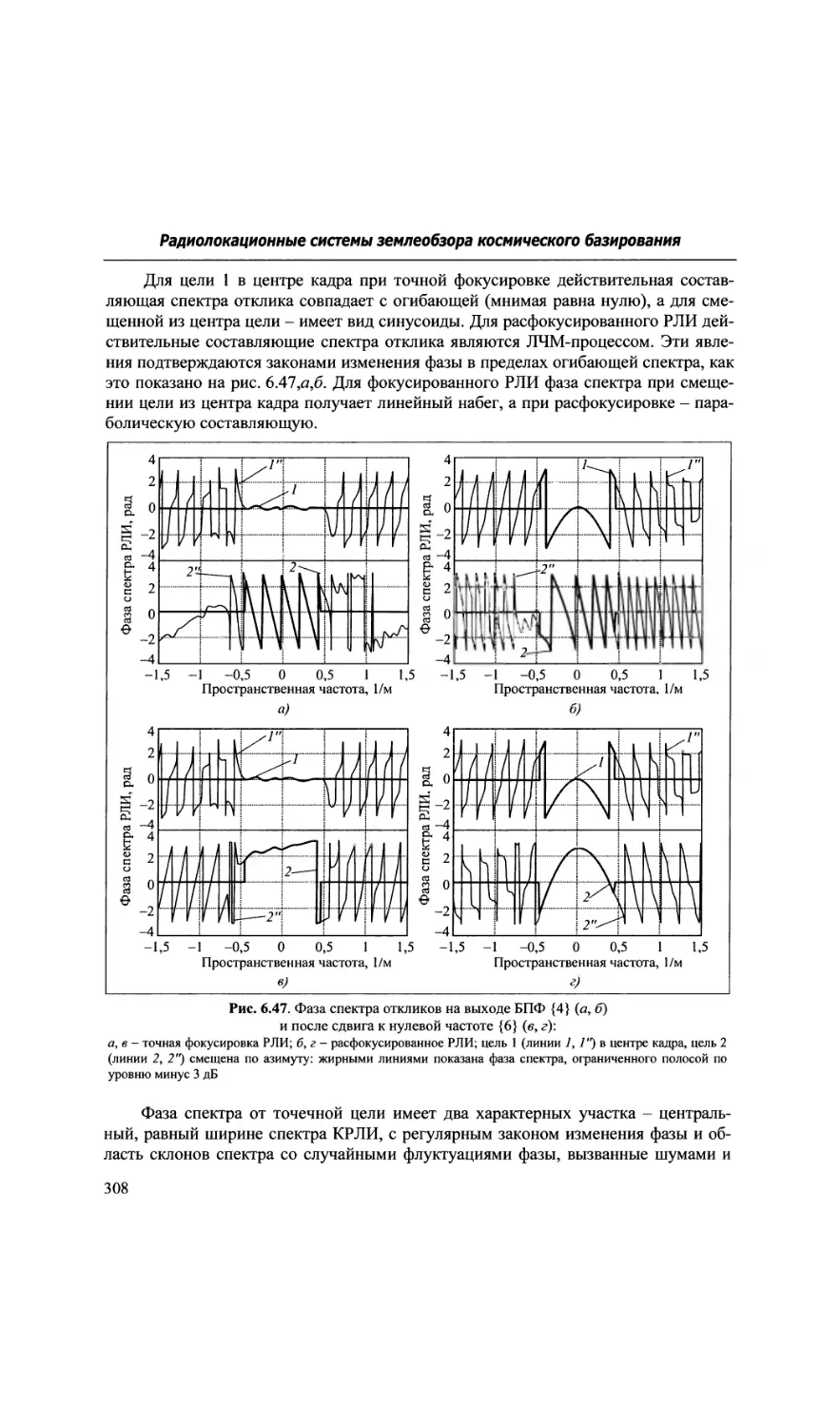
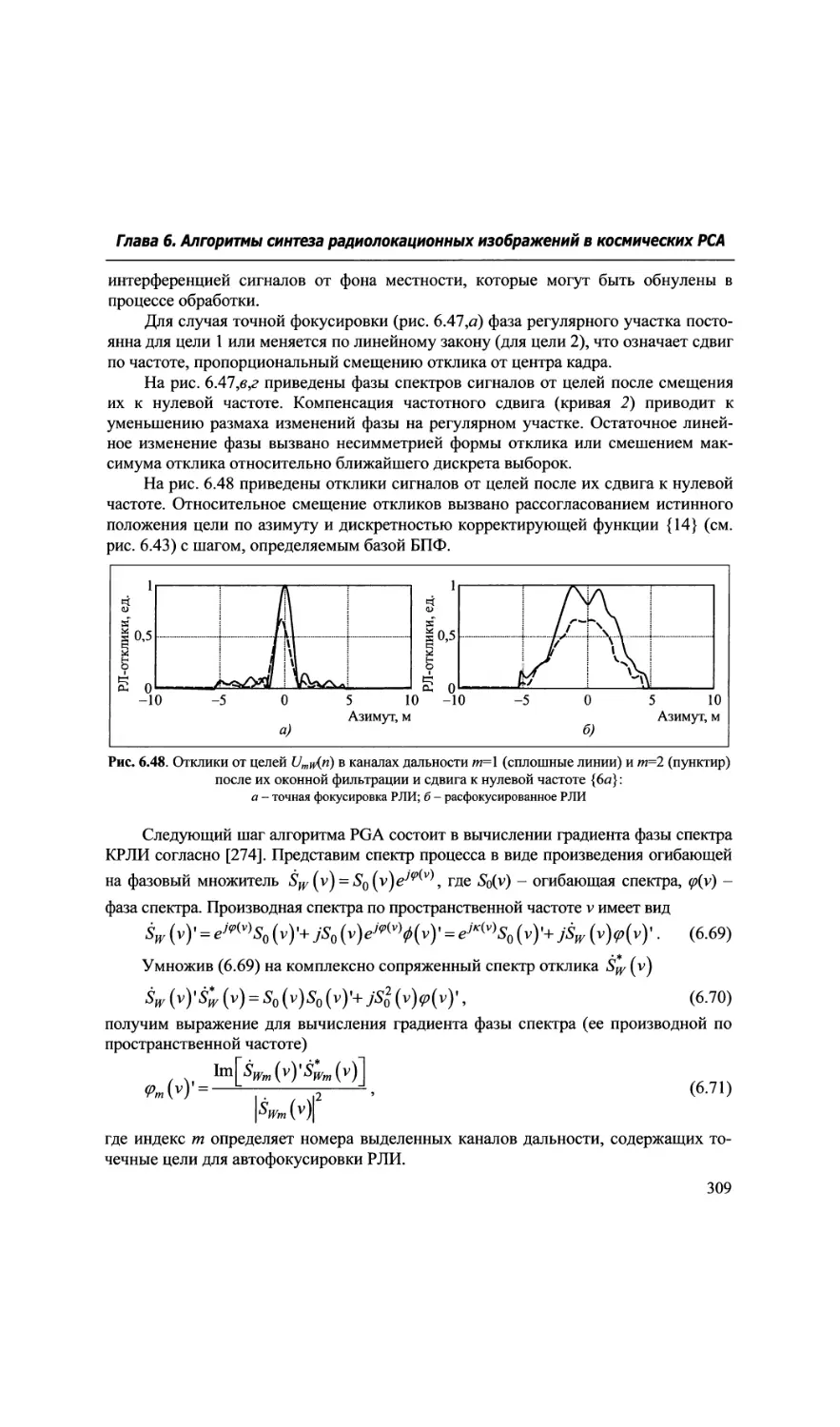
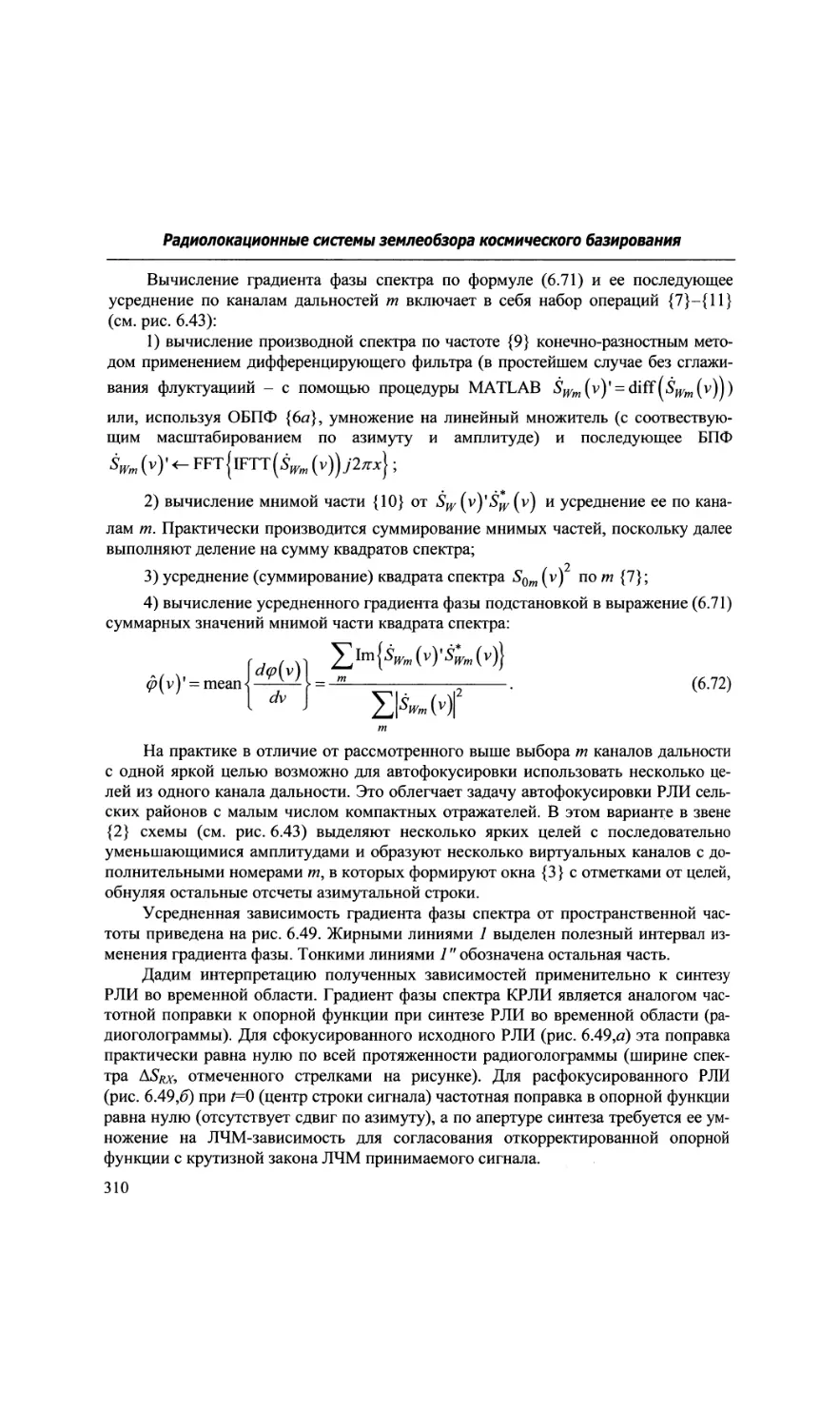
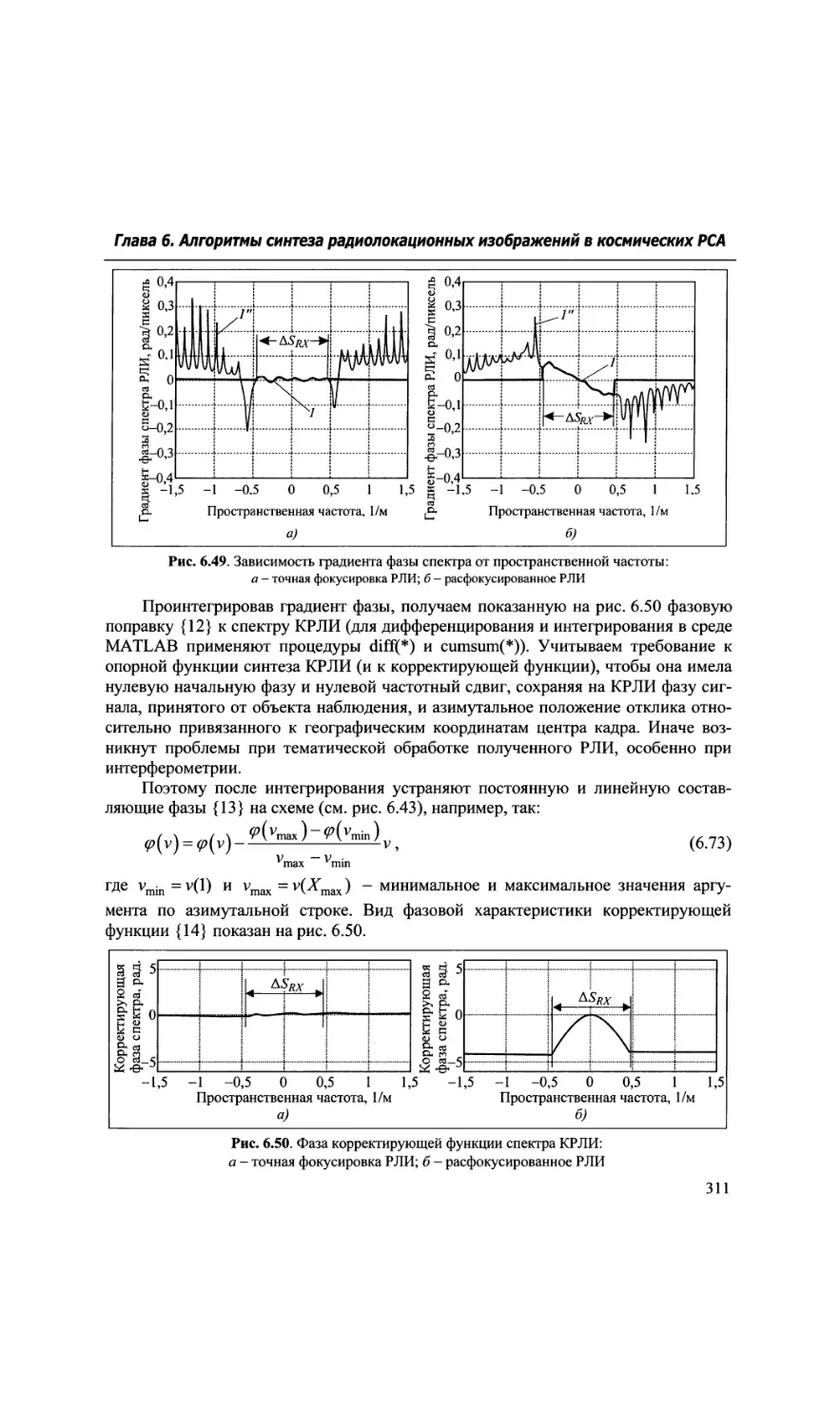
/


































Автор: Верба В.С. Осипов И.Г. Турук В.Э. Неронский Л.Б.
Теги: радиолокация космос космонавтика
Похожие




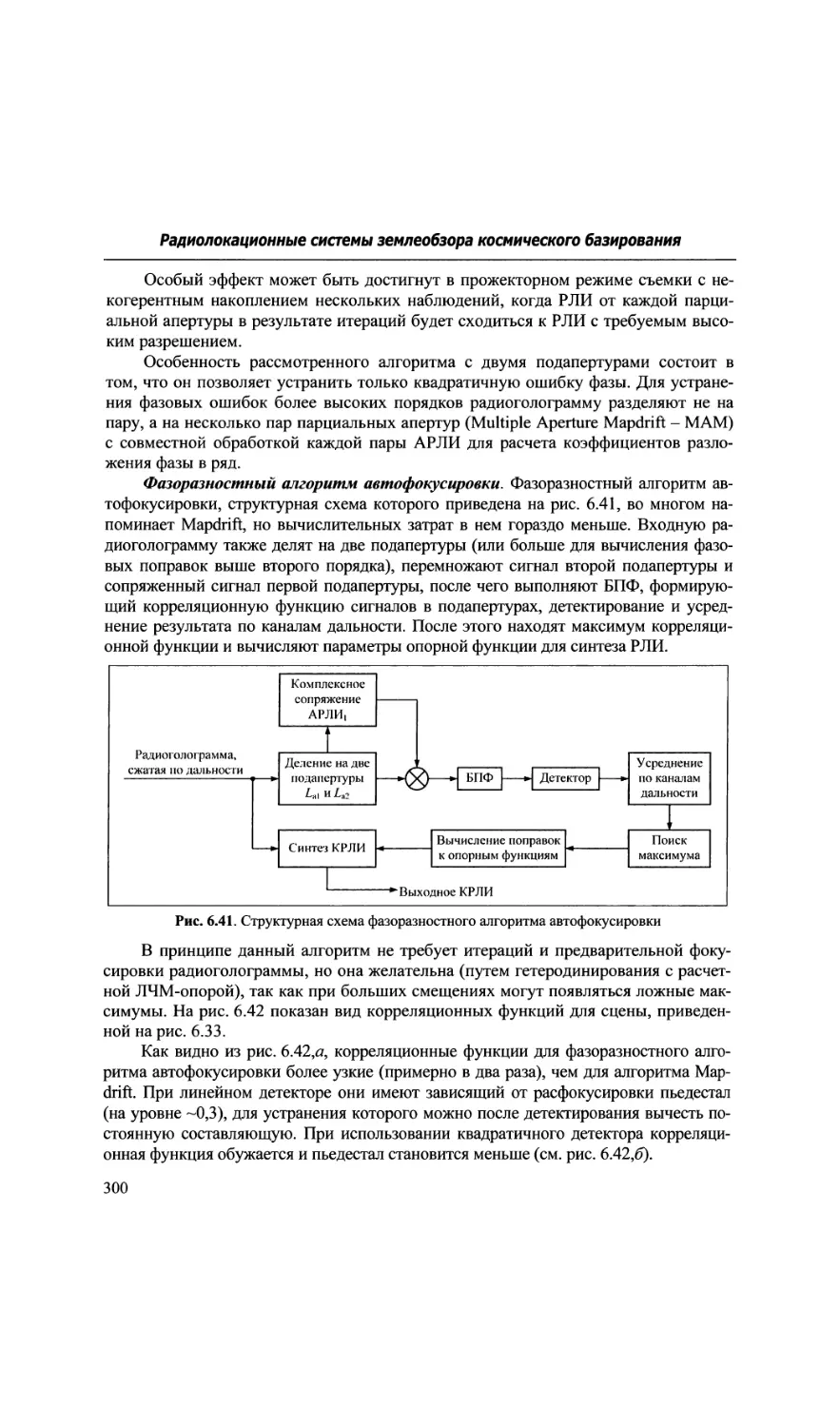
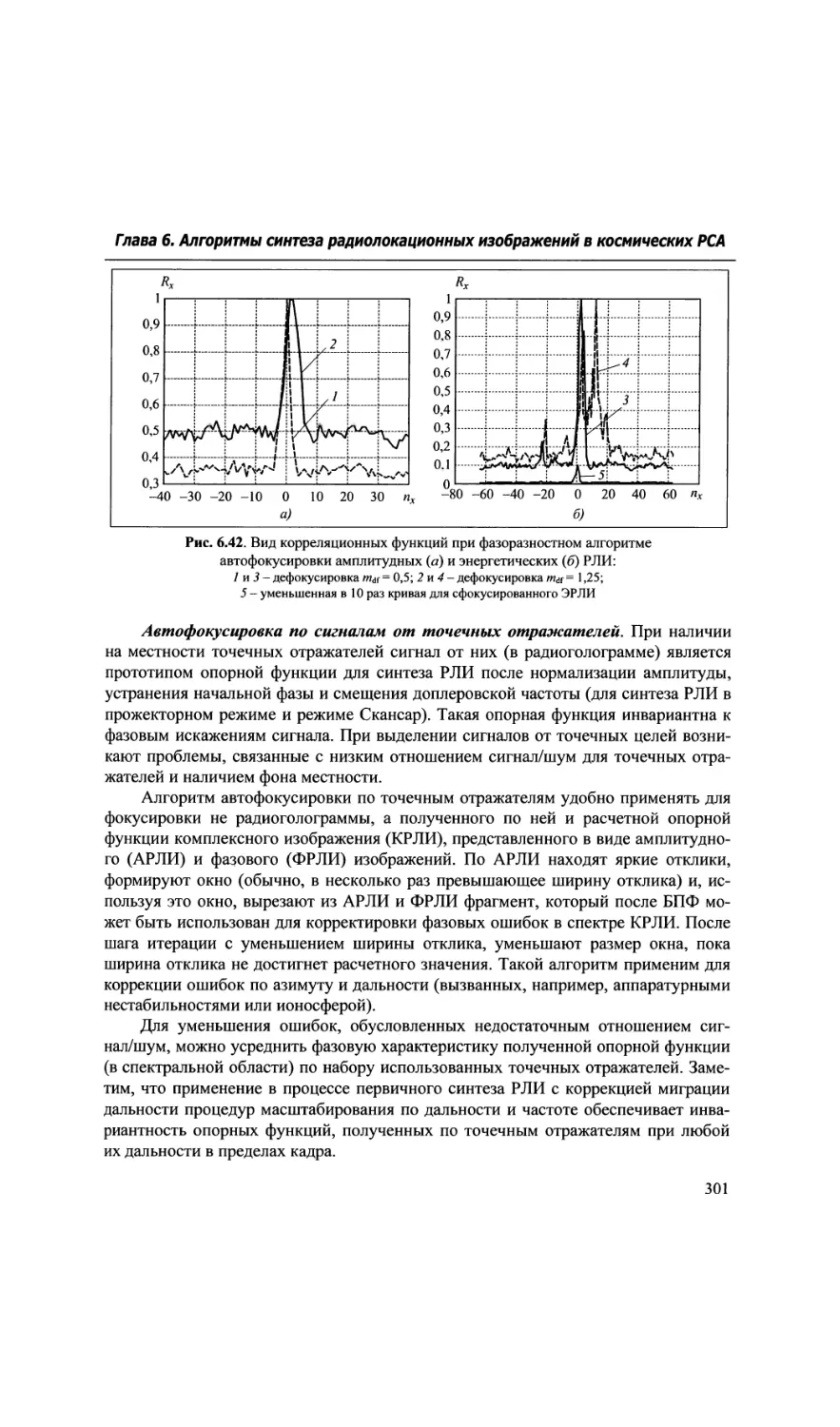
Текст
В.С.Верба Л.Б.Неронский И.Г.Осипов В.Э.Турук
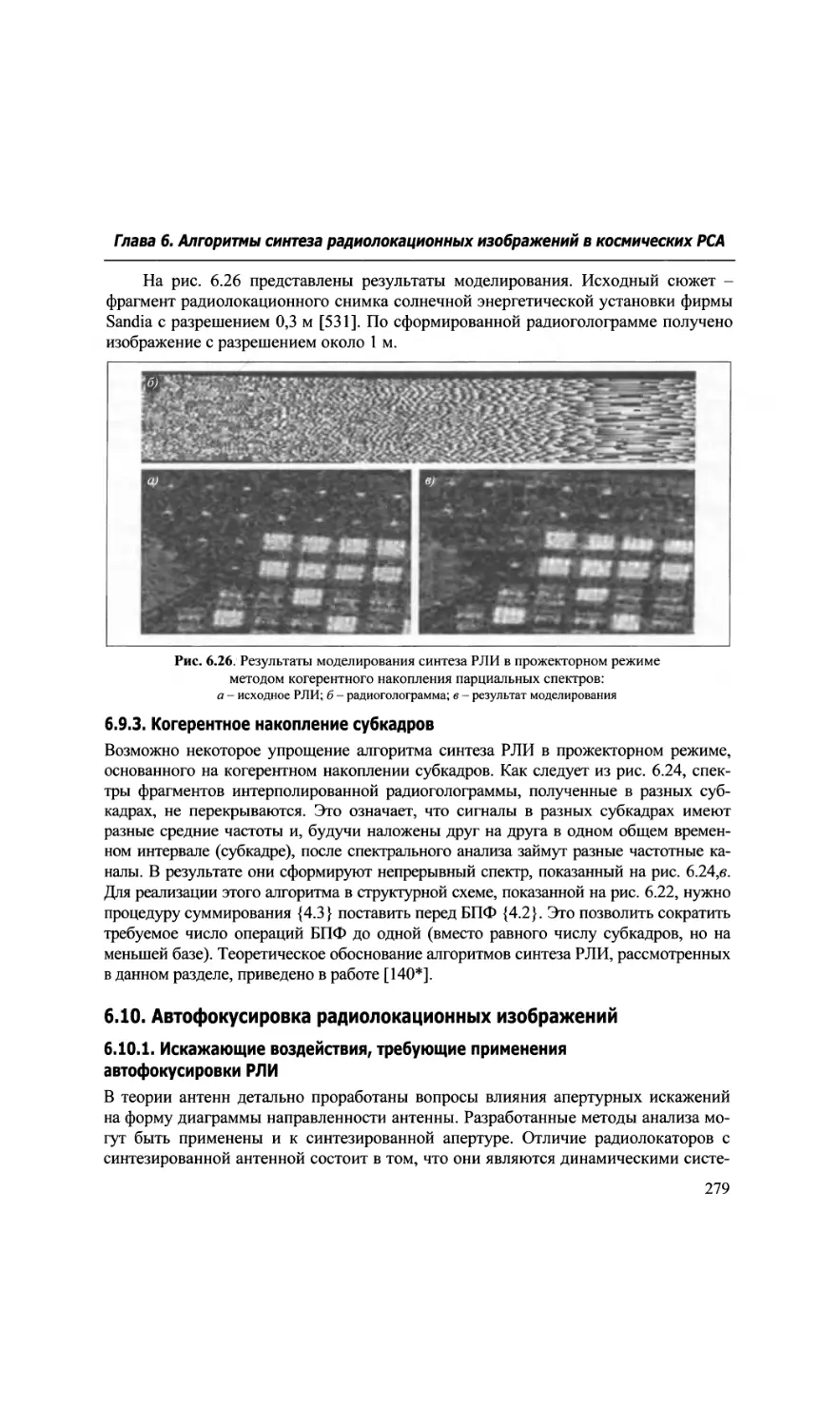
РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ
ЗЕМЛЕОБЗОРА
КОСМИЧЕСКОГО БАЗИРОВАНИЯ
ОГЛАВЛЕНИЕ
Отзыв о книге академика РАН Л.М. Зеленого.................................11
От редактора..............................................................13
Введение..................................................................17
Глава 1. Радиолокационные системы землеобзора космического базирования
в глобальной системе аэрокосмического мониторинга.........................25
1.1. Структура глобальной системы аэрокосмического мониторинга......... 25
1.2. Информационные параметры радиолокационных систем землеобзора
космического базирования....................................... 28
1.3. Применение космических систем радиолокационного наблюдения
для видовой разведки при информационном сопровождении военных
операций......................................................... 35
1.4. Задачи, решаемые космическими системами радиолокационного
наблюдения двойного назначения................................... 44
1.5. Концепция использования космических средств радиолокационного
наблюдения в глобальной информационной системе и ее национальных
сегментах........................................................ 55
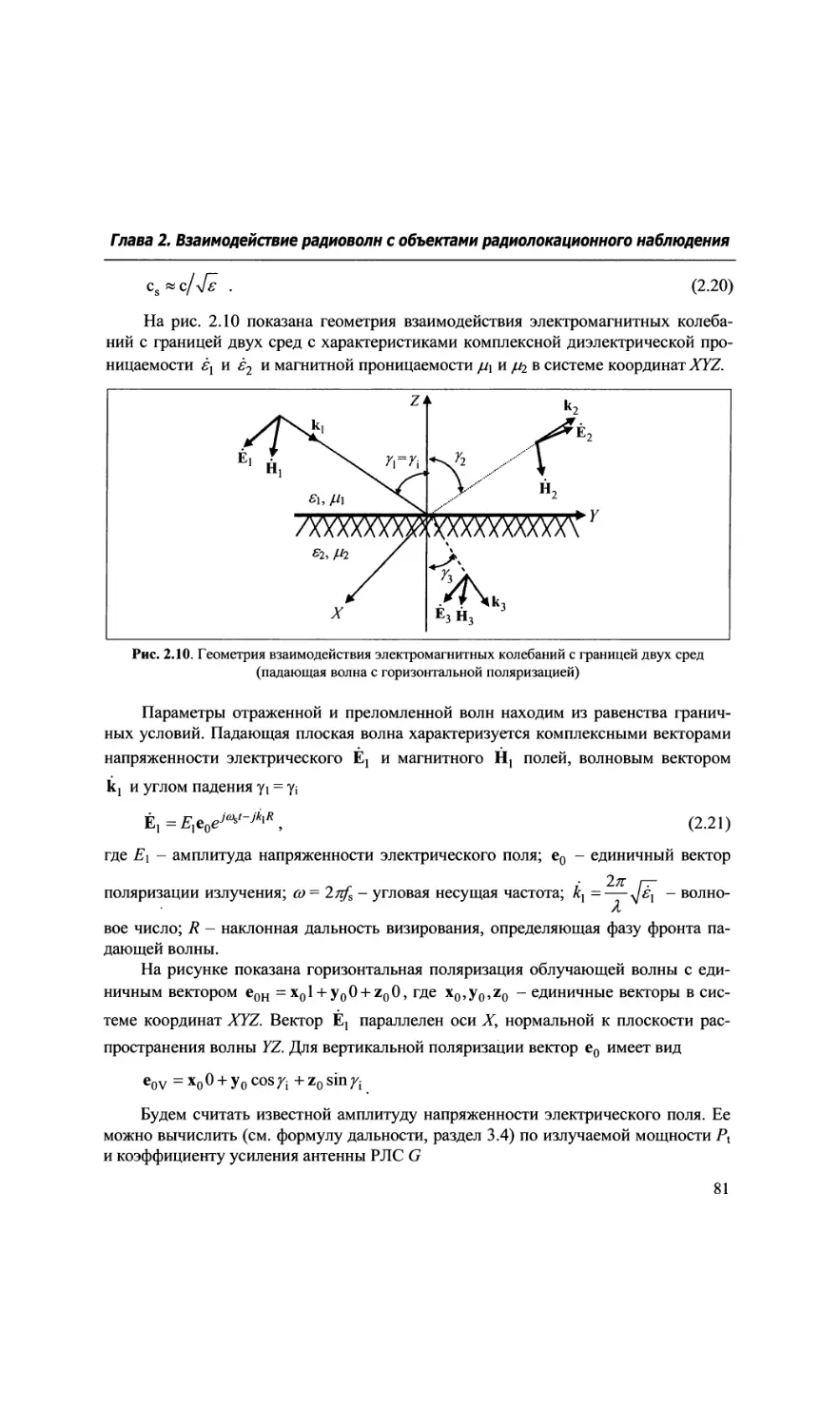
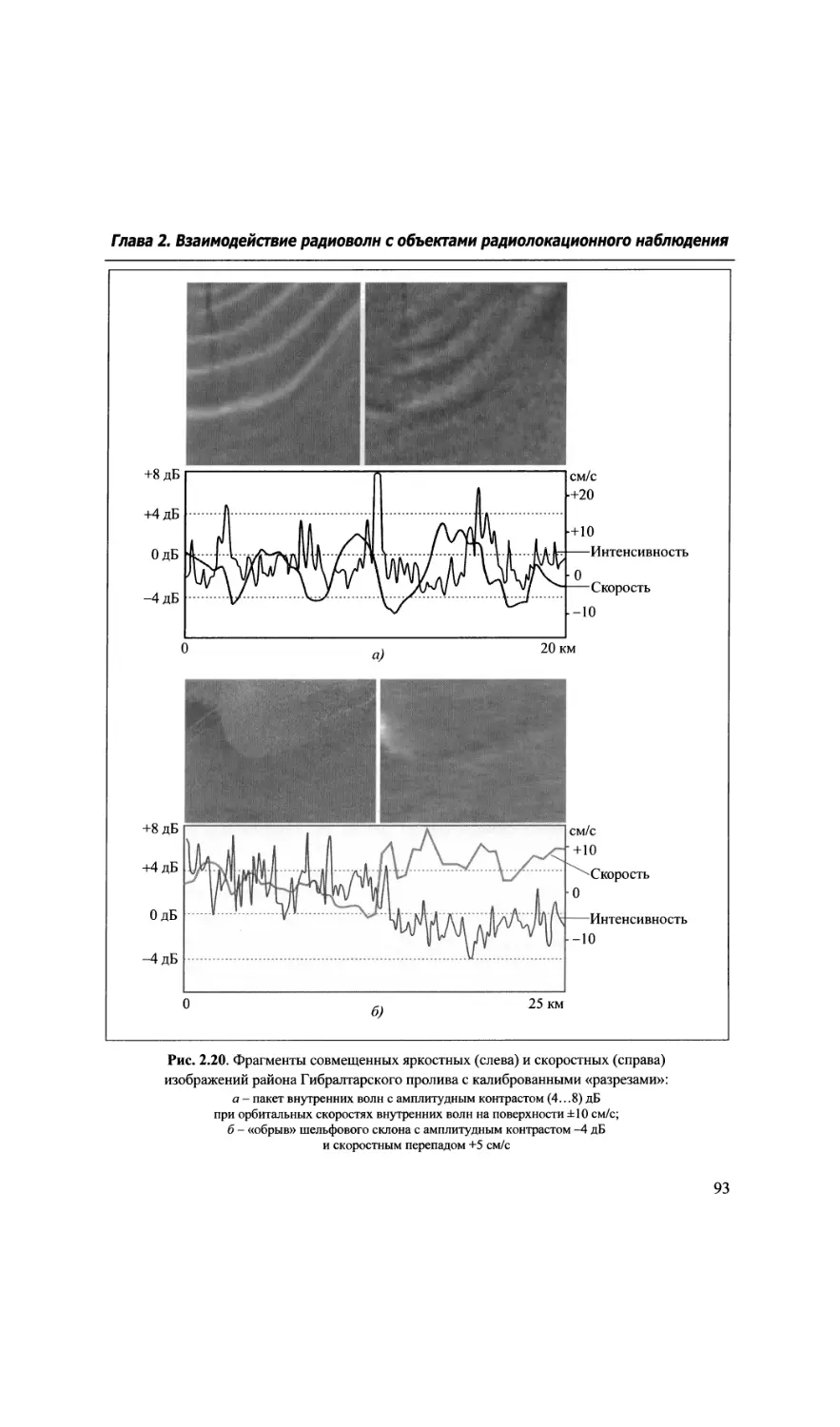
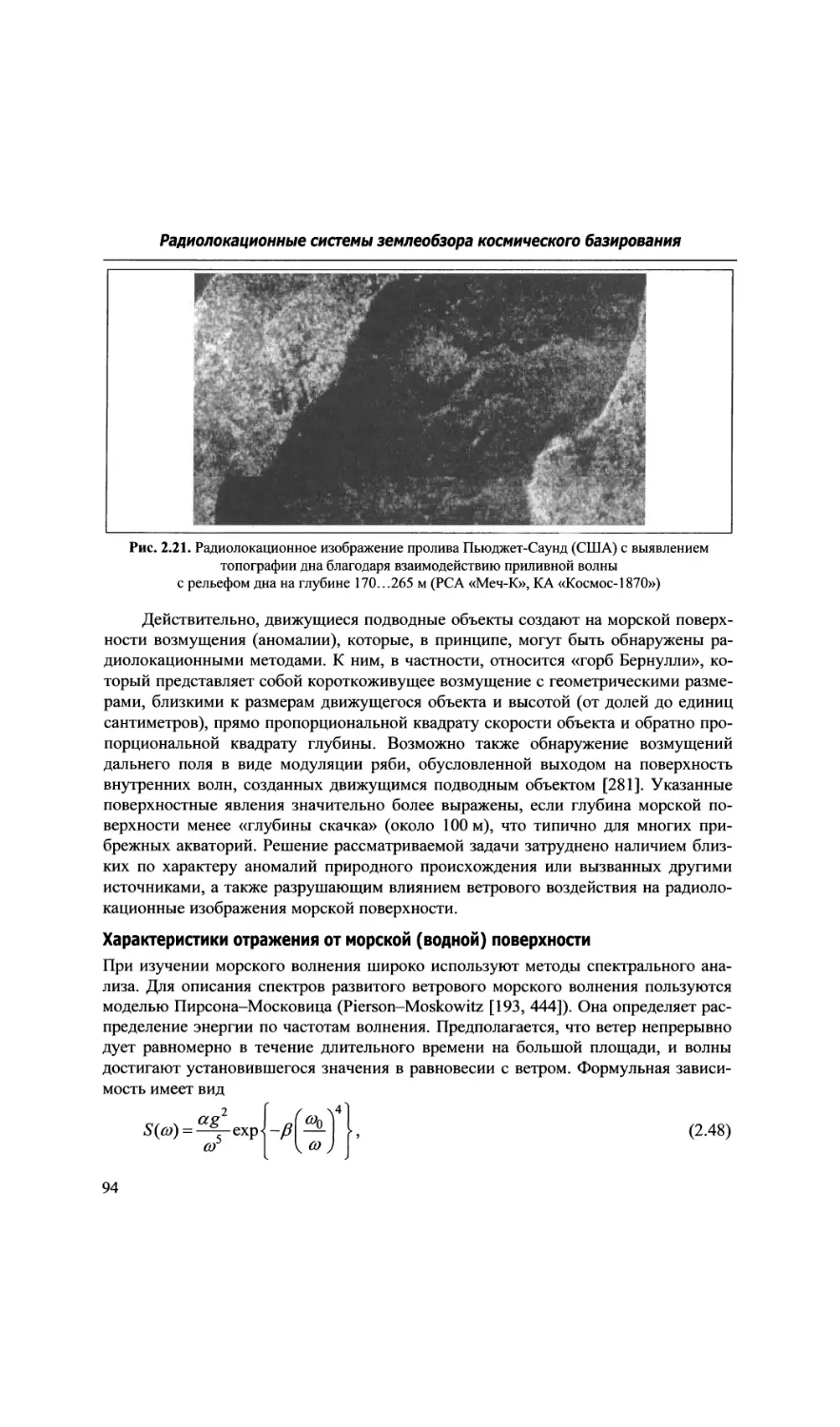
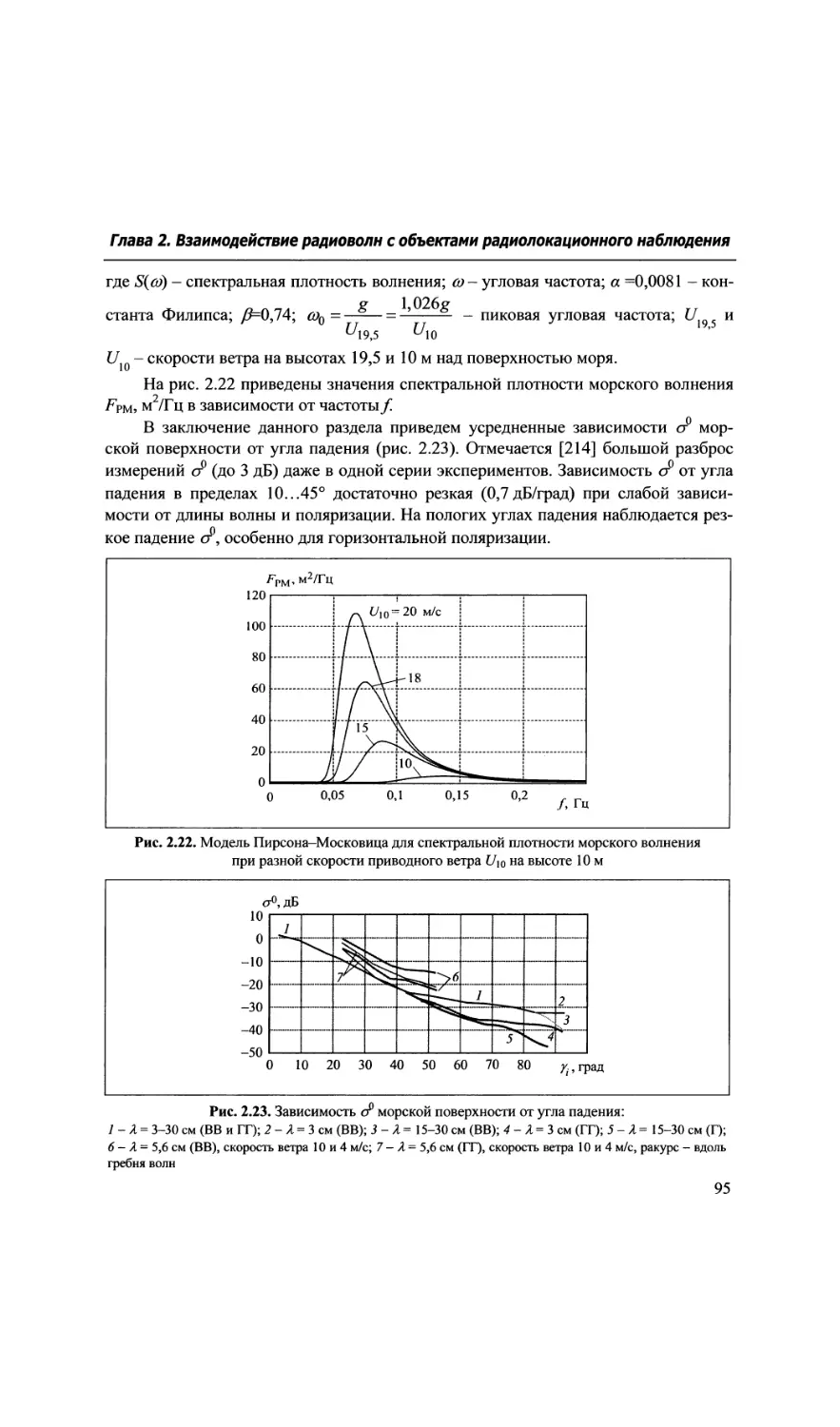
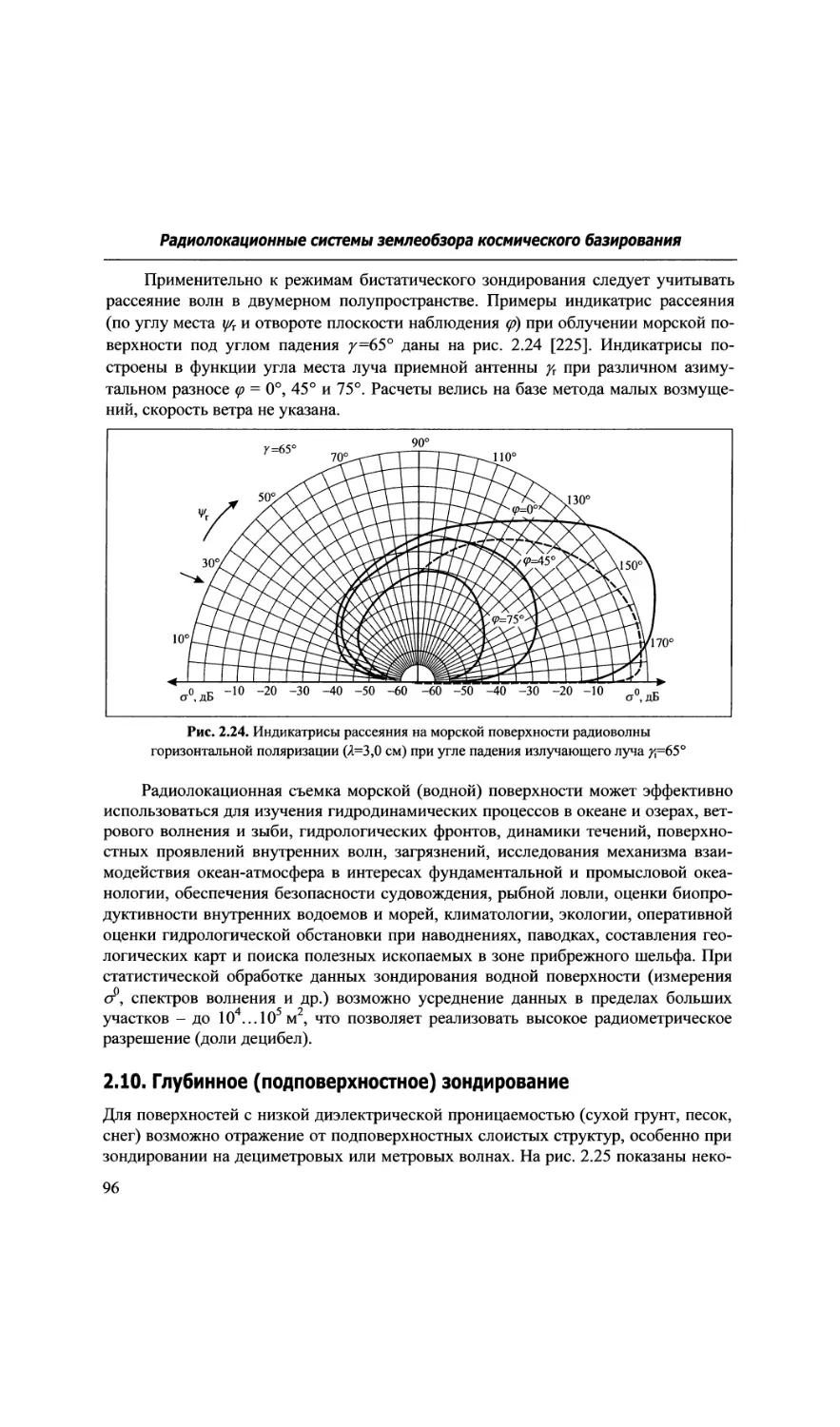
Глава 2. Взаимодействие радиоволн с объектами радиолокационного
наблюдения................................................................59
2.1. Объекты радиолокационного наблюдения и их свойства........... 59
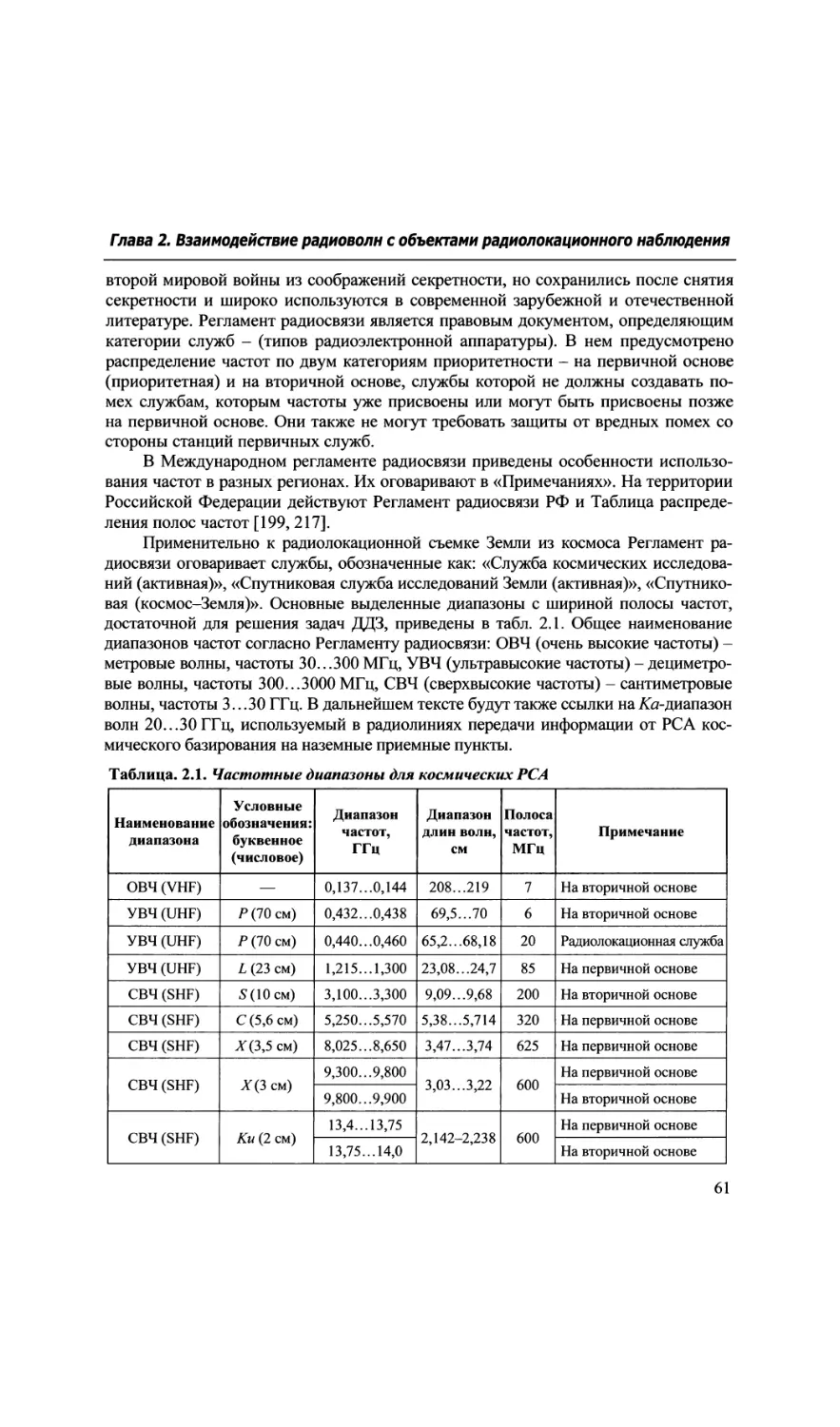
2.2. Спектр электромагнитных колебаний, используемых для наблюдения
земной поверхности из космоса.....................................60
2.2.1. Диапазоны частот, выделенные Регламентом радиосвязи для
радиолокационного зондирования Земли из космоса...................60
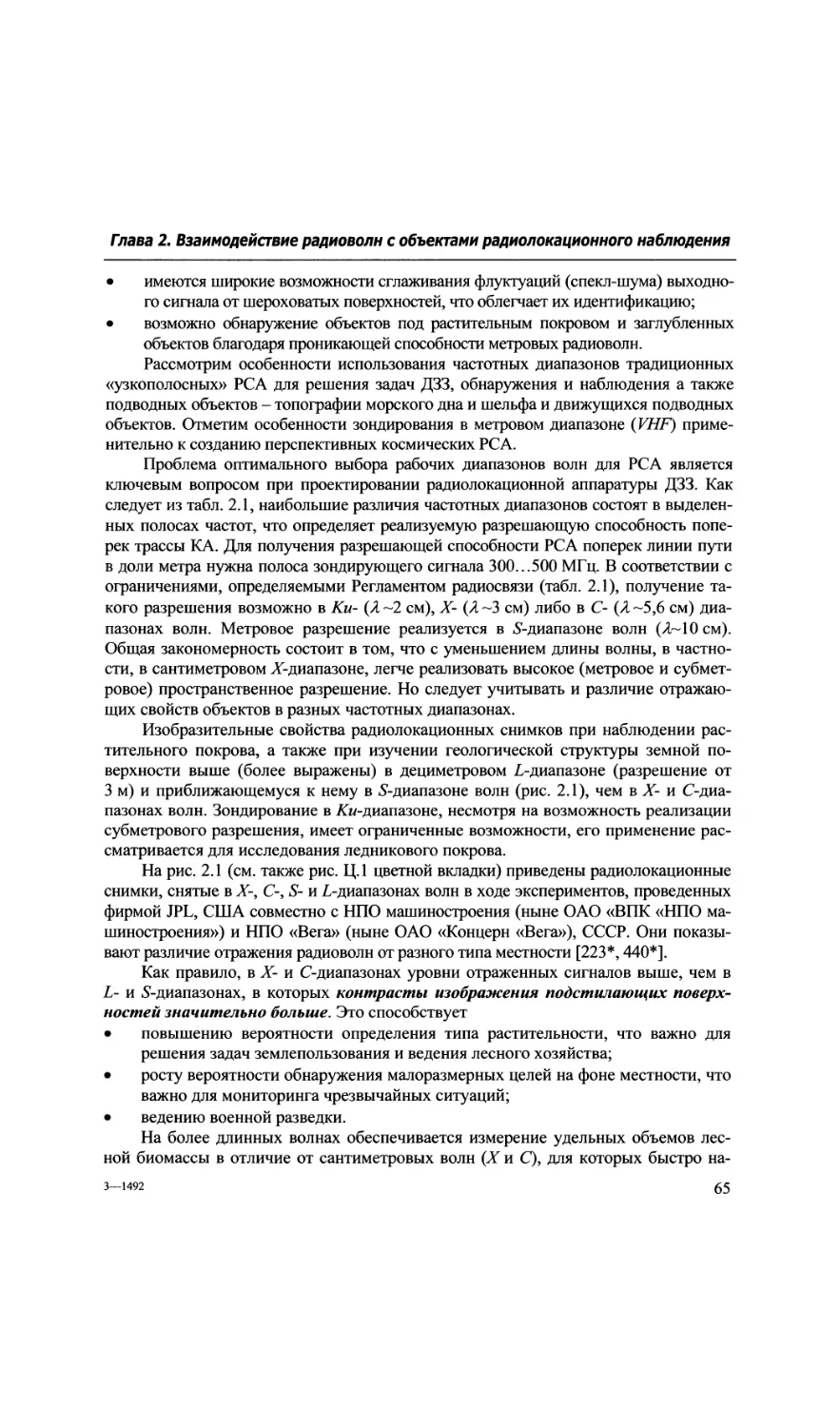
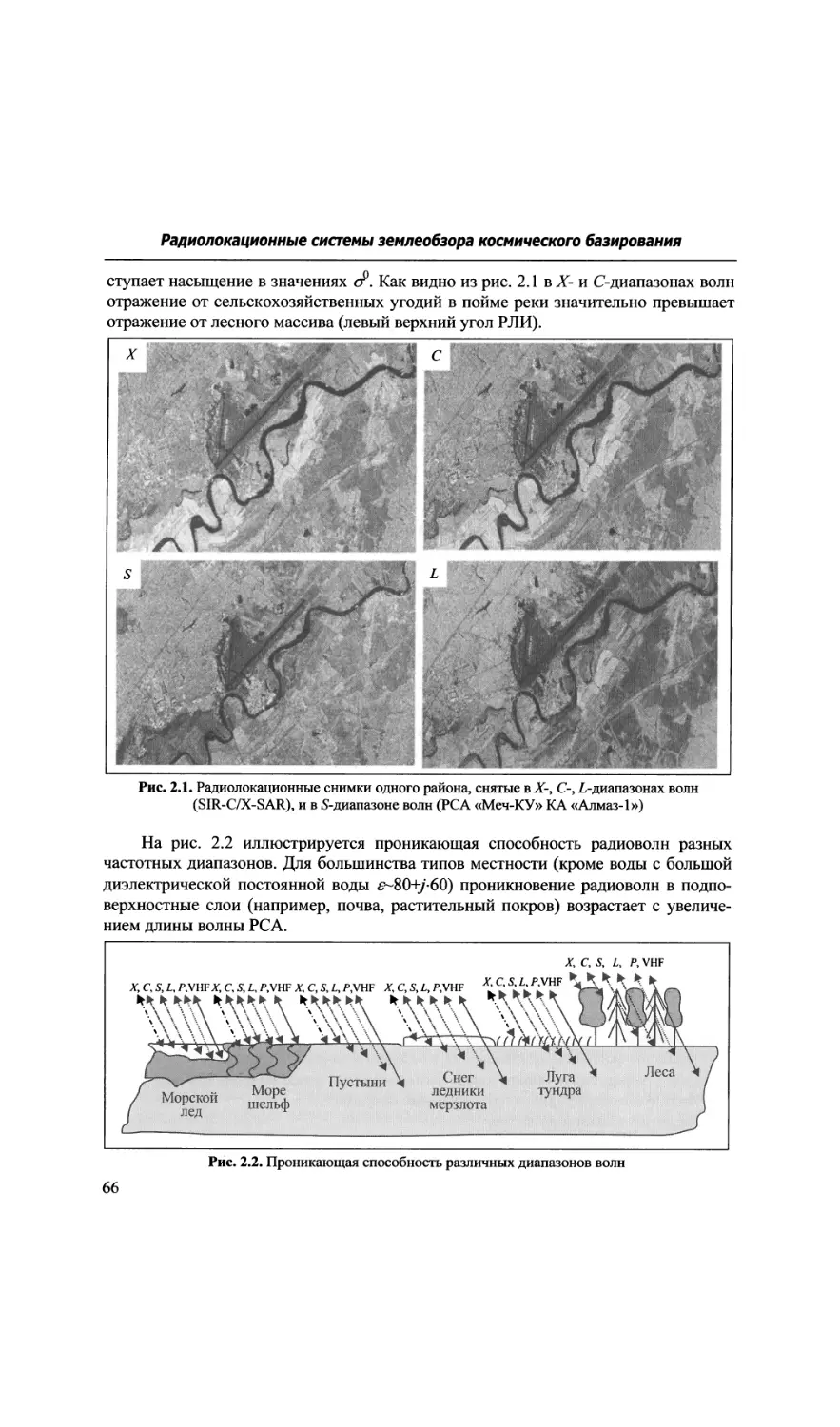
2.2.2. Изобразительные свойства радиолокационных снимков в зависимости
от длины волны PC А..............................................63
2.2.3. Влияние трассы распространения сигнала на возможности
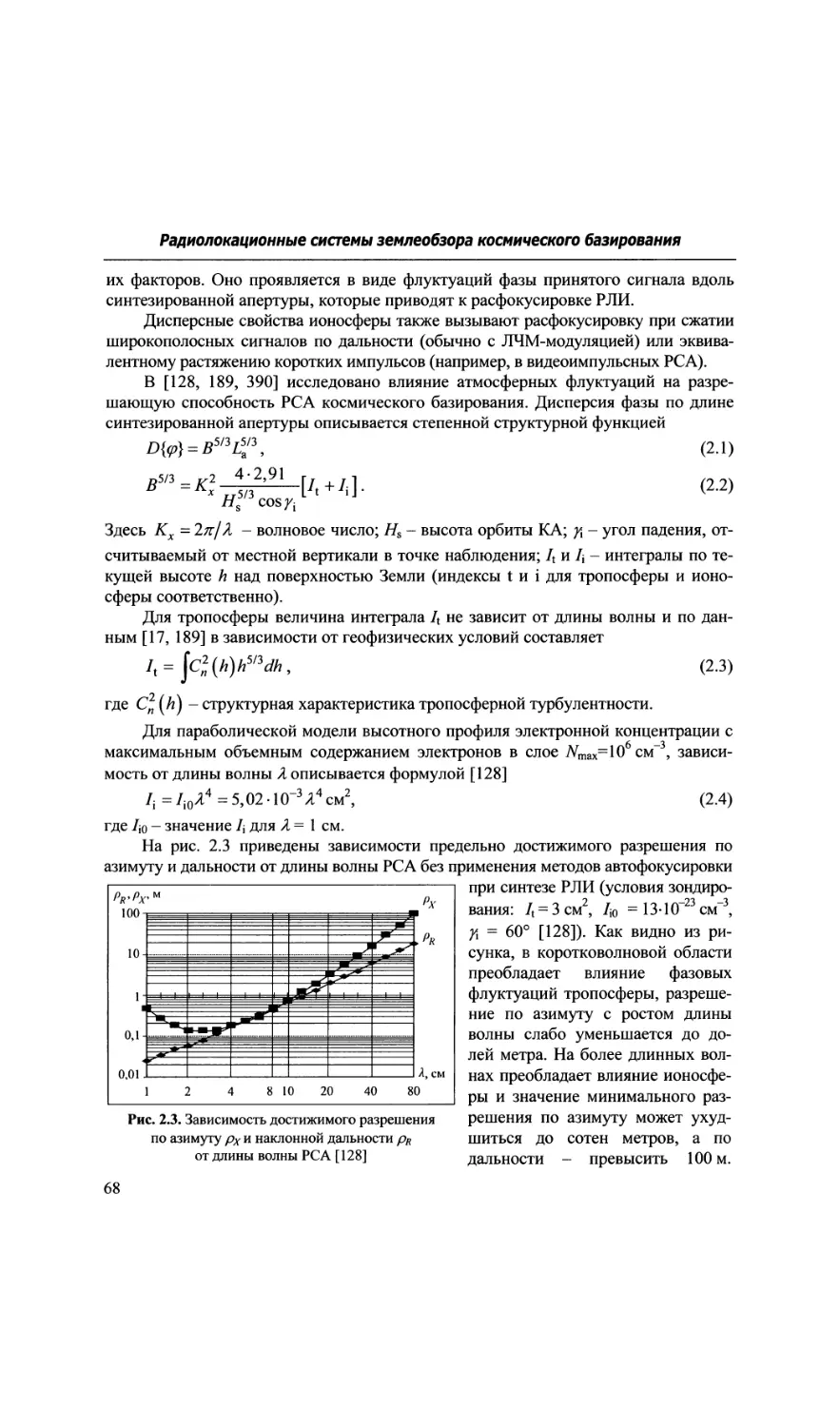
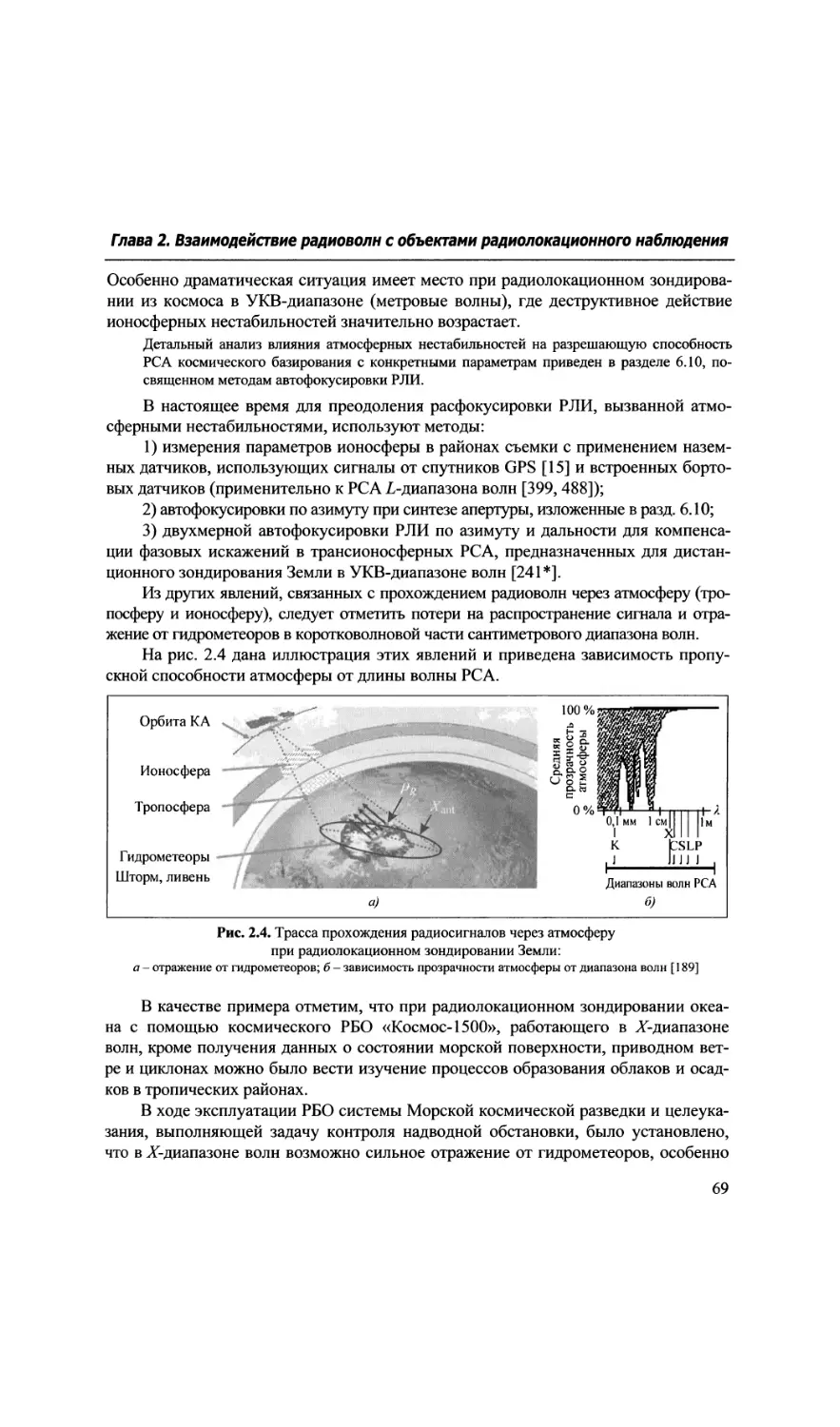
радиолокационного наблюдения в разных диапазонах волн............67
2.3. Поляризация радиосигналов при передаче и приеме.............. 71
2.4. Отражение электромагнитных волн от сосредоточенных и протяженных
объектов и численные характеристики отраженных сигналов...........74
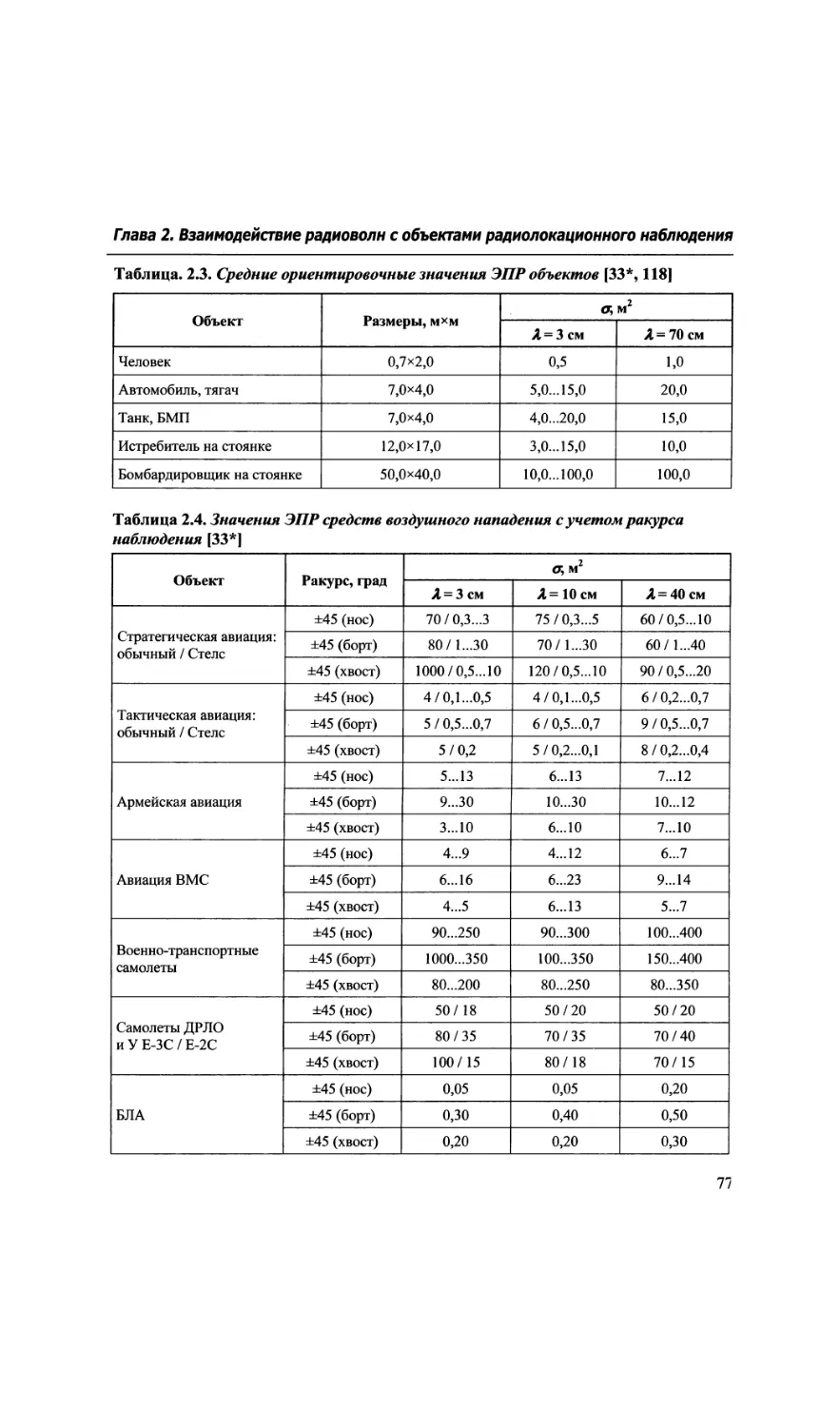
2.4.1. ЭПР и диаграммы обратного рассеяния простых объектов.......74
2.4.2. Отражение радиоволн от сложных объектов....................76
2.4.3. Отражение радиоволн от пространственно распределенных объектов.78
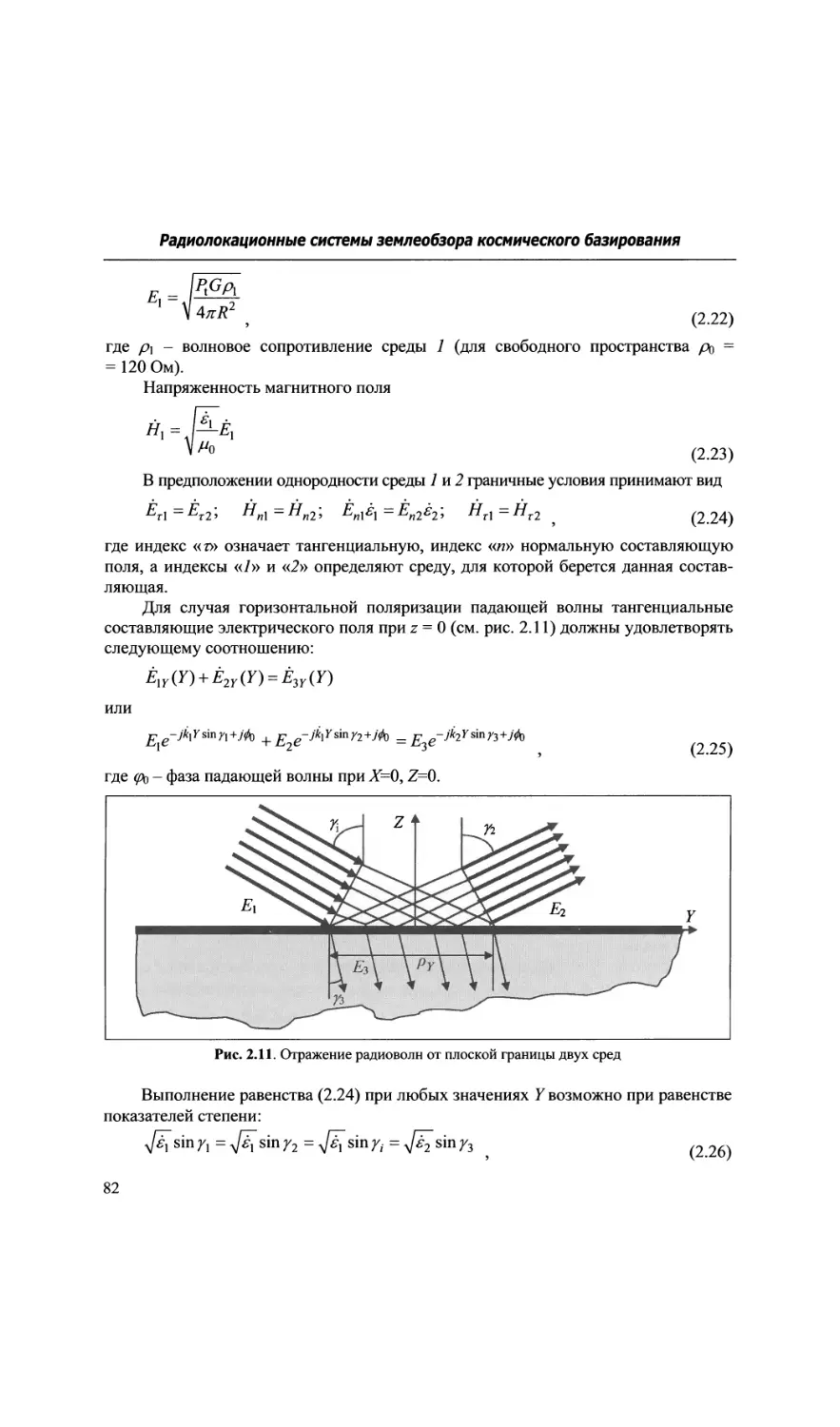
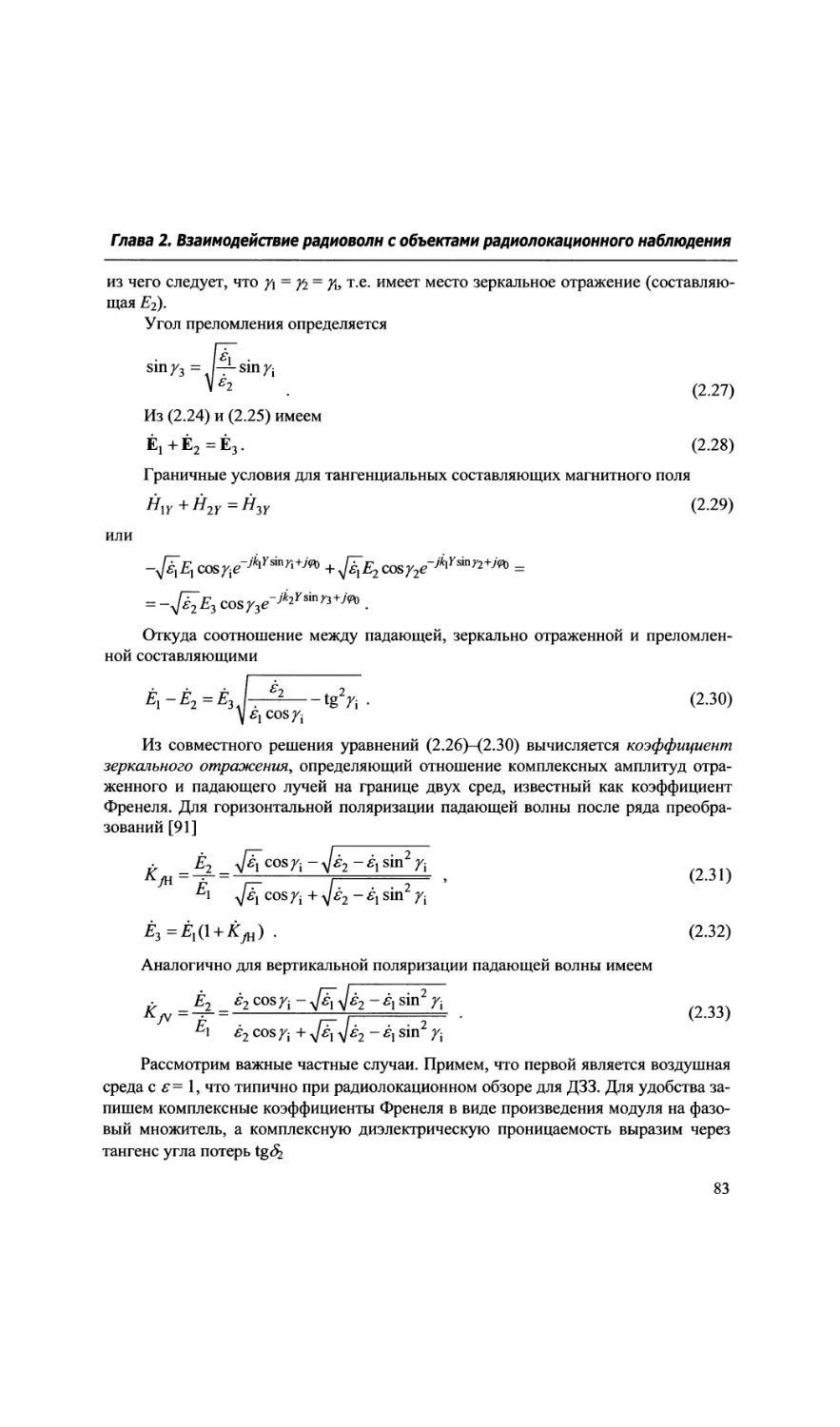
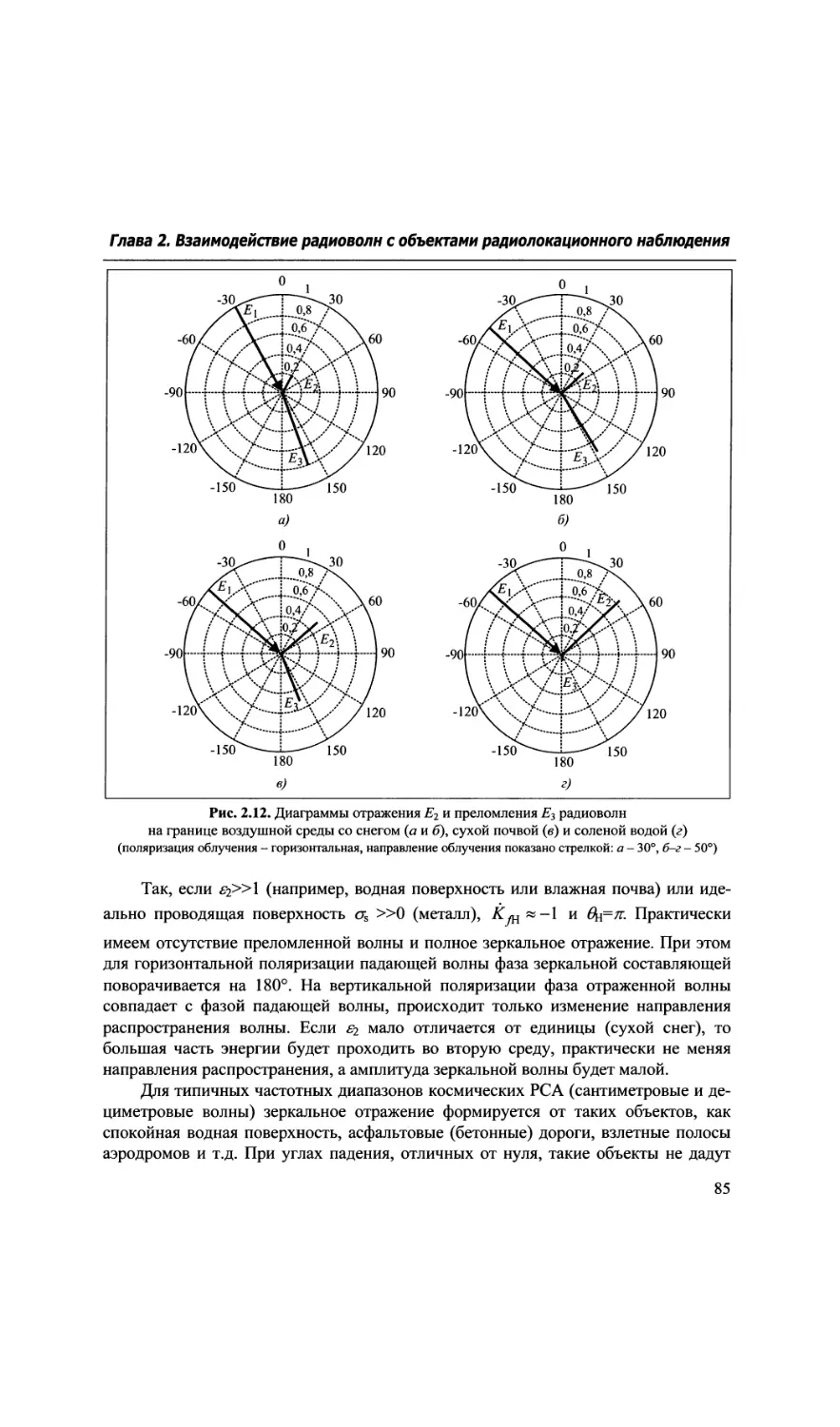
2.5. Отражение радиоволн от плоской границы двух сред..............80
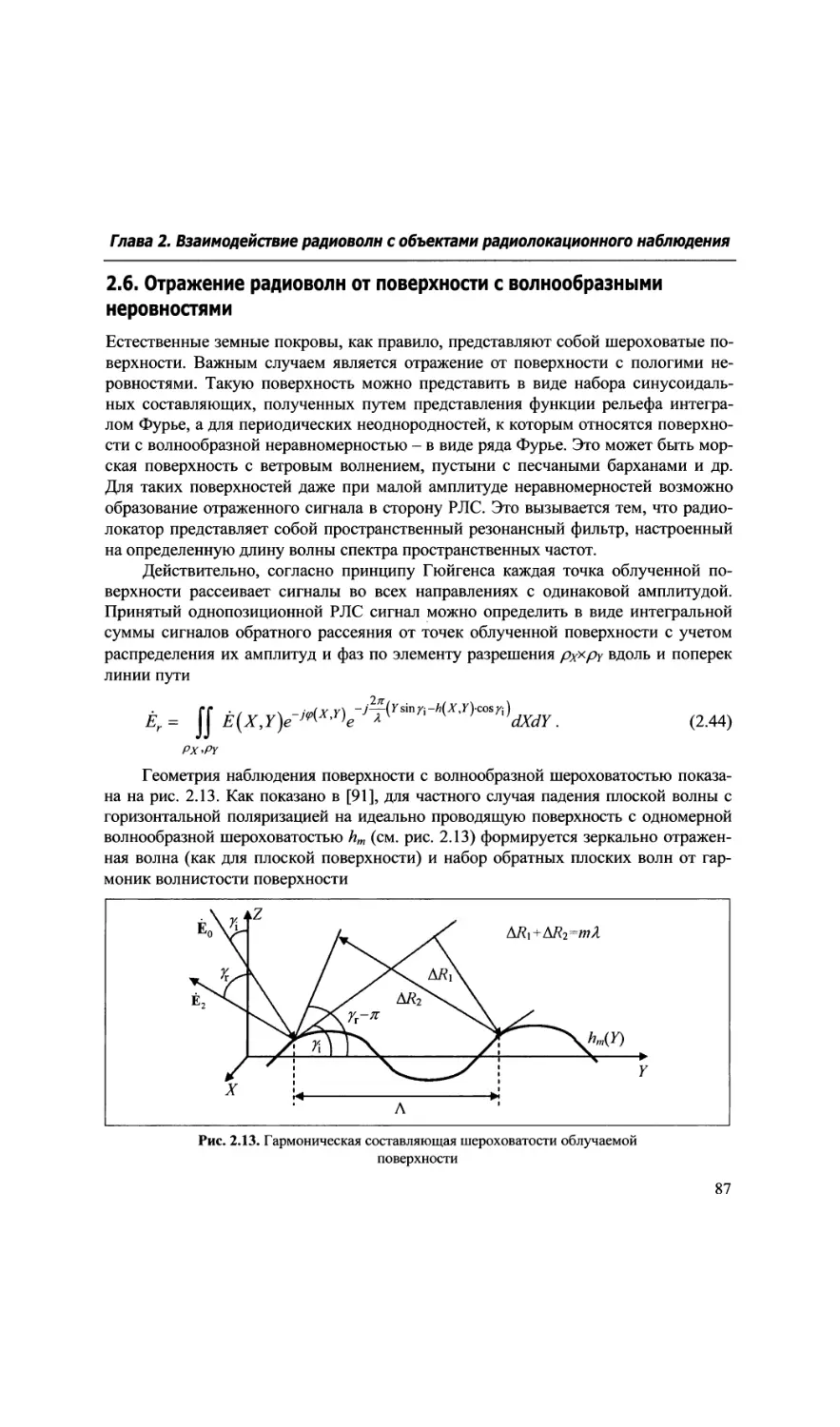
2.6. Отражение радиоволн от поверхности с волнообразными
неровностями......................................................87
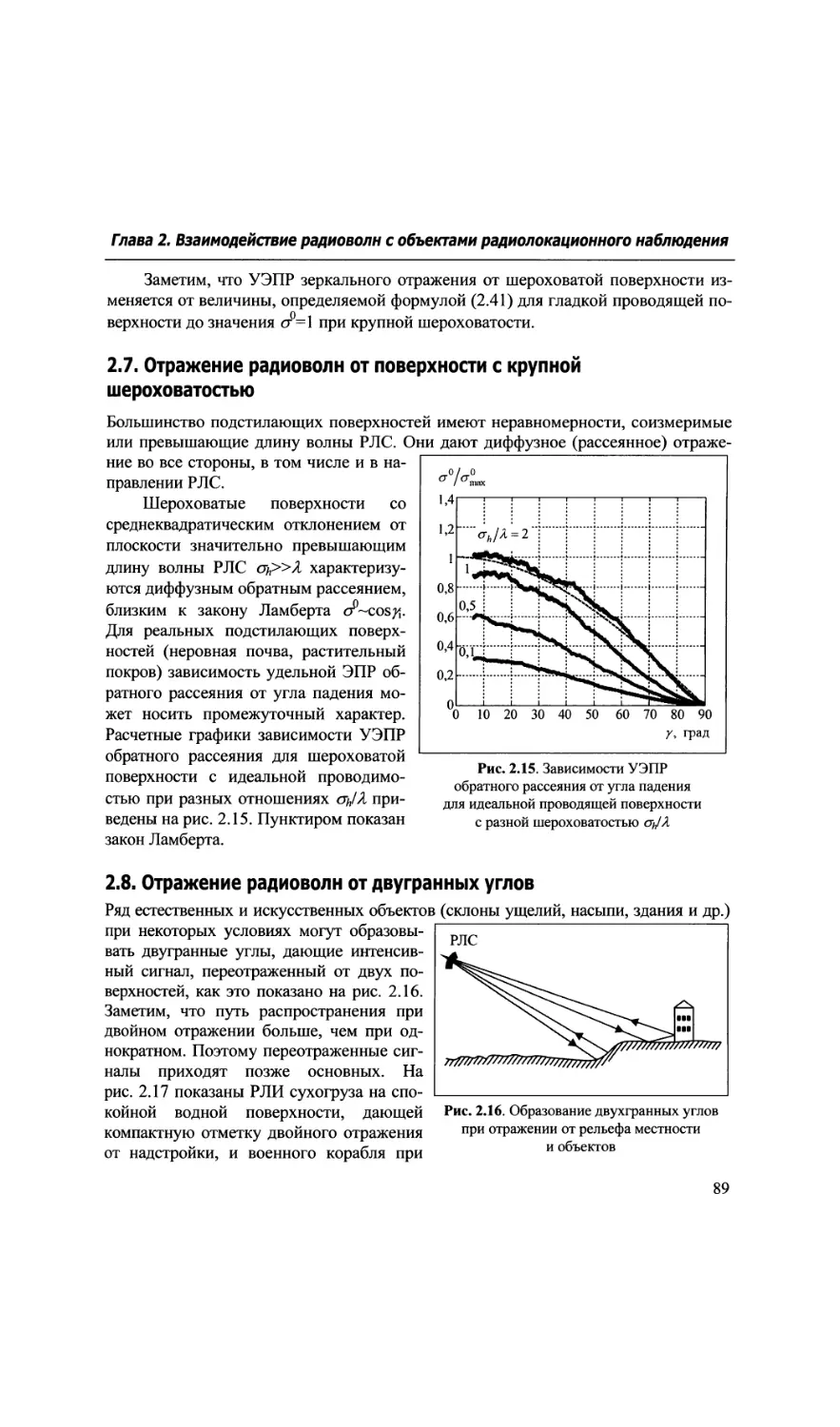
2.7. Отражение радиоволн от поверхности с крупной шероховатостью.......89
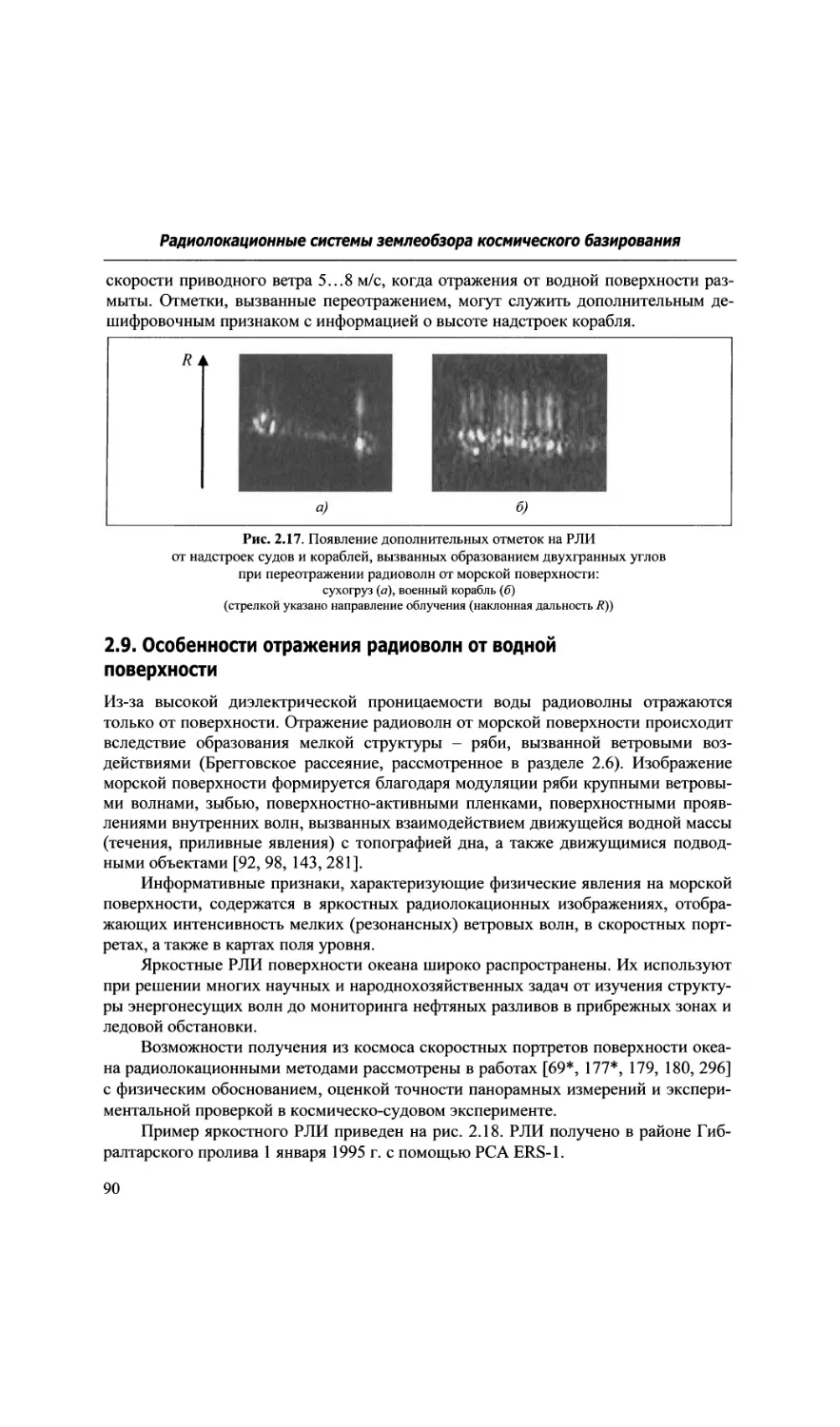
2.8. Отражение радиоволн от двугранных углов.......................89
3
Радиолокационные системы землеобзора космического базирования
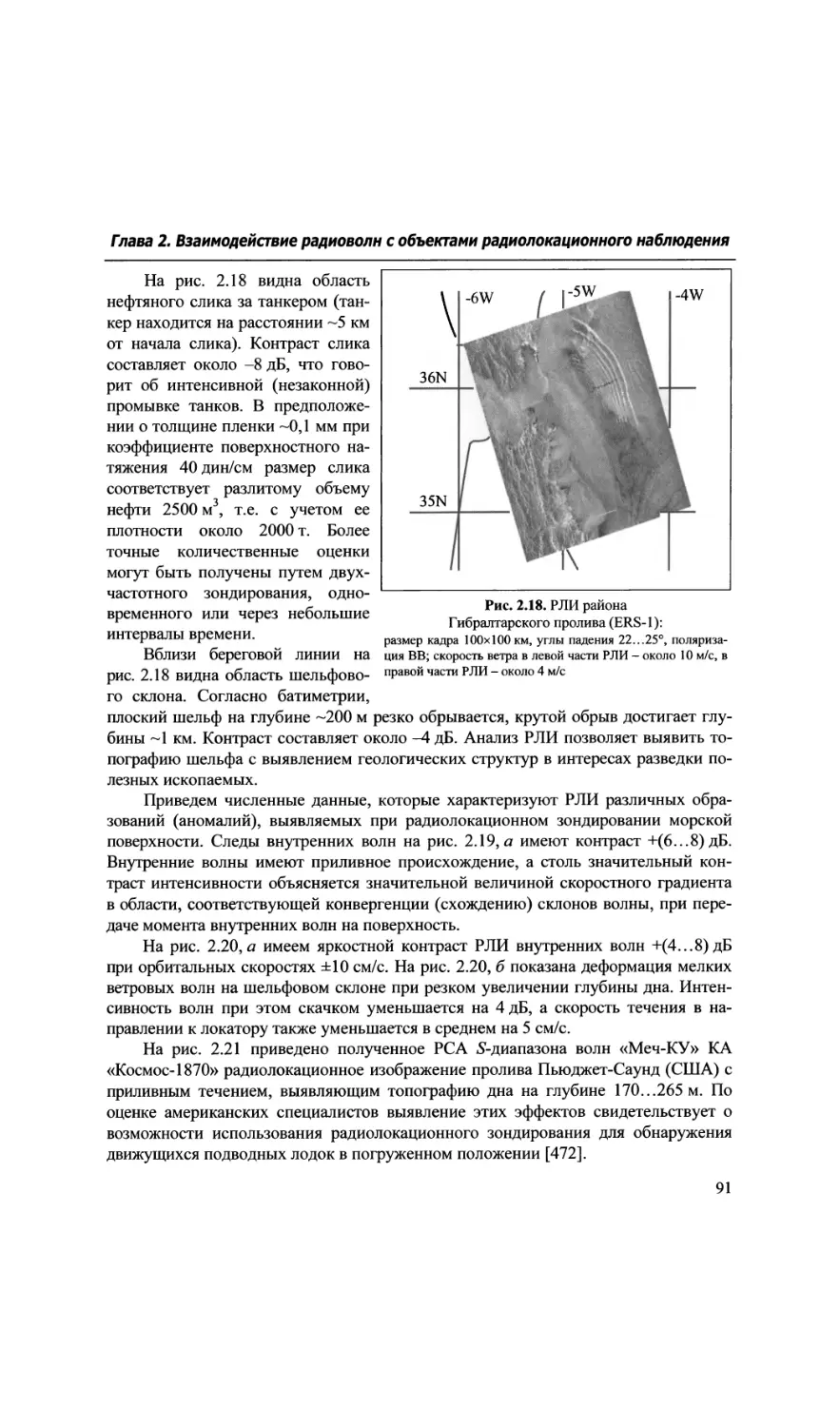
2.9. Особенности отражения радиоволн от водной поверхности..........90
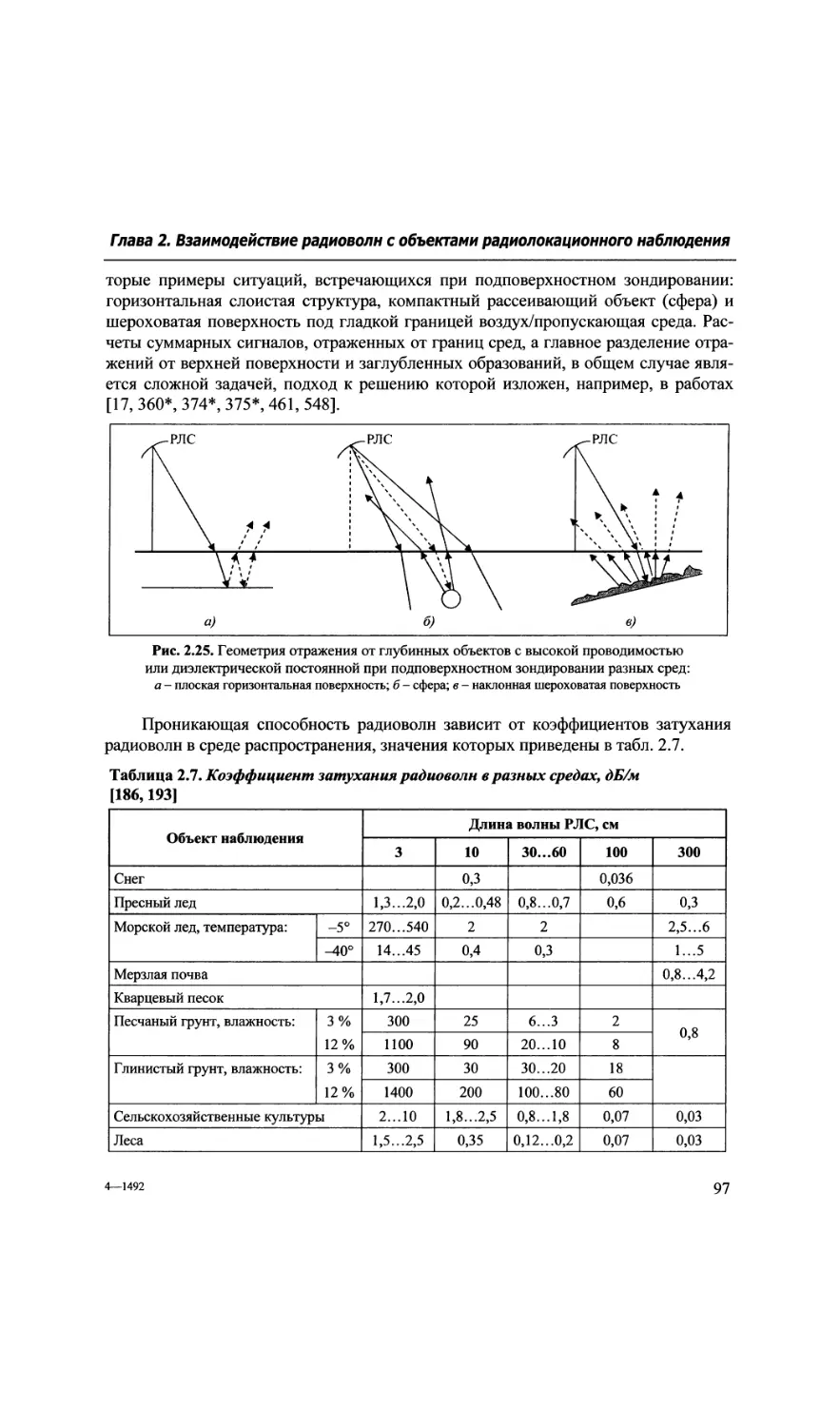
2.10. Глубинное (подповерхностное) зондирование.....................96
2.11. Отражение радиоволн от растительного покрова..................98
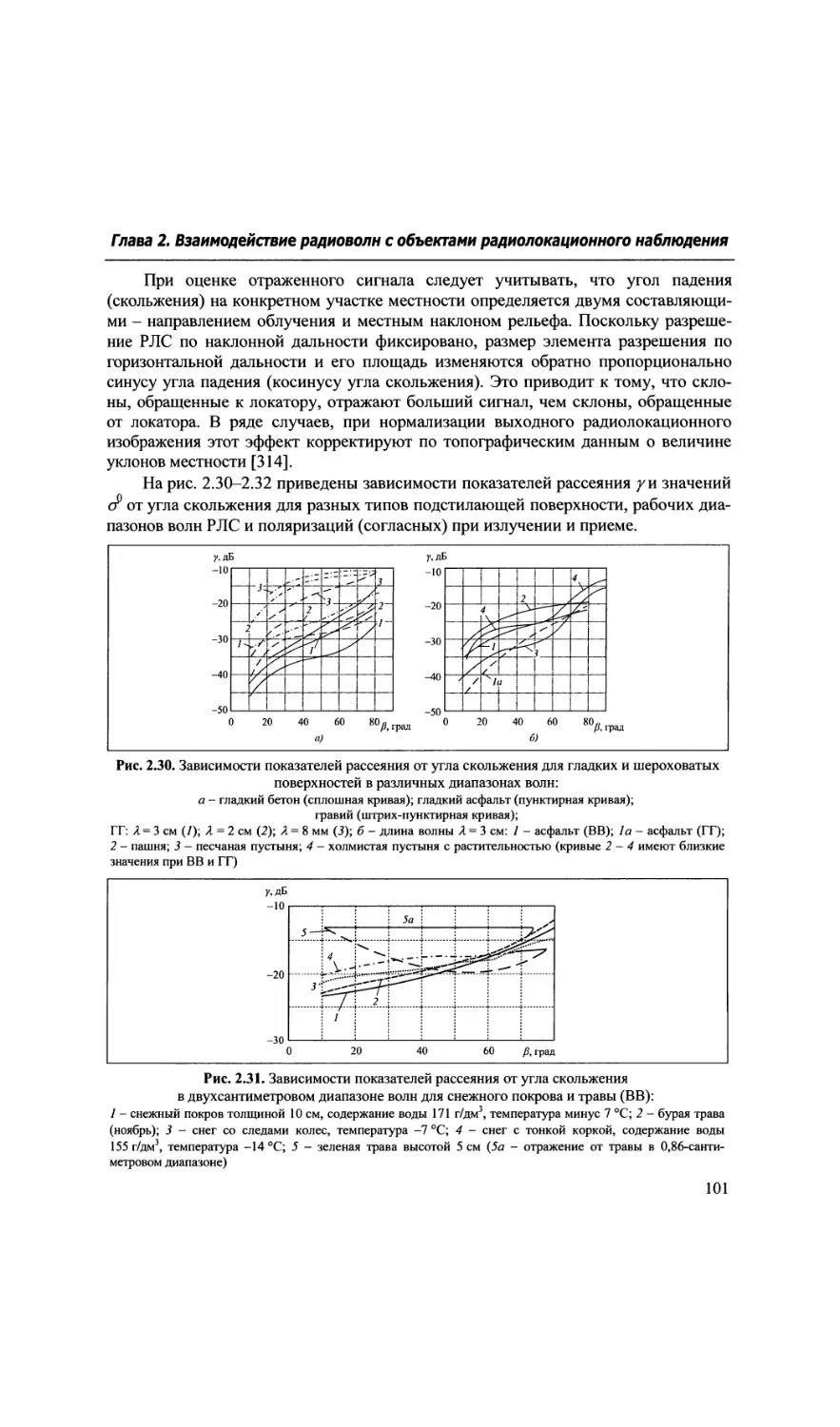
2.12. Влияние угла облучения на отражающие характеристики
местности......................................................... 100
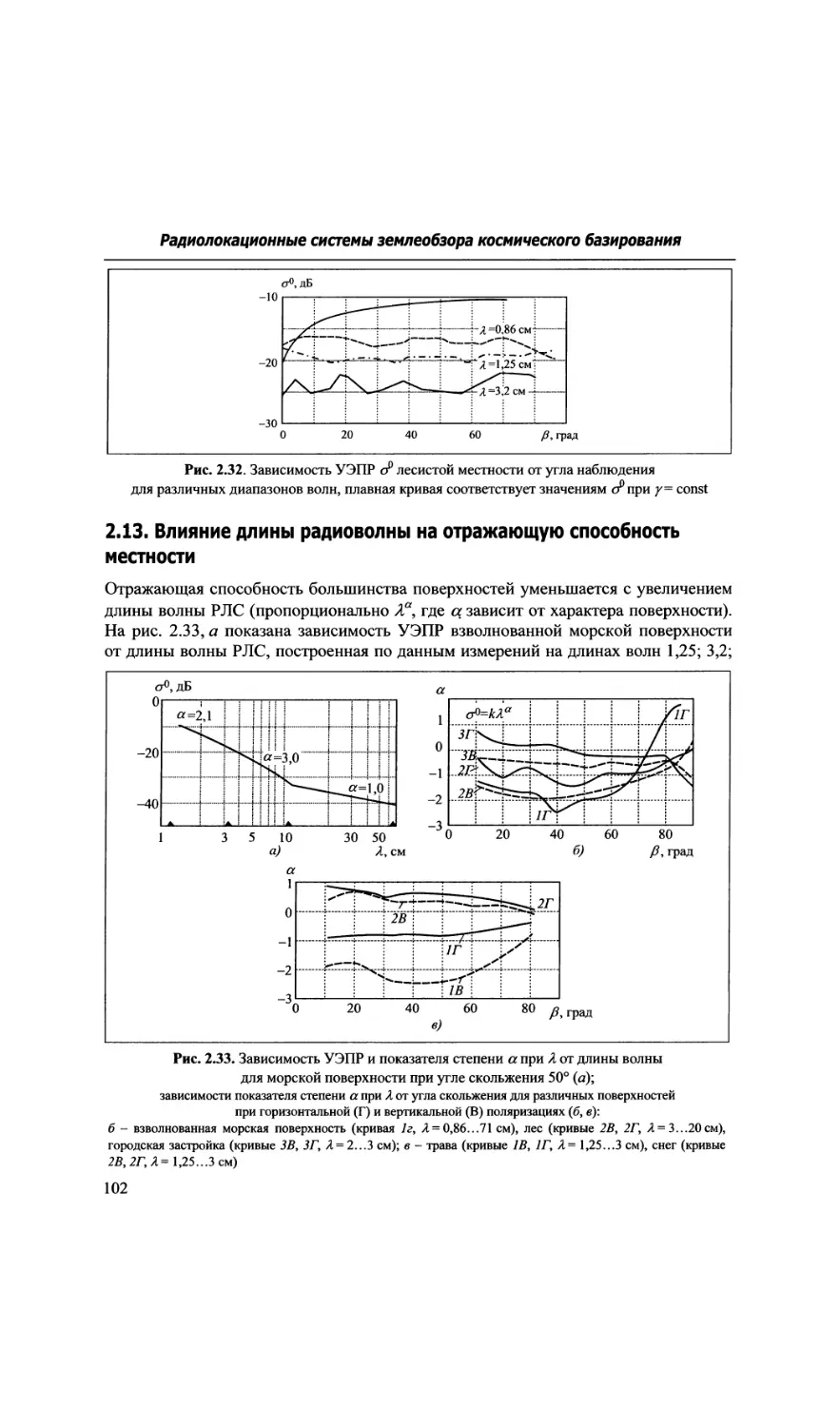
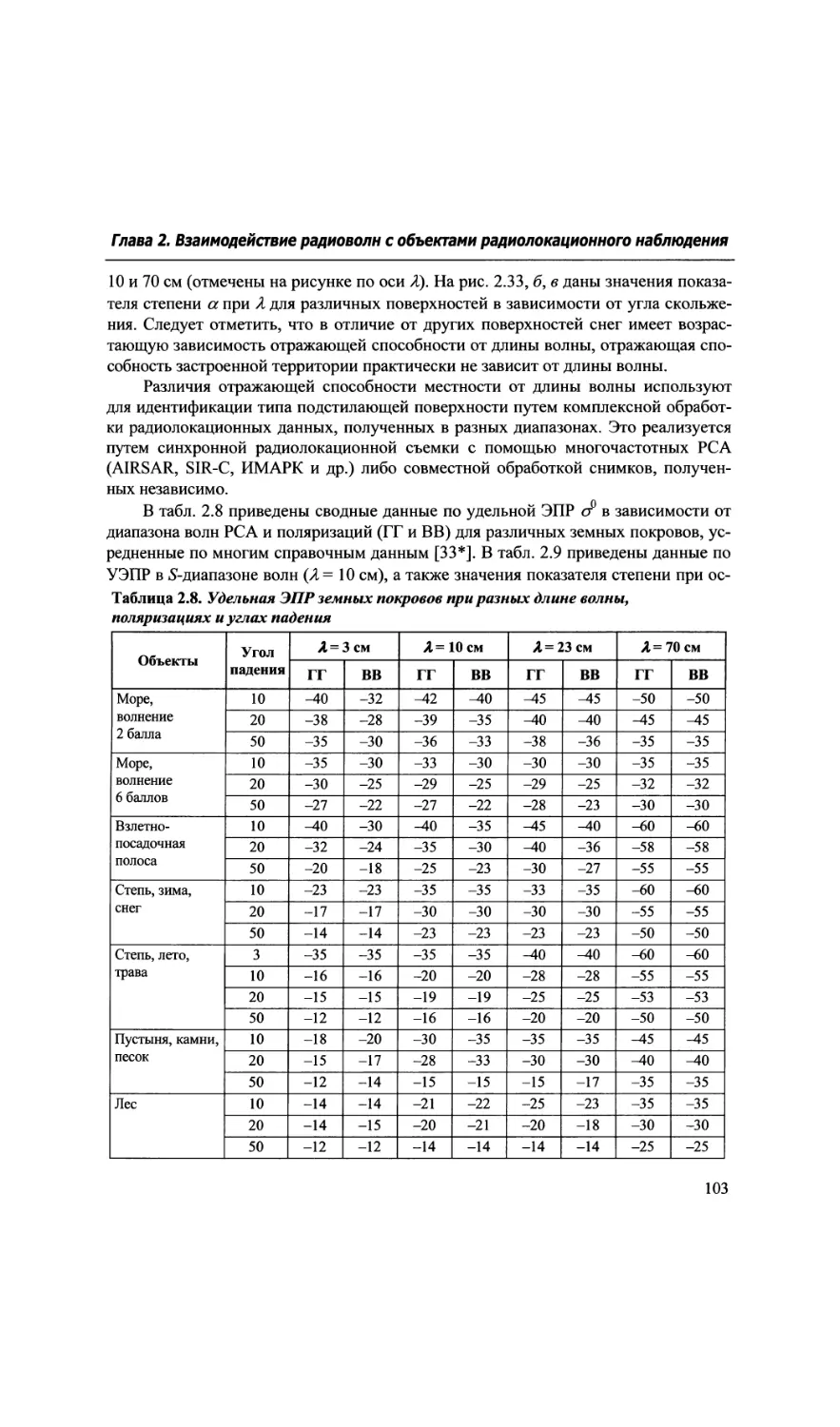
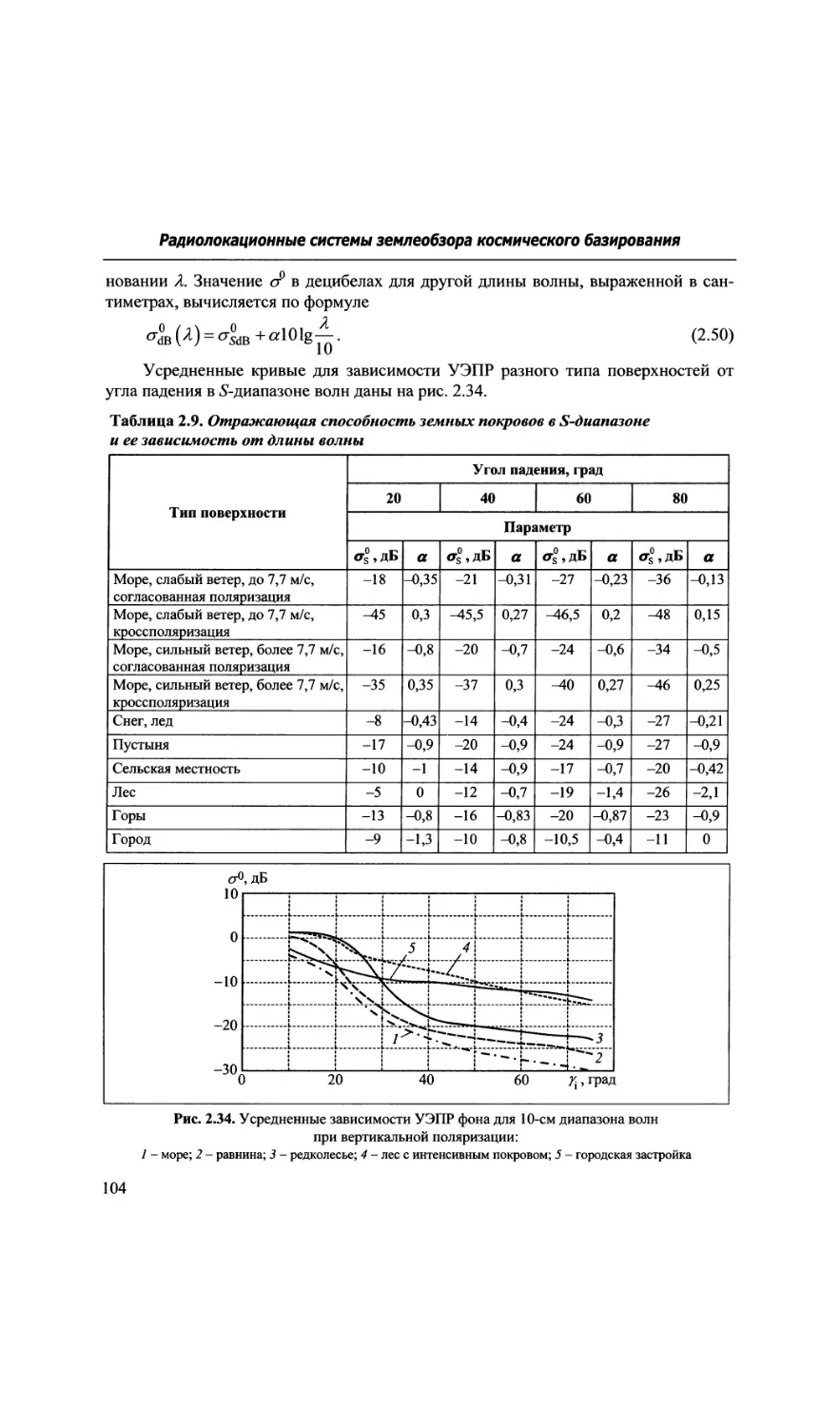
2.13. Влияние длины радиоволны на отражающую способность
местности......................................................... 102
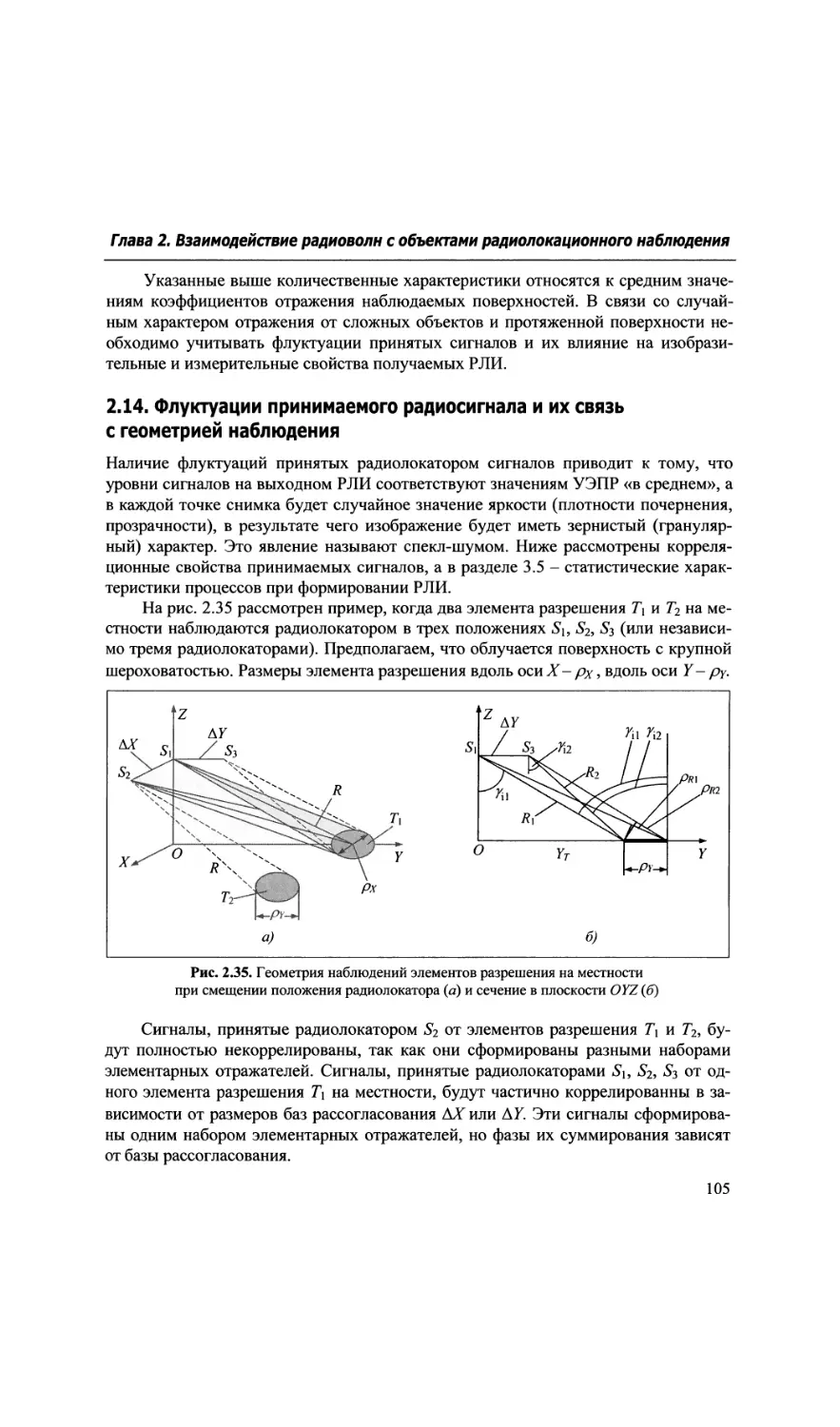
2.14. Флуктуации принимаемого радиосигнала и их связь с геометрией
наблюдения........................................................ 105
2.15. Временная изменчивость объектов наблюдения................... 107
Глава 3. Современные методы космического радиолокационного
землеобзора. Основные определения..........................................109
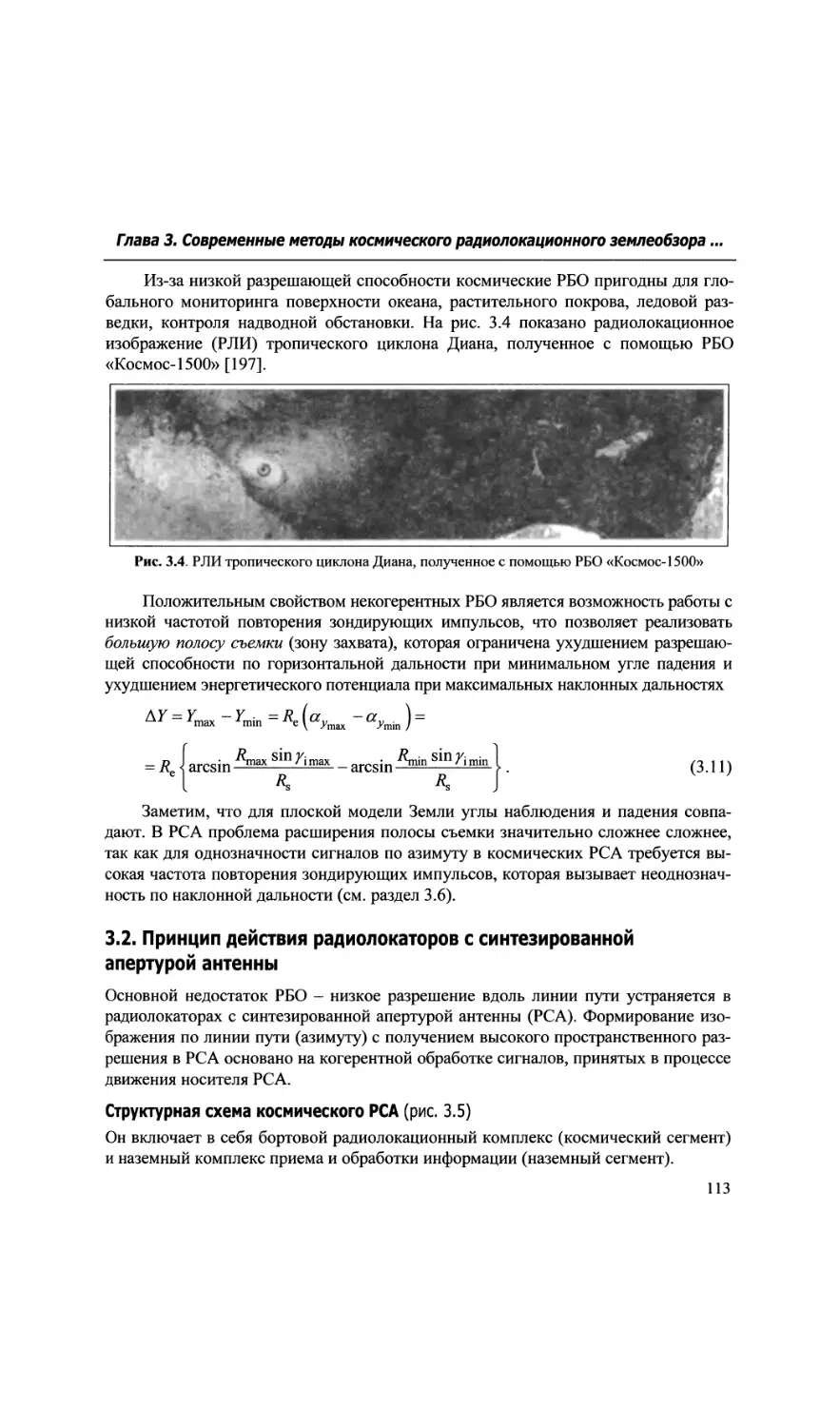
3.1. Принцип действия и основные характеристики космических
радиолокаторов бокового обзора..................................... 109
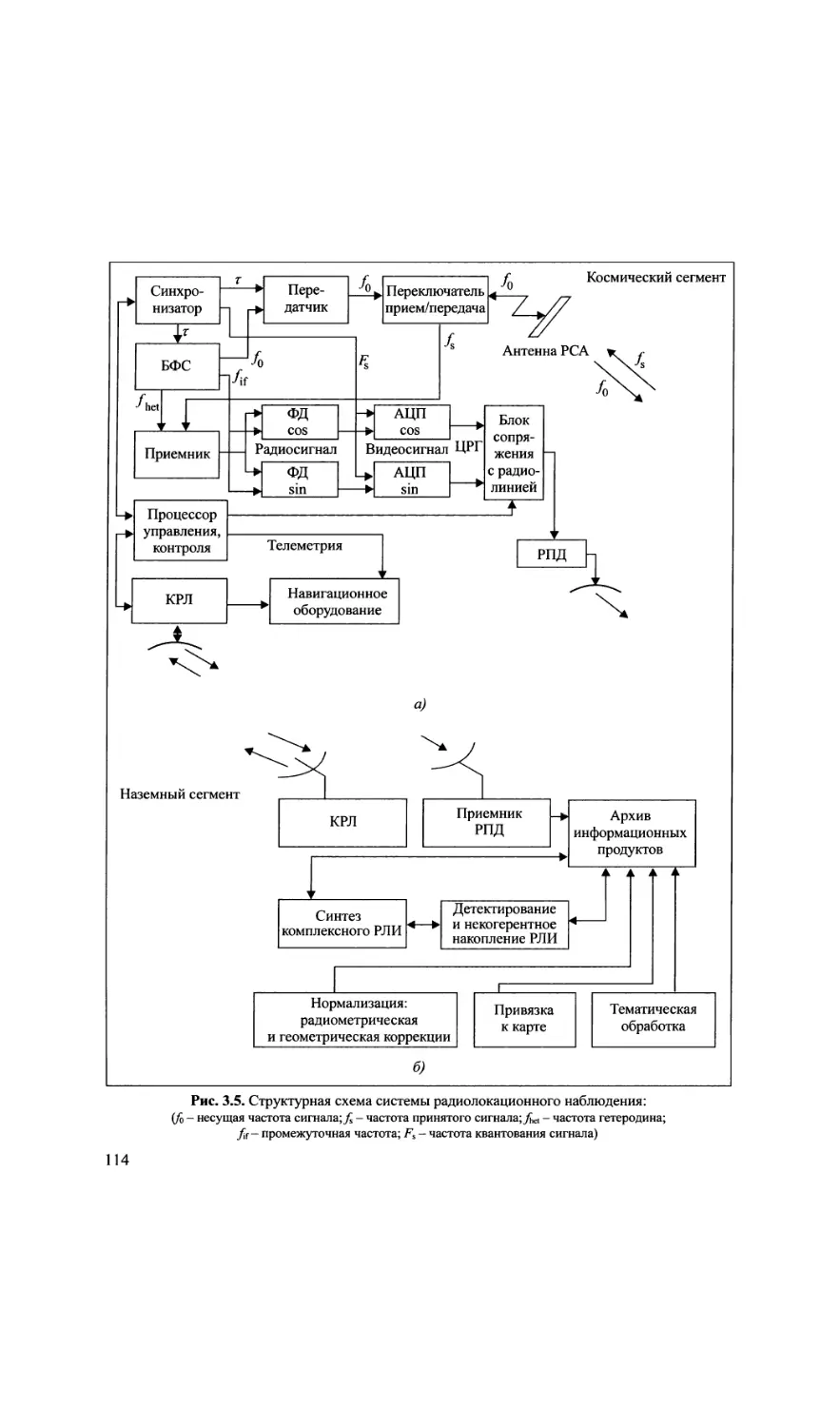
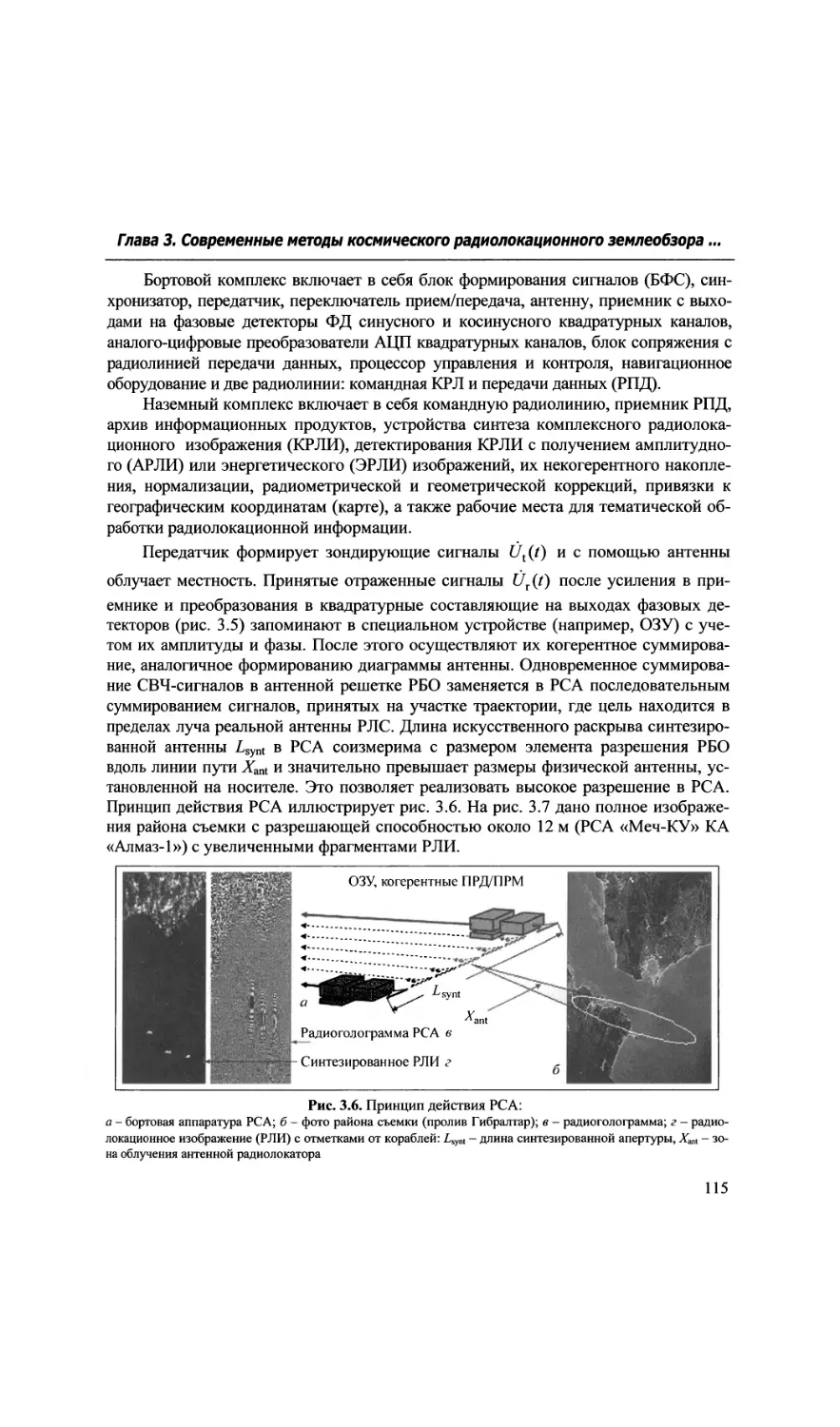
3.2. Принцип действия радиолокаторов с синтезированной апертурой
антенны............................................................ 113
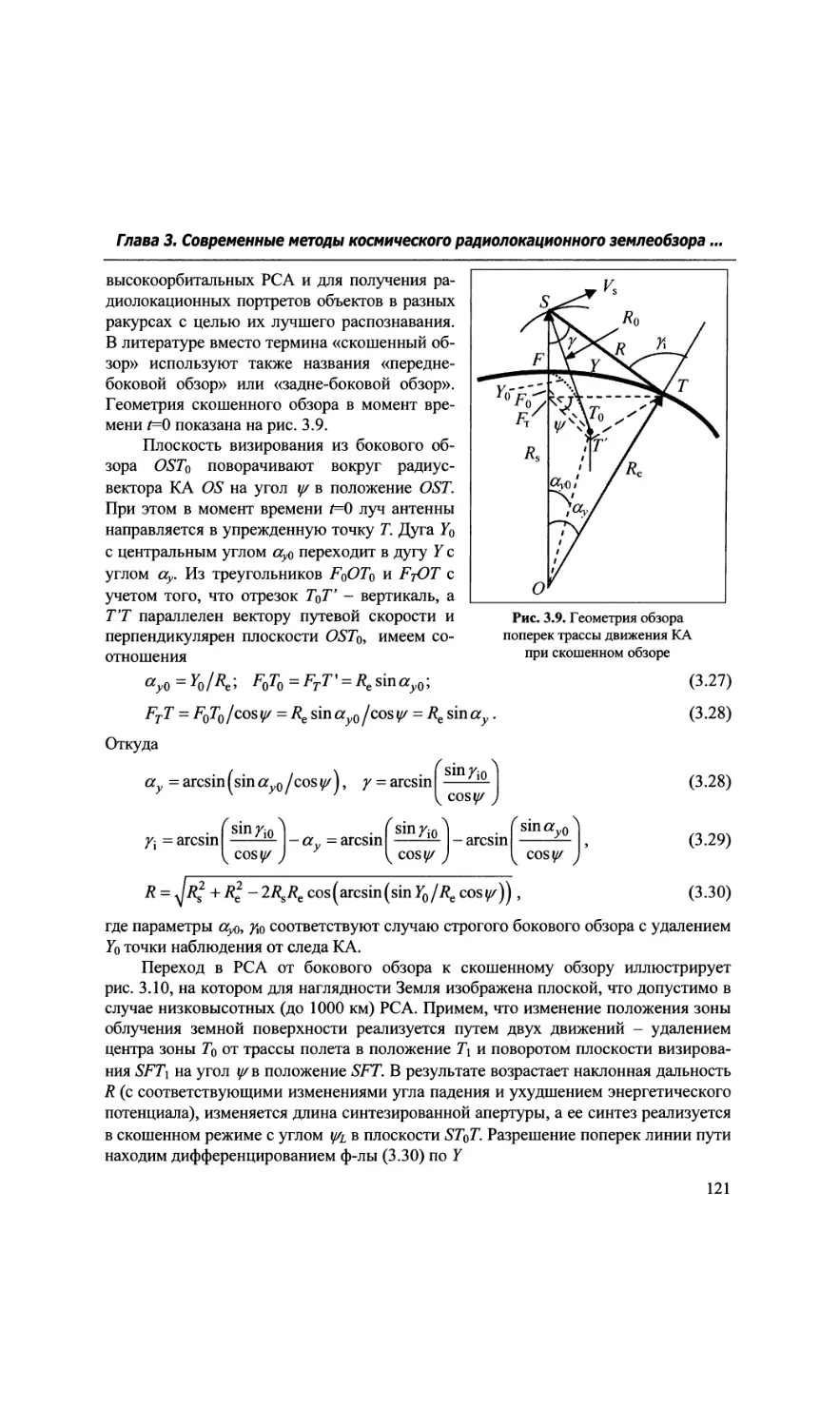
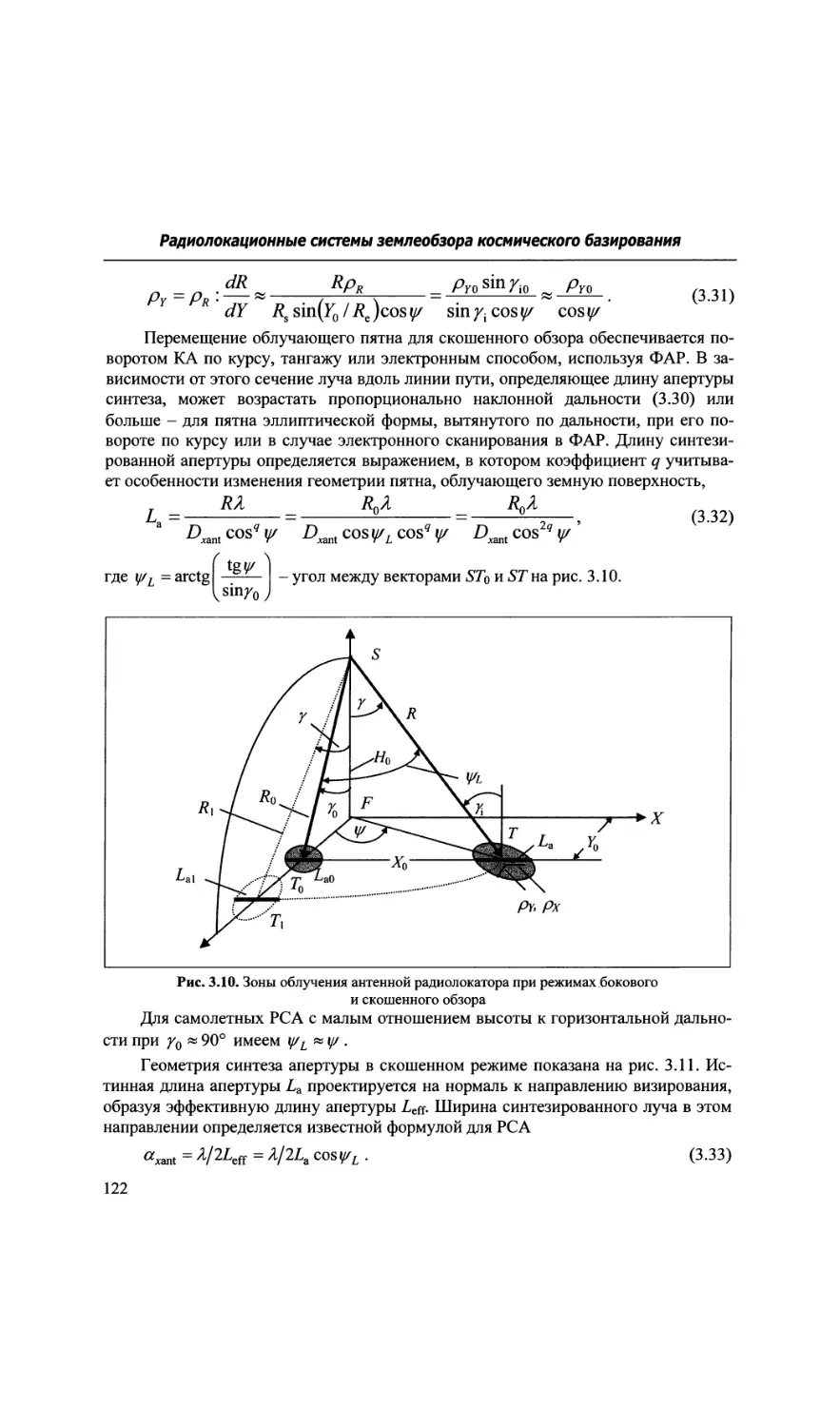
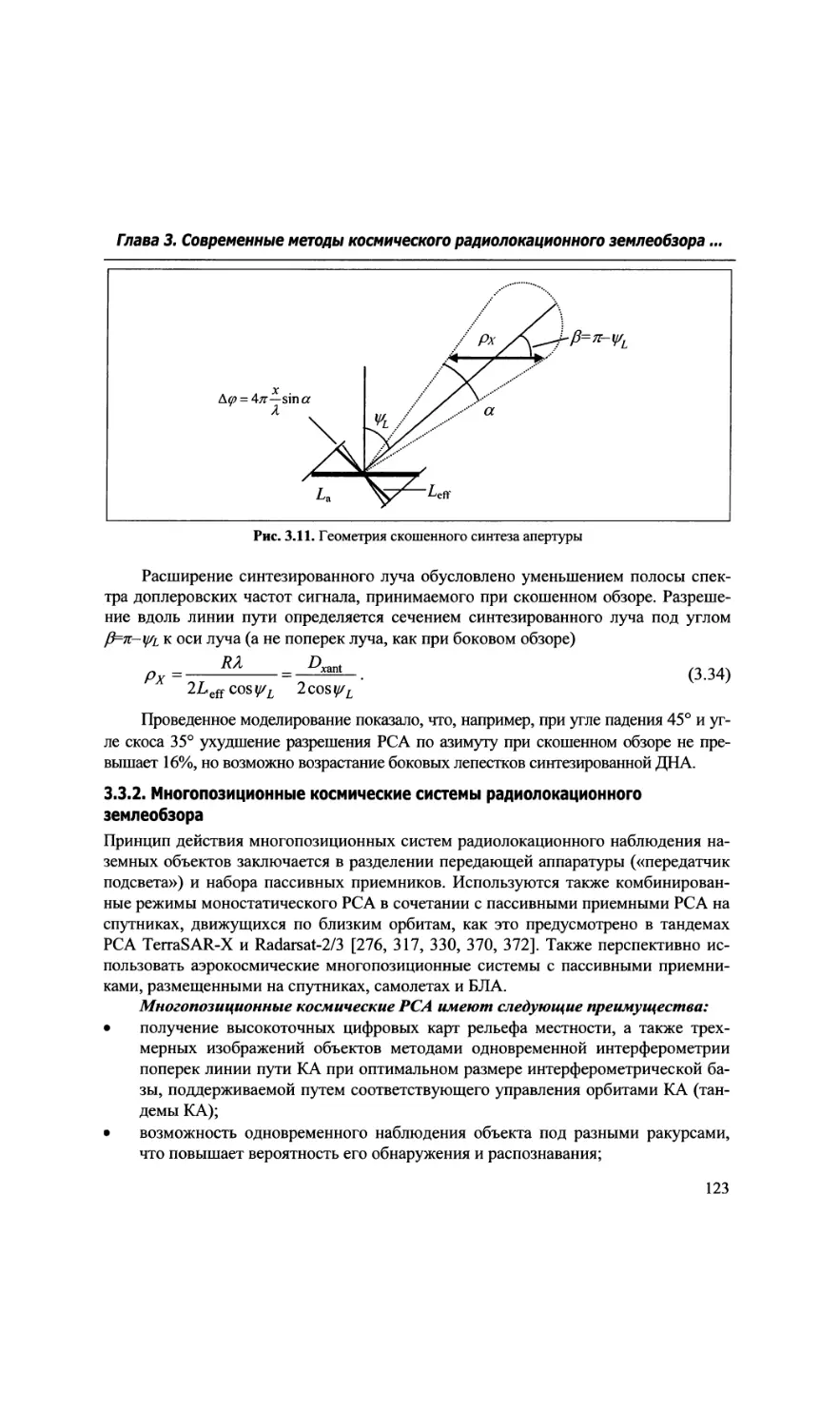
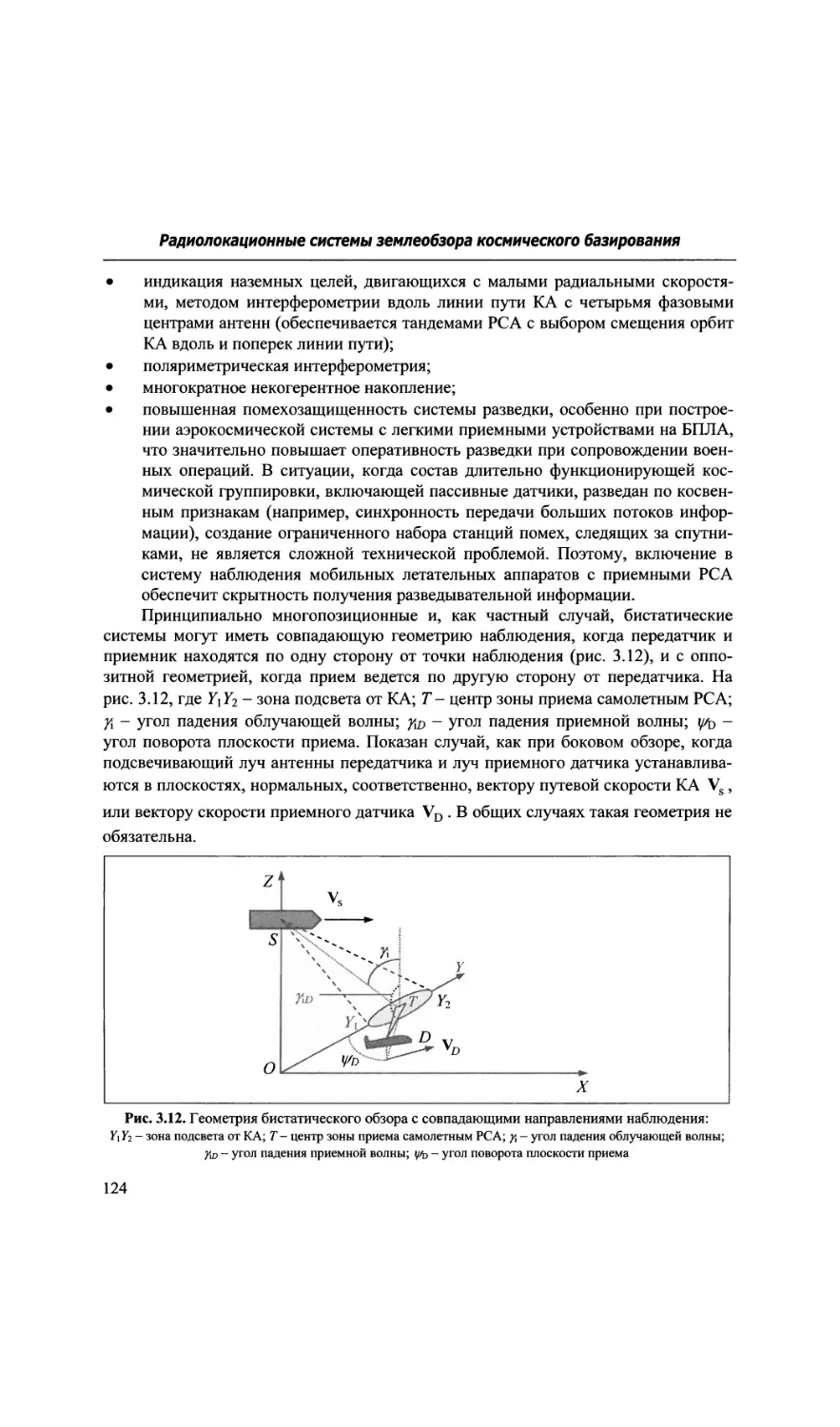
3.3. Геометрия обзора при скошенном и бистатическом
режимах съемки.................................................... 120
3.3.1. Геометрические соотношения в режиме скошенного обзора..... 120
3.3.2. Многопозиционные космические системы радиолокационного
землеобзора...................................................... 123
3.3.3. Геометрия обзора при бистатическом квазизеркальном космическом
режиме съемки.................................................... 126
3.3.4. Бистатический режим обзора с подсветом от передающей РЛС
на геостационарной орбите........................................ 128
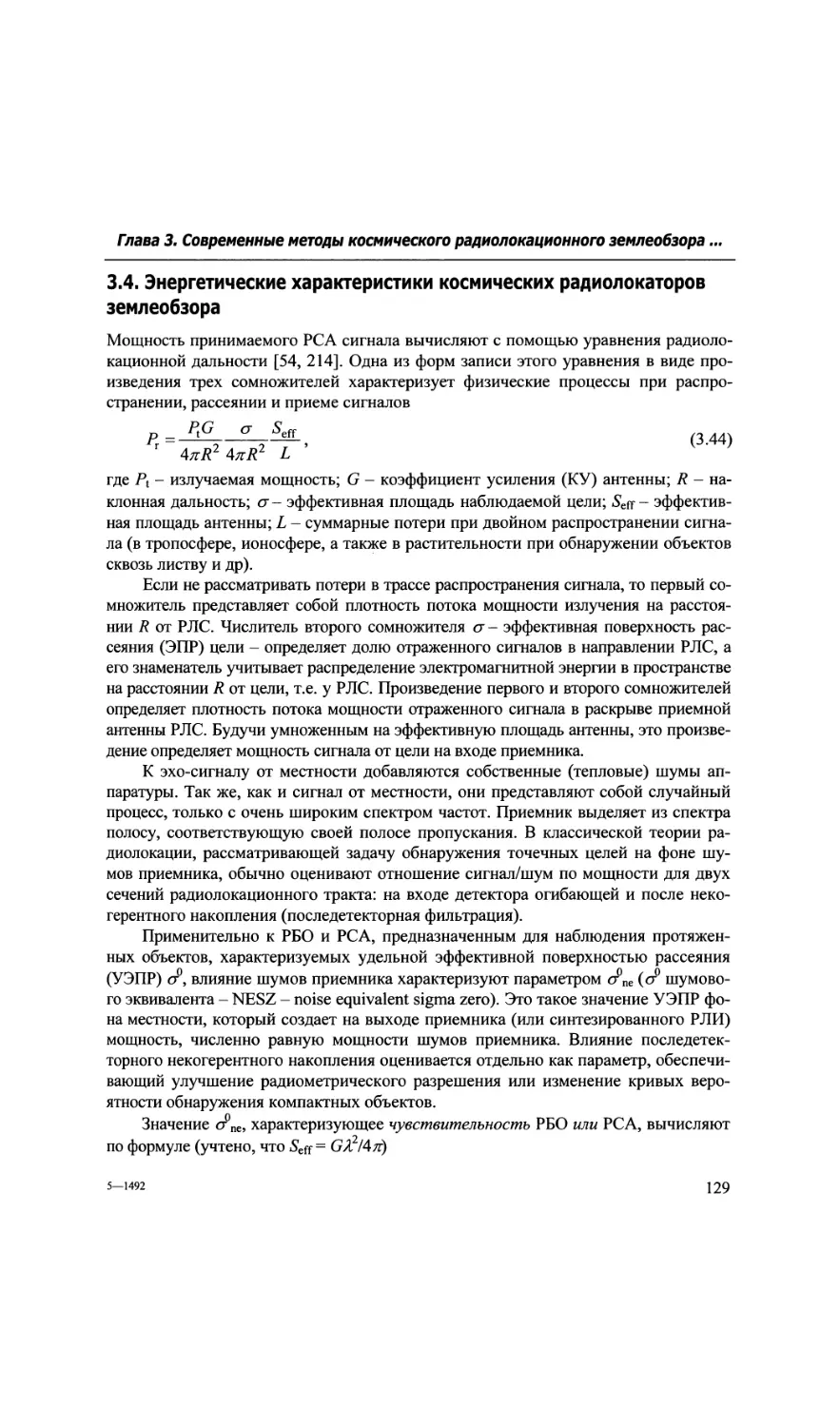
3.4. Энергетические характеристики космических радиолокаторов
землеобзора........................................................ 129
3.5. Радиометрическое разрешение в радиолокаторах землеобзора...... 131
3.5.1. Радиометрическое разрешение в РБО......................... 131
3.5.2. Радиометрическое разрешение в РСА......................... 135
3.6. Факторы, определяющие выбор параметров РСА.
Функция неопределенности сигналов.................................. 136
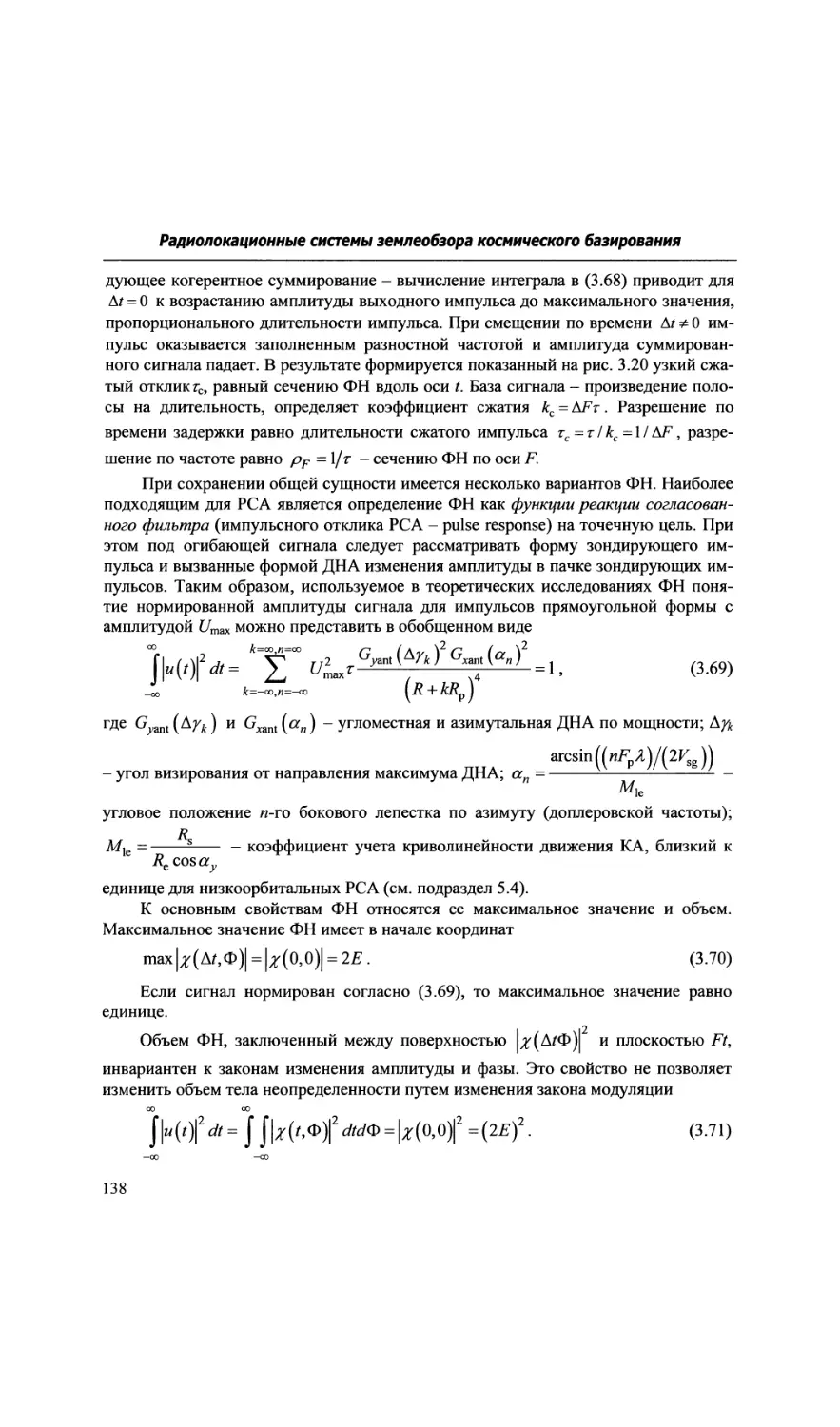
3.6.1. Вид функции неопределенности сигналов в космических РСА... 136
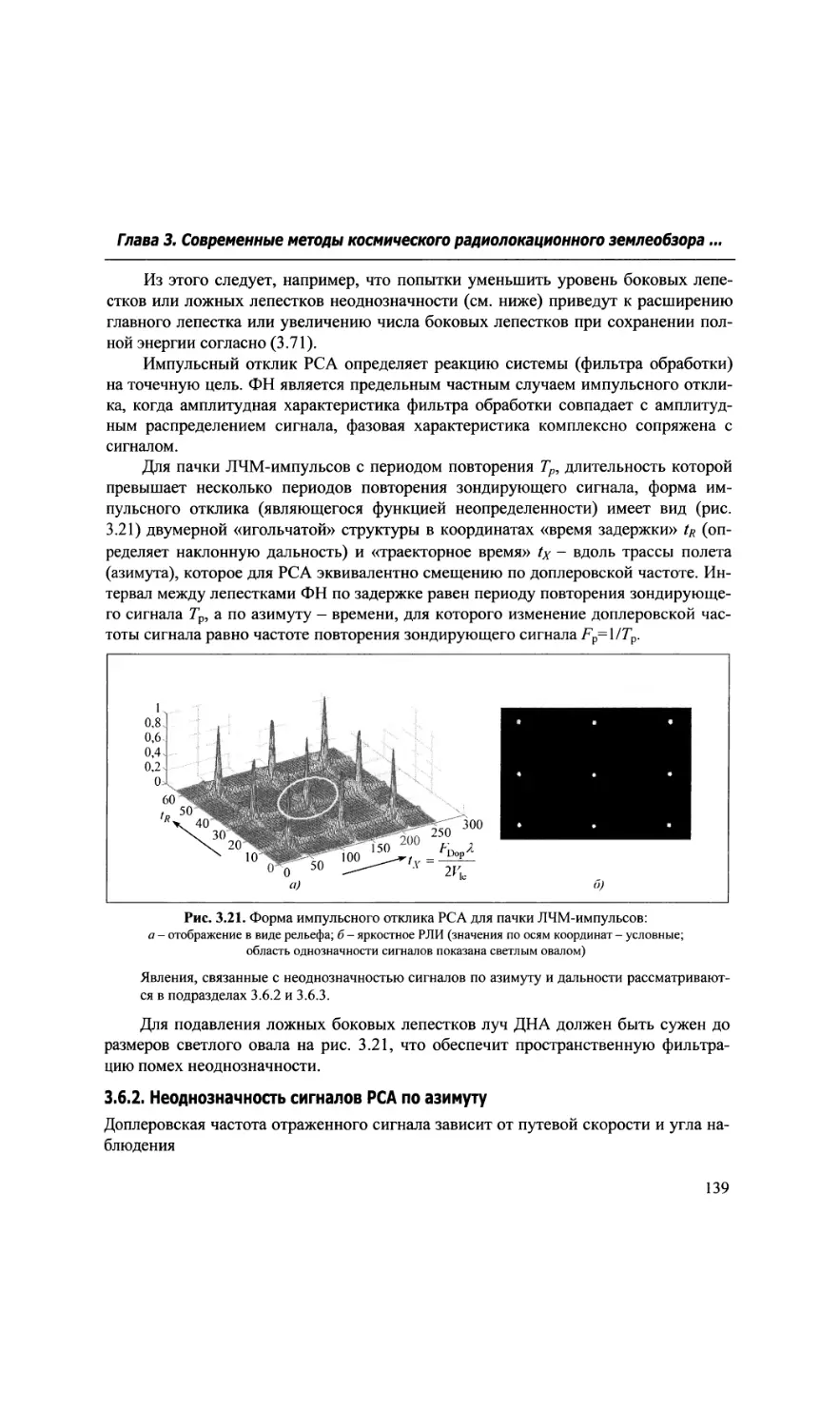
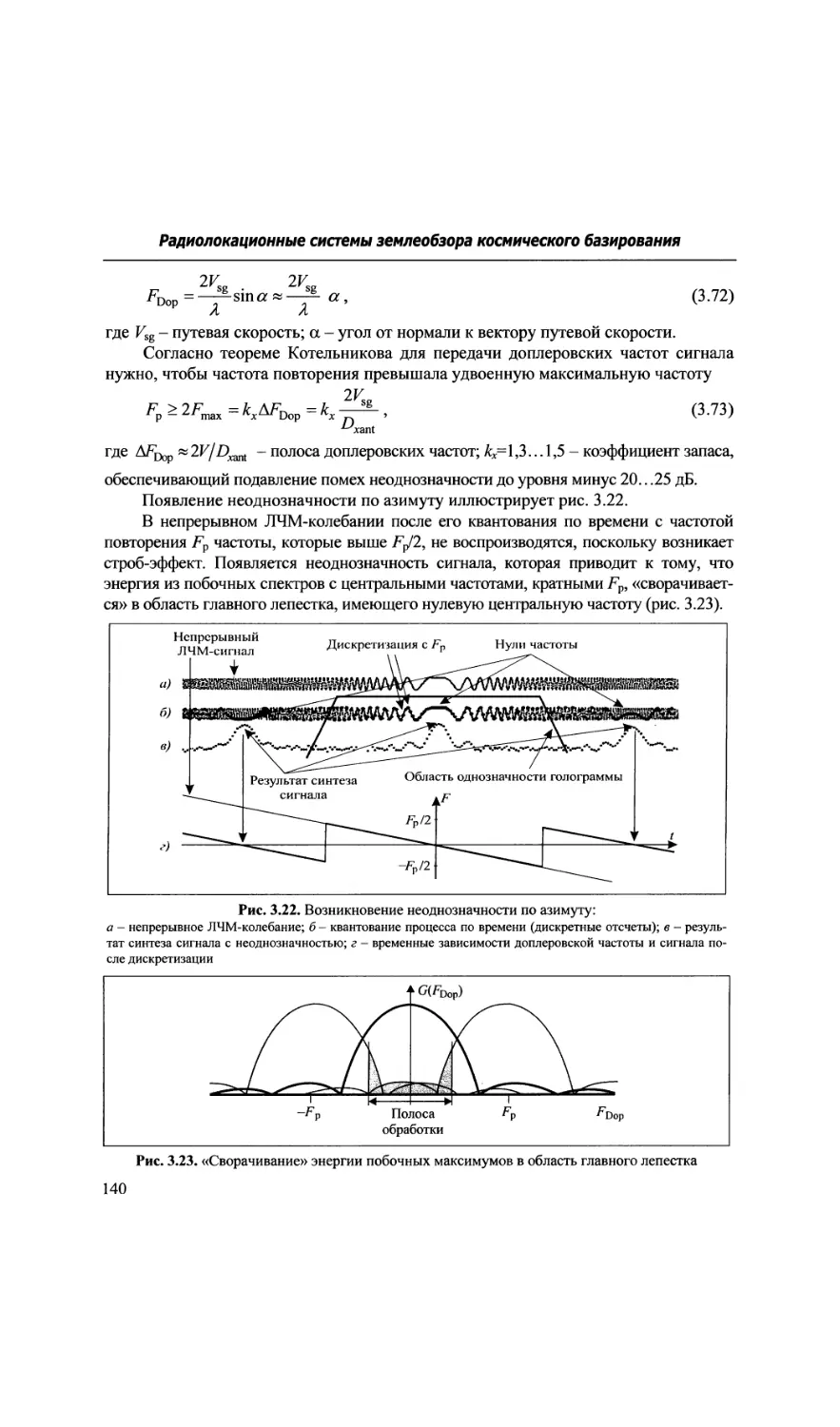
3.6.2. Неоднозначность сигналов РСА по азимуту................... 139
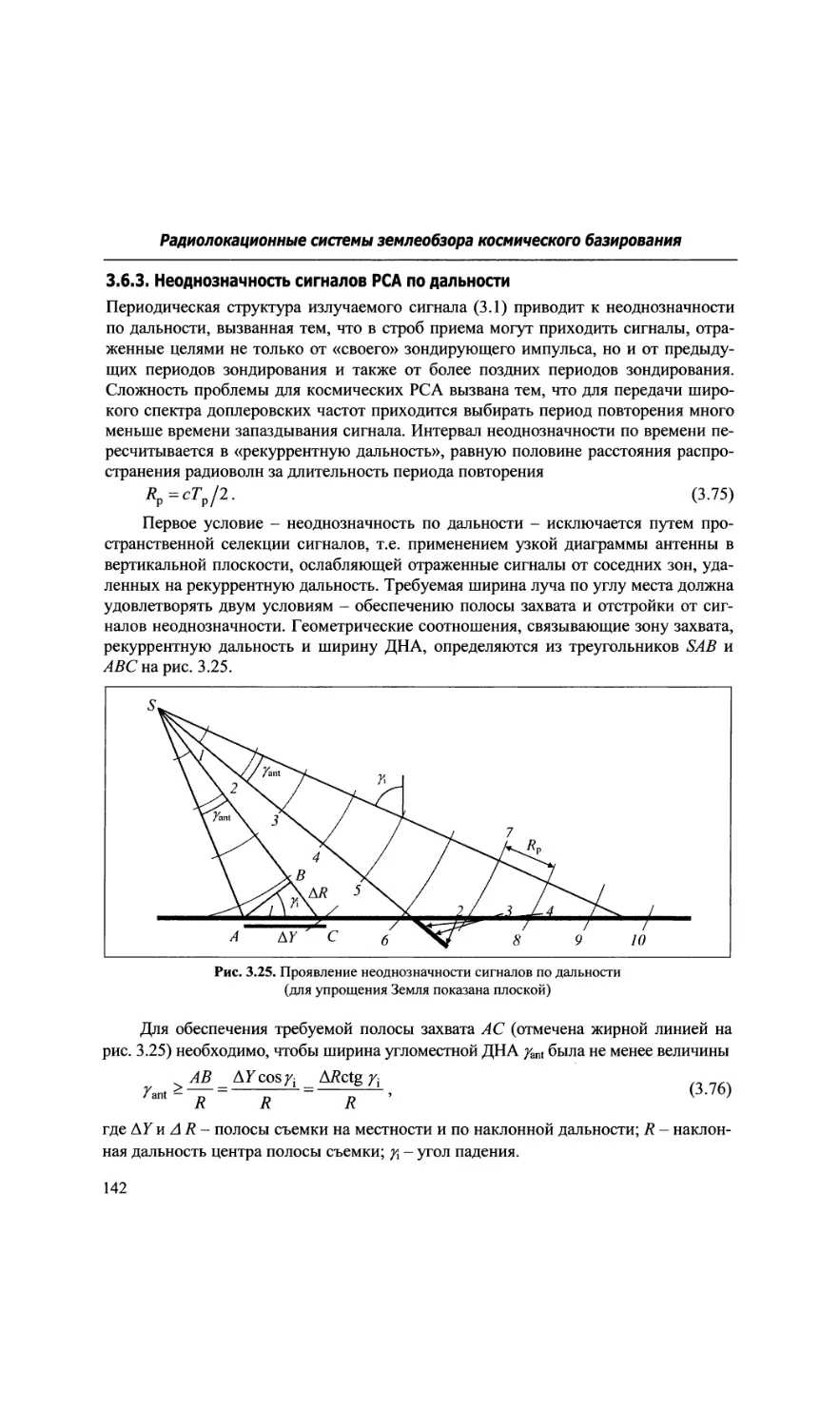
3.6.3. Неоднозначность сигналов РСА по дальности................. 142
3.7. Особенности работы систем радиолокационного наблюдения
космического базирования при воздействии активных помех............ 145
Глава 4. Режимы работы космических РСА.....................................151
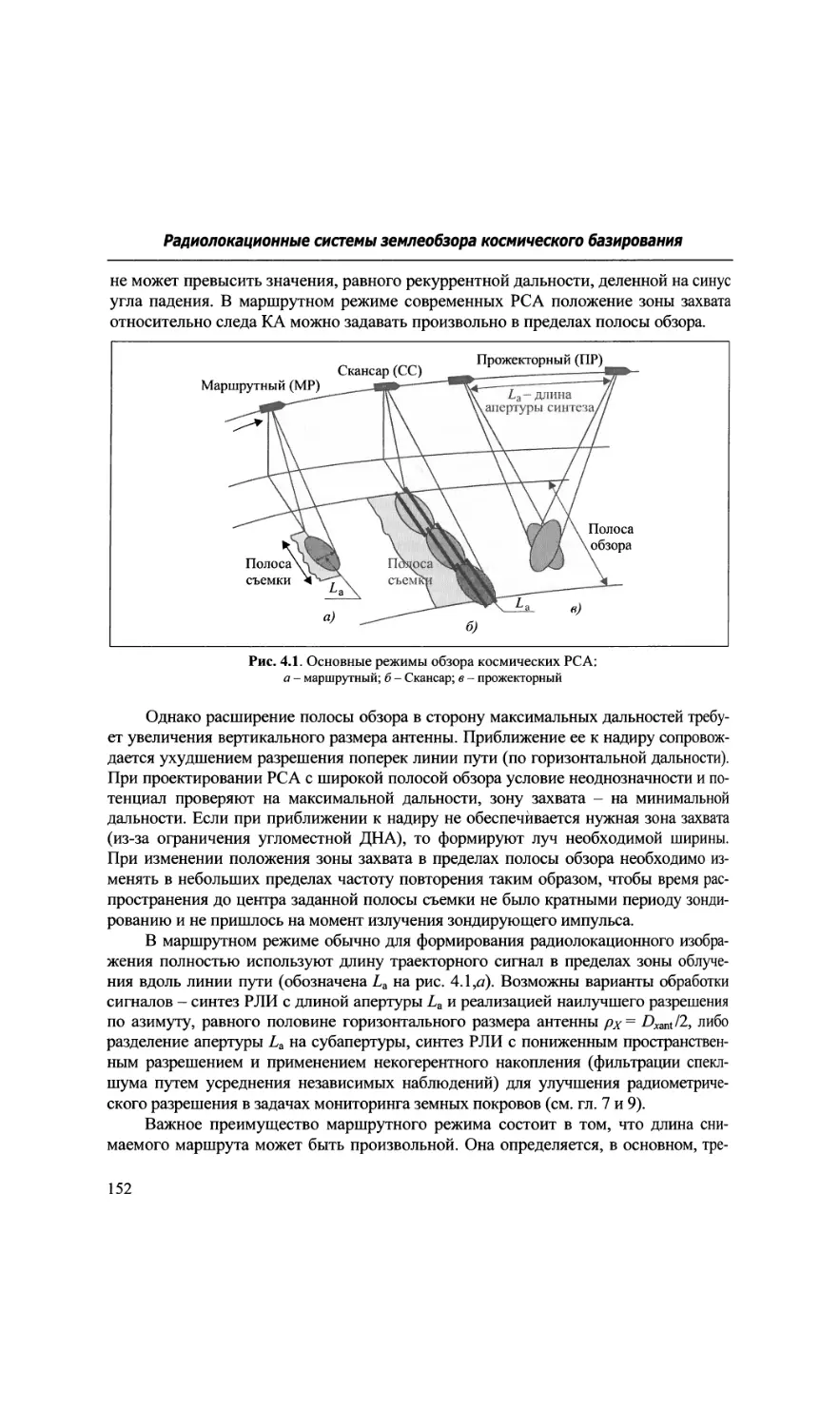
4.1. Основные режимы радиолокационного обзора...................... 151
4.1.1. Маршрутный режим обзора................................... 151
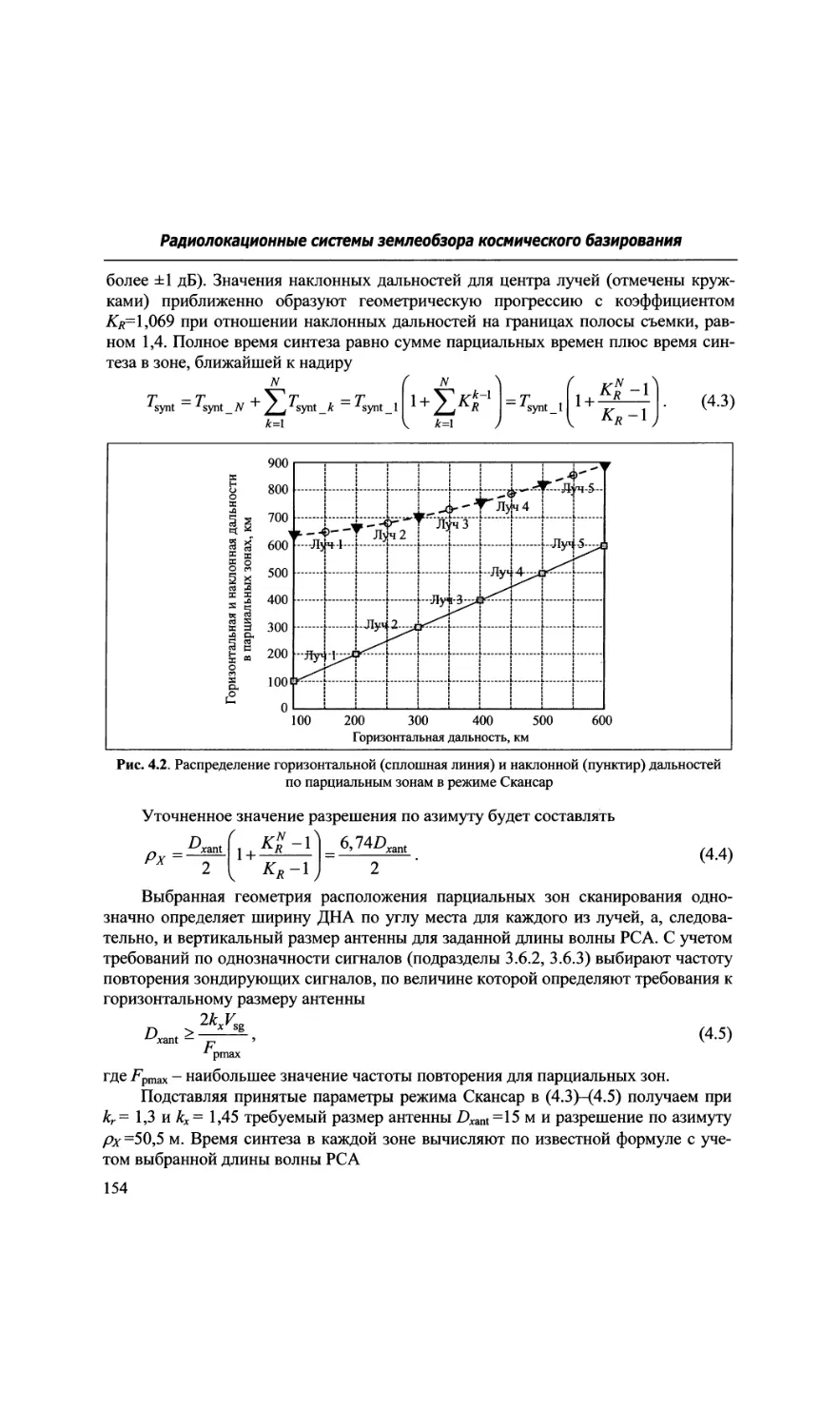
4.1.2. Широкозахватный режим Скансар............................. 153
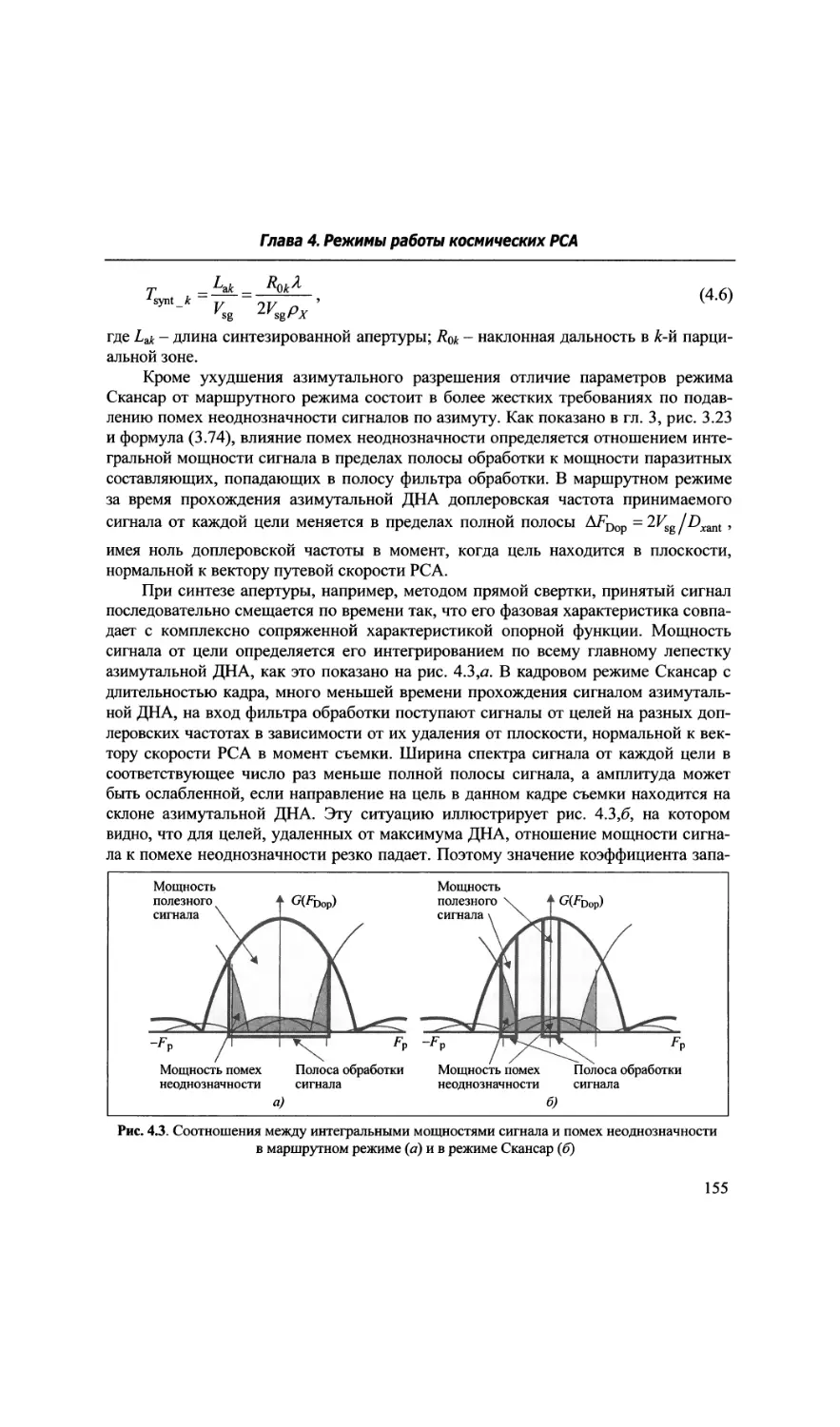
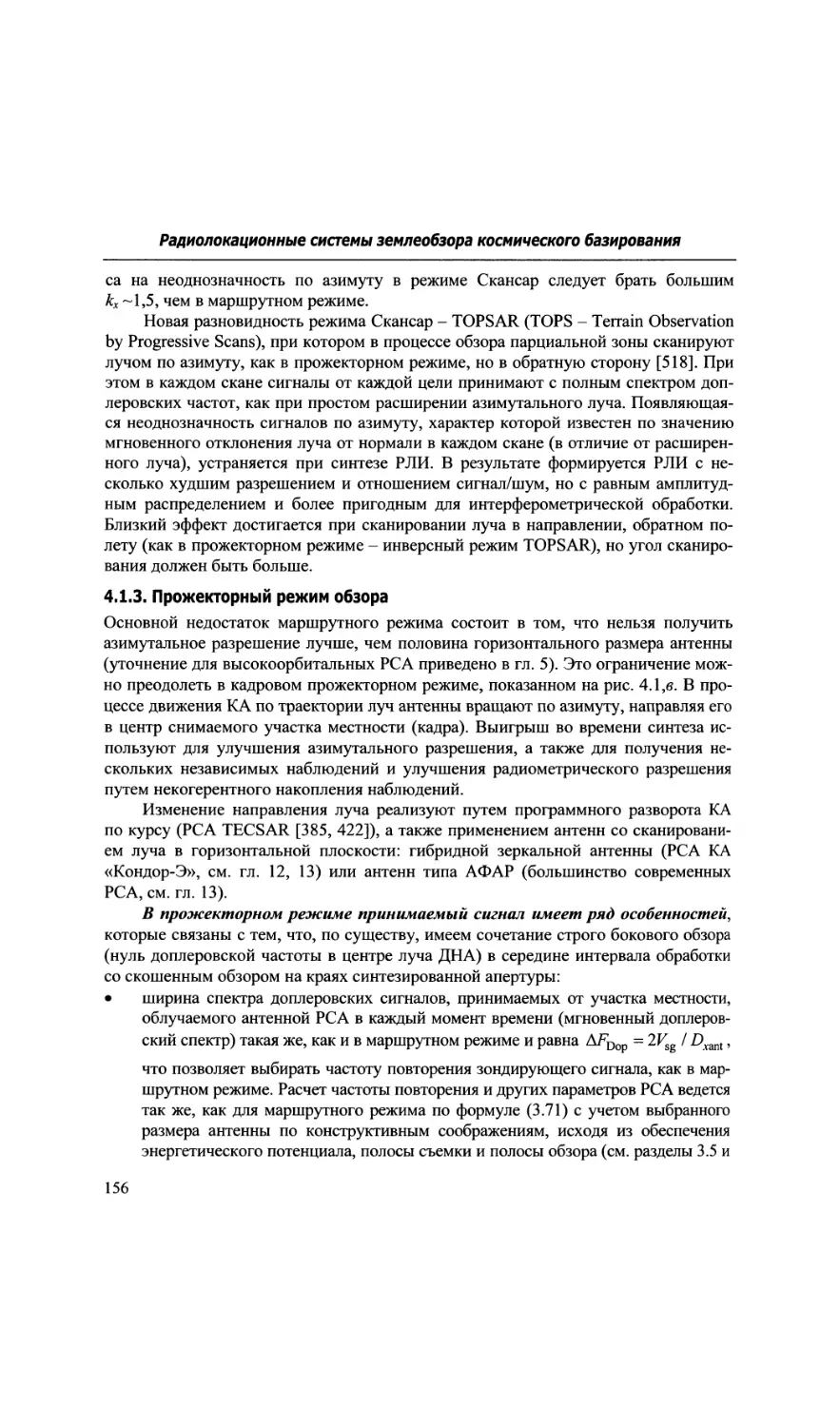
4.1.3. Прожекторный режим обзора................................. 156
4.1.4. Поляриметрические режимы радиолокационной съемки.......... 158
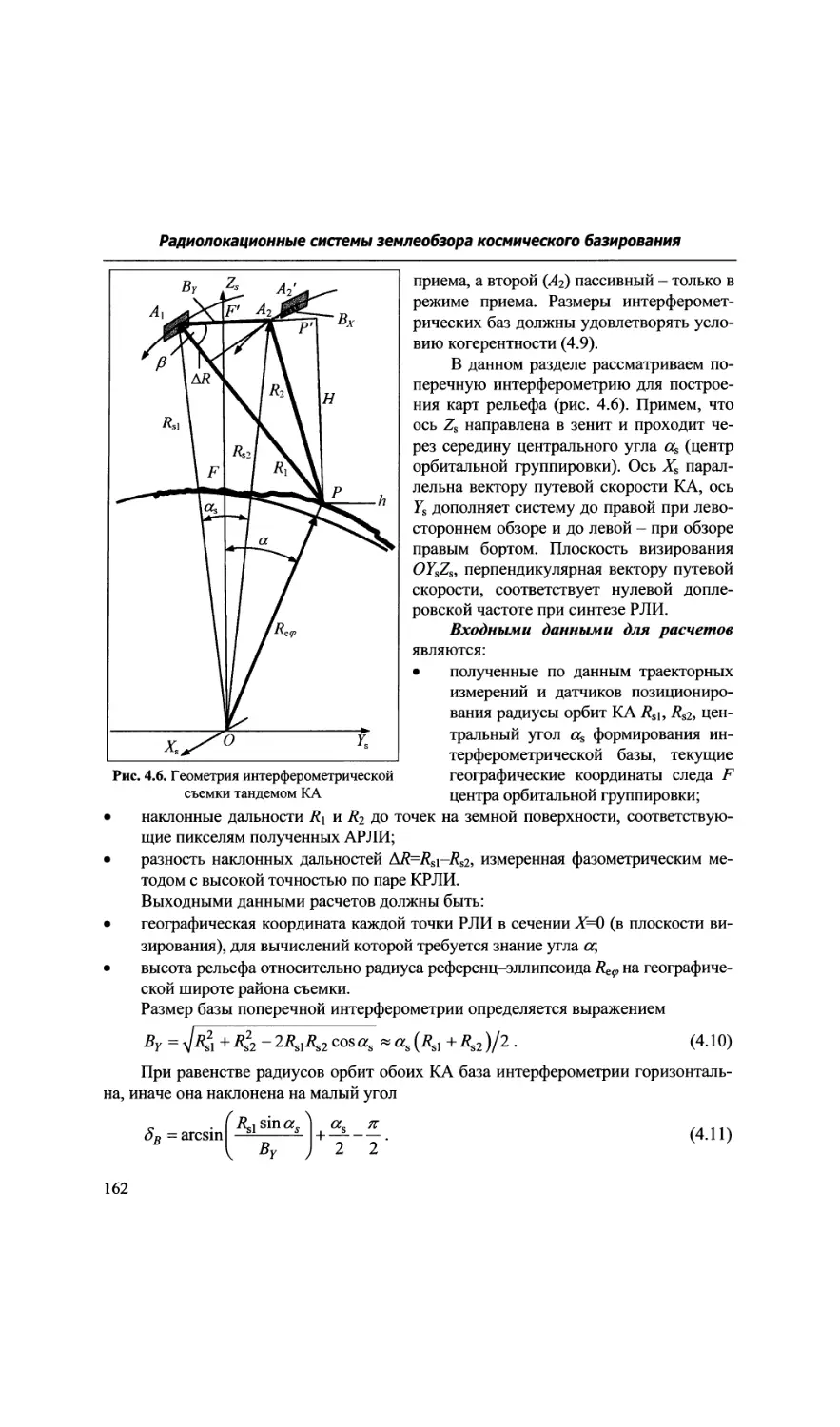
4.1.5. Интерферометрическая радиолокационная съемка.............. 160
4
Оглавление
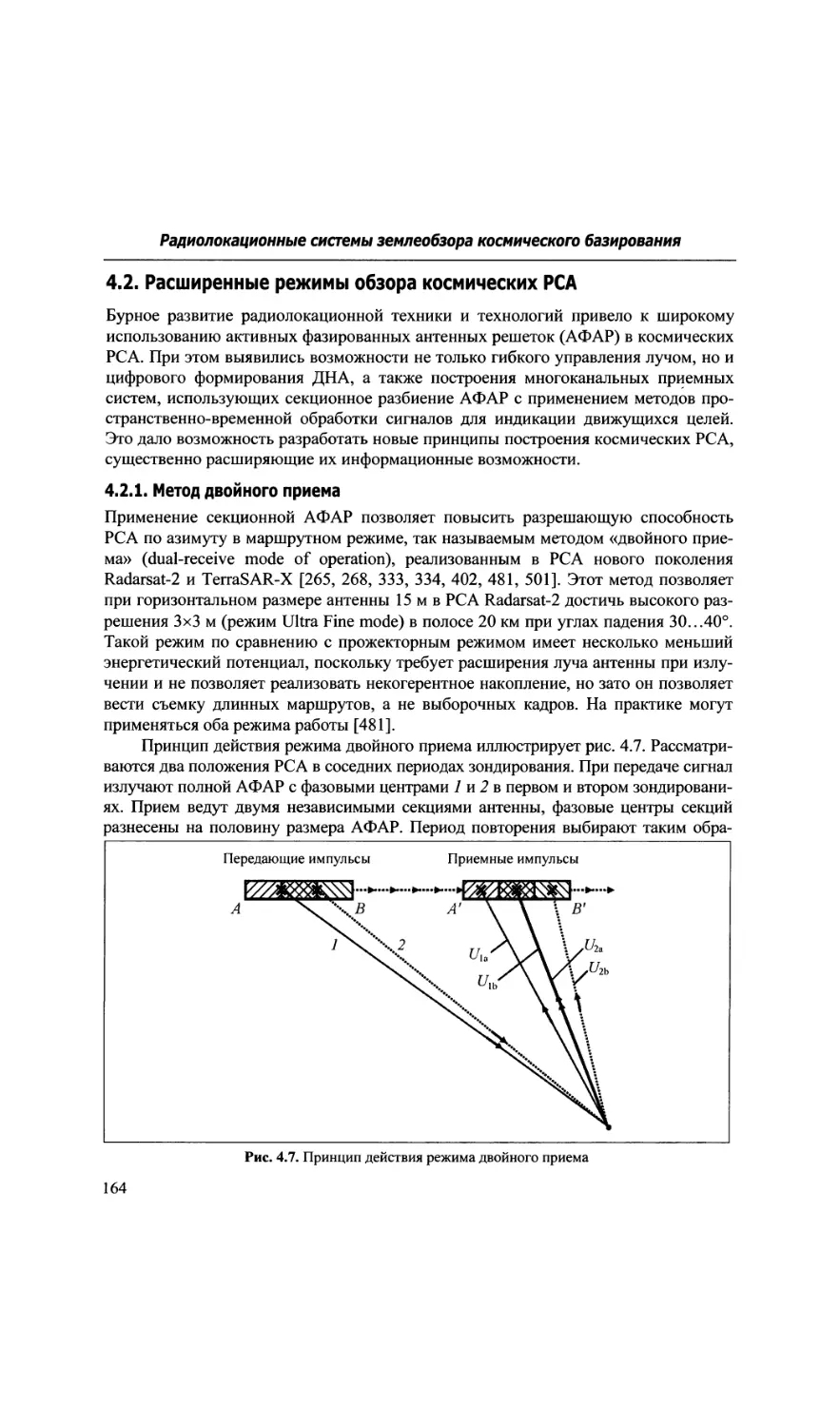
4.2. Расширенные режимы обзора космических РСА..................... 164
4.2.1. Метод двойного приема...................................... 164
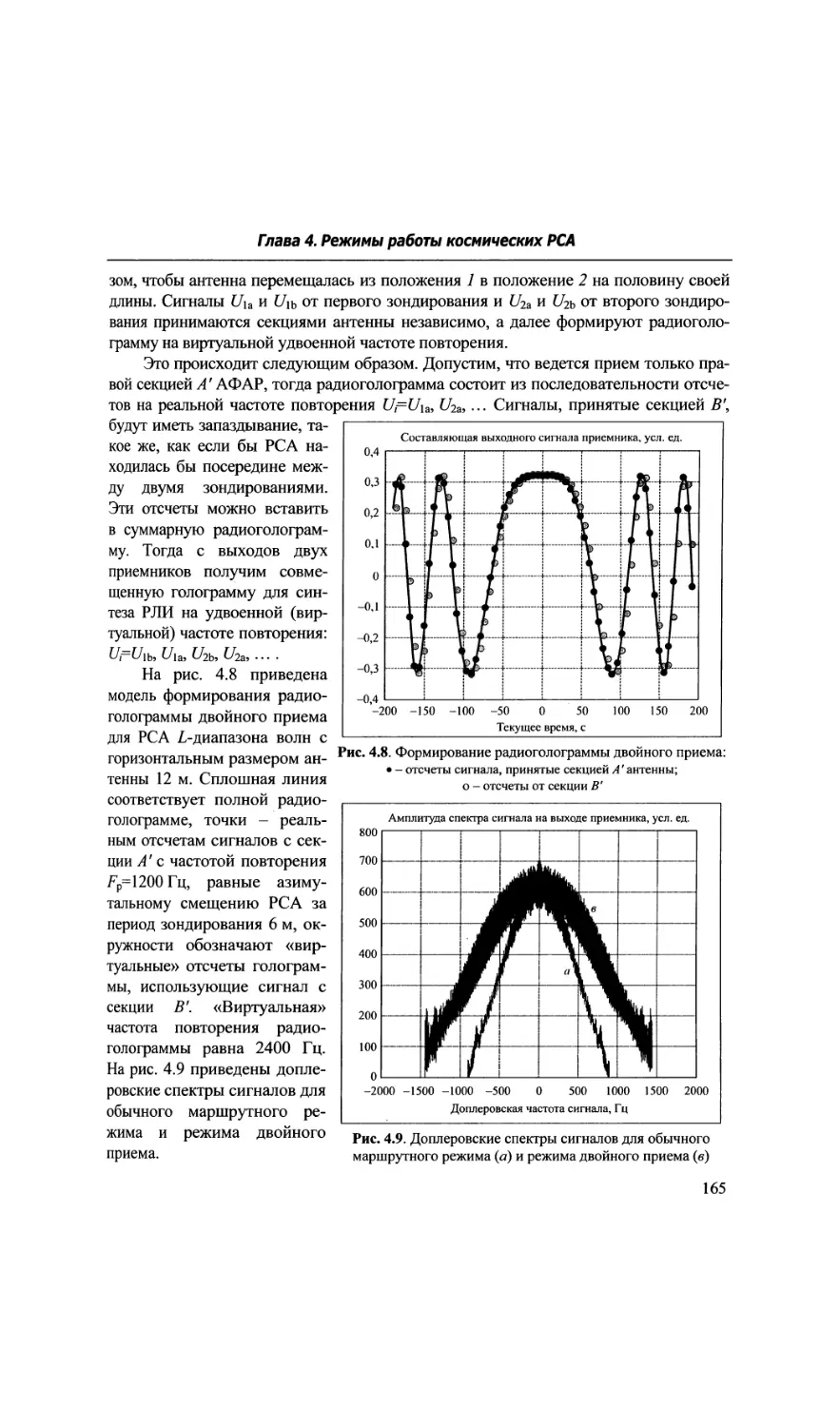
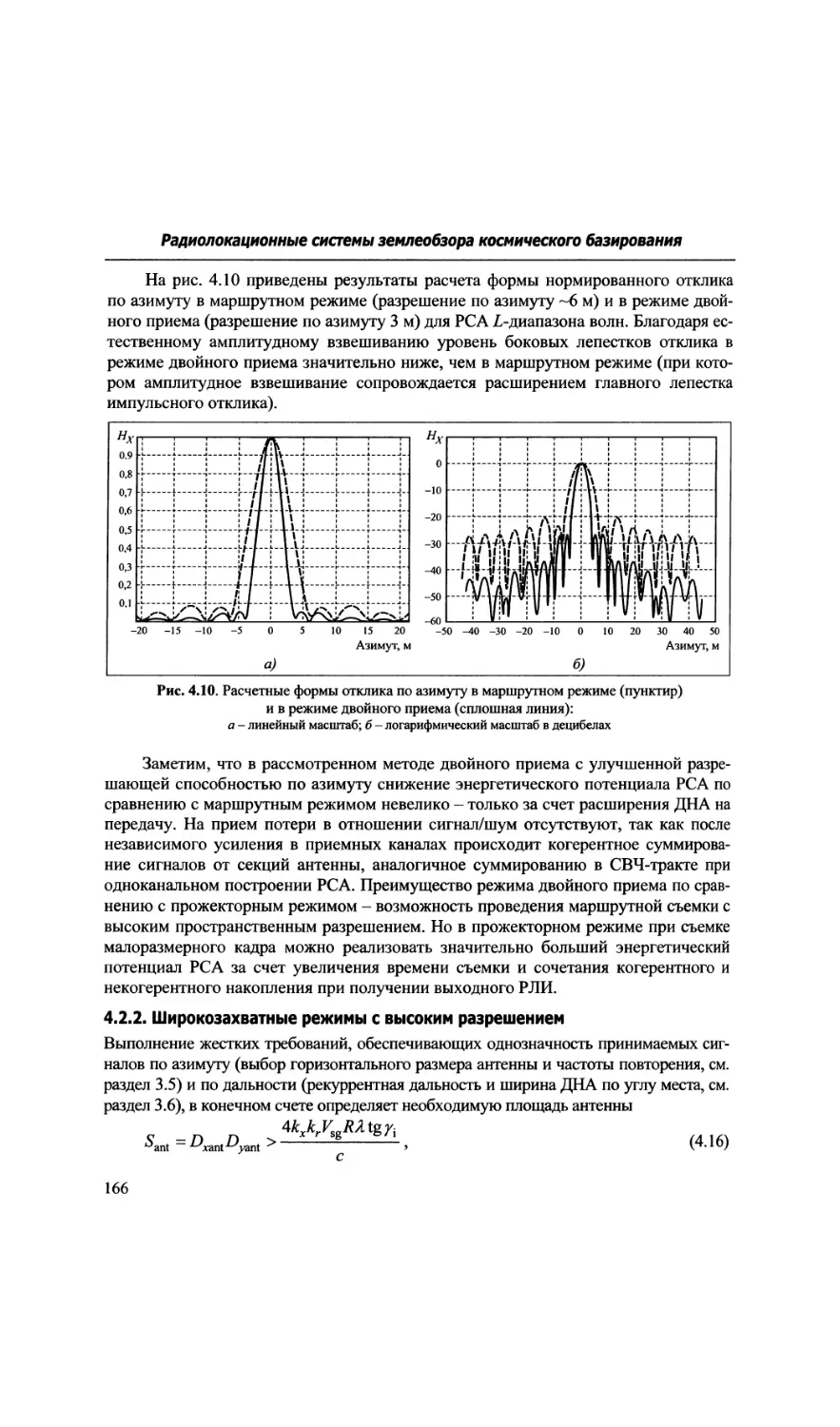
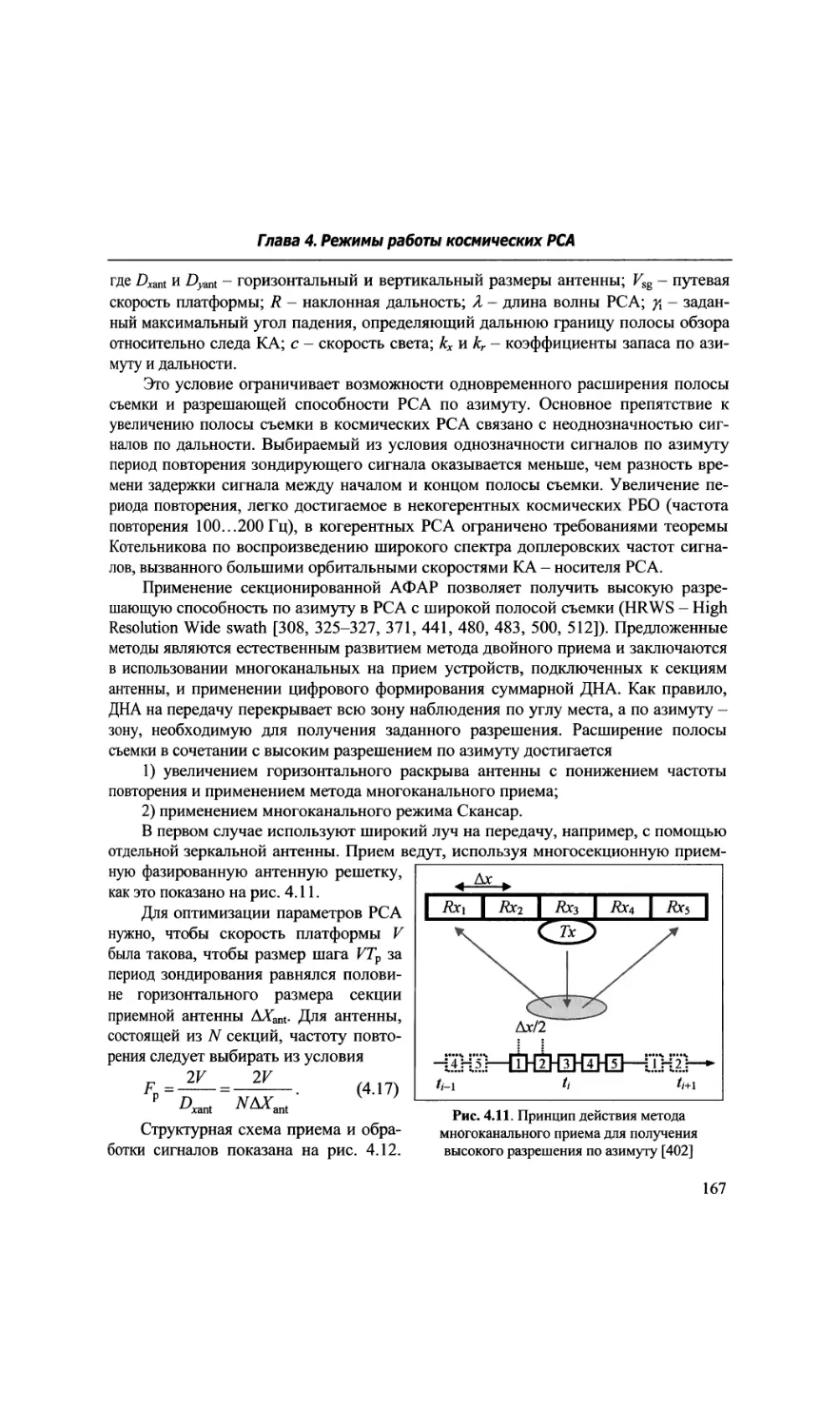
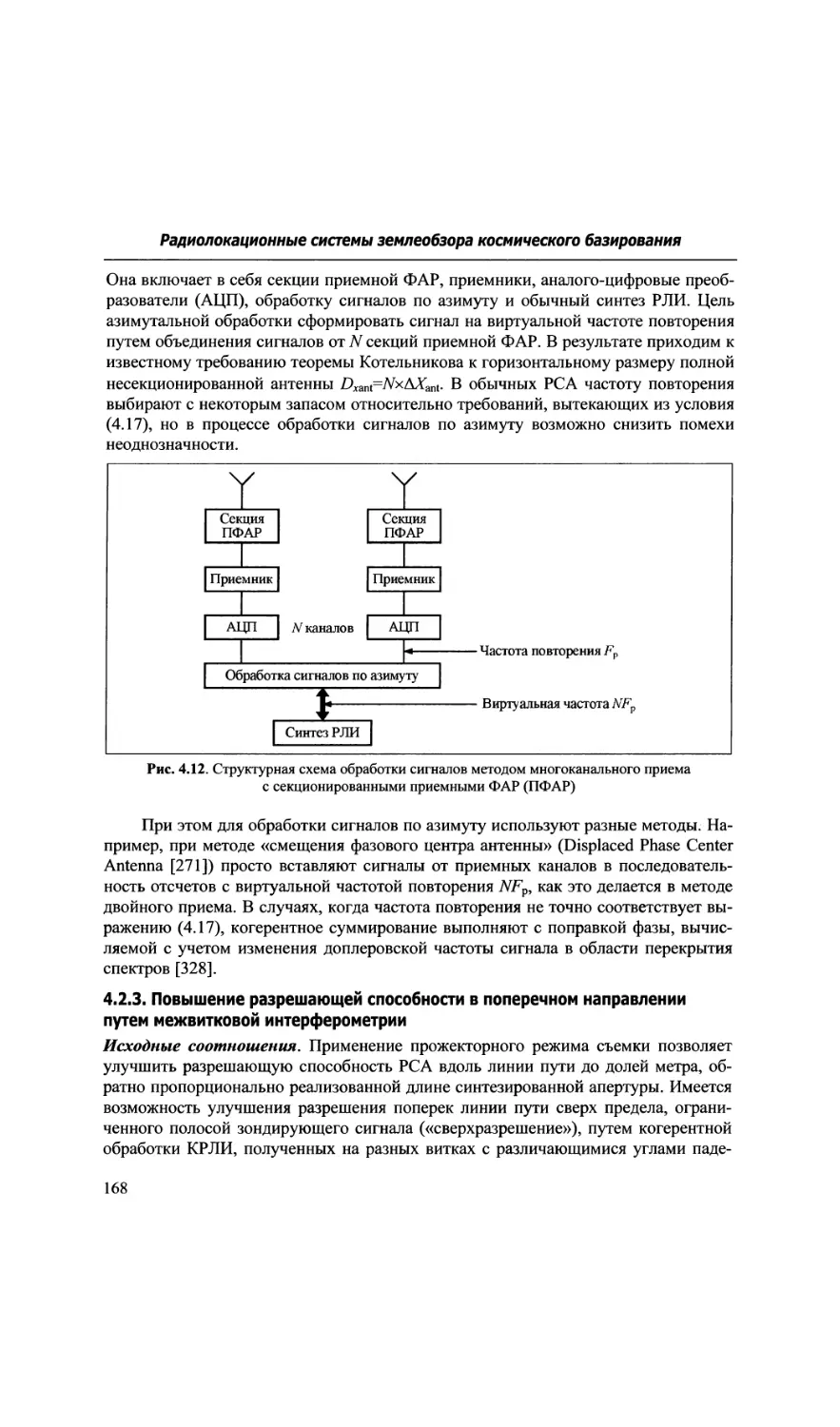
4.2.2. Широкозахватные режимы с высоким разрешением............... 166
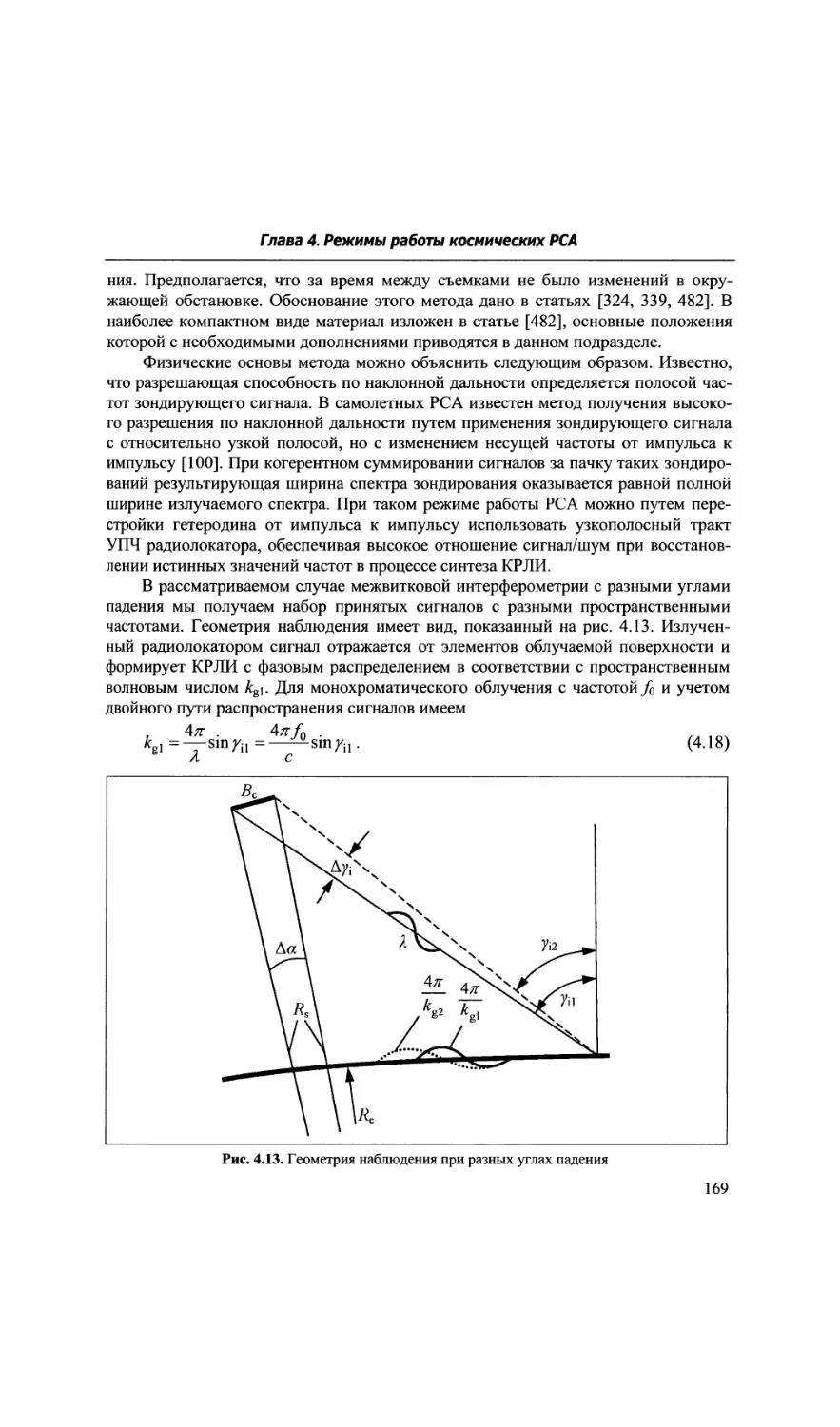
4.2.3. Повышение разрешающей способности в поперечном направлении
путем межвитковой интерферометрии............................... 168
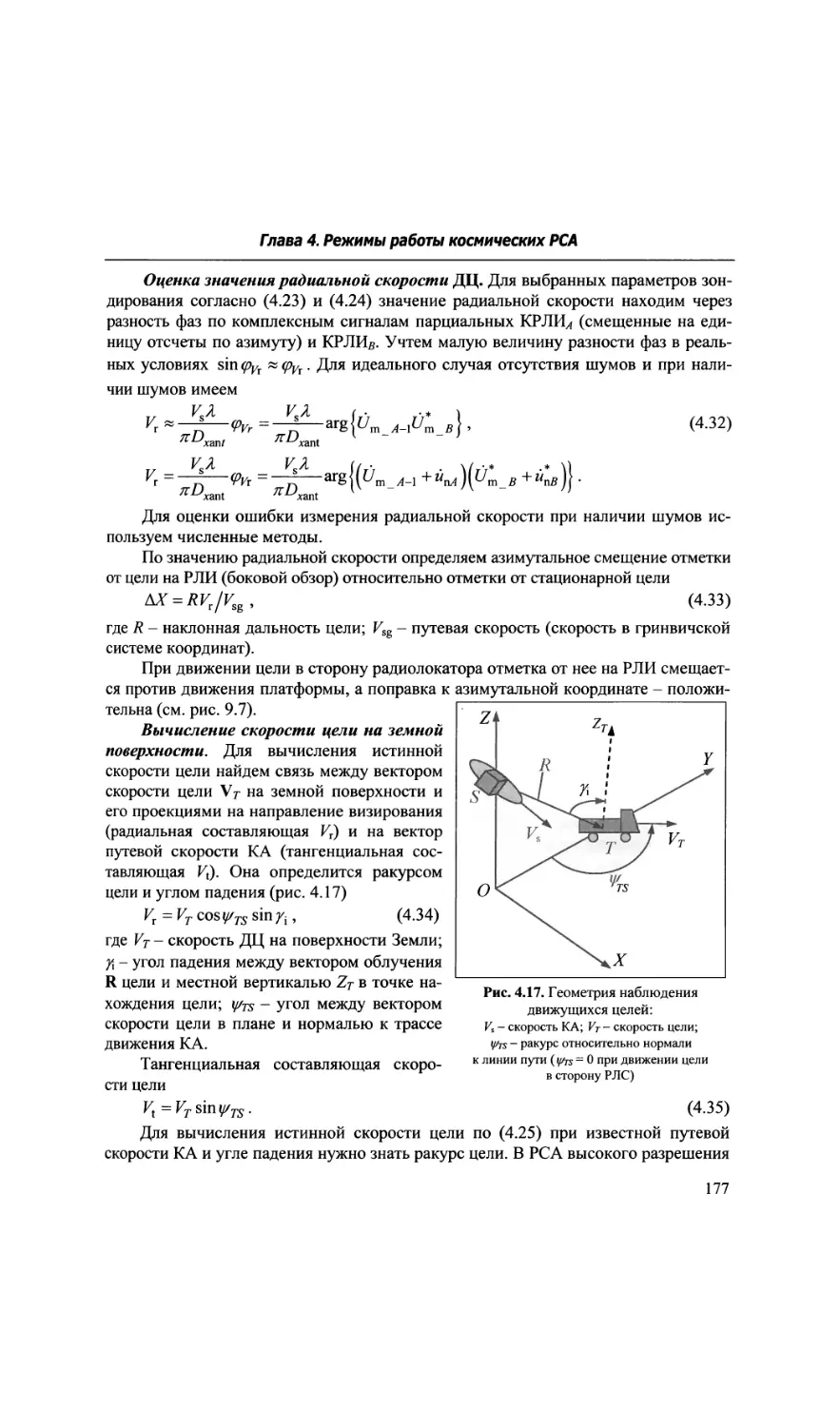
4.2.4. Режимы индикации движущихся целей.......................... 172
Глава 5. Расчет параметров траекторного сигнала
при космическом радиолокационном обзоре.....................................181
5.1. Состав параметров траекторного сигнала......................... 181
5.2. Системы координат, используемые при радиолокационном
обзоре............................................................ 183
5.3. Временные зависимости фазы и амплитуды принимаемого
сигнала в PC А.................................................... 186
5.4. Расчет параметров траекторного сигнала при движении
платформы по круговой орбите...................................... 191
5.5. Временная зависимость наклонной дальности цели при движении
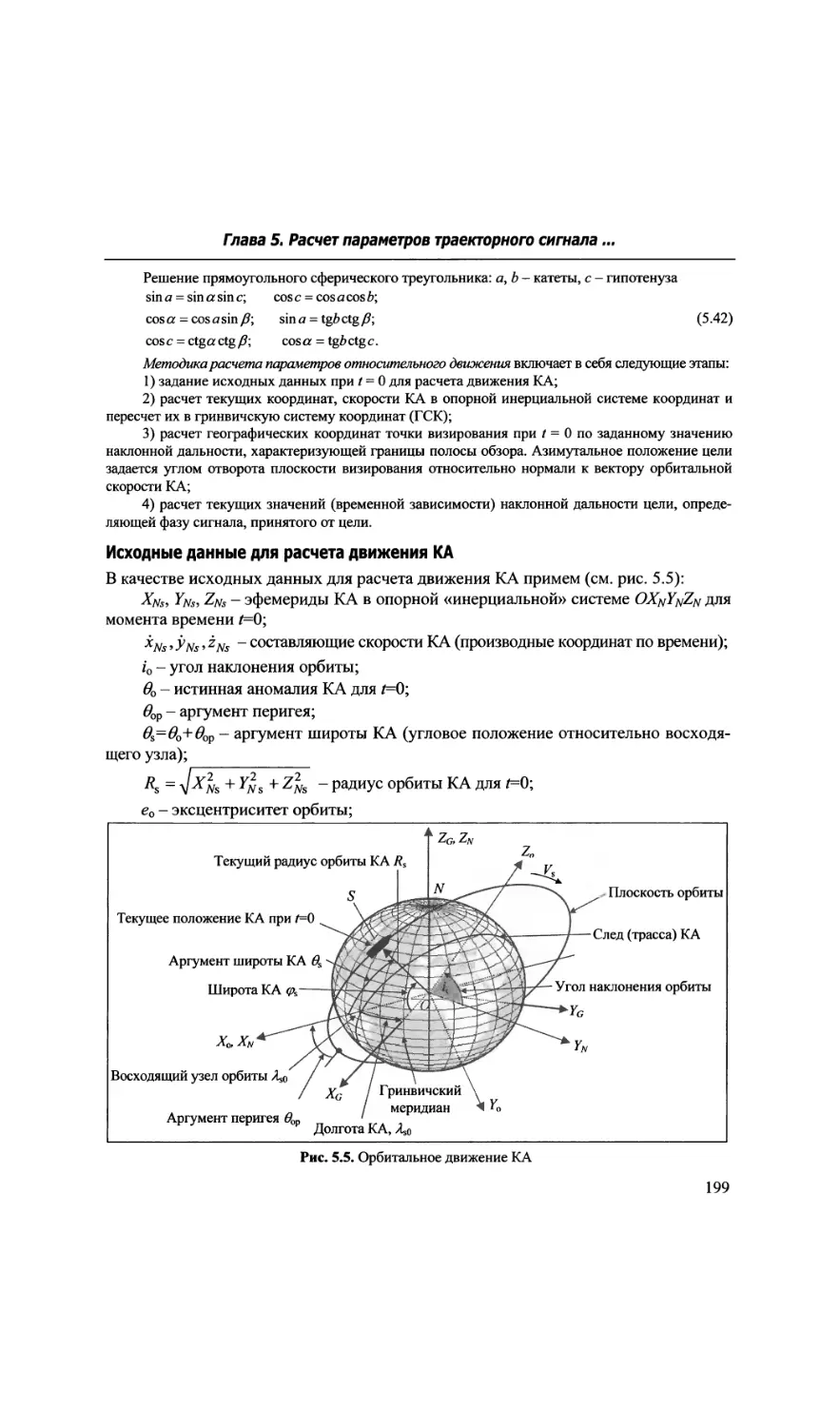
платформы по Кеплеровой орбите.................................... 197
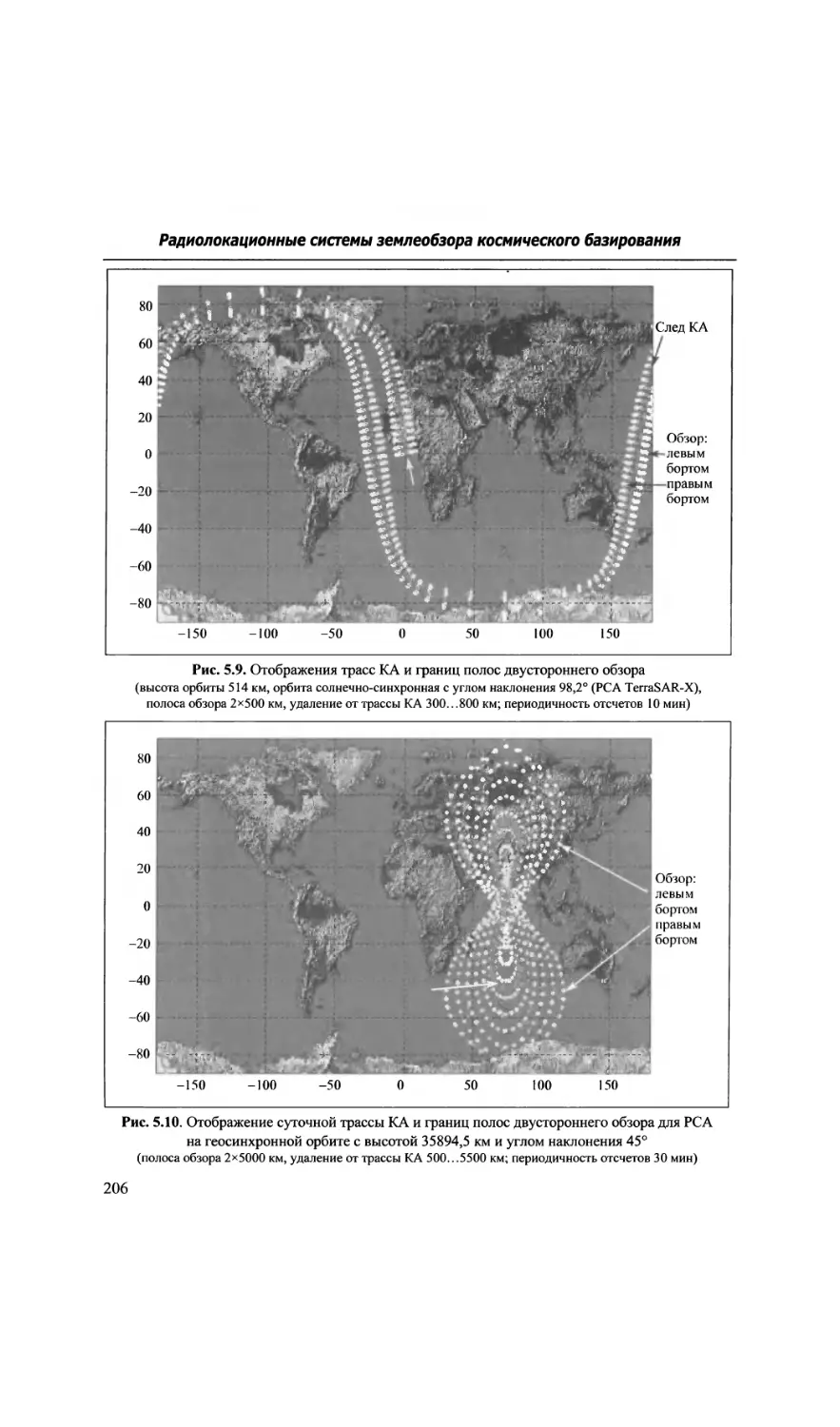
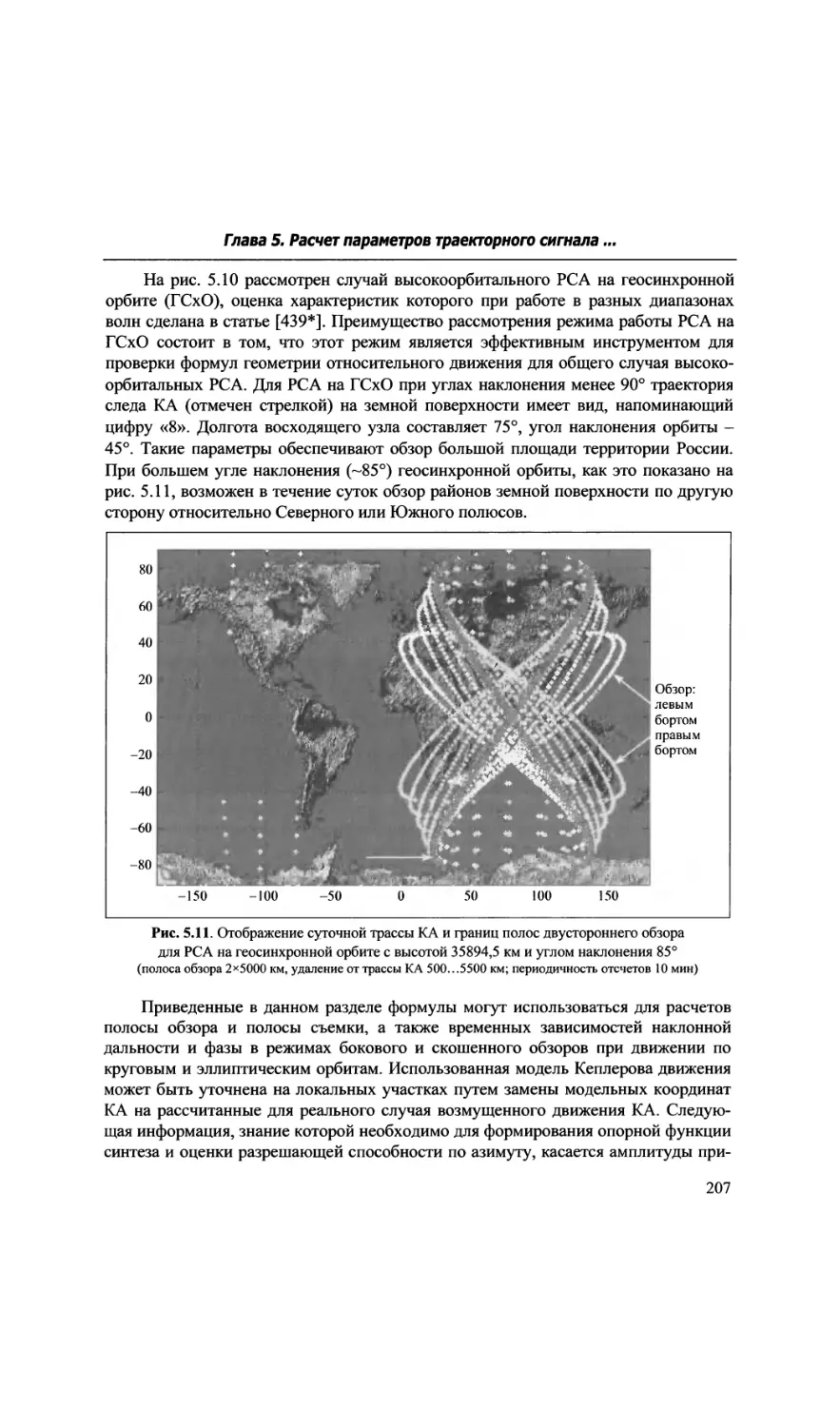
5.6. Параметры сигналов, принимаемых антенной РСА.....................208
5.6.1. Система координат, адаптированная к геометрии радиолокационного
обзора............................................................208
5.6.2. Зависимости доплеровской частоты принимаемого сигнала от аргумента
широты КА.........................................................211
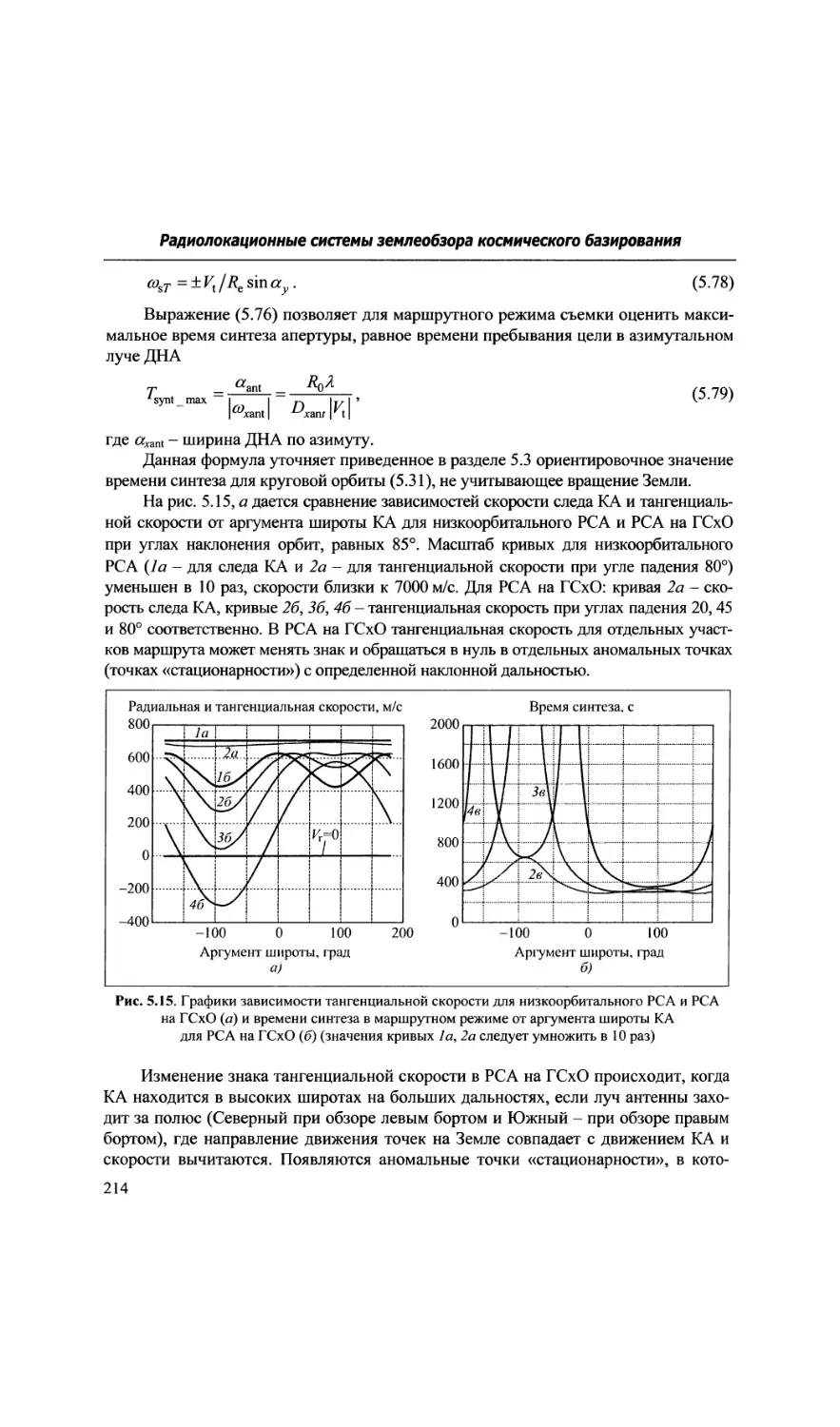
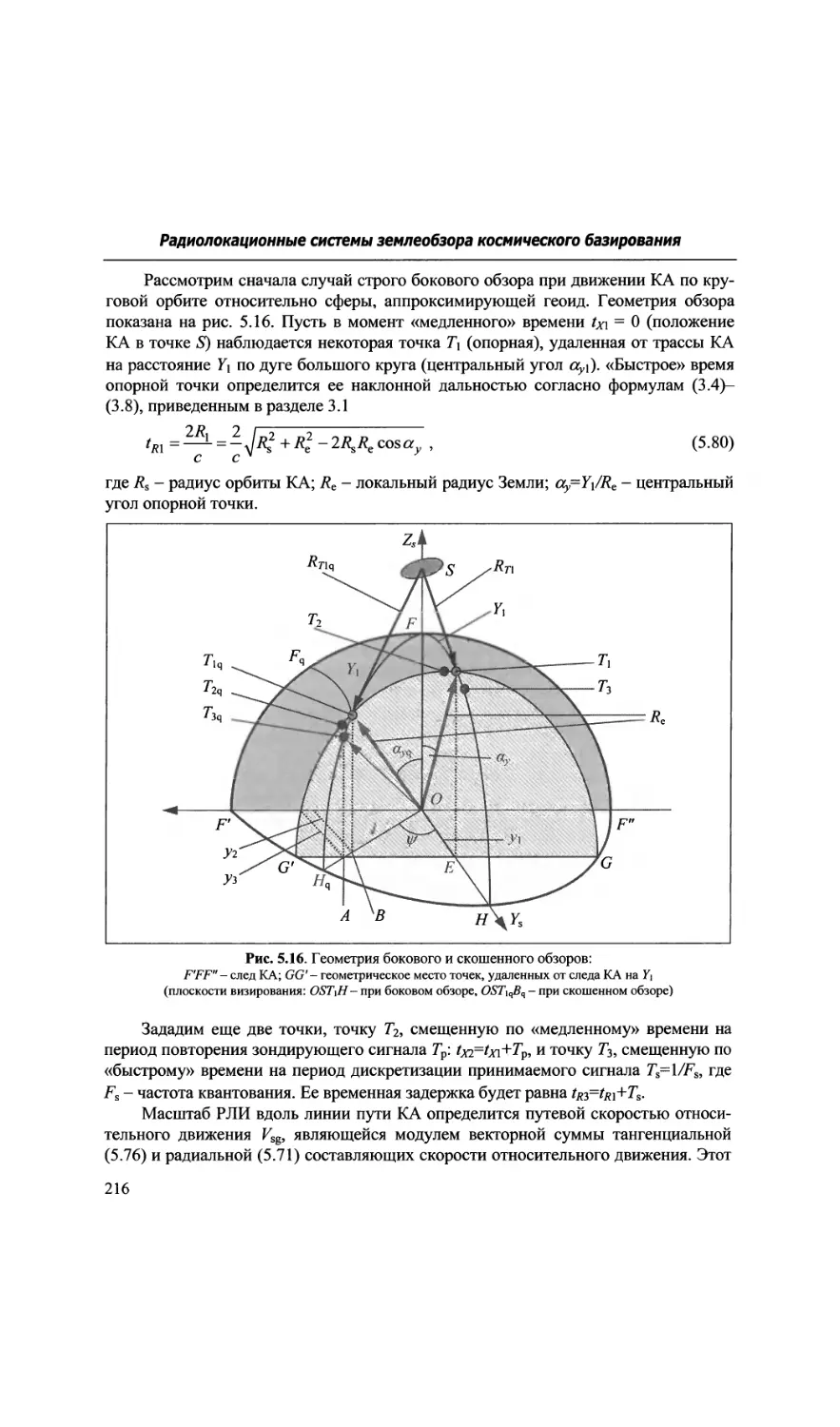
5.6.3. Тангенциальная составляющая скорости относительного движения.213
5.6.4. Масштабы радиолокационного изображения.......................215
5.6.5. Ширина спектра доплеровских частот принимаемого сигнала......218
5.6.6. Временной закон изменения наклонной дальности точки визирования.
