/
























































































































































































































































































Текст
А. И. ВАЖНОВ
ОСНОВЫ ТЕОРИИ
ПЕРЕХОДНЫХ ПРОЦЕССОВ
СИНХРОННОЙ МАШИНЫ
ГОСУДАРСТВЕННОЕ ЭНЕРГЕТИЧЕСКОЕ ИЗДАТЕЛЬСТВО
МОСКВА 19 6 0 ЛЕНИНГРАД
ЭЭ-5-4
В книге изложены дифференциальные уравнения
синхронной машины в форме А. А. Горева и в опе-
раторной форме Парка.
На их основе дано решение некоторых практи-
ческих задач, важных как с точки зрения расчета
машины, так и обеспечения нормальной ее работы
в системе переменного тока.
Рассмотрены схемы замещения машины для раз-
личных режимов работы, а также отдельных
ее параметров, позволяющие упростить расчеты
ряда характеристик.
Книга предназначена для студентов электроме-
ханических и электроэнергетических специально-
стей. Она может быть также полезной для ин-
женеров, работающих в области крупного элек-
тромашиностроения и энергетики.
Важное Александр Иванович
ОСНОВЫ ТЕОРИИ ПЕРЕХОДНЫХ ПРОЦЕССОВ СИНХРОННОЙ МАШИНЫ
Редактор М. Л. Левинштейн Техн, редактор Д. Л!. Соболева
Сдано в производство 27/1 1960 г. Подписано к печати 23/V 1960 г. М 40534. Печ. л. 19.5.
Бум. л. 9.75. Уч.-изд. л. 18.4. Формат 60 X 921/ie. Тираж 8500. Заказ № 281. Цена 10 р. 20 к.
Ленинградский Совет народного хозяйства. Управление полиграфической промышленности.
Типография № I «Печатный Двор» имени А. М. Горького. Ленинград. Гатчинская. 26.
Отпечатано с матриц типографии № I «Печатный Двор» имени А. М. Горького
в типографии имени Котлякова Госфиниздата СССР. Ленинград. Садовая, 21.
Заказ 1005.
ПРЕДИСЛОВИЕ
Исследованию переходных процессов синхронной машины по-
священо весьма большое количество работ, опубликованных как
у нас в Союзе, так и за рубежом. Объясняется это, с одной стороны,
сложностью этих процессов, а потому трудностью и многообразием
исследования, а с другой — тем, что синхронная машина играет
важную роль в современной энергетике.
В настоящее время теория переходных процессов синхронной
машины разработана достаточно глубоко и использует целый ряд
методов исследования. Для начинающего изучать эту теорию наи-
больший интерес представляют ее основы — дифференциальные
уравнения машины Парка—Горева и те идеи и методы, которые с
помощью исходных уравнений позволяют получить приближенные
решения ряда важных задач.
В этой книге сделана попытка изложения именно основ теории
переходных процессов синхронной машины, знакомство с которыми
облегчит изучение многочисленной специальной литературы в
этой области.
Поэтому здесь даны уравнения синхронной машины как в фор-
ме А. А. Горева (машина без демпферной обмотки), так и в форме
Парка, использующей операторные сопротивления. По этой же при-
чине в книге применена не одна система относительных единиц,
а две: система Парка, наиболее удобная для машин без демпферной
обмотки и широко применяемая до настоящего времени, и система
единиц, более наглядная для машин с любым числом контуров на
роторе.
Решения некоторых задач проводятся неодинаковыми способами,
чтобы можно было уяснить как можно больше существующих
идей и методов, хотя приводимый в книге материал, конечно, не
является исчерпывающим.
При написании книги автор пользовался многочисленными тру-
дами по переходным процессам синхронных машин, основные из
которых приведены в списке литературы.
Из-за отсутствия общепринятых обозначений ряда величин воз-
никли большие трудности при изложении материала. В книге при-
няты, в основном, те обозначения, которые используются в курсах
электрических машин.
1*
4
Предисловие
В теории синхронной машины важную роль играют линейные
преобразования и, в частности, преобразование к координатным
осям d, q. Однако в литературе нет единообразия в отношении
взаимного расположения этих осей. Автору представляется более
логичной система осей d, q, введенная А. А. Горевым, в которой ось
d упреждает ось q. Вместе с тем в большинстве теоретических работ,
в курсах по электрическим машинам и заводских методиках исполь-
зуется система осей d, q с отстающей продольной осью. Это и по-
служило причиной того, что она применяется в настоящем труде.
Книга является учебным пособием для студентов старших кур-
сов и дипломантов, специализирующихся в области электрических
машин и поэтому не претендует на полноту изложения. Тем не ме-
нее можно надеяться, что она будет полезной и для инженерных
работников.
Автор выражает благодарность и признательность Н. Н. Щед-
рину, который, рецензируя рукопись книги, не только отметил не-
достатки, но и дал ценные советы по ее улучшению. Автор считает
своим приятным долгом поблагодарить также М. П. Костенко и
Е. А. Паля, просмотревших рукопись и сделавших ряд важных
замечаний.
В оформление рукописи большой труд вложили И. А. Гордон
и Е. В. Толвинская. М. Л. Левинштейн с исключительной тщатель-
ностью провел редактирование книги. Всем им автор приносит
сбою благодарность.
ОГЛАВЛЕНИЕ
Введение..................................................................................... 8
Глава первая. Общие сведения о синхронной машине.............. 13
§ 1. Магнитная система и обмотки....................................................... —
§ 2. Магнитные поля и э. д. с......................................................... 15
Г лава вторая. Уравнения синхронной машины.................................................. 25
§ 3. Общие положения................................................................... —
§ 4. Потокосцепления обмоток машины................................................... 27
§ 5. Линейные преобразования.......................................................... 35
§ 6. Преобразование уравнений напряжения синхронной ма-
шины от осей а, Ь, с к осям а, 0 и d, q.................... 43
§ 7. Диаграмма синхронной машины для установившегося сим-
метричного режима работы................................... 58
§ 8. Уравнение моментов и электромагнитный момент. 60
§ 9. Уравнения синхронной машины в относительном движении 64
§ 10. Система относительных единиц......... 66
§ 11. Уравнения машины без демпферной обмотки в относитель-
ных единицах............................................... 77
§ 12. Физический смысл коэффициента р. Переходное сопротивле-
ление xd................................................... 79
§ 13. Продольная э. д. с. за переходным сопротивлением E’d . . . 81
§ 14. Общая характеристика системы уравнений синхронной ма-
шины с одним контуром на роторе............................ 84
Глава третья. Токи короткого замыкания синхронной машины без
демпферной обмотки............................................... 86
§ 15. Общие замечания .................................................................. —
А. Трехфазное короткое замыкание
§ 16. Общие физические представления .................................................. 88
§ 17. Определение токов машины при трехфазном коротком за-
мыкании ................................................... 91
§ 18. Определение постоянных времени T'd и Та......................................... 101
§ 19. Определение токов машины при трехфазном коротком замы-
кании с учетом активного сопротивления цепи статора . . 10g
Б. Однофазное и двухфазное короткие замыкания
§ 20. Предварительные замечания....................................................... 107
§ 21. Общие физические представления ................................................. 108
§22. Определение токов при двухфазном коротком замыкании . . . 109
§ 23. Определение токов при однофазном коротком замыкании 118
§ 24. Постоянные времени затухания токов при однофазном и
двухфазном коротких замыканиях........................... 123
в
Оглавление
§ 25. Применимость метода симметричных составляющих для
определения токов при внезапных несимметричных коротких
замыкаинях................................................. 124
§ 26. Сравнение максимальных токов при трехфазном, двухфазном
н однофазном коротких замыканиях для машины без демп-
ферной обмотки ............................................ 128
§ 27. Перенапряжения на статоре синхронной машины при двух-
фазном коротком замыкании.................................. 129
Глава четвертая. Уравнения синхронной машины с демпферной обмот-
кой и определение токов короткого замыкания...................... 133
§ 28. Общие замечания........................................ —
§ 29. Уравнения синхронной машины с демпферными контурами 134
§ 30. Операторные уравнения синхронной машины.............. 138
§ 31. Эквивалентные индуктивные сопротивления контуров ма-
шины по продольной н поперечной осям в переходных
режимах ................................................... 141
§ 32. Продольная и поперечная э. д. с. за сверхпереходными со-
противлениями ............................................. 144
§ 33. Токи трехфазного короткого замыкания в синхронной ма-
шине с демпферной обмоткой ................................ 145
§ 34. Постоянные времени затухания токов.................... 158
§ 35. Токи двухфазного и однофазного короткого замыкания в ма-
шине с демпферной обмоткой ................................ 160
Глава пятая. Электромагнитный момент............................. 164
§ 36. Общие замечания......................................... —
§ 37. Электромагнитный момент в установившемся симметричном
режиме..................................................... 166
§ 38. Электромагнитный момент при трехфазном коротком за-
мыкании .................................................. —
§ 39. Электромагнитный момент при двухфазном коротком за-
мыкании.................................................... 173
§ 40. Электромагнитный момент при малых устойчивых гармони-
ческих колебаниях ротора .................................. 176
§ 41. Электромагнитный момент при асинхронном вращении с за-
данным скольжением ........................................ 189
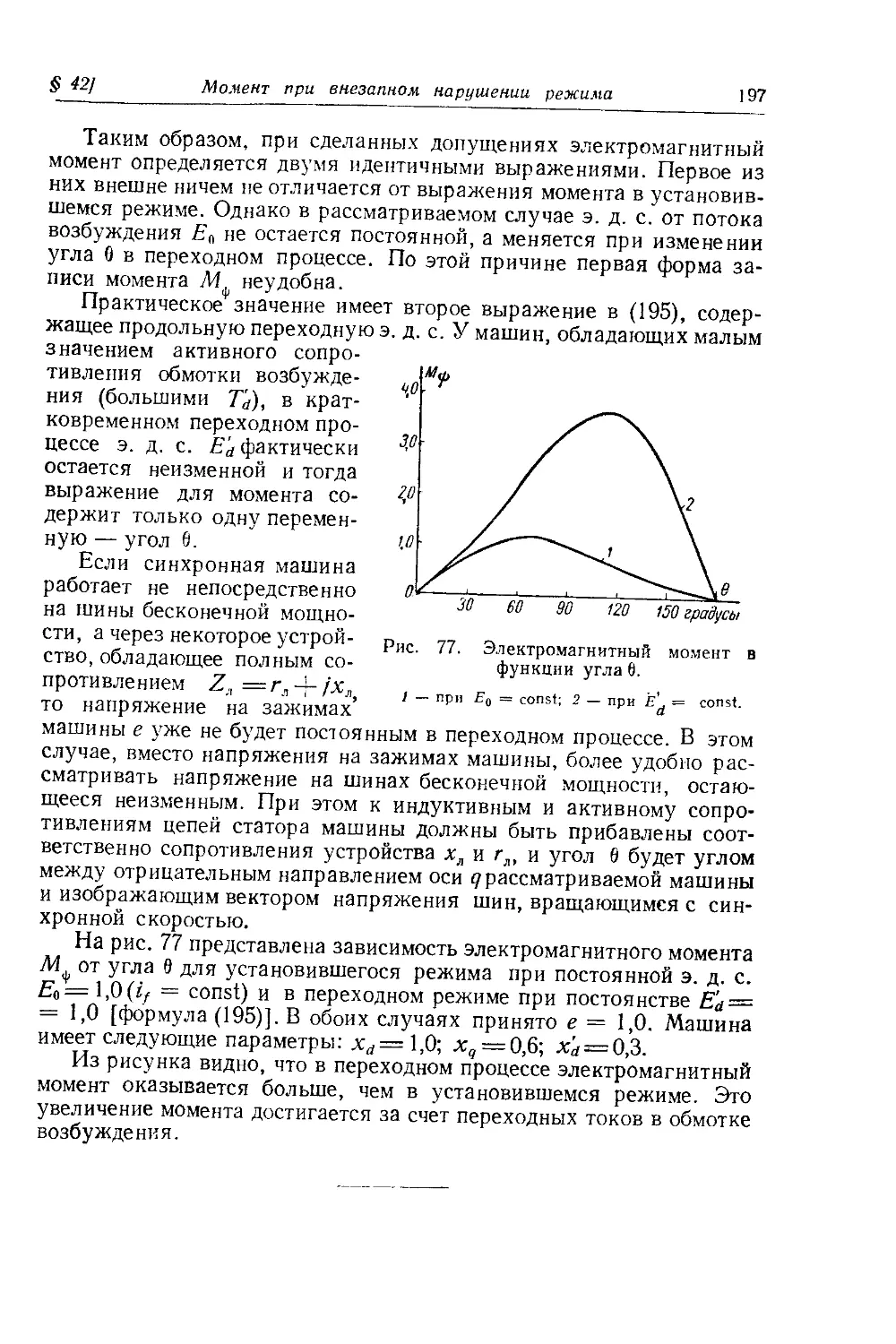
§ 42. Электромагнитный момент при внезапном нарушении уста-
' повившегося режима работы................................ 195
Глава шестая. Устойчивость работы сиихроииой машины.............. 198
§ 43. Понятие устойчивости работы синхронной машины........ —
§ 44. Методика исследования статической устойчивости на основе
малых возмущений...................................... 200
§ 45. Характер нарушений статической устойчивости..... 205
§ 46. Приближенный метод исследования статической устойчи-
вости ..................................................... 214
§ 47. Статическая устойчивость синхронной машины при регу-
лировании ее возбуждения 217
§ 48. Практическое применение методов исследования статичес-
кой устойчивости .......................................... 228
§ 49. Методика исследования динамической устойчивости .... 229
§ 50. Влияние регулирования возбуждения синхронных машин на
динамическую устойчивость.................................. 238
Глава седьмая. Схемы замещения синхронной машины................. 241
§ 51. Общие соображения....................................... —
§ 52. Схема замещения синхронной машины для установившегося
режима работы.............................................. 242
Оглавление
7
§ 53. Схемы замещения синхронной машины в асинхронном ре-
жиме с постоянным скольжением ........................... 245
§ 54. Упрощенные схемы замещения сопротивлений машины по
продольной, н поперечной осям при работе ее в асинхрон-
ном режиме............................................... 249
§ 55. Точные схемы замещения сопротивлений синхронной машины
по продольной и поперечной осям при работе ее в асинхрон-
ном режиме............................................... 254
§ 56. Схемы замещения сопротивлений по продольной и попереч-
ной осям машины при внезапном нарушении режима. . . 261
Глава восьмая. Самовозбуждение синхронной машины при наличии ем-
кости в цепи статора.......................................... 263
§ 57. Общие соображения....................................... —
§ 58. Уравнения машины при наличии емкости в цепи статора 264
§ 59. Возникновение самовозбуждения синхронной машины при
наличии емкости в цепи статора........................... 267
§ 60. Виды самовозбуждения.................................. 268
§ 61. Самовозбуждение синхронной машины с симметричным ро-
тором ................................................... 271
§ 62. Комплексный метод анализа асинхронного самовозбужде-
ния синхронной машины.................................... 276
§ 63. Общая методика определения условий самовозбуждения син-
хронной машины по характеристическому уравнению . . . 278
§ 64. Условия самовозбуждения синхронной машины без демпфер-
ной обмотки.............................................. 279
§ 65. Самовозбуждение синхронной машины с демпферной обмот-
кой ....................................................... 285
Г лава девятая. Сводка основных уравнений и расчетных формул .... 288
Приложение....................................................... 306
Литература...................................................... 307
ВВЕДЕНИЕ
При изменении параметров электрических цепей машины и на-'
пряжений, приложенных к ним', а также момента механических сил,
действующих на ротор, возникает процесс, который называют пере-
ходным. При этом меняются во времени величины, характеризую-
щие режим работы машины: токи, напряжения, скорость вращения
ротора. Характер протекания переходного процесса в электрической
машине очень часто определяет поведение всей системы, элементом
которой является машина.
Переходные процессы могут возникать в результате аварии в
системе (например короткие замыкания), либо являться следствием
операций, требуемых эксплуатационными условиями (например
пуск в ход, различного вида регулирование, торможение машины,
быстрое изменение нагрузки). Если первый вид переходных про-
цессов является нежелательным, но неизбежным и знакомство с
ним в теории и практике электромашиностроения произошло давно,
то второй вид процессов непрерывно пополняется за счет разнооб-
разных требований, выдвигаемых интенсификацией работы устройств
и установок, спецификой технологии производства, разработкой
новых схем. В этом большую роль сыграло придание электрической
машине регулятора (возбуждения, скорости вращения ротора),
оказывающего на нее непрерывное воздействие.
Время протекания переходного процесса обычно невелико.
Так, например, процесс внезапного короткого замыкания синхрон-
ных генераторов на практике длится 0,1—0,3 сек, некоторые пере-
ходные процессы могут длиться дольше — десятки секунд. Однако
возможны случаи, когда машина сколь угодно длительно работает,
по существу, в переходном процессе, как, например, при устой-
чивых малых колебаниях (синхронный двигатель, работающий с
компрессором).
Несмотря на обычную ограниченность во времени протекания
переходного процесса, последний оказывает глубокое влияние на
работу машины. Во многих случаях именно переходные процессы
определяют величину параметров машины при ее расчете, они ока-
зывают также влияние и на конструктивные соотношения в машине.
Так, для синхронных генераторов, работающих в энергосистеме,
требования динамической устойчивости приводят к необходимости
обеспечения надлежащего махового момента, что, в свою очередь,
определяет соотношение основных размеров генератора — его дли;
Введение
9
ны и диаметра; Возможность возникновения переходных режимов
в таких генераторах в условиях несимметрии и при асинхронизме
делает необходимым устройство в машине полной демпферной об-
мотки. Переходные режимы в ряде случаев предъявляют достаточно
жесткие требования и к возбудителям синхронных генераторов
в отношении их быстродействия и максимальных напряжений
возбуждения.
Переходные процессы могут сопровождаться появлением весьма
больших токов в цепях машины. Подобное положение возникает в
первую очередь в аварийных режимах. Например, при трехфаз-
ном коротком замыкании синхронного генератора ударные токи
в статоре могут в 10—15 раз превышать номинальные значения.
При однофазном коротком замыкании эти токи могут возрасти еще
на 25—35%. Значительные токи появляются при неправильной син-
хронизации синхронных генераторов, в результате самовозбуждения
при работе машины на емкость и в других случаях. В результате
этого отдельные части машины подвергаются воздействию весьма
больших сил. В частности, лобовые части обмоток статора синхрон-
ного генератора крупной мощности могут испытывать усилия, из-
меряемые тоннами. При коротких замыканиях генератора через
статор на фундамент передаются пульсационные моменты, в 5—
10 раз превышающие номинальный электромагнитный момент.
Значительный момент скручивает вал машины, особенно если ма-
ховой момент первичного двигателя не очень мал в сравнении с
маховым моментом генератора. При несимметричных коротких
замыканиях и отсутствии полных демпферных обмоток, на зажимах
статора синхронного генератора возможны значительные перена-
пряжения. Наконец в тех переходных режимах, где их продолжи-
тельность более или менее значительна (выпадение из синхронизма^
пуск и т. п.) должна быть произведена оценка теплового действия
токов.
Эти примеры можно было бы умножить, но и из того, что ска-
зано, очевидно, что только ясное понимание явлений, происходя-
щих в электрических машинах при переходных процессах, и воз-
можность количественной оценки их позволяют осуществить ра-
циональное проектирование электрической машины, произвести
надлежащий выбор электрооборудования, а также обеспечить на-
дежную его работу.
Характер протекания переходных процессов зависит прежде все-
го от вида электрической машины (коллекторная, бесколлекторная).
Существенное значение имеет также соотношение между скоростью
протекания чисто механического процесса (изменение скорости)
и быстротой изменения процесса электромагнитного (токи, электро-
магнитный момент). Если иметь в виду бесколлекторные машины
переменного тока, то для асинхронных машин в большинстве слу-
чаев электромагнитный переходный процесс протекает настолько
быстро, что за это время скорость вращения ротора машины не
10
Введение
успевает существенно измениться. Это позволяет в ряде случаев
не учитывать сложный переходный электромагнитный процесс в
асинхронной машине, который быстро затухает, и производить
расчеты изменения скорости с помощью статических характеристик.
Так, например, процесс пуска асинхронного двигателя в большин-
стве случаев можно рассчитывать, исходя из статической зависимо-
сти электромагнитного момента от скорости.
Эти возможные упрощения явились причиной того, что переход-
ные процессы асинхронной машины в строгой форме исследованы
в меньшем объеме, чем для синхронной машины, хотя в настоящее
время необходимость в таком строгом исследовании возросла.
Для синхронной машины переходные процессы разработаны дос-
таточно глубоко, так как она является одним из главнейших элемен-
тов энергосистемы и надежность работы ее в различных режимах —
дело первостепенной важности. Вместе с тем их исследование
сопряжено со многими трудностями, особенно в тех задачах, где
возникает необходимость совместного рассмотрения механического
и электромагнитного процессов, когда они изменяются со скоростя-
ми одного порядка. Эти трудности имеют место даже при изучении
только одного электромагнитного переходного процесса, ввиду на-
личия многих контуров на роторе с различными параметрами по
продольной и поперечной осям, а также из-за усложняющего влия-
ния магнитной асимметрии ротора (в случае машины явнополюсного
типа).
Первоначально теория синхронной машины была разработана,
в основном, трудами американских и немецких ученых — Парка,
Догерти, Никла, Дрейфуса, Нитхаммера, Бирманса и др. В даль-
нейшее развитие и углубление этой теории и разработку новых
методов исследования значительный вклад внесли советские уче-
ные — А. А. Горев, Д. А. Городский, Л. Н. Грузов, Е. Я. Казов-
ский, М. П. Костенко, Л. А. Ломоносова, Р. А. Лютер, Н. Н. Щед-
рин и др.
При аналитических исследованиях переходных процессов син-
хронной машины применяются такие методы, как преобразование ко-
ординат, введение комплексных величин для мгновенных значений
переменных, схемы замещения для различных режимов машины,
метод малых колебаний, методика, использующая теорему посто-
янства потокосцеплений контуров синхронной машины. Разработа-
ны графоаналитические способы представления переходных процес-
сов. Большую помощь при аналитических исследованиях оказы-
вают математические машины, получившие за последнее время силь-
ное развитие. Необходимо также отметить еще один важный метод
исследования переходных процессов в системах, содержащих син-
хронные машины — это электродинамическое моделирование, т. е.
воспроизведение процессов на физических моделях вращающихся
машин. Сочетание этого метода с аналитическим способом исследо-
вания открывает новые возможности при решении сложных проблем.
Введение
11
Эффективность применения того или иного метода зависит от
условий конкретной задачи.
Выше отмечалось многообразие переходных процессов, встре-
чающихся на практике. И хотя не существует строгой и исчерпы-
вающей их классификации, в применении к синхронной машине
можно условно разделить все переходные процессы на две боль-
шие группы, приняв в качестве характерного признака — сте-
пень отклонения скорости вращения машины в рассматриваемом
процессе от синхронной скорости нормального режима.
Первую группу переходных процессов синхронной машины мо-
гли бы составить процессы, возникающие при включении машины
на сеть (асинхронный пуск двигателя и компенсатора, самосинхро-
низация, повторное включение генератора). Сюда же можно отнести
процессы при асинхронном ходе машины после выпадения ее из
синхронизма, так как перечисленные выше режимы имеют место
при несинхронном вращении ротора с более или менее значительным
скольжением.
Во всех этих режимах важным является определение: 1) условий
вхождения машины в синхронизм; 2) токов статора и ротора;
3) электромагнитного момента.
Отметим, что нахождение величины токов представляет интерес
не только с точки зрения механических усилий, действующих на
обмотки, но и для оценки нагрева обмоток при значительной про-
должительности процесса.
Важной характеристикой процесса является электромагнитный
момент, определяющий, с одной стороны, ход процесса (например
разгон машины при асинхронном пуске и время пуска, возмож-
ность впадения машины в синхронизм), а с другой — механическую
нагрузку на вал машины, ее фундамент и детали крепления актив-
ной стали статора.
Строгое исследование указанной группы процессов весьма за-
труднительно, поэтому обычно рассматривается задача для ряда
постоянных значений скольжения (квазиустановившийся режим).
В этой книге асинхронный режим изложен только применитель-
но к асинхронному пуску машины.
Ко второй группе переходных процессов можно отнести такие
процессы, которые протекают при достаточно малых скольжениях
машины. Сюда относятся процессы при внезапных набросах и
сбросах нагрузки, внезапных коротких замыканиях с последующим
их отключением, коммутационных переключениях в системе пере-
менного тока. Исследование таких процессов проводится в двух на-
правлениях: 1) решается задача о том, сохраняет ли машина син-
хронизм с системой при данном возмущении установившегося режи-
ма (проверяется динамическая устойчивость); 2) находятся токи,
электромагнитные моменты, а иногда и напряжения на обмотках
для определения механической и электрической прочности соот-
ветствующих элементов самой машины. Это второе направление
12
Введение
представлено в книге наиболее тяжелым для машины случаем ко-
роткого замыкания.
При исследовании динамической устойчивости можно поставить
ограничение в величине возмущения установившегося режима и,
в частности, рассмотреть случай сколь угодно малых возмущений.
Решение такой самостоятельной задачи имеет большое практическое
значение, ибо оно позволяет установить, возможен или нет задан-
ный установившийся режим работы (проверяется статическая устой-
чивость). Это важно для оценки предельных нагрузок синхронной
машины, нахождения рациональной системы регулирования, опре-
деления возможных статических режимов при наличии емкости в
статоре машины и т. д.
Вопросы статической и динамической устойчивости даны в книге
только в своей основе.
Отметим, что в книге вообще рассмотрен только наиболее прос-
той случай работы синхронной машины на сеть бесконечной мощ-
ности, к которому сводится большое количество практических
задач.
ГЛАВА ПЕРВАЯ
ОБЩИЕ СВЕДЕНИЯ О СИНХРОННОЙ МАШИНЕ
§ 1. Магнитная система и обмотки
Будем иметь в виду нормальное исполнение синхронной машины
с обмотками якоря, расположенными на неподвижной части ма-
шины — статоре, основное магнитное поле которой создается
обмоткой возбуждения, размещенной на вращающейся части —
роторе. Роторы синхронных машин, как известно, имеют два со-
вершенно различных конструктивных исполнения: явнополюсное и
неявнополюсное.
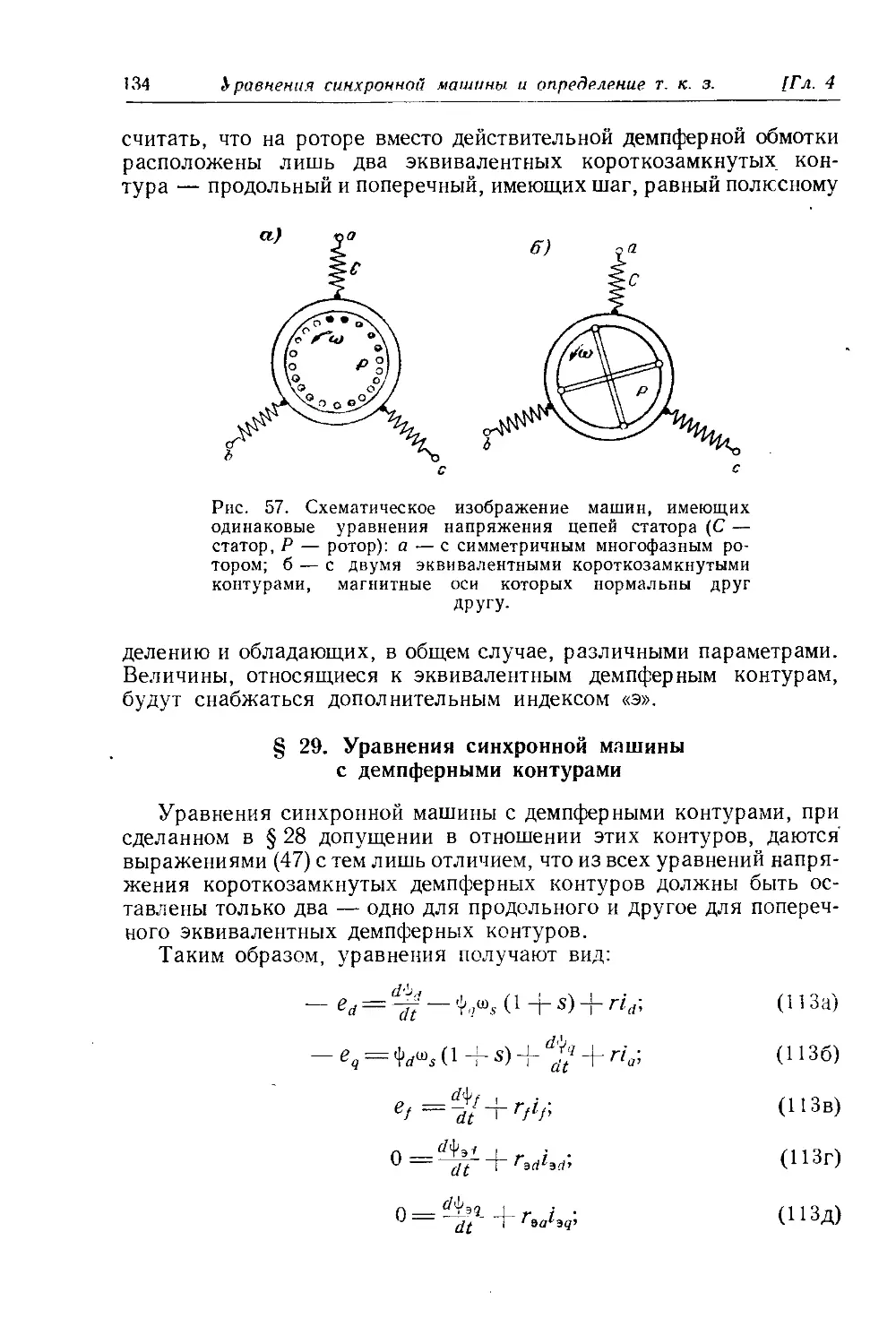
Рнс. 2. Ротор синхронной машины в
неявнополюсном исполнении (схема-
тический разрез).
1 — статор; 2 — воздушный зазор; 3 —
обмотка возбуждения (показана частично).
Рис. 1. Ротор синхронной машины в
явнополюсном исполнении (схемати-
ческий поперечный разрез).
/ — статор; 2 — воздушный зазор; 3 —
обмотка возбуждения (показана только на
двух полюсах); 4 — вал; 5 — крепление
полюса.
Как магнитопровод явнополюсный ротор (рис. 1) имеет две оси
магнитной симметрии: ось полюса, называемую продольной осью,
и ось, проходящую посередине между полюсного пространства,
так называемую поперечную ось; первая обозначается буквой d,
14
Общие сведения о синхронной машине
[Гл. t
вторая — буквой q (на рис. 1 показана пара осей). Неявнополюсный
ротор (рис. 2) также имеет две оси магнитной симметрии — про-
дольную d и поперечную q, однако в отличие от явнополюсного ро-
тора здесь магнитное сопротивление, обусловленное воздушным
зазором, по осям d и q практически одинаковое (зубчатость ротора
на части его окружности оказывает очень малое влияние).
Обмотка возбуждения в неявнополюсном роторе оказывается
распределенной по части окружности ротора, в отличие от явно-
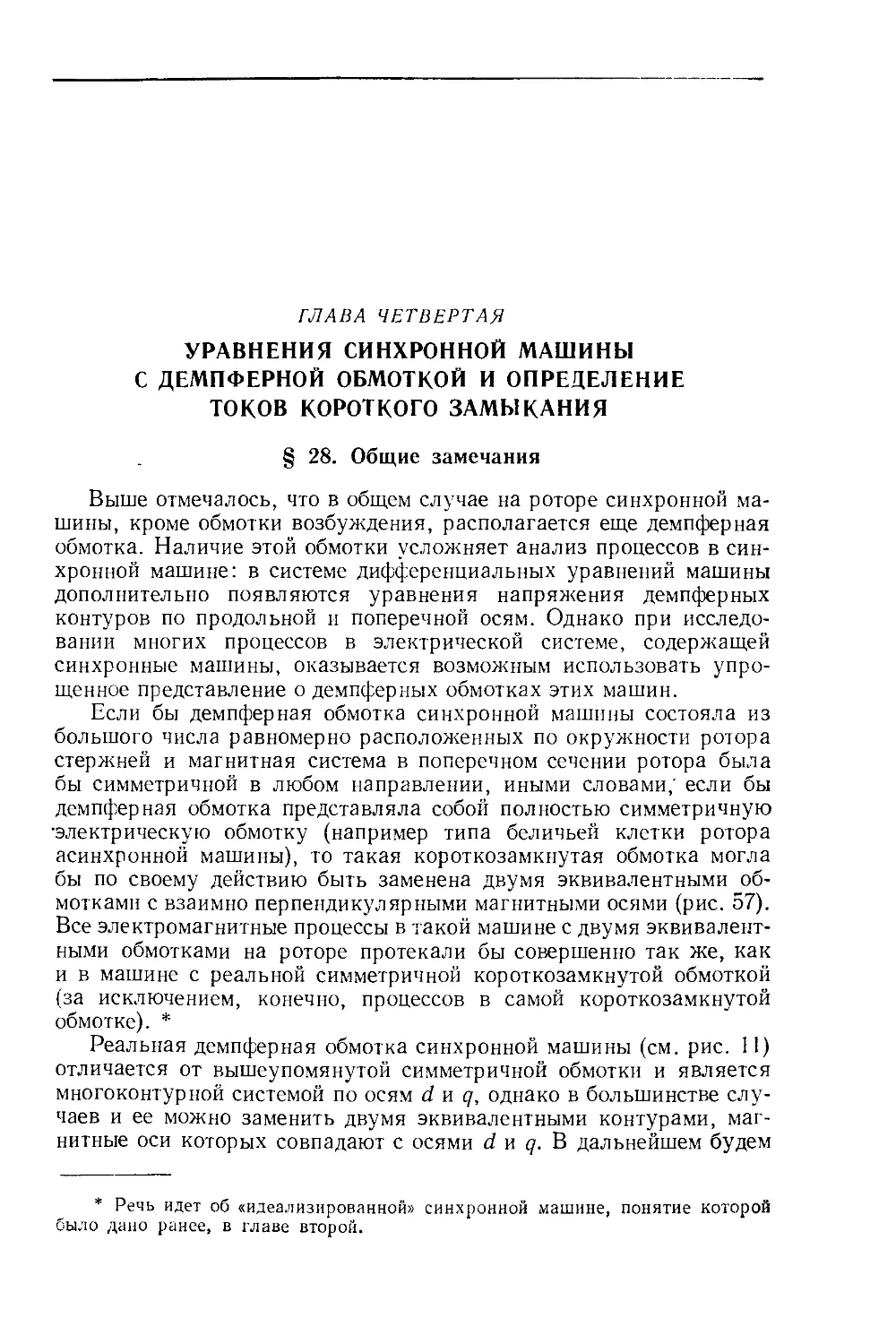
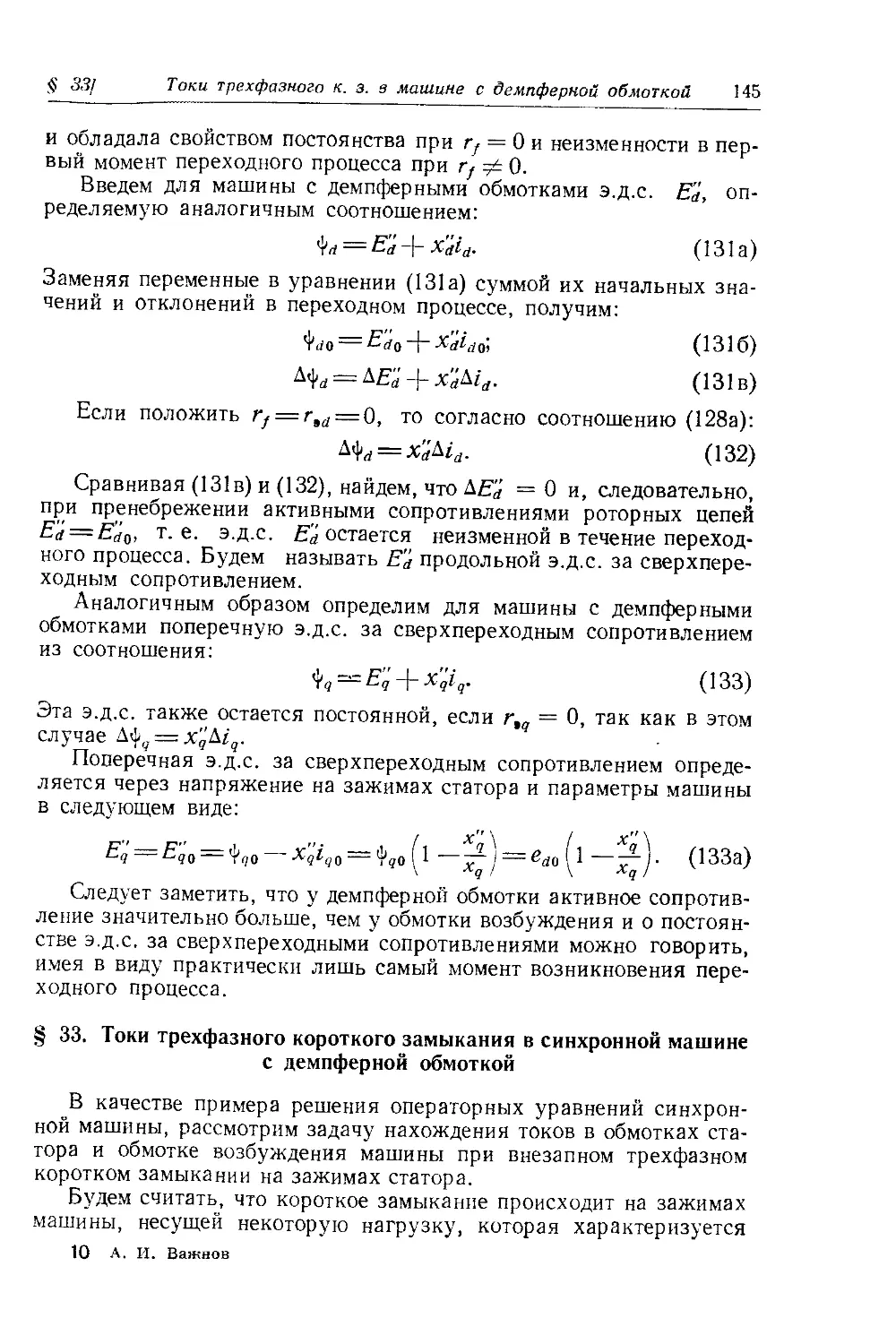
Рис. 3. Демпферная обмотка в явнополюсной синхронной машине:
а — неполная демпферная обмотка; б — полная демпферная об-
мотка.
С — стержни; КК — короткозамыкающие кольца; КС — короткозамыкающие
сегменты.
полюсного типа, где она имеет вид сосредоточенной обмотки. На
явнополюсном роторе,кроме обмотки возбуждения,часто размеща-
ется еще демпферная обмотка (ее называют иногда демпферной клет-
кой). Она состоит из медных или латунных стержней, заложенных
в пазы, которые образованы в полюсных наконечниках вблизи от
их наружной поверхности, и замкнутых между собой по торцам
машины (рис. 3). Если перемкнуты стержни, расположенные толь-
ко в пределах каждого данного полюсного наконечника, то демп-
ферную обмотку называют частичной или неполной (рис. 3, а).
Стержни, соединенные по торцам машины короткозамыкающими
кольцами, образуют полную демпферную обмотку (рис. 3, б).
Демпферная обмотка всегда устанавливается на синхронных дви-
$ 2]
Магнитные поля и э. д. с.
15
гателях и является пусковой обмоткой при асинхронном пуске
двигателя. В синхронных генераторах демпферная обмотка устра-
ивается обычно в машинах большой, а иногда и средней мощности.
Она служит в основном для успокоения колебаний ротора, облег-
чения втягивания в синхронизм при синхронизации и асинхронных
режимах с малым скольжением, а также для устранения перенапря-
жений в обмотках статора при несимметричных коротких замыка-
ниях. На неявнополюсных роторах специальной демпферной об-
мотки в настоящее время не устраивается, однако, сплошное стальное
тело ротора, в котором могут хорошо развиваться вихревые токи
при несинхронном вращении магнитного поля и ротора, играет
роль достаточно сильной демпферной обмотки.
Количество обмоток якоря определяется числом фаз переменно-
го тока т. Трехфазная машина, которую только и будем в дальней-
шем рассматривать, имеет на статоре три фазные обмотки, соединен-
ные между собой, в большинстве случаев, в звезду. Фазные обмотки
на статоре представляют совокупности распределенных по окруж-
ности статора катушек, симметрично размещенные в магнитном поле
ротора, т. е. со взаимным сдвигом в 120 электрических градусов.
Хотя обмотки статора явнополюсных и неявнополюсных машин
конструктивно могут несколько различаться (например с целым
и дробным числом пазов на полюс и фазу q), однако с точки зрения
основных электромагнитных процессов они совершенно идентичны.
§ 2. Магнитные поля и э. д. с.
а) Общие замечания. Для общей оценки тех упрощений, кото-
рые будут сделаны при составлении дифференциальных уравнений
синхронной машины, а также для определения индуктивностей ее
обмоток, необходимо иметь представление о характере магнитных
полей, создаваемых токами различных обмоток машины, и э. д. с.,
индуктируемых этими полями. При этом наибольший интерес
имеют поля, магнитно связывающие обмотки друг с другом. Это
в основном поля, пересекающие воздушный зазор между статором и
ротором.
Магнитное поле в воздушном зазоре между статором и ротором
является трехмерным. Это значит, что индукция поля изменяется
не только вдоль окружности расточки статора, но и в перпенди-
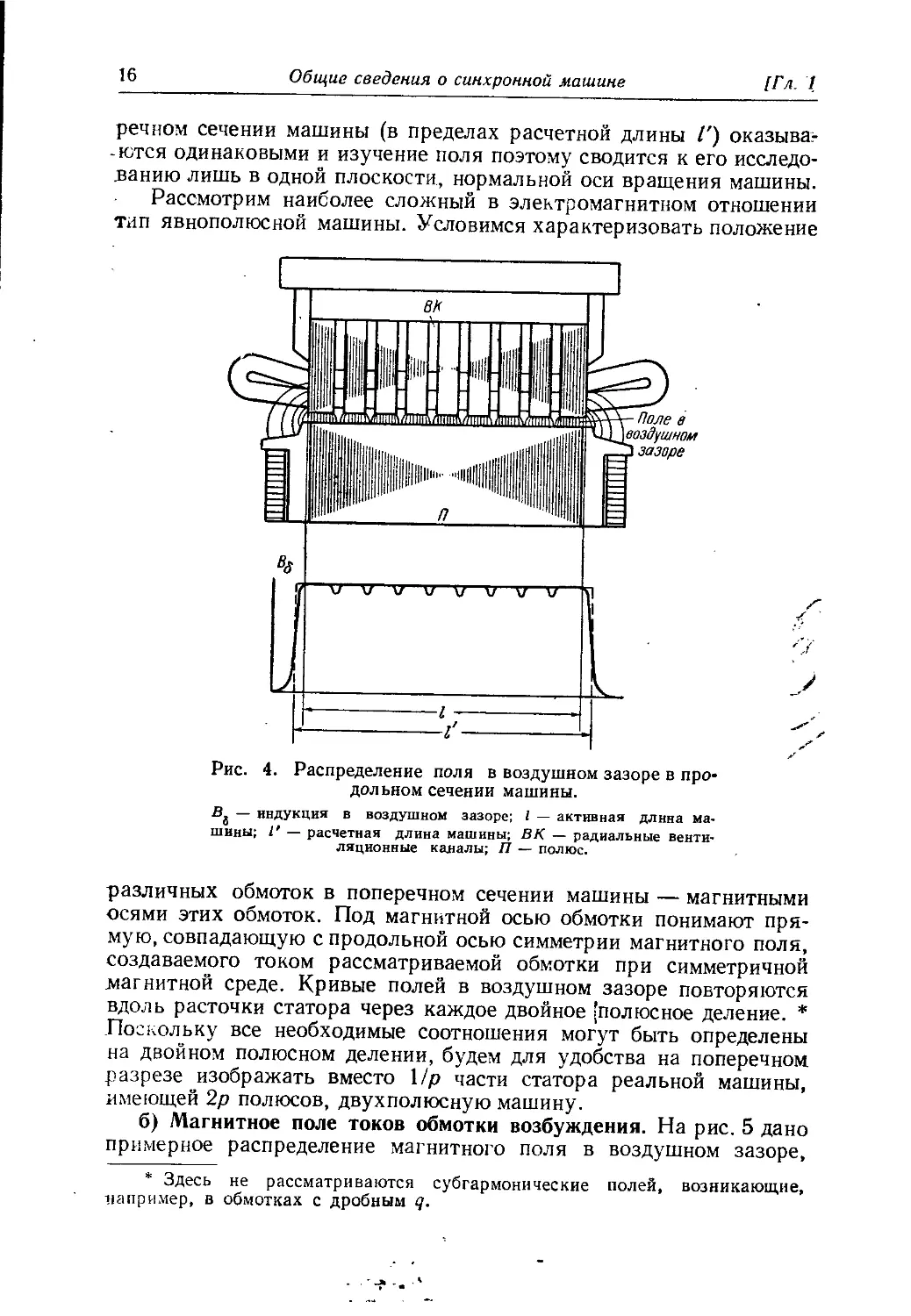
кулярном направлении — вдоль оси вращения. На рис. 4 сплошной
линией представлена примерная кривая распределения поля в за-
зоре в продольном сечении машины. Поскольку э. д. с. любого
проводника якоря и электромагнитная сила, действующая на про-
водник, определяется лишь интегральным значением поля вдоль
оси машины, в продольном сечении машины действительное распре-
деление поля заменяется расчетным (пунктирная линия на рис. 4).
Таким образом трехмерное магнитное поле в воздушном зазоре сво-
дится к плоско-параллельному, когда картины поля в любом попе-
16
Общие сведения о синхронной машине
[Гл. 1
речном сечении машины (в пределах расчетной длины /') оказыва-
ются одинаковыми и изучение поля поэтому сводится к его исследо-
ванию лишь в одной плоскости, нормальной оси вращения машины.
Рассмотрим наиболее сложный в электромагнитном отношении
тип явнополюсной машины. Условимся характеризовать положение
Рис. 4. Распределение поля в воздушном зазоре в про-
дольном сечении машины.
— индукция в воздушном зазоре; I — активная длина ма-
шины; — расчетная длина машины; В К — радиальные венти-
ляционные каналы; П — полюс.
различных обмоток в поперечном сечении машины — магнитными
осями этих обмоток. Под магнитной осью обмотки понимают пря-
мую, совпадающую с продольной осью симметрии магнитного поля,
создаваемого током рассматриваемой обмотки при симметричной
магнитной среде. Кривые полей в воздушном зазоре повторяются
вдоль расточки статора через каждое двойное ^полюсное деление. *
Поскольку все необходимые соотношения могут быть определены
на двойном полюсном делении, будем для удобства на поперечном
разрезе изображать вместо 1/р части статора реальной машины,
имеющей 2р полюсов, двухполюсную машину.
б) Магнитное поле токов обмотки возбуждения. На рис. 5 дано
примерное распределение магнитного поля в воздушном зазоре,
* Здесь не рассматриваются субгармонические полей, возникающие,
например, в обмотках с дробным q.
§ 2]
Магнитные поля и э. д. с.
17
созданного токами обмотки возбуждения. Сплошная кривая пред-
ставляет поле при гладком статоре, пунктирная — при зубчатом.
Действительное распределение поля заменяют совокупностью
Статор
Рис. 5. Распределение вдоль окружности расточки
статора поля в воздушном зазоре Bj, обусловленного
током обмотки возбуждения: а — действительная кри-
вая поля
1 — зубчатый якорь; 2 — гладкий якорь;
б — пространственные гармонические поля (изображены
только основная и третья гармонические)
3 — основная гармоническая; 4 — третья гармоническая;
в — поле, обусловленное зубцами якоря.
гармонических полей, из которых главную роль играет первая
или «основная» гармоническая (на рис. 5,6 изображены только
основная и 3-я гармо
2 А. И; Важное
РСФ
гора с синхронной
Баш г0 *иарх•«
Уфимс , J химзавод
Тсхниче-жая библиотека
18
Общие сведения о синхронной машине
[Гл 1
скоростью все гармонические поля возбуждения перемещаются в
пространстве с одинаковой скоростью, равной скорости вращения
ротора. Поэтому, если первая гармоническая поля индуктирует
в обмотках статора э. д. с. основной частоты, то высшие гармониче-
ские поля индуктируют соответственно высшие гармонические э. д. с.
В нормально спроектированных синхронных машинах удается
получить высшие гармонические э. д. с. в обмотках статора от поля
обмотки возбуждения весьма малой амплитуды. Этому способству-
ет распределение катушек фазных обмоток по окружности статора и
укороченный шаг катушек, дающие низкое значение обмоточного
коэффициента для ряда высших гармонических, выполнение обмо-
ток с дробным q и др. Поэтому при определении э. д. с. в обмотках
статора будем в дальнейшем считаться лишь с основной гармониче-
ской поля возбуждения.
Потокосцепление с самой обмоткой возбуждения (потокосцепле-
ние самоиндукции) от трубок поля, пересекающих воздушный за-
зор, определяется по реальной кривой поля в зазоре, так как все
они сцепляются с полным числом витков обмотки возбуждения.
Магнитная ось обмотки возбуждения, как это легко установить из
рис. 1 и 5, совпадаете продольной осью d.
в) Магнитное поле токов обмоток статора. Если принять про-
ницаемость стали = со и полюса симметричными, то индукция
в воздушном зазоре Вх, обусловленная токами обмоток статора,
может быть определена в виде:
Bx — Fx-Ax, (1)
где Fx — м. д. с. обмотки статора в данной точке;
ЛЛ — магнитная проводимость воздушного зазора в этой же точке.
Как показал ряд исследований [Л. 1, 2], для характеристики
основного электромагнитного процесса машины достаточно провести
определение магнитного поля в воздушном зазоре в предположении,
что на статоре отсутствуют пазы (гладкий статор) и что токи пазов
якоря сконцентрированы в точке (посередине паза, на поверхности
статора) (рис. 6). При этом м. д. с. каждой фазной обмотки будет
представлять совокупность пространственных гармонических: ос-
новной, имеющей период изменения вдоль расточки статора, равный
двойному полюсному делению, и высших гармонических с перио-
дом изменения в v раз меньше, где v — порядок гармонической.
В частном случае, когда три фазные обмотки статора обтекаются
симметричными синусоидальными токами прямой последователь-
ности, первая пространственная гармоническая м. д. с. обмоток
статора будет вращаться с синхронной скоростью <оЛ. в том же на-
правлении, что и ротор, третья гармоническая окажется равной ну-
лю, пятая будет вращаться со скоростью 1/5coJ в сторону, противо-
положную вращению ротора, седьмая—со скоростью в сторо-
ну вращения ротора и т. д. (рис. 7).
$ 2]
Магнитные поля и э. д. с.
19
В общем случае магнитное поле в воздушном зазоре, созданное
током фазной обмотки, определяется по выражению (1) для каждой
гармонической м. д. с. отдельно, так как магнитная проводимость
Лх, вообще говоря, различна для различных гармонических м. д. с.
[Л. 3].
Условимся определять положение точки в воздушном зазоре, в
которой магнитная проводимость равна Лх, угловой координатой
а, отсчитываемой от оси полюса
(рис. 6).
Магнитная проводимость Лх
изменяется вдоль окружности ста-
тора вследствие переменного зазо-
ра, однако величина ее меняется
периодически и период этот равен
180 электрическим градусам, так
Рис. 6. Расчетное распределение то- Рис. 7. Распределение м. д. с. якоря
ков обмотки статора. вдоль окружности расточки стато-
ра: а — первая (основная) простран-
ственная гармоническая м. д. с.;
б — питая пространственная гармо-
ническая м. д. с.
как в точках,отстоящих друг от друга на полюсное деление, воз-
душные зазоры одинаковы. Кроме того, воздушный зазор симметри-
чен относительно оси полюса, так что при изменении знака коорди-
наты (угла а), проводимость Ах не должна изменяться. Эти общие
соображения позволяют представить Лх в виде ряда, содержащего
лишь четные косинусные гармонические:
Ах = Ло Л2 COS 2а Л* cos 4а . (2)
Р. Догерти и Ч. Никл показали [Л. 3], что магнитное поле в зазоре,
которое индуктирует в обмотке статора основную гармоническую
э. д. с., определяется только первыми двумя членами ряда проводи-
мости, так что можно принять:
Ах = Ло -ф- Л2 cos 2а. (3)
При переменной вдоль расточки статора проводимости Ах магнит-
ное поле, обусловленное основной гармонической м. д. с. якоря,
будет отличаться от синусоидального. На рис. 8 изображено распре-
2*
20
Общие сведения о синхронной машине
[Гл. 1
деление индукции в зазоре, созданной основной гармонической
м. д. с. якоря, действующей по продольной оси машины. В верхней
части рисунка показано распределение индукций, обусловленных
отдельными составляющими магнитной проводимости. В нижней
части рисунка представлена действительная кривая индукции ВаФ
Рис. 8. Распределение магнитного
поля в воздушном зазоре, создан-
ного продольной м. д. с. якоря.
1 — поле, обусловленное постоянной
магнитной проводимостью Л ; 2 — поле,
обусловленное второй гармонической
проводимости Atcos2(x; 3 — действитель-
ная кривая поля (В^); 4 — основная
гармоническая поля
определяемая в виде A0cosa-|-
Л2 cos 2a • cos а, и ее первая гар-
моническая ВагП. Полями высших
пространственных гармонических
индукции, обусловленных основной
гармонической м. д. с., можно
пренебречь, так как они дают не-
большие потокосцепления как со
статорными, так и роторными об-
мотками. Это объясняется, с одной
стороны, небольшими величина-
ми самих магнитных потоков, а с
другой — малым значением обмо-
точных коэффициентов обмотки
статора для гармонических
поля, имеющих заметную ам-
плитуду.
Высшие пространственные гар-
монические м. д. с. обмоток ста-
тора создают магнитные поля,
индуктирующие в статоре э. д. с.
не только повышенной частоты (выс-
шие гармонические), но и основной
частоты. Это происходит потому,
что имеются поля, которые пере-
мещаются вдоль окружности ста-
тора со скоростью в v раз меньшей
скорости основной гармонической,
но их полюсное деление также в
v раз меньше, чем у основной гар-
монической. Интересно отметить,
что высшая гармоническая м. д. с.
порядка v = 6 1 (k = 1, 2, 3
и т. д.) создает не только v гармоническую поля, но и гармониче-
скую v' — 6k ± 1, также индуктирующую в статоре э. д. с. основ-
ной частоты [Л. 3]. Так, 5-я гармоническая м. д. с. (v = 5, k — 1)
создает, кроме 5-й гармонической поля, еще 7-ю гармоническую
(v' — 7); 7-я гармоническая м. д. с. (v = 7, k — 1) создает 7-ю и 5-ю
гармонические поля (v' = 5) и т. д. Это результат наличия в магнит-
ной проводимости члена Л2 cos 2a.
В нормально спроектированных синхронных машинах обмоточ-
ные коэффициенты для ряда высших гармонических м. д. с. стато-
§ 2]
Магнитные поля и э. д. с.
21
ра оказываются достаточно малыми, поэтому амплитуды соответ-
ствующих волн м.д. с. и полей малы. Это дает основание пренебречь
асинхронными моментами, которые могут создавать высшие про-
странственные гармонические поля, вращающиеся относительно
ротора, тем более, что скольжение их относительно ротора s, полу-
чается большим (например для v = 5 s, = 6, v = 7 5= —6, v =
= 11 s,= 12 ит. д.).
Синхронные моменты следует рассматривать только в некоторых
специальных случаях, например при резонансах высших временных
гармонических тока статора. Поскольку электромагнитными момен-
тами от полей высших пространственных гармонических можно пре-
небречь и вместе с тем они индуктируют в обмотках статора э д. с.
основной частоты, их относят к
полям рассеяния этих обмо-
ток.
Итак, можно считать, что маг-
нитное поле, созданное токами
обмоток статора, индуктирующее
в них э. д. с. основной частоты,
распределено в воздушном зазоре
вдоль окружности статора си-
нусоидально с периодом измене-
ния, равным двойному полюсному
делению машины. Это поле на-
зывается полем реакции якоря. Рис. 9. Магнитные оси фазных
Токи якоря создают также поле, обмоток статора а, Ь, с.
сцепляющееся только с обмоткой
якоря — поле рассеяния. Магнитные оси фазных обмоток статора
(а, Ь, с) сдвинуты друг относительно друга на угол 120 электрических
градусов, так как совокупности катушек, образующих фазную об-
мотку, размещены на статоре симметрично, т. е. сдвинуты на тот
же угол 120 градусов (рис. 9).
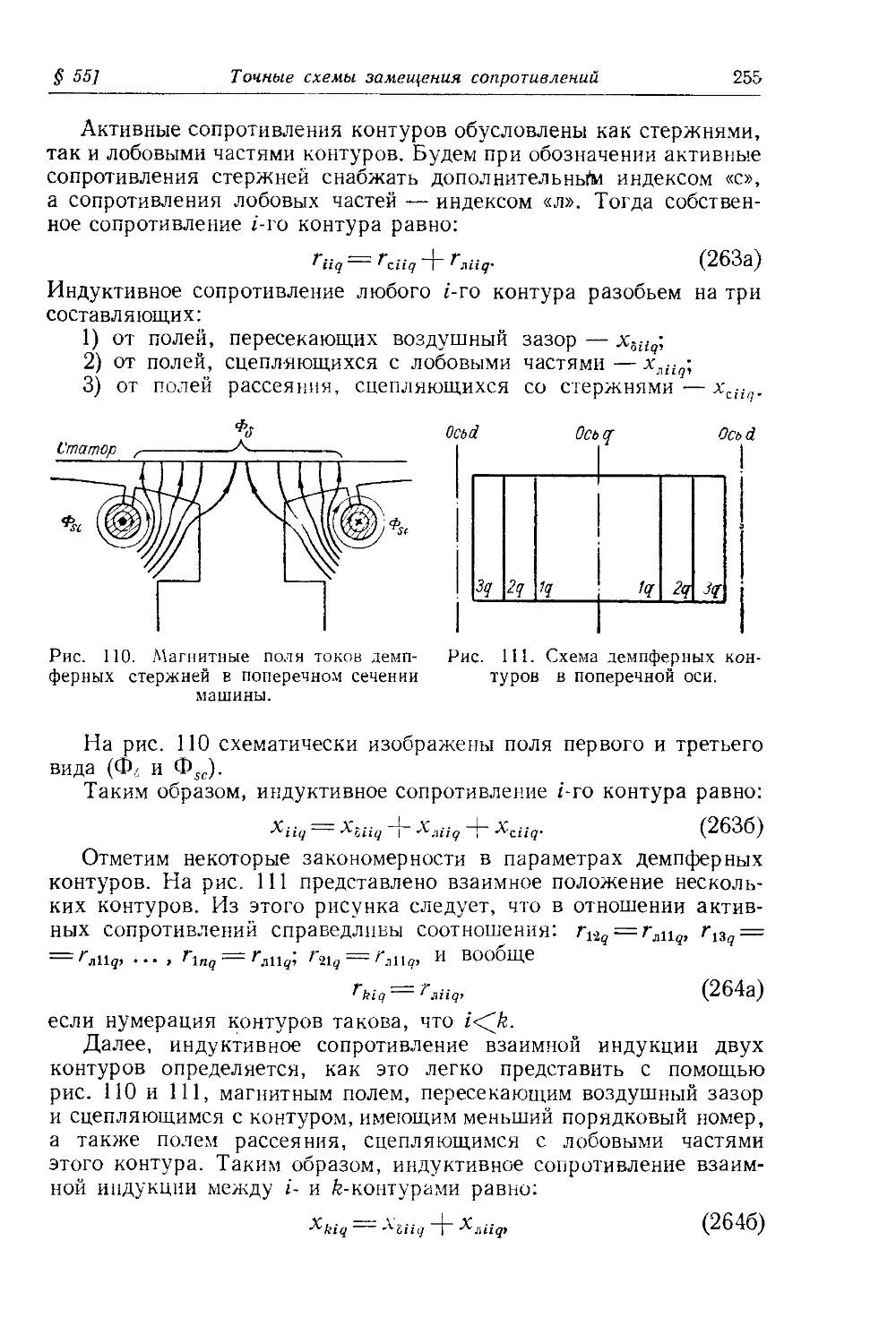
г) Магнитное поле токов демпферных контуров. В контурах
демпферной обмотки нет приложенных э. д. с., в них э. д. с. могут
только индуктироваться магнитными полями, сцепляющимися с
демпферной обмоткой. Даже в случае гармонически распределенного
внешнего магнитного поля в воздушном зазоре, перемещающегося
с некоторой скоростью относительно ротора, распределение токов в
стержнях демпферной обмотки, появляющихся под действием ин-
дуктированных в контурах обмотки э. д. с., имеет достаточно слож-
ный характер.
В общем случае реальное магнитное поле в воздушном зазоре
в данный момент времени имеет сложное распределение вдоль окруж-
ности статора, но это распределение будет периодическим с перио-
дом, равным двойному полюсному делению 2т. Во времени это поле
может меняться, однако точки, в которых индукция поля равна
нулю, хотя и могут перемещаться относительно демпферной обмотки,
22
Общие сведения о синхронной машине
[Гл. 1
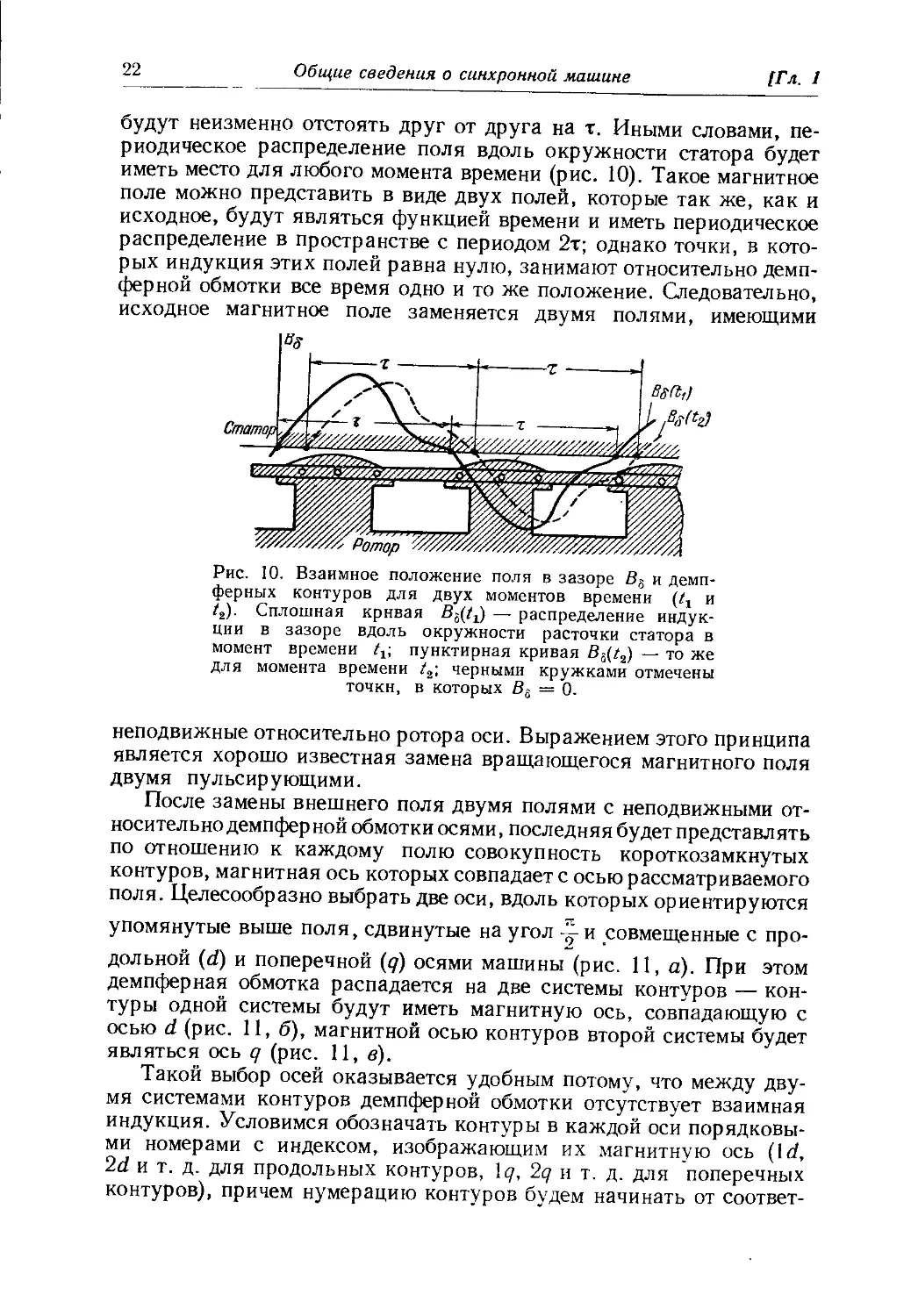
будут неизменно отстоять друг от друга на т. Иными словами, пе-
риодическое распределение поля вдоль окружности статора будет
иметь место для любого момента времени (рис. 10). Такое магнитное
поле можно представить в виде двух полей, которые так же, как и
исходное, будут являться функцией времени и иметь периодическое
распределение в пространстве с периодом 2т; однако точки, в кото-
рых индукция этих полей равна нулю, занимают относительно демп-
ферной обмотки все время одно и то же положение. Следовательно,
исходное магнитное поле заменяется двумя полями, имеющими
Рис. 10. Взаимное положение поля в зазоре и демп-
ферных контуров для двух моментов времени (1г и
/2). Сплошная кривая Ba(tj) — распределение индук-
ции в зазоре вдоль окружности расточки статора в
момент времени пунктирная кривая Ba(t2) — то же
для момента времени /2; черными кружками отмечены
точки, в которых Ва = 0.
неподвижные относительно ротора оси. Выражением этого принципа
является хорошо известная замена вращающегося магнитного поля
двумя пульсирующими.
После замены внешнего поля двумя полями с неподвижными от-
носительнодемпферной обмотки осями, последняя будет представлять
по отношению к каждому полю совокупность короткозамкнутых
контуров, магнитная ось которых совпадает с осью рассматриваемого
поля. Целесообразно выбрать две оси, вдоль которых ориентируются
упомянутые выше поля, сдвинутые на угол -^-и совмещенные с про-
дольной (d) и поперечной (<?) осями машины (рис. 11, а). При этом
демпферная обмотка распадается на две системы контуров — кон-
туры одной системы будут иметь магнитную ось, совпадающую с
осью d (рис. 11, б), магнитной осью контуров второй системы будет
являться ось q (рис. 11, в).
Такой выбор осей оказывается удобным потому, что между дву-
мя системами контуров демпферной обмотки отсутствует взаимная
индукция. Условимся обозначать контуры в каждой оси порядковы-
ми номерами с индексом, изображающим их магнитную ось (Id,
2d и т. д. для продольных контуров, lq, 2q и т. д. для поперечных
контуров), причем нумерацию контуров будем начинать от соответ-
§ 2]
Магнитные поля и э. д. с.
23
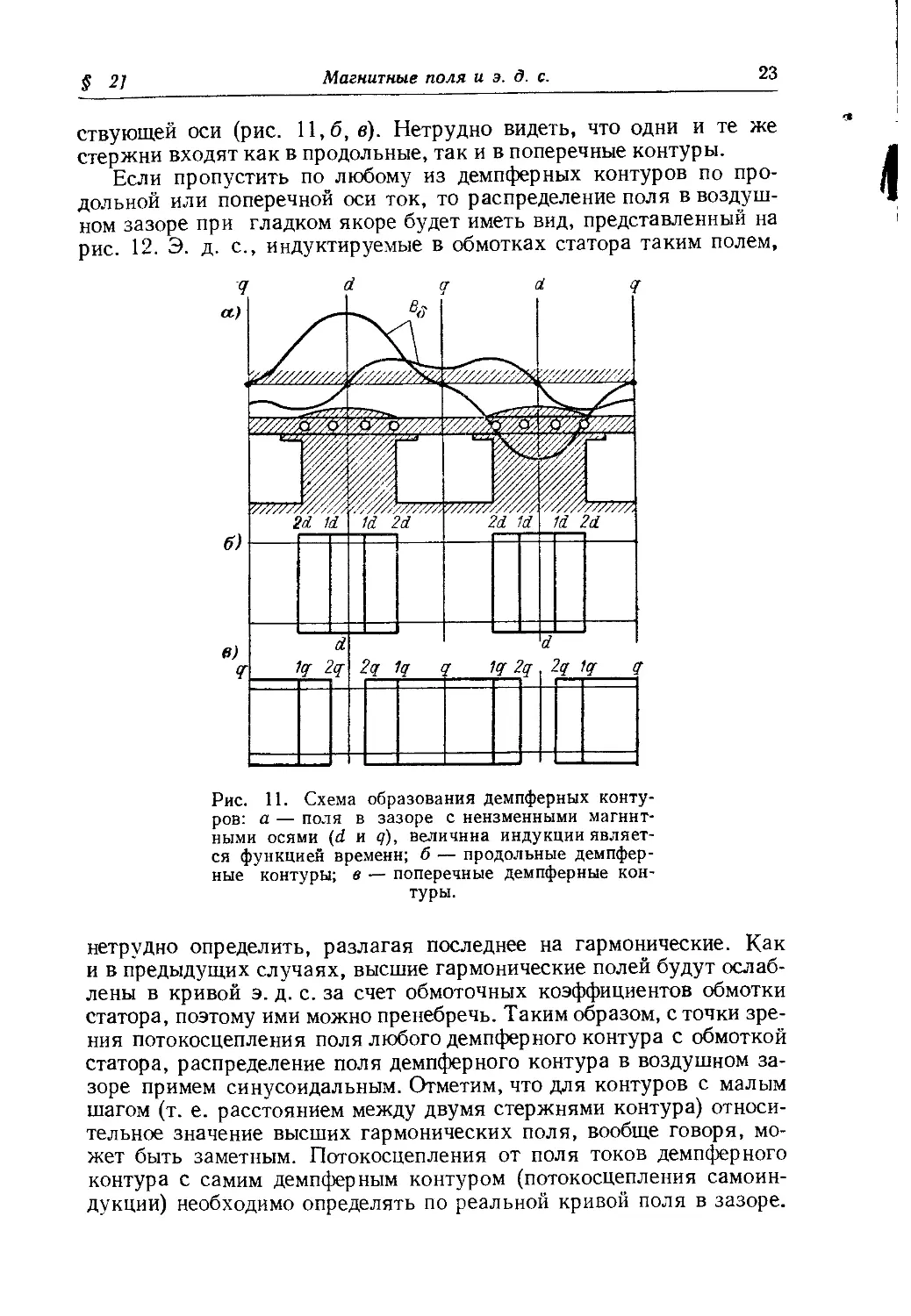
ствующей оси (рис. 11,6, в). Нетрудно видеть, что одни и те же
стержни входят как в продольные, так и в поперечные контуры.
Если пропустить по любому из демпферных контуров по про-
дольной или поперечной оси ток, то распределение поля в воздуш-
ном зазоре при гладком якоре будет иметь вид, представленный на
рис. 12. Э. д. с., индуктируемые в обмотках статора таким полем,
Рис. 11. Схема образования демпферных конту-
ров: а — поля в зазоре с неизменными магнит-
ными осями (d и q), величина индукции являет-
ся функцией времени; б — продольные демпфер-
ные контуры; в — поперечные демпферные кон-
туры.
нетрудно определить, разлагая последнее на гармонические. Как
и в предыдущих случаях, высшие гармонические полей будут ослаб-
лены в кривой э. д. с. за счет обмоточных коэффициентов обмотки
статора, поэтому ими можно пренебречь. Таким образом, с точки зре-
ния потокосцепления поля любого демпферного контура с обмоткой
статора, распределение поля демпферного контура в воздушном за-
зоре примем синусоидальным. Отметим, что для контуров с малым
шагом (т. е. расстоянием между двумя стержнями контура) относи-
тельное значение высших гармонических поля, вообще говоря, мо-
жет быть заметным. Потокосцепления от поля токов демпферного
контура с самим демпферным контуром (потокосцепления самоин-
дукции) необходимо определять по реальной кривой поля в зазоре.
24
Общие сведения о синхронной машине
[Гл. /
Аналогичным образом следует находить потокосцепления от поля
токов продольных демпферных контуров с обмоткой возбуждения
(потокосцепления взаимоиндукции продольных демпферных кон-
Рис. 12. Магнитное поле в воздушном зазоре от то-
ков продольного (а) и поперечного (б) демпферных
контуров.
1 — действительное распределение индукции: 2, 3, 4 — со-
ответственно первая (основная), третья и пятая гармониче-
ские индукции. Остальные гармонические на рисунке не
представлены.
туров и обмотки возбуждения). Это объясняется тем, что рассматри-
ваемые цепи являются сосредоточенными, имеющими одинаковое
сцепление трубок поля со всеми витками катушки, в отличие от фаз-
ных обмоток статора, катушки которых распределены вдоль окруж-
ности статора и, следовательно, в магнитном поле.
ГЛАВА ВТОРАЯ
УРАВНЕНИЯ СИНХРОННОЙ МАШИНЫ
§ 3. Общие положения
Дифференциальные уравнения синхронной машины были перво-
начально получены американским инженером Парком в 1929 г.
Им же были представлены исследования некоторых видов переход-
ных процессов синхронной машины, произведенные с помощью
этих уравнений методом операционного исчисления в форме Хевиеай-
да. Строгое доказательство и вывод дифференциальных уравнений
был сделан также советским ученым А. А. Горевым. Уравнения
Горева даны в классической форме записи дифференциальных урав-
нений для машины как с одним контуром на роторе — обмоткой
возбуждения, так и при наличии на роторе двух дополнительных
контуров — демпферных контуров по продольной и поперечной осям.
Позднее в уравнения синхронной машины Парка — Горева были
введены вместо действительных переменных — комплексные. Эта
форма уравнений представляет существенные удобства при анализе
ряда задач.
Дифференциальные уравнения Парка — Горева получены для
синхронной машины, обладающей рядом предполагаемых свойств,
которые в известной мере отличают ее от реальной машины. Подоб-
ную машину называют «идеализированной». Она характеризуется
следующими свойствами:
1. Магнитная проницаемость стали р.с машины равна бесконечно-
сти. Это предположение позволяет не только однозначно определить
картину поля от тока какой-либо обмотки, но и использовать прин-
цип наложения при определении результирующего поля в воздуш-
ном зазоре при совокупном действии токов всех обмоток машины.
Иными словами, индукция в любой точке зазора при одновременном
протекании токов во всех обмотках машины может быть определена
как сумма индукций в этой же точке, обусловленных теми же то-
ками, но протекающими поочередно в своих обмотках. В действи-
тельности рс является величиной конечной и зависящей от значения
магнитного потока. Для некоторых задач разработаны методы уче-
та насыщения магнитной системы машины, однако здесь они осве-
щаться не будут. Учет насыщения стали будет производиться соот-
26
Уравнения синхронной машины
[Гл. 2
ветствующим выбором индуктивностей машины («насыщенные»
и «ненасыщенные» значения).
2. Распределение полей самоиндукции обмоток статора и взаи-
моиндукции этих обмоток с обмотками ротора вдоль окружности
статора синусоидально. Иными словами, при рассмотрении магнит-
ных полей самоиндукции обмоток статора и взаимоиндукции этих
обмоток с обмотками ротора в «идеализированной» машине прини-
мается во внимание не действительное распределение индукции,
а только первая гармоническая этого распределения. О допусти-
мости такого предположения говорилось в § 2.
3. Фазные обмотки симметричны. Это значит, что они имеют оди-
наковые числа витков, активные сопротивления и взаимный сдвиг
магнитных осей. Стержни демпферной обмотки и магнитопровод
ротора симметричны относительно осей ротора d, q.
