нулевая динамическая поверхность Мирово
ro океана. М.: Из во Mry, 1962. 219 с.
368
18. Маркузе Ю.Н., Бойко Е.Т, Толубев В.В. rеодезия. Спра
вочное пособие. М.: Роскартоrрафия, 1994. 432 с.
19. Мельхиор П. Земные приливы. М.: Мир,1968. 482 с.
20. Молоде"ский М. с., Ере.иеев В.Ф., Юркина М.И. Методы
изучения внешнеrо rравитационноrо поля и фиrуры Земли 11 Tpy
ды цнииrАиК. ВЬШ. 131. М.: rеодезиздат, 1960. 251 с.
21. Молоде-нский М.С Избранные труды. М.: Наука, 2001.
570 с.
22. О введении системы координат 1995 rода 11 rеодезия и Kap
тоrрафия, 2002, N2 9. С. 1 .
23. 020родова Л.В., Шимбирев Б.П., Юзефович А.П. rравимет
рия. М.: Недра, 1978. 323 с.
24. О нивелирной сети СССР 1 Сборник под ред. Л.А. Кашина
и Л.С. Хренова. М.: Недра, 1979. 140 с.
25. Пеллuнен Л.П. Высшая rеодезия. М.: Недра, 1978. 264 с.
26. Серапинас Б.Б. rлобальные системы позиционирования,
изд. 3 e. М.: ИКФ «Каталоr», 2002. 106 с.
27. Topze В. rравиметрия. М.: Мир, 1999. 429 с.
28. ШU;14бuрев Б.П. Теория фиrуры Земли. М.: Недра, 1975.
431 с.
29. Яковлев Н.В. Высшая rеодезия. М.: Недра, 1989. 445 с.
30. Bursa М., Kostelecky J. Space Geodesy and Space Geody
namics, Pragиe, 1999, р. 459.
31. Europeaп vertical reference system (EVRS), р. 101 120. РЖ
2002, 8. 02.08.52.33.
32. Heiskaпeп W.A. and Moritz Н. Physical Geodesy. Freeman
W.H. San Francisco, 1967, р. 364.
33. Status of the UELN/EVS Data base and resиlts of the last
UELN adjustment. Р. 12 131. РЖ 2002, 8. 02.08.52 35.
АВТОРСКИЙ УКАЗАТЕЛЬ
Аль Мамун 9
Аронов В.И. 267, 272
Бессель Ф. 278 279, 292, 299
Бовшин Н.А. 301
Борисов Л.А. 320
Бородко А.В. 305
Боуринr 41
Бровар В.В. 73, 155, 331
Брунс r. 109 110
Буrе П. 11, 120 121, 203, 215,
257, 263
Бурша М. 99, 155, 328
Бьеркнес В. 324
Бьерхаммар А. 267
Ватрт В. 155, 328
Венинr Мейнес Ф.А. 116 117,
121, 137, 232, 274
Войтишкова М. 328
Волконский П.М. 276
rapyh-аль Рашид 9
raycc К.Ф. 224, 364, 366
rельмерт Ф.Р. 12, 61, 85, 104
105, 204, 216, 218, 224, 239
rрааф Хантер Д. де 213
rрин Д. 70, 97
Делам5р Ж. 11
Джеффрис r.213, 258
Еремеев В.Ф. 206, 218, 258
Ефимов r.H. 299, 305
Жонrолович И.Ф. 148
Зубинский В.И. 301
Изотов А.А. 11, 137,278,281,
292 293
Кассини 1 o 11
Касьянов М. 307
Каула В. 158 159
Кеплер И. 131
Клеро А.К. 12, 15, 85, 97
Костинский е.К. 59, 61
Коуба Я. 155
Красовский Ф.Н. 11, 105, 137,
175, 234, 244, 278 279, 281, 292,
29fr297, 299 300, 306, 308, 367
Крюrер 364, 366
Лакондамин Ш. 11
Лаплас П. 12 13, 70, 75, 178,
293, 298
Ларин Д.А. 299
Лежандр А. 29, 70, 74, 76 77,
104, 126, 141, 264
Леонардо да Винчи 123
Ляв 103
Максимова T.r. 264
Михайлов А.А. 234
Молоденский М.е. 5 6, 13, 97,
104, 108, 116, 207, 234, 242 245,
250, 255, 258, 281
Мопертюи П. 11
Мориц r. 79
Мохоровичич 24, 26, 264
Нейман Ю.М. 221, 265
Ньютон И. 5, 10 11, 60, 85
Остач О.М. 242 244, 250, 258,
262, 301
370
Пахтусов П.К. 315
Пеллинен Л.П. 148, 15 155, 157,
272
Пикар Ж.I0
Пицетти П. 97 98, 10 101, 104
Померанцев И.И. 278
Пратт Дж. 122 123, 295
Прей А. 158 159
Пуассон 270
Рапп Р. 158 159
Рейнеке М.Ф. 315
Сазонов А.З. 285
Сванберr Е.l1
Слудский Ф.А. 147 148
Сомильяна К. 85
Стейси Ф. 25
Стокс Д.r.12, 75, 95, 116, 126,
128, 226, 243, 253, 255, 257 262,
274
Струве В.Я. 276, 294, 333
Тейлор, ряд 86, 349, 365
Теннер К.И. 276
Фернель Ж. 10
Хейсканен А. 79