Разрешение РСА по азимуту.........................................219
5.6.7. Сравнение Кеплерова движения с возмущенным движением КА......221
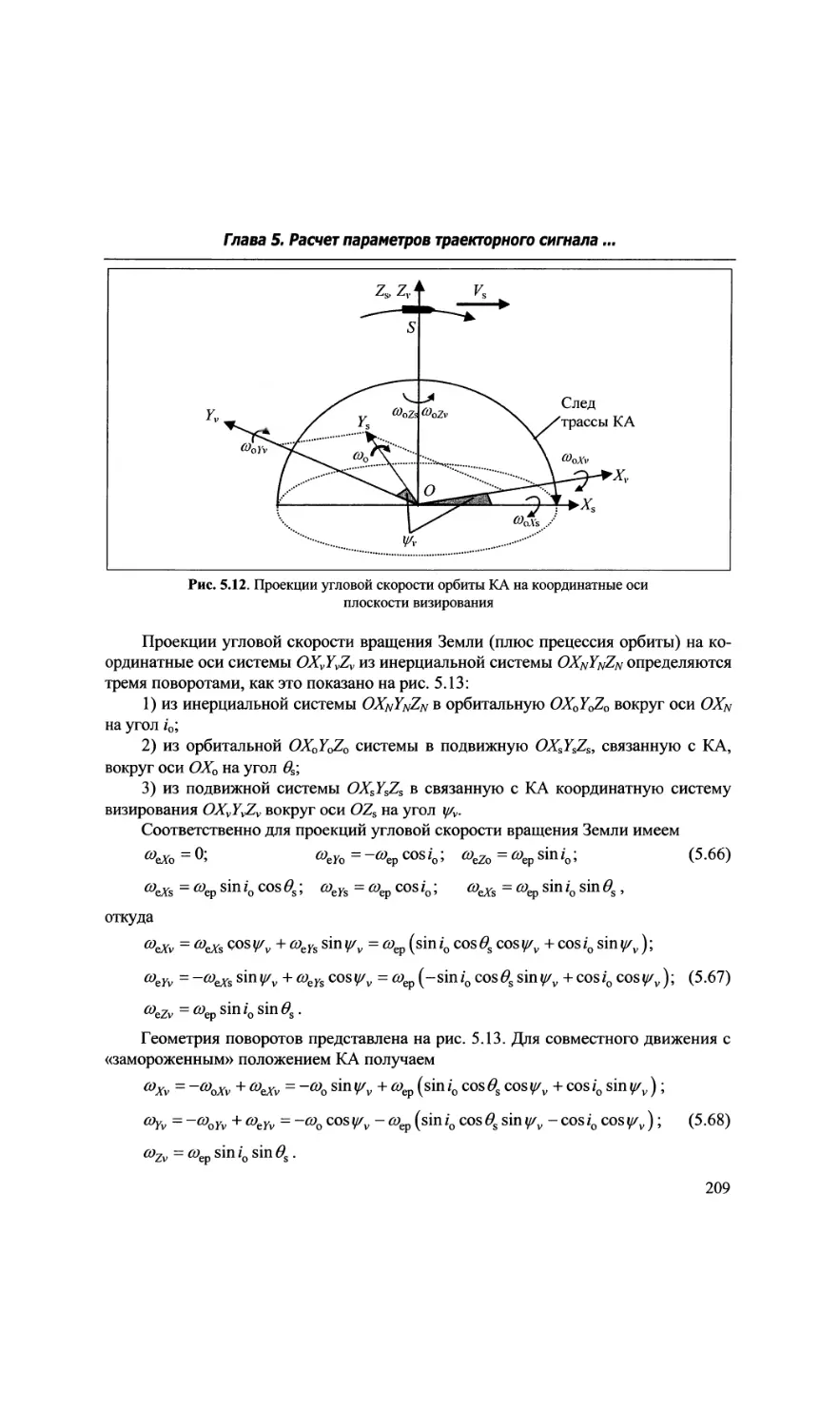
5.7. Связь между углами ориентации КА и направлением
визирования....................................................... 223
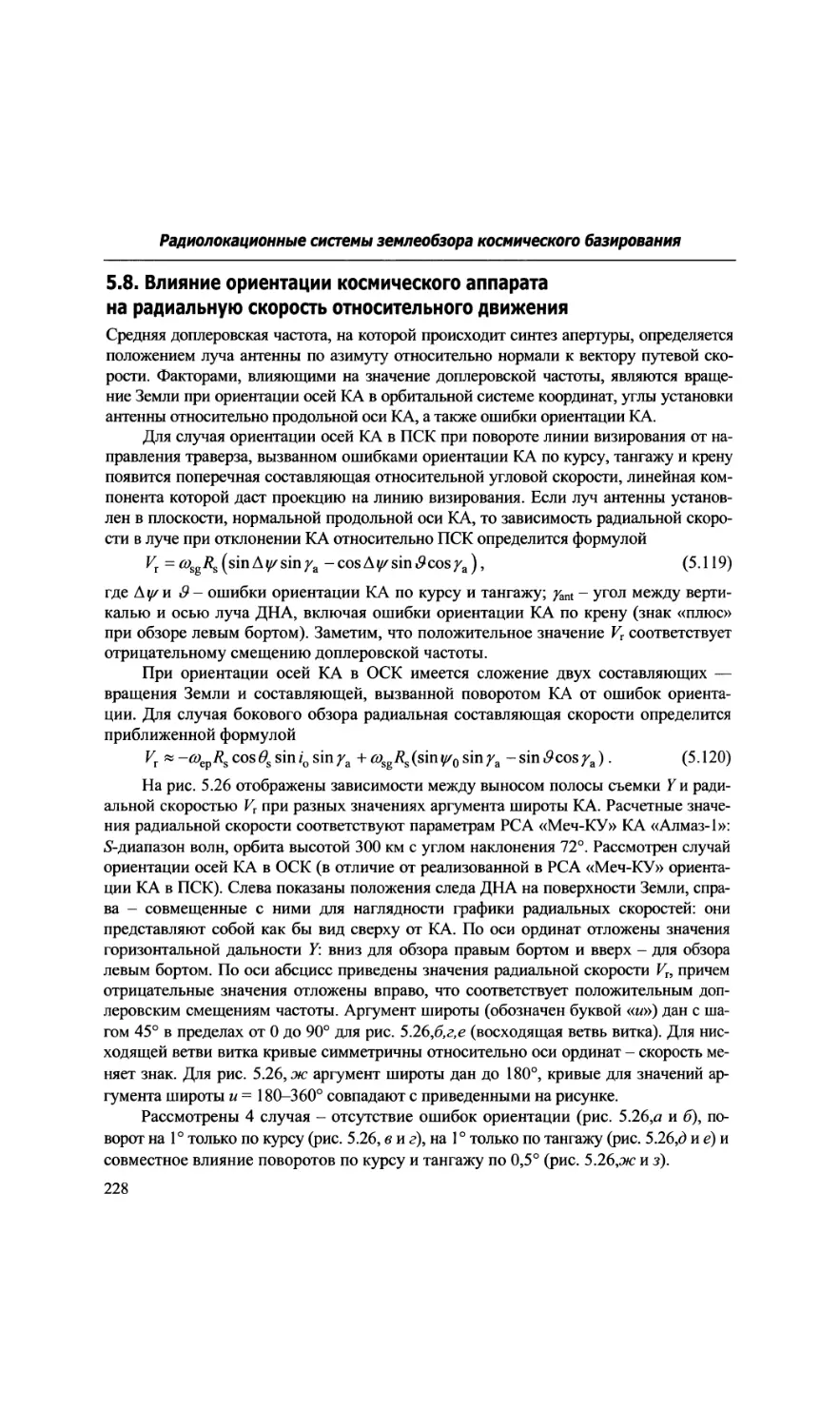
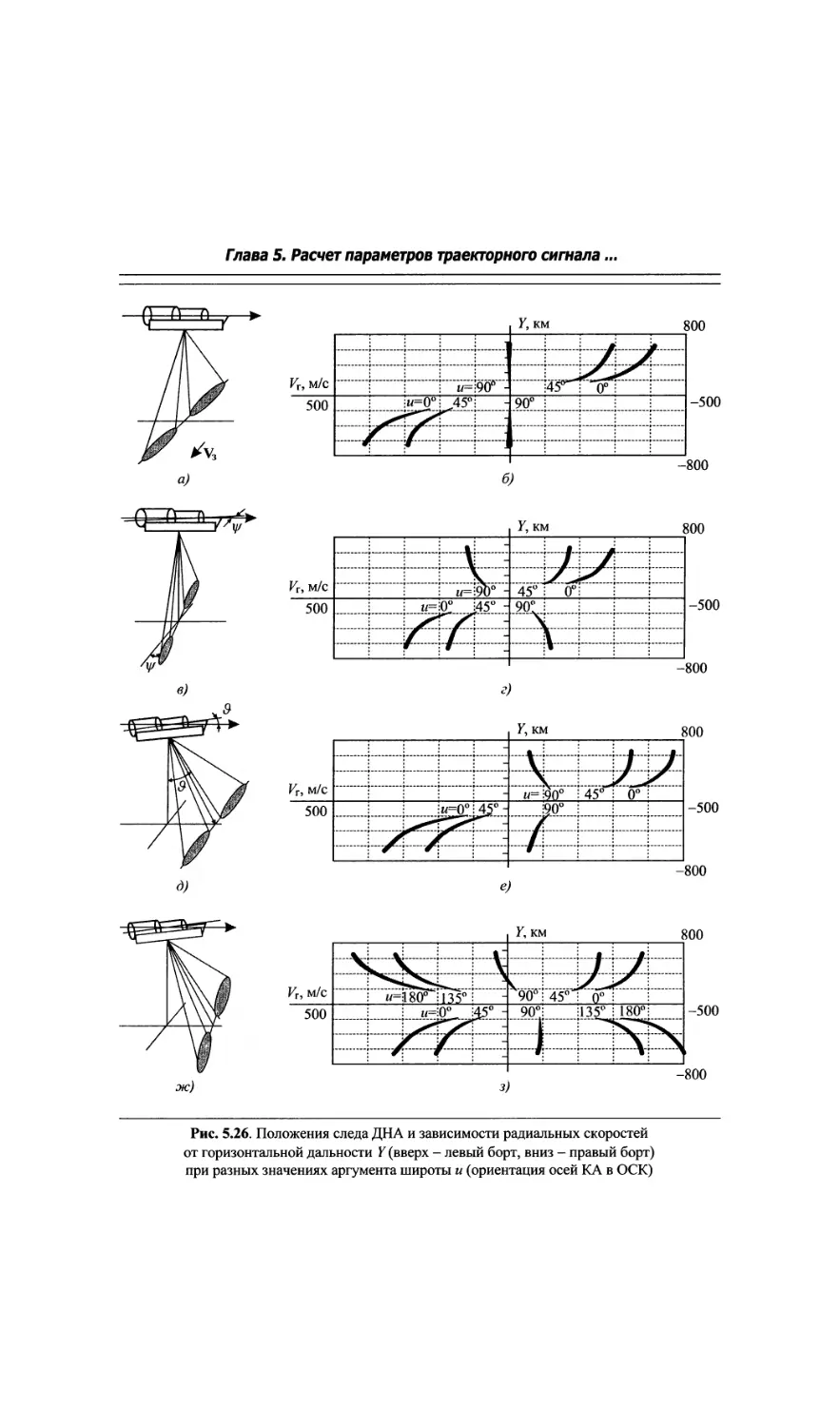
5.8. Влияние ориентации КА на радиальную скорость относительного
движения...........................................................228
5.9. Баллистические данные для расчета опорной функции синтеза
изображения........................................................230
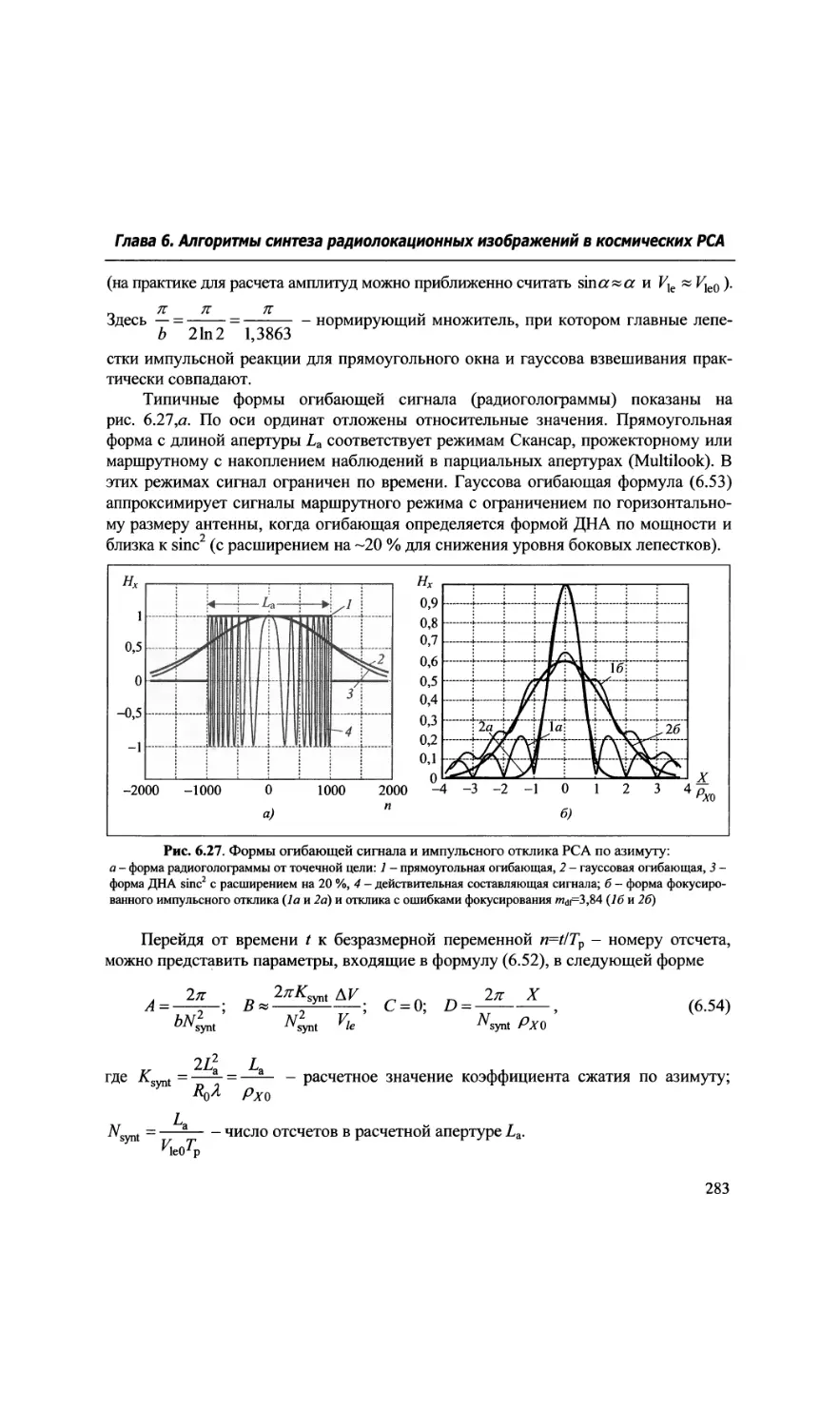
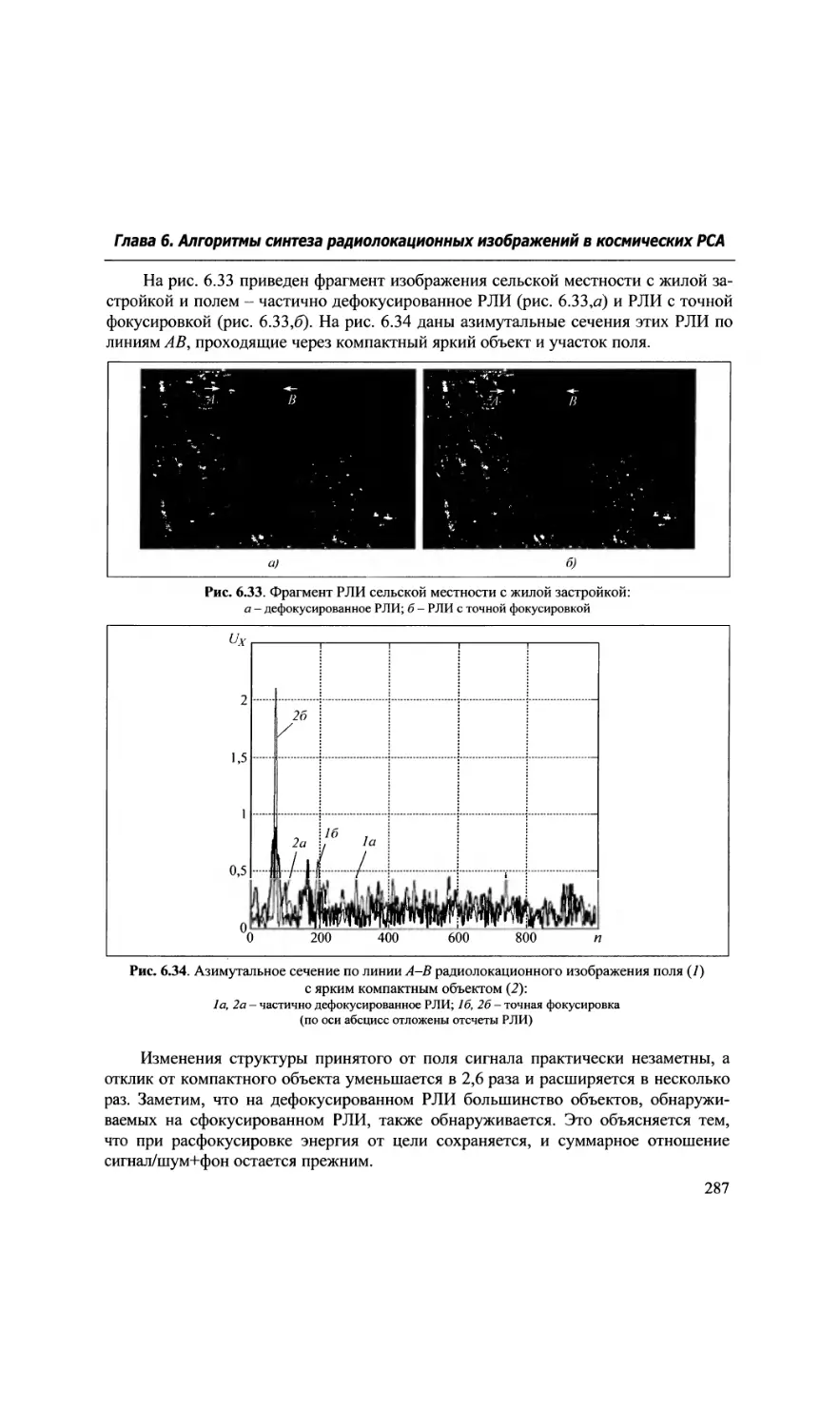
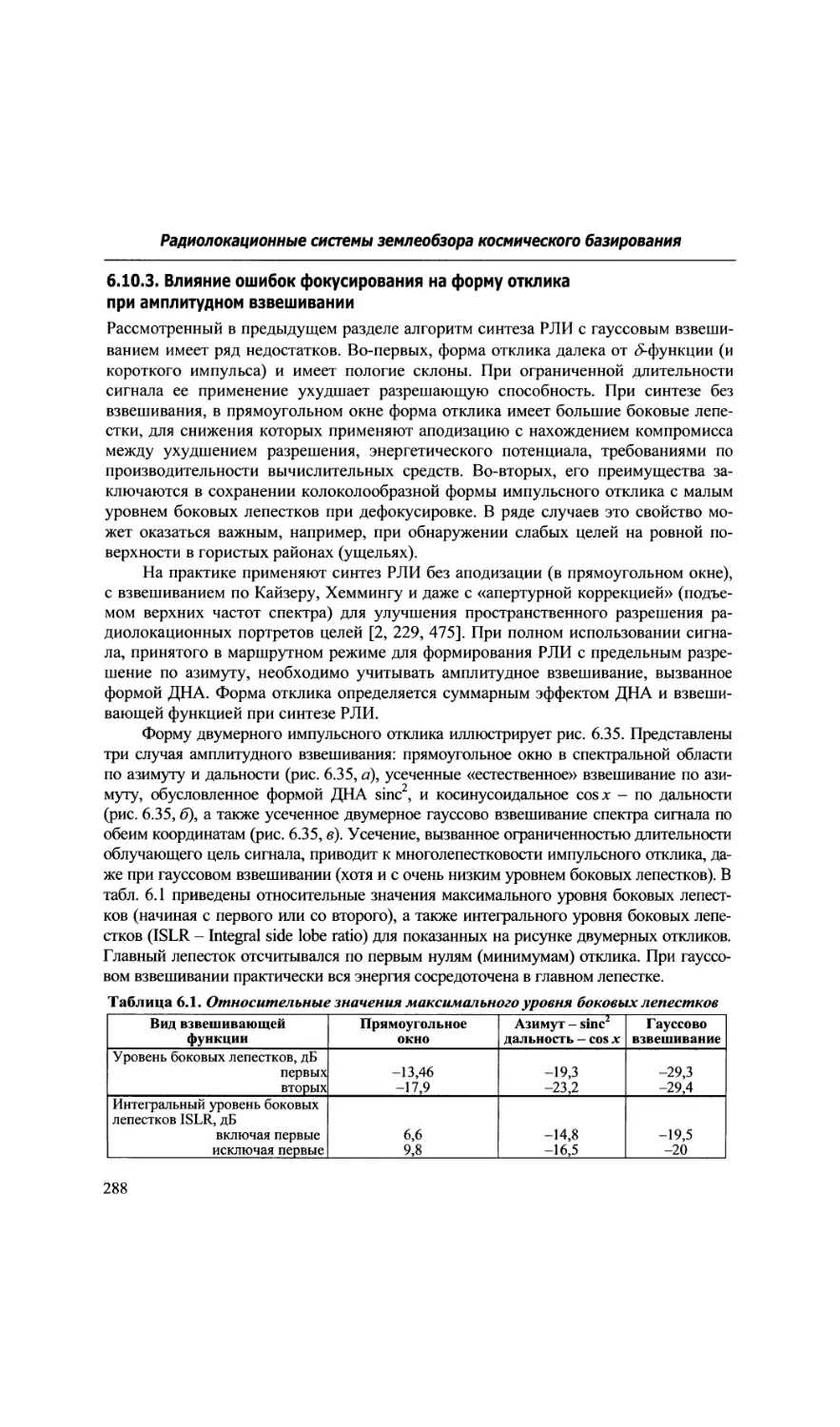
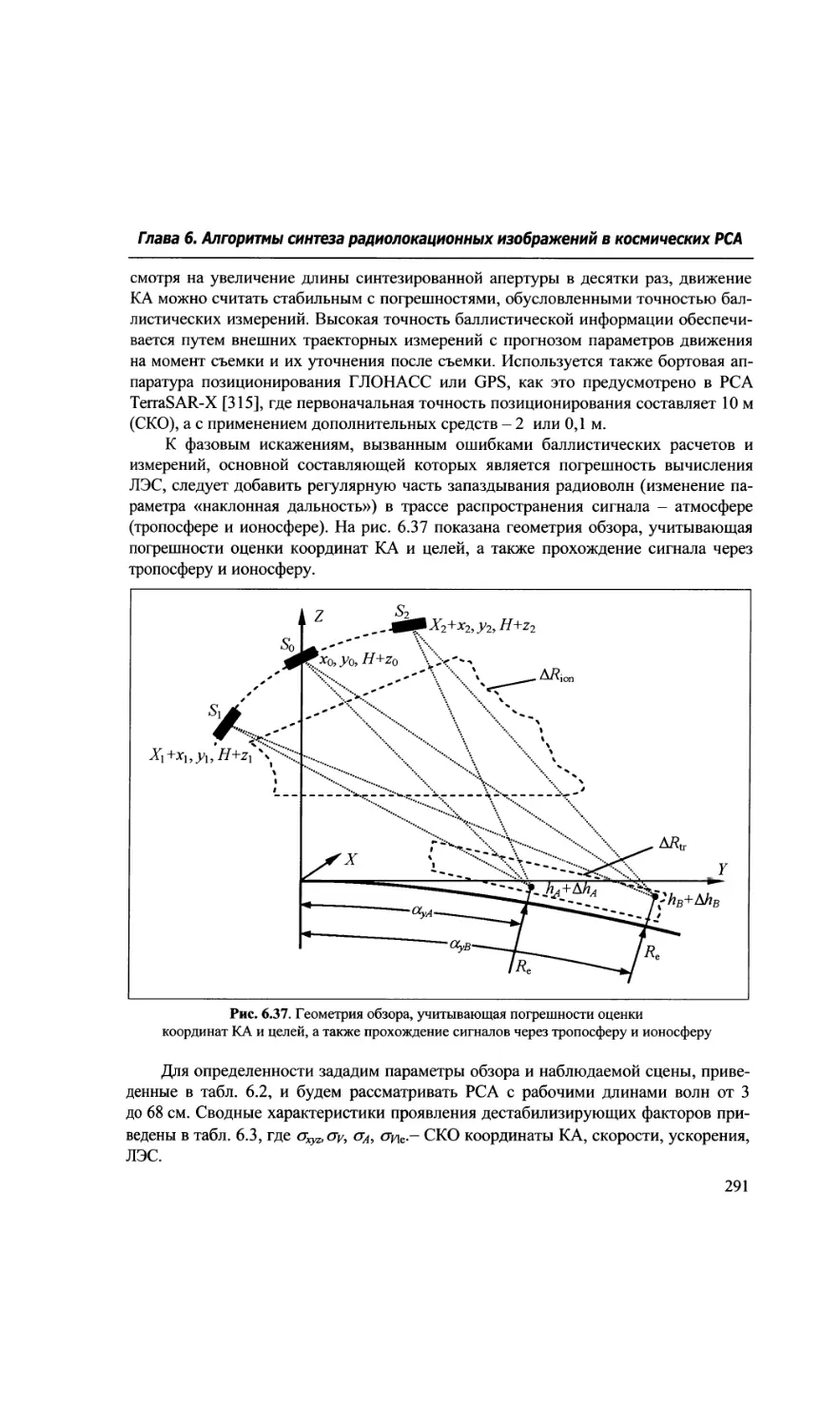
Глава 6. Алгоритмы синтеза радиолокационных изображений
в космических РСА...........................................................233
6.1. Этапы обработки радиолокационных сигналов и вид
информационных продуктов............................................ 233
6.2. Параметры, характеризующие миграцию дальности
в радиоголограмме..................................................236
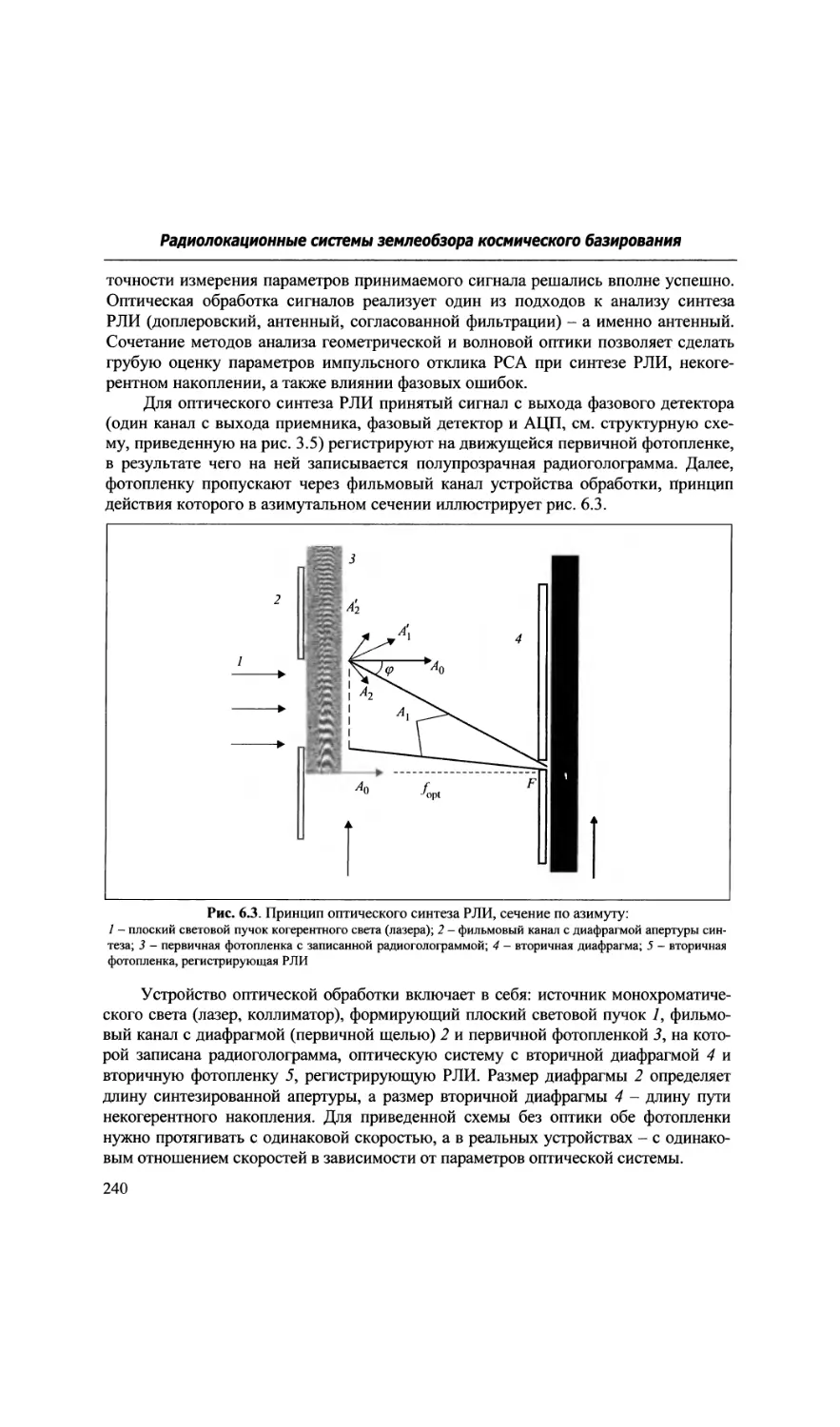
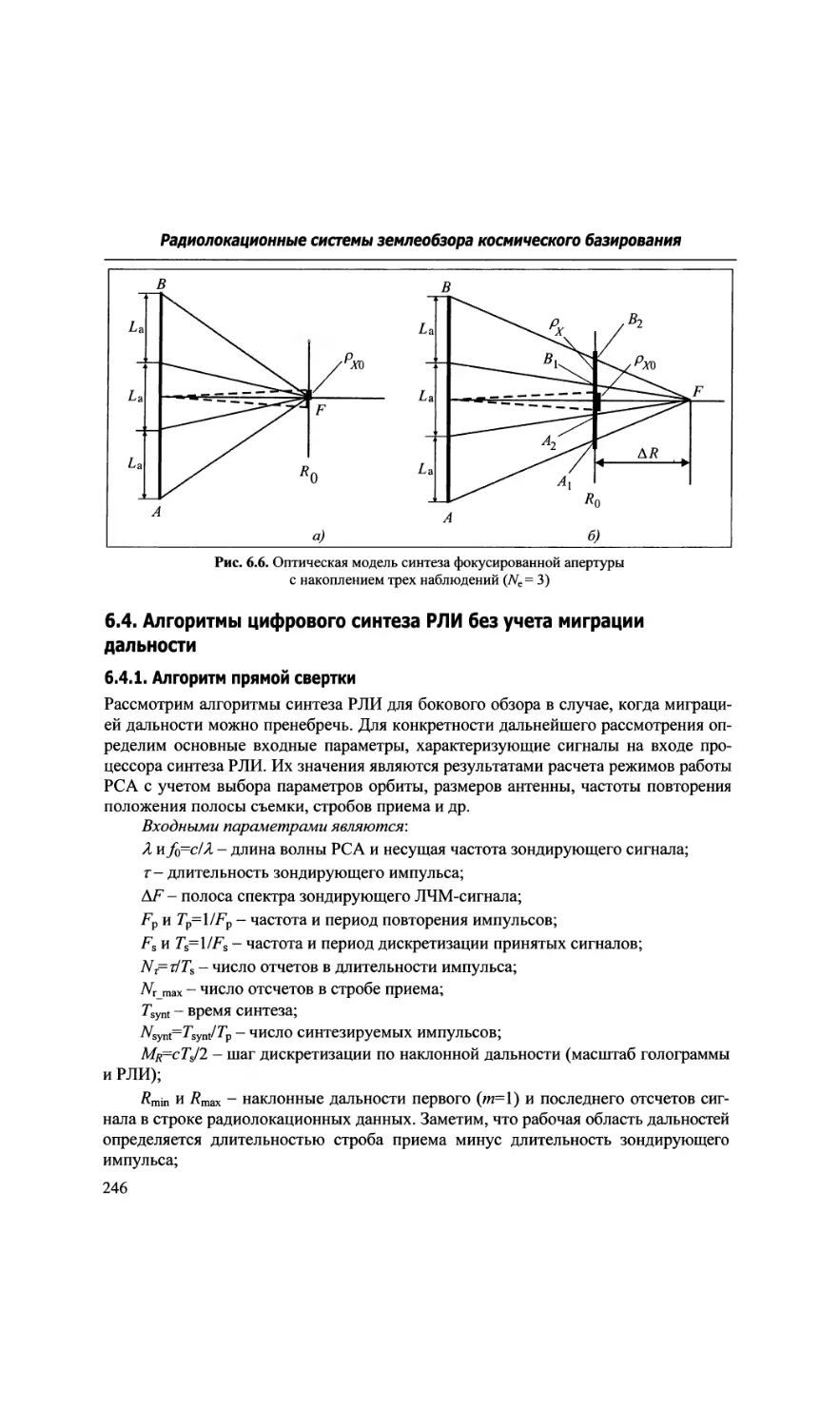
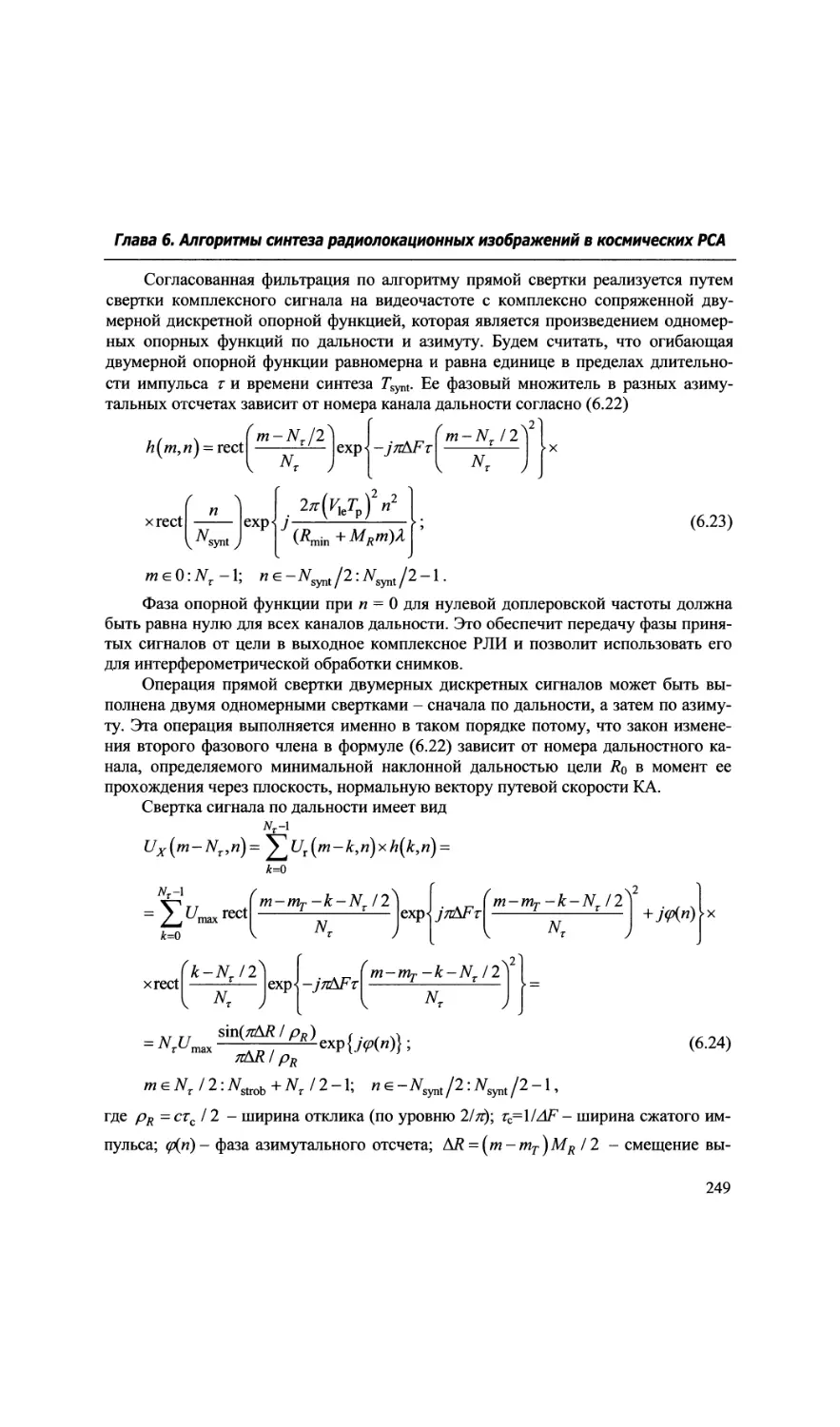
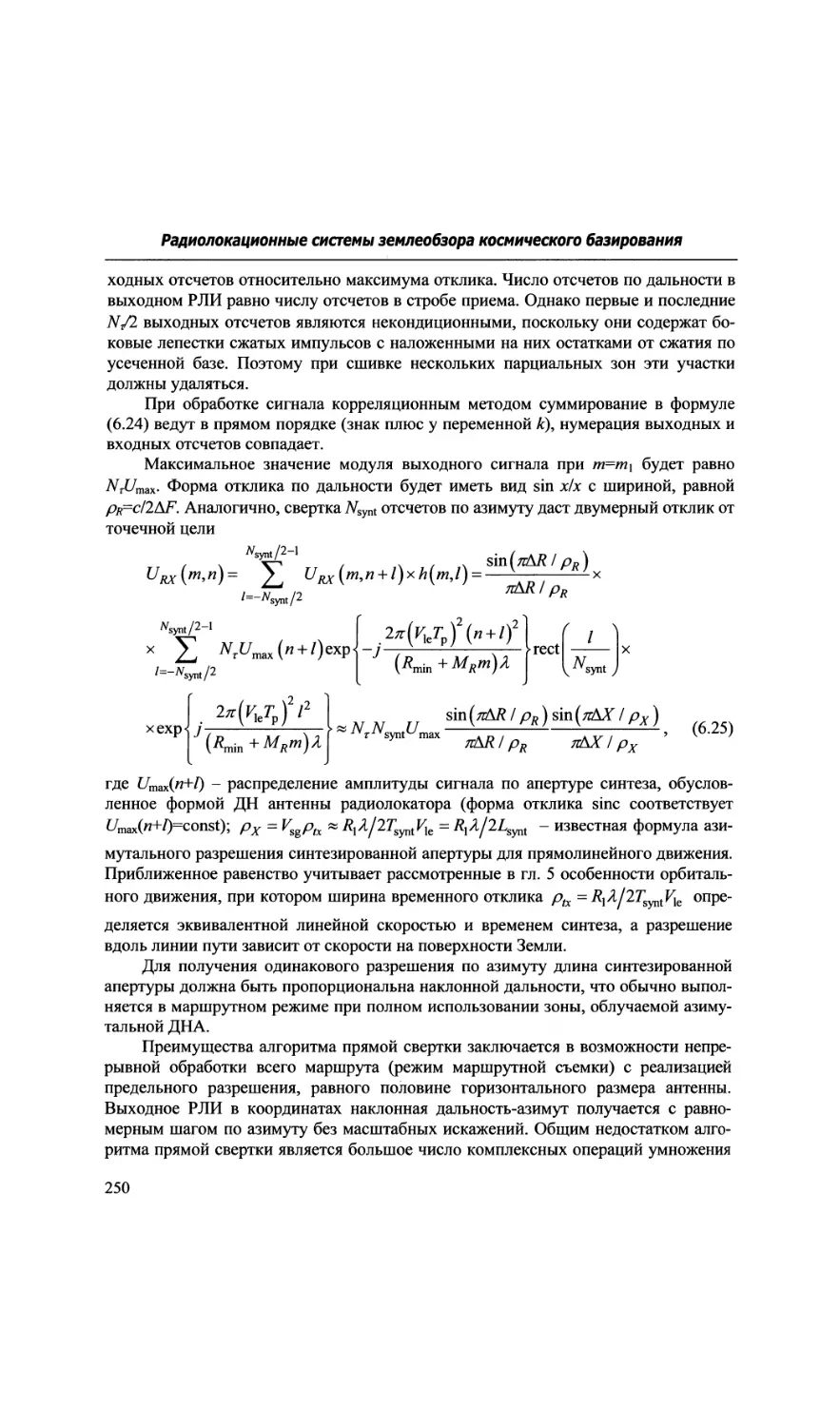
6.3. Оптическая обработка радиоголограммы как модель формирования
радиолокационного изображения в РСА................................239
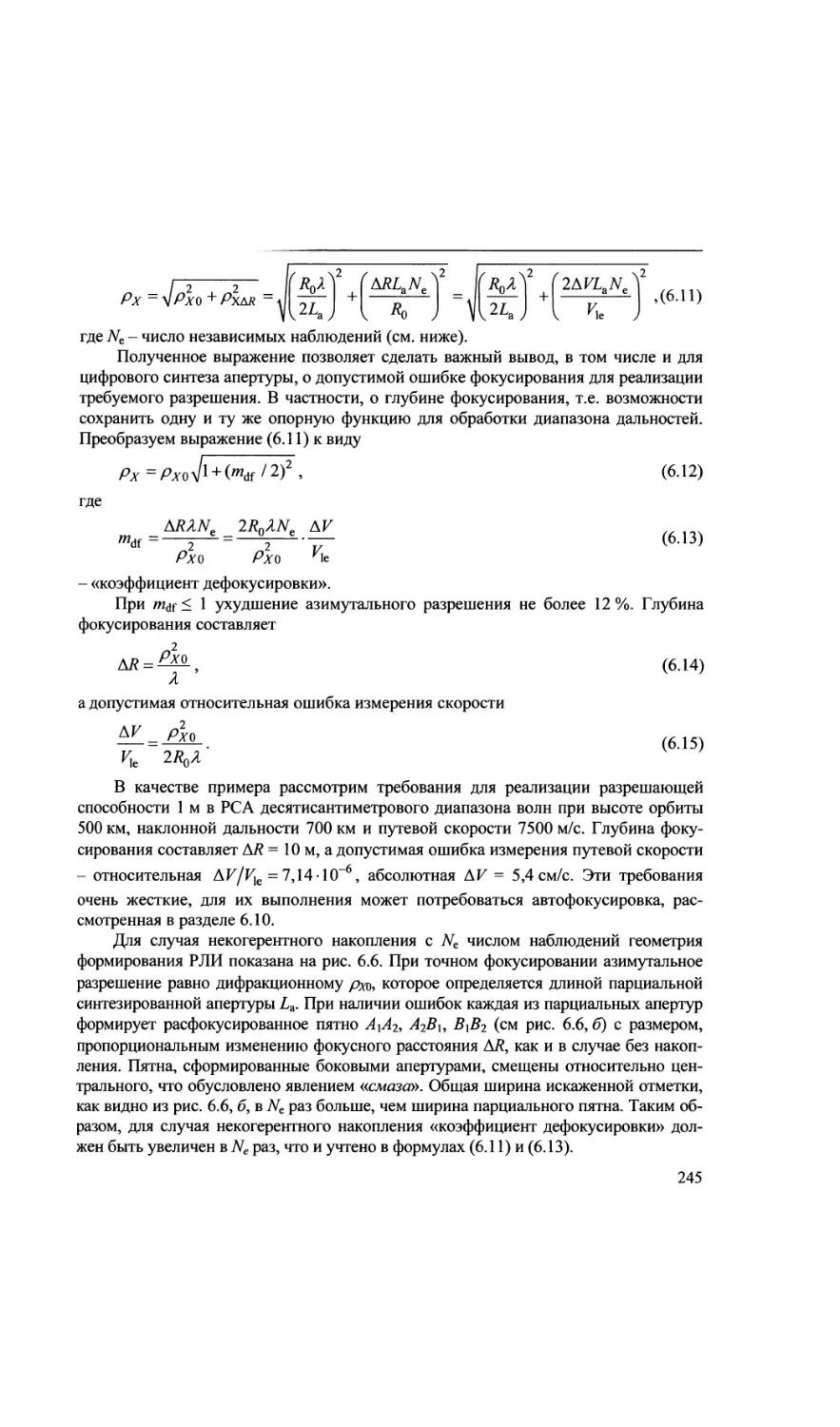
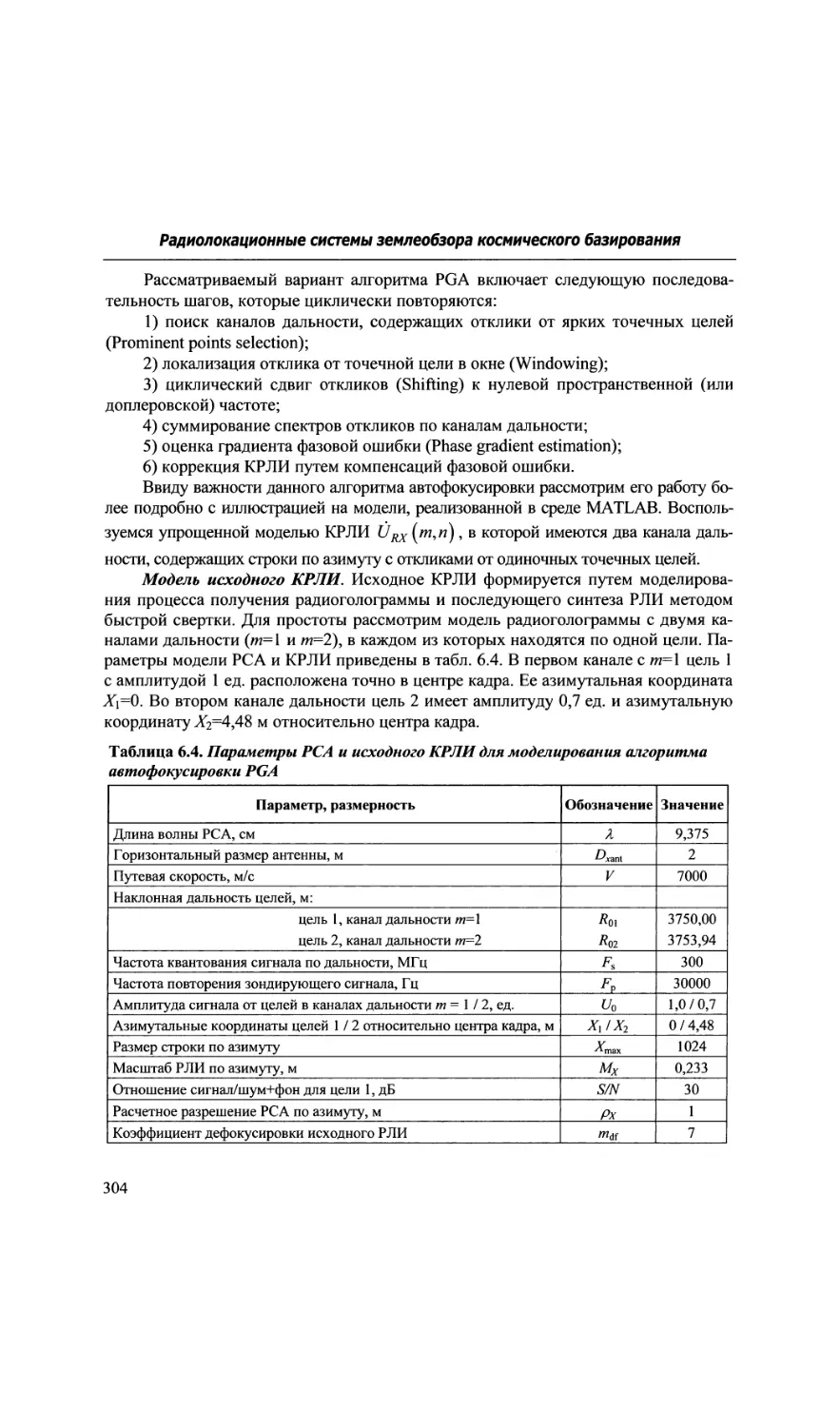
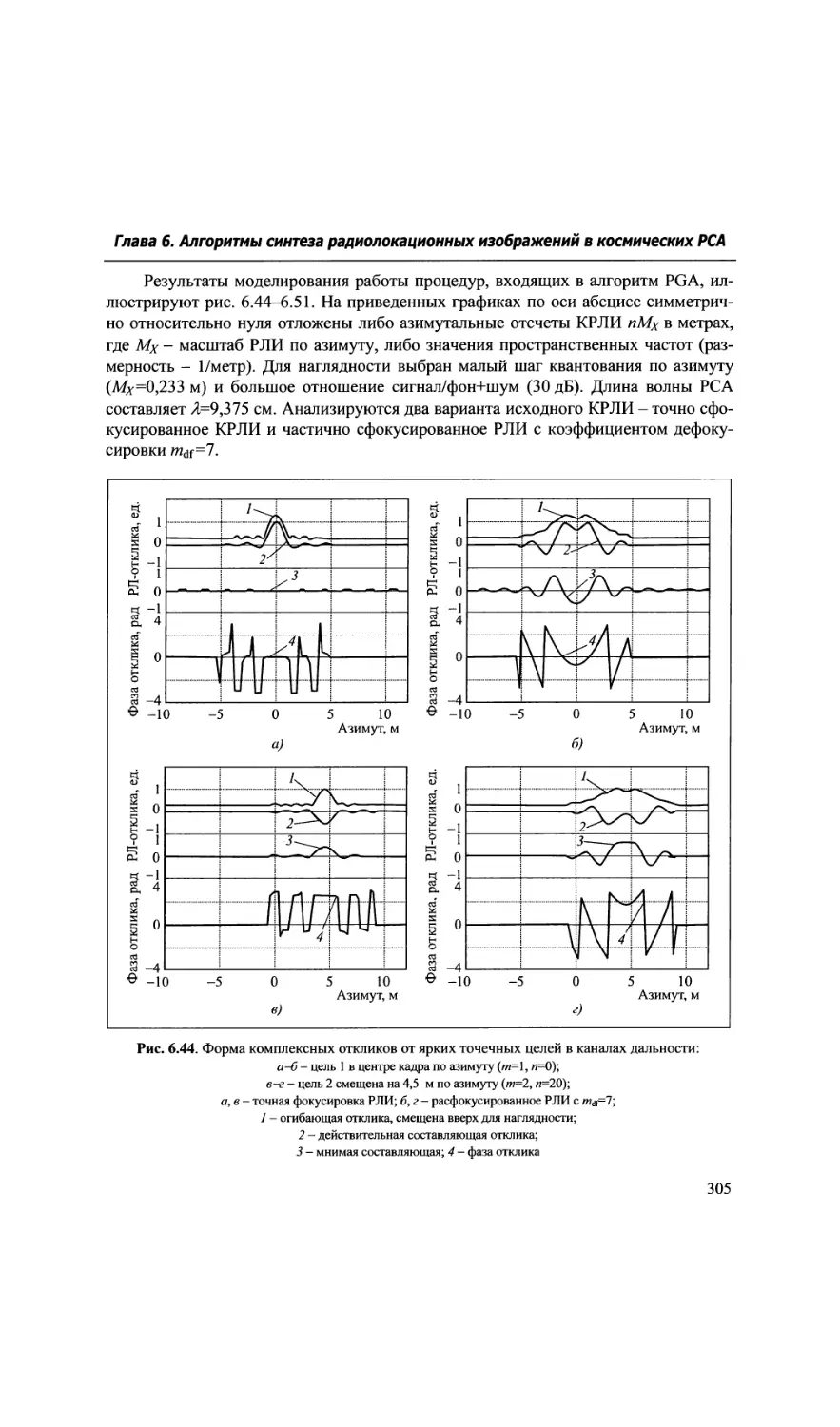
6.4. Алгоритмы цифрового синтеза РЛИ без учета миграции дальности.246
6.4.1. Алгоритм прямой свертки.....................................246
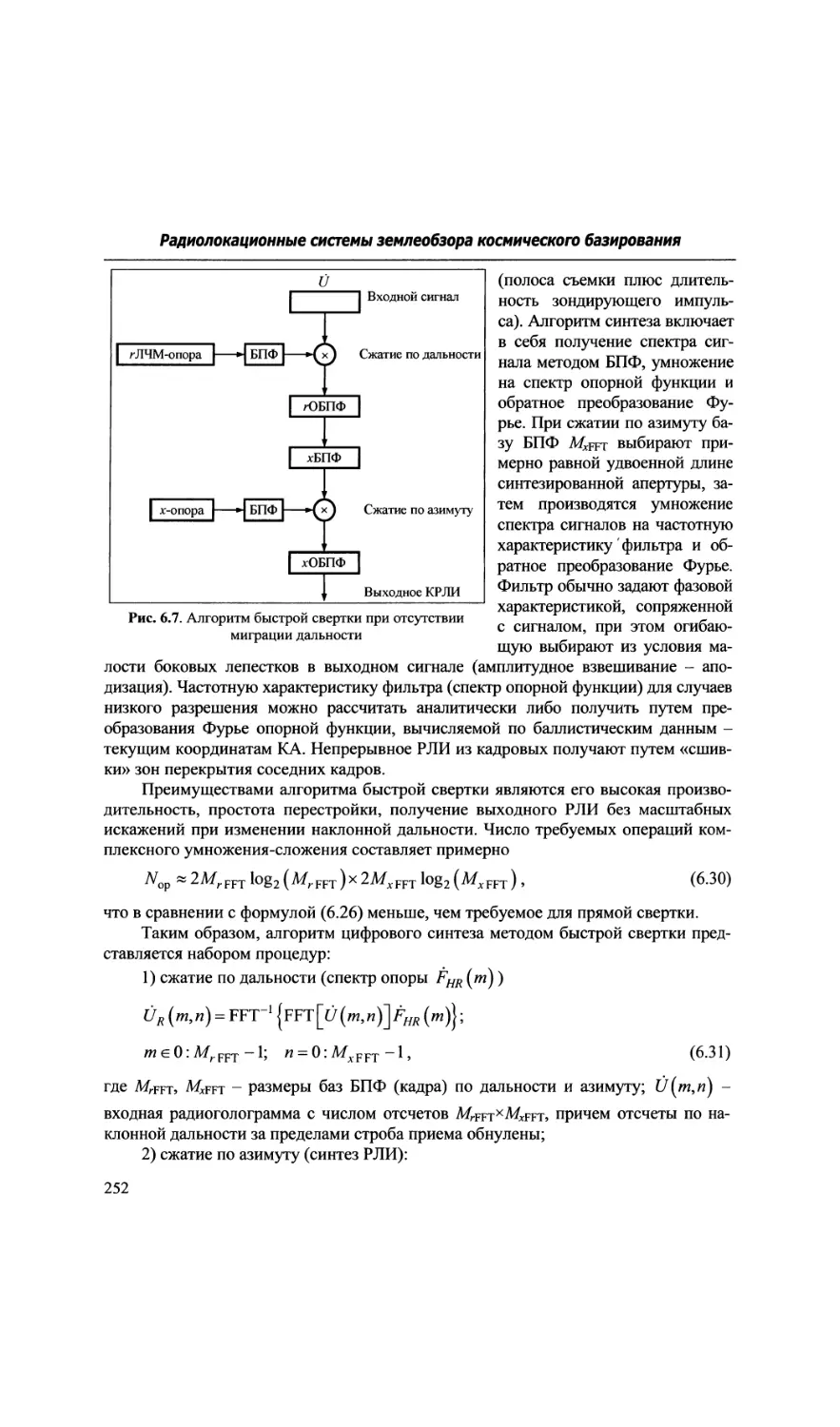
6.4.2. Алгоритм быстрой свертки....................................251
6.4.3. Алгоритм гармонического (спектрального) анализа.............253
5
Радиолокационные системы землеобзора космического базирования
6.5. Процедуры масштабирования и интерполяции комплексных
сигналов............................................................254
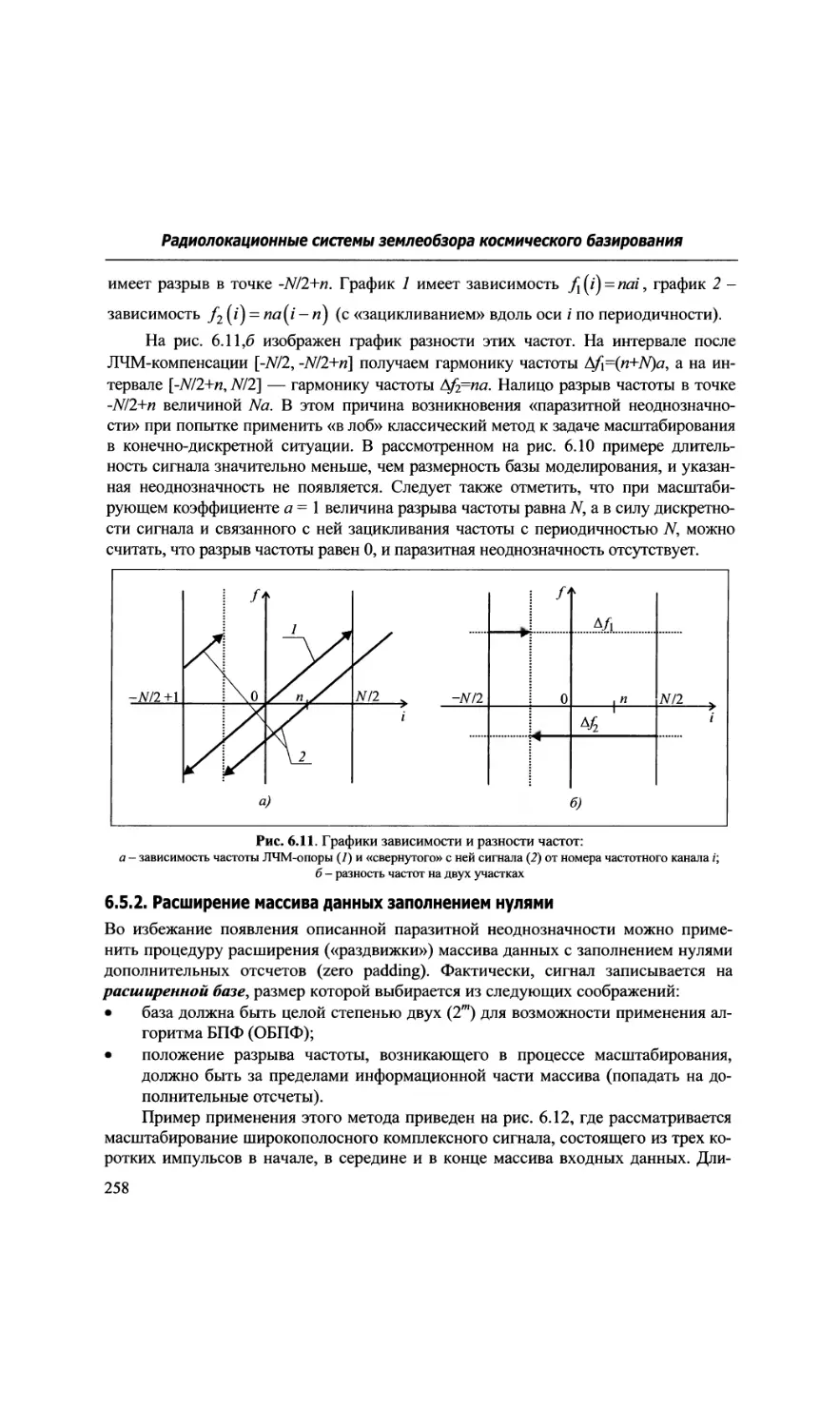
6.5.1. Масштабирование путем свертки с ЛЧМ-опорой...................254
6.5.2. Расширение массива данных заполнением нулями.................258
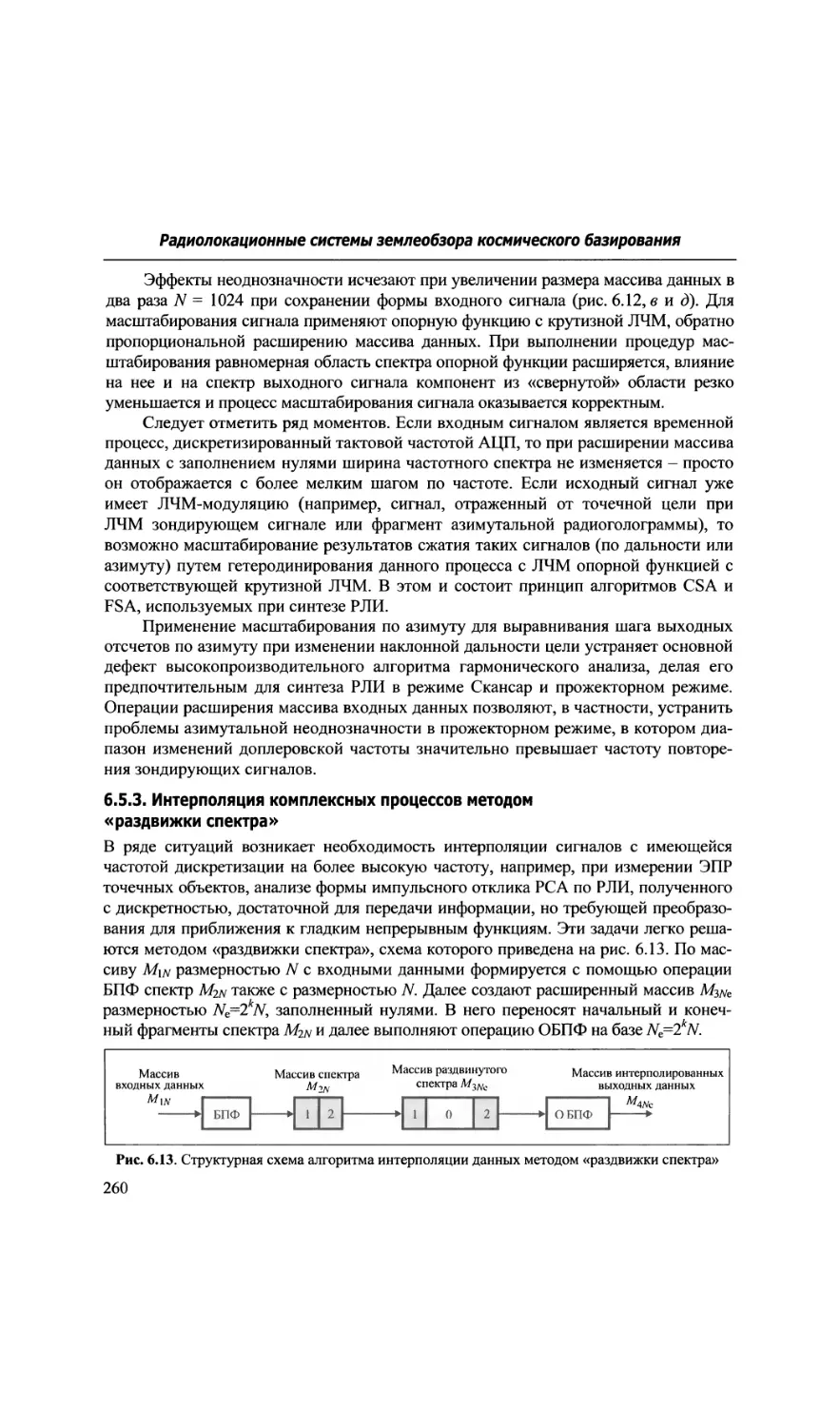
6.5.3. Интерполяция комплексных процессов методом «раздвижки
спектра»..........................................................260
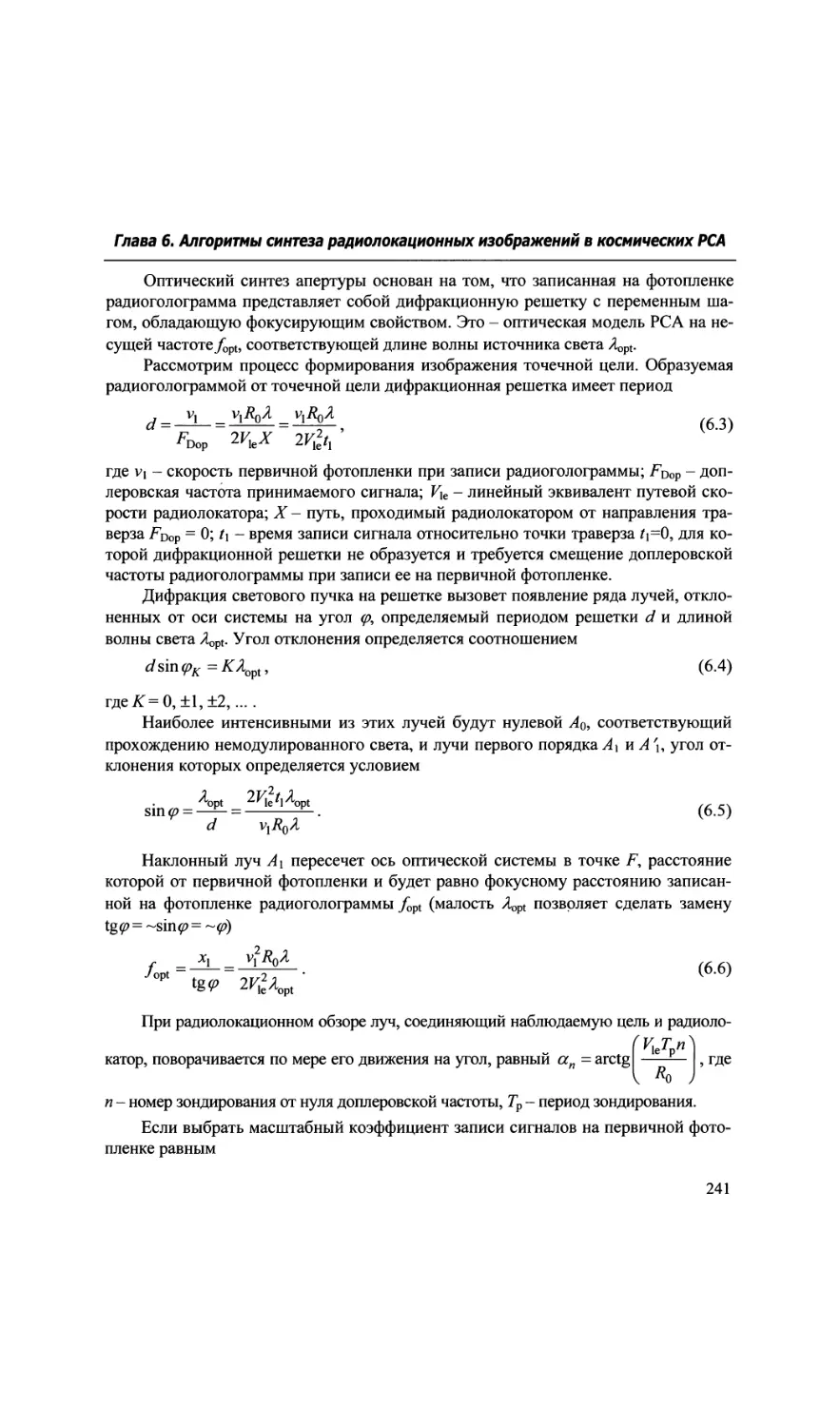
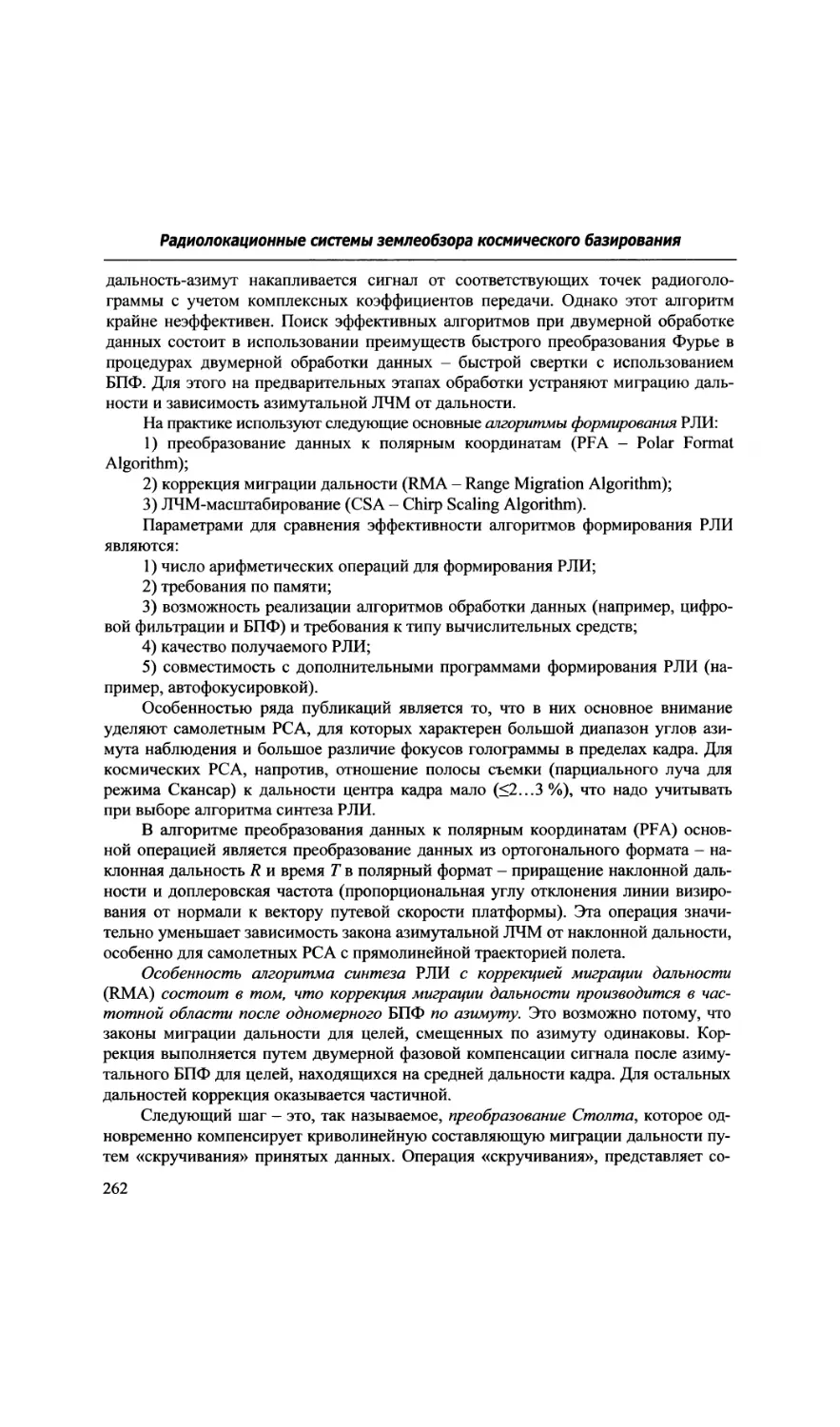
6.6. Алгоритмы синтеза РЛИ в маршрутном режиме с учетом миграции
дальности.......................................................... 261
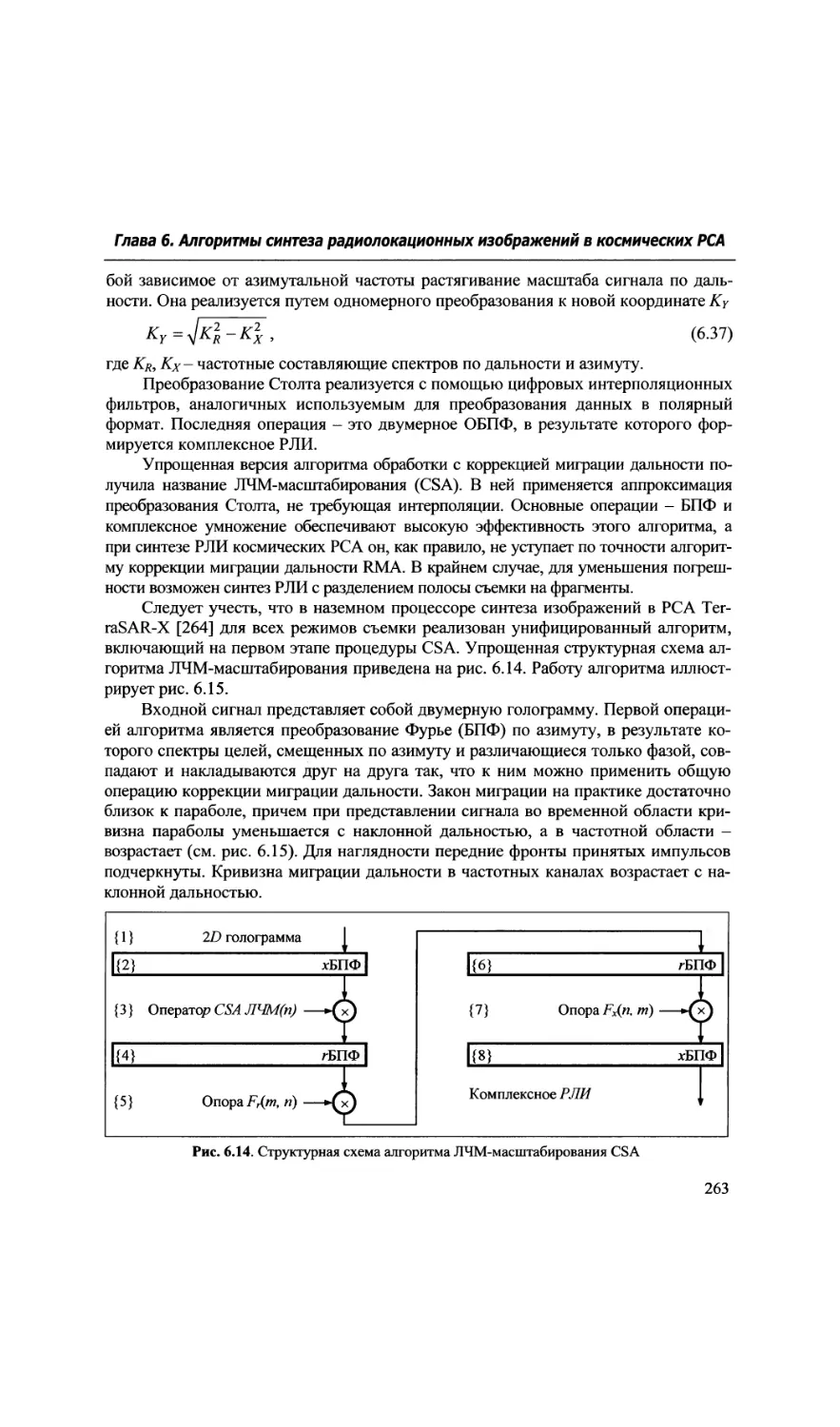
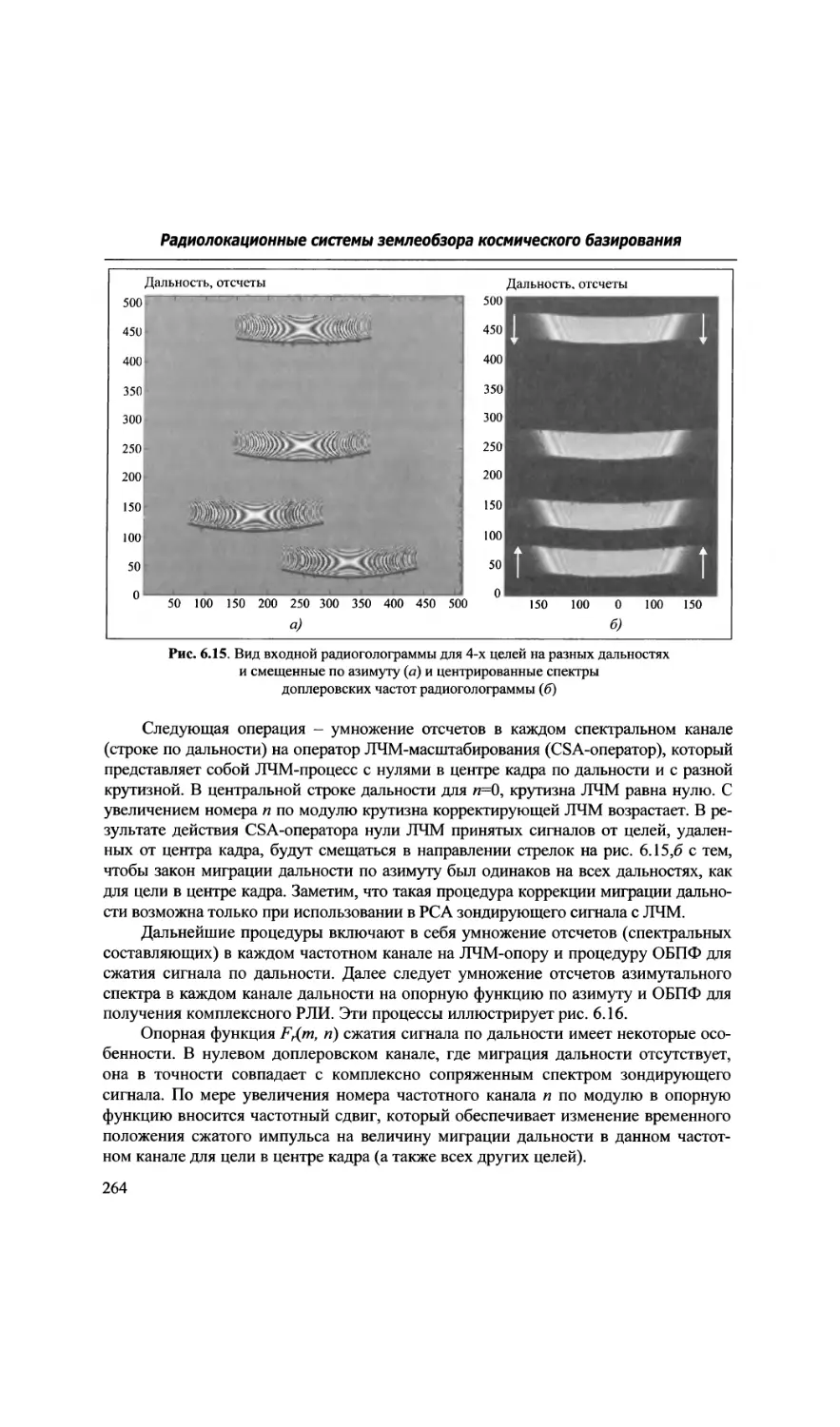
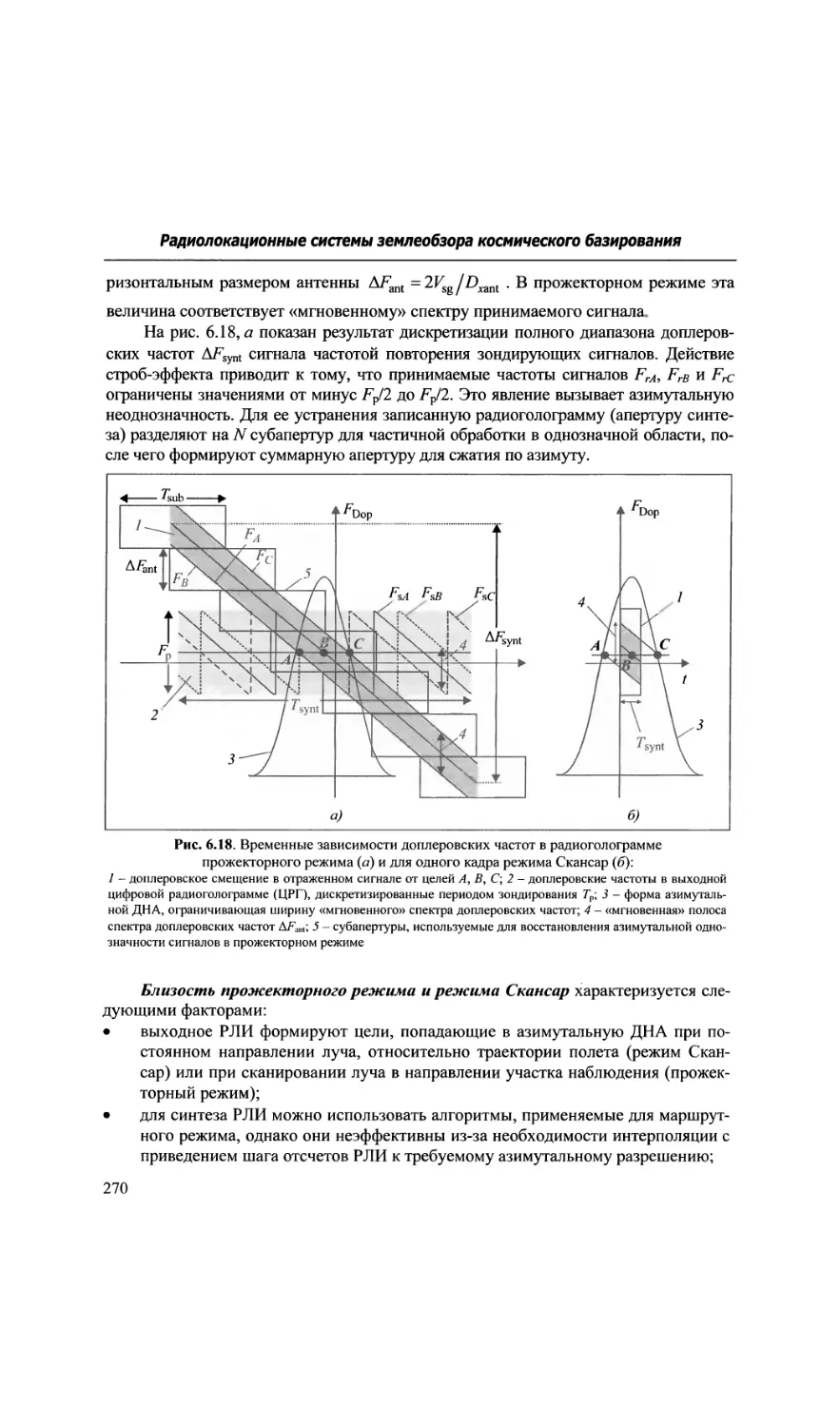
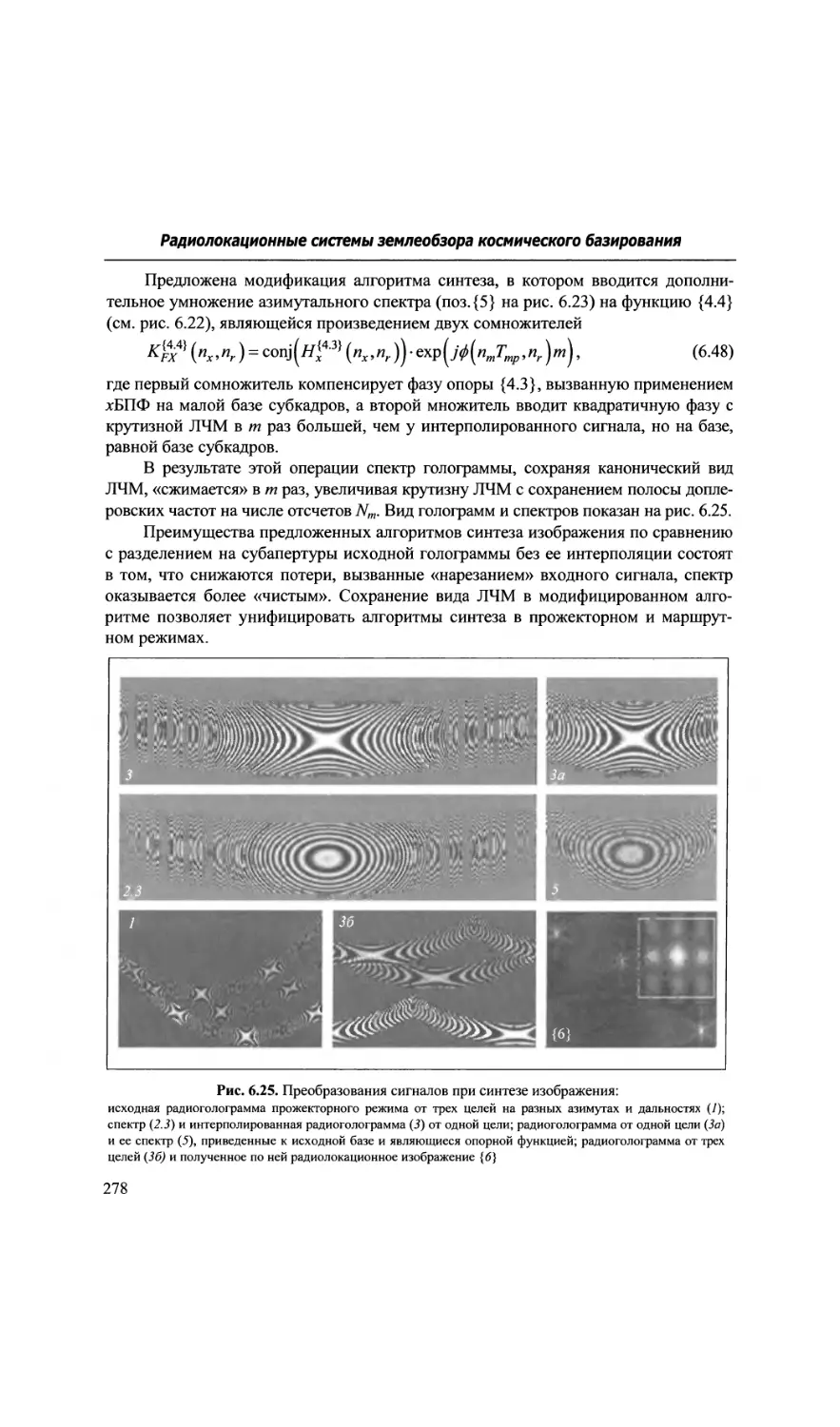
6.7. Особенности принимаемых сигналов в прожекторном режиме
съемки............................................................. 268
6.8. Унифицированный алгоритм синтеза изображения в основных
режимах работы РСА..................................................272
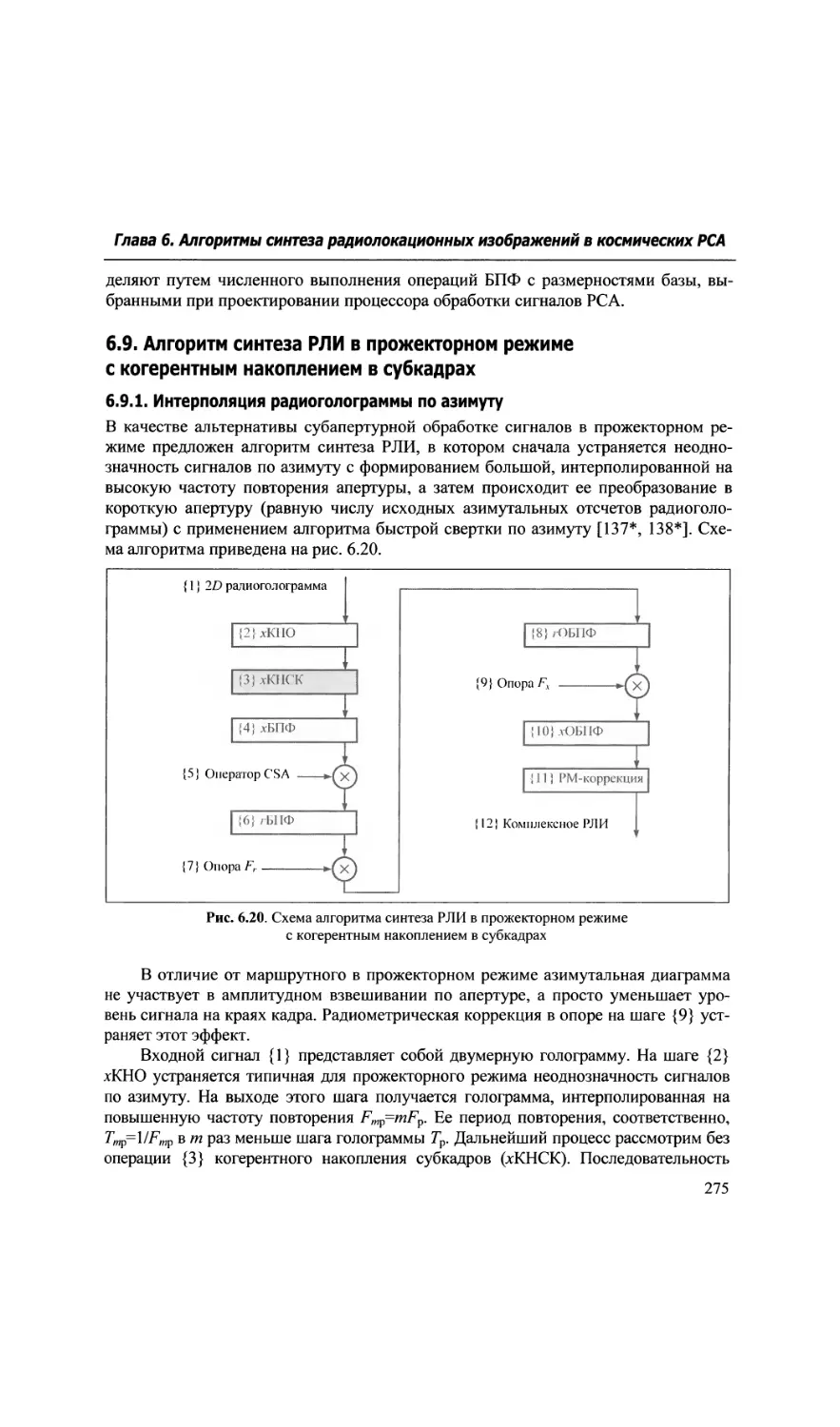
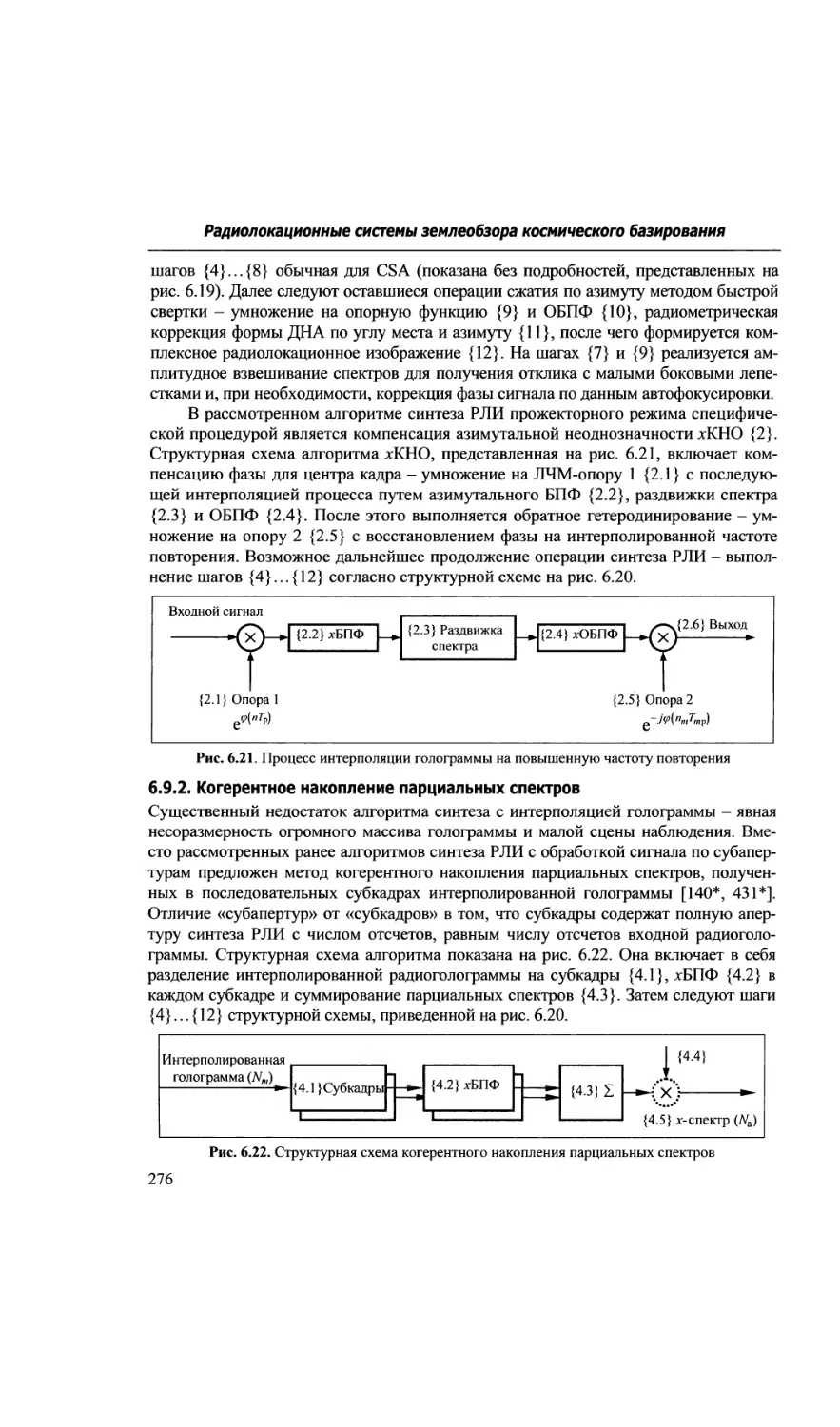
6.9. Алгоритм синтеза РЛИ в прожекторном режиме с когерентным
накоплением в субкадрах.............................................275
6.9.1. Интерполяция радиоголограммы по азимуту......................275
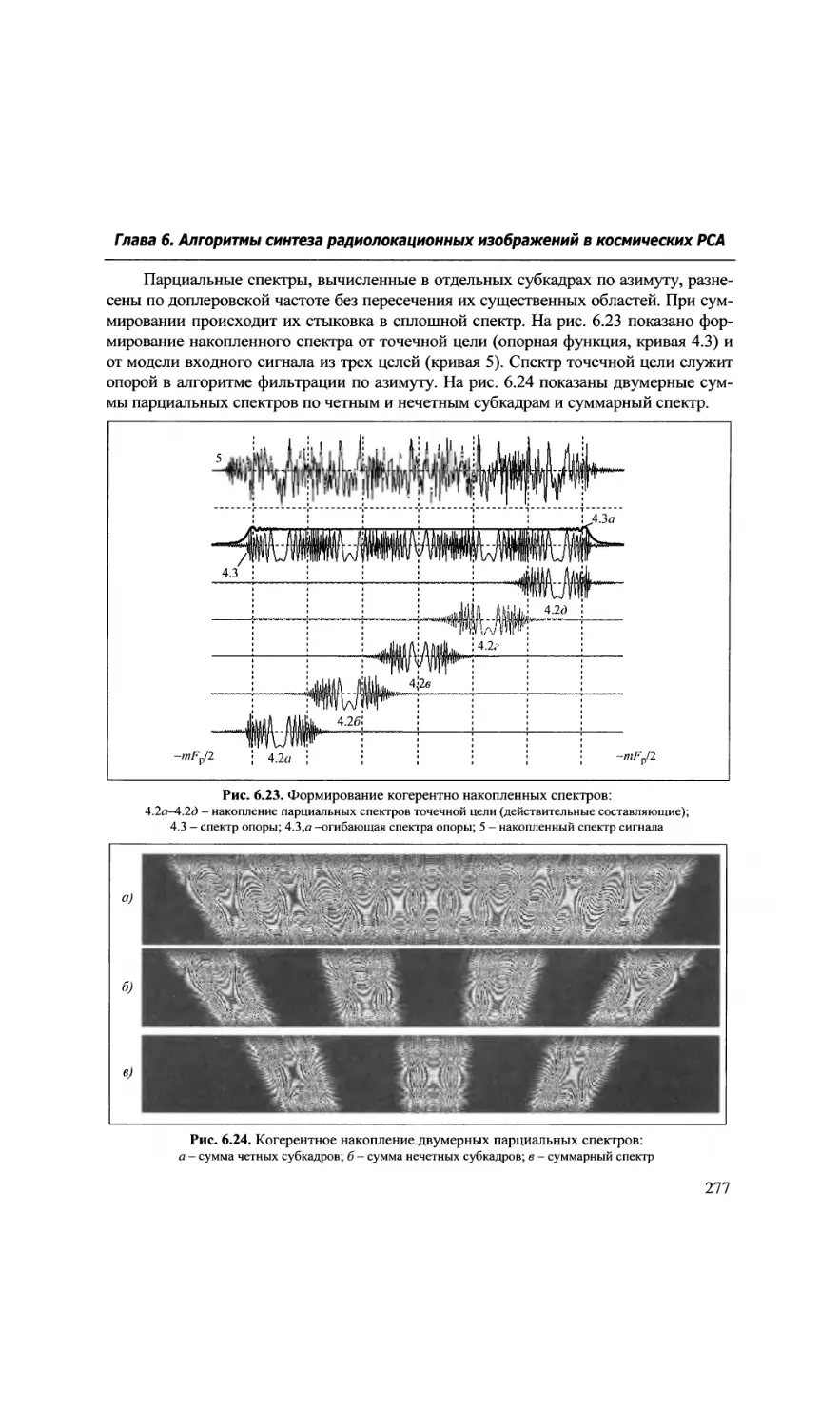
6.9.2. Когерентное накопление парциальных спектров..................276
6.9.3. Когерентное накопление субкадров.............................279
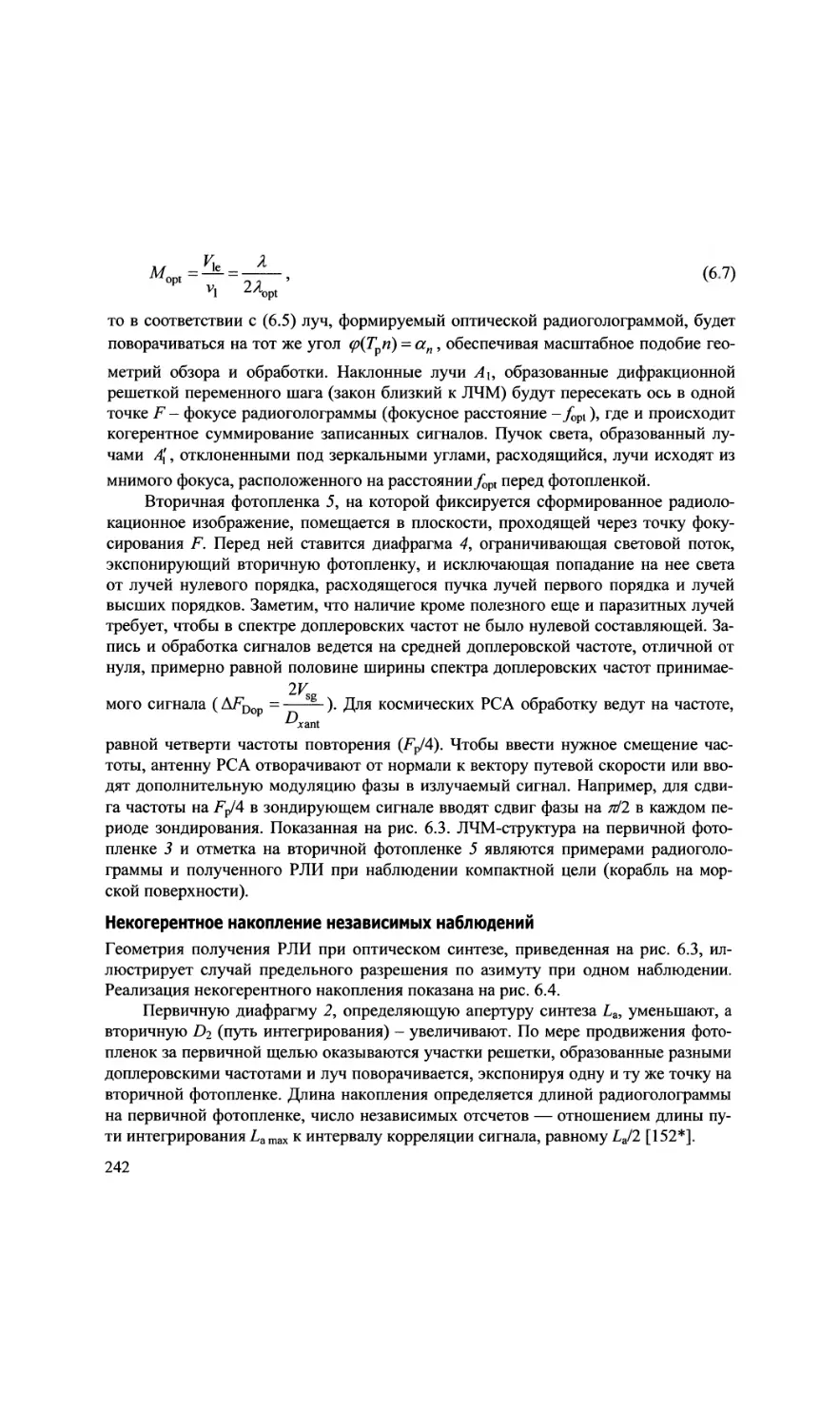
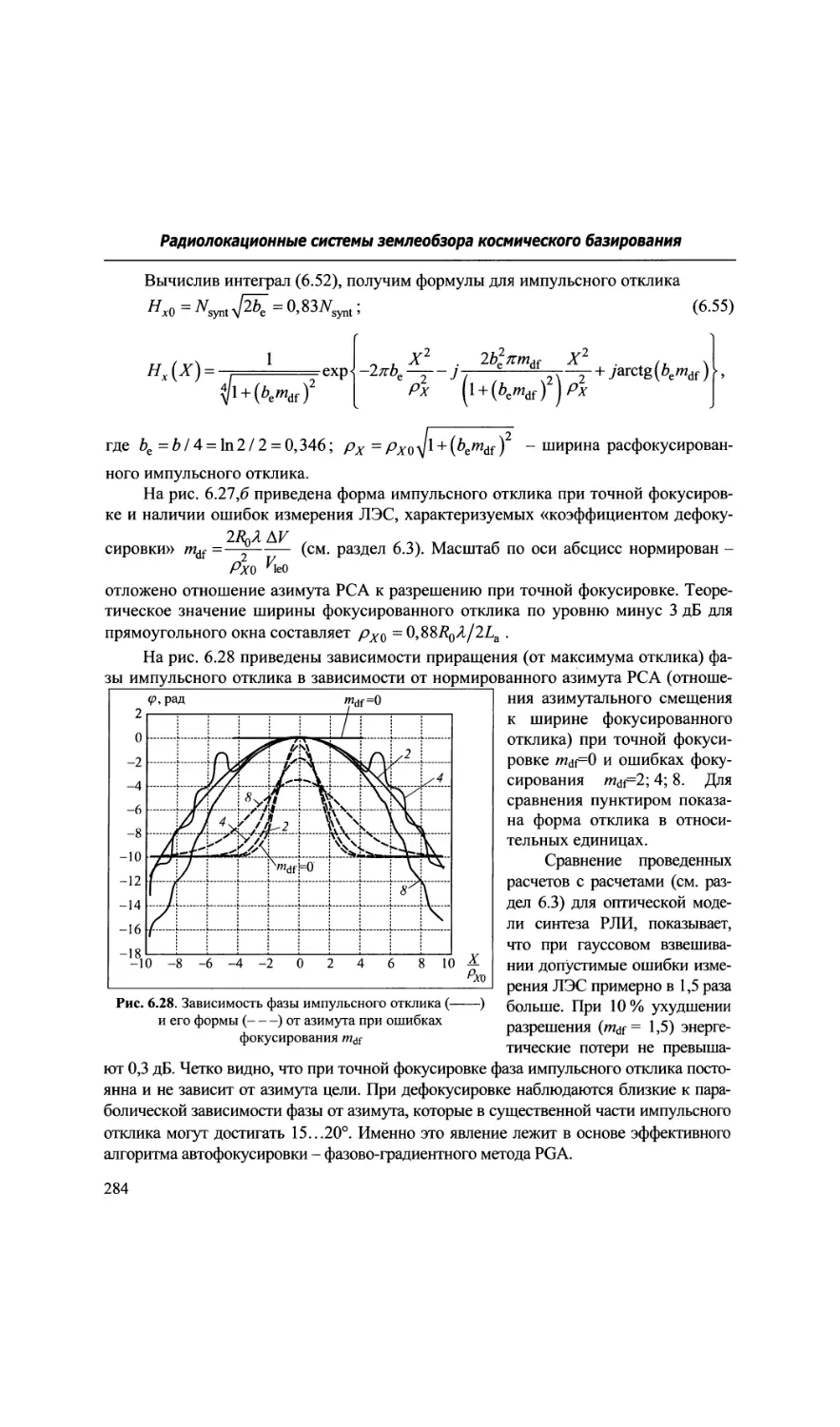
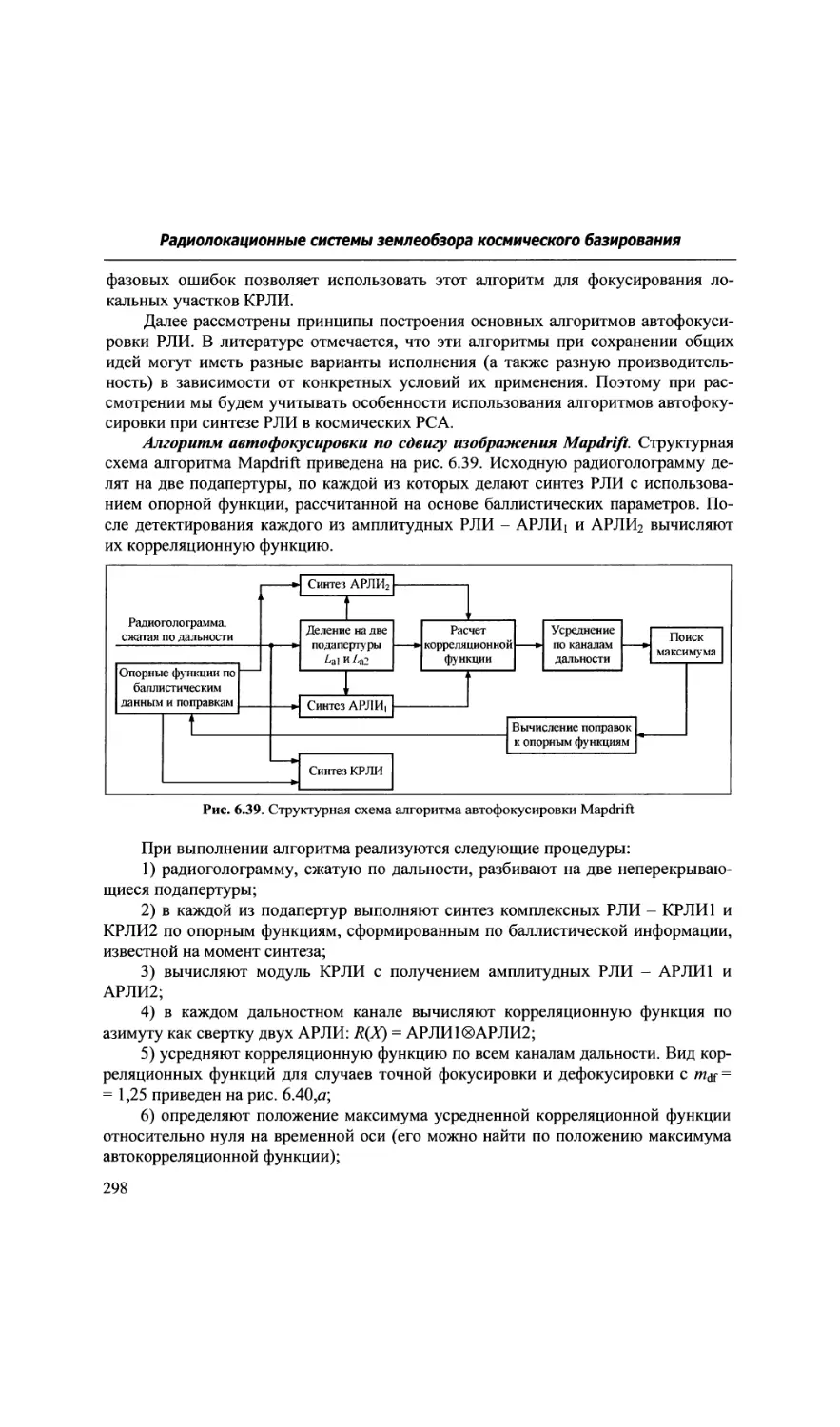
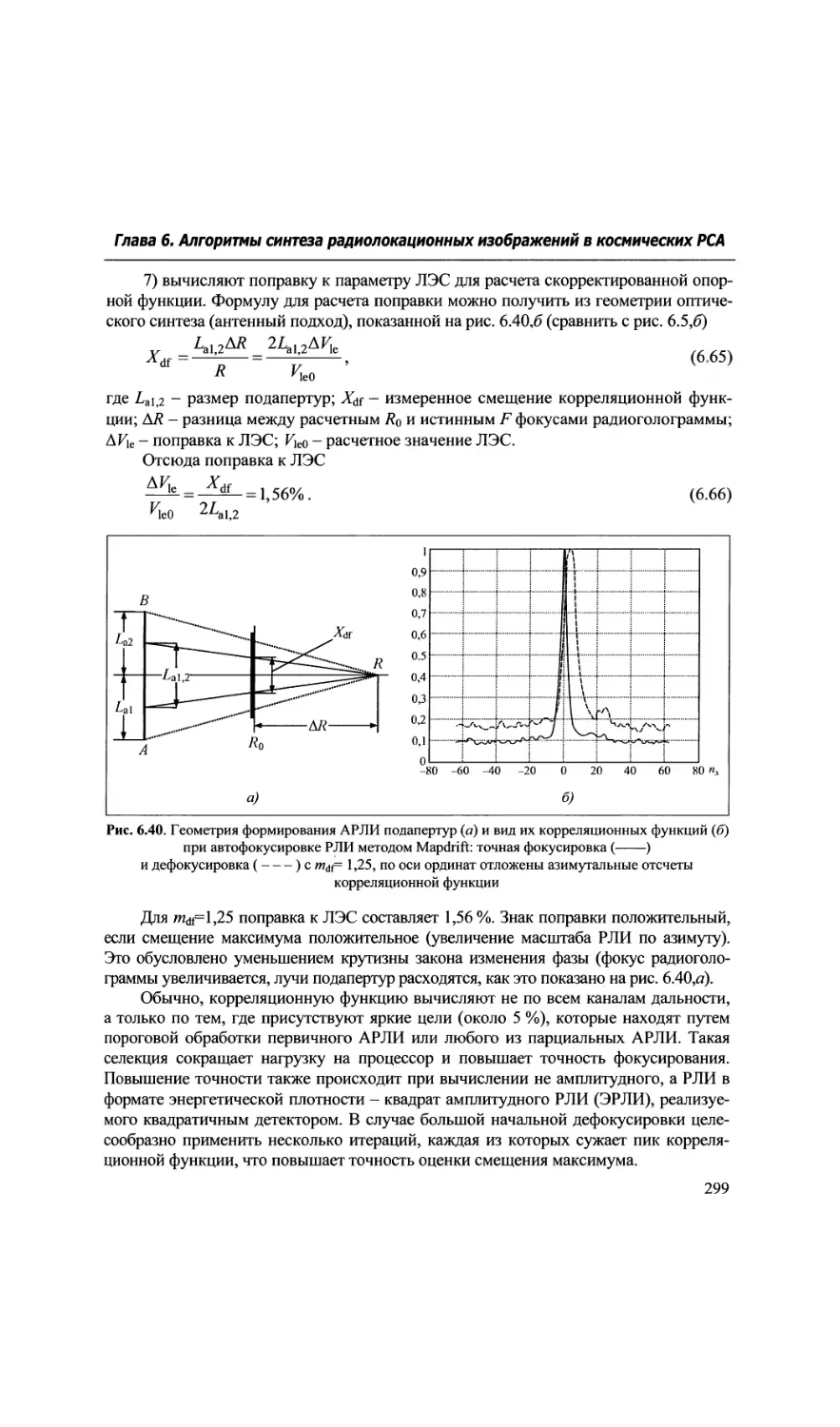
6.10. Автофокусировка радиолокационных изображений.................. 279
6.10.1. Искажающие воздействия, требующие применения
автофокусировки РЛИ.............................................. 279
6.10.2. Аналитическая оценка влияния ошибок фокусирования...........281
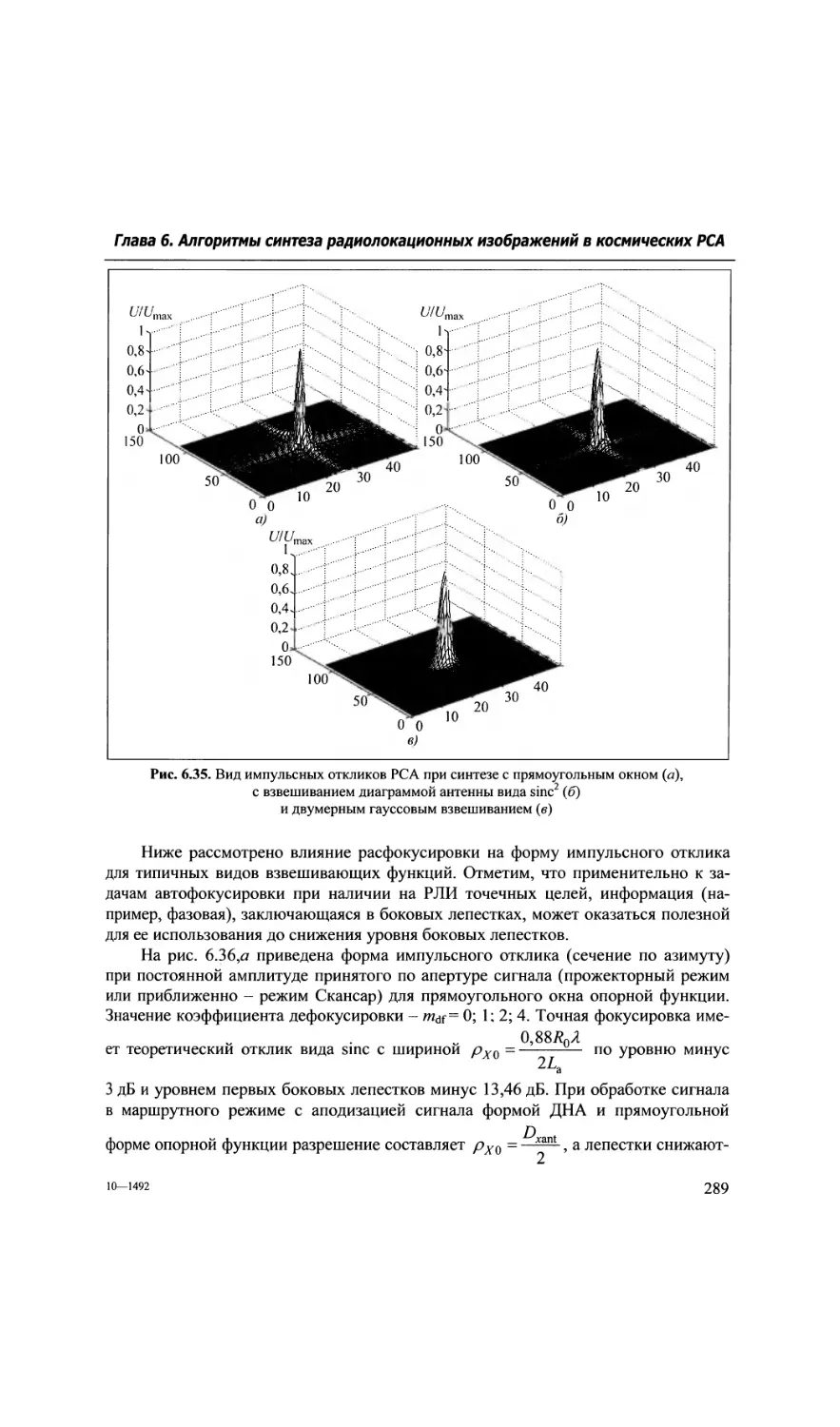
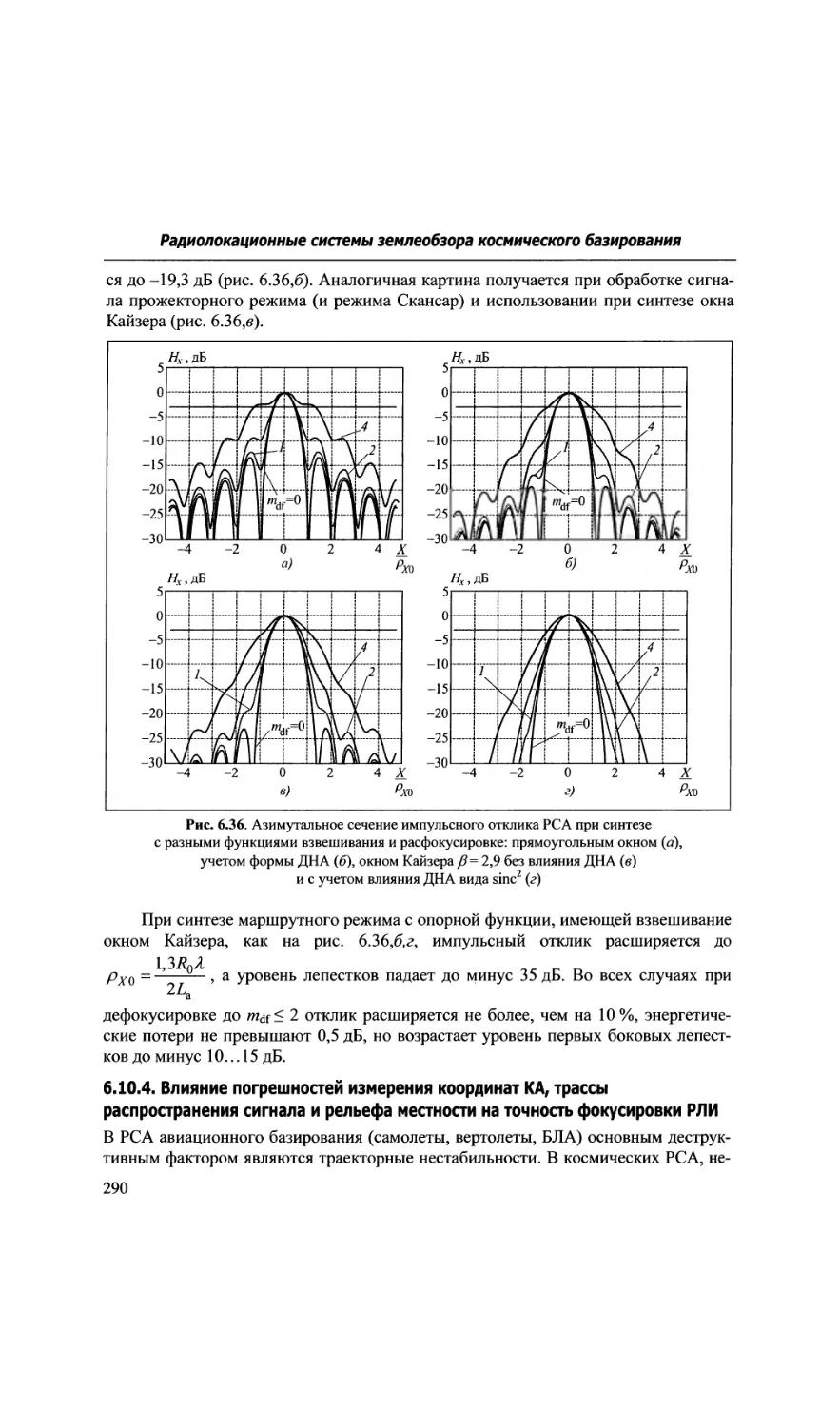
6.10.3. Влияние ошибок фокусирования на форму отклика при амплитудном
взвешивании.......................................................288
6.10.4. Влияние погрешностей измерения координат КА, трассы
распространения сигнала и рельефа местности на точность
фокусировки РЛИ...................................................290
6.10.5. Обзор алгоритмов автофокусировки............................296
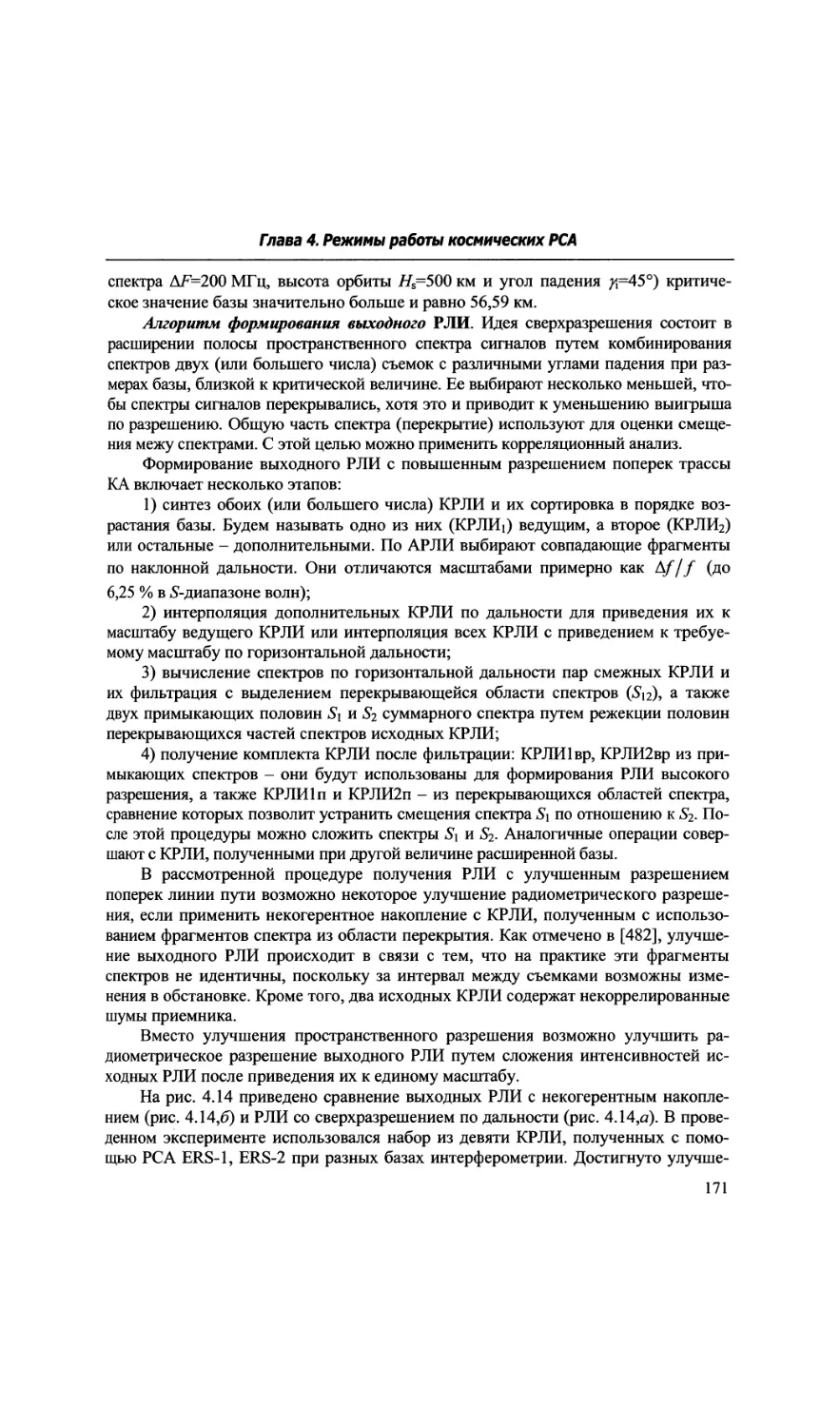
6.10.6. Фазово-градиентный алгоритм автофокусировки.................302
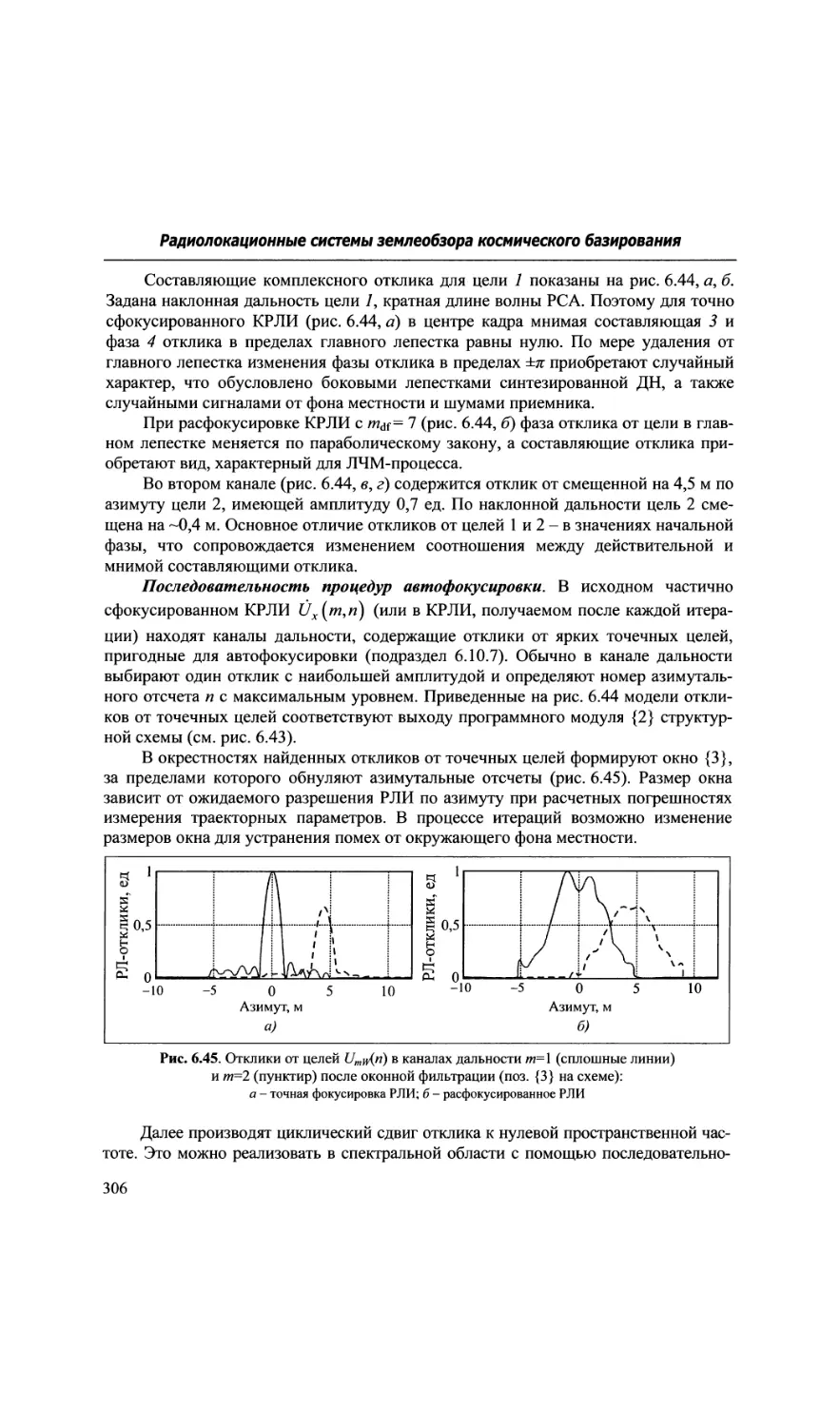
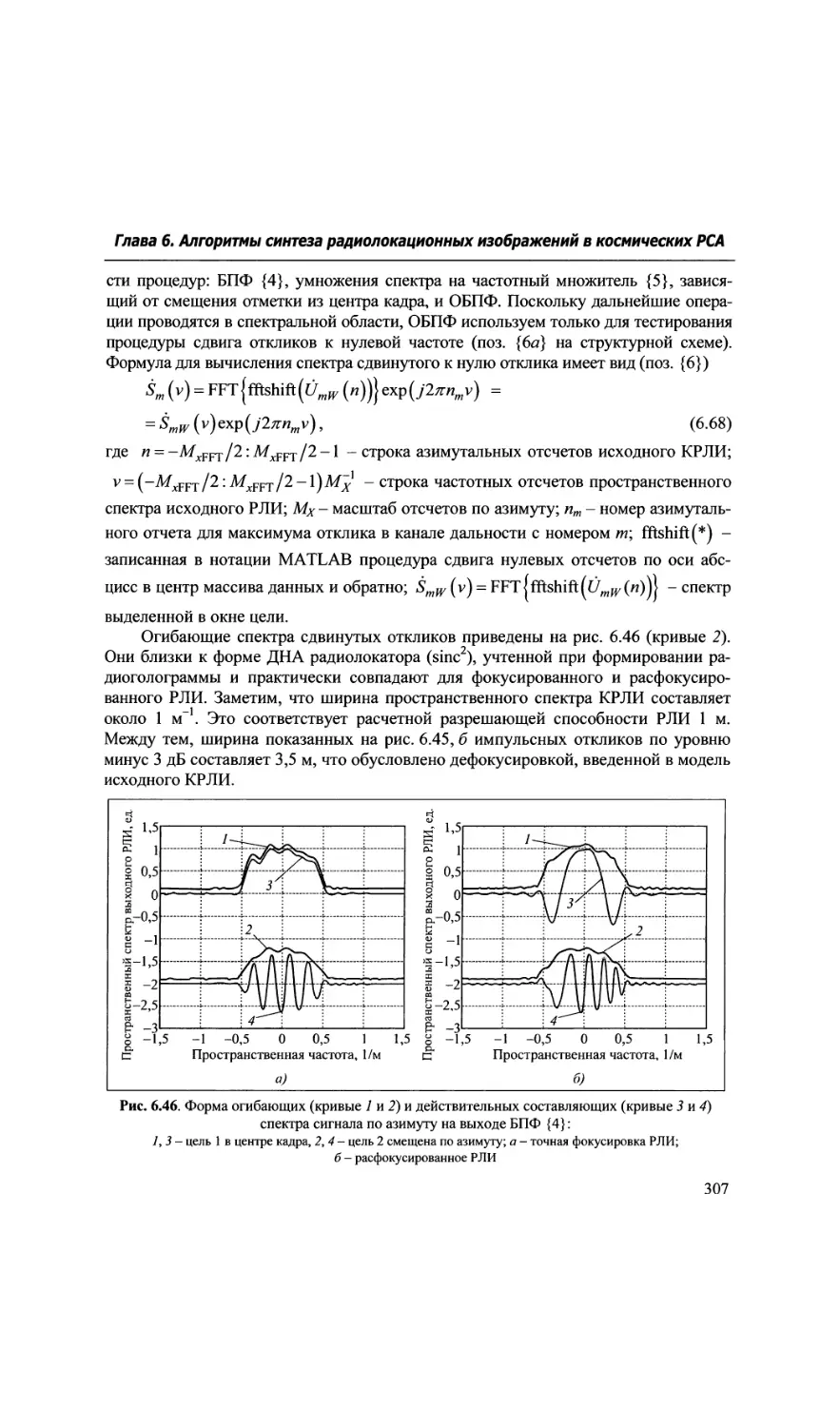
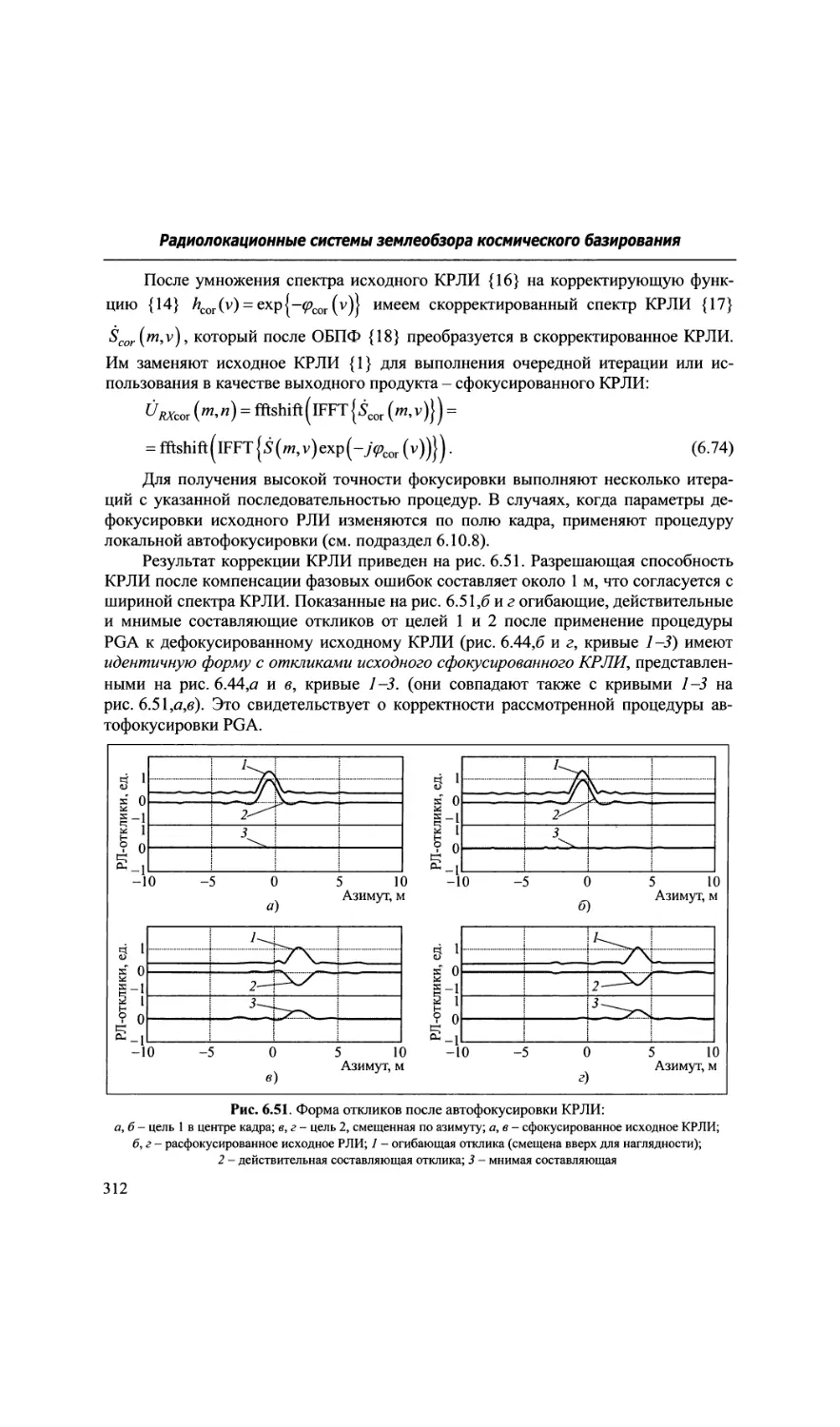
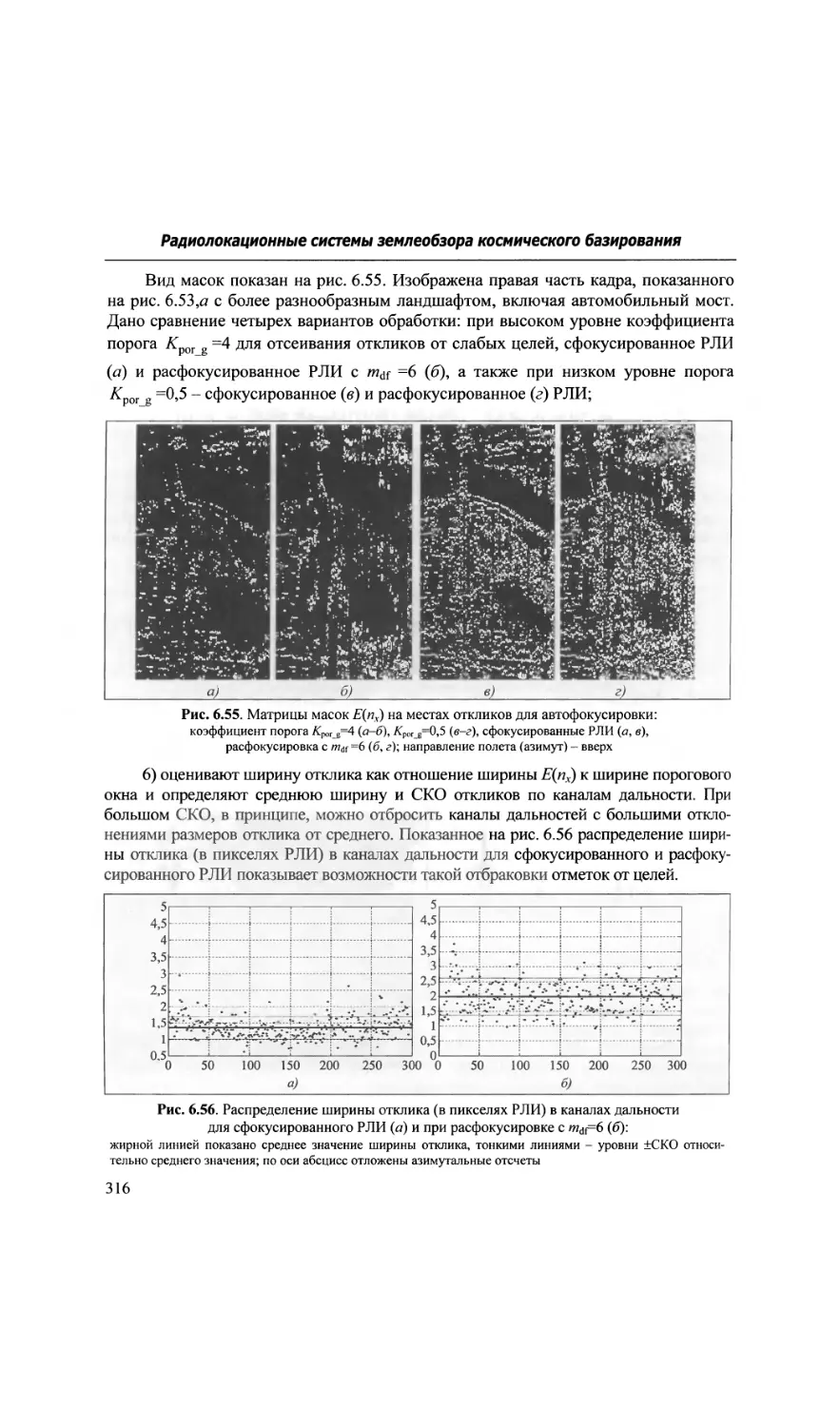
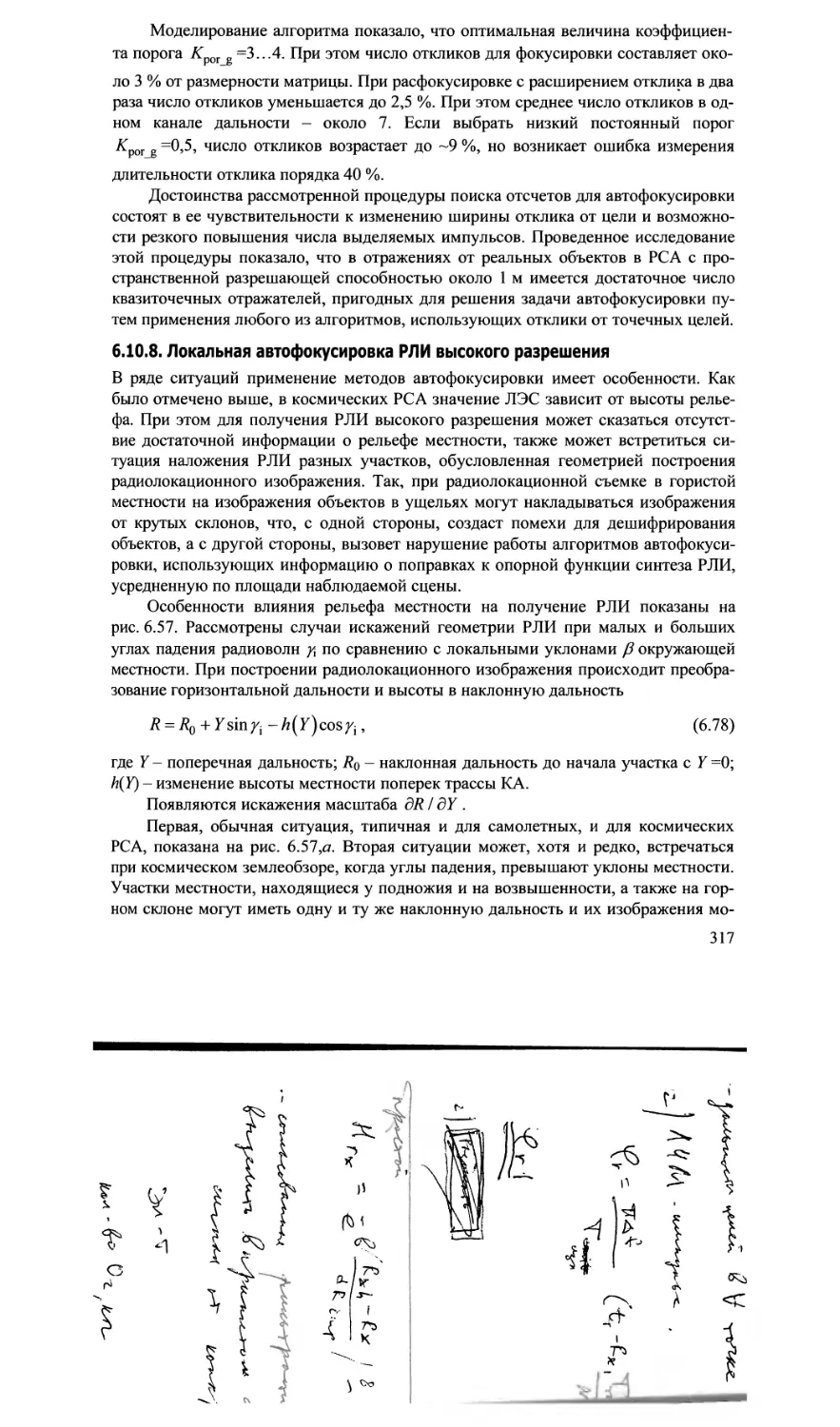
6.10.7. Процедура поиска откликов для автофокусировки РЛИ...........313
6.10.8. Локальная автофокусировка РЛИ высокого разрешения...........317
6.11. Особенности синтеза РЛИ в режимах скошенного
и бистатического обзоров.............................................. 320
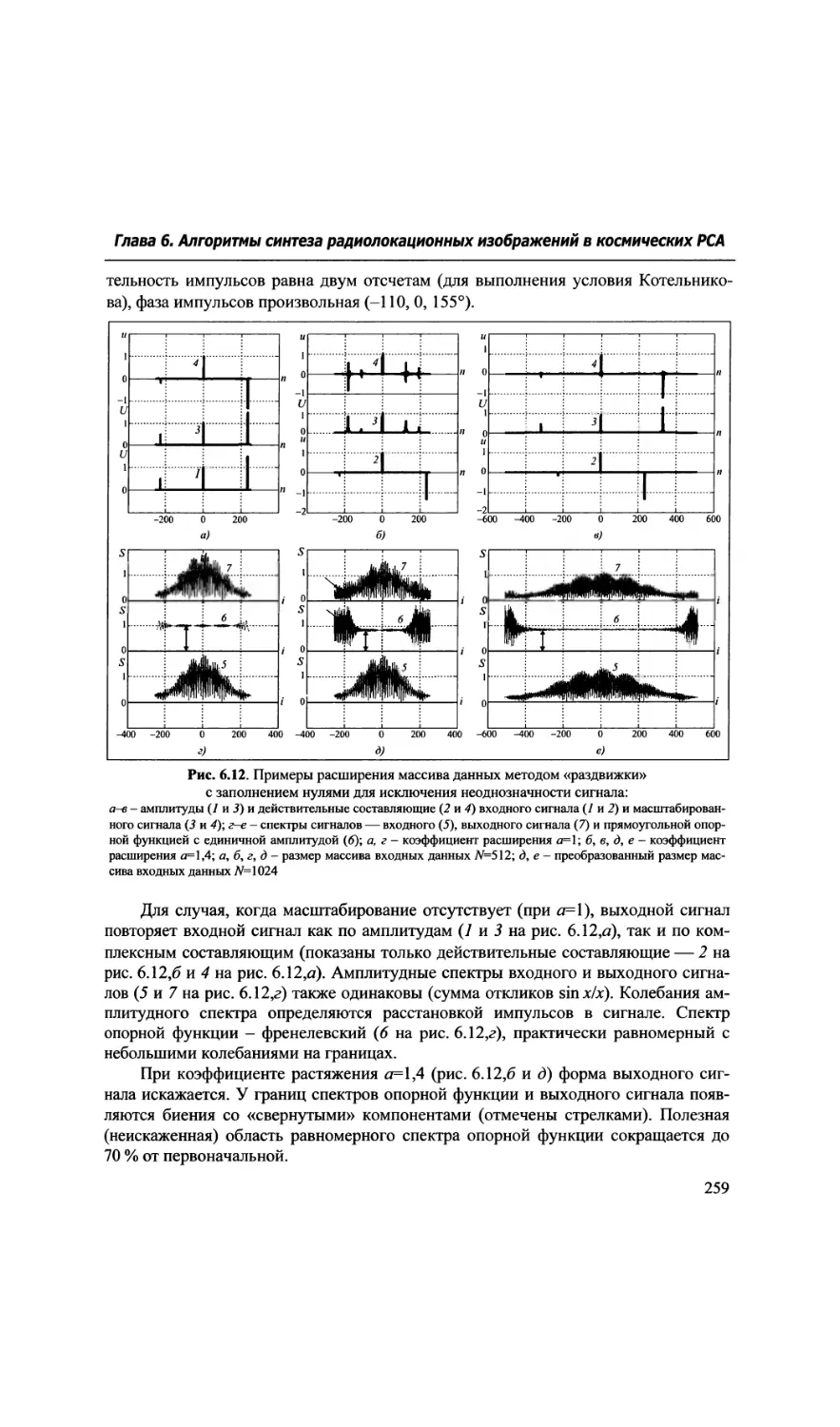
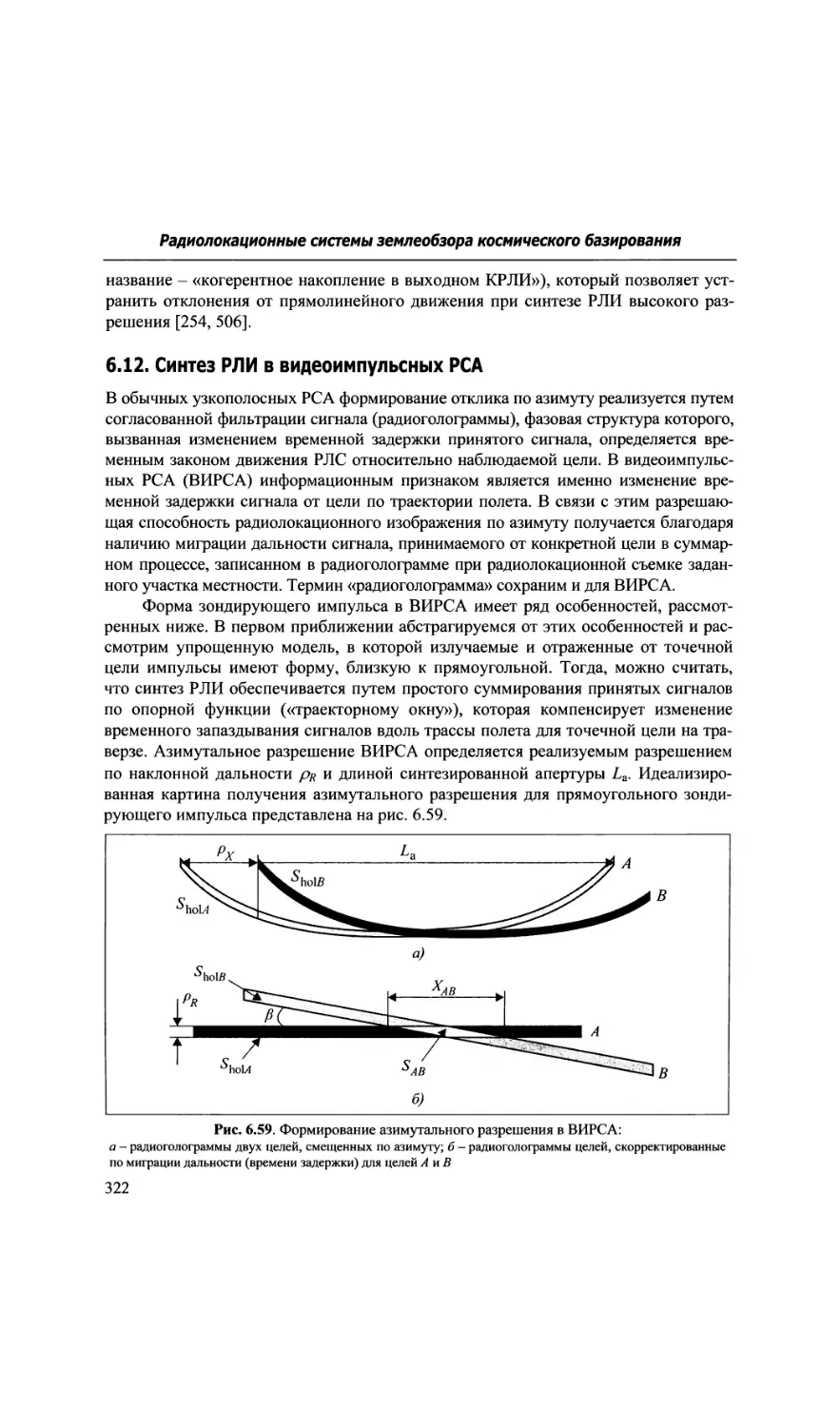
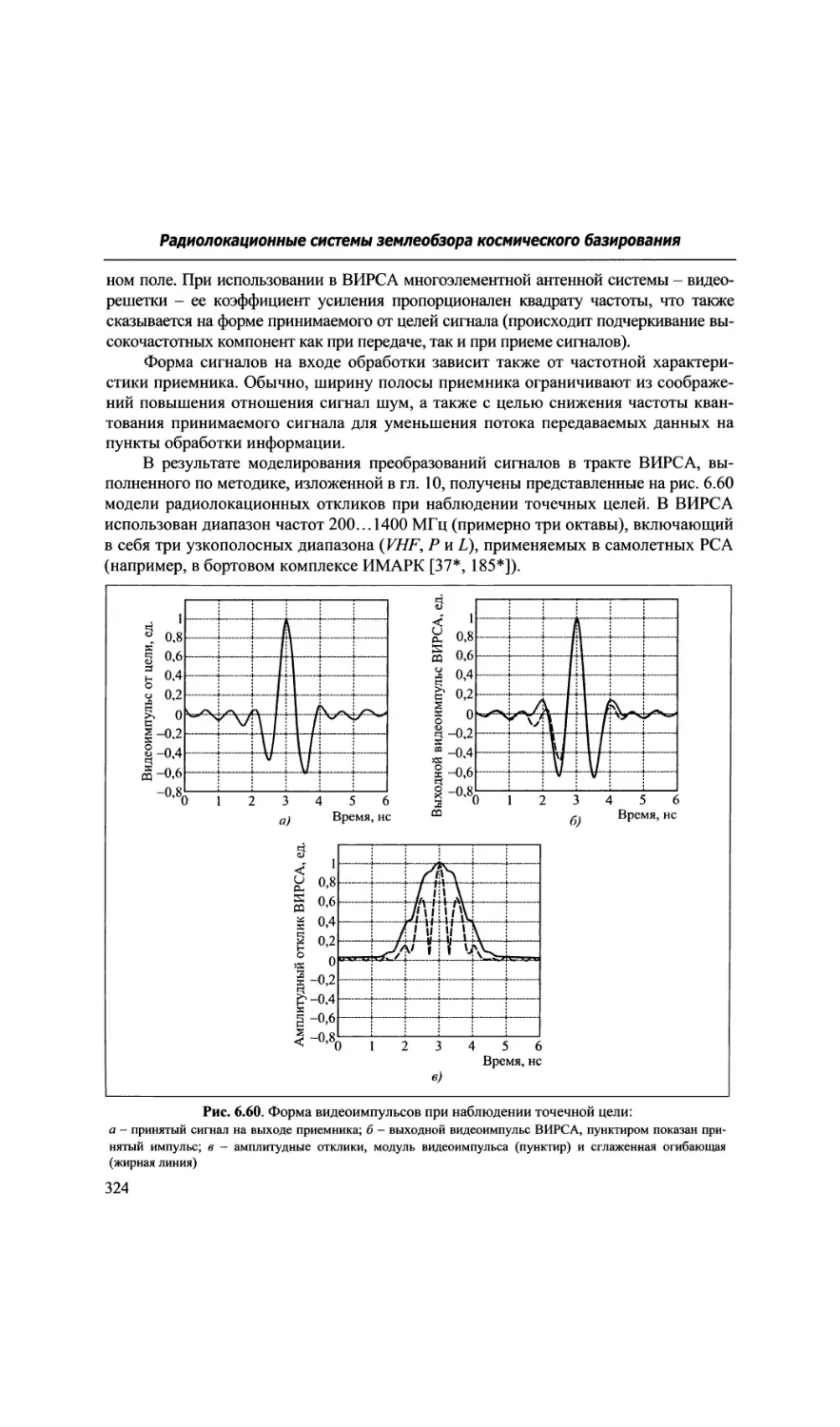
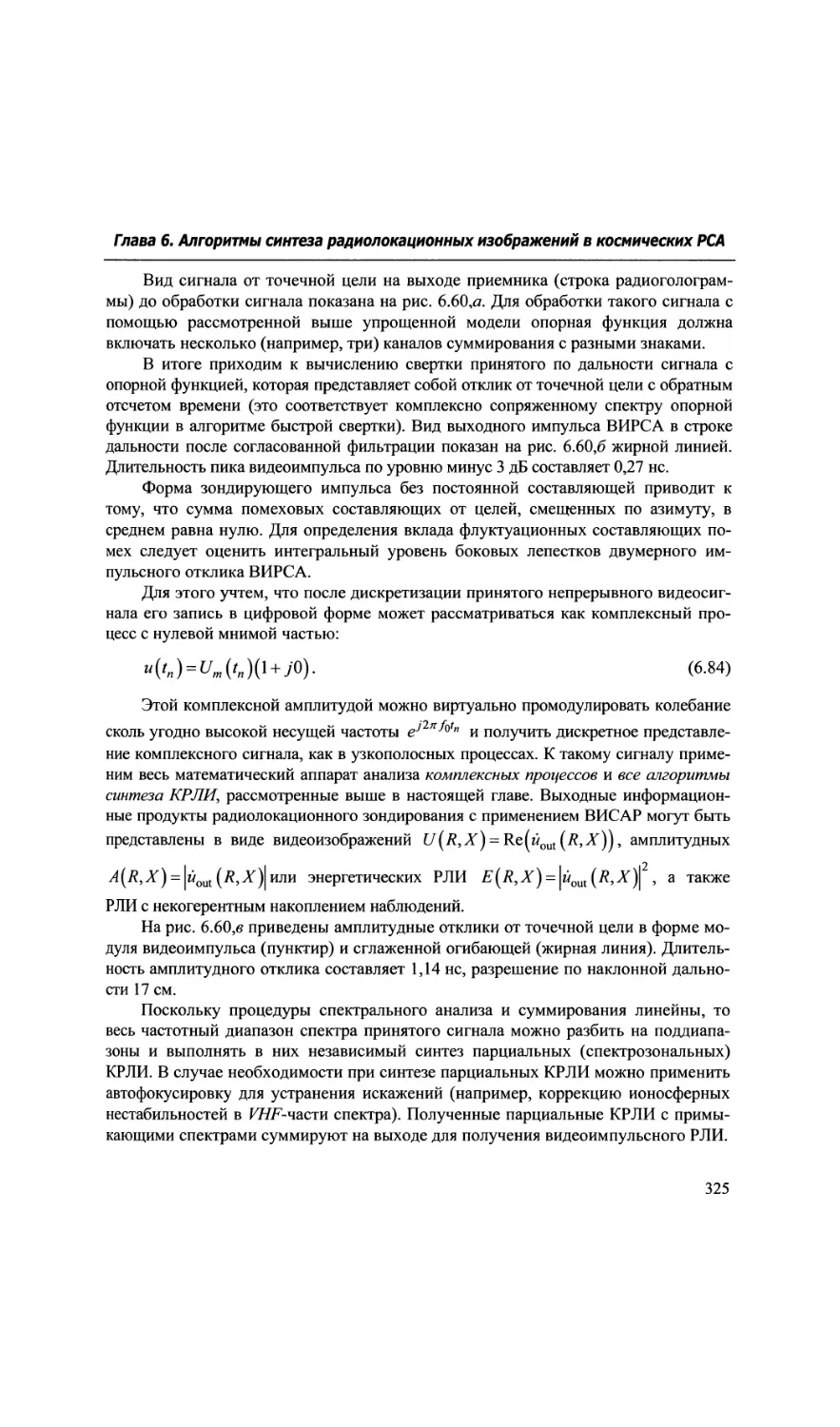
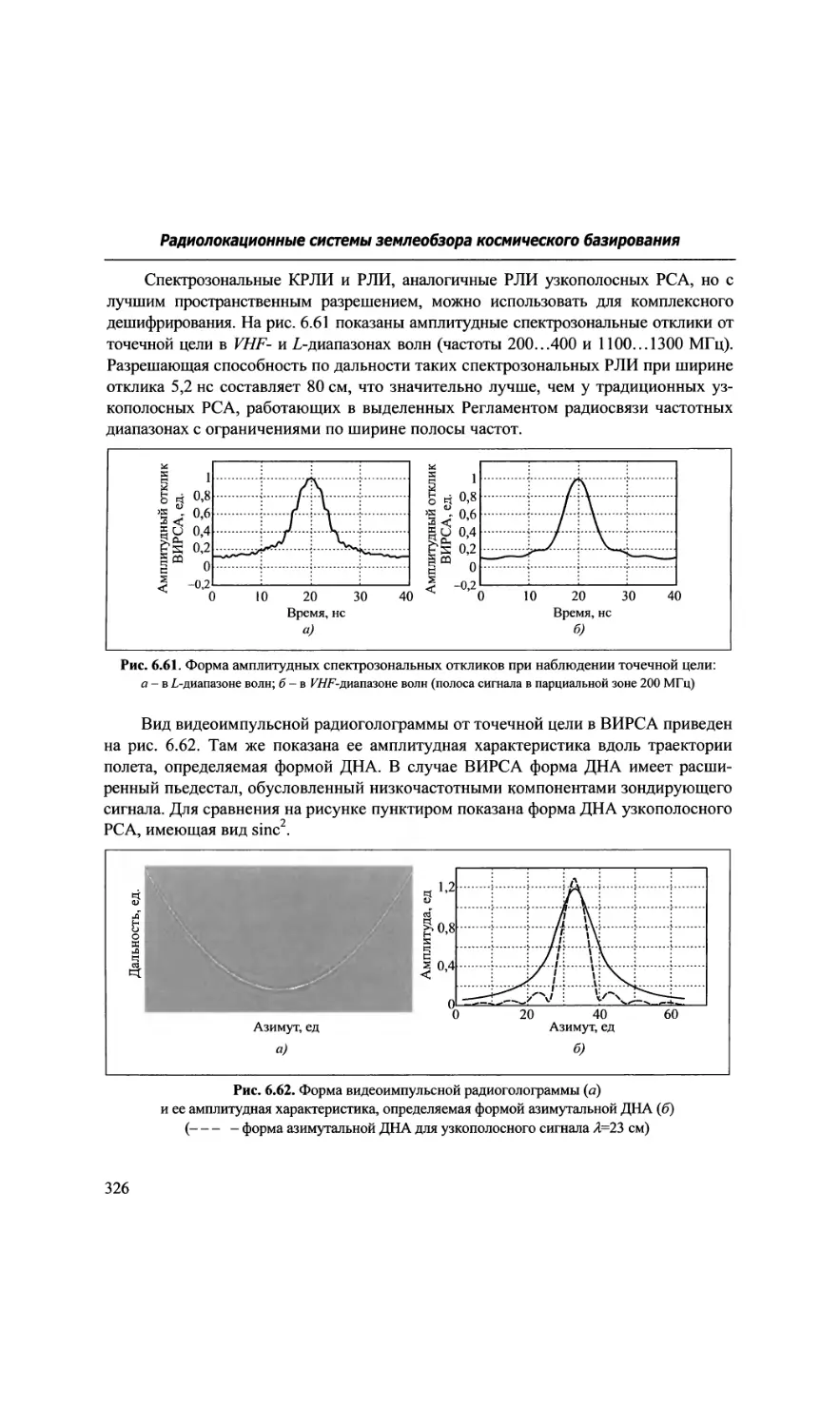
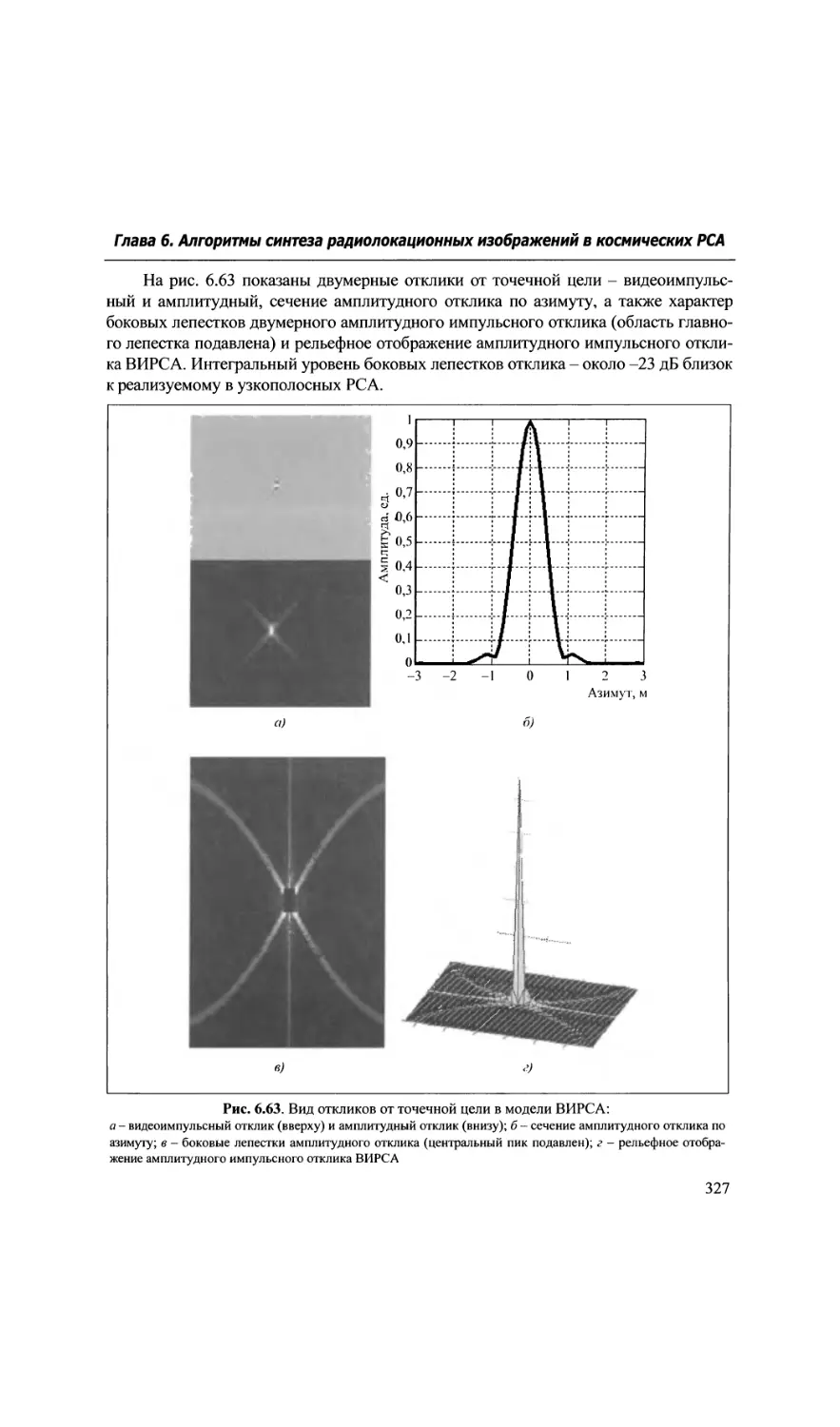
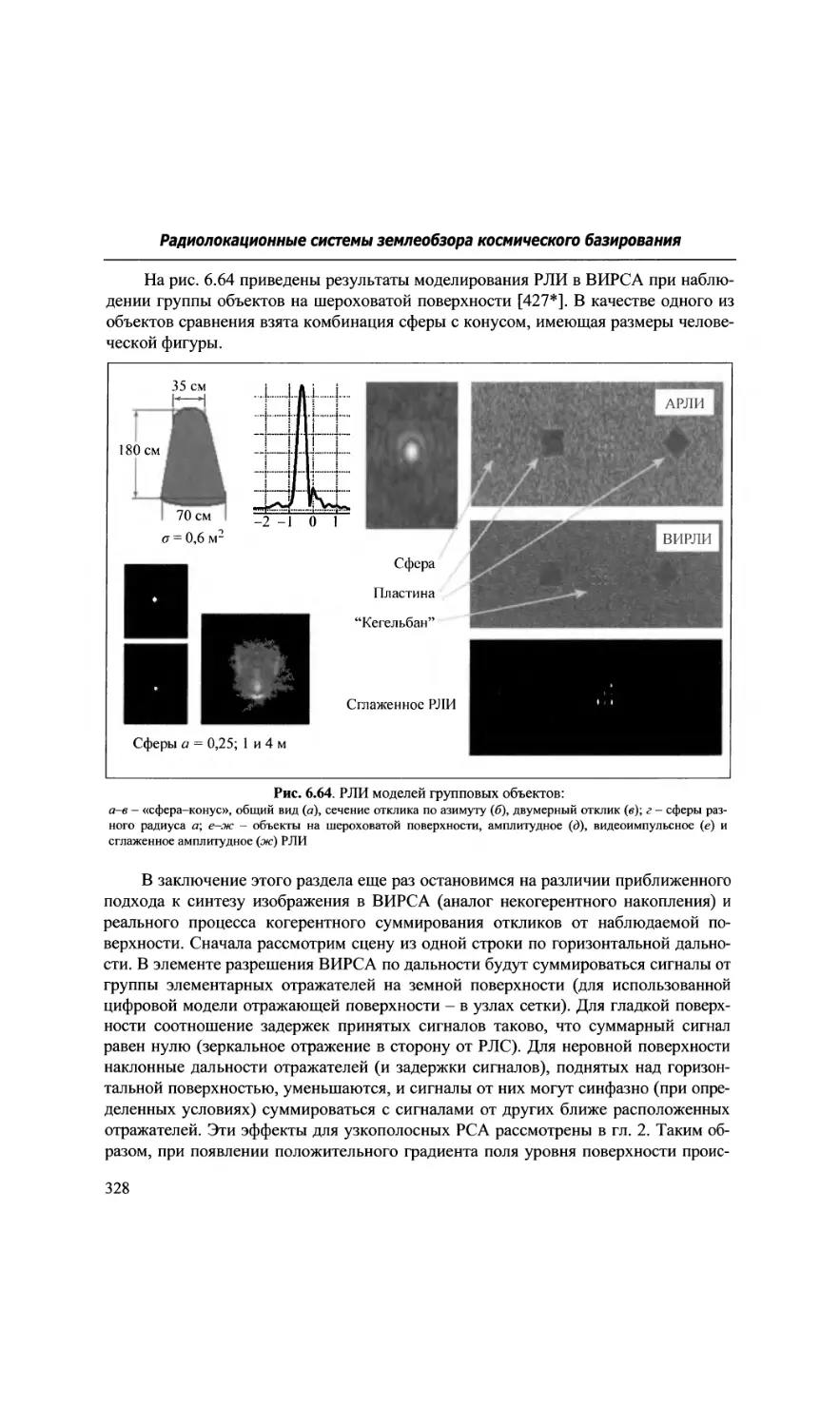
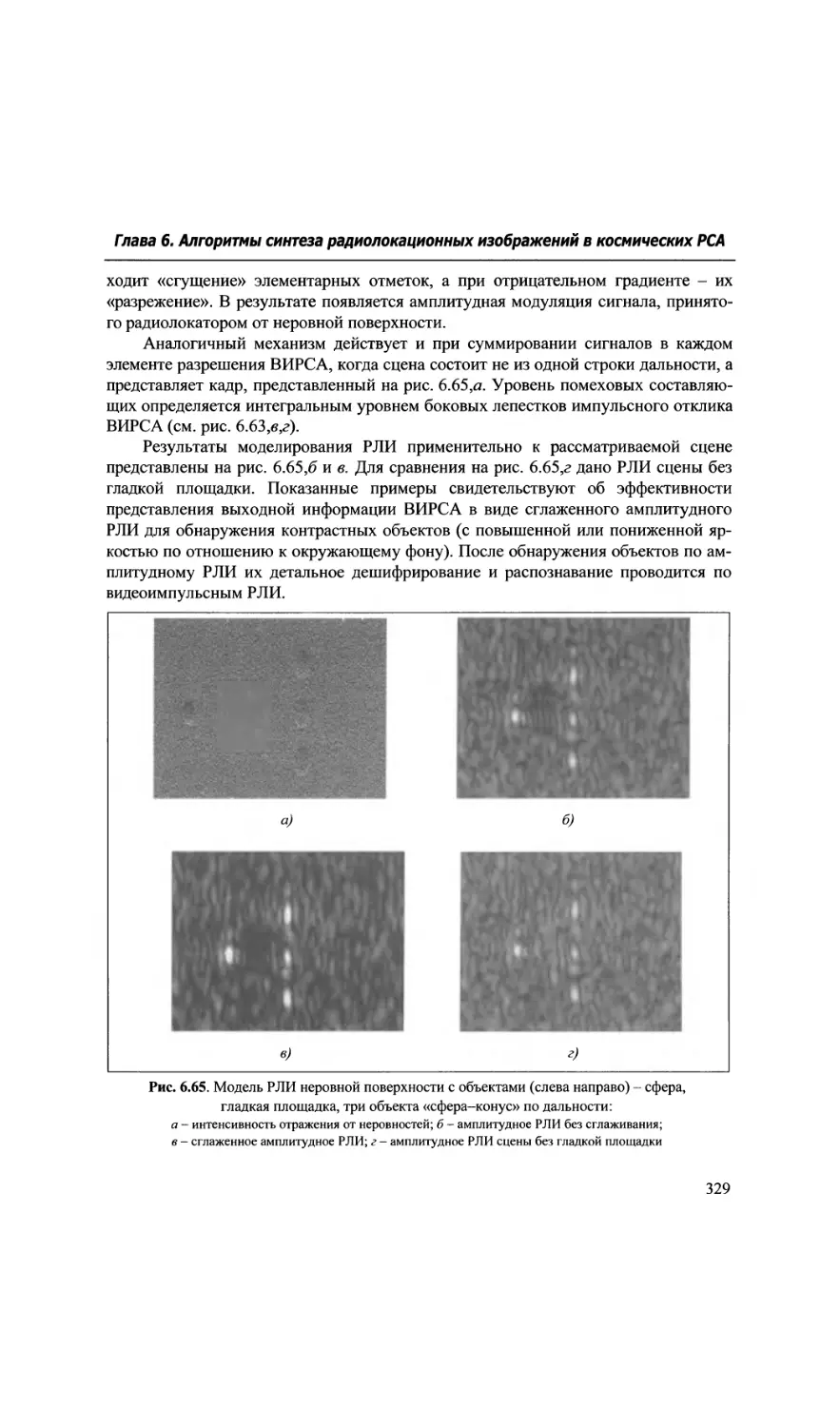
6.12. Синтез РЛИ в видеоимпульсных РСА.............................. 322
6.13. Современные тенденции создания программно-аппаратных
комплексов для синтеза радиолокационных изображений................ 330
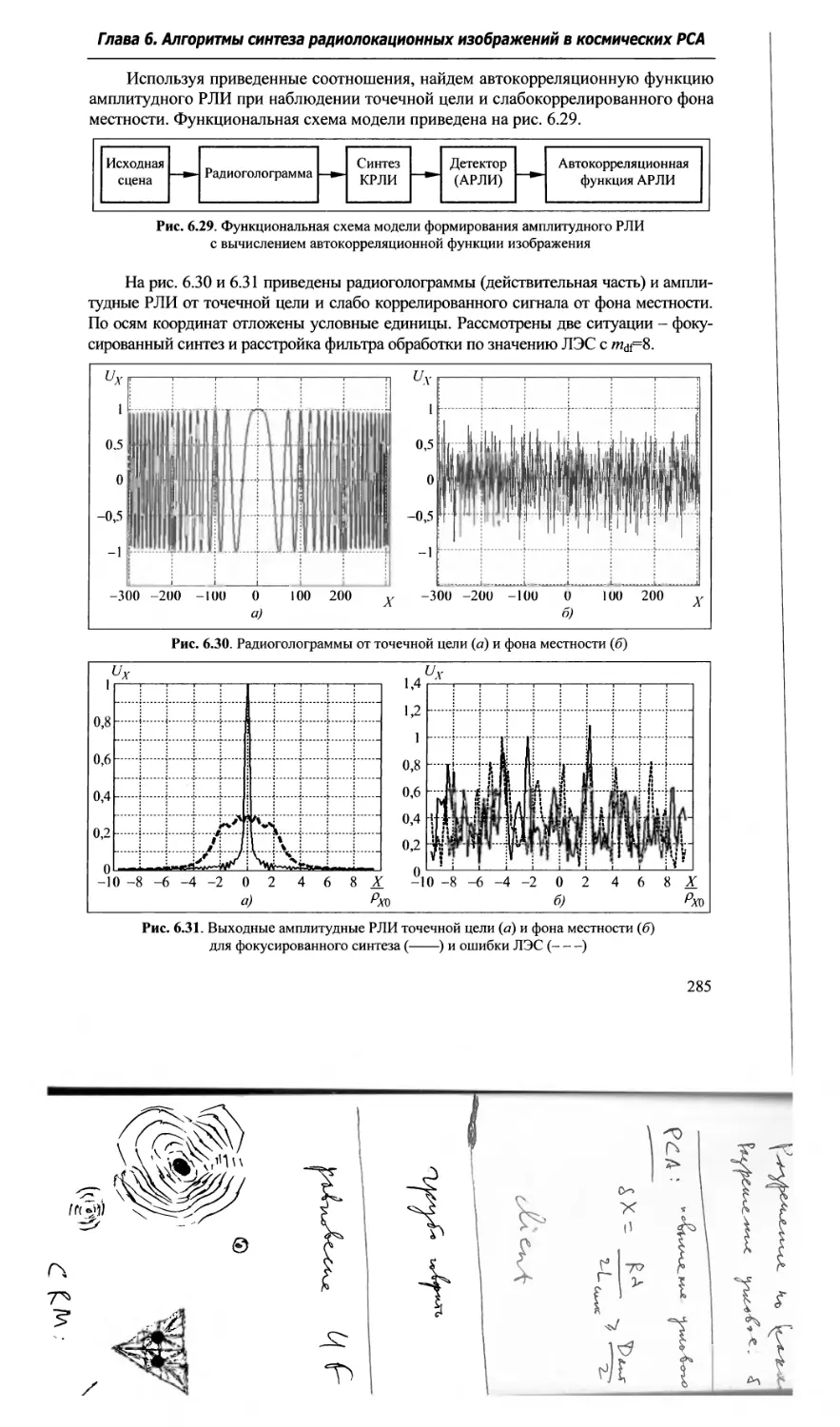
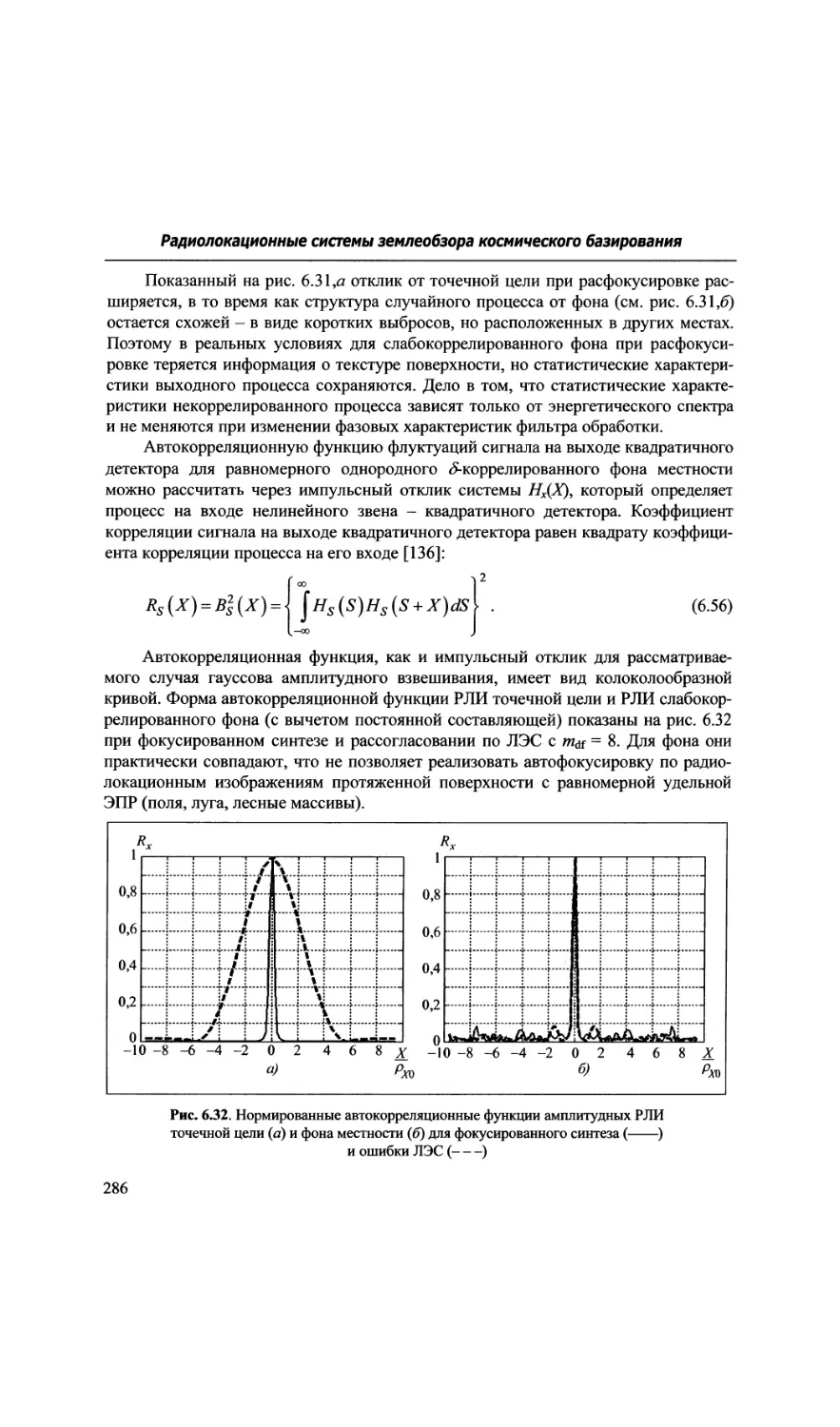
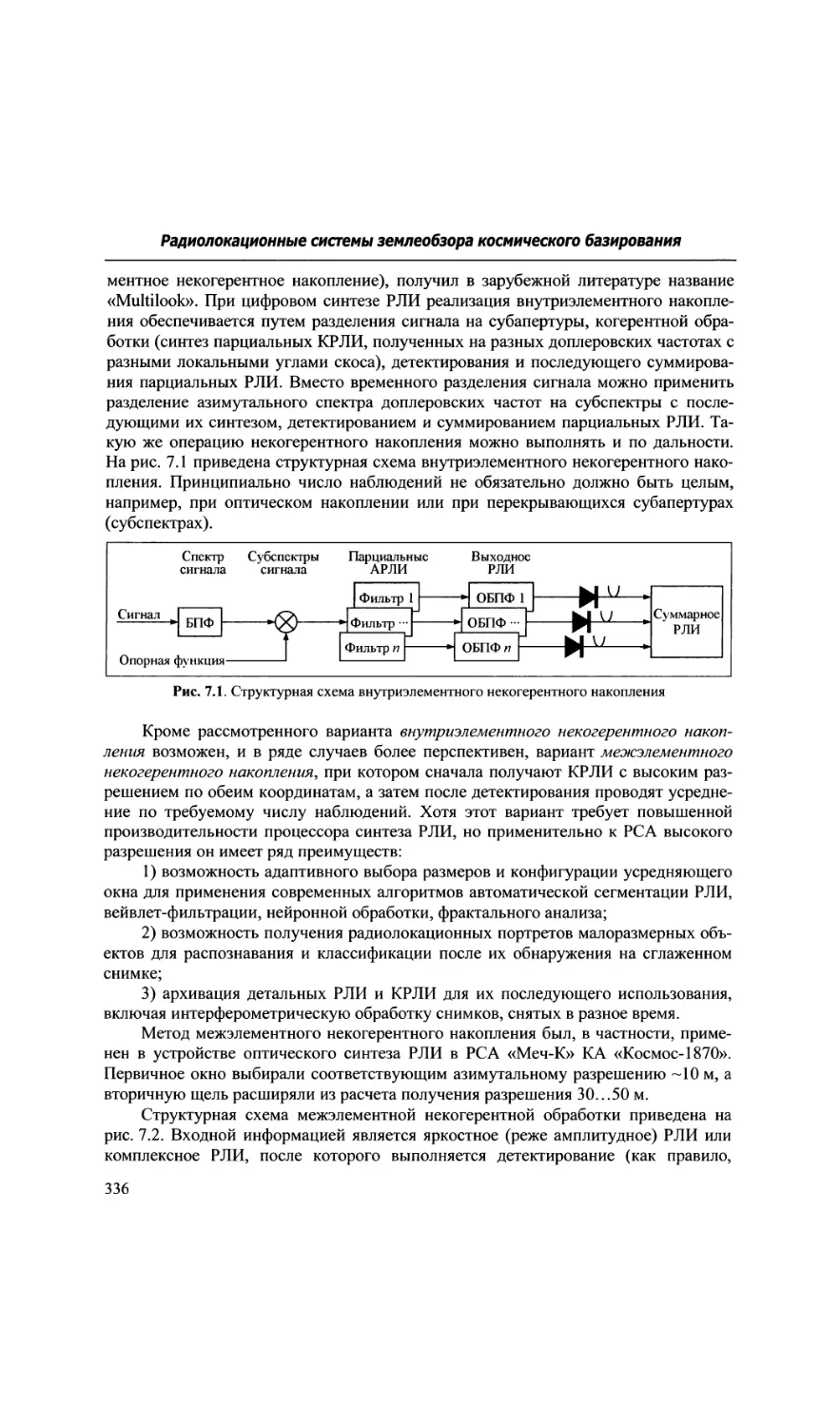
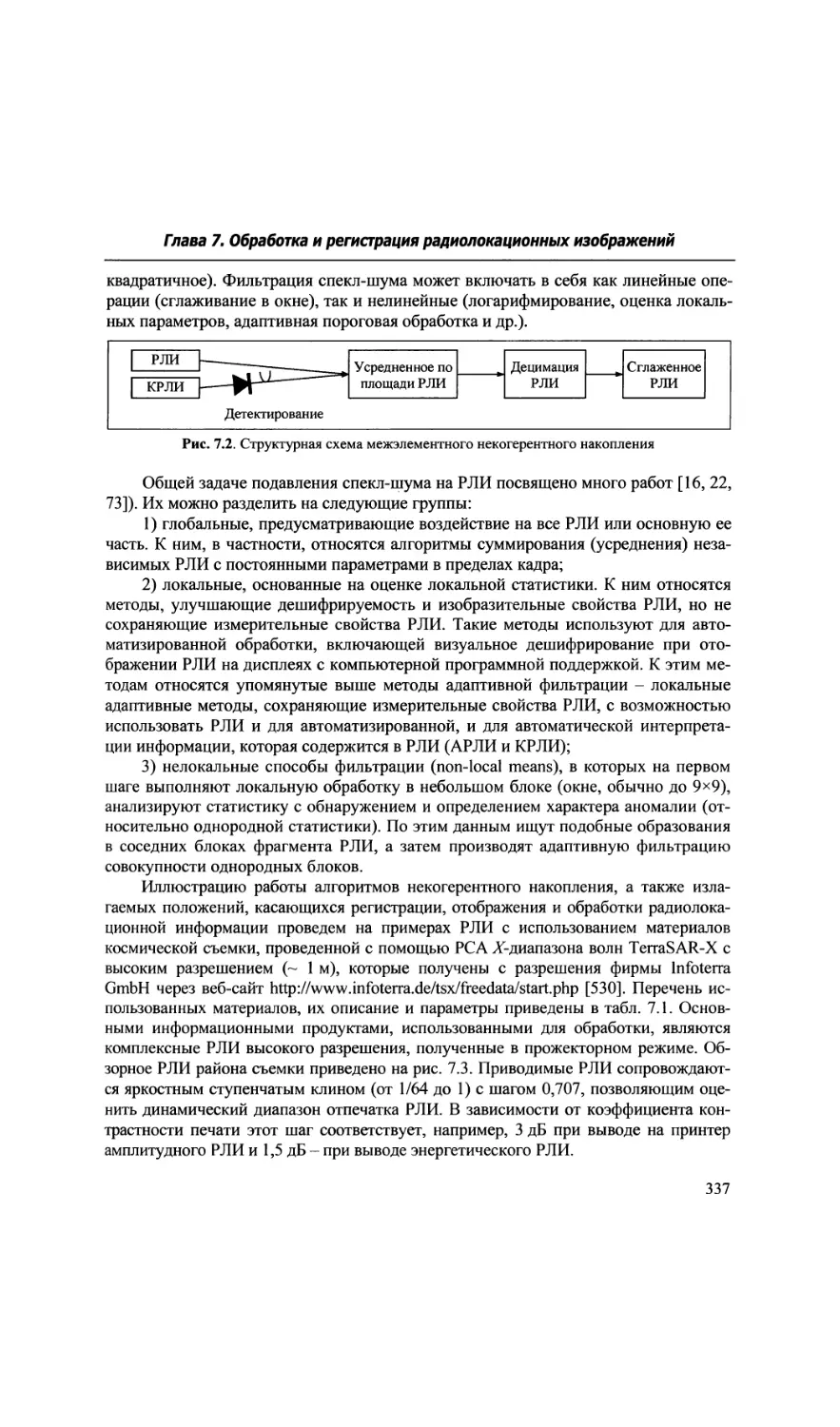
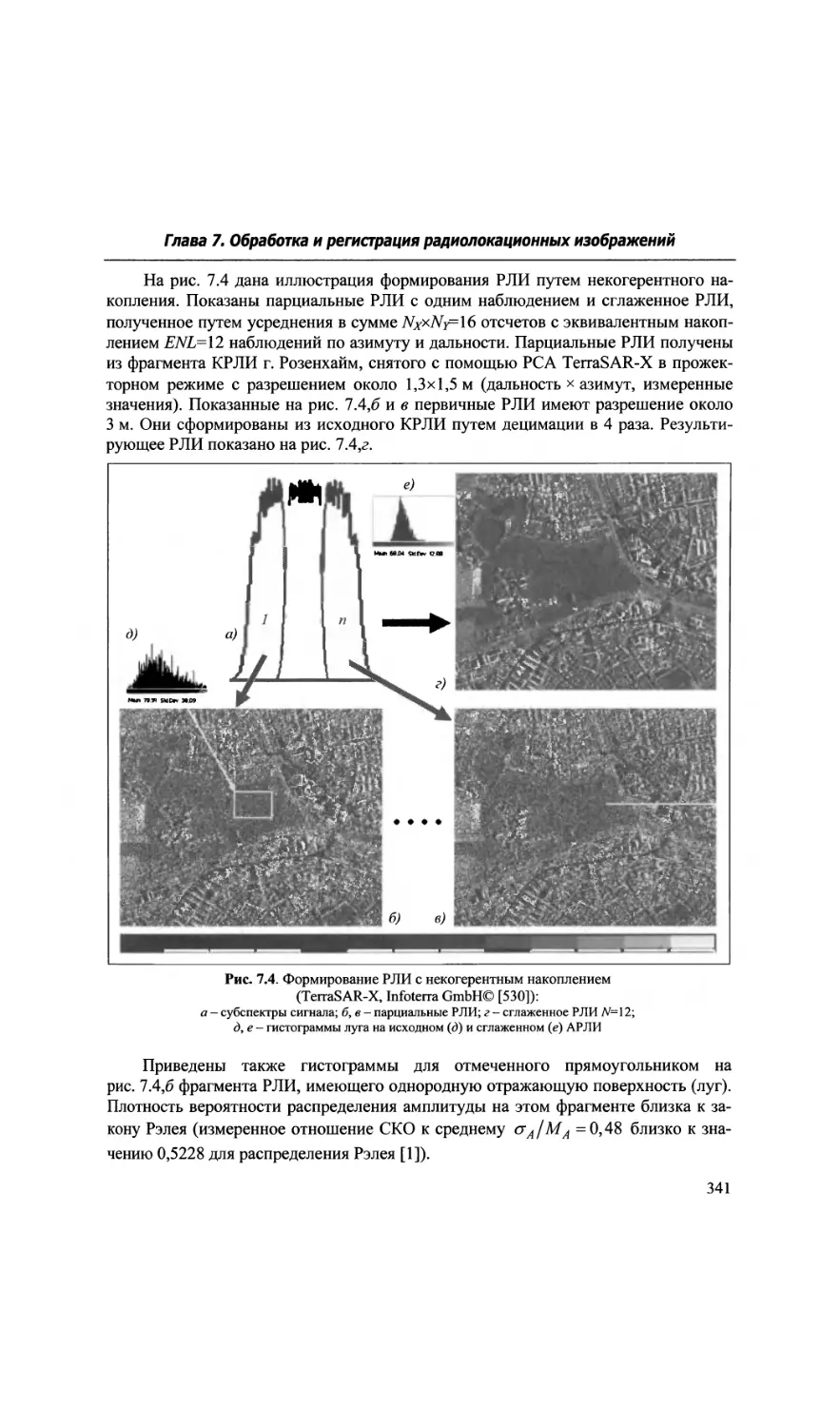
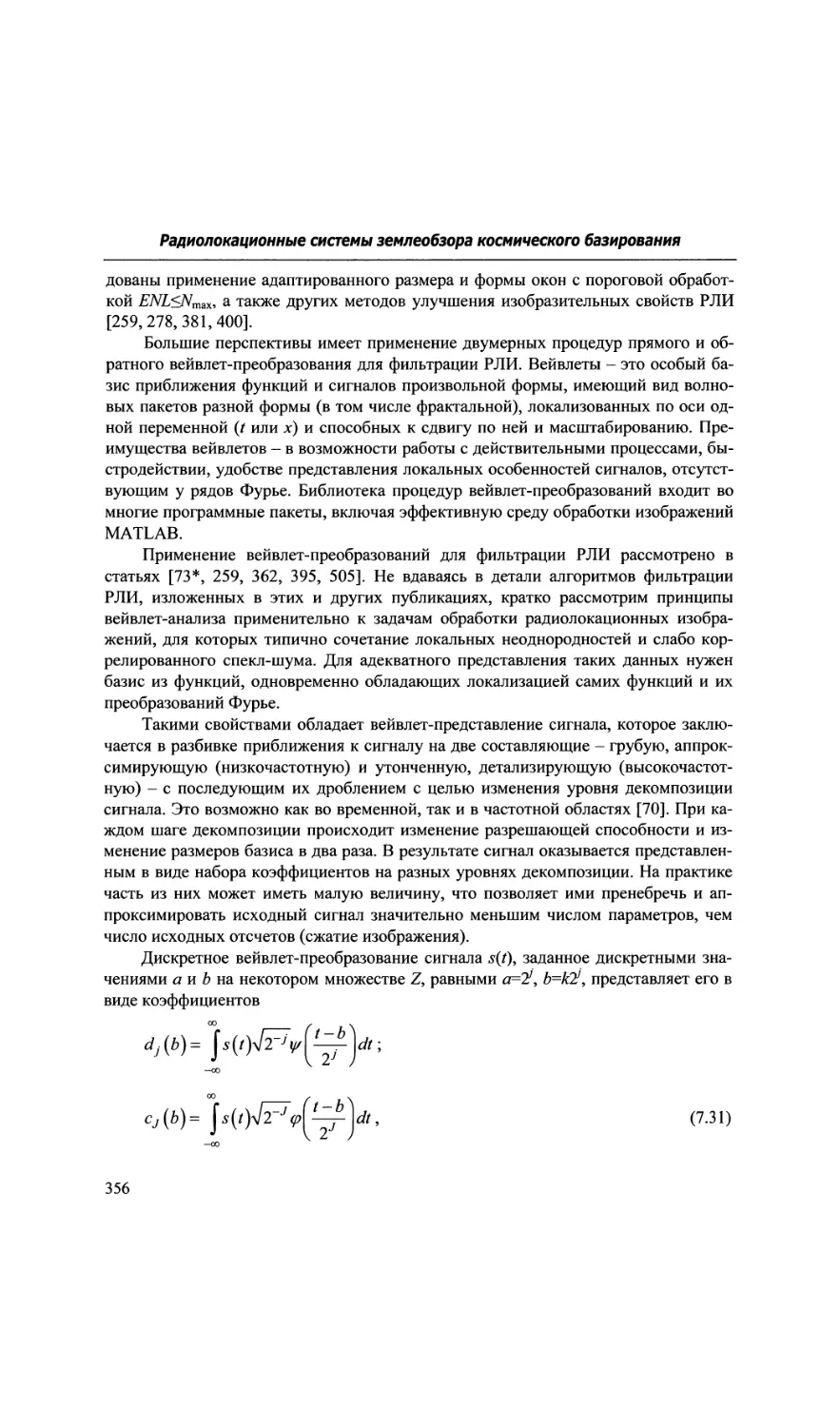
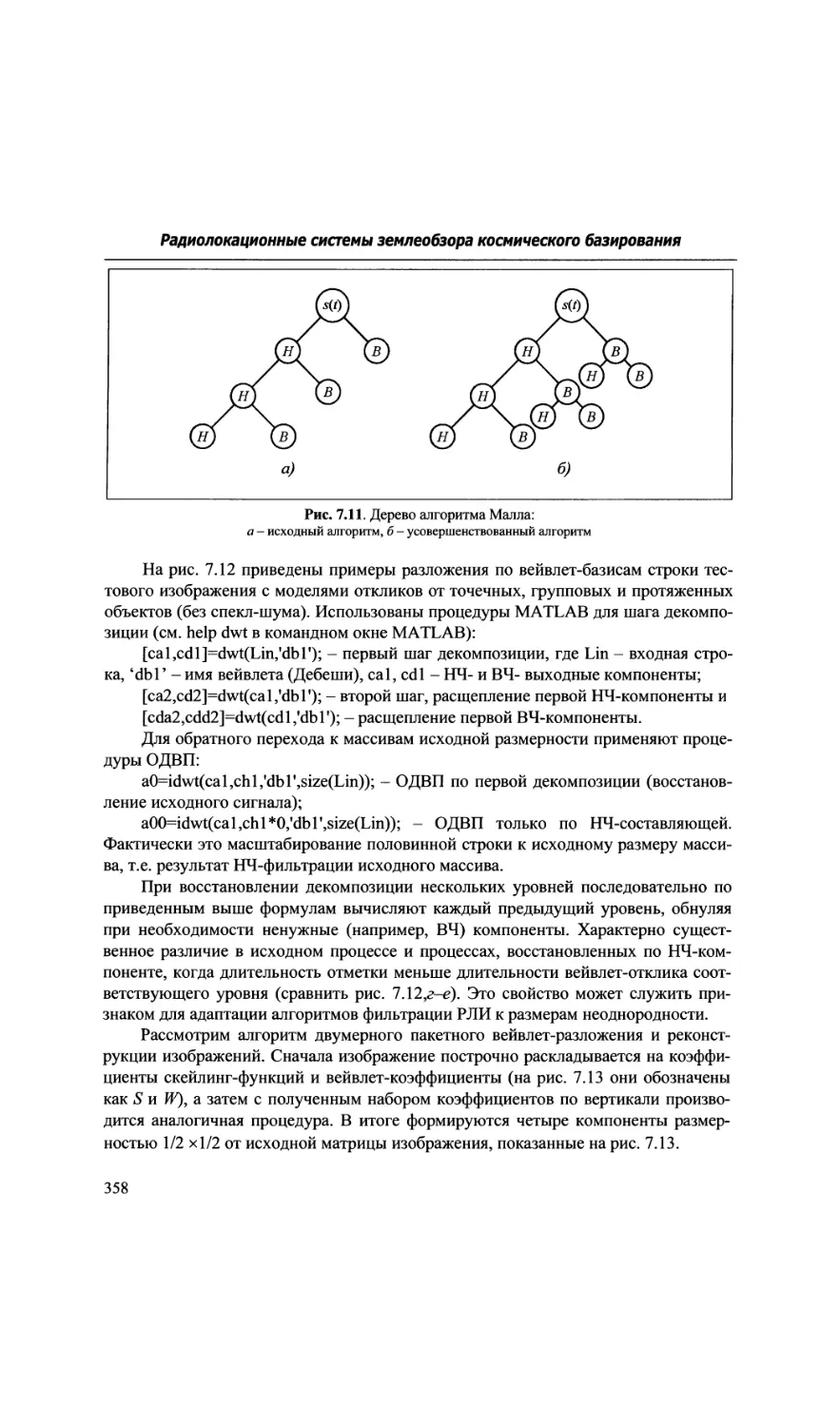
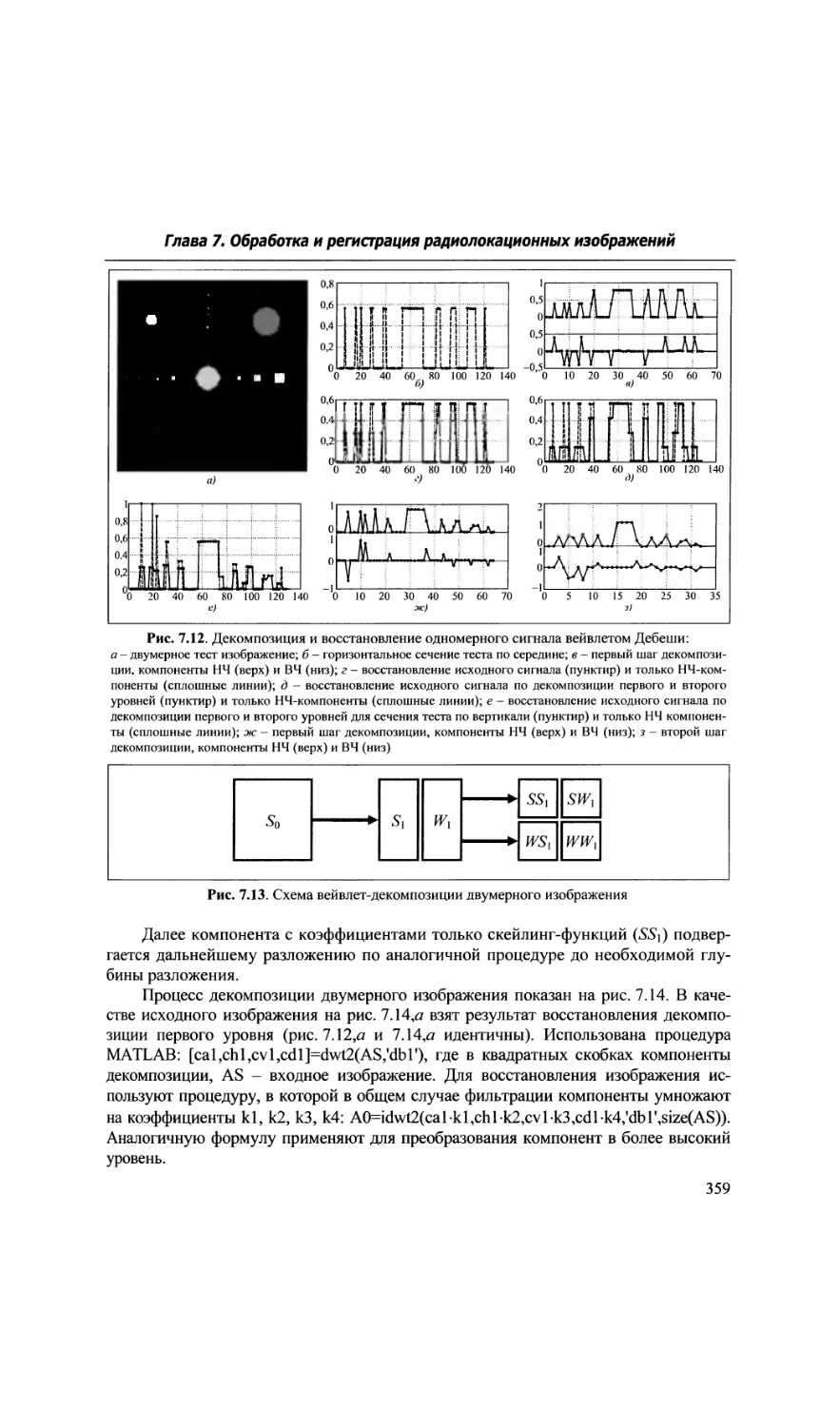
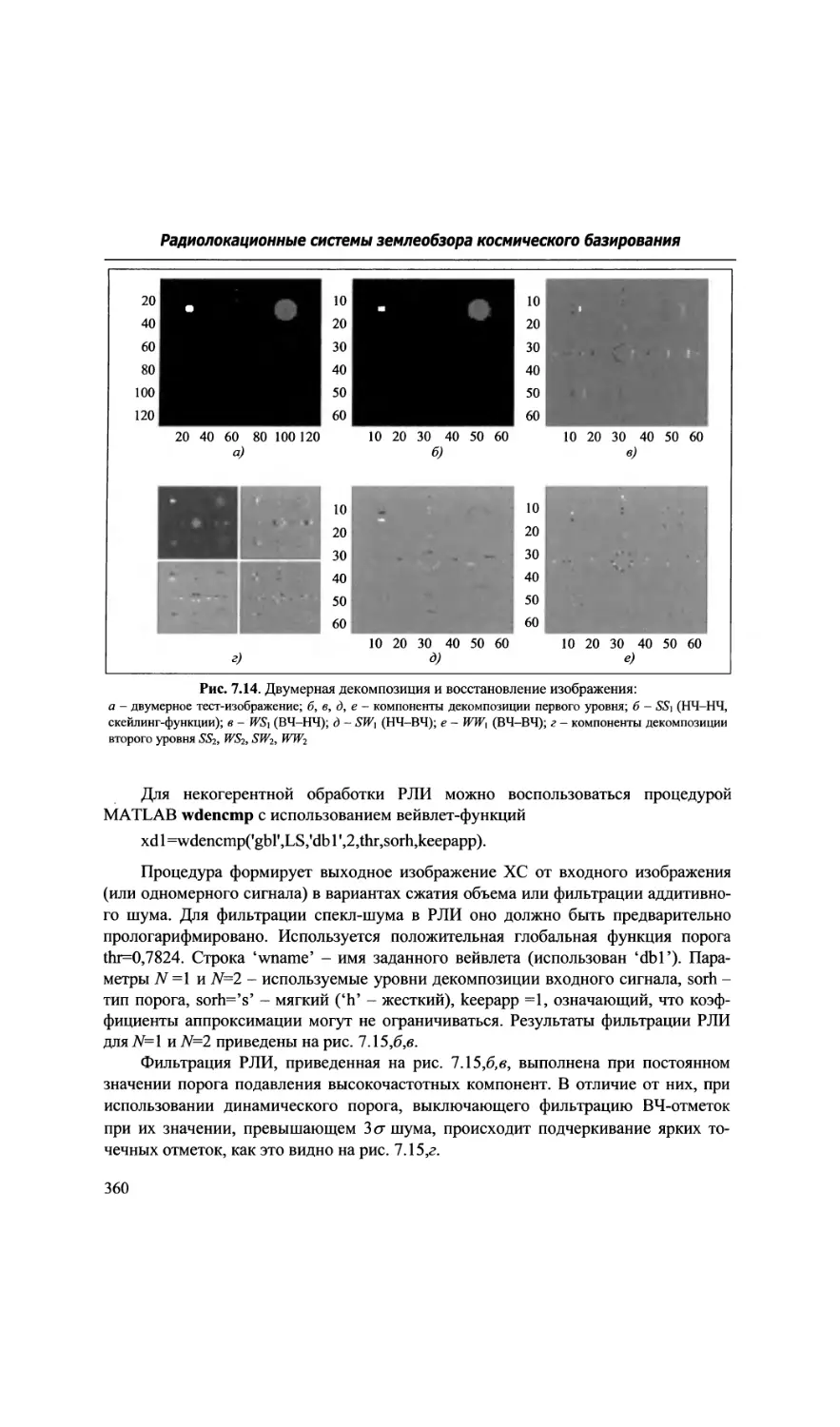
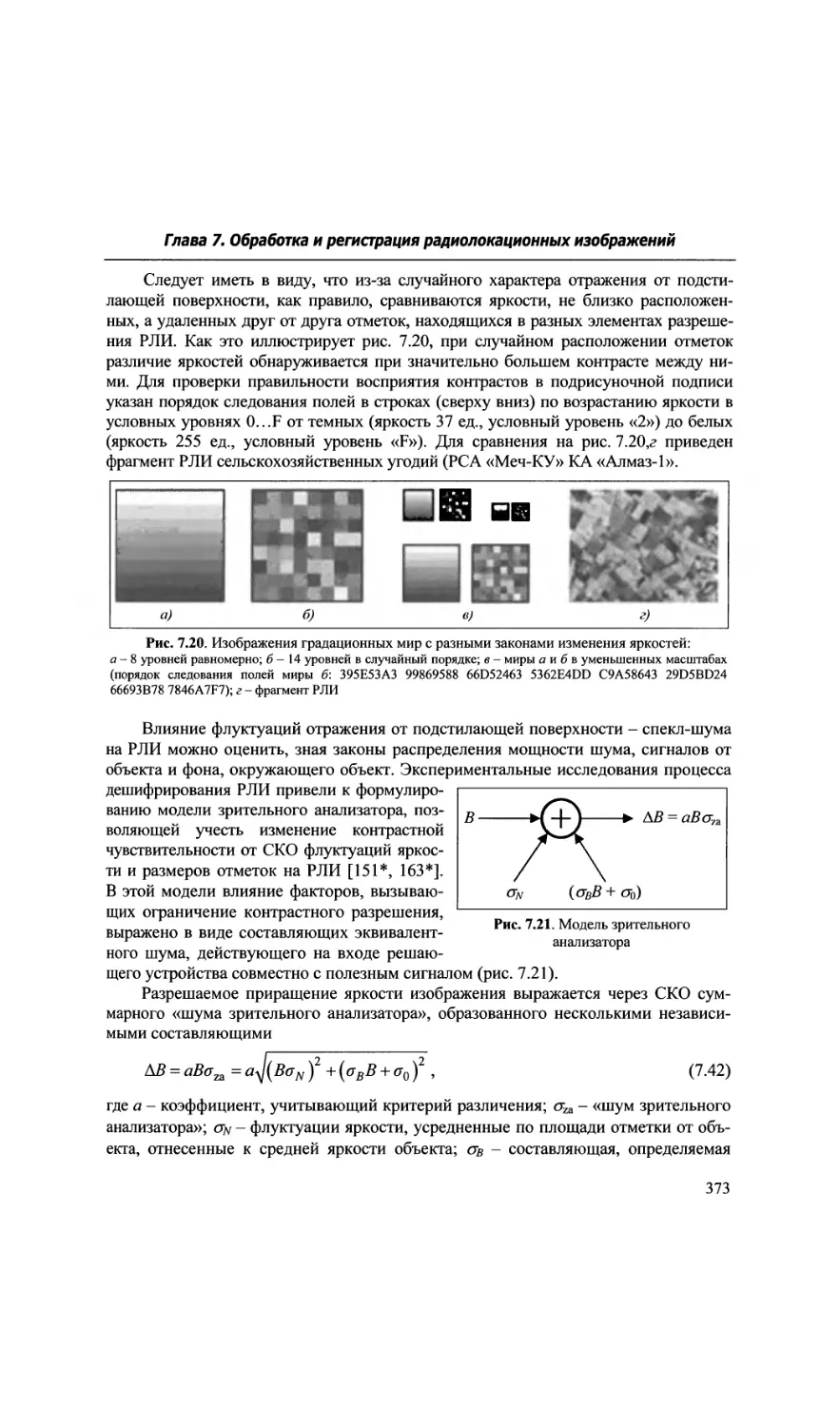
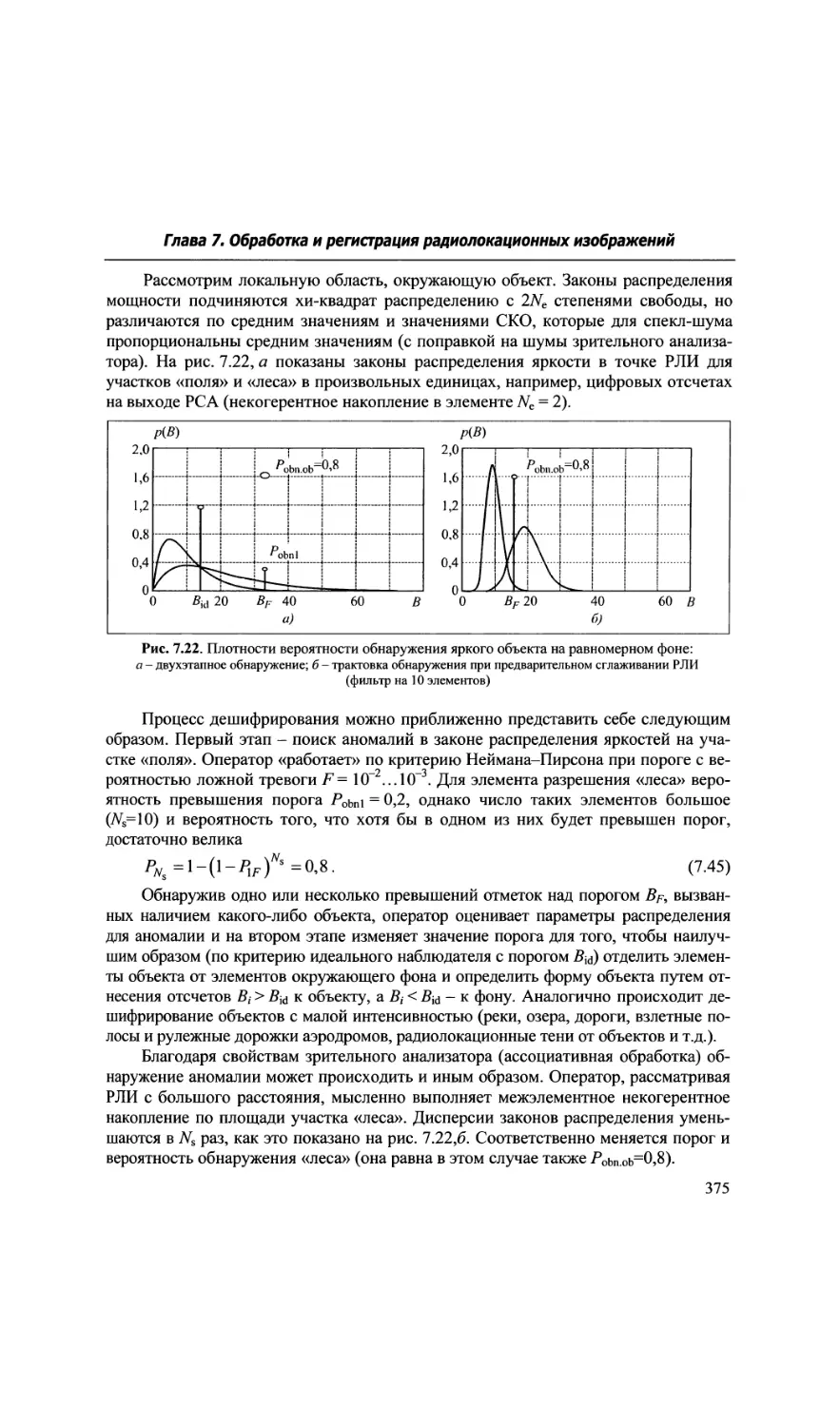
Глава 7. Обработка и регистрация радиолокационных изображений.................335
7.1. Методы фильтрации спекл-шума на РЛИ .............................. 335
7.1.1. Задачи некогерентной обработки РЛИ.............................338
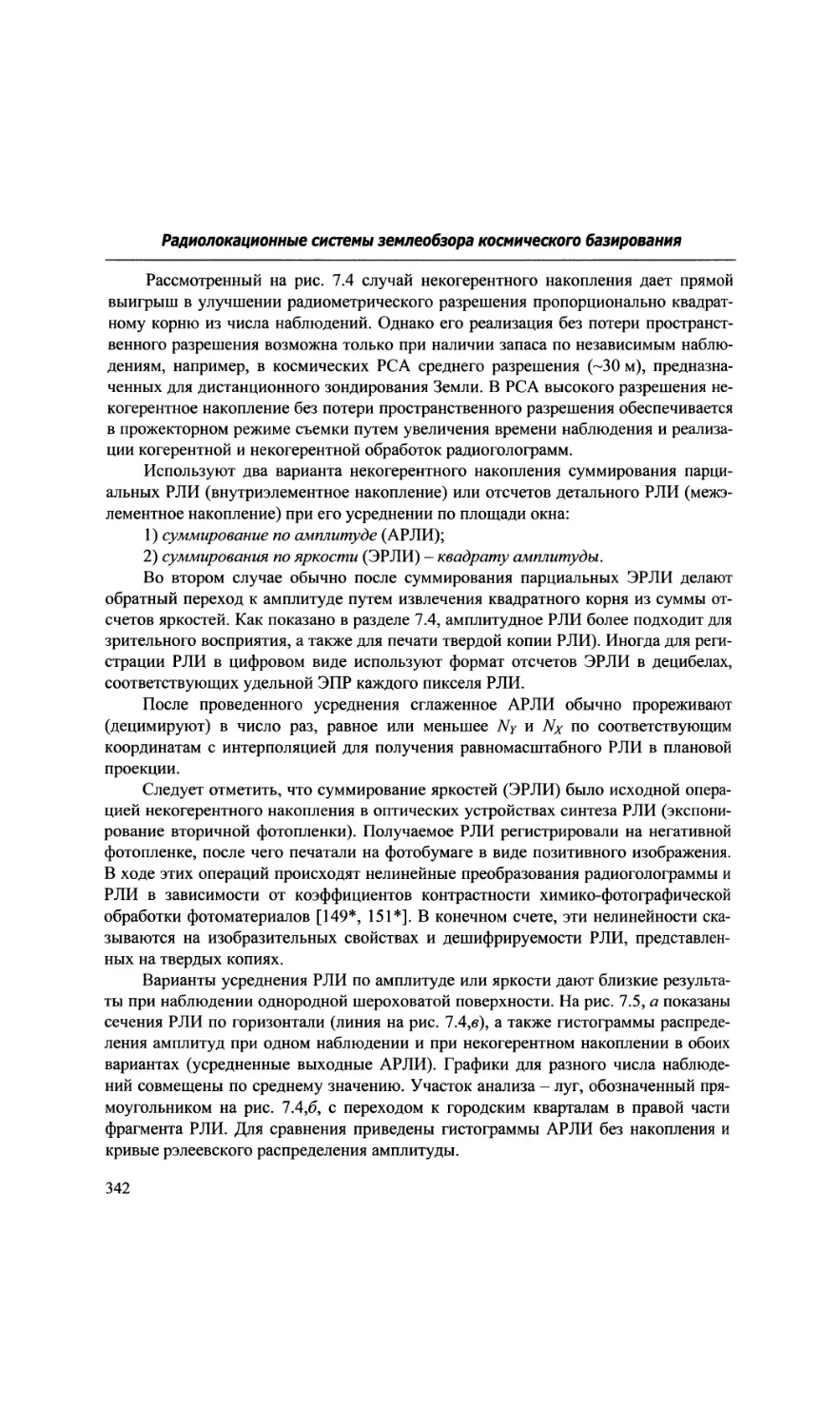
7.1.2. Варианты и характеристики процедуры некогерентного накопления. 339
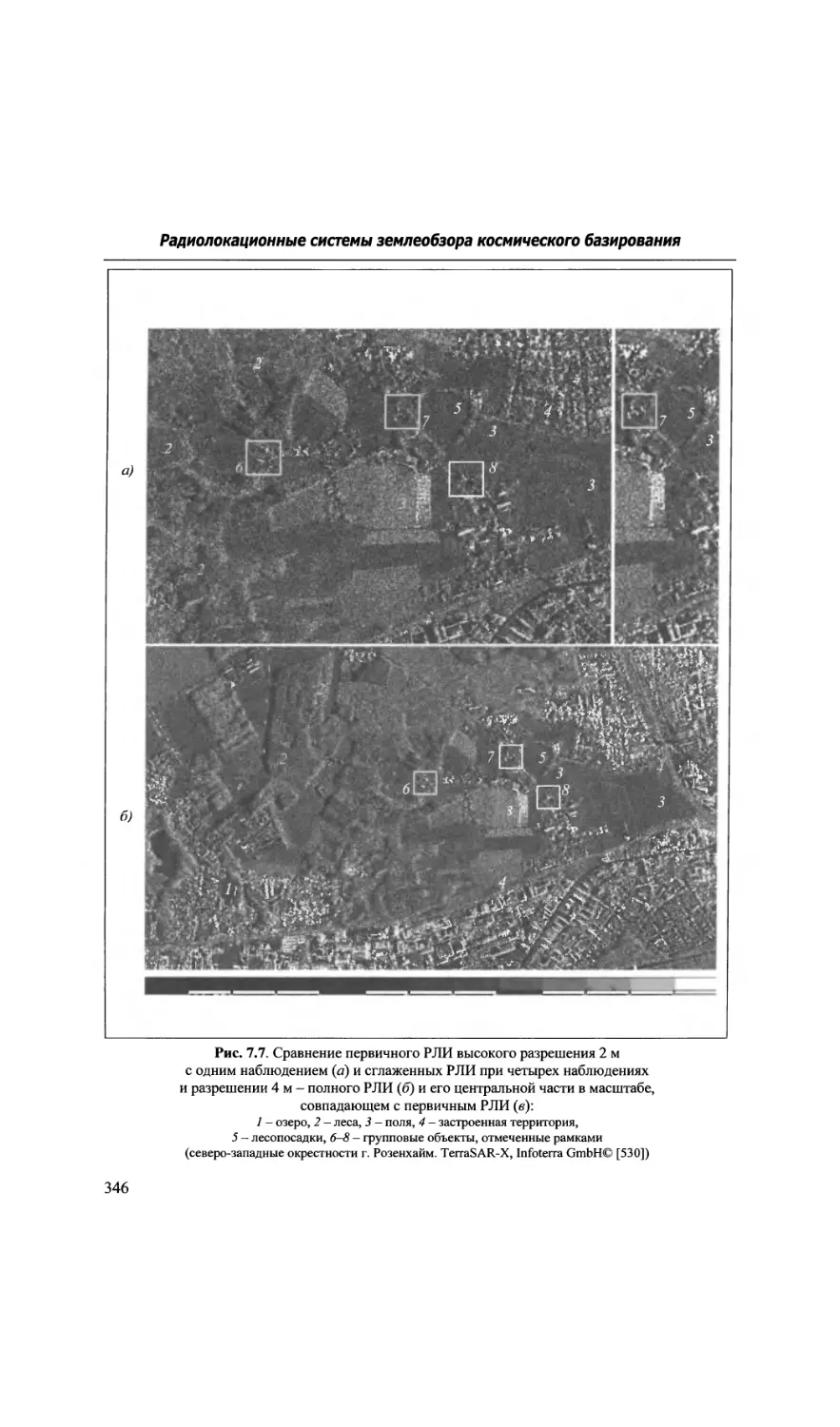
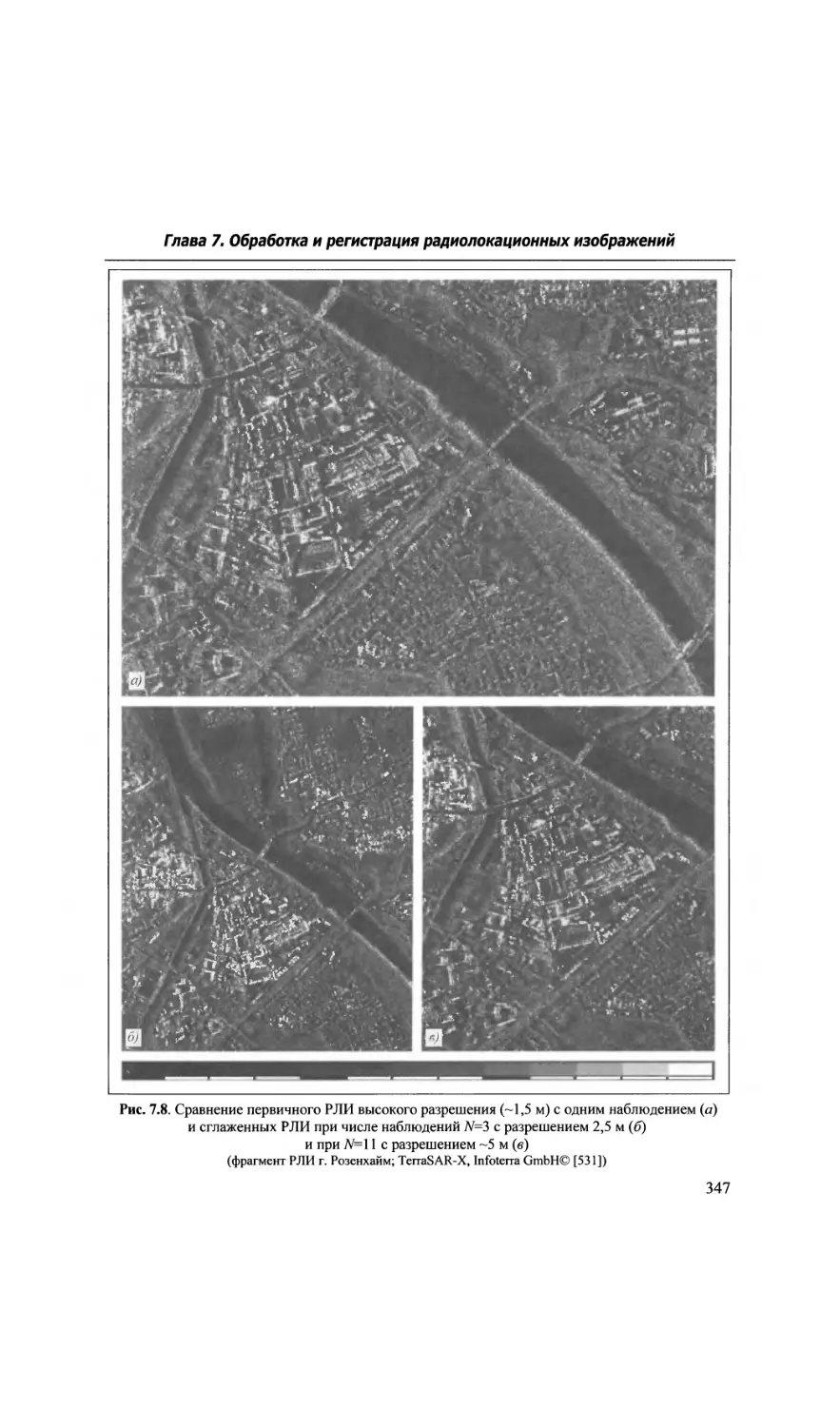
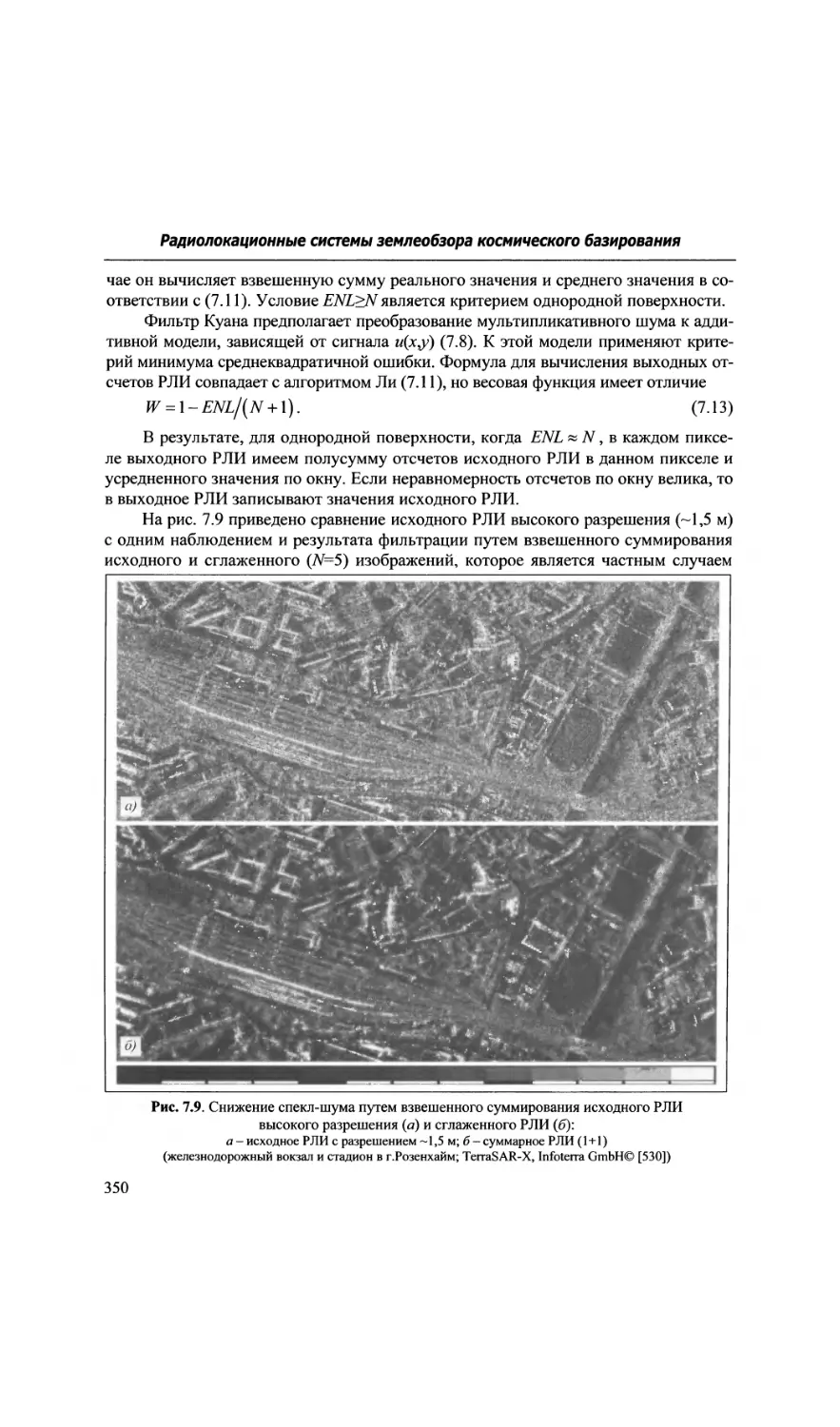
7.1.3. Базовые алгоритмы фильтрации спекл-шума........................348
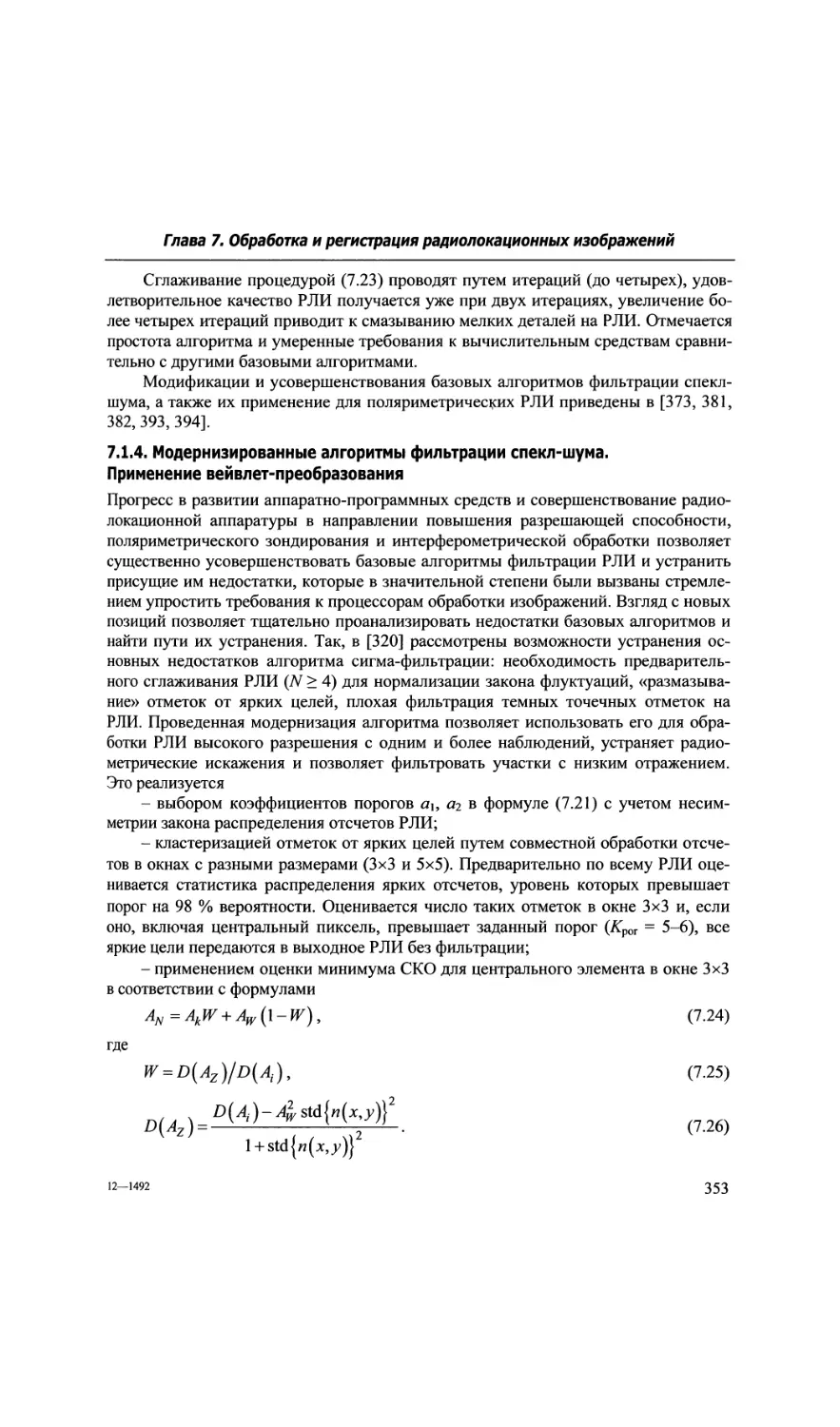
7.1.4. Модернизированные алгоритмы фильтрации спекл-шума.
Применение вейвлет-преобразования...................................353
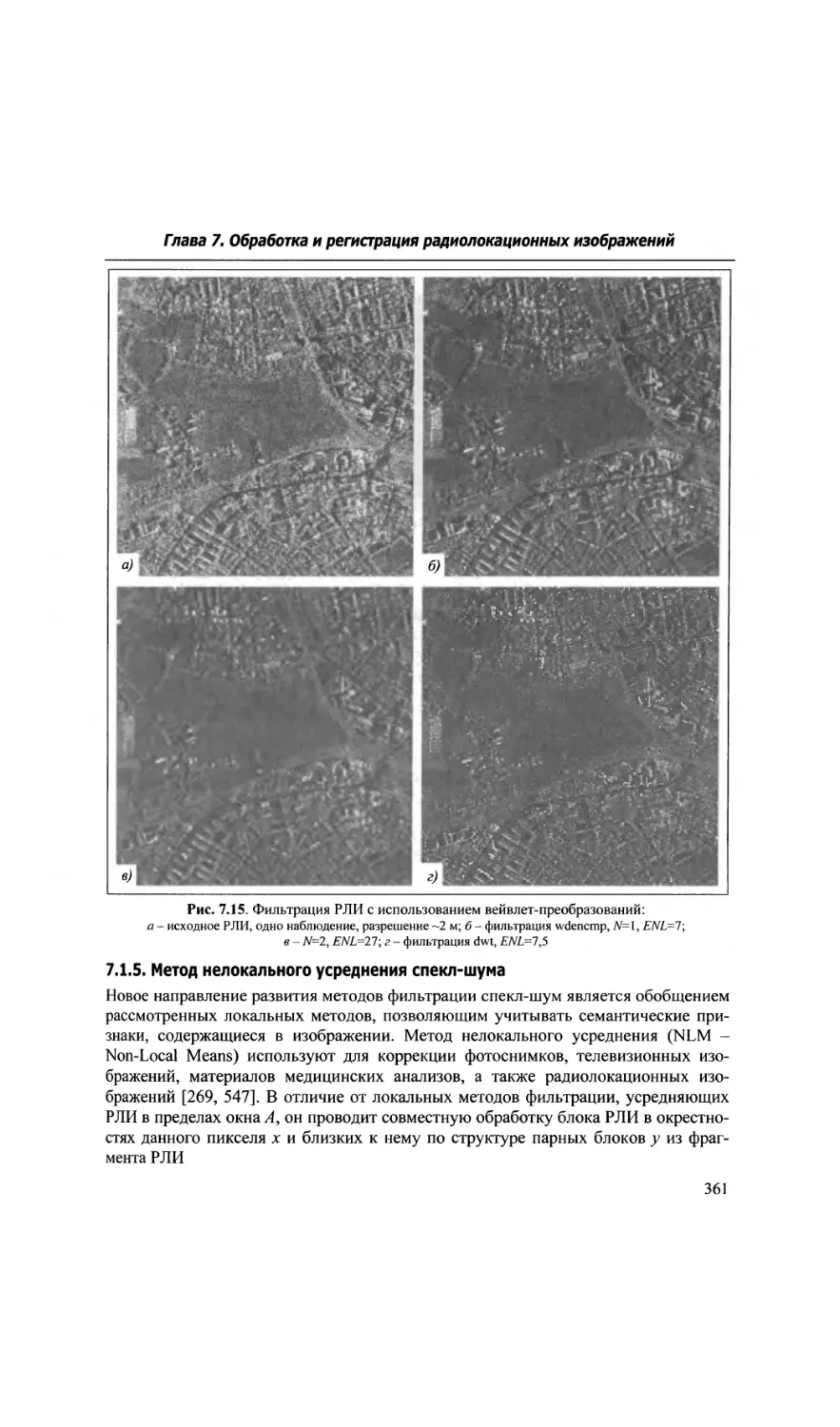
7.1.5. Метод нелокального усреднения спекл-шума.......................361
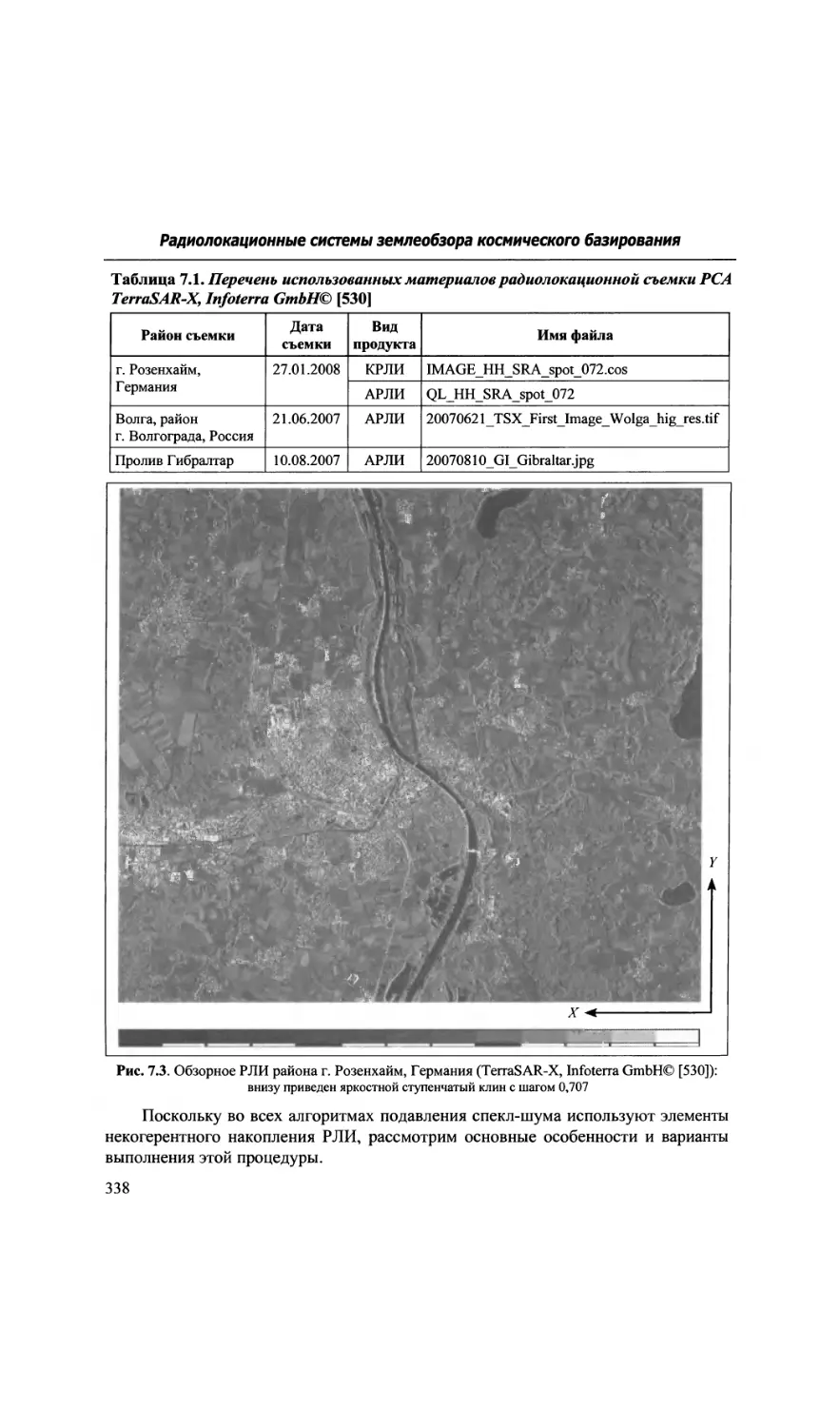
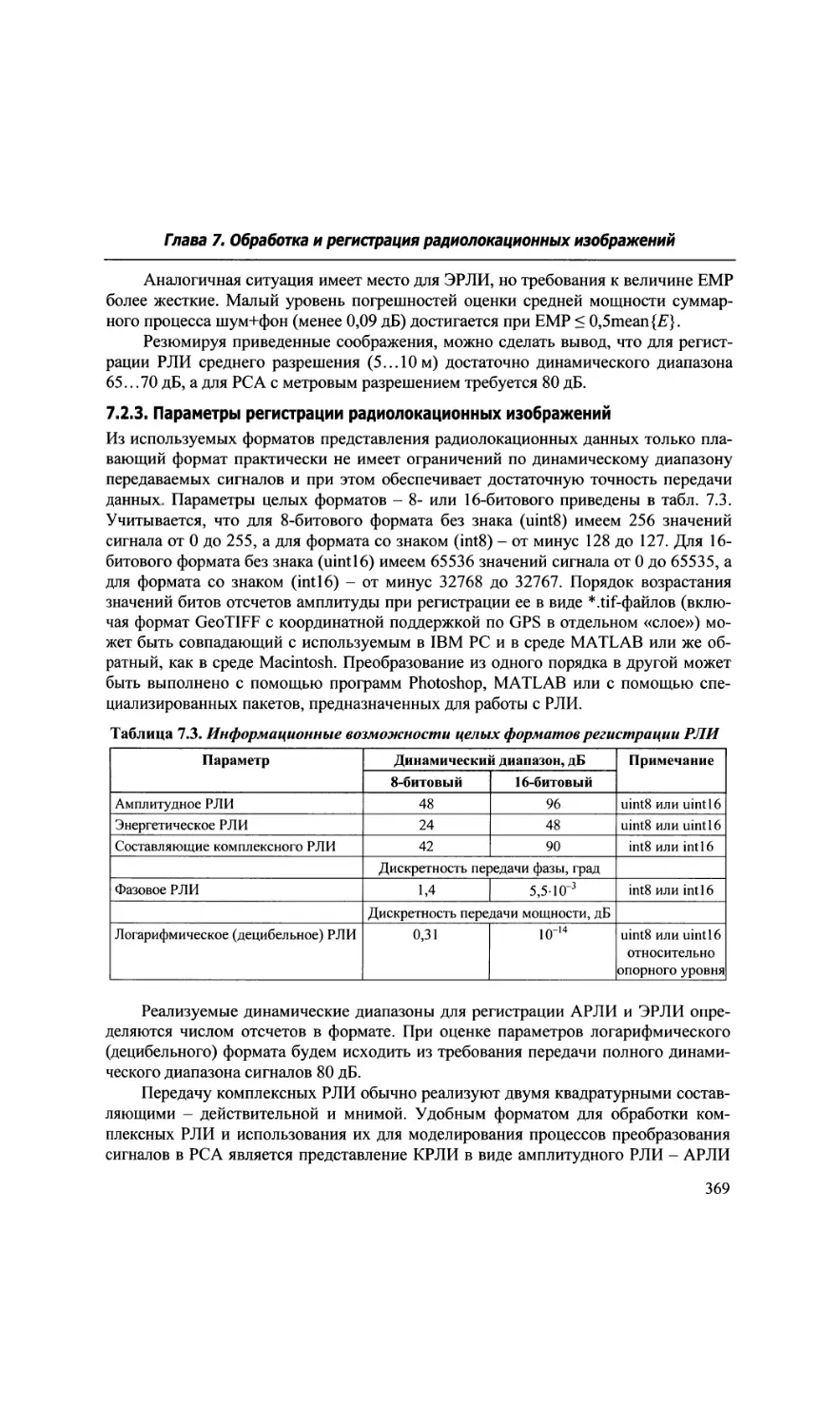
7.2. Регистрация радиолокационной информации........................... 363
7.2.1. Требования к регистрации радиоголограммы.......................363
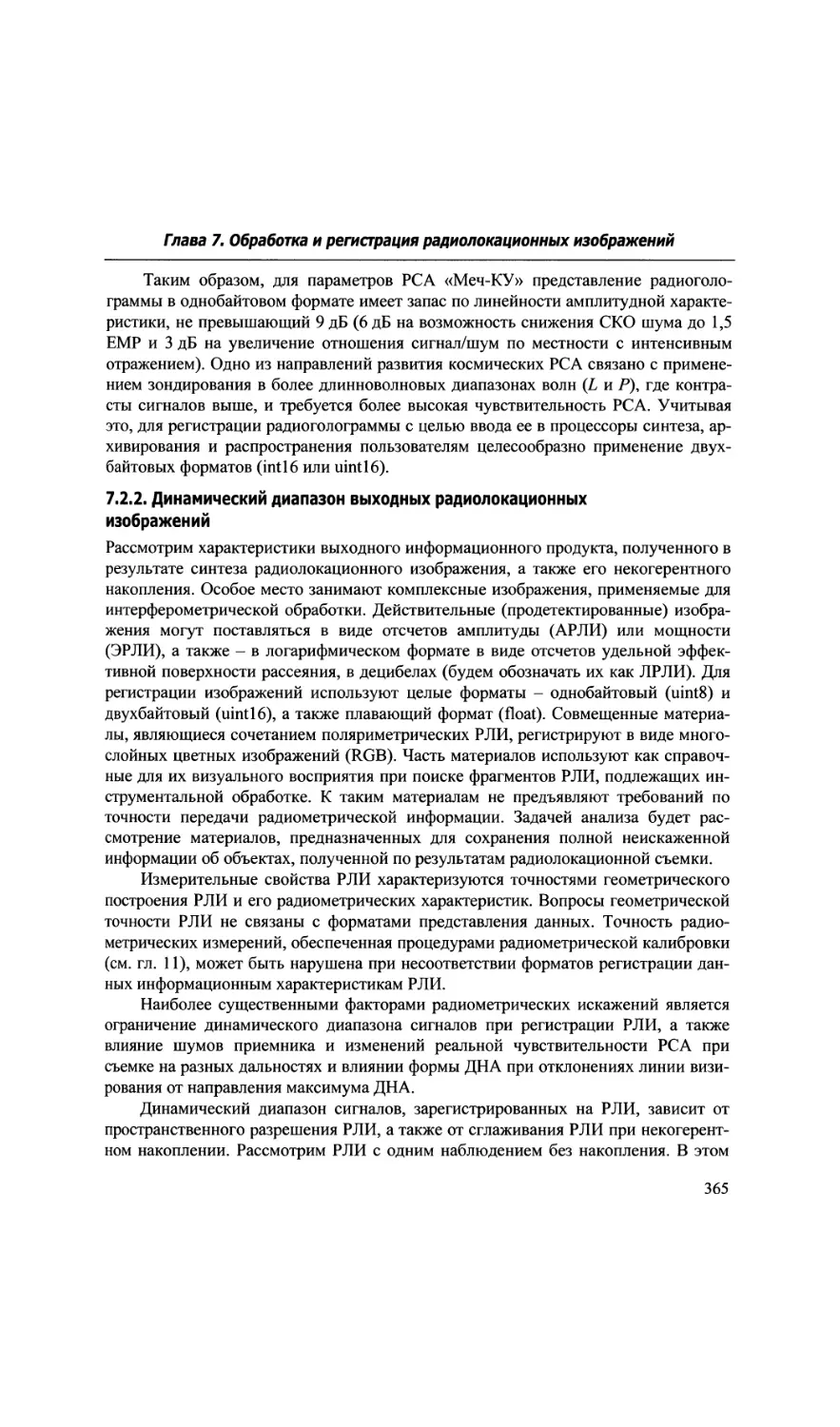
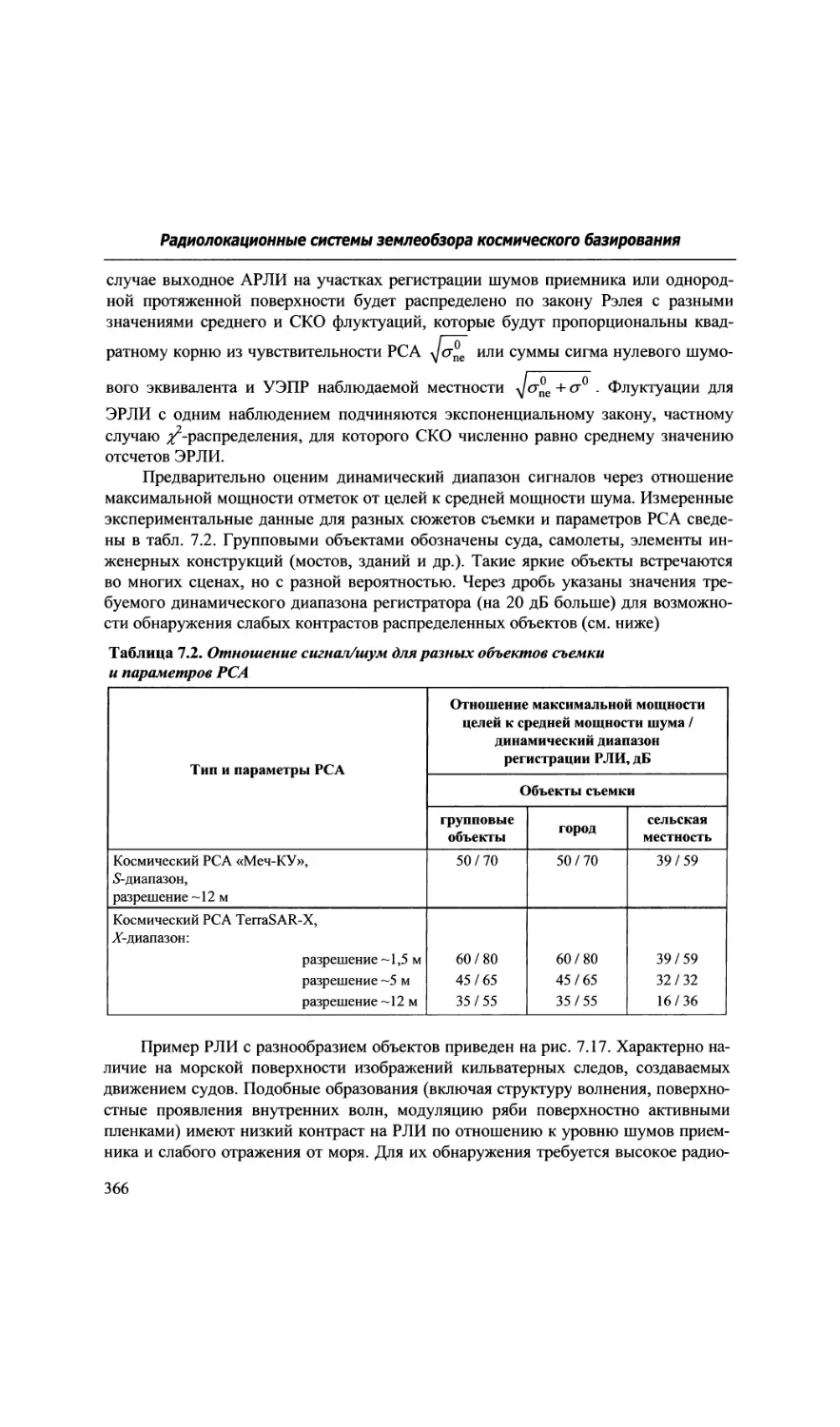
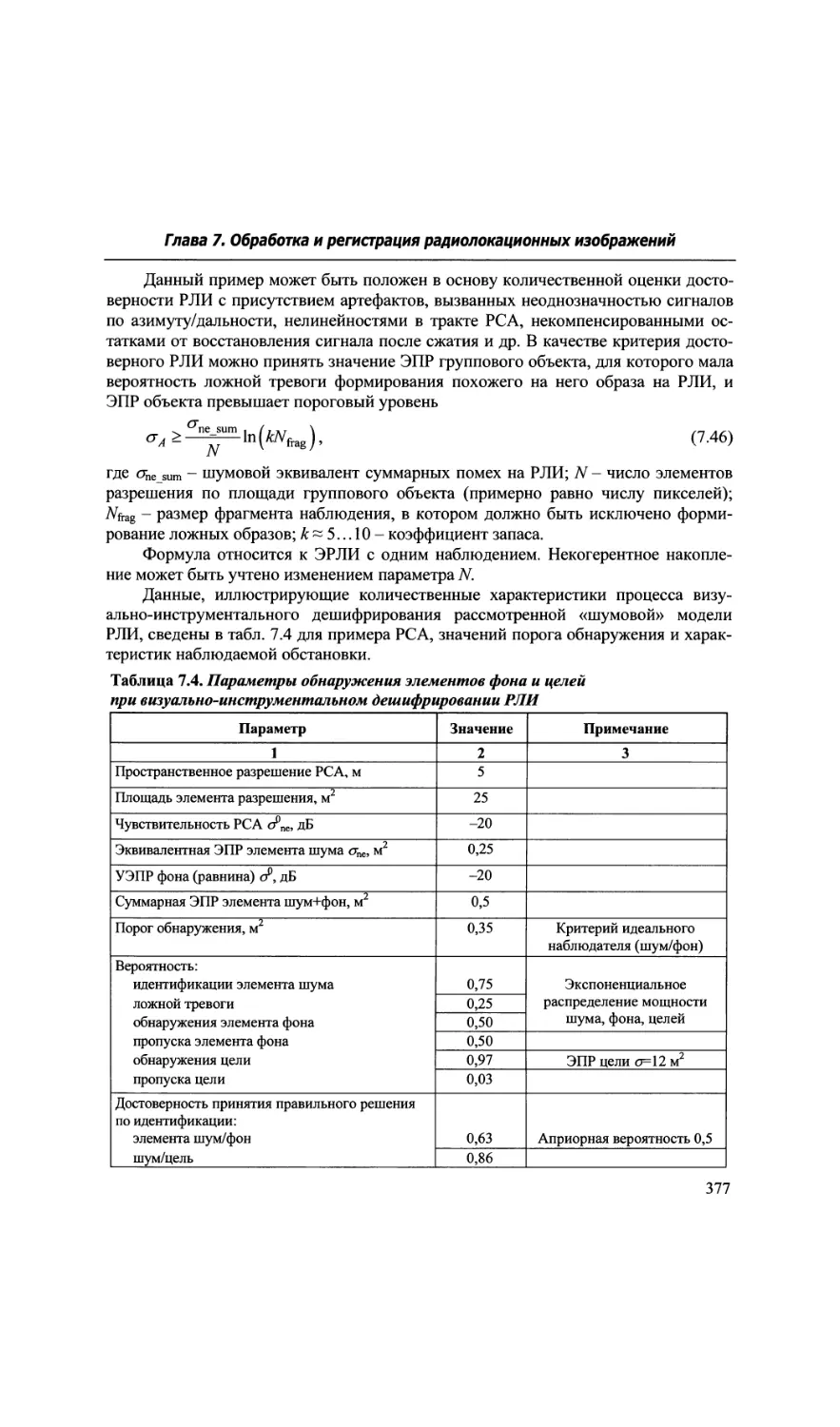
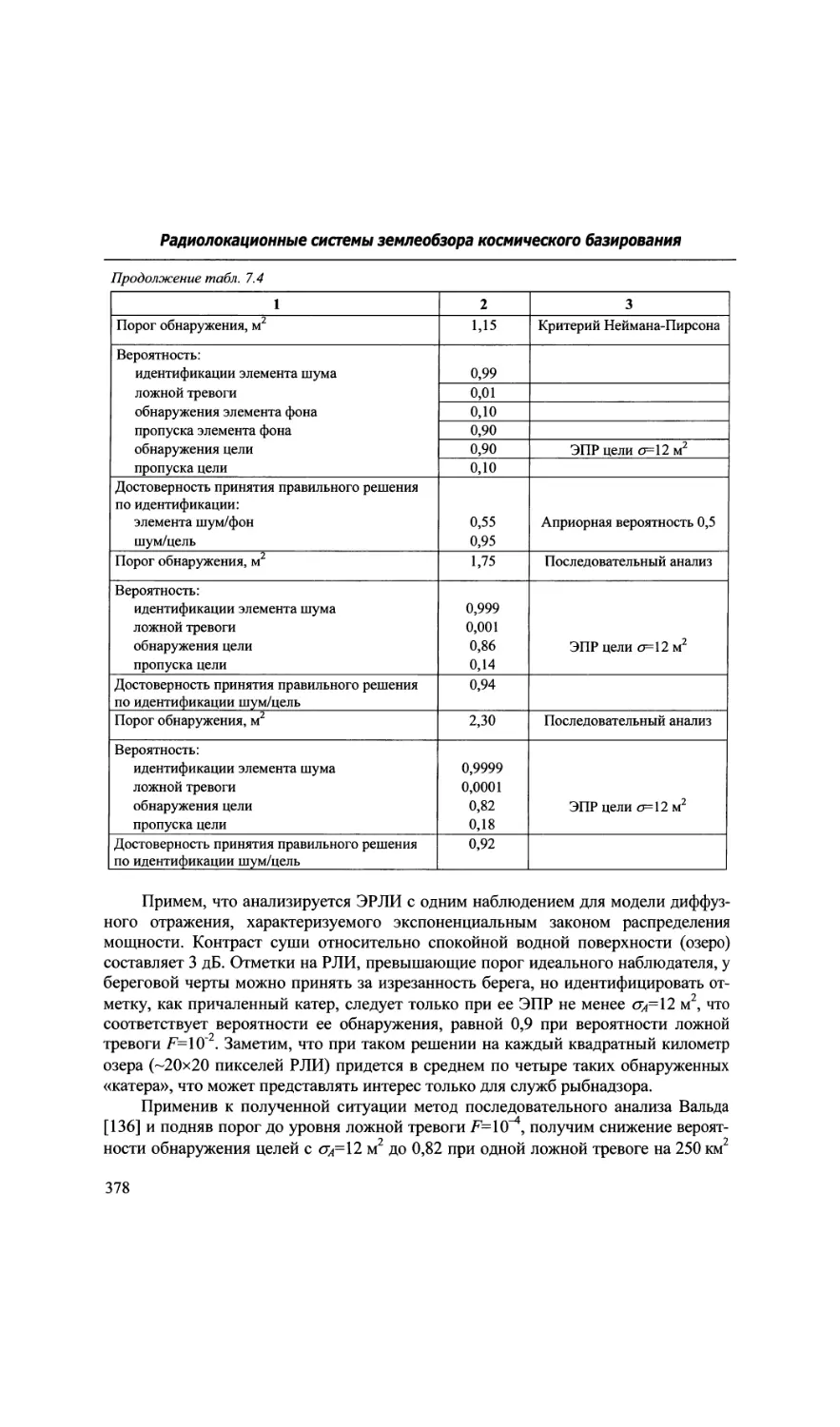
7.2.2. Динамический диапазон выходных радиолокационных изображений....365
7.2.3. Параметры регистрации радиолокационных изображений.............369
6
Оглавление
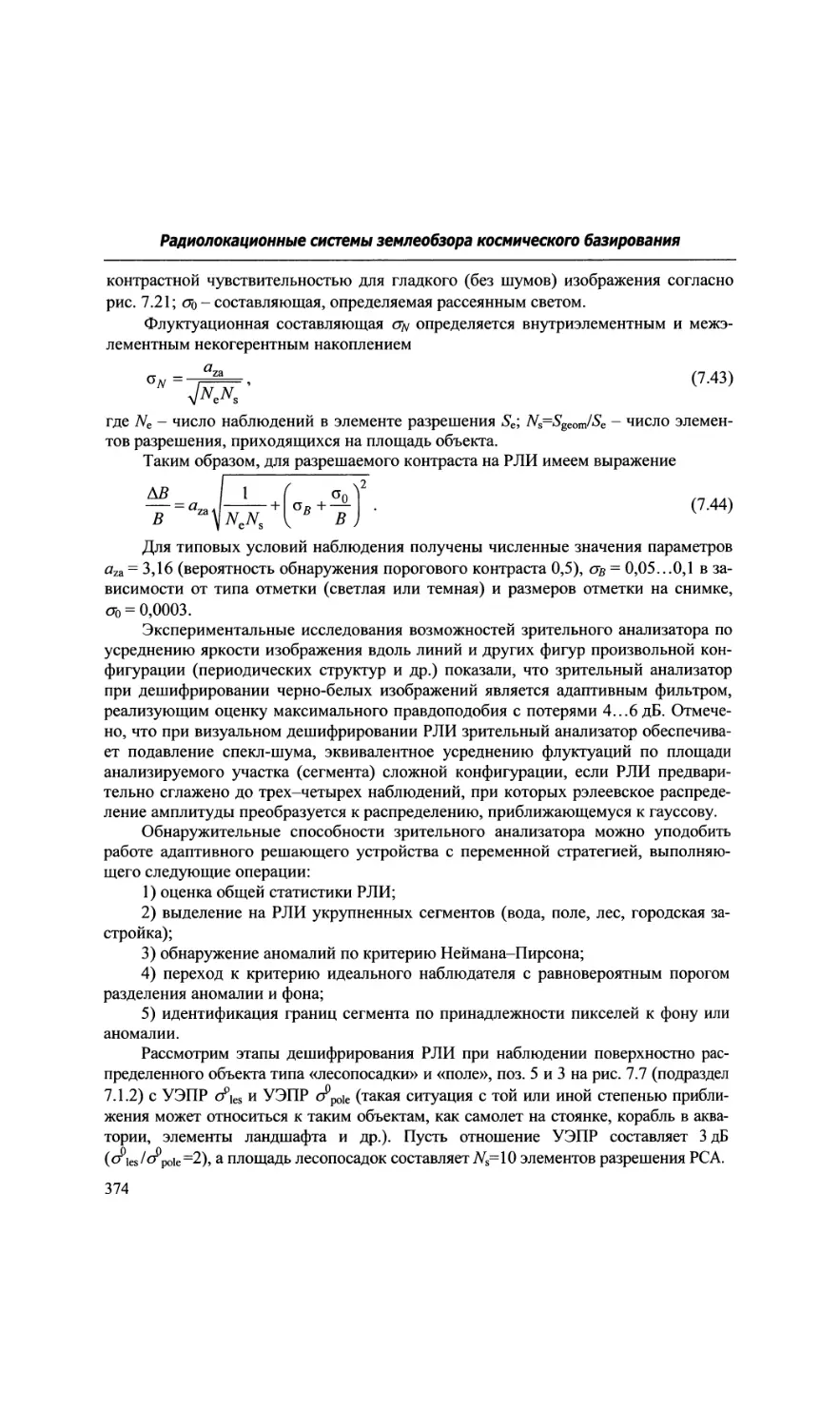
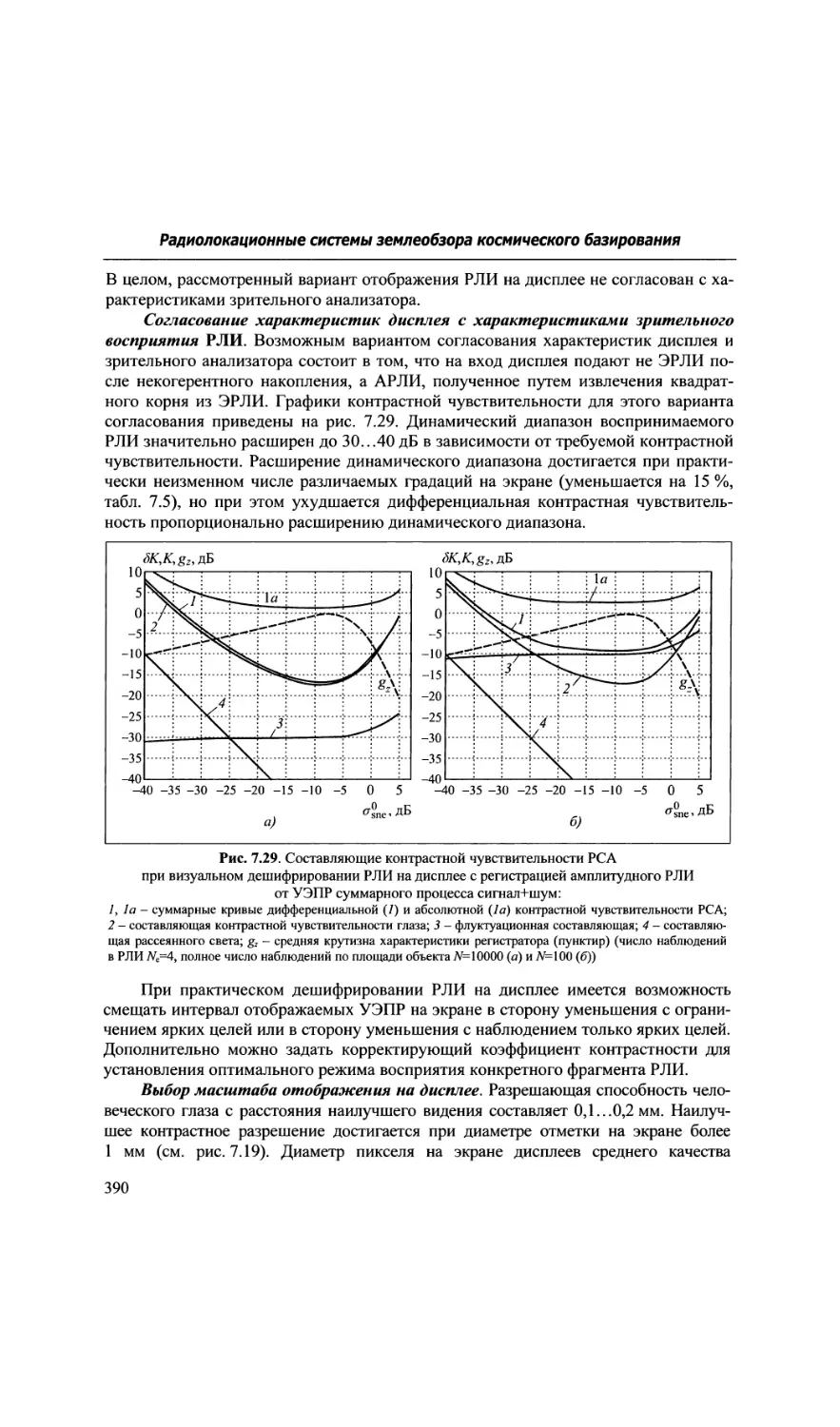
7.3. Характеристики зрительного восприятия РЛИ ..................... 370
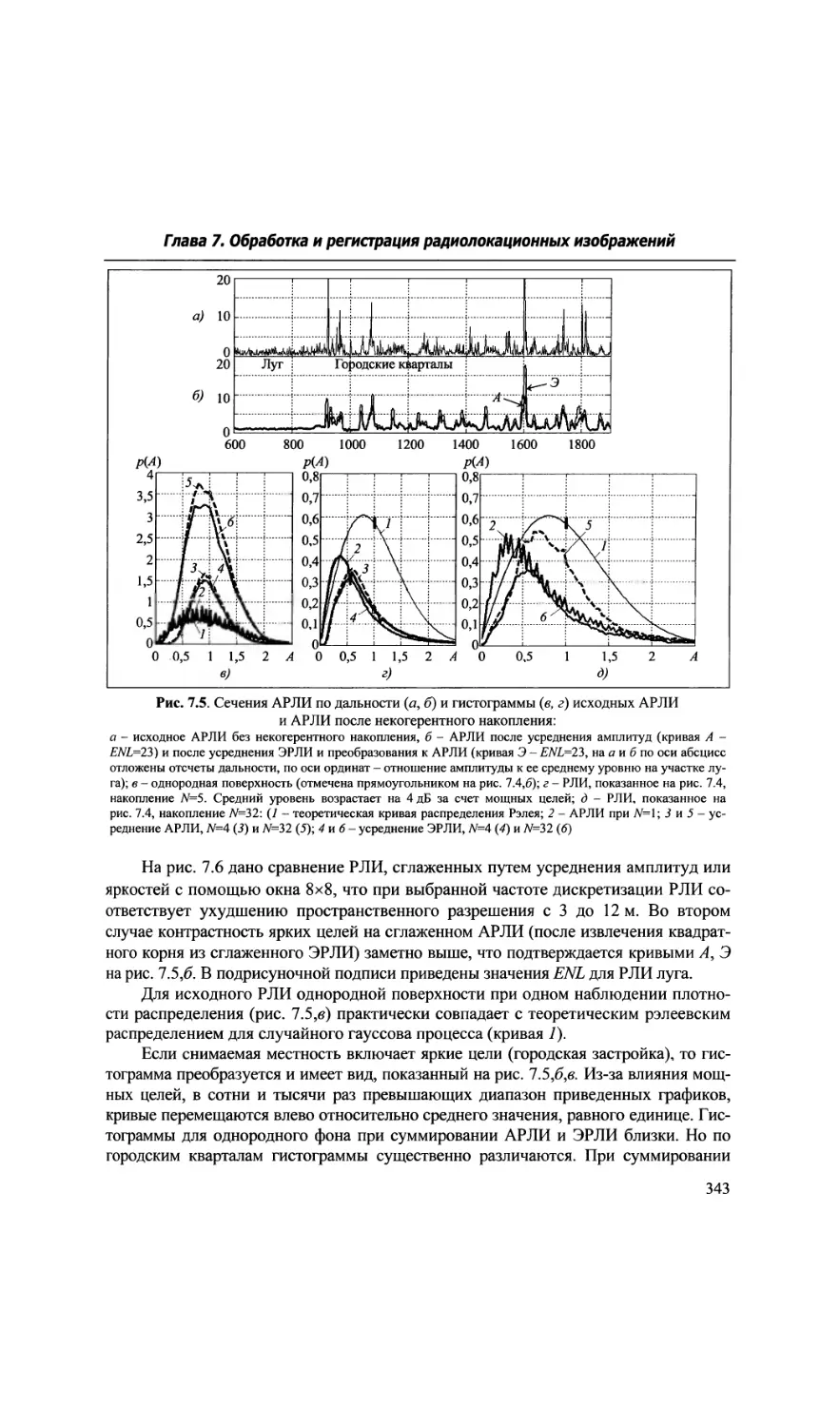
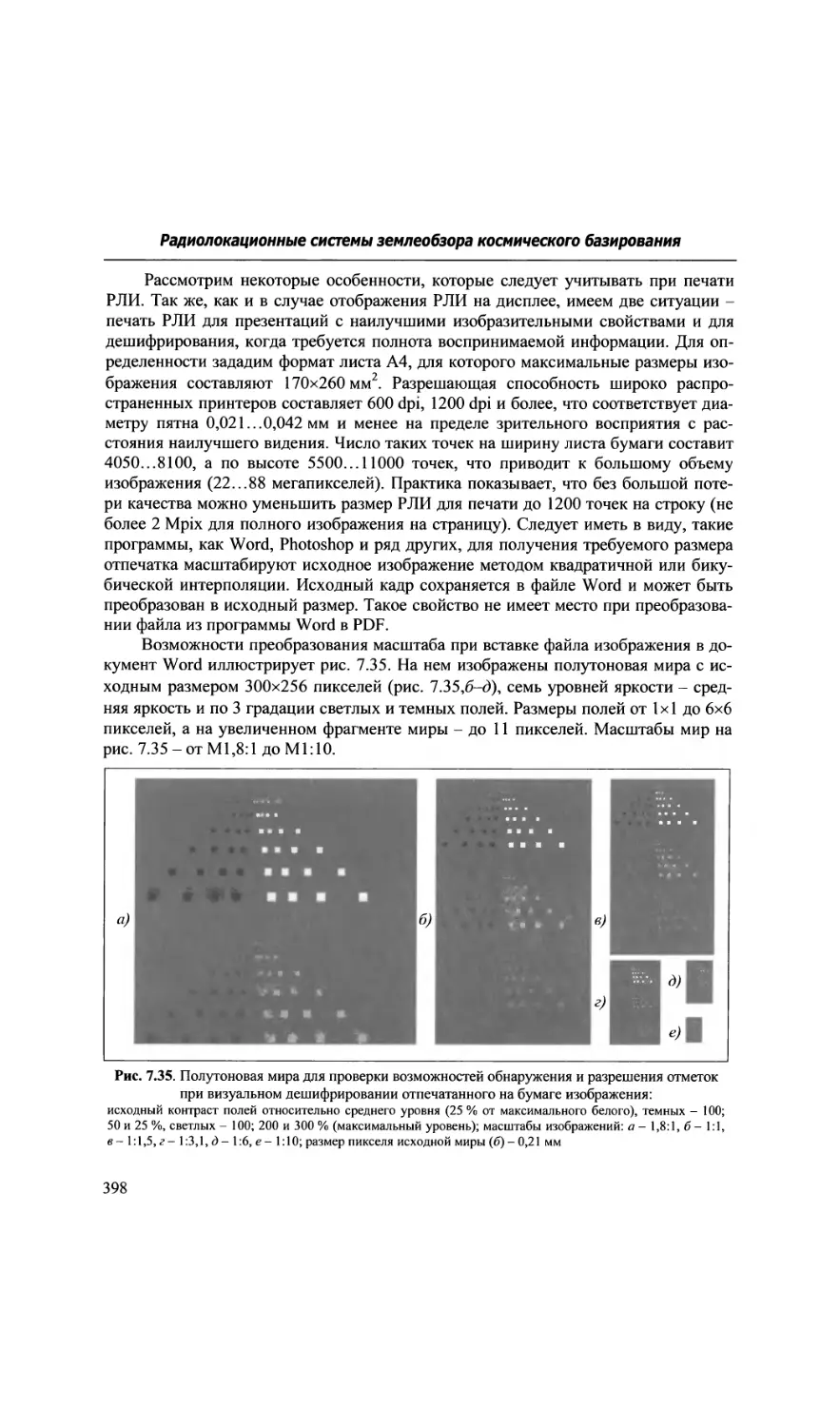
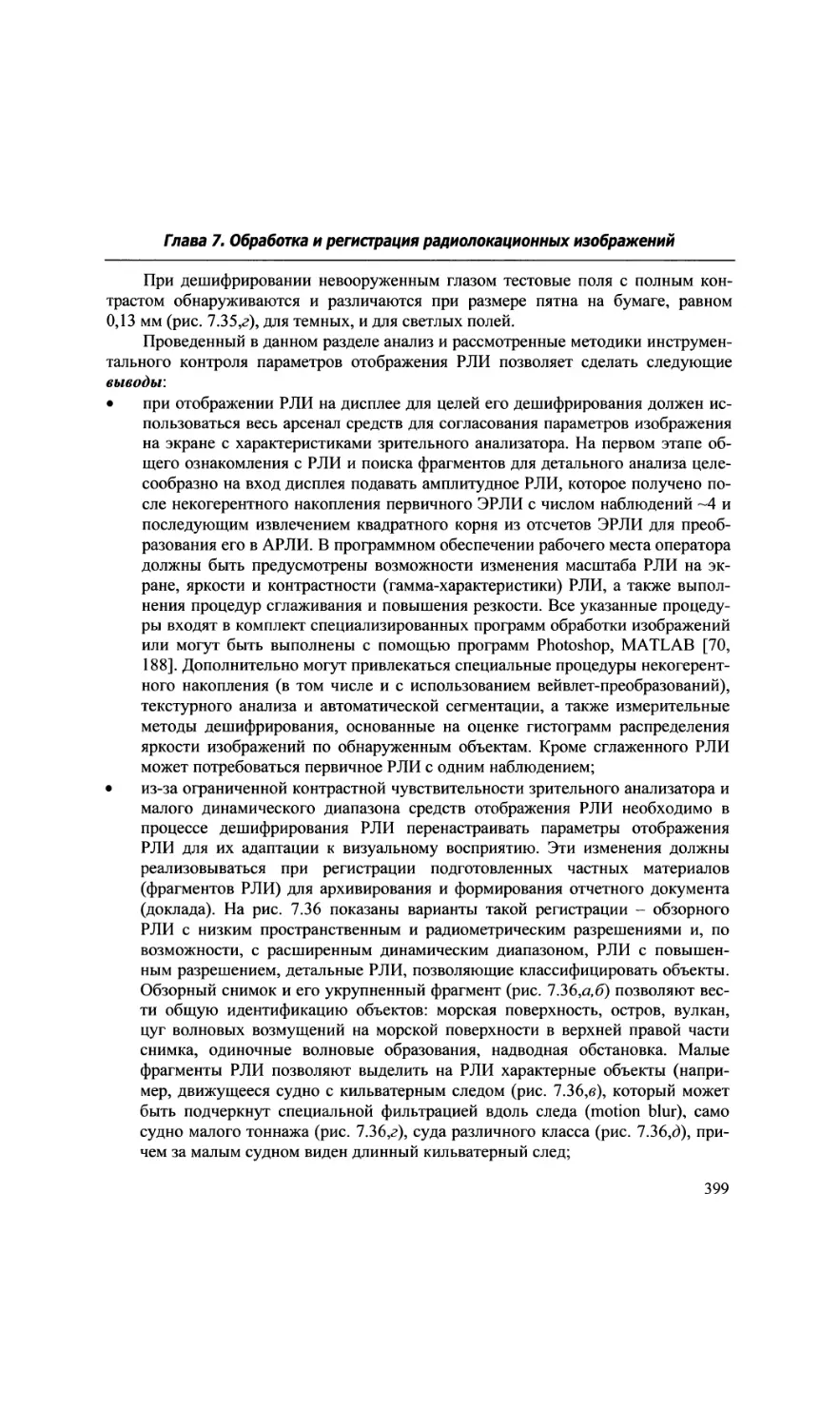
7.4. Отображение радиолокационной информации........................ 379
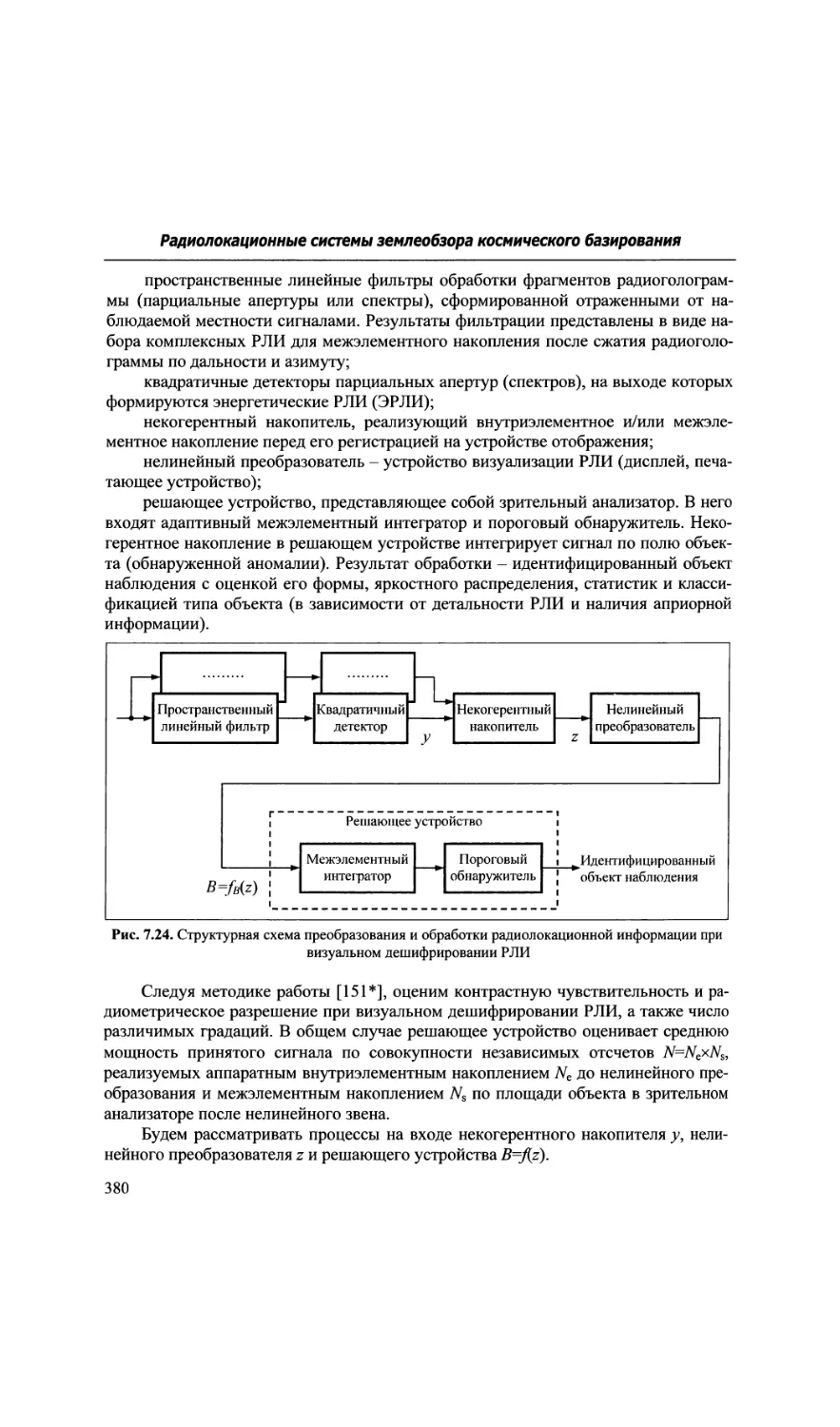
7.4.1. Структурная схема модели преобразования информации
при визуальном дешифрировании РЛИ..................................379
7.4.2. Линейный регистратор с ограничением.........................383
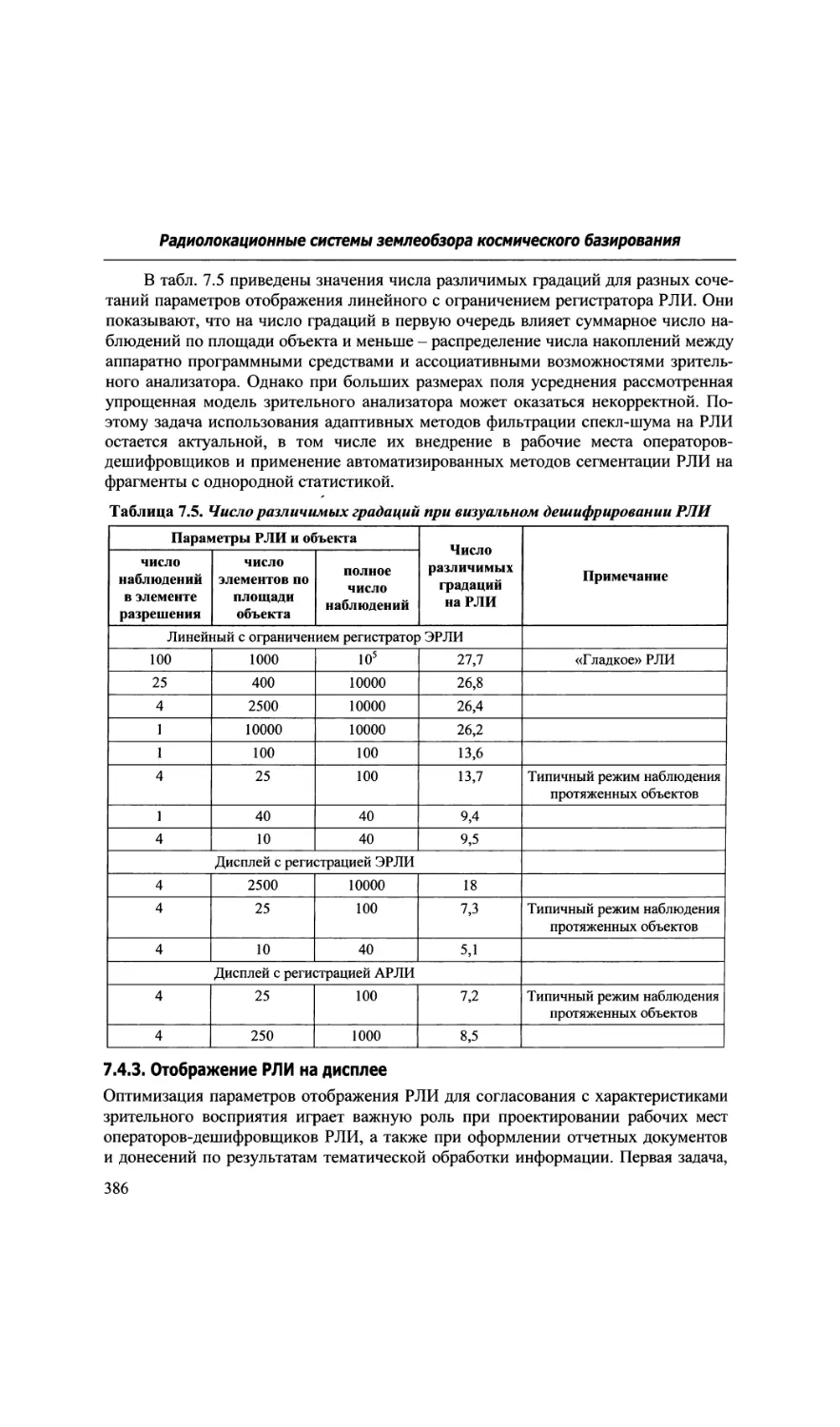
7.4.3. Отображение РЛИ на дисплее................................. 386
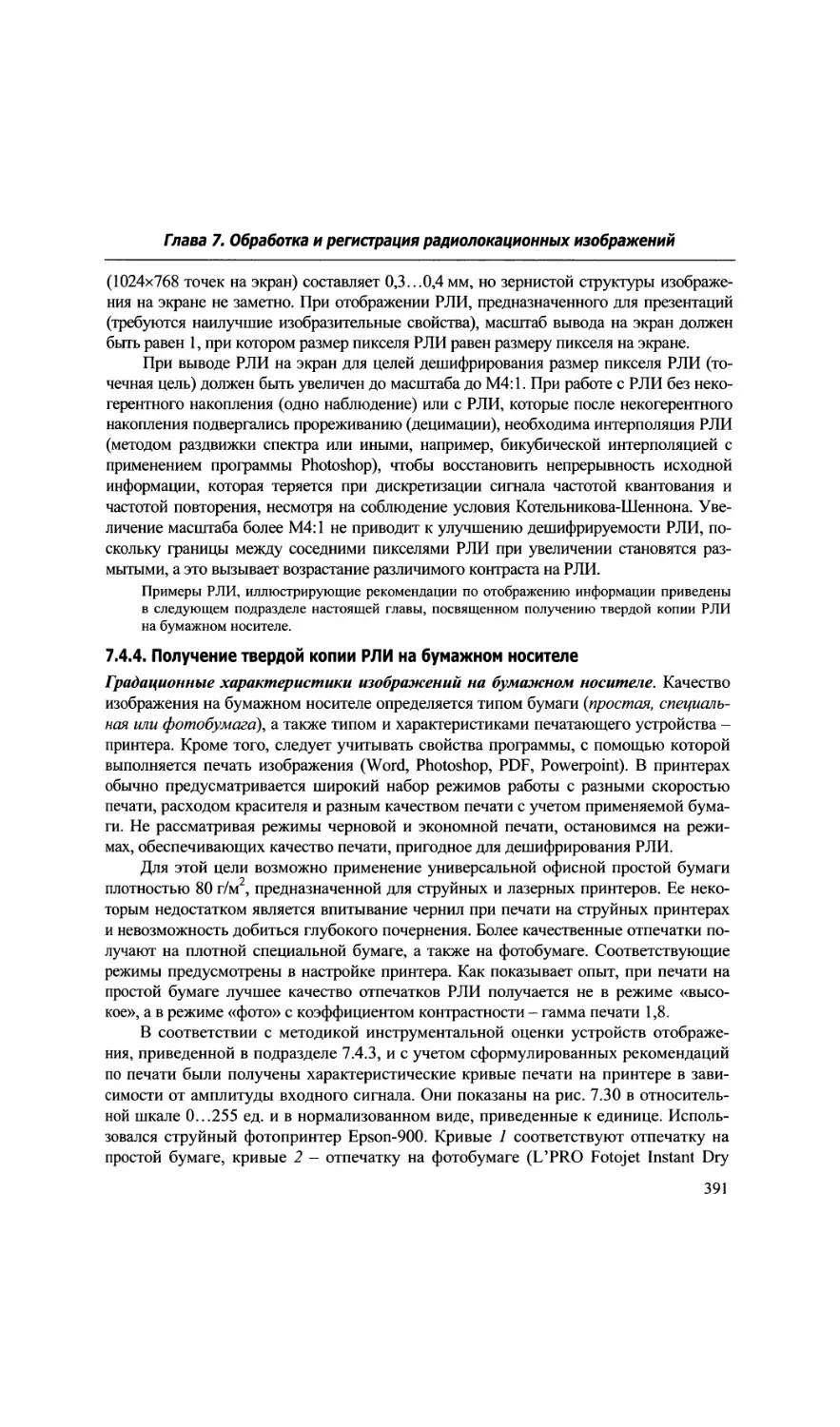
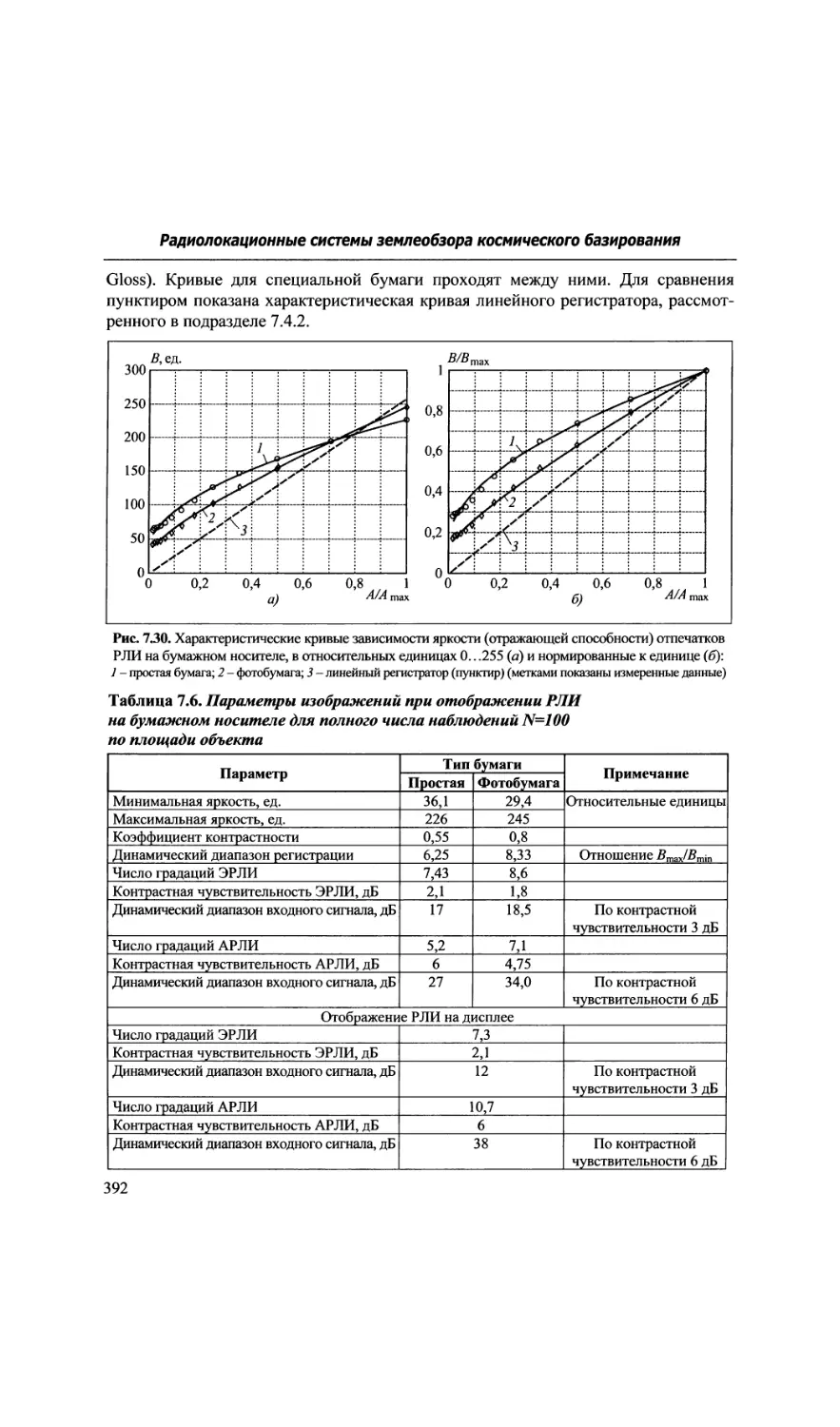
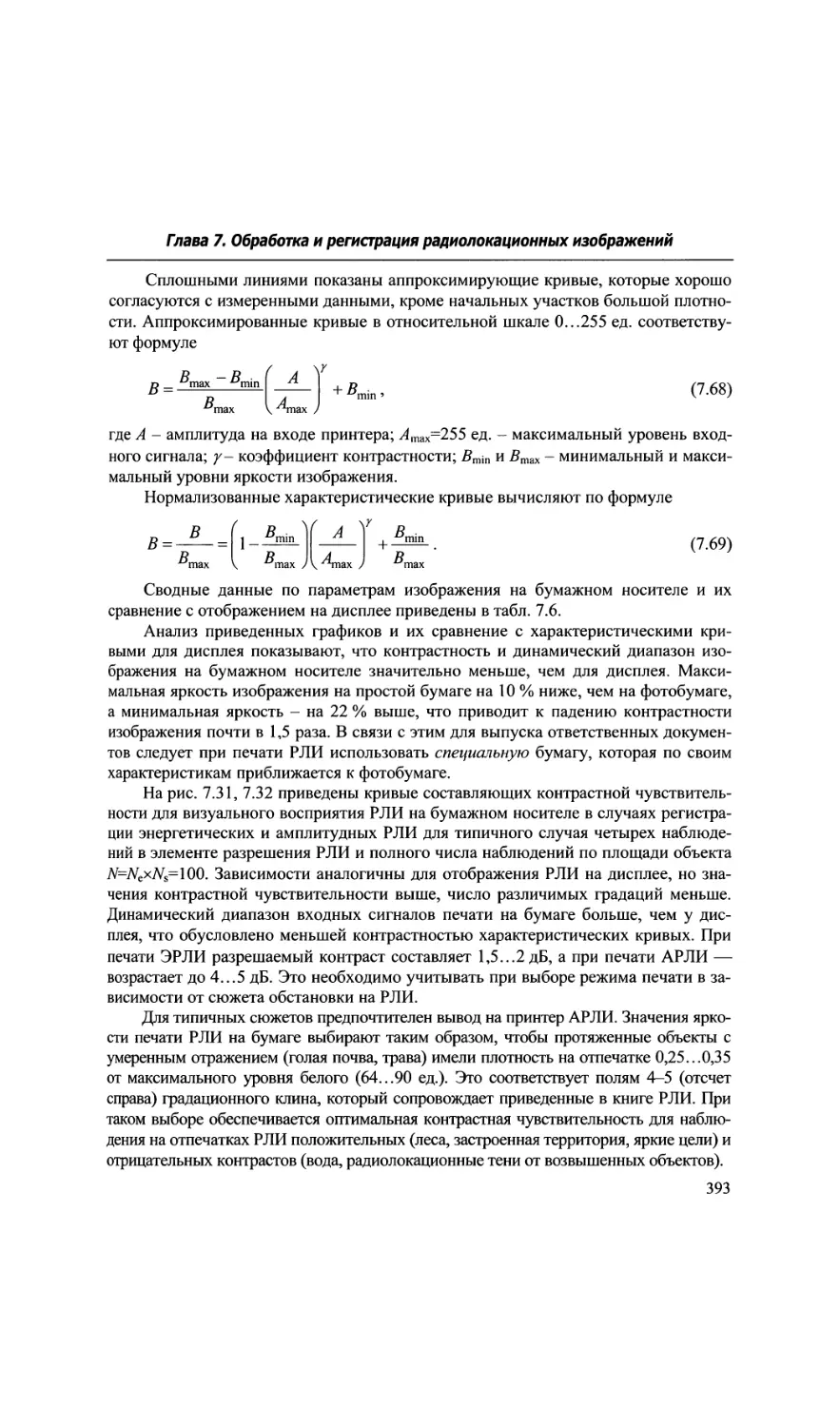
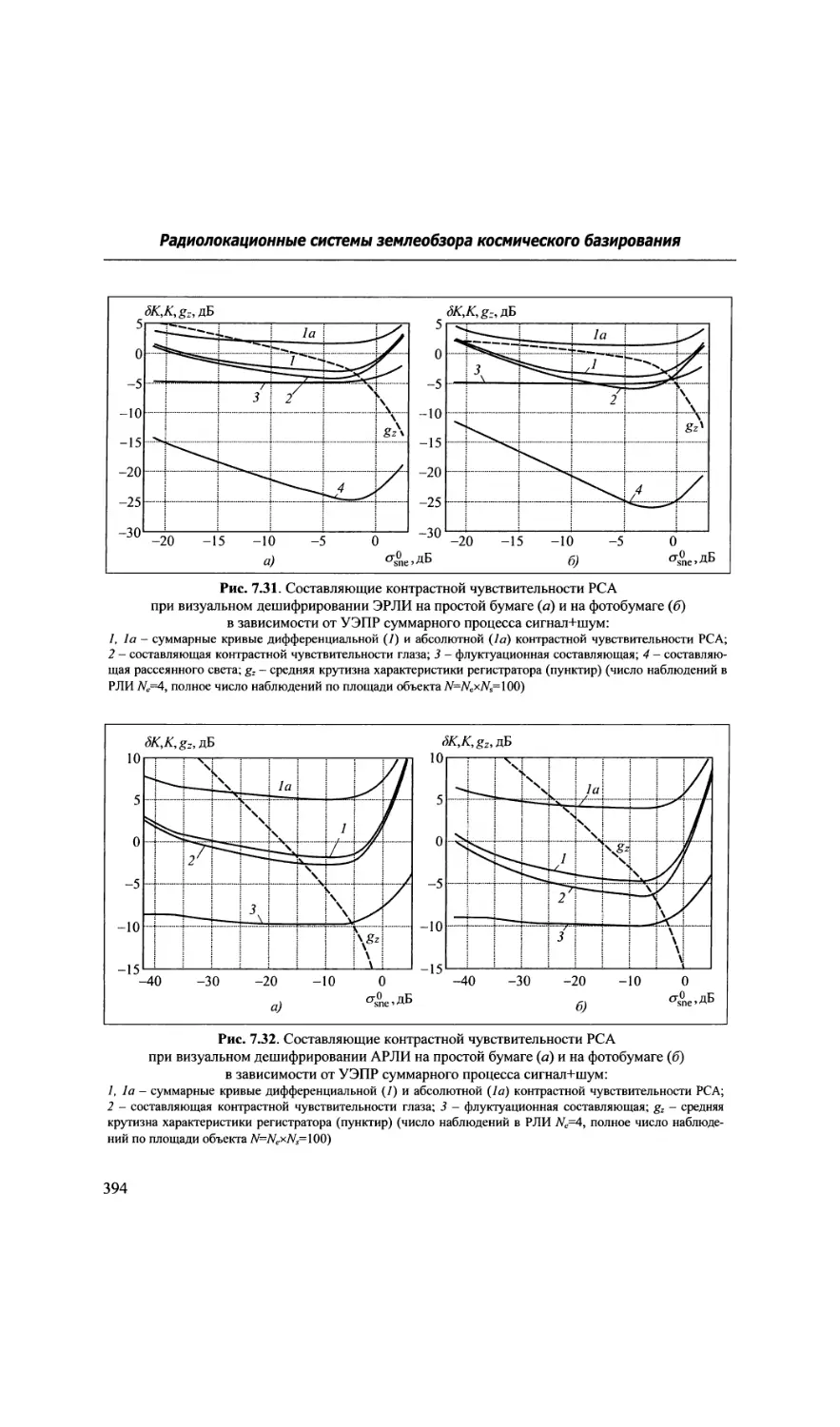
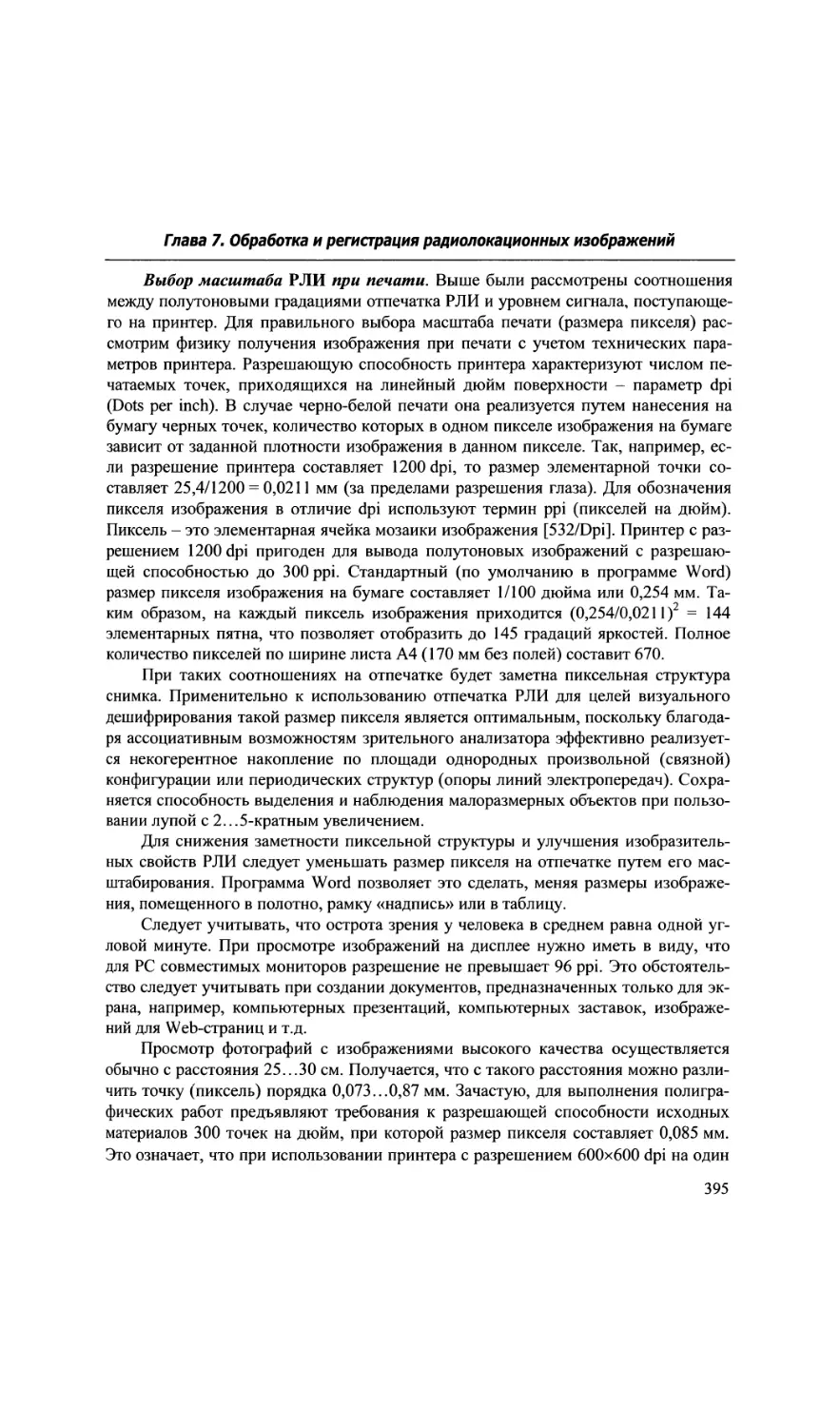
7.4.4. Получение твердой копии РЛИ на бумажном носителе............391
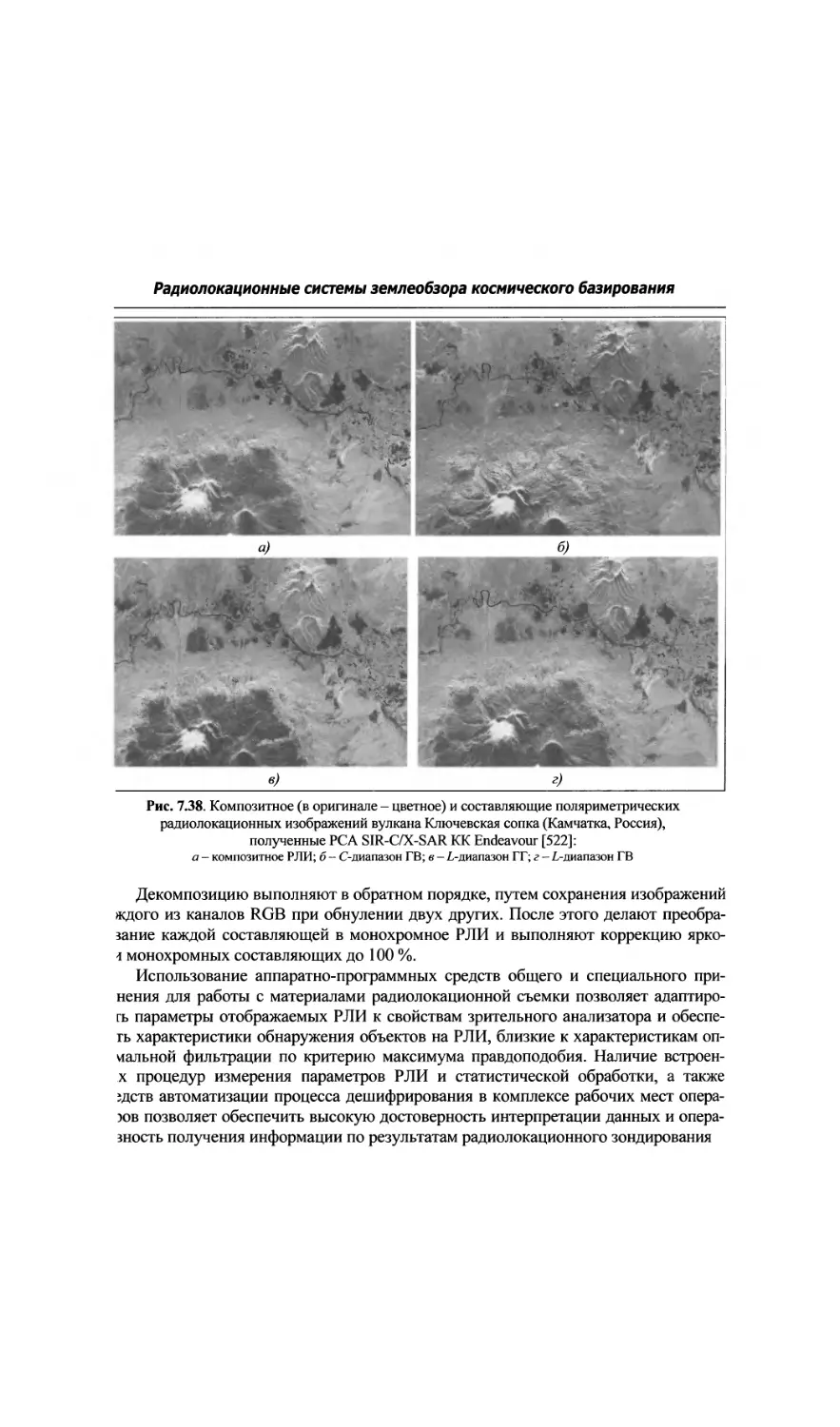
7.5. Характеристики цветного и псевдоцветного отображения РЛИ....... 402
Глава 8. Повышение информативности космических РСА.........................405
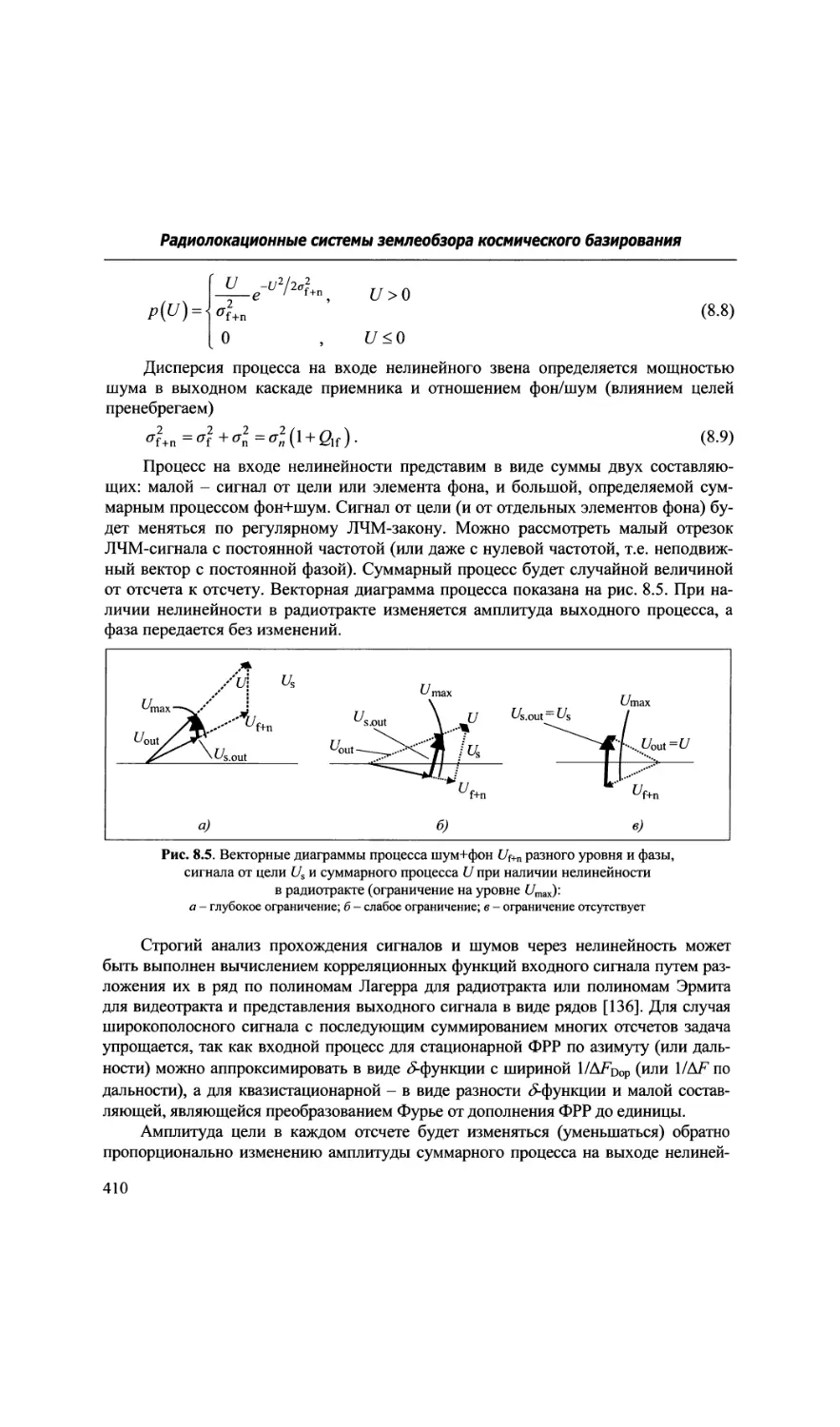
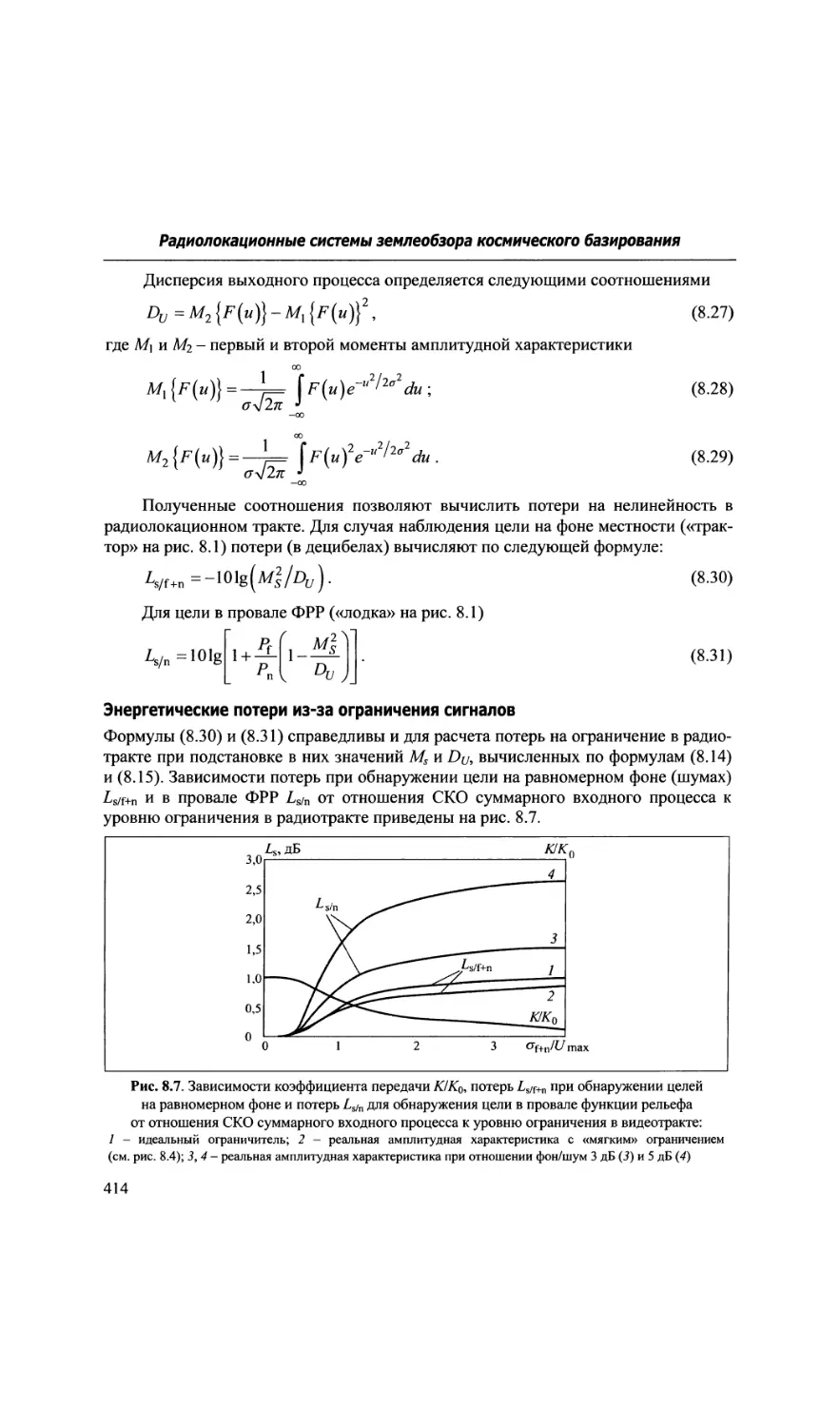
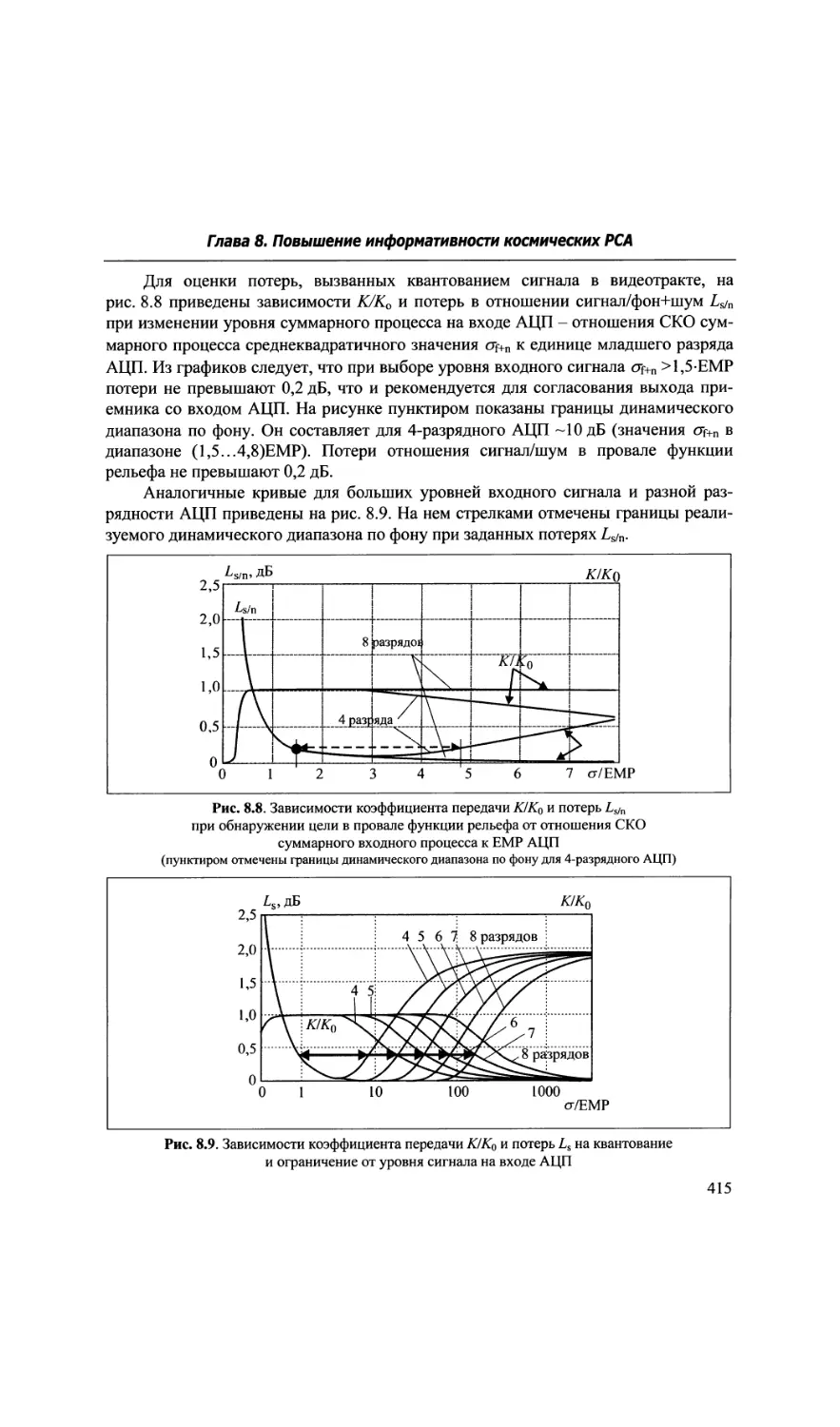
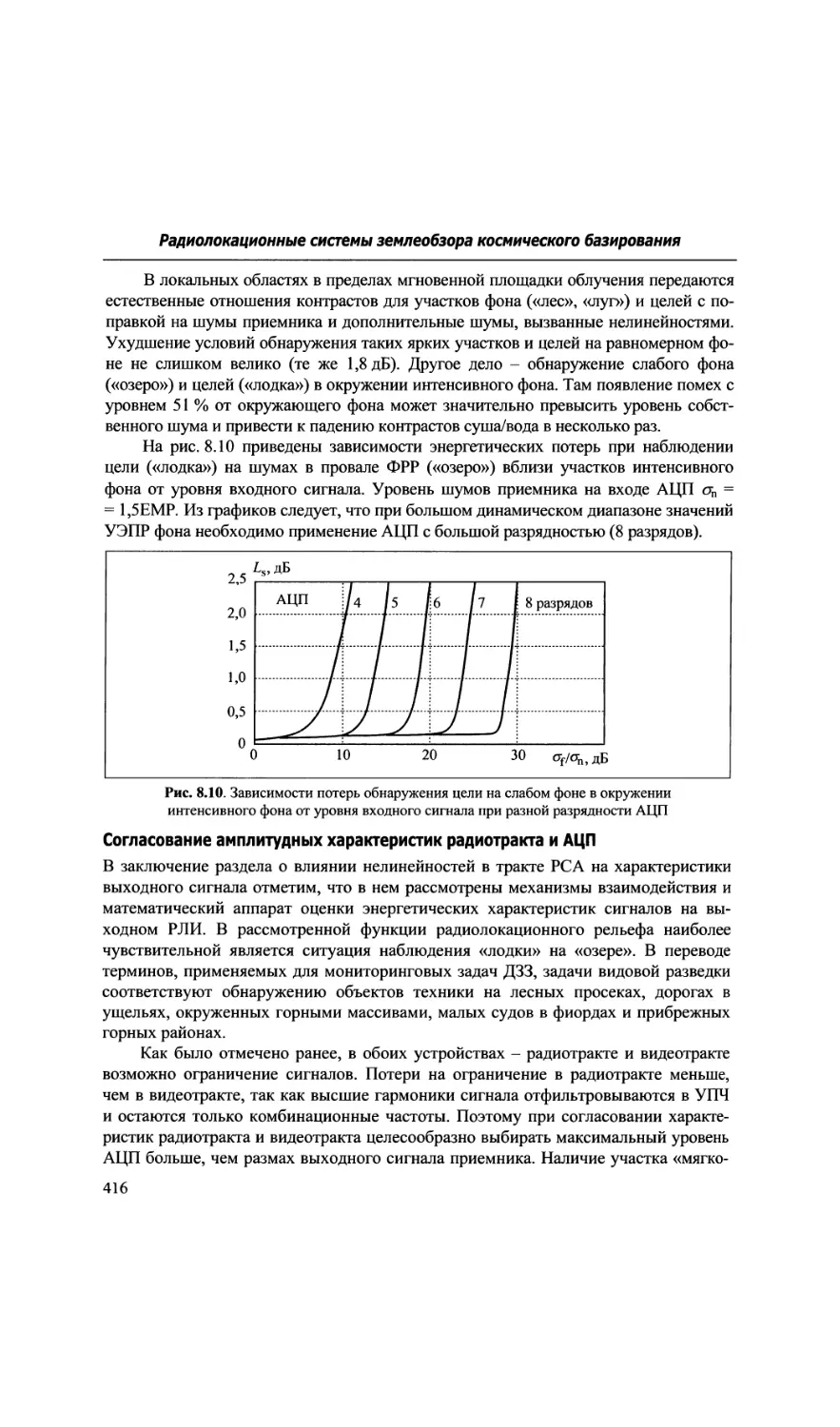
8.1. Учет влияния нелинейностей в тракте РСА.........................405
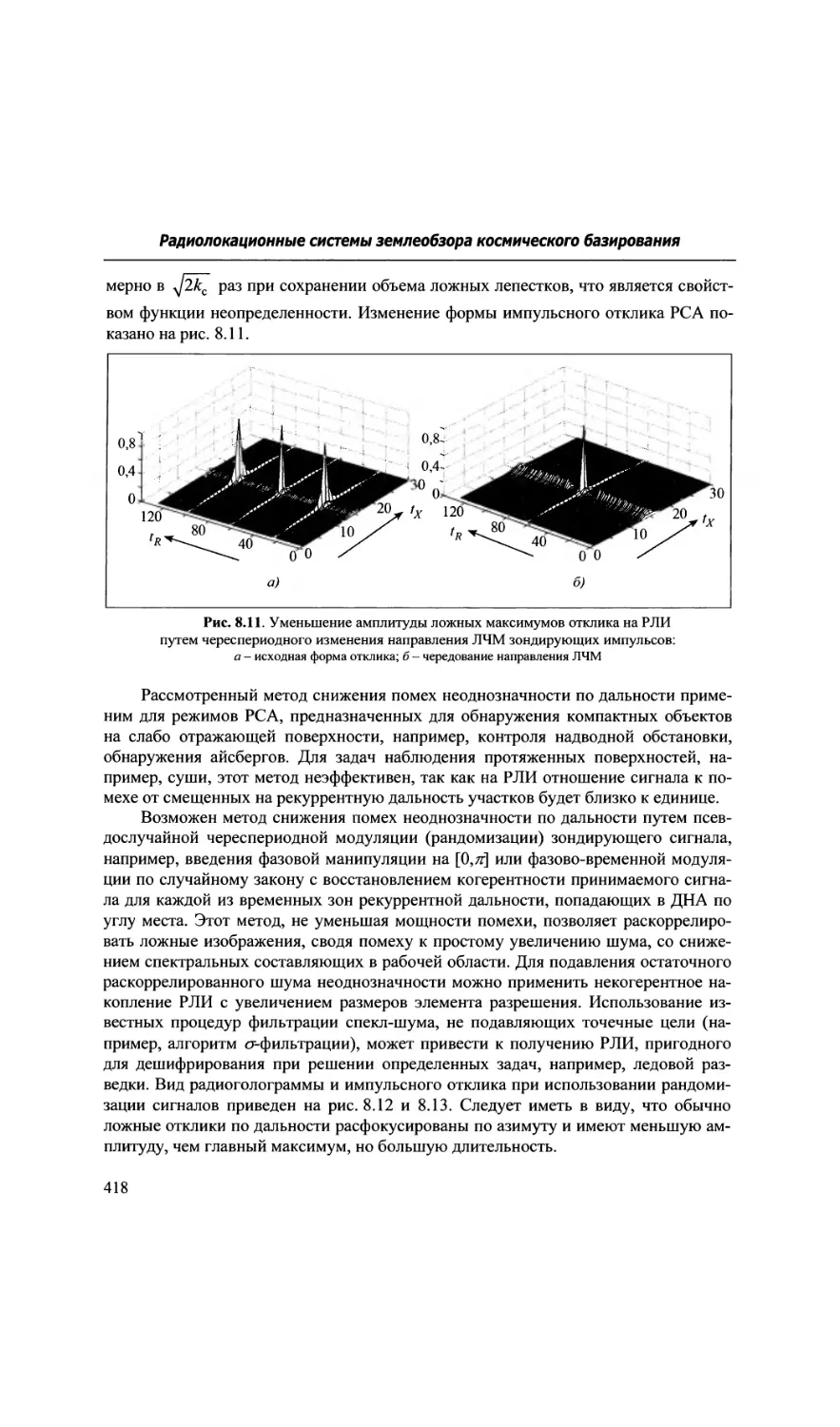
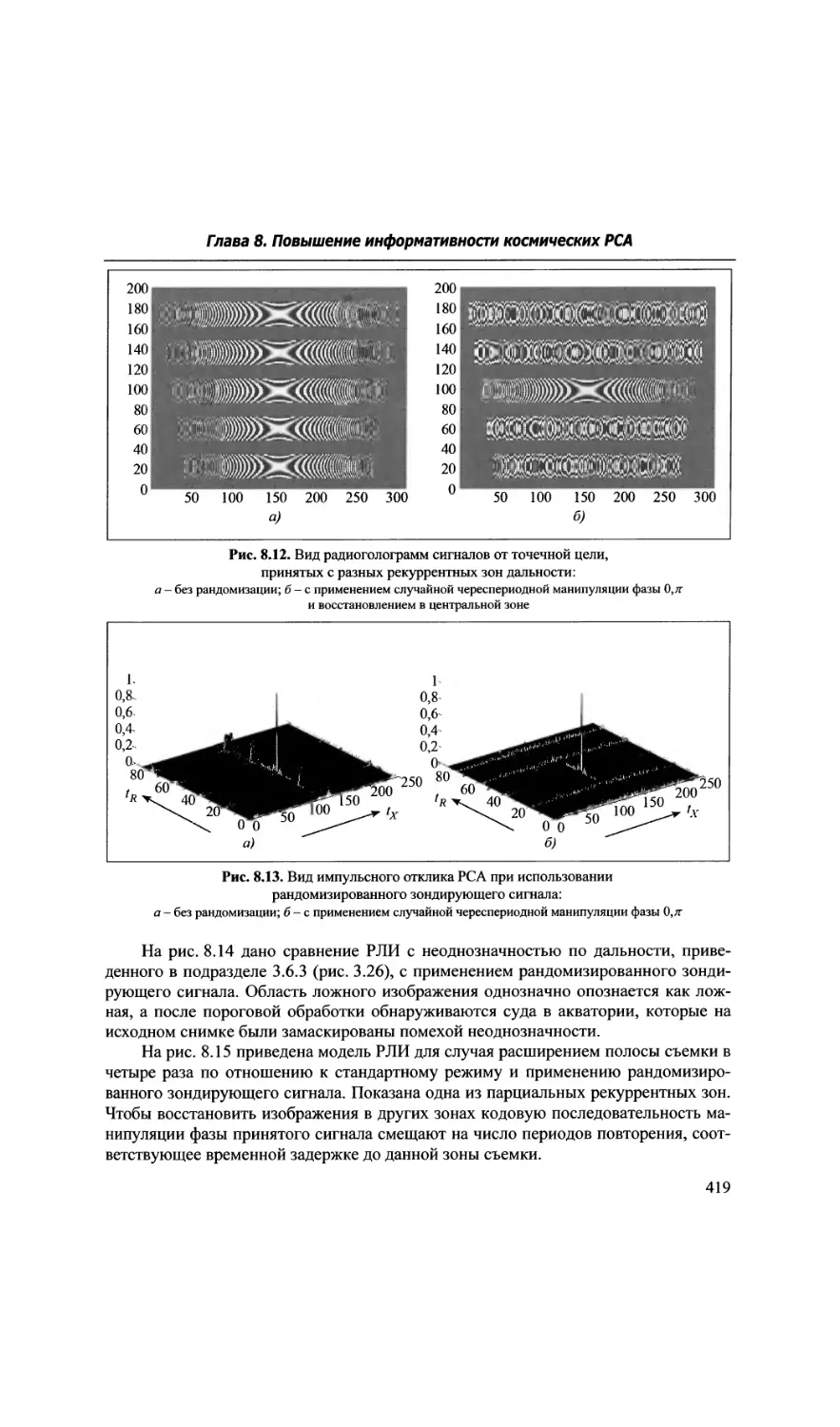
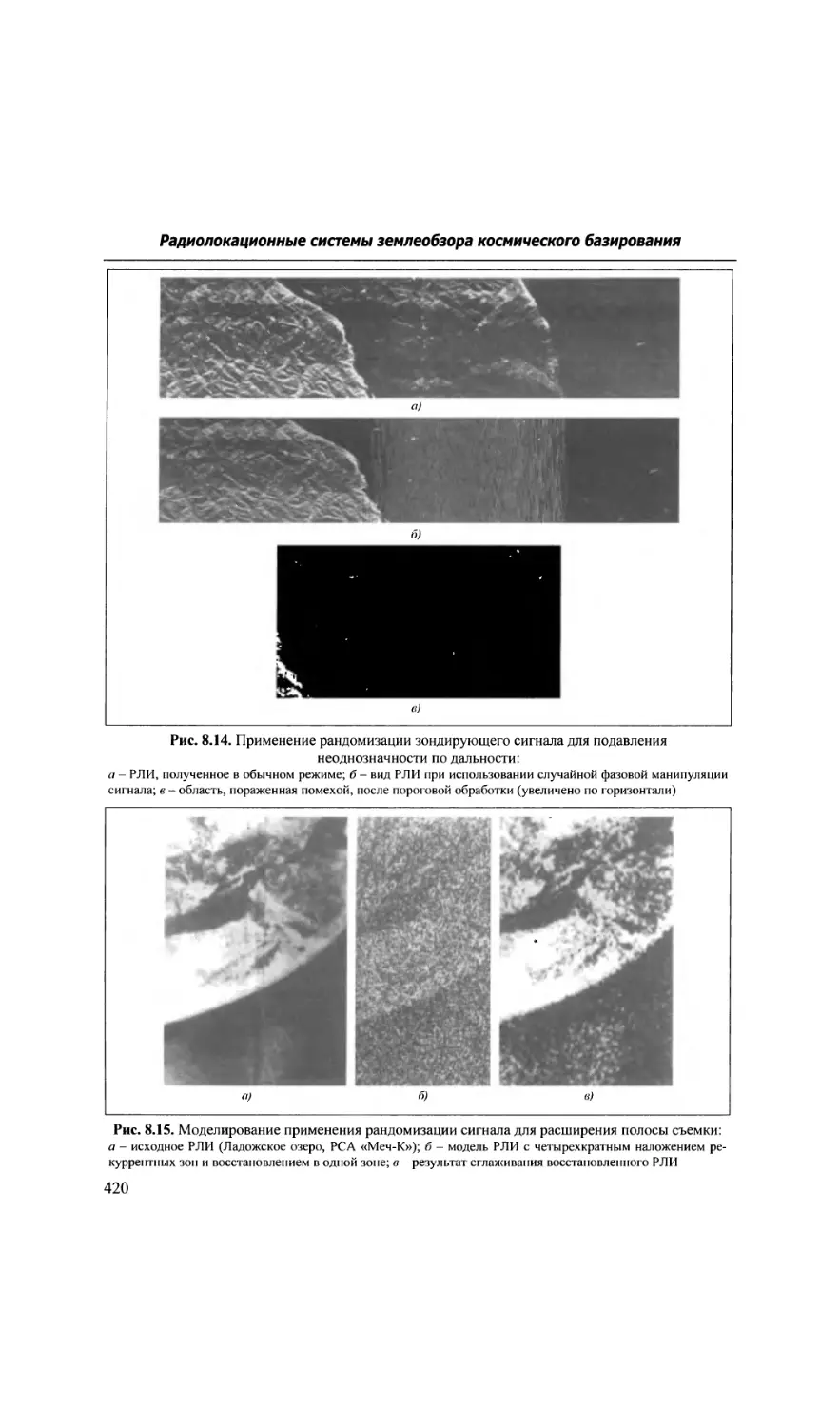
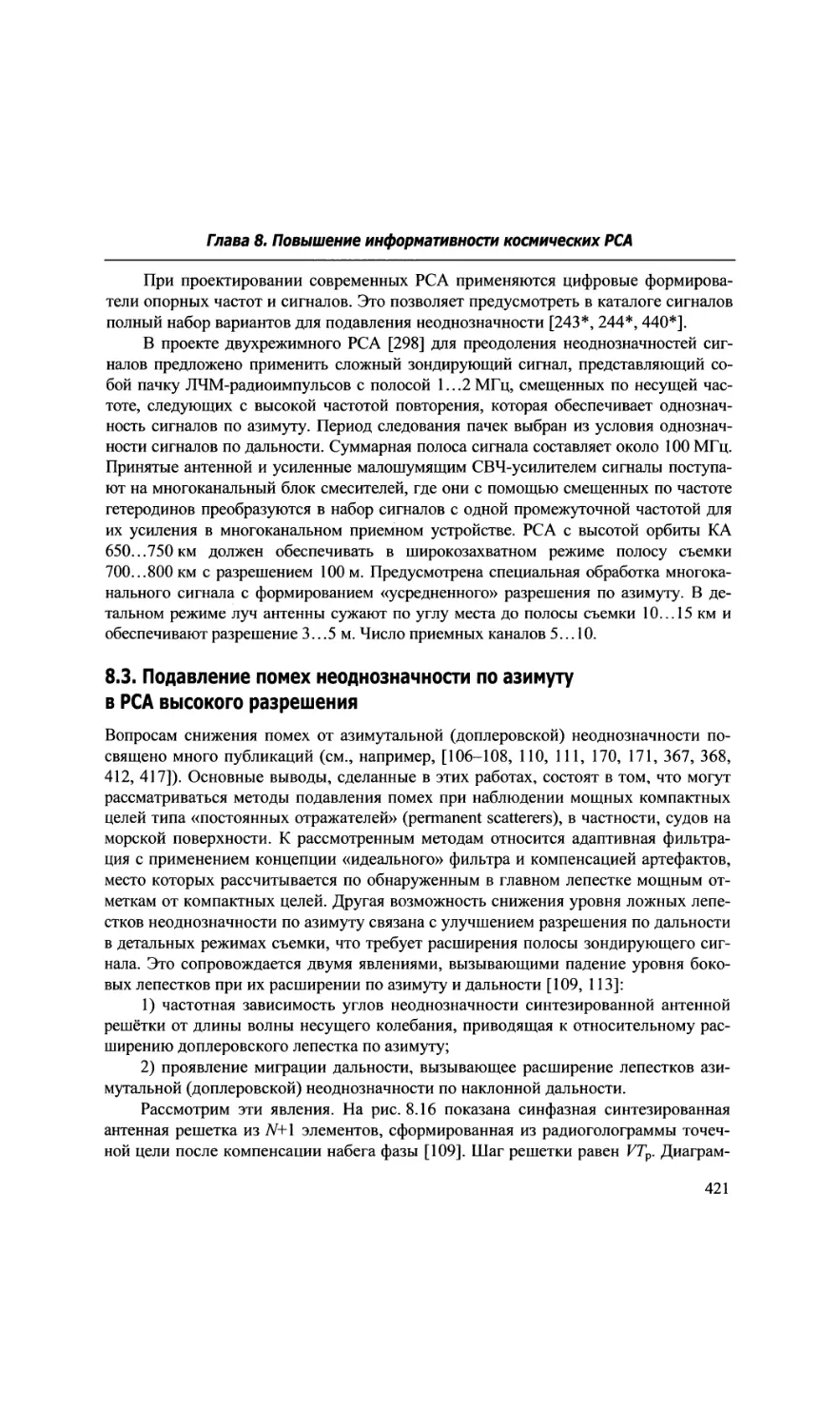
8.2. Подавление помех неоднозначности по дальности в РСА............ 417
8.3. Подавление помех неоднозначности по азимуту в РСА высокого
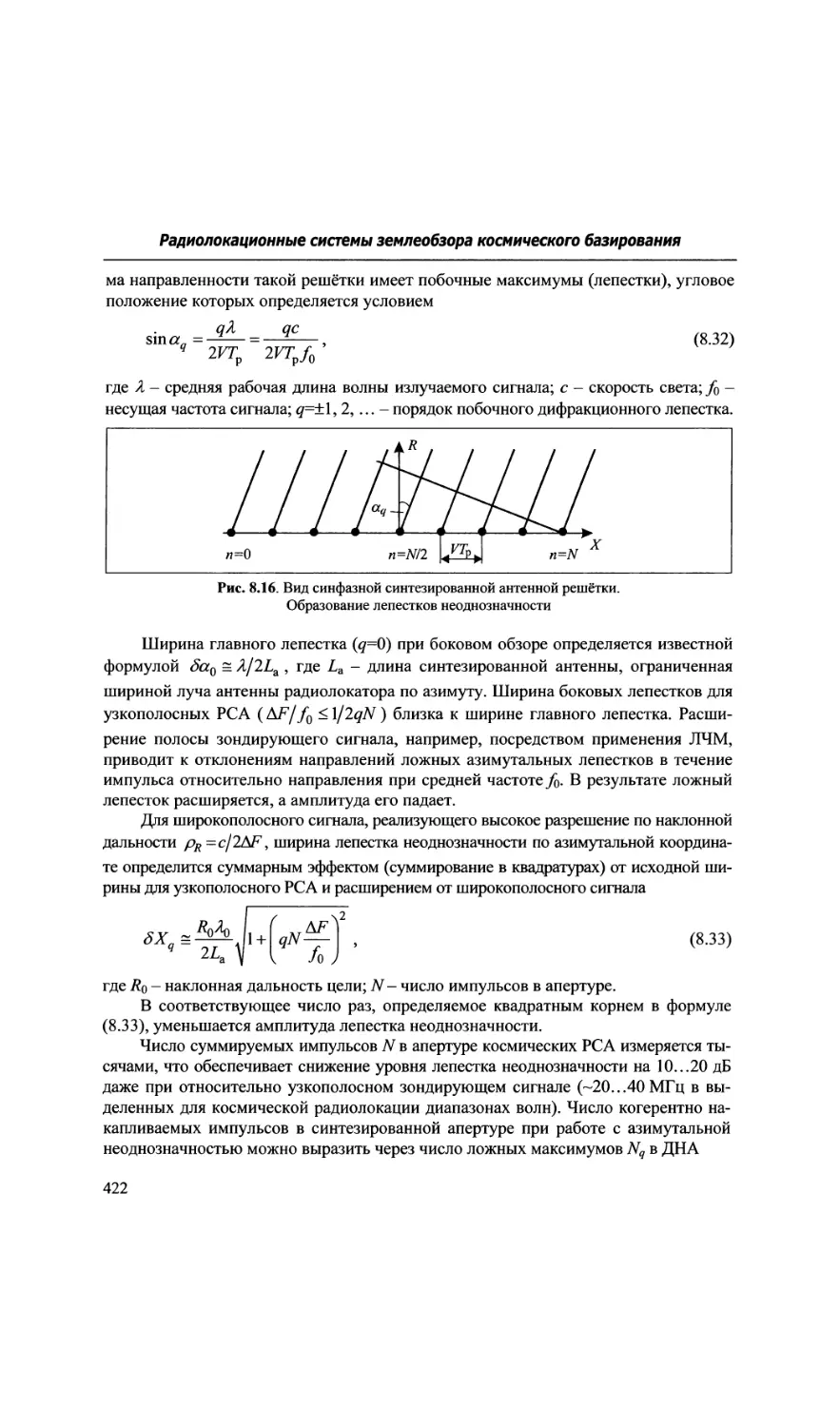
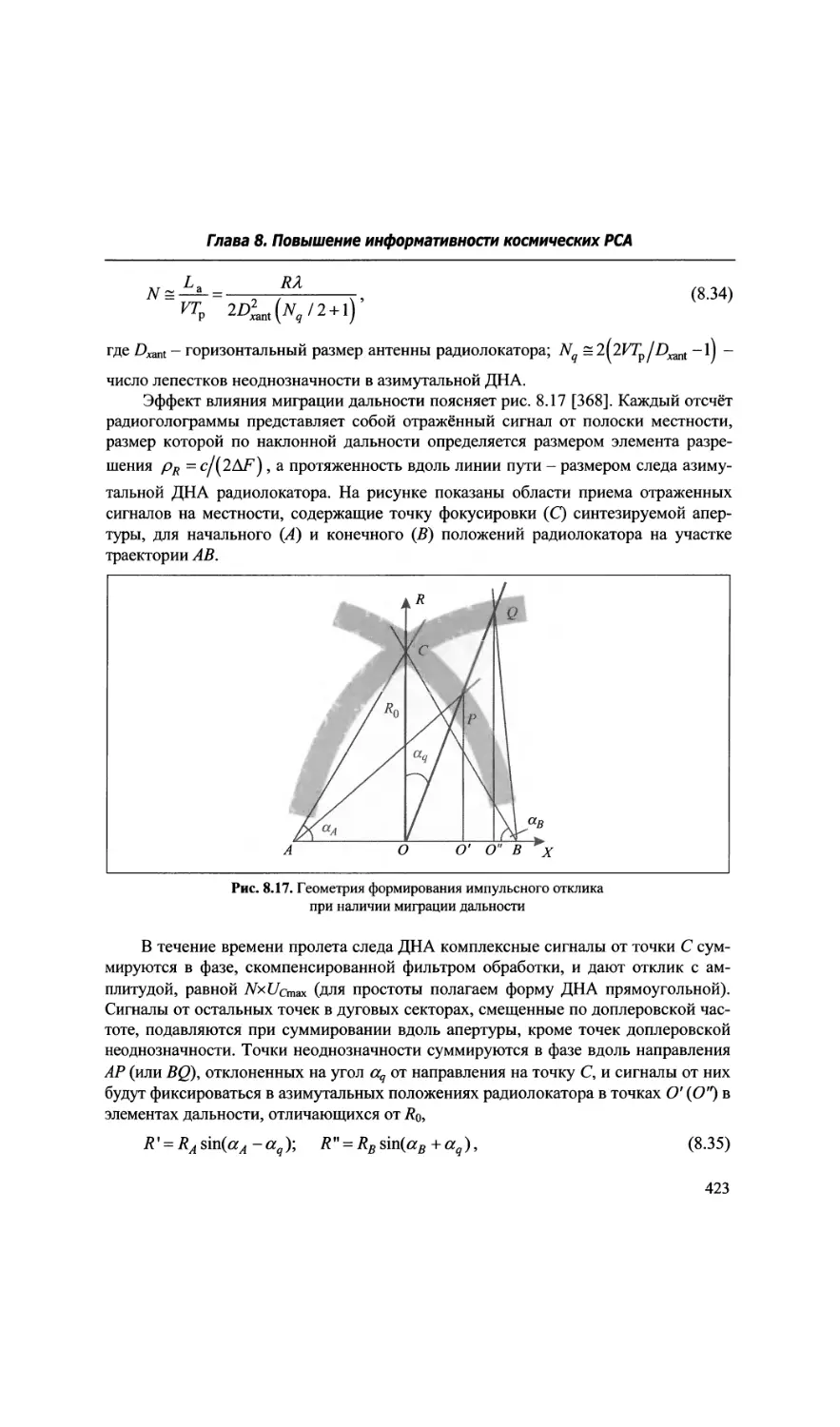
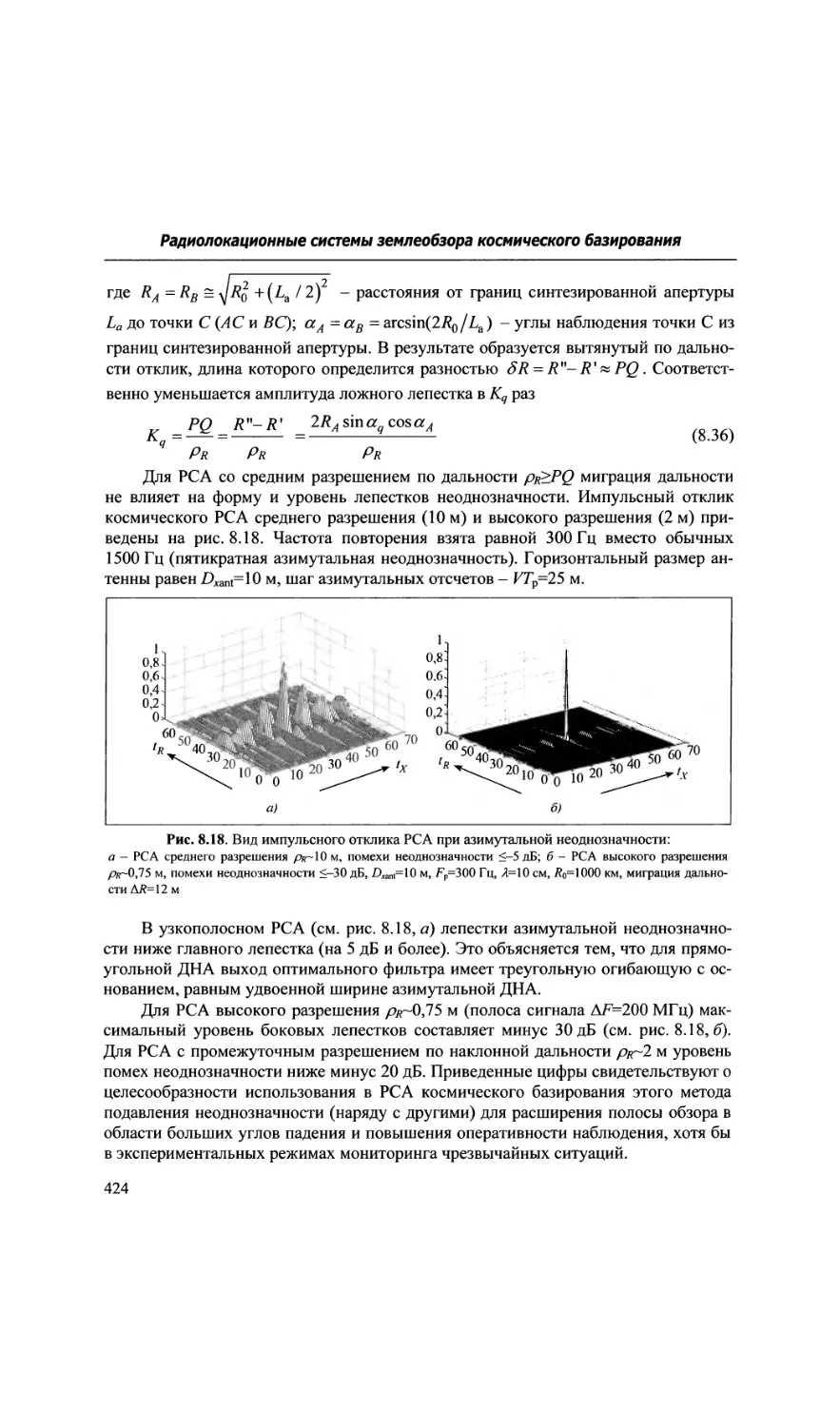
разрешения.......................................................... 421
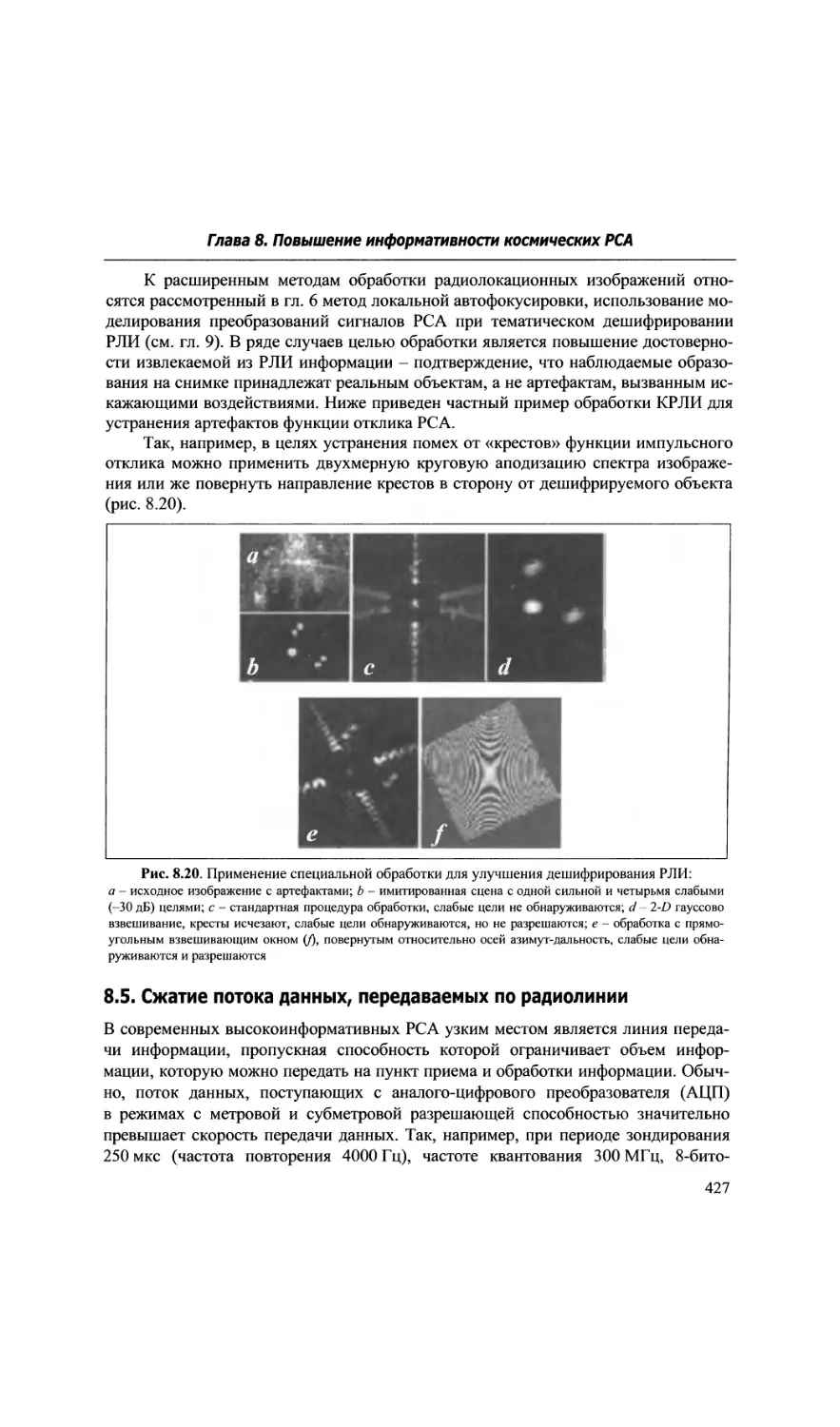
8.4. Методы расширенной обработки радиолокационных изображений.......426
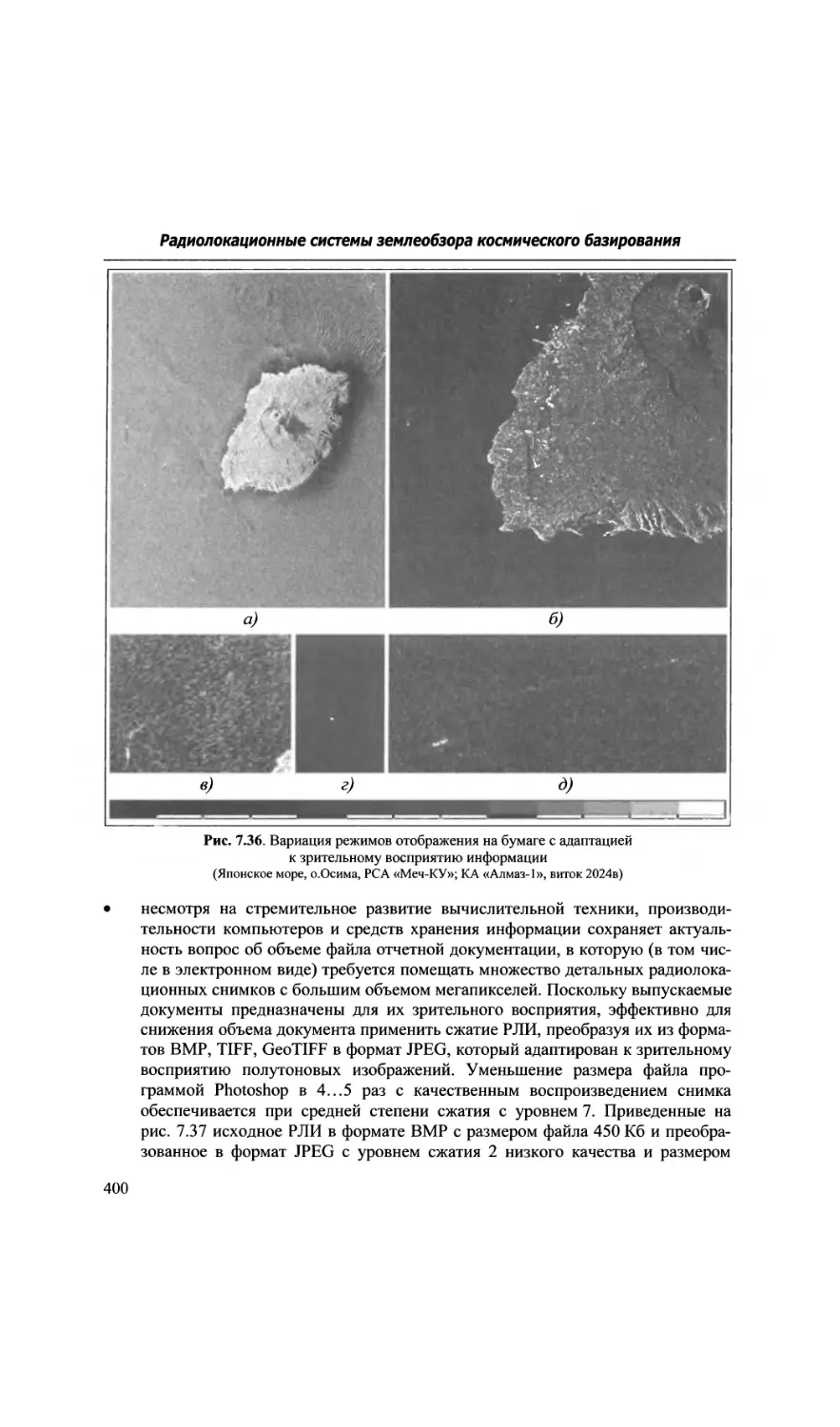
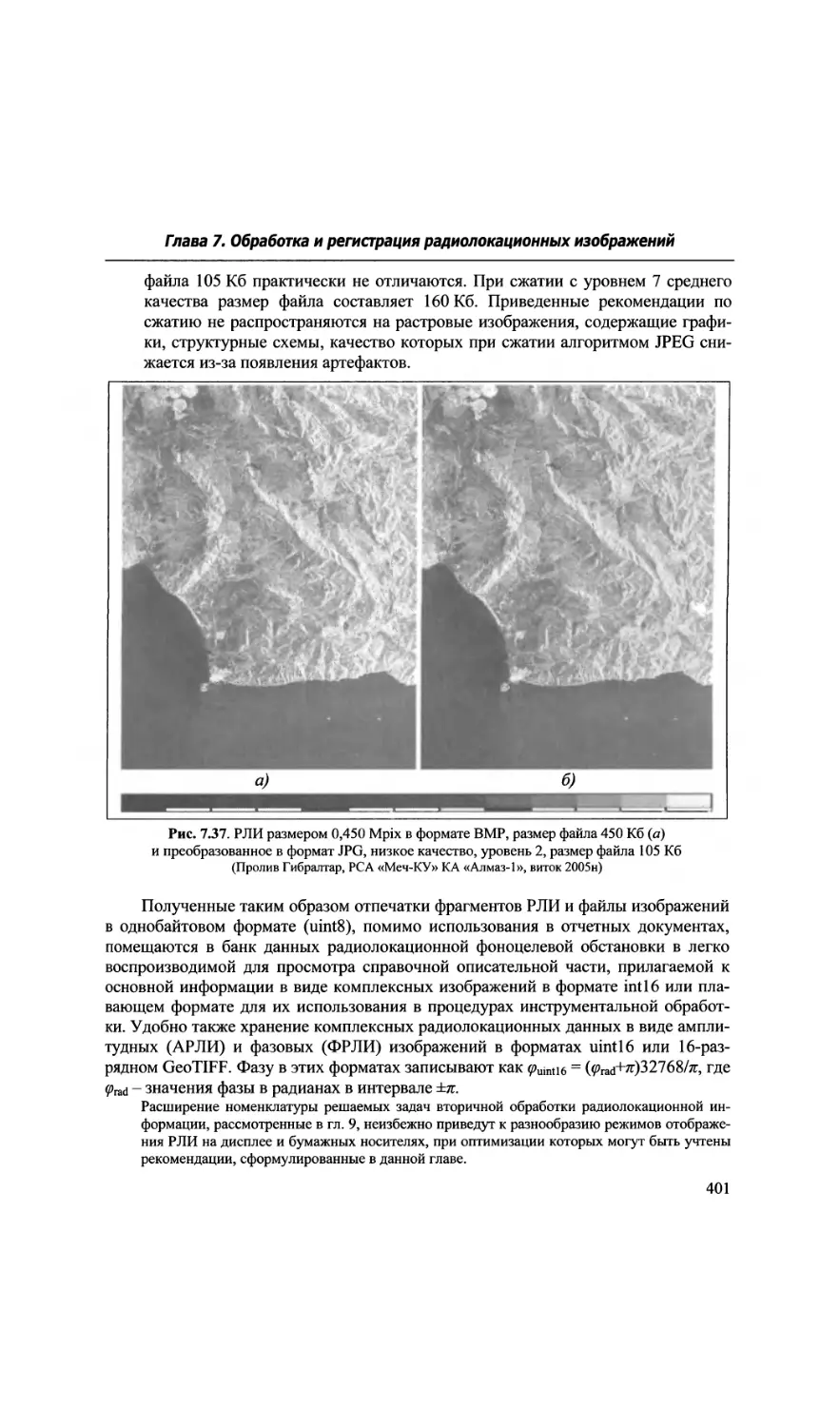
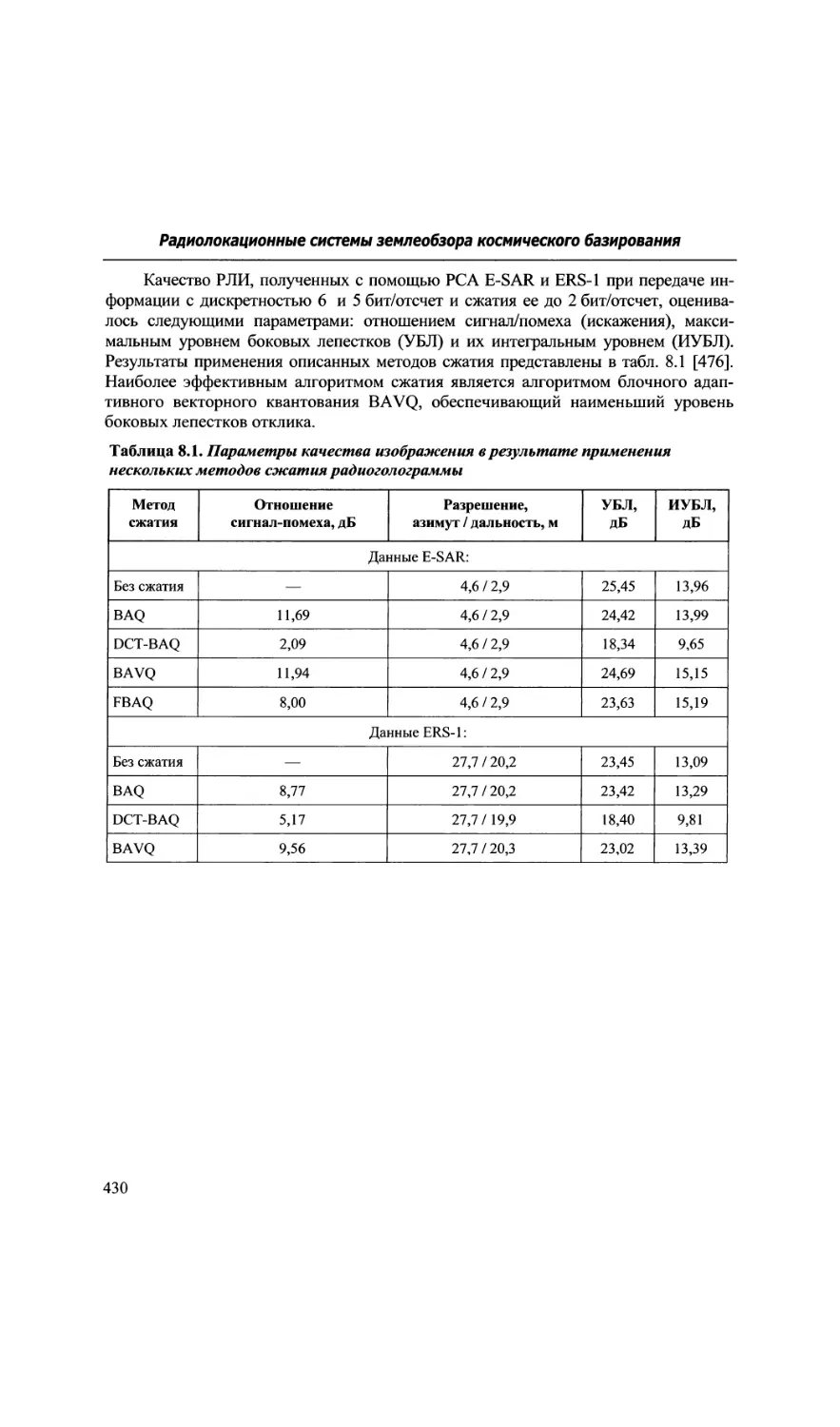
8.5. Сжатие потока данных, передаваемых по радиолинии................427
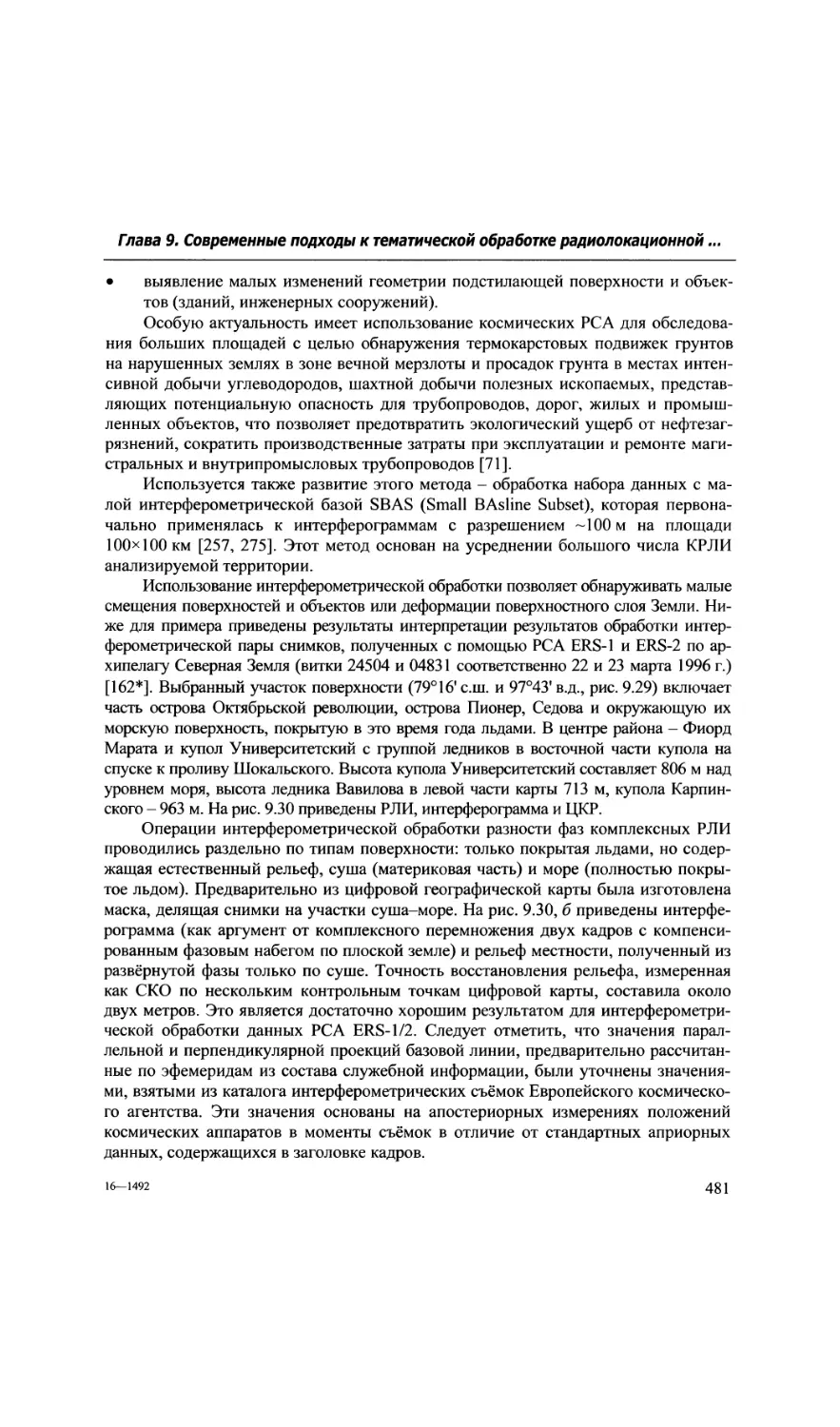
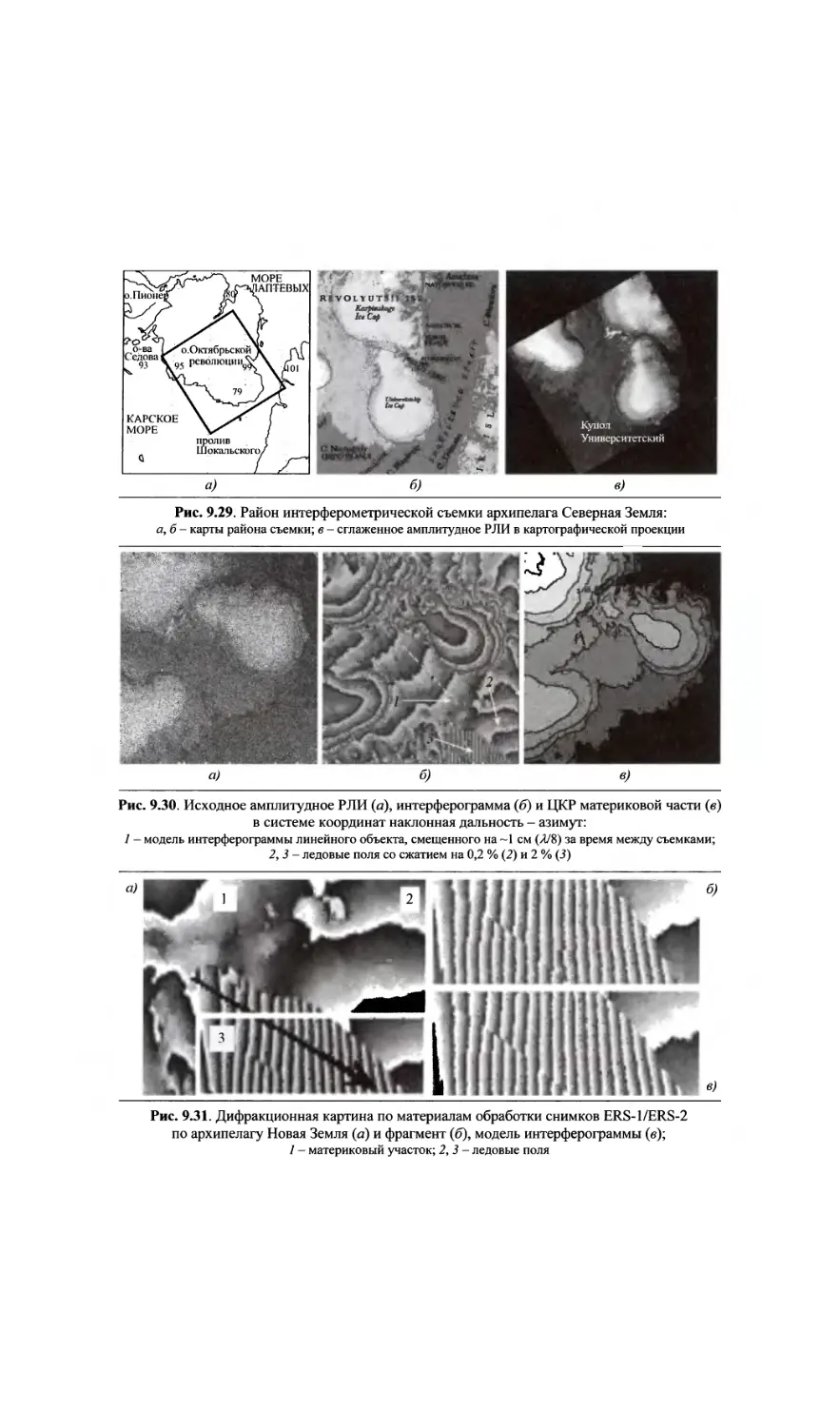
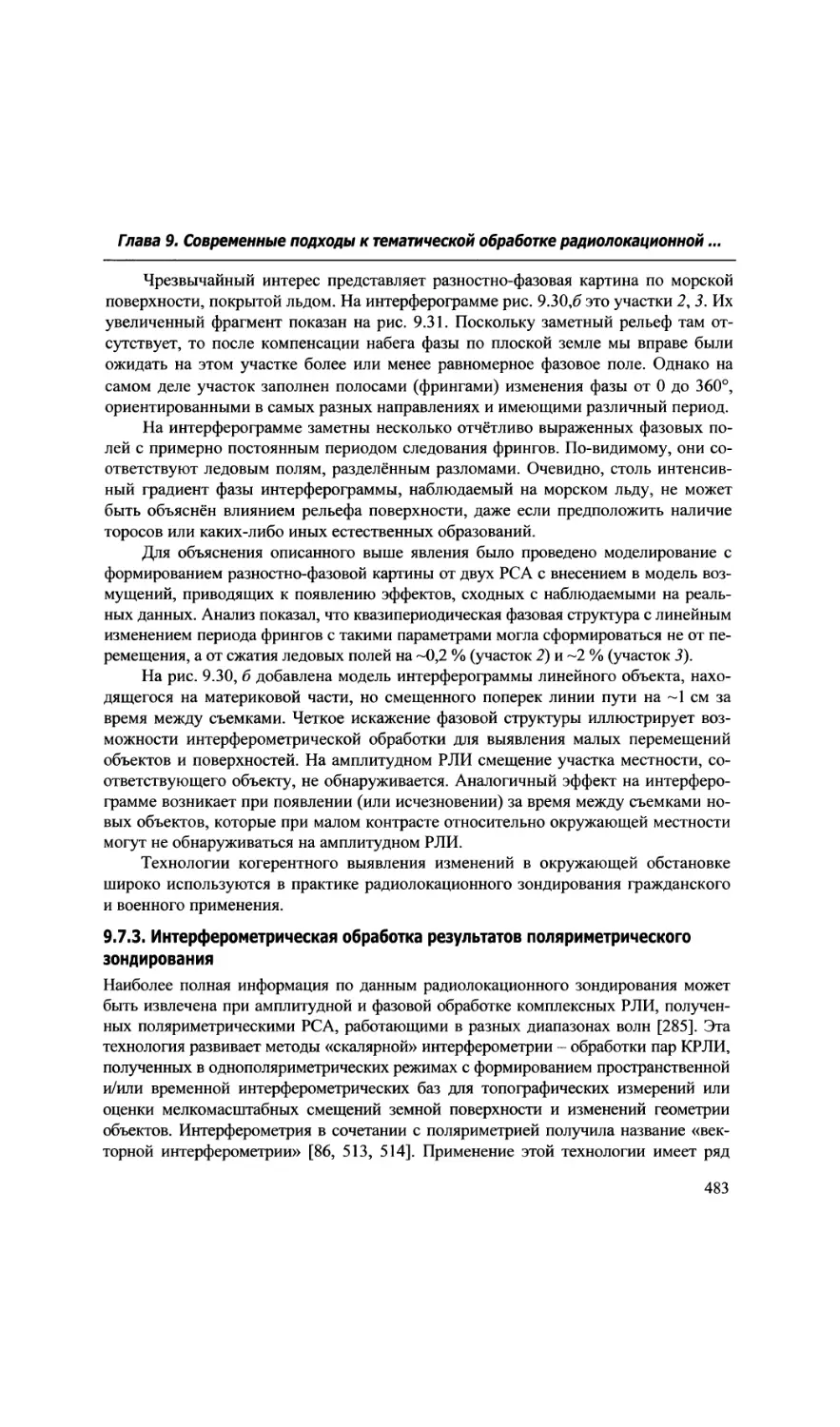
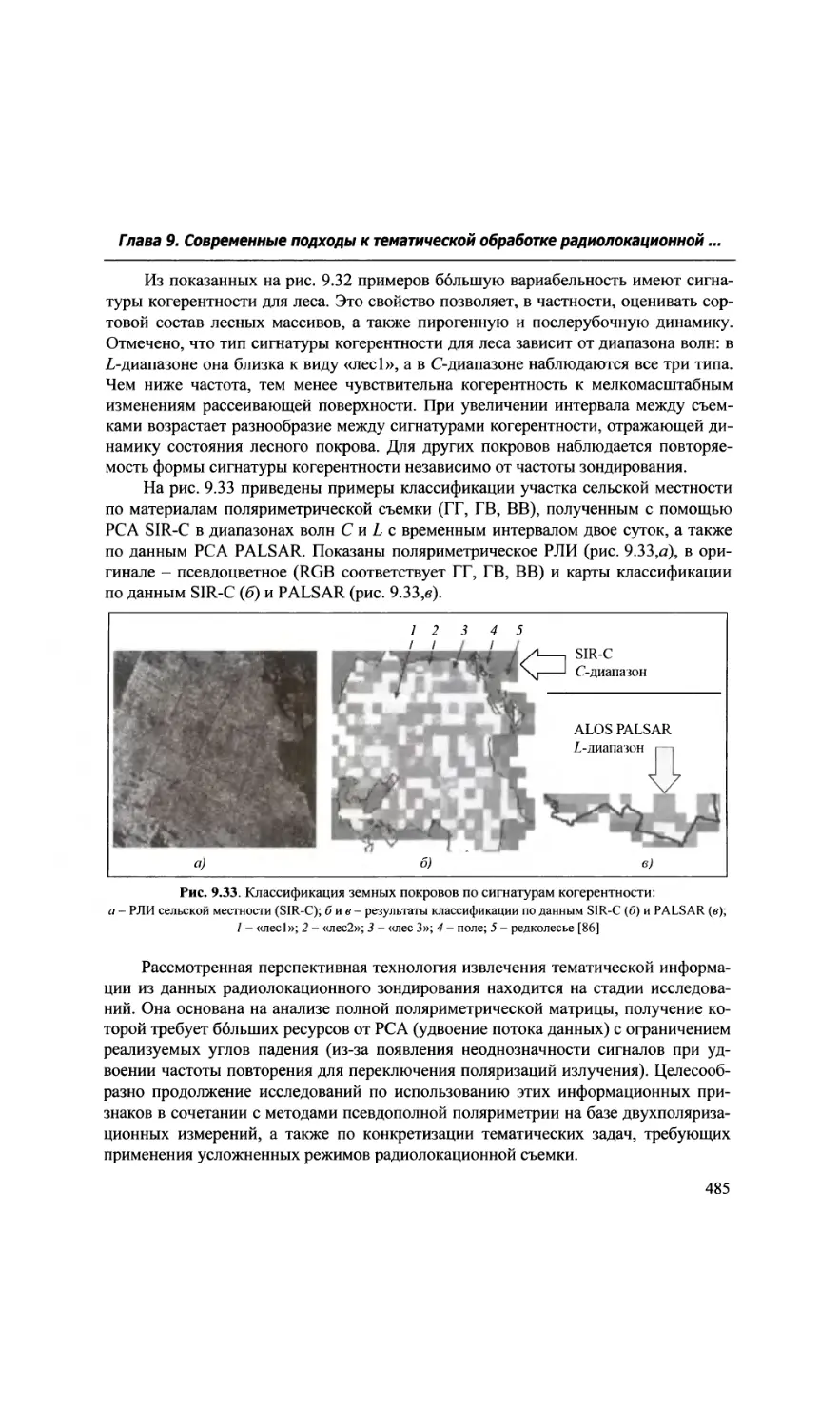
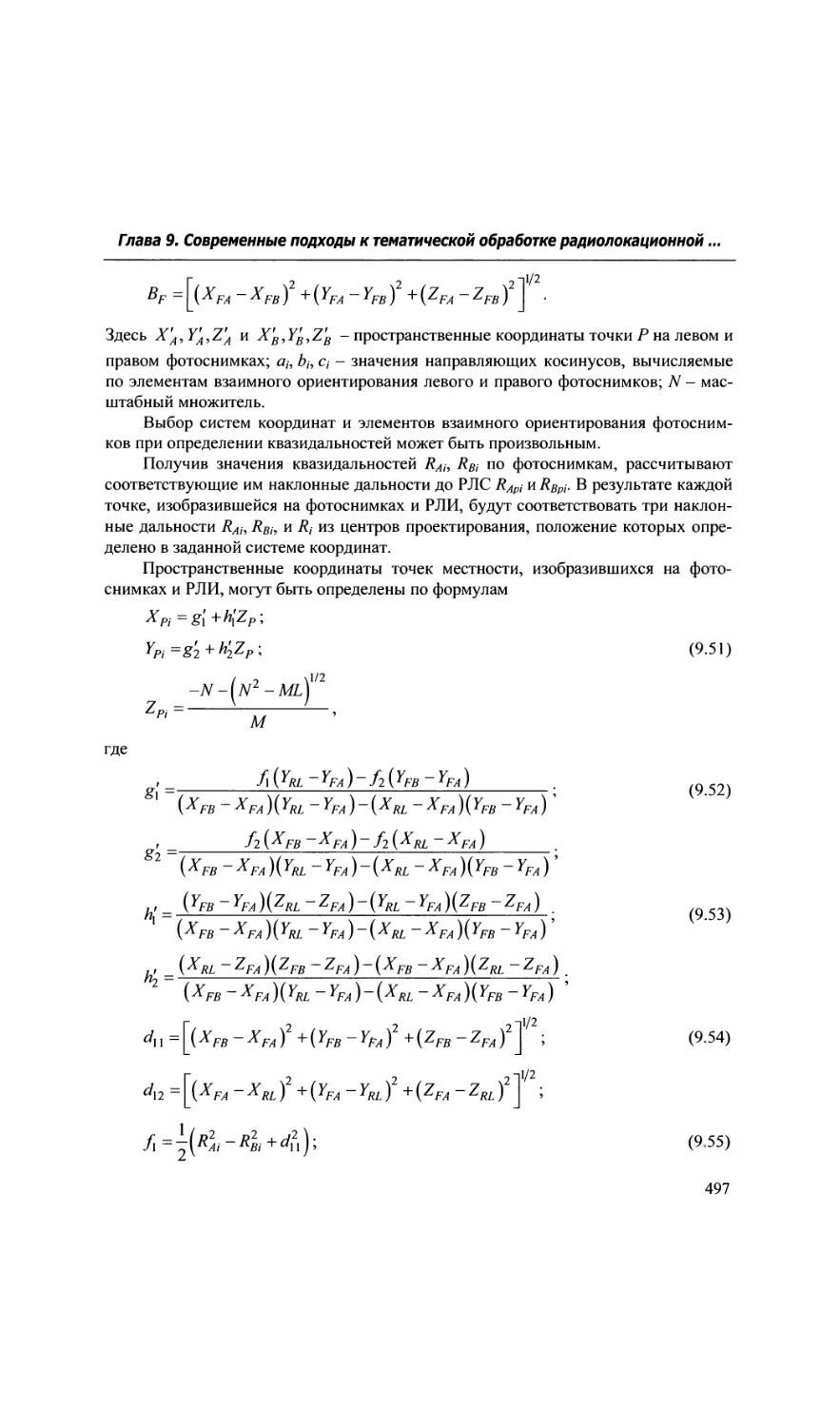
Глава 9. Современные подходы к тематической обработке
радиолокационной информации................................................431
9.1. Цели, задачи и методы тематической обработки радиолокационной
информации...........................................................431
9.2. Формирование банков радиолокационных портретов объектов
наблюдения...........................................................435
9.2.1. Исходные материалы, получаемые самолетными и космическими РСА
высокого разрешения................................................435
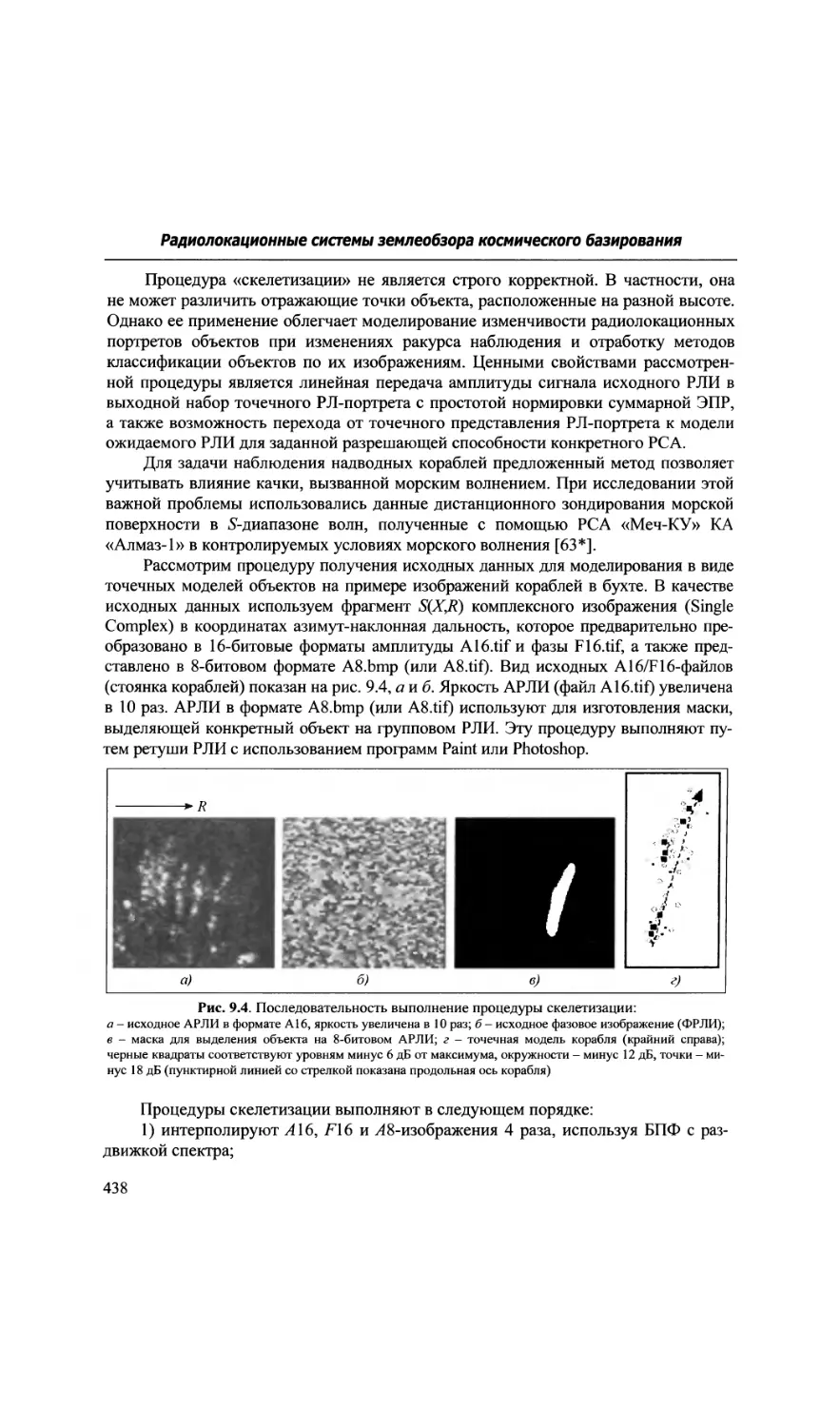
9.2.2. Получение точечных моделей объектов наблюдения .............437
9.3. Контроль надводной обстановки...................................440
9.3.1. Общие требования к решению задачи контроля надводной
обстановки.........................................................440
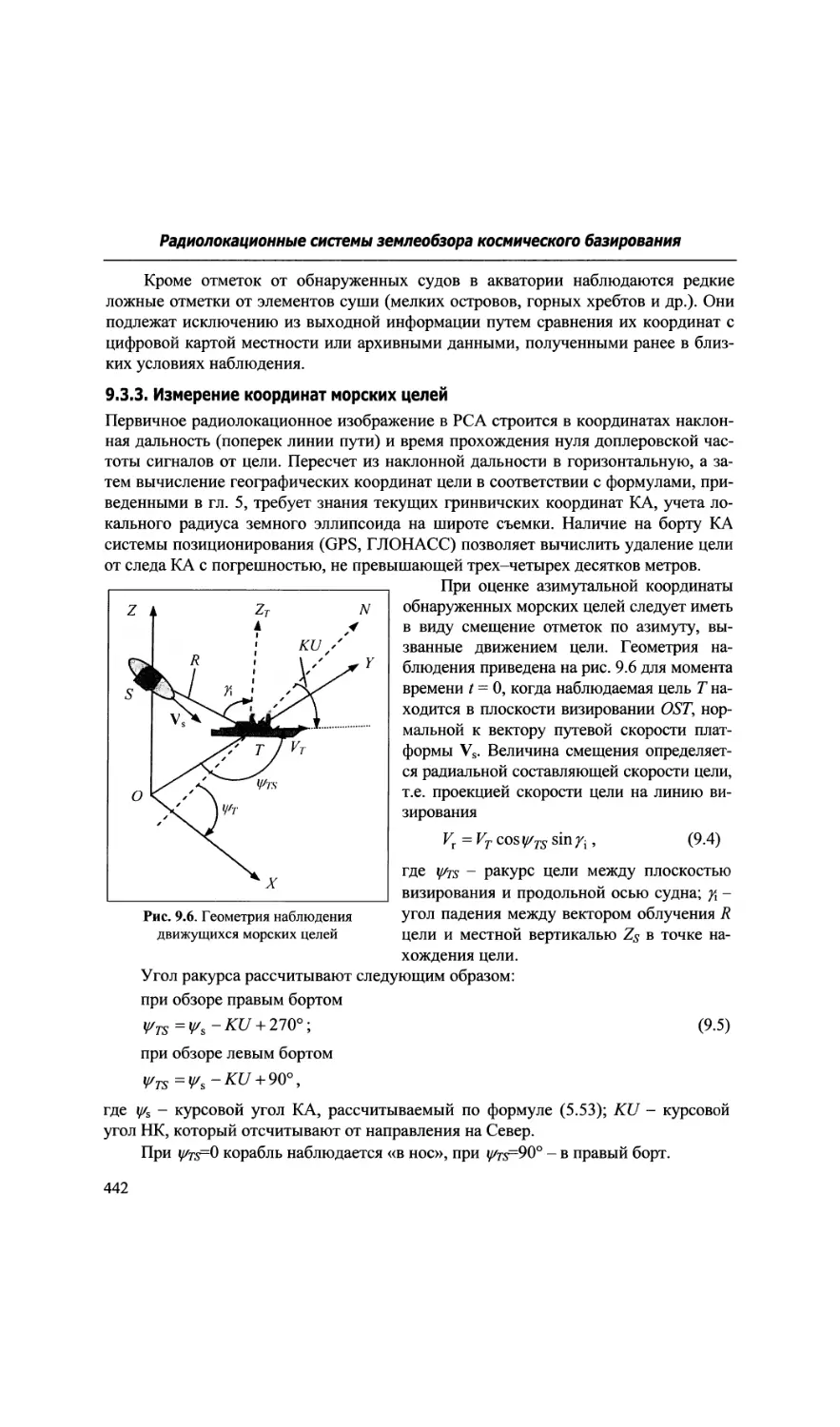
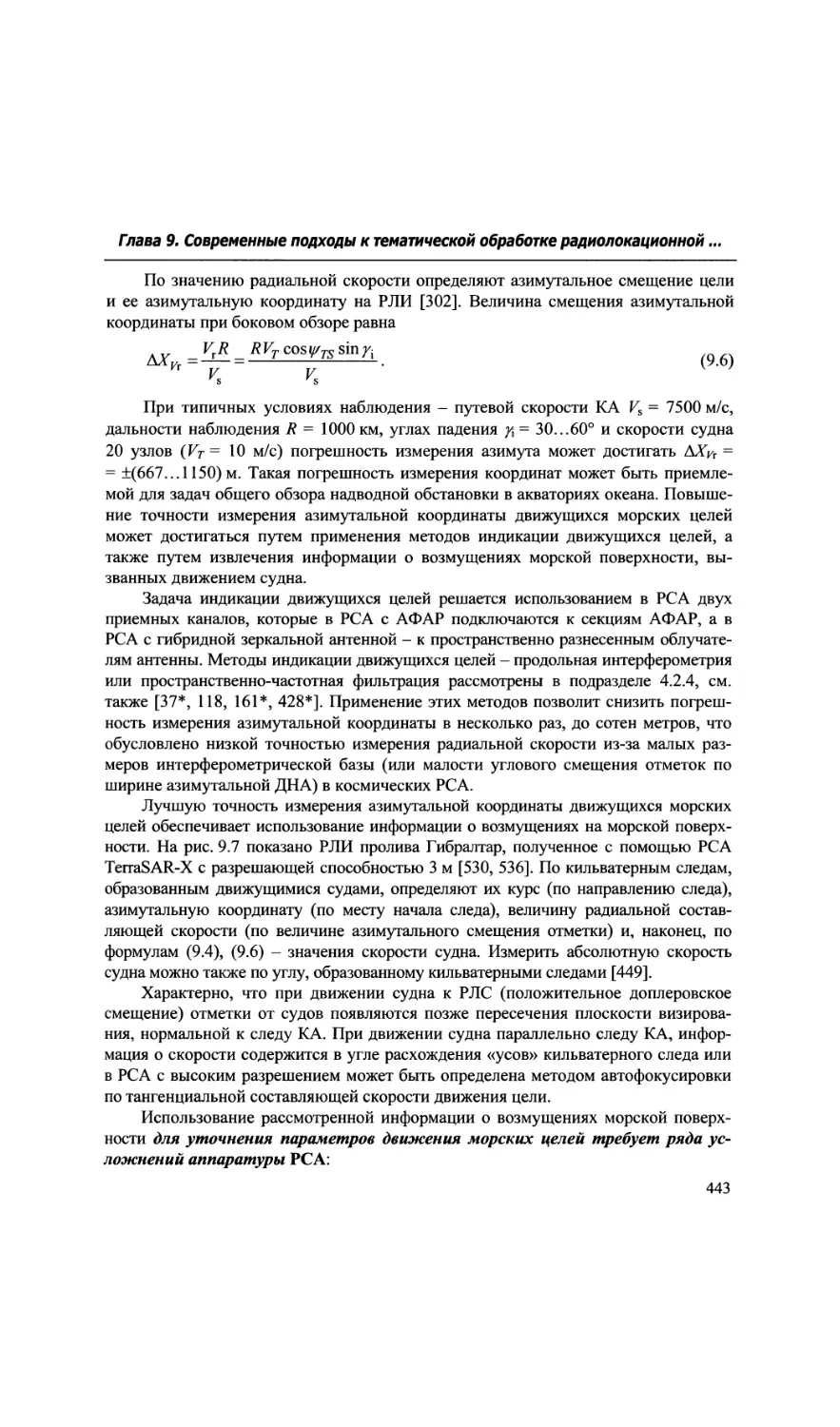
9.3.2. Обнаружение морских целей...................................442
9.3.3. Измерение координат морских целей...........................444
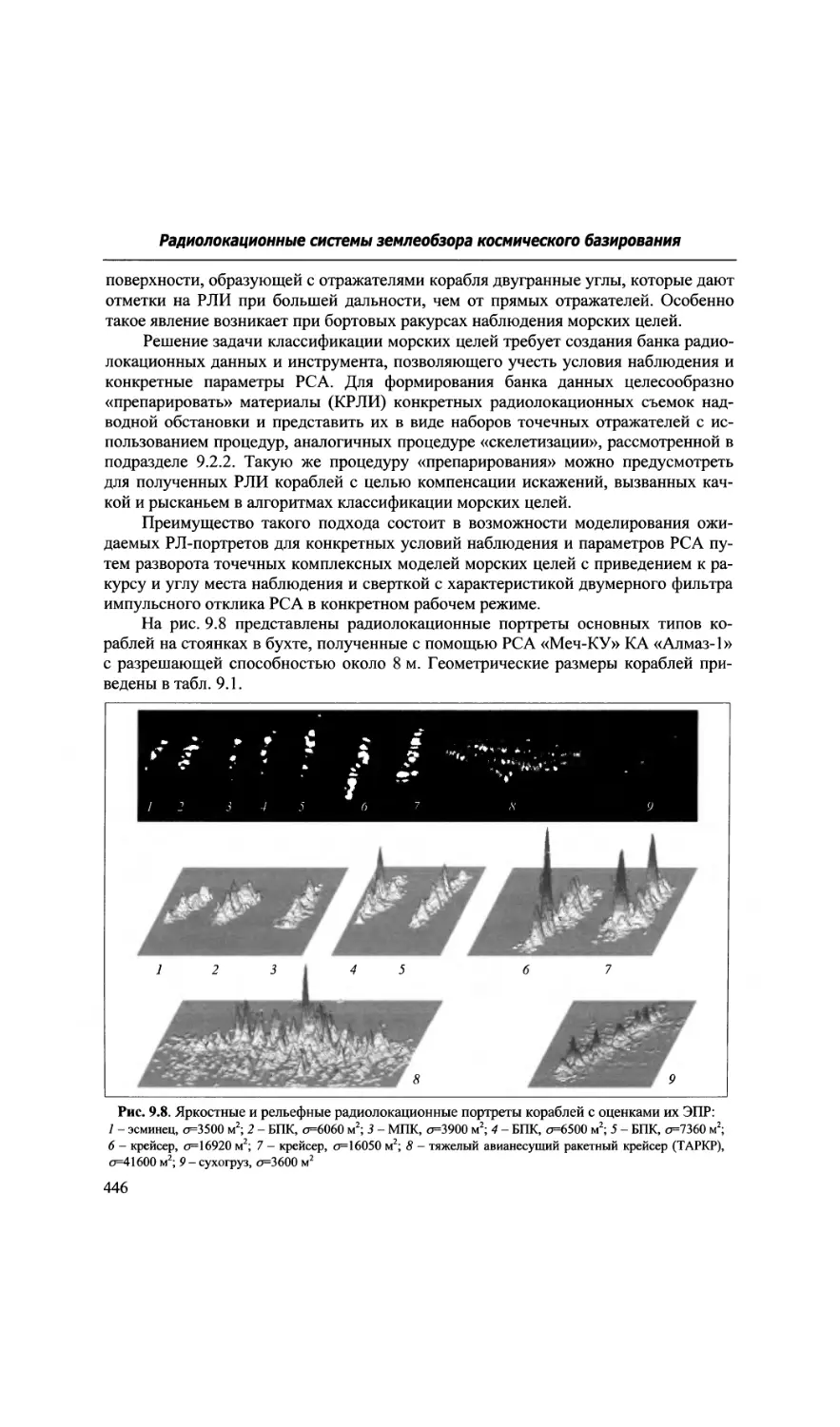
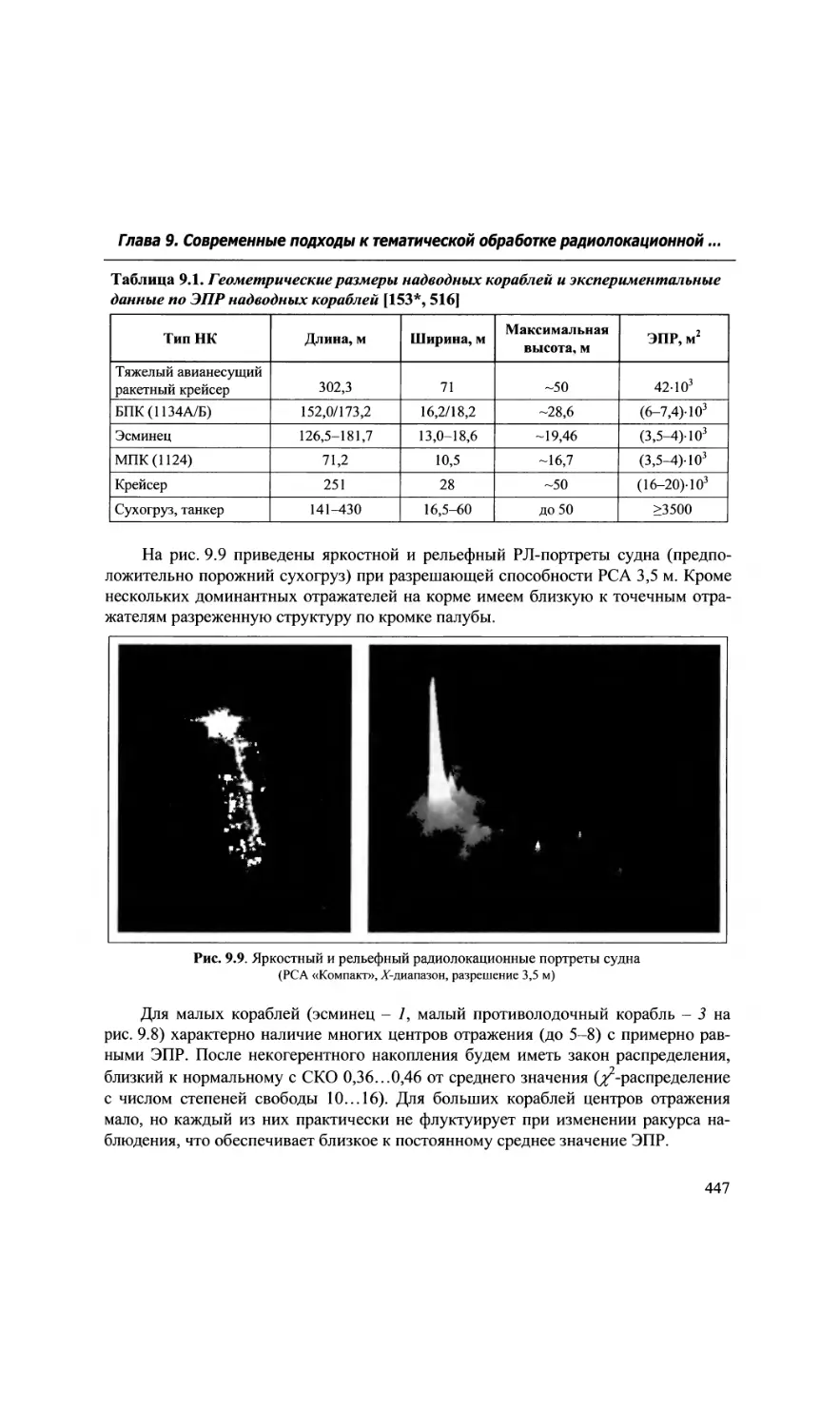
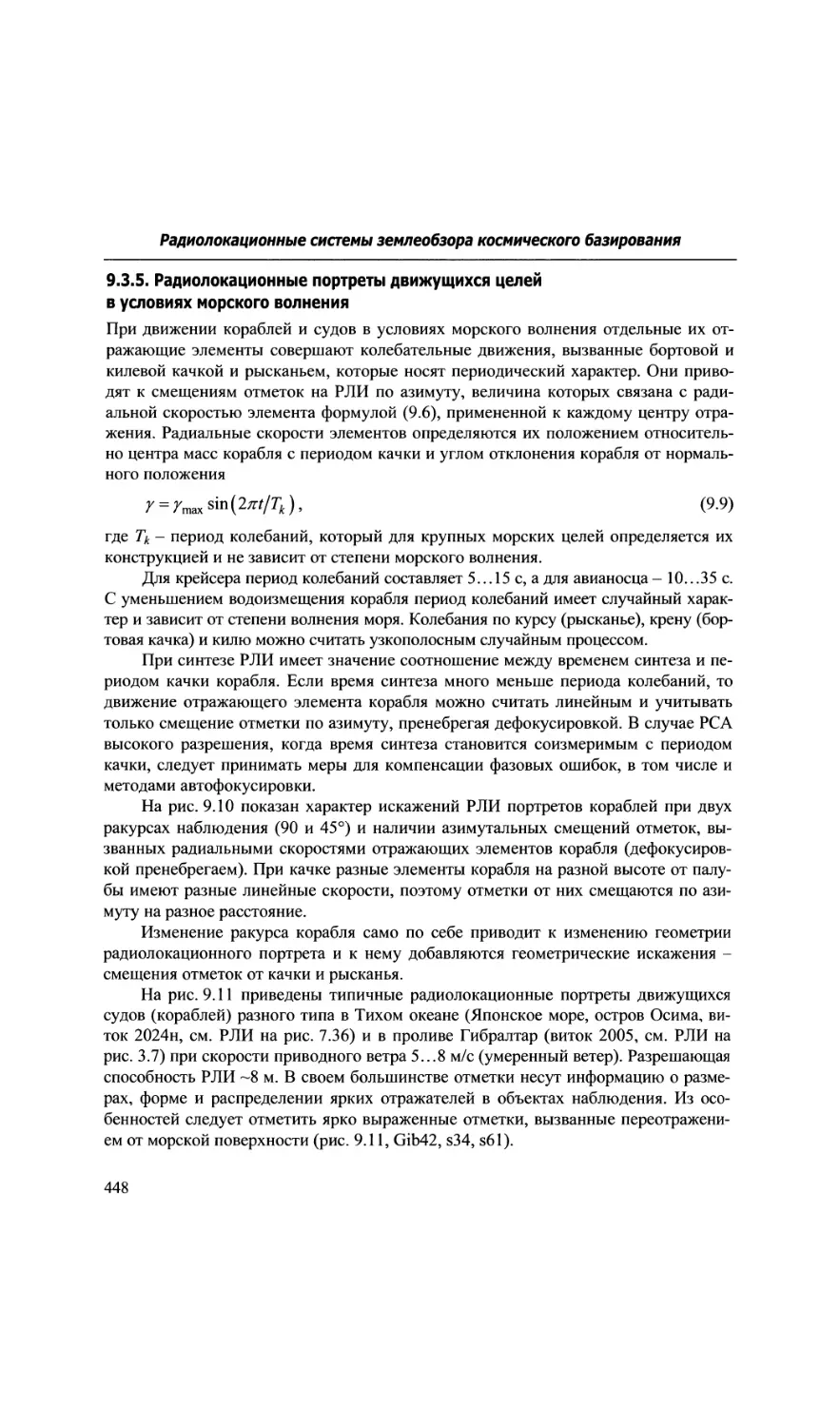
9.3.4. Радиолокационные портреты морских целей.....................448
9.3.5. Радиолокационные портреты движущихся целей
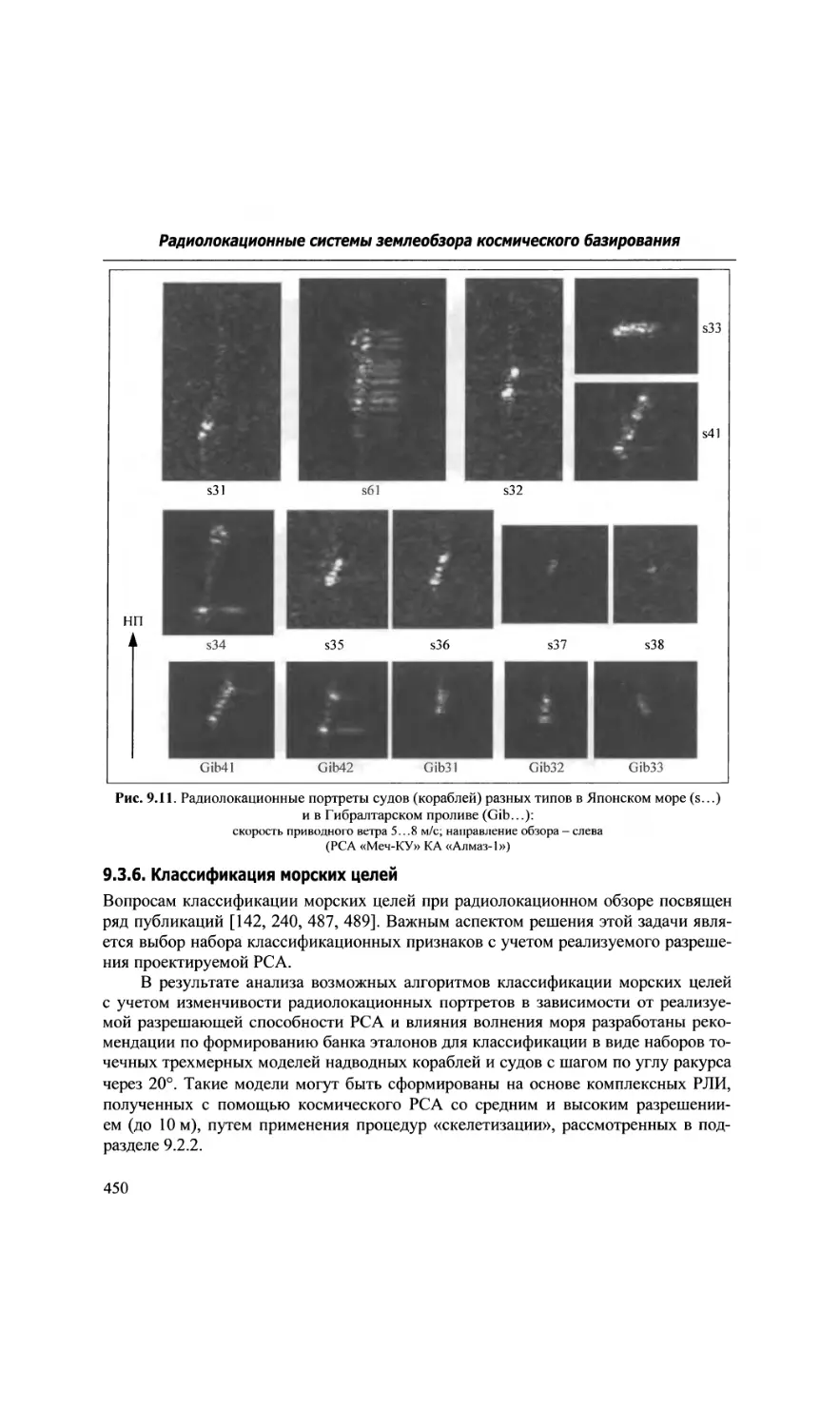
в условиях морского волнения........................................450
9.3.6. Классификация морских целей.................................452
9.4. Дистанционное зондирование морской поверхности..................452
9.4.1. Задачи дистанционного зондирования морской поверхности......452
9.4.2. Обнаружение эффектов взаимодействия взволнованной
морской поверхности с атмосферой...................................452
9.4.3. Оценка скорости морских течений.............................455
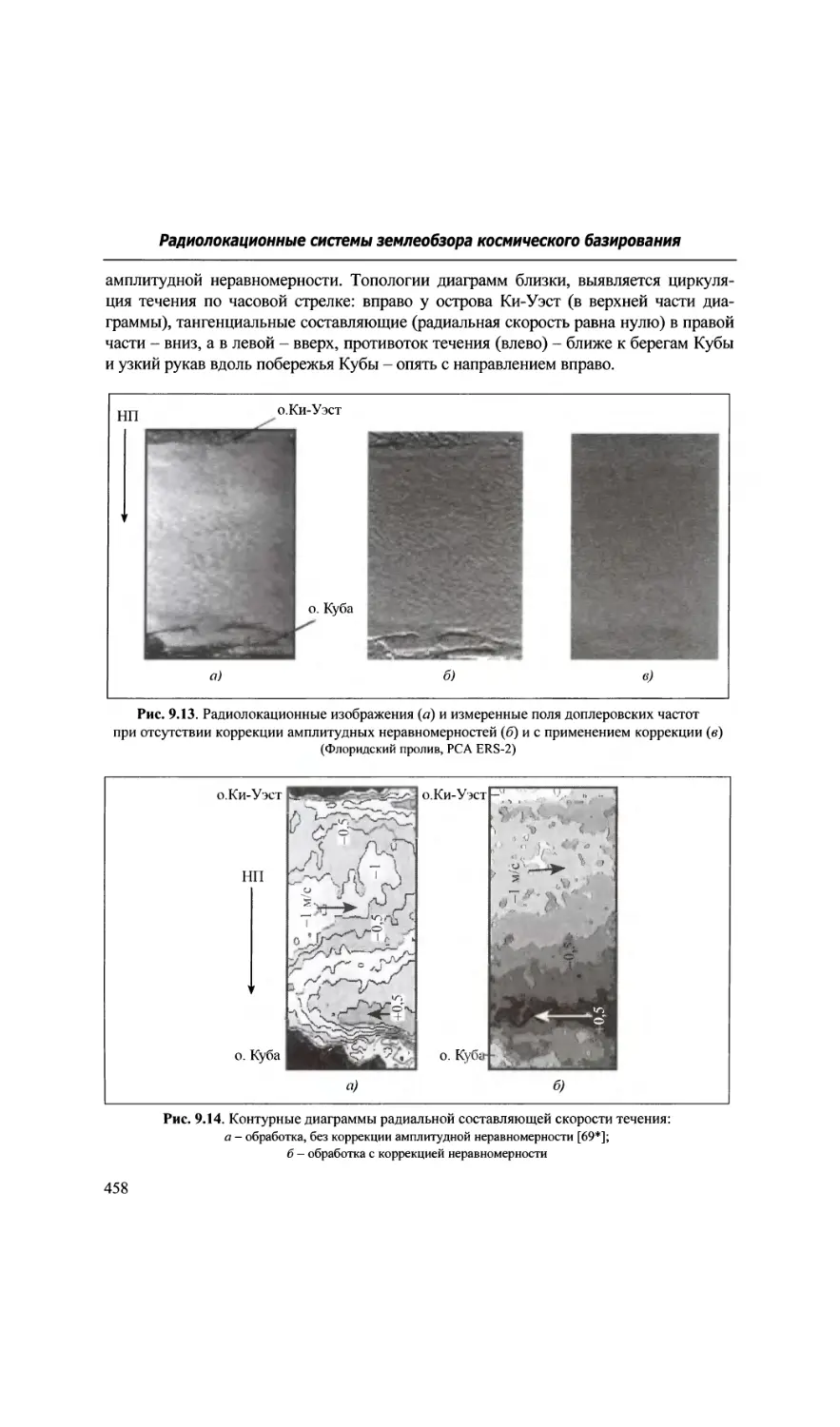
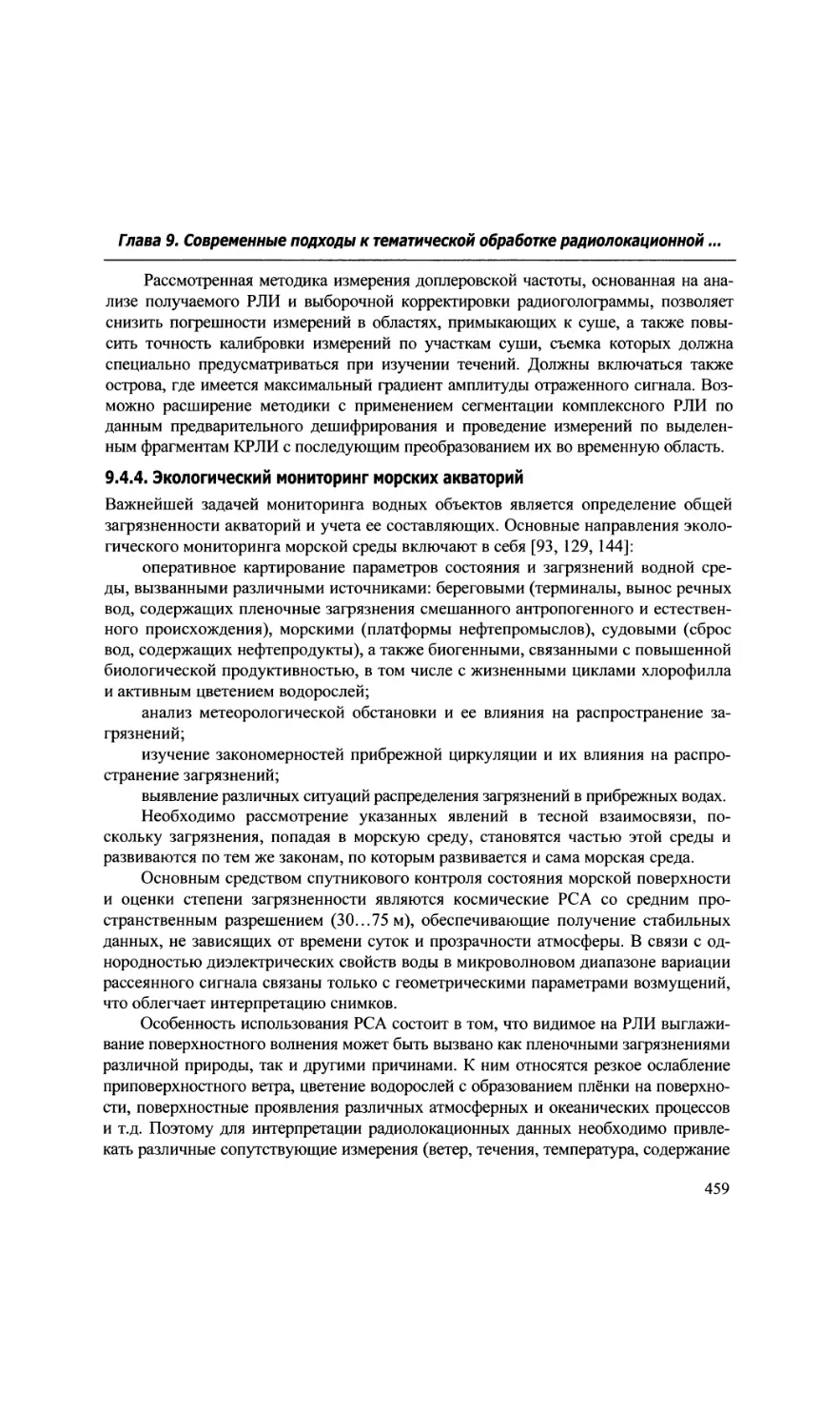
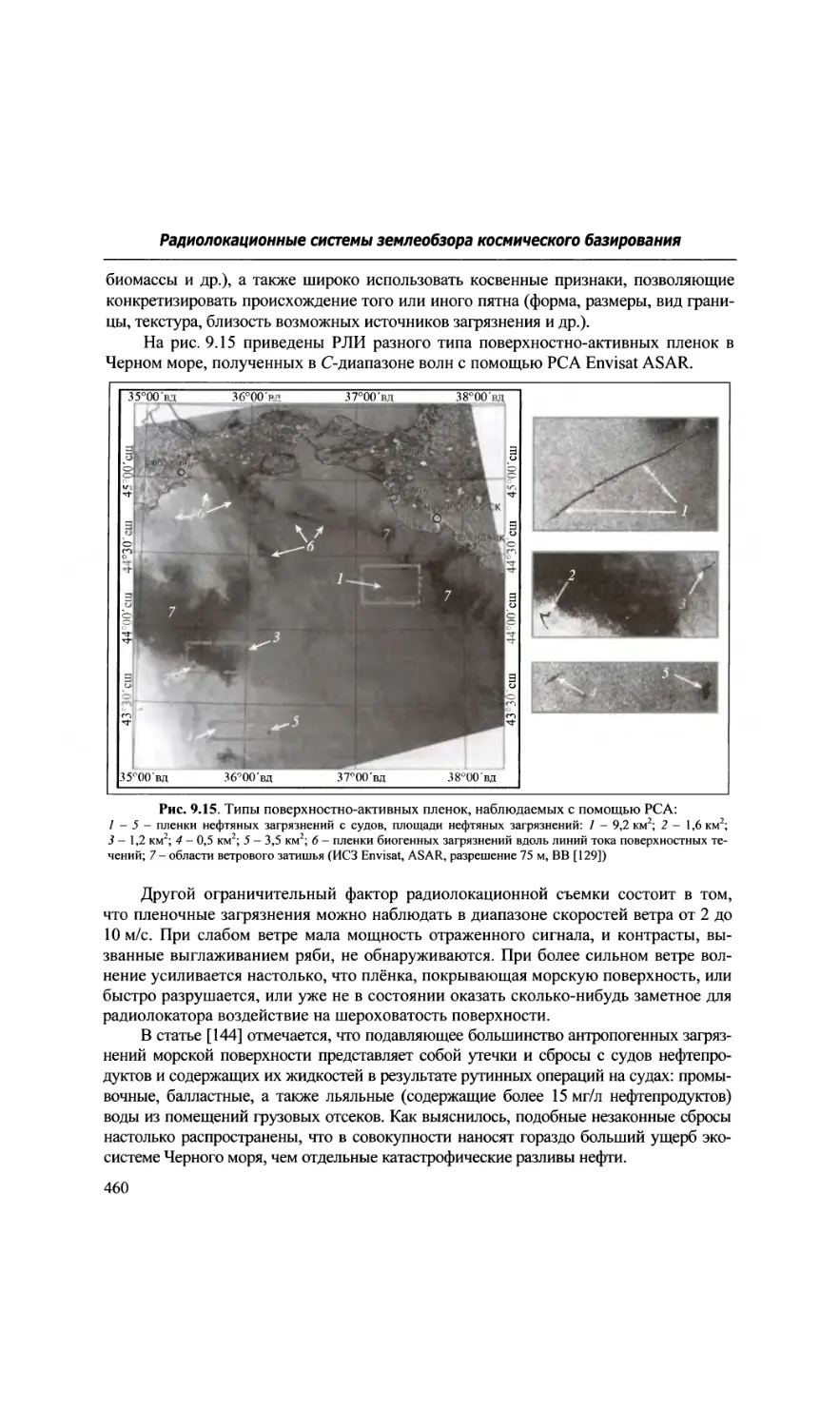
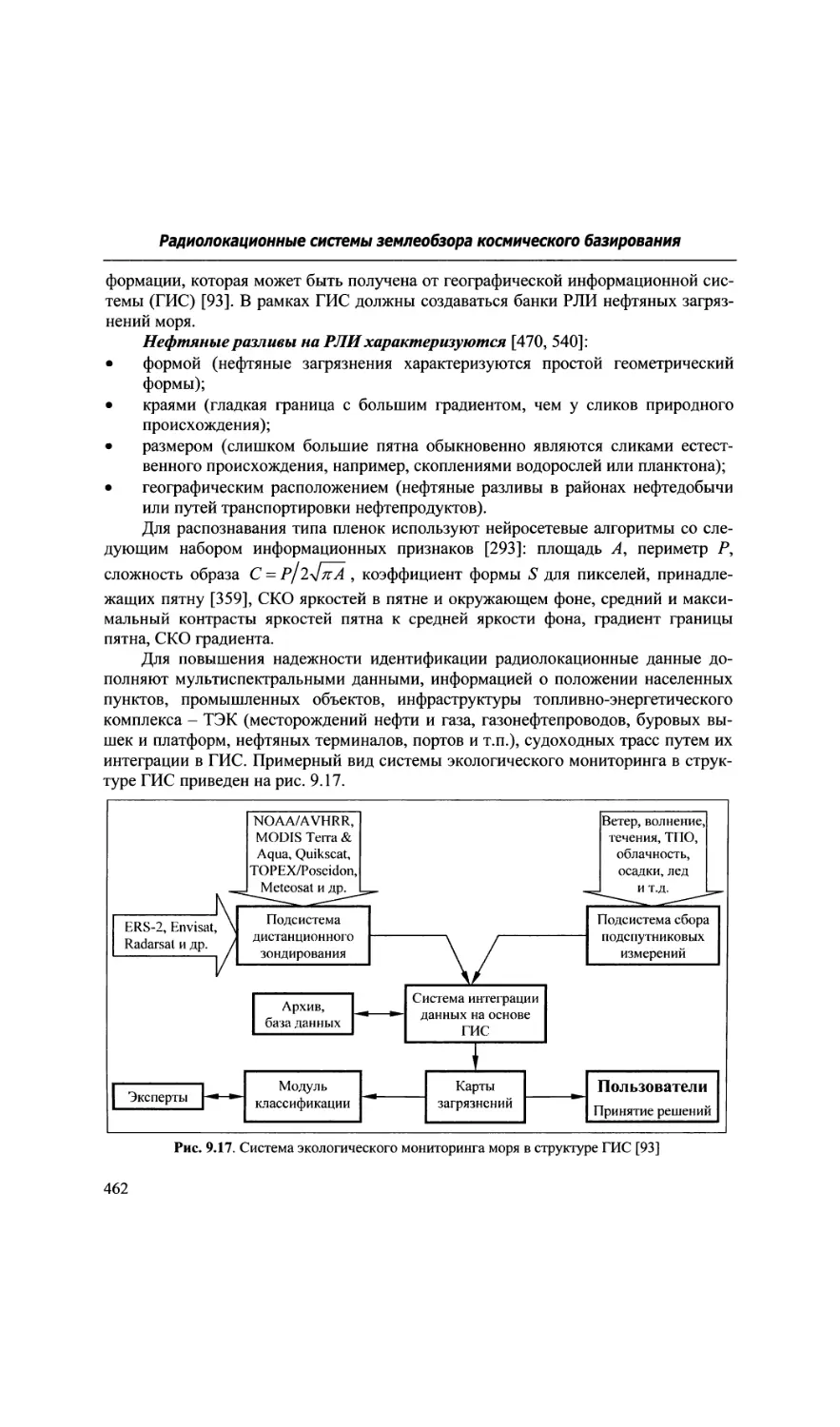
9.4.4. Экологический мониторинг морских акваторий..................459
9.4.5. Исследования проявлений внутренних волн для выявления
топографии дна.....................................................463
9.4.6. Обнаружение опасных волновых явлений и их предвестников.....464
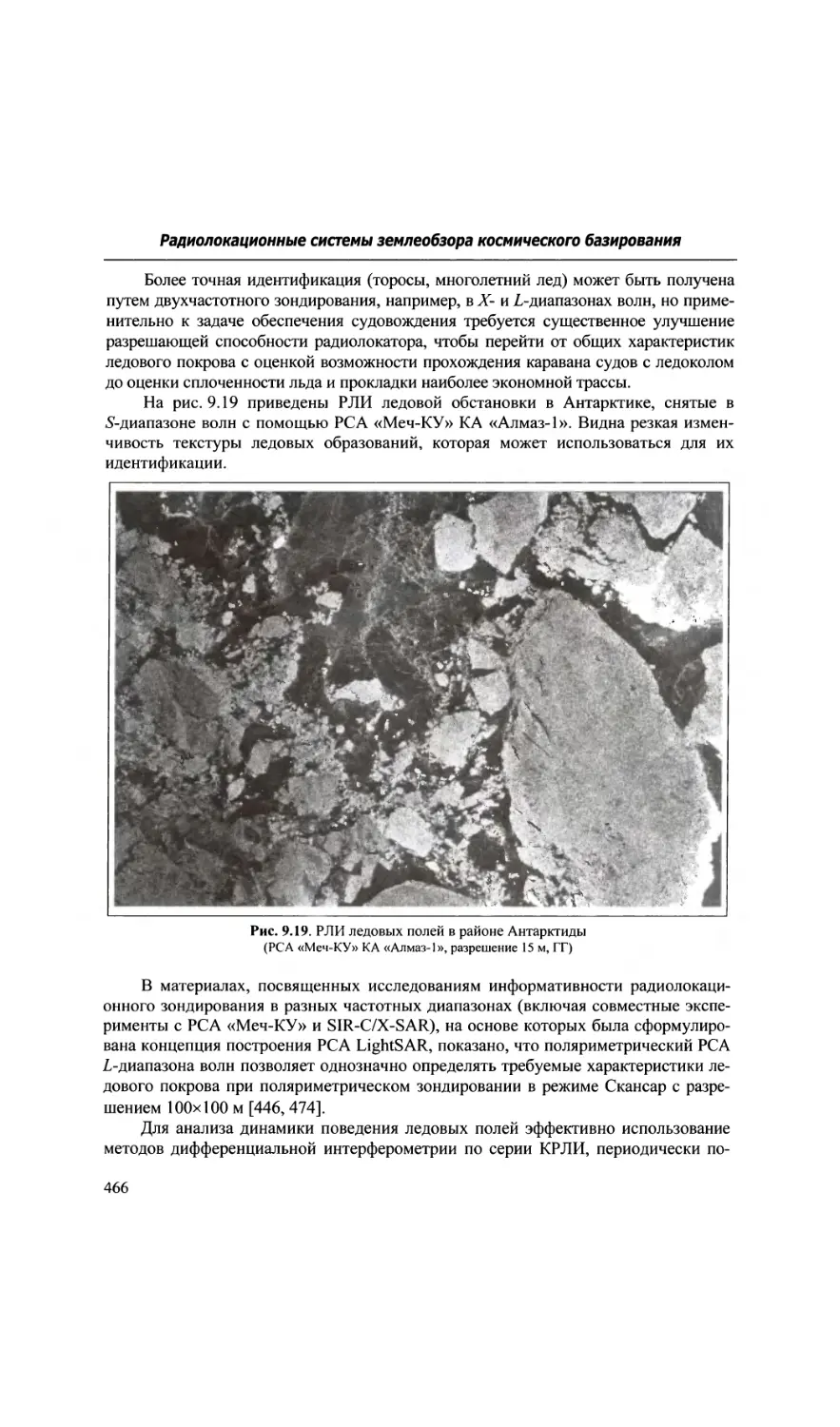
9.5. Исследование ледового покрова...................................465
9.6. Зондирование суши и растительного покрова.......................467
9.6.1. Тематическое картирование объектов суши.....................467
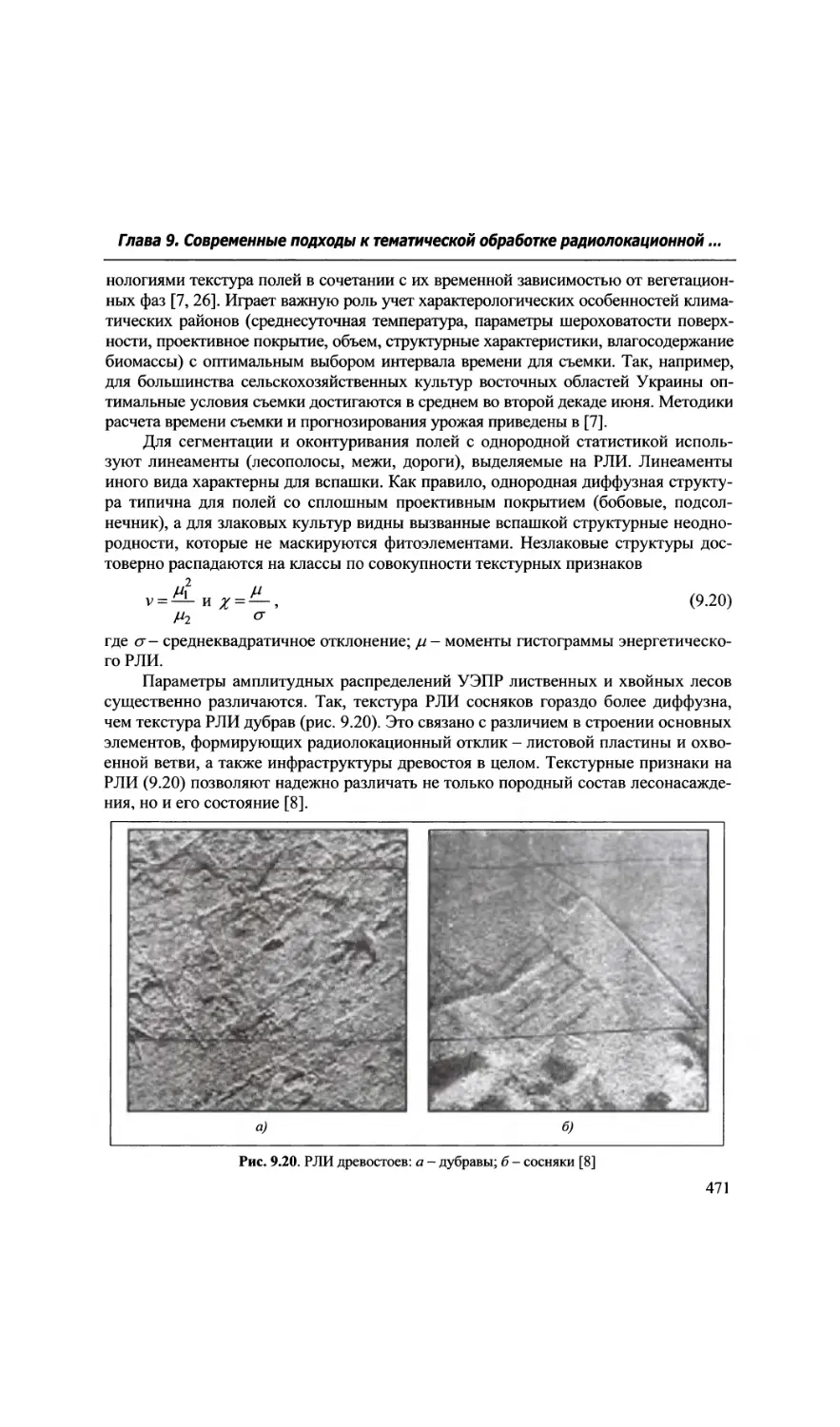
9.6.2. Мониторинг растительного покрова............................469
7
Радиолокационные системы землеобзора космического базирования
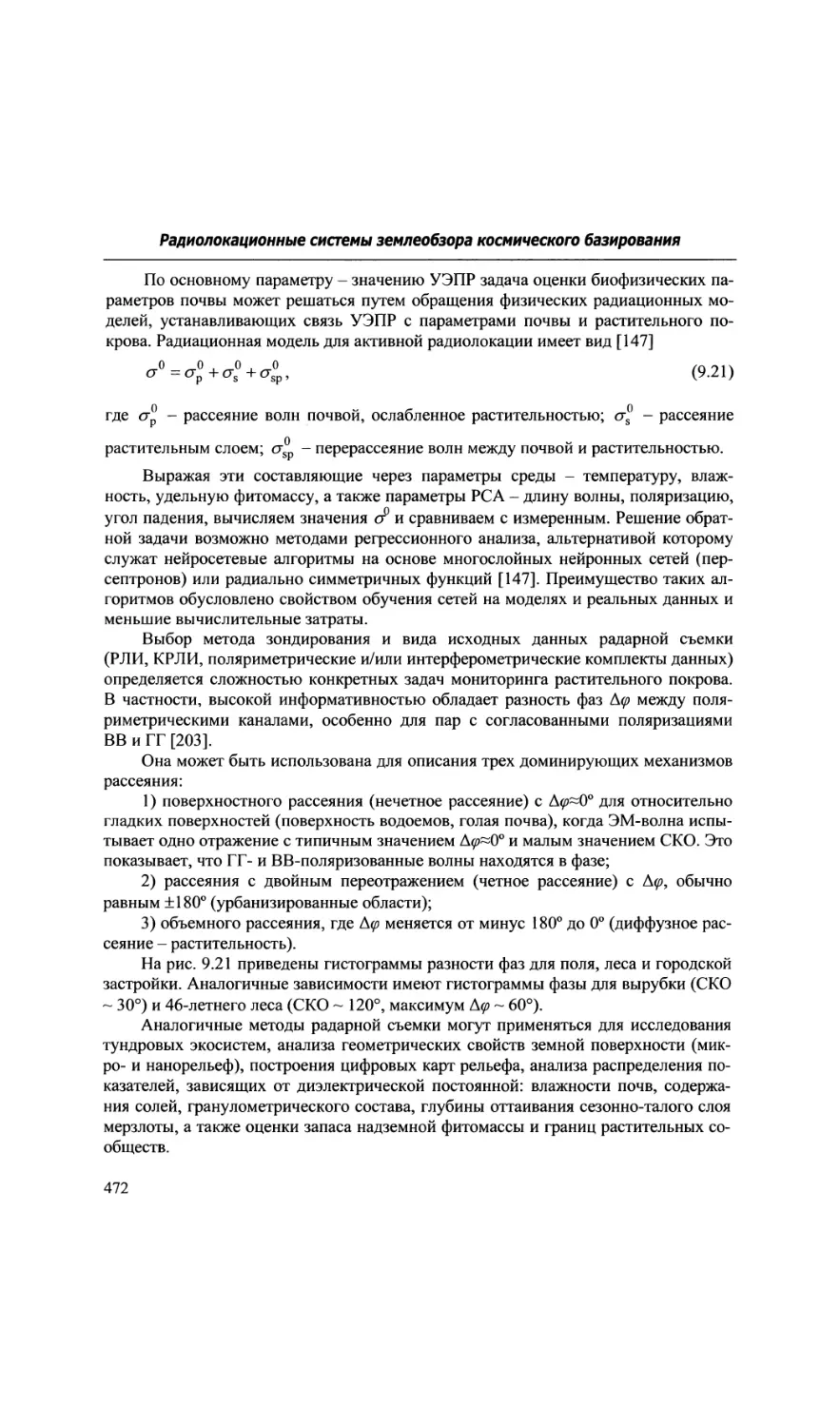
9.6.3. Некогерентные методы выявления изменений в оперативной
обстановке........................................................473
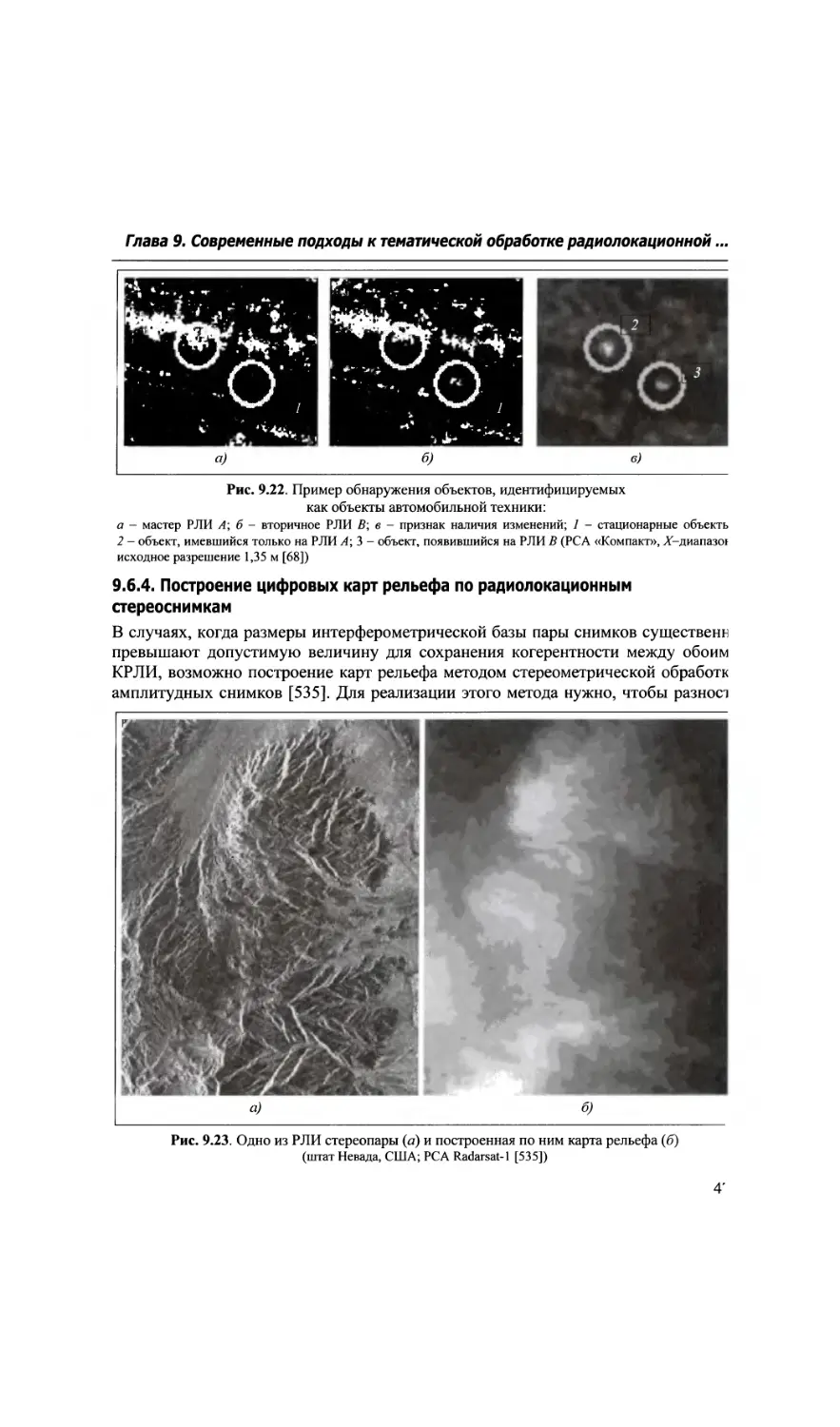
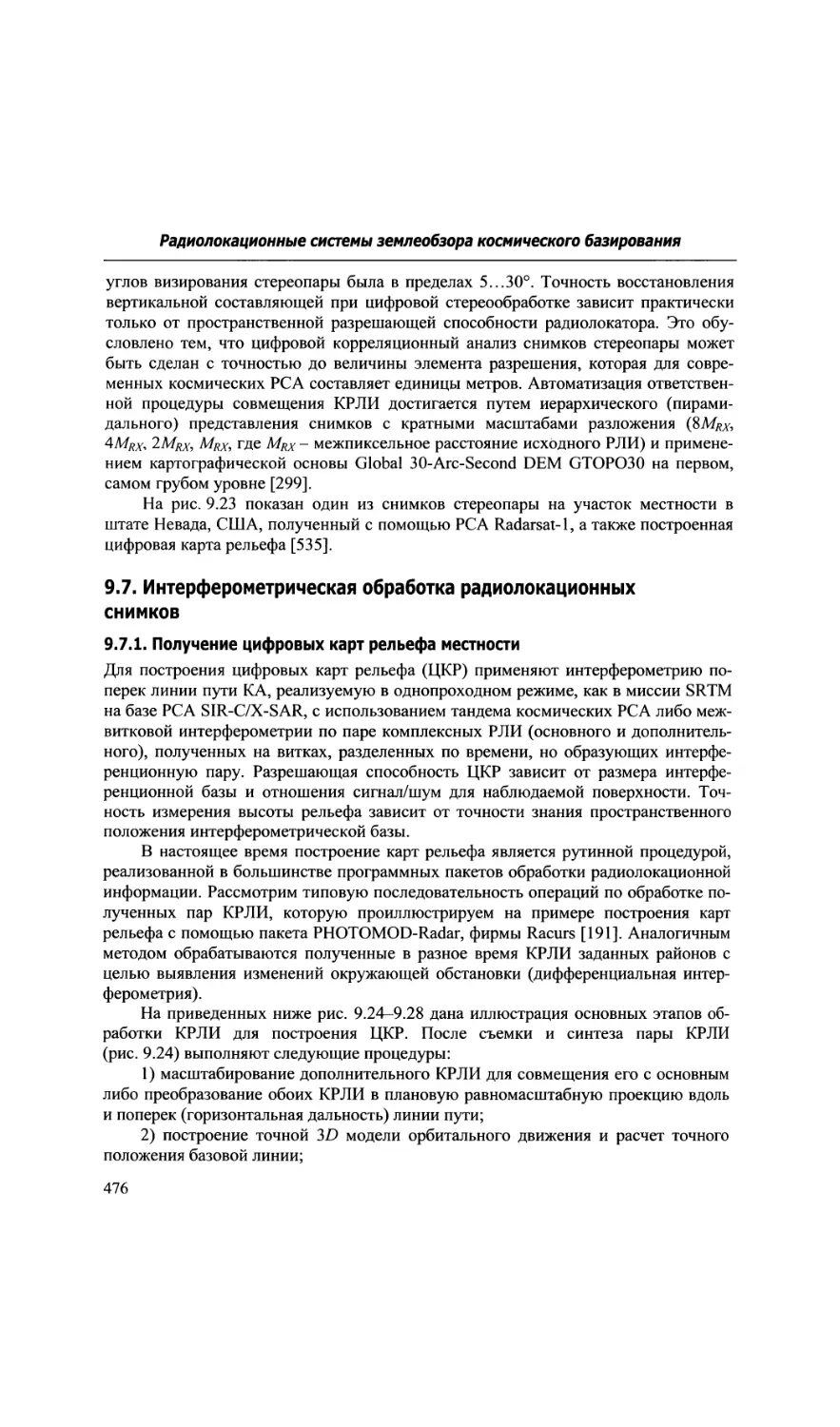
9.6.4. Построение цифровых карт рельефа по радиолокационным
стереоснимкам.....................................................475
9.7. Интерферометрическая обработка радиолокационных снимков........476
9.7.1. Получение цифровых карт рельефа местности..................476
9.7.2. Дифференциальная интерферометрия для обнаружения изменений
в обстановке и измерения малых смещений объектов..................480
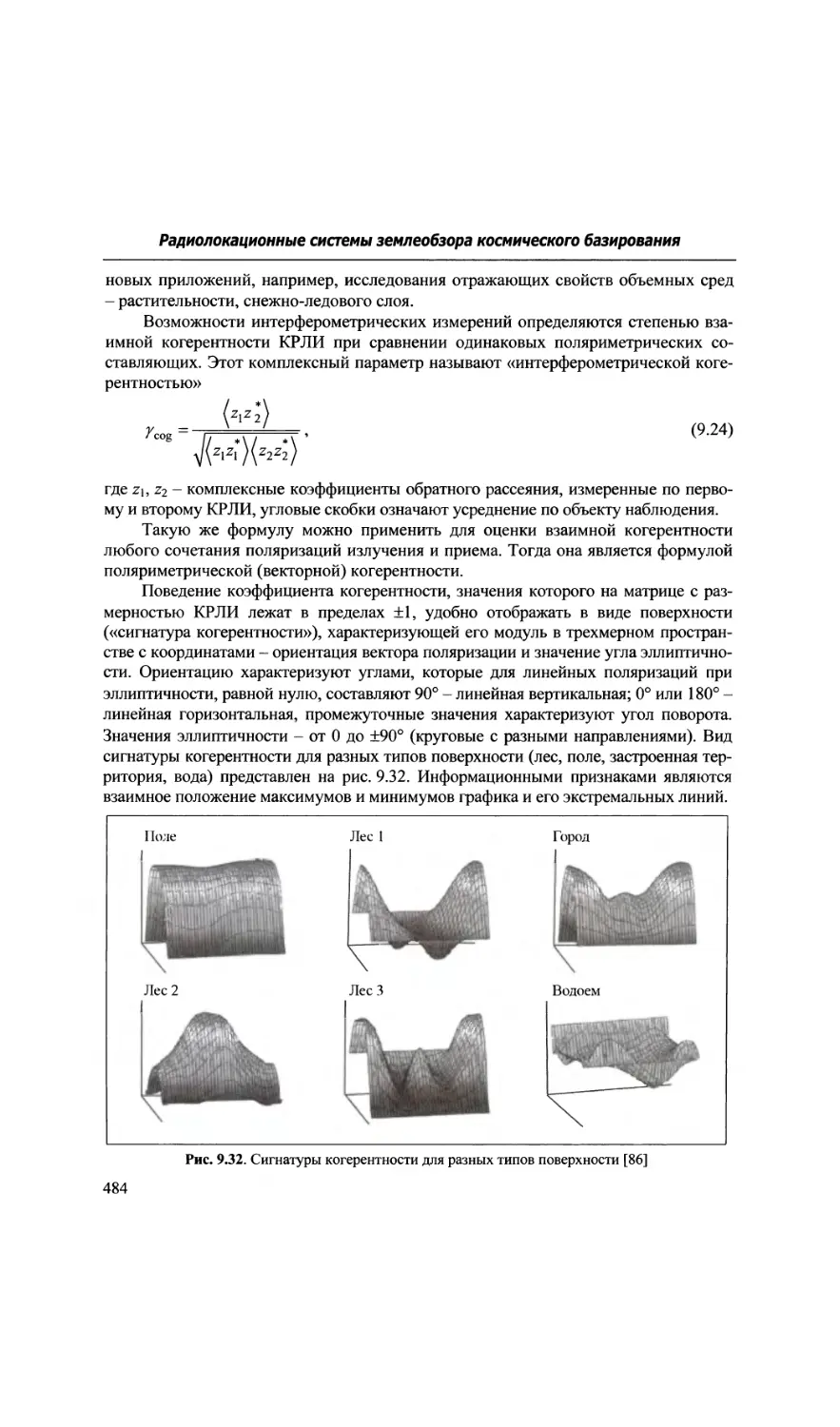
9.7.3. Интерферометрическая обработка результатов поляриметрического
зондирования......................................................483
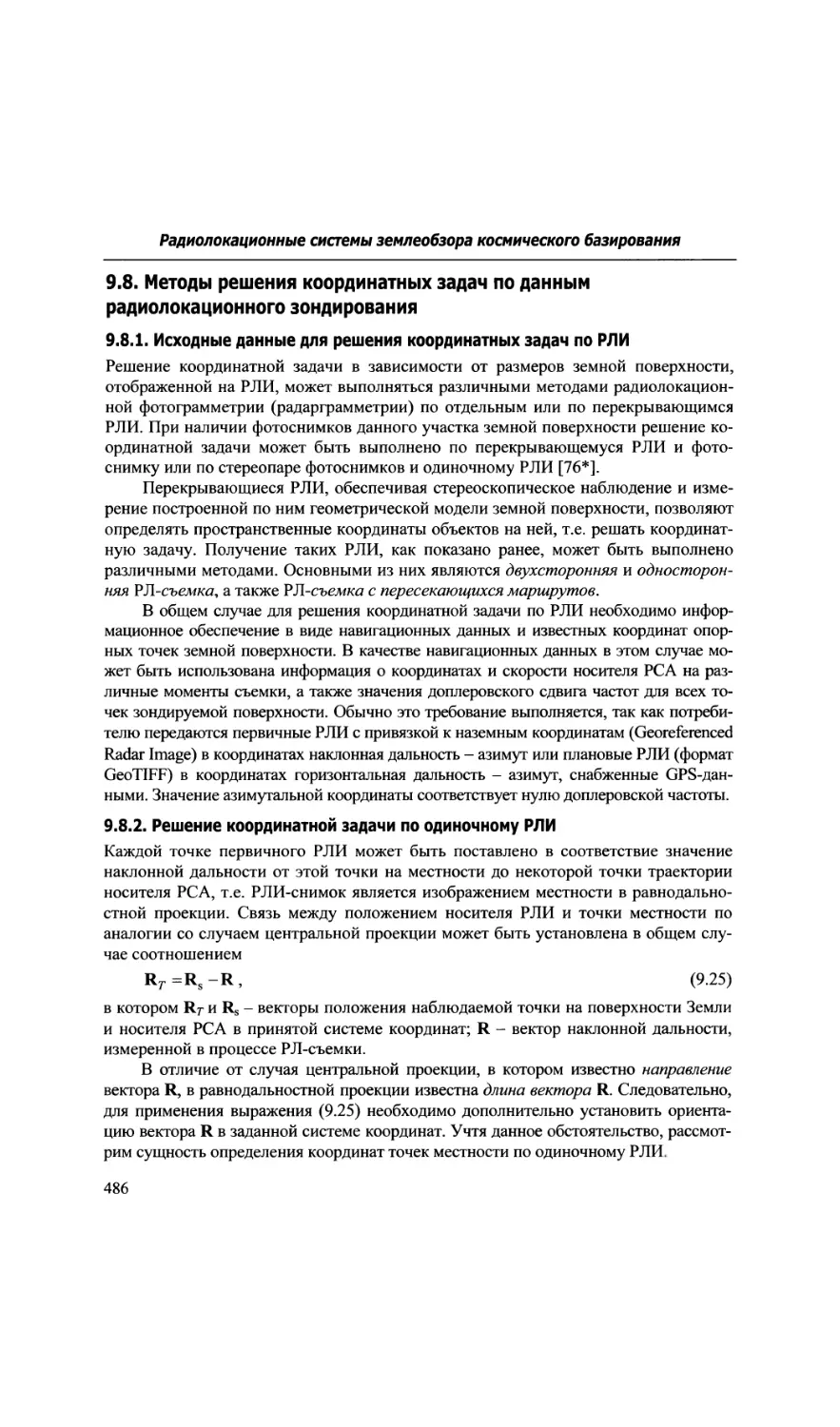
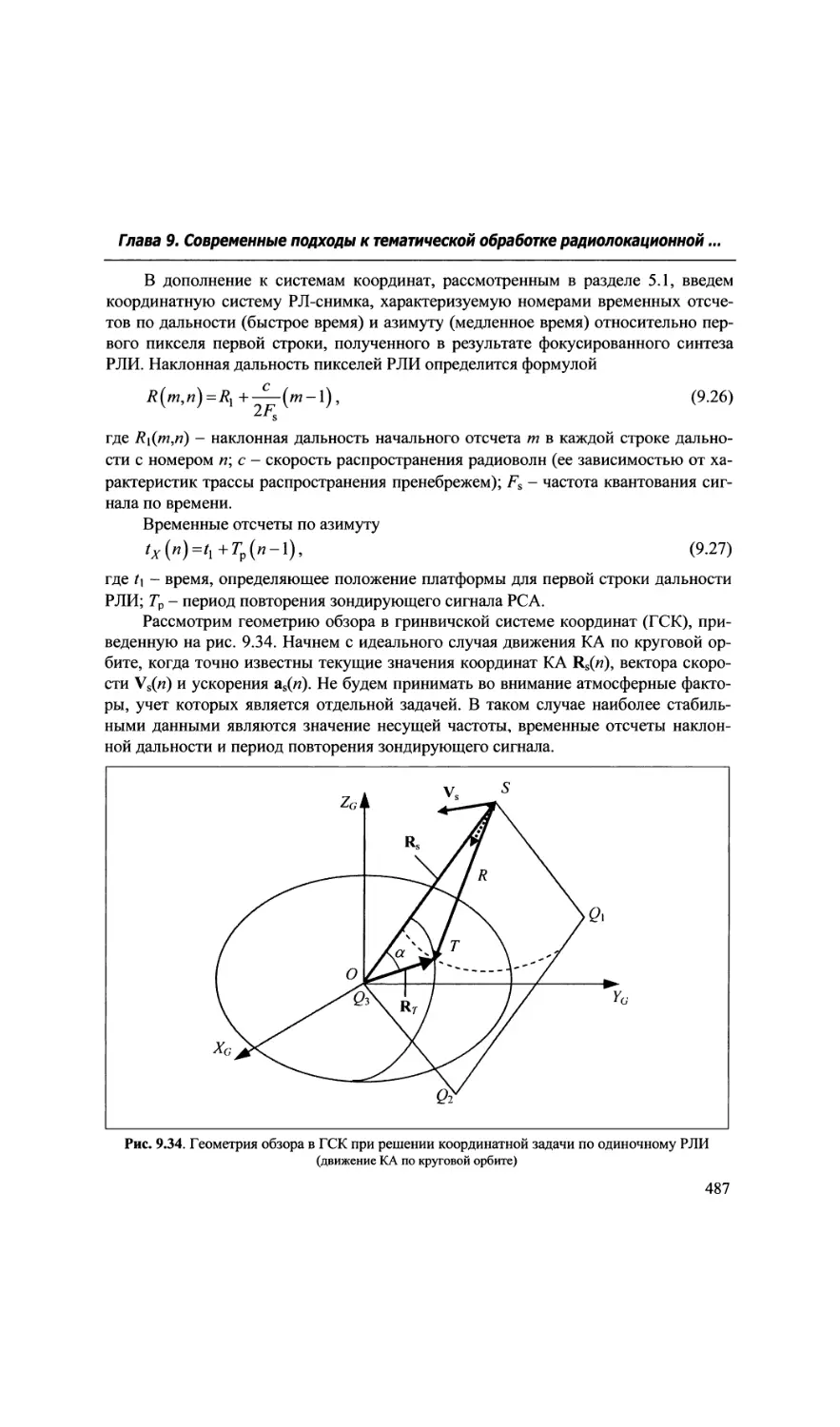
9.8. Методы решения координатных задач по данным радиолокационного
зондирования........................................................486
9.8.1. Исходные данные для решения координатных задач по РЛИ......486
9.8.2. Решение координатной задачи по одиночному РЛИ....................486
9.8.3. Определение элементов внешнего ориентирования антенны......489
9.8.4. Решение координатной задачи по стереопаре РЛИ земной поверхности.491
9.8.5. Совместная обработка перекрывающихся космических фотоснимков и РЛИ... 493
Глава 10. Технологии моделирования характеристик
аппаратуры РЛН и процессов прохождения сигналов
в радиолокационном тракте.................................................499
10.1. Исходные положения........................................... 499
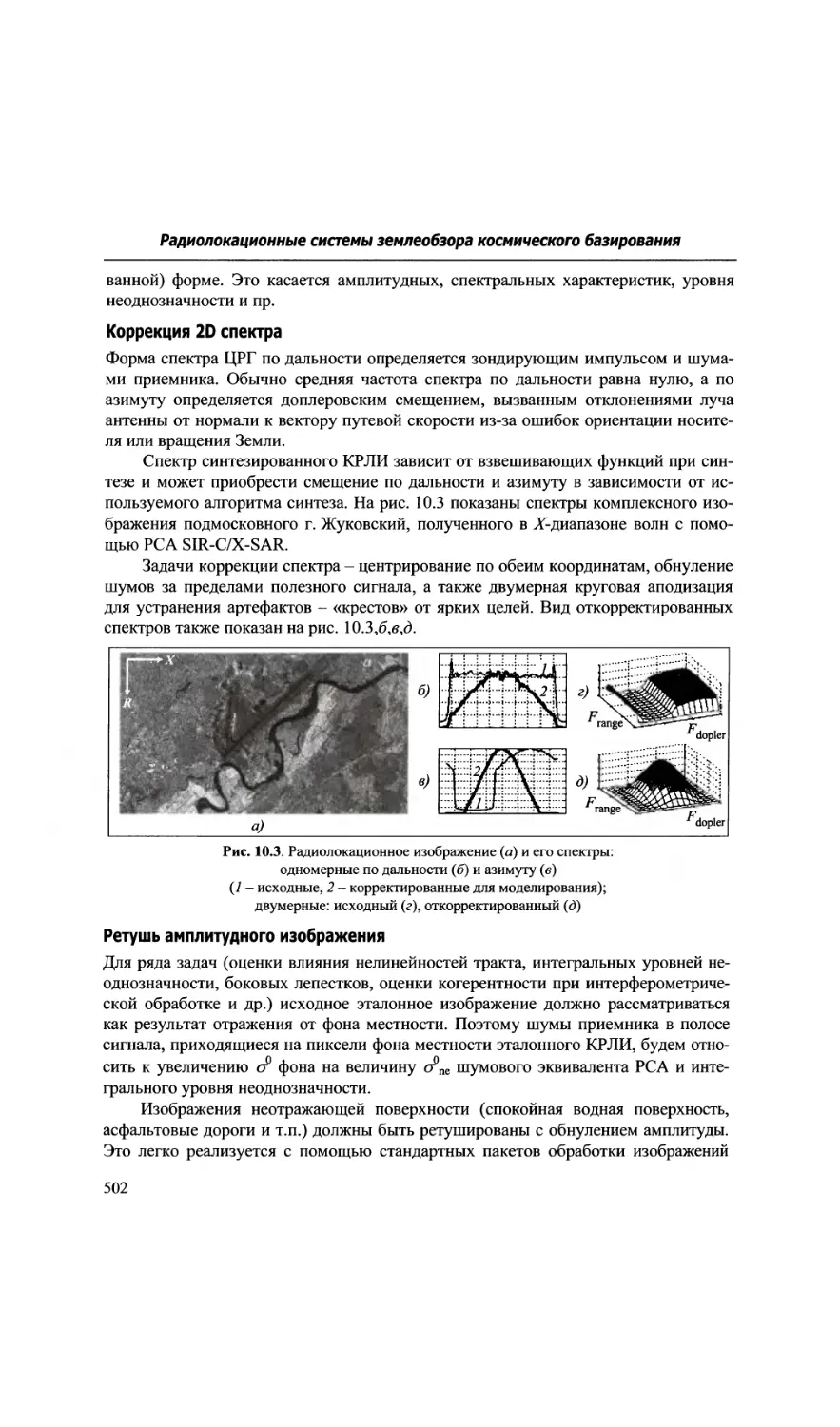
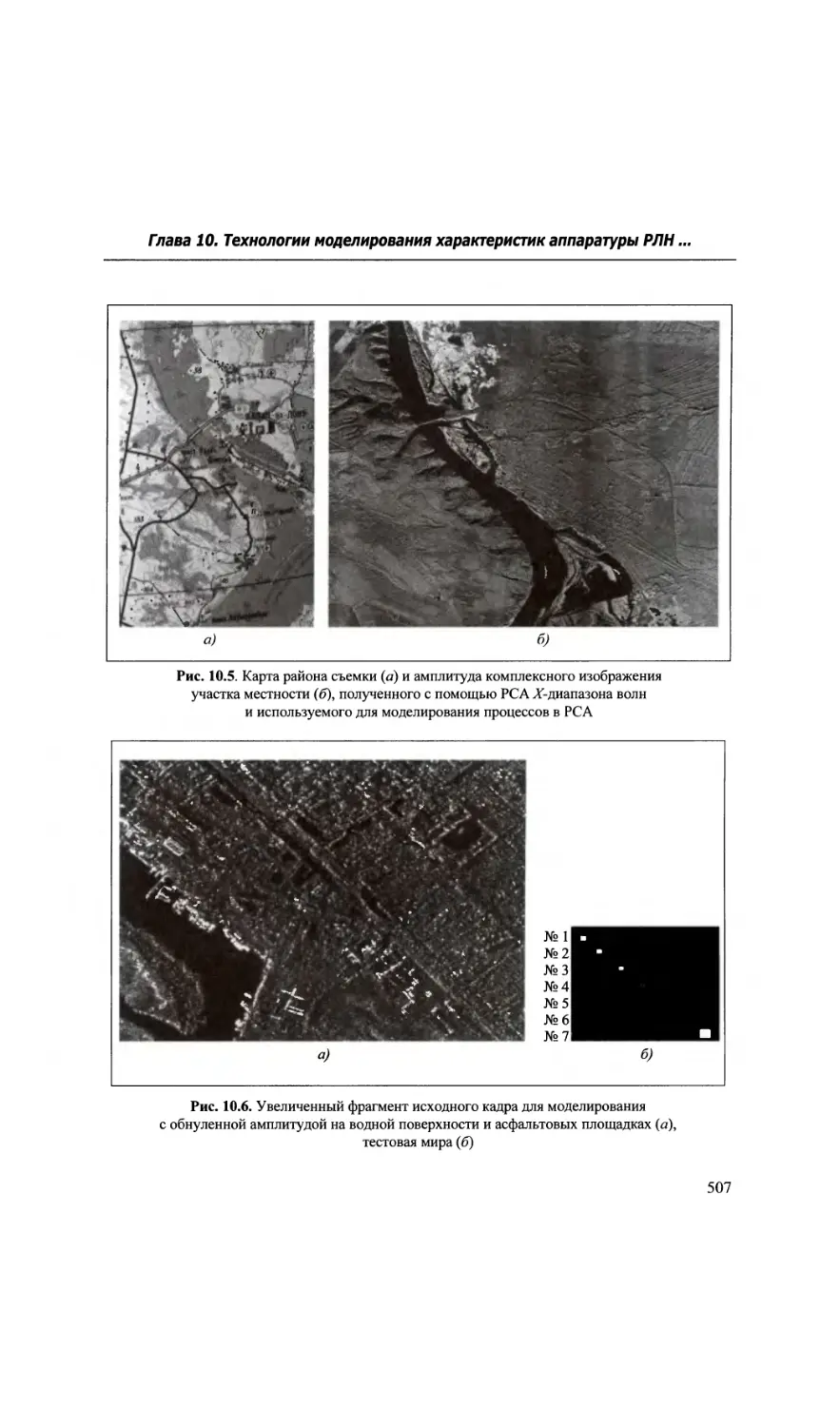
10.2. Подготовка исходного материала для моделирования............. 501
10.3. Моделирование обработки сигналов в РСА....................... 504
10.4. Моделирование интерферометрической обработки изображений............ 505
10.5. Моделирование индикации движущихся целей..................... 506
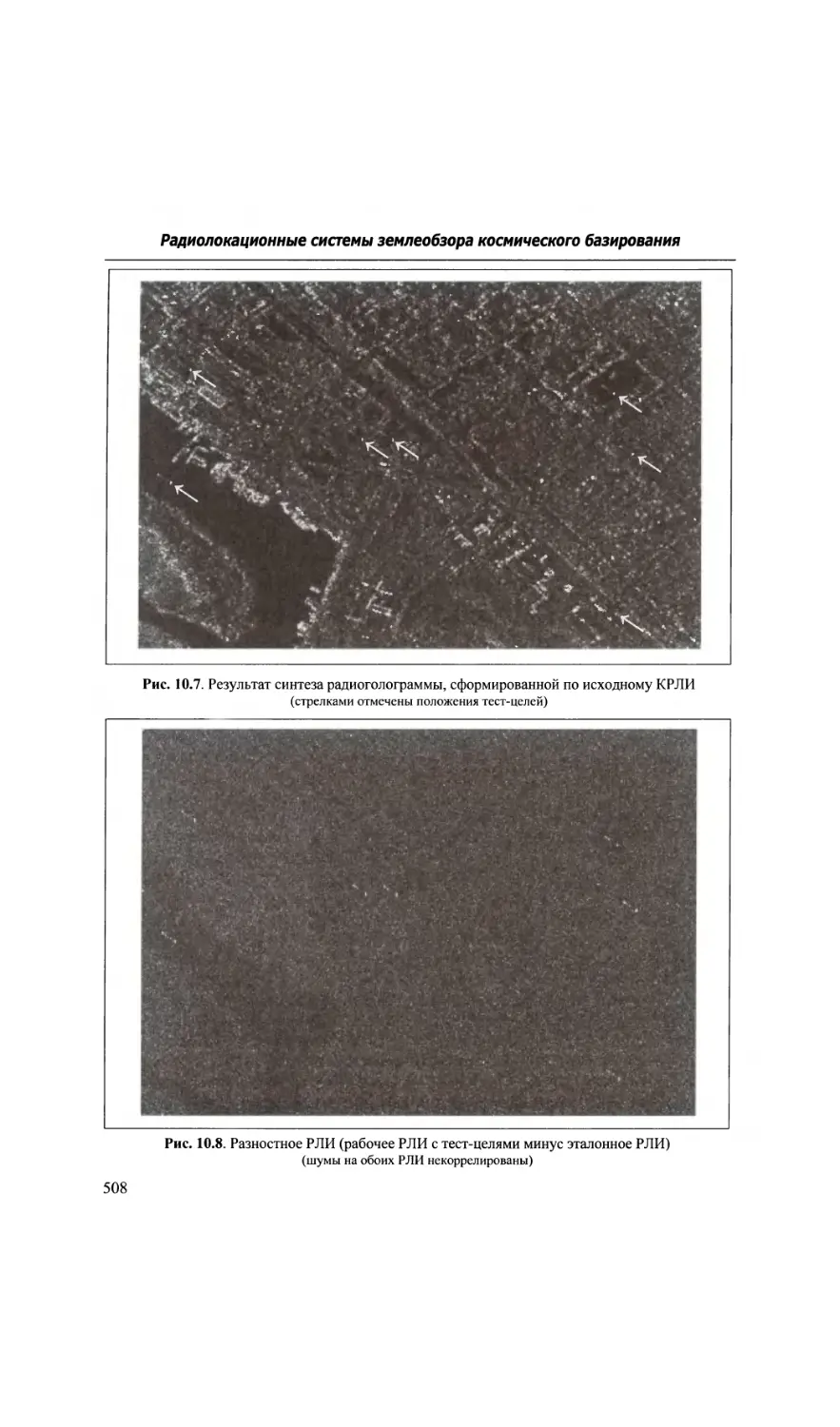
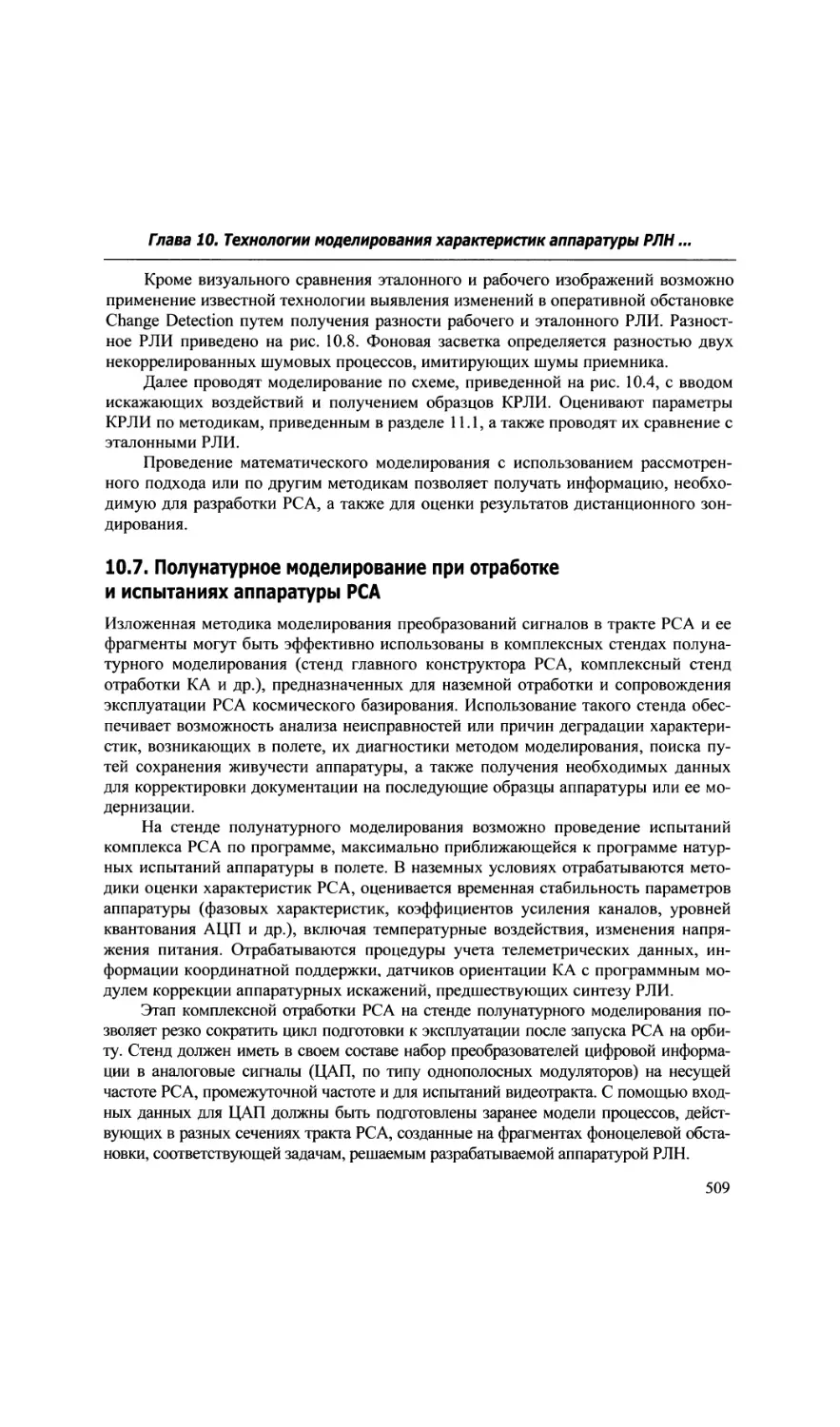
10.6. Структура математической модели сквозного тракта РСА......... 506
10.7. Полунатурное моделирование при отработке и испытаниях
аппаратуры РСА..................................................... 509
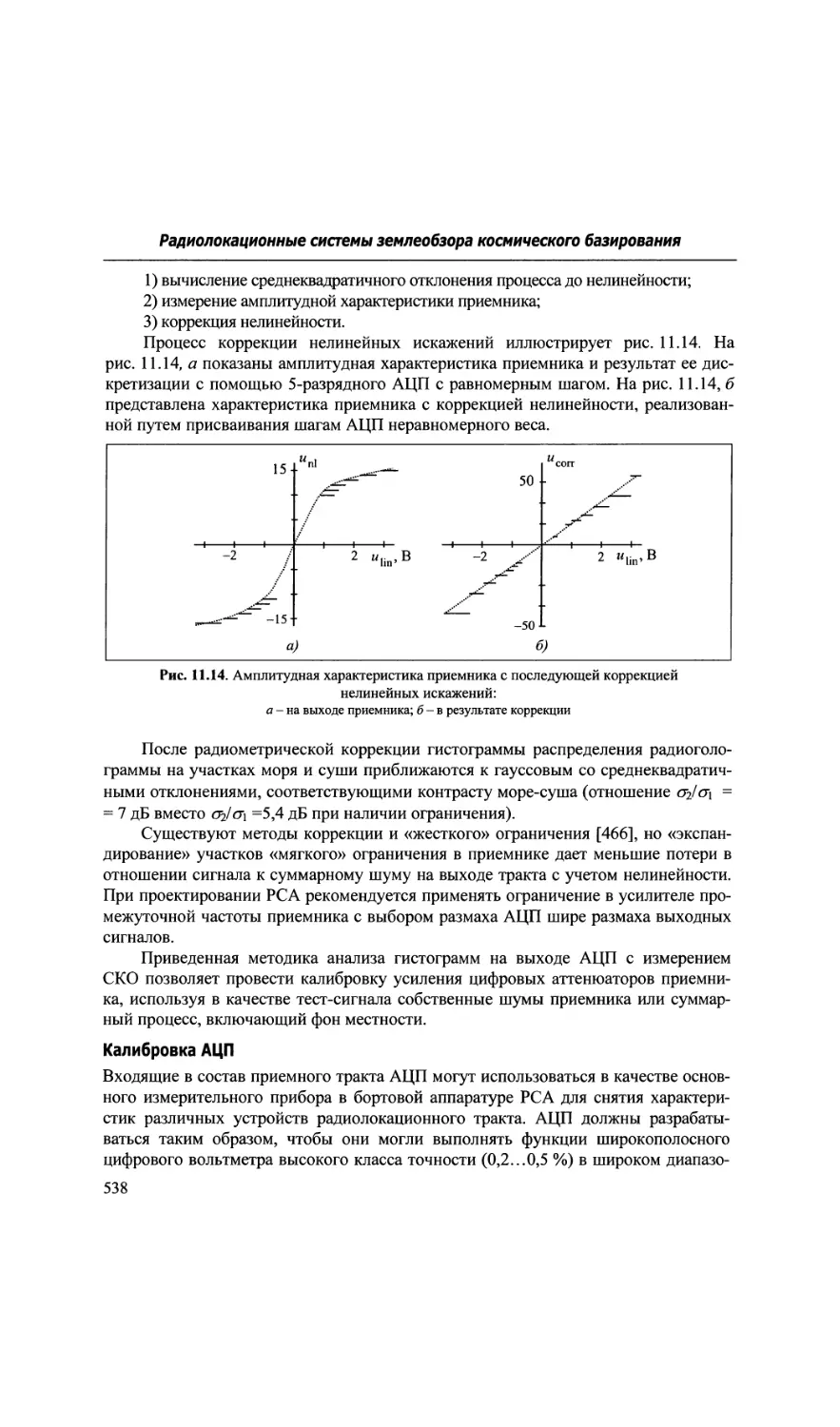
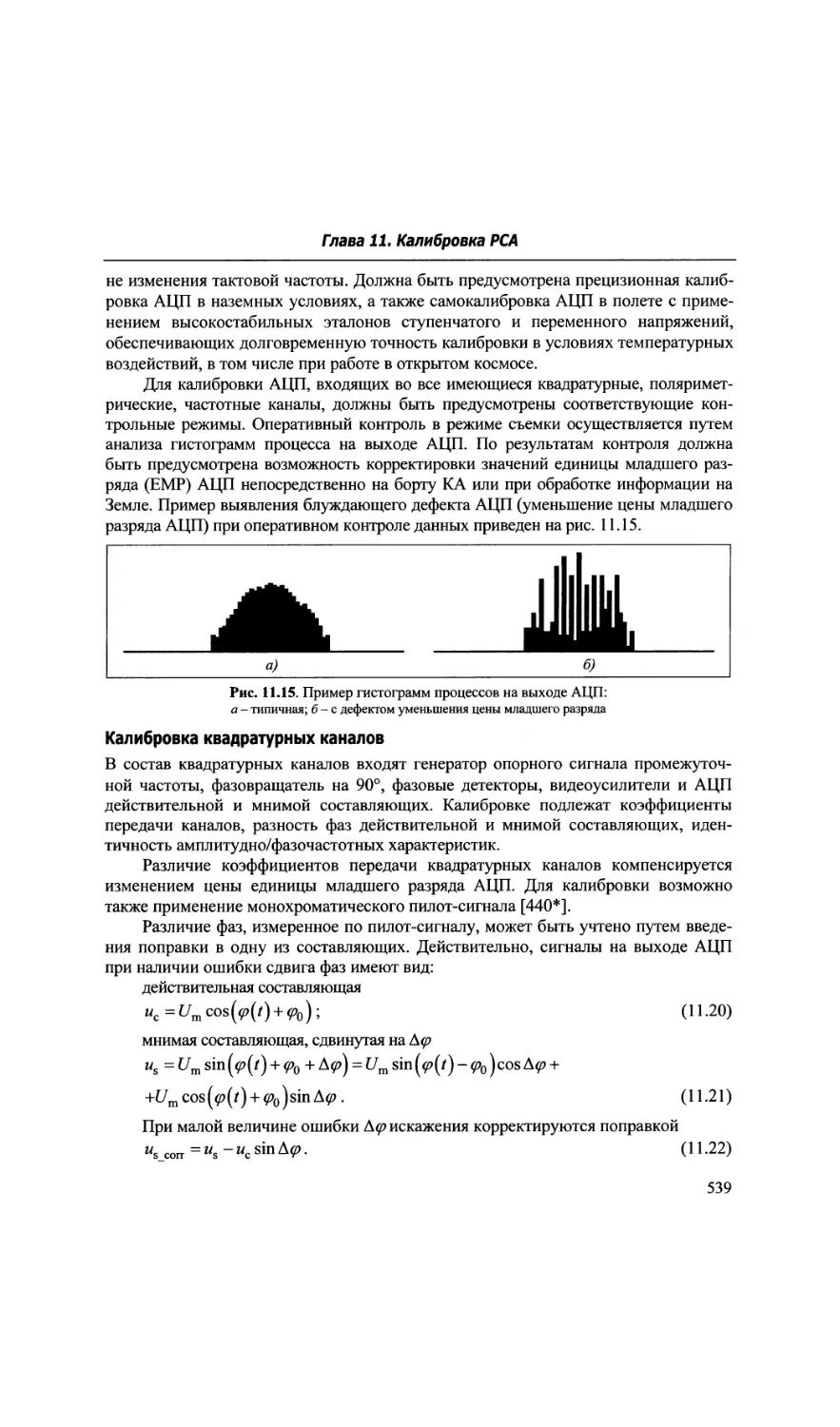
Глава 11. Калибровка РСА..................................................511
11.1. Методики оценки характеристик информационных
продуктов РСА....................................................... 511
11.1.1. Типы информационных продуктов........................... 511
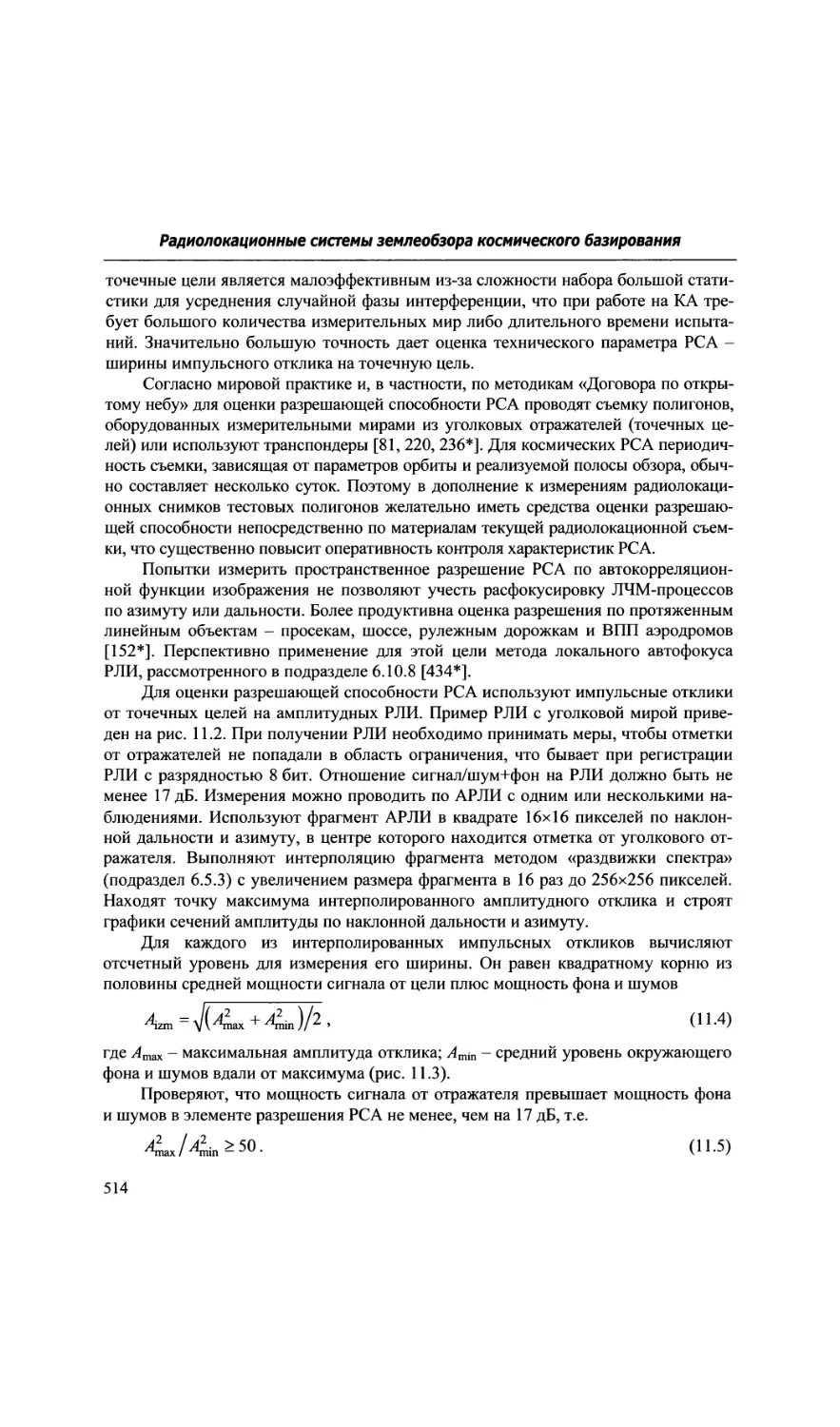
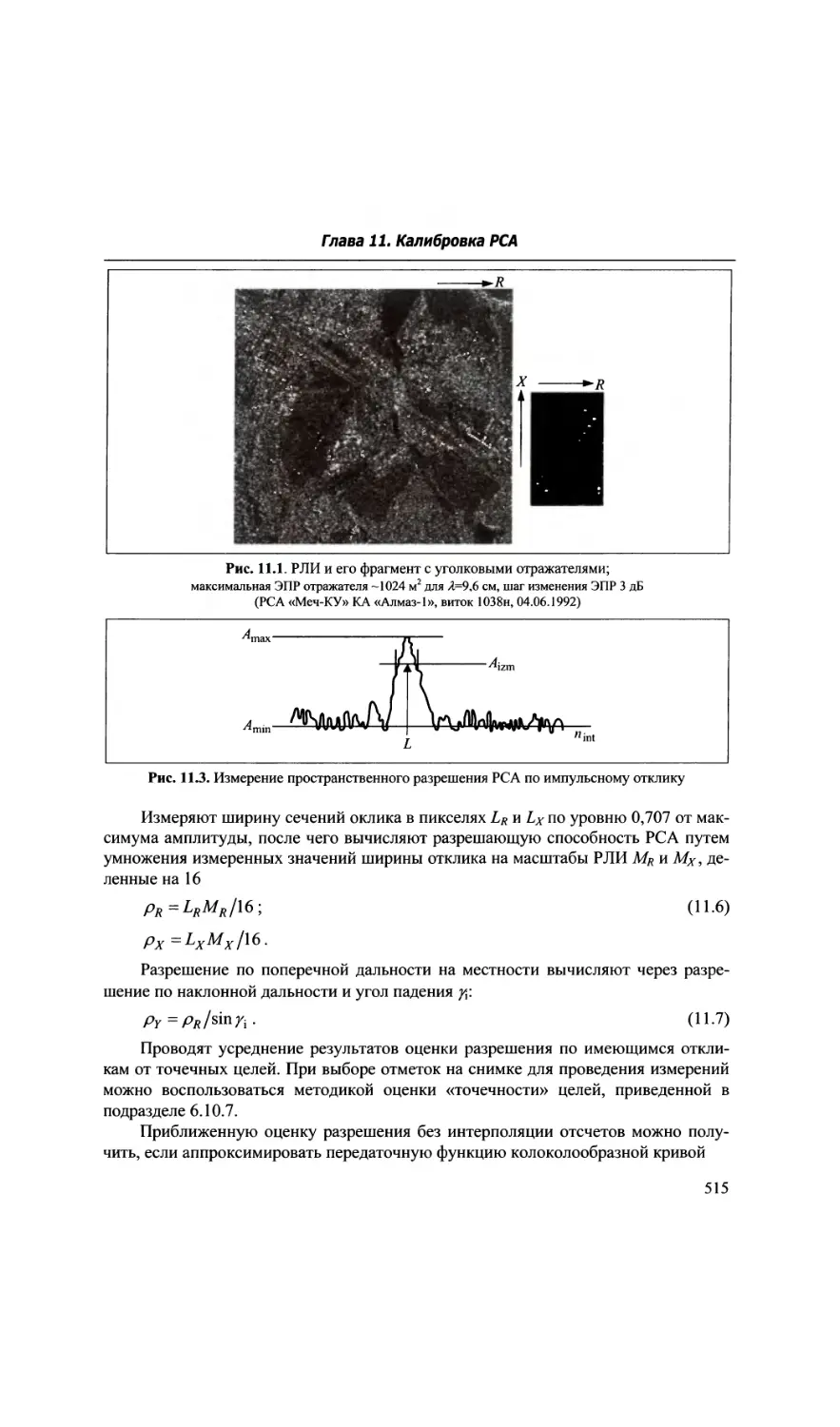
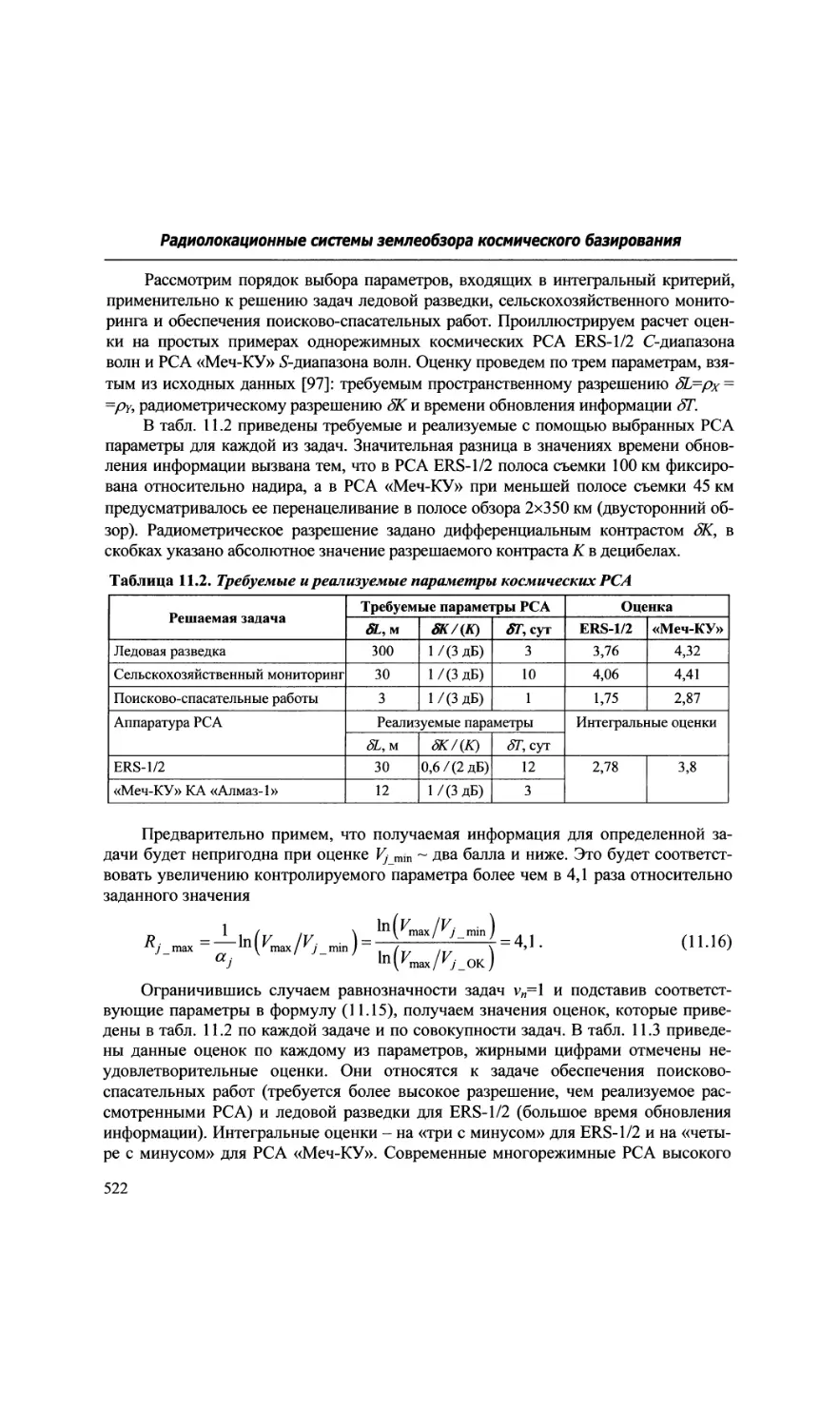
11.1.2. Оценка пространственного разрешения..................... 513
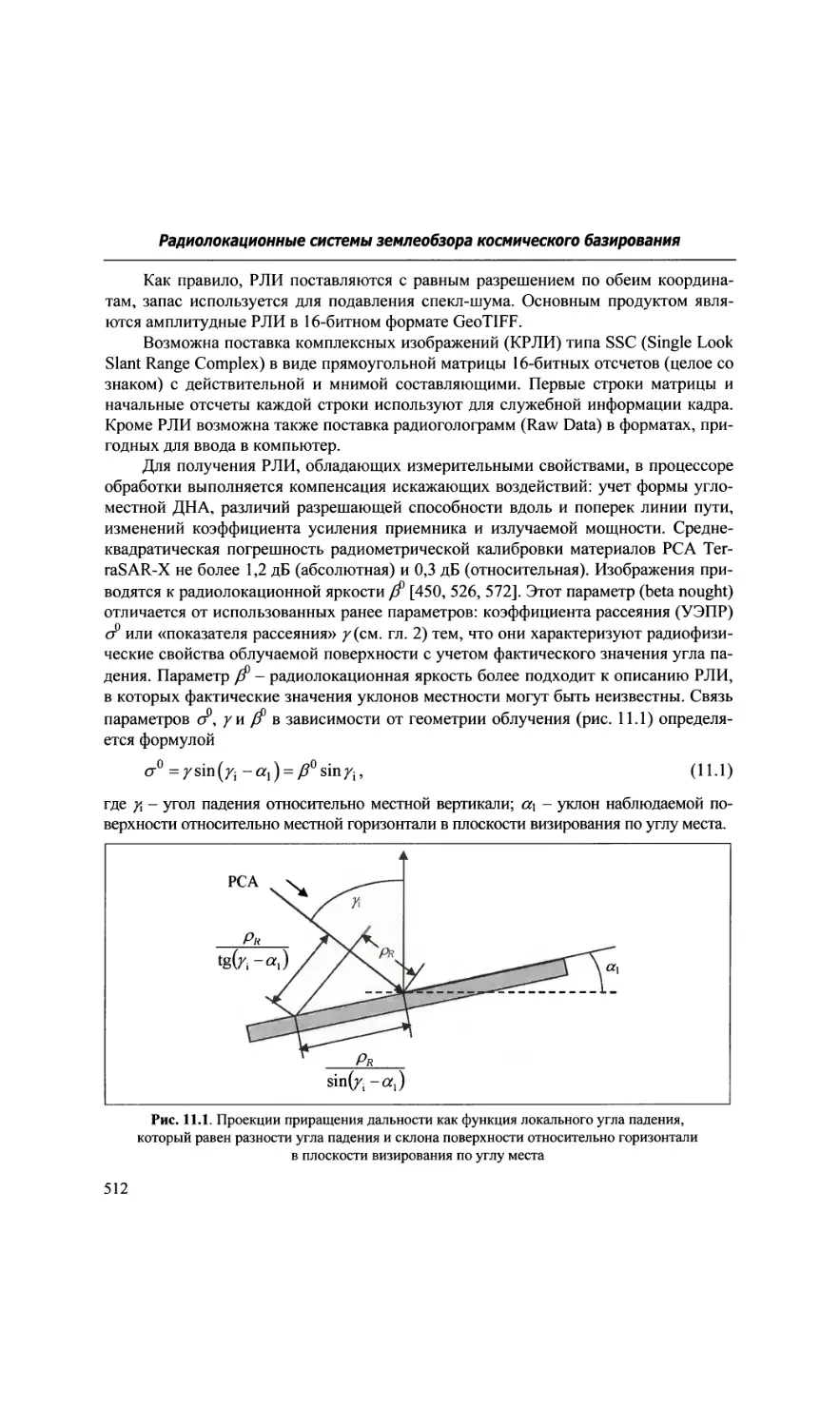
11.1.3. Вычисление импульсного отклика РСА по получаемым снимкам.......516
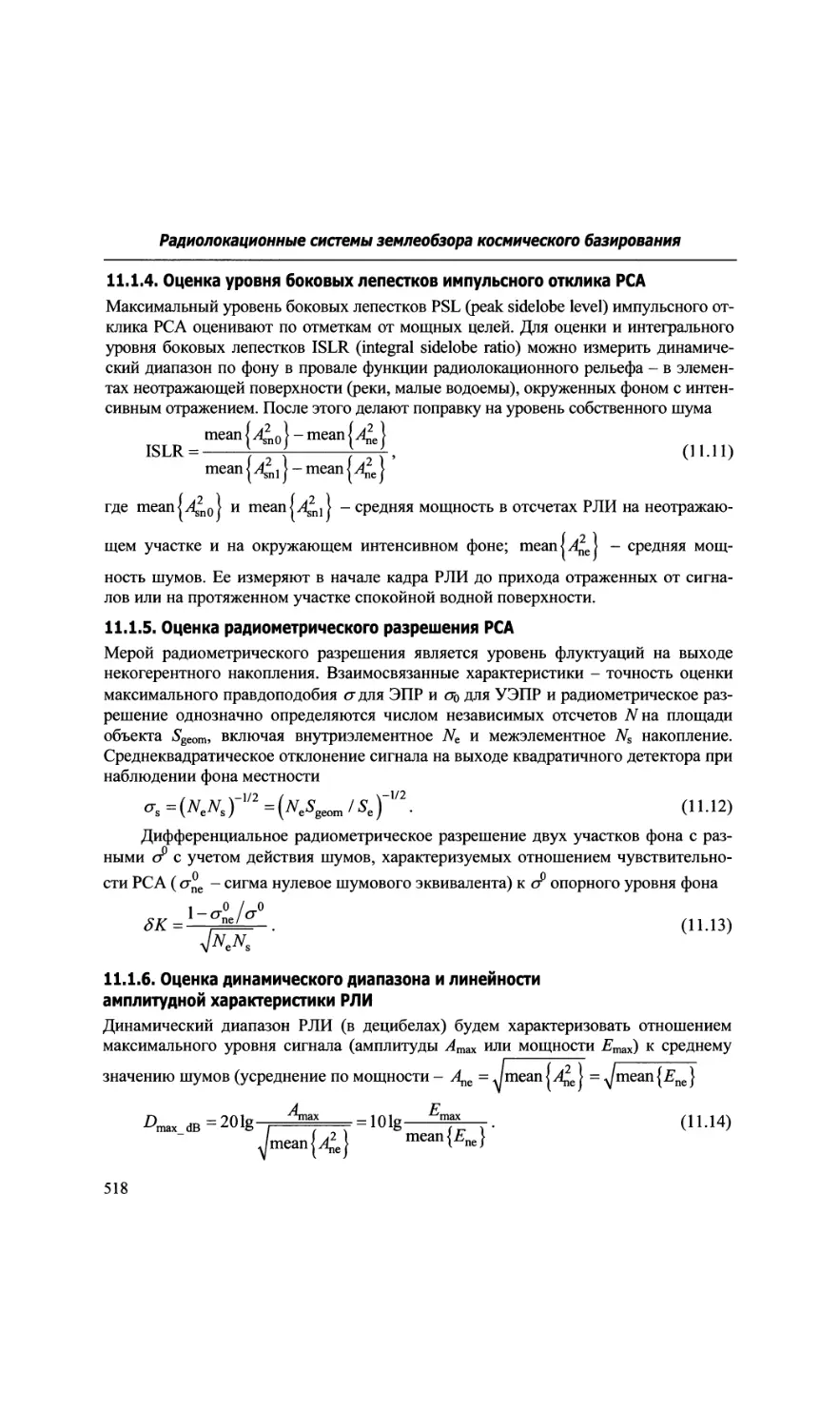
11.1.4. Оценка уровня боковых лепестков импульсного отклика РСА..518
11.1.5. Оценка радиометрического разрешения РСА..................518
11.1.6. Оценка динамического диапазона и линейности амплитудной
характеристики РЛИ................................................518
11.1.7. Интегральный эвристический критерий оценки информативности
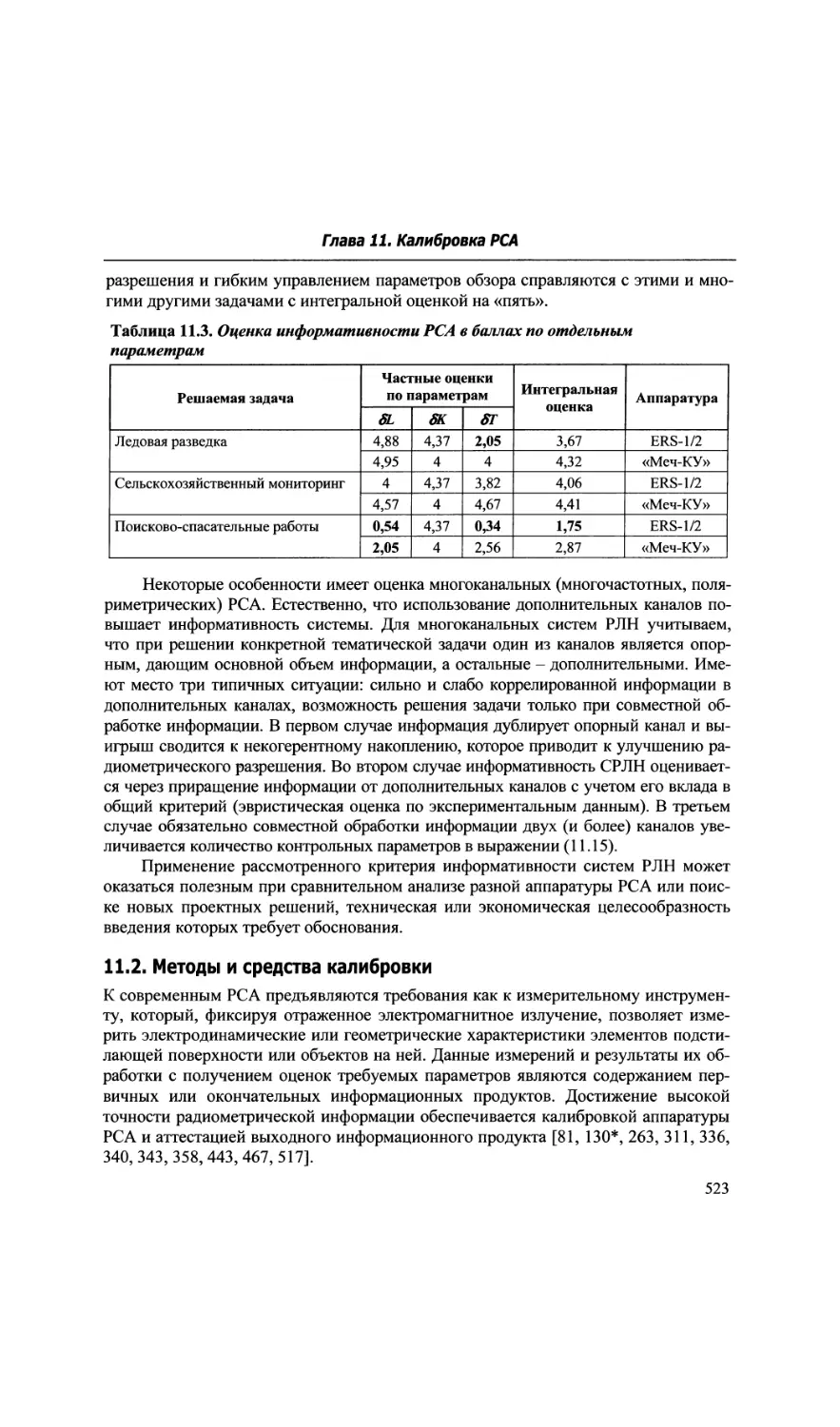
космических РСА...................................................519
11.2. Методы и средства калибровки................................. 523
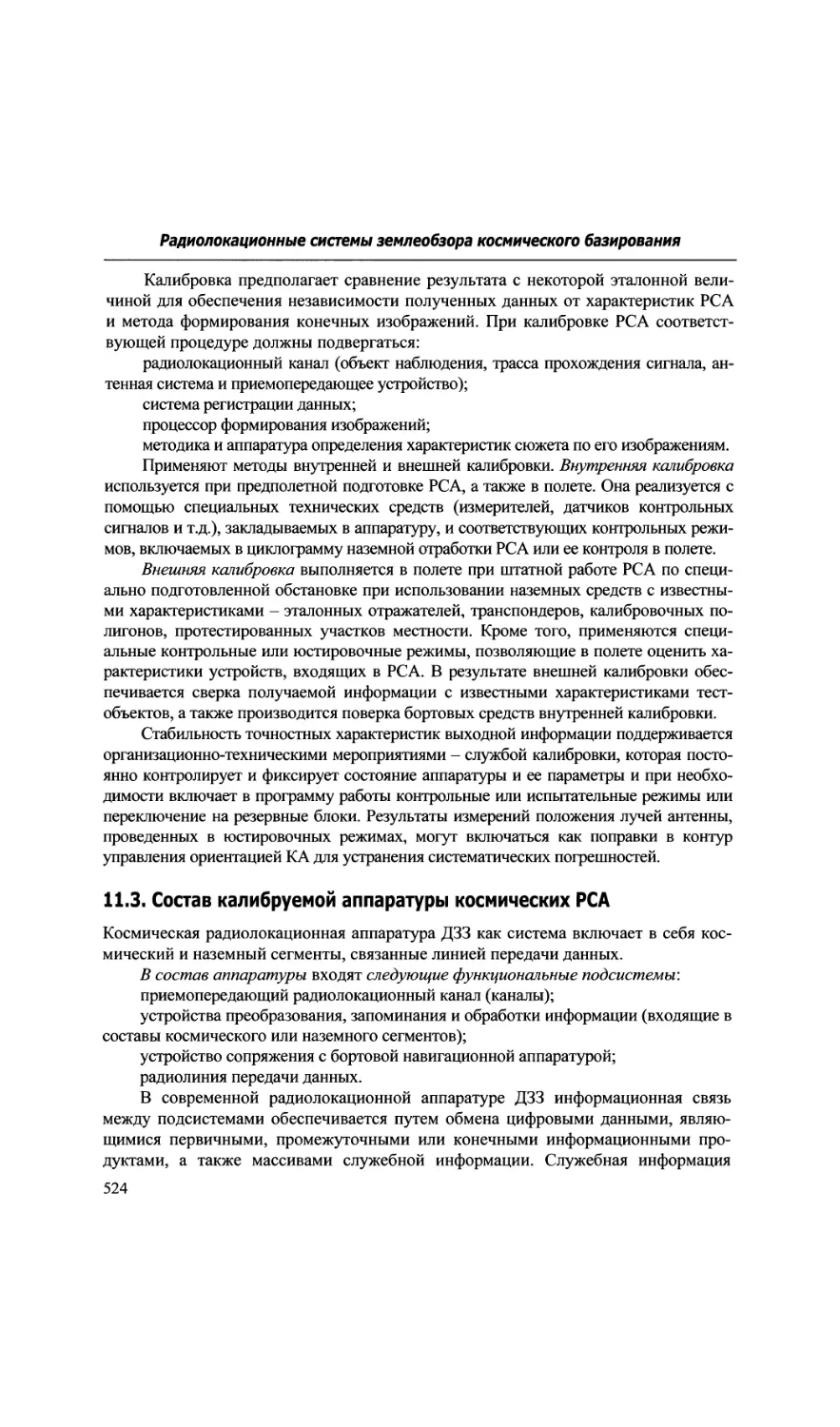
11.3. Состав калибруемой аппаратуры космических РСА................ 524
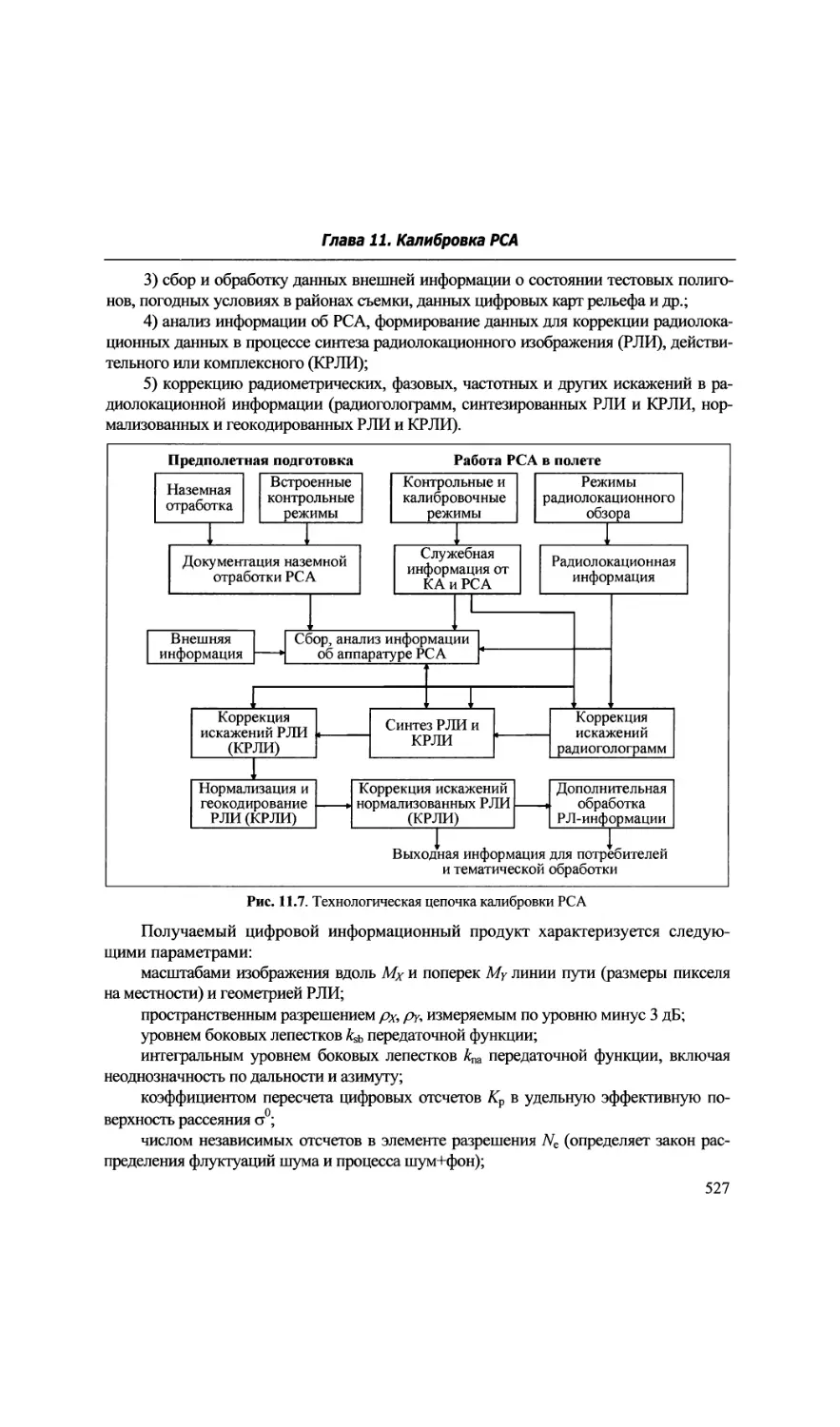
11.4. Технологическая цепочка калибровки РСА....................... 526
11.5. Методы предполетной калибровки РСА........................... 528
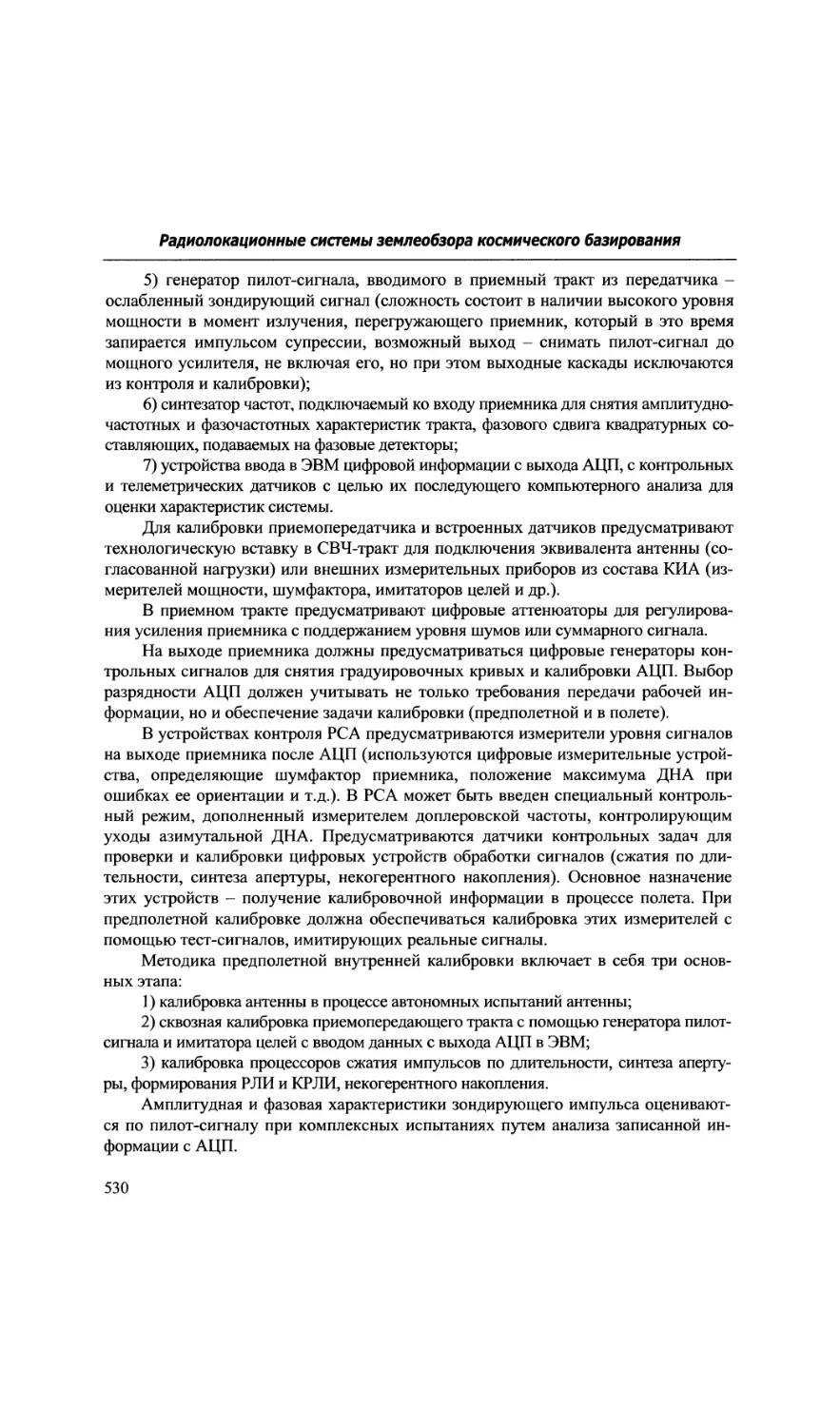
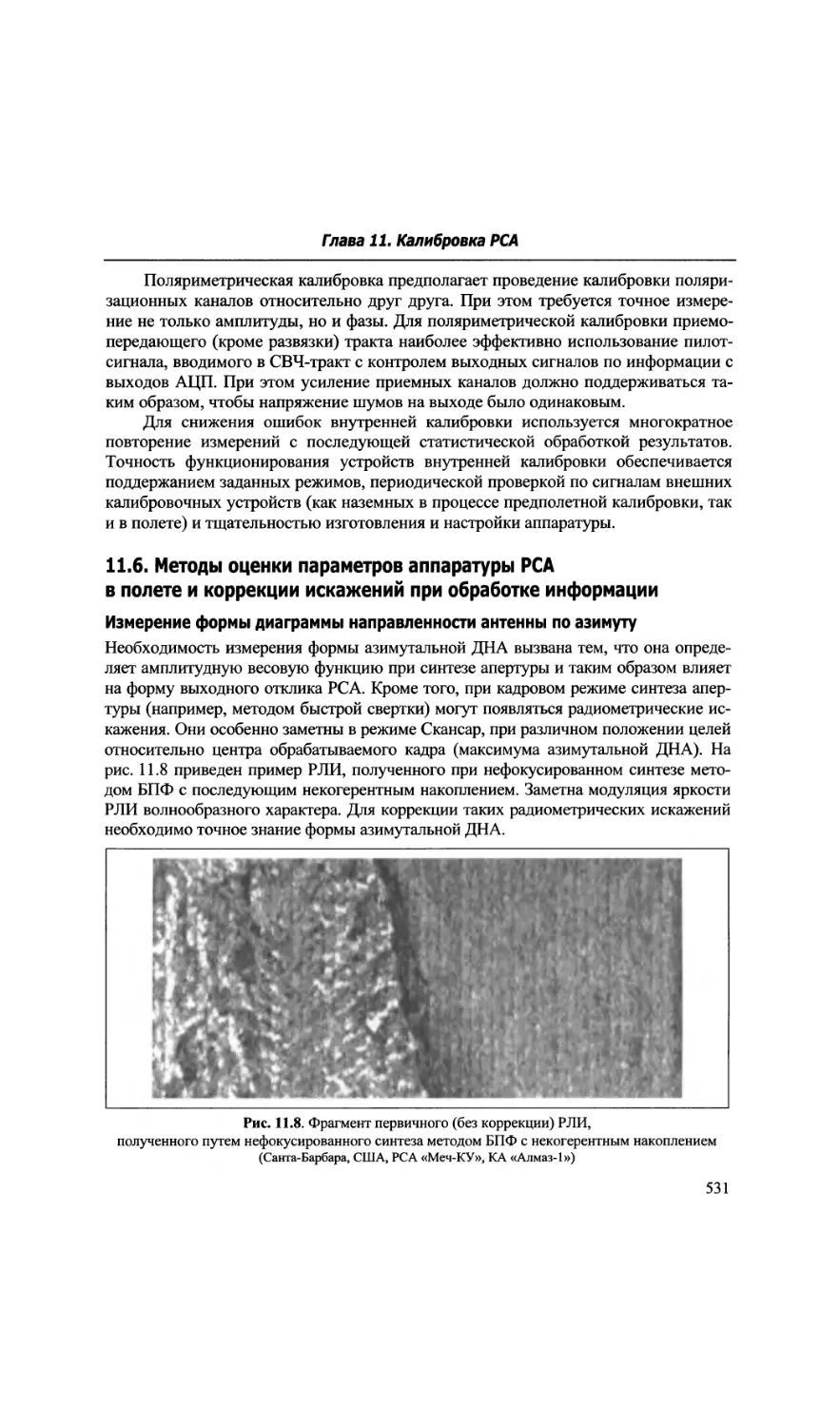
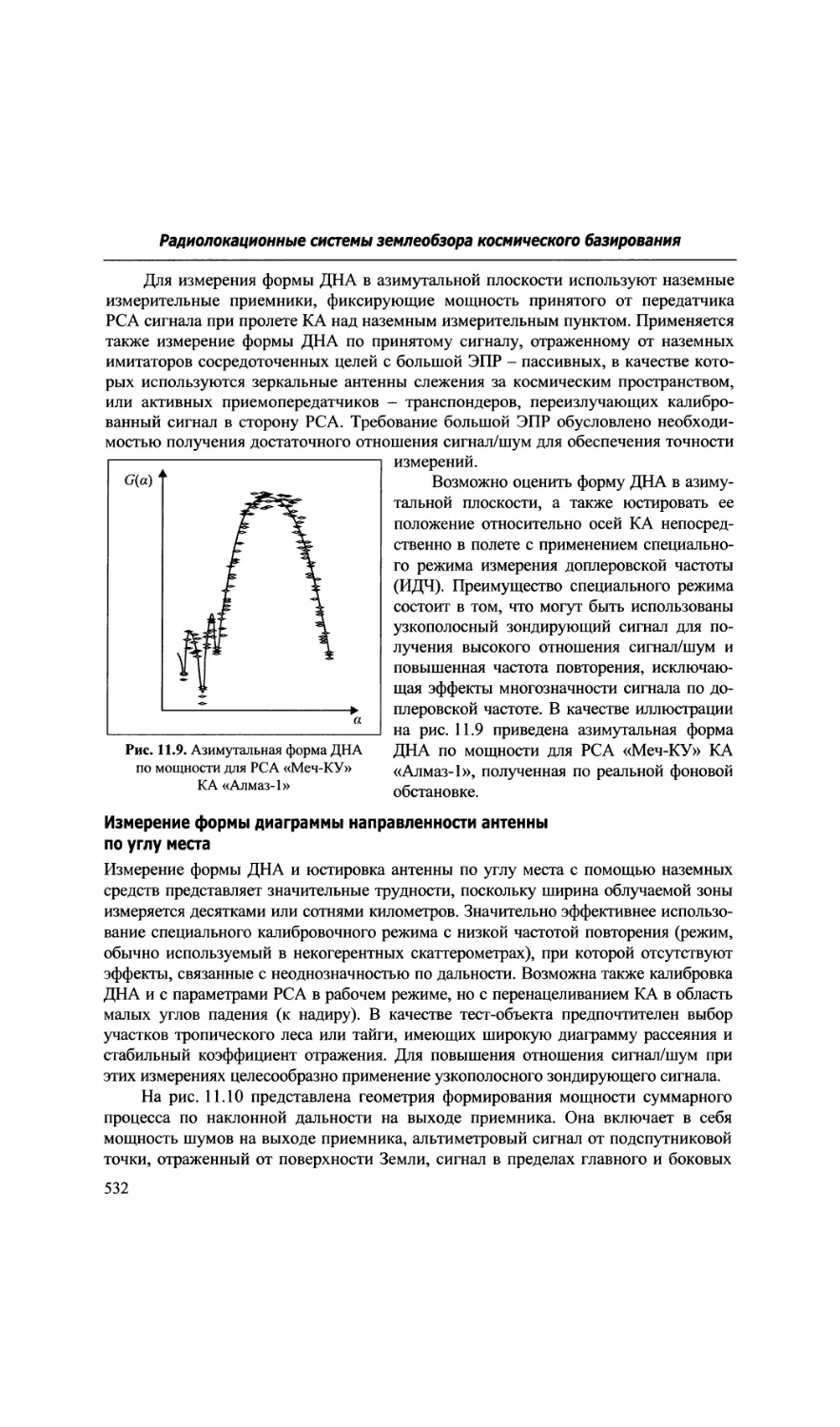
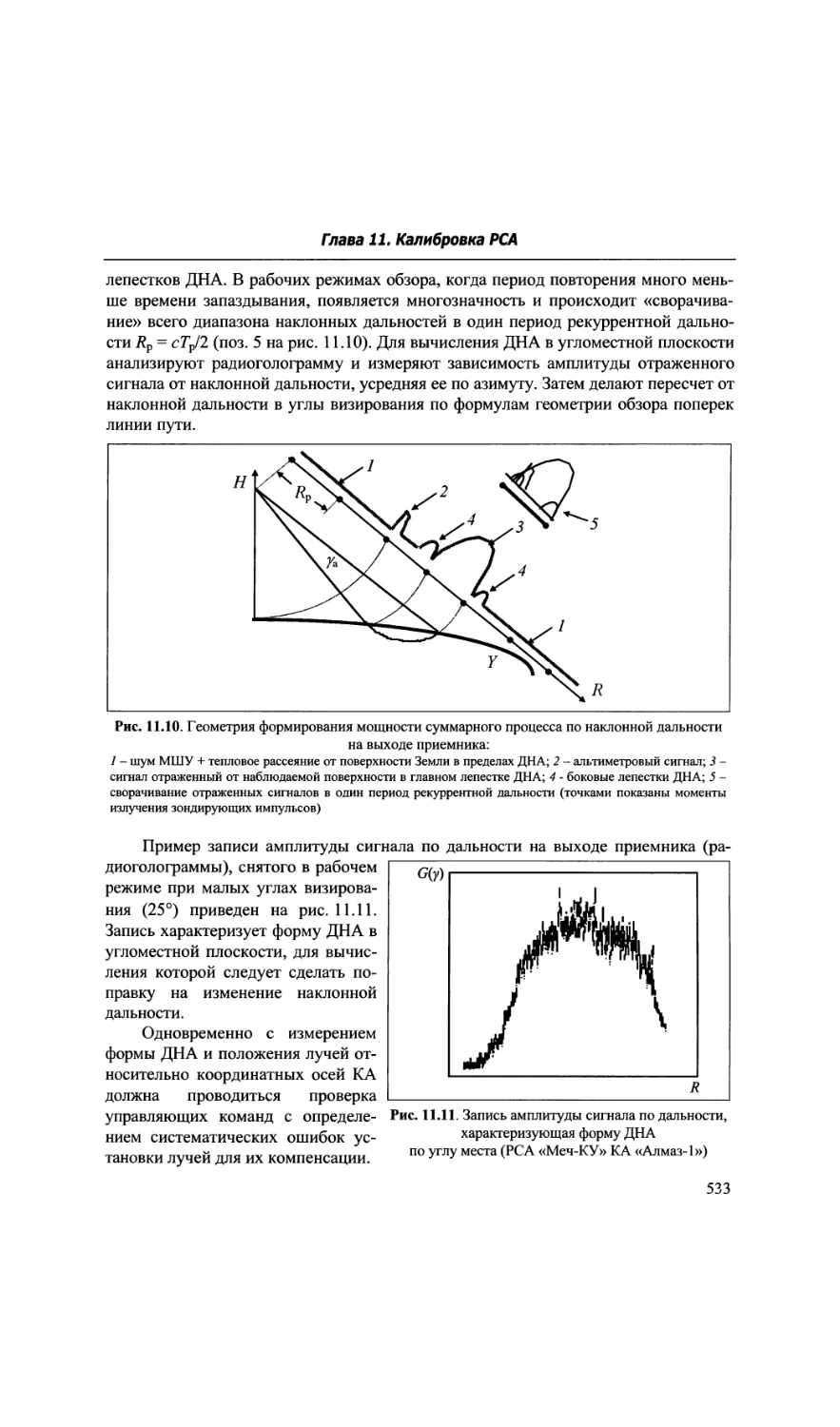
11.6. Методы оценки параметров аппаратуры РСА в полете и коррекции
искажений при обработке информации................................. 531
8
Оглавление
11.7. Калибровка тракта обработки сигналов и выходного
информационного продукта........................................... 540
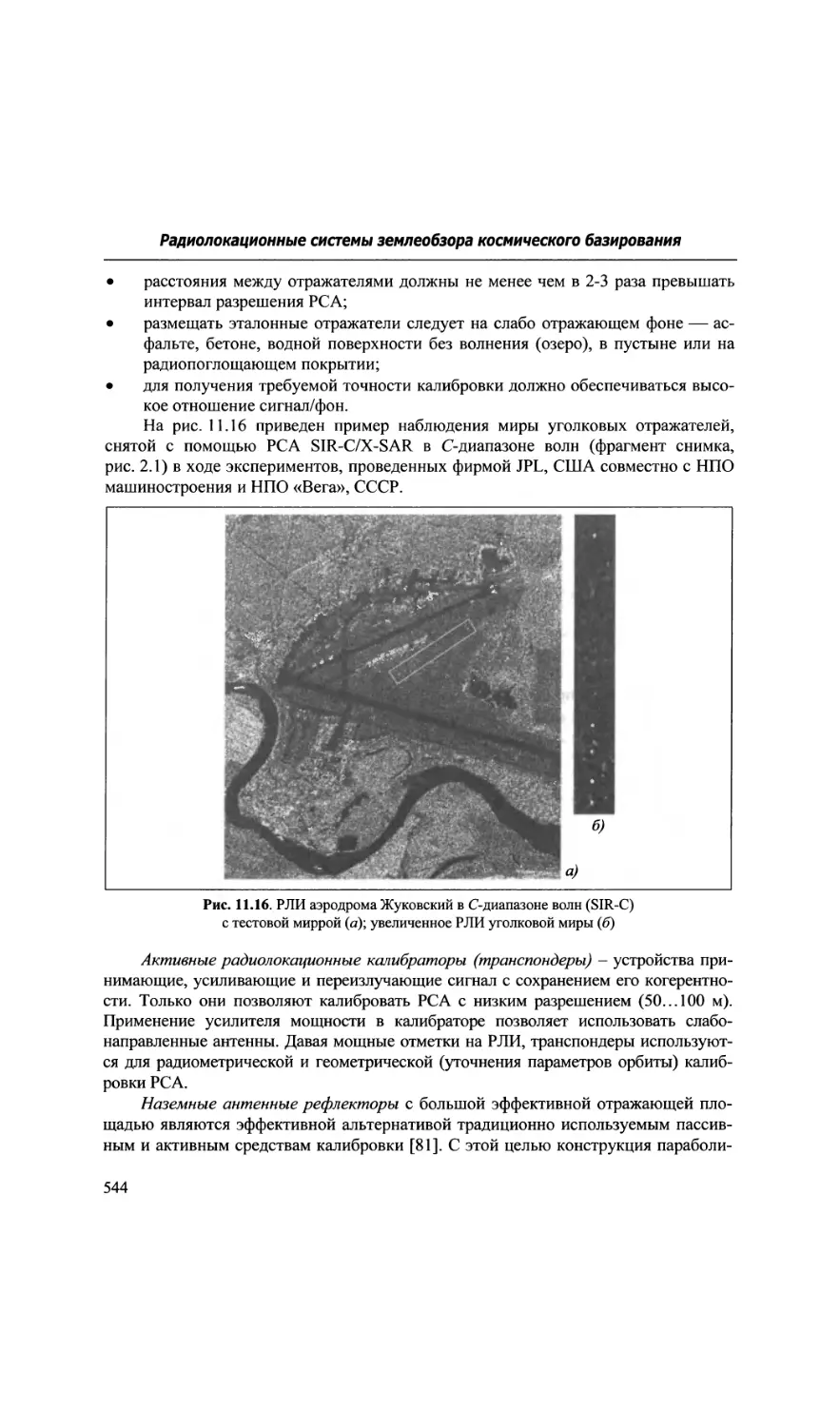
11.8. Состав наземного оборудования средств калибровки............. 543
11.9. Радиометрическая коррекция радиоголограммы при работе
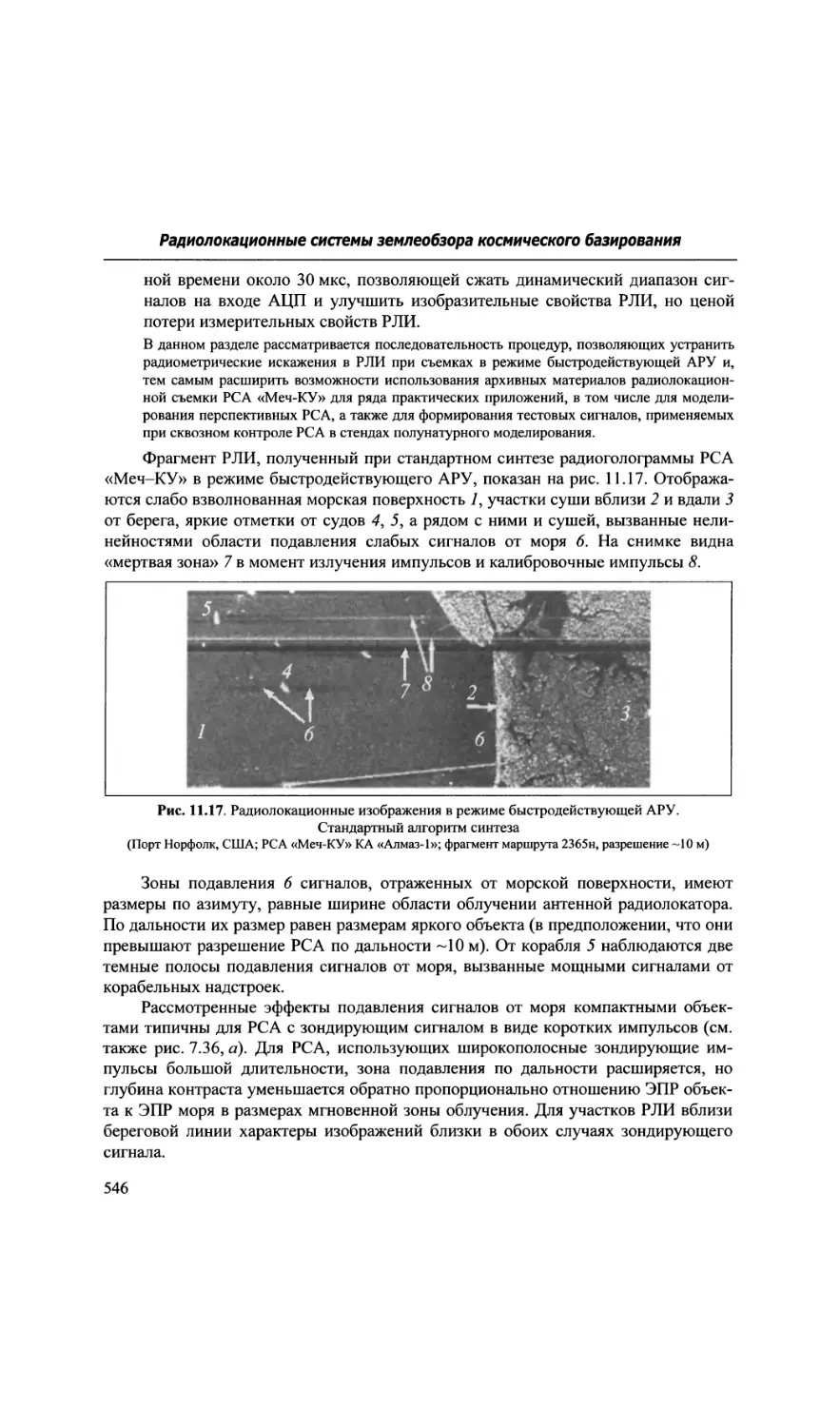
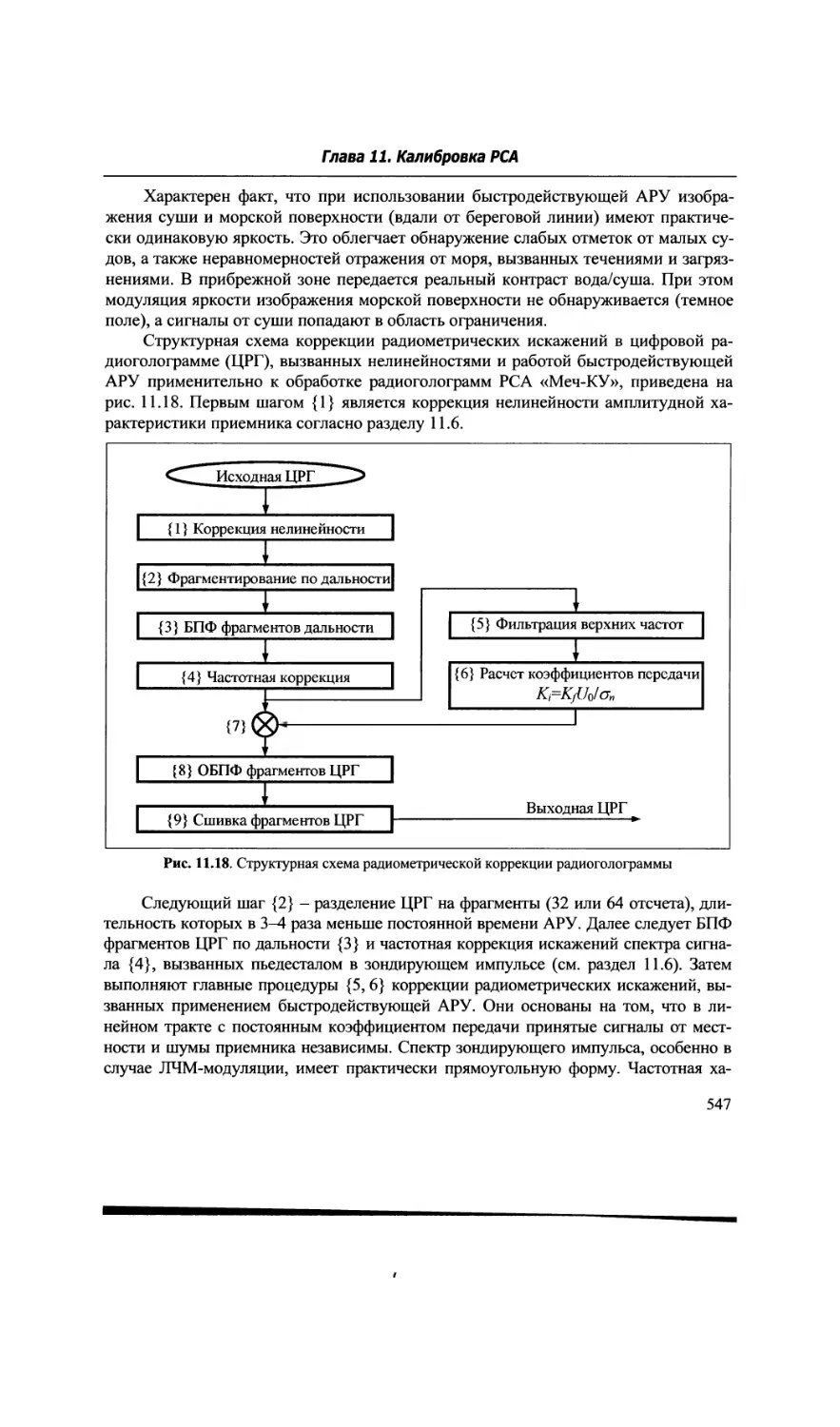
быстродействующей АРУ.............................................. 545
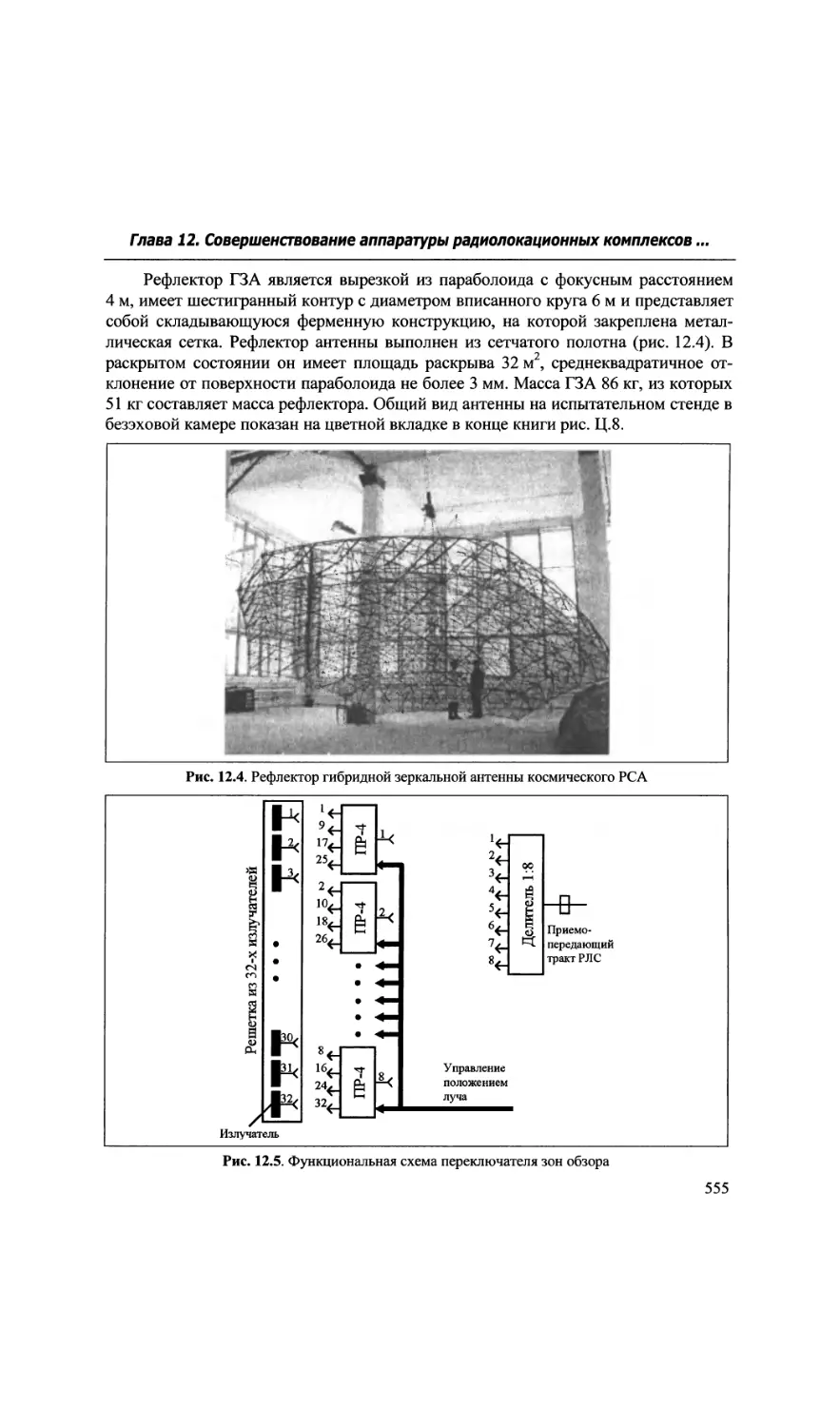
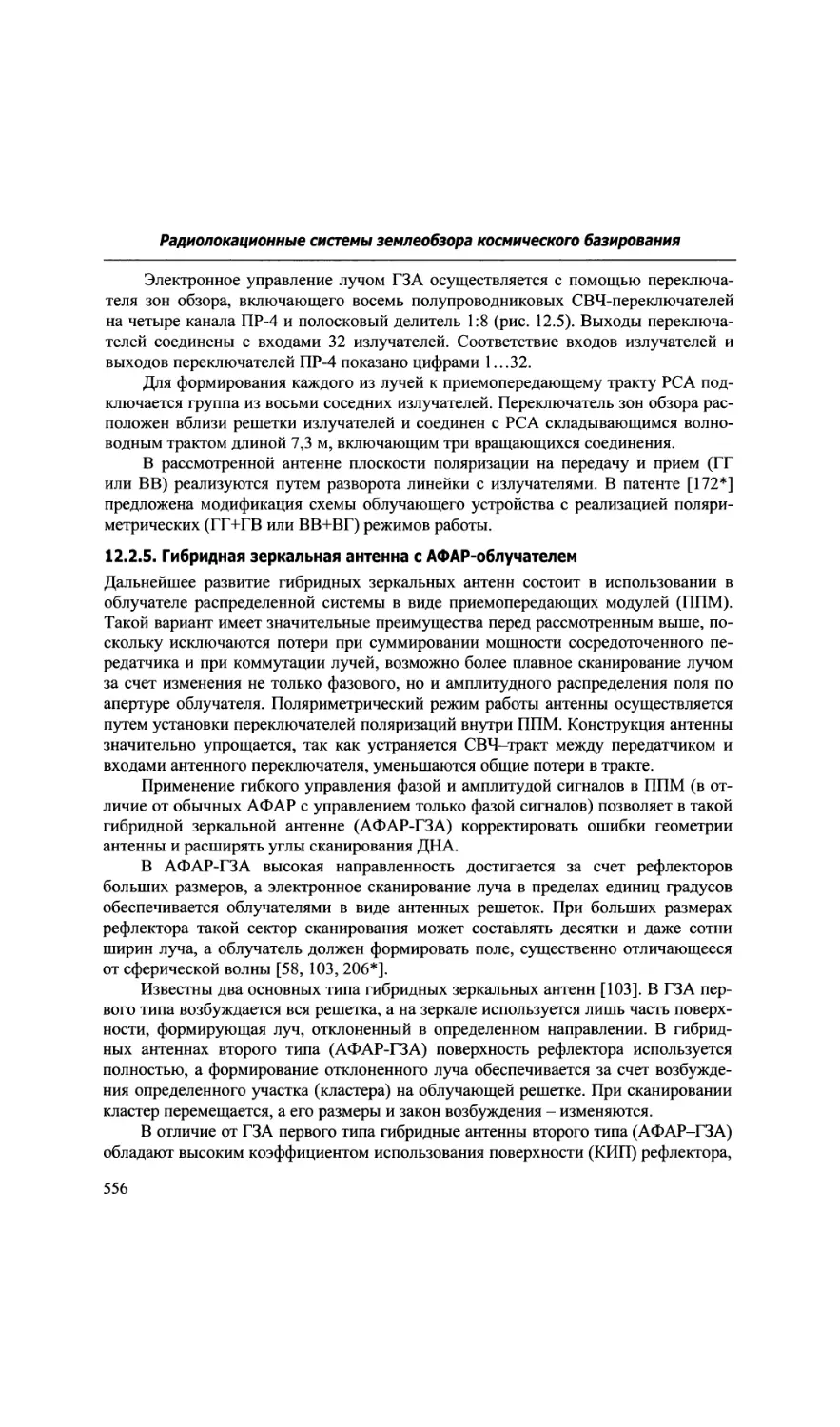
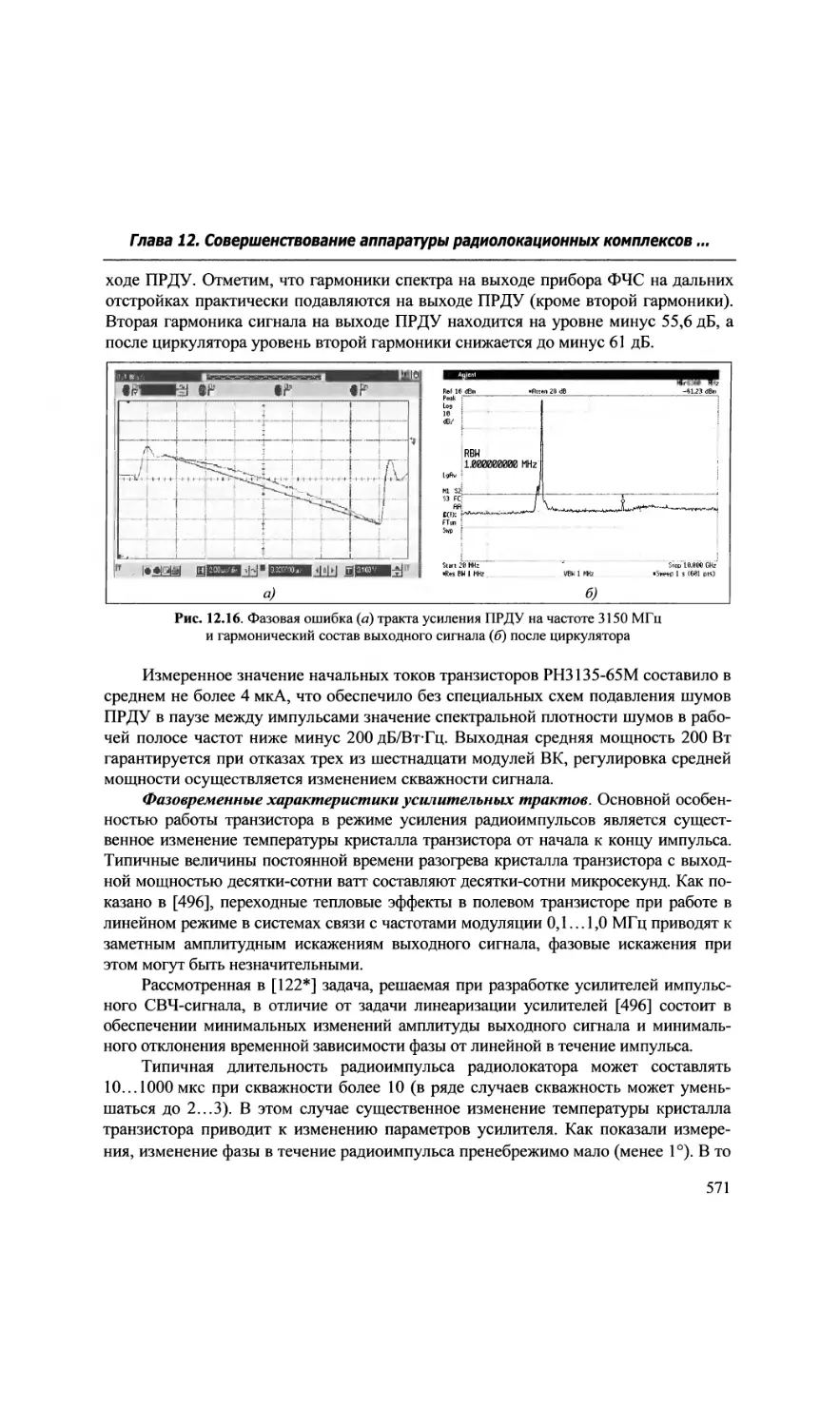
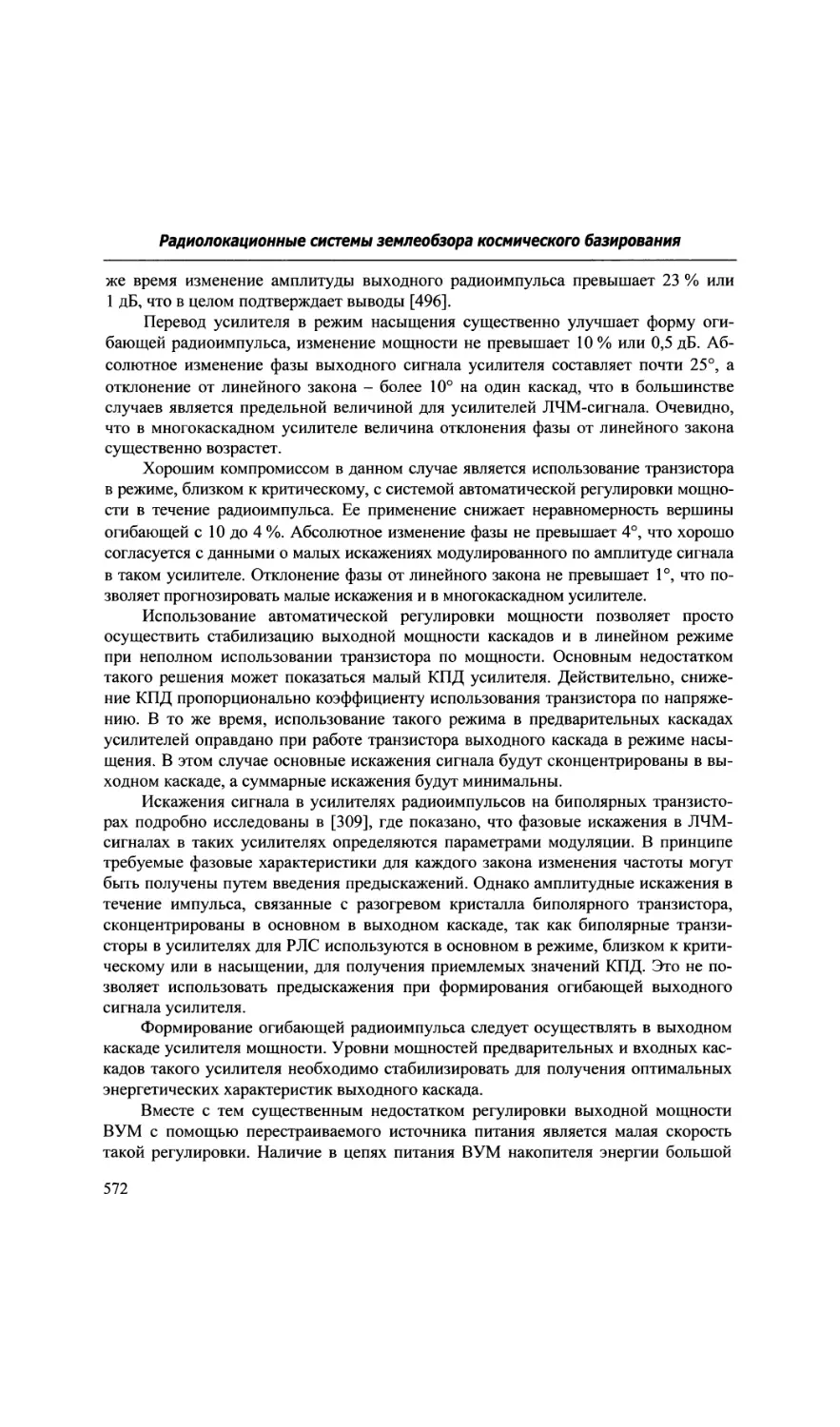
Глава 12. Совершенствование аппаратуры радиолокационных комплексов
землеобзора космического базирования......................................549
12.1. Системный подход к проектированию космической аппаратуры
радиолокационного наблюдения....................................... 549
12.2. Антенные устройства космических РСА.......................... 550
12.2.1. Общие требования к антеннам для космических РСА......... 550
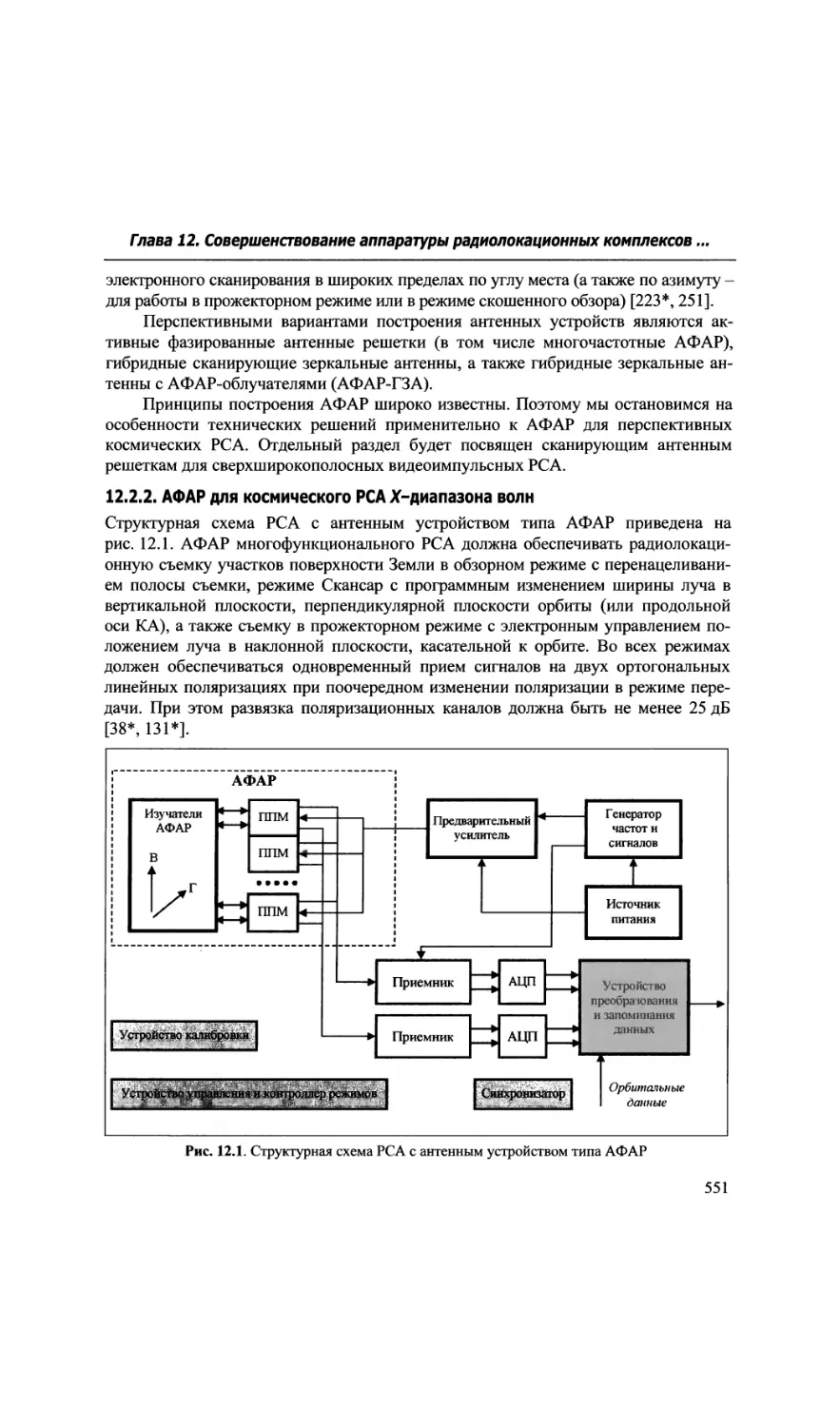
12.2.2. АФАР для космического РСА X-диапазона волн.............. 551
12.2.3. Совмещенная двухдиапазонная АФАР L- и Р-диапазонов волн. 553
12.2.4. Гибридная зеркальная антенна 5-диапазона волн для РСА
в составе малого космического аппарата...........................554
12.2.5. Гибридная зеркальная антенна с АФАР-облучателем......... 556
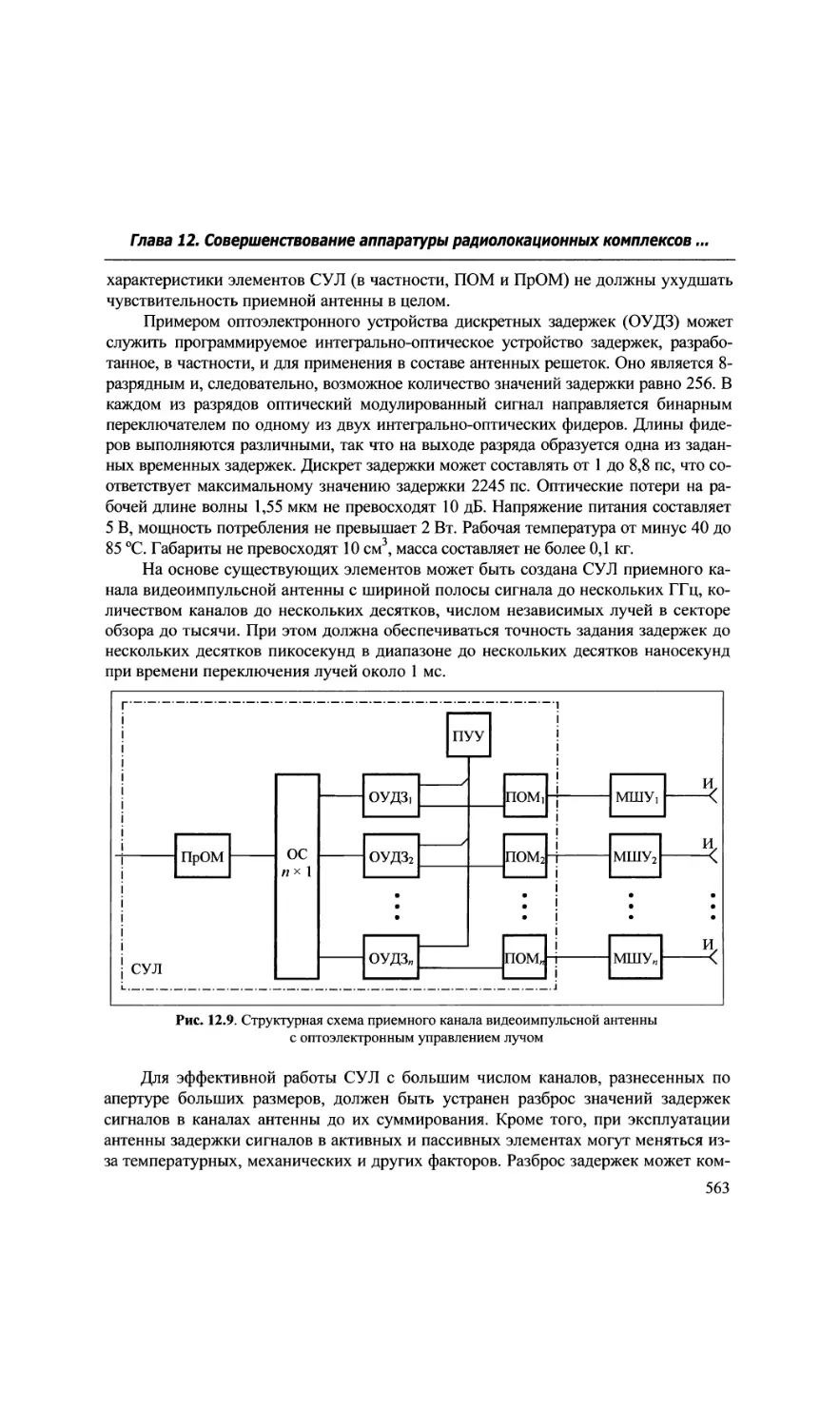
12.2.6. Активные антенные решетки и их элементы
для видеоимпульсных РСА......................................... 557
12.2.7. Перспективы развития антенных систем для РСА космического
базирования......................................................564
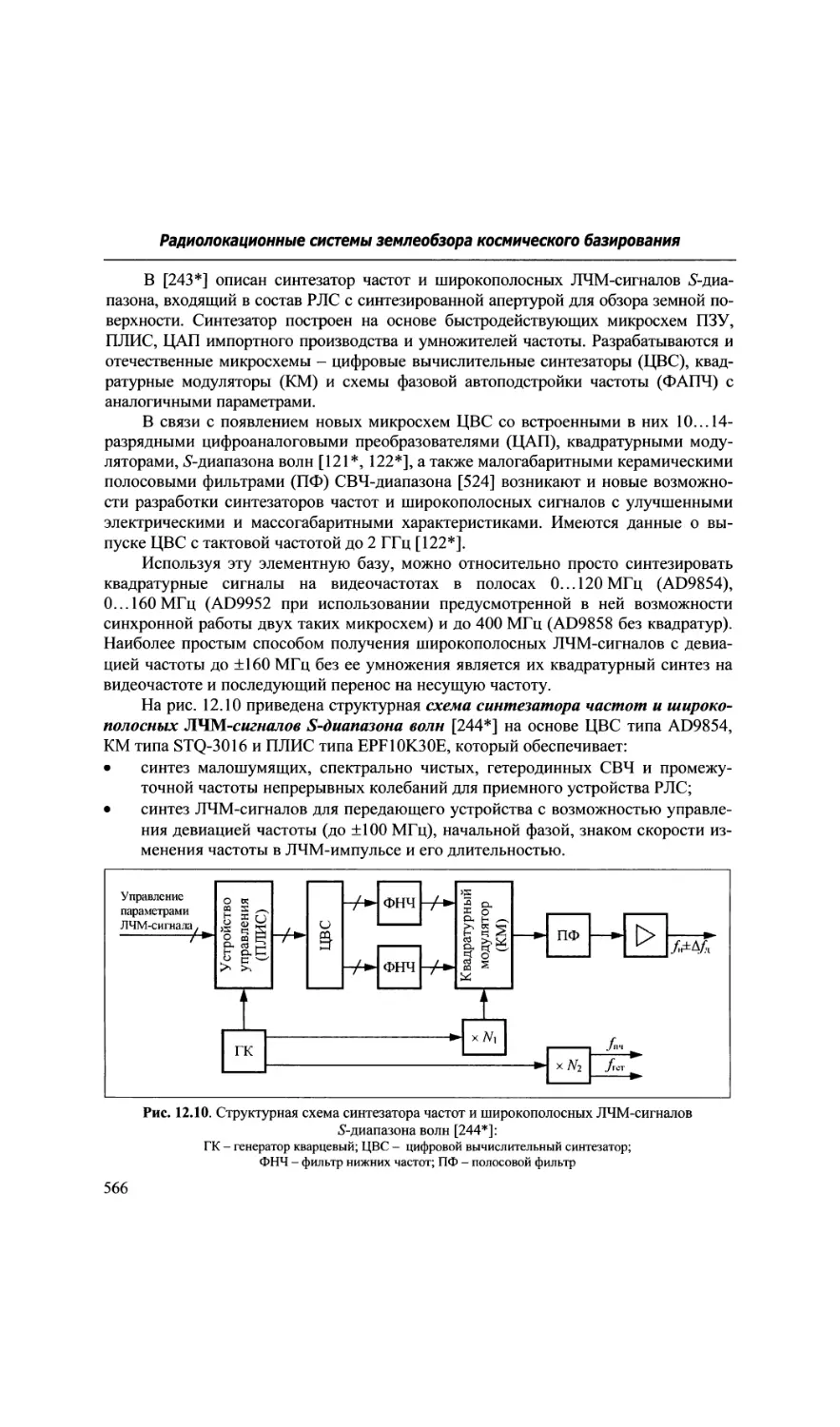
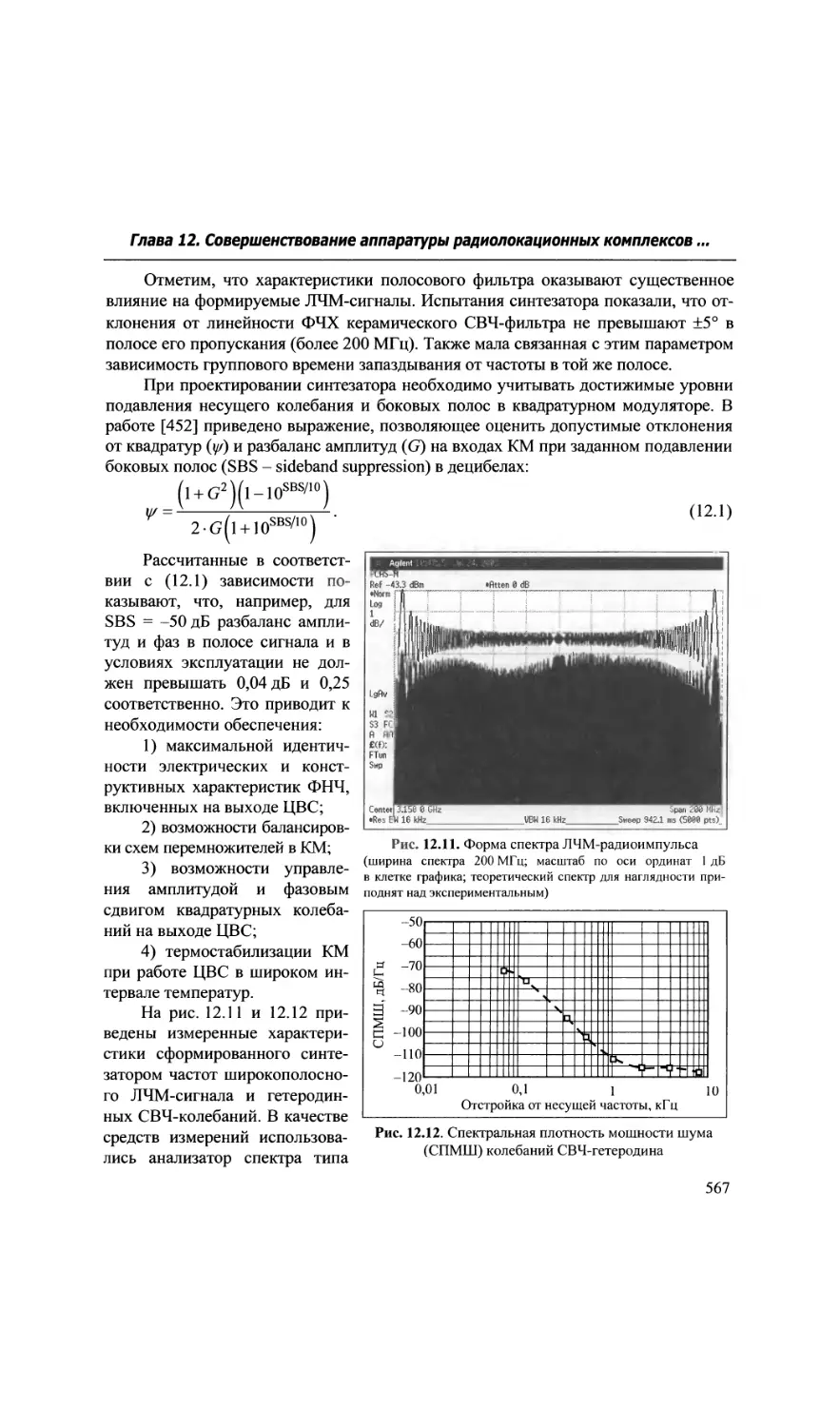
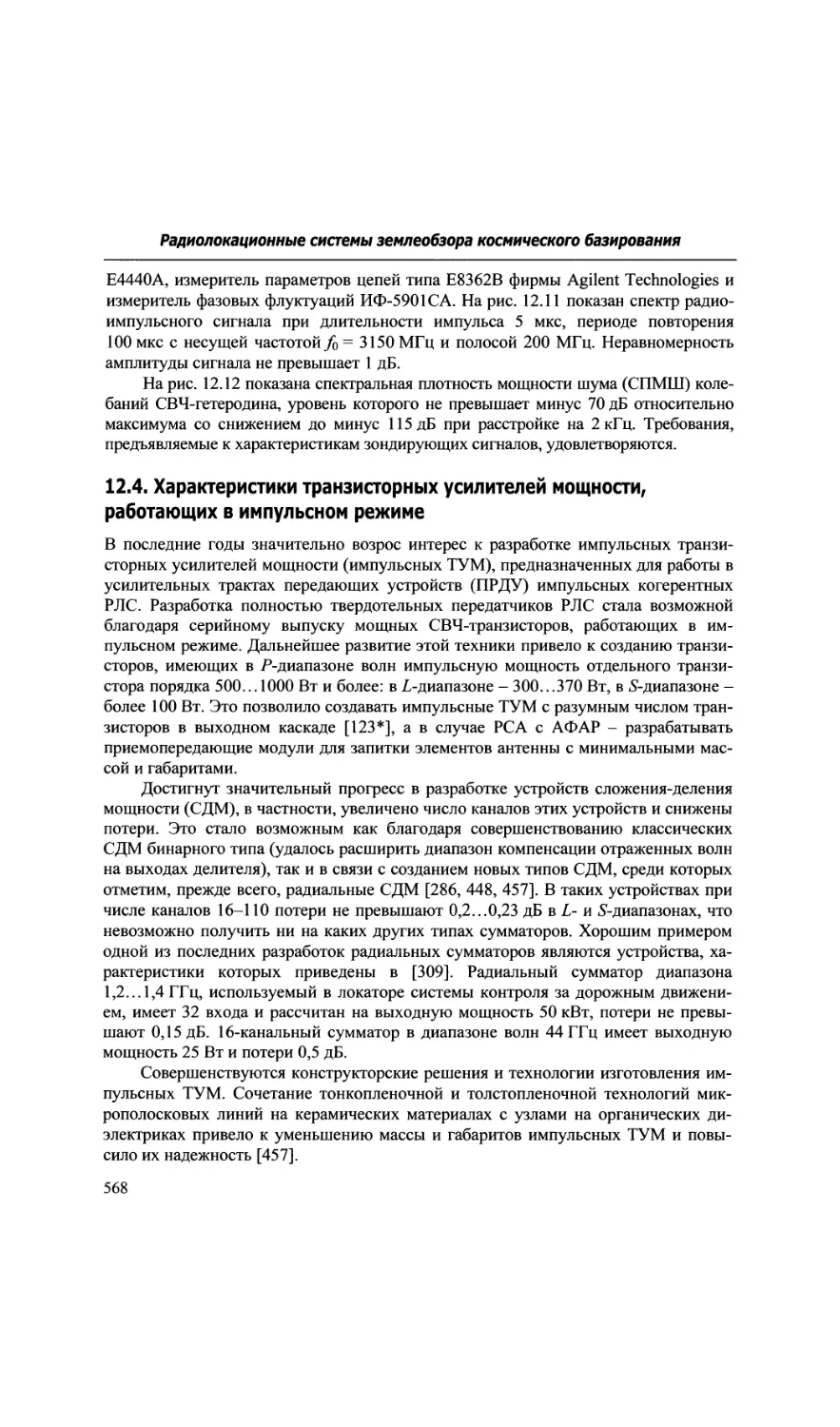
12.3. Генераторы частот и сигналов для космических РСА............. 565
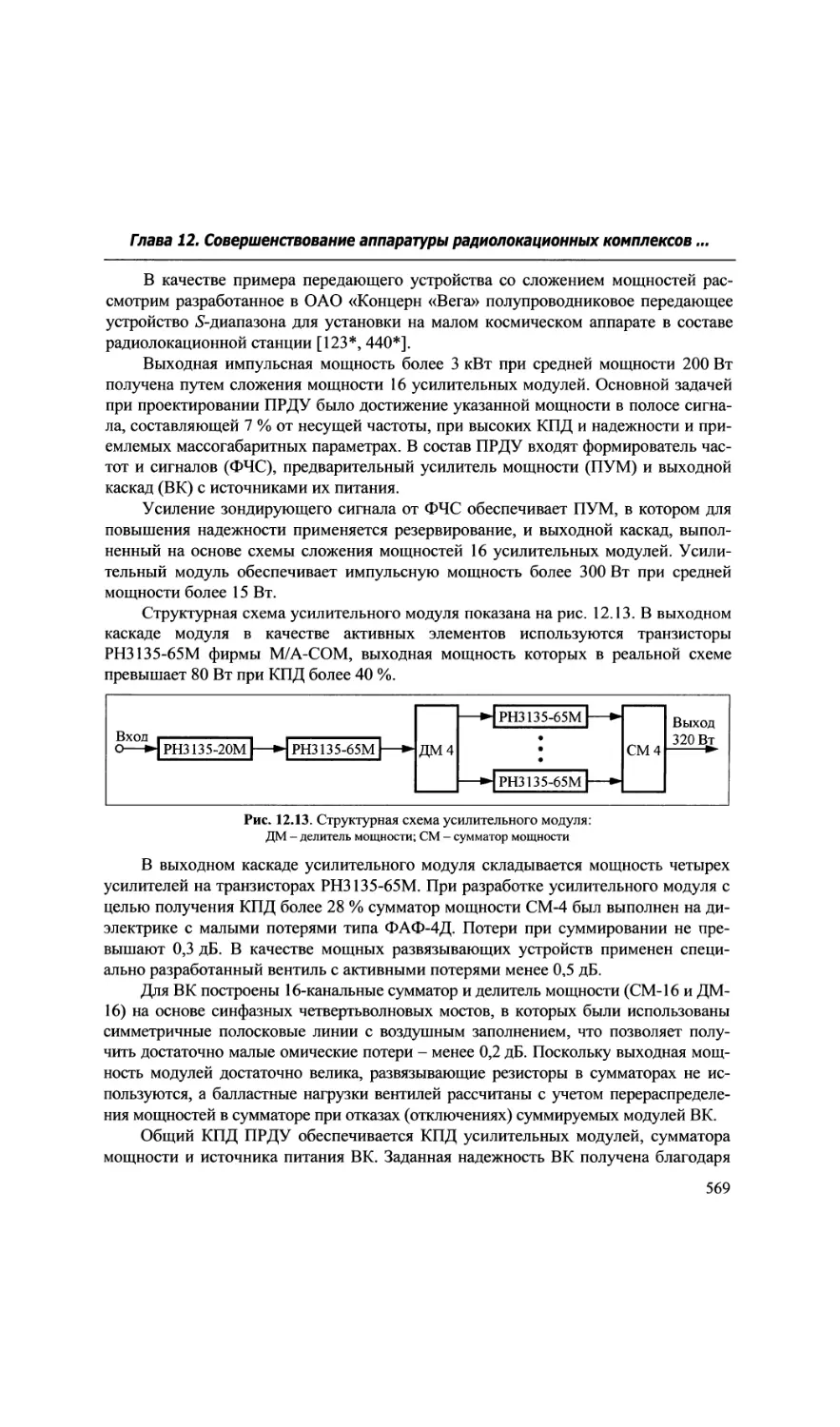
12.4. Характеристики транзисторных усилителей мощности,
работающих в импульсном режиме..................................... 568
12.5. Совершенствование приемопередающих модулей
применительно к гибридным зеркальным антеннам
с АФАР-облучателями................................................ 573
12.6. Требования к приемному тракту РСА............................ 575
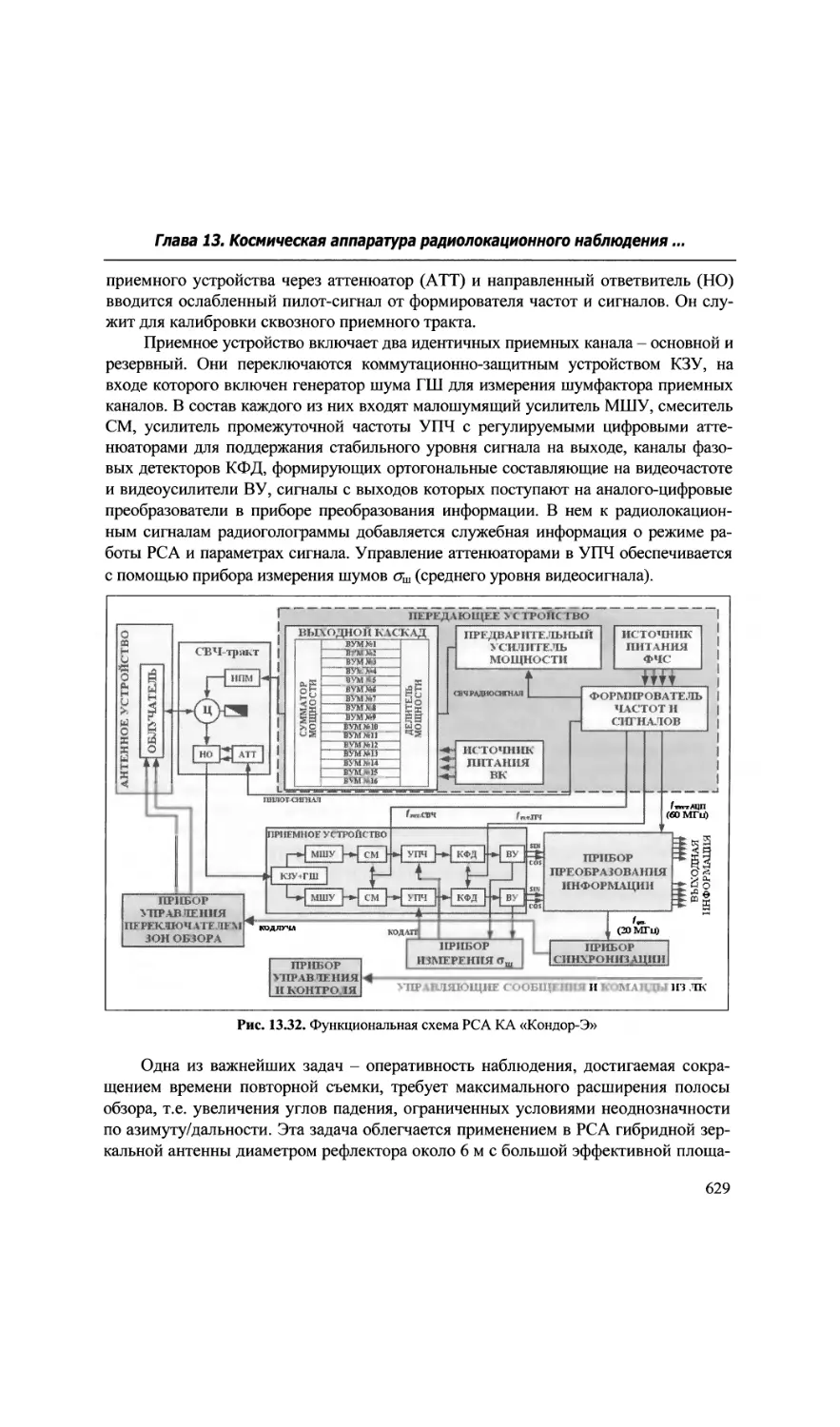
Глава 13. Космическая аппаратура радиолокационного наблюдения
земной поверхности и наземных (надводных) объектов........................577
13.1. Этапы создания космической аппаратуры радиолокационного
наблюдения......................................................... 577
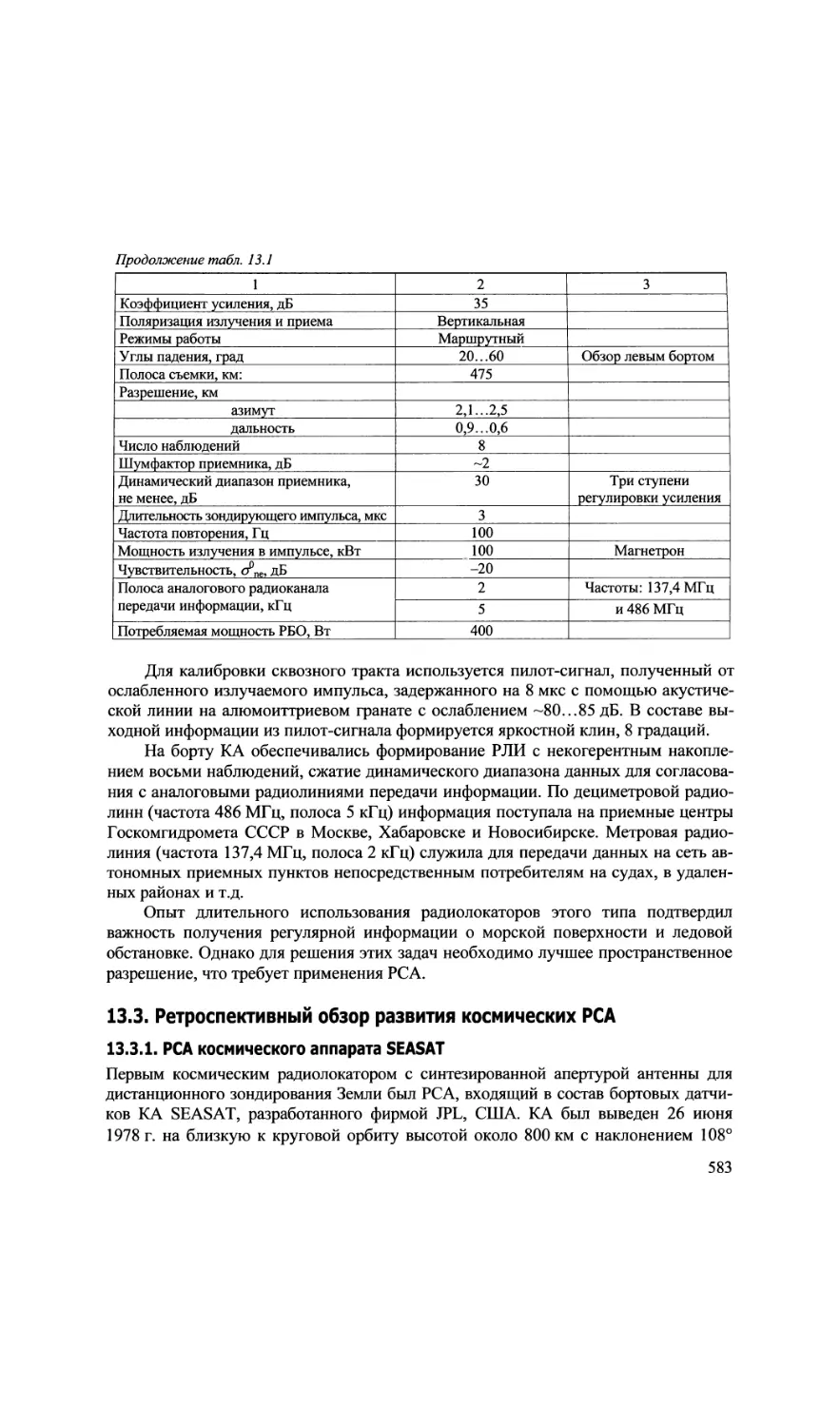
13.2. Некогерентные космические радиолокаторы бокового обзора
для наблюдения океана и надводной обстановки....................... 579
13.2.1. Некогерентные РБО контроля надводной обстановки.
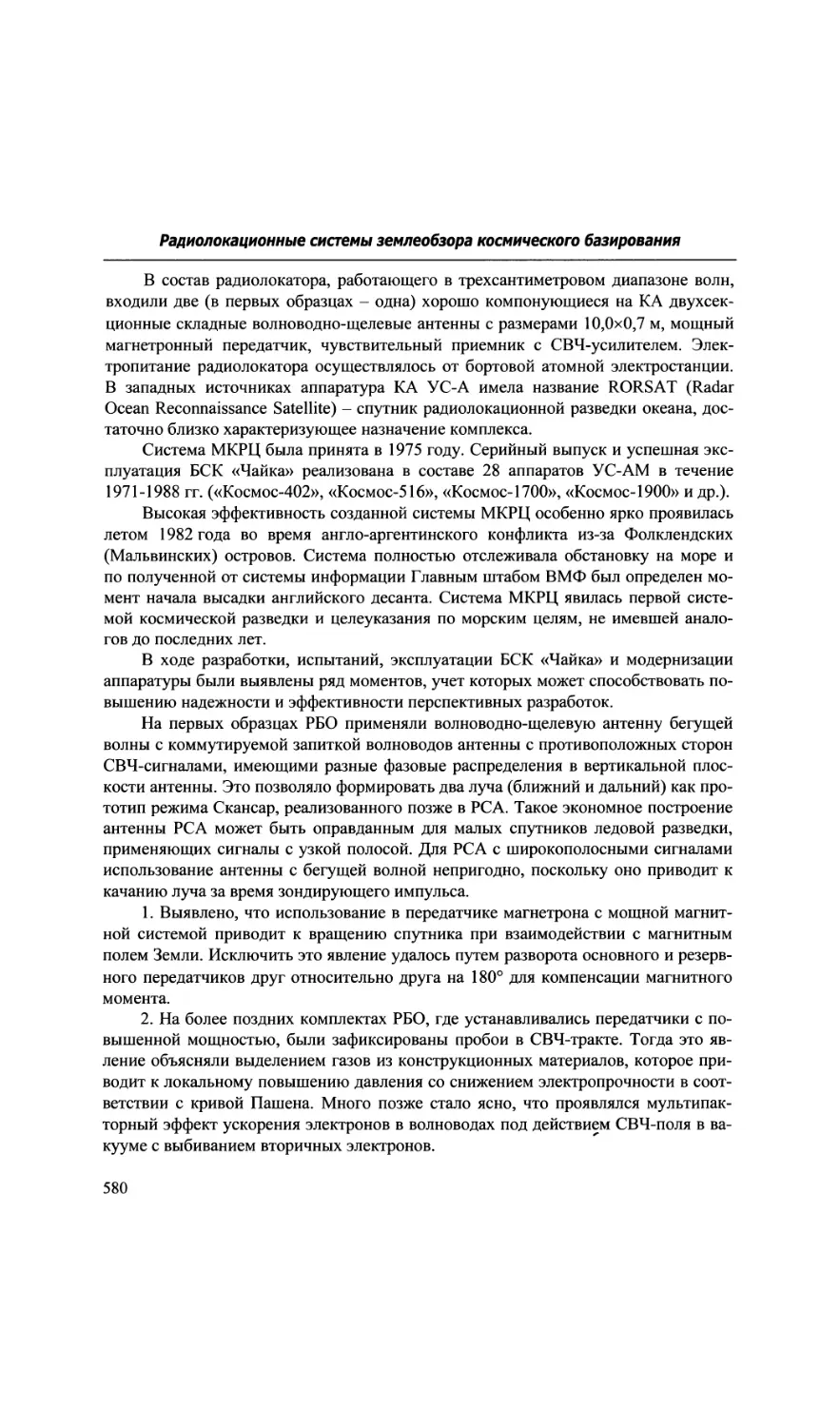
Бортовой комплекс «Чайка»........................................579
13.2.2. Космические РБО для исследования морской поверхности,
ледяного и ледникового покровов..................................581
13.3. Ретроспективный обзор развития космических РСА............... 583
13.3.1. РСА космического аппарата SEASAT.........................583
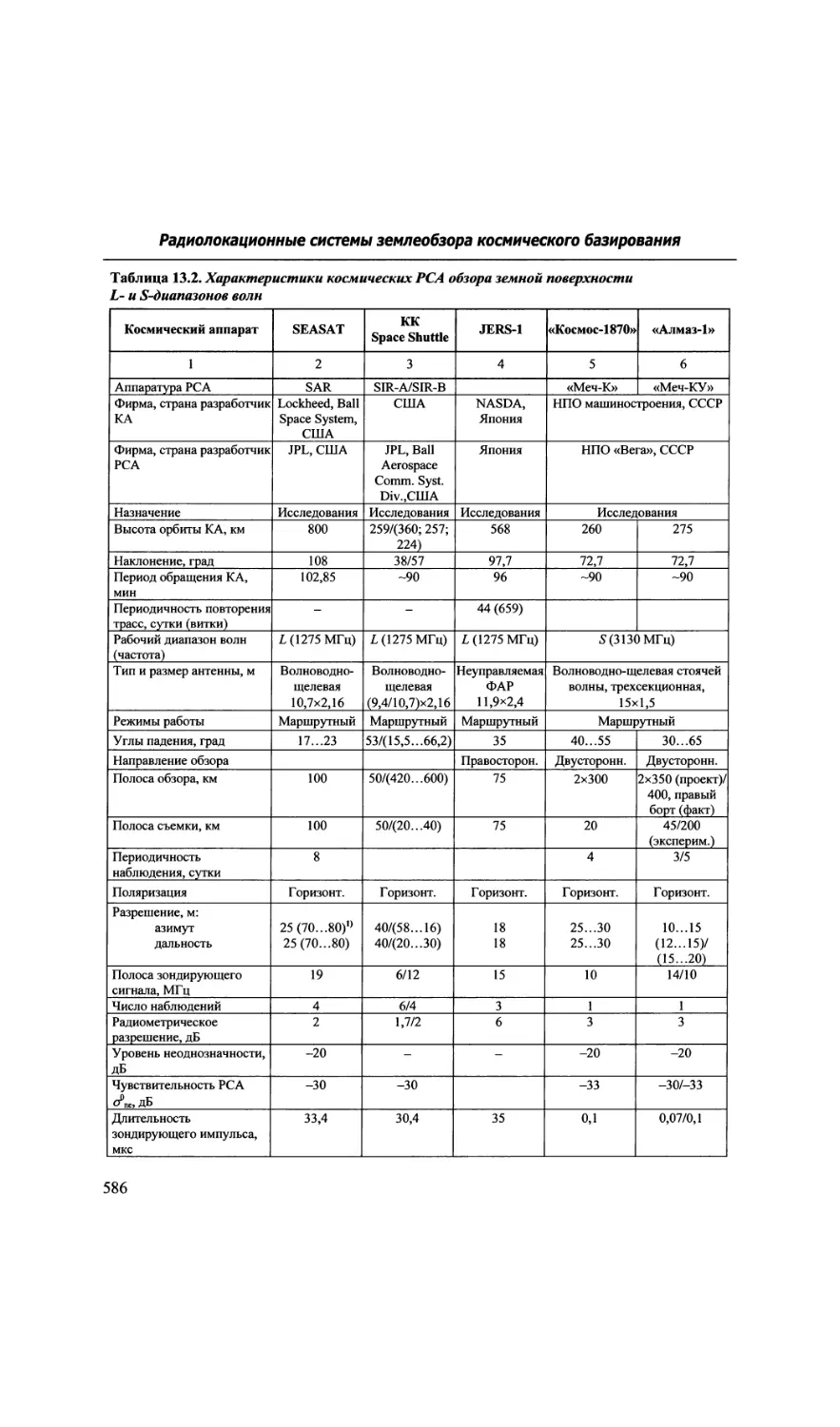
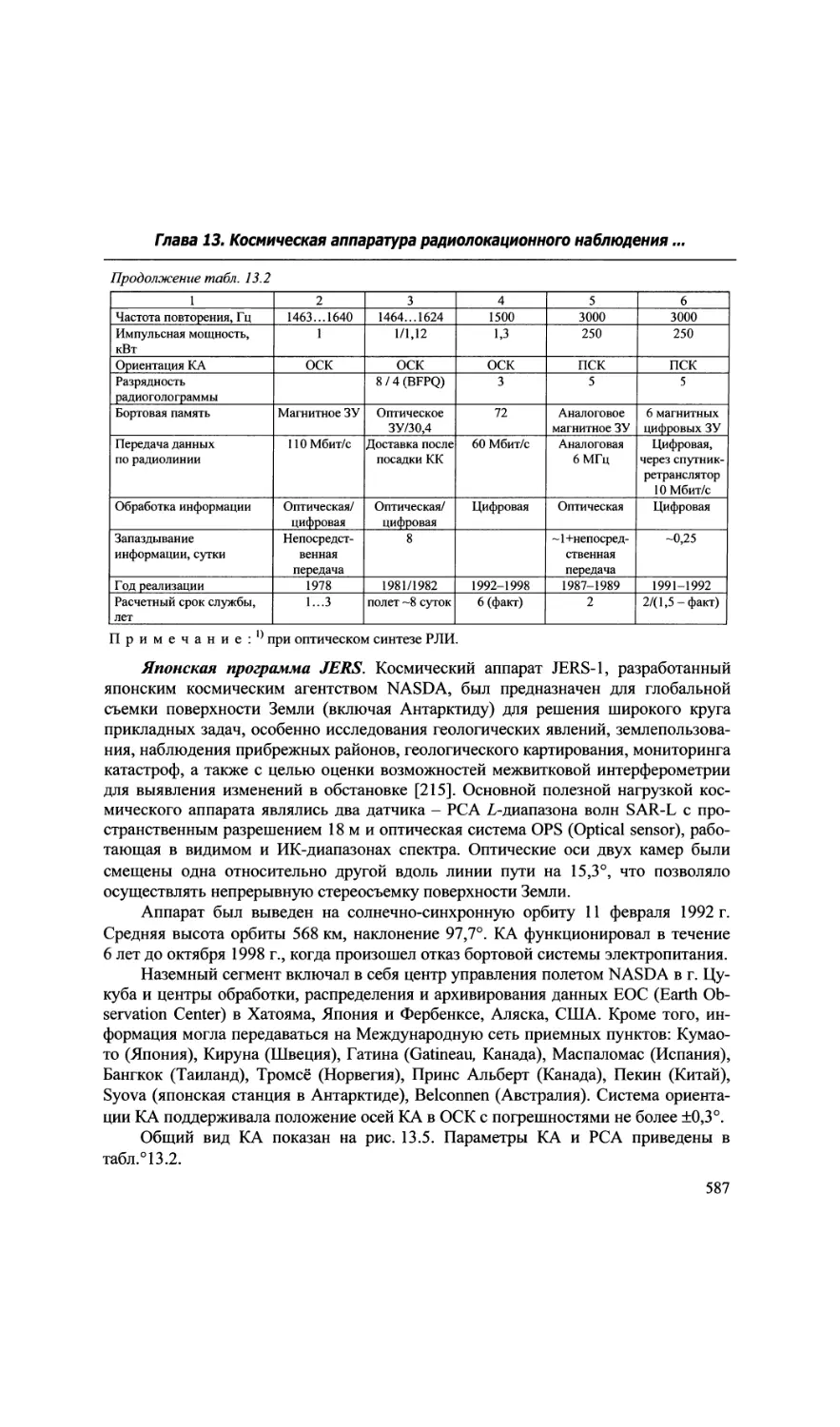
13.3.2. Космические РСА L-диапазона волн SIR-A, SIR-B, JERS-1....585
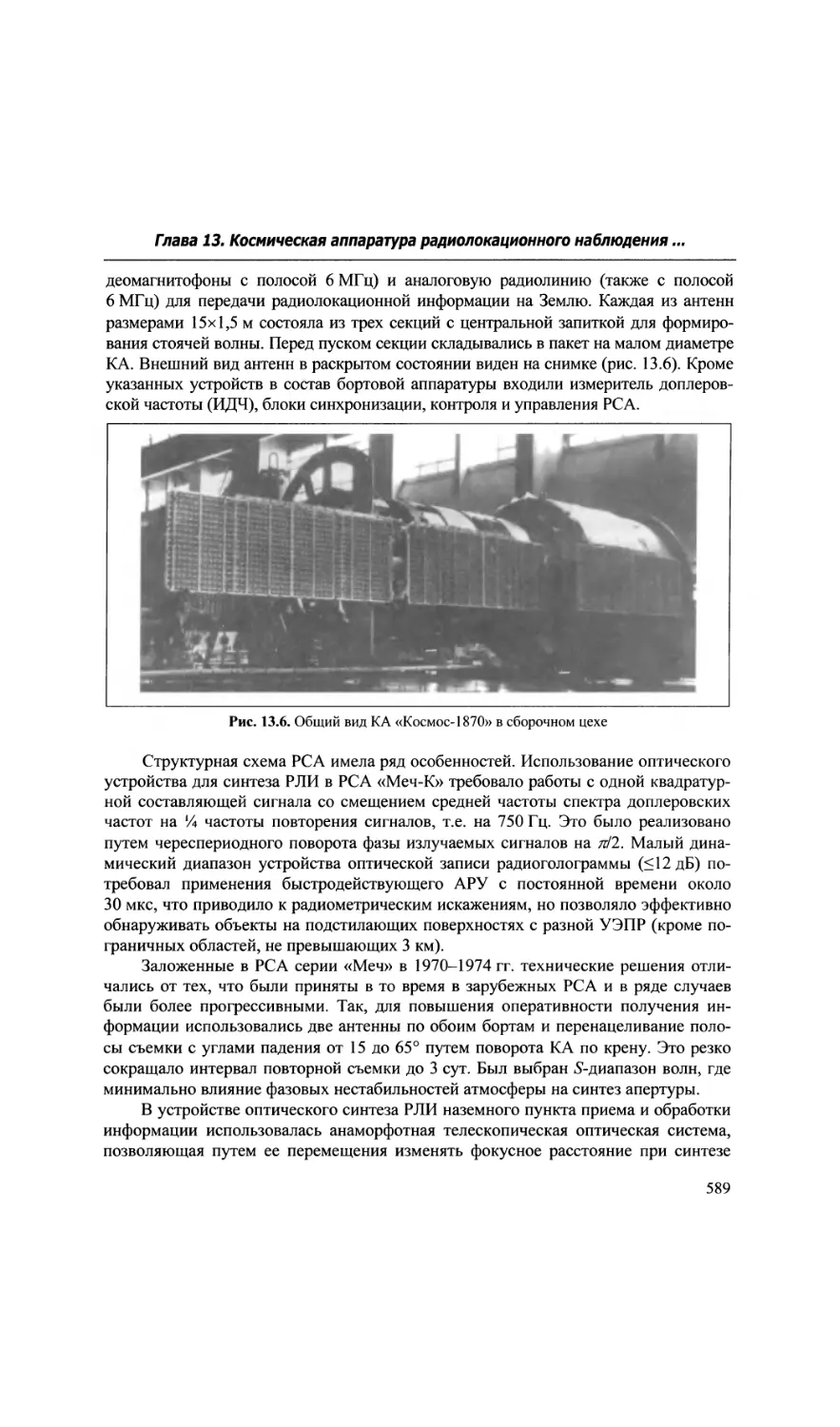
13.3.3. РСА «Меч-К», «Меч-КУ» космических аппаратов «Космос-1870»
и «Алмаз-1»......................................................588
13.3.4. Программа ERS космического агентства ESA.................594
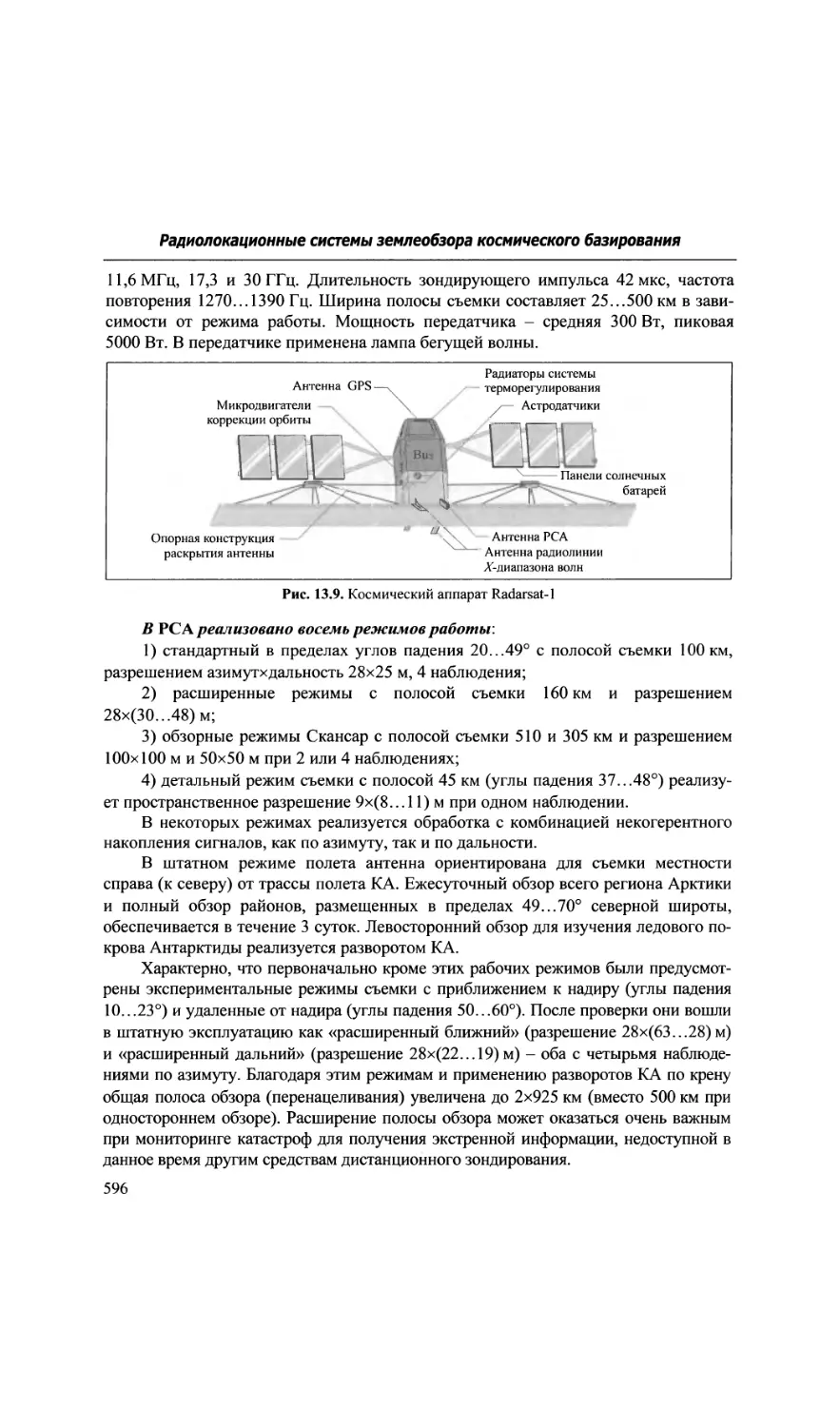
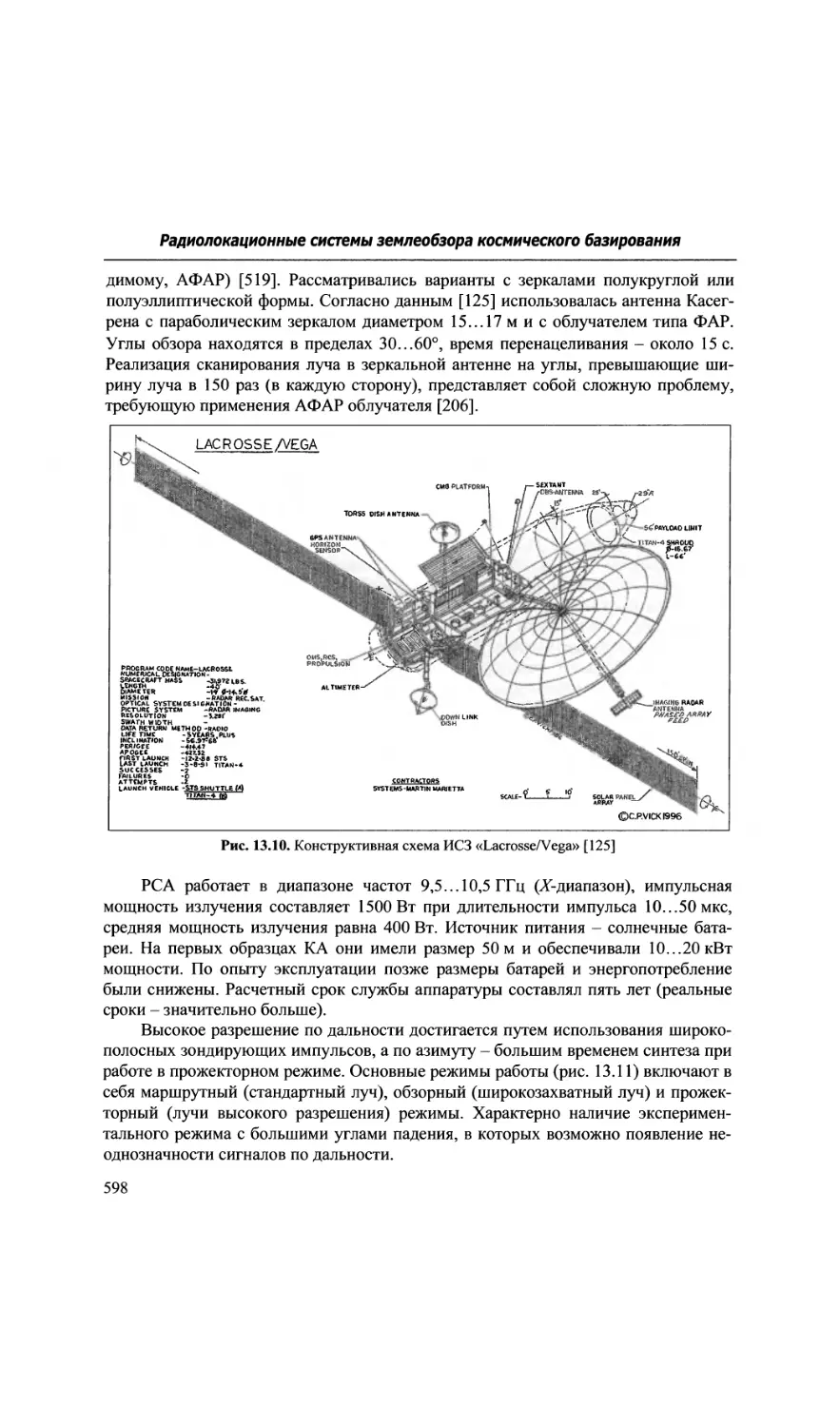
13.3.5. Многорежимный РСА С-диапазона волн Radarsat-1............595
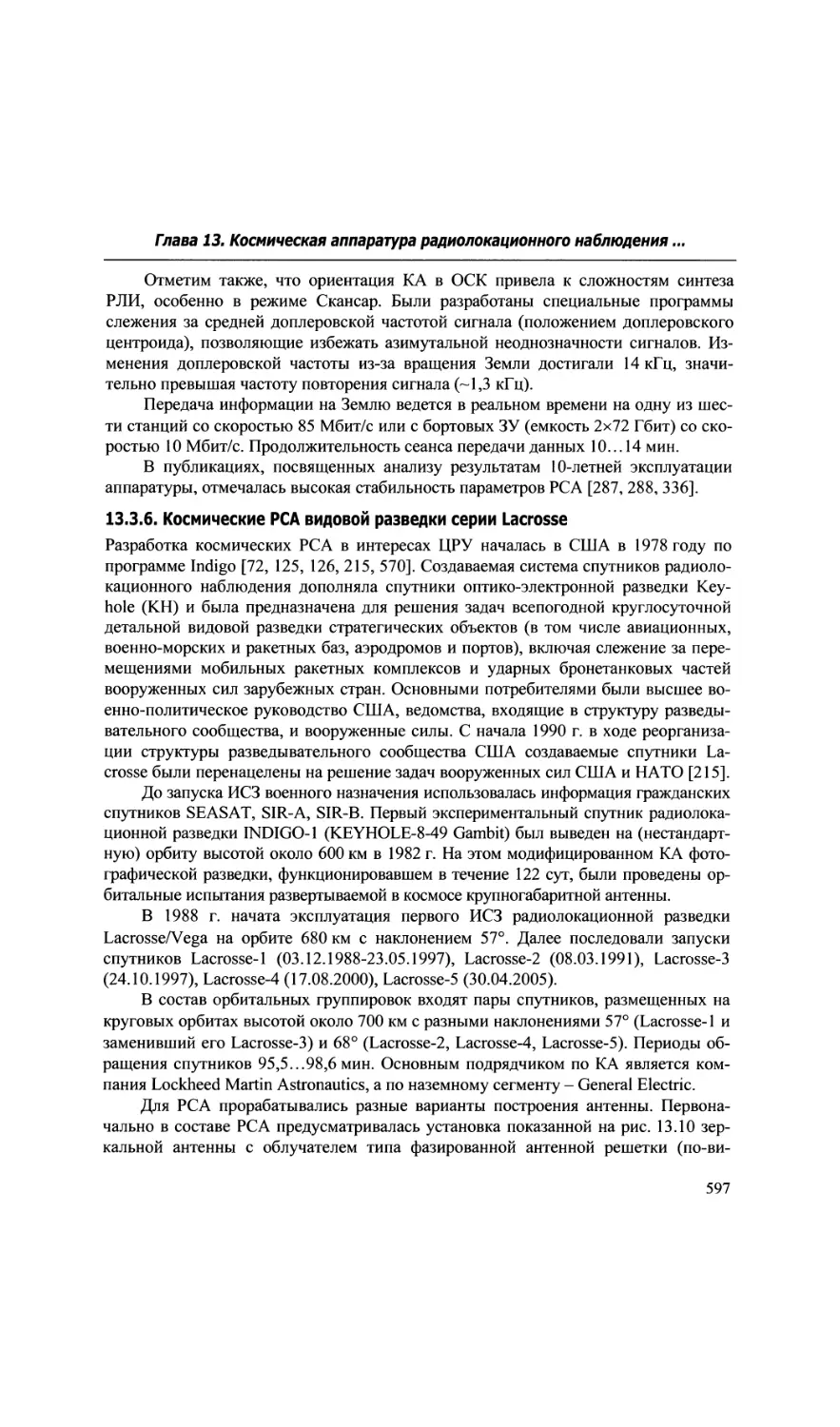
13.3.6. Космические РСА видовой разведки серии Lacrosse..........597
13.3.7. Многочастотные поляриметрические РСА SIR-C/X-SAR
многоразового космического корабля Space Shuttle................ 600
9
Радиолокационные системы землеобзора космического базирования
13.4. Разработки космических РСА, обеспечившие создание
научно-технического задела.......................................... 602
13.4.1. Многорежимный космический РСА LightsAR для малого КА.......602
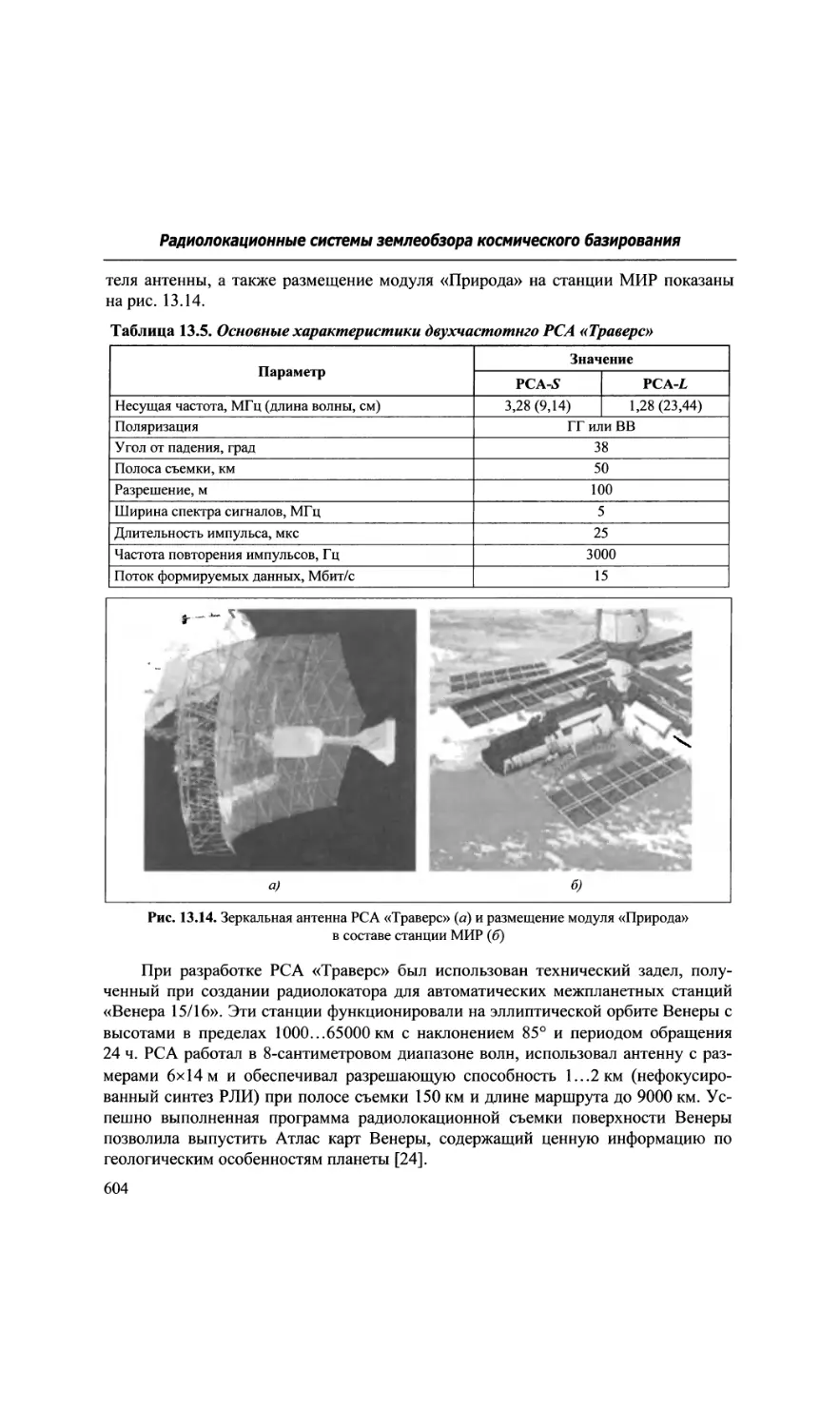
13.4.2. Двухчастотный РСА «Траверс» модуля «Природа»
космической станции МИР.......................................... 603
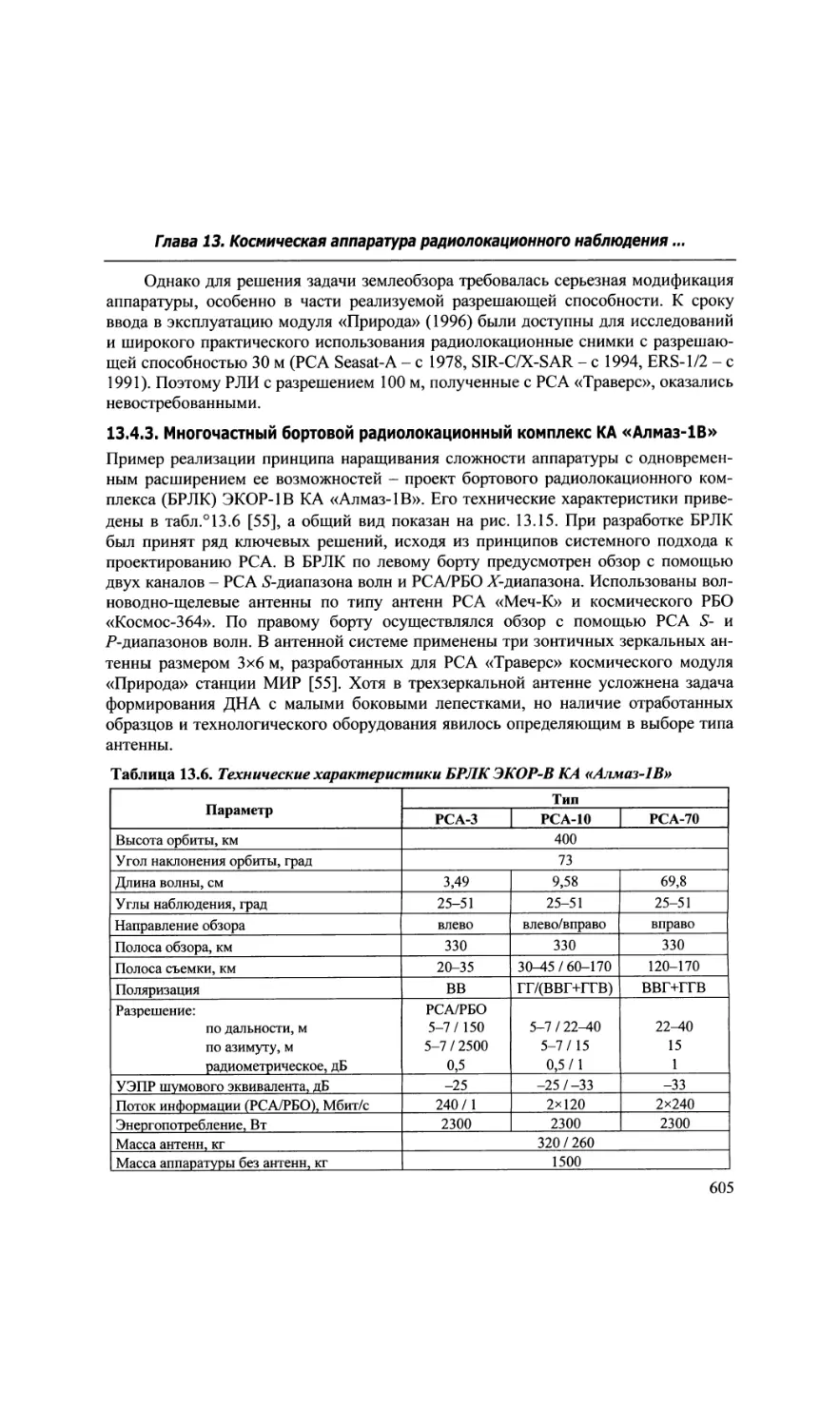
13.4.3. Многочастный бортовой радиолокационный комплекс КА «Алмаз-1 В» 605
13.4.4. Многочастный поляриметрический бортовой радиолокационный
комплекс «Аркон-2»................................................606
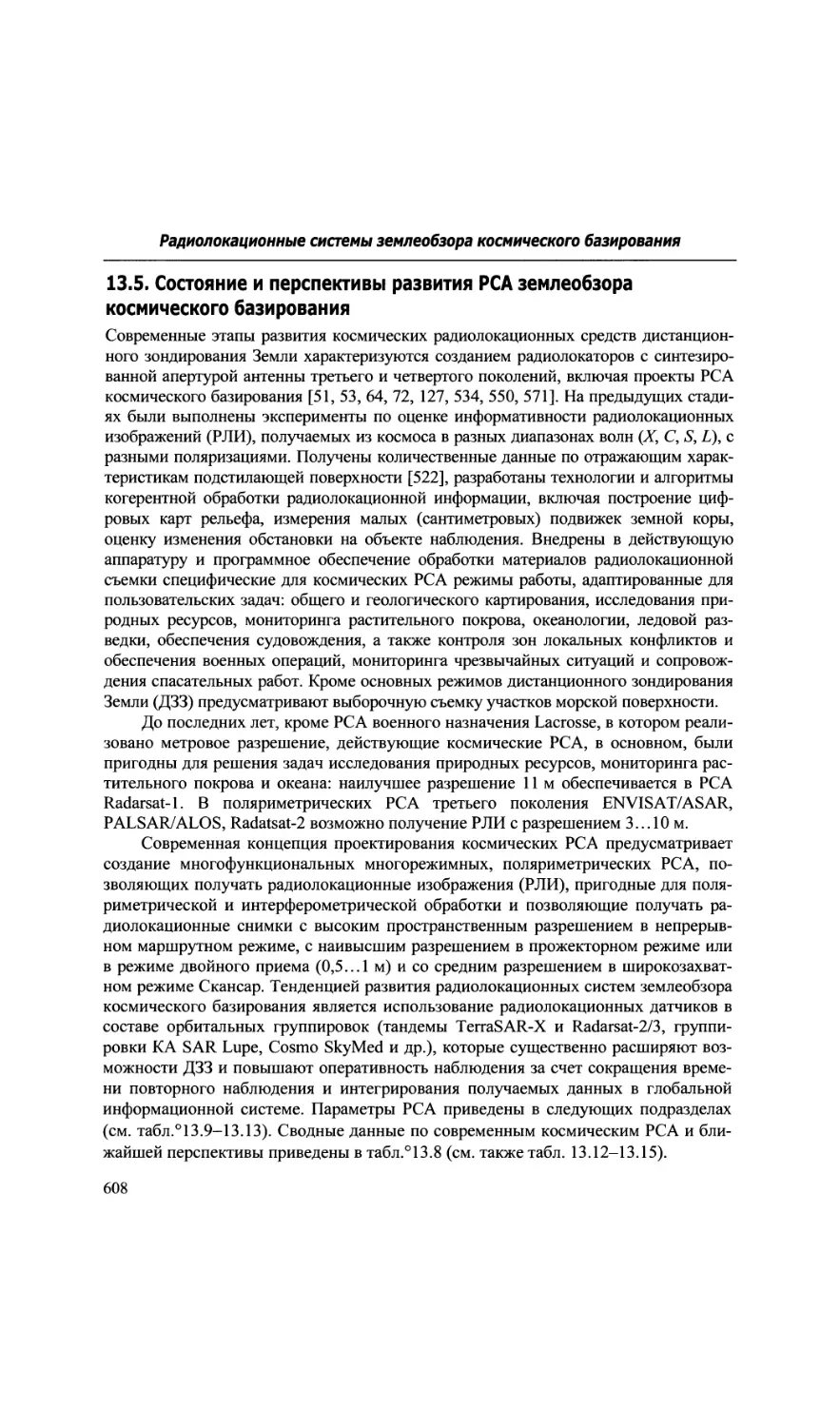
13.5. Состояние и перспективы развития РСА землеобзора космического
базирования......................................................... 608
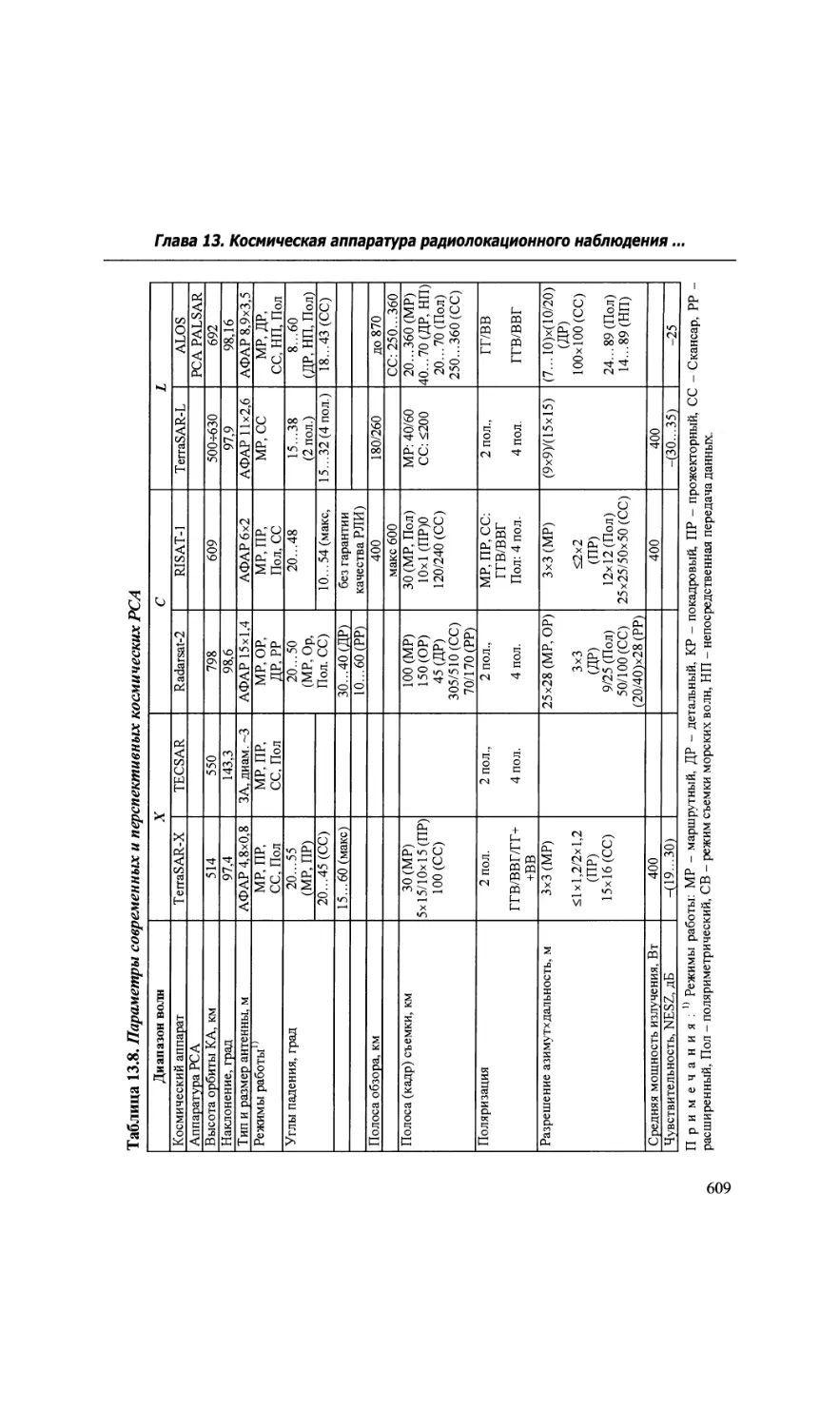
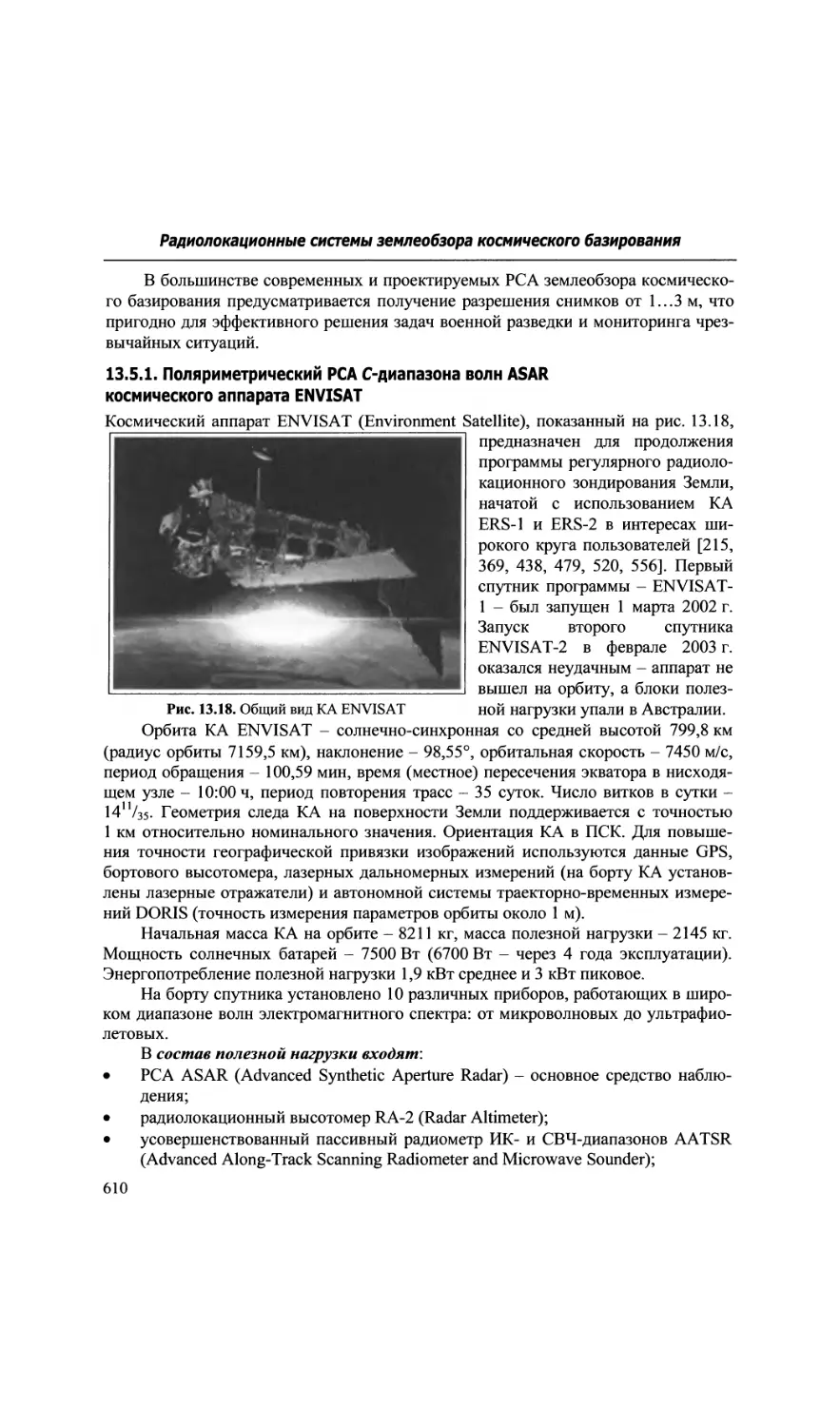
13.5.1. Поляриметрический РСА С-диапазона волн ASAR космического
аппарата ENVISAT................................................... 610
13.5.2. Многорежимный поляриметрический РСА С-диапазона волн Radarsat-2 .... 612
13.5.3. Поляриметрические РСА L-диапазона волн PALSAR космического
аппарата ALOS.....................................................614
13.5.4. Орбитальная группировка SAR Lupe...........................617
13.5.5. Космические аппараты Cosmo SkyMed..........................618
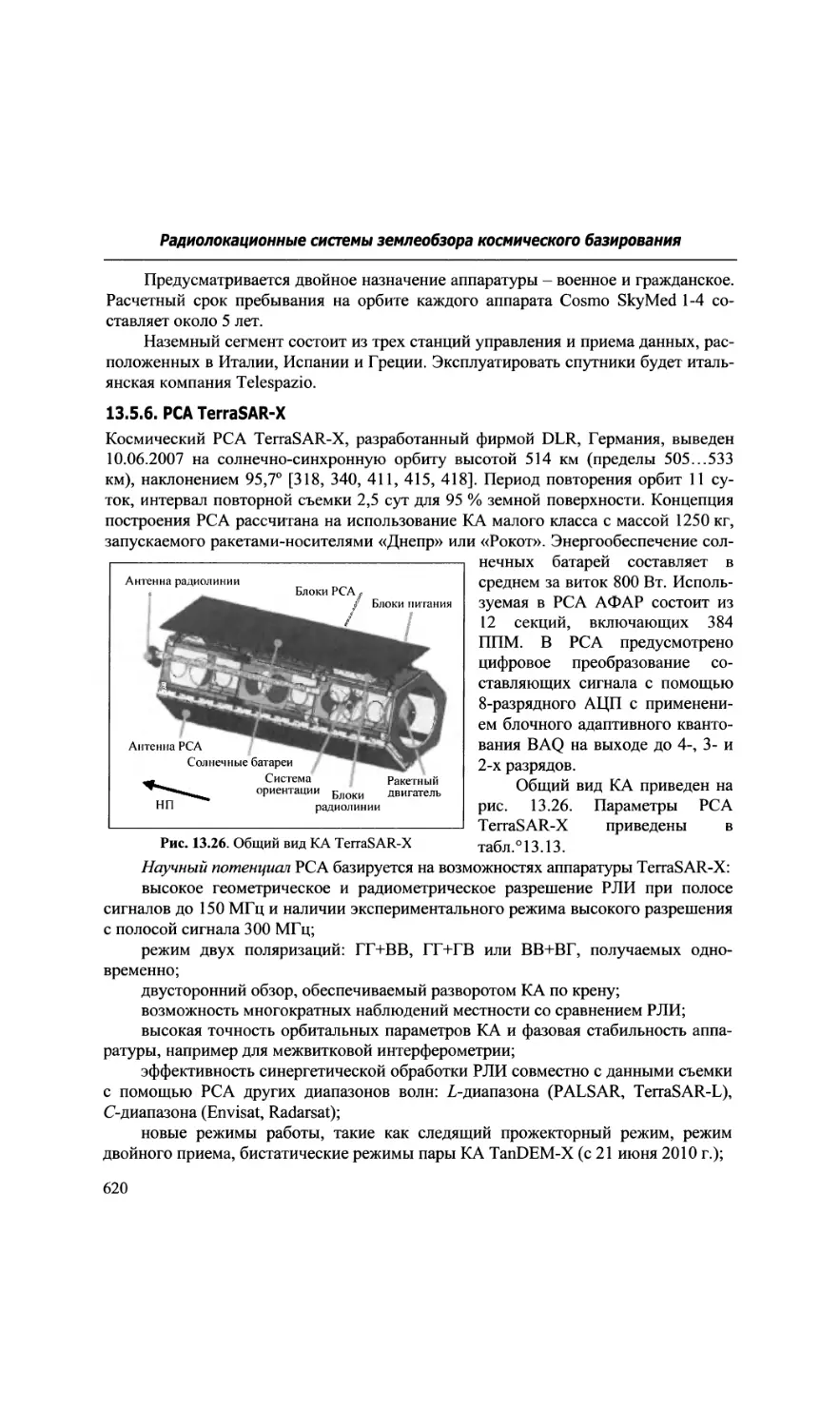
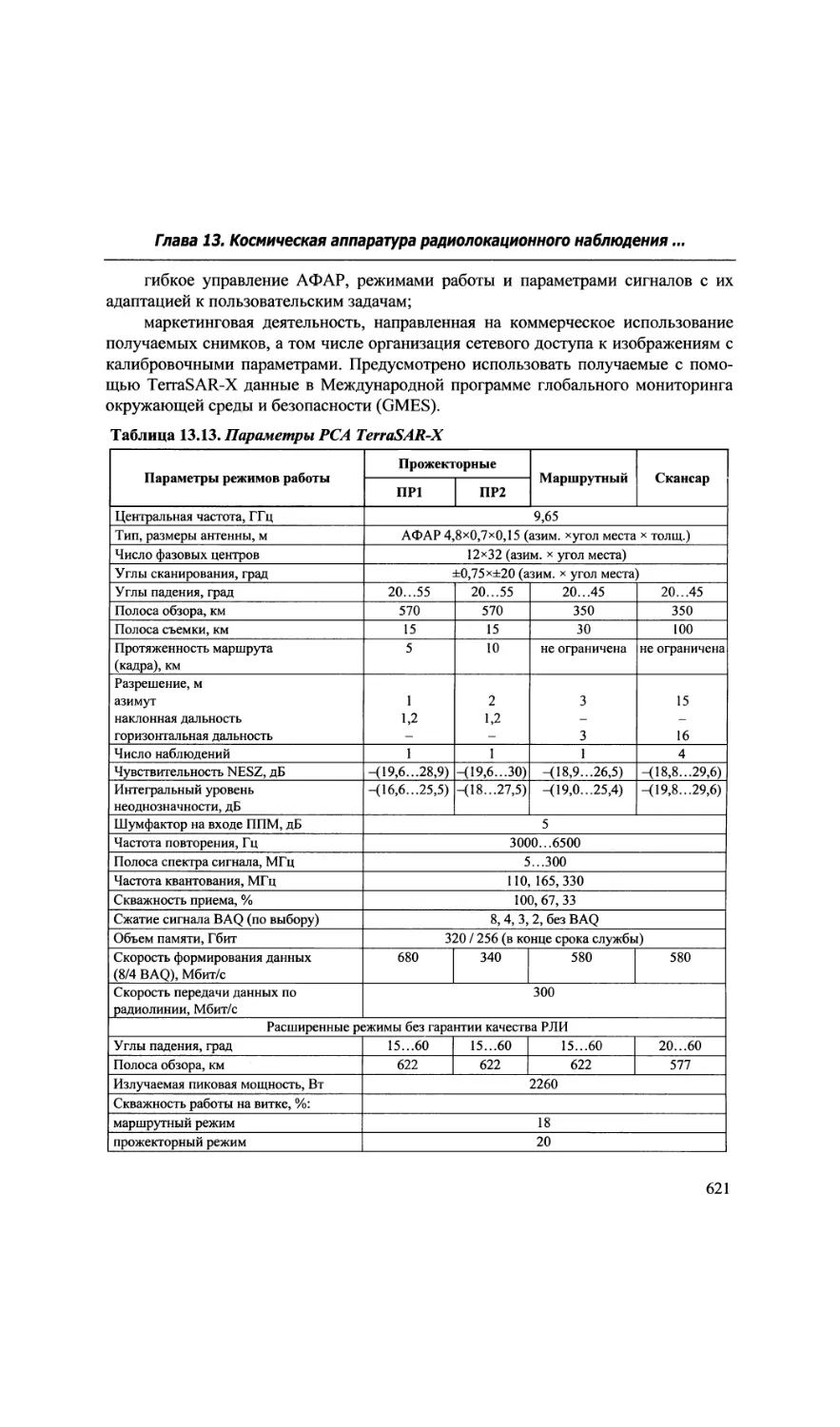
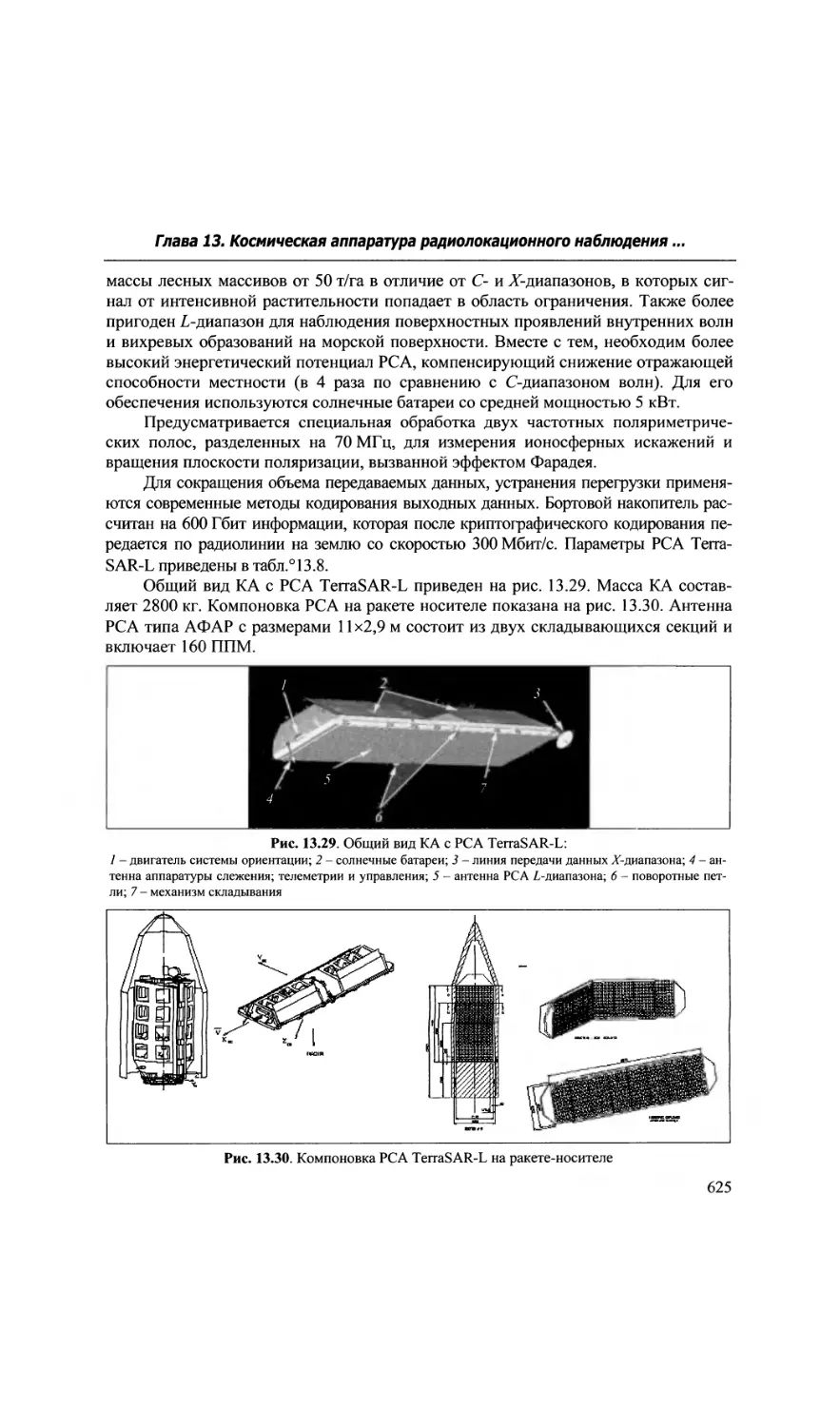
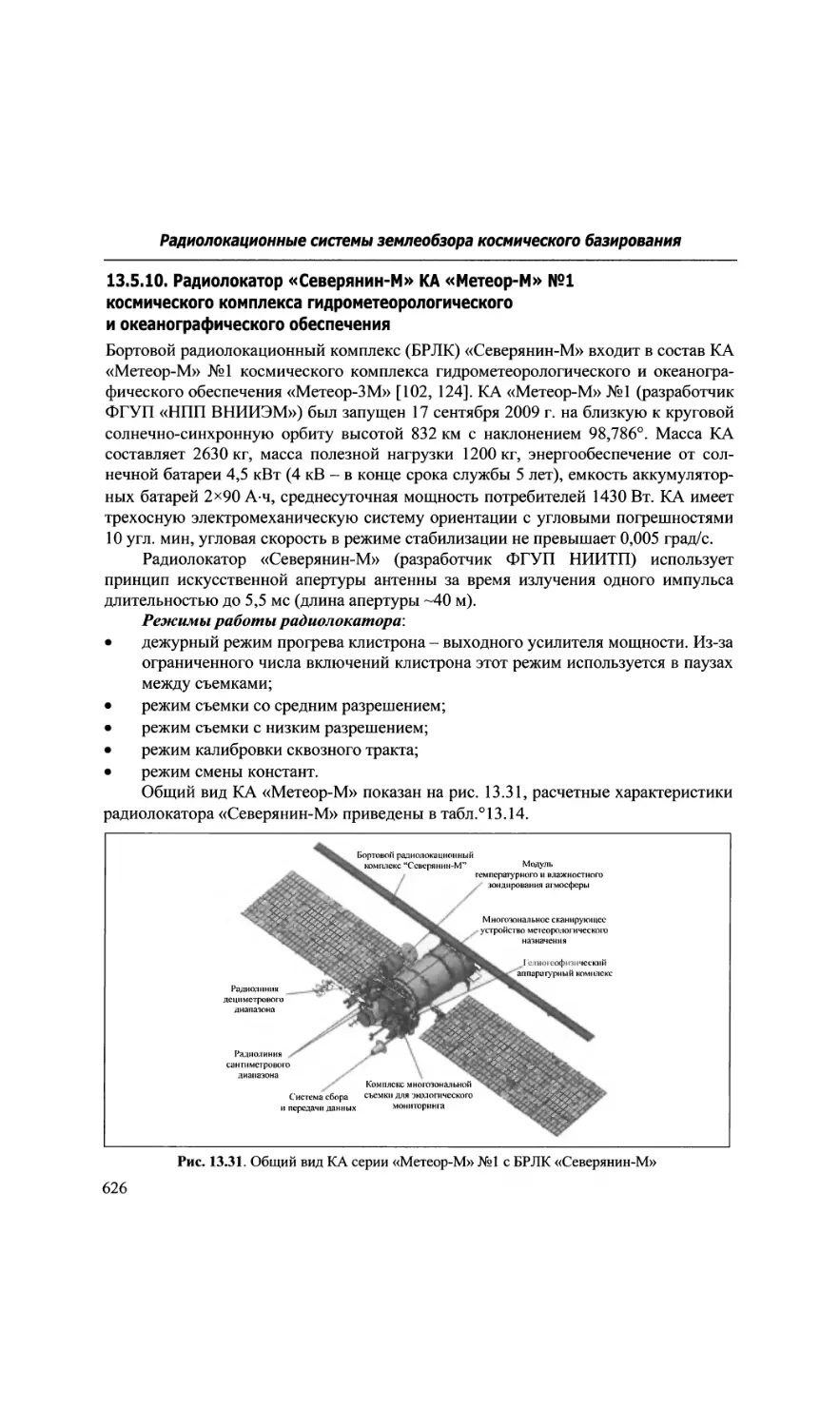
13.5.6. РСА TerraSAR-X.............................................620
13.5.7. PCATECSAR................................................. 622
13.5.8. Индийский РСА RISAT-1..................................... 623
13.5.9. Перспективный РСА TerraSAR-L.............................. 624
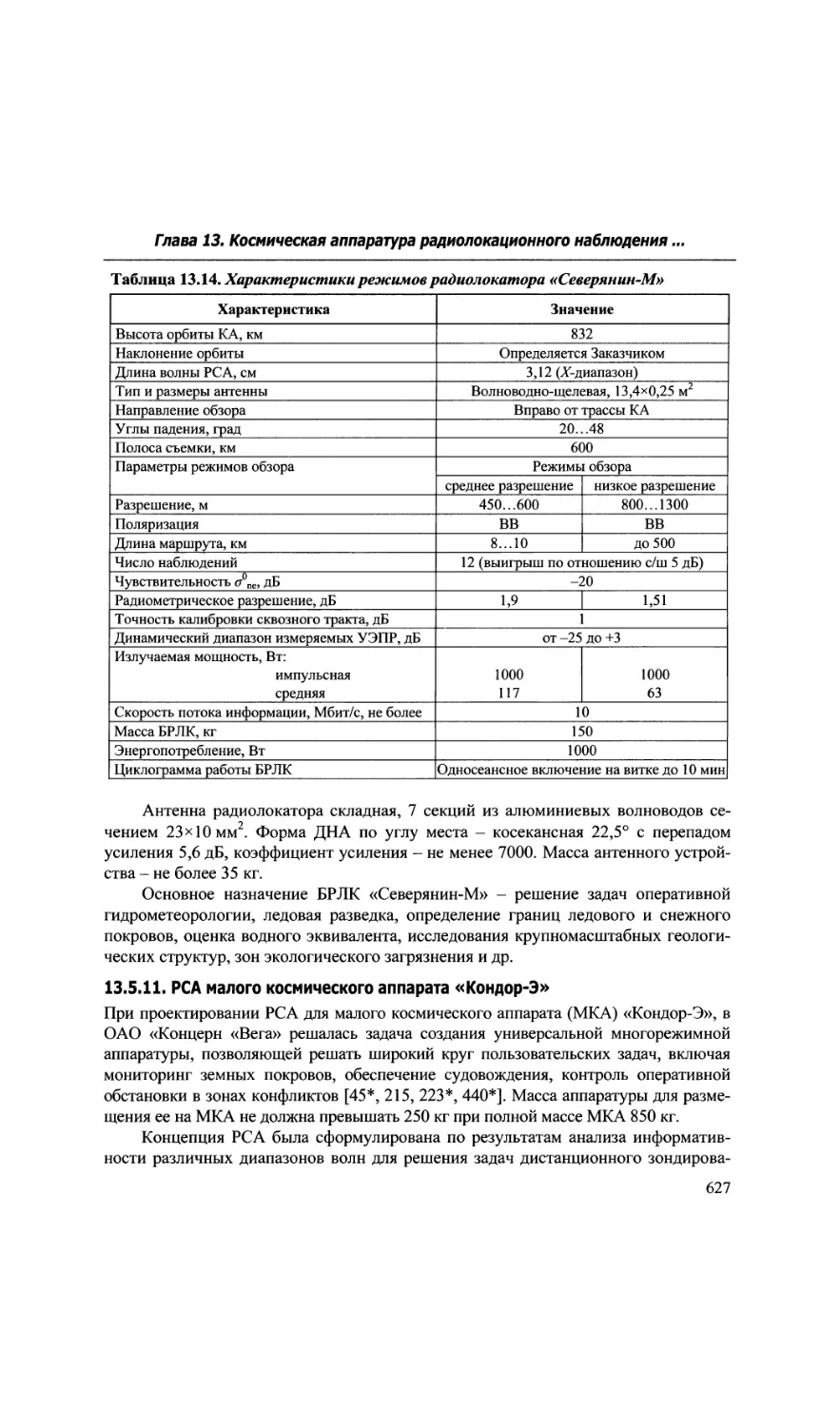
13.5.10. Радиолокатор «Северянин-М» КА «Метеор-М» №1
космического комплекса гидрометеорологического
и океанографического обеспечения...................................626
13.5.11. РСА малого космического аппарата «Кондор-Э»...............627
13.5.12. Проект двухчастотного БРЛК для мониторинга объектов топливно-
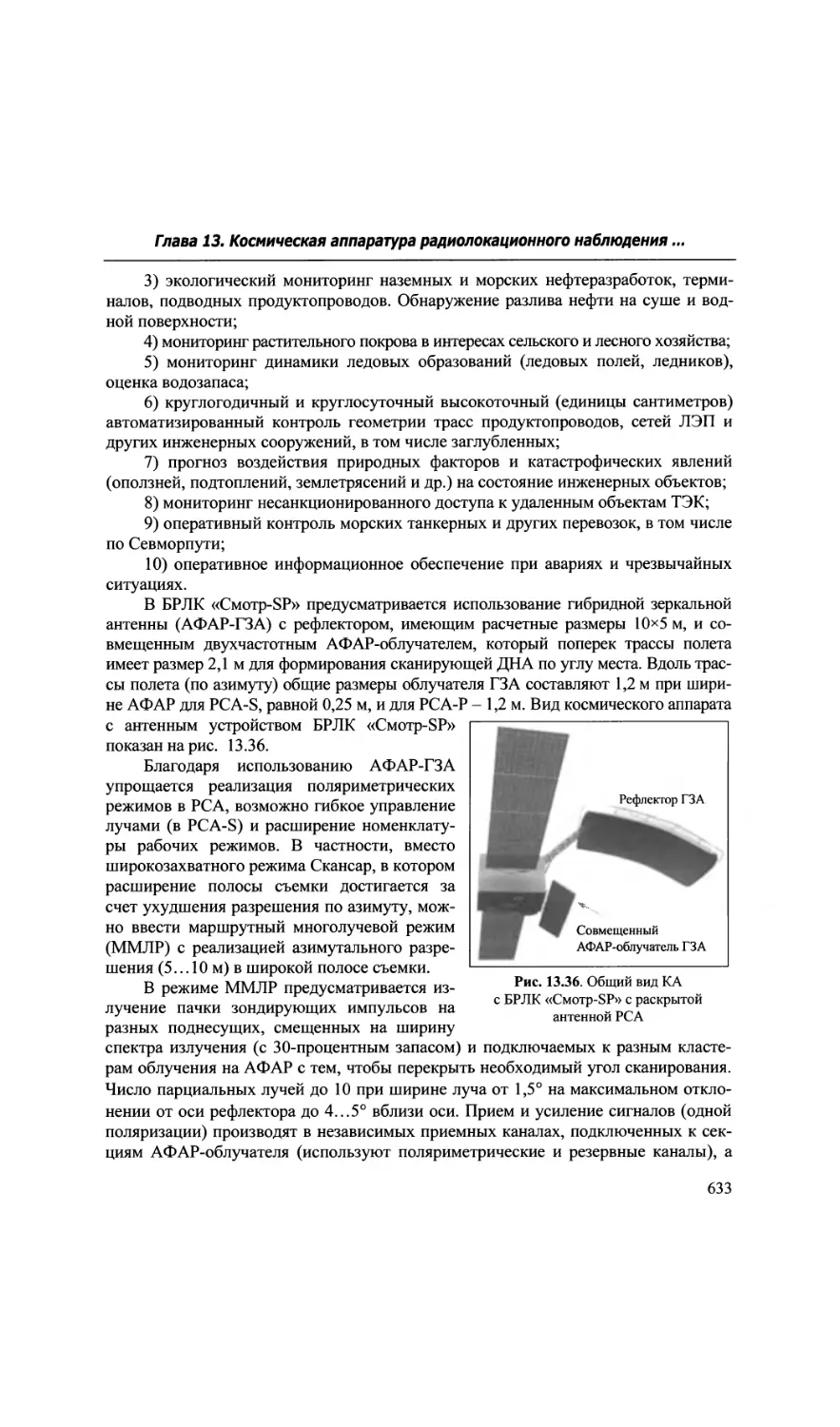
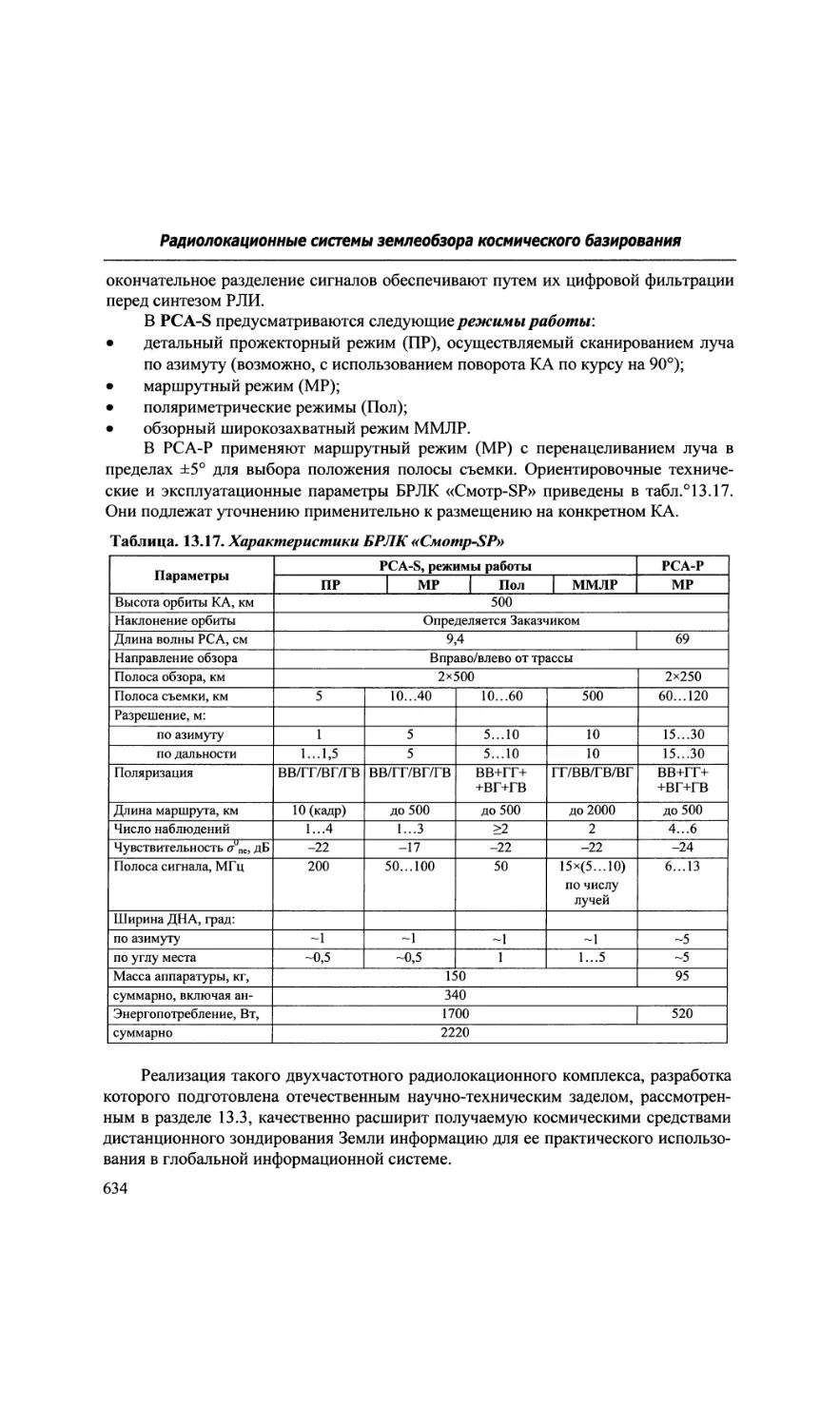
энергетического комплекса «Смотр-SP».............................. 632
Заключение...................................................................635
Литература...................................................................637
Перечень принятых сокращений.................................................665
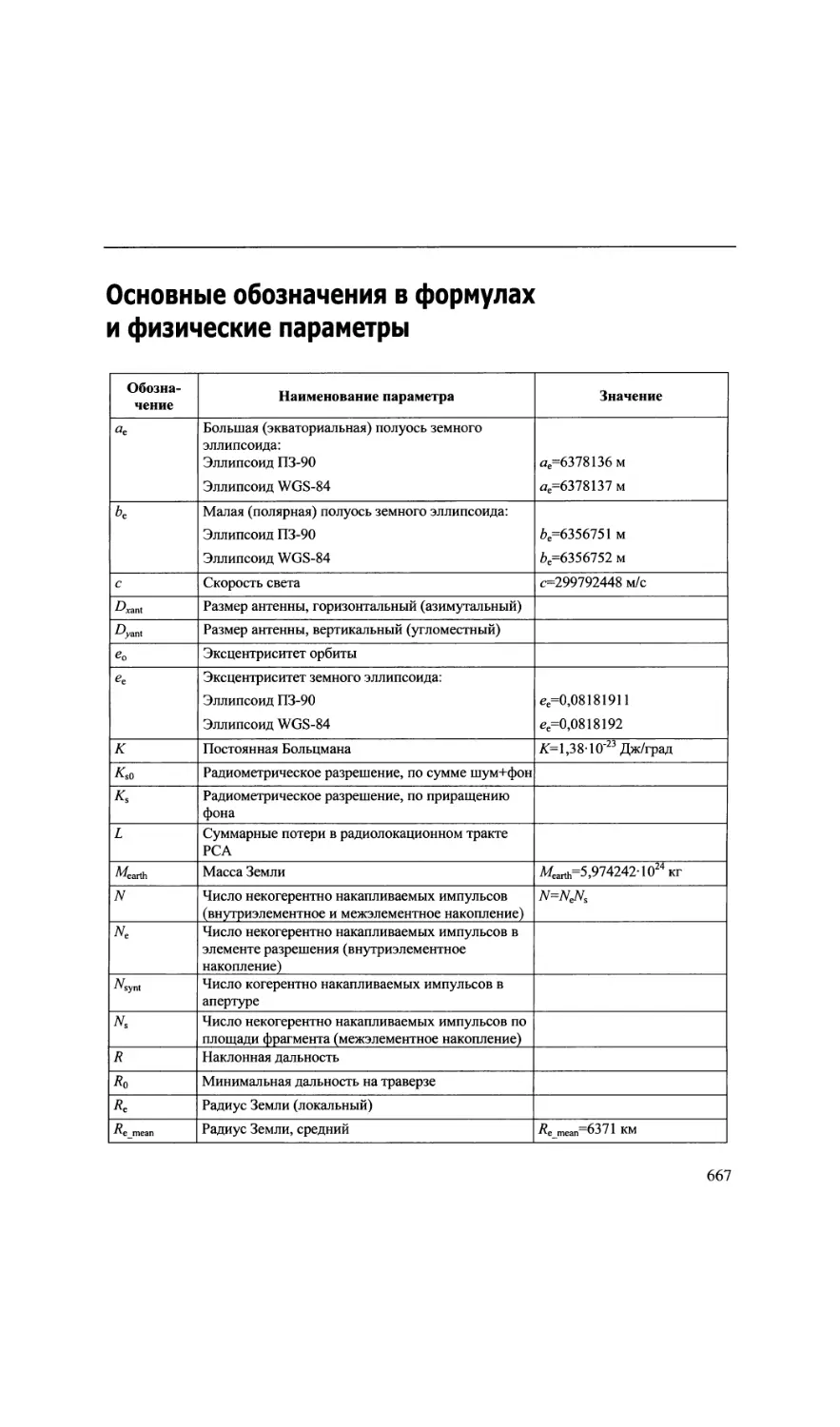
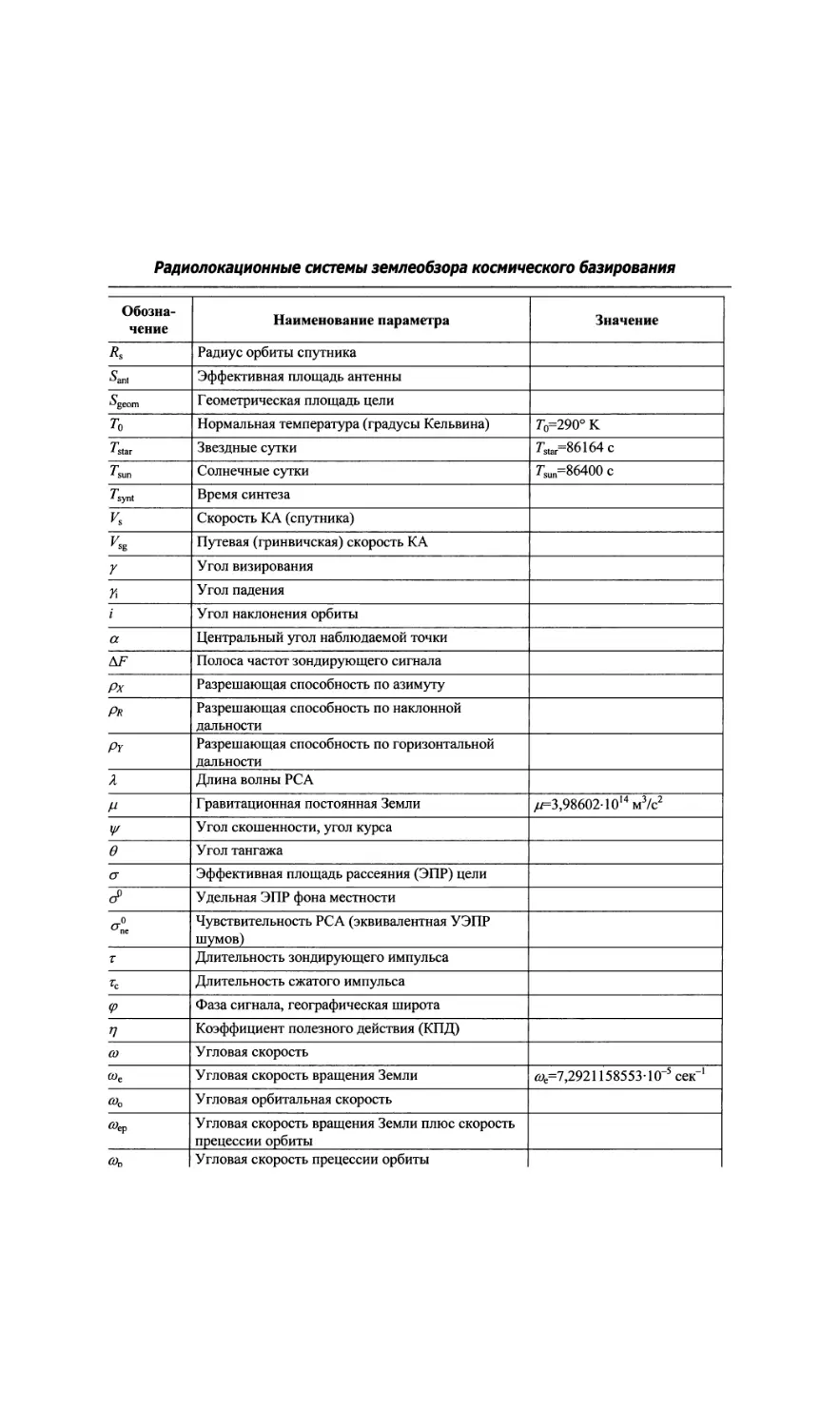
Основные обозначения в формулах и физические параметры.......................667
Сведения об авторах..........................................................699
Monograph structure..........................................................671
10
Выход в свет монографии «Радиолокационные системы землеобзора космиче-
ского базирования» в научной серии «Системы мониторинга воздушного, кос-
мического пространства и земной поверхности» в издательстве «Радиотех-
ника» представляется чрезвычайно своевременным явлением.
Спутниковая радиолокация является на сегодняшний день одним из важней-
ших наиболее успешно и динамично развивающихся направлений дистанцион-
ного зондирования Земли из космоса. Стремительное развитие этого направ-
ления привело к насущной необходимости собрать воедино, систематизиро-
вать и подвергнуть тщательному анализу научно-технические достижения
последних лет и новые идеи в деле создания и развития радиолокационных
систем, технологий обработки, хранения, интерпретации и использования
получаемых данных, обобщить информацию о разрабатываемых и уже реали-
зованных проектах.
Основу спутниковой радиолокации составляют разработки методов и
аппаратуры, обеспечивающих формирование радиолокационных изображений
земной поверхности с высоким пространственным разрешением, которые
служат информационным обеспечением при решении широкого круга задач на-
учного, народно-хозяйственного и оборонного характера. Получение таких ра-
диолокационных изображений стало возможным вследствие разработки и
практического освоения специфического метода радиолокации - метода син-
тезирования апертуры антенны. Особо хочется подчеркнуть, что авторы мо-
нографии являются пионерами создания радиолокаторов с синтезированной
апертурой в России, что позволяет читателю получить информацию «из пер-
вых рук». В монографии отражено изменяющееся и развивающееся содержа-
ние современной радиолокации, приведён обзор всех основных отечественных и
зарубежных радиолокационных систем спутникового базирования с анализом
их характеристик, возможностей и ограничений. Безусловную ценность пред-
ставляют результаты многолетних научных исследований и прикладных раз-
работок авторов, отражающие их реальный вклад в развитие систем и мето-
дов радиолокационного спутникового зондирования.
К несомненным достоинствам книги следует отнести то, что она объе-
диняет две взаимосвязанные и взаимодополняющие задачи. Она включает в се-
бя не только последовательно проведенный анализ теоретических основ и осо-
11
Радиолокационные системы землеобзора космического базирования
бенностей радиолокационных методов и построения радиолокационных сис-
тем, но и обзор наиболее впечатляющих научных результатов, полученных
при помощи таких систем. Главы, посвященные современным подходам к те-
матической обработке радиолокационной информации применительно к ши-
рокому кругу задач исследования процессов и явлений в океане и атмосфере над
ним, исследованию ледового покрова, мониторингу растительного покрова и
объектов суши, предоставляют возможность широкому кругу специалистов
получить систематизированное представление о возможностях метода
спутниковой радиолокации и о его месте в схеме глобального мониторинга.
Нельзя не отметить, что книга написана с большим мастерством. Из-
ложение построено таким образом, чтобы читатель получил необходимые и
наиболее полные сведения о современном уровне развития проблемы. Несмотря
на то, что во многих ВУЗах вводятся специальности или читаются спецкур-
сы по проблемам и методам дистанционного зондирования Земли, набор серь-
езной литературы, дающей представление о теоретических основах, совре-
менных возможностях и практических достижениях в области спутниковой
радиолокации, весьма ограничен. Хочется надеяться, что монография запол-
нит этот пробел и послужит важным вкладом в расширение научного круго-
зора молодых ученых и понимание ими различных аспектов радиолокационного
зондирования Земли, а также окажется интересной и полезной как специали-
стам в области спутниковой радиолокации, так и широкому кругу читателей.
Директор
Учреждения Российской академии наук
Институт космических исследований РАН
академик РАН
Л.М. Зеленый
12
Отечественным ученым, конструкторам, инженерам,
испытателям, военным специалистам - создателям
первых в мире космических радиолокаторов землеобзора
посвящается ...
От редактора
Монография «Радиолокационные системы землеобзора космического базирова-
ния» - третья книга из научной серии «Системы мониторинга воздушного, косми-
ческого пространства и земной поверхности», посвящена новым направлениям по-
строения современных космических систем радиолокационного наблюдения, пер-
спективам их развития, принципам обработки и использования получаемой ин-
формации. Монография обобщает результаты многолетнего освоения космическо-
го пространства с целью создания глобальной информационной системы, обеспе-
чивающей всепогодное детальное наблюдение динамических процессов, связанных
с естественными и антропогенными явлениями на планете Земля.
Рассматриваются задачи радиолокационного наблюдения земной и морской
поверхности, наземных и надводных объектов, характеризуемые общим термином
«землеобзор», который включает в себя дистанционное зондирования Земли (ДЗЗ),
мониторинг хозяйственной деятельности и природных воздействий, радиовидение.
В монографии изложены теоретические основы и имеющийся научно-
технический задел для проектирования космических систем радиолокационного
землеобзора, совершенствования методов получения и обработки радиолокацион-
ной информации с учетом опыта разработок коллектива ОАО «Концерн «Вега».
Высокая информативность современных космических радиолокаторов с син-
тезированной апертурой антенны (РСА) с метровым и субметровым пространст-
венным разрешением, особенности взаимодействия радиоволн с объектами наблю-
дения, возможность оперативного получения информации независимо от времени
суток и метеорологических условий, и, наконец, глобальный охват районов съемки
обусловливают приоритетную роль космических средств радиолокационного на-
блюдения для решения задач военной видовой разведки (в сочетании с информа-
цией от оптоэлектронных датчиков) и обеспечения национальной безопасности.
Монография написана на основе только открытой отечественной и зарубежной
литературы (справочники, монографии, статьи, учебные пособия, рекламные про-
спекты), а также открытых публикаций сотрудников ОАО «Концерн «Вега», вклю-
чающих более чем полувековой уникальный опыт создания аппаратуры авиационно-
космического базирования для наблюдения Земли и околоземного пространства.
Книга состоит из предисловия, введения, основного материала (13 глав), заклю-
чения и списка литературы. Во введении дается краткий обзор развития космических
средств радиолокационного наблюдения (землеобзора). В главах основного материа-
ла изложены роль космического сегмента в построении глобальной информацион-
ной системы двойного применения, особенности взаимодействия радиоволн с зем-
ными покровами и объектами наблюдения, принципы построения, режимы работы и
реализуемые характеристики космических радиолокаторов землеобзора, геометрия
13
Радиолокационные системы землеобзора космического базирования
обзора, связь характеристик принимаемых сигналов с параметрами орбитального
движения космического аппарата с РСА. Рассмотрены вопросы синтеза радиолока-
ционных изображений, их первичной и вторичной обработки, а также методы повы-
шения информативности РСА с учетом аппаратурных ограничений.
Изложены современные подходы к тематической обработке радиолокационной
информации, формированию банка радиолокационных данных, автоматизации про-
цесса интерпретации радиолокационной информации. Приведены алгоритмы моде-
лирования процессов преобразования сигналов в тракте РСА, методы оценки качест-
ва изображения, вопросы калибровки выходного информационного продукта и кор-
рекции аппаратурных искажений.
Рассмотрены основные аппаратурные решения при создании современных
РСА, дан ретроспективный обзор развития космических средств радиолокационного
землеобзора и обнаружения объектов.
При изложении материала особое внимание уделено новым режимам работы
РСА (скошенного обзора, двойного приема, широкозахватного режима высокого
разрешения, возможностям повышения разрешения поперек линии пути посредст-
вом использования серии интерферометрических снимков). Детально рассмотрены
особенности геометрии космического обзора, включая случаи высокоорбитальных
РСА и РСА на геосинхронной орбите. Изложены наиболее эффективные для случая
космических РСА алгоритмы синтеза радиолокационного изображения (РЛИ) высо-
кого разрешения, методы автофокусировки РЛИ с учетом погрешностей баллистиче-
ской информации и ошибок в трассе распространения.
Освещены современные методы последетекторной обработки РЛИ, включая
вейвлет преобразования и нелокальную фильтрацию. Проанализированные вопросы
регистрации РЛИ с учетом параметров отображающих устройств и характеристик
зрительного восприятия, в том числе с применением псевдоцветной индикации.
Особое внимание уделено алгоритмам моделирования преобразования сигналов
в сквозном тракте РСА с использованием экспериментальных комплексных изобра-