Уравнения напряжения обмоток машины в самой общей форме
имеют вид:
а) фазные обмотки статора (обозначаются буквами а, Ь, с)
~ea=pK + ria-,
еь =Р^ь 4~ Щ",
- ес = Р'Ъ + Пс,
(4а)
где еа, ёь, ес — фазные напряжения на зажимах обмоток статора;
Фь» Фс> h’ С — соответственно потокосцепления и токи
фазных обмоток статора; г — активное сопротивление этих обмоток;
р — знак дифференцирования по времени;
б) обмотка возбуждения (эта обмотка обозначается буквой /)
<4 =/% + '?/> (46)
гдеСу— напряжение возбуждения, приложенное к контактным коль-
цам синхронной машины; фу, if — потокосцепление и ток обмотки
возбуждения; rf — активное сопротивление обмотки;
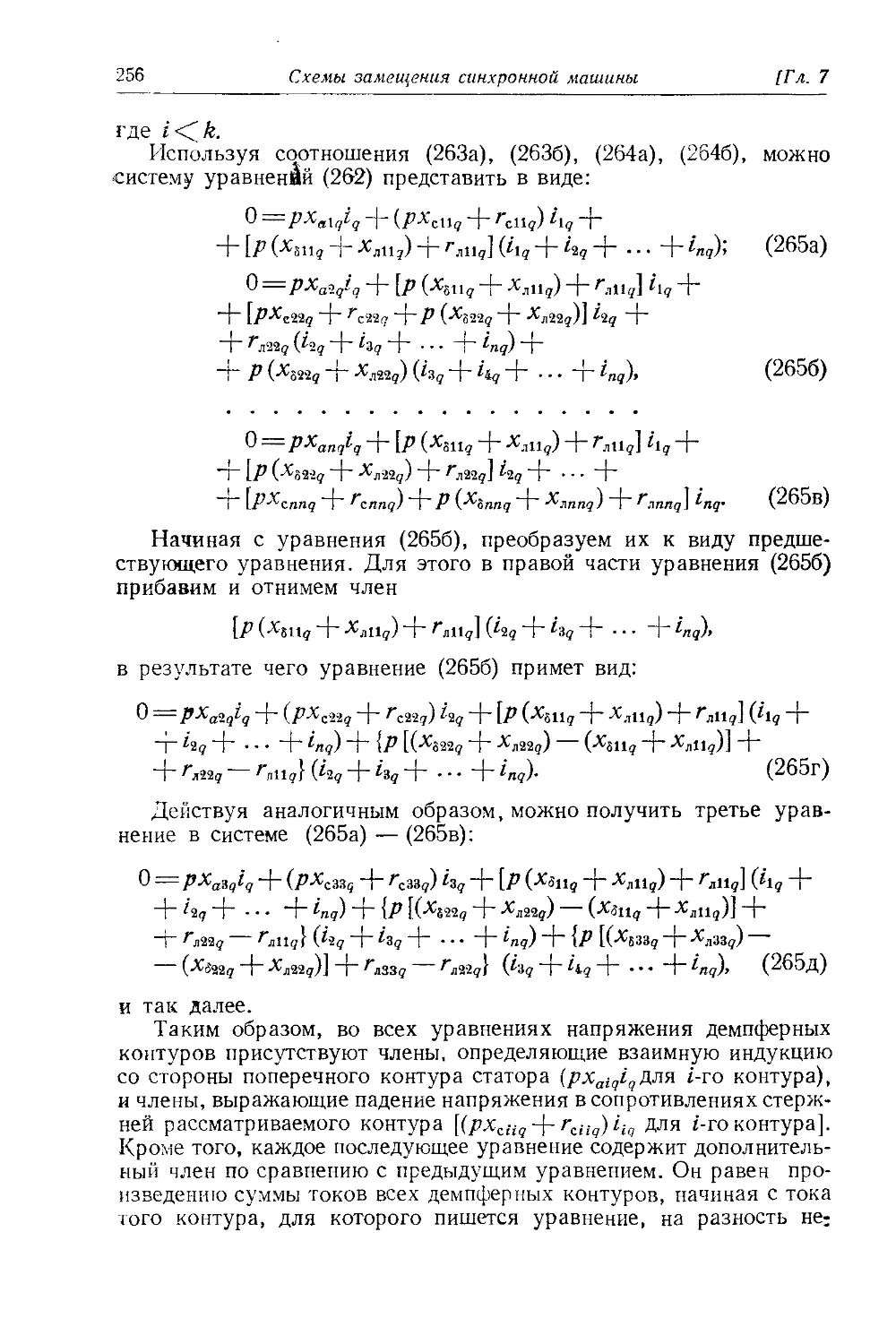
в) демпферная обмотка в продольной оси (л контуров)
О —-f- гiiditd + гitdiid 4~ ... + гindind;
0—pty2d -j- rilditd -f- riidi-id -f- ••• + rindind;
0 —p~>nd rnidiid + rnidiid + ..
fniudncT,
в поперечной оси (n контуров)
О—ptylq 4- rilqilq -ф- rliqiiq -j- ... 4“г1«?г'л?5
6 P'^lq I ri\ql]q | ^^iq^iq | • • - ^^nqinq^
(4b)
(4r)
6 P’inq I ^ll\qi\q | rtviqiitj T ••• I rnnqtnq,
§ 4]
Потокосцепления обмоток машины
Я
где ip„d, ind, фл<7, in? — потокосцепление и ток n-го демпферного
контура в продольной и поперечной осях
соответстве н но;
rnnd, rnnq — активное сопротивление n-го контура току
этого же контура в продольной и попереч-
ной осях соответственно;
rind, rinq(h£'ri) —активное сопротивление г-го контура току
и-го контура в продольной и поперечной
осях соответственно.
Появление взаимных активных сопротивлений rind, rinq вызвано
тем, что по части короткозамыкающих колец, являющихся лобовы-
ми соединениями демпферных контуров, протекают токи различных
контуров. Из рис. 11,6, например, видно, что по части короткоза-
мыкающего кольца между точками Id—Id, являющейся лобовой
частью 1-го продольного демпферного контура, протекают токи
1-го и 2-го контуров.
При необходимости исследования переходного процесса с уче-
том изменения скорости вращения ротора к уравнениям напряжения
обмоток (4а) — (4г) необходимо добавить уравнение моментов:
S m (F;) =Jpo>, (5)
где V tn (F,) — сумма моментов внешних сил Fit приложенных к
ротору;
J — момент инерции вращающихся частей;
<о — угловая скорость вращения ротора.
§ 4. Потокосцепления обмоток машины
На основании первого предположения § 3 потокосцепления об-
моток являются линейными функциями всех токов; при этом коэф-
фициенты пропорциональности между потокосцеплением данной
обмотки и токами обмоток есть индуктивность данной обмотки
(L) и взаимоиндуктивности (Л4) ее с другими обмотками. Поэтому
потокосцепления обмоток имеют вид:
Фа — ^аг'а 4~ МаЬ1Ь 4~ ^adc 4~ Maftf -ф- Maldild -ф-
+ 4~ • • • + Ma„dind + ^alq^lq +
~b^alqhq~l- nqt I
?t> = Mbaia ~Ф~ + Mbclc -ф- Mbfif -ф- M bldhd Ч-
~4~ AT&2dZ2d -ф— ... -ф- Mbndind ~]~Mbiqiiq
-ф- Mbiqi2q -ф-... -ф- Mbnqinq,
Фс ~ Mcaia Mcbtb ~Ф~ ^dc 4~ Mcftf -ф- Mc\diid -ф-
+ ••• -^cnd^nd ~l~ ^Clq^lq~l~
-ф- Afc29z2? -ф- ... -ф- Mcnqi
nqi )
(6a)
28
У равнения синхронной машины
[Гл. 2
Ф/ — Mfaia 4~ Mfbib 4- Mjcic -f- Lfif 4- Mftdild -j- Mfidiid -j-
~T“ • • 4~ Mfndind,
Ф1</-^ldaZa 4~ ^tdbh 4“ Mldcic Mldfif -j- Lldlld -f-
+ MI2dzM 4- ... -ф* Mlndind)
Фм = Midaia 4" ^idb^b~}~^idck~h^3df^H~^ildhd~b
+ ^2Ad+ ••• +^2n4n-?;
(6b)
Ф1? Mlqcja 4“ Miqbib 4~ MJ?eZ’e 4~ Llqhq 4“ ^liqhq 4“ |
4- ... 4-Mi„?zn?; j
Ф>у == M qqaia 4- Miqbtb 4“ Mqqcic 4* M<nj\q 4“ ^iqhq 4~ ' ™
+ ... Minqinq.
...................................................f
Поскольку fxc= oo, то, согласно принципу взаимности, взаимоин-
дуктивности с переставленными подстрочными индексами равны,
т. е.
^ab ^ba> Mja — ^afi ^ida--------------^ald И T. Д.
Кроме того, все коэффициенты в (6а) — (6г) являются функциями
лишь геометрических координат. При этом одни из этих коэффициен-
тов зависят от положения ротора в пространстве, другие же не за-
висят и поэтому имеют по-
стоянную величину. Постоян-
ными будут индуктивности и
взаимоиндуктивности тех кон-
туров, относительно которых
конфигурация магнитной си-
стемы остается неизменной при
любом положении ротора.
Очевидно, это будут индуктив-
ности всех контуров ротора,
взаимоиндуктивности обмотки
возбуждения и продольных
демпферных контуров, а так-
же взаимоиндуктивности меж-
ду демпферными контурами.
Остальные коэффициенты бу-
дут изменяться в зависимости
от положения ротора в прост-
Рис. 13. К определению индуктивностей
обмоток статора синхронной машины.
ранстве, так как магнитная проводимость воздушного зазора для
полей, создаваемых соответствующими контурами, из-за явно-
полюсности ротора будет зависеть от его положения. Ясно, что
зависимость индуктивностей от положения ротора будет перио-
дической.
§ 4] Потокосцепления обмоток машины 29
Рассмотрим характер этой зависимости [Л. 4]. Будем определять
положение ротора в пространстве углом у, на который продольная
ось d отстоит от магнитной оси фазы а (рис. 13).
а) Индуктивности фазных обмоток статора. Эти индуктивности
являются периодическими функциями угла между магнитной осью
фазы и продольной осью ротора d (углы уа, у& и на рис. 13) с перио-
дом, равным л. Действительно, магнитная проводимость воздуш-
ного зазора для поля, созданного фазным током статора, будет
одинакова, независимо от того, находится ли в данном месте полюс
1 или полюс 2 (рис. 13), что и соответствует изменению угла у на л.
Кроме того, рассматриваемые индуктивности будут четной функцией
угла у, т. е. будут иметь одинаковую величину как для положитель-
ного, так и для отрицательного значения угла. Это объясняется тем,
что магнитная проводимость для поля фазной обмотки будет одной и
той же, независимо от того, в какую сторону от магнитной оси фазы
поворачивается ротор на угол у. Четные периодические функции,
как известно, содержат в разложении в ряд Фурье только косинус-
ные члены; при периодичности функций, равной л, гармонические
будут только четного порядка. На основании этих общих соображе-
ний индуктивность фазных обмоток запишется в виде:
Lx — h + 1% cos 2ух 4- h cos 4yv I,- cos 6ух -ф ..., (7)
где х = а, Ь, с.
В выражении (7) коэффициенты разложения одинаковы для всех
фаз, ввиду симметрии последних.
Однако можно показать, что при принятом выше допущении
(второе допущение § 3) амплитуды всех гармонических в выражении
(7), начиная с 4-й, равны нулю и разложение принимает вид:
=/0-ф As cos 2ух. (7а)
В самом деле, пусть, например, по фазной обмотке а протекает ток,
создающий синусоидальную в пространстве волну м. д. с., амплиту-
да которой Fa совпадает с магнитной осью фазы а (рис. 14, а, б).
На рисунке фазная обмотка заменена эквивалентной катушкой,
плоскость которой перпендикулярна магнитной оси фазы. Для удоб-
ства разложим м. д. с. обмотки на две волны, действующих по про-
дольной (Fad) и поперечной (Faq) осям машины (рис. 14, а, б). Ампли-
туды этих составляющих м. д. с. равны:
Fad — Fa cos у, Faq = Fa cos (90 -ф у) = — Fa sin y.
Индукция от продольной м. д. с. в любой точке х, отстоящей на угол
а от оси d, будет согласно (1) и (3) равна:
Bad = [(Да cos у) cos а] (А, -ф cos 2а). (8)
Аналогичным образом индукция от поперечной м. д. с. определяет-
ся в виде:
Baq = [(— Fa sin у) sin a] (Au -ф Аг cos 2а). (8а)
30
Уравнения синхронной машины
[Гл. 2
Поскольку мы считаемся лишь с основными гармоническими индук-
ции, то в (8) и (8а) необходимо выделить первые гармонические и
только их и принимать в расчет. Находя первые гармонические обыч-
ным способом, получим:
Badi = (Fa cos 7) ^Ло + ~ Л2) cos а,
Baqi = (— Ва sin 7) f Ло — ~ AJ sin а.
(86)
(8в)
Реальное распределение поля в воздушном зазоре от продольной и
поперечной м. д. с. и первые гармонические индукции представлены
Рис. 14. М. д. с. и магнитные поля по осям d и q, обусловленные током фазной
обмотки: а — пространственное распределение м. д. с.; б — векторное пред-
ставление м. д. с.; в — действительное распределение н основные гармони-
ческие индукции.
на рис. 14, в. Потокосцепления с фазой а от гармонически распре-
деленных полей (86) и (8в), оси которых совпадают с осями d и q,
равны:
Фоб = г [(Л, cos у) (д0 -f- ~ Л2)] cos у 4-
4~ с [(— Ва sin 7) (л0 — 1Л,)] cos (90 4- 7) =
= cFa 4- V cos 2т) >
где с — константа, которая, будучи умноженной на амплитуду
индукции синусоидально распределенного поля, сцепляющегося
§ 4]
П отокосцепления обмоток машины
31
с обмоткой, дает величину потокосцепления с этой обмоткой. Эта
постоянная равна:
9
с — tZWo61,
где w — число последовательно соединенных витков обмотки ста-
тора;
ko5i — обмоточный коэффициент обмотки для 1-ой гармонической
поля.
Индуктивность фазной обмотки а, соответствующая потоку,
проникающему в воздушный зазор, равна:
Lai = = с (ЛО + -1cos 2у). (9)
Если к величине Lai прибавить индуктивность, соответствующую
Рис. 15. Зависимость индуктивности фазной обмотки статора от про-
странственного положения ротора (угла 7). Мощность машины 35 ква.
полям рассеяния Ls, которую можно считать практически не за-
висящей от угла у [Л. 3], то полная индуктивность равна:
La — Lab + Ls — с'^« ~Г Ls Аз COS 2f, (10)
т. е. имеет вид (7а). Подставляя в (7а) значения углов ух, которые
согласно рис. 13 равны: уо = 7 -[ft = 120— 7, -fc = 120 —|—7, получим
выражение индуктивности фазных обмоток статора в виде:
La — Io —Z2 cos 2у;
Lb = Zo Z-2 cos (2y -}- 120);
Lc = lb + Z2 cos (2y — 120).
(H)
На рис. 15 в виде иллюстрации представлена зависимость ин-
дуктивности фазной обмотки статора машины мощностью 35 ква
от пространственного положения ротора (угла у). Сплошная кривая
32
У равнения синхронной машины
[Гл. 2
построена по опытным данным, пунктиром показаны постоянная
составляющая /0, вторая и четвертая гармонические угла у. Ампли-
туда четвертой гармонической /4 составляет около 6% от среднего
значения /0, амплитуда шестой (не нанесенной на рисунке) — около
0,7%. Эти данные показывают, что зависимость индуктивности от
Рис. 16. К определению взаимоин-
дуктивностей обмоток статора син-
хронной машины.
знака угла уаЬ. Очевидно, что
пространственного положения
ротора в реальной машине доста-
точно близка к той, которая при-
нимается для машины «идеализи-
рованной».
б) Взаимоиндуктивности фаз-
ных обмоток статора. Взаи-
мен иду ктивность между фаза-
ми является четной периоди-
ческой функцией угла между
осью d и линией, проведенной
между магнитными осями рас-
сматриваемых фаз. Например
взаимоиндуктивность фаз а и
b — МаЬ будет четной функцией
угла уаЬ (см. рис. 16), так как в
силу принципа взаимноститИа(| =
= МЬа, т. е. МаЬ не зависит от
при повороте ротора на угол л
МаЬ будет иметь такое же значение, как и в исходном положении
ротора. Поэтому общее разложение Л1а(, в ряд Фурье должно иметь
вид:
Mal) — cos 2уа(>4- zra4 cos 4yaft4-zn6 cos 6ya& 4-... . (12)
.Можно показать, что в «идеализированной» синхронной машине
взаимоиндуктивность фаз, как и их индуктивности, определяются
только двумя первыми членами разложения.
Рассматриваемая взаимоиндуктивность МаЬ характеризуется
потокосцеплением с фазой b при протекании тока в фазе а. Выше,
выражениями (86) и (8в) были определены первые гармонические
полей по осям d и q, созданные током фазы а. Потокосцепления
этих полей с фазной обмоткой Ь, магнитная ось которой сдвинута на
120—у градусов от оси d и на 90—(120—у) от оси q (рис. 16), равны:
Фам = с [(Fo cos у) (л0 -% у Л2') j cos (120 — у) +
+ с [(— Fa sin у) (д0 — у A2jj cos [90 — (120 — у)] =
= сЛа|л0 [cosy • cos (120 — у) — sin у • sin (120 — у)] -ф-
4-у [cos Т ’ cos (120 — у) 4~ sin у • sin (120 — у)]| =
= cFa [- 4- 1 cos (120 - 2у)].
§ 41
Потокосцепления обмоток машины
33
Взаимоиндуктивность фаз а и Ь, соответствующая полям в воз-
душном зазоре, определяется выражением:
MeS8 = ^ = c|-^ + 4fcos(120-2T)]. (13)
Если к величине Mabi прибавить взаимоиндуктивность, соответствую-
щую полям взаимоиндукции рассеяния Ms, которая практически не
зависит от угла у, то полная взаимоиндуктивность равна:
Mab=Mabi~Ms=-c'^^Ms~r
Л2 cos (2?— 120) = m9 -j- тг cos (2?— 120). (14)
Поскольку yab = 60—у (рис. 16), полученное выражение для Mab
соответствует первым двум членам разложения (12). Аналогич-
ным образом запишутся взаимоиндуктивности других фаз:
Мас = «9 + cos 2уяс; 1 (14а)
AlSc = OT04-m2cos 2i&c. J
Коэффициенты разложения в (14а) в силу симметрии фазных об-
моток те же, что и в (14). Углы у^ и уЬс (рис. 16) выражаются через
угол у, характеризующий положение ротора, в виде:
ТаС = 60 + у; уЬс= 180 —у.
Сравнивая выражения (10), (11) и (14), легко установить следующие
соотношения:
4 + 2/??о = Ls 2MS; )
Z2 — тг. J
Следует отметить, что величина да0 всегда отрицательна, поскольку
магнитные оси фаз сдвинуты на угол, превышающий 90 ; это
также следует из (14), если иметь в виду, что всегда 0,5<?'Л0> A4S.
Подставляя значения углов уас, уЬс в (14а) и принимая во вни-
мание второе соотношение в (15), окончательно получим взаимо-
индуктивности фазных обмоток в виде:
МаЬ = /и0 + 4 cos (2у — 120);
А1Ж = т9 + Z2 cos (2у + 120);
Mbc = -j- Z2 cos 2у.
(16)
в) Взаимоиндуктивности фазных обмоток статора с обмотками
ротора. Согласно второму предположению § 3 взаимоиндуктивности
любого роторного контура с фазной обмоткой статора должны изме-
няться при вращении ротора по гармоническому закону, достигая
наибольшего значения при совпадении магнитных осей контура ро-
тора и фазы статора. Поэтому, взаимоиндуктивности между обмот-
3 А. II. Важ' Ов
34
Уравнения синхронной машины
[Гл. 2
кой возбуждения и фазными обмотками статора имеют вид:
Maf = Mafd cos у;
Mbf = Mafd cos (T — 120);
— Majd cos (y -}-120),
(17a)
где M.afd — взаименидуктивность обмоток при совпадении их маг-
нитных осей.
Аналогичные выражения имеют взаимоиндуктивности продоль-
ных демпферных контуров с фазными обмотками статора. Так для
n-го демпферного контура
and ^-and COS у,
Mbnd = mand cos (у — 120);
Mcnd = mand cos (y -j- 120),
(176)
где mand — взаимоиндуктивность фазной обмотки статора и п-го
продольного демпферного контура при совпадении их магнитных
осей. Взаимоиндуктивности любого п-то поперечного демпферного
контура с фазными обмотками статора равны:
Manq = manq cos (у -J- 90) = — manq sin у;
Mbnq = — manq sin (7 — 120);
Mcnq — rianq sin (7 4~ 120),
(17b)
где взаимоиндуктивность manq определяется при совпадении маг-
нитных осей обмоток.
Итак, целый ряд индуктивностей, определяющих потокосцепле-
ния обмоток (6а)—(6г), оказался периодической функцией угла у.
При вращении ротора за время dt угол у изменяется на rfy = adt,
где со — мгновенное значение скорости вращения ротора. К про-
извольному моменту времени t угол у составляет
t
у = С isidt —f— То, (1 $а)
о
где у0 — значение у при t = 0.
Если ротор вращается с постоянной скоростью, то
у = со/ + у0. (186)
Таким образом, даже при постоянной скорости вращения рото-
ра, индуктивности, зависящие от угла у, будут являться гармо-
ническими функциями времени. Это обстоятельство сильно затруд-
няет анализ переходных процессов, так как при этом потребуется
решение дифференциальных уравнений напряжений (4а) — (4г),
которые оказываются дифференциальными уравнениями с перио-
дическими коэффициентами. Поэтому возникает задача такого
преобразования дифференциальных уравнений напряжений (4а)—
$ 5/
Линейные преобразования
35
(4г), которое позволило бы существенно упростить их и, в частно-
сти, получить уравнения с постоянными коэффициентами. Такое
упрощение уравнений осуществляется с помощью так называемых
линейных преобразований. Поскольку линейные преобразования
играют существенную роль в теории синхронной машины, ниже да-
ется их краткое изложение.
§ 5. Линейные преобразования
Рассмотрим сперва формальную сторону линейных преобразова-
ний. Предположим, что уравнения, подлежащие решению, содер-
жат некоторое количество искомых переменных.
Линейные преобразования уравнений состоят в том, что исход-
ные переменные в уравнениях заменяются новыми переменными,
линейно связанными с исходными; при этом количество вводимых
в рассмотрение новых переменных равно количеству заменяемых
переменных. Так, например, вместо трех переменных—-фазных
токов статора синхронной машины ia, ib, ic — можно оперировать
с новыми тремя токами ix, iy, 1г, связанными со старыми токами
линейными зависимостями:
ix = Vxja + <?xbib + ®vc4; '
iy = ^yj-a Ч" ЧуЬ^Ь 4“
(19)
Коэффициенты <p в (19) называются коэффициентами линейного
преобразования.
После введения новых переменных, решению подлежат уже ви-
доизмененные уравнения и искомыми становятся новые переменные.
Практика показывает, что такая замена переменных при удачном
выборе коэффициентов линейного преобразования, который за-
висит от условий решаемой задачи, может существенно облегчить
исследование и решение преобразованных уравнений. После того
как в результате решения уравнений определены новые переменные,
осуществляется обратный переход к старым переменным, и задача
оказывается полностью решенной.
Для того чтобы между старыми и новыми переменными (в нашем
случае между токами ia, ib, ic, с одной стороны, и токами ix, iy,
iz, с другой) было однозначное соответствие, необходимо, чтобы
определитель, составленный из коэффициентов линейного преобра-
зования, не был равен нулю. Имея в виду (19), последнее требова-
ние выражаем соотношением:
'~?ха ТхЬ
У у a УуЬ
'fza 'т zb
,хс
Ъс
0.
(19а)
3’
36
У равнения синхронной машины.
[Гл. 2
Действительно, для окончательного решения задачи необходимо
по найденным значениям новых переменных (у нас ix, iy, 1г) опреде-
лить исходные переменные задачи (у нас ia, ib, ic), для чего система
вида (19) должна быть разрешена уже относительно старых перемен-
ных. Но определяя любую старую переменную, например ia, обрат-
но через новые переменные, получим в знаменателе выражения
для ia определитель системы (19а), который поэтому и должен быть
конечным. Следует подчеркнуть, что коэффициенты линейного пре-
образования могут являться функциями времени, лишь бы опреде-
литель системы (19а) в любой момент времени не равнялся нулю.
Продолжая рассмотрение примера линейного преобразования
трех фазных токов статора синхронной машины ia, ib, ic и замены
их новыми токами ix, iy, 1г, отметим, что один из новых токов, на-
пример 1г, удобно выбрать в виде (ia -ф- ib -ф- ic) [т. е. положить
в (19) (рга = сргЬ = сргс=^. Дадим этому току специальное обо-
значение:
у (г'а + + 4) = 4 (20)
и назовем нулевой составляющей тока. Удобство такого выбора
заключается в том, что часто i0 = 0, а если даже ток i0 0,
то, как будет видно из дальнейшего, этот ток не оказывает никакого
влияния на движение ротора синхронной машины в переходном
процессе и оно может определяться без учета i0.*
Дадим теперь линейному преобразованию геометрическую ин-
терпретацию. Вспомним с этой целью изображение токов на вектор-
ной диаграмме. Если действительные токи в фазах ia, ib, ic являются
синусоидальными функциями времени, то они могут быть изображе-
ны на диаграмме тремя векторами, вращающимися вокруг некоторой
точки (полюса) с угловой скоростью, равной угловой частоте тока.
Проекции векторов на линию времени дают мгновенное значение
токов ia, ib,ic (рис. 17, а). Можно на диаграмме оставить векторы
неподвижными, а вращать линию времени в противоположную сто-
рону, с той же угловой скоростью — очевидно, результат будет тем
же (рис. 17,6).
Диаграмму можно представить и иначе. С этой целью рассмотрим
вначале частный случай, когда токи по фазам симметричны.
Возьмем вместо трех симметричных векторов три оси (а, Ь, с),
расположенные симметрично; из центра проведем вектор Т, который
будем вращать с такой же угловой скоростью, с какой ранее враща-
лась на диаграмме линия времени (рис. 18). Если величина вектора I
равна амплитуде фазных токов, то его проекции на три оси, оче-
видно, также дадут мгновенные значения токов ia, ib, ic. Таким
* Отметим, что при определении токов статора машины необходимо учи-
тывать не равный нулю ток г0.
$ 5]
Линейные преобразования
37
образом, если вектор I будет иметь неизменную величину во времени
и будет вращаться с постоянной скоростью, то с его помощью изо-
бражаются симметричные синусоидальные токи. Конец вектора 1
будет при этом описывать окружность.
Однако с помощью вектора / можно изобразить любые три тока
ia, ib, ic, как угодно изменяющиеся во времени, при одном только
условии, что
za ’ Г zi> + Zc = 0- 1)
Это условие, накладываемое на токи, вытекает из принятого спо-
соба изображения токов как проекций некоторого вектора на три
Рис. 17. Определение мгновенных значений
фазных токов на векторной диаграмме:
а — неподвижная линия времени, вращаю-
щиеся векторы; б— вращающаяся линяя
времени, неподвижные векторы.
Рис. 18. Определение мгновен-
ных значений фазных токов с
помощью проекций изображаю-
щего вектора.
оси, сдвинутые на 120°, ибо сумма проекций как угодно изменяю-
щегося вектора на три оси, сдвинутые на 120°, всегда равна нулю
[/cosa + /cos(a — 120) + /cos(a—240) = 0]. Следовательно, ка-
ким бы образом ни менялись во времени токи ia, ib, ic, удовлетворяю-
щие (21), для каждого момента времени проекции вектора на осях
известны и поэтому вектор однозначно определен по величине и поло-
жению относительно осей. Однако конец вектора в общем случае
будет описывать сложную кривую.
На рис. 19 в качестве примера показаны два способа изображения
синусоидальных, но несимметричных фазных токов, удовлетворяю-
щих условию (21). На рис. 19, а представлено изображение токов
тремя векторами 1а, 1Ь, 1С, вращающимися с угловой скоростью,
равной угловой частоте изменения токов; положение векторов на
рисунке соответствует со/ = 0. На рис. 19,6 те же токи изображе-
38
Уравнения синхронной машины
[Гл... 2
ны проекциями одного вектора 1 на три оси. Вектор вращается
уже с переменной скоростью и конец его описывает эллипс (на кри-
вой рис. 19,6 расставлены значения со/, при которых конец вектора
попадает в данную точку). Этот вектор называется изображающим
вектором.
С помощью проекций вектора на оси можно представить не
только мгновенные значения токов, но и напряжений и потоко-
сцеплений. Условимся изображающие векторы тока, потокосцепле-
ния и напряжения обозначать соответственно /, Ф, е. Отметим,
Рис. 19. Изображение мгновенных значений несиммет-
ричной системы токов: а — с помощью трех векторов
н линии времени; б — с помощью изображающего век-
тора и трех осей. Положение векторов соответствует
t = 0.
что, если в частном случае изображающий вектор имеет постоянный
модуль, то амплитуда переменных, которые он определяет, равна
модулю этого вектора. Это значение переменная приобретает в
тот момент времени, когда изображающий вектор совпадает с осью,
на которой откладывается рассматриваемая величина.
Вернемся к токам tx, i i0, которые были выбраны в качестве
новых переменных вместо действительных фазных токов ia, ib,
ic. Условимся эти новые токи представлять на диаграмме с помощью
изображающего вектора тока I. Поскольку этот способ, как было по-
казано, справедлив только при условии ia ib -J- ic = 3z0 = 0,
то из трех новых токов ix, 1у, z'o только два ix, zv могут графически
изображаться на диаграмме, а конечный по величине ток ia указан-
ным способом изображен быть не может. Однако выше отмечалось,
что при решении дифференциальных уравнений машины не всегда
возникает необходимость в определении тока г0, и поэтому наиболь-
ший интерес представляют два остающихся тока ix и iv. Но если нужно
$ 5]
Линейные преобразования
39
изобразить только два тока, то для этого требуется всего две оси
(х, у). Естественно выбрать их нормальными друг другу (рис. 20).
В общем случае эти прямоугольные оси на диаграмме вращаются.
Пусть углы, составляемые с неподвижной осью а изображающим
вектором тока I и вращаю-
щейся осью х, равны соот-
ветственно б и бк (рис. 20).
Можно убедиться, что про-
екции изображающего векто-
ра тока в осях х, у оказы-
ваются линейно связанными
с проекциями того же векто-
ра в осях а, Ь, с зависимо-
стями типа (19). Старые токи
определяются как проекции
I на оси а, Ь, с, т. е.
z0 = /cos 8;
ib = /cos (8 — 120);
ze = /cos (8 4-120),
(22a)
тем самым предполагая пока,
его проекции на вращающиеся оси х, у.
что
ia + ib + ic — 0.
Аналогично токи новые:
Z4 = /COS(8K-S); 1
iy = — I sin (8K — 8). J
Выразим теперь в (226) токи ix, iy через токи ia, ib, ic, чтобы
получить соотношения типа (19); при этом нужно исключить 8, так
как скорость вращения вектора / неизвестна нам до решения урав-
нений машины. Используя тригонометрические соотношения:
cos (8К — 8) — -|- [cos 8К cos 8 4- cos (8К — 120) cos (8 — 120)4-
4-cos (8К 4-120) cos (8 4- 120)];
sin (8K — 8) = ~ [sin 8K cos 8 4- sin (8K — 120) cos (8 — 120) -[-
4- sin (8K 4- 120) cos (8 4- 120)].
с помощью (22a) перепишем выражение (226) в виде:
i.v — у [ia cos 4" ib cos (®к — 120) -[- ic cos (8K -|- 120)];
iy =— -| [C sin 8K -4 ib sin (8K — 120) 4- ic sin (8K -[- 120)].
(22b)
40
У равнения синхронной машины
[Гл. 2
Сравнивая полученное выражение для токов ix, iy (22в)' с общим
выражением линейных преобразований (19), можно видеть их
полное соответствие. Коэффициенты линейного преобразования в
(22в) представляют в общем случае функции времени. Нетрудно
убедиться, что для принятых здесь значений коэффициентов ли-
нейного преобразования определитель системы (19) для любого
момента времени в нуль не обращается.
Выражения (22в) получены в предположении, что
—{— /(, —j— ic — 3zq — 0.
Однако нетрудно убедиться, что они остаются в силе и тогда,
когда z0 96 0. В этом случае можно рассмотреть сперва вместо то-
ков ia, ibl ic токи
la — la 1й\ lb — lb Ifii Ic — Ic — l<>-
(22r)
Поскольку i'a i'b-|- ic = 0, выражения (22в) справедливы для
этих токов, т. е.
ix = -|- [ia cos 8К + t'b cos (8К— 120) -|- i[cos (8K-|- 120)];
(22д)
L = — 4 [ia sin 8К + i'b sin (8K— 120)-[-ic sin (8K-[- 120)].
Подставляя в (22д) токи из (22г), можно видеть, что для токов
ix, iy снова получаются выражения вида (22в), т. е. ониоказываются
справедливыми и при i0 0.
Изложенные выше геометрические соотношения показывают,
что линейное преобразование — это по существу изменение систе-
мы координат, в которых производится отсчет величин. Действи-
тельно, токи ia, ib, ic определяются изображающим вектором в
виде его проекций на оси а, Ь, с, т. е. измеряются в системе осей
координат, неподвижных в пространстве; замена их токами i0,
ix, iy обозначает, что теперь измерение тех же токов производится
в осях х, у, вращающихся с некоторой скоростью. Это обстоятель-
ство объясняет встречающуюся в литературе терминологию — «пере-
менные в таких-то осях» или «переход к осям таким-то».
Уравнения напряжения обмоток статора синхронной машины
(4а) содержат, кроме фазных токов ia, ib, ic, соответствующие по-
токосцепления и напряжения. Если для фазных потокосцеплений
и напряжений выбрать такую же форму линейного преобразования,
как и для токов, то, согласно изложенному, они могут измеряться
проекциями изображающих векторов потокосцепления и напря-
жения е либо на координатные оси а, Ь, с, либо оси — х, у. Тогда
переход от трех исходных осей а, Ь, с к двум — х, у физически обо-
значает замену трехфазной машины двухфазной, в которой магнит-
ные оси обмоток сдвинуты на 90°. Приэтом[в фазах двухфазной ма-
шины сохраняются величины амплитуд токов и числа витков фаз-
§ 5]
Линейные преобразования
41
ных обмоток трехфазной машины ввиду того, что изображающие
векторы тока, потокосцепления и напряжения являются одними и
теми же для осей а, Ь, с и х, у.
Связь между старыми переменными — переменными в осях а,
Ь, с и новыми переменными — в осях х, у будет показана на примере
фазных токов. Независимо от вида осей х, у к системе токов ix,
iy должен всегда добавляться одинаковый ток г,
выбран независимо от вида токов
образования потокосцеплений
будут точно такими же, как
для токов ia, ib, ic.
В современной теории
электрических машин исполь-
зуются три системы осей
х, у.
1. При анализе переход-
ных процессов асинхронных
машин, а также несиммет-
ричных режимов синхронных
машин удобно использовать
оси х, у, неподвижные в про-
странстве. Такие оси носят
название осей а, р. Ось а при
этом совмещают с осью а ис-
ходной системы координат а,
Ь, с (рис. 21). Соотношения
между старыми переменны-
ми — в осях а, Ь, с и новыми
переменными — в осях а,
Р могут быть найдены из выражений (22в), в которых нужно поло-
жить 6К = 0. Они имеют вид:
Za — 3 [/а
г =
₽ уз
1 /.•
К
ly.
ф&, %
0, так как он был
Формулы линейного пре-
и
напряжений еа, еь, ес
Рис. 21. Координатные оси а, р и q.
сок — скорость вращения координатных
осей.
(23а)
Токи za, I называют соответственно а и ₽ составляющими тока
статора. Обратные соотношения имеют вид:
61 — 4 |
ib = io~~ ~2 (4 1^3 z’p); (
6 — io ~2 + 1^3 z’₽). j
Если zo = O, то za = ze.
(236)
42
Уравнения синхронной машины
[Гл. 2
2. Симметричные переходные процессы в синхронной машине
целесообразно исследовать в системе координат, вращающихся вме-
сте с ротором (ось х при этом совмещают с осью полюса). Эта сис-
тема осей называется осями d, q (рис. 21). Удобство системы коор-
динат, жестко связанных с ротором, для явнополюсной синхрон-
ной машины заключается в том, что для наблюдателя, вращающегося
вместе с этими осями, машина в магнитном отношении оказывается
симметричной, независимо от положения ротора. Поэтому в системе
координат d, q потокосцепления уже не содержат переменных ин-
дуктивностей, а дифференциальные уравнения имеют постоянные
коэффициенты, что существенно облегчает исследование. Преобра-
зование к осям d, q является практически единственным, приводя-
щим дифференциальные уравнения синхронной машины с периоди-
ческими коэффициентами к уравнениям с постоянными коэффициен-
тами. Это делает преобразование к осям d, q весьма важным,
играющим фундаментальное значение в теории синхронной ма-
шины.
Для определения соотношений переменных в осях а, Ь,с и d,
q в (22в) нужно положить дк = у, где у — угол между осью полюса
d и осмо фазы а*.
Тогда:
id = у cos 1 c°s (у — 120) -ф- ic cos (у -ф-120)];
iq = — 4 14 sin T +ib sin — 120) + 4 sin + 120)b
4 о
i» = у (4 + ib + 4)-
(24a)
Токи id и i называют соответственно продольным и поперечным
токами статора. Обратные соотношения имеют вид:
4 = 4 + 4 cos у — 4 sin у;
4 = 4 + 4 cos (у — 120) — iq sin (у — 120);
4 = 4 + 4 cos (у —j— 120) — iq sin (у + 120).
(246)
3. Применяются также оси х, у, вращающиеся в пространстве
с синхронной скоростью cos. Эта система осей обычно используется
при исследовании группы машин. Линейные соотношения для
синхронно вращающихся осей можно получить из предыдущего
случая, полагая там у =
Для перехода от одних координатных осей к другим можно по-
лучить формулы, которые связывают переменные в осях «, Р и
d, q. Переменные в данной системе координат суть проекции на
оси изображающего вектора или, что то же самое, сумма проекций
* У некоторых авторов [Л. 4] положительная ось q отстает на угол л/2
от оси d, а не упреждает, как принято здесь, что приводит к изменению знака
во всех количествах оси q.
S 5J
Линейные преобразования
43
на рассматриваемые оси составляющих вектора в другой системе
осей. Определим, например, токи id, iq через токи z\, i (рис. 22).
Из рисунка следует, что
^ = 4 cos-[ + z?sin 7;
ig = — 4 sin 7 4- z3 cos 7.
Обратные соотношения имеют вид:
4 — id cos 7 — iq sin 7; )
zp = id sin 7 iq cos 7. (
(25a)
(256)
В дальнейшем изложении будут использоваться как аналитическая
запись линейного преобразования, так и геометрическое его пред-
ставление.
В преобразованиях переменных можно пойти дальше, а именно
рассматривать в качестве переменных не проекции изображающего
вектора на оси координат, а сам
изображающий вектор. Очевидно,
что коль скоро будет определен
изображающий вектор (положе-
ние его конца на диаграмме) в
функции времени, то тем самым
определяются и переменные, ко-
торые представляются его проек-
циями на оси. Причем, если
вместо декартовой плоскости вве-
сти комплексную, то изображаю-
щий вектор будет заменен ком-
плексом. Таким образом прихо-
дят к идее использования ком-
плексных переменных для харак-
теристики мгновенных значений
тока, напряжений, потокосцепле-
ний.
Совместим с осью х веществен-
Рис. 22. К определению связи
между составляющими токов в
осях а, р и d, д.
ную ось комплексной плоскости
(+ 1), а с осью у — ось мнимых (+ /). Тогда вместо двух веществен-
ных переменных, например ix, iy можно рассматривать одну ком-
плексную z = 44" fiy> являющуюся не чем иным, как изображаю-
щим вектором (комплексом) тока. * Аналогичным образом вводятся
комплексные переменные потокосцеплений и напряжений обмоток
статора машины.
Следует отметить, что в общем случае уравнения напряжений
содержат не только указанные выше комплексные переменные,
но и сопряженные им; поэтому необходимо рассматривать оба вида
* Здесь и в дальнейшем символ мгновенного значения комплекса тока
будет отмечаться жирной точкой над буквой
44
Уравнения синхронной машины
[Гл. 2
комплексов. Пусть, например, токи z", и zp характеризуются изобра-
жающим вектором (комплексом) тока ta на комплексной плоскости,
вещественная ось которой совмещена с осью а, а мнимая — с осью Р
декартовой плоскости (рис. 23). Тогда токи z\ и z определяются в
виде:
4 = Re za; zp = Im z’o,
где Re, 7m — знаки вещественной
и мнимой части комплекса.
С другой стороны, токи za и z’ мо-
гут быть определены через комплекс
тока zT и сопряженный ему z* с по-
мощью диаграммы рис. 23 или непо-
средственно из выражения za = za-|-
+yz’p в виде:
Рис. 23. Замена действитель-
ных токов /а, /р комплексными
«8. 'а*-
=0,5 (!о 4- z*), zp = — 0,5/ (z\ — it)-
Эти выражения показывают, что на-
ши переменные ia, z? представляются
двумя вращающимися в противопо-
ложные стороны векторами половин-
ной длины. Подобное представле-
ние широко применяется в теории
электрических машин при исследова-
нии установившихся процессов, на-
пример, при анализе пульсирующих полей. Вводя вместо векто-
ров z„ и z* векторы половинной длины, которые обозначим zt,
z2, получим:
f*
4 — h + i? — —— 1г)-
Обратные соотношения имеют вид:
z\ = 0,5 • (za +/z₽); z’2 = 0,5 • (za —yz₽).
(26а)
(266)
Нетрудно показать, что переменные zn z2 получаются в результате
линейного преобразования вида (19) с комплексными коэффициен-
тами линейного преобразования. Подставляя в (266) выражения
для токов z’a и z из (23а), после несложных преобразований получим:
Z1 — у (za + azZ> + °2zc);
z2 = У (za + O*ib + azc)> .
(27)
где комплекс a = e712".
Присоединяя к уравнениям (27) выражение для тока нулевой со-
ставляющей z0 = у (za-|- ib ic) видим, что токи z0, z\, z*2 записы-
ваются аналогично симметричным составляющим тока. Однако эта
аналогия чисто формальная. Так, система синусоидальныхсиммет-
$ 51
Линейные преобразования
45
ричных трехфазных токов в представлении метода симметричных
составляющих создает только систему токов прямой последователь-
ности. Согласно преобразованию (27) эта же совокупность токов
обуславливает оба тока zt и z2. Если токи прямой и обратной после-
довательностей по методу симметричных составляющих имеют в
общем случае различную амплитуду, то амплитуда токов Ц и z2
всегда одинакова. Эти различия объясняются тем, что в методе сим-
метричных составляющих преобразования вида (27) совершаются
над комплексами токов 1а, 1Ь, 1С, а здесь ia, ib, ic — вещественные
количества.
Итак, в теории синхронной машины применяется еще один вид
линейного преобразования переменных (27), дающий так называе-
мые 1, 2, 0 составляющие — токи zb z2 z0, потокосцепления ф1,
ф2, Ч’о, напряжения е1г е2, е0. Токи z1; z2 (аналогично потокосцепления
ф3 и напряжения е1г е2) на комплексной плоскости, совмещен-
ной с осями а, р, как было выше показано, представляют два сопря-
женных комплекса, вращающихся в противоположные стороны.*
Подобные сопряженные комплексы могут быть введены на комп-
лексной плоскости, совмещенной с осями d, q, вращающимися вме-
сте с ротором машины, а также с осями координат х, у, синхронно
вращающимися в пространстве. Переход в комплексных переменных
от одних осей к другим чрезвычайно прост. Если, например, перемен-
ные z, = L 4- /z„ и i* = — /7 отсчитываются на комплексной плос-
кости, совмещенной с осями а и Р, то переменные ls = i(i jiq и z* =
= id —jiq с отсчетом в осях d и q приобретают с помощью выра-
жений (25а) вид:
4 = (4 cos 7 + z sin 7) + j(— 1л sin 7 + z cos 7) =
= (za +/zp 4 =
т. e. получаются из исходных переменных (/*) умножением на коор-
динатный множитель (е71), где у — угол между осями отсчета.
Применение линейных преобразований токов, напряжений, по-
токосцеплений делает необходимым определение мощностей машины
в новых системах координат. Ограничимся здесь выражениями
мощности для вещественных переменных. Так, мощность трех-
фазной цепи (трехфазного генератора) равна:
Р = 44 ~Ь еь!ь вЛс- (28а)
Эта мощность может быть выражена в системе осей а, р.если в (28а)
подставить значения токов и напряжений в этой системе [см. соот-
ношения (236) для токов, для напряжений соотношения аналогич-
ные]. После подстановки получим:
Q
Р = 3e0z0 у (ел1л + (286)
* В литературе можно встретить наименование этой системы координат
как системы F, В (буквы F и В являются начальными в словах forward, back-
ward, обозначающими вращение векторов в противоположные стороны — вперед
и назад).
46
Уравнения синхронной машины
[Гл. 2
Этот результат можно было предвидеть. Действительно, выше было
отмечено, что преобразование от осей а, Ь, с к осям а, р есть по су-
ществу замена трехфазной машины двухфазной. При этом, если в
трехфазной машине ia -ф- ib -J- ic = 3in Ф 0, то к системе токов
двухфазной машины нужно добавить ток z0. Поскольку электромаг-
нитный момент, а потому и мощность — величины инвариантные,
т. е. они не должны изменяться при преобразованиях осей коорди-
нат, то ввиду того, что мощность двухфазной машины в 3/2 раза мень-
ше трехфазной, выражение (286) имеет такой же вид, как и (28а),
но с множителем 3/2. Кроме того, конечно, добавляется утроенное
значение мощности нулевой составляющей. Мощность в осях d,
q должна иметь вид мощности в осях а, р, так как в обоих случаях
рассматривается одна и та же двухфазная машина. Формальная
подстановка в (28а) токов и напряжений, выраженных через пере-
менные в осях d, q, дает:
Р — 3^0г0 ““ V ““ eq^q)- (28в)
Аналогичным образом получаются выражения для мощности, вы-
деляющейся в виде потерь в меди обмоток статора рм:
Ря = (Й + ib + ic) r = -ф у (z’a z|)J r=
= [3^ + |(Й-Кф (28г)
§ 6. Преобразование уравнений напряжения синхронной машины
от осей а, Ь, с к осям а, р и d, q
Уже указывалось, что в осях d, q, являющихся осями магнитной
симметрии синхронной машины, уравнения напряжения для сим-
метричных режимов должны содержать лишь постоянные коэффи-
циенты. Имея в виду в дальнейшем исследование несимметричных
переходных режимов, рассмотрим здесь эти уравнения также в
осях а, р.
Переход к переменным а, р от исходных переменных а, Ь, с про-
изводится с помощью постоянных коэффициентов линейного пре-
образования [см. формулы (23а)]. Поэтому можно в уравнениях
напряжения обмоток статора (4а) производить необходимые пре-
образования как с самими переменными (г, е), так и их производ-
ными (рф). В силу этого, производя линейные преобразования по
формулам (23а) одновременно со всеми членами каждого из уравне-
ний (4а), получаем:
— е?=Р%-г"?;
-- ^0 —Р^О + г/о-
(29а)
(296)
(29в)
§ 6]
Преобразование уравнений напряжения
47
К уравнениям (29) должны быть добавлены уравнения напряжения
остальных цепей машины (46) — (4г). Уравнения напряжения кон-
туров машины содержат производные потокосцеплении с этими кон-
турами. Поэтому необходимо определить все потокосцепления че-
рез новые токи 4, i z0.
Если подставить в выражения (6а) значения индуктивностей
из (11), (16), (17а) — (17в), то фазные потокосцепления статора
примут вид:
Фа = (4 + h COS 2у) ia 4- [т0 4- Z.2 cos (2у — 120)] ib 4~
4" [4 о 4~ 4cos (2y 4~ 120)] ic 4- Mafd cos Y ' 4 4"
4" fflakdikd 1 COS у Wlakqikq ] Sin Y,
4=1 ' 4=1
Фь — [тй 4~ 4 cos (2y — 120)] ia -]- [Zo 4~ 4 cos (2y 4" 120)] ib 4~
“I- (pi6 4~ 4 cos 2y) ic 4~ Mafd cos (y 120) if -]-
n n
4-(2 makdik^ cos 120)—(2 makqikq)^(.l— 120);
*=1 й=1
фс = [m0 + Z2 cos (2y 4- 120)] ia 4- 4- Z.2 cos 2y) ib 4-
~4 [4 4~ 4 cos (2y — 120)] ic -j-Mafa cos (y 4~ 120) if 4-
n n
+ (2W^MCOS(y + 12°)-(2 Wa*A)sin(l4- 120).
k = 1 k=\
(30)
Определим теперь потокосцепления обмоток статора в осях а, 0.
С помощью выражений (30) и формул (23а) после несложных пре-
образований получим:
Фк = 4[фа — т (Ф» + Фс)] = (4 —/»о4-у4 COS 2y) Z«4-
4- 4 Z.2 sin 2y • Z3 4- Mafd cos Y • 4 4-
n n
+(2 makd ika}cos 7—(2 такч sin
*=i 4=i
, '4 3 , . o . Z, 3 , „ \ . , (31a7
фо = —py^ = yZ2sln2Y • 4x4-(/о — m0 — yZ.2cos2Yj l? 4-
n n
4- Ma1d Sin Y • 4 4- ( У makdikd^ sin Y + ( 2 w«a949) cos y;
'*=1 *=1
Фо — Z3 (Фа 4~ Фь 4~ Фс)= 4- ^mo) 4-
Уравнения синхронной машины
[Гл. 2
Потокосцепление обмотки возбуждения фу в функции токов z0,
za, z\ получается подстановкой в (66) индуктивностей, данных выра-
жениями (17а) и (176), и простыми преобразованиями с учетом
(23а). В результате получаем:
Фу — уТИду^ (za cos 74^ sin 7) -f- Lfif -f- ^7Wyfcdzfcd. (316)
Аналогичным образом могут быть получены потокосцепления любо-
го демпферного контура по продольной или поперечной осям с по-
мощью выражений (6в) и (6г), (176) и (17в) и общих соотношений
(23а). Например, для п-х контуров в продольной и поперечной осях
будем иметь:
'Pnd = 2 mand (ia cos 1 + z₽ sin 7) 4- Mfndif +
fe=l
(31b)
Фп? 2 manq (ia sin Y COS 7) [ ^dnkqikq ~H I'nqinq- (31г)
Поскольку в выражениях (31а) — (31г) коэффициенты, стоящие пе-
ред токами, зависят от угла у, т. е. являются функцией времени,
в осях а, р уравнения напряжения синхронной машины (29),
(46) — (4г) будут уравнениями с переменными коэффициентами.
Следует обратить внимание на одно существенное обстоятельство:
согласно (31а) потокосцепление ф0 зависит только от нулевой со-
ставляющей тока г’о и не зависит от других токов.
Преобразуем теперь уравнения от осей а, р к осям d, qc помощью
соотношений (25а), справедливых как для токов, таки для напряже-
ний и потокосцеплений. Уравнения для обмоток статора вместо
(29а, б) примут вид:
— 4 = (— еа) cos 7 4 (— ер) sin 7 =
= cos -у • рфа 4- sin 7 • рф, 4- rzd;
— eq = — (— 4) sin 7 4 (— 4) cos 7 =
== — sin 7 • />фх 4 cos 7 • 4-rz?.
Ho
p (фд. sin 7) = sin 7 • pt>x 4 ’4 cos 7 • /77;
p (фА. cos 7) = cos f рфд — фА sin 7 • py,
(33)
где для нашего случая х = а, р.
Преобразование уравнений напряжения
49
Подставляя в (32) члены вида cos 7 • р'Ьх и sin 7 • р^х из (33), по-
лучим:
— ел=р (ф. cos 7) 4- sin 7 • Л 4~^ (Фэ sin 7) — фр cos 7 • Л + rid =
=Р$а — ^q-Pl + rid, (34a)
— eq =P^q + ФаЛ 4- riq. (346)
К уравнениям напряжения (34a) и (346) нужно присоединить урав-
нение нулевой составляющей (29в), а также уравнения напряжения
роторных цепей (46) — (4г).
Рассмотрим потокосцепления как функции токов id, iq и осталь-
ных роторных токов. Потокосцепления обмоток статора ф^, ф мо-
гут быть получены линейным преобразованием вида (25а) и подста-
новкой в него выражений фа и ф из (31а):
п
фа — фа COS 7 4~ фр sin 7 — 4" 4- 2 makd ^kd'i
fe=l
n
Ф9 = — Фа sin 14- Фр cos 7 — Lqiq 4- makqikq,
й=1
(35a)
где обозначено
Pd---HIq 4 2” ^2’
Потокосцепление нулевой составляющей статора ф0 остается во
всех осях одинаковым:
фо = (356)
где Z,o = /0 4- 2/Ио-
Потокосцепления роторных контуров получаются заменой в
(316) — (31г) круглых скобок выражениями (25а), после чего они
принимают вид:
п
Ф/ = у Mafdid 4- L/if 4~ ^fkd ^kd' (Зов)
п —1
Фпй = у mand id fnd if “H nkd ^kd “J" ^nd ind* (35r)
fe==l
n—1
Фл<7 у nkq^kq~[~ ^-nq^nq' (ЗЭД)
fe=l
Поскольку потокосцепления контуров машины (35а) — (35д) в
осях d, q содержат только постоянные, от времени не зависящие
индуктивности, дифференциальные уравнения напряжения (34а),
4 А. И. Важное
50
Уравнения синхронной машины
[Гл. 2
(346), (29в), (46) — (4г) в этих осях будут уравнениями с постоянны-
ми коэффициентами.
Относительно полученных выражений потокосцеплений (35а),
(35в) — (35д) необходимо заметить следующее. Потокосцепления
контуров как в продольной оси (tyd> ..., так и поперечной
(ф?, •••> Фи?) имеют не совсем обычное написание для магнито-
связанных цепей. Выражения (35а), (35в) —- (35д) показывают,
что для взаимоиндуктивностей контуров ротора по любой из осей
с контуром статора по этой же оси не выполняется правило взаим-
ности, согласно которому для магнитосвязанных контуров взаимо-
индуктивности Л412 = Л421. Например, в потокосцеплениях про-
дольного контура статора взаимоиндуктивность, определяющая
потокосцепление от тока обмотки возбуждения,'равна Mafd, а в по-
токосцеплениях обмотки возбуждения потокосцепление взаимной
индукции со стороны продольного контура статора определяется
величиной у Mafdid и, следовательно, взаимоиндуктивность равна
^Mafd.
Подобное различие во взаимоиндуктивностях в 3/2 раза можно
обнаружить и для демпферных контуров, сравнивая выражения
(35а) и (35г), (35д). Появление множителя 3/2 в индуктивностях,
определяющих взаимную индукцию полей статора на ротор, объ-
ясняется характером линейных преобразований вида (24а). Физиче-
ски контуры статора по осям d и q не являются реальными, неизме-
няемыми контурами, а лишь эквивалентными цепями, отражающими
магнитное действие трех фазных обмоток статора на контуры ро-
тора по осям dug. Вместе с тем, согласно введенным линейным пре-
образованиям, собственные максимальные токи и потокосцепления
этих контуров равны амплитудам величин только одной фазной об-
мотки статора. Поэтому э. д. с., индуктируемая в продольном кон-
туре статора потоком обмотки возбуждения, определяется взаимо-
индуктивностью обмотки возбуждения и фазной обмотки статора
Mafd; э. д. с., индуктируемая в обмотке возбуждения продольным
потоком статора, определяется токами всех трех фаз, обуславливаю-
щих поле в 3/2 раза большее, нежели создаваемое током одной фазы
или продольным током id (поскольку эти токи равны).
Подобная запись потокосцеплений с различными взаимоиндук-
тивностями двух контуров в зависимости от направления взаимной
индукции, используется в уравнениях Парка—Горева. Однако по-
следующее развитие теории синхронной машины показало, что бо-
лее удобной и наглядной формой записи потокосцеплений является
такая, которая полностью соответствует принципу взаимности в
отношении индуктивностей магнитосвязанных контуров [Л. 5].
При этом выражения для потокосцеплений машины в продольной
и поперечной осях полностью соответствуют таковым для много-
обмоточного трансформатора.
§
Преобразование уравнений напряжения
51
Исходные выражения (35а), (35в) — (35д) легко преобразуются
к указанной форме, если в них рассматривать вместо действитель-
ных токов цепей ротора (Л, ikd, ik ) приведенные токи, уменьшенные
J 4 /,2,2
в 3/3 раза по сравнению с действительными {y = ~i^ikd = — ikd*
tkq — у ikq и вместо действительных индуктивностей цепей ротора
(МаЫ, Lf, Lhd, Lkq, MfM,makd,mallg) увеличенные в 3/2 раза (M'afd =
— 4 Mafd, = Lf, L'kd = 4 ^иИТ. Д.) .Поскольку, однако, уравне-
ния синхронной машины записываются в системе относительных еди-
ниц, кратко излагаемой ниже, необходимые преобразования могут
быть сделаны одновременно с введением относительных единиц.
Индуктивности обмоток статора L,h Lq, LQ, определяющие пото-
косцепления в осях d, q, имеют простой физический смысл. Поло-
жим, что невозбужденная синхронная машина (if = 0) подключена
к трехфазной сети с симметричными напряжениями еа, еь, ес. Токи,
протекающие по обмоткам статора, создадут вращающееся магнит-
ное поле. Если ротор машины привести во вращение со скоростью,
равной скорости вращающегося поля, то ротор и поле будут непод-
вижны друг относительно друга, токи демпферных контуров равны
нулю и магнитное поле обусловлено только токами статора. При
этом амплитуда поля в воздушном зазоре может, в общем случае,
занимать любое положение относительно осей ротора d, q. Пусть
симметричные фазные токи статора определяются выражениями:
ia = lm cos («/ + ?);
iq ~~ Лп cos (<о/ —j— ф — 2 20);
ic = lm cos (w/ -f- <p -f- 120).
Продольный и поперечный токи статора id и iq определяются выра-
жениями (24а), в которых нужно положить 7 = так как
скорость ротора равна скорости вращающегося поля токов статора.
Тогда
. 2
== у Im [COS (tilt -|- a) COS («)/ f0) COS (tilt <р- 120) X
X cos (mt —|— 7o — 120) -f- cos (tilt 4- a -f- 120) cos (mt + 70+ 120) ] =
— Im cos (cp — 70);
lq =---у Im [ COS (tilt 4- 'f) sin (tilt 4- 7o) 4- cos (tilt <p — 120) X
X sin (tilt 4~ Io — 120)4- cos (<1)^4-? + 120) sin (mt 4"7o+ 120) ] =
= Im sin (<p — 70).
На рис. 24 дано графическое изображение токов id и iq с помощью
изображающего вектора тока, модуль которого равен амплитуде
фазных токов 1т. Из полученных выражений следует, что система
4*
52
Уравнения синхронной машины
/Гл„ 2
симметричных фазных токов прямой последовательности дает по-
стоянные по величине токи id и iq, определяемые амплитудой фаз-
ных токов и углом <р—у0. Допустим,
Рис. 24. Определение токов id, iq
с помощью изображающего векто-
ра в случае установившегося сим-
метричного режима работы синх-
ронной машины.
создаваемая токами
что при синхронном вращении
ротора и поля амплитуда послед-
него совпадает с осью полюсов —
осью d (рис. 25). В этом случае
полей, сцепляющихся с обмотками
статора в поперечной оси, очевид-
но, не будет, т. е. = 0. Пото-
косцепление нулевой составляю-
щей ф0 также равно нулю, посколь-
ку при симметричных токах ста-
тора z0 = ± (ia Д- ib + 4) = 0. Сле-
довательно, в этих условиях пото-
косцепление с обмотками статора
будет определяться только величи-
ной tpd.
Поскольку 6? = 0 и % — 0,
то из (35а) следует, что iq = 0 и
токи статора носят чисто продоль-
ный характер; амплитуда м. д. с.,
фазных обмоток статора, совпадает с осью d.
На рис. 24 этим условиям будут соответствовать изображающие век-
Рис. 25. Продольный и поперечный потоки (потокосцепле-
ния) обмотки статора: а — чисто продольное поле (>L? = 0);
б — чисто поперечное поле ('^ = 0).
торы тока и потокосцепления, совпадающие с осью d (угол э —
= 0). Из выражения (35а) для рассматриваемых условий находим:
(36)
§ б/ Преобразование уравнений напряжения
Поскольку потокосцепление равно модулю изображающего век-
тора потокосцеплений, и, следовательно, максимальному значению
потокосцеплений с фазной обмоткой, а ток id равен амплитуде фаз-
ного тока, то их отношение (36) есть индуктивность фазной
обмотки. Это следует и из аналитических зависимостей. Пользуясь
выражениями (246) для токов фаз и аналогичными выражениями
для потокосцеплений, имея в виду, что iq =0; — 0; г0 = 0; % — 0,
получим для любой из фаз, например фазы а:
Фо _ cos т _ L
ia id cos 7 id d'
Однако нужно иметь в виду, что отношение 4^ дает не просто ин-
1а
дуктивность фазы а, но эквивалентную индуктивность, учитываю-
щую взаимную индукцию токов других фаз. Итак, Ld представляет
индуктивность фазной обмотки статора при протекании по обмоткам
статора симметричных синусоидальных токов прямой последова-
тельности, вращении ротора с синхронной скоростью и ориентации
поля токов статора по продольной оси. Соответствующее индуктив-
ное сопротивление xd = u>Ld называется синхронным сопротивлением
по продольной оси. Измеряя при описанных условиях работы син-
хронной машины фазное напряжение е, ток I и мощность на фазу Р,
можно вычислить полное сопротивление фазы, ее активное и ин-
дуктивное сопротивления:
е Р -. р~,--т
= r = xd = yz2d — r2.
Отметим, что на практике пользуются другими, более простыми
методами определения сопротивления xd. Аналогичным образом
может быть определена индуктивность Lq с той лишь разницей, что
теперь ось поля в воздушном зазоре, созданного токами статора,
должна совпадать с поперечной осью машины (рис. 25, б).В этом
случае ld = Q,id = 0 и Lq = 4^- есть отношение амплитуд потоко-
lq
сцепления и тока фазной обмотки. Таким образом, Lq есть индуктив-
ность фазной обмотки статора при протекании по обмоткам статора
симметричных синусоидальных токов прямой последовательности,
вращении ротора с синхронной скоростью, но при условии ориента-
ции поля токов статора по поперечной оси машины.
Соответствующее индуктивное сопротивление хд — шЬд назы-
вается синхронным сопротивлением по поперечной оси. Синхронное
индуктивное сопротивление xd можно представить в виде суммы двух
составляющих — одной, которая соответствует полю основной гар-
монической, проходящему через воздушный зазор (поле реакции
якоря) xad, и другой, соответствующей полю рассеяния обмотки
статора xsd. При этом предполагается, что поле реакции якоря совпа-
дает с осью d. При совпадении магнитного поля реакции якоря с
осью ц, когда фазная обмотка имеет сопротивление xq, последнее
54
Д'рйвпспиЯ CUHXpOHHOU MUUlUHbl
[Гл. 2
подобным же образом распадается на две составляющие: xaq и xsq.
В § 4 было указано, что практически xsd^xsq — Xs. Поэтому
xd = xad + xs-, xq=xa,+x,
Индуктивность статора Lo может быть определена, если в обмотках
статора протекают только токи нулевой составляющей /0 (id =
= iq — 0). Это будет иметь место при условии, что во всех фазах
протекает одинаковый ток i, т. е. ia = ib = ic = i. Тогда в соответ-
ствии с (24а):
id — -j i [cos т+ cos (l — 120) -f- cos (y-f- 120) ] =0;
ia — — [sin r-4- sin (y — 120)4- sin (?-[- 120) ] =0.
Это означает, что м. д. с. трехфазной обмотки равна нулю.Сле-
довательно, токи z0 не создают магнитного поля, проходящего через
зазор в ротор. * Тогда при невозбужденном роторе потокосцепления
с обмотками статора определяются только током I и они не зависят
от того, вращается ротор или нет.
В соответствии с соотношениями (246), справедливыми как для
токов, так и для потокосцеплений, отношение фазного потокосцеп-
ления к току этой фазы для рассматриваемых условий (фй = ф9 =
= zd = z? = O), т. е. индуктивность фазы равна:
= = (k=a,b,c).
Итак, Lo есть индуктивность фазной обмотки при протекании по
обмоткам токов нулевой составляющей г0. Поскольку индуктивность
не зависит от характера изменения тока во времени, то можно
принять z0 = Im cos (ш[ -[- ®). При гармоническом изменении ток /0
есть хорошо известный из метода симметричных составляющих ток
нулевой последовательности. Следовательно, индуктивное сопро-
тивление х0 = (о£(| есть индуктивное сопротивление нулевой после-
довательности.
Возвратимся к полученным ранее уравнениям синхронной ма-
шины.
Уравнения напряжения синхронной машины в осях а, Р (29а),
(296) и в осях d, q (34а), (346) могут быть выведены и другим пу-
тем, наглядно иллюстрирующим линейное преобразование коорди-
нат.
* Это утверждение справедливо лишь в отношении основной пространст-
венной гармонической поля, которая только здесь и рассматривается. Более
детальное исследование [Л. 6] показывает, что высшие гармонические поля и,
в частности, третья гармоническая замыкаются через ротор.
Преобразование уравнений напряжения
55
Рассмотрим из соображений удобства в качестве исходной двух-
фазную * синхронную машину с вращающимся якорем и непо-
движным полем, поскольку с точки зрения электромагнитных про-
цессов безразлично, что вращается: обмотка якоря или поле. На
рис. 26 в виде окружности схематически изображена двухфазная
обмотка кольцевого якоря, выведенная на две пары контактных ко-
лец. Магнитные оси двух фазных обмоток а и Р нормальны друг другу
и вращаются вместе с якорем.
Потокосцепления любого контура ф в электрической машине в
самом общем случае, как известно, можно считать функцией време-
ни t и координаты ав, определяющей взаимное положение поля и
контура. Поэтому приращение потокосцепления с контуром и
э. д. с., индуктируемая им, соответственно равны:
т в 1 dt ’
дф дф ।
- уг = ев + ет,
где о>в — относительная скорость вращения поля и контура.
Следовательно, э. д. с., индуктируемая в контуре, определяется
суммой так называемых э. д. с. вращения ев и э. д. с. трансформа-
ции ет.
Когда уравнения напряжения машины записываются в осях
а, Р, это значит, что индуктирование э. д. с. в обмотках якоря про-
изводится потокосцеплениями 0^, ориентированными по осям
а, р. Из рис. 26 нетрудно видеть, что потокосцепления ф не
создают э. д. с. вращения, поскольку они не перемещаются отно-
сительно якоря (сов — 0). Э. д. с. трансформации, возникающие в
обмотках а, р, будут создаваться только тем полем, которое совпада-
ет с магнитной осью рассматриваемой обмотки; от нормально напра-
вленного поля э. д. с. трансформации в обмотке равна нулю. По-
этому на одной паре контактных колец напряжение равно
еа = еат —=-------—пл,
а на других контактных кольцах:
е — е — Н = — —— pi
И И dt
что соответствует уравнениям (29а) и (296).
Перейдем теперь к осям d,q, жестко связанным с полюсами
нитной системы (рис. 27). Чтобы измерить напряжение якоря в
осях(е^, ед), нужно иметь две пары точек токосъема с якоря, распо-
лагающиеся вдоль осей d, q. Это может быть осуществлено с помощью
* Трехфазная машина заменяется двухфазной, если токи нулевой состав-
ляющей /0 не создают полей в воздушном зазоре, что в «идеализированной»
машине и имеет место.
маг-
этих
56
У равнения синхронной машины
[Гл. 2
коллектора, к которому присоединяется кольцевая обмотка якоря,
и двух систем щеток, расположенных на осях d, q (рис. 27).
В системе осей d, q индуктирование э. д. с. в якоре необходимо
рассматривать от потокосцеплении ф^, ф ориентированных по
Рис. 26. Схема двухфазной
машины, магнитные оси фаз-
ных обмоток которой а, р
перемещаются относительно
полюсов.
Рис. 27. Схема двухфазной
машины, магнитные оси фаз-
ных обмоток которой d, q
неподвижны относительно
полюсов.
осям d, q. Поскольку потокосцепления (поля) <pd, ф и обмотка яко-
ря перемещаются друг относительно друга со скоростью вращения
Рис. 28. Направление положительных токов ij, tq в якоре
двухфазной машины.
якоря, то напряжения ed, eq будут содержать как э. д. с. трансформа-
ции, так и э. д. с. вращения, и, следовательно,
~i~ ri-a.
^дв Г1д.
§ У
Преобразование уравнений напряжения
57
На рис. 28 указаны направления токов id, iq, принимаемые за
положительные (id^>0; z9^>0), создающие положительные потоко-
сцепления Ф^>0, направленные вдоль положительных осей
d, q. Из рис. 28 нетрудно видеть, что э. д. с. трансформации на щет-
ках dd (еат) создается только за счет изменения потокосцеплений
фй, а на щетках qq (eqT) — только за счет изменения потокосцеплений
%, т. е.
е — — е — —
CliT dt ’ »т dt ‘
Э. д. с. трансформации на щетках от полей, направленных
нормально к оси щеток, равны нулю. Нетрудно также видеть, что
э. д. с. вращения обмотки якоря, измеряемые на щетках, будут
Рис. 29. Направление положительных э. д. с. вращения
от продольного и поперечного потокосцеплений в
якоре двухфазной машины.
создаваться только от полей, нормально направленных к оси щеток,
а от полей, совпадающих со щетками, э. д. с. вращения равна нулю.
На рис. 29 нанесены направления э. д. с. вращения в обмотке
якоря от положительных потокосцеплений ф^и фо. Сопоставляя их с
направлением положительных токов id,iq, на рис. 28 можно заметить,
что э. д. с. вращения е,/в от потокосцеплений ф9 направлена соглас-
но с током zd^>0, а э. д. с. вращения eqB от потокосцеплений фй
и ток z9^>0 имеют противоположные направления. Поэтому
= —ФйШ.
Подставляя найденные значения э. д. с. трансформации и вращения
в общие уравнения напряжения, получим:
di>d । ,
di 4~
Эти уравнения совпадают с полученными ранее уравнениями (34а),
(346).
58
Уравнения синхронной машины
[Гл. 2
На основании изложенного попутно можно сделать вывод о
том, что: 1) дифференциальные уравнения синхронной машины ока-
зываются справедливыми и для коллекторных машин; 2) моделью
«идеализированной» синхронной машины, электромагнитные про-
цессы которой исследуются в осях d, q, служит коллекторная маши-
на. Это представление соотношений в синхронной машине с помощью
коллекторной машины было дано Г. Кроном. Отметим, что в такой
модели пренебрегается коммутационными процессами. На рис. 30
схематически изображена модель синхронной машины, демпферные
обмотки которой представлены одним контуром в каждой оси (Dd,
Dq).
§ 7. Диаграмма синхронной машины
для установившегося симметричного режима работы
По полученным дифференциальным уравнениям напряжения в
осях d, q может быть построена известная из общего курса электри-
ческих машин векторная диаграмма синхронной машины для уста-
новившегося симметричного режима работы. Для этого достаточно
использовать уравнения (34а) и (346), так как г0 = = е0 = 0.
При наличии в статоре симметричных синусоидальных токов
продольный и поперечный токи id, iq, как было показано выше, ока-
зываются постоянными. В установившемся симметричном режиме
токи в демпферной обмотке отсутствуют, а ток возбуждения lf —
= const. Поэтому в уравнениях (34а) и (346) p^d = ptya = 0,
a p-[=zws, так как ротор вращается с постоянной синхронной ско-
ростью, и они принимают вид:
— ed = ~ ф^+ «</ = — Xqiq + ridi (37а)
eq — Ф<Л + riq = Xdld @7б)
где Mafdwsif — До обозначает э. д. с., индуктируемую в обмотках
статора магнитным потоком возбуждения (или основным магнит-
ным потоком).
Нанесем на плоскость оси: фазы а, продольную d и поперечную
q (рис. 31, а). Чтобы определить положение изображающих век-
торов напряжения и тока на диаграмме, рассмотрим предваритель-
но холостой ход возбужденной синхронной машины (if 0; id —
= iq — 0). Потокосцепление в этом режиме, например с фазой а,
равно:
Фа = Mafdif cos т — б</0 cos у
и вектор направлен по оси d. Э. д. с.,индуктируемая полем обмот-
ки возбуждения в той же фазе
=—р^а = -'qd^>s cos = До cos [j — yj
$ 7] Диаграмма синхронной машины для установившегося режима 59
и, следовательно, вектор совпадает с отрицательным направлени-
ем оси q. Если при холостом ходе фазное напряжение статора е
изменяется во времени одинаково с
э. д. с. от поля обмотки возбужде-
ния, то при нагрузке синхронной
машины э. д. с. Ег, и напряжение е
будут по фазе различаться. Обозна-
чим угол между е и Ео через 0О и
нанесем на диаграмму вектор е,
считая 900, если вектор £0 уп-
реждает вектор е. Величина угла 90
будет характеризовать нагрузку
синхронной машины (величину
электромагнитного момента). Век-
тор £0 на диаграмме рис. 31, а
вращается со скоростью ротора
(в установившемся режиме с син-
хронной скоростью). Вектор фаз-
Рис. 30. Схема коллекторной ма-
шины, служащей моделью син-
хронной машины, процессы кото-
рой исследуются в координатных
осях d, q.
ного напряжения е вращается на
диаграмме со скоростью, равной
угловой частоте фазного напряже-
ния (если машина работает парал-
лельно с системой, то это частота
системы), и, следовательно, в установившемся режиме с той же
скоростью, что и вектор Ёо Поэтому угол между векторами е и Ей
Рис. 31. Векторная диаграмма синхронной машины для установившегося
режима работы: а — положение изображающих векторов на диаграмме; б —
диаграмма на комплексной плоскости.
для заданного режима должен оставаться неизменным. Как изве-
стно, нормальная работа синхронной машины параллельно с си-
стемой возможна в режиме генератора при углах 0О 0, но не
60
Уравнения синхронной машины
превышающих примерно 90°. * Для углов 0О, находящихся в пре-
делах 0 9о «£ 90°, напряжения ed, eq, отрицательны (рис. 31, а).
Токи id, ig легко определяются из уравнений (37а), (376). Прене-
брегая активным сопротивлением обмоток статора (г = 0), кото-
рое имеет малое влияние на величину тока, получим:
I =
I 4 хч
Таким образом, при 0 sg 0О «ё 90°, токи iq, id отрицательны. **
Изображающий вектор тока I определяется выражениями (38).
Обычно при построении диаграммы пользуются комплексной плос-
костью, оперируя, следовательно, не векторами, а комплексами.
Совмещая оси d, q с осями + 1, + j комплексной плоскости, ум-
sin % . __
~с ’ ld—
I £д ______Eq____е cos zqq
ха '
Xd
Рис. 62. Видоизмененная векторная диаграмма син-
хронной машины для установившегося режима ра-
боты.
ножая уравнения (37а), (376) соответственно на —1, —j, и склады-
вая их, получим комплексное уравнение, по которому на рис. 31, б
построена векторная диаграмма. Отметим, что иногда бывает удоб-
ной модификация векторной диаграммы, представленная на рис. 32.
Суть ее состоит в том, что, вводя в рассмотрение некую э. д. с.
Eq, однозначно определяемую через параметры машины и данные
режима, синхронную машину можно уподобить неявнополюсной
с синхронным сопротивлением, равным хд, и э. д. с. EQ (вместо£0
в реальной машине).
§ 8. Уравнение моментов и электромагнитный момент
Переходный процесс синхронной машины всегда сопровож-
дается изменением скорости вращения ротора. В тех случаях, когда
изменение скорости начинает оказывать влияние на протекание
* При специальном автоматическом регулировании возбуждения машины
могут достигаться углы 60, превышающие 90°.
* * При недовозбуждении машины id может стать положительным.
$ 8J У равнение моментов и электромагнитный момент
61
процесса, возникает необходимость совместного исследования про-
цессов в электрических цепях и механического движения ротора.
Тогда к уравнениям напряжения цепей машины должно быть до-
бавлено дифференциальное уравнение движения ротора (5):
2 tn (Fi) = Jp^-
(39)
На ротор машины действуют следующие моменты сил /тг(/7;)(рис. 33):
1) Момент механических сил М’т, приложенный со стороны вала
машины. При работе синхронной машины генератором моментМ'т
является моментом первичного двигателя. При работе машины в
режиме двигателя М'т является моментом сил, совершающих ме-
ханическую работу в рабочем механизме, присоединенном к валу
синхронного двигателя (момент полезной нагрузки на валу). В слу-
чае синхронного генератора момент М’т является движущим, а в
случае синхронного двига-
теля — тормозящим. Мо-
мент Л4щВ границах иссле-
дуемого процесса часто
остается постоянным, од-
нако в общем случае он
является некоторой функ-
цией скорости и времени.
2) Момент электромаг-
нитных сил (электро-
магнитный момент), обус-
ловленный тем, что обмот-
ки с токами находятся в
Рис. 33. Моменты, действующие на ротор
синхронной машины: а — режим генера-
тора; б — режим двигателя.
магнитном поле воздушного зазора. Момент для синхронного
генератора является тормозящим, в синхронном двигателе он,
напротив, — движущий.
3) Момент механических сил Л40, имеющих характер трения,
(трение в подшипниках, ротора о воздух и т. п.) * и называемый
моментом холостого хода. Этот момент всегда является тормозя-
щим. Момент Л10 может быть принят постоянным, если скорость
меняется в небольших пределах.
В соответствии со сказанным относительно характера действия
моментов (движущий, тормозящий) и принимая электромагнитный
момент и момент на валу М'т положительными в режиме работы
машины генератором, получим дифференциальное уравнение дви-
жения ротора, или просто — уравнение моментов, в виде:
Мт — М^ = Jpv, (40)
где Мт = М'т— Мо — момент механических сил.
* В «идеализированной» синхронной машине, которая здесь рассматри-
вается, потери в стали равны нулю. В реальной машине в момент Л1о входит
составляющая, соответствующая потерям в стали.
62
Уравнения синхронной машины
[Гл. 2
Определим выражение для через новые переменные, отне-
сенные к осям d, q.
Известно, что электромагнитные силы, действующие на контуры
с током, определяются исключительно мгновенными значениями
токов в контурах и не зависят от производных токов по времени
[Л. 7]. Поскольку электромагнитные силы и, следовательно, электро-
магнитный момент зависят только от токов и не зависят от
их производных, то может быть найден при исследовании лю-
бого режима работы машины, в том числе и такого, при котором
pid—piq = pif = 0; р-[ = = const,
т. e. из рассмотрения установившегося симметричного режима ра-
боты, когда такое рассмотрение будет наиболее простым. Найден-
ное выражение для Л4ф будет одинаково справедливым как для уста-
новившегося, так и для переходного режима работы, при условии,
что токи определены для данного момента времени соответственно
рассматриваемому переходному процессу.
В установившемся режиме работы генератора электромагнит-
ная мощность Р , отдаваемая мощность в сеть Р и потери в меди в
обмотках статора рм подчиняются соотношению:
Р, = Р+ря^ (41а)
Электромагнитный момент и соответствующая ему мощность
связаны общим соотношением:
(416)
Подставляя в (41а) выражения мощности Р из (28в) и потерь
р* из (28г), получим:
= { У [ Г (Z1 + Z?) ] + 3 (бо4 + ZZ) } • (41 в)
Напряжения ed и е определяются в установившемся режиме урав-
нениями (37а) и (376). Подстановка их значений, а также е# = — «о
(рфо = О) в выражение (41в) дает:
р^= 4 [фл—
Тогда, имея в виду (416), находим электромагнитный момент:
л1ф=4ьрл- ш <42)
Формальное выражение (42) показывает, что электромагнитный
момент машины не зависит от нулевой составляющей тока г0, что,
впрочем, следует также и из физических представлений. Действи-
* Отметим, что в переходном режиме Р + рм представляет внутреннюю
мощность машины, отличающуюся от электромагнитной Р,^ на величину мощ-
ности, затрачиваемой на изменение энергии магнитных полей.