Хейфорд Д. 123 124, 136, 195
Цинrер Н.Я. 315
Чандлер С. 60
Чуйкова Н.А. 264
UUapHropcт К.В. 277
Эверест Дж. 122
Эйлер Д .A. 13
Эйлер Л. 13, 23, 60
Энтин И.И. 333
Эратосфен 9
Эри Дж. 122 123
Юркина М.И. 258, 331
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Абиссаль 24
Азимут 54, 56, 175
астрономический 47, 59, 175,
296, 354
rеодезический 55, 175, 185, 296,
350
Лапласа 176, 298
редуцирование 175 176
Аномалия высоты 108 109, 125,
205, 211, 214 215, 226, 229, 239,
248, 349
абсолютная 126, 128, 226, 229
астрономо rеодезическая 126,
128, 138, 238
rравиметрическая 128, 138,
209 210, 229, 242 243, 249
местная 242, 246, 25 251, 257,
262
относительная 226, 229
чистая 1 11, 332
Аномалия динамической rлубины
323
Аномалия силы тяжести 110, 143,
149
Буrе 120 121, 215, 257, 263
в свободном воздухе 120
смешанная 110 111, 142 144
чистая 111,332
Ближние зоны 116, 232, 243, 255,
258, 261, 263
Высота
абсолютная 218
в нормальном поле 92 95
rельмерта 204, 216, 218, 339
rеодезическая 39, 93 95, 125,
168, 178, 184
rеоида 155 157, 159, 202, 21
215, 279, 296
динамическая 218, 223, 322
323, 360, 361
квазиrеоида 207, 213
квазиортометрическая 207
коrеоида 213 214, 217
нормальная 108, 125, 210 211,
216, 218, 222, 224 225, 242
249, 317, 328 331, 334, 339,
361
относительная 218
rеодезическая референц система
[PC 80 1 O 105
rеоид 5 6, 12 13, 23 24, 133, 155
157, 191, 211 212, 239, 321, 328
планетарный 157
rеопотенциальное число 21, 1 O
109,201, 217, 223 224, 317, 321,
327, 332, 336
нормальное 92, 1 06 109
rлубоководный желоб 24, 26 27
rравитационный масштабный MHO
житель 100, 155
rрадусные измерения 9 ll, 133,
137, 139 140, 281, 292
Дальние зоны 232, 234, 243, 258
259, 262, 264, 266
Движения земной коры 337
вертикальные 33 34, 33
337
rоризонтальныс 33 34, 58
372
Динамическая rлубина 322 324
Динамический метр 324
Динамическое расстояние 322
323, 325
Дисперсия 221, 265, 286 291, 336
степенная 152 153, 159, 266
Долrота
астрономическая 46, 49, 175,
223
в нормальном поле 91, 95
rеодезическая 39, 49, 95, 175
Дуrа Струве 276, 294, 333
Задача Молоденскоrо 6
Зенит
астрономический 48
rеодезический 48
Ifзостазия 122 124
Исходные rеодезические даты 279,
296
Квазар 14
Квазиrеоид 207, 213 214
Коrеоид 213 214, 216
Кривизна
силовой линии 18 20, 89 91,
344
уровенной поверхности 18, 87,
90, 342 344, 347, 349, 351, 357
Литосферная плита 34
Мантия 2 25
Меридиан
астрономический 46, 49, 59, 175
rеодезический 49, 175
Метод
астрономо rеодезический 8,
167, 226
астрономо rравиметрический
8, 12, 14
rравиметрический 8, 12 14, 17
. космическо rеодезический 14
космической rеодезии 13 14
rеометрический 13
динамический 13
М одели rравитационноrо поля
rAO 95 302
rAO 98 151 154, 266
ПЗ 90 150
Слудскоrо 147 148
EGM 96 150, 152 154, 160,
266, 326, 328
WGS 84 150, 152 154
Модели нормальноrо поля
rpC 80 105, 153 154
ПЗ 62 149, 154
ПЗ 90 154, 162
Моменты инерции 61, 71,98
осевые 61
центробежные 61, 72
М осковская аномалия 271
Отвесная линия 18, 33, 46, 170,
185, 191, 198, 247, 343, 350, 355
358
Ошибка
интерполяции 220, 221, 230, 240
представительства 265
Поверхность
rипсометрическая 207
морская топоrрафическая 22,
27, 133, 151, 159 160, 325
Мохоровичича 2 26
уровенная 17 18, 23, 27, 46,
75, 89 91, 155, 167,214, 2]7,
219, 224 225, 319, 321, 325,