жений. Они могут быть эффективно применены при проектировании РСА, наземной
отработке аппаратуры, при анализе нештатных ситуаций в процессе эксплуатации
РСА, а также интерпретации данных радиолокационного зондирования.
В конце текста проведены аннотация и структура книги на английском языке.
В монографии приведен большой список литературы для углубленного изу-
чения материалов по конкретным проблемам. В приложении приведены перечень
публикаций создателей радиолокаторов в коллективе ОАО «Концерн «Вега» и уча-
стников работ из смежных организаций (более 90 названий), а также перечень ра-
бот, посвященных уникальным результатам дистанционного зондирования Земли в
10-см диапазоне волн с использованием РСА «Меч-К» и «Меч-КУ», в том числе в
рамках международных экспериментов.
Часть ссылок, приведенных в списке литературы, например, на англоязычные
издания отечественных авторов, дублируют статьи на русском языке. Это сделано в
связи с их большей доступностью (включая онлайн-ресурсы), чем оригинальные
публикации в трудах конференций, изданных малым тиражом. В тексте книги для
облегчения поиска дополнительных материалов по ключевым словам приведен в
14
От редактора
скобках их перевод на английский язык. При написании математических формул
применена латиница, что упрощает их программирование в среде MATLAB/Mathcad
при инженерных расчетах и моделировании РСА.
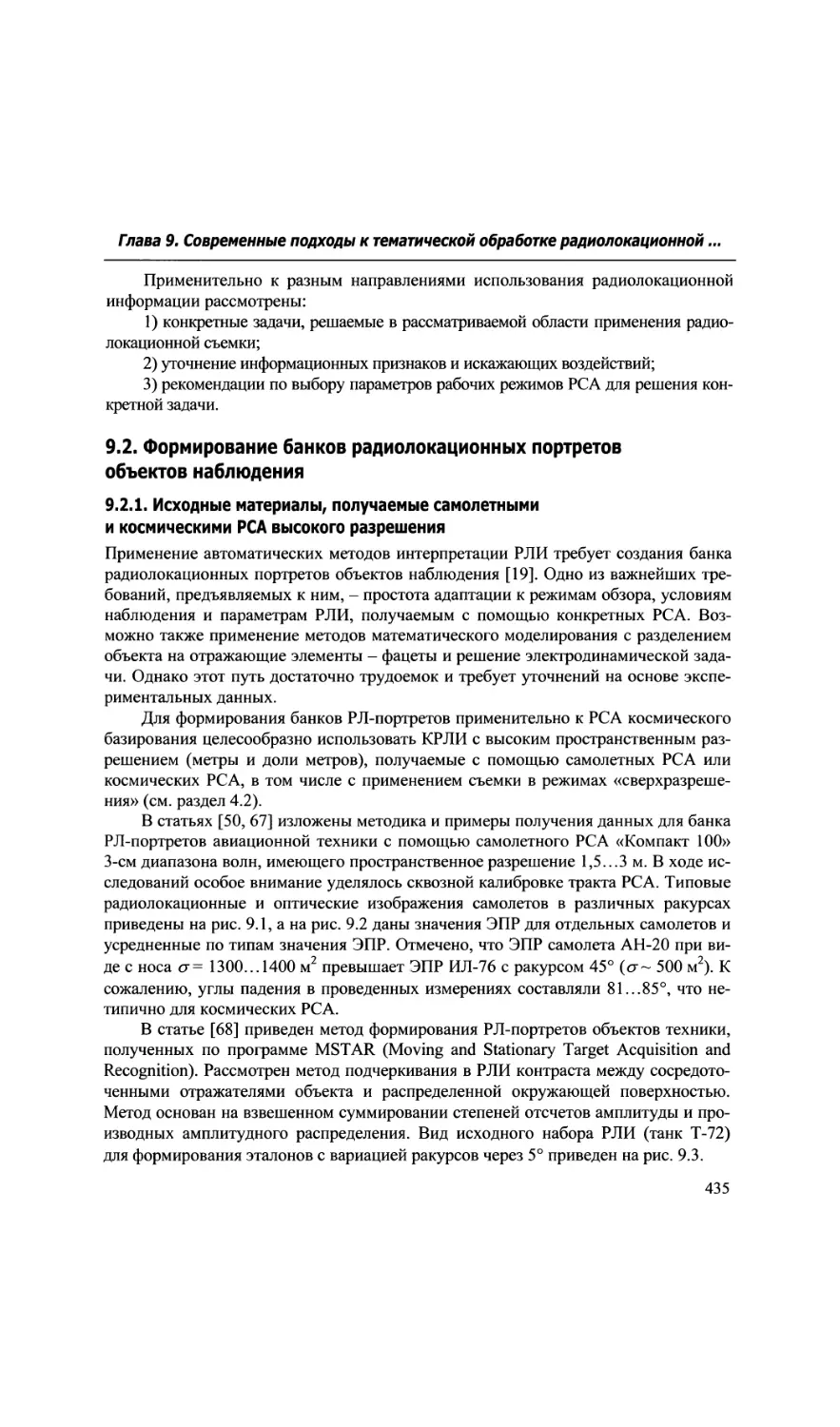
Монография иллюстрирована большим количеством радиолокационных изо-
бражений, полученных с помощью отечественных и зарубежных космических
РСА, включая изображения РСА TerraSAR-X с разрешением от 1 м, любезно пре-
доставленные фирмой Infoterra GmbH© [530].
Книга предназначена для широкого круга специалистов по радиолокации и
дистанционному зондированию Земли - инженеров, научных сотрудников, связан-
ных с проектированием информационных систем, созданием и применением средств
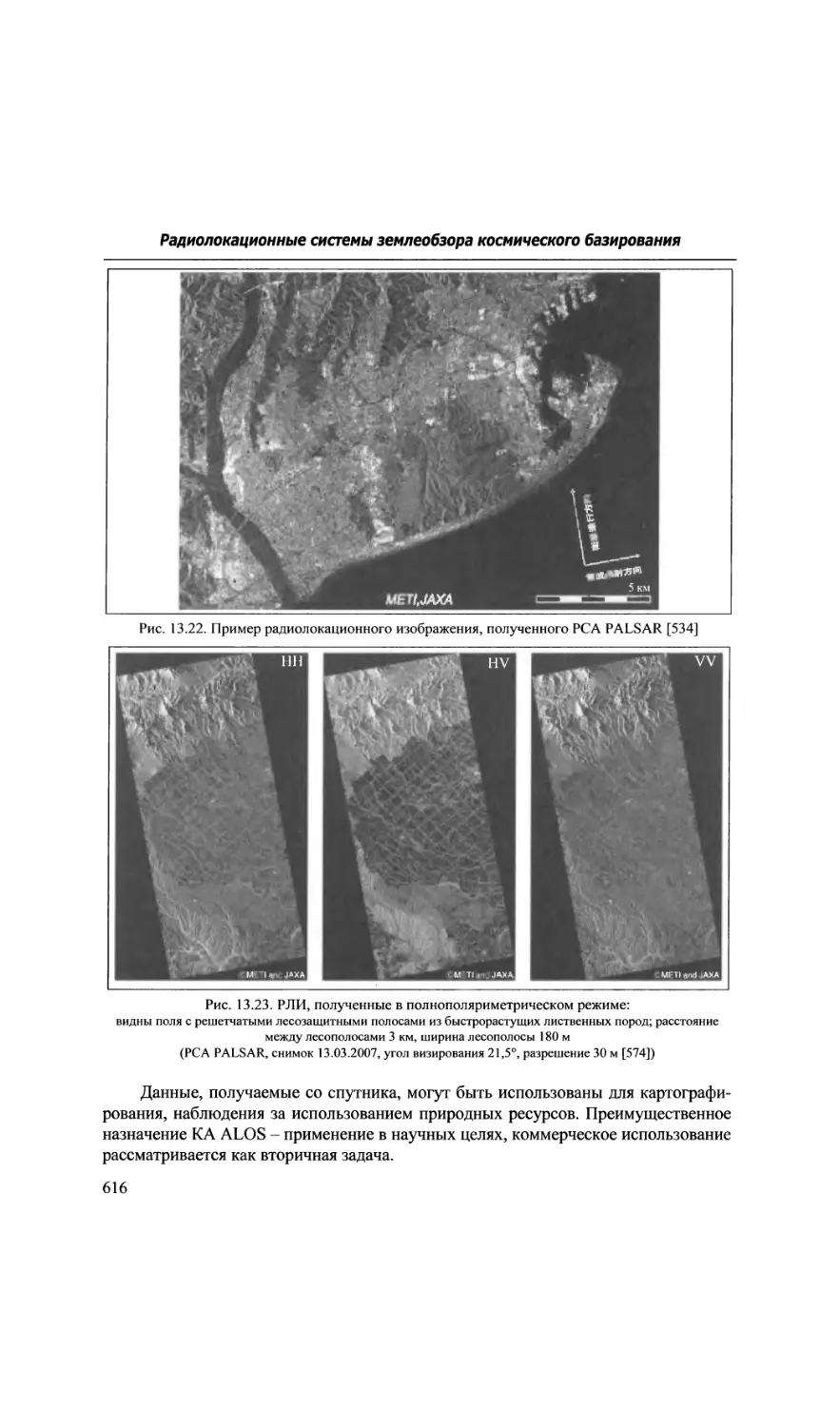
радиолокационного наблюдения гражданского и военного назначения, а также для
преподавателей, аспирантов и студентов соответствующих факультетов и вузов.
Авторы надеются, что данная монография станет настольной книгой разра-
ботчика радиолокаторов землеобзора космического (а по общим вопросам — и са-
молетного) базирования. Уверенность в этом поддерживают и отзывы первых чи-
тателей книги - ее рецензентов.
Отзыв доктора физико-математических наук, профессора, академика РАН
Льва Матвеевича Зеленого, директора Института космических исследований РАН
приведен в начале книги.
Заслуженный деятель науки и техники РФ, Лауреат Государственной премии
СССР, доктор технических наук, профессор Геннадий Степанович Кондратен-
ков, Почетный профессор ВВИА им. проф. Н.Е.Жуковского и Ю.А.Гагарина, один
из основоположников развития теории РСА и радиовидения, их реализации в са-
молетной аппаратуре, в своем отзыве отмечает, что предлагаемая книга «является
первой отечественной монографией, содержащей системное изложение знаний,
относящихся к решению научных, хозяйственных и военных задач землеобзора из
космоса с помощью радиолокационных систем. По своему комплексному подходу,
широте и глубине изложения, и практической направленности данная монография
значительно превосходит недавно изданную книгу американских авторов Pillai, Li,
Himed «Space Based Radar», McGrow HU I, 2008 г.
В монографии поставлены и разработаны алгоритмы решения практически
всех задач радиолокационного обзора из космоса. Это концепция использования
радиолокационных комплексов в глобальной информационной системе, методы
радиолокационного землеобзора из космоса, принципы построения космических
радиолокационных систем, алгоритмы формирования детальных радиолокацион-
ных изображений, их тематической обработки и регистрации, вопросы проекти-
рования аппаратуры, моделирования и калибровки, обзор современных и перспек-
тивных систем землеобзора космического базирования.
Важной особенностью монографии является оценка использования косми-
ческих радиолокационных систем для решения многочисленных хозяйственных за-
дач и их рыночная привлекательность...
Публикация данной монографии, несомненно, будет важной вехой в разви-
тии науки и техники радиолокационных систем землеобзора космического базиро-
вания».
15
Радиолокационные системы землеобзора космического базирования
В отзыве Заслуженного деятеля науки и техники РФ, доктора технических
наук, профессора, академика РАН Игоря Борисовича Федорова, ректора МГТУ
им. Н.Э.Баумана, заведующего кафедрой «Радиоэлектронные системы и устройст-
ва» отмечено, что «в монографии обобщен и систематизирован мировой опыт
создания и применения космических систем радиолокационного землеобзора и, что
особенно важно, - вклад в мировую науку и технику непосредственных участников
разработки отечественных радиолокационных информационных систем ОАО
«Концерн «Вега», создавшего непревзойденный в нашей стране научно-
технический задел в этой области техники.
Достоинством книги является системный подход к проектированию радиоло-
кационного сегмента сетецентрических информационных технологий, исчерпываю-
щая полнота рассмотрения всего круга вопросов, касающихся разработки современ-
ных систем радиолокационного наблюдения космического базирования гражданского
(дистанционное зондирование Земли) и военного (видоваяразведка) применения...
Благодаря высокому научному и инженерному уровню, доступному языку из-
ложения, глубокой проработке основных вопросов создания и использования систем
радиолокационного землеобзора двойного применения, широкому охвату представ-
ленного в ней оригинального материала, а также подробному библиографическому
списку с ссылками на публикации для углубленного изучения отдельных вопросов, мо-
нография, несомненно, станет настольной книгой для инженеров-разработчиков
радиолокационных систем, специалистов по дистанционному зондированию Земли и
послужит дальнейшему развитию передовых информационных технологий».
Авторы благодарят коллектив специалистов Открытого акционерного общест-
ва «Концерн радиостроения «Вега», чей опыт создания отечественной аппаратуры
радиолокационного наблюдения обобщен в настоящей монографии. Особую бла-
годарность авторы выражают докт. техн, наук., проф. В.Г.Елюшкину, докт. техн,
наук., проф. А.П.Курочкину, канд. техн, наук С.ГЛиханскому, канд. физ.-мат. на-
ук В.Ф.Лосю, В.Ю.Манакову, канд. техн, наук А. Г. Островскому, канд. техн, наук
В. А. Плющеву, докт. техн, наук., проф. Е.Ф.Толстову за предоставление материа-
лов в книгу и ценные замечания, способствующие ее улучшению, а также
Г.В.Гладштейн и В.В.Радченко за их труд по подготовке рукописи к печати.
Авторы будут признательны за все замечания и предложения по содержа-
нию книги, которые просим присылать в Издательство «Радиотехника» по адре-
су: 107031, Москва, К-31, Кузнецкий мост, д. 20/6.
Телефон Издательства'. +7-495-625-92-41, телефон/факс\ +7-495-621-48-37,
e-mail: info@radiotec.ru
Доктор технических наук,
профессор
Верба В. С.
16
Радиолокационные системы землеобзора космического базирования являются эф-
фективным средством получения оперативной и долговременной информации о
состоянии и динамике объектов и районов земного шара в глобальных и регио-
нальных масштабах независимо от метеорологических условий и времени суток.
Научные и инженерные основы для реализации таких систем заложены в сере-
дине прошлого века. Они были подготовлены достижениями в области самолетного
приборостроения, в том числе разработкой в НИИ-^панорамной РЛС «Кобальт»
для бортового комплекса прицельного оборудования «Рубидий» бомбардировщика
Ту-4 (1949). С помощью этой аппаратуры решались задачи навигации и прицелива-
ния по крупным площадным объектам в отсутствии оптической видимости.
Совершенствование аппаратуры (внедрение перестройки частоты, цветной
индикации, автоматического обнаружения объектов на земной поверхности и др.),
а главное, переход от панорамных РЛС к радиолокаторам бокового обзора (РБО) с
улучшенным угловым разрешением по азимуту (до 9... 15 угл. мин), способствова-
ло развитию нового применения радиолокации - землеобзора [153*, 222*]1 2.
Интенсивные исследования по совершенствованию радиолокаторов землеобзо-
ра, выполненные в 1958-1961 гг. практически одновременно в СССР (ВВИА им.
проф. Н.Е. Жуковского) и в США (Мичиганский технологический институт), приве-
ли к созданию принципиально новых средств радиолокационного наблюдения -
когерентных радиолокаторов с синтезированной апертурой антенны (РСА),
способных решать задачи радиовидения с пространственным разрешением в едини-
цы и доли метра. Метод повышения угловой разрешающей способности РЛС путем
создания искусственной антенны с когерентным суммированием сигналов, принятых
вдоль траектории полета (Г.С. Кондратенков, авт. свид. 1959 г. [116] с приоритетом
на год раньше американского патента), был экспериментально подтвержден с помо-
щью РСА 70-сантиметрового диапазона волн в ходе проведенной в ВВИА им. проф.
Н.Е. Жуковского НИР «Азимут» (научный руководитель НИР А.П. Реутов) [116,
146]. С этих первых работ начались теоретические и экспериментальные исследо-
вания в области РСА и их воплощение в конкретные разработки [4, 28, 39*, 99, 118,
192*, 195, 196, 200*, 209].
1 В 1967 г. НИИ-17 переименован в МНИИП, а с 2003 г. - в ОАО «Концерн «Вега».
2 Здесь и далее звездочкой отмечены публикации создателей радиолокаторов землеобзора в кол-
лективе ОАО «Концерн «Вега» и непосредственных участников работ из смежных организаций.
1
Радиолокационные системы землеобзора космического базирования
История создания отечественной аппаратуры радиолокационного землеобзора -
воздушной и космической радиолокационной разведки, решенные технические
проблемы, а также вклад творческого коллектива, объединяющего специалистов
ОАО «Концерн «Вега» и смежных организаций, подробно изложены в публикаци-
ях, посвященных 60-летнему юбилею ОАО «Концерн «Вега» [39*, 222*].
Первой из работ была выполненная в 1961-1963 гг. фундаментальная НИР
«Клинок» (научный руководитель П.О. Салганик), которая создала необходимый на-
учно-технический задел для проведения опытно конструкторских разработок РСА.
В НИР «Клинок» были проработаны вопросы теории РСА с оценкой влияния аппа-
ратурных и траекторных нестабильностей на характеристики РСА, определены тре-
бования к входящим подсистемам и пути их реализации, впервые были предложены
принципы построения и разработана теория РСА космического базирования. Были
определены требования к составным частям РСА, исследованы пути их построения,
разработаны действующие макеты основных блоков бортовой аппаратуры.
На созданной экспериментальной базе были изготовлены и испытаны само-
летные макеты РСА трех диапазонов волн (2, 3 и 10 см), установленные на самоле-
тах Ил-18 и Ли-2. С их помощью проведен большой объем летных исследований,
позволивших обосновать параметры РСА в перспективных ОКР. Впервые в нашей
стране были получены радиолокационные снимки местности и объектов с разре-
шением 10...15 м. Их сравнение с оптическими снимками выявило значительное
превышение контрастов отображения объектов и элементов местности, особенно
при работе в 10-см диапазоне волн.
В НИР «Клинок» и в последующих работах МНИИП по созданию самолетных
и космических РСА большой вклад внесен специалистами ВВИА им. проф.
Н.Е. Жуковского и Ленинградской академии им. А.Ф. Можайского.
Особое внимание уделялось созданию высокопроизводительных оптических
устройств синтеза радиолокационного изображения, основанных на подобии пре-
образований когерентных оптических сигналов (голограммы) с записанными вдоль
траектории полета когерентными радиолокационными сигналами (радиоголограм-
мами). Достижению высоких результатов способствовало привлечение к разработ-
ке этих устройств специалистов ВВИА им. проф. Н.Е. Жуковского под руково-
дством Г.А. Кондратенкова и ГОИ им. С.И. Вавилова под руководством Ю.Н. Де-
нисюка в части принципов оптической обработки сигналов РСА и реализации ко-
герентной оптической системы.
Реализация и совершенствование отечественных средств радиолокационного
землеобзора в последующие годы осуществлялась в следующих направлениях:
разработка и введение в эксплуатацию аппаратуры воздушной радиолокационной
разведки; проведение исследований по оценке и повышению информативности
РСА, а также развитию методов дистанционного зондирования Земли (ДЗЗ); разра-
ботка и эксплуатация космических РБО и РСА.
Работы по созданию средств воздушной разведки, завершенные передачей в ре-
гулярную эксплуатацию, выполнялись в рамках ОКР «Булат», «Штык», «Сабля»,
«Шомпол» для самолетов Як-28БИ, Су-24МР, МиГ-25РБ, Ту-22М (руководители ра-
18
Введение
бот А.Т. Метельский, Г.А. Зонненштраль, В.В. Вепринцев, Г.П. Володин, А.А. Кух-
тин), ОКР «Авиационная система наблюдения «Открытое небо» (РСА «Ронсар») и
ОКР «Аннотация» по сертификации характеристик аппаратуры (руководители ра-
бот Л.Н. Тяпкин, В.Н. Шахгеданов), ОКР «ИМАРК» - многочастотный поляримет-
рический бортовой радиолокационный комплекс с цифровой адаптивной обработ-
кой информации (руководители работ А.В. Дзенкевич, В.А. Плющев).
В ряде проведенных НИР «Экран-1» (научный руководитель Г.А. Зонненшт-
раль), «Изгородь», «Силуэт» - восьмимиллиметрового РСА с разрешением 30 см
(научный руководитель В.Б. Штейншлейгер) и др. намечены пути совершенство-
вания самолетных РСА с улучшением разрешения от единиц метров до единиц де-
циметров. Параллельно проводились экспериментальные исследования, целями
которых были подтверждение параметров разрабатываемых РСА и оценка инфор-
мативности радиолокационного зондирования земной и морской поверхностей для
решения широкого круга мониторинговых задач, изучения радиофизических
свойств земной поверхности и объектов. Такие исследования с использованием
РСА разных диапазонов волн, установленных на самолетах Як-28ИБ (3 см), Ту-124
(3 см и 2,5 м), Ил-18 (10 и 68 см), Ту-134А и Ан-26БРЛ «Арктика» (3, 23, 68 см и
2,5 м), проводились совместно с ИРЭ РАН. Следует также упомянуть эксперименты,
проведенные в НИИП им. В.В. Тихомирова, Холдинге «Ленинец», НИИТП и в дру-
гих организациях. Эти исследования позволили получить ценную информацию для
практического применения материалов радиолокационного зондирования Земли.
Эпоха космической радиолокации наземных и надводных объектов открылась
в 1971 г. запуском космического аппарата УС-А «Космос-402» с бортовым радио-
локационным комплексом - активным сегментом системы морской космической
разведки и целеуказания (МКРЦ) [88*, 545]. Идея создания космических аппаратов
с радиолокаторами для наблюдения морской поверхности и контроля надводной
обстановки была впервые сформулирована в 1959 г. выдающимся генеральным
конструктором НПО машиностроения академиком В.Н. Челомеем. Общее научное
руководство созданием системы МКРЦ осуществлял генеральный конструктор
ЦНИИ «Комета» академик А.И. Савин. Разработанный в МНИИП бортовой ком-
плекс (главный конструктор И.А. Бруханский) включал широкозахватный радио-
локатор бокового обзора (РБО) «Риф», бортовую цифровую вычислительную ма-
шину (БЦВМ) и линию передачи данных. Комплекс обеспечивал при работе в ав-
томатическом режиме обнаружение и определение координат надводных кораблей.
Для обеспечения высокого энергетического потенциала РБО электропитание на
борту КА обеспечивала ядерная энергетическая установка (ЯЭУ) «Бук».
Система МКРЦ с КА УС-А, УС-AM была принята в 1975 г. и успешно функ-
ционировала (28 запусков) до 1988 г.
Линия космических РБО, обладающих грубым пространственным разрешени-
ем (~2 км), но хорошим радиометрическим разрешением (около 1 дБ) и широкой
полосой захвата (до 500 км), была продолжена отечественной программой «Океан»
(КА «Космос-1500», «Океан» и др.), сыгравшей важную роль в изучении Мирового
океана и ледового покрова, а также при решении практических задач обеспечения
судоходства в полярных широтах [197].
19
Радиолокационные системы землеобзора космического базирования
Сложная судьба досталась отечественным космическим системам детальной
радиолокационной разведки [49*, 222*, 552]. В 1966 г. в МНИИП была начата разра-
ботка орбитальной пилотируемой станции (ОПС) «Алмаз-А» с РСА «Меч-А» 10-см
диапазона волн (главный конструктор П. О. Салганик). К марту 1978 г. летный ком-
плект ОПС «Алмаз-А» был готов к запуску (ранее американского Seasat-A). Запуск
был отменен. Была задана разработка РСА «Меч-К» для автоматического космиче-
ского аппарата (КА) «Алмаз-Т», который был готов к запуску в 1982 г. После семи
лет пребывания КА «Алмаз-Т» с РСА «Меч-К» на полигоне Байконур коллективам
разработчиков космического аппарата и РСА удалось реализовать в 1987 г. запуск и
успешную эксплуатацию в 1987-1989 гг. РСА «Меч-К» на спутнике «Космос-1870».
В реализацию и совершенствование отечественных космических РСА боль-
шой вклад внес ведущий специалист НПО машиностроения Е.А. Ксенофонтов. На-
земная обработка информации с помощью машины оптического преобразования
информации (МОПИ) обеспечивала получение радиолокационных снимков с раз-
решением 15... 20 м
Усовершенствованный вариант РСА «Меч-КУ» с улучшенными характери-
стиками был успешно реализован в составе КА «Алмаз-1» в 1991-1992 гг. Был
применен цифровой синтез радиолокационных изображений с помощью много-
процессорного вычислительного комплекса ПС-2000 с алгоритмами синтеза мето-
дом ускоренной прямой свертки с субапертурами [90*, 157*, 158*] (ответственный
за наземную обработку Л.Б. Неронский). Достигнутая разрешающая способность
радиолокационных снимков составляла 10...15 м.
После завершения эксплуатации РСА «Меч-КУ» на КА «Алмаз-1» архив полу-
ченных радиограмм, обработанный с помощью вычислительного комплекса на базе
универсальных ЭВМ в НПО машиностроения (ныне ОАО «ВПК «НПО машино-
строения»), доступен для использования заинтересованными потребителями [538].
До настоящего времени информация, полученная с помощью РСА «Меч-КУ» явля-
ется наивысшим отечественным достижением в области радиолокационного зонди-
рования из космоса, а, учитывая используемый в РСА отличающийся от зарубежных
РСА диапазон волн 10 см, она является уникальной и в мировом масштабе.
За истекшие годы в МНИИП (ОАО «Концерн «Вега») выполнен ряд НИР и
этапов ОКР, направленных на повышение информативности космических РСА и
формирование научно-технического задела для создания РСА, отвечающих совре-
менным требованиям. Начиная с 1990 г. работами по созданию систем землеобзора
из космоса руководит И.Г. Осипов. За это время выполнены эскизные проекты мно-
горежимных многочастотных бортовых радиолокационных комплексов (БРЛК)
ЭКОР-В (3, 10 и 68 см) для КА «Алмаз-1В» (главный конструктор БРЛК И.Г. Оси-
пов), БРЛК Спинар-1ДМ (главный конструктор Ю.Н. Кулыба) с дециметровыми
каналами (23 и 68 см) для трехчастотного БРЛК полезной нагрузки КА «Аркон-2»,
НИР «Арктика», «Корвет» (ответственный исполнитель В.Э. Турук) - широкоза-
хватный РСА 3-см диапазона волн для ледовой разведки, использующий антенну с
частотным сканированием по углу места, НИР «Карта» (исполнители В.Э. Турук,
Л.Б. Неронский) с проработкой путей построения высокоорбитальных РСА, техни-
ческие предложения по РСА «Смотр-Х» и «Смотр-L» (исполнитель А.А. Липатов)
20
Введение
для мониторинга объектов теплоэнергетического комплекса, а также НИР «Видео-
решетка» (научный руководитель А.П. Курочкин) и НИР «Плеск-Вега» (научный
руководитель Ю.Н. Кулыба), в которых прорабатывались перспективы создания
сверхширокополосных видеоимпульсных РСА космического базирования.
Качественным скачком в развитии космических средств землеобзора является
полномасштабная разработка РСА десятисантиметрового диапазона (главный конст-
руктор И.Г. Осипов, с декабря 2004 г. - В.Э. Турук) для малого космического аппарата
«Кондор-Э». При проектировании РСА предусматривалось создание универсальной
многорежимной аппаратуры с сочетанием высокого пространственного разрешения
(1...2 м), изобразительных и измерительных свойств получаемых снимков для реше-
ния широкого класса мониторинговых задач, а также контроля оперативной обстанов-
ки в зонах конфликтов. Его реализация в сочетании с действующей зарубежной и про-
ектируемой отечественной аппаратурой, работающей в других диапазонах волн, суще-
ственно расширит информационные возможности глобальной системы дистанционно-
го зондирования Земли, в том числе по районам Крайнего Севера и Антарктиды [45*].
Исторически реализация и освоение космических радиолокаторов с синтези-
рованной апертурой антенны (РСА), которые, в принципе, могут обеспечить про-
странственное разрешение получаемых снимков до долей метра, можно характери-
зовать четырьмя этапами [55, 72, 125, 126, 215, 332, 454].
Первый этап - исследовательский, включающий запуск американских РСА
Seasat-A (1978), SIR-A (1981), SIR-B (1982), работающих в 23-см диапазоне волн,
отечественных РСА «Меч-К» и «Меч-КУ» космических аппаратов «Космос-1870»
(1987-1989 гг.) и «Алмаз-1» (1991-1992 гг.), работающих в 10-см диапазоне волн,
трехчастотного (диапазоны 3,1, 5,6 и 23 см) поляриметрического РСА SIR-C/X-
SAR (1994) совместной разработки США, Германии. На этом этапе был накоплен
большой экспериментальный материал, отработаны методы решения задач воен-
ной разведки, разработаны методики, а также программные пакеты для обработки
и интерпретации получаемых радиолокационных изображений.
Второй этап - уточнение методик тематической обработки радиолокацион-
ных снимков и их применение для решения практических задач дистанционного
зондирования Земли в разных сферах деятельности. С этой целью используется
информация с европейских КА ERS-1 (1991-2000), ERS-2 (с 1995), канадского Ra-
darsat-1 (с 1995), японского JERS-1 (1992-1998). Решение задач разведки сухопут-
ных объектов и обеспечения военных операций «Буря в пустыне», война в Ираке
реализуется системой военных спутников США Lacrosse (запуски в 1988, 1991,
1997, 2000, 2005) с разрешающей способностью до 0,6 м.
Третий этап, характеризующийся резким скачком в технологии радиолока-
ционной съемки, включает запуск в 2000 г. интерферометрического РСА с жесткой
базой SRTM (Shuttle Radar Topography Mission) co съемкой 80 % земной суши для
построения карт рельефа местности, эксплуатацию полнополяриметрических РСА
Envisat-1 и PALSAR и широкое коммерческое использование космической радио-
локационной информации, в том числе в интересах частных потребителей.
Четвертый этап характеризуется информационным взрывом в области кос-
мических радаров, который произошел в 2007 г., когда Германия, Италия, Китай,
21
Радиолокационные системы землеобзора космического базирования
>ния, Канада вывели на орбиты 9 спутников с бортовыми радарами [125]. Отме-
чается, что на протяжении 90-х годов спутники с бортовыми радарами с синтези-
рованной апертурой запускали четыре страны с темпом один старт в 1,5-2 года.
Пентагон использовал военные спутники Lacrosse для всепогодного слежения за
советскими военными объектами на Севере и мобильными пусковыми установка-
ми МБР. Масштабы применения гражданских радарных спутников Канады, ESA и
Японии в 90-х годах оставались довольно скромными из-за сравнительно высокой
стоимости и недостаточной детальности радарных изображений, что ограничивало
области их применения.
В начале нового века ситуация изменилась коренным образом. Современные
технологии позволяют создавать спутниковые радиолокаторы с РСА, способные
получать из космоса высокодетальные изображения объектов на Земле с простран-
ственным разрешением менее 1 метра. Спецслужбы и оборонные структуры пер-
выми оценили преимущества радиолокационной съемки из космоса. Сразу не-
сколько стран - Япония, Китай, Германия, Италия, Израиль и Корея стали разраба-
тывать военные спутники с РСА метрового и субметрового разрешения. Появились
аналогичные коммерческие проекты и программы двойного назначения.
Достигнутая высокая разрешающая способность космических РСА позволяет
решать задачу радиовидения, имея преимущества перед съемкой в оптическом
диапазоне не только во всепогодности, но и в возможности обнаружения и опозна-
вания объектов наблюдения по радиолокационным контрастам, селекции движу-
щихся наземных объектов [118, 194, 211].
Используется многочастотное поляриметрическое зондирование с измерени-
ем амплитудных и фазовых различий отраженных сигналов. Широко применяется
интерферометрическая обработка данных радиолокационного зондирования для
получения детальных трехмерных портретов объектов наблюдения, стационарных
и движущихся, выявления изменений, вызванных природными, техногенными и
антропогенными факторами.
Существенного повышения информативности систем радиолокационного на-
блюдения следует ожидать как от повышения пространственного разрешения кос-
мических РСА, так и от развития методов комплексной интерферометрической об-
работки данных разных частотных радиоканалов. Эти методы могут приблизить
возможности распознавания типа объектов техники, идентификации и измерения
физических параметров подстилающей поверхности (толщины пленок на морской
поверхности, распределения влажности почвы и др.) к перспективным методам ис-
пользования сверхширокополосных сигналов.
Примечательно, что как за рубежом, так и в России наблюдается серьезное
продвижение в использовании методов обработки космической радиолокационной
информации для решения практических задач землепользования, сельскохозяйст-
венного и лесного мониторинга, экологии суши и морской поверхности, контроля
районов рыбной ловли. Особо эффективны методы дифференциальной интерферо-
метрии для выявления предвестников опасных явлений в окружающей обстановке:
оползней, паводков, критических изменений геометрии природных и искусствен-
ных объектов и инженерных сооружений [364, 520].
22
Введение
Широкий круг проблем, связанных с реализацией космических РСА и приме-
нением материалов радиолокационной съемки, широко освещается в журнальных
публикациях (IEEE Transactions on Geoscience and Remote Sensing, «Исследования
Земли из космоса», «Радиотехника», «Радиотехника и электроника», «Наукоемкие
технологии» и др.) и трудах симпозиумов и конференций как зарубежных (EUSAR,
IGARSS, RADAR, URSI), так и отечественных (НТОРЭС им. А.С. Попова, ИКИ
РАН, ИРЭ РАН, Научного совета по космосу РАН и др.).
Из книжных публикаций последних лет следует отметить коллективную мо-
нографию «Аэрокосмический радиолокационный мониторинг Земли» под редак-
цией А.И. Канащенкова, издательство Радиотехника, 2006 г. [17], в которой приве-
ден подробный перечень задач, решаемых космическими РСА, рассмотрены во-
просы распространения электромагнитного излучения в неоднородных средах,
разработана иерархическая структура построения космической системы радиоло-
кационного мониторинга. Следует отметить также выпущенные издательством
ВВИА им. проф. Н.Е. Жуковского в 2008-2009 гг. учебники «Радиолокационные
системы воздушной разведки, дешифрирование радиолокационных изображений»
под редакцией Л.А. Школьного [194] и «Теоретические основы построения радио-
локационных систем дистанционного зондирования Земли», авторы Кондратен-
ков Г.А., Фролов А.Ю. [117]. Приведенные в них скрупулезное изложение класси-
ческих принципов формирования синтезированной апертуры и математических
преобразований сигнала, вопросов обнаружения целей можно с успехом использо-
вать для изучения основ предмета с последующим учетом специфики космических
РСА, изложенной в предлагаемой монографии.
Современное состояние аппаратурного оснащения средствами дистанционного
зондирования Земли, методологии их применения и реализуемого эффекта от их ис-
пользования, а также баланса между затратами и окупаемостью еще далеки до на-
сыщения. Прослеживается ряд направлений развития этой области информаци-
онных технологий с учетом потребностей гражданского и военного применений:
• широкое применение комплексных методов тематической обработки с ис-
пользованием набора оптических, ИК и радиолокационных датчиков. Объе-
динение (сближение) и стандартизация требований к аппаратуре военного и
гражданского применения, мониторинга катастроф и чрезвычайных ситуаций;
• увеличение состава орбитальных группировок для уменьшения времени об-
новления информации преимущественно путем введения малогабаритных
космических датчиков - РСА сантиметрового диапазона волн, где легче дос-
тигается субметровое пространственное разрешение, но значительно меньше
возможностей для информации методами интерферометрии в связи с резкой
зависимостью от погодных условий и состояний растительного покрова;
• непрерывное и регулярное использование действующих радиолокационных
датчиков для проведения архивных съемок в фоновом режиме с ограничения-
ми только по энергопотреблению и пропускной способности канала передачи
данных. Это позволяет формировать банки радиолокационной информации
для их использования в режимах выявления изменения в оперативной обста-
новке, повышения информативности материалов съемки - радиометрического
23
Радиолокационные системы землеобзора космического базирования
или пространственного разрешения или построения детальных карт рельефа
местности;
• при проектировании новых радиолокационных датчиков предусматривается
их многофункциональное использование, гибкое цифровое управление пара-
метрами сигналов и режимами, возможности комплексирования активных
(передающих) и пассивных (приемных) устройств в многопозиционные авиа-
космические элементы глобальной информационной системы.
Учет перечисленных направлений реализуется в системном подходе к проек-
тированию аппаратуры радиолокационного наблюдения, элементы которого про-
слеживаются по мере рассмотрения изложенных в монографии частных вопросов,
связанных с созданием и применением радиолокационных систем землеобзора
космического базирования.
24
Глава 1
РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ ЗЕМЛЕОБЗОРА
КОСМИЧЕСКОГО БАЗИРОВАНИЯ В ГЛОБАЛЬНОЙ СИСТЕМЕ
АЭРОКОСМИЧЕСКОГО МОНИТОРИНГА
1.1. Структура глобальной системы аэрокосмического мониторинга
Развитие средств дистанционного зондирования Земли и околоземного простран-
ства (атмосферы, ионосферы, магнитосферы, гравитационного поля), систем полу-
чения координатной информации (GPS, ГЛОНАСС), спутников-ретрансляторов на
геостационарных орбитах, глобальных сетевых коммуникационных систем и ин-
формационных технологий привело к созданию глобальных систем аэрокосмиче-
ского мониторинга. Обеспечивая оперативное слежение за земной и водной по-
верхностью и состоянием окружающей среды, системы аэрокосмического монито-
ринга позволяют решать задачи разведки, картографии, прогнозирования глобаль-
ных природных процессов, в том числе опасных, управления транспортными пото-
ками, поиска полезных ископаемых, государственного и муниципального управле-
ния, научных исследований и т.п.
В зависимости от состава и принадлежности источников получения данных,
содержания решаемых задач, организации распределения информации, а также ее
применения, различают глобальные системы аэрокосмического мониторинга (Меж-
дународные и национальные) гражданского и военного назначения. Общим для
этих систем служит реализуемый в них комплекс базовых функций, основными из
которых являются [184]:
• наблюдение поверхности Земли и околоземного пространства с использова-
нием аппаратуры оптического, инфракрасного и радиодиапазонов, низко- и
высокочастотных волновых комплексов, плазменных комплексов, комплексов
мониторинга энергетических частиц, магнитометров, масс-анализаторов,
спектрометров, градиентометров;
• сбор и регистрация на борту носителей средств наблюдения получаемой ин-
формации;
• передача с борта на наземные станции приема информации в режиме получе-
ния и с задержкой при ее накоплении данных в бортовом запоминающем уст-
ройстве;
• первичная обработка информации на наземных станциях приема и передача
полученных данных в глобальные (Международные) и национальные центры
управления различного назначения;
• сбор и обработка данных для решения задач глобального оперативного и
краткосрочного прогноза процессов на земной поверхности или околоземного
25
Радиолокационные системы землеобзора космического базирования
пространства, а также ее хранение и отображение в глобальных (Междуна-
родных) и национальных центрах управления различного назначения;
• обеспечение потребителей навигационной информацией, получаемой косми-
ческими навигационными системами, в интересах проведения мероприятий,
связанных с перемещением необходимых ресурсов.
Наиболее полное решение задач оперативного слежения за земной поверхно-
стью и состоянием окружающей среды обеспечивается структурой глобальной
системы аэрокосмического мониторинга, развертываемой Федеральным косми-
ческим агентством России в интересах выявления предвестников стихийных бед-
ствий, природных и техногенных катастроф [184].
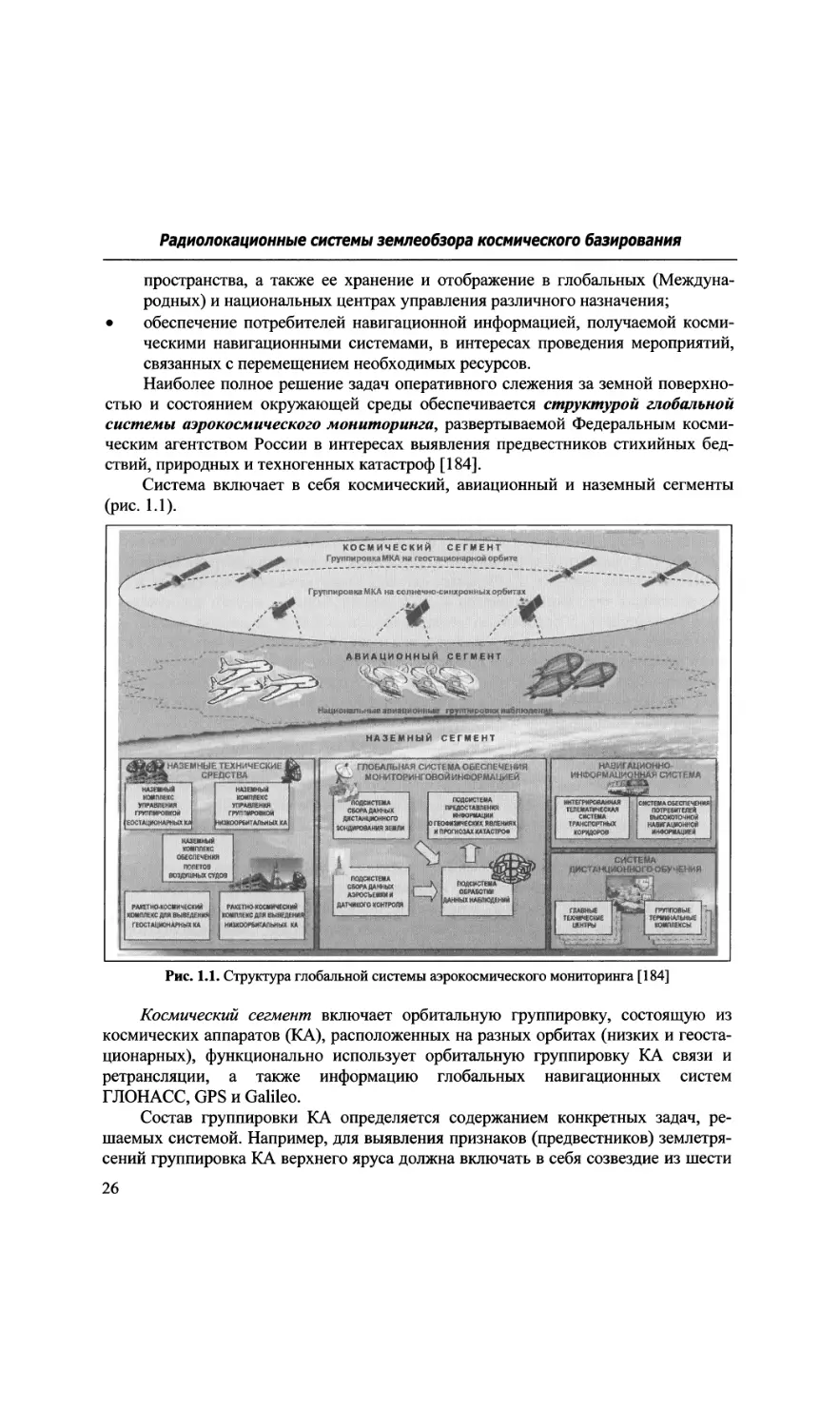
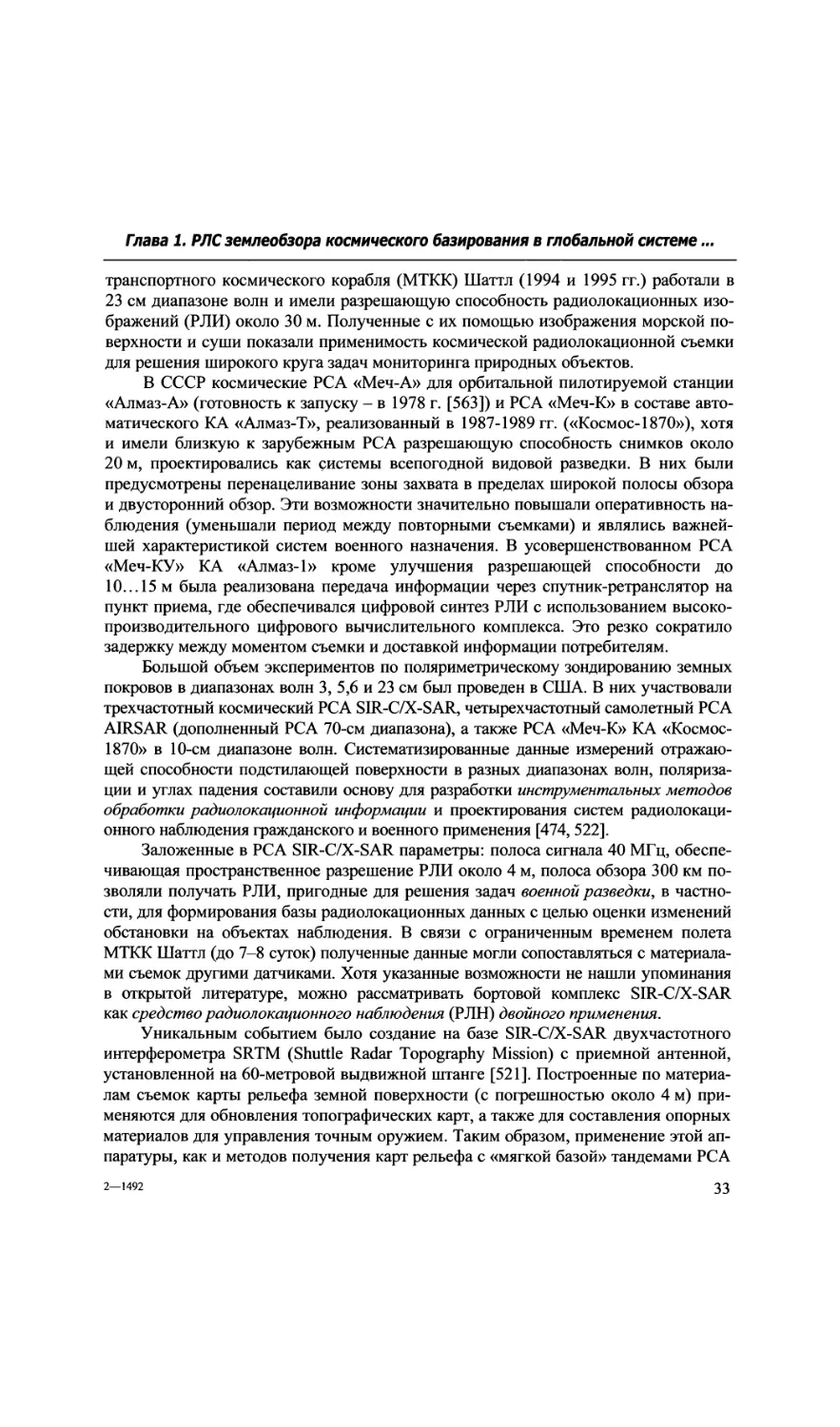
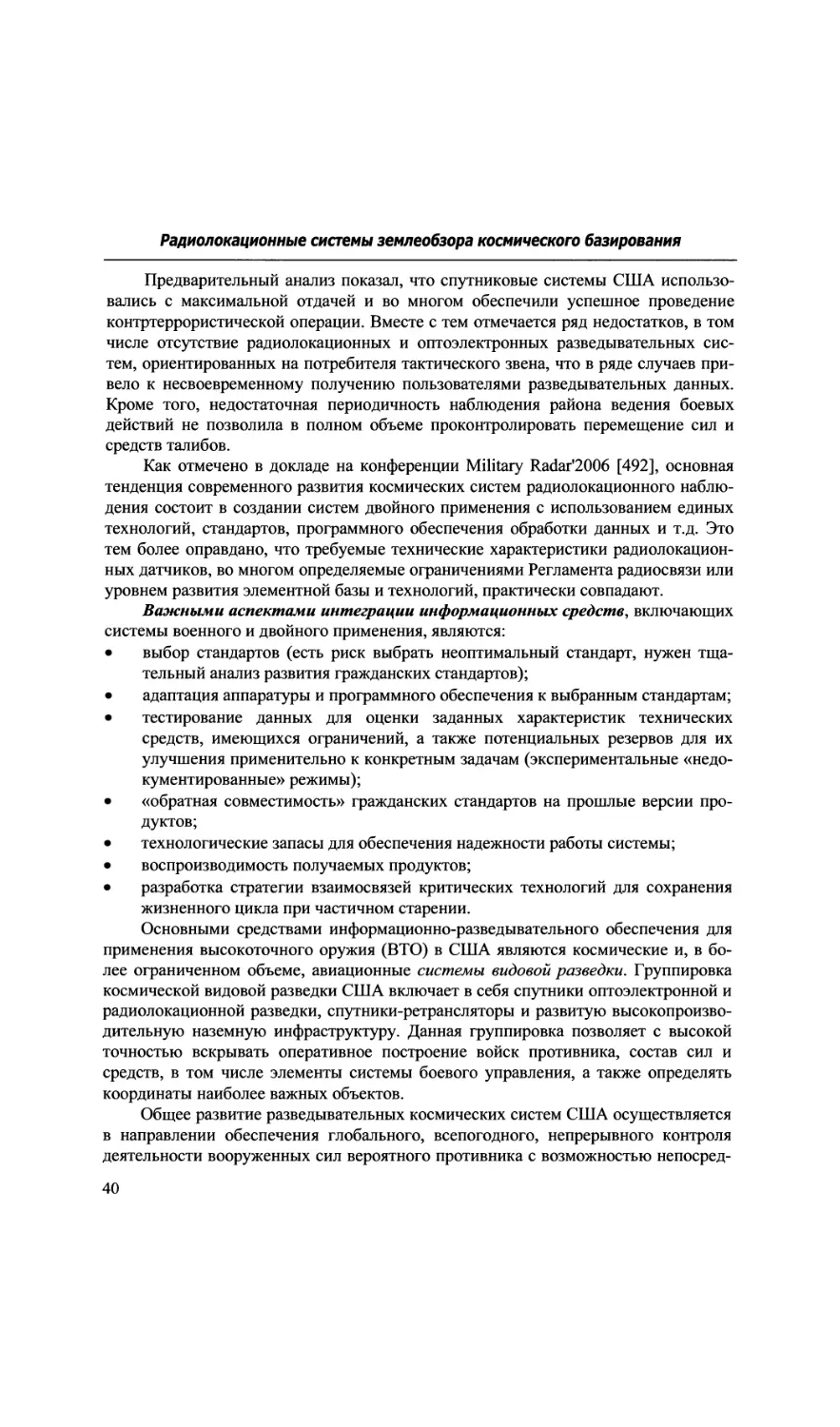
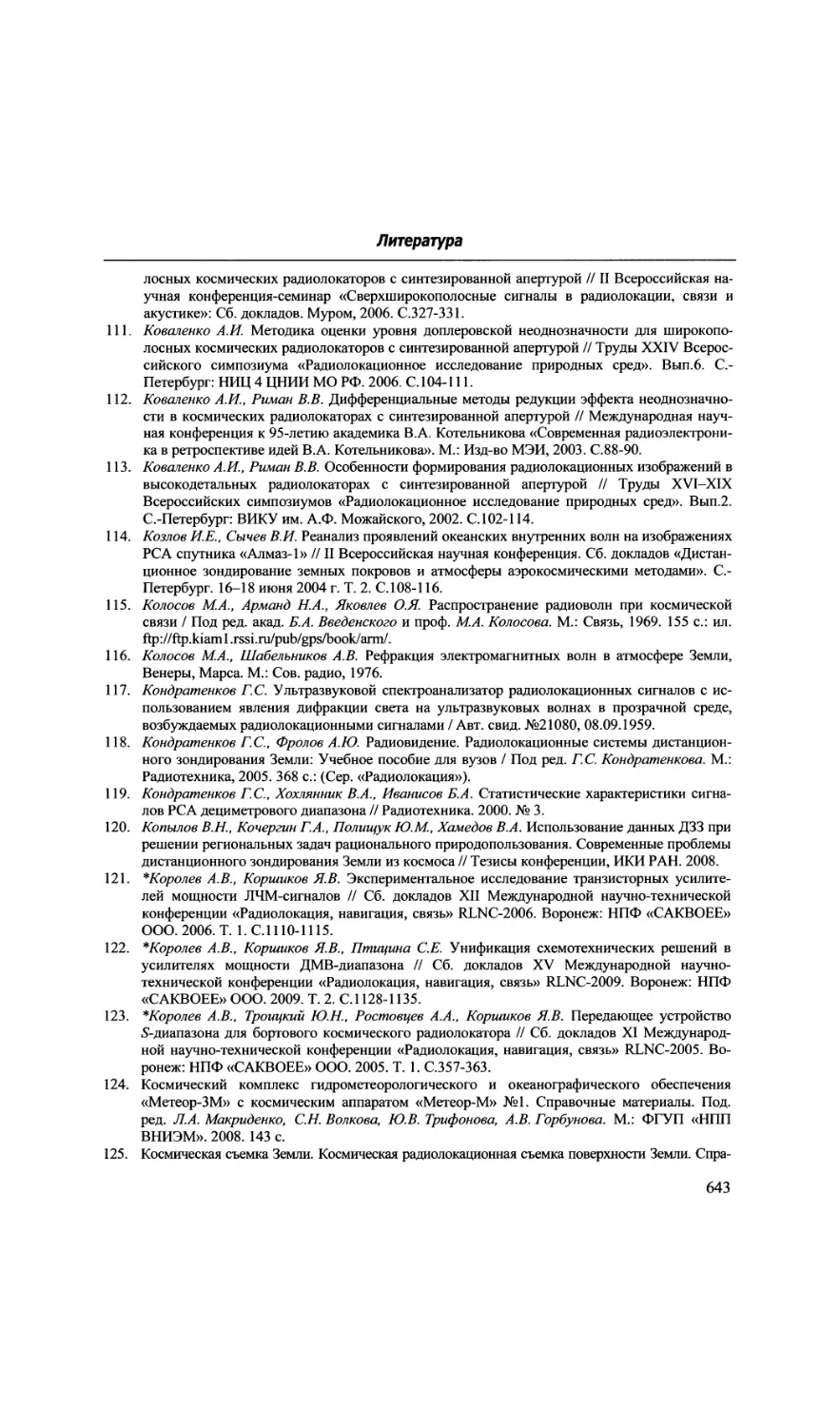
Система включает в себя космический, авиационный и наземный сегменты
(рис. 1.1).