§ SJ
Уравнение моментов и электромагнитный момент
63
тельно, ранее было показано (§ 6), что ток z0 не создает в воздуш-
ном зазоре магнитного поля, он обуславливает лишь поля рассея-
ния обмоток статора. Поэтому он не принимает никакого участия в
создании электромагнитного момента М . Это обстоятельство до-
казывает высказанное в § 5 положение о*том, что ток i0 не оказы-
вает влияния на характер движения ротора в переходном процессе.
Рис. 34. К определению электромагнитного момента
синхронной машины на ее модели — коллекторной
машине: а, б — взаимодействие одноименных токов
и потокосцеплений; в, г — взаимодействие разноимен-
ных токов и потокосцеплений.
Уравнение моментов (40), после подстановки в него выражения
из (42), принимает вид:
Mm = Jpu> + У — <М9]. (43)
Отметим, что выражение (42) для электромагнитного момента
может быть получено также непосредственно с помощью модели
синхронной машины — коллекторной машины с двумя системами
щеток (§ 6). На рис. 34 указаны направления токов в генератор-
ном режиме модели синхронной машины. Положительный электро-
магнитный момент направлен в сторону, противоположную враще-
нию якоря. Из рис. 34 можно видеть, что потокосцепление и
64
У равнения синхронной машины
/Гл. 2
ток якоря id не создают момента; аналогичным образом момент от
взаимодействия потокосцеплений и тока I равен нулю. Электро-
магнитный момент 2ИФ1 от взаимодействия потокосцеплений и
тока id равен Л/ф1 =tyqid и положителен, поскольку направлен в
сторону, противоположную вращению якоря.
Наконец электромагнитный момент Л4фг от потокосцеплений
и тока I равен 2Ифз = 6rf i и направлен в сторону вращения якоря,
т. е. действует противоположно моменту Л4Ф1. Поэтому суммарный
момент Л41(1 равен:
Mi = — Mi. = $qid — $diq.
Полученный таким образом электромагнитный момент от-
носится к двухфазной синхронной машине. При переходе к машине
трехфазной нужно М увеличить в 3/2 раза, что и приводит к выра-
жению (42).
§ 9. Уравнения синхронной машины в относительном движении
Как уже указывалось, большинство переходных процессов
синхронной машины, работающей параллельно с системой, совер-
в =const
f- const
Эквивалентная
машина
Рассматриваемая
машина
Риг. 35. Схема включения синхронной машины на шины бесконечной мощ-
ности (а). Замена шин эквивалентной машиной (б).
шается при переменной скорости вращения ротора. Однако откло-
нение ее от значения в предшествующем установившемся режи-
ме — синхронной скорости, при условии сохранения устойчивой
работы (сохранения синхронизма с системой) невелико.
Пусть рассматриваемая синхронная машина работает параллель-
но с системой бесконечной мощности (рис. 35,а), т. е. с такой систе-
мой, напряжение и частота которой остаются постоянными при лю-
бом изменении нагрузки рассматриваемой машины. Такую систему
можно на схеме заместить одной синх.гонной машиной, — мы на-
зовем ее эквивалентной машиной, — работающей с постоянной син-
xj uiiHofi ско] остью (/ = const) и обладающей сопротивлениями
§ 9] Уравнения синхронной машины в относительном движении 65
обмоток статора, равными нулю (е = const при любой нагрузке)
(рис. 35, б).
В установившемся режиме обе машины вращаются с постоянны-
ми синхронными скоростями. В переходном процессе скорость вра-
щения рассматриваемой машины изменяется, в то время как ротор
эквивалентной машины продолжает вращаться с прежней синхрон-
ной скоростью.
При исследовании переходного процесса рассматриваемой ма-
шины оказывается более удобным иметь дело не с абсолютным
движением ее ротора в пространстве, а с относительным движением
по о;ношению к ротору эквивалентной машины. *
Перемещение ротора рассматриваемой машины в таком относи-
тельном движении может определяться углом, который составляет
продольная или поперечная ось ротора с одной из осей ротора
эквивалентной машины. Условимся характеризовать взаимное по-
ложение роторов машин углом между
отрицательными направлениями их по-
перечных осей —q и —qb (рис. 35, б).
При рассмотрении установившегося
процесса (§ 7) синхронной машины было
показано, что на диаграмме изображаю-
щий вектор э. д. с. £0 от поля возбуж-
дения расположен по отрицательному
направлению поперечной оси машины.
Поскольку у эквивалентного генератора
сопротивления обмоток статора равны
нулю, то фазное напряжение на его за-
жимах е в точности равно Еп. Таким
Рис. 36. Определение угла 0
синхронной машины.
образом, изображающий
вектор е совпадает с осью — q3 эквивалентной машины и угол
между осями — q и — q^ есть угол между осью — q рассматри-
ваемой машины и изображающим вектором фазного напряжения е,
обозначенный ранее 0 (§ 7). Поскольку вектор е системы бес-
конечной мощности вращается с постоянной скоростью, угол, ко-
торый он составляет с осью фазы а, равен ast + а (рис. 36),
а угол 0, как видно из рисунка,
2 ‘
Дифференцирование этого соотношения дает:
ре =Р1 —
(44а)
(446 )
* Подобная методика используется и при исследовании совместной работы
машин соизмеримой мощности, когда рассматривается относительное движение
роторов машин.
5 А. И. Важное
66
Уравнения синхронной машины
[Гл. 2
Введем в рассмотрение скольжение s, аналогичное тому, которое
используется в асинхронных машинах, но отличающееся от него
знаком:
СО - С0с
S=-------
1.
(45)
Из уравнений (44а) и (45) находим, что
(45а)
Таким образом, скольжение s равно скорости изменения угла 6,
выраженной в долях синхронной скорости. Далее,
= (1 + s) А = ^Ps- (46>
Вводя параметр скольжения в уравнения (34а), (346) и (43) из
(46), получим систему уравнений синхронной машины в следующем
виде:
ed =P^d----'^qMs (1 ~Ь s) + rf-d,
~eq = 1 + S) + Ptyq + riq,
ef=ptyf-\-rfif,
0 = ptyid Д- гndiid Д- r+ • • • Ч- rtn
0 P^lq “Г ГHqhq + f Hjhq “Г •
(47)
M,n 2 [Ф7О ФД^]*
Здесь и в дальнейшем уравнение напряжения нулевой состав-
ляющей в систему уравнений не включается. Потокосцепления,
входящие в уравнения (47), определяются выражениями (35а),
(35в) — (35д).
§ 10. Система относительных единиц
В теории синхронной машины ее уравнения обычно записываются
не в абсолютных значениях, а в относительных единицах. Это зна-
чит, что все величины, входящие в уравнения машины, выражены
не в физических единицах (напряжение в вольтах, ток в амперах
и т. д.), а как доли некоторых количеств, имеющих ту же физиче-
скую размерность. Последние носят название базисных количеств
или базисных величин. Относительные значения величин будут,
естественно, безразмерными. Пусть, например, такие переменные,
относящиеся к статору, как напряжения erf, ед и токи zrf, iq изме-
ряются соответственно в вольтах и амперах. Если принять в ка-
честве базисных величин для напряжения и тока статора eg и is>
§ 10]
Система относительных единиц
67
также измеряемые в вольтах и амперах, то относительные значения
рассматриваемых переменных определятся отношениями:
&d . &q . id . iq
еб ’ «б ’ 'б ’ <’б ’
Подобным образом могут быть представлены и любые другие вели-
чины, описывающие синхронную машину.
В дальнейшем базисные величины будут снабжаться индексом
«б», а эти же величины для роторных цепей — дополнительным ин-
дексом, обозначающим рассматриваемую цепь. Например, базисное
напряжение обмотки возбуждения имеет обозначение ef6. При по-
следующем изложении до § И включительно все величины в отно-
сительных единицах снабжены чертой снизу, а те же количества,
имеющие физическую размерность, обозначаются аналогичным
символом, но без черты. Например, индуктивность, измеряемая
в генри, обозначается L, а та же индуктивность в относительных
единицах — L. В остальной части книги, после §11, где преиму-
щественно используются величины в относительных единицах, они
будут обозначаться символом без черты, т. е. так же, как и вели-
чины с физической размерностью, но использование последних бу-
дет специально оговариваться, чтобы не было путаницы в обозна-
чениях.
Система относительных единиц обладает целым рядом положи-
тельных свойств. Переход к системе относительных единиц упро-
щает запись уравнений, освобождая их от некоторых постоянных
коэффициентов, облегчает вычисления, поскольку переменные вы-
ражаются удобными числами (долями единицы), а также делает
возможным сравнение результатов, получаемых для машин различ-
ной мощности.
Для того чтобы совершить переход от физических величин к их
относительным значениям, выраженным в долях базисных коли-
честв, нужно прежде всего однозначно определить всю совокупность
базисных величин. В современной теории большая часть базисных
величин является общепринятой, однако некоторые базисные коли-
чества оказываются различными у различных авторов. Общеприня-
тыми базисными величинами являются следующие:
1. Ток статора z6 — за базисный ток статора принимается ам-
плитуда номинального фазного тока статора.
2. Напряжение статора е5 — за базисное напряжение статора
принимается амплитуда номинального фазного напряжения статора.
3. Угловая частота шб — за базисную угловую частоту прини-
мается синхронная угловая частота ws = 2nfB (fg—номинальная
частота).
4. Потокосцепление статора ф6— за базисное потокосцепление
статора принимается потокосцепление, индуктирующее в обмотке
статора при базисной угловой частоте базисное напряжение: %=—.
ГГ/7 9
I •* —
68
У равнения синхронной машины
5. Базисное сопротивление статора z$ =^~.
6. Мощность статора Рб — за базисную мощность принимается
номинальная мощность машины Ра (в ква):
Q
Рб = Ра = ^Л = ^ ебгб,
где t/H, /н — действующие значения номинальных фазных напря-
жения и тока статора.
р,
7. Базисный момент Л40 = ^ р, где р — число пар полюсов
машины.
8. Базисная
индуктивность статора L6 =
Z6
“б’
9. Базисное время t6 — время, соответствующее повороту ро-
тора синхронной машины при базисной угловой частоте на 1 эл.
радиан ~ сек).
Время, выраженное в долях t5,
будем в дальнейшем обозна-
чать
М/2
«2
>МЛ/------о
т. Согласно определению,
Рис. 37. Схема замещения трансфор-
матора. Время т называют иногда син-
хронным временем.
Базисные величины для роторных цепей, к сожалению, не яв-
ляются общепринятыми. Это положение сложилось исторически,
так как по мере развития теории синхронной машины различные
авторы использовали наиболее удобную для исследования систему
базисных величин роторных цепей. Удобство того или иного выбора
базисных величин для роторных цепей определяется, в основном,
количеством этих цепей. Если иметь в виду физическую наглядность,
то наиболее целесообразной следует признать такую систему базис-
ных величин, при которой уравнения напряжения синхронной
машины в относительных единицах сохраняют форму уравнений
трансформатора в физических величинах. Оказывается, что в по-
добной системе базисных величин существует определенная связь
между отдельными базисными количествами.
Рассмотрим для примера статический двухобмоточный однофаз-
ный трансформатор (рис. 37). Уравнения напряжения первичной
(1) и вторичной (2) обмоток трансформатора в физических величи-
нах имеют вид:
«1 — -ф- гjZ’i;
(zW18Zi ~Г Ч-
(48)
§ 10]
Система относительных единиц
69
где
Lx, L2, г2 — индуктивности и активные сопротивления обмоток;
М12 — взаимоиндуктивность обмоток;
и2, г1; i2 — напряжения, приложенные к обмоткам, и токи
в них.
Чтобы уравнения напряжения в относительных единицах сохра-
нили форму уравнений, имеющих физическую размерность (48),
необходимо подчинить базисные количества первичной и вторич-
ной обмоток следующим условиям:
£16 — Ф1б<об > (49а)
Ф1б — Lidis, (496)
216 — ^-1бшб; (49в)
еаб= фзб^б; (49г)
Фаб — ^-гб^аб’, (49д)
2зб — ^-2бшб1 (49е)
Р1б = Раб или е1бг1б — е2бг2б- (49ж)
Разделив первое уравнение (48) на (49а), а второе уравнение на
(49г) и имея в виду соотношения (496) — (49е), получим в относи-
тельных единицах:
d / J ! 71412 Z2O • \ t
Lib + T~ Z2 1 “Ь ГlZb
— a*\— Lio чб— / — '
= i 1 + -2-2).
На основании условий (49ж) в уравнениях (50):
Z26 __ Z16
^16Z16 ^26Z26
Поэтому уравнения (50) окончательно принимают форму
(48):
(50)
(51)
уравнении
И1---- (^-14 ~Г -^412^2 ) 4“
Wg = f/VJ jgZj -ф- LJj) -ф- r3z2,
где относительное значение взаимоиндуктивности равно:
(52а)
— \Цб/
а относительное значение параметров вторичной цепи трансформа-
тора с помощью (51) и (49е) может быть записано в виде:
(526)
(52в)
70
Уравнения синхронной машины
[Гл. 2
Выражения (52а) — (52в) имеют простой физический смысл. Для
того чтобы установить его, напомним операцию приведения пара-
метров вторичной обмотки трансформатора к первичной. Это приве-
дение состоит в умножении взаимоиндуктивности двух обмоток Л412
на коэффициент трансформации £12, а параметров вторичной обмотки
на при этом
®а — Лн>
где wv w2, /1Н, /2н — соответственно числа витков первичной и вто-
ричной обмоток и номинальные токи этих обмоток.
Таким образом, приведенные значения параметров г', Л4'., Z.'
равны:
М\.=Мы-к» = М^-,
Z; = Z3.^8 = Aa.(^)2;
Л, = г9* =
\'1н/
Сравнивая полученные выражения с (52а) — (52в), видим, что в по-
следних параметры сперва приведены к первичной цепи, а затем
отнесены к базисным- величинам первичной же цепи, что дает их
относительные значения. Отметим, что если базисная мощность
первичной цепи Pi6 выбрана равной номинальной мощности Р1н,
то
*86_(ан .
Йб Лн
в случае произвольного выбора Р16 —
Йб
йб ^Лн
и это будет обозначать, что приведение параметров трансформа-
тора к первичной цепи в выражениях (52а) — (52в) производится
с коэффициентом трансформации, отличным от общепринятого
в теории трансформаторов.
Если необходимо получить уравнения напряжения в относи-
тельных единицах, сохраняющие вид уравнений с физическими ве-
личинами, для многообмоточного трансформатора, то соотношения
между базисными количествами (49а) — (49ж) должны быть распро-
странены на все обмотки трансформатора. Таким образом, для любой
х-й обмотки будем иметь:
ехб — Фхб шб; (53а)
Фхб ^хб^хбу (536)
гхб = йхбшб; (53в)
Рхб — ^хб^хб== Р1б* (53г)
§ 10]
Система относительных единиц
71
Относительные значения параметров всех обмоток (кроме первич-
ной) определяются, как и в двухобмоточном трансформаторе, деле-
нием приведенного к первичной обмотке параметра на базисную
величину первичной обмотки. Например, взаимоиндуктивность вто-
ричной и третичной обмоток М23, приведенная к первичной обмотке,
равна:
М'„ = Л423 • k„ k13 = №\ • (Н = ,
\‘1н/ \*1н/ \б
где k12, k13 — коэффициенты трансформации между первичной
и соответственно вторичной и третичной обмотками. Относительное
значение этой индуктивности равно:
я /г _______ Л4зз *?б * Чб
/И 23 — j— — j S.
— Мб Мб *16
Таким образом, относительные значения параметров для х-й
обмотки и взаимных индуктивностей k-й и х-й обмоток равны:
_Lxk*ix — Сб LX / {яб У . 1-16 Vie/ (54a)
Гх - = Гх^Х = (546)
— 21б ^•16 Vi6 /
Mkx= Mkxkik^lx Сб Mkx 46'1x6 i\6 ’ (54b)
где klx, klk — коэффициенты трансформации между первичной об-
моткой и соответственно х-й и k-й обмотками;
ix5, Чб— базисные токи х-й и k-й обмоток.
Возвратимся к синхронной машине. Вдоль осей da q она может
рассматриваться как многообмоточный трансформатор, причем роль
первичной обмотки трансформатора играют продольный и попереч-
ный контуры статора, а остальные обмотки трансформатора — это
роторные контуры по осям d и q.
Если обратиться к общепринятым базисным количествам, то
можно заметить, что они удовлетворяют условиям (53а) — (53в).
Сложнее дело обстоит с роторными базисными количествами.
Широкое применение до сих пор имеет система базисных вели-
чин, введенная Парком. В этой системе в качестве базисных вели-
чин тока, напряжения и потокосцепления любого роторного кон-
тура были выбраны такие значения, которые, существуя в данном
контуре, обуславливают на статоре в режиме холостого хода но-
минальное напряжение по спрямленной характеристике холостого
хода. *
* «Идеализированная» синхронная машина имеет прямолинейную харак-
теристику холостого хода.
Т2.
У равнения синхронной машины
[Гл. 2
Имея в виду, что за базисное напряжение на статоре принято его
номинальное значение, в соответствии с определением Парка полу-
чим, например, для базисных величин обмотки возбуждения следую-
щие выражения:
е6 = MafdK>sif6-,
ef<s = rfife',
Ф/б = Lfifs-
Ясно, что эти соотношения не. подчиняются условиям (53а) — (53г).
Следовательно, уравнения напряжения роторных контуров и по-
токосцепления машины в таких относительных единицах прини-
мают форму, отличающуюся от обычной для индуктивно связанных
электрических цепей. Несмотря на это, система базисных величин
Парка достаточно проста в случае машины с одним контуром на
роторе — обмоткой возбуждения. Однако уже при наличии в ма-
шине по одному демпферному контуру в каждой из осей (d, q) эта
система становится мало удобной, сохраняя свой недостаток — фи-
зическую ненаглядность уравнений в относительных единицах,
получаемых с ее помощью.
Чтобы уравнения напряжений синхронной машины, записанные
в относительных единицах, сохраняли физическую ясность при лю-
бом числе контуров на роторе, нужно выражения для потокосце-
плений контуров машины преобразовать к виду, при котором вы-
полняется принцип взаимности в отношении индуктивностей, а за-
тем базисные количества роторных цепей подчинить условиям
(53а) — (53г). Проделаем необходимые преобразования для потоко-
сцеплений продольных контуров машины, которые можно рассмат-
ривать как обмотки многообмоточного трансформатора. Выше,
в § 6 уже указывалось, что для соблюдения принципа взаимности
необходимо токи всех цепей ротора уменьшить в 3/2 раза, а индуктив-
ности этих цепей увеличить в 3/2 раза. Тогда выражения потоко-
сцеплений продольных контуров (35а), (35в), (35г) принимают вид:
Ф<* = Laid + (4 Mafd} (у if) + 2 (4 makd \ (^ikd) > (55а)
fe=l
п
Ф/=(4 Mafd} id+(4 Lf} (f if)+2 (1) (4 : <556)
n—1
if ) + 2 ( 2~ bikd] +
*=r
+ (y Lna ) (y ino^~ (55b)
§ 10]
Система относительных единиц
73
Пусть для продольного контура статора базисными током, пото-
косцеплением и индуктивностью будут величины: ie, 0б, Ls, соот-
ветственно для обмотки возбуждения: z/6, fy6, А/б, а для п-го демп-
ферного контура: zn6, ^пб- Будем считать, что эти базисные вели-
чины подчиняются соотношениям (53а) — (53г). Тогда выражения
(55а) — (55в) в относительных единицах принимают вид:
Ф/ — Mafdid + У ^fkdika'y
(56)
п—1
Ф/ni =_^andz'd-i_^/nd£/4- ^nd£nd>
k=l
где, в соответствии с формулами, полученными для многообмоточ-
ного трансформатора:
Аналогичная запись для потокосцеплений и индуктивностей может
быть сделана в отношении поперечных контуров машины.
Подчинение базисных величин условиям (53а) — (53г) позволяет
установить связь между базисными количествами роторных цепей
и обмотки статора. Поскольку для синхронной машины в (53г)
Р16 — Рб — у — у
74
Уравнения синхронной машины
[Гл. 2
то из (53а) — (53в) эта связь имеет вид:
з .
о _ 2 ‘б .
хб ; »
*хб
3 .
*хб
т 2 *б
= Ц -р— ;
1хб
2 6
^хб----%б /2
гхб
(58)
Уравнения напряжения роторных контуров в относительных еди-
ницах должны, на основании изложенного, иметь такой же вид, как
и уравнения с физической размерностью, т. е.
n d^-W 1
О = Г flld/ld +/lidhd ~Ь • - • ~Ь ^ndind'i
(59)
<tynd
0 — + fnld£ld + fn2 dhd H~ • • • H~ fnnd£nd>
ГДО = Й
5Z2/6-. r _rl_r± '/6 .
______Ф1Й ___<Pld йб . _ hid rlid '15 .
~ld~ Ф1б~Фб 3 • ’ -1,d~*16 ~ z5 ”3~’
2 6 2 5
_ ____f lid (*36 \_rnd *16 ' I26 .
-12d Z16 \i16) Z5 3 ’
__^ind Ллб \___find Лб * ^пб TJ л-
~3~ и т- Д-
2 '6
Аналогичные уравнения могут быть записаны и для поперечной оси.
Необходимо отметить, что во всех исследованиях процессов син-
хронной машины, где она рассматривается как элемент электриче-
ской системы и когда не представляет интереса детальное изучение
процессов в демпферной обмотке, последняя учитывается с доста-
точной точностью лишь двумя эквивалентными контурами по про-
дольной и поперечной осям, ширина которых равна полюсному
делению. Поэтому в качестве базисных токов для любых демпфер-
$ 10]
Система относительных единиц
75
ных контуров в продольной и поперечной осях целесообразно при-
нять одинаковый базисный ток эквивалентного демпферного контура
по продольной оси. Будем обозначать его гвб. В этом случае все
базисные количества роторных цепей (58) определяются лишь отно-
шениями ^иг-^,т. е. при выбранном базисном токе статора гб
'б *б
зависят от выбора базисных токов обмотки возбуждения if5 и экви-
валентного демпферного контура is6. Ввиду того, что в синхронной
машине коэффициент приведения обмоток ротора к статору не полу-
чается таким определенным, как в трансформаторе, так как обмотка
статора распределена более сложно, нежели обмотки трансформа-
тора, базисные токи роторных цепей у различных авторов оказа-
лись не одинаковыми. Но коэффициенты приведения или, что то же
самое, отношения базисных токов роторных цепей к базисному току
статора-, у различных авторов отличаются не очень сильно и они
близки к тому значению, которое принимается в трансформаторах
. Это позволяет получать все индуктивности цепей в отно-
\ ’1н
сительных единицах, как и в трансформаторе, величинами одного
порядка.
Рассмотрим наиболее важные из числа применяемых отношения
базисных токов [Л. 51.
«б 'б
1. За базисный ток обмотки возбуждения if6 принимается такой
ток, при котором поле обмотки возбуждения индуктирует в фазной
обмотке статора напряжение амплитуды, равной хаа-1$. Иными сло-
вами, базисный ток возбуждения if6 создает в воздушном зазоре
такое же поле первой гармонической, как и продольная реакция
якоря при токе z6, так как последняя индуктирует в статоре напря-
жение xadi6. Отношение легко определяется из условия равенства
'б
указанных выше первых гармонических индукции в воздушном
зазоре. Амплитуда первой гармонической поля обмотки возбуждения
при токе возбуждения ifS равна:
D --- Р-0 U
bf'— b-ks
где 6 — зазор, ks—коэффициент воздушного зазора, wf— число
витков обмотки возбуждения на полюс, ц0 — проницаемость воз-
духа, kfi — отношение амплитуды первой
поля обмотки возбуждения к максимальному его
рис. 5).
Амплитуда первой гармонической поля реакции
плитуде тока статора г6 равна:
гармонической
значению (см.
якоря при ам-
Ва1 =
( 1,35/fiw * fepgi p-о »
\ /2 р dl
76
Уравнения синхронной машины
[Гл. 2
(60а)
(606)
где w, ka6i— число витков и обмоточный коэффициент обмотки ста-
тора, kai = ^-----отношение амплитуды первой гармонической
поля реакции якоря к максимальному его значению (см. рис. 14, в).
Из условия Bft = Bai находим:
Уб ‘ feo6i в ^dl
У ’ 2pwf kfi'
За базисный ток эквивалентного демпферного контура у6 прини-
мается ток, который, протекая в эквивалентном демпферном кон-
туре, создает поле основной гармонической, индуктирующее в ста-
торе напряжение xadi5. Таким образом получим соотношение ба?
зисных токов уб и z6, аналогичное (60а):
Уб 1Q1 * fe°6i в
i5 ’ 2pws ’ йД1
где — число витков демпферного контура (практически wJS = 1);
йд1— отношение амплитуды первой гармонической поля возбужден-
ного демпферного контура с шагом, равным полюсному делению,
к максимальному значению этого поля (практически
Для таких базисных токов ротора Mafd = xad. Назовем опре-
деленную описанным способом систему базисных токов роторных
цепей «система xad».
2. Определим базисный ток z/6, как ток обмотки возбуждения,
при котором м. д. с. этой обмотки на полюс равна амплитуде м. д. с.
реакции якоря при токе у по прямоугольной волне. * Пусть базис-
ный ток демпферного контура определяется аналогичным образом.
В этом случае
Уб __ l,5ayfeO6i .
У 2pwf ’
Уб 1 I
1*6
2ртЛ •
Такая система базисных токов ротора называется «система м. д. с.».
3. При анализе синхронных машин с помощью схем замещения
удобной является система базисных токов, для которой взаимоин-
дуктивности контура статора, обмотки возбуждения и эквивалент-
ного демпферного контура равны между собой. При равенстве
взаимоиндуктивностей
наиболее просто. Для
цепей схемы замещения составляются
этого случая соотношения токов имеют вид
Уб___ 1 1 /?д| .
У 2pwy /г.о ’
Уб __ 1.5^061 kfl
У 2/^д *д0 ’
* В американской литературе м. д. с. реакции якоря определяется по
2,12/wfeo61 '4
прямоугольной волне, которая на полюс равна —— ,т. е. в — разменьше
2,7/w£fil
амплитуды первой гармонической м. д. с. - _——.
чР
§ 111
Уравнения машины без демпферной обмотки
77
где kA0 определяем аналогично коэффициенту Ад1, но полагая, что
поток первой гармонической поля равен действительному потоку,
возникающему при возбуждении эквивалентного демпферного кон-
тура.
В дальнейшем для машины с одним контуром на роторе — об-
моткой возбуждения — будет использована система относительных
единиц, принятая Парком, для машины с демпферными контурами —
«система xad», как это распространено в литературе.
§11. Уравнения машины без демпферной обмотки
в относительных единицах
Уравнения машины с одной цепью на роторе — обмоткой воз-
буждения — даются в форме, предложенной А. А. Горевым [Л. 4].
При наличии на роторе только обмотки возбуждения из всех урав-
нений (47) остаются лишь первые три уравнения напряжения и урав-
нение моментов. Подставляя в них выражения потокосцеплений
(35а) и (35в), в которых токи всех демпферных контуров должны
быть положены равными нулю, получим: *
— еа----(P^d + Г) — ^qws (1 + s) iq Paff‘i
---eq — 4" s) if,
ef =p^ Mafdid + (pLf 4- rf) if,
== J<OspS 2 [(4d4 Mafdif) tq Lgigirf],
Введем в систему уравнений (61а) индуктивные сопротивления
4/U)s = x:rf; Lqws = xq-, \Mafdws = xafd, Lfws = Xf коэффициенты,
характеризующие рассеяние энергии в контурах pd = —; р = —;
3 ’х2 Xd Xq
pf — , и некоторый коэффициент И — у > смысл которого бу-
дет пояснен ниже. Тогда система (61а) может быть записана в виде:
ed — Pd ^xdid (14 s) xqiq 4 £- Xafdif
eq = (l ~FS) Xdid-\- Xqiq + 0 + S) Xafdif\
= + (<4 + P/J Xafdif,
Mmws JwspS 2 —Ь Xafdif) iq Xqiqi‘d\'
(616)
Переведем все величины в уравнениях (616) в относительные
единицы. Напомним, что для обмотки возбуждения за базисный ток
* В уравнениях А. А. Горева все величины, относящиеся к обмотке возбужде-
ния, снабжены индексом г; здесь принят индекс /.
78
У пленения синхпонной машины
[Гл. 2
if6 принимается такой ток, который создает на холостом ходу потоко-
сцепление, индуктирующее при номинальной скорости ротора но-
минальное (базисное) напряжение в статоре, а базисное напряже-
ние ej6 — это напряжение, создающее в обмотке возбуждения ток
е/б. На основе этих определений получаем:
Xafdif6<, вуб — (/б*4* (62а)
и, следовательно, базисные напряжения находятся в соотношении
e/6^-e/6J^ = e6. (626)
Базисное потокосцепление для обмотки возбуждения ф/6 создается
в режиме холостого хода базисным током ротора; следовательно,
Ф/б = ^4/б-
Отметим также, что в системе относительных единиц
Л = 4еб/б==/Иб“б = /Иб“^ (62в)
В (616) ~ обозначает дифференцирование по синхрон-
ному времени. В дальнейшем изложении символом р будем обо-
значать дифференцирование по времени т.
Разделив первые два уравнения (616) на еб согласно (62а) или
равную величину z5i6, третье уравнение (616) на соотношение (626)
и четвертое уравнение в (616) на соотношение (62в), а также вводя
обозначения:
г? • Ле»8 *
Р — х i F ___ г 7 • F ______ xnfilf _: . pi —_f
±dhi, Eq Efa, 4° E П i p6 >
получим систему уравнений машины в относительных единицах:
— ed = (p + pd)Ed — (l-{-s)Eq+pEf,
(1 + S) ^d + G7 + Р?)^? + G +S)£<h
efPf = ppE,t + (p + P/) £e;
Г E0En { i i \ 1
Mm = HjPs - M-------------1- \EdEq .
Потокосцепления в относительных' единицах равны:
Id — Ed -j- Ео = Ed 4- ip, |
14 = Ev } (63a)
Ф/ =P^d+ Ea = pEd 4- if. I
* Соответствующие величины у А. А. Горева [Л. 4] обозначены: uqt
urt С.
$ 12] Физический смысл (Л. Переходное сопротивление х'а 79
Постоянная Hj называется инерционной постоянной и имеет простой
физический смысл. Пусть ротор отсоединенной от сети машины раз-
гоняется из неподвижного состояния (<о = О, s = —1) моментом,
равным базисному. Тогда время в электрических радианах т, необ-
ходимое для достижения ротором синхронной скорости (w = ws,
s = 0) и будет равно инерционной постоянной. В самом деле, для
рассматриваемых условий четвертое уравнение (63) принимает вид:
1 = Hjps. Интегрируя его, получим ^==s | ° f или Н} = т. Если
инерционная постоянная Hj измеряется в секундах, то
]<>>"
Я,- = ^ = 2,74
GD- п2
-------• 10~6
Рб
сек,
где GD2— маховой момент вращающихся частей в кГм\ Рб — в ква\
ns — синхронная скорость в o6jMUH. Если GD2 подставляется в нью-
тонометр в квадрате, то приведенное выражение для Нj нужно раз-
делить на 9,81.
Отметим еще раз, что в принятой системе базисных величин для
ротора относительное значение э. д. с., индуктируемой в статоре
полем обмотки возбуждения ЕЛ, численно равно относительному
значению тока возбуждения if.
§ 12. Физический смысл коэффициента ц.
Переходное сопротивление
Нетрудно убедиться, что коэффициент р, введенный в уравнения
напряжений машины, представляет собой коэффициент магнитной
связи продольного контура статора и обмотки возбуждения.
Если имеются два трансформатор но связанных контура с индук-
тивностями L± и L2 и взаимоиндуктивностью М12, то для оценки сте-
пени электромагнитной связи контуров обычно используется коэф-
фициент магнитной связи
и полный коэффициент рассеяния двух контуров а=1—k. При
полной связи, когда не имеется полей рассеяния, Lt = Ег = Мц
и k—\, а а = 0.
В случае синхронной машины с одним контуром на роторе,
можно рассматривать в трансформаторной связи два контура по
продольной оси — реальный контур обмотки возбуждения и некото-
рый эквивалентный контур статора по продольной оси. Потоко-
сцепления этих контуров в физических величинах равны;
Ф/ = Lfif + '4 = Ldid 4- Mafdif.
синхронной машины
[Гл. 2
so
Таким образом, в рассматриваемом случае индуктивности кон-
туров равны La и Lf, а взаимоиндуктивности, как уже отмечалось,
з
оказываются неодинаковыми и равны у Ma^d и Mafd. Следовательно,
по общему определению, коэффициент магнитной связи контуров
в синхронной машине равен:
3 ^~afd 3 х afd
2 LfLd 2 XfXd '
т. е. представляет величину, ранее обозначенную jjl; коэффициент
рассеяния рассматриваемых контуров а = 1 — ц.
Выразим коэффициенты ц и о через широко употребляемые пара-
метры — синхронное сопротивление xd и переходное индуктивное
сопротивление по продольной оси xd. Физическое содержание пара-
метра xd было дано ранее. Параметр x’d можно представить следую-
щим образом. Пусть в синхронной машине происходит некоторый
переходный процесс. Рассмотрим его, пренебрегая активным сопро-
тивлением обмотки возбуждения (ру = О). В этом случае уравнение
напряжений обмотки возбуждения принимает вид: *
О = ^pEd -{- рЕц. (64)
Обозначая через \Ed и &Е0 приращения переменных Ed и Ео в пере-
ходном процессе, получим из (64), что
ЬЕ0=~ yAEd,
так как произвольная постоянная равна нулю (при t = 0 &Ed —
ЬЕ0 = &).
Потокосцепление статора по продольной оси
'(о — Ed Ео.
Отсюда
= ^Ed + АЕ0 = аДЕ^ = °xdMd.
Следовательно, при р/ = 0 в продольной оси статор имеет при пере-
ходном процессе индуктивное сопротивление, равное:
Это индуктивное сопротивление и называют переходным индуктив-
ным сопротивлением по продольной оси (x'd).
Подчеркнем еще раз, что обмотка статора в продольной оси при
переходном процессе имеет индуктивное сопротивление x'd только
в случае, если rf = 0 или если г} 0, но величина этого сопроти-
вления не сказывается на начальной величине токов в переходном
процессе.
Относительные значения величин здесь обозначены без черты снизу.
$ 13] Продольная э. д. с. за переходным сопротивлением (E'rf) 81
Поскольку а = 1 — р. <С 1 > то Ха = аХа <^ха- Это понятно и физи-
чески, так как в переходном процессе по продольной оси, кроме
продольного контура статора, оказывает воздействие коротко-
замкнутый через возбудитель контур обмотки возбуждения; в уста-
новившемся процессе трансформаторная связь этих контуров не
проявляется и индуктивное сопротивление каждого контура возра-
стает (сравни индуктивное сопротивление трансформатора при ко-
ротком замыкании и холостом ходе).
Итак,
В табл. 1 приведены значения синхронных индуктивных сопро-
тивлений xd, xq, а также переходного сопротивления по продольной
оси х'а для современных машин (параметры даны в относительных
единицах).
Таблица 1
Параметр Г идрогенераторы Двухполюсные турбогенераторы Синхронные компенсаторы
Xd 0,7—1,4* 1,2-2,2 1,6-2,4
й. Tq > 0,45—0,70* 1,2-2,2 0,8—1,2
0,20—0,35 0,15—0,24 0,25—0,50
* В некоторых гидрогенераторах, выполненных для работы
в системе с дальней электропередачей, индуктивные сопротивле-
ния имеют пониженное значение (хЛ «в 0,50, х9=»0,32).
§ 13. Продольная э.д.с. за переходным сопротивлением (Ed)
Рассмотрим одну характерную для синхронной машины э. д. с. --
так называемую продольную э. д. с. за переходным индуктивным
сопротивлением. Эта э. д. с., индуктируемая в обмотках статора,
не может рассматриваться как обусловленная физически определен-
ным магнитным полем (например, полем реакции якоря, полем воз-
буждения и т. п.), а является формальной величиной, существенно
облегчающей некоторые расчеты при переходных процессах.
Поток и потокосцепление любого контура, как известно, изме-
няются во времени более или менее плавно, не претерпевая мгно-
венных изменений, скачков. В линейных задачах апериодическое
изменение потокосцепления контура ф происходит по экспоненциаль-
ному закону
Ф = (Фо — фу) S-T/r-Hy,
где
фо, фу — начальное и установившееся значения потокосцеплении;
Т— —-----постоянная времени контура, а
6 А. И. Важнов
82
Уравнения синхронной машины
Ь и г — соответственно индуктивность и активное сопротивле-
ние контура.
Если контур обладает значительной постоянной времени Т, то
изменение потока и потокосцеплений такого контура во времени
будет достаточно медленным, причем скорость их изменения в пер-
вые моменты времени примерно обратно пропорциональна Т, так
как
а при
Из контуров синхронной машины значительной постоянной вре-
мени обладает обмотка возбуждения. Даже при наличии коротко-
at Ец
—----т-------—
-ву E^idXd
£о
Рис. 38. Продольная э. д. с. за переход-
ным сопротивлением E'd на векторной
диаграмме: а — диаграмма, содержащая
падение напряжения в продольном син-
хронном сопротивлении; б — диаграмма,
содержащая падение напряжения в про-
дольном переходном сопротивлении.
условие справедливо в первый
замкнутого статора постоян-
ная времени обмотки возбуж-
дения в машинах крупной
мощности составляет 1—3 сек.
Это обстоятельство исполь-
зуется при приближенных
расчетах и анализе переход-
ных режимов синхронной ма-
шины. При не слишком дли-
тельных переходных процес-
сах, когда время его значи-
тельно меньше постоянной
времени роторной цепи,
можно считать потокосцепле-
ния обмотки возбуждения
const в течение всего пе-
реходного процесса; это же
момент времени любого пере-
ходного процесса.
Итак, используя принцип постоянства потокосцепления в отно-
шении цепи обмотки возбуждения, будем считать <|»z= const.
Можно определить в цепи статора машины некую э. д. с., про-
порциональную потокосцеплению ф/, которая, в силу <[у= const
также не меняется в начальные моменты переходного процесса.
С этой целью рассмотрим э. д. с., индуктируемые в цепи статора
продольными полями. Уравнение напряжений по поперечной оси
в установившемся режиме при пренебрежении активным сопроти-
влением цепи статора имеет вид:
— eq---Ф;/--E’d Ч- — Et> “И Xdid-
На рис. 38, а изображена часть векторной диаграммы машины,
соответствующая этому соотношению.
£ 13] Продольная э. д. с. за переходным сопротивлением (Е'а)
83
По отношению к внешнему напряжению на зажимах статора
— е?э. д. с. Еп может быть названа продольной э. д. с. за синхронным
сопротивлением ха> так как она больше — eq на величину падения
напряжения от продольного тока id в синхронном сопротивлении ха.
Но это же уравнение можно представить и в таком виде:
-- eq = tyd — 4~ £) 4~ 4“ + Xdld’
так как а + ц == 1. Э. д. с. p.Erf-|- Elt, по аналогии с предыдущим,
может быть названа продольной э. д. с. за переходным индуктивным
сопротивлением, так как она больше внешнего напряжения на ве-
личину падения напряжения от продольного тока в переходном
индуктивном сопротивлении x'd. Обозначим эту э. д. с. E'd и усло-
вимся для краткости ее называть продольной переходной э. д. с.
В соответствии с новым представлением напряжения — eq на
рис. 38, б изображена видоизмененная диаграмма (ср. срис. 38а). Эта
э. д. с. E'd обладает замечательным свойством неизменности во вре-
мени, если — const. В самом деле, в соответствии с (63а)
Еа = pEd + Ео = ф/- (65)
Следовательно, Е'а и потокосцепление фу в относительных единицах
равны.
Итак, если фу = const, то и продольная переходная э. д. с. Е’а
остается постоянной.
С помощью э. д. с. Е'а облегчается определение токов, а следо-
вательно, и электромагнитных моментов в переходных процессах.
Это видно из следующего.
Сравним уравнения напряжения обмоток статора в установив-
шемся и переходном процессах, предполагая, что в последнем слу-
чае фу = const. Из системы (63) получаем:
установившийся процесс
@d == Pd-^dC (1 “I- ®) Xqig, 1
eq = (1 4“ S) Xrjd 4- PqXqig 4~ (1 4~ S) ^O', J
переходный процесс
— ed —px'did 4- PiiXd<-d-(1 4- S) Xqi<p
eq — (1 4- S) Xdld 4- (P + P<j) Xjq 4“ О 4~ S) E'd-
В уравнениях (656) использовано соотношение рЕй =— y.pEd, полу-
чаемое из третьего уравнения (63) при ру = 0 (фу= const), а также
выражение Е'а = рЕа-\-Ей.
Сравнивая уравнения (65а) и (656), видим, что, если в переход-
ном процессе принять pid=piq = Q> то уравнения переходного
процесса идентичны уравнениям установившегося режима и могут
быть получены заменой в последних э. д. с. Ео на э. д. с. Е'а и со-
противления ха — сопротивлением х'а. Это значит, что постоянные
6»
(65а)
84
У равнения синхронной машины
[Гл. 2
составляющие в токах id и / возникающие при переходном про-
цессе, которые при фу — const во времени не меняются и производ-
ные которых поэтому равны нулю, * могут определяться по фор-
мулам установившегося режима с заменой в них э. д. с. Ео и сопро-
тивления xd соответственно величинами E'd и xd. Поскольку э. д. с.
E'd в переходном процессе (или в начале его, пока фу = const) остается
такой же, какой она была в установившемся режиме, предшествую-
щем переходному процессу, и поэтому определяется весьма просто,
все исследование существенно облегчается.
Так, например, при трехфазном коротком замыкании на зажимах
генератора, вращающегося с неизменной скоростью (з = 0), постоян-
ные составляющие в токах id, iq— idm iqn при условии E‘d= const
можно определить из уравнений (65а), полагая в них ed — eq = 0 и
заменяя Ео и ха на Ed и x'd, в виде:
, , E'dr
dn x'dxq -I- r« ’ «я x'dxq + Г* ’ ' '
а при пренебрежении активным сопротивлением обмоток статора
(г — 0) в виде:
. _ Ed .
— — Iqn — U.
Следует обратить внимание еще на одно важное обстоятельство,
связанное с рассмотрением э. д. с. E'd. Если считать E'd= const,
то вместо трех уравнений напряжения достаточно рассмотреть
только два дифференциальных уравнения контуров статора с за-
меной в них xd на x'd и э. д. с. Ео на E'd (см. уравнения (656)).
§ 14. Общая характеристика системы уравнений
синхронной машины с одним контуром на роторе
Система уравнений синхронной машины с одним контуром на
роторе (63) состоит из нелинейных дифференциальных уравнений,
причем нелинейность возникает при изменении скорости машины
(з^О) как в уравнениях напряжения (произведения искомых токов
и скольжения), так и в уравнении моментов (электромагнитный мо-
мент определяется произведением токов). ** Эта нелинейность урав-
нений затрудняет их решение в самом общем случае.
Решение системы существенно облегчается при исследовании
переходных процессов с заданным характером движения ротора.
В этом случае величина скольжения з будет заданной функцией
времени и решению подлежат лишь уравнения напряжения машины,
* При изменении угла 0 токи id и iq будут содержать медленно изменяю-
щиеся во времени составляющие, производные от которых также близки к нулю.
** Нелинейность электромагнитного момента от токов остается и при за-
данной скорости (s задано), однако в этом случае уравнение моментов решать
ие нужно.
£ 14] Общая характеристика системы уравнений синхронной машины 85
которые, в общем, могут содержать переменные коэффициенты (если
s = <? (/)). Электромагнитный момент тогда определяется после
нахождения переменных Ed, Eq, Ео. К этому классу задач относятся
асинхронные режимы с заданным скольжением, режим малых
гармонических колебаний ротора.
В ряде случаев возможны решения в предположении, что s =0,
т. е. рЧ — 0, но обычно необходим учет изменения самого угла
9 в переходном процессе. Таковы задачи, связанные с вопросами
динамической устойчивости, т. е. с исследованием поведения син-
хронных машин, работающих параллельно с системой, при измене-
ниях параметров и напряжения электрических цепей, а также мо-
мента механических сил на валу машин.
Ниже рассматривается с помощью системы (63), а также уравне-
ний в осях а, р ряд переходных процессов синхронной машины
с одним контуром на роторе. При этом используются приближенные
методы, дающие, как показывает практика, результаты, хорошо
согласующиеся с опытом.
ГЛАВА ТРЕТЬЯ
ТОКИ КОРОТКОГО ЗАМЫКАНИЯ СИНХРОННОЙ МАШИНЫ
БЕЗ ДЕМПФЕРНОЙ ОБЛ4ОТКИ
§ 15. Общие замечания
Наиболее.распространенной аварией в энергосистемах является
внезапное короткое замыкание на линиях электропередачи или даже
на шинах станций, сопровождающееся появлением весьма больших
токов короткого замыкания. Протекание этого явления во многом
определяется характером процесса в синхронных генераторах,
работающих в энергосистемах. Однако существенное влияние на
процесс в некоторых случаях может оказать и сама электрическая
система. Так, распределенные емкости линии передачи, емкости,
последовательно включенные в линии, осуществляющие компенса-
цию ее индуктивности (продольная компенсация), вносят специфику
в характер изменения токов при коротком замыкании.
Длительность процесса короткого замыкания синхронного гене-
ратора практически ограничена временем, равным 0,1—0,3 сек,
так как при большей продолжительности процесса генератор в боль-
шинстве случаев не сможет работать синхронно с системой после
отключения короткого замыкания. Несмотря на кратковременность
процесса определение токов короткого замыкания в цепях машины
имеет важное значение. Величина тока в цепях статора генератора
определяет силу, действующую на лобовые части обмотки статора,
и поэтому служит основой для расчета их крепления. Знание вели-
чины этого тока необходимо для обеспечения надежной работы
выключателей, отключающих короткое замыкание, а также транс-
форматоров тока, питающих цепи измерения и защиты. Наконец
величина и характер изменения тока в цепях статора (в линии пе-
редачи) при коротком замыкании определяет условия работы реле
защиты. Вычисление токов в цепи возбуждения синхронного гег>е-
ратора для рассматриваемых условий позволяет оценить комму-
тационную устойчивость возбудителя п надежность работы возбу-
дительной системы в целом.
В процессе короткого замыкания токи достигают максимальных
значений весьма быстро, практически через один полупериод пере-
менного тока (0,01 сек). Эти максимальные значения представляют
так называемые ударные токи короткого замыкания. Следует отме-
§ 15]
Общие замечания
87
тить, что на современных синхронных генераторах применяется
автоматическое регулирование возбуждения, предусматривающее
резкое увеличение напряжения возбудителя при коротком замы-
кании (форсировка возбуждения). При значительной кратности
напряжения возбудителя в режиме форсировки по сравнению с его
номинальным значением и большой скорости нарастания этого на-
пряжения во времени, токи короткого замыкания перед отключением
его могут превзойти ударные токи в самом начале процесса. Однако
чаще всего в кратковременном процессе короткого замыкания влияние
регулирования возбуждения на величину токов машины невелико.
Ниже будут рассмотрены вопросы определения токов машины
без демпферной обмотки в случае внезапных коротких замыканий
при некоторых упрощающих предположениях, которые состоят
в следующем:
Рис. 39. Схема связи синхронной
машины с системой при коротких за-
мыканиях: а — трехфазное замыка-
ние; б — двухфазное замыкание.
Рис. 40. Цепь статора синхронной
машины при коротких замыканиях.
1. В процессе короткого замыкания не рассматривается влияние
системы, параллельно с которой работает синхронный генератор.
Поэтому учесть нагрузку машины перед коротким замыканием
возможно только при симметричном (трехфазном) коротком замыка-
нии, когда генератор отсечен от системы (рис. 39, а). Несимметрич-
ные короткие замыкания рассматриваются в генераторе, отсоеди-
ненном от системы, т. е. работающем вхолостую. В противном
случае у нагруженного генератора в процессе несимметричного
короткого замыкания сохраняется связь с системой (рис. 39, б).
2. Не учитывается сопротивление дуги в месте короткого замы-
кания.
3. Принимается, что в процессе короткого замыкания скорость
генератора не меняется и остается равной синхронной (s = 0).
Поскольку генератор при коротком замыкании не связан с системой,
это предположение достаточно хорошо отражает условия опреде-
ления токов, так как обычно «<^1,0.
4. Предполагается, что внешняя цепь до точки короткого замы»
кания может быть замещена последовательно соединенными актив:
88
Т. к. з. синхронной машины без демпферной обмотки
[Гл. 3
ним сопротивлением гвн и индуктивностью Ьвн(рис. 40). Это условие
позволяет ограничиться рассмотрением короткого замыкания непо-
средственно на зажимах машины, параметры обмотки статора кото-
рой увеличены на гвн и LBH.
5. Считается, что возбуждение синхронного генератора в про-
цессе короткого замыкания не регулируется.
Таким образом, рассматривается, в известной мере, идеализи-
рованное короткое замыкание. Однако такое рассмотрение позво-
ляет выяснить основные характерные черты процесса и является
первой ступенью к изучению более сложных случаев.
Современная теория синхронной машины широко использует
теорему о постоянстве потокосцеплений контуров машины не только
для описания физической картины отдельных процессов, в частности
внезапного короткого замыкания, но и для аналитического исследо-
вания и расчетов. Методика определения токов машины при корот-
ком замыкании для нормальных значений активных сопротивлений
цепей, основанная на постоянстве потокосцеплений контуров в пер-
вые моменты короткого замыкания, является весьма плодотворной
и используется как при трехфазном (симметричном), так и несиммет-
ричном коротких замыканиях. Уточнения, которые могут быть сде-
ланы путем строгого решения уравнений, в большинстве случаев
не имеют практического значения.
А. ТРЕХФАЗНОЕ КОРОТКОЕ ЗАМЫКАНИЕ
§ 16. Общие физические представления
Короткое замыкание цепей статора синхронной машины обус-
лавливает скачкообразное изменение параметров и приводит поэтому
к резкому изменению токов машины. Характер и величину токов
в начале процесса короткого замыкания можно легко определить,
полагая активные сопротивления цепей машины равными нулю,
т. е. рассматривая контуры машины сверхпроводящими. В этом
случае при изменении параметров цепей машины в них должны
протекать такие токи, которые дают постоянство потокосцеплений
со всеми контурами машины. Это положение, несмотря на конечную
величину активных сопротивлений цепей, все же может быть при-
менено в начале переходного процесса.
Постоянство потокосцеплений с контурами синхронной машины
обуславливает прежде всего появление постоянных составляющих
в токах контуров, так как именно такие составляющие токов и могут
создать неизменное потокосцепление. Вместе с тем наличие взаим-
ного перемещения контуров статора и ротора приводит к тому, что
в контурах появляются дополнительные гармонические токи основ-
ной частоты, так как короткозамкнутые контуры статора переме-
щаются в постоянном поле ротора и наоборот. Наконец магнитная
$ 16] Общие физические представления
или электрическая асимметрия ротора * должна вызвать дополни-
тельное колебание тока в контурах статора, относительно которых
перемещается несимметричный ротор, причем колебание будет
в постоянной составляющей тока, создающей неподвижное поле
в пространстве. Эти колебания происходят с удвоенной частотой,
так как магнитная проводимость для неподвижных потоков статора
изменяется периодически с двойной частотой, а при любом положе-
нии ротора относительно обмоток статора, потокосцепление с по-
следними должно оставаться неизменным. На рис. 41 изображен
явнополюсный ротор машины в двух положениях относительно
неподвижного постоянного магнитного поля Ф.
° t л К
4 *
Рис. 41. Изменение составляющей тока в статоре, обеспечивающей постоян-
ство потокосцепления ’F с фазной обмоткой: а — исходное положение ротора
Ч» Ч» л / Л \ Т ____________Т’
7 = 0; h = = д-; б — ротор повернут на у (т = I: zs = — =-^-. В об-
мотке возбуждения показан ток, обусловленный вращением ротора в магнитном
поле Ф; в — зависимости магнитной проводимости Л от угла 7 н фазного тока
i= /(т), обеспечивающего Т = const.
Вследствие наличия замкнутой через возбудитель обмотки воз-
буждения магнитная проводимость Л для поля Ф будет наименьшей
(AJ для положения ротора при у — 0 и наибольшей (Л2) при пово-
роте ротора на угол у = Между этими крайними значениями
проводимость Л изменяется по гармоническому закону (рис. 41).
В соответствии с этим составляющая тока в статоре, обеспечиваю-
щая постоянство потокосцепления if с фазной обмоткой, оказывается
наибольшей для исходного положения ротора (ix) и наименьшей
(z2) при повороте ротора на угол 4. Таким образом, постоянство
* При трехфазном коротком замыкании указанная несимметрия может
быть только на роторе: явнополюсный ротор, однофазная обмотка на роторе,
многофазная обмотка с различными параметрами по продольной и попереч-
ной осям.
00 Т. к. з. синхронной машины без демпферной обмотки [Гл. 3
потокосцепления ip при различной по осям d и q проводимости Л
обеспечивается совокупностью постоянной составляющей и второй
гармонической тока (рис. 41, в).
Итак, при внезапном трехфазном коротком замыкании в конту-
рах машины, помимо существовавших там токов, возникают следую-
щие дополнительные составляющие:
1. Обмотка статора: постоянная составляющая; гармоническая
составляющая удвоенной частоты; гармоническая составляющая
основной частоты.
2. Обмотка возбуждения: постоянная составляющая; гармониче-
ская составляющая основной частоты.
Поскольку гармонические токи основной частоты в статоре со-
здают вращающееся магнитное поле, неподвижное относительно
ротора, а в роторе постоянное поле создается постоянной соста-
вляющей тока, то амплитуды этих токов статора и ротора взаимо-
связаны. Поэтому можно говорить о трансформаторной связи между
постоянной составляющей тока в роторе и гармонической состав-
ляющей тока основной частоты в статоре. Вторая трансформатор-
ная связь имеет место между гармонической составляющей тока
в роторе, с одной стороны, и постоянной и гармонической удвоенной
частоты составляющими токов в статоре, с другой. Нетрудно видеть,
что эти составляющие токов также взаимосвязаны, так как они
создают поля на статоре и роторе, неподвижные друг относительно
друга.
Амплитуды дополнительных составляющих тока, возникших
в результате внезапного короткого замыкания, не остаются неизмен-
ными. Под влиянием конечных по величине активных сопротивлений
контуров происходит затухание токов. С этой точки зрения более
правильно говорить не о постоянных составляющих тока в цепях
машины, а об апериодических составляющих или токах постоян-
ного направления. Апериодические составляющие токов затухают
с некоторой постоянной времени, которая практически определяется
активным сопротивлением того контура, в котором затухает аперио-
дический ток, и индуктивностью этого контура с учетом взаимоин-
дуктивностей других короткозамкнутых контуров. С такой же
скоростью вместе с апериодической составляющей затухают соста-
вляющие токов в других контурах, трансформаторно связанные
с рассматриваемым затухающим апериодическим током.
В синхронной машине с одним контуром на роторе имеется две
постоянных времени затухания апериодических токов: в роторе Та
и статоре Та. Апериодические токи в статоре затухают до нуля,
так как в статоре нет источников напряжений постоянного знака,
которые поддерживали бы эти токи. Следовательно, вторая гармо-
ническая тока в статоре и основная гармоническая тока в роторе
также затухают до нуля. Апериодическая составляющая тока в ро-
торе затухает до значения, которое определяется напряжением воз-
будителя; в случае отсутствия регулирования возбуждения в про-
§ 17]
Определение токов машины при трехфазном к. з.
91
цессе короткого замыкания апериодический ток затухает до перво-
начального значения постоянного тока в роторе. Поэтому в статоре
основная гармоническая тока затухает до некоторого установив-
шегося значения. Разность между начальным и установившимся
значениями основной гармонической тока в статоре, затухающая до
нуля, носит название переходной составляющей тока.
Отметим, что более строгое рассмотрение процесса короткого
замыкания указывает на некоторое отличие его от нарисованного
выше. Однако при практически встречающихся активных сопроти-
влениях контуров машины это отличие несущественно.
§ 17. Определение токов машины
при трехфазном коротком замыкании
При трехфазном коротком замыкании линейные напряжения
в точке короткого замыкания равны нулю (рис. 42), фазные напря-
жения также равны нулю и, следовательно,
е q — @0-----О*
Таким образом, решению подлежит си-
стема линейных дифференциальных урав-
нений с постоянными коэффициентами:
(Р 4- pd) Ed — Eq +рЕь = 0;
+ -4 £-о = О;
P-P^d "Г (Р 4~ Р/) = Р-ё{-
Рис. 42. К определению
напряжения фазных об-
моток статора при трех-
фазном коротком замы-
Система (67) может быть решена как
обычным классическим, так и операцион-
ным методами.
Формальное решение системы линейных
дифференциальных уравнений :(67) относи-
тельно любой переменной, например Ed, имеет вид:
Ed = А^ + А^ 4- А^ 4- Alt (67а)
где первые три члена соответствуют общему решению однородных
уравнений, а четвертый член — частному решению полной системы
(67). Поскольку ef = const, Ai — константа. Коэффициенты р1У
Р^, Рз— корни характеристического уравнения системы (67), имею-
щего третью степень.
При решении (67) применим обычно допустимое упрощение,
которое позволит сравнительно просто решать задачу и в более
сложных случаях несимметричных коротких замыканий. Уже
указывалось, что токи цепей синхронной машины при коротком
замыкании испытывают всплеск, после чего они затухают до пекс>
торых значений, называемых установившимися; при этом разность
между всплеском тока и его установившимся значением предста-
вляет сумму экспонент, затухающих до нуля. При обычно ветре-
92
Т. к. з. синхронной машины без демпферной обмотки
[Гл. 3
чающихся активных сопротивлениях контуров первый всплеск токов
можно с большой степенью точности определить из системы (67),
полагая в ней все р равными нулю, так как активные сопротивления
обмоток машины практически не влияют на амплитуду токов. В даль-
нейшем обозначения этих токов будут дополняться штрихом сверху.
Таким образом, активные сопротивления должны учитываться
лишь в затухании токов.
Установившиеся значения токов определятся из (67), если в них
положить р = 0.
Будем решать систему (67) классическим методом, применяя
символическое обозначение производных знаком р в соответствую-
щей степени, при следующих начальных условиях:
при т = 0
ДдО» Ед--Eg®, ^0---А>0---
Начнем с нахождения всплесков токов, т. е. токов в начальные
моменты времени. Полагая в (67) все р равными нулю, перепишем
ее в виде:
pEd — £'9 + ^£'о = О;
рЕд -|~ Eq = 0;
?рЕа + рЕЛ=0. .
(68)
Дифференцируя первое уравнение в (68) и складывая со вторым,
получим:
(Ра + 1Ж+£о) = О. (69)
Из третьего уравнения (68) р (рЕа -|~ До) = 0 и, следовательно,
pEd -|- Ей=E'd = const = Еао, (70)
где’ E'd — продольная переходная э. д. с.;
Ем — та же э. д. с. до короткого замыкания.
Подставляя из (70) величину Ео, а также p!Eq =— РР*Еа в (69),
получим, имея в виду, что 1 — р = а:
(/>a+l)a£d =-fie, (71а)
или
(^+1)^ = -^°. (716)
Решение (716) имеет вид:
Ed = |~ -)- ?l9s~j'T=
=’---+ (А + A) cos т+у (Д1 — Л2) sin т. (72;
Для определения постоянных в уравнении (72) воспользуемся
начальными условиями. При т = 0 Ed = Edq, производная pEd
§ 17]
Определение токов машины при трехфазном к. з.
93
может быть определена из (68): подставляя рЕй из третьего урав-
нения в первое в (68), получим:
°pEd = Eq,
и поэтому
<s[pEd]x=Ji=EqV
Таким образом, из начальных условий (при т = 0) следует, что
^#==-v4(A+4a), I
^=/(A-4a).
(73)
Подставляя из (73) постоянные в общее решение (72), получим:
Ed =—^4-(£’d#4-^cost4-^sinT, (74а)
Eq = apEd = Eqt cos t — (oZTde -f- Е'ай) sin t. (746)
Переменная Eo легко определяется из (70):
Ей=Г}=-~ — [i (£4>+ ^cost —-tf^sinT. (74в)
Из уравнений напряжения в установившемся режиме, а также из
определения э. д. с. E'd (§ 13) следует, что
aEd$ Еж — хргл 4~ E'do — — •— eq9;
Ego — Ф?о ~ ed<t-
Подставляя последние соотношения в выражения (74а) и (746),
найдем из них продольный и поперечный токи статора в виде:
•' Е</ еп0 I е„(1 . ।
td= — =-----Г---V-cos Т4--^ Sint;
Xd хз хз хз
. F ed6 е» (74г)
iq = ^=^C0ST4-^sinT. I
Всплески фазных токов в статоре определяются с помощью об-
щих формул линейного преобразования (246), в которых нужно
положить г0 — 0. Например, для фазы а, имея в виду (74г), найдем:
i'a = id cos 7 — i’q sin у = i'd cos (t 4- To) — iq sin (t 4- To) =
E'
= — -^cos(t 4-To) — 5??-COST • cos(t4-To) 4-
xd xd
4-^sinT-cos (t 4-To) —sinT-sin(T4~To) —^-cost • sin (*4-70).
Ла xq
94
Т. к, з. синхронной машины без демпферной обмотки
[Гл. 3
После несложных преобразований получим:
G = — V2 cos (т 7о) уЦт- + 4 [— е?оcos То ~ е</о sin f0] +
Л<1 z \ла л9 J
Ч" у I ё9°cos Ч" То) + &do sin (2Т Ч* То)]-
Подставляя в это выражение значения напряжений
ed0 = — е sin 90, е9о = —ecos90,
где ё — напряжение на зажимах генератора перед коротким замы-
канием, окончательно получим:
1 / 1 1 \
i'a = ~ -^cos(T-He) + 4 V7~TF) ecos (2т + то + 0о) +
Ч-у(4 + 41 ecos(To — б°)- (75)
х \ л£ ля /
Всплески токов в других фазах определяются по выражению (75)
с заменой угла у0 на у0 — 120 (для тока Гь) и на у0 4~ 120 (для
тока Гс).
Установившиеся значения токов (отмечаем индексом «у»)
можно найти, полагая в (67) р — 0 и pd = p9 = O, что дает: Еду = 0;
i^dy ~~ ^-Oyj Fy ^0(Ь
откуда
Чу = ; iqy = 0; if у = ifo-
Установившийся ток короткого замыкания в фазе а:
iay = idy COS (т 4- 7о) — /9у sin (т Ч- Те) = — ~ cos (т -j- у0). (76)
лс1
Теперь нетрудно записать общее выражение тока короткого за-
мыкания фазы а, учитывая затухание отдельных составляющих
(см. § 16):
Ч = -1” COS + т») - (4 -1; 1 cos + То) е- Ч-
\ ла лл j
+ У 4 Gf ~ тЧ cos (2т + То Ч- б») Ч- (Ч + 41C0S <То — 0о)1 е-Т'Та
L L\лЛ лд / \xd xq j J
Здесь и в последующих выражениях постоянные времени изме-
ряются в радианах.
§ 17]
Определение токов машины при трехфазном к. з.
95
, / 1 1
— Л'7
\ xd xd
Поскольку
Ed0__Еоо _ ~ xd‘d° _ Ф.-70 — Ха1ао_
Xd Хд Хд xd
__ L\
~ е«° \x’d >rf ] '
ia = — ~ cos (т + то) — Ц- — e cos 0O cos (t -ф 7o) e~T- Td -ф-
xd \xd xd /
+ 4e [ (7---^)cos(2T + To + 6o) + (jr +~Jj COS(to — Mp Ta-
(77)
Токи в фазах b и с получаются из (77) заменой угла у0 на у0 — 120
и у0 + 120.
Ток обмотки возбуждения при трехфазном коротком замыкании
(фз) с учетом затухания отдельных составляющих (§ 16) определяется
с помощью (74в) и соотношения Е9у = Ем> и имеет вид:
Z/з = Ego -ф- — -Еооу e~z/Td — — [(aZ^g-j-fi^o) cos T-j-F^sin т] в
= foo + е cos еов- е cos (т + 0О) ^/та. (78)
xd xd
Если короткое замыкание происходит на холостом ходу генера-
тора, то в выражениях (77) и (78) следует положить Ем = Eq^ = Q,
6о=:0> e = Fdo-
Выражение для всплеска тока в ф>азе а соответствует общим
физическим представлениям, изложенным в § 13 и 16. Амплитуда
первой гармонической тока короткого замыкания, соответствующая
постоянной составляющей в продольном токе статора id, опреде-
ляется продольной переходной э. д. с. и переходным индуктивным
сопротивлением по продольной оси х’а. Величина второй гармони-
ческой тока Га зависит от степени магнитной и электрической несим-
метрии ротора, и она обращается в нуль, если эквивалентные индук-
тивные сопротивления в переходном процессе по продольной и по-
перечной осям равны (в рассматриваемом случае Ха = Хд). Наконец
постоянная составляющая в токе короткого замыкания Га опреде-
ляется тем потокосцеплением, которое фаза а имеет в момент корот-
кого замыкания (Фа0) и индуктивностью статора La при протекании
в нем постоянного тока и при наличии вращающейся короткозамк-
нутой через возбудитель обмотки возбуждения генератора. Дальше
будет показано (§ 18), что
<pa0 = ecos (то — %);
96
Т. к. з. синхронной машины без демпферной обмотки
[Гл. 3
Обращаясь к выражению (75), видим, что постоянная составляю-
щая в токе i‘a равна как раз отношению .
На рис. 43, а по уравнению (78) построены отдельные составляю-
щие тока tp в функции времени т: апериодическая составляющая ifa,
затухающая с постоянной времени обмотки возбуждения (при ко-
роткозамкнутом статоре) ТЗ, постоянный ток значение которого
Рис. 43. Ток возбуждения синхронной машины без
демпферной обмотки при трехфазном коротком замы-
кании: а — составляющие тока; б — полный ток.
— Т/ / и
1 — апериодическая составляющая i^a = ; 2 —
гармоническая составляющая; 3 — огибающая гармониче*
ской составляющей ±ifn* а‘,4 — установившийся ток
х.—х'^
~— е cos бо. Расчетные данные: е == — 1,0;
xd = 1,0; x'd = 0,3; xg <= 0,6; T'd == 0,2 сек\ Ta = 0,02 сек\ 9o=0.
определяется напряжением возбудителя, а также гармоническая
основной частоты, затухающая с постоянной времени статора Та.
Эта составляющая тока i/3 затухает быстрее составляющей i^a,
так как обычно ТЗ в несколько раз больше Та. На рис. 43, б про-
изведено сложение отдельных составляющих тока возбуждения и
представлен полный ток i/3 при коротком замыкании в зависимости
от времени.
На рис. 44, а построены отдельные составляющие фазного тока
статора в функции времени в соответствии с уравнением (77) для
одного частного случая, а именно при So — -[0 —0, т. е. в предпо-
ложении, что короткое замыкание происходит на холостом ходу и
в такой момент времени, когда потокосцепление с фазой а макси-
§17] Определение токов машины при трехфазном к. з. 97
мально. Амплитуда основной гармонической переходной составляю-
щей тока затухает с постоянной времени T'd, а вторая гармониче-
ская и апериодическая составляющая — с постоянной времени Та.
Отметим, что для рассматриваемых условий в фазе а апериодиче-
ская составляющая тока имеет максимально возможное значение.
Рис. 44. Фазный ток статора синхронной машины без демп-
ферной обмотки при трехфазиом коротком замыкании (6О=
= Yo==0): а — составляющие тока; б — полный ток при малой
постоянной времени Та.
, 1 / 1 1 1 \ — т/Тп
I — апериодическая составляющая — е f —- -f-j g u.
2 \*d xqj ’
2 — огибающая
/1 1 _______________
переходной гармонической составляющей •+ е (?“> ~~ 7~18 ' d ; 3 ~
' d а /
огибающая гармонической составляющей двойной частоты + -^- е(—--
2 *d
— -—) с Т а\4 — установившийся ток — cos т. Расчетные данные
q xd
см. в подписи к рис. 43.
На рис. 44, б представлена кривая полного тока в фазе а при
трехфазном коротком замыкании в начале процесса.
Кривые рис. 43 и 44 соответствуют случаю, когда машина имеет
очень малые значения постоянных времени ТапТ'а; поэтому, соста-
вляющие токов затухают весьма быстро.
Покажем теперь, как можно было непосредственно использовать
теорему постоянства потокосцеплений с контурами машины для
определения всплесков тока в обмотках.
Постоянство потокосцепления с обмоткой возбуждения (ф/ =
— const) приводит к тому, что продольная переходная э. д. с. также
7 А. И. Важиов
98
Т. к. з. синхронной машины без демпферной обмотки
[Гл. 3
остается постоянной:
Е'а = рЕа-[-Ео = рЕа-\-1/ = Ело = const. (79)
Постоянство потокосцеплений с фазными обмотками статора
позволяет получить очень просто выражения для потокосцеплении
Рис. 45. Изображающий вектор
потокосцепления обмоток статора
в момент короткого замыкания.
статора по продольной и попереч-
ной осям и Обратимся к гео-
метрическому представлению ли-
нейного преобразования, согласно
которому потокосцепления tya, <|>6,
и <}»d, суть проекции изо-
бражающего вектора на соответст-
вующие оси (рис. 45).
Ясно, что постоянство потоко-
сцеплений фй, возможно лишь
при неподвижном на диаграмме век-
торе ЧУ, сохраняющем свою ампли-
туду. При этом положение его от-
носительно осей а, Ь, с таково, что
проекции Y на оси а, Ь, с равны
потокосцеплениям фаз перед ко-
ротким замыканием (т = 0): фа0, ф6в, фс0. Вместе с тем при г = О
вектор Т упреждает на 90° изображающий вектор фазного напря-
жения е, поскольку ех = — ~^(х = а> Ь, и Равен емУ по величине
(Ф = е). Положение же вектора е на диаграмме определяется углом
0О относительно отрицательного направления оси q (см. рис. 31),
величина которого зависит от режима, предшествующего корот-
кому замыканию. В процессе короткого замыкания (т > 0) угол
между вектором Y и осью d, вращающейся с синхронной скоростью,
будет равен 0О 4~ ws? — т и поэтому
<|»d = cos (т Ц- 0„) = е cos (х + 0g);
cos (j4-0o-f-yj= —esinft + Og).
(80a)
Выражения ранее в виде: потокосцеплений <pd, через токи были даны b = Ed + E. = Xdid + if\\ (8()б) tyq Eg Xqiq- J
Приравнивая правые части выражений (80а) и (806), получим:
Ed + if — е cos (т 0О);
Eq = — esin (T-f-Gg).
(81)
§17] Определение токов машины при трехфазном к. з. 99
Уравнения (79) и (81) позволяют определить все переменные — Ed,
Ея' V- F, .
V=^-^-ecos(T + 0o);
р ^dO ! е , , v • (82)
Ed =——-Д-cos (т-н0);
Eq = — e sin Д-ф-9Д
Всплески токов в фазах статора определяются по выражениям (82)
с помощью линейного преобразования. Например, для фазы а:
ia — id cos 7 — i j sin 7 = Г —- 4^ -Д cos (т -j- 90) I cos (t -ф- 70) -ф-
L xd xd J
+ 5Г sin + e°) sin f») •
Используя тригонометрическое соотношение
A cos a cos р -ф- В sin а sin Р = у (А — В) cos (а -ф р) -|~
+ |(Д + В)СО8 (а —р)
в выражении для тока i'a, найдем:
i'a= — -p-°cos (т-Но) + у Ц---Ц ecos(2t-J-70-]-e0) +
xd z \xd xq /
I 1 / 1 . 1 \ , „ ,
+ "2 (Аё "Ь ~x~ e cos
Таким образом получено то же выражение для тока Га, что и в (75).
Необходимо отметить, что в выражении (82) отдельные соста-
вляющие переменных (всплесков токов) находятся в определенной
взаимозависимости, являющейся результатом принятой концепции
постоянства потокосцеплений контуров. Установим эту связь, по-
лезную для некоторых приложений. Переменные Ed, Eq, Z) можно
в самом общем виде представить как сумму постоянной соста-
вляющей и составляющей, являющейся функцией времени:
Ed — Edn -ф- Ed~,
Eg = Eqn-\-Eg^;
if = ifn -ф- i t~',
(83)
где индексами п и ~ соответственно обозначены постоянная и пере-
менная составляющие.
Поскольку согласно (79) E'd= const, то подстановка туда Ed и
if из (83) дает соотношения:
tifdn -ф- — EdQ-, (84а)
fi£,d^ + Z^ = 0. (846)
7*
100 Т. к. з. синхронной машины без демпферной обмотки [Гл. ?
Подстановка переменных в форме (83) в выражения (81) дает до-
полни тельные соотношения:
Ed~ + i't~ = e cos (T-f-60); (84в)
fdn + /;n = 0; (84г)
Eq~ = — е sin (т 4- 0О); (84д)
Eqa = Q. (84е)
Выражения (84а) — (84е) устанавливают искомую связь между
отдельными составляющими переменных.
Определим теперь максимальные всплески токов, не учитывая
затухания токов, для чего в выражениях (77) и (78) положим Т'а~
=Та = оо.
Из выражения (78) следует, что наибольшее значение тока воз-
буждения при трехфазном коротком замыканий //Зтбудет иметь
место в момент времени т = тс — 0в и не зависит от момента корот-
кого замыкания (значения угла у0). Оно равно:
4 3m = 4° 4-Р е 1 4- COS 00). (85)
xd
Ток достигает максимально возможного значения при некото-
рой нагрузке, так как при 0О 0 ток увеличивается в сравнении
с его значением в режиме холостого хода (по регулировочной ха-
рактеристике).
При холостом ходе е = £'00 = //0 и
(1 +2^iрЯ
Максимальное значение тока в фазе зависит от того, в какой
момент времени произошло короткое замыкание.
Согласно (75) максимальное значение тока в фазе а для заданного
исходного режима (//0, 0О, Еап) возникает при у»— 0о = О, когда
апериодическая составляющая имеет наибольшее значение. Это
соответствует максимальному потокосцеплению с фазой а в момент
короткого замыкания (рис. 45).
При этом ток в фазе а равен:
=----^cos 0е 4~ + 4- [[х' cos 2 (х 4- То) 4” + р'П*
xd 1 L\xd XQ / \xd ' 7/1
Фазный ток достигает максимального значения (обозначим его
ikim) в момент времени т = тс — То = т:— и равен
£)о + е
/йЗтл - •
xd
§ 18]
Определение постоянных времени Т j и Т,
101
Рассмотрим пример. Пусть трехфазное короткое замыкание происходит
на зажимах машины, имеющей следующие параметры:
ха= 1,0; xd = 0,3.
Будем считать, что перед коротким замыканием машина работала в холо-
стом ходу с номинальным напряжением на зажимах. В этом случае:
= Ею + И-Edo = Еай = е= 1,0.
Максимальное значение тока в обмотке возбуждения при коротком замы-
кании, если пренебречь затуханием, равно:
______. /, .„-*</ ха\ , !. . „ 1 — 0,3 \-------_
2/зт — '/о (14-2 р-----------------------------I — 1 । 1 4- 2 ———I 5,7,
\ ха / \ 'А'3 /
т. е. примерно в 5,7 раза превышает ток установившегося режима.
Максимальный ток в фазе, при пренебрежении затуханием, равен:
. _ £rf()4-*_ 1 + 1
th*m~ х'а ~ 6’7'
т. е. в 6,7 раза превышает амплитуду номинального тока статора.
§ 18. Определение постоянных времени Т'а и Та
Сравнивая выражения (72) и (67а), видим, что при pd = p9 =
= pz = 0 корни характеристического уравнения системы (67) равны
рхЛ = ± j, /;:| = 0. При р + 0 отдельные составляющие в Ed со вре-
менем должны затухать; это значит, что в корнях характеристиче-
ского уравнения появятся отрицательные вещественные части и они
окажутся равными:
7’1,2 —ai—7> /’з=:а2-
Сравнивая выражение (67а) с принятой формой записи тока,
например (77), можно видеть, что постоянные времени равны об-
ратной величине вещественной части корней характеристического
уравнения, взятой с противоположным знаком:
Таким образом, формально Та и T’d определяются нахождением
корней характеристического уравнения. Характеристическое урав-
нение получается приравниванием нулю определителя однородной
системы (67) (т. е. при + = 0):
(р + Pd) — 1 р
1 (р + р9) 1 = 0.
Р-Р 0 (р Н- Рг)
102
Т. к. з. синхронной машины без демпферной обмотки
[Гл. 3
Раскрывая определитель и деля его на а = I—р, получим урав-
нение относительно буквы р:
Р3 +Р1 (Р? + Ра + Р/) +Р [1 + Р/ (Р? + Р^) + PgPid +
+0 4- p«pi) р/—(86)
где
Р> = ^ и Pi=7-
При наличии на роторе машины дополнительных контуров в виде
демпферной обмотки характеристическое уравнение получается еще
более высокой степени, нежели уравнение (86). Поэтому, хотя корни
могут быть приближенно вычислены с любой степенью точности
[Л. 4], однако целесообразно упростить их определение. Основанием
для подобного упрощения является то, что затухание апериодиче-
ских токов в контуре определяется, в основном, активным сопро-
тивлением этого контура, и активные сопротивления вращающихся,
трансформаторно связанных контуров оказывают на затухание
незначительное влияние. Найдем поэтому корни, поочередно счи-
тая активные сопротивления обмоток возбуждения и статора рав-
ными нулю.
Полагая в (86) pf = 0 (rf = 0), получаем корни уравнения в виде:
+ Pd , . /Р? + Pd'4
Р1.2—----2 —/ у * + Р<гРа 2 / №
^ + pi-. Ji 1 „ vsl.
2 •—J|4 g \Ра Pq) J, I
/’з==0. J
Таким образом, постоянная времени затухания апериодических
токов (а также второй гармонической) в статоре и трансформаторно
с ними связанного гармонического тока в роторе Та равна:
т = 2 <Zx'dXq =2X3
“ Pd + p« '•(x;+xg) г ’
P-Xdxq
где Xi= , — есть сопротивление обратной последовательности
Xd "Г xq
при синусоидальном напряжении.
Полагая в (86) р'а — pq — 0 (г=0), получаем корни уравнения
в виде:
Р1Л = ±Г, Рз = ~Рр (88)
Таким образом, постоянная времени затухания апериодического
тока в роторе и трансформаторно с ним связанных гармонических
токов в статоре T'd равна:
т’ — L — X'd 1_+г
ld~ xd\t~xd 1м>
§ 18]
Определение постоянных времени Т 'Л и Т
103
где Тм =— = -1— постоянная времени обмотки возбуждения
при разомкнутой обмотке статора.