327 328, 332, 335, 340 34 7,
360
Положение пункта
абсолютное 8
относительное 8
373
Потенциал
аномальный 67, 106, 109, 143
144
возмущающий 67, 140
rрадиент 16
нормальный 67 68
приливный 29, 32, l03 104
центробежной силы 15,72, 132
центробежный 15, 74 75, 78,
127
Приливная сила 28, 30, 33
П риливные волны 32
Сеть
астрономо rеодезическая ArC
11, 133, 19 191, 230, 235, 245,
279, 282 283, 291, 294, 297
высокоточная rеодезическая
Brc 309 312
доплеровская rеодезическая
дrс 162, 282, 297
космическая reодезическая Krc
163, 282, 291, 297
спутниковая rеодезическая
crc 1 309 312
фундаментальная aCTpOHOMO
rеодезическая ФАrс 309 312
Силовая линия 18, 46, 9 91
Система координат
rеоцентрическая 36
rоризонтная 52 55
общеземная 36, 57, 65, 160
ПЗ 90 1 60, 163 166, 304,
307 308
Пулковская 1932 r. 279
CK 42 298, 307 308
WGS 84 105, 16 166
экваториальная 52 53
Спутниковая альтиметрия 151,331
Срединно океанический хребет 24,
26 27
Стоксовы постоянные 7 71, 129
Теллуроид 207
Теорема
Клеро 12
Стокса 75
Уклонение отвеса 170 171, 226,
228 229, 239, 242, 343, 348 358,
360
абсолютное 51, 114, 117 118,
229
астрономо rеодезическое 48,
110, 114 115, 117 118, 121,
134 137, 229, 241 243, 247,
352, 358, 367
астрономо rравиметрическое
233
rравиметрическое 11 о, 115,
117 118, 125, 137, 229, 242
243, 295 296, 363
местное 116, 135, 233 234,
242, 246
Молоденскоrо 116
относительное 51, 114, 226,
229
смешанное 190, 192
топоrрафо изостатическое
124 125, 135 137, 234, 295
Уровень моря 40, 217, 319 320
колебания 22, 321
средний 313, 319 321
Уровнемерный
пост 313 315, 317 318, 321
пункт 327, 330, 334, 337
Формула
Боуринrа 41
Брунса 109 110
374
Венинr Мейнеса 11 117, 121
fельмерта 10 105
rрина 129
Клеро 12
Молоденскоrо 97, 104
нормальная 85, 95, 148
нулевоrо приближения 116
Пицетти 97 98, 100 101, 104
Сомильяна 85
Стокса 75, 128, 226, 237, 243,
253, 255, 258, 260, 274
Футшток 217 218
Амстердамский 337, 339
Кронштадтский 218, 315 316,
334, 339
Широта
астрономическая 46, 223
в нормальном поле 91, 93, 95
rеодезическая 39, 93, 95, 178
rеоцентрическая 43
приведенная 41
Экспедиция
Лапландская 11
Перуанская 11, 121
Элементы ориентирования
. внутренние 39, 137
Эллипсоид
Бесселя 278 279
инерции 61, 65
KpacoBcKoro 11, 10 105, 137,
281, 308
общий земной 40, 1] 7, 125
128, 138, 148, 229, 232 233,
238, 362
отсчетный 40, 109, 208, 327,
330
референц эллипсоид 40, 117,
125 126, 138, 190, 229, 232
233, 352
уровенный 68, 73, 78, 95, 329
Хейфорда 13 137
WGS 84 105, 155 156, 162
ИСПОЛЬЗОВАННЫЕ АББРЕВИАТУРЫ
а) русские
ArH астрономо rравиметрическое нивелирования
Arc астрономо rеодезическая сеть
Brc высокоточная rеодезическая сеть
Bry Высшее rеодезическое управление
r АО rравиметрия, Альтиметрия, Орбитальные данные
rrc rосударственная rеодезическая сеть
rео ИК rеодезический исследовательский комплекс
rЛОНАСС rлобальная навиrационная спутниковая система
rпз rравитационноеполе3емли
rpc rеодезическая референц система
дrс Доплеровская rеодезическая сеть
ДОРИС Доплеровская орбитоrрафическая радиопозиционная
интеrрированнаяспутниковаясистема
КВТ Корпус военных топоrрафов
KrC Космическая rеодезическая сеть
MAr Международная ассоциация rеодезии
МАС Международный астрономический союз
МБВ Международное бюро времени
MrrC Международный rеодезический и rеофизический союз