КОСМИЧЕСКИЙ СЕГМЕНТ
Группировка МКА на геостационарной орбита
НАЗЕМНЫЙ
КОМПЛЕКС
УПРАВЛЕНИЯ
ГРУППИРОВКОЙ
ЕОСТАЦИОНАРНЫХМ
Группировка МКА ка солтчнонеинхроннь1х орбитах
АВИАЦИОННЫМ СЕГМЕНТ
НАВИГАЦИОННОЙ
ИНОДОДДОЫ
навигационное
СИСТЕМА
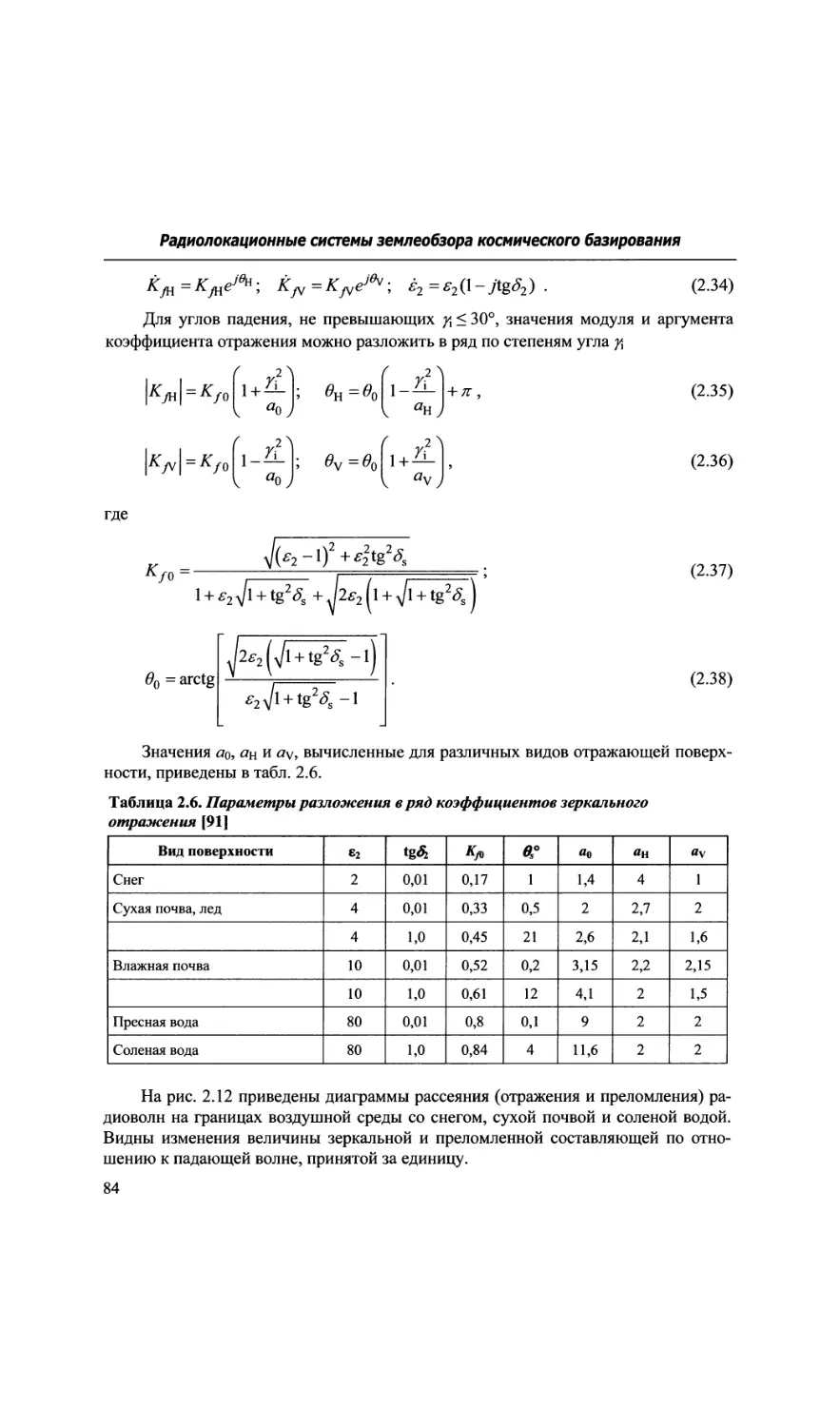
Рис. 1.1. Структура глобальной системы аэрокосмического мониторинга [184]
Национальные авиационным? гоугнмрбеш
НАЗЕМНЫЙ СЕГМЕНТ
НАЗЕМНЫЕ ТЕХНИЧЕСКИЕ,
b СРЕДСТВА ,
НАЗЕМНЫЙ
КОМПЛЕКС
УПРАВЛЕНИЯ
ГРУППИРОВКОЙ
ЧИЗКООРБИГАЛЪНЫХ ХА
цмаиныи
КОМПЛЕКС
ОБЕСПЕЧЕНИЯ
ПОЛЕТОВ
ВОЗДУШНЫХ СУДОВ
РАКЕТНО-КОСЯИЧЕСКТМ
КОМПЛЕКС ДЛЯ ВЫВЕДЕНИЙ
ГЕОСТАЦИОНАРНЫХ ХА
РАКЕТНО-КОСМИЧЕСКИЙ
КОМПЛЕКС ДЛЯ ВЫВЕДЕН!
НИЗКООРЕИТАПЫНЫХ КА
I . ГЛОБАЛЬНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ
МОНИТОРИНГОВОЙ ИНФОРМАЦИЕЙ
'^ЩСЖТЕМА
«ЖОРА ДАННЫХ
ДИСТАНЦИОННОГО
S WPOBAHH» ЗЕМЛИ
ПОДСИСТЕМА
СБОРА ДАННЫХ
АЭРОСЪЕМКИИ
ДАТЧИИХО КОНТРОЛЯ
ПОДСИСТЕМА
ПРЕДОСТАВЛЕН»®
ИНФОРМАЦИИ
О ГЕОФИЗИЧЕСКИХ ЯВЛЕНИЯХ
И ПРОГНОЗАХ КАТАСТРОФ
вддсиотемаГ*1*
, О6РА6СТКИ
V ДАННЫХ НМ^ЦДЕНИЙ!
ИНТЕГРИРОВАННАЯ
ТЕЛЕМАТИЧЕОСад
СИСТЕМА
ТРАНСПОРТНЫХ
кСТШ-чЧ*
СИСТЕМА ОБЕСПЕЧЕН ИЯ
СИСТЕМА
ДИСТА»(ИОННОГО<Ж¥ЧЕНИЯ
ГЛАВНЫЕ
технические
ЦЕНТРЫ
ГРУППОВЫЕ.
ТЕРМИНАЛЬНЫЕ
КОМПЛЕКСЫ
Космический сегмент включает орбитальную группировку, состоящую из
космических аппаратов (КА), расположенных на разных орбитах (низких и геоста-
ционарных), функционально использует орбитальную группировку КА связи и
ретрансляции, а также информацию глобальных навигационных систем
ГЛОНАСС, GPS и Galileo.
Состав группировки КА определяется содержанием конкретных задач, ре-
шаемых системой. Например, для выявления признаков (предвестников) землетря-
сений группировка КА верхнего яруса должна включать в себя созвездие из шести
26
Глава 1. РЛС землеобзора космического базирования в глобальной системе
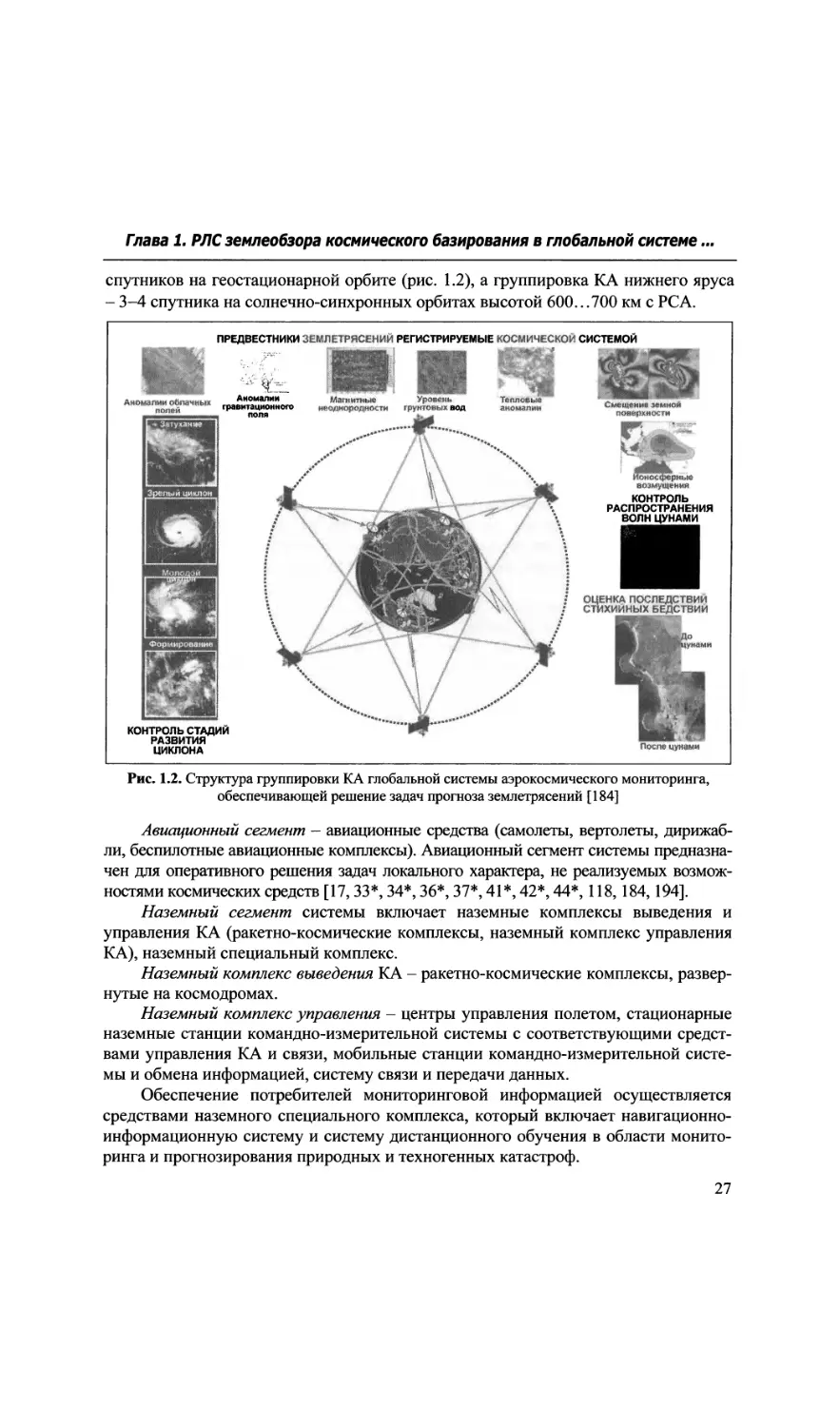
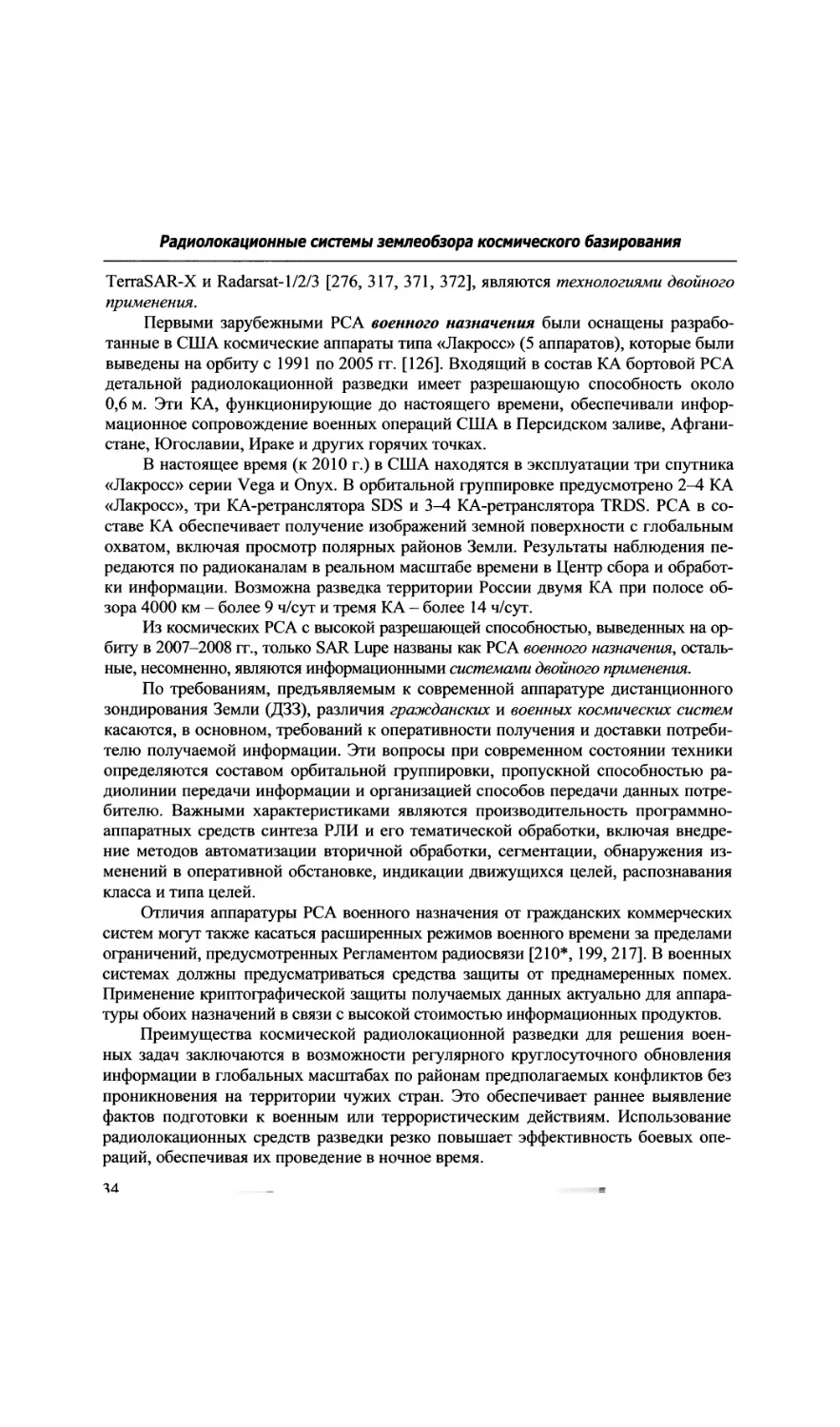
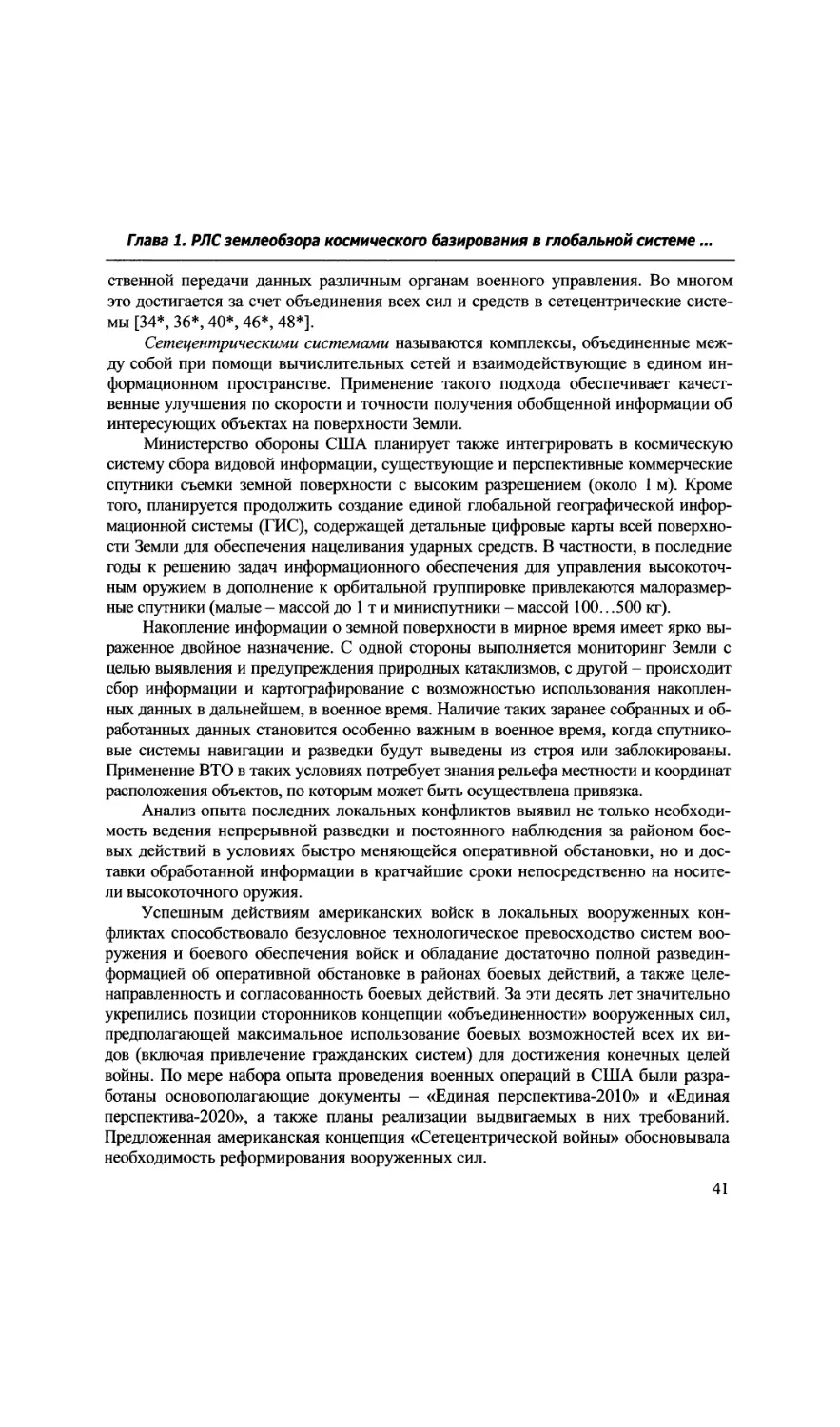
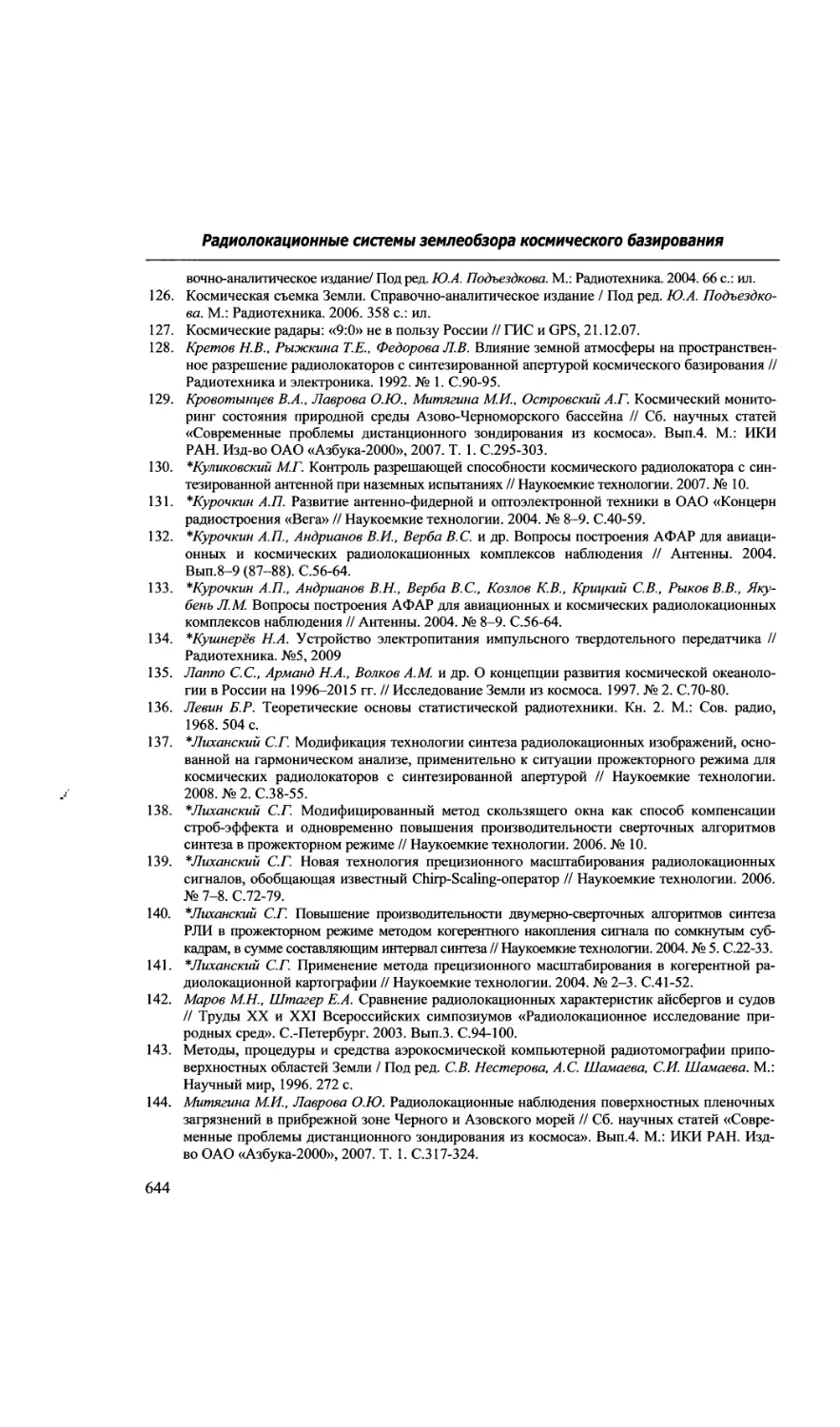
спутников на геостационарной орбите (рис. 1.2), а группировка КА нижнего яруса
- 3-4 спутника на солнечно-синхронных орбитах высотой 600...700 км с РСА.
ПРЕДВЕСТНИКИ ЗЕМЛЕТРЯСЕНИЙ РЕГИСТРИРУЕМЫЕ КОСМИЧЕСКОЙ СИСТЕМОЙ
ЦИКЛОНА
Смещение земной
поверхности
возмущения
КОНТРОЛЬ
РАСПРОСТРАНЕНИЯ
ВОЛН ЦУНАМИ
После цунами
Рис. 1.2. Структура группировки КА глобальной системы аэрокосмического мониторинга,
обеспечивающей решение задач прогноза землетрясений [184]
Авиационный сегмент - авиационные средства (самолеты, вертолеты, дирижаб-
ли, беспилотные авиационные комплексы). Авиационный сегмент системы предназна-
чен для оперативного решения задач локального характера, не реализуемых возмож-
ностями космических средств [17,33*, 34*, 36*, 37*, 41*, 42*, 44*, 118,184,194].
Наземный сегмент системы включает наземные комплексы выведения и
управления КА (ракетно-космические комплексы, наземный комплекс управления
КА), наземный специальный комплекс.
Наземный комплекс выведения КА - ракетно-космические комплексы, развер-
нутые на космодромах.
Наземный комплекс управления — центры управления полетом, стационарные
наземные станции командно-измерительной системы с соответствующими средст-
вами управления КА и связи, мобильные станции командно-измерительной систе-
мы и обмена информацией, систему связи и передачи данных.
Обеспечение потребителей мониторинговой информацией осуществляется
средствами наземного специального комплекса, который включает навигационно-
информационную систему и систему дистанционного обучения в области монито-
ринга и прогнозирования природных и техногенных катастроф.
27
Радиолокационные системы землеобзора космического базирования
Эффективность системы глобального аэрокосмического мониторинга опреде-
ляется возможностями применяемых средств наблюдения состояния поверхности
Земли и околоземного пространства (в оптическом, инфракрасном, радио, низко- и
высокочастотном диапазонах и т.д.), а также технологий обработки и распростра-
нения аэрокосмической информации.
В общей структуре информационной системы аэрокосмического мониторинга
можно выделить два основных направления, различающиеся решаемыми задачами,
источниками получения данных, организацией процесса распределения информа-
ции, а также ее применением:
1) национальный фрагмент геоинформационной системы (ГИС), решающей
задачи гражданского применения, в том числе мониторинга катастроф;
2) национальные информационные системы военного назначения (ИСВН).
Данные для ГИС от оптоэлектронных, радиолокационных и других датчиков
космического базирования распределяются на коммерческой основе (или по Меж-
дународным соглашениям по мониторингу катастроф) через фирмы-дистри-
бьюторы.
Источником данных для ИСВН являются национальные средства землеобзора
или данные, получаемые от других стран по договорам о Международном сотруд-
ничестве (например, EC-НАТО), в том числе по совместной антитеррористической
деятельности.
Наиболее информативные средства получения видовой информации - опти-
ческие и радиолокационные датчики, работающие в разных частях электромагнит-
ного спектра. Благодаря различию свойств электромагнитных волн и принципов
формирования изображений обеспечиваемая этими средствами информация вза-
имно дополняет друг друга.
В разделах 1.2-1.3 рассмотрено место радиолокационных систем землеобзора космическо-
го базирования как важнейшего сегмента глобальной аэрокосмической информационной
системы двойного применения. Подробное описание аэрокосмической группировки дано в
разделе 1.4.
1.2. Информационные параметры радиолокационных систем
землеобзора космического базирования
Дадим определения основным информационным параметрам радиолокационных
систем землеобзора космического базирования в сравнении их с параметрами оп-
тоэлектронной аппаратуры, работающей в видимой части электромагнитного спек-
тра. Рассмотрим особенности космической радиолокационной съемки в интересах
гражданских и военных потребителей.
Радиолокационные системы являются активными средствами наблюдения,
использующими облучение пространства зондирующим сигналом, прием и обра-
ботку отраженных сигналов и формирование выходных радиолокационных изо-
бражений (РЛИ), в которых представлена информация о разных свойствах объекта
наблюдения, извлеченная из принятого сигнала, отраженного от облученного объ-
екта или подстилающей поверхности. Кроме моностатических (однопозиционных}
28
Глава 1. РЛС землеобзора космического базирования в глобальной системе
радиолокационных датчиков, в которых передатчик и приемник размещены на од-
ном КА, возможно многопозиционное построение радиолокационной системы
(бистатическое, мультистатическое), когда передатчики и приемники размеща-
ются на разных КА и образуют многодатчиковое информационное поле (техноло-
гия MIMO - Multi Input Multi Output [403]).
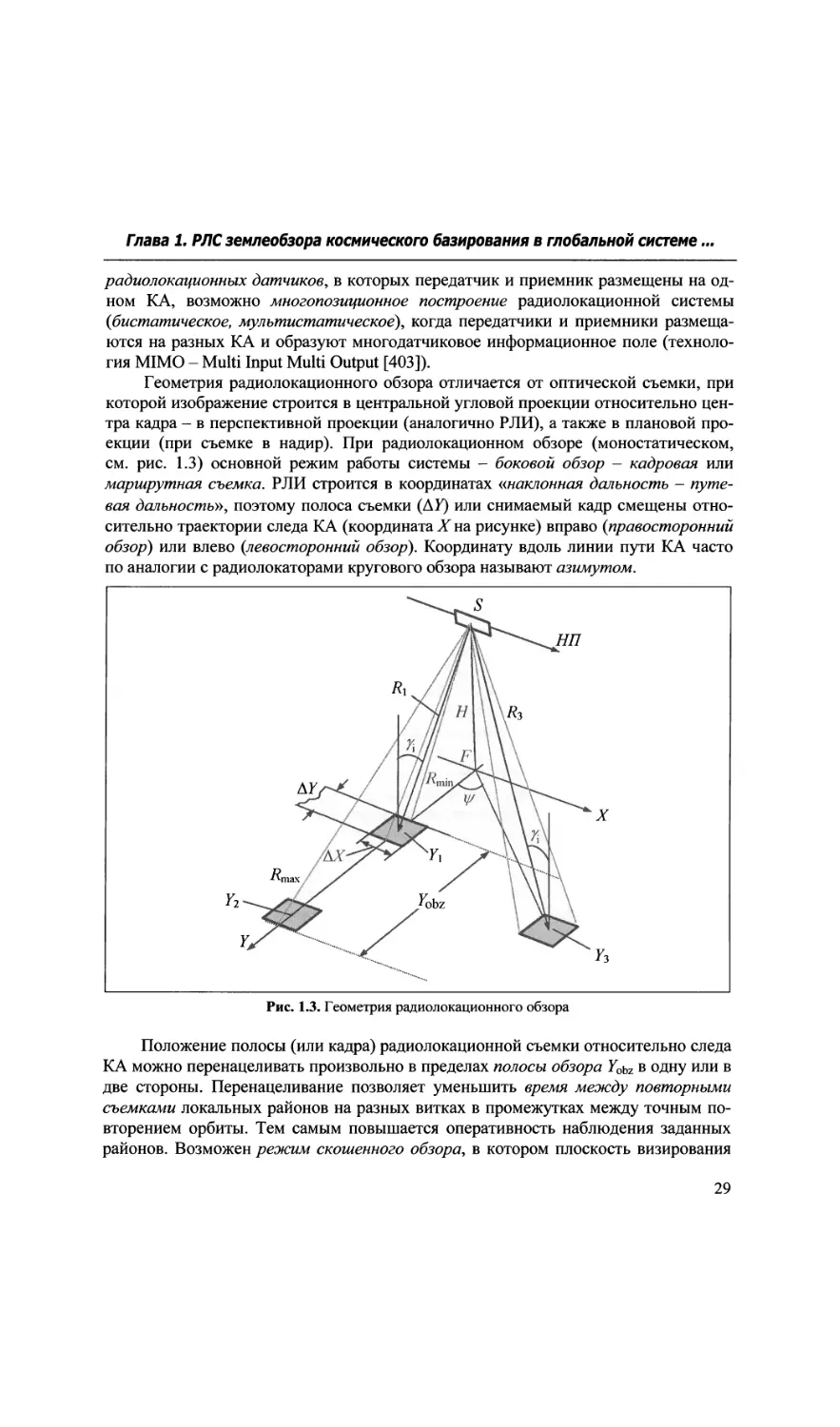
Геометрия радиолокационного обзора отличается от оптической съемки, при
которой изображение строится в центральной угловой проекции относительно цен-
тра кадра - в перспективной проекции (аналогично РЛИ), а также в плановой про-
екции (при съемке в надир). При радиолокационном обзоре (моностатическом,
см. рис. 1.3) основной режим работы системы - боковой обзор — кадровая или
маршрутная съемка. РЛИ строится в координатах «наклонная дальность - путе-
вая дальность», поэтому полоса съемки (АУ) или снимаемый кадр смещены отно-
сительно траектории следа КА (координата X на рисунке) вправо (правосторонний
обзор) или влево (левосторонний обзор). Координату вдоль линии пути КА часто
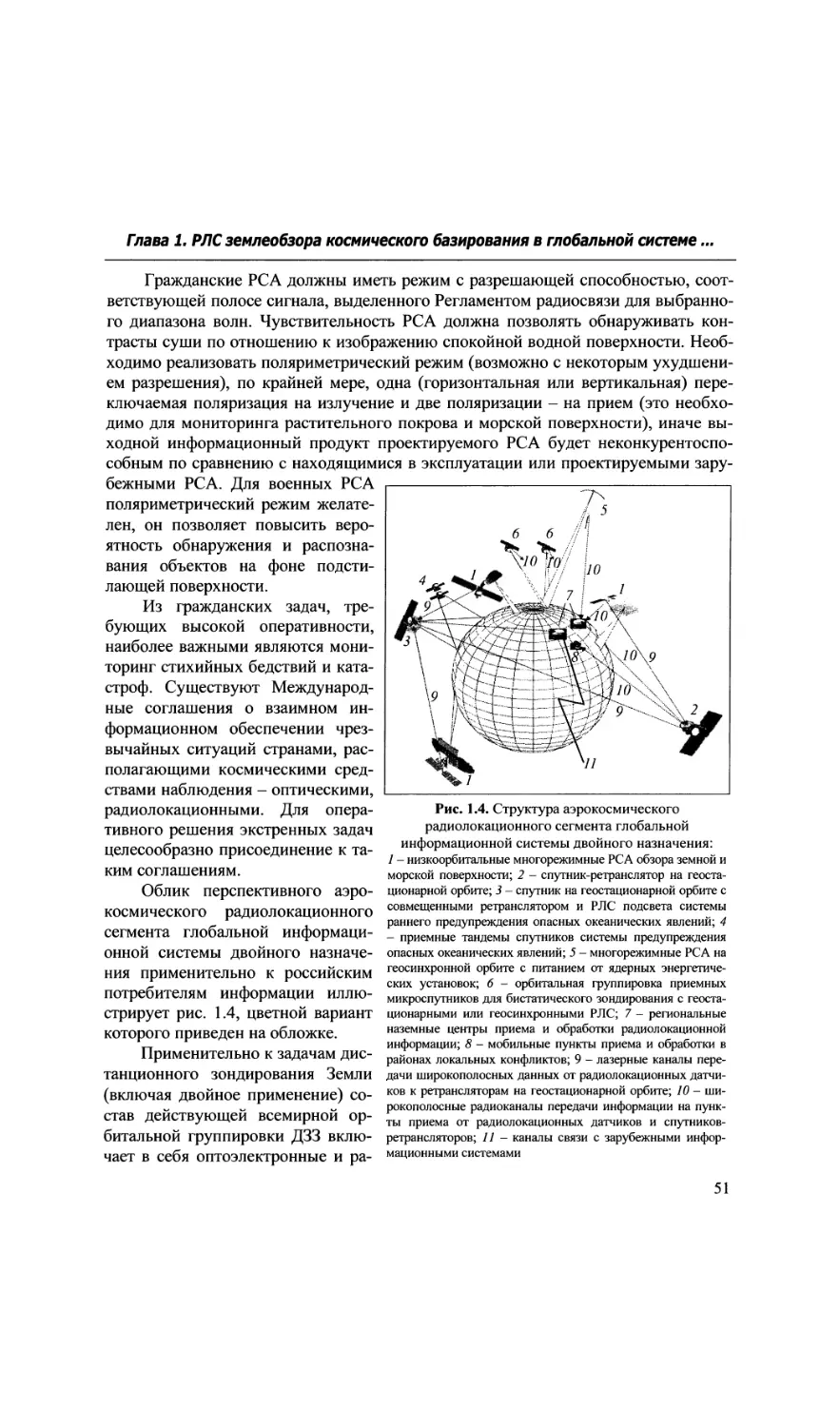
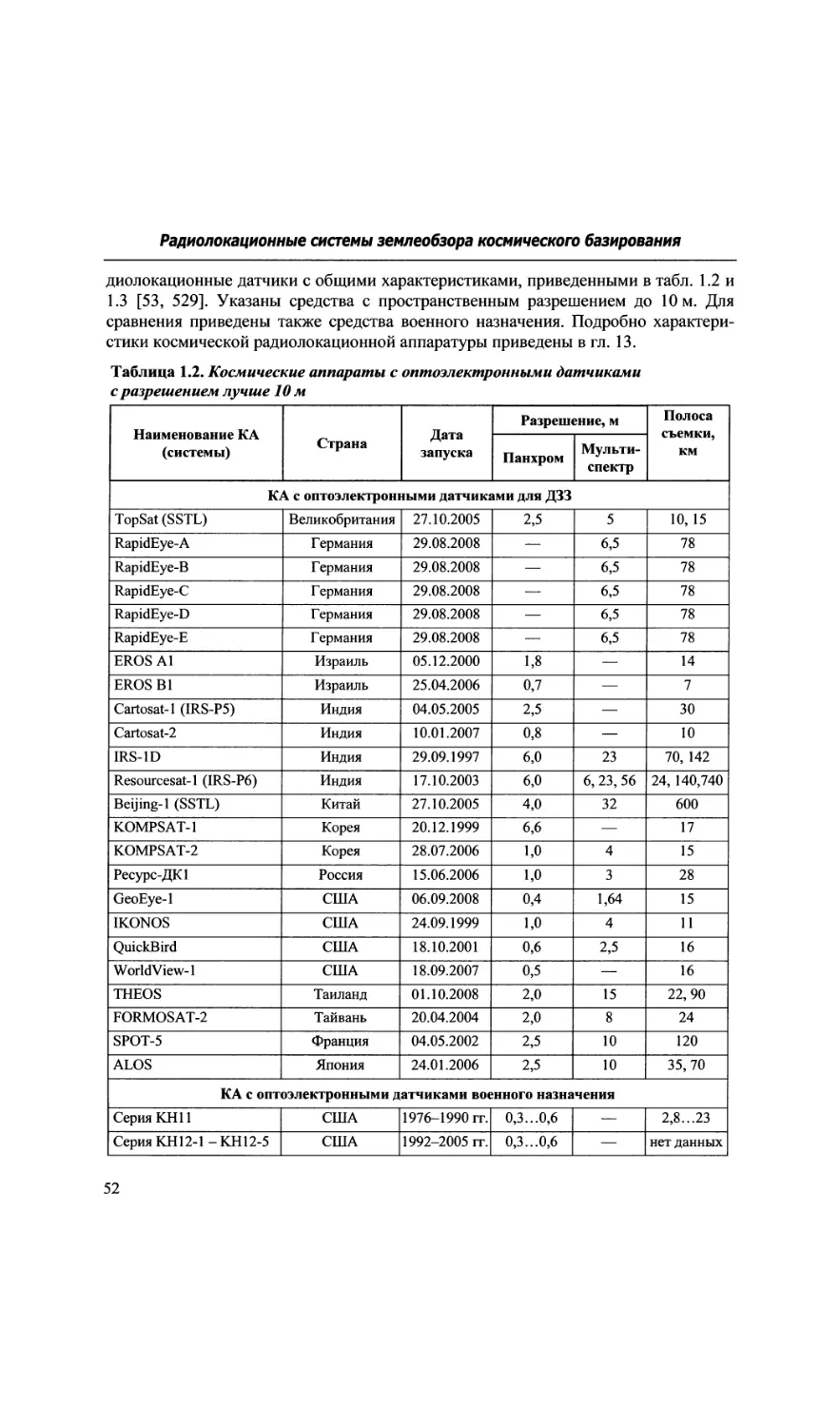
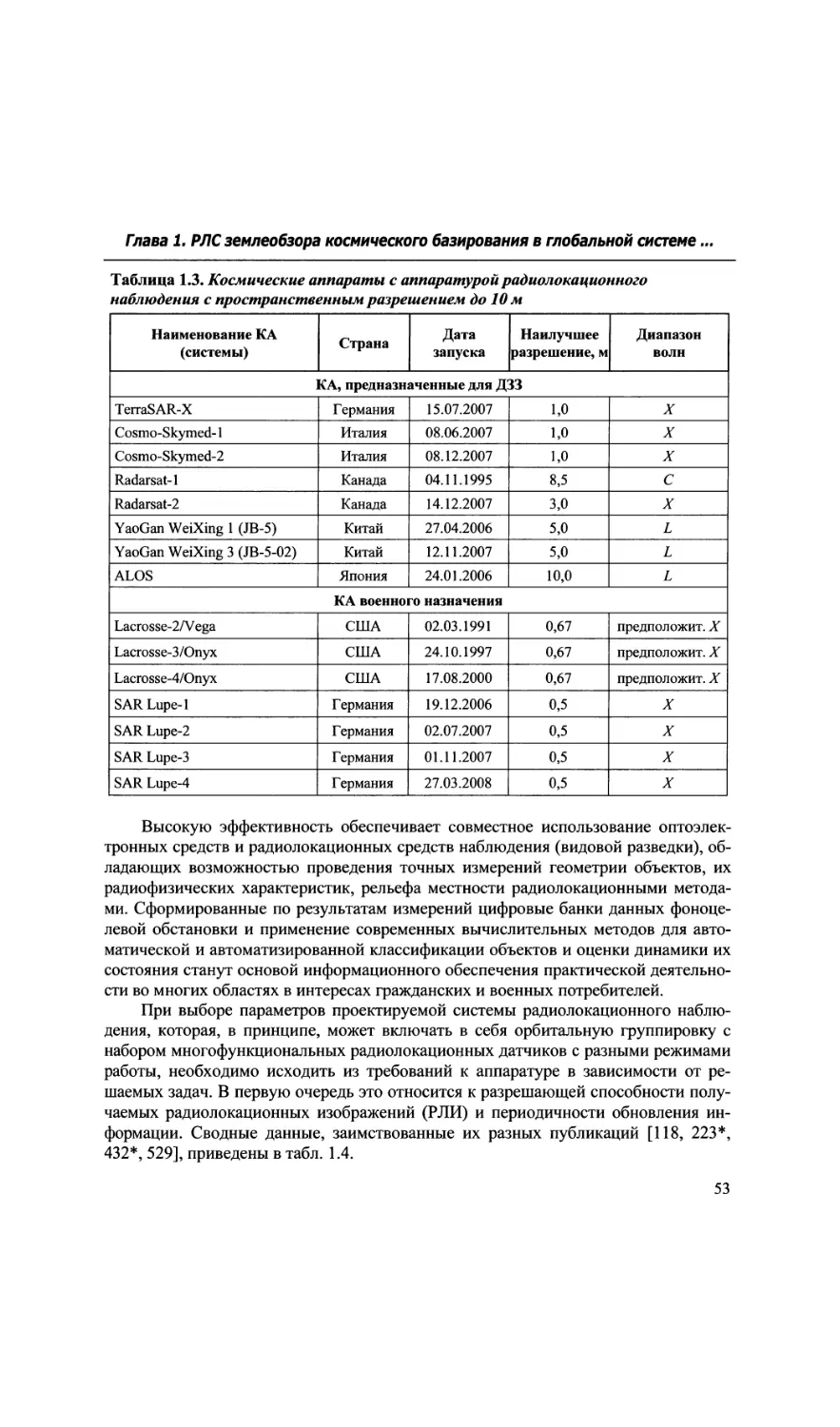
по аналогии с радиолокаторами кругового обзора называют азимутом.
Положение полосы (или кадра) радиолокационной съемки относительно следа
КА можно перенацеливать произвольно в пределах полосы обзора Уоь2 в одну или в
две стороны. Перенацеливание позволяет уменьшить время между повторными
съемками локальных районов на разных витках в промежутках между точным по-
вторением орбиты. Тем самым повышается оперативность наблюдения заданных
районов. Возможен режим скошенного обзора, в котором плоскость визирования
29
Радиолокационные системы землеобзора космического базирования
SFY3 поворачивают на угол у/ относительно нормали к следу КА, а синтез РЛИ ве-
дут, как и в режиме бокового обзора, предварительно скомпенсировав изменение
дальности сигналов вдоль траектории полета относительно центра кадра съемки.
Этот режим позволяет изменить ракурс наблюдения, провести съемку нескольких
участков, расположенных на разном удалении от следа КА, а также увеличить вре-
мя наблюдения заданного района с целью повышения разрешающей способности
РЛИ (прожекторный режим съемки РСА).
Космические радиолокаторы землеобзора используют импульсный зонди-
рующий сигнал, ширина спектра которого определяет разрешение по наклонной
дальности а также разрешение по горизонтальной дальности на местности ру
поперек линии пути, которое в режиме бокового обзора равно
п =PR = ^1
sin /i 2 AF sin
(1-1)
где AF - ширина спектра зондирующего импульса; - угол падения, отсчитывае-
мый от местной вертикали.
Разрешение вдоль линии пути зависит от типа радиолокатора и существенно
отличается для случая некогерентного радиолокатора бокового обзора (РБО) или
радиолокатора с синтезированной апертурой антенны (РСА). Аналогично оптиче-
ским датчикам разрешение определяется через отношение рабочей длины волны к
длине апертуры антенны в РБО, а в РСА - к длине участка траектории движения
платформы, на котором происходит когерентное запоминание принимаемого сиг-
нала и последующий синтез искусственной апертуры (согласованная фильтрация
траекторного сигнала).
Таким образом, для РБО при двойном учете диаграммы направленности антен-
ны (ДНА) на передачу и прием разрешение вдоль линии пути (по азимуту), измеряе-
мое по уровню половинной мощности принятого сигнала, определяется формулой
RA, RA,
— , (1-2)
^xant ^xant
где Fxant - горизонтальный размер антенны радиолокатора (множитель 0,64 соот-
ветствует равномерному распределению поля по раскрыву антенны, а приближен-
ное равенство - применению амплитудного взвешивания для уменьшения уровня
боковых лепестков).
Для РСА форма ДНА реальной антенны радиолокатора мало влияет на разре-
шающую способность по азимуту. Она определяется длиной синтезированной
апертуры, сформированной после приема сигналов,
RA RA
р =0,44—~-----,
Х La 2La
(1.3)
где La - длина синтезированной апертуры, которая может составлять десятки ки-
лометров (множитель «2» учитывает двойной набег фазы при передаче и приеме
сигналов от наблюдаемой местности; приближенное равенство учитывает ампли-
тудное взвешивание при синтезе апертуры).
30
Глава 1. РЛС землеобзора космического базирования в глобальной системе...
Реализуемая разрешающая способность современных средств радиолокаци-
онного землеобзора космического базирования (РСА) составляет от долей метра до
сотен метров.
Возможность наблюдения отражающих радиоволны объектов или элементов
местности характеризуется чувствительностью РСА. Она ограничена тепловыми
шумами на входе приемника. Связь чувствительности с параметрами РСА опреде-
ляется уравнением радиолокационной дальности, приведенным в разделе 3.4.
Численно чувствительность РСА выражается через значение удельной отражаю-
щей способности (коэффициента отражения) подстилающей поверхности cP, мощ-
ность принимаемого сигнала от которой равна мощности тепловых шумов. По ве-
личине cP и площади элемента разрешения РСА для известной ЭПР цели можно
вычислить отношение сигнал/шум или сигнал/шум+фон для оценки вероятности
обнаружений целей на неотражающей поверхности или на отражающем фоне
местности [35*, 214].
Радиометрическое разрешение РСА (или контрастно-яркостная чувстви-
тельность) характеризует способность различать объекты с разной отражающей
способностью (см. раздел 3.5). Она зависит от чувствительности РСА и площади
наблюдаемого объекта.
Для космического радиолокационного землеобзора принципиально можно
использовать часть электромагнитного спектра - радиоволны, которые с малыми
потерями проходят через атмосферу. Их длина волны составляет от единиц санти-
метров (частоты 10... 18 ГГц) до единиц метров (частоты 200...400 МГц). Практи-
чески к началу XXI в. освоен частотный диапазон 1200...9500 МГц (длина волны
соответственно от 23 до 3 см), в ближайшей перспективе ожидается расширение
освоенного частотного диапазона до 400... 14000МГц (длина волны соответствен-
но от 70 до 2 см).
Электромагнитное излучение характеризуется векторными свойствами - на-
правлением вектора электрического поля или поляризацией. Обычно используют
линейную поляризацию излучаемого сигнала - вертикальную или горизонтальную.
При отражении электромагнитных волн от объектов сложной конфигурации про-
исходит поворот плоскости поляризации. Используя прием параллельной (согласо-
ванной) и ортогональной (кроссполяризации) поляризаций и сравнение параметров
отраженных сигналов в поляриметрических каналах можно существенно повысить
информативность радиолокационного зондирования, особенно для идентификации
земных покровов.
Получаемая радиолокационная информация в цифровом виде представляет
собой комплексные радиолокационные изображения (КРЛИ), каждый элемент
(пиксель) которых характеризуется комплексным числом - действительной и мни-
мой составляющими или амплитудой и фазой, численное значение которых опре-
деляет параметры сигнала, принятого от соответствующего элемента на земной
поверхности. Современные радиолокаторы землеобзора являются измерительными
приборами, позволяющими проводить инструментальную обработку получаемых
данных о земной поверхности и расположенных на ней объектах.
31
Радиолокационные системы землеобзора космического базирования
Большие возможности заключены в интерферометрической обработке пар
фазовых изображений (ФРЛИ). Это построение высокоточных карт рельефа, изме-
рение малых (миллиметры и сантиметры) смещений земной коры и изменений
геометрии инженерных сооружений (строительных конструкций, продуктопрово-
дов), выявление изменений в оперативной обстановке за время между съемками
(включая вскрытие несанкционированного доступа).
Возможности обнаружения и измерения параметров, слабо отражающих объ-
ектов и подстилающей поверхности на фоне тепловых шумов (шумы приемника)
характеризуют радиометрической чувствительностью радиолокатора.
Абсолютной и относительной погрешностями радиометрических измерений
определяют точность измерения отражающих свойств объектов наблюдения и под-
стилающей поверхности.
Радиолокационная съемка обладает рядом преимуществ и особенностей по
сравнению с другими видовыми средствами наблюдения - оптическими, инфра-
красными датчиками:
• независимость от метеорологических условий;
• независимость от условий освещенности;
• повышенная точность измерения геометрических характеристик объектов;
• возможность трехмерного портретирования объектов и построения карт рель-
ефа местности;
• возможность выявления специфических характеристик объектов наблюдения,
характеризующих их диэлектрические свойства, динамические характеристи-
ки, внутреннюю структуру;
• возможность наблюдения и обнаружения объектов, невидимых в оптическом
или ИК-диапазонах электромагнитного спектра, скрытых снежным или расти-
тельным покровом, или по косвенным эффектам, например, по поверхност-
ным проявлениям глубинных процессов в водной среде;
• возможность получения дополнительной информации об объектах по их элек-
тродинамическим свойствам (резонансу, поляриметрическим характеристи-
кам, отражательным, проникающим или поглощающим свойствам в зависи-
мости от длины радиоволн).
Исторически сложилось, что первые радиолокаторы бокового обзора с реаль-
ной антенной (РБО) и с синтезированной апертурой антенны (РСА) авиационного
базирования предназначались для видовой разведки при сопровождении боевых
операций [101, 292, 477, 553]. Первые космические РБО входили в состав системы
морской космической разведки и целеуказания (МКРЦ), находившейся на воору-
жении ВМФ СССР (28 КА с 1975 по 1985 г. [88*, 222*, 545]). Космические РБО
гражданского применения серии «Космос-1500», «Океан» обеспечивали получение
информации в интересах гидрометеорологии, океанологии, изучения ледового пок-
рова и материковых льдов, а также контроля ледовой обстановки для гражданских
потребителей и служб ВМФ СССР [197].
Первый космический радиолокатор с синтезированной апертурой Seasat-A,
запущенный США в 1978 г., а также РСА SIR-A, SIR-B в составе многоразового
32
Глава 1. РЛС землеобзора космического базирования в глобальной системе...
транспортного космического корабля (МТКК) Шаттл (1994 и 1995 гг.) работали в
23 см диапазоне волн и имели разрешающую способность радиолокационных изо-
бражений (РЛИ) около 30 м. Полученные с их помощью изображения морской по-
верхности и суши показали применимость космической радиолокационной съемки
для решения широкого круга задач мониторинга природных объектов.
В СССР космические РСА «Меч-А» для орбитальной пилотируемой станции
«Алмаз-А» (готовность к запуску - в 1978 г. [563]) и РСА «Меч-К» в составе авто-
матического КА «Алмаз-Т», реализованный в 1987-1989 гг. («Космос-1870»), хотя
и имели близкую к зарубежным РСА разрешающую способность снимков около
20 м, проектировались как системы всепогодной видовой разведки. В них были
предусмотрены перенацеливание зоны захвата в пределах широкой полосы обзора
и двусторонний обзор. Эти возможности значительно повышали оперативность на-
блюдения (уменьшали период между повторными съемками) и являлись важней-
шей характеристикой систем военного назначения. В усовершенствованном РСА
«Меч-КУ» КА «Алмаз-1» кроме улучшения разрешающей способности до
10...15 м была реализована передача информации через спутник-ретранслятор на
пункт приема, где обеспечивался цифровой синтез РЛИ с использованием высоко-
производительного цифрового вычислительного комплекса. Это резко сократило
задержку между моментом съемки и доставкой информации потребителям.
Большой объем экспериментов по поляриметрическому зондированию земных
покровов в диапазонах волн 3, 5,6 и 23 см был проведен в США. В них участвовали
трехчастотный космический РСА SIR-C/X-SAR, четырехчастотный самолетный РСА
AIRSAR (дополненный РСА 70-см диапазона), а также РСА «Меч-К» КА «Космос-
1870» в 10-см диапазоне волн. Систематизированные данные измерений отражаю-
щей способности подстилающей поверхности в разных диапазонах волн, поляриза-
ции и углах падения составили основу для разработки инструментальных методов
обработки радиолокационной информации и проектирования систем радиолокаци-
онного наблюдения гражданского и военного применения [474, 522].
Заложенные в РСА SIR-C/X-SAR параметры: полоса сигнала 40 МГц, обеспе-
чивающая пространственное разрешение РЛИ около 4 м, полоса обзора 300 км по-
зволяли получать РЛИ, пригодные для решения задач военной разведки, в частно-
сти, для формирования базы радиолокационных данных с целью оценки изменений
обстановки на объектах наблюдения. В связи с ограниченным временем полета
МТКК Шаттл (до 7-8 суток) полученные данные могли сопоставляться с материала-
ми съемок другими датчиками. Хотя указанные возможности не нашли упоминания
в открытой литературе, можно рассматривать бортовой комплекс SIR-C/X-SAR
как средство радиолокационного наблюдения (РЛН) двойного применения.
Уникальным событием было создание на базе SIR-C/X-SAR двухчастотного
интерферометра SRTM (Shuttle Radar Topography Mission) с приемной антенной,
установленной на 60-метровой выдвижной штанге [521]. Построенные по материа-
лам съемок карты рельефа земной поверхности (с погрешностью около 4 м) при-
меняются для обновления топографических карт, а также для составления опорных
материалов для управления точным оружием. Таким образом, применение этой ап-
паратуры, как и методов получения карт рельефа с «мягкой базой» тандемами РСА
2—1492
33
Радиолокационные системы землеобзора космического базирования
TerraSAR-X и Radarsat-1/2/3 [276, 317, 371, 372], являются технологиями двойного
применения.
Первыми зарубежными РСА военного назначения были оснащены разрабо-
танные в США космические аппараты типа «Лакросс» (5 аппаратов), которые были
выведены на орбиту с 1991 по 2005 гг. [126]. Входящий в состав КА бортовой РСА
детальной радиолокационной разведки имеет разрешающую способность около
0,6 м. Эти КА, функционирующие до настоящего времени, обеспечивали инфор-
мационное сопровождение военных операций США в Персидском заливе, Афгани-
стане, Югославии, Ираке и других горячих точках.
В настоящее время (к 2010 г.) в США находятся в эксплуатации три спутника
«Лакросс» серии Vega и Опух. В орбитальной группировке предусмотрено 2—4 КА
«Лакросс», три KA-ретранслятора SDS и 3^4 KA-ретранслятора TRDS. РСА в со-
ставе КА обеспечивает получение изображений земной поверхности с глобальным
охватом, включая просмотр полярных районов Земли. Результаты наблюдения пе-
редаются по радиоканалам в реальном масштабе времени в Центр сбора и обработ-
ки информации. Возможна разведка территории России двумя КА при полосе об-
зора 4000 км - более 9 ч/сут и тремя КА - более 14 ч/сут.
Из космических РСА с высокой разрешающей способностью, выведенных на ор-
биту в 2007-2008 гг., только SAR Lupe названы как РСА военного назначения, осталь-
ные, несомненно, являются информационными системами двойного применения.
По требованиям, предъявляемым к современной аппаратуре дистанционного
зондирования Земли (ДЗЗ), различия гражданских и военных космических систем
касаются, в основном, требований к оперативности получения и доставки потреби-
телю получаемой информации. Эти вопросы при современном состоянии техники
определяются составом орбитальной группировки, пропускной способностью ра-
диолинии передачи информации и организацией способов передачи данных потре-
бителю. Важными характеристиками являются производительность программно-
аппаратных средств синтеза РЛИ и его тематической обработки, включая внедре-
ние методов автоматизации вторичной обработки, сегментации, обнаружения из-
менений в оперативной обстановке, индикации движущихся целей, распознавания
класса и типа целей.
Отличия аппаратуры РСА военного назначения от гражданских коммерческих
систем могут также касаться расширенных режимов военного времени за пределами
ограничений, предусмотренных Регламентом радиосвязи [210*, 199, 217]. В военных
системах должны предусматриваться средства защиты от преднамеренных помех.
Применение криптографической защиты получаемых данных актуально для аппара-
туры обоих назначений в связи с высокой стоимостью информационных продуктов.
Преимущества космической радиолокационной разведки для решения воен-
ных задач заключаются в возможности регулярного круглосуточного обновления
информации в глобальных масштабах по районам предполагаемых конфликтов без
проникновения на территории чужих стран. Это обеспечивает раннее выявление
фактов подготовки к военным или террористическим действиям. Использование
радиолокационных средств разведки резко повышает эффективность боевых опе-
раций, обеспечивая их проведение в ночное время.
34
Глава 1. РЛС землеобзора космического базирования в глобальной системе...
Недостатками космических средств радиолокационной видовой разведки яв-
ляются малая длительность контакта (для низкоорбитальных средств - секунды в
маршрутном или прожекторном режимах, единицы минут - в режиме скошенного
обзора) с большими интервалами повторной съемки, а также опасность подавления
РСА путем создания мощной помехи по главному лепестку диаграммы направлен-
ности антенны РСА с территории контролируемого района.
Для повышения оперативности наблюдения требуется увеличение состава ор-
битальной группировки. Альтернативой является комплексирование аэрокосмиче-
ских средств видовой разведки. Особые перспективы имеют бистатические (мно-
гопозиционные) средства аэрокосмического радиолокационного наблюдения с
подсветом от КА на эллиптической или геостационарной орбите и применением
легких пассивных приемных датчиков на беспилотных летательных аппаратах
(БЛА) или микроспутниках. Скрытность работы пассивных датчиков обеспечит
помехозащищенность системы наблюдения, а комплексирование со средствами ра-
диотехнической разведки позволит определить точные координаты станций помех
для их уничтожения в ходе боевой операции.
Приведенные доводы говорят о необходимости построения комплексной аэ-
рокосмической информационной системы, включающей датчики видовой развед-
ки, систему передачи, обработки и распределения информации. Космический сег-
мент такой информационной системы в его взаимосвязи с другими обеспечиваю-
щими подсистемами является предметом рассмотрения в настоящей монографии.
В разделе 1.3 дана иллюстрация информационного обеспечения военных операций США и
НАТО по опубликованным материалам («Независимое военное обозрение», «Новости кос-
монавтики» и др.). Эти операции проводились, в основном, летом и в районах, располо-
женных в низких широтах, с благоприятными метеорологическими условиями. Поэтому
большое значение в информационном обеспечении имели оптические датчики, роль кото-
рых в других условиях гораздо меньше.
1.3. Применение космических систем
радиолокационного наблюдения для видовой разведки
при информационном сопровождении военных операций
Операции США и НАТО против Ирака
Рассмотрим опыт информационного обеспечения боевых действий на примере
операций США и НАТО в Ираке, Югославии и Афганистане.
Последние два десятилетия характеризуются вооруженным вмешательством
США и стран НАТО в Ирак. Это операции «Буря в пустыне» 1991 г., «Лиса в пус-
тыне» 1998 г. и «Свобода Ираку» 2003 г. Если рассматривать военный аспект этих
операций, то война в Персидском заливе 1991 г., операция «Буря в пустыне», от-
крыли эру войн высоких технологий [27, 201, 202]. Многонациональными силами
(МНС) антииракской коалиции была развернута мощная авиационная группировка,
включающая ударные тактические самолеты, оснащенные высокоточным оружием
и оборудованные индивидуальными станциями активных и пассивных помех,
35
Радиолокационные системы землеобзора космического базирования
стратегические и тактические самолеты-разведчики, самолеты радиоэлектронной
борьбы. Применялись специальные самолеты для уничтожения радиоэлектронных
средств управления войсками.
МНС имели абсолютное превосходство по стратегическим самолетам, косми-
ческим средствам навигации и связи, высокоточному управляемому оружию клас-
са «воздух-поверхность», «корабль-поверхность» (крылатые ракеты). Контроль
воздушного пространства и управление авиацией обеспечивали самолеты дальнего
радиолокационного обнаружения и управления Е-3 АВАКС, Е-2С «Хокай», а так-
же радиолокационная система воздушной разведки наземных целей и управления
нанесением ударов Е-8 «Джистарс».
Характерные особенности операции «Буря в пустыне» - сопровождение мас-
сированных ударов авиации самой крупной в истории радиоэлектронной войной;
нанесение массированных ударов преимущественно ночью; применение глобаль-
ной спутниковой навигационной системы «Навстар». Одной из задач, которые, не-
сомненно, ставились в ходе этих операций, было проведение испытаний ракетного
вооружения различного базирования в боевых условиях в интересах его дальней-
шего развития.
К проведению операции «Лиса в пустыне» командование вооруженных сил
США и Великобритании тщательно подготовились, используя возможность свобод-
ного ведения воздушной и космической разведки территории Ирака в ходе контроля
произвольно провозглашенных Вашингтоном и Лондоном «бесполетных зон».
Разведывательное обеспечение боевых действий сил союзников осуществля-
лось постоянно действующей системой наземных, космических, авиационных и
корабельных средств разведки и наблюдения. Основу разведывательного обеспе-
чения, особенно при оценке результатов нанесенных ударов, составляла дейст-
вующая орбитальная группировка, включающая три КА оптоэлектронной разведки
КН-11 и два КА радиолокационной разведки «Лакросс». Вся орбитальная группи-
ровка функционировала на орбитах до начала боевых действий, потребовалось
только осуществить координатный маневр двух КА системы КН-И с тем, чтобы
увеличить время контроля обстановки на территории Ирака. Использовавшиеся
системы космической разведки обеспечивали ведение оптоэлектронной разведки с
периодичностью (в среднем) 2...3ч/сут, радиолокационной разведки 2...2,5 ч с
суммарным ежесуточным контролем территории Ирака порядка 160... 190 мин.
Несмотря на небольшую продолжительность и масштабы, операция «Лиса в
пустыне» имела свои особенности по сравнению с операцией «Буря в пустыне». В
воздушной наступательной операции имелись следующие тенденции: увеличение
количества беспилотных летательных средств (соотношение пусков крылатых ра-
кет к самолетовылетам 1:1,3 против 1:10), увеличение количественного состава
крылатых ракет, особенно морского базирования. В ходе всей операции постоянно
привлекались самолеты ДРЛО и управления Е-3 системы АВАКС, самолеты раз-
ведки наземных целей и управления нанесением ударов Е-8 «Джистарс», воздуш-
ный пункт управления ЕС-130 «Геркулес» и самолеты-разведчики RC-135 и U-2, а
также вертолеты поисково-спасательного обеспечения.
36
Глава 1. РЛС землеобзора космического базирования в глобальной системе...
Операция «Лиса в пустыне» подтвердила:
• наибольшая угроза воздушного нападения будет исходить непосредственно с
моря или с приморских направлений;
• главным средством боевого воздействия будет являться высокоточное оружие;
• наиболее предпочтительным временем для нанесения первых ракетно-
авиационных ударов является темное время суток;
• успеху операции во многом способствует комплексное применение сил и
средств разведки, включающих космическую, воздушную, наземную и мор-
скую разведки, до начала и в ходе операции.
При операции США и НАТО «Свобода Ираку» в 2003 г. значительное влия-
ние оказали уроки, полученные США и их союзниками в первой иракской войне, в
войне на Балканах и в антитеррористической операции в Афганистане. Как и в
1991 г., союзники создали мощную группировку сил и средств, в том числе и воз-
душного нападения. Для скорейшего достижения целей «молниеносной» войны с
учетом прежнего опыта применения высокоточного оружия (ВТО), воздушные
удары наносились в основном с применением крылатых ракет морского («Тома-
гавк») и воздушного (AGM-86) базирования, а также высокоточных авиационных
бомб. Роль ВТО резко возросла. Так, если в операции «Буря в пустыне» его доля не
превышала 10 %, то в операции «Свобода для Ирака» доля ВТО составила не менее
80 % от общего числа использованных боеприпасов.
Одной из больших проблем для командования коалиции стала организация
взаимодействия между ВВС и наземными войсками с целью обеспечения взаимной
безопасности (потери от применения своих ракет). По мнению специалистов одной
из главных причин введения неверных координат перед пуском ракеты или бомбы
была неспособность ВВС США вести обмен данными в режиме реального времени
с союзными силами на уровне отделения.
Большое значение в организации взаимодействия имело создание интеграль-
ной системы сбора информации с использованием самолетов ДРЛО Е-3 АВАКС,
Е-8 «Джистарс», разведывательных RC-135 «Ривет Джойнт» и U-2, а также БЛА
«Предейтор». Совокупность поступающих от них данных давала точную картину
действий противоборствующих сторон на поле боя. Обработанная информация
оперативно передавалась боевым патрульным самолетам, которые успевали пора-
зить цель до нанесения ею удара.
Во время первой войны с Ираком американские вооруженные силы использо-
вали 16 военных, и пять коммерческих спутников, которые позволяли передавать
информацию в объеме 200 млн. бит/с [20, 65]. При операции в Косово ее объемы
выросли почти вдвое, в Афганистане (2001-2002 гг.) объем передаваемых данных
достиг почти 1 млрд, бит/с. В 2003 г. во время вторжения в Ирак войска США уже
обладали возможностью передавать 2,4 Гбит/с. Большая часть этого объема пере-
давалась через коммерческие спутники.
В целом Ирак в очередной раз стал испытательным полигоном для проверки
новых американских концепций ведения войны, в частности, так называемой «док-
трины Рамсфелда», или «цифровой войны», со ставкой на обеспечение господства
в воздухе, тесное межвидовое взаимодействие, широкое применение высокоточно-
37
Радиолокационные системы землеобзора космического базирования
го оружия и компьютерных технологий, активные действия небольших мобильных
войсковых формирований. При этом некоторые эксперты в США полагают, что
речь идет о коренном пересмотре характера современной войны — новом этапе ре-
волюции в военном деле.
Военная операция против Югославии
Операция «Решительная сила» против Югославии началась 24 марта 1999 г. прове-
дением воздушной наступательной операции авиационной группировки НАТО.
Она продолжалась до 27 марта. Кампания НАТО против Югославии характеризу-
ется беспрецедентными масштабами использования военных и гражданских спут-
ников. Свыше 50 спутников США и европейских стран, изначально предназначав-
шихся для использования против стран Варшавского договора, были непосредст-
венно задействованы НАТО в операциях по координации действий авиации, осу-
ществлению разведки и обеспечению боевых действий. По меньшей мере, от 15 до
20 американских и европейских КА были использованы при планировании и осу-
ществлении налетов.
В войне в Югославии применялся комплекс космических разведывательных
средств, включая два спутника радиолокационной разведки «Лакросс», три усо-
вершенствованных спутника оптоэлектронной разведки типа КН-11, а также три
более легких спутника Национального бюро аэрофотосъемки. По признанию самих
американцев в этом конфликте спутники должны были решать в основном такти-
ческие задачи - отслеживать, куда направляются военные автоколонны, и быстро
передавать информацию на базы ВВС. При этом выяснилось, что задержка достав-
ки информации до исполнителя - оператора бомбометания самолета - была велика,
что приводило к низкой эффективности бомбовых ударов по мобильным объектам
- танковым колоннам, скоплениям войск.
Применение спутников радиолокационной разведки «Лакросс» имело целью
разведку до и после нанесения бомбовых ударов по целям в лесных массивах, ко-
торые могли укрывать скопление войск и военной техники. Для обработки и пере-
дачи командованию НАТО огромных потоков космической информации было
сформировано специальное Управление тактической разведки, куда вошли пред-
ставители нескольких разведывательных структур США. Это Управление обеспе-
чивало выбор целей и оперативную передачу разведывательных изображений ко-
мандованию и летным экипажам, принимавшим участие в авиаударах.
Операция США в Афганистане
Американскими военными экспертами дана предварительная оценка использова-
ния космической группировки США в ходе антитеррористической операции «Не-
сокрушимая свобода» в Афганистане. Отмечается существенный вклад спутнико-
вых систем в решение разведывательных, коммуникационных, радионавигацион-
ных и метеорологических задач [235].
Космические разведывательные системы применялись в целях обеспечения
американских войск своевременными и достоверными данными о группировке сил
Исламского движения талибов, замысле действий противника, его боеспособности
38
Глава 1. РЛС землеобзора космического базирования в глобальной системе...
и готовности к нанесению ударов, а также для добывания сведений об особенно-
стях местности.
Космические системы оптоэлектронной и радиолокационной разведки были
задействованы в полном объеме. В их состав входило шесть ИСЗ (три ИСЗ опто-
электронной разведки типа КН-11 и три ИСЗ радиолокационной разведки типа
«Лакросс»). Они обеспечивали получение изображений различных объектов, об-
разцов вооружений и военной техники, наблюдение за дислокацией группировки
войск Исламского движения талибов и в целом за ведением боевых действий в Аф-
ганистане. Спутники разведки вели съемку с максимальным разрешением и ис-
пользовались совместно с ИСЗ-ретрансляторами типов SDS и TDRS. Кроме того,
для обеспечения функционирования КА типа КН-11 задействовались ИСЗ метео-
рологической системы.
В целях расширения возможностей видовой разведки по обеспечению боевых
действий национальное управление видовой разведки и картографии еще в октябре
2001 года приобрело эксклюзивное право на использование снимков территории
Афганистана, сделанных коммерческим аппаратом «Айконэс-2», обладающим
максимальной разрешающей способностью порядка 1 м.
Вооруженными силами США также активно использовались данные, полу-
чаемые спутниками системы разведки природных ресурсов Земли «Лэндсат-7»,
«Терра», «Орбвью-2». Это расширило возможности по составлению, обновлению и
своевременному уточнению карт местности, облегчило проведение инженерной
оценки зоны боевых действий. Высокая эффективность такой системы была дока-
зана в Афганистане при передаче в режиме реального времени изображения с БЛА
«Предейтор» на самолет АС-130 в ходе поисков боевиков «Аль-Каиды». Оснащен-
ный ракетой «Хеллфайр» БЛА после обнаружения цели получил команду Цен-
трального командования США во Флориде и уничтожил ее через несколько минут.
Для решения проблемы взаимодействия также использовались компьютерные
системы обработки и передачи данных, позволяющие значительно улучшить вла-
дение обстановкой на поле боя. При их применении данные системы ДРЛО Е-3
АВАКС и объединенной системы радиолокационного наблюдения и целеуказания
ударным средствам Е-8С «Джистарс» собирались воедино, обрабатывались и пере-
давались заинтересованным штабам.
Военные спутниковые системы связи работали с максимальным напряжени-
ем, однако смогли обеспечить лишь 40...60% потребности участников операции
«Несокрушимая свобода». В состав спутниковой группировки вошли шесть спут-
ников стратегической системы связи DSCS, три спутника объединенной стратеги-
ческой и тактической связи «Милстар», два ИСЗ типа UFO оперативно-тактичес-
кой системы связи ВМС, ВВС и сухопутных войск и шесть спутников системы пе-
редачи данных SDS. Кроме того, традиционно использовались ИСЗ принадлежа-
щей НАСА системы слежения и ретрансляции данных TDRSS. Вместе с тем резко
возросшие потоки данных (по сравнению с операцией «Буря в пустыне» объемы
передаваемой информации возросли примерно в семь раз), необходимых для обес-
печения проводимой операции, потребовали активного привлечения коммерческих
систем связи.
39
Радиолокационные системы землеобзора космического базирования
Предварительный анализ показал, что спутниковые системы США использо-
вались с максимальной отдачей и во многом обеспечили успешное проведение
контртеррористической операции. Вместе с тем отмечается ряд недостатков, в том
числе отсутствие радиолокационных и оптоэлектронных разведывательных сис-
тем, ориентированных на потребителя тактического звена, что в ряде случаев при-
вело к несвоевременному получению пользователями разведывательных данных.
Кроме того, недостаточная периодичность наблюдения района ведения боевых
действий не позволила в полном объеме проконтролировать перемещение сил и
средств талибов.
Как отмечено в докладе на конференции Military Radar'2006 [492], основная
тенденция современного развития космических систем радиолокационного наблю-
дения состоит в создании систем двойного применения с использованием единых
технологий, стандартов, программного обеспечения обработки данных и т.д. Это
тем более оправдано, что требуемые технические характеристики радиолокацион-
ных датчиков, во многом определяемые ограничениями Регламента радиосвязи или
уровнем развития элементной базы и технологий, практически совпадают.
Важными аспектами интеграции информационных средств, включающих
системы военного и двойного применения, являются:
• выбор стандартов (есть риск выбрать неоптимальный стандарт, нужен тща-
тельный анализ развития гражданских стандартов);
• адаптация аппаратуры и программного обеспечения к выбранным стандартам;
• тестирование данных для оценки заданных характеристик технических
средств, имеющихся ограничений, а также потенциальных резервов для их
улучшения применительно к конкретным задачам (экспериментальные «недо-
кументированные» режимы);
• «обратная совместимость» гражданских стандартов на прошлые версии про-
дуктов;
• технологические запасы для обеспечения надежности работы системы;
• воспроизводимость получаемых продуктов;
• разработка стратегии взаимосвязей критических технологий для сохранения
жизненного цикла при частичном старении.
Основными средствами информационно-разведывательного обеспечения для
применения высокоточного оружия (ВТО) в США являются космические и, в бо-
лее ограниченном объеме, авиационные системы видовой разведки. Группировка
космической видовой разведки США включает в себя спутники оптоэлектронной и
радиолокационной разведки, спутники-ретрансляторы и развитую высокопроизво-
дительную наземную инфраструктуру. Данная группировка позволяет с высокой
точностью вскрывать оперативное построение войск противника, состав сил и
средств, в том числе элементы системы боевого управления, а также определять
координаты наиболее важных объектов.
Общее развитие разведывательных космических систем США осуществляется
в направлении обеспечения глобального, всепогодного, непрерывного контроля
деятельности вооруженных сил вероятного противника с возможностью непосред-
40
Глава 1. РЛС землеобзора космического базирования в глобальной системе...
ственной передачи данных различным органам военного управления. Во многом
это достигается за счет объединения всех сил и средств в сетецентрические систе-
мы [34*, 36*, 40*, 46*, 48*].
Сетецентрическими системами называются комплексы, объединенные меж-
ду собой при помощи вычислительных сетей и взаимодействующие в едином ин-
формационном пространстве. Применение такого подхода обеспечивает качест-
венные улучшения по скорости и точности получения обобщенной информации об
интересующих объектах на поверхности Земли.
Министерство обороны США планирует также интегрировать в космическую
систему сбора видовой информации, существующие и перспективные коммерческие
спутники съемки земной поверхности с высоким разрешением (около 1 м). Кроме
того, планируется продолжить создание единой глобальной географической инфор-
мационной системы (ГИС), содержащей детальные цифровые карты всей поверхно-
сти Земли для обеспечения нацеливания ударных средств. В частности, в последние
годы к решению задач информационного обеспечения для управления высокоточ-
ным оружием в дополнение к орбитальной группировке привлекаются малоразмер-
ные спутники (малые - массой до 1 т и миниспутники - массой 100.. .500 кг).
Накопление информации о земной поверхности в мирное время имеет ярко вы-
раженное двойное назначение. С одной стороны выполняется мониторинг Земли с
целью выявления и предупреждения природных катаклизмов, с другой - происходит
сбор информации и картографирование с возможностью использования накоплен-
ных данных в дальнейшем, в военное время. Наличие таких заранее собранных и об-
работанных данных становится особенно важным в военное время, когда спутнико-
вые системы навигации и разведки будут выведены из строя или заблокированы.
Применение ВТО в таких условиях потребует знания рельефа местности и координат
расположения объектов, по которым может быть осуществлена привязка.
Анализ опыта последних локальных конфликтов выявил не только необходи-
мость ведения непрерывной разведки и постоянного наблюдения за районом бое-
вых действий в условиях быстро меняющейся оперативной обстановки, но и дос-
тавки обработанной информации в кратчайшие сроки непосредственно на носите-
ли высокоточного оружия.
Успешным действиям американских войск в локальных вооруженных кон-
фликтах способствовало безусловное технологическое превосходство систем воо-
ружения и боевого обеспечения войск и обладание достаточно полной разведин-
формацией об оперативной обстановке в районах боевых действий, а также целе-
направленность и согласованность боевых действий. За эти десять лет значительно
укрепились позиции сторонников концепции «объединенное™» вооруженных сил,
предполагающей максимальное использование боевых возможностей всех их ви-
дов (включая привлечение гражданских систем) для достижения конечных целей
войны. По мере набора опыта проведения военных операций в США были разра-
ботаны основополагающие документы - «Единая перспектива-2010» и «Единая
перспектива-2020», а также планы реализации выдвигаемых в них требований.
Предложенная американская концепция «Сетецентрической войны» обосновывала
необходимость реформирования вооруженных сил.
41
Радиолокационные системы землеобзора космического базирования
Современная военная доктрина США охватывает следующие области:
• обеспечение деятельности в космосе;
• боевое и техническое обеспечение из космоса боевых действий вооруженных
сил;
• ведение непрерывного контроля и управление ситуацией с помощью косми-
ческих средств;
• применение силы в космосе и из космоса.
Политическое руководство США обязывает МО организовывать интегриро-
ванную систему управления спутниковыми системами, скоординированную с дру-
гими ведомствами. Особой задачей является достижение информационного пре-
восходства, реализация принципа стратегического сдерживания, повышение эф-
фективности вооруженных сил государства в целом, расширение выгодного для
США Международного сотрудничества в военной и других сферах.
При создании космических систем военного назначения (КСВН) в США
основное внимание уделяют следующим направлениям [216]:
• поддержание в состоянии боевой готовности существующих систем и развер-
тывание новых;
• расширение возможностей бортовой аппаратуры КА;
• повышение оперативности доставки информации со спутников;
• увеличение времени активного существования КА;
• размещение на одном КА аппаратуры для решения двух и более задач;
• создание новых ракет-носителей одноразового и многоразового применения;
• совершенствование наземных средств управления КСВН;
• объединение результатов всех видов разведки;
• разработка КА для противокосмической и противоракетной обороны.
Американские ведомства - Агентство перспективных оборонных исследова-
ний (DARPA), Военно-воздушные силы и Национальное разведывательное управ-
ление (NRO) - изучают возможность создания системы глобального радиолокаци-
онного наблюдения, которая могла бы обеспечивать прямое и оперативное получе-
ние информации войсковыми командирами без посредничества центральных раз-
ведывательных органов.
Такая система должна будет состоять из 24-48 относительно небольших ап-
паратов, оснащенных радиолокаторами. По замыслу, войсковые подразделения,
действующие в кризисных регионах, будут в состоянии непосредственно выдавать
задания спутникам на получение изображений заданных районов и получать ин-
формацию в течение 15 мин.
Предполагается также, что эта система будет функционировать во взаимодейст-
вии со спутниковой системой предупреждения о ракетном нападении, что позволит
решить проблему обнаружения мобильных пусковых установок баллистических ракет.
Главным из этих требований является всемерное укрепление единства воору-
женных сил. Всем командирам предписывается стремиться к тому, чтобы на основе
использования передовых информационных технологий, объединенные группировки
американских вооруженных сил непременно достигли подавляющего превосходства
42
Глава 1. РЛС землеобзора космического базирования в глобальной системе...
над противником не в какой-то одной, а во всех сферах вооруженного противоборст-
ва: в воздухе, на суше и море, в космосе и информационном пространстве.
Разработанная концепция признает, что последовательное или независимое
параллельное применение различных элементов военной мощи США нецелесооб-
разно. Наоборот, подчеркивается, что максимальная интеграция их возможностей,
тесное и грамотное взаимодействие многократно увеличивают боевой потенциал
военной группировки и служат основой общей победы над противником. Эти по-
ложения были реализованы на практике в ходе военной операции США и их союз-
ников против Ирака, они отличаются высоким уровнем взаимодействия видов и
родов войск (сил), применением всех видов маневра войсками и средств пораже-
ния, дальнейшим развитием форм и способов ведения боевых действий.
Военное руководство США, достаточно осторожно оценивая роль авиации в
этой операции, все же признает, что в 2003 г. авиация применялась значительно эф-
фективней, чем 12 лет назад. Она позволяла широко применять высокоточное ору-
жие и наносить удары в любое время суток, используя автоматизированные системы
боевого управления и данные космической разведки. Дальнейшее повышение эф-
фективности боевого применения тактической авиации руководство ВВС США свя-
зывает с массовым оснащением частей тактической авиации малозаметными, имею-
щими больший радиус действия и оснащенных новейшим оборудованием самолета-
ми нового поколения F-22 и F-35, а также разведывательными и ударными БЛА.
В ближайшие 10 лет Пентагон планирует создание инновационной системы опера-
тивной разведки поля боя, которая должна соединять преимущества космических
аппаратов (недосягаемость для средств ПВО противника и глобальность разведки) с
достоинствами воздушных беспилотных летательных аппаратов (большая продол-
жительность наблюдения и высокая оперативность доклада данных). Система из
24 космических аппаратов с РСА, размещенная на низких круговых орбитах высотой
770 км, может обеспечить высокую частоту просмотра театра военных действий
(10... 15 мин), что не позволит противнику осуществлять незаметную передислока-
цию. Проект получил наименование «Дискавери-2» (считается, что первая система
«Дискавери-1» положила начало в 60-х годах созданию космических средств фото-
графической разведки). Требования Пентагона к спутниковому радиолокатору чрез-
вычайно высоки. Станция должна работать в трех основных режимах:
1) съемка местности (обзорная, маршрутная и детальная) с разрешением от
0,3 до 3 м;
2) автоматическое обнаружение движущихся целей (диапазон скоростей
целей 4... 100 км/ч);
3) картографическая съемка для формирования цифровых карт рельефа мест-
ности с точностью около 1 м.
Такое сочетание режимов работы РСА позволяет оператору-дешифровщику
РЛИ последовательно решать весь цикл задач, связанных с поиском, обнаружением
и распознаванием целей, определением их координат для дальнейшей выдачи целе-
указания средствам поражения. РСА должна работать в трехсантиметровом диапазо-
не волн и использовать активную фазированную антенную решетку (АФАР). Она
обеспечит электронное сканирование лучами в двух плоскостях для решения задач
43
Радиолокационные системы землеобзора космического базирования
видовой съемки, селекции движущихся целей, пассивной радиотехнической развед-
ки и даже пространственной отстройки от сигналов постановщиков радиопомех.
Из рассмотренных примеров можно сделать вывод, что интеграция граждан-
ских и военных систем в едином информационно-управляющем пространстве для
реализации «Сетецентрических боевых операций» является ключевым направлени-
ем дальнейшего развития аэрокосмических информационных систем и уже доказа-
ла свою состоятельность. Одним из важных аспектов развития современных ин-
формационных технологий - интегрирование аэрокосмических средств, в том чис-
ле использование распределенных многопозиционных радиолокационных систем
[36*, 40*, 43*, 234].
1.4. Задачи, решаемые космическими системами
радиолокационного наблюдения двойного назначения
Анализ современного состояния и перспектив совершенствования космических
средств радиолокационного наблюдения позволяет сформулировать задачи, которые
могут решаться этими средствами в глобальной аэрокосмической информационной
системе, реализующей мониторинг воздушного и космического пространства и зем-
ной поверхности. В дальнейшем будем различать системы военного назначения,
предназначенные для ведения разведки военных объектов и непосредственного
обеспечения боевых операций и гражданские системы, предназначенные для реше-
ния хозяйственных и научных исследований. Их отличие от систем военного назна-
чения состоит в том, что все характеристики аппаратуры (кроме ноу-хау фирм разра-
ботчиков, составляющую коммерческую тайну) доступны потребителям. Это не ис-
ключает использование материалов радиолокационной съемки гражданских систем
различными специальными службами для мониторинга чрезвычайных ситуаций,
природных катастроф, аварий, для охраны государственной границы, для нужд обу-
стройства военных городков, полигонов и т.д. [218]. В этом смысле такие граждан-
ские системы могут рассматриваться как системы двойного применения.
Многорежимные космические РСА военного назначения могут, за малым ис-
ключением, решать гражданские задачи. При соответствующей инфраструктуре рас-
пределения получаемой информации космические РЛИ могут распространяться на
коммерческой основе. Современная концепция системного подхода к проектирова-
нию космических РСА [153*, 335, 493*] рекомендует рассматривать любую аппара-
туру как предназначенную для двойного применения. Например, отечественные
космические РБО космических аппаратов серии «Космос-1500» гражданского назна-
чения обеспечивали ВМФ СССР информацией о ледовой обстановке в районах во-
енно-морских баз ВМФ и фактически являлись системами двойного применения.
На основе анализа зарубежного опыта применения систем радиолокационного
наблюдения космического базирования в табл. 1.1 приведен перечень задач, кото-
рые принципиально могут решаться с применением космической радиолокацион-
ной съемки в интересах гражданских и военных потребителей. Эти области приме-
нения условно по основному использованию названы «дистанционное зондирова-
44
Глава 1. РЛС землеобзора космического базирования в глобальной системе...
ние земли» (ДЗЗ) и «видовая разведка». В первом столбце таблицы перечислены
объекты наблюдения (земные покровы, инженерные сооружения и др.) или методы
получения данных (одно- или многопозиционное зондирование, поляриметрия, ин-
терферометрическая обработка и т.д.). Во втором столбце задачи, решаемые аппа-
ратурой ДЗЗ в интересах военных потребителей или спецслужб, отмечены «*» в
качестве двойного применения.
Современная тенденция (системный подход) проектирования аппаратуры РЛН,
как правило, предусматривает ее двойное применение. Это позволяет, оптимизируя
параметры системы для основного назначения (гражданского или военного), закла-
дывать в нее гибкие возможности для решения задач по второму направлению.
Такой подход имеет исторические корни в Российском промышленном произ-
водстве. Со времен Петра Первого при строительстве судов было требование уста-
навливать вдоль бортов судов привалочные брусья для установки на них пушек, в
случае необходимости. В автобусах, изготавливаемых до середины прошлого века,
предусматривалась задняя дверь, на случай перевозки раненых.
Примером обратной ситуации служат армейские машины времен Второй Ми-
ровой войны, на базе которых были позже созданы столь популярные среди насе-
ления внедорожники. Такой подход экономически оправдан, так как позволяет от-
рабатывать унифицированные составные части аппаратуры, на базе которых вы-
пускаются варианты исполнения аппаратуры того или другого основного (первого)
назначения. Целесообразно создание систем двойного назначения, в которых пре-
дусматривают режимы и каналы распределения информации для военных и граж-
данских потребителей с разными правами доступа к информации, как это реализу-
ется в глобальных навигационных системах GPS, ГЛОНАСС, Galileo.
Следует также иметь в виду, что развитие и освоение гражданских техноло-
гий всегда способствует прогрессу в военных применениях. Как пример можно от-
метить резкое повышение производительности вычислительных средств за послед-
нее десятилетие, оплаченное покупателями игровых приставок с 3D индикацией
динамических сцен.
Представляет интерес сравнить требования к информационному продукту -
радиолокационному изображению, требуемому для решения, приведенного в
табл. 1.1 перечня задач в интересах одного или другого применения. Рассмотрим
случай многорежимного гражданского РСА, а для военных РСА ограничимся ра-
ботой в режиме мирного времени в соответствии с Регламентом радиосвязи. Будем
считать исходно выбранными рабочий частотный диапазон и высоту орбиты. Важ-
нейшими характеристиками получаемых РЛИ для гражданских РСА являются про-
странственное разрешение снимка, чувствительность РСА, поляризация на излуче-
ние и прием, а для военных РСА - разрешение РЛИ, чувствительность, а также по-
лоса съемки и полоса обзора, от которых зависит оперативность получения инфор-
мации от заданного района и время повторной съемки. Поставляемый информаци-
онный продукт должен быть комплексным РЛИ для возможности его интерферо-
метрической обработки (карты рельефа, когерентные методы выявления измене-
ний геометрии и обстановки).
45
Таблица 1.1. Задачи двойного назначения, решаемые космическими системами радиолокационного наблюдения
Объект наблюдения или методы получения данных Дистанционное зондирование Земли Видовая разведка
1 2 3
Глобальный мониторинг земной поверхности (суши и моря) Исследования природных ресурсов Стратегическая разведка
Климатические исследования Выявление подготовки военных операций
Обновление и уточнение карт
Геологическое картирование
Детальная радиолокационная съемка локальных районов Землепользование, составление планов участков для строительства Оперативное наблюдение обстановки на военных объектах
Мониторинг катастроф Изучение местности в районах готовящих- ся операций
Разведка поля боя
Оценка результатов боевых действий
Обнаружение минных полей
Морская (водная) поверхность Состояние волнения (балльность) Оценка текущего состояние морской поверхности при планировании операций на ТВД
Оценка направления и измерения скорости течений
Экологический мониторинг загрязнений
Взаимодействие океан-атмосфера
Оценка биоресурсов
Мониторинг катастроф
Обнаружение кильватерных следов для определения курса и скорости судов Обнаружение кильватерных следов для определения курса и скорости кораблей
Обнаружение косяков рыбы Обнаружение движущихся подводных лодок (ПЛ) с перископом
Морская поверхность - возмущения, вызванные внутренними волнами Изучение топографии дна Обнаружение движущихся подводных объектов (ПЛ, торпед и др)
Геологическое картирование шельфа
Изучение глубинных течений
Радиолокационные системы землеобзора космического базирования
Продолжение табл. 1.1
1 2 3
Морская поверхность - измерение поля уровня Обнаружение опасных «волн-убийц» Обнаружение ПЛ по эффекту Бернулли
Раннее обнаружение цунами
Контроль надводной обстановки Контроль районов рыбной ловли Глобальный контроль надводной обстанов- ки в акваториях Мирового океана и морях с автоматическим обнаружением, определе- нием класса, типа НК, курса, скорости
* Обнаружение контрабандистов в прибреж- ных акваториях
Сопровождение морских операций ВМФ
Наблюдение ледового покрова - морского льда Обеспечение судовождения Сопровождение морских операций в поляр- ных широтах, поиск мест, пригодных для всплытия ПЛ
Климатические исследования
Прогноз опасных подвижек льда в местах шель- фовых разработок полезных ископаемых для проведения защитных мероприятий
Обеспечение поисково-спасательных операций
Исследование ледового покрова - материкового льда Климатические исследования
Определение водозапасов материковых льдов
Прогноз чрезвычайных ситуаций, вызванных подвижкой ледников
Изыскательские работы при строительстве дорог, тоннелей и других объектов в горных районах Подготовка и обеспечение боевых опе- раций в высокогорных районах
Обеспечение поисково-спасательных опера- ций в горных районах
Интерферометрическая обработка радиолокационных изображений Создание цифровых карт рельефа Построение карт рельефа для управления точным оружием
Обновление топографических карт
Создание опорного материала для навигации ракет и головных частей по местности
Глава 1. РЛС землеобзора космического базирования в глобальной системе
Продолжение табл 1.1
00
1 2 3
Картирование растительного покрова (сельскохозяйственные угодья) Контроль агротехнологий, оценка необ- ходимости и эффективности мер поддержки предприятий сельского хозяйства Обнаружение военной техники (ВТ) на открытой местности
Планирование трасс передвижения ВТ
Экономическая разведка с контролем уро- жайности по зарубежным территориям
Измерение влажности почвы
Картирование лесных массивов Ведение лесного хозяйства, определение состояния лесов Обнаружение скоплений техники и войск под пологом лесных массивов
Оценка бонитета и объема биомассы лесных массивов
Оценка ущерба от лесных пожаров
Оценка послерубочной и пирогенной динамики состояния лесов
Планирование участков для вырубки
Подповерхностное зондирование Поиск залежей, полезных ископаемых, подземных запасов воды, нефти Обнаружение заглубленных инженерных сооружений, блиндажей, шахт и др.
Мониторинг подземных инженерных сооружений, коммуникаций
Обнаружение мест аварий
Археологические исследования
Обнаружение изменений в окружающей обстановке (некогерентные методы) Обновление картографического материала Оценка изменения оперативной обстановки на объектах (аэродромах, базах ВМС, военной техники в районах боевых действий и локальных конфликтов)
Мониторинг паводков, наводнений
Обнаружение зон подтоплений, опустынивания, засоления и др
Оценка состояния зон военных операций после нанесения удара
Обнаружение перемещений мобильной техники
Радиолокационные системы землеобзора космического базирования
Продолжение табл. 1.1
1 2 3
Методы дифференциальной интерферометрии - обнаружение изменений в окружающей обстановке Обнаружение повреждений дорожного пок- рытия, железнодорожных магистралей при воздействии природных факторов Выявление малых возмущений на объектах (следы от прохода техники или войсковых подразделений, постановки минных заграждений и т.д.)
Обнаружение измеряемых сантиметрами под- вижек земной поверхности, деформаций инженерных сооружений, трубопроводов и др Обнаружение перемещений слабоотра- жающей мобильной техники (автомашин, самолетов технологии Стеле и др.)
Обнаружение факта несанкционированного доступа к объектам
Методы дифференциальной интерферометрии - радиолокация «постоянных отражателей» Контроль долговременных изменений инженерных конструкций, зданий Выявление нарушений геометрии инже- нерных сооружений (мачт, мостовых конструкций, опор линий связи)
Обнаружение разрушения объектов обустройства государственной границы и огороженных территорий
Методы индикации движущихся объектов Контроль дорожного трафика Обнаружение, индикация и определение скорости движущихся целей
Поляриметрическое зондирование Идентификация растительных покровов, контроль фаз вегетации, оценка объема биомассы Повышение вероятности обнаружения и распознавания объектов
Многопозиционное радиолокационное зондирование (тандемы КА) Построение высокоточных карт рельефа Индикация целей, движущихся с малыми скоростями
Индикация целей, движущихся с малыми скоростями
Многопозиционное аэрокосмическое зондирование с применением БЛА * Контроль государственной границы, зон рыболовства, обнаружение контрабандис- тов в прибрежных акваториях Повышение помехозащищенности радиолокационных средств разведки
Повышение вероятности распознавания целей по многоракурсным радиолокацион- ным портретам
Глава 1. РЛС землеобзора космического базирования в глобальной системе
О
Окончание табл. 1.1
1 2 3
Все объекты и технологии обработки радиолокационной информации Изучение планеты Земля Повышение информативности средств РЛН
Экспериментальная проверка и отработка новых методов радиолокационного зондирования
Экспериментальная отработка элементов перспективной аппаратуры
Объекты наблюдения и технологии обработки данных. Развитие технологий практического использования радиолокационной информации для решения текущих задач:
Применение космической радиолокационной информации. - гражданских потребителей - федеральные и муниципальные службы и предприятия (экологи, топографическая служба, МЧС, лесхозы, сельскохозяйственные, строительные предприятия, железная дорога, аэродромы, порты);
- частных потребителей (фермеры, туристы, краеведы);
- военных потребителей - инфраструктура военных округов и войсковых частей, военно- топографическая служба, боевые учения, пограничная служба
Радиолокационные системы землеобзора космического базирования
Глава 1. РЛС землеобзора космического базирования в глобальной системе...
Гражданские РСА должны иметь режим с разрешающей способностью, соот-
ветствующей полосе сигнала, выделенного Регламентом радиосвязи для выбранно-
го диапазона волн. Чувствительность РСА должна позволять обнаруживать кон-
трасты суши по отношению к изображению спокойной водной поверхности. Необ-
ходимо реализовать поляриметрический режим (возможно с некоторым ухудшени-
ем разрешения), по крайней мере, одна (горизонтальная или вертикальная) пере-
ключаемая поляризация на излучение и две поляризации - на прием (это необхо-
димо для мониторинга растительного покрова и морской поверхности), иначе вы-
ходной информационный продукт проектируемого РСА будет неконкурентоспо-
собным по сравнению с находящимися в эксплуатации или проектируемыми зару-
бежными РСА. Для военных РСА
поляриметрический режим желате-
лен, он позволяет повысить веро-
ятность обнаружения и распозна-
вания объектов на фоне подсти-
лающей поверхности.
Из гражданских задач, тре-
бующих высокой оперативности,
наиболее важными являются мони-
торинг стихийных бедствий и ката-
строф. Существуют Международ-
ные соглашения о взаимном ин-
формационном обеспечении чрез-
вычайных ситуаций странами, рас-
полагающими космическими сред-
ствами наблюдения - оптическими,
радиолокационными. Для опера-
тивного решения экстренных задач
целесообразно присоединение к та-
ким соглашениям.
Облик перспективного аэро-
космического радиолокационного
сегмента глобальной информаци-
онной системы двойного назначе-
ния применительно к российским
потребителям информации иллю-
стрирует рис. 1.4, цветной вариант
которого приведен на обложке.
Применительно к задачам дис-
танционного зондирования Земли
(включая двойное применение) со-
став действующей всемирной ор-
битальной группировки ДЗЗ вклю-
чает в себя оптоэлектронные и ра-
Рис. 1.4. Структура аэрокосмического
радиолокационного сегмента глобальной
информационной системы двойного назначения:
1 - низкоорбитальные многорежимные РСА обзора земной и
морской поверхности; 2 - спутник-ретранслятор на геоста-
ционарной орбите; 3 - спутник на геостационарной орбите с
совмещенными ретранслятором и РЛС подсвета системы
раннего предупреждения опасных океанических явлений; 4
- приемные тандемы спутников системы предупреждения
опасных океанических явлений; 5 - многорежимные РСА на
геосинхронной орбите с питанием от ядерных энергетиче-
ских установок; 6 - орбитальная группировка приемных
микроспутников для бистатического зондирования с геоста-
ционарными или геосинхронными РЛС; 7 - региональные
наземные центры приема и обработки радиолокационной
информации; 8 - мобильные пункты приема и обработки в
районах локальных конфликтов; 9 - лазерные каналы пере-
дачи широкополосных данных от радиолокационных датчи-
ков к ретрансляторам на геостационарной орбите; 10 - ши-
рокополосные радиоканалы передачи информации на пунк-
ты приема от радиолокационных датчиков и спутников-
ретрансляторов; 11 - каналы связи с зарубежными инфор-
мационными системами
51
Радиолокационные системы землеобзора космического базирования
дислокационные датчики с общими характеристиками, приведенными в табл. 1.2 и
1.3 [53, 529]. Указаны средства с пространственным разрешением до 10 м. Для
сравнения приведены также средства военного назначения. Подробно характери-
стики космической радиолокационной аппаратуры приведены в гл. 13.
Таблица 1.2. Космические аппараты с оптоэлектронными датчиками
с разрешением лучше 10 м
Наименование КА (системы) Страна Дата запуска Разрешение, м Полоса съемки, км
Панхром Мульти- спектр
КА с оптоэлектронными датчиками для ДЗЗ
TopSat (SSTL) Великобритания 27.10.2005 2,5 5 10, 15
RapidEye-A Германия 29.08.2008 — 6,5 78
RapidEye-B Германия 29.08.2008 — 6,5 78
RapidEye-C Г ермания 29.08.2008 — 6,5 78
RapidEye-D Германия 29.08.2008 — 6,5 78
RapidEye-E Г ермания 29.08.2008 — 6,5 78
EROS Al Израиль 05.12.2000 1,8 — 14
EROS Bl Израиль 25.04.2006 0,7 — 7
Cartosat-1 (IRS-P5) Индия 04.05.2005 2,5 — 30
Cartosat-2 Индия 10.01.2007 0,8 — 10
IRS-ID Индия 29.09.1997 6,0 23 70, 142
Resourcesat-1 (IRS-P6) Индия 17.10.2003 6,0 6, 23, 56 24, 140,740
Beijing-1 (SSTL) Китай 27.10.2005 4,0 32 600
KOMPSAT-1 Корея 20.12.1999 6,6 — 17
KOMPSAT-2 Корея 28.07.2006 1,0 4 15
Ресурс-ДК1 Россия 15.06.2006 1,о 3 28
GeoEye-1 США 06.09.2008 0,4 1,64 15
IKONOS США 24.09.1999 1,0 4 11
QuickBird США 18.10.2001 0,6 2,5 16
World Vie w-1 США 18.09.2007 0,5 — 16
THEOS Таиланд 01.10.2008 2,0 15 22, 90
FORMOSAT-2 Тайвань 20.04.2004 2,0 8 24
SPOT-5 Франция 04.05.2002 2,5 10 120
ALOS Япония 24.01.2006 2,5 10 35, 70
KA с оптоэлектронными датчиками военного назначения
Серия КН 11 США 1976-1990 гг. 0,3...0,6 — 2,8...23
Серия КН12-1-КН12-5 США 1992-2005 гг. 0,3...0,6 — нет данных
52
Глава 1. РЛС землеобзора космического базирования в глобальной системе...
Таблица 1.3. Космические аппараты с аппаратурой радиолокационного
наблюдения с пространственным разрешением до 10 м
Наименование КА (системы) Страна Дата запуска Наилучшее разрешение, м Диапазон волн
КА, предназначенные для ДЗЗ
TerraS AR-X Германия 15.07.2007 1,0 X
Cosmo-Skymed-1 Италия 08.06.2007 1,0 X
Cosmo-Skymed-2 Италия 08.12.2007 1,о X
Radarsat-1 Канада 04.11.1995 8,5 с
Radarsat-2 Канада 14.12.2007 3,0 X
YaoGan WeiXing 1 (JB-5) Китай 27.04.2006 5,0 L
YaoGan WeiXing 3 (JB-5-02) Китай 12.11.2007 5,0 L
ALOS Япония 24.01.2006 10,0 L
KA военного назначения
Lacrosse-2/Vega США 02.03.1991 0,67 предположит. X
Lacrosse-3/Onyx США 24.10.1997 0,67 предположит. X
Lacrosse-4/Onyx США 17.08.2000 0,67 предположит. X
SAR Lupe-1 Германия 19.12.2006 0,5 X
SAR Lupe-2 Германия 02.07.2007 0,5 X
SAR Lupe-3 Германия 01.11.2007 0,5 X
SAR Lupe-4 Германия 27.03.2008 0,5 X
Высокую эффективность обеспечивает совместное использование оптоэлек-
тронных средств и радиолокационных средств наблюдения (видовой разведки), об-
ладающих возможностью проведения точных измерений геометрии объектов, их
радиофизических характеристик, рельефа местности радиолокационными метода-
ми. Сформированные по результатам измерений цифровые банки данных фоноце-
левой обстановки и применение современных вычислительных методов для авто-
матической и автоматизированной классификации объектов и оценки динамики их
состояния станут основой информационного обеспечения практической деятельно-
сти во многих областях в интересах гражданских и военных потребителей.
При выборе параметров проектируемой системы радиолокационного наблю-
дения, которая, в принципе, может включать в себя орбитальную группировку с
набором многофункциональных радиолокационных датчиков с разными режимами
работы, необходимо исходить из требований к аппаратуре в зависимости от ре-
шаемых задач. В первую очередь это относится к разрешающей способности полу-
чаемых радиолокационных изображений (РЛИ) и периодичности обновления ин-
формации. Сводные данные, заимствованные их разных публикаций [118, 223*,
432*, 529], приведены в табл. 1.4.
53
Радиолокационные системы землеобзора космического базирования
Таблица 1.4. Требования к разрешающей способности РСА и периодичности
обновления информации
Решаемая задача Обнаружение, м Распознавание, м Периодичность, сутки
класс тип
Мониторинг океана, ледовая разведка 300 300 70 <3
Судоходство, рыбная ловля 15...300 <1
Общее картографирование 5...30 >30
Морские порты 30 15 6
Населенные пункты 60 30
Железнодорожные узлы 30 15 6
ВПП 40 9,0
Ведение кадастра 2...3 >30
Геологическое картирование 5...30 >30
Лесное, сельское хозяйство 3...30 <5
Мониторинг катастроф, контроль зон <1,5 <0,1
Мосты 6 4,5 1,5
Аэродромы, аэропорты 6,0 4,5 3,0
Самолеты на аэродроме 4,5 1,5 0,9
Ракетные комплексы, ракеты 3,0 1,5
Командные пункты 3,0 1,5 0,9
РЛС 3,0 0,9 о,з
Средства радиосвязи 3,0 1,5 о,з
Склады 1,5 0,6 0,3
Воинские части или места расположе- 6 2,1 1,2
Оборудование баз ВВС 6 4,5 3,0
Артиллерия 0,9 0,6 0,15
ЗРК 3 1,5 0,6
Автотранспорт 1,5 0,6 0,3
Морские суда (средние) 7,5 4,5 0,6
Подводные лодки (на поверхности) 9 6 1,5
Минные поля на суше 30 6 1,5
Сопоставление приведенных в табл. 1.4 требований к разрешающей способ-
ности аппаратуры и достигнутых параметров космических средств наблюдения
(см. табл. 1.2 и 1.3) показывает, что решение задачи распознавания класса и типа
объектов требует повышения информативности средств наблюдения, что примени-
тельно к космическим РСА может достигаться не только путем улучшения про-
странственного разрешения, но и использованием специфических признаков, осно-
54
Глава 1. РЛС землеобзора космического базирования в глобальной системе...
ванных на измерении радиофизических свойств объектов (поляризации, резонанс-
ных явлений, интерферометрии) или косвенных признаков, таких как размеры и
конфигурация радиолокационных теней от объектов наблюдения, наличие на изо-
бражениях подстилающей поверхности «лысых мест», вызванных азимутальным
смещением отметок от движущихся целей, направления и углы схождения кильва-
терных следов от движущегося корабля в зависимости от его скорости, отметки
переотражения от его надстроек и т.д.
Для перечисленных в первом столбце табл. 1.1 типов объектов можно дать их
обобщенное определение и сформулировать задачи обнаружения и распознавания
применительно к видовым средствам радиолокационного наблюдения (РЛН). При
этом любой объект как естественного, так и искусственного происхождения может
быть определен как локальная аномалия (или набор локальных аномалий) в одно-
родном окружении. Как локальную аномалию будем рассматривать набор ярких
отметок от компактного отражающего объекта, темные отметки от областей, не
дающих отражения в сторону РЛС, изменение текстуры участка поверхности.
Наличие достаточно большого объема накопленных данных по определенным
территориям (априорной информации для дешифрирования конкретного снимка) за-
меняет классическую задачу обнаружения и распознавания, типичную для контроля
воздушного пространства, на задачу выявления изменений в оперативной обстановке
и идентификации обнаруженных аномалий. Фактически требуется обнаружение
аномалии и распознавание ее типа аномалий при обработке не всего полученного
изображения, а только небольших фрагментов, содержащих изменения.
Часть из указанных в табл. 1.1 задач требует высокой оперативности получе-
ния информации, что наряду с высоким разрешением является приоритетным для
перспективных РСА. Следует отметить, что при пространственном разрешении
лучше 3 м резко снижаются ошибки идентификации растительных покровов даже
без применения поляризационной селекции. Это связано с повышением роли тек-
стурных особенностей отражающей поверхности. Кроме того, возможен обмен
пространственного разрешения на радиометрическое, что позволяет анализировать
гистограммы а для типизации поверхности. Аналогично, для идентификации типа
ледовых полей требуется разрешение около 75 м, при этом для дешифрирования
проводят усреднение отсчетов (32x32), повышающее радиометрическое разреше-
ние по площади. На сглаженном РЛИ выявляется текстура ледовых образований,
характерная для данного типа ледового покрова [87].
1.5. Концепция использования космических средств
радиолокационного наблюдения в глобальной
информационной системе и ее национальных сегментах
Анализ возможностей, реализуемых современными космическими системами ра-
диолокационного наблюдения (главы 2, 8, 9, 13), позволяет сделать вывод, что в
настоящее время они стали неотъемлемым звеном глобальных сетецентрических
информационных систем [36*, 46*, 96, 331, 350,492].
55
Радиолокационные системы землеобзора космического базирования
Сформулируем концепцию использования радиолокационных систем в гло-
бальной информационной системе и ее национальных сегментах.
Рассмотрим фрагмент информационной системы (или, конкретнее - гео-
информационной системы), относящийся к получению и распределению видовой и
картографической информации, т.е. данных, полученных на основе тематической
обработки радиолокационных снимков (включая количественную интерпретацию
данных радиолокационного зондирования, оценку оперативной обстановки в рай-
онах съемки, выявление ее изменений), данных координатной обработки снимков
(обновление картографического материала, построение карт рельефа местности,
выявление изменений геометрической конфигурации объектов), а также формуля-
ров обнаруженных движущихся целей и др.
Гражданским аналогом таких глобальных информационных системы является
Интернет-система распределения карт и космических снимков земной поверхности
Google Мар [537]. Ресурсы Google Мар предоставляют в свободном доступе де-
тальные космические снимки поверхности Земли с разрешающей способностью до
1 м. Однако в свободном доступе отсутствуют детальные снимки территорий (на-
пример, военных баз), которые могут быть квалифицированы как нарушение суве-
ренитета отдельных стран.
Фактически, Google Мар объединяет данные, полученные с различных спут-
ников, также как и должна это делать сетецентрическая система военного назначе-
ния. Необходимо также отметить, что системы навигации и позиционирования
GPS и ГЛОНАСС, являющиеся в настоящее время элементами глобальных сете-
центрических систем, применяются как в гражданских, так и в военных целях, од-
нако имеют при этом различные каналы для доступа, обеспечивающие разные
уровни точности позиционирования.
Применительно к задачам военной разведки или мониторинга катастроф и в
зависимости от конкретных ситуаций радиолокационные снимки могут иметь раз-
ный приоритет по отношению к оптическим снимкам (с одинаковой или разной
разрешающей способностью), полученным ранее (априорная опорная информация)
или синхронно с радиолокационными снимками, если метеорологические условия
позволяют вести оптическую съемку.
В первой ситуации (использование априорной опорной информации) радио-
локационная съемка выполняет функции оперативной видовой доразведки — полу-
чение дополнительных данных для принятия решения. Так, например, при монито-
ринге катастроф наличие оптических снимков территория бедствия, а также ранее
полученных отдешифрированных радиолокационных снимков, снабженных ката-
логом обнаруженных ярких объектов (брошенная техника, обломки аварий в тунд-
ровых и таежных районах), позволяет вести автоматический поиск новых образо-
ваний и по их характеру диагностировать предшествующие события, локализиро-
вать район для высылки поисково-спасательных групп и принимать решение о
привлечении дополнительных специализированных средств (например, проведения
радиолокационной съемки в других диапазонах волн, с другими ресурсами или на-
бором поляризаций).
56
Глава 1. РЛС землеобзора космического базирования в глобальной системе...
Вторая ситуация относится к случаям отсутствия оптических снимков, невоз-
можности их оперативного получения или их недостаточной информативности.
Тогда радиолокационная информация имеет высший приоритет по отношению к
оптическим средствам благодаря специфическим особенностям радиолокационно-
го зондирования - всепогодности, возможностям получения информации о радио-
физических свойствах объектов, обнаружения замаскированных или скрытых рас-
тительностью объектов, применения высокоточной координатной обработки, а
также выявления изменений в оперативной обстановке методами корреляционной
обработки или дифференциальной интерферометрии.
Соответственно концепция использования космических средств РЛН в гло-
бальной информационной системе может включать в себя следующие положения:
• получаемая с помощью космических средств РЛН двойного применения от-
крытая информация, в том числе срочная (при мониторинге катастроф и про-
ведении поисково-спасательных работ), может иметь свободное распростра-
нение (на коммерческой основе или по взаимному обмену);
• специальная информация, предназначенная для использования в национальном
сегменте, должна передаваться по специальным защищенным каналам, причем
для доведения фрагментов этой информации до конкретных локальных потреби-
телей могут использоваться открытые каналы с применением шифрования;
• должна использоваться комбинированная сетецентрическая распределенная
система, оборудованная мобильными (подвижными наземными, корабельны-
ми) пунктами приема/обработки данных радиолокационного зондирования,
обеспечивающих мониторинг инфраструктуры отдаленных районов (ком-
плексов разработки полезных ископаемых, Севморпути и др.), а также зон ло-
кальных конфликтов. Целесообразно использование в мобильных пунктах
стандартных аппаратно-программных средств для их сегментации и экстрен-
ной углубленной обработки.
Проведенное рассмотрение места и роли космических систем радиолокацион-
ного наблюдения в глобальной системе аэрокосмического мониторинга позволяет
сделать следующие выводы:
1) сочетание современных оптоэлектронных и радиолокационных средств
землеобзора космического базирования обеспечивает получение детальной видо-
вой информации для решения широкого круга задач в интересах гражданских и во-
енных потребителей. Независимость радиолокационной съемки от метеорологиче-
ских условий и времени суток, а также применение интерферометрической обра-
ботки снимков позволяет отслеживать изменения оперативной обстановки на объ-
ектах наблюдения;
2) ценные свойства радиолокационной съемки состоят в возможности измере-
ния геометрических характеристик объектов с высокой точностью, а также изме-
рения радиофизических характеристик объектов;
3) информационное обеспечение военных операций и мониторинга чрезвы-
чайных ситуаций должно базироваться на использовании сетецентрических систем
с привлечением всех доступных аэрокосмических датчиков и каналов связи.
57
Радиолокационные системы землеобзора космического базирования
Должна быть предусмотрена регулярная архивная съемка территорий предпола-
гаемых активных действий с составлением и обновлением цифровых карт рельефа,
формированием банка фоноцелевой обстановки и радиолокационных портретов
объектов;
4) проектируемая радиолокационная аппаратура землеобзора космического
базирования должна предусматривать многорежимное многофункциональное ис-
пользование и быть рассчитана на двойное, гражданское и военное применение.
Далее в монографии рассматриваются конкретные вопросы, связанные с получением ра-
диолокационных снимков средствами РЛН космического базирования и извлечением ин-
формации для потребителей. Глава 2 посвящена рассмотрению механизмов формирования
сигналов, отраженных объектами наблюдения и информационных признаков, содержа-
щихся в получаемых данных радиолокационного зондирования, по которым можно иден-
тифицировать объекты и проводить количественную оценку их параметров.
58
Глава 2
ВЗАИМОДЕЙСТВИЕ РАДИОВОЛН С ОБЪЕКТАМИ
РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ
2.1. Объекты радиолокационного наблюдения и их свойства
Объектами радиолокационного наблюдения в широком смысле являются физиче-
ские объекты, которые могут быть обнаружены с использованием методов радио-
локационного зондирования. В общем виде под объектом радиолокационного на-
блюдения, характеризуемого некоторыми радиофизическими свойствами, будем
понимать локальную аномалию в однородном окружении. Будем рассматривать
также другой тип объекта (участка местности), радиофизические характеристики
которого несут информацию о нем или его состоянии, характеризуемой изменчи-
востью за определенный промежуток времени. К этому типу объектов относятся,
например, изменения геометрии инженерных конструкций, появление ям на до-
рожном покрытии, просадки почвы. Однако, обнаруживаемое путем радиолокаци-
онного зондирования изменение влажности почвы после дождя, как правило, не
содержит полезной информации. Вместе с тем, участки земли повышенной влаж-
ности в районе защитных дамб явно относятся к объектам наблюдения.
К объектам радиолокационного наблюдения относятся природные объекты, в
том числе с воздействием антропогенных факторов, искусственные объекты, вклю-
чая различные инженерные сооружения и объекты техники, живые объекты (люди,
животные, косяки рыб и др.). В связи с различием радиофизических свойств и меха-
низмов рассеяния электромагнитной энергии от различных земных покровов целесо-
образно раздельное рассмотрение наблюдаемых объектов суши (геологическая
структура земной поверхности, растительный покров, наземные и подземные объек-
ты и сооружения) и образования на водной поверхности (морей, озер, рек). Объекта-
ми радиолокационного наблюдения являются также волновые явления, обусловлен-
ные топографией дна, и т.д. Для обозначения конкретных объектов (преимуществен-
но - компактных) используют также термин «радиолокационные цели».
При облучении радиоволной какого-либо объекта в нем наводятся электриче-
ские токи, создающие в свою очередь электромагнитное поле, распространяющее-
ся в направлении РЛС. Радиоволны имеют векторные свойства, которые характе-
ризуются поляризацией, определяющей направления векторов электрического и
магнитных полей в пространстве.
Энергетические, фазовые и поляризационные характеристики отраженного
поля определяются многими факторами [79, 91, 193, 196, 214]: длиной облучающей
волны, размерами, конфигурацией, электрическими характеристиками (диэлектри-
ческой и магнитной проницаемостью, затуханием) объекта или его элементов, рас-
положением относительно направления облучения.
59
Радиолокационные системы землеобзора космического базирования
В современной практике результатом радиолокационной съемки является ка-
либрованное по значению эффективной площади обратного рассеяния цифровое
радиолокационное изображение. Содержащаяся в нем количественная информация
о подстилающей поверхности и объектах на ней позволяет применить измеритель-
ные методы при тематической обработке радиолокационных снимков.
Принимаемый радиолокатором сигнал от наблюдаемой поверхности характе-
ризует ее отражающие свойства (удельную эффективную площадь обратного рас-
сеяния) в диапазонах волн работы РСА с учетом поляризаций на излучение и при-
ем, изменение фазы сигнала при отражении; пространственно-статистические ха-
рактеристики (гистограммы распределения, корреляционные функции и т.д.). Точ-
ность оценки этих характеристик во многом зависит от возможности усреднения
измеренных параметров по площади участков (сегментов) с однородной статисти-
кой для данного типа поверхности (морская поверхность, ледовые поля, сельскохо-
зяйственные и лесные угодья и т.д.).
При высоком пространственном разрешении 0,6... 1 м, реализуемом современ-
ными космическими РСА, размеры элемента разрешения на получаемом РЛИ за
редким исключением (кроме специальных точечных целей или транспондеров, при-
меняемых для калибровки РСА) значительно меньше геометрических размеров на-
блюдаемых объектов. Радиолокация с такой детальностью и возможностью получе-
ния трехмерных радиолокационных портретов объектов получила название «Радио-
видение» [118]. В этих условиях классическая задача обнаружения объектов по
превышению мощности сигнала над окружающим фоном (например, по критерию
Неймана-Пирсона) во многих случаях трансформируется в комбинацию локальных
задач, общим свойством которых является обнаружение локальных аномалий относи-
тельно окружающей поверхности с однородными статистическими характеристиками:
• обнаружение положительных контрастов от ярких компактных или распределен-
ных объектов;
• обнаружение отрицательных контрастов пространственно распределенных объ-
ектов (нефтяные пятна на морской поверхности, ВПП и рулежные дорожки аэро-
дромов, радиолокационные тени от высоких объектов);
• обнаружение изменений текстуры РЛИ (кильватерные следы движущихся кораб-
лей, аномалии на морской поверхности от движущихся подводных объектов) или
изменений фазовой структуры комплексного РЛИ, вызванных, например, появ-
лением выбоин на асфальтовом шоссе [369].
2.2. Спектр электромагнитных колебаний, используемых
для наблюдения земной поверхности из космоса
2.2.1. Диапазоны частот, выделенные Регламентом радиосвязи
для радиолокационного зондирования Земли из космоса
В современных космических РСА, применяемых для дистанционного зондирова-
ния Земли (ДЗЗ), используют выделяемые Международным регламентом радиосвя-
зи диапазоны волн [210]. Для их обозначения обычно применяют буквенные сим-
волы [214]. Исходные кодовые группы (Р, £, 5, Хи К) были введены в США в годы
60
Глава 2. Взаимодействие радиоволн с объектами радиолокационного наблюдения
второй мировой войны из соображений секретности, но сохранились после снятия
секретности и широко используются в современной зарубежной и отечественной
литературе. Регламент радиосвязи является правовым документом, определяющим
категории служб - (типов радиоэлектронной аппаратуры). В нем предусмотрено
распределение частот по двум категориям приоритетности - на первичной основе
(приоритетная) и на вторичной основе, службы которой не должны создавать по-
мех службам, которым частоты уже присвоены или могут быть присвоены позже
на первичной основе. Они также не могут требовать защиты от вредных помех со
стороны станций первичных служб.
В Международном регламенте радиосвязи приведены особенности использо-
вания частот в разных регионах. Их оговаривают в «Примечаниях». На территории
Российской Федерации действуют Регламент радиосвязи РФ и Таблица распреде-
ления полос частот [199, 217].
Применительно к радиолокационной съемке Земли из космоса Регламент ра-
диосвязи оговаривает службы, обозначенные как: «Служба космических исследова-
ний (активная)», «Спутниковая служба исследований Земли (активная)», «Спутнико-
вая (космос-Земля)». Основные выделенные диапазоны с шириной полосы частот,
достаточной для решения задач ДДЗ, приведены в табл. 2.1. Общее наименование
диапазонов частот согласно Регламенту радиосвязи: ОВЧ (очень высокие частоты) -
метровые волны, частоты 30...300 МГц, УВЧ (ультравысокие частоты) - дециметро-
вые волны, частоты 300...3000 МГц, СВЧ (сверхвысокие частоты) - сантиметровые
волны, частоты 3.. .30 ГГц. В дальнейшем тексте будут также ссылки на Xzz-диапазон
волн 20...30 ГГц, используемый в радиолиниях передачи информации от РСА кос-
мического базирования на наземные приемные пункты.
Таблица. 2.1. Частотные диапазоны для космических РСА
Наименование диапазона Условные обозначения: буквенное (числовое) Диапазон частот, ГГц Диапазон длин волн, см Полоса частот, МГц Примечание
ОВЧ (VHF) — 0,137...0,144 208...219 7 На вторичной основе
УВЧ (UHF) Р(70 см) 0,432...0,438 69,5...70 6 На вторичной основе
УВЧ (UHF) Р (70 см) 0,440...0,460 65,2...68,18 20 Радиолокационная служба
УВЧ (UHF) L (23 см) 1,215...1,300 23,08...24,7 85 На первичной основе
СВЧ (SHF) 5(10 см) 3,100...3,300 9,09...9,68 200 На вторичной основе
СВЧ (SHF) С (5,6 см) 5,250...5,570 5,38...5,714 320 На первичной основе
СВЧ (SHF) % (3,5 см) 8,025... 8,650 3,47...3,74 625 На первичной основе
СВЧ (SHF) Х(3 см) 9,300...9,800 3,03...3,22 600 На первичной основе
9,800...9,900 На вторичной основе
СВЧ (SHF) Ки (2 см) 13,4...13,75 2,142-2,238 600 На первичной основе
13,75...14,0 На вторичной основе
61
Радиолокационные системы землеобзора космического базирования
Следует отметить, что распределение частот в Международном регламенте регу-
лярно уточняется. Так, в редакциях Регламента, относящихся к 1970-1980 гг., косми-
ческая радиолокационная съемка в P-диапазоне не была предусмотрена, а в новой ре-
дакции выделена полоса 6 МГц. Значительно расширены полосы частот в X- и С-
диапазонах волн - с 300 до 600 МГц в X- и со 100 до 320 МГц в С-диапазоне. В ряде
случаев по согласованию с Государственной Комиссией по радиочастотам (ГКРЧ)
[199] и с учетом региональных ограничений возможны отступления от Регламента, а
также расширение полосы частот радиолокационной съемки, например за счет службы
«Радиолокационная» (служба радиоопределения для целей радиолокации).
В радиолокаторах землеобзора космического базирования, как правило, исполь-
зуют импульсные зондирующие сигналы, характеризуемые длительностью импульса
г, шириной спектра AF, несущей частотой f0 и частотой повторения Гр. Возможна ра-
бота смодулированными короткими импульсами (ширина спектра XF=\/t\ дли-
тельность которых определяет разрешающую способность по наклонной дальности
(РБО «Чайка» КА УС, РСА «Меч-К», «Меч-КУ» КА «Космос-1870» и «Алмаз-1»). В
современных РСА с целью повышения энергетического потенциала используют ши-
рокополосные зондирующие импульсы с XF=kc 1т9 где kc = XFt» 1 - коэффициент
сжатия. В основном применяют сигналы с линейной частотной модуляцией (ЛЧМ), в
редких случаях - фазоманипулированные (ФМ) сигналы.
В практике создания и применения космических РСА реализуется одночас-
тотное зондирование (РСА Х-9 С-, S- или ^-диапазонов волн, в перспективе Р-диа-
пазона) или многочастотное зондирование в двух вариантах:
1) синхронное зондирование с использованием многочастотных РСА, например
комплекс SIR-C/X-SAR (США) космического аппарата Space Shuttle, включающий
РСА АГ-, С- и L-диапазонов, российские проекты бортовых радиолокационных ком-
плексов (БРЛК) A"-, L- и P-диапазонов КА «Алмаз-1В» и «Аркон-2» [215, 548];
2) несинхронное зондирование с комбинацией изображений, полученных не-
зависимо одночастотными РСА в разное время и разных условиях наблюдения.
Многочастотное зондирование в обоих вариантах аналогично обработке спек-
трозональных снимков в оптическом диапазоне электромагнитного спектра.
В современной радиолокации получают также распространение радары со
сверхширокополосными зондирующими сигналами (СШП). Для таких систем от-
носительная ширина полосы Bf=(fa -fa^Kfa + /l) близка к единице, где Ун и fa - са-
мая высокая и самая низкая частотные компоненты спектра сигнала. Сверхширо-
кополосные сигналы нашли ряд применений в видеоимпульсных радиолокаторах с
синтезированной апертурой антенны (БИРСА), размещаемых на движущихся
платформах или самолетах. Сигнал, использующийся в БИРСА - это не имеющий
несущей частоты импульс (или кодированная последовательность импульсов) с
большой относительной шириной спектра [52, 239, 272, 391].
Стремительные технологические достижения в создании твердотельных элек-
тронных и оптоэлектронных приборов, микроволновых источников с высокой
мощностью и сверхбыстрых цифровых ЭВМ обещают в перспективе реализацию
рентабельных СШП радарных систем. В настоящее время различные типы видео-
импульсных радиолокаторов используют в медицине, в гуманитарной и военной
62
Глава 2. Взаимодействие радиоволн с объектами радиолокационного наблюдения
деятельности по картографированию минных полей, в археологии. Известны бор-
товые видеоимпульсные радиолокаторы, установленные на самолетах, вертолетах
и дирижаблях, применяемые для разведки толщины льда, подземного зондирова-
ния, измерения небольших глубин озер, водоемов и др.
За прошедшие годы прошло большое число конференций и семинаров, на ко-
торых вопросы широкополосных и сверхширокополосных (СШП) сигналов и сис-
тем рассматривались как ключевые (The 11th International Conference on Ground-
penetrating Radar. - Columbus, Ohio State University, USA. - June, 2006; The 12th In-
ternational Conference on Ground-penetrating Radar. - University of Birmingham, Unit-
ed Kingdom. - June, 2008; 14-я Международная научно-техническая конференция
«Радиолокация, навигация, связь». Воронеж, апрель 2008 г.; The «European Micro-
wave Week», Amsterdam, Нидерланды, October, 2008 и др.).
За рубежом создаются нормативные документы, относящиеся к применению
СШП-сигналов и устройств, в частности, импульсных локаторов, имеющих широ-
кий сплошной спектр излучаемого сигнала, что может привести к интерференции с
другими СВЧ-устройствами (системы глобального позиционирования, различные
типы связи и т.д.) и, как следствие, к конфликту с существующими нормами и пра-
вилами. В России нет пока нормативного документа, относящегося к СШП-уст-
ройствам, но можно ориентироваться на документы Федеральной комиссии связи
США [306, 307]). Создаются аналогичные документы других стран: Европейского
союза [304], Канады, Австралии и других, но с ещё более жёсткими требованиями.
Очевидно, что и российские производители СШП-устройств столкнутся с подоб-
ными проблемами в ближайшее время [239].
В частности, FCC установила, что СШП-устройства для наблюдения через оп-
тически непрозрачные преграды могут создаваться либо на частотах ниже
960 МГц, либо в диапазоне частот 1990... 10600 МГц. При этом спектральная плот-
ность излучения должна быть не более минус 41,3 дБм/МГц.
Комиссия FCC относит к СШП сигналы, обладающие хотя бы одним из сле-
дующих свойств'.
• разность между верхней /н и нижней /L частотами спектра (ширина спектра по
уровню минус 10 дБ) не менее 500 МГц;
• отношение ширины спектра /н - /L к его средней частоте (/н + /L )/2 (относи-
тельная полоса частот) не менее 0,2.
2.2.2. Изобразительные свойства радиолокационных снимков
в зависимости от длины волны РСА
Под изобразительными свойствами аэрокосмических снимков обычно понимают их
пригодность для визуального дешифрирования. Первичным дешифровочным при-
знаком на снимке является интенсивность пикселя. Модифицированные дешифро-
вочные признаки формируются путем выявления и формализации структурных, тек-
стурных и контекстных свойств объектов различных классов [3, 7, 12, 104]. Изобра-
зительные свойства снимков характеризуют связь между техническими параметра-
ми, такими как пространственное разрешение, масштаб изображения, и возможно-
63
Радиолокационные системы землеобзора космического базирования
стями выделения на снимке различных элементов местности - линейных контуров,
участков растительности с разными градациями яркости и текстурой, поверхностных
структур почвенного слоя и водной среды, искусственных сооружений и т.д.
Основной фактор, ухудшающий изобразительные и измерительные свойства
радиолокационных изображений (РЛИ) по сравнению с оптическими, связан с по-
вышенной зернистостью РЛИ, обусловленной спекл-шумом - когерентным сложе-
нием откликов от большого количества элементарных отражателей, попадающих в
элемент разрешения РСА [119]. Поэтому в отображении однородного фона появля-
ется пятнистость, вызванная флуктуациями суммарного процесса при переходе от
одного элемента к другому.
Спекл-шум ухудшает радиометрическое разрешение РЛИ (см. раздел 3.5). Для
снижения спекл-шума применяют рассмотренные в гл. 7 методы фильтрации РЛИ.
Но это приводит к потере пространственного разрешения РЛИ, а также полезной
информации, содержащейся в спекл-шуме, которая может быть использована для
идентификации пространственно распределенных объектов.
В отличие от шумов приемника спекл-шум имеет мультипликативный харак-
тер - его мощность пропорциональна мощности отраженного сигнала. В результа-
те оказывается, что при фиксированных пространственном разрешении и масштабе
изобразительные свойства РЛИ в основном зависят от исходных контрастов сигна-
лов, отраженных от наблюдаемых объектов и подстилающей поверхности, которые
в свою очередь зависят от рабочей длины волны РСА.
Анализ радиолокационных снимков традиционных «узкополосных» РСА, по-
лученных в диапазонах волн, выделенных Регламентом радиосвязи для зондирова-
ния Земли из космоса, показывает, что по общему характеру снимки близки. На
более длинных волнах лучше различаются контрасты растительного покрова, выше
проникающая способность под крону леса, выше вероятность обнаружения мало-
размерных объектов на фоне местности. Волны Р- (70 см), VHF- (1,5...2,5 м) диа-
пазонов способны проникать под слой почвы с возможностями обнаружения за-
глубленных объектов и выявления подповерхностных геологических структур.
Эффективность этого направления в развитии космических РСА эксперимен-
тально доказана материалами дистанционного зондирования с помощью традици-
онных самолетных РСА, работающих в Р- и EHF-диапазонах волн, в частности,
БРЛК ИМАРК [37*, 185*], РСА «Компакт» [66]. Известны также положительные
результаты зондирования Луны при использовании РСА с длиной волны 15 м на
спутнике «Аполлон-17» [445, 562].
Основные преимущества видеоимпульсных РСА в сравнении с традицион-
ными «узкополосными» РСА состоят в следующем:
• короткие импульсные сигналы, как правило, не создают помех для аппаратуры
другого типа, что облегчает применение таких сигналов в космической аппарату-
ре ДЗЗ;
• возможно получить высокое пространственное разрешение до единиц деци-
метров, что обеспечивает распознавание малоразмерных целей по их видео-
портретам;
• возможно распознавание типа объектов по их резонансным свойствам;
64
Глава 2. Взаимодействие радиоволн с объектами радиолокационного наблюдения
• имеются широкие возможности сглаживания флуктуаций (спекл-шума) выходно-
го сигнала от шероховатых поверхностей, что облегчает их идентификацию;
• возможно обнаружение объектов под растительным покровом и заглубленных
объектов благодаря проникающей способности метровых радиоволн.
Рассмотрим особенности использования частотных диапазонов традиционных
«узкополосных» РСА для решения задач ДЗЗ, обнаружения и наблюдения а также
подводных объектов - топографии морского дна и шельфа и движущихся подводных
объектов. Отметим особенности зондирования в метровом диапазоне (VHF) приме-
нительно к созданию перспективных космических РСА.
Проблема оптимального выбора рабочих диапазонов волн для РСА является
ключевым вопросом при проектировании радиолокационной аппаратуры ДЗЗ. Как
следует из табл. 2.1, наибольшие различия частотных диапазонов состоят в выделен-
ных полосах частот, что определяет реализуемую разрешающую способность попе-
рек трассы КА. Для получения разрешающей способности РСА поперек линии пути
в доли метра нужна полоса зондирующего сигнала 300...500 МГц. В соответствии с
ограничениями, определяемыми Регламентом радиосвязи (табл. 2.1), получение та-
кого разрешения возможно в Ku- (Я~2 см), X- (Я~3 см) либо в С- (Я~5,6 см) диа-
пазонах волн. Метровое разрешение реализуется в S-диапазоне волн (2-10 см).
Общая закономерность состоит в том, что с уменьшением длины волны, в частно-
сти, в сантиметровом Х-диапазоне, легче реализовать высокое (метровое и субмет-
ровое) пространственное разрешение. Но следует учитывать и различие отражаю-
щих свойств объектов в разных частотных диапазонах.
Изобразительные свойства радиолокационных снимков при наблюдении рас-
тительного покрова, а также при изучении геологической структуры земной по-
верхности выше (более выражены) в дециметровом //-диапазоне (разрешение от
3 м) и приближающемуся к нему в 5-диапазоне волн (рис. 2.1), чем в X- и С-диа-
пазонах волн. Зондирование в ^-диапазоне, несмотря на возможность реализации
субметрового разрешения, имеет ограниченные возможности, его применение рас-
сматривается для исследования ледникового покрова.
На рис. 2.1 (см. также рис. Ц.1 цветной вкладки) приведены радиолокационные
снимки, снятые в Х-9 С-, S- и Z-диапазонах волн в ходе экспериментов, проведенных
фирмой JPL, США совместно с НПО машиностроения (ныне ОАО «ВПК «НПО ма-
шиностроения») и НПО «Вега» (ныне ОАО «Концерн «Вега»), СССР. Они показы-
вают различие отражения радиоволн от разного типа местности [223*, 440*].
Как правило, в X- и С-диапазонах уровни отраженных сигналов выше, чем в
L- и 5-диапазонах, в которых контрасты изображения подстилающих поверх-
ностей значительно больше. Это способствует
• повышению вероятности определения типа растительности, что важно для
решения задач землепользования и ведения лесного хозяйства;
• росту вероятности обнаружения малоразмерных целей на фоне местности, что
важно для мониторинга чрезвычайных ситуаций;
• ведению военной разведки.
На более длинных волнах обеспечивается измерение удельных объемов лес-
ной биомассы в отличие от сантиметровых волн (X и Q, для которых быстро на-
3—1492
65
Радиолокационные системы землеобзора космического базирования
ступает насыщение в значениях cP. Как видно из рис. 2.1 в X- и С-диапазонах волн
отражение от сельскохозяйственных угодий в пойме реки значительно превышает
отражение от лесного массива (левый верхний угол РЛИ).
Рис. 2.1. Радиолокационные снимки одного района, снятые в Х-, С-, L-диапазонах волн
(SIR-C/X-SAR), и в S-диапазоне волн (РСА «Меч-КУ» КА «Алмаз-1»)
На рис. 2.2 иллюстрируется проникающая способность радиоволн разных
частотных диапазонов. Для большинства типов местности (кроме воды с большой
диэлектрической постоянной воды £~804у-60) проникновение радиоволн в подпо-
верхностные слои (например, почва, растительный покров) возрастает с увеличе-
нием длины волны РСА.
X, С, S, L, Р, VHF
Рис. 2.2. Проникающая способность различных диапазонов волн
66
Глава 2. Взаимодействие радиоволн с объектами радиолокационного наблюдения
Особенности прохождения радиоволн через слоистые земные покровы и коли-
чественные значения коэффициентов затухания радиоволн в среде распространения,
характеризующие проникающую способность, приведены в разделах 2.6 и 2.10.
2.2.3. Влияние трассы распространения сигнала на возможности
радиолокационного наблюдения в разных диапазонах волн
При космическом зондировании трасса прохождения излученных сигналов до цели и
отраженных - до приемной антенны РСА включает в себя тропосферу и ионосферу,
которые оказывают влияние на параметры сигналов в зависимости от длины волны
РСА. Это влияние в общем случае включает в себя затухание радиоволн, фазовое за-
паздывание, поворот плоскости поляризации (эффект Фарадея в ионосфере), а также
появление отражений от метеообразований в атмосфере. Эти явления могут вносить
деструктивное влияние на получение (синтез) радиолокационного изображения
(РЛИ), а могут создавать на РЛИ образы, вызванные отражением от метеорологиче-
ских объектов с интенсивным отражением, маскирующих наземные (надводные)
объекты, которые являются объектами радиолокационного наблюдения. В любом
случае, изображения таких метеообразований (грозовая облачность, дождь, снег)
должны быть идентифицированы при дешифрировании РЛИ.
Земная атмосфера является неоднородной средой с пространственной и вре-
менной зависимостью, обладающей поглощающими, преломляющими и отражаю-
щими свойствами, а ее верхний слой - ионосферная плазма обладает дисперсными
и анизотропными свойствами [13-15, 115, 128, 390, 523, 543]. Распространение
радиоволн в такой среде сопровождается следующими физическими процесса-
ми в тропосфере и ионосфере'.
• преломлением радиоволн в тропосфере, обусловленным регулярным изменением
диэлектрической постоянной по высоте и флуктуациями из-за турбулентностей.
Эти явления вызывают увеличение задержки и фазы принимаемого сигнала, а
также искривление пути распространения сигнала;
• поглощением радиоволн в газах тропосферы, в осадках типа дождя, тумана и др.;
• отражением от локальных неоднородностей атмосферы, грозовых облаков, дождя
и метеообразований;
• поглощением, а также изменением времени задержки и фазы, обусловленными
конечной проводимостью ионосферы из-за наличия свободных электронов;
• изменением поляризации волны в анизотропной ионосфере (эффект Фарадея);
• дисперсными свойствами, вызванными резко выраженной частотной зависимо-
стью воздействия параметров ионосферы на характеристики распространяющих-
ся сигналов.
Влияние атмосферных нестабильностей на характеристики сигналов в косми-
ческих РСА различно на сантиметровых, дециметровых и метровых волнах [128].
В сантиметровых диапазонах волн наиболее ощутимы пространственные нестабиль-
ности, вызванные турбулентностью тропосферы, а в дециметровом диапазоне - ио-
носферы. Временные изменения состояния тропосферы и ионосферы, проявляю-
щиеся при записи сигналов по апертуре синтезированной антенны, можно отнести
к пространственным флуктуациям и оценивать общее деструктивное действие обо-
67
Радиолокационные системы землеобзора космического базирования
их факторов. Оно проявляется в виде флуктуаций фазы принятого сигнала вдоль
синтезированной апертуры, которые приводят к расфокусировке РЛИ.
Дисперсные свойства ионосферы также вызывают расфокусировку при сжатии
широкополосных сигналов по дальности (обычно с ЛЧМ-модуляцией) или эквива-
лентному растяжению коротких импульсов (например, в видеоимпульсных РСА).
В [128, 189, 390] исследовано влияние атмосферных флуктуаций на разре-
шающую способность РСА космического базирования. Дисперсия фазы по длине
синтезированной апертуры описывается степенной структурной функцией
D{(p} = В5/31%3, (2.1)
Д”°^2 Л2,9' [Л+Л]. Р-2)
Hs cos/i
Здесь Кх = 2л-/Я - волновое число; Hs - высота орбиты КА; - угол падения, от-
считываемый от местной вертикали в точке наблюдения; Д и Д - интегралы по те-
кущей высоте h над поверхностью Земли (индексы t и i для тропосферы и ионо-
сферы соответственно).
Для тропосферы величина интеграла Д не зависит от длины волны и по дан-
ным [17, 189] в зависимости от геофизических условий составляет
It = $C2n(h)h5l3dh, (2.3)
где С2(й) - структурная характеристика тропосферной турбулентности.
Для параболической модели высотного профиля электронной концентрации с
максимальным объемным содержанием электронов в слое Атах=106 см-3, зависи-
мость от длины волны Я описывается формулой [128]
/. = д0Я4 = 5,02 • 10-3 Я4 см2, (2.4)
где До - значение Д для Я = 1 см.
На рис. 2.3 приведены зависимости предельно достижимого разрешения по
азимуту и дальности от длины волны РСА без применения методов автофокусировки
Рис. 2.3. Зависимость достижимого разрешения
по азимуту рх и наклонной дальности pR
от длины волны РСА [128]
при синтезе РЛИ (условия зондиро-
вания: Д = 3см2, До = 13-10-23 см-3,
= 60° [128]). Как видно из ри-
сунка, в коротковолновой области
преобладает влияние фазовых
флуктуаций тропосферы, разреше-
ние по азимуту с ростом длины
волны слабо уменьшается до до-
лей метра. На более длинных вол-
нах преобладает влияние ионосфе-
ры и значение минимального раз-
решения по азимуту может ухуд-
шиться до сотен метров, а по
дальности - превысить 100м.
68
Глава 2. Взаимодействие радиоволн с объектами радиолокационного наблюдения
Особенно драматическая ситуация имеет место при радиолокационном зондирова-
нии из космоса в УКВ-диапазоне (метровые волны), где деструктивное действие
ионосферных нестабильностей значительно возрастает.
Детальный анализ влияния атмосферных нестабильностей на разрешающую способность
РСА космического базирования с конкретными параметрам приведен в разделе 6.10, по-
священном методам автофокусировки РЛИ.
В настоящее время для преодоления расфокусировки РЛИ, вызванной атмо-
сферными нестабильностями, используют методы:
1) измерения параметров ионосферы в районах съемки с применением назем-
ных датчиков, использующих сигналы от спутников GPS [15] и встроенных борто-
вых датчиков (применительно к РСА //-диапазона волн [399,488]);
2) автофокусировки по азимуту при синтезе апертуры, изложенные в разд. 6.10;
3) двухмерной автофокусировки РЛИ по азимуту и дальности для компенса-
ции фазовых искажений в трансионосферных РСА, предназначенных для дистан-
ционного зондирования Земли в УКВ-диапазоне волн [241*].
Из других явлений, связанных с прохождением радиоволн через атмосферу (тро-
посферу и ионосферу), следует отметить потери на распространение сигнала и отра-
жение от гидрометеоров в коротковолновой части сантиметрового диапазона волн.
На рис. 2.4 дана иллюстрация этих явлений и приведена зависимость пропу-
скной способности атмосферы от длины волны РСА.
Орбита КА
Ионосфера
Тропосфера
Гидрометеоры
Шторм, ливень
Рис. 2.4. Трасса прохождения радиосигналов через атмосферу
при радиолокационном зондировании Земли:
a - отражение от гидрометеоров; б - зависимость прозрачности атмосферы от диапазона волн [189]
В качестве примера отметим, что при радиолокационном зондировании океа-
на с помощью космического РБО «Космос-1500», работающего в А'-диапазоне
волн, кроме получения данных о состоянии морской поверхности, приводном вет-
ре и циклонах можно было вести изучение процессов образования облаков и осад-
ков в тропических районах.
В ходе эксплуатации РБО системы Морской космической разведки и целеука-
зания, выполняющей задачу контроля надводной обстановки, было установлено,
что в А'-диапазоне волн возможно сильное отражение от гидрометеоров, особенно
69
Радиолокационные системы землеобзора космического базирования
на экваториальных широтах, резко снижающих вероятность обнаружения кораблей
и подстилающей поверхности.
Отраженный сигнал, создаваемый гидрометеообразованиями (ГМО), форми-
руется объемным отражением от облаков и осадков (дожди, град, снегопад). Из-за
движения элементарных отражателей в этих образованиях интервал корреляции
принимаемого от них сигнала не превышает 10 мс [193]. При этом реализуется
сжатие сигналов по дальности, но при синтезе РЛИ по азимуту ГМО отображаются
как дополнительный шум. Следует учесть, что при наблюдении протяженной по-
верхности в РСА сжатие сигнала по азимуту (или дальности) не приводит к изме-
нению отношения сигнал/шум. Оно остается равным <т°/сг^е на входе приемника
и после синтеза РЛИ. Удельную ЭПР ГМО сг®то можно вычислить через суммар-
ную ЭПР ГМО <7gmo , равную объемному рассеянию ГМО 7, умноженному на им-
пульсный объем сигнала от ГМО vgmo, путем деления ее на облучаемую площадь в
элементе разрешения по горизонтальной дальности:
|>l' zl (2.5)
РуЛат У7*, 7
где vgmo - объем области, формирующей сигнал от ГМО; ру - разрешение по гори-
зонтальной дальности; Хш - зона облучения антенны по азимуту; rj - радиолока-
ционная отражательная способность ГМО - его ЭПР в единице объема (см. [214],
гл. 6]); К - комплексный коэффициент, зависящий от комплексной диэлектриче-
ской проницаемости водной среды (|А?|2 «1 для воды и |А?|2 «0,197 для сне-
га/льда); Z (мм6/м3) - множитель отражения, равный Z «1000г1’6 для слабых дож-
дей или снегопада с интенсивностью г от 4 до 30 мм/ч и Z « 200г1’6 для интенсив-
ных осадков (грозы, ливни) с г = 50... 120 мм/ч.
Импульсный объем ГМО vgmo = pRX^t Z/gmo/sin равен произведению раз-
решения по наклонной дальности pR, размера зоны облучения антенны по азимуту
(ширина эллипса на рис. 2.4, а) и длины дальностной трубки шириной pR в преде-
лах высоты ГМО T/gmo/sin/i, где ZZgmo - высота ГМО; - угол падения, опреде-
ляющий поперечное сечение гидрометеора (длину дуги pR на рис. 2.4,а).
Значения удельной ЭПР <7gmo дождя с интенсивностью г = 50 мм/ч при высоте
=1 км и угле падения д = 45° в зависимости от длины волны РЛС составляют:
Длина волны Л, см................................ 3 5,6 10 23
УЭПРа^.дБ...................................... -14 “25 -35
Приведенные данные показывают, что при зондировании в дециметровых
диапазонах волн, отражение от гидрометеоров существенно падает.
70
Глава 2. Взаимодействие радиоволн с объектами радиолокационного наблюдения
Пример наблюдения гидрометеора с помощью РСА высокого разрешения
приведен на рис. 2.5, где показан снимок р. Волги в районе г. Волгограда, получен-
ный с помощью РСА TerraSAR-X
(Infoterra GmbH©) [530] с разре-
шением около 3 м. Отражение от
грозового облака на 5,5 дБ пре-
вышает отражение от поля с за-
метным маскирующим действи-
ем, не позволяющим обнаружить
наземные объекты в области
большой плотности изображения
облака. По данным синоптиков в
районе съемки в это время на-
блюдались грозовая облачность и
дождь.
Принципиально РСА могут
применяться для зондирования
облачности и атмосферных осад-
ков и иметь близкие к РБО харак-
теристики, если использовать в
РСА режим некогерентной обра-
ботки или синтез РЛИ на интер-
вале когерентности сигнала до
Юме (см. главу 13, РБО «Кос-
мос-1500» и РСА «Северянин»).
Рис. 2.5. Фрагмент радиолокационного снимка
р. Волги в районе г. Волгограда в X-диапазоне волн
с отражением от грозового облака (в левой части):
РСА TerraSAR-X, режим высокого разрешения,
20070621_TSX_First_Image_Wolga_hig_res.tif.
Infoterra GmbH© [530]
2.3. Поляризация радиосигналов при передаче и приеме
В практике радиолокационного ДЗЗ используют зондирующие сигналов с разной
поляризацией при передаче (горизонтальной или вертикальной, реже круговой). В
однополяризационных РСА прием ведут с согласованными вертикальной (ВВ), го-
ризонтальной (ГГ) или круговой поляризациями. В поляриметрических РСА ис-
пользуют два приемных канала с горизонтальной и вертикальной поляризациями,
позволяющих сравнивать сигналы с любыми комбинациями поляризаций при пе-
редаче и приеме (режимы ВВ, ВГ, ГГ, ГВ или VV, VH, НН, HV). Поляризация из-
лучения определяется направлением вектора электрического поля Е в плоскости,
нормальной направлению распространения радиоволны. При горизонтальной по-
ляризации излучения вектор Ен электрического поля параллелен наблюдаемой по-
верхности. При вертикальной поляризация вектор излучения Ev направлен под уг-
лом падения к местной вертикали.
Заметим, что объекты простой формы (сфера, трехгранный уголковый отра-
жатель) дают отраженный сигнал только при согласованных поляризациях излуче-
ния и приема (ГГ или ВВ). Линейные вертикальные объекты (например, металли-
ческие или железобетонные столбы) дают слабое отражение при горизонтальной
71
Радиолокационные системы землеобзора космического базирования
поляризации ГГ. Горизонтальные линейные объекты (провода, рельсы) могут да-
вать интенсивное отражение при ГГ-поляризации, если они параллельны вектору
Е. Линейные вертикальные объекты, а также горизонтальные, направленные от
РЛС, дают отражение при ВВ. Сложные объемные и линейные объекты при произ-
вольных направлениях дают отражения в любых комбинациях поляризаций, при-
чем при отсутствии искажающих воздействий (например, ионосферы) комбинации
ВГ и ГВ одинаковы.
При поляриметрических измерениях кроме амплитудных соотношений име-
ется возможность по комплексному сигналу измерить разность фаз между сигна-
лами комбинаций поляризаций ВВ и ВГ, ГГ и ГВ или ВВ и ГГ. Можно также вы-
числить полную поляризационную матрицу (матрицу Стокса), которая описывает
преобразование амплитуды, фазы и поляризации волны, облучающей цель
(2.6)
где ^/<тнн , ^crHV , л/Оуу , - элементы матрицы рассеяния, характеризую-
щие амплитуду отраженного сигнала; ^Нн, ^hv, ^vv, ^vh, - соответствующие фазы.
В поляриметрических РСА обычно используют либо режим двух поляризаций -
одна на передачу (В или Г) и две - на прием (В+Г), либо полнополяриметрический ре-
жим четырех поляризаций, при котором на излучение поочередно переключают поля-
ризацию в соседних зондированиях с двухканальным приемом отраженных сигналов
обеих поляризаций. При этом частота повторения удваивается, что вызывает опреде-
ленные сложности с обеспечением однозначности сигналов (см. раздел 3.6). Анало-
гичным образом реализуется и режим двух поляризаций в комбинации ВВ+ГГ.
Кроме режима с линейными поляризациями на излучение, возможна работа с
круговой поляризацией, при которой путем соответствующего построения антен-
ного тракта одновременно излучаются зондирующие сигналы обеих поляризаций,
но с разностью фаз 90° между ними. В зависимости от знака разности фаз вектор
электрического поля получает вращение по или против часовой стрелки. Прием
отраженных сигналов обычно ведут с помощью двухканального приемника, как в
случае работы с линейными поляризациями, а необходимую разность фаз для по-
лучения круговой поляризации вводят после синтеза комплексных изображений.
При этом возможно получение РЛИ с совпадающим направлением вращения и с
обратным направлением вращения плоскости поляризации. Применение режима с
круговой поляризацией может быть полезно в низкочастотном P-диапазоне волн, в
котором при прохождении радиоволн через ионосферу возможен поворот плоско-
сти поляризации вектора электрического поля (эффект Фарадея). Сравнение вы-
ходных РЛИ с согласованным и противоположным направлениями вращения ана-
логично сравнению ВВ- и ВГ- или ГГ- и ГВ-поляризаций при работе с линейными
поляризациями.
Упрощенные режимы, близкие по возможностям к полнополяриметрическому режиму,
рассмотрены в подразделе 4.1.4.
72
Глава 2. Взаимодействие радиоволн с объектами радиолокационного наблюдения
Мощность сигнала, попадающего в приемную антенну РЛС для данного типа
подстилающей поверхности, зависит от поляризации излучения и от взаимного на-
правления поляризаций при излучении и приеме. Если поляризации излучения и
приема совпадают, то для большинства поверхностей (пашня, покрытая раститель-
ностью местность) уровни отраженного сигнала для горизонтальной и вертикаль-
ной поляризации близки. Исключения составляют гладкие поверхности (бетон, ас-
фальт, гравий, спокойная водная поверхность). Для них, особенно в длинноволно-
вом диапазоне (3 см и более), отраженный сигнал при горизонтальной поляризации
меньше, чем при вертикальной (до 16 дБ при больших углах падения).
Влияние поляризации сказывается на подчеркивании контрастов объектов,
протяженных по длине в направлении, совпадающем с направлением поляризации.
Так, при вертикальной поляризации возрастает сигнал от объектов, протяженных
по высоте - опоры линий электропередач, деревья (особенно ель), морские волны и
т.д. При горизонтальной поляризации могут дать интенсивный сигнал провода ли-
ний электропередач или железнодорожные рельсы при соответствующем ракурсе,
деревья с вытянутой горизонтально кроной. В частности это явление позволяет на
радиолокационных снимках различать лиственные и хвойные породы леса.
В общем случае коэффициент рассеяния земной и водной поверхности при
вертикальной поляризации выше, чем при горизонтальной и перекрестной. Осо-
бенно сильно это различие проявляется при малых углах наклона (локальных углах
скольжения) и при гладких поверхностях. При малых углах наклона значение cP
морской поверхности для ВВ может быть на 22 дБ выше, чем при ГГ в случае спо-
койного моря. Эта разность постепенно уменьшается с увеличением волнения мор-
ской поверхности и угла наклона уменьшением угла падения и практически исче-
зает при скоростях ветра 28.. .37 км/ч и углах наклона от 60 до 90°.
Влияние выбора поляризации показано на рис. 2.6, где представлены два РЛИ
(ГГ- и ГВ-поляризаций) морской поверхности с рыболовными судами при сильном
волнении моря (скорость ветра 9 м/с). Из-за сильного отражения от морской по-
верхности, близкого по уровню к отражению от суши, суда обнаруживаются толь-
ко на перекрестной ГВ-поляризации.
Рис. 2.6. Фрагменты РЛИ с рыболовными судами при сильном волнении моря:
a - ГГ-поляризации; б - ГВ-поляризации; С-диапазон волн
(Черное море в районе Новороссийска, РСА ASAR КА Envisat [378])
73
Радиолокационные системы землеобзора космического базирования
Рис. 2.7. Зависимость разности фаз ВВ-
и ГГ-поляризаций для леса в L-диапазоне
При работе с различными поля-
ризациями информативными призна-
ками являются отношения ЭПР в по-
ляризационных каналах (например,
c^hv/c^hh или q°hh /a°w), отношение
ЭПР поляризационной составляю-
щей К уСреДНеННОЙ ЭПР С?теап=
= (с^нн + <Av + 2xopvh)/4 или же
разность фаз между ВВ- и ГГ- либо
между согласованной поляризацией
и кроссполяризацией. Фазовую ин-
формацию иллюстрирует рис. 2.7, где приведена зависимость от угла падения разно-
сти фаз вертикальной и горизонтальной составляющих в L-диапазоне для леса.
Как правило, для кроссполяризации отраженный сигнал меньше, чем для со-
гласованной, особенно для гладких поверхностей, причем подчеркиваются контра-
сты различных поверхностных особенностей (вид дороги, участки лавы, осадочных
пород и т.д.). Для растительного покрова разница не превышает 0,75 дБ [193].
2.4. Отражение электромагнитных волн от сосредоточенных
и протяженных объектов и численные характеристики
отраженных сигналов
2.4.1. ЭПР и диаграммы обратного рассеяния простых объектов
Мощность сигнала в приемном тракте в соответствии с уравнением дальности (см.
раздел 3.4) определяются величиной эффективной площади рассеяния (ЭПР) объ-
екта (радиолокационной цели). ЭПР является количественной мерой отношения
плотности потока мощности сигнала, рассеянного в направлении приемника, к
мощности потока СВЧ электромагнитных волн, падающих на цель при заданной
поляризации передающей антенны. ЭПР
ст = 4тг—м2, (2.7)
Wi
где Ps, Вт - мощность сигнала, отраженного от цели в направлении приемника
РЛС в единице телесного угла; W\, Вт/м2 - плотность потока мощности, облучаю-
щего цель.
Следует отметить, что реальные объекты при облучении их под разными уг-
лами могут дать различную мощность отражения. Это вызывает флуктуации при-
нимаемого сигнала. Тогда говорят о средней ЭПР и об уровнях её флуктуаций.
По методу определения ЭПР радиолокационные цели удобно разделять на
простые (элементарные) и сложные. К элементарным относятся простейшие гео-
метрические конструкции: металлические плоская пластина, сфера, цилиндр, угол-
ковый отражатель и др. Их ЭПР и зависимости диаграммы обратного рассеяния
(ДОР) от размеров, длины волны РЛС, углов наблюдения могут быть вычислены
74
Глава 2. Взаимодействие радиоволн с объектами радиолокационного наблюдения
по формулам (в случае, когда их размеры существенно больше длины волны). ЭПР
и ДОР для основных типов простых объектов приведены в табл. 2.2. Заметим, что
ЭПР этих объектов на перекрестных поляризациях ГВ или ВГ близка к нулю (оп-
ределяется краевыми явлениями).
Таблица. 2.2. Характеристики ЭПР и ДОР для простых объектов
Объект Геометрия отражения Формулы для ЭПР и ДОР
Плоская пластина ах 6 4яа2А2 Л2 8тГла(а/Л)1 С(«) = ~ ,77vJ яа[а/Л) sin[^(6/2)] (2-8)
Сфера с радиусом г» Л СУ = 71Г1 (2.9)
ДОР - равномерная в интервале ±л/2
Цилиндр вертикальный радиусом г, высотой h при ВВ h I*—r 2/ih2r а = Л (2.Ю)
Цилиндр вертикальный радиусом г, высотой h при ГГ z ч sin (A? Asina) G(a) = (J— - Kxhsma Kx = 2л/A (2.П)
Трехгранный уголковый отражатель, длина грани а a 4 а4 (У-—71 — 3 Л2 (2.12)
ДОР - равномерная в интервале ~±30°
Отражатель диск - цилиндр «шляпа» (Top-hat reflector [274, 358]) 4 к h _ J L. 4 A ► _ 2ягА2 cos/? Л v 7 KxhsinJ3 (2.13)
a h A >r + ДОР по азимуту - равномерная 0.. .360° круговая
Радиолокационные системы землеобзора космического базирования
Рис. 2.8. ЭПР сферы [214]
ЭПР металлической сферы с
диаметром, много большим длины
волны (оптическая область), равна
площади поперечного сечения сфе-
ры согласно (2.9). При уменьшении
радиуса сферы появляется резонанс-
ная колебательная область Ми, а при
г«Л - область Релея, в которой ЭПР
сферы изменяется обратно пропор-
ционально четвертой степени длины
волны (см. рис. 2.8).
Из элементарных целей наибо-
лее важны уголковые отражатели,
которые могут служить радиолока-
ционными ориентирами и эталон-
ными объектами для измерения
разрешающей способности РЛС и калибровки чувствительности её тракта. С этой
целью оборудуются специальные измерительные полигоны.
2.4.2. Отражение радиоволн от сложных объектов
К сложным целям относится большинство реальных объектов. Их эффективная
площадь рассеяния может быть определена экспериментально или математически-
ми методами электродинамических расчетов. Как правило, ЭПР сложных объектов
задают статистически, так как отраженный ими сигнал меняется при малейшем
случайном перемещении элементов их конструкций относительно РЛС. Сложные
цели могут рассматриваться как точечные, групповые и распределенные.
Точечные цели - цели, линейные и угловые размеры которых значительно
меньше элемента разрешения РЛС на местности. Обычно это малоразмерные объ-
екты (опоры линий электропередач, мелкие суда на воде, автомашины и т.д.), на-
блюдаемые в режимах низкого разрешения РСА - обзорных или широкозахватных.
Групповые цели соизмеримы с элементом разрешения РЛС или занимают не-
сколько элементов: здания, крупные корабли, мосты, либо объекты техники, наблю-
даемые в детальных режимах высокого пространственного разрешения РСА (~1 м).
Распределенные цели (площадные, линейные) занимают много элементов раз-
решения и обычно характеризуются однородностью статистического распределе-
ния. К ним относятся, например, сельскохозяйственные угодья, лесные массивы,
взволнованная морская поверхности, а также крупные неоднородности (аномалии)
на равномерной поверхности (кильватерные следы, пятна загрязнений и др.).
В табл. 2.3 приведены ориентировочные значения ЭПР для ряда сложных
объектов. В табл. 2.4 приведены значения ЭПР для средств воздушного нападения
с учетом ракурса наблюдения. Следует иметь в виду, что при радиолокационном
наблюдении самолетов на земле при углах падения ~45° значения ЭПР ближе
к указанным для бортовых ракурсов, чем для случаев при наблюдения в нос или
хвост.
76
Глава 2. Взаимодействие радиоволн с объектами радиолокационного наблюдения
Таблица. 2.3. Средние ориентировочные значения ЭПР объектов [33*, 118]
Объект Размеры, мхм а, м2
Л = 3 см Л = 70 см
Человек 0,7x2,0 0,5 1,0
Автомобиль, тягач 7,0x4,0 5,0... 15,0 20,0
Танк, БМП 7,0x4,0 4,0...20,0 15,0
Истребитель на стоянке 12,0x17,0 3,0...15,0 10,0
Бомбардировщик на стоянке 50,0x40,0 10,0...100,0 100,0
Таблица 2.4. Значения ЭПР средств воздушного нападения с учетом ракурса
наблюдения [33*]
Объект Ракурс, град а, м2
Л = 3 см Л = 10 см Л = 40 см
Стратегическая авиация: обычный / Стеле ±45 (нос) 70/0,3...3 75 / 0,3...5 60 / 0,5...10
±45 (борт) 80/1...30 70/ 1...30 60/1...40
±45 (хвост) 1000 / 0,5...10 120 / 0,5...10 90 / 0,5...20
Тактическая авиация: обычный / Стеле ±45 (нос) 4/0,1...0,5 4/0,1...0,5 6 / 0,2...0,7
±45 (борт) 5 / 0,5...0,7 6/0,5...0,7 9/0,5...0,7
±45 (хвост) 5/0,2 5 / 0,2...0,1 8 / 0,2...0,4
Армейская авиация ±45 (нос) 5...13 6...13 7...12
±45 (борт) 9...30 10...30 10...12
±45 (хвост) 3...10 6...10 7...10
Авиация ВМС ±45 (нос) 4...9 4...12 6...7
±45 (борт) 6...16 6...23 9...14
±45 (хвост) 4...5 6...13 5...7
Военно-транспортные самолеты ±45 (нос) 90...250 90...300 100...400
±45 (борт) 1000...350 100...350 150...400
±45 (хвост) 80...200 80...250 80...350
Самолеты ДРЛО и У Е-ЗС / Е-2С ±45 (нос) 50/18 50/20 50/20
±45 (борт) 80/35 70/35 70/40
±45 (хвост) 100/15 80/18 70/15
БЛА ±45 (нос) 0,05 0,05 0,20
±45 (борт) 0,30 0,40 0,50
±45 (хвост) 0,20 0,20 0,30
77
Радиолокационные системы землеобзора космического базирования
В табл. 2.5 дана сводка усредненных данных по ЭПР морских целей в ^-диа-
пазоне волн. С увеличением длины волны ЭПР уменьшается в соответствии с при-
веденными ниже коэффициентами:
Диапазон волн.................................... X S L Р
Коэффициент пересчета ЭПР...................... 1,0 0,8 0,4 0,2
Таблица 2.5. Значения ЭПР морских целей в Х-диапазоне волн [33*]
Морские цели Длина, м Ширина, м ЭПР с носа, м2 ЭПР с борта, м2
Авианосец типа Нимиц 332,8 78,4 4105 3-106
Крейсер типа Тикондерога 171,7 16,8 6-103 ЗЮ5
Фрегат типа Перри 135,6 13,7 ЗЮ3 3-1 о4
Катер Пегас 40,5 8,6 180 1800
Подводная лодка, всплывшая ДО 172 ДО 23 ~10 -200
Экспериментальные оценки ЭПР морских целей в 5-диапазоне волн, полученные в ходе
эксплуатации РСА «Меч-КУ» КА «Алмаз-1», приведены в подразделе 9.3.4 (табл. 9.1).
2.4.3. Отражение радиоволн от пространственно распределенных
объектов
Пространственно распределенные объекты имеют однородную отражающую способ-
ность в пределах некоторого участка: луга, поля, леса, взволнованная водная поверх-
ность, ледовые поля, дороги, просеки и т.д. Если ширина объекта меньше разрешения
РЛС, то говорят о линейно-протяженных объектах (провода, ограждения, межи и др.).
Согласно принципу Гюйгенса, каждая точка облученной поверхности рассеи-
вает сигналы во всех направлениях с одинаковой амплитудой. Интегральный от-
раженный сигнал определяется векторной суммой отражений от отдельных мел-
кошероховатых пластин (фацетов). Можно рассматривать несколько основных ти-
пичных случаев формирования отраженного сигнала от земных покровов: гладкая
поверхность; поверхность с пологими неровностями; поверхность с крупной шеро-
ховатостью; слоистая среда; двухгранные углы; морская поверхность; сельскохо-
зяйственные угодья; лесные массивы.
Отражающую способность подстилающей поверхности характеризуют коэф-
фициентом рассеяния, представляющим собой удельную эффективную площадь
рассеяния (УЭПР) - отношение ЭПР элемента разрешения на местности к значе-
нию его геометрической площади:
ст°=<т/[рхру], (2.14)
где рх, Py ~ линейное разрешение РЛС по координатам на местности вдоль и попе-
рек линии пути.
В режиме бокового обзора оно соответствует геометрии получаемого РЛИ, а
при скошенном обзоре РЛИ преобразуют к прямоугольным координатам с отсче-
тами по азимуту, соответствующими нулю доплеровской частоты.
Обычно УЭПР выражают в децибелах:
78
Глава 2. Взаимодействие радиоволн с объектами радиолокационного наблюдения
crdB = lOlgcr0. (2.15)
При падении радиоволны на наблюдаемую поверхность принципиально мож-
но рассматривать следующие составляющие, представленные на рис. 2.9: падаю-
щую волну Eq, зеркально отраженную волну £3, волну, обратно отраженную в сто-
рону источника облучения Е\, и волны, отраженные в разные стороны Е2, в том
числе и под углом к плоскости падающей волны.
Применительно к обычной однопозиционной радиолокации интерес пред-
ставляет только волна Е\, отраженная обратно к источнику. Для бистатических и
многопозиционных радиолокационных систем должны рассматриваться все отра-
женные компоненты.
Рис. 2.9. Виды отраженных волн
(2-16)
Характер отражения зависит от шероховатости поверхности. Ее характеризуют
величиной неровности - среднеквадратическим отклонением от идеальной плос-
кости. Если величина неровностей мала по сравнению с длиной волны РЛС (удовле-
творяется условие Релея), то поверхность может рассматриваться как гладкая
crh -------,
16cos/j
где Л - длина волны РЛС; - угол падения от местной вертикали.
В общем случае следует рассматривать прохождение электромагнитных волн
на границах сред с разными значениями диэлектрической проницаемости и маг-
нитной проницаемости, когда происходит направленное (зеркальное) отражение,
рассеяние радиоволн, а также их преломление в другую среду.
Особый случай поверхности с малой шероховатостью (пологой неровностью) -
когда неравномерность имеет волнообразный характер. К ней относятся морская
поверхность с рябью, а также песчаные пустыни с барханами. Общими свойствами
для них является связь отражающей способности с величиной неравномерности, а
различие состоит в том, что морская поверхность является динамическим объек-
том, отраженный сигнал от которого имеет малый временной интервал корреля-
ции. Иногда пренебрегают этим фактором и рассматривают «замороженную» мор-
скую поверхность в виде «стиральной доски». Поэтому, при дальнейшем анализе
отдельно рассматриваются модели рассеяния от волнообразной шероховатости и
79
Радиолокационные системы землеобзора космического базирования
отдельно отражение от морской поверхности с учетом ветровых воздействий,
сейсмических явлений, проявления внутренних волн и т.д.
Определенные различия характерны для растительных покровов разных ти-
пов. Для сельскохозяйственных угодий основное отражение формируется зеленой
массой. Для отдельных культур (кукуруза, подсолнечник) могут иметь место резо-
нансные явления. Для лесных массивов в зависимости от диапазона волн изменяет-
ся доля энергии, отраженная лиственной массой, ветками и стволами, а также поч-
вой и подпочвенным слоем.
2.5. Отражение радиоволн от плоской границы двух сред
Имеет большие перспективы многочастотное радиолокационное зондирование
земных покровов со слоистой структурой. Механизмы прохождения радиоволн че-
рез среды с различными радиофизическими свойствами имеют свои особенности,
что требует специального рассмотрения. В первую очередь это касается процесса
взаимодействия электромагнитных колебаний на границе двух сред. Основными
параметрами, определяющими волновые процессы в среде, являются скорость рас-
пространения и затухание, которые зависят от электрических параметров среды -
диэлектрической и магнитной проницаемости [17, 91, 245]. Скорость света в сво-
бодном пространстве с = \/^0//0 , длина волны РЛС Л = с/ f , где значения ди-
электрической проницаемости £q = 8,86-10-12 Ф/м (А-с/В-м) и магнитной проницае-
мости Д)= 4л-10-7 Гн/м (В-с/А-м).
Физические среды характеризуются относительной диэлектрической прони-
цаемостью £, которая при наличии потерь имеет комплексное значение ё, и отно-
сительной магнитной проницаемостью р. Для вакуума £=1 и //=1. Потери при рас-
пространении радиоволн в среде характеризуют тангенсом угла потерь, который
является отношением мнимой £' и действительной £ частей диэлектрической про-
ницаемости
^S = £^£. (2.17)
Комплексная относительная диэлектрическая проницаемость среды выража-
ется формулой
ё - £ - j Атку/со = ^(1 - jtg£),
где аг=2т$ь - круговая частота колебаний; су- потери в среде.
Комплексное волновое число
/ г.-------- 2тг/ г~ 2л п~
=----V£s =-rVes ’
С Л
где с и Л - скорость света и длина радиоволны в свободном пространстве соот-
ветственно.
Большинство природных сред близки к диэлектрикам и имеют магнитную
проницаемость, мало отличающуюся от единицы р «1. Поэтому скорость распро-
странения радиоволн в среде приблизительно равна
(2-18)
(2.19)
80
Глава 2. Взаимодействие радиоволн с объектами радиолокационного наблюдения
cs~c/VJ .
(2.20)
На рис. 2.10 показана геометрия взаимодействия электромагнитных колеба-
ний с границей двух сред с характеристиками комплексной диэлектрической про-
ницаемости и ё2 и магнитной проницаемости я и //2 в системе координат XYZ.
Рис. 2.10. Геометрия взаимодействия электромагнитных колебаний с границей двух сред
(падающая волна с горизонтальной поляризацией)
Параметры отраженной и преломленной волн находим из равенства гранич-
ных условий. Падающая плоская волна характеризуется комплексными векторами
напряженности электрического Е1 и магнитного Hj полей, волновым вектором
kj и углом падения yi = yi
Ё] = Деое7^'-7*1Л , (2.21)
где Ei - амплитуда напряженности электрического поля; е0 - единичный вектор
поляризации излучения; со = 2tz/s - угловая несущая частота; кх = —
Л
ёх - волно-
вое число; R - наклонная дальность визирования, определяющая фазу фронта па-
дающей волны.
На рисунке показана горизонтальная поляризация облучающей волны с еди-
ничным вектором еон =xol + yoO + zoO, где x0,y0,z0 - единичные векторы в сис-
теме координат XYZ. Вектор Ej параллелен оси X, нормальной к плоскости рас-
пространения волны YZ. Для вертикальной поляризации вектор е0 имеет вид
eov = х0 0 + у0 cos /j + z0 sin
Будем считать известной амплитуду напряженности электрического поля. Ее
можно вычислить (см. формулу дальности, раздел 3.4) по излучаемой мощности Pt
и коэффициенту усиления антенны РЛС G
81
Радиолокационные системы землеобзора космического базирования
F - PtGA
V 4л-2? , (2.22)
где р\ - волновое сопротивление среды 1 (для свободного пространства =
= 120 Ом).
Напряженность магнитного поля
’Ло (2.23)
В предположении однородности среды / и 2 граничные условия принимают вид
^п\~^п2^ “ Д?2^ ^т\~^т2 , (2.24)
где индекс «г» означает тангенциальную, индекс «п» нормальную составляющую
поля, а индексы «У» и «2» определяют среду, для которой берется данная состав-
ляющая.
Для случая горизонтальной поляризации падающей волны тангенциальные
составляющие электрического поля при z = 0 (см. рис. 2.11) должны удовлетворять
следующему соотношению:
Eiy(Y) + E2Y(Y) = E3Y(Y)
или
E{e~J^Ys[nn+J^ + E2e~Jk}Ys'nr2+J^ = E3e~j^Y^in/3+-/<^
Выполнение равенства (2.24) при любых значениях Y возможно при равенстве
показателей степени:
44 sin ух = 44 sin у2 ~ -\Д1" sin Yi ~ 4^2 s^n /з
(2.26)
82
Глава 2. Взаимодействие радиоволн с объектами радиолокационного наблюдения
из чего следует, что у\ = у2 = Л, т.е. имеет место зеркальное отражение (составляю-
щая Е2).
Угол преломления определяется
s«ir3= p-sin/i
’E1 . (2.27)
Из (2.24) и (2.25) имеем
Ej+E2=E3. (2.28)
Граничные условия для тангенциальных составляющих магнитного поля
Я1Г + Я2У = ЯЗУ (2.29)
или
-y^xExc^yie-jk^mr'^ +y[TlE2cosr2e-jk'Ysinr2+j^ =
= -.[^17. me v.^2Ysinn+J<PO
Откуда соотношение между падающей, зеркально отраженной и преломлен-
ной составляющими
А А — А
(2.30)
£4 2
—2—tg /i.
£r COS Xj
Из совместного решения уравнений (2.26)-(2.30) вычисляется коэффициент
зеркального отражения, определяющий отношение комплексных амплитуд отра-
женного и падающего лучей на границе двух сред, известный как коэффициент
Френеля. Для горизонтальной поляризации падающей волны после ряда преобра-
зований [91]
COS/i
• _ Ё2 _ cos/i -^isin2 Yi
г 2 '
y/Si COS/J + yj£2 - sm /i
(2.31)
£3 =£1(1 + £уН) . (2.32)
Аналогично для вертикальной поляризации падающей волны имеем
• _Ё2 _е2 cos/j
7^Т. = (2-33'
£2 COS + у[£х у] £2 - SIH /i
Рассмотрим важные частные случаи. Примем, что первой является воздушная
среда с £= 1, что типично при радиолокационном обзоре для ДЗЗ. Для удобства за-
пишем комплексные коэффициенты Френеля в виде произведения модуля на фазо-
вый множитель, а комплексную диэлектрическую проницаемость выразим через
тангенс угла потерь tg<%
83
Радиолокационные системы землеобзора космического базирования
К^=К^’, К„=К^-, f2 =£’2(l-/tg<5’2) . (2.34)
Для углов падения, не превышающих ух < 30°, значения модуля и аргумента
коэффициента отражения можно разложить в ряд по степеням угла ух
\Kfv\ = Kfb
(2.35)
(2.36)
где
^/0 -
(2.37)
= arctg
(2.38)
Значения а0, ян и яу, вычисленные для различных видов отражающей поверх-
ности, приведены в табл. 2.6.
Таблица 2.6. Параметры разложения в ряд коэффициентов зеркального
отражения [91]
Вид поверхности ^2 tg$ А/о о° «0 «н «V
Снег 2 0,01 0,17 1 1,4 4 1
Сухая почва, лед 4 0,01 0,33 0,5 2 2,7 2
4 1,0 0,45 21 2,6 2,1 1,6
Влажная почва 10 0,01 0,52 0,2 3,15 2,2 2,15
10 1,0 0,61 12 4,1 2 1,5
Пресная вода 80 0,01 0,8 0,1 9 2 2
Соленая вода 80 1,0 0,84 4 11,6 2 2
На рис. 2.12 приведены диаграммы рассеяния (отражения и преломления) ра-
диоволн на границах воздушной среды со снегом, сухой почвой и соленой водой.
Видны изменения величины зеркальной и преломленной составляющей по отно-
шению к падающей волне, принятой за единицу.
84
Глава 2. Взаимодействие радиоволн с объектами радиолокационного наблюдения
Рис. 2.12. Диаграммы отражения Е2 и преломления Е3 радиоволн
на границе воздушной среды со снегом (а и б), сухой почвой (в) и соленой водой (г)
(поляризация облучения - горизонтальная, направление облучения показано стрелкой: а - 30°, б-г - 50°)
Так, если <S2>>1 (например, водная поверхность или влажная почва) или иде-
ально проводящая поверхность crs »0 (металл), «-1 и 0^=71. Практически
имеем отсутствие преломленной волны и полное зеркальное отражение. При этом
для горизонтальной поляризации падающей волны фаза зеркальной составляющей
поворачивается на 180°. На вертикальной поляризации фаза отраженной волны
совпадает с фазой падающей волны, происходит только изменение направления
распространения волны. Если £> мало отличается от единицы (сухой снег), то
большая часть энергии будет проходить во вторую среду, практически не меняя
направления распространения, а амплитуда зеркальной волны будет малой.
Для типичных частотных диапазонов космических РСА (сантиметровые и де-
циметровые волны) зеркальное отражение формируется от таких объектов, как
спокойная водная поверхность, асфальтовые (бетонные) дороги, взлетные полосы
аэродромов и т.д. При углах падения, отличных от нуля, такие объекты не дадут
85
Радиолокационные системы землеобзора космического базирования
отражения в сторону РЛС и, соответственно, мощность сигнала в приемной антен-
не будет близка к нулю.
Определим величину зеркально отраженного сигнала для случая бистатиче-
ского зондирования. При этом учтем, что в сложившейся практике дистанционного
зондирования основным информационным продуктом, который поступает потре-
бителям от службы эксплуатации современных РСА, является, так называемое,
«геокорректированное» РЛИ в плановой проекции, каждый пиксель которого ка-
либрован по значению УЭПР cP.
Рассмотрим эту особенность, используя рис. 2.11 для отражения радиоволны от
гладкой границы двух сред с размерами отражающего элемента, равными рхРч- По-
ток мощности, падающий на площадку разрешения, определяется плотностью пото-
ка мощности и проекцией площадки разрешения на волновой фронт плоской волны
п £0
Ре=— РхРус^Г\
р
где Ео ~ напряженность электрического поля в падающей волне; /7—120 Ом - вол-
новое сопротивление среды; - угол падения.
Отраженная мощность на границе воздух-поверхность определится коэффи-
циентами отражения А/н или Kjy в зависимости от свойств поверхности и поляри-
зации падающей волны. С их учетом ЭПР площадки зеркального излучения, а так-
же УЭПР выразятся через формулу (2.39) для плоской пластины
Cr=4^l/7r^/H/VCOS2/i,
Л
0 _ ^PxPy к2 2
G ~ -2 A>H/VCOS /i-
Л
При углах падения, близких к отвесным (случай надирных высотомеров),
корректность формул нарушается, так как падающую волну в пределах элемента
разрешения по наклонной дальности нельзя рассматривать как плоскую. Анало-
гичное ограничение имеет место в высокоорбитальных РСА, для которых необхо-
дим учет сферичности земной поверхности. Указанными явлениями можно пре-
небречь при выполнении соотношений
PR '
tg/i,
(2.39)
(2.40)
(2.41)
RA
(2.42)
ИЛИ
z ч2
ReA>> ММ , (2.43)
Wi)
где R - наклонная дальность наблюдения (близка к высоте орбиты Hs); Re - радиус
Земли; Pr - разрешение РСА по наклонной дальности.
В этом случае ЭПР элемента разрешения и УЭПР отражающей поверхности
определятся формулами (2.40) и (2.41).
86
Глава 2. Взаимодействие радиоволн с объектами радиолокационного наблюдения
2.6. Отражение радиоволн от поверхности с волнообразными
неровностями
Естественные земные покровы, как правило, представляют собой шероховатые по-
верхности. Важным случаем является отражение от поверхности с пологими не-
ровностями. Такую поверхность можно представить в виде набора синусоидаль-
ных составляющих, полученных путем представления функции рельефа интегра-
лом Фурье, а для периодических неоднородностей, к которым относятся поверхно-
сти с волнообразной неравномерностью - в виде ряда Фурье. Это может быть мор-
ская поверхность с ветровым волнением, пустыни с песчаными барханами и др.
Для таких поверхностей даже при малой амплитуде неравномерностей возможно
образование отраженного сигнала в сторону РЛС. Это вызывается тем, что радио-
локатор представляет собой пространственный резонансный фильтр, настроенный
на определенную длину волны спектра пространственных частот.
Действительно, согласно принципу Гюйгенса каждая точка облученной по-
верхности рассеивает сигналы во всех направлениях с одинаковой амплитудой.
Принятый однопозиционной РЛС сигнал можно определить в виде интегральной
суммы сигналов обратного рассеяния от точек облученной поверхности с учетом
распределения их амплитуд и фаз по элементу разрешения рх*Рч вдоль и поперек
линии пути
4 = jj (2.44)
РХ'РУ
Геометрия наблюдения поверхности с волнообразной шероховатостью показа-
на на рис. 2.13. Как показано в [91], для частного случая падения плоской волны с
горизонтальной поляризацией на идеально проводящую поверхность с одномерной
волнообразной шероховатостью hm (см. рис. 2.13) формируется зеркально отражен-
ная волна (как для плоской поверхности) и набор обратных плоских волн от гар-
моник волнистости поверхности
Рис. 2.13. Гармоническая составляющая шероховатости облучаемой
поверхности
87
Радиолокационные системы землеобзора космического базирования
-jytrsin/i+Zcosy,) 2л-
Е2н = -,/2£0 cosy- — х
Л,
(2.45)
где Лт - высота неровностей; Л - пространственная длина волны.
Направление распространения формируемой волны (угол уг) определяется уг-
лом, при котором разность хода лучей, проходящих через одинаковые фазы волни-
стости, равна или кратна длине электромагнитной волны
Д7?! + ДТ?2 =—sinXj +—sin(/r -я) = — (sinXi + sin/r) = 2 .
n n n
(2-46)
Механизм отражения от периодических структур называют Брэгговским
рассеянием. На рис. 2.14 приведены амплитуды составляющих отраженного сигна-
ла: зеркальной 1 и обратного рассеяния 2 при волнообразной неровности высотой
Лт=1 мм с периодом Л=2 см, который согласован по формуле (2.47) с длиной вол-
ны РЛС Л=3 см при угле падения облучающей волны /i=50°. Уровень обратной со-
ставляющей составляет -18 дБ от зеркальной составляющей, величина которой оп-
ределяется формулами (2.40) и (2.41).
Отражение в сторону РЛС будет давать «резонансная» длина волны на на-
блюдаемой поверхности или ее субгармоники с номером п
\ = (2 АТ)
2sin/i
Рис. 2.14. Составляющие отраженного сигнала:
зеркальная 1 и обратного рассеяния 2 при волнообразной неровности высотой h=\ мм с периодом А=2 см (а)
и при случайной шероховатости с сгл=1 мм (б); длина волны РЛС 2=3 см (по оси ординат отложены относи-
тельные значения о°)
88
Глава 2. Взаимодействие радиоволн с объектами радиолокационного наблюдения
Заметим, что УЭПР зеркального отражения от шероховатой поверхности из-
меняется от величины, определяемой формулой (2.41) для гладкой проводящей по-
верхности до значения сг=1 при крупной шероховатости.
2.7. Отражение радиоволн от поверхности с крупной
шероховатостью
Большинство подстилающих поверхностей имеют неравномерности, соизмеримые
или превышающие длину волны РЛС. Они дают диффузное (рассеянное) отраже-
ние во все стороны, в том числе и в на-
правлении РЛС.
Шероховатые поверхности со
среднеквадратическим отклонением от
плоскости значительно превышающим
длину волны РЛС с%»Л характеризу-
ются диффузным обратным рассеянием,
близким к закону Ламберта cr0~cos^.
Для реальных подстилающих поверх-
ностей (неровная почва, растительный
покров) зависимость удельной ЭПР об-
ратного рассеяния от угла падения мо-
жет носить промежуточный характер.
Расчетные графики зависимости УЭПР
обратного рассеяния для шероховатой
поверхности с идеальной проводимо-
стью при разных отношениях при-
ведены на рис. 2.15. Пунктиром показан
закон Ламберта.
Рис. 2.15. Зависимости УЭПР
обратного рассеяния от угла падения
для идеальной проводящей поверхности
с разной шероховатостью сг/Д
2.8. Отражение радиоволн от двугранных углов
Ряд естественных и искусственных объектов (склоны ущелий, насыпи, здания и др.)
при некоторых условиях могут образовы-
вать двугранные углы, дающие интенсив-
ный сигнал, переотраженный от двух по-
верхностей, как это показано на рис. 2.16.
Заметим, что путь распространения при
двойном отражении больше, чем при од-
нократном. Поэтому переотраженные сиг-
налы приходят позже основных. На
рис. 2.17 показаны РЛИ сухогруза на спо-
койной водной поверхности, дающей
компактную отметку двойного отражения
от надстройки, и военного корабля при
Рис. 2.16. Образование двухгранных углов
при отражении от рельефа местности
и объектов
89
Радиолокационные системы землеобзора космического базирования
скорости приводного ветра 5...8 м/с, когда отражения от водной поверхности раз-
мыты. Отметки, вызванные переотражением, могут служить дополнительным де-
шифровочным признаком с информацией о высоте надстроек корабля.
Рис. 2.17. Появление дополнительных отметок на РЛИ
от надстроек судов и кораблей, вызванных образованием двухгранных углов
при переотражении радиоволн от морской поверхности:
сухогруз (я), военный корабль (б)
(стрелкой указано направление облучения (наклонная дальность R))
2.9. Особенности отражения радиоволн от водной
поверхности
Из-за высокой диэлектрической проницаемости воды радиоволны отражаются
только от поверхности. Отражение радиоволн от морской поверхности происходит
вследствие образования мелкой структуры - ряби, вызванной ветровыми воз-
действиями (Брегговское рассеяние, рассмотренное в разделе 2.6). Изображение
морской поверхности формируется благодаря модуляции ряби крупными ветровы-
ми волнами, зыбью, поверхностно-активными пленками, поверхностными прояв-
лениями внутренних волн, вызванных взаимодействием движущейся водной массы
(течения, приливные явления) с топографией дна, а также движущимися подвод-
ными объектами [92, 98, 143, 281].
Информативные признаки, характеризующие физические явления на морской
поверхности, содержатся в яркостных радиолокационных изображениях, отобра-
жающих интенсивность мелких (резонансных) ветровых волн, в скоростных порт-
ретах, а также в картах поля уровня.
Яркостные РЛИ поверхности океана широко распространены. Их используют
при решении многих научных и народнохозяйственных задач от изучения структу-
ры энергонесущих волн до мониторинга нефтяных разливов в прибрежных зонах и
ледовой обстановки.
Возможности получения из космоса скоростных портретов поверхности океа-
на радиолокационными методами рассмотрены в работах [69*, 177*, 179, 180, 296]
с физическим обоснованием, оценкой точности панорамных измерений и экспери-
ментальной проверкой в космическо-судовом эксперименте.
Пример яркостного РЛИ приведен на рис. 2.18. РЛИ получено в районе Гиб-
ралтарского пролива 1 января 1995 г. с помощью РСА ERS-1.
90
Глава 2. Взаимодействие радиоволн с объектами радиолокационного наблюдения
На рис. 2.18 видна область
нефтяного слика за танкером (тан-
кер находится на расстоянии -5 км
от начала слика). Контраст слика
составляет около -8 дБ, что гово-
рит об интенсивной (незаконной)
промывке танков. В предположе-
нии о толщине пленки -О,1 мм при
коэффициенте поверхностного на-
тяжения 40дин/см размер слика
соответствует разлитому объему
нефти 2500 м3, т.е. с учетом ее
плотности около 2000 т. Более
точные количественные оценки
могут быть получены путем двух-
Рис. 2.18. РЛИ района
Гибралтарского пролива (ERS-1):
размер кадра 100x100 км, углы падения 22...25°, поляриза-
ция ВВ; скорость ветра в левой части РЛИ - около 10 м/с, в
правой части РЛИ - около 4 м/с
частотного зондирования, одно-
временного или через небольшие
интервалы времени.
Вблизи береговой линии на
рис. 2.18 видна область шельфово-
го склона. Согласно батиметрии,
плоский шельф на глубине -200 м резко обрывается, крутой обрыв достигает глу-
бины -1 км. Контраст составляет около -4 дБ. Анализ РЛИ позволяет выявить то-
пографию шельфа с выявлением геологических структур в интересах разведки по-
лезных ископаемых.
Приведем численные данные, которые характеризуют РЛИ различных обра-
зований (аномалий), выявляемых при радиолокационном зондировании морской
поверхности. Следы внутренних волн на рис. 2.19, а имеют контраст +(6...8)дБ.
Внутренние волны имеют приливное происхождение, а столь значительный кон-
траст интенсивности объясняется значительной величиной скоростного градиента
в области, соответствующей конвергенции (схождению) склонов волны, при пере-
даче момента внутренних волн на поверхность.
На рис. 2.20, а имеем яркостной контраст РЛИ внутренних волн +(4...8)дБ
при орбитальных скоростях ±10 см/с. На рис. 2.20, б показана деформация мелких
ветровых волн на шельфовом склоне при резком увеличении глубины дна. Интен-
сивность волн при этом скачком уменьшается на 4 дБ, а скорость течения в на-
правлении к локатору также уменьшается в среднем на 5 см/с.
На рис. 2.21 приведено полученное РСА 5-диапазона волн «Меч-КУ» КА
«Космос-1870» радиолокационное изображение пролива Пьюджет-Саунд (США) с
приливным течением, выявляющим топографию дна на глубине 170...265 м. По
оценке американских специалистов выявление этих эффектов свидетельствует о
возможности использования радиолокационного зондирования для обнаружения
движущихся подводных лодок в погруженном положении [472].
91
Радиолокационные системы землеобзора космического базирования
Рис. 2.19. Калиброванные «разрезы» на выбранных участках РЛИ рис. 2.18:
a - фрагмент внутренних волн, контрасты +(6...8) дБ; б - фрагмент следа танкера (нефтяной слик), кон-
траст -8 дБ; в - фрагмент шельфового склона, контраст -4 дБ
92
Глава 2. Взаимодействие радиоволн с объектами радиолокационного наблюдения
Рис. 2.20. Фрагменты совмещенных яркостных (слева) и скоростных (справа)
изображений района Гибралтарского пролива с калиброванными «разрезами»:
a - пакет внутренних волн с амплитудным контрастом (4.. .8) дБ
при орбитальных скоростях внутренних волн на поверхности ±10 см/с;
6 - «обрыв» шельфового склона с амплитудным контрастом -4 дБ
и скоростным перепадом +5 см/с
93
Радиолокационные системы землеобзора космического базирования
Рис. 2.21. Радиолокационное изображение пролива Пьюджет-Саунд (США) с выявлением
топографии дна благодаря взаимодействию приливной волны
с рельефом дна на глубине 170...265 м (РСА «Меч-К», КА «Космос-1870»)
Действительно, движущиеся подводные объекты создают на морской поверх-
ности возмущения (аномалии), которые, в принципе, могут быть обнаружены ра-
диолокационными методами. К ним, в частности, относится «горб Бернулли», ко-
торый представляет собой короткоживущее возмущение с геометрическими разме-
рами, близкими к размерам движущегося объекта и высотой (от долей до единиц
сантиметров), прямо пропорциональной квадрату скорости объекта и обратно про-
порциональной квадрату глубины. Возможно также обнаружение возмущений
дальнего поля в виде модуляции ряби, обусловленной выходом на поверхность
внутренних волн, созданных движущимся подводным объектом [281]. Указанные
поверхностные явления значительно более выражены, если глубина морской по-
верхности менее «глубины скачка» (около 100 м), что типично для многих при-
брежных акваторий. Решение рассматриваемой задачи затруднено наличием близ-
ких по характеру аномалий природного происхождения или вызванных другими
источниками, а также разрушающим влиянием ветрового воздействия на радиоло-
кационные изображения морской поверхности.
Характеристики отражения от морской (водной) поверхности
При изучении морского волнения широко используют методы спектрального ана-
лиза. Для описания спектров развитого ветрового морского волнения пользуются
моделью Пирсона-Московица (Pierson-Moskowitz [193, 444]). Она определяет рас-
пределение энергии по частотам волнения. Предполагается, что ветер непрерывно
дует равномерно в течение длительного времени на большой площади, и волны
достигают установившегося значения в равновесии с ветром. Формульная зависи-
мость имеет вид
5(бУ) = ^^-ехр< -0\
СО
СО
(2.48)
94
Глава 2. Взаимодействие радиоволн с объектами радиолокационного наблюдения
где S(a>) - спектральная плотность волнения; at- угловая частота; a =0,0081 - кон-
g 1,026g
станта Филипса; /?=0,74; а>0 =---= —------ - пиковая угловая частота; 5 и
Ц$>,5 Цо
J7 - скорости ветра на высотах 19,5 и 10 м над поверхностью моря.
На рис. 2.22 приведены значения спектральной плотности морского волнения
Fpm, м2/Гц в зависимости от частоты f.
В заключение данного раздела приведем усредненные зависимости сг° мор-
ской поверхности от угла падения (рис. 2.23). Отмечается [214] большой разброс
измерений сг° (до 3 дБ) даже в одной серии экспериментов. Зависимость сг° от угла
падения в пределах 10...45° достаточно резкая (0,7 дБ/град) при слабой зависи-
мости от длины волны и поляризации. На пологих углах падения наблюдается рез-
кое падение сг°, особенно для горизонтальной поляризации.
Рис. 2.22. Модель Пирсона-Московица для спектральной плотности морского волнения
при разной скорости приводного ветра UiQ на высоте 10 м
Рис. 2.23. Зависимость cP морской поверхности от угла падения:
1 - 2 = 3-30 см (ВВ и ГГ); 2 - 2 = 3 см (ВВ); 3-Л = 15-30 см (ВВ); 4 - 2 = 3 см (ГГ); 5 - 2 = 15-30 см (Г);
6 - 2 = 5,6 см (ВВ), скорость ветра 10 и 4 м/с; 7 - 2 = 5,6 см (ГГ), скорость ветра 10 и 4 м/с, ракурс - вдоль
гребня волн
95
Радиолокационные системы землеобзора космического базирования
Применительно к режимам бистатического зондирования следует учитывать
рассеяние волн в двумерном полупространстве. Примеры индикатрис рассеяния
(по углу места у/г и отвороте плоскости наблюдения ф) при облучении морской по-
верхности под углом падения /=65° даны на рис. 2.24 [225]. Индикатрисы по-
строены в функции угла места луча приемной антенны /г при различном азиму-
тальном разносе (р = 0°, 45° и 75°. Расчеты велись на базе метода малых возмуще-
ний, скорость ветра не указана.
Рис. 2.24. Индикатрисы рассеяния на морской поверхности радиоволны
горизонтальной поляризации (Л=3,0 см) при угле падения излучающего луча ^=65°
Радиолокационная съемка морской (водной) поверхности может эффективно
использоваться для изучения гидродинамических процессов в океане и озерах, вет-
рового волнения и зыби, гидрологических фронтов, динамики течений, поверхно-
стных проявлений внутренних волн, загрязнений, исследования механизма взаи-
модействия океан-атмосфера в интересах фундаментальной и промысловой океа-
нологии, обеспечения безопасности судовождения, рыбной ловли, оценки биопро-
дуктивности внутренних водоемов и морей, климатологии, экологии, оперативной
оценки гидрологической обстановки при наводнениях, паводках, составления гео-
логических карт и поиска полезных ископаемых в зоне прибрежного шельфа. При
статистической обработке данных зондирования водной поверхности (измерения
сг°, спектров волнения и др.) возможно усреднение данных в пределах больших
участков - до 104...105 м2, что позволяет реализовать высокое радиометрическое
разрешение (доли децибел).
2.10. Глубинное (подповерхностное) зондирование
Для поверхностей с низкой диэлектрической проницаемостью (сухой грунт, песок,
снег) возможно отражение от подповерхностных слоистых структур, особенно при
зондировании на дециметровых или метровых волнах. На рис. 2.25 показаны неко-
96
Глава 2. Взаимодействие радиоволн с объектами радиолокационного наблюдения
торые примеры ситуаций, встречающихся при подповерхностном зондировании:
горизонтальная слоистая структура, компактный рассеивающий объект (сфера) и
шероховатая поверхность под гладкой границей воздух/пропускающая среда. Рас-
четы суммарных сигналов, отраженных от границ сред, а главное разделение отра-
жений от верхней поверхности и заглубленных образований, в общем случае явля-
ется сложной задачей, подход к решению которой изложен, например, в работах
[17, 360*, 374*, 375*, 461, 548].
Рис. 2.25. Геометрия отражения от глубинных объектов с высокой проводимостью
или диэлектрической постоянной при подповерхностном зондировании разных сред:
a - плоская горизонтальная поверхность; б - сфера; в - наклонная шероховатая поверхность
Проникающая способность радиоволн зависит от коэффициентов затухания
радиоволн в среде распространения, значения которых приведены в табл. 2.7.
Таблица 2.7. Коэффициент затухания радиоволн в разных средах, дБ/м
[186,193]
Объект наблюдения Длина волны РЛС, см
3 10 30...60 100 300
Снег о,3 0,036
Пресный лед 1,3...2,0 0,2...0,48 0,8...0,7 0,6 0,3
Морской лед, температура: -5° 270...540 2 2 2,5...6
-40° 14...45 0,4 0,3 1...5
Мерзлая почва 0,8...4,2
Кварцевый песок 1,7...2,0
Песчаный грунт, влажность: 3% 12% 300 25 6...3 2 0,8
1100 90 20...10 8
Глинистый грунт, влажность: 3% 12% 300 30 30...20 18
1400 200 100...80 60
Сельскохозяйственные культуры 2...10 1,8...2,5 0,8...1,8 0,07 0,03
Леса 1,5...2,5 0,35 0,12...0,2 0,07 0,03
4—1492
97
Радиолокационные системы землеобзора космического базирования
Более простые ситуации - обнаружение объектов и контроль их геометрии (на-
пример, продукгопроводов) под снежным покровом, гляциологические исследования,
построение карт рельефа территорий, покрытых лесом, не требуют специальных алго-
ритмов послойного дешифрирования. Даже в L-диапазоне волн при разрешающей спо-
собности РЛИ около 10 м были получены ценные материалы в интересах археологии
при съемках в северной Африке [474, 522]. На рис. 2.26 (ср. рис. Ц.2) дано сравнение
летнего и зимнего снимков месторождения Лангепас, Западная Сибирь. На летнем
снимке интенсивная равнинная растительность маскирует структуру почвенного слоя.
Рис. 2.26. Сравнение летнего (а) и зимнего (б) снимков
(РСА «Меч-КУ» КА «Алмаз-1»; месторождение Лангепас, Западная Сибирь)
Особые перспективы имеет зондирование с применением видеоимпульсных
РСА при реализации в низкочастотной (200...400 МГц) области электромагнит-
ного спектра разрешающей способности порядка 1,5...2 м, что позволит разделить
отражения от поверхностного слоя и глубинных образований. Зондирование под
разными углами падения позволит применить технологии томографической обра-
ботки данных.
2.11. Отражение радиоволн от растительного покрова
Для растительных покровов в зависимости от диапазона волн возможны разные
механизмы формирования отраженного сигнала. Для коротких сантиметровых
волн (К-, Х-, С-диапазоны) основное отражение формируется зеленой массой, при-
чем в случае интенсивной растительности - ее верхним слоем (рис. 2.27). На более
длинных волнах (S- и L-диапазоны) лиственный покров оказывается более «про-
зрачным» (уменьшается уровень отражения и затухание в листве). Отраженный
сигнал формируется объемным рассеянием, частично от листвы, частично от дре-
весной массы, а также отражением от поверхностного слоя почвы. В длинноволно-
вых дециметровых и метровых диапазонах отражение формируется в основном
древесной массой, почвой, а также подпочвенным слоем.
98
Глава 2. Взаимодействие радиоволн с объектами радиолокационного наблюдения
Мощность отраженного сигнала зависит от объема биомассы, содержания вла-
ги, определяемых типом растительности, фазой вегетации и сезонными изменения-
ми, а также от длины волны РСА и поляризации излучения. Так, на рис. 2.28 пред-
ставлены типичные зависимости от угла наблюдения в С- и L-диапазонах при раз-
ной поляризации для лесных массивов. В зависимости от длины волны проявляется
разный механизм отражения. В коротковолновых диапазонах Ku, X, С основное от-
ражение дает листва (зеленая масса), в диапазонах S, Z-ветви, в диапазоне Р и на
метровых волнах - стволы и поч-
венный слой. Поляризационные
зависимости отражения также от-
четливее выражены в более длин-
новолновых диапазонах.
Задача радиолокационного
зондирования растительного по-
крова в современных условиях -
получение количественной ин-
формации об объеме биомассы,
степени созревания в целях про-
гноза урожаев, выявления забо-
леваний, контроля применения
агротехнологий или оценки ди-
намики рубочных работ для лес-
ных массивов. Актуальной зада-
чей является также точная типи-
зация растительности, например
для выявления посевов наркоти-
ческих растений. Для решения
этих задач используются поляри-
зационные и спектральные раз-
личия в отражении от подсти-
лающей поверхности, выявляе-
мые при комплексном дешифри-
ровании данных.
Рис. 2.28. Зависимости cP лесного покрова
европейского региона от угла падения
в С-диапазоне (пунктирные линии) и Z-диапазоне
(сплошные линии) при ВВ, ГГ и ВГ
Рис. 2.29. Усредненные зависимости cP растительного
покрова от объема биомассы в разных диапазонах
волн при согласованной поляризации
99
Радиолокационные системы землеобзора космического базирования
Наибольшее отражение от растительности наблюдается в коротковолновых диа-
пазонах. Однако при определенном уровне биомассы наступает ограничение в значе-
нии cP и могут отсутствовать различия в отраженном сигнале от леса и полей. Зависи-
мость cP от объема биомассы представлена на рис. 2.29 (данные [388, 522], дополнен-
ные кривыми 5- и /Cw-диапазонов). Поэтому более длинноволновые диапазоны оказы-
ваются существенно более информативными для решения тематических задач.
В следующих разделах приведены характерные зависимости, иллюстрирующие влияние
параметров аппаратуры, условий наблюдения и свойств подстилающей поверхности на ее
отражательную способность при радиолокационном зондировании.
2.12. Влияние угла облучения на отражающие характеристики
местности
(2.49)
Влияние угла облучения (угла скольжения Р от горизонтали или угла падения у от
местной вертикали) на уровень отраженного сигнала зависит от степени шерохова-
тости поверхности. Для описания этих зависимостей в литературе рассматривают
аппроксимирующие модели (закон Ламберта, равномерное рассеяние), а в качестве
количественных показателей, кроме параметра УЭПР <7°, используют параметр у
(не смешивать с углом визирования, введенным в гл. 3), удобный для описания от-
ражающих свойств подстилающей поверхности при самолетном землеобзоре с ма-
лыми углами скольжения Р (для космических РСА это соответствует большим уг-
лам падения = л/2- J3). Параметр у определяет отношение ЭПР ст элемента раз-
решения не к его площади (как cP), а к площади проекции элемента разрешения на
направление визирования
о о
(7 (7 (7
у =------------=-------=-------
Ру sin/7 sinР cosy.
Во избежание путаницы в дальнейшем будем называть параметр у «показате-
лем рассеяния».
Гладкие поверхности (бетон, асфальт, гравий) характеризуются резкой зави-
симостью мощности отраженного сигнала от угла облучения: показатель рассеяния
у может меняться на 10... 15 дБ (обычно возрастает) при изменении угла Р в преде-
лах 10...60°, что соответствует изменению удельной ЭПР или мощности отражен-
ного сигнала на 18...23 дБ (предполагается, что мощность РЛС не зависит от угла
наблюдения). Аналогичный характер имеет угловая зависимость отражения от
пашни, песчаной и холмистой пустыни и снежного покрова. Отражения от травя-
ного покрова в восьмимиллиметровом диапазоне (его нет в выделенных для зонди-
рования из космоса) характеризуется параметром у= const. Более «шероховатые»
поверхности, например, лесистая местность, имеют почти изотропное изображение -
их УЭПР практически не зависит от угла скольжения.
Показатель рассеяния у удобно применять для характеристики поверхностей, у
которых рассеяние подчиняется закону Ламберта, тогда он не зависит от угла сколь-
жения. Показатель рассеяния, как и значение <7°, обычно выражают в децибелах.
100
Глава 2. Взаимодействие радиоволн с объектами радиолокационного наблюдения
При оценке отраженного сигнала следует учитывать, что угол падения
(скольжения) на конкретном участке местности определяется двумя составляющи-
ми - направлением облучения и местным наклоном рельефа. Поскольку разреше-
ние РЛС по наклонной дальности фиксировано, размер элемента разрешения по
горизонтальной дальности и его площадь изменяются обратно пропорционально
синусу угла падения (косинусу угла скольжения). Это приводит к тому, что скло-
ны, обращенные к локатору, отражают больший сигнал, чем склоны, обращенные
от локатора. В ряде случаев, при нормализации выходного радиолокационного
изображения этот эффект корректируют по топографическим данным о величине
уклонов местности [314].
На рис. 2.30-2.32 приведены зависимости показателей рассеяния /и значений
(/ от угла скольжения для разных типов подстилающей поверхности, рабочих диа-
пазонов волн РЛС и поляризаций (согласных) при излучении и приеме.
Рис. 2.30. Зависимости показателей рассеяния от угла скольжения для гладких и шероховатых
поверхностей в различных диапазонах волн:
a - гладкий бетон (сплошная кривая); гладкий асфальт (пунктирная кривая);
гравий (штрих-пунктирная кривая);
ГГ: 2 = 3 см (7); 2 = 2 см (2); 2 = 8 мм (3); б - длина волны 2=3 см: 1 - асфальт (ВВ); la - асфальт (ГГ);
2 - пашня; 3 - песчаная пустыня; 4 - холмистая пустыня с растительностью (кривые 2-4 имеют близкие
значения при ВВ и ГГ)
Рис. 2.31. Зависимости показателей рассеяния от угла скольжения
в двухсантиметровом диапазоне волн для снежного покрова и травы (ВВ):
7 - снежный покров толщиной 10 см, содержание воды 171 г/дм3, температура минус 7 °C; 2 - бурая трава
(ноябрь); 3 - снег со следами колес, температура -7 °C; 4 - снег с тонкой коркой, содержание воды
155 г/дм3, температура -14 °C; 5 - зеленая трава высотой 5 см (5a - отражение от травы в 0,86-санти-
метровом диапазоне)
101
Радиолокационные системы землеобзора космического базирования
Рис. 2.32. Зависимость УЭПР лесистой местности от угла наблюдения
для различных диапазонов волн, плавная кривая соответствует значениям о0 при /= const
2.13. Влияние длины радиоволны на отражающую способность
местности
Отражающая способность большинства поверхностей уменьшается с увеличением
длины волны РЛС (пропорционально Ла, где а зависит от характера поверхности).
На рис. 2.33, а показана зависимость УЭПР взволнованной морской поверхности
от длины волны РЛС, построенная по данным измерений на длинах волн 1,25; 3,2;
Рис. 2.33. Зависимость УЭПР и показателя степени а при 2 от длины волны
для морской поверхности при угле скольжения 50° (а);
зависимости показателя степени а при 2 от угла скольжения для различных поверхностей
при горизонтальной (Г) и вертикальной (В) поляризациях (б, в):
б - взволнованная морская поверхность (кривая 7г, 2 = 0,86...71 см), лес (кривые 2В, 2Г, 2=3...20см),
городская застройка (кривые ЗВ, ЗГ, 2= 2...3 см); в - трава (кривые 1В, 1Г, 2= 1,25...3 см), снег (кривые
2В,2Г,Л = 1,25. ..Зсм)
102
Глава 2. Взаимодействие радиоволн с объектами радиолокационного наблюдения
10 и 70 см (отмечены на рисунке по оси Л). На рис. 2.33, б, в даны значения показа-
теля степени а при Л для различных поверхностей в зависимости от угла скольже-
ния. Следует отметить, что в отличие от других поверхностей снег имеет возрас-
тающую зависимость отражающей способности от длины волны, отражающая спо-
собность застроенной территории практически не зависит от длины волны.
Различия отражающей способности местности от длины волны используют
для идентификации типа подстилающей поверхности путем комплексной обработ-
ки радиолокационных данных, полученных в разных диапазонах. Это реализуется
путем синхронной радиолокационной съемки с помощью многочастотных РСА
(AIRSAR, SIR-C, ИМАРК и др.) либо совместной обработкой снимков, получен-
ных независимо.
В табл. 2.8 приведены сводные данные по удельной ЭПР сг° в зависимости от
диапазона волн РСА и поляризаций (ГГ и ВВ) для различных земных покровов, ус-
редненные по многим справочным данным [33*]. В табл. 2.9 приведены данные по
УЭПР в 5-диапазоне волн (2=10 см), а также значения показателя степени при ос-
Таблица 2.8. Удельная ЭПР земных покровов при разных длине волны,
поляризациях и углах падения
Объекты Угол падения 2 = 3 см 2= 10 см 2 = 23 см 2 = 70 см
ГГ ВВ ГГ ВВ ГГ ВВ ГГ ВВ
Море, волнение 2 балла 10 -40 -32 42 -40 45 -45 -50 -50
20 -38 -28 -39 -35 -40 -40 -45 -45
50 -35 -30 -36 -33 -38 -36 -35 -35
Море, волнение 6 баллов 10 -35 -30 -33 -30 -30 -30 -35 -35
20 -30 -25 -29 -25 -29 -25 -32 -32
50 -27 -22 -27 -22 -28 -23 -30 -30
Взлетно- посадочная полоса 10 -40 -30 -40 -35 -45 -40 -60 -60
20 -32 -24 -35 -30 40 -36 -58 -58
50 -20 -18 -25 -23 -30 -27 -55 -55
Степь, зима, снег 10 -23 -23 -35 -35 -33 -35 -60 -60
20 -17 -17 -30 -30 -30 -30 -55 -55
50 -14 -14 -23 -23 -23 -23 -50 -50
Степь, лето, трава 3 -35 -35 -35 -35 -40 40 -60 -60
10 -16 -16 -20 -20 -28 -28 -55 -55
20 -15 -15 -19 -19 -25 -25 -53 -53
50 -12 -12 -16 -16 -20 -20 -50 -50
Пустыня, камни, песок 10 -18 -20 -30 -35 -35 -35 -45 -45
20 -15 -17 -28 -33 -30 -30 40 -40
50 -12 -14 -15 -15 -15 -17 -35 -35
Лес 10 -14 -14 -21 -22 -25 -23 -35 -35
20 -14 -15 -20 -21 -20 -18 -30 -30
50 -12 -12 -14 -14 -14 -14 -25 -25
103
Радиолокационные системы землеобзора космического базирования
новании Л. Значение сг° в децибелах для другой длины волны, выраженной в сан-
тиметрах, вычисляется по формуле
^°BW = ^dB+«101g^- (2-50)
Усредненные кривые для зависимости УЭПР разного типа поверхностей от
угла падения в 5-диапазоне волн даны на рис. 2.34.
Таблица 2.9. Отражающая способность земных покровов в S-диапазоне
и ее зависимость от длины волны
Тип поверхности Угол падения, град
20 40 60 80
Параметр
о° ,дБ а о° ,дБ а 0's, дБ а Os ,дБ а
Море, слабый ветер, до 7,7 м/с, согласованная поляризация -18 -0,35 -21 -0,31 -27 -0,23 -36 -0,13
Море, слабый ветер, до 7,7 м/с, кроссполяризация -45 о,з -45,5 0,27 -46,5 0,2 -48 0,15
Море, сильный ветер, более 7,7 м/с, согласованная поляризация -16 -0,8 -20 -0,7 -24 -0,6 -34 -0,5
Море, сильный ветер, более 7,7 м/с, кроссполяризация -35 0,35 -37 о,з -40 0,27 -46 0,25
Снег, лед -8 -0,43 -14 -0,4 -24 -0,3 -27 -0,21
Пустыня -17 -0,9 -20 -0,9 -24 -0,9 -27 -0,9
Сельская местность -10 -1 -14 -0,9 -17 -0,7 -20 -0,42
Лес -5 0 -12 -0,7 -19 -1,4 -26 -2,1
Горы -13 0,8 -16 -0,83 -20 -0,87 -23 -0,9
Город -9 -1,3 -10 -0,8 -10,5 -0,4 -11 0
сг°, дБ
IV 0 -10 -20 -30( 1 1 - ——L 1 L 1 ‘V 5 ' 7-^ ! 4 L— 1*^2
) 20 41 D 60 ^,град
Рис. 2.34. Усредненные зависимости УЭПР фона для 10-см диапазона волн
при вертикальной поляризации:
1 - море; 2 - равнина; 3 - редколесье; 4 - лес с интенсивным покровом; 5 - городская застройка
104
Глава 2. Взаимодействие радиоволн с объектами радиолокационного наблюдения
Указанные выше количественные характеристики относятся к средним значе-
ниям коэффициентов отражения наблюдаемых поверхностей. В связи со случай-
ным характером отражения от сложных объектов и протяженной поверхности не-
обходимо учитывать флуктуации принятых сигналов и их влияние на изобрази-
тельные и измерительные свойства получаемых РЛИ.
2.14. Флуктуации принимаемого радиосигнала и их связь
с геометрией наблюдения
Наличие флуктуаций принятых радиолокатором сигналов приводит к тому, что
уровни сигналов на выходном РЛИ соответствуют значениям УЭПР «в среднем», а
в каждой точке снимка будет случайное значение яркости (плотности почернения,
прозрачности), в результате чего изображение будет иметь зернистый (грануляр-
ный) характер. Это явление называют спекл-шумом. Ниже рассмотрены корреля-
ционные свойства принимаемых сигналов, а в разделе 3.5 - статистические харак-
теристики процессов при формировании РЛИ.
На рис. 2.35 рассмотрен пример, когда два элемента разрешения Т\ и Т2 на ме-
стности наблюдаются радиолокатором в трех положениях Sb S2, S3 (или независи-
мо тремя радиолокаторами). Предполагаем, что облучается поверхность с крупной
шероховатостью. Размеры элемента разрешения вдоль оси X-рх, вдоль оси Y- pY.
Рис. 2.35. Геометрия наблюдений элементов разрешения на местности
при смещении положения радиолокатора (а) и сечение в плоскости OYZ (б)
Сигналы, принятые радиолокатором S2 от элементов разрешения Т\ и Г2, бу-
дут полностью некоррелированы, так как они сформированы разными наборами
элементарных отражателей. Сигналы, принятые радиолокаторами Si, S2, S3 от од-
ного элемента разрешения Т\ на местности, будут частично коррелированны в за-
висимости от размеров баз рассогласования ЬХ или ДУ. Эти сигналы сформирова-
ны одним набором элементарных отражателей, но фазы их суммирования зависят
от базы рассогласования.
105
Радиолокационные системы землеобзора космического базирования
Считается (подтверждено аналитически [152*]), что сигналы, принятые радио-
локаторами 51 и 52 или 5j и 53, будут полностью раскоррелированы, если вызванная
разворотом дополнительная разность фаз между крайними отражателями в элементе
разрешения превысит 2я (разность их расстояний А/? более длины волны Л). Для
сдвига по азимуту имеем AT? « ^R2 + (АХ + рх /2)2 - ^R2 + {1ХХ - рх /2)2 > 2 ,
откуда условие декорреляции принятых сигналов
д „ RX
Рх
(2-51)
Геометрия смещения вдоль оси У показана на рис. 2.35, б. При заданном раз-
мере элемента разрешения по вдоль оси У, равном ру, исходная (для 51) разность
фаз между крайними отражателями определиться отношением проекции на на-
правление визирования (т.е. размером элемента разрешения по наклонной дально-
сти pRl = pY sin/n , где 75i - угол падения) к длине волны 2. При смещении радио-
локатора вдоль оси У угол падения меняется и изменяются размеры элемента раз-
решения по наклонной дальности pR2 = pY sin 7^ . Декорреляция принятых сигна-
лов возникает при смещении вдоль оси У
ДГ > ^|tg/ii - tgyi2| = Н
sin A/i
COS/ii -cos/i2
АЛ
Py cos2 Yi ’
(2.52)
где H - высота РЛС; A/j = |/n - yi2| - приращение угла падения, учтено его малое
значение так, что sin A/j « А^ и « /i2 .
Заметим, что для РБО сигналы декоррелируются при смещении радиолокато-
ра вдоль оси X на величину, равную горизонтальному размеру антенны (см. гл. 3),
а при наблюдении в надир (75 = 0) формулы (2.51) и (2.52) совпадают.
Декорреляция спекл-шума при изменении условий наблюдения используется
для его уменьшения путем некогерентного накопления. Сохранение когерентности
при малой базе смещения используется для точного измерения разности расстоя-
ний при интерферометрической обработке снимков для построения цифровых карт
рельефа и выявления изменений в оперативной обстановке.
Формульные зависимости плотности распределения амплитуды и мощности флуктуирую-
щих сигналов в зависимости от типа детектора, применяемого при формировании РЛИ,
приведены в разделе 3.5. Методы фильтрации спекл-шума изложены в гл. 7.
Вызванная спекл-шумом зернистость РЛИ хотя и ухудшает дешифрируемость
РЛИ, но ее характер (текстура) может служить дополнительным дешифрирующим
признаком для идентификации типа подстилающей поверхности. Размах флуктуаций
для идеально шероховатой поверхности пропорционален ее УЭПР, поэтому для гру-
бых оценок спекл-шум считают мультипликативным шумом. Однако на самом деле
он несет информацию о структуре поверхности (в частности, по сочетанию момен-
тов распределения спекл-шума различают породы деревьев, вид посевов и степень
созревания и т.д.). Эти вопросы более детально рассматриваются в гл. 9.
106
Глава 2. Взаимодействие радиоволн с объектами радиолокационного наблюдения
2.15. Временная изменчивость объектов наблюдения
Для космических РСА высокого разрешения время синтеза может оказаться соиз-
меримым с временем корреляции отраженного сигнала, определяемым движением
отражателей, в первую очередь, под воздействием ветровых нагрузок: морской по-
верхности, растительности (лес, кустарник, сельскохозяйственные культуры) и др.
Согласно приведенным в литературе [193] данным, полученным эксперименталь-
ным путем, в сантиметровом диапазоне волн спектральную плотность сигналов,
обусловленную собственным движением рассеивателей на земной и водной по-
верхности, можно аппроксимировать гауссовой кривой
Ру (/) = ехр[- v{flfo )] ’ (2-53)
где То - частота зондирующего сигнала; у- параметр, зависящий от типа отражаю-
щей поверхности и метеорологических условий.
Значения параметра у и ширины спектра отраженных сигналов для участков
местности, покрытых лесом, а также морской поверхности приведены в табл. 2.10.
Ширина спектра на уровне £ от максимума определяется соотношением
2/0 J-ln(^)
A/v= —-------L2. (2.54)
V
Таблица 2.10. Параметры спектра флуктуаций сигнала, обусловленные
движением элементарных отражателей для А,=10 см [193]
Отражающий объект Параметр v 10 15 Ширина спектра по уровню 0,1, Гц
Холмы, поросшие лесом: редким, при тихой погоде; густым, при ветре 9 м/с 3,9-104 2,3-10 2 2,5 10
Морская поверхность при ветре 14,1 38
Дождевые облака 2,3 95
В табл. 2.11 приведены параметры спектра сигналов (отношения когерентной
и флуктуационной составляющих и ширина спектра), отраженных от леса при раз-
ной скорости ветра. Для сельскохозяйственных культур доля флуктуационной со-
ставляющей не превышает 25 % от когерентной, а спектр флуктуационной состав-
ляющей - как у леса при умеренном ветре.
Таблица 2.11. Параметры спектра флуктуаций сигнала, отраженного от леса [193]
Скорость ветра, м/с Доля мощности флуктуационной составляющей Ширина спектра, Гц
по уровню 0,5 по уровню 0,1
4,7 0,43 1,1 1,7
6,0 0,5 3,7 6,0
8,3 0,8 6,2 10,0
13,9 1,0 9,3 15,0
107
Радиолокационные системы землеобзора космического базирования
Движение РЛС относительно рассматриваемого участка земной поверхности
приводит к доплеровскому сдвигу частоты, который в отличие от временных флук-
туаций имеет регулярный характер (закон, близкий к ЛЧМ) и компенсируется в
процессе синтеза апертуры. Дополнительное к регулярному закону смещение при-
нимаемого сигнала по доплеровской частоте, вызванное движением объекта, при-
водит к азимутальному смещению отметок от объекта, величина которого зависит
от параметров РСА. В результате будет происходить «размазывание» отметок от
объекта по случайному закону в пределах, определяемых соотношением
A^ = A/v^ant/A^Dop, (2-55)
где AFDop - смещение доплеровской частоты, вызванное собственным движением
отражателей; Xnt - зона облучения азимутальной ДНА; AFDop - ширина спектра
доплеровских частот принимаемых сигналов от неподвижной поверхности.
В настоящей главе рассмотрены отражающие свойства объектов и подсти-
лающих поверхностей, их зависимость от выбора параметров радиолокатора (дли-
ны волны, поляризаций, геометрии обзора) и их связь с получаемыми радиолока-
ционными изображениями, которые подлежат тематической обработке. Приведен-
ные количественные данные являются основой для расчета параметров радиолока-
торов, исходя из их назначения, решаемых задач землеобзора, а также ограниче-
ний, предусмотренных Регламентом радиосвязи на выбор частотных диапазонов
РЛС и полосы зондирующего сигнала, определяющей разрешающую способность
РЛС по наклонной дальности.
Преимущества радиолокационного зондирования в сравнении с оптическими
датчиками не только в возможности получения информации независимо от време-
ни суток и метеорологических условий, но и в измерении радиофизических пара-
метров объектов и извлечении фазовой информации из снимков путем их интерфе-
рометрической обработки. Для реализации таких режимов должны использоваться
(и каталогизироваться) комплексные радиолокационные изображения (КРЛИ) в
отличие от менее информативных действительных амплитудных (АРЛИ) или энер-
гетических (ЭРЛИ) изображений.
В следующих главах рассмотрены: построение РСА космического базирования, режимы
работы РСА, связь параметров орбитального движения с характеристиками принимаемого
сигнала, а также вопросы, связанные с получением радиолокационных изображений и их
тематической обработкой.
108
Глава 3
СОВРЕМЕННЫЕ МЕТОДЫ КОСМИЧЕСКОГО
РАДИОЛОКАЦИОННОГО ЗЕМЛЕОБЗОРА.
ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ
3.1. Принцип действия и основные характеристики космических
радиолокаторов бокового обзора
Принцип радиолокации наземных объектов с летательных (космических) аппаратов
состоит в облучении поверхности Земли электромагнитными волнами с помощью
РЛС, установленной на носителе, приеме рассеянных поверхностью сигналов,
формировании радиолокационного изображения и его обработке с целью извлече-
ния тематической информации, включая измерение характеристик объектов на-
блюдения. Классический случай радиолокации - когда передатчики и приемники
совмещены и имеют общую антенну. Это однопозиционная или моностатическая
радиолокация. В последние годы активно прорабатываются методы двухпозицион-
ной (бистатической) или многопозиционной радиолокации, когда источник излу-
чения - передатчик подсвета и приемники размещаются на разных носителях, на-
пример, передатчик на одном космическом аппарате, а приемники - на другом
(других) КА, самолетах или беспилотных аппаратах. Частным случаем такой аэро-
космической системы может быть подсвет с КА на геостационарной орбите, кото-
рый находится неподвижно в заданной точке над экватором, и серия пассивных
приемных сенсоров аэрокосмического базирования. Используют также тандемы
двух КА с РСА на близких орбитах, обеспечивающих излучение зондирующего
сигнала с помощью передатчика на одном из КА и синхронный прием отраженных
сигналов, приемными устройствами обоих КА. Геометрия обзора таких систем
рассмотрена в разделе 3.3.
Принцип действия РБО иллюстрирует рис. 3.1. Бортовая аппаратура РБО
включает в себя приемопередатчик (ПРМ-ПРД), антенну и блок обработки инфор-
мации (БОИ), в котором формируется радиолокационное изображение (РЛИ) для
его передачи по радиолинии на наземный приемный пункт. Антенна, луч которой
направлен перпендикулярно линии пути, имеет большой раскрыв Z)xant вдоль линии
пути (по азимуту). Ее можно представить в виде линейки излучателей, формирую-
щих широкий луч по вертикали и узкий - по горизонтали.
Геометрия бокового обзора для случая прямолинейного равномерного движе-
ния радиолокатора (РБО или РСА) показана на рис. 3.2. Начало координат нахо-
дится на поверхности Земли. Ось Z направлена вертикально вверх, ось X направле-
на вдоль вектора путевой скорости носителя К, ось Y - вправо по нормали к векто-
109
Радиолокационные системы землеобзора космического базирования
ру путевой скорости. Координаты радиолокатора S: Xs(t)=Vt - вдоль линии пути;
ys=0 - поперек линии пути; Zs - высота полета. Координаты цели: Хт- вдоль линии
пути; YT - поперек линии пути (горизонтальная дальность); ZT - высота цели над
поверхностью Земли. Заметим, что при правостороннем обзоре, показанном на
рис. 3.2, система координатXYZ левая.
Рис. 3.1. Принцип действия РБО:
a - бортовая аппаратура РБО; б - фото района съемки (пролив Гибралтар);
в - радиолокационное изображение (РЛИ);
г - фрагмент РЛИ морской поверхности с отметками от кораблей
Рис. 3.2. Геометрия бокового обзора при прямолинейном движении
В простейшем случае антенна излучает формируемую передатчиком последо-
вательность коротких импульсов длительностью г, заполненных СВЧ-колебаниями
с частотой Уо и следующих с периодом повторения Тр. Излучаемый сигнал в ком-
плексной форме имеет вид
7V-1
Ц (0=22А (' _ кгр)ехр (' - кгР)+m} >
/с=0
(3.1)
где A(t) - огибающая импульса; - фаза излучаемого импульса; N - число излу-
чаемых импульсов за время наблюдения t.
ПО
Глава 3. Современные методы космического радиолокационного землеобзора
Электромагнитные колебания, излучаемые антенной, распространяются в
пространстве, достигая наблюдаемой поверхности, и отражаются от нее. При нали-
чии точечной цели, удаленной от радиолокатора на расстояние R по наклонной
дальности, принятый антенной от каждого зондирования сигнал от цели будет за-
держан на время tR = 2R/c, где с=299792448 м/с - скорость света.
Обычно временные процессы, характеризующие принимаемые сигналы, рас-
сматривают раздельно: для каждого зондирования и в процессе перемещения ра-
диолокатора вдоль траектории полета. Процесс для каждого зондирования (по на-
клонной дальности) определяют зависимостью от «быстрого» времени tR, отсчиты-
ваемого от момента излучения &-го зондирующего импульса. Временной процесс,
связанный с движением радиолокатора вдоль траектории полета (будем применять
термины «вдоль линии пути» или «по азимуту»), характеризуем «медленным»
(траекторным) временем Принятый от цели сигнал определится формулой
( А ’tx)= Qa Аг) (а)А Х
xexp{-j2^(^)}, (3.2)
где Кх=2тг1Х - волновое число; 2 = с/fa - длина волны радиолокатора; G(a) - коэф-
фициент усиления антенны в направлении на цель; a - угол отклонения направле-
ния на цель от максимума ДНА; QA(R^y^^} - амплитудный множитель (см. уравне-
ние дальности в разделе 3.4). Он зависит от наклонной дальности цели Л, ее эффек-
тивной площади рассеяния (ЭПР) сг, а также коэффициента потерь на трассе рас-
пространения сигнала £tr- Наклонную дальность цели R в пределах луча ДНА счи-
тают для РБО постоянной.
Разрешающая способность РБО и РСА по наклонной дальности определяется
длительностью зондирующего импульса т или для современных РСА, использую-
щих сложные широкополосные сигналы, - длительностью сжатого импульса тс,
определяемого шириной спектра излучения тс = 1 / AF
СТс с
Рр = —“ =-----
к 2 2\F
(3.3)
Разрешение поперек линии пути на поверхности Земли (эту координату по
аналогии с самолетными РЛС называют горизонтальной дальностью) определяется
пересчетом наклонной дальности R в горизонтальную дальность Y. Для самолет-
ных РБО и РСА, в которых наклонная дальность, как правило, значительно превы-
шает высоту полета, значения наклонной и горизонтальной дальностей и разреше-
ния по этим координатам близки. Для космических РБО и РСА различия сущест-
венны и определяются геометрией космического обзора с учетом высоты орбиты,
кривизны Земли и других параметров.
Геометрия обзора поперек трассы полета в космических РБО и РСА представ-
лена на рис. 3.3 с учетом сферичности Земли. Параметры обзора: Rs - радиус орби-
ты спутника, Rcрадиус Земли на широте цели, /-угол наблюдения (визирова-
111
Радиолокационные системы землеобзора космического базирования
Рис. 3.3. Геометрия обзора поперек трассы дви-
жения КА в космических РБО и РСА:
полоса съемки обозначена пунктиром;
показано начальное положение полосы съемки
ния) от надира (подспутниковой точки),
R - наклонная дальность, Y-
горизонтальная дальность по дуге
большого круга, /-угол падения (от-
носительно местной вертикали в точке
наблюдения).
Основные соотношения при обзо-
ре получаем из треугольника SOP:
по теореме косинусов
R2 = R2 +R2 - 2RsRq cosay ;
по теореме углов треугольника
/i = /+^;
по теореме синусов
sin/ _ sin(180-/j) _ sin «у
Re Rs R
Вычисляя, имеем угол падения (от
местной вертикали в точке наблюдения)
(3-4)
(3.5)
(3.6)
/i =arcsin —sin/ = arccos
I Rr
R^-R^-R
(3.7)
(3.8)
(3.9)
2ReR J
и горизонтальную дальность по дуге большого круга с углом, равным Оу
Y = Reay,
где Оу = / - у - центральный угол, определяющий вынос точки наблюдения отно-
сительно следа КА.
Таким образом, разрешение поперек линии пути (на поверхности Земли по
дуге большого круга) в РБО и РСА для строго бокового обзора определится через
разрешение по наклонной дальности и угол падения
п _ PR с
sin/i 2AFsin/j
Разрешение вдоль линии пути (по азимуту) в случае РБО определяется шири-
ной луча антенны по горизонтали, характеризующей область облучения Xant на
земной поверхности, показанную на рис. 3.1, в. Для реальных антенн ширина луча
по уровню -3 дБ близка к величине aant=A/Dxant, где Dxant - горизонтальный размер
антенны РБО. Поэтому разрешение РБО вдоль линии пути
Px-R^nf (3.10)
Например, для космических РБО, работавших в диапазоне волн Л~3 см, при
горизонтальном размере антенны £)хат= Юм и дальности наблюдения R, равной
нескольким сотням километров, разрешающая способность по азимуту составляла
около 2 км.
112
Глава 3. Современные методы космического радиолокационного землеобзора...
Из-за низкой разрешающей способности космические РБО пригодны для гло-
бального мониторинга поверхности океана, растительного покрова, ледовой раз-
ведки, контроля надводной обстановки. На рис. 3.4 показано радиолокационное
изображение (РЛИ) тропического циклона Диана, полученное с помощью РБО
«Космос-1500» [197].
Рис. 3.4. РЛИ тропического циклона Диана, полученное с помощью РБО «Космос-1500»
Положительным свойством некогерентных РБО является возможность работы с
низкой частотой повторения зондирующих импульсов, что позволяет реализовать
большую полосу съемки (зону захвата), которая ограничена ухудшением разрешаю-
щей способности по горизонтальной дальности при минимальном угле падения и
ухудшением энергетического потенциала при максимальных наклонных дальностях
= ^шах ~ ^min = (а>тах ~ ^min ) =
^тах S*n/imax _ • ^min s*n /imin
------------------dlUoJLIl---------------
= Re < arcsin
(3.11)
Заметим, что для плоской модели Земли углы наблюдения и падения совпа-
дают. В РСА проблема расширения полосы съемки значительно сложнее сложнее,
так как для однозначности сигналов по азимуту в космических РСА требуется вы-
сокая частота повторения зондирующих импульсов, которая вызывает неоднознач-
ность по наклонной дальности (см. раздел 3.6).
3.2. Принцип действия радиолокаторов с синтезированной
апертурой антенны
Основной недостаток РБО - низкое разрешение вдоль линии пути устраняется в
радиолокаторах с синтезированной апертурой антенны (РСА). Формирование изо-
бражения по линии пути (азимуту) с получением высокого пространственного раз-
решения в РСА основано на когерентной обработке сигналов, принятых в процессе
движения носителя РСА.
Структурная схема космического РСА (рис. 3.5)
Он включает в себя бортовой радиолокационный комплекс (космический сегмент)
и наземный комплекс приема и обработки информации (наземный сегмент).
113
Наземный сегмент
Рис. 3.5. Структурная схема системы радиолокационного наблюдения:
Оо - несущая частота сигнала;^ - частота принятого сигнала;/^ - частота гетеродина;
/f- промежуточная частота; Fs - частота квантования сигнала)
114
Глава 3. Современные методы космического радиолокационного землеобзора
Бортовой комплекс включает в себя блок формирования сигналов (БФС), син-
хронизатор, передатчик, переключатель прием/передача, антенну, приемник с выхо-
дами на фазовые детекторы ФД синусного и косинусного квадратурных каналов,
аналого-цифровые преобразователи АЦП квадратурных каналов, блок сопряжения с
радиолинией передачи данных, процессор управления и контроля, навигационное
оборудование и две радиолинии: командная КРЛ и передачи данных (РПД).
Наземный комплекс включает в себя командную радиолинию, приемник РПД,
архив информационных продуктов, устройства синтеза комплексного радиолока-
ционного изображения (КРЛИ), детектирования КРЛИ с получением амплитудно-
го (АРЛИ) или энергетического (ЭРЛИ) изображений, их некогерентного накопле-
ния, нормализации, радиометрической и геометрической коррекций, привязки к
географическим координатам (карте), а также рабочие места для тематической об-
работки радиолокационной информации.
Передатчик формирует зондирующие сигналы Ut(t) и с помощью антенны
облучает местность. Принятые отраженные сигналы UT(t) после усиления в при-
емнике и преобразования в квадратурные составляющие на выходах фазовых де-
текторов (рис. 3.5) запоминают в специальном устройстве (например, ОЗУ) с уче-
том их амплитуды и фазы. После этого осуществляют их когерентное суммирова-
ние, аналогичное формированию диаграммы антенны. Одновременное суммирова-
ние СВЧ-сигналов в антенной решетке РБО заменяется в РСА последовательным
суммированием сигналов, принятых на участке траектории, где цель находится в
пределах луча реальной антенны РЛС. Длина искусственного раскрыва синтезиро-
ванной антенны £synt в РСА соизмерима с размером элемента разрешения РБО
вдоль линии пути Xnt и значительно превышает размеры физической антенны, ус-
тановленной на носителе. Это позволяет реализовать высокое разрешение в РСА.
Принцип действия РСА иллюстрирует рис. 3.6. На рис. 3.7 дано полное изображе-
ния района съемки с разрешающей способностью около 12 м (РСА «Меч-КУ» КА
«Алмаз-1») с увеличенными фрагментами РЛИ.
Рис. 3.6. Принцип действия РСА:
a - бортовая аппаратура РСА; б - фото района съемки (пролив Гибралтар); в - радиоголограмма; г - радио-
локационное изображение (РЛИ) с отметками от кораблей: £synt - длина синтезированной апертуры, Xmt - зо-
на облучения антенной радиолокатора
115
Радиолокационные системы землеобзора космического базирования
Рис. 3.7. РЛИ пролива Гибралтар и прилегающих горного ландшафта и долины
(видны угодья круглой формы, характерной для применения автоматических сельскохозяйственных техно-
логий, гавань с большим числом судов, морская поверхность с модуляцией ряби, вызванной ветром и влия-
нием загрязнений, а также кильватерный след на море от двигающегося судна (показаны стрелками))
Временные зависимости фазы, доплеровской частоты и амплитуды сигнала
от одиночной точечной цели
Рассмотрим более подробно процесс формирования сигнала вдоль линии пути (по
азимуту) для приведенной на рис. 3.2 геометрии бокового обзора. Для РСА нельзя
пренебрегать изменениями наклонной дальности цели в процессе движения радио-
локатора, так как они приводят к изменениям фазы принятого сигнала. Текущая
наклонная дальность цели
7?(Zs - Zr )2 + Уг2 + ()2 , (3.12)
где tx- «медленное время», характеризующее движение радиолокатора.
Обычно V tx «R. Поэтому временную зависимость наклонной дальности це-
ли можно представить первыми членами разложением квадратного корня в сте-
пенной ряд
. . (Vty-хЛ
Х , (3.13)
где 7?о - наклонная дальность на траверзе в точке, в которой производная dR/dt и доп-
плеровская частота FDop равны нулю (точка с координатами {0, YT, ZT} на рис. 3.2)
T?0=J(Zs-Zr)2+rr2 . (3.14)
В зарубежной литературе точку с дальностью Ro именуют «ближайшей на-
клонной дальностью» (the nearest slant range).
116
Глава 3. Современные методы космического радиолокационного землеобзора
В каждом периоде зондирования излучается сигнал
Ц(^) = ^т(^)^2я/0'й > (3-15)
где Um - амплитуда; fo - несущая частота; tR - «быстрое время».
Начальную фазу зондирующего сигнала примем равной нулю.
Сигнал от одиночной точечной цели, поступающий на вход приемника, будет
иметь фазу, определяемую задержкой сигнала на двойное время распространения
от РЛС до цели и от цели до РЛС, и амплитуду, смещенную на время распростра-
нения и зависящую от ЭПР цели, потерь на распространение до цели и обратно, а
также коэффициента усиления антенны в направлении на цель
• , , (VtY-XT'\ ( 2R(tx\\ [. (
^r(?7?>?A') = ^7?(Aant „ (m fR ехРу27Г/о tR Г~
I *b J I C ) I C J
( ,1 (ЗЛ6)
(Vtx-XT\ ( ,-4< >
~KR^xant ~ \(R qxP]J^WR J - f,
I ^0 ) I c J x W
где KR - коэффициент потерь при распространении сигнала до цели и Gxant - КУ
антенны в направлении на цель; 2 = c/fo - длина волны РЛС; с - скорость света;
txr = XT/V - момент времени, когда радиолокатор находится в точке «ближайшей
наклонной дальности».
Заметим, что отсчеты «медленного» времени дискретны t^=nTp, где п - номер
зондирующего импульса; Тр - период зондирования. Строго говоря, текущую на-
клонную дальность (азимутальный отсчет с номером п) можно найти решением
параметрического уравнения, учитывающего время распространения излученного
сигнала от и-го положения радиолокатора до цели (дальность R}n) плюс время рас-
пространения отраженного сигнала от цели до радиолокатора, движущегося со
скоростью V (наклонная дальность суммарное время А/):
*(М = (^ +Л2„)/2 = ^/г02 + К2(И7’р-/лг)2 +^А02+К2(л7’р+АГ-^)2у2
И
А/ = (7?1„+/?2„)/2с-
На практике величиной А/ пренебрегают и приближенно считают R(tx}« RXn .
Учет А/ приведен в подразделе 4.2.4.
После преобразования сигнала в фазовом детекторе приемника на видеочас-
тоту множитель, зависящий от fQ, будет скомпенсирован, и фаза по синтезирован-
ной апертуре будет иметь квадратичную зависимость от времени
7 ч „ у2((х-(хт)2 4лУат 2лУ2 2 „
*р((х ) ~ % _ 2я — - - tx ——r~txr + <Рхт > (3-17)
где aT~ VtxT/Re=XT/RQ - угол отклонения цели от центра синтезированной апер-
туры при /а=0, определяющий линейный член в формуле (3.17); (р^и (рхт~ постоян-
ные фазы сигнала по апертуре синтеза.
117
Радиолокационные системы землеобзора космического базирования
Частота принимаемого сигнала (доплеровское смещение, вызванное движени-
ем РЛС) как производная фазы будет меняться по линейному закону, изменение
сигнала по азимуту будет представлять собой ЛЧМ-процесс (принято (дт^О)
1 _ 2Г% ~zat) _
2тг dtx
(3.18)
Временные зависимости параметров сигнала приведены на рис. 3.8.
Рис. 3.8. Временные зависимости наклонной дальности R, фазы
доплеровской частоты FDop, амплитуды и мгновенного значения сигнала Ur
при прямолинейном движении радиолокатора;
по оси абсцисс отложено траекторное время, по оси ординат - условные единицы
Зона облучения антенны Xanh равная азимутальному разрешению (3.10) в РБО,
определяет полосу доплеровских частот сигнала и максимальное время синтеза в
режиме непрерывной съемки (маршрутный режим)
др .. 2^ant _ 2К . <Xant 7?qA
Dop «о ^ant’ synt V DXJ'’
(3-19)
где DXant - горизонтальный раскрыв антенны.
Синтез апертуры. Антенный подход
В литературе по РСА, особенно в ранних публикациях, рассматривали разные под-
ходы для интерпретации процесса синтеза апертуры: доплеровская фильтрация,
антенный подход, согласованная фильтрация. Воспользуемся антенным подходом.
Преобразуем (3.17) к зависимости фазы от координаты Xпо апертуре синтеза
118
Глава 3. Современные методы космического радиолокационного землеобзора
(3.20)
.4тгХат .2л X2
r------ J-------
2
[dX
(3.21)
/ ,r\ 4лХат 2 л X2
~ -^~ + <Рхт-
Tv JvqZL
Форма синтезированной ДНА при отклонении цели от направления траверза
(/=0) выражается интегралом Френеля
4/2 г
Л(аг)= | ЛехР'7
-Za/2 I
где Ао - амплитудное распределение поля по синтезированной апертуре, имеющей
размер £а.
Сначала пренебрежем квадратичным фазовым членом, что допустимо, если
фазовая ошибка на краях синтезированной апертуры не превышает я/4, т.е.
£а< Дл/2. (3.22)
Этот случай синтеза апертуры, когда диаграмма синтезированной антенны
формируется в дальней зоне, называется «нефокусированным синтезом»
4/2
ехр<
-4/2
sin(2TrarZa/2)
Л™* 2латЬл/Л
где Jmax - амплитуда отклика в максимуме ДНА.
Форма синтезированной ДНА
г i/v .
V2
I j COS
-4/2
4<2
sin
-4/2
^Ttctr
2
^X dX
Л
-X dX+jAv j si
A
(3.23)
(3.24)
Лпах лат/а0
GX )= s*nc( Хт/ рх),
где функция sinc(x)=sin(^x)Zo; a^A/2L^ - ширина луча синтезированной ДНА;
Px~R$A/2La - разрешение по азимуту.
Формулы для ширины луча и разрешения по азимуту отличаются от случая
РБО (3.10) для физической антенны с горизонтальным размером Dxant наличием
множителя 2 в знаменателе. Это обусловлено двойным фазовым набегом по синте-
зированной апертуре. Область нефокусированного синтеза отмечена на рис. 3.8.
Для фокусированного синтеза, учитывающего сферичность облучающей вол-
ны, необходима компенсация квадратичного набега фазы по синтезированной
апертуре путем умножения подынтегрального выражения в (3.23) на зависящий от
,2л X2
наклонной дальности множитель ехр< j------->
цифровом синтезе РЛИ с применением алгоритмов согласованной фильтрации (см.
гл. 6). Переписав (3.21) в виде зависимости от времени tx и учтя принятый по апер-
туре синтеза сигнал, получаем выражение для расчета сигнала на выходе РСА по
>. Такую процедуру выполняют при
119
Радиолокационные системы землеобзора космического базирования
азимуту, которое представляет собой свертку входного сигнала по траектории по-
л 7 А „ [ ,2лУ2 2'
лета Ur(tx)c комплексно сопряженной опорной функцией ехр< у-------tx >, pea-
( j
tx >, реа-
лизующей согласованную фильтрацию принятого сигнала (для простоты рассмот-
рения не учитываем дискретности tx и записываем интегральную сумму)
^out
^synr/2
(/ат) = J Ц(^Х“^Ат)СХР<
_^synt /2
' .2тгГ2
7 *oA
(3.25)
t х * di х '
В общем случае согласованной фильтрации принятого сигнала с учетом пара-
метров движения радиолокатора и влияния других факторов разрешающая способ-
ность РСА по азимуту определяется выражением
ЯЛ
2^synt
(3.26)
где £synt - длина синтезированной апертуры.
В обычном маршрутном (с непрерывной съемкой) режиме бокового обзора
длина апертуры £synt не может превышать размеров области облучения Хш- В этом
предельном случае разрешающая способность РСА по азимуту равна половине го-
ризонтального размера антенны px=Dx^/2 и не зависит от дальности наблюдения.
На практике существуют методы получения азимутального разрешения лучше, чем
Pxant/2 - так называемые, прожекторный режим, режим двойного приема. Они рас-
смотрены в гл. 4.
Особенность формирования РЛИ высокого разрешения. Приведенная в
формуле (3.16) зависимость огибающей сигнала от траекторного времени
-2Я(/х)/с) может приводить к ее смещению на много элементов разре-
шения по наклонной дальности. Этот эффект, называемый миграцией дальности
(range migration), требует учета при синтезе РЛИ, значительно усложняя алгоритмы
синтеза (см. гл. 6).
3.3. Геометрия обзора при скошенном и бистатическом
режимах съемки
3.3.1. Геометрические соотношения в режиме скошенного обзора
В перспективных космических РСА могут применяться режимы не только бокового,
но и скошенного обзора (squint mode), в которых плоскость визирования разворачи-
вают относительно нормали к вектору путевой скорости, т.е. относительно направ-
ления бокового обзора. Малые углы скоса (до ±5°) встречаются при ориентации осей
КА не в гринвичской (путевой) системе координат, как это принято в современных
космических РСА, а в орбитальной системе координат (когда спутник стабилизиро-
ван в плоскости орбиты). Работа с большими углами скоса (до ±60°) может исполь-
зоваться для повышения оперативности съемки в прожекторном режиме, а также для
120
Глава 3. Современные методы космического радиолокационного землеобзора
высокоорбитальных РСА и для получения ра-
диолокационных портретов объектов в разных
ракурсах с целью их лучшего распознавания.
В литературе вместо термина «скошенный об-
зор» используют также названия «передне-
боковой обзор» или «задне-боковой обзор».
Геометрия скошенного обзора в момент вре-
мени /=0 показана на рис. 3.9.
Плоскость визирования из бокового об-
зора OST$ поворачивают вокруг радиус-
вектора КА OS на угол у/ в положение OST.
При этом в момент времени /=0 луч антенны
направляется в упрежденную точку Т. Дуга Уо
с центральным углом переходит в дугу Y с
углом Оу. Из треугольников FqOTq и FjOT с
учетом того, что отрезок Т$Т’ - вертикаль, а
Т’Т параллелен вектору путевой скорости и
перпендикулярен плоскости OST$, имеем со-
отношения
Рис. 3.9. Геометрия обзора
поперек трассы движения КА
при скошенном обзоре
ay0 = Y0 /Re J F0T0=FTT' = Re sin ay0 »
FTT = FqTq /cos у/ = Re sin ay0 /cos у/ = Re sin ay .
Откуда
ay = arcsin (sin / cos y/}, у = arcsin
sm/i0
k cos у/
/i = arcsin
sm/iQ
k cos у/
- av - arcsin
sm/io
k cos у/
- arcsin
sina^Q
cos 5/ )
R = +Rq - 2RsRe cos (arcsin (sin Fo /Re cosy/)),
(3.27)
(3.28)
(3.28)
(3.29)
(3.30)
где параметры Oyo, /10 соответствуют случаю строгого бокового обзора с удалением
Уо точки наблюдения от следа КА.
Переход в РСА от бокового обзора к скошенному обзору иллюстрирует
рис. 3.10, на котором для наглядности Земля изображена плоской, что допустимо в
случае низковысотных (до 1000 км) РСА. Примем, что изменение положения зоны
облучения земной поверхности реализуется путем двух движений - удалением
центра зоны Го от трассы полета в положение 7\ и поворотом плоскости визирова-
ния SF7\ на угол у/ в положение SFT. В результате возрастает наклонная дальность
R (с соответствующими изменениями угла падения и ухудшением энергетического
потенциала), изменяется длина синтезированной апертуры, а ее синтез реализуется
в скошенном режиме с углом y/L в плоскости ST$T. Разрешение поперек линии пути
находим дифференцированием ф-лы (3.30) по Y
121
Радиолокационные системы землеобзора космического базирования
pY = Pr : ~ RP* = Pro Sin Ко Pro
Y R dY 2?ssin(yo/2?e)cos{/ sin 7; cos?/ cos?/
Перемещение облучающего пятна для скошенного обзора обеспечивается по-
воротом КА по курсу, тангажу или электронным способом, используя ФАР. В за-
висимости от этого сечение луча вдоль линии пути, определяющее длину апертуры
синтеза, может возрастать пропорционально наклонной дальности (3.30) или
больше - для пятна эллиптической формы, вытянутого по дальности, при его по-
вороте по курсу или в случае электронного сканирования в ФАР. Длину синтези-
рованной апертуры определяется выражением, в котором коэффициент q учитыва-
ет особенности изменения геометрии пятна, облучающего земную поверхность,
RA, RqA' RqA'
^antCOsV P^cos^cosV Dxantcos2V
(3.31)
(3.32)
tg ш
где у/L = arctg -----
lsin/0
- угол между векторами ST0 и ST на рис. 3.10.
Рис. 3.10. Зоны облучения антенной радиолокатора при режимах бокового
и скошенного обзора
Для самолетных РСА с малым отношением высоты к горизонтальной дально-
сти при /0 « 90° имеем y/L~y/.
Геометрия синтеза апертуры в скошенном режиме показана на рис. 3.11. Ис-
тинная длина апертуры £а проектируется на нормаль к направлению визирования,
образуя эффективную длину апертуры £eff- Ширина синтезированного луча в этом
направлении определяется известной формулой для РСА
«xant = = 2/2Ла cosy/L . (3.33)
122
Глава 3. Современные методы космического радиолокационного землеобзора...
Расширение синтезированного луча обусловлено уменьшением полосы спек-
тра доплеровских частот сигнала, принимаемого при скошенном обзоре. Разреше-
ние вдоль линии пути определяется сечением синтезированного луча под углом
P=7t-i//L к оси луча (а не поперек луча, как при боковом обзоре)
^xant
(3.34)
Рх —
cos у/L 2 cos у/L
Проведенное моделирование показало, что, например, при угле падения 45° и уг-
ле скоса 35° ухудшение разрешения РСА по азимуту при скошенном обзоре не пре-
вышает 16%, но возможно возрастание боковых лепестков синтезированной ДНА.
3.3.2. Многопозиционные космические системы радиолокационного
землеобзора
Принцип действия многопозиционных систем радиолокационного наблюдения на-
земных объектов заключается в разделении передающей аппаратуры («передатчик
подсвета») и набора пассивных приемников. Используются также комбинирован-
ные режимы моностатического РСА в сочетании с пассивными приемными РСА на
спутниках, движущихся по близким орбитам, как это предусмотрено в тандемах
РСА TerraSAR-X и Radarsat-2/З [276, 317, 330, 370, 372]. Также перспективно ис-
пользовать аэрокосмические многопозиционные системы с пассивными приемни-
ками, размещенными на спутниках, самолетах и БЛА.
Многопозиционные космические РСА имеют следующие преимущества:
• получение высокоточных цифровых карт рельефа местности, а также трех-
мерных изображений объектов методами одновременной интерферометрии
поперек линии пути КА при оптимальном размере интерферометрической ба-
зы, поддерживаемой путем соответствующего управления орбитами КА (тан-
демы КА);
• возможность одновременного наблюдения объекта под разными ракурсами,
что повышает вероятность его обнаружения и распознавания;
123
Радиолокационные системы землеобзора космического базирования
• индикация наземных целей, двигающихся с малыми радиальными скоростя-
ми, методом интерферометрии вдоль линии пути КА с четырьмя фазовыми
центрами антенн (обеспечивается тандемами РСА с выбором смещения орбит
КА вдоль и поперек линии пути);
• поляриметрическая интерферометрия;
• многократное некогерентное накопление;
• повышенная помехозащищенность системы разведки, особенно при построе-
нии аэрокосмической системы с легкими приемными устройствами на БПЛА,
что значительно повышает оперативность разведки при сопровождении воен-
ных операций. В ситуации, когда состав длительно функционирующей кос-
мической группировки, включающей пассивные датчики, разведан по косвен-
ным признакам (например, синхронность передачи больших потоков инфор-
мации), создание ограниченного набора станций помех, следящих за спутни-
ками, не является сложной технической проблемой. Поэтому, включение в
систему наблюдения мобильных летательных аппаратов с приемными РСА
обеспечит скрытность получения разведывательной информации.
Принципиально многопозиционные и, как частный случай, бистатические
системы могут иметь совпадающую геометрию наблюдения, когда передатчик и
приемник находятся по одну сторону от точки наблюдения (рис. 3.12), и с оппо-
зитной геометрией, когда прием ведется по другую сторону от передатчика. На
рис. 3.12, где У1У2 - зона подсвета от КА; Т- центр зоны приема самолетным РСА;
% - угол падения облучающей волны; - угол падения приемной волны; -
угол поворота плоскости приема. Показан случай, как при боковом обзоре, когда
подсвечивающий луч антенны передатчика и луч приемного датчика устанавлива-
ются в плоскостях, нормальных, соответственно, вектору путевой скорости КА Vs,
или вектору скорости приемного датчика VD . В общих случаях такая геометрия не
обязательна.
Рис. 3.12. Геометрия бистатического обзора с совпадающими направлениями наблюдения:
У1У2 - зона подсвета от KA; Т - центр зоны приема самолетным РСА; д - угол падения облучающей волны;
Дг - угол падения приемной волны; - угол поворота плоскости приема
124
Глава 3. Современные методы космического радиолокационного землеобзора...
Положение передатчика подсвета в геоцентрической гринвичской системе ко-
ординат характеризуется координатами XsYsZs. Положение приемного датчика оп-
ределяется координатами XDYDZD. Наклонные дальность облучения R цели Т с ко-
ординатами XTYTZT и дальность приема отраженного сигнала RD характеризуются
формулами
= - jrs)2 +(УГ -у5)2 + (Zr -zs)2 , (3.35)
Rd = )2 + (Уг - )2 + - Zo )2 . (3.36)
Одна из важнейших проблем при бистатическом зондировании состоит в син-
хронизации движений передающего и приемного модулей. Согласование геомет-
рии обзора обеспечивается прогнозными траекторными измерениями с их коррек-
тировкой по аппаратуре GPS, установленной на обоих датчиках. Для временной
синхронизации возможно применение кодированных синхропосылок, использова-
ние прямого сигнала от передатчика, восстановление строчной структуры данных в
процессе синтеза РЛИ. Когерентность сигналов обеспечивается применением вы-
сокостабильных опорных генераторов.
Взаимное расположение облучающей и приемной волн характеризуется угла-
ми: направление облучения - углом падения облучающей волны д направление
приема рассеянного излучения - углом падения Дп, отсчитываемым от местной
вертикали в точке наблюдения, и углом y/D поворота плоскости приема.
Указанные выше параметры бистатического обзора учитываются при расчете
энергетического потенциала РСА, включая оценку УЭПР отражающей местности при
углах наблюдения и y/D, отличных от угла падения при моностатическом обзоре.
При работе в режиме тандема двух КА можно обеспечить оптимальную «мяг-
кую» интерференционную базу (от 200 м до 1 км в зависимости от диапазона волн
РСА), значительно превышающую размеры «жесткой» базы (60 м), реализованной
в бортовом комплексе SIR-C/X-SAR SRTM космического корабля Space Shuttle
[521]). При этом повышается точность вычисления карт рельефа местности, а так-
же точность измерения скорости движущихся объектов за счет «мягкой» базы вме-
сто разделения приемной ФАР на две секции по азимуту (см. подраздел 4.2.4).
Для режима тандема координаты обоих КА должны быть близкими и разли-
чаться на величину интерферометрической базы, образуемой интервалом времени
задержки положения на орбите (вдоль орбиты) и смещением географического поло-
жения узла орбиты второго КА. Соответственно R ~ Rd, Ую ~ У, i//d = № этих усло-
виях разрешающая способность (и другие параметры) получаемых РЛИ близки.
При образовании сложной орбитальной группировки для многопозиционного
зондирования разрешающая способность бистатического РЛИ будет зависеть от
геометрии обзора
ст
Ру = --------, (3.37)
Sin/j + 81П/щ/с08^о
где гс =1/AF- длительность сжатого импульса, обратно пропорциональная ширине
спектра зондирующего сигнала.
125
Радиолокационные системы землеобзора космического базирования
Разрешающая способность по азимуту определиться через наклонную даль-
ность до приемного датчика и время синтеза, которое для аэрокосмической систе-
мы может быть ограничено временем пролета спутником зоны, облучаемой пере-
дающей антенной
т = КЛ
л у
a\sg
?х VnT
' D1synt
(3.38)
(3.39)
где Ksg - скорость следа КА на поверхности Земли.
3.3.3. Геометрия обзора при бистатическом квазизеркальном
космическом режиме съемки
Для глобального мониторинга океанских явлений широкие возможности дает при-
менение оппозитного бистатического зондирования, использующего наклонное
«квазизеркальное» зондирование поверхности океана, при котором РСА принимает
сигналы от «радиолокационного
блика», образованного «подсветом»
поверхности с передающего косми-
ческого аппарата. Геометрия такого
оппозитного бистатического обзора
показана на рис. 3.13.
Пусть заданы высоты орбит пе-
редающего Hs и приемного HD КА и
текущий центральный угол o.sd меж-
ду подспутниковыми точками. Точка
зеркального отражения Гт между пе-
редающим КА S и приемным КА D
будет удалена от обоих КА с наклон-
ными дальностями R и RD, обеспечи-
Рис. 3.13. Геометрия бистатического вающими равенство углов падения ft
квазизеркального обзора и отражения
В оппозитной системе в области квазизеркального приема разрешающая спо-
собность резко ухудшается. Она определяется большим пятном (бликом) на на-
блюдаемой поверхности. Положение зеркальной точки Тт (центральный угол ат)
находят из следующих уравнений при
sin _ sin qm _ sin (^ - am )
Re+Hs R Re
(3-40)
sin _ sin (asp - ) .. sin («Я) - «m - /Р )
126
Глава 3. Современные методы космического радиолокационного землеобзора
При равной высоте орбит обоих спутников имеем для углов падения и отра-
жения
П = Гю = arcsin
где Rs = Re + Hs - радиус орбит КА; R = -Jt?2 + 7?2 - 2Л.7?р cos (аж /2)
ная дальность от каждого из КА до точки зеркального отражения.
Суммарная наклонная дальность определится формулой
(3-41)
наклон-
7?да(АГ)= p?s2+7?e2-2As2?Dcos
ДУ )
d+
+ К+ Ri-2R,RDa>S
V
АУ^
СЗ.42)
где ДУ - приращение горизонтальной дальности (по дуге большого круга) относи-
тельно зеркальной точки.
Разрешающую способность бистатического РСА в зависимости от удаления
текущей точки от зеркальной точки можно определить, решая уравнение относи-
тельно py при заданном разрешении РСА по наклонной дальности pR
pR = rsd (ду + pY (ДУ)) - Rsd (ДУ). (3.43)
На рис. 3.14 приведена зависимость разрешения по горизонтальной дальности
от удаления текущей точки от зеркальной точки при высоте орбит обоих КА
800 км, их удаления друг от друга на 2000 км. Угол падения для зеркальной точки
равен 60°, полоса зондирующего сигнала 300 МГц (разрешение по наклонной
дальности 0,5 м).
Рис. 3.14. Зависимость разрешения по горизонтальной дальности
от удаления текущей точки от зеркальной точки Hs=HD=800 км.
Масштаб тонкой кривой уменьшен в 10 раз
127
Радиолокационные системы землеобзора космического базирования
3.3.4. Бистатический режим обзора с подсветом от передающей РЛС
на геостационарной орбите
Определенные перспективы и преимущества перед низкоорбитальной космической
группировкой для зондирования океана имеет сочетание подсвета с КА на геоста-
ционарной орбите с системой низкоорбитальных спутников [182, 183*]. Геометрия
обзора показана на рис. 3.15. Задавая значения радиусов орбит передающего КА
7?st = 42164 км и приемных датчиков 7?pi, RD2 в формулах (3.40), (3.42) и (3.43),
можно рассчитать зависимость разрешения по горизонтальной дальности от удале-
ния текущей точки от зеркальной точки.
На рис. 3.16 приведена зависимость разрешения по горизонтальной дальности
от расстояния относительно точки зеркального отражения при квазизеркальном
бистатическом обзоре с подсветом от РЛС на геостационарной орбите. Высота ор-
бит приемных КА - 800 км.
Рис. 3.15. Геометрия бистатического обзора с подсветом от РЛС на геостационарной орбите
Рис. 3.16. Разрешение по горизонтальной дальности
при квазизеркальном бистатическом обзоре с подсветом от РЛС на геостационарной орбите
(масштаб тонкой кривой уменьшен в 10 раз)
128
Глава 3. Современные методы космического радиолокационного землеобзора...
3.4. Энергетические характеристики космических радиолокаторов
землеобзора
Мощность принимаемого РСА сигнала вычисляют с помощью уравнения радиоло-
кационной дальности [54, 214]. Одна из форм записи этого уравнения в виде про-
изведения трех сомножителей характеризует физические процессы при распро-
странении, рассеянии и приеме сигналов
р - Pfi гу
г 4я7?2 4я7?2 L
(3.44)
где Л - излучаемая мощность; G - коэффициент усиления (КУ) антенны; R - на-
клонная дальность; сг- эффективная площадь наблюдаемой цели; 5eff- эффектив-
ная площадь антенны; L - суммарные потери при двойном распространении сигна-
ла (в тропосфере, ионосфере, а также в растительности при обнаружении объектов
сквозь листву и др).
Если не рассматривать потери в трассе распространения сигнала, то первый со-
множитель представляет собой плотность потока мощности излучения на расстоя-
нии R от РЛС. Числитель второго сомножителя сг - эффективная поверхность рас-
сеяния (ЭПР) цели - определяет долю отраженного сигналов в направлении РЛС, а
его знаменатель учитывает распределение электромагнитной энергии в пространстве
на расстоянии R от цели, т.е. у РЛС. Произведение первого и второго сомножителей
определяет плотность потока мощности отраженного сигнала в раскрыве приемной
антенны РЛС. Будучи умноженным на эффективную площадь антенны, это произве-
дение определяет мощность сигнала от цели на входе приемника.
К эхо-сигналу от местности добавляются собственные (тепловые) шумы ап-
паратуры. Так же, как и сигнал от местности, они представляют собой случайный
процесс, только с очень широким спектром частот. Приемник выделяет из спектра
полосу, соответствующую своей полосе пропускания. В классической теории ра-
диолокации, рассматривающей задачу обнаружения точечных целей на фоне шу-
мов приемника, обычно оценивают отношение сигнал/шум по мощности для двух
сечений радиолокационного тракта: на входе детектора огибающей и после неко-
герентного накопления (последетекторная фильтрация).
Применительно к РБО и РСА, предназначенным для наблюдения протяжен-
ных объектов, характеризуемых удельной эффективной поверхностью рассеяния
(УЭПР) о9, влияние шумов приемника характеризуют параметром сгпе (сг° шумово-
го эквивалента - NESZ - noise equivalent sigma zero). Это такое значение УЭПР фо-
на местности, который создает на выходе приемника (или синтезированного РЛИ)
мощность, численно равную мощности шумов приемника. Влияние последетек-
торного некогерентного накопления оценивается отдельно как параметр, обеспечи-
вающий улучшение радиометрического разрешения или изменение кривых веро-
ятности обнаружения компактных объектов.
Значение сгпе, характеризующее чувствительность РБО или РСА, вычисляют
по формуле (учтено, что 5eff= G22/4^)
5—1492
129
.о
ne PtG222^p/
(3.45)
где px., Py - разрешение на местности для рассматриваемых сечений тракта РБО
или РСА; Px*Py - площадь элемента разрешения на местности; L - суммарные по-
тери в трассе распространение сигнала (без проникновения в листву); Рп - мощ-
ность шумов на входе приемника, определяемая выражением
Рп - MF[rs + То (Fn -1)] = 4 • IO’21 AFFn . (3.46)
Здесь к = 1,38-10-23 Вт/Гц °К - постоянная Больцмана, То - абсолютная темпера-
тура приемной системы, Тс - абсолютная температура источника сигнала (для РЛС
обзора земной поверхности принимают Tc=7q=290°/Q, AF - полоса пропускания
приемника, Fn - шумфактор приемника.
Значения излучаемой мощности и шумов приемника относятся к фланцу ан-
тенны. Потери в антенном тракте учитывают в значении коэффициента усиления
(или эффективной площади антенны).
Заметим, что для разных сечений трактов РБО или РСА (вход приемника, коге-
рентная обработка - сжатие по дальности для РБО и РСА или синтез РЛИ для РСА)
значения разрешающей способности рх, ру могут быть разные, но величина сгпе оста-
ется постоянной. Это связано с тем, что сжатие сигнала по дальности и/или азимуту
приводит к уменьшению площади разрешаемого элемента и пропорционально
уменьшает его ЭПР. Отношение сигнал/шум+фон по уменьшенной ЭПР от фона ме-
стности сохраняется. Напротив, для малоразмерных целей оно возрастает с увеличе-
нием коэффициента сжатия сигнала и уменьшением площади фона.
При расчетах энергетического потенциала по формулам уравнения дальности
(3.44)-(3.46) обычно принимают, что в случае простого зондирующего импульса
излучаемая мощность равна импульсной Л=ЛтР- Для широкополосных ЛЧМ- или
ФМ-импульсов принимают Л=Лтр£с, где кс=АЕт - коэффициент сжатия по дально-
сти при полосе сигнала AF и длительности импульса т. Можно также ввести от-
дельные обозначения для разрешения на местности до сжатия по дальности ру\ и
азимуту рх\ и после синтеза РЛИ со сжатием по дальности ру=ру\1кс и по азимуту
где Mynt ~ число когерентно суммируемых импульсов по азимуту.
Соотношения (3.44)-(3.46) позволяют по заданному значению чувствительно-
сти сг°пе РБО или РСА вычислить требуемую импульсную мощность Р1тр и сред-
нюю мощность Рср
(4^)37?4PnZ (4^)37?4FnZ
imp 4с2Л2рпАп a^G4\pYpxNsynX
(3.47)
ср
э —
imp у.
130
Глава 3. Современные методы космического радиолокационного землеобзора...
По значениям импульсной и средней мощностей с учетом выбранного типа
передающего устройства и допустимой скважности для выходного усилителя
мощности задают длительность зондирующего импульса т и вычисляют коэффи-
циент сжатия зондирующего сигнала по длительности kc=\Fx.
3.5. Радиометрическое разрешение в радиолокаторах
землеобзора
3.5.1. Радиометрическое разрешение в РБО
Пространственно-протяженные объекты (например, фон местности или групповые
объекты) при облучении их радиоволнами создают рассеянное излучение, часть
которого перехватывается приемной антенной РЛС (рис. 3.17). Каждый участок
фона представляет собой хаотический набор элементарных отражателей и по-
разному ориентированных. В пределах каждого элемента разрешения РЛС проис-
ходит векторное суммирование сигналов от этих элементарных отражателей и
формируется суммарный сигнал, причем, как правило, доля энергии каждого отра-
жателя много меньше суммарной энергии в элементе разрешения. Сигнал, прини-
маемый РЛС от данного элемента разрешения, будет иметь случайное значение
ЭПР, которое может изменяться от ракурса наблюдения, от элемента к элементу
или от захода к заходу съемки в несколько раз. Похожее явление происходит и при
зондировании сверхширокополосными сигналами с их когерентной обработкой
(согласованной фильтрацией) до тех пор, пока размер разрешаемого элемента пре-
вышает размер неоднородностей наблюдаемого объекта (поверхности).
Для радиолокационных изображений характерно наличие спекл-шума, обу-
словленного узкополосностью зондирующего сигнала (малое отношение AF//o).
Такое же явление наблюдается в оптическом диапазоне волн при освещении узко-
полосным лазерным излучением поверхностно распределенных объектов.
Сравним два случая, представленных на рис. 3.18: наблюдение при освещении
источником белого света с широким спектром (диапазон длин волн =
= 390...770 мкм) и монохроматический подсвет лазерным источником (Aiaser~
~ 700 мкм), аналогичный узкому спектру одночастотного радиолокационного на-
блюдения.
Рис. 3.17. Формирование диаграммы обратного рассеяния от шероховатой поверхности (а, б)
и от группового объекта - корабля (в)
131
Радиолокационные системы землеобзора космического базирования
Рис. 3.18. Обложка книги, снятая в белом свете (а) и в свете лазера (б) и соответствующие
гистограммы яркости (в, г) (СКО флуктуаций яркости различаются в 12 раз)
Диаграмма обратного рассеяния (ДОР) от распределенных объектов при радио-
локационном наблюдении (а также лазерном подсвете) имеет многолепестковую
структуру, причем угловая ширина лепестка пропорциональна отношению длины
волны к размерам элемента разрешения (или размерам группового объекта, если он
меньше элемента разрешения). В частности, для ДОР по азимуту будем иметь
(3.48)
где Ха = рх - азимутальное разрешение РБО или размер группового объекта по
азимуту.
Сигнал, принятый от однородной шероховатой поверхности, является гауссо-
вым процессом, к которому добавляются шумы приемника. Сигнал на выходе ли-
нейного амплитудного детектора Л распределен по закону Релея:
А2 1
(3.49)
(3.50)
«sq °”
где ^sq - дисперсия процесса (квадрат среднеквадратичного отклонения) на входе
детектора, определяемая средней ЭПР данного элемента, шумами приемника и ко-
эффициентом передачи сквозного тракта РБО Q.
Ms2q=0CTsn=e(o’O+o’ne)>
где cr()sn = су + сг()пс - эквивалентное значение УЭПР, определяемое суммарным
процессом фон + шум, включающим сигнал, отраженный от наблюдаемой местно-
сти с УЭПР а и шумы приемника, характеризуемые значением шумового эквива-
лента с^пе.
В практике обработки сигналов в РБО и РСА обычно применяют не ампли-
тудный (линейный), а квадратичный (энергетический) детектор, выходной сигнал
которого Е=А2 пропорционален мощности процесса на входе детектора или значе-
нию суммарной УЭПР для данного элемента разрешения на местности. Для квад-
ратичного детектора выходной сигнал имеет экспоненциальное распределение
, ч 1
2^Sq
2Msq J
(3.51)
132
Глава 3. Современные методы космического радиолокационного землеобзора
С учетом формулы (3.50) плотность распределения отсчетов (однократных
наблюдений) суммарной УЭПР фон+шум
z
p(z) = -Le<&, (3.52)
^sn
где z - случайное значение суммарной УЭПР фон+шум, определяемое процессом
на выходе квадратичного детектора при однократном наблюдении.
При движении радиолокатора изменяется ракурс наблюдения данного элемента
разрешения, что приводит к флуктуациям принятого сигнала. При усреднении при-
нимаемого сигнала (последетекторное некогерентное накопление) дисперсия флук-
туаций выходного процесса уменьшается обратно пропорционально числу незави-
симых наблюдений в каждом элементе разрешения N. Плотность распределения от-
счетов УЭПР будет подчиняться закону -распределения с 27V степенями свободы,
который в нормированном виде находят по формуле [154*, 160*, 163*, 295]
Pn (z) =
(3.53)
При больших У плотность вероятности приближается к гауссову закону [1]:
Z \2
• <3-54)
Osn V 2л:
Среднее значение, дисперсия и среднеквадратичное отклонение (СКО) отсче-
тов УЭПР соответственно
<+ + D{z}=^-- CKO{z}=-^L. (3.55)
Законы распределения плотности вероятности и интегральные законы распре-
деления при последетекторном накоплении приведены на рис. 3.19.
Рис. 3.19. Плотности вероятности p(z) и интегральные функции распределения F(z) процесса
на выходе квадратичного детектора при = 1 и числе независимых наблюдений
в элементе разрешения, равном N
133
Радиолокационные системы землеобзора космического базирования
Частным случаем при ЛМ является экспоненциальное распределение (3.51).
Число независимых наблюдений определяется интервалом корреляции флуктуаций
и периодом выборок. Для РБО пространственный интервал корреляции флуктуа-
ций по азимуту при наблюдении фона местности соответствует ширине лепестка
ДОР (3.48) и имеет значение, равное горизонтальному размеру антенны РБО Dxant
^corr ~ RaX = =£*ant • (3.56)
Интервал временной корреляции флуктуаций при наблюдении фона местно-
сти в РБО равен времени, за которое радиолокатор перемещается на азимутальный
размер антенны:
rC0^DxsaJV, (3.57)
где V- путевая скорость.
Поскольку интервал корреляции азимутального сигнала в РБО значительно
меньше длительности сигнала, принимаемого от данного элемента (Tsjg=yVant/Jz),
возможно усреднение флуктуаций сигнала за время наблюдения, причем макси-
мальное число независимых наблюдений в элементе разрешения составляет
Nx NXmax = X^/Dxmt = RA/D2^ . (3.58)
При наблюдении групповых целей, размеры которых меньше, чем азимуталь-
ное разрешение РБО, число независимых наблюдений вычисляют по формуле
*a>*ant
(3.59)
где Тр - период зондирования; VTP - путь, проходимый радиолокатором за период
зондирования.
В РБО в отличие от РСА нет ограничений на выбор периода повторения зон-
дирующего сигнала. Его выбирают из требуемой полосы съемки, и может оказать-
ся, что его величина превышает интервал корреляции флуктуаций принимаемого
сигнала. Тогда число отсчетов сигнала Nx будет меньше Л^тах, но все они будут
некоррелированными.
Радиометрическое разрешение характеризует возможность различения объ-
ектов, имеющих яркостные контрасты, т.е. отличающиеся по значениям ЭПР или
УЭПР. Для оценки радиометрического разрешения предлагались различные крите-
рии [295, 319, 413], основанные на оценке вероятности ошибки правильного обна-
ружения яркостного контраста. Сравнение этих критериев показало, что наиболее
устойчивым параметром является оценка среднеквадратичного отклонения флук-
туаций наблюдаемого процесса.
Техническим параметром, характеризующим радиометрическое разрешение
РБО или РСА, является значение среднеквадратичного отклонения (СКО) флуктуа-
ций наблюдаемого процесса при большом отношении сигнал/шум, когда сР^-сР.
Разрешаемое приращение УЭПР (дифференциальный контраст) и разреша-
емый абсолютный контраст (в децибелах) определяются формулами
134
Глава 3. Современные методы космического радиолокационного землеобзора
Jn
(3.60)
^=10^1+-^
I y/N
(3.61)
где N - число независимых наблюдений (в общем случае - по площади наблюдае-
мого объекта, см. подраздел 3.5.2).
На практике важны случаи, когда требуется оценка радиометрического раз-
решения участков местности с малой УЭПР, близкой к чувствительности РБО или
РСА сг°пе (используют термин радиометрическая чувствительность). При наблю-
дении участков местности, окруженных неотражающей поверхностью, например,
при обнаружении контраста вода/суша, разрешаемая УЭПР
о
<4in=-7= • (3-62)
\/N
При оценке разрешаемого контраста между двумя участками с разными УЭПР
сг° и ctj0 формулы (3.60)-(3.62) принимают вид
(3.63)
(3.64)
Разрешаемый контраст между участками фона, измеряемый в децибелах
A?dB=101og 1 +
(3.65)
Заметим, что приведенные оценки радиометрического разрешения по значе-
нию СКО флуктуаций (3.63) характеризуют также случайную погрешность изме-
рения УЭПР по результатам радиолокационной съемки (СКО^0} = СГ1°). Вероят-
ность ошибки обнаружения контраста между участками, определяемого выражени-
ем (3.64), составляет около 0,35. Повышение точности измерений и повышение ве-
роятности различения контрастов между участками достигается увеличением чис-
ла наблюдений, в том числе путем усреднения отсчетов по площади наблюдаемого
участка (межэлементное некогерентное накопление - см. подраздел 3.5.2).
3.5.2. Радиометрическое разрешение в РСА
В РСА получение высокого пространственного разрешения связано с когерентной
обработкой траекторного сигнала в пределах зоны облучения ДНА по азимуту. В
результате в каждом элементе разрешения РЛИ формируется однократное наблю-
135
Радиолокационные системы землеобзора космического базирования
дение ЛМ. Возможен обмен пространственного разрешения на радиометрическое
разрешение. Для этого увеличивают размеры элемента разрешения РЛИ по азиму-
ту и/или по дальности с увеличением его площади в Nc раз и применяют внутри-
элементное некогерентное накопление (Ne наблюдений в элементе разрешения).
Это достигается путем уменьшения длины синтезированной апертуры в Nx раз, по
сравнению с предельной, а также разделением спектра зондирующего сигнала на
NR субспектров по дальности
Ne=NxNR . (3.66)
Применение такой обработки при синтезе РЛИ облегчает требования к вы-
числительным средствам синтеза и поэтому часто использовалось в РСА преды-
дущих поколений. В современных РСА при наличии высокопроизводительной вы-
числительной техники более эффективно получение РЛИ с предельным разреше-
нием по азимуту и дальности и применение межэлементного некогерентного нако-
пления по площади наблюдаемого объекта. Полное число наблюдений
N = NeNs , (3.67)
где PxPy - число элементов разрешения по площади объекта.
Межэлементное некогерентное накопление (усреднение отсчетов РЛИ по
площади наблюдаемых объектов) широко используют при тематической обработке
РЛИ (см. гл. 7 и 9). Выделяя участки с однородной статистикой (поля, лесные мас-
сивы), в том числе методами автоматической сегментации РЛИ, определяют их
конфигурацию и усредняют параметры сигнала по всей площади выделенного сег-
мента. Такая процедура позволяет резко повысить радиометрическое разрешение и
точность измерения УЭПР протяженных объектов для их идентификации и изме-
рения радиофизических характеристик при тематическом дешифрировании.
Технические параметры РСА или РБО: чувствительность с^пе, пространствен-
ное разрешение вдоль рх и поперек pY трассы КА и радиометрическое разрешение
Ж (или число наблюдений 7Ve) в элементе разрешении на местности — однозначно
определяют ошибки измерения контраста и точности оценки УЭПР объекта с за-
данной площадью.
3.6. Факторы, определяющие выбор параметров РСА.
Функция неопределенности сигналов
3.6.1. Вид функции неопределенности сигналов в космических РСА
В отличие от РСА авиационного базирования в космических РСА проблема обеспе-
чения однозначности измерения времени задержки и доплеровской частоты прини-
маемых сигналов является крайне сложной. Она обусловлена высокой скоростью
движения радиолокатора относительно цели и большими наклонными дальностями
наблюдения. При расчете параметров РСА необходимо выбирать высокую частоту
повторения (а значит, малый период повторения) зондирующих сигналов для пере-
дачи спектра доплеровских частот, определяемого горизонтальным размером антен-
ны (для однозначности сигналов по азимуту) с учетом требований по полосе съемки
136
Глава 3. Современные методы космического радиолокационного землеобзора...
поперек трассы КА, которая ограничивается выбранным периодом зондирования
(однозначность сигналов по дальности) [253, 310, 312, 313, 337, 401,442, 469].
Функция неопределенности (ФН) зондирующего сигнала, предложенная в 50-х
годах П. Вудвордом [54], описывает комплексную огибающую сигнала на выходе
радиолокационного приемника как функцию дальности и радиальной скорости и
определяет разрешающую способность, меру неопределенности, теоретическую
точность измерения дальности и скорости целей. Основное определение ФН (ино-
гда ее называют «телом неопределенности») — это автокорреляционная функция
зондирующего сигнала при смещении его по времени или частоте, показывающая
потенциальные возможности сигнала по измерению времени задержки или смеще-
ния по доплеровской частоте
00 *
/(Д/,Ф)= ]w(/)w(/ + (3.68)
где А/ - задержка по времени; Ф - смещение по частоте; й - комплексные значе-
ния принятого сигнала; * - комплексно сопряженная величина.
Применяемые в радиолокации зондирующие сигналы различаются амплитуд-
ной и частотной зависимостями от времени. Их можно характеризовать корреля-
ционными функциями (при смещении по времени), зависимостью при смещении
по частоте, функцией неопределенности (при смещениях по времени и частоте),
длительностью (проекция сечения ФН на временную ось), полосой частот (проек-
ция сечения ФН на частотную ось). Наиболее широко используемый вид зонди-
рующих сигналов в космических РСА - пачки ЛЧМ-импульсов, которые имеют
ряд преимуществ, например, перед фазоманипулированными сигналами:
одинаковая структура по координатам азимута и дальности;
сохранение формы при сдвиге по доплеровской частоте;
сохранение формы при преобразовании из временной области в частотную и
обратно;
возможность применения эффективного алгоритма ЛЧМ-масштабирования
для коррекции миграции дальности и интерполяции комплексных сигналов.
След функции неопределенности для одиночного ЛЧМ-импульса на плоскости
время-частота показан на рис. 3.20. Про-
екция следа ФМ на ось t равна длительно-
сти импульса г, на ось F - ширине спект-
ра AF. Вычисление автокорреляционной
функции включает в себя умножение зон-
дирующего сигнала на сопряженный
ЛЧМ-множитель, который можно рас-
сматривать как опорную функцию в со-
гласованном фильтре обработки сигнала.
В результате умножения частотная моду-
ляция в импульсе оказывается скомпен-
сированной (deramped signal). После-
Рис. 3.20. След функции неопределенности
на плоскости время - частота
для одиночного ЛЧМ-импульса
137
Радиолокационные системы землеобзора космического базирования
дующее когерентное суммирование - вычисление интеграла в (3.68) приводит для
А/ = 0 к возрастанию амплитуды выходного импульса до максимального значения,
пропорционального длительности импульса. При смещении по времени А/ О им-
пульс оказывается заполненным разностной частотой и амплитуда суммирован-
ного сигнала падает. В результате формируется показанный на рис. 3.20 узкий сжа-
тый отклик тс, равный сечению ФН вдоль оси t. База сигнала - произведение поло-
сы на длительность, определяет коэффициент сжатия kc = AFt . Разрешение по
времени задержки равно длительности сжатого импульса тс=т / kc=l/ AF, разре-
шение по частоте равно pF =\/т - сечению ФН по оси F.
При сохранении общей сущности имеется несколько вариантов ФН. Наиболее
подходящим для РСА является определение ФН как функции реакции согласован-
ного фильтра (импульсного отклика РСА - pulse response) на точечную цель. При
этом под огибающей сигнала следует рассматривать форму зондирующего им-
пульса и вызванные формой ДНА изменения амплитуды в пачке зондирующих им-
пульсов. Таким образом, используемое в теоретических исследованиях ФН поня-
тие нормированной амплитуды сигнала для импульсов прямоугольной формы с
амплитудой С/тах можно представить в обобщенном виде
"г, ,, 1Р с-,(лп)2с™(«.)2 .
I|"(')| rf' = 2 . U,-----------------~4-----= 1. О-69)
-оо /г=-со,и=-со ^7? + kRp j
где G\,ant (А/^) и Gxant (ап) - угломестная и азимутальная ДНА по мощности; Ад
arcsin ((nFpA ) Д 2 Ksg))
- угол визирования от направления максимума ДНА; ап =---------------------
угловое положение «-го бокового лепестка по азимуту (доплеровской частоты);
р
Мх& =-----5-- - коэффициент учета криволинейности движения КА, близкий к
T^COSC^
единице для низкоорбитальных РСА (см. подраздел 5.4).
К основным свойствам ФН относятся ее максимальное значение и объем.
Максимальное значение ФН имеет в начале координат
тах|^(Д/,Ф)| = |/(0,0)| = 2£. (3.70)
Если сигнал нормирован согласно (3.69), то максимальное значение равно
единице.
Объем ФН, заключенный между поверхностью |/(А/Ф)|2 и плоскостью Ft,
инвариантен к законам изменения амплитуды и фазы. Это свойство не позволяет
изменить объем тела неопределенности путем изменения закона модуляции
ОО оо
||м(0|2<*= J ||/(лФ)Г dtd<b = |z(0,0)|2 = (2£)2. (3.71)
-ОО -ОО
138
Глава 3. Современные методы космического радиолокационного землеобзора
Из этого следует, например, что попытки уменьшить уровень боковых лепе-
стков или ложных лепестков неоднозначности (см. ниже) приведут к расширению
главного лепестка или увеличению числа боковых лепестков при сохранении пол-
ной энергии согласно (3.71).
Импульсный отклик РСА определяет реакцию системы (фильтра обработки)
на точечную цель. ФН является предельным частным случаем импульсного откли-
ка, когда амплитудная характеристика фильтра обработки совпадает с амплитуд-
ным распределением сигнала, фазовая характеристика комплексно сопряжена с
сигналом.
Для пачки ЛЧМ-импульсов с периодом повторения Тр, длительность которой
превышает несколько периодов повторения зондирующего сигнала, форма им-
пульсного отклика (являющегося функцией неопределенности) имеет вид (рис.
3.21) двумерной «игольчатой» структуры в координатах «время задержки» tR (оп-
ределяет наклонную дальность) и «траекторное время» tx - вдоль трассы полета
(азимута), которое для РСА эквивалентно смещению по доплеровской частоте. Ин-
тервал между лепестками ФН по задержке равен периоду повторения зондирующе-
го сигнала 7Р, а по азимуту - времени, для которого изменение доплеровской час-
тоты сигнала равно частоте повторения зондирующего сигнала Fp=l/7p.
Рис. 3.21. Форма импульсного отклика РСА для пачки ЛЧМ-импульсов:
a - отображение в виде рельефа; б - яркостное РЛИ (значения по осям координат - условные;
область однозначности сигналов показана светлым овалом)
Явления, связанные с неоднозначностью сигналов по азимуту и дальности рассматривают-
ся в подразделах 3.6.2 и 3.6.3.
Для подавления ложных боковых лепестков луч ДНА должен быть сужен до
размеров светлого овала на рис. 3.21, что обеспечит пространственную фильтра-
цию помех неоднозначности.
3.6.2. Неоднозначность сигналов РСА по азимуту
Доплеровская частота отраженного сигнала зависит от путевой скорости и угла на-
блюдения
139
Радиолокационные системы землеобзора космического базирования
2Ksg . 2Ksg
FDop = “V’Sin « ~ a
Л л
(3.72)
где Ksg - путевая скорость; а - угол от нормали к вектору путевой скорости.
Согласно теореме Котельникова для передачи доплеровских частот сигнала
нужно, чтобы частота повторения превышала удвоенную максимальную частоту
2V
> 2^ = ^AFDop = kx , (3.73)
^Aant
где Д/^ор «IVjD^ - полоса доплеровских частот; kx= 1,3... 1,5 - коэффициент запаса,
обеспечивающий подавление помех неоднозначности до уровня минус 20.. .25 дБ.
Появление неоднозначности по азимуту иллюстрирует рис. 3.22.
В непрерывном ЛЧМ-колебании после его квантования по времени с частотой
повторения Fp частоты, которые выше Fp/2, не воспроизводятся, поскольку возникает
строб-эффект. Появляется неоднозначность сигнала, которая приводит к тому, что
энергия из побочных спектров с центральными частотами, кратными Fp, «сворачивает-
ся» в область главного лепестка, имеющего нулевую центральную частоту (рис. 3.23).
Рис. 3.22. Возникновение неоднозначности по азимуту:
a - непрерывное ЛЧМ-колебание; б - квантование процесса по времени (дискретные отсчеты); в - резуль-
тат синтеза сигнала с неоднозначностью; г - временные зависимости доплеровской частоты и сигнала по-
сле дискретизации
Рис. 3.23. «Сворачивание» энергии побочных максимумов в область главного лепестка
140
Глава 3. Современные методы космического радиолокационного землеобзора
Как правило, помехи неоднозначности не видны на уровне отражения от зем-
ной поверхности. Однако на участках границы вода/суша они могут создавать лож-
ные образы, затрудняющие дешифрирование снимков. Так, на рис. 3.24 приведено
РЛИ Ладожского озера (РСА «Меч-К» КА «Космос-1870»), на котором видны арте-
факты, вызванные неоднозначностью по азимуту. Яркость изображения водной по-
верхности, кроме прибрежной зоны, повышена благодаря работе быстродействующего
АРУ по дальности. На водной поверхности видны возмущения, вызванные, дождем,
вихрями, а также артефактами отражения от суши, смещенными по азимуту.
Рис. 3.24. Образование артефактов на РЛИ, вызванных неоднозначностью
сигналов по азимуту
Интегральный уровень паразитных сигналов (отношение мощности сигналов
неоднозначности к мощности сигнала в максимуме синтезированной ДНА) зависит
от полосы доплеровских частот, используемой для синтеза РЛИ, отношения часто-
ты повторения к полосе доплеровских частот, а также от уровня боковых лепестков
антенны РСА по азимуту. Он равен
Г^Ъор2+л^р ^2 / f \
п ^Ъор1 +л^р
(3.74)
где п - номера зон неоднозначности (обычно не более п = ±1); FDopi, FDop2 - преде-
лы интегрирования при синтезе РЛИ; GF (FDop) = Gx («) - пересчет азимутальной
формы ДНА по полю из угловой координаты к доплеровской частоте с учетом со-
2dR 4И
отношения « —a .
°°р Adt А
141
Радиолокационные системы землеобзора космического базирования
3.6.3. Неоднозначность сигналов РСА по дальности
Периодическая структура излучаемого сигнала (3.1) приводит к неоднозначности
по дальности, вызванная тем, что в строб приема могут приходить сигналы, отра-
женные целями не только от «своего» зондирующего импульса, но и от предыду-
щих периодов зондирования и также от более поздних периодов зондирования.
Сложность проблемы для космических РСА вызвана тем, что для передачи широ-
кого спектра доплеровских частот приходится выбирать период повторения много
меньше времени запаздывания сигнала. Интервал неоднозначности по времени пе-
ресчитывается в «рекуррентную дальность», равную половине расстояния распро-
странения радиоволн за длительность периода повторения
Лр=сГр/2. (3.75)
Первое условие - неоднозначность по дальности - исключается путем про-
странственной селекции сигналов, т.е. применением узкой диаграммы антенны в
вертикальной плоскости, ослабляющей отраженные сигналы от соседних зон, уда-
ленных на рекуррентную дальность. Требуемая ширина луча по углу места должна
удовлетворять двум условиям - обеспечению полосы захвата и отстройки от сиг-
налов неоднозначности. Геометрические соотношения, связывающие зону захвата,
рекуррентную дальность и ширину ДНА, определяются из треугольников SAB и
АВС на рис. 3.25.
Рис. 3.25. Проявление неоднозначности сигналов по дальности
(для упрощения Земля показана плоской)
Для обеспечения требуемой полосы захвата АС (отмечена жирной линией на
рис. 3.25) необходимо, чтобы ширина угломестной ДНА /ant была не менее величины
R R R
где АГ и A R - полосы съемки на местности и по наклонной дальности; R - наклон-
ная дальность центра полосы съемки; - угол падения.
142
Глава 3. Современные методы космического радиолокационного землеобзора
Второе условие - подавление сигналов от соседних зон неоднозначности -
требует выбора ширины угломестной ДНА таким образом, чтобы ее след АС (по-
лоса съемки на местности) на поверхности Земли был меньше расстояния по Земле
между точками пересечения соседних окружностей 4 и 5 с радиусами, кратными
рекуррентной дальности. В противном случае (правая область рисунка, окружно-
сти 6-10) в строб приема будут попадать сигналы с нескольких интервалов рекур-
рентной дальности. Таким образом, ширина угломестной ДНА ограничена макси-
мальным значением
< Rp ct8 Л
Zant" Rk,
(3.77)
где kr = 1,2... 1,4 - коэффициент запаса, определяемый допустимым уровнем сигна-
лов неоднозначности по дальности, который рассчитывается по формуле дальности
с учетом формы ДНА и изменения наклонной дальности.
Отношение мощностей ложных сигналов к мощности полезного сигнала для
равномерного фона (для двух соседних зон неоднозначности) определяется соот-
ношением
R4 G^nt(/(R + Rp)-/o) Gyant(r(R-Rp)-ro)
aR /'•vfp'i'H I \4 + / \4 I’
где R - наклонная дальность до цели; угол визирования; GyantCy-ytf) ~ КУ антен-
ны в направлении угла визирования у в угломестной плоскости; - угломестное
положение максимума ДНА; 7?р - рекуррентная дальность; 7?+7?р и 7?-7?р - расстоя-
ния до целей, формирующих сигналы неоднозначности. Значения Х^)> Х^+^р) и
Я^р) по формулам (3.4)-(3.6).
Вертикальный размер антенны находят по выбранной из условий (3.76) и
(3.77) ширины ДНА по углу места.
Вертикальный размер антенны находят по выбранному из обоих условий углу
ДНА
^t=Vranf (3-79)
При этом полоса съемки
ДГ = -—. (3.80)
V 4krkx sin /j
Влияние помех неоднозначности проявляется в виде ложных изображений,
накладывающихся на изображение наблюдаемого участка местности. Значения ко-
эффициентов запаса kr, kx выбирают с учетом отношения сигнал/шум на выходе
РСА. Примерные нормы на допустимый интегральный уровень ложных сигналов -
минус 20...25 дБ. Экспериментально установлено, что эта норма обеспечивает вы-
сокое качество изображения для большинства сюжетов радиолокационной съемки.
Однако в нетипичных ситуациях (например, геологическая разведка шельфа), ко-
гда область неоднозначности приходится на область с высоким отражением (горы),
143
Радиолокационные системы землеобзора космического базирования
а основной лепесток ДНА - на область с низким отражением (море), возможны по-
казанные на рис. 3.26 помехи неоднозначности по дальности, существенно сни-
жающие достоверность получаемой радиолокационной информации.
Отдельного внимания требует оценка помех от альтиметровых сигналов, при-
нимаемых по боковым лепесткам ДНА от участка местности под РЛС. Дело в том,
что при вертикальных углах отражение имеет характер, близкий к зеркальному, а,
кроме того, отраженный сигнал формируется большой площадкой в виде круга с
радиусом, определяемым разрешением по наклонной дальности:
raltim = 7(Я + ^)2-Я2 «, (3.81)
где Н - высота орбиты КА; pR - разрешение по наклонной дальности для данного
сечения тракта РСА, по которому оценивается влияние помех от альтиметрового
сигнала - в приемном тракте (длительность излученного импульса) или на выходе
РСА (определяется длительностью сжатого импульса). Соответственно ЭПР пло-
щадки фона точно под РЛС
^aitim = 2^altima° (0) = 17tHpR^ (0) . (3.82)
Рис. 3.26. Образование ложного расфокусированного изображения
горного рельефа на фоне морской поверхности
(Черное море, побережье Турции, РСА «Меч-К» КА «Космос-1870»)
Используя формулы (3.81) и (3.82), получаем выражение для относительного
уровня мощности альтиметрового сигнала по отношению к сигналам в главном ле-
пестке ДНА
2жт°(0)Я4
^altim “7^2 ( ( г>\ \ О/ ГТгЗ ’ (3.83)
Gyant(r(^)-/0)^ (/i)# РХ
где сДя) - УЭПР фона в точке наблюдения с углом падения я-
144
Глава 3. Современные методы космического радиолокационного землеобзора...
Обычно выбор параметров РСА для обеспечения однозначности сигналов
представляет собой итерационную процедуру. После выбора горизонтального раз-
мера антенны из условия однозначности по азимуту (доплеровской частоте) рас-
считывают вертикальный размер антенны по формуле (3.79) для середины полосы
обзора (в пределах углов падения 30...50°). Затем проверяют отсутствие неодно-
значности на заданной дальней границе полосы обзора и выполнение требований
по полосе захвата на малых дальностях. Если различия оказываются большие, то
задаются максимальным размером антенны, исходя из ширины луча на максималь-
ной дальности, а в ближней зоне формируют широкий луч по углу места.
Следует иметь в виду, что сигналы от целей, облученные в разных периодах
зондирования и суммирующиеся в стробе приема, будут при синтезе РЛИ форми-
ровать отметки, расфокусированные по азимуту. Вид функции неопределенности
зондирующего сигнала в РСА при смещении по азимуту и дальности показан на
рис. 3.27, где: a - гипотетический случай, когда нет ослабления паразитных макси-
мумов, б - реальная ситуация применения пространственной селекции соответст-
вующим выбором ДНА по углу места и азимуту.
Рис. 3.27. Вид функции неопределенности РСА при смещении цели по дальности и азимуту:
a - без пространственной селекции; б - с учетом пространственной селекции, создаваемой антенной РСА
Характерно, что паразитные максимумы при смещении по дальности имеют
меньшую амплитуду, но растянуты по азимуту (расфокусировка). Общая энергия в
каждом из паразитных лепестков на рис. 3.27 одинакова.
Возможны пути снижения помех неоднозначности (см. гл. 8).
3.7. Особенности работы систем радиолокационного наблюдения
космического базирования при воздействии активных помех
Одной из важнейших характеристик систем радиолокационной разведки является
эффективность их работы в условиях ведения радиоэлектронной борьбы (РЭБ).
Помехозащищенность РЛС в общем случае принято оценивать параметрами
скрытности и помехоустойчивости работы [32, 33*, 62, 105, 118, 187].
Скрытность характеризует степень защищенности излучаемых сигналов РЛС
от обнаружения и измерения их параметров системой радиотехнической разведки
(РТР) противника и создания специально организованных помех. Помехоустойчи-
вость характеризует эффективность работы РЛС в условиях воздействия помех.
145
Радиолокационные системы землеобзора космического базирования
Заметим, что постановка помех радиолокаторам дистанционного зондирова-
ния Земли в мирное время запрещена Международными соглашениями и трактует-
ся как вооруженный акт. Поэтому задача РЭБ должна рассматриваться в контексте
информационного обеспечения военных операций в конкретных условиях воору-
женного конфликта.
В отличие от самолетных РЛС, для которых траектория полета, время вклю-
чения и параметры РЛС противнику неизвестны, ситуация для космических РСА
землеобзора иная. Орбитальное движение КА с РСА заранее известно по данным
траекторных измерений, а параметры аппаратуры — по данным средств РТР. Вы-
сокий уровень мощности зондирующего сигнала у поверхности Земли облегчает
задачу РТР, в том числе при переходе на литерные частоты. Априорно предпола-
гают, что каждый раз, когда КА с РСА появляется в секторе, пригодном для прове-
дения съемки, она выполняется. Таким образом, параметр «скрытность» для кос-
мических РСА не применяется.
Для оценки помехоустойчивости РСА проведем расчет энергетического по-
тенциала постановщика помех, обеспечивающего подавление космического РСА
землеобзора. Результаты такого расчета применимы и для решения задачи защиты
от разведки противника. Будем считать, что сторона, создающая помехи, распо-
лагает следующей информацией о РСА:
• рабочий диапазон волн РСА 2;
• ширина полосы зондирующего сигнала AF в ожидаемом режиме наблюдения;
• геометрические размеры антенны РСА по горизонтали Dxant и вертикали £)Лат
и ее площадь 5^ = DxantxDjant;
• импульсная мощность излучения Pimp;
• длительность зондирующего импульса г,
• наклонная дальность до РСА R.
Рассмотрим задачу подавления РСА с высокой разрешающей способностью,
предназначенного для обнаружения и распознавания малоразмерных наземных це-
лей, имеющих малый контраст по отношению к окружающему фону (до 10 дБ).
Эта ситуация имеет место, в частности, при скрытии передислокации техники из
одного места расположения в другое при подготовке военных операций.
Практика использования современных космических РСА предусматривает
полное использование ресурсов КА по энергоснабжению и объему передаваемой
на Землю информации для проведения регулярной съемки земной поверхности.
Благоприятные условия для повторной съемки определяются циклом повторения
орбит (обычно от 10 до 25 сут с возможным специальным выбором параметров ор-
биты КА для уменьшения цикла до трех суток [436]). Съемка ведется с получением
комплексных РЛИ, пригодных для фазовой (интерферометрической) обработки с
исключением отметок от стационарных объектов.
Проведенное моделирование зашумленных КРЛИ с разрешением 1...2 м по-
казало, что для уверенного подавления РСА в этой ситуации достаточно, чтобы
спектральная плотность помехи превышала спектральную плотность процесса от
146
Глава 3. Современные методы космического радиолокационного землеобзора...
фона местности более, чем на 25 дБ, т.е., чтобы результирующее отношение сиг-
нал/помеха было меньше минус 15 дБ. Тогда на РЛИ могут обнаруживаться только
отметки от мощных отражателей - зданий, мостов, но в целом РЛИ будет непри-
годным для дешифрирования.
Приведенная цифра отношения сигнал/помеха может быть уточнена из сле-
дующих соображений. Если провести сглаживание РЛИ с потерей пространствен-
ного разрешения, то для площадных групповых объектов (стоянка техники) отно-
шение сигнал/помеха может возрасти, и не исключено обнаружение факта исчез-
новения большого скопления объектов в одном месте и появление их в другом
месте (без распознавания типа объектов).
Эффективное подавление РСА обеспечивается созданием в полосе зонди-
рующего сигнала непрерывной шумовой помехи с потоком мощности вдоль траек-
тории РСА, который позволяет снизить вероятность обнаружения целей на фоне
подстилающей поверхности. Не входя в детали радиоэлектронной борьбы (РЭБ),
рассмотренные в [33*, 62, 118], дадим грубую оценку требований к постановщику
помех для подавления РСА космического базирования.
Возможны следующие ситуации при создании активных помех для РСА:
1) постановка помех по главному лепестку ДНА радиолокатора, направленной
на объект разведки;
2) постановка помех по боковым лепесткам ДНА.
В первом случае с менее жесткими требованиями по энерговооруженности
возможно применить более простую аппаратуру постановщика помех с антенной,
имеющей круговую ДНА по азимуту и 30...70° по углам места, которые совпадают
с рабочими углами места РСА. Второй случай требует применения узконаправлен-
ных антенн, следящих за спутником с РСА.
Мощность суммарного процесса от местности (несжатый сигнал) определится
формулой дальности (см. раздел 3.4):
Р _ ^imp^ ст _ ^imp'Seff0’ RA СТ
Л- —----й-----TAff —-----Л—й-------------, (Э.оЧ)
4л-Я2 4я7?2 4л-Я422 £>xant 2sin/,
где сделана замена G = 47rSeff /?12 - КНД антенны РСА; a - УЭПР фона местно-
сти (суша); а- ЭПР облучаемого участка местности с геометрическими размерами
o- = a°AXAY = a0—-----С—, (3.85)
^xant 2sin/i
где ст0 - УЭПР подстилающей поверхности; АХ = 7?2/Dxant - зона облучения ан-
тенны РСА вдоль линии пути; ДУ = cr/2sin/j - зона поперек линии пути, соответ-
ствующая длительности зондирующего импульса (/; - угол падения).
Преобразуя формулу дальности (3.84) для случая распространения сигнала в
одну сторону - от передатчика помех до РСА, найдем мощность шумовой помехи
на входе приемника РСА
147
Радиолокационные системы землеобзора космического базирования
Plr.Glr.
Prpn=^Seff, (3.86)
где ЛР ~ мощность передатчика помех; Gtp - КНД антенны передатчика помех.
Задав отношение сигнал/шум+помеха и пренебрегая составляющей шума
<7Snp - Рт / (^гп + ^грп) ~ / ^грп ’ получим формулу для расчета мощности передат-
чика помех
a CT , (3 87)
tfsnp^^tp 2 sin 73
где множитель 2 в первой дроби учитывает потери при использовании круговой
поляризации излучаемой помехи для подавления поляриметрических РСА.
Оценим необходимую мощность источника помех применительно к гипоте-
тическим РСА со следующими параметрами:
диапазоны волн X, С, S,L;
размеры антенны РСА Z)^antx^\ant=5x2 м2 для X- и С-диапазонов волн и
A-antx£\ant=10x3 м2 - для 5- и Z-диапазонов волн;
наклонная дальность 7?=600 км;
импульсная мощность Pimp = 500 Вт для X- и С-диапазонов волн и Pimp =
= 1000 Вт для S- и С-диапазонов волн;
длительность зондирующего импульса г= 10 мкс;
угол падения д = 40°.
Примем, что УЭПР фона в указанных диапазонах обратно пропорциональна
длине волны. Их расчетные значения приведены в табл. 3.1. Зададим отношение
сигнал/помеха #snp=0,0032 (-25 дБ).
Для постановщика помех по главному лучу предполагаем использование ан-
тенны с круговой ДНА по азимуту, а по углу места - в пределах 30...70. КНД та-
кой антенны равен Gtp=4,55. Расчеты по формуле (3.87) сведены в табл. 3.1.
Таблица 3.2. Параметры постановщика помех
Параметр Диапазон волн РСА
X С 5 L
Площадь антенны РСА, м2 10 10 30 30
Импульсная мощность РСА, Вт 500 500 1000 1000
Расчетная УЭПР фона местности, дБ -15 -17,7 -20 -23
Подавление РСА по главному лепестку ДНА
Площадь антенны постановщика помех, м2 0,3-10“3 1,1-10“3 3,2-10-3 19,1-Ю"3
Излучаемая мощность помехи, Вт 5360 1535 6540 1092
Подавление РСА по боковым лепесткам ДНА (>-25 дБ)
Площадь антенны постановщика помех, м2 0,12 0,41 1,23 1,23
Диаметр антенны постановщика помех, м 0,46 0,86 1,5 1,5
Излучаемая мощность помехи, Вт 4671 1340 5352 5352
148
Глава 3. Современные методы космического радиолокационного землеобзора...
Требования по мощности могут быть снижены в разы при создании помех в
меньшем секторе по азимуту, в котором ожидается появление РСА. Для подавле-
ния РСА по боковым лепесткам ДНА энергетический потенциал постановщика
помех Лрп -Gtp должен возрасти в сотни и тысячи раз. Это можно реализовать при-
менением остронаправленной антенны, установленной на подвижной платформе
для слежения за спутником с РСА. Ширина луча антенны не должна быть уже 5°,
чтобы не возникало проблем, связанных с ошибками прогнозирования траектории
спутника с РСА. КНД антенны для этого случая - Gtp=l650, т.е. в 363 раза больше,
чем для подавления РСА по главному лепестку ДНА при ненаправленной ДНА по-
становщика помех. Параметры постановщика помех для подавления РСА по боко-
вым лепесткам с уровнем минус 25 дБ приведены в табл. 3.2. Такая аппаратура
реализуема в наземных (мобильных) или корабельных условиях, однако эффектив-
ность подавления может быть снижена принятием на борту специальных мер по-
вышения помехозащищенности, часть из которых рассмотрена ниже.
Применение в РСА многосекционных АФАР с многоканальными выходами
позволяет динамически управлять формой ДНА, направляя нуль ДНА на источник
помех. В принципе число подавляемых источников равно числу секций АФАР
(приемных каналов) минус единица.