Отметим, что при г#0 согласно (87) мнимая часть корня р1г
уже не точно равна единице, как это имеет место при г = 0 [см.
(88)], а отличается от единицы на малую величину = (pi— р?)2.
В этом случае в выражениях (72) и (74г) вместо cost и sint будут
фигурировать cos (1—v')t и sin (1—v')t, а токи в статоре (75), (77)
содержать вместо апериодической составляющей гармоническую
очень малой частоты v' и вместо второй гармонической гармониче-
скую с частотой, весьма близкой к удвоенной: (2—v'). Однако прак-
тическое значение этого уточнения ничтожно. Например, для гене-
ратора крупной мощности в среднем г = 0,004; xj = 0,3; х? = 0,5
и, следовательно, pd = -]—= 0,013; po = -k=-=0,008, а поэтому
У = 1 (0,013 — 0,008)2 = 3,13 • 10“6 < 1,0.
Укажем теперь другой метод определения постоянных времени,
основанный на общих физических представлениях и являющийся
полезным для приближенных решений задач по несимметричным
коротким замыканиям [Л. 8, 24].
Пусть имеется некоторый короткозамкнутый контур, в котором
происходит затухание постоянного тока. Будем полагать, что дру-
гих короткозамкнутых контуров, неподвижных по отношению к рас-
сматриваемому, нет, но имеются контуры, вращающиеся относи-
тельно рассматриваемого. Если в таком контуре затухает ток по-
стоянного направления, не поддерживаемый внешним источником
напряжения,то уравнение напряжений относительно этой составляю-
щей тока будет иметь вид:
Л + «п = 0, (89)
где бп — потокосцепление с контуром, изменяющееся вместе с за-
тухающим током постоянного направления /п;
г — активное сопротивление контура.
Потокосцепление фп создается не только током гп, протекающим
в рассматриваемом контуре, но и соответствующими составляю-
щими токов других контуров.
Потокосцепление <рп можно в общем виде представить соотно-
шением:
Фп = Мр (89а)
где индуктивность L должна определяться с учетом взаимной ин-
дукции от токов других контуров, трансформаторно связанных
с затухающим током in. Следовательно, это некоторая эквивалентная
индуктивность контура. В соответствии с уравнениями (89) и (89а)
104
Т. к. з. синхронной машины без демпферной обмотки
[Гл. 3
ток in будет затухать экспоненциально с постоянной времени Т,
равной
г ‘
Согласно уравнению (89а) в общем виде индуктивность L может
быть определена как
Л = (90)
Таким образом, если для рассматриваемого контура в переход-
ном процессе найдены для начального момента времени всплеск
апериодического тока /п и апериодическое потокосцепление <рп,
то в соответствии с (90) определяется эквивалентная индуктивность
контура L, а по ней и постоянная времени Т. Определение тока in
и потокосцепления Фп в начальный момент времени процесса отно-
сительно просто, так как при этом обычно можно принять активные
сопротивления всех цепей равными нулю, что позволяет считать
потокосцепление фп равным потокосцеплению с контуром перед
рассматриваемым процессом (теорема постоянства потокосцепле-
ний).
Определим описанным методом найденные выше постоянные
времени Та и Т'а.
Находим эквивалентную индуктивность для апериодических
токов в статоре при коротком замыкании Ла = ^. Потокосцепле-
ние фап = фао, где 'Фао — потокосцепление с фазой а в момент перед
коротким замыканием (т=0). Оно определяется согласно линей-
ному преобразованию и соотношению в установившемся режиме
в виде:
фао — Фйо COS 7о — ф9о sin 7о = (£оо + Ем) cos — Eg0 sin =
= е cos 90 cos 7о + е sin 90 sin -[0 = е cos — 90).
Апериодическая составляющая тока фазы а в первый момент корот-
кого замыкания 1аа согласно (75) равна:
• _ 1 / 1 । 1 \
/ап 2 1 xgj е cos (То — 9о).
Таким образом,
что и было получено ранее формальным путем.
Отметим, что соотношение L'a = %,<> показывает, что индуктив-
ность статора при протекании по обмоткам постоянного тока такая
же, как и для токов обратной последовательности. *
* Это можно увидеть и из схем замещения асинхронных машин, полагая
активные сопротивления равными нулю. Сопротивление схемы при этом не бу-
дет зависеть от скольжения s, равного для постоянного тока 1,0 и для токов
обратной последовательности — двум.
§ 19J Определение токов машины при трехфазном коротком замыкании 105
Найдем теперь эквивалентную индуктивность для апериодиче-
ского тока обмотки возбуждения при коротком замыкании
где ф/п = ф/0, а фр — потокосцепление перед коротким замыка-
Е'
нием. Согласно (65) tyf<j = E'do, а из выражения (74в) ifn=
поэтому индуктивность L'f в относительных единицах равна Е)=а,
, xd
а в генри Z,/= cZ,/6 = cZ,/ = — Lf. Тогда постоянная T'd прини-
z.* '
мает вид: T'd = -£= — Td«. Этот же результат был получен ранее
rf
формальным путем.
В табл. 2 приведены средние значения постоянных времени для
машин различной мощности и скорости вращения.
Таблица 2
Постоян- ная вре- мени Явнополюсные генерато- ры (гидрогенераторы) Двухполюсные турбогенераторы Синхронные компенсаторы
Мва
5-15 40—120 0,6—15 30—165 1 5.-75
Tdo сек T'd сек т сек 1 а 2—4 0,8-1,5 0,08—0,2 5—7,5 1,5—3 0,12—0,4 3—6 0,4—0,8 0,04—0,13 8—12 0,8- 1,6 0,16—0,4 4,5—10 0,8—2,4 0,1—0,3
Из данных табл. 2 явствует, что постоянная Та примерно на
порядок больше постоянной Та.
§ 19. Определение токов машины
при трехфазном коротком замыкании
с учетом активного сопротивления цепи статора
В тех случаях, когда величина активного сопротивления в цепи
статора до точки короткого замыкания оказывается более или менее
значительной, полученные уравнения токов должны быть уточнены.
При этом по-прежнему можно определять всплески токов, полагая
ру = О и учитывать сопротивление rf только в затухании токов.
В этом случае решению подлежат уравнения:
(.Pa + Pd)E<i — f9==0; 1
+ (р + Pg) Eg = ~ E'd0, J
полученные из первых двух уравнений (67) с помощью третьего
уравнения (67), в котором положено ру = О. Решение уравнения
106
Т. к. з. синхронной машины без демпферной обмотки
[Гл. 3
(91) элементарно. Оно имеет общий вид:
Ed Edn I [(£(/0 £^п) COS X | Eds SIH £
Eq Egn | [(£^0 Eqn) COS X —[— EgS sin x] £
(92)
где значками «п» и «0» обозначены соответственно постоянное и на-
чальное значения переменных, а значком s — амплитуда синусои-
дальной составляющей. Здесь частота гармонических взята такой же,
как при г — 0, так как влияние г на частоту, как было показано
в § 18, ничтожно.
Постоянные составляющие £’rfn = zrfnxrf и £’?п—/дп.г? определяются
уравнениями (66). Постоянные Eas и Eqs могут быть найдены, напри-
мер, подстановкой (92) и их производных в (91) по способу сравнения
коэффициентов. Они оказываются равными:
Eqs^ — » (Ем — Еап) 4
(EqQ Eqn)
причем Egs определена с точностью до величин порядка р2; постоян-
ная времени Та имеет прежнее значение Та = ~.
Постоянная составляющая тока idn в действительности не
остается неизменной, а затухает под влиянием сопротивления г,.
Установившееся значение Edy может быть получено, если в (66)
заменить E'd и x'd на £00 и xd соответственно. Постоянная составляю-
щая Eqn не изменяется во времени, так как в поперечной оси на ро-
торе никакого контура нет. Поэтому в (92) при учете rf в затухании
изменится лишь первое уравнение, принимающее вид:
Ed = £rfy + (£rfn — £rfy) e~x/rd 4- [(Ed0 — fdn) cos * + Eds sin x] e
Постоянная времени T'd может быть уточнена следующим образом. По
L' E'f
данному в § 18 общему определению Td = ~ = ~ Td9, где
F f Xf
L'f— а потокосцепление <Ь/0, как и раньше, равно — E'da. Со-
гласно выражению (84а):
P-Edn —Zyn Ed<>.
Подставляя сюда определенную ранее величину Edn = idnXd с учетом
г [см. (66)], найдем:
$ 20J
Предварительные замечания
107
Таким образом, с учетом г, эквивалентная индуктивность обмотки
xdxq г3
возбуждения при коротком замыкании L'f = Lf х^х _|_г8[гнЬ а по'
стоянная времени
I'd— Tdo
xdxq + Т2
xdxq +
По найденным TOKaMZd = — и i9 = — с помощью линейного
4 Xq
преобразования нетрудно вычислить ток статора.
Ток возбуждения имеет аналогичные случаю г=0 составляю-
щие:
— £оо + (ifn — £«o)s 1
где z/n определено выражением (93), а переменная составляющая
тока возбуждения if~ находится с помощью соотношения (846):
if~ = — Р [(£\гв — Edn) cos т sin t] e" T/r«.
Б. ОДНОФАЗНОЕ И ДВУХФАЗНОЕ КОРОТКИЕ ЗАМЫКАНИЯ
§ 20. Предварительные замечания
Наиболее частым видом короткого замыкания является несим-
метричное короткое замыкание — однофазное, двухфазное, двух-
фазное на нейтраль (рис. 46).
Рис. 46. Схемы несимметричных коротких замыканий: а — одно-
фазное; б—двухфазное; в — двухфазное на нейтраль.
Если с точки зрения динамической устойчивости системы наибо-
лее тяжелым является трехфазное короткое замыкание, то несиммет-
ричные короткие замыкания неприятны появлением больших зна-
копеременных моментов и значительных перенапряжений на сво-
бодной фазе при отсутствии поперечной демпферной обмотки. Кроме
того, при несимметричном коротком замыкании появляется полный
спектр гармонических в токах, которые при наличии соответствую-
щей емкости в цепи статора могут значительно усилиться. Подобные
резонансные явления возможны, например, при работе генераторов
через линию передачи заметной протяженности.
Анализ несимметричных коротких замыканий будет произведен
для случая, когда внешняя цепь до точки короткого замыкания
108
Т. к. з. синхронной машины без демпферной обмотки
[Гл. 3
замещается последовательно соединенными сопротивлением гви и
индуктивностью Лвн. Этим условиям, в частности, удовлетворяет
и случай, когда между точкой короткого замыкания и зажимами
машины включен трансформатор [Л. 25].
§ 21. Общие физические представления
Рассмотрим однофазное и двухфазное короткие замыкания.
В обоих этих случаях физическая картина явления одна и та же.
Объясняется это тем, что как при однофазном, так и при двухфазном
коротком замыкании на статоре создается однофазный короткозамк-
нутый контур, создающий пульсирующее магнитное поле, если по
нему протекает переменный ток. Используя теорему постоянства
потокосцеплений, можно нарисовать следующую физическую кар-
тину на примере однофазного короткого замыкания.
Постоянство потокосцеплений с однофазной обмоткой на статоре
приводит к появлению постоянного уравнительного тока в статоре,
который в действительности должен затухать под влиянием конеч-
ного активного сопротивления до нуля, так как в установившемся
режиме постоянный ток в статоре отсутствует. Неподвижное в про-
странстве и постоянное во времени (если отвлечься от затухания)
поле, обусловленное постоянным током статора, индуктирует э. д. с.
основной частоты в обмотке ротора, вращающегося с синхронной
скоростью. Поскольку обмотка ротора замкнута через возбудитель,
в ней возникает ток основной частоты, обуславливающий пульси-
рующее поле. Это однофазное пульсирующее поле можно разложить
на прямо- и обратно-вращающиеся поля.
Прямо-вращающееся поле, движущееся относительно ротора
в направлении вращения ротора, индуктирует в статоре вторую гар-
моническую э. д. с., обратно-вращающееся поле остается в про-
странстве неподвижным и, таким образом, трансформаторно связано
с постоянным полем статора. Ток второй гармонической в однофаз-
ной обмотке статора создает пульсирующее с двойной частотой поле,
которое можно опять разложить на прямо- и обратно-вращающиеся
поля. Обратное поле индуктирует в роторе э. д. с. утроенной ча-
стоты, результатом чего явится появление токов четвертой гармо-
нической в статоре и т. д.
На рис. 47, а схематически указаны взаимные связи гармониче-
ских тока в обмотках статора и ротора. Итак, в статоре появляются
уравнительные токи постоянного направления и четные гармони-
ческие, которые должны затухать до нуля с некоторой постоянной
времени, определяемой активным сопротивлением обмотки статора.
С этими токами в статоре трансформаторно связаны нечетные гар-
монические тока в роторе, которые, следовательно, должны затухать
с такой же постоянной времени. Аналогичные рассуждения, основан-
ные на сохранении постоянными потокосцеплений с обмоткой
ротора, приведут к установлению уравнительных составляющих
£ 22] Определение токов при двухфазном коротком замыкании
109
тока постоянного направления и четных гармонических в роторе
и связанных с ними трансформатор но нечетных гармонических в ста-
торе (рис. 47, б). Эта вся группа гармонических будет затухать до
установившегося значения с постоянной времени, определяемой
роторным сопротивлением.
а.)
б)
ках ротора и статора, возникающих: а — при постоянстве по-
токосцепления в статоре; б — при постоянстве потокосцепления
в роторе.
Отметим, что следствием общности физических процессов при
двухфазном и однофазном коротких замыканиях является подобие
аналитического их исследования: уравнения однофазного короткого
замыкания могут быть получены из уравнений двухфазного замы-
кания увеличением параметров машины на величину, равную^.г0
[Л. 26].
§ 22. Определение токов при двухфазном коротком замыкании
Строгое решение дифференциальных уравнений напряжения при
несимметричных коротких замыканиях весьма сложно, так как при
этом приходится иметь дело с уравнениями, содержащими периоди-
ческие коэффициенты, а не постоянные, как это было в случае сим-
метричного короткого замыкания. Приближенное решение может
быть найдено с помощью применения теоремы постоянства потоко-
сцеплений контуров, т. е. по методике, уже использованной в задаче
о трехфазном коротком замыкании. Согласно этой методике находят
сперва всплески токов, полагая г — rf = 0, затем определяют
установившиеся токи короткого замыкания, также считая г = 0;
после .этого составляют общее выражение для тока, имея в виду,
что переходные составляющие токов (т. е. разности между вспле-
Т. к. з. синхронной машины без демпферной обмотки [Гл. 3
сками токов и их установившимися значениями) затухают по экспо-
ненциальному закону до нуля. Сравнение приближенного и строгого
решений задачи о токах несимметричного короткого замыкания
показывает, что при обычных значениях активных сопротивлений
цепей машины они весьма мало отличаются друг от друга. При
определении токов более удобными являются а, (3 координаты.
Найдем всплески токов при двухфазном коротком замыкании,
происходящем на холостом ходу генератора, т. е. при начальных
условиях = ia = ib = ic = 0 или, что то же самое,
/от =/«о = ^0 = 0. (94)
При двухфазном коротком замыкании короткозамкнутым конту-
ром на статоре является контур, образованный фазами b и с. Постоян-
ство потокосцепления с этим контуром может быть выражено усло-
вием:
— Фс = К — фс0 = const, Ф3 = Ф9о = const, (94а)
так как фь —Фс=|<3 ф3.
Постоянство потокосцепления с обмоткой возбуждения дает соот-
ношение:
= фу’ = const. (946)
Приведем выражения для потокосцеплений фа, ф фу в относи-
тельных единицах через токи ip. Подставляя в потокосцепление
фу (63а) выражение для продольного тока id (25а), получим:
Ф/ = (*d — Xd) (z« cos у + sin 7) + if, (95a)
где z\ и L выражены, как и ток id, в долях базисного тока статора i6.
Потокосцепления фа, ф в физических величинах можно взять
из (31а), в котором нужно 'положить равными нулю токи демпфер-
ных контуров, поскольку рассматривается машина только с одним
контуром на роторе — обмоткой возбуждения. Подставляя в (31а)
продольные и поперечные индуктивности Ld и Eq из (35а), получим:
Фа = + Ld~L4cos27) 1Л + -a~4.sin2Tzp+ Mafdcos7 if,
Фр= sin 27 4+ (—cos 27) zp+ Mafd sin 7 if.
Для того чтобы получить ф„ и фр в относительных единицах,
нужно последние выражения разделить на базисное потокосцепле-
ние статора фб = £6гб (см. § 10). Потокосцепление ф6 на основании
(62а) также равно:
Л ___ £б __xafdlf6__м
?б MafdbS-
§ 22] Определение токов при двухфазном коротком замыкании
11Г
В результате получаем ф2, в относительных единицах в виде:
фа = 4-cos 2Т) 1а + х-^лSin 2р • /₽ +1, cosр; (956)
фр = sin 2р • 4 + — х* — хя cos 2р) Zp + if sin р. (95в)
Подставляя в (94а) и (946) потокосцепления из (95в) и (95а), прини-
мая во внимание начальные условия (94), а также то, что в процессе
короткого замыкания 4 = 0*, и вводя для обозначения всплесков
токов дополнительные штрихи сверху, получим два уравнения:
/Xг] “4“ о Хп с\ А *' f *' • • •
3 —cos l? +tf sln т= tf°Sln T°;
(xd — xd) z? sin p + if — ifa.
(96)
Для того чтобы в дальнейшем наиболее просто рассмотреть слу-
чай однофазного короткого замыкания, введем в уравнения (96)
вместо угла р — р0 -ф- т новый угол а = а0-|-т, который будет
составлять ось d с осью поля, создаваемого токами двух коротко-
замкнутых фаз (рис. 48).
Принимая за положительное направление тока короткого замы-
кания z*„ направление тока в фазе b, ib, получаем направление потока
от токов двух фаз Фъ т. е. ось поля, располагающуюся нормально
к оси фазы а (рис. 48). Из рис. 48 следует, что
л . л
Т— “2 га> То — ттЧ
поэтому
sinp0 = cosa0; sin у = cos a; cos2p =— COS 2а.
Подставляя эти соотношения в уравнения (96), получаем:
x<i хч cos 2а] 4 4- if COS а = Zyo COS а0;
(xd — Xd) i?' cos а 4- i'f = ita.
Уравнения (96a) позволяют определить обе переменные
40(cosa0 — COS а)
f Xrf + Xq i XQ „ ’
•--------j--------COS 2a
(96a)
4 и if.
(97a)
if
(976)
* В процессе короткого замыкания фаза а разомкнута; следовательно,.
4 — 0; ток /о ="з’ (4 + ib + zc) = 0 в любой момент времени. Поэтому 1Л =
— ia — ia — °-
112
Т. к. з. синхронной машины без демпферной обмотки
[Гл. 3
Отметим, что ток i мог быть определен с помощью только одного
статорного потокосцепления ¥ в котором нужно заменить ха на
x'd и Еа —if на E'd = E’dri, равную при холостом ходе э. д. с. Ем =
— Ч«-
При двухфазном коротком за-
мыкании (рис. 46):
ic — Ч — iks-
Рис. 48. Взаимное положение
координатных осей и оси маг-
нитного поля статора при двух-
фазном коротком замыкании.
Но
; __ ib ic 2 .
3 /Т у з
Подставляя это значение i в (97a)
xd — xq p
и обозначая Л = • .получим
xd । xq
ток короткого замыкания в стато-
ре в виде:
___ Y 3 ^00 cos а0 — COS а
xd + xq 1 4- COS 2а '
Токи /ф, и if являются периодиче-
скими четными функциями угла а (т. е. при изменении знака а
токи не меняются), поэтому разложение их в ряд Фурье должно
содержать только косинусные члены. Эти разложения имеют вид:
i'k — °.р д_% cos 2а-ф-cos 4а -ф- ...] —
2 У x'dxq
------— [cos а -ф- b cos За -ф- Ьг cos 5а -ф ...]; (98a)
if — if0 -ф (%d Xd)
</,(!+»)
Xd+ V^Yi^q
-ф COS 2а -ф b cos 4а -ф b* COS 6а -ф-
— (Xd — Xd) (1 -ф b) [cos а -ф- b COS За -фЬг COS 5а -ф ..(986)
V xdxq
где
Выражения (98а), (986) показывают, что отношение амплитуды
любой гармонической к амплитуде предыдущей гармонической токов
одинаково и равно Ь. Величина постоянной составляющей и четных
гармонических, связанных с ней, в токе статора зависит от момента
короткого замыкания, т. е. угла у0 (или а0).Она максимальна при
§22] Определение токов при двухфазном коротком замыкании 113
а0 = 0, когда начальное потокосцепление с короткозамкнутым кон-
туром максимально (рис. 48).
Определим теперь токи в режиме установившегося короткого
замыкания. Этот режим можно характеризовать соотношениями:
Ф?у^0; (99а)
РФ/у^О. (996)
Действительно, уравнение напряжения короткозамкнутого контура
на статоре имеет вид:
Д (Фбу ’Рсу) Ч- Г (tby icy) == О,
или
ДФру + ^у = °-
Ввиду малости г имеем /?фру 0, и так как постоянного потокосце-
пления в установившемся режиме в цепях статора нет, то получаем
выражение (99а).
Для цепи ротора уравнение напряжения имеет вид:
ef =РФ/у + rfi/y
Поскольку в установившемся режиме z/y = z'/~ , где —пе-
ременная составляющая в токе х/у, то = и рфуу-J-=0.
Ввиду малости гу можно считать =0, что и дает выражение
(996).
Постоянная составляющая и четные гармонические токов в ста-
торе, а также связанные с ними нечетные гармонические тока в ро-
торе затухают до нуля; поэтому установившиеся токи имеют вид:
__ со
sin — 1)a + A2ft_1 cos(2A—1)а];
k=\
со
//у = Z/O 4- 2 (B^ksin 2А(Х + BcU cos 2£<X).
*=i
(100)
Определение амплитуд токов в (100) можно произвести следующим
образом. В уравнения (99а) и (996) следует подставить общие вы-
ражения потокосцеплений ф и ijy (95в) и (95а), в которых нужно по-
ложить ^ = 0, /₽ = /₽у и i] = i]y и установившиеся токи I у, //у
заменить их разложениями (100). После выполнения операции
дифференцирования в (996) приравниваются нулю коэффициенты,
стоящие при синусах и косинусах в (99а) и (996). В результате полу-
чается бесконечная система алгебраических уравнений, содержащих
неизвестные амплитуды гармонических токов. Решение этой системы
и подстановка амплитуд гармонических токов в общие выражения
8 Л. И. Важное
114
Т. к. з. синхронной машины без демпферной обмотки
[Гл. 3
(100) приводит последние к виду:
(xd — x'd)
—"2^-- [cos а -|~ b cos За cos 5а + • ••]; (101a)
У xdxq
4у Йо
ч
X [cos 2а -J- Ь COS 4а Ьг COS 6а X •••]• (1016)
Амплитуды первой гармонической токов в статоре при всплеске
их и в установившемся режиме согласно (98а) и (101а) равны:
X 3 Eqq У 3 Eq0
xd +VxdXq
Из приложений метода симметричных составляющих известно, что
ток установившегося двухфазного короткого замыкания (основная
гармоническая) определяется в виде:
т — V 3
- xd + xi
Сравнение приведенных здесь выражений показывает, что при
определении тока Ikiy необходимо считать индуктивным сопроти-
влением обратной последовательности синхронной машины с одним
контуром на роторе в режиме двухфазного короткого замыкания
Xs' величину, равную х'У — У x'dXq.
Отметим также, что амплитуда всплеска основной гармонической
определяется аналогично установившемуся току, только вместо
параметра xd стоит x'd. Это — уже ранее отмечавшийся результат
применения концепции постоянства э. д. с. E'd- *
Под влиянием конечных сопротивлений ротора и статора раз-
ности между всплесками токов и их установившимися значениями
затухают до нуля по экспоненциальному закону (§ 21). Поэтому
общие выражения для токов будут иметь вид:
Z*2 =-------3 ~ [cos а b cos За -L Ьг COS 5а —J- ...] —
xd + У x'dxq
r- X/4 X j
~ V 3 Еоо --------------------;= X
(X' + J XdXq) (Xrf +)/ XdXq)
X [cos a -J- b COS За Ц- b* cos 5а ...] '
. / 3~ Ew cos x
2/
X [1 + 2Й cos 2а X 2A2cos 4а ...] (102a)
* В рассматриваемом случае двухфазного короткого замыкания из холос-
того хода E'd = E'da — Еоо- Поэтому замена xd и Ео на xd и Ed приводит лишь
к замене xd на xd.
§ 22] Определение токов при двухфазном коротком замыкании
115
, , , (xd-xd)tf (1 +Z-)
Чг — Z/o Н----------, ----- X
xd + У xdxg
X [cos 2а b cos 4а -ф- Ьг cos 6а —...]-[-
। -*~,У 4Д1 +^)
{Xd + уXdx4) (x'd+ yxdx4)
x.d+yxdx4 4- cos 2a 4- b cos 4a 4-
(1 + (A'd — xdy
&-r-,Td2 —
(xd — xd)i/f) COS70(1 + b)
я
X [cos a 4- b cos 3a -|- Ьг cos 5a 4- ...] e X/Ta-,
(1026)
где T'ds и Ta2 — постоянные времени роторной и статорной цепей
при двухфазном коротком замыкании, определение которых дается
ниже, в § 24.
В кривых токов zftsH if2 из высших гармонических имеют замет-
ную амплитуду лишь вторая и третья, так как при среднем отно-
шении х?^2 коэффициент Ь= 0,17 (й2 0,03, ЬЛ 0,005).
xd
Можно отметить также, что если машина будет иметь симметрич-
ный ротор в двух осях, т. е. x'd = xq (b = 0), то высшие гармони-
ческие в кривых тока будут отсутствовать, кроме второй гармони-
ческой в роторе, аналогично второй гармонической в статоре при
трехфазном коротком замыкании.
На рис. 49 построены отдельные составляющие тока короткого
замыкания в статоре для машины со следующими параметрами:
Xd = l,0; х? = 0,6; %; = 0,3; Ew = if„= 1,0; Та2 = 0,02сек-, T'd2=
— 0,1 сек.
Здесь приняты очень малые значения постоянных времени, чтобы
наглядно показать затухание на небольшом отрезке времени.
Предполагается, что короткое замыкание происходит при наличии
максимального потокосцепления с контуром статора (а0 = 0). Для
указанных параметров машины уравнение (102а) принимает вид: *
ikt^ — 1,21 (cos т 4- 0,17 cos Зт) — 1,17 (cos т Ц- 0,17 cos 3?) е-т/31’44-
4- 2,03 (1 4- 0,34 cos 2т) е- V6.28.
На рис. 49, а представлен установившийся ток короткого замы-
кания (сплошная кривая); на рис. 49, б, в — затухающие переход-
ные составляющие в токе ife„. Полный ток в функции времени
дан на рис. 50.
Для рассматриваемой машины ток возбуждения при коротком
замыкании по уравнению (1026) описывается в виде:
4, 1 + 0,575 (cos 2т 4- 0,17 cos 4т) 4- 0,555 (1,74 4- cos 2т Д-
Д-0,17 cos 4т) г-V3i,4 _ 193 (cos т 4- 0,17 cos Зт) S-V6.28
* Из высших гармонических учтены лишь вторая и третья.
8*
Т. к. з. синхронной машины без демпферной обмотки
[Гл. 3
По этому уравнению на рис. 51 построена кривая тока в зависи-
Оценим теперь в об-
щем виде те максималь-
ные значения токов, ко-
торые вообще могут ожи-
даться при 'двухфазном
коротком замыкании.
Наибольшие значе-
ния токов получаются,
если а0 = 0, т. е. в
случае, когда потокосце-
пление с контуром стато-
ра в момент короткого
замыкания максимально.
Если пренебречь зату-
ханием токов,то послед-
ние достигают своего наи-
большего значения через
0,01 сек после начала
процесса внезапного ко-
роткого замыкания, т. е.
в момент времени
т = л. Эти максималь-
ные значения токов
получаются из вы-
ражений (98а), (986), в
которые нужно подста-
вить а = а0 + т — л,
а0 = 0. Имея в виду,
что сумма
Рис. 49. Составляющие фазного тока гр"
двухфазном коротком замыкании: а — уста
сПтраи 14-26 + 2^ + 2^ +
новившийся ток короткого замыкания; б — не- . 1&
четные гармонические; в — апериодическая + • • • — [______
доставляющая и четные гармонические.
1+6 + 62 + 63+...=г^,
найдем из (98а), (986):
_ У~3 Ее1> 1 +& ।_____/Т Еоо .
ktm 2/+^ (х-+у^)(1_&)’
; । / 1 , 1 Ь
—4 + & + 1-6Р
yd — x^ifo(l + b) {
У xdxq \—b‘
§ 22] Определение токов при двухфазном коротком замыкании 117
Поскольку
1 I ь_ _ = 2Ух'л
Vxq+Vx'd x'd+yx'dxq
то максимальные значения токов окончательно принимают вид:
= (Ю2в)
xd
+ (102г)
\ d /
Таким образом, максимальные токи при сделанных до-
пущениях не зависят от несимметрии цепей ротора по осям d и q
Рис. 50. Фазный ток при двухфазном коротком замыка-
нии синхронной машины без демпферной обмотки.
(Xd х?) и определяются лишь параметрами продольной оси xd
и Х'а.
Отметим, что если рассматривать в токе статора только основную
гармоническую и постоянную составляющую, то максимальный ток
ikim будет зависеть от отношения xqfx'd. Обозначая xqjx'd = а, получим
в этом случае максимальный ток без высших гармонических в виде:
1 + з ут
2 Va (1+а)‘
118 Т. к. з. синхронной машины без демпферной обмотки [Гл. 3
На рис. 52 представлена зависимость k=f(d), из которой видно,
что при a = xq/xa^> 1 коэффициент k<^l, т. е. основная гармониче-
0 2л чл бл 8л Юл 12л-«л т
Рис. 51. Ток возбуждения при двухфазном корот-
ком замыкании синхронной машины без демпферной
обмотки.
ская и постоянная составляющая в токе короткого замыкания умень-
шаются по сравнению со случаем симметричных обмоток ротора
Рис. 52. Коэффициент k, учиты-
вающий изменение доли основной
гармонической и постоянной со-
ставляющей в максимальном токе
при двухфазном коротком замыка-
(Xd = Xq).
Так, при xqlx'd = ‘2 основная
гармоническая и постоянная со-
ставляющая в
ке Ччт составляют около 75%,
остальные 25% обуславливают-
ся высшими гармоническими тока.
Для оценки значений макси-
мальных токов при двухфазном
коротком замыкании определим
для машины, имеющей
максимальном то-
If'lm
параметры xd=l,0; х,/ = 0,3.
Пусть короткое замыкание про-
изошло при номинальном напря-
жении (Д00 = = 1,0).
По формулам (102в) и (102г)
НИИ.
находим:
Ччт= 1(1 +2Ц^) ^5,7.
§ 23. Определение токов при однофазном коротком замыкании
Определим сперва всплески токов при однофазном коротком
замыкании (см. рис. 46). Будем считать, что оно произошло на хо-
§ 23]
Определение токов при однофазном коротком замыкании
119
лостом ходу генератора, т. е. при начальных условиях: if = ifw
AlO == =: 60 И-
Применение теоремы постоянства потокосцеплений к коротко-
замкнутой фазе а и обмотке возбуждения дает соотношения:
Фа = Фа0 = Const; (103а)
Ф/ — Ф/о = const. (1036)
В процессе короткого замыкания z& = zc = O. Поэтому is = 0,
12 р
z0 = -g- ia, a ia = ia — = Потокосцепление фазы а согласно
линейному преобразованию и выражению (356) равно:
Фа — Фо + Ф<х =-Wo + Фа == у Хо4 фа- (Ю4)
Подставляя в (104) потокосцепление ф, из (956) и полагая в нем
/\ = 0, получим в соответствии с требованием (103а):
I sjs -
xd-xq cos + cos 1 = cos
(104а)
где обозначено xd = xd -j- Хо, + у х«-
Условие (1036) с помощью выражения (95а), в котором нужно
положить 4 = 0 принимает вид:
(%d 2Cd) za cos у if = if0,
и поскольку xd — xd = xd — xd, где x'd = x'd -ф- у x0, окончательно
имеем:
(xd — Xd)zaCOS-[4-z)=z/0- (1046)
Уравнения для определения всплеска токов (104а) и (1046)
полностью идентичны соответствующим уравнениям при двухфаз-
ном коротком замыкании (96а), с тем лишь отличием, что вместо тока
4 и угла у ранее стояли ток i и угол а и параметры в (104а) и (1046)
снабжены знаком (*). Поэтому можно сразу воспользоваться полу-
ченными выражениями (98а,б), чтобы записать всплески токов при
однофазном коротком замыкании в виде: *
[1 + 2b cos 2f + 2Й2 cos 4-r -h ...] —
2 у x'dXq
-------[cos у b cos 3f -ф- b* cos 5-f -ф- ..(105a)
* Следует иметь в виду, что при двухфазном коротком замыкании =
__ У 3
— —ф, а при однофазном коротком замыкании ikl = ia = 3/2ф, т. е. постоян-
ный множитель в последнем случае раз больше.
120 Т. к. з синхронной машины без демпферной обмотки [Гл. 3
if = If о+ X
xd + у xdxq
X [ —Ц + cos 2у 4- b cos 4-г 4- b* cos 6т + ...] —
Li + ь
- (xd - x'd) (1 + Ь [cos T + b cos 37 + cos57+ ...], (1056)
У xdxq
где
/л;
~PT+W'
Установившиеся токи ikiy и z/ly находятся из условий
<Рау = О; /%у = 0>
аналогичных условиям (99а,б) при двухфазном коротком замыка-
нии и подобными же методами. Поэтому получается результат, сход-
ный с (101а,б), а именно:
4iy = > ~!/-°тгтг~ [cos у + b cos 37 + Ьг cos 5у + ..(106а)
Xd + У XdXq
I x'd^f9 (1+^)г oil л I ia о I 1
z/iy= z/o 4—*--z-^- [cos2y+b cos 4y+Z»2cos 67+..(1066)
xd + У x'dxq
Амплитуды первой гармонической токов в статоре при всплеске
их и в установившемся режиме согласно (105а) и (106а) равны соот-
ветственно:
*' । 1 /~ *' * 1 Г i 1 \ / 1\
Xd "г" V xaxq xd -j-—xo-i~y \x'd -р-^-ХоДХд 42x°j
и
xd 4“ xdxq xd 2 Xo 4- "j/-(\X'd 4--y Xo j (\Xq 4-
Определяемый методом симметричных составляющих установив-
шийся ток при однофазном коротком замыкании, как известно,
равен:
j _ 3£оо
ftIy ~ xd + xs4x0-
Сравнение приведенных здесь выражений показывает, что при
определении тока 1 к\у необходимо считать индуктивным сопротивле-
Определение токов при однофазном коротком замыкании
121
нием обратной последовательности синхронной машины с одним
контуром на роторе в режиме однофазного короткого замыкания
х' величину:
^2 } Н- "2" Х0) Н- ~2 2" ^О"
Отметим, что амплитуда всплеска основной гармонической опре-
деляется аналогично установившемуся току; в выражении послед-
него лишь нужно изменить xd на x'd (см. сноску на стр. 114).
Учитывая затухание токов, можно, согласно описанной выше
методике, представить токи в виде:
41 = *------77= [cos 7 + b cos З7 + b- cos 5Т 4-...] —
X“ + V x’dxq
* * ,
____ ОС* X/
X [cos 7 -|~ b cos З7 -|- Ьг cos 67 -|-...] s-T/ra'i 4-
—[! + 2b cos 27 4- 2b'2 cos 47 4-
V XdXq
(107a)
* *' . *
4i= 4» + ———[cos 27 4- b cos 47 4- b1 cos 67 4-... ] +
J •₽ 1 / sjJ ’ si-
Xd + ' XdXg
* * ' •»
I_______(xd—xdy 4-fr) у
(Xd + xdXq)(xd + V XdXq)
* i Г *
X [ » Х<1ХЧ'-cos 27 4- b COS 474--I &~х,Тл\ —
(1 + b) (xd—xd)
* * ' ¥
_ fe-xrf)l/0 cos 7o(l+l)[cos 7 I cos З7 +
Ь2 COS 67 4- ...]e— Z/Tai, (1076)
где T'dl и Tal — постоянные времени роторной и статорной цепей
при однофазном коротком замыкании, определяемые далее в § 24.
$
Коэффициент Ь, характеризующий уменьшение амплитуд выс-
ших гармонических при однофазном коротком замыкании, для нор-
мального соотношения параметров (xd<^x?) меньше аналогичного
коэффициента b при двухфазном коротком замыкании. Поэтому, как
и раньше, в токах ikl и ifi наибольшее значение среди высших гар-
монических имеют — вторая и третья.
Оценка наибольших возможных токов при однофазном коротком
замыкании, которые, как и раньше, получаются при наличии макси:
122 Т. к. з. синхронной машины без демпферной обмотки [Гл. 3
мальной постоянной составляющей в токе статора (уо = О), может
быть произведена с помощью выражений (102в), (102г), получен-
ных для двухфазного короткого замыкания. В этих выражениях
нужно заменить ]/3 на 3 и параметры xd, x'd на ха, xd. Таким обра-
зом, при пренебрежении затуханием наибольшие токи в рассматри-
ваемом случае оказываются равными:
= = (107в)
xd xd^
в f
+ (107г)
\ Xd ) \ xd . Я, )
где обозначено k, = 1 4- 0,5 .
1 xd
Из выражений (107в), (107г) следует, что наибольшие значения
токов однофазного короткого замыкания, при сделанных допуще-
ниях, не зависят от несимметрии цепей ротора по осям d и q (x'd
Ф Хд), однако на их величину оказывает влияние индуктивное со-
противление нулевой последовательности х0.
Для оценки значений максимальных токов при однофазном ко-
ротком замыкании определим iklm, ifbn для машины, имеющей пара-
метры: ха=1,0; = 0,3; хо = О,1, полагая, что короткое замы-
кание произошло при номинальном напряжении (ЕйЛ — 1^ = 1,0).
По формулам (107в), (107г) находим:
_____ 3-1 ос. •____________________ 1! 1 I о 1 — 0,3 \ к п
lklm 0,3 • 1,17 ?гай’Ь; 1(11 г 2 0,3 • 1,17/_°’и’
где
^=14-0,5^^1,17.
U, о
Необходимо отметить, что при расчете токов короткого замыка-
ния в случае, когда между точкой короткого замыкания и обмоткой
статора машины с изолированной нейтралью включен трансформа-
тор с заземленной нейтральной точкой, можно пользоваться приве-
денными выше формулами. При этом вместо сопротивлений статора
машины следует подставлять их сумму с сопротивлением короткого
замыкания трансформатора, а вместо сопротивления нулевой по-
следовательности машины — аналогичное сопротивление трансфор-
матора. Кроме того, в (102а) и (1026) необходимо заменить угол а
на у, а в (107а) и (1076) — угол у на У + у-
Очевидно, что в этом случае будут вычислены не токи статора
машины, а токи в трансформаторе. Токи статора машины можно
§ 24]
Постоянные времени затухания токов
123
найти, исходя из соотношений [Л. 25]:
^a.s Ipm’ Ips== hn>
где ias, i s и iam, i?m — a, p-составляющие соответственно токов ста-
тора машины и трансформатора.
§ 24. Постоянные времени затухания токов при
однофазном и двухфазном коротких замыканиях
Определим постоянные времени затухания токов методом, ука-
занным в § 18 и сводящимся к нахождению эквивалентной индуктив-
ности контуров при коротком замыкании.
а) Постоянные времени ротора T'd2 и T'd\. Согласно определениям,
данным в § 18,
П2=^и 7^=^-*,
г/ rf
где Ь'}2 и L'f\ — эквивалентные индуктивности обмотки возбужде-
ния соответственно при двухфазном и однофазном коротких замы-
каниях.
Но
= р---= -т-г- ,
‘/2п г/2п
где и i-'f2n — постоянные составляющие потокосцепления с об-
моткой возбуждения и тока в первые моменты короткого замыкания;
— потокосцепление с обмоткой возбуждения непосредственно
перед коротким замыканием.
Согласно выражению для всплеска тока в роторе (986) постоян-
ная составляющая тока равна:
’ • \ i \ ho • )'^xdxq
Ifln - I/O + (Xd - Xd) p—r—-^== — IfQ , - —----- .
xd+yxdxq xd-ryxdxq
Таким образом, индуктивность ротора при коротком замыкании
имеет вид:
£' ’Ь Xd + __ L X'd + Vx'dxq
f2 ho xd+yx'dXq f Xd уx'dxq
а постоянная времени
x'd + Vx'dxq _ T x'd +X’2O
Xd+V^q ~ d°Xd+x^>-
(108a)
Выражение для всплеска тока в роторе при однофазном коротком
124
Т. к. з. синхронной машины без демпферной обмотки
[Гл. .?
замыкании (1056) идентично выражению (986); поэтому можно по
аналогии написать:
Т + ~ -Krf + *0 +-Kj1’
rfi~/rf0^+vn d°Xrf+x#+xi1'
u 1 r q
(1086)
б) Постоянные времени статора Ta2 и Та1. По общему правилу
*т- __ ^-<z2
1 al--И 1 а1 --------’
где L'a2 и L'a\ — эквивалентные индуктивности короткозамкнутых
цепей статора соответственно при двухфазном и однофазном корот-
ких замыканиях.
В знаменателе Та2 стоит 2г — активное сопротивление коротко-
замкнутого контура двух фаз. Индуктивности определяются в об-
щем виде как
,, Ф45п „ т' _ Ьы
-----"Р ' И La\ . ,
Ч2п lkin
где ф52п, ф51п, z’A2n. 4ы — постоянные потокосцепления и постоян-
ные составляющие токов короткозамкнутых контуров статора соот-
ветственно при двухфазном и однофазном коротких замыканиях.
Но вследствие постоянства потокосцеплений с короткозамкну-
тыми контурами статора
Фйп = ф6о — Ьо = Уз фэо = УЗ 1/0 cos а0;
't'sin = bo = if о COS >
Подставляя в выражения индуктивностей указанные значения по-
токосцеплений и значения токов /*2П и z*in из (98а) и (105а), полу-
чим:
L'a2 = 2y^=2x'fu =
Таким образом, постоянные времени статора равны:
7^=^-’; (Ю9а)
Та, = 2л"^+-У|>.. (1096)
§ 25. Применимость метода симметричных составляющих
для определения токов при внезапных несимметричных
коротких замыканиях
Если ротор синхронной машины симметричен в смысле равен-
ства параметров по продольной и поперечной осям (x'd = xq), то
отпадает причина возникновения высших гармонических в токах
§ 25] Метод симметричных составляющих при внезапных к. з. 125
статора при внезапных коротких замыканиях. В этом случае син-
хронная машина может быть причислена к так называемым симмет-
ричным устройствам [Л. 8], фазы которых имеют одинаковое актив-
ное и индуктивное сопротивления.
Известно, что при приложении к симметричному трехфазному
устройству системы напряжений какой-либо последовательности,
последняя вызывает протекание токов только той же последователь-
ности. Если, например, к статору синхронной машины с рассматри-
ваемым симметричным ротором подвести синусоидальное напряжение
обратной последовательности, то в установившемся режиме по об-
моткам потечет синусоидальный ток только обратной последователь-
ности. Оказывается, что если пренебречь активным сопротивлением
обмотки ротора, то при соблюдении условия x'd = xq и при внезап-
ном приложении напряжения к статору в его обмотках появляются
периодические токи только той же последовательности, что и при-
ложенное напряжение [Л. 8]. Уравнительный ток в переходном про-
цессе при подаче напряжения прямой последовательности будет
содержать как апериодическую, так и периодическую составляю-
щую, а при приложении напряжений обратной и нулевой после-
довательностей он является чисто апериодическим. Поскольку для
синхронной машины с симметричным ротором высшие гармоничес-
кие в токах и напряжениях статора отсутствуют, можно представить
внезапное несимметричное короткое замыкание как приложение
к статору системы синусоидальных напряжений различных после-
довательностей. Пренебрегая активными сопротивлениями обмоток
(т. е. не учитывая затухания токов короткого замыкания), будем
иметь систему синусоидальных напряжений с неизменными во
времени амплитудами.
Таким образом, для симметричной синхронной машины с по-
мощью метода симметричных составляющих можно вычислять при
несимметричных коротких замыканиях не только установившиеся
токи, но и гармонические токи в начале процесса короткого замы-
кания. В машине с несимметричными сопротивлениями статора при
переходном процессе в осях d, q (с одной обмоткой возбуждения
на роторе при x'd xq) в кривых тока и напряжения при несиммет-
ричных коротких замыканиях появляются высшие гармонические.
Однако и в этом случае оказывается возможным распространить
метод симметричных составляющих на определение амплитуды ос-
новной гармонической тока в первые моменты процесса короткого
замыкания. При этом условием применения метода симметричных
составляющих является необходимость введения различных ин-
дуктивных сопротивлений обратной последовательности в за-
висимости от вида несимметрии цепи статора машины. * В § 22 и 23
* Более строгое рассмотрение вопроса показывает, что индуктивное сопро-
тивление нулевой последовательности х0 также должно изменяться для различ-
ных видов короткого замыкания, однако это изменение невелико и им можно
пренебречь.
126
Т. к. з. синхронной, машины без демпферной оомотки
[Гл. 3
было показано, что сопротивления х2 для однофазного и двухфаз-
ного коротких замыканий должны выбираться различными, если
пользоваться при определении амплитуды основной гармонической
тока формулами метода симметричных составляющих.
Изменение х2 в зависимости от режима объясняется тем, что при
x'd xq, т. е. при наличии высших гармонических, синхронная
Рис. 53. Магнитные поля воздушного зазора при питании статора
от источника с напряжением обратной последовательности f/2:
а — поле Ф25 от основной гармонической тока статора; б —
пульсирующее поле от тока обмотки возбуждения и его
составляющие Ф2у и Ф2у. вращающиеся относительно ротора со
скоростями 2со5; в — вращающиеся поля Ф^ и Ф2^, указаны ско-
рости вращения относительно статора.
машина, строго говоря, не может уже считаться симметричным уст-
ройством. Индуктивное сопротивление хг, представляющее отно-
шение основных гармонических напряжения и тока обратной по-
следовательности (пренебрегаем активным сопротивлением), на-
чинает зависеть от содержания высших гармонических в кривых
тока и напряжения, которые оказывают влияние на величину ос-
новной гармонической. Поскольку содержание высших гармони-
ческих в токах и напряжениях статора зависит от вида несимметрии,
сопротивление х2 не остается для машины постоянным.
В самом деле, пусть, например, к симметричному статору ма-
шины приложено синусоидальное напряжение обратной последо-
вательности (Ц>), ротор машины вращается с синхронной скоростью,
а обмотка возбуждения — короткозамкнута. В статоре образуется
магнитное поле Ф25, вращающееся в сторону, противоположную
§ 25J Метод симметричных составляющих при внезапных к. з. 127
вращению ротора (рис. 53). В обмотке возбуждения индуктируется
э.д.с. двойной частоты (2со5) и потекут токи такой же частоты. Пуль-
сирующее поле, которое возникает благодаря этим токам Фу, раз-
ложим на два вращающихся. Очевидно, что одно из полей Ф1/(
вращающееся в сторону движения ротора, обусловит появление в
статоре токов прямой последовательности утроенной частоты (3cos),
замыкающихся через источник напряжения (72. Второе поле Ф2/,
вращающееся относительно ротора с удвоенной скоростью в сто-
рону, противоположную движению ротора, но переносимое им в
пространстве с синхронной скоростью, будет относительно статора
перемещаться с синхронной скоростью и в сторону, противополож-
ную вращению ротора. Это поле оказывается неподвижным отно-
сительно обратного поля статора Ф.2л. и образует вместе с ним ре-
зультирующее обратное поле Ф2.
От того, в какой мере разовьется ток 3-ей гармонической в ста-
торе, будет зависеть и величина тока обратной последовательности
основной частоты, поскольку магнитное поле Ф2 определяется по-
лями Ф2л. и Ф2у, а последнее связано с полем Фу. Таким образом,
взаимная связь амплитуд основной гармонической тока обратной
последовательности и высших гармонических в кривой тока оказы-
вает влияние на величину сопротивления х2. Можно показать, что
если приложенное напряжение U» — синусоидально (очень мощный
источник t/2), то в этих условиях, когда в токе развивается 3-я
гармоническая, сопротивление х2 равно:
__ 2x'dxq
x'd + xq'
Это сопротивление х2 называется сопротивлением обратной после-
довательности при синусоидальном напряжении. Если, напротив,
ток /2 окажется синусоидальным (при включении на схеме рис.
53,а индуктивности в цепь статора), то индуктивное сопротивление
х2 становится равным:
X, — 2
Это сопротивление х^1 называется сопротивлением обратной после-
довательности при синусоидальном токе. При несимметричных ко-
ротких замыканиях содержание высших гармонических в кривых
тока и напряжения становится уже другим, нежели в рассмотренных
выше режимах определения х2. Поэтому получаем новые значения
индуктивного сопротивления обратной последовательности (см.
§ 22 и 23): для двухфазного короткого замыкания Хг2’ = ]/rx'dXq
и для однофазного x'i’ = jZ \x'd ~ хп j (xq + 4 хо 'i — у Л'"' ^ля
других несимметричных режимов величина сопротивления х2 будет
отличаться от приведенных выше.
128
Т к. з. синхронной машины без демпферной обмотки
[Гл. 3
В табл. 3 даны значения отношений индуктивного сопротивления
обратной последовательности к переходному сопротивлению х'а
для различных величин xqlx'a и различных режимов.
Таблица 3
xg/x'd 1 2 3 4
х(Г}1Х'л 1,0 1,5 2,0 2,5
x*lx'd 1,0 1,33 1,5 1,6
x(?!x'd 1,0 1,41 1,73 2,0
x^/xd xd 1,0 1,41 1,73 2,0
Xq ^=0,3 xd 1,0 1,42 1,75 2,03
Из табл. 3 следует, что сопротивления обратной последователь-
ности для двухфазного и однофазного коротких замыканий практи-
чески одинаковы, т. е. х#’-Ха’• При больших значениях отношения
хч!х'Л разница в сопротивлениях обратной последовательности для
различных режимов может быть заметной.
§ 26. Сравнение максимальных токов при трехфазном,
двухфазном и однофазном коротких замыканиях для машины
без демпферной обмотки
Произведем сопоставление максимальных токов в обмотках ста-
тора и возбуждения синхронной машины при различных видах ко-
роткого замыкания. Будем считать, что короткое замыкание про-
исходит на холостом ходу генератора. Максимальные токи были
определены ранее в § 17, 22, 23. При этом считалось, что затухание
токов мало сказывается на величине наибольших токов обмоток
и поэтому определение их производилось без учета затухания. Най-
дем отношения максимальных токов при несимметричных коротких
замыканиях к аналогичным токам при трехфазном коротком замы-
кании. В соответствии с полученными ранее формулами эти отно-
шения равны:
а) для двухфазного короткого замыкания
</г2ш = )L _ о,866; ^. = 1,0;
§27] Перенапряжения при двухфазном коротком замыкании 129
б) для однофазного короткого замыкания
1-| 2Xd7Xd
_ L5. ‘Jim=__________X'dk> 1
iksm ifzm _1_ 9Л,/ X(^
где ki = 1 4- 0,5 -?.
xd
В табл. 4 представлены величины отношений l^L и Ч\т для не.
,, , lf3m
скольких значении хп/Ха-
Таблица 4
x0/x'd
0 0,2 0,4 0,6
1 dm 'lk$m 1,5 1,36 1,25 1,15
ifindpm 1,0 0,91 0,84 0,77
Данные этой таблицы показывают, что наибольшие токи корот-
кого замыкания в статоре имеют место при однофазном коротком
замыкании, когда-они могут превысить максимальный ток при трех-
фазном коротком замыкании на 25—40% в зависимости от величины
отношения индуктивных сопротивлений х0/х^. Максимальный ток
статора при двухфазном коротком замыкании составляет всего
около 87% от тока при трехфазном коротком замыкании.
§ 27. Перенапряжения на статоре синхронной машины
при двухфазном коротком замыкании
Наличие высших гармонических в кривых тока, возникающих
при несимметричном роторе (х'а Ф xq), обуславливает появление
повышенных напряжений на статоре.
Рассмотрим подобные перенапряжения в случае двухфазного
короткого замыкания (см. рис. 46).
Определим напряжение в первые моменты короткого замыкания
на свободной фазе еа и между свободной и короткозамкнутой фа-
зами — еаЬ. Эти напряжения через а, (3-переменные могут быть
выражены следующим образом:
— еа=Р'К = Р7’ (ИОа)
ввиду того, что % = 0 (Zo = 0), и
— еаЬ = — (еа — ед) =р (% — ФД =р [% — — 4 Ф*)] =
=Р (4 Фа-(ИОб)
9 А. И. Важнов
130
Т к. з. синхронной машины без демпферной обмотки
[Гл. 3
При постоянстве потокосцепления с короткозамкнутым конту-
ром на статоре, что справедливо для начальных моментов короткого
замыкания, имеем:
Ф& — фс = /3 = const
На этом основании вместо (1106) получаем:
(110в)
Потокосцепление может быть определено из выражения
(956), в котором следует положить ix = 0, а ток if исключить с по-
мощью выражения для потокосцепления фу (95а), остающегося в пер-
вые моменты процесса неизменным:
(xd — x'd) i? sin 7 + if = ifQ.
В результате получаем:
'К = d 2 4 sin 2T h + ho cos I- (Illa)
Подставляя в (Illa) найденное выше в § 22 выражение для тока
__________________________________ £
i (97а) и вводя параметрЛр= , окончательно получаем:
Р Xd -f- Xg
= ( sin 7о_— sin у) Ap_sin_27_
Тя 1 — Др cos 2 у । •
(1Иб)
Таким образом, потокосцепление с фазой а фа = фя зависит
только от соотношения индуктивных сопротивлений Xqfx'd и не за-
висит от их отдельных значений.
Беря производную от выражения (1116), получаем напряжение
на свободной фазе в виде:
— еа = Р'К =
. [2 ( sin 70 — sin 7) Ар cos 27 — Ар sin 27 cos 7] (1 —Ар cos 27) —
= Z70 (1 — Ар cos27)2
— 2А2 sin2 27(sin70— sin 7)
(1_Лр cos2l)2 ho sin I-
(112)
Величина ea имеет максимум в случае Yo= л/2, когда потокосцеп-
ление с короткозамкнутым контуром на статоре в момент короткого
замыкания имеет наибольшее значение. Напряжение еа достигает
максимума в момент времени т = л I у = -1- т = у к ) и равно
eam~ho\2 — 1). Напряжение еаЬ согласно (ПОв) в 1,5 раза пре-
вышает напряжение еа. Поэтому максимальное напряжение eabm
определяется выражением: eabm = 1,5 z/0 ^2*?—lj. Так, при
коротком замыкании генератора на холостом ходу при номи-
§ 27]
Перенапряжения при двухфазном коротком замыкании
131
нальном напряжении (//0= 1,0), параметры которого равны
Ха~ 0,3 и xq — 0,6, максимальное напряжение между свободной
и короткозамкнутой фазами в первые моменты короткого замыкания
равно:
еаьт= 1,5 • 1,0 • (2 i) = 4,5,
т. е. в 4,5 раза превышает номинальное напряжение.
Характер кривой еаЬ можно видеть из рис. 54, где представлено
изменение напряжения на протяжении одного периода при у0 = л/2.
Рис. 54. Напряжение между свобод- Рис. 55. Схема двухфазного коротко-
ной и короткозамкнутой ’фазами при го замыкания при наличии в цепи ста-
двухфазном коротком замыкании син- тора емкости.
хронного генератора без демпферной
обмотки в начале процесса.
Если в цепи статора включена емкость С (рис. 55), то при несим-
метричном коротком замыкании перенапряжения могут усилиться.
Можно считать, что для высших гармонических тока синхронная
машина представляет индуктивное сопротивление обратной после-
довательности х2, так как ротор по отношению к их полям является
вторичной короткозамкнутой обмоткой, вращающейся с некоторой
скоростью. Поэтому возможен резонанс для гармонической тока
порядка vB, если удовлетворяется соотношение:
1 _ г
WsC ~
или
где Хс — —~----емкостное сопротивление, — индуктивность ста-
тора для токов обратной последовательности.
Как показывают исследования, резонансные явления обуслав-
ливаются, в основном, нечетными гармоническими, так как четные
9*
132 Т. к. з. синхронной машины без демпферной обмотай
гармонические обычно быстро затухают и не оказывают существен-
ного влияния на процесс.
На рис. 56 представлен характер изменения перенапряжения на
статоре в зависимости от соотношения Кривые получены для
Хо
машины без демпферной
Рис. 56. Резонансные перенапряжения на за-
жимах синхронного генератора при двухфаз-
ном коротком замыкании и наличии емкости в
цепях фазных обмоток машины.
обратной последовательности г2, которое
обмотки в предположе-
нии, что активные со-
противления обмоток
статора и ротора не за-
висят от частоты. Из ри-
сунка видны резонанс-
ные перенапряжения для
третьей и пятой гармо-
нических.
Следует иметь в виду,
что уровень резонанс-
ных перенапряжений в
сильной степени зави-
сит от величины ак-
тивного сопротивления
в практических условиях
значительно превышает значение, рассчитанное по сопротивлениям
обмоток на постоянном токе. Поэтому в реальных условиях резо-
нансные перенапряжения для машин без демпферных обмоток
значительно меньше приведенных на рис. 56.
Решающей мерой в борьбе с перенапряжениями в цепи статора
при несимметричных коротких замыканиях является устройство
в синхронной машине полной демпферной обмотки. Такая обмотка
уравнивает индуктивные сопротивления машины по осям d и q
в переходном процессе и тем самым значительно уменьшает ампли-
туды высших гармонических тока и потокосцепления, а следова-
тельно, и напряжения в цепи статора.
ГЛАВА ЧЕТВЕРТАЯ
УРАВНЕНИЯ СИНХРОННОЙ МАШИНЫ
С ДЕМПФЕРНОЙ ОБМОТКОЙ И ОПРЕДЕЛЕНИЕ
ТОКОВ КОРОТКОГО ЗАМЫКАНИЯ
§ 28. Общие замечания
Выше отмечалось, что в общем случае на роторе синхронной ма-
шины, кроме обмотки возбуждения, располагается еще демпферная
обмотка. Наличие этой обмотки усложняет анализ процессов в син-
хронной машине: в системе дифференциальных уравнений машины
дополнительно появляются уравнения напряжения демпферных
контуров по продольной и поперечной осям. Однако при исследо-
вании многих процессов в электрической системе, содержащей
синхронные машины, оказывается возможным использовать упро-
щенное представление о демпферных обмотках этих машин.
Если бы демпферная обмотка синхронной машины состояла из
большого числа равномерно расположенных по окружности ротора
стержней и магнитная система в поперечном сечении ротора была
бы симметричной в любом направлении, иными словами,' если бы
демпферная обмотка представляла собой полностью симметричную
•электрическую обмотку (например типа беличьей клетки ротора
асинхронной машины), то такая короткозамкнутая обмотка могла
бы по своему действию быть заменена двумя эквивалентными об-
мотками с взаимно перпендикулярными магнитными осями (рис. 57).
Все электромагнитные процессы в такой машине с двумя эквивалент-
ными обмотками на роторе протекали бы совершенно так же, как
и в машине с реальной симметричной короткозамкнутой обмоткой
(за исключением, конечно, процессов в самой короткозамкнутой
обмотке). *
Реальная демпферная обмотка синхронной машины (см. рис. 11)
отличается от вышеупомянутой симметричной обмотки и является
многоконтурной системой по осям d и q, однако в большинстве слу-
чаев и ее можно заменить двумя эквивалентными контурами, маг-
нитные оси которых совпадают с осями d и q. В дальнейшем будем
* Речь идет об «идеализированной» синхронной машине, понятие которой
было дано ранее, в главе второй.
134 Л равнения синхронной машины и определение т. к. з. [Гл. 4
считать, что на роторе вместо действительной демпферной обмотки
расположены лишь два эквивалентных короткозамкнутых кон-
тура — продольный и поперечный, имеющих шаг, равный полюсному
Рис. 57. Схематическое изображение машин, имеющих
одинаковые уравнения напряжения цепей статора (С —
статор, Р — ротор): а — с симметричным многофазным ро-
тором; б — с двумя эквивалентными короткозамкнутыми
контурами, магнитные оси которых нормальны друг
другу-
делению и обладающих, в общем случае, различными параметрами.
Величины, относящиеся к эквивалентным демпферным контурам,
будут снабжаться дополнительным индексом «э».
§ 29. Уравнения синхронной машины
с демпферными контурами
Уравнения синхронной машины с демпферными контурами, при
сделанном в § 28 допущении в отношении этих контуров, даются
выражениями (47) с тем лишь отличием, что из всех уравнений напря-
жения короткозамкнутых демпферных контуров должны быть ос-
тавлены только два — одно для продольного и другое для попереч-
ного эквивалентных демпферных контуров.
Таким образом, уравнения получают вид:
еа = (1 + «) + (113a)
?ч = Фл (1 -г «) 4- + ч,; (1136)
ef dt 1 rflf’ (113b)
o (Jt (113r)
0=^qjrraai3q-, (ИЗД)
§ 29] Уравнения синхронной машины с демпферными контурами
135
у/ с Q
(113е)
+ Mafiif -j- ma3dhd'^
Y^ Lqiq 4~ ^aiq^iqi
ФэГ 2 d~\~Mf3dif \~^3d^3d^
(114)*
tysg ‘> ffta3qiq~\~ L$qt3q-
Эти уравнения содержат переменные с физической размерностью
(напряжение в вольтах, ток в амперах и т. д.). Следуя ранее избран-
ному пути, используем систему относительных единиц и приведем
уравнения к виду, при котором они будут содержать безразмерные
величины. В отличие от рассмотренного случая машины с одним
контуром на роторе, когда была использована система относитель-
ных единиц, предложенная Парком, применим теперь другую до-
статочно распространенную систему — «систему xari» (§ 10), как более
ясную и удобную для машины с демпферными обмотками. Напом-
ним, что в этой системе базисные количества, относящиеся к ста-
тору, остаются такими же, как и в системе Парка; роторные базис-
ные величины связаны со статорными соотношениями вида (58),
для которых отношение базисных токов ?'Хб//б дано на стр. 75, 76.
Разделим уравнения напряжения статорных цепей (113а) и
(1136) на базисное напряжение статора ев = = фб“5 = zda,
уравнение обмотки возбуждения (НЗв) на базисное напряжение
обмотки возбуждения efs = ф/б°>Л- = zj&i^, уравнения эквивалентных
демпферных контуров** (113г), (НЗд) на еэ6 = фэбй>5 = гэб(эб и, на-
конец, уравнение моментов (НЗе) на базисный момент М& —
. 3/2 Cg/g о о .
— — —--------— ° Гбгб-
В результате получим систему уравнений синхронной машины
в рассматриваемой системе относительных единиц:
— ed = P^d — М1 + s>-\-rid, (115а).
— ^=^(1 + 5)4-^? + ^; (п5б)
4=М-т-гА; (115в)
+ (Ног)
0=A? + W (П5Д)
Mm = Hjps + $qid — <pdz?), (115е)
* Сравни эта выражения с (35а) — (35в), записанные в общем виде.
** Базисные величины обоих эквивалентных демпферных контуров приняты
одинаковыми.
136 Уравнения синхронной машины и определение т. к. э [Гл. 4
.где символ р обозначает дифференцирование по «синхронному вре-
мени» z = tu>-
Л»’
Hj = -p------инерционная постоянная;
4*d ~I- Mafdif Ч- -^d^'d ~I- ^afd^f ~Ь -^as.Ad’ (116а)
Vq Lqiq Ч- ^-aBq^Bq---^qlq Ч- ^aBq^Bq' (11 66)
Ф/ ^afd^d "T- ДЧ/ Ч- Mf3qi3d = Xafdid Ч- 4“ (11 6b)
УвЛ ^aBd^d I J ^Bd^Bd ^ав-l^d I Xf3dij —j— -Xgd^ad’ (116r)
Фэд ffla3qtq | L3ql3q Xa3qtq —J— X3ql3g. (1 16д)
Соотношения (116а)—(116д) представлены двумя равноценными фор-
мами записи, так как относительные значения индуктивностей и
соответствующих индуктивных сопротивлений равны между собой.
Замечания, сделанные в главе второй в отношении общей ха-
рактеристики системы дифференциальных уравнений синхронной
машины с одним контуром на роторе, целиком относятся и к сис-
теме уравнений (115а)—(115е), описывающих машину с демпфер-
ными обмотками.
Отметим, что ряд переходных процессов в машине может быть
исследован при пренебрежении активным сопротивлением цепи
статора (г = 0) и неучете переходных процессов в этой цепи, обус-
ловленных ее активным сопротивлением. При таких допущениях
и постоянстве напряжения сети (е = const) в исследуемом режиме
уравнения (115а), (1156) принимают вид:
ed = ^q\ ~eq = ^d- (117)
Действительно, потокосцепления в (117) являются частным решением
уравнений (115а)—(1156), содержащих левые части. В этом можно
убедиться подстановкой фиЪ из (117) в уравнения (115а), (1156),
где нужно положить г = 0. Таким образом потокосцепления об-
моток статора становятся зависящими только от приложенных на-
пряжений к зажимам статора.
Уравнения (117) имеют вид уравнений установившегося режима
с тем лишь отличием, что угол 9, входящий в выражения ed, eq не
остается постоянным, а изменяется в соответствии с характером ис-
следуемого переходного процесса.
Пренебрежение указанными выше переходными процессами в
цепи статора приводит к тому, что потокосцепления обмотки ста-
тора в начале исследуемого переходного процесса могут претерпе-
вать скачок, равный:
'Ь— Ч.о = —(е, —e4„);
Ф? ФсО &d е d0>
которого в действительности нет, так как потокосцепления могут
изменяться во времени только непрерывно. Если отвлечься от влия-
§ 29] Уравнения синхронной машины с демпферными контурами
137
ния изменения скорости вращения ротора (1 + s 1,0), то неучет
переходных процессов в статоре обозначает пренебрежение свобод-
ными гармоническими составляющими в потокосцеплениях i|?d,
ф которые при г = 0 имеют неизменную амплитуду, а в действи-
тельности (г # 0) затухают со временем. Эти составляющие в ф^, ф?
создаются током основной частоты в роторных цепях и токами апе-
риодическими и второй гармонической в статоре. Поэтому опреде-
ление токов в цепях машины при переходном процессе, произве-
денное на основе уравнений (117), будет неправильным. Однако
упрощенные уравнения (117) могут быть использованы при иссле-
довании явлений, где эффект указанных токов незначителен. Так,
например, характер движения ротора синхронной машины опреде-
ляется средними значениями электромагнитного момента и знако-
переменными составляющими низкой частоты. Знакопеременные
же моменты, обусловленные апериодической составляющей и второй
гармонической тока в статоре, имеют второстепенное значение и
ими можно пренебречь. Поэтому при исследовании устойчивости
правомерно применение упрощенных уравнений (117).
Возвращаясь к системе дифференциальных уравнений (115а)—
(115е), рассмотрим прежде всего один частный, но чрезвычайно-
важный случай, когда в переходном процессе ротор вращается с по-
стоянной скоростью. При этом s = const, в силу чего дифференци-
альные уравнения напряжения (115а), (1156) становятся линейными.
Любую переменную, входящую в уравнения (115а)—(П5е),
можно представить в общем виде суммой двух членов — значения
этой переменной в исходном установившемся режиме и отклонения
переменной от этого исходного значения в переходном процессе.
Например,
= + = + id = id»~r^d 11 т- Д-,
где еь0, Od0, id0—значения переменных ed, tyd,id в исходном устано-
вившемся режиме или начальные значения пере-
менных при т = 0,*
Aed, Дф^, — отклонения переменных от исходных значений;
они являются функцией времени, но при т = 0
все искомые величины равны нулю.
Подставляя в уравнения (115а)—(115д) все переменные в ука-
занной форме и исключая величины установившегося режима,
получим уравнения для приращений переменных в виде:
~^d=p^d — Дф?(1 +s) + rA/d; (117а)
-Де? = Д^(1+х) + /7Дф? + гД/г; (1176)
Де/=рД6/4-г/Дг/; (117в)
+ (117г)
0=рДфэ?4-гЭ(?Д/Э(?. (117д>
* Некоторые из этих начальных значений могут быть равными нулю.
138 Уравнения синхронной машины и определение т. к. з. [Рл. 4
§ 30. Операторные уравнения синхронной машины
В современной практике широко используются операторные
уравнения синхронной машины. Такие уравнения представляют
интерес не только с точки зрения экономичной записи и быстроты
решения конкретных задач. Они оказываются весьма удобными
при исследованиях параметров машины, построении схем ее заме-
щения, а также для применения частотных методов анализа переход-
ных процессов.
Ниже в краткой форме излагается операторный метод решения
дифференциальных уравнений синхронной машины.
Следует заметить, что при переходе от исходной функции —
оригинала <p(t) к его изображению <р(р), используется преобразование
Карсона—Хевисайда:
СО
ср (у?) =р е~ ₽т ср(-с) d"..
о
Будем ориентироваться на такие задачи, в которых скольжение
постоянно. При этом решению подлежат только уравнения напря-
жений (117а)—(117д).
Поскольку переменные в (117а)—(П7д) при т = 0 обращаются
в нуль, то в операторной форме эти уравнения должны иметь вид
исходных дифференциальных уравнений с той лишь разницей, что
вместо переменных (оригиналов), являвшихся функцией времени
в (Н7а)—(117д), будут стоять их изображения, являющиеся функ-
цией р, а само р будет обыкновенным множителем.
В дальнейшем изображения переменных обозначаются так же,
как и оригиналы, но необходимо помнить, что в выражениях, где р
является простым множителем, содержатся только изображения
переменных.
Во многих случаях исследование переходного процесса требует
лишь определения токов в обмотках статора машины, непосредст-
венно включенных в энергосистему. Поэтому, рассматривая син-
хронную машину как элемент энергосистемы, удобно оперировать
только с уравнениями напряжения статорных обмоток (117а),
(1176). При этом, конечно, токи роторных контуров, содержащиеся
в потокосцеплениях ф,; и <bq, должны быть исключены с помощью
уравнений роторных цепей (117в)—(117д).
Произведем сперва исключение роторных токов продольных кон-
туров в потокосцеплении статора по продольной оси:
(11 8а)
Зависимость Дф, только от тока Д/,; может быть получена из урав-
нения (118а) и операторных уравнений напряжения роторных кон-
§ 30]
Операторные уравнения синхронной машины
139
туров по продольной оси, идентичных (117в), (117г):
Д<7 =pxafdMd 4- (pxf + rf) +pxf3dM3d,
0=pxa3dДid + pxf3dMf 4- (px3d 4- r3 4 M3d.
(1186)
(118b)
Из алгебраических уравнений (118a)—(l 18в) находим ток Xid в виде:
д(Р) — ^efM^ (Р) (119)
где D(p) — определитель системы уравнений (118а)—(118в):
Xd Xafd xa3d
D(P) = pxafd (pXf + rj) pxf3d
PXa^i PXf3d (px3d^r3d)
a MJp) и M2(p) — миноры системы, равные:
All (p) = (pxf 4- rz) (px3d 4- r3d) — p*x}9tf,
M^P) = xafd (px3d 4- r3d) — xa3dxf3dp.
Из уравнения (119) определяется потокосцепление Лфй в виде:
Д^ = Д/Л(/’)4-д^С(/’). (120а)
Р~ (xsdxafd ~xf$dxafdxa9d ~Т xfx~aad)
где
Y ( \ — D(p> —
' а\Р) Xd ps ^X9dXf _ Х2за) _|_р ^Хэ(1Г( Х1г9!1) rfrэЛ -Г
,_____________Р (xaJdrBl + x'^drf)_________ .
+ р2 (x3dxf - x-f3d) + Р (X3drf + xfr3d) 4- rfr3, '
Q (Ipl ________________P (x3ixafd xa^dxf3'l) "4" xafdr^d__
{P) — A4j (p) ~p2 (x3ixf — x)3d) + p (x3irf + xfrs1) + rfr3i'
Аналогичным образом из выражения для потокосцепления об-
мотки статора по поперечной оси и операторного уравнения
напряжения эквивалентного демпферного контура в поперечной
оси найдем
где
^q = MqXq(p),
(1206)
Xq Ы = л-„---P-^—.
(,t 4 px3q+r3q
Функции оператора p: Xd(p), Xq(p) и G(p) в (120a) и (1206) на-
зываются соответственно операторными сопротивлениями по про-
дольной и поперечной осям и операторной проводимостью.
Таким образом, операторные уравнения напряжения синхрон-
ной машины принимают вид:
— = [pXd (р) 4- г] MltXpG (р) Ье, —
-ХД^)Дг9(14-5);
- Де9 = Xd (p)Md (1 + s) 4- G (p) Де, (1 4- s) 4-
4- [p*q (p)4-d
(121)
140
Уравнения синхронной машины и определение т. к. з.
[Гл. 4
При заданных Aerf, Де? и Де/ изображения продольного
речного токов &ia, \iq находятся из (121) в виде:
л/ __ Agd [pXg (Р) + г] + &egXq (д) (1 + s) ,
“ К(р) +
, Ae/G (р) {[д* + (1 + s)3] Xq (р) +рг} .
К(р)
К} __ (pXd (р) + Г) - Ьеаха (д) (1 + з) + Де/G (p)r (1 + s)
lq
и попе-
(122а)
К(Р)
(1226)
где
К (р) = [pXd (р) + г] [pXq (р) + г] + Xd (р) Xq (р) (1 -L- s)1.
При отсутствии регулирования возбуждения синхронного ге-
нератора (ef = const) Де/ = 0 и поэтому выражения (122а), (1226)
упрощаются:
д/ ^d[pXq(p) + r]-L-AeqXq(p)(i+s)^
К(р)
(123а)
Л,- ^[рХ7(д)4-г] —AedXrf(p)(l 4-8)
К(Р)
(1236)
При необходимости вычисления роторных токов, последние мо-
гут быть найдены по изображениям, определяемым из операторных
уравнений. Так, для токов продольных контуров из уравнений
(118а)—(118в) и уравнения (119), находим:
д; P~(X3dxafi xa3dxf3t> + Pxaf!rз! I
+еетг-’А"/' <124а>
д/ ______Д2 (xfxa3d xafdxfad) Т~ Рхаз'1^f д: _
зЛ ЛЛ (д) ’ '
__ P^l^L де
Лй (д) ef-
(1246)
Аналогичным образом для тока поперечного демпферного кон-
тура найдем:
Ызч
РХазд
РХ3Ч + ГЗЧ Ч'
(124в)
В случае, если в переходном процессе возбуждение синхронной
машины не регулируется, в уравнениях (124а), (1246) следует по-
ложить Дв/ = 0.
Очевидно, что общий вид операторных потокосцеплений (120а),
(1206), а следовательно, и операторных уравнений напряжения (121),
сохранится при любом числе демпферных контуров на роторе ма-
шины, однако значения операторных сопротивлений Xd(p), Xq(p) и
$ 31]
Эквивалентные индуктивные сопротивления
141
операторной проводимости G(p) будут меняться в зависимости от
количества этих контуров. Так, для уже рассмотренного выше слу-
чая машины с одним контуром на роторе — обмоткой возбуждения,
операторные функции Х^р), Xq(p),G(p) могут быть получены, если в
выражениях (120а) и (1206) положить г,Л = r,q = со, что будет соот-
ветствовать размыканию демпферных контуров. В этом случае они
оказываются равными:
Xd (p) = Xd-------
а " pXf 4- Г( '
G (п) = - ;
V ’ pxf + Г/
Xq(/>) = Xq.
(125)
§ 31. Эквивалентные индуктивные сопротивления контуров машины
по продольной и поперечной осям в переходных режимах
Пусть переходный процесс в машине происходит при нерегули-
руемом возбуждении (Xef = 0), и предположим, что активные со-
противления роторных цепей машины ничтожно малы, так что
можно принять их равными нулю:
rf = G>d = r,g = Q-
В этом случае уравнения напряжения роторных цепей (П7в)—
(117д) для приращений переменных по сравнению с их начальными
значениями получат вид:
= xafdMd + xfMf + xf3d M3d = 0; (126a)
= xa3d^id -j- Xf3d^if -|- x3d&31 = 0; (1266)
А'Рэд == Xaiq^iq 4- X3q^t3q-0. (126в)
Изменение потокосцеплений статора в переходном процессе оп-
ределяется выражениями:
xd^-id 4- xafd^if xa3dXi3d, (127а)
A't'g Xq^lq 4- Xa3q^l3q. (127б)
Как видно из (127а) — (1276), потокосцепления продольного и по-
перечного контуров статора определяются не только током данного
контура, но и токами всех контуров, электромагнитно связанных с
рассматриваемым. Таким образом, потокосцепления контуров обра-
зуются полями само- и взаимоиндукции. Введем теперь в рассмот-
рение такие индуктивные сопротивления контуров статора xd, Xq,
которые, будучи умноженными на ток, протекающий в данном кон-
142 Уравнения синхронной машины и определение т. к. з. [Гл. 4
туре, дают истинное значение потокосцепления с ним (127а), (1276):
= (128а)
(1286)
Очевидно, сопротивления x'd, x'q представляют некоторые эквива-
лентные сопротивления обмоток статора, учитывающие потокосцеп-
ления взаимной индукции со стороны контуров ротора. Сопротив-
ление x'd при сделанных выше предположениях легко опреде-
ляется с помощью уравнений (126а), (1266) и (127а), из которых нахо-
дится отношение Из уравнений (126в) и (1276) аналогичным
образом определяется сопротивление x'q. Эти эквивалентные ин-
дуктивные сопротивления, которые представляет статор по осям
d, q в переходном процессе, носят название сверхпереходных со-
противлений.* Аналогичные сопротивления статора для машин без
демпферных обмоток называются переходными сопротивлениями
(Xrf, Xq).
И наконец, если на роторе все контуры разомкнуты, индуктив-
ность статора по осям d и q определяется синхронными сопротив-
лениями xd, Xq. Поскольку обмотка возбуждения в машине устраи-
вается только в продольной оси, в машине без демпферных обмоток
не имеется контуров ротора в поперечной оси и поэтому для нее
Xq = Xq.
Характер электромагнитных связей, определяющих сопротив-
ления x’d, x'q в соответствии с уравнениями (126а)—(1286), отра-
жен в схемах замещения, представленных на рис. 58. Аналогичная
схема замещения для сопротивления x'd представлена на рис. 59.
Она получается из схемы рис. 58, а, если в последней разомкнуть
демпферный контур.