МСВ3 Международная служба вращения Земли
МСДП Международная служба полярноrо движения
МСШ Международная служба широты
МТП Морская топоrрафическая поверхность
МУН Международное условное начало
ПВЗ Параметры вращения Земли
П3 Параметры Земли
РСДБ Радиоинтерферометрия со сверхдлинной базой
crc Специальные rеодезические сети
crc 1 Спутниковая rеодезическая сеть первоrо клаСса точности
CrP Специальные rеОДезические работы
СК Система координат
СУМ Система точечных масс
СУМ Средний уровень моря
ФАrс Фундаментальная астрономо rеодезическая сеть
376
б) латинские
BIH Bureu International de'Heure
стр Conventional Terrestrial Pole
ЕОМ Earth Gravitational Model
ERS Earth Rotation Service
ETRS European Terrestrial Reverence System
EUREF European Reference Frame
EURES European Reference System
EUVN European Vertical Reverence Network
EVRF European Vertical Reverence Frame
EVRS European Vertical Reverence System
EVS European Vertical System
GLOBE The Global Land One kilometer Base Elevation
MERIT Monitoring of Earth Rotation апд Intercomparisen of the Tech
niques of observation and analyses
IERS International Earth Rotation Service
IGEX International GLONASS Experiment
IGS International GPS Service for Geodynamics
ITRF International Terrestrial Reference Frame
ITRS International Terrestrial Reference System
OSU Ohio State University
SAO Smithsonian Astronomical Observatory
SE S tandard Earth
UELN United European Leveling Network
UPLN United Precise Leveling Network
UTC Universal Coordinated Time
WGS World Geodetic System
оrЛАВЛЕНИЕ
ПРЕДИ СЛОВИЕ .................................................................................. 3
ВВЕДЕНИЕ........................................................................................... 5
rЛАВА 1. ПОВЕРХНОСТЬ ЗЕМЛИ И СИЛА ТЯЖЕСТИ .............. 15
9 1. Сила тяжести и ее потенциал .............................................. 15
2. Физическая поверхность Земли и rеоид ............................. 21
3. Изменения поверхности Земли и силы тяжести во
времени. Земные приливы .................................................. 28
rЛАВА2. СИСТЕМЫ КООРДИНАТ, ИСПОЛЬЗУЕМЫЕ
В ТЕОРЕТИЧЕСКОЙ rEОДЕЗИИ,
И ИХ ПРЕОБРАЗОВАНИЯ ................................................. 36
* 4. rеодезическиепрямоуrольныесистемы координат .......... 36
9 5. rеодезическая эллипсоидальная система координат ........ 39
9 6. Сферическая система координат ........................................ 43
* 7. Специальная система координат сжатоrо эллипсоида
вращения.. .................. ...... ... ... ... ... ... ... ... ......... ...... ... ...... ... .... 44
9 8. Натуральная система координат ....................................... 46
99. Связь натуральной и rеодезической систем координат .... 47
9 10. Т опоцентрические системы координат.............................. 52
9 11. Влияние движения полюса на координаты. ....................... 57
* 12. Международная служба широты и Международное
условное начало. ......... ........ ................................................ 60
9 13. Международная служба вращения Земли ......................... б4
rЛАВА 3. НОРМАЛЬНАЯ ЗЕМЛЯ И ФУНДАМЕНТАЛЬНЫЕ
rЕОДЕЗИЧЕСКИЕ ПОСТОЯННЫЕ ............................. 67
9 14. Нормальный потенциал и нормальное поле.