Более эффективно использовать в АФАР приемные модули с цифровым вы-
ходом, обеспечивающие гибкое управление положением луча ДНА. Это расширит
возможности подавления помех путем формирования нулей ДНА по азимуту и уг-
лу места. При задаче наблюдения локальных участков с кадровой съемкой и огра-
ниченным объемом выходных данных (кадровый прожекторный режим) адаптив-
ная обработка сигналов для режекции помех может быть реализована на наземном
пункте обработки информации при синтезе РЛИ.
Помехоустойчивость системы радиолокационного наблюдения космического
базирования может быть существенно повышена путем многопозиционного зонди-
рования с увеличением состава орбитальной группировки или применением пас-
сивных приемников на авиационных носителях, включая БЛА. Ниже приведены
формулы для расчета мощности передатчика помех при бистатическом радиолока-
ционном зондировании.
Мощность сигнала от местности на входе приемного датчика равна
Р _ ^mp^ О~2 ~ _ ^imp^ \п12°~0 ^2^ СТ /о оо\
г2 4тг7?2 4л-7?2 31112 4tz-7?2 4л-Я2 Dxant2 2sin/j ’
где R2 - наклонная дальность; Sant2 - эффективная площадь антенны приемного
датчика; £>xant2 - горизонтальный размер приемной антенны.
Принятая мощность помехи
^n2=7^^ant2- (3-89)
4^2
В отличие от рассмотренного выше моностатического случая задача подавле-
ния такой системы значительно усложняется из-за необходимости создания всена-
149
Радиолокационные системы землеобзора космического базирования
правленного поля помех высокого уровня, достаточного для подавления приемных
РСА по боковым лепесткам. Возможность использования в многопозиционной
системе авиационных датчиков, для которых неизвестны их количество и азимуты
относительно постановщика помех является важным ресурсом повышения поме-
хоустойчивости аэрокосмической информационной системы в целом [234].
Имеются предложения по снижению мощности постановщика помех путем
использования имитационных помех, получаемых путем модуляции принятого
прямого сигнала от РСА с последующим его переизлучением. Предполагается, что
яркость ложных отметок на синтезированном РЛИ соизмерима с яркостью отметок
от реальных объектов, что соответствует уменьшению (на 20...25 дБ) мощности
постановщика помех по сравнению с шумовой помехой. Недостаток таких методов
в отсутствии гарантированного скрытия объекта защиты. Не исключено, что при-
менение алгоритмов интерферометрической обработки по серии снимков выявит
эти искусственные образования и позволит режектировать их на снимках.
При защите ограниченных территорий возможно снижение средней мощности
шумовой помехи в несколько раз путем синхронизации излучения помехи с мо-
ментом прихода зондирующего импульса РСА. Длительность шумового импульса
уменьшают до величины
Грп = 2yzone sin Y-Jc + T, (3.90)
где yzone - протяженность защищаемой зоны поперек линии пути спутника с РСА.
В целом создание постановщиков помех для космических РСА - сложная
техническая задача, при решении которой необходимо учитывать следующие
факторы'.
• цель РЭБ и методы ее достижений для конкретных объектов и территорий;
• результаты анализа действующих и перспективных средств аэрокосмической
радиолокационной разведки и их параметры, в том числе в возможных «экс-
периментальных» режимах, выходящих за рамки выделенной Регламентом
радиосвязи полосы частот для радиолокации Земли из космоса;
• возможности реализации сложной антенной системы с гибким управлением
ДНА по данным об орбитальной обстановке со средствами разведки;
• синхронизацию работы постановщика помех с зондирующими сигналами
РСА, измеренными средствами РТР.
С учетом рассмотренных аспектов аппаратурной реализации в задаче РЭБ и
тактике организации РЭБ в боевых условиях [33*], можно сделать вывод, что аэро-
космическая система радиолокационного наблюдения при надлежащем ее по-
строении может иметь достаточно высокую устойчивость к активным помехам.
150
Глава 4
РЕЖИМЫ РАБОТЫ КОСМИЧЕСКИХ РСА
4.1. Основные режимы радиолокационного обзора
Рассмотренные в гл. 3 явления, связанные с неоднозначностью сигналов в космиче-
ских РСА, ограничивают возможности одновременной реализации высокой разре-
шающей способности по азимуту и широкой полосы съемки (зоны захвата) по даль-
ности, а также ее перенацеливания в полосе обзора. Расширение полосы обзора по-
зволяет уменьшить время повторной съемки заданных районов и повысить опера-
тивность радиолокационного наблюдения. Эти вопросы, связанные с геометрией
космического землеобзора и необходимым составом орбитальной группировки для
получения требуемого периода обновления информации, обсуждаются в гл. 5.
Выбор, расчет и оптимизация параметров РСА являются итерационной про-
цедурой, в которой следует учитывать располагаемые ресурсы КА по энергопо-
треблению, массе, тепловыделению, конструкции и компоновке аппаратуры на КА.
Современная тенденция нахождения компромисса для удовлетворения требований,
предъявляемых к информационной системе, предусматривает создание многоспут-
никовой орбитальной группировки с компактными РСА, располагающими широ-
ким набором режимов работы и параметров зондирующих сигналов, которые
управляются цифровыми командами. Режимы работы РСА включают в себя ком-
бинацию режимов обзора, поляриметрические режимы, индикацию движущихся
целей, интерферометрическое зондирование. Предусматриваются также режимы
многопозиционного зондирования.
Основные режимы обзора в космических РСА (рис. 4.1) включают в себя:
1) маршрутный режим обзора непрерывной съемки (МР);
2) широкозахватный режим Скансар (СС);
3) прожекторный кадровый режим (ПР).
Поляриметрическое и интерферометрическое зондирование в этих режимах
обзора реализуют путем управления параметрами бортовых устройств РСА. Над-
лежащим образом выбирают время съемки набора РЛИ для совместной обработки,
а при необходимости - управляют параметрами орбиты КА.
4.1.1. Маршрутный режим обзора
Маршрутный режим обзора, показанный на рис. 4.1,а, - это режим непрерывной
съемки в течение длительного времени, при котором полоса съемки фиксирована
слева или справа относительно следа КА в пределах технически возможной полосы
обзора. Из условий однозначности сигналов, рассмотренных в гл. 3, в маршрутном
режиме разрешение по азимуту не может быть лучше половины горизонтального
раскрыва антенны, а реализуемая полоса съемки (зона захвата) поперек линии пути
151
Радиолокационные системы землеобзора космического базирования
не может превысить значения, равного рекуррентной дальности, деленной на синус
угла падения. В маршрутном режиме современных РСА положение зоны захвата
относительно следа КА можно задавать произвольно в пределах полосы обзора.
Рис. 4.1. Основные режимы обзора космических РСА:
a - маршрутный; б - Скансар; в - прожекторный
Однако расширение полосы обзора в сторону максимальных дальностей требу-
ет увеличения вертикального размера антенны. Приближение ее к надиру сопровож-
дается ухудшением разрешения поперек линии пути (по горизонтальной дальности).
При проектировании РСА с широкой полосой обзора условие неоднозначности и по-
тенциал проверяют на максимальной дальности, зону захвата - на минимальной
дальности. Если при приближении к надиру не обеспечйвается нужная зона захвата
(из-за ограничения угломестной ДНА), то формируют луч необходимой ширины.
При изменении положения зоны захвата в пределах полосы обзора необходимо из-
менять в небольших пределах частоту повторения таким образом, чтобы время рас-
пространения до центра заданной полосы съемки не было кратными периоду зонди-
рованию и не пришлось на момент излучения зондирующего импульса.
В маршрутном режиме обычно для формирования радиолокационного изобра-
жения полностью используют длину траекторного сигнал в пределах зоны облуче-
ния вдоль линии пути (обозначена £а на рис. 4.1,а). Возможны варианты обработки
сигналов - синтез РЛИ с длиной апертуры Za и реализацией наилучшего разрешения
по азимуту, равного половине горизонтального размера антенны рх= либо
разделение апертуры Za на субапертуры, синтез РЛИ с пониженным пространствен-
ным разрешением и применением некогерентного накопления (фильтрации спекл-
шума путем усреднения независимых наблюдений) для улучшения радиометриче-
ского разрешения в задачах мониторинга земных покровов (см. гл. 7 и 9).
Важное преимущество маршрутного режима состоит в том, что длина сни-
маемого маршрута может быть произвольной. Она определяется, в основном, тре-
152
Глава 4. Режимы работы космических РСА
буемыми районами съемки, с ограничениями по производительности линии пере-
дачи данных, а также по энергетике, поскольку РСА во время съемки потребляет
повышенную мощность от буферных батарей.
4.1.2. Широкозахватный режим Скансар
Если требуется широкая полоса съемки, в которой условия однозначности не удов-
летворяются, то используют многолучевой режим работы. Полосу съемки реали-
зуют несколькими парциальными лучами (режим Скансар, рис. 4.1 ,б). Это достига-
ется ценой уменьшения времени синтеза апертуры и ухудшения разрешения в каж-
дой из парциальных зон. Обзор ведут кадрами поочередно с переключением лучей.
Число лучей в угломестной плоскости (парциальных зон по дальности) опре-
деляется соотношением
N=kr^—^ , (4.1)
где 7?max, 7?min - максимальная и минимальная границы зоны захвата по наклонной
дальности; Яр=сГр/2 - рекуррентная дальность, соответствующая периоду по-
вторения зондирующего сигнала; kr - коэффициент запаса для устранения неодно-
значности по дальности.
Принципиальные отличия режима Скансар от маршрутного режима состоят в
следующем. В маршрутном режиме возможна съемка короткими кадрами, но при
этом длина участка траектории съемки должна превышать размер снимаемого кад-
ра плюс длина зоны облучения вдоль линии пути (см. £а на рис. 4.1,а). Как отмече-
но в подразделе 4.1.1, длина синтеза РЛИ может быть уменьшена, а резерв исполь-
зован для нескольких наблюдений. В режиме Скансар этот резерв используют для
переключения парциальных зон, что позволяет расширить общую полосу съемки.
Разрешение вдоль линии пути (по азимуту) в режиме Скансар примерно равно
Рх ~ ^xant (7Vz+l)/2, (4.2)
где jDxant - горизонтальный размер антенны РЛС.
Единица добавляется для того, чтобы не было ослабления сигнала в зоне, на-
ходящейся на краю диаграммы антенны. Сканирование лучей с частичным пере-
крытием соседних зон по углу места реализуется путем использования фазируемой
антенной решетки либо переключением облучателей в зеркальной антенне.
Для получения одинаковой разрешающей способности по азимуту во всех
парциальных зонах длина синтезированной апертуры и время синтеза должны
быть пропорциональны наклонным дальностям до центра зон. На рис. 4.2 показаны
рассчитанные по формулам, приведенным в гл. 3, графики для горизонтальной и
наклонной дальностей и их распределение по парциальным лучам. Взяты парамет-
ры РСА: высота орбиты 630 км (солнечно-синхронная с углом наклонения 98,2°),
полоса съемки 500 км, углы падения от 10 до 48°, пять лучей. Для такой орбиты
максимальная путевая скорость КА составляет Ksg=7657 м/с (см. гл. 5). Ширина
парциальных зон по горизонтальной дальности выбрана одинаковой, что обеспе-
чивает примерно равную чувствительность РСА во всех лучах (с отклонением не
153
Радиолокационные системы землеобзора космического базирования
более ±1 дБ). Значения наклонных дальностей для центра лучей (отмечены круж-
ками) приближенно образуют геометрическую прогрессию с коэффициентом
KR= 1,069 при отношении наклонных дальностей на границах полосы съемки, рав-
ном 1,4. Полное время синтеза равно сумме парциальных времен плюс время син-
теза в зоне, ближайшей к надиру
N
т =т ч- \Л т = т
synt synt N / ^ synt k synt l
k=\
N
£=1
(4.3)
= т
1 synt _ 1
'N
R
R
Рис. 4.2. Распределение горизонтальной (сплошная линия) и наклонной (пунктир) дальностей
по парциальным зонам в режиме Скансар
Уточненное значение разрешения по азимуту будет составлять
_Dxanl( ^-1^6,74^
Л=— (1+7Г7,Г^-
(4.4)
Выбранная геометрия расположения парциальных зон сканирования одно-
значно определяет ширину ДНА по углу места для каждого из лучей, а, следова-
тельно, и вертикальный размер антенны для заданной длины волны РСА. С учетом
требований по однозначности сигналов (подразделы 3.6.2, 3.6.3) выбирают частоту
повторения зондирующих сигналов, по величине которой определяют требования к
горизонтальному размеру антенны
Г) >____1**
F
Л ртах
(4.5)
где Fpmax - наибольшее значение частоты повторения для парциальных зон.
Подставляя принятые параметры режима Скансар в (4.3)-(4.5) получаем при
kr = 1,3 и кх= 1,45 требуемый размер антенны Fxant=15 м и разрешение по азимуту
/9y=50,5 м. Время синтеза в каждой зоне вычисляют по известной формуле с уче-
том выбранной длины волны РСА
154
Глава 4. Режимы работы космических РСА
р _ ^ак _ ^Ок^
synt-"“Ksg“2Ksg^’
(4.6)
где ~ длина синтезированной апертуры; ЛОл - наклонная дальность в k-й парци-
альной зоне.
Кроме ухудшения азимутального разрешения отличие параметров режима
Скансар от маршрутного режима состоит в более жестких требованиях по подав-
лению помех неоднозначности сигналов по азимуту. Как показано в гл. 3, рис. 3.23
и формула (3.74), влияние помех неоднозначности определяется отношением инте-
гральной мощности сигнала в пределах полосы обработки к мощности паразитных
составляющих, попадающих в полосу фильтра обработки. В маршрутном режиме
за время прохождения азимутальной ДНА доплеровская частота принимаемого
сигнала от каждой цели меняется в пределах полной полосы AFDop = 2^/7)^ ,
имея ноль доплеровской частоты в момент, когда цель находится в плоскости,
нормальной к вектору путевой скорости РСА.
При синтезе апертуры, например, методом прямой свертки, принятый сигнал
последовательно смещается по времени так, что его фазовая характеристика совпа-
дает с комплексно сопряженной характеристикой опорной функции. Мощность
сигнала от цели определяется его интегрированием по всему главному лепестку
азимутальной ДНА, как это показано на рис. 4.3,6/. В кадровом режиме Скансар с
длительностью кадра, много меньшей времени прохождения сигналом азимуталь-
ной ДНА, на вход фильтра обработки поступают сигналы от целей на разных доп-
леровских частотах в зависимости от их удаления от плоскости, нормальной к век-
тору скорости РСА в момент съемки. Ширина спектра сигнала от каждой цели в
соответствующее число раз меньше полной полосы сигнала, а амплитуда может
быть ослабленной, если направление на цель в данном кадре съемки находится на
склоне азимутальной ДНА. Эту ситуацию иллюстрирует рис. 4.3,6, на котором
видно, что для целей, удаленных от максимума ДНА, отношение мощности сигна-
ла к помехе неоднозначности резко падает. Поэтому значение коэффициента запа-
Рис. 4.3. Соотношения между интегральными мощностями сигнала и помех неоднозначности
в маршрутном режиме (а) и в режиме Скансар (б)
155
Радиолокационные системы землеобзора космического базирования
са на неоднозначность по азимуту в режиме Скансар следует брать большим
кх ~1,5, чем в маршрутном режиме.
Новая разновидность режима Скансар - TOPSAR (TOPS - Terrain Observation
by Progressive Scans), при котором в процессе обзора парциальной зоны сканируют
лучом по азимуту, как в прожекторном режиме, но в обратную сторону [518]. При
этом в каждом скане сигналы от каждой цели принимают с полным спектром доп-
леровских частот, как при простом расширении азимутального луча. Появляющая-
ся неоднозначность сигналов по азимуту, характер которой известен по значению
мгновенного отклонения луча от нормали в каждом скане (в отличие от расширен-
ного луча), устраняется при синтезе РЛИ. В результате формируется РЛИ с не-
сколько худшим разрешением и отношением сигнал/шум, но с равным амплитуд-
ным распределением и более пригодным для интерферометрической обработки.
Близкий эффект достигается при сканировании луча в направлении, обратном по-
лету (как в прожекторном режиме - инверсный режим TOPSAR), но угол сканиро-
вания должен быть больше.
4.1.3. Прожекторный режим обзора
Основной недостаток маршрутного режима состоит в том, что нельзя получить
азимутальное разрешение лучше, чем половина горизонтального размера антенны
(уточнение для высокоорбитальных РСА приведено в гл. 5). Это ограничение мож-
но преодолеть в кадровом прожекторном режиме, показанном на рис. 4.1,в. В про-
цессе движения КА по траектории луч антенны вращают по азимуту, направляя его
в центр снимаемого участка местности (кадра). Выигрыш во времени синтеза ис-
пользуют для улучшения азимутального разрешения, а также для получения не-
скольких независимых наблюдений и улучшения радиометрического разрешения
путем некогерентного накопления наблюдений.
Изменение направления луча реализуют путем программного разворота КА
по курсу (РСА TECSAR [385, 422]), а также применением антенн со сканировани-
ем луча в горизонтальной плоскости: гибридной зеркальной антенны (РСА КА
«Кондор-Э», см. гл. 12, 13) или антенн типа АФАР (большинство современных
РСА, см. гл. 13).
В прожекторном режиме принимаемый сигнал имеет ряд особенностей,
которые связаны с тем, что, по существу, имеем сочетание строго бокового обзора
(нуль доплеровской частоты в центре луча ДНА) в середине интервала обработки
со скошенным обзором на краях синтезированной апертуры:
• ширина спектра доплеровских сигналов, принимаемых от участка местности,
облучаемого антенной РСА в каждый момент времени (мгновенный доплеров-
ский спектр) такая же, как и в маршрутном режиме и равна AFDop = 2Ksg / Z)xant,
что позволяет выбирать частоту повторения зондирующего сигнала, как в мар-
шрутном режиме. Расчет частоты повторения и других параметров РСА ведется
так же, как для маршрутного режима по формуле (3.71) с учетом выбранного
размера антенны по конструктивным соображениям, исходя из обеспечения
энергетического потенциала, полосы съемки и полосы обзора (см. разделы 3.5 и
156
Глава 4. Режимы работы космических РСА
3.6). Параметры прожекторного режима отличаются от маршрутного временем
обработки, длиной синтезированной апертуры и числом когерентно и некоге-
рентно суммируемых импульсов;
средняя доплеровская частота спектра сигналов изменяется по времени, при-
мерно по линейному закону, причем интервал изменения частоты в несколько
раз превышает ширину мгновенного спектра. Поэтому записанная в ОЗУ ра-
диоголограмма прожекторного режима содержит несколько интервалов неод-
нозначности по азимуту, как это иллюстрирует рис. 3.23 гл. 3, а также вид дву-
мерной радиоголограммы, приведенной на рис. 4.4. Положение «крестов» соот-
ветствует значениям доплеровской частоты, кратным частоте повторения зон-
дирующего сигнала. Поскольку полоса доплеровских частот от облучаемого
антенной РСА участка местности меньше частоты повторения Fp, отличие при-
нимаемой частоты сигнала по азимуту (в пределах ±Fp/2) от истинной допле-
ровской частоты и вызванная этим многозначность не даст ложных целей. За-
кон изменения средней частоты известен, условие обобщенной теоремы Ко-
тельникова о соотношении полосы спектра сигнала и частоте дискретизации не
нарушается и возможно восстановление непрерывности исходного закона из-
менения доплеровской частоты принимаемого сигнала, например, путем гете-
родинирования с ЛЧМ-процессом, интерполяцией отсчетов на повышенную
частоту и обратным гетеродинированием. Временные зависимости параметров
принимаемого сигнала детально рассмотрены в гл. 5 и 6;
интервал дискретизации отсчетов радиоголограммы по азимуту в несколько раз
превышает азимутальное разрешение РЛИ. Для отображения такого РЛИ тре-
буется в процессе синтеза РЛИ повысить частоты дискретизации, например,
методом интерполяции (см. выше);
на краях радиоголограммы резко возрастает миграция дальности (рис. 4.4).
Может оказаться, что величина миграции сигнала от цели за период зондирова-
ния превысит шаг квантования по дальности, так, что в отдельных отсчетах
дальности сигналы от цели будут отсутствовать, и радиоголограмма будет раз-
рушаться. В первую очередь это проявится в возрастании интегрального уровня
боковых лепестков синтезированной ДНА, оценка которого проведена в [431*].
Рис. 4.4. Вид радиоголограммы прожекторного режима
157
Радиолокационные системы землеобзора космического базирования
Обычно в прожекторном режиме амплитуда принимаемых от местности сиг-
налов постоянна по времени. Она максимальна для центра кадра и уменьшается к
краям снимаемого кадра в соответствии с формой ДНА, ограничивающей размер
снимаемого кадра по азимуту. Возможен, так называемый, прожекторный режим
«с протяжкой», при котором луч антенны не строго следит за центральным объек-
том, а «скользит» относительно него с отставанием от точного слежения. В этом
режиме амплитуды принимаемых по полю кадра сигналов меняются по времени,
но при этом он позволяет несколько увеличить размер кадра по азимуту.
Приведенные выше особенности сигналов в прожекторном режиме должны
учитываться в алгоритмах синтеза РЛИ (см. гл. 6).
4.1.4. Поляриметрические режимы радиолокационной съемки
Поляриметрические режимы являются синхронной съемкой с комбинацией раз-
личных поляризаций при излучении и приеме. Их техническая реализация зависит
от решаемой задачи дистанционного зондирования, особенностей построения кон-
кретной аппаратуры РСА с учетом ограничений, связанных с принципом работы
РСА. Обычно используют линейно поляризованные сигналы, излучаемые и при-
нимаемые антенными устройствами с линейными горизонтальной (Г) и вертикаль-
ной (В) поляризациями. При проектировании современных РСА предусматривают
полнополяриметрические режимы, обеспечивающие прием и регистрацию четырех
(Quad-pol) сочетаний поляризаций излучения и приема, составляющих матрицу
Стокса ГГ+ГВ+ВВ+ВГ, а также сокращенные режимы с регистрацией сигналов
двух (Dual-pol) сочетаний поляризаций: ГГ+ГВ, ВВ+ВГ или ГГ+ВВ [80]. Выходной
информацией РСА в таких режимах являются КРЛИ, по которым можно измерять
отношения между амплитудами компонентов матрицы Стокса, разности фаз между
ними, а также вести интерферометрическую обработку поляриметрических данных
(режим PolInSAR).
Наиболее информативным инструментом поляриметрического зондирования
является поляриметрическая интерферометрия (PolInSAR), основанная на анализе
полнополяриметрической матрицы. Применительно к мониторингу лесных масси-
вов она позволяет оценивать высоту деревьев, вести многослойное топографиче-
ское картирование.
В отличие от полнополяриметрического режима или комбинации ГГ+ВВ реа-
лизация режимов с двумя поляризациями ГГ+ГВ или ВВ+ВГ (сокращенная запись -
ГГВ, ВВГ) предъявляет значительно меньшие требования к аппаратуре РСА. Сиг-
нал передатчика (или выходы мощных усилителей модулей АФАР) подключают к
антенне (излучателям) требуемой поляризации (Г или В). Принятый антеннами
двух (Г и В) поляризаций сигнал усиливают в двух приемных каналах и далее по-
сле оцифровки подают на линию передачи данных. Для поляриметрических режи-
мов поток информации, передаваемой по радиолинии, возрастает, что обычно ком-
пенсируют ухудшением пространственного разрешения.
В режиме четырех поляризаций радиолокатор работает на удвоенной частоте
повторения с череспериодным чередованием поляризации излучения, прием и уси-
ление сигналов ведут как в рассмотренном выше случае. Повышение частоты повто-
158
Гпава 4. Режимы работы космических РСА
рения зондирующих сигналов приводит к появлению неоднозначности сигналов по
дальности, что ограничивает полосу съемки в области больших углов падения.
Вариантом получения частичной информации о составляющих матрицы Сто-
кса без удвоения частоты повторения может быть режим, который по аналогии с
режимом Скансар можно назвать «Сканпол». Съемку с приемом двух поляризаций
проводят кадрами длительностью, примерно в три раза меньшей времени облуче-
ния целей по азимуту, меняя поляризацию излучения от кадра к кадру. После син-
теза КРЛИ будут получены две поляриметрические пары ГГВ и ВВГ изображений,
пригодные для измерений отношения амплитуд и разности фаз с тем отличием, что
в соседних кадрах флуктуации сигналов будут некоррелированы, и для повышения
точности измерений потребуется их сглаживание (некогерентное накопление) по
площади наблюдаемых протяженных объектов.
Необходимость использования в поляриметрических режимах двух приемных
каналов, как правило, не слишком усложняет бортовую аппаратуру, поскольку при
проектировании РСА космического базирования обязательно предусматривают ре-
зервирование основных блоков, и усложнение касается только коммутационных
устройств. При выходе из строя одного из каналов сокращаются функциональные
возможности бортового комплекса, но в целом живучесть сохраняется.
Применительно к мини-спутникам с АФАР требование наличия двух прием-
ных каналов в модулях может оказаться невыполнимым из-за превышения общей
массы аппаратуры. В таких случая реализация режима двухполяризационного зон-
дирования в комбинациях ГГВ, ВВГ или ГГ+ВВ возможна путем череспериодного
переключения поляризаций при излучении и приеме с работой на удвоенной час-
тоте повторения.
В связи со сложностями работы в полнополяриметрическом режиме применяют
«компактный режим» (СР compact polarimetry), при котором излучают линейно по-
ляризованную волну с углом наклона плоскости поляризации 45° [321, 377, 471].
Технически такой режим реализуют в РСА с АФАР, разделяя на две группы по вер-
тикали управление приемопередающими модулями (ППМ) при передаче: одна груп-
па излучает горизонтальную, а другая - вертикальную поляризации. Введением до-
полнительного сдвига фазы в одной из групп ППМ на ±90° можно получить зонди-
рующий сигнал с круговой поляризацией. Прием ведут как обычно - двумя каналами
Г и В поляризаций.
В результате в режиме СР тг/4 в приемных каналах оказываются суммы сигна-
лов с согласной и кроссполяризованной компонентами:
= ^{W7'*’™ + -W7*™ }; (4-7)
t7v =^|+ ^HVe7№v} •
Для круговой поляризации излучения имеем аналогичные соотношения.
Как и в полнополяриметрическом режиме в компактном режиме информатив-
ными признаками являются отношения амплитуд и разность фаз мощных ком-
плексных составляющих ГГ и ВВ поляризаций с дополнением к ним низкого уров-
159
Радиолокационные системы землеобзора космического базирования
ня (минус 7... 10 дБ) кроссполяризованных компонентов. При таком соотношении
амплитуда кроссполяризованной компоненты составляет 0,3 - 0,45 от параллель-
ной компоненты. Поэтому в комбинации компонент амплитуда суммарного сигна-
ла может изменяться в пределах 55... 145 %, а фаза - до ±24°. Комбинация поляри-
заций существенно повышает вероятность идентификации типа подстилающих по-
верхностей, имеющих симметричные кроссполяризованные компоненты ГВ и ВГ,
что характерно, например, для растительного покрова.
Применение компактного поляриметрического зондирования позволяет избе-
жать ограничений, типичных для полнополяриметрического режима, при сниже-
нии вероятности распознавания типа поверхности не более единиц процентов.
Особо заметны преимущества компактного представления поляриметрических
данных при поляриметрической интерферометрии, требующей удвоения объема
данных для тематической обработки.
4.1.5. Интерферометрическая радиолокационная съемка
Интерферометрическая съемка предусматривает получение набора (двух и более)
КРЛИ заданной территории при совпадающих или близких условиях наблюдения,
определяемых интерферометрической базой. В зависимости от решаемой задачи база
может располагаться поперек линии пути (построение карт рельефа, топографиче-
ское картирование), вдоль линии пути (индикация движущихся целей) или опреде-
ляться временным интервалом между съемками (временная база дифференциальной
интерферометрии для измерения малых смещений земной коры и изменения геомет-
рии объектов, а также для выявления изменений в оперативной обстановке). Инфор-
мация, извлекаемая при интерферометрической обработке, содержится в разности
фаз в каждом пикселе РЛИ, вычисляемой через произведение комплексных отсчетов
одного КРЛИ на комплексно-сопряженные отсчеты второго КРЛИ
= arctg-
Refcqt/j)
(4.8)
Используют интерферометрию с «жесткой» базой, при которой передатчик и
два приемных канала с независимыми антеннами размещаются на одном КА, и с
«мягкой» базой в виде тандемов КА, двигающихся по близким параллельным ор-
битам или путем съемки на другом витке кратно повторяющейся орбиты (межвит-
ковая интерферометрия).
Основное требование к получаемым парам КРЛИ - их пригодность к коге-
рентной обработке. Ее характеризуют коэффициентом когерентности. Этот ком-
плексный параметр называют «интерферометрической когерентностью»
где zi, z2 - комплексные коэффициенты обратного рассеяния, рассчитанные по перво-
му и второму КРЛИ, угловые скобки означают усреднение по объекту наблюдения.
160
Глава 4. Режимы работы космических РСА
Нарушение когерентности КРЛИ может быть вызвано увеличением размера
базы, при котором в дополнительный приемный канал попадают сигналы не от
максимума главного лепестка диаграммы обратного рассеяния (ДОР) каждого эле-
мента разрешения на местности или группового объекта, а из области, где сказы-
ваются флуктуации сигналов, вызванные интерференцией элементарных отражате-
лей, попадающих в элемент разрешения РСА. Критический размер базы, когда ко-
герентность нарушается, составляет от сотен метров до километров в зависимости
от диапазона волн и разрешающей способности РСА.
Преимущества жесткой базы - ее фиксированный размер. В РСА SRTM КА
Space Shuttle [521], предназначенном для топографического картирования, реали-
зована сложная уникальная конструкция с выдвижной 60-метровой штангой, на
которой установлены выносная двухдиапазонная приемная ФАР, а также лазерная
и телевизионная аппаратура контроля геометрии. Размер базы значительно мень-
ше критического, что ограничивает точности измерения разности фаз.
Примером создания жесткой базы вдоль линии пути являются РСА с секцион-
ными АФАР, в которых сигналы от каждой секции усиливаются в разных каналах.
Такую распределенную систему можно использовать для пространственно-времен-
ной обработки сигналов (STAP - Space-Time Adaptive Processing) с целью индика-
ции движущихся целей. Однако и в этом случае конструктивные соображения ог-
ранивают размеры интерферометрической базы и соответственно пороговое значе-
ние и точность измерения скоростей целей.
Преодоление указанных ограничений достигается использованием интерферо-
метрии с мягкой базой, один из вариантов которой - создание орбитальной груп-
пировки в виде синхронного тандема спутников, движущихся по параллельным
орбитам со смещением поперек и вдоль линии (TanDem-X, Radarsar-2 и Radarsat-3
[276, 317, 370, 372]). Такая конфигурация пригодна для продольной и поперечной
интерферометрии, но в последнем случае следует учитывать изменения размера базы
в пределах каждого витка, особенно при полярных орбитах. Особые требования
предъявляются к точности измерения разме-
ров и углового положения базы между спут-
никами, что требует применения прецизион-
ной бортовой аппаратуры позиционирования
и уточнения данных по наземным средствам
траекторных измерений и путем анализа за-
писанных радиоголограмм.
Геометрия интерферометрической съем-
ки с использованием тандемов КА показана
на рис. 4.5. Спутники двигаются по близким
орбитам. В текущий момент времени поло-
жение спутников в точках Ai и образует
интерферометрические базы - поперечную В у
и продольную Вх. Обычно один из спутников
(Л1) работает в активном режиме излучения и
Рис. 4.5. Интерферометрическая съемка
с использованием тандемов КА [370]
6—1492
161
Радиолокационные системы землеобзора космического базирования
Рис. 4.6. Геометрия интерферометрической
съемки тандемом КА
приема, а второй (А2) пассивный - только в
режиме приема. Размеры интерферомет-
рических баз должны удовлетворять усло-
вию когерентности (4.9).
В данном разделе рассматриваем по-
перечную интерферометрию для построе-
ния карт рельефа (рис. 4.6). Примем, что
ось Zs направлена в зенит и проходит че-
рез середину центрального угла as (центр
орбитальной группировки). Ось As парал-
лельна вектору путевой скорости КА, ось
Ys дополняет систему до правой при лево-
стороннем обзоре и до левой - при обзоре
правым бортом. Плоскость визирования
OYSZS, перпендикулярная вектору путевой
скорости, соответствует нулевой допле-
ровской частоте при синтезе РЛИ.
Входными данными для расчетов
являются:
• полученные по данным траекторных
измерений и датчиков позициониро-
вания радиусы орбит КА Bsi, Rs2y цен-
тральный угол Os формирования ин-
терферометрической базы, текущие
географические координаты следа F
центра орбитальной группировки;
наклонные дальности R\ и R2 до точек на земной поверхности, соответствую-
щие пикселям полученных АРЛИ;
разность наклонных дальностей ^R=Rs\-Rs2, измеренная фазометрическим ме-
тодом с высокой точностью по паре КРЛИ.
Выходными данными расчетов должны быть:
географическая координата каждой точки РЛИ в сечении Х=0 (в плоскости ви-
зирования), для вычислений которой требуется знание угла ст,
высота рельефа относительно радиуса референц-эллипсоида Re<p на географиче-
ской широте района съемки.
Размер базы поперечной интерферометрии определяется выражением
= у]+ R^2 - 2RsiRs2 cos as « as + Rs2 )/2 . (4.10)
При равенстве радиусов орбит обоих КА база интерферометрии горизонталь-
на, иначе она наклонена на малый угол
„ . ( Resina 8В = arcsin — / А 1 1 \ + — . (4.11)
’Г 7
162
Глава 4. Режимы работы космических РСА
Для упрощения выкладок примем, что радиусы орбит КА в тандеме одинако-
вы, тогда линия А\Р' горизонтальна, а линия РР' параллельна оси OZS. Координату
точки Р относительно базовой линии А^Р' находят решением прямоугольного тре-
угольника А\РР' с гипотенузой и прилежащим углом Д вычисленным через раз-
ность наклонных дальностей AR
Р « arccos(Afl/By ).
Отсюда получаем соотношения для координаты точки Р\
(4.12)
Yp =F'P' = R} cos P~BY /2 = -BY /2 ;
BY
ZP = 7^! cos(as/2) - 7?! sin J3.
Для высоты рельефа относительно референц-эллипсоида имеем
(4.13)
(4.14)
Центральный угол а для вычисления удаления точки наблюдения от трассы
КА находим из выражения
a - arcsin
(4.15)
В возможном варианте расчета выражают - А/?, а далее решают тре-
угольник по трем сторонам с вычислением высоты )(/?-Я2)/Ву
иугла Р = arccos^T?2-Н2 где p=(BY +7^ +Я2)/2 - полупериметр треугольни-
ка А\А2Р.
Соотношения, аналогичные приведенным выше, справедливы и для случаев
межвитковой интерферометрии, когда изображения получают независимо с помощью
одного или разных КА. Непременное требование - соблюдение базы интерферомет-
рии, при которой сохраняется когерентность пар КРЛИ. Обычно используют повто-
ряющиеся орбиты с циклом 11-21 суток. Из-за влияния разных факторов (например,
медленного снижения) точного совпадения орбит не происходит и может образоваться
требуемая интерферометрическая база. В ряде случаев управляют параметрами орби-
ты, сокращая цикл повторения до двух-трех суток. Причиной разрушения когерентно-
сти могут быть временные изменения обстановки (суточная или сезонная изменчи-
вость). Более стабильна интерферометрия в дециметровых S- и Z-диапазонах волн.
Межвитковая съемка с повторяющихся орбит может применяться для диффе-
ренциальной интерферометрической обработки - когерентным методам выявления
изменений в окружающей обстановке, оценке подвижек земной коры, изменений
геометрии инженерных сооружений путем сопоставления полученных в разное
время фазовых изображений.
163
Радиолокационные системы землеобзора космического базирования
4.2. Расширенные режимы обзора космических РСА
Бурное развитие радиолокационной техники и технологий привело к широкому
использованию активных фазированных антенных решеток (АФАР) в космических
РСА. При этом выявились возможности не только гибкого управления лучом, но и
цифрового формирования ДНА, а также построения многоканальных приемных
систем, использующих секционное разбиение АФАР с применением методов про-
странственно-временной обработки сигналов для индикации движущихся целей.
Это дало возможность разработать новые принципы построения космических РСА,
существенно расширяющие их информационные возможности.
4.2.1. Метод двойного приема
Применение секционной АФАР позволяет повысить разрешающую способность
РСА по азимуту в маршрутном режиме, так называемым методом «двойного прие-
ма» (dual-receive mode of operation), реализованным в РСА нового поколения
Radarsat-2 и TerraSAR-X [265, 268, 333, 334, 402, 481, 501]. Этот метод позволяет
при горизонтальном размере антенны 15 м в РСА Radarsat-2 достичь высокого раз-
решения 3x3 м (режим Ultra Fine mode) в полосе 20 км при углах падения 30...40°.
Такой режим по сравнению с прожекторным режимом имеет несколько меньший
энергетический потенциал, поскольку требует расширения луча антенны при излу-
чении и не позволяет реализовать некогерентное накопление, но зато он позволяет
вести съемку длинных маршрутов, а не выборочных кадров. На практике могут
применяться оба режима работы [481].
Принцип действия режима двойного приема иллюстрирует рис. 4.7. Рассматри-
ваются два положения РСА в соседних периодах зондирования. При передаче сигнал
излучают полной АФАР с фазовыми центрами 1 и 2 в первом и втором зондировани-
ях. Прием ведут двумя независимыми секциями антенны, фазовые центры секций
разнесены на половину размера АФАР. Период повторения выбирают таким обра-
164
Глава 4. Режимы работы космических РСА
зом, чтобы антенна перемещалась из положения 1 в положение 2 на половину своей
длины. Сигналы (Да и C7ib от первого зондирования и t/2a и (Ль от второго зондиро-
вания принимаются секциями антенны независимо, а далее формируют радиоголо-
грамму на виртуальной удвоенной частоте повторения.
Это происходит следующим образом. Допустим, что ведется прием только пра-
вой секцией Л' АФАР, тогда радиоголограмма состоит из последовательности отсче-
тов на реальной частоте повторения (7z-=(/ia, СЛа, ••• Сигналы, принятые секцией В',
будут иметь запаздывание, та-
кое же, как если бы РСА на-
ходилась бы посередине меж-
ду двумя зондированиями.
Эти отсчеты можно вставить
в суммарную радиоголограм-
му. Тогда с выходов двух
приемников получим совме-
щенную голограмму для син-
теза РЛИ на удвоенной (вир-
туальной) частоте повторения:
С/la» ^2b, t/za, ••• •
На рис. 4.8 приведена
модель формирования радио-
голограммы двойного приема
для РСА L-диапазона волн с
горизонтальным размером ан-
тенны 12 м. Сплошная линия
соответствует полной радио-
голограмме, точки - реаль-
ным отсчетам сигналов с сек-
ции А' с частотой повторения
Гр=1200Гц, равные азиму-
тальному смещению РСА за
период зондирования 6 м, ок-
ружности обозначают «вир-
туальные» отсчеты голограм-
мы, использующие сигнал с
секции В'. «Виртуальная»
частота повторения радио-
голограммы равна 2400 Гц.
На рис. 4.9 приведены допле-
ровские спектры сигналов для
обычного маршрутного ре-
жима и режима двойного
приема.
Рис. 4.8. Формирование радиоголограммы двойного приема:
• - отсчеты сигнала, принятые секцией А' антенны;
о - отсчеты от секции В'
Доплеровская частота сигнала, Гц
Рис. 4.9. Доплеровские спектры сигналов для обычного
маршрутного режима (а) и режима двойного приема (в)
165
Радиолокационные системы землеобзора космического базирования
На рис. 4.10 приведены результаты расчета формы нормированного отклика
по азимуту в маршрутном режиме (разрешение по азимуту ~6 м) и в режиме двой-
ного приема (разрешение по азимуту 3 м) для РСА Z-диапазона волн. Благодаря ес-
тественному амплитудному взвешиванию уровень боковых лепестков отклика в
режиме двойного приема значительно ниже, чем в маршрутном режиме (при кото-
ром амплитудное взвешивание сопровождается расширением главного лепестка
импульсного отклика).
Рис. 4.10. Расчетные формы отклика по азимуту в маршрутном режиме (пунктир)
и в режиме двойного приема (сплошная линия):
a - линейный масштаб; б - логарифмический масштаб в децибелах
Заметим, что в рассмотренном методе двойного приема с улучшенной разре-
шающей способностью по азимуту снижение энергетического потенциала РСА по
сравнению с маршрутным режимом невелико - только за счет расширения ДНА на
передачу. На прием потери в отношении сигнал/шум отсутствуют, так как после
независимого усиления в приемных каналах происходит когерентное суммирова-
ние сигналов от секций антенны, аналогичное суммированию в СВЧ-тракте при
одноканальном построении РСА. Преимущество режима двойного приема по срав-
нению с прожекторным режимом - возможность проведения маршрутной съемки с
высоким пространственным разрешением. Но в прожекторном режиме при съемке
малоразмерного кадра можно реализовать значительно больший энергетический
потенциал РСА за счет увеличения времени съемки и сочетания когерентного и
некогерентного накопления при получении выходного РЛИ.
4.2.2. Широкозахватные режимы с высоким разрешением
Выполнение жестких требований, обеспечивающих однозначность принимаемых сиг-
налов по азимуту (выбор горизонтального размера антенны и частоты повторения, см.
раздел 3.5) и по дальности (рекуррентная дальность и ширина ДНА по углу места, см.
раздел 3.6), в конечном счете определяет необходимую площадь антенны
4£Д И JUtg/j
С _ n П \__________X г sg____0/1
° ant ^xant ^jyant
(4.16)
с
166
Глава 4. Режимы работы космических РСА
где £>Xant и Dyant - горизонтальный и вертикальный размеры антенны; Ksg - путевая
скорость платформы; R - наклонная дальность; А - длина волны РСА; - задан-
ный максимальный угол падения, определяющий дальнюю границу полосы обзора
относительно следа КА; с - скорость света; кх и кг - коэффициенты запаса по ази-
муту и дальности.
Это условие ограничивает возможности одновременного расширения полосы
съемки и разрешающей способности РСА по азимуту. Основное препятствие к
увеличению полосы съемки в космических РСА связано с неоднозначностью сиг-
налов по дальности. Выбираемый из условия однозначности сигналов по азимуту
период повторения зондирующего сигнала оказывается меньше, чем разность вре-
мени задержки сигнала между началом и концом полосы съемки. Увеличение пе-
риода повторения, легко достигаемое в некогерентных космических РБО (частота
повторения 100...200 Гц), в когерентных РСА ограничено требованиями теоремы
Котельникова по воспроизведению широкого спектра доплеровских частот сигна-
лов, вызванного большими орбитальными скоростями КА - носителя РСА.
Применение секционированной АФАР позволяет получить высокую разре-
шающую способность по азимуту в РСА с широкой полосой съемки (HRWS - High
Resolution Wide swath [308, 325-327, 371, 441, 480, 483, 500, 512]). Предложенные
методы являются естественным развитием метода двойного приема и заключаются
в использовании многоканальных на прием устройств, подключенных к секциям
антенны, и применении цифрового формирования суммарной ДНА. Как правило,
ДНА на передачу перекрывает всю зону наблюдения по углу места, а по азимуту -
зону, необходимую для получения заданного разрешения. Расширение полосы
съемки в сочетании с высоким разрешением по азимуту достигается
1) увеличением горизонтального раскрыва антенны с понижением частоты
повторения и применением метода многоканального приема;
2) применением многоканального режима Скансар.
В первом случае используют широкий луч на передачу, например, с помощью
отдельной зеркальной антенны. Прием ведут, используя многосекционную прием-
ную фазированную антенную решетку,
как это показано на рис. 4.11.
Для оптимизации параметров РСА
нужно, чтобы скорость платформы V
была такова, чтобы размер шага VTP за
период зондирования равнялся полови-
не горизонтального размера секции
приемной антенны AA^t- Для антенны,
состоящей из N секций, частоту повто-
рения следует выбирать из условия
•17)
Рис. 4.11. Принцип действия метода
Структурная схема приема и обра- многоканального приема для получения
ботки сигналов показана на рис. 4.12. высокого разрешения по азимуту [402]
2V
F^
Р Дсап, ^ant
(4
167
Радиолокационные системы землеобзора космического базирования
Она включает в себя секции приемной ФАР, приемники, аналого-цифровые преоб-
разователи (АЦП), обработку сигналов по азимуту и обычный синтез РЛИ. Цель
азимутальной обработки сформировать сигнал на виртуальной частоте повторения
путем объединения сигналов от N секций приемной ФАР. В результате приходим к
известному требованию теоремы Котельникова к горизонтальному размеру полной
несекционированной антенны Dxant=A^xAAant. В обычных РСА частоту повторения
выбирают с некоторым запасом относительно требований, вытекающих из условия
(4.17), но в процессе обработки сигналов по азимуту возможно снизить помехи
неоднозначности.
Рис. 4.12. Структурная схема обработки сигналов методом многоканального приема
с секционированными приемными ФАР (ПФАР)
При этом для обработки сигналов по азимуту используют разные методы. На-
пример, при методе «смещения фазового центра антенны» (Displaced Phase Center
Antenna [271]) просто вставляют сигналы от приемных каналов в последователь-
ность отсчетов с виртуальной частотой повторения NFP, как это делается в методе
двойного приема. В случаях, когда частота повторения не точно соответствует вы-
ражению (4.17), когерентное суммирование выполняют с поправкой фазы, вычис-
ляемой с учетом изменения доплеровской частоты сигнала в области перекрытия
спектров [328].
4.2.3. Повышение разрешающей способности в поперечном направлении
путем межвитковой интерферометрии
Исходные соотношения. Применение прожекторного режима съемки позволяет
улучшить разрешающую способность РСА вдоль линии пути до долей метра, об-
ратно пропорционально реализованной длине синтезированной апертуры. Имеется
возможность улучшения разрешения поперек линии пути сверх предела, ограни-
ченного полосой зондирующего сигнала («сверхразрешение»), путем когерентной
обработки КРЛИ, полученных на разных витках с различающимися углами паде-
168
Глава 4. Режимы работы космических РСА
ния. Предполагается, что за время между съемками не было изменений в окру-
жающей обстановке. Обоснование этого метода дано в статьях [324, 339, 482]. В
наиболее компактном виде материал изложен в статье [482], основные положения
которой с необходимыми дополнениями приводятся в данном подразделе.
Физические основы метода можно объяснить следующим образом. Известно,
что разрешающая способность по наклонной дальности определяется полосой час-
тот зондирующего сигнала. В самолетных РСА известен метод получения высоко-
го разрешения по наклонной дальности путем применения зондирующего сигнала
с относительно узкой полосой, но с изменением несущей частоты от импульса к
импульсу [100]. При когерентном суммировании сигналов за пачку таких зондиро-
ваний результирующая ширина спектра зондирования оказывается равной полной
ширине излучаемого спектра. При таком режиме работы РСА можно путем пере-
стройки гетеродина от импульса к импульсу использовать узкополосный тракт
УПЧ радиолокатора, обеспечивая высокое отношение сигнал/шум при восстанов-
лении истинных значений частот в процессе синтеза КРЛИ.
В рассматриваемом случае межвитковой интерферометрии с разными углами
падения мы получаем набор принятых сигналов с разными пространственными
частотами. Геометрия наблюдения имеет вид, показанный на рис. 4.13. Излучен-
ный радиолокатором сигнал отражается от элементов облучаемой поверхности и
формирует КРЛИ с фазовым распределением в соответствии с пространственным
волновым числом &gl. Для монохроматического облучения с частотой и учетом
двойного пути распространения сигналов имеем
169
Радиолокационные системы землеобзора космического базирования
(4.19)
Принятый радиолокационный сигнал формируется всей отражающей поверх-
ностью и является когерентной суммой сигналов, отраженных от ее элементов с
соответствующими амплитудами и фазами. При излучении модулированного сиг-
нала (короткие импульсы или импульсы с широкополосной модуляцией с полосой
&F) взаимодействие спектральных составляющих отраженного сигнала обеспечи-
вает пространственное разрешение по горизонтальной дальности. Такого же эф-
фекта можно достигнуть, если когерентно суммировать сигналы от пространствен-
но разнесенных датчиков с соответствующим перекрытием по волновым числам
при разных углах падения и записать формулу (3.09) с дополнительным членом в
знаменателе, учитывающим диапазон изменения углов падения
2я с
Py =----~ —г----------------------------и »
A£g 2|_AFsinyi + 2/0cosyisin(A/i/2)J
где при /i = (/и + /i2 )/2 - среднем угле падения значения волновых чисел на зем-
ной поверхности определяются формулой с учетом двойного распространения и
проекции горизонтальной дальности на наклонную дальность
*gi,2 =y^-sin/ii,2 = 4Я7*’2 sin/ii,2 =—(/о ± AF/2)sin(/j ± A/j/2). (4.20)
При малой разности углов падения (малая база интерферометрии) отражен-
ные от местности сигналы когерентны и по разности фаз (сравнение ФРЛИ) можно
построить карту рельефа. Если размеры базы возрастают, то отраженные сигналы
декоррелируются и возможны два варианта обработки - внутриэлементное некоге-
рентное накопление по дальности с сохранением пространственного разрешения и
улучшением радиометрического разрешения или же когерентное суммирование
для улучшения разрешения по горизонтальной дальности. Критическое значение
разности углов падения (определяющее критическую базу) вычисляем через шири-
ну спектра зондирующих импульсов из выражений (4.19), (4.20)
А АТ7
A/i =/il "/i2 >
(4.21)
гдеУо - несущая частота зондирующего сигнала.
Используя геометрические соотношения (3.4)-(3.8) дифференцируя зависи-
мость центрального угла а от угла падения, получим выражение для критического
значения базы при межвитковой интерферометрии:
1-
cos/i
Л2 Де -Sin2/i
(4.22)
где Re - локальный радиус Земли; Rs - радиус орбиты КА.
Так, например, для ERS-1 (несущая частота сигнала ГГц, ширина спек-
тра AF=15,55 МГц, высота орбиты Hs=785 км, угол падения /,=23°) критическое
значение базы составляет Bs= 1048 м, а ее изменения в пределах полосы съемки - от
849 до 1262 м [482]. Для РСА КА «Кондор-Э» (несущая частотаУо=3,2 ГГц, ширина
170
Глава 4. Режимы работы космических РСА
спектра АЕ=200МГц, высота орбиты 14=500 км и угол падения ^=45°) критиче-
ское значение базы значительно больше и равно 56,59 км.
Алгоритм формирования выходного РЛИ. Идея сверхразрешения состоит в
расширении полосы пространственного спектра сигналов путем комбинирования
спектров двух (или большего числа) съемок с различными углами падения при раз-
мерах базы, близкой к критической величине. Ее выбирают несколько меньшей, что-
бы спектры сигналов перекрывались, хотя это и приводит к уменьшению выигрыша
по разрешению. Общую часть спектра (перекрытие) используют для оценки смеще-
ния межу спектрами. С этой целью можно применить корреляционный анализ.
Формирование выходного РЛИ с повышенным разрешением поперек трассы
КА включает несколько этапов:
1) синтез обоих (или большего числа) КРЛИ и их сортировка в порядке воз-
растания базы. Будем называть одно из них (КРЛИ1) ведущим, а второе (КРЛИ2)
или остальные - дополнительными. По АРЛИ выбирают совпадающие фрагменты
по наклонной дальности. Они отличаются масштабами примерно как А/// (до
6,25 % в 5-диапазоне волн);
2) интерполяция дополнительных КРЛИ по дальности для приведения их к
масштабу ведущего КРЛИ или интерполяция всех КРЛИ с приведением к требуе-
мому масштабу по горизонтальной дальности;
3) вычисление спектров по горизонтальной дальности пар смежных КРЛИ и
их фильтрация с выделением перекрывающейся области спектров (Si2), а также
двух примыкающих половин и 52 суммарного спектра путем режекции половин
перекрывающихся частей спектров исходных КРЛИ;
4) получение комплекта КРЛИ после фильтрации: КРЛИ1вр, КРЛИ2вр из при-
мыкающих спектров - они будут использованы для формирования РЛИ высокого
разрешения, а также КРЛИ1п и КРЛИ2п - из перекрывающихся областей спектра,
сравнение которых позволит устранить смещения спектра 51 по отношению к 52. По-
сле этой процедуры можно сложить спектры 51 и 52. Аналогичные операции совер-
шают с КРЛИ, полученными при другой величине расширенной базы.
В рассмотренной процедуре получения РЛИ с улучшенным разрешением
поперек линии пути возможно некоторое улучшение радиометрического разреше-
ния, если применить некогерентное накопление с КРЛИ, полученным с использо-
ванием фрагментов спектра из области перекрытия. Как отмечено в [482], улучше-
ние выходного РЛИ происходит в связи с тем, что на практике эти фрагменты
спектров не идентичны, поскольку за интервал между съемками возможны изме-
нения в обстановке. Кроме того, два исходных КРЛИ содержат некоррелированные
шумы приемника.
Вместо улучшения пространственного разрешения возможно улучшить ра-
диометрическое разрешение выходного РЛИ путем сложения интенсивностей ис-
ходных РЛИ после приведения их к единому масштабу.
На рис. 4.14 приведено сравнение выходных РЛИ с некогерентным накопле-
нием (рис. 4.14,6) и РЛИ со сверхразрешением по дальности (рис. 4.14,а). В прове-
денном эксперименте использовался набор из девяти КРЛИ, полученных с помо-
щью РСА ERS-1, ERS-2 при разных базах интерферометрии. Достигнуто улучше-
171
Радиолокационные системы землеобзора космического базирования
ние поперек линии пути в 2,7 раза (с 32 до 11,9 м) при неизменном разрешении по
азимуту, равном 7,5 м.
Рис. 4.14. Сравнение выходных РЛИ, полученных в результате когерентной (а)
и некогерентной (б) обработки набора снимков, снятых с различием в углах падения:
1 - точечные цели, 2 - групповая цель [482]
Рассмотренная технология может быть применена для получения подробной ин-
формации по важным объектам, состояние которых контролируется путем регулярной
радиолокационной съемки. Используя прожекторный режим съемки большой про-
должительности (с высокими азимутальным и радиометрическим разрешениями) и ал-
горитмы дифференциальной интерферометрии выявляют изменения в оперативной
обстановке, а методом сверхразрешения по дальности - получают изображение непод-
вижной обстановки на объекте со сверхвысоким разрешением в доли метра.
4.2.4. Режимы индикации движущихся целей
Одной из важных задач оценки оперативной обстановки в районе радиолокацион-
ной съемки является обнаружение движущихся наземных целей. При принятой
терминологии эта задача называется селекцией движущихся целей (СДЦ) - обна-
ружение сигналов движущихся сосредоточенных целей путем подавления всех
других неподвижных целей и фона местности [118]. В настоящее время эта задача
значительно расширена и включает обнаружение одновременно движущихся и не-
подвижных объектов с измерением их координат и векторов скорости с индикаци-
ей на фоне радиолокационного изображения земной поверхности.
В современных самолетных РСА для решения этой задачи применяют методы
пространственно-временной обработки сигналов, позволяющие строить на РЛИ
трассы движения ДЦ. В космических РСА отношение скорости цели к скорости
платформы мало, и цель отображается на РЛИ местности в виде отметки, смещенной
по азимуту относительно ее фактического положения. Поэтому речь идет не об об-
наружении цели, обычно ее ЭПР значительно превышает ЭПР окружающего фона
местности, а об идентификации цели как движущейся. В дальнейшем будем приме-
нять общий термин индикация движущихся целей (MTI — moving target indication).
172
Глава 4. Режимы работы космических РСА
В качестве информационных признаков ДЦ можно использовать радиальную
и тангенциальную составляющие ее скорости относительного РСА, а также изме-
нение ее положения на РЛИ при двукратном наблюдении.
Индикация движущихся целей методом продольной интерферометрии.
Наиболее распространен метод индикации движущихся целей по их радиальной
скорости, основанный на продольной (вдоль линии пути) интерферометрии сигна-
лов, принятых двумя независимыми антеннами (или секциями антенны). Фазовые
центры антенн (секций) должны быть смещены вдоль линии пути КА (метод оста-
новленной фазы). Принцип продольной интерферометрии в космических РСА ил-
люстрирует рис. 4.15. Учтено, что в отличие от самолетных РСА в космических
РСА периоды зондирования, в которых происходит прием сигнала, не совпадают с
периодами излучения сигнала.
Рис. 4.15. Принцип продольной интерферометрии в космических РСА
Метод интерферометрии вдоль линии пути реализуется при использовании в
РСА активной фазированной антенной решетки, разделенной на две или большее
число секций. Реализуют многоканальную пространственно-временную адаптив-
ную обработку сигнала (STAP - Space-Time Adapted Processing). Для простоты ог-
раничимся рассмотрением двухсекционной антенны. На передачу сигналы от обе-
их секций суммируются, а прием и обработка ведутся независимо. Пусть РСА,
173
Радиолокационные системы землеобзора космического базирования
оборудованный антенной с горизонтальным размером Dxant и имеющей две секции
А и В, движется со скоростью Vs. Фазовый центр передающей антенны, сформиро-
ванный обеими секциями, занимает последовательно положения Ci и С2. Антенна
излучает зондирующие сигналы в направлении целей - неподвижной цели Tst и
движущейся с радиальной составляющей скорости Vr цели, которая в моменты
времени t2 занимает положения rmti и 7^2-
Спустя интервалы времени, определяемые пространственной задержкой сиг-
нала, в положениях радиолокатора при t\ и /2 производится прием сигналов обеими
секциям антенны А и В. Для реализации данного метода требуется, чтобы период
повторения зондирующих сигналов был равен времени прохождения одной чет-
верти длины антенны
у- _ ficant
Р“ 4KS
(4.23)
где Ks - путевая скорость КА; Dxanl - горизонтальный размер антенны.
Для неподвижной цели длины путей СуТ^А^ и СгТ^А^, а значит и фазы приня-
того сигнала будут одинаковы (с точностью до малой величины, которой при обзо-
ре, близком к боковому, можно пренебречь). При вычитании сигналов А у и В2 от
неподвижных целей и фона местности они компенсируются. Для движущейся це-
ли, имеющей радиальную составляющую скорости Кг, появится разность фаз
Рассмотрим структурную схему системы обработки сигналов с выходов при-
емных каналов, подключенных к секциям ФАР, представленную на рис. 4.16. Она
включает в себя канал синтеза РЛИ местности и целей и канал селекции движущихся
целей (ДЦ) с измерением их радиальных скоростей и вычислением поправок к ази-
мутальной координате. Последнее необходимо, поскольку наличие радиальной ско-
рости целей приводит к смещению отметок от них на РЛИ по азимуту.
КРЛИ фона и ДЦ Параметры ДЦ
Рис. 4.16. Структурная схема обработки сигналов для получения РЛИ
и индикации движущихся целей с измерением радиальной скорости целей
174
Глава 4. Режимы работы космических РСА
Характеристики сигналов в суммарном и разностном каналах РСА. Сиг-
налы, принятые секциями А и В антенн в последовательные периоды зондирования
к, характеризуются фазовыми множителями, обусловленными задержкой на рас-
пространение
UА к +ЛгЛ_а)} ;
йв_к = ^т_к ехр{— №х >
(4.25)
где Кх = 2л/Л - волновое число; к - порядковый номер зондирования (-Asynt/2 < к <
< Муп/2, где Nsynt - число синтезируемых импульсов); Um_к - амплитуда принятых
сигналов (для простоты будем их считать одинаковыми в каналах А и В)\ Rt к, RTA_k->
Rt к и RVB_k - дальности распространения сигналов до цели и обратно к секциям ан-
тенны при к-м зондировании.
Примем, что изменение наклонной дальности цели по временным отсчетам
характеризуется квадратичным законом, и пренебрежем составляющими более чем
второй степени. Задержки сигнала, принятого от неподвижной цели секцией А ан-
тенны, определятся наклонной дальностью
2
(wstp
Ra k=2R0+-р
\к + ^гА к
2^o
= 2Я"+Т
(4-26)
где Ks - путевая скорость РЛС; с - скорость света; Хр = KsTp = Dxant / 4 - путь РЛС
за период зондирования; XR=\Rt к+&тА kWs!c ~~ ПУТЬ> проходимый РЛС за
суммарное время распространения зондирующего сигнала от РЛС до цели и отра-
женного сигнала до РЛС в ее новом положении. Этот параметр зависит от к.
Для упрощения дальнейших записей примем за начало азимутальной коорди-
наты точку, в которой цель Tst находится на траверзе и принято ^=0. Для секции В
будем иметь выражение, отличающееся сдвигом фазового центра приемной секции
на Z)xant/2
к2Х2
RB-k=2R°+^
27?о
= 2Ro+^\k2X2+kXp(xR-Xp) + UxR-Xp)2
I Z
(4.27)
Приведем теперь выражение для наклонной дальности цели, принятой секци-
ей антенны А в предыдущем зондировании к-1. Оно практически совпадает с вы-
ражением (4.27) для секции В антенны:
k-i=2Ro+^(k2X2p+kXp(XR-Xp)-XRXp+^XR-Xp)2]. (4.28)
175
Радиолокационные системы землеобзора космического базирования
Выражения (4.27) и (4.28) для условий зондирования из космоса отличаются на
малую величину порядка XRXp/R0 , что вызывается изменением положения радио-
локатора за время пространственной задержки сигнала из положения С\ в Сз на ве-
личину XRt =RtVs / с . При этом фазовые центры приемных секций будут соответст-
венно находиться в положениях XAi = XRl + Dxant /4 и XBi = XRi - Dxant /4 .
Как следует из дальнейшего, необходимо раздельно рассматривать процессы
обнаружения ДЦ и измерения ее скорости. Усиление в каналах А и В будем считать
одинаковым. Парциальные КРЛИл и КРЛЩ в пикселях, где формируется отметка
от ДЦ, будут включать комплексные сигналы от ДЦ с малой разницей фаз cpw,
синфазные сигналы от местности и независимые отсчеты шумов. В суммарном
КРЛИ будет действовать процесс
^sum_mt ~ Цп_пй eXP{-Mmt} + ^m_mt exp{->Omt + j<Pyr} + 2wfon +UnA+UnB«
~ 2t/m_mt exP{“Mint} + 2“fan + «пЛ + йпВ ’ (4-29)
где Um_mt - амплитуда сигнала от ДЦ; 2zifon - суммарный комплексный сигнал от
фона местности в пикселе РЛИ, где зафиксирована смещенная по азимуту отметка
от ДЦ; Z7rvj и йпВ - комплексные отсчеты шума.
После детектирования суммарного КРЛИ получим амплитудное (линейный
детектор) или энергетическое (квадратичный детектор) РЛИ, содержащее изобра-
жения неподвижных объектов и местности, отметки от ДЦ (смещенные по азиму-
ту) и шумовые отметки.
В разностном канале имеем составляющую от ДЦ, пропорциональную
sin (рУт «(рУт и шумы:
^diffmt ~ ^m_mt ехР {"Мий } - exp {"Mint + } + «пЛ " “nB ~
« -J2C/m_mt exP {-Mrnt} sin «Vr + «пЛ “ "nB • (4-30)
Выполнив операцию детектирования разностного КРЛИ, получим изображе-
ние, содержащее шумовые отметки и отметки от ДЦ, которые можно выделить по-
роговой обработкой.
Вероятность обнаружения неподвижных или движущихся целей по суммар-
ному РЛИ определяется отношением сигнал/фон+шум.
Вероятность идентификации цели как движущейся по разностному РЛИ за-
висит от ее отношения сигнал/шум и величины радиальной скорости
mt Sin /л а 1 \
Qt sn=-----7Л~~\----> (4.31)
где £/m mt - амплитуда ДЦ в парциальном РЛИ, D[un} - дисперсия шума в парци-
альном РЛИ.
Пороговое значение измеряемой радиальной скорости в зависимости от пара-
метров РСА рассмотрено ниже.
176
Глава 4. Режимы работы космических РСА
Оценка значения радиальной скорости ДЦ. Для выбранных параметров зон-
дирования согласно (4.23) и (4.24) значение радиальной скорости находим через
разность фаз по комплексным сигналам парциальных КРЛИл (смещенные на еди-
ницу отсчеты по азимуту) и КРЛИв. Учтем малую величину разности фаз в реаль-
ных условиях sin cpVx ® cpVx. Для идеального случая отсутствия шумов и при нали-
чии шумов имеем
Т7 W W
Кг « —5§—
^^xant ^^xant
агё{£Лп_Л-1^т_в)>
(4.32)
V. =---5---<PVt =---5---
*Aant *Aant
A-l *" ^nA )(^m_S "* UnB .
arg (^m
Для оценки ошибки измерения радиальной скорости при наличии шумов ис-
пользуем численные методы.
По значению радиальной скорости определяем азимутальное смещение отметки
от цели на РЛИ (боковой обзор) относительно отметки от стационарной цели
AX = 7?rr/rsg, (4.33)
Рис. 4.17. Геометрия наблюдения
движущихся целей:
Ks - скорость КА; Кг - скорость цели;
^rs - ракурс относительно нормали
к линии пути ( i/Jts = 0 при движении цели
где R - наклонная дальность цели; Ksg - путевая скорость (скорость в гринвичской
системе координат).
При движении цели в сторону радиолокатора отметка от нее на РЛИ смещает-
ся против движения платформы, а поправка к азимутальной координате - положи-
тельна (см. рис. 9.7).
Вычисление скорости цели на земной
поверхности. Для вычисления истинной
скорости цели найдем связь между вектором
скорости цели NT на земной поверхности и
его проекциями на направление визирования
(радиальная составляющая Кг) и на вектор
путевой скорости КА (тангенциальная сос-
тавляющая Kt). Она определится ракурсом
цели и углом падения (рис. 4.17)
Кг = VT cos y/TS sin /i, (4.34)
где VT - скорость ДЦ на поверхности Земли;
/1 - угол падения между вектором облучения
R цели и местной вертикалью Zt в точке на-
хождения цели; y/TS - угол между вектором
скорости цели в плане и нормалью к трассе
движения КА.
Тангенциальная составляющая скоро-
в сторону РЛС)
сти цели
Kt = VT sin y/TS. (4.35)
Для вычисления истинной скорости цели по (4.25) при известной путевой
скорости КА и угле падения нужно знать ракурс цели. В РСА высокого разрешения
177
Радиолокационные системы землеобзора космического базирования
ракурс цели можно оценить по форме отметки от цели на РЛИ. Задача упрощается
для крупногабаритных морских целей (см. раздел 9.3). Информативным признаком
может быть направление дороги, но следует учитывать азимутальное смещение
отметки ДЦ на РЛИ. Величина смещения азимутальной координаты при боковом
обзоре равна
ду _ Кг7? ^KrCQS^sin/j
И К К
При тематической обработке РЛИ с индикацией ДЦ их расчетное положение
на РЛИ обычно отмечают специальными значками.
Оценка погрешности оценивания скорости ДЦ. Проведем приближенную
оценку погрешности измерения радиальной скорости в предположении большого
отношения сигнал/фон+шум. Воспользуемся соотношением для малых значений
фазы
(4.36)
(р - arg [й| = arcsin
откуда с учетом (4.36) и (4.37) имеем
+"1ъ4)Х(С_в+«пв)!
= 4>Vt - <^г>= 4>Vx------Т-------\--------- = (PVr~
1т{(Цп Л-1 +ЙМ)х
-------------„2 ~------~ =
^m_mt
(4.37)
(4.38)
где й ’ = йпА + йпВ - сумма независимых случайных отсчетов шума в кана-
лах А и В, умноженных на произвольные фазовые множители.
Среднеквадратическое отклонение фазовой ошибки равно
ско(д^) = 7шГ,
где (?sn - отношение сигнал/шум для ДЦ в суммарном канале.
Амплитуду ДЦ можно оценить по РЛИ в суммарном канале, учитывая, что ее
координаты совпадают с РЛИ разностного канала. В точке, где обнаружена сме-
щенная по азимуту отметка от ДЦ суммируются мощности сигналов от ДЦ, фона
местности и шумов. Если цель компактная, то ее амплитуда на выходе синтеза
суммарного канала может быть вычислена через разность квадратов амплитуд
(мощностей) в точке цели и ближайших окрестностей
= 2t7m_mt = . (4.39)
где t/fon+n - среднее значение процесса фон+шум в окрестности ДЦ.
СКО радиальной составляющей скорости определится выражением
1,41сгп Л
сгГг «------2— =--------==.
1,4Ырл/аГ
(4.40)
178
Глава 4. Режимы работы космических РСА
На рис. 4.18 приведены зависимости для амплитуд суммарного и разностного
сигналов от радиальной скорости при разных отношениях сигнал/шум для РСА
Jf-диапазона волн с шестиметровой двухсекционной антенной. При увеличении
длины волны или уменьшении горизонтального размера антенны пороговое значе-
ние измеряемой радиальной скорости возрастает. Имеется тенденция создания со-
временной многоспутниковой информационной системы на базе малогабаритных
РСА с решением задачи индикации движущихся целей путем использования бис-
татических комплексов - тандемов РСА (Radarsat-2/3, TanDEM-X на базе
TerraSAR-X) с близкими орбитами и смещением КА вдоль и поперек (для построе-
ния карт рельефа) линии пути.
Рис. 4.18. Зависимости амплитуд суммарного и разностного сигналов
от радиальной скорости. Пунктиром показаны СКО шума в разностном канале
при разных отношениях сигнал/шум (?sn
Метод пространственно-частотной фильтрации сигналов для индика-
ции движущихся целей. Альтернативой к продольной интерферометрии, но при-
менительно к РСА с зеркальными антеннами может быть использован метод про-
странственно-частотной фильтрации (ПЧФ) сигнала, создающий виртуальное сме-
щение фазового центра излучения, не меняя формы ДНА [37*, 161*, 428*]. В ан-
тенне формируют три частично перекрывающиеся луча в азимутальной плоскости.
Центральный луч, направленный по нормали к вектору путевой скорости, исполь-
зуют для излучения сигналов. Боковые лучи, направленные вперед А и назад В, ис-
пользуют для приема сигналов и их усиления в двух независимых приемниках, на
выходе которых стоят аналого-цифровые преобразователи.
В процессе синтеза РЛИ азимутальные спектры сигналов, принятые в каждом
из каналов А и В умножаются на весовые функции, соответствующие другому кана-
179
Радиолокационные системы землеобзора космического базирования
лу В и А. При этом спектр доплеровских частот сигнала 51 умножается на взвеши-
вающую функцию Х/1, совпадающую с огибающей спектра сигнала S2 и наоборот. В
результате спектры сигналов обоих каналов для неподвижных целей и фона местно-
сти совпадают. Полученные после обратного преобразования Фурье радиолокацион-
ные изображения подстилающей поверхности после детектирования для неподвиж-
ных целей оказываются идентичными и при вычитании они компенсируются. Для
движущихся целей огибающие входных спектров смещаются, что при их вычитании
дает разность РЛИ, отличную от нуля и пропорциональную скорости цели.
Метод ПЧФ, помимо преимущества использования в РСА с зеркальными ан-
теннами, обеспечивает меньшие значения СКО оценки радиальной скорости, чем
продольная интерферометрия, для случаев небольшого отношения ЭПР цели к ЭПР
элемента фона (менее 15 дБ), но при больших отношениях сигнал/шум ~35 дБ.
Индикация движущихся целей по тангенциальной составляющей скоро-
сти движения. В РСА высокого разрешения возможна индикация и измерение
скорости целей не только по радиальной составляющей, но и по тангенциальной
составляющей, вызывающей расфокусировку изображения ДЦ, а также за счет об-
наружения смещения отметок от целей за время наблюдения. Эти методы, как пра-
вило, не требуют введения специальных режимов работы космических РСА, а от-
носятся к алгоритмам обработки радиоголограмм или получаемых комплексных
РЛИ. Поэтому они рассматриваются в гл. 6.
Рассмотренные режимы космических РСА (кроме широкозахватных режимов
с высоким разрешением и метода пространственно-частотной фильтрации движу-
щихся целей), как правило, реализуются в современных РСА. Это обеспечивает
многофунциональность РСА с гибкой адаптацией параметров аппаратуры для ре-
шения широкого круга задач двойного применения.
180
Глава 5
РАСЧЕТ ПАРАМЕТРОВ ТРАЕКТОРНОГО СИГНАЛА
ПРИ КОСМИЧЕСКОМ РАДИОЛОКАЦИОННОМ ОБЗОРЕ
5.1. Состав параметров траекторного сигнала
Под траекторным сигналом в РСА будем понимать сигнал, принятый от одиночной
точечной цели в процессе движения платформы с РСА в течение времени, достаточ-
ном для получения радиолокационного изображения. Это «медленное время» tx, ха-
рактеризующее движение радиолокатора вдоль траектории полета, будем в данной
главе обозначать символом t без индекса (см. раздел 3.2). Траекторный сигнал яв-
ляется аналогом амплитудно-фазового распределения поля по раскрыву физиче-
ской антенны (конформной антенной решетки произвольного профиля). Он опре-
деляет форму диаграммы направленности синтезированной антенны (импульсного
отклика РСА) вдоль траектории полета, получаемой в результате согласованной
фильтрации сигнала.
В состав параметров траекторного сигнала, знание которых необходимо для
выбора технических параметров РСА, реализации алгоритмов синтеза радиолока-
ционного изображения (РЛИ) и оценки разрешающей способности РСА вдоль ли-
нии пути (по азимуту), входят:
1) временные зависимости наклонной дальности цели R(t), а также фазы
(p(t)=47tR(t)/A, однозначно определяемой наклонной дальностью при выбранной
длине волны РСА Л;
2) временная зависимость доплеровской частоты (производной фазы по вре-
1 d(p(t)
мени) Fd (t) =----—, с учетом которой выбирают частоту повторения зонди-
р 2тг dt
рующих сигналов РСА для исключения помех неоднозначности;
3) временная зависимость амплитуды принятого сигнала от точечной цели U(t);
4) длительность траекторного сигнала, определяющая максимальное время
синтеза Tsynt РЛИ или время обработки, сочетающей когерентное и некогерентное
накопление;
5) геометрические размеры синтезированной апертуры в пространстве £а, ис-
пользуемые при антенном подходе к анализу процессов синтеза РЛИ и оценке реа-
лизуемого разрешения по азимуту;
6) ширина спектра доплеровских частот AFDop, ограниченная шириной луча
антенны РСА по азимуту и определяющая выбор частоты повторения зондирую-
щего сигнала;
7) разрешение РСА по азимуту рх.
181
Радиолокационные системы землеобзора космического базирования
В перечисленном списке параметров траекторного сигнала, часть из них (фаза,
доплеровская частота) зависят не только от параметров движения платформы, но и
от рабочей длины волны РСА. Приведенные в данной главе расчетные формулы ха-
рактеризуют кинематику движения, не привязанную к значениям длины волны кон-
кретного РСА. Предполагается, что временная зависимость фазы сигнала (p(t) одно-
значно определена временной зависимостью наклонной дальности цели R(t) через
длину волны РСА Л, т.е. (p(t) = A7iR(f)/A, а зависимость доплеровской частоты сигнала
FDop(0 - радиальной скоростью цели 7r(t): FDop(0 = 2Кг(/)/Л. В дальнейшем тексте при
описании параметров сигнала возможно объединение этих понятий.
Примеры вычисления перечисленных параметров даны в гл. 3 при объяснении
принципов работы РСА для простейшего случая прямолинейного равномерного
движения платформы с РСА. На практике для самолетных РСА рассматривают
также случаи синтеза РЛИ при полете с ускорением, криволинейном полете, а так-
же при круговой траектории полета [353].
Работа РСА в составе космического аппарата связана с необходимостью учета
ряда специфических факторов, к которым относятся:
1) кривизна земной поверхности;
2) вращение Земли и ошибки ориентации осей КА, вызывающие смещение
доплеровского спектра и увеличенную миграцию дальности;
3) большая дальность наблюдения, предъявляющая высокие требования к
энергетическому потенциалу РСА и точности фокусирования синтезированной
апертуры;
4) высокая орбитальная скорость КА, что приводит к существенной неопреде-
ленности зондирующего сигнала по азимуту или дальности;
5) возмущения от кеплеровского закона движения КА и ошибки ориентации
строительных осей КА относительно осей координат радиолокационного обзора;
6) деструктивные воздействия на трассе распространения сигнала (тропо-
сферные и ионосферные нестабильности).
Создание и эксплуатация космических РСА разделяется на несколько стадий, в
которых анализ воздействия перечисленных факторов имеет различия и разные тре-
бования к точности знания параметров относительного движения. На стадии проек-
тирования РСА для выбора требований к параметрам РСА и обеспечивающих сис-
тем можно ограничиться простой моделью Кеплерова движения спутника. Очень
высокая точность позиционирования КА при съемке требуется для «нацеливания»
антенны радиолокатора на заданный участок местности, особенно для интерферо-
метрической обработки, построения высокоточных карт рельефа местности, вычис-
ления опорной функции для синтеза РЛИ высокого разрешения и привязки РЛИ к
географическим координатам с точностью до одного пикселя (отсчета) РЛИ.
Преобразование первичной информации в координатах наклонная дальность -
время излучения зондирующего импульса в картографические координаты поперек
и вдоль трассы движения КА требуют тщательного учета доплеровского смеще-
ния принимаемого сигнала, рельефа местности и параметров относительного
движения.
182
Глава 5. Расчет параметров траекторного сигнала...
Для нацеливания радиолокатора на объект съемки необходимы измерение те-
кущих координат КА, ориентация осей КА в пространстве обзора, а также управле-
ние параметрами радиолокатора (частотой повторения, положением временных
стробов приема) и управление диаграммой антенны по углу места и азимуту. Необ-
ходимые управляющие параметры вводятся на основании баллистических расчетов
движения КА, данных текущих траекторных измерений, параметров модели геоида.
5.2. Системы координат, используемые при радиолокационном
обзоре
Для описания соотношений, определяющих положения КА и точки наблюдения,
геометрию получаемого радиолокационного снимка, параметры принимаемого сиг-
нала (фазу, доплеровскую частоту), используют различные системы координат -
полярные (угловые) и прямоугольные (декартовы). К ним относятся (рис. 5.1) [95,
160*, 169, 221,233]:
1) геоцентрическая гринвичская система координат (ГСК) OXGYGZG, учиты-
вающая вращение Земли, в которой ось OZG направлена на север, ось OXG - в сто-
рону нулевого меридиана, а ось OYG дополняет ГСК до правой тройки;
2) геоцентрическая инерциальная экваториальная система координат
в которой ось OZr направлена на север, ось ОХГ - в точку весеннего равноденствия,
а ось OYr дополняет систему до правой тройки;
3) введенная для удобства рассмотрения «опорная» система координат
OXnYnZn, образованная поворотом системы OXrY^Zr вокруг оси OZr таким образом,
чтобы ее ось OXN была направлена в восходящий узел орбиты КА;
4) орбитальная система координат (ОСК) OXoYqZq с осью OZo в плоскости ор-
биты, образованная поворотом системы OXNYNZN вокруг оси OXN;
5) полярная географическая система координат, характеризуемая широтой ср и
долготой Л (по Гринвичу), а также локальным радиусом Земли Ле или текущим ра-
диусом орбиты КА 7?s (на рис. 5.1 не показана);
6) подвижная, связанная с КА геоцентрическая система OX^Y^Z^ в которой ось
OZS направлена в зенит, ось ОХ$ параллельна вектору орбитальной скорости, а ось
OKS дополняет систему до правой (на рис. 5.1 не показана);
7) подвижная, связанная с КА опорная система координат SXYZ с началом в
центре масс КА и осями, параллельными осям OXSYSZS, но обозначения которых
заменены. Ось SX направлена вдоль продольной оси КА, ось SY - в зенит, а ось SZ
вбок, дополняя систему до правой. Систему координат с таким направлением осей
обычно используют в литературе по управлению космическими аппаратами;
8) подвижная, связанная система координатных осей КА SXpYpZp, начало ко-
торой находится в центре масс КА. Ось SXP направлена вдоль продольной оси КА,
ось SYP - вверх, а ось *SZP вбок, дополняя систему до правой. Связанные с КА сис-
темы на рис. 5.1 не показаны. Они рассматриваются в следующих разделах этой
главы.
183
Радиолокационные системы землеобзора космического базирования
В дальнейшем изложении геоцентрические координаты используются для
описания движения центра масс платформы с РСА, расчета наклонной дальности
наблюдения и ее временной зависимости. Связанные с КА подвижные системы ко-
ординат требуются для описания углов ориентации платформы и углов нацелива-
ния луча антенны на заданный район радиолокационной съемки, расчета амплиту-
ды принимаемого сигнала, отраженного от земной поверхности и объектов.
К полярной системе координат относится географическая система координат
с началом в центре Земли (геоцентрическая система), определяющая точку на зем-
ной поверхности через широту (р относительно плоскости экватора (базовая плос-
кость) и долготу Л относительно нулевого (гринвичского) меридиана. Расстояние
точки от центра (длина радиус-вектора) определяется радиусом Земли Ле на широ-
те ср. В географических координатах может задаваться положение центра масс КА
координатами подспутниковой точки <р^ и текущим радиусом орбиты 7?s.
Показанная на рис. 5.1 опорная геоцентрическая система координат OXnYnZn
является аналогом инерциальной системы. Она повернута таким образом, чтобы ее
ось OXN лежала в плоскости орбиты (совпадала с осью ОХо). Это позволяет упро-
стить формулы при рассмотрении геометрии радиолокационного обзора.
Положение спутника задают шестимерным вектором координат Rs(f) и скоро-
стей Vs(0 либо элементами орбиты: ао - большой полуосью орбиты; Ьо - малой по-
луосью орбиты; ео - эксцентриситетом; zo - наклонением орбиты; 0ор - аргументом
перигея; Ао - долготой восходящего узла; 0s - аргументом широты и угловой ско-
ростью орбитального движения zys.
Форму Земли - геоид - принято описывать эллипсоидом вращения - рефе-
ренц-эллипсоид. Используемая фигура референц-эллипсоида наилучшим образом
подходит для территории отдельной страны или нескольких стран для выполнения
определенных работ. В СССР с 1946 г. для геодезических работ использовали эл-
липсоид Красовского.
184
Глава 5. Расчет параметров траекторного сигнала...
В настоящее время используют следующие референц-эллипсоиды [219, 460,
532/Фигура Земли, 546]:
• GRS80 (Geodetic Reference System 1980), разработанный Международной Ассо-
циацией Геодезии и Геофизики (International Union of Geodesy and Geophysics).
Рекомендуется для геодезических работ;
• WGS84 (World Geodetic System 1984) применяется в системе спутниковой нави-
гации GPS (США);
• ПЗ-90 (Параметры Земли 1990 года) используется на территории России для
геодезического обеспечения орбитальных полетов. Этот эллипсоид применяет-
ся в системе спутниковой навигации ГЛОНАСС.
К параметрам референц-эллипсоидов относятся:
1) яе - большая полуось (экваториальный радиус) эллипсоида;
2) Z?e - малая полуось (полярный радиус);
3) f = (ae~be)lat - геометрическое (полярное) сжатие;
4) ее = ^(a2-Z>2)/a2 =71-(1"/)2 =0,08181911 (ПЗ-90), е'е = ^(ле2 -6е2)Д2 -
первый и второй эксцентриситеты эллипсоида;
5) Д) - гравитационная постоянная Земли (произведение универсальной гра-
витационной постоянной и массы Земли);
6) Jn - безразмерные постоянные, характеризующие форму и гравитационное
поле Земли;
7) сое - угловая скорость вращения Земли.
Основные параметры референц-эллипсоидов и связанных с ними систем зем-
ных координат приведены в табл. 5.1.
Таблица 5.1. Параметры Земли
Тип референц-эллипсоида Параметры Земли
ае, км 1// Д)Х1014, м3с“2 J1 шех10"5, рад/с
GRS80 6378,137 298,257222101 3,986005 1,08263 7,292115
WGS84 6378,137 298,257223563 3,986004418 1,08263 7,292115
ПЗ-90 6378,136 298,257839303 3,9860044 1,0826257 7,292115
В нулевом приближении Землю можно считать шаром со средним радиусом
Яе теап=6371,004-6371 км [533], что соответствует географической широте 34,5°.
Для более точных практических расчетов относительного движения (радиолокато-
ра относительно точки наблюдения на земной поверхности) можно использовать
сферическую модель Земли с локальным радиус-вектором Re на широте ср, вычис-
ляемым по формуле
1 - е% cos2 <р
185
Радиолокационные системы землеобзора космического базирования
где (р - астрономическая широта точки наблюдения. Она практически совпадает с
географической широтой.
Особенность радиолокационной съемки и ее преимущество в сравнении с фо-
тографической съемкой заключается в возможности измерений расстояний между
объектами с точностью до долей длины волны. Для реализации этой возможности
требуется знание формы геоида, характеристик рельефа местности, точных пара-
метров движения платформы с РСА.
Расчет параметров траекторного сигнала для модели прямолинейного дви-
жения платформы приведен в разделе 5.3, а для орбитального движения - в раз-
делах 5.4-5.6.
5.3. Временные зависимости фазы и амплитуды
принимаемого сигнала в РСА
Синтез радиолокационного изображения основан на согласованной фильтрации
принятого сигнала с применением опорной функции, точно компенсирующей закон
распределения фазы сигнала, записанного в процессе движения РСА по траектории
полета. Формирование опорных функций при цифровом синтезе РЛИ требует значи-
тельных вычислительных ресурсов, для снижения которых используют аналитиче-
ское описание временных зависимостей параметров принимаемых сигналов (радио-
голограммы) с использованием разных аппроксимирующих моделей. В данном раз-
деле рассмотрена модель прямолинейного движения платформы и приведены соот-
ношения для расчета основных параметров принимаемого сигнала вдоль траектории
полета: зависимостей амплитуды и фазы, времени синтеза и размеров синтезирован-
ной апертуры для реализации заданного азимутального разрешения.
При синтезе радиолокационного изображения по записанным радиоголо-
граммам в общем случае должны учитываться:
1) временная зависимость наклонной дальности до цели, характеризующая за-
кон изменения фазы сигнала и опорную функцию для синтеза изображения;
2) радиальная скорость цели, характеризующая положение доплеровского
центроида;
3) временная зависимость амплитуды сигнала, определяющая размеры синте-
зированной апертуры, реализующей разрешающую способность, и оказывающая
влияние на форму весовой функции обработки и форму отклика.
При анализе алгоритмов синтеза апертуры обычно используют упрощенные
модели движения радиолокатора относительно точки наблюдения. Для самолетных
РСА это модель прямолинейного равномерного движения радиолокатора. Она по-
зволяет проводить расчет параметров РСА и основных составляющих опорной
функции для синтеза, к которым добавляются составляющие для коррекции траек-
торных и других нестабильностей.
Для космических РСА закон относительного движения значительно сложнее.
Реальная временная зависимость дальности определяется параметрами возмущен-
ного движения спутника в гравитационном поле Земли, геометрией обзора, кри-
визной земной поверхности, вращением Земли и другими факторами. Тем не ме-
186
Глава 5. Расчет параметров траекторного сигнала...
нее, идея использования упрощенной модели движения платформы с прямолиней-
ным равномерным движением остается актуальной и в этом случае.
В ряде работ [347, 348] используют разложение временной зависимости даль-
ности в ряд Тейлора, коэффициенты которого должны вычисляться по эфемеридам
спутника. Однако такой подход громоздок, усложняет анализ временных зависи-
мостей фазы и углов наблюдения при вариации наклонной дальности съемки, осо-
бенно для режимов прожекторного и скошенного обзора.
Более продуктивно для расчета космических РСА использовать модель отно-
сительного движения РСА и цели, адаптированную к условиям радиолокационного
обзора [159*, 430*]. Она заменяет истинное движение в окрестности точки съемки
невозмущенным Кеплеровым движением. Земля представляется сферой с радиу-
сом, равным радиусу земного эллипсоида на широте спутника (или широте района
съемки - для высокоорбитальных РСА). Приведенная аппроксимация криволиней-
ного орбитального движения эквивалентной моделью прямолинейного движения
значительно облегчает расчет опорных функций для синтеза изображения.
В настоящем разделе рассмотрены особенности, связанные с орбитальным
движением РСА и проведено сравнение со случаем прямолинейного движения на
примере упрощенной модели круговой орбиты. В разделе 5.5 анализируется общий
случай Кеплеровой орбиты, а в разделе 5.6 приведена модель движения, адаптиро-
ванная к радиолокационному обзору, и особенности ее применения для учета воз-
мущенного движения КА.
Проводя аналогию орбитального обзора с обзором в самолетных РСА при
прямолинейном полете, следует рассматривать три составляющие скорости плат-
формы: воздушную скорость (аналог орбитальной скорости спутника), ветровой
снос (аналог вращения Земли) и вертикальную скорость (изменение высоты орби-
ты из-за эллиптичности орбиты и возмущающих воздействий). Геометрия само-
летного обзора показана на рис. 5.2, где ось X- направлена вдоль вектора горизон-
тальной путевой скорости Vsg, которая является векторной суммой воздушной ско-
рости и скорости ветра.
Рис. 5.2. Геометрия обзора при прямолинейном движении платформы
187
Радиолокационные системы землеобзора космического базирования
В декартовой системе координат OXYZ вектор наклонной дальности 7?(/) равен
разности векторов цели и фазового центра антенны
R(/) = Rr-Rs(z), (5.2)
где R^X'Xt+yYt+z-Zt - координаты цели; Rs(/) - текущие координаты фазового цен-
тра антенны (близкие к центру масс КА); х, у, z - единичные орты по осям.
Примем, что при /=0 облучается цель Т в плоскости OST, перпендикулярной
вектору горизонтальной скорости Vsg, при этом Х=0, Хт(0)=0. Текущее положение
носителя определяется вектором Rs(/) с началом в начале координат О
Rs(f) = xKsgZ + yO + z(Zs+ КЯ</). (5.3)
Временной закон изменения дальности цели можно представить разложением
в ряд Тейлора по степеням t:
R (0=#s2/ + ^2+(^s + K№/-zr)2 = 7z?o2 + ^2+2(Hs-zr)K№/«
N
«7?o+^CZ+..., (5.4)
п=\
где Rq = R(0) = ^Y^ +(ZS ~Zr)2 - начальная наклонная дальность при /=0; N -
число членов, зависящее от требуемой точности вычислений.
При прямолинейном горизонтальном полете (С№=0) для всех целей в плоско-
сти визирования SOY, проходящей через вертикаль в точке следа и перпендикуляр-
ной траектории следа на поверхности Земли, радиальная скорость и соответствен-
но доплеровская частота принятого сигнала равны нулю - цели находятся в точках
«ближайшей дальности» для всех наклонных дальностей целей независимо от их
удаления от трассы даже при наличии рельефа или кривизны Земли.
Если вертикальная скорость отлична от нуля то при t=Q начальная
дальность Rq цели, находящейся в плоскости, нормальной к следу, не совпадает с
ее «ближайшей дальностью», для которой Я(/пг) = 0. Так, например, при полете с
набором высоты, вызываемая ею радиальная скорость отрицательна (создается от-
рицательное доплеровское смещение частоты) и для ее компенсации требуется по-
ворот плоскости визирования вперед по тангажу на угол
^A=arctg(K№/rsg). (5.5)
Соответствующие поправки требуются для вычисления минимальной дально-
сти цели, времени прохождения нулевой доплеровской частоты и азимутальной
координаты цели. Для плоской Земли угловая азимутальная поправка не зависит от
наклонной дальности, но изменяется пропорционально изменению текущей высо-
ты носителя ZS(Z).
Временная зависимость фазы связана с изменением наклонной дальности
4тг
tT(t) = -2KxR(t) = -—R(t), (5.6)
Л
где К.х=2л/Л- волновое число.
188
Глава 5. Расчет параметров траекторного сигнала
Временная зависимость амплитуды принимаемого сигнала определится фор-
мой диаграммы направленности антенны G(aT, у) по азимуту ат и углу места у. Для
типичных условий ^«Ksg. Это позволяет при оценке углов пренебречь верти-
кальной скоростью и отклонением линии S\S2 от горизонтали на рис. 5.3. Прини-
маемый сигнал от цели имеет вид
ur (?) = AG(ar (/),/- Za0)eX2^z-2^^)), (5.7)
где А - коэффициент, определяемый энергетическими параметрами РСА; fo - час-
тота сигнала РСА; уао - угол места установки луча антенны; ат - угол визирования
по азимуту, который для прямолинейного движения со скоростью Vs в маршрутном
режиме равен
a(/) = arctg(Ksg//7?0). (5.8)
Применим модель прямолинейного движения платформы с РСА к приведен-
ной на рис. 5.3, а геометрии космического обзора для двух целей Т\ и Г2, смещен-
ных по азимуту. Такая модель применима для расчета основных параметров низко-
высотных (до -1000 км) РСА. Рассмотрим геоцентрическую систему координат, в
которой в момент /=0 ось Z проходит через фазовый центр антенны РСА и направ-
лена в зенит. Ось X параллельна вектору путевой скорости спутника Vsg относи-
тельно поверхности Земли (вектор скорости в гринвичской системе координат).
Ось Y дополняет систему до правой.
Рис. 5.3. Геометрия космического обзора при прямолинейной модели движения платформы (а)
и при движении по круговой орбите (б):
Rs - радиус орбиты КА; Re - локальный радиус Земли; Ra, Rq - текущие дальности целей Т2;
X- смещение по азимуту
189
Радиолокационные системы землеобзора космического базирования
Векторы положения целей Ть Т2 и модели движения спутника S(Z), а также
значение минимальной дальности Ro представлены выражениями (5.9)—(5.12)
Т] = |0, Re sin ay, Re cos ay |, (5.9)
T2 = {Arr2,Aesina>,,Aecosa>,}, (5.10)
S(0 = {^,0,^}, (5-11)
Ao = ^(АевтаЛ)2 +(Л. -Aecoscr>,)2 = + A2 -2RJiecosOy . (5.12)
Запишем выражения для временных зависимостей наклонной дальности, фазы
и доплеровской частоты сигнала, принятого от цели Т2. Они понадобятся в даль-
нейшем для сравнения с другими моделями движения платформы с РСА. Времен-
ная зависимость наклонной дальности до цели Rn, представленная первыми чле-
нами разложения в степенной ряд, имеет вид
Г-.------------7 V2t2 - 2KseXr2Z + Х22
RT2(t) = yl^ +(Vset-XT2)2 «Ao ----- + ... . (5.13)
Временная зависимость фазы определяется уравнением (5.6)
(1) = ~ + . (5.14)
V 7 2 2 2Aq2
Для временной зависимости доплеровской частоты сигнала от цели 7г имеем
близкий к ЛЧМ процесс
г M-J_£ М-2^ 2Fs2g<
Dop7’2^ 2л dt^2^" R0A RqA
Временная зависимость амплитуды принимаемого сигнала от цели Т2 опреде-
ляется формой азимутальной ДНА:
. rsg'
arcsin——
(5.15)
(5-16)
где C7max - амплитуда сигнала в максимуме ДНА; Gxant(<z) - форма азимутальной
ДНА (по мощности); Ksg - путевая скорость платформы.
Для оценки разрешения РСА по азимуту найдем разность фаз сигналов на
краях синтезированной апертуры (/=±Tsynt/2), принятых от разнесенных по азимуту
точек Т\ и Т2 на поверхности Земли (рис. 5.3, а). Фазовый набег по апертуре синте-
зированной антенны при наблюдении цели Т\ по нормали к апертуре равен нулю.
Фазовый набег по апертуре синтезированной антенны при наблюдении цели Т2,
смещенной по азимуту наЛ^, определяется формулой
&срТ2 —
f т \ (т
1synt 1S
Фп ~Фт2 ~
к 2 7 к J
4^Jfr2Ks7synt
4яЬлХТ2
RqA,
(5.17)
190
Глава 5. Расчет параметров траекторного сигнала...
Разрешающую способность РСА по азимуту находят из величины набега фа-
зы на синтезированной апертуре, равной A^n(Ar72)=2^; откуда получаем известное
соотношение для разрешения по азимуту:
Рх ~ ^Т2\^2=2л:
(5.18)
2La ’
где La = - длина синтезированной апертуры.
Анализ рассмотренной модели прямолинейного движения платформы с РСА
показывает, что применительно к расчету основных параметров синтеза РЛИ -
длины синтезированной апертуры, времени синтеза и азимутального разрешения
она совпадает с типичным случаем самолетных РСА, имеющих значительно мень-
шую наклонную дальность съемки. Отличия состоят в том, что аппроксимация
временной зависимости наклонной дальности степенным рядом (5.13) до члена
второй степени (включительно) неприемлема для космических РСА из-за больших
фазовых ошибок. Для реализации разрешающей способности в единицы метров в
S- или 1-диапазонах волн на дальностях до 1000 км в предположении прямолиней-
ной модели движения необходимо точное вычисление квадратного корня либо его
представление членами ряда до 10-й степени (погрешности расчета фазы не долж-
ны превышать единиц градусов). Рассмотренная модель не учитывает реального
движения платформы по криволинейной траектории, например, круговой орбиты
(рис. 5.3, б). Анализ параметров сигнала при движения платформы по круговой ор-
бите проведен в следующем разделе. При этом показано, что в расчетах парамет-
ров принимаемого сигнала при криволинейном движении можно применить рас-
смотренную выше модель прямолинейного движения, но с измененным (эквива-
лентным) значением путевой скорости платформы и другими уточнениями.
5.4. Расчет параметров траекторного сигнала
при движении платформы по круговой орбите
В данном подразделе рассмотрены принципиальные отличия параметров прини-
маемого сигнала при работе РСА на криволинейной (круговой) траектории. Свя-
занные с этим явления особенно заметны для высокоорбитальных РСА, например,
для РСА на геосинхронной орбите [439] или для самолетного РСА с круговой тра-
екторией полета [353], в которой объект наблюдения находится в центре окружно-
сти - траектории РСА. Фаза принимаемого от такого объекта сигнала постоянна и
получаемое РЛИ в окрестностях этого объекта имеет ряд особенностей.
Для расчета технических параметров в ходе проектирования космических
РСА с учетом явлений, обусловленных кривизной траектории движения платфор-
мы, целесообразно использовать общепринятые методики, применяемые для слу-
чая прямолинейного равномерного движения. Это оказывается возможным для
круговой траектории, если сектор, образованный апертурой синтеза, не превышает
четверти окружности. Задача решается введением в расчеты корректирующих ко-
эффициентов в исходные данные.
191
Радиолокационные системы землеобзора космического базирования
Геометрия космического обзора для движения платформы по круговой орбите
приведена на рис. 5.3, б. Для простоты данного рассмотрения, в отличие от приве-
денного в разделе 5.6, формула (5.69), влияние вращения Земли учтем только по-
правкой от тангенциальной составляющей, зависящей от угла наклонения орбиты.
Временная зависимость положения платформы при круговой орбите движения
спутника определится выражением
S(z) = {\sin(zysg/),0,7?sCOs(<ysg/)} ’ (519>
<ysg «<УО -€WeCOSZo,
где - угловая путевая (в гринвичской системе координат) скорость спутника;
6УО - угловая орбитальная скорость; б9е - угловая скорость вращения Земли; z0 -
угол наклонения орбиты КА.
При этом для цели Т2 на рис. 5.3, б имеем временную зависимость наклонной
дальности Rnif), представленную в виде квадратного корня, а также первыми чле-
нами его разложения в степенной ряд:
Т?Г2(') = ^(^sSinzwsg/-^r2)2 + ??2sin2a>, + (flscos<wsgZ-7?ecosaJ2 «
R^RQ CGsay sin2 [cds^-2RsXT2 sin + X^2
или
RsRg CGsay sin
(5.20)
(5.21)
вТ2 = arcsin
в них
2Ло
где смещение по азимуту выражено через центральный угол сегмента Т\О\Т2
^Т2 |
Re cosay J
Для цели 7] справедливы выражения (5.20) и (5.21) с подстановкой
Aj2~0 И $72=0.
Рассмотрим наиболее распространенный случай маршрутного режима работы
РСА и определим реализуемые время синтеза, ширину спектра сигнала и разреше-
ние по азимуту для орбитального движения КА. Будем считать заданными азиму-
тальную форму диаграммы направленности антенны (ДНА) по мощности Gx(ax) и
ширину ДНА по заданному уровню мощности Заметим, что амплитуда приня-
того сигнала пропорциональна КУ антенны в направлении на цель, поскольку
форма ДНА по полю учитывается на передачу и прием. Для прямолинейного дви-
жения платформы соотношения между указанными параметрами хорошо известны.
Максимальная длина синтезированной апертуры
г = ЯрЛ
^атах
^Aant
(5.22)
максимальное время синтеза
192
Глава 5. Расчет параметров траекторного сигнала...
7 _ ^атах _
7syntmax “ у ~ V Г)
Fsg 'sg^xant
временной закон изменения доплеровской частоты
^Doplin
2^,
ширина спектра доплеровских частот
^Dop =
2V
ZFsg
^xant
наилучшее реализуемое разрешение по азимуту
__ W _ Dxant
PXmin гу '
^amax
(5.23)
(5.24)
(5.25)
(5.26)
Расчет параметров для движения платформы по круговой орбите иллюстрирует
рис. 5.4. На нем показаны крайние положения плоскости OO2S\ и OO2S2, вращаю-
щейся вокруг оси OY. Максимальный угол отворота плоскости as, при котором
цель 7"i еще облучается антенной РСА, можно найти приближенным решением
треугольников P\P2S и Р\Р2О\.
След КА
Сечение
земной сферы
вертикальной
плоскостью,
проходящей
через цель
Рис. 5.4. Расчет параметров обзора при движении платформы по круговой орбите
7—1492
193
Радиолокационные системы землеобзора космического базирования
Поскольку при расчете разрешающей способности и длины апертуры синтеза
особой точности не требуется (допустима погрешность до ~5 %), можно пренеб-
речь высотой дуги Р1Р2, и принять высоты треугольников равными
^P}P2S ~ *0 ’ ~ cos^ •
(5.27)
где Оу - центральный угол цели на поверхности Земли, показанный на рис. 5.3.
При этом основание треугольников - хорда PjP2 - определит область облучения
местности антенной и угловое положение КА на краю области облучения цели Т\
Aft. « arctg------------. (5.28)
Pecos 6Z^Z)xant
Максимальные длина синтезированной антенны и время синтеза в маршрут-
ном режиме будут превышать рассчитанные для прямолинейной модели движения
значения, пропорционально масштабному коэффициенту М\е, который равен отно-
шению радиуса орбиты КА к радиусу сечения (окружность с центром в О\} земной
сферы плоскостью, проходящей через наблюдаемую цель Т\.
М[е =----------->
Re cosay
£а max ~ 2/?s SID Aft =------°
а IIldA о
2A<9S z 7?0Л ' М|е7?0Л
synt max rr & n f
^sg ^eCOS^j^xant ^s^xant
(5.29)
(5.30)
(5.31)
Это явление обусловлено тем, что в процессе орбитального движения луч ан-
тенны, лежащий в плоскости, которая вращается вокруг оси У, «обкатывает» цель,
увеличивая время наблюдения. Наилучшее разрешение в маршрутном режиме
^xant
__ __V _______ Л <1111
Рхmin — п т ~ Ъ ns
2Zamax 2Л/1е
Ширина спектра доплеровских частот с учетом формулы (5.21)
D°p z, ъ
Z ^Aant
(5.32)
(5.33)
В табл. 5.2 приведено сравнение параметров РСА для модели прямолинейного
движения платформы и орбитального движения КА по круговой орбите. В ней
введены два пересчетных параметра: масштабный коэффициент пересчета пара-
метров орбитального движения к эквивалентной модели прямолинейного движе-
ния M\Q и линейная эквивалентная скорость Pie, значение которой характеризует
крутизну временной зависимости принимаемых ЛЧМ-сигналов по азимуту:
М1е = /Ле C0Say > (5-34)
(5.35)
194
Глава 5. Расчет параметров траекторного сигнала...
1
где С2 =-—/?(/) -
2 at
коэффициент разложения временной зависимости дальности
в степенной ряд.
Таблица 5.2. Сравнение параметров РСА для орбитального движения
платформы и модели прямолинейного движения
Параметр Модель прямолинейного движения Орбитальное движение
Путевая скорость КА, м/с у ' sg
Горизонтальный размер антенны, м ^le=-DxantM* ^xant
Зона облучения по азимуту, м ^ant = ^)^^le/^xant ^ant = ^0^-^le/^xant
Наклонная дальность наблюдения, м Ro Ro
Ширина спектра принимаемого сигнала, Гц ^FDvr=2Vv/D1M
Длина синтезированной апертуры, м La=R0A/Dlc Ai = ^le^O^/^xant
Время синтеза, с T^R^/DJ* ^synr ~ Ksg
Разрешение по азимуту, м Px ~ ^le/2 Px = ^xant/^^le
Закон изменения дальности по времени, м 7?(/) = Ja„2+(^)2 7ф) = ^+(Ке//7л4)2+...
Закон изменения доплеровской частоты, Гц K2/ „ , ч 1 d( „ 2R(t)\ FDod(Z) = -2^—— pV 7 2л dty A )
Примечание:* - эквивалентное значение горизонтального размера антенны.
Поясним полученные соотношения на примерах. Рассмотрим гипотетические
РСА S-диапазона волн для двух вариантов - низкоорбитальный РСА на круговой
орбите с радиусом орбиты 7?si=6900 км (средняя высота 528,7 км) и высокоорби-
тальный РСА на геосинхронной орбите (ГСхО) с радиусом 7?s2=42164 км. Соответ-
ствующие орбитальные скорости КА составляют 7600 и 3074,7 м/с.
Зададим углы наклонения орбит z0=85°, горизонтальный размер антенны РСА
Дсатп=10м. Проведем расчеты параметров маршрутного режима при угле падения
Я=70°.
Вычисленные по приведенным в разделах 5.5 и 5.6 формулам значения пара-
метров обзора для вариантов РСА представлены в табл. 5.3.
По существу, при движении платформы с РСА по круговой орбите происхо-
дят два явления:
1) «подфокусировка» синтезированной апертуры, которая эквивалентна гетеро-
динированию азимутального ЛЧМ-сигнала с опорной функцией, имеющей меньшую
195
Радиолокационные системы землеобзора космического базирования
(для космических РСА) крутизну ЛЧМ. При ограниченном секторе синтеза закон
изменения частоты сигнала остается линейным и после такой процедуры;
2) эффект «слежения» за объектом наблюдения путем поворота антенны вме-
сте с платформой относительно центра вращения, аналогичной прожекторному
режиму с «протяжкой».
Приведенные в табл. 5.3 данные показывают, что учет криволинейности тра-
ектории движения платформы позволяет уточнить ряд параметров принимаемого
сигнала в РСА. Так, для низкоорбитальных РСА (до 1000 км) получается выигрыш
в азимутальном разрешении на 7... 10 %, а для высокоорбитальных РСА - в не-
сколько раз. При выводе формул был допущен ряд приближений. Например, оцен-
ка размера зоны облучения по азимуту на Земле (а также реализуемой длины син-
тезированной апертуры) дана относительно касательной к поверхности Земли
(траектории полета), а не хорде, как следовало бы. Но при практических значениях
угловой зоны синтеза (менее 4,1°) этими погрешностями можно пренебречь.
Несмотря на приближенный характер приведенных формул, они вполне пригодны
для инженерных расчетов РСА.
Таблица 5.3. Расчетные параметры для вариантов РСА
Параметр Обозна- чение Низкоорби- тальный РСА РСА на ГСхО
Радиус орбиты КА, км Rs 6900 42164
Средняя высота орбиты КА, км Hs 528,7 35792,9
Орбитальная скорость КА м/с v0 7600 3074,7
Путевая скорость КА, м/с Vsg 6977...6992 2807...4154
Наклонная дальность наблюдения, км Ro 1251 39560
Центральный угол точки съемки, град Оу 9,87 61,8
Ширина ДНА по азимуту, град ^xant 0,63 0,63
Зона облучения по азимуту на Земле, км 11,9 376
Ширина спектра принимаемого сигнала, Гц AFDop 1738...1742 561...830
Масштабный коэффициент учета кривизны орбиты Me 1,067 3,123
Линейная эквивалентная скорость, м/с He 71327 715
Длина синтезированной апертуры, км -TSynt 11,8*/13,3 376* /1880
Время синтеза, с ^synt 1,56*/1,75 122*/618
Азимутальное разрешение, м Px 5* / 4,38 5*/1
Примечание:* звездочкой отмечены значения, рассчитанные по обычным формулам
для прямолинейного движения платформы со скоростью Ksg; данные расчетов для криволиней-
ного движения подчеркнуты.
196
Глава 5. Расчет параметров траекторного сигнала...
5.5. Временная зависимость наклонной дальности цели
при движении платформы по Кеплеровой орбите
Обычно цель баллистических расчетов состоит в вычислении параметров управле-
ния РСА, обеспечивающих съемку района земной поверхности с географическими
координатами Лт при известных или прогнозируемых параметрах орбитального
движения КА. При синтезе радиолокационного изображения в РСА решаемая задача
имеет отличия. В ней по известным для времени съемки параметрам движения КА,
заданным наклонным дальностям для начала, центра и конца строба приема должны
вычисляться временные зависимости фазы и амплитуды принимаемого сигнала.
Эти зависимости используют при синтезе радиолокационного изображения
(РЛИ) для вычисления опорной функции в процессе согласованной фильтрации
радиоголограммы. Двумерная опорная функция согласованной фильтрации должна
быть комплексно сопряженной с принятым сигналом во всем интервале наклонных
дальностей строба приема и длительности синтезированной апертуры. Особо от-
ветственным является расчет временной зависимости наклонной дальности, при
котором погрешность не должна превышать малые доли длины волны (миллимет-
ры при работе в Jf-диапазоне волн). Процедура расчета заключается в оценке рас-
стояния между двумя точками, одна из которых (фазовый центр антенны РСА или,
приближенно, центр масс КА) движется по орбите, а другая - точка на земной по-
верхности вращается вместе с Землей.
Расчеты движения КА в возмущенном гравитационном поле Земли ведут в
абсолютной геоцентрической системе координат и решают уравнения, описываю-
щие движение КА относительно точки на земной поверхности. Для расчета возму-
щенного движения КА используют основное уравнение динамики свободной мате-
риальной точки [95]:
m— = F, (5.36)
dt
где т - масса тела; V - вектор скорости точки; F - равнодействующая сил, дейст-
вующих на точку.
Космический аппарат совершает неуправляемое движение под действием силы
притяжения Земли и других небесных тел, силы сопротивления атмосферы, силы
светового давления и иных воздействий. Сила земного притяжения является основ-
ной, определяющей движение КА по околоземной орбите. Остальные возмущающие
факторы в пределах временного интервала съемки оказывают незначительное влия-
ние по сравнению с силой притяжения Земли - их учет необходим только в случае
долгосрочного прогнозирования движения КА. Рассмотрим основной из возмущаю-
щих факторов - неравномерность гравитационного поля Земли. Тогда основное
уравнение динамики свободной материальной точки можно записать в виде
z/V
dearth — = grad(C/p), (5.37)
at
где Маль - масса Земли; UР - потенциал притяжения Земли или силовая функция.
197
Радиолокационные системы землеобзора космического базирования
Потенциал притяжения задается через разложение по сферическим функциям
Лежандра, при этом, как правило, учитывают только зональные гармоники до чет-
вертого порядка включительно в силу их определяющего влияния на движение КА:
N
Rs
РП (sinn)L
(5.38)
где р - постоянная притяжения; 7?е mean - средний экваториальный радиус Земли;
Rs - величина радиус-вектора от центра Земли до центра масс КА; <ps - широта
подспутниковой точки КА; Pn(z) - полином Лежандра порядка и; Jn - безразмерные
постоянные, характеризующие форму и гравитационное поле Земли.
Для решения системы дифференциальных уравнений (5.37) можно применить
метод численного интегрирования Адамса. По результатам расчета для заданного
положения КА относительно точки визирования (при t = 0) можно вычислить экви-
валентные параметры Кеплеровой орбиты для расчета движения в пределах апер-
туры синтеза.
В данном разделе рассматривается модель относительного движения платфор-
мы с РСА и точечной цели на поверхности Земли с получением временной зависи-
мости наклонной дальности сигнала от выбранной точечной цели. Для вычисления
текущего положения платформы используем Кеплерову модель движения. Результа-
ты моделирования с расчетом полосы съемки для низкоорбитального РСА и РСА на
геосинхронной орбите отображаются на рисунках в меркаторской проекции.
В модели предусмотрено вычисление набора параметров, которые при реаль-
ном синтезе РЛИ будут содержаться в служебной информации к маршруту, на-
пример, отсчеты текущих координат и скоростей платформы, наклонные дальности
начала и конца строба приема и т.д. Сравнение расчетных данных Кеплерова дви-
жения и возмущенного движения платформы проведено в разделе 5.4.
Для упрощения дальнейшие расчеты в пределах одного витка будем вести от-
носительно введенной в разделе 5.1 опорной инерциальной геоцентрической сис-
темы координат. Полезно также при анализе геометрии наблюдения локальных
участков земной поверхности рассматривать сферическую модель Земли с локаль-
ным радиусом Это позволяет, не нарушая общности результатов, использовать
известные формулы тригонометрии на сфере.
Приведем основные соотношения для сферических треугольников со сторонами а, Ь, с и
противолежащими углами а, Д а также формулы для решения прямоугольных сферических
треугольников [25].
Теорема синусов:
sin л _ sinb _ sine
sin a sin Д sin у
Теорема косинусов сторон
cos с = cos a cos b + sin a sin b cos у . (5.40)
Теорема косинусов углов
cos у = -cos a cos Д + sin a sin Д cos с. (5.41)
198
Глава 5. Расчет параметров траекторного сигнала...
Решение прямоугольного сферического треугольника: a,b- катеты, с - гипотенуза
sin a = sin a sin c; cost = cos л cos
cos <? = cos <7 sin/?; sina = tgZ>ctg/?; (5.42)
cos c = ctga ctg cos a = tgZ> ctg c.
Методика расчета параметров относительного движения включает в себя следующие этапы:
1) задание исходных данных при t = 0 для расчета движения КА;
2) расчет текущих координат, скорости КА в опорной инерциальной системе координат и
пересчет их в гринвичскую систему координат (ГСК);
3) расчет географических координат точки визирования при t = 0 по заданному значению
наклонной дальности, характеризующей границы полосы обзора. Азимутальное положение цели
задается углом отворота плоскости визирования относительно нормали к вектору орбитальной
скорости КА;
4) расчет текущих значений (временной зависимости) наклонной дальности цели, опреде-
ляющей фазу сигнала, принятого от цели.
Исходные данные для расчета движения КА
В качестве исходных данных для расчета движения КА примем (см. рис. 5.5):
XNs, У Ns. Zns - эфемериды КА в опорной «инерциальной» системе OXNYNZN для
момента времени /=0;
, yNs , zNs - составляющие скорости КА (производные координат по времени);
z0 - угол наклонения орбиты;
в0 - истинная аномалия КА для /=0;
#ор - аргумент перигея;
0s=0o+#op ~ аргумент широты КА (угловое положение относительно восходя-
щего узла);
Rs = 4хNs + yNs + ZNs - радиус орбиты КА для /=0;
е0 - эксцентриситет орбиты;
Рис. 5.5. Орбитальное движение КА
199
Радиолокационные системы землеобзора космического базирования
ао - большая полуось орбиты;
= е0 sin0Оа0[\-е^ - вертикальная скорость;
д>=3,98602-1014 м3/с2 - произведение универсальной гравитационной посто-
янной и массы Земли;
соо = (1 + е0 cos 0О )7?s“1 ~ ео ) ~ угловая орбитальная скорость на мо-
мент времени /=0;
бЦэ - угловая скорость прецессии орбиты.
Период обращения КА Ts = 2л I соо_mean « 2л/R;1y[Jijao .
Одним из возмущений орбитального движения спутника, вызванным отличием
Земли от сферы, является прецессия орбиты [458, 532/Солнечно-синхронная орби-
та, 532/Фигура Земли, 546]. Скорость прецессии зависит от высоты орбиты и угла
наклонения. Специально выбирая параметры орбиты, можно реализовать, так назы-
ваемые, солнечно-синхронные орбиты, для которых солнечное время прохождения
узлов (плоскости экватора) фиксировано. Объект, находящийся на такой орбите,
проходит над любой точкой земной поверхности приблизительно в одно и то же ме-
стное солнечное время и можно реализовать точное повторение траекторий движе-
ния радиолокатора относительно поверхности Земли через несколько суток. Это по-
зволяет применять когерентные методы дифференциальной интерферометрии для
выявления изменений в окружающей обстановке.
Для реализации солнечно-синхронной орбиты ее параметры выбирают таким
образом, чтобы орбита прецессировала в восточном направлении на 360 градусов в
год (около 1/365 от скорости вращения Земли), компенсируя вращение Земли во-
круг Солнца. Нужной скорости прецессии можно достичь лишь для определенного
диапазона высот орбит (как правило, выбираются значения 600...800 км с перио-
дами 96... 100 мин.), необходимое наклонение для упомянутого диапазона высот
около 98°.
Для солнечно-синхронной орбиты прецессия должна происходить в направ-
лении, противоположном вращению Земли. Хорошее приближение дает следую-
щая формула
3«е Г
typ=-T±J24COSZo>
(5.43)
где ae - экваториальный радиус Земли; Rs - радиус орбиты КА; бУо - угловая орби-
тальная скорость; /о - наклонение орбиты; J2 =1,08-10-3 - второй динамический
фактор формы Земли, выражаемый через полярное сжатие следующим образом:
2^е a3 col
з 3//0
(5.44)
где £& - полярное сжатие Земли; - угловая скорость вращения Земли; д0 - произ-
ведение универсальной гравитационной постоянной и массы Земли.
200
Глава 5. Расчет параметров траекторного сигнала...
При дальнейшем рассмотрении будем относить скорость прецессии орбиты к
скорости вращения Земли, полагая ее равной б9ер = 7,312166-10-5 для солнечно-
синхронных орбит с io> 90 и пренебрегая прецессией орбиты (б?ер=7,2921158-10"5) -
для орбит с zo < 90. Для моделирования относительного движения эти допущения
несущественны, а опорные функции для реального синтез РЛИ будут основаны на
служебной информации с фактическими координатами КА, учитывающими пре-
цессию орбиты.
Расчет текущих координат КА
Обычно текущие координаты КА рассчитывают методом интегрирования уравне-
ния движения с учетом изменений текущего радиуса орбиты, угловой скорости,
включая учет возмущающих воздействий (неравномерности гравитационного по-
тенциала, влияния притяжения Луны, солнечного ветра и пр.). При кеплеровом
движении имеем
dOs = a>odt, (5.45)
<Ws('Mr (5-46)
7?s (?) = «0 (1 - е02 )/(1 + eocos(0s (z) - 0ор )), (5.47)
Ч (0 = (1 + еоcos6*oМ^о/ао(!-ео) (5-48)
Координаты радиус-вектора КА в инерциальной системе OXnYnZn
Rs(/) = -^(Z)COs6’s(0XW -^s WsinZ?s(0COS/oyw +^s(0sin6's(/)sin/ozW • (5-49)
Полярные координаты KA
географическая широта
cps (/) = arcsin(sin#s (f)sinz0); (5.50)
географическая долгота с учетом вращения Земли
Ag (0 = arctg(tg^s (0• cos/o ) + Ao - ’ (5-51)
где Ло - долгота восходящего узла при t = 0; б9ер - суммарная угловая скорость
вращения Земли 69С = 7,292115-10“5 1/с с одним оборотом за звездные сутки Tstar=
= 86164,091 с и скорости прецессии орбиты. Солнечные сутки - Tsun=86400 с -
примерно на 4 мин длиннее.
Текущие координаты КА в гринвичской системе координат (ГСК) относи-
тельно неподвижной Земли определяются вектором
Rs (0 = -xG^s (0COS^s (0COS Ag (0 - Yg^s (0cos% (0sin Ag (0 +
+zGAs(z)sin<3s. (5.52)
Полученная временная зависимость радиус-вектора КА будет далее использо-
вана для расчета временной зависимости наклонной дальности цели.
201
Радиолокационные системы землеобзора космического базирования
Расчет координат точки визирования
Определим географические координаты цели Т(<ргЛт), сигнал от которой при t = О
будет зафиксирован в А?м отсчете цифровой радиоголограммы (ЦРГ) в пределах
строба приема. Временная задержка этого отсчета ЦРГ относительно начала излу-
ченного импульса передатчика определит наклонную дальность 7?0 до цели. Положе-
ние КА (точка S) в плоскости орбиты OXoYcZo определено аргументом широты 0S
(угол XoOS на рис. 5.1). След КА на поверхности Земли при Z=0 показан на рис. 5.6
точкой F с географическими координатами (р^.
Азимутальное положение наблюдаемой цели на земной поверхности опреде-
лится углом поворота y/v плоскости визирования KVOZV относительно плоскости ор-
биты, задаваемого в связанной с КА подвижной системе координат *SXsysZs. В ней
ось OZS направлена в зенит, ось ОХ$ параллельна вектору орбитальной скорости, а
ось OKS дополняет систему до правой. Положительное значение угла \pv плоскости
визирования относительно нормали к плоскости орбиты OKS соответствует левосто-
роннему обзору (показано на рисунке). Наклонная дальность отсчета ЦРГ (расстоя-
ние ST) определит положение цели.
Для ориентировочных расчетов используем среднее значение радиуса Земли
2?e_mean= 6371 км [533]. При строгих расчетах опорной функции синтеза изображений с
высоким разрешением следует учитывать локальное возвышение рельефа местности
над уровнем земного эллипсоида RT = Rc + Нт , где Re = a^l-e^ Icos2 (рт -
радиус Земли на широте цели <рг, а ///’-локальная высота рельефа.
Исходными параметрами для расчета положения точки визирования являются
географические координаты следа КА F(^, ЯД углы поворота плоскости визирова-
ния OYV относительно нормали к плоскости орбиты y/v, центральный угол Оу точки
202
Глава 5. Расчет параметров траекторного сигнала
визирования Г, соответствующий ее наклонной дальности. Расчет географической
координаты точки визирования проведем по (5.50) и (5.51) с учетом текущего угла
между вектором скорости КА и меридианом, проходящим через след КА при 1=0
(курсовой угол КА y/s отсчитывается от направления на Север по часовой стрелке)
восходящий виток
cos<z>s J 2
(5.53)
НИСХОДЯЩИЙ виток
-л- arcsin
coszo
cos^s
Рассмотрим геометрию, показанную на рис. 5.6. В плоскости визирования
OYVZV построим проходящую через след КА F виртуальную орбиту с радиусом /?е,
равным радиусу Земли на широте (ps. Ее параметрами будут: угол наклонения iV9
аргумент широты следа КА Я, долгота восходящего следа Д,. Дуга этой виртуаль-
ной орбиты будет геометрическим местом пересечения плоскости визирования с
поверхностью Земли.
Параметры виртуальной орбиты
угол наклонения
iv = ), (5.54)
Зя
где i//T = — + i//s-y/v - азимут точки визирования;
аргумент широты следа КА (удаление от экватора по дуге большого круга):
0v = arcsin
Г sinp/
<siniv ,
(5.55)
долгота узла:
Д, = Л + arctg(tg0v COS/V). (5.56)
Положение точки визирования (дуга FT, угол ау на рисунке) определится ее
центральным углом относительно следа КА
У I ^Rt }
откуда аргумент широты точки визирования на виртуальной орбите (знак «плюс»
при обзоре левым бортом и «минус» - при обзоре правым бортом)
6T=0v+ay (5.58)
и гринвичские координаты точки визирования
(рт = arcsin (sin 0T sin zv), (5.59)
203
Радиолокационные системы землеобзора космического базирования
Zp = arctg (tg вт sin iv) + . (5.60)
Гринвичские координаты точки визирования для /=0, ^?s(0), Л(0), Ro и задан-
ного направления обзора определятся формулой
RT =-xGRTcos(pTcosAT -yGRTcos(pr sinA^ + zGArsin^y. (5.61)
При моделировании обзора по приведенным выше формулам следует учиты-
вать неоднозначность функций arcsin, arccos при вычислении углов по квадрантам,
а также размеры градусной сетки географической долготы ±180°. Например, для
вычисления долготы точки визирования по формуле (5.60) в программном ком-
плексе MATLAB можно применить процедуру вычисления полного в четырех
квадрантах арктангенса, которая в нотации MATLAB имеет вид
= atan2 (sin (Я^), cos^ )). (5.62)
На практике в элементе с наклонной дальностью Ro фиксируется сигнал от
участка на земной поверхности в виде дуги, являющейся геометрическим местом
точек, удаленных от Земли на дальность Ro (для сферической Земли - это показан-
ная на рис. 5.7 окружность, являющаяся пересечением сферы и конуса с образую-
щей 7?о). Длина дуги (соответствует разрешению по азимуту для РБО) определяется
шириной диаграммы направленности реальной антенны. Положение дуги зависит
от направления луча ДНА (след ДНА показан на рисунке) относительно плоскости
орбиты - угла y/v, значение которого выбирают на стадии проектирования системы
радиолокационного наблюдения.
Рис. 5.7. Формирование области приема сигналов от поверхности Земли
Например, при проектировании системы МКРЦ была предусмотрена ориен-
тация осей космического аппарата У С-А (У С-AM) в орбитальной системе коорди-
нат: продольная ось КА поддерживалась вдоль вектора орбитальной скорости. В
РБО бортового комплекса «Чайка» использовались антенны бегущей волны с фор-
204
Глава 5. Расчет параметров траекторного сигнала
мированием луча, отклоненного назад примерно на 5° относительно нормали к
плоскости антенны. Координаты обнаруженных целей рассчитывались с учетом
поправок по азимуту в зависимости от наклонной дальности целей.
Направление луча антенны определяет значение средней доплеровской часто-
ты принятого сигнала («доплеровского центроида») в РСА, которое нужно учиты-
вать при синтезе изображения. Необходимо рассматривать влияние «бега Земли»,
вызванное двумя факторами отворотом луча от нормали к плоскости орбиты и
вращением Земли. Временные зависимости наклонной дальности и доплеровской
частоты вычисляют по заданному в параметрической форме (5.45)-(5.49) уравне-
нию движения КА с учетом изменения входящих в него параметров орбиты КА с
последующим вычитанием вектора координат точки визирования (5.61):
RT(t) = |RS — Rr | = | (i?s (/)cos^s (/)cos2sg (z) - RTcos(pT cos^) +
2 1
4-^(z)sin^s(z)sin>!Sg(z)-Arcos^rsin7l7j +(7^(z)sin^s-Arsin^j > .(5.63)
Доплеровскую частоту вычисляют через производную дальности (5.63) по
времени с учетом формул (5.24, 5.47, 5.48, 5.50-5.52, 5.61).
На рис 5.8 и 5.9 приведены отображения трасс КА и полос обзора в Мерка-
торской картографической проекции для современных низковысотных РСА. Вос-
ходящий узел орбиты показан на гринвичском меридиане, направление движения
следа КА показано стрелкой. Отображено 1,2 периода обращения спутника, что по-
зволяет увидеть смещение области наблюдения, вызванное вращением Земли.
Плоскость визирования нормальна к плоскости орбиты i//v=0.
Рис. 5.8. Отображения трасс КА и границ полос двустороннего обзора
(высота орбиты 300 км, угол наклонения 72° (РСА «Меч-КУ»), полоса обзора 2x500 км,
удаление от трассы КА 200...700 км; периодичность отсчетов 10 мин)
205
Радиолокационные системы землеобзора космического базирования
Рис. 5.9. Отображения трасс КА и границ полос двустороннего обзора
(высота орбиты 514 км, орбита солнечно-синхронная с углом наклонения 98,2° (РСА TerraS AR-X),
полоса обзора 2x500 км, удаление от трассы КА 300.. .800 км; периодичность отсчетов 10 мин)
Рис. 5.10. Отображение суточной трассы КА и границ полос двустороннего обзора для РСА
на геосинхронной орбите с высотой 35894,5 км и углом наклонения 45°
(полоса обзора 2x5000 км, удаление от трассы КА 500...5500 км; периодичность отсчетов 30 мин)
206
Глава 5. Расчет параметров траекторного сигнала...
На рис. 5.10 рассмотрен случай высокоорбитального РСА на геосинхронной
орбите (ГСхО), оценка характеристик которого при работе в разных диапазонах
волн сделана в статье [439*]. Преимущество рассмотрения режима работы РСА на
ГСхО состоит в том, что этот режим является эффективным инструментом для
проверки формул геометрии относительного движения для общего случая высоко-
орбитальных РСА. Для РСА на ГСхО при углах наклонения менее 90° траектория
следа КА (отмечен стрелкой) на земной поверхности имеет вид, напоминающий
цифру «8». Долгота восходящего узла составляет 75°, угол наклонения орбиты -
45°. Такие параметры обеспечивают обзор большой площади территории России.
При большем угле наклонения (-85°) геосинхронной орбиты, как это показано на
рис. 5.11, возможен в течение суток обзор районов земной поверхности по другую
сторону относительно Северного или Южного полюсов.
Рис. 5.11. Отображение суточной трассы КА и границ полос двустороннего обзора
для РСА на геосинхронной орбите с высотой 35894,5 км и углом наклонения 85°
(полоса обзора 2*5000 км, удаление от трассы КА 500...5500 км; периодичность отсчетов 10 мин)
Приведенные в данном разделе формулы могут использоваться для расчетов
полосы обзора и полосы съемки, а также временных зависимостей наклонной
дальности и фазы в режимах бокового и скошенного обзоров при движении по
круговым и эллиптическим орбитам. Использованная модель Кеплерова движения
может быть уточнена на локальных участках путем замены модельных координат
КА на рассчитанные для реального случая возмущенного движения КА. Следую-
щая информация, знание которой необходимо для формирования опорной функции
синтеза и оценки разрешающей способности по азимуту, касается амплитуды при-
207
Радиолокационные системы землеобзора космического базирования
нимаемого сигнала. Для ее расчета целесообразнее использовать систему коорди-
нат, адаптированную к геометрии радиолокационного обзора.
5.6. Параметры сигналов, принимаемых антенной РСА
5.6.1. Система координат, адаптированная к геометрии
радиолокационного обзора
Задача оценки текущей наклонной дальности между точкой на земной поверхности
и фазовым центром антенны была рассмотрена в предыдущем разделе. По этим
данным рассчитывают фазу и доплеровскую частоту (производную фазы) принято-
го сигнала для их учета в опорной функции синтеза РЛИ. Следующий набор дан-
ных, требуемый для синтеза РЛИ, а также оценки реализуемого разрешения вдоль
линии пути (по азимуту) относится к параметрам сигналов, принимаемых антенной
РСА: огибающей, ширине спектра доплеровских частот, средней доплеровской
частоте, которые определяются рассмотренными выше параметрами относительно-
го движения, а также шириной ДНА, углами ориентации антенны и т.д. Влияние
этих фактов удобнее анализировать в системе координат, адаптированной к радио-
локационному обзору.
Для вывода компактных формул, позволяющих непосредственно вычислять
параметры относительного движения с учетом углов ориентации осей КА (или на-
правления луча антенны РСА), рассмотрим приведенные на рис. 5.7 геоцентриче-
ские системы координат. Примем ряд допущений, упрощающих анализ без сниже-
ния общности для практических параметров радиолокационного обзора:
1) представим геоид сферической моделью с радиусом Re, равным локальному
радиусу земного эллипсоида на широте точки визирования;
2) представим систему координат OXSYSZS «замороженной», а орбитальное
движение отнесем с обратным знаком к земной поверхности с угловой скоростью
со0 относительно оси вращения OYS, направленной в противоположную сторону по
отношению к оси OYo\
3) влияние эллиптичности орбиты выразим через вектор вертикальной скоро-
сти, направленный вдоль оси OZS.
Сначала рассмотрим круговую орбиту КА. Найдем проекции суммы угловых
скоростей орбиты и вращения Земли на оси системы OXVYVZV. Заметим, что по-
скольку оси лежат в плоскости орбиты, то проекции орбитальной скорости КА на
них равны нулю. Орбитальное движение КА в координатной системе OXSYSZ^ при-
веденной на рис. 5.12, характеризуется составляющими
*w=°; &,ozs=°- (5-64)
Проекции орбитальной скорости КА определяются углом y/v поворота плоско-
сти визирования YVOZV вокруг оси OZS относительно нормали к плоскости орбиты
OYS и равны
=<yosin^; 4h-=®ocos^; &,ozv = °- (5-65)
208
Глава 5. Расчет параметров траекторного сигнала
Рис. 5.12. Проекции угловой скорости орбиты КА на координатные оси
плоскости визирования
Проекции угловой скорости вращения Земли (плюс прецессия орбиты) на ко-
ординатные оси системы OXVYVZV из инерциальной системы OXnYnZn определяются
тремя поворотами, как это показано на рис. 5.13:
1) из инерциальной системы OXNYNZN в орбитальную OXQY^Zo вокруг оси OXN
на угол z0;
2) из орбитальной OXoYqZq системы в подвижную OXSYSZ^ связанную с КА,
вокруг оси ОХо на угол ft;
3) из подвижной системы OXSYSZS в связанную с КА координатную систему
визирования OXVYVZV вокруг оси OZS на угол y/v.
Соответственно для проекций угловой скорости вращения Земли имеем
"еЛЬ=0; "еУо =-«epcoszo; "eZo = "ер sin zo J (566)
"eXs = "ер sin *о cos J "еУз = "ер cos zo J "eAs = "ep sin zo sin ’
откуда
"eXv = "e№ COS Vv + "eZs sin Vv = "ep (sin zo cos cos Vv + cos zo sin Wv ) J
"eKv = “"eAs sin + "eZs COS^v = "ep (“8*4 COS<?s SWv +COSZQ COS^J; (5.67)
"eZv ="epsinzosin<?s-
Геометрия поворотов представлена на рис. 5.13. Для совместного движения с
«замороженным» положением КА получаем
(°Xv = “"oAv + "eAv = “"о sin ^v + "ер (sin zo COS COS Vv + COS zo sin ^v ) J
"Tv = -"o/v + "eZv = ~"o C0S Vv ~ "ep (sin zo COS sin Vv ~ COS zo C0S Vv ) ’ (5-68)
"Zv="epsinzosin6’s-
209
Радиолокационные системы землеобзора космического базирования
Рис. 5.13, Проекции угловой скорости вращения Земли на координатные оси системы:
a - положение плоскости орбиты; б - поворот вокруг оси ОХо\ в - поворот вокруг оси OZS;
г - геометрия движения точки визирования (левосторонний обзор)
Найдем путевую скорость следа КА для случая круговой орбиты КА. Как сле-
дует из рис. 5.13, в, линейная скорость следа КА (точка F на оси OZS) определяется
двумя составляющими - тангенциальной -ojq+oxys и нормальной tye%s- Поэтому
суммарная путевая угловая скорость, вызванная орбитальным движением КА и
вращением Земли, определится из формул (5.64) и (5.66)
^sg
// \2 \ 2
^-<yo+<yepcoszo) +(<yepsinzocos<9J .
(5.69)
Рассмотрим влияние составляющих угловых скоростей по осям координатной
системы визирования точки наблюдения, показанной на рис. 5.13,г. Составляющая
coxv приводит к появлению радиальной составляющей скорости Vr вдоль линии ви-
зирования, которая вызывает сдвиг доплеровской частоты принимаемого сигнала,
вызванного вращением Земли. Радиальная скорость пропорциональна проекции
касательной к окружности Земли в точке Т, которая вычисляется через угол паде-
210
Глава 5. Расчет параметров траекторного сигнала
ния и зависит от удаления точки визирования от трассы КА, характеризуемого
центральным углом Оу
Гг =^e^vSin/i =
= Re (-<у0 sin y/v + <Уер (sin io cos 0S cos y/v + cos i0 sin y/v )j
Rs sin ay
*0
(5.70)
где / = 7r-arcsin
—sin6zv
y
- угол падения; RQ=ylR^+R^-2RsRe cosay -наклон-
ная дальность точки визирования.
5.6.2. Зависимости доплеровской частоты принимаемого сигнала
от аргумента широты КА
При движении КА по орбите в случае ориентации его осей в ОСК (y/v=0) доплеров-
ская частота принимаемого сигнала будет изменяться, отличаясь от нуля. Это со-
ответствует скошенному обзору. Графики изменения доплеровской частоты в зави-
симости от аргумента широты КА приведены на рис. 5.14, а для длины волны РСА
Л=5,6 см (соответствует РСА Radarsat-1). Рассмотрен случай движения по круговой
орбите (кривая / для ближней границы полосы обзора 200 км и кривая 2 для даль-
ней границы 800 км). Приведенные на рисунке кривые 5, 4 характеризуют увели-
ченные в 10 раз дополнительные составляющие, вызванные вертикальной скоро-
стью для орбиты с эллиптичностью ео=0,0025, при которой отклонения от средней
высоты не превышают ±10 км.
Рис. 5.14. Графики зависимостей доплеровской частоты сигнала от аргумента широты КА:
a - ориентация осей КА в ОСК; б - ориентация осей КА в ПСК
(высота орбиты 743 км, наклонение 92,6°, аргумент перигея - минус 45°,
обзор левым бортом, длина волны РСА 5,6 см)
211
Радиолокационные системы землеобзора космического базирования
Как следует из рис. 5.14,<7, изменения доплеровской частоты для длины волны
РСА 5,6 см могут достигать ±(6... 12) кГц в экваториальных районах. Для антенны
с горизонтальным размером Dxant=15 м, как у Radarsat-1, ширина спектра доплеров-
ских частот сигнала равна AFDop=2Kr/Dxant ~3 кГц, и выбранная частота повторе-
ния близка к этой величине. Поскольку доплеровская частота может значительно
превышать частоту повторения, возникает неоднозначность сигналов по азимуту,
для устранения которой в РСА Radarsat-1 используют сложные алгоритмы. Осо-
бенно сложна компенсация смещения доплеровской частоты в режиме Скансар.
При строго боковом обзоре доплеровское смещение частоты в центре луча
должно быть равно нулю, что реализуют путем ориентации осей КА в путевой сис-
теме координат (ПСК). Ориентация осей КА в ПСК осуществляется в большинстве
современных РСА. Она достигается путем поворота КА по курсу на угол y/v в пре-
делах ±4,5°, при котором вращение Земли компенсируется радиальной составляю-
щей орбитальной скорости
Wv = Vv =-arctg<
бУер sin /0 cos 6S
4 -^epCOSZ0
-arcsin
69epsinzocos0s
^sg
(5.71)
где 6t>sg - модуль суммарной угловой скорости согласно (5.69).
На рис. 5.14, б показаны графики доплеровской частоты сигнала в плоскости
визирования при ориентации осей КА в ПСК для круговой орбиты — кривые 5 и 6
совпадают независимо от дальности обзора. Для эллиптической орбиты можно вы-
числить поправку к доплеровской частоте, вызванную эллиптичностью орбиты, ес-
ли учесть вертикальную составляющую скорости VHs:
VHs = ео sin0Од/ао/«о (!-<;) ’ (5-72)
, 2Ktfscos/
Dop//
(5.73)
где =0s-0o? - истинная аномалия КА; а0 - большая полуось орбиты; у- угол ви-
зирования. На рис. 5.14, б приведены кривые для доплеровской частоты при эллип-
тической орбите с компенсацией вертикальной скорости на ближней границе 7 или
на дальней границе 8 полосы обзора.
Для практически используемых в РСА орбит, близких к круговым, величина
доплеровских смещений от эллиптичности орбиты невелика и составляет долю от
ширины доплеровского спектра сигналов (до 550 Гц, см. увеличенные в 10 раз кри-
вые 3 и 4 на рис. 5.14,6z). Принципиально возможна компенсация этих смещений
путем дополнительного разворота КА по курсу, но не во всей полосе обзора, а
только в режимах съемки с узкой полосой. Суммарный компенсирующий угол по-
ворота вычисляют по формуле
^0=-arctg<
б)ер sin i cos 6>s + cos / / 7?e sin
4-4Pcos/o
(5-74)
где у- угол визирования от надира; у - угол падения.
212
Глава 5. Расчет параметров траекторного сигнала...
Результат такой компенсации для ближней и дальней границ полосы обзора
показан на рис. 5.14,6, кривые 7 и 8. При среднем значении компенсирующего угла
можно снизить доплеровское смещение от эллиптичности орбиты до ±270 Гц по
всей полосе обзора. Заметим, что независимо от компенсации доплеровского сме-
щения, наличие вертикальной скорости приводит к нарушению строго бокового
обзора (когда равна нулю доплеровская частота точек на земной поверхности в ее
сечении вертикальной плоскостью, нормальной к следу КА). Азимутальная ошибка
пропорциональна отношению F^s/Ksg и зависит от ширины полосы съемки.
5.6.3. Тангенциальная составляющая скорости относительного
движения
Найдем тангенциальную составляющую скорости суммарного движения КА отно-
сительно цели. Она определяет угловую скорость движения цели по отношению к
лучу антенны РСА, а, значит максимальное время синтеза в маршрутном режиме
или скорость разворота луча в прожекторном режиме обзора. Для круговой орбиты
тангенциальная составляющая скорости определится суммой составляющих угло-
вых скоростей cdyv и cozv. а также проекциями радиус-вектора цели на оси OYV и OZV
Vt = -Re (<yKv cosay - a>Zv sin ay ) =
--Re|^-<y0 cos^v _<yep(s*nz0 cos#s_coszosiny/v))cosay -
-69pnsinz‘ sin ft sin<z3 . (5.75)
CU V о у I x z
Знак «минус» служит для перехода от модели «замороженного» КА к движе-
нию КА относительно точки визирования на вращающейся земной поверхности.
В маршрутном режиме ось луча антенны РСА должна находиться в верти-
кальной плоскости OYVZV (рис. 5.13, г). В прожекторном режиме съемки ось луча
должна быть направлена на центр снимаемого кадра. Это может быть достигнуто
двумя способами:
1) если в РСА используют антенну со сканированием ДНА по азимуту (на-
пример, АФАР), то луч поворачивают в плоскости SP\Pi (рис. 5.4), направляя его в
точку Т\ с угловой скоростью
^t=±Kt//?o, (5.76)
где
Ло = ^+^-2^008^ (5.77)
- минимальная наклонная дальность до цели; знак «плюс» - при левостороннем
обзоре и «минус» - при правостороннем обзоре. Для случая высокоорбитального
РСА предполагается, что ширина луча антенны значительно меньше углового раз-
мера Земли;
2) если в РСА не применяют антенны со сканированием по азимуту (напри-
мер, РСА TECSAR [385]), то для прожекторного режима выполняют разворот КА
по курсу относительно направления в зенит с угловой скоростью
213
Радиолокационные системы землеобзора космического базирования
= + Vt/Resmay.
(5.78)
Выражение (5.76) позволяет для маршрутного режима съемки оценить макси-
мальное время синтеза апертуры, равное времени пребывания цели в азимутальном
луче ДНА
где c^ant - ширина ДНА по азимуту.
Данная формула уточняет приведенное в разделе 5.3 ориентировочное значение
времени синтеза для круговой орбиты (5.31), не учитывающее вращение Земли.
На рис. 5.15, а дается сравнение зависимостей скорости следа КА и тангенциаль-
ной скорости от аргумента широты КА для низкоорбитального РСА и РСА на ГСхО
при углах наклонения орбит, равных 85°. Масштаб кривых для низкоорбитального
РСА (la - для следа КА и 2a - для тангенциальной скорости при угле падения 80°)
уменьшен в 10 раз, скорости близки к 7000 м/с. Для РСА на ГСхО: кривая 2a - ско-
рость следа КА, кривые 26, 36, 46 - тангенциальная скорость при углах падения 20,45
и 80° соответственно. В РСА на ГСхО тангенциальная скорость для отдельных участ-
ков маршрута может менять знак и обращаться в нуль в отдельных аномальных точках
(точках «стационарности») с определенной наклонной дальностью.
Радиальная и тангенциальная скорости, м/с Время синтеза, с
-100 0 100
Аргумент широты, град
а)
100 0 100
Аргумент широты, град
б)
Рис. 5.15. Графики зависимости тангенциальной скорости для низкоорбитального РСА и РСА
на ГСхО (а) и времени синтеза в маршрутном режиме от аргумента широты КА
для РСА на ГСхО (б) (значения кривых 1а, 2а следует умножить в 10 раз)
Изменение знака тангенциальной скорости в РСА на ГСхО происходит, когда
КА находится в высоких широтах на больших дальностях, если луч антенны захо-
дит за полюс (Северный при обзоре левым бортом и Южный - при обзоре правым
бортом), где направление движения точек на Земле совпадает с движением КА и
скорости вычитаются. Появляются аномальные точки «стационарности», в кото-
214
Глава 5. Расчет параметров траекторного сигнала...
рых КА совершает круговое движение относительно «мгновенного центра» на
Земле. Происходят два явления. Во-первых, луч антенны в течение длительного
времени направляется на цель, как при прожекторном режиме. При этом возможно
получение высокого азимутального разрешения. Во-вторых, доплеровская частота
сигнала для точки мгновенного центра в течение длительного времени равна нулю.
Этот случай аналогичен самолетному РСА при полетах по круговой траектории
[353] и эквивалентен фильтрации ЛЧМ-сигнала методом гармонического анализа,
при котором точки, смещенные по азимуту, имеют постоянное смещение по часто-
те, что позволяет их различать на выходе фильтра обработки.
На рис. 5.15,« показан также график радиальной скорости VT (жирная линия).
Она равна нулю для всех углов падения, поскольку реализуется боковой обзор с
ориентацией КА в ПСК.
На рис. 5.15,6 приведены зависимости времени синтеза в маршрутном режиме
от аргумента широты КА для РСА на ГСхО (кривые 2е, Зе, 4е) для ширины луча
антенны 0,5°. Есть участки, где время синтеза резко возрастает из-за снижения тан-
генциальной скорости относительного движения.
Для детального анализа процессов в аномальных точках РСА на ГСхО следу-
ет использовать методику моделирования, изложенную в разделе 5.5, задавая гео-
графические координаты точек в окрестностях аномалии. Можно показать (см.
также формулу (5.66)), что ширина спектра сигналов, попадающих в луч антенны в
районе аномальной точки, примерно такая же, как и на всем маршруте, что соот-
ветствует аналогии с гармоническим анализом ЛЧМ-сигнала. При диаметрально
противоположном положении КА скорость разворота луча возрастает, и время
синтеза в маршрутном режиме уменьшается.
В общем случае в процессе радиолокационного обзора должна обеспечивать-
ся ориентация строительных осей КА (и соответственно осей антенны РСА) в про-
странстве по курсу, крену и тангажу. При фиксированном положении полосы
съемки относительно трассы КА (Seasat-A, ERS-1, ERS-2) вертикальную ось КА
направляют в зенит (нулевой угол тангажа), поперечную ось КА - в горизонталь-
ном направлении (нулевой угол крена), а продольную ось КА (курсовой угол) -
вдоль вектора скорости: орбитальной (ориентация в ОСК) или путевой (ориента-
ция в ПСК). Для изменения положения полосы съемки относительно трассы КА
возможен разворот КА по крену КА (РСА «Меч-К», «Меч-КУ») или сканирование
ДНА по углу места.
5.6.4. Масштабы радиолокационного изображения
Полученные формулы для тангенциальной и радиальной составляющих скорости
относительного движения позволяют вычислить масштабы получаемого радиоло-
кационного изображения по координатам вдоль и поперек линии пути КА. В об-
щем случае имеем скошенный обзор, обусловленный отклонениями от строго бо-
кового обзора в гринвичской системе координат, которые вызваны явлениями сис-
тематического характера (управление в ОСК, эллиптичность орбиты или заданный
режим скошенного обзора), а также ошибками ориентации КА.
215
Радиолокационные системы землеобзора космического базирования
Рассмотрим сначала случай строго бокового обзора при движении КА по кру-
говой орбите относительно сферы, аппроксимирующей геоид. Геометрия обзора
показана на рис. 5.16. Пусть в момент «медленного» времени tx\ = 0 (положение
КА в точке 5) наблюдается некоторая точка Т\ (опорная), удаленная от трассы КА
на расстояние У) по дуге большого круга (центральный угол «Быстрое» время
опорной точки определится ее наклонной дальностью согласно формулам (3.4)-
(3.8), приведенным в разделе 3.1
27? 7 /-------------------
^1 = 1 = - + Яе - 2АА coss ’ (5-80)
С с
где - радиус орбиты КА; 2?е - локальный радиус Земли; с^=У1/7?е - центральный
угол опорной точки.
Рис. 5.16. Геометрия бокового и скошенного обзоров:
F'FF" - след КА; GG'- геометрическое место точек, удаленных от следа КА на У1
(плоскости визирования: OST\H- при боковом обзоре, OSTufl^ - при скошенном обзоре)
Зададим еще две точки, точку Гг, смещенную по «медленному» времени на
период повторения зондирующего сигнала Гр: /л2=<¥1+Гр, и точку Гз, смещенную по
«быстрому» времени на период дискретизации принимаемого сигнала Ts=l/Fs, где
Fs - частота квантования. Ее временная задержка будет равна te=6?i+7s-
Масштаб РЛИ вдоль линии пути КА определится путевой скоростью относи-
тельного движения Ksg, являющейся модулем векторной суммы тангенциальной
(5.76) и радиальной (5.71) составляющих скорости относительного движения. Этот
216
Глава 5. Расчет параметров траекторного сигнала...
случай аналогичен движению самолетного РСА с суммой воздушной скорости и
скорости ветра, когда луч антенны РСА направлен по нормали к вектору путевой
скорости. После преобразований формул (5.71), (5.76) с учетом (5.72) приходим к
формуле для угловой скорости относительного движения (5.70), откуда получаем
формулу для масштаба (шага пикселей) РЛИ вдоль линии пути:
мх = rpFg = cosay. (5.81)
Для прожекторного режима вместо Тр следует брать интервал между интер-
полированными отсчетами, соответствующими временной дискретизации пиксе-
лей выходного РЛИ. В режиме Скансар следует учитывать выполняемую обычно
децимацию (прореживание) выходных отсчетов.
Выражение для масштаба поперек линии пути следует из (3.4)-(3.8) раздела 3.1
с сТ
Му = ~(fR3 ~ )= ’ (5.82)
2
где Ts - такт квантования сигнала в АЦП; - угол падения, равный
Л
= arcsin sin ay,
\Ry y
> = arcsin
—sin
Ry
(5.83)
Для скошенного обзора, когда плоскость визирования OSTXqHq повернута от-
носительно нормали к вектору путевой скорости КА на угол уг9 рассматриваем
точки Tiq, 72Ч, T3q на рисунке. Выражение для масштаба вдоль линии пути КА не
изменяется (5.81), так как след луча движется по той же траектории.
Переход к скошенному обзору приводит к возрастанию наклонной дальности
целей, удаленных от следа КА на расстояние Yx. Из геометрии, приведенной на
рис. 5.16, имеем основные соотношения, связывающие центральный угол Oyq с уг-
лом поворота у/ плоскости визирования:
проекция дуги FTX=YX на горизонтальную плоскость
ОЕ = yx=RQ sin aу; (5.84)
проекция дуги FTXq на горизонтальную плоскость после поворота плоскости
визирования
ОВ = 1 = ух/cos^ = Resinay/cosj/ ; (5.85)
центральный угол точки 7ц
ау({ = = arcsin(sinау/cosу/). (5.86)
Наклонная дальность точки 7}с определится известной формулой
я1ч = ^7?2 +7?2-27?s7?e cosajq . (5.87)
Наклонная дальность точки 73q
7?3q =7?lq +cTj2. (5.88)
Первичное РЛИ в косоугольных координатах азимут-наклонная дальность в
плоскости визирования (до преобразования РЛИ в прямоугольную систему коор-
217
Радиолокационные системы землеобзора космического базирования
динат) имеет масштаб по наклонной дальности, который определяется формулой
(5.83) с подстановкой в нее Fi=Flq из формулы (5.88).
При скошенном обзоре смещение точки вдоль плоскости визирования (по на-
клонной дальности) проектируется вдоль и поперек линии пути. Значения проекций
можно найти путем решения прямоугольного сферического треугольника FF^T^ по
гипотенузе FTiq и углу при вершине, равному Z_F=n/l-y/. Как и следовало ожидать,
дуга Fq7"iq, характеризующая расстояние точки Fq от следа КА, равна
FqTlq = Fe arcsin {sinayq cos. (5.89)
Для точки Тзч длина дуги FT^ равная расстоянию Уз от следа КА (на рисунке
не показана), определяется формулой, где sin /iq = (Fs sin ayq ) / Frlq
cT
К =7L arcsin < sin +-------—
1 Iм 2^sinZiqJ
n cTscos^
cost/ >» arcsin < sin o' cost/+— -cos6/w
Iм 2^sinZiq
(5.90)
Разлагая арксинус в степенной ряд и учитывая малость приращения наклон-
ной дальности, получаем после преобразований формулу масштаба РЛИ поперек
линии пути для скошенного режима обзора
cF cos o' cost/
MY =-------- I 2 2 • (5'91)
2sm/iqV1-Sm °>qCOS V
Аналогично из треугольника FFqFiq вычисляем время упреждения при на-
блюдении цели в скошенном (переднебоковом) режиме обзора и азимутальное
смещение отметки на РЛИ по отношению к боковому обзору
Z,q = arctgSin {/}/«sg (5.92)
AXq = Re cosa>,arctg{tg<z>,q sin^|.
Вычисленные значения масштабов и азимутальное смещение при косоуголь-
ном обзоре используются в процедурах геокодирования РЛИ с преобразованием в
равномасштабную плановую проекцию и другие картографические проекции.
5.6.5. Ширина спектра доплеровских частот принимаемого сигнала
Из геометрии, представленной на рис. 5.7, следует, что в канал с дальностью Rq
кроме сигнала от цели Т будут попадать сигналы от целей, расположенных по ок-
ружности с радиусом Fesinc^ на Земле в пределах ширины азимутальной ДНА axant
(или зоны облучаемой антенной на земной поверхности Хш)- Ввиду малости угла
«ram можно пренебречь различием между хордами Т\Т2 и соответствующими дуга-
ми с центрами S и О' на рис. 5.17, а также отличием наклонной дальности R и Rq.
С учетом принятых допущений получаем соотношение между углом поворота
плоскости визирования Ay/V и угловым размером ДНА Oant
Resincr,, sin A^v «R^sm(aaBj2'). (5.93)
218
Глава 5. Расчет параметров траекторного сигнала
Откуда имеем соотношения для
приращения разворота плоскости визи-
рования и для ее крайних положений в
пределах азимутальной ДНА
. r./?osin(a t/2V
Ay/V=arcsm -5-----;
I, ^esinS J
^vi,2 + (5-94)
Подставляя полученные углы в
формулу (5.70), вычисляем значения
радиальных скоростей на краях ДНА и
ширину спектра доплеровских частот
принимаемых сигналов
Д/Ъор = .(5.95)
Л
В результате приходим к извест-
ному соотношению AFDop =2Ksg/Z)xaHT .
Рис. 5.17. Связь между угловым
размером ДНА и углом разворота
плоскости визирования
5.6.6. Временной закон изменения наклонной дальности точки визирования.
Разрешение РСА по азимуту
Проанализируем геометрию относительного движения точки визирования, пока-
занную на рис. 5.13, г. В рассматриваемой модели с орбитальным движением, от-
несенным к земной поверхности (кроме вертикальной скорости, вызванной эллип-
тичностью орбиты), координаты КА характеризуются вектором
Rs (г) = {0xv + 0у„ + + 7ffst)zv]. (5.96)
Вектор наклонной дальности R(Z) в пределах малых углов отклонения, когда
результаты вращений можно складывать независимо, определится умноженными
на время суммой составляющих угловых скоростей &zv и проекций ради-
ус-вектора точки визирования на плоскости, нормальные к осям вращения
R(Z) = Rr (Z) - R5 (t) = Re (cos ay sin ty^Z - sin ay sin a>Zvt} xv +
4-T?e(sin6Zy -sintyAVZcos6Zy)yv + (2^ + VHst-Re(cosay -sinay sin69yvz)jzv .(5.97)
Временная зависимость модуля наклонной дальности для эллиптической ор-
биты при строго боковом обзоре определяется формулой
R(z) = |/?e2 (cos ау sin cdyJ - sin ay sin coZvtf + (sin ay ~ 8*п C0Xvt cos ay )2 +
2)1/2
+(2?5 + VHst-R&(cGsay +sin6rvsin6yrvzj) j . (5.98)
Как и в разделе 5.4, заменим орбитальное движение приближенно прямоли-
нейным с линейной эквивалентной скоростью (ЛЭС) Fie, для которой на наклонной
219
Радиолокационные системы землеобзора космического базирования
дальности Rq скорость азимутальной ЛЧМ совпадает со скоростью ЛЧМ орбиталь-
ного движения
К1е = = л/2С2^о , (5.99)
где R(t}-d2R(t)l dt2 - вторая производная наклонной дальности цели по време-
ни; С2 - коэффициент разложения временной зависимости наклонной дальности в
степенной ряд, определяющий скорость азимутальной ЛЧМ принимаемого сигнала
от цели.
Значения ЛЭС И(е, а также времени минимальной дальности /пг, радиальной
скорости VT при /=0 и минимальной наклонной дальности цели Rnr при расчете па-
раметров движения можно выразить через отсчеты модуля наклонной дальности и
гринвичских координат спутника
/т?(-/г)2+7?(/г)2-27?(0)2
К1е = -----Ч--------, (5.100)
V 2h2
JZ2/ КГ(О) = ^Ц-, V ’ Я(0) (5.102)
^r=^(°)2-^nr- (5.103)
Здесь h - шаг временных отсчетов наклонной дальности.
Используя полученные выражения, найдем значение разрешающей способности
РСА по азимуту по известным формулам прямолинейного движения (см. табл. 5.2) с
учетом вычисленного ранее значения времени синтеза для орбитального движения
_ _ ^xant
2rlersynt 2М1е
(5.104)
На рис. 5.18 приведены графики зависимостей линейной эквивалентной ско-
рости, тангенциальной составляющей скорости и разрешения по азимуту, реали-
зуемого в маршрутном режиме, от аргумента широты КА для РСА на ГСхО (гори-
зонтальный размер антенны равен 20 м, угол наклонения орбиты 85°, время синте-
за ограничено значением 800 с).
Характерно, что значения тангенциальной скорости (и скорость следа КА)
значительно меньше значений линейной эквивалентной скорости, которая учиты-
вает также изменения радиальной скорости при смещении от нуля. Как было ранее
отмечено в разделе 5.2, из-за вращательного движения КА реализуемое в мар-
шрутном режиме разрешение по азимуту может быть значительно лучше, чем по-
ловина горизонтального размера антенны DxarAH.
220
Глава 5. Расчет параметров траекторного сигнала
Рис. 5.18. Графики зависимости от аргумента широты КА для РСА на ГСхО:
слева - для линейной эквивалентной скорости (сплошные линии) и для тангенциальной состав-
ляющей (пунктир): углы падения 20° (7), 45° (2) и 80° (5); справа - кривые для разрешающей
способности по азимуту (максимальное время синтеза 800 с; угол наклонения орбиты 85°)
5.6.7. Сравнение Кеплерова движения с возмущенным движением КА
Для сравнения параметров траекторного сигнала при возмущенном движении КА и
модели его движения по Кеплеровой орби-
те проведено моделирование [159*]. Пара-
метры моделирования приведены в табл.
5.4. Высота орбиты около 500 км. Результа-
ты моделирования приведены на рис. 5.19,
где показаны графики зависимостей ЛЭС от
аргумента широты КА для трех дальностей
580, 1180 и 1780 км, соответственно 7, 2, 5,
а также значения путевых скоростей спут-
ника 4 и следа 5. В отличие от прямолиней-
ного движения значения ЛЭС меняются с
изменением наклонной дальности, а также
высоты рельефа наблюдаемой местности.
Это приводит к различию законов ЛЧМ.
Указанные различия необходимо учитывать
Путевая скорость, м/с
7600
7500
7400
7300
7200
7100
7000
6900
6800
6700
-200
-100 0 100
Аргумент широты КА, град
Рис. 5.19. Зависимости скоростей относи-
тельного движения от аргумента
широты КА
в алгоритмах синтеза изображения с высоким разрешением.
На рис. 5.20 приведены графики для остаточных погрешностей временного
закона наклонной дальности цели при аппроксимации возмущенного движения
спутника прямолинейным движением с ЛЭС и Кеплеровым движением. Заметим,
что эти графики относятся к орбитам с эксцентриситетом 0,008, при котором пере-
пад высот орбиты составляет ±54 км. Снижение перепада высот до ±21 км (е0 =
= 0,003), что более типично для космических РСА, приводит к уменьшению оста-
точных погрешностей до ±8,2 мм.
221
Радиолокационные системы землеобзора космического базирования
Рис. 5.20. Остаточные поправки для прямолинейной модели (а, б, в) и Кеплеровой
аппроксимации (г, д, е) возмущенного движения спутника при истинной аномалии 0о=О° (а, г),
0О=45° (рисунки б, д) и 0о =90° (в, е); наклонные дальности цели 7?0=580 км (кривые 7),
7?о=1180 км (кривые 2), 7?0=1780 км (кривые 3)
Таблица 5.4. Параметры моделирования
Параметр Значение
Большая полуось орбиты яо=6871 км
Эксцентриситет орбиты ео=0,008
Угол наклонения орбиты io=70°
Долгота узла Ло=О
Аргумент перигея 0ор—9Оо
Аргумент широты спутника 0S=-9O°, -45°, 0°
Истинная аномалия 0о=О°, 45°, 90°
Средняя высота орбиты 7/s=500 км
Наклонные дальности 7?0=580/1180/1780 км
Для расчета параметров опорной функции по всем наклонным дальностям не-
обходимо также знание закона изменения ЛЭС по наклонной дальности. Такая за-
висимость может быть рассчитана на основе данных движения спутника по дис-
кретному числу опорных наклонных дальностей (3...5 в пределах полосы съемки).
Графики изменения ЛЭС по наклонной дальности для разных значений истинной
аномалии приведены на рис. 5.21. Как видно, характер графиков существенно за-
висит от аргумента широты спутника или величины истинной аномалии.
222
Глава 5. Расчет параметров траекторного сигнала
Рассмотренная модель относитель-
ного движения и проведенные на ее ос-
нове расчеты показывают, что движение
платформы в окрестностях опорной точ-
ки наблюдения может рассматриваться
как прямолинейное, имеющее скорость,
которая рассчитывается по параметрам
возмущенного движения КА. Приведен-
ные аналитические формулы можно ис-
пользовать для вычислении опорных
функций сигнала с интерполяцией пара-
метров движения, вычисленных в дис-
кретных точках (для начальной, цен-
тральной, конечных дальностей и про-
межуточных точек). Для РСА высокого
Рис. 5.21. Зависимость ЛЭС от наклонной
дальности при разных значениях истинной
аномалии спутника
разрешения модель кеплерова движения платформы требует уточнения по расчетам
возмущенного движения, а также по информации от аппаратуры позиционирования
(ГЛОНАСС, GPS, Galileo), устанавливаемых на КА.
5.7. Связь между углами ориентации КА и направлением
визирования
Как следует из предыдущих разделов данной главы, при заданных в программе по-
лета параметрах радиолокационного обзора на вход приемного устройства РСА
будут поступать сигналы, отраженные от местности в пределах следа ДНА, пока-
занного на рис. 5.7. В задаче получения радиолокационного изображения с высо-
ким разрешением нужно рассматривать элементарные цели, сигналы от которых в
момент времени t = 0 попадают в след
ДНА и в определенные дальностные
каналы. Временные законы изменения
текущей дальности каждой цели инди-
видуальны, в зависимости от положе-
ния цели по азимуту, как это показано
на рис. 5.22, и это проявляется в изме-
нениях фазы принятого сигнала и ми-
грации дальности, которые надо учиты-
вать при синтезе РЛИ.
Поддержание ДНА в требуемом
положении по азимуту и углу места яв-
ляется задачей ориентации КА. В об-
Рис. 5.22. Временные законы изменения
дальности целей 1,2,3, смещенных
по азимуту на 500 м (высота орбиты 500 км,
наклонная дальность /?о=7ОО км)
щем случае направление луча антенны
относительно вектора скорости КА V
определяется установкой луча антенны
относительно осей КА и разворотами
223
Радиолокационные системы землеобзора космического базирования
Рис. 5.23. Опорная (SXYZ) и связанная
(SXpYpZp) системы координат
КА по трем углам - по курсу y/s, тангажу <9S и крену ys относительно путевой сис-
темы координат (ПСК), принятой за опорную систему.
В известной литературе по радиолокации и космическим системам обозначе-
ния осей, принятые для описания космических (или летательных) аппаратов, отли-
чаются от принятых в радиолокации. Положение осей космического аппарата опи-
сываем в представленных на рис. 5.23 свя-
занной с КА подвижной опорной системе ко-
ординат SXYZ и в связанной системе коор-
динатных осей платформы (космического ап-
парата) iSLYpKpZp [95, 221], начало которой на-
ходится в центре масс КА, ось SXP направлена
вдоль продольной оси КА, ось SYP направлена
вверх, ось SZP направлена вбок, дополняя сис-
тему до правой.
Опорная система координат SXYZ имеет
начало в центре масс КА (как правило, близ-
ком к фазовому центру антенны), ось X на-
правлена вдоль вектора путевой скорости, ось
Y - вертикально вверх, ось Z при левосторон-
нем обзоре направлена по левому борту, обра-
зуя правую систему координат, а при правостороннем обзоре направлена по пра-
вому борту, образуя левую систему координат. Курсовой угол вектора скорости
относительно направления на Север отсчитывается от меридиана по часовой
стрелке. Опорная система SXYZ может быть получена из показанной на рис. 5.13, г
геоцентрической системы радиолокационного обзора OXVYVZV путем перемещения
начала координат по OZsg в центр масс КА.
Положение системы координат КА SXpYpZp относительно опорной SXYZ опре-
деляется тремя углами <9, у/, у. Угол <9 между осью SXp и горизонтальной плоско-
стью SXZ - угол тангажа, угол у/ между проекцией оси SXp на горизонтальную
плоскость SXY (промежуточная ось SX' на рис. 5.23) и осью SX-угол рысканья или
угол курса, угол /между осью SYp и вертикальной плоскостью SXY-угол крена или
угол вращения. Положительным направлением отсчета углов принимается направ-
ление против хода часовой стрелки для наблюдателя, смотрящего с конца оси вра-
щения. Заметим, что оси вращения по курсу и тангажу не совпадают с физически-
ми осями КА (вертикальной и поперечной), приближаясь к ним при малых значе-
ниях углов отклонения.
Для перехода от опорной системы координат к системе координат КА можно
использовать матрицу, определяющую последовательные повороты по курсу отно-
сительно оси У, тангажу относительно оси Z и крену относительно оси X
А р
С11 с12 С13
С21 С22 с23
<с31 с32 с33 )
(5.105)
224
Глава 5. Расчет параметров траекторного сигнала...
где ||^У||, ||t9Z||, ||/Jf|| - матрицы поворотов по соответствующим осям; - коэф-
фициенты матрицы АХр<^х.
В соответствии с формулами аналитической геометрии прямое и обратное
преобразования можно записать в векторной форме [95]
Хр =CnX + Ci2y + Ci3Z
<Ур=С21Х + С22У + С2зХ,
zp =с31х + с32 y+c33z
x = сихр+с21Ур+c31zp
^У = С12Хр+С22Ур-ЬС32гр
Z = Ci3Xp+C23yp+C33Zp
(5.106)
(5.107)
или в матричном виде
С12
с22
С32
С23 Х
С33>
(5.108)
С21
с22
с23
(5.109)
Из геометрии, представлен-
ной на рис. 5.24, вычислим на-
правляющие косинусы системы
при повороте из опорной системы
SXYZ в промежуточные системы
SX'YZ' (поворот по курсу) и
SXpY'Z' (поворот по тангажу), а за-
тем и в систему координат КА
SXpYpZp (поворот по крену). Опор-
ная система в векторной форме
определяется ортами х, у, z.
Переход к промежуточным
осям X\Y\Z' определяется со-
отношениями
X’ = xcos5/-zsiny/;
Рис. 5.24. Преобразования координат при повороте
осей
Y' = -X’sin £ + у cos <9 = -х cos у sin & + у cos & + zsin у sin 9 ; (5.110)
Z’ = xsin^/ + zcosj/.
8—1492
225
Радиолокационные системы землеобзора космического базирования
Координаты осей КА
Х_ =X'cosi9 + ysini9;
Yp = Y’cos/ + Z’sin/;
(5.111)
Zp = -Y’sin/ + Z’cos/.
Окончательно получим выражения для осей связанной системы
с12
Л cos^cos<9
sin <9
rsin 5/ • sin / - cos sin 19 cos у
cos <9 cos/
k cos у sin y + sin у sin <9 cos у ?
(5.112)
(c A
C31
C32
kc33>
^sin у cos у + cos у sin <9sin y'
-cos <9 sin/
k cos у cos у - sin у sin <9 sin / ?
Рис. 5.25. Положение линии визирования SP}
Применим полученные форму-
лы для вычисления координат точки
визирования при наличии ошибок
ориентации КА. Сначала рассмотрим
важный частный случай, когда луч
антенны находится в плоскости,
нормальной продольной оси КА (бо-
ковой обзор). Примем, что антенна
установлена на левом борту КА, луч
SP\ направлен вниз и отклонен от
вертикали SF на угол £а, как это по-
казано на рис. 5.25. Расстоянием ме-
жду центром масс КА и фазовым
центром антенны пренебрежем.
Вектор линии визирования R в
центре антенного луча (точка оп-
ределяется проекциями в связанной
системе координат (орты хр, ур, zp)
R = 7?0(xp0-ypCOs£a “Zp sin£> ) ,
(5.113)
где Rq - наклонная дальность точки на земной поверхности в центре луча. Значе-
ние Ro вычисляют решением треугольника OST (см. рис. 5.13,г) по известным па-
226
Глава 5. Расчет параметров траекторного сигнала
раметрам 7?s, у и локальному радиусу Re в ее сечении плоскостью OSY, проходящей
через ось ДНА.
Координаты центра луча в подвижной опорной системе координат SXpYpZp
при наличии ошибок ориентации осей КА находим преобразованием
R = * >5 > = АР х (X с11^Яр +с21^Лр + с31^Яр с12^Яр +с22^Лр +с32-^Яр (5.Н4)
<z*p> 4cB^J?p +с23^Яр +сЗЗ^Яр>
Откуда составляющие вектора R
^-sin^sin^ +/a) + cos,/sini9cos(£a + /а)Л
R = F0 -cosi9cos(£a+/а) . (5.115)
I- cos у/ sin(£a + /а ) - sin у/ sin & cos(£ + /а ))
В более общем случае плоскость луча может быть повернута из положения по
нормали к продольной оси КА SFPX на угол у/а по курсу в положение SFP. Тогда
проекции вектора линии визирования R в центре луча (точка Р) в связанной систе-
ме определяться формулой
R = 7?о (-хр sin £ sin у/Л - ур cos £а - zp sin £ cos^a ). (5.116)
В частном случае поворота КА только по курсу имеем
'-sin^sin^
-cos£
(5.П7)
k-sin£a cos^a cos,/^
В общем случае при произвольных углах ориентации КА составляющие век-
тора центра луча R=X?-xp+y^-yp+Z^-zp выражаются формулами
XR = Л (-sin £а sin y/a cos у/ cos & - cos £a sin у/ sin /a + cos £a cos у/ sin & cos /a -
- sin £a cos y/h sin у/ cos /a - sin £a cos y/h cos у/ sin & sin /a);
Yr = F(sin^a sin^//a sini9-cos£a cos <9sin/a +sin£a cos?/a cosi9sin/a); (5.118)
ZR =7f(sin£asiny<asiny<sini9-cos£acosy<sin/a -cos£a sin^sini9sin/a -
- sin £a cos y/^ cos у/ cos /a + sin £a cos y/^ sin у/ sin & sin /a).
Приведенные формулы будут использованы в следующем разделе, в котором
рассматривается влияние выбора системы ориентации КА на доплеровскую часто-
ту сигнала, принимаемого антенной РСА. Она зависит от значения радиальной
скорости относительного движения в направлении, соответствующем максимуму
ДНА, FDop=2Kr/2, где 2- длина волны РСА.
227
Радиолокационные системы землеобзора космического базирования
5.8. Влияние ориентации космического аппарата
на радиальную скорость относительного движения
Средняя доплеровская частота, на которой происходит синтез апертуры, определяется
положением луча антенны по азимуту относительно нормали к вектору путевой ско-
рости. Факторами, влияющими на значение доплеровской частоты, являются враще-
ние Земли при ориентации осей КА в орбитальной системе координат, углы установки
антенны относительно продольной оси КА, а также ошибки ориентации КА.
Для случая ориентации осей КА в ПСК при повороте линии визирования от на-
правления траверза, вызванном ошибками ориентации КА по курсу, тангажу и крену
появится поперечная составляющая относительной угловой скорости, линейная ком-
понента которой даст проекцию на линию визирования. Если луч антенны установ-
лен в плоскости, нормальной продольной оси КА, то зависимость радиальной скоро-
сти в луче при отклонении КА относительно ПСК определится формулой
Kr = 69sgT?s (sin A^/sin/a -cosA^sin^cos/a), (5.119)
где А^и <9 - ошибки ориентации КА по курсу и тангажу; yant - угол между верти-
калью и осью луча ДНА, включая ошибки ориентации КА по крену (знак «плюс»
при обзоре левым бортом). Заметим, что положительное значение Vr соответствует
отрицательному смещению доплеровской частоты.
При ориентации осей КА в ОСК имеется сложение двух составляющих —
вращения Земли и составляющей, вызванной поворотом КА от ошибок ориента-
ции. Для случая бокового обзора радиальная составляющая скорости определится
приближенной формулой
®-4p^scos6,Ssin/osin/a +<ysg7?s(sin^Osin/a - sin COS/а ) . (5.120)
На рис. 5.26 отображены зависимости между выносом полосы съемки Yи ради-
альной скоростью Кг при разных значениях аргумента широты КА. Расчетные значе-
ния радиальной скорости соответствуют параметрам РСА «Меч-КУ» КА «Алмаз-1»:
5-диапазон волн, орбита высотой 300 км с углом наклонения 72°. Рассмотрен случай
ориентации осей КА в ОСК (в отличие от реализованной в РСА «Меч-КУ» ориента-
ции КА в ПСК). Слева показаны положения следа ДНА на поверхности Земли, спра-
ва - совмещенные с ними для наглядности графики радиальных скоростей: они
представляют собой как бы вид сверху от КА. По оси ординат отложены значения
горизонтальной дальности У: вниз для обзора правым бортом и вверх - для обзора
левым бортом. По оси абсцисс приведены значения радиальной скорости Кг, причем
отрицательные значения отложены вправо, что соответствует положительным доп-
леровским смещениям частоты. Аргумент широты (обозначен буквой «п») дан с ша-
гом 45° в пределах от 0 до 90° для рис. 5.26,б,г,е (восходящая ветвь витка). Для нис-
ходящей ветви витка кривые симметричны относительно оси ординат - скорость ме-
няет знак. Для рис. 5.26, ж аргумент широты дан до 180°, кривые для значений ар-
гумента широты и = 180-360° совпадают с приведенными на рисунке.
Рассмотрены 4 случая - отсутствие ошибок ориентации (рис. 5.26,а и б), по-
ворот на 1° только по курсу (рис. 5.26, в и г), на 1 ° только по тангажу (рис. 5.26,6 и е) и
совместное влияние поворотов по курсу и тангажу по 0,5° (рис. 5.26,ж и з).
228
Глава 5. Расчет параметров траекторного сигнала
Рис. 5.26. Положения следа ДНА и зависимости радиальных скоростей
от горизонтальной дальности Y (вверх - левый борт, вниз - правый борт)
при разных значениях аргумента широты и (ориентация осей КА в ОСК)
Радиолокационные системы землеобзора космического базирования
Поведение кривых радиальной скорости для ориентации осей КА в ОСК при
аргументе широты 90 и 270° совпадает со случаем ориентации осей КА в ПСК
(Гринвичской системе координат). Смещение доплеровской частоты от нуля может
быть вызвано вертикальной скоростью при орбите, отличающейся от круговой.
Влияние поворотов по курсу и тангажу различно. При повороте КА по курсу
плоскость лучей поворачивается относительно вертикали, радиальные скорости
при обзоре вправо и влево изменяются в разные стороны.
При повороте по тангажу плоскость лучей перемещается вперед, приводя к оди-
наковым значениям радиальных скоростей по правому и левому бортам. Путем пово-
рота КА по курсу при произвольном значении аргумента широты можно достичь ком-
пенсации радиальной составляющей скорости Земли Иг - кривая пройдет точно по оси
ординат, что соответствует нормали к вектору путевой скорости (нулевому доплеров-
скому сдвигу), т.е. ориентации в ПСК (как при w=90° для случая ориентации в ОСК).
Если зона захвата невелика и обзор односторонний, то поворотом КА по кур-
су можно скомпенсировать ошибки по тангажу (кривая w=90° для левого борта).
Этот способ был использован для устранения ошибок ориентации в РСА «Меч-К»
КА «Космос-1870» и «Меч-КУ» КА «Алмаз-1».
Анализ приведенных формул для расчета радиальной скорости (а, значит, и доп-
леровской частоты в максимуме ДНА), а также данные о практических РСА космиче-
ского базирования (см. гл. 13) свидетельствует, что при ориентации КА в ОСК смеще-
ния доплеровской частоты могут достигать 10... 15 кГц, значительно превышая часто-
ту повторения зондирующего сигнала и создавая проблемы устранения помех неодно-
значности сигналов по азимуту. Поэтому в современных РСА используют ориентацию
КА в ПСК. Должны приниматься меры по уменьшению ошибок ориентации КА до
единиц угловых минут, чтобы вызванное ими смещение доплеровской частоты было
существенно меньше ширины спектра доплеровской частоты и не вызывало дополни-
тельных сложностей при синтезе РЛИ и коррекции геометрических искажений РЛИ.
5.9. Баллистические данные для расчета опорной функции синтеза
изображения
Как уже отмечалось, для формирования опорных функций согласованной фильтра-
ции при синтезе РЛИ необходима баллистическая информация о движении КА. Ее
вводят в процессор синтеза РЛИ в виде массива служебной информации, который
содержит также сведения о включенном режиме работы, параметрах зондирующе-
го сигнала и.т.д. В процессе радиолокационной съемки в программу полета запи-
сывают время включения заданного режима работы РСА и его параметры, часть из
которых может рассчитываться на борту с учетом имеющейся навигационной ин-
формации. Современные РСА используют внешние данные траекторных измере-
ний, а также автономные устройства позиционирования КА (GPS, ГЛОНАСС) и
астродатчики для ориентации осей КА. Как правило, точность ориентации КА ни-
же, чем точность измерения положения осей по астродатчикам. Измеренные по-
правки должны учитываться в алгоритмах синтеза изображения и привязки его к
географическим координатам. Для получения качественного изображения заданно-
го объекта необходимо согласование двух систем управления:
230
Глава 5. Расчет параметров траекторного сигнала...
1) системы выбора временного положения строба приема с заданием наклонной
дальности первого и последующих отсчетов радиоголограммы и числа отсчетов;
2) системы ориентации осей КА и установки луча антенны по углу места в
центр снимаемого участка и по азимуту - в направлении нулевой (или заданной)
доплеровской частоты при съемке в маршрутном режиме или в упрежденную точ-
ку в прожекторном режиме.
При рассогласовании этих систем, но с учетом соблюдения точного закона
изменения фазы при синтезе РЛИ, может происходить снижение яркости изобра-
жения без ухудшения его разрешающей способности по азимуту либо появление
смещенного изображения из зоны неоднозначности.
В процессе радиолокационной съемки каждый снимаемый кадр (маршрут)
должен сопровождаться достаточной служебной информацией для выполнения син-
теза радиолокационного изображения (РЛИ), преобразования его в картографиче-
ские проекции и привязки РЛИ к географическим координатам. Часть этой инфор-
мации (константы, параметры режимов, форма геоида, геометрия установки антенны
на КА и др.) может находиться в архивах (файлах) комплекса обработки радиолока-
ционной информации (КОРЛИ), а оперативные данные - в файле-заголовке, предше-
ствующем радиолокационной информации или в специально отведенных фрагмен-
тах строк радиолокационных данных. Такого рода служебная информация должна
сопровождать все виды информационных продуктов: первичные («сырые») данные -
радиоголограмму и РЛИ - амплитудные, комплексные, геокодированные и т.д. Для
упрощения процедур обмена и тематической обработки радиолокационных данных,
включая сети Интернета, существуют рекомендации Международной комиссии по
дистанционному зондированию CEOS (Commission on the Earth Observation Systems)
[460, 557, 558]. В состав служебной информации включающей параметры режима
и баллистическую информацию должны входить следующие параметры:
• сглаженные значения текущего положения центра масс КА в гринвичской
системе координат (ГСК);
• сглаженные значения текущего вектора скорости центра масс КА в ГСК;
• угловые координаты строительных осей КА SX^Y^Z? относительно подвижной
связанной опорной системы координат SXYZ с центром S в центре масс КА,
осью Х9 направленной вдоль вектора путевой скорости в ГСК, осью У, направ-
ленной в зенит и осью Z, дополняющей систему до правой;
• координаты центра кадра на поверхности Земли, включая значение локальной
высоты рельефа относительно референц-эллипсоида (или значение локально-
го радиуса Земли).
Для получения и практического использования космических РЛИ с метровым
разрешением, особенно при интерферометрической обработке группы снимков, необ-
ходима совместная географическая привязка РЛИ с погрешностями, соизмеримыми с
шагом дискретизации РЛИ. Поэтому требуется очень высокая точность баллистиче-
ской информации, что достигается внешними траекторными измерениями и установ-
кой на борту КА аппаратуры GPS, как это предусмотрено в РСА TerraSAR-X [315]. В
этой аппаратуре первоначальная точность позиционирования составляет 10 м (СКО), а
с применением дополнительных средств - 2 или 0,1 м. Для расчета опорной функция
231
Радиолокационные системы землеобзора космического базирования
кроме траекторных данных, уточняемых после съемки, проводится дополнительная
специальная обработка радиоголограммы. Необходимое сглаживание флуктуаций дос-
тигается путем совместной обработки результатов интегрирования уравнений возму-
щенного движения КА и данных GPS или ГЛОНАСС. Точность измерения положений
осей КА с использованием астродатчиков составляет доли угловых минут.
Особенность учета параметров принимаемых сигналов для вычисления опор-
ных функций синтеза РЛИ и географической привязки состоит в том, что ряд из
них имеют высокую временную точность, определяемую используемыми эталона-
ми времени. К точным параметрам относятся: период зондирования, частота кван-
тования принимаемого сигнала, величина задержки принятых сигналов в отсчетах
с номерами, отсчитываемыми от начала строба приема, время прохождения сигна-
ла от цели минимальной наклонной дальности (эта точка соответствует нулевому
значению доплеровской частоты, погрешность измерения которой равна l/rsynt, где
Tsynt - время синтеза апертуры), угловая скорость вращения Земли.
Вычисленные значения географических координат целей поперек трассы КА
путем преобразования наклонной дальности в горизонтальную по поверхности
Земли включают погрешности вычисления координат следа КА, текущего радиуса
орбиты и локальной высоты рельефа в точке наблюдения. На точность вычисления
координат целей вдоль трассы КА (по азимуту) влияют погрешности вводимых
поправок на компенсацию смещений доплеровской частоты, вызванных верти-
кальной скоростью при эллиптических орбитах, а также отклонения осей КА от
опорной системы координат и погрешности измерений этих отклонений.
Используя приведенные в предыдущих разделах формулы (5.2), (5.3), (5.101),
(5.103), по координатам КА (с интерполяцией по вектору скорости) и координатам
точки прицеливания вычисляют текущий радиус орбиты КА, локальный радиус
Земли, текущую и минимальную наклонные дальности, а также зависимость ЛЭС
от наклонной дальности по стробу приема. По этим данным рассчитывают фазо-
вый множитель опорной функции синтеза РЛИ и закон миграции дальности. По
углам ориентации осей КА для РСА с АФАР рассчитывают компенсирующие от-
клонения ДНА для реализации строго бокового обзора или скошенного обзора под
заданными углами (включая прожекторный режим). При отсутствии в антенне
РСА сканирования по азимуту вычисляют смещение по доплеровской частоте для
учета в весовой функции синтеза РЛИ.
По вычисленным данным делают пересчет наклонной дальности в горизон-
тальную по дуге большого круга на Земле, а по времени прохождения нуля допле-
ровской частоты с учетом поправки на вертикальную скорость — положение точек
РЛИ вдоль линии в плановой проекции и их координаты.
Приведенные в настоящей главе модели движения платформы с РСА, форму-
лы для расчета геометрии космического землеобзора и параметров траекторного
сигнала могут быть использованы при проектировании РСА для выбора парамет-
ров аппаратуры, получения исходных данных для моделирования алгоритмов син-
теза РЛИ и выработке требований к обеспечивающим системам КА по точностям
измерения координат КА и угловой ориентации осей КА для проведения радиоло-
кационной съемки.
232
Глава 6
АЛГОРИТМЫ СИНТЕЗА РАДИОЛОКАЦИОННЫХ
ИЗОБРАЖЕНИЙ В КОСМИЧЕСКИХ РСА
6.1. Этапы обработки радиолокационных сигналов
и вид информационных продуктов
К настоящему времени общие принципы получения и обработки радиолокационных
снимков широко освещены в зарубежной и отечественной литературе, включая жур-
нальные публикации. Конкретная реализация алгоритмов синтеза и первичной обра-
ботки РЛИ на рабочих станциях дистрибьюторов радиолокационной информации и в
ряде поставляемых программных пакетах обработки данных обеспечивает пользова-
телей необходимым информационным продуктом, но является ноу-хау фирм произ-
водителей. В данной главе дается анализ и систематизация основных алгоритмов
синтеза комплексных и амплитудных РЛИ. В гл. 7 рассмотрены вопросы последе-
текторной обработки (некогерентного накопления) и отображения РЛИ.
Процесс получения выходного информационного продукта в современных
космических РСА включает в себя несколько этапов, часть которых выполняется
на борту КА, а остальные - на наземном комплексе приема и обработки радиоло-
кационной информации (НКОРЛИ). Этот комплекс может быть совмещен с пунк-
том управления полетом и режимами съемки.
Основные этапы преобразования и обработки информации и соответствую-
щие им информационные продукты обычно включают в себя:
1) преобразование аналоговых сигналов с выходов приемника РСА в цифро-
вую форму с использованием методов сжатия потока данных для передачи по ра-
диолинии. Результат - упакованная радиолокационная информация (радиоголо-
грамма) с приложением к ней сопроводительной служебной информации о режи-
мах работы и их параметрах, а также баллистической информации о движении
платформы, форматов данных и др.;
2) передачу данных по радиолинии, прием и форматирование данных для по-
следующей обработки;
3) преобразование радиолокационных данных с восстановлением результатов
компрессии и коррекцией аппаратурных искажений (амплитудных, частотных, фа-
зовых). В результате этого этапа получают квадратурные составляющие радиого-
лограммы в стандартных форматах (например, integers, integer 16 или float32), а
также сопроводительную информацию, по которой рассчитывают опорные функ-
ции для синтеза РЛИ;
4) синтез комплексных радиолокационных изображений (КРЛИ) или их фраг-
ментов с коррекцией миграции дальности и автофокусировкой при необходимости;
233
Радиолокационные системы землеобзора космического базирования
5) вычисление модуля КРЛИ с получением амплитудного РЛИ (первичные
РЛИ в координатах наклонной и путевой дальностей). Радиолокационная инфор-
мация может предоставляться также в виде цифровых отсчетов мощности, пропор-
циональных значениям удельной ЭПР в пикселе изображения;
6) некогерентное накопление нескольких независимых наблюдений;
7) привязку первичных РЛИ к географическим координатам (геореферен-
цирование);
8) сборку фрагментов КРЛИ (в частности, для режима Скансар) с приведением
масштабов фрагментов к единому масштабу по наклонной и путевой дальностям;
9) преобразование РЛИ к плановой равномасштабной проекции в координатах
вдоль и поперек линии пути с коррекцией геометрических и радиометрических ис-
кажений (калибровка РЛИ);
10) преобразование РЛИ к картографическим проекциям (геокодирование);
11) специальную обработку радиолокационных изображений - синтез поля-
риметрических, интерферометрических изображений и др.;
12) тематическую обработку изображений - извлечение информации для по-
требителей, включая обнаружение и распознавание наземных (надводных) объек-
тов, разведку оперативной обстановки, построение карт рельефа местности, инди-
кацию движущихся целей, измерение подвижек земной коры и изменений геомет-
рии объектов, оценку биомассы растительного покрова, ледовую разведку и кон-
троль судовождения, а также решение задач исследования природных ресурсов,
экологического мониторинга суши и морской поверхности, обеспечения поисково-
спасательных операций и др.
При анализе алгоритмов синтеза РЛИ будем отдельно рассматривать случаи
строго бокового обзора и скошенного обзора.
Примем, что при боковом обзоре угловое положение максимума ДНА близко
к нулю доплеровской частоты и что ошибки ориентации КА не превышают 1/4 от
ширины ДНА. Поэтому проблема неоднозначности по азимуту не возникает, и нет
необходимости компенсации средней доплеровской частоты. В этом случае кор-
рекция ошибок ориентации КА для исключения энергетических потерь обеспечи-
вается небольшим смещением максимума амплитудной весовой функции обработ-
ки для ее совпадения с максимумом ДНА, а компенсации геометрических ошибок
в РЛИ не требуется.
В случае скошенного обзора даже при малом скосе, например, в прожектор-
ном режиме съемки, возникает необходимость компенсации циклического смеще-
ния азимутальных отсчетов, а также миграции дальности.
Общим принципом получения радиолокационных изображений (РЛИ) в РСА
авиационного и космического базирования является согласованная фильтрация
принятого сигнала. Параметры сигналов и выходного РЛИ имеют различия в зави-
симости от режима работы РСА, что приводит к необходимости применения раз-
ных алгоритмов синтеза РЛИ [290]. Для целостности изложения основные из них и
возможные варианты рассмотрены в настоящей главе с учетом их применимости
для космических РСА, основные отличия которых от самолетных РСА касаются
численных значений параметров сигналов, ограничений, вызванных неоднозначно-
234
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
стью сигналов, наличия режима Скансар, различия влияния дестабилизирующих
факторов.
Основные особенности современных РСА
1. В современных РСА используют сложные зондирующие сигналы, преимущест-
венно с ЛЧМ-модуляцией. Как вариант использовались также фазоманипулиро-
ванные (ФМ) зондирующие сигналы [31], требующие более простого оборудова-
ния. Однако появление фазовых искажений в зондирующем импульсе, вызванных
доплеровским сдвигом частоты принимаемого сигнала, ограничивает применение
ФМ-сигналов в РСА высокого разрешения.
Особым случаем являются сверхширокополосные видеоимпульсные РСА, ис-
пользующие короткие сигналы типа моноцикла с длительностью в доли наносе-
кунды.
2. В режимах бокового обзора низкого разрешения (обзорном маршрутном или
широкозахватном режиме Скансар, когда миграция дальности мала) возможно при-
менение классических алгоритмов согласованной фильтрации двумерных ЛЧМ-
процессов: прямой свертки, гармонического анализа, быстрой свертки, а для нефоку-
сированного синтеза РЛИ по азимуту - спектрального анализа с применением алго-
ритма быстрого преобразования Фурье (БПФ). Такие возможности обусловлены тем,
что в современных РСА применяют ориентацию осей космического аппарата в путе-
вой (гринвичской) системе координат (ПСК), при которой линейная миграция даль-
ности практически отсутствует. Суммарное значение линейной и квадратичной ми-
грации не должно превышать 1/4 от разрешения по наклонной дальности.
3. В режимах скошенного кадрового обзора низкого разрешения линейную
миграцию дальности можно компенсировать аппаратными средствами или специ-
альной процедурой коррекции входных данных.
4. В режимах высокого разрешения необходимо учитывать не только зависи-
мость временного закона фазы от наклонной дальности A^(Z,2?0), но и миграцию
дальности.
При больших размерах синтезированной апертуры, необходимых для реали-
зации высокого разрешения по азимуту, значение миграции дальности на краях
апертуры может в десятки и сотни раз превышать размеры элемента разрешения по
дальности. Для коррекции миграции дальности используют известные алгоритмы:
ЛЧМ-масштабирования (Chirp Scaling Algorithm - CSA), коррекции миграции
дальности (Range Migration Algorithm - RMA), преобразования в полярный формат
(Polar Formation Algorithm - PFA) и др. [248, 274].
5. В скошенных режимах обзора, а также вблизи границ апертуры синтеза в
прожекторном режиме, возможно изменение скорости ЛЧМ по дальности, вызван-
ное доплеровским смещением частоты. Для исключения расфокусировки импульс-
ного отклика по дальности необходима коррекция опорной функции по дальности,
компенсирующая фазовые ошибки.
6. Особые сложности в алгоритмах синтеза РЛИ возникают в прожекторном
режиме. Они связаны с тем, что диапазон изменения доплеровской частоты в ин-
тервале синтеза в космических РСА значительно превышает частоту повторения
235
Радиолокационные системы землеобзора космического базирования
зондирующего сигнала, что требует интерполяции сигнала для преобразования к
большей базе для исключения неоднозначности сигналов по азимуту.
7. Получение метрового и субметрового разрешения по азимуту требует син-
теза апертуры большой протяженности, для которой формирование опорной функ-
ции требует знания временного закона изменения фазы с высокой точностью, ко-
торую могут не обеспечивать средства измерения текущих координат движения
платформы. Дополнительные погрешности фазы могут быть вызваны неоднород-
ностями параметров трассы распространения сигнала - тропосферными (в санти-
метровых диапазонах волн) и ионосферными (в дециметровых и метровых диапа-
зонах) флуктуациями.
8. Большое внимание уделяется синтезу РЛИ на борту КА в реальном време-
ни, что позволяет повысить оперативность доставки информации потребителю,
уменьшить поток передаваемых по радиолинии данных и упростить наземную ап-
паратуру. Особо актуальна эта задача для ледовой разведки в полярных районах, а
также в системах контроля надводной обстановки. Применение бортовой обработ-
ки целесообразно в обзорных режимах работы РСА с получением амплитудных
РЛИ среднего или низкого разрешения и применением некогерентного накопле-
ния. При использовании алгоритмов сжатия РЛИ (например, формата JPEG), алго-
ритмов автоматического обнаружения судов и границы вода-суша, сегментации
однородных текстур можно значительно сократить поток передаваемых по радио-
линии данных. Однако для долговременного архивирования материалов радиоло-
кационной съемки с возможностью получения комплексных РЛИ для последую-
щей обработки, включая интерферометрические методы обнаружения изменений
оперативной обстановки, следует предусматривать передачу радиоголограммы.
Надо иметь в виду, что в космических РСА в отличие от самолетных РСА
практически отсутствует избыточность радиоголограммы по отношению к состав-
ляющим комплексного РЛИ. Применение на борту известных методов сжатия ра-
диоголограммы позволяет снизить разрядность передаваемых данных до двух -
четырех разрядов (вместо шести - восьми). Поэтому использование бортовой об-
работки с синтезом КРЛИ высокого разрешения не даст особых преимуществ в
оперативности доставки потребителю конечного информационного продукта по
сравнению с передачей радиоголограммы на наземный пункт обработки информа-
ции (НКОРЛИ) через спутник-ретранслятор. Наличие на НКОРЛИ высокопроизво-
дительного вычислительного комплекса с применением методов автоматической
фрагментации РЛИ может значительно сократить время между моментом съемки и
получением требуемой информации по заданным участкам и районам наблюдения.
6.2. Параметры, характеризующие миграцию дальности
в радиоголограмме
Исходная операция цифрового синтеза РЛИ - дискретизация, т.е. разделение на
временные отсчеты аналогового сигнала с выхода фазового детектора приемника
(видеосигнал). Выбор частоты квантования в соответствии с теоремой отчетов
В.А. Котельникова - с небольшим запасом от удвоенной максимальной частоты
236
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
видеосигнала, в принципе, обеспечивает восстановление аналогового сигнала без
искажений. Однако процедуру точного восстановления (свертка сигнала со сгла-
живающей функцией), требующую дополнительных вычислительных затрат (см.,
например, [527]), обычно в алгоритмы синтеза РЛИ не включают. При этом оказы-
вается, что передаваемое в ОЗУ процессора мгновенное значение ЛЧМ-видео-
сигнала от цели, имеющего, например, частоту 100 МГц (период 10 нс) и началь-
ную фазу, определяемую наклонной дальностью цели Ro, будет зависеть от вре-
менной расстановки тактирующих импульсов АЦП, которая при частоте квантова-
ния 250 МГц определится периодом, равным 4 нс (при этом дискретность отсчетов
фазы ЛЧМ составит 144°). При движении радиолокатора относительно цели на-
клонная дальность до цели меняется, что приводит не только к изменению фазы
принятого от цели сигнала Д^(/,Я0) = 47г(Я(/,Я0)-Т?0)/А, но и к изменению
мгновенного значения сигнала в данном канале дальности. В конечном счете, мо-
жет появиться амплитудная модуляция в радиоголограмме, которая, не будучи уч-
тена надлежащим образом, может вызвать падение уровня выходного сигнала или
появление ложных лепестков синтезированной диаграммы на выходном РЛИ. Это
явление - миграция дальности - характеризуется двумя составляющими: линейной
и, так называемой, «криволинейной» (curvature). Кроме абсолютных значений ми-
грации дальности за время синтеза или существования сигнала в азимутальной
ДНА важными являются два параметра — отношение миграции дальности к раз-
меру элемента разрешения Др7? = ДЯ/pR и отношение миграции дальности к шагу
дискретизации по дальности kmR = £sR/Mr , т.е. к масштабу отсчетов наклонной
дальности MR =cTs/2, где Ts - шаг квантования, с - скорость света.
Важной характеристикой является также максимальное смещение дальности в
соседних за период повторения отсчетах по азимуту на интервале синтеза
SR = max
ДЯ(/ + Гр,Я0)-ДЯ(/,Я0)]
MR
(6.1)
где Гр - период зондирования.
Как показано в работе [431*], при смещении по дальности за период повторе-
ния, превышающим 1/4 от шага дискретизации по дальности, возможно резкое
увеличение интегрального уровня импульсного отклика РСА по азимуту.
Отмечено также, что использование ЛЧМ-сигнала (по сравнению с коротким
импульсом) уменьшает помехи, вызванные «скачками» импульсов в соседних зон-
дированиях.
Сначала рассмотрим наиболее простой случай строго бокового обзора, когда
максимум азимутальной ДНА совпадает с точкой минимальной дальности
dR/dt = 0, в которой доплеровская частота принимаемого сигнала равна нулю. Это
обеспечивается на практике в современных РСА, если ориентация КА осуществля-
ется в путевой системе координат, а ошибки ориентации не превышают 1/4 от ши-
рины ДНА. Как показано в гл. 5, орбитальное движение можно аппроксимировать
237
Радиолокационные системы землеобзора космического базирования
прямолинейным движением с эквивалентной линейной скоростью Fie и предста-
вить разложением в степенной ряд относительно t=0 в точке минимальной наклон-
ной дальности Rq. Тогда временной закон текущей наклонной дальности имеет
следующий вид, причем для РСА с низким и средним разрешением можно ограни-
читься двумя первыми членами ряда
я(')=+ К1е2/2 = + i,2 _ Х/+... , (62)
2Л0 24к0
где значения текущего времени t ограничены допустимым спадом азимутальной ДНА.
Для низкоорбитальных РСА при расчетах параметров миграции можно пренеб-
речь различием значений линейной эквивалентной скорости и путевой скорости.
На рис. 6.1 приведены типичные зависимости миграции дальности для мар-
шрутного режима при строго боковом обзоре (а) и при слабо скошенном обзоре (б)
с углом скоса, равным 1/4 ширины ДНА. Расчетные параметры РСА: длина волны
2=10 см, горизонтальный размер антенны Z>xant=5 м, высота орбиты Яо=500 км, на-
клонные дальности границ полосы съемки = 520 км (ближняя) и R2 = 570 км
(дальняя), что обеспечивает полосу съемки по горизонтальной дальности 65 км при
углах падения 50...52°.
Как видно из рис. 6.1, а, значения миграции дальности в пределах уровня ми-
нус 6 дБ составляют 20...25 м с разницей около 2 м для ближней и дальней границ
полосы съемки. При наличии ошибок ориентации до 1/4 от ширины ДНА (см. рис.
6.1, б) появляется линейная составляющая миграции, а ее суммарная величина дос-
тигает 45 м. Заметим, что при увеличении горизонтального размера антенны или
уменьшении длины волны РСА значения миграции уменьшаются пропорциональ-
но квадрату длины волны и обратно пропорционально размеру антенны.
Рис. 6.1. Типичные зависимости миграции дальности от азимутального положения РСА:
а - строго боковой обзор; б - ошибки ориентации луча на 1/4 ДНА;
1,2 - формы ДНА по мощности на ближней и дальней границах полосы съемки, точками отмечен уровень
0,5 от максимума принятого сигнала (минус 6 дБ сигнала); 3, 4 - кривые миграции на ближней и дальней
границах полосы съемки; 5 - разность приращений дальности на границах полосы съемки относительно
точки нуля доплеровской частоты; 6 - линейная составляющая миграция дальности
238
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
Так, для РСА S'-диапазона волн «Меч-КУ» КА «Алмаз-1», где использовалась
антенна с горизонтальным размером 15 м, а ошибка ориентации КА составляла
около 3 угл. мин., величина миграции дальности не превышала 3 м, что позволяло
без ее учета вести синтез РЛИ с разрешением 12... 15 м.
На рис. 6.2 приведены графики миграции дальности для прожекторного и
скошенного режимов съемки. Поскольку в прожекторном режиме антенна все вре-
мя направлена на центр кадра, то огибающая сигнала имеет прямоугольную форму
и ограничена временем съемки.
Как следует из графиков на рис. 6.2, миграция дальности может составлять
сотни и тысячи элементов разрешения, особенно в скошенных режимах обзора, в
которых основная - линейная составляющая. Таким образом, за исключением ред-
ких случаев, рассмотренных в разделе 6.4, алгоритмы синтеза РЛИ должны вклю-
чать в себя процедуры устранения миграции дальности, предшествующие сжатию
сигналов по азимуту.
Рис. 6.2. Зависимости миграции дальности от азимутального положения РСА
для прожекторного (а) и скошенного (б) режимов:
1,2 - формы ДНА по мощности на ближней и дальней границах полосы съемки, точками отмечен уровень
0,5 от максимума принятого сигнала; 3,4 - кривые миграции на ближней и дальней границах полосы съем-
ки; 5 - разность приращений дальности на границах полосы съемки относительно точки нуля доплеровской
частоты; 6 - линейная составляющая миграция дальности
6.3. Оптическая обработка радиоголограммы как модель
формирования радиолокационного изображения в РСА
Для получения радиолокационных изображений в первых самолетных и космиче-
ских РСА (Seasat-A, «Меч-К») использовались оптические устройства синтеза, в
которых реализовались основные принципы формирования РЛИ и которые явля-
лись масштабными моделями радиолокационного обзора [194, 195, 213]. При дос-
тижимых в те годы параметрах РСА проблем, связанных с миграцией дальности
еще не возникало, но вопросы фокусировки изображений и оценки требований к
239
Радиолокационные системы землеобзора космического базирования
точности измерения параметров принимаемого сигнала решались вполне успешно.
Оптическая обработка сигналов реализует один из подходов к анализу синтеза
РЛИ (доплеровский, антенный, согласованной фильтрации) - а именно антенный.
Сочетание методов анализа геометрической и волновой оптики позволяет сделать
грубую оценку параметров импульсного отклика РСА при синтезе РЛИ, некоге-
рентном накоплении, а также влиянии фазовых ошибок.
Для оптического синтеза РЛИ принятый сигнал с выхода фазового детектора
(один канал с выхода приемника, фазовый детектор и АЦП, см. структурную схе-
му, приведенную на рис. 3.5) регистрируют на движущейся первичной фотопленке,
в результате чего на ней записывается полупрозрачная радиоголограмма. Далее,
фотопленку пропускают через фильмовый канал устройства обработки, принцип
действия которого в азимутальном сечении иллюстрирует рис. 6.3.
Рис. 6.3. Принцип оптического синтеза РЛИ, сечение по азимуту:
1 - плоский световой пучок когерентного света (лазера); 2 - фильмовый канал с диафрагмой апертуры син-
теза; 3 - первичная фотопленка с записанной радиоголограммой; 4 - вторичная диафрагма; 5 - вторичная
фотопленка, регистрирующая РЛИ
Устройство оптической обработки включает в себя: источник монохроматиче-
ского света (лазер, коллиматор), формирующий плоский световой пучок 1, фильмо-
вый канал с диафрагмой (первичной щелью) 2 и первичной фотопленкой 3, на кото-
рой записана радиоголограмма, оптическую систему с вторичной диафрагмой 4 и
вторичную фотопленку 5, регистрирующую РЛИ. Размер диафрагмы 2 определяет
длину синтезированной апертуры, а размер вторичной диафрагмы 4 - длину пути
некогерентного накопления. Для приведенной схемы без оптики обе фотопленки
нужно протягивать с одинаковой скоростью, а в реальных устройствах - с одинако-
вым отношением скоростей в зависимости от параметров оптической системы.
240
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
Оптический синтез апертуры основан на том, что записанная на фотопленке
радиоголограмма представляет собой дифракционную решетку с переменным ша-
гом, обладающую фокусирующим свойством. Это - оптическая модель РСА на не-
сущей частотеTopt, соответствующей длине волны источника света 2opt.
Рассмотрим процесс формирования изображения точечной цели. Образуемая
радиоголограммой от точечной цели дифракционная решетка имеет период
(63)
Г,,,,, 2У^
где vi - скорость первичной фотопленки при записи радиоголограммы; FDop - доп-
леровская частота принимаемого сигнала; V\e - линейный эквивалент путевой ско-
рости радиолокатора; X - путь, проходимый радиолокатором от направления тра-
верза FDop = 0; t\ - время записи сигнала относительно точки траверза /1=0, для ко-
торой дифракционной решетки не образуется и требуется смещение доплеровской
частоты радиоголограммы при записи ее на первичной фотопленке.
Дифракция светового пучка на решетке вызовет появление ряда лучей, откло-
ненных от оси системы на угол ср. определяемый периодом решетки d и длиной
волны света 2opt. Угол отклонения определяется соотношением
Jsin^ = A?20pt, (6.4)
где АГ = 0, ±1, ±2,....
Наиболее интенсивными из этих лучей будут нулевой Ао, соответствующий
прохождению немодулированного света, и лучи первого порядка A i и А 'ь угол от-
клонения которых определяется условием
2 t 2 Efe /] ^ODt
sin <р = = 1е 1 opt . (6.5)
d
Наклонный луч А\ пересечет ось оптической системы в точке F, расстояние
которой от первичной фотопленки и будет равно фокусному расстоянию записан-
ной на фотопленке радиоголограммы fopt (малость 2opt позволяет сделать замену
tg^ = ~sin(p=~(p)
2^e2lopt
(6-6)
При радиолокационном обзоре луч, соединяющий наблюдаемую цель и радиоло-
катор, поворачивается по мере его движения на угол, равный an = arctg
, где
и - номер зондирования от нуля доплеровской частоты, Гр - период зондирования.
Если выбрать масштабный коэффициент записи сигналов на первичной фото-
пленке равным
241
М = ^- = —^—
°₽t 21opt
то в соответствии с (6.5) луч, формируемый оптической радиоголограммой, будет
поворачиваться на тот же угол (р(Трп) = ап, обеспечивая масштабное подобие гео-
метрий обзора и обработки. Наклонные лучи образованные дифракционной
решеткой переменного шага (закон близкий к ЛЧМ) будут пересекать ось в одной
точке F - фокусе радиоголограммы (фокусное расстояние -/>р1), где и происходит
когерентное суммирование записанных сигналов. Пучок света, образованный лу-
чами 4, отклоненными под зеркальными углами, расходящийся, лучи исходят из
мнимого фокуса, расположенного на расстоянии/^ перед фотопленкой.
Вторичная фотопленка 5, на которой фиксируется сформированное радиоло-
кационное изображение, помещается в плоскости, проходящей через точку фоку-
сирования F. Перед ней ставится диафрагма 4, ограничивающая световой поток,
экспонирующий вторичную фотопленку, и исключающая попадание на нее света
от лучей нулевого порядка, расходящегося пучка лучей первого порядка и лучей
высших порядков. Заметим, что наличие кроме полезного еще и паразитных лучей
требует, чтобы в спектре доплеровских частот не было нулевой составляющей. За-
пись и обработка сигналов ведется на средней доплеровской частоте, отличной от
нуля, примерно равной половине ширины спектра доплеровских частот принимае-
ма
мого сигнала (AFDop =---— ). Для космических РСА обработку ведут на частоте,
Mant
равной четверти частоты повторения (Fp/4). Чтобы ввести нужное смещение час-
тоты, антенну РСА отворачивают от нормали к вектору путевой скорости или вво-
дят дополнительную модуляцию фазы в излучаемый сигнал. Например, для сдви-
га частоты на Fp/4 в зондирующем сигнале вводят сдвиг фазы на л/2 в каждом пе-
риоде зондирования. Показанная на рис. 6.3. ЛЧМ-структура на первичной фото-
пленке 3 и отметка на вторичной фотопленке 5 являются примерами радиоголо-
граммы и полученного РЛИ при наблюдении компактной цели (корабль на мор-
ской поверхности).
Некогерентное накопление независимых наблюдений
Геометрия получения РЛИ при оптическом синтезе, приведенная на рис. 6.3, ил-
люстрирует случай предельного разрешения по азимуту при одном наблюдении.
Реализация некогерентного накопления показана на рис. 6.4.
Первичную диафрагму 2, определяющую апертуру синтеза £а, уменьшают, а
вторичную Di (путь интегрирования) - увеличивают. По мере продвижения фото-
пленок за первичной щелью оказываются участки решетки, образованные разными
доплеровскими частотами и луч поворачивается, экспонируя одну и ту же точку на
вторичной фотопленке. Длина накопления определяется длиной радиоголограммы
на первичной фотопленке, число независимых отсчетов — отношением длины пу-
ти интегрирования Zamax к интервалу корреляции сигнала, равному £а/2 [152*].
(6.7)
242
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
Рис. 6.4. Оптический синтез РЛИ с некогерентным накоплением в высокочастотной (а)
и низкочастотной (б) частях спектра доплеровских частот сигнала
Влияние ошибок фокусирования
Точная фокусировка оптической системы требует выполнения условий (6.7) для
заданной наклонной дальности съемки 7?0 и значения путевой скорости Fie с учетом
выбранных рабочей длины волны РСА и длины волны лазера. На практике это реа-
лизуется путем управления скоростью протяжки первичной фотопленки по про-
гнозным или измеренным баллистическим данным, а при синтезе РЛИ - переме-
щением положения фильмового канала с вторичной фотопленкой в устройстве об-
работки. Применяются также оптические системы с переменным фокусным рас-
стоянием, коническими линзами [118, 196, 213], но для нашего рассмотрения эти
подробности несущественны. Абстрагируясь от конкретных деталей конструкции
устройства оптической обработки, представим геометрию формирования РЛИ в
упрощенном виде, как показано на рис. 6.5.
Рис. 6.5. Оптическая модель синтеза фокусированной апертуры:
а - точная фокусировка; б - ошибки фокусирования (уменьшение линейной эквивалентной скорости - ЛЭС);
буквенные обозначения соответствуют пространству обзора: Ro - положение плоскости формирования РЛИ
(настройка фильтра обработки), F и F\- фокусы радиоголограмм при оптическом синтезе
243
Радиолокационные системы землеобзора космического базирования
Будем считать, что средняя доплеровская частота в апертуре равна нулю, в от-
личие от рассмотренного выше физического устройства обработки, в котором гео-
метрия лучей более типична для слабо скошенного обзора.
Сфокусированное в точке F изображение точечной цели образует пятно, раз-
меры которого определяются дифракцией света на первичной щели. Согласно
формулам волновой оптики размер пятна, приведенный к геометрии на местности,
будет совпадать с известной формулой разрешения РСА по азимуту
_ ./opt A>pt^opt _ Fo2
Рх° ~ 4 ~ ’
(6.8)
где обозначен физический размер оптический апертуры /а = L^J= L^/V^ .
Рассмотрим влияние ошибок фокусирования, вызванных погрешностями из-
мерения параметров движения. При изменении значения ЛЭС относительно рас-
четного (измеренного на момент съемки) значения К1е1 = К1е0+ДИ и сохранения
значения скорости протяжки Vi изменится масштаб записи и фокус радиоголо-
граммы согласно (6.6) и (6.7). Так, например, при меньшем значении Гы (ДК<0)
реальная апертура в пространстве обзора уменьшится Lal =£а 9 как и зна-
чения доплеровской частоты на ее краях FL)op =/^)ор ^iei/^ieo • Соответствен-
но угол отклонения луча от нормали ах будет меньше исходного а=ср. При записи
сигналов на прежней скорости Vi физические размеры оптической апертуры не из-
менятся (обозначено на рисунке £а =/а V\Qo/v\ ), периоды дифракционной решетки
увеличатся, что приведет к уменьшению угла отклонения ф\ для крайнего луча и к
увеличению фокусного расстояния оптической радиоголограммы на величину
У.ЧЛ Лео f
?г2 л у2 'opt
24elZopt Hel
t 2ДК
И1е1
•/opt
t 2ДК
>le0
./opt •
(6-9)
Новый фокус Fi (рис. 6.5, б) удалится на расстояние АЛ от фиксированного
положения вторичной фотопленки, выбранного по расчетным параметрам (точка
Ro). Это приведет к увеличению размера пятна в плоскости изображения Rq, кото-
рое можно приближенно оценить по формуле геометрической оптики из подобия
треугольников ABFX wA'B'Fx
Px&R R0+AR
|A/?|Za _ ^a(./optl /opt) _
/>ptl
'а
К2
Л el
2|AK|£a
^leO
(6.10)
где АЛ и ДИ- ошибки измерения дальности и скорости соответственно.
При ошибках по скорости в сторону увеличения ЛЭС фокус оптической ра-
диоголограммы перемещается ближе к фильмовому каналу. При этом количест-
венные соотношения, приведенные в выражении (6.10), сохраняются.
Совместный эффект дифракции и расфокусировки может быть учтен прибли-
женной формулой - сложением в квадратурах размеров пятен, вызванных обоими
факторами
244
_ 2 2 _
Рх “ V Рхъ + Рхдя -
Г Д/МЛеУ
2Д1 > I ^0 >
|ГмПглад?
K24J I, Kle J
где Ne - число независимых наблюдений (см. ниже).
Полученное выражение позволяет сделать важный вывод, в том числе и для
цифрового синтеза апертуры, о допустимой ошибке фокусирования для реализации
требуемого разрешения. В частности, о глубине фокусирования, т.е. возможности
сохранить одну и ту же опорную функцию для обработки диапазона дальностей.
Преобразуем выражение (6.11) к виду
Рх = Рхо аД+ (wdf / 2) , (6.12)
где
РхО Рхо Ие
- «коэффициент дефокусировки».
При < 1 ухудшение азимутального разрешения не более 12%. Глубина
фокусирования составляет
2
Д7? = ^-, (6.14)
А
а допустимая относительная ошибка измерения скорости
В качестве примера рассмотрим требования для реализации разрешающей
способности 1 м в РСА десятисантиметрового диапазона волн при высоте орбиты
500 км, наклонной дальности 700 км и путевой скорости 7500 м/с. Глубина фоку-
сирования составляет АТ? = 10 м, а допустимая ошибка измерения путевой скорости
- относительная АГ/Г1е =7,14-10-6, абсолютная АГ = 5,4 см/с. Эти требования
очень жесткие, для их выполнения может потребоваться автофокусировка, рас-
смотренная в разделе 6.10.
Для случая некогерентного накопления с Ne числом наблюдений геометрия
формирования РЛИ показана на рис. 6.6. При точном фокусировании азимутальное
разрешение равно дифракционному которое определяется длиной парциальной
синтезированной апертуры La. При наличии ошибок каждая из парциальных апертур
формирует расфокусированное пятно А}А2, А2ВЬ ВХВ2 (см рис. 6.6, б) с размером,
пропорциональным изменению фокусного расстояния АТ?, как и в случае без накоп-
ления. Пятна, сформированные боковыми апертурами, смещены относительно цен-
трального, что обусловлено явлением «смаза». Общая ширина искаженной отметки,
как видно из рис. 6.6, б, в Ne раз больше, чем ширина парциального пятна. Таким об-
разом, для случая некогерентного накопления «коэффициент дефокусировки» дол-
жен быть увеличен в Ne раз, что и учтено в формулах (6.11) и (6.13).
245
Радиолокационные системы землеобзора космического базирования
Рис. 6.6. Оптическая модель синтеза фокусированной апертуры
с накоплением трех наблюдений (Ne = 3)
6.4. Алгоритмы цифрового синтеза РЛИ без учета миграции
дальности
6.4.1. Алгоритм прямой свертки
Рассмотрим алгоритмы синтеза РЛИ для бокового обзора в случае, когда миграци-
ей дальности можно пренебречь. Для конкретности дальнейшего рассмотрения оп-
ределим основные входные параметры, характеризующие сигналы на входе про-
цессора синтеза РЛИ. Их значения являются результатами расчета режимов работы
РСА с учетом выбора параметров орбиты, размеров антенны, частоты повторения
положения полосы съемки, стробов приема и др.
Входными параметрами являются'.
2 и ftf=clA - длина волны РСА и несущая частота зондирующего сигнала;
т— длительность зондирующего импульса;
AF - полоса спектра зондирующего ЛЧМ-сигнала;
Fp и Tp=l/Fp - частота и период повторения импульсов;
Fs и Ts=l/Fs - частота и период дискретизации принятых сигналов;
Nt=t/Ts - число отчетов в длительности импульса;
Ar max - число отсчетов в стробе приема;
^synt - время синтеза;
Asynt=TSynt/rp - число синтезируемых импульсов;
MR=cTJl - шаг дискретизации по наклонной дальности (масштаб голограммы
и РЛИ);
7?min и 7?тах - наклонные дальности первого (ал=1) и последнего отсчетов сиг-
нала в строке радиолокационных данных. Заметим, что рабочая область дальностей
определяется длительностью строба приема минус длительность зондирующего
импульса;
246
Глава б. Алгоритмы синтеза радиолокационных изображений в космических РСА
Qa(R, су, 0^, Лг) - коэффициент передачи, определяющий амплитуду сигнала
на входе процессора. Он зависит от ЭПР цели, ее удаления от РЛС, а также усиления
антенны в направлении на цель по углу места и азимуту. Из этих факторов примени-
тельно к синтезу РЛИ имеет значение форма ДНА по азимуту, влияющая на ампли-
тудное взвешивание (аподизацию) сигнала и, соответственно, на разрешение и уро-
вень боковых лепестков импульсного отклика РСА. Влияние остальных факторов
относится к оценке чувствительности РСА и вопросам радиометрической калибров-
ки. В данном разделе для простоты влияние этого множителя рассматривать не бу-
дем, определяя значение амплитуды сигнала на входе процессора параметром L/max.
Обычно, излучаемые, а также принимаемые двумерные сигналы рассматри-
вают раздельно в координатах «быстрого времени» tR (по наклонной дальности) и
«медленного времени» по азимуту tx, которое можно выразить через номер зонди-
рующего импульса tx = пТр. Излучаемый сигнал представляет собой последова-
тельность ЛЧМ зондирующих импульсов, каждый из которых характеризуется в
«быстром времени» выражением
v(tR,n)=umsK
+ j2nf0tR к
(6.16)
где rect(x) = l при хе-0,5...0,5 - прямоугольная огибающая, равная единице на
интервале -0,5...0,5 и нулю в остальной области.
Как показано в гл. 5, для орбитального движения, как и для прямолинейного
движения, длина синтезированной апертуры £а и время синтеза Tsynt определяются
заданной разрешающей способностью по азимуту рх
(617)
^Рх
где Ksg - путевая скорость КА, значение которой для низкоорбитальных РСА прак-
тически совпадает с эквивалентной линейной скоростью (см. раздел 5.3).
Миграцией дальности пренебрегают, если она на крайних углах ДНА не пре-
вышает 1/4 от разрешения по наклонной дальности pR при максимальной дально-
сти наблюдения Rq
&pR =7?o(l/COS(«xant/2 + «((/ +«tf)-l)^A?/4, (6-19)
где axant - ширина ДНА; = arcsin (sin А у/• sin у,) - составляющая, вызванная
ошибками ориентации по курсу Ду/; ae =- arcsin (cos А у/ - sin А <9- cos yj - состав-
ляющая, вызванная ошибками ориентации по тангажу A# - угол падения (см.
раздел 5.8).
Необходимость учитывать миграцию дальности по всей ширине ДНА, а не
только на интервале синтеза объясняется тем, что для получения РЛИ всегда ис-
247
Радиолокационные системы землеобзора космического базирования
пользуют полный принимаемый сигнал в зоне облучения ДНА: в маршрутном ре-
жиме - для некогерентного накопления, в режиме Скансар - для обеспечения бес-
пропускного обзора.
Принятый от одиночной точечной цели комплексный видеосигнал на выходе фа-
зового детектора приемника в стробе приема для и-го зондирования будет иметь вид
гг/ \ гг (тп-тпт -NT 12 \
Ut (m,n) = t/max recti-----------lx
хехр< jn&Fr
' т-тт - NT / 2
I
_ 2я.2ад
Я
(6.20)
где тпт = (RT -Rmin)/Mr - номер отсчета дальности для переднего фронта при-
нятого импульса от цели; NT - число отсчетов в длительности зондирующего им-
пульса; 7?min - дальность первого (т=0) отсчета радиоголограммы в стробе приема.
В рассматриваемом случае тТ не зависит от положения РСА по азимуту (номера
строки дальности п) вследствие малости миграции дальности; Ri(n) - текущая на-
клонная дальность до цели, определяющая фазу и доплеровское смещение приня-
того сигнала. Считаем, что минимальная наклонная дальность цели на траверзе Rrm
и ноль доплеровской частоты достигаются при п=0. При аппроксимации временно-
го закона текущей наклонной квадратичным членом азимутальные отсчеты даль-
ности и фазы определятся формулами
/~----}2 п2
*т (") = М + (W1) * ЛГпг + . (6.21)
. . яг(«) „ (Vp)2«2
<?(”) = 4^—« 2^v 7— +
Z Лу’пгЛ
(6.22)
где фо - постоянная начальная фаза для данной цели.
Известно, что в принципе процедура согласованной обработки может быть
реализована в виде согласованного фильтра или корреляционного приёмника. В
согласованном фильтре опорная функция свертки h(t) представляет собой им-
пульсную реакцию фильтра обработки на ^функцию. Ее фазовая характеристика
совпадает с комплексно сопряженной временной зависимостью фазы сигнала с об-
ратным законом времени arg |^Л(-&)J = arg|^L/r*(A:)J , где к - дискретный аргумент.
Для корреляционного приемника опорная функция hCOTr(~k) = h(t) . Амплитудная
характеристика опорной функции может совпадать с амплитудной характеристи-
кой сигнала от точечной цели, обеспечивая наибольшее отношение сигнал/шум, но
с частичной потерей разрешения (по азимуту, если огибающая сигнала на интерва-
ле синтеза взвешена формой ДНА). Выбор специальной формы амплитудного
взвешивания позволяет повысить разрешение (апертурная коррекция) или снизить
уровень боковых лепестков импульсного отклика РСА.
248
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
Согласованная фильтрация по алгоритму прямой свертки реализуется путем
свертки комплексного сигнала на видеочастоте с комплексно сопряженной дву-
мерной дискретной опорной функцией, которая является произведением одномер-
ных опорных функций по дальности и азимуту. Будем считать, что огибающая
двумерной опорной функции равномерна и равна единице в пределах длительно-
сти импульса г и времени синтеза Tsynt. Ее фазовый множитель в разных азиму-
тальных отсчетах зависит от номера канала дальности согласно (6.22)
, / х \ m-Nr/2\
ft(m,w) = rect -—— exp
-jnAFz
m-NT!2
xrect
N
k synt J
exp*
. 2я(г,еГр)\1 2
(6.23)
ne-Nsynt/2;Nsynt/2-l.
Фаза опорной функции при п = 0 для нулевой доплеровской частоты должна
быть равна нулю для всех каналов дальности. Это обеспечит передачу фазы приня-
тых сигналов от цели в выходное комплексное РЛИ и позволит использовать его
для интерферометрической обработки снимков.
Операция прямой свертки двумерных дискретных сигналов может быть вы-
полнена двумя одномерными свертками - сначала по дальности, а затем по азиму-
ту. Эта операция выполняется именно в таком порядке потому, что закон измене-
ния второго фазового члена в формуле (6.22) зависит от номера дальностного ка-
нала, определяемого минимальной наклонной дальностью цели Rq в момент ее
прохождения через плоскость, нормальную вектору путевой скорости КА.
Свертка сигнала по дальности имеет вид
7Vr-l
t/y (w-Ar,w)= =
k=0
1\^rT {m-mr-k-N , (т-Шр-k-N /2
= rect ------------------ ex₽ ^T\----------------
k=G v J [ V
+jW)rx
xrect
exp*
(т-Шг-k-Nr /2
----L----£—
= 51П(^/Рд)ехр{^(и)} ; (6-24)
лДЯ/ pR
m^NT/2-.Ns^ + NTl2-\- ne-Nsynt/2:Nsynt/2-l,
где pR=crc 12 - ширина отклика (по уровню 2/я); rc=l/ZlF - ширина сжатого им-
пульса; (р{п)~ фаза азимутального отсчета; AZ? = (jn-mT}MR / 2 - смещение вы-
249
Радиолокационные системы землеобзора космического базирования
ходных отсчетов относительно максимума отклика. Число отсчетов по дальности в
выходном РЛИ равно числу отсчетов в стробе приема. Однако первые и последние
N/2 выходных отсчетов являются некондиционными, поскольку они содержат бо-
ковые лепестки сжатых импульсов с наложенными на них остатками от сжатия по
усеченной базе. Поэтому при сшивке нескольких парциальных зон эти участки
должны удаляться.
При обработке сигнала корреляционным методом суммирование в формуле
(6.24) ведут в прямом порядке (знак плюс у переменной Л), нумерация выходных и
входных отсчетов совпадает.
Максимальное значение модуля выходного сигнала при m=mx будет равно
А^гС/max- Форма отклика по дальности будет иметь вид sin х/х с шириной, равной
pR=c/2^F. Аналогично, свертка 7Vsynt отсчетов по азимуту даст двумерный отклик от
точечной цели
^Synt/2 1
URx(m,n)= U^n
/=-^synt/2
^synt /2“ 1
X X 2Vrt/max(« + Z)eXP<-
l=~ Miynt /2
sin(^A7? / Pr)
71AR I pR
(^min +MRni)A,
>rect
•^synt }
х
хехр<
sin(;zA7? /pR} sin(^AX/px)
^r^synt^max ad/ kv / 9 (6.25)
aAR / pR лЛХ / px
где t/max(^+0 - распределение амплитуды сигнала по апертуре синтеза, обуслов-
ленное формой ДН антенны радиолокатора (форма отклика sine соответствует
^max(«+/)=const); рх = Vs^ptx « RxX/ 2T3yntVXe = Rxh/2LsynX - известная формула ази-
мутального разрешения синтезированной апертуры для прямолинейного движения.
Приближенное равенство учитывает рассмотренные в гл. 5 особенности орбиталь-
ного движения, при котором ширина временного отклика ptx = Rxh/2TsyrAVXe опре-
деляется эквивалентной линейной скоростью и временем синтеза, а разрешение
вдоль линии пути зависит от скорости на поверхности Земли.
Для получения одинакового разрешения по азимуту длина синтезированной
апертуры должна быть пропорциональна наклонной дальности, что обычно выпол-
няется в маршрутном режиме при полном использовании зоны, облучаемой азиму-
тальной ДНА.
Преимущества алгоритма прямой свертки заключается в возможности непре-
рывной обработки всего маршрута (режим маршрутной съемки) с реализацией
предельного разрешения, равного половине горизонтального размера антенны.
Выходное РЛИ в координатах наклонная дальность-азимут получается с равно-
мерным шагом по азимуту без масштабных искажений. Общим недостатком алго-
ритма прямой свертки является большое число комплексных операций умножения
250
Глава б. Алгоритмы синтеза радиолокационных изображений в космических РСА
сигнала на опору и сложений. Для обработки Муп{ строк дальности суммарное чис-
ло операций составляет
<6-26)
где Nr- число отчетов в длительности импульса; 7Vr - число отчетов в строке даль-
ности.
Приведенная оценка является приближенной, так как она не учитывает разли-
чия между комплексным сложением (две операции с действительными числами) и
комплексным умножением (четыре операции с действительными числами) и зави-
сит от архитектуры процессора.
Следует отметить, что применительно к обработке ЛЧМ-сигналов алгоритм
прямой свертки имеет резервы для снижения требований к производительности
вычислительных средств. Так, при синтезе РЛИ в РСА «Меч-КУ» КА «Алмаз-1»
использовался алгоритм субапертурной обработки, в котором применена линейно-
ломаная аппроксимация закона изменения фазы [90*, 157*, 158*]. Это позволило
часть операций умножения заменить сложениями и уменьшить требования к памя-
ти вычислительного комплекса ПС-2000. Определенные перспективы имеет при-
менение алгоритма прямой свертки в процессорах бортового и наземного синтеза
РЛИ с использованием специализированных интегральных микросхем.
6.4.2. Алгоритм быстрой свертки
Один из самых производительных и наиболее распространенных алгоритмов - это
алгоритм быстрой свертки, который реализует фильтрацию сигнала в частотной
области. Он использует известное свойство преобразования Фурье, что свертке
сигналов во временной области соответствует произведение спектров в частотной
области. Или иначе, спектр свертки сигналов равен произведению спектров каждо-
го из сигналов. Свертка сигнала с опорной функцией (® - знак свертки) имеет вид
(6.27)
Спектр выходного сигнала
S0Ut(f) = Su(f)xSh(f), (6.28)
где Sh (/) - спектр опорной функции (частотная характеристика фильтра обра-
ботки).
Выходной сигнал после быстрой свертки формируется в виде последователь-
ности процедур
6/out (0 = FFT1 [Sout (/)] = F1 (f)Sh (/)], (6.29)
где FFT-1 - обратное преобразование Фурье.
Преимущества быстрой свертки реализуются при использовании для дискрет-
ного преобразования Фурье алгоритма быстрого преобразования Фурье (БПФ).
Структурная схема алгоритма быстрой свертки представлена на рис. 6.7. Он
реализуется двумя одномерными процедурами - сжатием дальности и по азимуту.
Базу БПФ по дальности Mfft, как правило, выбирают равной ближайшему числу,
кратному степени 2, превышающему число отсчетов по дальности в стробе приема
251
Рис. 6.7. Алгоритм быстрой свертки при отсутствии
миграции дальности
Радиолокационные системы землеобзора космического базирования
(полоса съемки плюс длитель-
ность зондирующего импуль-
са). Алгоритм синтеза включает
в себя получение спектра сиг-
нала методом БПФ, умножение
на спектр опорной функции и
обратное преобразование Фу-
рье. При сжатии по азимуту ба-
зу БПФ Mfft выбирают при-
мерно равной удвоенной длине
синтезированной апертуры, за-
тем производятся умножение
спектра сигналов на частотную
характеристику ' фильтра и об-
ратное преобразование Фурье.
Фильтр обычно задают фазовой
характеристикой, сопряженной
с сигналом, при этом огибаю-
щую выбирают из условия ма-
лости боковых лепестков в выходном сигнале (амплитудное взвешивание - апо-
дизация). Частотную характеристику фильтра (спектр опорной функции) для случаев
низкого разрешения можно рассчитать аналитически либо получить путем пре-
образования Фурье опорной функции, вычисляемой по баллистическим данным -
текущим координатам КА. Непрерывное РЛИ из кадровых получают путем «сшив-
ки» зон перекрытия соседних кадров.
Преимуществами алгоритма быстрой свертки являются его высокая произво-
дительность, простота перестройки, получение выходного РЛИ без масштабных
искажений при изменении наклонной дальности. Число требуемых операций ком-
плексного умножения-сложения составляет примерно
Мэр ~ 2MrFFT log2 (MrFFT)x 2MxFFT log2 (MxFFT), (6.30)
что в сравнении с формулой (6.26) меньше, чем требуемое для прямой свертки.
Таким образом, алгоритм цифрового синтеза методом быстрой свертки пред-
ставляется набором процедур:
1) сжатие по дальности (спектр опоры FHR (m) )
UR (m,n) = FFT-1 {FFT[t7(m,„)]F^ (ю)};
weO:MrFFT-1; n = 0: A/xFFT -1, (6.31)
где M-fft, Mcfft - размеры баз БПФ (кадра) по дальности и азимуту; U(m,n) -
входная радиоголограмма с числом отсчетов MfftxMcfft, причем отсчеты по на-
клонной дальности за пределами строба приема обнулены;
2) сжатие по азимуту (синтез РЛИ):
252
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
Urx (m,n) = FFT-1 {FFTpa (m,n)]FHX
meO:Mr-l; neO:Mx-l, (6.32)
где MT - число отсчетов по дальности в выходном РЛИ, равное числу отсчетов сиг-
нала в стробе приема; FHX (m,n) - спектр опорной функции сжатия сигнала по ази-
муту, закон частотной модуляции которого зависит от номера отсчета по дальности.
Число отсчетов выходного РЛИ составляет МГ^МХ, где Мх - число отсчетов в кад-
ре выходного РЛИ по азимуту, обычно равное половине базы БПФ по азимуту. Мас-
штабы изображения определяются по формулам, приведенным в подразделе 5.6.7.
6.4.3. Алгоритм гармонического (спектрального) анализа
В ряде ситуаций, например, в режиме Скансар, в том числе и при нефокусирован-
ном синтезе, требуемая длина синтезированной апертуры оказывается много
меньше области облучения ДНА, а разрешение по азимуту в несколько раз превы-
шает шаг азимутальных отсчетов. Применение для сжатия по азимуту алгоритма
быстрой свертки оказывается неэффективным, так как число требуемых операций
не уменьшается, а после синтеза РЛИ понадобится прореживание выходных отсче-
тов (децимация) для устранения избыточности. Простая свертка позволяет умень-
шить число операций в число раз, равное шагу прореживания, однако оно все рав-
но остается большим.
Применение процедуры БПФ для синтеза апертуры позволяет существенно об-
легчить требования к процессору. Простейшим случаем является нефокусированный
синтез апертуры путем спектрального анализа, выполняемого с помощью БПФ. Осо-
бенности такого режима состоят в том, что он кадровый, с длиной кадра £а < yjRA и
соответственно с разрешающей способностью не лучше, чем рх > 0,7yjRA .
Для фокусированного синтеза апертуры сигнал предварительно гетеродини-
руют путем его умножения на ЛЧМ-опору, сопряженную с ЛЧМ-сигналом. В ре-
зультате от каждой цели, смещенной по доплеровской частоте, получают смоду-
лированный (deramped) комплексный сигнал с постоянной амплитудой, пропор-
циональной амплитуде цели с учетом формы ДНА по азимуту (а также - по углу
места). Такой алгоритм называют гармоническим анализом (в зарубежных источ-
никах используют один термин SPECAN - Spectrum Analysis для обоих вариантов
алгоритмов нефокусированного и фокусированного синтезов РЛИ). В обоих алго-
ритмах шаг формируемых отсчетов по азимуту пропорционален изменению допле-
ровской частоты, поэтому масштабы по азимуту имеют разное значение для кана-
лов дальностей в каждой из зон. Для получения равномасштабного РЛИ применя-
ют интерполяцию отсчетов, что требует дополнительных вычислительных ресур-
сов. В связи с этим требуемое число операций оказывается большим, чем 7Уор/2,
вычисленное по формуле (6.30). В ряде случаев, например, в РСА, предназначен-
ных для контроля надводной обстановки с бортовым синтезом РЛИ и автоматиче-
ским обнаружением целей, эта особенность может быть несущественной. В таких
253
Радиолокационные системы землеобзора космического базирования
РСА азимутальную координату обнаруженных объектов рассчитывают по номеру
частотного канала на выходе БПФ.
Метод гармонического анализа эффективно используют для синтеза РЛИ в
режимах Скансар и прожекторном при наличии миграции дальности. Поскольку
радиоголограмма и ее спектр по азимуту являются ЛЧМ-процессами, для интерпо-
ляции применяют алгоритмы ЛЧМ-масштабирования по азимуту (FSA), аналогич-
ные масштабированию по дальности (CSA, ECS), которые используются для кор-
рекции миграции дальности [141*, 419].
Последовательность операций синтеза РЛИ в режиме Скансар включает сжа-
тие по дальности (6.31) и сжатие по азимуту методом гармонического анализа (ум-
ножение на ЛЧМ-опору и хБПФ)
Ьгл%(т,и) = РРТ{с7д(те,и)Ял-(/и,«)}; meO:Mr-l; п&Ъ.Мх-\, (6.33)
где Нх (т,п) - опорная функция по азимуту с законом частотной модуляции, за-
висящим от наклонной дальности. Эта зависимость не такая резкая, как в мар-
шрутном или прожекторном режимах с более высоким разрешением по азимуту.
Поэтому возможно ее ступенчатое изменение по группе отсчетов. Число отсчетов
опорной функции Мх соответствует длине синтезированной апертуры в режиме
Скансар, а база хБПФ - ближайшему большему числу ZN.
Как было отмечено выше, получение равномасштабного РЛИ требует интер-
поляции первичного РЛИ. Для этого применяют процедуры интерполяции, в том
числе включенные в состав алгоритмов синтеза РЛИ с учетом миграции дальности,
которые рассмотрены в следующих разделах.
6.5. Процедуры масштабирования и интерполяции комплексных
сигналов
6.5.1. Масштабирование путем свертки с ЛЧМ-опорой
Потребность в операциях масштабирования и интерполяции временных и частот-
ных процессов возникает при синтезе РЛИ, преобразовании РЛИ в картографиче-
ские проекции, интерферометрической обработке материалов радиолокационной
съемки, а также при оценке характеристик выходных информационных продуктов.
Широкое применение для синтеза РЛИ с компенсацией миграции дальности нашли
упомянутые выше алгоритмы ЛЧМ-масштабирования CSA и их расширенные ва-
рианты ESC (Extended Chirp Scaling) и FSA (Frequency Scaling Algorithm). Учиты-
вая важность этих операций, рассмотрим их формульное обоснование. Следует от-
метить, что эти алгоритмы носят приближенный характер, требуют оценки их точ-
ности и обобщения на комплексные сигналы произвольной структуры. Применяе-
мый для масштабирования универсальный алгоритм Sampling Rate Conversion
(SRC) [274], который, фактически, является приближенной интерполяцией по ус-
ловию Котельникова методом прямой свертки с шаблоном двумерной функции
sinc(,) «с усеченными хвостами», является компромиссным между точностью и
производительностью.
254
Глава б. Алгоритмы синтеза радиолокационных изображений в космических РСА
Сначала рассмотрим процедуру, которая является основой (и обобщением)
алгоритма CSA. Адаптация алгоритма CSA к случаю сигналов общего вида вклю-
чает в себя следующие этапы [139*, 141*, 433*]:
1) искусственное введение в сигнал изначально отсутствующей ЛЧМ-
структуры путем свертки данного сигнала с определенным ЛЧМ-сигналом, имею-
щим крутизну ЛЧМ, определяемую заданным коэффициентом масштабирования а;
2) компенсация ЛЧМ-составляющей в результирующем сигнале, принимаю-
щем вид линейной комбинации гармоник, частоты которых соответствуют величи-
нам сдвигов отсчетов исходного сигнала, помноженным на масштабирующий ко-
эффициент, т.е. фактически получаем Фурье-образ желаемого сигнала - сигнала с
надлежащим образом измененным масштабом;
3) обратное преобразование Фурье.
Первый этап является искусственным созданием ситуации, используемой в
алгоритме CSA, второй и третий этапы являются аналогом процедур гармониче-
ского анализа.
Полную операцию свертки сигнала x(i) = 3N(i-n} с ЛЧМ-сигналом Ha(i) =
( .Л -2 1
= expl j~al I можно представить в виде
, (6.34)
где а - параметр крутизны ЛЧМ; i - независимая переменная (счетчик в массиве);
® - значок свертки.
Предполагаем, что ЛЧМ-опора Ha(i) определена на бесконечной дискретной
оси (хотя сам сигнал определен на интервале -7V/2...A72-1) и свертывание также
производится по бесконечной оси.
Первый сомножитель в формуле (6.34) - константа, второй - центрированная
ЛЧМ-составляющая, зависящая только от параметра крутизны а, третий - линей-
ный набег фазы от смещения п. После компенсации ЛЧМ-составляющей получаем,
включая фазовый множитель-константу С(п)
Г '^Л 1
у,(г) = С(«)ехр^-у—ani\. (6.35)
Применяя к сигналу формулы (6.35) обратное преобразование Фурье, получа-
ем ядро Дирихле с периодом N и базой N- функцию ), являющуюся точным ко-
нечно-дискретным аналогом изображенной на рис. 6.8 «5-функции для частного
случая целого сдвига
= ехр<
.лап2
>8N(i-an).
(6.36)
255
Радиолокационные системы землеобзора космического базирования
Для масштабируемого сигнала произвольного вида, являющегося линейной
суммой таких ^-функций, наличие С(п) фактически будет означать появление на вы-
[ Я" 2 I
ходе паразитной ЛЧМ вида ехр<! J—i >, так что для полного масштабирования (не
I Afa J
только огибающей, но и фазы сигнала) надо еще скомпенсировать эту ЛЧМ.
-Д72+1 0 п N/2
1 1 1 'z
Рис. 6.8. Дискретный аналог дельта-функции в массиве размером N
имеет значение 1 в отсчете номер п (относительно середины массива)
и значение О-в остальных
Таким образом, параметр крутизны <7, на который умножилась величина сдви-
га произвольно взятой ^функции от центра массива, является масштабирующим
множителем сигнала общего вида, как линейной суперпозиции смещенных по п
«5-функций. Структурная схема реализации этого алгоритма приведена на рис. 6.9.
Рис. 6.9. Структурная схема алгоритма ЛЧМ-масштабирования методом быстрой свертки
с компенсацией паразитной ЛЧМ
На рис. 6.10 дан пример масштабирования комплексного сигнала в среде
МАТЛАБ [433*]. Входной сигнал представляет собой два импульса с единичной
амплитудой: длинный - действительный (фаза равна нулю) и короткий - с фазой,
равной минус 45°. База моделирования N=512, коэффициент растяжения <7=1,4. Для
устранения паразитных эффектов, связанных с дискретизацией сигнала, введена
прямоугольная весовая функция W(n) = rectpuls(n/0.8N), ограничивающая крае-
вые эффекты. Приведенная процедура, является, по существу, моделью преобразо-
ваний сигналов в РСА - формирования радиоголограммы и синтеза комплексного
РЛИ. Чтобы подчеркнуть эту близость, продукт первой свертки обозначен как
«Но1». Для сохранения фазы выходного масштабированного процесса его умно-
256
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
жают на корректирующую функцию Нсог. Сохранение амплитуды выходного про-
цесса достигается умножением его на корректирующий множитель, равный а,
нормализация по энергии (показано на рисунке) - на множитель, равный у[а .
N=512; n=(l:N)-N/2; % База процесса % Аргумент сигнала
S=rectpuls(n/100)+rectpuls((n-120)/30)*exp(-j*pi/4); % Пример процесса
а=1.4; W=rectpuls(n/(O.8*N)); % Коэффициент растяжения % Окно амплитудного взвешивания
Ha=W.*exp(j*pi/N*a*(n-l).A2); Hcor=exp(-j*pi/N/a*(n-l).A2); Acor=sqrt(a); F_S=fft(S); F_Ha=fft(Ha); FHOL =F_S.*F_Ha; HOL=fftshift(ifft(F_HOL)).*conj(Ha); Out =fftshift(ifft(fftshift(HOL))). *Hcor* Acor; % ЛЧМ-опора % ЛЧМ-множитель коррекции фазы % Множитель нормализации энергии % Спектр сигнала % Спектр опоры % Спектр «голограммы» % Корректированная «голограмма» % Масштабированный процесс с коррекцией фазы а)
в) г)
Рис. 6.10. Пример масштабирования комплексного сигнала с использованием ЛЧМ-преобразований:
а - текст МАТЛАБ-программы; б - амплитуды входного (?) и выходного (2) сигналов; в - действительные
составляющие входного (7) и выходного (2) сигналов; г - мнимые составляющие входного (7) и выходного
(2)сигналов
Рассмотренный пример относится к случаю, когда частота дискретизации
сигнала выбрана с большим запасом к неоднозначности по частоте. В реальной си-
туации приходится иметь дело с массивом из конечного числа N элементов и, та-
ким образом, с ЛЧМ-опорой, определенной на интервале длины N (с распростра-
нением на всю ось по периодичности).
На стадии компенсации ЛЧМ на первом этапе происходит вычитание из час-
тоты сигнала частоты опоры, как показано на рис. 6.11,6/. На рис. 6.11,а цифрой 1
обозначен график изменения частоты ЛЧМ-опоры, цифрой 2 - график изменения
частоты свертки ЛЧМ-опоры со «сдвинутой дельта-функцией» График 2
9—1492 2 57
Радиолокационные системы землеобзора космического базирования
имеет разрыв в точке -N/2+п. График 1 имеет зависимость fx(i) = nai, график 2 -
зависимость /2 (0 = na(i ~ (с «зацикливанием» вдоль оси i по периодичности).
На рис. 6.11,6 изображен график разности этих частот. На интервале после
ЛЧМ-компенсации [-N/2, -N/2+п] получаем гармонику частоты Nf\=(n+N)a, а на ин-
тервале {-N/2+п, NIZ\ — гармонику частоты /\f2=na. Налицо разрыв частоты в точке
-N/2+п величиной Na. В этом причина возникновения «паразитной неоднозначно-
сти» при попытке применить «в лоб» классический метод к задаче масштабирования
в конечно-дискретной ситуации. В рассмотренном на рис. 6.10 примере длитель-
ность сигнала значительно меньше, чем размерность базы моделирования, и указан-
ная неоднозначность не появляется. Следует также отметить, что при масштаби-
рующем коэффициенте a = 1 величина разрыва частоты равна N, а в силу дискретно-
сти сигнала и связанного с ней зацикливания частоты с периодичностью N, можно
считать, что разрыв частоты равен 0, и паразитная неоднозначность отсутствует.
Рис. 6.11. Графики зависимости и разности частот:
a - зависимость частоты ЛЧМ-опоры (7) и «свернутого» с ней сигнала (2) от номера частотного канала /;
б - разность частот на двух участках
6.5.2. Расширение массива данных заполнением нулями
Во избежание появления описанной паразитной неоднозначности можно приме-
нить процедуру расширения («раздвижки») массива данных с заполнением нулями
дополнительных отсчетов (zero padding). Фактически, сигнал записывается на
расширенной базе, размер которой выбирается из следующих соображений:
• база должна быть целой степенью двух (2W) для возможности применения ал-
горитма БПФ (ОБПФ);
• положение разрыва частоты, возникающего в процессе масштабирования,
должно быть за пределами информационной части массива (попадать на до-
полнительные отсчеты).
Пример применения этого метода приведен на рис. 6.12, где рассматривается
масштабирование широкополосного комплексного сигнала, состоящего из трех ко-
ротких импульсов в начале, в середине и в конце массива входных данных. Дли-
258
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
тельность импульсов равна двум отсчетам (для выполнения условия Котельнико-
ва), фаза импульсов произвольная (-110, 0, 155°).
Рис. 6.12. Примеры расширения массива данных методом «раздвижки»
с заполнением нулями для исключения неоднозначности сигнала:
a-e - амплитуды (7 и 3) и действительные составляющие (2 и 4) входного сигнала (7 и 2) и масштабирован-
ного сигнала (3 и 4); г-е - спектры сигналов — входного (5), выходного сигнала (7) и прямоугольной опор-
ной функцией с единичной амплитудой (6); а, г - коэффициент расширения а=1; б, в, Э, е - коэффициент
расширения аМ,4; а, б, г, д - размер массива входных данных ДМ 12; д, е - преобразованный размер мас-
сива входных данных AM 024
Для случая, когда масштабирование отсутствует (при а=1), выходной сигнал
повторяет входной сигнал как по амплитудам (7 и 3 на рис. 6.12,я), так и по ком-
плексным составляющим (показаны только действительные составляющие — 2 на
рис. 6.12,6 и 4 на рис. 6.12,а). Амплитудные спектры входного и выходного сигна-
лов (5 и 7 на рис. 6.12,г) также одинаковы (сумма откликов sinx/x). Колебания ам-
плитудного спектра определяются расстановкой импульсов в сигнале. Спектр
опорной функции - френелевский (6 на рис. 6.12,г), практически равномерный с
небольшими колебаниями на границах.
При коэффициенте растяжения д=1,4 (рис. 6.12,6 и 6) форма выходного сиг-
нала искажается. У границ спектров опорной функции и выходного сигнала появ-
ляются биения со «свернутыми» компонентами (отмечены стрелками). Полезная
(неискаженная) область равномерного спектра опорной функции сокращается до
70 % от первоначальной.
259
Радиолокационные системы землеобзора космического базирования
Эффекты неоднозначности исчезают при увеличении размера массива данных в
два раза N = 1024 при сохранении формы входного сигнала (рис. 6.12, в и Э). Для
масштабирования сигнала применяют опорную функцию с крутизной ЛЧМ, обратно
пропорциональной расширению массива данных. При выполнении процедур мас-
штабирования равномерная область спектра опорной функции расширяется, влияние
на нее и на спектр выходного сигнала компонент из «свернутой» области резко
уменьшается и процесс масштабирования сигнала оказывается корректным.
Следует отметить ряд моментов. Если входным сигналом является временной
процесс, дискретизированный тактовой частотой АЦП, то при расширении массива
данных с заполнением нулями ширина частотного спектра не изменяется - просто
он отображается с более мелким шагом по частоте. Если исходный сигнал уже
имеет ЛЧМ-модуляцию (например, сигнал, отраженный от точечной цели при
ЛЧМ зондирующем сигнале или фрагмент азимутальной радиоголограммы), то
возможно масштабирование результатов сжатия таких сигналов (по дальности или
азимуту) путем гетеродинирования данного процесса с ЛЧМ опорной функцией с
соответствующей крутизной ЛЧМ. В этом и состоит принцип алгоритмов CSA и
FSA, используемых при синтезе РЛИ.
Применение масштабирования по азимуту для выравнивания шага выходных
отсчетов по азимуту при изменении наклонной дальности цели устраняет основной
дефект высокопроизводительного алгоритма гармонического анализа, делая его
предпочтительным для синтеза РЛИ в режиме Скансар и прожекторном режиме.
Операции расширения массива входных данных позволяют, в частности, устранить
проблемы азимутальной неоднозначности в прожекторном режиме, в котором диа-
пазон изменений доплеровской частоты значительно превышает частоту повторе-
ния зондирующих сигналов.
6.5.3. Интерполяция комплексных процессов методом
«раздвижки спектра»
В ряде ситуаций возникает необходимость интерполяции сигналов с имеющейся
частотой дискретизации на более высокую частоту, например, при измерении ЭПР
точечных объектов, анализе формы импульсного отклика РСА по РЛИ, полученного
с дискретностью, достаточной для передачи информации, но требующей преобразо-
вания для приближения к гладким непрерывным функциям. Эти задачи легко реша-
ются методом «раздвижки спектра», схема которого приведена на рис. 6.13. По мас-
сиву M\N размерностью N с входными данными формируется с помощью операции
БПФ спектр M2N также с размерностью N. Далее создают расширенный массив M3Ne
размерностью Ne=2kN, заполненный нулями. В него переносят начальный и конеч-
ный фрагменты спектра М2^ и далее выполняют операцию ОБПФ на базе Ne=2kN.
Массив
входных данных
Массив спектра
* БПФ
1 2
Массив раздвинутого
спектра Л/зл,е
1 0 2
Массив интерполированных
выходных данных
"“"П M4Nc
ОБПФ ------►
Рис. 6.13. Структурная схема алгоритма интерполяции данных методом «раздвижки спектра»
260
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
Корректное выполнение операций БПФ и ОБПФ с сохранением равенства сум-
марных энергий сигнала во временной и спектральной областях согласно равенству
Парсеваля требует, чтобы при выполнении БПФ значения спектра были разделены
на нормирующий множитель Jn , а при ОБПФ - умножены на Jn (или для
расширенной базы). В стандартных программных пакетах (например, МАТЛАБ)
нормирующий множитель может отсутствовать для ускорения работы процедур fft и
ifft, хотя совместная работа процедур сохраняет суммарную энергию сигнала.
В [141*] изложен корректный алгоритм прецизионного линейного масштаби-
рования, основанный на сочетании операций раздвижки массивов данных во вре-
менной и спектральной областях. Использованный подход является адаптацией к
случаю конечно-дискретного сигнала известного в математике факта (извлечение
из так называемого «исчисления Вейля» [230]), согласно которому оператор изме-
нения масштаба прямой может быть представлен в виде компози-
ции операторов, применяемой к обобщенным функциям fix) на прямой и вклю-
чающих БПФ, ОБПФ, умножение на ЛЧМ-функции.
В практических задачах синтеза РЛИ для космических РСА требуемые значе-
ния параметра масштабирования сигналов отличаются от единицы на сотые доли,
что облегчает проблему устранения неоднозначности и позволяет получить высо-
кую производительность процессора, в том числе для практически важного случая
двумерного масштабирования комплексного РЛИ с одновременной компенсацией
аффинных искажений, вызванных скосом ДНА.
6.6. Алгоритмы синтеза РЛИ в маршрутном режиме
с учетом миграции дальности
Получение близкого к метровому разрешения по азимуту в космических РСА свя-
зано с проблемой устранения миграции дальности при синтезе РЛИ. Как показано
в разделе 6.4, эта проблема актуальна и в маршрутном режиме, но особенно в про-
жекторном режиме обзора, в котором применительно к космическим РСА кроме
миграции дальности требуется еще и устранение неоднозначности сигналов по до-
плеровской частоте.
Синтезу РЛИ с учетом миграции дальности посвящено много публикаций [270,
274, 419, 421, 451, 504, 567]. В [274] дано систематизированное их изложение. Ос-
воению представленного в ней материала значительно способствовало появление в
Интернете демонстрационного программного пакета SAP TOOL в среде MATLAB.
Более поздняя публикация [567] снабжена Веб-приложением с MATLAB-програм-
мами. Аналогичный подход использован в лабораторном практикуме по РСА [155*],
где даны тексты MATLAB-программ (от RC-фильтрации до синтеза изображений
РСА «Меч-КУ»), иллюстрирующие алгоритмы, приведенные в [160*].
Детальный маршрутный режим можно рассматривать как частный случай
прожекторного режима. В принципе, наиболее строгим из алгоритмов синтеза яв-
ляется, так называемый, алгоритм «обратной проекции» (Backprojection). Его суть
состоит в том, что в каждой точке комплексного РЛИ в координатах наклонная
261
Радиолокационные системы землеобзора космического базирования
дальность-азимут накапливается сигнал от соответствующих точек радиоголо-
граммы с учетом комплексных коэффициентов передачи. Однако этот алгоритм
крайне неэффективен. Поиск эффективных алгоритмов при двумерной обработке
данных состоит в использовании преимуществ быстрого преобразования Фурье в
процедурах двумерной обработки данных - быстрой свертки с использованием
БПФ. Для этого на предварительных этапах обработки устраняют миграцию даль-
ности и зависимость азимутальной ЛЧМ от дальности.
На практике используют следующие основные алгоритмы формирования РЛИ:
1) преобразование данных к полярным координатам (PFA - Polar Format
Algorithm);
2) коррекция миграции дальности (RMA - Range Migration Algorithm);
3) ЛЧМ-масштабирование (CSA - Chirp Scaling Algorithm).
Параметрами для сравнения эффективности алгоритмов формирования РЛИ
являются:
1) число арифметических операций для формирования РЛИ;
2) требования по памяти;
3) возможность реализации алгоритмов обработки данных (например, цифро-
вой фильтрации и БПФ) и требования к типу вычислительных средств;
4) качество получаемого РЛИ;
5) совместимость с дополнительными программами формирования РЛИ (на-
пример, автофокусировкой).
Особенностью ряда публикаций является то, что в них основное внимание
уделяют самолетным РСА, для которых характерен большой диапазон углов ази-
мута наблюдения и большое различие фокусов голограммы в пределах кадра. Для
космических РСА, напротив, отношение полосы съемки (парциального луча для
режима Скансар) к дальности центра кадра мало (<2...3 %), что надо учитывать
при выборе алгоритма синтеза РЛИ.
В алгоритме преобразования данных к полярным координатам (PFA) основ-
ной операцией является преобразование данных из ортогонального формата - на-
клонная дальность R и время Т в полярный формат - приращение наклонной даль-
ности и доплеровская частота (пропорциональная углу отклонения линии визиро-
вания от нормали к вектору путевой скорости платформы). Эта операция значи-
тельно уменьшает зависимость закона азимутальной ЛЧМ от наклонной дальности,
особенно для самолетных РСА с прямолинейной траекторией полета.
Особенность алгоритма синтеза РЛИ с коррекцией миграции дальности
(RMA) состоит в том, что коррекция миграции дальности производится в час-
тотной области после одномерного БПФ по азимуту. Это возможно потому, что
законы миграции дальности для целей, смещенных по азимуту одинаковы. Кор-
рекция выполняется путем двумерной фазовой компенсации сигнала после азиму-
тального БПФ для целей, находящихся на средней дальности кадра. Для остальных
дальностей коррекция оказывается частичной.
Следующий шаг - это, так называемое, преобразование Столта, которое од-
новременно компенсирует криволинейную составляющую миграции дальности пу-
тем «скручивания» принятых данных. Операция «скручивания», представляет со-
262
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
бой зависимое от азимутальной частоты растягивание масштаба сигнала по даль-
ности. Она реализуется путем одномерного преобразования к новой координате KY
Ку=у[к^К^, (6.37)
где KR, Кх- частотные составляющие спектров по дальности и азимуту.
Преобразование Столта реализуется с помощью цифровых интерполяционных
фильтров, аналогичных используемым для преобразования данных в полярный
формат. Последняя операция - это двумерное ОБПФ, в результате которого фор-
мируется комплексное РЛИ.
Упрощенная версия алгоритма обработки с коррекцией миграции дальности по-
лучила название ЛЧМ-масштабирования (CSA). В ней применяется аппроксимация
преобразования Столта, не требующая интерполяции. Основные операции - БПФ и
комплексное умножение обеспечивают высокую эффективность этого алгоритма, а
при синтезе РЛИ космических РСА он, как правило, не уступает по точности алгорит-
му коррекции миграции дальности RMA. В крайнем случае, для уменьшения погреш-
ности возможен синтез РЛИ с разделением полосы съемки на фрагменты.
Следует учесть, что в наземном процессоре синтеза изображений в РСА Тег-
raSAR-X [264] для всех режимов съемки реализован унифицированный алгоритм,
включающий на первом этапе процедуры CSA. Упрощенная структурная схема ал-
горитма ЛЧМ-масштабирования приведена на рис. 6.14. Работу алгоритма иллюст-
рирует рис. 6.15.
Входной сигнал представляет собой двумерную голограмму. Первой операци-
ей алгоритма является преобразование Фурье (БПФ) по азимуту, в результате ко-
торого спектры целей, смещенных по азимуту и различающиеся только фазой, сов-
падают и накладываются друг на друга так, что к ним можно применить общую
операцию коррекции миграции дальности. Закон миграции на практике достаточно
близок к параболе, причем при представлении сигнала во временной области кри-
визна параболы уменьшается с наклонной дальностью, а в частотной области -
возрастает (см. рис. 6.15). Для наглядности передние фронты принятых импульсов
подчеркнуты. Кривизна миграции дальности в частотных каналах возрастает с на-
клонной дальностью.
{1} 2D голограмма 1 —
|{2} хБПф| |{6} гБПФ |
{3} Оператор CSA ЛЧМ(п) - — {7} Опора Fx(n, m) - —4х)
|{4} гБПФ | |{8} хБПФ |
{5} Опора Fr(m, п) - — Комплексное РЛИ J
Рис. 6.14. Структурная схема алгоритма ЛЧМ-масштабирования CSA
263
Радиолокационные системы землеобзора космического базирования
Рис. 6.15. Вид входной радиоголограммы для 4-х целей на разных дальностях
и смещенные по азимуту (а) и центрированные спектры
доплеровских частот радиоголограммы (б)
Следующая операция - умножение отсчетов в каждом спектральном канале
(строке по дальности) на оператор ЛЧМ-масштабирования (CSA-оператор), который
представляет собой ЛЧМ-процесс с нулями в центре кадра по дальности и с разной
крутизной. В центральной строке дальности для п=0, крутизна ЛЧМ равна нулю. С
увеличением номера п по модулю крутизна корректирующей ЛЧМ возрастает. В ре-
зультате действия CSA-оператора нули ЛЧМ принятых сигналов от целей, удален-
ных от центра кадра, будут смещаться в направлении стрелок на рис. 6.15,6 с тем,
чтобы закон миграции дальности по азимуту был одинаков на всех дальностях, как
для цели в центре кадра. Заметим, что такая процедура коррекции миграции дально-
сти возможна только при использовании в РСА зондирующего сигнала с ЛЧМ.
Дальнейшие процедуры включают в себя умножение отсчетов (спектральных
составляющих) в каждом частотном канале на ЛЧМ-опору и процедуру ОБПФ для
сжатия сигнала по дальности. Далее следует умножение отсчетов азимутального
спектра в каждом канале дальности на опорную функцию по азимуту и ОБПФ для
получения комплексного РЛИ. Эти процессы иллюстрирует рис. 6.16.
Опорная функция Fr(jn, п) сжатия сигнала по дальности имеет некоторые осо-
бенности. В нулевом доплеровском канале, где миграция дальности отсутствует,
она в точности совпадает с комплексно сопряженным спектром зондирующего
сигнала. По мере увеличения номера частотного канала п по модулю в опорную
функцию вносится частотный сдвиг, который обеспечивает изменение временного
положения сжатого импульса на величину миграции дальности в данном частот-
ном канале для цели в центре кадра (а также всех других целей).
264
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
Частоты дальности: -150... 150 МГц
Рис. 6.16. Результат сжатия по дальности с коррекцией миграции (а),
результат синтеза РЛИ (б), вид отклика на точечную цель (в)
Вторая особенность опорной функции Fr(m, и) состоит в том, что она должна
компенсировать расфокусировку сжимаемого сигнала по дальности, вызванную
ЛЧМ-множителем в CSA-операторе. В подробной структурной схеме процессора
синтеза РЛИ, которая рассмотрена в разделе 6.7, опорная функция по дальности
представлена тремя процедурами умножения: сжатие по дальности, вторичное
сжатие по дальности для компенсации ЛЧМ в CSA-операторе и корректировка ос-
новной миграции дальности для центра кадра.
В ряде случаев, например, в режиме высокого разрешения РСА Radarsat-1 (режим
Fine, разрешение 3 м) процедура вторичного сжатия может не требоваться [447].
Опорные функции в алгоритме синтеза с ЛЧМ-масштабированием рассчиты-
вают на основе баллистических данных с преобразованием из временной области к
частотной по азимуту. Для прямолинейного движения платформы, типичного для
самолетных РСА, такие расчеты приведены в работах [231*, 274], причем в [274]
использован приближенный метод стационарной фазы [30]. Применительно к кос-
мическим РСА можно воспользоваться рассмотренной в гл. 5 аппроксимацией ор-
битального движения моделью прямолинейного движения с эквивалентной линей-
ной скоростью И1е. При расчетах параметров компенсации миграции дальности по-
грешность не должна превышать (1/16... 1/8) от элемента разрешения по дальности,
что значительно мягче требований по точности вычисления фазы опорной функции
синтеза РЛИ высокого разрешения. Поэтому можно воспользоваться первыми чле-
нами разложения временного закона изменения дальности в степенной ряд, пред-
ставляя его параболой. В отличие от самолетного случая (постоянство путевой
265
Радиолокационные системы землеобзора космического базирования
скорости по дальности) - в космических РСА значения Kie меняются по дальности
примерно по линейному закону.
Обозначим используемые в расчетах параметры соответствующими индекса-
ми, например: Гы для первого пикселя РЛИ, Pjeo - для центра кадра, Гы - для по-
следнего пикселя. Аналогичным образом будем обозначать наклонные дальности
Л], Rq, R2, доплеровские частоты FDopl, FDopo, FDop2 и другие параметры опорных
функций. Для определенности примем, что нулевой отсчет по азимуту п=0 соот-
ветствует целям с нулевой доплеровской частотой на всем интервале наклонных
дальностей от Ri до R2. Это означает, что при круговой орбите КА плоскость визи-
рования проходит вдоль радиус-вектора КА и нормальна к вектору путевой скоро-
сти. Оси координат планового РЛИ на земной поверхности будут перпендикуляр-
ны. В общем случае эллиптической орбиты КА, влияние которой можно учесть со-
ставляющей вертикальной скорости, согласно формулам (5.97), (5.98), плоскость
визирования наклоняется относительно надира, так что оси первичного РЛИ ока-
зываются неперпендикулярными и это требует коррекции при построении плано-
вого РЛИ. Связь текущих параметров с номерами азимутальных отсчетов п опре-
деляется нижеследующими формулами. Для центра кадра имеем
7/2 т2
> (6.38)
2л0
^ЪоР0 (л) ~
2^
----—п
RqA,
(6.39)
где и=0 при FDopo(0)=0 соответствует цели, удаленной от РСА на дальность Ro (ми-
нимальная «ближайшая» наклонная дальность цели при движении РСА).
Для начальной и конечной дальностей имеем аналогичные формулы.
После БПФ процесс преобразуется в частотную область с шагом по доплеров-
ской частоте, равным F?IMx^y, где Mfft - база БПФ по азимуту.
Для центра кадра имеем зависимость приращения дальности от номера час-
тотного канала
A/?o(wf)
^xFFT McFFT
Пр
2 2
(6.40)
Для начала и конца полосы съемки имеем разницу по отношению к центру
кадра
Я2 f 7?i
8rp2M2FFT [Г,2
Я2 [ Т?2
^pXfftW
(6.41)
Устранение отличий законов миграции дальности от центра кадра достигается
умножением строки дальности в каждом частотном канале на ЛЧМ-множитель.
Этот процесс показан на рис. 6.17. В исходной картине, рассматриваемой в частот-
266
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
ной области, кривизна закона миграции дальности на границе кадра больше, чем в
центре кадра (рис. 6.17, а). Выравнивание законов показано на рис. 6.17, б условно
(скорректирована миграция дальности в центре кадра, что на практике реализуется
на следующем шаге после CSA-оператора). Коррекцию разницы миграций осуще-
ствляют путем гетеродинирования сигнала на частоту, смещающую нуль ЛЧМ-
сигнала в нужное положение, в котором окажется сжатый по дальности импульс.
Огибающая при этом не смещается. Значение частоты гетеродинирования пере-
менно по дальности с нулем для центра кадра и для линейного закона изменения
миграции дальности по строке имеет вид ЛЧМ-процесса.
Рис. 6.17. Коррекция частотной зависимости миграции дальности для центра кадра
и дальней границы полосы съемки:
а - исходная картина для центра кадра (?) и для дальней границы (2); б - устранение разницы миграции на
границе (2) по отношению к центру кадра (/); изменяется положение нулевой частоты сигнала, а в огибаю-
щей сигнала миграция остается
Параметры гетеродинирующего ЛЧМ-процесса находят с учетом следующих
соображений. Производная наклонной дальности по частоте ЛЧМ-процесса зонди-
рующего сигнала выражается через длительность импульса г и полосу зондирую-
щего сигнала AF:
dRT _ ст
dF ” 2AF ’
откуда корректирующая частота равна
„ 2AF67?r
Лх>г =------->
ст
а крутизна ЛЧМ для Fcor, в предположении, что центр кадра равноудален от гра-
ниц, равна
d!Fcor _ ^Fc
dt
Аналогичным образом по формулам (6.42), (6.43) рассчитывают гетеродини-
рующую частоту для коррекции миграции дальности в каждом частотном канале.
Поскольку законы миграции выровнены, гетеродинирующая частота постоянна для
(6.42)
(6.43)
(6.44)
267
Радиолокационные системы землеобзора космического базирования
каждой строки дальности. В результате получаем опорную функцию сжатия сигна-
ла по дальности в каждом частотном канале, которая является произведением трех
составляющих: основной, комплексно сопряженной с ЛЧМ зондирующим сигна-
лом (и с учетом поправки на доплеровский эффект на краях азимутальной ДНА),
ЛЧМ-гетеродинирования для выравнивания законов миграции по полю кадра и
частоты, корректирующей основную миграцию дальности для центра кадра.
Заметим, что на спектр отраженного ЛЧМ-сигнала после преобразования радио-
голограммы из временной в частотную область влияет доплеровское смещение часто-
ты - его крутизна ЛЧМ уменьшается в соответствии с формулой [231 *, 274,419]
^r(^Dop’^o)
(6.45)
.2 /
1-
Однако это явление, характеризуемое вторым членом в формуле (6.45), в ос-
новном, сказывается при больших угловых интервалах радиоголограммы по ази-
муту, что нетипично для космических РСА.
При выборе амплитудного распределения опорной функции сжатия по даль-
ности следует руководствоваться известными соображениями по снижению уровня
боковых лепестков (аподизация функциями косинус на пьедестале, Хемминга,
Кайзера и др. [2, 168, 229]), а также необходимостью ограничить ширину спектра
обработки на краях импульсов, где нет полного перекрытия этих импульсов по
всем азимутальным каналам. Поскольку различия законов миграции по полю кадра
невелики, потерями в разрешающей способности и потенциале РСА при примене-
нии алгоритма CSA можно пренебречь.
Суммарное воздействие составляющих коррекции миграции дальности может
привести к тому, что в каждом канале дальности после сжатия появятся погрешно-
сти по фазе, которые подлежат компенсации перед сжатием по азимуту. Заключи-
тельная операция синтеза РЛИ - сжатие по азимуту не отличается от случая без
миграции дальности, рассмотренного выше.
6.7. Особенности принимаемых сигналов в прожекторном
режиме съемки
При работе в прожекторном режиме съемка ведется кадрами, при этом луч ан-
тенны все время поворачивают по азимуту в направлении снимаемого района.
Длительность кадра съемки определяется временем наблюдения, которое можно
полностью использовать для синтеза апертуры (когерентного накопления) и реали-
зовать наилучшее разрешение по азимуту при одном наблюдении либо разделить
на несколько субапертур, реализовывать в них синтез РЛИ (с пониженным разре-
шением), но выполнить некогерентное накопление нескольких независимых на-
блюдений для улучшения радиометрического разрешения.
268
Глава б. Алгоритмы синтеза радиолокационных изображений в космических РСА
Возможны несколько вариантов реализации прожекторного режима:
1) строго боковой обзор, при котором нуль доплеровской частоты находится в
середине апертуры синтеза;
2) скошенный прожекторный обзор с малым углом скоса в апертурах, сосед-
них с центральной апертурой (при нечетном числе апертур, а при четном - относи-
тельно середины интервала наблюдения);
3) скошенный прожекторный обзор с малыми или большими углами скоса
при съемке объектов на разной дальности с упреждением или задержкой;
4) прожекторный обзор «с протяжкой», когда в начале съемки луч антенны
направляют с упреждением на 1/2 ширины ДНА относительно центра снимаемого
участка. Угловую скорость поворота луча выбирают такой, чтобы в конце съемки
максимум луча отставал от центра кадра на 1/2 ширины ДНА. Таким методом
можно расширить азимутальный размер кадра в 1,5...2 раза по отношению к ши-
рине зоны облучения по азимуту.
По сравнению с рассмотренным ранее маршрутным режимом при наличии
миграции дальности прожекторный режим имеет ряд особенностей'.
• большой диапазон изменений доплеровской частоты в апертуре синтеза;
• значительное увеличение миграции дальности;
• шаг отсчетов принимаемого сигнала по азимуту, определяемый периодом по-
вторения, значительно больше, чем реализуемое азимутальное разрешение.
Для правильного воспроизведения получаемого РЛИ необходима интерполя-
ция периода повторения в число раз, равное отношению длины апертуры к
ширине зоны, облучаемой азимутальной ДНА.
Главное отличие прожекторного режима в космических РСА от маршрутно-
го режима состоит в том, что диапазон изменения доплеровской частоты целей за
время синтеза в несколько раз превышает ширину спектра доплеровских частот и
частоту повторения зондирующих сигналов. В результате строб-эффекта допле-
ровская частота принимаемого сигнала не превышает по модулю 1/2 от частоты
повторения. Поскольку луч антенны подсвечивает один и тот же участок местно-
сти по азимуту, это явление не приводит к неоднозначности сигналов, но требует
восстановления истинного значения доплеровской частоты для синтеза РЛИ.
В литературе отмечается близость явлений, касающихся миграции дальности
и алгоритмов ее коррекции для всех основных режимов работы РСА. Отмечается
близость прожекторного режима и режима Скансар в алгоритмах азимутальной
обработки радиоголограммы [357, 409, 410, 420, 486]. Процессы формирования ра-
диоголограммы в прожекторном режиме рассматриваются на рис. 6.18. Рассмотре-
ны временные зависимости частоты сигналов от трех целей Л, В и С, попадающих
в зону облучения антенной радиолокатора по азимуту. Приведены временные гра-
фики доплеровского смещения частоты сигналов Fa, Fb и Fc за время наблюдения
Дут, которое определяет апертуру синтеза.
Для сравнения на рис. 6.18, б приведены временные зависимости частоты
сигналов в режиме Скансар. Ширина спектра доплеровских частот, принимаемого
антенной радиолокатора в режиме Скансар, определяется путевой скоростью и го-
269
Радиолокационные системы землеобзора космического базирования
ризонтальным размером антенны AFant = 2Ksg/Dxant . В прожекторном режиме эта
величина соответствует «мгновенному» спектру принимаемого сигнала.
На рис. 6.18, а показан результат дискретизации полного диапазона доплеров-
ских частот AFsynt сигнала частотой повторения зондирующих сигналов. Действие
строб-эффекта приводит к тому, что принимаемые частоты сигналов FrA, FrB и FrC
ограничены значениями от минус Fp/2 до Fp/2. Это явление вызывает азимутальную
неоднозначность. Для ее устранения записанную радиоголограмму (апертуру синте-
за) разделяют на N субапертур для частичной обработки в однозначной области, по-
сле чего формируют суммарную апертуру для сжатия по азимуту.
Рис. 6.18. Временные зависимости доплеровских частот в радиоголограмме
прожекторного режима (а) и для одного кадра режима Скансар (б):
1 - доплеровское смещение в отраженном сигнале от целей А, В, С; 2 - доплеровские частоты в выходной
цифровой радиоголограмме (ЦРГ), дискретизированные периодом зондирования Гр; 3 - форма азимуталь-
ной ДНА, ограничивающая ширину «мгновенного» спектра доплеровских частот; 4 - «мгновенная» полоса
спектра доплеровских частот AFanti 5 - субапертуры, используемые для восстановления азимутальной одно-
значности сигналов в прожекторном режиме
Близость прожекторного режима и режима Скансар характеризуется сле-
дующими факторами:
• выходное РЛИ формируют цели, попадающие в азимутальную ДНА при по-
стоянном направлении луча, относительно траектории полета (режим Скан-
сар) или при сканировании луча в направлении участка наблюдения (прожек-
торный режим);
• для синтеза РЛИ можно использовать алгоритмы, применяемые для маршрут-
ного режима, однако они неэффективны из-за необходимости интерполяции с
приведением шага отсчетов РЛИ к требуемому азимутальному разрешению;
270
Глава б. Алгоритмы синтеза радиолокационных изображений в космических РСА
• начало и конец записи данных одинаковы, независимо от дальности целей.
Это позволяет в обоих случаях применить для синтеза РЛИ эффективный ал-
горитм гармонического анализа (SPECAN);
• характер сигнала в каждой субапертуре прожекторного режима практически
совпадает с принимаемым сигналом в кадре режима Скансар. На рис. 6.18, б
показана апертура синтеза Tsynt в режиме Скансар при строго боковом обзоре,
когда луч антенны радиолокатора направлен по нормали к вектору путевой
скорости платформы. При г=0 доплеровская частота для цели В, находящейся
по нормали к траектории равна нулю. Такой же характер имеет сигнал в цен-
тральной субапертуре прожекторного режима, показанной на рис. 6.18, а. В
соседних субапертурах ширина спектра принимаемых сигналов сохраняется,
однако средняя доплеровская частота отличается от нуля и компоненты спек-
тра могут перемещаться по частотным каналам, переходя через границы +FJ2
по кольцу. Аналогично это происходит и в режиме Скансар при скошенном
обзоре, например, при ориентации платформы в орбитальной системе коор-
динат (ОСК).
Исходя из рассмотренного выше поведения спектра сигналов в субапертурах
для обеспечения однозначности сигналов в каждой из них, число субапертур
должно быть не менее
AF + AF
^sUb Syn‘ —, (6-46)
A^ant
2Fs₽
где A/^t ~—-— ширина «мгновенного» спектра сигнала, определяемого азимуталь-
Prant
ной ДНА; AFsynt - полная полоса доплеровских частот обрабатываемого сигнала.
При этом для исключения краевых эффектов необходимо наложение соседних
субапертур, а их длительность должна соответствовать полосе доплеровских частот,
равной частоте повторения Fp с запасом на перекрытие на ширину спектра сигналов
г ^p^ant
sub ~ ,
F Dop
rsynt(Fp+AFant)
AFsynt
(6.47)
где F'Dop = —= —— - скорость азимутальной ЛЧМ.
^synt
Для исключения азимутальной неоднозначности может оказаться необходи-
мым увеличить размеры субапертур с заполнением добавленных отсчетов нулями,
как это было рассмотрено в подразделе 6.5.2. Предполагается квадратичная зави-
симость фазы принятого сигнала по времени. Отклонения от этого закона учиты-
ваются при формировании субапертур. При выборе размера субапертуры возможно
уменьшить погрешности, вызванные малой разрядностью фазовращателей в прие-
мопередающих модулях АФАР радиолокатора, если учесть дискретность азиму-
тальных положений луча [264, 408].
271
Радиолокационные системы землеобзора космического базирования
6.8. Унифицированный алгоритм синтеза изображения
в основных режимах работы РСА
В материалах [264, 357, 409, 410, 420] рассмотрены вопросы унификации алгоритмов
синтеза РЛИ в основных режимах работы космических РСА: маршрутном, прожек-
торном и режиме Скансар. Структурная схема такого алгоритма приведена на
рис. 6.19. Она содержит три функциональных блока, помещенных в пунктирные
рамки: сжатия по дальности с коррекцией миграции дальности (процедуры
{2}... {12} для всех режимов работы), сжатия по азимуту для прожекторного режима
и режима Скансар (процедуры {13}...{21}) и для маршрутного режима (процедуры
{23}...{24}). На схеме процедуры, применяемые только в прожекторном режиме,
помещены в двойную рамку, для режима Скансар - в пунктирную рамку, а процеду-
ры, используемые только в маршрутном режиме, обозначены серым фоном.
Входной операцией унифицированного алгоритма является амплитудное взве-
шивание радиоголограммы по азимуту для уменьшения уровня боковых лепестков
выходного отклика РСА. Поскольку в прожекторном и режиме Сансар длитель-
ность радиоголограммы одинакова для всех дальностей эта операция выполняется
простым умножением матрицы входных отсчетов на весовую функцию.
Далее, только для прожекторного режима, следует формирование субапертур {3}.
В каждой из субапертур (для режима Скансар - в апертуре) после азимутального
БПФ {4} выполняют стандартную последовательность процедур {5}...{12} для
коррекции миграции дальности путем ЛЧМ-масштабирования по дальности. Ис-
пользуемый алгоритм ESC (Extended Chirp Scaling) является расширенной моди-
фикацией алгоритма CSA.
После коррекции миграции дальности (процедура {12}) приступают к азиму-
тальной обработке. Для прожекторного режима и режима Скансар выполняют
масштабирование по азимуту {13}, которое преобразует реальный (для орбиталь-
ного полета) закон изменения фазы по субапертуре (апертуре) в квадратичный,
одинаковый для всех дальностей. Проводят амплитудную коррекцию {14} радио-
метрических искажений, вызванных формой азимутальной ДНА, что особенно
важно для режима Скансар. В прожекторном режиме радиометрическую коррек-
цию можно сделать на последнем этапе синтеза РЛИ.
Следующая операция - преобразование данных во временную область по
азимуту путем хОБПФ {15}, в результате чего образуются двумерные субапертуры
(дальность-азимут) для сборки полной апертуры, подлежащей сжатию по азимуту.
По существу, если бы использовался простой зондирующий сигнал в виде корот-
ких импульсов, отсутствовала миграция дальности и не было зависимости азиму-
тальной ЛЧМ от наклонной дальности, то такие субапертуры могли быть получены
из исходной радиоголограммы путем простой нарезки. Особенность этих субапер-
тур состоит в том, что в них одинаковые законы ЛЧМ, ширина и положение спек-
тров доплеровских частот, что обеспечено процедурой частотного масштабирова-
ния и центрирования {13}.
272
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
I {3 } (1Нормирование субапертур
{2} z\-весовая функция подавления
боковых lenecncoB
{4} тБПФ
{5} Оператор CSA ЛЧМ(н)
{7} Сжатие ио дальности
{8* Вторичное сжатие по
дальности_____________
[9) Коррекция м тирании по кадру
{10} Подавление боковых
лепестков по дальности
[ {6}гБПФ[
{12} Коррекция фазы CSА
{11}/ОБПФ
маршрутного режима (одно наблюдение)
X
Рис. 6.19. Схема унифицированного алгоритма синтеза РЛИ
в маршрутном, прожекторном режимах и режиме Скансар
273
Радиолокационные системы землеобзора космического базирования
Умножая каждую из субапертур на ЛЧМ-множитель (первая операция гармо-
нического анализа {16}), получим непрерывную последовательность фрагментов
азимутального процесса (за исключением краевых явлений в областях перекрытия)
для сборки полной апертуры. Диапазон доплеровских частот в каждом фрагменте
лежит в пределах ±Fp/2. После сборки субапертур {18} и операции хБПФ {19} по-
лучаем выходное комплексное РЛИ {22} с шагом отсчетов по азимуту в N раз
меньшим, чем в исходной радиоголограмме. Это позволяет передать без пропусков
РЛИ с разрешающей способностью, соответствующую полной апертуре прожек-
торного режима.
В режиме Скансар перед хБПФ следует операция {17}, выравнивающая шаг
отсчетов в выходном РЛИ (частотное масштабирование по азимуту).
Заключительные операции: коррекция квадратичного закона изменения фазы
{20}, и компенсация фазы {21}, вызванной масштабированием по азимуту и цен-
трированием {13}, необходимы для того, чтобы получаемые комплексные РЛИ
прожекторного режима и режима Скансар были пригодны для интерферометриче-
ской обработки данных.
Для режима Скансар комплексные РЛИ, полученные в разных кадрах парци-
альной зоны по дальности можно комбинировать для некогерентного накопления с
целью повышения радиометрического разрешения (амплитудные РЛИ с несколь-
кими наблюдениями) или уменьшения фазовых ошибок для интерферометриче-
ской обработки. Парциальные РЛИ, полученные в режиме Скансар в разных пар-
циальных лучах по углу места, требуют сшивки в единое РЛИ. Поскольку в разных
лучах частоты повторения, как правило, различны, их приводят к единой шкале
при масштабировании по азимуту {13}.
Кроме рассмотренного выше алгоритма синтеза РЛИ в работе [569] приведен
вариант алгоритма для случая аналоговой компенсации азимутальной ЛЧМ элек-
тронным методом до АЦП (Dechirp on Receive), который может применяться для
бортового синтеза РЛИ при ограниченных ресурсах вычислительных средств.
В нем на первом этапе алгоритма синтеза РЛИ используют масштабирование сиг-
налов по доплеровской частоте, для чего добавлены модуль коррекции фазы и
ЮБПФ между процедурами {6} и {7}, а также модифицирован ряд процедур
{5}, {7}, {12}.
В маршрутном режиме для сжатия по азимуту используют классический ал-
горитм быстрой свертки, включающий умножение спектра доплеровских частот на
опорную функцию {22} и ОБПФ {23}. Эти операции, идентичные приведенным на
рис. 6.10, обеспечивают получение РЛИ с равномерным шагом во всем интервале
наклонных дальностей, который определяется длиной отрезка на земной поверхно-
сти, между двумя периодами зондирования (масштаб РЛИ вдоль линии пути).
Расчет опорных функций для выполнения операций, входящих в алгоритм
синтеза, можно вести с использованием аналитических формул, связывающих па-
раметры временных и частотных процессов. Другой путь состоит в расчете вре-
менных законов изменения фазы сигнала от точечных целей в интервале наклон-
ных дальностей наблюдения при относительном движении платформы (орбиталь-
ное движение и вращение Земли). Параметры сигналов в частотной области опре-
274
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
деляют путем численного выполнения операций БПФ с размерностями базы, вы-
бранными при проектировании процессора обработки сигналов РСА.
6.9. Алгоритм синтеза РЛИ в прожекторном режиме
с когерентным накоплением в субкадрах
6.9.1. Интерполяция радиоголограммы по азимуту
В качестве альтернативы субапертурной обработке сигналов в прожекторном ре-
жиме предложен алгоритм синтеза РЛИ, в котором сначала устраняется неодно-
значность сигналов по азимуту с формированием большой, интерполированной на
высокую частоту повторения апертуры, а затем происходит ее преобразование в
короткую апертуру (равную числу исходных азимутальных отсчетов радиоголо-
граммы) с применением алгоритма быстрой свертки по азимуту [137*, 138*]. Схе-
ма алгоритма приведена на рис. 6.20.
Рис. 6.20. Схема алгоритма синтеза РЛИ в прожекторном режиме
с когерентным накоплением в субкадрах
В отличие от маршрутного в прожекторном режиме азимутальная диаграмма
не участвует в амплитудном взвешивании по апертуре, а просто уменьшает уро-
вень сигнала на краях кадра. Радиометрическая коррекция в опоре на шаге {9} уст-
раняет этот эффект.
Входной сигнал {1} представляет собой двумерную голограмму. На шаге {2}
хКНО устраняется типичная для прожекторного режима неоднозначность сигналов
по азимуту. На выходе этого шага получается голограмма, интерполированная на
повышенную частоту повторения Fm?=mF?. Ее период повторения, соответственно,
Twp=l/Fwp в m раз меньше шага голограммы Тр. Дальнейший процесс рассмотрим без
операции {3} когерентного накопления субкадров (хКНСК). Последовательность
275
Радиолокационные системы землеобзора космического базирования
шагов {4}...{8} обычная для CSA (показана без подробностей, представленных на
рис. 6.19). Далее следуют оставшиеся операции сжатия по азимуту методом быстрой
свертки - умножение на опорную функцию {9} и ОБПФ {10}, радиометрическая
коррекция формы ДНА по углу места и азимуту {11}, после чего формируется ком-
плексное радиолокационное изображение {12}. На шагах {7} и {9} реализуется ам-
плитудное взвешивание спектров для получения отклика с малыми боковыми лепе-
стками и, при необходимости, коррекция фазы сигнала по данным автофокусировки.
В рассмотренном алгоритме синтеза РЛИ прожекторного режима специфиче-
ской процедурой является компенсация азимутальной неоднозначности хКНО {2}.
Структурная схема алгоритма хКНО, представленная на рис. 6.21, включает ком-
пенсацию фазы для центра кадра - умножение на ЛЧМ-опору 1 {2.1} с последую-
щей интерполяцией процесса путем азимутального БПФ {2.2}, раздвижки спектра
{2.3} и ОБПФ {2.4}. После этого выполняется обратное гетеродинирование - ум-
ножение на опору 2 {2.5} с восстановлением фазы на интерполированной частоте
повторения. Возможное дальнейшее продолжение операции синтеза РЛИ - выпол-
нение шагов {4}...{12} согласно структурной схеме на рис. 6.20.
Рис. 6.21. Процесс интерполяции голограммы на повышенную частоту повторения
6.9.2. Когерентное накопление парциальных спектров
Существенный недостаток алгоритма синтеза с интерполяцией голограммы - явная
несоразмерность огромного массива голограммы и малой сцены наблюдения. Вме-
сто рассмотренных ранее алгоритмов синтеза РЛИ с обработкой сигнала по субапер-
турам предложен метод когерентного накопления парциальных спектров, получен-
ных в последовательных субкадрах интерполированной голограммы [140*, 431*].
Отличие «субапертур» от «субкадров» в том, что субкадры содержат полную апер-
туру синтеза РЛИ с числом отсчетов, равным числу отсчетов входной радиоголо-
граммы. Структурная схема алгоритма показана на рис. 6.22. Она включает в себя
разделение интерполированной радиоголограммы на субкадры {4.1}, хБПФ {4.2} в
каждом субкадре и суммирование парциальных спектров {4.3}. Затем следуют шаги
{4}... {12} структурной схемы, приведенной на рис. 6.20.
Интерполированная голограмма (Nm) {4.1} Субкадры 1 {4.2} хБПФ ' 1 {4.3) Z —►(> {4.5 {4-4} <) ► } х- спектр (Na)
Рис. 6.22. Структурная схема когерентного накопления парциальных спектров
276
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
Парциальные спектры, вычисленные в отдельных субкадрах по азимуту, разне-
сены по доплеровской частоте без пересечения их существенных областей. При сум-
мировании происходит их стыковка в сплошной спектр. На рис. 6.23 показано фор-
мирование накопленного спектра от точечной цели (опорная функция, кривая 4.3) и
от модели входного сигнала из трех целей (кривая 5). Спектр точечной цели служит
опорой в алгоритме фильтрации по азимуту. На рис. 6.24 показаны двумерные сум-
мы парциальных спектров по четным и нечетным субкадрам и суммарный спектр.
Рис. 6.23. Формирование когерентно накопленных спектров:
4.2о—4.2d - накопление парциальных спектров точечной цели (действительные составляющие);
4.3 - спектр опоры; 4.3,а -огибающая спектра опоры; 5 - накопленный спектр сигнала
Рис. 6.24. Когерентное накопление двумерных парциальных спектров:
a - сумма четных субкадров; б — сумма нечетных субкадров; в — суммарный спектр
277
Радиолокационные системы землеобзора космического базирования
Предложена модификация алгоритма синтеза, в котором вводится дополни-
тельное умножение азимутального спектра (поз.{5} на рис. 6.23) на функцию {4.4}
(см. рис. 6.22), являющейся произведением двух сомножителей
kfx4} (пХ’пг ) = conj(//<4-3} (пх,пг )) • exp^nmTmp,nr ) m), (6.48)
где первый сомножитель компенсирует фазу опоры {4.3}, вызванную применением
хБПФ на малой базе субкадров, а второй множитель вводит квадратичную фазу с
крутизной ЛЧМ в m раз большей, чем у интерполированного сигнала, но на базе,
равной базе субкадров.
В результате этой операции спектр голограммы, сохраняя канонический вид
ЛЧМ, «сжимается» в m раз, увеличивая крутизну ЛЧМ с сохранением полосы допле-
ровских частот на числе отсчетов Nm. Вид голограмм и спектров показан на рис. 6.25.
Преимущества предложенных алгоритмов синтеза изображения по сравнению
с разделением на субапертуры исходной голограммы без ее интерполяции состоят
в том, что снижаются потери, вызванные «нарезанием» входного сигнала, спектр
оказывается более «чистым». Сохранение вида ЛЧМ в модифицированном алго-
ритме позволяет унифицировать алгоритмы синтеза в прожекторном и маршрут-
ном режимах.
Рис. 6.25. Преобразования сигналов при синтезе изображения:
исходная радиоголограмма прожекторного режима от трех целей на разных азимутах и дальностях (/);
спектр (2.3) и интерполированная радиоголограмма (3) от одной цели; радиоголограмма от одной цели (За)
и ее спектр (5), приведенные к исходной базе и являющиеся опорной функцией; радиоголограмма от трех
целей (36) и полученное по ней радиолокационное изображение {6}
278
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
На рис. 6.26 представлены результаты моделирования. Исходный сюжет -
фрагмент радиолокационного снимка солнечной энергетической установки фирмы
Sandia с разрешением 0,3 м [531]. По сформированной радиоголограмме получено
изображение с разрешением около 1 м.
Рис. 6.26. Результаты моделирования синтеза РЛИ в прожекторном режиме
методом когерентного накопления парциальных спектров:
a - исходное РЛИ; б - радиоголограмма; в - результат моделирования
6.9.3. Когерентное накопление субкадров
Возможно некоторое упрощение алгоритма синтеза РЛИ в прожекторном режиме,
основанного на когерентном накоплении субкадров. Как следует из рис. 6.24, спек-
тры фрагментов интерполированной радиоголограммы, полученные в разных суб-
кадрах, не перекрываются. Это означает, что сигналы в разных субкадрах имеют
разные средние частоты и, будучи наложены друг на друга в одном общем времен-
ном интервале (субкадре), после спектрального анализа займут разные частотные ка-
налы. В результате они сформируют непрерывный спектр, показанный на рис. 6.24,в.
Для реализации этого алгоритма в структурной схеме, показанной на рис. 6.22, нужно
процедуру суммирования {4.3} поставить перед БПФ {4.2}. Это позволить сократить
требуемое число операций БПФ до одной (вместо равного числу субкадров, но на
меньшей базе). Теоретическое обоснование алгоритмов синтеза РЛИ, рассмотренных
в данном разделе, приведено в работе [140*].
6.10. Автофокусировка радиолокационных изображений
6.10.1. Искажающие воздействия, требующие применения
автофокусировки РЛИ
В теории антенн детально проработаны вопросы влияния апертурных искажений
на форму диаграммы направленности антенны. Разработанные методы анализа мо-
гут быть применены и к синтезированной апертуре. Отличие радиолокаторов с
синтезированной антенной состоит в том, что они являются динамическими систе-
279
Радиолокационные системы землеобзора космического базирования
мами, в которых искажающие факторы могут иметь меняющийся по времени слу-
чайный характер с неизвестными параметрами. Для их компенсации могут быть
использованы методы «слепой» обработки (blind signal processing) [59], основанной
на анализе информации, заложенной в принимаемом сигнале. В общем случае сле-
дует рассматривать искажения и нестабильности фазы, а также амплитудные не-
стабильности, вызванные, например, ошибками управления лучом антенны в про-
жекторном режиме, которые могут приводить к появлению ложных лепестков син-
тезированной ДНА. Механизмы компенсации искажений различны. Влияние фазо-
вых искажений значительно больше амплитудных и их устранение возможно при
использовании автофокусировки.
Основными источниками искажений распределения фазы по апертуре
синтеза в космических РСА с высокой разрешающей способностью являются:
• траекторные искажения, обусловленные погрешностями измерения парамет-
ров движения КА (гринвичских координат, векторов скорости и ускорения) в
гравитационном поле Земли с учетом возмущающих воздействий (притяже-
ния Луны, Солнца, солнечного ветра и др.). Имеют влияние особенности гео-
метрии орбитального движение и вращения Земли относительно объекта на-
блюдения (эллиптические орбиты, высота рельефа земной поверхности);
• аппаратурные искажения и нестабильности при формировании зондирующих
сигналов, их усилении, прохождении через приемный тракт, преобразовании в
цифровую форму и обработке для получения радиолокационных изображений;
• искажения и нестабильности в трассе распространения сигнала на участке
синтеза, рассмотренные в разделе 2.2 гл. 2 - тропосферные нестабильности,
проявляющиеся в коротковолновой части сантиметрового диапазона волн, и
ионосферные нестабильности, влияние которых начинает сказываться от длин
волн 23 см [488], весьма существенно в P-диапазоне волн (Л = 68 см) и огром-
но на метровых волнах, входящих в частотный диапазон зондирующего сиг-
нала видеоимпульсных РСА;
• нестабильности, вызванные движением наблюдаемых объектов, - линейной
скоростью, ускорениями, колебательным движением (морская поверхность,
качка кораблей и др.), хаотическими движениями (растительность при ветро-
вых воздействиях);
• искажения и нестабильности, возникающие при многопозиционном радиоло-
кационном зондировании.
При анализе влияния перечисленных факторов на синтез РЛИ целесообразно
различать искажения и нестабильности. В отличие от самолетных РСА, в которых
траекторные нестабильности являются основным деструктивным фактором, в кос-
мических РСА орбитальное движение носит регулярный характер с постоянством
отклонений, по крайней мере, для локального участка наблюдения. Для них синтези-
рованная апертура может быть уподоблена конформной антенне со сложной, но по-
стоянной геометрией, для описания которой может оказаться недостаточной точ-
ность датчиков траекторных измерений и аппаратуры позиционирования (GPS,
ГЛОНАСС). Но при этом по параметрам принимаемого сигнала имеется возмож-
280
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
ность решить (или уточнить) уравнение движения фазового центра антенны радио-
локатора относительно трехмерной поверхности наблюдаемой сцены. В этом и со-
стоит задача автофокусировки при синтезе РЛИ. Наличие других искажающих воз-
действий, а также нестабильностей делает эту задачу менее определенной, но, как
показывает опыт эксплуатации космических РСА, получение выходной радиолока-
ционной информации, пригодной для практического применения, обеспечивается.
Ошибки измерения пирометров, определяющих зависимость фазы сигнала
от времени (ошибки фокусирования), приводят к искажениям формы импульсного
отклика при синтезе апертуры и формировании радиолокационного изображения:
• расширению отклика, что вызывает ухудшение разрешающей способности
РЛИ;
• уменьшению амплитуды сигнала в максимуме отклика, что приводит к по-
грешности измерения ЭПР целей по РЛИ и ошибкам радиометрической ка-
либровки РСА по эталонным точечным целям;
• возрастанию уровня пьедестала отклика в главном лепестке, что вызывает
ухудшение условий распознавания компактных целей;
• повышению уровня боковых лепестков, что может привести к появлению
ложных отметок на РЛИ;
• повышению интегрального уровня боковых лепестков, что вызывает сниже-
ние контраста изображения объектов на РЛИ и радиометрические искажения.
Характер и величина искажений формы отклика зависят от законов распреде-
ления фазовых ошибок по синтезированной апертуре, требуемого разрешения
РЛИ, а также от формы амплитудного взвешивания, используемого для уменьше-
ния уровня боковых лепестков отклика. Необходимо учитывать также использова-
ние некогерентного накопления (усреднение независимых наблюдений) при фор-
мировании РЛИ.
В разделе 6.3 были принципиально рассмотрены эффекты, связанные с ошиб-
ками фокусирования. Для получения более точных количественных оценок рас-
смотрим их влияние на форму импульсного отклика при различных видах ампли-
тудных взвешивающих функций'.
• гауссового взвешивания;
• прямоугольного взвешивающего окна;
• окна Кайзера;
• взвешивающей функции, определяемой формой диаграммы направленности
антенны в режиме непрерывной съемки.
6.10.2. Аналитическая оценка влияния ошибок фокусирования
Рассмотрим влияние ошибок фокусирования при синтезе апертуры с гауссовым
взвешиванием для прямолинейного движения с линейной эквивалентной скоро-
стью (ЛЭС) Fie, аппроксимированного параболическим законом изменения фазы.
Нормированный импульсный отклик РСА по азимуту определяется суммировани-
ем комплексных отсчетов сигнала от точечной цели по апертуре Za с весом, задан-
ным комплексной опорной функцией
281
Радиолокационные системы землеобзора космического базирования
1 Na/2~' ( k
Нх{к) = — S иАк-к\)^{-^Лк-к\^ ~С~ exp{j^ref(^)}, (6.49)
nx0kx=-Na/2
где Nm - число импульсов в апертуре; и (ps(k} - амплитуда и фаза отсчетов
сигнала; W(k) - амплитудная весовая функция обработки; <prcf(k) - фазовая опорная
функция; //х0 - нормирующий множитель, обеспечивающий max [Нх (&)} = 1.
Фаза отсчетов сигнала определяется формулой
4 л- ^2 2л-(Ие71) _
^sw=-vA+(w)»—{-^~к (б-50)
Л v /vqA
где <ро = -4ttRq/A - фаза отраженного сигнала в начальном положении радиолокато-
ра при нулевой доплеровской частоте.
Фаза отсчетов опорной функции при точной фокусировке должна быть ком-
плексно сопряжена с сигналом (без постоянного члена фо). При ее настройке на
расчетное значение ЛЭС она принимает вид
^ref (*) =^Ш+(КгеЛ*)2 - До! « 2^1е°Гр) к2 . (6.51)
Как показано в [152*], для параболического закона изменения фазы можно
получить аналитическое выражение для импульсного отклика, если применить ве-
совую функцию в виде гауссовой кривой, выполняя интегрирование в бесконечных
пределах. Интеграл от экспоненты с квадратичным комплексным переменным в
бесконечных пределах вычисляется по формуле [60]
оо
J ехр + JBt2 + Ct + jDt} dt =
- i =exp^
4/F7b2
AC2-AD2-2BCD .2ACD + BC2-BD2 . В
----г~2—г\—+J------г~2—п—+-/arct8-; г • (6-52)
4Ы2 + Й21 41Л2+В21 а
Преобразуем выражение (6.49) для импульсного отклика в интеграл по коор-
динате времени синтеза t
Jvo “r
/'•('>=—f'A
(К I
ехР]-7
к *4) /
2?Гри / \2 . 2^rFien 2 j
? <*i =
_ exp{j^o} °Г / 2л- Pj2/!2 4лУ12//1 4лДГ(Pje + АК/2) ,1
м ' j' • ( *
у2 ^2 1
где Gs(a) « GH(a) « ехр<---^3— > - форма ДНА по мощности (определяющая
I ь 4 J
амплитуду принятого сигнала) и огибающая опорной функции по амплитуде
282
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
(на практике для расчета амплитуд можно приближенно считать sin«~« и Р]е ~ К|е0).
71 71 ТС
Здесь — =----=----------нормирующим множитель, при котором главные лепе-
b 2 In 2 1,3863
стки импульсной реакции для прямоугольного окна и гауссова взвешивания прак-
тически совпадают.
Типичные формы огибающей сигнала (радиоголограммы) показаны на
рис. 6.27,67. По оси ординат отложены относительные значения. Прямоугольная
форма с длиной апертуры £а соответствует режимам Скансар, прожекторному или
маршрутному с накоплением наблюдений в парциальных апертурах (Multilook). В
этих режимах сигнал ограничен по времени. Гауссова огибающая формула (6.53)
аппроксимирует сигналы маршрутного режима с ограничением по горизонтально-
му размеру антенны, когда огибающая определяется формой ДНА по мощности и
близка к sine2 (с расширением на ~20 % для снижения уровня боковых лепестков).
Рис. 6.27. Формы огибающей сигнала и импульсного отклика РСА по азимуту:
a - форма радиоголограммы от точечной цели: 7 - прямоугольная огибающая, 2 - гауссовая огибающая, 3 -
форма ДНА sine2 с расширением на 20 %, 4 - действительная составляющая сигнала; б - форма фокусиро-
ванного импульсного отклика {la и 2d) и отклика с ошибками фокусирования mdf=3,84 {16 и 26)
Перейдя от времени t к безразмерной переменной n=t/Tp - номеру отсчета,
можно представить параметры, входящие в формулу (6.52), в следующей форме
А = -^—\ С = 0; D = — (6.54)
bNsynt ^synt ^le ^synt PxO
2£2 L
где A?synt = —— = —— - расчетное значение коэффициента сжатия по азимуту;
Рхо
^synt = ---число отсчетов в расчетной апертуре £а.
^leO^p
283
Радиолокационные системы землеобзора космического базирования
Вычислив интеграл (6.52), получим формулы для импульсного отклика
^о=^Д=ож5уп(;
(6.55)
тг , _.ч 1 _ , X2 2b27rmdf X2 . ч
= I ехР 1 -2А — “ J 7—7---------— + jarctg (bemdf ) ,
^/l + (6ewdf) [ Рх (l + (6ewdf) )Рх
Рис. 6.28. Зависимость фазы импульсного отклика (-)
и его формы (---) от азимута при ошибках
фокусирования wdf
где 6е = 6/ 4 = In 2/2 = О,346; px = pXG^l + (6ewdf)2 - ширина расфокусирован-
ного импульсного отклика.
На рис. 621,6 приведена форма импульсного отклика при точной фокусиров-
ке и наличии ошибок измерения ЛЭС, характеризуемых «коэффициентом дефоку-
сировки» тп& =—-------(см. Раздел 6.3). Масштаб по оси абсцисс нормирован -
Рхо ^1е0
отложено отношение азимута РСА к разрешению при точной фокусировке. Теоре-
тическое значение ширины фокусированного отклика по уровню минус 3 дБ для
прямоугольного окна составляет pXQ = O,887?o2/2Za .
На рис. 6.28 приведены зависимости приращения (от максимума отклика) фа-
зы импульсного отклика в зависимости от нормированного азимута РСА (отноше-
ния азимутального смещения
к ширине фокусированного
отклика) при точной фокуси-
ровке ^аг=О и ошибках фоку-
сирования ^df=2; 4; 8. Для
сравнения пунктиром показа-
на форма отклика в относи-
тельных единицах.
Сравнение проведенных
расчетов с расчетами (см. раз-
дел 6.3) для оптической моде-
ли синтеза РЛИ, показывает,
что при гауссовом взвешива-
нии допустимые ошибки изме-
рения ЛЭС примерно в 1,5 раза
больше. При 10% ухудшении
разрешения = 1,5) энерге-
тические потери не превыша-
ют 0,3 дБ. Четко видно, что при точной фокусировке фаза импульсного отклика посто-
янна и не зависит от азимута цели. При дефокусировке наблюдаются близкие к пара-
болической зависимости фазы от азимута, которые в существенной части импульсного
отклика могут достигать 15...20°. Именно это явление лежит в основе эффективного
алгоритма автофокусировки - фазово-градиентного метода PGA.
284
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
Используя приведенные соотношения, найдем автокорреляционную функцию
амплитудного РЛИ при наблюдении точечной цели и слабокоррелированного фона
местности. Функциональная схема модели приведена на рис. 6.29.
Исходная сцена Радиоголограмма —► Синтез КРЛИ —► Детектор (АРЛИ) —► Автокорреляционная функция АРЛИ
Рис. 6.29. Функциональная схема модели формирования амплитудного РЛИ
с вычислением автокорреляционной функции изображения
На рис. 6.30 и 6.31 приведены радиоголограммы (действительная часть) и ампли-
тудные РЛИ от точечной цели и слабо коррелированного сигнала от фона местности.
По осям координат отложены условные единицы. Рассмотрены две ситуации - фоку-
сированный синтез и расстройка фильтра обработки по значению ЛЭС с wdf=8.
Рис. 6.30. Радиоголограммы от точечной цели (а) и фона местности (б)
Рис. 6.31. Выходные амплитудные РЛИ точечной цели (а) и фона местности (б)
для фокусированного синтеза (-----------) и ошибки ЛЭС (---)
285
Радиолокационные системы землеобзора космического базирования
Показанный на рис. 6.31 ,а отклик от точечной цели при расфокусировке рас-
ширяется, в то время как структура случайного процесса от фона (см. рис. 6.31,6)
остается схожей - в виде коротких выбросов, но расположенных в других местах.
Поэтому в реальных условиях для слабокоррелированного фона при расфокуси-
ровке теряется информация о текстуре поверхности, но статистические характери-
стики выходного процесса сохраняются. Дело в том, что статистические характе-
ристики некоррелированного процесса зависят только от энергетического спектра
и не меняются при изменении фазовых характеристик фильтра обработки.
Автокорреляционную функцию флуктуаций сигнала на выходе квадратичного
детектора для равномерного однородного ^-коррелированного фона местности
можно рассчитать через импульсный отклик системы Нх(Х), который определяет
процесс на входе нелинейного звена - квадратичного детектора. Коэффициент
корреляции сигнала на выходе квадратичного детектора равен квадрату коэффици-
ента корреляции процесса на его входе [136]:
Rs^ = b2s
I2
(X) = j + .
(6.56)
Автокорреляционная функция, как и импульсный отклик для рассматривае-
мого случая гауссова амплитудного взвешивания, имеет вид колоколообразной
кривой. Форма автокорреляционной функции РЛИ точечной цели и РЛИ слабокор-
релированного фона (с вычетом постоянной составляющей) показаны на рис. 6.32
при фокусированном синтезе и рассогласовании по ЛЭС с Wdf = 8. Для фона они
практически совпадают, что не позволяет реализовать автофокусировку по радио-
локационным изображениям протяженной поверхности с равномерной удельной
ЭПР (поля, луга, лесные массивы).
Рис. 6.32. Нормированные автокорреляционные функции амплитудных РЛИ
точечной цели (а) и фона местности (б) для фокусированного синтеза (-)
и ошибки ЛЭС (----)
286
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
На рис. 6.33 приведен фрагмент изображения сельской местности с жилой за-
стройкой и полем - частично дефокусированное РЛИ (рис. 6.33,б?) и РЛИ с точной
фокусировкой (рис. 6.33,6). На рис. 6.34 даны азимутальные сечения этих РЛИ по
линиям АВ, проходящие через компактный яркий объект и участок поля.
Рис. 6.33. Фрагмент РЛИ сельской местности с жилой застройкой:
a - дефокусированное РЛИ; б - РЛИ с точной фокусировкой
1,5
0,5
200
400
600
800
Рис. 6.34. Азимутальное сечение по линии A-В радиолокационного изображения поля (/)
с ярким компактным объектом (2):
la, 2a — частично дефокусированное РЛИ; 16, 26 - точная фокусировка
(по оси абсцисс отложены отсчеты РЛИ)
Изменения структуры принятого от поля сигнала практически незаметны, а
отклик от компактного объекта уменьшается в 2,6 раза и расширяется в несколько
раз. Заметим, что на дефокусированном РЛИ большинство объектов, обнаружи-
ваемых на сфокусированном РЛИ, также обнаруживается. Это объясняется тем,
что при расфокусировке энергия от цели сохраняется, и суммарное отношение
сигнал/шум+фон остается прежним.
287
Радиолокационные системы землеобзора космического базирования
6.10.3. Влияние ошибок фокусирования на форму отклика
при амплитудном взвешивании
Рассмотренный в предыдущем разделе алгоритм синтеза РЛИ с гауссовым взвеши-
ванием имеет ряд недостатков. Во-первых, форма отклика далека от ^-функции (и
короткого импульса) и имеет пологие склоны. При ограниченной длительности
сигнала ее применение ухудшает разрешающую способность. При синтезе без
взвешивания, в прямоугольном окне форма отклика имеет большие боковые лепе-
стки, для снижения которых применяют аподизацию с нахождением компромисса
между ухудшением разрешения, энергетического потенциала, требованиями по
производительности вычислительных средств. Во-вторых, его преимущества за-
ключаются в сохранении колоколообразной формы импульсного отклика с малым
уровнем боковых лепестков при дефокусировке. В ряде случаев это свойство мо-
жет оказаться важным, например, при обнаружении слабых целей на ровной по-
верхности в гористых районах (ущельях).
На практике применяют синтез РЛИ без аподизации (в прямоугольном окне),
с взвешиванием по Кайзеру, Хеммингу и даже с «апертурной коррекцией» (подъе-
мом верхних частот спектра) для улучшения пространственного разрешения ра-
диолокационных портретов целей [2, 229, 475]. При полном использовании сигна-
ла, принятого в маршрутном режиме для формирования РЛИ с предельным разре-
шение по азимуту, необходимо учитывать амплитудное взвешивание, вызванное
формой ДНА. Форма отклика определяется суммарным эффектом ДНА и взвеши-
вающей функцией при синтезе РЛИ.
Форму двумерного импульсного отклика иллюстрирует рис. 6.35. Представлены
три случая амплитудного взвешивания: прямоугольное окно в спектральной области
по азимуту и дальности (рис. 6.35, а), усеченные «естественное» взвешивание по ази-
муту, обусловленное формой ДНА sine2, и косинусоидальное cosx - по дальности
(рис. 6.35, б), а также усеченное двумерное гауссово взвешивание спектра сигнала по
обеим координатам (рис. 6.35, в). Усечение, вызванное ограниченностью длительности
облучающего цель сигнала, приводит к многолепестковости импульсного отклика, да-
же при гауссовом взвешивании (хотя и с очень низким уровнем боковых лепестков). В
табл. 6.1 приведены относительные значения максимального уровня боковых лепест-
ков (начиная с первого или со второго), а также интегрального уровня боковых лепе-
стков (ISLR - Integral side lobe ratio) для показанных на рисунке двумерных откликов.
Главный лепесток отсчитывался по первым нулям (минимумам) отклика. При гауссо-
вом взвешивании практически вся энергия сосредоточена в главном лепестке.
Таблица 6.1. Относительные значения максимального уровня боковых лепестков
Вид взвешивающей функции Прямоугольное окно Азимут - sine2 дальность - cos х Гауссово взвешивание
Уровень боковых лепестков, дБ первых вторых -13,46 -17,9 -19,3 -23,2 -29,3 -29,4
Интегральный уровень боковых лепестков ISLR, дБ включая первые исключая первые 6,6 9,8 -14,8 -16,5 -19,5 -20
288
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
Рис. 6.35. Вид импульсных откликов РСА при синтезе с прямоугольным окном (а),
с взвешиванием диаграммой антенны вида sine2 (б)
и двумерным гауссовым взвешиванием (в)
Ниже рассмотрено влияние расфокусировки на форму импульсного отклика
для типичных видов взвешивающих функций. Отметим, что применительно к за-
дачам автофокусировки при наличии на РЛИ точечных целей, информация (на-
пример, фазовая), заключающаяся в боковых лепестках, может оказаться полезной
для ее использования до снижения уровня боковых лепестков.