В табл. 5 приведены типичные значения сверхпереходных индук-
тивных сопротивлений современных машин (значения переходных
и синхронных сопротивлений см. табл. 1, § 12).
Таблица 5
Гидрогене- раторы Турбогенераторы двухполюсные Турбогенераторы четырехпол юсные Компенсаторы
xd 0,14—0,26 0,10—0,15 0,12—0,17 0,15—0,30
хч 0,15—0,35 0,10—0,15 0,12—0,17 0,15—0,30
* Отметим еще раз, что они определены при равенстве нулю активных
сопротивлений роторных контуров.
§ 31]
Эквивалентные индуктивные сопротивления
143
Отметим, что существует численное соответствие сопротивлений
x’d, x'q и операторных сопротивлений Xd(p), Х9(р) для определен-
ного значения р.
Можно видеть, что уравнения (126а), (1266), (127а) для продоль-
ной оси имеют такой же вид, как и операторные уравнения для этой
% г &afd*xf3d)
Рис. 58. Схемы замещения для определения сопротивлений x’d, х" в машине
с демпферной обмоткой: а — продольная ось; потокосцепление с продольным
контуром статора равно = х'^Ыа
1 — продольный контур статора; 2 — контур обмотки возбуждения; 3 — продольный демп-
ферный контур;
б — поперечная ось; потокосцепление с поперечным контуром статора равно
/ — поперечный контур статора; 2 — поперечный демпферный контур.
оси (при Аву = 0) (118а), (1186), (118в), содержащие изображения
переменных, если два последних разделить на р и положить р = оо.*
Поэтому формально отношение получаемое из уравнений
(126а), (1266), (127а), численно равно отношению , определяемому
^ld
из операторных уравнений при р = оо. Но из (120а), при Aez = 0,
= Xd(p). Поэтому сверхпереходное сопротивление по продоль-
ной оси численно равно операторному сопротивлению по этой же
оси при значении р = со , * т. е.
[Xd (р)Ь=оо = Ха (оо) = x'd.
(129а>
* Тот же результат получится, если положить rj = г3а = 0.
144
Уравнения синхронной машины и определение т. к. э.
[Гл. 4
Аналогично для поперечной оси
(оо) = х'д.
(1296)
Если рассматривать машину без демпферных обмоток, то для
нее подобное соответствие параметров будет в отношении переход-
ных сопротивлений, т. е.
Ха(со) — х'а, (129в)
I
',Xf-xafd
—АЛЛЛЛЛЛА^—
{ \
' leaf'd
—W1AAAAW—-
*1
/ %d~%afd
Рис. 59. Схема замещения
для определения сопро-
тивления xd. Потокосцеп-
ление с продольным конту-
ром статора равно ДЧ1^ =
= xjMd.
Xq(co) = x'q = xq. (129г)
До сих пор определялись эквивалентные
сопротивления контуров статора. Но ана-
логичным образом можно определить эк-
вивалентные индуктивные сопротивления
контуров ротора, полагая остальные маг-
нитосвязанные контуры (ротора и статора)
короткозамкнутыми. Так, эквивалентное
сопротивление продольного демпферного
контура при наличии короткозамкнутых
обмоток статора и возбуждения x’id полу-
чается по схеме рис. 58, а, если на ней зам-
кнуть накоротко контур 1 и разомкнуть
контур 3; сопротивление x'id получается
между внешними зажимами контура 3.
Эквивалентное сопротивление продоль-
ного демпферного контура при наличии ко-
роткозамкнутой обмотки возбуждения, но
разомкнутой обмотке статора х'ЗЛ может
быть определено по схеме рис. 58, а,
если на ней разомкнуть контур 3 и из-
мерить индуктивность между его зажи-
мами.
1 — продольный контур ста-
тора; 2 — контур обмотки воз-
бужден ия.
ными сопротивлениями
С помощью схем замещения легко полу-
чить и другие эквивалентные индуктивные
сопротивления контуров. Между отдель-
существует определенная связь. Например,
можно показать, что
(130)
§ 32. Продольная и поперечная э.д.с.
за сверхпереходными сопротивлениями
При изучении машины без демпферных обмоток было исполь-
зовано понятие о продольной переходной э.д.с. E'd. Она удовлетво-
ряла соотношению (стр. 83):
Фа — А'о Ed = Ed -ф- xdid
§ 331 Токи трехфазного к. з. в машине с демпферной обмоткой 145
и обладала свойством постоянства при rf = 0 и неизменности в пер-
вый момент переходного процесса при rf 0.
Введем для машины с демпферными обмотками э.д.с. Ed, оп-
ределяемую аналогичным соотношением:
'J'rf = Еd xdid- (131а)
Заменяя переменные в уравнении (131а) суммой их начальных зна-
чений и отклонений в переходном процессе, получим:
Фб?о== Edo xdido, (1316)
A'J'd = ^Ed Xd^id- (131b)
Если положить rf = t\d = G, то согласно соотношению (128а):
^d = x'd^id- (132)
Сравнивая (131 в) и (132), найдем, что ДЕ)/ = 0 и, следовательно,
при пренебрежении активными сопротивлениями роторных цепей
E'd = E'do> т. е. э.д.с. Е) остается неизменной в течение переход-
ного процесса. Будем называть E'd продольной э.д.с. за сверхпере-
ходным сопротивлением.
Аналогичным образом определим для машины с демпферными
обмотками поперечную э.д.с. за сверхпереходным сопротивлением
из соотношения:
^q — Eq-\-Xqiq. (133)
Эта э.д.с. также остается постоянной, если = 0, так как в этом
случае Дф? = <Д/?.
Поперечная э.д.с. за сверхпереходным сопротивлением опреде-
ляется через напряжение на зажимах статора и параметры машины
в следующем виде:
Eq == Eqg - Д„о Xqiq(j = ф?0 ^1 - —— I = 6d0 ( 1 ~ j . (1 ЗЗз)
Следует заметить, что у демпферной обмотки активное сопротив-
ление значительно больше, чем у обмотки возбуждения и о постоян-
стве э.д.с. за сверхпереходными сопротивлениями можно говорить,
имея в виду практически лишь самый момент возникновения пере-
ходного процесса.
§ 33. Токи трехфазного короткого замыкания в синхронной машине
с демпферной обмоткой
В качестве примера решения операторных уравнений синхрон-
ной машины, рассмотрим задачу нахождения токов в обмотках ста-
тора и обмотке возбуждения машины при внезапном трехфазном
коротком замыкании на зажимах статора.
Будем считать, что короткое замыкание происходит на зажимах
машины, несущей некоторую нагрузку, которая характеризуется
10 А. И. Важнов
Уравнения синхронной машины и определение т. к. з. [Гл. 4
начальными значениями токов — id0, iq0, if0. Поскольку в устано-
вившемся режиме токов в демпферных контурах нет, начальные
значения этих токов равны нулю:
'-э/О ^Э'/О
Ток любого контура машины равен сумме начального значения
и той величины, которая явится решением операторных уравнений
§ 30. Положим, что в процессе короткого замыкания возбуждение
машины не регулируется (Деу = 0). Поскольку в установившемся
режиме перед коротким замыканием ротор машины вращается с син-
хронной скоростью, то будем считать скольжение ротора во время
короткого замыкания равным нулю (s — 0). Формальное решение
операторных уравнений (123а), (1236), (124а), (1246), (124в), пред-
ставленных в виде:
где U(p) и W(p) — полиномы от р, дает теорема разложения. Со-
гласно этой теореме оригинал <р(т), изображение которого равно <р(р),
имеет вид:
/ \С(0) , V U(Pt) J’t’ ИЗД"!
i
Здесь Pi — корень уравнения W(p) = 0;
1У'(Р») — производная от W(p) по р, вычисленная при р = pt.
Как видно, решение содержит затухающие составляющие, по-
скольку корни pi либо отрицательны, либо, если они комплексные,
имеют отрицательную вещественную часть. Установившееся зна-
ет)
чение переменной определяется отношением
Дадим приближенное решение задачи, используя те же приемы,
которые применялись для машины без демпферных контуров,
а именно будем определять всплески токов, т. е. токи в начальные
моменты времени процесса, принимая активные сопротивления це-
пей равными нулю и учитывая конечные сопротивления лишь в за-
тухании токов. Установившиеся значения токов обычно можно оп-
ределить с достаточной точностью также упрощенно, полагая ак-
тивное сопротивление обмотки статора равным нулю.
Поскольку при трехфазном коротком замыкании напряжения
ed = eq = 0, то оригиналы ^ed = ed — edg = — ed0 — const и Де7 =
== eq — eqo = — eqo= const, т. e. определяются начальными значе-
ниями напряжений ed, eq.
Операционное изображение Дей и Де?, как постоянных величин,
равно:
Дв</---- edg И Дв^----------
§ 33 J
Токи трехфазного к. з. в машине с демпферной обмоткой
147
Таким образом, изображение статорных токов из (123а) и (1236),
в которых нужно положить s = 0, имеет вид:
л,- _ ed0 [pXq (р) + г] + еЯ0Хд (р) НЧК-Л
d ~ [pXd (р) + г] {pXq (р) 4-г]+ Xd (р)Хд(рГ <1 dOa'
М — ^7olP^d<P) + '']-^ZoXz(p)
4 [pXd(p) + r][PXg(p) + r]+Xd(p)Xg(p)
Операционное изображение тока возбуждения из уравнения (124а):
Д ,* Р xa3lxf3d) 4"Рха* I J (j о е \
Лй(р) Sld‘ (1ООВ)
а) Токи в начальные моменты времени короткого замыкания
(всплески токов). Определим токи для начальных моментов времени
короткого замыкания, для чего положим в (135а) — (135в) все ак-
тивные сопротивления равными нулю. Применяя для обозначения
всплесков токов (как изображений, так и оригиналов) дополнитель-
ный индекс в виде двойного штриха, будем иметь:
Лд</ ~ (/Л %”; (136а)
Дд? ~ (р^+ 1)х” ’ 0 366)
Д// = — АМа, (136в)
где постоянная
л __xtdxafd хаэ1х(э I
XfX»d ~ x)3j
Оригиналы, соответствующие изображениям (136а) — (136в) равны
[Л. 27]:
Дй = sin т 4-^(1-cost). (137а)
Мд = Sin т-^(1- COST); (1376)
xq xq
Mf = — /l^sinT — А (1—cost). (137в)
xd xd
Прибавляя к токам Д/5, Д/g, Д//, определяемым выражениями
(137а)—(137в), начальные значения id0, iq0, if0, найдем действитель-
ные токи id, ig, i’f, справедливые для первых моментов короткого
замыкания, пока не сказывается их затухание.
10*
Уравнения синхронной машины и определение т. к. з. [Гл. 4
Из уравнений (131а) и (133), примененных к начальному устано-
вившемуся режиму,
• __— Ed0 .
^do у" г* *
xd xd
; .^-E’qa *
q° xq ~ xq '
Действительные токи в начальные моменты короткого замыкания
равны:
/" &qo । &do _ OC1C «Г -J Qin (138a)
xd xd ' xd
E’qn 1 е<1<> 1 cos T + eqo . <7 (1386)
lq xq
if = iff, - ^eqo xd 4 -£• COS T xd Aeao • sin t. xd (138b)
Сравнение токов z4, iq с аналогичными токами для машины
без демпферной клетки [выражения (74г)], показывает идентич-
ность формул — разница лишь, во-первых, в параметрах статорной
обмотки: вместо индуктивных сопротивлений x'd, х„ теперь фигури-
руют Xd, Xq, т. е. сопротивления, соответствующие новым элек-
тромагнитным связям контуров статора и ротора, где теперь имеет-
ся демпферная обмотка. Второе отличие состоит в появлении по-
стоянной составляющей в токе iq [см. (1386)], объясняемое нали-
чием поперечного демпферного контура, для которого в первый
момент короткого замыкания должно обеспечиваться постоянство
потокосцепления и, наконец, вместо э.д.с. E'd в рассматриваемом
случае фигурирует э.д.с. Е%. Поэтому при определении всплеска
фазных токов воспользуемся полученным результатом для машины
без демпферных обмоток (75). Учитывая отмеченные различия в фор-
мулах для токов id, iq, получим:
Е" Е№ 1 / 1 1 \
i’a=— COS (т-j--[о)sin ^ + то)4--(т^ —7^-) X
xd xq 2 \xd xq/
X e COS (2x-Ho 4-M + pH e cos (b — 60). (139)
Всплески токов в других фазах определяются по выражению (139)
с заменой угла у0 на —120 (для тока Ц) и на у0 +120 (для тока Гс)-
Установившиеся значения токов zdy, Z?y, а также установившиеся
фазные токи статора будут такие же, как в машине без демпферной
обмотки [см. (76)].
* Соотношения +0 = — eqa и = eda справедливы прн г = 0. См.
например, уравнения (115а) и (1156), примененные к установившемуся режиму.
§ 33] Токи трехфазного к. з. в машине с демпферной обмоткой 149
б) Затухание токов короткого замыкания. Учтем теперь затуха-
ние токов. Картина здесь в общем случае несколько сложнее, не-
жели в машине без демпферных обмоток. В первые моменты корот-
кого замыкания, когда обмотки машины можно рассматривать как
сверхпроводящие контуры, характер токов в них определяется ус-
ловием постоянства потокосцеплений с контурами. Во всех конту-
рах возникают: 1) постоянная (апериодическая) составляющая тока,
обеспечивающая постоянство начального потокосцепления; 2) гар-
моническая составляющая основной частоты, которая появляется
в результате вращения контура в поле апериодической составляю-
щей другого контура, перемещающегося относительно первого.
Кроме того, в фазах статора, относительно которого перемещается
несимметричный ротор, возникает вторая гармоническая тока. Так
что физическая картина для первого момента короткого замыкания
не отличается от той, которая была дана для машины без демпфер-
ной обмотки (§ 16).
Апериодическая составляющая и вторая гармоническая в токе
статора соответствуют гармоническим составляющим в токах id,
iq и взаимосвязаны с гармоническими составляющими в токах ро-
торных контуров. Все они затухают до нуля с постоянной времени,
определяемой эквивалентной индуктивностью обмоток статора и их
активным сопротивлением (Та). Затухание апериодической состав-
ляющей тока в поперечном демпферном контуре, а вместе с ней и
апериодической слагающей в токе iq, до нуля обуславливается ак-
тивным сопротивлением этого контура и происходит с постоянной
времени контура Тд. Подобное определение постоянных времени
затухания токов было рассмотрено для машины без демпферных
обмоток, подтверждено формальными выкладками (§ 18) и является
справедливым для определения затухания апериодического тока
в таком контуре, который имеет электромагнитную связь только
с контурами, вращающимися относительно рассматриваемого.
В машине с демпферными обмотками это положение применимо
к поперечному демпферному контуру и к обмотке статора.
Что касается контуров на роторе в продольной оси, то здесь
имеются два самостоятельных контура — обмотка возбуждения
и продольный демпферный контур, электромагнитно связанные
друг с другом и неподвижные один относительно другого. Поэтому
затухание апериодических токов, возникающих для поддержания
потокосцепления с этими контурами в начальный момент короткого
замыкания, будет происходить более сложно и, в общем случае,
постоянные времени затухания уже не могут определяться указан-
ным простым способом.
Рассматриваемый процесс соответствует затуханию апериоди-
ческих токов в обмотках двухобмоточного трансформатора, когда
каждый из токов содержит две составляющие, затухающие с раз-
личными постоянными времени [Л. 9]. В явнополюсных машинах
продольный демпферный контур обычно имеет активное сопротив-
150
Уравнения синхронной машины и определение т. к. з.
[Гл. 4
ление гэ/, в несколько десятков раз большее, нежели обмотка воз-
буждения (Гу). При таком соотношении параметров быстрое затуха-
ние апериодического тока в демпферном контуре можно рассмат-
ривать как обусловленное только активным сопротивлением этого
контура г9у и считать при этом сопротивление rf = 0.
Поскольку потокосцепление с обмоткой возбуждения при г} = 0
должно сохраняться неизменным, при быстром уменьшении тока
в демпферном контуре в обмотке возбуждения с такой же скоростью
Рис. 60. Измеиеиие апериодических токов в об-
мотке возбуждения (А1/а) и продольном демпферном
контуре (ДМа). возникающих при коротком замыка-
нии; Alfa, ^z3rfa — апериодические токи контуров в
первый момент короткого замыкания (т = 0). Сплош-
ные кривые относятся к случаю, [когда rad >> rf,
пунктирные — к случаю, когда rad и /у одного по-
рядка.
будет нарастать апериодический ток. Очевидно, постоянную вре-
мени этой быстро изменяющейся апериодической составляющей тока
в продольных контурах ротора (а также в токе zrf) Td при сделан-
ных допущениях можно определять прежним методом, как отноше-
ние эквивалентной индуктивности демпферного контура к его ак-
тивному сопротивлению. На рис. 60, где представлено изменение
апериодических токов продольных контуров ротора в процессе
короткого замыкания, эта первая описанная фаза процесса занимает
отрезок времени от нуля до т = ту.
Дальнейшее изменение токов происходит под влиянием дейст-
вия конечного сопротивления rf. Ввиду его малости, в токах про-
дольных контуров будут медленно изменяющиеся составляющие.
Такая составляющая в демпферном контуре очень мала, так как
э.д.с., индуктируемая в этом контуре, мала вследствие медленного
изменения потокосцепления, а активное сопротивление относительно
велико. Пренебрежение этим током равносильно размыканию демп-
ферного контура. Поэтому медленно изменяющаяся составляющая
§ 33]
Токи трехфазного к. з. в машине с демпферной обмоткой
151
в апериодическом токе обмотки возбуждения и в токе id затухает
с постоянной времени T'd, равной постоянной времени обмотки воз-
буждения при короткозамкнутом статоре. Эта постоянная, по об-
щему правилу, определяется отношением эквивалентной индуктив-
ности обмотки возбуждения к сопротивлению ту.
Если собственные постоянные времени обмотки возбуждения
и продольного демпферного контура различаются не очень сильно,
то каждая из двух постоянных времени затухания зависит от посто-
янных времени обоих контуров. В этом случае характер изменения
апериодических токов в контурах будет таким, как это показано на
рис. 60 пунктирными кривыми. Подобные условия встречаются
в неявнополюсных синхронных машинах, имеющих мощные скры-
тые демпферные контуры в теле ротора.
По окончании процесса затухания апериодические токи в про-
дольных контурах машины достигают установившихся значений.
Итак, при коротком замыкании апериодические токи в обмотке
возбуждения, продольном демпферном контуре и апериодическая
составляющая в токе id представляют сумму трех составляющих:
одна из них, называемая переходной, затухает с постоянной времени
Т'а, другая — так называемая сверхпереходная — затухает с по-
стоянной времени Та, третья дает установившееся значение апе-
риодического тока. Так, апериодический ток в обмотке возбуждения
может быть представлен в виде:
if а — if у Ч- A ifns Ч- A if ns d ’ (140)
где AZ/n, Af/п — максимальные значения соответственно переход-
ной и сверхпереходной составляющих тока, ify — установившееся
значение апериодического тока.
Аналогичные выражения общего вида можно написать для апе-
риодических токов продольного демпферного контура i,da и про-
дольного контура статора — тока ida.Отметим, что установившееся
значение апериодического тока в обмотке возбуждения равно по-
стоянному току if0 в этой цепи до короткого замыкания, так как
принято, что возбуждение синхронной машины не регулируется,
а установившийся апериодический ток в демпферном контуре ра-
вен нулю.
Рассмотрим случай r9rf^>/y, когда затухание апериодических
токов в обмотке возбуждения, продольном демпферном контуре и апе-
риодической составляющей в токе id определяется постоянными
времени Та, Тд, равными постоянным времени отдельных конту-
ров. Последнее обстоятельство позволяет легко найти максималь-
ные значения переходной и сверхпереходной составляющих, и,
следовательно, получить выражение для апериодического тока
в целом. Покажем это на примере апериодического тока в цепи воз-
буждения, описываемого в общем виде уравнением (140).
152 Уравнения синхронной машины и определение т. к. з. [Гл. 4
Если постоянная Та равна постоянной времени демпферного
контура, то, полагая Та = 0, что будет соответствовать размыка-
нию демпферного контура, получим из (140) при т = 0:
Ча---Чу Ч~ ^Чп'
(141а)
Таким образом, определяя апериодический ток i'fa для начального
момента короткого замыкания (т = 0), в предположении, что про-
дольный демпферный контур отсутствует, и зная установившееся
значение апериодического тока, находим из (141а):
Д//п = Ча — ify
(1416)
Кроме того, для момента т = 0 уравнение (140) принимает вид:
Ча — Чу ^Чп Ч- &Ч п>
(141в)
где ifa — апериодический ток для начального момента короткого
замыкания при наличии обоих контуров на роторе в продольной
оси. Из соотношений (141в) и (1416) находим, что
= ifa — i’fa.
(141г)
Аналогичные соотношения могут быть получены для составляющих
в апериодических токах 1ь,1аЛаа- Таким образом, амплитуда переход-
ной и сверхпереходной составляющих тока определяются значениями
апериодического тока при т = 0 для двух случаев: при разомкнутом
демпферном контуре и при наличии обоих контуров на роторе,
а также значением установившегося постоянного тока в контуре.
Например, для апериодической составляющей в продольном
токе статора ida из уравнений (138а) и (74г) находим ее значения при
х = 0 в виде:
для случая, когда в продольной оси имеются два короткозамкнутых
контура — демпферный и обмотка возбуждения и
когда продольный демпферный контур разомкнут. Соответствующая
величина апериодической составляющей тока возбуждения i"fa
при двух короткозамкнутых контурах на роторе находится из(138в)
и равна:
Составляющая i'fa при разомкнутом демпферном контуре легко
получается с помощью операторного выражения (124а), в котором
§ 33]
Токи трехфазного к. з. в машине с демпферной обмоткой
153
нужно для этого случая положить rtd = сю, что дает для оператор-
ных изображений токов:
Д/
—рХпр1 AZrf.
+ rf a
При определении всплесков токов можно положить rt = 0, и тогда
операционные изображения токов оказываются связанными соот-
ношением:
Таким образом, апериодическая составляющая тока возбуждения
i'fa при разомкнутом демпферном контуре равна:
ifa----ifo
xafd eqo
xf xd''
в) Токи в процессе короткого замыкания. В соответствии с урав-
нением (140) и соотношениями (1416) и (141г), примененными к апе-
риодической составляющей продольного тока статора, получим ее
в виде:
£оо (Edo £do) s ____________(^^2
xd \xd x'd } ®
£ “
где-----— = zrf—установившийся продольный ток статора. От-
xd
метим, что
^</0 ?d0 xd,ido ’r'rfo xdido M 1 \
у у' y" y' yr? у' I
xd xd xd xd \xd xd
И
^do Eqo ^do xd^do 'r'rfo Xdido л I \
x'd ~ Xd X^ ~ x~d ~e4° \x’d xd)'
Таким образом, с учетом затухания, продольный и поперечный
токи статора получают вид:
I ------Eoo । /J__________1_\
ld • Xd±e4°\x"d x'd)£
1 f . — 1
* ^do Sin £
- _ j 1 1 \ j
( y" ~y~) 6 1
\Л<7 XQ/
+ e9Osin t) s ^Ta,
1 \ -7/
------г Td —
d xd j
(142)
а ,
154
Уравнения синхронной машины и определение т. к. з.
[Гл. 4
где вместо E"qo подставлено выражение (133а).
Ток короткого замыкания в фазах статора, например в фазе
а, равен:
ia = id cos (т 4- у0) — i sin (т -f- То) == — cos (т + То) —
— е cos 6017^ — + cos (т + Те) —
L\xrf xd/ \xd xd) J
. I 1 1 \ -VtZ • / i ч I 1 17 1 Их/
— e sin 60 -7 — — e ч Sin (t 4- To) -L — e -r, — X
\ Xq Xq / z L \ d Xq)
X COS (2т 4-Yo4-6e) 4-4-7Й cos (Ye — 6»)]e XlTa. (543)
\Xd XqJ
Токи в фазах b и с можно получить подстановкой в уравнение (143)
вместо угла у0 значений у0—120 и уо4-120.
Уравнение для тока возбуждения на основании выражений
(138в), (140), (1416), (141г) и с учетом того, что установившееся его
значение равно начальному (г/о), принимает вид:
Z/ = 9o + gcos6o(,4 — ЙЯ е X/Td
\ xd xfxdJ
I xafde cos % ^/fd
+ xf x'd
— e cos (t 4- 0o) г T/r“. (144)
xd
Если короткое замыкание машины происходит на холостом ходу,
то для определения токов в уравнениях (143), (144) нужно положить
6о = 0.
На рис. 61 представлены отдельные составляющие фазного тока
короткого замыкания для машины с демпферной обмоткой в соот-
ветствии с выражением (143). При этом предполагается, что короткое
замыкание произошло на холостом ходу (60 = 0) и в такой момент
времени, когда рассматриваемая фазная обмотка имеет максималь-
ное потокосцепление (у0 = 0). На рисунке не изображена вторая
гармоническая тока, появляющаяся только при xd ф Xq. Полный
ток короткого замыкания в статоре, как сумма отдельных составля-
ющих по выражению (143), представлен на рис. 62.
На рис. 63 изображены отдельные составляющие тока возбуж-
дения if при трехфазном коротком замыкании в соответствии с вы-
ражением (144), в котором принято б0 = 0. Отметим, что ампли-
туды составляющих тока if, затухающих с постоянными времени Td
и T'd, зависят от соотношения индуктивностей рассеяния эквива-
лентного продольного демпферного контура Ls9d(xs9d) и обмотки воз-
буждения Lsf(xsf), так как коэффициент А в уравнении (144) в пер-
вом приближении определяется отношением индуктивности рас-
сеяния демпферного контура и суммы индуктивностей рассеяния
этого контура и обмотки возбуждения:
д xssd __________1____
хssd 4“ хsf 1 “Ь xsf!xssd
§ 331
Токи трехфазного к. з. в машине с демпферной обмоткой
155
Рис. 61. Составляющие фазного тока при трехфазном
коротком замыкании машины с демпферной обмоткой
(во = Yo— 0).
, е / 1 , 1 \ в—т/г
1 — апериодическая составляющая-/—--^---—) 8 а;
2Ч Xq>
2 — огибающая сверхпереходной гармонической составляющей
+ -----е 3 — огибающая переходной гармони-
Kxd xd 7
ческой составляющей +е(—г----— \ 8 4 — установивший-
Xd '
Е
ся ток-----— cost. Расчетные данные: е — EqQ ~ 1,0; х, =
Х:1
= 1,0; = 0,3; xd~xq = 0,2; = 2 сек; т"д — 0,02 сек;
Та — 0.2 сек.
Рис. 62. Фазный ток при трехфазном корот-
ком замыкании машины с Демпферной об-
моткой (0о = у» — 0).
Расчетные данные те же, что и для кри-
вых рис. 61.
156
Уравнения синхронной машины и определение т. к. з.
(Гл 4
Рис. 64 показывает характер изменения полного тока if во вре-
мени для генератора крупной мощности (7'а = 0,2 сек; T'd— 2 сек;
Рис. 63. Составляющие тока возбуждения при трехфазиом
коротком замыкании машины с демпферной обмоткой
(0О = 0).
/А
1 — апериодическая сверхпереходиая составляющая е , —
Vеd
xafd\ —
—----jr.’e “• 2 — апериодическая переходная составляющая
XfXd*
Xafi —
е—6 ,3 — огибающая гармонической составляющей
f*d
А
е~ 4 — начальное значение тока I,
xd J ’
Расчетные данные: е = £00 «= 1,0; = 1,0; ха = 0,3; х^ « 0,2;
Xf = 1,05; Xafd — 0,9;Л = 0,25; т'& = 2 сек; «= 0,02 сек; Та в
= 0,2 сек.
Td = Q№ сёк). Кривая тока построена для xsf'xs,d — 3(Д = 0,25).
Для отношения xsflxstd = 1(Д = 0,5) и тех же остальных парамет-
ров зависимость if = f(r) представлена на рис. 65.
Рис. 64. Ток возбуждения при трехфазном коротком замыка-
нии машины с демпферной обмоткой, обладающей малым рассе-
янием (пунктиром обозначена апериодическая составляющая).
Расчетные данные те же, что и для рис. 63.
На рис. 64 и 65 пунктирными кривыми показаны апериодичес-
кие составляющие тока if.
Определение максимальных значений токов при коротком замы-
кании в обмотках статора и возбуждения при наличии в машине
§ 33] Токи трехфазного к. з. в машине с демпферной обмоткой 157
демпферной обмотки оказывается в общем виде более сложным, чем
в случае машины с одной обмоткой на роторе — обмоткой возбуж-
дения. Трудности подобного определения состоят в том, что ввиду
малых значений постоянных времени Та и Та уже нельзя прене-
брегать затуханием соответствующих составляющих токов, так как
величины г~х1та и &~~х1та начинают заметно отличаться от 1,0 даже
для моментов времени, равных т = л (0,01 сек).
Можно считать, что максимальный ток в статоре будет иметь
место, если при коротком замыкании апериодическая составляю-
щая достигает наибольшего значения. Пусть короткое замыкание
Рис. 65. Ток возбуждения при трехфазном коротком замыкании
машины с демпферной обмоткой, обладающей большим рас-
сеянием (пунктиром обозначена апериодическая составляю-
щая).
Параметр А = 0,5; остальные расчетные данные те же, что и
для рис. 63.
происходит на холостом ходу генератора. Тогда, полагая в выра-
жении (143) 0О = 0, Ет = е, найдем, что максимум тока будет при
у0 = 0 и в момент времени т = л (0,01 сек). Максимальное значение
фазного тока ikim равно из уравнения (143):
Для средних значений параметров мощных машин, а именно
Td = 0,02—0,04 сек, Та = 0,1ч-0,2 сек, xi/x'a^0,7, величина
выражения, стоящего в квадратных скобках, изменяется в преде-
лах 1,75—1,90.
Обычно принято считать этот коэффициент равным 1,8, и тогда
максимальный ток в статоре (ударный ток) оказывается равным:
_ 1,8е
Е'Ьт v" •
xd
Максимальный ток возбуждения i/3m при наличии в машине демп-
ферной обмотки, при прочих равных условиях, будет меньше, чем
в машине с одной обмоткой возбуждения на роторе.
158
Уравнения синхронной машины и определение т. к. з.
[Гл. 4
При этом различие в максимальных токах возбуждения для ма-
шин с демпферной обмоткой и без нее определяется в основном ве-
личинами параметров А, Td, Та.
Для каждого конкретного случая максимальный ток возбужде-
ния может быть определен с помощью выражения (144).
§ 34. Постоянные времени затухания токов
Формальное определение постоянных времени затухания раз-
личных составляющих токов связано, как это следует из (134),
с нахождением корней уравнения 1С(р) = 0. Постоянная времени
равна обратной величине вещественной части корня (или вещест-
венного корня), взятой с противоположным знаком (см. § 18).
При определении постоянной времени затухания апериодичес-
кого тока в статоре Та можно пренебречь активными сопротивлени-
ями цепей ротора. В этом случае, как было показано ранее,
Ха(р-) = х’Л Xq(p) = Xq.
Операционное изображение, например тока Aid, в этом случае
имеет, согласно (135а), вид:
. _ «do (px”q + г) + eqax’q
td ~ tPxd + Г)(PX’q + г) + x’dxq •
Поэтому необходимо вычислить корни уравнения
(pXd -|- г) (рх’./ “F Г) Ч~ XaXq = 0,
которые равны
2 —/L 8«^)2 г
Жх’ х2 2xdx’
Постоянная времени Та=,.,\^==—, где х2= . , * — со-
rHrf-r^g) ' xd~Txq
противление обратной последовательности машины с демпферными
обмотками.
Сравнивая этот результат с тем, который был получен для маши-
ны без демпферной обмотки (§ 18), можно видеть их полную иден-
тичность. При этом, конечно, нужно учитывать, что в рассматри-
ваемом случае наличие демпферных контуров в продольной и по-
перечной осях машины приводит к изменению эквивалентных ин-
дуктивных сопротивлений статора (Xd, Xq вместо x'd, xq для ма-
шины без демпферных обмоток).
При определении постоянных времени затухания апериоди-
ческих токов в роторных цепях — T'd, T'd можно пренебречь ак-
тивным сопротивлением статора. При этом операционное изобра-
жение тока \id имеет согласно (135а) вид:
д ; _ edoP + eqo
(Д3+1)^(р)-
§ 34]
Постоянные времени затухания токов
159
Поскольку Xd(p) — jf^[CM. уравнение (120а)], то для опре-
деления Td, Та необходимо вычислять корни уравнения
(p2+l)Z)(p) = 0.
Два корня р1га = гЬ/ соответствуют в выражении (137а) незатухаю-
щим (при г = 0) периодическим составляющим тока id. Вычисле-
ние корней уравнения D(p) = 0 позволяет найти T'd, T'd.
Развернутое по степеням р это уравнение имеет вид:
Р (Xf%3d Xf3d) Xajd (Xa‘dX3d Xf3dXa3d) —|—
4~ Xa3d (XafdXf3d — Xa9dXf)] -]-p [x,y (XyT3d 4- X3drf) — X~afdr31 —
— x3a3drf] -4- x.rfr3d = 0.
Приближенное решение этого уравнения дает следующие зна-
чения корней:
д. J
где Тd =—— Та« — постоянная времени обмотки возбуждения при
короткозамкнутом статоре и разомкнутой демп-
ферной обмотке;
х'
T'3d = —- —постоянная времени продольного демпферного
Г bd
контура при короткозамкнутом статоре, но
разомкнутой обмотке возбуждения;
х~
x'3j = x3d---— —эквивалентная индуктивность продольного
демпферного контура для этих же условий;
T3d — — постоянная времени продольного демпферного
контура при короткозамкнутых статоре и об-
мотке возбуждения;
ЛГ^*
x'3d = Х31 —г — эквивалентная индуктивность продольного
xd
демпферного контура в этих же условиях.
Таким образом, одна постоянная времени затухания токов равна
T'd + T3d, другая T"d= Гар/,
1 а + 13d
Если сопротивление демпферного контура rtd в несколько десят-
ков раз больше сопротивления обмотки возбуждения rf, то
Td>T'3d. В этом случае постоянные времени затухания практически
равны T’d и Td—T'id, т. е. постоянным времени обмотки воз-
буждения и демпферного контура при наличии соответствующих
короткозамкнутых контуров.
* См. соотношение (130).
4
V ппо ипи 11 n спи vnnt/илЛ wttiiuUci »« ли no/Jnл* ь* Q
CZ puuiwilw/l VHIIA fJKJI H *4Z 14, mUtWU'KJt b* uu^ztvOZttuUo i. /V. u*
Аналогичным образом находится постоянная времени затухания
апериодического тока в поперечном контуре Tq. Операционное
изображение тока Дг? имеет вид:
д ; _ eq»P — edo
9 (p^+l)Xq(py
Подставляя сюда Xq(p) [см. (1206)], получим уравнение для оп-
ределения Tq'.
Р (X3q Xq — X*a3q) + Xqraq = 0.
X* x~
Отсюда Т"ч = i где x3q = x3q------- — эквивалентная индуктив-
' »ч , хч
ность поперечного демпферного контура при короткозамкнутом
статоре, a Tq — постоянная времени этого контура в тех же усло-
виях.
Отметим, что нахождение постоянных времени отдельных кон-
туров, основанное на общих физических соображениях (см. § 18),
дает те же результаты, что и формальное их определение, изложен-
ное выше.
В табл. 6 даны типичные значения постоянной времени Td-
Таблица 6
Явнополюсные ге- нераторы с демп- ферной обмоткой Неявнополюсные генераторы (двух- полюсные) Синхронные компенсаторы
Td, сек 0,02—0,С6 0,03—0,11 0,007—0,03
§ 35. Токи двухфазного и однофазного короткого замыкания
в машине с демпферной обмоткой
При рассмотрении несимметричных коротких замыканий ма-
шины с демпферной обмоткой ограничимся определением токов
статора при двухфазном и однофазном коротких замыканиях, по-
лагая, что последние, как это было принято и для машины без демп-
ферной обмотки, происходят на холостом ходу машины. Для при-
ближенного решения задачи воспользуемся теми положениями, ко-
торые составляли основу методики определения токов короткого
замыкания в уже рассмотренных случаях. Эти положения сводятся
к следующему:
1. Определение токов короткого замыкания для первых моментов
времени (всплески токов) производится в предположении, что ак-
тивные сопротивления контуров машины равны нулю.
Это положение позволяет воспользоваться готовыми решениями
для всплесков токов при несимметричных коротких замыканиях
машины без демпферной обмотки [выражения (98а), (105а)], заменив
в них параметры х'а, xq на xd, Xq, соответствующие эквивалент-
§ Зо] Токи двухфазного и однофазного к. з. 161
ним индуктивностям статора по осям d, q при наличии на роторе
машины демпферной обмотки.
2. Постоянные времени затухания апериодических составляю-
щих токов статора и ротора равны постоянным времени отдельных
обмоток — Та (статора), T’d (обмотки возбуждения), Т* (демпфер-
ной обмотки). Допустимость такого определения постоянных вре-
мени T'd и T'd была рассмотрена в § 33,6. При этом амплитуды от-
дельных затухающих членов в апериодическом токе ida (а следова-
тельно, в основной гармонической фазного тока статора) вычисля-
ются в соответствии с уравнениями (140), (1416) и (141г).
3. Затухание основной и высших гармонических тока происхо-
дит экспоненциально, с постоянной времени той апериодической
составляющей тока, с которой трансформаторно связаны рассматри-
ваемые гармонические (§ 20).
4. Для определения как всплеска основной гармонической тока
статора при несимметричном коротком замыкании,так и ее установив-
шегося значения можно пользоваться формулами метода симметрич-
ных составляющих (§25).
В соответствии с первым положением, всплески токов статора
при двухфазном и однофазном коротких замыканиях равны:
.„ yT/WoS-Co ц । 26 cos 2а 4- 2>Ьг COS 4а 4-...] —
x"dx"q 11 Г J
-----„ [cos а -ф- b COS За -ф- 62 COS 5а -ф-...]; (145a)
Tbl = [ 1 + 2b cos 2T + 2&* cos 4T Д-...] -
2 И XdXg
3Eoo
# /г
Xd
[cos y -J- b cos Зу -ф- A2cos 5? -ф-..
(1456)
где
# *
^=х?+°>5л:0'
— Xd -ф- O,5xo;
Аналогично случаю несимметричных коротких замыканий ма-
шины без демпферной обмотки здесь У XdXq — X*,2'—сопротив-
ление обратной последовательности при двухфазном коротком за-
мыкании; хф = У(x'q 4- ОДХоДх^ОДко) — О,5х0 — ТО же сопро-
тивление при однофазном коротком замыкании.
11 А. И. Важной
Уравнения синхронной машины и определение т. к. з.
[Гл. 4
В соответствии с четвертым положением и формулами (101а),
(106а), получим выражения установившихся токов в статоре в виде:
=-----------[cos а ~Г b cos За -ф- Ьг cos 5а -ф-..
*</ + ]/ x"dx"
Op # *
= — *.....[cos T + b cos 3? + Ьг cos 5y -ф-..
xd + V XdXq
(146a)
(1466)
На основании положений 2, 3 и 4 можно получить общие выра-
жения токов в виде:
hi— — ФЛ3 £оо I х", + х(2) Xrf + x(2)le
L. \ U ‘ U * а /
_! /_____!_____________1____4-
\x'd + 2С<2) Xd + Х(2) У
4----------—1 [cos а b COS За -|- b2 COS 5а . .1 -ф-
ха т х 5 1
4- ^00(2;— ° (1 + 2b cos 2а -4 2b* cos 4а -ф-...) е-т/г“2; (147a)
1 ____ ОЕ* |7___J_____ ________J\ с I
И— б£Оо Ц + х(1> + Хо х'а + х<и +х0 )е ~Г
! ( 1_________________1 ) !
( Xd -bx'l’ + xo + + хо/
V-ltUx"] fcos I + cos Зт 4- £ cos 5т 4-...] 4-
Л 2 j- J
Ф- gngj0 [1 + Гь cos 2т 4- 262 cos 4т 4- • • •] (1476)
Постоянные времени 7^2, 7'd1, Tai, Tai могут быть получены
из выражений (108а), (1086), (109а), (1096) заменой в индуктивных
сопротивлениях хф>, .^параметров x'd, хч на x’d, x’q.
Постоянные времени затухания сверхпереходных составляющих
Т’ц, Tdi легко получаются из выражения для аналогичной по-
стоянной при трехфазном коротком замыкании, которая равна (см.
стр. 159)
Td=T'ad§, (148)
xd
где T'9d — постоянная времени демпферного контура по продоль-
ной оси при короткозамкнутом статоре и разомкнутой обмотке
возбуждения.
Из приложений метода симметричных составляющих известно,
что определение основных гармонических токов несимметричных
коротких замыканий может производиться по формулам, аналогии-
§ 35]
Токи двухфазного и однофазного к. з.
163
ным для трехфазного короткого замыкания при условии, что к ин-
дуктивностям, определяющим эти токи, будет прибавлена некоторая
добавочная индуктивность (правило Вагнера—Эванса). Для двух-
фазного короткого замыкания эта добавочная индуктивность равна
X®, а для однофазного хф-ф-л:0(Л. 8) (см. полученные выражения
для основных гармонических токов ikt и ikl). Поэтому постоянные
времени и Tdi могут быть получены из выражения (148),
если к индуктивным сопротивлениям x'd и x'd прибавить добавоч-
ные сопротивления. Таким образом, постоянные времени затухания
сверхпереходных составляющих тока при двухфазном и однофаз-
ном коротких замыканиях равны:
1 d% — 1 за Y' 1 — * 9d । r<i> ! r •
ГЛАВА ПЯТАЯ
ЭЛЕКТРОМАГНИТНЫЙ МОМЕНТ
§ 36. Общие замечания
Полный анализ переходного процесса синхронной машины в об-
щем случае производится путем решения системы дифференциаль-
ных уравнений машины, включающей уравнения напряжения и мо-
ментов. Однако в ряде случаев при исследовании переходного про-
цесса может быть поставлена ограниченная задача, когда требуется
определение не всех переменных, характеризующих режим машины,
а только некоторых из них. В этих случаях, как правило, для на-
хождения искомой переменной может быть использован ряд допу-
щений, упрощающих поставленную задачу и вместе с тем не оказы-
вающих существенного влияния на точность решения. К подобного
рода задачам можно отнести определение электромагнитного момента
синхронной машины в заданных условиях и, в частности, при за-
данном движении ротора. В последнем случае для определения
электромагнитного момента нет необходимости в совместном реше-
нии дифференциальных уравнений напряжения и моментов. От-
дельное решение уравнений напряжения позволяет найти токи и по-
токосцепления машины, а по ним и электромагнитный момент.
Так, для расчетов механической прочности отдельных узлов
и креплений машины при внезапных коротких замыканиях опреде-
ление электромагнитного момента можно производить, считая ско-
рость вращения ротора в переходном процессе постоянной и равной
синхронной скорости. Моменты при коротких замыканиях дости-
гают-максимальных значений за весьма короткий промежуток вре-
мени с момента замыкания (около 0,01 сек) и поэтому могут в пер-
вом приближении находиться без учета затухания, т. е. в предпо-
ложении, что активные сопротивления цепей равны нулю. Моменты
при коротких замыканиях с учетом активных сопротивлений пред-
ставляют интерес не только для механических расчетов, но и для
уточнения расчетов динамической устойчивости синхронной ма-
шины.
Существенное значение имеет электромагнитный момент машины,
определенный для малых гармонических колебаний ротора. Он
является основой для расчета режимов работы синхронной машины
при пульсирующем моменте механических сил на ее валу (например
§ 36]
Общие замечания
165
синхронный двигатель как привод компрессора), а также служит ба-
зой приближенного метода оценки устойчивости режима работы
машины.
Важную роль играет электромагнитный момент машины при ра-
боте с постоянным скольжением, позволяющий в большинстве слу-
чаев рассмотреть режим асин-
хронного пуска синхронных дви-
гателей и компенсаторов, в ча-
стности его продолжительность.
Это позволяет правильно вы-
брать параметры машины, кото-
рые обеспечивают ее нормаль-
ный асинхронный пуск.
В задачах, связанных с опре-
делением динамической устойчи-
вости синхронной машины, наш-
ла применение зависимость 714^=
—f(6), получаемая в предполо-
жении, что э.д.с. за переходным
сопротивлением E'd остается в пе-
реходном процессе постоянной.
Электромагнитный момент сою
носительных единицах) равен:
Рис. 66. Взаимное положение изо-
бражающих векторов тока и потоко-
сцепления.
1асно общему выражению (в от-
'4'0 tyqid
(149)
Выражение (149) можно представить также в ином виде, учитывая,
что токи и потокосцепления в (149) определяются проекциями соот-
ветствующих изображающих векторов на оси d, q. На рис. 66 пред-
ставлены изображающие вектора I и Чг, положение которых отно-
сительно оси d определено углами а и 0. Из рис. 66 получаем:
= Т’ cos + -у V cos a — coS ? ' Icos ~
Таким образом, выражение электромагнитного момента принимает
вид:
Л1. = 4-7 sin (7, Ф) = [7. W],
(149а)
где квадратные скобки обозначают векторное произведение.
Отметим, что угол 7, ¥ считается положительным, если Т уп-
реждает I.
166
Электромагнитный момент
[Гл. 5
§ 37. Электромагнитный момент в установившемся симметричном
режиме
Обычно в установившемся режиме активное сопротивление об-
моток статора, ввиду его малости, оказывает незначительное влия-
ние на величину электромагнитного момента. Поэтому будем счи-
тать, что г = 0. Для установившегося режима при г = 0 ранее было
найдено:
<b = -^o = ecos90; = Е"=е.™^-- Е^>
, • н (160)
'P?o = e<io = —tfsin80; ZO = ^ = —
Подставляя значения токов и потокосцеплений из уравнений (150)
в (149), получаем известное выражение для электромагнитного
момента:
Л4 = sin 90 4- J (1 - Д sin 290. (151)
§ 38. Электромагнитный момент
при трехфазном коротком замыкании
Рассмотрим прежде всего наиболее общий случаи — машину
с демпферными обмотками. Произведем определение момента с по-
мощью выражения (149а). При этом сперва будем считать все ак-
Рис. 67. Положение изображаю-
щих векторов тока и потокосцеп-
ления при трехфазном коротком
замыкании.
тивные сопротивления цепей рав-
ными нулю, а затем учтем их
влияние.
а) Активные сопротивления це-
пей машины равны нулю.
Поскольку принято г = 0, то
потокосцепления с фазными об-
мотками статора при трехфазном
коротком замыкании остаются
постоянными. Следовательно, при
коротком замыкании вектор пото-
косцеплений статора Ч’’ должен ос-
тановиться на диаграмме и со-
хранять свою величину. Поло-
жение его на диаграмме в момент
короткого замыкания (т = 0) оп-
ределяется тем, что при г — 0
вектор V должен упреждать на л/2
вектор напряжения на зажимах
машины е, а последний при т = 0 составляет с отрицательным на-
правлением оси q угол, равный 6а (см. рис. 31). Поэтому при т = 0
§ 38] Электромагнитный момент при трехфазном коротком замыкании 167
угол между ¥ и осью d равен 60. Поскольку в процессе короткого
замыкания ротор, а вместе с ним и оси d, q продолжают вращаться
с синхронной скоростью, угол между Y и осью d для любого момента
времени равен 90 ф- т (Рис- 67).
Изображающий вектор тока I при коротком замыкании переме-
щается на диаграмме по сложному закону. Чтобы упростить задачу,
представим I в виде суммы векторов, каждый из которых будет
изображать отдельные составляющие тока короткого замыкания:
постоянную, гармонические основной частоты и гармоническуюдвой-
ной частоты [см. уравнение (139)].
При этом
7 = 4 + 41 + 4.4-4* (152)
где /п — изображающий вектор постоянной составляющей тока
короткого замыкания;
4i — то же для синусоидальной и косинусоидальной гармони-
ческих основной частоты;
7ci — изображающий вектор гармонической составляющей тока
двойной частоты.
Согласно выражению (139) для тока в фазе а, углы между маг-
нитной осью фазы а и соответствующими изображающими векторами
тока должны быть равны:
- Л_ - Л
Z (4, л) = 7о — 90; Z (41, + = То + ': + гс,
Z (41, Л) = То + г— у 5 ((с2> Л) = То Н-90 + 2т.
Положение изображающих векторов иллюстрируется диаграммой
на рис. 67.
В соответствии с выражением (149а), принимая во внимание
(152), находим электромагнитный момент:
Л4з — 1F [Л, sin 0 — Jcl sin (90 -ф- т -ф- гс) —
— 4i sin [90-ф-т — — 42 sin 2 (90 + т)]. (153)
Подставляя в (153) модуль Ф = -ф- = е и модули токов
из (139), найдем:
ТИфз= —sin (~ 4~ М +
Xd
4- COS (т 4- 0о) — у (+-----Ц sin 2 (т 4~ 9 ). (153а)
Таким образом, при трехфазном коротком замыкании первая и
вторая гармонические тока в статоре, взаимодействуя с постоянным
168
Электромагнитный момент
[Гл. 5
(при г = 0) потоком, обуславливают появление знакопеременного
момента. Всплеск первой гармонической тока статора связан с воз-
растанием апериодической составляющей не только в продольных
контурах ротора (и токе irf), но и в поперечном демпферном контуре
(и токе iq), как это уже отмечалось в § 33. Следствием этого является
наличие двух гармонических членов основной частоты в (153а).
Если короткое замыкание происходит на холостом ходу маши-
ны, то в уравнении (153а) нужно положить 9о = О, £^ = 0 и Еа0 = е,
и момент в этом случае равен:
рЗ / 1 1 \
Лй3 = —sinx— -75- — — — | sin 2-с. (1536)
Xd £ \Xd Xq )
б) Электромагнитный момент при учете активных сопротивлений
обмоток. Наличие активных сопротивлений обмоток статора и ро-
тора приводит, с одной стороны, к затуханию рассмотренного выше
знакопеременного момента,* а с другой — к появлению составляю-
щих момента, не меняющих знака. Затухание знакопеременного
момента определяется как затуханием потокосцепления со статор-
ными обмотками, которое характеризуется постоянной времени Та,
так и затуханием первой и второй гармонических тока короткого
замыкания в статоре, амплитуды которых изменяются по экспонен-
циальному закону с постоянными времени T'd, T’q, T'd (для основной
гармонической) и Та (для второй гармонической).
Возникновение составляющих момента, не меняющих знака,
или так называемых апериодических составляющих, объясняется
следующим образом. В контурах ротора и статора при коротком
замыкании возникают всплески апериодических токов и создаются
поля, неподвижные относительно данной обмотки. Если активное
сопротивление обмоток равно нулю, апериодические поля не изме-
няются и во времени. В случае конечных активных сопротивлений
эти поля затухают во времени, оставаясь практически неподвиж-
ными относительно своих обмоток.** Апериодическое поле продоль-
ных контуров ротора затухает так же, как апериодические состав-
ляющие токов этих контуров, т. е. оно имеет составляющие с по-
стоянными времени T'd и T’d- Апериодическое поле поперечного демп-
ферного контура затухает со своей постоянной Tq. И, наконец,
апериодическое поле статора во времени убывает экспоненциально
с постоянной времени Та.
При вращении ротора апериодическое поле контуров ротора пе-
ресекает короткозамкнутую обмотку статора, и наоборот — в апе-
риодическом поле статора движется ротор со своими короткозамк-
* Здесьне учитывается влияние на знакопеременный момент незначитель-
ной составляющей потокосцеплений с обмотками статора, которая обуславли-
вается конечным значением активного сопротивления фазных обмоток. Это
влияние при обычных сопротивлениях не имеет практического значения.
** Смотри § 18,где рассмотрено влияние активного сопротивления на пово-
рот поля апериодических токов статора.
§ 38] Электромагнитный момент при трехфазном коротком замыкании 169
нутыми контурами. Если активные сопротивления контуров не
равны нулю, то при этом возникают асинхронные моменты, не ме-
няющие знака, но убывающие по величине, поскольку затухают
магнитные поля.
Затухающий знакопеременный момент на основании приведенных
рассуждений может быть получен из уравнения (153), где вместо
Y — е нужно подставить = ег~х11а) а взамен постоянных
амплитуд токов /с1, Isl — их значения из (143), где учитывается
затухание. Тогда знакопеременный электромагнитный момент М'^
примет вид:
=1 { ё + е C0S 0о |Н - +
lb V *d L X ха Xd !
+(4— -Ц 5“77'Л}sin +0о)—
\ ха I J J
— е sin 0в (Л- — V-) £_7г9 cos (х + М —
'Xq лд /
- У (4------vb- T/r« Sin 2 (т 4- 90)] ег- ^а. (154)
2 \ Xd Xq / л
Следует отметить, что токи в (143) определены с некоторым прибли-
жением, так как предполагалось, что на их величину в первые мо-
менты короткого замыкания активные сопротивления обмоток
ротора не оказывают влияния. В большинстве случаев это пред-
положение вполне допустимо. При значительных же активных со-
противлениях демпферной обмотки (Та и Tq меньше 0,02—0,03 сек)
выражения для токов должны быть уточнены, и тогда в амплитудах
момента появляются дополнительные члены [Л.28].
Составляющая момента постоянного знака, обусловленная ак-
тивным сопротивлением статора AfJ3, определяется как электро-
магнитный момент в асинхронной машине; при этом роль ее вторич-
ной короткозамкнутой обмотки играет здесь короткозамкнутый
статор синхронной машины. Известно, что электромагнитная мощ-
ность в асинхронной машине определяется в виде Р ==^ ,
где рМ2 — потери в меди вторичной обмотки от токов, появляющихся
в результате наведения э. д. с. магнитным полем воздушного за-
зора, s — скольжение, определяющее относительное вращение вто-
ричной обмотки и магнитного поля в зазоре. В нашем случае s = 1,0,
так как апериодическое поле ротора вращается с синхронной ско-
ростью относительно неподвижного статора. Поскольку в относи-
тельных единицах электромагнитные мощность и момент численно
равны, искомая составляющая момента равна потерям в меди статора
синхронной машины от основной гармонической тока. Находя из
(143) квадрат тока первой гармонической и пренебрегая быстрозаг
170
Электромагнитный момент
[Гл. 5
тухающей составляющей, пропорциональной e-T/rJ, получим:
A^ = {f°- + ecos90|7-4------Ц®"7^ +
I xd \-\Xd Xd )
+(г css)
Определение третьей составляющей электромагнитного момента—
асинхронного момента, обусловленного активным сопротивлением
роторных цепей ЛД', значительно сложнее. Объясняется это тем,
что роторные цепи машины имеют неодинаковые параметры по осям
d и q, и поэтому задача сводится к определению момента асинхрон-
ной машины с несимметричным ротором.
По уравнепиям идеализированной синхронной машины эта со-
ставляющая электромагнитного момента равна [Л.28]:
Поскольку в идеализированной машине не учитываются потери
в стали ротора, а также изменение активных сопротивлений обмоток
ротора от частоты, приведенное выражение ЛД” не может считаться
вполне правильным.
Другой подход к определению момента ДД," состоит в применении
метода симметричных составляющих, хотя правомерность этого
строго доказать нельзя. Разлагая гармонические токи в роторных
цепях на прямую (м. д. с. токов вращается против направления
вращения ротора) и обратную последовательности, можно обна-
ружить, что последняя образует момент, пропорциональный ак-
тивному сопротивлению статора синхронной машины. Однако вели-
чина этого тока определяется разностью параметров по продольной
и поперечной осям x*q— Xd, и момент, обусловленный ими, невелик.
Основной асинхронный момент образуется токами прямой после-
довательности и он пропорционален активному сопротивлению ро-
торных цепей синхронной машины. Приведем без доказательства
выражение этой составляющей электромагнитного момента, опре-
деленной Р. А. Лютером [Л. 10], в виде:
Л1фа-----у- -J---------s 2т/7а • гр,
2 \Xd Xq )
(156)
где эквивалентное активное сопротивление роторных цепей гр на-
ходится через сопротивление обратной последовательности
в виде:
гр = 2(г2-г)^-. (157)
*100
В выражении (157) коэффициентами ke учитывается увеличение
активного сопротивления при частоте 50 и 100 гц по сравнению с со-
§ 38] Электромагнитный момент при трехфазном коротком замыкании 171
противлением при/->0. Таким образом, отношением роторное
-100
сопротивление, определенное по сопротивлению обратной последо-
вательности, которое измеряется при частоте в роторе, равной
100 гц, приводится к частоте 50 гц. Эта частота имеет место в роторе
синхронной машины при образовании момента
Экспоненциальный множитель в выражении (156) учитывает
затухание гармонических токов в роторных цепях, которое про-
исходит с постоянной времени Та.
Итак, электромагнитный момент при трехфазном коротком за-
мыкании синхронного генератора определяется в виде:
a^=ms+<3+m;. (158)
где отдельные составляющие вычисляются по выражениям (154) —
(156).
Отметим, что полученное выражение для Л4ф3 справедливо для
небольших значений активных сопротивлений цепей, что обычно
и имеет место на практике.
в) Электромагнитный момент при трехфазном коротком замыка-
нии машины без демпферной обмотки. Электромагнитный момент
машины без демпферной обмотки можно получить из выражений
(154) — (156), определяющих момент машины с демпферной обмоткой,
полагая в них r9d = r99 = oo и заменяя сверхпереходные сопротив-
ления х'а, x’q соответственно переходным сопротивлением x'd и
синхронным сопротивлением xq.
Производя указанные подстановки, найдем составляющие мо-
мента для машины без демпферной обмотки в следующем виде:
Знакопеременный момент
Ma = { I ЗТ + е cos 8о ("F — sin (т + 60) —
\ к Ла Лс1 / J
-4 (Л - -Me- Sin 2 (Т Н-е0) } е • в- ^7а. (159)
z \ Xd xq / '
Апериодический момент, пропорциональный активному сопро-
тивлению статора,
M3 = lt^-i-6cos60f-’r--l7U-7d2-r. (160)
L V i J
Апериодический момент, пропорциональный активному сопро-
тивлению роторных цепей,
* = 7Й+^,'М-Г-' <161)
Полный электромагнитный момент определяется по выра-
жению (158).
172 Электромагнитный момент
г) Пример. Определим электромагнитный момент машины с демпферной
обмоткой при трехфазном коротком замыкании. Параметры машины:
xd = l,0; х^=0,3; х’=0,2; х" = 0,25; г = 0,006;
г2 = 0,02; T'd = 2 сек-, T"d = 0,06 сек\ Та = 0,2 сек.
Коэффициент, учитывающий изменение сопротивления с частотой, равен:
^- = 0,7.
"5100
Будем считать, что короткое замыкание происходит на холостом ходу ма-
шины (0О = 0; Есо = е = 1,0). Знакопеременная составляющая мвмента по
уравнению (154) равна:
= [(1 + 1,67 е“ °’033’ + 2,33 s-°’0016t) sin т — 0,5 е-°'0!6х sin 2т] s~°’016t.
Максимальное значение Al^3m«s4,7.
Апериодическая составляющая момента, пропорциональная активному
сопротивлению статора, в соответствии с уравнением (155), равна:
Л1’3 =(1 + 1,67 г~ °’<ВЗт + 2,33 е-°.о°1бт)а . 0|006.
После затухания сверхпереходной составляющей тока короткого замыка-
ния эта составляющая момента определяется в виде:
Л4£3 (1 + 2,33 е-0,0016т)8.01006_
Для моментов времени, когда затухание переходного тока еще невелико,
будем иметь:
Л4’з (1 + 2,33)2 • 0,006 = 0,066.
Апериодическая составляющая момента, пропорциональная активному
сопротивлению ротора, по уравнению (156) равна:
М^ = 0,4 е-°>032\
Знакопеременный момент как показывает расчет, достигает значе-
4 7
ния, приблизительно в 4,7 раза превышающего базисный момент или в —
раз —• номинальный момент машины. *
В некоторых расчетах при коротком замыкании необходимо
считаться и с апериодической составляющей момента, создающей
достаточно сильное торможение ротора машины. Это относится
в первую очередь к турбогенераторам, массивные роторы которых
обуславливают большое значение активного сопротивления обрат-
ной последовательности.
* Базисный (Л4б) и номинальный (Л1Н) моменты связаны соотношением
Л4
А?б = — Н , где cos <рн—номинальный коэффициент мощности машины.
COS уц
£ 39] Электромагнитный момент при двухфазном коротком замыкании 173
§ 39. Электромагнитный момент
при двухфазном коротком замыкании
Еще большие значения электромагнитного момента М получа-
ются при несимметричных коротких замыканиях. Рассмотрим этот
момент при двухфазном коротком замыкании, когда получаются
наибольшие знакопеременные составляющие. Ограничимся при
этом вычислением максимального значения М,^ в самом начале про-
цесса короткого замыкания, когда можно пренебречь влиянием
затухания токов в контурах. Таким образом, будем считать все
активные сопротивления равными нулю. Положим, что короткое
замыкание происходит на холостом ходу машины (idn — i = 0),
так что начальные значения потокосцеплений статора равны;
ФйО =: ^00 4~ ===
ФдО == Xqiqto = 0.
Потокосцепления в процессе короткого замыкания, при отсут-
ствии активных сопротивлений, равны:
Фа — Фао 4“ — ^оо 4~ Xd^id = Ем -ф- Xdiq',
Ф? = Ф?0 4- Аф? = Xq^ig = Xqig.
Подставляя потокосцепления из (162) в общее выражение для
момента (149), получим:
— (xq Xd) iqid Ewig. (163)
При двухфазном коротком замыкании, как было найдено ранее
(§ 22):
2 .
гк = 0; =
Соотношение (25а) между переменными в осях d, q и a, [J в на-
шем случае дает:
zd = zpsin-[; z9 = zpcos-[.
Подставляя эти значения токов в (163), получим:
7Иф2 = 4-(х^ —ху^51п2-[ —f00zp cosT. (163а)
Ток двухфазного короткого замыкания при равенстве нулю ак-
тивных сопротивлений (всплеск тока) z*2 определяется выражением
(145а), которое после замены угла а углом у— л/2 (см. рис. 48)
и соответственно а0 углом у0 — л/2 принимает вид:
IL = 70 - [ 1 — 2b cos 2Т 4- 2й2 cos 47 —..—
2 V XdXq
----lsin Т — b sin Зт 4- b" sin 5т —...]. (164)
-«+ У хахч
(162)
174
Электромагнитный момент
[Гл. 5
Если подставить в (163а) юк
7 — 2 Г
* уз
где z'L дается выражением (164), и произвести в (163а) разложение
в ряд Фурье, то получим электромагнитный момент в виде:
М 2 Isin То (— cos у + 3b cos З7 — 5Z>2 cos 5? 4~ • • ) +
Xd + Xs
! r(2) — r'2) \
+ b ,\(2)'------JT sin2To) (sin 2т — 2b sin 4? +
4-362 sin бу—...)]. (165)
Максимального значения момент Л-^., достигает в том случае,
когда короткое замыкание происходит при наибольшем потокосцеп-
лении с контуром замыкаемых фаз (при а0 — 0, т. е.у0 = , когда,
следовательно, в токе короткого замыкания появляется наибольшая
апериодическая составляющая. При этом из (165) получим, опуская
для краткости записи значок (2) у сопротивления х<2>:
М = ?Е°° [sin т 4- 3b sin Зт 4- 5^ sin 5т 4-... —
*' Xd + Xq
--------1тт.х*. ) (sin 2т 4- 2b sin 4т 4~ 3b2 sin 6т 4-...)]. (165а)
xd + Xs Xa /
Сопоставим первую и вторую гармонические момента при двух-
фазном (Л4^) и трехфазном (М ) коротких замыканиях, происходя-
щих на холостом ходу генератора. Для последнего случая выражение
момента получается из (153а), где нужно положить 0О = О, £^0 =
= е = Ею и Еде = 0; в результате получаем:
^3 = ^3!sin т — Мф348ш2т, (166а)
где
Для двухфазного короткого замыкания из (165а) будем иметь:
где
MISHIT — ^Msin2T> (1666)
дд ___ ф
m^ — x’d+xa Xd(i + y-^y
дл — 2£°° ( Xt _______x’d ~М — 2£°° (2х — 1)
Xd + xa\x£ + x3 х‘ ) Xd(l + Yt. )* yT '
В уравнениях (166а), (1666) сопротивление обратной после-
довательности х^ — YXdXq. Если определять соответствующие мо-
§39] Электромагнитный момент при двухфазном коротком замыкании 175
менты для машины без демпферной обмотки, то в уравнения (166а),
(1666) нужно подставлять xd, вместо сопротивления x’d, и считать
= XaXq.
Выразим амплитуды гармонических моментов Л4фз, Л4фз в долях
амплитуды основной гармонической момента при трехфазном корот-
ком замыкании — Л4ф31. Относительное значение амплитуд гармо-
нических равно:
дд — ____ 2 . д. _________AL.S2 — х______1.
—Ф21 Л1ф51 1 + /Г ’ — Ф32 Мф31 2х ’
дд ______Л4ф»2 ____ 2 (2х— 1)
—Ф22 ~ Л1ф81 — (1 _|_ уТ)2 •
На рис. 68 представлена зависимость относительных значении
амплитуд гармонических от параметра х = Из рисунка
видно, что при хД> 1,0 имеет место
некоторое уменьшение основной
гармонической момента при двух-
фазном коротком замыкании по
сравнению с таковой при трех-
фазном замыкании. Однако при
двухфазном коротком замыкании
оказывается сильно развитой
вторая гармоническая момента
[а также некоторые другие — см.
(165а)]; поэтому полный момент
оказывается больше, чем при
трехфазном коротком замыка-
нии.
Для неявнополюсной машины,
У которой МОЖНО принять Х’^Х’
(b = 0), из высших гармонических
в моменте при двухфазном ко-
ротком замыкании присутствует
только вторая гармоническая,
Рис. 68. Зависимость относитель-
ного значения амплитуд гар-
монических электромагнитного мо-
мента при двухфазном и трехфаз-
ном коротких замыканиях от па-
раметра X — Xq/x'd'
И поскольку при ЭТОМ X2^Xd,
из уравнения (165а) получим момент в виде:
Мф2 = - (sin т — 0,5 sin 2т).
xd -|- х2
(167а)
В действительности, под влиянием активных сопротивлений об-
моток, которыми здесь пренебрегалось, электромагнитный момент
затухает, и его наибольшее значение можно определить в виде
[Л.10]:
(fedl sin т — 0,5 kdi sin 2т), (1676)
▼ Xd + Xt
176
Электромагнитный момент
[Гл. 5
где kdl, kdi — коэффициенты затухания первой и второй гармони-
ческих момента, зависящие от постоянных времени обмоток машины.
Для машин явнополюсных определить наибольший момент
в общем виде гораздо труднее, так как при более или менее значи-
тельном коэффициенте b высшие гармонические момента получаются
достаточно большими.
Р. А. Лютер [Л. 10] рекомендует следующую формулу для опре-
деления максимального момента при двухфазном коротком замыка-
нии (с учетом гармонических):
Xd -р Xg L \ Xg -j- Xd< J
где kd — коэффициент затухания, зависящий от постоянных вре-
мени обмоток генератора.
§ 40. Электромагнитный момент
при малых устойчивых гармонических колебаниях ротора
При исследованиях устойчивости, а также режимов работы синх-
ронной машины с пульсирующим моментом механических сил на ее
валу, возникает необходимость в определении электромагнитного
момента машины. Здесь будут рассмотрены только малые колебания,
анализ которых достаточно прост.
Пусть синхронная машина работает параллельно с источником
бесконечной мощности, т. е. фазные обмотки машины присоединены
к шинам бесконечной мощности (см. рис. 35) и пусть ротор ее со-
вершает малые колебания относительно некоторого положения,
характеризуемого углом 0О (см. рис. 31, а). Если малые колебания
ротора возникают под действием периодического изменения меха-
нических сил на валу машины, то угол 0О определяется величиной
среднего момента и, следовательно, соответствует среднему значению
электромагнитного момента, развиваемого машиной. Таким образом,
угол 0, определяющий положение ротора относительно синхронно
вращающегося ротора эквивалентного генератора, заменяющего
шины бесконечной мощности (рис. 35) равен:
О==0о4-Д0, (168)
где А0 — отклонение угла 0 от среднего значения.
Отклонение ротора на угол А0 от своего исходного положения
поведет к соответствующему изменению всех электрических вели-
чин — токов, напряжений, потокосцеплений машины, которые оп-
ределяются дифференциальными уравнениями (115а)— (115д).* Эти
уравнения удобно записать в другом виде, когда все переменные,
входящие в них, представляются суммой двух составляющих:
одной, соответствующей среднему значению угла 0О, и другой, обя-
* Предполагается, что машина имеет демпферную обмотку.
§ 40] Момент при малых гармонических колебаниях ротора 177
занной изменению угла на А9. Так, напряжения —еЛ = е sin9,
—е = е cos9, входящие в уравнения (115а), (1156) с учетом (168),
получают вид:
— е.: = — (ем 4* Aed) = е sin (90 -ф- д9) б sin 90 —Д9 е cos 90; (169а)
— б, = — (<?9о + Де?) = е cos (90 -ф- Д9) е cos 90 — Д9 е sin 90, (1696)
где в силу малости угла А9 принято:
cos ДО ^1,0 и sin ДО № ДО.
Таким образом, составляющие в напряжениях —ed,—eq, вызван-
ные отклонением угла на Д9, равны:
Д<?й = — Д9 е cos % = Д9 е90, (170а)
Де9 — ДО • <?sin90 = —ДО • ed0. (1706)
Остальные переменные в общем виде могут быть записаны:
— Фйо +
О = + и т. д.
Отметим, что исходное скольжение, соответствующее среднему
углу 90, равно нулю, т. е. s0= 0 и
Д$ = $ — •?(, = •?•
Подставляя переменные в новой форме записи в уравнения
(115а) — (115д), исключая величины, соответствующие среднему
углу 90, принимая также во внимание, что s = рА9 и пренебрегая
произведениями приращений переменных, получим систему урав-
нений напряжения в виде:
— (де<* — Ф^М9) =Рд4/ — дФ? 4-г Azd;
---(Де<? + —
Д<?/ —P^f + rf
®—ptybd ~Г r->d ^ad'i
0 = P д49 + ^д49-
(171)
Ранее в § 29 была получена аналогичная форма уравнений (117а) —
(117д), однако там предполагалось постоянство скольжения и на-
личие его в исходном режиме ($0 = $). В рассматриваемом случае
скольжение s0 для среднего угла 90 равно нулю, и поэтому урав-
нения напряжения цепей статора получились несколько отличными.
Тем не менее достаточно в уравнениях (117а) — (117д) подставить
вместо ДеЛ Д<?9 соответственно Дей — tp?os, Ae94~^dos, а в правых
частях положить s = 0, и прежняя система уравнений (117а) —
(117д) будет точно такой же, как полученная здесь система (171).
Уравнение моментов (115е) в новой форме получит вид:
ДМт = ^ + дЛ4ф. (172)
12 А. и. Важной
178
Электромагнитный момент
[Гл. 5
При этом, если пренебречь произведениями малых приращений пе-
ременных, дополнительный электромагнитный момент ДЛ4ф равен:
AAfp = Ч~ ^i-dtyqo ^d^qt> ^qtydy G^3)
Если в выражение (173) подставить операторные изображения при-
ращений переменных, то оно представит изображение момента
ДМ,. Для нахождения изображений токов Azd, Д/ можно восполь-
зоваться выражениями (122а), (1226), в которых нужно произвести
указанную выше замену напряжений Де^, Де? и положить s = 0;
изображения потокосцеплений определяются выражениями (120а),
(1206).
Важно рассмотреть малые гармонические качания, так как к ним
сводится задача и о малых периодических качаниях вообще. Поэтому
будем считать, что отклонение угла Д0 подчиняется закону:
Д0 = Д0т cos Лт, (174)
где h = j-, fk — частота колебаний ротора, —частота сети, Д0т —
амплитуда изменения угла Д0. Скольжение s будет также гармо-
нической функцией времени:
5=/>Д0 = —AA0msinZiT. (175)
В случае синусоидальных колебаний для определения ДМ,
как функции времени (оригинала) нет нужды решать уравнения
(171) в операторной форме, находя сперва изображения токов, а за-
тем оригинал ДЛ4, по (173). В самом деле, приращения токов Дг(/
Д/? и соответствующий момент ДМф определяются для установив-
шихся гармонических колебаний угла 9. Поэтому из дифференциаль-
ных уравнений напряжения синхронной машины (171) подлежат
определению установившиеся значения токов Дгй, Д/?, которые при
наличии синусоидальных напряжений Де7— Де?-|-
$doP^> * будут гармоническими функциями времени той
же частоты.
В этом случае определение токов A/rf, Дг может быть произведено
комплексным методом, широко используемым в электротехнике.
Как известно, по этому методу вместо гармонической функции вре-
мени вводится в рассмотрение комплекс; например, вместо перемен-
ной ked = &edm cos h~ оперируют с комплексом Де7 = и
очевидно, что действительная часть комплекса Дф( равна исходной
функции Дед. В дифференциальных уравнениях операция диффе-
ренцирования комплексной переменной заменяется умножением
дифференцируемого комплекса на jh, гдей — частота изменения гар-
монической переменной, так как, например, рДё,. — kedmjh zlh~ =
— jh\ed. Следовательно, при нахождении комплексов тока Д/,;,
* При принятом законе изменения угла Д6 напряжение Де< будет гармони-
ческой функцией времени при любом характере регулирования возбуждения.
г 40]
Момент при малых гармонических колебаниях ротора
179
Д?7 из уравнений (171), в последних знак дифференцирования р
должен быть заменен на jh, который станет простым алгебраическим
множителем.
Учитывая указанные выше различия рассматриваемых здесь
уравнений (171) с системой (Н7а) — (117д), получим по аналогии
с выражениями (122а), (1226) изображения токов в виде:
д/ _____ (^grf — (рХч (р) + Г) + (Ле3 + tydopM) xq (р) ,
(рХ7(р) + г)(рЛ?(р)+г) + ЛИр)А9(р) '
I ^g/ 6? (p) [(p2 -|~ 0 (p) pr]_____. zi7c„\
^pXd(p) + r)(pXq(p) + r) + Xd(p)Xq(pY U
д; _ + 'W-^)№ (p) + r) — (^grf—^opAO) Xd (p) + AgyG (p) r
4 (pXd(p) + r)(pXq(p) + r) + Xd(p)Xq(p) ’ U °'
Найдем комплексы токов, пренебрегая активным сопротивлением
статора. Полагая в (176а), (1766) р = jhnr = 0, получим:
д? jh (^ёч — jh Ьдд А9) + Аё? ф- jh'bdq Д*9 + Ag/z (jh) (1 — Л5). /177 х
d~ (i-h^)xd(jh) ’ (1/7а)
д? — J'h Л6) — (Aed — jhi>qll А9) /-177КЧ
(1 — lr)Xq(jh) ’ U /О'
где обозначено:
Д9 =. №mzlhx = Д9т (cos hi -ф-у sin Ат);
Aed = e?0 Д9.
Дё9 = —ed0A9;*
Дёу — комплекс, получаемый из изображения Де7 заменой в нем
р на jh и Д9 на А9.
Подставляя комплексы ДёЛ Дё? в (177а), (1776) и принимая во
внимание, что для постоянного угла 90 имеют место соотношения:
Фс?О== Oqb и Фдо ^<J0>
получим окончательно комплексы токов в виде:
^ДЬдё ; (177в)
а Xd (jh) Xd (jn) f' v >
<177r)
Поскольку мгновенное значение Д9 изменяется во времени коси-
нусоидально и, следовательно, оно соответствует вещественной части
комплекса А9, то мгновенное значение токов Azd, Аг также опреде-
ляется вещественной частью комплексов Aid, Д??. Аналогично,
потокосцепления Дф.,., Дф? как функции времени представляются ве-
* Смотри выражения (170а) и (1706), определяющие связь между Aed,
ixeq и ДО.
12*
180
Элекгромагнитный момент
[Гл. 5
шественной частью комплексов, получаемых из (120а), (1206):
Дфй = Re (A6rf) = Re [Д?Л W G (jh) Дё7];
Дф7 = Re (Дф9) = Re [(jhj\.
Тогда из выражения (173) найдем мгновенное значение момента
в виде:
ДАЛ— Re {[idoXq (jh) <pd0] Д/9 [z90zVd (jh) ?<7(JA^d
- iqfi (jh) } = Re (Ш^. (178a)
Подставляя из (177в), (177г) комплексы токов в выражение (178а)»
получим:
= — — ~ ^Ж) д/] 1786)
Подстановка в (1786) токов и потокосцеплений, соответствующих
постоянному углу 0О, определяемых при пренебрежении активным
сопротивлением статора выражениями (150), окончательно дает:
™». + U - ”) “S 2».+sin’-4J+
4- е’ cos- 9, уд} — — | — е sin 90 }Л'Л (178»)
Пусть комплекс, стоящий в фигурной скобке в (178в)
ДЛ1ф
вид Ms-j-/hMd. Тогда, поскольку
До
имеет
Re(A9)=A6, a Im (Д9) = Д9,п sin hr.= — =
момент АЛ4, в функции времени равен:
ДМф = Re (ДЛ4ф) = Ms Re (Д9) — Im (Д9) =
= <Д9 4-М^, (178г)
где
< = Re(^) = <0 + ./Ws«; (179а)
<o = ^cos90 + e4'J----4-)cos29e; (1796)
\ лд Л:1 /
м„ = е-Re { sin’ 9, + cos’ 9„ +
+esi"«4^“6 (179в)
1 т /ДЛ1ф\ е2 т ( од Г 1 11
TWd = -5- Jm —v = -7- Jm I sin- 9 . ------
Л \ ДО / Л I ° Ud (jh) xd i
I rns--' e Г 1________LI I l e sin Q° ГG (J'1'!
+ COS °|Л9(/Л) xJJ 1 JlnlAd(yA)
(179г)
§ 40]
Момент при малых гармонических колебаниях ротора
181
Выражение (178г) показывает, что дополнительный момент АЛ4
обусловленный малыми гармоническими колебаниями угла Ад
имеет две составляющие: одну — пропорциональную углу отклоне-
ния АО, другую — пропорциональную скорости изменения угла
А9, т. е. скольжению s. Эти составляющие соответственно назы-
ваются синхронизирующим и демпферным моментами. Коэффи-
циенты Ms nMd носят название коэффициентов синхронизирующего
и демпферного моментов. Из их общих выражений (179а) —
(179г) следует, что они зависят от вида комплексных сопротивле-
ний Xd (jh),Xq (jh), т. е. от того, какие контуры имеет машина
на роторе, а также от характера регулирования возбуждения (вида
ДёД
Отметим, что коэффициент синхронизирующего момента содер-
жит так называемую основную составляющую Als0, которая не за-
висит от вида роторных контуров и физически определяет момент
Д7Иф, когда отсутствует регулирование возбуждения (Ад = 0)
и изменение угла АО происходит бесконечно медленно. В этом слу-
чае h -> 0 и, следовательно, Xd(Jh)-+ хЛ и Xq (jh)->xq * а потому
Л15Д -> 0 и hA4d-*().