Способы выбора.................................................................. 67
9 15. Внешний потенциал ypoBeHHoro эллипсоида .................... 74
9 16. Представление потенциала ypoBeHHoro эллипсоида
в виде ряда ........................................................................... 78
9 17. Сила тяжести на поверхности ypoBeHHoro эллипсоида ..... 83
9 18. Нормальная сила тяжести во внешней точке.
Кривизна силовой линии................................. ... ...... ... ... ... .. 86
9 19. Система координат в нормальном поле ............................. 91
920. Соотношения между параметрамиуровенноrо эллипсоида .... 95
21. Фундаментальные rеодезические постоянные........ ... ...... .. 99
378
rЛАВА4. АНОМАЛЬНОЕ ПОЛЕ. УКЛОНЕНИЯ ОТВЕСА
И АНОМАЛИИ ВЫСОТЫ ............................................... 106
9 22. Связь системы координат в нормальном поле
с натуральной ...................................................................... 106
9 23. Связь элементов аномальноrо поля с аномальным
потенциалом ........................................................................ 11 О
9 24. Уклонения отвеса в rеометрическом и физическом
определениях ....................................................................... 112
9 25. Астрономо rеодезические и rpавиметрические уклонения
отвеса................................................................................... 114
9 26. Топоrрафические уклонения отвеса .................................. 118
9 27. Топоrрафо изостатические уклонения отвеса ................... 121
9 28. Астрономо rеодезическая и rравиметрическая аномалии
высоты ................................................................................. 125
rЛАВА5. ПРИНЦИПЫ ОПРЕДЕЛЕНИЯ
ФУНДАМЕНТ АЛЬНЫХ ПОСТОЯННЫХ.
rЛОБАЛЬНЫЕ МОДЕЛИ ЗЕМЛИ.
ОБЩЕЗЕМНЫЕ СИСТЕМЫ КООРДИНАТ ................ 129
9 29. Определение фундаментальных постоянных нулевоrо
порядка ................................................................................ 129
9 30. Определение стоксовых постоянных Земли
(коэффициентов разложения потенциала) ......................... 140
* 31. rлобальные модели потенциала. Результаты определения
фундаментальных постоянных. Современные модели
нормальноrо поля .................... ........... .......... ............. .......... 147
9 32. rлобальные модели рельефа...... ................... .......... ........... 157
9 33. Общеземные системы координат ....................................... 160
rЛАВА6. РЕДУЦИРОВАНИЕ РЕЗУЛЬТАТОВ
rЕОДЕЗИЧЕСКИХ ИЗМЕРЕНИЙ .................................167
9 34. Редукция уrловых измерений ............................................. 169
9 35. Редукция линейных измерений ........................................... 1 77
9 36. Приведение линейно уrловой сети в единую систему
координат ............................................................................ 185
g 37. Требования к точности rеодезических координат для
редуцирования... ... . ........... . . . . .. . .. . . . . . . ... ... .............. . .......... . .. .. 187
9 38. Развертывание астрономо rеодезической сети на
поверхности референц эллипсоида .................................... 189
rЛАВА 7. СИСТЕМЫ ВЫСОТ ..........................................................193
9 39. rеодезическая высота и методы ее определения ............... 194
9 40. Ортометрическая высота и высота rеоида ........................200
9 41. Нормальная высота и аномалия высоты........................... 204
379
9 42. Связь rеодезической высоты с нормальной высотой
и аномалией высоты.................................... ........ ........... ..... 208
9 43. Нормально ортометрическая высота и высота коreоида ...... 212
9 44. Сравнение ортометрической, нормальной и нормально
ортометрической высот ....... ......... .............. ........................ 215
9 45. Определение разности нормальных высот .........................218
9 46. Динамическая высота. ................. ......... ..... ............ ......... .... 223
rЛАВА8. ВЫЧИСЛЕНИЕ УКЛОНЕНИЯ ОТВЕСА