На рис. 6.36,6/ приведена форма импульсного отклика (сечение по азимуту)
при постоянной амплитуде принятого по апертуре сигнала (прожекторный режим
или приближенно - режим Скансар) для прямоугольного окна опорной функции.
Значение коэффициента дефокусировки - wdf= 0; 1; 2; 4. Точная фокусировка име-
О,887?оЯ
ет теоретический отклик вида sine с шириной рХ() =-----— по уровню минус
3 дБ и уровнем первых боковых лепестков минус 13,46 дБ. При обработке сигнала
в маршрутного режиме с аподизацией сигнала формой ДНА и прямоугольной
форме опорной функции разрешение составляет рХ() = ^xant , а лепестки снижают-
10—1492
289
Радиолокационные системы землеобзора космического базирования
ся до -19,3 дБ (рис. 6.36,6). Аналогичная картина получается при обработке сигна-
ла прожекторного режима (и режима Скансар) и использовании при синтезе окна
Кайзера (рис. 6.36,в).
Рис. 6.36. Азимутальное сечение импульсного отклика РСА при синтезе
с разными функциями взвешивания и расфокусировке: прямоугольным окном (а),
учетом формы ДНА (6), окном Кайзера 0= 2,9 без влияния ДНА (в)
и с учетом влияния ДНА вида sine2 (г)
При синтезе маршрутного режима с опорной функции, имеющей взвешивание
окном Кайзера, как на рис. 6.36,б,г, импульсный отклик расширяется до
1,ЗЯ0А _
PXq =----—, а уровень лепестков падает до минус 35 дБ. Во всех случаях при
дефокусировке до < 2 отклик расширяется не более, чем на 10 %, энергетиче-
ские потери не превышают 0,5 дБ, но возрастает уровень первых боковых лепест-
ков до минус 10... 15 дБ.
6.10.4. Влияние погрешностей измерения координат КА, трассы
распространения сигнала и рельефа местности на точность фокусировки РЛИ
В РСА авиационного базирования (самолеты, вертолеты, БЛА) основным деструк-
тивным фактором являются траекторные нестабильности. В космических РСА, не-
290
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
смотря на увеличение длины синтезированной апертуры в десятки раз, движение
КА можно считать стабильным с погрешностями, обусловленными точностью бал-
листических измерений. Высокая точность баллистической информации обеспечи-
вается путем внешних траекторных измерений с прогнозом параметров движения
на момент съемки и их уточнения после съемки. Используется также бортовая ап-
паратура позиционирования ГЛОНАСС или GPS, как это предусмотрено в РСА
TerraSAR-X [315], где первоначальная точность позиционирования составляет 10 м
(СКО), а с применением дополнительных средств - 2 или 0,1 м.
К фазовым искажениям, вызванным ошибками баллистических расчетов и
измерений, основной составляющей которых является погрешность вычисления
ЛЭС, следует добавить регулярную часть запаздывания радиоволн (изменение па-
раметра «наклонная дальность») в трассе распространения сигнала - атмосфере
(тропосфере и ионосфере). На рис. 6.37 показана геометрия обзора, учитывающая
погрешности оценки координат КА и целей, а также прохождение сигнала через
тропосферу и ионосферу.
Рис. 6.37. Геометрия обзора, учитывающая погрешности оценки
координат КА и целей, а также прохождение сигналов через тропосферу и ионосферу
Для определенности зададим параметры обзора и наблюдаемой сцены, приве-
денные в табл. 6.2, и будем рассматривать РСА с рабочими длинами волн от 3
до 68 см. Сводные характеристики проявления дестабилизирующих факторов при-
ведены в табл. 6.3, где (Jxyz,(Jv, оа, оие- СКО координаты КА, скорости, ускорения,
ЛЭС.
291
Радиолокационные системы землеобзора космического базирования
Таблица 6.2. Параметры движения КА и наблюдаемой сцены
Параметр, размерность Обозначение Значение
Высота орбиты, км Н 500
Путевая скорость, м/с V 7500
Время отсчета координат КА, с ±Д/ ±30
Начальная наклонная дальность, км Rqa 700
Конечная наклонная дальность, км Rqb 720
Значение ЛЭС, м/с: начало зоны конец зоны Кы Кв 7211,7 7210,6
Ошибки карт рельефа, м ARhA ±20
^RhB
Задержка по дальности, м: в тропосфере [128, 390] в ионосфере [59, 128] (а-оп =4,48-TEC/TECU) Ь Q 3 3 -3,76 ion7^
Таблица 6.3. Сводные характеристики проявления дестабилизирующих
факторов
№ н/п Параметр ор, м/с Оа, м/с2 One, М/С Разрешающая способность РСА, м, при длине волны, см
3 5,6 9,4 23 68
1 Разрешение по наклонной дальности, ограниченное регламентом радиосвязи pR, м
0,25 0,5 0,75 1,76 25 (5)
Величина составляющих ошибок Реализуемое разрешение, м
2 Gxyz = 0,5 м 0,012 з-ю-4 0,033 0,75 1,023 1,32 2,07 3,58
3 ®xyz — 1 М 0,047 1,4-Ю-4 0,135 1,50 2,05 2,66 4,14 7,20
4 &xyz — 2 М 0,189 5,4-1 О'4 0,535 з,о 4,08 5,31 8,25 14,29
5 = 4 м 0,759 2,2-10-3 2,136 6,0 8,23 10,65 16,54 28,49
6 ®xyz “8м 3,035 8,8-10-4 8,48 12,0 16,36 21,2 33,47 56,84
7 Высота рельефа местности h= 1000 м 1,74 2,38 3,08 4,82 8,3
8 Время синтеза апертуры Tsynt, с 2,9 1,8 6,0 6,3 1,3 (6,5)
9 Размеры апертуры синтеза, км 22 14 45 47 10(50)
10 Длина участка в угловом секторе синтеза, км:
ионосфера 77ion=300 км 13 8,4 27 28 6(30)
тропосфера Htr=6 км 0,25 0,15 0,55 0,57 0,25 (0,75)
11 Смещение дальности в ионосфере ARion, м 0,02 0,07 0,2 1,18 10,36
292
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
Рефракция радиоволн в тропосфере вызывает искривление пути и увеличение
времени распространения радиоволн [128, 390]. Величину поправки наклонной
дальности вызванной увеличением времени вследствие искривления трассы
распространения радиоволн и уменьшения скорости радиоволн в тропосфере,
можно оценить по приближенной формуле [128]
A/?tr =Ю6-^-
COS/i
(6.57)
н
Jexp {-0,13/гкт }dh,
О
где /Уо=(и-1)1О6 - так называемый, индекс преломления тропосферы; у\ - угол па-
дения радиоволн на земную поверхность; Я—20 км - высота атмосферного слоя; h -
размер ступени интегрирования слоев тропосферы (в метрах); /?кт - текущая высо-
та слоя (в километрах); п - коэффициент преломления тропосферы на уровне моря
(/7=1,00035).
Предполагается, что градиент изменения коэффициента преломления тропо-
сферы постоянен по высоте и равен --= 4 -10 8 м-1 (нормальная тропосфера). При
дН
угле падения радиоволн у = 45° поправка на распространение сигнала в тропосфере
составляет A/?tr = 3,76 м и не зависит от частоты зондирующего сигнала. Регулярная
составляющая задержки не ухудшает разрешения РЛИ. Однако интервал простран-
ственной корреляции фазы (масштаб турбулентности) обычно составляет 50... 100 м,
что меньше пределов углового сектора апертуры синтеза (табл. 6.2), и может потре-
боваться компенсация случайных фазовых флуктуаций по апертуре синтеза путем
автофокусировки.
Влияние ионосферы, содержащей электронную плазму, имеет аналогичный
характер, как для тропосферы, но оно значительно более выражено, поскольку
диапазон высот ионосферы шире (от 60 до 1000 км при максимуме ионизации в
районе 200...300 км), угловой сектор синтеза РЛИ перекрывает большой простран-
ственный интервал с неоднородностями и, кроме того, деструктивные воздействия
возрастают с ростом рабочей длины волны РСА. Для ионосферы коэффициент
преломления и фаза принятого сигнала, определяемая задержкой, зависят от пол-
ного электронного содержания (ПЭС) TEC (Total Electron Content [390]) вдоль на-
правления распространения луча
A^ion
2^/(40,308 ^, 8,44-10-71
= —— —Ч— Neds = —----------
с J /2 е f
(6.58)
(6.59)
где f- несущая частота сигнала; / = = ТЕС » 5TECU - величина ПЭС вдоль
s
направления распространения; TECU = 1016 эл./м2 - единица ПЭС (Total Electron
Content Unit); Ае~ Ю12 - плотность электронов.
293
Радиолокационные системы землеобзора космического базирования
Как показал анализ экспериментов [390], СКО фазы (задержки сигнала), вы-
званной влиянием атмосферы, составляет примерно 10...20% от величины запаз-
дывания сигнала в целом по кадру, которое может быть учтено в алгоритме синтеза
по метеорологическим данным и/или информации о состоянии ионосферы в районе
съемки. Для дециметровых диапазонов волн, где больше влияет ионосфера, может
предусматриваться применение специальных измерений (с разделением частот) для
оценки полного объема электронов и коррекции параметров обработки сигналов
[488]. Остаточные фазовые искажения и случайные фазовые ошибки, вызванные не-
стабильностями пространственно-временного распределения по апертуре синтеза,
подлежат компенсации путем автофокусировки. Их значения (СКО), а также зависи-
мости от длины волны реализуемого разрешения по азимуту и дальности без приме-
нения автофокусировки приведены на рис. 6.38. Масштаб неоднородностей ионо-
сферы 200...5000 м также меньше углового сектора синтеза РЛИ, что требует при-
менения автофокусировки РЛИ для компенсации фазовых ошибок.
Рис. 6.38. Зависимости фазы сигнала и разрешения от длины волны РСА:
a - СКО флуктуаций фазы [390]; б - реализуемого разрешения по азимуту и дальности
без применения автофокусировки (см. [128], подраздел 2.2.3)
Среднее значение смещения дальности A/?ion, вызванное прохождением сигна-
ла через ионосферу при ТЕС=5 TECU в диапазонах волн от 3 до 70 см, составляет
А7?1ОП ~ 0,02... 10 м. Такая величина запаздывания практически не ухудшает азиму-
тального разрешения (/?% ~ 0,032...0,35 м). Основная причина ухудшения разре-
шающей способности - флуктуации фазы вдоль разных путей распространения
сигнала, вызванные пространственными и временными (за время синтеза) неодно-
родностями.
Оценим теперь влияние ошибок измерения координат КА. Следует иметь в
виду, что ошибки вычисления наклонной дальности до объекта съемки (центра
кадра или начала полосы съемки) сами по себе не вызывают расфокусировки РЛИ.
Наклонная дальность каждого пикселя РЛИ относительно центра масс КА опреде-
ляется частотой квантования сигнала, которая формируется от высокостабильного
бортового эталона времени. При ошибках измерения текущего положения КА объ-
294
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
ект съемки смещается относительно расчетного пикселя РЛИ (ошибки привязки
РЛИ к географическим координатам). Появление ошибок позиционирования отра-
жается на вычислении значения ЛЭС или аналогичных параметров опорной функ-
ции для синтеза РЛИ.
В качестве примера рассмотрим геометрию обзора на рис. 6.37 с параметрами
движения КА и наблюдаемой сцены, приведенными в табл. 6.2. Расчеты ведем от-
носительно положения КА в точке So при 4)=0 с измеренными координатами КА
(хо, Ж 7/+zo), где малыми буквами обозначены ошибки измерений.
Расчетные координаты точек визирования А и В в пикселях РЛИ с наклонны-
ми дальностями RqA, Rqb и нулевой координатой по азимуту ХА= Хв=0 (ноль допле-
ровской частоты) определятся следующими формулами, в том числе с заменой в
(6.60)-(6.63) индексов А на В
ХА=ХВ =Xq,
„ _ /К +^o)2+(^e +hA +АЛл)2-(7?(М-АЛ1г-ДЯ^)2)
У 2(Rs+z^Re + hA+\hA)
(6.60)
(6.61)
ya = (А + hA + bhA ) sin ayA , (6.62)
Z A = (Re + hA + AhA ) cos ayA ~ Re (6-63)
Как правило, в служебную информацию, сопровождающую записанную ра-
диоголограмму, включают измеренные координаты КА в гринвичской системе ко-
ординат (ГСК), проекции вектора скорости и ускорения. Эти параметры вычисля-
ют путем совместной обработки данных внешних траекторных измерений и борто-
вых датчиков. Используют процедуры сглаживания, результат которых можно
представить в виде постоянных для всего интервала синтеза ошибок и флуктуаци-
онных составляющих. Их влияние на фокусирование РЛИ различно, при этом по-
стоянная ошибка вычисления координат КА аналогична изменению высоты цели
слабо влияет на величину ЛЭС. Для ориентировочной оценки изменений ЛЭС вос-
пользуемся формулой (5.100) гл. 5, подставив в нее координаты КА для Z=0 и t=±At
с добавлением случайных ошибок по каждой координате
^А
^(-А/)2+^(А02-27?Д0)2
2 А?2
- +xi ~хо) + (*! + У\ ~ ya) + (zi +zi ~za) + (A +x2-x0) +
ч 1/2
+У2 ~Ya? +(Z2 +z2 ~za? -2(Го + Уо ~YA? -2(Z0 +z0 -Zj2} , (6.64)
где x, y9 z9 At с индексами - случайные значения ошибок.
Результаты математического моделирования влияния ошибок приведены в
табл. 6.3. Интервал времени выбран достаточно большим Д/=30 с, при котором
сглаженные отсчеты координат, скоростей и ускорений КА можно считать некор-
релированными. Для сравнения в таблице приведены значения СКО скоростей оу и
295
Радиолокационные системы землеобзора космического базирования
ускорений oj КА, а также СКО полученных значений ЛЭС <эие- Среднее значение
ЛЭС для начала зоны равно ^=7211,7 м/с, для конца зоны V\gB=12 10,6 м/с.
В табл. 6.3 приведены значения разрешающей способности по наклонной
дальности в разных диапазонах волн, которые ограничены полосой сигнала, выде-
ленной Регламентом радиосвязи для исследований Земли из космоса (для P-диа-
пазона в скобках указано разрешение 5 м с учетом возможной перспективы).
Предполагается получение одинакового разрешения по азимуту и дальности.
Для приведенных в табл. 6.3 СКО составляющих ошибок даны соответст-
вующие коэффициенту mtf= 1 значения азимутального разрешения, которые гаран-
тировано (по Зоне) могут быть обеспечены без автофокусировки. Заметим, что при
эксплуатации РСА 5-диапазона волн «Меч-КУ» обеспечивалось без применения
автофокусировки азимутальное разрешение 11... 15 м по известным баллистиче-
ским данным - значению, так называемой, «приведенной дальности», соответст-
вующей изменению ЛЭС.
Проведенное математическое моделирование формулы (6.64) показало, что
при орбитальном движении необходима коррекция опорной функции по дальности
с учетом изменения ЛЭС. Необходим также учет рельефа местности. В отличие от
прямолинейного равномерного движения платформы изменение высоты цели на
1 км требует поправки к значению ЛЭС на 0,526 м/с для исключения расфокуси-
ровки РЛИ (строка 7 табл. 6.3).
В строках 8-10 табл. 6.3 приведены размеры апертуры синтеза РЛИ и длины
участков в угловом секторе синтеза РЛИ на высотах 300 км (ионосфера) и 6 км
(тропосфера). Для случая прожекторного режима съемки с некогерентным накоп-
лением приведенные размеры участков должны быть увеличены в число раз, опре-
деляемых числом наблюдений Ne.
В строке 11 табл. 6.3 даны расчетные значения регулярного смещения по
дальности, вызванное прохождением сигнала через ионосферу при TEC=5 TECU.
Анализ приведенных в табл. 6.3 данных показывает, что реализация высокого
пространственного разрешения в космических РСА предъявляет очень жесткие тре-
бования к знанию параметров орбитального движения, которые не во всех случаях
могут быть обеспечены. Вместе с тем, по баллистической информации может быть
выполнен синтез комплексных РЛИ с ухудшенной разрешающей способностью, но
пригодных для первичного дешифрирования с обнаружением ярких объектов и ло-
кализацией участков для детального дешифрирования с применением автофокуси-
ровки, радиолокационного портретирования объектов и их классификации.
6.10.5. Обзор алгоритмов автофокусировки
Сигнальная информация о законе изменения фазы сигнала. По результатам про-
веденного анализа эффектов, вызванных отличием фазовой характеристики фильт-
ра синтеза РЛИ от комплексно сопряженной фазы сигнала, можно выделить ряд
информационных признаков для их использования в алгоритмах автофокусировки
РЛИ в космических РСА.
В цитируемой монографии по синтезу РЛИ [274] задача автофокусировки ре-
шается в два этапа - измерение фазовых ошибок в сигнале и их компенсация. При
296
Глава б. Алгоритмы синтеза радиолокационных изображений в космических РСА
этом под сигналом понимают радиоголограмму, сжатую по дальности, а фазовые
искажения рассматривают как ошибки по апертуре антенны, сфокусированной на
бесконечность. При таком подходе импульсный отклик системы по азимуту явля-
ется спектром входного сигнала с огибающей, равной форме ДНА антенны радио-
локатора по мощности, а его фазовая характеристика - совпадающей с радиоголо-
граммой от точечной цели. Задача автофокусировки - устранить ЛЧМ-модуляцию,
включая искажения и случайные отклонения от нее, и получить на выходе БПФ
сжатый импульс по азимуту. Отмечается, что алгоритмы автофокусировки и их
трактовка могут иметь варианты. Так, например, перед модулем измерения ошибок
можно компенсировать ЛЧМ в радиоголограмме по баллистическим данным
(предварительная фокусировка [118] - как шаг гармонического анализа) и анали-
зировать только остаточные ошибки. Если предметом автофокусировки является
уже полученное комплексное РЛИ (КРЛИ), то возврат на порождающую его ра-
диоголограмму эквивалентен вычислению спектра КРЛИ.
Информация о степени фокусировки РЛИ преимущественно содержится в от-
кликах от точечных и компактных объектов, в их амплитудах, гистограммах распре-
деления, ширине откликов, фазовых характеристиках. Информация, заключенная в
гистограммах амплитудного распределения РЛИ, может быть использована для вы-
бора фрагментов РЛИ (фрагментов радиоголограммы) по дальности и азимуту для
проведения процедур автофокусировки с последующим распространением коррек-
тирующих поправок на весь кадр съемки или большой фрагмент маршрута.
Реальный фон местности отличается от идеальной диффузной поверхности
наличием текстуры, границ участков, дорог, просек и т.д. Поэтому автокорреляци-
онная функция РЛИ фона кроме узкого пика, характеризующего спекл-шум, может
нести информацию о дефокусировке РЛИ, которую можно использовать при ма-
лом числе компактных объектов.
При расширении импульсного отклика, вызванного дефокусировкой, имеется
возможность использовать взаимный сдвиг («смаз») парциальных РЛИ, получен-
ных в двух неперекрывающихся уменьшенных апертурах (см. рис. 6.6,6, «разма-
занные» и смещенные отметки Л1-Л2 и Ву-Вг при расфокусировке). На этом прин-
ципе основан алгоритм автофокусировки Mapdrift (MD) - «Смещение изображе-
ния» [274], который в русскоязычной литературе называют также «Оценка средней
доплеровской частоты» [118]. Наличие азимутального смещения («смаза») отклика
при дефокусировке РЛИ может рассматриваться как появление разностной допле-
ровской частоты между комплексными РЛИ, полученными в паре парциальных
апертур. Эту разность частот можно измерить фазоразностным (Phase Difference -
PD) методом. По своим возможностям он близок к алгоритму Mapdrift, но имеет
преимущества по числу операций.
Дефокусировка комплексного РЛИ приводит к появлению квадратичной и бо-
лее высоких порядков фазовой составляющей импульсного отклика (см. рис. 6.28).
Они обусловлены фазовыми ошибками в спектре сигнала, который является анало-
гом радиоголограммы, если в ней компенсировать ЛЧМ (Deramped signal). Алго-
ритм, реализующий этот метод, носит название «фазово-градиентный автофокус»
(Phase Gradient Autofocus - PGA). Высокая чувствительность формы отклика от
297
Радиолокационные системы землеобзора космического базирования
фазовых ошибок позволяет использовать этот алгоритм для фокусирования ло-
кальных участков КРЛИ.
Далее рассмотрены принципы построения основных алгоритмов автофокуси-
ровки РЛИ. В литературе отмечается, что эти алгоритмы при сохранении общих
идей могут иметь разные варианты исполнения (а также разную производитель-
ность) в зависимости от конкретных условий их применения. Поэтому при рас-
смотрении мы будем учитывать особенности использования алгоритмов автофоку-
сировки при синтезе РЛИ в космических РСА.
Алгоритм автофокусировки по сдвигу изображения Mapdrift. Структурная
схема алгоритма Mapdrift приведена на рис. 6.39. Исходную радиоголограмму де-
лят на две подапертуры, по каждой из которых делают синтез РЛИ с использова-
нием опорной функции, рассчитанной на основе баллистических параметров. По-
сле детектирования каждого из амплитудных РЛИ - АРЛИ1 и АРЛИ2 вычисляют
их корреляционную функцию.
Рис. 6.39. Структурная схема алгоритма автофокусировки Mapdrift
При выполнении алгоритма реализуются следующие процедуры:
1) радиоголограмму, сжатую по дальности, разбивают на две неперекрываю-
щиеся под апертуры;
2) в каждой из подапертур выполняют синтез комплексных РЛИ - КРЛИ1 и
КРЛИ2 по опорным функциям, сформированным по баллистической информации,
известной на момент синтеза;
3) вычисляют модуль КРЛИ с получением амплитудных РЛИ - АРЛИ1 и
АРЛИ2;
4) в каждом дальностном канале вычисляют корреляционную функция по
азимуту как свертку двух АРЛИ: R(X) = АРЛИ10АРЛИ2;
5) усредняют корреляционную функцию по всем каналам дальности. Вид кор-
реляционных функций для случаев точной фокусировки и дефокусировки с ^df=
= 1,25 приведен на рис. 6.40,67;
6) определяют положение максимума усредненной корреляционной функции
относительно нуля на временной оси (его можно найти по положению максимума
автокорреляционной функции);
298
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
7) вычисляют поправку к параметру ЛЭС для расчета скорректированной опор-
ной функции. Формулу для расчета поправки можно получить из геометрии оптиче-
ского синтеза (антенный подход), показанной на рис. 6.40,6 (сравнить с рис. 6.5,6)
v _ Ad,2^ _ 241,2Д^1е
R ^1е0
где Lai,2 - размер подапертур; Xdf - измеренное смещение корреляционной функ-
ции; АТ? - разница между расчетным 7?0 и истинным F фокусами радиоголограммы;
ДГ1е - поправка к ЛЭС; - расчетное значение ЛЭС.
Отсюда поправка к ЛЭС
(6.65)
Рис. 6.40. Геометрия формирования АРЛИ подапертур (а) и вид их корреляционных функций (б)
при автофокусировке РЛИ методом Mapdrift: точная фокусировка (-----------)
и дефокусировка (---) с wdf= 1,25, по оси ординат отложены азимутальные отсчеты
корреляционной функции
Для #2df=l ,25 поправка к ЛЭС составляет 1,56 %. Знак поправки положительный,
если смещение максимума положительное (увеличение масштаба РЛИ по азимуту).
Это обусловлено уменьшением крутизны закона изменения фазы (фокус радиоголо-
граммы увеличивается, лучи подапертур расходятся, как это показано на рис. 6.40,а).
Обычно, корреляционную функцию вычисляют не по всем каналам дальности,
а только по тем, где присутствуют яркие цели (около 5 %), которые находят путем
пороговой обработки первичного АРЛИ или любого из парциальных АРЛИ. Такая
селекция сокращает нагрузку на процессор и повышает точность фокусирования.
Повышение точности также происходит при вычислении не амплитудного, а РЛИ в
формате энергетической плотности - квадрат амплитудного РЛИ (ЭРЛИ), реализуе-
мого квадратичным детектором. В случае большой начальной дефокусировки целе-
сообразно применить несколько итераций, каждая из которых сужает пик корреля-
ционной функции, что повышает точность оценки смещения максимума.
299
Радиолокационные системы землеобзора космического базирования
Особый эффект может быть достигнут в прожекторном режиме съемки с не-
когерентным накоплением нескольких наблюдений, когда РЛИ от каждой парци-
альной апертуры в результате итераций будет сходиться к РЛИ с требуемым высо-
ким разрешением.
Особенность рассмотренного алгоритма с двумя подапертурами состоит в
том, что он позволяет устранить только квадратичную ошибку фазы. Для устране-
ния фазовых ошибок более высоких порядков радиоголограмму разделяют не на
пару, а на несколько пар парциальных апертур (Multiple Aperture Mapdrift - МАМ)
с совместной обработкой каждой пары АРЛИ для расчета коэффициентов разло-
жения фазы в ряд.
Фазоразностный алгоритм автофокусировки. Фазоразностный алгоритм ав-
тофокусировки, структурная схема которого приведена на рис. 6.41, во многом на-
поминает Mapdrift, но вычислительных затрат в нем гораздо меньше. Входную ра-
диоголограмму также делят на две подапертуры (или больше для вычисления фазо-
вых поправок выше второго порядка), перемножают сигнал второй подапертуры и
сопряженный сигнал первой подапертуры, после чего выполняют БПФ, формирую-
щий корреляционную функцию сигналов в подапертурах, детектирование и усред-
нение результата по каналам дальности. После этого находят максимум корреляци-
онной функции и вычисляют параметры опорной функции для синтеза РЛИ.
Выходное КРЛИ
Рис. 6.41. Структурная схема фазоразностного алгоритма автофокусировки
В принципе данный алгоритм не требует итераций и предварительной фоку-
сировки радиоголограммы, но она желательна (путем гетеродинирования с расчет-
ной ЛЧМ-опорой), так как при больших смещениях могут появляться ложные мак-
симумы. На рис. 6.42 показан вид корреляционных функций для сцены, приведен-
ной на рис. 6.33.
Как видно из рис. 6.42,а, корреляционные функции для фазоразностного алго-
ритма автофокусировки более узкие (примерно в два раза), чем для алгоритма Map-
drift. При линейном детекторе они имеют зависящий от расфокусировки пьедестал
(на уровне ~0,3), для устранения которого можно после детектирования вычесть по-
стоянную составляющую. При использовании квадратичного детектора корреляци-
онная функция обужается и пьедестал становится меньше (см. рис. 6.42,6).
300
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
Рис. 6.42. Вид корреляционных функций при фазоразностном алгоритме
автофокусировки амплитудных (а) и энергетических (6) РЛИ:
1 и 3 - дефокусировка mdf = 0,5; 2 и 4 - дефокусировка wdf = 1,25;
5 - уменьшенная в 10 раз кривая для сфокусированного ЭРЛИ
Автофокусировка по сигналам от точечных отражателей. При наличии
на местности точечных отражателей сигнал от них (в радиоголограмме) является
прототипом опорной функции для синтеза РЛИ после нормализации амплитуды,
устранения начальной фазы и смещения доплеровской частоты (для синтеза РЛИ в
прожекторном режиме и режиме Скансар). Такая опорная функция инвариантна к
фазовым искажениям сигнала. При выделении сигналов от точечных целей возни-
кают проблемы, связанные с низким отношением сигнал/шум для точечных отра-
жателей и наличием фона местности.
Алгоритм автофокусировки по точечным отражателям удобно применять для
фокусировки не радиоголограммы, а полученного по ней и расчетной опорной
функции комплексного изображения (КРЛИ), представленного в виде амплитудно-
го (АРЛИ) и фазового (ФР Л И) изображений. По АРЛИ находят яркие отклики,
формируют окно (обычно, в несколько раз превышающее ширину отклика) и, ис-
пользуя это окно, вырезают из АРЛИ и ФР ЛИ фрагмент, который после БПФ мо-
жет быть использован для корректировки фазовых ошибок в спектре КРЛИ. После
шага итерации с уменьшением ширины отклика, уменьшают размер окна, пока
ширина отклика не достигнет расчетного значения. Такой алгоритм применим для
коррекции ошибок по азимуту и дальности (вызванных, например, аппаратурными
нестабильностями или ионосферой).
Для уменьшения ошибок, обусловленных недостаточным отношением сиг-
нал/шум, можно усреднить фазовую характеристику полученной опорной функции
(в спектральной области) по набору использованных точечных отражателей. Заме-
тим, что применение в процессе первичного синтеза РЛИ с коррекцией миграции
дальности процедур масштабирования по дальности и частоте обеспечивает инва-
риантность опорных функций, полученных по точечным отражателям при любой
их дальности в пределах кадра.
301
Радиолокационные системы землеобзора космического базирования
Автофокусировка изображения методом формирования динамических
фазовых портретов. В [118] изложен метод измерения квадратичной фазовой
ошибки путем формирования динамических фазовых портретов. Динамический
фазовый портрет - это радиолокационное изображение сцены, получаемое с высо-
ким пространственным разрешением. Каждая точка изображения несет информа-
цию о разности фаз сигналов (дельта-ФРЛИ), полученных в двух каналах РСА,
разнесенных во времени (а также в пространстве и во времени). В качестве таких
каналов предлагается использовать симметрично расположенные подапертуры с
разной длительностью.
Этот метод не предъявляет требований к «точечности» объекта. В результате об-
работки полученных данных вычисляют квадратичный коэффициент разложения вре-
менного закона фазы С2 = d2(p/Idt2 , определяющий значение ЛЭС. Структурная
схема алгоритма основана на поиске максимума апостериорной плотности вероятно-
сти оценки коэффициента С2 с учетом априорной плотности вероятности распределе-
ния ошибок навигационных датчиков. Показано, что оптимальное соотношение дли-
тельностей подапертур составляет 0,6...0,8. Применение этого метода может быть ре-
комендовано для случаев, когда интервал корреляции фазовых флуктуаций соизмерим
с апертурой синтеза РЛИ (РСА авиационного базирования или космические РСА мет-
рового диапазона с сильным деструктивным влиянием ионосферы).
Энтропийный алгоритм автофокусировки. В основе энтропийного алго-
ритма [508] лежит идея минимизации некоторой функции качества изображения по
фазе опорной функции. В качестве такой целевой функции, например, используют
энтропию изображения
г) 1оё2 Р(Х’Г) > (6-67)
\ЯЫ ( х, г)|2
где Р = ---=-.
X г
Работа алгоритма заключается в итерационном процессе минимизации целе-
вой функции энтропии в пространстве фазы опорной функции. Фактически, алго-
ритм пытается получить наиболее контрастное изображение, подобрав соответст-
вующую фазу опорной функции.
В практике синтеза РЛИ наиболее широко применяется фазово-градиентный
алгоритм автофокусировки PGA. Он рассмотрен в следующем подразделе.
6.10.6. Фазово-градиентный алгоритм автофокусировки
Одним из наиболее эффективных и широко используемых при синтезе РЛИ алго-
ритмов автофокусировки является фазово-градиентный алгоритм автофокусировки
PGA [274, 497], основанный на извлечении некомпенсированной фазовой ошибки
непосредственно из ярких точечных целей. Теоретическое обоснование алгоритма,
приведенное в [274], исходило из синтеза РЛИ с использованием для сжатия по ази-
муту метода гармонического анализа. Входным процессом для работы алгоритма
PGA в этом случае является предварительно сжатая по дальности (с коррекцией ми-
302
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
грации) радиоголограмма, в которой скомпенсирован (deramped) закон ЛЧМ с оста-
точными отклонениями, требующими устранения. Получаемое в каждом канале
дальности комплексное РЛИ представляет собой спектр радиоголограммы. Приме-
нением ОБПФ возможна обратная операция перехода от КРЛИ к радиоголограмме с
частично (на данном шаге итераций) скомпенсированными отклонениями.
Существует много вариантов реализации алгоритма PGA. Его усовершенст-
вованные модификации используют в качестве входного процесса частично сфоку-
сированное КРЛИ, компенсацию фазовых ошибок выполняют в спектре КРЛИ по
азимуту, что не противоречит первоначальной идее метода в связи с эквивалентно-
стью процедур БПФ и ОБПФ (с точностью до множителей).
Алгоритм PGA имеет преимущества компенсации фазовых ошибок по апертуре
синтеза РЛИ независимо от их закона. Принцип работы алгоритма основан на разви-
тии и конкретизации метода автофокусировки по точечным отражателям. Структур-
ная схема рабочего варианта алгоритма показана на рис. 6.43, где входным сигналом
является КРЛИ, синтезированное по известным баллистическим данным.
Рис. 6.43. Схема фазово-градиентного алгоритма автофокусировки PGA
Алгоритм автофокусировки PGA базируется на вычислении градиента фазы
спектра КРЛИ за вычетом постоянной фазы и линейной зависимости фазы от ази-
мутальной координаты. Принципиально этот метод можно применить и для авто-
фокусировки КРЛИ по дальности, например, с целью компенсации нестабильно-
стей ионосферы [241*, 468*].
303
Радиолокационные системы землеобзора космического базирования
Рассматриваемый вариант алгоритма PGA включает следующую последова-
тельность шагов, которые циклически повторяются:
1) поиск каналов дальности, содержащих отклики от ярких точечных целей
(Prominent points selection);
2) локализация отклика от точечной цели в окне (Windowing);
3) циклический сдвиг откликов (Shifting) к нулевой пространственной (или
доплеровской) частоте;
4) суммирование спектров откликов по каналам дальности;
5) оценка градиента фазовой ошибки (Phase gradient estimation);
6) коррекция КРЛИ путем компенсаций фазовой ошибки.
Ввиду важности данного алгоритма автофокусировки рассмотрим его работу бо-
лее подробно с иллюстрацией на модели, реализованной в среде MATLAB. Восполь-
зуемся упрощенной моделью КРЛИ U RX , в которой имеются два канала даль-
ности, содержащих строки по азимуту с откликами от одиночных точечных целей.
Модель исходного КРЛИ. Исходное КРЛИ формируется путем моделирова-
ния процесса получения радиоголограммы и последующего синтеза РЛИ методом
быстрой свертки. Для простоты рассмотрим модель радиоголограммы с двумя ка-
налами дальности (m= 1 и т=2), в каждом из которых находятся по одной цели. Па-
раметры модели РСА и КРЛИ приведены в табл. 6.4. В первом канале с т=1 цель 1
с амплитудой 1 ед. расположена точно в центре кадра. Ее азимутальная координата
Xi=0. Во втором канале дальности цель 2 имеет амплитуду 0,7 ед. и азимутальную
координату А2=4,48 м относительно центра кадра.
Таблица 6.4. Параметры РСА и исходного КРЛИ для моделирования алгоритма
автофокусировки PGA
Параметр, размерность Обозначение Значение
Длина волны РСА, см 2 9,375
Горизонтальный размер антенны, м /-^xant 2
Путевая скорость, м/с V 7000
Наклонная дальность целей, м:
цель 1, канал дальности т=\ цель 2, канал дальности т=2 о о 3750,00 3753,94
Частота квантования сигнала по дальности, МГц Fs 300
Частота повторения зондирующего сигнала, Гц 30000
Амплитуда сигнала от целей в каналах дальности т = 1 / 2, ед. и0 1,0/0,7
Азимутальные координаты целей 1 / 2 относительно центра кадра, м XJX2 0/4,48
Размер строки по азимуту ^inax 1024
Масштаб РЛИ по азимуту, м мх 0,233
Отношение сигнал/шум+фон для цели 1, дБ S/N 30
Расчетное разрешение РСА по азимуту, м Рх 1
Коэффициент дефокусировки исходного РЛИ rridf 7
304
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
Результаты моделирования работы процедур, входящих в алгоритм PGA, ил-
люстрируют рис. 6.44-6.51. На приведенных графиках по оси абсцисс симметрич-
но относительно нуля отложены либо азимутальные отсчеты КРЛИ пМх в метрах,
где Мх - масштаб РЛИ по азимуту, либо значения пространственных частот (раз-
мерность - 1/метр). Для наглядности выбран малый шаг квантования по азимуту
(Л(г=0,233 м) и большое отношение сигнал/фон+шум (30 дБ). Длина волны РСА
составляет Л=9,375 см. Анализируются два варианта исходного КРЛИ - точно сфо-
кусированное КРЛИ и частично сфокусированное РЛИ с коэффициентом дефоку-
сировки т^=1.
Рис. 6.44. Форма комплексных откликов от ярких точечных целей в каналах дальности:
a-б - цель 1 в центре кадра по азимуту (ти=1, и=0);
в-г - цель 2 смещена на 4,5 м по азимуту (w=2, /7=20);
а, в - точная фокусировка РЛИ; б, г - расфокусированное РЛИ с wdf=7;
1 - огибающая отклика, смещена вверх для наглядности;
2 - действительная составляющая отклика;
3 - мнимая составляющая; 4 - фаза отклика
305
Радиолокационные системы землеобзора космического базирования
Составляющие комплексного отклика для цели 1 показаны на рис. 6.44, а, б.
Задана наклонная дальность цели 7, кратная длине волны РСА. Поэтому для точно
сфокусированного КРЛИ (рис. 6.44, а) в центре кадра мнимая составляющая 3 и
фаза 4 отклика в пределах главного лепестка равны нулю. По мере удаления от
главного лепестка изменения фазы отклика в пределах ±тг приобретают случайный
характер, что обусловлено боковыми лепестками синтезированной ДН, а также
случайными сигналами от фона местности и шумами приемника.
При расфокусировке КРЛИ с = 7 (рис. 6.44, б) фаза отклика от цели в глав-
ном лепестке меняется по параболическому закону, а составляющие отклика при-
обретают вид, характерный для ЛЧМ-процесса.
Во втором канале (рис. 6.44, в, г) содержится отклик от смещенной на 4,5 м по
азимуту цели 2, имеющей амплитуду 0,7 ед. По наклонной дальности цель 2 сме-
щена на ~0,4 м. Основное отличие откликов от целей 1 и 2 - в значениях начальной
фазы, что сопровождается изменением соотношения между действительной и
мнимой составляющими отклика.
Последовательность процедур автофокусировки. В исходном частично
сфокусированном КРЛИ Ux^myn) (или в КРЛИ, получаемом после каждой итера-
ции) находят каналы дальности, содержащие отклики от ярких точечных целей,
пригодные для автофокусировки (подраздел 6.10.7). Обычно в канале дальности
выбирают один отклик с наибольшей амплитудой и определяют номер азимуталь-
ного отсчета п с максимальным уровнем. Приведенные на рис. 6.44 модели откли-
ков от точечных целей соответствуют выходу программного модуля {2} структур-
ной схемы (см. рис. 6.43).
В окрестностях найденных откликов от точечных целей формируют окно {3},
за пределами которого обнуляют азимутальные отсчеты (рис. 6.45). Размер окна
зависит от ожидаемого разрешения РЛИ по азимуту при расчетных погрешностях
измерения траекторных параметров. В процессе итераций возможно изменение
размеров окна для устранения помех от окружающего фона местности.
Рис. 6.45. Отклики от целей UmW(n) в каналах дальности т=\ (сплошные линии)
и ди=2 (пунктир) после оконной фильтрации (поз. {3} на схеме):
а - точная фокусировка РЛИ; б - расфокусированное РЛИ
Далее производят циклический сдвиг отклика к нулевой пространственной час-
тоте. Это можно реализовать в спектральной области с помощью последовательно-
306
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
сти процедур: БПФ {4}, умножения спектра на частотный множитель {5}, завися-
щий от смещения отметки из центра кадра, и ОБПФ. Поскольку дальнейшие опера-
ции проводятся в спектральной области, ОБПФ используем только для тестирования
процедуры сдвига откликов к нулевой частоте (поз. {6a} на структурной схеме).
Формула для вычисления спектра сдвинутого к нулю отклика имеет вид (поз. {6})
(О = FFT {ffishift {ymW (n)^^(j2nnmv) =
= Smfr(v)exp(j2fl7Jmv), (6.68)
где n = - AfxFFT/2: A7xFFT/2 -1 - строка азимутальных отсчетов исходного КРЛИ;
v = : MxFFT/2 - 1)Л/^ - строка частотных отсчетов пространственного
спектра исходного РЛИ; Мх - масштаб отсчетов по азимуту; пт - номер азимуталь-
ного отчета для максимума отклика в канале дальности с номером m; fftshift(*) -
записанная в нотации MATLAB процедура сдвига нулевых отсчетов по оси абс-
цисс в центр массива данных и обратно; SmW (v) = FFT {fftshift - спектр
выделенной в окне цели.
Огибающие спектра сдвинутых откликов приведены на рис. 6.46 (кривые 2).
Они близки к форме ДНА радиолокатора (sine2), учтенной при формировании ра-
диоголограммы и практически совпадают для фокусированного и расфокусиро-
ванного РЛИ. Заметим, что ширина пространственного спектра КРЛИ составляет
около 1 м"1. Это соответствует расчетной разрешающей способности РЛИ 1 м.
Между тем, ширина показанных на рис. 6.45, 6 импульсных откликов по уровню
минус 3 дБ составляет 3,5 м, что обусловлено дефокусировкой, введенной в модель
исходного КРЛИ.
Рис. 6.46. Форма огибающих (кривые 1 и 2) и действительных составляющих (кривые 3 и 4)
спектра сигнала по азимуту на выходе БПФ {4}:
1,3 - цель 1 в центре кадра, 2,4- цель 2 смещена по азимуту; a - точная фокусировка РЛИ;
б - расфокусированное РЛИ
307
Радиолокационные системы землеобзора космического базирования
Для цели 1 в центре кадра при точной фокусировке действительная состав-
ляющая спектра отклика совпадает с огибающей (мнимая равна нулю), а для сме-
щенной из центра цели - имеет вид синусоиды. Для расфокусированного РЛИ дей-
ствительные составляющие спектра отклика являются ЛЧМ-процессом. Эти явле-
ния подтверждаются законами изменения фазы в пределах огибающей спектра, как
это показано на рис. 6.47,а,б. Для фокусированного РЛИ фаза спектра при смеще-
нии цели из центра кадра получает линейный набег, а при расфокусировке - пара-
болическую составляющую.
Рис. 6.47. Фаза спектра откликов на выходе БПФ {4} (а, б)
и после сдвига к нулевой частоте {6} (в, г):
а, в - точная фокусировка РЛИ; б, г - расфокусированное РЛИ; цель 1 (линии 7, 7") в центре кадра, цель 2
(линии 2, 2,г) смещена по азимуту: жирными линиями показана фаза спектра, ограниченного полосой по
уровню минус 3 дБ
Фаза спектра от точечной цели имеет два характерных участка - централь-
ный, равный ширине спектра КРЛИ, с регулярным законом изменения фазы и об-
ласть склонов спектра со случайными флуктуациями фазы, вызванные шумами и
308
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
интерференцией сигналов от фона местности, которые могут быть обнулены в
процессе обработки.
Для случая точной фокусировки (рис. 6.47,6?) фаза регулярного участка посто-
янна для цели 1 или меняется по линейному закону (для цели 2), что означает сдвиг
по частоте, пропорциональный смещению отклика от центра кадра.
На рис. 6.47,в,г приведены фазы спектров сигналов от целей после смещения
их к нулевой частоте. Компенсация частотного сдвига (кривая 2) приводит к
уменьшению размаха изменений фазы на регулярном участке. Остаточное линей-
ное изменение фазы вызвано несимметрией формы отклика или смешением мак-
симума отклика относительно ближайшего дискрета выборок.
На рис. 6.48 приведены отклики сигналов от целей после их сдвига к нулевой
частоте. Относительное смещение откликов вызвано рассогласованием истинного
положения цели по азимуту и дискретностью корректирующей функции {14} (см.
рис. 6.43) с шагом, определяемым базой БПФ.
Рис. 6.48. Отклики от целей UmW(n) в каналах дальности w=l (сплошные линии) и т=2 (пунктир)
после их оконной фильтрации и сдвига к нулевой частоте {6а}:
a - точная фокусировка РЛИ; б - расфокусированное РЛИ
Следующий шаг алгоритма PGA состоит в вычислении градиента фазы спектра
КРЛИ согласно [274]. Представим спектр процесса в виде произведения огибающей
на фазовый множитель Slv (v) = So(v)e/*^V\ где Sq(v) - огибающая спектра, ^(г) -
фаза спектра. Производная спектра по пространственной частоте v имеет вид
Sw (v)’ = ej^so (v)’+ jS0 (v)e^(v)’ = ej^S0 (v\+jSw (v>(v)'. (6.69)
Умножив (6.69) на комплексно сопряженный спектр отклика (v)
4 (*)'& (v) - So (v)so (v)’+ A2 (v>(v)’, (6.70)
получим выражение для вычисления градиента фазы спектра (ее производной по
пространственной частоте)
Я-М’- |. ,',2-----< <6-71)
(V)|
где индекс тп определяет номера выделенных каналов дальности, содержащих то-
чечные цели для автофокусировки РЛИ.
309
Радиолокационные системы землеобзора космического базирования
Вычисление градиента фазы спектра по формуле (6.71) и ее последующее
усреднение по каналам дальностей m включает в себя набор операций {7}—{11}
(см. рис. 6.43):
1) вычисление производной спектра по частоте {9} конечно-разностным мето-
дом применением дифференцирующего фильтра (в простейшем случае без сглажи-
вания флуктуациий - с помощью процедуры MATLAB S,^w(v)’ = diff(S'^(v)j)
или, используя ОБПФ {6a}, умножение на линейный множитель (с соотвествую-
щим масштабированием по азимуту и амплитуде) и последующее БПФ
(v)'^FFT{lFTT(^m(v))j2^};
2) вычисление мнимой части {10} от и усреднение ее по кана-
лам т. Практически производится суммирование мнимых частей, поскольку далее
выполняют деление на сумму квадратов спектра;
3) усреднение (суммирование) квадрата спектра SQm (v)2 по m {7};
4) вычисление усредненного градиента фазы подстановкой в выражение (6.71)
суммарных значений мнимой части квадрата спектра:
</)(v)' = mean<
<MV)
dv
(6.72)
На практике в отличие от рассмотренного выше выбора m каналов дальности
с одной яркой целью возможно для автофокусировки использовать несколько це-
лей из одного канала дальности. Это облегчает задачу автофокусировки РЛИ сель-
ских районов с малым числом компактных отражателей. В этом варианте в звене
{2} схемы (см. рис. 6.43) выделяют несколько ярких целей с последовательно
уменьшающимися амплитудами и образуют несколько виртуальных каналов с до-
полнительными номерами т, в которых формируют окна {3} с отметками от целей,
обнуляя остальные отсчеты азимутальной строки.
Усредненная зависимость градиента фазы спектра от пространственной час-
тоты приведена на рис. 6.49. Жирными линиями 1 выделен полезный интервал из-
менения градиента фазы. Тонкими линиями 1" обозначена остальная часть.
Дадим интерпретацию полученных зависимостей применительно к синтезу
РЛИ во временной области. Градиент фазы спектра КРЛИ является аналогом час-
тотной поправки к опорной функции при синтезе РЛИ во временной области (ра-
диоголограммы). Для сфокусированного исходного РЛИ (рис. 6.49,6?) эта поправка
практически равна нулю по всей протяженности радиоголограммы (ширине спек-
тра AS^y, отмеченного стрелками на рисунке). Для расфокусированного РЛИ
(рис. 6.49,6) при /=0 (центр строки сигнала) частотная поправка в опорной функции
равна нулю (отсутствует сдвиг по азимуту), а по апертуре синтеза требуется ее ум-
ножение на ЛЧМ-зависимость для согласования откорректированной опорной
функции с крутизной закона ЛЧМ принимаемого сигнала.
310
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
Рис. 6.49. Зависимость градиента фазы спектра от пространственной частоты:
a - точная фокусировка РЛИ; б - расфокусированное РЛИ
Проинтегрировав градиент фазы, получаем показанную на рис. 6.50 фазовую
поправку {12} к спектру КРЛИ (для дифференцирования и интегрирования в среде
MATLAB применяют процедуры diff(*) и cumsum(*)). Учитываем требование к
опорной функции синтеза КРЛИ (и к корректирующей функции), чтобы она имела
нулевую начальную фазу и нулевой частотный сдвиг, сохраняя на КРЛИ фазу сиг-
нала, принятого от объекта наблюдения, и азимутальное положение отклика отно-
сительно привязанного к географическим координатам центра кадра. Иначе воз-
никнут проблемы при тематической обработке полученного РЛИ, особенно при
интерферометрии.
Поэтому после интегрирования устраняют постоянную и линейную состав-
ляющие фазы {13} на схеме (см. рис. 6.43), например, так:
( A zr»/ A ^(Vmax)— ^(Vmin) ЛА
(р\у) = (р\у)----------------v , (6.73)
^тах vmin
где vmin = v(l) и vmax = г(Хтах) - минимальное и максимальное значения аргу-
мента по азимутальной строке. Вид фазовой характеристики корректирующей
функции {14} показан на рис. 6.50.
Рис. 6.50. Фаза корректирующей функции спектра КРЛИ:
a - точная фокусировка РЛИ; б - расфокусированное РЛИ
311
Радиолокационные системы землеобзора космического базирования
После умножения спектра исходного КРЛИ {16} на корректирующую функ-
цию {14} ^cor(v)-exp{”^cor(v)} имеем скорректированный спектр КРЛИ {17}
(/я, v), который после ОБПФ {18} преобразуется в скорректированное КРЛИ.
Им заменяют исходное КРЛИ {1} для выполнения очередной итерации или ис-
пользования в качестве выходного продукта - сфокусированного КРЛИ:
= fftshift (IFFT (scor (m, v)}) =
= fftshift(lFFT (m, v)exp(-j>cor ( v))|). (6.74)
Для получения высокой точности фокусировки выполняют несколько итера-
ций с указанной последовательностью процедур. В случаях, когда параметры де-
фокусировки исходного РЛИ изменяются по полю кадра, применяют процедуру
локальной автофокусировки (см. подраздел 6.10.8).
Результат коррекции КРЛИ приведен на рис. 6.51. Разрешающая способность
КРЛИ после компенсации фазовых ошибок составляет около 1 м, что согласуется с
шириной спектра КРЛИ. Показанные на рис. 6.51,6 и г огибающие, действительные
и мнимые составляющие откликов от целей 1 и 2 после применение процедуры
PGA к дефокусированному исходному КРЛИ (рис. 6.44,6 и г, кривые 7-3) имеют
идентичную форму с откликами исходного сфокусированного КРЛИ, представлен-
ными на рис. 6.44,67 и в, кривые 7-3. (они совпадают также с кривыми 7-3 на
рис. 6.51/7,в). Это свидетельствует о корректности рассмотренной процедуры ав-
тофокусировки PGA.
-10 -5 0 5 10 -10 -5 0 5 10
Рис. 6.51. Форма откликов после автофокусировки КРЛИ:
а, б - цель 1 в центре кадра; в, г - цель 2, смещенная по азимуту; а, в - сфокусированное исходное КРЛИ;
б, г- расфокусированное исходное РЛИ; 7 - огибающая отклика (смещена вверх для наглядности);
2 - действительная составляющая отклика; 3 - мнимая составляющая
312
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
При проведении автофокусировки методом PGA следует учитывать, что раз-
мер окна ограничивает наивысшую частоту коррекции фазы. Окно должно быть
достаточно большим, чтобы все частотные компоненты ошибки передались в спек-
тральную область. При малом окне компенсируются только низкочастотные ком-
поненты изменения фазы по апертуре синтеза (азимутальному спектру КРЛИ). Та-
кая ситуация, в частности, более типична для космических РСА в отличие от само-
летных РСА, в которых траекторные флуктуации имеют малый интервал корреля-
ции, соизмеримый с апертурой синтеза РЛИ.
К достоинствам фазово-градиентного алгоритма следует отнести то, что он
дает хорошую точность фокусирования изображения и сходится за небольшое чис-
ло итераций. Также существуют модификации PGA (QPGA [279, 389]), сходящиеся
за одну итерацию. К недостаткам PGA следует отнести то, что для его работы тре-
буется большое количество мощных точечных целей, чего в реальных сценах мо-
жет и не быть.
К недостаткам алгоритма PGA следует отнести чувствительность к «качеству»
отражателей, а также повышенные вычислительные затраты, связанные с требовани-
ем выполнения нескольких итераций. Существует вариант метода PGA, не требую-
щий проведения итераций NPGA [389, 497]. Вместо этого можно использовать ус-
реднение градиентов фазы, вычисленных не по одному, а по нескольким откликам от
ярких точечных целей, найденных строках по азимуту в соответствующих каналах
дальности. Такая возможность имеется при съемке застроенных территорий или ме-
стности, содержащей инженерные сооружения (опоры ЛЭП, мосты и др.)
6.10.7. Процедура поиска откликов для автофокусировки РЛИ
При рассмотрении алгоритмов автофокусировки отмечена критичность большин-
ства из них к «качеству» отражателей, отклики от которых используют для вычис-
ления поправок к опорной функции синтеза РЛИ. Главными факторами качества
являются их близость к точечным отражателям и отношение сигнал/шум+фон. Ре-
альные объекты (кроме однородной отражающей поверхности), как правило, пред-
ставляют собой групповые цели. Отраженный от них сигнал является когерентной
суммой отражений от фрагментов объекта, причем характер суммарного отклика
от реального объекта зависит от его конфигурации, а также длины волны РСА,
расчетной разрешающей способности РСА, ширины и фазового распределения в
дефокусированном импульсном отклике от точечной цели. Проблема поиска то-
чечных объектов для автофокусировки РЛИ актуальна как для РСА высокого раз-
решения 0,5... 1м, так и для РСА со средним пространственным разрешением
(7...10 м). Опыт эксплуатации РСА «Меч-КУ» показал, что среди ярких объектов с
высоким контрастом над окружающим фоном к точечным объектам нельзя, в част-
ности, отнести ни опоры линий электропередач, ни палубные надстройки кораб-
лей, ни множество инженерных конструкций. В настоящее время благодаря при-
менению на борту КА высокоточной аппаратуры позиционирования задача фоку-
сирования РЛИ среднего разрешения в РСА, работающих в традиционных диапа-
зонах волн (3...23 см), решается без применения автофокусировки, но она остается
актуальной для РСА метровых диапазонов волн.
313
Радиолокационные системы землеобзора космического базирования
Во многих случаях для упрощения обработки ограничиваются поиском одной
яркой цели в канале дальности, выбранном для вычисления поправки к опорной функ-
ции (см. подраздел 6.10.6). Общее число таких целей может оказаться малым, что при-
водит к большому числу итераций для достижения нужной точности. Более продук-
тивным является использование большего числа точек в канале дальности. Поэтому
анализ «качества» откликов от реальных объектов и их пригодности для целей авто-
фокусировки РЛИ высокого разрешения является важной прикладной задачей. Мето-
дика основана на формировании плавающего порога для измерения ширины импульс-
ного отклика РСА по заданному уровню и сравнению ширины отклика с его теорети-
ческим значением при точной фокусировке. Структурная схема анализа и выделения
квазиточечных отметок для проведения автофокусировки приведена на рис. 6.52.
Рис. 6.52. Структурная схема выделения и анализа отметок от целей
Рассмотрим методику проведения такого анализа на примере радиолокацион-
ного снимка с разрешающей способностью ~1 м, полученного с помощью РСА
^-диапазона волн TerraSAR-X. Исходным является комплексное КРЛИ. В выбран-
ном для анализа фрагменте РЛИ, показанном на рис. 6.53, имеется река 1 с двумя
Рис. 6.53, Оценка «качества» радиолокационных
откликов от объектов разных типов
(фрагмент АРЛИ г. Розенхайм. TerraSAR-X,
Infoterra © [530]);
сечение РЛИ вдоль линии A-В приведено на рис. 6.54
мостами - малым для местного про-
езда 2 и автомобильным 3, при-
брежные парковые зоны 4 и город-
ская застройка 5. Азимутальная ось
направлена вверх, направление об-
зора - справа.
Процедура оценки откликов
выполняется в следующей последо-
вательности:
1) КРЛИ интерполируют по
азимуту методом раздвижки спек-
тра с увеличением базы в два раза;
2) выполняют квадратичное
детектирование (получение ЭРЛИ),
что позволяет снизить вклад отра-
жателей малой мощности, располо-
женных вблизи с главным макси-
мумом;
314
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
3) задают значение постоянного порога для отсева откликов от однородной
поверхности
^por-g ^por_g N D (пх ) >
N
(6.75)
где АрОГ g=1...4 - коэффициент порога для отсеивания откликов от однородной
протяженной поверхности; D(nx) - текущие азимутальные отсчеты ЭРЛИ в канале
дальности; N - число азимутальных отсчетов. Сравнивают отсчеты ЭРЛИ с поро-
гом и обнуляют все отсчеты ниже порога;
4) формируют функцию плавающего порога с окном (плоским горизонталь-
ным участком), ширину которого задают с небольшим превышением ожидаемой
ширины расфокусированного отклика от точечной цели. Пример формирования
плавающего порога иллюстрирует рис. 6.54. Значение пороговой функции рассчи-
тывают по формуле
^рог (”х+
'КротО(пх), если Dp0I (пх+ k) < K^D^n*),
(пх+к), если DPOAnx+k)>KpOrDM
(6.76)
при - ДА;/2 < к < кк/2,
\к - ширина порогового окна; АГрог =0,5 - коэффициент плавающего порога,
выбранный соответственно ширине отклика на уровне минус 3 дБ;
Рис. 6.54. Формирование плавающего порога в канале дальности (линия A-В на рис. 6.53, а)
для сфокусированного РЛИ (а) и при расфокусировке с wdf=6 (6):
1 - сигнальная функция ЭРЛИ, 2 - плавающий порог, уровень минус 3 дБ;
по оси абсцисс — азимутальные отсчеты, по оси ординат — относительные величины
5) выполняют пороговую обработку по плавающему порогу с формированием
«маски» (признака о выборе отклика для фокусировки), определяющей интервал,
где отклик от цели превышает плавающий порог
1, Р(их)>Ррог(лх)
0, П(их)<£)рог(их)'
(6-77)
315
Радиолокационные системы землеобзора космического базирования
Вид масок показан на рис. 6.55. Изображена правая часть кадра, показанного
на рис. 6.53,67 с более разнообразным ландшафтом, включая автомобильный мост.
Дано сравнение четырех вариантов обработки: при высоком уровне коэффициента
порога Л?рог =4 для отсеивания откликов от слабых целей, сфокусированное РЛИ
(а) и расфокусированное РЛИ с =6 (б), а также при низком уровне порога
Л?р0Г g =0,5 - сфокусированное (в) и расфокусированное (г) РЛИ;
Рис. 6.55. Матрицы масок £(иг) на местах откликов для автофокусировки:
коэффициент порога /Срог_g=4 (а-б), A?por g=0,5 (e-г), сфокусированные РЛИ {а, в),
расфокусировка с wdf =6 (б, г); направление полета (азимут) - вверх
6) оценивают ширину отклика как отношение ширины E(rQ к ширине порогового
окна и определяют среднюю ширину и СКО откликов по каналам дальности. При
большом СКО, в принципе, можно отбросить каналы дальностей с большими откло-
нениями размеров отклика от среднего. Показанное на рис. 6.56 распределение шири-
ны отклика (в пикселях РЛИ) в каналах дальности для сфокусированного и расфоку-
сированного РЛИ показывает возможности такой отбраковки отметок от целей.
Рис. 6.56. Распределение ширины отклика (в пикселях РЛИ) в каналах дальности
для сфокусированного РЛИ (а) и при расфокусировке с mdf=6 (б):
жирной линией показано среднее значение ширины отклика, тонкими линиями - уровни ±СКО относи-
тельно среднего значения; по оси абсцисс отложены азимутальные отсчеты
316
Моделирование алгоритма показало, что оптимальная величина коэффициен-
та порога ЛрОГ g =3...4. При этом число откликов для фокусировки составляет око-
ло 3 % от размерности матрицы. При расфокусировке с расширением отклика в два
раза число откликов уменьшается до 2,5 %. При этом среднее число откликов в од-
ном канале дальности - около 7. Если выбрать низкий постоянный порог
/Грог g =0,5, число откликов возрастает до ~9 %, но возникает ошибка измерения
длительности отклика порядка 40 %.
Достоинства рассмотренной процедуры поиска отсчетов для автофокусировки
состоят в ее чувствительности к изменению ширины отклика от цели и возможно-
сти резкого повышения числа выделяемых импульсов. Проведенное исследование
этой процедуры показало, что в отражениях от реальных объектов в РСА с про-
странственной разрешающей способностью около 1 м имеется достаточное число
квазиточечных отражателей, пригодных для решения задачи автофокусировки пу-
тем применения любого из алгоритмов, использующих отклики от точечных целей.
6.10.8. Локальная автофокусировка РЛИ высокого разрешения
В ряде ситуаций применение методов автофокусировки имеет особенности. Как
было отмечено выше, в космических РСА значение ЛЭС зависит от высоты релье-
фа. При этом для получения РЛИ высокого разрешения может сказаться отсутст-
вие достаточной информации о рельефе местности, также может встретиться си-
туация наложения РЛИ разных участков, обусловленная геометрией построения
радиолокационного изображения. Так, при радиолокационной съемке в гористой
местности на изображения объектов в ущельях могут накладываться изображения
от крутых склонов, что, с одной стороны, создаст помехи для дешифрирования
объектов, а с другой стороны, вызовет нарушение работы алгоритмов автофокуси-
ровки, использующих информацию о поправках к опорной функции синтеза РЛИ,
усредненную по площади наблюдаемой сцены.
Особенности влияния рельефа местности на получение РЛИ показаны на
рис. 6.57. Рассмотрены случаи искажений геометрии РЛИ при малых и больших
углах падения радиоволн по сравнению с локальными уклонами [} окружающей
местности. При построении радиолокационного изображения происходит преобра-
зование горизонтальной дальности и высоты в наклонную дальность
R = R0 + Ysinyl -A(y)cosyi5 (6.78)
где Y - поперечная дальность; R$ - наклонная дальность до начала участка с Y =0;
Л(У) - изменение высоты местности поперек трассы КА.
Появляются искажения масштаба dRI dY .
Первая, обычная ситуация, типичная и для самолетных, и для космических
РСА, показана на рис. 6.57,а. Вторая ситуации может, хотя и редко, встречаться
при космическом землеобзоре, когда углы падения, превышают уклоны местности.
Участки местности, находящиеся у подножия и на возвышенности, а также на гор-
ном склоне могут иметь одну и ту же наклонную дальность и их изображения мо-
317
Радиолокационные системы землеобзора космического базирования
гут накладываться (нарушается гомеоморфизм), как это показано на рис. 6.57,6
(участки 1 -2'и 2'-4г).
Рис. 6.57. Геометрия наблюдения гористой местности при малых (а)
и больших (б) углах падения
Естественно, что работа алгоритмов автофокусировки в этой второй двузнач-
ной ситуации нарушается, а наложение фрагментов РЛИ друг на друга ухудшит
дешифрируемость РЛИ. Вместе с тем, можно сформулировать стратегию формиро-
вания и отображения радиолокационных снимков местности с большими перепада-
ми рельефа для их тематического дешифрирования. Можно рекомендовать построе-
ние рабочего места дешифровщика, с использованием в качестве исходного мате-
риала КРЛИ, синтез которого выполнен по параметрам баллистического обеспече-
ния, и реализацией локальной фокусировки КРЛИ в процессе дешифрирования.
Исходя из такой концепции, для систем экстренного наблюдения (при мони-
торинге катастроф) целесообразно изменить классическую процедуру получения
фокусированного РЛИ, требующую временных затрат. Синтез комплексных изо-
бражений выполняют непосредственно по баллистической информации, имеющей-
ся на момент съемки. Не проводя автофокусировки, полученное изображение (пер-
вичное, не полностью скорректированное, некалиброванное) подают на рабочее
место дешифровщика, который выделяет нужные фрагменты изображения для де-
тального дешифрирования и реализует по ним локальную автофокусировку. Ма-
лый размер фрагмента позволяет сократить время итераций процедуры автофоку-
сировки. Такое построение рабочего места является эффективным также и для на-
блюдения гористых районов.
Для ситуации, показанной на рис. 6.57,я, возможно использование цифровой
карты рельефа с разделением кадра на набор фрагментов с перепадами высот, не
ухудшающих разрешение, затем производится автофокусировка каждого фрагмента
и составляется мозаика полного изображения. Для ситуации с наложением изобра-
жений участков местности с разными высотами (рис. 6.57,6) предложенное построе-
ние рабочего места позволит применить алгоритмы локального фокусирования.
Воспользовавшись тем, что на этих участках временные зависимости фазы раз-
личаются, можно снизить помехи от наложения изображений при их дешифрирова-
нии путем локальной фокусировки суммарного комплексного изображения. На
318
рис. 6.58 иллюстрируются результаты моделирования. В качестве исходной модели
(а) взято полученное с помощью самолетного РСА ИМАРК [37*, 185*] комплексное
изображение с азимутальным разрешением около 1 м. Изображение включает распо-
ложенные на равнине городскую застройку 7, автомагистраль 2, сельский поселок 3,
усадьбу 4 и два близких по конфигурации инженерных сооружения 5 и 6.
►У- горизонтальная дальность
Рис. 6.58. Моделирование фокусированного синтеза изображения с перепадами высот:
а - первичное РЛИ ^-диапазона, полученное самолетным РСА; б - модель рельефа местности, включающая
равнину (точка 7), горное плато (точка 2), зону наложения изображений (7-3); в, г - модель РЛИ космиче-
ского РСА с фокусировкой по равнине (в) и по горному плато (г); д - импульсный отклик РЛИ по азимуту
для фокусированной (7) и расфокусированной (2) частей РЛИ; е, ж - увеличенные фрагменты первичного
РЛИ (е) и модели РЛИ (ж) в зоне наложений изображений
При моделировании использовался алгоритм автофокусировки PGA с моди-
фикацией, позволяющей оценивать поправку к фазе по множеству откликов в каж-
дом из каналов дальности. Это позволило уменьшить размеры фрагмента КРЛИ
при сохранении высокой точности фокусирования.
На рис. 6.58,6 приведена карта рельефа модели местности с горным плато вы-
сотой 1000 м. Модели изображений для космического РСА S-диапазона волн при-
ведены на рис. 6.58,в и г. Представлены изображения с двумя вариантами фоку-
сированной обработки'.
319
Радиолокационные системы землеобзора космического базирования
• с фокусированием по равнине (рис. 6.58,в), на котором резко отображается
низменная часть ландшафта (объекты 7,2, 4, 5), а верхняя часть (объекты 3, 6)
размыта;
• с фокусированием по плато (рис. 6.58,г), где объекты на плато видны с высо-
ким разрешением, а изображение объектов на равнине размыто.
Заметим, что помехи от расфокусированных составляющих на участках нало-
жения изображений (усадьба 4 на рис. 6.58,е и ж) хотя и снижают качество изо-
бражения, но возможность дешифрирования сохраняется.
Полученные результаты моделирования подтвердили эффективность приме-
нения алгоритма локального фокусирования PGA для получения РЛИ высокого
разрешения малых фрагментов, необходимых для тематической обработки.
6.11. Особенности синтеза РЛИ в режимах скошенного и
бистатического обзоров
Синтез РЛИ в скошенном режиме обзора
Преимущества скошенного обзора кроме увеличения времени наблюдений и воз-
можности получения изображений объектов под разными ракурсами заключаются
в снижении уровня помех неоднозначности [416, 459]. Работа в скошенных режи-
мах обзора приводит к появлению смещения доплеровской частоты сигнала и ли-
нейной миграции дальности. Методы компенсации доплеровского смещения ана-
логичны применяемым в прожекторном режиме, для которых, несмотря на малые
углы скоса, доплеровская частота значительно превышает частоту повторения зон-
дирующего сигнала. Для устранения линейной составляющей миграции дальности
в РСА самолетного базирования с широкими углами наблюдения по азимуту реко-
мендовано применение преобразования Столта. Однако для космических РСА при
узком азимутальном угле антенны РСА в большинстве случаев можно ограничить-
ся модифицированными алгоритмами на основе алгоритма CSA [258]. Вместе с тем
изменение фазы принимаемого сигнала между соседними зондированиями на не-
сколько л может вызвать необходимость введения межпериодной интерполяции
отчетов на повышенную виртуальную частоту повторения.
Особенности бистатического зондирования
Технические аспекты, связанные с получением радиолокационного изображения в
многопозиционных системах, сводятся к рассмотрению бистатической пары ак-
тивного облучающего устройства - передатчика и пассивного приемного устрой-
ства - приемника. Основные практические варианты бистатического зондирования
с участием космического сегмента включают в себя космическую пару передат-
чик-приемник на разных орбитах (например, тандемы спутников), аэрокосмиче-
скую пару [254, 398], обычно: орбитальный передатчик и приемник, размещенный
на самолете или БЛА, и наконец, вариант с подсветом с помощью передатчика, ус-
тановленного на геостационарном спутнике и приемнике - на низкоорбитальном
спутнике, самолете или БЛА (соответственно космическая или аэрокосмическая
бистатическая система [329, 439*, 507]).
320
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
Особенности работы бистатических систем связаны с геометрией относитель-
ного движения, согласованием времени совместной работы, синхронизацией цик-
лограмм облучения и приема сигналов, способами выделения зондирующего сиг-
нала (прямой прием облучающего сигнала) на фоне паразитных отражений от под-
стилающей поверхности, компенсацией различия частот и фазы локальных опор-
ных генераторов, миграцией дальности и доплеровским смещением зондирующего
и отраженных сигналов [282, 303, 329, 392, 424, 425, 499, 510].
Возможны два варианта геометрии обзора в бистатических системах - со-
гласная и оппозитная. Для согласования времени обзора в аэрокосмических систе-
мах возможно расширение луча антенны передатчика или управление лучом под-
света, как в прожекторном режиме съемки в моностатических РСА.
Наиболее простой случай бистатического зондирование - тандемы космических
РСА на близких орбитах TanDEM-X, Radarsat-2/З [276, 317, 330], для которых глав-
ная проблема - точное измерение базы между спутниками для снижения погрешно-
стей интерферометрических измерений и построения карт рельефа местности.
При аэрокосмическом бистатическом зондировании приемник на самолете ра-
ботает в квазинепрерывном режиме. Для параллельных траекторий движения спут-
ника и самолета (что может не соблюдаться на практике) разрешающая способность
по наклонной дальности определяется шириной спектра зондирующего сигнала, как
в моностатических РСА, а вдоль линии пути она зависит от соотношения между ско-
ростями и наклонными дальностями до цели от передатчика и приемника
Л
Рх ~~
^synt
(6.79)
^гх >
где rsynt - время синтеза; и Vrx - путевые скорости передатчика и приемника;
и RTX - наклонные дальности цели от передатчика и приемника.
Для моностатического обзора, когда параметры передатчика и приемника
идентичны, имеем известную формулу для азимутального разрешения.
Разрешение поперек линии пути по горизонтальной дальности в случае со-
гласных направлений обзора вычисляется через углы падения для падающей и от-
ражающей волн
Рг = —1--------------Г, (6.80)
A/|sin/ti +sin/ri|
где с - скорость света; А/* - полоса зондирующего сигнала; Д1 и - углы падения
облучающей и отраженной волн.
Приведенная формула справедлива и для оппозитного бистатического обзора,
при котором знак угла падения облучающей волны берется с минусом.
Принципиально для синтеза РЛИ пригодны те же алгоритмы, что и для моно-
статического обзора, но с учетом другого закона изменения фазы опорной функ-
ции, зависящего от геометрии взаимного движения. Применяют, например, алго-
ритм нелинейного ЛЧМ-масштабирования [426] или адаптированный для бистати-
ческого зондирования алгоритм «обратной проекции» (Backproj ection, другое его
11—1492
321
Радиолокационные системы землеобзора космического базирования
название - «когерентное накопление в выходном КРЛИ»), который позволяет уст-
ранить отклонения от прямолинейного движения при синтезе РЛИ высокого раз-
решения [254, 506].
6.12. Синтез РЛИ в видеоимпульсных РСА
В обычных узкополосных РСА формирование отклика по азимуту реализуется путем
согласованной фильтрации сигнала (радиоголограммы), фазовая структура которого,
вызванная изменением временной задержки принятого сигнала, определяется вре-
менным законом движения РЛС относительно наблюдаемой цели. В видеоимпульс-
ных РСА (БИРСА) информационным признаком является именно изменение вре-
менной задержки сигнала от цели по траектории полета. В связи с этим разрешаю-
щая способность радиолокационного изображения по азимуту получается благодаря
наличию миграции дальности сигнала, принимаемого от конкретной цели в суммар-
ном процессе, записанном в радиоголограмме при радиолокационной съемке задан-
ного участка местности. Термин «радиоголограмма» сохраним и для БИРСА.
Форма зондирующего импульса в БИРСА имеет ряд особенностей, рассмот-
ренных ниже. В первом приближении абстрагируемся от этих особенностей и рас-
смотрим упрощенную модель, в которой излучаемые и отраженные от точечной
цели импульсы имеют форму, близкую к прямоугольной. Тогда, можно считать,
что синтез РЛИ обеспечивается путем простого суммирования принятых сигналов
по опорной функции («траекторному окну»), которая компенсирует изменение
временного запаздывания сигналов вдоль трассы полета для точечной цели на тра-
верзе. Азимутальное разрешение БИРСА определяется реализуемым разрешением
по наклонной дальности pR и длиной синтезированной апертуры £а- Идеализиро-
ванная картина получения азимутального разрешения для прямоугольного зонди-
рующего импульса представлена на рис. 6.59.
Рис. 6.59. Формирование азимутального разрешения в БИРСА:
a - радиоголограммы двух целей, смещенных по азимуту; б - радиоголограммы целей, скорректированные
по миграции дальности (времени задержки) для целей А нВ
322
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
В результате обработки радиоголограммы цели А амплитуда на выходе будет
пропорциональна площади следа (годографа) голограммы 5’ьоы =PrL^ Годограф го-
лограммы цели В будет смещен по азимуту на величину рх и после компенсации
миграции дальности окажется повернутым относительно опорной функции на угол
/7 = arctg(^//?0), (6.81)
где Rq - наклонная дальность на траверзе.
Радиоголограмма от цели В, будучи коррелирована с опорой, совпадающей с
годографом цели А, даст на выходе амплитуду, пропорциональную общей площади
параллелограмма
SAB = = ПРИ Р > arCtg^- ’ <6-82)-
2 tg/? рх 2£а
Если, как обычно, принять, что интервал разрешения равен ширине реакции
на уровне -3 дБ (0,707 от амплитуды), то из соотношения SAB= 0,7075ьоы получаем
известное для «узкополосных» РСА выражение, в котором длина волны заменена
разрешением по наклонной дальности, деленным на квадратный корень из двух
RqPrI^ // ода
Рх =----~----• (6-83)
Кроме сигнала от цели А в окно опорной функции в каждом зондировании бу-
дут попадать сигналы от целей, наклонная дальность которых совпадает с наклон-
ной дальностью окна в пределах ширины диаграммы направленности радиолока-
тора, для которой в маршрутном режиме съемки размер зоны облучения по азиму-
ту определяет длину синтезированной апертуры £а. При наблюдении местности с
равномерной случайной отражающей поверхностью доля таких помеховых состав-
ляющих для этой упрощенной модели во много раз (как Ljрх ) превысит долю
полезной составляющей от цели А.
Рассмотренная упрощенная модель обработки радиоголограммы БИРСА ис-
ходит из некогерентного накопления сигналов в окне опорной функции, без учета
реальной формы зондирующего импульса и корреляционных связей в отраженном
сигнале. Поэтому из нее делается ошибочный вывод о снижении контраста ярких
целей на окружающем фоне, а также невозможности обнаружения элементов фона
с нулевым отражением (например, участков поверхности с поглощающим покры-
тием). Учет реальных условий зондирования приводит к классическому алгоритму
согласованной фильтрации когерентных сигналов, в которых приведенная выше
упрощенная модель обработки сигналов является элементом полного алгоритма
синтеза видеоимпульсного РЛИ.
Учтем влияние формы зондирующего импульса в БИРСА [6, 94, 228, 404, 455].
Видеоимпульс, излученный антенной БИРСА в пространство, представляет собой
сложное колебание, не имеющее постоянной составляющей. Это объясняется тем, что
антенная система представляет собой полосовой фильтр со свойствами дифференци-
рующего звена. Излучаемое антенной поле является производной от возбуждающего
тока. Постоянная составляющая отсутствует в распространяющемся электромагнит-
323
Радиолокационные системы землеобзора космического базирования
ном поле. При использовании в БИРСА многоэлементной антенной системы - видео-
решетки - ее коэффициент усиления пропорционален квадрату частоты, что также
сказывается на форме принимаемого от целей сигнала (происходит подчеркивание вы-
сокочастотных компонент как при передаче, так и при приеме сигналов).
Форма сигналов на входе обработки зависит также от частотной характери-
стики приемника. Обычно, ширину полосы приемника ограничивают из соображе-
ний повышения отношения сигнал шум, а также с целью снижения частоты кван-
тования принимаемого сигнала для уменьшения потока передаваемых данных на
пункты обработки информации.
В результате моделирования преобразований сигналов в тракте БИРСА, вы-
полненного по методике, изложенной в гл. 10, получены представленные на рис. 6.60
модели радиолокационных откликов при наблюдении точечных целей. В БИРСА
использован диапазон частот 200... 1400 МГц (примерно три октавы), включающий
в себя три узкополосных диапазона (VHF, Р и Z), применяемых в самолетных РСА
(например, в бортовом комплексе ИМАРК [37*, 185*]).
Рис. 6.60. Форма видеоимпульсов при наблюдении точечной цели:
a - принятый сигнал на выходе приемника; б - выходной видеоимпульс БИРСА, пунктиром показан при-
нятый импульс; в - амплитудные отклики, модуль видеоимпульса (пунктир) и сглаженная огибающая
(жирная линия)
324
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
Вид сигнала от точечной цели на выходе приемника (строка радиоголограм-
мы) до обработки сигнала показана на рис. 6.60,а. Для обработки такого сигнала с
помощью рассмотренной выше упрощенной модели опорная функция должна
включать несколько (например, три) каналов суммирования с разными знаками.
В итоге приходим к вычислению свертки принятого по дальности сигнала с
опорной функцией, которая представляет собой отклик от точечной цели с обратным
отсчетом времени (это соответствует комплексно сопряженному спектру опорной
функции в алгоритме быстрой свертки). Вид выходного импульса БИРСА в строке
дальности после согласованной фильтрации показан на рис. 6.60,6 жирной линией.
Длительность пика видеоимпульса по уровню минус 3 дБ составляет 0,27 нс.
Форма зондирующего импульса без постоянной составляющей приводит к
тому, что сумма помеховых составляющих от целей, смещенных по азимуту, в
среднем равна нулю. Для определения вклада флуктуационных составляющих по-
мех следует оценить интегральный уровень боковых лепестков двумерного им-
пульсного отклика БИРСА.
Для этого учтем, что после дискретизации принятого непрерывного видеосиг-
нала его запись в цифровой форме может рассматриваться как комплексный про-
цесс с нулевой мнимой частью:
«(z„) = C/OT(z„)(l + jO). (6.84)
Этой комплексной амплитудой можно виртуально промодулировать колебание
сколь угодно высокой несущей частоты ejlKи получить дискретное представле-
ние комплексного сигнала, как в узкополосных процессах. К такому сигналу приме-
ним весь математический аппарат анализа комплексных процессов и все алгоритмы
синтеза КРЛИ, рассмотренные выше в настоящей главе. Выходные информацион-
ные продукты радиолокационного зондирования с применением ВИСАР могут быть
представлены в виде видеоизображений U(R,X} = Re(wout , амплитудных
Ал) = |wout или энергетических РЛИ E(R,X) = |nour (7?,Af)|2 , а также
РЛИ с некогерентным накоплением наблюдений.
На рис. 6.60,в приведены амплитудные отклики от точечной цели в форме мо-
дуля видеоимпульса (пунктир) и сглаженной огибающей (жирная линия). Длитель-
ность амплитудного отклика составляет 1,14 нс, разрешение по наклонной дально-
сти 17 см.
Поскольку процедуры спектрального анализа и суммирования линейны, то
весь частотный диапазон спектра принятого сигнала можно разбить на поддиапа-
зоны и выполнять в них независимый синтез парциальных (спектрозональных)
КРЛИ. В случае необходимости при синтезе парциальных КРЛИ можно применить
автофокусировку для устранения искажений (например, коррекцию ионосферных
нестабильностей в KTTF-части спектра). Полученные парциальные КРЛИ с примы-
кающими спектрами суммируют на выходе для получения видеоимпульсного РЛИ.
325
Радиолокационные системы землеобзора космического базирования
Спектрозональные КРЛИ и РЛИ, аналогичные РЛИ узкополосных РСА, но с
лучшим пространственным разрешением, можно использовать для комплексного
дешифрирования. На рис. 6.61 показаны амплитудные спектрозональные отклики от
точечной цели в VHF- и Z-диапазонах волн (частоты 200...400 и 1100... 1300 МГц).
Разрешающая способность по дальности таких спектрозональных РЛИ при ширине
отклика 5,2 нс составляет 80 см, что значительно лучше, чем у традиционных уз-
кополосных РСА, работающих в выделенных Регламентом радиосвязи частотных
диапазонах с ограничениями по ширине полосы частот.
Рис. 6.61. Форма амплитудных спектрозональных откликов при наблюдении точечной цели:
a - в L-диапазоне волн; б - в ИЯЕ-диапазоне волн (полоса сигнала в парциальной зоне 200 МГц)
Вид видеоимпульсной радиоголограммы от точечной цели в БИРСА приведен
на рис. 6.62. Там же показана ее амплитудная характеристика вдоль траектории
полета, определяемая формой ДНА. В случае БИРСА форма ДНА имеет расши-
ренный пьедестал, обусловленный низкочастотными компонентами зондирующего
сигнала. Для сравнения на рисунке пунктиром показана форма ДНА узкополосного
РСА, имеющая вид sine2.
Рис. 6.62. Форма видеоимпульсной радиоголограммы (а)
и ее амплитудная характеристика, определяемая формой азимутальной ДНА (б)
(---------- форма азимутальной ДНА для узкополосного сигнала 2=23 см)
326
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
На рис. 6.63 показаны двумерные отклики от точечной цели - видеоимпульс-
ный и амплитудный, сечение амплитудного отклика по азимуту, а также характер
боковых лепестков двумерного амплитудного импульсного отклика (область главно-
го лепестка подавлена) и рельефное отображение амплитудного импульсного откли-
ка БИРСА. Интегральный уровень боковых лепестков отклика - около -23 дБ близок
к реализуемому в узкополосных РСА.
Рис. 6.63. Вид откликов от точечной цели в модели БИРСА:
a - видеоимпульсный отклик (вверху) и амплитудный отклик (внизу); б - сечение амплитудного отклика по
азимуту; в - боковые лепестки амплитудного отклика (центральный пик подавлен); г - рельефное отобра-
жение амплитудного импульсного отклика БИРСА
327
Радиолокационные системы землеобзора космического базирования
На рис. 6.64 приведены результаты моделирования РЛИ в БИРСА при наблю-
дении группы объектов на шероховатой поверхности [427*]. В качестве одного из
объектов сравнения взята комбинация сферы с конусом, имеющая размеры челове-
ческой фигуры.
Рис. 6.64. РЛИ моделей групповых объектов:
a-e - «сфера-конус», общий вид (а), сечение отклика по азимуту (б), двумерный отклик (в); г - сферы раз-
ного радиуса а; е-ж - объекты на шероховатой поверхности, амплитудное (б), видеоимпульсное (е) и
сглаженное амплитудное (ж) РЛИ
В заключение этого раздела еще раз остановимся на различии приближенного
подхода к синтезу изображения в БИРСА (аналог некогерентного накопления) и
реального процесса когерентного суммирования откликов от наблюдаемой по-
верхности. Сначала рассмотрим сцену из одной строки по горизонтальной дально-
сти. В элементе разрешения БИРСА по дальности будут суммироваться сигналы от
группы элементарных отражателей на земной поверхности (для использованной
цифровой модели отражающей поверхности - в узлах сетки). Для гладкой поверх-
ности соотношение задержек принятых сигналов таково, что суммарный сигнал
равен нулю (зеркальное отражение в сторону от РЛС). Для неровной поверхности
наклонные дальности отражателей (и задержки сигналов), поднятых над горизон-
тальной поверхностью, уменьшаются, и сигналы от них могут синфазно (при опре-
деленных условиях) суммироваться с сигналами от других ближе расположенных
отражателей. Эти эффекты для узкополосных РСА рассмотрены в гл. 2. Таким об-
разом, при появлении положительного градиента поля уровня поверхности проис-
328
Глава б. Алгоритмы синтеза радиолокационных изображений в космических РСА
ходит «сгущение» элементарных отметок, а при отрицательном градиенте - их
«разрежение». В результате появляется амплитудная модуляция сигнала, принято-
го радиолокатором от неровной поверхности.
Аналогичный механизм действует и при суммировании сигналов в каждом
элементе разрешения БИРСА, когда сцена состоит не из одной строки дальности, а
представляет кадр, представленный на рис. 6.65,а. Уровень помеховых составляю-
щих определяется интегральным уровнем боковых лепестков импульсного отклика
БИРСА (см. рис. 6.63,в,г).
Результаты моделирования РЛИ применительно к рассматриваемой сцене
представлены на рис. 6.65,6 и в. Для сравнения на рис. 6.65,г дано РЛИ сцены без
гладкой площадки. Показанные примеры свидетельствуют об эффективности
представления выходной информации БИРСА в виде сглаженного амплитудного
РЛИ для обнаружения контрастных объектов (с повышенной или пониженной яр-
костью по отношению к окружающему фону). После обнаружения объектов по ам-
плитудному РЛИ их детальное дешифрирование и распознавание проводится по
видеоимпульсным РЛИ.
Рис. 6.65. Модель РЛИ неровной поверхности с объектами (слева направо) - сфера,
гладкая площадка, три объекта «сфера-конус» по дальности:
а - интенсивность отражения от неровностей; б - амплитудное РЛИ без сглаживания;
в - сглаженное амплитудное РЛИ; г - амплитудное РЛИ сцены без гладкой площадки
329
Радиолокационные системы землеобзора космического базирования
Приведенные модели изображений, получаемых с помощью БИРСА, свиде-
тельствуют о том, что при сверхширокополосном зондировании сохраняются все
механизмы рассеяния с поправкой на соотношения длины волны к масштабам не-
однородностей облучаемой поверхности. Качественные отличия в изображениях
разных объектов в видеоимпульсных РСА и в обычных узкополосных РСА явля-
ются носителями дополнительной информации об объектах. В первую очередь это
связано с частотной зависимостью ЭПР объекта в диапазоне длин волн от санти-
метров до метров, содержащихся в видеоимпульсе. Так, например, при отражении
от сферы суммируются эффекты, вызванные разными механизмами рассеяния,
включающими оптическую, резонансную и релеевскую области.
Для синтеза изображения в БИРСА в связи с большими значениями миграции
дальностей и их изменениями в пределах кадра наиболее адекватным алгоритмом
представляется алгоритм обратной проекции (Backprojection). Его недостаток - вы-
сокие вычислительные затраты. Для их снижения целесообразно адаптировать ал-
горитмы, используемые для узкополосных РСА, к конкретным параметрам прини-
маемых сигналов в БИРСА.
6.13. Современные тенденции создания программно-аппаратных
комплексов для синтеза радиолокационных изображений
Современные РСА космического базирования проектируются как многорежимные,
многофункциональные информационные датчики, реализующие близкие к пре-
дельно достижимым технические характеристики (пространственное и радиомет-
рическое разрешение, чувствительность, полоса обзора и полосы съемки). В аппа-
ратуре широко используются секционированные активные фазированные антенные
решетки, позволяющие осуществить многоканальное поляриметрическое зондиро-
вание, возможность индикации движущихся целей и использования специальных
режимов (двойного приема, режима Скансар с высоким разрешением), а также ин-
терферометрических режимов с применением гибкого цифрового управления фор-
мой ДНА, сканированием лучей по азимуту и углу места, выбором параметров
зондирующих сигналов в режимах работы РСА.
Существует тенденция создания универсального вычислительного комплекса
для обработки радиолокационных данных, который можно использовать в распре-
деленной системе станций приема и обработки информации космических РСА. Та-
кой вычислительный комплекс, названный 3dSAR разработан фирмой Vexcel Cor-
poration, США [316]. Он включает в себя процессор SKY «нулевого уровня», обес-
печивающий автоматическое определение источника данных, бит-коррекцию оши-
бок принимаемой информации, быстрый просмотр и оценку качества данных, пре-
образование времени к Международной шкале UTS, привязку данных к географи-
ческим координатам, а также оригинальный измеритель положения доплеровского
центроида с повышенной точностью. Процессор QuickLook нулевого уровня вы-
полняет синтез РЛИ низкого разрешения, по которому можно оценить полосу
съемки и длину снятого маршрута.
330
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
Обработка информации уровня 1 реализуется в процессоре маршрутного ре-
жима FOCUS, использующего алгоритм синтеза «Дальность - доплеровская часто-
та», а также в процессоре SWATH для режима Скансар, где применяется алгоритм
/-преобразования. Специальный процессор OrthoSAR выполняет коррекцию и
точные преобразования РЛИ в картографические проекции изображений уровня 2.
При разработке вычислительного комплекса 3dSAR применительно к обра-
ботке информации РСА PALSAR был учтен опыт создания и эксплуатации много-
численных станций приема и обработки космической информации, размещенных
по территории земного шара. Комплекс позволяет обрабатывать данные с ранее за-
пущенных и находящихся в эксплуатации космических РСА ERS-1/2, Radarsat-1.
Процессор SKY преобразует данные, полученные по радиоканалу от бортово-
го локатора, в «компьютерный» стандарт CEOS нулевого уровня. Архивирование
данных возможно также в исходном формате радиоголограммы STF (Sky Telemetry
Format) в виде двух (I/Q - cos/sin) сжатых на борту составляющих.
Процессор FOCUS использует входные данные нулевого уровня в форматах
CEOS или STF и после синтеза выдает данные в формате CEOS первого уровня: SLC
(single look complex) - КРЛИ, одно наблюдение или продетектированные продукты.
SWATH Скансар процессор, предназначенный для обработки данных Radarsat-1 лег-
ко адаптируется для информации РСА ASAR КА Envisat, РСА PALSAR КА ALOS.
Процессор OrtoSAR преобразует РЛИ в картографические проекции UTM, может ав-
томатически работать в режиме геокодирования или в автоматизированном режиме
проводить прецизионную коррекцию РЛИ на основе цифровых карт рельефа или
корректировать РЛИ по опорным точкам, которые выбираются оператором.
Примером построения многорежимного процессора синтеза РЛИ является уни-
версальный процессор, предназначенный для обработки сигналов космического РСА
TerraSAR-X в составе наземного сегмента Германского Космического Центра DLR
[264—266, 464]. Конфигурация процессора и гибкое управление параметрами позво-
ляют вести синтез изображения в маршрутном, прожекторном режимах, в режиме
Скансар, поляриметрических режимах работы при разных характеристиках лучей
антенны, в режиме двойного приема и интерферометрии вдоль линии пути.
Наземный сегмент центра обеспечивает управление спутником, прием и архи-
вирование радиолокационной информации, ее обработку и распределение потре-
бителям. Главной составной частью наземного сегмента является многорежимный
РСА процессор TMSP. Его архитектура и программное обеспечение (ПО) преду-
сматривают систематический анализ всех получаемых радиоголограмм, их архиви-
рование и синтез РЛИ со средним разрешением, необходимым для каталогизации и
поиска материалов радиолокационной съемки. Процессор позволяет по заявкам
потребителей реализовать высокоточный синтез КРЛИ с сохранением фазы, а так-
же получение РЛИ с некогерентной обработкой и геореференцированных РЛИ.
При проектировании процессора была предусмотрена задача валидации и тестиро-
вания ПО. Алгоритмы синтеза РЛИ, реализованные в ПО процессора, основаны на
применении алгоритмов ЛЧМ-масштабирования и масштабирования по азимуту,
гармонического анализа и субапертурной обработки. Структурная схема заложен-
ных в ПО алгоритмов синтеза РЛИ рассмотрена в разделе 6.8.
331
Радиолокационные системы землеобзора космического базирования
Принятая концепция реализации унифицированного ПО с соответствующей
адаптацией входящих в него модулей для синтеза РЛИ во всех режимах работы по-
зволила выполнить отладку, тестирование, документирование и валидацию ПО
один раз, что обеспечило когерентность получаемых данных во всех режимах и
снизило затраты на разработку программного обеспечения по сравнению с вариан-
том трех специализированных процессоров, предназначенных для каждого из ре-
жимов работы.
Унификация структуры процессора имеет преимущества сквозной калибровки
РЛИ, в частности, при формировании мозаики снимков мокрого леса (со стабиль-
ным рассеянием), снятых в разных режимах работы РСА.
Рассмотрим основные идеи и технические решения, заложенные в процессор
обработки информации, получаемой с РСА TerraSAR-X, как наиболее соответст-
вующие современному уровню развития средств радиолокационного наблюдения
космического базирования гражданского назначения (что не противоречит воз-
можности их двойного применения).
Процессор обеспечивает получение РЛИ в широком наборе рабочих режимов -
маршрутный, прожекторный и Скансар с различными комбинациями поляризаций.
Предусмотрены разнообразные варианты выходных информационных продуктов
от КРЛИ с одним наблюдением (SLC - single look complex) до РЛИ с большим
числом наблюдений (multilook), в том числе с улучшенным пространственным
(spatially enhanced) или радиометрическим (radiometrically enhanced) разрешением в
различных геометрических (картографических) проекциях. Возможно использова-
ние гибридного алгоритма фокусирования для получения КРЛИ в координатах на-
клонная дальность - азимут с сохранением фазовой информации (SSC - single look
slant range complex), полученных в любом из режимов (маршрутный, прожектор-
ный, Скансар). Во всех выходных информационных продуктах азимутальная коор-
дината соответствует нулю доплеровской частоты.
Реализация режимов синтеза первичного КРЛИ согласно структурной схеме
(рис. 6.19) имеет ряд особенностей. В маршрутном режиме кадр синтеза КРЛИ
включает несколько апертур с наложением изображений каждого кадра на преды-
дущий, по крайней мере на одну апертуру. Размеры кадра ограничены изменением
положения доплеровского центроида и параметров опорной функции, а также ап-
паратными ограничениями процессора.
В прожекторном режиме используют разделение принятого сигнала на суб-
апертуры, обеспечивающие азимутальную однозначность сигнала. В связи с тем,
что в приемопередающих модулях АФАР применены фазовращатели с малой раз-
рядностью, компенсация ошибок обеспечивается соответствующим выбором шага
дискретизации азимутального положения луча [408]. Величина шага углов скоса
лучей ДНА учитывалась при выборе длины субапертур синтеза в кадре обработки,
в который, как и в режиме Скансар, перед процедурой азимутального БПФ встав-
ляют дополнительные нулевые отсчеты (zero padding) во избежание появления не-
однозначности.
332
Глава 6. Алгоритмы синтеза радиолокационных изображений в космических РСА
В маршрутном режиме перед сжатием по азимуту в координатах дальность -
доплеровская частота выполняют фильтрацию по частоте, сдвиг азимутальных от-
счетов для устранения скоса и многозначности. Этапы обработки совпадают с реали-
зованными в процессоре BSAR, который использовался для синтеза и интерферо-
метрической обработки данных в канале X-SAR в составе РСА SRTM/X-SAR [266].
Последний этап синтеза РЛИ в маршрутном режиме включает в себя умноже-
ние азимутального спектра сигнала на спектральную опорную функцию, завися-
щую от наклонной дальности, и ОБПФ. В прожекторном режиме в модулях кор-
рекции миграции дальности выполняют масштабирование сигналов по дальности и
доплеровской частоте, что обеспечивает постоянство опорной функции по всему
кадру съемки.
При синтезе РЛИ используют амплитудное взвешивание спектров сигнала с
использованием окна Хемминга
= a + (1-6z)cos(2.r//B)rect(//В), (6.85)
где задавалось значение о=0,75, обеспечивающее уровень боковых лепестков не
более -21,4 дБ и интегральный уровень---16 дБ. По результатам эксплуатации
РСА было установлено, что качество РЛИ значительное улучшается при компро-
миссном значении a = 0,6 с уровнями боковых лепестков -32,6 дБ и -19,5 дБ при
ухудшении пространственного разрешение всего на 18 % [265].
Входящий в структурную схему (см. рис. 6.19) программный модуль предва-
рительной обработки входной информации обеспечивает восстановление формата
сигналов после сжатия потока данных на борту КА, а также коррекцию аппаратур-
ных искажений, вызванных температурными воздействиями и другими дестабили-
зирующими факторами, выявленными в процессе эксплуатации РСА на орбите.
Архитектура вычислительного комплекса построена по модульному принци-
пу с распараллеливанием потоков обработки данных. Программирование в основ-
ном ведется на языке высокого уровня ADA, что облегчает и удешевляет отладку
ПО. Предусмотрено гибкое управление ресурсами вычислительного комплекса,
позволяющего выполнять все операции синтеза РЛИ с использованием высокопро-
изводительных компьютеров широкого применения.
Особое внимание должно уделяться обеспечению автономности программных
модулей с возможностью выполнения их на других процессорах и в другое время.
Для этого обрамление модуля должно включать все необходимые входные и вы-
ходные данные, а также сопровождающую и командную информацию. Дополни-
тельные объемы вычислительных ресурсов, требуемые для такого построения про-
граммного обеспечения, вполне оправданы.
Рассмотренные в гл. 6 алгоритмы синтеза радиолокационного изображения
обеспечивают получение комплексных, амплитудных или энергетических РЛИ (а
для БИРСА еще и видеоимпульсных РЛИ) с одним наблюдением. Такие изображе-
ния имеют значительную зернистость, вызванную спекл-шумом и поэтому низкое
радиометрическое разрешение. Для улучшения изобразительных свойств (и де-
333
Радиолокационные системы землеобзора космического базирования
шифрируемости) РЛИ используют последетекторную обработку - некогерентное
накопление. Необходимость применения некогерентного накопления относится, в
частности, к получаемым материалам со средним пространственным разрешением,
которые помещают в каталоги для общего ознакомления с доступными материала-
ми радиолокационной съемки.
Вопросы последетекторной обработки РЛИ, их регистрации, отображения и
зрительного восприятия рассматриваются в гл. 7.
334
Глава 7
ОБРАБОТКА И РЕГИСТРАЦИЯ РАДИОЛОКАЦИОННЫХ
ИЗОБРАЖЕНИЙ
7.1. Методы фильтрации спекл-шума на РЛИ
7.1.1. Задачи некогерентной обработки РЛИ
Специфической особенностью радиолокационных сигналов, отраженных от разно-
го типа объектов при облучении узкополосным зондирующим СВЧ-импульсом,
является наличие флуктуаций (спекл-шума), которые вызваны интерференцией
элементарных отражателей, образующих объект. Принципиальным в образовании
спекл-шума является соотношение размеров объекта и размера элемента разреше-
ния изображения, формируемого при когерентной обработке сигнала. Для многих
искусственных объектов, например, самолетов, ракет, кораблей радиолокационное
изображение представляет собой набор ярких отметок от зеркальных точек (доми-
нантных отражателей) со стабильной ЭПР при изменениях ракурса наблюдения.
При использовании широкополосных (или сверхширокополосных) сигналов про-
исходит разбиение группового объекта на элементы, взаимное положение которых
за время синтеза может меняться под влиянием движения или затенения. Это при-
водит к нарушению когерентности траекторного сигнала, ухудшению пространст-
венного разрешения РЛИ и возрастанию флюктуаций.
Наличие спекл-шума приводит к ухудшению дешифрируемости РЛИ, радио-
метрического разрешения и точности измерения компонентов радиолокационного
портрета объекта, а также к повышению требований к каналу передачи данных и
средствам отображения информации. Основным методом снижения спекл-шума
является фильтрация (линейная, адаптивная и комбинированные методы) форми-
руемого в результате синтеза амплитудного РЛИ (АРЛИ) или яркостного РЛИ - по
энергии (ЭРЛИ), соответствующего квадрату амплитуды. Главная процедура такой
фильтрации - некогерентное накопление или усреднение независимых наблюде-
ний по площади выбранного окна на РЛИ.
Исторически сложилось, что космические РСА первого поколения имели раз-
решение по горизонтальной дальности около ру « 30 м, более грубое, чем пре-
дельное разрешение рх - / 2 « 5 м, обусловленное горизонтальным размером
используемых антенн (Dxant »10 м). Для синтеза РЛИ применяли оптические уст-
ройства обработки сигналов с выбором апертуры синтеза так, чтобы иметь одина-
ковое разрешение по обеим координатам. Имеющийся запас длительности сигнала
использовали для некогерентного накопления (4 наблюдения).
Такой метод, при котором в одном элементе разрешения синтезированной
ДНА усреднялись РЛИ, полученные на разных доплеровских частотах (внутриэле-
335
Радиолокационные системы землеобзора космического базирования
ментное некогерентное накопление), получил в зарубежной литературе название
«Multilook». При цифровом синтезе РЛИ реализация внутриэлементного накопле-
ния обеспечивается путем разделения сигнала на субапертуры, когерентной обра-
ботки (синтез парциальных КРЛИ, полученных на разных доплеровских частотах с
разными локальными углами скоса), детектирования и последующего суммирова-
ния парциальных РЛИ. Вместо временного разделения сигнала можно применить
разделение азимутального спектра доплеровских частот на субспектры с после-
дующими их синтезом, детектированием и суммированием парциальных РЛИ. Та-
кую же операцию некогерентного накопления можно выполнять и по дальности.
На рис. 7.1 приведена структурная схема внутриэлементного некогерентного нако-
пления. Принципиально число наблюдений не обязательно должно быть целым,
например, при оптическом накоплении или при перекрывающихся субапертурах
(субспектрах).
Спектр Субспектры Парциальные
сигнала сигнала АРЛИ
Выходное
РЛИ
Рис. 7.1. Структурная схема внутриэлементного некогерентного накопления
Кроме рассмотренного варианта внутриэлементного некогерентного накоп-
ления возможен, и в ряде случаев более перспективен, вариант межэлементного
некогерентного накопления, при котором сначала получают КРЛИ с высоким раз-
решением по обеим координатам, а затем после детектирования проводят усредне-
ние по требуемому числу наблюдений. Хотя этот вариант требует повышенной
производительности процессора синтеза РЛИ, но применительно к РСА высокого
разрешения он имеет ряд преимуществ:
1) возможность адаптивного выбора размеров и конфигурации усредняющего
окна для применения современных алгоритмов автоматической сегментации РЛИ,
вейвлет-фильтрации, нейронной обработки, фрактального анализа;
2) возможность получения радиолокационных портретов малоразмерных объ-
ектов для распознавания и классификации после их обнаружения на сглаженном
снимке;
3) архивация детальных РЛИ и КРЛИ для их последующего использования,
включая интерферометрическую обработку снимков, снятых в разное время.
Метод межэлементного некогерентного накопления был, в частности, приме-
нен в устройстве оптического синтеза РЛИ в РСА «Меч-К» КА «Космос-1870».
Первичное окно выбирали соответствующим азимутальному разрешению ~10 м, а
вторичную щель расширяли из расчета получения разрешения 30...50 м.
Структурная схема межэлементной некогерентной обработки приведена на
рис. 7.2. Входной информацией является яркостное (реже амплитудное) РЛИ или
комплексное РЛИ, после которого выполняется детектирование (как правило,
336
Глава 7. Обработка и регистрация радиолокационных изображений
квадратичное). Фильтрация спекл-шума может включать в себя как линейные опе-
рации (сглаживание в окне), так и нелинейные (логарифмирование, оценка локаль-
ных параметров, адаптивная пороговая обработка и др.).
РЛИ
КРЛИ
Усредненное по
площади РЛИ
Децимация
РЛИ
Сглаженное
РЛИ
Детектирование
Рис. 7.2. Структурная схема межэлементного некогерентного накопления
Общей задаче подавления спекл-шума на РЛИ посвящено много работ [16, 22,
73]). Их можно разделить на следующие группы:
1) глобальные, предусматривающие воздействие на все РЛИ или основную ее
часть. К ним, в частности, относятся алгоритмы суммирования (усреднения) неза-
висимых РЛИ с постоянными параметрами в пределах кадра;
2) локальные, основанные на оценке локальной статистики. К ним относятся
методы, улучшающие дешифрируемость и изобразительные свойства РЛИ, но не
сохраняющие измерительные свойства РЛИ. Такие методы используют для авто-
матизированной обработки, включающей визуальное дешифрирование при ото-
бражении РЛИ на дисплеях с компьютерной программной поддержкой. К этим ме-
тодам относятся упомянутые выше методы адаптивной фильтрации - локальные
адаптивные методы, сохраняющие измерительные свойства РЛИ, с возможностью
использовать РЛИ и для автоматизированной, и для автоматической интерпрета-
ции информации, которая содержится в РЛИ (АРЛИ и КРЛИ);
3) нелокальные способы фильтрации (non-local means), в которых на первом
шаге выполняют локальную обработку в небольшом блоке (окне, обычно до 9><9),
анализируют статистику с обнаружением и определением характера аномалии (от-
носительно однородной статистики). По этим данным ищут подобные образования
в соседних блоках фрагмента РЛИ, а затем производят адаптивную фильтрацию
совокупности однородных блоков.
Иллюстрацию работы алгоритмов некогерентного накопления, а также изла-
гаемых положений, касающихся регистрации, отображения и обработки радиолока-
ционной информации проведем на примерах РЛИ с использованием материалов
космической съемки, проведенной с помощью РСА Х-диапазона волн TerraSAR-X с
высоким разрешением (~ 1 м), которые получены с разрешения фирмы Infoterra
GmbH через веб-сайт http://www.infoterra.de/tsx/freedata/start.php [530]. Перечень ис-
пользованных материалов, их описание и параметры приведены в табл. 7.1. Основ-
ными информационными продуктами, использованными для обработки, являются
комплексные РЛИ высокого разрешения, полученные в прожекторном режиме. Об-
зорное РЛИ района съемки приведено на рис. 7.3. Приводимые РЛИ сопровождают-
ся яркостным ступенчатым клином (от 1/64 до 1) с шагом 0,707, позволяющим оце-
нить динамический диапазон отпечатка РЛИ. В зависимости от коэффициента кон-
трастности печати этот шаг соответствует, например, 3 дБ при выводе на принтер
амплитудного РЛИ и 1,5 дБ - при выводе энергетического РЛИ.
337
Радиолокационные системы землеобзора космического базирования
Таблица 7.1. Перечень использованных материалов радиолокационной съемки РСА
TerraSAR-X, Infoterra GmbH© [530]
Район съемки Дата съемки Вид продукта Имя файла
г. Розенхайм, Германия 27.01.2008 КРЛИ IMAGE_HH_SRA_spot_072.cos
АРЛИ QL_HH_SRA_spot_072
Волга, район г. Волгограда, Россия 21.06.2007 АРЛИ 20070621_TSX_First_Image_Wolga_hig_res.tif
Пролив Гибралтар 10.08.2007 АРЛИ 20070810_GI_Gibraltar.jpg
Рис. 7.3. Обзорное РЛИ района г. Розенхайм, Германия (TerraSAR-X, Infoterra GmbH© [530]):
внизу приведен яркостной ступенчатый клин с шагом 0,707
Поскольку во всех алгоритмах подавления спекл-шума используют элементы
некогерентного накопления РЛИ, рассмотрим основные особенности и варианты
выполнения этой процедуры.
338
Глава 7. Обработка и регистрация радиолокационных изображений
7.1.2. Варианты и характеристики процедуры некогерентного
накопления
При анализе методов некогерентного накопления исходят из предположения, что
на КРЛИ спекл-шум, создаваемый однородной отражающей поверхностью, харак-
теризуется действительной и мнимой составляющими, каждая из которых является
нормальным гауссовым процессом с нулевым, средним и СКО, пропорциональным
корню квадратному из a - удельной эффективной поверхности рассеяния данного
участка местности. Плотность вероятности распределения амплитуд подчиняется
рэлеевскому закону. Плотность вероятности мощности (квадрата амплитуды) от-
раженного сигнала или ЭПР в элементе разрешения, образующая энергетическое
РЛИ (ЭРЛИ), подчиняется экспоненциальному закону распределения, который яв-
ляется частным случаем %% -распределения с к степенями свободы (£=2).
При усреднении РЛИ с некоррелированными флуктуациями среднее суммы
остается неизменным, а дисперсия уменьшается обратно пропорционально квад-
ратному корню из числа наблюдений. Эти зависимости в виде формул приведены в
разделе 3.5. По физической сущности распределение /2 (хи-квадрат) с к степеня-
ми свободы - это распределение суммы квадратов (ЭРЛИ) N=k/2 независимых
стандартных нормальных случайных величин.
Применительно к межэлементному некогерентному накоплению усреднение
РЛИ проводят в окне размером NYxNx. Математическая зависимость отсчетов
выходного усредненного РЛИ от входного имеет вид:
• при усреднении энергетического РЛИ с последующим преобразованием в ам-
плитудное РЛИ
7Vy/2 Nx/2
AN(m,n) = .l——- £ Е Л2(/п + А,и + /); (7.1)
\ k=-Ny/2+\ l=-Nx/2+l
при усреднении по амплитуде
Ny/2 Nx/2
S E A(m+k,n+l). (7.2)
WyWX k=-Ny/2+\ l=-Nx/2+l
В ряде специальных случаев (для интерферометрической обработки) усредне-
ние по амплитуде реализуют путем усреднения отдельно действительной и мнимой
составляющих
2
AN(m,n) =——
7 NyN^
Ny/2 Nx/2
А(т + к,п + /)cos</?(m + к,п + /)
k=-NY/2+1 l=-Nx/2+l
339
Радиолокационные системы землеобзора космического базирования
1/2
7Vy/2 Nx!2
А(тп + к,и + Z)sin + к,п + /)
k=-NY/2+l l=-Nx!2+\
(7.3)
Реальное число наблюдений в выходном снимке зависит от размеров усред-
няющего окна и разрешающей способности исходного РЛИ по координатам Х9 Y.
Число наблюдений вычисляется по следующей формуле
АГ X yN уМуМ Х
X = Y х—-——, (7.4)
РтРх
где Ху, Xх - размеры окна усреднения в пикселях; MY, Мх - масштабы исход-
ного РЛИ (шаг пикселей); pY, рх - разрешение исходного РЛИ по координатам
дальности и азимута соответственно.
Реальное число наблюдений в сглаженном РЛИ характеризуют параметром -
эквивалентное число наблюдений EXL (Equivalent Number of Looks), которое мо-
жет быть найдено по характеристикам выходного РЛИ на участках с однородным
отражением (поля, леса). Оно равно отношению квадрата среднего значения к дис-
персии флуктуаций или квадрату отношения среднего к стандартному отклонению
(СКО) отсчетов. Для амплитудного изображения (АРЛИ) имеем
ENL = [ mean^ Г=______________И (<,.,f___________ , (75)
[0,5228 std,J 0,52282
где mean^ = Mj (Ат,п ) - первый момент (среднее) амплитудного распределения;
std/i = = - СКО Флуктуаций; М2 и D - второй
момент и дисперсия амплитудного распределения; коэффициент в знаменателе
учитывает отношение СКО к среднему для закона Рэлея.
Для энергетического изображения (ЭРЛИ) имеем аналогично
— (76)
stdf M2(Emtn)-Mx(Em^
При ENL>10 плотность вероятности в обоих случаях приближается к нор-
мальному закону. Оценка EML по АРЛИ может давать погрешность вычисления до
1,6 дБ по сравнение с оценкой по ЭРЛИ, которую обычно применяют на практике.
Заметим, что расчет EML по формулам (7.5), (7.6) для РЛИ, представленным в
формате JPG (например, в электронных публикациях статей), может дать значения,
в несколько раз превышающие ожидаемые. В JPG при сжатии объема информации
реализуется фильтрация спекл-шума, а отображение контрастных объектов может
сопровождаться артефактами в виде повторов, что требует особого внимания при
пользовании этим форматом.
340
Глава 7. Обработка и регистрация радиолокационных изображений
На рис. 7.4 дана иллюстрация формирования РЛИ путем некогерентного на-
копления. Показаны парциальные РЛИ с одним наблюдением и сглаженное РЛИ,
полученное путем усреднения в сумме АухАу=16 отсчетов с эквивалентным накоп-
лением ENL=V2 наблюдений по азимуту и дальности. Парциальные РЛИ получены
из фрагмента КРЛИ г. Розенхайм, снятого с помощью РСА TerraSAR-X в прожек-
торном режиме с разрешением около 1,3x1,5 м (дальность х азимут, измеренные
значения). Показанные на рис. 7.4,6 и в первичные РЛИ имеют разрешение около
3 м. Они сформированы из исходного КРЛИ путем децимации в 4 раза. Результи-
рующее РЛИ показано на рис. 7.4,г.
Рис. 7.4. Формирование РЛИ с некогерентным накоплением
(TerraSAR-X, Infoterra GmbH© [530]):
a - субспектры сигнала; б, в - парциальные РЛИ; г - сглаженное РЛИ 7V= 12;
д, е - гистограммы луга на исходном (д) и сглаженном (е) АРЛИ
Приведены также гистограммы для отмеченного прямоугольником на
рис. 7.4,6 фрагмента РЛИ, имеющего однородную отражающую поверхность (луг).
Плотность вероятности распределения амплитуды на этом фрагменте близка к за-
кону Рэлея (измеренное отношение СКО к среднему сгА/МА =0,48 близко к зна-
чению 0,5228 для распределения Рэлея [1]).
341
Радиолокационные системы землеобзора космического базирования
Рассмотренный на рис. 7.4 случай некогерентного накопления дает прямой
выигрыш в улучшении радиометрического разрешения пропорционально квадрат-
ному корню из числа наблюдений. Однако его реализация без потери пространст-
венного разрешения возможна только при наличии запаса по независимым наблю-
дениям, например, в космических РСА среднего разрешения (~30 м), предназна-
ченных для дистанционного зондирования Земли. В РСА высокого разрешения не-
когерентное накопление без потери пространственного разрешения обеспечивается
в прожекторном режиме съемки путем увеличения времени наблюдения и реализа-
ции когерентной и некогерентной обработок радиоголограмм.
Используют два варианта некогерентного накопления суммирования парци-
альных РЛИ (внутриэлементное накопление) или отсчетов детального РЛИ (межэ-
лементное накопление) при его усреднении по площади окна:
1) суммирование по амплитуде (АРЛИ);
2) суммирования по яркости (ЭРЛИ) - квадрату амплитуды.
Во втором случае обычно после суммирования парциальных ЭРЛИ делают
обратный переход к амплитуде путем извлечения квадратного корня из суммы от-
счетов яркостей. Как показано в разделе 7.4, амплитудное РЛИ более подходит для
зрительного восприятия, а также для печати твердой копии РЛИ). Иногда для реги-
страции РЛИ в цифровом виде используют формат отсчетов ЭРЛИ в децибелах,
соответствующих удельной ЭПР каждого пикселя РЛИ.
После проведенного усреднения сглаженное АРЛИ обычно прореживают
(децимируют) в число раз, равное или меньшее Ny и Nx по соответствующим
координатам с интерполяцией для получения равномасштабного РЛИ в плановой
проекции.
Следует отметить, что суммирование яркостей (ЭРЛИ) было исходной опера-
цией некогерентного накопления в оптических устройствах синтеза РЛИ (экспони-
рование вторичной фотопленки). Получаемое РЛИ регистрировали на негативной
фотопленке, после чего печатали на фотобумаге в виде позитивного изображения.
В ходе этих операций происходят нелинейные преобразования радиоголограммы и
РЛИ в зависимости от коэффициентов контрастности химико-фотографической
обработки фотоматериалов [149*, 151*]. В конечном счете, эти нелинейности ска-
зываются на изобразительных свойствах и дешифрируемое™ РЛИ, представлен-
ных на твердых копиях.
Варианты усреднения РЛИ по амплитуде или яркости дают близкие результа-
ты при наблюдении однородной шероховатой поверхности. На рис. 7.5, а показаны
сечения РЛИ по горизонтали (линия на рис. 7.4,в), а также гистограммы распреде-
ления амплитуд при одном наблюдении и при некогерентном накоплении в обоих
вариантах (усредненные выходные АРЛИ). Графики для разного числа наблюде-
ний совмещены по среднему значению. Участок анализа - луг, обозначенный пря-
моугольником на рис. 7.4,6, с переходом к городским кварталам в правой части
фрагмента РЛИ. Для сравнения приведены гистограммы АРЛИ без накопления и
кривые рэлеевского распределения амплитуды.
342
Глава 7. Обработка и регистрация радиолокационных изображений
Рис. 7.5. Сечения АРЛИ по дальности (а, б) и гистограммы (в, г) исходных АРЛИ
и АРЛИ после некогерентного накопления:
а - исходное АРЛИ без некогерентного накопления, б - АРЛИ после усреднения амплитуд (кривая А -
ENL=23) и после усреднения ЭРЛИ и преобразования к АРЛИ (кривая Э - ENL=23, на а и б по оси абсцисс
отложены отсчеты дальности, по оси ординат - отношение амплитуды к ее среднему уровню на участке лу-
га); в - однородная поверхность (отмечена прямоугольником на рис. 7.4,6); г - РЛИ, показанное на рис. 7.4,
накопление 7V=5. Средний уровень возрастает на 4 дБ за счет мощных целей; д - РЛИ, показанное на
рис. 7.4, накопление N=32: (7 - теоретическая кривая распределения Рэлея; 2 - АРЛИ при W=l; 3 и 5 - ус-
реднение АРЛИ, 7V=4 (3) и 7V=32 (5); 4 и 6 - усреднение ЭРЛИ, N=4 (4) и 7V=32 (6)
На рис. 7.6 дано сравнение РЛИ, сглаженных путем усреднения амплитуд или
яркостей с помощью окна 8x8, что при выбранной частоте дискретизации РЛИ со-
ответствует ухудшению пространственного разрешения с 3 до 12 м. Во втором
случае контрастность ярких целей на сглаженном АРЛИ (после извлечения квадрат-
ного корня из сглаженного ЭРЛИ) заметно выше, что подтверждается кривыми Л, Э
на рис. 7.5,6. В подрисуночной подписи приведены значения ENL для РЛИ луга.
Для исходного РЛИ однородной поверхности при одном наблюдении плотно-
сти распределения (рис. 7.5,в) практически совпадает с теоретическим рэлеевским
распределением для случайного гауссова процесса (кривая У).
Если снимаемая местность включает яркие цели (городская застройка), то гис-
тограмма преобразуется и имеет вид, показанный на рис. 7.5,б,в. Из-за влияния мощ-
ных целей, в сотни и тысячи раз превышающих диапазон приведенных графиков,
кривые перемещаются влево относительно среднего значения, равного единице. Гис-
тограммы для однородного фона при суммировании АРЛИ и ЭРЛИ близки. Но по
городским кварталам гистограммы существенно различаются. При суммировании
343
Радиолокационные системы землеобзора космического базирования
АРЛИ возрастают погрешности измерения ЭПР отдельных ярких целей (до 10 дБ),
особенно при большом усреднении. Таким образом, корректная процедура - сум-
мирование энергетических РЛИ.
Рис. 7.6. Варианты некогерентного накопления РЛИ:
a - вид РЛИ с одним наблюдением ст/Мх =0,53, ENL = 0,97 (участок луга), разрешение pXY ~ 3 м ; б и в -
выходные АРЛИ, полученные суммированием амплитуд (б) и путем суммирования парциальных ЭРЛИ (в)
(в обоих случаях по участку луга pXY «12 м, a/Мх = 0,11; ENL = 23 ; TerraSAR-X, Infoterra GmbH© [530])
344
Глава 7. Обработка и регистрация радиолокационных изображений
Рассмотренные выше примеры относятся к ситуации, когда имеется запас по
времени наблюдения, который используют для некогерентного накопления. Более
типична другая ситуация (маршрутные режимы, Скансар), когда такой запас отсут-
ствует, некогерентное накопление реализуют за счет ухудшения пространственно-
го разрешения. Вариант улучшенного пространственного разрешения можно ис-
пользовать для формирования банка радиолокационных портретов объектов, а
улучшенные радиометрическое разрешение и изобразительные свойства РЛИ - для
общих мониторинговых задач и обнаружения групповых объектов.
На рис. 7.7 приведены РЛИ сельской местности при высоком пространствен-
ном разрешении (~2 м, одно наблюдение) и при сглаживании четырех наблюдений
(окном 2x2), которое резко улучшает изобразительные свойства РЛИ. Потери в ве-
роятности обнаружения групповых объектов (выделены прямоугольниками на
РЛИ), размеры которых превышают размеры элемента сглаженного РЛИ (4 м),
практически отсутствуют, если выбранный масштаб РЛИ достаточен для воспри-
ятия мелких объектов, как это приведено на рис. 7.7,в. Крупный масштаб, подчер-
кивающий зернистость РЛИ, менее пригоден для дешифрирования протяженных
объектов. На практике при компьютерном дешифрировании РЛИ изменение мас-
штаба является рутинной процедурой.
На рис. 7.8 показаны исходное РЛИ с пространственным разрешением ~ 1,5 м,
а также сглаженные РЛИ - 3 наблюдения с разрешением 2,5 м и 11 наблюдений с
разрешением 5 м. Снижение флюктуаций изображения протяженных объектов
приводит к повышению контраста компактных объектов и способствует их обна-
ружению на окружающем фоне. Заметим, что в выходном информационном про-
дукте РСА TerraSAR-X предусмотрена альтернатива: улучшение пространственно-
го или радиометрического разрешения, в том числе при съемке в прожекторном
режиме с расчетным пространственным разрешением 1 м [572, 573].
Вообще говоря, возможности снижения спекл-шума на РЛИ путем некоге-
рентного накопления ограничены допустимым ухудшением пространственного
разрешения до пределов, когда теряется информация об объекте. Это связано с тем,
что спекл-шум, вызванный интерференцией сигналов от элементов группового или
распределенного объекта, является порождением совокупного отражения радио-
волн от данного объекта или участка местности, в котором содержится информа-
ция о среднем (по ансамблю) значении удельной ЭПР в усредняемой площадке
разрешения.
В реальных условиях дешифрирования радиолокационных снимков для ре-
шения тематических задач приходится искать компромисс между улучшением ра-
диометрического и ухудшением пространственного разрешения. Применительно к
задаче оценки урожайности при сельскохозяйственном мониторинге эффективно
усреднение РЛИ до размеров элемента разрешения 30...50 м. Но при мониторинге
лесных массивов при таком разрешении могут быть потеряны текстурные призна-
ки, характеризующие породы деревьев. Для ледовых покровов критические разме-
ры площадки усреднения составляют 300x300 м2 [87].
345
Радиолокационные системы землеобзора космического базирования
Рис. 7.7. Сравнение первичного РЛИ высокого разрешения 2 м
с одним наблюдением (я) и сглаженных РЛИ при четырех наблюдениях
и разрешении 4м- полного РЛИ (б) и его центральной части в масштабе,
совпадающем с первичным РЛИ (в):
1 - озеро, 2 - леса, 3 - поля, 4 - застроенная территория,
5 - лесопосадки, 6-8 - групповые объекты, отмеченные рамками
(северо-западные окрестности г. Розенхайм. TerraSAR-X, Infoterra GmbH© [530])
346
Глава 7. Обработка и регистрация радиолокационных изображений
Рис. 7.8. Сравнение первичного РЛИ высокого разрешения (~1,5 м) с одним наблюдением (а)
и сглаженных РЛИ при числе наблюдений N=3 с разрешением 2,5 м (б)
и при N=11 с разрешением ~5 м (в)
(фрагмент РЛИ г. Розенхайм; TerraSAR-X, Infoterra GmbH© [531])
347
Радиолокационные системы землеобзора космического базирования
Как следует из рис. 7.8, при сглаживании исходного РЛИ, которое сопровож-
дается ухудшением пространственного разрешения (но не более 5...7 м), вероят-
ность обнаружения групповых объектов (зданий, мостов) практически не изменя-
ется. А для уточнения особенностей конструкции объекта необходим переход к де-
тальным снимкам (двухэтапное дешифрирование). Соответственно рабочие места
операторов, выполняющих тематическую обработку радиолокационных снимков,
должны располагать программным обеспечением, позволяющим гибко варьиро-
вать параметры некогерентного накопления при отображении РЛИ.
7.1.3. Базовые алгоритмы фильтрации спекл-шума
Широкое развитие алгоритмов фильтрации спекл-шума относится к 1980-1990 гг.
Их систематизация и аналитический обзор представлен в статье [22]. Основная
цель, решаемая при фильтрации спекл-шума - повышение точности измерения
УЭПР пространственно распределенных объектов с сохранением информации, со-
держащейся в текстурных признаках, характеризующих отраженный сигнал, гис-
тограммах его распределения, включая возможности поляриметрической обработ-
ки. В публикациях последних лет рассмотрены пути применения методов вейвлет-
фильтрации, фрактального анализа, нейронных сетей.
Разработка математического аппарата адаптивной фильтрации спекл-шума ос-
нована на моделях, аппроксимирующих законы распределения отраженного сигнала
от наблюдаемой поверхности в зависимости от ее характера: распределение Рэлея
(шероховатая поверхность), Райса (наличие когерентной составляющей отражения),
Вейбулла, /^-распределение (морская поверхность). В ряде случаев используют не-
параметрический подход, не требующий точного знания закона распределения [379].
Наиболее часто для аналитического описания исходного РЛИ рассматривают ряд
моделей взаимодействия сигнала и шума. Самая простая из них - модель мультип-
ликативного шума
и(х,у) = S(х,^)п(х,у), (7.7)
где х,у - координаты пикселя на РЛИ; S(xy) - стационарная составляющая (тексту-
ра), значение которой может быть найдено при усреднении сигналов по ансамблю;
а?(х,^) - случайная составляющая, не зависящая от сигнала и определяемая мгно-
венным распределением фаз элементарных отражателей в элементе разрешения
при конкретных ракурсе и угле места наблюдения.
Следующая по сложности - это модель аддитивного шума, модулируемого
сигналом
u(x,y) = S(х,у) + /{5(х,j')}п(х,у), (7.8)
где f{S(x,y)} в общем случае, нелинейная функция.
Модификация модели (7.7) для описания нестационарных РЛИ - мультипли-
кативная модель с аддитивным средним
w(x,^) = S'(x,y) + [^ + r(x,y)], (7.9)
где q - среднее значение помехи; г(х,у) - стационарный эргодический процесс с
нулевым средним.
348
Глава 7. Обработка и регистрация радиолокационных изображений
Используют также обобщенную модель взаимодействия, учитывающую
мультипликативную и аддитивную составляющие
w(x,y) = S) (х, J') + S2 (х,y)q(х,у) + г (х,у), (7.10)
где 51 (х,у) и S2(x,y) - компоненты изображения, представляющие собой линейные или
нелинейные функции от идеального РЛИ без флуктуаций S(x,y). Эти компоненты кор-
релированны между собой, но статистически независимы от шумов q(x,y) и г(х,у).
Как показывает анализ материалов радиолокационной съемки с получением
РЛИ, значительно отличающихся по пространственному разрешению (от единиц
метров), во многих случаях достаточно применение простейшей модели (7.7).
Локальные адаптивные фильтры основаны на формировании локальных стати-
стик относительно центрального пикселя в окне обработки и принятии решения о
выборе формулы для расчета центрального элемента. Широко известны алгоритмы
фильтрации спекл-шума Ли, Куана, Фроста, расширенный Ли, расширенный Фроста,
медианный, фильтр максимального правдоподобия. Эти базовые алгоритмы основа-
ны на оценке статистических характеристик локальных фрагментов РЛИ (в окне от
3x3 до 9x9 и более), окружающем анализируемый пиксель РЛИ. По результатам
анализа принимается решение о значении отсчета в центральном пикселе (например,
взвешенная сумма исходного и усредненного по окну значений) [16, 297, 373, 394,
423,494, 560].
В ходе многолетней эксплуатации космических РСА и практического исполь-
зования материалов радиолокационной съемки подтверждена правильность подхо-
дов к проблеме фильтрации спекл-шума, получена сравнительная оценка этих ал-
горитмов и заложена база для разработки новых алгоритмов с использованием со-
временных вычислительных методов обработки радиолокационной информации
РСА нового поколения. В публикациях о новых алгоритмах фильтрации РЛИ либо
приводят сравнение с перечисленными «классическими» алгоритмами, либо ис-
пользуют их в качестве основы для первичной обработки РЛИ.
Кратко рассмотрим основные алгоритмы фильтрации спекл-шума. Алгоритм
Ли исходит из мультипликативной модели спекл-шума (7.7). Выходной отсчет
ЭРЛИ (или АРЛИ) в центральном пикселе окна IV вычисляют по формуле
+ (7.11)
где Ek - отсчет ЭРЛИ в центральном пикселе окна к=(гп,пУ, Ew=mean{Ek} w ~ сред-
нее значение отсчетов по окну с центром в к\ W = 1- ENL/N- весовая функция
(здесь N - расчетное число наблюдений для однородной поверхности, измеренное
по РЛИ или рассчитанное по формуле (7.4); ENL - измеренное по ЭРЛИ эффектив-
ное число наблюдений для локальной области окна W, вычисленное с учетом фор-
мулы (7.6)).
В результате имеем
E^eV-^Ve^. (7.12)
Ч N ) N
Таким образом, когда попадающий в окно участок местности однороден,
ENL>N, фильтр Ли работает как простой сглаживающий фильтр. В противном слу-
349
Радиолокационные системы землеобзора космического базирования
чае он вычисляет взвешенную сумму реального значения и среднего значения в со-
ответствии с (7.11). Условие ENL>N является критерием однородной поверхности.
Фильтр Куана предполагает преобразование мультипликативного шума к адди-
тивной модели, зависящей от сигнала и(х,у) (7.8). К этой модели применяют крите-
рий минимума среднеквадратичной ошибки. Формула для вычисления выходных от-
счетов РЛИ совпадает с алгоритмом Ли (7.11), но весовая функция имеет отличие
W = l-ENL/(N + \). (7.13)
В результате, для однородной поверхности, когда ENL & N , в каждом пиксе-
ле выходного РЛИ имеем полусумму отсчетов исходного РЛИ в данном пикселе и
усредненного значения по окну. Если неравномерность отсчетов по окну велика, то
в выходное РЛИ записывают значения исходного РЛИ.
На рис. 7.9 приведено сравнение исходного РЛИ высокого разрешения (~1,5 м)
с одним наблюдением и результата фильтрации путем взвешенного суммирования
исходного и сглаженного (Л/=5) изображений, которое является частным случаем
Рис. 7.9. Снижение спекл-шума путем взвешенного суммирования исходного РЛИ
высокого разрешения (а) и сглаженного РЛИ (б):
а - исходное РЛИ с разрешением ~1,5 м; б - суммарное РЛИ (1+1)
(железнодорожный вокзал и стадион в г.Розенхайм; TerraSAR-X, Infoterra GmbH© [530])
350
Глава 7. Обработка и регистрация радиолокационных изображений
алгоритмов Ли и Куана. Заметно увеличение контраста РЛИ групповых объектов
(железнодорожные составы, обустройство путевого хозяйства) и улучшение на-
блюдаемости протяженных объектов (уличные проезды, стадион и др.).
Адаптивный фильтр Фроста использует модель мультипликативного шума в
предположении, что сигнал имеет экспоненциальную автокорреляционную функ-
ция (РЛИ стационарно и однородно в пределах окна). Отличие фильтра Фроста от
фильтров Ли и Куана в том, что он оценивает отражающую способность сцены пу-
тем свертки наблюдаемого РЛИ и импульсной реакции РСА. Применение фильтра
требует формирования окна с круговой симметрией, которое характеризуется на-
бором коэффициентов взвешивания, зависящих от положения отсчетов РЛИ в окне
М = ехр {-ад,/ENL} , (7.14)
где Dr - коэффициент демпфирования, задающий спадание весовой функции; /?, -
расстояние z-ro пикселя в окне от центрального пикселя.
Результирующая формула для вычисления выходных отсчетов РЛИ имеет вид
en = - X Е>м‘- <7Л5>
/ , NX*NY
N X
Таким образом, для однородной поверхности фильтр Фроста будет усреднять
отсчеты РЛИ в круговой области окна, задаваемой коэффициентом демпфирова-
ния. При появлении неоднородности диаметр усредняемой области будет умень-
шаться, пока не сравняется с центральным пикселем. Фильтр Фроста, в отличие от
фильтров Ли и Куана, требует увеличенных вычислительных затрат, при этом не
устраняет присущих указанным фильтрам искажений при наблюдении линейных
объектов на РЛИ и на границах однородных участков.
Расширенные фильтры Ли и Фроста предусматривают оценку однородности
исходного РЛИ в локальной области окна и выбор альтернативной стратегии для
формирования выходного РЛИ: для однородной поверхности, текстуры и изо-
лированных точечных целей [394]. В качестве параметра однородности использу-
ют соотношение между измеренным в окне эффективным числом наблюдений ENL
и расчетным числом наблюдений N. Для расширенного фильтра Ли имеем выра-
жение для отсчетов выходного РЛИ
Ew при
EN=< EkW + Ew(\-W) при
Ek ПРИ
ENL>Nmax,
Nmax < ENL < N;
N > ENL,
(7-16)
где Ek - отсчет исходного РЛИ в центре скользящего окна; Ew - усредненные от-
счеты по окну
W = exp{-DR(Ci -C„)/(Cmax -С,.)}, (7.17)
- весовая функция (здесь Cu =i/\[N ; С, =stdJF/mean(F =\/4enl- ^=^1+2^ -
порог идентификации текстуры в окне РЛИ; DR - коэффициент демпфирования,
задающий спадание весовой функции.
351
Радиолокационные системы землеобзора космического базирования
Работа расширенного фильтра Фроста аналогична фильтру Ли, но только с
тем отличием, что весовая функция имеет круговую симметрию
М = ехр{-ад (С, - Cu )/(Стах - С,)} , (7.18)
где Ri - расстояние z-ro пикселя в окне от центрального пикселя.
Результирующая формула для вычисления выходных отсчетов РЛИ при аль-
тернативных значениях параметра, характеризующего однородности РЛИ в окне,
имеет вид
при
при
при
ENL>N^,
Nmsa<ENL<N;
N > ENL,
(7.19)
К фильтрам, построенным на порядковых статистиках, относится предложен-
ный Ли сигма-фильтр [379, 380], который учитывает, что для нормально распреде-
ленной случайной величины с СКО, равной ст, вероятность ее попадания в интер-
вал ±2 а относительно среднего уровня равна 0,995. Принцип алгоритма сигма-
фильтрации состоит в том, что по фрагменту РЛИ в пределах окна Nx*Ny вычис-
ляют средний уровень МА и СКО флуктуаций суа
а а ;
МА = mean {Ai}; (7.20)
Da = mean | Д21 - mean {Д }2 .
По этим данным формируют два плавающих порога относительно среднего
уровня
(7.21)
где <71 и <72 - коэффициенты порога, в общем случае разные (см. ниже). Для выде-
ления отсчетов РЛИ внутри интервала между порогами формируют локальную
маску
4/ =
1.
если
A(m + k,n + /)А?рог1 < А(т + к,п + Г) < А(т + к,п + Г)Крот2
о,
в противном случае
.(7.22)
Отсчеты выходного РЛИ определяются путем усреднения отсчетов входного
РЛИ, если они близки (в пределах, определяемых порогами) к центральному отсчету
Wy/2 Nx/2 / Ny/2 Nx/2
AN(m,n) = S ЗыА(т+к,п+1) £ £ (7-23)
A:=-2Vy/2+l l=-Nx/2+\ / k=-NY!2+\ l=-Nx/2+1
352
Глава 7. Обработка и регистрация радиолокационных изображений
Сглаживание процедурой (7.23) проводят путем итераций (до четырех), удов-
летворительное качество РЛИ получается уже при двух итерациях, увеличение бо-
лее четырех итераций приводит к смазыванию мелких деталей на РЛИ. Отмечается
простота алгоритма и умеренные требования к вычислительным средствам сравни-
тельно с другими базовыми алгоритмами.
Модификации и усовершенствования базовых алгоритмов фильтрации спекл-
шума, а также их применение для поляриметрических РЛИ приведены в [373, 381,
382, 393, 394].
7.1.4. Модернизированные алгоритмы фильтрации спекл-шума.
Применение вейвлет-преобразования
Прогресс в развитии аппаратно-программных средств и совершенствование радио-
локационной аппаратуры в направлении повышения разрешающей способности,
поляриметрического зондирования и интерферометрической обработки позволяет
существенно усовершенствовать базовые алгоритмы фильтрации РЛИ и устранить
присущие им недостатки, которые в значительной степени были вызваны стремле-
нием упростить требования к процессорам обработки изображений. Взгляд с новых
позиций позволяет тщательно проанализировать недостатки базовых алгоритмов и
найти пути их устранения. Так, в [320] рассмотрены возможности устранения ос-
новных недостатков алгоритма сигма-фильтрации: необходимость предваритель-
ного сглаживания РЛИ (N > 4) для нормализации закона флуктуаций, «размазыва-
ние» отметок от ярких целей, плохая фильтрация темных точечных отметок на
РЛИ. Проведенная модернизация алгоритма позволяет использовать его для обра-
ботки РЛИ высокого разрешения с одним и более наблюдений, устраняет радио-
метрические искажения и позволяет фильтровать участки с низким отражением.
Это реализуется
- выбором коэффициентов порогов а2 в формуле (7.21) с учетом несим-
метрии закона распределения отсчетов РЛИ;
- кластеризацией отметок от ярких целей путем совместной обработки отсче-
тов в окнах с разными размерами (3x3 и 5x5). Предварительно по всему РЛИ оце-
нивается статистика распределения ярких отсчетов, уровень которых превышает
порог на 98 % вероятности. Оценивается число таких отметок в окне 3x3 и, если
оно, включая центральный пиксель, превышает заданный порог (А?рог = 5-6), все
яркие цели передаются в выходное РЛИ без фильтрации;
- применением оценки минимума СКО для центрального элемента в окне 3x3
в соответствии с формулами
AN=AkW + Aw(\-W), (7.24)
где
fF = Dpz)/D(4), (7.25)
D(A)-^std{n(x,y)}2
Д(Лг)= V»/ I (7.26)
1 +
12—1492
353
Радиолокационные системы землеобзора космического базирования
Здесь An - отфильтрованный центральный отсчет в выходном РЛИ; А к - централь-
ный отсчет в исходном РЛИ; Aw= mean {ЯД - среднее значение отсчетов исходного
РЛИ в окне; IV - весовая функция; D(AZ) - вычисленная в текущем окне дисперсия
по ярким целям, входящим в кластер; D(A^) - дисперсия всех отметок в окне; п(х,у) -
закон распределения модели мультипликативного шума (7.7) для входного РЛИ с
учетом числа наблюдений при его предварительном сглаживании.
На рис. 7.10 показан результат обработки исходного РЛИ высокого разреше-
ния (N= 1) с помощью модернизированного алгоритма сигма-фильтрации. В отли-
чие от рис. 7.9 на выходном снимке лучше просматривается структура отражения
от элементов железнодорожных вагонов.
Рекомендации по усовершенствованию алгоритмов фильтрации РЛИ и их
применению изложены в публикациях [342, 382, 383, 395, 485]. В статье [485] рас-
смотрено усовершенствование фильтра Ли путем адаптивного выбора окна, кото-
рое автоматически меняет разрешающую способность выходного РЛИ с учетом
неоднородности отражения от наблюдаемой поверхности.
Рис. 7.10. Применение модернизированного алгоритма сигма-фильтрации
для улучшения изобразительных свойств РЛИ:
а - исходное РЛИ с разрешением —1,5 м; б - выходное РЛИ (железнодорожный вокзал и стадион в г. Розен-
хайм; TerraSAR-X, Infoterra GmbH© [530])
354
Глава 7. Обработка и регистрация радиолокационных изображений
Также в статье [485] рассмотрен имеющий высокую производительность ме-
тод фильтрации спекл-шума, являющийся комбинацией алгоритмов с разными по-
рогами, применяемых к набору парциальных РЛИ - «мягкого», «жесткого» и адап-
тивного порогов. Поскольку спекл-шум является мультипликативным процессом
для выравнивания СКО флуктуаций, выполняют логарифмирование сигнала, после
чего он соответствует модели аддитивного шума. После логарифмирования отсче-
ты РЛИ в децибелах принимают вид
Lk = lOlogEk -lOlog^ +-12-(4 -1пЛГ), (7.27)
InlO
где двойной номер m, п для краткости обозначен как k\ - среднее УЭПР фона в
локальном окне W с центром в данном пикселе РЛИ; Lk - переменная, характери-
зующаяся плотностью распределения [505]
Lk=\K(NEk/<Jwy, (7.28)
ехр{М,*ехр(£л)}
------Fw-------’
где Г(У) = (ДМ)! - Гамма-функция. При N> 3 распределение (7.28) близко к гауссову.
Среднее и СКО находят через производную от Гамма-функции от аргумента N
М {^} =У"[’пГ(а)]а=лг=^(АГ); (7.29)
da
d2
std{4}=-rrl?1 r(°0]«=w= W •
da
Для целого TV можно воспользоваться следующим выражением:
tv-1 1
Мх {Lk }=^) = -z + y_; (7.30)
N-l ,
std{4}=</a'(#)=^-y—,
6
где /=0,57721566 - постоянная Эйлера-Маскерони.
Далее по формуле (7.5) находят значение эффективного числа наблюдений
ENL и выбирают стратегию обработки по приведенным выше алгоритмам.
Метод, изложенный в [485], предусматривает разделение сигнала на субблоки
(в голограмме или спектре) разных размеров с получением разного разрешения
парциальных РЛИ.
Важным фактором для выбора стратегии формирования выходного РЛИ
является оценка однородности исходного РЛИ в пределах анализируемого окна.
Именно она позволяет сохранить текстуру протяженных объектов на РЛИ, найти
границы участков и выявить наличие компактных объектов. Кроме простых крите-
риев сравнения значений расчетного N и эффективного ENL накопления рекомен-
355
Радиолокационные системы землеобзора космического базирования
дованы применение адаптированного размера и формы окон с пороговой обработ-
кой ENL<Nmax, а также других методов улучшения изобразительных свойств РЛИ
[259, 278,381,400].
Большие перспективы имеет применение двумерных процедур прямого и об-
ратного вейвлет-преобразования для фильтрации РЛИ. Вейвлеты - это особый ба-
зис приближения функций и сигналов произвольной формы, имеющий вид волно-
вых пакетов разной формы (в том числе фрактальной), локализованных по оси од-
ной переменной (/ или х) и способных к сдвигу по ней и масштабированию. Пре-
имущества вейвлетов - в возможности работы с действительными процессами, бы-
стродействии, удобстве представления локальных особенностей сигналов, отсутст-
вующим у рядов Фурье. Библиотека процедур вейвлет-преобразований входит во
многие программные пакеты, включая эффективную среду обработки изображений
MATLAB.
Применение вейвлет-преобразований для фильтрации РЛИ рассмотрено в
статьях [73*, 259, 362, 395, 505]. Не вдаваясь в детали алгоритмов фильтрации
РЛИ, изложенных в этих и других публикациях, кратко рассмотрим принципы
вейвлет-анализа применительно к задачам обработки радиолокационных изобра-
жений, для которых типично сочетание локальных неоднородностей и слабо кор-
релированного спекл-шума. Для адекватного представления таких данных нужен
базис из функций, одновременно обладающих локализацией самих функций и их
преобразований Фурье.
Такими свойствами обладает вейвлет-представление сигнала, которое заклю-
чается в разбивке приближения к сигналу на две составляющие - грубую, аппрок-
симирующую (низкочастотную) и утонченную, детализирующую (высокочастот-
ную) - с последующим их дроблением с целью изменения уровня декомпозиции
сигнала. Это возможно как во временной, так и в частотной областях [70]. При ка-
ждом шаге декомпозиции происходит изменение разрешающей способности и из-
менение размеров базиса в два раза. В результате сигнал оказывается представлен-
ным в виде набора коэффициентов на разных уровнях декомпозиции. На практике
часть из них может иметь малую величину, что позволяет ими пренебречь и ап-
проксимировать исходный сигнал значительно меньшим числом параметров, чем
число исходных отсчетов (сжатие изображения).
Дискретное вейвлет-преобразование сигнала s(t)9 заданное дискретными зна-
чениями а и b на некотором множестве Z, равными <я=27, b=kl\ представляет его в
виде коэффициентов
(7.31)
356
Глава 7. Обработка и регистрация радиолокационных изображений
где ^/) - вейвлет-функция (/мг-функция) с нулевым значением интеграла
00
( = 0), определяющая детали сигнала; <p(t) - масштабирующая или скей-
00
линг-функция (scaling) с единичным значением интеграла ( = 1), опреде-
-00
ляющая грубое приближение (аппроксимацию) и порождающая коэффициенты ап-
проксимации у; J=l, 2, ... - октавный индекс уровня декомпозиции. Базисная psi-
функция (тип ортогонального вейвлета) обеспечивает выполнение двух основных
операций в области ее определения R:
смещение по оси времени t
(Ръ(1-Ь), где \
масштабирование
<7-1/Vo — ПРИ a > ° И Ь G R .
\a J
Параметр а задает ширину пакета, а b - его положение. Таким образом, вы-
полняется соотношение на одном шаге декомпозиции
5/(?) = а-1/25/оГ—\ (7-32)
у a )
Обратное нормированное дискретное вейвлет-преобразование (ОДВП), ис-
пользуемое в MATLAB пакете, выполняется по формуле
5(Z) = XSJ(7’^)ao7/V7.4ao7 ~k\ (7-33)
yeZ k^Z
Технология вейвлет-обработки РЛИ основана на представлении пространства
сигналов V в виде системы вложенных подпространств Vj, отличающихся друг от
друга только перемасштабированием независимой переменной. Основанный на
этом метод называется методом кратномасштабным анализом (multiresolution
analysis) (KMA).
Кратномасштабное представление сигналов изображений означает их преоб-
разование в последовательность образов с разной степенью детализации. Для гру-
бых (сглаженных) образов служит функция cp(t), а уточнение достигается с помо-
щью вейвлет-коэффициентов. Наиболее часто используют серию ортогональных
вейвлетов Добеши и реализуют пакетную обработку согласно «дереву» алгоритма
Малла (Mallat) или его усовершенствований, показанных на рис. 7.11,а,б. На каж-
дом шаге выполняется операция «расщепления сигнала» на НЧ- и ВЧ-составляю-
щие и формируется два децимированных НЧ- и ВЧ-массива. Граница разделения
равна половине максимальной частоты дискретизации. Для следующего шага ис-
пользуют НЧ-часть (в алгоритме Малла). В усовершенствованном алгоритме опе-
рация «расщепления» (splitting) применяется и для любой из ВЧ-компонент.
357
Радиолокационные системы землеобзора космического базирования
Рис. 7.11. Дерево алгоритма Малла:
a - исходный алгоритм, б - усовершенствованный алгоритм
На рис. 7.12 приведены примеры разложения по вейвлет-базисам строки тес-
тового изображения с моделями откликов от точечных, групповых и протяженных
объектов (без спекл-шума). Использованы процедуры MATLAB для шага декомпо-
зиции (см. help dwt в командном окне MATLAB):
[cal,cdl]=dwt(Lin,’dbr); - первый шаг декомпозиции, где Lin - входная стро-
ка, ‘dbl ’ - имя вейвлета (Дебеши), cal, cdl - НЧ- и ВЧ- выходные компоненты;
[ca2,cd2]=dwt(cal,’dbl’); - второй шаг, расщепление первой НЧ-компоненты и
[cda2,cdd2]=dwt(cdl,’dbl'); - расщепление первой ВЧ-компоненты.
Для обратного перехода к массивам исходной размерности применяют проце-
дуры ОДВП:
aO=idwt(cal,chl,'dbT,size(Lin)); - ОДВП по первой декомпозиции (восстанов-
ление исходного сигнала);
aOO=idwt(cal,chl*O,'dbr,size(Lin)); - ОДВП только по НЧ-составляющей.
Фактически это масштабирование половинной строки к исходному размеру масси-
ва, т.е. результат НЧ-фильтрации исходного массива.
При восстановлении декомпозиции нескольких уровней последовательно по
приведенным выше формулам вычисляют каждый предыдущий уровень, обнуляя
при необходимости ненужные (например, ВЧ) компоненты. Характерно сущест-
венное различие в исходном процессе и процессах, восстановленных по НЧ-ком-
поненте, когда длительность отметки меньше длительности вейвлет-отклика соот-
ветствующего уровня (сравнить рис. 7.12,г-е). Это свойство может служить при-
знаком для адаптации алгоритмов фильтрации РЛИ к размерам неоднородности.
Рассмотрим алгоритм двумерного пакетного вейвлет-разложения и реконст-
рукции изображений. Сначала изображение построчно раскладывается на коэффи-
циенты скейлинг-функций и вейвлет-коэффициенты (на рис. 7.13 они обозначены
как S и W), а затем с полученным набором коэффициентов по вертикали произво-
дится аналогичная процедура. В итоге формируются четыре компоненты размер-
ностью 1/2 xl/2 от исходной матрицы изображения, показанные на рис. 7.13.
358
Глава 7. Обработка и регистрация радиолокационных изображений
а)
0,8
0,6
0,4
0,2
0 20 40 60 80 100 120 140
е)
Рис. 7.12. Декомпозиция и восстановление одномерного сигнала вейвлетом Дебеши:
а - двумерное тест изображение; б - горизонтальное сечение теста по середине; в - первый шаг декомпози-
ции, компоненты НЧ (верх) и ВЧ (низ); г - восстановление исходного сигнала (пунктир) и только НЧ-ком-
поненты (сплошные линии); д - восстановление исходного сигнала по декомпозиции первого и второго
уровней (пунктир) и только НЧ-компоненты (сплошные линии); е - восстановление исходного сигнала по
декомпозиции первого и второго уровней для сечения теста по вертикали (пунктир) и только НЧ компонен-
ты (сплошные линии); ж - первый шаг декомпозиции, компоненты НЧ (верх) и ВЧ (низ); з - второй шаг
декомпозиции, компоненты НЧ (верх) и ВЧ (низ)
0.
JltQu
Далее компонента с коэффициентами только скейлинг-функций (ОД) подвер-
гается дальнейшему разложению по аналогичной процедуре до необходимой глу-
бины разложения.
Процесс декомпозиции двумерного изображения показан на рис. 7.14. В каче-
стве исходного изображения на рис. 7.14,я взят результат восстановления декомпо-
зиции первого уровня (рис. 7.12,а и 7.14,я идентичны). Использована процедура
MATLAB: [cal,chl,cvl,cdl]=dwt2(AS,’dbr), где в квадратных скобках компоненты
декомпозиции, AS - входное изображение. Для восстановления изображения ис-
пользуют процедуру, в которой в общем случае фильтрации компоненты умножают
на коэффициенты kl, k2, k3, к4: A0=idwt2(cal kl,chl k2,cvl k3,cdl k4,’dbl',size(AS)).
Аналогичную формулу применяют для преобразования компонент в более высокий
уровень.
359
Радиолокационные системы землеобзора космического базирования
Рис. 7.14. Двумерная декомпозиция и восстановление изображения:
a - двумерное тест-изображение; б, в, д, е - компоненты декомпозиции первого уровня; б - SS] (НЧ-НЧ,
скейлинг-функции); в - WSi (ВЧ-НЧ); d - SW\ (НЧ-ВЧ); е - WW\ (ВЧ-ВЧ); г - компоненты декомпозиции
второго уровня SS2, WS2, SW2, WW2
Для некогерентной обработки РЛИ можно воспользоваться процедурой
MATLAB wdencmp с использованием вейвлет-функций
xd 1 =wdencmp(’gbr,LS,’db 1 ’,2,thr,sorh,keepapp).
Процедура формирует выходное изображение ХС от входного изображения
(или одномерного сигнала) в вариантах сжатия объема или фильтрации аддитивно-
го шума. Для фильтрации спекл-шума в РЛИ оно должно быть предварительно
прологарифмировано. Используется положительная глобальная функция порога
thr=0,7824. Строка ‘wname’ - имя заданного вейвлета (использован ‘dbl ’)• Пара-
метры N=1 и N=2 - используемые уровни декомпозиции входного сигнала, sorh -
тип порога, sorh=’s’ - мягкий (‘h’ - жесткий), кеерарр =1, означающий, что коэф-
фициенты аппроксимации могут не ограничиваться. Результаты фильтрации РЛИ
для ДМ и N=2 приведены на рис. 7.15,б,в.
Фильтрация РЛИ, приведенная на рис. 7.15,6,в, выполнена при постоянном
значении порога подавления высокочастотных компонент. В отличие от них, при
использовании динамического порога, выключающего фильтрацию ВЧ-отметок
при их значении, превышающем Зег шума, происходит подчеркивание ярких то-
чечных отметок, как это видно на рис. 7.15,г.
360
Глава 7. Обработка и регистрация радиолокационных изображений
Рис. 7.15. Фильтрация РЛИ с использованием вейвлет-преобразований:
a - исходное РЛИ, одно наблюдение, разрешение ~2 м; б- фильтрация wdencmp, N=\, ENL=7\
в - N=2, ENL=27; г - фильтрация dwt, ENL=7,5
7.1.5. Метод нелокального усреднения спекл-шума
Новое направление развития методов фильтрации спекл-шум является обобщением
рассмотренных локальных методов, позволяющим учитывать семантические при-
знаки, содержащиеся в изображении. Метод нелокального усреднения (NLM -
Non-Local Means) используют для коррекции фотоснимков, телевизионных изо-
бражений, материалов медицинских анализов, а также радиолокационных изо-
бражений [269, 547]. В отличие от локальных методов фильтрации, усредняющих
РЛИ в пределах окна Л, он проводит совместную обработку блока РЛИ в окрестно-
стях данного пикселя х и близких к нему по структуре парных блоков у из фраг-
мента РЛИ
361
Радиолокационные системы землеобзора космического базирования
(7-34)
где NLz(x) - результат фильтрации в пикселе х, равный взвешенной сумме пиксе-
лей блока z(y), ближайшего по структуре, найденного во фрагменте РЛИ; w(x,y) -
весовая функция; C = ^w(x,j^) - сумма коэффициентов w(x,y). Весовую функ-
уеА
цию для аддитивного гауссова шума рассчитывают через эвклидово расстояние
между векторами (матрицами) значений пикселей в блоках х и у:
w(x,y) = exp(-||z(x) - Z(y)||2/h2} , (7.35)
где h= 12a -параметр сглаживания; символ ||-||2 означает сумму квадратов разно-
стей значений соответствующих пикселей в блоках х и у.
Для спекл-шума, имеющего мультипликативный характер, может потребо-
ваться предварительное логарифмирование отсчетов.
Основные принципы метода базируются на предположении о наличии иде-
ального РЛИ zo(x) без шумов и аддитивного шума с неизвестными параметрами
zn(x). Производится сравнение предъявленного зашумленного РЛИ z(x)=z0(x)+zw(x)
с результатами фильтрации NLz(x) и оценкой исключенного шума zn(x) = z(x)-
-7VLz(x). Задача фильтрации состоит в том, чтобы правильно определить отсчеты
шума по блоку с учетом того, что структура сигнала в блоке может быть неодно-
родна - включать компактные групповые цели, линейные объекты и границы уча-
стков с разной УЭПР, которые имеют произвольную ориентацию относительно
осей координат снимка.
Для выделения аномалий от однородного шума на первом этапе выполняют
серию операций линейной и нелинейной локальной обработки (медианную, анизо-
тропную фильтрацию, выделение контуров, углов, пороговую обработку) и фор-
мируют вектор признаков, характеризующих структуру изображения в каждом
блоке. По-существу, решается задача распознавания типа аномалии, в ходе которой
формируется библиотека признаков для данного РЛИ, с которой сравнивают век-
тор признаков текущего блока для поиска близких ему по структуре блоков во
всем фрагменте РЛИ с последующим усреднением шумов по общему массиву дан-
ных в выбранных блоках.
В приведенных примерах фильтрации фотоизображений [269] выбирались
размеры блока (окна) 15x15 или 21x21 пикселей и массив блоков, размерностью
7x7. Для оптимизации поиска ближайших соседей возможно применение Байесо-
ва критерия. Благодаря многократному увеличению усредняемой площади пропор-
ционально числу однородных блоков значение ENL возрастает в несколько раз.
Одним из критериев качества фильтрации служит близость исключенного шума
zn (х) к белому шуму (с учетом полосы частотной характеристики сквозного трак-
та РСА. Неравномерность его спектра (например, подъем высоких частот) может
362
Глава 7. Обработка и регистрация радиолокационных изображений
свидетельствовать о потере разрешения в выходном РЛИ, а низкочастотные со-
ставляющие - о появлении артефактов на РЛИ.
Метод нелокального усреднения, позволяя значительно улучшить изобрази-
тельные свойства снимков, требует значительных вычислительных затрат. Воз-
можна его модификация, например, путем расчета весовой функции не для каждо-
го пикселя РЛИ, а на разреженной решетке блоков.
В дополнение к рассмотренным алгоритмам фильтрации спекл-шума следует
отметить перспективность методов автоматического сегментирования РЛИ по при-
знакам однородности статистических характеристик фрагментов РЛИ на основе
нейросетевых подходов (см. гл. 9). В целом, учитывая возрастание потоков дан-
ных, возросшие требования по точности измерения отражающих свойств наблю-
даемой местности и объектов, а также необходимость внедрения методов автома-
тической обработки радиолокационной информации, задача оптимизации алгорит-
мов фильтрации РЛИ остается актуальной.
7.2. Регистрация радиолокационной информации
7.2.1. Требования к регистрации радиоголограммы
Задача регистрации радиолокационной информации состоит в обеспечении долго-
временного хранении полученных материалов радиолокационной съемки для воз-
можности их использования в любых областях, где они могут потребоваться. Со-
временные средства хранения цифровых данных имеют достаточно высокую ем-
кость (гигабайты и десятки гигабайт на единицу носителя) при относительно низ-
кой стоимости по сравнению со стоимостью получения информационного продук-
та и не должны быть ограничивающим фактором, вызывающим невосполнимые
потери информации. Вопросы формирования банка радиолокационных данных,
организации оперативного доступа к ним и сохранности информации являются
предметом специальных исследований. Решение этих важных проблем выходит за
рамки настоящей монографии. Ниже рассмотрены технические характеристики ра-
диолокационных информационных продуктов, необходимая точность их фикса-
ции, форматы хранимых данных.
Регистрации подлежат первичные данные - радиоголограмма и продукты
синтеза изображения. Для записи радиоголограмм целесообразно использовать два
формата:
1) «как есть» - с выхода радиолинии передачи данных с искажающими аппа-
ратурными воздействиями (нелинейностью, сжатием потока сигналов), но после
восстановления дефектов передачи сигналов по радиолинии (пропуска строк, на-
рушений синхронизации и т.д.);
2) формат, поступающий на синтез РЛИ после коррекции аппаратурных ис-
кажений с нормализацией уровня сигналов и восстановлением динамического диа-
пазона сигналов, подвергнутых сжатию на борту КА. Такой формат радиоголо-
граммы, непосредственно пригодный для синтеза РЛИ, а также для распростране-
ния заинтересованным потребителям, иногда называют «компьютерным форма-
том». Естественно, файл радиолокационных данных должен сопровождаться фай-
363
Радиолокационные системы землеобзора космического базирования
лами служебной информации с параметрами режимов съемки, баллистическими
данными движения КА и др.
Форматы радиоголограммы с выхода приемного канала радиолинии передачи
данных индивидуальны для каждой аппаратуры РСА. Запись этих сигналов имеет
страховочный характер, а также служит для специальной обработки поврежденных
мест, если возникает надобность в восстановлении информации при чрезвычайных
ситуациях. Для представления радиоголограммы в компьютерном формате, обыч-
но, достаточно 8 бит на отсчет по каждой, действительной и мнимой составляю-
щих сигнала (целое со знаком int8 или без знака uint8 с введением опорного уровня
128 ед.). В случаях, когда на предварительной стадии коррекции аппаратурных ис-
кажений производится умножение на коэффициенты, мало отличающиеся от еди-
ницы (коррекция усиления в приемном тракте или рассогласования параметров
АЦП в квадратурных каналах), может потребоваться уменьшение шага квантова-
ния шумов и слабых сигналов от одиночных целей, что приведет к необходимости
перехода на 16-битовый формат (целое со знаком inti6 или без знака uintl6). Ука-
занные проблемы исчезают при работе в плавающей арифметике, но это приводит
к удвоению объема данных.
В качестве иллюстрации приведем параметры радиоголограммы РСА «Меч-КУ»
КА «Алмаз-1». Использовались пятиразрядные АЦП, но установленный высокий
уровень сигналов на их входе - СКО шумов, равное 5 единиц младшего разряда
(ЕМР), приводил к ограничению сильных сигналов от местности. Рекомендуемое
значение СКО шумов, равное 1,5 ЕМР, реализовать не удалось по техническим
причинам, так как выход приемника был оптимизирован для оптического синтеза
РЛИ [208*].
Для устранения нелинейности была использована специальная процедура
коррекции голограммы (см. раздел 11.6). После этого радиоголограмма преобразо-
вывалась в однобайтовый формат (uint8). Примеры гистограмм откорректирован-
ных радиоголограмм на входе процессора синтеза РЛИ приведены на рис. 7.16 для
шумов приемника, взволнованной морской поверхности и суши. СКО шумов со-
ставляет -3,26 ЕМР, полный размах сигнала от местности не превышает 180 ЕМР
при допустимом размахе 256 ЕМР.
Рис. 7.16. Гистограммы радиоголограммы РСА «Меч-КУ» КА «Алмаз-1»:
a - шумы приемника; б - взволнованная морская поверхность, скорость приводного ветра 5...8 м/с [63*],
угол падения 41°, о0 - около минус 20 дБ; в - застроенная прибрежная территория, гористая местность,
вулкан (5-диапазон волн, поляризация ГГ, чувствительность Ле—30 дБ; Тихий океан, остров Осима,
Япония, виток 2024в, 05.08.1991 (см. РЛИ рис. 7.17))
364
Глава 7. Обработка и регистрация радиолокационных изображений
Таким образом, для параметров РСА «Меч-КУ» представление радиоголо-
граммы в однобайтовом формате имеет запас по линейности амплитудной характе-
ристики, не превышающий 9 дБ (6 дБ на возможность снижения СКО шума до 1,5
ЕМР и 3 дБ на увеличение отношения сигнал/шум по местности с интенсивным
отражением). Одно из направлений развития космических РСА связано с примене-
нием зондирования в более длинноволновых диапазонах волн (L и Р), где контра-
сты сигналов выше, и требуется более высокая чувствительность РСА. Учитывая
это, для регистрации радиоголограммы с целью ввода ее в процессоры синтеза, ар-
хивирования и распространения пользователям целесообразно применение двух-
байтовых форматов (inti6 или uintl6).
7.2.2. Динамический диапазон выходных радиолокационных
изображений
Рассмотрим характеристики выходного информационного продукта, полученного в
результате синтеза радиолокационного изображения, а также его некогерентного
накопления. Особое место занимают комплексные изображения, применяемые для
интерферометрической обработки. Действительные (продетектированные) изобра-
жения могут поставляться в виде отсчетов амплитуды (АРЛИ) или мощности
(ЭРЛИ), а также - в логарифмическом формате в виде отсчетов удельной эффек-
тивной поверхности рассеяния, в децибелах (будем обозначать их как ЛРЛИ). Для
регистрации изображений используют целые форматы - однобайтовый (uint8) и
двухбайтовый (uintl6), а также плавающий формат (float). Совмещенные материа-
лы, являющиеся сочетанием поляриметрических РЛИ, регистрируют в виде много-
слойных цветных изображений (RGB). Часть материалов используют как справоч-
ные для их визуального восприятия при поиске фрагментов РЛИ, подлежащих ин-
струментальной обработке. К таким материалам не предъявляют требований по
точности передачи радиометрической информации. Задачей анализа будет рас-
смотрение материалов, предназначенных для сохранения полной неискаженной
информации об объектах, полученной по результатам радиолокационной съемки.
Измерительные свойства РЛИ характеризуются точностями геометрического
построения РЛИ и его радиометрических характеристик. Вопросы геометрической
точности РЛИ не связаны с форматами представления данных. Точность радио-
метрических измерений, обеспеченная процедурами радиометрической калибровки
(см. гл. 11), может быть нарушена при несоответствии форматов регистрации дан-
ных информационным характеристикам РЛИ.
Наиболее существенными факторами радиометрических искажений является
ограничение динамического диапазона сигналов при регистрации РЛИ, а также
влияние шумов приемника и изменений реальной чувствительности РСА при
съемке на разных дальностях и влиянии формы ДНА при отклонениях линии визи-
рования от направления максимума ДНА.
Динамический диапазон сигналов, зарегистрированных на РЛИ, зависит от
пространственного разрешения РЛИ, а также от сглаживания РЛИ при некогерент-
ном накоплении. Рассмотрим РЛИ с одним наблюдением без накопления. В этом
365
Радиолокационные системы землеобзора космического базирования
случае выходное АРЛИ на участках регистрации шумов приемника или однород-
ной протяженной поверхности будет распределено по закону Рэлея с разными
значениями среднего и СКО флуктуаций, которые будут пропорциональны квад-
ратному корню из чувствительности РСА \[сг^ или суммы сигма нулевого шумо-
вого эквивалента и УЭПР наблюдаемой местности +сг° . Флуктуации для
ЭРЛИ с одним наблюдением подчиняются экспоненциальному закону, частному
случаю Z2-распределения, для которого СКО численно равно среднему значению
отсчетов ЭРЛИ.
Предварительно оценим динамический диапазон сигналов через отношение
максимальной мощности отметок от целей к средней мощности шума. Измеренные
экспериментальные данные для разных сюжетов съемки и параметров РСА сведе-
ны в табл. 7.2. Групповыми объектами обозначены суда, самолеты, элементы ин-
женерных конструкций (мостов, зданий и др.). Такие яркие объекты встречаются
во многих сценах, но с разной вероятностью. Через дробь указаны значения тре-
буемого динамического диапазона регистратора (на 20 дБ больше) для возможно-
сти обнаружения слабых контрастов распределенных объектов (см. ниже)
Таблица 7.2. Отношение сигнол/шум для разных объектов съемки
и параметров РСА
Тип и параметры РСА Отношение максимальной мощности целей к средней мощности шума / динамический диапазон регистрации РЛИ, дБ
Объекты съемки
групповые объекты город сельская местность
Космический РСА «Меч-КУ», S- диапазон, разрешение ~12 м 50/70 50/70 39/59
Космический РСА TerraSAR-X, ^-диапазон: разрешение ~1,5 м разрешение ~5 м разрешение ~12 м 60/80 45/65 35/55 60/80 45/65 35/55 39/59 32/32 16/36
Пример РЛИ с разнообразием объектов приведен на рис. 7.17. Характерно на-
личие на морской поверхности изображений кильватерных следов, создаваемых
движением судов. Подобные образования (включая структуру волнения, поверхно-
стные проявления внутренних волн, модуляцию ряби поверхностно активными
пленками) имеют низкий контраст на РЛИ по отношению к уровню шумов прием-
ника и слабого отражения от моря. Для их обнаружения требуется высокое радио-
366
Глава 7. Обработка и регистрация радиолокационных изображений
метрическое разрешение, которое достигается некогерентным накоплением по
площади этого образования (аномалии).
Рис. 7.17. Фрагмент РЛИ о. Осима, Япония с окружающей надводной обстановкой
(РСА «Меч-КУ» КА «Алмаз-1». Виток 2024в)
При регистрации РЛИ в целых форматах необходимо, чтобы единица млад-
шего разряда (ЕМР) дискретизации сигнала была достаточно малой по сравнению
с СКО флуктуаций шумов приемника. Как известно, ошибки квантования распре-
делены по равномерному закону, СКО ошибок квантования равно
= std {Aw}2 =
ЕМР/2
J &u2p(ku}du =
-ЕМР/2
Aw3
ЕМР/2
ЗЕМР
= {0,28867ЕМР}2,
w=-EMP/2
(7.36)
/л х 1 |Л I EMR
где /?(Aw) = дмр ПРИ |Aw|<—------плотность вероятности равномерного зако-
на распределения ошибок.
На рис. 7.18 приведены графики, характеризующие ошибки дискретного
представления случайных процессов - составляющих комплексного РЛИ (гауссово
распределение), амплитудных РЛИ (рэлеевское распределение) и энергетических
РЛИ (экспоненциальное распределение).
367
Радиолокационные системы землеобзора космического базирования
Рис. 7.18. Графики ошибок дискретизации шумов приемника:
a - составляющие КРЛИ (гауссово распределение); б - амплитудное РЛИ (рэлеевское распределение);
в - энергетическое РЛИ (экспоненциальное распределение)
Особенность получаемых РЛИ состоит в том, что выходной сигнал пропорцио-
нален суммарному процессу сигнал+шум. Отношение сигнал/шум для сигнала от
некоторой поверхности зависит от наклонной дальности съемки (от кадра к кадру, по
формуле дальности), а также от формы ДНА по углу места (в пределах одного кад-
ра). При перенацеливании полосы съемки выбирают один из вариантов: сохраняют
одно и то же значение средней излучаемой мощности или для экономии энергопо-
требления изменяют среднюю мощность излучения, регулируя скважность. В любом
случае, регулируя усиление приемника, добиваются согласования выхода приемника
со входом АЦП, но во втором случае отношение сигнал/шум в выходном РЛИ со-
храняется постоянным, а в первом случае меняется от кадра к кадру. В сопроводи-
тельной информации к снимку обычно прилагают таблицу зависимости мощности
шумов от дальности, по которой можно откалибровать выходное РЛИ в единицах
УЭПР (или ЭПР) отражающей способности наблюдаемой местности или объектов
(см. гл. 11). Для калибровочных операций погрешность оценки мощности шума на
РЛИ не должна превышать 0,25...0,5 дБ (Aw/crM~ 0,03...0,06). Соответственно для ре-
гистрации составляющих КРЛИ значение ЕМР не должно превышать
Aw inAdB/20_i
ЕМР =---------<yu =-----------<т = (0,1...0,2)сг . (7.37)
0,28867 11 0,28867 "
Это означает, что требуемый динамический диапазон при регистрации со-
ставляющих КРЛИ должен превышать цифры, приведенные в табл. 7.2 для отно-
шения максимального уровня сигнала к средней мощности шума, на 14...20 дБ.
При регистрации АРЛИ ошибки дискретизации имеют то же значение, определяе-
мое формулой (7.37) с аналогичными требованиями к динамическому диапазону,
как для регистрации составляющих КРЛИ. Однако в задачах обнаружения слабых
контрастов на РЛИ по площадным объектам требования к уменьшению ЕМР могут
быть ослаблены. Как показывают графики, приведенные на рис. 7.18,б,в, погреш-
ности оценки среднего значения суммарного процесса шум+фон пренебрежимо
малы (менее 0,07 дБ), если ЕМР < 1,5теап{Л}.
368
Глава 7. Обработка и регистрация радиолокационных изображений
Аналогичная ситуация имеет место для ЭРЛИ, но требования к величине ЕМР
более жесткие. Малый уровень погрешностей оценки средней мощности суммар-
ного процесса шум+фон (менее 0,09 дБ) достигается при ЕМР < 0,5mean{£}.
Резюмируя приведенные соображения, можно сделать вывод, что для регист-
рации РЛИ среднего разрешения (5... Юм) достаточно динамического диапазона
65.. .70 дБ, а для РСА с метровым разрешением требуется 80 дБ.
7.2.3. Параметры регистрации радиолокационных изображений
Из используемых форматов представления радиолокационных данных только пла-
вающий формат практически не имеет ограничений по динамическому диапазону
передаваемых сигналов и при этом обеспечивает достаточную точность передачи
данных. Параметры целых форматов - 8- или 16-битового приведены в табл. 7.3.
Учитывается, что для 8-битового формата без знака (uint8) имеем 256 значений
сигнала от 0 до 255, а для формата со знаком (int8) - от минус 128 до 127. Для 16-
битового формата без знака (uintl6) имеем 65536 значений сигнала от 0 до 65535, а
для формата со знаком (inti6) - от минус 32768 до 32767. Порядок возрастания
значений битов отсчетов амплитуды при регистрации ее в виде *.й1*-файлов (вклю-
чая формат GeoTIFF с координатной поддержкой по GPS в отдельном «слое») мо-
жет быть совпадающий с используемым в IBM PC и в среде MATLAB или же об-
ратный, как в среде Macintosh. Преобразование из одного порядка в другой может
быть выполнено с помощью программ Photoshop, MATLAB или с помощью спе-
циализированных пакетов, предназначенных для работы с РЛИ.
Таблица 7.3. Информационные возможности целых форматов регистрации РЛИ
Параметр Динамический диапазон, дБ Примечание
8-битовый 16-битовый
Амплитудное РЛИ 48 96 uint8 или uint 16
Энергетическое РЛИ 24 48 uint8 или uint 16
Составляющие комплексного РЛИ 42 90 int8 или inti6
Дискретность передачи фазы, град
Фазовое РЛИ 1,4 5,5-10’3 int8 или inti6
Дискретность передачи мощности, дБ
Логарифмическое (децибельное) РЛИ 0,31 10“14 uint8 или uintl6 относительно опорного уровня
Реализуемые динамические диапазоны для регистрации АРЛИ и ЭРЛИ опре-
деляются числом отсчетов в формате. При оценке параметров логарифмического
(децибельного) формата будем исходить из требования передачи полного динами-
ческого диапазона сигналов 80 дБ.
Передачу комплексных РЛИ обычно реализуют двумя квадратурными состав-
ляющими - действительной и мнимой. Удобным форматом для обработки ком-
плексных РЛИ и использования их для моделирования процессов преобразования
сигналов в РСА является представление КРЛИ в виде амплитудного РЛИ - АРЛИ
369
Радиолокационные системы землеобзора космического базирования
и сопровождающего его фазового РЛИ - ФРЛИ. Этот формат также представлен в
таблице. Форматы со знаком можно заменить на форматы без знака, прибавив
опорный уровень 128 (для uint8) или 32768 (uintl6), что даст дополнительные
удобства регистрации файлов в форматах RAW или GeoTIFF с просмотром их с
помощью программы Photoshop.
Приведенные в таблице данные свидетельствуют о пригодности 16-битового
формата для передачи АРЛИ, ФРЛИ и составляющих КРЛИ. Для передачи энерге-
тического РЛИ, полученного, например, в результате некогерентного накопления,
16-битовый формат пригоден с ограничениями, для исключения которых ЭРЛИ
преобразуют в АРЛИ путем извлечения квадратного корня из отсчетов ЭРЛИ. Сле-
дует отметить, что в отдельных случаях возможно появление аномально ярких от-
меток на РЛИ. Например, при съемке аэродрома со стоянкой пассажирских само-
летов класса ИЛ-18 (РСА «Меч-КУ», виток 1038н) было обнаружено, что их ЭПР
составляет десятки тысяч квадратных метров, вместо обычных 350...400 м. Такое
явление было вызвано бликом отражения от фюзеляжей самолетов, имеющих фор-
му, близкую к цилиндру, при нормальном падении радиоволн. Для исключения ис-
кажений регистрируемой радиолокационной информации в алгоритмах обработки
РЛИ должен быть предусмотрен контроль уровней выходного сигнала.
Использование 8-битовых целых форматов для регистрации РЛИ, значитель-
но более удобных при работе с изображениями, возможно в случаях, когда не ста-
вится задача радиолокационного портретирования объектов или для общего озна-
комления с имеющимися материалами радиолокационной съемки.
Далее изложены материалы по отображению радиолокационной информации, что так или
иначе предполагает ее зрительное восприятие. В следующем разделе рассмотрены особен-
ности зрительного восприятия РЛИ, а затем их отображение на мониторе и получение
твердой копии РЛИ.
7.3. Характеристики зрительного
восприятия РЛИ
Работа с радиолокационными изображениями, полученными в результате синтеза и
применения последетекторной фильтрации, предусматривает получение твердых
копий РЛИ на бумаге или другом носителе, а также отображение на экране мони-
тора для анализа и дешифрирования РЛИ и их тематической обработки в сочета-
нии с инструментальными методами. Зрительное восприятие и возможности из-
влечения полезной информации зависят от характеристик зрительного анализатора
и параметров носителя РЛИ. При отображении РЛИ на экране монитора имеются
широкие возможности для согласования параметров отображаемого РЛИ (яркости,
контраста, масштаба, цветовой гаммы, применение пороговых преобразований) с
параметрами зрительного анализатора, а также применение процедур, улучшаю-
щих изобразительные или дешифровочные свойства изображений перед их фикса-
цией на твердом носителе.
Несмотря на развитие методов автоматической обработки радиолокационной
информации, остается приоритетным визуальное дешифрирование РЛИ с исполь-
370
Глава 7. Обработка и регистрация радиолокационных изображений
зованием поддержки средствами и процедурами автоматизации. Это обусловлено
сложностью характера наблюдаемой поверхности, разнообразием объектов, тре-
бующих выявления и классификации по данным радиолокационной съемки, а так-
же тем фактом, что зрительный анализатор в сочетании с мыслительным аппара-
том реализует близкую к оптимальной пространственную фильтрацию изобра-
жений с адаптивным пороговым обнаружением аномалий на статистически одно-
родном фоне и их классификацией.
Количественные характеристики обнаружения объектов на РЛИ при визуаль-
ном дешифрировании определяются яркостью (контрастом) их изображений, ми-
нимальным размером пятна на бумаге (простой или предназначенной для регист-
рации фотографий) или на экране монитора при выборе оптимального масштаба
увеличения, а также размеров фрагмента РЛИ, в пределах которого возможна ас-
социативная фильтрация с выделением формы объекта (аномалии).
В процессе дешифрирования РЛИ принятие решения о наличии объекта и его
классификация реализуются несколькими этапами в зависимости от сложности на-
блюдаемой фоноцелевой обстановки. Первый этап - это общее дешифрирование -
выявление элементов рельефа, гидрографии, дорожной сети, застройки, инженер-
ных сооружений и сегментация изображения с выделением однородных участков
для детальной визуальной и инструментальной обработки. Обнаружению объектов
предшествует оценка статистики локально однородного участка фона и обнаруже-
ние «аномалии» по отношению к нему, выделение объекта (определение его фор-
мы) и после этого отнесение объекта к определенному классу - его опознавание.
Количественные соотношения, определяющие связь контрастной чувстви-
тельности глаза с параметрами изображения и условиями наблюдения, достаточно
сложны и к тому же имеют значительный разброс от оператора к оператору. По-
этому в литературе обычно рассматривают некоторые обобщенные модели зри-
тельного восприятия, отражающие общие закономерности [57, 204]. К ним в пер-
вую очередь относится закон Вебера-Фехнера, характеризуемый постоянством по-
роговой контрастной чувствительности при изменении яркости
ДВ. В:-В ,
—- = —-----= b = const, (7.38)
В В
где Bi - яркость наблюдаемого объекта; В - яркость окружающего фона; \В - при-
ращение яркости; b - постоянная контрастной чувствительности.
Закон Вебера-Фехнера верен лишь для ограниченного диапазона яркостей. При
малых яркостях пороговый контраст резко возрастает. Г.Т. Фехнер и Г.Л. Гельм-
гольц [57] объясняли это влиянием собственного света сетчатки глаза Во и представ-
ляли соотношение (7.38) в виде
=b = const. (7.39)
В + Во
Выражение (7.39) сводится к закону Вебера-Фехнера при большой яркости
фона. На практике дешифрирования РЛИ к такому же эффекту приводит рассеян-
ный свет от лица оператора, деталей приборов, используемых при дешифрирова-
371
Радиолокационные системы землеобзора космического базирования
нии, а также общее освещение в помещении. Это ухудшает контрастную чувстви-
тельность на темных участках изображения.
Значение пороговой чувствительности в общем случае зависит от угловых раз-
меров наблюдаемого объекта (в пределе - пикселя изображения), четкости его кон-
тура, абсолютных яркостей объекта и фона. При больших размерах объекта и неде-
фицитной продолжительности наблюдения, нормальных условиях освещенности и
резкой границе между объектом и фоном пороговая контрастная чувствительность в
среднем равна 0,02. По существу, эта цифра относится к условиям наблюдения фо-
тометрического клина, сопровождающего приведенные в этом и других разделах ра-
диолокационные снимки. При ухудшении условий наблюдения пороговая контраст-
ная чувствительность может возрасти до 0,35 для размытых аэрофотоснимков.
При наблюдении РЛИ с их зернистой структурой, обусловленной спекл-
шумом, количественная мера различимости объектов по яркости согласно закону
Вебера-Фехнера [77, 205] характеризуется величиной ощущения, пропорциональ-
но логарифму воздействия (стимулу)
S = a In В, (JAG)
где В - яркость; a — константа, зависящая от размеров отметки, резкости границ,
характера окружающего фона; 5 - величина ощущения. Различаемое приращение
радиолокационного контраста вычисляется путем дифференцирования приведен-
ной формулы
до
— = ^р0Г, (7.41)
где 8Крог - пороговое значение обнаруживаемого приращения контраста.
Зависимость порогового контраста от размеров отметки на РЛИ для положи-
тельных и отрицательных
контрастов приведена на
рис. 7.19.
Такая же логарифми-
ческая зависимость обна-
ружения контраста спра-
ведлива и для мощности
отраженного сигнала. Од-
нако реальные устройства
регистрации РЛИ имеют
предел по передаче макси-
мальной яркости (макси-
мальная яркость индикато-
ра, прозрачность фото-
пленки, отражающая спо-
Рис. 7.19. Контрастная чувствительность
зрительного анализатора для «гладких» изображений
в зависимости от диаметра отметки d
собность фотоотпечатка РЛИ). Минимальная же яркость определяется не мини-
мальной мощностью отраженного сигнала, а общим освещением помещения или
рассеянием света от средней яркости РЛИ. Эти явления влияют на характеристики
зрительного анализатора.
372
Глава 7. Обработка и регистрация радиолокационных изображений
Следует иметь в виду, что из-за случайного характера отражения от подсти-
лающей поверхности, как правило, сравниваются яркости, не близко расположен-
ных, а удаленных друг от друга отметок, находящихся в разных элементах разреше-
ния РЛИ. Как это иллюстрирует рис. 7.20, при случайном расположении отметок
различие яркостей обнаруживается при значительно большем контрасте между ни-
ми. Для проверки правильности восприятия контрастов в подрисуночной подписи
указан порядок следования полей в строках (сверху вниз) по возрастанию яркости в
условных уровнях 0...F от темных (яркость 37 ед., условный уровень «2») до белых
(яркость 255 ед., условный уровень «F»). Для сравнения на рис. 7.20,г приведен
фрагмент РЛИ сельскохозяйственных угодий (РСА «Меч-КУ» КА «Алмаз-1».
Рис. 7.20. Изображения градационных мир с разными законами изменения яркостей:
a - 8 уровней равномерно; 6-14 уровней в случайный порядке; в - миры а и б в уменьшенных масштабах
(порядок следования полей миры б: 395E53A3 99869588 66D52463 5362E4DD С9А58643 29D5BD24
66693В78 7846A7F7); г - фрагмент РЛИ
Рис. 7.21. Модель зрительного
анализатора
Влияние флуктуаций отражения от подстилающей поверхности - спекл-шума
на РЛИ можно оценить, зная законы распределения мощности шума, сигналов от
объекта и фона, окружающего объект. Экспериментальные исследования процесса
дешифрирования РЛИ привели к формулиро-
ванию модели зрительного анализатора, поз-
воляющей учесть изменение контрастной
чувствительности от СКО флуктуаций яркос-
ти и размеров отметок на РЛИ [151*, 163*].
В этой модели влияние факторов, вызываю-
щих ограничение контрастного разрешения,
выражено в виде составляющих эквивалент-
ного шума, действующего на входе решаю-
щего устройства совместно с полезным сигналом (рис. 7.21).
Разрешаемое приращение яркости изображения выражается через СКО сум-
марного «шума зрительного анализатора», образованного несколькими независи-
мыми составляющими
АВ = aBa^ = ch](BaN )2 + (авВ + <т0 )2 ,
(7.42)
где а - коэффициент, учитывающий критерий различения; <т/а - «шум зрительного
анализатора»; crN - флуктуации яркости, усредненные по площади отметки от объ-
екта, отнесенные к средней яркости объекта; сгв - составляющая, определяемая
373
Радиолокационные системы землеобзора космического базирования
контрастной чувствительностью для гладкого (без шумов) изображения согласно
рис. 7.21; оо - составляющая, определяемая рассеянным светом.
Флуктуационная составляющая одг определяется внутриэлементным и межэ-
лементным некогерентным накоплением
(7.43)
где Ne - число наблюдений в элементе разрешения 5е; M=Sgeom/Se - число элемен-
тов разрешения, приходящихся на площадь объекта.
Таким образом, для разрешаемого контраста на РЛИ имеем выражение
кВ |1
— а7Л 4-
в-----------\nqns
\2
+ Яо
в J
(7.44)
Для типовых условий наблюдения получены численные значения параметров
6zZa = 3,16 (вероятность обнаружения порогового контраста 0,5), сгв = 0,05...0,1 в за-
висимости от типа отметки (светлая или темная) и размеров отметки на снимке,
оо = 0,0003.
Экспериментальные исследования возможностей зрительного анализатора по
усреднению яркости изображения вдоль линий и других фигур произвольной кон-
фигурации (периодических структур и др.) показали, что зрительный анализатор
при дешифрировании черно-белых изображений является адаптивным фильтром,
реализующим оценку максимального правдоподобия с потерями 4...6 дБ. Отмече-
но, что при визуальном дешифрировании РЛИ зрительный анализатор обеспечива-
ет подавление спекл-шума, эквивалентное усреднению флуктуаций по площади
анализируемого участка (сегмента) сложной конфигурации, если РЛИ предвари-
тельно сглажено до трех-четырех наблюдений, при которых рэлеевское распреде-
ление амплитуды преобразуется к распределению, приближающемуся к гауссову.
Обнаружительные способности зрительного анализатора можно уподобить
работе адаптивного решающего устройства с переменной стратегией, выполняю-
щего следующие операции:
1) оценка общей статистики РЛИ;
2) выделение на РЛИ укрупненных сегментов (вода, поле, лес, городская за-
стройка);
3) обнаружение аномалий по критерию Неймана-Пирсона;
4) переход к критерию идеального наблюдателя с равновероятным порогом
разделения аномалии и фона;
5) идентификация границ сегмента по принадлежности пикселей к фону или
аномалии.
Рассмотрим этапы дешифрирования РЛИ при наблюдении поверхностно рас-
пределенного объекта типа «лесопосадки» и «поле», поз. 5 и 3 на рис. 7.7 (подраздел
7.1.2) с УЭПР o^es и УЭПР c^poie (такая ситуация с той или иной степенью прибли-
жения может относиться к таким объектам, как самолет на стоянке, корабль в аква-
тории, элементы ландшафта и др.). Пусть отношение УЭПР составляет 3 дБ
(cr0ies/6T0poie=2), а площадь лесопосадок составляет Ns= 10 элементов разрешения РСА.
374
Глава 7. Обработка и регистрация радиолокационных изображений
Рассмотрим локальную область, окружающую объект. Законы распределения
мощности подчиняются хи-квадрат распределению с 2NC степенями свободы, но
различаются по средним значениям и значениями СКО, которые для спекл-шума
пропорциональны средним значениям (с поправкой на шумы зрительного анализа-
тора). На рис. 7.22, а показаны законы распределения яркости в точке РЛИ для
участков «поля» и «леса» в произвольных единицах, например, цифровых отсчетах
на выходе РСА (некогерентное накопление в элементе Ае = 2).
Рис. 7.22. Плотности вероятности обнаружения яркого объекта на равномерном фоне:
a - двухэтапное обнаружение; б - трактовка обнаружения при предварительном сглаживании РЛИ
(фильтр на 10 элементов)
Процесс дешифрирования можно приближенно представить себе следующим
образом. Первый этап - поиск аномалий в законе распределения яркостей на уча-
стке «поля». Оператор «работает» по критерию Неймана-Пирсона при пороге с ве-
роятностью ложной тревоги F= 10-2... 10-3. Для элемента разрешения «леса» веро-
ятность превышения порога PObni = 0,2, однако число таких элементов большое
(As=10) и вероятность того, что хотя бы в одном из них будет превышен порог,
достаточно велика
PNs =l-(l-^fs = 0,8. (7.45)
Обнаружив одно или несколько превышений отметок над порогом BF, вызван-
ных наличием какого-либо объекта, оператор оценивает параметры распределения
для аномалии и на втором этапе изменяет значение порога для того, чтобы наилуч-
шим образом (по критерию идеального наблюдателя с порогом 2?id) отделить элемен-
ты объекта от элементов окружающего фона и определить форму объекта путем от-
несения отсчетов Bi > Bld к объекту, а Д < Bid - к фону. Аналогично происходит де-
шифрирование объектов с малой интенсивностью (реки, озера, дороги, взлетные по-
лосы и рулежные дорожки аэродромов, радиолокационные тени от объектов и т.д.).
Благодаря свойствам зрительного анализатора (ассоциативная обработка) об-
наружение аномалии может происходить и иным образом. Оператор, рассматривая
РЛИ с большого расстояния, мысленно выполняет межэлементное некогерентное
накопление по площади участка «леса». Дисперсии законов распределения умень-
шаются в 7VS раз, как это показано на рис. 7.22,6. Соответственно меняется порог и
вероятность обнаружения «леса» (она равна в этом случае также Роьп.оь=0,8).
375
Радиолокационные системы землеобзора космического базирования
Рассмотренные выше соотношения справедливы не только для однородного
«леса» с постоянной УЭПР, но и для объекта с неравномерным распределением
ЭПР в отдельных элементах разрешения. При большом числе элементов разреше-
ния, приходящихся на площадь объекта, суммарный процесс нормализуется (дей-
ствует центральная предельная теорема) и вероятность обнаружения оказывается
зависящей только от отношения суммарной ЭПР объекта к его площади, что ана-
логично случаю объекта, имеющего равномерное распределение УЭПР.
Ассоциативные возможности зрительного анализатора можно проиллюстри-
ровать на примере «дешифрирования», приведенного на рис. 7.23 искусственного
РЛИ, сформированного из шумового нормального процесса, два уровня с контра-
стом 3 дБ (имитации воды и суши). Для согласования отпечатков РЛИ с характери-
стиками анализатора они представлены в трех вариантах - амплитудного (выделе-
ние слабых контрастов) и двух энергетических - нормального (выделение ярких
отметок) и с повышенной яркостью, но с ограниченными яркими отметками (про-
межуточный случай). На такой сцене можно выделить образования (аномалии), ха-
рактерные для ярких точечных объектов (опоры электросетей темных протяжен-
ных объектов (объекты гидрографии, ВПП аэродромов, радиолокационные тени) и
ярких групповых целей (здания, инженерные сооружения, группы деревьев).
Рис. 7.23. Иллюстрация ассоциативных возможностей зрительного анализатора:
a - искусственное из шумового процесса амплитудное РЛИ с разрешением 5 м, имитирующее участок су-
ши и водную поверхность с контрастом 3 дБ, «береговая линия» - сектор окружности; б, в - энергетические
РЛИ, нормальное (6) и с увеличенной яркостью (в); г-е - результаты «дешифрирования», интерпретация
отметок (отмечены рамками или усилены яркостью): Z - причал у берега, 2 - реки, каналы, дороги, 3 - мос-
ты, 4 - загрязнения на водной поверхности, 5 - суда у причала, 6 - дамба, 7 - опоры электросетей и осве-
щения, 8 - мелкие суда в акватории, 9 - инженерные сооружения, здания
376
Глава 7. Обработка и регистрация радиолокационных изображений
Данный пример может быть положен в основу количественной оценки досто-
верности РЛИ с присутствием артефактов, вызванных неоднозначностью сигналов
по азимуту/дальности, нелинейностями в тракте РСА, некомпенсированными ос-
татками от восстановления сигнала после сжатия и др. В качестве критерия досто-
верного РЛИ можно принять значение ЭПР группового объекта, для которого мала
вероятность ложной тревоги формирования похожего на него образа на РЛИ, и
ЭПР объекта превышает пороговый уровень
(7.46)
где <7ne_sum - шумовой эквивалент суммарных помех на РЛИ; N - число элементов
разрешения по площади группового объекта (примерно равно числу пикселей);
Mrag - размер фрагмента наблюдения, в котором должно быть исключено форми-
рование ложных образов; к ~ 5... 10 - коэффициент запаса.
Формула относится к ЭРЛИ с одним наблюдением. Некогерентное накопле-
ние может быть учтено изменением параметра N.
Данные, иллюстрирующие количественные характеристики процесса визу-
ально-инструментального дешифрирования рассмотренной «шумовой» модели
РЛИ, сведены в табл. 7.4 для примера РСА, значений порога обнаружения и харак-
теристик наблюдаемой обстановки.
Таблица 7.4. Параметры обнаружения элементов фона и целей
при визуально-инструментальном дешифрировании РЛИ
Параметр Значение Примечание
1 2 3
Пространственное разрешение РСА, м 5
Площадь элемента разрешения, м2 25
Чувствительность РСА о°пе, дБ -20
Эквивалентная ЭПР элемента шума сгпе, м2 0,25
УЭПР фона (равнина) о°, дБ -20
Суммарная ЭПР элемента шум+фон, м2 0,5
Порог обнаружения, м2 0,35 Критерий идеального наблюдателя (шум/фон)
Вероятность: идентификации элемента шума ложной тревоги обнаружения элемента фона пропуска элемента фона обнаружения цели пропуска цели 0,75 Экспоненциальное распределение мощности шума, фона, целей
0,25
0,50
0,50
0,97 ЭПР цели о=12 м2
0,03
Достоверность принятия правильного решения по идентификации: элемента шум/фон шум/цель 0,63 Априорная вероятность 0,5
0,86
377
Радиолокационные системы землеобзора космического базирования
Продолжение табл. 7.4
1 2 3
Порог обнаружения, м2 1,15 Критерий Неймана-Пирсона
Вероятность: идентификации элемента шума ложной тревоги обнаружения элемента фона пропуска элемента фона обнаружения цели пропуска цели 0,99
0,01
0,10
0,90
0,90 ЭПР цели о=12 м2
0,10
Достоверность принятия правильного решения по идентификации: элемента шум/фон шум/цель 0,55 0,95 Априорная вероятность 0,5
Порог обнаружения, м2 1,75 Последовательный анализ
Вероятность: идентификации элемента шума ложной тревоги обнаружения цели пропуска цели 0,999 0,001 0,86 0,14 ЭПР цели о=12 м2
Достоверность принятия правильного решения по идентификации шум/цель 0,94
Порог обнаружения, м2 2,30 Последовательный анализ
Вероятность: идентификации элемента шума ложной тревоги обнаружения цели пропуска цели 0,9999 0,0001 0,82 0,18 ЭПР цели о=12 м2
Достоверность принятия правильного решения по идентификации шум/цель 0,92
Примем, что анализируется ЭРЛИ с одним наблюдением для модели диффуз-
ного отражения, характеризуемого экспоненциальным законом распределения
мощности. Контраст суши относительно спокойной водной поверхности (озеро)
составляет 3 дБ. Отметки на РЛИ, превышающие порог идеального наблюдателя, у
береговой черты можно принять за изрезанность берега, но идентифицировать от-
метку, как причаленный катер, следует только при ее ЭПР не менее 0^=12 м2, что
соответствует вероятности ее обнаружения, равной 0,9 при вероятности ложной
тревоги F=10"2. Заметим, что при таком решении на каждый квадратный километр
озера (-20x20 пикселей РЛИ) придется в среднем по четыре таких обнаруженных
«катера», что может представлять интерес только для служб рыбнадзора.
Применив к полученной ситуации метод последовательного анализа Вальда
[136] и подняв порог до уровня ложной тревоги F=10'4, получим снижение вероят-
ности обнаружения целей с oj=12 м2 до 0,82 при одной ложной тревоге на 250 км2
378
Глава 7. Обработка и регистрация радиолокационных изображений
поверхности озера. Достоверность правильной идентификации пикселей РЛИ (шум
или катер) составит 0,918.
В результате приведенного рассмотрения можно сделать достаточно триви-
альный вывод, что для достоверного обнаружения на РЛИ отметок, принадлежа-
щих наблюдаемой обстановке, необходимо выбирать порог обнаружения не менее
1,75 по отношению к СКО суммарного процесса на локальных участках неотра-
жающей поверхности (река, озеро, радиолокационные тени). На этих участках вы-
ходной сигнал определяется суммой мощностей шума, интегрального уровня боко-
вых лепестков импульсного отклика РСА плюс мощность артефактов, вызванных
неоднозначностью сигналов по дальности и азимуту, а также нелинейностями в
сквозном тракте РСА. При таком выборе порога вероятность ложного принятия
случайного выброса на РЛИ за объект наблюдения не превысит 10-3.
Для визуально-инструментального дешифрирования РЛИ используют специа-
лизированные пакеты обработки радиолокационной информации. Можно также
применить программу Photoshop или типовые процедуры среды MATLAB.
Важный вопрос, связанный со зрительным восприятием изображений, касает-
ся числа градаций яркости, воспринимаемых оператором при наблюдении РЛИ.
Оно во многом зависит от характеристик отображающей среды. Как это сделано на
рис. 7.23,6 и в, можно разделить РЛИ на интервалы яркостей для раздельного ото-
бражения яркостных «слоев».
Расширить динамический диапазон восприятия монохромных изображений
(до трех раз) можно путем преобразования их в псевдоцветные. Эту процедуру
легко реализовать при компьютерной обработке снимков с их распечаткой на
цветных принтерах. Однако на псевдоцветном РЛИ теряется способность зритель-
ного анализатора к сглаживанию откликов по площади однородных сегментов (от-
сутствует свойство определять «средний цвет»).
Вопросы, связанные с отображением радиолокационной информации, рас-
смотрены в следующем разделе.
7.4. Отображение радиолокационной информации
7.4.1. Структурная схема модели преобразования информации
при визуальном дешифрировании РЛИ
Рассмотрим особенности преобразования радиолокационной информации при ото-
бражении РЛИ на дисплее (проекторе) или получении твердой копии РЛИ на бума-
ге (фотобумаге) для зрительного восприятия РЛИ. Следует рассматривать две за-
дачи отображения РЛИ: для презентаций и отчетов (включая материалы с резуль-
татами тематической обработки) и для дешифрирования РЛИ. В общем случае для
первой задачи требуется отображение РЛИ на соответствующем носителе с наи-
лучшими изобразительными свойствами. Для второй задачи требуется полнота
представления информации для ее восприятия зрительным анализатором.
Обобщенная структурная схема преобразования и обработки радиолокацион-
ной информации представлена на рис. 7.24. Она включает в себя следующие функ-
циональные узлы:
379
Радиолокационные системы землеобзора космического базирования
пространственные линейные фильтры обработки фрагментов радиоголограм-
мы (парциальные апертуры или спектры), сформированной отраженными от на-
блюдаемой местности сигналами. Результаты фильтрации представлены в виде на-
бора комплексных РЛИ для межэлементного накопления после сжатия радиоголо-
граммы по дальности и азимуту;
квадратичные детекторы парциальных апертур (спектров), на выходе которых
формируются энергетические РЛИ (ЭРЛИ);
некогерентный накопитель, реализующий внутриэлементное и/или межэле-
ментное накопление перед его регистрацией на устройстве отображения;
нелинейный преобразователь - устройство визуализации РЛИ (дисплей, печа-
тающее устройство);
решающее устройство, представляющее собой зрительный анализатор. В него
входят адаптивный межэлементный интегратор и пороговый обнаружитель. Неко-
герентное накопление в решающем устройстве интегрирует сигнал по полю объек-
та (обнаруженной аномалии). Результат обработки - идентифицированный объект
наблюдения с оценкой его формы, яркостного распределения, статистик и класси-
фикацией типа объекта (в зависимости от детальности РЛИ и наличия априорной
информации).
Рис. 7.24. Структурная схема преобразования и обработки радиолокационной информации при
визуальном дешифрировании РЛИ
Следуя методике работы [151*], оценим контрастную чувствительность и ра-
диометрическое разрешение при визуальном дешифрировании РЛИ, а также число
различимых градаций. В общем случае решающее устройство оценивает среднюю
мощность принятого сигнала по совокупности независимых отсчетов N=NexNs,
реализуемых аппаратным внутриэлементным накоплением Ne до нелинейного пре-
образования и межэлементным накоплением 7VS по площади объекта в зрительном
анализаторе после нелинейного звена.
Будем рассматривать процессы на входе некогерентного накопителя у, нели-
нейного преобразователя z и решающего устройства
380
Глава 7. Обработка и регистрация радиолокационных изображений
Ограничимся случаем наблюдения протяженных объектов (фона местности),
когда общее число независимых отсчетов по полю объекта (аномалии) велико. То-
гда процесс на входе порогового обнаружителя нормализуется и для его описания
достаточно знать среднее его значение и дисперсию (или СКО), которые вычисля-
ют по первым двум моментам одномерного распределения входного процесса. На
выходе квадратичного детектора имеем случайный процесс сигнал+шум, функция
распределения которого подчиняется экспоненциальному закону
_У
Ру(у) = -^~е Му , (7.47)
WL у
где Му - средняя мощность суммарного процесса на входе детектора.
Для простоты примем, что коэффициент передачи по мощности для сквозного
тракта РСА, включая выход некогерентного накопителя, равен единице и выразим
процесс на входе нелинейного звена в терминах удельной ЭПР — сигнала (фона
местности) и шумов приемника. Для краткости суммарный входной процесс, яв-
ляющийся суммой УЭПР сигнала, отраженного от фона местности crs°, и УЭПР
шумового эквивалента обозначен как crs°ne
My=a°+a°ne=a°ne. (7.48)
В некогерентном накопителе (реализованным как внутриэлементный или ме-
жэлементный накопитель или обоих типов) происходит усреднение сигналов
1
z = — У v , которое характеризуется -распределением с 2Уе степенями сво-
е к=\
боды (см. (3.53)-(3.55) раздела 3.5):
yVe-1
/ \ Ае А/ z \
pz (z) =------------—е z ---------
(7.49)
Заметим, что среднее значение процесса не меняется Mz=My=(jsnQ. а дисперсия
и СКО уменьшаются соответственно в Ne и квадратный корень из Ne раз
^z=4e; ^=(4е)2Д; (?-50)
Следующее звено - нелинейный преобразователь, который характеризуется
зависимостью яркости В от мощности входного процесса:
/s(z) = B(z). (7.51)
Представим функцию fs(z) в виде степенного ряда и ограничимся членами ну-
левого и первого порядков, определяющими постоянный уровень выходного сиг-
нала и СКО флуктуаций, которое будет зависеть от средней крутизны характери-
стической кривой регистратора в диапазоне яркостей, отображающих данную ано-
малию с суммарной УЭПР о?пе
381
Радиолокационные системы землеобзора космического базирования
fB(z) = B(.z)afo+gBz’
где
gB = mean< —£
I az
(7-52)
(7.53)
Возможность такого допущения обусловлена тем, что при наблюдении про-
тяженных объектов произвольной конфигурации, но связной формы, зрительный
анализатор работает как близкий к оптимальному усредняющему фильтру, процесс
на выходе которого (входе решающего устройства) нормализуется и для его опи-
сания достаточно вычислить его среднее значение и дисперсию (или СКО).
Параметры процесса на выходе нелинейного преобразователя вычисляют че-
рез функцию распределения входного процесса:
00
Мв = mean{5} = (z)pz (z)dz, (7.54)
О
00
&в = db = mean{я2} - мв = J/в (z)Pz (z)dz-M2B, (7.55)
0
где модуль учитывает возможность появления падающего участка характеристиче-
ской кривой регистратора РЛИ, меняющего знак, но не величину флуктуаций вы-
ходного процесса. Для функции распределения вида (7.49) значение производной
Фг(г) _ 7/е
dMz Mz
(7.57)
откуда
-1 Pz(z)dz
(7.58)
(7.59)
Последнее преобразование - усреднение по площади аномалии путем межэ-
лементного накопления, реализуемого зрительным анализатором:
z »—Ys,.
N.h
На выходе межэлементного накопителя параметры процесса
= Мв; <tz = —'
(7.60)
Приведенные выше соотношения позволяют оценить контрастную чувстви-
тельность и радиометрическое разрешение РСА. Процесс на выходе нелинейного
382
Глава 7. Обработка и регистрация радиолокационных изображений
звена соответствует изменению яркости изображения на дисплее или другом ото-
бражающем РЛИ носителе. Соотношения (7.50, (7.60) устанавливают функцио-
нальную зависимость между УЭПР наблюдаемой местности и средним уровнем
сигнала, а также флуктуациями при его отображении. Предположим, что на входе
имеем контраст двух участков Асг0. Относительный контраст суммарных процессов
сигнал+шум и контраст УЭПР двух участков определятся соотношениями
Аст°= Аа°
(7.61)
8KS
Да0
С ГГ° }
= 8К 1 + ^
По формулам (7.52)-(7.61) можно установить связь между входными и вы-
ходными параметрами РЛИ, после чего, сопоставив эти параметры с моделью зри-
тельного анализатора, найти контрастную чувствительность и радиометрическое
разрешения РСА при визуальном дешифрировании РЛИ в зависимости от характе-
ристик отображающего устройства.
7.4.2. Линейный регистратор с ограничением
Контрастная чувствительность РСА. Анализ характеристик регистрирующих
сред (фотопленка, печатающие устройства, дисплеи) позволяет выделить общие
свойства устройств отображения РЛИ: наличие начальной засветки f0, ограничение
максимального уровня fmax, изменение крутизны по характеристической кривой
(для случая коэффициента контрастности 7^1). Следует также отметить возмож-
ность изменения коэффициента контрастности или формирования характеристиче-
ской кривой любой формы путем цифрового преобразования РЛИ на входе устрой-
ства отображения. Таким способом могут быть реализованы пороговая обработка,
разные виды гамма-коррекции, преобразование из энергетического РЛИ в ампли-
тудное и др.
Рассмотрим сначала простейший случай идеализированного линейного реги-
стратора с ограничением
z < 0
0<z<l .
Z > 1
(7.62)
Параметры выходного процесса рассчитываем по формулам (7.52), (7.53),
(7.56). На линейном участке амплитудной характеристики Мв = Mz , crz=\/y/N ,
gz = 1. Учтя нелинейность, рассчитываем входящие в формулу (7.44) составляю-
щие дифференциальной контрастной чувствительности при визуальном дешифри-
ровании
8Kn----^=,
^=; 8КВ=^^--, 8К0=-^^-
Sz
(7.63)
383
Радиолокационные системы землеобзора космического базирования
На практике для интегральной оценки влияния суммы составляющих удобнее
пользоваться не дифференциальным контрастом (по приращению), а абсолютным
контрастом - отношением УЭПР в децибелах. Формула перехода от дифференци-
ального к абсолютному контрасту имеет вид
KdB = 101g(JA? + l). (7.64)
На рис. 7.25 показаны зависимости составляющих контрастной чувствитель-
ности РСА при визуальном дешифрировании РЛИ, записанного с помощью реги-
стратора, имеющего линейную с ограничением характеристику. По оси абсцисс
отложены значения УЭПР суммарного процесса фон+шум в децибелах. Путем из-
менения коэффициента передачи тракта РСА они могут быть смещены так, чтобы
левая граница соответствовала фактической чувствительности РСА апе или тре-
буемому начальному уровню. По оси ординат кроме значения дифференциального
контраста £A?dB =101og(£A?) для суммарного процесса отложены также значения
абсолютного контраста в децибелах. В качестве исходных данных взяты следую-
щие параметры: потери зрительного анализатора <7za=3,15 (5 дБ), контрастная чув-
ствительность глаза для гладкого изображения Жв=0,08 (-11 дБ), составляющая
рассеянного света Жо=О,ОО1 (-30 дБ). Для рис. 7.25,а полное число наблюдений
составляет ДМ О4, при числе наблюдений до нелинейности Nt=25 и числе усред-
няемых зрительным анализатором наблюдений М=400. Это соответствует площади
протяженного объекта (аномалии), равной 400 элементам разрешения РСА и сум-
марному числу наблюдений по площади объекта N=NcxNs=lO4.
Рис. 7.25. Составляющие контрастной чувствительности РСА
при визуальном дешифрировании РЛИ для линейного с ограничением регистратора
при числе наблюдений в РЛИ Nt=25 и полном числе N=NexNs=104 (a),
а также при Ne=4 и ДМ О2 (б) в зависимости от УЭПР суммарного процесса сигнал+шум:
1, la - суммарные кривые дифференциальной (7) и абсолютной (la) контрастной чувствительности РСА;
2 - составляющая контрастной чувствительности глаза; 3 - флуктуационная составляющая; 4 - составляю-
щая рассеянного света; gz - средняя крутизна характеристики регистратора (пунктир)
384
Глава 7. Обработка и регистрация радиолокационных изображений
На рис. 7.25,6 показана более типичная ситуация Ne=4 и ЛМО2 - наблюдение
протяженных объектов с усреднением 10x10 элементов разрешения (Ne=4 - до ре-
гистрации и 7VS=25 - зрительным анализатором). Это соответствует участку на зем-
ной поверхности площадью 1 га для РСА с пространственным разрешением 10 м.
Как следует из рис. 7.25, а, для «гладкого» РЛИ сквозные характеристики (кри-
вые 1 и 1а, а также график средней крутизны gz) имеют горизонтальные участки с
постоянным значением. Основной вклад в контрастную чувствительность создает
контрастная чувствительность глаза (кривая 2). Составляющая рассеянного света
приводит к потерям до 4 дБ при малых уровнях входных сигналов. Разрешаемый
контраст составляет: дифференциальный минус 8 дБ, абсолютный - примерно 1 дБ.
Для изображенного на рис. 7.25, б варианта с накоплением перед регистрацией
РЛИ Ne=4 и суммарном числе наблюдений по площади объекта ДМ 00 контрастная
чувствительность (минус 9 дБ) ограничена флуктуационной составляющей (кривая
5), динамический диапазон по уровню контрастной чувствительности минус 8 дБ со-
ставляет около 23 дБ (левая часть графика, в которой начинается резкое ухудшение
контрастной чувствительности на графике не показана). Разрешаемый контраст со-
ставляет: дифференциальный минус 5 дБ, абсолютный - примерно 1,2 дБ.
При дальнейшем анализе практических устройств отображения будем предпо-
лагать, что перед отображением информации для визуального дешифрирования реа-
лизуется некогерентное накопление с N<>4 путем его сглаживания или путем приме-
нения рассмотренных в разделе 7.1 адаптивных алгоритмов фильтрации РЛИ, сохра-
няющих высокий контраст малоразмерных точечных или групповых целей.
Число разрешаемых градаций на РЛИ. Как известно, число градаций, раз-
решаемых на изображении, выражается через контрастное разрешение (которое в
случае РЛИ совпадает с контрастной чувствительностью) с помощью интегрально-
го преобразования
о
°тах
”= J
<7°.
min
где 8К - контрастное разрешение РСА; сг° - средняя УЭПР наблюдаемого участка
местности; o-°min и сготах - минимальное и максимальное значения УЭПР суммарно-
го процесса сигнал+шум.
Наибольшее число градаций будет на «гладком» изображении при отсутствии
флуктуаций, вызванных спекл-шумом. Число градаций будет зависеть от характе-
ристической кривой регистратора РЛИ и параметров модели зрительного анализа-
тора. В общем случае число градаций для линейного с ограничением регистратора
РЛИ составит
о
° max
"= J
<7°.
min
rfcr0
8Ксг® ’
(7.65)
(7.66)
.о
13—1492
385
Радиолокационные системы землеобзора космического базирования
В табл. 7.5 приведены значения числа различимых градаций для разных соче-
таний параметров отображения линейного с ограничением регистратора РЛИ. Они
показывают, что на число градаций в первую очередь влияет суммарное число на-
блюдений по площади объекта и меньше - распределение числа накоплений между
аппаратно программными средствами и ассоциативными возможностями зритель-
ного анализатора. Однако при больших размерах поля усреднения рассмотренная
упрощенная модель зрительного анализатора может оказаться некорректной. По-
этому задача использования адаптивных методов фильтрации спекл-шума на РЛИ
остается актуальной, в том числе их внедрение в рабочие места операторов-
дешифровщиков и применение автоматизированных методов сегментации РЛИ на
фрагменты с однородной статистикой.
Таблица 7.5. Число различимых градаций при визуальном дешифрировании РЛИ
Параметры РЛИ и объекта Число различимых градаций на РЛИ Примечание
число наблюдений в элементе разрешения число элементов по площади объекта полное число наблюдений
Линейный с ограничением регистратор ЭРЛИ
100 1000 105 27,7 «Гладкое» РЛИ
25 400 10000 26,8
4 2500 10000 26,4
1 10000 10000 26,2
1 100 100 13,6
4 25 100 13,7 Типичный режим наблюдения протяженных объектов
1 40 40 9,4
4 10 40 9,5
Дисплей с регистрацией ЭРЛИ
4 2500 10000 18
4 25 100 7,3 Типичный режим наблюдения протяженных объектов
4 10 40 5,1
Дисплей с регистрацией АРЛИ
4 25 100 7,2 Типичный режим наблюдения протяженных объектов
4 250 1000 8,5
ТАЗ. Отображение РЛИ на дисплее
Оптимизация параметров отображения РЛИ для согласования с характеристиками
зрительного восприятия играет важную роль при проектировании рабочих мест
операторов-дешифровщиков РЛИ, а также при оформлении отчетных документов
и донесений по результатам тематической обработки информации. Первая задача,
386
Глава 7. Обработка и регистрация радиолокационных изображений
касающаяся отображения РЛИ на экране дисплея, решается путем использования
стандартных (Photoshop, Microsoft Office Picture Manager, Paint и др.) или специа-
лизированных программных средств (ENV1, ERDAS, SARScape, PHOTOMODE-
RADAR [191, 541, 542, 549]), с помощью которых оператор настраивает параметры
отображения РЛИ в соответствии со своими индивидуальными свойствами зри-
тельного восприятия. Для второй задачи - отображения РЛИ на бумажном носите-
ле должны учитываться усредненные характеристики зрительного анализатора, а
также параметры конкретных регистрирующих устройств - принтеров и типа ис-
пользуемой бумаги.
В данном и следующем подразделах рассмотрен общий методологический подход к инст-
рументальной оценке параметров отображения РЛИ для его визуального восприятия. Этот
подход основан на проведенных применительно к оптическому синтезу РЛИ тщательных
исследованиях путей оптимизации характеристик записи радиоголограммы на фотопленке,
а также регистрации РЛИ на негативной фотопленке и их отпечатках на фотобумаге [145,
149*, 156*, 198].
Измерение характеристической кривой изображения на дисплее или бу-
мажном носителе. Структурная схема измерения характеристик устройств ото-
бражения РЛИ приведена на рис. 7.26. В ее состав входят компьютер, используе-
мый для формирования файла с градационным клином, а также обработки резуль-
татов измерений, дисплей отображения клина на экране, печатающий принтер, от-
печаток РЛИ, фотометр и цифровой фотоаппарат. В качестве программного обес-
печения можно использовать пакет MATLAB для формирования клина и програм-
му Photoshop для измерения характеристик РЛИ. Роль фотометра может выполнять
бытовой экпозиметр, проградуированный в, так называемых, «действующих чис-
лах», соответствующих изменению яркости в два раза (логарифмическая шкала).
Особо высокой точности измерений не требуется (важны относительные данные)
из-за разброса характеристик принтера и бумаги, условий наблюдения (освещенно-
сти), а также индивидуальных свойств зрительного восприятия.
Рис. 7.26. Структурная схема измерения характеристик отображения РЛИ
Измерения проводятся в следующей последовательности. С помощью про-
граммы imwrite(Test,‘Test_name.tif ,’tif) среды MATLAB (или иной) формируют
387
Радиолокационные системы землеобзора космического базирования
файл с градационным клином, аналогичным клину, прилагаемому к РЛИ, которые
помещены в разделе 7.1, но с числом пикселей по вертикали 400...500. Диапазон
уровней клина 0...1 ед., шаг декремента входных значений равен 0,707 от макси-
мального значения, что соответствует шагу 3 дБ при отображении АРЛИ или шагу
1,5 дБ при отображении ЭРЛИ. Такой шаг совпадает со стандартным фотометриче-
ским клином, используемым для испытаний фотоматериалов [145].
Файл с клином отображают на экране дисплея. Устанавливают режим работы
дисплея - яркость 100 %, контрастность - 100 %. С помощью фотометра измеряют
яркость его полей. Строят характеристическую кривую дисплея (в относительных
единицах). Далее калибруют цифровой фотоаппарат. Для этого фотографируют эк-
ран дисплея (предварительно можно установить чувствительность фотоаппарата
400 или 800 ISO). Полученный цифровой снимок просматривают программой Pho-
toshop, тип изображения - серое (Mode - Grayscale) и с помощью опции Гисто-
грамма (Histogram) измеряют уровни полей клина (от 0 до 255), после чего сопос-
тавляют их с показаниями фотометра.
После проведенной калибровки фотоаппарат пригоден для снятия характери-
стических кривых других дисплеев или данного дисплея в пониженных режимах
яркости и контрастности изображения. С помощью откалиброванного цифрового
фотоаппарата измеряют также характеристики отражения от полей клина, отпеча-
танного на бумажном носителе. Детально требования к печати РЛИ рассмотрены в
подразделе 7.4.4.
Характеристики РЛИ на дисплее. Радиолокационное изображение на дис-
плее характеризуется следующими параметрами:
Рис. 7.27. Зависимость яркости дисплея от амплитуды
входного сигнала
+ ^min ’
1) максимальной /?тах и
минимальной яркостями;
2) характеристической кри-
вой (/-характеристикой), опреде-
ляющей зависимость яркости от
амплитуды входного сигнала;
3) масштабом изображения
- размером пикселя на экране.
На рис. 7.27 приведена ти-
пичная характеристическая кри-
вая ЖК-дисплея при начальных
настройках: яркость 100%, кон-
трастность 100 %.
Аппроксимирующая зави-
симость яркости дисплея от ам-
плитуды входного сигнала (от-
мечена на графике кружками)
характеризуется формулой
(7.67)
388
Глава 7. Обработка и регистрация радиолокационных изображений
где у- коэффициент контрастности; Втах и Вгтнп - максимальная и минимальная яр-
кости в настроенном рабочем режиме дисплея. В частности, для испытанного типа
дисплея FLATRON LCD 575LE фирмы LG у =2,7, Втах=1 и ^т1п=0,042 (в относи-
тельных единицах), динамический диапазон изображения (отношение максималь-
ной яркости к минимальной) составляет D=Bmax/Bm[n=23,S.
Для рассматриваемого случая большого некогерентного накопления N=NGxNs
размах (±З СКО) флуктуаций яркости на экране значительно меньше общего пере-
пада яркостей на носителе. Поэтому, оценка параметров выходного процесса по
локальному значению средней крутизны характеристической кривой дисплея до-
пустима. Кривые для составляющих контрастной чувствительности РСА при визу-
альном дешифрировании ЭРЛИ на дисплее в зависимости от нормированного
уровня мощности на входе и от УЭПР суммарного процесса сигнал+шум приведе-
ны на рис. 7.28. Числа различаемых градаций на дисплее приведены в табл. 7.5.
Рис. 7.28. Составляющие контрастной чувствительности РСА
при визуальном дешифрировании ЭРЛИ на дисплее при числе наблюдений в РЛИ Ne=4
и полном числе N=NexN=\04 (а), а также при NQ=4 и ДМ О2 (б) в зависимости
от УЭПР суммарного процесса сигнал+шум:
7, la - суммарные кривые дифференциальной (7) и абсолютной (la) контрастной чувствительности РСА;
2 - составляющая контрастной чувствительности глаза; 3 - флуктуационная составляющая; 4 - составляю-
щая рассеянного света; gz - средняя крутизна характеристики регистратора (пунктир)
В отличие от линейного регистратора характеристическая кривая дисплея
имеет коэффициент контрастности /=2,7 (вместо единицы). Сравнение графиков
контрастной чувствительности (разрешаемого контраста по суммарному процессу
фон+шум) для дисплея с линейным регистратором показывает увеличение значе-
ний разрешаемого контраста в области слабых сигналов (до 5 дБ, вместо 1,5 дБ,
кривые la). Это вызвано значительно большим уровнем начальной яркости (2?min =
= 0,042 вместо Жо=О,ОО 1). Число разрешаемых градаций на дисплее на 20%
меньше, чем для линейного регистратора (см. табл. 7.5). Резко сокращен динамиче-
ский диапазон входных сигналов до 14 дБ вместо 23 дБ. Это вызвано возрастанием
уровня минимальной яркости и большой величиной коэффициента контрастности.
389
Радиолокационные системы землеобзора космического базирования
В целом, рассмотренный вариант отображения РЛИ на дисплее не согласован с ха-
рактеристиками зрительного анализатора.
Согласование характеристик дисплея с характеристиками зрительного
восприятия РЛИ. Возможным вариантом согласования характеристик дисплея и
зрительного анализатора состоит в том, что на вход дисплея подают не ЭРЛИ по-
сле некогерентного накопления, а АРЛИ, полученное путем извлечения квадрат-
ного корня из ЭРЛИ. Графики контрастной чувствительности для этого варианта
согласования приведены на рис. 7.29. Динамический диапазон воспринимаемого
РЛИ значительно расширен до 30...40 дБ в зависимости от требуемой контрастной
чувствительности. Расширение динамического диапазона достигается при практи-
чески неизменном числе различаемых градаций на экране (уменьшается на 15 %,
табл. 7.5), но при этом ухудшается дифференциальная контрастная чувствитель-
ность пропорционально расширению динамического диапазона.
Рис. 7.29. Составляющие контрастной чувствительности РСА
при визуальном дешифрировании РЛИ на дисплее с регистрацией амплитудного РЛИ
от УЭПР суммарного процесса сигнал+шум:
7, 1а - суммарные кривые дифференциальной (7) и абсолютной (1а) контрастной чувствительности РСА;
2 - составляющая контрастной чувствительности глаза; 3 - флуктуационная составляющая; 4 - составляю-
щая рассеянного света; gz - средняя крутизна характеристики регистратора (пунктир) (число наблюдений
в РЛИ 7VC=4, полное число наблюдений по площади объекта N= 10000 (а) и 7V=10() (б))
При практическом дешифрировании РЛИ на дисплее имеется возможность
смещать интервал отображаемых УЭПР на экране в сторону уменьшения с ограни-
чением ярких целей или в сторону уменьшения с наблюдением только ярких целей.
Дополнительно можно задать корректирующий коэффициент контрастности для
установления оптимального режима восприятия конкретного фрагмента РЛИ.
Выбор масштаба отображения на дисплее. Разрешающая способность чело-
веческого глаза с расстояния наилучшего видения составляет 0,1...0,2 мм. Наилуч-
шее контрастное разрешение достигается при диаметре отметки на экране более
1 мм (см. рис. 7.19). Диаметр пикселя на экране дисплеев среднего качества
390
Глава 7. Обработка и регистрация радиолокационных изображений
(1024x768 точек на экран) составляет 0,3...0,4 мм, но зернистой структуры изображе-
ния на экране не заметно. При отображении РЛИ, предназначенного для презентаций
(требуются наилучшие изобразительные свойства), масштаб вывода на экран должен
быть равен 1, при котором размер пикселя РЛИ равен размеру пикселя на экране.
При выводе РЛИ на экран для целей дешифрирования размер пикселя РЛИ (то-
чечная цель) должен быть увеличен до масштаба до М4:1. При работе с РЛИ без неко-
герентного накопления (одно наблюдение) или с РЛИ, которые после некогерентного
накопления подвергались прореживанию (децимации), необходима интерполяция РЛИ
(методом раздвижки спектра или иными, например, бикубической интерполяцией с
применением программы Photoshop), чтобы восстановить непрерывность исходной
информации, которая теряется при дискретизации сигнала частотой квантования и
частотой повторения, несмотря на соблюдение условия Котельникова-Шеннона. Уве-
личение масштаба более М4:1 не приводит к улучшению дешифрируемости РЛИ, по-
скольку границы между соседними пикселями РЛИ при увеличении становятся раз-
мытыми, а это вызывает возрастание различимого контраста на РЛИ.
Примеры РЛИ, иллюстрирующие рекомендации по отображению информации приведены
в следующем подразделе настоящей главы, посвященном получению твердой копии РЛИ
на бумажном носителе.
7.4.4. Получение твердой копии РЛИ на бумажном носителе
Градационные характеристики изображений на бумажном носителе. Качество
изображения на бумажном носителе определяется типом бумаги (простая, специаль-
ная или фотобумага), а также типом и характеристиками печатающего устройства -
принтера. Кроме того, следует учитывать свойства программы, с помощью которой
выполняется печать изображения (Word, Photoshop, PDF, Powerpoint). В принтерах
обычно предусматривается широкий набор режимов работы с разными скоростью
печати, расходом красителя и разным качеством печати с учетом применяемой бума-
ги. Не рассматривая режимы черновой и экономной печати, остановимся на режи-
мах, обеспечивающих качество печати, пригодное для дешифрирования РЛИ.
Для этой цели возможно применение универсальной офисной простой бумаги
плотностью 80 г/м2, предназначенной для струйных и лазерных принтеров. Ее неко-
торым недостатком является впитывание чернил при печати на струйных принтерах
и невозможность добиться глубокого почернения. Более качественные отпечатки по-
лучают на плотной специальной бумаге, а также на фотобумаге. Соответствующие
режимы предусмотрены в настройке принтера. Как показывает опыт, при печати на
простой бумаге лучшее качество отпечатков РЛИ получается не в режиме «высо-
кое», а в режиме «фото» с коэффициентом контрастности - гамма печати 1,8.
В соответствии с методикой инструментальной оценки устройств отображе-
ния, приведенной в подразделе 7.4.3, и с учетом сформулированных рекомендаций
по печати были получены характеристические кривые печати на принтере в зави-
симости от амплитуды входного сигнала. Они показаны на рис. 7.30 в относитель-
ной шкале 0...255 ед. и в нормализованном виде, приведенные к единице. Исполь-
зовался струйный фотопринтер Epson-900. Кривые 1 соответствуют отпечатку на
простой бумаге, кривые 2 - отпечатку на фотобумаге (L’PRO Fotojet Instant Dry
391
Радиолокационные системы землеобзора космического базирования
Gloss). Кривые для специальной бумаги проходят между ними. Для сравнения
пунктиром показана характеристическая кривая линейного регистратора, рассмот-
ренного в подразделе 7.4.2.
Рис. 7.30. Характеристические кривые зависимости яркости (отражающей способности) отпечатков
РЛИ на бумажном носителе, в относительных единицах 0.. .255 (а) и нормированные к единице (б):
1 - простая бумага; 2 - фотобумага; 3 - линейный регистратор (пунктир) (метками показаны измеренные данные)
Таблица 7.6. Параметры изображений при отображении РЛИ
на бумажном носителе для полного числа наблюдений N=100
по площади объекта
Параметр Тип бумаги Примечание
Простая Фотобумага
Минимальная яркость, ед. 36,1 29,4 Относительные единицы
Максимальная яркость, ед. 226 245
Коэффициент контрастности 0,55 0,8
Динамический диапазон регистрации 6,25 8,33 Отношение 5max/Bmin
Число градаций ЭРЛИ 7,43 8,6
Контрастная чувствительность ЭРЛИ, дБ 2,1 1,8
Динамический диапазон входного сигнала, дБ 17 18,5 По контрастной чувствительности 3 дБ
Число градаций АРЛИ 5,2 7,1
Контрастная чувствительность АРЛИ, дБ 6 4,75
Динамический диапазон входного сигнала, дБ 27 34,0 По контрастной чувствительности 6 дБ
Отображение РЛИ на дисплее
Число градаций ЭРЛИ 7,3
Контрастная чувствительность ЭРЛИ, дБ 2,1
Динамический диапазон входного сигнала, дБ 12 По контрастной чувствительности 3 дБ
Число градаций АРЛИ 10,7
Контрастная чувствительность АРЛИ, дБ 6
Динамический диапазон входного сигнала, дБ 38 По контрастной чувствительности 6 дБ
392
Глава 7. Обработка и регистрация радиолокационных изображений
Сплошными линиями показаны аппроксимирующие кривые, которые хорошо
согласуются с измеренными данными, кроме начальных участков большой плотно-
сти. Аппроксимированные кривые в относительной шкале 0...255 ед. соответству-
ют формуле
D _ D Л А V
В= max min +5min, (7.68)
^тах \ Апах /
где А - амплитуда на входе принтера; Jmax=255 ед. - максимальный уровень вход-
ного сигнала; /- коэффициент контрастности; Bmin и Втах - минимальный и макси-
мальный уровни яркости изображения.
Нормализованные характеристические кривые вычисляют по формуле
о f d j! Y R
В = -^—= 1-------^-1 + (7.69)
^тах \ ^тах / \ Апах / ^тах
Сводные данные по параметрам изображения на бумажном носителе и их
сравнение с отображением на дисплее приведены в табл. 7.6.
Анализ приведенных графиков и их сравнение с характеристическими кри-
выми для дисплея показывают, что контрастность и динамический диапазон изо-
бражения на бумажном носителе значительно меньше, чем для дисплея. Макси-
мальная яркость изображения на простой бумаге на 10 % ниже, чем на фотобумаге,
а минимальная яркость - на 22 % выше, что приводит к падению контрастности
изображения почти в 1,5 раза. В связи с этим для выпуска ответственных докумен-
тов следует при печати РЛИ использовать специальную бумагу, которая по своим
характеристикам приближается к фотобумаге.
На рис. 7.31, 7.32 приведены кривые составляющих контрастной чувствитель-
ности для визуального восприятия РЛИ на бумажном носителе в случаях регистра-
ции энергетических и амплитудных РЛИ для типичного случая четырех наблюде-
ний в элементе разрешения РЛИ и полного числа наблюдений по площади объекта
#=АехМ=Ю0. Зависимости аналогичны для отображения РЛИ на дисплее, но зна-
чения контрастной чувствительности выше, число различимых градаций меньше.
Динамический диапазон входных сигналов печати на бумаге больше, чем у дис-
плея, что обусловлено меньшей контрастностью характеристических кривых. При
печати ЭРЛИ разрешаемый контраст составляет 1,5...2 дБ, а при печати АРЛИ —
возрастает до 4...5 дБ. Это необходимо учитывать при выборе режима печати в за-
висимости от сюжета обстановки на РЛИ.
Для типичных сюжетов предпочтителен вывод на принтер АРЛИ. Значения ярко-
сти печати РЛИ на бумаге выбирают таким образом, чтобы протяженные объекты с
умеренным отражением (голая почва, трава) имели плотность на отпечатке 0,25...0,35
от максимального уровня белого (64...90 ед.). Это соответствует полям 4—5 (отсчет
справа) градационного клина, который сопровождает приведенные в книге РЛИ. При
таком выборе обеспечивается оптимальная контрастная чувствительность для наблю-
дения на отпечатках РЛИ положительных (леса, застроенная территория, яркие цели) и
отрицательных контрастов (вода, радиолокационные тени от возвышенных объектов).
393
Радиолокационные системы землеобзора космического базирования
Рис. 7.31. Составляющие контрастной чувствительности РСА
при визуальном дешифрировании ЭРЛИ на простой бумаге (а) и на фотобумаге (б)
в зависимости от УЭПР суммарного процесса сигнал+шум:
1, 1а - суммарные кривые дифференциальной (7) и абсолютной (1а) контрастной чувствительности РСА;
2 - составляющая контрастной чувствительности глаза; 3 - флуктуационная составляющая; 4 - составляю-
щая рассеянного света; gz - средняя крутизна характеристики регистратора (пунктир) (число наблюдений в
РЛИ Ne=4, полное число наблюдений по площади объекта N=NC*NS=IOO)
Рис. 7.32. Составляющие контрастной чувствительности РСА
при визуальном дешифрировании АРЛИ на простой бумаге (а) и на фотобумаге (б)
в зависимости от УЭПР суммарного процесса сигнал+шум:
1, 1а - суммарные кривые дифференциальной (7) и абсолютной (1а) контрастной чувствительности РСА;
2 - составляющая контрастной чувствительности глаза; 3 - флуктуационная составляющая; gz - средняя
крутизна характеристики регистратора (пунктир) (число наблюдений в РЛИ Ne=4, полное число наблюде-
ний по площади объекта М=7Уех7Уу=1ОО)
394
Глава 7. Обработка и регистрация радиолокационных изображений
Выбор масштаба РЛИ при печати. Выше были рассмотрены соотношения
между полутоновыми градациями отпечатка РЛИ и уровнем сигнала, поступающе-
го на принтер. Для правильного выбора масштаба печати (размера пикселя) рас-
смотрим физику получения изображения при печати с учетом технических пара-
метров принтера. Разрешающую способность принтера характеризуют числом пе-
чатаемых точек, приходящихся на линейный дюйм поверхности - параметр dpi
(Dots per inch). В случае черно-белой печати она реализуется путем нанесения на
бумагу черных точек, количество которых в одном пикселе изображения на бумаге
зависит от заданной плотности изображения в данном пикселе. Так, например, ес-
ли разрешение принтера составляет 1200 dpi, то размер элементарной точки со-
ставляет 25,4/1200 = 0,0211 мм (за пределами разрешения глаза). Для обозначения
пикселя изображения в отличие dpi используют термин ppi (пикселей на дюйм).
Пиксель - это элементарная ячейка мозаики изображения [532/Dpi]. Принтер с раз-
решением 1200 dpi пригоден для вывода полутоновых изображений с разрешаю-
щей способностью до 300 ppi. Стандартный (по умолчанию в программе Word)
размер пикселя изображения на бумаге составляет 1/100 дюйма или 0,254 мм. Та-
ким образом, на каждый пиксель изображения приходится (0,254/0,0211)2 = 144
элементарных пятна, что позволяет отобразить до 145 градаций яркостей. Полное
количество пикселей по ширине листа А4 (170 мм без полей) составит 670.
При таких соотношениях на отпечатке будет заметна пиксельная структура
снимка. Применительно к использованию отпечатка РЛИ для целей визуального
дешифрирования такой размер пикселя является оптимальным, поскольку благода-
ря ассоциативным возможностям зрительного анализатора эффективно реализует-
ся некогерентное накопление по площади однородных произвольной (связной)
конфигурации или периодических структур (опоры линий электропередач). Сохра-
няется способность выделения и наблюдения малоразмерных объектов при пользо-
вании лупой с 2...5-кратным увеличением.
Для снижения заметности пиксельной структуры и улучшения изобразитель-
ных свойств РЛИ следует уменьшать размер пикселя на отпечатке путем его мас-
штабирования. Программа Word позволяет это сделать, меняя размеры изображе-
ния, помещенного в полотно, рамку «надпись» или в таблицу.
Следует учитывать, что острота зрения у человека в среднем равна одной уг-
ловой минуте. При просмотре изображений на дисплее нужно иметь в виду, что
для PC совместимых мониторов разрешение не превышает 96 ppi. Это обстоятель-
ство следует учитывать при создании документов, предназначенных только для эк-
рана, например, компьютерных презентаций, компьютерных заставок, изображе-
ний для Web-страниц и т.д.
Просмотр фотографий с изображениями высокого качества осуществляется
обычно с расстояния 25...30 см. Получается, что с такого расстояния можно разли-
чить точку (пиксель) порядка 0,073...0,87 мм. Зачастую, для выполнения полигра-
фических работ предъявляют требования к разрешающей способности исходных
материалов 300 точек на дюйм, при которой размер пикселя составляет 0,085 мм.
Это означает, что при использовании принтера с разрешением 600x600 dpi на один
395
Радиолокационные системы землеобзора космического базирования
пиксель такого изображения будет приходиться по 4 элементарные точки, а для
принтеров с разрешением 1200x1200 или 2400x2400 dpi - по 16 или 64 элементар-
ных точек соответственно. Таким образом, каждый пиксель изображения будет в
среднем отображаться соответственно пятью, семнадцатью или шестьюдесятью
пятью градациями - от полного отсутствия точек в пикселе (белое поле) до полной
заливки (черное поле).
В отличие от принтеров, у которых размер элементарной точки постоянный,
при обычной типографской печати размер точки изображения изменяется (от 0,05
до 1 мм) в зависимости от яркости исходного рисунка.
Для исследований микроструктуры отпечатка полутоновых пикселей исполь-
зовалась точечная мира, состоящая из одиночных пикселей с яркостью от 255 ед.
(белый цвет, совпадающий с фоном) до 0 (черная отметка), вид которой представ-
лен на рис. 7.33. Мира имеет несколько полей, сформированных из стандартного
BMP файла (Тест №1 в левой верхней части миры) с точечными отметками в один
пиксель. Тесты №2-№4 уменьшены в 2, 4 и 8 раз, а тест №5 увеличен в 2 раза пу-
тем изменения размера рисунка при вставке его в документ Word. При этом про-
грамма Word интерполирует (экстраполирует) размеры пикселя до требуемого
масштаба. Следует отметить, что в электронной версии документа Word размеры
всех тестов одинаковы (273x100 пикселей) и одинаковым образом могут быть экс-
портированы в программы Photoshop или Paint.
------Тест № 4
Тест № 3
Тест № 2
Тест № 1
Тест № 5
IIIIIIIIIIIIIIIIIIIIIIIIIIB
Рис. 7.33. Точечная мира для проверки воспроизведения пикселей при печати РЛИ.
Диапазон яркостей 0...255, линейный закон
(масштабы тестов: исходный М1:1 (№1); М1:2 (№2); М1:4 (№3); М1:8 (№4); М2:1 (№5);
размер пикселя исходной миры - 0,21x0,21 мм)
396
Глава 7. Обработка и регистрация радиолокационных изображений
Микроструктура фрагментов (начало, середина, конец) тестов миры, отпеча-
танной на бумаге, представлена на рис. 7.34. Микрофотографии отпечатков миры
получены с помощью цифрового USB-микроскопа PolyPower. В табл. 7.7 приведе-
ны сводные данные по размерам пикселя, среднему числу яркостных градаций в
пикселе в зависимости от разрешающей способности принтера.
Тест № 1
Рис. 7.34. Микрофотографии фрагментов тестов точечной миры (рис. 7.33)
Таблица 7.7. Число отображаемых градаций в пикселе РЛИ в зависимости
от разрешения принтера в dpi
Параметр Размеры пикселя, мм
0,254x0,254 0,085x0,085
Число градаций в пикселе изображения при разрешении принтера: 600 dpi 37 5
1200 dpi 145 17
2400 dpi 577
397
Радиолокационные системы землеобзора космического базирования
Рассмотрим некоторые особенности, которые следует учитывать при печати
РЛИ. Так же, как и в случае отображения РЛИ на дисплее, имеем две ситуации -
печать РЛИ для презентаций с наилучшими изобразительными свойствами и для
дешифрирования, когда требуется полнота воспринимаемой информации. Для оп-
ределенности зададим формат листа А4, для которого максимальные размеры изо-
бражения составляют 170x260 мм2. Разрешающая способность широко распро-
страненных принтеров составляет 600 dpi, 1200 dpi и более, что соответствует диа-
метру пятна 0,021...0,042 мм и менее на пределе зрительного восприятия с рас-
стояния наилучшего видения. Число таких точек на ширину листа бумаги составит
4050...8100, а по высоте 5500... 11000 точек, что приводит к большому объему
изображения (22...88 мегапикселей). Практика показывает, что без большой поте-
ри качества можно уменьшить размер РЛИ для печати до 1200 точек на строку (не
более 2 Mpix для полного изображения на страницу). Следует иметь в виду, такие
программы, как Word, Photoshop и ряд других, для получения требуемого размера
отпечатка масштабируют исходное изображение методом квадратичной или бику-
бической интерполяции. Исходный кадр сохраняется в файле Word и может быть
преобразован в исходный размер. Такое свойство не имеет место при преобразова-
нии файла из программы Word в PDF.
Возможности преобразования масштаба при вставке файла изображения в до-
кумент Word иллюстрирует рис. 7.35. На нем изображены полутоновая мира с ис-
ходным размером 300x256 пикселей (рис. 7.35,б-д), семь уровней яркости - сред-
няя яркость и по 3 градации светлых и темных полей. Размеры полей от 1 х 1 до 6x6
пикселей, а на увеличенном фрагменте миры - до 11 пикселей. Масштабы мир на
рис. 7.35 - от Ml,8:1 до М1:10.
Рис. 7.35. Полутоновая мира для проверки возможностей обнаружения и разрешения отметок
при визуальном дешифрировании отпечатанного на бумаге изображения:
исходный контраст полей относительно среднего уровня (25 % от максимального белого), темных - 100;
50 и 25 %, светлых - 100; 200 и 300 % (максимальный уровень); масштабы изображений: a - 1,8:1, б - 1:1,
в - 1:1,5, г - 1:3,1, д - 1:6, е - 1:10; размер пикселя исходной миры (б) - 0,21 мм
398
Глава 7. Обработка и регистрация радиолокационных изображений
При дешифрировании невооруженным глазом тестовые поля с полным кон-
трастом обнаруживаются и различаются при размере пятна на бумаге, равном
0,13 мм (рис. 7.35,г), для темных, и для светлых полей.
Проведенный в данном разделе анализ и рассмотренные методики инструмен-
тального контроля параметров отображения РЛИ позволяет сделать следующие
выводы.
• при отображении РЛИ на дисплее для целей его дешифрирования должен ис-
пользоваться весь арсенал средств для согласования параметров изображения
на экране с характеристиками зрительного анализатора. На первом этапе об-
щего ознакомления с РЛИ и поиска фрагментов для детального анализа целе-
сообразно на вход дисплея подавать амплитудное РЛИ, которое получено по-
сле некогерентного накопления первичного ЭРЛИ с числом наблюдений ~4 и
последующим извлечением квадратного корня из отсчетов ЭРЛИ для преоб-
разования его в АРЛИ. В программном обеспечении рабочего места оператора
должны быть предусмотрены возможности изменения масштаба РЛИ на эк-
ране, яркости и контрастности (гамма-характеристики) РЛИ, а также выпол-
нения процедур сглаживания и повышения резкости. Все указанные процеду-
ры входят в комплект специализированных программ обработки изображений
или могут быть выполнены с помощью программ Photoshop, MATLAB [70,
188]. Дополнительно могут привлекаться специальные процедуры некогерент-
ного накопления (в том числе и с использованием вейвлет-преобразований),
текстурного анализа и автоматической сегментации, а также измерительные
методы дешифрирования, основанные на оценке гистограмм распределения
яркости изображений по обнаруженным объектам. Кроме сглаженного РЛИ
может потребоваться первичное РЛИ с одним наблюдением;
• из-за ограниченной контрастной чувствительности зрительного анализатора и
малого динамического диапазона средств отображения РЛИ необходимо в
процессе дешифрирования РЛИ перенастраивать параметры отображения
РЛИ для их адаптации к визуальному восприятию. Эти изменения должны
реализовываться при регистрации подготовленных частных материалов
(фрагментов РЛИ) для архивирования и формирования отчетного документа
(доклада). На рис. 7.36 показаны варианты такой регистрации - обзорного
РЛИ с низким пространственным и радиометрическим разрешениями и, по
возможности, с расширенным динамическим диапазоном, РЛИ с повышен-
ным разрешением, детальные РЛИ, позволяющие классифицировать объекты.
Обзорный снимок и его укрупненный фрагмент (рис. 7.36,я,б) позволяют вес-
ти общую идентификацию объектов: морская поверхность, остров, вулкан,
цуг волновых возмущений на морской поверхности в верхней правой части
снимка, одиночные волновые образования, надводная обстановка. Малые
фрагменты РЛИ позволяют выделить на РЛИ характерные объекты (напри-
мер, движущееся судно с кильватерным следом (рис. 7.36,в), который может
быть подчеркнут специальной фильтрацией вдоль следа (motion blur), само
судно малого тоннажа (рис. 7.36,г), суда различного класса (рис. 7.36,6), при-
чем за малым судном виден длинный кильватерный след;
399
Радиолокационные системы землеобзора космического базирования
Рис. 7.36. Вариация режимов отображения на бумаге с адаптацией
к зрительному восприятию информации
(Японское море, о.Осима, РСА «Меч-КУ»; КА «Алмаз-1», виток 2024в)
несмотря на стремительное развитие вычислительной техники, производи-
тельности компьютеров и средств хранения информации сохраняет актуаль-
ность вопрос об объеме файла отчетной документации, в которую (в том чис-
ле в электронном виде) требуется помещать множество детальных радиолока-
ционных снимков с большим объемом мегапикселей. Поскольку выпускаемые
документы предназначены для их зрительного восприятия, эффективно для
снижения объема документа применить сжатие РЛИ, преобразуя их из форма-
тов BMP, TIFF, GeoTIFF в формат JPEG, который адаптирован к зрительному
восприятию полутоновых изображений. Уменьшение размера файла про-
граммой Photoshop в 4...5 раз с качественным воспроизведением снимка
обеспечивается при средней степени сжатия с уровнем 7. Приведенные на
рис. 7.37 исходное РЛИ в формате BMP с размером файла 450 Кб и преобра-
зованное в формат JPEG с уровнем сжатия 2 низкого качества и размером
400
Глава 7. Обработка и регистрация радиолокационных изображений
файла 105 Кб практически не отличаются. При сжатии с уровнем 7 среднего
качества размер файла составляет 160 Кб. Приведенные рекомендации по
сжатию не распространяются на растровые изображения, содержащие графи-
ки, структурные схемы, качество которых при сжатии алгоритмом JPEG сни-
жается из-за появления артефактов.
Рис. 7.37. РЛИ размером 0,450 Mpix в формате BMP, размер файла 450 Кб (а)
и преобразованное в формат JPG, низкое качество, уровень 2, размер файла 105 Кб
(Пролив Гибралтар, РСА «Меч-КУ» КА «Алмаз-1», виток 2005н)
Полученные таким образом отпечатки фрагментов РЛИ и файлы изображений
в однобайтовом формате (uint8), помимо использования в отчетных документах,
помещаются в банк данных радиолокационной фоноцелевой обстановки в легко
воспроизводимой для просмотра справочной описательной части, прилагаемой к
основной информации в виде комплексных изображений в формате inti6 или пла-
вающем формате для их использования в процедурах инструментальной обработ-
ки. Удобно также хранение комплексных радиолокационных данных в виде ампли-
тудных (АРЛИ) и фазовых (ФРЛИ) изображений в форматах uintl6 или 16-раз-
рядном GeoTIFF. Фазу в этих форматах записывают как ^Umti6 = (^гаа+^)32768/л:, где
^rad - значения фазы в радианах в интервале ±яг.
Расширение номенклатуры решаемых задач вторичной обработки радиолокационной ин-
формации, рассмотренные в гл. 9, неизбежно приведут к разнообразию режимов отображе-
ния РЛИ на дисплее и бумажных носителях, при оптимизации которых могут быть учтены
рекомендации, сформулированные в данной главе.
401
Радиолокационные системы землеобзора космического базирования
7.5. Характеристики цветного и псевдоцветного
отображения РЛИ
В предыдущих подразделах рассматривались вопросы отображения и восприятия мо-
нохромного черно-белого изображения. Между тем, современные методы цветного
отображения радиолокационной информации и цветная печать РЛИ позволяют рас-
ширить динамический диапазон воспринимаемых радиояркостей и улучшить контра-
стную чувствительность зрительного анализатора. В ряде случаев цветная индикация
является незаменимым способом представления и анализа получаемых данных.
Цветное отображение на дисплее и на бумаге характеризуется разными прин-
ципами: на дисплее происходит аддитивное суммирование цветов. Палитра основ-
ных цветов RGB (Red - красный, Green - зеленый и Blue - синий) и значения ярко-
сти (Intensity) могут быть представлены в виде трехмерной системы координат
(определяющей куб цветовых векторов), в которой каждая из координат отражает
вклад каждой составляющей в результирующий цвет в диапазоне от нуля до мак-
симального значения, равного единице или 255 ед., а яркость, характеризующая
оттенки серого (три цветовых составляющих, яркость каждой из которых равна
100 %) является множителем этих составляющих.
Изображение на бумаге наблюдают в отраженном свете. Из белого цвета вы-
читаются определенные цвета, соответствующие подавлению спектральных со-
ставляющих широкополосного облучения от источника белого цвета. Палитра суб-
страктивных дополнительных цветов CMYK (Cyan - голубой, Magenta - пурпур-
ный, Yellow - желтый и добавленный для коррекции цветовой палитры черный
цвет - Black). Обе палитры RGB и CMYK однозначно связаны между собой, пре-
образование из одной в другую происходит автоматически в зависимости от типа
отображающего устройства. При необходимости возможно формирование произ-
вольных цветовых палитр.
Широкий набор цветовых палитр, которые можно применять для вывода РЛИ
на дисплей, содержится в программах Photoshop, MATLAB и других. Их можно
разделить на два класса - совместимых с черно-белой (Grayscale) палитрой и несо-
вместимых, имеющих вид радуги, в которой яркость постоянна, но изменяется со-
отношение цветовых составляющих. При печати выполненных в такой палитре
изображений на черно-белом принтере серая палитра будет трудно понимаемой.
Это объясняется тем, что вклад цветовых составляющих в яркость изображения
разный (уравнение яркости)
Ey = 0, 3Er + 0, 59Eg + 0,11ЕВ, (7.70)
где Еу ~ интенсивность суммарного изображения; ER,EG,EB - интенсивности
цветовых составляющих RGB-изображения.
Когда решается задача расширения динамического диапазона при восприятии
монохромных РЛИ, то применяют псевдоцветную индикацию РЛИ. Сложность со-
стоит в том, что палитры, хорошо воспринимаемые в цвете, могут исказить града-
ционную характеристику при черно-белой монохромной печати РЛИ. Так, напри-
мер, не применима для вывода РЛИ при черно-белой печати известная, хорошо
402
Глава 7. Обработка и регистрация радиолокационных изображений
различаемая в цвете, шкала глубин и высот, используемая в цветных картографи-
ческих материалах.
Создание оптимальной палитры, которая одинаково или близко воспринимает-
ся и в цветной и в черно-белой печати, является достаточно сложной задачей. При-
ближенно она решалась при подготовке рукописи Книги к печати, электронная вер-
сия которой использует цветные иллюстрации, в том числе РЛИ в псевдоцветной па-
литре. Такие РЛИ представлены, в частности, на рис. 2.1, 2.26 и 3.7. На практике для
вывода РЛИ в черно-белом изображении применяют палитру в синих тонах на уча-
стках малой яркости с переходом к зеленому и желтому при увеличении яркости до
100%. Псевдоцветные изображения этих снимков приведены на цветной вкладке в
конце книги (рисунки соответственно Ц1, ЦЗ и Ц2).
Формирование такой палитры легко реализуется в программах Photoshop,
MATLAB и специализированных пакетах, предназначенных для обработки РЛИ.
Ожидаемое расширение динамического диапазона РЛИ - в 2...2,5 раза (в децибе-
лах) или улучшение контрастной чувствительности (радиометрического разреше-
ния) при визуальном дешифрировании РЛИ. Вместе с тем, как уже отмечалось, при
псевдоцветной индикации ухудшаются ассоциативные свойства зрительного ана-
лизатора, что снижает эффективность некогерентного накопления по площади ана-
лизируемого объекта на РЛИ.
Кроме задачи улучшения дешифрируемое™ монохромных РЛИ цветная инди-
кация может применяться для совмещенного отображения материалов поляриметри-
ческого, многочастотного или многовременного зондирования. Каждый из входящих
материалов монохромный, а композитное РЛИ делается цветным. На рис. 7.38 при-
ведено композитное РЛИ вулкана Ключевская сопка, полученное с помощью РСА
SIR-C/X-SAR КК Endeavour в октябре 1994 г. на следующий день после начала из-
вержения вулкана [522]. Первая фаза извержения характеризовалась выделением га-
за, пара и пепла до высоты 20 км, а также двумя лавовыми потоками.
Иллюстрация формирования композитных РЛИ по монохромным составляю-
щим дана на рис. 7.38 (в черно-белом отображении), а также на рис. Ц.4 и Ц.5 цвет-
ной вкладки. Монохромные составляющие РЛИ: красный (рис. 38,67 и L[.4R) -
L-диапазон ГГ; зеленый (рис. 7.38,6 и Ц.4О) - L-диапазон ГВ; синий (рис. 7.38,в и
Ц.4В) - С-диапазон ГВ. Композитное однодиапазонное двухканальное РЛИ - 1-ГГ+
Г-ГВ приведено на рис. 7.38,г (черно-белое отображение) и на рис. Ц. 5,6
На РЛИ река Камчатка протекает по горизонтали в центре снимка. На правом
склоне вулкана видны два желто-зеленых (светлых - на ч/б снимках см. рис. 7.38,в,г)
ручейка свежей лавы. Цветовые различия позволяют оценить состояние посевов
вдоль реки Камчатка, неизмеримо отчетливее выделяются геологические структуры
на склонах вулкана.
При преобразовании монохромных составляющих в композитное цветное РЛИ
серые изображения составляющих преобразуют в RGB (используя, например,
Photoshop), обнуляют ненужные цветовые составляющие, корректируют яркости
парциальных РЛИ в соответствии с формулой (7.70), а затем собирают композитное
RGB изображения по слоям и сохраняют его как однослойное цветное в нужном
формате (TIFF, JPG и др.).
403
Радиолокационные системы землеобзора космического базирования
Рис. 7.38. Композитное (в оригинале - цветное) и составляющие поляриметрических
радиолокационных изображений вулкана Ключевская сопка (Камчатка, Россия),
полученные РСА SIR-C/X-SAR КК Endeavour [522]:
a - композитное РЛИ; б - С-диапазон ГВ; в - L-диапазон ГГ; г - Z-диапазон ГВ
Декомпозицию выполняют в обратном порядке, путем сохранения изображений
ждого из каналов RGB при обнулении двух других. После этого делают преобра-
зание каждой составляющей в монохромное РЛИ и выполняют коррекцию ярко-
4 монохромных составляющих до 100 %.
Использование аппаратно-программных средств общего и специального при-
нения для работы с материалами радиолокационной съемки позволяет адаптиро-
гь параметры отображаемых РЛИ к свойствам зрительного анализатора и обеспе-
гь характеристики обнаружения объектов на РЛИ, близкие к характеристикам оп-
иальной фильтрации по критерию максимума правдоподобия. Наличие встроен-
х процедур измерения параметров РЛИ и статистической обработки, а также
щств автоматизации процесса дешифрирования в комплексе рабочих мест опера-
эов позволяет обеспечить высокую достоверность интерпретации данных и опера-
зность получения информации по результатам радиолокационного зондирования
Глава 8
ПОВЫШЕНИЕ ИНФОРМАТИВНОСТИ КОСМИЧЕСКИХ РСА
8.1. Учет влияния нелинейностей в тракте РСА
Информативность РСА характеризуется набором основных технических парамет-
ров и уровнем помех, вызванных различными искажающими воздействиями -
ошибками траекторных изменений, нестабильностями трассы распространения и
аппаратуры, боковыми лепестками функции неопределенности зондирующего сиг-
нала, а также нелинейностями сквозного тракта РСА
Источники нелинейностей в тракте РСА
Сигнал, отраженный от местности, характеризуется большим динамическим диа-
пазоном, определяемым различием УЭПР наблюдаемой местности. Проходя через
тракт РСА, сигнал может подвергаться нелинейным искажениям и ограничению,
определяемым формой амплитудной характеристики аналоговых устройств РСА
или ограничением разрядной сетки в цифровых модулях синтеза РЛИ. В некоге-
рентных РБО влияние нелинейностей сказывается на изменении амплитудных со-
отношений сигнала, принимаемого от разных участков местности и целей. В РСА
влияние таких нелинейностей сказывается при отображении полученных в резуль-
тате синтеза АРЛИ или ЭРЛИ (см. гл. 7).
В данном разделе анализируются нелинейные искажения радиоголограммы.
Их воздействие на выходное изображение гораздо сложнее. Нелинейности приво-
дят к появлению гармоник сигнала и комбинационных частот между сигналами.
Действительно, если представить амплитудную характеристику степенным рядом,
а сигнал представлять в виде суммы двух или более синусоидальных составляю-
щих, то в суммарном колебании появятся степени составляющих входного сигнала
[7ои1(/) = (Ц8т^2 + t/2sin(z?2)” = U"smnq\ + и(Ц sin^)” 1 t/2sin(P2+... > (81)
где (p=(p{t) - зависимость фазы от времени;
q\=G\t + q\^ ср2 = &2t + ^20 • (8.2)
Здесь Qi, Q2 - круговые частоты сигналов; ^ю, <^2о - начальные фазы.
Степени сигналов дают гармоники nQ и иО2; произведения составляющих -
суммарные и разностные частоты a?Qi+^Q2 и hQi-wQ2.
По характеру воздействия следует рассматривать два функциональных звена:
1) радиотракт до фазового детектора приемника. Основным источником ис-
кажений являются нелинейности амплитудных характеристик усилителя промежу-
точной частоты (УПЧ), в том числе наличие встроенных в УПЧ ограничителей
сигналов, необходимых для исключения перегрузки в каскадах усиления;
405
Радиолокационные системы землеобзора космического базирования
2) видеотракт, включающий фазовые детекторы, видеоусилители, аналогово-
цифровые преобразователи (АЦП), модули сжатия и восстановления динамическо-
го диапазона сигнала. В РСА первого поколения к видеотракту относились фоторе-
гистраторы радиоголограммы.
Влияние гармоник и комбинационных частот разное в радиотракте и видеотрак-
те. Различие процессов в этих звеньях определяется тем, что в радиотракте нелинейно-
сти изменяют амплитуду сигнала, сохраняя ее фазу. В видеотракте нелинейности воз-
действуют на действительную и мнимую составляющие раздельно, векторная сумма
которых формирует комплексный сигнал с изменениями и амплитуды и фазы.
В РСА первого поколения использовали оптический синтез апертуры с запи-
сью радиоголограммы на фотопленку с помощью однострочного индикатора и бы-
ли сложности получения сквозной линейной характеристики с учетом зависимости
яркости индикатора от амплитуды входного сигнала, коэффициента контрастности
и чувствительности фотопленки, а также параметров фотопроцесса. В современ-
ных РСА, использующих цифровое сжатие по длительности и азимуту, а также
цифровую передачу информации по радиолинии, нелинейности в видеотракте оп-
ределяются амплитудными характеристиками видеоусилителей в каналах действи-
тельной и мнимой составляющих, разрядной сеткой АЦП, разрядностью радиоли-
нии передачи данных, преобразованиями при сжатии динамического диапазона до
передачи и восстановления информации после ее приема, а также разрядностью
вычислений при синтезе РЛИ.
Характерная особенность РСА состоит в том, что выходной сигнал формиру-
ется путем суммирования многих отсчетов входного сигнала - это когерентное
суммирование после умножения на фазовый множитель. При этом сигнал от цели
суммируется когерентно, его амплитуда умножается на kc^Nx, шум приемника на-
капливается некогерентно, как ^kc х Nx , а сигналы от других целей или элементов
фона, смещенных по дальности или азимуту относительно настройки фильтра об-
работки, дают результат, близкий к нулю.
Энергетические соотношения для фона и целей
Процесс, действующий в приемном тракте, представляет собой сложение множества
сигналов, отраженных от облучаемой поверхности, и шума приемника. Принимае-
мые сигналы в РСА представляют собой нестационарный процесс, определяемый
различным уровнем отражения от подстилающей поверхности разного характера,
отличающейся по УЭПР, и в разной конфигурации (море, равнина, леса, горы, горо-
да). Для исследований прохождения сигналов через тракт обычно рассматривают уп-
рощенную стационарную модель отражения от местности (с переменными параметра-
ми для разных ситуаций) или квазистационарную - с малыми неоднородностями. По-
сле оптимизации характеристик тракта для стационарного процесса рассматривают
явления на резких перепадах входного процесса - границах море/суша, наблюдение
мощных целей (мосты, промышленные сооружения, корабли) на слабом фоне.
В общем виде модель местности можно характеризовать функцией радиоло-
кационного рельефа (ФРР) - произвольной неотрицательной функцией, одномер-
406
Глава 8. Повышение информативности космических РСА
ной Ф(Х), Ф(К) или двумерной где R - наклонная дальность. Типовая си-
туация при радиолокационном наблюдении показана на рис. 8.1. Для простоты бу-
дем рассматривать наклонную, а не горизонтальную дальность. Влияние нелиней-
ностей ограничено локальными зонами, которые будем называть мгновенной обла-
стью облучения, как это обозначено прямоугольниками на рис. 8.1.
Рис. 8.1. Типичные объекты и ситуации при радиолокационном наблюдении:
Ф1 - «море», o°i = 0; Ф2 - «озеро», = 0; Ф3 - «луг», = 0,01 (-20 дБ); Ф4 - «лес», Л = 0,032 (-15 дБ);
Ц\ - «корабль», си = 10000 м2; Ц2 - «трактор», сг2 = 50 м2; Цз - «лодка», <т3 = 50 м2 (прямоугольниками а-ж
отмечены положения «мгновенной области облучения»)
Мгновенная область облучения ограничена по наклонной дальности длитель-
ностью зондирующего ЛЧМ-импульса
7?imp=cr/2, (8.3)
а по азимуту - шириной зоны облучения антенны
Xant=RA/Dxant. (8.4)
Функцию радиолокационного рельефа (ФРР) рассматривают как стационар-
ную (участки: а - «море», б - «луг») или квазистационарную с локальными неод-
нородностями: включением целей (в, г) или участков с отличающейся УЭПР (д -
«озеро» или е - «лес»), что допустимо, если общая мощность сигнала от этих уча-
стков мала по сравнению с мощностью суммарного процесса шум+фон. Особый
случай для анализа представляет существенно нестационарная ФРР на границах
участков с разной УЭПР, показанная на рис. 8.1,ж. На рис. 8.2 показаны сечения
ФРР по наклонной дальности и по азимуту.
Для исследуемых явлений суммарный процесс в радиотракте может рассмат-
риваться как нормальный стационарный процесс, спектр которого по дальности
определяется суммой спектра процесса, принятого от фона местности Sf (ширина
спектра равна полосе зондирующего импульса AF), и спектра шумов приемника (с
полосой AFn, которая обычно несколько превышает полосу зондирующего импуль-
са, чтобы не ухудшать разрешающей способности РСА). Спектр процесса по ази-
муту определяется суммой спектра доплеровских частот сигнала (AFDop) и спектра
некоррелированных выборок шума приемника с частотой повторения зондирую-
щих импульсов Fp (ширина спектра шума AFn=Fp). Вид сечений спектров по даль-
ности и азимуту для суммарного процесса в радиотракте представлен на рис. 8.3.
407
используемые для анализа прохождения сигналов через тракт РСА:
а - стационарная ФРР по дальности; б - стационарная ФРР по азимуту; в - квазистационарная ФРР с ма-
лыми неоднородностями (цель cts и провал в УЭПР) по дальности; г - квазистационарная ФРР с малыми
Рис. 8.3. Сечения спектра процесса в радиотракте по дальности (а) и азимуту (б)
Энергетические соотношения для процесса на входе приемного тракта харак-
теризуются мощностями шума, фона и цели, определяемыми уравнением дально-
сти (раздел 3.4). ЭПР фона Of вычисляют через УЭПР фона и площадь мгно-
венной области облучения, пересчитанной к горизонтальной дальности
2sin/Aant
(8-5)
По значениям crf для фона и crs для цели из уравнения дальности находят
отношение фон/шум и сигнал/шум 2is на выходе линейной части приемника
(см. обозначения раздела 3.4). Эти отношения определят отношения спектральных
плотностей мощности шума 5П и суммарного процесса фон+шум Sf+n (а также для
фона£г=5г+п-5п).
408
Глава 8. Повышение информативности космических РСА
Параметры сигнала на выходе тракта РСА после сжатия по дальности (kc) и
азимуту (Mynt) будем оценивать отношением мощностей на участке фона к мощно-
сти шумов приемника и отношением сигнал/шум+фон для точечной цели. Отно-
шение сигнал/шум+фон для точечной цели на выходе РСА для линейного трак-
та РСА имеет вид
(«б»
где (?s.out = 6s 1 ^сМут - отношение сигнал/шум на выходе РСА после сжатия им-
пульсов по длительности и синтеза апертуры.
Наблюдаемость фона и, в частности, элементов с малым отражением («озе-
ро») в окружении интенсивного фона определится отношением суммарной мощно-
сти на участке фона к мощности в провале функции рельефа Рпо- Энергетические
соотношения для фона можно назвать «динамическим диапазоном по фону», опре-
деляющим контраст элементов фона на выходе РСА
(8.7)
Л10
где Рпо представляет собой сумму мощности шума приемника, доли мощности от
соседних элементов фона, попавших в боковые лепестки импульсной реакции
РСА, мощности помех от неоднозначности функции неопределенности и продук-
тов нелинейности.
Нелинейности в радиотракте РСА
Рис. 8.4. Амплитудная характеристика приемника
Примем, что нелинейность в радиотракте относится только к последнему его кас-
каду, коэффициент передачи которого в линейной части амплитудной характери-
стики равен 1. Для примера рассмотрим приведенную на рис. 8.4 типичную ам-
плитудную характеристику при-
емника (по огибающей), имеющую
линейный участок до 0,7 В, плавно
переходящий в ограничение («мяг-
кое» ограничение) с максималь-
ным уровнем 1 В.
В суммарном процессе, дей-
ствующем в тракте РСА и вклю-
чающем шум приемника, фон ме-
стности в пределах мгновенной
области облучения и точечные це-
ли, можно выделить сигнал от од-
ной из точечных целей (или от элемента фона с размерами рх х pY} и рассматривать
его прохождение через тракт совместно с суммарным процессом. На входе нели-
нейности действует случайный нормальный процесс, шум плюс фон, с мощностью
(дисперсией) <т^+п, амплитуда которого распределена по рэлеевскому закону
409
Радиолокационные системы землеобзора космического базирования
и е-"2Мп
о
{7>0
С7 <0
(8.8)
Дисперсия процесса на входе нелинейного звена определяется мощностью
шума в выходном каскаде приемника и отношением фон/шум (влиянием целей
пренебрегаем)
<Tf2+n=<7f2+<7n=^(l + af). (8.9)
Процесс на входе нелинейности представим в виде суммы двух составляю-
щих: малой - сигнал от цели или элемента фона, и большой, определяемой сум-
марным процессом фон+шум. Сигнал от цели (и от отдельных элементов фона) бу-
дет меняться по регулярному ЛЧМ-закону. Можно рассмотреть малый отрезок
ЛЧМ-сигнала с постоянной частотой (или даже с нулевой частотой, т.е. неподвиж-
ный вектор с постоянной фазой). Суммарный процесс будет случайной величиной
от отсчета к отсчету. Векторная диаграмма процесса показана на рис. 8.5. При на-
личии нелинейности в радиотракте изменяется амплитуда выходного процесса, а
фаза передается без изменений.
Рис. 8.5. Векторные диаграммы процесса шум+фон t/f+n разного уровня и фазы,
сигнала от цели Us и суммарного процесса U при наличии нелинейности
в радиотракте (ограничение на уровне С/тах):
a - глубокое ограничение; б - слабое ограничение; в - ограничение отсутствует
Строгий анализ прохождения сигналов и шумов через нелинейность может
быть выполнен вычислением корреляционных функций входного сигнала путем раз-
ложения их в ряд по полиномам Лагерра для радиотракта или полиномам Эрмита
для видеотракта и представления выходного сигнала в виде рядов [136]. Для случая
широкополосного сигнала с последующим суммированием многих отсчетов задача
упрощается, так как входной процесс для стационарной ФРР по азимуту (или даль-
ности) можно аппроксимировать в виде ^-функции с шириной l/AFDop (или 1/AF по
дальности), а для квазистационарной - в виде разности ^-функции и малой состав-
ляющей, являющейся преобразованием Фурье от дополнения ФРР до единицы.
Амплитуда цели в каждом отсчете будет изменяться (уменьшаться) обратно
пропорционально изменению амплитуды суммарного процесса на выходе нелиней-
410
Глава 8. Повышение информативности космических РСА
ности. Амплитуда цели на выходе РСА будет пропорциональна средней крутизне Ms
и числу когерентно накапливаемых отсчетов по дальности кс и по азимуту 7Vsynl
(8-ю)
Мощность цели
Ps^PnQs^N^. (8.11)
Энергетические соотношения на выходе РСА при наблюдении цели и контра-
стов фона определяются составляющими мощностей цели Ps.out, фона Pf, а также
мощности шумов Рп, включающих дополнительный шум. Эти составляющие вы-
ражаются через среднюю крутизну и второй момент амплитудной характеристики
тракта. Суммарная мощность процесса на выходе РСА после сжатия по длительно-
сти и когерентного накопления по азимуту
^out.nl “ ^f.nl + ^l.nl = А/ (1 + 6fl )^rA^synt • (8.12)
Мощность шумов, определяющая контраст фон/шум (обнаружение элемента в
провале ФРР - «озеро» на рис. 8.2),
f’n.nl =(Pf+nDu-PfM2s)kcNsynt. (8.13)
Здесь Ms - средняя крутизна, вычисляемая взятием интеграла по частям,
= —1— И^+Пг)2 re^dr (8.15)
2<Tf+n 0J
- дисперсия (мощность) суммарного процесса на выходе.
Окончательно получаем для отношения сигнал/фон+шум на выходе РСА
О/f+n.nl = ~ ^ =6s/f+n^-, (8.16)
Mini + Mi.nl UU
динамический диапазон по фону
^(l + 1/бп)
Воздействие нелинейности в радиотракте сводится к тому, что изменяется
средний уровень передаваемого сигнала (пропорционально средней крутизне Ms) и
появляется дополнительный широкополосный шум, вызванный нелинейностью (их
сумма с шумом приемника пропорциональна Du). Таким образом, можно сделать
вывод, что энергетические соотношения (контрасты) между целями (а также гра-
ницами участков с разной УЭПР) в пределах мгновенной области облучения оста-
ются такими же (с точностью до дополнительного шума), как и при отсутствии не-
линейностей.
411
Радиолокационные системы землеобзора космического базирования
Нелинейности в видеотракте РСА
В современных РСА основные источники нелинейности в видеотракте определяются
разрядной сеткой АЦП и разрядностью вычислений при синтезе РЛИ. Необходимо
рассматривать два явления - шумы квантования и шумы ограничения. Их влияние за-
висит от выбора единицы младшего разряда (ЕМР) АЦП по отношению к СКО вход-
ного процесса ст и числа разрядов АЦП Лдор, определяющих число уровней квантова-
ния a?adp> максимальный Umax и минимальный L/mm уровни передаваемого сигнала.
Рассмотрим амплитудную характеристику АЦП [4(^1) - зависимость выход-
ного напряжения U2 от входного U\, как это показано на рис. 8.6 а. Примем, что
минимальное и максимальное значения определяются размахом разрядной сетки, а
промежуточные значения - округленным целым входного сигнала L^round^i).
Число уровней квантования
Рис. 8.6. Преобразование сигнала из аналоговой формы в дискретную:
а - амплитудная характеристика АЦП U2(Ui); б - процессы на выходе АЦП: Ui(t) - входной временной
процесс, совпадающий с выходным сигналом при идеальной линейной характеристике (пунктир); U2(t) -
выход АЦП; A£7(Z) - ошибка дискретизации сигнала
Если уровни квантования сигнала АЦП расставлены равномерно, то шаг
квантования (ЕМР) одинаковый и равен полному размаху 2L/max, деленному на
число уровней иАор
ЕМР = 2£/тах//?ADP . (8.19)
При проектировании АЦП желательно, чтобы при нулевом входном сигнале
на входе сигнал на выходе АЦП был бы равен нулю, и обеспечивалась симметрия
выходного сигнала (что критично при малой разрядности АЦП). Иначе в выходном
процессе может появиться зависимая от уровня входного сигнала постоянная со-
ставляющая. Максимальное передаваемое значение будет равно
t/max =EMPwadp/2-1, (8.20)
а минимальное
412
Глава 8. Повышение информативности космических РСА
Ц™п=-ЕМРИаор/2. (8.21)
В случае применения бортового синтеза РЛИ с использованием малоразряд-
ного АЦП рекомендуется для симметрирования сигнала на входе процессора син-
теза ограничивать минимальное значение сигнала до уровня, равного по модулю
максимальному значению
Ц™ =-(EMPWadp/2-1). (8.22)
Тогда для 4- или 8-разрядных (включая знак) АЦП будем иметь соответственно
^max ~ “^min —
ИЛИ
^=-^=127. (8.23)
Таким же образом учитывают разрядность вычислительных процессов при
обработке. Аналогичные соотношения имеют место для сигнала после синтеза
апертуры и детектирования (вычисления модуля).
Ошибку дискретизации, равную разнице между входным непрерывным про-
цессом и его дискретным представлением на выходе АЦП, можно выразить двумя
процессами: шумом квантования (средняя часть кривой ДЦ/) на рис. 8.6, б) и
ошибками ограничения [18].
Если входной сигнал плавно меняется в пределах раствора амплитудной ха-
рактеристики АЦП, то ошибка квантования имеет пилообразный характер со сред-
ним значением, равным нулю и размахом ±ЕМР/2. При подаче на вход АЦП слу-
чайного процесса ошибка квантования будет также случайным процессом, кото-
рый при сг> 1,5ЕМР характеризуется равномерным законом распределения
Jl/ЕМР Н<ЕМР/2
v ’ [о и<-ЕМР/2 при w>-EMP/2.
Мощность шумов квантования
„ f! и2 ЕМР2
Truant = I -----<7w =----• (8.25)
quant J ЕМР 12
-ЕМР/2
Вычислить мощность шумов ограничения и оценить потери в отношении сиг-
нал/шум можно, воспользовавшись соотношениями (8.10)—(8.13), с подстановкой в
них средней крутизны и дисперсии, вычисленных для реальной амплитудной ха-
рактеристики видеотракта с учетом плотности распределения нормального процес-
са. Они пригодны также для произвольной амплитудной характеристики видео-
тракта, в том числе и для АЦП с неравномерным шагом. Средняя крутизна вычис-
ляется взятием интеграла по частям
где F(u) - амплитудная характеристика видеотракта.
413
Радиолокационные системы землеобзора космического базирования
Дисперсия выходного процесса определяется следующими соотношениями
Dv = М2 {Г(ц)} - Мх {F(и)}2, (8.27)
где Mi и М2- первый и второй моменты амплитудной характеристики
Л/,{^(и)}=—£= f F(u)e~u^2a2du ; (8.28)
(J у] 271 -J
M2{F(u)} =
1
<тл/2тг
^F(u}2e~u2l2a2du .
(8.29)
Полученные соотношения позволяют вычислить потери на нелинейность в
радиолокационном тракте. Для случая наблюдения цели на фоне местности («трак-
тор» на рис. 8.1) потери (в децибелах) вычисляют по следующей формуле:
Zs/f+n =-101g(A/2/z^). (8.30)
Для цели в провале ФРР («лодка» на рис. 8.1)
4/n=ioig
< Du л
(8.31)
Энергетические потери из-за ограничения сигналов
Формулы (8.30) и (8.31) справедливы и для расчета потерь на ограничение в радио-
тракте при подстановке в них значений Ms и Du, вычисленных по формулам (8.14)
и (8.15). Зависимости потерь при обнаружении цели на равномерном фоне (шумах)
£s/f+n и в провале ФРР £s/n от отношения СКО суммарного входного процесса к
уровню ограничения в радиотракте приведены на рис. 8.7.
Рис. 8.7. Зависимости коэффициента передачи K/Kq, потерь Zs/f+n при обнаружении целей
на равномерном фоне и потерь £s/n для обнаружения цели в провале функции рельефа
от отношения СКО суммарного входного процесса к уровню ограничения в видеотракте:
1 - идеальный ограничитель; 2 - реальная амплитудная характеристика с «мягким» ограничением
(см. рис. 8.4); 3,4- реальная амплитудная характеристика при отношении фон/шум 3 дБ (3) и 5 дБ (4)
414
Глава 8. Повышение информативности космических РСА
Для оценки потерь, вызванных квантованием сигнала в видеотракте, на
рис. 8.8 приведены зависимости К/Ко и потерь в отношении сигнал/фон+шум £s/n
при изменении уровня суммарного процесса на входе АЦП - отношения СКО сум-
марного процесса среднеквадратичного значения crf+n к единице младшего разряда
АЦП. Из графиков следует, что при выборе уровня входного сигнала crf+n >1,5 ЕМР
потери не превышают 0,2 дБ, что и рекомендуется для согласования выхода при-
емника со входом АЦП. На рисунке пунктиром показаны границы динамического
диапазона по фону. Он составляет для 4-разрядного АЦП -10 дБ (значения crf+n в
диапазоне (1,5...4,8)ЕМР). Потери отношения сигнал/шум в провале функции
рельефа не превышают 0,2 дБ.
Аналогичные кривые для больших уровней входного сигнала и разной раз-
рядности АЦП приведены на рис. 8.9. На нем стрелками отмечены границы реали-
зуемого динамического диапазона по фону при заданных потерях £s/n.
Рис. 8.8. Зависимости коэффициента передачи К/Ко и потерь Ls/n
при обнаружении цели в провале функции рельефа от отношения СКО
суммарного входного процесса к ЕМР АЦП
(пунктиром отмечены границы динамического диапазона по фону для 4-разрядного АЦП)
Рис. 8.9. Зависимости коэффициента передачи К/Ко и потерь Ls на квантование
и ограничение от уровня сигнала на входе АЦП
415
Радиолокационные системы землеобзора космического базирования
В локальных областях в пределах мгновенной площадки облучения передаются
естественные отношения контрастов для участков фона («лес», «луг») и целей с по-
правкой на шумы приемника и дополнительные шумы, вызванные нелинейностями.
Ухудшение условий обнаружения таких ярких участков и целей на равномерном фо-
не не слишком велико (те же 1,8 дБ). Другое дело - обнаружение слабого фона
(«озеро») и целей («лодка») в окружении интенсивного фона. Там появление помех с
уровнем 51 % от окружающего фона может значительно превысить уровень собст-
венного шума и привести к падению контрастов суша/вода в несколько раз.
На рис. 8.10 приведены зависимости энергетических потерь при наблюдении
цели («лодка») на шумах в провале ФРР («озеро») вблизи участков интенсивного
фона от уровня входного сигнала. Уровень шумов приемника на входе АЦП сгп =
= 1,5ЕМР. Из графиков следует, что при большом динамическом диапазоне значений
УЭПР фона необходимо применение АЦП с большой разрядностью (8 разрядов).
Рис. 8.10. Зависимости потерь обнаружения цели на слабом фоне в окружении
интенсивного фона от уровня входного сигнала при разной разрядности АЦП
Согласование амплитудных характеристик радиотракта и АЦП
В заключение раздела о влиянии нелинейностей в тракте РСА на характеристики
выходного сигнала отметим, что в нем рассмотрены механизмы взаимодействия и
математический аппарат оценки энергетических характеристик сигналов на вы-
ходном РЛИ. В рассмотренной функции радиолокационного рельефа наиболее
чувствительной является ситуация наблюдения «лодки» на «озере». В переводе
терминов, применяемых для мониторинговых задач ДЗЗ, задачи видовой разведки
соответствуют обнаружению объектов техники на лесных просеках, дорогах в
ущельях, окруженных горными массивами, малых судов в фиордах и прибрежных
горных районах.
Как было отмечено ранее, в обоих устройствах - радиотракте и видеотракте
возможно ограничение сигналов. Потери на ограничение в радиотракте меньше,
чем в видеотракте, так как высшие гармоники сигнала отфильтровываются в УПЧ
и остаются только комбинационные частоты. Поэтому при согласовании характе-
ристик радиотракта и видеотракта целесообразно выбирать максимальный уровень
АЦП больше, чем размах выходного сигнала приемника. Наличие участка «мягко-
416
Глава 8. Повышение информативности космических РСА
го» ограничения в приемнике способствует сжатию динамического диапазона сиг-
налов при приеме сигналов от сильно отражающих объектов. Это эквивалентно
применению АЦП с переменным шагом и позволяет дополнительно расширить ди-
намический диапазон сквозного тракта. Рекомендуется поддерживать уровень шу-
ма на входе АЦП сгп ~ 1,5ЕМР, при больших уровнях входных сигналов, вызы-
вающих ограничение, целесообразно применение цифрового АРУ в приемнике с
включением в состав служебной информации устанавливаемых значений усиления
(для радиометрической калибровки тракта). Пример корректировки ограничения
сигналов в приемном тракте РСА приведен в разделе 11.6.
Ряд особенностей имеет выбор положения нулевого уровня сигнала в АЦП.
Необходимо выполнение двух условий: чувствительности к сигналам малого уров-
ня (шумов приемника при минимальном усилении УПЧ) и стабильности выходно-
го значения для нулевого входного сигнала при изменениях окружающих условий
(температуры, напряжения питания и др.). Первое условие гарантирует отсутствие
«лысых мест» на РЛИ в местах перепада контраста местности, а второе обеспечи-
вает контролеспособность сопряжения аналоговой и дискретной частей тракта РСА
при наземной отработке и эксплуатации аппаратуры в полете.
Для оптимизации параметров сквозного тракта РСА с учетом нелинейностей
амплитудных характеристик звеньев можно использовать рассмотренные выше
формулы, а также методы моделирования преобразований сигналов в РСА, изло-
женные в гл. 10.
В современной практике проектирования космических РСА используют АЦП
с достаточно большой разрядностью (6-8), однако для уменьшения потока переда-
ваемых данных применяют адаптивные методы сжатия информации или уменьше-
ние разрядности передаваемых данных до 2-, 3- и 4-х разрядов (PALSAR [316,
467]). Выбор варианта зависит от конкретной задачи радиолокационной съемки.
Ряд публикаций обосновывает возможность применения однобитового кван-
тования (только знак сигнала [462]). Однако этот случай относится к кодированию
выходных сигналов АФАР с цифровым формированием ДНА, где происходит
суммирование сигналов от большого числа приемопередающих модулей. В резуль-
тате формируются отсчеты квадратурных составляющих сигнала, записанные с
большой разрядностью.
8.2. Подавление помех неоднозначности по дальности РСА
Как было отмечено в подразделе 3.6.3, неоднозначность по дальности может про-
являться при проведении радиолокационной съемки у дальней границы полосы об-
зора с увеличением угла визирования, при котором ширина ДНА по углу места не
обеспечивает отстройки от соседних ложных откликов неоднозначности по даль-
ности. Возможно подавление ближайших ложных максимумов по дальности путем
череспериодного изменения направления ЛЧМ зондирующих импульсов. Эта опе-
рация приводит к расширению ложных лепестков отклика по дальности до удвоен-
ной величины длительности импульса (в 2kc раз) и уменьшению амплитуды при-
14—1492
417
Радиолокационные системы землеобзора космического базирования
мерно в у]2кс раз при сохранении объема ложных лепестков, что является свойст-
вом функции неопределенности. Изменение формы импульсного отклика РСА по-
казано на рис. 8.11.
Рис. 8.11. Уменьшение амплитуды ложных максимумов отклика на РЛИ
путем череспериодного изменения направления ЛЧМ зондирующих импульсов:
a - исходная форма отклика; б - чередование направления ЛЧМ
Рассмотренный метод снижения помех неоднозначности по дальности приме-
ним для режимов РСА, предназначенных для обнаружения компактных объектов
на слабо отражающей поверхности, например, контроля надводной обстановки,
обнаружения айсбергов. Для задач наблюдения протяженных поверхностей, на-
пример, суши, этот метод неэффективен, так как на РЛИ отношение сигнала к по-
мехе от смещенных на рекуррентную дальность участков будет близко к единице.
Возможен метод снижения помех неоднозначности по дальности путем псев-
дослучайной череспериодной модуляции (рандомизации) зондирующего сигнала,
например, введения фазовой манипуляции на [О,тг] или фазово-временной модуля-
ции по случайному закону с восстановлением когерентности принимаемого сигна-
ла для каждой из временных зон рекуррентной дальности, попадающих в ДНА по
углу места. Этот метод, не уменьшая мощности помехи, позволяет раскоррелиро-
вать ложные изображения, сводя помеху к простому увеличению шума, со сниже-
нием спектральных составляющих в рабочей области. Для подавления остаточного
раскоррелированного шума неоднозначности можно применить некогерентное на-
копление РЛИ с увеличением размеров элемента разрешения. Использование из-
вестных процедур фильтрации спекл-шума, не подавляющих точечные цели (на-
пример, алгоритм ст-фильтрации), может привести к получению РЛИ, пригодного
для дешифрирования при решении определенных задач, например, ледовой раз-
ведки. Вид радиоголограммы и импульсного отклика при использовании рандоми-
зации сигналов приведен на рис. 8.12 и 8.13. Следует иметь в виду, что обычно
ложные отклики по дальности расфокусированы по азимуту и имеют меньшую ам-
плитуду, чем главный максимум, но большую длительность.
418
Глава 8. Повышение информативности космических РСА
Рис. 8.12. Вид радиоголограмм сигналов от точечной цели,
принятых с разных рекуррентных зон дальности:
a - без рандомизации; б - с применением случайной череспериодной манипуляции фазы 0,;г
и восстановлением в центральной зоне
Рис. 8.13. Вид импульсного отклика РСА при использовании
рандомизированного зондирующего сигнала:
a - без рандомизации; б - с применением случайной череспериодной манипуляции фазы О,тг
На рис. 8.14 дано сравнение РЛИ с неоднозначностью по дальности, приве-
денного в подразделе 3.6.3 (рис. 3.26), с применением рандомизированного зонди-
рующего сигнала. Область ложного изображения однозначно опознается как лож-
ная, а после пороговой обработки обнаруживаются суда в акватории, которые на
исходном снимке были замаскированы помехой неоднозначности.
На рис. 8.15 приведена модель РЛИ для случая расширением полосы съемки в
четыре раза по отношению к стандартному режиму и применению рандомизиро-
ванного зондирующего сигнала. Показана одна из парциальных рекуррентных зон.
Чтобы восстановить изображения в других зонах кодовую последовательность ма-
нипуляции фазы принятого сигнала смещают на число периодов повторения, соот-
ветствующее временной задержке до данной зоны съемки.
419
Радиолокационные системы землеобзора космического базирования
Рис. 8.14. Применение рандомизации зондирующего сигнала для подавления
неоднозначности по дальности:
a - РЛИ, полученное в обычном режиме; б — вид РЛИ при использовании случайной фазовой манипуляции
сигнала; в - область, пораженная помехой, после пороговой обработки (увеличено по горизонтали)
Рис. 8.15. Моделирование применения рандомизации сигнала для расширения полосы съемки:
a - исходное РЛИ (Ладожское озеро, РСА «Меч-К»); б — модель РЛИ с четырехкратным наложением ре-
куррентных зон и восстановлением в одной зоне; в — результат сглаживания восстановленного РЛИ
420
Глава 8. Повышение информативности космических РСА
При проектировании современных РСА применяются цифровые формирова-
тели опорных частот и сигналов. Это позволяет предусмотреть в каталоге сигналов
полный набор вариантов для подавления неоднозначности [243*, 244*, 440*].
В проекте двухрежимного РСА [298] для преодоления неоднозначностей сиг-
налов предложено применить сложный зондирующий сигнал, представляющий со-
бой пачку ЛЧМ-радиоимпульсов с полосой 1...2 МГц, смещенных по несущей час-
тоте, следующих с высокой частотой повторения, которая обеспечивает однознач-
ность сигналов по азимуту. Период следования пачек выбран из условия однознач-
ности сигналов по дальности. Суммарная полоса сигнала составляет около 100 МГц.
Принятые антенной и усиленные малошумящим СВЧ-усилителем сигналы поступа-
ют на многоканальный блок смесителей, где они с помощью смещенных по частоте
гетеродинов преобразуются в набор сигналов с одной промежуточной частотой для
их усиления в многоканальном приемном устройстве. РСА с высотой орбиты КА
650...750 км должен обеспечивать в широкозахватном режиме полосу съемки
700...800 км с разрешением 100 м. Предусмотрена специальная обработка многока-
нального сигнала с формированием «усредненного» разрешения по азимуту. В де-
тальном режиме луч антенны сужают по углу места до полосы съемки 10... 15 км и
обеспечивают разрешение 3.. .5 м. Число приемных каналов 5... 10.
8.3. Подавление помех неоднозначности по азимуту
в РСА высокого разрешения
Вопросам снижения помех от азимутальной (доплеровской) неоднозначности по-
священо много публикаций (см., например, [106-108, ПО, 111, 170, 171, 367, 368,
412, 417]). Основные выводы, сделанные в этих работах, состоят в том, что могут
рассматриваться методы подавления помех при наблюдении мощных компактных
целей типа «постоянных отражателей» (permanent scatterers), в частности, судов на
морской поверхности. К рассмотренным методам относится адаптивная фильтра-
ция с применением концепции «идеального» фильтра и компенсацией артефактов,
место которых рассчитывается по обнаруженным в главном лепестке мощным от-
меткам от компактных целей. Другая возможность снижения уровня ложных лепе-
стков неоднозначности по азимуту связана с улучшением разрешения по дальности
в детальных режимах съемки, что требует расширения полосы зондирующего сиг-
нала. Это сопровождается двумя явлениями, вызывающими падение уровня боко-
вых лепестков при их расширении по азимуту и дальности [109, 113]:
1) частотная зависимость углов неоднозначности синтезированной антенной
решётки от длины волны несущего колебания, приводящая к относительному рас-
ширению доплеровского лепестка по азимуту;
2) проявление миграции дальности, вызывающее расширение лепестков ази-
мутальной (доплеровской) неоднозначности по наклонной дальности.
Рассмотрим эти явления. На рис. 8.16 показана синфазная синтезированная
антенная решетка из 7V+1 элементов, сформированная из радиоголограммы точеч-
ной цели после компенсации набега фазы [109]. Шаг решетки равен VTP. Диаграм-
421
Радиолокационные системы землеобзора космического базирования
ма направленности такой решётки имеет побочные максимумы (лепестки), угловое
положение которых определяется условием
аЛ qc
sin an = —— = —-------
9 2F7p 2JTp/0
(8.32)
где 2 - средняя рабочая длина волны излучаемого сигнала; с - скорость света; То -
несущая частота сигнала; #=±1, 2, ... - порядок побочного дифракционного лепестка.
Рис. 8.16. Вид синфазной синтезированной антенной решётки.
Образование лепестков неоднозначности
Ширина главного лепестка (#=0) при боковом обзоре определяется известной
формулой &z0 = A/IL^ , где £а - длина синтезированной антенны, ограниченная
шириной луча антенны радиолокатора по азимуту. Ширина боковых лепестков для
узкополосных РСА (AF//0 <l/2g7V) близка к ширине главного лепестка. Расши-
рение полосы зондирующего сигнала, например, посредством применения ЛЧМ,
приводит к отклонениям направлений ложных азимутальных лепестков в течение
импульса относительно направления при средней частоте То- В результате ложный
лепесток расширяется, а амплитуда его падает.
Для широкополосного сигнала, реализующего высокое разрешение по наклонной
дальности pR =cj2&F9 ширина лепестка неоднозначности по азимутальной координа-
те определится суммарным эффектом (суммирование в квадратурах) от исходной ши-
рины для узкополосного РСА и расширением от широкополосного сигнала
ёХ 1 + ГфУ—) (833)
9 2£а \ /о J
где Ro - наклонная дальность цели; N- число импульсов в апертуре.
В соответствующее число раз, определяемое квадратным корнем в формуле
(8.33), уменьшается амплитуда лепестка неоднозначности.
Число суммируемых импульсов N в апертуре космических РСА измеряется ты-
сячами, что обеспечивает снижение уровня лепестка неоднозначности на 10...20 дБ
даже при относительно узкополосном зондирующем сигнале (~20...40МГц в вы-
деленных для космической радиолокации диапазонах волн). Число когерентно на-
капливаемых импульсов в синтезированной апертуре при работе с азимутальной
неоднозначностью можно выразить через число ложных максимумов Nq в ДНА
422
Глава 8. Повышение информативности космических РСА
N ~ ______
2D2xant(Ng/2 + iy
(8.34)
где Z\ant - горизонтальный размер антенны радиолокатора; Nq zlylVT^D^ -1) -
число лепестков неоднозначности в азимутальной ДНА.
Эффект влияния миграции дальности поясняет рис. 8.17 [368]. Каждый отсчёт
радиоголограммы представляет собой отражённый сигнал от полоски местности,
размер которой по наклонной дальности определяется размером элемента разре-
шения pR = c/(2\F} , а протяженность вдоль линии пути - размером следа азиму-
тальной ДНА радиолокатора. На рисунке показаны области приема отраженных
сигналов на местности, содержащие точку фокусировки (Q синтезируемой апер-
туры, для начального (А) и конечного (В) положений радиолокатора на участке
траектории АВ.
Рис. 8.17. Геометрия формирования импульсного отклика
при наличии миграции дальности
В течение времени пролета следа ДНА комплексные сигналы от точки С сум-
мируются в фазе, скомпенсированной фильтром обработки, и дают отклик с ам-
плитудой, равной N'KUcmwi (для простоты полагаем форму ДНА прямоугольной).
Сигналы от остальных точек в дуговых секторах, смещенные по доплеровской час-
тоте, подавляются при суммировании вдоль апертуры, кроме точек доплеровской
неоднозначности. Точки неоднозначности суммируются в фазе вдоль направления
АР (или BQ), отклоненных на угол aq от направления на точку С, и сигналы от них
будут фиксироваться в азимутальных положениях радиолокатора в точках О' (О,г) в
элементах дальности, отличающихся от Яо,
R' = RA sin(tfj -aq); R” = RB sin(tfB + aq), (8.35)
423
Радиолокационные системы землеобзора космического базирования
где Ra = RB =^Rq + (£а /2)2 - расстояния от границ синтезированной апертуры
La до точки С (Л С и ВС); aA =aB = arcsin(2/?0/£a) - углы наблюдения точки С из
границ синтезированной апертуры. В результате образуется вытянутый по дально-
сти отклик, длина которого определится разностью 8R = R"- R' PQ. Соответст-
венно уменьшается амплитуда ложного лепестка в Кя раз
„ PQ R"-R' 2RAsinaqcosaA
Kq — — —
Pr Pr Pr
(8.36)
Для РСА co средним разрешением по дальности Pr>PQ миграция дальности
не влияет на форму и уровень лепестков неоднозначности. Импульсный отклик
космического РСА среднего разрешения (10 м) и высокого разрешения (2 м) при-
ведены на рис. 8.18. Частота повторения взята равной 300 Гц вместо обычных
1500 Гц (пятикратная азимутальная неоднозначность). Горизонтальный размер ан-
тенны равен Dxant=10 м, шаг азимутальных отсчетов - К7р=25 м.
Рис. 8.18. Вид импульсного отклика РСА при азимутальной неоднозначности:
a - РСА среднего разрешения рЛ~10 м, помехи неоднозначности <-5 дБ; б - РСА высокого разрешения
ря~0,75 м, помехи неоднозначности <-30 дБ, £)хап1=10 м, Fp=300 Гц, Л=10 см, Ао=1000 км, миграция дально-
сти AF=12 м
В узкополосном РСА (см. рис. 8.18, а) лепестки азимутальной неоднозначно-
сти ниже главного лепестка (на 5 дБ и более). Это объясняется тем, что для прямо-
угольной ДНА выход оптимального фильтра имеет треугольную огибающую с ос-
нованием, равным удвоенной ширине азимутальной ДНА.
Для РСА высокого разрешения /?я~0,75 м (полоса сигнала AF=200 МГц) мак-
симальный уровень боковых лепестков составляет минус 30 дБ (см. рис. 8.18, б).
Для РСА с промежуточным разрешением по наклонной дальности pR-2 м уровень
помех неоднозначности ниже минус 20 дБ. Приведенные цифры свидетельствуют о
целесообразности использования в РСА космического базирования этого метода
подавления неоднозначности (наряду с другими) для расширения полосы обзора в
области больших углов падения и повышения оперативности наблюдения, хотя бы
в экспериментальных режимах мониторинга чрезвычайных ситуаций.
424
Глава 8. Повышение информативности космических РСА
На рис. 8.19 показаны артефакты на РЛИ, вызванные азимутальной нео;
значностью. Разрешение РЛИ по наклонной дальности составляет pR~\ м. Ради<
лограмма по азимуту по сравнению с обычным маршрутным режимом съемки <
зывается прореженной в Nq раз. Поэтому для получения разрешающей способнс
РЛИ по азимуту, равной половине горизонтального размера антенны, необход
при синтезе РЛИ применять интерполяцию сигнала на виртуальную частоту
вторения, с тем, чтобы шаг отсчетов соответствовал теореме Котельникова для
нозначной передачи спектра доплеровских частот. Методы такой интерполя
близки к применяемым для синтеза РЛИ в прожекторном режиме съемки или в
жиме двойного приема.
Рис. 8.19. Вид артефактов на РЛИ двух целей, смещенных по азимуту (5 км)
и дальности (50 м): полоса зондирующего сигнала ДГ=150 МГц
(по горизонтали отложен азимут, по вертикали - наклонная дальность)
Кроме рассмотренных выше были предложены методы адаптивного пода]
ния (редукции) помех доплеровской неоднозначности посредством фазовой комг
сации фрагментов артефактов, реализуемой дифференциальной интерферометра
ской обработкой комплексных РЛИ [112, 367, 368]. В частности, в этих работах г
тверждена эффективность указанных методов для случая наблюдения компакт]
целей. Применительно к наблюдению пространственно распределенных поверх
стей выигрыш в снижении интегрального уровня неоднозначности не превып
~3 дБ. Важным преимуществом предложенных в этих работах методов является
что повышение информативности РСА реализуется путем обработки получае!
Радиолокационные системы землеобзора космического базирования
информации, не усложняют построения бортовой аппаратуры и могут использовать-
ся в расширенных режимах работы космических РСА.
Для ряда задач расширение полосы съемки в РСА путем снижения помех не-
однозначности по азимуту имеет преимущества по сравнению с рассмотренными в
предыдущем разделе методами подавления неоднозначности по дальности. Это
обусловлено тем, что при работе на больших углах падения с увеличенной полосой
съемки выбор частоты повторения, гарантирующей азимутальную однозначность,
приводит к появлению нескольких рекуррентных зон дальности. Принятый сигнал
от любой из них создает помеху для всех остальных зон. В расширенной зоне за-
хвата возникают «слепые» области в моменты излучения зондирующих сигналов с
длительностью импульса супрессии приемника. Особые преимущества имеет ре-
жим с подавлением помех неоднозначности по азимуту в космических РСА кон-
троля надводной обстановки, для которой основным объектом наблюдения являет-
ся слабоотражающая морская поверхность с ограниченными участками прибреж-
ной суши, примыкающей к морской поверхности, произвольно по азимуту и даль-
ности с образованием артефактов в зоне облучения наблюдаемой поверхности уз-
ким азимутальным лучом.
8.4. Методы расширенной обработки радиолокационных
изображений
Используемые в современной практике тематической обработки радиолокационных
снимков программные пакеты предназначены для выполнения набора операций,
включающих импорт-экспорт данных космических РСА для ДЗЗ и охватывающих
всю номенклатуру работавших на орбите РСА, начиная с РСА SEASAT. Эта задача
облегчена стандартизацией форматов получаемых данных, а также сопроводитель-
ной служебной информации (стандарты CEOS [460, 464, 502, 557, 558]).
Общая тенденция состоит в том, что пользователь, как правило, получает го-
товые изображения в требуемых режимах съемки и параметрах (уровнях) обработ-
ки и решает свои прикладные задачи с применением перечисленных программных
пакетов.
По мере освоения и внедрения космических информационных технологий в
практическую деятельность региональных служб землепользования, экологическо-
го контроля и в сферу образования круг решаемых задач расширяется и возникает
потребность преодолеть ограничения специализированных пакетов с привлечени-
ем универсальных программных средств обработки изображений (Photoshop,
MATLAB и др.). Результаты развития методов тематической обработки радиоло-
кационной информации регулярно публикуются в трудах конференций по ДЗЗ в
России и за рубежом (ИКИ, ИРЭ, IGARSS, EUSAR и других). Особые перспективы
имеет использование комплексных радиолокационных изображений. Целесообраз-
но расширение функций, используемых в программных пакетах, предусматривая в
них возможность расширенной обработки РЛИ, в том числе с применением среды
MATLAB.
426
Глава 8. Повышение информативности космических РСА
К расширенным методам обработки радиолокационных изображений отно-
сятся рассмотренный в гл. 6 метод локальной автофокусировки, использование мо-
делирования преобразований сигналов РСА при тематическом дешифрировании
РЛИ (см. гл. 9). В ряде случаев целью обработки является повышение достоверно-
сти извлекаемой из РЛИ информации - подтверждение, что наблюдаемые образо-
вания на снимке принадлежат реальным объектам, а не артефактам, вызванным ис-
кажающими воздействиями. Ниже приведен частный пример обработки КРЛИ для
устранения артефактов функции отклика РСА.
Так, например, в целях устранения помех от «крестов» функции импульсного
отклика можно применить двухмерную круговую аподизацию спектра изображе-
ния или же повернуть направление крестов в сторону от дешифрируемого объекта
(рис. 8.20).
Рис. 8.20. Применение специальной обработки для улучшения дешифрирования РЛИ:
a - исходное изображение с артефактами; b - имитированная сцена с одной сильной и четырьмя слабыми
(-30 дБ) целями; с - стандартная процедура обработки, слабые цели не обнаруживаются; d - 2-D гауссово
взвешивание, кресты исчезают, слабые цели обнаруживаются, но не разрешаются; е - обработка с прямо-
угольным взвешивающим окном (/), повернутым относительно осей азимут-дальность, слабые цели обна-
руживаются и разрешаются
8.5. Сжатие потока данных, передаваемых по радиолинии
В современных высокоинформативных РСА узким местом является линия переда-
чи информации, пропускная способность которой ограничивает объем инфор-
мации, которую можно передать на пункт приема и обработки информации. Обыч-
но, поток данных, поступающих с аналого-цифрового преобразователя (АЦП)
в режимах с метровой и субметровой разрешающей способностью значительно
превышает скорость передачи данных. Так, например, при периоде зондирования
250 мкс (частота повторения 4000 Гц), частоте квантования 300 МГц, 8-бито-
427
Радиолокационные системы землеобзора космического базирования
вом квантовании действительной и мнимой составляющих сигнала и скважности
записи сигнала 40 % (полоса съемки 15...20 км) требуемый поток передачи ин-
формации составляет 1920Мбит/с (мегабод). Типичная пропускная способность
одного канала линии передачи данных составляет 256...512 Мбод. Время сброса
информации с низкоорбитального (до 1000 км) спутника на один наземный пункт
приема не превышает 8 мин за один сеанс связи при 1-2 сеансах в сутки. Для
согласования потоков на борту КА устанавливают буферные запоминающие уст-
ройства, а также применяют кодирование выходной информации с преобразовани-
ем ее до 2x4 бит на отсчет радиоголограммы, а в экспериментальных режимах
снижают разрядность кодирования до двух или трех бит. Для увеличения времени
передачи информации на наземные пункты используют спутники-ретрансляторы
на геостационарной орбите.
В принципе снижение потока передаваемой информации может быть достиг-
нуто применением синтеза РЛИ на борту КА с передачей на землю только ампли-
тудного РЛИ. Однако при этом существенно снижается ценность получаемой ин-
формации с невозможностью использования ее для интерферометрической обра-
ботки, которая необходима в современных условиях и для идентификации земных
покровов, и для выявления изменений в оперативной обстановке в районах наблю-
дения. Поэтому в структурной схеме РСА должно быть предусмотрено сжатие ра-
диоголограммы, обеспечивающее снижение потока выходных данных.
Как показывает анализ, известные технологии JPEG, эффективно применяе-
мые для сжатия «гладких» оптических изображений, имеющих спектр, плавно спа-
дающий в области высоких частот, малопригодны для сжатия радиоголограмм с их
близкой к прямоугольной огибающей спектра. Для сжатия радиоголограмм ис-
пользуют метод блочного квантования с плавающей точкой BFPQ (Block Float
Point Quantization), а также алгоритмы блочного адаптивного квантования (BAQ -
Block Adapted Quantization), модернизированный (fuzzy) FBAQ, блок-адаптивный
векторный BAVQ и другие, позволяющие разделить радиоголограмму на участки
(блоки), измерить и записать среднее значение коэффициента передачи по блоку в
формате с плавающей точкой и записать информацию о сигнале с меньшей разряд-
ностью [246, 255, 256, 262, 376, 437, 463, 476].
Обычно сжатие данных реализуют путем снижения количества уровней кван-
тования цифрового сигнала по амплитуде, что позволяет кодировать данные мень-
шим количеством бит на отсчет. Применять сжатие ко всей радиоголограмме цели-
ком нецелесообразно, так как это может привести к потере информативности сним-
ка, например, если подстилающая поверхность в кадре является сильно неоднород-
ной. Поэтому алгоритмы сжатия должны основываться на разбиении цифровой ра-
диоголограммы на блоки, где диапазон амплитуд в пределах блока данных намного
меньше, чем динамический диапазон всей первичной информации. При этом необ-
ходимо знать статистические параметры распределения сигналов.
Структурные схемы основных алгоритмов сжатия представлены на рис. 8.21.
Выполняется разбиение данных на блоки для косинусной (действительной) и си-
нусной (мнимой) составляющих, которые имеют гистограммы, близкие к распре-
428
Глава 8. Повышение информативности космических РСА
делению Гаусса с нулевым математическим ожиданием. Для каждого из блоков
вычисляют среднеквадратичное отклонение, значения блока данных кодируют 2-
битовым квантователем. В алгоритме блока адаптивного квантования определяют
степень отличия распределения в блоке данных от распределения Гаусса, оценивая
среднеквадратичное отклонение для блока данных. Это позволяет правильно раз-
личать закодированную первичную информацию от возможно ошибочной первич-
ной информации. В блок-адаптивном векторном преобразовании передается адрес
вектора из «книги векторов», которому соответствуют с минимальной ошибкой за-
кодированные данные в блоке. Здесь качество выходной информации зависит от со-
ставляемой «книги векторов». В методе DCT-BAQ квантованию предшествует дис-
кретно-косинусное преобразование ДКП (Digital Cosine Transformation), а в инфор-
мации кодируются коэффициенты, полученные в процессе преобразования. Дис-
кретно-косинусное преобразование задается формулой
I 7V-1
^^-(/o+C-T’A^Acos^-, А: е {0,1,...,7V}. (8.37)
7=1
Рис. 8.21. Алгоритмы методов сжатия первичной информации РСА
429
Радиолокационные системы землеобзора космического базирования
Качество РЛИ, полученных с помощью РСА E-SAR и ERS-1 при передаче ин-
формации с дискретностью 6 и 5 бит/отсчет и сжатия ее до 2 бит/отсчет, оценива-
лось следующими параметрами: отношением сигнал/помеха (искажения), макси-
мальным уровнем боковых лепестков (УБЛ) и их интегральным уровнем (ИУБЛ).
Результаты применения описанных методов сжатия представлены в табл. 8.1 [476].
Наиболее эффективным алгоритмом сжатия является алгоритмом блочного адап-
тивного векторного квантования BAVQ, обеспечивающий наименьший уровень
боковых лепестков отклика.
Таблица 8.1. Параметры качества изображения в результате применения
нескольких методов сжатия радиоголограммы
Метод сжатия Отношение сигнал-помеха, дБ Разрешение, азимут / дальность, м УБЛ, ДБ ИУБЛ, дБ
Данные E-SAR:
Без сжатия — 4,6/2,9 25,45 13,96
BAQ 11,69 4,6 / 2,9 24,42 13,99
DCT-BAQ 2,09 4,6/2,9 18,34 9,65
BAVQ 11,94 4,6 / 2,9 24,69 15,15
FBAQ 8,00 4,6 / 2,9 23,63 15,19
Данные ERS-1:
Без сжатия — 27,7 / 20,2 23,45 13,09
BAQ 8,77 27,7 / 20,2 23,42 13,29
DCT-BAQ 5,17 27,7/19,9 18,40 9,81
BAVQ 9,56 27,7 / 20,3 23,02 13,39
430
Глава 9
СОВРЕМЕННЫЕ ПОДХОДЫ К ТЕМАТИЧЕСКОЙ ОБРАБОТКЕ
РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ
9.1. Цели, задачи и методы тематической обработки
радиолокационной информации
В настоящее время задачу формирования радиолокационных изображений по мате-
риалам космической радиолокационной съемки (действительных, комплексных, по-
ляриметрических, в разных диапазонах волн, с различным пространственным разре-
шением от долей метра до сотен метров) можно считать практически решенной.
Совершенствование аппаратуры космических РСА направлено на повышение
оперативности радиолокационного наблюдения до долей часа, расширение частот-
ных диапазонов вверх и вниз (до метровых волн с использованием видеоимпульсных
РСА), миниатюризацию аппаратуры, увеличение пропускной способности средств
доставки информации потребителю. Проводятся также разработка и совершенство-
вание новых методов радиолокационного зондирования, например, многопозицион-
ной радиолокации, подповерхностного зондирования, обнаружения опасных волно-
вых явлений в океане, создания архивов и банков радиолокационных данных фоно-
целевой обстановки. Совершенствование аппаратно-программных средств получе-
ния радиолокационных изображений (первичная обработка) ведется преимущест-
венно в направлении повышения быстродействия вычислительных средств для со-
кращения временных затрат на получение радиолокационных снимков.
Целью вторичной, тематической обработки радиолокационной информации
космических РСА является извлечение из материалов радиолокационной съемки
содержательной информации об объекте съемки для ее практического использова-
ния конкретными потребителями [12, 61, 78, 165, 167, 211, 212, 242, 301, 484]. Со-
временные технологии компьютерной обработки космических снимков предусмат-
ривают комплексное использование материалов радиолокационной, оптической и
ИК-съемки, архивных данных, картографической и метеорологической информа-
ции. Процесс обработки включает процедуры автоматического сегментирования
изображений, классификации основных типов объектов (дорожной сети, гидрогра-
фии, растительного покрова, инженерных сооружений), а также детализацию типа
объекта (распознавание) до уровня, требуемого конкретными потребителями.
В процедурах распознавания РЛИ используют классические алгоритмы сравне-
ния с эталонами по вектору информационных признаков в метрическом пространст-
ве [238]. По мере развития методов дистанционного зондирования, усложнения ап-
паратуры, набора опыта дешифрирования космических снимков от разных датчиков
изменяется состав информационных признаков, повышаются точности идентифика-
ции объектов и оценки их параметров. При этом остается актуальной проблема оп-
431
Радиолокационные системы землеобзора космического базирования
тимального выбора пространства признаков с учетом доступных для использования
первичных данных: их типа, параметров, цены информационных продуктов, дости-
гаемого экономического эффекта от получаемой конечной информации.
Ценовая политика зарубежных поставщиков радиолокационной информации
заключается в том, что задается цена на базовый продукт в стандартных режимах
съемки, одинаковая на маршрутное РЛИ (Path Image - SGF или SGX) и на КРЛИ
(Single Look Complex - SLC), цена двух поляризаций (ГГ+ГВ или ВВ+ВГ) возрастает
на ~5,6 %, а четырех поляризаций - на 50 %. Так, для РСА Radarsat-2 по состоянию
на 2008 г. цена базового РЛИ с разрешением 3 м составляла 5400 долл. США, с раз-
решением 8м- 3600 долл. США (одно наблюдение) и 4200 долл. США (несколько
наблюдений), с разрешением 25 м - 3600 долл. США. Цена РЛИ (КРЛИ) с четырьмя
поляризациями с разрешением 6 или 25 м составляла 5400 долл. США [564].
Цена архивных снимков ERS-1/2, ENVISAT/ASAR с разрешением 30 м со-
ставляет 400 евро, с разрешением 75 м (ENVISAT) - 75 евро. Цена заказных сним-
ков ENVISAT/ASAR 600 евро при заказе за 15 сут, 900 евро - за 8 сут и 1600 евро -
особо срочные (за 3 сут). Информация предоставляется на CD-дисках или по Ин-
тернету. При заказе больших пакетов с повторной съемкой, в том числе для ин-
терферометрии предоставляются скидки [559]. Практикуется передача радиолока-
ционной информации в региональные центры обработки в рамках договоров о со-
вместной деятельности по отработке методов интерпретации РЛИ и извлечения
научной информации о планете Земля [75, 147, 378 и др.].
Условием эффективной организации процесса тематической обработки ра-
диолокационной информации является формирование банков эталонов, удовлетво-
ряющих возрастающим требованиям по детализации типов объектов и надежности
распознавания для военных и гражданских областей применения.
Особая ситуация касается мониторинга катастроф, наиболее связанных с
опасностью экологических бедствий. Роль радиолокационного зондирования здесь
особенно велика благодаря их всепогодности и измерительным свойствам. По
мнению специалистов НИИКАМ в этих случаях должен реализовываться принцип
«наилучших доступных технологий» с внедрением в системы гражданского при-
менения технологий, имеющихся в военном секторе [29].
Совершенствование средств вторичной обработки радиолокационной инфор-
мации направлено на развитие инструментальных технологий идентификации, оцен-
ки состояния и выявления изменений в объектах наблюдения, автоматизации про-
цесса тематической обработки, включая автоматизацию составления высокоточных
крупномасштабных топографических карт по данным радиолокационной съемки,
создание каталогов и банков эталонной информации по земным покровам и объек-
там для их автоматической идентификации и классификации. Развитые компьютер-
ные технологии, дополненные априорной информацией об оперативной обстановке
и материалами от других датчиков, расширяют возможности методов визуального
дешифрирования с выбором наиболее подходящих программно-алгоритмических
средств и их модификации к конкретно решаемым задачам [29, 75, 120, 491]. Важ-
ным аспектом является стандартизация информационных продуктов, методик фор-
мирования банков данных и тематической обработки информации [89].