Определим коэффициенты Л-1ЛД и Md при отсутствии регулиро-
вания возбуждения. Для машины без демпферной обмотки согласно
выражению (125) комплексные сопротивления равны:
= Xq(Jh) = Xq.
Сопротивление Xd(jh) нетрудно выразить через употребительные
параметры в виде:
v (:~х
лаЧп) — хл i+jhTiil) >
где
Тм=^, а =
Подставляя эти значения сопротивлений Xd(Jh), Xq(Jh) в выра-
жения (179в) и (179г), после несложных преобразований получим:
Л4 = е'2 sin2 60 (Ц—— -'j , .2Т~2; (180а)
д \xd xd) 1 + h2T v
Md = e'2 sin2 So f-L-Ц . , (1806)
\ xd Xd) 1 + 4
'-ГУ f ГТ* d
где rd=7d0-—
* Действительно, операторные сопротивления Xd (p), Xq(p) стремятся
к xd, xq, если p —r 0.
182
Электромагнитный момент
[Гл. 5
Если на роторе машины, кроме обмотки возбуждения имеется демп-
ферная обмотка, но только по поперечной оси, то сопротивление
Xq(jh) имеет вид, аналогичный Xd(jh), при наличии в продольной
оси одной обмотки возбуждения. В этом случае согласно выражениям
(179в), (179г) к уже найденным значениям М5Д, Md добавятся члены,
пропорциональные cos'290 и имеющие такое же строение, как най-
денные в (180а), (1806), т. е. коэффициенты и Md будут равны:
/1 1 \ h-T 2
Msa = е2 sin2 0О (4--)
/1 1 \ Л2 Г'2
+ еЧо820о(^-™)тТ^т;
Md= е‘ sin2 0О -г- — —} + hiT,q
+ ег cos2 0О (-t- — ’
\Лд ч / L 11 1 q
(181а)
(1816)
где
х"
-^-и Taq— постоянная времени поперечного демпфер-
ного контура.
При наличии демпферной обмотки по обеим осям сопротивление
Xd(jh) получается более громоздким, чем в рассмотренном выше слу-
чае, и поэтому выражения для Ms и Md здесь не приводятся. Их
можно найти, например, в [Л.11].
Удобным является расчет коэффициентов Л'1ДД и Md с помощью
схем замещения синхронной машины [Л. 12].
Иллюстрацией характера изменения коэффициентов синхрони-
зирующего и демпферного моментов с нагрузкой машины служат
рис. 69 и 70. На рис. 69 представлена зависимость основной (Ms0)
и добавочной (Л'15Д) составляющих коэффициента синхронизирующего
момента от среднего значения угла 0О. Кривые построены для ма-
шины, имеющей следующие параметры:
xd — 1,0; xq = 0,6; x'd = 0,3; x'q = 0,25; Td ~ 1 сек; Tq = 0,05 сек.
Кривая 1 на рис. 69 изображает MSK для машины без демпфер-
ной обмотки {x'q = Xq), кривая 2 соответствует случаю, когда
на роторе имеется, кроме обмотки возбуждения, еще попереч-
ный демпферный контур. На рис. 70 представлена зависимость
коэффициента демпферного момента Md от угла 0О для машины с
теми же параметрами. Из рисунка видно, что при отсутствии
на роторе машины демпферной обмотки (кривая 1) Md = 0 при
0О = 0 и сравнительно мал при небольших значениях угла 0и.
Напротив, поперечная демпферная обмотка обуславливает высо-
кие значения Md (кривая 2 на рис. 70) в области обычных
углов 60. При расчете Л'15О полагалось возбуждение машины оди-
§ 40J Момент при малых гармонических колебаниях ротора 183
наковым при различных углах 90 (£00 = 1,0). Относительная час-
тота колебаний 1г принималась постоянной и равной 1г — 0,03.
Напряжение шин е равно единице.
Необходимо еще раз отметить, что выражения коэффициентов
синхронизирующего и демпферного моментов (179а) — (179г) по-
лучены в предположении равенства нулю активного сопротивления
обмотки статора г. В отдельных случаях влияние этого сопротивле-
4/.
Рис. 69. Зависимость коэффи-
циента синхронизирующего мо-
мента Ms от угла 0О (частота
котебаний h != 0,03 = const).
Af.so — основной коэффициент;
ЛЕд — добавочная составляю-
щая.
1 — машина без демпферной обмот-
ки; 2 — на роторе, кроме обмотки
возбуждения, имеется поперечный
демпферный контур.
-80 -60 -40 -20 0 20 40 60 градусы
Рис. 70. Зависимость коэффициен-
та демпферного момента ЛЕ; от
угла 0о (частота колебаний h =
=0,03 — ci nst).
1 — машина без демпферной обмотки;
2 — на роторе, кроме обмотки возбужде-
ния, имеется поперечный демпферный
контур.
ния может оказаться существенным, особенно на демпферный мо-
мент машины.
Найдем коэффициенты синхронизирующего и демпферного мо-
ментов с учетом активного сопротивления обмотки статора в первом
приближении, т. е. пренебрегая всеми членами, содержащими г’1 2
и более высокие степени г, считая, что возбуждение машины не ре-
гулируется (Абу = 0).
Комплексы токов Azd, Azd определяем, как и прежде, из уравне-
ний (176а), (1766), полагая в них р — jh. Принимая во внимание,
что для постоянного угла в0 соотношения между напряжениями и
потокосцеплениями с учетом сопротивления г имеют вид:*
= — е90 — rz'g01 Фдо — еоо + rz<70>
* См. уравнения (37а), (376).
184
Электромагнитный момент
[Гл. 5
получим из уравнений (176а), (1766) первое приближение токов
Д/д, равное:
^ld== bdW ~ К" + xq (Jk) —
~lh [epo + <Jh) — edqXq(jh) (Xd (y7z))]}] Д6,
AZ? = — (l-h*)Xd(j/i)Xq(j7i) {“ вм + h\*X4 (Jh) —
—jh [e9o — id9Xd (jh) — eq0Xd (Jh) (Xd(y7i) + (/Л) )]}]|Л0'
Дополнительный электромагнитный момент АЛД определяется вы-
ражением (178а), которое является общим, т. е/ справедливым не-
зависимо от того, учитывается сопротивление г или нет. Подстав-
ляя в (178а) найденные токи ДД, Д/ , заменяя постоянные токи и по-
токосцепления выражениями, получаемыми из уравнений напря-
жений в установившемся режиме:
. __ — (foo + ego) xq — erfor _£oa — e cos 0O . re sin 0O .
d0 xaxqXr- ~ xd “Г xdxq ’
z- _ grfo^rf —(foo + e^olr ____e sin 0O_r (Eoa — e cos 90).
9° XdXq-\-r2 Xq XdXq
, . Q , re sin 0„
ho = — eq0 — rz9o e cos 90 -|---2;
1 I - n r(Em — e cos 0O)
До = eda + rid9 — e sin 00----,
получим после несложных преобразований комплекс ДЛ4фв виде
ДМ -If^cos 90 + e'2j‘--------—) cos 290 + e2sin2 М-тЛцд----4 +
ф IL Xd 01 \xq xdj 01 v\Xd<jh) xdJ [
sin9-----sin90 —
XdXq 0 Xdxd(jh) u
1 ) 1 ; h Г /£»(> _
XdUh} ‘ J \-[f\\xd
, .>n / 1 1 \
с05Лк«--^
_e'Slna,(x,X,(;y,) .
— e cos 9 (— •— 1 e1 sin' 90 f 1-} ) 1)11 AG.
°\*d Xq(jh)jl 1 u\,xQ Xd(jh)l JJJj
Сравнение полученного выражения для АЛ4,, с аналогичным выра-
жением (178в) в случае г = 0 показывает, что при учете активного
сопротивления обмотки статора появляется дополнительная со-
ставляющая в моменте пропорциональная г и равная:
д W = -'•[FT-sin 6о (-J-ттдт) -
~ e ’ Sln 2001 ~ ^jxTUh)) {[ Xrf —
л'7с/л))] !“ e'sm’ °0 UP’
— ecos
§ 40]
Момент при малых гармонических колебаниях ротора
185
Представляя, как и в случае г = О,
ДЛ-U
-/- = ±Ms+jhbMd,
Ап
где ДМ5 и AMrf — дополнительные составляющие в коэффициентах
синхронизирующего и демпферного моментов, обусловленные ак-
тивным сопротивлением обмотки статора, найдем их в виде:
Д< = - г sin 0О U-----2iahx\ - е2 sin 20„
1Ь \\ Лд Л1 /
2/l f/Гппв Л • 1 О ГЛ 1 \ • • О Л I
] ft? 6о ~ ~х~ ] % ’’Г’
+ (iqhx tqhr C0S
Л ,4 _ „[Г 2е sin 6„ ;'Е00 — е cos 0о ; , ecosfl0. \
ДЛ/rf— h Хл Iihr “Г Iqhr]
— г-Ц-Де2 cos2 0о^йг+ е2 sin2 9azsftr— е2 sin2 0ft [idhx — J-) ~
J ft I \ ^-q /
где величины idhx, idhr, iqhx, iqhr определяются из выражений:
ldhx -Г Jldhr — X(l (jty ; Iqhx -|- Jlqhr — Xq (jh) >
т. e. являются вещественными и мнимыми частями комплексов
1 1
Xd (jh) ’ Xq (jh.)-
Если заданы параметры контуров ротора синхронном машины,
то вычисление указанных величин не представляет трудностей.
Например, для машины без демпферной обмотки:
1 _ l+y/zTrfo __ 1 1 + jh Td„ _ 1 ri + ^Trfofi , Trf»— Tdl
Xd(jh) — xd + jhTdoxd—xd l+jhTd—'xd[ \^-1гТУ 1 + Л2Г^];
1 _ 1
Xq (jh) Xq ’
. _ 1 l+^Trfo/rf. . _ h Tdn-Td .
Idhx— Xd ’ ldhr— Xd ! +
Таким образом, с учетом активного сопротивления обмотки ста-
тора коэффициенты синхронизирующего и демпферного моментов
вычисляются в виде сумм:
Mso4-Л/?д -ф- ДЛ^ и Md~\- ^Md>
186
Электромагнитный момент
[Гл. 5
где составляющие Ms0, Msil и Md определяются по выражениям
(1796) и (179г).
На рис. 71 представлена зависимость добавочных составляющих
в коэффициентах синхронизирующего и демпферного моментов
ДЛ15, обусловленных конечным активным сопротивлением
Рис. 71. Дополнительные составляющие коэффи-
циентов синхронизирующего (ЛД13) и демпфер-
ного (ДЛф.у) моментов, пропорциональные актив-
ному сопротивлению статора, для синхронной ма-
шины без демпферной обмотки; г — 0,02; h = 0,03.
Сплошные кривые соответствуют Еоо = 1,0; пунк-
тирные — ЕП1) =1,5.
обмотки статора, от угла 60. Кривые построены для синхронной
машины без демпферной обмотки со следующими параметрами:
xd = 1,0; х? = 0,6; х() = 0,3; 7^=1 сек; г — 0,02.
Частота колебаний принималась равной h = 0,03. Возбуждение
машины считалось постоянным, не зависящим от угла 0О. Сплош-
ные кривые на рисунке соответствуют Ею = 1,0, а пунктирные —
£00 = 1,5. Напряжение сети е = 1,0.
Сравнение кривых рис. 71 с соответствующими кривыми рис. 69
и 70 показывает, во-первых, что при не слишком больших сопротив-
лениях обмотки статора г, дополнительная составляющая ДМ5
мало изменяет полный коэффициент; во-вторых, что для машины
без демпферной обмотки в зоне небольших углов 0О за счет допол-
§ 40] Момент при малых гармонических колебаниях ротора 187
нительной составляющей AAld коэффициент демпферного момента
может стать отрицательным.
Демпферная обмотка, имеющая поперечные контуры, создает
большие положительные демпферные моменты, превосходящие
обычно отрицательные моменты, обусловленные активным сопротив-
лением обмотки статора.
Из рис. 71 и выражения для AAlrf следует, что увеличению
отрицательного коэффициента демпферного момента способствует
увеличение активного сопротивления обмотки статора г и возбуж-
дения машины (£Оо). Кроме того, видно, что при работе машины
в двигательном режиме получаются большие отрицательные зна-
чения коэффициента AA4rf, нежели в режиме генератора. В следую-
щей главе будет показано, что отрицательные коэффициенты дем-
пферного момента обозначают режим колебаний машины с нараста-
юще!: амплитудой и поэтому совершенно недопустимы.
Отметим, что при определении AA4S и AA4d для повышенных зна-
чений активного сопротивления г необходим более точный учет его.
В этом случае обычно достаточно второго приближения в коэффи-
циентах AMS, AMd, учитывающего активное сопротивление с точ-
ностью до г2. Соответствующие значения AA4S и AAld можно найти
в [Л. 13, 14].
Угловая характеристика машины Л/ =/(в) при наличии ма-
лых гармонических колебаний угла 9 около среднего значения 0о
может быть получена наложением па постоянный момент Л1^о,
соответствующий углу 90, дополнительного момента АЛ4 , обуслов-
ленного колебаниями.
Да рис. 72 кривой 1, 2, 3, 4 представлена зависимость =
=/(Д9), построенная по выражению (178г). Прямая 1—3 дает
синхронизирующий момент, пропорциональный изменению угла АО.
Очевидно, тангенс угла наклона этой прямой к оси абсцисс опреде-
ляет коэффициент синхронизирующего момента Ms. Ординаты,
заключенные между кривой 1, 2, 3, 4 и прямой 1—3, представляют
значения демпферного момента. Поскольку при гармонических коле-
баниях максимумы угла А9 и его производной сдвинуты на чет-
верть периода колебаний, то в точках 2 и 4, грр. \ 9= 0, скорость
-^7 имеет максимальное значение, а в точках 1 и 3, где Д9 = Д9т,
напротив = 0. Поэтому в точках 1 и 3 АЛ!^ представляет
чисто синхронизирующий момент, а в точках 2 и 4 только демп-
фер ный момент.
На рис. 72 положительному значению угла Д9т соответствует
ДЛ4ф^> 0; следовательно, считается, что 0. Знак коэффициента
демпферного момента Мг! определяет направление движения по ха-
рактеристике ДЛ4 =/(Д9) при изменении угла. Так, если
то при увеличении угла А9, когда 0, демпферный момент
188
Электромагнитный момент
[Гл. 5
положителен и он откладывается на графике над прямой 1—3
(участок кривой 3, 4, 1). При уменьшении ДО, когда -^-<^0,
демпферный момент отрицателен и ДЛ1ф определяется кривой 1,2,3.
Поэтому при Md 0 движение по кривой 1, 2, 3, 4 будет происходить
по часовой стрелке. Аналогичным образом, если Md <ф0, движение
по кривой совершается против вращения часовой стрелки.
Отметим, что обычно демпферные моменты составляют не более
7—10% от синхронизирующего момента, поэтому петля 1, 2, 3, 4
на рис. 72 в действительности более узка, чем это изображено.
Рис. 72. Зависимость дополни-
тельного электромагнитного мо-
мента ДЛ1ф от изменения угла Д9.
Рис. 73. Угловая характеристика
машины при малых гармонических
колебаниях угла 6.
На рис. 73 дано сравнение угловых характеристик машины:
статической Af<pn=/(9o) (кривая 1) и в случае гармонических коле-
баний около среднего угла 90 (кривая 2). Точка 0 на рис. 72 совме-
щена на рис. 73 с координатой Лцп, 6».
С помощью полученных выше выражений коэффициентов синхро-
низирующего и демпферного моментов может быть рассчитан режим
работы синхронной машины в случае пульсирующего момента на ее
валу.
Пусть момент &Мт представляет сумму гармонических составля-
ющих заданной частоты и амплитуды. Требуется определить пуль-
сации электромагнитного момента ДМ и токов цепей статора.
Будем считать, что колебания ротора имеют ограниченную величину
и для них справедливы соотношения настоящего параграфа.
Подстановка выражения (178г) в уравнение моментов (172) и за-
мена в нем производной скольжения второй производной угла
Д9 дает уравнение для определения гармонических составляющих
в колебании угла ДО. Для вычисленных гармонических составляю-
£ 41] Момент при асинхронном вращении с заданным скольжением 189
щих угла № по выражению (178г) находится пульсация момента
ДМ,/а по (177а), (1776) — пульсации токов Дф, Дф. По найденным
токам Дф, Дф можно определить пульсацию фазных токов ма-
шины.
§ 41. Электромагнитный момент при асинхронном вращении
с заданным скольжением
При работе синхронной машины параллельно с сетью возможны
асинхронные режимы, когда угол 6, характеризующий положение
ротора машины относительно синхронно вращающейся осп, во вре-
мени неограниченно возрастает.
Асинхронные режимы синхронного генератора имеют место при
включении машины в сеть по методу самосинхронизации, когда
скорость вращения ротора может отличаться от синхронной на 2—3
и даже более процентов; они могут возникать также при потере ге-
нератором возбуждения. В последнем случае неявнополюсные гене-
раторы с массивным ротором способны развивать значительные элек-
тромагнитные моменты при весьма малых скольжениях, изме-
ряемых десятыми долями процента [Л. 15].
Для синхронных двигателей и компенсаторов важное значение
имеет асинхронный режим, возникающий при асинхронном пуске
машины. Такой пуск, как известно, осуществляется путем включе-
ния обмоток статора, либо непосредственно на шины переменного
тока, либо через устройство, позволяющее уменьшить пусковые
токи в статоре (реактор, автотрансформатор). Обмотка возбужде-
ния машины при этом замыкается на активное сопротивление и,
следовательно, в ее цепи отсутствует напряжение возбудителя
(рис. 74). Поскольку на роторе двигателя или компенсатора имеются
пусковая (демпферная) обмотка и замкнутая обмотка возбуждения,
то в машине возникает асинхронный момент, сообщающий ротору
ускорение. По достижении ротором скорости, близкой к синхрон-
ной, цепь возбуждения включается на возбудитель и машина синх-
ронизируется.
В дальнейшем будем иметь в виду именно такой асинхронный
режим — асинхронный пуск двигателей и компенсаторов.
Определим электромагнитный момент машины для этого режима.
Имея в виду, что большая часть пуска осуществляется при замкну-
той обмотке возбуждения, будем считать напряжение возбудителя
равным нулю (е? = 0). Ограничим также поставленную задачу слу-
чаем, когда ускорение ротора машины при пуске невелико. Это по-
зволяет приближенно вычислять токи машины и электромагнит-
ный момент Аф для мгновенного значения скольжения д в предпо-
ложении, что это скольжение постоянно и существует длительно
(если ускорение wsps~(), то скольжение s = const). Таким об-
разом, задача сводится к рассмотрению установившегося асинхрон-
ного режима с постоянным скольжением.
190
'АС12!111ТпЪ1'й МОМвНТ
[Гл. 5
Задаваясь различными значениями скольжения s и определяя
для них момент Л4ф, получаем зависимость М =f(s), которая
называется статической механической характеристикой. Обычный
вид ее представлен на рис. 75. Предположение о том, что разгон
машины при асинхронном пуске происходит по статической харак-
теристике допустимо в тех случаях, когда скорость про-
текания электромагнитного процесса в машине гораздо выше, чем
скорость изменения процесса механического. Обычно это соотноше-
ние выполняется. В некоторых случаях, таком, например, как
асинхронный пуск машины с незначительной инерционной посто-
янной, токи и электромагнитный момент должны определяться с уче-
Рис. 74. Схема включения обмоток
синхронной машины при асинхронном
пуске.
СМ — синхронная машина; К. К—кон-
тактные кольца; R — активное сопро-
тивление; В — возбудитель.
Рис. 75. Средний асинхронный мо-
мент, обусловленный напряжением
статора. Машина средней - мощности
с полной демпферной обмоткой.
Сплошная кривая соответствует г —
= 0, пунктирная г — 0,02.
том переходного электромагнитного процесса, и механическая ха-
рактеристика /И = f(s), которая в этих условиях называется дина-
мической, может существенно отличаться от статической.
Итак, определим прежде всего токи статора машины в асинхрон-
ном режиме с заданным постоянным скольжением s, при отсутствии
возбуждения (ef = 0).
Токи статора определяются из дифференциальных уравнений
синхронной машины (115а) — (П5д); при этом в уравнении (115в)
нужно положить бу = 0. Поскольку скольжение s принято постоян-
ным, то при работе синхронной машины от шин бесконечной мощ-
ности (напряжение на шинах е — const) напряжения elt и eq оказы-
ваются гармоническими функциями времени. Действительно, при
вращении ротора машины с постоянным скольжением s угол 9 из
выражения (45а) равен:
t
0 = J swsdt = st. (182)
о
§41] Момент при асинхронном вращении с заданным скольжением 191
Следовательно,
ed — е cos (9 4- -М =— esin(s4); 1
v 2/ } (183)
eq = e cos (9 к) = — е cos (st). J
Напомним, что ранее было принято скольжение положительным
при скорости ротора большей, чем синхронная. Будем для асинхрон-
ного пуска считать, как это принято в теории асинхронных машин,
скольжение s)>l при скоростях меньших, чем синхронная. Тогда
в выражениях (183) скольжение изменит знак и они примут вид:
ed = е sin (st);
eq — — ecos (st).
(183a>
Поскольку из уравнений (115a) — (115д) требуется определить
только установившиеся значения токов при заданном
скольжении, то закон их изменения во времени должен быть таким
же, как у напряжений ed, eq, т. е. они тоже будут гармоническими
функциями времени. При нахождении установившихся гармони-
ческих токов воспользуемся комплексным методом, для чего пред-
ставим напряжения ed, eq как вещественные части комплексов
ёа. Имея в виду выражения (183а), получим комплексы ёа, eq.
в виде:
ed = — Je&Js\
eq = — e^ =—Jed.
При определении комплексов токов id, lq в уравнениях (115а) —
(115д) знак производной заменяется на js и становится алгебраиче-
ским множителем.* Поэтому можно воспользоваться операторными
выражениями токов (123а), (1236), так как они получены из опера-
торных уравнений (117а) —(117д) при \ef = 0, в которых р —
простой множитель и которые аналогичны уравнениям (115а) —
(115д) при е< = 0.
Таким образом, искомые комплексы токов получаем из (123а),
(1236), в которых изменяем знак у скольжения, заменяем Aerf на
ёа, Ае? на eq =— jed\c.M. (184)] и р на js. В результате получаем;
? = а _____________-r + /(l-2s)^(/S)_____________. , 85 '
“ а (\—Ъз) Xd(js) Xq(js)-j-г'2-j jrs[Xd(js)-j-Xq(js)] ’
; ____________-r + j(i-2s)xd(js)____________ п8-б)
9 Ml - 2s) Xd (js) Xq (js) + 4 + jrs [Xd (js) + Xq (js)] • °°°'
Комплексы потокосцеплений M, равны:
^ = ^(>5)^; (186а)
$q = Xq(js)iq. (1866)
См. стр. 178.
192
Электро.магнитный момент
Выше было условлено, что мгновенное значение напряжений
еа, е„ представляется вещественной частью комплексов ё,(, е?. Поэтому
аналогичные значения токов (i(l, iq) и потокосцеплений (-]>rf,
определяются вещественными частями соответствующих комплек-
сов (185а) — (1866).
Таким образом, электромагнитный момент при асинхронном
режиме, в соответствии с выражением (149), равен:
= —’Ы; = ^е(ф?) • Re(zd) — Re(^) • Re(Z?). (187)
Получим расчетную формулу момента М для случая незначи-
тельного активного сопротивления обмотки статора, когда можно
положить г = 0.
При этом допущении комплексы токов, получаемые из урав-
нений (185а), (1856) с помощью (184), принимают вид:
; _ — _ iez,sz .
d jXd(js) jXd(jsy
• __ —iq ______
4 jXq(js) jXq(jS)'
(188a)
(1886)
Нетрудно видеть, что сопротивления jXd(js) и jXq (js) представ-
ляют полные сопротивления машины (при г = 0) по осям d и q
для заданного скольжения s и могут быть представлены такими же
схемами замещения, какие используются для асинхронных машин.
Поскольку параметры контуров синхронной машины по осям d и q
неодинаковы [X,, (js) # Xq (js)], полные сопротивления jXd(js)
и jX„ (js) определяются двумя схемами замещения, в то время как
для асинхронных машин с симметричным ротором достаточно одной
схемы.
Полные сопротивления синхронной машины по осям d и q мо-
гут быть записаны в общем виде:
jXd(js) = Rds-YjXds==zds^<i-, 1
jXq (js) = Rqs + jXqs = Zqs ^<2, I
(189)
где /?r.s. Xds, Xas — соответственно эквивалентные активные и
индуктивные сопротивления по осям d и <?;
zds, zqs — модули полных сопротивлений;
Подставляя сопротивления из (189) в выражения (188а), (1886)
и выделяя в них вещественную часть, получим:
—у- sin (st — <pd);
^ds
C°S
^qs
(190)
§41] Момент при асинхронном вращении с заданным скольжением 193
Комплексы потокосцеплений >i? определяются выражениями
(186а), (1866), куда следует подставить комплексы токов из (188а),
(1886). Эта подстановка дает:
Ф?=—je-lsr-. . Вещественные части в (191а) равны: = е cos (st) (191а)
= е sin (st). } (1916)
Подставляя в выражение (187) найденные значения токов и по-
токосцеплений (190), (1916), после несложных преобразований полу-
чим электромагнитный момент для случая г — 0 в виде:
М.=М. +Л1. , (192а)
Ф фа ‘ фп’ v 7
где
= + (1926)
z \ zds zqs 1
М^ = -е~ _ S°s(2sT-^)~|. (192в)
L Zqs zds J
Составляющая Мфа представляет средний асинхронный момент,
сообщающий ротору машины положительное ускорение. Эта состав-
ляющая получилась отрицательной, так как в основных уравнениях
синхронной машины за положительный электромагнитный момент
принят момент в генераторном режиме. Выражение (1926) преоб-
разуется к виду:
Мь = - - 4 (73 Rds + Rgs), * (193)
“ \ ds qs /
где /d = —и/„=—, согласно (190), представляют амплитуды
zds zqs
продольного и поперечного токов статора.
Таким образом, средний асинхронный момент М^а определяется,
как и в асинхронной машине, потерями в меди роторных цепей.
На рис. 75 изображена зависимость от скольжения $ (сплошная
кривая).
Составляющая Л4,п представляет знакопеременный электромаг-
нитный момент, причем частота его /, как это следует из выражения
(192в), равна:
где fi — частота питающей сети.
Эта составляющая момента физически идентична так называемому
реактивному моменту синхронной машины, возникающему при сик-
* Ср. с выражением (156).
13 А. И. Важное
194
Электромагнитный момент
[Гл. 5
хронном вращении в случае неравенства синхронных сопротивлений
по осям d, q (xd Xq). Как известно, реактивный момент равен:
—ibin26’ 094)
т. е. является второй гармонической угла между осью полюса и
осью результирующего поля (на диаграмме угол 6 обозначает угол
между отрицательным направлением оси q и изображающим век-
тором напряжения е). При асинхронном вращении угол 6 возрастает
пропорционально времени [см. (182)]. Кроме того, в обмотках ро-
тора появятся токи; поэтому момент 2W определяется уже не син-
хронными сопротивлениями, а сопротивлениями zas и zds [сравни
(192в) и (194)].
Однако по-прежнему этот момент образуется тяжением магнит-
ных трубок, возникающим за счет различных результирующих про-
водимостей для поля по осям d и q.
Из выражения (192в) следует, что для машины с симметричным
по осям d и q ротором, когда ydz=yq и zds = z4S, момент Л4фп равен
нулю. Знакопеременный момент обычно не оказывает большого вли-
яния на скорость машины, если частота его f достаточно велика.
В области же малых скольжений s, когда частота f мала, его влияние
на впадение машины в синхронизм может быть значительным.
До сих пор предполагалось, что активное сопротивление стато-
ра г = 0. Наличие этого сопротивления приводит к появлению
пополнительной составляющей в среднем асинхронном моменте.
Как известно [Л.9],при несимметричном роторе асинхронной машины
возникает асинхронный электромагнитный момент, обусловленный
обратным полем ротора и пропорциональный активному сопротив-
лению статораг. Величина его при заданном г определяется степенью
несимметрии обмоток по осям d и q и обычно невелика. При сколь-
жениях l,0S=s>0,5 этот момент является движущим; в области
0,5^>s^>0— он является тормозящим, а при $ —0 и s = 0,5
момент равен нулю. На рис. 75 пунктирной кривой изображен асин-
хронный момент Л1фа в функции скольжения s с учетом дополнитель-
ной составляющей, обусловленной активным сопротивлением статора.
Наличие постоянного возбуждения (ef = const) в машине при-
водит к образованию дополнительных составляющих момента:
изменяющейся во времени по гармоническому закону с частотой j\s
и средней асинхронной составляющей. Первая аналогична основному
электромагнитному моменту в синхронном режиме, который равен
ЛГ = sin 6.
Ф ха
Поскольку при асинхронном режиме угол 0 = st, этот момент
становится знакопеременным.*
* Амплитуда момента, конечно, определяется более сложно, нежели при
синхронном вращении.
§
Момент при внезапном нарушении режима
195
Средний асинхронный момент, обусловленный основным полем
машины, определяется по общему правилу потерями в меди статора
от токов, вызванных э. д. с. основного поля £0. Очевидно, что этот
момент является генера-
торным, т. е. оказывает
тормозящее действие при
асинхронном вращении.
Поскольку э. д. с. £0 в
статоре пропорциональ-
на скорости ротора, т. е.
в относительных едини-
цах 1—s, то асинхрон-
ный момент, обусловлен-
ный основным полем воз-
буждения, будет иметь
зависимость от 1—s та-
кого же вида, какой
имеет асинхронный мо-
мент, обусловленный
приложенным к статору
напряжением, от сколь-
жения s (рис. 76).
Электромагнитный
момент В асинхронном у _ момент> обусловленный напряжением статора е;
режиме при наличии по- 2 — момент, обусловленный напряжением ротора еу_
стоянного возбуждения
(б/ = const) может быть найден по общему выражению (149); при
этом токи id, iq и потокосцепления должны содержать,
кроме гармонических членов, определяемых из (185а) — (1866) при
ef = 0, еще постоянные члены от напряжения ef = const.
§ 42. Электромагнитный момент при внезапном нарушении
установившегося режима работы
При внезапном изменении параметров электрических цепей
синхронной машины (короткое замыкание; отключение одной из
линий передачи, через которые генератор работает на приемные
шины и т. п.) или момента механических сил на валу (например
наброс нагрузки на синхронный двигатель) в контурах машины воз-
никают переходные токи. Характер изменения их во времени может
быть достаточно сложным. В обмотках статора появляются периоди-
ческие токи (например периодическая составляющая при коротком
замыкании), токи двойной частоты (при x'd хчъ машинах без демп-
ферной обмотки и при x'd Xq в машинах с демпферными конту-
рами), апериодические токи.
Если возникает несимметрия в цепи статора, то появляется боль-
шое количество высших гармонических в кривой тока. При от-
13*
196
Электромагнитный момент
[Гл. 5
клонении скорости вращения ротора от синхронной токи изменяются
вследствие изменения угла.* Еще более сложная картина будет
при наличии регулирования возбуждения в переходном процессе.
В некоторых задачах требуется определить изменение угла 0
при внезапных нарушениях установившегося режима. Поскольку
на изменение угла 0 знакопеременные моменты оказывают неболь-
шое влияние, ими можно пренебречь. Обычно пренебрегают также
средними асинхронными моментами, хотя при строгом рассмотре-
нии и повышенных значениях активного сопротивления обратной
последовательности г2 их следует учитывать.
Эти упрощения в определении электромагнитного момента соот-
ветствуют пренебрежению в токах цепей статора рядом высших гар-
монических и апериодической составляющей. Иными словами, при
определении электромагнитного момента в рассматриваемых усло-
виях пренебрегают активным сопротивлением цепей статора и пере-
ходным процессом, обусловленным этим сопротивлением.
При таком допущении уравнения напряжения цепей статора,
как было отмечено ранее, принимают вид уравнений (117):
еа — — e sin 9 = Ф?; —e9 = ecos0 = <pd.
При определении момента для машины с демпферной обмоткой
следует иметь в виду, что сверхпереходные составляющие тока, зату-
хающие с постоянной времени демпферной обмотки, через 0,02—
0,04 сек становятся незначительными и поэтому практически не ока-
зывают влияния на процесс изменения угла 0. Это дает основание их
не учитывать и считать потокосцепления продольного и поперечного
контуров статора равными:
— £о Ч~ xdid =Ed-\- xdid;
V.; == Xqlqt
т. e. такими же, как в машине без демпферной обмотки.
Из приведенных соотношений продольный и поперечный токи ста-
тора определяются в виде:
/ = —Eo=^d — F'd. • 4^
d ха xd ’ 4 xq
Подставляя эти токи, а также потокосцепления <prf, из уравнений
(117) в общее выражение электромагнитного момента, получим:
= $qtd — ФЛ = ~ sin 0 4- у sin 20 =
Т L \Лц Лд /
Г'.е <>* / 1 1 \
= -^sin0 + y(-A —4)sin 20. (195)
L \Лд Ла J
* При этом предполагается, что в переходном процессе синхронная ма-
шина имеет связь с сетью переменного тока.
§ 42}
Момент при внезапном нарушении режима
197
Таким образом, при сделанных допущениях электромагнитный
момент определяется двумя идентичными выражениями. Первое из
них внешне ничем не отличается от выражения момента в установив-
шемся режиме. Однако в рассматриваемом случае э. д. с. от потока
возбуждения £ft не остается постоянной, а меняется при изменении
угла 6 в переходном процессе. По этой причине первая форма за-
писи момента Мф неудобна.
Практическое* значение имеет второе выражение в (195), содер-
жащее продольную переходную э. д. с. У машин, обладающих малым
значением активного сопро-
тивления обмотки возбужде-
ния (большими Та}, в крат-
ковременном переходном про-
цессе э. д. с. Е'а фактически
остается неизменной и тогда
выражение для момента со-
держит только одну перемен-
ную — угол 6.
Если синхронная машина
работает не непосредственно
на шины бесконечной мощно-
сти, а через некоторое устрой-
ство, обладающее полным со-
противлением Z, =гл + /хл
Рис. 77. Электромагнитный момент в
функции угла 0.
1 — при Еа = const; 2 — при Ё' = const,
то напряжение на зажимах а
машины е уже не будет постоянным в переходном процессе. В этом
случае, вместо напряжения на зажимах машины, более удобно рас-
сматривать напряжение на шинах бесконечной мощности, остаю-
щееся неизменным. При этом к индуктивным и активному сопро-
тивлениям цепей статора машины должны быть прибавлены соот-
ветственно сопротивления устройства хл и гл, и угол 9 будет углом
между отрицательным направлением оси qрассматриваемой машины
и изображающим вектором напряжения шин, вращающимся с син-
хронной скоростью.
На рис. 77 представлена зависимость электромагнитного момента
от угла 9 для установившегося режима при постоянной э. д. с.
Е<> = 1,0 (if = const) и в переходном режиме при постоянстве E'd =
— 1,0 [формула (195)]. В обоих случаях принято е = 1,0. Машина
имеет следующие параметры: ха = 1,0; xq — 0,6; х^ = 0,3.
Из рисунка видно, что в переходном процессе электромагнитный
момент оказывается больше, чем в установившемся режиме. Это
увеличение момента достигается за счет переходных токов в обмотке
возбуждения.
ГЛАВА ШЕСТАЯ
УСТОЙЧИВОСТЬ РАБОТЫ СИНХРОННОЙ МАШИНЫ
§ 43. Понятие устойчивости работы синхронной машины
Одним из основных свойств, отличающих синхронную машину от
других электрических машин, является строгое соответствие ско-
рости вращения ее ротора частоте сети переменного тока, к которой
она подключена.
Поэтому, нормальный режим работы синхронной машины, вклю-
ченной на сеть переменного тока заданной частоты, предполагает
постоянство скорости вращения ее ротора (синхронная скорость).
Однако нормальный режим работы характеризуется постоянством
не только скорости вращения ротора машины, но также и осталь-
ных величин, определяющих режим — токов, напряжений.
При работе синхронной машины, включенной на сеть перемен-
ного тока, может возникнуть возмущение нормального режима
вследствие изменения параметров электрических цепей машины или
напряжений, действующих на их зажимах, а также механических
сил на ее валу.. Переходный процесс, сопровождающий подобное
возмущение режима, может развиваться двояко: либо он закан-
чивается установлением нового нормального режима, либо нормаль-
ный режим после возмущения оказывается невозможным. Из того
обстоятельства, что после возмущения исходного нормального ре-
жима новый нормальный режим не устанавливается, не следует,
что машина обязательно теряет синхронизм с сетью (выпадает из
синхронизма).
В практике известны случаи возникновения устойчивых коле-
баний ротора синхронной машины при наличии синхронизма машины
с сетью. В этих случаях скорость вращения ротора машины перио-
дически изменяется, но среднее ее значение соответствует синхрон-
ной скорости. Такой режим с устойчивыми колебаниями ротора, вы-
зывающими колебания токов и мощности, нельзя, конечно, счи-
тать нормальным, несмотря на то, что машина не теряет синхронизма
с сетью.
Итак, все нормальные режимы синхронной машины можно разде-
лить на две категории в зависимости от того, возможен или не воз-
можен новый нормальный режим после возмущения исходного ре-
жима. Если в результате возникшего возмущения исходного режима
§ 43]
Понятие устойчивости работы синхронной машины
199
устанавливается новый нормальный режим, то исходный режим на-
зывают устойчивым; если же после возмущения нормальный режим
невозможен, то исходный режим называют неустойчивым. Вопросы
устойчивости синхронных машин, работающих в системе перемен-
ного тока, играют весьма важную роль в оценке свойств машины
и системы в целом, а иногда они становятся определяющими. Об-
щая теория устойчивости движения рассматривает два вида воз-
мущений: 1) возмущения сколь угодно малы, 2) величина возмуще-
ния конечна.
Устойчивость при наличии первого вида возмущений называют
устойчивостью в малом; устойчивость при конечных возмущениях
называют устойчивостью в большом.
В отношении синхронных машин также различают два вида устой-
чивости: статическую (устойчивость в малом) и динамическую
(устойчивость в большом).
Динамическая устойчивость синхронных машин определяет пове-
дение машин при конечных изменениях параметров системы (внезап-
ное короткое замыкание в системе, внезапный наброс нагрузки на
синхронный двигатель и т. д.). При этом чаще всего конечное возму-
щение не остается неизменным в течение переходного процесса (напри-
мер короткое замыкание с последующим быстрым отключением его).
Статическая устойчивость синхронных машин характеризует
поведение машин при сколь угодно малых изменениях режима.
Более общим является определение Динамической устойчивости,
поскольку она имеет дело с конечными возмущениями. Однако рас-
смотрение статической устойчивости также имеет большое практи-
ческое значение, так как оно позволяет определить, осуществим
ли вообще заданный режим работы машины или нет, может он су-
ществовать сколь угодно длительно при заданных параметрах сис-
темы или вследствие ничтожных возмущений режим начнет изме-
няться, т. е. окажется неустойчивым. Вместе с тем исследование
статической устойчивости намного проще, нежели исследование
динамической устойчивости. Объясняется это тем, что строгое рас-
смотрение динамической устойчивости связано с решением общих
нелинейных дифференциальных уравнений синхронной машины
или сложного качественного анализа их, тогда как при исследова-
нии статической устойчивости приходится иметь дело с линеаризо-
ванными уравнениями машины, поскольку определяется характер
малых приращений переменных.
Статическая устойчивость синхронной машины имеет дело с до-
статочно малыми возмущениями, поэтому устойчивость или неустой-
чивость машины однозначно определяется параметрами самого
исходного режима. Динамическая устойчивость или неустойчивость
зависит не только от параметров исходного режима, но и от величины
и характера возмущения.
Долгое время вопрос статической устойчивости синхронных ма-
шин сводился хотя и к очень важному, но все же частному вопросу
200
Устойчивость работы синхронной машины
[Гл. 6
о величине предела передаваемой мощности для синхронных
генераторов и предела перегружаемости для синхронных двигателей.
Иными словами, под пределом статической устойчивости понималась
та максимальная нагрузка синхронной машины, которую она могла
нести в установившемся режиме, продолжая работать синхронно
с сетью переменного тока. Другой вид статической неустойчивости —
возникновение самопроизвольных колебаний в машине, исследо-
вался самостоятельно с помощью теории малых колебаний.
Поскольку статическая устойчивость синхронной машины рас-
сматривалась применительно к отдельным конкретным видам воз-
можной неустойчивости (статическая перегружаемость, режим коле-
баний), а не на базе общей теории устойчивости, это привело к соз-
данию приближенного метода исследования на основе синхрони-
зирующих и демпферных моментов машины при гармонических
колебаниях. Впоследствии анализ статической устойчивости син-
хронной машины был поставлен на прочный фундамент общей
теории устойчивости.
Здесь следует отметить, что завершением большого исторического
этапа в развитии теории устойчивости явилась ставшая классиче-
ской работа академика А. М. Ляпунова «Общая задача об устойчи-
вости движения». В этой работе А. М. Ляпунов прежде всего строго
доказал, что устойчивость движения в малом (статическая устой-
чивость), описываемого системой нелинейных дифференциальных
уравнений, в подавляющем числе случаев определяется устойчи-
востью соответствующей линеаризованной системы, т. е. по первому
приближению.* Иными словами, А. М. Ляпунов показал, что для
определения статической устойчивости вместо рассматриваемых
нелинейных дифференциальных уравнений достаточно исследовать
эти уравнения в линеаризованном виде. Таким образом была
доказана правомерность использования теории малых возмущений
для исследования устойчивости в малом нелинейных систем.
Что касается методов исследования динамической устойчивости,
то они разработаны менее глубоко, хотя и позволяют решать мно-
гие инженерные задачи. Основными из них являются: 1) метод
«площадей»; 2) метод последовательных интервалов; 3) метод моде-
лирования.
§ 44. Методика исследования статической устойчивости
на основе малых возмущений
Как указывалось выше, строгое исследование статической устой-
чивости синхронной машины можно производить на основе линеа-
ризованных уравнений машины. Линеаризация уравнений состоит
* Исключение составляют «особенные случаи», в которых первое прибли-
жение не решает задачи и для которых А. М. Ляпунов указал метод исследо-
вания. Но эти случаи в технических задачах практически не встречаются,
в частности они не имеют места и для полной системы уравнений синхронной
машины.
§ 44]
Методика исследования статической устойчивости
201
в следующем. Представим любую из переменных х; суммой началь-
ного значения переменной х;(1 (т = 0) и малого изменения ее Д.г;
(при т 0), так что х; = х;о + Ахг. После подстановки переменных
в указанном виде в нелинейные дифференциальные уравнения и пре-
небрежения произведениями малых переменных Ах;, получается
система линейных дифференциальных уравнений относительно пе-
ременных Ахг.
Решение линейных дифференциальных уравнений с постоянными
коэффициентами относительно переменной Axz, как известно, имеет
вид:
Дх< = ЛиеР1т4-Агге^4- , (196)
где pit р2, ... — корни характеристического уравнения, соответ-
ствующего системе линейных дифференциальных
уравнений;
Лн, A2i, ... — произвольные постоянные.
Движение устойчиво, если координаты Алу будут оставаться во
времени сколь угодно малыми, а это возможно, если все веществен-
ные корни и вещественные части комплексных корней ps, р.2, ...
будут отрицательными. В этом случае согласно (196) при т —оо
Дх; — 0. Если хотя бы один вещественный корень или вещественная
часть комплексного корня положительны, то при т —оо Дх,-^ со,
и движение становится неустойчивым.
Таким образом, для исследования статической устойчивости не-
коей системы, описываемой нелинейными дифференциальными урав-
нениями, необходимо последние линеаризовать, составить по ним
характеристическое уравнение и исследовать его корни. Условием
статической устойчивости является отрицательность всех корней
(или вещественных частей комплексных корней).
Отметим, что для проверки указанного условия нет нужды оп-
ределять самые корни характеристического уравнения. Существуют
методы, которые позволяют установить отсутствие положительных
корней (комплексных корней с положительной вещественной частью),
не производя их вычисления. Одним из подобных методов является
метод, предложенный Гурвицем и основанный на том, что при опре-
деленных соотношениях между коэффициентами алгебраического
уравнения все его вещественные корни будут отрицательными, а ком-
плексные корни — с отрицательной вещественной частью. Как
показал Гурвиц, для этого необходимо и достаточно, чтобы опре-
делители, составленные специальным способом из коэффициентов
уравнения—так называемые определители Гурвица — были по-
ложительны.
Пусть имеется уравнение n-й степени:
«орп 4- а1Рп-1 + aiP™ + ... + ап = 0. (197)
Определители Гурвица, числом п, составляются следующим образом.
Определитель n-го порядка Ал заполняется коэффициентами урав-
202
Устойчивость работы синхронной машины
[Гл. б
нения так, что по его диагонали сверху вниз, слева — направо
размещаются подряд коэффициенты с а{ по ап. В строках определи-
теля слева от диагонали записываются коэффициенты с увеличи-
вающейся нумерацией, а справа от нее—е уменьшающейся. За коэф-
фициентами с предельной нумерацией а0 и ап свободные места в стро-
ках заполняются нулями. Таким образом определитель Гурвица
n-го порядка имеет вид:
cti а9 0 0 0... 0
а3 а.2 а0 0... 0
а№ at а3 а2 щ ... 0
ап ап-1 ап-1
0............0 0 ап
Последующие определители получаются из предыдущих зачер-
киванием крайнего правого столбца и нижней строки. Так, опреде-
литель п—1 порядка имеет вид:
I av ап 0 . . . . 0
а3 Oj в! а0 0 ... 0
а3
0 ... 0 ап an_i
Последний определитель Д1 = а1. Итак, условием отсутствия
положительных корней является выполнение неравенств
Ап>0, Д„_1>0, ..., \>0, (198)
называемых критериями Гурвица.* *
Отметим, что поскольку An = a„A„_t и Д„_1>0, то первый кри-
терий в (198) заменяется неравенством
я„>0.
Так, если имеется уравнение 3-й степени
а0р3 + «1Р2 + а^р + а3 — 0,
* Предполагается, что в уравнении (197) а0>0.
§44] Методика исследования статической устойчивости 203
то критерии Гурвица, выполнение которых обеспечивает отсутствие
положительных корней этого уравнения, имеют вид:
^>0;
«1 «о I
= ага^ — а0а8 > 0; а3>0.
I
Рассмотрим простейший пример исследования статической устой-
чивости по изложенной методике — устойчивость нерегулируемой
явнополюсной синхронной машины без демпферной обмотки, вклю-
ченной по схеме рис. 78 на сеть бесконечной мощности с неизменным
напряжением е.
Рис. 78. Схема включения синхронной машины на
сеть бесконечной мощности с напряжением е.
Пусть синхронная машина описывается упрощенными уравнени-
ями (117), которые справедливы при г — 0 и при пренебрежении
переходными процессами в статоре, обусловленными этим сопротив-
лением. Воспроизведем их здесь еще раз:*
— ed = esin9 = —
— eq = е cos 9 = Ed -ф- Ео;
= ppEd + (р + Р/) Ео; (1
Мт = Н/РЧ - ± - А ) EqEd.
Линеаризуем уравнения (199), для чего подставим в них пере-
менные в виде суммы начального значения и малого отклонения:
9 = 904-Д9,
Eq = Eq, + bEq,
Ed = Edf)-\-hEd и т. д.,
исключим соотношения, удовлетворяющие начальному установив-
шемуся режиму и пренебрежем произведениями малых переменных
* Здесь и далее предполагается, что индуктивные и активные сопротив-
ления обмотки статора машины включают внешние сопротивления хД, гд до
шин с неизменным напряжением е.
204
Устойчивость работы синхронной машины
[Гл. 6
(ДД0 ДДР Д£"й ЬЕЧ). Имея в виду, что для малых значений угла
А9 справедливы соотношения:
sin (90 Д9) <=« sin 90 -[- Д9 cos 90;
cos (90 -J- Д9) cos 90 — Д9 sin 90,
и что в нерегулируемой машине &ef =0, получим линеаризованные
уравнения в виде:
— ДД? — е cos 90Д9 = 0;
ЫЕа 4- ДД0 4- е sin 9оД9 = 0;
p.pAf'd 4-04- Ру) д£о = 0;
(200)
- \Eq^Ed - Г\ЕМ 4- Д£? - Д£о 4- ^Уд9 = ДМт,
L XgJ Xq
где обозначено--------= X.
Xq xd
Характеристическое уравнение системы (200) есть приравненный
нулю ее определитель, т. е.*
0 — 1 0 — е cos 90
1 0 1 е sin 90
0 Р + Р; 0 = 0. (201а)
-A£?0-(Xfd04-§2)-^ HjP\
Раскрывая определитель по степеням р и деля уравнение (201а)
на Hj(\ —— получим после несложных преобразований ха-
рактеристическое уравнение в виде:
аоР34-а1/’2 + ааР + аз = О, (2016)
где
а» = 1; <11 = р/;
«2 = cos 0о + е2(?--------Мcos 290-J-е2 (Л- — sin2 901 .
“j L xd \xq Xd ) \xd J ’
fi:!=Й 1д7cos 00 + WJ- — J;)cos 29«]: p/=9i •
11 j L Ad \Xq Ad / J J
Для того чтобы синхронная машина была статически устойчива,
нужно, чтобы среди корней уравнения (2016) не было положительных
вещественных (или комплексных с положительной вещественной
частью), что в свою очередь будет иметь место, если удовлетворены
критерии Гурвица. Последние для уравнения 3-й степени имеют
вид:
я,4>0; аха2— а3а0^>0; а3)>0.
* Для простоты принято ДЛ4т — const.
S 45]
Характер нарушений статической устойчивости
205
Первый критерий а! = р)Д>0 выполняется при любых значениях
угла 0О. Второй критерий также выполняется, так как — аоа3 =
— -Ue3(-L —'isin^SУ>0 для любого режима работы машины.
“/ \xd XJ1
Третий критерий (д3> 0) удовлетворяется не для всех режимов.
Поэтому он и определяет зону статической устойчивости машины.
Предельный угол впр, при котором машина находится на границе
устойчивости, определяется, следовательно, из условия:
а3=cos 6пр + ei - J- Vos 20пр = 0. (202)
§ 45. Характер нарушений статической устойчивости
Выше была изложена методика, позволяющая определить усло-
вия статически устойчивой работы синхронной машины в самом об-
щем случае. Установим теперь виды нарушений статической устой-
чивости, что представляет интерес не только с точки зрения харак-
тера физического процесса нарушения устойчивости, но и оценки
приближенного метода исследования ее. Решение этой задачи тре-
бует нахождения корней характеристического уравнения, соответ-
ствующего системе линеаризованных дифференциальных уравне-
ний.
Рассмотрим синхронную машину без демпферной обмотки, ра-
ботающую через сопротивления хл, i л совместно с сетью бесконеч-
ной мощности (рис. 78). Допустим, что момент механических сил на
валу машины получил малое постоянное по величине приращение
АЛ4т, что вызывает возмущение нормального режима работы. Оп-
ределим характер возникающего при этом изменения угла А9
между вектором напряжения сети ё, вращающимся с синхронной
скоростью,и отрицательной поперечной осью рассматриваемой ма-
шины. Пренебрежем сперва влиянием активного сопротивления
цепи статора (r-j-^ = O)> а также переходными процессами
в этой цепи. При этом уравнения напряжения цепи статора стано-
вятся более простыми, а именно:
— eq — е cos 6 = (203а)
ed =— е s'mQ — ^q = Eq. (2036)
Будем пока считать, что машина имеет неявнополюсный тип ро-
тора.
Из соображений удобства составим характеристическое урав-
нение в виде, несколько отличном от ранее приводившегося (2016).
Уравнение моментов для малых приращений переменных имеет вид:
ДМт = ДЛ4ф4-^ = ДЖф + /У7р2Де. (204)
Изменение электромагнитного момента ДЛ4 может быть определено
следующим образом. *
206
Устойчивость работы синхронной машины
[Гл. б
Для неявнополюсной машины (ха = Хд) электромагнитный мо-
мент на основании уравнения (40) и четвертого уравнения (63)
равен:
Л1ф=-¥2- <205а>
Момент Мф можно представить и в другой форме записи, если учесть,
что потокосцепления в машине без демпферной обмотки определя-
ются соотношениями:
Ф<г = Д<< +До!
Ф/ = рД<г + Д0-
Находя из этих выражений э. д. с. £0 и подставляя ее в (205а),
получим новую форму записи момента:
2И — _ (2056)
Согласно уравнениям (203а), (2036), переменные Eq и 4d, входя-
щие в выражения момента (205а), (2056), при заданном напряжении
сети е являются функцией лишь одного угла 6. Поэтому момент
М , определяемый уравнениями (205а), (2056), можно рассматривать
как функцию двух независимых переменных — либо £0, 6, либо
фу, 0. В соответствии с этим малое приращение электромагнитного
момента ДМ определяется двояким образом нижеследующими вы-
ражениями: *
дм = • Д0 + Д£о; (206а)
Ф \ 00 /Ео = const 1 \OEol 0 v
ДМ. = №} • Л0 + (W Дфу. (2066)
ф \ 00 Ду = const 1 \О?у/ ’
Три уравнения (204), (206а), (2066) содержат четыре переменных
ДМф, ДДо, Дфу, Д6. Поэтому для определения Д0 следует добавить
еще одно уравнение, связывающее указанные переменные, а именно
уравнение напряжения цепи возбуждения [см. (63)]:
е/Р/ = \xpEd -J- (р -J- Ру) Д»—Pty? + P/До- (207а)
Давая малые приращения переменным в уравнении (207а) и
исключая величины установившегося режима, получим:
ДеуРу=рД<ру-)-РуДД0. (2076)
Рассмотрим прежде всего случай, когда возбуждение синхрон-
ной машины не регулируется (&ef = 0), и для которого полученное
уравнение (2076) принимает вид:
0 =рДфур^ ДДд. (207в)
Четыре уравнения (204), (206а), (2066), (207в) позволяют оп-
ределить любую из рассматриваемых переменных, в частности Д9,
§ 45]
Характер нарушений статической устойчивости
207
при условии, что изменение момента механических сил Д7Ит задано;
при этом в начале процесса (т = 0) все малые приращения равны
нулю. Отметим, что если = const, то можно решать задачу,
полагая в уравнении (204) ДЛ4т = 0, т. е. рассматривая исходный
режим как уже возмущенный приложением момента ДЛ4т. Однако
в этом случае начальные значения малых приращений не равны нулю.
Итак, характер малых изменений угла А6 во времени при сде-
ланных допущениях определяется системой уравнений, которая в при-
нятых здесь обозначениях повторяет уравнения С. А. Лебедева
[Л. 16]:
Я^Дб^ ДЛ1, =0;
№\ ХЧ — ДЛ4 + (Др^ДАо = 0;
\ да /Ео = const 4 1 \д£0/ 0
• Д0 —ДЛ4 +(Жд<р7 = 0;
\ = const Ф 1 \ <^7 / Т/
рД^ + Р/Д£-в = 0.
Составляя определитель этой системы и приравнивая его нулю,
получим характеристическое уравнение системы (208) в виде:
Р I d’5f / • \дЕ0 ) r Р да = const
I р/ I. (дМ^ _ I „
"* Hj \ dd = const \dE0/‘
(209)
Производные от момента 7Иф, входящие в уравнение (209),
можно вычислить с помощью выражений (205а) и (2056), и они равны:
<И1ф Еда . д Ego
Ob. ах.! ’ дЕо хл
(210)
Что касается остальных двух производных, то они представляют не
что иное, как коэффициенты синхронизирующего момента. Действи-
тельно, предположим, что изменение угла А0 происходит таким
образом, что при этом в цепи возбуждения синхронной машины не
индуктируется никаких токов, т. е. Д£о = 0. В этом случае согласно
уравнению (206а) изменение электромагнитного момента ДЛ4,
представляет собой величину, пропорциональную отклонению угла
Д6:
ДМ.=(^ • Д0.
4 \ dO /Ео — const
Условие Д£о = 0 может быть выполнено в случае бесконечно
медленного изменения угла Д9. Ранее (см. стр. 181) такое движение
уже рассматривалось как частный случай малых гармонических ко-
лебаний угла при частоте h —» 0, и там было найдено, что изменение
момента для таких условий равно:
дмф=/И50 .ДО.
208
Устойчивость работы синхронной машины
[Гл. 6
Таким образом,
<211а>
т. е. производная от момента по углу в условиях постоянства
э. д. с. £'о (тока в обмотке возбуждения) определяет основную состав-
ляющую коэффициента синхронизирующего момента.
Если изменение угла Д9 происходит в такой гипотетической
машине, в которой rf равно нулю, то изменение момента в соответст-
вии с выражением (2066) равно:
bMf = №] -Л9,
J \ Ou = const
так как при rf = 0 потокосцепление обмотки возбуждения фу ос-
тается постоянным и, следовательно, Дф/ = 0.
Условие Дф/ = 0 может быть выполнено в машине с rf = 0
при любом характере изменения угла ДО, в частности, при синусо-
идальном с частотой h.
Но если Г/ = 0, т. е. Т'а = оо, то hMa = 0 и изменение момента
ДЛ/ = (Afi0 -ф. ДО, причем величина Msa должна вычисляться
при Т'а = <х>- Согласно выражению (180а) в этом случае:
=e2sin4(j^-^) •
Обозначая Л15Д(Г^ = ОО) -ф- Afi0 = M's, получим:
<2,,б>
т. е. производная от момента по углу в условиях постоянства по-
токосцепления ф/ определяет коэффициент синхронизирующего мо-
мента ПрИ УСЛОВИИ T'd = СО.
Поскольку <p/ = E^( то постоянство потокосцепления ф/ обозна-
чает неизменность продольной переходной э. д. с. Е'Т Поэтому ве-
личина M‘s представляет также производную по углу от электромаг-
нитного момента, определенного при E'd = const.
Нетрудно также проверить правильность выражений (211а),
(2116) непосредственным взятием производных от М^, используя
уравнения (205а), (2056).
Подставляя выражения (210), (211а) и (2116) в характеристи-
ческое уравнение (209), приведем его к виду:
/И' р S
/,3 + /’г?/+/’77:+77:^50 = 0, (212)
где рф = р//«.
При определении корней уравнения (212) учтем, что в синхрон-
ных машинах величины Hj и 7 d = Л имеют один порядок (в мощных
S 45]
Характер нарушений статической устойчивости
209
машинах И, — 4 ч- беек, т. е. около 1250—1900рад, T'd = 1—Зсск,
т. е. около 300—950 рад).
В предельном случае, когда р) = 0, один корень уравнения
(212) равен нулю, два других — мнимые.
При р) ф 0 корни получают малые приращения по сравнению
со случаем р) = 0 и в общем виде принимают вид:
Р\ = »; Ргр = ? ±Jh.
Поскольку порядок коэффициентов в (212) при р и рг одинаков
и равен порядку р), а при р'л — равен 1,0, то с большой точностью
вещественный корень р} определяется из уравнения:
All , р)
р н] + тг, =°’
т. е.
А = я = _р;ЛЬ. (213а)
Согласно теореме Виэта, дающей связь между корнями уравнения
и его коэффициентами, имеем:
Pi+ А + А = 7-+ = — р); (2136)
ААЛ = «(₽2 + А4) = — 77-Л'?50. (21 Зв)
Из выражения (2136) находим р, а из (213в) h в виде:
Таким образом, изменение угла Д9, определяемое из системы
уравнений (208), будет иметь вид:
Д9 = 4- (Дг cos h-. -4 Д3 sin hz). (214)
Постоянные Аь Д4, А3 в уравнении (214) находятся из началь-
ных условий.
Наличие возмущения в виде момента ДЛ4т обуславливает при
т = 0 начальное отклонение Дб0 и начальное ускорение (р-Д(()0, оп-
ределяемое из уравнения моментов:
дмф+^#де=о,
откуда
14 II. Важной
210
Устойчивость работы синхронной машины
[Гл. 6
По этим начальным условиям нетрудно найти искомые посто-
янные. Опуская выкладки, приведем окончательный результат:
(215)
Уравнение (214), в котором постоянные определены выражениями
(215), позволяет проанализировать характер изменения угла М,
вызванного постоянным по величине возмущением момента меха-
нических сил.
Угол Аб содержит две составляющие: 1) монотонно меняющуюся,
2) гармоническую частоты h. При этом частота h не превосходит
значений h = 0,02 ~ 0,04 (1—2 гц). Обе эти составляющие, в зави-
симости от знака показателей экспонент аир, будут либо со време-
нем затухать до нуля (а<Д, Р<^0), либо неограниченно увеличи-
ваться (сС>0, Р^>0). Правда, в последнем случае выражение (214)
справедливо лишь до тех пор, пока Аб остается достаточно малым.
Однако характер нарастания Аб остается, по крайней мере в отно-
шении монотонной составляющей, и в последующие моменты вре-
мени, когда Аб перестает быть малым.
До тех пор, пока а<Д, Р<4), синхронная машина работает
при незначительных возмущениях устойчиво, сколь угодно дли-
тельно сохраняя заданный режим работы.
Если aj>0, либо РД-0 — заданный режим оказывается стати-
чески неустойчивым. Следовательно, граница статической устой-
чивости машины определяется из условий:
я = 0, р=о.
Отметим, что неустойчивость,наступающая при а==«0, сопровож-
дается только монотонным изменением угла б; машина теряет
синхронизм без колебаний. В самом деле, а»я0, если ^0; но
при этом в силу (215) Л^.Д^Ои в отклонении угла Аб гармо-
ническая составляющая практически отсутствует. Неустойчивость
такого рода иногда называют «сползанием».
На рис. 79 представлен характер подобного нарушения стати-
ческой устойчивости. Колебания угла б появляются при таких его
значениях, когда отклонение б—бп перестает быть малым и закон
изменения угла описывается нелинейной системой уравнений ма-
шины.
Неустойчивость, которая могла бы наступить при |Г>0, когда
отклонение содержит гармоническую составляющую, называют са-
мораскачиванием. Характер такого нарушения статической устой-
чивости можно видеть на рис. 80.
§ 45]
Характер нарушений статической устойчивости
211
Потеря устойчивости в результате сползания, которая наступает
при «=«0,происходит весьма медленно, так как при а—-0 из урав-
нения (214) находим, что
рМ ъ — 0.
Поэтому граница устойчивости этого рода физически ясна: она
отвечает такому значению угла 90, при котором статическое при-
в
Рис. 80. Характер изменения угла ®
во времени при статической неустой-
чивости типа самораскачивания ро-
тора машины.
Рис. 79. Характер изменения угла О
во времени при статической неустой-
чивости типа «сползания» ротора ма-
1 шины.
ращение момента ДЛ4ф, вызванное
равно нулю
Рис. 81. Угловая характеристи-
ка неявнополюсной синхронной
машины в установившемся ре-
жиме и зависимость основного
коэффициента синхронизирую-
щего момента от угла 60(г—0).
изменением угла Д0,
п, следовательно, статического равновесия моментов
и Л46 при новом значении угла 0О + Д-9
не наступает. Иными словами, спол-
зание появляется в том случае, ко-
гда производная момента Л4, по углу
(по статической угловой характери-
стике) обращается в нуль. Эта про-
изводная и равна основной состав-
ляющей коэффициента синхронизи-
рующего момента ЛП„.
В рассматриваемом случае неяв-
нополюсной машины при равенстве
нулю активного сопротивления ста-
тора, статическая угловая характери-
стика представляет синусоидальную,
a Also — косинусоидальную зависи-
мости от угла нагрузки 0О (рис. 81).
Предельный угол по сползанию 0П =
= 90° (точка А на рис. 81).
Самораскачивания в рассматри-
ваемом случае, т. е. при отсут-
ствии регулирования возбуждения (Де^ = 0) и равенстве нулю ак-
тивного сопротивления цепи статора (г = 0) возникнуть не может.
14»
[Гл. 6
В самом деле, при любых углах 90 имеем 44^—=
=/И5д(Г^оо) >0, а в соответствии с выражением (213г) Р<фО;
и лишь при =0 будет 4Д— 44i0 = O и р = 0.
Если возможность «сползания» машины определяется знаком ко-
эффициента синхронизирующего момента 44s0, то явление саморас-
качивания зависит от знака коэффициента демпферного момента
Md* Действительно, самораскачивание, как было выше показано,
должно иметь место при Рф>0. Преобразуем выражение (213 г),
определяющее р.
Коэффициент демпферного момента Md, согласно выражению
(1806), при практически встречающихся параметрах у машин круп-
ной мощности, когда №Т'а ^>,1,0, равен:
M6/ = e9sin'26o (1
\ла
xd!^rd’
или
44d 44sn( та=<»; • ^27^ •
Подставляя сюда выражение для частоты качаний h из (213д),
получим:
(216)
Сравнение выражений (213г) и (216) дает:
т. е. знак коэффициента Р определяется только знаком коэффициента
демпферного момента 44d.
Наличие отрицательного Md («отрицательное демпфирование»)
приводит к самораскачиванию машины, которое часто остается ог-
раниченным по амплитуде.
Наконец следует обратить внимание на то, что частота свобод-
ных колебаний ротора машины h (213д) определяется коэффициентом
синхронизирующего момента Л4ф т. е. находимого с учетом токов,
наводимых в цепи возбуждения при колебаниях.
Все приведенные выше рассуждения относились к неявнополюс-
ной машине и в предположении, что активное сопротивление цепи
статора равно нулю.
Нетрудно убедиться в том, что полученные результаты распро-
страняются и на явнополюсную машину без демпферной обмотки.
Для этой машины электромагнитный момент равен:
44,= —е
ф Xq \Xq xd) 9 d
Определение Md дано в § 40.
§ 45}
Характер нарушений статической устойчивости
213
и может быть представлен функцией двух переменных — либо
б, либо Ео, 0, аналогично выражениям (205а), (2056) для не-
явнополюсной машины. Имея в виду, что
= —Fo или Ed = ELxJtft
получим;
(24°)
<2|7б>
У ->Aq ч \Xq *d i *
Таким образом, для явнополюсной машины остается справедливой
система уравнений (208) и ее характеристическое уравнение (209).
Вычисление производных и по выражениям (217а)
и (2176) дает тот же результат, что и для неявнополюсной машины;
поэтому характеристическое уравнение (212) остается без изменения
и для явнополюсной машины. Естественно, что коэффициенты син-
хронизирующего момента Лф0 и A4j должны вычисляться для яв-
нополюсной машины.
До сих пор статическая устойчивость машины рассматривалась
на основе упрощенных уравнений, а именно при пренебрежении ак-
тивным сопротивлением цепей статора и переходным процессом в них.
Если учесть указанные факторы, то в изменении угла ДО, кроме рас-
смотренных ранее монотонной составляющей и гармонических коле-
баний с частотой 1г, появляется еще одно гармоническое колебание
с частотой, практически равной частоте сети [Л. 4].
Физически это объясняется влиянием переходных (апериодиче-
ских и двойней частоты) токов в обмотках статора, ранее нами не
учитывавшихся. Эти токи создают знакопеременный электромаг-
нитный момент основной частоты. С математической точки зрения,
учет сопротивления г и переходного процесса в цепях статора
приводит к тому, что уравнения напряжения продольного и попе-
речного контуров статора становятся дифференциальными вместо
алгебраических [ср. (203а), (2036) и уравнения при г 0] и степень
характеристического уравнения системы увеличивается на две
единицы — получается уравнение пятой степени. При этом, как
показывает подробный анализ [Л. 4], будет добавляться пара сопря-
женных комплексных корней, что и обуславливает появление в угле
Д9 дополнительного колебания основной частоты. Это колебание
при конечном г оказывается всегда затухающим, поскольку аперио-
дические переходные токи в обмотках статора будут затухать до
нуля. Кроме того, можно представить, что ввиду большой механи-
ческой инерции ротора машины, колебания основной частоты дол-
жны быть совершенно ничтожны по амплитуде. Это обстоятельство
подтверждает и формальный анализ.
214 У стойчиаос i ь работы синхронной машины [Гл. 6
Поэтому для машины, описываемой полной системой дифферен-
циальных уравнений, остаются рассмотренные выше виды стати-
ческой неустойчивости, т. е. сползание и самораскачивание с часто-
той h. Не прибавляя нового в характере статической неустойчивости,
конечное по величине активное сопротивление цепи статора оказы-
вает влияние на границу устойчивости по сползанию и самораска-
чиванию. Изменение предельных углов 9пр, определяющих сполза-
ние машины, под влиянием конечного г невелико, самораскачивание
же машины в сильной степени зависит от величины этого сопротив-
ления.
§ 46. Приближенный метод исследования
статической устойчивости
Приближенный метод исследования статической устойчивости
синхронной машины основан на рассмотрении режима малых коле-
баний ротора машины и сводится к анализу синхронизирующего
и демпферного моментов. Сущность этого метода исследования ста-
тической устойчивости заключается в следующем.
Пусть под влиянием некоторого возмущения угол между син-
хронно вращающейся осью и поперечной осью ротора во времени
изменяется гармонически с частотой й:
0 = 0ОЛ9 = 90-р cos Лт,
т. е. ротор совершает гармонические колебания малой амплитуды
Д9т, налагающиеся на синхронное вращение. Определим теперь
характер воздействия электромагнитного момента машины на ро-
тор, при наличии исходных малых синусоидальных колебаний его.
Если это воздействие будет таким, что Д9 будет стремиться умень-
шиться со временем, то движение устойчиво, в противном случае —
неустойчиво.
Заметим, что для возмущенного режима электромагнитный
момент равен:
(218)
где ДМ, — изменение электромагнитного момента, вызванное воз-
мущением, — постоянный момент механических сил на валу
машины.
Если работа, совершаемая моментом ДМ за период колебания
угла 6 отрицательна, то это значит, что работа момента больше
работы момента М, и, следовательно, колебания угла 0 должны
иметь нарастающую амплитуду — движение ротора машины ока-
зывается неустойчивым. Напротив, если работа момента ДМ за
период колебания угла 0 положительна, должны иметь место
затухающие колебания, и движение ротора будет устойчивым.
При синусоидальном характере колебаний ротора изменение
электромагнитного момента ДЛ1 было получено [см. (178 г)] в виде:
ДЛ1ф = Л1.Л9 4-/И^Д9,
S 46] Приближенный метод исследования статической устойчивости 215
где Ms, М„ — коэффициенты синхронизирующего и демпферного
моментов. Там же (§ 40) было показано, что в зависимости от знака
Л1, движение точки, определяющей значение угла б, по характе-
ристике М, = /(6) будет происходить либо по часовой, либо про-
тив часовой стрелки (см. рис. 72, 73). Когда Ald<ZO, движение
точки на характеристике совершается против часовой
стрелки и работа, произведенная моментом Д7Иф за время полного
колебания угла 9, оказывается отрицательной. В этом нетрудно
убедиться с помощью рис. 72, если учесть, что работа, совершаемая
моментом ДЛ^, равна ДЛ4фс?Д9и на рис. 72 она определяется пло-
щадью фигуры 1—2—3—4. Аналогичным образом можно видеть,
что при работа момента ДЛ1, за период колебания угла 9
положительна. Таким образом, условием отсутствия самораскачи-
вания является неравенство:
Afd>0. (219)
Нарушение устойчивости может происходить не только в коле-
бательном процессе, но и при монотонном, весьма медленном из-
менении угла 9. Этот случай можно рассматривать как частный
случай гармонических колебаний, если частоту й устремить к нулю.
Тогда ATM =Afs0A9, где Als(, — коэффициент синхронизирующего
момента при h—-0. КогдауИ^ОО, момент ДЛ1ф при возрастании угла
положителен и, следовательно, М, — В этом случае изме-
нение ДМ, препятствует увеличению угла 9, так как ДМе/>0 соот-
ветствует'’торможению ротора. Если М50<^0, то при увеличении
угла 9 будет Л1, — М,^>0 и ротор будет продолжать разгоняться,
ибо при этом ускоренье, действующее на ротор, остается положи-
тельным. Таким образом, условием отсутствия «сползания» ротора
машины является неравенство:
/И„(| > 0. (220)
Итак, критерием статической устойчивости по рассматривае-
мому методу следует считать выполнение неравенств:
AG>0; Ms0>0. (221)
Выше отмечалось, что для неявнополюсной машины при г =0
предельный угол по сползанию, определяемый из условия Ms# = 0,
равен 9пр = 90° (рис. 81). При работе машины двигателем предель-
ный угол в этих условиях равен 9 = —90°. Условие A4s0 = 0
для явнополюсной машины наступает при 9пр<ТЮ°. Так, явно-
полюсная машина, для которой на рис. 69 построена зависимость
= /(%)> имеет предельный угол в двигательном и генератор-
ном режиме, равный 9пр = -Т'65;;.
Конечное по величине активное сопротивление цепи статора
г обуславливает дополнительный коэффициент синхронизирующего
момента ДМ40, определяемый из выражения для &MS (стр. 185),
216
Устойчивость работы синхронной машины
[Гл. 6
в котором нужно частоту 1г устремить к нулю. Этот дополнительный
коэффициент равен:
A<o = resin0or^^-±Vi-2ecos .
L лй лЛ xq 1 xq л d / J
Таким образом, в двигательном режиме (90 0) AMSO0и резуль-
тирующий основной коэффициент синхронизирующего момента
Рис. 82. Зависимость критиче-
ского активного сопротивления
цепи статора от угла 0 для
машины со следующими пара-
метрами: Xd = 1,0; xd = 0,3;
Xq = 0,6; Td = 1 сек. Сплошная
кривая построена на основе точ-
ного выражения коэффициента
демпферного момента; пункти-
рная кривая — по приближен-
ному выражению, справедли-
вому только для режима гене-
ратора (0о>0).
при г Ф 0 обращается в нуль при мень-
ших углах 9 чем в случае г = 0,
когда AAls0 = 0. В генераторном ре-
жиме (90^>0),напротив, ДУИ50^>0и пре-
дельные углы 6 становятся больше,
нежели при г = 0. При обычно
встречающихся значениях активного
сопротивления г изменение предель-
ного угла 6пр, определяющего спол-
зание ротора машины, невелико.
Отметим, что величина Ms0 не за-
висит от того, имеет машина демп-
ферную обмотку, или нет. Поэтому
демпферная обмотка не оказывает
влияния на условия сползания ро-
тора машины.
Анализ коэффициента демпферного
момента Ма, произведенный в § 40,
показывает, что если г = 0, то при
любых углах Активное со-
противление г вызывает появление
отрицательной составляющей в Ма
для довольно широкого диапазона
углов 0О (см. рис. 71). Из сопостав-
ления данных рис. 70 и 71 видно,
что самораскачивание (Alrf<^0) может
наступить в зоне малых углов б0, т. е. при небольшой нагрузке
машины или при работе машины компенсатором.
Самораскачивание возникает при вполне определенном значе-
нии активного сопротивления гкр, которое носит название кри-
тического. Это сопротивление гкр определяется из условия:
Md = Md^} + ±Md=^,
(222)
где Лф/(Г_(Н — коэффициент демпферного момента, определяемый
при отсутствии сопротивления г и вычисляемый по выражению
(179г); &Md— составляющая коэффициента демпферного момента,
обусловленная сопротивлением г. Она вычисляется по выражению,
данному на стр. 185.
§ 47] Статическая устойчивость при регулировании возбуждения
217
Па рис. 82 представлена зависимость гкр=/(60), иощроенная
по уравнению (222) для явнополюсной машины без демпферной
обмотки со следующими параметрами:
Xd=l,0; xq = 0,6; x'd = 0,3; 7^=1 сек.
При вычислениях было положено е = £00 = 1,0 и h = 0,03.
Более грубый анализ дает простое выражение для критического
сопротивления в виде [Л. 17]:
rKp = Xqtg^. (223)
Однако сопротивление гкр, вычисляемое по формуле (223), может
существенно отличаться от более точных значений, даваемых усло-
вием (222). В качестве иллюстрации на рис. 82 пунктирной линией
нанесена зависимость гкр=/(90), построенная по уравнению (223)
для той же машины, для которой производился расчет г из усло-
вия (222).
Если демпферная обмотка не оказывает никакого влияния на
условия сползания ротора машины, то она имеет решающее зна-
чение для явления самораскачивания. Устройство поперечной
(или полной) демпферной обмотки практически исключает возмож-
ность возникновения самораскачивания, так как такая обмотка
создает мощное положительное демпфирование (см. рис. 70).
§ 47. Статическая устойчивость синхронной машины
при регулировании ее возбуждения
Практически любая современная синхронная машина крупной
мощности имеет автоматически регулируемое возбуждение.
Непрерывное автоматическое регулирование возбуждения позво-
ляет не только поддерживать неизменными определенные качества
режима синхронной машины (напряжение на зажимах синхронного
генератора, требуемый коэффициент мощности синхронного двига-
теля и т. п.). Оно дает также возможность расширить зону устой-
чивой работы машины при незначительных и конечных по величине
нарушениях режима, т. е. увеличить статическую и динамическую
устойчивость машины.
Принципиальная схема регулирования возбуждения синхрон-
ного генератора представлена на рис. 83. Синхронный генератор
СГ работает через линию передачи ЛЭП на приемную систему ПС.
На вход измерительного элемента регулятора ИЭ подается напря-
жение, пропорциональное одной из величин, характеризующих
режим генератора — току I, напряжению статора elf углу на-
грузки 9. На измерительный элемент регулятора может воздей-
ствовать также комбинация указанных величин или их производ-
ных. В измерительном элементе регулятора производится срав-
нение измеряемой величины с некоторым эталонным значением ее
и поэтому на выходе этого элемента появляется напряжение, как
218
Устойчиаость заботы син.хпонноц. машины
[Гл. 6
только измеряемая регулятором величина начинает изменяться.
Маломощный импульс, появляющийся на выходе измерительного
элемента, усиливается и с помощью силового элемента произво-
дится соответствующее воздействие на возбудитель синхронного
генератора.
Независимо от конкретного вида регуляторов их можно разде-
лить на два класса: 1) работающие без зоны нечувствительности;
2) имеющие зону нечувствительности. Те из них, которые обладают
зоной нечувствительности, начинают работать лишь после того,
Рис. 83. Принципиальная схема регулирования
возбуждения синхронного генератора.