И АНОМАЛИИ ВЫСОТЫ ............................................... 226
9 47. Связь уклонения отвеса и аномалии высоты ..................... 227
9 48. Методы определения астрономо rеодезическоrо
уклонения отвеса........... ........ ......... ..... ................................ 230
9 49. Способы определения аномалии высоты ........................... 237
9 50. Астрономическое нивелирование. .....................................239
9 51. Астрономо rравиМетрическое нивелирование. ................ 241
9 52. Т очность астрономо rpавиметрическоrо нивелирования.... 245
53. Связь приращений rеодезической высоты, нормальной
высоты и аномалии высоты................................................ 247
9 54. Определение разности нормальных высот по спутниковым
наблюдениям. (AcтpOHOMO rравиметрическое
нивелирование теллуроида) '., ........... .,. ... ... .., ... '" ... ... ... ... .... 249
9 55. Интерполирование астрономо rеодезической аномалии
высоты ................................................................................. 25 1
9 56. Вычисление rравиметрической аномалии высоты ............257
9 57. Вычисление аномальноrо потенциала по дискретным
измерениям силы тяжести ................................................... 267
9 58. Вычисление аномалии высоты и уклонения отвеса по
дискретным измерениям силы тяжести............................... 273
rЛАВА 9. rОСУДАРСТВЕННАЯ rЕОДЕЗИЧЕСКАЯ СЕТЬ.
ПОСТРОЕНИЕ И УРАВНИВАНИЕ ............................. 276
9 59. Историческая справка о построении rосударственной
rеодезической сети России.................................................. 276
9 60. Точность измерений в rосударственной rеодезической
сети ....................................................................................... 2 8 3
9 61. Определение ЭЛЛипсоида KpacoBcKoro.
Система координат 1942 r. ................................................. 292
9 62. Уравнивание rосударственной rеодезической сети. ......... 297
963. Система координат 1995 r. ................................................. 305
9 64. Перспективы развития rосударственной rеодезической
сети России .......................................................................... 309
380
rЛАВА 10. СОЗДАНИЕ ВЫСОТНОЙ ОСНОВЫ.
УРАВНИВАНИЕ НИВЕЛИРНОЙ СЕТИ .....................313
9 65. Начало счета rеопотенциальных чисел и высот ................ 313
9 66. Водное нивелирование ........................................................ 317
9 67. Океаноrрафическое нивелирование ..................................322
9 68. Определение потенциала в начале счета высот ................327
9 69 . Уравнивание нивелирной сети ........................................... 332
r ЛАВА 11. ВЛИЯНИЕ НЕОДНОРОДНОСТИ ПОЛЯ СИЛЫ
ТЯЖЕСТИ НА РЕЗУЛЬ ТА ТЫ ИНЖЕНЕРНО.
rЕОДЕЗИЧЕСКИХ ИЗМЕРЕНИЙ ................................ 340
9 70. Необходимость учета rеометрии поля силы тяжести
в специальных rеодезических работах............................... 342
9 71. Особенности редукционных вычислений в специальных
rеодезических работах........................................................ 350
g 72. Редуцирование результатов измерений в местную
прямоуrольную систему координат ................................... 353
9 73. Высоты в локальной системе координат ........................... 358
9 74. Определение уклонений отвеса в местной системе ........... 362
Список литературы............ ................................... ..................... ............ 368
Авторский указатель............................. ....................... ........... .............. 370
П редметный указатель....... .., ... .,. ... ... ... ... ... ........... '" ...... ... .,. ... ... .., ........ 372
Использованные аббревиатуры . ...... ................... ..... ..... ............ ........... 376
Учебное издание
Людмила Валентиновна оrОРОДОВА
ВЫСШАЯ rЕОДЕЗИЯ
Часть III
Теоретическая rеодезия
Подписано в печать 10.10.2006. Формат 60x90 1 / 16 .
fарнитура «Тimes». Печать офсетная.
Печ.Л. 24. Тираж 500 ЭКЗ.
rеодезкартиздат
ОАО «Типоrрафия «Новостш>
105005, r. Москва, ул. Фр. Энrельса. 46