432
Глава 9. Современные подходы к тематической обработке радиолокационной...
Разрабатываются технологии точного измерения геометрии инженерных со-
оружений, зданий, дорожного покрытия для прогноза аварийных ситуаций, обес-
печения строительных работ, технологии выявления изменений в оперативной об-
становке для сопровождения поисково-спасательных работ, количественные мето-
ды оценки объемов природных ресурсов (биомассы, водозапаса), объемов загряз-
нений в задачах экологического мониторинга и мониторинга катастроф, оценки
послерубочной и пирогенной динамики лесных массивов и т.д.
Выходной продукт обработки, как правило, представляет собой картосхемы в
векторной форме с соответствующими обозначениями и пояснениями. Для случая
индикации движущихся целей выпускаемые материалы могут дополняться форму-
лярами с измеренными параметрами движения. Для решения рутинных задач зем-
лепользования, мониторинга растительного покрова, геологического картирования,
построения карт рельефа широко используются программные пакеты для обработ-
ки изображений (растровых данных) ENVI, ERDAS, SARScape, PHOTOMODE-
Radar и др. Должно обеспечиваться выполнение следующих операций:
1) импорт-экспорт с поддержкой форматов данных, включая CEOS ERS,
CEOS RADARSAT, CEOS SIR-C/X, ENVISAT/ASAR, PALSAR, TERRASAR-X и
других, а также преобразование типов данных - амплитудных и комплексных изо-
бражений, включая наборы для интерферометрической обработки, радиоголограм-
мы (Raw Data);
2) преобразование растровых данных, включая операции с файлами данных
(суммирование, вычитание, умножение и др.), вращение, отражение, интерполяцию,
повторную дискретизацию изображений, изъятие и включение фрагментов для синтеза
тестовых сцен;
3) геометрическая коррекция и привязка к местности снимков РСА (геокодирова-
ние, орторектификация, геореференцирование);
4) формирование цифровых моделей рельефа интерферометрическим методом;
5) выявление изменений в наблюдаемой обстановке методами некогерентной об-
работки и дифференциальной интерферометрии разновременных снимков;
6) улучшение качества радиолокационных изображений путем подавления спекл-
шума, апертурной коррекции, повышения резкости (edge detection), применения тек-
стурного анализа;
7) статистический и спектральный анализ изображений с применением процедур
БПФ, ОБПФ, амплитудного взвешивания и фазовой коррекции, БПФ-интерполяции;
8) визуализация входных данных и выходных 2D и 3D продуктов с оптимизацией
масштабов и яркостной шкалы под условия дешифрирования;
9) документирование результатов обработки и параметров создаваемых про-
дуктов.
Преимущества использования таких пакетов для обработки радиолокацион-
ных снимков состоят в том, что кроме простого отображения растровой информа-
ции в виде файлов GeoTIFF они обеспечивают координатную поддержку с привяз-
кой к системе позиционирования GPS, а также (в ряде случаев) радиометрическую
калибровку радиолокационных изображений по служебной информации, постав-
ляемой в комплекте с изображениями.
433
Радиолокационные системы землеобзора космического базирования
Одна из продуктивных современных концепций извлечения полезной инфор-
мации из материалов радиолокационного зондирования заключается в рассмотре-
нии ансамбля радиолокационных датчиков как многопозиционной информацион-
ной системы MIMO (Multiple Input Multiple Output) RADAR [403]. Эта концепция
позволяет оптимизировать требования к элементам информационной системы и
использовать все доступные методы анализа данных (некогерентные, когерентные
интерферометрические, пространственно-временная обработка и т.д.).
Для интерпретации РЛИ природных площадных объектов с локальными не-
однородностями, включая линеаменты, используют нейросетевые подходы, которые
позволяют проводить автоматическую сегментацию РЛИ с использованием про-
странственных взаимосвязей между его пикселями [237]. Сегментация и классифи-
кация РЛИ может выполняться, например, с использованием нейронных сетей Кохо-
нена [345, 366], обладающих свойством формировать самоорганизующиеся карты
Кохонена с автоматическим выделением статистически значимых свойств входных
данных (самообучение без учителя). Идентификацию каждого пикселя РЛИ прово-
дят по результатам анализа его ближайших окрестностей (на матрицах 3x3,5x5,7x7
и более). Важным аспектом является выбор информационных признаков в каждом
пикселе - интенсивность, значения ее производных, различные преобразования (Фу-
рье, вейвлеты). Эти признаки используют как входные значения нейронной сети,
причем выход нейронной сети в данной процедуре определяют для каждого цен-
трального пикселя. Технология применения такого подхода к информации от РСА
Radarsar-1, ERS-2, Envisat для определения зон затопления после наводнений приве-
дена в работе [237]. Этот метод был интегрирован в качестве сервиса в InterGrid-
инфраструктуру, объединяющую ресурсы ряда организаций Украины, России, Китая
и ЕКА и доступны для использования [237, 525].
В качестве мощного инструментария для идентификации наблюдаемых явле-
ний используют моделирование радиолокационных изображений на основе анали-
за радиофизических процессов взаимодействия радиоволн с подстилающей по-
верхностью и объектами. Этот метод применяется для оценки топографии шельфа,
ветровых воздействий на морскую поверхность, динамики ледовых образований и
др. [92,114,162*].
Данная глава не претендует на изложение всех аспектов тематической обра-
ботки материалов космической радиолокационной съемки. В ней дан краткий об-
зор областей применения космической радиолокационной съемки с анализом фак-
торов, которые влияют на определение требований к разрабатываемой бортовой и
наземной аппаратуре, выбор рабочих режимов, обеспечение качества выходных
информационных продуктов.
Изложенный материал основан на опыте разработки радиолокационной аппара-
туры землеобзора авиационного и космического базирования и проведенных экспе-
риментальных исследований действующих образцов аппаратуры, накопленный кол-
лективом ОАО «Концерн «Вега» в кооперации со специалистами ОАО «ВПК «НПО
машиностроения», ИРЭ РАН, ИКИ РАН, ИО РАН и других организаций, проводя-
щих исследования методов радиолокационного зондирования по материалам, полу-
ченным с помощью отечественной и зарубежной аппаратуры.
434
Глава 9. Современные подходы к тематической обработке радиолокационной...
Применительно к разным направлениями использования радиолокационной
информации рассмотрены:
1) конкретные задачи, решаемые в рассматриваемой области применения радио-
локационной съемки;
2) уточнение информационных признаков и искажающих воздействий;
3) рекомендации по выбору параметров рабочих режимов РСА для решения кон-
кретной задачи.
9.2. Формирование банков радиолокационных портретов
объектов наблюдения
9.2.1. Исходные материалы, получаемые самолетными
и космическими РСА высокого разрешения
Применение автоматических методов интерпретации РЛИ требует создания банка
радиолокационных портретов объектов наблюдения [19]. Одно из важнейших тре-
бований, предъявляемых к ним, - простота адаптации к режимам обзора, условиям
наблюдения и параметрам РЛИ, получаемым с помощью конкретных РСА. Воз-
можно также применение методов математического моделирования с разделением
объекта на отражающие элементы - фацеты и решение электродинамической зада-
чи. Однако этот путь достаточно трудоемок и требует уточнений на основе экспе-
риментальных данных.
Для формирования банков РЛ-портретов применительно к РСА космического
базирования целесообразно использовать КРЛИ с высоким пространственным раз-
решением (метры и доли метров), получаемые с помощью самолетных РСА или
космических РСА, в том числе с применением съемки в режимах «сверхразреше-
ния» (см. раздел 4.2).
В статьях [50, 67] изложены методика и примеры получения данных для банка
РЛ-портретов авиационной техники с помощью самолетного РСА «Компакт 100»
3-см диапазона волн, имеющего пространственное разрешение 1,5...3 м. В ходе ис-
следований особое внимание уделялось сквозной калибровке тракта РСА. Типовые
радиолокационные и оптические изображения самолетов в различных ракурсах
приведены на рис. 9.1, а на рис. 9.2 даны значения ЭПР для отдельных самолетов и
усредненные по типам значения ЭПР. Отмечено, что ЭПР самолета АН-20 при ви-
де с носа сг = 1300... 1400 м2 превышает ЭПР ИЛ-76 с ракурсом 45° (<7~ 500 м2). К
сожалению, углы падения в проведенных измерениях составляли 81...85°, что не-
типично для космических РСА.
В статье [68] приведен метод формирования РЛ-портретов объектов техники,
полученных по программе MSTAR (Moving and Stationary Target Acquisition and
Recognition). Рассмотрен метод подчеркивания в РЛИ контраста между сосредото-
ченными отражателями объекта и распределенной окружающей поверхностью.
Метод основан на взвешенном суммировании степеней отсчетов амплитуды и про-
изводных амплитудного распределения. Вид исходного набора РЛИ (танк Т-72)
для формирования эталонов с вариацией ракурсов через 5° приведен на рис. 9.3.
435
Радиолокационные системы землеобзора космического базирования
Исходные материалы для составления банка РЛ-портретов объектов и образ-
цов подстилающей поверхности должны храниться в виде комплексных РЛИ, при-
веденных к единому масштабу по координатам вдоль и поперек линии пути.
Должна быть обеспечена их радиометрическая калибровка. Требования использо-
вания КРЛИ высокого разрешения обусловлены необходимостью адаптации этих
материалов для их применения в радиолокационной аппаратуре разных классов, с
наличием средств автоматического распознавания объектов наблюдения.
Рис. 9.1. Типовые РЛ-портреты (вверху) и оптические изображения (внизу)
авиационной техники различных ракурсах:
a - вертолет МИ-6; б, в - самолет ИЛ-76; г,д- самолет АН-26;
ракурсы съемки: а, б, г - вид с носа; в, д - с хвоста (самолетный РСА «Компакт 100» [50])
Sum(A*A)
а)
МИ-8 МИ-6 АН-12 ИЛ-76 АН-26 АН-12 АН-26
хв. хв.
Sum(A*A)
б)
МИ-8 МИ-6 АН-12 ИЛ-76 АН-26АН-12 АН-26
хв. хв.
Рис. 9.2. Значения ЭПР для отдельных самолетов (а) и усредненные по типам (б) [50]
436
Глава 9. Современные подходы к тематической обработке радиолокационной...
9.2.2. Получение точечных моделей объектов наблюдения
Для каталогизации комплексных радиолокационных портретов искусственных
объектов, уменьшения объема данных, а также для проведения исследований по
распознаванию классов объектов с анализом влияния различных факторов удобно
использовать точечные модели объектов. Использовать для этих целей оператор
деконволюции неэффективно, так как приводит к резкому возрастанию шумов.
Предложенная процедура «скелетизации» радиолокационных изображений
исходит из предположения, что сигнал, отраженный от искусственных объектов, в
основном формируется яркими компактными отражателями и набором случайных
отражателей с малым общим вкладом по сравнению с вкладом ведущего отражате-
ля. Типичным объектом, соответствующим этой модели рассеяния радиоволн, яв-
ляется башня-надстройка корабля с гладкой криволинейной основной отражаю-
щей поверхностью. Закон распределения амплитуды отраженного сигнала при-
ближается к распределению Райса с основной когерентной составляющей.
437
Радиолокационные системы землеобзора космического базирования
Процедура «скелетизации» не является строго корректной. В частности, она
не может различить отражающие точки объекта, расположенные на разной высоте.
Однако ее применение облегчает моделирование изменчивости радиолокационных
портретов объектов при изменениях ракурса наблюдения и отработку методов
классификации объектов по их изображениям. Ценными свойствами рассмотрен-
ной процедуры является линейная передача амплитуды сигнала исходного РЛИ в
выходной набор точечного РЛ-портрета с простотой нормировки суммарной ЭПР,
а также возможность перехода от точечного представления РЛ-портрета к модели
ожидаемого РЛИ для заданной разрешающей способности конкретного РСА.
Для задачи наблюдения надводных кораблей предложенный метод позволяет
учитывать влияние качки, вызванной морским волнением. При исследовании этой
важной проблемы использовались данные дистанционного зондирования морской
поверхности в 5-диапазоне волн, полученные с помощью РСА «Меч-КУ» КА
«Алмаз-1» в контролируемых условиях морского волнения [63*].
Рассмотрим процедуру получения исходных данных для моделирования в виде
точечных моделей объектов на примере изображений кораблей в бухте. В качестве
исходных данных используем фрагмент S(X,R) комплексного изображения (Single
Complex) в координатах азимут-наклонная дальность, которое предварительно пре-
образовано в 16-битовые форматы амплитуды A16.tif и фазы F16.tif, а также пред-
ставлено в 8-битовом формате A8.bmp (или A8.tif). Вид исходных A16/F 16-файлов
(стоянка кораблей) показан на рис. 9.4, а и б. Яркость АРЛИ (файл A16.tif) увеличена
в 10 раз. АРЛИ в формате A8.bmp (или A8.tif) используют для изготовления маски,
выделяющей конкретный объект на групповом РЛИ. Эту процедуру выполняют пу-
тем ретуши РЛИ с использованием программ Paint или Photoshop.
Рис. 9.4. Последовательность выполнение процедуры скелетизации:
a - исходное АРЛИ в формате А16, яркость увеличена в 10 раз; б — исходное фазовое изображение (ФРЛИ);
в - маска для выделения объекта на 8-битовом АРЛИ; г - точечная модель корабля (крайний справа);
черные квадраты соответствуют уровням минус 6 дБ от максимума, окружности - минус 12 дБ, точки - ми-
нус 18 дБ (пунктирной линией со стрелкой показана продольная ось корабля)
Процедуры скелетизации выполняют в следующем порядке:
1) интерполируют Л16, F16 и Л 8-изображения 4 раза, используя БПФ с раз-
движкой спектра;
438
Глава 9. Современные подходы к тематической обработке радиолокационной...
2) находят на интерполированном Л 8-изображении нужный объект и, исполь-
зуя Photoshop или Paint, делают маску Mask(yV,7?) для его выделения (правый ко-
рабль - БПК на рис. 9.4,а);
3) с использованием методики, изложенной в подразделе 11.1.3, получают ус-
редненную, нормированную к единице, двухмерную функцию импульсного откли-
ка h(Xh,Rh). Задают размер прямоугольного окна, за пределами которого обнуляют
функцию отклика (примерно на уровне минус 20 дБ относительно максимума). По
размерам окна обнуляют также граничные пиксели используемого фрагмента изо-
бражения.
На этом предварительные операции заканчивают и приступают к выполнению
собственно процедуры получения точечной модели объекта:
1) выполняют поиск глобального максимума на изображении ХХА'тахЛтах) и
записывают в строке промежуточной матрицы М\ значения амплитуды, фазы и но-
меров пикселя по азимуту Хтах и дальности Ятах;
2) из исходного комплексного изображения вычитают значения опорной
функции, умноженные на комплексный отсчет в максимуме. В результате из изо-
бражения будет изъята одна точечная цель
Si(X,R)-h(Xh,Rh)Amm^
при X g %max ± Dh/2 иу е Ктах ±Dh/2, (9.1)
при X tR^lDb/2 wny£Rmax±Dh/2,
где X, R - координаты по снимку; Хтах, Rmax - координаты глобального максимума
изображения S',; Хи, Rh - координаты по опорной функции; Атах, (р^ах - амплитуда и
фаза в максимуме; Dh - размеры окна;
3) повторяют предыдущие операции выделения отметки с максимальной ам-
плитудой до тех пор, пока амплитуда оставшихся отметок не достигнет уровня
шумов или подстилающей поверхности;
4) по данным, записанным в М\, формируют точечное амплитудное изобра-
жение P(X,R) для полного фрагмента;
5) умножают P(X,R) на маску, получая точечное изображение выделенного
объекта
Р} (X,R) = P(X,R)Mask(X,R).
(9.2)
Полученная точечная модель корабля показана на рис. 9.4, г. Обозначения от-
меток: квадраты - уровень выше минус 6 дБ от максимума, окружности - выше
минус 12 дБ, точки - уровень выше минус 18 дБ. Отношение мощности макси-
мальной отметки к среднему уровню отражения от морской поверхности составля-
ет 25 дБ. Исходная разрешающая способность снимков 8 м по азимуту и 9 м по на-
клонной дальности.
С учетом масштаба интерполированного снимка 1,2 м длина корабля состав-
ляет 140 м. По величине отклонения отметок по наклонной дальности от продоль-
ной оси корабля можно оценить высоту надстроек. Они составляют около 15 м.
439
Радиолокационные системы землеобзора космического базирования
9.3. Контроль надводной обстановки
9.3.1. Общие требования к решению задачи контроля надводной обстановки
Для решения задач контроля надводной обстановки в течение многих лет исполь-
зовались радиолокаторы бокового обзора (РБО) системы морской космической
разведки и целеуказания (МКРЦ) в составе космических аппаратов УС-А, УС-АМ.
Бортовые радиолокационные комплексы «Чайка» обеспечивали автоматическое
обнаружение кораблей и селекцию сигналов от суши (см. гл. 13 и публикации [88,
545]). Контроль состояния морской поверхности и ледовая разведка осуществля-
лось с помощью космических РБО типа «Космос-1500», «Ресурс-О» [197]. Низкое
пространственное разрешение, которое может быть обеспечено космическими РБО
(1,5...2 км), ограничивает возможности обнаружения малых судов и идентифика-
цию ледового покрова.
В современных условиях общая задача обнаружения судов (ship detection)
включает в себя:
1) обнаружение и определение координат кораблей (в акваториях и базах)
и судов разных классов. Особой задачей является контроль зон рыболовства с
выявлением нарушителей, а также обнаружение контрабандистов на судах малого
тоннажа;
2) определение класса (типа) морской цели;
3) определение курса и скорости.
В [554] сформулированы требования к перспективной системе контроля над-
водной обстановки ЕКА, разрабатываемой по программе Sentinel-1: поляриметри-
ческий (ГГ+ГВ) РСА с полосой съемки от 100...200 до 300...600 км и обнаружени-
ем судов с размерами от 3 м (поисково-спасательные операции), 15...35 м (рыбо-
ловы), 8...50 м (контрабандисты, торговцы оружием, террористы).
9.3.2. Обнаружение морских целей
В условиях, когда размеры разрешаемого элемента РСА меньше линейного разме-
ра обнаруживаемой морской цели, вероятность ее обнаружения, в конечном счете
(с учетом параметров РСА) определяется отношением ее ЭПР crs к ЭПР, создавае-
мой суммарным процессом отражения от моря и шумов приемника на площадке,
определяемой отметкой от цели. Отношение сигнал/фон+шум равно
= / о 0°;—
(°f +Vne)PxPYNs
где рх, ру — разрешение РСА по азимуту и горизонтальной дальности; As - число
элементов разрешения, приходящихся на площадь отметки от цели, представляю-
щей собой проекцию отражающих точек (в 3D координатах) на плоскость визиро-
вания (наклонная дальность - азимут) с учетом угла падения и ракурса цели.
Имея в виду последующую задачу распознавания класса целей по значению ЭПР,
ее размерам и радиолокационному портрету, необходимо, чтобы на длину цели прихо-
дилось, как правило, более чем один элемент разрешения, например, для катера дли-
ной ~40 м - 1-2 элемента, для сухогруза, танкера, эсминца, фрегата длиной 90... 130 м
440
Глава 9. Современные подходы к тематической обработке радиолокационной...
- по 3^4 элемента и т.д. Указанные характеристики реализуются при радиолокацион-
ном зондировании с режимами среднего разрешения с расширенной полосой съемки.
Процедура автоматического обнаружения морских целей включает в себя ко-
герентное накопление (синтез первичного РЛИ), некогерентное накопление
(фильтрацию ЭРЛИ) и пороговую обработку с использованием плавающего адап-
тивного порога, учитывающего изменения локальных уровней отражения от мор-
ской поверхности.
Для некогерентного накопления первичного РЛИ применяют двумерную
оконную фильтрацию, вейвлет-фильтрацию на базисах с разным разрешением, а
также комбинированные алгоритмы, основанные на сегментации радиолокацион-
ных портретов морских целей [22, 142, 400, 473, 494].
Для повышения вероятности правильного обнаружения возможно применение
процедур последовательного анализа с учетом того обстоятельства, что отметки от
морских целей в координатах азимут-наклонная дальность имеют явную несиммет-
рию с отношением длины к ширине от 1/10 до 1/7 с учетом высоты надстроек, а так-
же зависимость ЭПР от ракурса цели (резкое увеличение ЭПР при боковых ракурсах
наблюдения). Это позволяет ввести в процедуру обнаружения пространственную
фильтрацию по ракурсу цели для уменьшения вероятности ложной тревоги.
Двумерная фильтрация первичного РЛИ при автоматическом обнаружении мор-
ских целей позволяет реализовать селекцию протяженной поверхности (островов и
суши), после которой резко снижается поток ложных отметок от суши, подлежащих
изъятию из выходной информации путем сравнения с цифровой географической кар-
той. Иллюстрация работы порогового обнаружителя приведена на рис. 9.5.
Рис. 9.5. Обнаружение морских целей с селекцией сигналов от суши (показана условно)
(Гибралтарский пролив, РСА «Меч-КУ» КА «Алмаз-1»)
441
Радиолокационные системы землеобзора космического базирования
Кроме отметок от обнаруженных судов в акватории наблюдаются редкие
ложные отметки от элементов суши (мелких островов, горных хребтов и др.). Они
подлежат исключению из выходной информации путем сравнения их координат с
цифровой картой местности или архивными данными, полученными ранее в близ-
ких условиях наблюдения.
9.3.3. Измерение координат морских целей
Рис. 9.6. Геометрия наблюдения
движущихся морских целей
Первичное радиолокационное изображение в РСА строится в координатах наклон-
ная дальность (поперек линии пути) и время прохождения нуля доплеровской час-
тоты сигналов от цели. Пересчет из наклонной дальности в горизонтальную, а за-
тем вычисление географических координат цели в соответствии с формулами, при-
веденными в гл. 5, требует знания текущих гринвичских координат КА, учета ло-
кального радиуса земного эллипсоида на широте съемки. Наличие на борту КА
системы позиционирования (GPS, ГЛОНАСС) позволяет вычислить удаление цели
от следа КА с погрешностью, не превышающей трех-четырех десятков метров.
При оценке азимутальной координаты
обнаруженных морских целей следует иметь
в виду смещение отметок по азимуту, вы-
званные движением цели. Геометрия на-
блюдения приведена на рис. 9.6 для момента
времени t = 0, когда наблюдаемая цель Т на-
ходится в плоскости визировании О ST, нор-
мальной к вектору путевой скорости плат-
формы Vs. Величина смещения определяет-
ся радиальной составляющей скорости цели,
т.е. проекцией скорости цели на линию ви-
зирования
Гг = VT cos y/TS sin , (9.4)
где y/Ts ~ ракурс цели между плоскостью
визирования и продольной осью судна; -
угол падения между вектором облучения R
цели и местной вертикалью Zs в точке на-
хождения цели.
Угол ракурса рассчитывают следующим образом:
при обзоре правым бортом
y/TS =i//s - KU+ 270°; (9.5)
при обзоре левым бортом
^TS =^s~KU + 90°,
где y/s - курсовой угол КА, рассчитываемый по формуле (5.53); KU - курсовой
угол НК, который отсчитывают от направления на Север.
При ^ту=0 корабль наблюдается «в нос», при у/т&=90о - в правый борт.
442
Глава 9. Современные подходы к тематической обработке радиолокационной...
По значению радиальной скорости определяют азимутальное смещение цели
и ее азимутальную координату на РЛИ [302]. Величина смещения азимутальной
координаты при боковом обзоре равна
К Ks
При типичных условиях наблюдения - путевой скорости КА Ks = 7500 м/с,
дальности наблюдения R = 1000 км, углах падения = 30...60° и скорости судна
20 узлов (Гт = 10 м/с) погрешность измерения азимута может достигать AAVr =
= ±(667... 1150) м. Такая погрешность измерения координат может быть приемле-
мой для задач общего обзора надводной обстановки в акваториях океана. Повыше-
ние точности измерения азимутальной координаты движущихся морских целей
может достигаться путем применения методов индикации движущихся целей, а
также путем извлечения информации о возмущениях морской поверхности, вы-
званных движением судна.
Задача индикации движущихся целей решается использованием в РСА двух
приемных каналов, которые в РСА с АФАР подключаются к секциям АФАР, а в
РСА с гибридной зеркальной антенной - к пространственно разнесенным облучате-
лям антенны. Методы индикации движущихся целей - продольная интерферометрия
или пространственно-частотная фильтрация рассмотрены в подразделе 4.2.4, см.
также [37*, 118, 161*, 428*]. Применение этих методов позволит снизить погреш-
ность измерения азимутальной координаты в несколько раз, до сотен метров, что
обусловлено низкой точностью измерения радиальной скорости из-за малых раз-
меров интерферометрической базы (или малости углового смещения отметок по
ширине азимутальной ДНА) в космических РСА.
Лучшую точность измерения азимутальной координаты движущихся морских
целей обеспечивает использование информации о возмущениях на морской поверх-
ности. На рис. 9.7 показано РЛИ пролива Гибралтар, полученное с помощью РСА
TerraSAR-X с разрешающей способностью 3 м [530, 536]. По кильватерным следам,
образованным движущимися судами, определяют их курс (по направлению следа),
азимутальную координату (по месту начала следа), величину радиальной состав-
ляющей скорости (по величине азимутального смещения отметки) и, наконец, по
формулам (9.4), (9.6) - значения скорости судна. Измерить абсолютную скорость
судна можно также по углу, образованному кильватерными следами [449].
Характерно, что при движении судна к РЛС (положительное доплеровское
смещение) отметки от судов появляются позже пересечения плоскости визирова-
ния, нормальной к следу КА. При движении судна параллельно следу КА, инфор-
мация о скорости содержится в угле расхождения «усов» кильватерного следа или
в РСА с высоким разрешением может быть определена методом автофокусировки
по тангенциальной составляющей скорости движения цели.
Использование рассмотренной информации о возмущениях морской поверх-
ности для уточнения пирометров движения морских целей требует ряда ус-
ложнений аппаратуры РСА:
443
Радиолокационные системы землеобзора космического базирования
• повышения разрешающей способности и чувствительности РСА;
• введения канала вертикальной поляризации для получения изображения мор-
ской поверхности при больших углах падения;
• применения специальных алгоритмов обработки РЛИ с выделением кильва-
терных следов и извлечения информации о движении судов.
Сравнение РЛИ, приведенных на рис. 3.7, 7.36 и 9.7, показывает, что наблю-
даемость возмущений морской поверхности зависит от параметров РСА, степени
волнения моря и курса судна относительно фронта волны. В ряде ситуаций кильва-
терные следы могут не обнаруживаться на РЛИ.
НП X
Я
Рис. 9.7. РЛИ надводной обстановки в проливе Гибралтар с наблюдением кильватерных следов
(РСА TerraSAR-X, 05.07.2007 [536])
9.3.4. Радиолокационные портреты морских целей
Повышение разрешающей способности РСА до единиц метров требует пересмотра
используемых моделей отражения радиоволн от кораблей и судов. Для случая РСА
низкого разрешения, когда элемент разрешения РСА превышает размеры корабля
(сложная точечная цель), используют модель отражения от него как ^-распре-
деление с четырьмя степенями свободы [33*]. Этот случай характеризуется интер-
ференцией сигналов, отраженных фрагментами корабля с интенсивным отражением
(преимущественно - надстройками). При повышении разрешения до единиц метров
для описания закона отражения используют метод декомпозиции на «постоянные
444
Глава 9. Современные подходы к тематической обработке радиолокационной...
симметричные отражатели» (permanent symmetric scatterers). Суммарный сигнал от
корабля представляет собой результат некогерентного накопления изображений от
его отражающих элементов, что значительно снижает флуктуации сглаженного РЛИ
и повышает вероятность обнаружения распознавания класса [240, 283,489].
Высокая разрешающая способность современных космических РСА позволя-
ет получать радиолокационные портреты морских целей, пригодные для их клас-
сификации. Необходимо рассматривать несколько ситуаций: наблюдение непод-
вижных судов и кораблей на рейде или на стоянках и их обнаружение при движе-
нии в условиях морского волнения.
Радиолокационные портреты морских целей формируются конструктивными
элементами корабля (судна), образующими доминантные центры отражения, кото-
рые по своим статистическим характеристикам близки к постоянным отражателям,
но в пределах изменения ракурса, не превышающего ±20°, когда можно пренеб-
речь эффектами затенения одних элементов конструкции другими. Координаты
наклонная дальность-азимут для центров отражения находят путем пересчета их
трехмерных координат в плоскость визирования с учетом углов падения и ракурса
наблюдения согласно рис. 9.6:
X,!=jrc+x/sin^SP; (9.7)
Rj =RC+ yi cos y/SP sin /j - zz cos ,
где X - координата центра масс корабля вдоль линии пути; 7?с - координата центра
масс корабля по наклонной дальности, рассчитываемая по формулам (3.4)-(3.8) с
учетом удаления корабля Ус от следа КА, текущего радиуса орбиты КА Rs и радиу-
са земного эллипсоида 7?е на географической широте точки наблюдения (предпола-
гаем обнаружение на уровне моря); xz-, yt - координаты /-го центра отражения отно-
сительно центра масс корабля.
Форма комплексного радиолокационного портрета цели в координатах R, X
определится сверткой точечного портрета с двумерной функцией импульсного от-
клика РСА
N ( 1------)
U(R,X) = 4q^^^\-JKJR" + X?\®h(R,X), (9.8)
1=1
где N- число доминантных центров отражения цели; Q - множитель пропорциональ-
ности между ЭПР отражателя и отсчетами мощности выходного ЭРЛИ; о; - ЭПР ло-
кального центра отражения; Кх - волновое число; h(RJC) - нормированная функция
импульсного отклика РСА; R^X- координаты функции отклика на выходном КРЛИ.
Изменчивость получаемых радиолокационных портретов на РЛИ зависит от
геометрии отражающих фрагментов корабля (судна) и их взаимного расположения,
определяющего интерференцию сигналов в элементе разрешения РСА в зависимо-
сти от ракурса наблюдения. Считается, что модель отраженного сигнала может
быть представлена в виде набора постоянных отражателей, которые сохраняют
свою геометрию при изменении ракурса в пределах ±20°. При дальнейшем поворо-
те часть отражателей затеняются и появляются другие отражатели. При формиро-
вании радиолокационного портрета имеет значение также отражение от морской
445
Радиолокационные системы землеобзора космического базирования
поверхности, образующей с отражателями корабля двугранные углы, которые дают
отметки на РЛИ при большей дальности, чем от прямых отражателей. Особенно
такое явление возникает при бортовых ракурсах наблюдения морских целей.
Решение задачи классификации морских целей требует создания банка радио-
локационных данных и инструмента, позволяющего учесть условия наблюдения и
конкретные параметры РСА. Для формирования банка данных целесообразно
«препарировать» материалы (КРЛИ) конкретных радиолокационных съемок над-
водной обстановки и представить их в виде наборов точечных отражателей с ис-
пользованием процедур, аналогичных процедуре «скелетизации», рассмотренной в
подразделе 9.2.2. Такую же процедуру «препарирования» можно предусмотреть
для полученных РЛИ кораблей с целью компенсации искажений, вызванных кач-
кой и рысканьем в алгоритмах классификации морских целей.
Преимущество такого подхода состоит в возможности моделирования ожи-
даемых РЛ-портретов для конкретных условий наблюдения и параметров РСА пу-
тем разворота точечных комплексных моделей морских целей с приведением к ра-
курсу и углу места наблюдения и сверткой с характеристикой двумерного фильтра
импульсного отклика РСА в конкретном рабочем режиме.
На рис. 9.8 представлены радиолокационные портреты основных типов ко-
раблей на стоянках в бухте, полученные с помощью РСА «Меч-КУ» КА «Алмаз-1»
с разрешающей способностью около 8 м. Геометрические размеры кораблей при-
ведены в табл. 9.1.
Рис. 9.8. Яркостные и рельефные радиолокационные портреты кораблей с оценками их ЭПР:
1 - эсминец, о=3500 м2; 2 - ВПК, сг=6060 м2; 3 - МПК, сг=3900 м2; 4 - ВПК, сг=6500 м2; 5 - ВПК, о=7360 м2;
6 - крейсер, о=16920 м2; 7 - крейсер, о= 16050 м2; 8 - тяжелый авианесущий ракетный крейсер (ТАРКР),
сг=41600 м2; 9 - сухогруз, о=3600 м2
446
Глава 9. Современные подходы к тематической обработке радиолокационной...
Таблица 9.1. Геометрические размеры надводных кораблей и экспериментальные
данные по ЭПР надводных кораблей [153*, 516]
Тип НК Длина, м Ширина, м Максимальная высота, м ЭПР, м2
Тяжелый авианесущий ракетный крейсер 302,3 71 -50 42-103
БПК(1134А/Б) 152,0/173,2 16,2/18,2 -28,6 (6-7,4)! О3
Эсминец 126,5-181,7 13,0-18,6 -19,46 (3,5-4)-103
МПК(1124) 71,2 10,5 -16,7 (3,5-4)-103
Крейсер 251 28 -50 (16-20)-103
Сухогруз, танкер 141-430 16,5-60 до 50 >3500
На рис. 9.9 приведены яркостной и рельефный РЛ-портреты судна (предпо-
ложительно порожний сухогруз) при разрешающей способности РСА 3,5 м. Кроме
нескольких доминантных отражателей на корме имеем близкую к точечным отра-
жателям разреженную структуру по кромке палубы.
Рис. 9.9. Яркостный и рельефный радиолокационные портреты судна
(РСА «Компакт», ^-диапазон, разрешение 3,5 м)
Для малых кораблей (эсминец - 7, малый противолодочный корабль - 3 на
рис. 9.8) характерно наличие многих центров отражения (до 5-8) с примерно рав-
ными ЭПР. После некогерентного накопления будем иметь закон распределения,
близкий к нормальному с СКО 0,36...0,46 от среднего значения (jf-распределение
с числом степеней свободы 10... 16). Для больших кораблей центров отражения
мало, но каждый из них практически не флуктуирует при изменении ракурса на-
блюдения, что обеспечивает близкое к постоянному среднее значение ЭПР.
447
Радиолокационные системы землеобзора космического базирования
9.3.5. Радиолокационные портреты движущихся целей
в условиях морского волнения
При движении кораблей и судов в условиях морского волнения отдельные их от-
ражающие элементы совершают колебательные движения, вызванные бортовой и
килевой качкой и рысканьем, которые носят периодический характер. Они приво-
дят к смещениям отметок на РЛИ по азимуту, величина которых связана с ради-
альной скоростью элемента формулой (9.6), примененной к каждому центру отра-
жения. Радиальные скорости элементов определяются их положением относитель-
но центра масс корабля с периодом качки и углом отклонения корабля от нормаль-
ного положения
/ = /maxSin(2^/Tj, (9.9)
где Тк - период колебаний, который для крупных морских целей определяется их
конструкцией и не зависит от степени морского волнения.
Для крейсера период колебаний составляет 5... 15 с, а для авианосца - 10... 3 5 с.
С уменьшением водоизмещения корабля период колебаний имеет случайный харак-
тер и зависит от степени волнения моря. Колебания по курсу (рысканье), крену (бор-
товая качка) и килю можно считать узкополосным случайным процессом.
При синтезе РЛИ имеет значение соотношение между временем синтеза и пе-
риодом качки корабля. Если время синтеза много меньше периода колебаний, то
движение отражающего элемента корабля можно считать линейным и учитывать
только смещение отметки по азимуту, пренебрегая дефокусировкой. В случае РСА
высокого разрешения, когда время синтеза становится соизмеримым с периодом
качки, следует принимать меры для компенсации фазовых ошибок, в том числе и
методами автофокусировки.
На рис. 9.10 показан характер искажений РЛИ портретов кораблей при двух
ракурсах наблюдения (90 и 45°) и наличии азимутальных смещений отметок, вы-
званных радиальными скоростями отражающих элементов корабля (дефокусиров-
кой пренебрегаем). При качке разные элементы корабля на разной высоте от палу-
бы имеют разные линейные скорости, поэтому отметки от них смещаются по ази-
муту на разное расстояние.
Изменение ракурса корабля само по себе приводит к изменению геометрии
радиолокационного портрета и к нему добавляются геометрические искажения -
смещения отметок от качки и рысканья.
На рис. 9.11 приведены типичные радиолокационные портреты движущихся
судов (кораблей) разного типа в Тихом океане (Японское море, остров Осима, ви-
ток 2024н, см. РЛИ на рис. 7.36) и в проливе Гибралтар (виток 2005, см. РЛИ на
рис. 3.7) при скорости приводного ветра 5...8 м/с (умеренный ветер). Разрешающая
способность РЛИ ~8 м. В своем большинстве отметки несут информацию о разме-
рах, форме и распределении ярких отражателей в объектах наблюдения. Из осо-
бенностей следует отметить ярко выраженные отметки, вызванные переотражени-
ем от морской поверхности (рис. 9.11, Gib42, s34, s61).
448
Глава 9. Современные подходы к тематической обработке радиолокационной...
Рис. 9.10. Искажения радиолокационных портретов кораблей (НК),
вызванные качкой и рысканием:
a - общий вид корабля (показаны отражающие точки 1-5); б - радиолокационный портрет НК при ракурсе
наблюдения 90°; в - геометрические искажения при рыскании по часовой стрелке (показаны векторы ради-
альных скоростей и изменения положения отметок); г - рыскание против часовой стрелки; д - бортовая
качка (движение надстройки в сторону РЛС); е-з - искажения, вызванные рысканьем и качкой при ракурсе
наблюдения НК, равном 45°
Одиночные отметки переотражения предположительно от кормовых надстроек
характерны для сухогруза (Gib42) и танкера (s34). Более выражены отметки переот-
ражения для снимка s61 (предположительно военный корабль), подчеркивающие на-
личие высоких надстроек по всей длине. Наличие отметок переотражения затрудняет
оценку размеров морской цели, но в то же время является дополнительным инфор-
мационным признаком о количестве и высоте надстроек наблюдаемого объекта.
Из представленного набора РЛ-портретов морских целей два могут рассматри-
ваться как аномальные - s31 и s32. Оба они характеризуются большой яркостью, но
азимутальные размеры отметок, как для катера (30...70 м), не соответствуют наблю-
даемой ЭПР. Можно предположить, что такой вид отметок от кораблей обусловлен
влиянием рысканья, как на рис. 9.10, г. Это подтверждается тем, что в азимутальном
направлении видны области повышенной яркости, которые могут относиться к от-
ражению от элементов корабля с меньшим влиянием искажающих воздействий.
15—1492
449
Радиолокационные системы землеобзора космического базирования
Рис. 9.11, Радиолокационные портреты судов (кораблей) разных типов в Японском море (s...)
и в Гибралтарском проливе (Gib...):
скорость приводного ветра 5...8 м/с; направление обзора - слева
(РСА «Меч-КУ» КА «Алмаз-1»)
9.3.6. Классификация морских целей
Вопросам классификации морских целей при радиолокационном обзоре посвящен
ряд публикаций [142, 240, 487, 489]. Важным аспектом решения этой задачи явля-
ется выбор набора классификационных признаков с учетом реализуемого разреше-
ния проектируемой РСА.
В результате анализа возможных алгоритмов классификации морских целей
с учетом изменчивости радиолокационных портретов в зависимости от реализуе-
мой разрешающей способности РСА и влияния волнения моря разработаны реко-
мендации по формированию банка эталонов для классификации в виде наборов то-
чечных трехмерных моделей надводных кораблей и судов с шагом по углу ракурса
через 20°. Такие модели могут быть сформированы на основе комплексных РЛИ,
полученных с помощью космического РСА со средним и высоким разрешении-
ем (до Юм), путем применения процедур «скелетизации», рассмотренных в под-
разделе 9.2.2.
450
Глава 9. Современные подходы к тематической обработке радиолокационной...
Преимущества таких эталонов состоят в их компактности, а также в возмож-
ности гибко формировать образцы ожидаемых РЛИ эталонных кораблей с учетом
параметров обзора и измеренного ракурса наблюдаемого объекта.
Используемые для распознавания кораблей векторы признаков включают в
себя:
1) суммарную ЭПР наблюдаемой цели;
2) площадь (число пикселей РЛИ) «силуэта» цели в координатах наклонная
дальность - азимут, вычисленного по пороговым уровням с включением и исклю-
чением отметок, переотраженных от морской поверхности;
3) длину отметки (диагональ);
4) ширину отметки с учетом высоты надстроек;
5) распределение доминантных точек отражения и т.д.
Рекомендованы методы учета искажений радиолокационного портрета кораб-
ля, вызванных качкой и рысканьем путем расширения набора эталонов.
Для задач контроля надводной обстановки предпочтительнее использовать
излучение с горизонтальной поляризацией с возможностью приема двух поляриза-
ций для повышения энергетического потенциала и вероятности распознавания це-
лей. Это позволит расширить полосу съемки в область малых углов падения, где
для подавления сигналов от моря можно работать на перекрестной поляризации.
Для исключения влияния гидрометеоров, особенно в тропических широтах, жела-
тельна работа РСА в S- или L-диапазонах волн.
Период обновления информации о надводной обстановке определяется реали-
зуемой полосой съемки (включая двусторонний обзор) и составом орбитальной
группировки. Реализация широкой полосы съемки, особенно в области больших уг-
лов падения (до 70°), требует применения антенн с большой эффективной площадью
для устранения неоднозначности принимаемых сигналов и повышения энергетиче-
ского потенциала. Необходим также поиск компромисса по определению требова-
ний к разрешающей способности РСА в режиме Скансар, исходя из энергетического
потенциала РСА и вероятности распознавания классов морских целей.
Для удовлетворения этим требованиям перспективно применение в РСА гиб-
ридных зеркальных антенн с АФАР-облучателями (АФАР-ГЗА). Применение в та-
ких АФАР-ГЗА поляриметрических приемопередающих модулей (ППМ) с цифро-
вым управлением фазы и амплитуды на излучение и цифровым выходом на прием
позволит преодолеть ограничения разрешающей способности, присущие режиму
Скансар (см. подраздел 4.2.2), и реализовать гибкое управление ресурсами РСА
для оптимизации задач обнаружения, определения координат и классификации
морских целей. Эффективно применение методов последовательного анализа по-
лучаемых данных с возможностью введения дополнительных засветок участка на-
блюдения с адаптацией параметров зондирующего сигнала, в том числе с кратко-
временным использованием форсированного режима излучения.
Для контроля трафика судов, а также зон рыбной ловли целесообразно соче-
тание космического радиолокационного обзора с обработкой информации от аппа-
ратуры идентификации судов [267].
451
Радиолокационные системы землеобзора космического базирования
Анализ имеющихся материалов радиолокационной съемки морских целей по-
казывает, что комплексное использование информационных признаков, содержа-
щихся в РЛИ (суммарная энергия, геометрические размеры отметок и их конфигу-
рация в сочетании с дополнительной информацией о состоянии морской поверхно-
сти), дает возможность разделения наблюдаемых морских целей на 5-8 и более
классов, точное количество которых зависит от технических характеристик РСА, в
первую очередь, от разрешающей способности.
9.4. Дистанционное зондирование морской поверхности
9.4.1. Задачи дистанционного зондирования морской поверхности
Дистанционное зондирование морской поверхности предназначено для решения
следующих задач:
1) климатические исследования взаимодействия океан-атмосфера;
2) изучение морских течений;
3) исследование активных пленок, выявление областей загрязнений, экологи-
ческий мониторинг морских акваторий;
4) исследование внутренних волн, характеризующих топографию морского
дна, шельфовых зон (радиотомография морской поверхности);
5) обнаружение движущихся надводных и подводных объектов;
6) обнаружение опасных волновых явлений и их предвестников.
Решение перечисленных задач, как правило, включает в себя обнаружение
«аномалий» на РЛИ морской поверхности, их распознавание и интерпретацию, в том
числе и для обнаружения движущихся подводных объектов [190, 281, 361, 509].
9.4.2. Обнаружение эффектов взаимодействия взволнованной морской
поверхности с атмосферой
Как было отмечено в разделе 2.9, амплитудное (энергетическое) радиолокацион-
ное изображение водной поверхности образуется благодаря механизму брэгговско-
го рассеяния - модуляции ряби, имеющей длину волны, резонансную по отноше-
нию к радиоволне зондирующего сигнала РСА. Модуляция отраженного сигна-
ла вызвана изменением поверхностного натяжения на профиле морских волн (вет-
ровых, внутренних, волн зыби), наличием поверхностно активных пленок или раз-
личными возмущающими факторами (вихри, ветровая тень, плавающие объекты и
др.) [98,135].
При пространственном разрешении РСА 30 м и лучше ветровые волны отчет-
ливо видны на РЛИ, а их структура и системы волн выявляются путем спектраль-
ного анализа РЛИ. Текстурный анализ позволяет выявить нарушение периодиче-
ской структуры волнения, связанного с атмосферными воздействиями. На рис. 9.12
показан фрагмент РЛИ морской поверхности, иллюстрирующий эффекты взаимо-
действия океан-атмосфера (образование кольцевых структур) при зондировании в
5-диапазоне волн с горизонтальной поляризацией.
452
Глава 9. Современные подходы к тематической обработке радиолокационной...
Рис. 9.12. РЛИ морской поверхности с развитым ветровым волнением
и образованием кольцевых структур в результате взаимодействия океан - атмосфера:
7 - ветровые волны (А = 150-200 м); 2 - ринги;
3 - области подавления ряби (РСА «Меч-К» КА «Космос-1870»)
Широко известны методы измерения параметров ветровых волн и скорости
приводного ветра, использующие скаттерометры. Метод измерений основан на за-
висимости УЭПР морской поверхности от угла между плоскостью визирования и
фронтом ветровых волн. Отраженный от моря сигнал формируется мелкими (брэг-
говскими) волнами - рябью, которая модулируется крупной ветровой волной из-за
изменения локальных уклонов фрагментов поверхности, а также при нелинейном
взаимодействии мелких и крупных волн (имеет место усиление интенсивности
мелких волн на переднем склоне крупных волн). При использовании известной
спектральной модели развитых ветровых волн (спектр Пирсона - Московица) она
определяется выражением [444]
5° (0) = («0 /8)|у (с, 0)|2 77(A)ctg40, (9.10)
где во избежание путаницы с СКО уклонов (сг&, далее в тексте) символом 5ю
обозначена УЭПР (сг°) на площадке наблюдения; О- локальный угол визирования
между направлением излучения и нормалью к фрагменту морской поверхности;
ao=6,510’6 - средний коэффициент отражения; /(б*,#) - комплексный коэффици-
ент, учитывающий поляризационные свойства принятых сигналов; £- комплексная
диэлектрическая проницаемость водной поверхности, зависящая от температуры,
солености и длины волны Л радиолокатора [227]; т]{Х) - коэффициент, учитываю-
щий гравитационно-капиллярную область спектра волн [174*].
453
Рассмотрим основные соотношения для общего случая поляриметрического
зондирования. Для рабочей области углов визирования (0 = 30...70°) зависимость
(9.10) можно аппроксимировать экспонентой относительно некоего среднего угла
визирования 0q\
So=So(0o)exp{-w(0-/9o)/0o), (9.11)
где для ВВ-составляющей имеем /wVv = 2,7, а для ГГ-составляющей аиНн = 7,8.
Влияние крупной структуры принято оценивать, учитывая два фактора: «геомет-
рический» (угловую модуляцию нормали к малой площадке, содержащей мелкие
волны), а также «модуляционный», природа которого определяется взаимодейст-
вием мелких волн с локальным течением, т.е. с орбитальной скоростью крупной
волны. Вторым фактором пренебрегаем.
Проведенные в [178] расчеты значений УЭПР моря при поляриметрическом
зондировании ВВ+ВГ привели к формулам
‘S'w — ^vv (^о )
2 2
i а0х
4^02
2 2 А
mNN G6x
el J
____ 2 ( 2 2 A
c0 _ c0 /n x
oVh -^vvwo/-7“ H
2 I 3) J
(9.13)
где (Уду - CKO уклонов волн вдоль и поперек трассы КА с учетом развитого
волнения; 0$ - угол визирования для горизонтальной площадки (обычно обозна-
чаемый как угол падения д). Из формул (9.3) и (9.4) видно, что УЭПР на перекре-
2
стнои поляризации почти полностью определяется величиной <зву, а на соосной
поляризации УЭПР слабо зависит как от так и от (Уду. Величина же SyV(0{}),
включающая амплитудную модуляцию УЭПР, одинакова для обеих поляризацион-
ных составляющих.
Модельные представления [174*, 175*] показывают, что при интегрировании
пространственных спектров уклонов и высот развитых ветровых волн Ч\к) в пре-
делах от А=0 до Л=2л/Л (Л - длина волны радиолокатора), наблюдаемые «в точке»
2 2
дисперсии уклонов <уе и высот <yh , имеют значения:
(9.14)
(9.15)
где W- скорость приводного ветра. Дисперсия уклонов (9.14) возрастает с уменьше-
нием длины волны РЛС, что обусловлено формой спектра Пирсона - Московица.
Измеряемые радиолокатором параметры волнения целесообразно отнести к
скорости ветра того же направления (вдоль Wx и поперек Wy трассы КА). Отноше-
ние СКО уклонов q=cyey/(Jex характеризует анизотропию процесса. Она в зависимо-
454
Глава 9. Современные подходы к тематической обработке радиолокационной...
сти от направления ветра может изменяться в пределах от q = 0,7... 1,4 (дисперсии
уклонов при этом изменяются в 4 раза). Главный вклад (# ~ 1) вносят почти изо-
тропные гравитационно-капиллярные волны, а отличие q от единицы обусловлено
пологими энергонесущими волнами.
В случае скаттерометра с многолучевой антенной системой, например при
круговом сканировании под фиксированным углом 0$ к надиру, в принципе можно
разделить составляющие сг& и сг^ вдоль и поперек линии пути, а также определить
направление ветра. Скорость ветра можно грубо определить по измеряемой усред-
ненной величине сге. В существующем СВЧ-скаттерометре QUIKSCAT применяет-
ся другой алгоритм обработки, использующий зависимость УЭПР от направ-
ления и скорости ветра, минуя измерение параметров волнения. Недостаток скат-
терометрических измерений - низкое пространственное разрешение и большие
размеры зоны усреднения, определяемые расстояниями между лучами (десятки и
более километров).
Для исследования перечисленных выше явлений могут использоваться РСА,
работающие в любом из традиционных диапазонов волн (А, С, 5, L). Наличие по-
ляриметрического режима (две поляризации с возможностью выбора комбинаций
ВВГ или ГГВ) позволяет получить более детальную информацию об атмосферных
явлениях и расширить рабочий диапазон углов падения.
В связи с тем, что для рассмотренных явлений характерна однородность в
пределах больших площадей целесообразно введение в РСА специального «мор-
ского» режима для съемки фрагментов морской поверхности площадью 20x20 км2,
как это реализовано в РСА ERS-1/2. Съемка возможна в фоновом режиме, соче-
тающимся с выполнением основных задач.
9.4.3. Оценка скорости морских течений
Оценка скорости морских течений является важной составляющей мониторинга
морской поверхности. По своей природе течения являются динамическим объек-
том, параметры которого имеют суточные (вызванные приливными явлениями) и
сезонные изменения, а также вызванные другими факторами. При радиолокацион-
ном зондировании амплитуда РЛИ морской поверхности не фиксирует постоянной
составляющей скорости течений, а только ее градиент [63*, 69*, 176*].
Для измерения скорости течений могут быть использованы методы индика-
ции движущихся целей, основанные на интерферометрии вдоль линии пути. Одна-
ко для космических РСА измерение радиальной составляющей скорости в доли
метра в секунду при пространственном разрешении порядка десятков метров тре-
бует размера интерферометрической базы, реализуемой только при бистатическом
построении (тандеме) радиолокационной системы.
Во многих ситуациях ширина морского течения превышает несколько кило-
метров и для измерения его скорости можно воспользоваться известными метода-
ми измерения доплеровской частоты в луче ДНА (измерение положения доплеров-
ского центроида, используемое при синтезе РЛИ для оптимизации опорной функ-
ции [69*, 164*, 250, 289, 323, 396, 435*, 503]).
455
Радиолокационные системы землеобзора космического базирования
Измеренная доплеровская частота пересчитывается к значению радиальной ско-
рости, по которой через известные из условий съемки углы падения и ракурс наблю-
дения (в сопоставлении с географическими данными) вычисляют скорость течения
К =----, (9.16)
2 sin cos^p
где /i - угол падения между вектором облучения R и местной вертикалью ZT в точ-
ке наблюдения (см. геометрию наблюдения, показанную на рис. 9.6; y/Sp - угол ме-
жду плоскостью визирования и направлением течения; FDop - измеренная допле-
ровская частота; Л - длина волны РСА.
Применительно к наблюдению морской поверхности с низким коэффициен-
том отражения (для углов падения 30° и выше) имеется ряд факторов, ухудшаю-
щих точность оценки средней доплеровской частоты в ДНА. К ним относятся низ-
кое отношение сигнал/шум для отражения от морской поверхности, неравномер-
ность локальной отражающей способности (при попадании в луч островов или
фрагментов суши).
Кроме указанных факторов необходим учет ошибок измерения параметров
орбитального движения и ориентации КА, а также флуктуационных ошибок изме-
рений частоты спектра доплеровских частот, ширина которого определяется путе-
вой скоростью КА Ks и горизонтальным размером антенны Z)xant
2V
Д^р=-^. (917)
^/rant
При типичных размерах антенны РСА (Dxant = 5... 10м) ширина спектра состав-
ляет AFDop=1500.. .3000 Гц. СКО однократного измерения частоты составляет о>о0р «
» (0,2...0,29)AFDop в зависимости от отношения сигнал/шум. Поэтому для получения
малой флуктуационной ошибки измерения доплеровского смещения (и радиальной
скорости) требуется усреднение результатов изменений по каналам дальности.
Используемые методы измерения доплеровской частоты, в конечном счете,
сводятся к оценке формы принимаемого спектра доплеровских частот. Так, напри-
мер, используют оценку по центру тяжести спектра или путем вычисления разности
фаз коэффициента корреляции соседних отсчетов [503]. Такие оценки при малом от-
ношении сигнал/шум дают систематическую ошибку измерений тем большую, чем
больше отличие средней доплеровской частоты от нулевого значения. Ошибка изме-
рений обусловлена тем, что выборки шума в каждом канале дальности с тактом, рав-
ным периоду повторения зондирующего сигнала, некоррелированы и измеренное по
ним среднее значение доплеровской частоты равно нулю. В измерителе частоты
происходит взвешенное суммирование спектра сигнала со средней доплеровской
частотой, отличной от нуля, и шума с нулевой средней частотой.
Для исключения систематической погрешности необходимо применение сле-
дящего измерителя доплеровской частоты, который гетеродинирует суммарный
процесс к нулевой частоте, когда спектры шума и сигнала имеют равные (нулевые)
средние частоты.
456
Глава 9. Современные подходы к тематической обработке радиолокационной
Интерференционный характер отражения от элементов земной поверхности
вызывает резкие изменения мгновенного доплеровского спектра, формируемого
ДНА. Для уменьшения негативного влияния модуляции принимаемого сигнала на
положение доплеровского центроида возможно применение процедуры сглажива-
ния [164*, 435*]. Она основана на обратимости алгоритмов формирования радио-
голограммы и синтеза РЛИ (см. гл. 10) и включает в себя следующие этапы:
выделение протяженного фрагмента радиоголограммы, существенно превы-
шающего ширину ДНА по азимуту;
формирование комплексного РЛИ путем сжатия по дальности и азимуту без
учета миграции дальности. Взвешивающее окно по азимуту - прямоугольное;
сглаживание КРЛИ с нормировкой амплитуды в каждом пикселе;
обратное преобразование КРЛИ в азимутальном направлении (во временную
область) с использованием комплексно-сопряженной опорной функции;
разделение полученной радиоголограммы на фрагменты, в которых произво-
дится измерение доплеровской частоты с использованием следящего измерителя.
Большинство современных космических РСА используют платформы, ориен-
тированные с высокой точностью (лучше 0,1°) в подвижной путевой (гринвичской)
системе координат, что гарантирует отсутствие смещений доплеровской частоты,
кратных частоте повторения зондирующего сигнала. Тем не менее, малые отклоне-
ния КА от точной ориентации по курсу и тангажу могут дать погрешности измере-
ния доплеровской частоты. Они могут быть учтены путем измерения доплеровской
частоты в начале, центре и на дальней границе полосы съемки для начала и конца
маршрута (в том числе и со съемкой суши для получения опорной информации).
По этим данным и приведенной ниже формуле строится поле поправок для уточ-
нения результатов измерений
4тг
^Dop =-~T(i)SgRs {-sin^sin/j +cos</sin6‘cosyi},
Л
(9.18)
где 6?sg - текущая угловая скорость КА в гринвичской системе координат; Rs - теку-
щий радиус орбиты КА; у/, и <9 - отклонения по курсу и тангажу; - угол падения.
На рис. 9.13 и 9.14 дано сравнение результатов измерений поля течений во
Флоридском проливе по радиоголограммам ERS-2 без сглаживания амплитудных
неравномерностей [69*] и с применением процедуры сглаживания. На рис. 9.13/7
показано РЛИ участка пролива между островами Куба и Ки-Уэст. Оно имеет ти-
пичный для условий работы РСА ERS-1/2 вид - темные отметки от островов (ввер-
ху и внизу снимка) и светлое поле изображения морской поверхности со структу-
рами, образованными ветровым волнением. Модуляция яркости РЛИ при обычном
методе измерений доплеровской частоты приводит к ошибкам - наблюдаемым на
рис. 9.13,6 перепадам на градиентах яркости, которые в значительной степени по-
давляются при использовании рассмотренной процедуры сглаживания амплитуд-
ных неравномерностей (см. рис. 9.13,в).
На рис. 9.14,я,б соответственно представлены контурные диаграммы радиаль-
ной составляющей скорости течения при обработке без коррекции и с коррекцией
457
Радиолокационные системы землеобзора космического базирования
амплитудной неравномерности. Топологии диаграмм близки, выявляется циркуля-
ция течения по часовой стрелке: вправо у острова Ки-Уэст (в верхней части диа-
граммы), тангенциальные составляющие (радиальная скорость равна нулю) в правой
части - вниз, а в левой - вверх, противоток течения (влево) - ближе к берегам Кубы
и узкий рукав вдоль побережья Кубы - опять с направлением вправо.
НП
Рис. 9.13. Радиолокационные изображения (а) и измеренные поля доплеровских частот
при отсутствии коррекции амплитудных неравномерностей (б) и с применением коррекции (в)
(Флоридский пролив, РСА ERS-2)
Рис. 9.14. Контурные диаграммы радиальной составляющей скорости течения:
а - обработка, без коррекции амплитудной неравномерности [69*];
б - обработка с коррекцией неравномерности
458
Глава 9. Современные подходы к тематической обработке радиолокационной ...
Рассмотренная методика измерения доплеровской частоты, основанная на ана-
лизе получаемого РЛИ и выборочной корректировки радиоголограммы, позволяет
снизить погрешности измерений в областях, примыкающих к суше, а также повы-
сить точность калибровки измерений по участкам суши, съемка которых должна
специально предусматриваться при изучении течений. Должны включаться также
острова, где имеется максимальный градиент амплитуды отраженного сигнала. Воз-
можно расширение методики с применением сегментации комплексного РЛИ по
данным предварительного дешифрирования и проведение измерений по выделен-
ным фрагментам КРЛИ с последующим преобразованием их во временную область.
9.4.4. Экологический мониторинг морских акваторий
Важнейшей задачей мониторинга водных объектов является определение общей
загрязненности акваторий и учета ее составляющих. Основные направления эколо-
гического мониторинга морской среды включают в себя [93, 129, 144]:
оперативное картирование параметров состояния и загрязнений водной сре-
ды, вызванными различными источниками: береговыми (терминалы, вынос речных
вод, содержащих пленочные загрязнения смешанного антропогенного и естествен-
ного происхождения), морскими (платформы нефтепромыслов), судовыми (сброс
вод, содержащих нефтепродукты), а также биогенными, связанными с повышенной
биологической продуктивностью, в том числе с жизненными циклами хлорофилла
и активным цветением водорослей;
анализ метеорологической обстановки и ее влияния на распространение за-
грязнений;
изучение закономерностей прибрежной циркуляции и их влияния на распро-
странение загрязнений;
выявление различных ситуаций распределения загрязнений в прибрежных водах.
Необходимо рассмотрение указанных явлений в тесной взаимосвязи, по-
скольку загрязнения, попадая в морскую среду, становятся частью этой среды и
развиваются по тем же законам, по которым развивается и сама морская среда.
Основным средством спутникового контроля состояния морской поверхности
и оценки степени загрязненности являются космические РСА со средним про-
странственным разрешением (30...75 м), обеспечивающие получение стабильных
данных, не зависящих от времени суток и прозрачности атмосферы. В связи с од-
нородностью диэлектрических свойств воды в микроволновом диапазоне вариации
рассеянного сигнала связаны только с геометрическими параметрами возмущений,
что облегчает интерпретацию снимков.
Особенность использования РСА состоит в том, что видимое на РЛИ выглажи-
вание поверхностного волнения может быть вызвано как пленочными загрязнениями
различной природы, так и другими причинами. К ним относятся резкое ослабление
приповерхностного ветра, цветение водорослей с образованием плёнки на поверхно-
сти, поверхностные проявления различных атмосферных и океанических процессов
и т.д. Поэтому для интерпретации радиолокационных данных необходимо привле-
кать различные сопутствующие измерения (ветер, течения, температура, содержание
459
Радиолокационные системы землеобзора космического базирования
биомассы и др.), а также широко использовать косвенные признаки, позволяющие
конкретизировать происхождение того или иного пятна (форма, размеры, вид грани-
цы, текстура, близость возможных источников загрязнения и др.).
На рис. 9.15 приведены РЛИ разного типа поверхностно-активных пленок в
Черном море, полученных в С-диапазоне волн с помощью РСА Envisat ASAR.
Рис. 9.15. Типы поверхностно-активных пленок, наблюдаемых с помощью РСА:
1 - 5 - пленки нефтяных загрязнений с судов, площади нефтяных загрязнений: 1 - 9,2 км2; 2-1,6 км2;
3-1,2 км2; 4 - 0,5 км2; 5 - 3,5 км2; 6 - пленки биогенных загрязнений вдоль линий тока поверхностных те-
чений; 7- области ветрового затишья (ИСЗ Envisat, ASAR, разрешение 75 м, ВВ [129])
Другой ограничительный фактор радиолокационной съемки состоит в том,
что пленочные загрязнения можно наблюдать в диапазоне скоростей ветра от 2 до
10 м/с. При слабом ветре мала мощность отраженного сигнала, и контрасты, вы-
званные выглаживанием ряби, не обнаруживаются. При более сильном ветре вол-
нение усиливается настолько, что плёнка, покрывающая морскую поверхность, или
быстро разрушается, или уже не в состоянии оказать сколько-нибудь заметное для
радиолокатора воздействие на шероховатость поверхности.
В статье [144] отмечается, что подавляющее большинство антропогенных загряз-
нений морской поверхности представляет собой утечки и сбросы с судов нефтепро-
дуктов и содержащих их жидкостей в результате рутинных операций на судах: промы-
вочные, балластные, а также льяльные (содержащие более 15 мг/л нефтепродуктов)
воды из помещений грузовых отсеков. Как выяснилось, подобные незаконные сбросы
настолько распространены, что в совокупности наносят гораздо больший ущерб эко-
системе Черного моря, чем отдельные катастрофические разливы нефти.
460
Глава 9. Современные подходы к тематической обработке радиолокационной...
Одним из главных характерных признаков, помогающих выявить нефтяное
пятно на РЛИ, является его геометрическая форма. Она разная — в виде вытяну-
тых темных линий (при сбросах с судов во время их движения) или в виде темного
пятна округлой формы для неподвижных судов. Существенно влияние ветра на
форму и структуру пятна - под непосредственным воздействием ветра нефть акку-
мулируется на подветренной стороне. Приповерхностный ветер возбуждает дина-
мические процессы в верхнем слое воды, например вихри, трансформирующие
геометрию пятна.
Биогенные пленки - результат жизнедеятельности морских организмов и рас-
тений, главным образом, фито- и зоопланктона, а также бактерий. Они сохраняют-
ся в море при слабых ветрах в течение продолжительного времени и начинают раз-
рушаться, когда скорость ветра превышает 6...7 м/с. После прекращения действия
сильного ветра органические вещества снова выносятся на поверхность и образуют
слики. При интерпретации радиолокационных изображений главная трудность за-
ключается в различении пятен нефтяных пленок и пленок от биогенных поверхно-
стно-активных веществ на морской поверхности.
Данные радиолокационного зондирования нефтяных загрязнений можно по-
лучать с помощью космических РСА диапазонов волн X, С, S, а также миллимет-
рового диапазона. На рис. 9.16 приведены РЛИ морской поверхности, снятые в
5-диапазоне волн. В L-диапазоне волн одночастотное зондирование менее инфор-
мативно. Но оно в сочетании с использованием информации РСА другого диапазо-
на волн позволяет получить грубую оценку толщины пленки.
Рис. 9.16. РЛИ морской поверхности, снятые в 5-диапазоне волн:
а- Мраморное море, август 1987 г., пленки биогенных загрязнений; б - нефтяное пятно, эксперимент в Ат-
лантическом океане; в - размытое нефтяное пятно (РСА «Меч-К» КА «Космос-1870» (а), РСА «Меч-КУ»
КА «Алмаз-1» (б, в), разрешение ~20 м, ГГ)
Наибольший опыт интерпретации данных получен при зондировании в С-диа-
пазоне волн по амплитудным РЛИ от РСА Radarsat-1 (ГГ-поляризация), ERS-1/2
(ВВ-поляризация), Envisat (ВВ- или ГГ-поляризации). Анализ снимков перекрест-
ных поляризаций затруднен из-за низкого отражения сигналов от поверхности пя-
тен. Используемые радиолокационные данные позволяют определить геометрию и
текстуру пятен, но не дают оценки толщины слоя загрязнения. Эта задача является
предметом исследований, включая анализ комплексных ГГ+ВВ изображений, по-
лучаемых в разных диапазонах волн.
Сложность идентификации типа пленок и различения природных образований
от антропогенных пленочных загрязнений моря, поступающих с судов, объектов
ТЭК, рек, промышленных производств, требует привлечения дополнительной ин-
461
Радиолокационные системы землеобзора космического базирования
формации, которая может быть получена от географической информационной сис-
темы (ГИС) [93]. В рамках ГИС должны создаваться банки РЛИ нефтяных загряз-
нений моря.
Нефтяные разливы на РЛИ характеризуются [470, 540]:
• формой (нефтяные загрязнения характеризуются простой геометрический
формы);
• краями (гладкая граница с большим градиентом, чем у сликов природного
происхождения);
• размером (слишком большие пятна обыкновенно являются сликами естест-
венного происхождения, например, скоплениями водорослей или планктона);
• географическим расположением (нефтяные разливы в районах нефтедобычи
или путей транспортировки нефтепродуктов).
Для распознавания типа пленок используют нейросетевые алгоритмы со сле-
дующим набором информационных признаков [293]: площадь Л, периметр Р,
сложность образа С = р/2у!л:А 9 коэффициент формы S для пикселей, принадле-
жащих пятну [359], СКО яркостей в пятне и окружающем фоне, средний и макси-
мальный контрасты яркостей пятна к средней яркости фона, градиент границы
пятна, СКО градиента.
Для повышения надежности идентификации радиолокационные данные до-
полняют мультиспектральными данными, информацией о положении населенных
пунктов, промышленных объектов, инфраструктуры топливно-энергетического
комплекса - ТЭК (месторождений нефти и газа, газонефтепроводов, буровых вы-
шек и платформ, нефтяных терминалов, портов и т.п.), судоходных трасс путем их
интеграции в ГИС. Примерный вид системы экологического мониторинга в струк-
туре ГИС приведен на рис. 9.17.
Рис. 9.17. Система экологического мониторинга моря в структуре ГИС [93]
462
Глава 9. Современные подходы к тематической обработке радиолокационной...
В работе [93] предложен состав системы мониторинга моря из четырех ос-
новных блоков.
1. Подсистема дистанционного зондирования, обеспечивающая сбор, обра-
ботку и анализ как РЛИ, так и других данных дистанционного зондирования: тем-
пературы поверхности моря (ИСЗ NOAA/AVHRR), цвета моря и облачного покро-
ва (ИСЗ Terra и Aqua), ветра (ИСЗ Quikscat), осадков (SSV/I и TMI), высоты волн
(ИСЗ Topex-Poseidon).
2. Подсистема сбора спутниковых измерений, которая отвечает за сбор под-
спутниковых измерений, данных и сопутствующей информации о морской среде
(ветер, течения, состояние моря и т.п.), о характере нефти и параметрах нефтяных
разливов. Собранные данные могут дальше использоваться как начальные в моде-
лях дрейфа нефтяных пятен.
3. Система интеграции данных. Ее основа - ГИС, которая вместе с модулем
Классификации осуществляет интеграцию всех других данных и создание конеч-
ного продукта для пользователей - карт распределения нефтяных загрязнений.
4. Подсистемы архивирования и хранения данных, обеспечивающая сохран-
ность информации, необходимой для моделирования прогнозных сценариев и по-
лучения статистических сведений о нефтяных загрязнениях.
Привлечение региональных информационных и управляющих служб ГИС к эко-
логическому контролю моря и прибрежных территорий оправдано отмеченным выше
обстоятельством необходимости быстрого реагирования на обнаруженные очаги за-
грязнения с привязкой их к движущимся источникам. Должны использоваться коор-
динатная информация от систем опознавания, привлекаться морские средства контро-
ля для взятия проб нефтепродуктов. По результатам анализа должны приниматься ор-
ганизационные меры для устранения ущерба и предотвращения загрязнений.
9.4.5. Исследования проявлений внутренних волн для выявления топографии дна
В настоящее время практически освоена технология составления топографических
карт рельефа дна по результатам космического радиолокационного зондирования
морской поверхности. Реализуемая точность сравнима с точностью промера с помо-
щью эхолотов [92]. Для определения глубин применяют модели РЛИ, параметрами
которых являются опорные глубины, скорости течения и характеристики волнения
на момент съемки. По существу решается вариационная обратная задача моделиро-
вания амплитудного радиолокационного изображения по взаимодействию рельефа
дна с морским течением, которая позволяет инвертировать изменения интенсивности
РЛИ в локальные вариации глубины относительно известных опорных значений
глубин. По экспериментальным данным, собранным в Северном море, установлено,
что наиболее благоприятными метеорологическими условиями для топографических
измерений являются скорость течения 0,4.. .0,8 м/с, скорости ветра 3... 10 м/с.
Как отмечается в [92], бельгийская фирма ARGOSS разработала новую техно-
логию мониторинга рельефа морского дна BAS (Bathymetry Assessment System).
Она включает в себя пакет компьютерных моделей для расчета глубин по данным
радиолокационного зондирования. Эти модели учитывают, что формирование РЛИ
донной топографии происходит вследствие трех процессов, протекающих в слое
463
Радиолокационные системы землеобзора космического базирования
воды от поверхности до дна. Взаимодействие между приливным потоком и релье-
фом дна вызывает модуляцию поверхностного потока, она приводит к вариациям
спектра поверхностных волн, а значит изменяется коэффициент отражения радио-
волн. При моделировании используют уравнения, описывающие эти три процесса.
Для обеспечения строительства портов фирма ARGOSS создала службу, кото-
рая составляет карты глубин, течений, уровня моря, а также концентрации взвесей.
Кроме РСА (ERS-2) используют информацию от датчиков SeaWiFSs, оптоэлек-
тронного сканера MOS и радиовысотомера КА Topex/Poseidon.
В России отрабатываются методики решения этой задачи картографирования то-
пографии дна с использованием архивных данных от РСА «Меч-КУ» КА «Алмаз-1».
9.4.6. Обнаружение опасных волновых явлений и их предвестников
К опасным волновым явлениям в Мировом океане относятся штормовые волны с
экстремально высоким уровнем (до 12 м- «волны-убийцы») и опасные волны зы-
би, а также волны цунами. Для их наблюдения имеют перспективы бистатическое
зондирование морской поверхности в режиме квазизеркального отражения в соче-
тании с методами интерферометрии [181*, 182, 183*].
Режим квазизеркального отражения позволяет совместить преимущества ра-
диоальтиметра (высокий энергетический потенциал) с преимуществами космиче-
ских РСА (широкая зона бокового и скошенного обзоров). Использование фазо-
метрических методов позволяет формировать не только яркостные изображения
(воспроизводящие высоту энергонесущих волн), но и изображения поля уровня
(усредненные высоты морской поверхности), характеризующее поле сейсмических
(быстрых гравитационных) волн.
Возможны два варианта реализации бистатического режима:
1) использование пар низкоорбитальных (-800 км) спутников, один из кото-
рых - активный, передающий, а второй - пассивный с двумя антеннами и прием-
ными каналами (интерферометрия поперек трассы КА);
2) использование подсвета с геостационарного КА и набора низкоорбиталь-
ных (-800 км) КА с пассивными интерферометрическими приемниками (или тан-
демами приемных КА).
Такие конфигурации могут быть использованы для наблюдения морского
волнения и получения скоростных портретов, а также для обнаружения подъема
уровня морской поверхности на 2,5...5 см и более (на площади, превышающей
100x100 км), который является порождением волны цунами. Разрешающая спо-
собность бистатической РСА с учетом некогерентного накопления в элементе раз-
решения должна быть не хуже 1 км. Полоса съемки должна быть не менее 1000 км
при периодичности получения информации не более 1,5...2 ч.
При бистатическом зондировании разрешающая способность поперек трассы
КА в районе зеркальной точки резко падает (см. подраздел 3.3.4). Но в случае ис-
пользования широкополосного сигнала (200...300 МГц) можно реализовать при-
емлемое для наблюдения морской поверхности пространственное разрешение
(-30 м поперек трассы КА), как и у моностатических РСА. Для обнаружения волн
цунами используется интерферометрическая обработка с усреднением отсчетов
высоты по площади пятна 1 км2 с числом отсчетов 7V>3OOOO.
464
Глава 9. Современные подходы к тематической обработке радиолокационной...
Реализации такой информационной системы раннего предупреждения об опас-
ных волновых явлениях должен предшествовать натурный эксперимент. Для его
проведения в первой конфигурации может использоваться орбитальная группировка
из трех КА с РСА - передающей и приемного тандема. В результате эксперимента
должны быть отработаны алгоритмы измерения мезомасштабного рельефа морской
поверхности, обнаружения возмущений, оценены ожидаемые характеристики кос-
мической системы, оптимизированы режимы обзора и параметры аппаратуры.
9.5. Исследование ледового покрова
В задачи, решаемые средствами радиолокационного зондирования ледового по-
крова, входят [197]:
1) оценка ледовой обстановки и прогноз ее изменений, выработка рекоменда-
ций по проводке судов и районам ловли рыбы;
2) измерение скорости дрейфа льда;
3) применение радиофизических методов для изучения климата и взаимодей-
ствия океан - атмосфера в прикромочных зонах с типичным для них большим гра-
диентом параметров гидрометеорологических процессов;
4) оценка объема водозапаса в ледниках и материковых льдах;
5) выявление подвижки ледников;
6) контроль таянья материкового льда.
Многолетние экспериментальные исследования ледовых покровов с исполь-
зованием самолетных и космических радиолокационных средств низкого разреше-
ния (1...2 км) - скаттерометров и космических РБО на ИСЗ «Космос-1500, -1602,
-1766», «Океан», работавших в A-диапазоне волн, выявили зависимости между
общим характером ледового покрова и значением УЭПР. Обобщенная по экспери-
ментальным и расчетным данным зависимость а от возраста льда для z=3 см и
вертикальной поляризации
приведена на рис. 9.18. Как
видно, по значению сг не
всегда возможна однознач-
ная интерпретации РЛ-ин-
формации о ледовом покро-
ве. Значительные трудности
возникают при определении
возрастных градаций одно-
летних льдов, причем кон-
трасты морских льдов на фо-
не открытой воды могут
принимать в зависимости от
шероховатости льда и скоро-
сти приводного ветра как по-
ложительные, так и отрица-
тельные значения.
Рис. 9.18. Обобщенная зависимость УЭПР
различных типов льда по данным измерений
в А'-диапазоне волн (ВВ) при угле падения 40° [197]:
1 - море, скорость ветра 0—10 м/с; 2 - нилас (5-10); 3- серый, серо-
белый (10-30); 4 - тонкий однолетний (30-70); 5 - средний однолет-
ний (70-120); 6 - толстый однолетний (>120); 7 - многолетний (>200);
8 - шельфовые ледники (в скобках указана толщина льда, см)
465
Радиолокационные системы землеобзора космического базирования
Более точная идентификация (торосы, многолетний лед) может быть получена
путем двухчастотного зондирования, например, в X- и L-диапазонах волн, но приме-
нительно к задаче обеспечения судовождения требуется существенное улучшение
разрешающей способности радиолокатора, чтобы перейти от общих характеристик
ледового покрова с оценкой возможности прохождения каравана судов с ледоколом
до оценки сплоченности льда и прокладки наиболее экономной трассы.
На рис. 9.19 приведены РЛИ ледовой обстановки в Антарктике, снятые в
5-диапазоне волн с помощью РСА «Меч-КУ» КА «Алмаз-1». Видна резкая измен-
чивость текстуры ледовых образований, которая может использоваться для их
идентификации.
Рис. 9.19. РЛИ ледовых полей в районе Антарктиды
(РСА «Меч-КУ» КА «Алмаз-1», разрешение 15 м, ГГ)
В материалах, посвященных исследованиям информативности радиолокаци-
онного зондирования в разных частотных диапазонах (включая совместные экспе-
рименты с РСА «Меч-КУ» и SIR-C/X-SAR), на основе которых была сформулиро-
вана концепция построения РСА LightSAR, показано, что поляриметрический РСА
L-диапазона волн позволяет однозначно определять требуемые характеристики ле-
дового покрова при поляриметрическом зондировании в режиме Скансар с разре-
шением 100x100 м [446, 474].
Для анализа динамики поведения ледовых полей эффективно использование
методов дифференциальной интерферометрии по серии КРЛИ, периодически по-
466
Глава 9. Современные подходы к тематической обработке радиолокационной...
лучаемых на повторных орбитах. Применение метода прецизионного масштабиро-
вания комплексных сигналов, рассмотренного в подразделе 6.5.1, для интер-
претации дифракционных картин ледовых полей позволило обнаружить и оценить
их сжатие [162*].
Задача определения баланса ледовой массы материковых льдов решается пу-
тем измерения вертикальных и горизонтальных смещений ледника, что реализует-
ся поперечной интерферометрией. Изменения скорости движения может провоци-
ровать динамические нестабильности, вызванные эффектом смазки от водного
слоя. С целью устранения ошибок измерений скорости из-за рельефа применяют
метод четырехпроходной интерферометрии, вычисляя рельеф по одной из пар и
компенсируя его в интерферограмме. Для проведения съемок эффективно исполь-
зовались тандемы ERS-1, ERS-2 [478].
В дополнение к приведенным выше рассмотрим задачу обнаружения пла-
вающих айсбергов и возможностей их отличия от судов по получаемым РЛИ. Ак-
туальность этой задачи заключается в том, что айсберги и их осколки встречаются
в арктических морях в 59 % случаев [142]. Размер типичного айсберга («Bertha»)
составляет по длине 150 м и имеет высоту 35 м. Осколки айсбергов, даже не пре-
вышающие 20 м по длине (ширине) и высоте 5 м (как у маломерных судов), имеют
объем льда до 10000 тонн, что представляет серьезную угрозу мореходству в арк-
тических широтах.
Основными классификационными признаками айсбергов являются их низкие
значения ЭПР и УЭПР по сравнению с судами. Так, например, при угле падения
51° расчетная ЭПР для осколка айсберга размером 14 м и высотой 3 м составляет
от о=6...25 м2 (СКО 6...20 м2). В зависимости от ракурса наблюдения это соответ-
ствует УЭПР <т°=0,03...0,125. Морские суда с аналогичными размерами надводной
части (катер) имеют о=100...Ю00 м2 и <т°=0,6...1,7. Очевидно, что по полученным
двумерным радиолокационным портретам судна и осколков айсбергов их различе-
ние не составляет технических трудностей при достаточных пространственном
разрешении и чувствительности РСА. Заметим, что даже при минимальном значе-
нии УЭПР айсберга отметки от него имеют достаточный контраст на фоне отраже-
ния от морской поверхности с сг°~0,003. В [142] сделан вывод, что выбор длины
волны РСА из сантиметрового или дециметрового диапазонов, равно как и сила
морского волнения, не играют заметной роли.
9.6. Зондирование суши и растительного покрова
9.6.1. Тематическое картирование объектов суши
Разнообразие задач дистанционного зондирования суши требует дифференцирован-
ного подхода к выбору (заказу) вида радиолокационного продукта и алгоритмов те-
матической обработки. Как уже отмечалось, концепция проведения радиолокацион-
ной съемки поверхности Земли предусматривает полное использование ресурсов КА
по энергопотреблению и пропускной способности радиолинии передачи данных.
При планировании съемок учитывают заявки потребителей, а оставшийся резерв ис-
пользуют для создания архива РЛИ. Для задач, не требующих оперативных данных
467
Радиолокационные системы землеобзора космического базирования
(картография, геологические изыскания, землеустройство, составление земельного
кадастра и т.п.), возможно использование архивных материалов ДЗЗ.
Топографическое картирование (построение цифровых карт рельефа). Для
этого вида зондирования достаточно съемки с одной поляризацией с получением
пар КРЛИ в интерферометрическом режиме с «жесткой» или «мягкой» базой (тан-
демы или межвитковая интерферометрия). Разрешающая способность КРЛИ опре-
деляется масштабом и точностью создаваемых карт. Методы обработки КРЛИ рас-
смотрены в подразделе 9.7.1.
Геологическое картирование. Для геологического картирования (археологии,
исследования вулканической деятельности) желательно применение поляриметри-
ческой съемки преимущественно в дециметровых 5- или Z-диапазонах волн, а в
перспективе - двухчастотного зондирования с добавлением P-диапазона волн [87].
Возможности выделения подповерхностных структур возрастают при проведении
съемок с разными углами падения и ракурсами, применением правостороннего и
левостороннего обзоров на восходящем и нисходящем витках. Алгоритмы обра-
ботки информации аналогичны приведенным в статьях [360*, 374*].
Хозяйственная деятельность. Ее обеспечение на региональном уровне
(строительные и изыскательские работы, землепользование) требует постоянного
обновления крупномасштабных картографических материалов. Преимущество ра-
диолокационного зондирования - получение стабильных, повторяемых материа-
лов, позволяющих применить эффективные алгоритмы выявления изменений в ок-
ружающей обстановке и автоматизировать процесс обновления карт. Для боль-
шинства таких задач применимы рассмотренные в подразделе 9.6.3 робастные не-
когерентные методы выявления изменений (Change detection), основанные на кор-
реляционной обработке пар РЛИ, снятых в разное время. В отличие от дифферен-
циальной интерферометрии некогерентные методы не требуют повторяемости ус-
ловий наблюдения для совпадения фазы.
Мониторинг антропогенных объектов. Новые методы этого вида монито-
ринга на основе радиолокационной съемки (городов, населенных пунктов, дорож-
ной сети, различных инженерных сооружений, линий электропередач, инфраструк-
туры ТЭК и т.п.) позволяют вести контроль нарушений геометрии зданий от про-
садки почвы (вызванной природными явлениями или горнодобывающей деятель-
ностью), а также от действия разрушительных факторов. Используя методы диф-
ференциальной интерферометрии для КРЛИ с повторяющихся орбит, составляют
карты городов с фиксацией изменений геометрии зданий за период в несколько
лет. Регистрируемые скорости уходов около 2 см/год. При обработке данных ис-
пользуется 3D триангуляция [260].
Такую же технологию применяют при мониторинге железнодорожных путей в
горных районах, подверженных осыпям и лавинам [224], и контроле состояния газо-
проводов. Обнаруживаются процессы проседания линий газопроводов на миллиметры
в день из-за возможного таяния грунта под трубами. Отсутствие какой-либо динамики
за зимний период является следствием промерзания почвы и стабилизации поверхно-
сти. Отмечено, что переход из С-диапазона в более длинноволновый диапазон, напри-
мер, в Z, может резко снизить проблему временной декорреляции КРЛИ [83-86].
468
Глава 9. Современные подходы к тематической обработке радиолокационной
Индикация движущихся наземных целей. Эта самостоятельная задача —
решается методами продольной интерферометрии в РСА с секционными АФАР,
применением тандемов РСА. Новые технологии предусматривают использование
антенны с переключаемой ДНА, многоканальное построение РСА [277], а также
реализацию рассмотренного в подразделе 4.2.4 метода пространственно-частотной
фильтрации [37*, 428*].
Военная разведка. Основным инструментом при дешифрировании радиоло-
кационных данных в задачах военной разведки являются некогерентные и коге-
рентные методы выявления изменений оперативной обстановки в районах наблю-
дения. В ходе регулярных наблюдений театра военных действий формируют архив
КРЛИ стационарных объектов с вариацией углов падения и ракурсов, что позволя-
ет автоматизировать задачу обнаружения изменений обстановки и сократить время
дешифрирования [67, 68]. Дифференциальную интерферометрию сочетают с роба-
стными некогерентными методами выявления изменений, рассмотренными в под-
разделе 9.6.3.
Мониторинг чрезвычайных ситуаций. Рассмотренные выше методы эффек-
тивны при мониторинге чрезвычайных ситуаций, в том числе для сопровождения
поисково-спасательных работ. Как показывает опыт радиолокационного зондиро-
вания, нужна четкая каталогизация отражающих объектов на территории страны,
чтобы выявить на их фоне вновь появившиеся отметки - следы катастроф.
9.6.2. Мониторинг растительного покрова
Задача радиолокационного зондирования растительного покрова в современных
условиях - получение количественной информации об объеме биомассы, степени
созревания культур в целях прогноза урожаев, выявления заболеваний, контроля
применения агротехнологий или оценки динамики рубочных работ для лесных
массивов. Актуальной задачей является также точная типизация растительности,
например для выявления посевов наркотических растений. Для решения этих задач
используются поляризационные и спектральные различия в отражении от подсти-
лающей поверхности, выявляемые при комплексном дешифрировании данных.
В широком спектре частот радиолокационного зондирования из космоса па-
раметры сигнала, отраженного от растительного покрова, имеют большие вариа-
ции, которые обусловлены резкой частотной зависимостью отражающих и погло-
щающих свойств зеленой массы, различием геометрии растений (включая резо-
нансные явления), особенностями отражения от древесной массы и почвы. Общие
методы тематической обработки в задачах сельскохозяйственного мониторинга и
мониторинга лесопокрытых территорий близки, хотя решаемые задачи несколько
отличаются.
В задачи сельскохозяйственного мониторинга входят'.
учет использования продуктивных земель для регионального управления ре-
сурсами;
прогноз урожая, в том числе в глобальном масштабе, с целью экономической
разведки для установления цен на сельхозпродукты;
мониторинг сельхозугодий и контроль состояния посевов;
469
Радиолокационные системы землеобзора космического базирования
контроль эффективности агротехнологий, особенно для районов с резкой из-
менчивостью химического состава и влажности почвы, требующих проведения из-
бирательных мероприятий;
обнаружение зон поражения вредителями — насекомыми или грызунами;
оценка динамики плодородия почв, засоления, опустынивания.
В задачи дистанционного зондирования лесопокрытых территорий входят [9]:
оценка общего состояния лесных массивов, объема деловой древесины;
уточнение границ кварталов и выделов, их площадей, создание автоматизиро-
ванной системы непрерывной лесотаксации, кадастровой оценки;
контроль эффективности мероприятий по качественному состоянию лесов и
непрерывности их использования, лесовосстановления, контроль проведения ру-
бок, ухода, санитарных рубок, оценка текущего среднего прироста древесины;
определение и оконтуривание территорий вспышек вредителей и болезней ле-
са, оперативной оценки ущерба от таких явлений;
оконтуривание территорий произрастания особо ценных пород;
оценка характеристик жизнедеятельности лесных экосистем в их многообразии;
прогнозирование чрезвычайных ситуаций (оконтуривание территорий с по-
вышенной пожароопасностью, территорий будущего паводка), ускорения их лик-
видации (координатная привязка очагов горения в условиях сильной задымленно-
сти), выявление ущерба от нарушения режима хозяйствования (несанкционирован-
ные рубки, перерубы), оценка ущерба от природных катаклизмов (ветролом, вет-
ровал, снеголом).
Применительно к сельскому хозяйству требуется по материалам дистанцион-
ного зондирования определять вид культуры, стадию вегетации, объем фитомассы.
Наиболее эффективным является регулярное (более шести раз в год [75, 456]) по-
ляриметрическое (две поляризации) радиолокационное зондирование в сочетании с
использованием информации от оптических и ИК-датчиков (MERIS, MODIS).
Спектроанализатор MERIS (Medium Resolution Imaging Spectrometer) с разре-
шением 300 м и полосой съемки 1000 км входит в состав полезной нагрузки КА
Envisat, сканер MODIS (Moderate Resolution Imaging Spectroradiometer) с разре-
шением 250 м установлен на спутниках Terra и Aqua. Использование информации
от оптических и ИК-датчиков позволяет получить приближенную оценку распре-
деления запасов фитомассы в сообществах на основании расчета и сравнения зна-
чений нормализованного вегетационного индекса NDVI (Normalized difference
vegetation index):
ndvi = nir-red,
NIR + RED
(9.19)
где NIR - значение отражения в ближней инфракрасной области спектра; RED -
отражение в красной области спектра [26, 273].
Основной опыт практического применения космической радиолокационной
съемки основан на использовании амплитудных РЛИ, полученных в С-диапазоне
волн от ERS-1/2, Radarsat-1, Envisat (две поляризации).
Информативными признаками для идентификации вида сельскохозяйствен-
ных культур и прогноза урожая являются значения УЭПР и определяемая агротех-
470
Глава 9. Современные подходы к тематической обработке радиолокационной...
нологиями текстура полей в сочетании с их временной зависимостью от вегетацион-
ных фаз [7, 26]. Играет важную роль учет характерологических особенностей клима-
тических районов (среднесуточная температура, параметры шероховатости поверх-
ности, проективное покрытие, объем, структурные характеристики, влагосодержание
биомассы) с оптимальным выбором интервала времени для съемки. Так, например,
для большинства сельскохозяйственных культур восточных областей Украины оп-
тимальные условия съемки достигаются в среднем во второй декаде июня. Методики
расчета времени съемки и прогнозирования урожая приведены в [7].
Для сегментации и оконтуривания полей с однородной статистикой исполь-
зуют линеаменты (лесополосы, межи, дороги), выделяемые на РЛИ. Линеаменты
иного вида характерны для вспашки. Как правило, однородная диффузная структу-
ра типична для полей со сплошным проективным покрытием (бобовые, подсол-
нечник), а для злаковых культур видны вызванные вспашкой структурные неодно-
родности, которые не маскируются фитоэлементами. Незлаковые структуры дос-
товерно распадаются на классы по совокупности текстурных признаков
2
v = ^-HX = ^~, (9.20)
А2
где а- среднеквадратичное отклонение; ju- моменты гистограммы энергетическо-
го РЛИ.
Параметры амплитудных распределений УЭПР лиственных и хвойных лесов
существенно различаются. Так, текстура РЛИ сосняков гораздо более диффузна,
чем текстура РЛИ дубрав (рис. 9.20). Это связано с различием в строении основных
элементов, формирующих радиолокационный отклик - листовой пластины и охво-
енной ветви, а также инфраструктуры древостоя в целом. Текстурные признаки на
РЛИ (9.20) позволяют надежно различать не только породный состав лесонасажде-
ния, но и его состояние [8].
Рис. 9.20. РЛИ древостоев: а - дубравы; б - сосняки [8]
471
Радиолокационные системы землеобзора космического базирования
По основному параметру - значению УЭПР задача оценки биофизических па-
раметров почвы может решаться путем обращения физических радиационных мо-
делей, устанавливающих связь УЭПР с параметрами почвы и растительного по-
крова. Радиационная модель для активной радиолокации имеет вид [147]
где <Тр - рассеяние волн почвой, ослабленное растительностью; <rs° - рассеяние
растительным слоем; crs°p - перерассеяние волн между почвой и растительностью.
Выражая эти составляющие через параметры среды - температуру, влаж-
ность, удельную фитомассу, а также параметры РСА - длину волны, поляризацию,
угол падения, вычисляем значения а и сравниваем с измеренным. Решение обрат-
ной задачи возможно методами регрессионного анализа, альтернативой которому
служат нейросетевые алгоритмы на основе многослойных нейронных сетей (пер-
септронов) или радиально симметричных функций [147]. Преимущество таких ал-
горитмов обусловлено свойством обучения сетей на моделях и реальных данных и
меньшие вычислительные затраты.
Выбор метода зондирования и вида исходных данных радарной съемки
(РЛИ, КРЛИ, поляриметрические и/или интерферометрические комплекты данных)
определяется сложностью конкретных задач мониторинга растительного покрова.
В частности, высокой информативностью обладает разность фаз Д^ между поля-
риметрическими каналами, особенно для пар с согласованными поляризациями
ВВ и ГГ [203].
Она может быть использована для описания трех доминирующих механизмов
рассеяния:
1) поверхностного рассеяния (нечетное рассеяние) с Д^~0° для относительно
гладких поверхностей (поверхность водоемов, голая почва), когда ЭМ-волна испы-
тывает одно отражение с типичным значением Д^-0° и малым значением СКО. Это
показывает, что ГГ- и ВВ-поляризованные волны находятся в фазе;
2) рассеяния с двойным переотражением (четное рассеяние) с Д^, обычно
равным ±180° (урбанизированные области);
3) объемного рассеяния, где Д^ меняется от минус 180° до 0° (диффузное рас-
сеяние - растительность).
На рис. 9.21 приведены гистограммы разности фаз для поля, леса и городской
застройки. Аналогичные зависимости имеют гистограммы фазы для вырубки (СКО
~ 30°) и 46-летнего леса (СКО ~ 120°, максимум Д^ ~ 60°).
Аналогичные методы радарной съемки могут применяться для исследования
тундровых экосистем, анализа геометрических свойств земной поверхности (мик-
ро- и нанорельеф), построения цифровых карт рельефа, анализа распределения по-
казателей, зависящих от диэлектрической постоянной: влажности почв, содержа-
ния солей, гранулометрического состава, глубины оттаивания сезонно-талого слоя
мерзлоты, а также оценки запаса надземной фитомассы и границ растительных со-
обществ.
472
Глава 9. Современные подходы к тематической обработке радиолокационной
Рис. 9.21. Гистограммы разности фаз (в радианах) согласованных поляризаций для объектов:
a - поле; б - лес; в - город;
1 - без фильтрации, 2 - после фильтрации с помощью фильтра Lee [203]
Обработка РЛИ предусматривает фильтрацию спекл-шума, сравнение разновре-
менных и поляриметрических снимков (RGB-композиции), применение стандартных
процедур сегментации и классификации, анализ гистограмм УЭПР. Для валидации
данных радиолокационной съемки используют подспутниковые полигоны [10].
9.6.3. Некогерентные методы выявления изменений
в оперативной обстановке
Возможности дифференциальной интерферометрии для выявления изменений в опе-
ративной обстановке на местности ограничены жесткими требованиями идентично-
сти условий наблюдения, при которых сохраняется когерентность пар КРЛИ стацио-
нарных объектов. В другой ситуации прибегают к некогерентному сравнению полу-
ченных энергетических или амплитудных РЛИ. Основными деструктивными факто-
рами являются спекл-шум и недостаточное отношение сигнал/шум на РЛИ, что тре-
бует применения фильтрации РЛИ как первого шага обработки. Вызванные этим по-
тери пространственного разрешения приводят к увеличению размеров обнаруживае-
мого группового объекта, что частично может быть скомпенсировано увеличением
длины синтезированной апертуры при съемке в прожекторном режиме.
Основная идея алгоритма выделения изменений на РЛИ базируется на пред-
положении, что при повторной съемке одного и того же участка местности с одно-
го и того же ракурса изображения стационарных объектов на обоих РЛИ тождест-
венны [68, 465]. Различия возникают только в местах, где на изображениях появ-
ляются новые объекты или исчезают объекты, ранее на них присутствовавшие.
Предполагается, что целевые объекты (одиночные или групповые) должны созда-
вать хорошо наблюдаемые отметки на РЛИ. Как правило, подобным образом про-
изводится обнаружение объектов техники - автомобильной, железнодорожной или
авиационной.
Обнаружение перемещающихся объектов на фоне местности возможно с ис-
пользованием стандартных методов обнаружения целей по величине локального
контраста. Однако возникающий при этом уровень ложных тревог, создаваемый
стационарными объектами небольших размеров, оказывается весьма высоким, что
существенно снижает эффективность применения общепринятых методов.
473
Радиолокационные системы землеобзора космического базирования
Алгоритм выделения изменений на РЛИ включает в себя следующие основ-
ные этапы [68]:
1) выбор совпадающих кадров РЛИ одного диапазона волн и с близкими ра-
курсами наблюдения;
2) сравнение геометрического положения и определение локальных смещений
соответственных фрагментов РЛИ;
3) фильтрация сформированного поля локальных смещений;
4) наложение совпадающих областей двух кадров друг на друга с компенса-
цией локальных смещений фрагментов;
5) вычисление взаимной корреляционной функции с соответствующим фрагмен-
том другого кадра РЛИ. При этом выполняют пространственное совмещение РЛИ;
6) построение функционала амплитудного рассогласования кадров РЛИ.
В результате взаимной корреляции фрагментов по максимуму значения кор-
реляционной функции Rc(m,n) определяется положение наилучшего совпадения
для каждого фрагмента. Данная операция позволяет устранить влияние остаточных
неучтенных геометрических искажений, присутствующих на обоих кадрах РЛИ. В
космических РСА (в отличие от самолетных) со стабильной траекторией движения
остаточные геометрические искажения невелики, что облегчает попиксельное со-
вмещение РЛИ.
Функционал рассогласования вычисляют через отношение амплитуд РЛИ А и
В по алгоритму:
В/А = I - изменения на РЛИ отсутствуют; (9.22)
В/ А>1 - на изображении В появился новый отражающий объект;
В/ А < 1 - на изображении В исчез отражающий объект,
ранее присутствовавший на изображении Л;
DAB = 5 / Л; В / А>1 - признак наличия изменений.
Признак наличия изменений
Dab=B/A х\риВ/А>\\ (9.23)
DAB = А/ В при В / А < 1.
На рис. 9.22 приведен пример работы классификатора изменений обстановки.
Представленный выше алгоритм обнаружения различий на РЛИ позволяет
значительно снизить уровень ложных тревог от стационарных объектов со ста-
бильным отражением. На практике приходится применять фильтрацию для сниже-
ния шумов и спекл-шума, что сопровождается ухудшением пространственного
разрешения.
Перспективным представляется итерационный метод с переходом от затруб-
ленных РЛИ (фильтрация на матрице 7*7 или 5x5) к более детальным. Далее к
объектам, отметки от которых превысили пороговый уровень, применяют анало-
гичные рассмотренным в подразделе 9.6.3 алгоритмы классификации, обладающие
возможностью адаптации банка эталонов к параметрам анализируемых РЛИ.
474
Глава 9. Современные подходы к тематической обработке радиолокационной...
Рис. 9.22. Пример обнаружения объектов, идентифицируемых
как объекты автомобильной техники:
a - мастер РЛИ Л; б - вторичное РЛИ В; е - признак наличия изменений; 1 - стационарные объекть
2 - объект, имевшийся только на РЛИ Л; 3 - объект, появившийся на РЛИ В (РСА «Компакт», А-диапазо!
исходное разрешение 1,35 м [68])
9.6.4. Построение цифровых карт рельефа по радиолокационным
стереоснимкам
В случаях, когда размеры интерферометрической базы пары снимков существен^
превышают допустимую величину для сохранения когерентности между обоим
КРЛИ, возможно построение карт рельефа методом стереометрической обработк
амплитудных снимков [535]. Для реализации этого метода нужно, чтобы разносз
Рис. 9.23. Одно из РЛИ стереопары (а) и построенная по ним карта рельефа (б)
(штат Невада, США; РСА Radarsat-1 [535])
Радиолокационные системы землеобзора космического базирования
углов визирования стереопары была в пределах 5...30°. Точность восстановления
вертикальной составляющей при цифровой стереообработке зависит практически
только от пространственной разрешающей способности радиолокатора. Это обу-
словлено тем, что цифровой корреляционный анализ снимков стереопары может
быть сделан с точностью до величины элемента разрешения, которая для совре-
менных космических РСА составляет единицы метров. Автоматизация ответствен-
ной процедуры совмещения КРЛИ достигается путем иерархического (пирами-
дального) представления снимков с кратными масштабами разложения (8А/^,
2Mrx, Mrx, где MRX - межпиксельное расстояние исходного РЛИ) и примене-
нием картографической основы Global 30-Arc-Second DEM GTOPO30 на первом,
самом грубом уровне [299].
На рис. 9.23 показан один из снимков стереопары на участок местности в
штате Невада, США, полученный с помощью РСА Radarsat-1, а также построенная
цифровая карта рельефа [535].
9.7. Интерферометрическая обработка радиолокационных
снимков
9.7.1. Получение цифровых карт рельефа местности
Для построения цифровых карт рельефа (ЦКР) применяют интерферометрию по-
перек линии пути КА, реализуемую в однопроходном режиме, как в миссии SRTM
на базе РСА SIR-C/X-SAR, с использованием тандема космических РСА либо меж-
витковой интерферометрии по паре комплексных РЛИ (основного и дополнитель-
ного), полученных на витках, разделенных по времени, но образующих интерфе-
ренционную пару. Разрешающая способность ЦКР зависит от размера интерфе-
ренционной базы и отношения сигнал/шум для наблюдаемой поверхности. Точ-
ность измерения высоты рельефа зависит от точности знания пространственного
положения интерферометрической базы.
В настоящее время построение карт рельефа является рутинной процедурой,
реализованной в большинстве программных пакетов обработки радиолокационной
информации. Рассмотрим типовую последовательность операций по обработке по-
лученных пар КРЛИ, которую проиллюстрируем на примере построения карт
рельефа с помощью пакета PHOTOMOD-Radar, фирмы Racurs [191]. Аналогичным
методом обрабатываются полученные в разное время КРЛИ заданных районов с
целью выявления изменений окружающей обстановки (дифференциальная интер-
ферометрия).
На приведенных ниже рис. 9.24-9.28 дана иллюстрация основных этапов об-
работки КРЛИ для построения ЦКР. После съемки и синтеза пары КРЛИ
(рис. 9.24) выполняют следующие процедуры:
1) масштабирование дополнительного КРЛИ для совмещения его с основным
либо преобразование обоих КРЛИ в плановую равномасштабную проекцию вдоль
и поперек (горизонтальная дальность) линии пути;
2) построение точной 3D модели орбитального движения и расчет точного
положения базовой линии;
476
Глава 9. Современные подходы к тематической обработке радиолокационной..
Рис. 9.24. Снимки интерферометрической пары:
район Феникс, США; РСА Radarsat-2; РЛИ от 04.05.2008 - основное (а)
и РЛИ от 28.05.2008 - дополнительное (б) [191]
Рис. 9.25. Формирование разностной интерференционной картины:
а - одно из исходных фазовых РЛИ (основное ФРЛИ); б - интерферограмма (фазоразностное РЛИ) с нео;
нозначностью фазы (О...2л). На участках с резкой крутизной рельефа видны многократные переходы фаз
через уровни 0.. .2л-
4:
Радиолокационные системы землеобзора космического базирования
3) точное совмещение обоих КРЛИ интерференционной пары, основанное на
тчисленной геометрии орбит с их уточнением на основе корреляции амплитуд-
IX РЛИ, и с исключением аномальных значений по результатам статистической
работки. Используются быстрые алгоритмы интерполяции дополнительного
1И к координатам основного РЛИ с точностью до 1/5 размера пикселя или луч-
?, а также интерактивные процедуры совмещения по опознанным ориентирам;
4) спектральная фильтрация по азимуту и дальности для подавления спекл-
/ма и уточнения положения базовой линии (быстрые алгоритмы оценки «декор-
ляции базовой линии») с целью получения оптимального качества интерферен-
онной пары КРЛИ;
5) формирование интерферограммы (фазоразностного РЛИ) путем вычисле-
я фазы от произведения основного КРЛИ на сопряженное дополнительное КРЛИ
лс. 9.25,6). Фазовая картина отображается в виде линий (фрингов), яркость (или
ет) которых соответствует одинаковым значениям фазы;
6) проверка когерентности пар КРЛИ (рис. 9.26, а);
Рис. 9.26. Матрица когерентности (а), темные участки - низкая когерентность,
светлые - высокая; интерферограмма с компенсацией набегов по плоской земле
и азимуту и фильтрации (б)
7) корректировка интерферограммы с вычитанием составляющей для гори-
1тальной поверхности (рис. 9.26, б) или же для задач дифференциальной интер-
рометрии исключение фазы от известных ранее объектов. Разность фаз, опреде-
ющая рельеф местности, выражается через приращение фазы по отношению к
эизонтальной поверхности. Заметим, что идеальная плоская горизонтальная по-
Глава 9. Современные подходы к тематической обработке радиолокационной...
верхность не дает отраженного сигнала в сторону РЛС, поэтому речь идет о шеро-
ховатой горизонтальной поверхности, для которой актуальна проблема подавления
флуктуаций сигнала, образующих спекл-шум;
8) оптимизация интерферограммы путем ее фильтрации в областях высокой
когерентности перед процедурой развертывания фазы. Применяется также коррек-
ция карты когерентности в соответствии со значением отношения сигнал/шум по
участкам РЛИ;
9) развертывание фазы (устранение неоднозначности с периодом рис. 9.27,а).
Эта операция, наиболее ответственная для вычисления рельефа, требует примене-
ния специальных методов обработки - «метод остаточных цепочек», «ближайших
соседей» и их модификаций, позволяющих во многих случаях полностью автома-
тизировать процесс развертывания фазы. Специальная тестовая программа позво-
ляет интерактивно оценить точность развертывания фазы;
Рис. 9.27. Интерферограмма с развёрнутой фазой (а) и фрагмент совмещения (суммирования)
интерферограмм с развёрнутой и неразвёрнутой фазами (б)
10) преобразование ФРЛИ с развернутой фазой в цифровую карту рельефа мест-
ности или в дифференциальное РЛИ. Рельеф формируется путем интегрирования раз-
ности фаз интерференционной пары с соответствующим пересчетом к высоте;
11) геокодирование - все радиолокационные продукты формируют в коорди-
натах на земной поверхности, а также преобразуют в картографические проекции
(рис. 9.28,6).
479
Радиолокационные системы землеобзора космического базирования
На рис. 9.28 дано сравнение ЦКР, полученных РСА SRTM (интерферометрия
с жесткой базой) и путем межвитковой интерферометрии снимков Radarsat-2, ко-
торые обладают лучшим пространственным разрешением и большей интерферо-
метрической базой. Это обеспечивает более высокие разрешающую способность и
точность построения ЦКР.
Рис. 9.28. Сравнение фрагментов цифровых карт рельефа для SRTM (а) и для Radarsat-2 (б)
9.7.2. Дифференциальная интерферометрия для обнаружения изменений
в обстановке и измерения малых смещений объектов
Методы дифференциальной интерферометрии DInSAR (Differential Synthetic
Aperture Radar Interferometry) - обработка КРЛИ, полученных с близких орбит (для
сохранения когерентности), но в разное время, позволяет решать следующие за-
дачи [71, 82-85, 224, 257, 275, 465]:
• обнаружение изменений в оперативной обстановке в районах наблюдения,
сопровождающееся появлением и исчезновением объектов;
• обнаружение следов, оставленных пребыванием посторонних объектов на на-
блюдаемой территории, «примятости» травы после прохода человека (кон-
троль несанкционированного доступа), следов шин автомобиля на грунтовой
дороге и др.;
480
Глава 9. Современные подходы к тематической обработке радиолокационной...
• выявление малых изменений геометрии подстилающей поверхности и объек-
тов (зданий, инженерных сооружений).
Особую актуальность имеет использование космических РСА для обследова-
ния больших площадей с целью обнаружения термокарстовых подвижек грунтов
на нарушенных землях в зоне вечной мерзлоты и просадок грунта в местах интен-
сивной добычи углеводородов, шахтной добычи полезных ископаемых, представ-
ляющих потенциальную опасность для трубопроводов, дорог, жилых и промыш-
ленных объектов, что позволяет предотвратить экологический ущерб от нефтезаг-
рязнений, сократить производственные затраты при эксплуатации и ремонте маги-
стральных и внутрипромысловых трубопроводов [71].
Используется также развитие этого метода - обработка набора данных с ма-
лой интерферометрической базой SBAS (Small BAsline Subset), которая первона-
чально применялась к интерферограммам с разрешением —100 м на площади
100x100 км [257, 275]. Этот метод основан на усреднении большого числа КРЛИ
анализируемой территории.
Использование интерферометрической обработки позволяет обнаруживать малые
смещения поверхностей и объектов или деформации поверхностного слоя Земли. Ни-
же для примера приведены результаты интерпретации результатов обработки интер-
ферометрической пары снимков, полученных с помощью РСА ERS-1 и ERS-2 по ар-
хипелагу Северная Земля (витки 24504 и 04831 соответственно 22 и 23 марта 1996 г.)
[162*]. Выбранный участок поверхности (79°16* с.ш. и 97°43’ в.д., рис. 9.29) включает
часть острова Октябрьской революции, острова Пионер, Седова и окружающую их
морскую поверхность, покрытую в это время года льдами. В центре района - Фиорд
Марата и купол Университетский с группой ледников в восточной части купола на
спуске к проливу Шокальского. Высота купола Университетский составляет 806 м над
уровнем моря, высота ледника Вавилова в левой части карты 713 м, купола Карпин-
ского - 963 м. На рис. 9.30 приведены РЛИ, интерферограмма и ЦКР.
Операции интерферометрической обработки разности фаз комплексных РЛИ
проводились раздельно по типам поверхности: только покрытая льдами, но содер-
жащая естественный рельеф, суша (материковая часть) и море (полностью покры-
тое льдом). Предварительно из цифровой географической карты была изготовлена
маска, делящая снимки на участки суша-море. На рис. 9.30, б приведены интерфе-
рограмма (как аргумент от комплексного перемножения двух кадров с компенси-
рованным фазовым набегом по плоской земле) и рельеф местности, полученный из
развёрнутой фазы только по суше. Точность восстановления рельефа, измеренная
как СКО по нескольким контрольным точкам цифровой карты, составила около
двух метров. Это является достаточно хорошим результатом для интерферометри-
ческой обработки данных РСА ERS-1/2. Следует отметить, что значения парал-
лельной и перпендикулярной проекций базовой линии, предварительно рассчитан-
ные по эфемеридам из состава служебной информации, были уточнены значения-
ми, взятыми из каталога интерферометрических съёмок Европейского космическо-
го агентства. Эти значения основаны на апостериорных измерениях положений
космических аппаратов в моменты съёмок в отличие от стандартных априорных
данных, содержащихся в заголовке кадров.
16—1492
481
Рис. 9.29. Район интерферометрической съемки архипелага Северная Земля:
а, б- карты района съемки; в - сглаженное амплитудное РЛИ в картографической проекции
Рис. 9.30. Исходное амплитудное РЛИ (а), интерферограмма (б) и ЦКР материковой части (в)
в системе координат наклонная дальность - азимут:
7 - модель интерферограммы линейного объекта, смещенного на ~1 см (Л/8) за время между съемками;
2, 3 - ледовые поля со сжатием на 0,2 % (2) и 2 % (3)
Рис. 9.31. Дифракционная картина по материалам обработки снимков ERS-1/ERS-2
по архипелагу Новая Земля (а) и фрагмент (б), модель интерферограммы (в);
1 - материковый участок; 2, 3 - ледовые поля
Глава 9. Современные подходы к тематической обработке радиолокационной...
Чрезвычайный интерес представляет разностно-фазовая картина по морской
поверхности, покрытой льдом. На интерферограмме рис. 9.30,6 это участки 2, 3. Их
увеличенный фрагмент показан на рис. 9.31. Поскольку заметный рельеф там от-
сутствует, то после компенсации набега фазы по плоской земле мы вправе были
ожидать на этом участке более или менее равномерное фазовое поле. Однако на
самом деле участок заполнен полосами (фрингами) изменения фазы от 0 до 360°,
ориентированными в самых разных направлениях и имеющими различный период.
На интерферограмме заметны несколько отчётливо выраженных фазовых по-
лей с примерно постоянным периодом следования фрингов. По-видимому, они со-
ответствуют ледовым полям, разделённым разломами. Очевидно, столь интенсив-
ный градиент фазы интерферограммы, наблюдаемый на морском льду, не может
быть объяснён влиянием рельефа поверхности, даже если предположить наличие
торосов или каких-либо иных естественных образований.
Для объяснения описанного выше явления было проведено моделирование с
формированием разностно-фазовой картины от двух РСА с внесением в модель воз-
мущений, приводящих к появлению эффектов, сходных с наблюдаемыми на реаль-
ных данных. Анализ показал, что квазипериодическая фазовая структура с линейным
изменением периода фрингов с такими параметрами могла сформироваться не от пе-
ремещения, а от сжатия ледовых полей на ~0,2 % (участок 2) и ~2 % (участок 3).
На рис. 9.30, б добавлена модель интерферограммы линейного объекта, нахо-
дящегося на материковой части, но смещенного поперек линии пути на -1 см за
время между съемками. Четкое искажение фазовой структуры иллюстрирует воз-
можности интерферометрической обработки для выявления малых перемещений
объектов и поверхностей. На амплитудном РЛИ смещение участка местности, со-
ответствующего объекту, не обнаруживается. Аналогичный эффект на интерферо-
грамме возникает при появлении (или исчезновении) за время между съемками но-
вых объектов, которые при малом контрасте относительно окружающей местности
могут не обнаруживаться на амплитудном РЛИ.
Технологии когерентного выявления изменений в окружающей обстановке
широко используются в практике радиолокационного зондирования гражданского
и военного применения.
9.7.3. Интерферометрическая обработка результатов поляриметрического
зондирования
Наиболее полная информация по данным радиолокационного зондирования может
быть извлечена при амплитудной и фазовой обработке комплексных РЛИ, получен-
ных поляриметрическими РСА, работающими в разных диапазонах волн [285]. Эта
технология развивает методы «скалярной» интерферометрии - обработки пар КРЛИ,
полученных в однополяриметрических режимах с формированием пространственной
и/или временной интерферометрических баз для топографических измерений или
оценки мелкомасштабных смещений земной поверхности и изменений геометрии
объектов. Интерферометрия в сочетании с поляриметрией получила название «век-
торной интерферометрии» [86, 513, 514]. Применение этой технологии имеет ряд
483
Радиолокационные системы землеобзора космического базирования
новых приложений, например, исследования отражающих свойств объемных сред
- растительности, снежно-ледового слоя.
Возможности интерферометрических измерений определяются степенью вза-
имной когерентности КРЛИ при сравнении одинаковых поляриметрических со-
ставляющих. Этот комплексный параметр называют «интерферометрической коге-
рентностью»
/cog
(9-24)
где zi, z2 - комплексные коэффициенты обратного рассеяния, измеренные по перво-
му и второму КРЛИ, угловые скобки означают усреднение по объекту наблюдения.
Такую же формулу можно применить для оценки взаимной когерентности
любого сочетания поляризаций излучения и приема. Тогда она является формулой
поляриметрической (векторной) когерентности.
Поведение коэффициента когерентности, значения которого на матрице с раз-
мерностью КРЛИ лежат в пределах ±1, удобно отображать в виде поверхности
(«сигнатура когерентности»), характеризующей его модуль в трехмерном простран-
стве с координатами - ориентация вектора поляризации и значение угла эллиптично-
сти. Ориентацию характеризуют углами, которые для линейных поляризаций при
эллиптичности, равной нулю, составляют 90° - линейная вертикальная; 0° или 180° -
линейная горизонтальная, промежуточные значения характеризуют угол поворота.
Значения эллиптичности - от 0 до ±90° (круговые с разными направлениями). Вид
сигнатуры когерентности для разных типов поверхности (лес, поле, застроенная тер-
ритория, вода) представлен на рис. 9.32. Информационными признаками являются
взаимное положение максимумов и минимумов графика и его экстремальных линий.
Рис. 9.32. Сигнатуры когерентности для разных типов поверхности [86]
484
Глава 9. Современные подходы к тематической обработке радиолокационной
Из показанных на рис. 9.32 примеров большую вариабельность имеют сигна-
туры когерентности для леса. Это свойство позволяет, в частности, оценивать сор-
товой состав лесных массивов, а также пирогенную и послерубочную динамику.
Отмечено, что тип сигнатуры когерентности для леса зависит от диапазона волн: в
//-диапазоне она близка к виду «лес1», а в С-диапазоне наблюдаются все три типа.
Чем ниже частота, тем менее чувствительна когерентность к мелкомасштабным
изменениям рассеивающей поверхности. При увеличении интервала между съем-
ками возрастает разнообразие между сигнатурами когерентности, отражающей ди-
намику состояния лесного покрова. Для других покровов наблюдается повторяе-
мость формы сигнатуры когерентности независимо от частоты зондирования.
На рис. 9.33 приведены примеры классификации участка сельской местности
по материалам поляриметрической съемки (ГГ, ГВ, ВВ), полученным с помощью
РСА SIR-C в диапазонах волн С и £ с временным интервалом двое суток, а также
по данным РСА PALSAR. Показаны поляриметрическое РЛИ (рис. 933,а), в ори-
гинале - псевдоцветное (RGB соответствует ГГ, ГВ, ВВ) и карты классификации
по данным SIR-C (б) и PALSAR (рис. 9.33,в).
Рис. 9.33. Классификация земных покровов по сигнатурам когерентности:
а - РЛИ сельской местности (SIR-C); б и в - результаты классификации по данным SIR-C (6) и PALSAR (в);
/ - «лес1»; 2 - «лес2»; 3 - «лес 3»; 4 - поле; 5 - редколесье [86]
Рассмотренная перспективная технология извлечения тематической информа-
ции из данных радиолокационного зондирования находится на стадии исследова-
ний. Она основана на анализе полной поляриметрической матрицы, получение ко-
торой требует больших ресурсов от РСА (удвоение потока данных) с ограничением
реализуемых углов падения (из-за появления неоднозначности сигналов при уд-
воении частоты повторения для переключения поляризаций излучения). Целесооб-
разно продолжение исследований по использованию этих информационных при-
знаков в сочетании с методами псевдополной поляриметрии на базе двухполяриза-
ционных измерений, а также по конкретизации тематических задач, требующих
применения усложненных режимов радиолокационной съемки.
485
Радиолокационные системы землеобзора космического базирования
9.8. Методы решения координатных задач по данным
радиолокационного зондирования
9.8.1. Исходные данные для решения координатных задач по РЛИ
Решение координатной задачи в зависимости от размеров земной поверхности,
отображенной на РЛИ, может выполняться различными методами радиолокацион-
ной фотограмметрии (радарграмметрии) по отдельным или по перекрывающимся
РЛИ. При наличии фотоснимков данного участка земной поверхности решение ко-
ординатной задачи может быть выполнено по перекрывающемуся РЛИ и фото-
снимку или по стереопаре фотоснимков и одиночному РЛИ [76*].
Перекрывающиеся РЛИ, обеспечивая стереоскопическое наблюдение и изме-
рение построенной по ним геометрической модели земной поверхности, позволяют
определять пространственные координаты объектов на ней, т.е. решать координат-
ную задачу. Получение таких РЛИ, как показано ранее, может быть выполнено
различными методами. Основными из них являются двухсторонняя и односторон-
няя ^Л-съемка^ а также РЛ-съемка с пересекающихся маршрутов.
В общем случае для решения координатной задачи по РЛИ необходимо инфор-
мационное обеспечение в виде навигационных данных и известных координат опор-
ных точек земной поверхности. В качестве навигационных данных в этом случае мо-
жет быть использована информация о координатах и скорости носителя РСА на раз-
личные моменты съемки, а также значения доплеровского сдвига частот для всех то-
чек зондируемой поверхности. Обычно это требование выполняется, так как потреби-
телю передаются первичные РЛИ с привязкой к наземным координатам (Georeferenced
Radar Image) в координатах наклонная дальность - азимут или плановые РЛИ (формат
GeoTIFF) в координатах горизонтальная дальность - азимут, снабженные GPS-дан-
ными. Значение азимутальной координаты соответствует нулю доплеровской частоты.
9.8.2. Решение координатной задачи по одиночному РЛИ
Каждой точке первичного РЛИ может быть поставлено в соответствие значение
наклонной дальности от этой точки на местности до некоторой точки траектории
носителя РСА, т.е. РЛИ-снимок является изображением местности в равнодально-
стной проекции. Связь между положением носителя РЛИ и точки местности по
аналогии со случаем центральной проекции может быть установлена в общем слу-
чае соотношением
Rr=Rs-R, (9.25)
в котором R^ и Rs - векторы положения наблюдаемой точки на поверхности Земли
и носителя РСА в принятой системе координат; R - вектор наклонной дальности,
измеренной в процессе РЛ-съемки.
В отличие от случая центральной проекции, в котором известно направление
вектора R, в равнодальностной проекции известна длина вектора R. Следовательно,
для применения выражения (9.25) необходимо дополнительно установить ориента-
цию вектора R в заданной системе координат. Учтя данное обстоятельство, рассмот-
рим сущность определения координат точек местности по одиночному РЛИ.
486
Глава 9. Современные подходы к тематической обработке радиолокационной...
В дополнение к системам координат, рассмотренным в разделе 5.1, введем
координатную систему РЛ-снимка, характеризуемую номерами временных отсче-
тов по дальности (быстрое время) и азимуту (медленное время) относительно пер-
вого пикселя первой строки, полученного в результате фокусированного синтеза
РЛИ. Наклонная дальность пикселей РЛИ определится формулой
R(m,n)=Rx +— (дм-1), (9.26)
2FS
где - наклонная дальность начального отсчета m в каждой строке дально-
сти с номером и; с - скорость распространения радиоволн (ее зависимостью от ха-
рактеристик трассы распространения пренебрежем); Fs - частота квантования сиг-
нала по времени.
Временные отсчеты по азимуту
Zx(n)=/1+7’p(«-l), (9.27)
где t\ - время, определяющее положение платформы для первой строки дальности
РЛИ; Гр - период повторения зондирующего сигнала РСА.
Рассмотрим геометрию обзора в гринвичской системе координат (ГСК), при-
веденную на рис. 9.34. Начнем с идеального случая движения КА по круговой ор-
бите, когда точно известны текущие значения координат КА Rs(«), вектора скоро-
сти Vs(fl) и ускорения а8(и). Не будем принимать во внимание атмосферные факто-
ры, учет которых является отдельной задачей. В таком случае наиболее стабиль-
ными данными являются значение несущей частоты, временные отсчеты наклон-
ной дальности и период повторения зондирующего сигнала.
Рис. 9.34. Геометрия обзора в ГСК при решении координатной задачи по одиночному РЛИ
(движение КА по круговой орбите)
487
Радиолокационные системы землеобзора космического базирования
Временной отсчет t^ri) в момент нулевой доплеровской частоты опорной
функции синтеза РЛИ образует в пространстве обзора плоскость визирования
SQ\Q2Q3, нормальную к вектору путевой скорости КА. При движении КА по кру-
говой орбите плоскость визирования проходит через центр Земли и радиус-вектор
КА Rs(«). Проведенная в этой плоскости окружность с центром в фазовом центре
антенны и с радиусом R(m) является геометрическим местом точки на РЛИ. Плос-
кость визирования является также секущей земного эллипсоида (геоида, характе-
ризующего реальную земную поверхность). Точки совпадения окружности R(m) с
линией сечения соответствуют их отображению на РЛИ.
Уравнение плоскости визирования Q
(Q(w)-Rs(«))vs =0, (9.28)
где vA - орты вектора путевой скорости КА. Заметим, что в ГСК плоскость визиро-
вания не перпендикулярна плоскости орбиты КА.
Угол а находят путем решения треугольника SOT по трем сторонам, учиты-
вая, что географические координаты фт, Лт цели Т связаны с координатами КА
Л соотношениями
^=2s-^/2; (9.29)
(рт = arcsin {cos (ps cos a].
Высота цели относительно земного эллипсоида берется из картографических
данных. В прожекторном режиме с максимальной апертурой синтеза можно уточ-
нить высоту цели методом локальной автофокусировки PGA (подраздел 6.10.8).
При движении КА по эллиптической орбите появляется вертикальная состав-
ляющая скорости КА (см. раздел 5.6), что приводит к искривлению поверхности с
нулевой доплеровской частотой.
В общем случае для вычисления координаты цели, зафиксированной на РЛИ,
выполняют итерационные процедуры:
1) уравнение для доплеровской частоты:
_ 2-(V„-(Я„л хRJ)(Rr-R,)
rDop - 0 p ’
2) уравнение для наклонной дальности цели:
R2 = (RS-Rr)(Rs-Rr); (9-31)
3) уравнение земного эллипсоида (с поправкой на высоту точки наблюдения):
+ =1, (9.32)
(«е+/г) (be+h)
где FDop - центральная доплеровская частота; £learth - угловая скорость вращения
Земли; R -наклонная дальность визирования; ае, Ье - большая и малая полуоси
488
Глава 9. Современные подходы к тематической обработке радиолокационной...
Земли; h - высота цели над референц-эллипсоидом Re; RTx, Rty, Rtz, - проекции ра-
диус-вектора точки визирования на ГСК; Л - длина волны РСА.
Высокая точность геометрических построений обеспечивается путем предва-
рительного (прогнозного) и послесъемочного геокодирования. На первой стадии
оценивают ошибки прогноза траектории, временные уходы параметров, модель
геоида, цифровую модель рельефа и модель подстилающей поверхности, парамет-
ры взвешивания при синтезе РЛИ, а также атмосферные факторы. В [315] приведе-
на сводка погрешностей оценки координат целей при зондировании в Х-диапазоне
волн применительно к TerraSAR-X:
1) погрешности позиционирования КА, три градации СКО: первоначаль-
ные данные GPS - 10 м, повышенная точность GPS -2 м, высокая точность
GPS-0,1 м;
2) рефракция радиоволн в атмосфере - ионосфере и тропосфере. Их влияние
на точность позиционирования КА пренебрежимо мало. Задержка сигнала из-за
рефракции в ионосфере около 1 м при ТЕС=150 TECU (см. подраздел 6.10.4) и уг-
лах визирования 40,9°. Тропосферная рефракция включает две составляющие -
гидростатическую и составляющую, обусловленную влажностью, соответственно
2,3 м и 0...3 м при зондировании в зенит. Максимальная задержка в одну сторону
при угле визирования 40,9° около 3,3 м на уровне моря;
3) ошибки доплеровского центроида и взвешивающей функции. Обычно эти
параметры синтеза РЛИ не включают в спецификацию информационного продук-
та. При ошибках по доплеровской частоте в пределах 1...10Гц ожидаемые по-
грешности оценки координат составляют 1... 10 м;
4) погрешности координатной привязки пикселей РЛИ при наличии идеаль-
ной цифровой карты рельефа (ЦКР) для углов визирования 18,5 и 40,9° имеют ве-
личину 0,6 и 0,3 м, а без ЦКР, но при наличии опорных ориентиров на местности -
соответственно 8,7 и 4,2 м.
Отмечается, что для получения высокой точности привязки пикселей РЛИ в
прожекторном режиме желательно использовать двухчастотную прецизионную
аппаратуру GPS с точностью позиционирования СКО 0,1 м. В режиме Скансар по-
грешности GPS не должны превышать 2 м СКО. Исходные погрешности GPS 10 м
(СКО) допустимы только для информационных продуктов низкой точности с по-
грешностями порядка 30 м. Одна из сложностей привязки РЛИ к картам связана с
различием основных карт, особенно крупномасштабных (1:25000 и крупнее), ис-
пользуемых в хозяйственной деятельности.
9.8.3. Определение элементов внешнего ориентирования
антенны
По своей сути определение элементов внешнего ориентирования антенны РСА (~
центра масс КА) является задачей формирования выбранной (в нашем случае па-
раметрической) модели одиночного РЛИ. Решение ее может выполняться либо по
координатам опорных точек, либо по навигационным данным (GPS, ГЛОНАСС),
либо по тем и другим данным.
489
Радиолокационные системы землеобзора космического базирования
В случае использования координат опорных точек формирование модели
одиночного РЛИ, независимо от ее вида, связано с необходимостью решения сис-
темы нелинейных уравнений
7?[Ar(U,Z/.),r(U,Z/)].-/?(X,.,^) = 0; i = \,n, (9.33)
где л[^(и,^),У(и,^)]. - значение функционала, задающего принятую мате-
матическую модель в z-й опорной точке; U(z/],z/2?w3’.ui)T ~ вектор неизвестных
параметров принятой математической модели размером /xl; Z, - геодезическая вы-
сота опорной точки; п и I - соответственно число опорных точек и параметров
принятой математической модели.
Решение системы уравнений (9.33) есть задача нахождения оценок неизвест-
ных величин, которая решается по методу наименьших квадратов.
Использование информации о рельефе. При определении координат точек ме-
стности по РЛИ с известными элементами внешнего ориентирования антенны РСА и
наличием информации о рельефе местности заключается в следующем. Пусть ин-
формация о рельефе представлена в виде множества [Н] ={ХпУт1Нг, XT2YT2H2, —},
которое определяет значения высот, например, над уровневой поверхностью Eq, для
точек местности с координатами XTi и YTi.
На начальном приближении, принимая Zt=ZE =Hq, определяют координаты
XEi, YEi точки местности. По найденным таким образом координатам XEi, YEi вы-
бирают значения Н[ из множества {//} . При правильном определении высоты
точки местности должно обеспечиваться следующее условие:
|z;-z,'|<f, (9.34)
где Z'^H’i-H ; е - заранее заданное число.
Очевидно, что данное условие не всегда будет выполняться при первом при-
ближении. Поэтому, используя полученное значение ZJ, по формулам (9.25),
(9.28), (9.30)-(9.33) находят новые координаты XTi и YTi, а по ним - новое значе-
ние И- из множества {Н} до тех пор, пока не будет выполняться данное условие.
Величина е может быть вычислена по формуле
( Г / \И1/4
£=3h =но Я02+<Я>1<ЯЭ+2(/?2-Я2)1 , (9.35)
в которой
Я,2-(3h-Я) -(/г,2-Я2) , (9.36)
где величина 3D - допустимая ошибка определения положения точки местности в
плоскости радиолокационного зондирования.
490
Глава 9. Современные подходы к тематической обработке радиолокационной...
9.8.4. Решение координатной задачи по стереопаре РЛИ
земной поверхности
Определение пространственных координат точек местности по двум РЛИ, полу-
ченным с помощью РСА, может быть сведено к пространственной засечке двумя
наклонными дальностями /?1 и R2 в плоскости радиолокационного зондирования
одного из снимков стереопары. Получение стереопары возможно при обзорах с
разной стороны, на разных восходящем и нисходящем витках либо при разных уг-
лах падения. В зависимости от размера стереометрической базы может быть ис-
пользована интерферометрическая обработка комплексных РЛИ либо некогерент-
ная стереометрия, рассмотренные в подразделах 9.6.4 и 9.7.1.
В РСА с АФАР возможно получение стереопары за один проход в скошенном
(переднебоковом или заднебоковом) режиме обзора или при сочетании бокового и
скошенного режимов. Так, на рис. 9.35 показана геометрия съемки стереопары в
скошенном переднебоковом обзоре, когда КА находится в точке SA и имеет вектор
скорости Vj. Плоскость визирования SaQaiQaiQai отклонена от нормали к вектору
скорости УА на угол -у/ (скошенный обзор левым бортом вперед) и не проходит
через центр Земли, что обусловлено движением КА по эллиптичной орбите. В точ-
ке SB имеем случай бокового обзора, плоскость визирования SbQb\QbiQb3 нормаль-
на вектору путевой скорости и также отклонена от центра Земли.
Рис. 9.35. Геометрия плоскостей визирования стереопары при комбинации бокового
и скошенного обзоров
Известными параметрами движения являются моменты времени tA, tB, векто-
ры координат КА Rsj, Rsb, векторы скоростей VA, Уд, наклонные дальности визи-
491
Радиолокационные системы землеобзора космического базирования
рования цели RA, RB, доплеровские частоты синтеза РЛИ FvOpA и FDop£. В частном
случае бокового обзора для одного из РЛИ FDop/?=0.
Рассмотрим показанную на рис. 9.36 плоскость визирования бокового обзора
SbQbxQbiQb^ нормальную к вектору Ув и проходящую через фазовый центр антен-
ны (-центр масс КА) точку SB. Уравнение плоскости визирования имеет вид
^-SBx) + v°By(y-SBy) + v°Bz(z-SBz) = 0 (9.37)
0,0,0 л
или vBxx + vByy + vBzz -p = Q ,
где vBx,vBy,vBz ~ направляющие косинусы вектора скорости КА в ГСК; р-
= ^Вх^Вх + ^Ву^Ву + Vbz$Bz ~ расстояние плоскости от начала.
Определим на плоскости визирования проекции центра Земли Oq и положения
КА SAq в момент времени tA
о.; <9-38>
— Aq ’ $Aqz } —
= {4 (SAx -SBx),v°By (SAy -SBy),v°Bz (SAz - SBz )} . (9.39)
Рис. 9.36. Геометрические построения в плоскости визирования
при решении координатной задачи по перекрывающимся РЛИ,
полученным в режимах скошенного и бокового обзоров
492
Глава 9. Современные подходы к тематической обработке радиолокационной...
Длину проекции на плоскость визирования RAq для расстояния до цели RA в
первом положении КА SA находим из уравнения
R}q =R2a- S2a4 = R2a - (s2gx + S2gy + Sav ) • (9.40)
Проекция вектора KA Sb на плоскость визирования равна (линия Од5в)
R2Bq -О9|2 =(RsBx-Ogx)2 +(RsBy-Oqy)2 + (RsBz-Oqz)2 . (9.41)
Вычисляем расстояние между точками SAq и SB
) = ($Aqx ~ $Вх ) + “ $Ву ) + (^Aqz ~ $Bz ) • (9.42)
Далее следует выполнить триангуляционную задачу вычисления координаты
цели Т по трем сторонам треугольника с вершинами в точках Г, SB, SAq, после чего
из треугольника с вершинами Т, Sb, Oq находим проекцию радиус-вектора цели RTq
на плоскость визирования. Затем находим локальный радиус Земли и высоту цели
над референц-эллипсоидом на широте цели (рт
Rt^Jr^+p2 ; (9.43)
h — RT—Re (jpT ).
Рассмотренный случай сочетания бокового обзора со скошенным обзором
пригоден для решения координатной задачи некогерентными методами, поскольку
размеры стереобазы превышают интервал корреляции флуктуаций отраженных от
местности сигналов. При наличии постоянных отражателей можно использовать
интерферометрическую съемку в однопроходном скошенном режиме с малой ба-
зой, обеспечивающей когерентность принимаемых сигналов [23].
9.8.5. Совместная обработка перекрывающихся космических
фотоснимков и РЛИ
Перекрывающийся космический снимок в центральной проекции и РЛИ. Совме-
стная обработка данных о местности, получаемых различными системами, в первую
очередь фотографической и радиолокационной аппаратурой, является одним из ос-
новных направлений совершенствования средств и методов дистанционного зонди-
рования. Так, современные радиолокационные системы, являясь всепогодными, ис-
пользуются в любое время суток и имеют независимое от дальности разрешение на
земной поверхности, приближающееся к уровню разрешения оптических систем. С
другой стороны, фотографическая аппаратура не только являются наиболее освоен-
ной в практике дистанционного зондирования, но и может работать в многоспек-
тральном режиме в пределах видимого диапазона электромагнитных волн.
Совместная обработка РЛИ и фотоснимков позволяет расширить области их
применения в первую очередь за счет повышения информационного содержания
данных, получаемых при дистанционном зондировании.
РЛИ и фотоснимок одного участка земной поверхности обеспечивают наблю-
дение его с различных точек визирования, что обусловлено различиями основных
493
Радиолокационные системы землеобзора космического базирования
принципов формирования их изображений. Эта особенность перекрывающихся
РЛИ и фотоснимков позволяет решать координатную задачу. Ее сущность в дан-
ном случае заключается в том, что положение точки местности, изобразившейся на
перекрывающихся космическом фотоснимке центральной проекции и РЛИ, опре-
деляется направлением проектирующего луча Rf и наклонной дальностью R^,
расположенной в плоскости радиолокационного зондирования (рис. 9.37). При на-
личии информации о доплеровском сдвиге частоты отраженного от точки Р мест-
ности радиосигнала положение данной плоскости может быть однозначно опреде-
лено в пространстве.
Рассмотрим гринвичскую систему координат OgXgYgZg- Предположим, что в
ней известны координаты XF, YF, ZF и XRL, YRL, ZRL центров проектирования фото-
аппарата SF и радиолокатора SRL, а также угловые элементы внешнего ориентиро-
вания фотоснимка - географическая широта <pF, долгота AF и угол отклонения от
надира Ат (рис. 9.37). Известны также координаты х', у' и хг, уг соответственных то-
чек на фотоснимке и РЛИ.
Рис. 9.37. Решение координатной задачи по перекрывающемуся
космическому фотоснимку в центральной проекции и РЛИ
Проведем расчет координат точки Р раздельно по фотоснимку и РЛИ. В пер-
вом случае (обозначим их XFp,YFp,ZFp) можно воспользоваться известными форму-
лами для одиночного фотоснимка:
XFp=XF+NX'; YFp=YF+NY'; ZFp=ZF+NZ\ (9.44)
494
Глава 9. Современные подходы к тематической обработке радиолокационной...
в которых
X' = + d2y — a3f;
Y' = bxx' + b'2y'-b3f- (9.45)
Z' = <\х +с2у' -c3f,
где X\Y',Z’ - пространственные координаты точки Р на фотоснимке; N - масштаб-
ный множитель; ai9bi9Ci - направляющие косинусы, вычисленные по значениям уг-
ловых элементов внешнего ориентирования;/- фокусное расстояние.
Определим значение N в выражении (9.44). С этой целью воспользуемся соот-
ношениями между координатами точки Р местности и центра проектирования SRL,
устанавливаемые посредством определения наклонной дальности
Л2 =(ХР -Х^)2 + (YP - Yrl)2 + (ZP -z^)2. (9.46)
Подставив (9.44) в (9.46) и разрешив последнее относительно N, получим
где
= (XF -Xrl)X' + (Yf-Y^Y' +(zf-z^z'
K2 ^(XF-XRL)2 + (Yf-Yrl)2 +(Zf-Z^-R2 ; (9.48)
K3 = X'2 + Y'2 +Z'2.
За окончательное значение N в (9.47) принимается близкое к N=HF/f где HF -
высота фотографирования.
Анализ приведенных соотношений показывает, что для определения про-
странственных координат точек местности необходимо иметь угловые элементы
внешнего ориентирования фотоснимка. Следует отметить, что для приведенных
процедур могут использоваться не только РЛИ, синтезированные с нулевой допле-
ровской частотой, но и полученные при помощи опорной функции, смещенной по
доплеровской частоте (при скошенном обзоре). Тогда по РЛИ могут быть оценены
угловые элементы внешнего ориентирования как для РЛИ, так и для одиночных
фотоснимков и стереопар.
Определение угловых элементов внешнего ориентирования фотоснимков с
использованием РЛИ. В процессе дистанционного зондирования различными ти-
пами съемочных средств возможно получение РЛИ, которые перекрываются как с
отдельным фотоснимком, так и со стереопарой фотоснимков. В этих условиях воз-
можно определение угловых элементов внешнего ориентирования фотоснимков,
перекрывающихся с РЛИ.
Примем, что по данным навигационного определения снимков (включая
внешние траекторные измерения и бортовую аппаратуру позиционирования) из-
495
Радиолокационные системы землеобзора космического базирования
вестны координаты центров проектирования XFA, YFA, ZFA и XFB. YFB, ZFB левого А и
правого В фотоснимков, а также XRL, YRL, ZRL РЛИ (рис. 9.38).
Рис. 9.38. Прямая засечка по перекрывающимся фотоснимкам и РЛИ
Пусть при наблюдении точки Р, на фотоснимках известны координаты КА SFA
и SFB с SRB в момент съемки и направления векторов RAi, RBi на точку Pz. По радио-
локационному снимку определяется наклонная дальность Р. в плоскости, проходя-
щей через фазовый центр антенны радиолокатора (близкий к центру масс КА) и
нормальной к вектору путевой скорости КА. В процессе совместной обработки
стереопары фотоснимков и РЛИ основным является определение квазидальностей
RAi и RBi до точек земной поверхности Рь изобразившихся на фотоснимках и РЛИ.
Для этого, выполняя взаимное ориентирование фотоснимков, строят аналитически
геометрическую модель местности по фотоснимкам. Измеряют координаты точек
местности на фотоснимках xAi, yAi и xBi, yAi.
Далее получают значения квазидальностей RAi и RBi по формулам
= (tf2 • (X'2 + yf + Z'2))'/2; (9.49)
RBl, = (N2-(X'2 + Y^2 + Z'2^/2,
в которых
ZB
XAZB + XBZA’
(9.50)
X' =a{x + a2y - a3f; Yr =bxx + b2y — b3f; Zr = cxx + c2y - c3f;
496
Глава 9. Современные подходы к тематической обработке радиолокационной...
FA
Здесь X'A,YA,ZA и XB,YB,ZB - пространственные координаты точки P на левом и
правом фотоснимках; ah bh Cj - значения направляющих косинусов, вычисляемые
по элементам взаимного ориентирования левого и правого фотоснимков; N - мас-
штабный множитель.
Выбор систем координат и элементов взаимного ориентирования фотосним-
ков при определении квазидальностей может быть произвольным.
Получив значения квазидальностей RAi, RBi по фотоснимкам, рассчитывают
соответствующие им наклонные дальности до РЛС RApi и RBpi. В результате каждой
точке, изобразившейся на фотоснимках и РЛИ, будут соответствовать три наклон-
ные дальности RAh RBb и Rj из центров проектирования, положение которых опре-
делено в заданной системе координат.
Пространственные координаты точек местности, изобразившихся на фото-
снимках и РЛИ, могут быть определены по формулам
Xpi — g\ +h[Zp;
Ypi =S2 b2ZP\
(9.51)
1/2
zPi =
м
где
g'i =
А ~ Yfa (?fb ~ Yfa )
Xfa)(Yrl Yfa) (Xrl Xfa)(Yfb Yfa)
, _/2 (Xfb 2^£fa ) ~ /2 (Xrl ~ ^fa ).
(Xfb ~Xfa)(Xrl ~Yfa)~(Xrl ~Xfa')(Yfb -Yfa)
_ (JfB ~ ^FA }(ZrL ~ ^FA ) ~ ~ ^FA )(^FB ~ ^FA )
(Хрв ~XFA)(Fri _ Yfa) _(Xrl ~Xfa }(Yfb ~ Yfa )
pl _ (^RL ~ ^FA )(^FB ~ ^FA ) ~ (^FB ~ ^FA }(^RL ~ ^FA ) .
(Xfb ~ XFa )(Yrl ~ Yfa }~(Xrl ~ XFa )(Yfb-Yfa)
(9-52)
(9.53)
FB
FB
(9.54)
-il/2
<712 = (XFA - XRL )2 + (Yfa - Yrl )2 + (ZFA - ZRL )2
(9.55)
497
/2=|(^,-^+^22);
M = l + h[2+hf;
n = gW+g2^;
7 _ f2 . r2 n2
L~Sl +g2 ~RAi
(9.56)
Полученные по формулам (9.51)-(9.56) координаты точек принимают за
опорные, которые далее используют при определении угловых элементов внешне-
го ориентирования фотоснимков известными в фотограмметрии методами
498
Глава 10
ТЕХНОЛОГИИ МОДЕЛИРОВАНИЯ ХАРАКТЕРИСТИК
АППАРАТУРЫ РЛН И ПРОЦЕССОВ ПРОХОЖДЕНИЯ
СИГНАЛОВ В РАДИОЛОКАЦИОННОМ ТРАКТЕ
10.1. Исходные положения
Современная технология создания и совершенствования систем радиолокационно-
го наблюдения предусматривает широкое применение методов моделирования на
всех стадиях жизненного цикла: исследовании и разработки методов радиолокаци-
онного зондирования, разработка принципов построения аппаратуры и определе-
ние требований к подсистемам, сопровождении их экспериментальной отработки,
оптимизации методов и алгоритмов обработки радиолокационной информации,
обоснование правильности выбираемых технических решений на стадиях аванпро-
екта, эскизного и технического проектирования, разработки методик измерений и
испытаний параметров изготавливаемых технологических и летных комплектов
аппаратуры, комплексных испытаний аппаратуры в составе космического аппара-
та, а также сопровождения летных испытаний для диагностики отказов и деграда-
ции параметров летного комплекта с целью корректировки документации и под-
держания работоспособности аппаратуры на орбите. Эффективным инструментом
при расчете параметров РСА, моделировании преобразований сигналов, алгорит-
мов синтеза и фильтрации РЛИ, а также для обработки данных испытаний аппара-
туры, является программный пакет MATLAB, специально предназначенный для
обработки матричных (растровых) данных [155*, 252, 567].
Нормативные документы, регламентирующие порядок разработки космиче-
ской техники, предусматривают создание стендов полунатурного моделирования
для наземной отработки, испытаний и калибровки разрабатываемой аппаратуры в
условиях, максимально приближенных к условиям эксплуатации. Важнейшую роль
в работе таких стендов играют имитаторы внешних устройств управления и ин-
формационной поддержки, имитаторы сигналов для разных сечений радиолокаци-
онного тракта (от видеочастот до СВЧ), а также средства анализа результатов ис-
пытаний, средства протоколирования с диагностикой временной изменчивости па-
раметров аппаратуры.
Концепция проектирования современной радиолокационной аппаратуры пре-
дусматривает использование сквозного цифрового управления режимами работы,
параметрами блоков и средствами контроля. Это позволяет полностью компьюте-
ризировать работу стендов полунатурного моделирования для аппаратуры в целом
и ее подсистем, используя современные высокопроизводительные вычислительные
средства, снабженные специализированным программным обеспечением и допол-
ненные соответствующими датчиками, преобразующими физические процессы в
499
Радиолокационные системы землеобзора космического базирования
цифровую информацию и формирующие необходимые тестовые сигналы по циф-
ровым командам управления.
Классический метод моделирования состоит в задании входной обстановки в
виде одиночной точечной цели или набора точечных целей и расчета радиоголо-
граммы по формулам, учитывающим параметры излучаемого импульса, форму
диаграммы направленности и параметры движения РСА. Типичный случай форми-
рования радиоголограммы и синтеза радиолокационного изображения (РЛИ) для
случая одиночной точечной цели применительно к РСА с высокой разрешающей
способностью и проявлениями миграции сигнала по дальности иллюстрирует
рис. 10.1. Влияние миграции дальности приводит к искривлению формы двумер-
ной голограммы (рис. 10.1,я), формированию спектра сигнала в виде трапеции
(рис. 10.1,6) и характерному раздвоению боковых лепестков импульсного отклика
(рис. 10.1,в). На рис. 10.2 рассмотрен случай формирования последовательности из
шести целей с затуханием амплитуд.
а)
R
Рис. 10.1. Действительная составляющая радиоголограммы (а),
амплитудный спектр выходного сигнала (б) и вид выходного отклика (в)
для одиночной точечной цели
Рис. 10.2. Действительная составляющая радиоголограммы (а),
амплитудный спектр выходного сигнала (б) и вид выходного изображения (в)
для шести точечных целей с затуханием амплитуд
500
Глава 10. Технологии моделирования характеристик аппаратуры РЛН...
Формирование тестовых радиоголограмм на основе точечного представления
исходных сцен имеет ограниченные возможности, не позволяя во всей полноте ис-
следовать интегральное влияние совокупности искажающих факторов (природных,
траекторных, связанных с трассой распространения сигнала и аппаратурных иска-
жений) на качество и характеристики выходного информационного продукта.
Кроме того, при сложных многоточечных моделях объем потребных вычислений
для расчета радиоголограммы может оказаться весьма большим.
Значительно более эффективным для анализа и синтеза систем радиолокационно-
го наблюдения, использующих радиолокаторы с синтезированной апертурой, является
развитый в работах [428*, 431*, 433*] метод моделирования процессов преобразования
и обработки сигналов в РСА, основанный на математическом обращении последова-
тельности операторов, с помощью которого моделируют исследуемый РСА. Эта про-
цедура может использоваться в полном виде - при переходе от исходного комплексно-
го радиолокационного изображения (КРЛИ) к цифровой радиоголограмме (ЦРГ), а за-
тем - от ЦРГ к результирующему КРЛИ или в частичном виде, используя представле-
ние действующих процессов в спектральной области. В последнем случае реализуется
преобразование исходного КРЛИ к двумерному спектру ЦРГ и последующее двумер-
ное сжатие спектра ЦРГ с формированием выходного КРЛИ.
В общем виде моделирование комплексного радиолокационного изображения
можно рассматривать как результат последовательного применения обратной дву-
мерной свертки (деконволюции) для получения тестовой ЦРГ и прямой двумерной
свертки для синтеза КРЛИ
5(x,r) = Synt | Hol (х, r)| = Synt { Synt-1 { Set (x,r)|| (10.1)
или в спектральной области
FS (“>х ’ ) = FSyn/ ("х > "г ) FHol («>х > ) FSet (®х ’<°г ) ’ (1 °-2)
где Set(x,r) и 5(х,г) - исходные эталонное и получаемое КРЛИ; Но1(х,г) - ЦРГ, фор-
мируемая по эталонному КРЛИ; Synt - процедура синтеза КРЛИ; Synt-1 - обратная
процедура формирования ЦРГ; FSet - спектр эталона; А?Ноь A?Synt - частотные харак-
теристики фильтров формирования ЦРГ и синтеза КРЛИ.
При кажущейся тривиальности такого преобразования получение контроли-
руемых результатов для оценки качества конечного продукта требует теоретиче-
ского обоснования метода с его адаптацией для задач анализа сигналов РСА.
Обоснование корректности такого подхода можно провести на идеализированном
частном случае ЛЧМ-функций с гауссовой огибающей, который имеет строгое
аналитическое решение. Оно рассмотрено в подразделе 6.10.2.
10.2. Подготовка исходного материала для моделирования
Исходным материалом для моделирования являются полученные с помощью само-
летных или космических РСА комплексные РЛИ, представленные в виде ампли-
тудных (АРЛИ) и фазовых (ФРЛИ) изображений. Для получения контролируемых
результатов моделирования входные данные должны быть откорректированы с
устранением аппаратурных искажений и приведены к стандартной (нормализиро-
501
Радиолокационные системы землеобзора космического базирования
ванной) форме. Это касается амплитудных, спектральных характеристик, уровня
неоднозначности и пр.
Коррекция 2D спектра
Форма спектра ЦРГ по дальности определяется зондирующим импульсом и шума-
ми приемника. Обычно средняя частота спектра по дальности равна нулю, а по
азимуту определяется доплеровским смещением, вызванным отклонениями луча
антенны от нормали к вектору путевой скорости из-за ошибок ориентации носите-
ля или вращения Земли.
Спектр синтезированного КРЛИ зависит от взвешивающих функций при син-
тезе и может приобрести смещение по дальности и азимуту в зависимости от ис-
пользуемого алгоритма синтеза. На рис. 10.3 показаны спектры комплексного изо-
бражения подмосковного г. Жуковский, полученного в ^-диапазоне волн с помо-
щью РСА SIR-C/X-SAR.
Задачи коррекции спектра - центрирование по обеим координатам, обнуление
шумов за пределами полезного сигнала, а также двумерная круговая аподизация
для устранения артефактов - «крестов» от ярких целей. Вид откорректированных
спектров также показан на рис. 10.3,б,вД
Рис. 10.3. Радиолокационное изображение (а) и его спектры:
одномерные по дальности (б) и азимуту (в)
(/ - исходные, 2 - корректированные для моделирования);
двумерные: исходный (г), откорректированный (д)
Ретушь амплитудного изображения
Для ряда задач (оценки влияния нелинейностей тракта, интегральных уровней не-
однозначности, боковых лепестков, оценки когерентности при интерферометриче-
ской обработке и др.) исходное эталонное изображение должно рассматриваться
как результат отражения от фона местности. Поэтому шумы приемника в полосе
сигнала, приходящиеся на пиксели фона местности эталонного КРЛИ, будем отно-
сить к увеличению сг° фона на величину сгопе шумового эквивалента РСА и инте-
грального уровня неоднозначности.
Изображения неотражающей поверхности (спокойная водная поверхность,
асфальтовые дороги и т.п.) должны быть ретушированы с обнулением амплитуды.
Это легко реализуется с помощью стандартных пакетов обработки изображений
502
Глава 10. Технологии моделирования характеристик аппаратуры РЛН...
Paint, Photoshop, если АРЛИ преобразовать в 8- или 16-битный форматы RAW или
TIF или 8-битный формат BMP и применить пороговую обработку. Заметим, что
при работе с Photoshop не допускается преобразование типов RGB или Index в
Grayscale, так как это меняет гистограмму распределения значений (особенно за-
метно для ФР ЛИ). Для контроля коэффициента передачи тракта обработки в эта-
лонное АРЛИ до его нормализации можно добавить набор имитированных точеч-
ных целей с калиброванными уровнями.
Для отработки алгоритмов синтеза изображения с автофокусировкой в про-
жекторном режиме с получением метрового разрешения можно использовать эта-
лонные КРЛИ грубого разрешения с их масштабным преобразованием до требуе-
мого шага. Такие КРЛИ можно интерпретировать как результаты радиолокацион-
ной съемки уменьшенных макетов местности.
Для моделирования обработки сигналов с селекцией движущихся целей
(СДЦ) предложено исходное КРЛИ разделить на два или несколько слоев - непод-
вижная местность с «лысыми местами» от подвижных объектов и сами подвижные
объекты с формированием входных данных для синтеза КРЛИ по разным алгорит-
мам с последующим суммированием сигналов и добавлением шумов, имитирую-
щих шумы приемника.
При отсутствии КРЛИ можно воспользоваться и амплитудным изображением
(АРЛИ). Фаза задается случайной матрицей со спектром, соответствующим пара-
метрам моделируемой РСА. Имеющиеся на РЛИ артефакты, вызванные яркими
целями, устраняются ретушью.
Расщепление отсчетов в пикселе КРЛИ
Случайная амплитуда сигнала в каждом пикселе РЛИ определяется интерференци-
ей сигналов, отраженных от отражателей в данном элементе разрешения. При мо-
делировании интерферометрической обработки возникает необходимость учета
малых перемещений отражателей в пределах элемента разрешения. Исходя из
принципа Гюйгенса, можно считать, что элементарные отражатели формируют
равные по амплитуде отраженные сигналы. Суммарный отраженный в сторону
РЛС сигнал определится векторной суммой отдельных сигналов с учетом фазы,
определяемой положениями отражателей. Для моделирования таких эффектов
представим КРЛИ как сумму по крайней мере двух КРЛИ с постоянными ампли-
тудами Ао и координатами отражателей, обеспечивающими при суммировании
сигнал с амплитудой и фазой, совпадающей с исходным КРЛИ. Предполагаем, что
масштаб КРЛИ по дальности MR кратен длине волны. Если это не может быть со-
блюдено, КРЛИ интерполируют на частоту квантования, кратную частоте излуче-
ния. Для интерполяции можно применить процедуру масштабирования, приведен-
ную в подразделе 6.5.3. Координаты отражателей относительно центра «-го пиксе-
ля с наклонной дальностью Rn вычисляют по формулам
7?1Л — Rn — dr^ — drAn — dr(pn,
R2n =Rn+ drV + drAn ~ dr<pn > (10 3)
503
Радиолокационные системы землеобзора космического базирования
, MR Л
где б/г0 = ——----половина начального расстояния между отражателями приме-
8 8
нительно к гладкой поверхности с нулевым отражением; dr(Q = —— поправка по
" Кх
фазе в пикселе, соответствующая изменению наклонной дальности; drAn =
arcsin (Л/7/2 Ло)
Ап
- поправка, определяющая амплитуду отраженного сигнала.
Здесь Кх ~~~ ~ волновое число; Ап и (рп - амплитуда и фаза сигнала в пикселе;
Л о - заданная амплитуда сигнала от отдельного отражателя, превышающая макси-
мальную амплитуду РЛИ.
10.3. Моделирование обработки сигналов в РСА
Обобщенная структурная схема моделирования приведена на рис. 10.4. В ее состав
входят:
исходное КРЛИ {1} или несколько образцов (слоев) КРЛИ для формирования
суммарной сцены, например, при моделировании движущихся целей;
предобработка {2}, включающая устранение артефактов на КРЛИ, выделение
обстановки для каждого слоя КРЛИ;
вычисление спектров парциальных КРЛИ {3} и опорных функций {4}-{5}
для каждого слоя (операция БПФ);
перемножение спектров парциальных КРЛИ и опорных функций ({6} и {7});
суммирование парциальных спектров радиоголограмм {8} и добавление шу-
мов {9}, имитирующих шумы приемника;
формирование суммарной цифровой радиоголограммы (ЦРГ) {10} путем об-
ратного преобразования Фурье (ОБПФ);
далее следуют стандартные операции синтеза комплексного радиолокацион-
ного изображения {11} -{15} и обработка выходного КРЛИ {16}. В простейшем
случае, если эффекты миграции дальности не моделируются и можно пренебречь
зависимостью опорной функций синтеза КРЛИ от наклонной дальности, можно
выполнить операцию быстрой свертки с применением двумерных преобразований
Фурье - прямого БПФ и обратного ОБПФ.
Рис. 10.4. Структурная схема моделирования обработки сигналов в РСА
504
Глава 10. Технологии моделирования характеристик аппаратуры РЛН...
Такой вариант моделирования применим при теоретическом анализе явлений,
связанных с разработкой новых алгоритмов обработки, анализе влияния разных
искажающих воздействий и поиске методов их устранения, а также при наземной
отработке реальной аппаратуры в составе стендов полунатурного моделирования.
Искажающие воздействия, связанные с прохождением радиолокационных сигна-
лов через тракт РСА, включая преобразование из аналоговой формы сигнала в
цифровую, вводят в разрыв звеньев {10}—{11} структурной схемы модели.
Более сложные алгоритмы синтеза КРЛИ, включающие миграцию, реальные
зависимости опорной функции от наклонной дальности, смещение по доплеров-
ской частоте требуют модификации процедур обработки ЦРГ (звенья {11}—{16}) и
соответствующей корректировки процедур формирования ЦРГ (звенья {1}-{8}).
Изложенный подход к моделированию процессов в РСА был успешно приме-
нен при анализе алгоритмов обнаружения движущихся целей, исследовании мето-
дов формирования изображения в видеоимпульсном РСА (БИРСА), приведенном
в разделе 6.12, при разработке алгоритма синтеза радиолокационного сигнала в
прожекторном режиме, а также при моделировании интерферометрической обра-
ботки пары КРЛИ в целях интерпретации результатов радиолокационной съемки.
10.4. Моделирование интерферометрической обработки
изображений
При моделировании интерферометрической обработки пары КРЛИ исходный
эталон используют как первичное КРЛИа в координатах наклонная дальность -
азимут. Наклонные дальности вторичного КРЛИ/, пересчитывают с учетом зада-
ваемой высоты рельефа h
Rb = ^b + (Ле + Л)2 - 27?si (Яе + /j)cos(j/a + )
(10.4)
где 7?е - радиус Земли; Rsa и Rsb - радиусы орбит КА; уаЬ - угол между радиус-
векторами космических аппаратов на траверзе; ja=arccos<
угловое положение визируемой точки относительно следов вторичного и пер-
вичного КА.
Для задачи оценки качества интерферометрии ряд операций совмещения двух
КРЛИ можно опустить (пунктир на рис. 10.4). Для учета флуктуаций фона местно-
сти исходное разрешение эталона следует задавать в 2—4 раза лучше расчетного с
последующим усреднением соседних пикселей.
Результаты проведенного моделирования для высот орбиты 500 км при длине
волны РСА 9,6 см, базе интерферометрии 200 м, отношении сигнал/шум - 10 дБ,
плановых разрешениях: РЛИ - 2,5 м, карты рельефа - 20 м, СКО высот на равнине,
измеренное по выходу обработки, составило Qa=1,4 м.
505
Радиолокационные системы землеобзора космического базирования
10.5. Моделирование индикации движущихся целей
При радиолокационном наблюдении движущихся целей (ДЦ) проявляются разные
эффекты в зависимости от угла между вектором скорости и вектором визирования
по наклонной дальности. В общем случае мы имеем комбинацию эффектов, свя-
занных с радиальной скоростью (проекцией вектора скорости на линию визирова-
ния), которые приводят к смещению доплеровской частоты сигнала от цели и мигра-
цию дальности и тангенциальной составляющей скорости, которая складывается или
вычитается из скорости носителя РСА и вызывает расфокусировку изображения ДЦ.
Применительно к космическим РСА известны различные методы индикации
ДЦ по радиальной составляющей скорости, основанные на интерферометрии вдоль
линии пути с использованием разделенных антенн типа АФАР или тандем из пары
спутников с РСА, двигающихся по близким орбитам со смещением по времени
[317, 370, 515]. Предложен также пригодный для РСА с зеркальными антеннами
метод пространственно-временной фильтрации сигнала, создающий виртуальное
смещение фазового центра излучения и приема сигналов [37*, 161*, 428*].
Индикация ДЦ по тангенциальной составляющей скорости использует эффек-
ты изменения амплитуд сигналов от ДЦ, вызванные дефокусировкой РЛИ при син-
тезе РЛИ с разными опорными функциями.
Для моделирования методов индикации ДЦ по схеме, показанной на рис. 10.4,
сигналы от местности формируют в одном слое КРЛИ и преобразуют в ЦРГ по
опорной функции для неподвижной местности, а КРЛИ для ДЦ с радиальными и
тангенциальными составляющими формируют в другом слое (или других слоях)
КРЛИ, в которых формируют парциальные ЦРГ с соответствующими опорными
функциями.
10.6. Структура математической модели сквозного тракта РСА
В математическую модель сквозного тракта РСА входят три основных модуля:
1) формирования голограмы по комплексному изображению;
2) синтеза эталонного изображения;
3) синтеза рабочего изображения с возможностью введения искажающих воз-
действий.
В качестве примера исходного материала использовано комплексное РЛИ
(КРЛИ), полученное с помощью самолетного РСА X-диапазона волн с разрешаю-
щей способностью около 1,5 м (см. рис. 10.5). Для сокращения объема вычислений
размер исходного кадра ограничен матрицами 1024x1024 пикселей для записи
амплитуды и фазы. Исходный материал представлен двумя модификациями КРЛИ
(см. рис. 10.6): эталонного КРЛИ, в котором выделен ряд площадок для разме-
щения тест-целей. На этих площадках амплитуда РЛИ обнулена. Во второй моди-
фикации исходного КРЛИ на выбранных площадках помещены миры с тест-целя-
ми: шесть целей по диагонали дальность - азимут: от номинальной ЭПР (№ 1) с
убыванием через 3 дБ (№2-6) и яркий маркер (№7).
Вид выходного рабочего РЛИ, полученного в результате синтеза с расчетным
уровнем шумов, приведен на рис. 10.7.
506
Глава 10. Технологии моделирования характеристик аппаратуры РЛН...
Рис. 10.5. Карта района съемки (а) и амплитуда комплексного изображения
участка местности (б), полученного с помощью РСА X-диапазона волн
и используемого для моделирования процессов в РСА
а)
№ 1
№2
№3
№4
№5
№6
№7
Рис. 10.6. Увеличенный фрагмент исходного кадра для моделирования
с обнуленной амплитудой на водной поверхности и асфальтовых площадках (а),
тестовая мира (б)
507
Радиолокационные системы землеобзора космического базирования
Рис. 10.7. Результат синтеза радиоголограммы, сформированной по исходному КРЛИ
(стрелками отмечены положения тест-целей)
Рис. 10.8. Разностное РЛИ (рабочее РЛИ с тест-целями минус эталонное РЛИ)
(шумы на обоих РЛИ некоррелированы)
508
Глава 10. Технологии моделирования характеристик аппаратуры РЛН...
Кроме визуального сравнения эталонного и рабочего изображений возможно
применение известной технологии выявления изменений в оперативной обстановке
Change Detection путем получения разности рабочего и эталонного РЛИ. Разност-
ное РЛИ приведено на рис. 10.8. Фоновая засветка определяется разностью двух
некоррелированных шумовых процессов, имитирующих шумы приемника.
Далее проводят моделирование по схеме, приведенной на рис. 10.4, с вводом
искажающих воздействий и получением образцов КРЛИ. Оценивают параметры
КРЛИ по методикам, приведенным в разделе 11.1, а также проводят их сравнение с
эталонными РЛИ.
Проведение математического моделирования с использованием рассмотрен-
ного подхода или по другим методикам позволяет получать информацию, необхо-
димую для разработки РСА, а также для оценки результатов дистанционного зон-
дирования.
10.7. Полунатурное моделирование при отработке
и испытаниях аппаратуры РСА
Изложенная методика моделирования преобразований сигналов в тракте РСА и ее
фрагменты могут быть эффективно использованы в комплексных стендах полуна-
турного моделирования (стенд главного конструктора РСА, комплексный стенд
отработки КА и др.), предназначенных для наземной отработки и сопровождения
эксплуатации РСА космического базирования. Использование такого стенда обес-
печивает возможность анализа неисправностей или причин деградации характери-
стик, возникающих в полете, их диагностики методом моделирования, поиска пу-
тей сохранения живучести аппаратуры, а также получения необходимых данных
для корректировки документации на последующие образцы аппаратуры или ее мо-
дернизации.
На стенде полунатурного моделирования возможно проведение испытаний
комплекса РСА по программе, максимально приближающейся к программе натур-
ных испытаний аппаратуры в полете. В наземных условиях отрабатываются мето-
дики оценки характеристик РСА, оценивается временная стабильность параметров
аппаратуры (фазовых характеристик, коэффициентов усиления каналов, уровней
квантования АЦП и др.), включая температурные воздействия, изменения напря-
жения питания. Отрабатываются процедуры учета телеметрических данных, ин-
формации координатной поддержки, датчиков ориентации КА с программным мо-
дулем коррекции аппаратурных искажений, предшествующих синтезу РЛИ.
Этап комплексной отработки РСА на стенде полунатурного моделирования по-
зволяет резко сократить цикл подготовки к эксплуатации после запуска РСА на орби-
ту. Стенд должен иметь в своем составе набор преобразователей цифровой информа-
ции в аналоговые сигналы (ЦАП, по типу однополосных модуляторов) на несущей
частоте РСА, промежуточной частоте и для испытаний видеотракта. С помощью вход-
ных данных для ЦАП должны быть подготовлены заранее модели процессов, дейст-
вующих в разных сечениях тракта РСА, созданные на фрагментах фоноцелевой обста-
новки, соответствующей задачам, решаемым разрабатываемой аппаратурой РЛН.
509
Радиолокационные системы землеобзора космического базирования
В цикл отработки аппаратуры РСА в составе стенда полунатурного моде-
лирования должны входить:
• отработка и тестирование методик оценки сквозных характеристик РСА;
• отработка и тестирование методик внутренней и внешней калибровки РСА
(см. гл. 11);
• проведение проверочных испытаний РСА по специальным расширенным про-
граммам и в экспериментальных режимах;
• отработка циклограмм оперативного комплексного контроля РСА для архи-
вирования изменчивости параметров, входящих в изделие блоков в течение
жизненного цикла;
• формирование тестовых цифровых радиоголограмм (ЦРГ) для проверки про-
граммного обеспечения бортовой и наземной обработки информации;
• сопровождение работы РСА в полете, моделирование нештатных ситуаций и
выработка мер по восстановлению работоспособности РСА;
• отработка методик и алгоритмов коррекции искажений РЛ-информации, вы-
званных аппаратурными факторами и погрешностями измерения баллистиче-
ских параметров;
• оценка качества принимаемой радиолокационной информации и конечного
продукта.
В последние годы появилось большое число зарубежных публикаций (в част-
ности, в Трудах конференции EUSAR’2006 [287, 288, 336, 384]), посвященных во-
просам обеспечения заданных параметров РСА и анализу их стабильности в про-
цессе эксплуатации существующих систем Radarsat-1, Envisat-1 и др. Приводятся
результаты измерений сквозных параметров тракта РСА, определяющих качество
изображения. Отмечается, что благодаря тщательной наземной отработке предва-
рительная стадия подготовки аппаратуры TerraSAR-X к штатной эксплуатации по-
сле ее вывода на орбиту оказалась значительно меньше ожидаемой. Первое из по-
лученных изображений (см. рис. 2.5) вполне соответствовало предъявляемым к
РЛИ общим требованиям.
Приведенные данные свидетельствуют о широких возможностях применения
математического моделирования процессов преобразования сигналов в РСА при
проектировании РСА, в процессе создания аппаратуры и ее эксплуатации, тестиро-
вания и калибровки аппаратуры, а также для разработки методик тематической об-
работки получаемой радиолокационной информации и ее интерпретации.
510
Глава 11
КАЛИБРОВКА РСА
11.1. Методики оценки характеристик информационных
продуктов РСА
11.1.1. Типы информационных продуктов
Объективная оценка результатов радиолокационной съемки является неотъемлемым
элементом проведения радиолокационной съемки и формирования радиолокацион-
ных изображений в условиях наличия разных дестабилизирующих факторов - огра-
ничений, заложенных при проектировании аппаратуры (неоднозначности сигнала,
нелинейности тракта и др.), аппаратурных нестабильностей, погрешностей траек-
торных измерений, неоднородностей характеристик трассы распространения сигна-
ла. Влияние этих факторов подробно исследовано в литературе по РСА.
Методики оценки стандартизированы в документации Международного ко-
митета по спутникам дистанционного зондирования Земли CEOS (Committee on
Earth Observation Satellites). Аналогичные методики используют при испытаниях
разработанной аппаратуры, чтобы подтвердить правильность заложенных техниче-
ских решений.
Эти стандарты определяют типы поставляемых информационных продуктов,
форматы данных, состав и содержание сопроводительной служебной информации.
Соблюдение фирмами-распространителями радиолокационной информации этих
стандартов обеспечивает простоту использования информации потребителями,
возможность широкого обмена данными и совместную тематическую обработку
информации, полученной разными датчиками.
По мере совершенствования космических РСА меняется вид поставляемых
информационных продуктов и их форматы. Наиболее свежие данные содержатся в
документации по РСА PALSAR и TerraSAR-X [534, 557, 558, 572-574].
Эти документы оговаривают базовые типы и форматы поставляемых инфор-
мационных продуктов. Типы продуктов соответствуют режимам работы (мар-
шрутный, Скансар с одной, двумя, четырьмя поляризациями, прожекторный).
Можно получать РЛИ с улучшенным пространственным разрешением (resolution
enhanced) за счет специального взвешивания (апертурной коррекции) или улуч-
шенные по радиометрическому разрешению (radiometrically enhanced) после неко-
герентного накопления (5-7 наблюдений) и последующего прореживания. Это
обеспечивает радиометрическое разрешение около 1,5 дБ. Самостоятельным про-
дуктом являются сглаженные РЛИ с большим числом наблюдений (MGD - Multi
Look Ground Range Detected).
511
Радиолокационные системы землеобзора космического базирования
Как правило, РЛИ поставляются с равным разрешением по обеим координа-
там, запас используется для подавления спекл-шума. Основным продуктом явля-
ются амплитудные РЛИ в 16-битном формате GeoTIFF.
Возможна поставка комплексных изображений (КРЛИ) типа SSC (Single Look
Slant Range Complex) в виде прямоугольной матрицы 16-битных отсчетов (целое со
знаком) с действительной и мнимой составляющими. Первые строки матрицы и
начальные отсчеты каждой строки используют для служебной информации кадра.
Кроме РЛИ возможна также поставка радиоголограмм (Raw Data) в форматах, при-
годных для ввода в компьютер.
Для получения РЛИ, обладающих измерительными свойствами, в процессоре
обработки выполняется компенсация искажающих воздействий: учет формы угло-
местной ДНА, различий разрешающей способности вдоль и поперек линии пути,
изменений коэффициента усиления приемника и излучаемой мощности. Средне-
квадратическая погрешность радиометрической калибровки материалов РСА Тег-
raSAR-X не более 1,2 дБ (абсолютная) и 0,3 дБ (относительная). Изображения при-
водятся к радиолокационной яркости [450, 526, 572]. Этот параметр (beta nought)
отличается от использованных ранее параметров: коэффициента рассеяния (УЭПР)
су или «показателя рассеяния» у (см. гл. 2) тем, что они характеризуют радиофизи-
ческие свойства облучаемой поверхности с учетом фактического значения угла па-
дения. Параметр - радиолокационная яркость более подходит к описанию РЛИ,
в которых фактические значения уклонов местности могут быть неизвестны. Связь
параметров сг°, / и $ в зависимости от геометрии облучения (рис. 11.1) определя-
ется формулой
сг° =ysin(yi -a1) = /?°sinyi, (11.1)
где у - угол падения относительно местной вертикали; ос\ - уклон наблюдаемой по-
верхности относительно местной горизонтали в плоскости визирования по углу места.
Рис. 11.1. Проекции приращения дальности как функция локального угла падения,
который равен разности угла падения и склона поверхности относительно горизонтали
в плоскости визирования по углу места
512
Глава 11. Калибровка РСА
Значения о*’ вычисляют по формуле
<т° =(&S(DN)2-NEBN^sin/j, (11.2)
где DN - цифровой отсчет энергетического РЛИ; ks - множитель пропорциональ-
ности, указываемый в служебной информации; % - угол падения; NEBN = /Де -
радиолокационная яркость шумового эквивалента, записанная в служебной ин-
формации и не зависящая от локального угла склона местности
NESZ = NEBNsin /z-. (11.3)
Значения NEBN в виде полиномов от наклонной дальности приводятся в слу-
жебной информации к РЛИ.
Выходной информационный продукт в зависимости от степени обработки по-
ставляют в виде амплитудных РЛИ в координатах наклонная дальность - азимут,
привязанные к географическим координатам (Georeference Data) или в виде геоко-
дированных РЛИ (Geocoded Data) в меркаторской или полярной стереографиче-
ской проекциях. Каждый пиксель РЛИ по азимуту соответствует нулю доплеров-
ской частоты.
Комплексные изображения SSC (Single Look Slant Range Complex), одно на-
блюдение имеет координаты наклонная дальность - азимут. Обычно его представ-
ляют в формате uint 16 с чередованием строк, содержащих действительную и мни-
мую составляющие КРЛИ.
Погрешность географической привязки РЛИ TerraSAR-X в зависимости от
уровня обработки составляет около 700 м (вдоль линии пути) для экстренных дан-
ных в режиме, близком к реальному времени, 2...4 м (СКО) - для стандартного
продукта высокого разрешения и 20 см (СКО) - для интерферометрической обра-
ботки. Геокодированные РЛИ дополняются картографической основой GPS (эл-
липсоид WGS-84). Обеспечивается совместимость материалов, полученных от
РСА TerraSAR-X, ERS-1/2, ENVISAT/ASAR, RADARSAT, X-SAR/SIRC, PALSAR.
Поляриметрические РЛИ поставляются с одной поляризацией (ГГ или ВВ),
двумя поляризациями (ВВ+ВГ или ГГ+ГВ, или парными ВВ+ГГ), а также с че-
тырьмя поляризациями (ВВ+ВГ+ГГ+ГВ).
Основные параметры РЛИ - это пространственное и радиометрическое раз-
решение, чувствительность РСА (NEBZ или NESZ), максимальный и интегральный
уровни боковых лепестков импульсного отклика РСА, относительный уровень
азимутальной неоднозначности.
11.1.2. Оценка пространственного разрешения
Объективная оценка получаемых информационных продуктов является важным
аспектом системного подхода к проектированию современных РСА космического
базирования. Необходимость такой оценки вытекает из современных требований,
предъявляемых потребителями радиолокационной информации для решения прак-
тических задач ДЗЗ.
Для оценки пространственного разрешения широко применяемый для испы-
таний самолетных РЛС критерий Рэлея по провалу в реакции системы на парные
17—1492
513
Радиолокационные системы землеобзора космического базирования
точечные цели является малоэффективным из-за сложности набора большой стати-
стики для усреднения случайной фазы интерференции, что при работе на КА тре-
бует большого количества измерительных мир либо длительного времени испыта-
ний. Значительно большую точность дает оценка технического параметра РСА -
ширины импульсного отклика на точечную цель.
Согласно мировой практике и, в частности, по методикам «Договора по откры-
тому небу» для оценки разрешающей способности РСА проводят съемку полигонов,
оборудованных измерительными мирами из уголковых отражателей (точечных це-
лей) или используют транспондеры [81, 220, 236*]. Для космических РСА периодич-
ность съемки, зависящая от параметров орбиты и реализуемой полосы обзора, обыч-
но составляет несколько суток. Поэтому в дополнение к измерениям радиолокаци-
онных снимков тестовых полигонов желательно иметь средства оценки разрешаю-
щей способности непосредственно по материалам текущей радиолокационной съем-
ки, что существенно повысит оперативность контроля характеристик РСА.
Попытки измерить пространственное разрешение РСА по автокорреляцион-
ной функции изображения не позволяют учесть расфокусировку ЛЧМ-процессов
по азимуту или дальности. Более продуктивна оценка разрешения по протяженным
линейным объектам - просекам, шоссе, рулежным дорожкам и ВПП аэродромов
[152*]. Перспективно применение для этой цели метода локального автофокуса
РЛИ, рассмотренного в подразделе 6.10.8 [434*].
Для оценки разрешающей способности РСА используют импульсные отклики
от точечных целей на амплитудных РЛИ. Пример РЛИ с уголковой мирой приве-
ден на рис. 11.2. При получении РЛИ необходимо принимать меры, чтобы отметки
от отражателей не попадали в область ограничения, что бывает при регистрации
РЛИ с разрядностью 8 бит. Отношение сигнал/шум+фон на РЛИ должно быть не
менее 17 дБ. Измерения можно проводить по АРЛИ с одним или несколькими на-
блюдениями. Используют фрагмент АРЛИ в квадрате 16x16 пикселей по наклон-
ной дальности и азимуту, в центре которого находится отметка от уголкового от-
ражателя. Выполняют интерполяцию фрагмента методом «раздвижки спектра»
(подраздел 6.5.3) с увеличением размера фрагмента в 16 раз до 256x256 пикселей.
Находят точку максимума интерполированного амплитудного отклика и строят
графики сечений амплитуды по наклонной дальности и азимуту.
Для каждого из интерполированных импульсных откликов вычисляют
отсчетный уровень для измерения его ширины. Он равен квадратному корню из
половины средней мощности сигнала от цели плюс мощность фона и шумов
4Zm=7(^ax+4in)/2, (И-4)
где Лтах - максимальная амплитуда отклика; Лт1П - средний уровень окружающего
фона и шумов вдали от максимума (рис. 11.3).
Проверяют, что мощность сигнала от отражателя превышает мощность фона
и шумов в элементе разрешения РСА не менее, чем на 17 дБ, т.е.
4ах/4п^50. (11.5)
514
Глава 1L Калибровка РСА
Рис. ПЛ. РЛИ и его фрагмент с уголковыми отражателями;
максимальная ЭПР отражателя -1024 м2 для Я=9,6 см, шаг изменения ЭПР 3 дБ
(РСА «Меч-КУ» КА «Алмаз-1», виток 1О38н, 04.06.1992)
Рис. 11.3. Измерение пространственного разрешения РСА по импульсному отклику
Измеряют ширину сечений оклика в пикселях LR и £уно уровню 0,707 от мак-
симума амплитуды, после чего вычисляют разрешающую способность РСА путем
умножения измеренных значений ширины отклика на масштабы РЛИ MR и Мх, де-
ленные на 16
pR^LRMR/\6- (11.6)
Рх = LxMx/\6.
Разрешение по поперечной дальности на местности вычисляют через разре-
шение по наклонной дальности и угол падения /р
Pr=P«/sin/i. (11.7)
Проводят усреднение результатов оценки разрешения по имеющимся откли-
кам от точечных целей. При выборе отметок на снимке для проведения измерений
можно воспользоваться методикой оценки «точечное™» целей, приведенной в
подразделе 6.10.7.
Приближенную оценку разрешения без интерполяции отсчетов можно полу-
чить, если аппроксимировать передаточную функцию колоколообразной кривой
515
Радиолокационные системы землеобзора космического базирования
H(z) = exp[-2bz2/р2), (11.8)
где pz - разрешение по соответствующей координате в пикселях на уровне поло-
винной мощности; b = 2 In 2.
На РЛИ (рис. 11.4, а) берут максимальный отсчет Ао - амплитуда (или Ео - от-
счет ЭРЛИ) и соседние к нему два отсчета А\ и А^ (Е\ и Е2) и рассчитывают разре-
шающую способность в координатах РЛИ
Рис. 11.4. Измерение пространственного разрешения РСА по точечным целям (а)
и границе участков с разной УЭПР (б)
Линейное разрешение на местности вычисляют подстановкой вместо pz изме-
ренных по снимку разрешений по азимуту рх и дальности ру с учетом масштабов
РЛИ по координатам
px=Afxpz; pY=MYpz . (11.10)
Линейное разрешение РСА по «резкости границы» целесообразно оценивать
по интервалу между уровнями 0,1 и 0,85 при изображении границы участков с раз-
ной УЭПР. Оценка разрешения по резкости границы актуальна для текущей атте-
стации информационного продукта самолетных РСА, длинноволновых (Я>50 см) и
коротковолновых (2<3 см) космических РСА с автофокусировкой, применяемой с
целью компенсации фазовых (траекторных и атмосферных) флуктуаций по синте-
зируемой апертуре.
После выбора фрагмента делают интерполяцию и поворот РЛИ таким обра-
зом, чтобы граница была направлена вдоль строки (для поворота используют типо-
вые программы в среде Windows) и далее снимают переходную функцию, усредняя
(по мощности) отсчеты вдоль границы. Для колоколообразной передаточной
функции переходная функция является интегралом вероятности и разрешение по
уровню минус 3 дБ численно равно расстоянию между уровнями 0,15 и 0,85 пере-
ходной функции (рис. 11.4, б), умноженному на масштабы РЛИ.
11.1.3. Вычисление импульсного отклика РСА по получаемым снимкам
Особенностью космических РСА является большой интервал повторной съемки
заданных районов, обычно составляющий несколько суток. Это не позволяет вести
оперативный контроль технических характеристик выходных продуктов и основ-
ного параметра - формы импульсного отклика РСА, определяющего пространст-
516
Глава 11. Калибровка РСА
венное разрешение и уровень боковых лепестков. Используя элементы алгоритма
PGA, можно получать оценку разрешения РСА непосредственно по анализируемо-
му снимку и существенно повысить оперативность тестирования РСА [434*, 490].
Для точно сфокусированного РЛИ импульсный отклик однозначно определя-
ется обратным преобразованием Фурье от амплитуды спектра РЛИ. Остаточные
ошибки фокусирования РЛИ по азимуту и дальности, приводящие к деформации
отклика, могут быть измерены в спектральной области по алгоритмам PGA, после
чего можно получить усредненный по снимку импульсный отклик (применением
ОБПФ) и измерить его параметры.
Операции по получению импульсного отклика выполняют в следующей по-
следовательности:
1) интерполируют исходное комплексное изображение или его фрагмент в 4-8
раз (можно по одной координате), используя БПФ, раздвижку спектра и ОБПФ;
2) в каждой строке по азимуту выделяют отметку от яркой цели, превышающую
заданный порог;
3) выполняют БПФ и смещают спектр отметки к нулю;
4) устраняют неоднозначность фазы;
5) усредняют фазы спектров по всем строкам с отметками;
6) вычисляют амплитудный спектр по всему изображению;
7) умножают амплитудный спектр на усредненный фазовый множитель;
8) выполняют ОБПФ.
В соответствии с известными методиками измеряют параметры сечения им-
пульсного отклика по данной координате, после чего исходное КРЛИ транспони-
руют и повторяют все процедуры для измерения отклика по второй координате.
На рис. 11.5 приведен вид измеренных импульсного отклика и фазовых харак-
теристик спектра отклика до применения PGA (пунктир) и при точной фокусиров-
ке (сплошные линии). По оси абсцисс отложены относительные отсчеты интерпо-
лированного изображения и спектра. Вблизи нулевой доплеровской частоты при
точной фокусировке виден плоский участок фазовой характеристики, а при расфо-
кусировке видна параболическая кривая.
Рис. 11.5. Вид импульсного отклика РСА (а) и фаза спектра (б)
517
Радиолокационные системы землеобзора космического базирования
11.1.4. Оценка уровня боковых лепестков импульсного отклика РСА
Максимальный уровень боковых лепестков PSL (peak sidelobe level) импульсного от-
клика РСА оценивают по отметкам от мощных целей. Для оценки и интегрального
уровня боковых лепестков ISLR (integral sidelobe ratio) можно измерить динамиче-
ский диапазон по фону в провале функции радиолокационного рельефа - в элемен-
тах неотражающей поверхности (реки, малые водоемы), окруженных фоном с интен-
сивным отражением. После этого делают поправку на уровень собственного шума
теап{Лпо}-теап{4?е}
ISLR =-----J---j------f--J-, (И-ll)
meanj^J-meanj^e)
где теап|т42п0| и теап{д.2п|| - средняя мощность в отсчетах РЛИ на неотражаю-
щем участке и на окружающем интенсивном фоне; mean|j^ej - средняя мощ-
ность шумов. Ее измеряют в начале кадра РЛИ до прихода отраженных от сигна-
лов или на протяженном участке спокойной водной поверхности.
11.1.5. Оценка радиометрического разрешения РСА
Мерой радиометрического разрешения является уровень флуктуаций на выходе
некогерентного накопления. Взаимосвязанные характеристики - точность оценки
максимального правдоподобия ст для ЭПР и сто для УЭПР и радиометрическое раз-
решение однозначно определяются числом независимых отсчетов N на площади
объекта SgeOm, включая внутриэлементное Ne и межэлементное 7VS накопление.
Среднеквадратическое отклонение сигнала на выходе квадратичного детектора при
наблюдении фона местности
^=(NeNsy,2=(NeSeeom/Se) . (11.12)
Дифференциальное радиометрическое разрешение двух участков фона с раз-
ными cP с учетом действия шумов, характеризуемых отношением чувствительно-
сти РСА (сг^е - сигма нулевое шумового эквивалента) к cP опорного уровня фона
ёК =—. (11.13)
Тад
11.1.6. Оценка динамического диапазона и линейности
амплитудной характеристики РЛИ
Динамический диапазон РЛИ (в децибелах) будем характеризовать отношением
максимального уровня сигнала (амплитуды Лтах или мощности Emm) к среднему
значению шумов (усреднение по мощности - = ^теап|л^е| = ^теап{Епе}
р
= 101g----
теап{Епе}
(И-14)
518
Глава 11. Калибровка РСА
Шумы измеряют по снимку на спокойной водной поверхности (например,
озеро в верхней части РЛИ на рис. 11.2) или радиолокационным теням от высоких
объектов. Для оценки максимального уровня используют интерполированное РЛИ
(в 2-4 раза).
Линейность проверяют по отметкам от уголковых отражателей с известными
ЭПР, также используя интерполированное РЛИ. Следует отметить, что оценка ли-
нейности РЛИ была особо актуальна при оптическом синтезе радиоголограммы с
регистрацией РЛИ на фотоносителе.
При цифровом синтезе (линейной фильтрации радиоголограммы) нарушения
линейного закона передачи значений ЭПР в выходное РЛИ может вызываться ог-
раничением разрядной сетки в процессоре обработки (на выходе или в промежу-
точных процедурах), а также наличием аддитивного шума (шумов приемника, по-
мех, вызванных интегральным уровнем боковых лепестков импульсного отклика
РСА и неоднозначностью сигналов), который добавляется к сигналам от слабых
целей. Нелинейности амплитудных характеристик и ограничение в приемнике и
АЦП приводят к изменению средней крутизны передачи сквозного радиолокаци-
онного тракта, а также некоррелированного с изображением шумового фона, вы-
званного комбинационными составляющими. При этом в локальных участках РЛИ,
соответствующих длительности зондирующего импульса и ширине ДНА, сохраня-
ется линейность передачи реальных контрастов. Различие крутизны линейных за-
конов РЛИ проявляется при наблюдении разных ландшафтов подстилающей по-
верхности (море, суша, горная местность).
11.1.7. Интегральный эвристический критерий оценки
информативности космических РСА
Необходимость разработки критериев для оценки информативности систем радио-
локационного наблюдения ощущалась многими исследователями [28, 386, 413].
Однако некоторые из разработанных критериев носят частный характер, для дру-
гих требовалась четкая информация об априорных вероятностях состояний наблю-
даемого объекта, алгоритмах классификации и другие данные, зачастую отсутст-
вующие у проектировщика аппаратуры. Ни один из рассмотренных критериев не
учитывал фактор устаревания информации - наиболее важное качество радиолока-
ционной съемки.
В настоящее время потребитель располагает широким ассортиментом инфор-
мационных продуктов, включающих различные режимы съемки, различную глу-
бину обработки и различную их стоимость. Подходящего инструмента для сравни-
тельной оценки применимости данного продукта для решения конкретных задач и
их совокупности не было.
Наиболее эффективным представляется обобщенный интегральный эвристи-
ческий критерий оценки информативности космических РСА и многофункцио-
нальных систем ДЗЗ, основанный на экспертной оценке требуемых параметров
системы радиолокационного наблюдения (СРЛН) для решения конкретных потре-
бительских задач и сравнения требуемых параметров с параметрами используемой
519
Радиолокационные системы землеобзора космического базирования
аппаратуры. Он органически включает в себя частные критерии оценки качества
РЛИ, система параметров и интегральных оценок является открытой для расшире-
ния и может включать в себя разные аспекты проектирования РЛС (производи-
тельность, надежность, стоимость и т.д.).
Эвристический критерий учитывает, что РСА относятся к иконическим мет-
рическим информационным системам, передающим информацию о наблюдаемой
поверхности и объектах через изображение, каждый отсчет (пиксель) которого ха-
рактеризует ЭПР соответствующего элемента на земной поверхности с заданными
координатами, при определенных условиях и параметрах радиолокационного ин-
формационного канала. Применительно к РСА, предназначенным для решения за-
дач ДЗЗ, перечень параметров системы РЛН приведен в табл. 11.1.
Для оценки качества системы анализируется многомерное метрическое про-
странство, в котором радиолокационный канал характеризуется вектором парамет-
ров - условий наблюдения Psar, наблюдаемый объект - вектором требуемых пара-
метров Ptreb (функционал от условий наблюдения). Информативность системы РЛН
оценивается по вектору Rinf (матрице Rinf = ||Rsar - для многоканальной сис-
темы РЛН) контрольных параметров с помощью функции оценки информации
(ФОИ) для данной задачи, в качестве которой используется монотонная неотрица-
тельная функция, например, экспоненциальная (как, например, в работе Р. Мура
для разрешаемого «объема» [413])
. Nz М Nz т/ М
oils)
z п=\ 1V1 j=\ 7Vz п=\ 1V1 j=\
где Nz - число решаемых задач по совокупности; vn - коэффициент значимости за-
дачи; Итах - максимальная оценка информативности в баллах (например, Итах=5);
Vj - оценка информативности J-го канала (0 < V; < Kmax); Rj =ЛагУЛгеьу - отношение
реализуемого параметра радиоканала к требуемому для решения данной задачи;
М- число контрольных параметров; ц - коэффициент, определяемый допустимым
снижением общей оценки для выполнения задачи Vj (например, Vj ок=4 балла при
Rjг=1, тогда aj
-In
^/_ОК
V
\ r max
0,223).
Предполагается, что информационные и потребительские качества СРЛН воз-
растают при уменьшении параметра Rj. Это имеет место для таких технических па-
раметров аппаратуры, как пространственное и радиометрическое разрешение, чув-
ствительность РСА, время повторной съемки, а также массы и стоимости аппара-
туры. Для других параметров, таких как, например, полоса съемки, производитель-
ность съемки, области географической доступности съемки (они отмечены в
табл. 11.1 звездочкой «*»), при вычислении параметра Rj берут обратное отноше-
ние - отношение параметра аппаратуры, требуемого для решения данной задачи, к
реализуемому.
520
Таблица 11.1. Информационные параметры космической системы радиолокационного наблюдения
Параметры Размер -ность Обозна -чение Требуемые значения Обеспечиваемые РСА значения Примечания
Широта географическая* град <Рг 90 (с.ш.) -90 (ю.ш.) Определяется углом наклонения орбиты и выносом полосы обзора
Угол облучения* град 0-90 10-60 Ограничен ухудшением разрешения для /тах, потенциалом и условием однозначности для /т|П
Азимут облучения* град a 0-360 0-20; 60-200; 340-360 В полярных широтах
30-60; 120-150; 220-240; 300-330 В средних широтах. Зависит от угла наклонения орбиты, широты положения орбиты объекта, ветви витка
Длина волны* см А 2-250 3-100 Ограничена ТрОПОСферНЫМИ (Amin) И ИОНОСферНЫМИ (Атах) нестабильностями. Зависит от различных возможностей отра- женных сигналов от данного типа поверхности и решаемой задачи
Оптимальная длина волны см Aopt - —
Поляризация на излучение/прием* Pol ввг, ггв ВВГ. ггв Определяется различием ЭПР при изменении поляризации сигналов
ЭПР объекта наблюдения м2 (J 0,1-40000 - При наблюдении сосредоточенных объектов ст зависит от типа объекта.
УЭПР отражающей поверхности, чувствительность РСА дБ -40...0 — Определяется отражающей способностью наблюдаемой поверхности. Зависит от длины волны, поляризации на излучение и прием, углов облучения
Размер дешифрируемого элемента, линейное разрешение радиолокатора: разрешение по дальности разрешение по азимуту м м м SL 1-2000 0.5-3000 0,5-1000 0,5-3000
Радиометрическое разрешение по приращению дБ 0,1-10 - Определяется типом поверхности и решаемой задачей
Ж’пп 0,02-10 —
Число независимых отсчетов* Учитывается при расчете радиометрического разрешения
Интегральный уровень сигналов неоднозначности дБ -40.. .-10 Расчет Ж'пп
Площадь однородного сегмента м2 ‘S'segm 1-10° — Определяется площадью изоморфной области на местности, допускающей статистическую обработку РЛИ: усреднение, измерение гистограмм, спектральный и текстурный анализ
Максимальный размер объекта, зона захвата* км Утах 5-1000 5-1000 Расчет производительности РСА
Полоса обзора* км 10-1000 Расчет производительности РСА
Периодичность наблюдения сут ST 0.05-300 0.1-20 Определяется динамикой объекта, периодичностью обзора
Время перенацеливания с Trr 1-300 — Расчет производительности РСА
Суточная производительность съемки* мин Tsums - Расчет производительности РСА
Глава 11. Калибровка РСА
Радиолокационные системы землеобзора космического базирования
Рассмотрим порядок выбора параметров, входящих в интегральный критерий,
применительно к решению задач ледовой разведки, сельскохозяйственного монито-
ринга и обеспечения поисково-спасательных работ. Проиллюстрируем расчет оцен-
ки на простых примерах однорежимных космических РСА ERS-1/2 С-диапазона
волн и РСА «Меч-КУ» 5-диапазона волн. Оценку проведем по трем параметрам, взя-
тым из исходных данных [97]: требуемым пространственному разрешению 6L=px =
=Ръ радиометрическому разрешению Ж и времени обновления информации ST.
В табл. 11.2 приведены требуемые и реализуемые с помощью выбранных РСА
параметры для каждой из задач. Значительная разница в значениях времени обнов-
ления информации вызвана тем, что в РСА ERS-1/2 полоса съемки 100 км фиксиро-
вана относительно надира, а в РСА «Меч-КУ» при меньшей полосе съемки 45 км
предусматривалось ее перенацеливание в полосе обзора 2x350 км (двусторонний об-
зор). Радиометрическое разрешение задано дифференциальным контрастом Ж, в
скобках указано абсолютное значение разрешаемого контраста К в децибелах.
Таблица 11.2. Требуемые и реализуемые параметры космических РСА
Решаемая задача Требуемые параметры РСА Оценка
<51, м №/(К) 6Г, сут ERS-1/2 «Меч-КУ»
Ледовая разведка 300 1 /(3 дБ) 3 3,76 4,32
Сельскохозяйственный мониторинг 30 1/(3 дБ) 10 4,06 4,41
Поисково-спасательные работы 3 1/(3 дБ) 1 1,75 2,87
Аппаратура РСА Реализуемые параметры Интегральные оценки
6L, м Ж/(К) ST, сут
ERS-1/2 30 0,6/(2 дБ) 12 2,78 3,8
«Меч-КУ» КА «Алмаз-1» 12 1 /(3 дБ) 3
Предварительно примем, что получаемая информация для определенной за-
дачи будет непригодна при оценке VjLmm ~ два балла и ниже. Это будет соответст-
вовать увеличению контролируемого параметра более чем в 4,1 раза относительно
заданного значения
Rj_max = — n(^max/^j'_min ) = / ~ \ =4, ' (П.16)
aJ 1пИтах/%_ОК)
Ограничившись случаем равнозначности задач гЛ=1 и подставив соответст-
вующие параметры в формулу (11.15), получаем значения оценок, которые приве-
дены в табл. 11.2 по каждой задаче и по совокупности задач. В табл. 11.3 приведе-
ны данные оценок по каждому из параметров, жирными цифрами отмечены не-
удовлетворительные оценки. Они относятся к задаче обеспечения поисково-
спасательных работ (требуется более высокое разрешение, чем реализуемое рас-
смотренными РСА) и ледовой разведки для ERS-1/2 (большое время обновления
информации). Интегральные оценки - на «три с минусом» для ERS-1/2 и на «четы-
ре с минусом» для РСА «Меч-КУ». Современные многорежимные РСА высокого
522
Глава 11. Калибровка РСА
разрешения и гибким управлением параметров обзора справляются с этими и мно-
гими другими задачами с интегральной оценкой на «пять».
Таблица 11.3. Оценка информативности РСА в баллах по отдельным
параметрам
Решаемая задача Частные оценки по параметрам Интегральная оценка Аппаратура
8L ж ST
Ледовая разведка 4,88 4,37 2,05 3,67 ERS-1/2
4,95 4 4 4,32 «Меч-КУ»
Сельскохозяйственный мониторинг 4 4,37 3,82 4,06 ERS-1/2
4,57 4 4,67 4,41 «Меч-КУ»
Поисково-спасательные работы 0,54 4,37 0,34 1,75 ERS-1/2
2,05 4 2,56 2,87 «Меч-КУ»
Некоторые особенности имеет оценка многоканальных (многочастотных, поля-
риметрических) РСА. Естественно, что использование дополнительных каналов по-
вышает информативность системы. Для многоканальных систем РЛН учитываем,
что при решении конкретной тематической задачи один из каналов является опор-
ным, дающим основной объем информации, а остальные - дополнительными. Име-
ют место три типичных ситуации: сильно и слабо коррелированной информации в
дополнительных каналах, возможность решения задачи только при совместной об-
работке информации. В первом случае информация дублирует опорный канал и вы-
игрыш сводится к некогерентному накоплению, которое приводит к улучшению ра-
диометрического разрешения. Во втором случае информативность СРЛН оценивает-
ся через приращение информации от дополнительных каналов с учетом его вклада в
общий критерий (эвристическая оценка по экспериментальным данным). В третьем
случае обязательно совместной обработки информации двух (и более) каналов уве-
личивается количество контрольных параметров в выражении (11.15).
Применение рассмотренного критерия информативности систем РЛН может
оказаться полезным при сравнительном анализе разной аппаратуры РСА или поис-
ке новых проектных решений, техническая или экономическая целесообразность
введения которых требует обоснования.
11.2. Методы и средства калибровки
К современным РСА предъявляются требования как к измерительному инструмен-
ту, который, фиксируя отраженное электромагнитное излучение, позволяет изме-
рить электродинамические или геометрические характеристики элементов подсти-
лающей поверхности или объектов на ней. Данные измерений и результаты их об-
работки с получением оценок требуемых параметров являются содержанием пер-
вичных или окончательных информационных продуктов. Достижение высокой
точности радиометрической информации обеспечивается калибровкой аппаратуры
РСА и аттестацией выходного информационного продукта [81, 130*, 263, 311, 336,
340, 343,358, 443,467,517].
523
Радиолокационные системы землеобзора космического базирования
Калибровка предполагает сравнение результата с некоторой эталонной вели-
чиной для обеспечения независимости полученных данных от характеристик РСА
и метода формирования конечных изображений. При калибровке РСА соответст-
вующей процедуре должны подвергаться:
радиолокационный канал (объект наблюдения, трасса прохождения сигнала, ан-
тенная система и приемопередающее устройство);
система регистрации данных;
процессор формирования изображений;
методика и аппаратура определения характеристик сюжета по его изображениям.
Применяют методы внутренней и внешней калибровки. Внутренняя калибровка
используется при предполетной подготовке РСА, а также в полете. Она реализуется с
помощью специальных технических средств (измерителей, датчиков контрольных
сигналов и т.д.), закладываемых в аппаратуру, и соответствующих контрольных режи-
мов, включаемых в циклограмму наземной отработки РСА или ее контроля в полете.
Внешняя калибровка выполняется в полете при штатной работе РСА по специ-
ально подготовленной обстановке при использовании наземных средств с известны-
ми характеристиками - эталонных отражателей, транспондеров, калибровочных по-
лигонов, протестированных участков местности. Кроме того, применяются специ-
альные контрольные или юстировочные режимы, позволяющие в полете оценить ха-
рактеристики устройств, входящих в РСА. В результате внешней калибровки обес-
печивается сверка получаемой информации с известными характеристиками тест-
объектов, а также производится поверка бортовых средств внутренней калибровки.
Стабильность точностных характеристик выходной информации поддерживается
организационно-техническими мероприятиями - службой калибровки, которая посто-
янно контролирует и фиксирует состояние аппаратуры и ее параметры и при необхо-
димости включает в программу работы контрольные или испытательные режимы или
переключение на резервные блоки. Результаты измерений положения лучей антенны,
проведенных в юстировочных режимах, могут включаться как поправки в контур
управления ориентацией КА для устранения систематических погрешностей.
11.3. Состав калибруемой аппаратуры космических РСА
Космическая радиолокационная аппаратура ДЗЗ как система включает в себя кос-
мический и наземный сегменты, связанные линией передачи данных.
В состав аппаратуры входят следующие функциональные подсистемы'.
приемопередающий радиолокационный канал (каналы);
устройства преобразования, запоминания и обработки информации (входящие в
составы космического или наземного сегментов);
устройство сопряжения с бортовой навигационной аппаратурой;
радиолиния передачи данных.
В современной радиолокационной аппаратуре ДЗЗ информационная связь
между подсистемами обеспечивается путем обмена цифровыми данными, являю-
щимися первичными, промежуточными или конечными информационными про-
дуктами, а также массивами служебной информации. Служебная информация
524
Глава 11. Калибровка РСА
должна быть достаточной для выполнения геометрических или радиометрических
преобразований данных или извлечения из них метрологических характеристик.
Получение этой служебной информации также является одной из задач калибровки
аппаратуры как предполетной, так и в процессе эксплуатации.
Задачи калибровки аппаратуры и перечень контролируемых параметров могут
несколько различаться в зависимости от конкретного назначения радиолокацион-
ной аппаратуры ДЗЗ, особенностей ее построения, типа приемопередающих кана-
лов, конфигурации бортового и наземного оборудования.
В состав радиолокационного канала входят (рис. 11.6):
синхронизатор;
генератор опорных сигналов (ГОЧ);
блок формирования зондирующего сигнала (БФС);
усилитель мощности;
переключатель прием/передача (антенный коммутатор);
антенна;
приемник;
аналого-цифровые преобразователи (АЦП);
устройства управления и контроля.
Приемник когерентного канала включает в себя:
малошумящий усилитель;
смеситель (преобразователь частоты);
усилитель промежуточной частоты (УПЧ) с регулируемым усилением;
фазовые детекторы двух квадратурных составляющих;
Рис. 11.6. Обобщенная структурная схема РСА с калибровочными датчиками
для внутренней калибровки:
ИЗЦ - имитатор задержанной цели; ИПМ - измеритель проходящей мощности; ГШ - генератор шума;
ГПС - генератор пилот-сигнал а; К-АЦП - калибратор АЦП; К-Пр - калибратор процессора сигналов
525
Радиолокационные системы землеобзора космического базирования
Перечень и основные функции устройств, необходимых для проведения
внутренней калибровки РСА, приведены в разделе 11.5.
Средства внутренней калибровки в сочетании с внешними эталонами (искус-
ственными целями) позволяют проводить сравнение показаний встроенных датчи-
ков с реакцией на эталонную цель и распространять данные калибровки на другие
кадры, где отсутствуют средства внешней калибровки.
Внешняя калибровка РСА производится с помощью пассивных и активных
источников эталонных сигналов:
миры из точечных пассивных, например, уголковых отражателей, позволяю-
щих оценивать геометрические характеристики (разрешающую способность, точ-
ность измерения координат);
активные калибраторы - приемопередатчики (транспондеры), создающие эта-
лонные цели со строго определенными параметрами, в том числе и для поляримет-
рических измерений;
поверхностно-распределенные цели с известными и постоянными значениями
УЭПР, к таким эталонным участкам, в частности, относятся участки тайги и тро-
пического леса в Южной Америке.
Для измерения характеристик тракта РСА при внешней калибровке могут
предусматриваться специальные калибровочные и контрольные режимы, в том
числе с применением специальных разворотов КА:
режим для снятия формы ДНА и юстировки антенны в угломестной плоскости;
режим для снятия формы ДНА и юстировки антенны в азимутальной плоскости;
режим измерения температуры антенного входа.
В составе КА предусматривается аппаратура, в том числе система позициони-
рования GPS, ГЛОНАСС, астроблоки системы измерения положения, с использо-
ванием которых улучшаются точностные характеристики получаемого информа-
ционного продукта.
Особая задача калибровки имеет место для целей интерферометрической обра-
ботки информации с целью получения цифровых карт рельефа (ЦКР). Здесь требу-
ются точные измерения размеров и углового положения интерферометрической базы
(что особенно осложнено при многопроходной интерферометрии) и обеспечение вы-
сокой стабильности фазы в интерферометрических каналах, на которую влияют мно-
гие аппаратурные факторы, характеризующие также точность радиометрических из-
мерений (шумы, форма отклика, фазовые характеристики тракта и др.).
11.4. Технологическая цепочка калибровки РСА
Технологическая цепочка калибровки РСА (рис. 11.7) включает в себя:
1) сбор информации об аппаратуре РСА в процессе предполетной подготовки,
включая измерения параметров аппаратуры при ее наземной отработке и испыта-
ниях, калибровку встроенных датчиков, фиксацию данных контрольных режимов;
2) сбор информации об аппаратуре РСА после развертывания ее на орбите,
проведения первоначальных и текущих контрольных и калибровочных режимов в
соответствии с программой полета, а также при необходимости;
526
Глава 11. Калибровка РСА
3) сбор и обработку данных внешней информации о состоянии тестовых полиго-
нов, погодных условиях в районах съемки, данных цифровых карт рельефа и др.;
4) анализ информации об РСА, формирование данных для коррекции радиолока-
ционных данных в процессе синтеза радиолокационного изображения (РЛИ), действи-
тельного или комплексного (КРЛИ);
5) коррекцию радиометрических, фазовых, частотных и других искажений в ра-
диолокационной информации (радиоголограмм, синтезированных РЛИ и КРЛИ, нор-
мализованных и геокодированных РЛИ и КРЛИ).
Предполетная подготовка Работа РСА в полете
и тематической обработки
Рис. П.7. Технологическая цепочка калибровки РСА
Получаемый цифровой информационный продукт характеризуется следую-
щими параметрами:
масштабами изображения вдоль Мх и поперек Му линии пути (размеры пикселя
на местности) и геометрией РЛИ;
пространственным разрешением /?%, ру, измеряемым по уровню минус 3 дБ;
уровнем боковых лепестков к& передаточной функции;
интегральным уровнем боковых лепестков Ала передаточной функции, включая
неоднозначность по дальности и азимуту;
коэффициентом пересчета цифровых отсчетов Кр в удельную эффективную по-
0
верхность рассеяния с ;
числом независимых отсчетов в элементе разрешения Ае (определяет закон рас-
пределения флуктуаций шума и процесса шум+фон);
527
Радиолокационные системы землеобзора космического базирования
чувствительностью РСА - удельной эффективной поверхностью рассеяния шу-
мового эквивалента о°пе;
динамическим диапазоном РЛИ D = 101g(^ax/Мх {^oise}), где А - отсчеты ам-
плитуды (Л2 - отсчеты мощности ЭРЛИ).
Значения этих параметров рассчитываются по паспортным данным РСА с уче-
том условий съемки и уточняются на основе калибровочной информации. При атте-
стации информационного продукта измерения проводятся непосредственно по нему
с учетом имеющейся информации о подстилающей поверхности или тест-объектам.
11.5. Методы предполетной калибровки
Предполетная калибровка аппаратуры является первым этапом комплекса проце-
дур метрологической аттестации и сертификации аппаратуры дистанционного зон-
дирования Земли.
Методы калибровки включают в себя:
непосредственные измерения внешних (входных, выходных) параметров аппара-
туры с помощью универсальных измерительных приборов, входящих в состав техно-
логических пультов или контрольно-испытательной аппаратуры (КИА);
измерения с помощью специального технологического оборудования;
измерения параметров аппаратуры с помощью встроенных датчиков, генераторов
контрольных сигналов, имитаторов;
калибровку встроенных датчиков, генераторов сигналов и имитаторов;
косвенные методы калибровки аппаратуры;
обобщение и комплексный анализ данных измерений на всех стадиях калибровки
аппаратуры.
К внешним параметрам относятся также контрольные параметры аппаратуры,
выведенные на специальные контрольные разъемы.
К непосредственным измерениям относятся измерения:
частот, вырабатываемых синхронизатором, генератором опорных частот;
расстановки синхроимпульсов, длительностей и задержек;
выходной мощности передатчика (средней, импульсной), спектра зондирующего
сигнала;
шумфактора, коэффициентов усиления, частотных и амплитудных характери-
стик, уровней выходных сигналов приемника (УПЧ и видеотрактов);
градуировочных характеристик АЦП;
напряжений питания первичных и вторичных источников питания.
Специальное технологическое оборудование, встроенные датчики использу-
ются для калибровки антенных устройств, фазовых и поляриметрических измере-
ний, оценки сквозных характеристик, когерентности радиолокационного тракта.
Из-за больших геометрических размеров космических антенн для измерения
антенных характеристик (коэффициент усиления, форма ДНА, частотная характери-
стика, направление вектора поляризации) используются безэховые камеры или спе-
циальные полигоны. В состав испытательного оборудования должны входить уст-
528
Глава 1L Калибровка РСА
ройства для приведения антенн из сложенного состояния в рабочее положение. Как
правило, непосредственные измерения параметров невозможны, так как дальняя зо-
на удалена на расстояние сотен метров. Используются плоские или цилиндрические
сканирующие устройства, измеряющие амплитудное и фазовое распределение поля
по апертуре антенны. По измеренным данным с помощью соответствующего про-
граммного обеспечения рассчитываются формы ДНА в угломестной и азимутальной
плоскостях, а также другие параметры антенны. Операции по верификации характе-
ристик антенн проводятся на стадии автономных испытаний антенн.
Методы измерения пределов сканирования ДНА относительно осей КА зави-
сят от типа антенны. Для антенн с механическим сканированием (волноводно-
щелевая или зеркальная) измеряются угловые перемещения подвижной платформы
с контролем по механическим датчикам. Для фазируемых антенных решеток
(ФАР) с управляемыми фазовращателями кроме отклонений луча и изменения
формы ДНА контролируются выходные сигналы устройства управления антенной.
Для АФАР контролю подлежат фазовые и амплитудные характеристики
приемопередающих модулей (ППМ): выходная мощность, коэффициент усиления
приемной части, затухание встроенных аттенюаторов. В составе ППМ предусмат-
риваются встроенные средства контроля.
Геометрия относительного расположения панелей многоэлементных ФАР или
АФАР (в том числе при температурных воздействиях) контролируется механиче-
скими датчиками.
При использовании в РСА гибридных зеркальных антенн с облучателями типа
АФАР предусматриваются специальные контрольные приемопередатчики для фази-
ровки и калибровки ППМ-облучателей. Параметры контрольных устройств, входящих
в состав антенн, ППМ подлежат измерению в процессе предполетной калибровки.
Для автоматизации процесса предполетной калибровки и максимального при-
ближения момента измерений к запуску КА в состав бортовой аппаратуры должны
включаться следующие устройства.
В СВЧ-тракт, соединяющий антенну с сосредоточенной запиткой (типа ФАР
или зеркальную) с приемопередатчиком, встраивают датчики, предназначенные
для калибровки приемопередающих устройств и сквозных характеристик радиока-
нала. Эти устройства используются как при предполетной калибровке, так и в про-
цессе эксплуатации на орбите. В состав этих устройств входят:
1) измеритель проходящей мощности (направленный ответвитель с детекторной
секцией с цифровым выходом) для контроля импульсной мощности передатчика с
включением результата измерений в состав служебной информации;
2) измеритель шумфактора приемника (генератор шума на лавинопролетном
диоде с измерением уровня шумов приемника, управлением по командам и передачей
результатов измерений в составе служебной информации);
3) имитатор цели на гиперзвуковых линиях задержки, формирующих задержан-
ную копию зондирующего сигнала для сквозной проверки тракта;
4) имитатор цели с преобразованием сигнала в оптический диапазон, далее
задержки на волоконно-оптических линиях и обратным преобразованием в СВЧ-
диапазон;
529
Радиолокационные системы землеобзора космического базирования
5) генератор пилот-сигнала, вводимого в приемный тракт из передатчика -
ослабленный зондирующий сигнал (сложность состоит в наличии высокого уровня
мощности в момент излучения, перегружающего приемник, который в это время
запирается импульсом супрессии, возможный выход - снимать пилот-сигнал до
мощного усилителя, не включая его, но при этом выходные каскады исключаются
из контроля и калибровки);
6) синтезатор частот, подключаемый ко входу приемника для снятия амплитудно-
частотных и фазочастотных характеристик тракта, фазового сдвига квадратурных со-
ставляющих, подаваемых на фазовые детекторы;
7) устройства ввода в ЭВМ цифровой информации с выхода АЦП, с контрольных
и телеметрических датчиков с целью их последующего компьютерного анализа для
оценки характеристик системы.
Для калибровки приемопередатчика и встроенных датчиков предусматривают
технологическую вставку в СВЧ-тракт для подключения эквивалента антенны (со-
гласованной нагрузки) или внешних измерительных приборов из состава КИА (из-
мерителей мощности, шумфактора, имитаторов целей и др.).
В приемном тракте предусматривают цифровые аттенюаторы для регулирова-
ния усиления приемника с поддержанием уровня шумов или суммарного сигнала.
На выходе приемника должны предусматриваться цифровые генераторы кон-
трольных сигналов для снятия градуировочных кривых и калибровки АЦП. Выбор
разрядности АЦП должен учитывать не только требования передачи рабочей ин-
формации, но и обеспечение задачи калибровки (предполетной и в полете).
В устройствах контроля РСА предусматриваются измерители уровня сигналов
на выходе приемника после АЦП (используются цифровые измерительные устрой-
ства, определяющие шумфактор приемника, положение максимума ДНА при
ошибках ее ориентации и т.д.). В РСА может быть введен специальный контроль-
ный режим, дополненный измерителем доплеровской частоты, контролирующим
уходы азимутальной ДНА. Предусматриваются датчики контрольных задач для
проверки и калибровки цифровых устройств обработки сигналов (сжатия по дли-
тельности, синтеза апертуры, некогерентного накопления). Основное назначение
этих устройств - получение калибровочной информации в процессе полета. При
предполетной калибровке должна обеспечиваться калибровка этих измерителей с
помощью тест-сигналов, имитирующих реальные сигналы.
Методика предполетной внутренней калибровки включает в себя три основ-
ных этапа:
1) калибровка антенны в процессе автономных испытаний антенны;
2) сквозная калибровка приемопередающего тракта с помощью генератора пилот-
сигнала и имитатора целей с вводом данных с выхода АЦП в ЭВМ;
3) калибровка процессоров сжатия импульсов по длительности, синтеза аперту-
ры, формирования РЛИ и КРЛИ, некогерентного накопления.
Амплитудная и фазовая характеристики зондирующего импульса оценивают-
ся по пилот-сигналу при комплексных испытаниях путем анализа записанной ин-
формации с АЦП.
530
Глава 1L Калибровка РСА
Поляриметрическая калибровка предполагает проведение калибровки поляри-
зационных каналов относительно друг друга. При этом требуется точное измере-
ние не только амплитуды, но и фазы. Для поляриметрической калибровки приемо-
передающего (кроме развязки) тракта наиболее эффективно использование пилот-
сигнала, вводимого в СВЧ-тракт с контролем выходных сигналов по информации с
выходов АЦП. При этом усиление приемных каналов должно поддерживаться та-
ким образом, чтобы напряжение шумов на выходе было одинаковым.
Для снижения ошибок внутренней калибровки используется многократное
повторение измерений с последующей статистической обработкой результатов.
Точность функционирования устройств внутренней калибровки обеспечивается
поддержанием заданных режимов, периодической проверкой по сигналам внешних
калибровочных устройств (как наземных в процессе предполетной калибровки, так
и в полете) и тщательностью изготовления и настройки аппаратуры.
11.6. Методы оценки параметров аппаратуры РСА
в полете и коррекции искажений при обработке информации
Измерение формы диаграммы направленности антенны по азимуту
Необходимость измерения формы азимутальной ДНА вызвана тем, что она опреде-
ляет амплитудную весовую функцию при синтезе апертуры и таким образом влияет
на форму выходного отклика РСА. Кроме того, при кадровом режиме синтеза апер-
туры (например, методом быстрой свертки) могут появляться радиометрические ис-
кажения. Они особенно заметны в режиме Скансар, при различном положении целей
относительно центра обрабатываемого кадра (максимума азимутальной ДНА). На
рис. 11.8 приведен пример РЛИ, полученного при нефокусированном синтезе мето-
дом БПФ с последующим некогерентным накоплением. Заметна модуляция яркости
РЛИ волнообразного характера. Для коррекции таких радиометрических искажений
необходимо точное знание формы азимутальной ДНА.
Рис. П.8. Фрагмент первичного (без коррекции) РЛИ,
полученного путем нефокусированного синтеза методом БПФ с некогерентным накоплением
(Санта-Барбара, США, РСА «Меч-КУ», КА «Алмаз-1»)
531
Радиолокационные системы землеобзора космического базирования
Рис. 11.9. Азимутальная форма ДНА
по мощности для РСА «Меч-КУ»
КА «Алмаз-1»
Для измерения формы ДНА в азимутальной плоскости используют наземные
измерительные приемники, фиксирующие мощность принятого от передатчика
РСА сигнала при пролете КА над наземным измерительным пунктом. Применяется
также измерение формы ДНА по принятому сигналу, отраженному от наземных
имитаторов сосредоточенных целей с большой ЭПР - пассивных, в качестве кото-
рых используются зеркальные антенны слежения за космическим пространством,
или активных приемопередатчиков - транспондеров, переизлучающих калибро-
ванный сигнал в сторону РСА. Требование большой ЭПР обусловлено необходи-
мостью получения достаточного отношения сигнал/шум для обеспечения точности
измерений.
Возможно оценить форму ДНА в азиму-
тальной плоскости, а также юстировать ее
положение относительно осей КА непосред-
ственно в полете с применением специально-
го режима измерения доплеровской частоты
(ИДЧ). Преимущество специального режима
состоит в том, что могут быть использованы
узкополосный зондирующий сигнал для по-
лучения высокого отношения сигнал/шум и
повышенная частота повторения, исключаю-
щая эффекты многозначности сигнала по до-
плеровской частоте. В качестве иллюстрации
на рис. 11.9 приведена азимутальная форма
ДНА по мощности для РСА «Меч-КУ» КА
«Алмаз-1», полученная по реальной фоновой
обстановке.
Измерение формы диаграммы направленности антенны
по углу места
Измерение формы ДНА и юстировка антенны по углу места с помощью наземных
средств представляет значительные трудности, поскольку ширина облучаемой зоны
измеряется десятками или сотнями километров. Значительно эффективнее использо-
вание специального калибровочного режима с низкой частотой повторения (режим,
обычно используемый в некогерентных скаттерометрах), при которой отсутствуют
эффекты, связанные с неоднозначностью по дальности. Возможна также калибровка
ДНА и с параметрами РСА в рабочем режиме, но с перенацеливанием КА в область
малых углов падения (к надиру). В качестве тест-объекта предпочтителен выбор
участков тропического леса или тайги, имеющих широкую диаграмму рассеяния и
стабильный коэффициент отражения. Для повышения отношения сигнал/шум при
этих измерениях целесообразно применение узкополосного зондирующего сигнала.
На рис. 11.10 представлена геометрия формирования мощности суммарного
процесса по наклонной дальности на выходе приемника. Она включает в себя
мощность шумов на выходе приемника, альтиметровый сигнал от подспутниковой
точки, отраженный от поверхности Земли, сигнал в пределах главного и боковых
532
Глава 11. Калибровка РСА
лепестков ДНА. В рабочих режимах обзора, когда период повторения много мень-
ше времени запаздывания, появляется многозначность и происходит «сворачива-
ние» всего диапазона наклонных дальностей в один период рекуррентной дально-
сти Лр = сТ/1 (поз. 5 на рис. 11.10). Для вычисления ДНА в угломестной плоскости
анализируют радиоголограмму и измеряют зависимость амплитуды отраженного
сигнала от наклонной дальности, усредняя ее по азимуту. Затем делают пересчет от
наклонной дальности в углы визирования по формулам геометрии обзора поперек
линии пути.
Рис. 11.10. Геометрия формирования мощности суммарного процесса по наклонной дальности
на выходе приемника:
1 - шум МШУ + тепловое рассеяние от поверхности Земли в пределах ДНА; 2 - альтиметровый сигнал; 3 -
сигнал отраженный от наблюдаемой поверхности в главном лепестке ДНА; 4 - боковые лепестки ДНА; 5 -
сворачивание отраженных сигналов в один период рекуррентной дальности (точками показаны моменты
излучения зондирующих импульсов)
Пример записи амплитуды сигнала по дальности на выходе приемника (ра-
диоголограммы), снятого в рабочем
режиме при малых углах визирова-
ния (25°) приведен на рис. 11.11.
Запись характеризует форму ДНА в
угломестной плоскости, для вычис-
ления которой следует сделать по-
правку на изменение наклонной
дальности.
Одновременно с измерением
формы ДНА и положения лучей от-
носительно координатных осей КА
должна проводиться проверка
управляющих команд с определе-
нием систематических ошибок ус-
тановки лучей для их компенсации.
R
Рис. 11.11. Запись амплитуды сигнала по дальности,
характеризующая форму ДНА
по углу места (РСА «Меч-КУ» КА «Алмаз-1»)
533
Радиолокационные системы землеобзора космического базирования
Измерение шумовой температуры входа антенны и калибровка
генератора шума
Мощность процесса на выходе РСА, фиксируемая в информационном продукте
(РЛИ), является суммой мощности сигнала, отраженного от подстилающей по-
верхности, и мощности шумов приемника
A2=KX{{PS + Рт), (11.17)
где A7ri - коэффициент пропорциональности; Ps, Pm - мощности сигнала и шумов на
входе приемника.
В свою очередь по формуле (3.46) мощность шумов на входе приемника оп-
ределяется следующим выражением:
Pr„=MF[7;+r0(Fn-l)], (11.18)
где к = 1,38-10"23 Вт/ГцхК - постоянная Больцмана (К - градусы Кельвина); Го - абсо-
лютная температура приемного устройства; Ts - температура источника сигнала (зем-
ной поверхности); AF - полоса приемника; Fn - шумфакгор приемника, определяемый
параметрами малошумящего СВЧ-усилителя (МШУ) и потерями в СВЧ-тракте.
Температура источника сигнала - это температура поверхности Земли, на ко-
торую направлен луч антенны. Обычно принимают Ts=290 °К. Однако получение
высокой точности измерения абсолютного значения а подстилающей поверхности
требует корректного исключения мощности собственного шума на выходе РСА с
учетом доли теплового рассеяния наблюдаемой поверхности. Как правило, коэф-
фициент шума МШУ (с учетом потерь в СВЧ-тракте) близок к 3 дБ (2 раза), т.е.
дополнительная мощность тепловых шумов, создаваемых входным транзистором,
численно равна мощности шумов от антенны, если температуры МШУ и антенны
одинаковы (например, при наземных испытаниях аппаратуры в безэховой камере).
В реальных условиях при измерениях сг° таких поверхностей, как ледовые по-
ля, морская поверхность, следует вводить поправку на их температуру и уменьше-
ние радиояркости. Так, если чувствительность РСА, измеренная при Г=300 °К, со-
ставляет апе= -20 дБ, а удельная эффективная поверхность рассеяния (УЭПР) для
толстого однолетнего льда равна сг°= -17 дБ при радиояркостной температуре льда,
равной 160 °К, вместо расчетных 290 °К [193], то значение собственного шума на
выходе приемника при наблюдении ледовой поверхности определится шумовой
температурой
Тп =Ts+T0(Fn -1) = 160 + 290(2-1) = 450°К, (11.19)
вместо ожидаемых 580 °К, если не учитывать радиояркостной температуры на-
блюдаемой поверхности.
Таким образом, чувствительность РСА при измерении поверхности с малой
радиояркостью улучшится до величины сг°=0,0077 (-21,1 дБ). Оценка суммарного
процесса фон+шум в значениях УЭПР составит a fn=0,0277, а вычисленное значе-
ние a=afn - сг°пе =0,0177 (-17,5 дБ) вместо истинного значения сг°= -17 дБ. В этом
случае погрешность измерения сг° ледовой поверхности, вызванная пренебрежени-
534
Глава 1L Калибровка РСА
ем изменения ее радиояркостной температуры, составит около 0,5 дБ, что явится
существенным вкладом в суммарную ошибку измерений. Погрешность измерений
будет больше для поверхностей с УЭПР, меньшей, чем апе, например, при наблю-
дении почвенного покрова в длинноволновой части СВЧ-диапазона волн, для ко-
торого вариации яркостной температуры с изменением влажности грунта от 2 до
40 % достигают 60...90 °К [193].
Рассмотренные выше соотношения могут применяться и для калибровки
спектральной плотности мощности шума (СПМШ) контрольного генератора шума
(ГШ). Можно, например, сравнивать мощности шумов на выходе приемника при
выключенном передатчике, включенном и выключенном ГШ, когда антенну на-
правляют близко к надиру при наблюдении лесных массивов (Г-290 °К) и вообще
отворачивают от Земли в сторону открытого космоса, для которого шумовая тем-
пература не превышает десятков градусов Кельвина. Естественно, для выполнения
таких режимов должны быть предусмотрены соответствующие маневры КА.
Измерение коэффициента усиления антенны и коэффициента передачи
сквозного тракта РСА по мощности
Для измерения коэффициента усиления (КУ) антенны и коэффициента передачи
сквозного тракта РСА по мощности наиболее эффективно в качестве эталона ис-
пользовать активный имитатор цели - транспондер, с помощью которого можно
создать ответный сигнал, значительно превышающий по мощности сигнал, отра-
женный от близлежащей подстилающей поверхности. Поскольку коэффициент пе-
редачи сквозного тракта РСА зависит от формы передаточной функции и ампли-
тудного распределения при сжатии по дальности и азимуту, а также формы ДНА,
то целесообразно для измерений КУ антенны использовать смодулированный
зондирующий сигнал и малую длительность синтезируемой апертуры с равномер-
ной весовой функцией. Тогда форма отклика будет иметь вид sin х/х (и будет лег-
ко контролируемой, по уровню сигнала в нулях отклика). Фокусирующая функция
должна быть согласована с законом изменения фазы принимаемого сигнала, но ее
ошибки не приведут к погрешности измерений вследствие малой длительности
синтезированной апертуры.
При использовании транспондера аналогичным образом калибруют и поляри-
зационные характеристики антенны и тракта РСА для всех необходимых комбина-
ций ВВ, ВГ, ГГ, ГВ, включая в том числе и измерения фазовых характеристик по-
ляриметрических каналов.
Вычисление коэффициента передачи сквозного тракта РСА для рабочих ре-
жимов, в том числе и широкополосных с предельным разрешением, производится
путем использования встроенного генератора пилот-сигнала (ГПС) с получением
формы радиолокационного отклика с реальной передаточной функцией устройств
сжатия по дальности и азимуту и с введением поправок, учитывающих реальные
амплитудно-фазочастотные характеристики СВЧ-тракта и антенны, которые долж-
ны измеряться в специальных контрольных режимах. По данным измерения формы
отклика определяются коэффициенты пересчета мощности в максимуме отклика
535
Радиолокационные системы землеобзора космического базирования
Л2тах к значению сг°, которое фиксируется в конечном информационном продукте.
Необходимость этой операции вызывается тем, что при амплитудном взвешивании
меняется форма отклика и отношение сг°/А2тах.
Измерение амплитудно/фазочастотных характеристик приемника
и сквозного тракта РСА
Для измерения амплитудно/фазочастотных характеристик приемника и сквозного
тракта РСА вместо рабочего сигнала с большой базой (произведением ширины спек-
тра на длительность зондирующего импульса), не позволяющего проанализировать и
разделить частотные и фазовые искажения, предлагается использовать набор зонди-
рующих сигналов (например, 5 вариантов) с максимально большой длительностью
импульсов, заполненных ЛЧМ со скоростью изменения частоты в соответствующее
число раз (5 раз) меньшее, чем в рабочем режиме. Характеристики снимаются путем
перебора всех вариантов зондирующего сигнала, причем для приемного тракта ис-
пользуется генератор пилот-сигнала, а для сквозного тракта - эталонный отражатель
с большой ЭПР (например, доработанная антенна космической связи) или широко-
полосный транспондер, откалиброванные в наземных условиях.
Для оперативного контроля характеристик тракта РСА эффективен анализ
спектра процессов на выходе приемника в рабочем режиме, в результате которого
может быть получена форма корреляционной функции отраженного сигнала и
можно принять решение о необходимости корректировки параметров тракта обра-
ботки или на проведение специальных калибровочных режимов. На рис. 11.12
представлены спектры радиоголограмм на выходе АЦП для РСА «Меч-КУ» [429*].
Спектр шумов (рис. 11.12, а) определяется частотной характеристикой при-
емника и имеет спектральную плотность, близкую к равномерной. Спектр сигнала,
отраженного от равномерной протяженной поверхности, определится преобразо-
ванием Фурье от корреляционной функции зондирующего сигнала. Для приведен-
ного примера (РСА «Меч-КУ») зондирующий сигнал представлял короткий им-
пульс длительностью 0,07 мкс на пьедестале и длительностью 0,8 мкс с относи-
тельным уровнем минус 25 дБ. Корреляционная функция имела острый пик в об-
ласти частот 1,2 МГц. В зависимости от интенсивности отраженного сигнала от
местности (рис. 11.12, б, в) относительная доля спектральных составляющих шума
536
Глава 11. Калибровка РСА
уменьшается и больше проявляется форма спектра сигнала. Задача коррекции иска-
жений заключается в измерении спектра сигнала и применении цифровой фильтра-
ции при обработке, которая реализуется в частотной области (БПФ, умножение на
коэффициенты, реализующие корректирующий фильтр, ОБПФ). Для проектируемых
РСА, в которых зондирующий сигнал формируется цифровым способом в БФС
(рис. 11.6), амплитудно/фазочастотные искажения, возникающие в тракте РСА, мо-
гут быть измерены приведенным выше методом, а их компенсация может быть дос-
тигнута введением предыскажений в форму зондирующего сигнала.
Измерение и коррекция нелинейностей амплитудной характеристики
приемного тракта и калибровка цифровых аттенюаторов
Отраженный от местности сигнал характеризуется большим динамическим диапа-
зоном, определяемым различием УЭПР наблюдаемой местности. Проходя через
приемный тракт РСА, сигнал может подвергаться ограничению и нелинейным ис-
кажениям, определяемым формой амплитудной характеристики приемника. Ана-
лизируя гистограммы сигнала на выходе аналого-цифрового преобразователя
(АЦП), можно выявить характер этих искажений и частично скорректировать их.
Анализ статистических характеристик цифровых радиоголограмм на выходе
АЦП (рис. 11.13 [429*]) показывает, что амплитудная характеристика приемника
имеет ярко выраженный плавный участок, переходящий в ограничение - «мягкое»
ограничение. На рис. 11.13, а приведены гистограммы процессов на выходе фазо-
вого детектора приемника РСА «Меч-КУ». Анализируются два участка: 1 - мор-
ской поверхности и 2 - суши вблизи береговой линии, где отраженные сигналы
попадают в область ограничения. Для морской поверхности имеем распределение
процесса, близкое к гауссову.
Принятые сигналы от суши в
пределах зоны облучения ан-
тенны по азимуту имеют также
гауссово распределение (в си-
лу центральной предельной
теоремы). Но на выходе при-
емника сигналы попадают в
область перегрузки и форма
распределения искажается.
Моделирование жесткого ог-
раничения (рис. 11.13, б) дает
иной характер гистограммы с
резким подъемом числа отсче-
тов на граничных значениях в
области ограничения.
Наличие участков «мягкого» ограничения позволяет скорректировать нели-
нейность и растянуть сжатые участки путем присвоения шагам АЦП разного веса.
Задача коррекции делится на три этапа:
Рис. 11.13. Гистограммы процессов на выходе АЦП:
a - реальные; б - моделирование жесткого ограничения;
в - после коррекции нелинейностей
537
Радиолокационные системы землеобзора космического базирования
1) вычисление среднеквадратичного отклонения процесса до нелинейности;
2) измерение амплитудной характеристики приемника;
3) коррекция нелинейности.
Процесс коррекции нелинейных искажений иллюстрирует рис. 11.14. На
рис. 11.14, а показаны амплитудная характеристика приемника и результат ее дис-
кретизации с помощью 5-разрядного АЦП с равномерным шагом. На рис. 11.14, б
представлена характеристика приемника с коррекцией нелинейности, реализован-
ной путем присваивания шагам АЦП неравномерного веса.
Рис. 11.14. Амплитудная характеристика приемника с последующей коррекцией
нелинейных искажений:
a - на выходе приемника; б - в результате коррекции
После радиометрической коррекции гистограммы распределения радиоголо-
граммы на участках моря и суши приближаются к гауссовым со среднеквадратич-
ными отклонениями, соответствующими контрасту море-суша (отношение celery =
= 7 дБ вместо =5,4 дБ при наличии ограничения).
Существуют методы коррекции и «жесткого» ограничения [466], но «экспан-
дирование» участков «мягкого» ограничения в приемнике дает меньшие потери в
отношении сигнала к суммарному шуму на выходе тракта с учетом нелинейности.
При проектировании РСА рекомендуется применять ограничение в усилителе про-
межуточной частоты приемника с выбором размаха АЦП шире размаха выходных
сигналов.
Приведенная методика анализа гистограмм на выходе АЦП с измерением
СКО позволяет провести калибровку усиления цифровых аттенюаторов приемни-
ка, используя в качестве тест-сигнала собственные шумы приемника или суммар-
ный процесс, включающий фон местности.
Калибровка АЦП
Входящие в состав приемного тракта АЦП могут использоваться в качестве основ-
ного измерительного прибора в бортовой аппаратуре РСА для снятия характери-
стик различных устройств радиолокационного тракта. АЦП должны разрабаты-
ваться таким образом, чтобы они могли выполнять функции широкополосного
цифрового вольтметра высокого класса точности (0,2...0,5 %) в широком диапазо-
538
Глава 1L Калибровка РСА
не изменения тактовой частоты. Должна быть предусмотрена прецизионная калиб-
ровка АЦП в наземных условиях, а также самокалибровка АЦП в полете с приме-
нением высокостабильных эталонов ступенчатого и переменного напряжений,
обеспечивающих долговременную точность калибровки в условиях температурных
воздействий, в том числе при работе в открытом космосе.
Для калибровки АЦП, входящих во все имеющиеся квадратурные, поляримет-
рические, частотные каналы, должны быть предусмотрены соответствующие кон-
трольные режимы. Оперативный контроль в режиме съемки осуществляется путем
анализа гистограмм процесса на выходе АЦП. По результатам контроля должна
быть предусмотрена возможность корректировки значений единицы младшего раз-
ряда (ЕМР) АЦП непосредственно на борту КА или при обработке информации на
Земле. Пример выявления блуждающего дефекта АЦП (уменьшение цены младшего
разряда АЦП) при оперативном контроле данных приведен на рис. 11.15.
Рис. 11.15. Пример гистограмм процессов на выходе АЦП:
a - типичная; б - с дефектом уменьшения цены младшего разряда
Калибровка квадратурных каналов
В состав квадратурных каналов входят генератор опорного сигнала промежуточ-
ной частоты, фазовращатель на 90°, фазовые детекторы, видеоусилители и АЦП
действительной и мнимой составляющих. Калибровке подлежат коэффициенты
передачи каналов, разность фаз действительной и мнимой составляющих, иден-
тичность амплитудно/фазочастотных характеристик.
Различие коэффициентов передачи квадратурных каналов компенсируется
изменением цены единицы младшего разряда АЦП. Для калибровки возможно
также применение монохроматического пилот-сигнала [440*].
Различие фаз, измеренное по пилот-сигналу, может быть учтено путем введе-
ния поправки в одну из составляющих. Действительно, сигналы на выходе АЦП
при наличии ошибки сдвига фаз имеют вид:
действительная составляющая
wc =t/mcos(<z’(0+^o); (П.20)
мнимая составляющая, сдвинутая на Д(Р
«s = Um sin (<?(0 + <Ро + Д^) = Um Sm(^(0 - % )C0S &<Р +
+{7mcos(^(/) + ^0)sinA^. (П-21)
При малой величине ошибки &q> искажения корректируются поправкой
Ms_corr = Ms - мс sin Д <Р • (11 -22)
539
Радиолокационные системы землеобзора космического базирования
При всех калибровочных операциях должны, по возможности, задаваться па-
раметры аппаратуры РСА, обеспечивающие максимальную точность измерений:
тактовая частота АЦП, разрядность кодирования данных по амплитуде, частота
повторения зондирующего сигнала (кроме режима калибровки угломестной ДНА).
11.7. Калибровка тракта обработки сигналов
и выходного информационного продукта
Факторы, определяющие качество информационного продукта
Процессор сигналов, реализующий синтез апертуры с заданными параметрами фо-
кусирования и амплитудным взвешиванием для снижения уровня и интегральной
энергии боковых лепестков является устройством с известным алгоритмом работы
и прогнозируемым откликом. Контроль его работоспособности, как в процессе
предполетной подготовки, так и в полете, осуществляется с применением кон-
трольных задач, имитирующих условия радиолокационного обзора [261].
В ходе проектирования РСА принимаются технические решения, определяю-
щие основные характеристики выходного информационного продукта и его каче-
ство. Термин «качество» широко употребляется, но не является строго определен-
ным. Этим термином в данном контексте мы будем характеризовать совокупность
особенностей РЛИ, влияющих на изобразительные и дешифровочные свойства
РЛИ, не регламентированные усредненными характеристиками информационного
продукта, такими как пространственное и радиометрическое разрешения, инте-
гральный уровень боковых лепестков.
В частности, к особенностям, снижающим качество РЛИ, относится появле-
ние различных артефактов при наблюдении ярких объектов или фонов с большими
контрастами. Это - «кресты», локальные области подавления, а также дефекты,
связанные с формированием РЛИ (ложные изображения, модуляция яркости и др.).
Технические решения, влияющие на качество РЛИ, точность геометрических
и радиометрических измерений по выходному информационному продукту,
должны включить в себя следующие аспекты проектирования РСА:
• выбор системы координат для ориентирования лучей антенны в азимутальной
плоскости: путевая или гринвичская система координат (ПСК) с поворотом
плоскости лучей, используемая в современных РСА, в отличие от космиче-
ских РСА первого поколения (SIR-A, Radarsat-1, JERS-1). Луч антенны на-
правляют по нормали к вектору путевой скорости с учетом вращения Земли и
прецессии орбиты, т.е. в ноль доплеровской частоты;
• снижение погрешности ориентации ДНА относительно ПСК, обеспечиваемое
системами КА, наличие датчиков (например, астроблока) на борту КА, позво-
ляющих оценить отклонения ДНА от ПСК до единиц угловых минут, измере-
ние некомпенсированной ошибки ориентации и ввод ее значения в алгоритм
синтеза РЛИ;
• использование систем позиционирования GPS или ГЛОНАСС для точного
определения координат КА, особенно для интерферометрической обработки
информации;
540
Глава 11. Калибровка РСА
коррекция миграции дальности, обеспечивающая минимальный уровень пара-
зитной амплитудной модуляции сигнала по синтезируемой апертуре, вызван-
ной компенсацией миграции дальности, особенно в прожекторном режиме
работы РСА;
способ учета смещения спектра доплеровских частот в ДНА (доплеровского
центроида);
снижение отклонения доплеровского центроида от нулевой частоты и зависи-
мости от наклонной дальности при ошибках ориентации КА по курсу и тан-
гажу, применение алгоритмов компенсации уходов во всем диапазоне углов
визирования, что особенно критично в широкозахватных режимах Скансар;
калибровка цифровых аттенюаторов в приемном канале, применяемых для
уменьшения динамического диапазона сигналов в приемном тракте РСА;
выбор формы ДНА в угломестной плоскости и частот повторения зондирую-
щего сигнала, обеспечивающих минимальный уровень неоднозначности
сигналов;
выбор вида модуляции (ЛЧМ, ФМ) и формы спектра зондирующего сигнала,
частотной характеристики приемного тракта, выбор тактовой частоты кванто-
вания сигнала по времени. Предпочтительно использование ЛЧМ-сигналов,
не подверженных искажениям в широких пределах изменения доплеровской
частоты, особенно в прожекторном и скошенном режимах обзора;
согласование динамического диапазона принимаемого сигнала с разрядно-
стью данных, передаваемых по радиолинии (управление цифровыми аттенюа-
торами, разрядность дискретизации сигнала в АЦП, применение методов сжа-
тия информации, блочного адаптивного кодирования и др.);
использование алгоритмов уточнения временной зависимости фазы прини-
маемого сигнала (автофокусировка). Введение поправок в параметры фокуси-
рованного синтеза РЛИ и некогерентного накопления;
выбор алгоритма синтеза апертуры - непрерывный (простая свертка) или же
кадровый (быстрая свертка, гармонический анализ) с коррекцией амплитуд-
ных искажений, вызванных формой азимутальной ДНА, в пределах синтези-
руемого кадра;
выбор формы амплитудной весовой функции сжатия сигналов по дальности и
азимуту (косинусоидальный, Кайзер, Хемминг и др.) для уменьшения инте-
грального уровня боковых лепестков отклика, их критичность к изменениям,
вызванным погрешностями учета формы ДНА, остаточными ошибками дефо-
кусировки, смещениями доплеровской частоты;
выбор оптимальной разрядности вычислений на всех стадиях обработки сиг-
налов, особенно для РСА с бортовой обработкой сигналов;
коррекция геометрических и радиометрических искажений в выходном ин-
формационном продукте;
выбор типа представления данных в выходном продукте, особенно при ра-
диолокационных съемках для пополнения банка данных (в архив). Рекомен-
дуется создание банка комплексных изображений, позволяющих использовать
541
Радиолокационные системы землеобзора космического базирования
данные для интерферометрической обработки (дифференциальная интерфе-
рометрия, поляриметрическая интерферометрия);
• архивирование сопроводительной информации: метеорологической обстановки,
состояния морской поверхности, состояния ионосферы для коррекции ошибок;
• применение методов юстировки интерферометрической базы для однопро-
ходной или многопроходной интерферометрии;
• архивирование данных предполетной наземной отработки РСА с выявлением
параметров, подверженных изменениям во времени (влияние изменений тем-
пературы на фазовые характеристики сквозного тракта, выбор частоты и пр.).
Внутренняя калибровка тракта обработки
Внутренняя калибровка тракта обработки реализуется в процессе предполетной
подготовки методами имитационного моделирования, включающего набор ситуа-
ций, типичных для радиолокационного обзора и позволяющих отработать и отка-
либровать алгоритмы сжатия сигналов по дальности и азимуту, канал ввода слу-
жебной информации и управление алгоритмами коррекции искажений.
Внутренняя калибровка тракта обработки в полете, как было отмечено выше,
обеспечивает только контроль работоспособности соответствующих устройств и
связей управления.
Внешняя калибровка тракта обработки
Внешняя калибровка тракта обработки является процедурой интегральной оценки
работы алгоритмов обработки информации, включая коррекцию искажений. Дан-
ные внешней калибровки должны подтверждать корректность функционирования
всех звеньев РСА, а также выявлять дефекты, для диагностики которых использу-
ются все средства внутренней и внешней калибровки аппаратуры РСА.
Внешняя калибровка тракта обработки и конечного информационного
продукта должны предусматривать:
• калибровку геометрии РЛИ и оценку точности измерения координат объектов,
масштабов, внутренних задержек. Для проверки используются тестовые поли-
гоны, а также сравнение РЛИ с крупномасштабными картами районов съемки;
• радиометрическую калибровку по эталонным отражателям (уголковые отра-
жатели, транспондеры), включая калибровку поляриметрических каналов;
• радиометрическую калибровку по измеренным полигонам природного харак-
тера (тропические леса, тайга);
• измерение формы отклика от точечных объектов (уголковые отражатели,
транспондеры) для уточнения весовых функций обработки и алгоритмов кор-
рекции искажений;
• оценку интегрального уровня помех неоднозначности сигналов (по характер-
ным объектам на местности);
• использование априорной картографической информации (топокарт, цифро-
вых карт рельефа) для коррекции искажений, вызванных изменением площа-
ди элемента разрешения из-за изменения угла падения для поверхностей,
имеющих наклон [314].
542
Глава 11. Калибровка РСА
Эффективным способом контроля формы импульсного отклика РСА, позво-
ляющим получить оперативную оценку разрешающей способности РЛИ, является
применение локального алгоритма автофокусирования PGA, рассмотренного в
подразделе 6.10.8.
Следует отметить, что операции по калибровке РСА весьма трудоемки, тре-
буют выделения специального времени в программе полета, наличия соответст-
вующего наземного обеспечения и создания специальной службы. Так, при экс-
плуатации РСА Radarsat-1 для своевременного формирования и поставки откалиб-
рованных радиолокационных изображений было создано Канадское предприятие
по обработке данных [343].
11.8. Состав наземного оборудования средств калибровки
В состав наземного оборудования и калибровочных средств должны входить:
• точечные пассивные отражатели, например, уголковые отражатели;
• активные калибраторы - приемопередатчики (транспондеры), создающие эта-
лонные цели со строго определенными параметрами;
• поверхностно-распределенные цели с известными и постоянными значениями
УЭПР, к таким эталонным участкам, в частности, относятся участки тропиче-
ского леса в Южной Америке;
• измерительные приемники для калибровки антенн и излучаемой мощности;
• эталонные шумовые передатчики со ступенчатым изменением мощности шу-
ма для калибровки приемного тракта РСА.
К основным техническим характеристикам указанных средств относятся:
• диапазон углов наблюдения, в пределах которого сохраняется заданное зна-
чение ЭПР конкретного калибровочного средства (поэтому уголковые отра-
жатели с треугольными гранями предпочтительнее, хотя и имеют меньшую
ЭПР, чем отражатели с квадратными гранями);
• вероятность и степень искажений диаграммы обратного рассеяния при попа-
дании на его апертуру сигналов, переотраженных от подстилающей поверх-
ности или окружающих объектов (измерительные полигоны в США оборуду-
ют на высохших соляных озерах, уголки устанавливают на высоких опорах,
что обеспечивает малые переотраженные сигналы или их отстройку от основ-
ного сигнала);
• степень выраженности краевых эффектов.
При выборе ЭПР-отражателей необходимо соблюдать следующие условия '.
• минимальная ЭПР должна быть на уровне чувствительности РСА;
• максимальная ЭПР должна обеспечивать насыщение приемника;
• в пределах максимальной и минимальной ЭПР должны быть еще не менее
трех градаций ЭПР;
• для получения статистических оценок с высокой точностью необходимо уста-
навливать серии отражателей, имеющих одинаковую ЭПР;
543
Радиолокационные системы землеобзора космического базирования
• расстояния между отражателями должны не менее чем в 2-3 раза превышать
интервал разрешения РСА;
• размещать эталонные отражатели следует на слабо отражающем фоне — ас-
фальте, бетоне, водной поверхности без волнения (озеро), в пустыне или на
радиопоглощающем покрытии;
• для получения требуемой точности калибровки должно обеспечиваться высо-
кое отношение сигнал/фон.
На рис. 11.16 приведен пример наблюдения миры уголковых отражателей,
снятой с помощью РСА SIR-C/X-SAR в С-диапазоне волн (фрагмент снимка,
рис. 2.1) в ходе экспериментов, проведенных фирмой JPL, США совместно с НПО
машиностроения и НПО «Вега», СССР.
Рис. 11.16. РЛИ аэродрома Жуковский в С-диапазоне волн (SIR-C)
с тестовой миррой (а); увеличенное РЛИ уголковой миры (б)
Активные радиолокационные калибраторы (транспондеры) — устройства при-
нимающие, усиливающие и переизлучающие сигнал с сохранением его когерентно-
сти. Только они позволяют калибровать РСА с низким разрешением (50... 100 м).
Применение усилителя мощности в калибраторе позволяет использовать слабо-
направленные антенны. Давая мощные отметки на РЛИ, транспондеры используют-
ся для радиометрической и геометрической (уточнения параметров орбиты) калиб-
ровки РСА.
Наземные антенные рефлекторы с большой эффективной отражающей пло-
щадью являются эффективной альтернативой традиционно используемым пассив-
ным и активным средствам калибровки [81]. С этой целью конструкция параболи-
544
Глава 11. Калибровка РСА
ческих рефлекторов дорабатывалась с установкой в фокальной плоскости пассив-
ного отражателя в виде проводящего диска или поляризационной решетки. Такая
операция обеспечивает расширение диаграммы обратного рассеяния антенны, что
снижает требования к точности наведения антенны на КА.
В ходе совместных экспериментов, проведенных ОКБ МЭИ, ИРЭ РАН с РСА
ENVISAT, было подтверждено, что поляризационная матрица отражения дорабо-
танной антенны с установленным дисковым отражателем эквивалентна матрице
рассеяния сферы. Антенна с поляризационной решеткой ведет себя как диполь, так
что ЭПР на согласованной поляризации хх равна сгхх = crmax cos4 в , а на перекрест-
ной поляризации ху: сг^ = crmax cos2 #sin2 в 9 где в - угол между ориентацией эле-
ментов поляризационной решетки и плоскостью поляризации радиоволны. ЭПР
антенны с диаметром 4,7 м на волне 5,6 см равен 59 дБм при фазовой стабильно-
сти, составляющей (0,013...0,05) от длины волны РСА.
Поверхностно распределенные эталонные цели — это тропические леса бассей-
на реки Амазонки. Для них характерны следующие параметры: сг°= -5,9 дБ при вер-
тикальной поляризации на частоте 14,3 ГГц, среднее квадратичное отклонение
УЭПР при углах падения 44°, включая суточные изменения - в пределах 0,6.. .0,9 дБ.
11.9. Радиометрическая коррекция радиоголограммы
при работе быстродействующей АРУ
Рассмотренные выше методы калибровки элементов радиолокационного тракта РСА
были отработаны в ходе эксплуатации РСА «Меч-КУ» в составе КА «Алмаз-1». Ап-
паратура «Меч-КУ», краткое описание которой приведено в подразделе 13.3.3, имела
ряд особенностей в технических решениях, которые отличали ее от зарубежных
РСА. Это приводило к отличиям в процедурах калибровки РСА и коррекции иска-
жений в выходном информационном продукте.
Основные технические отличия аппаратуры «Меч-КУ» состоят в следующем:
• использовался зондирующий сигнал в виде мощного короткого импульса,
длительностью 0,07 мкс (или 0,1 мкс) с пьедесталом длительностью 0,8 мкс и
относительным уровнем около минус 25 дБ вместо обычных длинных им-
пульсов с ЛЧМ-модуляцией. При коротком сигнале более заметно влияние
ограничения амплитудной характеристики УПЧ при наблюдении компактных
целей (судов) на равномерном фоне (морской поверхности);
• для сжатия динамического диапазона сигнала в приемнике использовалось
аналоговое АРУ вместо цифровых аттенюаторов, управляемых по командам
или программе с фиксацией их затухания в служебной информации строки
данных для восстановления уровня сигнала перед синтезом РЛИ;
• использовались два режима АРУ: медленный режим АРУ с постоянной вре-
мени 3 с, превышающей время пролета зоны по азимуту, облучаемой антен-
ной РСА (измерительный режим, допускающий внешнюю радиометрическую
калибровку), и режим (основной) быстродействующей АРУ с малой постоян-
18—1492
545
Радиолокационные системы землеобзора космического базирования
ной времени около 30 мкс, позволяющей сжать динамический диапазон сиг-
налов на входе АЦП и улучшить изобразительные свойства РЛИ, но ценой
потери измерительных свойств РЛИ.
В данном разделе рассматривается последовательность процедур, позволяющих устранить
радиометрические искажения в РЛИ при съемках в режиме быстродействующей АРУ и,
тем самым расширить возможности использования архивных материалов радиолокацион-
ной съемки РСА «Меч-КУ» для ряда практических приложений, в том числе для модели-
рования перспективных РСА, а также для формирования тестовых сигналов, применяемых
при сквозном контроле РСА в стендах полунатурного моделирования.
Фрагмент РЛИ, полученный при стандартном синтезе радиоголограммы РСА
«Меч-КУ» в режиме быстродействующего АРУ, показан на рис. 11.17. Отобража-
ются слабо взволнованная морская поверхность 7, участки суши вблизи 2 и вдали 3
от берега, яркие отметки от судов 4, 5, а рядом с ними и сушей, вызванные нели-
нейностями области подавления слабых сигналов от моря 6. На снимке видна
«мертвая зона» 7 в момент излучения импульсов и калибровочные импульсы 8.
Рис. 11.17. Радиолокационные изображения в режиме быстродействующей АРУ.
Стандартный алгоритм синтеза
(Порт Норфолк, США; РСА «Меч-КУ» КА «Алмаз-1»; фрагмент маршрута 2365н, разрешение ~10 м)
Зоны подавления 6 сигналов, отраженных от морской поверхности, имеют
размеры по азимуту, равные ширине области облучении антенной радиолокатора.
По дальности их размер равен размерам яркого объекта (в предположении, что они
превышают разрешение РСА по дальности ~10 м). От корабля 5 наблюдаются две
темные полосы подавления сигналов от моря, вызванные мощными сигналами от
корабельных надстроек.
Рассмотренные эффекты подавления сигналов от моря компактными объек-
тами типичны для РСА с зондирующим сигналом в виде коротких импульсов (см.
также рис. 7.36, а). Для РСА, использующих широкополосные зондирующие им-
пульсы большой длительности, зона подавления по дальности расширяется, но
глубина контраста уменьшается обратно пропорционально отношению ЭПР объек-
та к ЭПР моря в размерах мгновенной зоны облучения. Для участков РЛИ вблизи
береговой линии характеры изображений близки в обоих случаях зондирующего
сигнала.
546
Глава 11. Калибровка РСА
Характерен факт, что при использовании быстродействующей АРУ изобра-
жения суши и морской поверхности (вдали от береговой линии) имеют практиче-
ски одинаковую яркость. Это облегчает обнаружение слабых отметок от малых су-
дов, а также неравномерностей отражения от моря, вызванных течениями и загряз-
нениями. В прибрежной зоне передается реальный контраст вода/суша. При этом
модуляция яркости изображения морской поверхности не обнаруживается (темное
поле), а сигналы от суши попадают в область ограничения.
Структурная схема коррекции радиометрических искажений в цифровой ра-
диоголограмме (ЦРГ), вызванных нелинейностями и работой быстродействующей
АРУ применительно к обработке радиоголограмм РСА «Меч-КУ», приведена на
рис. 11.18. Первым шагом {1} является коррекция нелинейности амплитудной ха-
рактеристики приемника согласно разделу 11.6.
Рис. 11.18. Структурная схема радиометрической коррекции радиоголограммы
Следующий шаг {2} - разделение ЦРГ на фрагменты (32 или 64 отсчета), дли-
тельность которых в 3^4 раза меньше постоянной времени АРУ. Далее следует БПФ
фрагментов ЦРГ по дальности {3} и частотная коррекция искажений спектра сигна-
ла {4}, вызванных пьедесталом в зондирующем импульсе (см. раздел 11.6). Затем
выполняют главные процедуры {5, 6} коррекции радиометрических искажений, вы-
званных применением быстродействующей АРУ. Они основаны на том, что в ли-
нейном тракте с постоянным коэффициентом передачи принятые сигналы от мест-
ности и шумы приемника независимы. Спектр зондирующего импульса, особенно в
случае ЛЧМ-модуляции, имеет практически прямоугольную форму. Частотная ха-
547
Радиолокационные системы землеобзора космического базирования
рактеристика широкополосного УПЧ, как правило, имеет плавные склоны (с «хво-
стами») и полоса спектра шума несколько перекрывает спектр полезного сигнала.
Изменение уровня сигнала в линейном тракте не приводит к изменению спектра
шумов, в том числе и в области «хвоста» частотной характеристики УПЧ. При работе
АРУ по суммарному сигналу изменяется коэффициент усиления УПЧ и меняется
мощность шума, в том числе и в области «хвоста». Поэтому, измеряя в записанной ра-
диоголограмме мощность шумов в этой области, можно оценить изменения коэффи-
циента усиления, вызванные действием АРУ и ввести множитель, компенсирующий
эти изменения в спектре суммарного процесса сигнал+шум, шаги {6, 7}. Далее следует
обратное преобразование Фурье {8} по фрагментам ЦРГ и сшивка фрагментов {9} для
получения выходной радиоголограммы с радиометрической коррекцией. Синтезиро-
ванное по этой радиоголограмме РЛИ приведено на рис. 11.19.
Рис. 11.19. РЛИ, синтезированное по радиоголограмме после радиометрической коррекции
Исправленное РЛИ с устраненными артефактами, вызванными нелинейно-
стями и работой быстродействующего АРУ, передает относительные контрасты
ЭПР наблюдаемых объектов и местности с добавлением мощности шумов. РЛИ
пригодно для проведения внутренней калибровки по встроенным датчикам, опре-
деляющим чувствительность РСА, а также для внешней калибровки по объектам с
известной ЭПР или земным покровам с известной УЭПР, находящимся на снятом
участке или в снимках эталонных участков, полученных с небольшим интервалом
времени относительно данного кадра и обработанных по такой же технологии ра-
диометрической коррекции.
Рассмотренная технология коррекции радиометрических искажений может
быть применена также в сочетании с цифровым АРУ, изменяющим коэффициент
усиления УПЧ по всей строке дальности. Это может понадобиться для коррекции
ограничения сигналов при съемке местности с большим перепадом контрастов -
море/горы, если методы адаптивного квантования, усложняющие бортовую аппа-
ратуру, не применяются.
548
Глава 12
СОВЕРШЕНСТВОВАНИЕ АППАРАТУРЫ
РАДИОЛОКАЦИОННЫХ КОМПЛЕКСОВ ЗЕМЛЕОБЗОРА
КОСМИЧЕСКОГО БАЗИРОВАНИЯ
12.1. Системный подход к проектированию космической аппаратуры
радиолокационного наблюдения
Обобщение отечественного и зарубежного опыта создания и применения космиче-
ской аппаратуры РЛН позволило сформулировать системный подход к проектиро-
ванию космических РСА. Он рассматривает РСА как замкнутую систему радиоло-
кационного наблюдения (СРЛН), включающую в себя бортовой и наземный сег-
менты. В отличие от традиционного подхода к проектированию системы, исходя из
требований конкретного технического задания (ТЗ), этот подход рассматривает
требования ТЗ как минимально необходимые исходные данные. Окончательный
облик аппаратуры, ее характеристики, режимы работы должны определяться на
основе анализа возможностей КА (с учетом ожидаемых запасов по параметрам),
требований потенциальных потребителей, методов дешифрирования и тематиче-
ской обработки информации, ожидаемой товарной стоимости выходного информа-
ционного продукта, перспектив совершенствования элементной базы [226, 493*].
Данный подход рассматривает любые космические РСА как системы двойного
применения и оценивает эффективность их использования для решения военных, на-
роднохозяйственных и научных задач, независимо от основного назначения разраба-
тываемой аппаратуры. В ходе проектирования должны приниматься ключевые ре-
шения (выбор диапазона волн, типа и размеров антенны, типа передатчика, распре-
деление функций космического и наземного сегментов и.т.д.), с учетом которых в
остальные устройства и в режимы работы аппаратуры закладываются технические
запасы, обеспечивающие повышение информативности СРЛН в целом.
Информативность СРЛН трактуется в широком смысле, это:
• повышение качества и информативности получаемых данных;
• повышение оперативности наблюдения;
• расширение круга задач, решаемых с использованием радиолокационной
съемки;
• совместная обработка данных разных информационных каналов;
• совершенствование технологии создания аппаратуры РЛН;
• создание научно-технического задела для совершенствования аппаратуры,
методов обработки информации и проектирования перспективных систем, а
также информационное обеспечение разработок перспективных СРЛН.
19—1492
549
Радиолокационные системы землеобзора космического базирования
Принимаемые технические решения основываются на новейших достижениях в электрон-
ной базе, вычислительной техники, космических технологий. В данной главе рассмотрены
пути построения и тенденции развития основных функциональных устройств, входящих в
состав бортовой аппаратуры радиолокационного землеобзора космического базирования.
Это, в первую очередь, антенные устройства, формирователи опорных частот и сигналов,
передающие и приемные устройства.
Направления перспективных разработок и исследований, как правило, отно-
сятся к созданию РСА космического базирования универсального применения. Но
есть и проекты специализированных РСА для решения частных задач, например,
контроля ледового покрова, измерения подвижек земной коры и т.д. Прорабатыва-
ется облик перспективных бистатических систем дистанционного зондирования,
высокоорбитальных РСА, аппаратуры с применением сверхширокополосных сиг-
налов [352, 354, 427*, 439*].
Продуктивно совмещение аппаратуры для решения разных задач, например,
введения режима зондирования участков морской поверхности, как в РСА ERS-1/2,
ASAR/ENVISAT, скаттерометра, как в РСА ERS-1/2 или совмещение РСА с СВЧ-
радиометром [414].
12.2. Антенные устройства космических РСА
12.2.1. Общие требования к антеннам для космических РСА
Основные требования к антенным устройствам для РСА космического базирования -
это, в первую очередь, большая эффективная площадь, обеспечивающая высокий
энергетический потенциал и снижение помех неоднозначности принимаемых сигна-
лов, конструктивные требования, связанные с размещением антенн на КА и необхо-
димостью их раскрытия после вывода КА на орбиту [21*, 131 *—133*, 206*, 208*].
Используют антенны разных типов (см. гл. 13):
• волноводно-щелевые антенны с неуправляемым лучом;
• фазированные антенные решетки (ФАР) с электронным сканированием бла-
годаря использованию управляемых фазовращателей или коммутаторов запи-
тывающих устройств;
• активные фазированные антенные решетки (АФАР) со сканированием по
углу места и по курсу, а также применением цифрового формирования ДНА
[325,511];
• зеркальные антенны зонтичного типа;
• гибридные зеркальные антенны с облучателями в виде антенной решетки;
• гибридные зеркальные антенны с АФАР-облучателями (АФАР-ГЗА).
В большинстве современных РСА предусматривают поляриметрические режи-
мы зондирования. Они реализуются путем переключения поляризаций излучаемого
сигнала на линейную горизонтальную (Г) или вертикальную (В). Прием ведут двумя
независимыми каналами для волн обеих поляризаций Г и В. Таким же образом осу-
ществляется прием сигналов в случае применения круговой поляризации излучения.
Необходимо обеспечение максимально возможной (по конструктивным соображе-
ниям) площади антенны (особенно для дециметровых диапазонов волн) и наличие
550
Глава 12. Совершенствование аппаратуры радиолокационных комплексов
электронного сканирования в широких пределах по углу места (а также по азимуту -
для работы в прожекторном режиме или в режиме скошенного обзора) [223*, 251].
Перспективными вариантами построения антенных устройств являются ак-
тивные фазированные антенные решетки (в том числе многочастотные АФАР),
гибридные сканирующие зеркальные антенны, а также гибридные зеркальные ан-
тенны с АФАР-облучателями (АФАР-ГЗА).
Принципы построения АФАР широко известны. Поэтому мы остановимся на
особенности технических решений применительно к АФАР для перспективных
космических РСА. Отдельный раздел будет посвящен сканирующим антенным
решеткам для сверхширокополосных видеоимпульсных РСА.
12.2.2. АФАР для космического РСА Х-диапазона волн
Структурная схема РСА с антенным устройством типа АФАР приведена на
рис. 12.1. АФАР многофункционального РСА должна обеспечивать радиолокаци-
онную съемку участков поверхности Земли в обзорном режиме с перенацеливани-
ем полосы съемки, режиме Скансар с программным изменением ширины луча в
вертикальной плоскости, перпендикулярной плоскости орбиты (или продольной
оси КА), а также съемку в прожекторном режиме с электронным управлением по-
ложением луча в наклонной плоскости, касательной к орбите. Во всех режимах
должен обеспечиваться одновременный прием сигналов на двух ортогональных
линейных поляризациях при поочередном изменении поляризации в режиме пере-
дачи. При этом развязка поляризационных каналов должна быть не менее 25 дБ
[38*, 131*].
Рис. 12.1. Структурная схема РСА с антенным устройством типа АФАР
551
Радиолокационные системы землеобзора космического базирования
По требованиям однозначности сигналов по азимуту и дальности при высоте ор-
биты около 500 км размеры антенны должны составлять примерно 6,0x0,8 м. По срав-
нению с антенной TerraSAR-X, имеющей размеры 4,8x0,8 м, желателен запас по час-
тоте повторения зондирующего сигнала с целью расширения полосы обзора в сторону
больших углов падения, а также для увеличения энергетического потенциала.
Для работы РСА в указанных режимах АФАР должна иметь следующие ос-
новные характеристики. Ширина главного лепестка ДН в вертикальной плоскости
(по углу места) должна принимать одно из четырех значений 2, 4, 6 и 8°, а в на-
клонной плоскости (вдоль линии пути) составлять около 0,3°. Сектор электронного
сканирования луча в вертикальной плоскости должен составлять ±10... 15°, а в го-
ризонтальной - несколько единиц градусов. При этом погрешность установки луча
в заданном направлении в этой плоскости не должна превышать нескольких сотых
долей ширины главного лепестка ДН. АФАР в режимах приема и передачи должна
обеспечивать работу с сигналами, ширина спектра которых составляет несколько
сотен мегагерц при средней мощности более 200 Вт и импульсной мощности более
5 кВт. Составные части АФАР должны работать в условиях открытого космоса с
циклическим изменением температуры в широких пределах.
Для работы на двух поляризациях с требуемой развязкой в АФАР целесооб-
разно использовать двухполяризационные излучатели (ДПИ), предложенные в ра-
боте [346], и состоящие из двух отрезков тонкостенного прямоугольного волново-
да, один из которых имеет щели на широкой, а второй - на узкой стенке волновода.
Узкая стенка волновода с продольными щелями примыкает по всей длине к широ-
кой стенке волновода с поперечными щелями. Волноводы с щелями на широкой
стенке обеспечивают работу АФАР на вертикальной поляризации, а волноводы с
щелями на узкой стенке - на горизонтальной поляризации. Такие излучатели име-
ют наименьшие потери по сравнению с другими типами излучателей.
В рассматриваемой АФАР предусмотрены приемопередающие модули (ППМ),
имеющие один передающий и два приемных канала. Число ППМ равно числу
ДПИ, причем каждый ППМ постоянно соединен со своим излучателем. Передаю-
щий канал ППМ поочередно подключается к одному из волноводов соответст-
вующего ДПИ с помощью pin-диодного коммутатора, а приемные каналы подклю-
чаются к этим волноводам одновременно. Управление работой модуля осуществ-
ляется с помощью микропроцессора, входящего в состав ППМ.
Антенная решетка имеет плоское прямоугольное излучающее полотно, длина
которого в раскрытом состоянии составляет около 6 м, причем длинная сторона по-
лотна располагается вдоль линии полета. Полотно состоит из панелей с размерами
около 2,0x0,8 м. В транспортном положении панели укладываются друг на друга.
Силовую основу конструкции составляют плоские трехслойные панели тол-
щиной около 15 мм с металлосотовым заполнением между тонкими дюралевыми
листами. Расположение элементов на обеих сторонах панелей выполнено таким
образом, чтобы минимально ослаблять конструкцию сквозными отверстиями для
прокладки кабелей и жгутов. Со стороны АФАР, не закрываемой экрановакуумной
тепловой изоляцией (ЭВТИ), расположены антенные модули, состоящие из ДПИ и
552
Глава 12. Совершенствование аппаратуры радиолокационных комплексов...
ППМ. С обратной стороны АФАР, закрываемой ЭВТИ, располагаются источники
питания, блоки управления и контроля.
На основе исследований радиотехнических характеристик АФАР, выполнен-
ных в ОАО «Концерн «Вега» совместно с ОАО «ВПК «НПО машиностроения»,
разработан проект АФАР, размещаемой на борту малого космического аппарата,
облик которого представлен на рис. 12.2.
Рис. 12.2. РСА X-диапазона волн с АФАР на малом космическом аппарате
Характеристики приемопередающих модулей, их параметры, а также инте-
гральные параметры АФАР X- и 1-диапазонов волн и расчетные формы диаграмм
направленности приведены в [131*, 132*].
12.2.3. Совмещенная двухдиапазонная АФАР 1- и P-диапазонов волн
Разработка дециметровых каналов бортового комплекса «Спинар-1ДМ» для кос-
мического аппарата «Аркон-2» НПО им. С.А. Лавочкина [125, 548] привела к целе-
сообразности создания совмещенного двухдиапазонного антенного полотна с
кратными рабочими длинами волн 2=23 см и 2=69 см [131*, 132*]. Размеры антен-
ны составляют 12x3,3 м.
Антенное устройство представляет собой совмещенную в единой конструк-
ции АФАР. Решетки L- и P-диапазонов могут работать на вертикальной и горизон-
тальной поляризацях. Излучатели L- и P-диапазонов размещены на двух склады-
вающихся панелях с размерами в раскрытом состоянии 12,0x3,3 м. Излучатели
Z-диапазона представляют собой совмещенные маловыступающие крестообразные
553
Радиолокационные системы землеобзора космического базирования
Рис. 12.3. Двухполяризационные излучатели
L- и Р-диапазонов волн
блюдения (маршрутный, Скансар, про-
излучатели резонаторного типа с полос-
ковыми возбудителями горизонтальной
7 и вертикальной 2 поляризаций (пока-
заны на рис. 12.3, а), Излучатели Р-диа-
пазона (рис. 12.3, б) - совмещенные в
одной конструкции вибраторная 3 и ре-
зонаторная антенны с полосковыми воз-
будителями 2.
Фазированная антенная решетка L-
и P-диапазонов должна обеспечивать
перенацеливание луча по углу места в
заданный район радиолокационной
съемки Земли в различных режимах на-
жекторный и др.). Для этого используется около 400 приемопередающих модулей
(ППМ), каждый из которых состоит из /ли-диодного фазовращателя, токовых клю-
чей, схемы контроля микропроцессора и соответствующей системы управления.
При этом ФАР имеет следующие расчетные значения параметров: коэффициент
усиления в зависимости от режима от 33 до 35 дБ, ширина ДН по уровню минус
3 дБ в горизонтальной плоскости 1,2° и в вертикальной плоскости (в зависимости
от режима) от 5 до 7,5°, сектор электронного сканирования в горизонтальной плос-
кости 6° и в вертикальной плоскости 23°. Для P-диапазона в виду в три раза боль-
шей ширины луча его положение фиксировано.
Антенная решетка P-диапазона имеет расчетный коэффициент усиления 26 дБ,
ширину главного лепестка ДН по уровню минус 3 дБ в горизонтальной плоскости
3,6° и в вертикальной плоскости 11°.
12.2.4. Гибридная зеркальная антенна S-диапазона волн для РСА
в составе малого космического аппарата
Антенное устройство космического РСА 5-диапазона, размещаемого на борту мало-
го космического аппарата, выполнено в виде гибридной зеркальной антенны (ГЗА),
состоящей из рефлектора и электронно-управляемой решетки из 32 излучателей,
расположенной в фокальной плоскости рефлектора вдоль одной из осей зеркала. Ре-
шетка излучателей может поворачиваться на 90°, позволяя реализовать сканирова-
ние лучом в вертикальной или горизонтальной плоскостях. ГЗА позволяет устанав-
ливать луч в заданном секторе углов в любое из 25 угловых положений с угловым
интервалом, равным 0,2 от ширины главного лепестка диаграммы направленности
(ДН) по уровню минус 3 дБ, и обеспечивает быстрое перенацеливание луча в раз-
личных режимах радиолокационной съемки, в том числе и в прожекторном режиме.
Гибридная зеркальная антенна имеет следующие расчетные значения пара-
метров: коэффициент усиления на средней частоте 32 дБ, угловой сектор сканиро-
вания 4,5° в выбранной плоскости, ширина ДН по уровню минус 3 дБ составляет
1°, уровень пересечения парциальных ДН 0,1 дБ, уровень ближних и дальних бо-
ковых лепестков ДН не более минус 20 и минус 25 дБ соответственно.
554
Глава 12. Совершенствование аппаратуры радиолокационных комплексов...
Рефлектор ГЗА является вырезкой из параболоида с фокусным расстоянием
4 м, имеет шестигранный контур с диаметром вписанного круга 6 м и представляет
собой складывающуюся ферменную конструкцию, на которой закреплена метал-
лическая сетка. Рефлектор антенны выполнен из сетчатого полотна (рис. 12.4). В
раскрытом состоянии он имеет площадь раскрыва 32 м2, среднеквадратичное от-
клонение от поверхности параболоида не более 3 мм. Масса ГЗА 86 кг, из которых
51 кг составляет масса рефлектора. Общий вид антенны на испытательном стенде в
безэховой камере показан на цветной вкладке в конце книги рис. Ц.8.
Рис. 12.4. Рефлектор гибридной зеркальной антенны космического РСА
Рис. 12.5. Функциональная схема переключателя зон обзора
555
Радиолокационные системы землеобзора космического базирования
Электронное управление лучом ГЗА осуществляется с помощью переключа-
теля зон обзора, включающего восемь полупроводниковых СВЧ-переключателей
на четыре канала ПР-4 и полосковый делитель 1:8 (рис. 12.5). Выходы переключа-
телей соединены с входами 32 излучателей. Соответствие входов излучателей и
выходов переключателей ПР-4 показано цифрами 1 ...32.
Для формирования каждого из лучей к приемопередающему тракту РСА под-
ключается группа из восьми соседних излучателей. Переключатель зон обзора рас-
положен вблизи решетки излучателей и соединен с РСА складывающимся волно-
водным трактом длиной 7,3 м, включающим три вращающихся соединения.
В рассмотренной антенне плоскости поляризации на передачу и прием (ГГ
или ВВ) реализуются путем разворота линейки с излучателями. В патенте [172*]
предложена модификация схемы облучающего устройства с реализацией поляри-
метрических (ГГ+ГВ или ВВ+ВГ) режимов работы.
12.2.5. Гибридная зеркальная антенна с АФАР-облучателем
Дальнейшее развитие гибридных зеркальных антенн состоит в использовании в
облучателе распределенной системы в виде приемопередающих модулей (ППМ).
Такой вариант имеет значительные преимущества перед рассмотренным выше, по-
скольку исключаются потери при суммировании мощности сосредоточенного пе-
редатчика и при коммутации лучей, возможно более плавное сканирование лучом
за счет изменения не только фазового, но и амплитудного распределения поля по
апертуре облучателя. Поляриметрический режим работы антенны осуществляется
путем установки переключателей поляризаций внутри ППМ. Конструкция антенны
значительно упрощается, так как устраняется СВЧ-тракт между передатчиком и
входами антенного переключателя, уменьшаются общие потери в тракте.
Применение гибкого управления фазой и амплитудой сигналов в ППМ (в от-
личие от обычных АФАР с управлением только фазой сигналов) позволяет в такой
гибридной зеркальной антенне (АФАР-ГЗА) корректировать ошибки геометрии
антенны и расширять углы сканирования ДНА.
В АФАР-ГЗА высокая направленность достигается за счет рефлекторов
больших размеров, а электронное сканирование луча в пределах единиц градусов
обеспечивается облучателями в виде антенных решеток. При больших размерах
рефлектора такой сектор сканирования может составлять десятки и даже сотни
ширин луча, а облучатель должен формировать поле, существенно отличающееся
от сферической волны [58, 103, 206*].
Известны два основных типа гибридных зеркальных антенн [103]. В ГЗА пер-
вого типа возбуждается вся решетка, а на зеркале используется лишь часть поверх-
ности, формирующая луч, отклоненный в определенном направлении. В гибрид-
ных антеннах второго типа (АФАР-ГЗА) поверхность рефлектора используется
полностью, а формирование отклоненного луча обеспечивается за счет возбужде-
ния определенного участка (кластера) на облучающей решетке. При сканировании
кластер перемещается, а его размеры и закон возбуждения - изменяются.
В отличие от ГЗА первого типа гибридные антенны второго типа (АФАР-ГЗА)
обладают высоким коэффициентом использования поверхности (КИП) рефлектора,
556
Глава 12. Совершенствование аппаратуры радиолокационных комплексов
что определяет их преимущества при создании антенн с дорогостоящими крупно-
габаритными раскладными рефлекторами. Однако они требуют применения облу-
чающих решеток, имеющих управление, как фазами, так и амплитудами сигналов в
каналах.
Для этого в ППМ, входящих в состав АФАР-облучателя рефлектора, в пере-
дающем канале применяют СВЧ-усилители с регулировкой выходной мощности.
Наличие в передающих и приемных каналах ППМ фазовращателей и аттенюаторов
позволяет включать нужный кластер и формировать внутри него требуемое ампли-
тудно-фазовое распределение.
При проектировании АФАР-ГЗА для космического РСА можно применять
офсетную конструкцию рефлектора и располагать полный профиль рефлектора в
вертикальной (угломестной) плоскости, где требуется максимальный угол скани-
рования ДНА, а сечение с вырезкой параболоида - вдоль линии пути, где углы
сканирования составляют несколько размеров ДНА. Общий вид АФАР-ГЗА для
двухчастотного космического РСА «Смотр-SP» приведен в подразделе 13.5.12.
12.2.6. Активные антенные решетки и их элементы
для видеоимпульсных РСА
Применение сверхкоротких видеоимпульсных сигналов (СКВИ) открывает пер-
спективу создания РЛС нового поколения. Как уже отмечалось, преимущества ви-
деоимпульсных РСА (БИРСА) состоят в том, что использование широкого спектра
зондирующего импульса от метрового диапазона до диапазонов традиционных
РСА позволяет получить новую информацию об объектах, в том числе и под рас-
тительным покровом. Важными проблемами, которые приходится решать при соз-
дании антенных устройств для БИРСА, являются выбор типа излучателя, комплек-
сирование его в сканирующую антенную решетку и обеспечение управления лучом
посредством изменения задержек между излучателями. Применительно к космиче-
ским РСА задача осложняется тем, что площадь антенны должна обеспечивать од-
нозначность передачи сигнала, а объем антенного устройства зависит от протя-
женности излучателей по нормали к площади антенны [21*, 247*].
Проведенный анализ возможностей реализации БИРСА космического бази-
рования показал, что оптимальный диапазон частот спектра зондирующего сигнала
находится в пределах от 160...200 до 1300 МГц [272, 427*]. Такой выбор нижней
границы спектра позволяет реализовать подповерхностное зондирование, не слиш-
ком увеличивая размеры антенны БИРСА. Верхняя граница включает используе-
мый в обычных узкополосных РСА Z-диапазон волн (и перспективный P-диапа-
зон), что позволит сравнивать результаты широкополосного и узкополосного зон-
дирования (радиолокационная спектрозональная съемка), расширяя тем самым ин-
формацию об объектах наблюдения.
Современные полупроводниковые приборы позволяют генерировать импуль-
сы длительностью порядка наносекунды и менее. Наряду с высокочастотными со-
ставляющими спектр видеоимпульса включает и большую часть энергии в низко-
частотной области сотен мегагерц. Благодаря таким свойствам видеоимпульсный
557
Радиолокационные системы землеобзора космического базирования
локатор имеет одновременно высокую как разрешающую, так и проникающую
способность и является альтернативой многочастотному радиолокационному ком-
плексу, состоящему из набора узкополосных радиоимпульсных локаторов с раз-
личными несущими частотами. Это позволяет существенно улучшить информаци-
онные возможности радиолокационного зондирования, в том числе и для систем
космического базирования двойного назначения.
Одним из ключевых элементов видеоимпульсного радиолокатора является ан-
тенное устройство, обеспечивающее излучение и прием СКВИ. Анализ показал,
что для реализации потенциальных возможностей такой аппаратуры антенное уст-
ройство видеолокатора должно представлять собой многоэлементную антенную
видеоимпульсную сканирующую решетку. Она позволит обеспечить большой уро-
вень излучаемой мощности путем сложения в пространстве СКВИ от многих гене-
раторов видеоимпульсов (ГВИ), подключаемых к излучателям решетки. Перспек-
тивой является совмещенная видеоимпульсная решетка, работающая в режимах
излучения и приема, аналогичная классической АФАР.
Сверхширокая полоса СКВИ заставляет отказаться от традиционного для ра-
диоимпульсных ФАР и АФАР управления сканированием с помощью фазовраща-
телей, устанавливаемых в приемопередающих модулях, а требует замены их на
управляемые линии задержки.
Излучатели сверхкоротких видеоимпульсных сигналов. При выборе типа
излучателей принимались в расчёт следующие соображения:
• максимальная эффективность излучения;
• минимальная масса и технологичность изготовления;
• наличие научно-методической и алгоритмической базы проектирования излу-
чателей данного типа, пригодной для инженерных разработок.
Рассмотрим кратко основные типы антенн, которые могут быть применены
для создания сканирующей видеорешетки: ТЕМ-рупоры и их модификации, зер-
кальные импульсные антенны, пазовые антенны.
ТЕМ-рупоры. Для работы со сверхкорот-
кими импульсными видеосигналами пригодна
специально разработанная конструкция ТЕМ-
рупора (рис. 12.6) или его модификации в виде
диполя V-формы. Экспериментально подтвер-
ждено, что излучатель указанной конструкции
имеет полосу частот от 200 МГц до 1,6 ГГц
по критерию коэффициента отражения на вхо-
де менее 0,1. Эффективная апертура диполя в
указанной полосе сохраняется на уровне
0,04 м2 при физическом размере 0,11 м. Это со-
ответствует коэффициенту использования по-
верхности 0,36.
Полоса частот ТЕМ-рупора практически соответствует требованиям их при-
менения в антеннах для БИРСА. Для его расчета имеется методическая база инже-
Рис. 12.6. Общий вид ТЕМ-рупора
558
Глава 12. Совершенствование аппаратуры радиолокационных комплексов
нерного проектирования, но в отношении технологичности конструкции он усту-
пает рассмотренному далее пазовому излучателю Вивальди.
Метод синтеза широкополосного проволочного вибратора с распределенной
резистивной нагрузкой путем вариации его формы приведен в [495]. Этот вибратор
(типа «ножницы») похож на простой V-диполь, но отличается от него криволиней-
ной формой плеч, изогнутых внутрь. Выбором формы плеч вибратора и закона из-
менения резистивной нагрузки можно максимизировать ширину полосы частот.
Вариант V-диполя с резистивной нагрузкой на концах проводов, представ-
лявшей собой линейно нарастающее сопротивление от 2/3 до 40 Ом на участках от
0,8£н. до Lw длины проводов вибратора, имеет КУ 5,7 дБ и вариацию КСВН менее
±1,25 дБ на уровне 1,7 в полосе Д/е(1...18) ГГц. Теоретические результаты под-
тверждены экспериментально на масштабной модели. Измерения КСВН проведе-
ны с характеристическим импедансом линии возбуждения 330 Ом.
Такой тип СШП-антенны имеет необходимую величину перекрытия частот
рабочего диапазона и при соответствующих габаритах может удовлетворить при-
веденным выше для видеоимульсных антенных решеток требованиям, но наличие
в его конструкции поглощающих элементов уменьшает эффективность излучения.
Зеркальные антенны. Специально для работы с СКВИ-сигналами и потому на-
званные импульсными зеркальными антеннами предложены в [349]. Эти антенны со-
стоят из возбудителя поперечной электромагнитной волны (ТЕМ-возбудитель), при-
соединенного через нагрузку к краям зеркала. ТЕМ-возбудитель подобен описанному
выше V-диполю, плечами которого являются проводники конической формы, возбуж-
даемые в вершинах конусов. Нагрузка в местах соединения ТЕМ-возбудителя с зерка-
лом выбирается так, чтобы обеспечить режим бегущей волны для генератора.
В зеркальных антеннах достигнута величина перекрытия частот q- fn//L = 80,
что даже превышает предъявляемые к ним требования, но по критериям сложности
конструкции и отсутствию методики проектирования эти антенны уступают пазо-
вым излучателям Вивальди.
Пазовые антенны. Пазовые антенны (ПА) относятся к классу антенн бегу-
щей волны и в печатном исполнении представляют собой расширяющуюся щель
той или иной формы в тонком листе проводника на подложке из диэлектрика или
без него при конечной толщине металла. Возбуждение излучателя осуществляется
в узкой части щели. Для сокращения продольной длины антенны ее узкая часть
может заканчиваться плоским резонатором, обычно круглой формы.
Исследованы ПА с различной формой щели - линейно расширяющейся, рас-
ширяющейся экспоненциально или комбинированной (рис. 12.7). Антенны этого
типа проанализированы как приближенно путем замены непрерывно изменяющей-
ся ширины щели совокупностью ступенчатых отрезков постоянной ширины [356],
так и строгими методами [355].
Экспериментально установлено, что минимальную ширину ДН имеет антенна
с постоянной шириной щели, а максимальную - с экспоненциальной щелью, одна-
ко этот эффект заметным образом проявляется при длине антенны L в несколько
длин волн. Основное ограничение накладывается на максимальную ширину щели
559
Радиолокационные системы землеобзора космического базирования
W, определяющую нижнюю граничную частоту^. Эти величины связаны прибли-
женным соотношением^ (ГГц) = 18/7/ (см) в свободном пространстве.
Рис. 12.7. Вид различных вариантов пазовых антенн
Особенностью антенн этого типа является продольный характер излучения -
вдоль оси симметрии щели, в сторону ее расширения. В антенне распространяется
бегущая волна типа поверхностной с фазовой скоростью Уф, меньшей скорости
света в вакууме. При протяженности щели несколько длин волн в воздухе пазовая
антенна может формировать ДН с шириной около 15° по уровню минус 3 дБ и ко-
эффициентом усиления до 17 дБ. Укорочением длины антенны можно расширить
её ДН, но при этом согласование антенны несколько усложняется.
Плоская конструкция излучающего элемента позволяет удобным образом ин-
тегрировать его с цепями возбуждения на одной подложке и допускает близкое
расположение подобных элементов в антенных решетках, позволяя уменьшить
уровень боковых лепестков. Кроме того, несмотря на плоскую геометрию, пазовые
антенны могут в принципе обеспечивать ДН равной ширины как в Е- (параллель-
ной плоскости щели), так и в //-плоскости.
Ширина полосы рабочих частот пазовых антенн может превышать 2-3 октавы.
Входной импеданс Zant антенн на тонких подложках наиболее обстоятельно
исследован теоретически и экспериментально для антенн с линейно расширяю-
щейся щелью. Для углов раствора щели (5... 15)° он равен около 80 Ом, слабо из-
меняясь в рабочей полосе частот. При длине антенны более четырех длин волн ве-
личина Zant слабо зависит и от формы щели, что является еще одним достоинством
пазовых антенн. Приведенная величина Zant позволяет сравнительно просто согла-
совать ПА с 50-омными фидерными трактами в следующей конструкции - две ан-
560
Глава 12. Совершенствование аппаратуры радиолокационных комплексов...
тенны располагаются параллельно диэлектрическими подложками внутрь и возбу-
ждаются полосковой линией с согласующим короткозамкнутым или разомкнутым
шлейфом, размещаемыми между подложками поперек узкой части щели.
Для уменьшения продольного размера пазовой антенны короткозамкнутую
часть щели заменяют резонатором обычно круговой формы по одну сторону от
точки возбуждения. Реактивный импеданс такого резонатора при определенном
выборе его размера в значительной мере компенсирует реактивный входной импе-
данс антенны. Экспериментально было установлено, что периметр резонатора, при
котором наблюдается наилучшее согласование антенны с фидерным трактом,
очень близок к длине излучающей части щели. При этом условии импульс напря-
жения, отражающийся от короткозамкнутой части резонатора и изменяющий свою
полярность на противоположную, компенсируется в точке питания отраженным от
разомкнутой части щели импульсом, не изменяющим своей полярности.
Антенны данного типа представляются наиболее приемлемыми в качестве ан-
тенных элементов бортовых антенных устройств для БИРСА по причине как тех-
нологичности их конструкции, отсутствию в их составе поглощающих элементов,
так и наличию методов их расчета. Именно такие излучатели были наиболее об-
стоятельно исследованы теоретически и экспериментально, а также проверены в
составе макета видеоимпульсной сканирующей антенной решетки.
Передающий канал видеоимпульсной сканирующей антенной решетки.
Кратко рассмотрим построение передающего и приемного каналов видеоимпульс-
ной сканирующей антенной решетки с аналоговым управлением задержкой видео-
импульсов. На рис. 12.8 представлена структурная схема передающей видеоим-
пульсной антенны. Сигнал генератора импульсов запуска (ГИЗ) с помощью развет-
вителя сигнала запуска (Р) делится по числу п излучателей (каналов) антенной ре-
шетки. В каждом канале решетки импульс запуска задерживается на требуемую
величину с помощью управляемого устройства дискретных задержек (УДЗ). За-
держанные сигналы подаются на входы генераторов видеоимпульсов (ГВИ), выхо-
ды которых подключены к антенным излучателям.
Установка требуемых величин задержек в каналах решетки в зависимости от
заданного направления луча и выдача их устройствам дискретных задержек произ-
водится программируемым устройством управления ПУУ.
Генератор импульсов запуска, разветвитель, устройства дискретных задержек
и программируемое устройство управления составляют основные элементы систе-
мы управления лучом СУЛ передающей видеоимпульсной сканирующей антенной
решетки.
Передающие видеоимпульсные антенны, как и АФАР, в зависимости от на-
значения могут иметь от десяти до нескольких тысяч каналов. Требуемый сектор
обзора может быть двумерным и достигать в одном измерении более 100°. Если
требуется иметь узкую диаграмму направленности в широком двумерном секторе
обзора, то число требуемых дискретных положений ДН в этом секторе может со-
ставлять несколько десятков тысяч.
561
Радиолокационные системы землеобзора космического базирования
Рис. 12.8. Структурная схема передающей активной видеорешетки:
ГИЗ - генератор импульсов запуска; Р - разветвитель 1 УДЗ - устройство дискретных задержек; ПУУ -
программируемое устройство управления; ГВИ - генератор видеоимпульсов; И - излучатель; СУЛ - систе-
ма управления лучом
Приёмный канол видеоимпульсной сканирующей антенной решетки.
Принципиально в видеоимпульсной антенне можно использовать аналоговые элек-
тронные, оптоэлектронные, а также цифровые устройства задержки с синхронным
суммированием сигналов для управления направлением приема отраженных сиг-
налов. Рассмотрим оптоэлектронный вариант как наиболее перспективный для
реализации. Структурная схема такой антенны приведена на рис. 12.9. Сигналы,
принимаемые излучателями каналов решетки, усиливаются малошумящими уси-
лителями (МШУ). Сигнал на выходе МШУ в каждом канале решётки преобразует-
ся из радиодиапазона длин волн в оптический диапазон сверхширокополосными
передающими оптическими модулями (ПОМ). Задержки создаются в результате
распространения светового потока, модулированного радиосигналом, через опти-
ческую линию устройства дискретных задержек (ОУДЗ). Далее оптические сигна-
лы суммируются с заданными временными задержками (модуль ОС) и преобразу-
ются из оптического в радиодиапазон сверхширокополосным приемным оптиче-
ским модулем (ПрОМ).
Для исключения потерь в элементах СУЛ (ПОМ и ПрОМ) желательно в этих
элементах производить усиление сигнала на 10...20 дБ в каждом канале. Шумовые
562
Глава 12. Совершенствование аппаратуры радиолокационных комплексов...
характеристики элементов СУЛ (в частности, ПОМ и ПрОМ) не должны ухудшать
чувствительность приемной антенны в целом.
Примером оптоэлектронного устройства дискретных задержек (ОУДЗ) может
служить программируемое интегрально-оптическое устройство задержек, разрабо-
танное, в частности, и для применения в составе антенных решеток. Оно является 8-
разрядным и, следовательно, возможное количество значений задержки равно 256. В
каждом из разрядов оптический модулированный сигнал направляется бинарным
переключателем по одному из двух интегрально-оптических фидеров. Длины фиде-
ров выполняются различными, так что на выходе разряда образуется одна из задан-
ных временных задержек. Дискрет задержки может составлять от 1 до 8,8 пс, что со-
ответствует максимальному значению задержки 2245 пс. Оптические потери на ра-
бочей длине волны 1,55 мкм не превосходят 10 дБ. Напряжение питания составляет
5 В, мощность потребления не превышает 2 Вт. Рабочая температура от минус 40 до
85 °C. Габариты не превосходят 10 см3, масса составляет не более 0,1 кг.
На основе существующих элементов может быть создана СУЛ приемного ка-
нала видеоимпульсной антенны с шириной полосы сигнала до нескольких ГГц, ко-
личеством каналов до нескольких десятков, числом независимых лучей в секторе
обзора до тысячи. При этом должна обеспечиваться точность задания задержек до
нескольких десятков пикосекунд в диапазоне до нескольких десятков наносекунд
при времени переключения лучей около 1 мс.
Рис. 12.9. Структурная схема приемного канала видеоимпульсной антенны
с оптоэлектронным управлением лучом
Для эффективной работы СУЛ с большим числом каналов, разнесенных по
апертуре больших размеров, должен быть устранен разброс значений задержек
сигналов в каналах антенны до их суммирования. Кроме того, при эксплуатации
антенны задержки сигналов в активных и пассивных элементах могут меняться из-
за температурных, механических и других факторов. Разброс задержек может ком-
563
Радиолокационные системы землеобзора космического базирования
пенсироваться как дополнительными электронными или оптическими настроеч-
ными устройствами, так и основными УДЗ СУЛ. В последнем случае в УДЗ, кроме
разрядов, обеспечивающих сканирование луча, могут потребоваться дополнитель-
ные разряды для настройки и стабилизации задержек при эксплуатации; СУЛ мо-
жет дополнительно содержать устройства измерения задержек в каналах.
12.2.7. Перспективы развития антенных систем для РСА
космического базирования
Анализируя тенденции развития систем радиолокационного землеобзора космиче-
ского базирования, можно сделать вывод о приоритетных направлениях в совер-
шенствовании антенной техники. Антенны РСА должны обеспечивать поляримет-
рическое зондирование с широкими углами электронного сканирования для повы-
шения оперативности наблюдения. Должны рассматриваться конструктивные ре-
шения, пригодные для размещения на малых космических аппаратах и «микро-
спутниках», а также в многочастотных радиолокационных комплексах, исполь-
зующих зондирование как в коротковолновой части СВЧ-диапазона волн (X и Q,
так и в дециметровых диапазонах волн (5, L и Р).
Совершенствование антенной техники базируется на рассмотренных в гл. 13
технических решениях, реализованных в действующей аппаратуре и проектных
проработках.
Основными перспективными направлениями в развитии антенных уст-
ройств для РСА следует считать:
• создание и совершенствование поляриметрических многосекционных актив-
ных фазированных антенных решеток с цифровым выходом сигнала, одночас-
тотных и совмещенных многочастотных;
• создание и совершенствование легких, компактных в размещении на КА гиб-
ридных зеркальных антенн с излучателями типа АФАР для работы в составе
малых космических аппаратов. Так же, как и для АФАР, должны предусмат-
риваться поляриметрическое зондирование, многочастотность, цифровой вы-
ход сигнала;
• совершенствование комплектующих элементов АФАР - приемопередающих
модулей, источников питания, процессоров управления, СВЧ распредели-
тельных систем, в том числе и с применением оптоэлектронных устройств;
• разработку видеоимпульсных антенных решеток для видеоимпульсных РСА
космического базирования.
В качестве прототипов по многочастотным АФАР могут рассматри-
ваться'.
• технические решения, реализованные в трехчастотном бортовом комплексе
SIR-C/X-SAR многоразового космического корабля Space Shuttle, в котором
на раме размером 10x3 м2 размещены независимо три антенны - АФАР С- и
1-диапазонов волн и щелевая антенна %-диапазона волн [521]. Такое конст-
руктивное решение облегчает отработку антенны, ее модификацию, замену
вышедших из строя элементов при подготовке аппаратуры к очередному за-
пуску на орбиту. Уникальный вариант модификации антенной системы с ус-
564
Глава 12. Совершенствование аппаратуры радиолокационных комплексов...
тановкой приемных антенн X- и С-диапазонов на выдвижной 60-метровой
штанге для проведения топографической съемки - программа SRTM [521],
по-видимому, сложен в повторении и может быть успешно заменен тандемом
спутников на близких орбитах [276, 317];
• проектные проработки АФАР %-диапазона волн (см. подраздел 12.2.2), а так-
же совмещенной антенны дециметровых L- и P-диапазонов волн для БРЛК
«Спинар-1ДМ» космического аппарата «Аркон-2» (см. подраздел 12.2.3).
Технический задел по гибридным зеркальным антеннам базируется на ГЗА с
электронно-управляемой решеткой облучателей РСА для малого КА «Кондор-Э», а
также на проработках АФАР-ГЗА для низкоорбитальных и высокоорбитальных
РСА [103, 173*].
12.3. Генераторы частот и сигналов для космических РСА
К генераторам опорных частот и сигналов, используемым в космических РСА,
предъявляются жесткие требования по стабильностям частот, что обеспечивает по-
вторяемость материалов радиолокационной съемки для их интерферометрической
обработки. Для получения высокой разрешающей способности по дальности в до-
ли метра требуются сигналы с шириной спектра излучения до 200...500 МГц. Тре-
буемый энергетический потенциал достигается применением широкополосных
сигналов с длительностью порядка 20...40 мкс, которая зависит от выбранного пе-
риода повторения зондирующих импульсов (200...700 мкс в зависимости от гори-
зонтального размера антенны) и допустимой для выходных импульсных транзи-
сторов скважности работы (обычно >10). Как уже отмечалось, в космических РСА
используют зондирующие сигналы преимущественно с линейной частотной моду-
ляцией (ЛЧМ). Для исключения появления в импульсном отклике РСА ложных
боковых лепестков при коэффициенте сжатия сигналов по времени —10000 необ-
ходимо, чтобы фазовые искажения в законе ЛЧМ-модуляции не превышали еди-
ниц градусов и обеспечивался низкий уровень шумов в паузе между импульсами
[243*, 244*, 305, 440*].
Экономное расходование электроэнергии солнечных батарей и емкости бу-
ферного аккумулятора требует изменения мощности излучения при съемке на
больших и малых дальностях в пределах полосы обзора. Это достигается измене-
нием скважности излучения путем изменения длительности зондирующего им-
пульса. Полоса сигнала при этом не меняется, что требует формирования импульса
с другой крутизной изменения ЛЧМ.
Предусматривается широкая номенклатура генерируемых сигналов, нужных не
только для разных режимов съемки, но и для применения методов подавления помех
неоднозначности сигналов, рассмотренных в гл. 8. Так, например, формируются
зондирующие сигналы с манипуляцией начальной фазы [0,±я] по псевдослучайной
последовательности с возрастающим и ниспадающим законами изменения ЛЧМ.
Изменение частот и параметров сигналов (длительность импульса, закон
ЛЧМ, фаза излучения, частота повторения и др.) достигается путем цифрового
управления синтезатором частот и сигналов по программе или по уточненным бал-
листическим данным, получаемым от бортового компьютера КА.
565
Радиолокационные системы землеобзора космического базирования
В [243*] описан синтезатор частот и широкополосных ЛЧМ-сигналов 5-диа-
пазона, входящий в состав РЛС с синтезированной апертурой для обзора земной по-
верхности. Синтезатор построен на основе быстродействующих микросхем ПЗУ,
ПЛИС, ЦАП импортного производства и умножителей частоты. Разрабатываются и
отечественные микросхемы - цифровые вычислительные синтезаторы (ЦВС), квад-
ратурные модуляторы (КМ) и схемы фазовой автоподстройки частоты (ФАПЧ) с
аналогичными параметрами.
В связи с появлением новых микросхем ЦВС со встроенными в них 10... 14-
разрядными цифроаналоговыми преобразователями (ЦАП), квадратурными моду-
ляторами, 5-диапазона волн [121*, 122*], а также малогабаритными керамическими
полосовыми фильтрами (ПФ) СВЧ-диапазона [524] возникают и новые возможно-
сти разработки синтезаторов частот и широкополосных сигналов с улучшенными
электрическими и массогабаритными характеристиками. Имеются данные о вы-
пуске ЦВС с тактовой частотой до 2 ГГц [122*].
Используя эту элементную базу, можно относительно просто синтезировать
квадратурные сигналы на видеочастотах в полосах 0... 120 МГц (AD9854),
0... 160 МГц (AD9952 при использовании предусмотренной в ней возможности
синхронной работы двух таких микросхем) и до 400 МГц (AD9858 без квадратур).
Наиболее простым способом получения широкополосных ЛЧМ-сигналов с девиа-
цией частоты до ±160 МГц без ее умножения является их квадратурный синтез на
видеочастоте и последующий перенос на несущую частоту.
На рис. 12.10 приведена структурная схема синтезатора частот и широко-
полосных ЛЧМ-сигналов S-диапазона волн [244*] на основе ЦВС типа AD9854,
КМ типа STQ-3016 и ПЛИС типа EPF10K30E, который обеспечивает:
• синтез малошумящих, спектрально чистых, гетеродинных СВЧ и промежу-
точной частоты непрерывных колебаний для приемного устройства РЛС;
• синтез ЛЧМ-сигналов для передающего устройства с возможностью управле-
ния девиацией частоты (до ±100 МГц), начальной фазой, знаком скорости из-
менения частоты в ЛЧМ-импульсе и его длительностью.
Рис. 12.10. Структурная схема синтезатора частот и широкополосных ЛЧМ-сигналов
5-диапазона волн [244*]:
ГК - генератор кварцевый; ЦВС - цифровой вычислительный синтезатор;
ФНЧ - фильтр нижних частот; ПФ - полосовой фильтр
566
Глава 12. Совершенствование аппаратуры радиолокационных комплексов
Отметим, что характеристики полосового фильтра оказывают существенное
влияние на формируемые ЛЧМ-сигналы. Испытания синтезатора показали, что от-
клонения от линейности ФЧХ керамического СВЧ-фильтра не превышают ±5° в
полосе его пропускания (более 200 МГц). Также мала связанная с этим параметром
зависимость группового времени запаздывания от частоты в той же полосе.
При проектировании синтезатора необходимо учитывать достижимые уровни
подавления несущего колебания и боковых полос в квадратурном модуляторе. В
работе [452] приведено выражение, позволяющее оценить допустимые отклонения
от квадратур (у/) и разбаланс амплитуд (G) на входах КМ при заданном подавлении
боковых полос (SBS - sideband suppression) в децибелах:
5/ =
(12.1)
Рассчитанные в соответст-
вии с (12.1) зависимости по-
казывают, что, например, для
SBS = -50 дБ разбаланс ампли-
туд и фаз в полосе сигнала и в
условиях эксплуатации не дол-
жен превышать 0,04 дБ и 0,25
соответственно. Это приводит к
необходимости обеспечения:
1) максимальной идентич-
ности электрических и конст-
руктивных характеристик ФНЧ,
включенных на выходе ЦВС;
2) возможности балансиров-
ки схем перемножителей в КМ;
3) возможности управле-
ния амплитудой и фазовым
сдвигом квадратурных колеба-
ний на выходе ЦВС;
4) термостабилизации КМ
при работе ЦВС в широком ин-
тервале температур.
На рис. 12.11 и 12.12 при-
ведены измеренные характери-
стики сформированного синте-
затором частот широкополосно-
го ЛЧМ-сигнала и гетеродин-
ных СВЧ-колебаний. В качестве
средств измерений использова-
лись анализатор спектра типа
Рис. 12.11. Форма спектра ЛЧМ-радиоимпульса
(ширина спектра 200 МГц; масштаб по оси ординат 1 дБ
в клетке графика; теоретический спектр для наглядности при-
поднят над экспериментальным)
Рис. 12.12, Спектральная плотность мощности шума
(СПМШ) колебаний СВЧ-гетеродина
567
Радиолокационные системы землеобзора космического базирования
Е4440А, измеритель параметров цепей типа Е8362В фирмы Agilent Technologies и
измеритель фазовых флуктуаций ИФ-5901СА. На рис. 12.11 показан спектр радио-
импульсного сигнала при длительности импульса 5 мкс, периоде повторения
100 мкс с несущей частотой fo = 3150 МГц и полосой 200 МГц. Неравномерность
амплитуды сигнала не превышает 1 дБ.
На рис. 12.12 показана спектральная плотность мощности шума (СПМШ) коле-
баний СВЧ-гетеродина, уровень которого не превышает минус 70 дБ относительно
максимума со снижением до минус 115 дБ при расстройке на 2 кГц. Требования,
предъявляемые к характеристикам зондирующих сигналов, удовлетворяются.
12.4. Характеристики транзисторных усилителей мощности,
работающих в импульсном режиме
В последние годы значительно возрос интерес к разработке импульсных транзи-
сторных усилителей мощности (импульсных ТУМ), предназначенных для работы в
усилительных трактах передающих устройств (ПРДУ) импульсных когерентных
РЛС. Разработка полностью твердотельных передатчиков РЛС стала возможной
благодаря серийному выпуску мощных СВЧ-транзисторов, работающих в им-
пульсном режиме. Дальнейшее развитие этой техники привело к созданию транзи-
сторов, имеющих в P-диапазоне волн импульсную мощность отдельного транзи-
стора порядка 500.. .1000 Вт и более: в Z-диапазоне - 300.. .370 Вт, в 5-диапазоне -
более 100 Вт. Это позволило создавать импульсные ТУМ с разумным числом тран-
зисторов в выходном каскаде [123*], а в случае РСА с АФАР - разрабатывать
приемопередающие модули для запитки элементов антенны с минимальными мас-
сой и габаритами.
Достигнут значительный прогресс в разработке устройств сложения-деления
мощности (СДМ), в частности, увеличено число каналов этих устройств и снижены
потери. Это стало возможным как благодаря совершенствованию классических
СДМ бинарного типа (удалось расширить диапазон компенсации отраженных волн
на выходах делителя), так и в связи с созданием новых типов СДМ, среди которых
отметим, прежде всего, радиальные СДМ [286, 448, 457]. В таких устройствах при
числе каналов 16-110 потери не превышают 0,2...0,23 дБ в L- и 5-диапазонах, что
невозможно получить ни на каких других типах сумматоров. Хорошим примером
одной из последних разработок радиальных сумматоров являются устройства, ха-
рактеристики которых приведены в [309]. Радиальный сумматор диапазона
1,2... 1,4 ГГц, используемый в локаторе системы контроля за дорожным движени-
ем, имеет 32 входа и рассчитан на выходную мощность 50 кВт, потери не превы-
шают 0,15 дБ. 16-канальный сумматор в диапазоне волн 44 ГГц имеет выходную
мощность 25 Вт и потери 0,5 дБ.
Совершенствуются конструкторские решения и технологии изготовления им-
пульсных ТУМ. Сочетание тонкопленочной и толстопленочной технологий мик-
рополосковых линий на керамических материалах с узлами на органических ди-
электриках привело к уменьшению массы и габаритов импульсных ТУМ и повы-
сило их надежность [457].
568
Глава 12. Совершенствование аппаратуры радиолокационных комплексов...
В качестве примера передающего устройства со сложением мощностей рас-
смотрим разработанное в ОАО «Концерн «Вега» полупроводниковое передающее
устройство 5-диапазона для установки на малом космическом аппарате в составе
радиолокационной станции [123*, 440*].
Выходная импульсная мощность более 3 кВт при средней мощности 200 Вт
получена путем сложения мощности 16 усилительных модулей. Основной задачей
при проектировании ПРДУ было достижение указанной мощности в полосе сигна-
ла, составляющей 7 % от несущей частоты, при высоких КПД и надежности и при-
емлемых массогабаритных параметрах. В состав ПРДУ входят формирователь час-
тот и сигналов (ФЧС), предварительный усилитель мощности (ПУМ) и выходной
каскад (ВК) с источниками их питания.
Усиление зондирующего сигнала от ФЧС обеспечивает ПУМ, в котором для
повышения надежности применяется резервирование, и выходной каскад, выпол-
ненный на основе схемы сложения мощностей 16 усилительных модулей. Усили-
тельный модуль обеспечивает импульсную мощность более 300 Вт при средней
мощности более 15 Вт.
Структурная схема усилительного модуля показана на рис. 12.13. В выходном
каскаде модуля в качестве активных элементов используются транзисторы
РН3135-65М фирмы М/А-СОМ, выходная мощность которых в реальной схеме
превышает 80 Вт при КПД более 40 %.
Рис. 12.13. Структурная схема усилительного модуля:
ДМ - делитель мощности; СМ - сумматор мощности
В выходном каскаде усилительного модуля складывается мощность четырех
усилителей на транзисторах РН3135-65М. При разработке усилительного модуля с
целью получения КПД более 28 % сумматор мощности СМ-4 был выполнен на ди-
электрике с малыми потерями типа ФАФ-4Д. Потери при суммировании не пре-
вышают 0,3 дБ. В качестве мощных развязывающих устройств применен специ-
ально разработанный вентиль с активными потерями менее 0,5 дБ.
Для ВК построены 16-канальные сумматор и делитель мощности (СМ-16 и ДМ-
16) на основе синфазных четвертьволновых мостов, в которых были использованы
симметричные полосковые линии с воздушным заполнением, что позволяет полу-
чить достаточно малые омические потери - менее 0,2 дБ. Поскольку выходная мощ-
ность модулей достаточно велика, развязывающие резисторы в сумматорах не ис-
пользуются, а балластные нагрузки вентилей рассчитаны с учетом перераспределе-
ния мощностей в сумматоре при отказах (отключениях) суммируемых модулей ВК.
Общий КПД ПРДУ обеспечивается КПД усилительных модулей, сумматора
мощности и источника питания ВК. Заданная надежность ВК получена благодаря
569
Радиолокационные системы землеобзора космического базирования
использованию избыточного числа модулей, мощность которых складывается. С
той же целью источники питания ВК выполнены на основе 16 модулей питания,
каждый из которых питает свой усилительный модуль. В них применены модули
производства компании «Электронинвест» с реальным КПД 82...88 % при токе на-
грузки до 2,8 А и выходном напряжении 36 В.
Приборы ФЧС, ПУМ и модули ВК передающего устройства установлены на
панелях с отводом тепла через боковые поверхности. Выходной тракт выполнен на
волноводе сечением 72x10 мм. Для защиты ПР ДУ от рассогласования в антенном
тракте используется волноводный циркулятор, установленный непосредственно
перед антенной (в состав ПР ДУ не входит).
Полученные в процессе испытаний огибающие и спектры выходного радио-
импульса ПР ДУ при различных девиациях приведены на рис. 12.14-12.16.
Рис. 12.14. Огибающая (а) и спектр (б) выходного радиоимпульса ПРДУ
при девиации 30 МГц
Рис. 12.15. Огибающая (я) и спектр (б) выходного радиоимпульса ПРДУ
при девиации 200 МГц
Измеренная зависимость фазы, вносимой трактом усиления ПРДУ в гармони-
ческий сигнал (наклонная прямая линия) на центральной частоте 3150 МГц, пока-
зана на рис. 12.16, а. На рис. 12.16, б показан гармонический состав сигнала на вы-
570
Глава 12. Совершенствование аппаратуры радиолокационных комплексов
ходе ПР ДУ. Отметим, что гармоники спектра на выходе прибора ФЧС на дальних
отстройках практически подавляются на выходе ПРДУ (кроме второй гармоники).
Вторая гармоника сигнала на выходе ПРДУ находится на уровне минус 55,6 дБ, а
после циркулятора уровень второй гармоники снижается до минус 61 дБ.
Рис. 12.16. Фазовая ошибка (а) тракта усиления ПРДУ на частоте 3150 МГц
и гармонический состав выходного сигнала (б) после циркулятора
Измеренное значение начальных токов транзисторов РН3135-65М составило в
среднем не более 4 мкА, что обеспечило без специальных схем подавления шумов
ПРДУ в паузе между импульсами значение спектральной плотности шумов в рабо-
чей полосе частот ниже минус 200 дБ/ВтТц. Выходная средняя мощность 200 Вт
гарантируется при отказах трех из шестнадцати модулей ВК, регулировка средней
мощности осуществляется изменением скважности сигнала.
Фазовременные характеристики усилительных трактов. Основной особен-
ностью работы транзистора в режиме усиления радиоимпульсов является сущест-
венное изменение температуры кристалла транзистора от начала к концу импульса.