СГ — синхронный генератор; ЛЭП — линия
электропередачи; ПС — приемная система; ИЭ—
измерительный элемент регулятора возбуждения;
СЭ—силовой элемент регулятора; В — возбуди-
тель синхронного генератора.
как отклонение в измеряемой регулятором величине достигает
определенных значений. Регуляторы же без зоны нечувствитель-
ности начинают воздействовать на возбудитель синхронного гене-
ратора, сколь бы малым не было отклонение измеряемого пара-
метра.
Применение регуляторов без зоны нечувствительности позволяет
расширить область статической устойчивости синхронной машины,
т. е. увеличить значения предельных углов 6 , соответствующих
границе устойчивости машины. Дополнительные значения углов 9,
при которых машина оказывается статически устойчивой за счет
автоматического регулирования возбуждения, образуют так назы-
ваемую область искусственной устойчивости.
Допустим, что автоматическое регулирование возбуждения
синхронного генератора позволяет при возмущениях режима обес-
печить постоянство э. д. с. за переходным сопротивлением (Е'а =
= const). В § 42 отмечалось, что угловая характеристика машины
при Е'а = const существенно отличается от аналогичной зависи-
мости при постоянстве тока возбуждения (Ео = const).
§47] Статическая устойчивость при регулировании возбуждения
219
На рис. 84 нанесены угловые характеристики неявнополюсной
машины (г = 0) при различных постоянных значениях э. д. с.
£0 (сплошные линии) и постоянной Е'а (пунктирная линия).
Из рисунка видно, что максимальный электромагнитный момент
при E'd~ const (точка а) достигается при значительно больших углах 0О,
нежели в условиях постоянства э. д. с. £0 (точки Ь). Если при пред-
полагаемом регулировании (E'd = const) не наступит самораскачи-
Рис. 84. Угловые характеристики неявнополюсной син-
хронной машины при £0 = const и Е 'd = const.
Параметры машины: Xj = xq = 1,0; x'd = 0,4; напряже-
ние приемной системы е = 1,0.
вания машины, то машина сможет устойчиво работать до углов 0О,
соответствующих максимуму электромагнитного момента при
Е'а = const. На рис. 84 предельный угол при Ей = const равен
9пр = 90°, при Е'а — const он равен 0пр«^ 115°. Зона углов 90—115°
в этом случае и составляет область искусственной устойчивости.
Наличие у регуляторов хотя бы небольшой зоны нечувствитель-
ности приводит в области искусственной устойчивости к непрерыв-
ным колебаниям ротора, а следовательно, тока и мощности генера-
тора, что делает невозможной работу машины в этой зоне углов 9.
Происходит это вследствие того, что при возникновении возму-
щения генератора, работающего в режиме, характеризуемом точкой
с на рис. 84, при отклонениях угла Д9 в пределах зоны нечувстви-
тельности регулятор не работает. При отсутствии регулирования
возбуждения точка с соответствует неустойчивости машины. Угол
Д9 начнет возрастать, и лишь после того, как будет пройдена зона
нечувствительности регулятора, возбуждение генератора усилится.
220
Устойчивость работы синхронной машины
[Гл. 6
Это приведет к увеличению электромагнитного момента, торможе-
нию ротора, т. е. уменьшению ДО. Однако уменьшиться колеба-
ния А9 до нуля не смогут, так как если бы они не стали выходить
за пределы зоны нечувствительности регулятора, возбуждение
перестало бы регулироваться и началось бы снова увеличение
угла А9.
Дадим аналитическое рассмотрение статической устойчивости
машины без демпферной обмотки, работающей по схеме рис. 78.
Будем считать, что имеет место безынерционное пропорцио-
нальное регулирование возбуждения синхронной машины, т. е.
что изменение напряжения регулируемого возбудителя не имеет
никакого запаздывания по отношению к величине, подаваемой на
вход регулятора, регулятор не имеет зоны нечувствительности и
измеряет только отклонение в каком-либо параметре, но не их
производные. Рассмотрим конкретный случай, когда регулирование
производится по углу 9.
При сделанных допущениях изменение напряжения возбуди-
теля будет пропорционально изменению угла А9, т. е.
Де/==М9. (224)
Пренебрежем активным сопротивлением цепи статора машины
и переходными процессами в ней, как это делалось при исследова-
нии устойчивости нерегулируемой машины. Тогда в рассматривае-
мом случае система уравнений машины будет аналогична системе
(208) с тем отличием, что уравнение цепи возбуждения (четвертое
уравнение) должно быть взято в форме (2076), а не (207в), как ранее.
Принимая во внимание соотношение (224), получим уравнения
машины в виде:
Я;УД9+ДЛ4ф = 0;
( Д9 — ДЛ4, -Ь f А£о = 0;
\ df) ,'£-0 = const Ф \дЕ(, ; 0
('—ф') • Д9 — ДЛ4. + (Дф7 = 0; 1
\ оО Д = const Ф 1 \ dbfi ’ I
— р/£вД9-|-/?Дф/-Ср/Д£'о = О. )
Производные от электромагнитного момента сохраняют, конечно,
те же значения, которые были получены в § 45. Поэтому характе-
ристическое уравнение системы (225) имеет вид:
апрЛ + + а*р —= 0, (226)
где
г?о=== 11 Р/== Р//°, := 77) ’ '
Сравнение уравнений (212) и (226) показывает, что они отли-
чаются лишь свободным членом а3. Условия устойчивости в соот-
§ 47] Статическая устойчивость при регулировании возбуждения
221
ветствии с уравнением (226) записываются в виде:
ai>>0; ata.2 — а3^>0.
Первое условие а1 = р)^>0 выполняется всегда. Второе условие дает
соотношение:
M's-MS0 + k^>0. (227а)
Л(1
Наконец третье условие дает неравенство:
(2276)
Неравенство (227а) ограничивает величину коэффициента усиле-
ния ki). Поскольку Е,/(1 = ф?0 — — esin90, неравенство (227а) дает:
и максимальный возможный коэффициент усиления
Л4' — Л4 „ х .— х',
^вмакс = е sin xd = е -л— sin 0O. (228a)
Подстановка этого максимального значения £0максв (2276) приводит
к неравенству:
<>о.
Таким образом, предельный угол 0пр в зоне искусственной
устойчивости, достигаемый машиной при регулировании с макси-
мально возможным коэффициентом Л0яакс, определяется из условия
Als = 0, т. е. в точке с наибольшим электромагнитным моментом
при E'd = const (точка а на рис. 84).
Неравенство (2276) определяет минимальные значения й0,
которые при заданном угле 0О еще обеспечивают устойчивость:
Ъ \
0 е sin 0О d'
Например, для неявнополюсной машины Ms cos90 и ми-
нимальный коэффициент &0МИН равен:
^0ЧИН = — Ew ctg 0О. (2286)
На рис. 85 в функции угла нагрузки 0О нанесены /г0макс и &0МИН
в соответствии с выражениями (228а) и (2286). Точка пересечения
этих кривых определяет предельное значение угла 0 характери-
зуемое M's — 0. Заштрихованная область соответствует устойчивой
работе. При расчете £0МИН по (2286) значения Ew выбирались та-
кими, чтобы при любом угле 0в э. д. с. за переходным сопротив-
лением E'd — 1,0 = const.
222
Устойчивость работы синхронной машины
[Гл. 6
да Ь0 да 1Z0 150 градусы
Рис. 85. Минимальные и максимальные
коэффициенты регулирования возбуж-
дения по углу, обеспечивающие устой-
чивую работу синхронного генератора.
Интересно отметить, что пропорциональное регулирование и
по любому другому параметру — току статора, напряжению на
зажимах генератора — позволяет в зоне искусственной устойчи-
вости достичь предельного угла 9пр, соответствующего максимальному
значению электромагнитного
момента при Е'а = const (т. е.
угла при Л4’ = 0). Дело в
том, что при любом пропор-
циональном регулировании
общая форма уравнения на-
пряжения цепи возбуждения
генератора сохраняется, и,
следовательно, не только ха-
рактеристическое уравнение
(226) сохраняет свою степень,
но и коэффициент а.г оказыва-
ется одинаковым и равным
Из условия устойчивости
а2а.2 — а2а^>0 вытекает, что
и й2Д>0, так как должны
быть вместе с тем выполнены неравенства 04 Д>0 и а3 0. Поэтому
как бы ни менялись коэффициенты регулирования, предельным ре-
жимом будет такой, когда ЛД = 0.
Введение в закон регулирования производных от тока статора,
напряжения на зажимах или угла нагрузки может быть исследовано
таким же методом, как и при пропорциональном регулировании
возбуждения. Например, если регулирование ведется по углу
нагрузки и его производной, то
Де7 = (kn + k!,p) Д0, (229)
где k'rs — коэффициент, определяющий составляющую регулируе-
мого напряжения, вызванную наличием производной от угла 9
по времени.
Составляя систему уравнений, аналогичную (225), получим
для рассматриваемого случая характеристическое уравнение вида
(226) с коэффициентами, равными:
, 1 (
«о = 1; «1 = р/, «2 = 7Д ^5 \;
J J \ АД ]
111 1 Л(1 J
Условия устойчивости, аналогичные вышерассмотренным, полу-
§ 47] Статическая устойчивость при регулировании возбуждения
223
чаются в виде:
М —<о —(230а)
xd xd
> 0. (2306)
Условие (2306) повторяет соответствующее условие (2276),
полученное при пропорциональном регулировании по углу. Оно
по-прежнему определяет минимальное значение коэффициента Е, М1,н,
равное:
ь„ —_____
1 мин — е sin flo Xd.
Подставляя в (230а) Eqa = — е sin 90, перепишем его в виде:
. , e(xd-x'd) .
Ae < ППГУ, Ь Р^в —-------sin 9„ + о fa.
Следовательно, максимально возможный коэффициент ka макс, равный
е (х — x'd) , ,
«О макс—----- s'n pfa,
xd
зависит не только от режима (угла
k'q регулирования по произ-
водной угла.
На рис. 86 нанесены зави-
симости А0макс и Аг9мнн от угла
нагрузки 90. При этом макси-
мально возможное значение
коэффициента макс опреде-
лено для нескольких вели-
ЧИН р}&в.
Из рисунка видно, что при
соответствующем знаке коэф-
фициента & fa )>0) регули-
рование возбуждения по про-
изводной угла может несколь-
ко увеличить предельный угол
9[1р по сравнению со случаем
пропорционального регули-
рования (А0 = О). Однако за-
'„), но и величины коэффициента
Рис. 86. Минимальные и максимальные
коэффициенты регулирования возбужде-
ния по углу, обеспечивающие устойчи-
вую работу синхронного генератора при
регулировании его возбуждения по углу
и производной угла.
меткое возрастание угла 9пр
связано с необходимостью
задания весьма больших коэф-
фициентов усиления k'tl, так
как мерой влияния регули-
рования возбуждения по производной угла служит величина p'fa,
ар) — мало.
224
Устойчивость работы синхронной машины
[Гл. 6
Оценим теперь то влияние, которое оказывает на статиче-
скую устойчивость электромагнитная инерция регулируемого воз-
будителя.
В силу того, что обмотка возбуждения возбудителя обладает
определенной постоянной времени (Тв), импульс, получаемый
ею от регулятора Дев, реализуется на зажимах якоря в виде изме-
нения напряжения Де, с некоторым запаздыванием во времени.
Уравнение напряжения цепи возбуждения возбудителя имеет
вид:
Дев = хв (р 4- рв) Д/в, (231)
где хв, гв — индуктивное и активное сопротивления этой цепи;
Дев, Дгв — изменение напряжения, приложенного к обмотке воз-
буждения возбудителя, и тока в этой цепи.
Исследуем рассмотренный выше случай регулирования воз-
буждения по углу 9, когда
Дев = &ввД9. (232)
Изменение напряжения на якоре возбудителя \ef пропорционально
току Дгв, однако коэффициент пропорциональности зависит от того,
в какой точке магнитной характеристики возбудителя определяется
напряжение Де,:
Aez = c-A/B. (233)
Подставляя выражения (232) и (233) в уравнение (231), получим его
в виде:
-РЛД9 + (р + рв)Де/ = 0, (234)
где k9 = ~kfjB есть прежний коэффициент регулирования по углу,
Г в
, Дс,
определяемый в статическом режиме как я0 = —
Таким образом, если учитывать электромагнитную инерцию
возбудителя, то к уже рассмотренным уравнениям машины нужно
добавить уравнение (234), с которым они образуют систему:
//^Д9ф-Д/Иф = 0;
-^4 । • Д9 — ДЛ1, -Д , -у,. ДЕ0 = 0;
1 дГ> 'E0 = c-.nst J
Д9 — ДЛ1. +|^')Д-4 = 0;
\ 6,9 -i^const J ,f
— rf^ef = 0;
— РЛ-^ + (P “Г Pa) = 0.
(235)
§47] Статическая устойчивость при регулировании возбуждения 225
Характеристическое уравнение системы (235) получается четвертой
степени и имеет вид:
+ с^р3 -4- а2р'г -ф- а3р -j- д4 = О,
где
йо—1; ai — рв ~г ?/; аг — р/Рв-Ь/у?;
_ .Шо?;+<Рв . _ _ Eq<)\
аз~ Hj ’ Qi— Hj xj-
Критерии Гурвица для уравнения 4-й степени имеют вид:
1) «!^>0; 2) аха.2 — а0а3>0; 3) а3(ага2— аиаз)— alc^^O;
4) о;>0.
Нетрудно видеть, что первые два условия устойчивости выпол-
няются при любых режимах машины. Третье условие после неслож-
ных преобразований приводится к виду:
*6 < чачс Г—1, (236а)
в \ , /7;-?в(Рв + р/)- J’ V >
где£9макс— максимально возможное значение коэффициента k$
при безынерционном возбудителе (228а).
Четвертое условие получается таким же, как и при отсутствии
запаздывания в возбудителе:
(2366)
Максимально допустимые коэффициенты k,: при наличии запаз-
дывания в возбудителе (Тв #0), как это следует из (236а), в ши-
роком диапазоне углов 0О значительно больше, чем в случае безы-
нерционного возбудителя (Тв = 0).
Однако вблизи предельного по устойчивости угла 0пр коэффи-
циенты/?9 макс при Тв = 0 и при Тв -ф 0 отличаются мало. На рис. 87
представлены в функции угла 0О зависимости &0vaitc, построенные
по выражению (236а) для различных значений постоянной вре-
мени Тв, а также k. мин, вычисленный по (2366), Штриховка на
рисунке отмечает область устойчивости. Точки пересечения кривых
макс И^9мин определяют предельный угол нагрузки. Из рисунка
видно, что уменьшение предельного угла за счет электромагнитной
инерции возбудителя весьма невелико.
Статическая устойчивость при регулировании возбуждения
машины по любому из параметров (току, напряжению, углу) и их
первым производным может быть рассмотрена также методом ана-
лиза коэффициентов синхронизирующего и демпферного моментов.
Граница устойчивости по этому методу, как было показано выше,
определяется условиями:
Md = 0; ' (237а)
= 0. (2376)
15 А. II. Важной
226
Устойчивость работы синхронной машины
[Гл. 6
Пусть, для примера, возбуждение машины без демпферной
обмотки регулируется по углу, когда [см. (224)]:
Дб^^-Дб. (238)
Рис. 87. Влияние постоянной времени цепи
возбуждения возбудителя синхронного ге-
нератора на величину предельного угла.
(179а) — (179г) для определе-
ния границы устойчивости
из условий (237а), (2376)
следует иметь в виду, что
напряжение Де,, входящее
в (179в), (179г), определе-
но в специальной системе
относительных единиц (си-
стема хаа), тогда как урав-
нения машины без демп-
ферной обмотки этого па-
раграфа содержат Де,, вы-
раженное в системе единиц
Парка (см. § 10). Для того
чтобы перевести величину
Дб7 в (238) из системы еди-
ниц Парка в систему xad,
ее нужно умножить на от-
ношение базисных напря-
жений возбуждения этих
систем, равное при-
чем параметры и xafd выражены в системе xad.
Таким образом, в выражения (179в), (179г) нужно подставлять
Дб/, равное:
Дб, = ^9-^Д6, (238 а)
xafd
или в комплексной форме:
4 = ^ ДД9.
Л afd
(2386)
При указанном законе регулирования возбуждения (2386) допол-
нительные составляющие коэффициентов синхронизирующего (MSJ.)
и демпферного (Maf) моментов в машине без демпферной обмотки,
обусловленные регулированием возбуждения, получают согласно
выражениям (179в), (179г) вид:
—б sin 90х® ] +
(239а)
» л • л ^9 d
= — е sin о -
(2396)
§47] Статическая устойчивость при регулировании возбуждения 227
Полный коэффициент демпферного момента по выражению (179г),
с учетом (1806) и (2396), равен:
* _ е‘ sin- 0, (4 - JL) , sln «. I . (240)
При увеличении коэффициента регулирования k9 величина Md
будет уменьшаться. Максимально возможный коэффициент k& макс
определяется из условия Ма = 0, что соответствует границе устой-
чивости по самораскачиванию. Приравнивая выражение (240)
нулю, найдем:
Л* . X j
kf) макс:== Sln ®о>
ха
что совпадает с полученным ранее результатом (228а).
Предельный угол 6пр определится из условий (237а), (2376).
Подставляя в (239а) максимально возможное значение коэффи-
циента регулирования ks макс и устремляя в нем h к нулю, получим
полный коэффициент синхронизирующего момента по формулам
(179а) — (179в) в виде:
Ms (Л_0)=Msa + е2 sin2 е0 f = m's.
\ха ла)
Следовательно, предельный угол 9пр соответствует M’s = 0, что
и было найдено выше.
Вся предыдущая часть настоящего параграфа посвящена только
одному виду регулирования возбуждения синхронной машины при
малых возмущениях режима, а именно регулированию по углу 9
и его производной. По изложенной методике можно рассмотреть
и другие виды регулирования, например по току (7) и напряжению
(ej цепи статора и их первым производным.
Не приводя соответствующих выкладок, дадим окончательные
выражения минимальных и максимальных значений коэффициентов
регулирования, определяющих границы устойчивой работы син-
хронной машины, для указанных законов регулирования возбу-
ждения: Абу — — (ke^k'ep) Дб1 и Де,- = (kj 4- k'lP) М. Здесь
коэффициенты регулирования по отклонению электрического па-
раметра обозначены через ki, а коэффициенты регулирования по
производным — через k'e, k',.
Будем считать, что синхронная машина включена на шины беско-
нечной мощности через сопротивление хл.
Примем следующие обозначения: е — напряжение шин беско-
нечной мощности; е, — напряжение, по которому производится
регулирование; е10 — то же напряжение, но для заданного режима;
xd, х’а — синхронное и переходное сопротивления, включающие
внешнее сопротивление хл (т. е. сопротивление до шин с напряже-
нием е); xdl — синхронное сопротивление, включающее внешнее
15*
!28
Устойчивость работы синхронной машины
[Гл. 6
сопротивление в схеме до точки с напряжением е10; р,——-------->
а = 1—[х; а = —; /0— ток статора для заданного режима.
xd
При принятых обозначениях минимальный (&М1,Н) и максималь-
ный (&макс) коэффициенты регулирования по отклонению электри-
ческого параметра для неявнополюсной машины имеют следующие
выражения:
, ___ <?10 cos 0О , __ Л> xdcos 8»
мин — — (]_а) [(1 —а)Еоо cos 00+ «4 ’ мин ~~ е — Ем cos 90 ’
e10'i + й' р а (1 — а) Еы
Ь —----------------Ы-------------- .
е макс (1 — 0) [(« — pi) Ем — рае cos 0О| ’
, _ iMAd + %Е00
1 макс Ем — ре cos Go
§ 48. Практическое применение методов исследования
статической устойчивости
Выше были рассмотрены два метода исследования статической
устойчивости синхронной машины: метод малых возмущений и
метод, названный приближенным и основанный на анализе коэф-
фициентов синхронизирующего и демпферного моментов машины.
По первому методу анализ поведения синхронной машины при
малых нарушениях режима производится с общих позиций теории
устойчивости (т. е. в смысле Ляпунова). Поэтому метод малых
возмущений является строгим и общим и позволяет установить
возможность нормальной работы машины в самых сложных схемах,
а также при применении любого вида регулирования возбуждения
и скорости машины.
Вместе с тем применение этого метода исследования статиче-
ской устойчивости в указанных условиях сопряжено с известными
трудностями, так как при этом приходится иметь дело с характери-
стическими уравнениями высоких степеней и соответственно гро-
моздкими критериями устойчивости. Анализ критериев Гурвица
в общем виде становится затруднительным.
В этих случаях возможен прежде всего численный расчет для
заданных параметров, который сводится либо к непосредственно;!
проверке выполнения критериев Гурвица, либо к построению ча-
стотных характеристик и применению критерия Михайлова [Л. 108].
С точки зрения анализа влияния различных параметров схемы на
статическую устойчивость синхронной машины при необходимости
применения численных расчетов более предпочтительным является
критерий Михайлова.
Следует также отметить, что если характеристическое уравнение
имеет достаточно высокую степень и критерии Гурвица в общем
§ 49]
Методика исследования динамической устойчивости
виде становятся громоздкими, то целесообразно применять для
анализа корней уравнения метод Д-разбиения [Л. 108]. Этот метод
позволяет исследовать влияние на статическую устойчивость одного
или двух параметров схемы, линейно входящих в коэффициенты
характеристического уравнения, если остальные параметры за-
даны.
Метод исследования статической устойчивости, основанный на
расчете коэффициентов синхронизирующего и демпферного момен-
тов машины дает точно такие же результаты, как и строгий метод
малых возмущений только в случае, когда синхронная машина
включена на шины бесконечной мощности, да и то при условии, что
регулирование машины не приводит к повышению степени харак-
теристического уравнения по сравнению с той, которая имеет место
при отсутствии регулирования. В других, более общих случаях
статическая устойчивость машины определяется не только коэф-
фициентами синхронизирующего и демпферного моментов машины,
но и некоторыми дополнительными условиями. При этом заранее
нельзя указать, будут ли эти дополнительные условия вообще
оказывать влияние на область статической устойчивости, а если
будут, то в какой мере. С математической точки зрения это соответ-
ствует тому, что характеристическое уравнение может иметь веще-
ственные корни или вещественные части комплексных корней, не
связанные с коэффициентами синхронизирующего и демпферного
моментов машины. В этом смысле и следует понимать приближен-
ность указанного метода исследования статической устойчивости.
Отметим, что приближенный метод практически применяется не
только для случая включения синхронной машины на шины беско-
нечной мощности, но и при рассмотрении статической устойчивости
двух синхронных машин, работающих на общую нагрузку.
§ 49. Методика исследования динамической устойчивости
При конечных по величине возмущениях режима синхронной
машины ротор ее может испытывать колебания значительной
амплитуды, которые заканчиваются либо установлением нового
нормального режима, либо нарушением синхронизма. При извест-
ных обстоятельствах синхронизм может быть нарушен также при
монотонном увеличении угла 9.
Выше уже отмечалось, что характер протекания процесса зави-
сит не только от исходного режима машины, но и от вида возмуще-
ния.
Простейшее возмущение — это однократное внезапное изменение
какого-либо параметра, остающегося в дальнейшем неизменным.
Так, например, внезапный наброс постоянной нагрузки на син-
хронный двигатель приводит к изменению момента механических
сил на валу на постоянную величину ДЛ4т; другой пример —от-
ключение участка линии передачи между генератором и приемной
Устойчивость работы синхронной машины
{Гл. 6
системой обуславливает скачкообразное изменение индуктивности
цепи статора от одного постоянного значения до другого.
Скачкообразное изменение параметра может быть и многократ-
ным. Например, при внезапном коротком замыкании на линии пере-
дачи, через которую работает генератор, наступает первое изменение
параметров цепи статора машины, при последующем отключении
поврежденного участка линии передачи параметры цепи снова
изменяются скачком, принимая новые значения, отличные от тех,
которые были в исходном режиме и которые будут определять новый
нормальный режим, если таковой возможен.
В практике встречается возмущение в виде импульса (кратко-
временная нагрузка синхронного двигателя). В общем случае
возмущение может иметь сложный характер во времени. Так,
в упомянутом выше процессе короткого замыкания генератора может
добавиться еще одно возмущение, действующее на протяжении
всего переходного режима — это непрерывное регулирование воз-
буждения синхронной машины.
Исследование динамической устойчивости синхронной машины
состоит не только в проверке сохранения машиной синхронизма
для заданного динамического нарушения, но также в определении
предельно допустимого возмущения, соответствующего границе
динамической устойчивости. Это дает возможность оценить запас
по динамической устойчивости при данном виде возмущения.
Наиболее простым методом исследования динамической устой-
чивости является метод площадей.
Для того чтобы понять его сущность, обратимся к уравнению
моментов синхронной машины, которое позволяет установить ряд
полезных соотношений, характеризующих движение ротора.
Из этого уравнения прежде всего определим ускорение ротора:
(241)
‘Ч
Производную от скольжения s по времени можно представить
в виде:
ds dQ ds /плох
ps = -^ • -p — s (242)
r db d~. d>i 47
Интегрируя уравнение моментов по углу и используя соотношение
(242), а также полагая скольжение исходного режима s0 = О,
получим:
9
S2 = ( S2 = А С (Л1т _ Жф) ^9. (243)
1 6о
Рассмотрим некоторые свойства движения ротора с помощью
уравнений (241) и (243).
Предположим, что нам известна угловая характеристика Л1^ =
= /(9) после динамического нарушения режима работы машины.
§ 49]
Методика исследования динамической устойчивости
231
Тогда с помощью уравнения (243) можно установить, сохраняет
машина устойчивость или нет. Покажем это на примере синхрон-
ного генератора, работающего через двухцепную линию передачи
на приемную систему бесконечной мощности (рис. 88). Пусть исход-
Рис. 88. Однолинейная схема работы синхронного ге-
нератора (генераторной станции) на приемную си-
стему.
Г — генератор (генераторная станция); Tl, Т2 — по-
вышающий и понижающий трансформаторы; Л1, Л2 —
цепи линии передачи; ПС — приемная система.
ный режим генератора характеризуется углом нагрузки 0() и мо-
ментом /VI Момент механических сил на валу генератора Мт
в установившемся режиме равен электромагнитному моменту М
Предположим, что динамическим нарушением этого режима
является отключение одной цепи линии передачи и что угловая
Рис. 89. Угловая характеристика машины прн ди-
намическом нарушении режима.
Исходный режим динамически устойчив.
характеристика машины Л1,=/(0) в переходном процессе представ-
ляется кривой 2, 3, 4, 5, 6? 7, изображенной на рис. 89. Допустим
также, что в течение рассматриваемого процесса момент Мт остается
постоянным (первичный двигатель генератора не регулируется).
В первый момент после динамического нарушения электромаг-
нитный момент, согласно кривым рис. 89, становится меньше мо-
232 Устойчивость работы синхронной машины /Гл. 6
мента Мт, и их разность Мт — М, (избыточный момент), выражае-
мая отрезком 1—2, сообщает ротору машины ускорение, которое
определяется уравнением (241). Ротор начинает вращаться со
скоростью, превышающей синхронную, и угол 6 возрастает от
своего начального значения 0О. В точке <3, где имеет место равен-
ство моментов Мт = М,, ускорение становится равным нулю, но
ротор продолжает вращаться со скоростью больше синхронной,
и угол 9 будет увеличиваться дальше.
На участке кривой 2—3 избыточный момент положителен и
совершает работу, идущую на увеличение кинетической энергии
ротора. После того как оказывается пройденной точка 3, избыточ-
ный момент становится отрицательным и соответствующая работа
совершается уже за счет кинетической энергии ротора, накопленной
на участке 2—3. На участке 3—4 кривой 7И = /(6) ротор испыты-
вает замедление (ускорение отрицательно), и когда кинетическая
энергия, приобретенная ранее на участке 2—3 будет полностью
М „
израсходована, относительная скорость станет равной нулю.
Работа, совершаемая избыточным моментом при изменении
угла 9, определяется интегралом в уравнении (243). Графически
же этот интеграл дает площадь между кривой Л1 = /(9) и пря-
мой Мт в пределах угла от 90 до 9.
При движении от точки 2 к точке 3, как видно из рис. 89, ука-
занная площадь возрастает, она максимальна в точке 3 (скорость
максимальна), а затем уменьшается, поскольку площадка на
участке 3—4 — отрицательна.
Поэтому точка 4, где || = 0, находится из условия, что пло-
щади между кривой М = /(9) и прямой механического момента
Мт на участках 2—3 (Мт — М^>0)пЗ—4 (Мт — Л1ф<0) равны.
Эти площади соответственно называются площадями ускорения
и торможения. Они изображены на рис. 89, заштрихованными рав-
новеликими фигурами 1—2—3 и 3—4—8.
Далее происходит процесс уменьшения угла 9, так как в точке 4
угловой характеристики избыточный момент-Л1т — М, отрицателен
и ротор испытывает замедление. При движении от точки 4 к точке 6
скорость становится отрицательной. На участке 4—5—6 кри-
вой М, =/(9) процесс совершается аналогично описанному выше;
в точке 5 (Л4т = М ) скорость имеет максимальное отрицатель-
ное значение; в точке 6 ~ равно нулю. Положение точки 6 опре-
деляется из условия равенства площадей между угловой характе-
ристикой и прямой Мт на участках 4—5 и 5—6.
После нескольких колебаний ротора, затухающих под воздей-
ствием демпферного момента, переходный процесс завершается
§ 49]
Методика исследования динамической устойчивости
233
установлением нового нормального режима в точке 7, точке пере-
сечения прямой Мт и статической угловой характеристики машины
для новых условий (одна цепь линии передачи отключена). На
рис. 89 показана лишь часть этой характеристики (кривая аб).
Рис. 90. Характер изменения угла 0 во времени при динамическом на-
рушении режима синхронной машины: а — исходный режим динами-
чески устойчив; б — исходный режим динамически неустойчив.
Характер изменения угла 0 во времени в переходном процессе,
вызванном динамическим нарушением режима, показан на рис. 90, а
(сравни с рис. 89). На рис. 91, а представлен характер изменения
скорости в зависимости от угла нагрузки 0.
Рис. 91. Характер изменения относительной скорости
ротора в зависимости от угла 6 при динамическом
нарушении режима синхронной машины: а — исходный
режим динамически устойчив; б — исходный режим
динамически неустойчив.
Исходный режим работы генератора при рассмотренном виде
нарушения оказался динамически устойчивым.
Характер процесса существенно изменится, если предположить,
что генератор имеет угловую характеристику после динамического
нарушения режима работы в виде кривой 2, 3, 4, 5, представленной
на рис. 92.
Из рис. 92 видно, что площадка ускорения 1—2—3 больше
площадки торможения 3—4; следовательно, в точке 4 кинетическая
234
Устойчивость работы синхронной машины
[Гл. 6
энергия, приобретенная ротором на участке разгона (2—5), не израс-
rfO
ходована полностью и скорость в соответствии с уравнением
(243) остается в этой точке больше нуля. Поэтому угол 9 будет
продолжать увеличиваться. Однако за точкой 4 избыточный момент
Мт — снова становится положительным, ротор опять начнет
ускоряться и это вызовет прогрессирующее увеличение угла 9,
т. е. потерю машиной синхронизма. На рис. 90, б и 91, б показан
характер зависимостей 0 = /(т) и ^=/(0) для этого случая.
Рис. 92. Угловая характеристика машины при
динамическом нарушении режима.
Исходный режим динамически неустойчив.
На рис. 91,6 обращает на себя внимание то обстоятельство, что
скорость^ ни при каких значениях угла 6 не обращается в нуль
(кроме, естественно, начального угла 0о).
Итак, теперь исходный режим работы генератора оказался
динамически неустойчивым.
Можно полагать, что если в результате постоянного возмуще-
ния режима угол 0 возрастает от начального значения 60 ограни-
ченно, т. е. если в первом колебании машина оказывается динами-
чески устойчивой, то последующие колебания не приводят к потере
устойчивости. Иными словами, при постоянном возмущении дина-
мическая устойчивость практически может оцениваться только по
первому колебанию.
Однако при этом нужно иметь в виду следующее. Угловая ха-
рактеристика машины М, = /(9) при динамических нарушениях
режима существенно отличается от статической характеристики
Л! == у(9) в установившемся режиме работы за счет наведенных
токов в цепях машины. Основное значение здесь имеет апериоди-
ческая составляющая в токе возбуждения синхронной машины,
затухание которой обозначает переход машины на статическую
§ 49 J
Методика исследования динамической устойчивости
235
угловую характеристику М = /(б). Поэтому может оказаться,
что до затухания апериодических токов в цепи возбуждения син-
хронной машины, колебания ротора будут происходить с ограни-
ченным размахом и машина сохраняет синхронизм с сетью, а после
затухания этих токов, если нагрузка превосходит предел стати-
ческой устойчивости по «сползанию», машина становится неустой-
чивой.
Таким образом, исходный режим оказывается динамически
неустойчивым, но это обстоятельство определяется единственно
тем, что в новом установившемся режиме, к которому стремится
машина, не обеспечивается статическая устойчивость. Так, если
Рис. 93. Характер изменения угла 6 во
времени при динамическом переходе к ста-
тически неустойчивому режиму.
Рис. 94. Характер изменения
относительной скорости ротора
в зависимости от угла 6 при
динамическом переходе к ста-
тически неустойчивому режиму.
в случае, представленном на рис. 89, статическая угловая характе-
ристика машины изображается кривой а'б', то рассмотренные выше
колебания по динамической характеристике закончатся на кривой
а'б', и поскольку на ней везде Л4т^>Л1ф, ротор получит ускорение
(неизменного знака) и машина потеряет синхронизм. Характер
изменений угла 9 = f(x) и скорости ^=/(6) для этого случая
представлены на рис. 93 и 94.
Из приведенных рассуждений можно сделать два вывода. Во-
первых, при динамических процессах, кратковременно, пока не
затухли апериодические токи в цепи возбуждения синхронной ма-
шины, последняя может выдерживать значительные нагрузки,
часто превосходящие предел ее статической устойчивости по пара-
метрам после динамического возмущения режима. Во-вторых,
машина будет динамически устойчивой при постоянном возмуще-
нии, если не только динамически устойчиво первое колебание ро-
тора, но также обеспечена статическая устойчивость в новом уста-
новившемся режиме. Таким образом, в этих случаях рассмотрение
динамической устойчивости в первом колебании должно быть до-
236 Устойчивость работы синхронной машины [Гл. 6
полнено проверкой статической устойчивости в новом установив-
шемся режиме.
Вышеприведенные рассуждения основывались на том, что угло-
вая характеристика машины М6 = /(5) после динамического
нарушения режима известна. Однако точное ее определение пред-
ставляет весьма большие трудности. Дело в том, что даже при
пренебрежении активным сопротивлением цепей статора и переход-
ным процессом в этих цепях, электромагнитный момент зависит
от двух переменных: продольной переходной э. д. с. Е'а и угла 5
(см. § 42). При этом э. д. с. Е'а является функцией угла 0, но она
может быть точно определена только в результате решения всей
системы дифференциальных уравнений синхронной машины. По-
скольку общие уравнения машины нелинейны, возможно найти
лишь численное их решение. Таким образом, искомая угловая
характеристика в общем случае находится путем численного инте-
грирования уравнений машины.
Вместе с тем, если ограничиться исследованием динамической
устойчивости в первом колебании, то соответствующая часть иско-
мой угловой характеристики в первом приближении определяется
достаточно просто. Поскольку время достижения углом б своего
первого максимума (9т1 на рис. 90, а) обычно невелико (не превос-
ходит 0,3—0,4сек), в этой части процесса можно не считаться с за-
туханием апериодических токов цепи возбуждения синхронной
машины. Это дает основание считать потокосцепление с обмоткой
возбуждения фу примерно постоянным, а следовательно, принять
постоянной продольную переходную э. д. с. Е'а. Угловая харак-
теристика в первом колебании (участок кривой 2, 3, 4 на рис. 89)
может определяться по выражению (195), в котором нужно считать
Е'а = const.
Определение угловой характеристики для последующих качаний
ротора, если это желательно, может быть произведено по методике,
изложенной в [Л. 18].
Оценка динамической устойчивости машины по первому колеба-
нию может производиться и при многократных возмущениях, но
возмущение при последующих качаниях не должно изме-
няться.
Рис. 95 иллюстрирует применение метода площадей для оценки
динамической устойчивости генератора в следующих условиях.
Исходный режим работы генератора через линию передачи опреде-
ляется углом б0 и моментом Л1^о = Мт (кривая аб — статическая
угловая характеристика в этом режиме). Первичный двигатель
не регулируется, т. е. Мт = const. На линии происходит несиммет-
ричное короткое замыкание (первое возмущение), в процессе кото-
рого характеристика М = /(S) имеет вид кривой а"б".
Под влиянием избыточных моментов Мт — ротор ускоряется
на участке 2—3, и угол h возрастает от до hk. В этот момент
короткое замыкание отключается (второе возмущение), после
§ 49]
Методика исследования динамической устойчивости
237
Мт~‘4г'м
м<р
е
Рис. 95.
кратном
Правило площадей при дву-
динамическом возмущении син-
хронной машины.
9ц 9ц
чего угловая динамическая характеристика УИ = /(9) принимает
вид кривой а'б'. На участке 5—6 ротор испытывает замедление.
Максимальный угол в первом колебании определяется точкой 6,
причем площадь торможения 4—5—6—7 равна площади ускоре-
ния 1—2—3—4. Из рисунка следует, что динамическая устойчивость
в первом колебании сохраняется.
Отметим, что метод площадей распространяется также на слу-
чай работы двух синхронных машин соизмеримой мощности, но
этим количеством машин исчерпывается область его примене-
ния.
Наиболее общий метод исследования динамической устойчи-
вости — это интегрирование уравнений синхронной машины при
заданном характере возмущения. Поскольку эти уравнения нели-
нейны, то решение в общем
виде получить невозможно.
Поэтому на практике интег-
рирование уравнений произ-
водится методом последова-
тельных интервалов [Л. 4,
19]. Несмотря на громоздкость
вычислений, численное интег-
рирование уравнений маши-
ны дает возможность полу-
чить полную картину движе-
ния ротора в переходном про-
цессе [9 = /(т)] при любом
характере возмущения, на-
пример, позволяет учесть при
колебаниях непрерывное ре-
гулирование возбуждения син-
хронной машины.
Наряду с аналитическими
методами исследования дина-
мической устойчивости, в на-
стоящее время широкое щ
намического моделирования.
Он состоит в исследовании устойчивости на моделях энергети-
ческих систем, представляющих универсальный набор вращаю-
щихся электрических машин-моделей небольшой габаритной мощ-
ности и статических устройств, моделирующих трансформаторы,
линии передачи и другие элементы энергосистем. Такие модели
позволяют легко изменять параметры системы и исследовать их
влияние на динамическую устойчивость, изучать поведение слож-
ных систем при динамических возмущениях самого общего вида,
производить опробование регуляторов возбуждения синхронных
машин, оценивать влияние защиты на работу системы в условиях
динамических режимов и т. д. [Л. 20].
находит метод электроди-
238
Устойчивость работы синхронной машины
[Гл. 6
§ 50. Влияние регулирования возбуждения синхронных машин
на динамическую устойчивость
В § 47 показано, что применение непрерывного автоматического
регулирования возбуждения синхронных машин существенно уве-
личивает область статической устойчивости. Столь же благотвор-
ным регулирование возбуждения является и в отношении динами-
ческой устойчивости машин.
Оно позволяет при прочих равных условиях уменьшить вели-
Рис. 96. Влияние регулирования воз-
буждения синхронной машины при
динамическом нарушении режима.
и ускорить затухание колебаний
ротора, возникающих в ре-
зультате динамических возму-
щений, т. е. увеличить запас
в динамической устойчивости
машины.
Однако требования, которые
предъявляются к системе регули-
руемого возбуждения, обеспе-
чивающей повышение динами-
ческой устойчивости, отличаются
от тех, которые диктуются усло-
виями увеличения статической
устойчивости.
Ограничение угла 0 в первом
колебании после динамического
нарушения режима, с точки зре-
ния метода площадей, будет тем
значительнее, чем сильнее удает-
ся сократить площадь ускорения
и увеличить возможную площадь
торможения на диаграмме угло-
вых характеристик. Это можно видеть из рис. 96, где дано опре-
деление максимального угла в первом колебании 0т1 по методу
площадей для двух случаев, различающихся лишь угловыми харак-
теристиками машин в переходном режиме. Динамическое наруше-
ние здесь принято двукратным; при этом второе возмущение
наступает в обоих случаях при одном и том же значении угла
6*-
На рисунке кривые представляют угловые характеристики:
аб — в исходном режиме, а"б"— после первого возмущения,
а'б' — после второго возмущения. В одном случае площадки уско-
рения и торможения представлены заштрихованными фигурами
1—2—3—4 и 4—5—6—7. Их равенство определяет максимальный
вылет угла 9mi. Во втором случае равные площадки ускорения и
торможения обозначены 1—2—3’—4 и 4—5'—6'—7'. Максималь-
ный угол равен 9^1 и он меньше угла 0ш1.
§ 50] Влияние регулирования возбуждения на динамич. устойчивость 239
Очевидно, что уменьшение угла 9,л1 может быть достигнуто
увеличением электромагнитного момента Л1,, для данного угла 9
в условиях переходного режима. у
Из выражения для момента (2176) следует, что при заданных
параметрах и угле 9, Л4ф можно увеличить только за счет увеличе-
ния потокосцепления обмотки возбуждения Ту.
Определим изменение этого потокосцепления ДТу из уравнения
напряжения цепи возбуждения синхронной машины (117в). Пре-
небрегая падением напряжения в сопротивлении rf и интегрируя
уравнение (И7в), получим:
т
Дфу = J b.efck. (244.)
о
Таким образом, в конечном итоге все определяется интегральным
значением изменения напряжения возбуждения за время т.
Для обеспечения надлежащих значений ДТ,., при сильных ди-
намических нарушениях режима, возбуждение синхронной машины
резко увеличивается. Такая фор-
сировка возбуждения осущест-
вляется путем воздействия на
цепь возбуждения возбудителя
синхронной машины. Поскольку
возбудитель обладает электро-
магнитной инерцией, то напря-
жение Дёу нарастает до макси-
мально возможного значения —
потолочного напряжения efm с
определенной конечной скоро-
стью.
На рис. 97 показан характер
изменения напряжения ef во
времени при форсировке воз-
буждения применительно к воз-
будителям, обеспечивающим раз-
личную скорость нарастания
напряжения. Кривая 3, пока-
Рис. 97. Характер нарастания на-
пряжения возбуждения синхронной
машины во времени при форсировке
возбуждения.
1, 2 — системы электромаш инного возбуж-
дения с различными скоростями нара-
стания напряжения; 3—система ионного
возбуждения.
зывающая почти мгновенное достижение напряжением своего по-
толочного значения, характерна для ионного возбудителя, кри-
вые 1 и 2 соответствуют различным схемам электромашинного воз-
буждения.
Интеграл, определяющий в (244) изменение потокосцепления
Д'1Гу, графически выражает площадь на графике Су = /(т), как
это показано штриховкой на рис. 97. Совершенно очевидно, что
эта площадь к заданному моменту времени т0 будет тем больше,
чем выше потолочное напряжение efm по отношению к исходному
е]й и чем больше скорость нарастания напряжения при форсировке.
240 Устойчивость работы синхронной машины [Гл. 6
Если посредством форсировки возбуждения необходимо получить
заметное приращение АЧф за достаточно малый промежуток вре-
мени (например, при внезапном коротком замыкании генератора
время ее действия может составлять 0,3—0,4 сек), то система воз-
буждения синхронной машины должна иметь одновременно повы-
шенное потолочное напряжение и значительную скорость нара-
стания напряжения. Так, система возбуждения синхронных гене-
раторов Куйбышевской ГЭС имеет потолочное напряжение при
форсировке, в 4 раза превышающее номинальное значение е/н,
а скорость нарастания напряжения составляет около 15е/п в секунду.
Таким образом, система возбуждения, существенно повышающая
динамическую устойчивость синхронной машины, должна быть
быстродействующей и обладать значительным потолочным напря-
жением.
Отметим, что после форсировки возбуждения, ограничивающей
вылет угла в первом колебании 9ш1, должно иметь место непрерыв-
ное автоматическое регулирование возбуждения для успокоения
последующих колебаний ротора. Не рассматривая здесь этого во-
проса, укажем, что при этом возникает тем больше трудностей,
чем значительнее форсировка возбуждения при первом колебании
угла 9.
Следует в заключение подчеркнуть, что регулирование воз-
буждения синхронных машин является не единственным средством
повышения их статической и динамической устойчивости. Так,
для ограничения угла 0, который значительно возрастает при
резком нарушении равенства момента механических сил Лф и элек-
тромагнитного момента М генератора, и, следовательно, для обес-
печения динамической устойчивости машины может быть исполь-
зовано кратковременное торможение ее ротора. Последнее можно
осуществить двумя способами: 1) непосредственным механическим
торможением с помощью пневматических тормозов, устанавливае-
мых под ободом ротора; * 2) кратковременным увеличением нагрузки
генератора путем включения в цепь статора машины нагрузочного
сопротивления (электрическое торможение).
Кроме того, для дальних электропередач, имеющих продоль-
ную емкостную компенсацию, динамическая устойчивость может
быть повышена за счет увеличения степени компенсации линии
передачи — форсировки продольной компенсации. Это приводит
к повышению угловой характеристики машины М, = /(9) и тем
самым к облегчению условий сохранения динамической устой-
чивости.
* Как показывают исследования, для обеспечения эффективного тормо-
жения синхронного генератора необходима некоторая переделка питания стан-
дартной тормозной системы.
ГЛАВА СЕДЬМАЯ
СХЕМЫ ЗАМЕЩЕНИЯ СИНХРОННОЙ МАШИНЫ
§ 51. Общие соображения
Одним из возможных методов исследования различных режимов
работы синхронной машины является метод математического моде-
лирования.
Этот метод, в частности, предполагает создание математических
аналогов, т. е. таких устройств, которые математически правильно
отражают исследуемые переменные, характеризующие процесс
в некотором объекте, не обладая физической природой этого объекта.
Так, определение различных величин, характеризующих про-
цессы в синхронной машине при заданной скорости вращения
ротора — токов, напряжений, мощностей — можно производить
с помощью схем замещения машины. Последние представляют
набор статических элементов — сопротивлений и источников э. д. с.
Поэтому физическая природа схем в целом ничем не напоминает
вращающуюся машину. Вместе с тем, если уравнения напряжений
схемы будут полностью соответствовать уравнениям напряжений
синхронной машины, описывающим исследуемый режим ее работы,
то этот режим с помощью схемы будет воспроизведен правильно.
Схема замещения позволяет произвести достаточно быстро
расчет заданного режима с помощью расчетных столов; она дает
также возможность наглядного представления о связях, существую-
щих между различными величинами, характеризующими про-
цесс.
Общим методом составления схем замещения синхронной ма-
шины для различных режимов является анализ уравнений ма-
шины, содержащих комплексные переменные (либо мгновенные
значения, либо установившиеся токи, напряжения, потокосцеп-
ления) [Л. 21]. На основе комплексных уравнений напряжения
были разработаны схемы замещения для целого ряда режимов син-
хронной машины: установившегося, начального процесса при вне-
запном несимметричном коротком замыкании, асинхронного хода,
установившихся малых гармонических колебаний ротора и т. д.
Кроме того, составлены схемы замещения для отдельных парамет-
ров синхронной машины, определяющих токи в различных режи-
мах.
16 А. И. Важнов
242
Схемы замещения синхронной машины
[Гл. 7
Ниже приводятся лишь некоторые из известных схем замеще-
ния. Общая теория создания схем замещения здесь не излагается
из-за недостатка места, однако отдельные примеры, рассматривае-
мые ниже, достаточны для составления первого представления
о методике построения схем замещения.
§ 52. Схема замещения синхронной машины
для установившегося режима работы
Существует несколько схем замещения синхронной машины
в установившемся режиме.
Построим схему замещения машины, с помощью которой можно
определять токи статора и мощность для заданного установив-
шегося режима работы, т. е. при известных значениях угла So,
напряжения на зажимах ста-
тора и тока возбуждения.
Поскольку фазные токи и
напряжения машины имеют
основную частоту, источники
э. д. с. на схеме замещения
должны иметь ту же часто-
ту.’ Схема замещения долж-
на быть составлена так, что-
бы она правильно отражала
фазные углы сдвига между
током и напряжением и ток
имел надлежащую амплитуду.
Эти соотношения могут
быть определены с помощью
изображающих векторов то-
ка и напряжения (см. § 5).
В самом деле, мгновенные зна-
Рис. 98. Изображающие векторы тока и
напряжения на комплексной плоскости.
чения фазных токов и напряжений представляют проекции изоб-
ражающих векторов тока и напряжения на оси а, Ь, с.
Амплитуды токов и напряжений равны модулям соответствующих
изображающих векторов, а фазовый сдвиг тока и напряжения во
времени равен углу между изображающими векторами.
Поэтому схема замещения может быть построена, если известна
связь между изображающими векторами тока и напряжения,
вращающимися на диаграмме с синхронной скоростью.
Для удобства будем оперировать не с векторами (сохраняя
термин «изображающий вектор»), а с комплексами, т. е. рассматри-
вать изображающие векторы на комплексной плоскости. С этой
целью совместим с осями d, q, вращающимися в установившемся
режиме с синхронной скоростью, оси 1, j комплексной плоскости
(рис. 98). Изображающие вектора напряжения и тока, вращающиеся
§ 52]
Схема замещения для установившегося режима работы
243
с синхронной скоростью это, очевидно, комплексы
e = + (245а)
Л — (2456)
Для установления между ними связи используем уравнения
напряжения машины в осях d, q (37а), (376):
ea = xqiq~ rid, (246а)
eq = — x,did — Ev— riq. (2466)
Умножая уравнение (2466) на j и складывая затем с уравнением
(246а), получим, имея в виду (245а), (2456):
е = (247а)
Поскольку уравнение (247а) содержит, кроме тока /5, еще сопря-
женный комплекс /s, необходимо к этому уравнению добавить со-
пряженное ему, т. е.
(2476)
Уравнения (247а), (2476) и дают связь между изображающими
векторами тока Is и напряжения ё в установившемся режиме.
Комплексы ls и е определены в комплексной плоскости, ориен-
тация осей которой указана на рис. 98. Более удобно определить
эти комплексы в осях 1, j, повернутых на угол т/2 по часовой стрелке
по сравнению с их положением на рис. 98 (указаны на этом рисунке
пунктиром). В этих новых осях вместо э. д. с. — jE0 будем иметь
• *
просто £0, а комплексы е и е в соответствии с рис. 98 равны:
е — е = — ее.+Р,
где ё — модуль изображающего вектора е (или амплитуда напря-
жения на зажимах статора).
Тогда уравнения (247а), (2476) принимают вид:
= + (248а)
+ + (2486)
♦
где Is> Is — комплекс тока и сопряженный комплекс тока в новых
осях.
Нетрудно видеть, что уравнениям (248а), (2486) соответствует
схема замещения, изображенная на рис. 99.
16«
244
Схемы замещения синхронной машины
[Гл. 7
Схема замещения, представленная на рис. 99, неудобна тем,
что содержит отрицательное активное сопротивление, которое
сложно воспроизвести при выполнении схемы.*
Однако, если влиянием г можно пренебречь, то схема замеще-
ния несколько упрощается и принимает вид, изображенный на
рис. 100.
Измерение тока в любой из крайних ветвей схемы (на рис. 100
амперметры At) дает действующее значение фазного тока статора.
Рис. 99. Схема замещения син-
хронной машины в установившем-
ся режиме работы.
синхронной машины в уста-
новившемся режиме работы при
пренебрежении активным со-
противлением пени статора.
По схеме рис. 100 можно также измерить продольный ток статора 1а,
если включить амперметр Д2 в среднюю ветвь схемы, где протекает
ток, амплитуда которого равна:
• *
Is — Is = ftid.
Мощность на зажимах машины в относительных единицах
равна (28в):
Р ~~ & did gqiqt
а с учетом (245а), (2456):
Поэтому измерение мощности на схеме замещения может быть
произведено ваттметром, токовая обмотка которого включена
в цепь, обтекаемую током Is, а обмотка напряжения на источник
э. д. с. ее-/'.
* Отрицательное активное сопротивление можно получить с похмощью
коллекторной машины или электронных скехм.
§ 53]
Схема замещения _ в асинхронном режиме
245
Для применения на расчетных столах представленная выше
схема замещения неудобна. Используя фиктивную э. д. с. £0(§7),
можно получить более простую схему. Эта э. д. с. была определена
в виде:
Eq = До 4~ h (%d — xq)-
Подставляя это соотношение в урав-
нение (248а), получим:
е = ее->0 = Eq — (г -\-jXq) is. (249)
Расчет Eq для заданного режима
можно производить по формуле:
Рис. 101. Схема замещения син-
хронной машины в установившем-
ся режиме работы, содержащая
эквивалентную э. д. с. Eq.
Eq = Ео 'Ь + е cos 60 ——Д?.
у ха 1 х,.
Схема замещения, соответствую-
щая уравнению (249), представлена
на рис. 101. На этой схеме можно непосредственно измерить фазный
ток статора машины, а также мощность на его зажимах.
§ 53. Схемы замещения синхронной машины
в асинхронном режиме с постоянным скольжением
Рассмотрим схемы замещения синхронной машины, включен-
ной на сеть бесконечной мощности и работающей с заданным по-
стоянным скольжением. Будем считать, что возбуждение машины
отсутствует, а обмотка возбуждения ее замкнута в общем случае
на некоторое сопротивление. Подобный режим уже рассматри-
вался в § 41. Напомним, что для этого режима скольжение при-
нималось положительным при скорости ротора ниже синхронной.
Для составления схемы замещения достаточно получить соот-
ношения между изображающими векторами тока н напряжения.
Однако в рассматриваемом режиме изображающий вектор тока до-
статочно сложен, поскольку фазные токи машины представляют
совокупность двух гармонических составляющих, частоты которых
равны Д и (1—2s)/j. Таким образом, на схеме замещения с источ-
никами э. д. с. одной частоты невозможно непосредственно получить
фазные токи машины. Можно, однако, создать схему, на которой
измеряются некоторые вспомогательные токи, а также электромаг-
нитный момент машины.
Ранее (§41) было установлено, что продольный и поперечный
токи статора id, iq в асинхронном режиме являются гармоническими
функциями времени [уравнения (190)]. Изображающий вектор тока
в системе комплексных осей, совмещенных с осями d, q, равен:
4 — id -\~jiq-
(250а)
246
Схемы замещения синхронной машины
[Гл. 7
Подставляя сюда токи id, iq из уравнения (190), после несложных
преобразований получим:
4 = (2506)
где
41 = 0,5 [(7d Sin ?d 4- Iq sin <?,) 4-y(/d cos ?d 4- Iq cos ?,)]; 1
= 0,5 [(/d sin ?d — Iq sin ?,)—y(/d cos <?d — Iq cos ®?)], J
Id, Iq — амплитуды токов id, iq.
определяемые формулами (190).
Рис. 102. Изображающий вектор
тока на плоскости d.q при асин-
хронном вращении ротора ма-
шины.
Рис. 103. Изображающие век-
торы продольного и попереч-
ного токов машины при асин-
хронном вращении ее ротора.
Изображающий вектор тока Is как функция времени достаточно
сложен. Кривая, которую он описывает на диаграмме, представляет
собой эллипс (рис. 102).
Вместе с тем выражение (2506) показывает, что вектор тока Is
представляет совокупность двух векторов: одного — неизменной
величины Isi, вращающегося со скоростью s®5 относительно осей
1, / (d, q) в сторону вращения ротора, другого — с постоянным
модулем /52, вращающегося с той же скоростью в противоположную
сторону. Поэтому непосредственное исследование вектора Is заменим
изучением его составляющих Isl, Is2, смысл которых нетрудно
установить. Векторы isl&>sx и Isit~]sx вращаются относительно
фазных осей а, Ь, с соответственно с синхронной скоростью
и скоростью (1—2$)о>5, поскольку оси 1 вращаются в про-
странстве со скоростью ротора, равной (1—s)®s. Таким образом,
модули векторов и /s2 равны амплитуде токов в статоре, частоты
которых равны /, и (1—2s)/!.
Для составления схемы замещения воспользуемся полученными
ранее выражениями (185а), (1856) комплексных токов 7 , iq, веще-
ственные части которых выражают токи id, iq. Если комплексы
7d, lq представить на комплексной плоскости рис. 103, то они будут
§ 53]
Схема замещения в асинхронном режиме
247
вращаться относительно осей 1, j(d, q) со скоростью sws и проек-
ции их на ось вещественных дают токи id, iq. Между комплексами
zri, lq, с одной стороны, и комплексами 7S1, Jsi, с другой, существует
однозначная связь. Как следует из рис. 103 и выражений (190),
комплексы id, iq равны:
id = !d [cos (st — + -J) +/' sin (st — -f- y)] =
= 4 (sin 4-/cos ?d) гЛт;
(251)
tq = Iq [cos (ST — ?Q) + /sin (ST — ®9)J =
= 4 (cos <p9 — i sin <p?) £At.
Соотношения (250в) и (251) устанавливают искомую связь в виде:
zd = (4i + 4а) e'ST>
(252а)
7sl = k±As-^; (2526)
г __ Ч J?q c-Jst
!s4— 2~ •
Подставляя в (2526) выражения комплексов (185а), (1856),
в которых напряжения ed, eq определены соотношениями (184)
и вводя обозначения:
Хс (у’$) = . Хр (Js) = ,
получим:
/ —____/х,____________________ г ~Ь /(1 2s) Хс (js)__. ^бЗа)
sl — 7е (1 _ 2s) Xd (Js) Xq (js) + r2 + j2rsXc (js) ’
f —____ jp______________~ 7 (1 — 2s) A'p (js)_ (2536)
s2 je (1 _ 2s) Xd (ys) xq (js) + r2 + j’2rs • Xz (js) • 'z
Нетрудно проверить, что уравнениям (253а), (2536) соответствует
схема замещения, представленная на рис. 104. Напряжение е
должно иметь частоту, равную s На схеме можно непосредст-
венно измерить токи 7sl, Isi, а также ток Isi jsi и, следовательно,
ток id. Кроме того, схема позволяет измерить среднее значение
электромагнитного момента машины И,а.
Чтобы показать, как это сделать, выразим момент через
изображающие векторы тока /s и потокосцепления статора машины
Изображающий вектор Is дан в выражениях (250а) — (250в);
248
Схемы замещения синхронной машины
[Гл. 7
изображающий вектор определяется аналогично, т. е.
(254а)
(2546)
Используя определения изображающих векторов ф5, Is через
мгновенные значения потокосцеплений и токов в (250а), (254а),
Рис. 104. Схема замещения синхрон-
ной машины при асинхронном вра-
щении ее ротора.
получим электромагнитный мо-
мент в виде:
^4 ^diq' Re [ fys^s]--
= Re[/'Vj- (255a)
Если подставить в выраже-
ние (255а) комплексы токов и
потокосцеплений из (2506),
(2546), то нетрудно получить:
• * *
214= Re [ /CksiZst + tys-j s-г) —
ЖЛ s is')]. (2556)
Поскольку комплексы токов
и потокосцеплений, входящие
в выражение (2556), от време-
ни не зависят, то первая круг-
лая скобка в (2556) представ-
ляет среднее значение момента,
а вторая дает момент, изменяю-
щийся с частотой 2sj\. Эти составляющие момента Af ранее были
подробно рассмотрены в § 41.
Итак, средний момент определяется в виде:
= Re [— / (фД1 + фЛг)] = Re [—/фДг + АЛг]- (256)
Комплексные потокосцепления ф ф аналогичны выражениям
(252а), (2526), для токов:
_______ та 4 ‘ Jrq e-JST. J _Фй Jr'q .-jsz
Y si — 2-S ’ г s2 —-2-°
Подставляя сюда комплексы фЛ ф? из выражений (186а), (1866)
и используя уравнения (252а), получим:
-А1 = ~7 [4Л (75) + 4Лр (75)]; (257а)
7Ъ=7 [4Л (/s) + 4з АГС (js)]. (2576)
Уравнения (257а), (2576) позволяют найти эти напряжения на
схеме замещения (рис. 104).
§ 54] Упрощенные схемы замещения сопротивлений машины 249
Таким образом, в соответствии с выражением (256), средний
электромагнитный момент /VI,а может быть измерен двумя ваттмет-
рами, токовые обмотки которых должны быть включены в цепи
с токами 41, Is„, а обмотки напряжения между точками схемы,
где действуют напряжения — j^sl и jtys2. Сумма показаний ватт-
метров равна моменту М^а.
Если положить активное сопротивление равным нулю (г — 0),
то нетрудно показать, что момент /И,Л, измеряемый на схеме заме-
щения, в точности совпадает с ранеет полученным значением (193).
В этом случае получаются простые схемы замещения для продоль-
ного и поперечного токов статора машины id, iq. В самом деле,
а) б)
Рис. 105. Схемы замещения для гармонически изменяю-
щихся продольного и поперечного токов машины при
пренебрежении активным сопротивлением цепи статора:
а —продольная ось; б — поперечная ось.
комплексы этих токов при г = 0 даются выражениями (188а),
(1886):
? — 1 = eeiSx /2581
d~jXd(Js) jXd<Js)’ 4 jXq(js) J^gUs)-
Этим выражениям соответствуют простые схемы замещения, изобра-
женные на рис. 105.
Независимо от того, используется ли точная схема замещения
рис. 104 или приближенные схемы рис. 105, для их построения
требуется знание комплексных сопротивлений машины по продоль-
ной и поперечной осям Xd(js), Xq(js\
Весьма удобным является представление этих сопротивлений
своими схемами замещения, которые и приводятся ниже.
§ 54. Упрощенные схемы замещения сопротивлений машины
по продольной и поперечной осям при работе ее
в асинхронном режиме
Сопротивления jX(i<js) и jXq(js) имеют простой физический смысл.
Подобно тому, как вращающаяся асинхронная машина может быть
уподоблена статическому трансформатору и, следовательно, пред-
ставлена некоторым эквивалентным статическим сопротивлением
по отношению к напряжению сети е, так и вращающаяся синхрон-
ная машина без возбуждения может при г = 0 и синусоидальных
250
Схемы замещения синхронной машины
[Гл. 7
напряжениях ed, eq рассматриваться как статический трансфор-
матор, но раздельно по осям d и q.
Такая возможность вытекает из уравнений (258), в которых
продольный и поперечный токи машины определяются только
одноименными напряжениями и некоторыми эквивалентными со-
противлениями. Последние как раз и равны jXd(Js)viJXq(Js). Эти
сопротивления могут быть представлены схемами замещения,
аналогичными тем, которые определяют эквивалентное сопротив-
ление вращающейся асинхронной машины.
Рассмотрим построение упрощенных схем для jXd (js) м JXq (Js),
которые соответствуют распространенному представлению демп-
ферной обмотки в виде двух эквивалентных контуров.
Рассмотрение асинхронного режима в § 41 показывает, что
комплексные сопротивления Xd(Js) \\Xq(Js) могут быть непосред-
ственно вычислены по выражениям операторных сопротивлений
Xd (р), Xq (р) заменой в них буквы р на js. Однако для составления
схемы замещения сопротивлений jXd (js), jXq (js) более наглядно
воспользоваться исходными уравнениями напряжения роторных
цепей машины и выражениями потокосцеплений статора. Для
асинхронного режима, как уже указывалось (см. § 41), решение
ищется с помощью комплексных переменных, для которых знак
производной по времени в дифференциальных уравнениях заме-
няется множителем js. Поскольку предполагается отсутствие воз-
буждения у синхронной машины (ef = 0), то уравнения машины
с демпферной обмоткой (115в) — (115д), (116а) — (1166) для комп-
лексных переменных принимают вид:
Ф.1 = Xdld + xafdlf + Xa3di а (259а)
= Xqlq + xa3qt3q; (2596)
0 = js (xafdtd -f- Xflf -J- Xf3di3J) rftp, (259b)
0 —js (xa3dtd -}- xf3dif Ц- x3dl3d) -f- r3dtad, (259r)
0 JS (Xawjq ~I- X3ql3q) ~H C3ql3q. (259д)
Для построения схем замещения преобразуем эти уравнения,
а именно первые два умножим на /, а остальные разделим на s.
Тогда, группируя их по осям, получим:
J^d =jXdid j-jXafd'lf +JXa,dht-,
0 = iXafcd-d + (jxf if + JXfidiidy
0 —jXa3dtd + jXfnjf + {jX3d +
jtyq jXqlq~j~ jXa3ql3q,
o ^Jxa3qlq + [jx3q + -’И i3q. .
(260a)
(2606)
§ 54]
Упрощенные схемы замещения сопротивлений машины
251
Уравнениям (260а) для продольной оси соответствует схема
замещения, изображенная на рис. 106. Схема замещения для попе-
речной оси, построенная по уравнениям (2606), представлена на
рис. 107. Поскольку в соответствии с уравнениями (186а) и (1866)
Рис. 106. Схема замещения в продольной оси для
эквивалентного сопротивления машины при асин-
хронном ходе (схема с электромагнитными свя-
зями).
Рис. 107. Схема замещения в попе-
речной оси для эквивалентного сопро-
тивления машины при асинхронном
ходе (схема с электромагнитными
связями).
между комплексами потокосцепления и токов имеют место соотно-
шения:
/Ъ =jXd (js) id; ji?q =jXq (Js) id,
то из рис. 106 и 107 нетрудно видеть, что эквивалентные сопротив-
ления изображенных схем и есть искомые сопротивленияjXd(js),
JXJJs).
Как и следовало ожидать,
схемы замещения для jXd (js),
jXq (Js) весьма схожи со схе-
мами для сверхпереходных со-
противлений xd, xq, получаемых
из операторных сопротивлений
Xlt(p), Xq(p) при р = оо (см.
рис. 58).
Обычно полученные схемы за-
мещения составляют таким обра-
зом, чтобы сопротивления взаим-
ной индукции между цепями оказывались одинаковыми. Этого
можно добиться, применяя специальную систему относительных
единиц для роторных величин. Подобная система единиц, в ко-
торой относительные значения параметров удовлетворяют соот-
ношению xaid — Xftd = xafd, приведена в § 10.
252
Схемы, за мещения синхронной машины
[Гл. 7
Для этого случая схема замещения сопротивления в продольной
оси, в которой синхронная машина представляет трехобмоточный
трансформатор, упрощается: индуктивная связь цепей заменяется
электрической, и схема принимает вид, изображенный на рис. 108.
На этой схеме цепи имеют одно общее индуктивное сопротивление
xafd. Кроме того, каждая из цепей имеет свое индуктивное сопро-
тивление «рассеяния».
В поперечной оси синхронная машина замещается двухобмоточ-
ным трансформатором, поэтому схема для сопротивления jXq(Js)
остается без изменения. При этом индуктивная связь цепей может
быть заменена электрической, что и сделано в схеме для jXq(js)y
представленной на рис. 108.
о-------------------j-
Id
о)
j'Xd(Js[ xard |
Рис. 108. Схемы замещения для эквивалентного сопротивления маши-
ны при асинхронном ходе (схема с электрическим соединением эле-
ментов): а — продольная ось; б — поперечная ось.
Схемы рис. 106—108 относятся к машине с демпферной обмот-
кой. Если в них устремить активные сопротивления гэ?->оо,
r3d -> оо, что будет соответствовать размыканию демпферных кон-
туров, то получатся схемы для машины без демпферной обмотки.
Полные комплексные сопротивления машины по двум осям
jXd(js)ujXq(js) имеют вещественную и мнимую части, т. е. экви-
валентные активные (7?) и индуктивные (X) сопротивления:
JXd (js) = Hds ~\~JXds; jXq (Js) = Rqs -4-jXqS.
Все эти эквивалентные сопротивления могут быть либо рассчи-
таны по приведенным схемам замещения, либо измерены на этих
схемах. Характер изменения активных и индуктивных сопротив-
лений в зависимости от скольжения s удобно проследить с помощью
комплексной плоскости, на которой откладываются комплексы
yXrf(/s)H/X?(/s)npH различных значениях s. При этом на оси веще-
ственных откладываются активные сопротивления Rds, Rq.„ а на
оси мнимых — индуктивные Xds, Xqs. Зависимость /А^ (/s) при раз-
личных s для машин с демпферной обмоткой (рис. 108, б) предста-
§ 54] Упрощенные схемы замещения сопротивлений машины 253
вит окружность. * Подобный же вид будет иметь зависимость
/Х//«)=/(«)для машины без демпферной обмотки. При наличии по-
следней кривая JXg(is) =
=f(s) имеет более слож-
ный характер.
Очевидно, что при
s = О сопротивления
Xa(js), Xq(js) превра-
щаются в синхронные
сопротивления xd, xq, а
при s = oo они стано-
вятся равными х'а, x'q
(или Xd — в машине
без демпферной обмот-
ки). Практически со-
противление Xris в ма-
шине с демпферной об-
моткой достигает зна-
чения переходного соп-
ротивления х'а при та-
ких скольжениях, ко-
гда s^TaoKd» = 1,0, а
сверхпереходного х'а,
когда s'2T'aM^ 40-7-50.
Здесь Так, Тэао — по-
стоя иные времени соот-
ветственно обмотки воз-
буждения и демпферного
Рис. 109. Эквивалентные сопротивления ма-
шины большой мощности при асинхронном
ходе и различных значениях скольжения: а —
продольная ось; б — поперечная ось.
контура в продольной оси (при короткозамкнутой обмотке возбуж-
дения и разомкнутой обмотке статора).
Сопротивление Xqs практически превращается в x"q при сколь-
жениях 5, для которых
№10--15,
Xq
где T"q — постоянная времени поперечного демпферного контура
при короткозамкнутом статоре.
Таким образом, сопротивления Xqs в машинах крупной
мощности достигают значений х'а, х"ч уже при скольжениях 5 =
= 0,05 —0,20.
В качестве иллюстрации на рис. 109 приведены зависимости
/Л’(/(/«),уА'9(/«)вфункции скольжения «длямашины со следующими
* Схема замещения на рис. 108,6 повторяет известную схему для асин-
хронной машины, для которой геометрическим местом токов и эквивалентного
сопротивления машины являются окружности.
254
Схемы замещения синхронной машины
[Гл. 7
параметрами: %d = 0,5; xa/d = 0,41; х/ = 0,55; xerf = 0,52; xq =
= 0,32; х,? = 0,32; ха q = 0,23; xd = 0,20; xd = 0,143; x" = 0,155;
r} = 0,00032; r9d = 0,01; r,q = 0,0075.
§ 55. Точные схемы замещения сопротивлений синхронной машины
по продольной и поперечной осям при работе ее
в асинхронном режиме
В тех случаях, когда возникает необходимость исследования
процессов в самой демпферной обмотке, упрощенное представление
ее двумя эквивалентными контурами оказывается непригодным.
Подобное положение может, например, встретиться при расчете
демпферных обмоток мощных машин, имеющих асинхронный пуск.
Для определения нагрева таких обмоток при пуске, необходимо
уметь правильно рассчитать распределение тока по отдельным
стержням обмотки. Исследование распределения тока в демпфер-
ной обмотке необходимо также для определения параметров демп-
ферных обмоток в специальных случаях с нестандартным разме-
щением стержней обмотки на полюсе и объединением их в контуры.
Рассмотрим построение схем замещения для сопротивлений
машины /Xd(/s) = /?rf5 + ;Xds и jXq (js) = R„s -f- JXqs с учетом
реальных контуров демпферной обмотки [Л. 22.] Образование
этих контуров из стержней обмотки и их нумерация описана в § 2.
Если обратиться к поперечной оси машины, то для нее следует
использовать уравнения напряжения демпферных контуров (4г)
и выражения для потокосцеплений всех контуров в этой оси. По-
следние имеют вид (в относительных единицах):
'^q~Xq^g~!rXalgilq~!rXaiqiiq-\- ... -\-xanqinq (261а)
для контура статора;
— Xalqiq + -*42949 + • • • + Xlnqinq (2616)
для 1-го демпферного контура;
Фл9 Xanqiq 1 Xni</\q 1 Xn2q^2q | • • • I Xnnq^nq (261 в)
для n-го демпферного контура, где il(„ iiq, ..., inq—токи в демпфер-
ных контурах. Подставляя потокосцепления вида (2616 — 261в)
в уравнения напряжения (4г), получим последние в виде:
0---PXaiqiq-]-(pXiiq^ Гид)
(pXliq riiq) hq Ч- • • ~r (.PXlnq + rinq) ^nq’l
0=PXaiqiq ~l~ (PXilq + Г219) Zl9 +
+ (/7Х22?4-Г2-27Н’‘2?+ ••• +(/7A'2n9 + ^inq)
0—pxanqiq -p (pxn\q + rniq) +
—1“ (pxn%q ~|— rn29) l%q “H • • • 1“ (pX/inq Гятк?) tnq. (262)
§ 55]
Точные схемы замещения сопротивлений
251
Активные сопротивления контуров обусловлены как стержнями,
так и лобовыми частями контуров. Будем при обозначении активные
сопротивления стержней снабжать дополнительны^ индексом «с»,
а сопротивления лобовых частей — индексом «л». Тогда собствен-
ное сопротивление /-го контура равно:
riiq = rziiq-^rMq. (263а)
Индуктивное сопротивление любого /-го контура разобьем на три
составляющих:
1) от полей, пересекающих воздушный зазор — Л'5гг?;
2) от полей, сцепляющихся с лобовыми частями — ;
3) от полей рассеяния, сцепляющихся со стержнями — x.ziin.
Рис. ПО. Магнитные поля токов темп- Рис. 111. Схема демпферных кон-
ферных стержней в поперечном сечении туров в поперечной оси.
машины.
На рис. ПО схематически изображены поля первого и третьего
вида (Фг и Ф5С).
Таким образом, индуктивное сопротивление f-го контура равно:
Xiig — Xiiig + ХлИ9 + Xciig- (2636)
Отметим некоторые закономерности в параметрах демпферных
контуров. На рис. 111 представлено взаимное положение несколь-
ких контуров. Из этого рисунка следует, что в отношении актив-
ных сопротивлений справедливы соотношения: rliq = rallq, fi3q —
= rMq, ... , г1п? = гл114; ritq = rMq, и вообще
rkig = (264а)
если нумерация контуров такова, что /<7г.
Далее, индуктивное сопротивление взаимной индукции двух
контуров определяется, как это легко представить с помощью
рис. ПО и 111, магнитным полем, пересекающим воздушный зазор
и сцепляющимся с контуром, имеющим меньший порядковый номер,
а также полем рассеяния, сцепляющимся с лобовыми частями
этого контура. Таким образом, индуктивное сопротивление взаим-
ной индукции между /- и fe-контурами равно;
Xkiq — ХЪИд ~Т Xnii<p (2646)
256
Схемы замещения синхронной машины
[Гл. 7
где i<Ck.
Используя соотношения (263а), (2636), (264а), (2646), можно
систему уравнений (262) представить в виде:
О —pxa\qiq (/’Л'с1)? гси?) 4-
+ [Р (ХИ11д + Хл11д) 4" OlllJ (Z’l? 4~ 4~ • • • 4~ ^пд)> (265а)
О =pxa<>qlq 4~ [р (-^51 lq 4~ Хл11д) 4~ Гл11д] l'lq 4“
4- [РХе22д 4~ Гс22д -j~P (XS22q 4~ -*4122?)] hq 4~
4- ГЛ22Ч {t-2q + hq + • • • + 4?) +
4“ p (XS229 4~ Хл229) (hq 4~ hq 4~ • • • ~T Zn?)> (2656)
0 PXanqiq + [P (-*811? + 4- ГЛ11,] Zl9 +
~T [P (XM2q 4~ Xj&iq) | Лл22д] + ••• +
i [PXcnnq I Ccnnq) j p (xtnnq | Хлппд') I Pinnq] ^nq' (265b)
Начиная с уравнения (2656), преобразуем их к виду предше-
ствующего уравнения. Для этого в правой части уравнения (2656)
прибавим и отнимем член
[р (Л8119 + Хл11д) + Гл11?] (hq + hq + • • 4" 4?)>
в результате чего уравнение (2656) примет вид:
О =PXa2qiq 4~ (РХс22д 4~ Гz22q) Чд 4~ [Р C^SU? 4~ -’Olig) 4" ГлИ?] (Zl? 4~
~ггЧ + -• + О?) 4~ {Р 4~ хл22?) (хШд 4~ •’Olig)] "И
4~ Гя22д Гл11д} (j-2q 4~ Z3? 4~ • ’ ‘ ~Т ^пд)- (265г)
Действуя аналогичным образом, можно получить третье урав-
нение в системе (265а) — (265в):
О =PXa3giq 4" (,PXtWq + ГсЗЗ?) hq 4~ [Р (Х$11д + -^лИ?) + Гл119] (Zl9 +
+ ^2д 4- - • • + Zn?) + {р [(XS229 + ^л22?) {Х&11д + Хл 119)] +
Н- Сл22д Cj,tlq} 4~ l^q 4“ 4~ Zn?) + {Р [(^838? 4- •^лЗЗ^)
(-^'S22q' Н“ -^'л22д')] ~Н ЛдЗЗ<7 -Гл22?} (4?4-4?4_ ••• (265д)
и так далее.
Таким образом, во всех уравнениях напряжения демпферных
контуров присутствуют члены, определяющие взаимную индукцию
со стороны поперечного контура статора (pxaiqiqpm i-ro контура),
и члены, выражающие падение напряжения в сопротивлениях стерж-
ней рассматриваемого контура [(jPXCI-,-? 4~ rzHg) hg Для i-ro контура].
Кроме того, каждое последующее уравнение содержит дополнитель-
ный член по сравнению с предыдущим уравнением. Он равен про-
изведению суммы токов всех демпферных контуров, начиная с тока
того контура, для которого пишется уравнение, на разность не;
£ 55]
Точные схемы замещения сопротивлений
257
.которых сопротивлений этого и предыдущего контуров. Например,
в уравнении 3-го контура (265д) содержится дополнительный по
сравнению с уравнением 2-го контура (265г) член, равный:
{[р (^оЗЗо 4" -’СлЗЗ?) -4 ГлЗЗ?] [р (^5229 4~ X:Aiq) ~ Г,-.22д]} (Л? ~Г hq “Ь
+ • • • +
Для режима работы синхронной машины с постоянным сколь-
приведенных уравнениях
жением s токи и потокосцепления
могут быть заменены комплексными
величинами, а знак дифференцирова-
ния р множителем js. Схема заме-
щения сопротивления jXAjs) состав-
ляется по уравнению (26! а) (в комп-
лексной форме), умноженному на/и
уравнениям напряжения контуров
вида (265а), (265г), (265д) (в компле-
ксной форме), разделенным на s.