Типичные величины постоянной времени разогрева кристалла транзистора с выход-
ной мощностью десятки-сотни ватт составляют десятки-сотни микросекунд. Как по-
казано в [496], переходные тепловые эффекты в полевом транзисторе при работе в
линейном режиме в системах связи с частотами модуляции 0,1... 1,0 МГц приводят к
заметным амплитудным искажениям выходного сигнала, фазовые искажения при
этом могут быть незначительными.
Рассмотренная в [122*] задача, решаемая при разработке усилителей импульс-
ного СВЧ-сигнала, в отличие от задачи линеаризации усилителей [496] состоит в
обеспечении минимальных изменений амплитуды выходного сигнала и минималь-
ного отклонения временной зависимости фазы от линейной в течение импульса.
Типичная длительность радиоимпульса радиолокатора может составлять
10... 1000 мкс при скважности более 10 (в ряде случаев скважность может умень-
шаться до 2...3). В этом случае существенное изменение температуры кристалла
транзистора приводит к изменению параметров усилителя. Как показали измере-
ния, изменение фазы в течение радиоимпульса пренебрежимо мало (менее 1°). В то
571
Радиолокационные системы землеобзора космического базирования
же время изменение амплитуды выходного радиоимпульса превышает 23 % или
1 дБ, что в целом подтверждает выводы [496].
Перевод усилителя в режим насыщения существенно улучшает форму оги-
бающей радиоимпульса, изменение мощности не превышает 10 % или 0,5 дБ. Аб-
солютное изменение фазы выходного сигнала усилителя составляет почти 25°, а
отклонение от линейного закона - более 10° на один каскад, что в большинстве
случаев является предельной величиной для усилителей ЛЧМ-сигнала. Очевидно,
что в многокаскадном усилителе величина отклонения фазы от линейного закона
существенно возрастет.
Хорошим компромиссом в данном случае является использование транзистора
в режиме, близком к критическому, с системой автоматической регулировки мощно-
сти в течение радиоимпульса. Ее применение снижает неравномерность вершины
огибающей с 10 до 4 %. Абсолютное изменение фазы не превышает 4°, что хорошо
согласуется с данными о малых искажениях модулированного по амплитуде сигнала
в таком усилителе. Отклонение фазы от линейного закона не превышает 1°, что по-
зволяет прогнозировать малые искажения и в многокаскадном усилителе.
Использование автоматической регулировки мощности позволяет просто
осуществить стабилизацию выходной мощности каскадов и в линейном режиме
при неполном использовании транзистора по мощности. Основным недостатком
такого решения может показаться малый КПД усилителя. Действительно, сниже-
ние КПД пропорционально коэффициенту использования транзистора по напряже-
нию. В то же время, использование такого режима в предварительных каскадах
усилителей оправдано при работе транзистора выходного каскада в режиме насы-
щения. В этом случае основные искажения сигнала будут сконцентрированы в вы-
ходном каскаде, а суммарные искажения будут минимальны.
Искажения сигнала в усилителях радиоимпульсов на биполярных транзисто-
рах подробно исследованы в [309], где показано, что фазовые искажения в ЛЧМ-
сигналах в таких усилителях определяются параметрами модуляции. В принципе
требуемые фазовые характеристики для каждого закона изменения частоты могут
быть получены путем введения предыскажений. Однако амплитудные искажения в
течение импульса, связанные с разогревом кристалла биполярного транзистора,
сконцентрированы в основном в выходном каскаде, так как биполярные транзи-
сторы в усилителях для РЛС используются в основном в режиме, близком к крити-
ческому или в насыщении, для получения приемлемых значений КПД. Это не по-
зволяет использовать предыскажения при формирования огибающей выходного
сигнала усилителя.
Формирование огибающей радиоимпульса следует осуществлять в выходном
каскаде усилителя мощности. Уровни мощностей предварительных и входных кас-
кадов такого усилителя необходимо стабилизировать для получения оптимальных
энергетических характеристик выходного каскада.
Вместе с тем существенным недостатком регулировки выходной мощности
ВУМ с помощью перестраиваемого источника питания является малая скорость
такой регулировки. Наличие в цепях питания ВУМ накопителя энергии большой
572
Глава 12. Совершенствование аппаратуры радиолокационных комплексов...
ёмкости не позволяет с достаточной скоростью изменять напряжение питания
ВУМ. В типовом ВУМ S- или Z-диапазона с длительностью импульса до 100 мкс
время перестройки уровня выходной мощности ВУМ на 12 дБ составляет около
150 мс, в то время, как требуемое время перестройки составляет порядка 1.. .2 мс.
В [134*] предложен способ построения устройств электропитания ВУМ, сво-
бодный от описанного недостатка. Суть этого способа заключается во включении
между накопителем энергии и ВУМ быстродействующего импульсного регулятора
с обратной связью по напряжению питания ВУМ или с детектора огибающей вы-
ходного сигнала ВУМ. Такое решение позволяет сократить время перестройки
уровня выходной мощности ВУМ до 0,1... 1 мс. Кроме того, предложенное в [134*]
решение позволяет стабилизировать уровень выходной мощности ВУМ или даже
формировать огибающую выходного импульса ВУМ требуемой формы, перенося
тем самым часть весовой обработки на передающую сторону с сохранением высо-
кого КПД передатчика. Ещё одним преимуществом такого способа построения
устройства электропитания ВУМ является в 10...40 раз меньшее значение необхо-
димой ёмкости накопителя энергии, что позволяет в ряде случаев в несколько раз
сократить массу передающего тракта ППМ, особенно в РЛС с большой длительно-
стью импульса.
12.5. Совершенствование приемопередающих модулей
применительно к гибридным зеркальным антеннам
с АФАР-облучателями
Анализ публикаций по приемопередающим модулям антенных устройств (АФАР),
применяемых в РСА землеобзора космического базирования [123*, 133*, 340, 341,
365, 453, 498], показывает, что основные технические проблемы связаны с повы-
шением мощности выходных каскадов ППМ и с развитием технологии изготовле-
ния модулей. В связи с применением в РСА широкополосных сигналов с шириной
спектра до 300...500 МГц в приемных каналах модулей используют аналоговые
элементы на несущей частоте РСА с суммированием выходных СВЧ-сигналов
ППМ в достаточно сложной распределительной системе, входящей в состав АФАР.
Задачей перспективных разработок является создание АФАР с цифровым форми-
рованием ДНА. Для этого потребуется разработка широкополосных приемных ка-
налов ППМ, в которых предусмотрены цифровой выход сигнала, как это реализу-
ется в более узкополосных системах [37*].
Как отмечено в подразделе 12.2.1, одно из направлений совершенствования
аппаратуры РСА связано с применением гибридных зеркальных антенн с АФАР-
облучателями. Это позволяет расширить возможности радиолокационного зонди-
рования путем создания многочастотных РСА, РСА с повышенным энергетиче-
ским потенциалом и полосой обзора, высокоорбитальных РСА.
Возможности электронного сканирования луча в ГЗА ограничены фазовыми
искажениями при выносе центра облучения из фокуса зеркала. Компенсация этих
явлений достигается созданием специального амплитудно-фазового распределения
по пятну, облучающему рефлектор антенны [103, 206*].
573
Радиолокационные системы землеобзора космического базирования
Общим требованием к ППМ для антенных устройств РСА является обеспече-
ние работы РСА в поляриметрическом режиме, при котором выход передающего
канала ППМ должен подключаться по команде к излучателям горизонтальной Г
или вертикальной В поляризаций радиоволны и должны быть предусмотрены два
приемных канала для обеих поляризаций сигнала.
Структурная схема модернизированного ППМ, предназначенного для исполь-
зования в АФАР-ГЗА, приведена на рис. 12.17.
Рис. 12.17. Структурная схема модернизированного ППМ,
предназначенного для использования в АФАР-ГЗА
(регулируемые устройства показаны штриховкой)
В его состав входят передающий и два приемных канала. В передающий ка-
нал входят: входной и выходной вентили В, регулируемый фазовращатель ФВ,
предварительный усилитель мощности ПУМ, выходной усилитель мощности
ВУМ, импульсный модулятор ИМ, регулируемый источник питания (РИП), антен-
ный переключатель (АП), совмещенный с переключателем поляризаций.
Каждый из приемных каналов горизонтальной и вертикальной поляризаций
включает: защитные устройства ЗУ, малошумящие усилители СВЧ МШУ, регулируе-
мые фазовращатели ФВ, регулируемые аттенюаторы АТТ, СВЧ-усилители СВЧУ.
В выходном транзисторном усилителе мощности обеспечивается глубокая ре-
гулировка выходящей мощности. Управление системой электропитания с помо-
щью РИП позволяет получить высокий КПД трактов усиления мощности ППМ при
значительном (в несколько раз) снижении выходной мощности от максимального
значения. При таком снижении выходной мощности ППМ их вклад в электропо-
требление кластера незначителен и снижение КПД становится допустимым. Базой
для создания перспективных РСА, работающих в S-диапазоне волн, является рас-
смотренный в разделе 12.4 технический задел по передающим устройства, полу-
ченный при разработке РСА малого космического аппарата «Кондор-Э» [440*].
Для выполнения требований глубокой регулировки выходной мощности по
задаваемой программе во все ППМ следует установить схему автоматической ре-
гулировки уровня выходной мощности, решающей следующие задачи:
574
Глава 12. Совершенствование аппаратуры радиолокационных комплексов...
1) поддержание заданного значения выходной мощности во всех условиях
эксплуатации;
2) установку требуемого уровня выходной мощности в зависимости от места
расположения ППМ в АФАР и угла сканирования (для использования электронно-
механического управления лучом);
3) стабилизацию уровня выходной мощности ППМ в течение импульса.
Особенностью требований к передающему каналу ППМ является большой
диапазон регулирования выходных мощностей (до 12 дБ). Снижение мощности
транзистора относительно номинальной путем снижения входной мощности, как
правило, приводит к ухудшению КПД ВУМ, а в биполярных транзисторах - к ис-
кажению формы импульса. В то же время при использовании источника питания с
регулируемым выходным напряжением появляется возможность уменьшения вы-
ходной мощности путем изменения режима работы транзистора. Исследования
усилителей S- и Z-диапазонов показывают, что за счет изменения входной мощно-
сти глубина регулировки без существенного изменения КПД и формы огибающей
составит порядка 2 дБ. Снижение напряжения питания дает снижение выходной
мощности, пропорциональное квадрату изменения напряжения питания. В рас-
смотренных выше ВУМ со сложением мощностей двух транзисторов (палетт) име-
ется возможность снижения мощности ВУМ на 6 дБ путем отключения питания
одного из транзисторов (палетты). Тогда регулировка мощности за счет изменения
напряжения питания составит 9 дБ или 8 раз, требуя снижения напряжения пита-
ния примерно в 2,8...3 раза, что реализуемо.
12.6. Требования к приемному тракту РСА
Приемный тракт современных РСА, использующих антенные устройства типа
АФАР или АФАР-ГЗА, как правило, включает в себя приемные каналы приемопе-
редающих модулей, работающие на несущей частоте РСА, и сосредоточенное при-
емно-усилительное устройство (приемник) супергетеродинного типа, на выходе
которого установлены фазовые детекторы, преобразующие сигналы к видеочастоте
(квадратурные составляющие). Современная тенденция проектирования аппарату-
ры РСА предусматривает включение в состав приемника аналого-цифровых пре-
образователей (АЦП) для преобразования аналогового видеосигнала в цифровую
форму. Разрядность выходных данных (от двух до восьми разрядов, включая знак)
задается по команде.
Обычно входные СВЧ-каскады - малошумящие усилители (МШУ) для ППМ
и приемника одинаковы. Это позволяет снизить коэффициент усиления приемного
тракта ППМ. Шум-фактор МШУ определяется элементной базой и обычно состав-
ляет около 2 дБ.
В состав приемника входят МШУ, смеситель, усилитель промежуточной час-
тоты (УПЧ), цифровые управляемые аттенюаторы, позволяющие по командам от
вычислительного устройства поддерживать постоянный средний уровень сигнала
на входе АЦП. Это позволяет корректировать изменения мощности принимаемого
сигнала в зависимости от наклонной дальности съемки и отражающей способности
575
Радиолокационные системы землеобзора космического базирования
наблюдаемой местности. Обязательна установка в тракте приемника быстродейст-
вующих ограничителей, предотвращающих перегрузку приемника от сильных сиг-
налов. Затухание, вносимое аттенюатором (код установки аттенюаторов), включа-
ют в состав служебной информации для его учета при синтезе РЛИ.
Основными требованиями к приемному тракту (приемным каналам ППМ и
приемнику) являются обеспечение равномерности амплитудной характеристики в
рабочей полосе частот (~1 дБ), линейности и стабильности фазовой характеристи-
ки (<5°), стабильности усиления, идентичности коэффициентов передачи квадра-
турных каналов (-1...2 %). Контроль этих параметров обеспечивается средствами
внутренней калибровки, рассмотренными в гл. 11.
Как показывает опыт тестирования аппаратуры РСА и приведенные в литера-
туре результаты многолетней эксплуатации РСА космического базирования, вклад
приемного устройства в суммарные нестабильности сквозного тракта РСА меньше,
чем у формирователя частот и сигналов, передающего тракта и антенны.
576
Глава 13
КОСМИЧЕСКАЯ АППАРАТУРА РАДИОЛОКАЦИОННОГО
НАБЛЮДЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ
И НАЗЕМНЫХ (НАДВОДНЫХ) ОБЪЕКТОВ
13.1. Этапы создания космической аппаратуры
радиолокационного наблюдения
Более чем полувековая деятельность в области создания космических средств радио-
локационного наблюдения внесла существенный вклад в развитие общей теории ра-
диолокации, теории фильтрации сигналов, радиофизики, информатики, науки о Зем-
ле. Были проведены теоретические исследования, созданы самолетные прототипы-
аналоги космической аппаратуры для экспериментальных исследований земных по-
кровов, выполнены проектно-конструкторские проработки вариантов построения
аппаратуры, из которых не более 10 % были реализованы в виде действующих кос-
мических систем, а остальные создали научно-технический задел для перспективных
разработок. Многочисленные экспериментальные материалы, полученные с помо-
щью космической и самолетной аппаратуры, систематизированы и стали основой
развития количественных методов интерпретации результатов радиолокационной
съемки, включая создание математических моделей рассеяния электромагнитных
волн от подстилающей поверхности и подповерхностных образований.
В данной главе приведен ретроспективный обзор аппаратурных решений, за-
ложенных в разработку космических систем РЛН, включая реализованные проекты
и научно-технический задел. В развитии космических РСА явно видны этапы с
разными возможностями получения и реальным использованием радиолокацион-
ной информации. Ими можно охарактеризовать «поколения» создания аппаратуры.
Первое поколение (1978-1992) - это однорежимные одноканальные РСА, ре-
шавшие задачу исследований методов радиолокационного землеобзора SEASAT,
SIR-A, SIR-B, а также РСА «Меч-К» КА «Космос-1870» и «Меч-КУ» КА «Алмаз-1»,
которые проектировались как средства видовой разведки, но фактически были ис-
пользованы с целью оценки потенциальных возможностей РСА космического ба-
зирования для решения широкого круга задач, включая исследование природных
ресурсов, экологический мониторинг океанской поверхности, изучение ледового
покрытия, ведение сельского и лесного хозяйства, геологию, картографию, а также
задачи Министерства Обороны [215].
Ко второму поколению (1992-2000) следует отнести одноканальные РСА,
функционирующие в «эксплуатационном» режиме, обеспеченные инфраструкту-
577
Радиолокационные системы землеобзора космического базирования
рой обработки и распределения информации для широкого круга потребителей, в
том числе и на коммерческой основе. К ним относятся РСА ERS-1, ERS-2, JERS-1,
Radarsat-1. По заложенным в эти РСА (кроме Radarsat-1) техническим решениям
(одноканальные, однорежимные, с фиксированным положением полосы съемки) они
относятся к первому поколению бортовой аппаратуры, но созданная инфраструктура
для доставки получаемой с помощью этой аппаратуры информации на Землю, ее об-
работки и распределения потребителям является серьезным шагом в развитии ин-
формационных систем космического базирования. Большой вклад в методологиче-
ское обеспечение тематической обработки РЛИ был внесен исследовательским трех-
частотным поляриметрическим комплексом SIR-C/X-SAR многоразового космиче-
ского корабля (КК) Space Shuttle, по результатам орбитальных полетов которого (за-
пуски апрель и сентябрь 1994) были определены количественные характеристики
отражения электромагнитных волн от наблюдаемой местности.
К третьему поколению космических РСА (2000-2006) следует отнести реа-
лизацию миссии SRTM (Shuttle Radar Topography Misson) - топографическая съем-
ка 80 % земной поверхности с помощью радиолокационного комплекса SIR-C/X-
SAR, дополненного интерферометрическими каналами X- и С-диапазонов волн, в
которых использовали приемные антенны, удаленные от корпуса КК с помощью
60-метровой выдвижной штанги. Также к третьему поколению будем относить се-
рию РСА военного назначения (видовая всепогодная разведка) Lacrosse/Vega,
Lacrosse/ONYX с высокой разрешающей способностью (около 1 м) и ее непрерыв-
ной модернизацией по мере расширения орбитальной группировки (запуски 1988,
1991, 1997, 1997, 2000, 2005). Эти РСА регулярно используются военным ведомст-
вом США при проведении военных операций. К третьему поколению будем также
относить находящиеся в постоянной эксплуатации полнополяриметрические РСА
С-диапазона волн ASAR КА ENVISAT-1, а также многорежимный поляриметриче-
ский РСА Radarsat-2 (декабрь 2007), поляриметрический РСА 1-диапазона волн
PALSAR КА ALOS, выведенный на орбиту 24.01.2006.
Наконец, к четвертому поколению относится целая «гроздь» космических
РСА гражданского и военного применения с метровым и субметровым разрешени-
ем: TerraSAR-X, Cosmo-SkyMed 1/4, TecSAR, SAR Lupe (2007-2008 гг.), TanDem-x
(2010 г.) и др., а также планируемые системы ближайшего будущего.
Рассмотренный научно-технический задел включает выполненные ранее, но
по ряду причин не доведенные до регулярной эксплуатации образцы аппаратуры
ДЗЗ, а также перспективные отечественные и зарубежные проекты.
В данной главе дан обзор характеристик космической аппаратуры радиолока-
ционного землеобзора, включая действующие образцы, перспективные проекты, а
также проекты, которые создали научно-технический задел для совершенствования
средств радиолокационного наблюдения. В ходе изложения материала обращено
внимание на элементы рассмотренного в гл. 12 подхода к проектированию косми-
ческой аппаратуры, которые можно найти в разработках как отечественных, так и
зарубежных систем землеобзора космического базирования.
578
Глава 13. Космическая аппаратура радиолокационного наблюдения...
13.2. Некогерентные космические радиолокаторы бокового обзора
для наблюдения океана и надводной обстановки
13.2.1. Некогерентные РБО контроля надводной обстановки.
Бортовой комплекс «Чайка»
Впервые в мире были разработаны и введены в эксплуатацию космические радио-
локаторы бокового обзора применительно к системе морской космической развед-
ки и целеуказания (МКРЦ) [88*, 545]. В нее входил активный космический аппарат
У С-А с бортовым спецкомплексом (БСК) всепогодной радиолокационной разведки
«Чайка». БСК включал в себя широкозахватный космический радиолокатор боко-
вого обзора (РБО) и бортовую цифровую вычислительную машину (БЦВМ), спо-
собные при работе в автоматическом режиме производить обнаружение и опреде-
ление координат надводных кораблей с передачей информации на наземные или
корабельные командные пункты.
Общий вид КА показан на рис. 13.1, а также на рис. Ц.6 цветной вкладки в
конце книги (демонстрационный комплект КА У С-AM). На рис. 13.2 представлен
фрагмент графической регистрации надводной обстановки на пультах операторов-
потребителей радиолокационной информации.
Рис. 13.1. Общий вид КА УС-AM с двумя антеннами РБО,
реализующими двусторонний обзор морской поверхности
Рис. 13.2. Вид графического отображения надводной обстановки, принятой от БСК «Чайка»
(отображаются отметки от надводных кораблей и судов, а также отметки от береговой линии;
НП - направление полета)
579
Радиолокационные системы землеобзора космического базирования
В состав радиолокатора, работающего в трехсантиметровом диапазоне волн,
входили две (в первых образцах - одна) хорошо компонующиеся на КА двухсек-
ционные складные волноводно-щелевые антенны с размерами 10,0x0,7 м, мощный
магнетронный передатчик, чувствительный приемник с СВЧ-усилителем. Элек-
тропитание радиолокатора осуществлялось от бортовой атомной электростанции.
В западных источниках аппаратура КА У С-А имела название RORSAT (Radar
Ocean Reconnaissance Satellite) - спутник радиолокационной разведки океана, дос-
таточно близко характеризующее назначение комплекса.
Система МКРЦ была принята в 1975 году. Серийный выпуск и успешная экс-
плуатация БСК «Чайка» реализована в составе 28 аппаратов УС-AM в течение
1971-1988 гг. («Космос-402», «Космос-516», «Космос-1700», «Космос-1900» и др.).
Высокая эффективность созданной системы МКРЦ особенно ярко проявилась
летом 1982 года во время англо-аргентинского конфликта из-за Фолклендских
(Мальвинских) островов. Система полностью отслеживала обстановку на море и
по полученной от системы информации Главным штабом ВМФ был определен мо-
мент начала высадки английского десанта. Система МКРЦ явилась первой систе-
мой космической разведки и целеуказания по морским целям, не имевшей анало-
гов до последних лет.
В ходе разработки, испытаний, эксплуатации БСК «Чайка» и модернизации
аппаратуры были выявлены ряд моментов, учет которых может способствовать по-
вышению надежности и эффективности перспективных разработок.
На первых образцах РБО применяли волноводно-щелевую антенну бегущей
волны с коммутируемой запиткой волноводов антенны с противоположных сторон
СВЧ-сигналами, имеющими разные фазовые распределения в вертикальной плос-
кости антенны. Это позволяло формировать два луча (ближний и дальний) как про-
тотип режима Скансар, реализованного позже в РСА. Такое экономное построение
антенны РСА может быть оправданным для малых спутников ледовой разведки,
применяющих сигналы с узкой полосой. Для РСА с широкополосными сигналами
использование антенны с бегущей волной непригодно, поскольку оно приводит к
качанию луча за время зондирующего импульса.
1. Выявлено, что использование в передатчике магнетрона с мощной магнит-
ной системой приводит к вращению спутника при взаимодействии с магнитным
полем Земли. Исключить это явление удалось путем разворота основного и резерв-
ного передатчиков друг относительно друга на 180° для компенсации магнитного
момента.
2. На более поздних комплектах РБО, где устанавливались передатчики с по-
вышенной мощностью, были зафиксированы пробои в СВЧ-тракте. Тогда это яв-
ление объясняли выделением газов из конструкционных материалов, которое при-
водит к локальному повышению давления со снижением электропрочности в соот-
ветствии с кривой Пашена. Много позже стало ясно, что проявлялся мультипак-
торный эффект ускорения электронов в волноводах под действием СВЧ-поля в ва-
кууме с выбиванием вторичных электронов.
580
Глава 13. Космическая аппаратура радиолокационного наблюдения...
3. Выяснилось, что благодаря технологическим запасам при разработке со-
ставляющих подсистем бортового комплекса суммарное энергопотребление (а зна-
чит и тепловыделение) аппаратуры оказалось значительно меньше расчетного и
спутник «замерзал». Пришлось устанавливать дополнительные электронагревате-
ли. В связи с этим фактом в проектируемой аппаратуре целесообразно предусмат-
ривать возможность работы РЛС (основного потребителя электроэнергии) в фор-
сированных режимах с целью полного использования ресурсов КА для повышения
тактико-технических характеристик системы РЛН.
4. Для повышения надежности широко применялось холодное резервирование
основных блоков БСК в сочетании со схемами горячего резервирования. Правиль-
ность такого подхода к проектированию космической РЭА была подтверждена и в
последующих разработках. Подтвердилась также целесообразность введения в ап-
паратуру многочисленных контрольных и калибрующих датчиков в сочетании с
наземной автоматизированной контрольно-измерительной аппаратурой.
5. Выявлен на первый взгляд неожиданный факт возможности распознавания
класса корабля по количеству отметок на выходе цифрового обнаружителя, а также
о подчеркивании береговой линии путем сгущения отметок. Это явление повыша-
ло точность определения координат кораблей.
6. При использовании Х-диапазона волн обнаружилось сильное отражение от
гидрометеоров, особенно в экваториальных широтах, резко снижающее вероятность
обнаружения кораблей и подстилающей поверхности. Для исключения таких потерь
желателен переход на более длинные волны или принятие специальных мер, напри-
мер, использования сигналов двух поляризаций или с круговой поляризацией.
7. Для обеспечения высокого энергетического потенциала РБО на спутнике бы-
ла установлена ядерная энергетическая установка. Система ядерной безопасности
имела дублированную защиту: систему увода радиационно-опасной части спутника
на высокую орбиту «высвечивания» при окончании срока эксплуатации и средства
«распыления» ядерных компонентов при падении спутника. Поэтому даже полная
авария спутника «Космос-954» с падением остатков от спутника на территорию Ка-
нады в 1977 г. не создали серьезной угрозы для населения [88*, 575]. В настоящее
время принципы использования ядерных энергетических установок в космосе и не-
обходимые меры безопасности утверждены ООН, и интерес к созданию космических
радиолокаторов с ядерными источниками питания сохраняется [56,439*].
13.2.2. Космические РБО для исследования морской поверхности,
ледяного и ледникового покровов
При разработке комплекса «Чайка» не рассматривался вопрос о расширении функ-
ций аппаратуры (сверх технического задания на нее) с целью ее адаптации для обзо-
ра земной поверхности применительно к мониторинговым задачам ледовой развед-
ки, метеорологических исследований состояния океана, обнаружения тайфунов и др.
Создание этой важной для страны системы было позже поручено Харьковскому
институту радиоэлектроники (радиолокатор) и КБ «Южное» (космический аппарат).
Эксплуатация этого типа РБО - космической системы «Океан-01» началась в 1983 г. с
эксперимента на КА «Космос-1500» в рамках программы «Океан» [12, 197].
20—1492
581
Радиолокационные системы землеобзора космического базирования
Основными задачами эксперимента являлись:
1) отработка методов дистанционных исследований Мирового океана и по-
верхности Земли в интересах народного хозяйства и науки;
2) отработка новых видов информационно-измерительной аппаратуры;
3) проведение оперативной съемки ледяных покровов Арктики и Антарктики
для обеспечения навигации в замерзающих акваториях.
Рис. 13.3. Общий вид КА
серии «Космос-1500», «Океан-01»
с РБО для исследования океана
Бортовой комплекс радиофизической ап-
паратуры КА включал в себя РБО Jf-диапазона
волн, сканирующий СВЧ-радиометр (2=0,8 см),
трехканальный трассовый СВЧ-спектрометр
(2=0,8/1,35/8,5 см, разрешение 17/20/85 км),
устройство обработки сигналов, а также ин-
формационный радиотелевизионный комплекс.
Наиболее ценная информация, независимая от
погодных условий и времени суток, могла быть
получена с помощью РБО Jf-диапазона волн с
разрешающей способностью изображений
1,5...2,0 км в полосе по дальности 450 км.
Аппарат функционировал на орбите высо-
той 650 км с наклонением 82,5°. Требуемое по-
ложение спутника в пространстве обеспечива-
лось трехосной гравитационной системой ори-
ентации и стабилизации в орбитальной системе
координат (ОСК) с точностью 2...3° и
0,02 град/с соответственно. Общий вид КА этой
серии показан на рис. 13.3. Характеристики
РБО КА «Космос-1500» приведены в табл. 13.1.
Таблица 13.1. Параметры РБО серии «Космос-1500», «Океан-1»
Параметр Значение Примечание
1 2 3
Высота орбиты КА, км 650
Наклонение, град 82,5
Период обращения КА, мин 97,5
Диапазон волн, см 3,1
Тип и размеры антенны (горизонтальхвертикаль), м Волноводно-щелевая с рупорным излучателем 11,085x0,04 Складная, 5 секций, сечение волноводов 23x10 мм
Ширина ДНА, град:
по азимуту 0,2 Установка антенны 35° от надира
по углу места 42
Уровни боковых лепестков, дБ -(22...25) Аподизация «косинус на пьедестале»
582
Продолжение табл. 13.1
1 2 3
Коэффициент усиления, дБ 35
Поляризация излучения и приема Вертикальная
Режимы работы Маршрутный
Углы падения, град 20...60 Обзор левым бортом
Полоса съемки, км: 475
Разрешение, км
азимут 2,1...2,5
дальность 0,9...0,6
Число наблюдений 8
Шумфактор приемника, дБ ~2
Динамический диапазон приемника, не менее, дБ 30 Три ступени регулировки усиления
Длительность зондирующего импульса, мкс 3
Частота повторения, Гц 100
Мощность излучения в импульсе, кВт 100 Магнетрон
Чувствительность, о°пе, дБ -20
Полоса аналогового радиоканала передачи информации, кГц 2 Частоты: 137,4 МГц
5 и 486 МГц
Потребляемая мощность РБО, Вт 400
Для калибровки сквозного тракта используется пилот-сигнал, полученный от
ослабленного излучаемого импульса, задержанного на 8 мкс с помощью акустиче-
ской линии на алюмоиттриевом гранате с ослаблением -80...85 дБ. В составе вы-
ходной информации из пилот-сигнала формируется яркостной клин, 8 градаций.
На борту КА обеспечивались формирование РЛИ с некогерентным накопле-
нием восьми наблюдений, сжатие динамического диапазона данных для согласова-
ния с аналоговыми радиолиниями передачи информации. По дециметровой радио-
линн (частота 486 МГц, полоса 5 кГц) информация поступала на приемные центры
Госкомгидромета СССР в Москве, Хабаровске и Новосибирске. Метровая радио-
линия (частота 137,4 МГц, полоса 2 кГц) служила для передачи данных на сеть ав-
тономных приемных пунктов непосредственным потребителям на судах, в удален-
ных районах и т.д.
Опыт длительного использования радиолокаторов этого типа подтвердил
важность получения регулярной информации о морской поверхности и ледовой
обстановке. Однако для решения этих задач необходимо лучшее пространственное
разрешение, что требует применения РСА.
13.3. Ретроспективный обзор развития космических РСА
13.3.1. РСА космического аппарата SEASAT
Первым космическим радиолокатором с синтезированной апертурой антенны для
дистанционного зондирования Земли был РСА, входящий в состав бортовых датчи-
ков КА SEASAT, разработанного фирмой JPL, США. КА был выведен 26 июня
1978 г. на близкую к круговой орбиту высотой около 800 км с наклонением 108°
583
Радиолокационные системы землеобзора космического базирования
Рис. 13.4. Общий вид КА SEASAT
[565, 569]. РСА работал в L-диапазоне волн (1275 МГц). Космический аппарат был
предназначен для проведения исследований Мирового океана с использованием
РСА. Первоначальной задачей была демонстрация возможностей глобальной сис-
темы для мониторинга океана, получения информации о приводном ветре, характе-
ристиках морского волнения и ледового покрова, топографии льда и морской по-
верхности. Но в ходе эксплуатации РСА задача была расширена с получением сним-
ков земной поверхности, давших ценную информацию для развития методов ДЗЗ.
Несмотря на короткий срок функционирования РСА (99 суток, из-за замыкания
в цепях питания) был собран обширный материал, который обрабатывался и изучал-
ся специалистами разного профиля в течение многих лет. Полученный объем (около
42 ч съемки) радиолокационных снимков
океана и земной поверхности составил
ПОЮ6 км2 (—11000 условных кадров
100x100 км) общей площадью 85 % поверх-
ности Земли, включая повторные съемки.
В состав бортовой аппаратуры кроме
РСА входили: радиолокационный альти-
метр (Лт/-диапазон, точность высотометрии
10 см), сканирующий многоканальный
СВЧ-радиометр (частоты 6,6; 18; 37; 10,7 и
21 ГГц, полоса съемки 600 км), скаттеро-
метр (L-диапазон, точность измерения ско-
рости ветра ±2 м/с), а также радиометры оп-
тического и ИК-диапазонов. Работой каждо-
го из бортовых датчиков управляли разные
организации. Общий вид КА SEASAT пока-
зан на рис. 13.4, на котором видна геомет-
рия взаимного расположения панелей сол-
нечных батарей (вверху), антенны РСА
(внизу справа) и антенн скаттерометра (сис-
тема антенн в нижней части КА). Аппарат был ориентирован в орбитальной систе-
ме координат (ОСК).
В РСА использовалась волноводно-щелевая антенна с общей запиткой разме-
ром 10,7 м по горизонтали и 2,2 м в угломестной плоскости. Поляризация излуче-
ния - горизонтальная. Полоса зондирующего сигнала 19 МГц, длительность ЛЧМ-
импульса 33,4 мкс, импульсная мощность 1 кВт, частота повторения зондирующе-
го сигнала 1463... 1640 Гц.
Сводные данные по космическим РСА первого поколения приведены в
табл. 13.2. Полоса съемки РСА 100 км была фиксирована относительно надира с
углами падения в пределах 17...23°. Расчетное пространственное разрешение
25x25 м при четырех наблюдениях. Выходную информацию РСА (радиоголограм-
му) записывали на четыре бортовых магнитных запоминающих устройства и пере-
давали по радиолинии с производительностью 110 Мбит/с (5 бит на слово).
584
Глава 13. Космическая аппаратура радиолокационного наблюдения...
Для синтеза РЛИ в большинстве случаев использовали оптическую обработку
радиоголограммы. Выходное РЛИ регистрировали на 70-мм фотопленку полосами
по 25 км, при этом разрешение составляло 70...80 м. Синтез РЛИ, реализованный с
помощью цифрового процессора фирмы JPL позволил обработать около 10 % дан-
ных в течение 1978-1982 гг., пока процессор не вышел из строя. При цифровом
синтезе РЛИ имели полную полосу съемки 100 км и разрешающую способность
25 м. Все обработанные РЛИ архивированы и доступны для распространения. В
процессе функционирования РСА SEASAT был организован прием информации
наземными станциями в США, Канаде, Англии.
Полученные РЛИ в ^-диапазоне волн в разных районах земного шара стали
основой для развития методов тематической обработки радиолокационной инфор-
мации. В частности, выяснилась возможность обнаружения по радиолокационным
снимкам внутренних волн, создаваемых движением погруженных подводных ло-
док, что не предполагалось до запуска РСА SEASAT на орбиту [566]. Исследова-
ния возможностей радиолокационной съемки в £-диапазоне волн были продолже-
ны с помощью РСА SIR-A и SIR-B в составе многоразового космического корабля
(КК) Space Shuttle.
13.3.2. Космические РСА /.-диапазона волн SIR-A, SIR-B, JERS-1
РСА SIR-A, SIR-B многоразового космического корабля
Space Shuttle
Проведенные на КА SEASAT исследования по радиолокационному зондированию
Земли в L-диапазоне волн были продолжены на запусках многоразового космиче-
ского корабля Space Shuttle в 1981 г. (SIR-А) и 1982 г. (SIR-B). Эти запуски яви-
лись последовательным шагом в программе набора и систематизации характери-
стик многочастотного поляриметрического зондирования Земли [284]. По своим
характеристикам эти РСА были близки к РСА SEASAT с отличием по высоте ор-
биты, углам падения, полосе съемки и реализуемому разрешению. Аппаратура
SIR-B представляла собой усовершенствованный вариант SIR-A. Основные пара-
метры РСА SIR-А и SIR-B приведены в табл. 13.2.
В РСА SIR-B высота орбиты в процессе полета снижалась с 360 до 224 км. В
отличие от SIR-A в SIR-B было обеспечено управление лучом антенны по углу места
в пределах 15...60° от надира с шагом 1°. Это позволило перенацеливать положение
полосы съемки относительно следа КА. Реализуемые углы падения 15,5...63,7° на
малых высотах (224км) и 15,8...66,2° на больших высотах орбиты (360км) могли
сопровождаться повышением интегрального уровня неоднозначности на больших
дальностях, что могло снижать качество получаемых РЛИ. Поэтому указанное в
табл. 13.2 значение полосы съемки (до 600 км) может оказаться завышенным.
Полное время съемки в РСА SIR-B составило 7 ч (4600 условных кадров
40x40 км). По всем полученным данным был выполнен цифровой синтез РЛИ и их
архивирование. В эксперименте принимала участие группа специалистов по геоло-
гии, возобновляемым ресурсам, океанологии и методам калибровки аппаратуры.
585
Радиолокационные системы землеобзора космического базирования
Таблица 13.2. Характеристики космических РСА обзора земной поверхности
L- и S-диапазонов волн
Космический аппарат SEASAT кк Space Shuttle JERS-1 «Космос-1870» «Алмаз-1»
1 2 3 4 5 6
Аппаратура РСА SAR SIR-A/SIR-B «Меч-К» «Меч-КУ»
Фирма, страна разработчик КА Lockheed, Ball Space System, США США NASDA, Япония НПО машиностроения, СССР
Фирма, страна разработчик РСА JPL, США JPL, Ball Aerospace Comm. Syst. Div.,США Япония НПО «Вега», СССР
Назначение Исследования Исследования Исследования Исследования
Высота орбиты КА, км 800 259/(360; 257; 224) 568 260 275
Наклонение, град 108 38/57 97,7 72,7 72,7
Период обращения КА, мин 102,85 ~90 96 ~90 ~90
Периодичность повторения трасс, сутки (витки) - - 44 (659)
Рабочий диапазон волн (частота) Л (1275 МГц) L(1275 МГц) L(1275 МГц) 5(3130 МГц)
Тип и размер антенны, м Волноводно- щелевая 10,7x2,16 Волноводно- щелевая (9,4/10,7)x2,16 Неуправляемая ФАР 11,9x2,4 Волноводно-щелевая стоячей волны, трехсекционная, 15x1,5
Режимы работы Маршрутный Маршрутный Маршрутный Маршрутный
Углы падения, град 17...23 53/(15,5...66,2) 35 40...55 30...65
Направление обзора Правосторон. Двусторонн. Двусторонн.
Полоса обзора, км 100 50/(420...600) 75 2x300 2x350 (проект)/ 400, правый борт (факт)
Полоса съемки, км 100 50/(20...40) 75 20 45/200 (эксперим.)
Периодичность наблюдения, сутки 8 4 3/5
Поляризация Горизонт. Горизонт. Горизонт. Горизонт. Горизонт.
Разрешение, м: азимут дальность 25 (70...80)° 25 (70...80) 40/(58...16) 40/(20...30) 18 18 25...30 25...30 10...15 (12...15)/ (15...20)
Полоса зондирующего сигнала, МГц 19 6/12 15 10 14/10
Число наблюдений 4 6/4 3 1 1
Радиометрическое разрешение, дБ 2 1,7/2 6 3 3
Уровень неоднозначности, ДБ -20 - - -20 -20
Чувствительность РСА <Ле, ДБ -30 -30 -33 -30/-33
Длительность зондирующего импульса, мкс 33,4 30,4 35 0,1 0,07/0,1
586
Глава 13. Космическая аппаратура радиолокационного наблюдения...
Продолжение табл. 13.2
1 2 3 4 5 6
Частота повторения, Гц 1463... 1640 1464... 1624 1500 3000 3000
Импульсная мощность, кВт 1 1/1,12 1,3 250 250
Ориентация КА ОСК ОСК ОСК ПСК ПСК
Разрядность радиоголограммы 8/4(BFPQ) 3 5 5
Бортовая память Магнитное ЗУ Оптическое ЗУ/ЗО,4 72 Аналоговое магнитное ЗУ 6 магнитных цифровых ЗУ
Передача данных по радиолинии 110 Мбит/с Доставка после посадки КК 60 Мбит/с Аналоговая 6 МГц Цифровая, через спутник- ретранслятор 10 Мбит/с
Обработка информации Оптическая/ цифровая Оптическая/ цифровая Цифровая Оптическая Цифровая
Запаздывание информации, сутки Непосредст- венная передача 8 ~1+непосред- ственная передача -0,25
Год реализации 1978 1981/1982 1992-1998 1987-1989 1991-1992
Расчетный срок службы, лет 1...3 полет ~8 суток 6 (факт) 2 2/( 1,5 - факт)
Примечание:^ при оптическом синтезе РЛИ.
Японская программа JERS. Космический аппарат JERS-1, разработанный
японским космическим агентством NASDA, был предназначен для глобальной
съемки поверхности Земли (включая Антарктиду) для решения широкого круга
прикладных задач, особенно исследования геологических явлений, землепользова-
ния, наблюдения прибрежных районов, геологического картирования, мониторинга
катастроф, а также с целью оценки возможностей межвитковой интерферометрии
для выявления изменений в обстановке [215]. Основной полезной нагрузкой кос-
мического аппарата являлись два датчика - РСА L-диапазона волн SAR-L с про-
странственным разрешением 18 м и оптическая система OPS (Optical sensor), рабо-
тающая в видимом и ИК-диапазонах спектра. Оптические оси двух камер были
смещены одна относительно другой вдоль линии пути на 15,3°, что позволяло
осуществлять непрерывную стереосъемку поверхности Земли.
Аппарат был выведен на солнечно-синхронную орбиту 11 февраля 1992 г.
Средняя высота орбиты 568 км, наклонение 97,7°. КА функционировал в течение
6 лет до октября 1998 г., когда произошел отказ бортовой системы электропитания.
Наземный сегмент включал в себя центр управления полетом NASDA в г. Цу-
куба и центры обработки, распределения и архивирования данных EOC (Earth Ob-
servation Center) в Хатояма, Япония и Фербенксе, Аляска, США. Кроме того, ин-
формация могла передаваться на Международную сеть приемных пунктов: Кумао-
то (Япония), Кируна (Швеция), Гатина (Gatineau, Канада), Маспаломас (Испания),
Бангкок (Таиланд), Тромсё (Норвегия), Принс Альберт (Канада), Пекин (Китай),
Syova (японская станция в Антарктиде), Belconnen (Австралия). Система ориента-
ции КА поддерживала положение осей КА в ОСК с погрешностями не более ±0,3°.
Общий вид КА показан на рис. 13.5. Параметры КА и РСА приведены в
табл.°13.2.
587
Радиолокационные системы землеобзора космического базирования
Рис. 13.5. Общий вид КА JERS-1
13.3.3. РСА «Меч-К», «Меч-КУ» космических аппаратов «Космос-1870»
и «Алмаз-1»
РСА «Меч-К» КА «Космос-1870». Принципы построения космических РСА были
разработаны в 1963-1965 гг. практически независимо в СССР и за рубежом. Пер-
воначально в СССР была выполнена разработка космического РСА «Меч-А»
(МНИИП, НПО «Вега», ныне ОАО «Концерн «Вега») для орбитальной пилотируе-
мой станции (ОПС) «Алмаз») [552]. Предусматривалось участие экипажа ОПС в
обслуживании аппаратуры РСА, в состав которой входило бортовое фоторегистри-
рующее устройство для записи радиоголограммы на восьмисантиметровую фото-
пленку. Периодически раз в три месяца кассеты с записями подлежали сбросу в
капсулах на Землю, где должен был обеспечиваться синтез РЛИ с помощью маши-
ны оптического преобразования информации (МОПИ). В задачу экипажа входили
перезарядка кассет с фотопленкой, их установка в капсулу, а также контроль рабо-
тоспособности бортовой аппаратуры с помощью индикатора бортового контроля
(ИБК) с встроенным осциллографом. При обнаружении отказа оператор мог пере-
ключить аппаратуру на резервные блоки.
Научно-технический задел, полученный при создании аппаратуры РСА с
управлением операторами, был использован для создания полностью автоматиче-
ского варианта РСА «Меч-К», предназначенного для ведения видовой разведки.
Запуск РСА «Меч-К» был осуществлен 15.07.1987 в составе КА «Космос-1870».
Ресурс работы системы (2 года, до 29.07.1989) был ограничен запасами топлива на
поддержание высоты орбиты КА и коррекцию электромеханической системы ори-
ентации осей КА в ПСК.
Бортовая аппаратура РСА включала две волноводно-щелевые антенны (лево-
го и правого бортов), расположенные вдоль корпуса КА, резервированный коге-
рентный приемопередатчик, устройства запоминания информации (аналоговые ви-
588
Глава 13. Космическая аппаратура радиолокационного наблюдения...
деомагнитофоны с полосой 6 МГц) и аналоговую радиолинию (также с полосой
6 МГц) для передачи радиолокационной информации на Землю. Каждая из антенн
размерами 15x1,5 м состояла из трех секций с центральной запиткой для формиро-
вания стоячей волны. Перед пуском секции складывались в пакет на малом диаметре
КА. Внешний вид антенн в раскрытом состоянии виден на снимке (рис. 13.6). Кроме
указанных устройств в состав бортовой аппаратуры входили измеритель доплеров-
ской частоты (ИДЧ), блоки синхронизации, контроля и управления РСА.
Рис. 13.6. Общий вид КА «Космос-1870» в сборочном цехе
Структурная схема РСА имела ряд особенностей. Использование оптического
устройства для синтеза РЛИ в РСА «Меч-К» требовало работы с одной квадратур-
ной составляющей сигнала со смещением средней частоты спектра доплеровских
частот на % частоты повторения сигналов, т.е. на 750 Гц. Это было реализовано
путем череспериодного поворота фазы излучаемых сигналов на я/2. Малый дина-
мический диапазон устройства оптической записи радиоголограммы (<12дБ) по-
требовал применения быстродействующего АРУ с постоянной времени около
30 мкс, что приводило к радиометрическим искажениям, но позволяло эффективно
обнаруживать объекты на подстилающих поверхностях с разной УЭПР (кроме по-
граничных областей, не превышающих 3 км).
Заложенные в РСА серии «Меч» в 1970-1974 гг. технические решения отли-
чались от тех, что были приняты в то время в зарубежных РСА и в ряде случаев
были более прогрессивными. Так, для повышения оперативности получения ин-
формации использовались две антенны по обоим бортам и перенацеливание поло-
сы съемки с углами падения от 15 до 65° путем поворота КА по крену. Это резко
сокращало интервал повторной съемки до 3 сут. Был выбран S-диапазон волн, где
минимально влияние фазовых нестабильностей атмосферы на синтез апертуры.
В устройстве оптического синтеза РЛИ наземного пункта приема и обработки
информации использовалась анаморфотная телескопическая оптическая система,
позволяющая путем ее перемещения изменять фокусное расстояние при синтезе
589
Радиолокационные системы землеобзора космического базирования
РЛИ. Для устранения фазовых ошибок по апертуре синтеза, вызванных неодно-
родностью фотоэмульсии, фильмовый канал с записанной радиоголограммой за-
полнялся иммерсионной жидкостью с близким к фотоэмульсии коэффициентом
преломления (этиловый спирт). Была реализована разрешающая способность по
дальности и азимуту порядка 25...30 м. Для повышения радиометрического разре-
шения и улучшения наблюдаемости протяженных поверхностей применительно к
гражданским задачам ДЗЗ были применены варианты некогерентного накопления
РЛИ: со сканирующей апертурой в фильмовом канале (внутриэлементное накопле-
ние) или путем межэлементного накопления за счет аберраций в оптической сис-
теме на криволинейной поверхности вторичной фотопленки (без иммерсии). Это
позволяло получать РЛИ с разрешением около 45 м при числе наблюдений 4-5.
По опыту создания предшествующих КА с оптическими датчиками была реа-
лизована ориентация КА в путевой системе координат (ПСК), учитывающей враще-
ние Земли. Предложенное разработчиками РСА управление космическим аппаратом
с помощью измерителя доплеровской частоты (ИДЧ) позволило снизить ошибки ус-
тановки луча антенны на нуль доплеровской частоты до 2...3 угл. мин., вместо
0,5.. .0,7°. Такое решение устраняло миграцию дальности принятых от цели сигналов
и значительно упрощало построение наземного устройства синтеза РЛИ как оптиче-
ского для РСА «Меч-К», так и цифрового для РСА «Меч-КУ». За рубежом к целесо-
образности ориентации КА в ПСК пришли значительно позже [280], а до того разра-
батывали сложные алгоритмы для измерения положения доплеровского центроида
(±3,5° и более по курсу) и коррекции большой миграции дальности.
Ко времени создания РСА отсутствовали мощные бортовые электровакуум-
ные усилители или транзисторные усилители. Поэтому была предложена и реали-
зована схема построения когерентного передатчика с использованием в выходном
каскаде фазируемого магнетрона, формирующего импульс с пиковой мощностью
-250 кВт и средней мощностью -80 Вт при длительности импульса 0,07...0,1 мкс и
частоте повторения 3000 Гц. В этом варианте сравнительно с клистронным усили-
телем мощности имеется выигрыш по массе и КПД, а требования к стабильности
частоты магнетрона при коротком импульсе легко реализуются, а начальная фаза с
точностью долей радиана совпадает с фазой колебаний высокостабильного кварце-
вого опорного генератора, усиленных с помощью предварительного клистронного
усилителя и поданных на вход магнетрона с уровнем на 25 дБ ниже уровня выход-
ного сигнала магнетрона. Применение зондирующего сигнала в виде коротких им-
пульсов (а не широкополосных ЛЧМ или ФМ-сигналов) способствовало улучше-
нию изобразительных свойств РЛИ (отсутствие «крестов», вызванных боковыми
лепестками импульсного отклика РСА).
Требуемая длительность одного маршрута съемки составляла от 3 до 30 с. В
этих условиях магнетрон работал в переходном тепловом режиме на выбеге часто-
ты до 3 МГц. В самолетном аналоговом комплекте РСА, рассчитанном на непре-
рывную работу, магнетрон пришлось перестраивать. Изменение фазы излучения на
выбеге частоты оказалось незначительным и не сказывалось на синтезе РЛИ, но
аналогичные явления должны учитываться при проектировании перспективных
РСА с высоким разрешением.
590
Глава 13. Космическая аппаратура радиолокационного наблюдения...
Наличие фазирующего импульса длительностью ~0,8 мкс создавало пьеде-
стал, искажающий радиолокационные портреты ярких компактных целей (корабли,
инженерные сооружения). Устранение влияния пьедестала достигалось специаль-
ной технологией повышения качества радиолокационной информации [429*].
В течение двухлетней эксплуатации РСА «Меч-К» на КА «Космос-1870»
функциональные блоки, входящие в РСА, работали на основном комплекте, кроме
аналоговых видеомагнитофонов, которые были очень сложными изделиями в связи
с необходимостью компенсации линейных деформаций движущейся магнитной
ленты (допускалась ошибка не более 0,02 %). Наличие режима непосредственной
передачи радиоголограммы на пункт приема в радиусе до 3000 км (время сеанса
связи около 8 мин) позволило сохранять живучесть системы после отказов ЗУ. В
перспективе должна предусматриваться передача бортовой информации на рас-
пределенную сеть приемных пунктов, в том числе корабельного базирования.
За время эксплуатации РСА было выполнено много целевых программ в ин-
тересах военных и гражданских потребителей. Высокая информативность зондиро-
вания в S-диапазоне волн, который не применяется в зарубежных РСА землеобзора,
была подтверждена в ходе эксплуатации космических аппаратов «Космос-1870»
и «Алмаз-1», включая совместные эксперименты с РСА AIRSAR, SIR-C/X-SAR,
ERS-1/2 [63*, 78, 92, 166*, 232*, 242, 474, 522].
РСА «Меч-КУ» КА «Алмоз-1». Рассмотренный в разделе 12.1 системный под-
ход к проектированию космических РСА был использован при создании РСА «Меч-
КУ» КА «Алмаз-1» в процессе его модернизации по результатам эксплуатации РСА
«Меч-К». При согласовании технического задания (ТЗ) на РСА «Меч-КУ» с улуч-
шенными характеристиками были согласованы с Заказчиком более жесткие требо-
вания, но вместе с тем было предусмотрено такое управление аппаратурой, кото-
рое расширяло ее возможности, не гарантируя определенного качества РЛИ. Эти
экспериментальные режимы использовались при выполнении различных программ
дистанционного зондирования Земли (например, исследования морской поверхно-
сти), проверки путей совершенствования аппаратуры РСА.
В частности, решался вопрос о расширении полосы съемки и полосы обзора
для перенацеливания полосы съемки относительно следа КА. При проектировании
пилотируемого варианта РСА «Меч-А» требуемая по ТЗ полоса съемки соответст-
вовала ширине фотопленки бортового фоторегистратора (8 см). При замене реги-
стратора на видеомагнитофон в РСА «Меч-К» не стали переделывать синхрониза-
тор для расширения полосы съемки сверх заданной в ТЗ, хотя это позволяло повы-
сить оперативность наблюдения. В процессе испытаний РСА «Меч-К» рассматри-
валась возможность расширения полосы обзора в сторону меньших и больших
дальностей с частичным ухудшением качества РЛИ, допустимым для решения за-
дач гражданских потребителей. Однако получить РЛИ на больших дальностях не
удалось, так как объектив МОПИ упирался в заднюю стенку МОПИ.
В ходе НИР, предшествующих запуску РСА «Меч-КУ», были предложены и
промоделированы методы снижения помех неоднозначности путем рандомизации
зондирующего сигнала (см. раздел 8.2), которые предполагалось проверить в лет-
591
Радиолокационные системы землеобзора космического базирования
ном эксперименте. Была специально предусмотрена съемка морской поверхности с
неоднозначностью сигналов по дальности. К сожалению, недостаток финансирова-
ния не позволил изготовить блок рандомизации. Тем не менее, возможность ис-
пользования в перспективных РСА режимов с частичной неоднозначностью сигна-
лов для повышения оперативности наблюдения была подтверждена. Для иденти-
фикации принадлежности обнаруженных целей к разным зонам неоднозначности
использовался признак расфокусировки.
Модернизация РСА «Меч-КУ» включала замену бортового аналогового ЗУ на
цифровые магнитофоны и использование цифровой линии передачи данных на Зем-
лю через спутник-ретранслятор. Слежение за спутником обеспечивала антенна типа
АФАР, которая видна на рис. 7.45 цветной вкладки в выдвинутом положении, гото-
вая к раскрытию. Вместо оптического (кроме первого этапа) был реализован назем-
ный цифровой синтез РЛИ с использованием многопроцессорной ЭВМ ПС-2000.
Следует отметить, что на первом этапе эксплуатации РСА «Меч-КУ» при оп-
тическом синтезе РЛИ было отмечено улучшение разрешающей способности по
наклонной дальности до 15 м по сравнению с реализованным в РСА «Меч-К»
(~20 м). Это объяснялось заменой аналоговых магнитофонов и аналоговой радио-
линии с полосами по 6 МГц на цифровые радиолинию и магнитофоны с частотой
дискретизации сигнала 28,8 МГц. Этот факт свидетельствует о том, что традици-
онное для задач обнаружения правило о согласовании полосы приемника с поло-
сой сигнала является не лучшим техническим решением, когда требуется высокое
пространственное разрешение, определяемое совокупностью характеристик звень-
ев радиолокационного тракта [207*].
В РСА «Меч-КУ» были введены следующие режимы работы, расширяю-
щие возможности радиолокационной съемки'.
1) два режима работы передатчика с длительностями импульса 0,1 и 0,07 мкс
(основной) с повышенным разрешением по поперек трассы полета 11...15 м в за-
висимости от угла падения;
2) два режима АРУ с применением быстродействующей АРУ (постоянная
времени 30 мкс) для сжатия динамического диапазона сигналов и медленной АРУ
(постоянная времени 3 с), позволяющей передать реальные контрасты отраженного
сигнала в выходном РЛИ и обеспечить возможность измерения ЭПР объектов и
местности после калибровки тракта РСА. Основная съемка проводилась в режиме
быстродействующей АРУ, в котором менее сказывалось ограничение амплитудной
характеристики приемника при наблюдении ярких объектов;
3) два режима преобразования радиоголограммы в цифровую форму: основной
- с частотой квантования 28,8 МГц (масштаб по наклонной дальности 5,20833 м) с
полосой съемки по наклонной дальности 30,375 км (~45 км по горизонтальной даль-
ности) и расширенный - с частотой квантования 20,05 МГц, масштабом 7,48 м и по-
лосой съемки по наклонной дальности 43,6 км, который позволял принимать отра-
женные сигналы почти от всего периода зондирования (за вычетом длительности
импульса супрессии приемника). В этом режиме проводились эксперименты по рас-
ширению полосы обзора в область неоднозначности по дальности.
592
Глава 13. Космическая аппаратура радиолокационного наблюдения...
При разработке РСА «Меч-К», «Меч-КУ» большое внимание уделяли обеспе-
чению и контролю когерентности тракта, для чего использовали специальный из-
мерительный прибор с кварцевой линией задержки 6 мс (возможно также сравне-
ние фаз двух генераторов опорных сигналов, используя основной и резервный
комплекты блоков). Современные приборы позволяют вести измерения на несущей
частоте сигнала. Для контроля волноводного тракта оказалось полезным встраива-
ние гиперзвуковой СВЧ-линии задержки (ГЗЛЗ) в СВЧ-тракт через направленный
ответвитель с потерями 25 дБ. Это позволило иметь пилот-сигнал в виде набора
калибровочных импульсов непосредственно после импульса супрессии приемника
с декрементом затухания около 3 дБ. Полезно записывать выходной сигнал, начи-
ная со строк шумов, предшествующих приходу отраженного сигнала.
Запуск КА «Алмаз-1» с РСА «Меч-КУ» на орбиту высотой около 270 км и на-
клонением 72,7° состоялся 31 марта 1991 г. К сожалению, предусмотренный про-
ектом двухсторонний обзор не был реализован, так как не удалось раскрыть антен-
ну левого борта. По-видимому, была виновата излишняя боязнь «человеческого
фактора» - в схему управления был заложен автоматический раскрыв сначала пер-
вой (задней, см. рис. Ц.7. цветной вкладки) секции антенны, а после откидывания
первой секции - включался двигатель третьей (передней) секции антенны. По не
установленной причине циклограмма раскрыва нарушилась и секции антенны
«сцепились». Отсутствие ручных команд для возвращения ситуации к исходной и
последовательного независимого раскрыва секций антенны привело к тому, что
полярные области выше 72° с.ш. оказались недоступными для радиолокационной
съемки. Съемка этих районов была реализована только в короткий период, когда
был выполнен разворот КА на 180° относительно вертикальной оси. В связи с до-
полнительным расходом топлива было принято мудрое решение о досрочном за-
вершении полета во избежание нештатных ситуаций.
Параметры РСА «Меч-КУ» приведены в табл.°13.2. В ходе эксплуатации КА
«Алмаз-1» был накоплен обширный материал по радиолокационному зондирова-
нию Земли в S-диапазоне волн. Было проведено большое число уникальных экспе-
риментов по зондированию морской поверхности, наблюдению течений, поверх-
ностных проявлений внутренних волн, совместные многочастотные эксперименты
с РСА ERS-1/2, SIR-C/X-SAR. Широко использовалось зондирование под крутыми
углами на малых дальностях, где потенциал РСА значительно выше. Каталогизи-
рованные архивные материалы радиолокационной съемки хранятся в Центре «Ал-
маз» ОАО «ВПК «НПО машиностроения» и доступны для распространения и ис-
пользования [538]. На рис. 13.7 дано расположение кадров радиолокационной
съемки с использованием РСА «Меч-КУ» КА «Алмаз-1».
При синтезе РЛИ по радиоголограммам, полученным в режиме быстродейст-
вующей АРУ, необходима специальная коррекция радиометрических искажений,
методика которой рассмотрена в разделе 11.9. Выходные РЛИ, включая комплекс-
ные РЛИ для интерферометрической обработки, должны регистрироваться в фор-
матах (целый 16-битовый или плавающий), исключающих ограничение отметок от
ярких целей, как это рассмотрено в гл. 7.
593
Радиолокационные системы землеобзора космического базирования
Рис. 13.7. Места расположения кадров радиолокационной съемки
с помощью РСА «Меч-КУ» КА «Алмаз-1» [538]
13.3.4. Программа ERS космического агентства ESA
Рис. 13.8. Космический аппарат ERS-2
Космические аппараты ERS-1, ERS-2 (рис. 13.8) предназначены для глобальных
измерений характеристик океанов, для составления метеопрогнозов, наблюдений
за состоянием поверхности океана и ле-
дового покрытия, исследований при-
брежных зон и зондирования поверхно-
сти суши [215]. В проекте принимали
участие 13 государств Европы и Канада.
Основной полезной нагрузкой КА ERS-1
был СВЧ-прибор AMI-SAR (Active Mi-
crowave Instrument - Synthetic Aperture
Radar), который мог работать в режиме
РСА (получение РЛИ) и в режиме скат-
терометра (измерение характеристик
ветров и морских волн). Пассивный ра-
диометр ИК- и СВЧ-диапазонов ASTR
(Along-Track Scanning Radiometer and
Microwave Sounder) обеспечивал высоко-
точное измерение температуры океана, а
радиолокационный высотомер ^-диапазона RA (Radar Altimeter) - топографиче-
ские характеристики поверхности океана и ледового покрытия. Прецизионный ра-
диодальномер PRARE (Precise Range and Rate Equipment) обеспечивал точные тра-
екторные измерения. В КА ERS-2 были установлены модернизированный радио-
метр ATSR-2, а также прибор для изучения озонового слоя GOME (Global Ozone
Monitoring Experiment).
В состав системы ERS входили космический сегмент и наземный комплекс,
состоящий из центра управления полетом, центра обработки и архивирования дан-
594
Глава 13. Космическая аппаратура радиолокационного наблюдения...
ных и сети из 33 приемных станций. По плану ERS-2 был предназначен для про-
должения сбора данных после выхода из строя ERS-1 и до запуска РСА нового по-
коления КА ENVISAT-1. В процессе эксплуатации оба спутника превысили рас-
четные сроки функционирования, что позволило кроме увеличения объема полу-
ченных данных провести совместную (ERS-1 и ERS-2, а позже и с ENVISAT-1) ра-
боту с проведением радиолокационной интерферометрической съемки одних и тех
же участков местности. Орбиты КА были сформированы таким образом, чтобы
один из КА пролетал по трассе другого на следующие сутки. При этом база интер-
ферометрии не превышала 600 м, что обеспечивало когерентность получаемых
РЛИ. Совместные полеты имели большое научное и практическое значение для от-
работки методов интерферометрии с «мягкой базой» для задач построения карт
рельефа и других приложений (см. раздел 9.7).
Радиолокационный комплекс AMI-SAR работает в С-диапазоне частот
(5,3 ГГц) в одном (маршрутном) режиме с фиксированной полосой съемки
(100 км), вертикальной поляризацией в пределах углов падения 17...23°. Парамет-
ры РСА приведены в табл.°13.2.
13.3.5. Многорежимный РСА С-диапазона волн Radarsat-1
Коммерческий космический аппарат Radarsat-1 был специально спроектирован для
съемки местности в интересах широкого круга пользователей. Основные задачи,
решаемые с его помощью - глобальные всепогодные наблюдения за состоянием
ледового покрытия и растительности, оценка урожайности сельскохозяйственных
угодий, мониторинг районов стихийных бедствий, геологоразведка, лесопользова-
ние, исследование береговой зоны, океанология, обнаружение айсбергов [215].
Космический аппарат был выведен 04.11.1995 на солнечно-синхронную орбиту
высотой 798 км (поддерживается с точностью 10 км), углом наклонения 98,6° с пе-
риодом обращения 100,7 мин. Местное время пересечения экватора в восходящем
узле орбиты 18:00, период повторения трасс порядка 24 сут. Благодаря работе на
солнечно-синхронной орбите, продолжительность работы на витке достигает 28 мин.
Расчетный срок эксплуатации 5 лет, находится в эксплуатации более 14 лет.
Начальная масса КА 2749 кг, масса полезной нагрузки 1366 кг. Мощность сол-
нечных батарей составляла 3000 Вт при запуске на орбиту со снижением до 1900 Вт
после трех лет эксплуатации. Аппарат ориентирован в орбитальной системе коорди-
нат, точность трехосной системы ориентации 0,1°. Общий вид КА Radarsat-1 приве-
ден на рис. 13.9.
Бортовой многорежимный РСА работает в С-диапазоне волн (частота 5,3 ГГц,
длина волны 5,8 см). РСА оборудован волноводно-щелевой фазированной антен-
ной решеткой (ФАР) размером 15x1,5 м. Ширина луча в горизонтальной/угломест-
ной плоскостях соответственно 0,2 и 3,5...6,5°. Поляризация излучения и приема-
горизонтальная. Луч может устанавливаться в 25 положениях по углу места, изме-
няя угол падения в пределах 10...59°. Сектор электронного сканирования по углу
места 25°. Коэффициент усиления антенны 40 дБ, время перенацеливания луча со-
ставляет 10 мин. Ширина спектра зондирующего сигнала в разных режимах
595
Радиолокационные системы землеобзора космического базирования
11,6 МГц, 17,3 и 30 ГГц. Длительность зондирующего импульса 42 мкс, частота
повторения 1270... 1390 Гц. Ширина полосы съемки составляет 25...500 км в зави-
симости от режима работы. Мощность передатчика - средняя 300 Вт, пиковая
5000 Вт. В передатчике применена лампа бегущей волны.
В РСА реализовано восемь режимов работы'.
1) стандартный в пределах углов падения 20...49° с полосой съемки 100км,
разрешением азимутхдальность 28x25 м, 4 наблюдения;
2) расширенные режимы с полосой съемки 160 км и разрешением
28х(30...48) м;
3) обзорные режимы Скансар с полосой съемки 510 и 305 км и разрешением
100x100 м и 50x50 м при 2 или 4 наблюдениях;
4) детальный режим съемки с полосой 45 км (углы падения 37...48°) реализу-
ет пространственное разрешение 9х(8...11) м при одном наблюдении.
В некоторых режимах реализуется обработка с комбинацией некогерентного
накопления сигналов, как по азимуту, так и по дальности.
В штатном режиме полета антенна ориентирована для съемки местности
справа (к северу) от трассы полета КА. Ежесуточный обзор всего региона Арктики
и полный обзор районов, размещенных в пределах 49...70° северной широты,
обеспечивается в течение 3 суток. Левосторонний обзор для изучения ледового по-
крова Антарктиды реализуется разворотом КА.
Характерно, что первоначально кроме этих рабочих режимов были предусмот-
рены экспериментальные режимы съемки с приближением к надиру (углы падения
10...23°) и удаленные от надира (углы падения 50...60°). После проверки они вошли
в штатную эксплуатацию как «расширенный ближний» (разрешение 28х(63...28) м)
и «расширенный дальний» (разрешение 28х(22...19) м) - оба с четырьмя наблюде-
ниями по азимуту. Благодаря этим режимам и применению разворотов КА по крену
общая полоса обзора (перенацеливания) увеличена до 2x925 км (вместо 500 км при
одностороннем обзоре). Расширение полосы обзора может оказаться очень важным
при мониторинге катастроф для получения экстренной информации, недоступной в
данное время другим средствам дистанционного зондирования.
596
Глава 13. Космическая аппаратура радиолокационного наблюдения...
Отметим также, что ориентация КА в ОСК привела к сложностям синтеза
РЛИ, особенно в режиме Скансар. Были разработаны специальные программы
слежения за средней доплеровской частотой сигнала (положением доплеровского
центроида), позволяющие избежать азимутальной неоднозначности сигналов. Из-
менения доплеровской частоты из-за вращения Земли достигали МкГц, значи-
тельно превышая частоту повторения сигнала (—1,3 кГц).
Передача информации на Землю ведется в реальном времени на одну из шес-
ти станций со скоростью 85 Мбит/с или с бортовых ЗУ (емкость 2x72 Гбит) со ско-
ростью 10 Мбит/с. Продолжительность сеанса передачи данных 10... 14 мин.
В публикациях, посвященных анализу результатам 10-летней эксплуатации
аппаратуры, отмечалась высокая стабильность параметров РСА [287, 288, 336].
13.3.6. Космические РСА видовой разведки серии Lacrosse
Разработка космических РСА в интересах ЦРУ началась в США в 1978 году по
программе Indigo [72, 125, 126, 215, 570]. Создаваемая система спутников радиоло-
кационного наблюдения дополняла спутники оптико-электронной разведки Key-
hole (КН) и была предназначена для решения задач всепогодной круглосуточной
детальной видовой разведки стратегических объектов (в том числе авиационных,
военно-морских и ракетных баз, аэродромов и портов), включая слежение за пере-
мещениями мобильных ракетных комплексов и ударных бронетанковых частей
вооруженных сил зарубежных стран. Основными потребителями были высшее во-
енно-политическое руководство США, ведомства, входящие в структуру разведы-
вательного сообщества, и вооруженные силы. С начала 1990 г. в ходе реорганиза-
ции структуры разведывательного сообщества США создаваемые спутники La-
crosse были перенацелены на решение задач вооруженных сил США и НАТО [215].
До запуска ИСЗ военного назначения использовалась информация гражданских
спутников SEASAT, SIR-A, SIR-B. Первый экспериментальный спутник радиолока-
ционной разведки INDIGO-1 (KEYHOLE-8-49 Gambit) был выведен на (нестандарт-
ную) орбиту высотой около 600 км в 1982 г. На этом модифицированном КА фото-
графической разведки, функционировавшем в течение 122 сут, были проведены ор-
битальные испытания развертываемой в космосе крупногабаритной антенны.
В 1988 г. начата эксплуатация первого ИСЗ радиолокационной разведки
Lacrosse/Vega на орбите 680 км с наклонением 57°. Далее последовали запуски
спутников Lacrosse-1 (03.12.1988-23.05.1997), Lacrosse-2 (08.03.1991), Lacrosse-3
(24.10.1997), Lacrosse-4 (17.08.2000), Lacrosse-5 (30.04.2005).
В состав орбитальных группировок входят пары спутников, размещенных на
круговых орбитах высотой около 700 км с разными наклонениями 57° (Lacrosse-1 и
заменивший его Lacrosse-З) и 68° (Lacrosse-2, Lacrosse-4, Lacrosse-5). Периоды об-
ращения спутников 95,5...98,6 мин. Основным подрядчиком по КА является ком-
пания Lockheed Martin Astronautics, а по наземному сегменту - General Electric.
Для РСА прорабатывались разные варианты построения антенны. Первона-
чально в составе РСА предусматривалась установка показанной на рис. 13.10 зер-
кальной антенны с облучателем типа фазированной антенной решетки (по-ви-
597
Радиолокационные системы землеобзора космического базирования
димому, АФАР) [519]. Рассматривались варианты с зеркалами полукруглой или
полуэллиптической формы. Согласно данным [125] использовалась антенна Касег-
рена с параболическим зеркалом диаметром 15... 17 м и с облучателем типа ФАР.
Углы обзора находятся в пределах 30...60°, время перенацеливания - около 15 с.
Реализация сканирования луча в зеркальной антенне на углы, превышающие ши-
рину луча в 150 раз (в каждую сторону), представляет собой сложную проблему,
требующую применения АФАР облучателя [206].
Рис. 13.10. Конструктивная схема ИСЗ «Lacrosse/Vega» [125]
РСА работает в диапазоне частот 9,5... 10,5 ГГц (X-диапазон), импульсная
мощность излучения составляет 1500 Вт при длительности импульса 10...50 мкс,
средняя мощность излучения равна 400 Вт. Источник питания - солнечные бата-
реи. На первых образцах КА они имели размер 50 м и обеспечивали 10...20 кВт
мощности. По опыту эксплуатации позже размеры батарей и энергопотребление
были снижены. Расчетный срок службы аппаратуры составлял пять лет (реальные
сроки - значительно больше).
Высокое разрешение по дальности достигается путем использования широко-
полосных зондирующих импульсов, а по азимуту - большим временем синтеза при
работе в прожекторном режиме. Основные режимы работы (рис. 13.11) включают в
себя маршрутный (стандартный луч), обзорный (широкозахватный луч) и прожек-
торный (лучи высокого разрешения) режимы. Характерно наличие эксперимен-
тального режима с большими углами падения, в которых возможно появление не-
однозначности сигналов по дальности.
598
Глава 13. Космическая аппаратура радиолокационного наблюдения...
Рис. 13.12. Конструкция КА Lacrosse/ONYX
в процессе сборки
В прожекторном режиме реализуется разрешающая способность 0,6... 1,0 м при
размере кадра на местности (2...5)х(2...5) км. В маршрутном покадровом режиме с
высоким разрешением (2...3м) размер кадра составляет (6...20)х(6...20) км, а в
маршрутном режиме со средним разрешением (3...10 м) ширина полосы съемки со-
ставляет 100...200 км. Возможна съемка небольших участков местности с высоким
разрешением (0,5...0,6м) и удаленных до 2200км. Приведенные данные являются
ориентировочными, но подход к выбору режимов близок к реализованному в РСА
Radarsat-1, поскольку в разработке режимов для РСА Lacrosse принимали участие
канадские специалисты [125].
Конструктивно РСА размещается на КА с диаметром ~4,8 м при длине 14,2 м.
Общая масса КА составляет -12,7 т. Конструкция КА в процессе сборки показана на
рис. 13.12. Отмечается серь-
езный технический прог-
ресс, достигнутый при реа-
лизации последних образ-
цов КА Lacrosse/ONYX. Их
можно отнести к четверто-
му поколению РСА [519].
Бортовая радиосисте-
ма обеспечивает передачу
данных от РСА со скоро-
стью около 150Мбит/с в
двух вариантах: в ^-диа-
пазоне частот (13/15 ГГц)
через спутники-ретрансляторы TDRSS и далее на наземные станции приема в
White Sands, штат Нью-Мексико и в ^-диапазоне частот (20/30 ГГц) путем непо-
средственной передачи на наземный центр приема в Fort Belvoir, штат Виржиния и
приемные пункты в Австралии, Великобритании и на Гавайских островах.
599
Радиолокационные системы землеобзора космического базирования
Перспективы развития системы связаны с работами по программам США FIO
SBR (бывший Discoverer-2).
13.3.7. Многочастотные поляриметрические РСА SIR-C/X-SAR
многоразового космического корабля Space Shuttle
Радиолокационные комплексы, размещаемые на многоразовом космическом ко-
рабле (КК) Space Shuttle, были предназначены для отработки новых технологий и
глобальной радиолокационной съемки Земли в разных диапазонах волн с целью
картографирования, изучения состояния и динамики процессов изменения поверх-
ности Земли [215]. Радиолокационный комплекс SRL размещается на открытой
платформе Spacelab, устанавливаемой в грузовом отсеке КК Space Shuttle. Аппара-
тура включает в себя американский двухчастотный РСА SIR-C, работающий в С- и
//-диапазонах волн и европейский РСА А"-диапазона волн X-SAR. Программа экс-
плуатации комплекса была рассчитана на три полета с доработкой аппаратуры для
расширения задач дистанционного зондирования Земли.
Запуски КК с радиолокационным комплексом были осуществлены в апреле
1994 г. (SRL-1), сентябре - октябре 1994 г. (SRL-2). В результате двух полетов бы-
ло снято 25 % территории суши с общим временем 133 ч (90 ч - SIR-C и 43 ч -
X-SAR), в том числе с применением поляриметрического зондирования в С- и
//-диапазонах волн. В последние трое суток полета SRL-2 высота орбиты была
скорректирована таким образом, чтобы трассы двух полетов практически совпада-
ли. Были получены данные для интерферометрической обработки с межвитковой
базой 10...4700 м и с интервалом времени межу съемками около 5 мес.
Эти исследования дали ценную информацию по применению интерферомет-
рии для построения карт рельефа местности, о взаимной когерентности снимков и
возможностям дифференциальной интерферометрии.
В феврале 2000 г. был реализован 11-суточный полет SRTM (Shuttle Radar To-
pography Mission) co сбором картографической информации методом интерферо-
метрии с жесткой базой для построения карт рельефа местности. Было снято до
80 % поверхности земной суши в пределах от 60° с.ш. до 56° ю.ш. Для проведения
Рис. 13.13. Космический корабль Space Shuttle
для топографической съемки поверхности Земли
(SRTM) [521]
съемок в режиме однопроходной ин-
терферометрии была демонтирована
антенна //-диапазона волн и на выде-
ленном месте размещены выдвижной
механизм (штанга с полной длиной
около 61 м) с двумя приемными ан-
теннами X- и С-диапазонов волн поло-
винного размера.
Высота орбиты КА составляет
200...233 км, наклонение 57°, период
обращения 91 мин. На рис. 13.13 при-
веден общий вид КА в варианте SRTM
в момент начала движения штанги с
выносными приемными антеннами
600
Глава 13. Космическая аппаратура радиолокационного наблюдения...
X- и С-диапазонов волн. Их горизонтальный размер (6 м) вдвое меньше основных
антенн. Для точного определения размеров и угловых отклонений базы интерфе-
рометрии была предусмотрена установка на блоке с приемными антеннами лазер-
ных и телевизионных датчиков.
Параметры РСА, входящих в бортовой комплекс, приведены в табл.°13.3.
Таблица 13.3. Параметры лучей и режимов работы
Параметр SIR-C X-SAR
PCA-L (для SRL-1, SRL-2) РСА-С
Несущая частота излучения, ГГц 1,25 5,5 9,6
Длина волны, см 23,5 5,8 3,1
Ширина спектра сигналов, МГц 19 9,5 и 40 19 и 9,5
Длительность импульса, мкс 8,5; 17; 33 40
Вид модуляции ЛЧМ ЛЧМ
Частота повторения, Гц 1200...2160 1395...1736
Тип антенны АФАР волноводно- щелевая ФАР
Размеры антенны, м 12x2,95 12x0,75 12x0,4
Поляризация излучаемых и принимаемых волн Любая комбинация, включая полную: ГГ+ГВ+ВВ+ВГ ВВ
Поляризационная развязка, дБ 30
Масса антенны, кг 3300 45
Пространственное разрешение, м:
азимут дальность 27 6 (наилучшее) 8...15 4 (наилучшее) 27 3 (наилучшее) 8...15 4 (наилучшее) менее 30 10...20 до 4
Ширина полосы съемки, км 15.. .90 (70 - средняя) 15...45
225 - Скансар до 60*
Углы падения, град, 15...60 20...55
предельно до 58*
Режимы съемки Маршрутный, Скансар, прожекторный
Импульсная мощность передатчика, Вт 3500 2200 3200
Скорость информационного потока, Мбит/с 45
Система передачи данных В реальном времени через систему TDRSS (90 Мбит/с) и запись на 3 цифровых магнитофона
601
Радиолокационные системы землеобзора космического базирования
Выходной сигнал радиолокационных каналов квантуется 8-битовыми отсче-
тами, для дальнейшего сжатия информации применяются алгоритмы блочного
квантования с плавающей точкой BFPQ (Block Floating-Point Quantization). В ре-
зультате обработки блоки данных из 128- и 8-битовых отсчетов преобразуются в
последовательность 4-битовых отсчетов, сохраняя исходный динамический диапа-
зон. Четыре цифровых канала по 45 Мбит/с собираются в единый поток 180 Мбит
для регистрации в бортовом записывающем устройстве.
13.4. Разработки космических РСА, обеспечившие создание
научно-технического задела
13.4.1. Многорежимный космический РСА LightSAR для малого КА
Космическая система радиолокационного наблюдения LightSAR (проект) включает
в себя бортовой и наземный сегменты.
Основные требования, предъявляемые к системе:
• максимальное удовлетворение требований потребителей при минимально
достижимой цене;
• быстрый и дешевый доступ потребителей к радиолокационной информации;
• применение передовой технологии для снижения стоимости аппаратуры с по-
вышением ее потребительских качеств;
• обеспечение 5-летнего срока эксплуатации.
Параметры космического аппарата:
• высота орбиты 600 км, период обращения 97,6 мин;
• орбита круговая, солнечно-синхронная, наклонение 97,8°; местное время вос-
ходящего узла - 06:00 ч;
• перекрытие глобального обзора - с периодичностью 10 суток.
Высокие параметры бортовой аппаратуры (см. табл. 13.14) обеспечиваются
• использованием облегченных панелей антенны (АФАР) с электронным
управлением лучом и миниатюризированных приемопередающих модулей с
целью снижения массы, потребления и стоимости;
• применением миниатюрных микроволновых интегральных схем;
• работой на одной частоте для снижения массы и потребления;
• минимальной длиной антенны с целью снижения стоимости антенных пане-
лей, механизма развертывания антенны и массы изделия.
Технические характеристики аппаратуры:
• рабочая частота: 1,2575 ГГц (Z-диапазон);
• направление обзора: правое или левое изменением угла крена КА;
• длительность съемки составляет Юмин/вит в прожекторном режиме и до
30 мин/вит в непрерывном режиме. Ограничивает длительность съемки про-
пускная способность радиолинии передачи данных;
• длительность импульса: 15, 3 мкс;
• частота повторения: 1600 Гц - номинал (пределы 1200.. .1700 Гц);
602
Глава 13. Космическая аппаратура радиолокационного наблюдения...
квантование: 8, 4 разряда (формат (BFPQ) и 4 разряда (без BFPQ);
мощность: 1,24 кВт (максимальная), в том числе 1,15 кВт - антенна, 90 Вт -
электроника (съемка 10 мин на витке в прожекторном режиме);
масса: <250 кг (225 кг - антенна, 25 кг - электроника);
антенна: 10,8 м (азимут) х 2,9 м (высота), складная, две 4-элементные плоские
секции, складывающиеся веером по бокам КА;
электронный блок: 10x16x30 см3 (4800 см3);
командная / телеметрическая радиолиния с производительностью 1 кбит/с;
радиолиния передачи данных - 150 Мбит/с.
Данные эфемерид спутника включаются в шапку кадра.
Таблица 13.4. Основные характеристики РСА LightSAR
Параметр Режим
Высокого разрешения Четыре поляризации Две поляризации Двух- проходный интерфе- рометр Скансар
Прожектор- ный Непрерыв- ный
Разрешение, м 3 6-10 50 25 25 100
Полоса захвата, км 15x20 22 50 50 100 250
Число наблюдений 3 3 10 4 4 8
Угол от надира, град 20-52 20-52 20-40 25-52 25—44 20-52
Поляризации ГГ или ВВ ГГ или ВВ ГГ+ГВ+ +ВВ+ВГ ГГ+ГВ или ВВ+ВГ ГГ или ВВ ГГ+ГВ или ВВ+ВГ
Чувствительность One, ДБ -20 -20 -30 -25 -25 -25
Полоса сигнала, МГц 80 80 10, 15 10, 15 15 2,5
Скорость передачи данных, Мбит/с 150 150 120 60 60 40
13.4.2. Двухчастотный РСА «Траверс» модуля «Природа»
космической станции МИР
В июне 1996 г. был введен в эксплуатацию научный модуль «Природа» орбиталь-
ной станции МИР [544]. Модуль «Природа» был предназначен для дистанционного
зондирования Земли и был оборудован целым рядом многоспектральных датчиков,
в том числе двухчастотным комплексом РСА «Траверс», разработки ОКБ МЭИ.
Составной частью двухчастотного РСА «Траверс» была зеркальная антенна разме-
ром 6x3 м и два радиолокационных канала S- и Z-диапазонов волн. Задачей стан-
ции МИР было проведение систематического дистанционного зондирования раз-
ных районов Земли и набор данных. Двухчастотный двухполяризационный ком-
плекс «Траверс» был предназначен для анализа типов и состояний растительного
покрова Земли, измерения влажности почв, топографирования поверхности, опре-
деления шероховатости снежного и ледового покровов [215, 539].
Основные параметры двухчастотного РСА «Траверс» приведены в табл.°13.5.
Общий вид зеркальной антенны РСА с передающими блоками в составе облуча-
603
Радиолокационные системы землеобзора космического базирования
теля антенны, а также размещение модуля «Природа» на станции МИР показаны
на рис. 13.14.
Таблица 13.5. Основные характеристики двухчастотнго РСА «Траверс»
Параметр Значение
РСА-5 PCA-Z
Несущая частота, МГц (длина волны, см) 3,28 (9,14) 1,28 (23,44)
Поляризация ГГ или ВВ
Угол от падения, град 38
Полоса съемки, км 50
Разрешение, м 100
Ширина спектра сигналов, МГц 5
Длительность импульса, мкс 25
Частота повторения импульсов, Гц 3000
Поток формируемых данных, Мбит/с 15
Рис. 13.14. Зеркальная антенна РСА «Траверс» (а) и размещение модуля «Природа»
в составе станции МИР (б)
При разработке РСА «Траверс» был использован технический задел, полу-
ченный при создании радиолокатора для автоматических межпланетных станций
«Венера 15/16». Эти станции функционировали на эллиптической орбите Венеры с
высотами в пределах 1000...65000 км с наклонением 85° и периодом обращения
24 ч. РСА работал в 8-сантиметровом диапазоне волн, использовал антенну с раз-
мерами 6x14 м и обеспечивал разрешающую способность 1...2км (нефокусиро-
ванный синтез РЛИ) при полосе съемки 150 км и длине маршрута до 9000 км. Ус-
пешно выполненная программа радиолокационной съемки поверхности Венеры
позволила выпустить Атлас карт Венеры, содержащий ценную информацию по
геологическим особенностям планеты [24].
604
Глава 13. Космическая аппаратура радиолокационного наблюдения...
Однако для решения задачи землеобзора требовалась серьезная модификация
аппаратуры, особенно в части реализуемой разрешающей способности. К сроку
ввода в эксплуатацию модуля «Природа» (1996) были доступны для исследований
и широкого практического использования радиолокационные снимки с разрешаю-
щей способностью 30 м (РСА Seasat-A - с 1978, SIR-C/X-SAR - с 1994, ERS-1/2 - с
1991). Поэтому РЛИ с разрешением 100 м, полученные с РСА «Траверс», оказались
невостребованными.
13.4.3. Многочастный бортовой радиолокационный комплекс КА «Алмаз-1В»
Пример реализации принципа наращивания сложности аппаратуры с одновремен-
ным расширением ее возможностей - проект бортового радиолокационного ком-
плекса (БРЛК) ЭКОР-1В КА «Алмаз-1 В». Его технические характеристики приве-
дены в табл.°13.6 [55], а общий вид показан на рис. 13.15. При разработке БРЛК
был принят ряд ключевых решений, исходя из принципов системного подхода к
проектированию РСА. В БРЛК по левому борту предусмотрен обзор с помощью
двух каналов - РСА 5-диапазона волн и РСА/РБО X-диапазона. Использованы вол-
новодно-щелевые антенны по типу антенн РСА «Меч-К» и космического РБО
«Космос-364». По правому борту осуществлялся обзор с помощью РСА S- и
P-диапазонов волн. В антенной системе применены три зонтичных зеркальных ан-
тенны размером 3x6 м, разработанных для РСА «Траверс» космического модуля
«Природа» станции МИР [55]. Хотя в трехзеркальной антенне усложнена задача
формирования ДНА с малыми боковыми лепестками, но наличие отработанных
образцов и технологического оборудования явилось определяющим в выборе типа
антенны.
Таблица 13.6. Технические характеристики БРЛК ЭКОР-В КА «Алмаз-1 В»
Параметр Тип
РСА-3 | РСА-10 | РСА-70
Высота орбиты, км 400
Угол наклонения орбиты, град 73
Длина волны, см 3,49 9,58 69,8
Углы наблюдения, град 25-51 25-51 25-51
Направление обзора влево влево/вправо вправо
Полоса обзора, км 330 330 330
Полоса съемки, км 20-35 30—45/60—170 120-170
Поляризация ВВ ГГ/(ВВГ+ГГВ) ввг+ггв
Разрешение: по дальности, м по азимуту, м радиометрическое, дБ РСА/РБО 5-7/150 5-7/2500 0,5 5-7 / 22—40 5-7/15 0,5/1 22-40 15 1
УЭПР шумового эквивалента, дБ -25 -25/-33 -33
Поток информации (РСА/РБО), Мбит/с 240/1 2x120 2x240
Энергопотребление, Вт 2300 2300 2300
Масса антенн, кг 320 / 260
Масса аппаратуры без антенн, кг 1500
605
Радиолокационные системы землеобзора космического базирования
Рис. 13.15, Общий вид проекта КА «Алмаз-1 В» с трехчастотным БРЛК (а)
и аналогичное построение антенного устройства в РСА Ku-диапазона фирмы Astrium GmbH (б)
Хотя данная разработка не была реализована, она позволила создать необхо-
димый технический задел для совершенствования космических РСА. Предложен-
ное оригинальное решение построение антенн способствовало развитию техники
РСА не только в России, но и за рубежом. Иллюстрацией может служить проект
космического РСА К7/-диапазона волн (2=1,75 см) для наблюдения снежного по-
крова (отличие сухого и влажного снега), где принято явно заимствованное реше-
ние для антенного устройства (см. рис. 13.15,6).
13.4.4. Многочастный поляриметрический бортовой радиолокационный
комплекс «Аркон-2»
КА «Аркон-2 разработки НПО им. С.А. Лавочкина оборудован тремя радиолокато-
рами - сантиметрового Jf-диапазона волн (Спинар-1) и дециметровых L- и Р-диа-
пазонов волн (БРЛК «Спинар-1 ДМ»), реализующих разрешающую способность от
1-2 м до 30 м [47*, 125, 126, 548]. Задачи, решаемые радиолокационным комплек-
сом: природопользование, оценка ледовой обстановки, поиск и разведка ископае-
мых, проведение гидро- и гляциологических наблюдений, создание и обновление
цифровых топографических карт, создание и обновление кадастров сельскохозяй-
ственных земель и природных ресурсов, мониторинг экологических процессов.
Радиолокационный комплекс предусматривал возможность оперативно полу-
чать данные об объектах, не обнаруживаемых визуально (скрытых снегом, листвой
деревьев, замаскированных, заглубленных), определять скорость движущихся объ-
ектов, применять интерферометрические технологии для получения данных о
рельефе местности, использовать поляриметрические характеристики объектов для
дешифрирования радиолокационных снимков и др.
Параметры бортового радиолокационного комплекса космического аппарата
«Аркон-2» приведены в табл.°13.7, общий вид КА показан на рис. 13.16. Иа
рис. 13.17 показан общий вид совмещенной АФАР L- и P-диапазонов волн БРЛК
«Спинар-1 ДМ».
В дециметровых каналах L- и Р-диапазонов «Спинар-1 ДМ», разрабатываемых
ОАО «Концерн «Вега», используется совмещенная двухчастотная АФАР с возмож-
ностью работы с полным набором поляризаций ВВ + ВГ + ГГ + ГВ (см. табл. 13.7), а
в P-диапазоне еще и с круговой поляризацией.
606
Глава 13. Космическая аппаратура радиолокационного наблюдения...
Таблица 13.7. Параметры бортового радиолокационного комплекса КА «Аркон-2»
Параметр Диапазон волн
Х(Зсм) L (23 см) Р(69 см)
Высота орбиты, км 500...600
Поляризация при приеме и передаче ВВ/В17П7ГВ вв+вг+гг+гв
Направление обзора вправо/влево от трассы КА
Полоса съемки, км 2...10 15...400 60... 120
Полоса обзора, км 450 450 250
Разрешающая способность, м 1...1,5 3...30 30
Радиометрическое разрешение, дБ 1,2...3,5
Чувствительность, о°пе, дБ -23
Рис. 13.16. Общий вид КА «Аркон-2» с антеннами РСА «Спинар-1»
и БРЛК «Спинар-1 ДМ» бортового радиолокационного комплекса
Полоню АФАР
Комбинированные излучатели L-дианазона. 256 пи. Излучатели Р-дианазона. <54 шт.
Рис. 13.17. Общий вид совмещенной АФАР L- и P-диапазонов волн
БРЛК «Спинар-1 ДМ»
607
Радиолокационные системы землеобзора космического базирования
13.5. Состояние и перспективы развития РСА землеобзора
космического базирования
Современные этапы развития космических радиолокационных средств дистанцион-
ного зондирования Земли характеризуются созданием радиолокаторов с синтезиро-
ванной апертурой антенны третьего и четвертого поколений, включая проекты РСА
космического базирования [51, 53, 64, 72, 127, 534, 550, 571]. На предыдущих стади-
ях были выполнены эксперименты по оценке информативности радиолокационных
изображений (РЛИ), получаемых из космоса в разных диапазонах волн (X, С, S, L), с
разными поляризациями. Получены количественные данные по отражающим харак-
теристикам подстилающей поверхности [522], разработаны технологии и алгоритмы
когерентной обработки радиолокационной информации, включая построение циф-
ровых карт рельефа, измерения малых (сантиметровых) подвижек земной коры,
оценку изменения обстановки на объекте наблюдения. Внедрены в действующую
аппаратуру и программное обеспечение обработки материалов радиолокационной
съемки специфические для космических РСА режимы работы, адаптированные для
пользовательских задач: общего и геологического картирования, исследования при-
родных ресурсов, мониторинга растительного покрова, океанологии, ледовой раз-
ведки, обеспечения судовождения, а также контроля зон локальных конфликтов и
обеспечения военных операций, мониторинга чрезвычайных ситуаций и сопровож-
дения спасательных работ. Кроме основных режимов дистанционного зондирования
Земли (ДЗЗ) предусматривают выборочную съемку участков морской поверхности.
До последних лет, кроме РСА военного назначения Lacrosse, в котором реали-
зовано метровое разрешение, действующие космические РСА, в основном, были
пригодны для решения задач исследования природных ресурсов, мониторинга рас-
тительного покрова и океана: наилучшее разрешение Им обеспечивается в РСА
Radarsat-1. В поляриметрических РСА третьего поколения ENVISAT/ASAR,
PALSAR/ALOS, Radatsat-2 возможно получение РЛИ с разрешением 3... 10 м.
Современная концепция проектирования космических РСА предусматривает
создание многофункциональных многорежимных, поляриметрических РСА, по-
зволяющих получать радиолокационные изображения (РЛИ), пригодные для поля-
риметрической и интерферометрической обработки и позволяющие получать ра-
диолокационные снимки с высоким пространственным разрешением в непрерыв-
ном маршрутном режиме, с наивысшим разрешением в прожекторном режиме или
в режиме двойного приема (0,5... 1 м) и со средним разрешением в широкозахват-
ном режиме Скансар. Тенденцией развития радиолокационных систем землеобзора
космического базирования является использование радиолокационных датчиков в
составе орбитальных группировок (тандемы TerraSAR-X и Radarsat-2/З, группи-
ровки КА SAR Lupe, Cosmo SkyMed и др.), которые существенно расширяют воз-
можности ДЗЗ и повышают оперативность наблюдения за счет сокращения време-
ни повторного наблюдения и интегрирования получаемых данных в глобальной
информационной системе. Параметры РСА приведены в следующих подразделах
(см. табл.°13.9-13.13). Сводные данные по современным космическим РСА и бли-
жайшей перспективы приведены в табл.°13.8 (см. также табл. 13.12-13.15).
608
609
Таблица 13.8. Параметры современных и перспективных космических РСА
Диапазон волн X С L
Космический аппарат TerraS AR-X TECSAR Radarsat-2 RISAT-1 TerraS AR-L ALOS
Аппаратура РСА РСА PALSAR
Высота орбиты КА, км 514 550 798 609 500-г630 692
Наклонение, град 97,4 143,3 98,6 97,9 98,16
Тип и размер антенны, м АФАР 4,8x0,8 ЗА, диам. ~3 АФАР 15x1,4 АФАР 6x2 АФАР 11x2,6 АФАР 8,9x3,5
Режимы работы МР, ПР, СС, Пол МР, ПР, СС, Пол МР. ОР, ДР, РР МР, ПР, Пол, СС МР, СС МР, ДР, СС, НП, Пол
Углы падения, град 20... 55 (МР, ПР) 20...50 (МР, Ор, Пол. СС) 20...48 15...38 (2 пол.) 8...60 (ДР, НП, Пол)
20...45 (СС) 10...54 (макс, 15...32 (4 пол.) 18...43 (СС)
15...60 (макс) 30...40 (ДР) без гарантии качества РЛИ)
10...60 (РР)
Полоса обзора, км 400 180/260 до 870
макс 600 СС: 250...360
Полоса (кадр) съемки, км 30 (МР) 5x15/10x15 (ПР) 100 (СС) 100 (МР) 150 (ОР) 45 (ДР) 305/510 (СС) 70/170 (РР) 30 (МР, Пол) 10x1 (ПР)0 120/240 (СС) МР: 40/60 СС: <200 20...360 (МР) 40...70 (ДР, НП) 20...70 (Пол) 250...360 (СС)
Поляризация 2 пол. ГГВ/ВВГ/ГГ+ +ВВ 2 пол., 4 пол. 2 пол., 4 пол. МР, ПР, СС: ГГВ/ВВГ Пол: 4 пол. 2 пол., 4 пол. ГГ/ВВ ГГВ/ВВГ
Разрешение азимутхдальность, м 3x3 (МР) <1x1,2/2x1,2 (ПР) 15x16 (СС) 25x28 (МР, ОР) 3x3 (ДР) 9/25 (Пол) 50/100 (СС) (20/40)х28 (РР) 3x3 (МР) <2x2 (ПР) 12x12 (Пол) 25x25/50x50 (СС) (9х9)/( 15х 15) (7... 10)х(10/20) (ДР) 100x100 (СС) 24...89 (Пол) 14...89 (НП)
Средняя мощность излучения, Вт 400 400 400
Чувствительность, NESZ, дБ -(19...30) -(30...35) -25
Примечания: Режимы работы: МР - маршрутный, ДР - детальный, КР - покадровый, ПР - прожекторный, СС - Скансар, РР -
расширенный. Пол - поляриметрический, СВ - режим съемки морских волн, НП - непосредственная передача данных
Глава 13. Космическая аппаратура радиолокационного наблюдения...
Радиолокационные системы землеобзора космического базирования
В большинстве современных и проектируемых РСА землеобзора космическо-
го базирования предусматривается получение разрешения снимков от 1...3 м, что
пригодно для эффективного решения задач военной разведки и мониторинга чрез-
вычайных ситуаций.
13.5.1. Поляриметрический РСА С-диапазона волн ASAR
космического аппарата ENVISAT
Космический аппарат ENVISAT (Environment Satellite), показанный на рис. 13.18,
Рис. 13.18. Общий вид КА ENVISAT
предназначен для продолжения
программы регулярного радиоло-
кационного зондирования Земли,
начатой с использованием КА
ERS-1 и ERS-2 в интересах ши-
рокого круга пользователей [215,
369, 438, 479, 520, 556]. Первый
спутник программы - ENVISAT-
1 - был запущен 1 марта 2002 г.
Запуск второго спутника
ENVISAT-2 в феврале 2003 г.
оказался неудачным - аппарат не
вышел на орбиту, а блоки полез-
ной нагрузки упали в Австралии.
Орбита КА ENVISAT - солнечно-синхронная со средней высотой 799,8 км
(радиус орбиты 7159,5 км), наклонение - 98,55°, орбитальная скорость - 7450 м/с,
период обращения - 100,59 мин, время (местное) пересечения экватора в нисходя-
щем узле - 10:00 ч, период повторения трасс - 35 суток. Число витков в сутки -
14и/з5. Геометрия следа КА на поверхности Земли поддерживается с точностью
1 км относительно номинального значения. Ориентация КА в ПСК. Для повыше-
ния точности географической привязки изображений используются данные GPS,
бортового высотомера, лазерных дальномерных измерений (на борту КА установ-
лены лазерные отражатели) и автономной системы траекторно-временных измере-
ний DORIS (точность измерения параметров орбиты около 1 м).
Начальная масса КА на орбите - 8211 кг, масса полезной нагрузки - 2145 кг.
Мощность солнечных батарей - 7500 Вт (6700 Вт - через 4 года эксплуатации).
Энергопотребление полезной нагрузки 1,9 кВт среднее и 3 кВт пиковое.
На борту спутника установлено 10 различных приборов, работающих в широ-
ком диапазоне волн электромагнитного спектра: от микроволновых до ультрафио-
летовых.
В состав полезной нагрузки входят'.
РСА ASAR (Advanced Synthetic Aperture Radar) - основное средство наблю-
дения;
радиолокационный высотомер RA-2 (Radar Altimeter);
усовершенствованный пассивный радиометр ИК- и СВЧ-диапазонов AATSR
(Advanced Along-Track Scanning Radiometer and Microwave Sounder);
610
Глава 13. Космическая аппаратура радиолокационного наблюдения...
• спектрометр среднего разрешения MERIS (Medium Resolution Imaging
Spectrometer);
• интерферометр Михельсона для зондирования атмосферы MIPAS (Michelson
Interferometer for Passive Atmospheric Sounding);
• спектрометр для измерения концентрации озона в атмосфере GOMOS (Global
Ozone Monitor by Occultation of Stars);
• пассивный СВЧ-радиометр MWR (Microwave Radiometer);
• сканирующий спектрометр атмосферы SCIAMACHY (Scanning Imaging
Absorption Spectrometer for Atmospheric Cartography).
Поляриметрический РСА ASAR работает в С-диапазоне волн (частота 5,331 ГГц,
длина волны 5,63 см). Антенна типа АФАР имеет размеры 10x1,3 м, массу 720 кг,
4 рабочих режима. Масса РСА составляет 832 кг.
Основные режимы РСА следующие*.
• маршрутный режим съемки с разными поляризациями MP (Image and
Alternative polarization Modes);
• широкозахватный режим Скансар;
• режим глобальной съемки (РГС);
• режим съемки морских волн РМВ.
Параметры режимов РСА ASAR приведены в табл.°13.9. Реализуемое пре-
дельное разрешение в РСА в маршрутном режиме с получением комплексных РЛИ
(формат SLC) определяется: по азимуту - половиной горизонтального размера ан-
тенны (5 м), а поперек трассы полета - максимальной полосой зондирующего сиг-
нала 16 МГц (т.е. 9,375 м по наклонной дальности и 27...13 м по горизонтальной
дальности при углах падения 20...45°). Предусмотрена также поставка обзорных
РЛИ с разрешением 75 м в полосе съемки 100 км.
Таблица 13.9. Параметры режимов РСА ASAR
Параметр МР Скансар РМВ РГС
1 2 3 4 5
Пространственное разрешение (азимут/дальность), м 30/30 150x150 30x30 1000x1000
Радиометрическое разрешение, дБ 2,8 3,5 (поляр.) 2 2 1,5
Углы падения, град 20...45 17...42 20...45 17...42
Число лучей ДНА 7 5 2 5
Ширина полосы съемки, км 100...56 405 5x5 или 5x10 405
2 кадра на площади 100x100 км2
Ширина полосы обзора, км 500 405 485 405
Поляризация в режимах: стандартный поляриметрические ГГ или ВВ или ГГ+ВВ или ГГ+ГВ или ВВ+ВГ ГГ или ВВ ГГ или ВВ ГГ или ВВ
611
Радиолокационные системы землеобзора космического базирования
Продолжение табл. 13.9
1 2 । 1 3 1 4 1 5
Ширина спектра зондирующего сигнала, МГц до 16 МГц
Частота повторения, Гц 1650...2100
Уровень неоднозначности (азимут/дальность), дБ 25 / 25 (по точечной цели)
22/15 (интегральный для дальнего луча)
Потребляемая мощность, Вт 1365 1200 647 751
Поток цифровых данных, Мбит/с 100 -100 0,9 0,9
Время съемки за виток, мин до 30 оставшееся на витке
Информация передается на землю непосредственно по радиолинии ^-диа-
пазона волн, а также через спутник-ретранслятор ARTEMIS (ЕКА) по радиолинии
^-диапазона. Используются четыре бортовых цифровых магнитофона по 30 Гбит
памяти (скорость записи/воспроизведения - 4,5/50 Мбит/с). Используется один вы-
сокоскоростной канал передачи данных 100 Мбит/с, один канал - до 32 Мбит/с и
9 каналов - до 10 Мбит/с.
За время эксплуатации РСА ENVISAT/ASAR выполнено множество научных
и прикладных исследований. Полученные материалы использованы для решения
практических задач землепользования, экологического контроля, геологии, обес-
печения инженерных и строительных работ [71, 87, 301, 369, 378, 520 и др.].
13.5.2. Многорежимный поляриметрический РСА С-диапазона волн
Radarsat-2
Существенно расширены возможности, реализуемые РСА Radarsat-2, по сравне-
нию с Radarsat-1 [268, 276, 330, 402]. Общий вид КА показан на рис. 13.19, зоны
Рис. 13.19. Общий вид КА Radarsat-2
обзора РСА Radarsat-2 показаны
на рис. 13.20, а параметры лучей
приведены в табл.°13.10. В от-
личие от обычно применяемого
прожекторного режима кадро-
вой съемки с высоким разре-
шением в РСА Radarsat-2 ис-
пользуется режим «двойного
приема» (см. подраздел 4.2.1) с
«ультравысоким» разрешением
РЛИ 3x3 м. Двойной прием реа-
лизуется путем частичного рас-
ширения ДНА на передачу (пу-
тем введения квадратичного
распределения фазы по апертуре АФАР), разделения АФАР на две секции по ази-
муту с независимым приемом сигналов от каждой секции. Азимутальное разреше-
ние улучшается примерно в 2 раза.
612
Рис. Ц.1. Изобразительные свойства радиолокационных снимков, снятых в Х-, С и £-диапазонах
волн (SIR-C/X-SAR) и в S-диапазоне волн (РСА «Меч-КУ» КА «Алмаз-1»).
Псевдоцветное изображение (ср. с ч/б РЛИ на рис. 2.1)
Рис. Ц.2. Псевдоцветное радиолокационное изображение пролива Гибралтар
и прибрежной территории (ср. с ч/б РЛИ на рис. 3.7). РСА «Меч-КУ» (КА «Алмаз-1»
Рис. Ц.З. Псевдоцветные радиолокационные изображения месторождения Лангепас
(Западная Сибирь), полученные РСА «Меч-КУ» (КА «Алмаз-1»):
а - летнее; б - зимнее (б). Сравнить с рис. 2.26
Рис. Ц.4. Формирование цветных композитных радиолокационных изображений
по монохромным составляющим: красный (R) - Л-диапазон ГГ-поляризации;
зеленый (G) - Z-диапазон ГВ-поляризации; синий (В) - С-диапазон, ГВ-поляризации
a)
б)
Рис. Ц. 5. Цветные композитные поляриметрические радиолокационные изображения:
вулкана), сформированные по информации, полученной РСА SIR-C/X-SAR, КК Endeavour [522]:
а - двухчастотное L-диапазон (ГГ и ГВ) и С-диапазон (ГВ);
б - одночастотное L-диапазон (ГГ и ГВ).
Цвета: L-диапазон ГГ - красный; L-диапазон ГВ - зеленый; С-диапазон ГВ - синий.
Вулкан Ключевская сопка (Камчатка, Россия)
Рис. Ц.6. Демонстрационный комплект космического аппарата У С-AM с раскрытыми
антеннами РБО РИФ. ОКБ «Арсенал» [11]
Рис. Ц.7. Общий вид космического аппарата «Алмаз-1» на ВДНХ с раскрытыми
волноводно-щелевыми антеннами РСА «Меч-КУ» и подготовленной
к раскрытию АФАР линии передачи данных.
Солнечные батареи находятся в сложенном положении на корпусе КА
Рис. Ц. 8. Испытания в безэховой камере ОАО «ВПК «НПО машиностроения)
гибридной зеркальной антенны РСА для космического аппарата «Кондор-Э»
Глава 13. Космическая аппаратура радиолокационного наблюдения
Все режимы
обеспечиваются
при двустороннем
обзоре
Скансар
Лу
500 км
Лучи
с широкой
полосой
съемки
Лучи с высоким
разрешением
и накоплением
4 поляризации с высоким
разрешением
(в сокращенной полосе)
высоким
разрешением Стандартные лучи
Стандартный режим
с 4-мя поляризациями
(в сокращенной полосе)
След трассы КА
Расширенные лучи
(малые углы падения)
Расширенные лучи
(большие углы
падения)
500 км
250 км
250 км
Рис. 13.20. Зоны обзора РСА Radarsat-2
Таблица 13.10. Параметры лучей РСА Radarsat-2
Режим Примерные углы падения, град Номинальная ширина полосы съемки, км Разрешение, гор. дальн. х азимут, м Число наблюдений дальн. х азимут
Выбор поляризации: передача Г или В, прием Г и/или В
Высокое разрешение 37...40 50 10x9 1X1
Стандартный 20...49 100 25x28 1x4
Ближний 10...23 170 40x28 1x4
Дальний 50...60 70 20x28 1x4
Обзорный (широкий захват) 20...45 150 25x28 1x4
Узкий Скансар 20...46 300 50x50 2x2
Широкий Скансар 20...49 500 100x100 4x4
Поляриметрия: передача Г и В через период, прием Г и В в каждом периоде
Высокое разрешение, 4 поляризации 20...41 25 11x9 1X1
Стандартный, 4 поляризации 20...41 25 25x28 1x4
Режимы одной поляризации: передача Г или В, прием Г или В
Ультравысокое разрешение 30...40 20 3x3 1X1
Высокое разрешение, накопление 30...50 50 11x9 2x2
В РСА Radarsat-2 значительно повышается точность ориентации КА с помо-
щью установленного астродатчика и точность позиционирования КА с помощью
GPS. Бортовой накопитель емкостью 384 Гбит обеспечивает накопление данных за
28 мин на каждом витке. Масса РСА составляет 750 кг при массе КА 2280 кг.
21—1492
613
Радиолокационные системы землеобзора космического базирования
13.5.3. Поляриметрический РСА L-диапазона волн PALSAR космического
аппарата ALOS
Разработанный Японией (фирма JAXA) космический РСА L-диапазона PALSAR
(Phased Array type L-band Synthetic Aperture Radar) с АФАР является одним из ос-
новных датчиков усовершенствованного космического аппарата ALOS (Advanced
Land Observing Satellite), предназначенного для ДЗЗ [72, 215, 322, 520, 534, 551].
Спутник был выведен 24 января 2006 г. на солнечно-синхронную орбиту высотой
691,65 км с углом наклонения 98,16°. Время обращения составляет 99 мин, время
пересечения экватора в нисходящем узле 10 ч 38 мин, период повторения трасс
46 суток.
Начальная масса КА составляет 3850 кг, мощность системы электропитания
7 кВт (после 3 лет полета). Кроме РСА на КА установлены:
1 ) фотоаппарат для стереосъемки PRISM (Panchromatic Remote-sensing Instru-
ment for Stereo Mapping), позволяющий получать снимки с разрешением до 2,5 м.
Фотоаппарат имеет три объектива для визирования вперед, вниз и назад, что по-
зволяет получать цифровые карты рельефа местности (ЦКР) в полосе до 70 км;
2 ) мультиспектральная камера видимого и ближнего ИК-диапазона волн
AVNIR-2 (Advanced Visible and Near Infrared Radiometer type), позволяющая полу-
чать цветные изображения Земли с разрешением 10 м.
Общий вид космического аппарата ALOS показан на рис. 13.21.
Радиолокационный ком-
плекс PALSAR работает в L-
диапазоне волн (несущая час-
тота 1270 МГц, длина волны
23,62 см) и является усовер-
шенствованным вариантом
станции SAR, работавшей в
составе КА JERS-1. Для рас-
ширения возможностей ДЗЗ в
РСА введен многоканальный
поляриметрический режим
съемки, при котором излуча-
ются импульсы Г- или В-по-
ляризаций и ведется прием
двух поляризаций отраженных волн (ГГ+ГВ или ВВ+ВГ). Поляризацию излучения
изменяют от импульса к импульсу, в результате реализуется полнополяриметриче-
ский режим (ГГ+ГВ+ВВ+ВГ), позволяющий получить матрицу Стокса объектов на-
блюдения и элементов подстилающей поверхности.
В РСА используется четырехсекционная АФАР с размерами 8,9x3,1 м, вклю-
чающая 80 приемопередающих модулей. Она обеспечивает сканирование луча в
угломестной плоскости (18 позиций луча в секторе углов визирования 10...51 °).
Это обеспечивает широкую полосу обзора (870 км) в детальном режиме и широкие
полосы съемки (3-5 полос по 250...350 км) в широкозахватном режиме Скансар.
Рис. 13.21. Общий вид КА ALOS с РСА
PALSAR Г5341
614
Глава 13. Космическая аппаратура радиолокационного наблюдения...
Масса АФАР составляет 250 кг, коэффициент усиления антенны на переда-
чу/прием 36,5/35,8 дБ. Масса РСА равна 440 кг, энергопотребление РСА 1100 Вт.
Предусмотрены следующие режимы работы РСА:
• детальный маршрутный одна поляризация FBS (Fine bean single);
• детальный маршрутный две поляризации FBD (Fine beam dual);
• низкоскоростной режим прямой передачи данных (Direct downlink mode);
• широкозахватный Скансар SB;
• полнополяриметрический режим.
Параметры режимов РСА PALSAR указаны в табл.° 13.11. На рис. 13.22 и
13.23 приведены образцы получаемых РЛИ. Для удобства визуального дешифри-
рования РЛИ, а также его регистрации в псевдоцвете поляризационные состав-
ляющие формируют в композитное RGB-изображение, например: красный - ГГ,
зеленый - ГВ, синий - ВВ.
Таблица 13.11. Параметры режимов РСА PALSAR
Параметр Детальный FBS Детальный FBD Прямая передача Скансар SB Полно- поляримет- рический
Поляризация ГГ или ВВ ГГ+ГВ или ВВ+ВГ ГГ или ВВ ГГ или ВВ ГГ+ГВ+ +ВВ+ВГ
Пространственное разрешение, м 7...44 14...88 14...88 100 24...89
(много наблюдений)
Углы падения, град 8...60 8...60 8...60 18...36 8...30
18...40
18...43
Количество лучей ДНА 18 18 18 3/4/5 5
Ширина полосы съемки, км 40...70 40...70 40...70 250...350 20...65
Ширина полосы обзора, км 870 870 40...70 250...350 20...65
Чувствительность сгпе, дБ -23 - пол. съемки 70 км <-25 <-29 <-25
-25 - пол. съемки 60 км
Радиометрическое разрешение, дБ, не более 1 по кадру съемки
1,5 за виток
Полоса зондирующего сигнала, МГц 28 14 14,28 14
Разрядность кодирования радиоголограммы 5 5 3/5 5 5
Скорость передачи данных на наземный сегмент, Мбит/с 240 240 120 120 240
Импульсная мощность передатчика, Вт 2000
Уровень неоднозначности сигнала, дБ, не более -16 - пол. съемки 70 км -21 -21 -19
-21 - пол. съемки 60 км
Формат файлов CEOS или GeoTIFF
Обработка информации Радиометрическая, геометрическая коррекция, преобразование к картографическим проекциям
615
Радиолокационные системы землеобзора космического базирования
Рис. 13.22. Пример радиолокационного изображения, полученного РСА PALSAR [534]
Рис. 13.23. РЛИ, полученные в полнополяриметрическом режиме:
видны поля с решетчатыми лесозащитными полосами из быстрорастущих лиственных пород; расстояние
между лесополосами 3 км, ширина лесополосы 180 м
(РСА PALSAR, снимок 13.03.2007, угол визирования 21,5°, разрешение 30 м [574])
Данные, получаемые со спутника, могут быть использованы для картографи-
рования, наблюдения за использованием природных ресурсов. Преимущественное
назначение КА ALOS - применение в научных целях, коммерческое использование
рассматривается как вторичная задача.
616
На предварительной стадии проектирования РСА PALSAR предполагалась
ориентация КА в ОСК. Окончательным решением стала ориентация КА в ПСК.
Режим ориентации в ОСК был оставлен как экспериментальный.
13.5.4. Орбитальная группировка SAR Lupe
Орбитальная группировка космических аппаратов с РСА SAR Lupe военного на-
значения включает в себя 5 спутников на трех околополярных орбитах высотой
470...505 км с углами наклонения около 98,7°(рис. 13.24). Первый спутник был за-
пущен в декабре 2006 г. и с января 2007 г. введён в эксплуатацию. Далее последо-
вали запуски 02.07.2007 г., 01.11.2007, 27.03.2008 и 22.07.2008.
РСА работает в .^-диапазоне волн и обеспечивает разрешающую способность
РЛИ от 0,5 м. Основное назначение системы - видовая разведка [125, 126,263, 568].
Рис. 13.24. Общий вид КА SAR Lupe (а) и состав орбитальной группировки (б) [568]
Масса одного спутника составляет примерно 720 кг, его размеры - 4><3><2 м.
Оцениваемое время активного существования 10 лет при доступности в течение
97 % времени в году. Средняя потребляемая мощность - 250 Вт.
По данным производителя разрешение спутника выше, чем у аналогичных аме-
риканских систем Lacrosse. Кадр съемки имеет размеры 5,5x5,5 км при «наивысшем
разрешении» менее 1 м и 60x8 км в «высоком разрешении». Ширина полосы съемки
ограничивается возможностями радара, длина кадра (в маршрутном режиме) - веро-
ятно либо методом обработки данных, либо потребляемой мощностью. Точные дан-
ные о зависимости разрешения от высоты и скорости - засекречены.
Солнечные батареи и зеркальная параболическая антенна РСА фиксировано
установлены на КА. Поэтому для перенацеливания полосы съемки, а также для до-
зарядки буферной батареи изменяется ориентация спутника в пространстве. Изме-
нение ориентации осуществляется при помощи магнитных катушек и маховиков. В
прожекторном режиме высокого разрешения последовательность сканирующих
импульсов направляется на цель с интервалом примерно 11 с. Значение используе-
мой при этом мощности засекречено.
617
Радиолокационные системы землеобзора космического базирования
Наземная станция была построена с 2004 по 2006 гг. в ФРГ, в районе Гельс-
дорф, неподалёку от Бонна. Наземная станция состоит из двух сегментов - сегмен-
та пользователя и сегмента управления. Первый осуществляет выбор цели и синтез
изображений, второй отвечает за техническое управление и передачу изображений.
Память на спутнике ограничена 128 Гб, что позволяет получать не более 30
изображений в день (возможно, что это ограничение возникает также за счёт потреб-
ляемой энергии и ширины полосы пропускания канала связи). Для передачи данных
используется радиолиния Х-диапазона волн. При этом используется та же антенна,
что и для РСА. Данные управления и телеметрии передаются в зашифрованном виде
в 5-диапазоне волн непосредственно с наземной станции или через другие спутники.
Среднее время реакции (время от запроса до передачи изображений) состав-
ляет примерно 11 ч. Правда 95 % запросов требуют для своего исполнения 19 ч.
Сообщения о мероприятиях по существенному уменьшению этого времени за счёт
специальных морских судов или мобильных станций управления, как это делается
в США или РФ, официально не публикуются.
13.5.5. Космические аппараты Cosmo SkyMed
Серия космических аппаратов двойного назначения Cosmo SkyMed 1-4 (Constellation
of Small Satellites for Mediterranean basin Observation - созвездие малых спутников
для наблюдения за Средиземноморским бассейном) разрабатывается Итальянским
Космическим Агентством (ASI) совместно с министерством обороны Италии
(MoD) [53]. Области применения РСА включают мониторинг лесного покрова,
сбор данных о характеристиках водной поверхности, картирование границ водо-
емов, экологический мониторинг, сопровождение операций по ликвидации послед-
ствий чрезвычайных ситуаций, планирование работ по развитию дорожно-транс-
портной структуры, обнаружение разливов нефти и лесных пожаров, обеспечение
судоходства, картирование снежного покрова, а также задачи обеспечения боевых
действий в ходе военных конфликтов.
В состав орбитальной группировки входят три малых КА с оптико-
электронной аппаратурой и четыре - с РСА. Первые два спутника были запущены
с авиабазы Вандерберг (США) соответственно 8 июня и 8 декабря 2007 г. и выве-
дены на солнечно-синхронную орбиту с высотой 619,6 км и наклонением 97,86°.
Период обращения - 97 мин. Третий спутник Cosmo SkyMed запущен 24 октября
2008 г. Четвертый спутник планируется запустить в 2010 году. Все спутники груп-
пировки будут оснащены радиолокатором с синтезированной апертурой. Мощ-
ность электропитания 1000 Вт. Продолжительность цикла работы на витке -
1,5... 10 % от длительности витка.
Общий вид КА показан на рис. 13.25. Параметры аппаратуры приведены в
табл.°13.12.
РСА обеспечивает съемку земной поверхности в Х-диапазоне длин волн
(3,1 см, несущая частота 9,6 ГГц) с изменяемой поляризацией излучения (ГГ, ГВ,
ВВ, ВГ) в диапазоне съемочных углов от 20 до 50°. РСА позволяет выполнять ин-
терферометрическую съемку с высоким пространственным разрешением (лучше
1 м на местности).
618
Глава 13. Космическая аппаратура радиолокационного наблюдения...
Рис. 13.25. Общий вид КА Cosmo SkyMed [53]
Таблица 13.12. Параметры режимов РСА Cosmo SkyMed
Параметр СВР МВР СР-СС НР-СС 2-пол
Поляризация С одним режимом поляризаций ГГ, ВВ, ГВ или ВГ по выбору гг+вв, ГГ+ГВ или ВВ+ВГ
Пространственное разрешение, м <1 3...15 30 100 15
(много наблюдений)
Полоса съемки, км Кадр 10x10 40 100 200 30
Углы падения, град 20...50
Объем бортовой памяти, Гбит 300
Скорость передачи данных на наземный пункт, Мбит/с 310
Периодичность съемки, ч 10
Разрядность кодирования радиоголограммы 8
Напряжение источника питания, В 42
Мощность источника питания, кВт 3,8
Масса спутника, кг 1700
Формат файлов CEOS или GeoTIFF
Обработка информации Радиометрическая, геометрическая коррекция, преобразование к картографическим проекциям
Режимы работы РСА:
сверхвысокого разрешения (СВР), прожекторный (Spotlight) или кадровый
(Frame);
маршрутный высокого разрешения (МВР) - Stripmap или HIMAGE;
среднего разрешения Скансар (СР-СС) - Wide Region ScanSAR;
низкого разрешения широкозахватный Скансар (НР-СС) - Huge Region
ScanSAR;
маршрутный среднего разрешения с двойной поляризацией (2-пол) -
Ping-Pong Stripmap.
619
Радиолокационные системы землеобзора космического базирования
Предусматривается двойное назначение аппаратуры - военное и гражданское.
Расчетный срок пребывания на орбите каждого аппарата Cosmo SkyMed 1-4 со-
ставляет около 5 лет.
Наземный сегмент состоит из трех станций управления и приема данных, рас-
положенных в Италии, Испании и Греции. Эксплуатировать спутники будет италь-
янская компания Telespazio.
13.5.6. РСА TerraSAR-X
Космический РСА TerraSAR-X, разработанный фирмой DLR, Германия, выведен
10.06.2007 на солнечно-синхронную орбиту высотой 514 км (пределы 505...533
км), наклонением 95,7° [318, 340, 411, 415, 418]. Период повторения орбит И су-
ток, интервал повторной съемки 2,5 сут для 95 % земной поверхности. Концепция
построения РСА рассчитана на использование КА малого класса с массой 1250 кг,
запускаемого ракетами-носителями «Днепр» или «Рокот». Энергообеспечение сол-
нечных батарей составляет в
среднем за виток 800 Вт. Исполь-
зуемая в РСА АФАР состоит из
12 секций, включающих 384
ППМ. В РСА предусмотрено
цифровое преобразование со-
ставляющих сигнала с помощью
8-разрядного АЦП с применени-
ем блочного адаптивного кванто-
вания BAQ на выходе до 4-, 3- и
2-х разрядов.
Общий вид КА приведен на
рис. 13.26. Параметры РСА
TerraSAR-X приведены в
табл.°13.13.
Система Ракетный
ориентации блоки двигатель
радиолинии
Рис. 13.26. Общий вид КА TerraSAR-X
Научный потенциал РСА базируется на возможностях аппаратуры TerraSAR-X:
высокое геометрическое и радиометрическое разрешение РЛИ при полосе
сигналов до 150 МГц и наличии экспериментального режима высокого разрешения
с полосой сигнала 300 МГц;
режим двух поляризаций: ГГ+ВВ, ГГ+ГВ или ВВ+ВГ, получаемых одно-
временно;
двусторонний обзор, обеспечиваемый разворотом КА по крену;
возможность многократных наблюдений местности со сравнением РЛИ;
высокая точность орбитальных параметров КА и фазовая стабильность аппа-
ратуры, например для межвитковой интерферометрии;
эффективность синергетической обработки РЛИ совместно с данными съемки
с помощью РСА других диапазонов волн: Z-диапазона (PALSAR, TerraSAR-L),
С-диапазона (Envisat, Radarsat);
новые режимы работы, такие как следящий прожекторный режим, режим
двойного приема, бистатические режимы пары КА TanDEM-X (с 21 июня 2010 г.);
620
Глава 13. Космическая аппаратура радиолокационного наблюдения...
гибкое управление АФАР, режимами работы и параметрами сигналов с их
адаптацией к пользовательским задачам;
маркетинговая деятельность, направленная на коммерческое использование
получаемых снимков, а том числе организация сетевого доступа к изображениям с
калибровочными параметрами. Предусмотрено использовать получаемые с помо-
щью TerraSAR-X данные в Международной программе глобального мониторинга
окружающей среды и безопасности (GMES).
Таблица 13.13. Параметры РСА TerraSAR-X
Параметры режимов работы Прожекторные Маршрутный Скансар
ПР1 ПР2
Центральная частота, ГГц 9,65
Тип, размеры антенны, м АФАР 4,8x0,7x0,15 (азим. хугол места х толщ.)
Число фазовых центров 12x32 (азим. х угол места)
Углы сканирования, град ±0,75 х±20 (азим. х угол места)
Углы падения, град 20...55 20...55 20...45 20...45
Полоса обзора, км 570 570 350 350
Полоса съемки, км 15 15 30 100
Протяженность маршрута (кадра), км 5 10 не ограничена не ограничена
Разрешение, м азимут наклонная дальность горизонтальная дальность 1 1,2 2 1,2 3 3 15 16
Число наблюдений 1 1 1 4
Чувствительность NESZ, дБ -(19,6...28,9) -(19,6...30) -(18,9...26,5) -(18,8...29,6)
Интегральный уровень неоднозначности, дБ -(16,6...25,5) -(18...27,5) -(19,0...25,4) -(19,8...29,6)
Шумфактор на входе ППМ, дБ 5
Частота повторения, Гц 3000...6500
Полоса спектра сигнала, МГц 5...300
Частота квантования, МГц НО, 165, 330
Скважность приема, % 100, 67, 33
Сжатие сигнала BAQ (по выбору) 8, 4, 3, 2, без BAQ
Объем памяти, Гбит 320 / 256 (в конце срока службы)
Скорость формирования данных (8/4 BAQ), Мбит/с 680 340 580 580
Скорость передачи данных по радиолинии, Мбит/с 300
Расширенные режимы без гарантии качества РЛИ
Углы падения, град 15...60 15...60 15...60 20...60
Полоса обзора, км 622 622 622 577
Излучаемая пиковая мощность, Вт 2260
Скважность работы на витке, %:
маршрутный режим 18
прожекторный режим 20
621
Радиолокационные системы землеобзора космического базирования
Кроме обычно применяемого прожекторного режима кадровой съемки с вы-
соким разрешением в РСА TerraSAR-X используется режим двойного приема с
разрешением РЛИ (1...2)х1,2 м. Двойной прием (см. подраздел 4.2.1) реализуется
путем частичного расширения ДНА на передачу (введением квадратичного рас-
пределения фазы по апертуре АФАР), разделения АФАР на две секции по азимуту
с независимым приемом сигналов от каждой секции. Разрешение по азимуту
улучшается примерно в два раза («ультравысокое» разрешение). Точность управ-
ления лучом антенны составляет 65 угл. с (Зо). Погрешность привязки РЛИ к ко-
ординатам по GPS не более 3 м (Зо).
Генератор зондирующих сигналов с цифровым управлением формирует четы-
ре типа импульсов с задаваемой длительностью и шириной спектра до 150 МГц. Из
хранимых в памяти четырех образцов сигнала может излучаться любой, чередуясь
от периода к периоду. Сигнал с полосой 300 МГц для экспериментального режима
формируется аналоговым методом.
В приемном устройстве используются сосредоточенные фильтры для исклю-
чения наложения сигналов, согласованные с частотами квантования в АЦП НО,
165 и 330 МГц и разрядностью 8 бит. После запоминания строки данных произво-
дится компрессия BAQ по блокам 128 отсчетов с выбранной разрядностью ком-
прессии (4, 3 или 2 разряда). На КА дополнительно установлен экспериментальный
лазерный канал передачи данных спутник-спутник.
21 июня 2010 г. запущен второй КА с РСА в режиме тандема TanDem-X.
13.5.7. РСА TECSAR
Интересная концепция заложена в израильский РСА TECSAR [385, 422], выведен-
ный 21.01.2008 на орбиту высотой 580 км с углом наклонения 41°. Период обраще-
ния равен ~90 мин. Аппарат имеет малый вес 295 кг при полезной нагрузке 100 кг
и мощности солнечных батарей 750 Вт. Это обеспечивает сочетание электронного
сканирования лучом ДНА с механическим разворотом КА по крену для двусторон-
него обзора и по азимуту для реализации прожекторного режима. Низкая ожидае-
мая цена КА с РСА облегчает создание орбитальной группировки для сокращения
периодичности съемки. Бортовая аппаратура включает в себя: блок формирования
сигналов и управления, многоламповый передатчик, разворачиваемую на орбите
зеркальную антенну с сетчатым рефлектором, бортовое запоминающее устройство,
радиолинию передачи данных. Общий вид КА с РСА представлен на рис. 13.27.
Основные режимы работы включают в себя (конкретные параметры режи-
мов в статье [422] не приводятся):
• режим Скансар (СС) с электронным управлением луча для обеспечения ши-
рокой полосы съемки;
• различные маршрутные режимы (МР);
• различные прожекторные режимы (ПР), использующие механический разво-
рот КА по курсу;
• режимы с некогерентным накоплением наблюдений;
• поляриметрические режимы ВВ, ВГ, ГГ, ГВ;
622
Глава 13. Космическая аппаратура радиолокационного наблюдения...
различные режимы «Мозаики», сочетающие высокое разрешение изображе-
ний с обзором в широком диапазоне углов падения, реализуемым электрон-
ным сканированием луча и механическим разворотом КА.
Рис. 13.27. Обший вид КА с РСА TecSAR (а) и конструкция облучателя антенны (б)
Возможность работы в этих режимах обеспечивается гибким управлением
зондирующих сигналов (полосы частот, длительности импульсов, частоты повто-
рения). Выбор орбиты обеспечивает малую периодичность съемки и возможность
межвитковой интерферометрии. Работа в поляриметрическом режиме обеспечива-
ется путем замены фидеров, запитывающих облучатель, и применением двух при-
емных каналов.
При общей массе РСА 100 кг обеспечивается резервирование всех электронных
блоков. Оригинально построение антенны и передатчиков. Антенна с параболическим
рефлектором имеет очень широкую полосу благодаря использованию элементов вре-
менной задержки при электронном сканировании. Антенна РСА TECSAR имеет
большую эффективную площадь, что обеспечивает повышение потенциала при высо-
ком разрешении РЛИ по дальности. Отражатель антенны включает в себя две секции -
центральную тарелку и периферический параболический сетчатый рефлектор. Каждый
фидер, соединяющий передатчики с облучателями, смещен по отношению к оси реф-
лектора, что позволяет формировать многолучевую ДНА в пространстве.
13.5.8. Индийский РСА RISAT-1
Проект индийского РСА RISAT-1 [405, 407] является примером «классического»
построения поляриметрического РСА С-диапазона волн: применение АФАР раз-
мером 6x2 м2, состоящей из трех панелей размером 2x2 м2. Всего АФАР включает
575 приемопередающих модулей (ППМ) со средней мощностью 400 Вт. Каждый
623
Радиолокационные системы землеобзора космического базирования
Рис. 13.28. Общий вид КА с РСА RISAT-1
ППМ имеет два приемных канала, под-
ключенные к двум распределительным
системам, что обеспечивает работу с
двумя поляризациями ВВГ или ГГВ при
разрешении РЛИ 3x3 м2. Режим четы-
рех поляризаций с разрешением
12 х 12 м2 реализуется чередованием
кадров ВВГ- и ГГВ-поляризаций, как в
режиме Скансар. Масса РСА составляет
950 кг при массе КА 1250 кг. Общий
вид КА с РСА RISAT-1, панелями АФАР и ППМ приведены на рис. 13.28.
Для двустороннего обзора КА разворачивается по крену на ±34°. В прожек-
торном режиме предусматривается механический разворот КА на ±13° по тангажу.
Компенсация вращения Земли обеспечивается разворотом КА по курсу в путевую
систему координат.
Используются зондирующие сигналы с полосой 18,75, 37, 5 и 75 МГц, а также
с полосой 225 МГц. Полоса 225 МГц обеспечивает получение РЛИ с разрешением
1...2м.
На борту предусматривается использование 8-разрядного АЦП с передачей ин-
формации в прожекторном режиме в 3-разрядном формате и 6-разрядном - в осталь-
ных режимах с применением сжатия динамического диапазона сигналов путем
блочного адаптивного квантования (BAQ). Емкость бортового накопителя 240 Гбит.
Максимальная скорость передачи данных на Землю 1478 Мбит/с для двух поляриза-
ционных составляющих.
Предусматривается 100-процентное резервирование подсистем РСА. Особые
меры применяются для калибровки передающих и приемных каналов каждого из
ППМ с использованием специальных переключателей и распределительных цепей.
Запуск КА RISAT-1 был запланирован на 2007 г., но отложен из-за сложно-
стей реализации заложенных в аппаратуру технических решений. Для обеспечения
страны радиолокационной информацией Индия приобрела у Израиля комплект
РСА TECSAR, осуществив его запуск под обозначением RISAT-2. Следующей раз-
работкой индийской фирмы ISRO должен быть РСА L-диапазона волн [294].
13.5.9. Перспективный РСА TerraSAR-L
Проект РСА L-диапазона волн TerraSAR-L [488] имеет целью расширение возмож-
ностей дистанционного зондирования Земли, особенно для задач мониторинга рас-
тительного покрова, ледовых образований, а также значительного повышения точ-
ности измерения рельефа местности. Отмечается, что при наблюдении раститель-
ности взаимная когерентность интерферометрических изображений в L-диапазоне
волн (около 90 %) существенно выше, чем в С-диапазоне волн (около 15 %). Осо-
бую роль имеет применение системы орбитальных измерений GNSS, обеспечи-
вающей прецизионную точность знания орбиты до 5 см в пределах трубки 100 м. В
этом смысле TerraSAR-L весьма пригоден для мониторинга сейсмических явлений
и вулканической деятельности. В L-диапазоне волн возможна оценка объема био-
624
Глава 13. Космическая аппаратура радиолокационного наблюдения...
массы лесных массивов от 50 т/га в отличие от С- и %-диапазонов, в которых сиг-
нал от интенсивной растительности попадает в область ограничения. Также более
пригоден ^-диапазон для наблюдения поверхностных проявлений внутренних волн
и вихревых образований на морской поверхности. Вместе с тем, необходим более
высокий энергетический потенциал РСА, компенсирующий снижение отражающей
способности местности (в 4 раза по сравнению с С-диапазоном волн). Для его
обеспечения используются солнечные батареи со средней мощностью 5 кВт.
Предусматривается специальная обработка двух частотных поляриметриче-
ских полос, разделенных на 70 МГц, для измерения ионосферных искажений и
вращения плоскости поляризации, вызванной эффектом Фарадея.
Для сокращения объема передаваемых данных, устранения перегрузки применя-
ются современные методы кодирования выходных данных. Бортовой накопитель рас-
считан на 600 Гбит информации, которая после криптографического кодирования пе-
редается по радиолинии на землю со скоростью 300 Мбит/с. Параметры РСА Тегга-
SAR-L приведены в табл.°13.8.
Общий вид КА с РСА TerraSAR-L приведен на рис. 13.29. Масса КА состав-
ляет 2800 кг. Компоновка РСА на ракете носителе показана на рис. 13.30. Антенна
РСА типа АФАР с размерами 11 х2,9 м состоит из двух складывающихся секций и
включает 160 ППМ.
7 - двигатель системы ориентации; 2 - солнечные батареи; 3 - линия передачи данных ^-диапазона; 4 - ан-
тенна аппаратуры слежения; телеметрии и управления; 5 - антенна РСА Z-диапазона; 6 - поворотные пет-
ли; 7 - механизм складывания
Рис. 13.30. Компоновка РСА TerraSAR-L на ракете-носителе
625
Радиолокационные системы землеобзора космического базирования
13.5.10. Радиолокатор «Северянин-М» КА «Метеор-М» №1
космического комплекса гидрометеорологического
и океанографического обеспечения
Бортовой радиолокационный комплекс (БРЛК) «Северянин-М» входит в состав КА
«Метеор-М» №1 космического комплекса гидрометеорологического и океаногра-
фического обеспечения «Метеор-ЗМ» [102, 124]. КА «Метеор-М» №1 (разработчик
ФГУП «НПП ВНИИЭМ») был запущен 17 сентября 2009 г. на близкую к круговой
солнечно-синхронную орбиту высотой 832 км с наклонением 98,786°. Масса КА
составляет 2630 кг, масса полезной нагрузки 1200 кг, энергообеспечение от сол-
нечной батареи 4,5 кВт (4 кВ - в конце срока службы 5 лет), емкость аккумулятор-
ных батарей 2x90 А ч, среднесуточная мощность потребителей 1430 Вт. КА имеет
трехосную электромеханическую систему ориентации с угловыми погрешностями
10 угл. мин, угловая скорость в режиме стабилизации не превышает 0,005 град/с.
Радиолокатор «Северянин-М» (разработчик ФГУП НИИТП) использует
принцип искусственной апертуры антенны за время излучения одного импульса
длительностью до 5,5 мс (длина апертуры -40 м).
Режимы работы радиолокатора:
• дежурный режим прогрева клистрона - выходного усилителя мощности. Из-за
ограниченного числа включений клистрона этот режим используется в паузах
между съемками;
• режим съемки со средним разрешением;
• режим съемки с низким разрешением;
• режим калибровки сквозного тракта;
• режим смены констант.
Общий вид КА «Метеор-М» показан на рис. 13.31, расчетные характеристики
радиолокатора «Северянин-М» приведены в табл.°13.14.
Рис. 13.31. Общий вид КА серии «Метеор-М» №1 с БРЛК «Северянин-М»
626
Глава 13. Космическая аппаратура радиолокационного наблюдения
Таблица 13.14. Характеристики режимов радиолокатора «Северянин-М»
Характеристика Значение
Высота орбиты КА, км 832
Наклонение орбиты Определяется Заказчиком
Длина волны РСА, см 3,12 (X-диапазон)
Тип и размеры антенны Волноводно-щелевая, 13,4x0,25 м2
Направление обзора Вправо от трассы КА
Углы падения, град 20...48
Полоса съемки, км 600
Параметры режимов обзора Режимы обзора
среднее разрешение низкое разрешение
Разрешение, м 450...600 800... 1300
Поляризация ВВ ВВ
Длина маршрута, км 8...10 до 500
Число наблюдений 12 (выигрыш по отношению с/ш 5 дБ)
Чувствительность сг°пе, дБ -20
Радиометрическое разрешение, дБ L9 1 1,51
Точность калибровки сквозного тракта, дБ 1
Динамический диапазон измеряемых УЭПР, дБ от -25 до +3
Излучаемая мощность, Вт: импульсная средняя 1000 117 1000 63
Скорость потока информации, Мбит/с, не более 10
Масса БРЛК, кг 150
Энергопотребление, Вт 1000
Циклограмма работы БРЛК Односеансное включение на витке до 10 мин
Антенна радиолокатора складная, 7 секций из алюминиевых волноводов се-
чением 23x10 мм2. Форма ДНА по углу места - косекансная 22,5° с перепадом
усиления 5,6 дБ, коэффициент усиления - не менее 7000. Масса антенного устрой-
ства - не более 35 кг.
Основное назначение БРЛК «Северянин-М» - решение задач оперативной
гидрометеорологии, ледовая разведка, определение границ ледового и снежного
покровов, оценка водного эквивалента, исследования крупномасштабных геологи-
ческих структур, зон экологического загрязнения и др.
13.5.11. РСА малого космического аппарата «Кондор-Э»
При проектировании РСА для малого космического аппарата (МКА) «Кондор-Э», в
ОАО «Концерн «Вега» решалась задача создания универсальной многорежимной
аппаратуры, позволяющей решать широкий круг пользовательских задач, включая
мониторинг земных покровов, обеспечение судовождения, контроль оперативной
обстановки в зонах конфликтов [45*, 215, 223*, 440*]. Масса аппаратуры для разме-
щения ее на МКА не должна превышать 250 кг при полной массе МКА 850 кг.
Концепция РСА была сформулирована по результатам анализа информатив-
ности различных диапазонов волн для решения задач дистанционного зондирова-
627
Радиолокационные системы землеобзора космического базирования
ния Земли и возможностей аппаратурной реализации. Был сделан вывод, что для
совмещения задач детального наблюдения заданных районов и дистанционного
зондирования Земли оптимален S'-диапазон волн с полным использованием выде-
ленной полосы частот и реализацией широкого набора режимов работы. Преду-
смотрены детальные маршрутный и прожекторные режимы с разрешением от 1 м,
обзорные режимы пониженного разрешения (Скансар).
Для решения всего спектра пользовательских задач в РСА реализован полный
набор режимов работы '.
• прожекторный режим (ПР) максимального разрешения;
• маршрутные детальный (ДР);
• обзорный (ОР);
• широкозахватный Скансар (СС) низкого разрешения.
Основные характеристики РСА приведены в табл.°13.15, а на рис. 13.32 при-
ведена функциональная схема РСА.
Таблица 13.15. Характеристики режимов РСА малого
космического аппарата «Кондор-Э»
Характеристика Значение
Высота орбиты КА, км 500
Наклонение орбиты Определяется Заказчиком
Длина волны РСА, см 9,4 (5-диапазон)
Направление обзора Вправо/влево от трассы
Углы падения, град 20...60
Полоса обзора, км 2x450
Параметры режимов обзора Режимы обзора
ПР ДР ОР СС
Полоса съемки, км 8...10 10...25 20...40 120
Разрешение, м:
по азимуту 1...2 2,5...3 5...10 30
по дальности 1...2 1,5...2,5 5...10 30
Поляризация ГГ ГГ, ВВ ВВ ВВ
Длина маршрута, км 8...10 до 500 до 500 >500
Число наблюдений 2...4 1 2...4 4...5
Чувствительность о°пе, дБ -20 -15 -20 -20
В состав РСА входят: передающее устройство с формирователем частот и
чалов, СВЧ-тракт, антенное устройство, прибор управления переключателем
эбзора, приемное устройство, прибор преобразования информации, приборы
энизации, управления и контроля, а также прибор для измерения шумов сгп
чбровки приемного устройства.
эставе СВЧ-тракта имеется измеритель проходящей мощности (ИПМ) и
р (Ц), выполняющий функции переключателя прием-передача. На вход
6
Глава 13. Космическая аппаратура радиолокационного наблюдения...
приемного устройства через аттенюатор (АТТ) и направленный ответвитель (НО)
вводится ослабленный пилот-сигнал от формирователя частот и сигналов. Он слу-
жит для калибровки сквозного приемного тракта.
Приемное устройство включает два идентичных приемных канала - основной и
резервный. Они переключаются коммутационно-защитным устройством КЗУ, на
входе которого включен генератор шума ГШ для измерения шумфактора приемных
каналов. В состав каждого из них входят малошумящий усилитель МШУ, смеситель
СМ, усилитель промежуточной частоты УПЧ с регулируемыми цифровыми атте-
нюаторами для поддержания стабильного уровня сигнала на выходе, каналы фазо-
вых детекторов КФД, формирующих ортогональные составляющие на видеочастоте
и видеоусилители ВУ, сигналы с выходов которых поступают на аналого-цифровые
преобразователи в приборе преобразования информации. В нем к радиолокацион-
ным сигналам радиоголограммы добавляется служебная информация о режиме ра-
боты РСА и параметрах сигнала. Управление аттенюаторами в УПЧ обеспечивается
с помощью прибора измерения шумов сгш (среднего уровня видеосигнала).
Рис. 13.32. Функциональная схема РСА КА «Кондор-Э»
Одна из важнейших задач - оперативность наблюдения, достигаемая сокра-
щением времени повторной съемки, требует максимального расширения полосы
обзора, т.е. увеличения углов падения, ограниченных условиями неоднозначности
по азимуту/дальности. Эта задача облегчается применением в РСА гибридной зер-
кальной антенны диаметром рефлектора около 6 м с большой эффективной площа-
629
Радиолокационные системы землеобзора космического базирования
дью - около 28 м2. Антенна имеет рефлектор ферменной конструкции, раскры-
вающийся в космосе, разработанный на основе антенны РСА, установленной на
модуле «Природа» космической станции МИР. Масса одного квадратного метра
таких рефлекторов составляет около 0,7 кг. Электронное сканирование лучом, не-
обходимое для реализации прожекторного режима, обеспечивается 32-рупорным
облучателем, образующим решетку по 8 излучателей с управляемым шагом в фо-
кальной плоскости рефлектора (см. подраздел 12.2.4). В результате формируются
25 парциальных лучей с отклонением ±2°. Общий вид космического аппарата с
раскрытой антенной показан на рис. 13.33.
Рис. 13.33. Общий вид космического аппарата «Кондор-Э» с раскрытой антенной РСА
Для режима Скансар облучатель антенны механически разворачивается в вер-
тикальное положение и реализуется электронное сканирование луча по углу места.
Одновременно меняется поляризация сигналов на излучение и прием (с ГГ на ВВ).
Подвижной узел крепления антенны позволяет расширить пределы перенацелива-
ния полосы съемки, а также изменять направление обзора вправо и влево относи-
тельно трассы полета.
Использование в передатчике (рис. 13.34) сосредоточенного транзисторного
усилителя с суммированием мощности и средней мощностью излучения 200 Вт по-
зволяет обеспечить высокую надежность в течение срока службы не менее 5 лет.
Используемый выходной сумматор мощности на 16 модулей имеет потери не бо-
лее 0,5 дБ.
Цифровой формирователь зондирующих сигналов с ЛЧМ обеспечивает ши-
рокие возможности для изменения параметров излучаемых импульсов. В РСА
применены современные методы уменьшения помех, вызванных неоднозначно-
стью сигналов по дальности и азимуту. С этой целью предусмотрены наборы зон-
дирующих сигналов с разной начальной фазой и направлением ЛЧМ. Предусмот-
рены также специальные сигналы и режимы для текущего контроля приемопере-
дающего тракта и калибровки РСА.
630
Глава 13. Космическая аппаратура радиолокационного наблюдения...
Рис. 13.34. Передающее устройство РСА
Резервированное приемное устройство имеет коэффициент шума менее 2 дБ и
динамический диапазон -40 дБ. Переключение каналов обеспечивается СВЧ-пе-
реключателем с потерями не более 0,2 дБ. Защита МШУ обеспечивается ориги-
нальным безынерционным циклотронным защитным устройством с потерями
-0,15 дБ. В усилителях промежуточной частоты приемников установлены цифро-
вые аттенюаторы с затуханием 1, 2, 4, 8, 16 дБ, управление которыми обеспечива-
ется либо программно, либо от системы цифровой АРУ (прибор измерения сгш) по
среднему уровню принимаемого от местности сигнала.
Для исключения перегрузок приемника при сильных сигналах в УПЧ уста-
новлены безынерционные ограничители. Фазовые сдвиги сигналов при работе
цифрового АРУ и ограничителя не превышают 10° на каждые 10 дБ сжатия дина-
мического диапазона. Наличие компрессии сигналов в приемнике позволяет ис-
пользовать в приборе преобразования информации 4-разрядный АЦП.
Цифровое управление аппаратурой РСА, режимами работы и параметрами зон-
дирующего сигнала обеспечивает гибкое использование ресурсов космического аппа-
рата для удовлетворения различных потребителей радиолокационной информации.
Для калибровки РСА предусмотрены устройства измерения мощности пере-
датчика, коэффициента шума приемника, пилот-сигнал для сквозного тестирова-
ния, а также другие средства.
Конструктивное выполнение аппаратуры рассчитано на работу в негерметичном
отсеке. Охлаждение обеспечивается тепловыми трубками, отводящими тепло на теп-
лообменник космического аппарата. Вид аппаратуры на технологической раме, конст-
рукция модуля мощного усилителя, синхронизатора и АЦП показаны на рис. 13.35.
Технические и эксплуатационные параметры РСА приведены в табл.°13.16.
631
Радиолокационные системы землеобзора космического базирования
Рис. 13.35. Вид аппаратуры на технологической раме
Таблица 13.16. Технические и эксплуатационные параметры РСА
Параметры Значение
Антенна: диаметр масса 6 м 95 кг
РСА масса 150 кг
Масса суммарно 250 кг
Энергопотребление не более 1700 Вт
Ресурс до 5 лет
Разрабатываемый для космического аппарата «Кондор-Э» радиолокатор с син-
тезированной апертурой антенны является высокоинформативным средством дис-
танционного зондирования Земли с возможностью измерения отражающих характе-
ристик объектов и земной поверхности в S-диапазоне волн. Аппаратура может быть
легко адаптирована для установки на космическом аппарате другого типа.
13.5.12. Проект двухчастотного РЛК для мониторинга объектов
топливно-энергетического комплекса «Смотр-SP»
Технические решения, основанные на разработках ОАО «Концерн «Вега» для ма-
лого КА «Кондор-Э» с РСА S-диапазона волн и бортового радиолокационного
комплекса (БРЛК) «Спинар-1 ДМ» с РСА L- и Р-диапазонов, находят развитие в
проекте двухчастотного космического БРЛК для системы регионального землеоб-
зора и мониторинга объектов и территорий «Смотр-SP», который предназначен для
решения следующих задач [45*, 64, 223*]:
1) топографическое и геологическое цифровое картографирование Земли в
интересах разведки полезных ископаемых, исследования природных ресурсов,
включая шельфовые зоны;
2) геоинформационное обеспечение землепользования и создания инфра-
структуры объектов;
632
Глава 13. Космическая аппаратура радиолокационного наблюдения...
3) экологический мониторинг наземных и морских нефтеразработок, терми-
налов, подводных продуктопроводов. Обнаружение разлива нефти на суше и вод-
ной поверхности;
4) мониторинг растительного покрова в интересах сельского и лесного хозяйства;
5) мониторинг динамики ледовых образований (ледовых полей, ледников),
оценка водозапаса;
6) круглогодичный и круглосуточный высокоточный (единицы сантиметров)
автоматизированный контроль геометрии трасс продуктопроводов, сетей ЛЭП и
других инженерных сооружений, в том числе заглубленных;
7) прогноз воздействия природных факторов и катастрофических явлений
(оползней, подтоплений, землетрясений и др.) на состояние инженерных объектов;
8) мониторинг несанкционированного доступа к удаленным объектам ТЭК;
9) оперативный контроль морских танкерных и других перевозок, в том числе
по Севморпути;
10) оперативное информационное обеспечение при авариях и чрезвычайных
ситуациях.
В БРЛК «Смотр-SP» предусматривается использование гибридной зеркальной
антенны (АФАР-ГЗА) с рефлектором, имеющим расчетные размеры 10x5 м, и со-
вмещенным двухчастотным АФАР-облучателем, который поперек трассы полета
имеет размер 2,1 м для формирования сканирующей ДНА по углу места. Вдоль трас-
сы полета (по азимуту) общие размеры облучателя ГЗА составляют 1,2 м при шири-
не АФАР для РСА-S, равной 0,25 м, и для РСА-Р - 1,2 м. Вид космического аппарата
с антенным устройством БРЛК «Смотр-SP»
показан на рис. 13.36.
Благодаря использованию АФАР-ГЗА
упрощается реализация поляриметрических
режимов в РСА, возможно гибкое управление
лучами (в РСА-S) и расширение номенклату-
ры рабочих режимов. В частности, вместо
широкозахватного режима Скансар, в котором
расширение полосы съемки достигается за
счет ухудшения разрешения по азимуту, мож-
но ввести маршрутный многолучевой режим
(ММЛР) с реализацией азимутального разре-
шения (5... 10 м) в широкой полосе съемки.
В режиме ММЛР предусматривается из-
лучение пачки зондирующих импульсов на
разных поднесущих, смещенных на ширину
спектра излучения (с 30-процентным запасом) и подключаемых к разным класте-
рам облучения на АФАР с тем, чтобы перекрыть необходимый угол сканирования.
Число парциальных лучей до 10 при ширине луча от 1,5° на максимальном откло-
нении от оси рефлектора до 4...5° вблизи оси. Прием и усиление сигналов (одной
поляризации) производят в независимых приемных каналах, подключенных к сек-
циям АФАР-облучателя (используют поляриметрические и резервные каналы), а
Рис. 13.36. Общий вид КА
с БРЛК «Смотр-SP» с раскрытой
антенной РСА
633
Радиолокационные системы землеобзора космического базирования
окончательное разделение сигналов обеспечивают путем их цифровой фильтрации
перед синтезом РЛИ.
В РСА-S предусматриваются следующие режимы работы'.
• детальный прожекторный режим (ПР), осуществляемый сканированием луча
по азимуту (возможно, с использованием поворота КА по курсу на 90°);
• маршрутный режим (МР);
• поляриметрические режимы (Пол);
• обзорный широкозахватный режим ММЛР.
В РСА-Р применяют маршрутный режим (МР) с перенацеливанием луча в
пределах ±5° для выбора положения полосы съемки. Ориентировочные техниче-
ские и эксплуатационные параметры БРЛК «Смотр-SP» приведены в табл.°13.17.
Они подлежат уточнению применительно к размещению на конкретном КА.
Таблица. 13.17. Характеристики БРЛК «Смотр-SP»
Параметры РСА-S, режимы работы РСА-Р
ПР | МР | Пол | ММЛР МР
Высота орбиты КА, км 500
Наклонение орбиты Определяется Заказчиком
Длина волны РСА, см 9,4 | 69
Направление обзора Вправо/влево от трассы
Полоса обзора, км 2x500 2x250
Полоса съемки, км 5 10...40 10...60 500 60... 120
Разрешение, м:
по азимуту 1 5 5...10 10 15...30
по дальности 1...1,5 5 5...10 10 15...30
Поляризация вв/гг/вг/гв ВВ/ГГ/ВГ/ГВ ВВ+ГГ+ +ВГ+ГВ гг/вв/гв/вг ВВ+ГГ+ +ВГ+ГВ
Длина маршрута, км 10 (кадр) до 500 до 500 до 2000 до 500
Число наблюдений 1...4 1...3 >2 2 4...6
Чувствительность сгиПе, дБ -22 -17 -22 -22 -24
Полоса сигнала, МГц 200 50... 100 50 15х(5...1О) по числу лучей 6...13
Ширина ДНА, град:
по азимуту ~1 ~1 ~1 ~1 ~5
по углу места ~0,5 ~0,5 1 1...5 ~5
Масса аппаратуры, кг, 150 95
суммарно, включая ан- 340
Энергопотребление, Вт, 1700 | 520
суммарно 2220
Реализация такого двухчастотного радиолокационного комплекса, разработка
которого подготовлена отечественным научно-техническим заделом, рассмотрен-
ным в разделе 13.3, качественно расширит получаемую космическими средствами
дистанционного зондирования Земли информацию для ее практического использо-
вания в глобальной информационной системе.
634
Заключение
Современные радиолокаторы землеобзора с синтезированной апертурой антенны в
своем развитии имеют огромные информационные возможности при совершенство-
вании способов дистанционного зондирования, алгоритмов и технических средств
обработки и интерпретации доставляемой информации, а также совершенствовании
элементной базы, использовании нанотехнологий для реализации глобальной аэро-
космической системы для непрерывного отслеживания динамических процессов
природного и техногенного характера, контроля состояния экосистем, мониторинга
вооруженных конфликтов.
Создана аппаратурная база для реализации космических РСА, в основном
удовлетворяющих требованиям гражданских и военных потребителей информации
в рамках ограничений Регламента радиосвязи по выделенным частотным диапазо-
нам для дистанционного зондирования Земли из космоса. Развиваются методы ра-
диолокационного зондирования: поляриметрия, интерферометрия, стереометрия,
комплексная обработка данных оптического, инфракрасного, СВЧ-диапазонов волн.
Непременным фактором извлечения тематической информации по результатам
радиолокационного зондирования является применение измерительных технологий.
Наряду с использованием амплитудных (или энергетических) изображений, позво-
ляющих измерять эффективную площадь рассеяния (ЭПР) объектов и удельную ЭПР
земных покровов при разных поляризациях, получает все большее применение ин-
терферометрическая обработки комплексных изображений (построения карт рельефа
местности, дифференциальная интерферометрия, измерение скоростей компактных
и распределенных объектов, поляриметрическая интерферометрия).
Активно применяется зондирование в разных диапазонах волн с помощью
РСА, размещаемых на разных космических аппаратах. Обеспечивается получение
радиолокационных снимков с высоким разрешением (0,5... 1,5 м) в 3-см диапазоне
волн (РСА SAR Lupe, Cosmo SkyMed, TerraSAR-X) для решения задач видовой раз-
ведки, обнаружения малоразмерных объектов на открытой местности, а также с раз-
решением от 3 м в диапазонах волн 3- и 5,6-см для мониторинга растительного по-
крова и других задач ДЗЗ. В отличие от сантиметровых диапазонов зондирование в
дециметром диапазоне 23 см с разрешением от 3...7 м (РСА PALSAR) имеет пре-
имущества обнаружения объектов техники под лиственным покровом, значительно
большей стабильности фазы сигнала для интерферометрической обработки (по-
строения карт рельефа и обнаружения изменений в оперативной обстановке методом
дифференциальной интерферометрии). Возрастают возможности оценки объема
биомассы и определения типа и состояния растительного покрова.
С учетом указанных особенностей зондирования в сантиметровых и децимет-
ровых диапазонах имеет большие перспективы испытанный в ходе эксплуатации
РСА «Меч-К» и «Меч-КУ» на КА «Космос-1870» и «Алмаз-1» и реализуемый в РСА
КА «Кондор-Э» 10-см диапазон, который наименее подвержен деструктивным влия-
635
Радиолокационные системы землеобзора космического базирования
ниям, нарушающим когерентность сигналов, позволяет получить разрешение от
0,75... 1,5 м с изобразительными свойствам получаемых снимков, приближающими-
ся к 23-см диапазону волн и пригодными как для видовой разведки, так и для реше-
ния основных задач ДЗЗ.
Важное направление совершенствования РСА, обусловленное улучшением
пространственного и радиометрического разрешения - это широкое внедрение ме-
тодов радиовидения и многопозиционного зондирования с получением трехмер-
ных радиолокационных портретов объектов, детально выявляющих их форму,
применение автоматических методов классификации объектов по их радиолокаци-
онным портретам и текстуре изображения.
Многопозиционное зондирование и миниатюризация приемных датчиков на
дешевых миниспутниках и беспилотных летательных аппаратах позволит обеспе-
чить непрерывный контроль локальных районов для сопровождения военных опе-
раций и мониторинга чрезвычайных ситуаций.
Разрабатываемые перспективные средства дистанционного зондирования Земли
с использованием многорежимных многофункциональных РСА интегрируются в
геоинформационную систему (ГИС), что дает возможность вести более точные рас-
четы формы геоида для составления высокоточных цифровых карт рельефа, клима-
тических исследований, исследований взаимодействия океан-атмосфера.
Кардинальная проблема дистанционного зондирования Земли, в которой на-
мечены только первые шаги, - решение обратной задачи определения и описания
свойств наблюдаемой поверхности, наземных и подземных (подводных) объектов с
использованием радиолокационной информации. Решение этой задачи дает про-
стор научной и технической творческой мысли как для радиоинженеров, совер-
шенствующих аппаратуру, так и для радиофизиков, выявляющих связи между па-
раметрами электромагнитного излучения и свойствами объектов.
Геоинформационные технологии, основанные на использовании радиолока-
торов с синтезированной апертурой антенны авиационного и космического бази-
рования, находятся в самом расцвете своего развития. За предшествующие годы
силами отечественных и зарубежных ученых были проведены фундаментальные
исследования процессов взаимодействия электромагнитного излучения с природ-
ными средами и искусственными объектами при распространении и отражении
зондирующих радиосигналов, разработана теория построения распределенных ан-
тенных систем и их воплощения в динамические многопозиционные структуры
синтезированных антенн.
Создание полноценного отечественного сегмента глобальной космической
информационной системы двойного назначения способно не только решить изло-
женные в монографии задачи гражданского и военного применения, но обеспечит
переход на новый технологический уровень во многих областях науки и техники,
способствуя развитию кадрового резерва и повышению конкурентоспособности
отечественных информационных технологий.
636
Литература
1. Абезгауз ГГ, Тронь А.П., Копенкин Ю.Н., Коровина И.А. Справочник по вероятностным
расчетам. М.: Воениздат, 1970.
2. Айфичер Э., Джервис Б. Цифровая обработка сигналов. Практический подход. М.: Виль-
ямс, 2004. 992 с.
3. Алябьев А.А., Коберниченко В.Г. Использование материалов радиолокационной космиче-
ской съемки для информационного обеспечения мониторинга пространственных данных //
Геодезия и картография. 2007. №5. С. 37-45.
4. Антипов В.Н., Горяйнов В.Т., Кулин А.Н. и др. Радиолокационные станции с цифровым
синтезированием апертуры антенны / Под ред. В.Т. Горяйнова. М.: Радио и связь. 1988.
304 с.
5. Арманд Н.А., Захаров А.И. Современные спутниковые РСА системы для дистанционного
зондирования земли: Достижения и перспективы И Труды конференции по ДЗЗ. Муром. 2003.
6. Астанин Л.Ю., Флерова А.А. Характеристики антенн при формировании и излучении сверх-
широкополосных импульсов И Сб. докладов Всероссийской научной конференции «Сверх-
широкополосные сигналы в радиолокации, связи и акустике». Муром. 2003. С. 67-73.
7. Атрошенко Л.М., Атрошенко М.Д., Горобец Н.Н., Софронова Л.П. Повышение надежности
прогнозирования урожая по радиолокационным снимкам высокого разрешения // Сб. док-
ладов «Дистанционное зондирование земных покровов и атмосферы аэрокосмическими
методами». С.-Петербург. 16—18 июня 2004. Т. 2. С. 245-250.
8. Атрошенко Л.М., Гайкович КП., Горобец Н.Н., Костяшкин С.И., Софронова Л.П. Оценка
радиолокационных контрастов лесонасаждений // II Всероссийская научная конференция.
Сб. докладов «Дистанционное зондирование земных покровов и атмосферы аэрокосмиче-
скими методами». С.-Петербург. 16-18 июня 2004. Т. 2. С. 251-256.
9. Атрошенко Л.М., Горобец В.Н., Горобец Н.Н., Костяшкин С.И., Софронова Л.П. Методика
описания лесных территорий в целях эффективного дешифрирования спутниковой информа-
ции РСА // II Всероссийская научная конференция. Сб. докладов «Дистанционное зондиро-
вание земных покровов и атмосферы аэрокосмическими методами». С.-Петербург. 16-18 ию-
ня 2004. Т. 2. С. 257-264.
10. Атрошенко Л.М., Горобец Н.Н., Костяшкин С.И., Софронова Л.П. Подспутниковые поли-
гоны Украины // II Всероссийская научная конференция. Сб. докладов «Дистанционное
зондирование земных покровов и атмосферы аэрокосмическими методами». С.-Петербург.
16-18 июня 2004. Т. 2. С. 265-271.
11. Афанасьев И.А. К истории разработки спутников морской радиоразведки И Новости кос-
монавтики. 2007. № 1.
12. Афанасьев Ю.А., Нелепо Б.А., Селиванов А.С. и др. Программа экспериментов на ИСЗ
«Космос-1500» И Исследования Земли из космоса. 1985. № 3. С. 3-8.
13. Афраймович Э.Л., Караченцев В.А. Исследование по данным глобальной сети GPS фазовых
искажений сигналов спутниковых радиотехнических систем, обусловленных неоднородной
и нестационарной ионосферой Земли И Труды XX Всероссийской конференции по распро-
странению радиоволн. Н. Новгород. 2002. С. 100-101.
14. Афраймович Э.Л., Караченцев В. А., Неудакин А.А. Методика прогнозирования погрешно-
стей функционирования спутниковых радиотехнических систем, обусловленных неодно-
родной и нестационарной ионосферой Земли, по данным глобальной сети GPS // Известия
ВУЗов. Сер. «Радиоэлектроника». 2003. № 4. С.51-60.
15. Афраймович Э.Л., Ясюкевич Ю.В. Адаптивная радиоастрономия И Труды конференции.
Секция А. Физика околоземного космического пространства. БШФФ. 2007. С.81-84.
637
Радиолокационные системы землеобзора космического базирования
16. Ахметьянов В.Р., Пасмуров А.Я. // Зарубежная радиоэлектроника. 1987. №1.
17. Аэрокосмический радиолокационный мониторинг Земли. Коллективная монография / Под
ред. А.И. Канащенкова. М.: Радиотехника. 2006. 240 с.: ил.
18. Бакитько Р.В., Васильев М.Б., Винницкий А.С. и др. Радиосистемы межпланетных космиче-
ских аппаратов / Под ред. А.С. Винницкого. М.: Радио и связь. 1993. 328 с.: ил.
19. Балашов И.В., Бурцев М.А., Ефремов В.Ю., Лупян Е.А. и др. Построение архивов результа-
тов спутниковых данных для систем динамического формирования производных информа-
ционных продуктов // Сб. научных статей «Современные проблемы дистанционного зон-
дирования Земли из космоса». М.: ОАО «Азбука-2000». 2008. Вып.5. Т. 1. С.26-31.
20. Баскаков В., Горшков А. Пентагон не боится провалов. Масштабы военно-космических
программ США достигли пика // Независимое военное обозрение, 23.05.2003.
21. *Бахрах Л.Д., Лось В.Ф., Шаманов А.Н. Широкополосные микрополосковые и вибратор-
ные антенны // Антенны. 2001. Вып.2 (48). С.21-26.
22. Белокуров А.А. Методы сглаживания спекл-шума на радиолокационных изображениях зем-
ной поверхности И Зарубежная радиоэлектроника. 1990. № 6. С.26-35.
23. Бобокин М.И. Оценка топографического рельефа местности в РСА при передне-боковом
обзоре. Кн. «Цифровая обработка сигналов в РСА» / Под ред. Е.Ф. Толстова. Смоленск:
Изд-во ВА ВПРО ВС РФ, 2005. С.173-181.
24. Богомолов А.Ф., Жерихин Н.В., Соколов Г.А. «Венера-15», «Венера-16»: Радиолокатор с
синтезированной апертурой на орбите ИСВ // Изв. ВУЗов. Сер. «Радиофизика». 1985,
том XXVIII. № 3. С.259-274.
25. Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся
ВТУЗОВ. М.: Наука, 1980. 936 с.
26. Брыксин В.М., Евтюшкин А.В., Кочергин Г.А., Рычкова Н.В. Мониторинг зерновых культур
на юге Западной Сибири по данным MODIS и ERS-2 // Сб. научных статей «Современные
проблемы дистанционного зондирования из космоса». Вып.4. М.: ИКИ РАН. Изд-во ОАО
«Азбука-2000». 2004. Т. 2. С. 163-188.
27. Будлянский А. Господство в воздухе и блицкриг. Некоторые особенности боевого при-
менения ВВС союзников в Ираке И Независимое военное обозрение. 23.01.2004.
http ://www.avia.ru/press/4022/.
28. Буренин Н.И. Радиолокационные станции с синтезированной антенной. М.: Сов. радио,
1972. 160 с.
29. Бычкова И.А., Викторов С.В. Спутниковый мониторинг портовых комплексов и судоход-
ных трасс Балтийского моря: текущие проблемы // II Всероссийская научная конференция.
Сб. докладов «Дистанционное зондирование земных покровов и атмосферы аэрокосмиче-
скими методами». С.-Петербург. 16-18 июня 2004 г. Т. 1. С.23-27.
30. Вакман Д.Е., Седлецкий Р.М. Вопросы синтеза радиолокационных сигналов. М.: Сов. ра-
дио, 1973. 312 с.
31. Варакин Л.Е. Теория сложных сигналов. М.: Сов.радио, 1970. 376 с.
32. Васин С.А., Шустов Л.Н. Основы радиоэлектронной борьбы. М.: ВВИА им. проф.
Н.Е. Жуковского, 1998.
33. *Верба В.С. Авиационные комплексы радиолокационного дозора и наведения. Состояние и
тенденции развития. М.: Радиотехника, 2008. 432 с.: ил. (Сер. «Системы мониторинга воз-
душного, космического пространства и земной поверхности», редактор серии В. С. Верба).
34. *Верба В.С. Авиационный комплекс радиолокационного дозора и наведения как элемент
глобальной сетецентрической системы // Радиотехника, 2008. № 9.
35. *Верба В.С. Априорная оценка вероятности обнаружения наземных объектов средствами
воздушной разведки // Радиотехника, 2004. № 9. С.32-33.
36. *Верба В. С. Метод управления информативностью авиационного комплекса, взаимодейст-
вующего с разнородными потребителями информации И Радиотехника. 2006. № 1.
37. *Верба В.С. Обнаружение наземных объектов. Радиолокационные системы обнаружения и
наведения воздушного базирования. М.: Радиотехника, 2007. 360 с.: ил. (Сер. «Системы
638
Литература
мониторинга воздушного, космического пространства и земной поверхности», редактор
серии В. С. Верба).
38. *Верба В. С. Разработка АФАР для авиационных и космических радиолокационных систем
// Новые технологии в радиоэлектронике и системах управления. Саратов: Изд-во Саратов-
ского университета, 2004.
39. *Верба В.С. Тенденции развития авиационных и космических средств информационной
разведки и дозора // Наукоемкие технологии. 2004. № 8-9. С.32-39.
40. *Верба В. С. Управление информационными возможностями многофункциональных борто-
вых радиолокационных комплексов // Радиотехника, 2006. № 1.
41. *Верба В. С. Формирование режима обнаружения и распознавания наземных целей в мно-
гофункциональном авиационном комплексе разведки, оповещения и управления // Радио-
техника, 2006. № 1.
42. *Верба В.С., Гандурин В.А. Радиолокатор с синтезированной апертурой на высотном бес-
пилотном дирижабле И Антенны. 2004. № 8-9.
43. *Верба В.С., Гандурин В.А., Меркулов В.И. Стратегические, оперативные и тактические
факторы, влияющие на облик авиационного комплекса радиолокационного дозора и наве-
дения И Информационно-измерительные и управляющие системы. 2008. № 5. С.76-84.
44. *Верба В.С., Гандурин В.А., Трофимов А.А. Бортовая РЛС для перспективного многофунк-
ционального авиационного комплекса разведки, оповещения и управления (МАК РОУ) с
цифровой АФАР И Наукоемкие технологии. 2004. № 8-9. С. 110-116.
45. *Верба В.С., Неронский Л.Б., Осипов И.Г, Турук В.Э. Радиолокационное зондирование Земли
в дециметровых диапазонах волн // Аэрокосмический курьер. 2009. № 6 (66). С.50-52.
46. *Верба В.С., Неронский Л.Б., Поливанов С.С. Тенденции развития систем радиолокационного
наблюдения космического базирования И Наукоемкие технологии. 2009. Т. 10. № 8. С.3-9.
47. *Верба В.С., Осипов И.Г, Неронский Л.Б., Турук В.Э. Перспективы создания космических
РЛС дистанционного зондирования Земли И Аэрокосмическое обозрение. Аналитика, ком-
ментарии, обзоры. М.: ООО «Изд. группа «Бедретдинов и Ко», 2007. № 4 (29). С.372-375.
48. *Верба В.С., Поливанов С.С. Организация информационного обмена в сетецентрических
боевых операциях И Радиотехника. 2009. № 8. С.57-62.
49. *Витер В., Петровский В., Кучейко А. Космические аппараты радиолокационного наблю-
дения, созданные в «НПО машиностроения» // Новости космонавтики. 2001. № 3 (216).
С.42-43.
50. Внотченко С.Л., Достовалов М.Ю., Зайцев А.Б., Мусинянц Т.Г., Смирнов С.Н. Результаты
измерений ЭПР искусственных и естественных объектов по радиолокационным изображе-
ниям РСА «Компакт-100» И Исследования Земли из космоса. 2003. № 6. С.49-57.
51. Внотченко С.Л., Коваленко А.И., Риман В.В., Шишанов А.В., Нейман И. С. Радиолокаторы для
малых космических аппаратов И III Международная конференция-выставка «Малые спут-
ники. Новые технологии, миниатюризация. Область эффективного применения в XXI ве-
ке». Королев, Московская обл. 27-31 мая 2002 г. Кн. III. С.419-426.
52. Вопросы подповерхностной радиолокации. Коллективная монография / Под ред. А.Ю. Гринё-
ва. М.: Радиотехника, 2005.
53. Всемирная орбитальная группировка космических аппаратов ДЗЗ / Геоматика. Geomatics. Жур-
нал о геоинформатике и дистанционном зондировании. М.: СОВЗОНД, 2008. № 1. С.61-69.
54. Вудворд П. Теория вероятностей и теория информации в применении к радиолокации. М.:
Сов. радио, 1955.
55. Гарбук С.В., Гершензон В.Е. Космические системы дистанционного зондирования Земли.
М.: Сканэкс, 1997. 296 с.
56. Гафаров А. Ядерная энергия в космосе: Состояние и перспективы И Новости космонавти-
ки. 2004. Т. 14. № 4(255). С.38-40, www.novosti-kosmonavtiki.ru/content/numbers/255/
Ol.shtml.
57. Глезер В.Д., Цуккерман ИИ. Информация и зрение. М.: Изд-во АН СССР, 1961.
58. Головенко Е.Н., Приходько А.И., Тараненко И.В., Халиманович В.И., Шипилов Г.В. Транс-
639
Радиолокационные системы землеобзора космического базирования
формируемая крупногабаритная антенна каркасного типа // Решетневские чтения: Мате-
риалы X Международной научной конференции, посвященной памяти генерального конст-
руктора ракетно-космических систем академика М.Ф. Решетнева. Красноярск: Сибирский
государственный аэрокосмический университет. 2006. С.41.
59. Горячкин О.В. Методы слепой обработки сигналов и их приложения в системах радиотех-
ники. М.: Радио и связь, 2003. 230 с.: ил.
60. Градштейн И.С., Рыжик ИМ. Таблицы интегралов, сумм, рядов и произведений. М.: Физ-
матгиз, 1962.
61. Гудкова Н.Л., Ширяев А.М. Использование в народном хозяйстве СВЧ-аппаратуры дистан-
ционного зондирования из космоса // Зарубежная радиоэлектроника. 1991. № 4. С.86-100.
62. Демин В.П., Куприянов А.И., Цветное В.В. Радиоэлектронная борьба: радиоразведка и ра-
диопротиводействие. М.: Изд-во МАИ, 1998.
63. *Дикинс А.В., Иванов А.Ю., Карлин Л.Н., Неронский Л.Б. и др. Атлас аннотированных ра-
диолокационных изображений морской поверхности, полученных космическим аппаратом
«Алмаз-1». М.: ГЕОС, 1999. 119 с.
64. До 2015 г. ОАО «Газком» намерено превратить систему спутниковой связи «Ямал» в пол-
номасштабную космическую информационную систему // Информационный бюллетень.
ГИС-Ассоциация. 2007. № 1 (58). С.4-12.
65. Дорофеев В. Взгляды американского военного руководства на формы боевого применения
космических сил И Зарубежное военное обозрение. 2001. № 8.
66. Доставалов М.Ю., Внотченко С.Л., Ермаков Р.В., Жаровская Е.П., Мусинянц Т.Г, Теличев А.В.
Сравнительный анализ радиолокационных характеристик отражения объектов и фоновых
поверхностей в Х-, L- и УКВ-диапазонах, обусловленных влиянием периодических струк-
тур // Сб. научных статей «Современные проблемы дистанционного зондирования из кос-
моса». Вып.6. М.: ИКИ РАН. Изд-во ОАО «Азбука-2000». 2009. Т. 1. С. 122-131.
67. Достовалов М.Ю., Внотченко С.Л., Лифанов А.С., Мусинянц Т.Г. Система автоматизиро-
ванного распознавания объектов на основе исследования радиолокационных портретов по
изображениям РСА «Компакт-100» И Исследования Земли из космоса. 2005. № 1. С.51-65.
68. Достовалов М.Ю., Лифанов А.С., Мусинянц Т.Г. Использование метода Change Detection
для обнаружения объектов на радиолокационных изображениях // Исследование Земли из
космоса. 2007. № 4. С. 15-26.
69. ^Достовалов М.Ю., Неронский Л.Б., Переслегин С.В. Исследования поля скорости океан-
ских течений по фазометрическим данным, полученным РСА космического аппарата
«ERS» // Океанология. 2003. Т. 43. № 3. С.473-480.
70. Дьяконов В.П. MATLAB 6.6/6.1/6.5/6.5+SP1 Simulink 5/5. Обработка сигналов и изображе-
ний. Сер. «Полное руководство пользователя». М.: СОЛОН-Пресс, 2005. 592 с.: ил.
71. Евтюшкин А.В., Филатов А.В. Оценка деформаций земной поверхности в районах интен-
сивной нефтедобычи Западной Сибири методом SAR-интерферометрии по данным
ENVISAT\ASAR и ALOS\ PALSAR И Сб. научных статей «Современные проблемы дис-
танционного зондирования из космоса». Вып. 6. М.: ИКИ РАН. Изд-во. ОАО «Азбука-
2000», 2009. Т. 1.
72. Ежегодник «Космическая съемка Земли. 2007-2008». Справочные данные и дополнения по
спутникам съемки Земли. Справочно-аналитическое издание / Под ред. Ю.А. Подъездкова.
М.: Радиотехника, 2008.
73. * Елизаветин ИВ. Оценка влияния некогерентного накопления при обработке данных с
космического аппарата «Алмаз-1» // Исследование Земли из космоса. 1993. №1. С.32-35.
74. Елизаветин И.В., Гудилин Д.С., Семёнов О.И. Сравнительная оценка фильтрации радиолока-
ционных снимков с использованием вейвлет-преобразований // Аэрокосмические техноло-
гии: Труды Всероссийской научно-технической конференции (22 мая 2002 г., Реутов, ФГУП
«НПО машиностроения») / Под ред. Р.П. Симоньянца. М.: Изд-во МГТУ им. Н.Э. Баумана.
2003. С.233-243.
75. Елсаков В.В. Развитие спутникового мониторинга экосистем европейских тундр с использо-
ванием данных SAR/ERS-2 И Сб. научных статей «Современные проблемы дистанционного
640
Литература
зондирования из космоса». Вып.5. М.: ИКИ РАН. Изд-во «Азбука». 2008. Т. 2. С.483-488.
76. *Елюшкин В.Г., Пронин Б.В. Фотограмметрическая обработка радиолокационных снимков.
М.: Недра, 1993. 191 с.
77. Живичин А.Н., Соколов В.С. Дешифрирование фотографических изображений. М.: Недра,
1980. 253 с.
78. Заболоцкий В.Р. Применение космических радиолокационных изображений РСА КА «Ал-
маз-1» для исследования сельскохозяйственных культур // Исследования Земли из космоса.
1996. №2. С. 106-110.
79. Загородников А.А. Радиолокационная съемка морского волнения с летательных аппаратов.
Л.: Гидрометеоиздат, 1978. 239 с.
80. Захаров А.И. Измерение полной матрицы рассеяния земных покровов спутниковым поля-
риметрическим РСА // II Всероссийская научная конференция. Сб. докладов «Дистанцион-
ное зондирование земных покровов и атмосферы аэрокосмическими методами».
С.-Петербург. 16-18 июня 2004 г. Т. 1. С.60-64.
81. Захаров А.И., Жердев П.А., Борисов М.М., Соколов А.Б. Калибровка современных космиче-
ских РСА с помощью антенных рефлекторов // II Всероссийская научная конференция. Сб.
докладов «Дистанционное зондирование земных покровов и атмосферы аэрокосмическими
методами». С.-Петербург, 16-18 июня 2004 г. Т. 3. С.47-50.
82. Захаров А.И., Машуров С.С. Использование стабильных отражателей в схеме интерферо-
метрической съемки TERRASAR-X при мониторинге карстовых территорий Нижегород-
ской области // IV Всероссийская научная школа и конференция «Радиофизические методы
в дистанционном зондировании сред». Муром, 2009.
83. Захаров А.И, Машуров С.С. Мониторинг магистрального газопровода на оползневом уча-
стке Кубанского края с помощью интерферометрической съемки радара TERRASAR-X //
IV Всероссийская научная школа и конференция «Радиофизические методы в дистанцион-
ном зондировании сред». Муром, 2009.
84. Захаров А.И., Хренов Н.Н. Радиолокационные интерферометрические методы наблюдения
Земли в задаче мониторинга подвижек газопроводов И II Всероссийская научная конфе-
ренция. Сб. докладов. «Дистанционное зондирование земных покровов и атмосферы аэро-
космическими методами». С.-Петербург. 16-18 июня 2004 г. Т. 3. С. 110-114.
85. Захарова Л.В., Захаров А.Н. Исследование динамики волжских берегов Ульяновска мето-
дом радиолокационной интерферометрии // VI открытая Всероссийская конференция. «Со-
временные проблемы дистанционного зондирования из космоса». Тезисы докладов. М.:
ИКИ РАН, 10-14 ноября 2008 г.
86. Захарова Л.Н. Использование интерферометрической когерентности по данным полнопо-
ляриметрического РСА для классификации земных покровов И Сб. научных статей «Со-
временные проблемы дистанционного зондирования Земли из космоса». М.: ИКИ РАН.
Изд-во ОАО «Азбука-2000», 2008. Вып.5. Т. 1. С.96-101.
87. Захваткина И. Ю., Александров В. Ю., Коросов А. Классификация морских льдов на РСА-
изображениях спутника ENVISAT И VI Всероссийская открытая ежегодная конференция
«Современные проблемы дистанционного зондирования Земли из космоса» / Тезисы док-
ладов. М.: ИКИ РАН, 10-14 ноября 2008 г.
88. *3емлянов А.Б., Коссов Г.Л., Траубе В.А. Система морской космической разведки и целе-
указания (история создания). С.-Петербург: ООО «Галея Принт», 2002. 216 с.
89. Зиновьев В.Г., Полетаев А.М., Присяжнюк СП Проблемы стандартизации в области дис-
танционного зондирования Земли И Сб. научных статей «Современные проблемы дистан-
ционного зондирования из космоса». Вып.5. М.: ИКИ РАН. Изд-во ОАО «Азбука-2000»,
2008. Т. 1. С.133-137.
90. *3раенко С.М., Коберниченко В.Г. Цифровое синтезирование апертуры при кусочно-
линейной аппроксимации опорной функции И Известия вузов. М.: Радиоэлектроника, 1987.
Т. 30. №8. С.8-12.
91. Зубкович С.Г. Статистические характеристики радиосигналов, отраженных от земной по-
641
Радиолокационные системы землеобзора космического базирования
верхности. М.: Сов. радио, 1968. 224 с.
92. Зубченко Э.С. Методы радиолокационного и электромагнитного зондирования морских аквато-
рий для картографирования рельефа дна И Навигация и гидрография. 2007. № 24. С. 152-162.
93. Иванов А.Ю., Затягалова В.В. Картографирование загрязнений моря с использованием
космической радиолокации и географических информационных систем И Исследование
Земли из космоса. 2007. № 6. С.46-63.
94. Иммореев И.Я. Сверхширокополосные радиосистемы. Обзор состояния и перспективы раз-
вития / Труды НТОРЭС им. А.С.Попова: Сер. «Сверхширокополосные сигналы и сверхко-
роткие импульсы в радиолокации, связи и акустике». М.:, 2005. С.9-14.
95. Инженерный справочник по космической технике. Изд. 2-е перераб. и доп. / Под ред.
А.В. Солодова. М.: Воениздат, 1977. 430 с.
96. Информационные технологии в радиотехнических системах: Учебное пособие: В.А. Васин,
И.Б. Власов, Ю.М. Егоров и др. / Под ред. И.Б. Федорова. М.: Изд-во Ml ГУ им.
Н.Э. Баумана, 2003.677 с.: ил. (Сер. «Информатика в техническом университете»).
97. Исходные данные по информационным параметрам перспективной космической системы
дистанционного зондирования Земли (ПКС ДЗЗ). М.: РКА, 1993.
98. Каневский М.Б. Теория формирования радиолокационного изображения поверхности океа-
на. Н. Новгород: ИПФ РАН, 2004. 124 с.
99. Караваев В.В., Сазонов В.В. Основы теории синтезированных антенн. М.: Сов. радио, 1974.
100. Карпов О.А., Луканидин А.М., Нечаев В.М., Овчинников А.А. и др. Экспериментальная проверка
алгоритмов межпериодного расширения спектра в РСА. Кн. «Цифровая обработка сигналов в
РСА» / Под ред. Е.Ф Толстова. Смоленск: Изд-во ВА ВПВО ВС РФ, 2005. С.226-230.
101. Катрона Л.Дж., Лейт Е.Н., Палермо КДж., Порцелло Л.Дж. Оптические системы фильт-
рации и обработки сигналов // Зарубежная радиоэлектроника. 1962. № 10.
102. Кислицкий М.И. Космическая система радиолокационного мониторинга «Север» // Сб. на-
учных статей «Современные проблемы дистанционного зондирования из космоса». Вып.5.
М.: ИКИ РАН. Изд-во ОАО «Азбука-2000», 2008. Т. 1. С.273-279.
103. Классен В.И., Кинбер Б.Е., Шиитов А.В., Тоболев А.К. Гибридные и полифокальные антен-
ны. Обзор «Антенны». М.: Радио и связь, 1987.
104. Коберниченко В.Г. Использование данных космических систем наблюдения для монито-
ринга и прогнозирования чрезвычайных ситуаций на региональном уровне // Вестник
УГТУ-УПИ. На передовых рубежах науки и инженерного творчества. Екатеринбург: ГОУ
ВПО УГТУ-УПИ, 2004. № 15 (45). С. 105-107.
105. Коберниченко В.Г., Доросинский Л.Г. Методика анализа помехозащищенности РСА // Тру-
ды VII Международной НТК «Радиолокация, навигация, связь». 24-26 апреля 2001 г. Во-
ронеж: Изд-во Воронежского государственного университета. 2001. Т. 3. С. 143 8-1443.
106. Коваленко А.И. Амплитудно-фазовые характеристики функции импульсного отклика ши-
рокополосных радиолокаторов с синтезированной апертурой в областях формирования
сигналов доплеровской неоднозначности // Труды НТОРЭС им. А.С. Попова: Сер.
«Сверхширокополосные сигналы и сверхкороткие импульсы в радиолокации, связи и аку-
стике». М., 2005. С.58-62.
107. Коваленко А.И. Анализ эффекта доплеровской неоднозначности для высокодетальных кос-
мических радиолокаторов с синтезированной апертурой // Труды XXIII Всероссийского
симпозиума «Радиолокационное исследование природных сред». Вып.5. С.-Петербург:
НИЦ 2 4 ЦНИИ МО РФ, 2005. С.48-55.
108. Коваленко А.И. Анализ эффекта доплеровской неоднозначности для космических радиоло-
каторов с синтезированной апертурой детального наблюдения Земли // Электромагнитные
волны и электронные системы. 2008. Т. 13. № 4. С.22-33.
109. Коваленко А.И Метод одномерной избирательной редукции доплеровской неоднозначно-
сти для радиолокаторов с синтезированной апертурой детального наблюдения Земли //
Электромагнитные волны и электронные системы. 2008. Т. 13. № 6. С.64-73.
110. Коваленко А.И. Методика оценки уровня доплеровской неоднозначности для широкопо-
642
Литература
лосных космических радиолокаторов с синтезированной апертурой // II Всероссийская на-
учная конференция-семинар «Сверхширокополосные сигналы в радиолокации, связи и
акустике»: Сб. докладов. Муром, 2006. С.327-331.
111. Коваленко А.И. Методика оценки уровня доплеровской неоднозначности для широкопо-
лосных космических радиолокаторов с синтезированной апертурой // Труды XXIV Всерос-
сийского симпозиума «Радиолокационное исследование природных сред». Вып.6. С.-
Петербург: НИЦ 4 ЦНИИ МО РФ. 2006. С. 104-111.
112. Коваленко А.И., Риман В.В. Дифференциальные методы редукции эффекта неоднозначно-
сти в космических радиолокаторах с синтезированной апертурой // Международная науч-
ная конференция к 95-летию академика В.А. Котельникова «Современная радиоэлектрони-
ка в ретроспективе идей В.А. Котельникова». М.: Изд-во МЭИ, 2003. С.88-90.
113. Коваленко А.И., Риман В.В. Особенности формирования радиолокационных изображений в
высокодетальных радиолокаторах с синтезированной апертурой // Труды XVI-XIX
Всероссийских симпозиумов «Радиолокационное исследование природных сред». Вып.2.
С.-Петербург: ВИКУ им. А.Ф. Можайского, 2002. С. 102-114.
114. Козлов И.Е., Сычев В.И. Реанализ проявлений океанских внутренних волн на изображениях
РСА спутника «Алмаз-1» // II Всероссийская научная конференция. Сб. докладов «Дистан-
ционное зондирование земных покровов и атмосферы аэрокосмическими методами». С.-
Петербург. 16-18 июня 2004 г. Т. 2. С. 108-116.
115. Колосов М.А., Арманд Н.А., Яковлев О.Я. Распространение радиоволн при космической
связи / Под ред. акад. Б.А. Введенского и проф. М.А. Колосова. М.: Связь, 1969. 155 с.: ил.
ftp://ftp.kiam 1 .rssi.ru/pub/gps/book/arm/.
116. Колосов М.А., Шабельников А.В. Рефракция электромагнитных волн в атмосфере Земли,
Венеры, Марса. М.: Сов. радио, 1976.
117. Кондратенков Г. С. Ультразвуковой спектроанализатор радиолокационных сигналов с ис-
пользованием явления дифракции света на ультразвуковых волнах в прозрачной среде,
возбуждаемых радиолокационными сигналами / Авт. свид. №21080, 08.09.1959.
118. Кондратенков Г.С., Фролов А.Ю. Радиовидение. Радиолокационные системы дистанцион-
ного зондирования Земли: Учебное пособие для вузов / Под ред. Г. С. Кондратенкова. М.:
Радиотехника, 2005. 368 с.: (Сер. «Радиолокация»).
119. Кондратенков Г.С., Хохлянник В.А., Иванисов Б.А. Статистические характеристики сигна-
лов РСА дециметрового диапазона // Радиотехника. 2000. № 3.
120. Копылов В.Н., Кочергин Г.А., Полищук Ю.М., Хамедов В.А. Использование данных ДЗЗ при
решении региональных задач рационального природопользования. Современные проблемы
дистанционного зондирования Земли из космоса // Тезисы конференции, ИКИ РАН. 2008.
121. ^Королев А.В., Коршиков Я.В. Экспериментальное исследование транзисторных усилите-
лей мощности ЛЧМ-сигналов // Сб. докладов XII Международной научно-технической
конференции «Радиолокация, навигация, связь» RLNC-2006. Воронеж: НПФ «САКВОЕЕ»
ООО. 2006. Т. 1. С.1110-1115.
122. ^Королев А.В., Коршиков Я.В., Птицина С.Е. Унификация схемотехнических решений в
усилителях мощности ДМВ-диапазона // Сб. докладов XV Международной научно-
технической конференции «Радиолокация, навигация, связь» RLNC-2009. Воронеж: НПФ
«САКВОЕЕ» ООО. 2009. Т. 2. С.1128-1135.
123. * Королев А. В., Троицкий Ю.Н., Ростовцев А. А., Коршиков Я.В. Передающее устройство
5-диапазона для бортового космического радиолокатора // Сб. докладов XI Международ-
ной научно-технической конференции «Радиолокация, навигация, связь» RLNC-2005. Во-
ронеж: НПФ «САКВОЕЕ» ООО. 2005. Т. 1. С.357-363.
124. Космический комплекс гидрометеорологического и океанографического обеспечения
«Метеор-ЗМ» с космическим аппаратом «Метеор-М» №1. Справочные материалы. Под.
ред. Л.А. Макриденко, С.Н. Волкова, Ю.В. Трифонова, А.В. Горбунова. М.: ФГУП «НПП
ВНИЭМ». 2008. 143 с.
125. Космическая съемка Земли. Космическая радиолокационная съемка поверхности Земли. Спра-
643
Радиолокационные системы землеобзора космического базирования
вочно-аналитическое издание/ Под ред. Ю.А. Подъездкова. М.: Радиотехника. 2004. 66 с.: ил.
126. Космическая съемка Земли. Справочно-аналитическое издание / Под ред. Ю.А. Подъездко-
ва. М.: Радиотехника. 2006. 358 с.: ил.
127. Космические радары: «9:0» не в пользу России // ГИС и GPS, 21.12.07.
128. Кретов Н.В., Рыжкина Т.Е., Федорова Л.В. Влияние земной атмосферы на пространствен-
ное разрешение радиолокаторов с синтезированной апертурой космического базирования //
Радиотехника и электроника. 1992. № 1. С.90-95.
129. Кровотынцев В.А., Лаврова О.Ю., Митягина М.И., Островский А.Г. Космический монито-
ринг состояния природной среды Азово-Черноморского бассейна // Сб. научных статей
«Современные проблемы дистанционного зондирования из космоса». Вып.4. М.: ИКИ
РАН. Изд-во ОАО «Азбука-2000», 2007. Т. 1. С.295-303.
130. ^Куликовский М.Г. Контроль разрешающей способности космического радиолокатора с син-
тезированной антенной при наземных испытаниях // Наукоемкие технологии. 2007. № 10.
131. *Курочкин А.П. Развитие антенно-фидерной и оптоэлектронной техники в ОАО «Концерн
радиостроения «Вега» // Наукоемкие технологии. 2004. № 8-9. С.40-59.
132. *Курочкин А.П., Андрианов В.И., Верба В.С. и др. Вопросы построения АФАР для авиаци-
онных и космических радиолокационных комплексов наблюдения // Антенны. 2004.
Вып.8-9 (87-88). С.56-64.
133. *Курочкин А.П., Андрианов В.Н., Верба В. С., Козлов КВ., Крицкий С.В., Рыков В.В., Яку-
бенъ Л.М. Вопросы построения АФАР для авиационных и космических радиолокационных
комплексов наблюдения // Антенны. 2004. № 8-9. С.56-64.
134. *Кушнерёв Н.А. Устройство электропитания импульсного твердотельного передатчика //
Радиотехника. №5, 2009
135. Лаппо С.С., Арманд Н.А., Волков А.М. и др. О концепции развития космической океаноло-
гии в России на 1996-2015 гг. // Исследование Земли из космоса. 1997. № 2. С.70-80.
136. Левин Б.Р. Теоретические основы статистической радиотехники. Кн. 2. М.: Сов. радио,
1968. 504 с.
137. *Лиханский С.Г. Модификация технологии синтеза радиолокационных изображений, осно-
ванной на гармоническом анализе, применительно к ситуации прожекторного режима для
космических радиолокаторов с синтезированной апертурой // Наукоемкие технологии.
2008. № 2. С.38-55.
138. *Лиханский С.Г. Модифицированный метод скользящего окна как способ компенсации
строб-эффекта и одновременно повышения производительности сверточных алгоритмов
синтеза в прожекторном режиме // Наукоемкие технологии. 2006. № 10.
139. *Лиханский С.Г. Новая технология прецизионного масштабирования радиолокационных
сигналов, обобщающая известный Chirp-Scaling-оператор // Наукоемкие технологии. 2006.
№ 7-8. С.72-79.
140. *Лиханский С.Г. Повышение производительности двумерно-сверточных алгоритмов синтеза
РЛИ в прожекторном режиме методом когерентного накопления сигнала по сомкнутым суб-
кадрам, в сумме составляющим интервал синтеза// Наукоемкие технологии. 2004. № 5. С.22-33.
141. *Лиханский С.Г. Применение метода прецизионного масштабирования в когерентной ра-
диолокационной картографии // Наукоемкие технологии. 2004. № 2-3. С.41-52.
142. Маров М.Н., Штагер Е.А. Сравнение радиолокационных характеристик айсбергов и судов
// Труды XX и XXI Всероссийских симпозиумов «Радиолокационное исследование при-
родных сред». С.-Петербург. 2003. Вып.З. С.94-100.
143. Методы, процедуры и средства аэрокосмической компьютерной радиотомографии припо-
верхностных областей Земли / Под ред. С.В. Нестерова, А.С. Шамаева, С.И. Шамаева. М.:
Научный мир, 1996. 272 с.
144. Митягина М.И., Лаврова О.Ю. Радиолокационные наблюдения поверхностных пленочных
загрязнений в прибрежной зоне Черного и Азовского морей // Сб. научных статей «Совре-
менные проблемы дистанционного зондирования из космоса». Вып.4. М.: ИКИ РАН. Изд-
во ОАО «Азбука-2000», 2007. Т. 1. С.317-324.
644
Литература
145. Михайлов В.Я. Фотография и аэрофотография. М.: Изд-во геодезической и картографиче-
ской литературы. 1952.
146. Михайлов Б.А., Кондратенков Г.С. Сравнение методов повышения разрешающей способ-
ности радиолокационных устройств по угловым координатам // Труды ВВИА им.
проф. Н.Е. Жуковского. 1961. Вып. 883.
147. Назаров Л.Е., Чухланцев А.А. Моделирование нейросетевых алгоритмов оценки биофизи-
ческих параметров почвы и растительных покровов с использованием данных пассивной и
активной радиолокации // II Всероссийская научная конференция. Сб. докладов «Дистан-
ционное зондирование земных покровов и атмосферы аэрокосмическими методами». С.-
Петербург. 16-18 июня 2004 г. Т. 1. С. 110-113.
148. Научные школы Военно-воздушной академии им. проф. Н.Е. Жуковского (Военного авиа-
ционного технического университета). М.: Изд-во «Академии Авиации», 2000. 466 с.
149. *Неронский Л.Б. Аналитическая аппроксимация сенситометрической кривой фотоматериа-
лов // Техника кино и телевидения. 1977. С.21-22.
150. *Неронский Л.Б., Верба В.С., Лиханский С.Г., Осипов И.Г., Пущинский С.Н., Турук В.Э.
Формирование точечных моделей объектов по комплексным РСА изображениям // Труды
седьмой Всероссийской открытой ежегодной конференции «Современные проблемы дис-
танционного зондирования Земли из космоса». М.: ИКИ РАН. 16-20 ноября 2009 г.
151. *Неронский Л.Б. Влияние нелинейности регистратора на различимость контрастов при ви-
зуальном дешифрировании РЛИ // Вопросы радиоэлектроники. Сер. «Общетехническая».
1978. Вып.9. С.13-34.
152. *Неронский Л.Б. Оценка разрешающей способности РЛС с синтезированной антенной по
переходным функциям и интервалу корреляции выходного сигнала // Радиотехника и элек-
троника. 1975. Т. XX. № 2. С.271-279.
153. *Неронский Л.Б. Перспективы совершенствования космических средств радиолокационно-
го наблюдения земной поверхности // Наукоемкие технологии. 2004. № 8-9. С.66-87.
154. *Неронский Л.Б., Беленкова Н.С. Расчет условий обнаружения флуктуирующего сигнала на
выходе квадратичного детектора с накоплением И Вопросы радиоэлектроники. Сер. «Об-
щие вопросы радиоэлектроники». 1984. Вып. 3. С.3-8.
155. *Неронский Л.Б., Виноградный А.В., Тимофеев Л.М. Моделирование преобразований сиг-
налов в радиолокаторах с синтезированной апертурой антенны. Лабораторный практикум:
Учебное пособие / Московский государственный институт радиотехники, электроники и
автоматики (технический университет). М. 2003. 72 с.
156. *Неронский Л.Б., Гончаренко М.В. Установка для фотометрических измерений с высоким
разрешением // Вопросы радиоэлектроники. Сер. «Общетехническая». 1972. Вып. 3. С.49-57.
157. *Неронский Л.Б., Иванов О.Ю., Коберниченко В.Г. Быстрый алгоритм цифрового синтези-
рования апертуры // Радиотехника. 1994. Т. 49. № 1.
158. *Неронский Л.Б., Коберниченко В.Г., Зраенко С.М. Цифровое синтезирование радиолока-
ционных изображений земной поверхности в радиолокаторе с синтезированной апертурой
космического аппарата «Алмаз-1» // Исследования Земли из космоса. 1993. № 4. С.33-43.
159. *Неронский Л.Б., Лиханский С.Г., Елизаветин И.В., Сысенко Д.В. Модель временных зави-
симостей фазы и амплитуды, адаптированная к радиолокационному обзору в космических
РСА // Исследования Земли из космоса. 2003. № 6. С.58-71.
160. *Неронский Л.Б., Михайлов В.Ф., Брагин И.В. Микроволновая аппаратура дистанционного
зондирования Земли и атмосферы. Радиолокаторы с синтезированной апертурой антенны:
Учебное пособие / СПбГУ АП. С.-Петербург. 1999. Ч. 2. 220 с.
161. *Неронский Л.Б., Осипов И.Г., Верба В. С. Моделирование метода пространственно-частотной
фильтрации для селекции движущихся целей в РСА И Труды XXII Всероссийского симпо-
зиума «Радиолокационное исследование природных сред». Вып.4. Изд-во Полиграфический
центр Автономной некоммерческой организации. Секция «Инженерные проблемы стабиль-
ности и конверсии» Российской инженерной академии (СИП РИА). М., 2005. С.7-15.
162. *Неронский Л.Б., Пушков Д.В., Елизаветин И.В. Применение моделирования преобразова-
22—1492
645
Радиолокационные системы землеобзора космического базирования
ний сигналов в РСА для интерпретации данных ДЗЗ. Труды конференции по дистанцион-
ному зондированию Земли // II Всероссийская научная конференция. Сб. докладов «Дис-
танционное зондирование земных покровов и атмосферы аэрокосмическими методами».
С.-Петербург. 16-18 июня 2004 г. Т. 3. С. 145-150.
163. *Неронский Л.Б., Салганик П.О., Яркин В.Ф. Экспериментальное исследование различимо-
сти распределенных целей на радиолокационных изображениях // Вопросы радиоэлектро-
ники. Сер. «Общетехническая». 1979. Вып. 1. С.23-36.
164. *Неронский Л.Н., Достовалов М.Ю., Переслегин С.В. Улучшенные алгоритмы измерения
доплеровской частоты сигналов РСА // II Всероссийская научная конференция. Сб. докла-
дов «Дистанционное зондирование земных покровов и атмосферы аэрокосмическими ме-
тодами». С.-Петербург. 16—18 июня 2004 г. Т. 3. С. 140-144.
165. Никольский Д.Б. Передовые направления в обработке и применении радиолокационных
данных // Геоматика. Geomatics. Журнал о геоинформатике и дистанционном зондирова-
нии. М.: СОВЗОНД, 2008. № 1. С.23-24.
166. *Нявро Б.П., Шилин Б.В., Ефремов Г.А., Салганик П.О., Неронский Л.Б. и др. Радиолокация
геологических структур с ИСЗ «Космос-1870» // Сб. «Экспресс-информация Совета по
космическим исследованиям АН СССР». Л.: ВНИИКАМ, 1989.
167. Обнаружение и распознавание объектов радиолокации. Коллективная монография / Под.
ред. А.В. Соколова. М.: Радиотехника. 2006.
168. Оппенгейм А.В., Шафер Р.В. Цифровая обработка сигналов: Пер. с англ. / Под ред.
С.Я. Шаца. М.: Связь. 1979.
169. Основы теории полета космических аппаратов / Под ред. Г. С. Нариманова. М.: Машино-
строение. 1972.
170. Охонский А.Г. Подавление азимутальных выбросов в искусственной диаграмме направлен-
ности РСА // Труды XXII Всероссийского симпозиума «Радиолокационное исследование
природных сред». Вып.4. М.: ИПЦ АНО «СИП РИА», 2005. С. 129-138.
171. Охонский А.Г. Подавление боковых выбросов диаграммы направленности РЛС с синтезирован-
ной апертурой в азимутальной плоскости // Межвузовский сборник научных трудов «Простран-
ственно-временная обработка радиолокационных сигналов». Л.: ЛИАП. 1990. С.65-69.
172. *Патент на изобретение RU №2310886 С1, МПК 7 G01S 13/90 (2006.01). Космический мно-
горежимный поляриметрический радиолокатор с синтезированной апертурой со скани-
рующей зеркальной антенной / Открытое акционерное общество «Концерн радиостроения
«Вега» (RU)/ Авторы: Неронский Л.Б., Андрианов В.И., Верба В.С., Осипов И.Г., Турук В.Э.
Заявка №2006103346. Приоритет 07 февраля 2006 г. Зарег. 20 ноября 2007 г.
173. *Патент на изобретение RU №2352033 С1, МПК 7 H01Q 1/100 (2006.01). Гибридная зер-
кальная антенна с расширенными углами сканирования / Открытое акционерное общество
«Концерн радиостроения «Вега» (RU)/ Авторы: Неронский Л.Б., Андрианов В.И., Верба
В.С., Осипов И.Г., Егоров М.А. Заявка № 2007127775/09. Приоритет 20.07.2007, опублико-
вано 10.04.07. Бюл. №10.
174. ^Переслегин С.В. Связь СВЧ-рассеяния от морской поверхности с пространственно-
временными характеристиками развитого волнения // Изв. АН СССР. Физика атмосферы и
океана. 1975. Т. 11. № 5. С.481-490.
175. ^Переслегин С.В. Статистические характеристики СВЧ-рассеяния от морской поверхности
с учетом конечного разрешения и фактора деполяризации // Изв. АН СССР. Физика атмо-
сферы и океана. 1975. Т. 11. № 6. С.610-619.
176. ^Переслегин С.В., Достовалов М.Ю., Манаков В.Ю., Неронский Л.Б. Формирование ярко-
стных и скоростных изображений морской поверхности в радиолокаторах с синтезирован-
ной апертурой // Сб. Труды НПФ. Н. Новгород: НПФ РАН, 2003.
177. *Переслегин С.В., Достовалов М.Ю., Сажнева А.Э., Неронский Л.Б., Осипов И.Г. Яркост-
ные и скоростные радиолокационные портреты океанских явлений // II Всероссийская на-
учная конференция. Сб. докладов «Дистанционное зондирование земных покровов и атмо-
сферы аэрокосмическими методами». С.-Петербург, 16-18 июня 2004 г. Т. 2. С.82-91.
646
Литература
178. Переслегин С.В., Елизаветин И.В., Иванов А.Ю. Измерение параметров ветровых волн в
области атмосферного циклона по данным поляризационного космического РСА // Сб.
«Современные проблемы дистанционного зондирования Земли из космоса». М.: ИКИ РАН,
2006. Вып.З. Т. II. С.140-148.
179. Переслегин С.В., Королев А.М., Маров М.Н. Анализ доплеровского радиолокационного ме-
тода измерений поля мезомасштабных океанических течений с орбитального аппарата //
Исследование Земли из космоса. 1994. № 2. С.84-93.
180. Переслегин С.В., Королев А.М., Маров М.Н. и др. Радиолокационные измерения мезомас-
штабных полей течений океана по данным РСА КА АЛМАЗ-1 // Исследование Земли из
космоса. 1994. № 4. С.28-38.
181. ^Переслегин С.В., Неронский Л.Б., Плющев В.А. Флуктуационно-уровенная чувствитель-
ность РЛ интерферометра при двухпозиционном зондировании морской поверхности // В
сб. «Проявления глубинных процессов на морской поверхности». Н. Новгород: ИПФ РАН,
2008. Вып.З.
182. Переслегин С.В., Халиков З.А. Двухпозиционная радиолокация морской поверхности // В
сб. «Проявления глубинных процессов на морской поверхности». Н. Новгород: ИПФ РАН,
2008. Вып.З.
183. ^Переслегин С.В., Халиков З.А., Неронский Л.Б. Физическое обоснование радиолокацион-
ной космической системы, решающей задачу раннего обнаружения опасных океанических
явлений // Сб. научных статей «Современные проблемы дистанционного зондирования из
космоса». Вып.5. М.: ИКИ РАН. Изд-во ОАО «Азбука-2000», 2008. Т. 2. С. 180-191.
184. Перминов А.Н, Меньшиков В.А. Реализация единой социоприродной стратегии освоения
космоса / Программа Интернет-брифингов пресс-службы Федерального космического агент-
ства. Изд-во «РЕСТАРТ», 2009. Веб-сайт http://www.federalspace.ru/program_brifmg.asp.
185. Шлющее В.А. Результаты разработки и направления развития многочастотных авиацион-
ных комплексов РСА // Наукоемкие технологии. 2004. № 8-9. С.88-100.
186. Подповерхностная радиолокация / Под ред. М.И. Финкельштейна. М.: Радио и связь. 1994.
187. Охонский А.Г., Елисеев А.А., Каплунова НВ. и др. Помехоустойчивость информационных
радиосистем управления: Учеб, пособие / Под ред. А.Г. Охонского. М.: МГАП «Мир кни-
ги», 1993. 216 с.: ил.
188. Пономаренко С.Н Adobe Photoshop 5.0. С.-Петербург: БХВ, 2000. 512 с.
189. Порцелло Л.Дж. И Зарубежная электроника. 1972. № 3. С. 15.
190. Приклонская В.И. Использование геометрических и энергетических признаков при обнару-
жении и распознавании аномалий морской поверхности // Сб. научных трудов ФГУП «ЦНИИ
«Комета» «Космические информационно-управляющие системы». М. 2008. Вып.2. С.48-54.
191. Программные решения в области геоинформатики, цифровой фотограмметрии и дистанци-
онного зондирования Земли. ЗАО «Фирма «Ракурс», http://www.racurs.ru/.
192. *Радиолокационная фотограмметрия / В.И. Аковецкий, Г.Н Донсков, Ю.Н. Корнеев, Л.Б.
Неронский. М.: Недра, 1979. 239 с.
193. Радиолокационные методы исследования Земли / Ю.А. Мельник, С.Г. Зубкович, В.Д. Сте-
паненко и др. / Под ред. Ю.А. Мельника. М.: Сов. радио, 1980. 264 с.
194. Радиолокационные системы воздушной разведки. Дешифрирование радиолокационных изо-
бражений / Под ред. Л.А. Школьного. М.: Изд. ВВИА им. проф. Н.Е. Жуковского, 2008. 531 с.
195. Радиолокационные станции бокового обзора / Под ред. А.П. Реутова. М.: Сов. радио, 1970.
196. Кондратенков Г.С., Потехин В.А., Реутов А.П., Феоктистов Ю.А. Радиолокационные
станции обзора Земли / Под ред. ГС. Кондратенкова. М.: Радио и связь, 1983. 272 с.
197. Назиров М., Пичугин А.П., Спиридонов Ю.Г. Радиолокация поверхности Земли из космоса.
Исследования морской поверхности, ледяного и ледникового покровов с помощью спутни-
ковой радиолокационной станции бокового обзора. Монография / Под. ред. Л.М. Митника,
С.В. Викторова. Л.: Гидрометеоиздат, 1990.
198. Регистрирующие среды для голографии / Под ред. Н.И. Кириллова, В.А. Барачевского.
Л.: Наука, Ленинградское отделение, 1975. 165 с.
647
Радиолокационные системы землеобзора космического базирования
199. Регламент радиосвязи Российской Федерации. Государственная комиссия по радиочасто-
там при Госкомсвязи Российской Федерации / Официальное издание. М., 1999.
200. *Peymoe А.П. Радиолокация на магистралях технологического прогресса XXI века // Нау-
коемкие технологии. 2004. № 8-9. С.23-31.
201. Рог В. Война высоких технологий. Операции в Персидском заливе - новое в теории и прак-
тике боевых действий // Независимое военное обозрение, 21.05.2005.
http://www.aviaport.ru/digest/2005/01/21/87330.html.
202. Рог В., Соловьев В. Принципиально новые лекала военных кампаний. // Независимое воен-
ное обозрение, 04.08.2006. http://www.logistics.rU/9/4/l/i77_28184p2.htm.
203. Родионова Н.В. Применение поляризационной разности фаз в задачах распознавания объ-
ектов на радарных изображениях // IV Всероссийская научная школа и конференция «Ра-
диофизические методы в дистанционном зондировании сред». Муром, 2009.
204. РоузА. Зрение человека и электронное зрение. М.: Мир, 1977. Т. 1.
205. Рубахин В.Ф. Психологические основы обработки первичной информации. Л.: Наука. 1974.
296 с.
206. *Савосин Г.В., Серяпин А.В., Шило В.К, Биленко И.Л., Неронский Л.Б., Королев А.В. Круп-
ногабаритные гибридно-зеркальные антенны с облучателями в виде АФАР // Решетневские
чтения: Материалы X Международной научной конференции, посвященной памяти гене-
рального конструктора ракетно-космических систем академика М.Ф. Решетнева. Красно-
ярск: Сибирский государственный аэрокосмический университет, 2006.
207. *Салганик П.О. К расчету разрешающей способности РЛС по пространственным коорди-
натам // Вопросы радиоэлектроники. Сер. «Общетехническая». 1974. Вып.1. с.3-19.
208. *Салганик П.О., Ефремов Г.А., Неронский Л.Б., Куликовский М.Г., Курмаев А.А. Радиоло-
кационное зондирование Земли с ИСЗ «Космос-1870» // Исследование Земли из космоса.
1990. №2. С.70-79.
209. Сарычев В.А. Попытка характеристики очередного этапа развития радиолокационной нау-
ки и техники // Радиопромышленность. 1996. Вып.2. С.81-92.
210. Сборник рабочих материалов по Международному регулированию планирования и ис-
пользования радиочастотного спектра (с учетом изменений, принятых ВКР-2007. Тома 1—4.
НПФ «Гейзер», 2009. http://www.geyser.ru/rus/products/.
211. Современные проблемы дистанционного зондирования из космоса // VI открытая Всерос-
сийская конференция // Сб. научных статей. Вып. 6. М.: ИКИ РАН. Изд-во ОАО «Азбука-
2000». 2009.
212. Современные проблемы дистанционного зондирования из космоса. Физические основы,
методы и технологии мониторинга окружающей среды, потенциально опасных явлений и
объектов // Сб. научных статей. Вып. 5. М.: ИКИ РАН. Изд-во ОАО «Азбука—2000». 2008.
Т. I. 575 с. Т. II. 595 с.
213. Справочник по радиолокации / Под ред. М. Сколника (Нью-Йорк, 1970). / Пер с англ, (в че-
тырех томах) под общей ред. КН. Трофимова. Т. 2 // Радиолокационные антенные устрой-
ства. Под ред. П.И. Дудника. М.: Сов. радио, 1977. 408 с.
214. Справочник по радиолокации / Под ред. М. Сколника, Нью-Йорк, 1970. / Пер. с англ, (в че-
тырех томах) под общей ред. КН. Трофимова. Т. 1 // Основы радиолокации. Под ред. Я.С.
Ицхоки. М.: Сов. радио, 1976. 456 с.
215. Спутники радиолокационного зондирования Земли // Приложение №1 к журналу «Спутни-
ковые системы связи и вещания». М.: Радиотехника, 2000. 86 с.
216. Стреналюк Ю.В. Военная активность в околоземном пространстве. Противоспутниковые
системы // Лекция. М.: МФТИ, 21 апреля 2005 г. http://www.armscontrol.ru/course/
lectures05a/yvs050428t.htm.
217. Таблица распределения полос частот между радиослужбами Российской Федерации, ут-
вержденная постановлением Правительства РФ от 15 июля 2006 г. №439-23.
218. Тарасенко М. Военные картографы США будут пользоваться коммерческими спутниками
// Новости космонавтики. 1998. № 23/24 (190/191). С.37.
648
Литература
219. Татевян С.К. Глобальная геодезическая система GGOS (Научные цели и статус). Совре-
менные проблемы дистанционного зондирования из космоса // VI открытая Всероссийская
конференция. Сб. научных статей. Вып. 6. М.: ИКИ РАН. Изд-во ОАО «Азбука-2000».
2009. Т. 1.С.58.
220. Толстов Е.Ф., Яковлев А.М., Карпов О.А. Радиолокационный комплекс аппаратуры наблю-
дения в программе «Открытое небо» // Радиотехника №11. Сер. «Радиолокационные сис-
темы и системы радиоуправления» №2. Вып.6. 1995. С.54-57.
221. Кузьмин Б.С., Герасимов Ф.Я., Молоканов В.М. и др. Топографо-геодезические термины.
Справочник. М.: Недра. 1989. 261 с.
222. *Траектория полета. ЦКБ-17, НИИ-17, МНИИП. ОАО «Концерн «Вега». М.: Оружие и
технологии, 2005. 252 с.: ил.
223. *Турук В.Э., Неронский Л.Б., Порохов И.О. Выбор технических характеристик РСА универ-
сального назначения для малого космического аппарата // Вопросы радиоэлектроники. Сер.
«Общетехническая». Вып.1. М. 2002. С.43-52.
224. Уманский В.И., Железнов М.М., А.С.Василейский А.С., Милосердое В.В. Интерферометри-
ческая обработка спутниковой радиолокационной информации для мониторинга объектов
железнодорожной инфраструктуры' // VI открытая Всероссийская конференция. «Совре-
менные проблемы дистанционного зондирования из космоса». Тезисы докладов. М.: ИКИ
РАН, 10-14 ноября 2008 г.
225. Файнберг Е.Л. Распространение радиоволн вдоль земной поверхности. М.: Изд-во АН
СССР. 1961.
226. Феоктистов Ю.А. Системный подход в радиотехнике // Радиотехника. 1996. № 1. С.5-8.
227. Фукс И.М. К теории рассеяния радиоволн взволнованной поверхностью моря // Изв.
вузов. Сер. Радиофизика. 1966. Т. 6. № 5. С.876-885.
228. Хармут Х.Ф. Несинусоидальные волны в радиолокации и радиосвязи. М.: Радио и связь.
1985.
229. Хемминг Р.В. Цифровые фильтры. М.: Недра. 1987. 221 с.
230. Хермандер Л. Анализ линейных дифференциальных операторов. Т. 3. Псевдодифференци-
альные операторы. М.: Мир. 1987.
231. Цветков О.Е. Алгоритмы обработки сигналов в РСА с миграцией дальности: Кн. «Цифро-
вая обработка сигналов в РСА» / Под ред. Е. Ф. Толстова. Смоленск: Изд-во В А ВПВО ВС
РФ, 2005. С.71-76.
232. *Челомей В.Н., Ефремов Г.А., Литовченко К.Ц., Неронский Л.Б., Семенов С.С., Салганик
П.О., Эткин В.С. и др. Радиолокация морской поверхности с высоким разрешением с ИСЗ
«Космос-1870» // Исследования Земли из космоса. 1990. С.80-90.
233. Чернов А.А., Чернявский Г.М. Орбиты спутников дистанционного зондирования Земли.
Лекции и упражнения. М.: Радио и связь. 2004. 200 с.: ил.
234. Черняк В.С. Многопозиционная радиолокация. М.: Радио и связь. 1993.
235. Чупарис В. И Зарубежное военное обозрение. 2002. № 8.
236. *Шахгеданов В.Н. Авиационная система наблюдения «Открытое небо». Наукоемкие тех-
нологии. 2004. № 8-9. С. 101-109.
237. Шелестов А.Ю., Скакун С.В., Тищенко Ю.Г. Комплексирование радиолокационных данных
для решения задач спутникового мониторинга // Сб. научных статей «Современные про-
блемы дистанционного зондирования Земли из космоса». М.: ИКИ РАН. Изд-во ОАО «Аз-
бука-2000». 2008. Вып. 5. Т. 1. С.181-188.
238. Ширман Я.Д., Горшков С.А., Лещенко С.П., Братченко Г.Д., Орленко В.М. Методы радио-
локационного распознавания и их моделирование // Зарубежная радиоэлектроника. 1996.
№ 11. С.3-63.
239. Широкополосные и сверхширокополосные сигналы и системы / Успехи современной ра-
диоэлектроники. Тематический выпуск. 2009. № 1-2.
240. Штагер Е.А. Методы расчета радиолокационных характеристик объектов, находящихся
вблизи неровной земной или морской поверхности // Зарубежная радиоэлектроника. 1994.
649
Радиолокационные системы землеобзора космического базирования
№ 4-5. С.22-40.
241. *Штейншлейгер В.Б., Дзенкевич А.В., Манаков В.Ю., Мельников Л.Я., Мисежников Г. С. О
разрешающей способности трансионосферных РЛС для дистанционного зондирования
Земли в УКВ-диапазоне волн // Радиотехника и электроника. 1997. Т. 42. № 6. С.725-732.
242. Яковлев В.П. Основные результаты опытной эксплуатации радиолокатора с синтезирован-
ной апертурой КА «Алмаз» // Зарубежная радиоэлектроника. Успехи современной радио-
электроники. 1997. № 5. С.28-40.
243. *Янушевский Г.Д., Пилипец Ю.С., Цыркин В.В., Смирнов Ю.А. Синтезатор частот и широ-
кополосных ЛЧМ-сигналов 5-диапазона // XVI EFTF European Frequency and Time Forum.
С.-Петербург. Март 2001 г.
244. *Янушевский ГД., Верба В.С., Рыков С.Г. Цифровой синтезатор широкополосных сигналов
S-диапазона // Материалы XI Международной научно-технической конференции «Радио-
локация, навигация, связь». Воронеж, 2005. Т. 1.
245. Финкельштейн М.И., Мендельсон В.Л., Кутев В.А. Радиолокация слоистых земных покро-
вов. М.: Сов. радио. 1977. 176 с.
246. Algra Т., Bierens L. Frequency domain raw data compression for multi-mode satellite instruments
// Proc, of EUSAR'2006, Dresden, Germany. May 16-18, 2006.
247. *Bakhrakh L.D., Los' V.F., ShamanovA.N. Ultrawideband method of feeding a dipole antenna //
Proc, of IV International Conference on Antenna Theory and Techniques, Sevastopol, Ukraine.
Sept 9-12, 2003. V. II. P.535-538.
248. Barnier R. «А comparison of range-doppler and wavenumber domain SAR focusing algorithms»
// IEEE Trans, on GRS. July 1992. V. 30. No. 4. P. 706-713.
249. Barnier R. A systematic comparison of SAR focusing algorithms // Proc. IGARSS'91, IEEE
Espoo, Finland. June 1991. P. 1005-1009.
250. Barnier R. Doppler Frequency Estimation and the Cramer-Rao Bound // Trans, on GRS. May,
1991. V. 29. No. 3. P. 385-390.
251. Barbarossa S., Levrini G. An Antenna Pattern Synthetic Technique For Spacebome SAR Perfor-
mance Optimization // IEEE Trans, on GRS. March, 1991. V. 29. No. 2. P. 254-259.
252. Bassem M.R. MATLAB simulations for radar systems design / Bassem R. Mahafza, Atef Z. El-
sherbeni, CHAPMAN & HALL/CRC Press Company. Boca Raton. London, New York, Wash-
ington, D.C. 2004.
253. Bauma R. W., Mclnnes P.A. Aperture size and ambiguity constraints for a synthetic aperture radar
// Synthetic Aperture Radar. J.J.Kovaly // Ed. Norwood, MA: Artech House. 1978.
254. Baumgartner S., Rodriguez-Cassola M., Nottensteiner A., Horn R., Scheiber R., Schwerdt M. et
al. Bistatic Experiment Using TerraSAR-X and DLR’s new F-SAR System // Proc, of
EUSAR'2008, Friedrichshafen, Germany. June 2-5, 2008. V. 1. P. 57-60.
255. Benz U., Fischer J., Coster W., Moreira A. Adaptive Compression of SAR Data // Proc, of
EUSAR'1998, Friedrichshafen, Germany. May 25-27, 1998. P. 525-528.
256. Benz U., Strodl K., Moreira A. Comparison of Several Algorithms for SAR Raw Data Compres-
sion // IEEE Trans, on GRS. Sept, 1995. V. 33. No. 5. P. 1266-1276.
257. Berardino P., Fornaro G., Lanari R., Sansosti E. A new Algorithm for Surface Deformation
Monitoring based on Small Baseline SAR Interferograms // IEEE Trans, on GRS. 2002. V. 40.
No. 11. P. 2375-2383.
258. Berens P. Efficient Wave Number Domain Processing for squinted Spotlight SAR // Proc, of
EUSAR’2004, Ulm, Germany. May 25-27, 2004. P. 171-174.
259. Bezvesilniy O.O., Dukhpelnykova Y.V., Vinogradov V.V., Vavriv D.M. Homogeneity Criteria for
Lee and Wavelet-Based Speckle Reduction Filters // Proc, of EUSAR'2006, Dresden, Germany.
May 16-18, 2006.
260. Blanko-Sdnchez P., Duque S., Mallorqui J.J., Monells D. Analysis of Highly Non-Linear Defor-
mations due to Mining Activity with DInSAR: PSIC4 Test Site // Proc, of Envisat Symposium
2007. Apr 23-27, 2007, ESA SP-636.
261. Boerner E., Lord R., Mittermayer J, Barnier R. Evaluation of TerraSAR-X Spotlight Processing
650
Литература
Accuracy based on a New Spotlight Raw Data Simulator // Proc, of the IGARSS'03, IEEE, Toul-
ouse, France. July 21-25, 2003. V. 2. P. 1323-1325.
262. Bolle J. Coding of SAR Raw Data // Proc, of EUSAR'1998, Friedrichshafen, Germany. May 25-
27, 1998. P. 537-540.
263. Braun H, Kicherer S. External Calibration for CRS-1 and SAR-Lupe // Proc, of EUSAR’2006,
Dresden, Germany. June 16-18, 2006.
264. Breit H, Boerner E., Mittermayer J., Holzner J., Eineder M. The TerraSAR-X Multi-Mode SAR
Processor - Algorithms and Design // Proc, of EUSAR’2004, Ulm, Germany. May 25-27 2004.
V. 2. P. 501-504.
265. Breit H, Fritz T., Schattler B., Balss U., Damerow H, Schwarz E. TerraSAR-X SAR Pay load Da-
ta Processing: Results from Commissioning and Early Operational Phase // Proc, of
EUSAR'2008, Friedrichshafen, Germany. June 2-5 2008/ V. 1. P. 95-99.
266. Breit H, Schattler D., Steinbrecher U. A High Precision Workstation-Based Chirp Scaling SAR
Processor. // Proc, of the IGARSS'97, IEEE, Singapore. Aug 3-8 1997. V. 1. P. 465-467.
267. Brekke C, Weydahl D.J., Helleren O., Olsen R. Ship traffic monitoring using multi-polarization
satellite SAR images combined with AIS reports Data // Proc, of EUSAR'2008, Friedrichshafen,
Germany. June 2-5, 2008. V. 1. P. 81-84.
268. Brule L., Baeggli H, MacDonald. Radarsat-2 Program Update // Proc, of EUSAR'2002, Cologne,
Germany. June 4-6 2002. P. 25-28.
269. Buades A., Coll B., Morel J.M. A review of image denoising algorithms, with a new one // Mul-
tiscale Modeling and Simulation. 2005. V. 4. No. 2. P. 490-530.
270. Cafforis C, Prati C, Rocca F. «SAR Data Focusing Using Seismic Migration Techniques» //
IEEE Trans, on Aerospace and Electronics Systems. March 1991. V. 27. No. 2. P. 194-206.
271. Callaghan G.D., Longstaff I.D. Wide-swath space-borne SAR using a quad element array // IEEE
Proc. Radar Sonar and Navigation. June 1999. V. 146. No. 3. P. 159-165.
272. Carin L., Geng N., McClure M., Sichina J., Lam Nguyen. Ultra-wide-band synthetic-aperture radar
for mine-field detection // IEEE Antennas and Propagation Magazine. 1999. V. 41. No. 1. P. 18-33.
273. Carrao H, Sarmento P., Araujo A., Caetano M. Separability Analysis of Land Cover Classes at
Regional Scale: A Comparative Study of MERIS and MODIS Data // Proc, of Envisat Sympo-
sium. Apr 23-27 2007, ESA SP-636.
274. Carrara W.G., Goodman R.S., Majevski R.M. Spotlight Synthetic Aperture Radar Signal
Processing Algorithms. Boston, London, Artech House. 1995. P. 554.
275. Casu E, Manzo M., Pepe A. et al. On the Capability of the SBAS-DInSAR Technique to Investi-
gate Deformation Phenomena of Large Areas with Low Resolution Data // Proc, of Envisat Sym-
posium. Apr 23-27 2007. ESA SP-636.
276. Caves R., Luscombe A.P., Lee P.F., James K. Topographic performance evaluation of the
RADARSAT-2/3 tandem mission / Proc, of IGARSS'02, IEEE, Houston, USA. June 24-28 2002.
V. 2. P. 961-963.
277. Cerutti-Maori D., Gierull C.H., Ender J.H.G. First experimental demonstration of GMTI im-
provement through antenna switching // Proc, of EUSAR'2008, Friedrichshafen, Germany. June
2-5,2008. V. 1, pp.47-50.
278. (jetin M., Karl W., Castanon D. Features Enhancement and ATR Performance Using Nonquadrat-
ic Optmization-Based SAR Imaging // IEEE Trans, on Aerospace and Electronics Systems. Oct.
2003. V. 39. No. 4. P. 1375-1395.
279. Chan H.L., Yeo T.S. Noniterative Quality Phase-Gradient Auto-Focus (QPGA) Algorithm for
Spotlight SAR Imagery // IEEE Trans, on GRS. Sept. 1998. V. 36. No. 5. Pt. 2. P. 1531-1539.
280. Chang C. Y, Curlander J.C. Attitude steering for Space based synthetic aperture radars // Proc, of
IGARSS'92, IEEE, Toronto, Canada. May 26-29. P. 297-301.
281. Chang Yu., Zhao F., Zhang J., Hong F.-W., Li P., Yun J. Numerical simulation of internal waves
excited by a submarine moving in the two-layer stratified fluid // Proc, of the Conference of
Global Chinese Scholars on Hydrodynamics. Journal of Hydrodynamics, Ser. В. V. 18, Issue 3,
Supplement 1. July, 2006. P. 330-336. http://www.sciencedirect.com/science.
651
Радиолокационные системы землеобзора космического базирования
282. Cherniakov М., Antoniou M.t Saini R., Zuo R., Edwards J., Space-Surface BSAR - Analytical and
Experimental Study // Proc, of EUSAR’2006, Dresden, Germany. June 16-18, 2006.
283. Chong J., Zhu M., Dong G. Ship Target Segmentation of High Resolution SAR Images // Proc, of
EUSAR'2002, Cologne, Germany. June 4-6, 2002, pp.693-696.
284. Cimino J., Elachi C, Settle M. SIR-B. The Second Shuttle Imaging Radar Experiment // IEEE
Transactions on Geoscience and Remote Sensing. July, 1986. V. GE-24. No. 4. P. 445-452.
285. Cloude S.R., Papathanassiou K.P. Polarimetric SAR Interferometry // IEEE Trans.on GRS. 1998.
V. 36. No. 5. P.1551-1565.
286. Compact radial power combiner teams up a dozen power GaAs FETs // Microwaves. Oct 1, 1977.
V. 16. No. 10. P. 8-9.
287. Cote S, Srivasfava S., Le Dantec P., Hawkins B. From Commissioning to Extended Mission: 9
Years of Maintaining RADARSAT-1 Image Quality Performance // Proc, of EUSAR'2006, Dres-
den, Germany. May 16-18 2006.
288. Cote S, Srivasfava S, Le Dantec P., Lukowski T., Hawkins R. Monitoring RADARSAT-1 Eleva-
tion Beam Pattern using the Canadian Boreal Forest: an Experiment // Proc, of EUSAR’2006,
Dresden, Germany. June 16-18 2006.
289. Cumming I. Model Based Doppler Estimation for Frame-Based SAR Processing // Proc, of
EUSAR'01, IEEE, Sydney, Australia. July 9-13 2001. V. 6. P. 2645-2647.
290. Cumming LG., Wong F.W. Digital Processing of Synthetic Aperture Radar Data. Algorithm and
Implementation, Artech House. 2005.
291. Curlander J.C., McDonough R.N. Synthetic Aperture Radar. New York: Wiley and Sons. 1991.
292. Cutrona L.J., Vivian W.E., Leith E.N., Hall G.O. A High Resolution Radar Combat-Surveillance
System // IRE Trans, on Military Electronics. Apr. 1961. V. MIL-6. P. 127-131.
293. Del Frate F., Petrocchi P., Lichtenegger J., Calabresi G. Neural Networks for Oil Spill Detection
Using ERS-SAR Data // IEEE Trans, on GRS. Sept, 2000. V. 38. No. 5. P. 2282-2287.
294. Desai N., Kumar S, Vachhani J., Gujraty V. Advanced Onboard technologies for ISRO's
RISAT-1 follow on L-Band Polarimetric SAR mission // Proc, of EUSAR'2008, Friedrichshafen,
Germany. June 2-5 2008. V. 1. P. 15-18.
295. Dong G., Chong J., Zhu M. Research on Some Problems about SAR Radiometric Resolution //
Proc, of EUSAR’2004 Conference, Ulm, Germany. May 25-27 2004. V. 1. P. 701-704.
296. Dostovalov M.Y., Ivanov A.Yu., Pereslegin S.V. Retrieval of Current Velocity Field Using the
ERS SAR Raw Data // Proc, of ERS-Envisat Symposium, Gothenburg. Oct. 2000.
297. Durand J.M., Gimonet B.J., Perbos J.R. SAR Data Filtering for Classification // IEEE Trans, on
GRS. 1987. V. GE-25. No. 5. P. 629-637.
298. Efimov VB., Kurekin A.S., Sytnik О. V. Two-Regime Radar // Proc, of EUSAR’2004, Ulm, Ger-
many. May 25-27 2004. P. 673-677.
299. Elizavetin I. V. Improving of SAR Stereo Correlator Performance using GTOPO30 Elevation Map
// Proc, of EUSAR’2004 Conference, Ulm, Germany. May 25-27 2004. V. 2. P. 973-976.
300. Elizavetin I. V. The Ground Surface Backscattering Modeling Using Integral Equation Model //
Proc, of EUSAR'1998, Friedrichshafen, Germany. May 25-27 1998. P. 153-156.
301. Elsakov V.V., Shanov V.M. Ecosystem Monitoring Development in the Russian Tundra Based on
SAR/ERS Data // Proc, of Envisat Symposium. Apr 23-27 2007. ESA SP-636.
302. Ender J.H.G., Cerutti-Maori D. Position Estimation of Moving Vehicles for Space-based Multi-
channel SAR/MTI Systems // Proc, of EUSAR'2006, Dresden, Germany. May 16-18, 2006.
303. Espete T., Walterscheid L, Brenner A., Klare J., Gierull C, Ender J. Progress of Hybrid Bistatic
SAR: Synchronization Experiments and First Imaging Results // Proc, of EUSAR’2008, Frie-
drichshafen, Germany. June 2-5 2008. P. 217-220.
304. European Telecommunications Standarts Institute (ETSI) EN 302 066-1 vl.2.1 (2007-05); ETSI
EN 302 066-2 vl.2.1 (2007-05).
305. Faure P.F., Adrian V., Phalippou L. Programmable Chirp Generator for SAR and Altimeters //
Proc, of EUSAR’1998, Friedrichshafen, Germany. May 25-27 1998. P. 233-236.
306. Federal Communication Commission USA (FCC) 02-48, ET Docket 98-153, First Report and
652
Литература
Order. Apr. 2002.
307. Federal Communication Commission USA (FCC) 04-285, ET Docket 98-153, Second Report and
Order and Second Memorandum Opinion and Order. Dec, 2004.
308. Fischer C, Heer C., Krieger G., Werninghaus R. A high resolution wide swath SAR // Proc, of
EUSAR'2006 Conference, Dresden, Germany. May 16-18, 2006.
309. Flam R.P., MacGaham J.P. Radial power combiner for solid-state power amplifier. // MM-92
conference proceedings. Oct, 1992. P. 23-34.
310. Freeman A. On Ambiguity in SAR Design // Proc, of EUSAR'2006, Dresden, Germany. May 16-
18, 2006. P. 697-700.
311. Freeman A. SAR Calibration. An overview // IEEE Trans, on GRS. Nov, 1992. V. 30. No. 6. P.
1107-1121.
312. Freeman A., Johnson W.T.K., Huneycutt B., Jordan R., Hensley S., Siqueira P., Cur lander J. The
"Myth" of the Minimum SAR Antenna Area Constraint // Proc, of IGARSS'99, IEEE, Hamburg,
Germany. June 28 - July 02 1999. V. 3. P. 1770-1772.
313. Freeman A., Johnson W.T.K, Huneycutt B., Jordan R., Hensley S., Siqueira P. and Curlander J.:
The “Myth” of the Minimum SAR Antenna Area Constraints // IEEE Trans, on GRS. Jan. 2000.
V. 38. P. 320-324.
314. Freeman A., Moghaddam M., Zink M., Zebker H. Radiometric Correction of SAR Images of Va-
rying Terrain Heights // Proc, of IGARSS'92, IEEE Toronto, Canada. May 26-29 1992. V. 1.
pp.271-273.
315. Frey O., Meier E., Nuesch D., Roth A. Geometric Error Budget Analysis for TerraSAR-X // Proc,
of EUSAR'2004 Conference, Ulm, Germany. May 25-27 2004. V. 2. P. 513-515.
316. Frick H, Palsetia M., Carande R., Curlander J. COTS SAR Ground Processing for PALSAR ap-
plication. // Proc, of EUSAR'2000, Munich, Germany. May 23-25 2000. P. 729-731.
317. Frieder H, Krieger G., Werner M., Reiniger K, Eineder M., D ’Amico S, Erhardt D., Wickler M.
TanDEM-X Mission Design and Data Acquisition Plan // Proc, of EUSAR'2008, Friedrichshafen,
Germany. June 2-5 2008. V. 4. P. 43-46.
318. Fritz T., Breit H, Schattler B., Balss U., Lachaise M., Eineder M. TerraSAR-X Image Products:
Characterization and Verification // Proc, of EUSAR'2008, Friedrichshafen, Germany. June 2-5
2008. P. 99-102.
319. Frost V.S. Probability of Error and Radiometric Resolution for Target Discrimination in Radar
Images // IEEE Trans, on GRS. 1984. V. GE-22. No. 2, 1984. P. 121-125.
320. Frost V.S, Stiles J.A., Shanmugan K.S. and Holtzman J.C. A model for radar images and its ap-
plication to adaptive digital filtering of multiplicative noise // IEEE Trans, on Pattern Analysis
and Machine Intelligence. March, 1982. V. PAMI-4. No. 2. P. 157-166.
321. Fujimura T., Kimura T. Compact Polarimetric Observation using Phased Array Antenna and Its
Case Study for PALSAR // Proc. EUSAR'2008, Friedrichshafen, Germany. June 2-5, 2008.
P. 37-40.
322. Fujimura T., Kimura T., Miyauchi M., Ito M. The Control Technique of ALOS PALSAR // Proc,
of EUSAR'2004, Ulm, Germany. May 25-27, 2004. V. 2. P. 611-614.
323. Gafforio C, Guccione P., Guarneri A.M. Doppler centroid estimation for ScanSAR data // IEEE
Trans, on GRS. 2004. V. 42. No. 1. P. 14-23.
324. Gatelli F., Guamieri A.M., Parizzi F., Pasquali P., Prati C, Rocca F. The Wavenumber Shift in
SAR Interferometry // IEEE Trans, on GRS. Jule, 1994. V. 32. No. 4. P. 855-865.
325. Gebert N., Krieger G., Moreira A. High Resolution Wide Swath SAR Image with Digital Beam-
forming - Performance Analysis, Optimization, System Design // Proc, of EUSAR'2006, Dres-
den, Germany. 2006.
326. Gebert N., Krieger G., Moreira A. High Resolution Wide Swath SAR Imaging-System Performance
and Influence of Perturbations // Proc, of International radar symposium IRS'05, Berlin. Sept 8, 2005.
P. 49-54.
327. Gebert N., Krieger G., Moreira A. Muli-Channel ScanSAR for High-Resolution Ultra-Wide-
Swath imaging // Proc, of EUSAR'2008, Friedrichshafen, Germany. 2008. P. 79-81.
653
Радиолокационные системы землеобзора космического базирования
328. Gebert N., Krieger G., Moreira A. SAR Signal Reconstruction from Non-Uniform Displaced Phase
Centre Sampling in the Presence of Perturbations // IGARSS'05, IEEE. 2005. P. 1034-1037.
329. Gebhardt U., Loffeld O., Nies H., Natroshvili K., Ender J. Bistatic Airborne / Space Borne Hybrid
Experiment: Simulation and Analysis // Proc, of EUSAR'2006, Dresden, Germany. June 16-18
2006. 2006.
330. Girard R., Lee P.F., James K. The RADARSAT-2&3 Topographic Mission: An Overview //
Proc, of IGARSS’02, IEEE, Houston, USA. June 24-28 2002. V. 3. P. 1477-1479.
331. Gray A. Multisensor Aerospace-Ground Joint Interoperability ISR Coalition Architecture
(MAJIIC) // Military Radar 2006 Conference. London, England. Oct. 24-25 2006.
332. Greenberg J.S. A system look at satellite-borne high resolution radar // RCA Rev. Dec. 1967.
V. 28. No. 4. P. 679-709.
333. Grenier C., Barnard L, Arsenault P. The Radarsat-2 Synthetic Aperture Radar Phased Array An-
tenna Performance Analysis Methodology // Proc, of EUSAR'2004, Ulm, Germany. May 25-27
2004. P. 117-120.
334. Grenier C., Barnard L, Arsenault P. The Radarsat-2 Synthetic Aperture Radar Phased Array An-
tenna Hardware Modeling and Analysis (System Approach) // Proc, of EUSAR’2004, Ulm, Ger-
many. May 25-27 2004. P. 665-668.
335. Griffith D.A. SAR/MTI Military Radar Application for Civilian Use // Proc, of EUSAR'1998,
Friedrichshafen, Germany. May 25-27 1998. P. 291-294.
336. Guarneri A.M., Giudici D. Accurate Estimate of the Azimuth Antenna Pattern from SAR Images
// Proc, of EUSAR’2006, Dresden, Germany. May 16-18 2006.
337. Guarneri A.M. Adaptive Removal of Azimuth Ambiguities in SAR Images // IEEE Trans, on
GRS. March 2005. V. 43. No. 3. P. 625-633.
338. Guarneri A.M. Space-Adaptive Ambiguity Suppression in SAR Images // Proc, of EUSAR’2004,
Ulm, Germany. May 25-27, 2004. P. 187-190.
339. Guillaso S, Reigber A., Ferro-Famil L., Pottier E. Range Resolution Improvement of Airborne
SAR Images // IEEE Trans, on GRS Letters. Jan. 2006. V. 3. No. 1. P. 135-139.
340. TerraSAR-X: Mission, Calibration and First Results. Special issue // IEEE Trans, on GRS. Feb.
2010. V. 48. No. 2.
341. Hackenberg U., Adolph M., Dreher H, Ott H., Reber R., Rieger R., Schweizer. T/R Module for
Synthetic Aperture Radar with Polarisation Agility // Proc, of EUSAR'2004, Ulm, Germany. May
25-27 2004. V. 2. P. 477-480.
342. Hajnsekl., Papathanassiou K.P., Moreira A., Cloude S.R. The Potential of Surface Parameter Es-
timation from Interferometric SAR // Proc, of EUSAR'2002, Cologne, Germany. June 4-6, 2002.
P. 275-278.
343. Hawkins R.K. et al. Operational calibration of spacebome SAR: The Radarsat experience // Proc,
of EUSAR'1998, Friedrichshafen, Germany. May 25-27, 1998. P. 213-216.
344. Hayashi N., Motoyuki, Sato N. Bistatic 3D subsurface radar imaging // Proc, of EUSAR'2008,
Friedrichshafen, Germany. June 2-5 2008. P. 155-158.
345. Haykin S. Neural Networks. A Comprehensive Foundation. Upper Saddle River, New Jersey:
Prentice Hall. 1999. 824 pp.
346. Heer Ch., Link Ju. The Light SAR X-band sensor design and performance // Proceedings // of
EUSAR'1998, Friedrichshafen, Germany. May 25-27 1998. P. 79-81.
347. Henrion S, Savy L., Planes J.G. New results for Spacebome Hybrid Strip-map/Spotlight SAR
High Resolution Processing // Proc, of IGARSS'99, IEEE, Hamburg, Germany. June 28 - July 2
1999. V. l.P. 530-551.
348. Henrion S, Savy L., Planes J-G. Properties of hybrid Strip-Map / Spotlight Spacebome SAR
processing // Proc, of IGARSS'99, IEEE, Hamburg, Germany. June 28 - July 2. 1999. V. 1.
P. 530-534.
349. Herskovitz D. Wide, Wider, Widest // Journal of Electronic Defense. July 1995. P. 50-57.
350. Hoogeboom P. NATO’s Air To Ground Surveillance Programme (AGS): Providing The Tech-
nology. // Military Radar 2006 Conference. London, England. Oct. 24-25 2006.
654
Литература
351. Hounam D., Mittermayer J. Techniques for Reducing SAR Antenna Size // Proc, of IGARSS'03,
IEEE, Toulouse, France. July 21-25 2003. V. 3. P. 2143-2145.
352. Hounam D., Moreira A., Mittermayer J., Kriger G., Small A. Low-Cost SAR Satellite for InSAR
Measurements of Permanent Scatterers // Proc, of EUSAR'2004, Ulm, Germany. May 25-27
2004. P. 49-52.
353. Hubert M.J. Airborne SAR imaging along a circular trajectory // Proc, of EUSAR'2006, Dresden,
Germany. June 16-18 2006.
354. Hussain, Malek G.M. Ultra-wideband impulse radar. An overview of principles // Aerospace
Electronics Systems Magazine. IEEE Magazine. 1998. V. 13. No. 9. P. 9-14.
355. Janaswamy R. An accurate moment method model for the tapered slot antenna // IEEE Trans, on
Antennas and Propagation. Dec. 1989. No. 12. P. 1523-1528.
356. Janaswamy R. and Schaubert D.H. Analysis of the tapered slot antenna // IEEE Trans, on Anten-
nas and Propagation. 1987. No. 9. P. 1058-1065.
357. Jin M.Y. High Quality Spotlight SAR Processing Algorithm Designed for LightSAR Mission //
Proc, of IGARSS'97, IEEE, Singapore. Aug 3-8 1997. V. 29. P. 477-480.
358. Johansen E.L. Top-Hat Reflectors Cap Radar Calibration // Microwave. Dec. 1984. P. 65-66.
359. Jollife LT. Principal Component Analysis . New York: Springer-Ver lag. 1986.
360. *Kalinkevich A., Kutuza B., Pliushchev V., Druchinin S. Possibilities of Use of Multi-Frequency
SAR for Subsurface Sensing of the Earth // Proc, of EUSAR'2002, Cologne, Germany. June 4-6
2002. P. 481-484.
361. Keller J.B., Munk W.H. Internal wave wakes of a body moving in a stratified fluids // Phys. Fluids
13 (1970). 1970. P. 1425-1431.
362. Kent S, U^an O.N., Ensari T. Speckle Reduction of Synthetic Aperture Radar Images Using
Wavelet Filtering // Proc, of EUSAR'2004, Ulm, Germany. May 25-27 2004. P. 1001-1004.
363. Kervrann C, Boulanger J., Coupe P. Bayesian Non-Local Means Filter, Image Redundancy and
Adaptive Dictionaries for Noise Removal // Proc. Conf. Scale-Space and Variational Meth.
(SSVM’07), Ischia, Italy. 2007.
364. Key del W. Considerations towards the Future of Space-borne SAR Systems // Proc, of URSI
GA'2005, New Delhi, India. 2005.
365. Knight A., Ludwig M., Vogel P., Gallou N. High Power L-band T/R Module for Spacebome SAR
// Proc, of EUSAR'2006, Dresden, Germany. May 16-18 2006.
366. Kohonen T. Self-Organizing Maps. Series in Information Science. Springer, Heidelberg. 1995. V. 20.
367. Kovalenko A. Method of Selective One-Dimensional Azimuth Ambiguity Reduction for High Resolu-
tion SAR// Proc, of EUSAR'2008, Friedrichshafen, Germany. June 02-05 2008. V. 3. P. 355-358.
368. Kovalenko A., Riman V. Reduction of Azimuth Ambiguities in High Resolution Spacebome SAR
Systems by Methods Of Differential Synthesizing of the Antenna's Aperture (DifSAR) // Proc, of
EUSAR'2004, Ulm, Germany. May 25-27 2004. P. 697-700.
369. Krawczyk A., Perski Z., Hanssen R. Application of ASAR Interferometry for Motorway Deforma-
tion Monitoring // Proc, of ENVISAT Symposium, Montreux, Switzerland. Apr 23-27 2007
(ESA SP-636, July, 2007, 507735kr.pdf).
370. Krieger G., Moreira A., Fiedler H, Hajnsek I., Zink M., Werner M. TanDEM-X: Mission Con-
ceipt, Product Definition and Performance Prediction // Proc, of EUSAR'2006, Dresden, Germa-
ny. May 16-18 2006.
371. Krieger G.. Gerbert N., Younis M., Bordoni F, Potyuchenko A., Moreira A. Advanced Conceipt
for Ultra-Wide-Swath Imaging // Proc, of EUSAR'2008, Friedrichshafen, Germany. June 2-5
2008. V. 2. P. 31-34.
372. Krieger G., Moreira A., Friedler H, Hajnsek I., Zink M., Werner M., Eineder M. TanDEM-X:
Mission Conceipt, Product Definition and Performance Prediction // Proc, of EUSAR'2006, Dres-
den, Germany. May 16-18 2006.
373. Kuan D.T., Sawchuk A.A., Strand T.C., Chavel P. Adaptive restoration of images with speckle //
IEEE Trans, on Ascoustics, Speech and Signal Processing. March 1987. V. 35. No. 3. P. 373-383.
374. *Kutuza B., Kalinkevich A., Shishkova O., Plushev V., Hajnsek I. Quantitative Estimation of Sub-
655
Радиолокационные системы землеобзора космического базирования
surface Parameters Using Polarimetric C- and VHF-band SAR Data // Proc, of EUSAR'2004,
Ulm, Germany. May 25-27, 2004. P. 653-656.
375. *Kutuza B., Kalinkevich A., Vostrov E., Dzenkevich A., Plushchev V., Koshevarov G., Manakov
V., Melnikov L., Porohov I. Some Investigation of Subsurface Hydrological Soil Regime Using
Multi-Frequency Polarimetric // Proc, of EUSAR'2002, Cologne, Germany. June 4-6 2002.
P. 125-128.
376. Lambers M. Adaptive Dynamic Range Reduction for SAR Images // Proc, of EUSAR'2008, Frie-
drichshafen, Germany. June 2-5 2008. P. 371-374.
377. Lavalle M., Solimini D., Pottier E., Desnos Y.-L. Investigation the Performance of Compact Pola-
rimetry in SAR Interferometry // Proc, of EUSAR'2008, Friedrichshafen, Germany. June 2-5
2008. P. 45-48.
378. Lavrova O., Shcherbak S., Mityagina M., Pyrkov V. Case study: Use of SAR Data for the Opera-
tional Control of Fishering Ships Positioning // Proc, of Envisat Symposium 2007, Montreux,
Switzerland. Apr 23-27 2007 (ESA SP-636, July, 2007, 4620361a.pdf).
379. Lee J.-S. Speckle suppression and analysis for synthetic aperture radar images // Optical Engi-
neering. 1986. V. 25. No. 5. P. 636-645.
380. Lee J.-S. Digital Image Enhancement and Noise Filtering by Use of Local Statistics // IEEE
Trans, on Pattern Analysis and Machine Intelligence. March, 1980. V. PAMI-2. No. 2. P. 165-168.
381. Lee J.-S. Refined Filtering of Image Noise Using Local Statistics // Computer Graphic and Image
Processing. 1981. P. 380-389.
382. Lee J.-S., Grunes M.R., Ainsworth T.L., Schuler D.L. Speckle Filtering of Polarimetric SAR Inter-
ferometry Data for Forest Applications // Proc, of EUSAR'2002, Cologne, Germany. June 4-6
2002. P. 271-273.
383. Lee J.-S., Wen J.-H., Ainsworth T.L., Chen К.-S., Chen A.J. Improved Sigma Filter for Speckle
Filtering of SAR Imagery // IEEE Trans, on GRS. Jan, 2009. V. 47. No. 1. P. 202-213.
384. Letsch K., Berens P. Improved PSLR Estimation from SAR Images by Consideration of the Clut-
ter Background // Proc, of EUSAR'2006, Dresden, Germany. May 16-18 2006.
385. Levy-Natansohn R. Overview of the TecSAR Satellite Modes of Operation // Proc, of
EUSAR'2006, Dresden, Germany. May 16-18 2006.
386. Li F.K., Bryan M.L. Tradeoffs Among Several Synthetic Aperture Radar Image Quality Parame-
ters. Results of a User Survey Study // Photogram. Eng. and Remote Sensing. June 1983. V. 49.
No. 6. P. 791-803.
387. Li F.K., Johnson W.T.K. Ambiguities in spacebome synthetic aperture radar systems // IEEE
Trans, on Aerospace and Electronics Systems. May 1983. V. 19. P. 389-397.
388. LightSAR preliminary phase A study. Jet Propulsion Lab. 1996.
389. Lim C, Soon Y. Non-iterative spotlight SAR autofocusing using a modified phase gradient ap-
proach // IEEE Trans, on GRS. 1997.
390. Liu J., Kuga Y., Ishimaru A., Pi X, Freeman A. Ionospheric Effects on SAR Imaging: A Numeri-
cal Study // IEEE Trans, on GRS. 2003. V. 41. No. 5. P. 939-947.
391. Lloyd D., Longstaff L.D. Ultra-Wideband Multi-Static SAR for the Detection and Location of
Landmines // Proc, of EUSAR'2002, Cologne, Germany. June 4-6 2002. P. 53-56.
392. Loffeld O., Nies H., Peters V., Knedlik S. Models and Useful Relations for Bistatic SAR
Processing // IEEE Trans, on GRS. Oct, 2004. V. 42. P. 2031-2038.
393. Lopes A., Nezry E., Touzi R., Laur H. Structure detection and statistical adaptive speckle filtering
in SAR images // International Journal of Remote Sensing. 1993. V. 14. No. 9. P. 1735-1758.
394. Lopes A., Touzi R., Nezry E. Adaptive speckle filters and Scene heterogeneity // IEEE Trans, on
GRS. Nov, 1990. V. 28. No. 6. P. 992-1000.
395. Lopez-Martinez C, Canovas X.F. Interferometric Phase Speckle Reduction Using Wavelet Trans-
form // Proc, of EUSAR'2002, Cologne, Germany. June 4-6, 2002. P. 593-596.
396. Lyzenga D.R., Shuchmann R.A., Walker J.L. Measurement of Ocean Surface Currents by Syn-
thetic Aperture Radar // Proc, of IGARSS'82, IEEE. 1982. V. 1. P. 71-76.
656
Литература
397. Mancell С.Е., Swiger J.M. A Map Drift Auto-focus Technique for Correcting Higher Order SAR
Phase Errors // 27th Annual Tri-Service Radar Symposium Record, Monterey, CA. June 23-25,
1981. P. 391-400.
398. Martisec D., Goldstein R. Bistatic Radar Experiment // Proc, of EUSAR'1998, Friedrichshafen,
Germany. May 25-27, 1998. P. 31-34.
399. Matew C.H., Burbidge G.T.A. TerraSAR L-band SAR System Component. Design and Status //
Proc, of EUSAR'2000, Munich, Germany. May 23-25 2000. P. 37-40.
400. Meer P., Park R.-H., Cho K. Multiresolution adaptive image smoothing // Graphical Models and
Image Processing. 1994. V. 56. No. 2. P. 140-148.
401. Mehlis J.G. Synthetic Aperture Radar range-azimuth design and constraints // IEEE Int. Radar
Conf. 1980. P. 143-152.
402. Meisl P., Tompson A.A., Luscombe A.P. Radarsat-2 Overview and Development Status // Proc, of
EUSAR'2000, Munich, Germany. May 23-25 2000. P. 373-376.
403. MIMO Radar signal processing. Edited by Jian Li, Peter Stoica. Wiley. A John Wiley & Sons,
Inc. Publication. New Jersey. 2009. 448 p.
404. Min K., Willis M. Dens Media Penetrating Radar. Ultra-Wideband, Short-Pulse Electromagnetics 3.
Edited by Carl E. Baum, Lawrence Carin and Alexander P. Stone // Plenum Press, New York.
1997. P.423.
405. Misra T., Rana S.S., Bora V.H., Desai N.M., Rao C. V.N., Jyothi R. SAR Payload of Radar Imag-
ing Satellite (RISAT) of ISRO // Proc, of EUSAR'2006, Dresden, Germany. June 16-18 2006.
406. Misra T., Rana S.S., Shankara K.N. Synthetic aperture radar payload of Radar imaging satellite
(RISAT) of ISRO // Proc, of URSI GA'2005, New Delhi, India. 2005.
407. Misra T., Rana S.S., Shankara K.N. Synthetic Aperture Radar Payload of Radar Imaging Satellite
(RISAT) of ISRO // Proc, of URSI GA'2005, New Delhi, India. Oct 23-29 2005.
408. Mittermayer J., Lord R., Boerner E. Sliding Spotlight SAR Processing for TerraSAR-X using a
new formulation of the Extended Chirp Scaling Algorithm // Proc, of IGARSS'03, IEEE, Toul-
ouse, France. 2003.
409. Mittermayer J., Moreira A. A Generic Formulation of the Extended Chirp Scaling Algorithm
(ECS) for Phase Preserving ScanSAR and SpotSAR // Proc, of IGARSS'00, IEEE. 2000.
410. Mittermayer J., Moreira A., Lofeld O. Spotlight SAR Data Processing Using the Frequency Scal-
ing Algorithm // IEEE Trans, on GRS. Sept, 1999. V. 37. No. 5.
411. Mittermayer J., Steinbrecher U., Meta A., Tous-Ramon N., Wollstadt S., Younis M., Marquez J.,
Schulze D. TerraSAR-X System Performance and Command Generation // Proc, of EUSAR'2008,
Friedrichshafen, Germany. June 2-5 2008. P. 87-90.
412. Mobley S.G., Maier M. W. Synthetic aperture radar with a non-uniform pulse repetition interval //
Proc, of SSST'95. 1995. P.498.
413. Moore R.K. Tradeoff Between Picture Element Dimensions and Noncoherent Averaging in Side-
Looking Airborne Radar // IEEE Trans, on Aerospace and Electronics Systems. Sept, 1979.
V. AES-15. No. 5. P. 697-708.
414. Moore R.K., Claassen J.P. Scanning Spacebome Synthetic Aperture Radar with Integrated Radiometer
// IEEE Trans, on Aerospace and Electronics Systems. May, 1981. V. AES-17. No. 3. P. 410-420.
415. Mora O., Granda J., Biescas E., Urdiroz A. TerraSAR-X high resolution SAR data: Ground mo-
tion and mapping applications for infrastructure, oil & gas and public health domain // Proc, of
EUSAR'2008, Friedrichshafen, Germany. June 2-5, 2008. P. 31-34.
416. Moreira A., Huang Y. Airborne SAR Processing of Highly Squinted Data Using a Chirp Scaling
Approach with Integrated Motion Compensation // IEEE Trans, on GRS. Sept, 1994. V. 32.
No. 5. P. 1029-1040.
417. Moreira A. Suppressing the Azimuth Ambiguities in Synthetic Aperture Radar Images // IEEE
Trans, on GRS. July, 1993. V. 31. No. 4. P. 885-895.
418. Moreira A. TerraSAR-X Upgrade to a Fully Polarimetric Imaging Mode // German Aerospace
Center (DLR). Jan, 2003 (TerraSAR-PolinSAR-16-01-2003.pdf).
657
Радиолокационные системы землеобзора космического базирования
419. Moreira A., Mittermayer J., Scheiber R. Extended Chirp Scaling Algorithm for Air- and Space-
bome SAR Data Processing in Stripmap and ScanSAR Imaging Modes // IEEE Trans, on GRS.
Sept, 1996. V. 34. No. 5. P. 1123-1136.
420. Moreira A., Mittermayer J., Scheiber R. Extended Chirp Scaling SAR Data Processing in Strip-
map, ScanSAR and Spotlight Imaging Modes // Proc, of EUSAR'2000, Munich, Germany. 2000.
P. 749-752.
421. Munson D.C., O'Brien J.D. and Jenkins W.K. A Tomographic Formulation of Spotlight-Mode
Synthetic Aperture Radar // Proc, of IEEE. Feb., 1983. V. 72. No. 8. P. 254-261.
422. Naftaly U. TECSAR - Performance, Design and Status // Proc, of EUSAR'2004, Ulm, Germany.
May 25-27 2004. P. 27-30.
423. Nathan K.S, Curlander JS. H Proc, of IGARSS'87, IEEE, Ann Arbor, USA. May 18-21. 1987.
P. 1457-1462.
424. Natroshvili K., Loffeld O. Comparison of Bistatic SAR Focusing Approaches utility // Proc, of
EUSAR'2006, Dresden, Germany. June 16-18 2006.
425. Natroshvili K, Loffeld O., Nies H. Focusing of Arbitrary Bistatic SAR Configurations Natroshvili
K., Loffeld O., Nies H. // Proc, of EUSAR'2006, Dresden, Germany. June 16-18 2006.
426. Neo Y.L., Wong F., Cumming I. An Efficient Non-Linear Chirp Scaling Method of Focusing Bis-
tatic SAR images // Proc, of EUSAR'2006, Dresden, Germany. June 16-18 2006.
427. *Neronskiy L., Osipov L, Verba V. Modelling of Signal Transformation in Spacebome UWB
short pulse SAR // Proc, of EUSAR'2006, Dresden, Germany. June 16-18 2006.
428. *Neronskiy L., Osipov L, Verba V. Modelling of Space-Frequency Filtering Method for Moving
Target Indication in SAR// Proc, of EUSAR'2006, Dresden, Germany. June 16-18 2006.
429. *Neronskiy L.B., Koshevarov G.A., Melnikov L. Ya., Likhansky S.G. Correction of Equipment Dis-
tortions in Data From Ekor-Al SAR on «Almaz-1» Satellite // Proc, of EUSAR'2000, Munich,
Germany. May 23-25 2000. P. 453-456.
430. *Neronskiy L.B., Likhansky S.G., Elizavetin I. V, Sysenko D. V. Phase History Model Adapted to
the Spacebome SAR Survey // IEE Proceedings, Radar, Sonar & Navigation. June 2003. V. 150.
No. 3. P. 184-192.
431. *Neronskiy L.B., Likhansky S.G., Lipatov A.A., Elizavetin I. V., Sysenko D. V. A New Approach to
the Analysis and Simulation of Image Synthesis Algorithms for Space-Based SAR Spotlight
Mode // Proc, of EUSAR'2002, Cologne, Germany. June 4-6 2002. P. 553-556.
432. *Neronskiy L., Osipov I, Turuk V., Andrianov V, Porokhov I. Choice of Engineering Perfor-
mances in Designing Multipurpose Synthetic Aperture Radar for Small Satellites // Proc, of
EUSAR'2002, Cologne, Germany. June 4-6 2002. P. 449-452.
433. *Neronskiy L.B., Verba V.S., Likhansky S.G., Pushkov D.V., Elizavetin I.V. Phenomenological
Approach to SAR Signal Processing Simulation // Proc, of EUSAR'2004, Ulm, Germany. May
25-27 2004. P. 1005-1008.
434. *Neronskiy L.B., Verba V.S., Osipov LG., Pushkov D.V. PGA Algorithm Application for Local
Autofocusing of Hi-Res Spacebome SAR Images // Proc, of EUSAR'2008, Friedrichshafen, Ger-
many. June 2-5 2008. V. 2. P. 101-104.
435. *Neronskiy L.B., Dostovalov M.Yu., Pereslegin S. V. The Extended Algorithms for Doppler Cen-
troid Estimation // Proc, of EUSAR'2004, Ulm, Germany. May 25-27 2004. V. 2. P. 709-712.
436. New Views of the Earth. Scientific Achievements of ERS-1. European Space Agency. Gilford,
UK: ESYS Ltd. 1995. P.162.
437. Odoux B., Deschoux-Beaume M., Planes J.G., Lambert-Nebout C., Adragna F. SAR Raw Data
On-Board Compression with Frequency Filtering // Proc, of EUSAR'1998, Friedrichshafen, Ger-
many. May 25-27 1998. P. 521-524.
438. Olsen O.M. Wide swath single look complex product for ENVISAT ASAR // Proc, of
EUSAR'2006, Dresden, Germany. May 16-18 2006.
439. *Osipov LG., Neronskiy L.B., Andrianov V.I., Verba V.S., Kozlov K.V., Kurenkov V.N., Pushkov
D. V. Calculated Performance of SAR for High Orbit Spacecraft Using Nuclear Power Supply //
Proc, of EUSAR'2006, Dresden, Germany. May 16-18 2006.
658
Литература
440. *Osipov LG., Neronskiy L.B., Turuk V.E., Andrianov V.I., Verba V.S., Korolev A. V., Kulikovsky
M.G., Pushkov D.V., Janushevsky G.D., Feyzulla N.M., Panteleev V.A. Synthetic Aperture Radar
for Earth and Sea Surface Observations // Proc, of EUSAR’2004, Ulm, Germany. May 25-27
2004. V. 1. P. 59-62.
441. Ossovska A., Kym J.H., Wiesbek W. Simulation of High-Resolution Wide-Swath SAR H Proc, of
EUSAR'2006, Dresden, Germany. 2006.
442. Patent USA #5,745,069. Reduction of Radar Antenna Area / Gail W.B. Apr 28 1998.
443. Pelizzari A., Buckreuss S., Eineder M. Measurement and Compensation of a Calibrated Tone in
the X-SAR Signal // Proc, of EUSAR'2000, Munich, Germany. May 23-25 2000. P. 255-227.
444. Pierson W.J., Moskowitz Z.A. A proposed spectral form for fully developed wind seas based on
the similarity theory of S.A. Kitaigorodskii // J. Oceanogr. Res. 1964. V. 69. P. 5181-5190.
445. Porcello et al. The Apollo Lunar Sounder Radar System // Proc, of the IEEE. June 1974.
446. Potts D.L. Lights AR Reference Mission. JPL, California Institute of Technology. March 1998.
JPL D-13946.
447. Radarsat. Special issue. Canadian Journal of Remote Sensing. Nov-Dec. 1993. V. 19. No. 4.
448. Radial combiner runs circles around hybrids // Microwaves. Nov. 1980. V. 19. No. 11. P. 55-58.
449. Radius A., Marques P. A Novel Methodology for Full Velocity Vector Estimation of Ships Using
SAR Data // Proc, of EUSAR'2008, Friedrichshafen, Germany. June 2-5 2008. V. 3. P. 93-96.
450. Raney R.K., Freeman A., Hawkins R.W., Barnier R. A Plea for Radar Brightness // Proc, of
IGARSS'94, IEEE. 1994. P. 1385-1387.
451. Raney R.K., Runge H., Barnier R. Cumming I., Wong F. Precision SAR Processing without Inter-
polation for Range Cell Migration Correction // IEEE Trans, on GRS. July, 1994. V. 32. No. 4.
452. RF Microdevices. Technical notes and articles. AN 0001.
453. Rieger R., Schweizer B., Dreher H., Reber R., Adolph M., Feldle H.-P. Highly Integrated Cost-
Effective Standard X-Band T/R Module Using LTCC Housing Concept for Automated Produc-
tion // Proc, of EUSAR'2000, Munich, Germany. May 23-25 2000. P. 303-306.
454. Rihaczek A. W. Principles of High Resolution Radar. N.-Y.: McGrow-Hill Inc. 1969.
455. Rothwell E.J., Chen K.M., Nyquist D.P., Ross J.E. Time-Domain Imaging of Airborne Targets us-
ing Ultra-Wideband or Short-Pulse Radar // IEEE Trans, on Antenna and Propagation. March
1995. V. 43.No. 3.P. 327-329.
456. Sabour S. V., Lohman P., Soergel U. Monitoring Agricultural Activities Using ASAR Envisat Da-
ta // Proc, of Envisat Symposium. Apr 23-27 2007. ESA SP-636.
457. Sanders R.J. Component advances open new doors for radar designers // MSN. March 1989.
V. 19. No. 3.P. 15-21.
458. Sandwell, David T. The Gravity Field of the Earth. 2002. Pt. 1.
http://topex.ucsd.edu/geodynamics/! 4gravity 11 .pdf.
459. Sanyuan X., Wang J., Xiaoling Zhang X. Time-Varying R-D Algorithm for High Squint SAR Im-
aging // Proc, of EUSAR'2006, Dresden, Germany. May 16-18 2006.
460. SAR Data Products Format Standard. CEOS. CEOS SAR Data Standards Subgroup. Rev.2.0,
10.03.1988.
461. Sato M., Takahashi K. 3D subsurface SAR for humanitarian demining // Proc, of EUSAR'2008,
Friedrichshafen, Germany. June 2-5 2008. P. 151-154.
462. Schaefer C, Fischer C, Volker M. One-bit Digitation for DBF-SAR: Too Good to be True. //
Proc, of EUSAR'2008, Friedrichshafen, Germany. June 2-5 2008. V. 1. P. 23-26.
463. Schaefer C, Henrichs A., Krahn E., Hantzsch M. Computation of Optimal Quantizers for Wave-
let-Bazed SAR Raw Data Compression // Proc, of EUSAR'1998, Friedrichshafen, Germany. May
25-27 1998. P. 531-536.
464. Schattler B. et al. Preliminary Design of the TerraSAR-X Payload Ground Segment Advanced
SAR and CEOS WGCV SAR Workshop, St.Hubert, Canada. June, 2003.
465. Schneider R.Z., Fernandes D. Entropy Concept for Change Detection in Mulitemporal SAR Im-
ages // Proc, of EUSAR'2002, Cologne, Germany. June 4-6 2002. P. 221-224.
659
Радиолокационные системы землеобзора космического базирования
466. Shimada М. Radiometric Correction of Saturated SAR Data // IEEE Trans, on GRS. Jan 1999.
V. 37. No. l.Pt. IL P. 467-478.
467. Shimada M., Watanabe M., Rosenqvist A., Ito N. ALOS and PALSAR Initial Calibration Status 11
Proc, of EUSAR'2006, Dresden, Germany. May 16-18 2006.
468. *Shteinshleiger V.B., Dzenkevich A.V., Manakov V.Yu., Melnikov L.Ya., Misezhnikov G.S. Two di-
mentional Adaptive Compensation for Ionosphere Destructive Effect on Resolution of VHF Space-
bome SAR// Proc, of EUSAR'1998, Friedrichshafen, Germany. May 25-27 1998. P. 157-162.
469. Siqueira P., Freeman T. Source Ambiguities for Imaging and Interferometric SAR // Proc, of
IGARSS'98, IEEE. 1998.
470. Solberg A., Brekke B., Husoy P.O. Oil Spill Detection in Radarsat and Envisat SAR Images //
IEEE Trans, on GRS. March 2007. V. 45. No. 3. P. 746-755.
471. Souyris J.-C., Fjortoft R., Mingot S, Lee J., Lee J.-S. Compact Polarimetry Based on Symmetry Proper-
ties of Geophysical Media: The pi/4 Mode // IEEE Trans, on GRS. March 2005. No. 3. P. 643-646.
472. Soviet Radar Satellite Shows Potential to Detect Submarines // Aviation Week & Space Technol-
ogy. Oct. 8 1990. P. 22-23.
473. Pillai S.U., Ke Young Li, Himed B. Me Graw Hill. Space Based Radar. Theory & Applications.
2008.
474. Spacebome Synthetic Aperture Radar: Current Status and Future Directions // NASA Technical
Memorandum 4679, NASA. Apr. 1995.
475. Stankwitz H.C., Dallaire R.J. and Fineup J.R. Nonlinear Apodization for Sidelobe Control in
SAR Imagery H IEEE Trans, on Aerospace and Electronics Systems. Jan. 1995. V. 31. No. 1.
P. 267-279.
476. Strodl K., Benz U., Blaser, F., Eiting T., Moreira A. A comparison of several algorithms for on-
board SAR raw data reduction // Proc, of IGARSS'94, IEEE. Aug 8-12, 1994. V. 4. P.
2197-2199.
477. Strong R. Radar: The Evolution Since World War II. Historical Electronics Museum // IEEE
A&E systems magazine. Jan. 2005. P. 19-24.
478. Strozzi T., Wegmiiller U., Werner C., Wiesman A. Surface Velocity of Swiss Alpine Glaciers from
ERS SAR Interferometry Data H Proc, of Envisat Symposium. Apr 23-27 2007. ESA SP-636.
479. Suchail J.-L., Buck C., Guijarro J., Schonenberger A., Torres R. The Envisat ASAR Instrument //
Proc, of EUSAR'2000, Munich, Germany. May 23-25 2000. P. 33-36.
480. Suess M., Grafmueller B., Zahn R. A Novel High Resolution, Wide Swath SAR System // Proc, of
IGARSS'2001, IEEE, Sydney, Australia. July 9-13 2001. V. 3. P. 1013-1015.
481. Suess M., Riegger S, Pitz W., Werninghaus R. TerraSAR X - Design and Performance // Proc, of
EUSAR'2002, Cologne, Germany. June 4-6 2002. P. 49-52.
482. Suess M., Volker M. Superresolution Range Resolution Improvement by Coherent Combination
of Repeat Pass SAR Images H Proc, of EUSAR'1998, Friedrichshafen, Germany. May 25-27
1998. P. 565-570.
483. Suess M., Zubler M., Zahn R. Performance Investigation on the High Resolution, Wide Swath
SAR System // Proc, of EUSAR'2002, Cologne, Germany. June 4-6 2002. P. 187-190.
484. Sullivan R.J. Microwave Radar. Imaging and Advanced Concepts // Artech House. 2000.
485. Sveinsson J.R., Atli Benediktsson J.A. Tree Structured Filter Banks for Speckle Reduction of SAR
Images // Proc, of IGARSS'97, IEEE, Sydney, Australia. July 9-13 2001. V. 3. P. 1013-1015.
486. Sysenko V., Elizavetin I. Comparative analysis of the spotlight SAR algorithms for ground
processing facility // Proc, of EUSAR’2004, Ulm, Germany. May 25-27 2004. P. 687-690.
487. Tello M., Lopez-Martinez C, Mallorqui J.J. Ship Detection in SAR Imagery based on the Wave-
let Transform // Proc, of EUSAR'2004, Ulm, Germany. May 25-27 2004. V. 2. P. 965-968.
488. Torres R., Simpson D. The TerraSAR-L System // Proc, of EUSAR'2004, Ulm, Germany.
. May 25-27 2004. P. 41-44.
489. Touzi R., Raney R.K., Charbonneau F. On the Use of Permanent Symmetric Scatterers for Ship
Characterization // IEEE Trans, on GRS. 2004. V. 42. No. 10. P. 2039-2045.
660
Литература
490. Vachon Р. V., Raney R.K. Estimation of the SAR System Transfer Function Trough Processor De-
focus // IEEE Trans, on GRS. Nov. 1989. V. 27. No. 6. P. 702-708.
491. Van den Broek A.C., Smith A.J.E., Dekker R.J., Steeghs T.P.H. Target Acquisition Performace as
a Function of Resolution using Radar Change Detection I I Proc, of EUSAR'2006, Dresden, Ger-
many. May 16-18 2006. P. 795-798.
492. Van Slyke R. Converting COTS Systems For Military Necessity from the Tail End to the Front
End of the Obsolescence Curve: A Case Study // Military Radar 2006 Conference, London.
Oct. 24-25 2006.
493. *Verba V., Neronskiy L., Osipov 1. Russian Spacebome Imaging Radars: Scientific and Technical
Achievements // Proc, of URSI GA'2005, New Delhi, India. Oct 23-29 2005.
494. Vidal-Pantelioni A., Marti D., Ferrando M. Adaptive multiresolution method for speckle noise
reduction in synthetic aperture radar images // Proc, of IGARSS'99, IEEE, Hamburg, Germany.
June 28-July 2 1999. V. 2. P. 1325-1327.
495. Vollmer E. and Hinken J.H. Synthesis method for broad-band tapered wire antennas and its expe-
rimental verification 11 IEEE Trans, on Antennas and Propagation. 1989. V. 37. No. 8. P. 959-965.
496. Vuolevi J., Rahkonen T. Distortion in RF Power Amplifiers. Artech House, inc. 2003.
497. Wahl D.E., Eichel P.H., Ghiglia D.C., Jakowatz C. VJr. Phase Gradient Auto-Focus - A Robust
Tool for High Resolution SAR Phase Correction // IEEE Trans, on Aerospace and Electronics
Systems. July 1994. V. 30. No. 3. P. 827-835.
498. Wahl M., Adolph M., Biller K, Hackenberg U. et al. High Precision T/R-Module for SAR Earth
Observations // Proc, of EUSAR'2006, Dresden, Germany. May 16-18 2006.
499. Walterscheid L, Klare L, Brenner A., Ender J., Loffeld O. Challenges of a Bistatic Space-
bome/Airbome SAR Experiment // Proc, of EUSAR'2006, Dresden, Germany. May 16-18 2006.
500. WangX. Using Satellite Yaw Technology to Avoid Blind Zones in Wide Swath High Resolution
SAR // Proc, of EUSAR'2006, Dresden, Germany. May 16-18 2006.
501. Werninghaus R., Balzer W., Buckreus S., Mittermayer J., Muhlbauer P. The TerraSAR-X Mission
11 Proc, of EUSAR'2004, Ulm, Germany. May 25-27 2004. P. 19-22.
502. Werninghaus W., Zerfowski I. The TerraSARX Mission // Advanced SAR and CEOS WGCV
SAR Workshop, St. Hubert, Canada. June 2003.
503. Wong E, Cumming L.G. A combined SAR Dopier Centroid Estimation Scheme Based upon Sig-
nal Phase // IEEE Trans, on GRS. May 1996. V. 34. No. 3. P. 696-707.
504. Wong F.H., Yeo T.S., Tan N.L. New Applications of Non-Linear Chirp Scaling in SAR Data
Processing // Proc, of IGARSS'00, IEEE, Honolulu, USA. 2000. V. 1. P. 96-98.
505. Xie H., Pierce L.E., Ulaby F.T. Statistical Properties of Logarithmically Transformed Speckle 11
IEEE Trans, on GRS. March, 2002. V. 40. No. 3. P. 721-727.
506. Xiong J., Yang J., Fan Y. Analysis and Improvement of a Fast Backprojection Algorithm for
Stripmap Bistatic SAR Imaging // Proc, of EUSAR'2008, Friedrichshafen, Germany. June 2-5
2008. P. 201-204.
507. Yates G., Blake A. Bistatic SAR image utility // Proc, of EUSAR'2006, Dresden, Germany. May
16-18 2006.
508. Yegulap A.F. Minimum Entropy Auto-Focus, Seventh Annual Adaptive Sensor Array Processing
// Workshop at Lincoln Laboratories. March 1999.
509. Yeung R.W., Nguyen T.C. Waves generated by a moving source in a two-layer ocean of finite
depth //J. Engng. Mathematics 35 (1999). 1999. P. 85-107.
510. Younis M., Metzig R., Krieger G., Klein R. Performance Prediction and Verification for Bistatic
SAR Synchronization Link // Proc, of EUSAR'2006, Dresden, Germany. May 16-18 2006.
511. Younis M., Fischer C, Wiesbeck W. Digital Beamforming in SAR systems П IEEE Trans, on
GRS. July 2003. V. 41. No. 7. P. 735-739.
512. Yuepeng S, Ruliang Y. High Resolution, Wide Swath Synthetic Aperture Radar Using Multiple
Transmit-receive Aperture // Proc, of EUSAR'2006, Dresden, Germany. May 16-18 2006.
513. Zakharova L. Polarimetric coherence for land covers classification // Proc, of URSI GA'2005,
New Delhi, India. 2005.
661
Радиолокационные системы землеобзора космического базирования
514. Zakharova L., Darizhapov D., Kirbizhekova I. Study of natural objects in Transbaikalia by means
of polarimetry and polarimetric interferometry // Proc. EUSAR'2004, Ulm, Germany. May 25-27
2004. P. 733-736.
515. Zin M., Krieger G., Fiedler H., Moreira A. The TanDEM-X Mission Concept // Proc, of
EUSAR'2008, Friedrichshafen, Germany. June 2-5 2008. V. 4. P. 31-34.
516. Jane's Fighting Ships 1990-1991, Richard Sharpe. Janes Yearbook. 1990. 800 pp.
517. Schwerdt M.t Brautigam B., Bachmann M., Doring B. TerraSAR-X Calibration Results // Proc, of
EUSAR'2008, Friedrichshafen, Germany. June 2-5 2008. V. 1. P. 91-94.
518. Meta A., Prats P., Steinbrecher U., Mittermayer J., Scheiber R. TerraSAR-X TOPSAR and ScanSAR
comparison // Proc, of EUSAR'2008, Friedrichshafen, Germany. June 2-5,2008. V. 2. P. 277-280.
519. Спутники радиолокационного зондирования Земли // Приложение №1 на CD к Ежегоднику
«Спутниковые системы связи и вещания» / Составители Е.А. Костюк и А.А. Кучейко.
М.:ИПРЖ, 2001. 86 с.
520. Proc, of Envisat Symposium, Montreux, Switzerland, CD-ROM SP-636. Apr 23-27 2007.
521. Shuttle Radar Topography Mission X-SAR/SRTM. 3D view on Earth. DLR, Oberphaffenhofen,
Germany. CD-ROM, 2000. SRTM Web Site www.dfd.dlr.de/srtm.
522. Spacebome Imaging Radar. JPL. SIRCE03: Educational CD-ROM PC Special Edition With
Companion World Wide. Web Site http://southport.jpl.nasa.gov/companion.
523. Афраймоеич Э.Л., Караченцев В.А. Погрешности функционирования спутниковых радио-
технических систем, обусловленные состоянием трансионосферного радиоканала // Элек-
тронный журнал «Исследовано в России». С. 2382-2390. http://zhumal.ape.relam.ru/
articles/2003/202.pdf.
524. Ритек-Корус. Веб-сайт htth://www.mnirti.ru/~reteckr.
525. Веб-сайт http://floods.ikd.kiev.ua/.
526. Веб-сайт http://epsilon.nought.de/tutorial/processing/sar_proz.pro.
527. Веб-сайт http://graphics.cs.msu.ru/courses/cg_elOO/kotelnikov.pdf.
528. Веб-сайт http://www.mssianspaceweb.com Almaz-T spacecraft.htm.
529. Веб-сайт американских ученых http://www.fas.org/military/.
530. Веб-сайт фирмы Infoterra, http://www.infoterra.de/tsx/freedata/start.php.
531. Веб-сайт фирмы Sandia National Laboratories General Atomics, США. www.sandia.gov.
532. Википедия. Свободная электронная энциклопедия. Веб-сайт
http: //ru. w ikipedia. org/wiki/Название статьи.
533. Постоянные на эпоху 2000 года (астрономические и другие). Веб-сайт
http://astro.websib.rn/sprav/const.htm.
534. Данные дистанционного зондирования со спутника ALOS (PALSAR). Веб-сайт Совзонд
http://www.sovzond.ru/satellites/.
535. Елизаветин И.В. Технология восстановления цифровых моделей рельефа с использованием
снимков космических радиолокаторов и пакета Advanced Radar Module Imagine для 8.3.
DATA+. 2008, http://www.dataplus.ru/industries/7ZOND/npomash.htm.
536. Инженерно-технологический центр СканЭкс. Примеры снимков TerraSAR-X. Веб-сайт
http://www.scanex.rn.
537. Карты Google. Веб-сайт http://maps.google.com/.
538. Каталог изображений Земли. Продукция космического аппарата «Алмаз-1». ОАО «НПО
машиностроения». Веб-сайты http://npomash.ru/activies/, http://almazl.rn/.
539. Научная аппаратура модуля 77КСИ «Природа». Веб-сайт
http://www.cosmoworld.ru/mirstation/mir/77KSE_devices.shtml.
540. Ошейко С.В., Серых Т.А., Гершензон О.Н. Оперативный мониторинг утечек и разливов
нефти в морских акваториях // ИТС «Скан-Экс». Ноябрь 2007 г.
http://www.scanex.ru/ru/publications/pdf.
541. Программный пакет Envi 4.6, ITT. Веб-сайт http://www.ittvis.com/envi.
542. Программный пакет Radar Mapping Suite ERDAS Imagine фирмы Leica.
Веб-сайт http://www.dataplus.ru/soft/ERDAS/index.htm.
662
Литература
543. Распространение радиоволн в земной атмосфере. Курс лекций.
Веб-сайт http://www.uftuit.uzpak.uz/Tatulib/lectures/afu/rasprostr_radiovoln/lecture_04.htm.
544. РСА «Траверс» модуля «Природа» космической станции МИР.
Веб-сайт http://www.cosmoworld.ru/mirstation/experiments.html.
545. Савин А.И., Зотов Г.Ф., Петрущенко Ю.Е. Система морской космической разведки и целе-
указания. http ://www.navy .ru/science/sor7 .htm.
546. Пантелеев В.Л. Теория фигуры Земли / Курс лекций. МГУ им. М.В. Ломоносова, Физиче-
ский факультет. 2000. Веб-сайт http://astronet.ru./db/msg/l 169819.
547. Путилин С., Лукин А. Модификация метода нелокального усреднения для подавления шу-
ма в видео. МГУ им. М.В. Ломоносова, М. 2007. Веб-сайт
http://www/graphicon.ru/2007/procedings/Papers/Paper_85.pdf.
548. Российская космическая система дистанционного зондирования Земли и перспективы ее
развития / Доклад на конференции. ЦНИИМАШ, 12.11.2007.
http://d33.infospace.ru/d33_conf/2007_pdf/plenar/nosenko.pdf.
549. Специализированные пакеты для обработки радиолокационных изображений. Веб-сайт
SOVZOND http://www.sovzond.ru/software.
550. Спутниковые системы: Все под контролем. «Газком» разработал проект общероссийской
системы спутникового мониторинга Земли. 19.10.2004, «Ведомости».
http://www.mforum.ru/.
551. Advanced Land Observation Satellite. Веб-сайт JAXA. http://www.eors.jaxa.jp/ALOS/en/
about/ALOS.
552. Almaz-T space exploration, http://www.astronautix.com/craft/almazt.htm.
553. AN/APQ - Equipment Listing, http://www.designation-systems.net/usmilav/jetds/ an-apq.html.
554. Attema E., Levrini G., Davidson M. Sentinel-1 ESS’s New European Observatory I I The Future or
Remote Sensing, Second International Workshop of VITO & ISPRS Inter-Commission Working
Group I/V Autonomous Navigation.
http://www.pegasus4europe.com/workshop/documents/contributions/Attema_full.pdf.
555. Chukhlantsev A.A., Shutko A.M., Sergei P., Golovachev S.P. Attenuation of electromagnetic
waves by vegetation canopies in the 100-10000 MHz frequency band / Журнал радиоэлектро-
ники. Электронный журнал. 2003. № 2. http://jre.cplire.ru/jre/feb03/index.
556. ENVISAT-1 Mission System. Critical Design Review. ENVISAT-1 Executive Payload Sum-
mary. ESA, Daimler-Benz Aerospace. Dornier, http://envisat.esa/int/support-docs/pdf/mis-
sys.pdf.
557. ERSDAC PALSAR CEOS Format Specification. ERSDAC-VX-CEOS-004 Rev. 1.6. ERSDAC.
Tokyo, Japan. ERDAC-VX-CEOS-004_16.pdf.
558. ERSDAC PALSAR CEOS Format Specification. Forefront Tower 3-12-1 Kachidoki. Tokyo, Ja-
pan. 2007. ERSDAC-VK-CEOS-004_16.pdf.
559. Eurimage. Price List. Веб-сайт http://www.eurimage.com.
560. FSPEC SAR Speckle Filters. Веб-сайт: http://www.pcigeomatics.com/dev_comer/
pcihlp_gateway.html.
561. Gunter’s Space page/ Веб-сайт http://space.skyrocket.de.
562. http://www.lpi.usra.edu/expmoon/Apollo 17/A17_Orbital_sounder.html on February 21, 2007.
563. http://www.novosti-kosmonavtiki.rU/content/numbers/217/50.shtmL
564. MDA Information Products - Geospacial Services. Веб-сайт
http://gs/mdacorporation.co./products/sensor/radarsat2/rs2_price.asp.
565. Mission and spacecraft library I I Quicklook. SEASAT. Веб-сайт
http://leonardo.jpl.nasa.gov/msl/QuickLooks/seasatQL.html.
566. Norris P. Spies in the Sky. Surveillance Satellites in War and Peace. Springer Praxis Books.
http://www.springerlink.com/content/h6m352/.
567. SAP Toolbox. Rockwell Science Center. Palo Alto Lab. Демонстрационный пакет для моделирова-
ния синтеза изображения в прожекторном режиме работы РСА. 1999. http://www.killmine.com.
568. Soumekh М. Synthetic Aperture Radar Synthesis with MATLAB Algorithms. A Wiley Inters-
663
Радиолокационные системы землеобзора космического базирования
cience Publication. John Wiley & Sons, Inc. N. Y. 1999. http://www.acsu.buffalo.edu/~msoum/.
569. SAR Lupe. The innovative program for satellite-based radar reconnaissance. OHB-System AG,
Bremen, Germany, http://www.ohb-system.de.
570. SEASAT'1978. Веб-сайт http://southport.jpl.nasa.gov/scienceapps/ seasat.html.
571. Space. LACROSSE/ONYX. Radar Imaging Reconnaissance Satellite. Веб-сайт
http://www.globalsecurity.org/space/systems/lacrosse.htm.
572. TerraSAR-X - Совзонд. Данные ДЗЗ co спутников.
Веб-сайт http://www.sovzond.ru/satellites/.
573. TerraSAR-X Ground Segment. Cluster Applied Remote Sensing. Basic Product
Specification Document. DLR, Germany. 2008. TX-GS-DD-3302. TX-GS-DD-3302_Basic-
Product-Specification-Document l .5.pdf. http://www.infoterra.de/tsx/freedata/start.php.
574. TerraSAR-X Ground Segment. Cluster Applied Remote Sensing. Level lb Product Format
Specification. DLR, Germany. 2008. TX-GS-DD-3307. 030201 Level-1 b-Product-Format-
Specification l .3.pdf. http://www.infoterra.de/tsx/freedata/start.php.
575. The Image observed by The PALSAR. ERSDAC, Tokyo, Japan. PALSAR Project
web-site http://www.palsar.ersdac.or.jp/e/index.shtml.
576. USA. Веб-сайт http://www.astronautix.com/craft/usa.htm.
Список публикаций непосредственных участников разработки
радиолокаторов обзора земной и морской поверхности
в ОАО «Концерн «Вега» и смежных организациях
21*, 33*, 34*, 35*, 36*, 37*, 38*, 39*, 40*, 41*, 42*, 43*, 44*, 46*, 47*, 48*, 49*, 63*, 69*, 73*, 76*,
88*, 90*, 121*, 122*, 123*, 130*, 131*, 132*, 133*, 137*, 138*, 139*, 140*, 141*, 149*, 150*, 151*,
152*, 153*, 154*, 155*, 156*, 157*, 158*, 159*, 160*, 161*, 162*, 163*, 164*, 166*, 172*, 173*,
171*, 172*, 176*, 177*, 181*, 183*, 185*, 192*, 200*, 206*, 207*, 208*, 222*, 223*, 231*, 232*,
236*, 241 *, 243*, 244*, 247*, 360*, 374*, 375*, 427*, 428*, 429*, 430*, 431*, 432*, 433*, 434*,
435*, 439*, 440*, 468*, 493*
Список публикаций, освещающих вопросы
радиолокационного зондирования в S-диапазоне волн
12, 63, 78, 116, 166, 179, 180, 208, 223, 232, 242,, 432, 440, 472,474, 493, 538
664
ПЕРЕЧЕНЬ СОКРАЩЕНИИ
АП - антенный переключатель
АРЛИ - амплитудное радиолокационное
изображение
АФАР - активная фазированная антенная
решетка
АФАР - ГЗА - гибридная зеркальная антенна
с АФАР-облучателем
АЦП - аналогово-цифровой преобразователь
БГВ - быстрые гравитационные волны
БД - база данных
БПФ - быстрое преобразование Фурье
БРЛК - бортовой радиолокационный
комплекс
БСК - бортовой спецкомплекс
БФС - блок формирования сигналов
БЦВМ - бортовая цифровая вычислительная
машина
БИРСА - видеоимпульсные радиолокаторы
с синтезированной апертурой
ВК - выходной каскад
ВПП - взлетно-посадочная полоса
ВТО - высотное оружие
ВУМ - выходной усилитель мощности
ГЗА - гибридная зеркальная антенна
ГКРЧ - Государственная комиссия
по радиочастотам
ГМО - гидрометообразование
ДЗЗ - дистанционное зондирование Земли
ДН - диаграмма направленности антенны
ДОР - диаграмма обратного рассеяния
ЗГ - задающий генератор
идч - измеритель доплеровской частоты
ИСВН - информационная система военного
назначения
КА - космический аппарат
КВЧ - крайне высокие частоты
КК - космический корабль
КНД - коэффициент направленного действия
КРЛИ - комплексное радиолокационное
изображение
КСВН - космическая система военного
назначения
ЛЧМ - линейная частотная модуляция
МКРЦ - система морской космической
разведки и целеуказания
МО - Министерство обороны
МТКК - многоразовый транспортный
космический корабль
МШУ - малошумящий усилитель
ОБПФ - обратное быстрое преобразование
Фурье
овч - очень высокие частоты
ОЗУ - оперативное запоминающее
устройство
ПА - пазовая антенна
ПЗУ - постоянное запоминающее
устройство
ПЛ - подводная лодка
ПО - программное обеспечение
ППМ - приемопередающий модуль
ПРД - передатчик
ПРДУ - передающее устройство
ПРМ - приемник
ПУМ - предварительный усилитель мощности
РБО - радиолокатор бокового обзора
РИП - регулируемый источник питания
РЛИ - радиолокационное изображение
РЛН - радиолокационное наблюдение
РЛС - радиолокационная станция
РСА - радиолокатор с синтезированной
апертурой антенны
СВЧ - сверхвысокие частоты
665
Радиолокационные системы землеобзора космического базирования
СВЧУ - усилитель сверхвысокой частоты
сдц - селекция движущихся целей
СКО - среднеквадратическое отклонение
СРЛН - система радиолокационного
наблюдения
ТЗ - техническое задание
ТУМ - транзисторный усилитель мощности
УВЧ - ультравысокие частоты
УМ - усилитель мощности
УПЧ - усилитель промежуточной частоты
УЭПР - удельная эффективная площадь
рассеяния
ФД - фазовый детектор
ФРЛИ - фазовое радиолокационное
изображение
ФС - формирователь сигналов
ФЧС - формирователь частот и сигналов
ЭВМ - электронная вычислительная машина
ЭПР - эффективная площадь рассеяния
ЭРЛИ - энергетическое (яркостное)
радиолокационное изображение
EUSAR - Европейская конференция
по радиолокаторам с синтезированной
апертурой антенны (European Conference
on Synthetic Aperture Radar.
Berlin, Offenbach, VDE), Германия
IGARSS - Международный симпозиум
по географическим наукам
и дистанционному зондированию Земли
(International Geoscience and Remote
Sensing Symposium, IEEE)
GPS - спутниковая навигационная система
(Global Position System)
GRS - Географические науки
и дистанционное зондирование Земли
(Geoscience and Remote Sensing)
NEBZ - чувствительность РСА (J? шумового
эквивалента - Noise Equivalent Beta Zero)
NESZ - чувствительность РСА (c^ шумового
эквивалента - Noise Equivalent Sigma Zero)
666
Основные обозначения в формулах
и физические параметры
Обозна- чение Наименование параметра Значение
Большая (экваториальная) полуось земного эллипсоида: Эллипсоид ПЗ-90 Эллипсоид WGS-84 ле=6378136м ле=6378137 м
Ье Малая (полярная) полуось земного эллипсоида: Эллипсоид ПЗ-90 Эллипсоид WGS-84 5е=6356751 м Ье=6356752 м
С Скорость света с=299792448 м/с
^xant Размер антенны, горизонтальный (азимутальный)
^yant Размер антенны, вертикальный (угломестный)
е0 Эксцентриситет орбиты
Эксцентриситет земного эллипсоида: Эллипсоид ПЗ-90 Эллипсоид WGS-84 ее=0,08181911 ее=0,0818192
К Постоянная Больцмана А=1,38-10’23 Дж/град
Ks0 Радиометрическое разрешение, по сумме шум+фон
Ks Радиометрическое разрешение, по приращению фона
L Суммарные потери в радиолокационном тракте РСА
dearth Масса Земли Harth=5,974242-1024 кг
TV Число некогерентно накапливаемых импульсов (внутриэлементное и межэлементное накопление) N=NeNs
Ne Число некогерентно накапливаемых импульсов в элементе разрешения (внутриэлементное накопление)
/Vsynt Число когерентно накапливаемых импульсов в апертуре
Ns Число некогерентно накапливаемых импульсов по площади фрагмента (межэлементное накопление)
R Наклонная дальность
Ro Минимальная дальность на траверзе
Re Радиус Земли (локальный)
^emean Радиус Земли, средний ^emean-6371 КМ
667
Радиолокационные системы землеобзора космического базирования
Обозна- чение Наименование параметра Значение
Rs Радиус орбиты спутника
*Sant Эффективная площадь антенны
С ‘“’geom Геометрическая площадь цели
То Нормальная температура (градусы Кельвина) 7Ь=290° К
^star Звездные сутки rstar=86164 с
T’sun Солнечные сутки 7^=86400 с
^synt Время синтеза
к Скорость КА (спутника)
Путевая (гринвичская) скорость КА
Y Угол визирования
Yi Угол падения
i Угол наклонения орбиты
a Центральный угол наблюдаемой точки
kF Полоса частот зондирующего сигнала
Px Разрешающая способность по азимуту
PR Разрешающая способность по наклонной дальности
Py Разрешающая способность по горизонтальной дальности
Л Длина волны РСА
P Гравитационная постоянная Земли /7=3,98602-1014 м3/с2
W Угол скошенности, угол курса
0 Угол тангажа
a Эффективная площадь рассеяния (ЭПР) цели
c? Удельная ЭПР фона местности
Чувствительность РСА (эквивалентная УЭПР шумов)
T Длительность зондирующего импульса
Длительность сжатого импульса
<P Фаза сигнала, географическая широта
7 Коэффициент полезного действия (КПД)
CO Угловая скорость
coe Угловая скорость вращения Земли со=1,2921158553-10’5 сек’1
6У0 Угловая орбитальная скорость
^ep Угловая скорость вращения Земли плюс скорость прецессии орбиты
Угловая скорость прецессии орбиты
СВЕДЕНИЯ ОБ АВТОРАХ
Владимир Степанович Верба. Родился в 1954 г. в станице Брюховецкая Краснодарского
края, окончил Таганрогский радиотехнический институт им. В.Д. Калмыкова (1978).
Доктор технических наук, профессор, Заслуженный деятель науки РФ, действи-
тельный член Российской академии естественных наук и Академии военных наук.
Генеральный директор - генеральный конструктор ОАО «Концерн «Вега» (Москва).
Генеральный конструктор Российской федерации по системам дозора и управления
авиационного базирования и комплексов с беспилотными летательными аппаратами.
Член научно-технического совета Военно-промышленной комиссии при Прави-
тельстве РФ. Председатель Совета директоров предприятий радиоэлектронного ком-
плекса РФ.
Член Совета генеральных и главных конструкторов, ведущих ученых и специали-
стов в области высокоэкономичных секторов экономики при Председателе Правитель-
ства РФ.
Председатель Совета директоров предприятий радиоэлектронного комплекса РФ.
Автор более 280 научных работ, в том числе 38 патентов, 7 монографий, 9 учеб-
ников и учебных пособий.
Область научных интересов', радиолокация, системный анализ, проектирование
информационно-управляющих систем авиационно-космического базирования.
Заведующий базовыми кафедрами: МФТИ «Радиоэлектронные информационные
системы», МГТУ им. Н.Э.Баумана «Радиоэлектронные устройства», МИРЭА «Радио-
приборостроение».
Член редколлегий ряда научных журналов, главный редактор журнала «Информа-
ционно-измерительные и управляющие системы».
Награжден орденом «Знак Почета».
Леон Богуславович Неронский родился в 1932 г. в селе Малаховка Московской обл.,
окончил Радиотехнический факультет Московского энергетического института (1955).
Доктор технических наук, профессор, Заслуженный конструктор РФ, главный на-
учный сотрудник ОАО «Концерн «Вега».
Участник разработки и испытаний космической радиолокационной аппаратуры
обзора земной и морской поверхности (заместитель главного конструктора, научный
руководитель НИР).
Автор более 170 научных работ, в том числе 12 изобретений, 2 монографии, 2
учебных пособия.
Область научных интересов: радиолокация, дистанционное зондирование, обра-
ботка сигналов и изображений, моделирование систем радиолокационного наблюдения.
Профессор базовых кафедр: МФТИ «Радиоэлектронные информационные систе-
мы», МИРЭА «Радиоприборостроения».
Награжден медалями: им. В.Н.Кузнецова, им. В.Н. Челомея, «300 лет Российского
флота» и др.
Член Института инженеров электрики и электроники (IEEE).
669
Радиолокационные системы землеобзора космического базирования
Игорь Георгиевич Осипов родился в 1936 г. в г. Кировобаде Азербайджанской ССР,
окончил факультет Вооружения Московского авиационного института (1959).
Заместитель генерального конструктора ОАО «Концерн «Вега» по космической
тематике, Заслуженный конструктор РФ.
Участник разработки и испытаний аппаратуры для космических комплексов ра-
диолокационного наблюдения, лазерных систем разведки (главный конструктор, науч-
ный руководитель НИР).
Автор более 40 научных работ, включая 9 изобретений, в области радиолокаци-
онной техники.
Область научных интересов’, радиолокация, проектирование радиоэлектронной
аппаратуры.
Награжден орденом «Трудового Красного Знамени», медалями «За трудовое от-
личие», «300 лет Российского флота», знаком Циолковского.
Владимир Эдуардович Турук родился в 1957 в г. Сасово Рязанской обл., окончил Ра-
диотехнический факультет Московского института радиотехники, электроники и авто-
матики (1984),.
Заместитель начальника отдела по НИОКР ОАО «Концерн «Вега», главный кон-
структор радиолокаторов землеобзора космического базирования.
Участник ОКР и НИР по созданию космических радиолокаторов обзора земной и
морской поверхности (ведущий инженер, ответственный исполнитель, главный конст-
руктор).
Автор более 20 научных работ в области радиолокационной техники..
Область научных интересов’, проектирование, методы экспериментальной отра-
ботки радиолокационной аппаратуры.
Стипендиат Президента РФ за заслуги в области вооружений, военной и специ-
альной техники (2008), лауреат премии им. П.С.Плешакова, награжден медалью «В па-
мять 850-летия Москвы», памятным знаком «200 лет Министерству обороны», Почет-
ный радист.
670
V.S. Verba, L.B. Neronskiy, I.G. Osipov, V.E. Turuk
Space-borne Earth Surveillance
Radar Systems
Edited by Prof. V.S. Verba
Space-borne Earth Surveillance Radar Systems
Scientific session
«SYSTEMS OF AIR, SPACE AND EARTH SURFACE MONITORING»
Reviewers:
Academician of RAS L.M. Zeleny, Prof. G.S. Kondratenkov,
Academician of RAS LB. Fedorov
Verba V.S., Neronskiy L.B., Osipov LG., Turuk V.E.
B31 Space-borne Earth Surveillance Radar Systems. Edited by Prof V.S. Verba. - M.:
Radiotechnika, 2010 - 680 pp.: 362 graphics, 576 ref. (Scientific series «Air, Space and
Earth Surface Monitoring Systems», editor of series Prof. V.S. Verba.
The monograph «Space-borne Earth Surveillance Radar Systems» is the third book from research series
«Air, Space and Earth Surface Monitoring Systems».
It is devoted to new trends in the design of modem space radar surveillance systems, the outlook of their
development prospects, principles of obtained data processing and application.
The monograph summarizes the results of long-term space development with the aim of setting global
information system providing all-weather detailed observation of dynamic processes related with natural
and man-made impact on Earth. The obtained results are a significant step to solve the problems of natu-
ral resources research, the control of economic activities, disasters monitoring, ensuring national safety
due to colliding interests of different countries in the world community and antiterrorist’ activities.
The monograph deals with the theory as well as the available scientific and technical groundwork to de-
sign space radar surveillance systems, to improve the methods of radar information obtaining and
processing considering the experience of developments from the collective at JSC «Radio Engineering
Corporation «Vega» (including production and employment of «Mech-К» and «Mech-KU» SARs of
«Kosmos-1870» and «Almaz-1» satellites as well as development of perspective systems for ground and
sea surface observations).
The basic material deals with the role of space segment in the design of dual application global Geoin-
formation system, the particulars in radio waves interaction with earth covers and surveillance objects,
design principles, operation modes of earth remote sensing, parameters of trajectory signals caused by
space vehicle orbital movement. Consideration was given to the problems of radar images synthesis,
their primary and secondary processing and methods of increasing SAR information content considering
instrument limitations.
The explanation was offered to up-to-date approaches in subject radar data processing, formation of ra-
dar data bank, automatization in the process of radar data interpretation. There are modeling algorithms
of signal transformation processes in SAR path, methods of image quality estimation, problems in the
calibration of output information product and correction of instrument distortions.
Examination is carried out on basic instrument decisions in the design of modem SAR, look back was
performed in the development of Earth surveillance radar space facilities and detection of objects.
A special attention was paid to SAR new operation modes (squint scanning mode, dual receive mode of
operation, high resolution wide swath - HRWS, possibilities of increasing resolution across the path by
using a series of interferometric images). A detailed consideration was given to the particulars of the
672
Monograph Annotation
space surveillance geometry including cases of high orbital SAR and SAR on geosynchronous orbit. For
space-borne SARs, the ideas were stated on the most efficient algorithms in the synthesis of high resolu-
tion radar image, methods of radar image autofocusing considering accuracies of ballistic data and er-
rors in propagation path.
Light was thrown on up-to-date methods of post-detection radar image processing including wavelet
transformation and nonlocal filtration. These methods are illustrated by examples of radar images with
the resolution of about 10 m, which were obtained by means of SAR «Mech-KU» «Almaz-1» satellite
and single look complex (SLC) radar images with about 1 m resolution, obtained by means of Terra-
SAR-X and used in the Book with permission of Infoterra GmbH. An analysis was made on problems of
radar images registration considering the parameters of reflectors and visual perception characteristics
including the use of pseudocolor indication.
A special attention was paid to algorithms of signal transformation in SAR through path modeling using
experimental complex (SLC) images. They can be efficiently used in SAR design, in ground preflight
equipment development test on semi realistic simulation benches, in analysis of off-normal situations in
SAR operation process, and also the interpretation of radar sensing data.
The book is intended for a wide range of specialists in Earth radar and remote sensing - engineers,
scientists related with the design of Geoinformation systems, development and use of civil and military
radar surveillance facilities, and also for teachers, postgraduates and students of respective depart-
ments and universities.
673
Space-borne Earth Surveillance Radar Systems
MONOGRAPH STRUCTURE
Comments ............................................................ 11
Introduction ........................................................ 17
Chapter 1
Space-Borne Earth Surveilance Radar Systems
in Global Aerospace Monitoring System................................ 25
Chapter 2
Interaction of Radio Waves With Radar Surveillance Objects........... 59
Chapter 3
Modern Methods of Space Earth Radar Surveillance.
Basic Definitions................................................... 109
Operating principle and basic performances of space side-looking radars and SAR, survey geome-
try in squint and bistatic survey modes. Bistatic survey mode with illumination from Tx radar on
geostationary orbit. SAR power budget, spatial and radiometric resolution. Signal ambiguity func-
tion. Particulars of space-borne radar surveillance systems operation in active jamming exposure.
Chapter 4
Space SAR Operation Modes...................................................... 151
Stripmap, ScanSAR, Spotligh, polarimetric operating modes. Interferometric radar survey. Ex-
tended SAR surveillance modes - Dual receive, high resolution wide swath Scansar mode
(HRWS). SAR range resolution increasing by repeat pass interferometry mapping. Moving targets
indication.
Chapter 5
Calculation of Trajectory Signal Parameters
in Space Radar Surveillance.................................................... 181
Coordinate systems, phase and amplitude time dependencies in SAR. Platform motion parameters
for Geosynchronous orbits SAR.
Chapter 6
Algorithms of Radar Images Synthesis
in Space-Borne SAR............................................................. 233
Stages of radar signals processing and information product type. Range migration. Complex sig-
nals scaling procedures. Unified algorithm of image synthesis. Radar images autofocusing, search
procedure of responses for radar image autofocusing. Squint and bistatic surveillance modes data
synthesis. UWB video pulse SAR image synthesis.
Chapter 7
Radar Images Registration and Processing....................................... 335
Problems of noncoherent radar image processing. Wavelet transform and nonlocal speckle filtering
procedure usage. Requirements for radio hologram and radar image registration. Visual perception
characteristics of radar images for diplay presentation and hard copies. Characteristics of color and
pseudocolor radar image display.
674
Monograph Annotation
Chapter 8
Improvement of Space SAR Information Content ........................ 405
Consideration of nonlinearity effect in SAR path, suppression of range and azimuth ambiguous
noises. SAR data compression.
Chapter 9
Modern Approaches to Thematicai Radar Data Processing............... 431
Creation of banks for radar surveillance object images. Object point models formation. Sea ships
traffic monitoring. Classification of sea targets under conditions of sea disturbance. Problems of
sea surface remote sensing. Sea current velocity measurements. Ecological monitoring of offshore
zones. Researches in occurrence of internal waves for detection of bottom topography. Detection
of dangerous wave phenomena and their precursors. Ice cover monitoring.
Terrain and vegetation cover sensing. Noncoherent and interferometry methods of change detec-
tion. Terrain relief mapping by radar stereo images and radar interferometry processing. Differen-
tial interferometry for changes detection and small shifts of land and objects measurements. Pola-
rimetric interferometry.
Methods of solving coordinate problems by radar sensing data. Joint processing of overlapping sa-
tellite photo and radar images.
Chapter 10
Technologies of Radar Equipment Performance Modeling
and Signal Transformation In Radar Path........................................... 499
Advantage of complex images usage for SAR signals modeling. Preparation of basic material.
Modeling of interferometry processing, moving target indication, semirealistic simulation in SAR
equipment development, testing and inflight diagnostics.
Chapter 11
SAR Calibration................................................................... 511
Procedures of SAR parameters evaluation. Integral heuristic criterion in estimation of SAR space
information content. Methods of SAR equipment parameters estimation in flight and distortion
correction in data processing.
Chapter 12
Improvement of Equipment for Spaced-Borne Earth
Surveillance Radar Systems........................................................ 549
System approach to design of space radar surveillance equipment SAR antennae. Combined
two-band APAA of wave L- and P-bands. Hybrid S-band mirror antenna for small satellite SAR.
Hybrid mirror antenna with APAA-feed. Active antenna arrays and their elements for video-pulse
SAR. Local stable oscillator. Elements of Tx and Rx modules.
Chapter 13
Space Equipment for Radar Surveillance of Ground Surface
and Ground (Overwater) Objects.................................................. 577
Stages in manufacture of space radar surveillance equipment. Lookback in development of space-
bome SAR. Scientific engineering groundwork.
State and outlook in development of space-borne Earth surveillance SAR
Conclusion..................................................................... 635
References..................................................................... 637
675
Научная серия
«Системы мониторинга воздушного, космического пространства
и земной поверхности»
Редактор серии
Владимир Степанович Верба
Радиолокационные системы землеобзора
космического базирования
Под редакцией
доктора технических наук, профессора В.С. Вербы
Авторы:
Владимир Степанович Верба
Леон Богуславович Неронский
Игорь Георгиевич Осипов
Владимир Эдуардович Турук
Изд. № 22. Сдано в набор 13.04.2010.
Подписано в печать 15.09.2010. Формат 70x100 1/16.
Бумага офсетная. Гарнитура Таймс.
Печать офсетная
Печ. л. 42,5. Тираж 1000 экз. Зак. № 1492.
Издательство «Радиотехника».
107031, Москва, К-31, Кузнецкий мост, д. 20/6.
Тел./факс: (495)621-48-37; 625-78-72, 625-92-41.
E-mail: info@radiotec.ru
www.radiotec.ru
Отпечатано в ООО ПФ «Полиграфист».
160001, г. Вологда, ул. Челюскинцев, д. 3.
В. С. Верба
Л. Б. Неронский
И.Г.Осипов
В. Э. Турук
Данная монография - третья книга из научной серии «Системы
мониторинга воздушного, космического прбстранства и земной
поверхности» посвящена новым направлениям построения
современных космических систем радиолокационного
наблюдения, перспективам их развития, принципам обработки и
использования получаемой информации. Монография обобщает
результаты многолетних исследований по созданию глобальной
информационной системы, обеспечивающей всепогодное
детальное наблюдение динамических процессов, связанных с
естественными и антропогенными явлениями на планете Земля.
Достигнутые к настоящему времени результаты являются
значительным шагом к решению задач исследования природных
ресурсов, контроля результатов хозяйственной деятельности,
мониторинга катастроф и обеспечения национальной
безопасности..
Книга предназначена для широкого круга специалистов по
радиолокации и дистанционному зондированию Земли,
инженеров, научных сотрудников, связанных с
проектированием геоинформационных систем, созданием и
применением средств радиолокационного землеобзора
гражданского и военного назначения, а также для
преподавателей, аспирантов и студентов соответствующих
факультетов и вузов
Издательство «Радиотехника»
107031, Москва, К-31, Кузнецкий мост, д. 20/6
тел./факс: +7(495)621-48-37; 625-78-72, 625-92-41
e-mail: info@radiotec.ru
- http://www. radiotec.ru
дНЛНИЕ
РАЗОРВЕТ ЦЕПИ РАБСТВА