В соответствии с уравнением
(261а) замещение поперечного кон-
тура статора производится цепочкой
последовательно включенных сопро-
тивлений. При этом в п точках долж-
ны быть присоединены п контуров
ротора, что создает напряжения
J-^alq^lqt jXatqll'P j^anq^nq- ОДНО
сопротивление в цепочке должно обте-
каться только током i , что соответ-
ствует первому члену в (261а). Таким
образом, цепочка сопротивлений, со-
ответствующая уравнению(261 а), при-
нимает вид, изображенный на рис. 112.
Сопротивления цепочки опреде-
ляются из равенства падения напря-
жения на всей цепочке и выражения
фициентов при токах в этом тождестве
сопротивлений цепочки:
г7
L — Imp
’^па i |
Рис.
НИЯ
при
112. Часть схемы замеще-
машины в поперечной оси
учете отдельных демпфер-
ных контуров.
(261а). Сравнение коэф-
дает следующие значения
В
О
%la %alqi
Х%а ^a'lq Xaiq't
Хпа %anq ~ п—1, q\
X = Xq — Xanq.
(266а)
Дополним цепочку на рис. 112 элементом, соответствующим
уравнению напряжения 1-го демпферного контура (265а). Этот
элемент схемы замещения представлен на рис. 113. Для опре-
17 А. И. Важное
Схемы зомеиления синхронной .ниш ины
Г Гл 7
деления его сопротивлений Zj и Z1(? нужно сопоставить уравнения
напряжения по контуру схемы и демпферного контура (265а) (раз-
деленного на s). Сравнение коэффициентов при одинаковых токах
дает:
7 __ iY I гс11д .
—7Лс11? ।-----—',
(2666)
Xi j (-^ollj? I л11<7 Л
S ’ ‘
Для замещения на схеме 2-го демпферного контура, имеющего
уравнение напряжения (265г), дополним схему на рис. 113 еще
одним элементом. Тогда она при-
мет вид, представленный на
рис. 114. Для определения но-
вых сопротивлений Z± и Ziq до-
статочно приравнять уравнения
Рис. 114. Элементы схемы замеще-
ния машины в поперечной оси.
Рис. 113. Элемент схемы замеще-
ния машины в поперечной оси.
напряжения по контуру схемы абвг и 2-го демпферного контура
(265г). Сравнение коэффициентов при одинаковых токах дает:
ГС2!!<?
8
—j [(хо22? -’С.тЗЗ.у) — (-^ги? + -^Л119) — (Xa2q— Ха19)] 4~ (266в)
Дальнейшее построение схемы замещения состоит в прибавлении
соответствующего числа цепей с сопротивлениями Z3 , Zi?, ...,Znq,
обтекаемых токами соответственно z3(?, и сопротивлениями
Z3, Zi;... ,Zn, обтекаемых токами соответственно (Ц -Д tlq -Д ... -Д
-Д inq), (Z47-W5?+ ••• и т- Д- Закон образования этих сопро-
тивлений ясен из приведенных выше значений сопротивлений
Z2?j Z.>(266b). На рис. 115 приведена схема замещения по попереч-
ной оси для машины с четырьмя демпферными контурами. Подоб-
ная схема замещения имеет эквивалентное полное сопротивление,
равное jX„(js).
§ 55}
Точные схемы замещения сопротивлений
259
Схема замещения в продольной оси может быть составлена
аналогичным образом, т. е. с помощью уравнений напряжения
цепей ротора в продольной оси и выражения для потокосцепления
статора В продольной оси, кроме демпферных контуров, распо-
лагается еще обмотка возбуждения. В этом случае уравнения
напряжения роторных цепей (46), (4в) получаются не совсем сим-
метричными, так как между обмоткой возбуждения и продольными
демпферными контурами отсутствуют взаимные активные сопро-
Тл'Л - Т’лЗЗ!?
Тпззц-Глгиг
Т
-(xo22q -Txzzq)-(Xasq -Xaztf)
TiZZir - Tnntp
-----У------
х5221р-*хЛ22сг ~(xgitq * xnnq)~(xn2q~xri:q'}
’лни
s "
~xaiq
Рис. 115. Схема "замещения машины в поперечной оси при учете от-
дельных демпферных контуров (четыре поперечных контура).
тивления (между этими обмотками нет электрической связи), в то
время как между демпферными контурами они существуют.
Это обстоятельство находит отражение на схеме замещения
в виде трансформаторной связи контура возбуждения с остальными
цепями, соответствующими демпферным контурам. Получающаяся
таким образом у А. Ранкина [Л. 22] схема замещения сложна и
неудобна. Рассмотрим, какие упрощения необходимо сделать,
чтобы схема замещения в продольной оси была такого же вида,
как и схема по поперечной оси. Например, для машины с тремя
продольными демпферными контурами и обмоткой возбуждения
желательно получить схему вида, представленного на рис. 116,
Составляя уравнения напряжения по контурам схемы рис. 116,
17*
260
Схемы замещения синхронной машины
[Гл. I
аналогичным тем, какие рассматривались на схеме рис. 114, и
сравнивая их с уравнениями напряжения действительных контуров
машины, определим все сопротивления схемы замещения.
Первая группа сопротивлений равна:
Л'1,7 =
Xia = Xatd Xald’i
-*-Зя — Xa3d XAh
X'ta =: Xafd Xa3dt
X — Xd Xafd*
(267a)
Таким образом, эти сопротивления составляются по тому же
закону, что и в схеме для поперечной оси. Этого следовало ожи-
дать, так как взаимоиндукция со статором от контуров ротора как
в поперечной, так и в продольной оси имеет одинаковый характер
(сравни выражения для и ipj.
Далее имеем:
Zxd=j(.XM.d — xfld)~\—у- >
— J (X42d xf2d'l H ’
Zzd —j(X33d Xf3d) H >
Z^d-----j l(Xf Xafd) (Xf3d Xa3d)] + >’
Z\ — j(xfld Xald)\
Z% = j l(xf-ld Xa2l) (xfld — '>
Z^ = j [(-’c/3tf Xa3d) (Xf2d — Xa2d)l-
(2676)
Кроме этих значений всех сопротивлений схемы рис. 116, полу-
чаются еще следующие условия:
v21[i = x31j = x/5i?; |
X32d == X/2di 1
r3td — Г32d — ГЧЫ — 0-
(268a)
(2686)
Из общих физических представлений, подтверждаемых расче-
том, следует, что
Xbiid Xfid. (269а)
т. е., что индуктивность z-ro продольного демпферного контура
от полей, пересекающих воздушный зазор, практически опреде-
ляется полями взаимоиндукции этого контура с обмоткой возбу-
§56] Схемы замещения сопротивлений при внезапном нарушении режима 261
ждения. Если пренебречь незначительными полями рассеяния
в лобовых частях демпферных контуров, то
xkid=-x<.iid + xMd^xbiid (2696)
для контуров с нумерацией i<Pk.
Нетрудно видеть, что при выполнении соотношений (269а),
(2696) удовлетворяются условия (268а). Условие (2686) строго не
выполняется, однако это не приводит к заметным погрешностям,
так как обычно активное сопротивление лобовых частей демпфер-
ных контуров составляет не более 10%
от сопротивления стержней.
Таким образом, для продольной
оси может быть использована схема
замещения типа, представленного на
рис. 116. Закон образования сопро-
тивлений в схеме ясен из выраже-
ний (267а), (2676). Эквивалентное со-
противление
iXd<is)-
Отметим, что расчеты с помощью
точных схем
производить, заменяя последовательно
ячейки схемы, имеющие вид треуголь-
ников сопротивлений, эквивалент-
ными звездами сопротивлений.
схемы замещения равно
замещения удобнее всего
§ 56. Схемы замещения сопротивле-
ний по продольной и поперечной осям
машины при внезапном нарушении
режима
Рис. 116. Упрощенная схема
замещения машины в продоль-
ной оси при учете отдельных
демпферных контуров.
Исследование переходного про-
цесса, протекающего при неизмен-
ной скорости вращения ротора или
ее от синхронной скорости, что этим изменением можно пренебречь,
помощью операторных уравнений машины,
цепей машины и, следовательно, электро-
существенно упрощается для начальных
процесса, поскольку активные сопротивле-
с
таким малым отклонением
удобно производить с
Определение токов
магнитного момента
моментов переходного
ния роторных цепей машины вследствие своей относительной ма-
лости не оказывают заметного влияния на величину токов в первые
моменты после нарушения режима. Иными словами, нахождение
токов машины при внезапном нарушении режима для начальной,
пусть кратковременной, стадии процесса может производиться при
пренебрежении активными сопротивлениями.
Это допущение приводит к тому, что в операторных уравнениях,
содержащих операторные сопротивления Ха (р), Xq (р), последние
262
Схемы замещения синхронной машины
[Гл. 7
превращаются в сверхпереходные сопротивления x’d, x"q для
машины с демпферной обмоткой или в сопротивления х'Л, xq для
машины без демпферной обмотки. Замена операторных функций
Хл(р), Xq(p) постоянными величинами x'd, Xq (или Ха, xq) суще-
ственно облегчает определение токов машины.
Физическая сущность параметров x'd, х”, х'а была рассмотрена
в § 31. Там же были указаны схемы замещения, определяющие
эти сопротивления. Напомним, что параметры x'd, х"ч (x'd, xq)
получаются из операторных сопротивлений Xd(p),Xq(p) подстановкой
значения р, равного оо.
Поэтому схемы замещения сопротивлений x'd, x"q должны
получаться из схем замещения сопротивлений Хл(js), Xq(js) при усло-
вии, что скольжение s будет устремлено к со. Из рис. 106—108 и
115, 116 видно, что при этом схемы замещения не будут содержать
активных сопротивлений цепей ротора. Практические схемы заме-
щения сопротивлений x'd, x"q получаются из схем, изображенных
на рис. 108. Развернутые схемы типа, представленного на рис.
115, 116, целесообразно применять лишь при определении сопро-
тивлений х"а, х" в случае специального исполнения демпферной
обмотки машины.
ГЛАВА ВОСЬМАЯ
САМОВОЗБУЖДЕНИЕ СИНХРОННОЙ МАШИНЫ
ПРИ НАЛИЧИИ ЕМКОСТИ В ЦЕПИ СТАТОРА
§ 57. Общие соображения
Работа синхронной машины в системе электропередачи проте-
кает в таких условиях, при которых в цепи ее статора оказывается
включенной емкость.
Линия электропередачи обладает прежде всего естественной
емкостью: это распределенные емкости между проводами передачи
и землей, а также между фазными проводами. С увеличением длины
линии электропередачи подобного рода емкости могут иметь зна-
чительную величину. Кроме того, в ряде линий передачи исполь-
зуется компенсация индуктивности линии посредством специально
включаемой емкости (продольная компенсация).
Известны случаи непосредственного включения емкости после-
довательно с машиной. Так, при наличии толчкообразной нагрузки,
для предотвращения колебаний напряжения в системе применяются
синхронные компенсаторы с последовательно включенной емко-
стью в цепь статора. В настоящее время исследуются электро-
передачи со специальными синхронными компенсаторами, повышаю-
щими ее устойчивость, в цепь статора которых также включается
емкость. Применение емкости в указанных случаях позволяет
получить требуемый эффект от синхронных компенсаторов при
значительном снижении их мощности.
Наличие емкости в системе, содержащей синхронные машины,
обуславливает ряд нежелательных процессов.
В частности, при несимметричных коротких замыканиях на
линии передачи, возможно возникновение резонансных явлений,
сопровождаемых перенапряжениями в отдельных элементах си-
стемы.
При определенных условиях может начаться самопроизвольное
нарастание тока синхронной машины — явление, получившее на-
звание самовозбуждения. Подобное явление может, например,
возникнуть при работе синхронного генератора на линию передачи,
отключенную от приемной системы (режим зарядки линии передачи).
Краткому рассмотрению самовозбуждения синхронной машины
в простейших случаях и посвящена настоящая глава.
264
Самовозбуждение при наличии емкости в цепи статора
[Гл. 8
Изложение этого вопроса дано применительно к случаю, когда
синхронная машина работает в неразветвленной схеме, в условиях
ее симметрии. Рассматривается не весь процесс самовозбуждения
во времени, а только условия его возникновения, т. е. определяется
соотношение параметров схемы, соответствующее началу процесса
самовозбуждения (граница самовозбуждения). Небольшое изме-
нение скорости вращения машины не оказывает сколько-нибудь
заметного влияния на условия самовозбуждения, поэтому они
определяются в предположении, что ротор машины вращается
с синхронной скоростью.
Указанная задача обычно решается двумя способами:
1) исследованием характеристического уравнения, составляе-
мого по дифференциальным уравнениям напряжения цепей объекта;
2) анализом комплексных схем, легко получаемых вследствие
того, что граница самовозбуждения соответствует некоторому
установившемуся режиму работы объекта.
Эти методы исследования в настоящее время достаточно хорошо
разработаны, и с их помощью изучены условия самовозбуждения
синхронных машин в самых сложных схемах, обладающих несим-
метрией, содержащих распределенные параметры и т. д.
§ 58. Уравнения машины при наличии емкости в цепи статора
Пусть синхронная машина работает параллельно с сетью через
емкость С. Схема включения обмоток статора машины представлена
на рис. 117. Уравнение напряжения для
Рис. 117. Схема включения
обмоток статора машины
при наличии емкости.
любой из фаз, например фазы а, теперь
принимает вид:
t
~e‘i = d'dt^ria~^ '(2 J iadt’
о
где ea — фазное напряжение в месте
присоединения машины к
сети;
С — потокосцепление фазной об-
мотки а и ток в этой фазе.
Для того чтобы исключить интеграл
в уравнении (270а), уравнение следует
продифференцировать, что приводит его
к виду:
Аналогичные уравнения могут быть написаны для других фаз:
(270з)
(270г)
§ 58]
У равнения машины при наличии емкости в цепи статора
265
Преобразуем уравнения (2706)—(270г), заменив фазные пере-
менные новыми переменными в осях d, q. Линейное преобразование
от осей а, Ь, с к новым осям d, q подчиняется соотношениям, приве-
денным в § 5:
У а = 4 [у a cos 7 + yb cos (7 — 120) + ус cos (7 4- 120)];
2 (271)
Уд = — -3 [Уа sin 7 +-У» sin (7 -120) - ус sin (7 4-120)],
где Уа> Уь> Ус — исходные переменные (токи, напряжения, потоко-
сцепления) в осях а, Ь, с.
yd, yq — переменные в осях d, q.
Умножая уравнение (2706) на cos 7 = cos (J ю dt 4- 70] и исполь-
зуя очевидные соотношения
dy d , , ,
cos 1' ’ it= ~dt cos i) + ш sm 7 • v;
dу d , . 4
Sin 7 • l) — “COS 7-y,
получим новое уравнение:
(—ea cos 7) + to (— ea sin 7) =
= it \it cos 7) + sin 7 + ria cos 7] 4-
+ wi sin 7)— cos 7 + “ ria sin 7 4-
Аналогичные уравнения могут быть записаны для фаз
после умножения (270в) и (270г) соответственно на cos(y — 120)
и cos(y 4- 120). Если полученные таким образом три уравнения
вида (273) сложить и умножить результат на 2/3, то в соответствии
с выражениями (271) нетрудно прийти к следующему результату:
й (- + rtd] -
— ® ~ 4- . (274а)
Разделим уравнение (274а) на синхронную угловую скорость
<os и обозначим символом р дифференцирование по синхронному
времени р — ~ . Тогда уравнение (274а) принимает вид:
— ея =р — 4 (ША) + г‘а\ ~^Р —
+ (2746)
1
где = — емкостное сопротивление.
(272)
(273)
b и с
266
Самовозбуждение при наличии емкости в цепи статора
[Гл. 8
Для того чтобы уравнение (2746) содержало относительные
значения параметров и переменных, его нужно разделить на базис-
ное напряжение цепи статора (см. § 10):
в(5 уУУб ^б^'б*
Сохраняя для относительных значений величин те же обозначе-
ния, что и для величин с физической размерностью, получим урав-
нение (2746) в относительных единицах в виде:
Р(— еа) -'г^еч = р— шф,-4-rid] — —
— ш-Д, — wriq 4- xcid. (274в)
Для получения второго уравнения напряжения цепей статора
в осях d, q нужно прежде всего исходные уравнения для фаз а, Ь, с
(2706)—(270г) умножить соответственно на siny, sin (у — 120) и
sin(y + 120). Учитывая соотношения (272), получим, например,
для фазы а:
(— еа sin у) + wea cos у = (Фа sin у) — cos у Д- ria sin у] —
— “ (Фа cos у) — ш-^а sin у - u>ria cos у Д- . (275)
Затем уравнения для трех фаз вида (275) необходимо сложить,
умножить на 2/3 и тогда с помощью соотношения (271) нетрудно
получить:
5 +ше*=i [- - rz’d -ш
— wrid----*4. (276а)
Совершая над уравнением (276а) те же операции, которые были
проделаны с (274а), получим второе уравнение напряжения статора
в относительных единицах в виде:
peq + '°еа =—р + ri9] — Wh +
4- ш2ф? — wrid — xci„- (2766)
К уравнениям напряжения цепей статора (274в) и (2766) должны
быть присоединены уравнения напряжения обмоток ротора, кото-
рые, естественно, остаются такими же, как и в случае работы машины
без емкости.
Отметим, что если сеть, к которой подключена синхронная ма-
шина, может считаться бесконечно мощной, а сама машина вращается
с синхронной скоростью, то в уравнениях (274в), (2766):
Для машины, подключенной к разомкнутой на конце линии
передачи, остаются справедливыми уравнения напряжения (274в),
(2760) при условии, что в них положено ed = eq = 0.
§ 59] Возникновение самовозбуждения синхронной машины 267
И
иЪПдЕГ-
§ 59. Возникновение самовозбуждения синхронной машины
при наличии емкости в цепи статора
Рассмотрим физическую сторону явления самовозбуждения
синхронной машины. Нетрудно показать, что по своей природе
оно в большинстве случаев представляет одну из разновидностей
резонанса — так называемый параметрический резонанс.
Сущность такого рода резонанса состоит в том, что в цепи,
содержащей индуктивность L, емкость С и активное сопротивление
г и не имеющей источника э. д. с. (рис. 118), при периодическом
изменении L или С возможно безграничное нарастание тока.
Подобное нарастание тока будет иметь место, если работа,
затрачиваемая при периодическом изменении L (или С), больше
энергии, рассеиваемой в активном сопротивлении цепи г.
Синхронная машина вместе с емкостью С, включенной в цепь
статора, как раз представляет такой контур г, L, С, в котором
индуктивность фазной обмотки L пе-
риодически изменяется, являясь гармо-
нической функцией угла между про-
дольной осью машины и магнитной осью
фазы и, следовательно, гармонической
функцией времени. Частота изменения
индуктивности фазной обмотки равна
удвоенному Значению синхронной ча- Рис. 118. Схема контура г,
стоты, если ротор машины вращается L’
с синхронной скоростью.
Следовательно, самовозбуждение синхронной машины, т. е.
нарастание тока в цепи статора, может возникать только при таком
соотношении параметров, которое приводит к генерации энергии,
т. е. образованию электромагнитного момента в машине за счет
появляющихся токов.
Следует подчеркнуть, что этот электромагнитный момент обус-
ловлен только возникающими при резонансе токами и не имеет
никакого отношения к электромагнитному моменту от нормального
возбуждения машины.
Самовозбуждение синхронной машины будет характеризоваться
протеканием токов неизменной амплитуды, если электромагнитная
мощность, образованная указанным выше способом, окажется рав-
ной потерям в активном сопротивлении цепи статора. Такой уста-
новившийся процесс в колебаниях тока соответствует границе само-
возбуждения.
Если потери в активном сопротивлении от возникающих при
самовозбуждении токов окажутся больше электромагнитной мощ-
ности, образуемой в машине этими токами, процесс самовозбуждения
должен затухнуть. Напротив, такой процесс начнет развиваться,
если электромагнитная мощность будет превалировать над потерями
в активном сопротивлении цепи статора.
268
Самовозбуждение при наличии емкости в цепи статора
[Гл. 8
Нарастание амплитуды токов в этом случае могло бы происхо-
дить неограниченно, если параметры цепей машины были бы линейны.
Однако практически самовозбуждение развивается лишь до опре-
деленных пределов, обусловленных нелинейностью в машине (насы-
щение).
Итак, характерная особенность процесса самовозбуждения со-
стоит в генерации энергии синхронной машиной при появлении токов
самовозбуждения.
Для первоначального появления токов достаточно иметь в цепи
статора машины небольшое напряжение, например напряжение от
остаточных магнитных полей. Следует подчеркнуть, что токи само-
возбуждения по своей природе являются свободными токами. По-
этому условия их возникновения определяются единственно соот-
ношением параметров схемы и не зависят от внешних напряжений,
приложенных к цепям машины. Это значит, что при нахождении
условий самовозбуждения можно считать внешние напряжения
цепей машины равными нулю.
§ 60. Виды самовозбуждения
Колебания тока при самовозбуждении синхронной машины
происходят с вполне определенной частотой, зависящей от соотно-
шения параметров машины и емкости, включенной в цепь ее статора.
Трехфазные токи самовозбуждения в статоре образуют вращаю-
щееся магнитное поле. При этом возможны два случая: либо маг-
нитное поле в воздушном зазоре вращается с синхронной скоростью,
т. е. остается неподвижным относительно ротора, либо оно пере-
мещается относительно ротора с некоторой скоростью. В первом
случае при самовозбуждении может возникнуть только синхронный
электромагнитный момент, называемый обычно реактивным момен-
том. Во втором случае образуются лишь асинхронные моменты.
В соответствии с этим различают два вида самовозбуждения: син-
хронное и асинхронное.
Более глубокое исследование [Л. 23] показывает, что каждый
из указанных видов самовозбуждения имеет по две разновидности.
Синхронное самовозбуждение обязано генерации энергии за
счет реактивного электромагнитного момента, который, как изве-
стно, может возникнуть только в машине, имеющей различные
сопротивления по осям d, q. В отношении различия сопротивлений
машины по двум осям необходимо иметь в виду следующее.
При разомкнутых обмотках ротора машина характеризуется
по осям d, q синхронными сопротивлениями xd, xq. В этом случае
при несовпадении оси магнитного поля токов статора с осями d, q
трубки магнитного поля в зазоре деформируются и образуется тан-
генциальная сила, обуславливающая реактивный электромагнит-
ный момент. Представим теперь, что обмотка возбуждения машины
накоротко замкнута, но ее активное сопротивление гу равно нулю.
§ 60]
Виды самовозбуждения
269
При сколь угодно малом изменении продольного тока статора i1
и любой скорости этого изменения возникает соответствующий ток
в обмотке возбуждения и сопротивление статора машины по про-
дольной оси делается равным x'd. Таким образом, в этих условиях
при неравенстве сопротивлений машины по осям d,q (x'd^x4) также
возникает реактивный электромагнитный момент, хотя неравенство
сопротивлений по осям теперь обусловлено не магнитной асиммет-
рией ротора, а наличием короткозамкнутой обмотки по оси d.
Характерным для обоих рассмотренных случаев возникнове-
ния реактивного момента является то, что последний может суще-
ствовать в условиях постоянства величины потока статора, по-
скольку скорость изменения токов id, iq не влияет на параметры
машины по осям d, q. Поэтому самовозбуждение машины при
таких электромагнитных моментах может быть устойчивым (граница
самовозбуждения), а при развитии процесса во времени скорость
его невелика [Л. 23]. Эту первую разновидность синхронного само-
возбуждения Н. Н. Щедрин назвал реактивно-синхронным само-
возбуждением.
В реальных условиях обмотка возбуждения по отношению к сво-
бодным токам является короткозамкнутой (через возбудитель),
однако она имеет конечное активное сопротивление. При небольших
значениях сопротивления rf статор машины в продольной оси имеет
сопротивление, практически равное x'd, только если продольный ток
id будет изменяться во времени с достаточной скоростью. В пределе,
при стремлении скорости изменения тока iri к нулю, сопротивление
статора по продольной оси будет стремиться к синхронному сопро-
тивлению ха.
Этим объясняется тот факт, что реактивный момент при конеч-
ном значении сопротивления rf также может возникнуть при нера-
венстве параметров xdv. xq, но при обязательном условии изменения
во времени токов i,, iq, т. е. при непрерывном возрастании потоков
статора.
Таким образом, синхронное самовозбуждение, определяемое
в машине параметрами x'd и хч, может иметь только нарастающий
характер. Эту вторую разновидность синхронного самовозбуждения,
следуя Н. Н. Щедрину, назовем репульсионно-синхронным само-
возбуждением.
Реактивно-синхронное самовозбуждение в реальных условиях
возможно только в явноплюсных машинах, имеющих неравные
сопротивления xd и xq. В машинах со сверхпроводящей обмоткой
возбуждения (/у = 0) реактивно-синхронное самовозбуждение было
бы возможным и при неявнополюсном роторе. Репульсионно-син-
хронное самовозбуждение может иметь место как в явно- так и
неявнополюсных машинах.
Отметим также,что в явнополюсных машинах с rf ф 0 реактивно-
синхронное самовозбуждение возникает при одних и тех же усло-
виях, независимо от того, замкнута или разомкнута обмотка воз-
270
Самовозбуждение
при наличии емкости в цепи ctcli ора
[Гл. 8
буждения машины. Это объясняется тем, что при таком виде
самовозбуждения магнитное поле не только остается неподвиж-
ным относительно ротора, но и очень медленно изменяется во
времени.
Поскольку при синхронном самовозбуждении магнитное поле
токов статора вращается с синхронной скоростью, то в статоре
могут протекать при этом токи только синхронной частоты. На
рис. 119 представлен характер нарастания токов статора при син-
хронном самовозбуждении. Очевидно, подобным же образом изме-
няется напряжение на зажимах статора синхронной машины.
Не рассматривая здесь разновидностей асинхронного самовоз-
буждения, можно тем не менее утверждать, что асинхронное само-
возбуждение в общем смысле характеризуется несинхронным враще-
нием магнитного поля и ротора.
Пусть скорость перемещения поля в воздушном зазоре относи-
тельно ротора равна <оп — <os = sto^, где <оп и <о4 — скорости вра-
Рис. 119. Характер изменения тока ста-
тора при синхронном самовозбуждении
машины.
щения соответственно поля и
ротора. Напомним, что иссле-
дование самовозбуждения
производится при постоян-
ной скорости вращения ро-
тора, равной синхронной ско-
рости.
Скольжение s, характери-
зующее относительную ско-
рость перемещения поля и
ротора, выбрано положитель-
ным, когда магнитное поле
вращается быстрее, нежели
ротор. Это дает возможность использовать в дальнейшем некото-
рые результаты, полученные ранее при анализе асинхронного ре-
жима машины (§ 41, 53), где положительное скольжение было оп-
ределено аналогичным образом.
При sws 0 в обмотках ротора индуктируются э. д. с. частоты
скольжения и возникают токи той же частоты.
Если обмотки ротора несимметричны в осях d, q, то магнитные
поля от токов ротора можно представить двумя вращающимися
в противоположные стороны полями. При этом скорость вращения
этих полей относительно ротора равна zhsoy.. Скорость вращения
этих же полей в пространстве, т. е. относительно статора, равна
zt sws = (1 -+- $). Следовательно, при асинхронном самовоз-
буждении, в общем случае в обмотках статора должны протекать
токи двух частот <os(l 4~s) и ws (1 —х)не равной амплитуды. Нало-
жение токов указанных частот обуславливает биение тока статора,
характер которого показан на рис. 120. При этом предположено,
что установившиеся биения тока соответствуют границе самовоз-
буждения машины с линейными параметрами; установившийся
§ 61] Самовозбуждение синхронной машины с симметричным ротором 271
режим колебаний в машине с насыщением имеет несколько отлич-
ный характер.
При наличии на роторе симметричных обмоток (например ротор
асинхронной машины), вращение магнитного поля относительно
ротора со скоростью sw5 обуславливает в роторе только систему
симметричных токов. Эти токи создают вращающееся магнитное
поле, которое перемещается
Здесь уместно отметить,
что генерирование мощно-
сти может иметь место
лишь в том случае, когда
ротор вращается со скоро-
стью большей, нежели ско-
рость поля (асинхронный
генератор). Таким обра-
зом, асинхронное самовоз-
буждение возникает только
при 5<^0.
Нетрудно видеть, что
асинхронное самовозбуж-
относительно ротора со скоростью sws.
Рис. 120. Характер изменения тока статора
при асинхронном самовозбуждении машины
с несимметричным ротором.
дение машины с симметричным ротором сопровождается протека-
нием токов в статоре только одной частоты и равной (14~s)<us.
Частота этих токов меньше синхронной частоты, так как 5<^0.
Характер токов в обмотках статора подобной машины анало-
гичен тому, который представлен на рис. 119. Очевидно, таким
же образом изменяется во времени напряжение на зажимах ста-
тора машины.
§ 61. Самовозбуждение синхронной машины с симметричным ротором
Для установления некоторых количественных соотношений,
полезных при изучении самовозбуждения синхронной машины
в общем случае, рассмотрим условия самовозбуждения на одном
частном примере, когда ротор машины полностью симметричен.
Такая синхронная машина конструктивно повторяет обычную
асинхронную машину, но в отличие от последней имеет синхронную
скорость вращения ротора.
В предыдущем параграфе было отмечено, что самовозбуждение
такой машины будет носить асинхронный характер и возможно
только в том случае, если ротор машины вращается с большей
скоростью, чем магнитное поле в воздушном зазоре. При этом частота
наводимых полем в обмотках статора э. д. с. и токов равна (1 -ф- s)
где 5u)s представляет относительную скорость поля и ротора.
На границе самовозбуждения гармонические токи в обмотках
имеют неизменную амплитуду. Следовательно, такой режим можно
рассматривать как установившийся и использовать при его анализе
обычные уравнения в комплексной форме.
272 Самовозбуждение при наличии емкости в цепи статора [Гл. 8
В этих условиях уравнения напряжения обмотки статора ма-
шины, включенной на емкость, и вторичной ее обмотки имеют вид:
Ё
+ + (277а)
£’$ 4-£;.2s = * (2776)
где Ё1 =—К) — э- Д- с- в обмотке статора от поля воз-
душного зазора при синхронной час-
тоте со5;
хт — сопротивление взаимной индукции между
обмотками статора и ротора;
Ё'3 — приведенная э. д. с. в обмотке ротора
от поля в зазоре при синхронной частоте
со5 (как известно, £) = £’');
Esi = — jxji, E'si = — jx'J's — э. д. с. от полей рассеяния в обмот-
ках статора и ротора при синхронной
частоте ros;
Ёс=j —V Л = Jxcii — э. д. с. емкости С при частоте со5;
Д, /' — токи в обмотках статора и ротора ма-
шины;
г, г' — активные сопротивления обмоток.
Штрихи в обозначениях показывают, что все величины, относя-
щиеся к ротору, приведены к обмотке статора по известным в тео-
рии электрических машин правилам.
Составим схему замещения рассматриваемой машины. Для этого
необходимо уравнения напряжения (277а), (2776) обмоток статора
и ротора привести к одной и той же частоте (т. е. привести машину
к статическому трансформатору с взаимно неподвижными обмот-
ками).
Удобнее всего сделать приведение к синхронной частоте, для
чего необходимо разделить уравнения (277а), (2776) соответственно
на 1 + s и s. После такого деления они принимают вид:
— jXi4 + (гУд7 Л — Л = 0; (278)
Ё' — jx'j’ — Ёг^ = 0.
2 7 8 2 2 s j
Уравнениям (278) соответствует схема замещения, представлен-
ная на рис. 121. Правая часть этой схемы может быть заменена
эквивалентным сопротивлением jX(Js) = Rs-\-jXs, которое опре-
деляется согласно схемы рис. 122, а, после чего вся схема замещения
принимает вид, изображенный на рис. 122, б.
* Приложенное к обмоткам ротора внешнее напряжение в уравнении не
учитывается, поскольку оно не влияет на условия самовозбуждения.
§ 61] Самовозбуждение синхронной машины с симметричным ротором 273
Поскольку самовозбуждение возможно только при s<^0, экви-
валентное сопротивление Rs отрицательно. Потерн в этом сопро-
тивлении на схеме замещения характеризуют электромагнитную
мощность, генерируемую в машине токами самовозбуждения.
Граница самовозбуждения
синхронной машины с симмет-
ричным ротором соответствует
условиям резонанса в схеме за-
мещения рис. 122, б, т. е. опре-
деляется из условий:
Рис. 121. Схема замещения машины
с симметричным ротором для режима,
соответствующего границе самовоз-
буждения.
хс
(1 + s)2
г _
т+т-
-Rs
(279а)
(2796)
Эквивалентные сопротивления Rs и Xs легко определяются из
схемы замещения рис. 122, а; они оказываются равными:
(280а)
(2806)
-||------ШЛг
•Jxc TTS
(1* S')2
Рис. 122. Схемы замещения машины с симметричным ро-
тором для режима, соответствующего границе самовозбуж-
дения: а — эквивалентное сопротивление машины; б—пол-
ная схема.
jX/Js)=Rs-jXs
г'а 1 гдар’-хт+х3'-т-2>а Т2 — постоянная времени контура ро- тора (в радианах);
_ хпг + х'г °2- хт — коэффициент рассеяния контура
Х' = Х1 + = Т Х1 ротора; — переходное сопротивление машины; — синхронное сопротивление машины.
1/а18 А» И. Важное
274
Самовозбуждение при наличии емкости в цепи статора
[Гл. 8
Из теории асинхронных машин известно, что эквивалентное
сопротивление схемы рис. 122, а представляет на комплексной плос-
кости окружность.
На рис. 123 изображена эта окружность, причем по оси мнимых
отложены значения Xs, а на отрицательной вещественной — пара-
на комплексной плоскости
эквивалентного сопротив-
ления машины с симмет-
ричным ротором.
метр Rs. В граничных точках — точках
пересечения окружности с осью мнимых —
эквивалентное индуктивное сопротивле-
ние Xs имеет значения, равные xd (при
$ = 0) и х' (при $ = — оо).
Отметим, что диаметр окружности не за-
висит от величины активного сопротивления
контура ротора г' (р2), но последнее оказы-
вает влияние на распределение параметра
s вдоль окружности.
Значение параметра s в любой точке
окружности может быть определено сле-
дующим простым способом. Проведем на
рис. 123 из точки A (Xs = х') прямую под
углом а к оси мнимых до пересечения ее с
окружностью (точка В). Длина перпенди-
куляра ВС, опущенного из точки В на ось
мнимых, очевидно, равна сопротивлению
—Rs. Из рис. 123 следует, что
tga =
ВС _ - Rs
AC Xs- x'
Подставляя сюда значения Xs и —Rs из выражений (280а),
(2806), нетрудно получить следующий результат:
. — S
Таким образом, значение параметра s в некоторой точке окружности
равно:
5 =— р2 tg а, (281)
где а — угол между осью мнимых и прямой, проведенной через
рассматриваемую точку на окружности и точку Xs = х' на оси
мнимых. Соотношение (281) показывает, что на большей части
окружности сопротивления jX(Js) параметр $ имеет малое значение,
так как обычно р2 — мало.
На рис. 123 указано распределение значений параметра s вдоль
окружности jX(js) при р2 = 0,01.
Возвратимся к уравнениям (279а), (2796), определяющим гра-
ницу самовозбуждения синхронной машины с симметричным рото-
ром. Поскольку представляет интерес нахождение значений емкост-
§61] Самовозбуждение синхронной машины с симметричным ротором 275
ного сопротивления хс, вызывающих самовозбуждение машины,
и так как процесс самовозбуждения в значительной мере зависит
от величины активного сопротивления цепи статора г, будем строить
границу самовозбуждения в координатных осях хс, г. Задаваясь
различными значениями относительной частоты токов в роторе
s от 0 до —1,* по уравнениям (279а), (2796) с помощью выражений
(280а), (2806) вычисляют для каждого s параметры хс, г, которые
затем откладывают в координатных осях
хс, г. Построенная в этих осях по точкам
кривая и представляет границу самовоз-
буждения.
Следует обратить внимание на то, что
на большей части окружности сопротивле-
ния jX (Js) = + JXS частота s имеет не-
значительную величину (рис. 123) и поэтому
почти на всем интервале изменения емко-
стного сопротивления в пределах xdJ>
Хс хг с достаточной точностью можно
принять 1 + s 1 и заменить уравнения
(279а), (2796) приближенными уравнениями
в виде:
xc^Xs, r^ — Rs.
Иными словами, в этой области значе-
ний емкостного сопротивления хс граница
самовозбуждения практически сливается с
окружностью сопротивления /Х( — Js).**
Это дает основание сделать важное за-
Рис. 124. Граница само-
возбуждения машины с
симметричным ротором.
ключение, состоящее в том, что для определения границы само-
возбуждения синхронной машины с симметричным ротором для
значений хс, лежащих в диапазоне xdJ> Xcj> х’, достаточно по-
строить на комплексной плоскости сопротивление машины JX (— js).
Это геометрическое место и явится границей самовозбуждения.
При приближении значений емкостного сопротивления Хс к х'
относительная частота s начинает возрастать, и для определения
границы самовозбуждения необходимо пользоваться точными урав-
нениями (279а), (2796). При s = —1 параметрыхс — г = 0 и гра-
ница самовозбуждения приходит в начало координат.
На рис. 124 изображена граница самовозбуждения, построенная
по уравнениям (279а), (2796) для машины со следующими парамет-
рами: xd=l,0; х' = 0,3; р.2 = 0,01. Для сравнения пунктиром
* При s = —1 токи статора превращаются в постоянные и это значение s
является предельным для самовозбуждения.
** Окружность jX(js) является зеркальным относительно оси мнимых
отображением окружности jX(—js), так как при перемене знака у s изменяется
на противоположный знак у Rs, а знак сопротивления Xs не меняется.
276
Самовозбуждение при наличии емкости в цепи статора
[Гл. 8
нанесено на рисунке сопротивление jX(— js). В значительной части
граница самовозбуждения xc=f(r) совпадает с кругом сопротив-
ления jX(—js). На этом же рисунке нанесена зависимость s—/(xc).
§ 62. Комплексный метод анализа асинхронного самовозбуждения
синхронной машины
Используем теперь комплексный метод для анализа асинхрон-
ного самовозбуждения синхронной машины в общем случае, т. е.
когда условие симметрии цепей ротора машины не выполняется.
Этот метод, как уже отмечалось, применим для режима, соответ-
ствующего границе самовозбуждения, когда токи машины являются
гармоническими функциями времени и имеют неизменную ампли-
туду.
Для указанного режима магнитные поля в воздушном зазоре
перемещаются относительно ротора с постоянной скоростью s<os.
Поэтому потокосцепления rpd, и токи id, iq являются гармониче-
скими функциями времени, частота которых в относительных
единицах равна s.
Введем в рассмотрение комплексы токов ld, lq и потокосцепле-
ний ф^, ф вещественные части которых равны мгновенным значе-
ниям соответствующих переменных. Такие комплексы уже приме-
нялись при изучении асинхронного режима работы машины (§ 41,
53). Соотношение между токами zrf, tq может быть получено с помощью
дифференциальных уравнений напряжения (274в), (2766), в которых
следует: 1) положить со = 1, поскольку процесс самовозбуждения
рассматривается при синхронной скорости вращения ротора машины;
2) положить еЛ = eq = 0, так как токи самовозбуждения id, i
являются по своему характеру свободными токами; 3) заменить
мгновенные значения переменных ф(„ гр id, iq соответствующими
комплексами; 4) заменить знак дифференцирования р на js, по-
скольку все комплексные переменные должны содержать мно-
житель eis\
Имея в виду, что комплексы потокосцеплений <pd, ф? равны:
Ъ = Xd (Js) id=—jZdsid, ‘ф? = Xq (js) iq = — jZqSiq,
и используя новые обозначения для суммарного (Zcs) и разностного
(ZPs) сопротивлений Zcs = 0,5 (Zds + Zqs), Z =0,5 (Zds—Zqs),
нетрудно преобразовать уравнения (274в), (276б) к виду:
К1 + s2) (ZcS+ Zps)—jXc 4-sr ]jid — [2s (Zcs ~Zps)4- 4 lq= 0; (282a)
[2s (Zcs4-Zps)4- r] td 4~[(1 4-s2)(Zcs ^ps) Jxc~vsr\jlq= 0. (2826)
Введем в полученные уравнения новые комплексы токов Isl,
]si, которые уже рассматривались ранее в § 53:
jsl = 0,5-(ld +jiq) !si = 0,5-(id ~jiq) e~Js\
$ 62] Комплексный метод анализа асинхронного самовозбуждения 277
Там было показано, что модули токов Isl и /s2представляют ампли-
туды гармонических токов в обмотках статора. Но, если в случае
обычного асинхронного режима (§41) относительные значения частот
токов статора равны единице и 1—2s, то при самовозбуждении ма-
шины они равны 1 + s и 1 — s. Таким образом, в нашем случае
модули токов /51 и !si представляют амплитуды токов статора, час-
тоты которых в относительных единицах соответственно равны
1 + s и 1 — s.
Умножая уравнение (282а) на —/, складывая и вычитая из него
(2826), умножая затем оба новых уравнения на 0,5 получим
в результате:
[(1 4- 4~(14~s)г—М Al 4~(14-s)2^psA2= (283а)
(1 - s)*Z?sIsl + [(1 - s/Zcs - (1 - s) r-jxc ] = 0. (2836)
Для построения схемы замещения разделим (283а) на (1 + s)2,
а (2836) на (1 — s)2, после чего они принимают вид:
[^4-Нру- (Т^р]Л14-ад-2=0; (283в)
Vsi + - -у— - Лз= 0; (283г)
Уравнениям (283в), (283г), очевидно, соответствует схема заме-
щения, представленная на рис. 125. Она аналогична схеме, полу-
ченной при асинхронном вращении машины (см. рис. 104), и отли-
чается только наличием емкостей в контурах, отсутствием внешнего
источника э. д. с. и частотами тока статора.
Можно показать аналогично тому, как это было проделано при
рассмотрении асинхронного хода машины, что электромагнитный
момент определяется на схеме замещения рис. 125 токами Isl, Isi
и соответственно напряжениями l)sl, Usi, отмеченными на этом
рисунке. Поскольку в рассматриваемом случае схема замещения
внешних источников э. д. с. не содержит, электромагнитный момент
г г
равен сумме потерь в активных сопротивлениях утру, и —,
т. е.
= (284)
Расчет границы самовозбуждения можно произвести тем же
путем, что и в случае машины с симметричным ротором, т. е. по
уравнениям (279а), (2796). Однако эквивалентные сопротивления
Xs, Rs в общем случае получаются громоздкими.
В зоне ЛсОх^при увеличении частоты s индуктивные сопротив-
ления в Zds и ZQS машины с полной демпферной обмоткой стремятся
18 А. И. Важной
278
Самовозбуждение при наличии емкости в цепи статора
[Гл. 8
к своим наименьшим значениям — сверхпереходным сопротивле-
ниям xj, x"q, которые различаются не очень сильно. Активные
сопротивления в Zds и Zqs, при таких частотах в машине с полной
демпферной обмоткой, также мало отличаются друг от друга. Это
Рис. 125. Схема замещения машины с
несимметричным ротором для режима,
соответствующего границе асинхронного
самовозбуждения.
—II-----ТЛЛГ ,"1
г
'2£с_ 77Т
(f*s)2
%ds +
~2
Рис. 126. Приближенная
схема замещения машины
для режима, соответст-
вующего границе асин-
хронного самовозбужде-
ния при достаточно боль-
ших зиачеицях частоты
в роторе.
дает основание считать Zds — Zqs ««0. В этом случае контуры с то-
ками /?1 и Isi могут рассматриваться самостоятельно, а это значит,
что эквивалентное сопротивление jX(js) может быть взято равным
0,5(Zds + Zqs) (рис. 126).
§ 63. Общая методика определения условий самовозбуждения
синхронной машины по характеристическому уравнению
Существует и другой метод определения условий самовозбужде-
ния машины, который в краткой форме излагается ниже.
Поскольку нас будет интересовать лишь нахождение границы
самовозбуждения, но не исследование развития этого процесса во
времени, можно принять, что параметры синхронной машины по-
стоянны. Будем также считать, что ротор машины вращается все
время с синхронной скоростью. При сделанных допущениях урав-
нения напряжения цепей статора (274в), (2766), а также уравнения
напряжения цепей ротора оказываются линейными.
Общий метод определения границы самовозбуждения состоит
в исследовании корней характеристического уравнения, соответст-
вующего системе линейных дифференциальных уравнений напря-
жения цепей машины.
§ 64] Условия самовозбуждения синхронной машины без демпф. обмотки 279
В самом деле, нужно найти характер изменения во времени сво-
бодных токов цепей машины, т. е. токов, не связанных с приложен-
ными к цепям напряжениями (ed, е , ef). Если эти свободные токи
(например токи статора id, iq) будут с'течением времени затухать,
то, очевидно, самовозбуждение при данных значениях параметров
невозможно. Напротив, стремление свободных токов к неограничен-
ному возрастанию будет указывать на самовозбуждение машины.
Свободные токи находятся решением однородных уравнений напря-
жения цепей машины, т. е. уравнений, в которых внешние напряже-
ния (ed, е9, бу) положены равными нулю. Решение системы однородных
линейных дифференциальных уравнений с постоянными коэффи-
циентами представляет совокупность экспонент вида:
_у = Д1гРп4-
где р2, ... — корни характеристического уравнения, соответ-
ствующего системе дифференциальных уравнений.
Очевидно, что если все корни рг, р2, ... имеют либо отрицатель-
ную вещественную часть, либо отрицательны (если корни веще-
ственны), то самовозбуждение машины невозможно. Переход хотя
бы одного корня (или вещественной части комплексного корня)
через нуль будет соответствовать переходу границы самовозбужде-
ния, т. е. неограниченному (в линейной системе) нарастанию токов.
Для определения условий, при которых все корни характери-
стического уравнения (вещественные части комплексных корней)
отрицательны, можно воспользоваться критериями Гурвица. *
Из вышеизложенного следует, что рассматриваемый метод опре-
деления условий самовозбуждения синхронной машины есть не
что иное, как общий метод исследования статической устойчивости
(§ 44). В данном случае определяется статическая неустойчивость
электромагнитного процесса, так как скорость машины постоянна.
§ 64. Условия самовозбуждения синхронной машины
без демпферной обмотки
Рассмотрим прежде всего самовозбуждение синхронной машины
без демпферной обмотки, для которой потокосцепления цепей равны
(см. (63а)):
^d = Ed + if = xdid + if-, (286а)
tyq = Eq = xqiq, (2866)
Ф/ — V-Ed -j- if = (xd — x'd)id-{-if. (286b)
* Критерии Гурвица, правильно определяя границы самовозбуждения,
не всегда позволяют проследить за физическим характером процесса самовоз-
буждения. Так, они не обнаруживают возможного перехода репульсионно-
синхронного самовозбуждения в асинхронное [Л. 23].
18*
280
Самовозбуждение при наличии емкости в цепи статора
[Гл 8
Подставляя в уравнения (274в), (2766) потокосцепления б,,-,
ф из (286а), (2866), полагая в них <о = 1, присоединяя к ним урав-
нение напряжения обмотки возбуждения и считая внешние напря-
жения цепей ed, eq, ef равными нулю, получим систему однородных
уравнений в виде:
(/’ • 2xrf + г) id 4- [(р2 — 1) xq +рг 4- хс] iq +Р • 2Zz == 0;
— [ (Р2 — 1) 4- рг+хс ] id -Н(р2х? 4- г) iq — (р2 — 1) if = 0;
Р {xd x'd) id 4- (р 4~ Р/) if — о.
(287)
Составляя определитель системы (287) и приравнивая его нулю,
найдем характеристическое уравнение, которое оказывается урав-
нением пятой степени:
(Тор5 4~ 4- <2jp3 4~ aip^ 4~ &ьР “Ь аз= (288)
где
XdXq}
a1 = (Xd4-^?)''4-xdx?p/;
= 2XdXq 4- (Xd 4~ Xq) Xc 4~ (xd -f~ xq) r?f 4- r2;
а3—(2хс 4~X/4~-*4)r4~[2xdXq-j-(Xd-j-Xg)Xc] P/4~r‘P/>
a4 == (x'd — xc) (Xq — xc) 4- (2%c 4- xd4- xq)r?f 4- r2;
«з = [(-*4 — xc) (xq — xc) 4- г2] Р/.
Все корни уравнения (288) будут отрицательными (или с отрица-
тельными вещественными частями), если определители Гурвица
больше нуля (§ 44).
Анализ определителей Гурвица показывает, что только два по-
следних из них могут принимать отрицательные значения; остальные
остаются положительными при любом соотношении параметров.
Таким образом, отсутствие самовозбуждения машины обеспечено
при таких соотношениях параметров, для которых выполняются
неравенства:
<21 <20 0 0
а„ = я3>0, Д„_1 = Д4 = 3 J J ° >0.
«5 U4 U3 <12
0 0 а5 а4
Граница самовозбуждения определяется уравнениями:
<23 = 0; Д4 = 0.
Часть этой границы определяется уравнением as = 0 или
(ха — хс) (xq — хс) 4- г2 = 0. (289)
§ 64] Условия самовозбуждения синхронной машины без демпф обмотки 28!
Представляя уравнение (289) в несколько преобразованном виде,
а именно:
нетрудно видеть, что оно соответствует окружности радиусом х'! 2 х°
и с координатами центра, равными Хс = х2, г = 0.
На рис. 127 изображена половина найденной окружности, соот-
ветствующая физически реальному, т. е. положительному актив-
ному сопротивлению. Вне г
наступить не может, так как
параметры хс, г будут удов-
летворять неравенству:
(xd — Хс) (xq — Хс) + г2 > 0.
Совокупность параметров хс,
г, заключенных внутри ок-
ружности, представленной на
рис. 127, напротив, обуслав-
ливает процесс самовозбужде-
ния машины.
Остальная часть границы
самовозбуждения может быть
построена по уравнению:
Д4 = 0. (290)
В явном виде установить
связь между параметрами хс
и г, удовлетворяющую урав-
нению (290), весьма затруд-
нительно. Задаваясь числен-
ными значениями одного из
них, можно определить другой
параметр, соответствующий
с тем, для значений емкостного сопротивления хс, лежащих в диапа-
зоне х,, хс> х'а, граница самовозбуждения машин, имеющих
малый параметр р., достаточно точно определяется приближенным
способом.
Рассмотрим с этой целью границу самовозбуждения в предпо-
ложении, что активное сопротивление обмотки возбуждения равно
нулю (р/ = 0). В этом случае коэффициент а3 обращается в нуль, и
определитель Гурвица Д4 запишется в виде:
окружности
хс
%
о
Рис. 127. Зона реак-
тивно синхронного
самовозбуждения.
границе
самовозоуждение
Рис. 128. Зона само-
возбуждения маши-
ны со сверхпроводя-
щим контуром воз-
буждения (р/= 0).
Вместе
Д4 = «4 а3
0
«0 о I
Ц-2 ] = а4Д3.
at
282
Самовозбуждение при наличии емкости в цепи статора
/Гл. 8
Таким образом, при ру = О уравнение (290) заменяется уравнением
а4 = 0 или
(x'd — xc)(xq — xc) + r2 = 0. (291)
Это последнее отличается от уравнения (289) только тем, что вместо
синхронного сопротивления по продольной оси xd, содержит пере-
ходное сопротивление x'd.
Преобразовывая уравнение (291) к виду:
у,
нетрудно видеть, что оно представляет окружность радиуса Xq ^-х—
с координатами центра, равными Хс= + , г=0.
На рис. 128 нанесена эта граница самовозбуждения, полученная
в предположении, что pz = 0. Часть плоскости хс, г, заключенная
внутри окружности, составляет зону самовозбуждения. Если пара-
метр ру конечен, но мал, то граница самовозбуждения в диапазоне
ха хс> x'd довольно близка к той, которая получается при
Р/' = °-
Самовозбуждение в зонах, найденных по уравнениям (289) и
(291), носит вполне определенный характер—оно является син-
хронным. Действительно, зона, определяемая уравнением (289),
не зависит от того, замкнута или разомкнута обмотка возбуждения
машины. Размыкание обмотки возбуждения математически выра-
жается условием ру—>оо. Если характеристическое уравнение (288)
разделить на ру -> оо, то получается новое уравнение, соответствую-
щее машине с разомкнутой обмоткой возбуждения, в виде:
аор1 + а[р3 + ajP Д- а'вр + а\ = 0,
где
а'й = xdxq,
al = (xd + xq)r-,
< = %xdxq + (xd + х9) хс + г2;
= 2хс + xd xq;
а\ = (xd — хс) (xq — хс) + г2.
Проверка неравенств Гурвица для этого уравнения показывает,
что единственным условием отрицательности всех корней урав-
нения, т. е. отсутствия самовозбуждения машины, является нера-
венство: «4^>0, которое в точности повторяет условие а8Д>0
для машины с замкнутой обмоткой возбуждения.
Таким образом, зона самовозбуждения, граница которой опре-
деляется уравнением (289), оказывается одной и той же как для
машины с замкнутой, так и разомкнутой обмоткой возбуждения.
§ 64] Условия самовозбуждения синхронной машины без демпф. обмотки 283
Но при разомкнутой обмотке возбуждения машины самовозбуждение
может быть только реактивно-синхронным, так как асинхронного
электромагнитного момента в этих условиях в машине возникнуть
не может.
Рассматриваемая зона самовозбуждения может быть получена
и более наглядным и простым путем. Предположим, что в статоре
машины протекают синусоидальные токи синхронной частоты ы4,
имеющие неизменную амплитуду. Этот режим, очевидно, соответ-
ствует границе синхронного самовозбуждения. Токи id, iq должны
быть при этом постоянными величинами. Уравнения напряжения
для такого режима ничем не отличаются от уравнений нормального
установившегося режима, но при равных нулю внешних напряже-
ниях ed, eq и сопротивлениях^ — хс, xq— Хс вместо обычных xd,
х„. когда машина работает без емкости. Уравнения напряжения
могут быть получены и непосредственно из системы (287), в которой
следует положить р = 0. Они имеют вид:
ria~(xq — xc')ig = 0-
(xd — xc')id-\-riq = 0.
В соответствии с этими уравнениями токи id, iq получаются отлич-
ными от нуля только, если
—хс)(х7 —хс) = 0,
что и определяет границу синхронного самовозбуждения.
Отметим, что приведенные уравнения удовлетворяются при
хс -> xd, если zQ->-0, г->0. Это значит, что для значений хс, близ-
ких к xd, ток в статоре носит почти продольный характер, магнит-
ное поле ориентируется вдоль оси d (tyq = xqiq^0), и реактивный
электромагнитный момент близок к нулю, так как тяжение магнит-
ных трубок в зазоре отсутствует (рис. 129, а). Аналогичным обра-
зом при хс ->хп будем иметь id—*0, г-^0, т. е. в статоре ток будет
чисто поперечным и снова электромагнитный момент равен нулю
(рис. 129, б). В зоне xd^> Хс xqток статора имеет как продоль-
ную, так и поперечную составляющие, что обеспечивает образование
реактивного момента (рис. 130).
Итак, в зоне I рис. 127 возникает реактивно-синхронное само-
возбуждение. В зоне II рис. 128, при условии, что pf = 0, само-
возбуждение также имеет реактивно-синхронный характер, по-
скольку, при равенстве нулю активного сопротивления обмотки
ротора, асинхронного момента в машине образоваться не может.
В действительности ру # 0, хотя величина этого параметра
в синхронных машинах весьма мала. Однако несмотря на малость
ру конечное значение его изменяет характер самовозбуждения
в зоне II рис. 128. Выше отмечалось, что граница самовозбуждения
при Xd^> -<с> xq (рис. 127) не зависит от величины Р/(ру^>0).
Остальная граница самовозбуждения при хс <^х4, определяемая
284 Самовозбуждение ппц наличии емкости в цени статора [Г т 8
уравнением Д4 = 0, напротив, зависит от величины этого параметра:
при ру = 0 она имеет вид окружности, представленной на рис.
128; при pf =оо эта граница вообще вырождается и само-
возбуждения при Хс^Л^не наступает. Но если граница самовоз-
буждения при Хс<Схч зависит от ру, то можно думать, что генерация
мощности в машине происходит за счет асинхронного электромаг-
нитного момента, а следовательно, самовозбуждение внутри этой
границы будет асинхронным. Однако следует иметь в виду, что в зоне
Хй<^хс<^'х?при малых ру, как указывалось выше, не исключено
возникновение также реактивного момента и, следовательно, в этой
зоне кроме асинхронного самовозбуждения возможно репульсионно-
Рис. 130. Характер
магнитного поля в за-
зоре машины при реак-
тивно-синхронном са-
мовозбуждении в об-
щем случае.
Рис. 129. Характер магнитных полей в зазоре
машины при реактивно-синхронном самовоз-
буждении и граничных значениях емкостного
сопротивления: а) хс х,:\ б) хс —- xq.
синхронное. Исключительно асинхронное самовозбуждение возни-
кает лишь при XC<Cx’il-
Если при pf = 0 граница самовозбуждения, соответствующая
уравнению Д4 = 0, представляет окружность, то при ру # 0 гра-
ница следует по части этой окружности, а затем при Хс<С x'<t плавно
устремляется в начало координат (зона II на рис. 131). Такой ход
граничной кривой объясняется тем, что при Хс<^ха относительная
частота токов в роторе s возрастает и это приводит к уменьшению
значений хс, г, вызывающих самовозбуждение, подобно тому, как
это было в слмчяе машины с симметпичным потопом ('ey упавнения
(279а), (2796)).
При незначительном сопротивлении обмотки возбуждения г,
асинхронный момент имеет наибольшее значение при весьма малых
частотах в роторе; с ростом этой частоты при заданном г} он умень-
шается (сравни с обыкновенной асинхронной машиной). Этим
объясняется то, что в зоне x’d Хс<Z хо, где s как раз мало, для
предотвращения самовозбуждения требуются значительные актив-
ные сопротивления цепи статора г. В зоне лс<^лрл где частота
s возрастает, асинхронный момент машины уменьшается и соответ-
ственно понижаются активные сопротивления г, поглощающие
§ 65] Самовозбуждение синхронной машины с демпферной обмоткой 285
создаваемую в машине электромагнитную энергию. При увеличе-
нии активного сопротивления обмотки возбуждения лу fpy) макси-
мальный электромагнитный момент сдвигается в сторону больших
частот s. Следовательно, наибольшие асинхронные моменты пере-
мещаются из зоны xq ф> Xc'J> x'd в зону xc<Zx'd,
граница асинхронного самовозбуждения прини-
мает форму, показанную пунктиром на рис.
131. В пределе при pz—’со, асинхронный момент
делается равным нулю и асинхронное самовоз-
буждение пропадает, т. е. зона II на рис. 131
исчезает.
§ 65. Самовозбуждение синхронной машины
с демпферной обмоткой
Строгий анализ условий самовозбуждения ма-
шины с демпферной обмоткой можно провести,
следуя общей методике, т. е. исследуя харак-
теристическое уравнение машины. Последнее без
труда получается по общим уравнениям напря-
жения статора (274в), (2766), в которые нужно
подставить соответствующие потокосцепления
'?«> '?</’ и уравнениям напряжения всех роторных
контуров. Очевидно, добавление двух уравнений
напряжения демпферных контуров приведет к
увеличению степени характеристического урав-
нения на две единицы. Таким образом, харак-
теристическое уравнение синхронной машины с 0
демпферной обмоткой, включенной на емкость,
имеет 7-ю степень. Анализ такого уравнения
становится громоздким и здесь не приводится;
его можно найти, например, в (Л. 29).
Используя результаты § 62, где была полу-
чена схема замещения синхронной машины в
режиме установившегося самовозбуждения, не-
сложно произвести приближенное определение
границы самовозбуждения. Для ее построения
следует воспользоваться уравнениями (279а),
(2796).
При малых частотах в роторе s, обычно
Рис. 131. Граница
самовозбуждения
синхронной маши-
ны.
I — зона реактивно-
синхронного самовоз-
буждения: II — зона
асинхронного и ре-
пу.и.сиовно - синхрон-
ного самовозбуждения.
Пунктиром обозначена
граница самовозбуж-
дения при увеличен-
ном значении ру.
соответствующих зоне xjj> ХсД- ха,
с демпферной обмоткой в поперечной
машина
оси характеризуется при
асинхронном ходе практически одним индуктивным сопротивле-
нием Xqs, близким к синхронному сопротивлению xq, а ее эквива-
лентное активное сопротивление Rqs почти равно нулю. Иными
словами, в этой зоне Zqs==JXq (Js) — Ros J-JXqs jxq. Это
можно видеть и па схеме замещения сопротивления jXa (Js),
286
Самовозбуждение при наличии емкости в цепи статора
[Гл. 8
представленной на рис. 108, б, где при малых значениях «цепь,
содержащая активное сопротивление демпферного контура^?,
практически оказывается разомкнутой.
Равенство нулю эквивалентного сопротивления Rgs физически
обозначает, что при малых частотах в роторе поперечная демпферная
обмотка не создает асинхронного момента. При малых частотах «
практически не создает асинхронного момента и продольная демпфер-
ная обмотка. Эквивалентное сопротивление Zds по продольной оси
в этих условиях мало отличается от аналогичного сопротивления
той же машины, но без демпферной обмотки. При малых частотах s
б*)
Рис. 132. Схема замещения эквивалентного сопротивления
машины по продольной оси при пренебрежении активным
сопротивлением обмотки возбуждения: а — исходная схема;
б — преобразованная схема:
_______ xafd(xf x.j б
xf
асинхронный момент создается, в основном, обмоткой возбуждения,
имеющей сопротивление rf в 30—50 раз меньшее, чем активное
сопротивление демпферных контуров rsd и rsq.
Приведенные рассуждения показывают, что зона асинхронного
самовозбуждения для значений сопротивления хс, лежащих в диапа-
зоне xq Л’с?> х'а, машины с демпферной обмоткой должна мало
отличаться от соответствующей зоны машины без демпферной
обмотки и поэтому в значительной части может строиться по урав-
нению (291).
Граница самовозбуждения при Л'с достаточно просто
строится по уравнениям (279а), (2796), так как при увеличенных «,
имеющих место в этой зоне, эквивалентное сопротивление jX (js)
практически определяется полусуммой сопротивлений Zds и Zqs.
Вследствие указанной разницы в сопротивлениях rf и rtd, для
рассматриваемых значений « можно пренебречь активным сопро-
тивлением обмотки возбуждения. В этом случае сопротивление
jXd(js) представляется на комплексной плоскости кругом, так как
пренебрежение сопротивлением rf приводит к схеме замещения
сопротивления jXd(js), представленной на рис. 132.
§65] Самовозбуждение синхронной машины с демпферной обмоткой 287
В зоне Xc<Zx'd, с повышенным значением s, асинхронный момент
в машине создается фактически только демпферной обмоткой.
Поскольку активные сопротивления этой обмотки r9d, rsa значи-
тельно больше сопротивления гу обмотки возбуждения, машина
с демпферной обмоткой развивает гораздо большие асинхронные
моменты, чем машина, имеющая на роторе только одну обмотку воз-
буждения.
Следовательно, зона асинхронного самовозбуждения при
Хс<^х'а машины с демпферной обмоткой гораздо шире, чем машины
без демпферной обмотки. Сужение этой зоны самовозбуждения может
быть достигнуто за счет уменьшения активных сопротивлений демп-
ферной обмотки гз:, rSJ (соответственно увеличения постоянных
времени обмотки).
Граница самовозбуждения машины для значений емкостного
сопротивления хс, близких к x'd, получается плавным соединением
границ в рассмотренных выше зонах Xc<Cx'd и x'd<Zxc<ixq.
Что касается зоны реактивно-синхронного самовозбуждения
(зона / на рис. 131), то она совершенно одинакова как в машине
с демпферной обмоткой, так и без нее. Объясняется это тем, что при
таком самовозбуждении магнитное поле в воздушном зазоре ока-
зывается неподвижным относительно ротора, а величина его изме-
няется достаточно медленно, так что обмотки, расположенные на
роторе, практически не принимают никакого участия в образовании
электромагнитного момента.
ГЛАВА ДЕВЯТАЯ
СВОДКА ОСНОВНЫХ УРАВНЕНИЙ И РАСЧЕТНЫХ ФОРМУЛ
I. Линейные преобразования
1. Преобразование фазных переменных уа, уь, ус* к осям а, р,
неподвижным в пространстве:
2 Г 1 7 । J
А = у [J'a — у (У b+Ус)J;
___Уб—Ус .
4 /3 ’
У» — у {Уа + Vb 4" Ус)-
Обратные соотношения:
уа=Уь +а;
Уь —Уо — (у« — 14з>р);
Уе=Уо— |(л + /Зу?).
2. Преобразование фазных переменных уа, уь, ус к осям d, q,
совмещенным с осями магнитной симметрии ротора машины (ось q
упреждает ось d):
Jd = y [Уa cos 7 -\-yb cos(t — 120)+_yccos(7+ 120)];
Уч = — у [J'o sin 7sin (jc — 120) 4-j'c sin (7-]- 120)];
J'o = у (уa 4" Vb + Ус)-
Обратные соотношения:
У a =О'« + У a cos 7 — yq sin 7;
Уь =.l'o +-У a cos (7 — 120) — yq sin (7 — 120);
Ус =Уо cos (7 4- 120) ~yq sin (7 + 120).
* Переменными z/u, yc являются фазные токи, потокосцепления, напря-
жения машины.
Гл. 9]
Сводка основных уравнений и расчетных формул
289
Переменные уя, у nyd, yq представляют проекции изображающего
вектора У на соответствующие оси (рис. 133).
3. Преобразование фазных пере-
менных уа, уь, ус к осям dc, qc,
вращающимся с синхронной скоро-
стью, производится по формулам п.
1,2 с заменой в них у на cyt + <рк.
4. Преобразование фазных пере-
менных к осям 1, 2:
1'1 = 4 (Уа + аУь + аЬ'сУ,
Уз = у (Уа + а*Уь + ayj;
Уо = ~3 (уа ~1~Уь Ч~Ус)>
где а = г 3*
Рис. 133. Изображающий век-
тор и его составлящие.
Обратные соотношения:
У а —У о У~У 1 + Уз’>
Уь — Уо т а'У\ -|- аУъ
Ус=Уь-Уау1 + ^У^
5. Связь между переменными в осях а, ₽ и ф q:
У a =J'acosy4-j/₽siny;
Уч = — У a sin у + У9 cos у;
УЛ=УЛ cosy — yq sin у;
У9 =Уа sin у +УЧ cos у.
6. Связь между переменными в осях а, р и 1, 2:
J'i — 0,5 (уа 4-/УД,
Уз = 0,5 (уа —jy?);
У о,— У1 “Ь-Уз",
У? = ~2(У1~Уз).
7. Мощность трехфазной цепи в различных координатах:
Р — еУа + ^bh + edc — Зб о^’о + у (Уа1я —
= Зео?о + ~2 (Уа^а 4~ eqiq\
II. Уравнения синхронной машины, со-
держащие переменные с физической р а з:
290 Сводка основных уравнений и расчетных формул [Гл. 9
мерностью. Демпферная обмотка заменена двумя эквивалент-
ными контурами по продольной и поперечной осям.
1. Уравнения напряжения в осях а, р:
Статор Ротор
rfdc , . d<bf .
~e9 ~dt+rtv’ ° +
rf'io । • r. d'b.a ,
— — di + rt^' 0 — y/' + rs?4?-
= 0,5 [(Ld + i7) + (£d — Lq) cos 2y] 4 + 0,5 (Ld — £?) sin 2T i? -Д
4~ ^a/d cos 7 * Zy 4"~ ria3d cos 7 • i3d ria9q sin 7 • Z9g,
<p₽ = 0,5 (Ld — Lq) sin 2T • 4 4- 0,5 [(Ld + Lq) — (Ld — Lq) cos 2Д 4 4-
4- zWa/d sin 7 • if 4- ma3d sin t • i,d 4- ma9q cos 7 • z',g;
фо = 4>4i
Ф/ — У ^afd (ia COS 7 4“ 4 sin 7) 4~ Lfif 4" ^/sd^sdi
<p9rf = y mavt (4 COS 7 4- zp sin 7) 4- Mf3dif 4- Ltdi,d,
ф»9=—4 sin i ~ scos 1)+A‘A-
На рис. 134 представлена обращенная (с вращающимся якорем)
синхронная машина: а) исходная машина с трехфазным якорем;
Рис. 134. Координатные оси а, Ь, с и а, 0.
б) машина с двухфазным якорем и магнитными осями фаз а, 0,
которой соответствуют приведенные уравнения напряжения.
Гл. 9] Сводка основных уравнений и расчетных формул 29i
2. Уравнения напряжения в осях d, q:
Статор Ротор
~ = ф —Ф?°> + г4; + W
— ^ = ^<«4-^4-^; 0 = ^z4-r949rf;
-e0 = ^ + rz0; 0 = ^ + r»A-
тде » =
Фй — Ldid H~ -4 тазЛзй',
Ф? Lqlq ~Ь Waiqiiqi
фо == 404;
Ф/ "2" Mafldd 4~ 4/4 4“ ^/3d4,(i
Фэd — ma»h “4 ^/»rf4 4“ L-bd^sd’i
, _ 3 . . J .
Модель синхронной машины, которой соответствуют уравнения
напряжения в осях d, q, представлена на рис. 30.
3. Уравнение моментов и электромагнитный момент:
Л1т = 7И,4- J~-
m Ф 1 dt ’
[ФрС У Ф^с!
III. Системы относительных единиц.
1. В табл. 7 представлены общепринятые базисные величины.
2. Базисные величины для роторных количеств:
а) Система Парка. В качестве базисных величин тока, напряже-
ния и потокосцепления любого роторного контура приняты такие
их значения, которые, существуя в данном контуре, обуславливают
в режиме холостого хода на статоре номинальное напряжение (по
спрямленной характеристике холостого хода).
Так, для обмотки возбуждения:
напряжение ef6 = rfif6\
потокосцепление = Lfif6.
б) Системы, при которых уравнения цепей ротора в относитель-
ных единицах сохраняют наглядный вид уравнений многообмоточ-
292
Сводка основных уравнений и расчетных формул
[Гл. 9
Таблица 7
Базисная величина Обозначе- и ие Количество, принятое за базисное
Ток статора ‘б Амплитуда номинального фазного тока
Напряжение статора <?б Амплитуда номинального фазного напряжения
Мощность статора Рб Номинальная мощность машины (пол- ная) Рб ~ у^'б
Угловая частота “б Синхронная угловая частота (Og
Потокосцепление статора Фб Потокосцепление, индуктирующее в статоре напряжение при базис- ной угловой частоте; фд = —
Сопротивление статора Ze z6 = -^
Индуктивность статора L6 г ?б Лб-<щ
Момент, действующий на ротор мб Рб где — синхронная уг- ловая скорость
Время is Время поворота ротора при базис- ной угловой частоте на 1 электри- ческий радиан, t - 1 1 6 2к/н
кого трансформатора с физической размерностью, имеют базисные
величины (для любого роторного контура х):
ток zv6;
3 - 3 ,’2
2 16 2
напряжение ехб = еб ——; индуктивность Lx5 — L6 ;
1хб 1хб
3 • 3
У 'б ‘>'й
потокосцепление = фб-—; сопротивление zx6 = z5 .
г.гб 1x6
В этих системах для машины с двумя демпферными контурами
относительные значения параметров цепей ротора определяются
в виде:*
3 2 . 3 2 .
2 "‘afd з 1[б 2 "д' (эб
= Г5 ' ~Ц~ ’ = ~’
* Для демпферных контуров в продольной и поперечной оси выбирается
обычно один и тот же базисный ток гЭд.
Гл. 9]
Сводка основных уравнений и расчетных формул
293
у Mf,rt 4 . . g ^d6lfo 3 p —i 2 2 4 9 V6
L- гб ’
3 3 4 . „
2 E3d 9 2 rf 9
-ad L6 ’ r-f ~~ —% ' ’
3 4 ..
2 ГзЛ 9 ’6
*6
Для параметров в поперечной оси выражения аналогичные.
Наиболее употребительные в практике отношения базисных токов,
определяющие величину параметров в относительных единицах,
представлены в табл. 8.
Таблица 8
Система х . ad Система «м. д. с.» Система равных взаимо- иидуктивностей
г’/б 1 91 l,5wfeo6i 1,5ш&об1 &д1
гб ’ 4pWf 2pWf *До
'эб 1 91 1,5ауйоб1 1,5ш/гоб1 kfi
'б ’ ^Pwn *Д1 2/нуд
Коэффициенты kai, kfi, /До, АД1 — см. рис. 135.
IV. У равнения синхронной машины без
д е м п ф е рной обмотки в фо рме, данной
А. А. Го ревы м,* в относительных единицах (для роторных
базисных величин принята система Парка):
— ed = (К + Ра)£а —(1-Н)£9 + рЕ^',
- е9 = (1 +s)^ + (? + p?)fe + (l +5)Д0;
е/Р/ = t1 pEd + {р Н- Р/) Еь
Mm = Hjps - [ЕаЕд . /J [ L Xq k Xq Xq EdEgJ ,
d d где р = -f-— = -j знак r atu.. ах дифференцирования по синхронному
времени т
а s = - {0^ , Eq Eq ^q^qi E$ xd~xd_ [J. = , 7 Xd
* Уравнения составлены в предположении, что положительная ось q опере-
жает на 90° ось d. Здесь и дальше уравнение нулевой составляющей опущено,
а в обозначениях относительных значений переменных опущена черта снизу.
294
Сводка основных уравнений и расчетных формул
[Гл. 9
г rf GD3 я"
Р9 = ^> Р/ = ^, ^/=8Д—р-&-----10 4 радиан;
маховой момент GD2—в кГм?\ синхронная скорость ns в об/мин;
Рис. 135. К определению коэффициентов магнитного по-
ля, равных отношению амплитуды первой гармонической
к максимальному значению индукции в зазоре: а — при
&
наличии продольного тока в якоре ~ ; б—при на-
'Ah Bfl
личии тока в оомотке возбуждения kfl = ; в — при
наличии тока в продольном демпферном контуре £Д1 =
ВД1 д.
= ; г—при наличии тока в продольном демпферном
контуре, но определении амплитуды первой гармонической
поля Вд10 из условия равенства потока первой гармони-
ческой и действительного потока (площадь $ф равна:
д 5Д10т), Лдо = д 0 .
u Dtm
базисная мощность Рб в ква.
Потокосцепления:
Г.г. 9/
Сводка основных уравнений и расчетных формул
295
— Edid + if — xdid -]-if — Ed + Eq,
^q—Eq‘,
^f = 9‘Ed + E^.
V. Уравнения синхронной машины в отно-
сительных единицах (для роторных базисных величин
может быть принята любая из трех систем, указанных в табл. 8).
Демпферная обмотка представлена двумя эквивалентными конту-
рами.
1. Общие уравнения:
~ ed — Ф9 (1 + «) + го;
Sq ~ Ф<У (1 4~ S) + P'tyq "Г /7'ф
О = pty9d -ф- г 9di9d,
^~P$3q Гeq^-sq",
Mm = Efjps + (%id — W,
4d Ldid 4~ Mafdif ~H ria9di9d xdid -j- xafdif -ф- xa9di9d,
Фд ' Lqiq -ф- tnaiqi3 ) Xqlq ~Ц ^a^qi^qi
Ф/ — Mafdid ~b Lfif + Mf3di3i = xafdid -ф- xfif -j- Xf3di9d,
Фэ.7 = maidid ~\~Mfadif -ф- L3di3d = Xa3dld + Xfi-fif 4- Xsdhd',
^sq ffl-abqiq | L3qt3g Xabqiq I X3qEq-
2. Уравнения при пренебрежении активным сопротивлением
статора г и неучете переходных процессов в этой цепи, обусловленных
ее активным сопротивлением:
— = —
== Фй-
Остальные уравнения те же, что и в предыдущем пункте.
3. Операторные уравнения напряжения, содержащие отклонения
переменных от начальных значений, соответствующих исходному
установившемуся режиму (скольжение s постоянно):
— A ed=p^d~ Дф?(1 -(_s) + rAirf;
--A Sq = ДФ</ (1 + S) ~ГР ДФ? 4~ Г iq>
Р Дф/ + О ^if\
0== р Дфэ^ ф- c3d №td,
О -ф- Гад№ад.
296
Сводка основных уравнений и расчетных формул
[Гл. 9
Здесь р — обычный множитель; все переменные представляют изо-
бражения оригиналов. Потокосцепления в этих уравнениях опре-
деляются аналогично п. V, 1.
Из приведенных уравнений определяются изображения токов:
Де,у [рХд г] —И &eqXq (р) (1 4- S)
К(р)
I Ае/G (р) Up8+ (l+s)*]Xg (/>) + />>•} .
К<Р)
Л, _______ Aeg [рХа (р) + г] — AerfXrf (р) (1 + s) + G (р) г (1 4~ s) .
К(Р)
___ Р~ (xbdxafd Хаз fa fad) 4~ PXgfd^ 3d 1 Рх3 i 4" ^3d .
/ Mi(p') ' Mi(p) f'
: ______ Р2 (-У/'Гаэ7 XofdXj3d) 4~ PXg3d 4~ Pxa3d^f д : _ Pxfad \ о .
1з“~~ МЛр) d Mdp) h
Мэа =--------
34 px3q 4- r3q *
где M! (p) = (pxf + rf) (px3d + r3d) — p*xp,d;
(p) = [P*d (P) + d lpXq (P) + d + Xd (p) Xq (p) (1 4- s)2.
Операторные сопротивления по продольной и поперечной осям
/р\___% ___Р3 (x3ixafd 2х[з lxafdxa3-l 4~ xfxa3d) ~ЬР (xa/drad 4~ xa3drf) _
rf ' d ps {x3dxf — x}3d) 4- P (x3trf + xtr3d) 4- rfr3d '
Xq(P~) = Xq~ •
//ЛЭ7 г ' э<7
Операторная проводимость
Q (п\ _____Р (x3dxafd xg3dxfad) ~4~ xafdrbd__
W — Ра (x3dxf — x}3d) 4-Р (Xsdff + Xfr3d) 4- rfr3d •
В случае отсутствия демпферной обмотки
Xd(p) = xd-^i^- Xq(p) = xq-,
G(p) = ^Pl—.
pxf+rf
При отсутствии регулирования возбуждения машины (Л^ = 0):
л; _________________ Aed[pXg(р)4-г] 4- АедЛд(р)(1 4-S) .
а~ К(р)
д/ _ Aeg [PXd (р) + г] - ±edXd (р) (1 + s).
К(Р)
\ ; Р3 ^x3dXafd Xa3dXf3d) 4~ PXatdr 3q . . _
Slf~ M,(P) Ud'
л; _____ p3 (XfXgbd - XafdXf3 d 4- pxa3drf л .
sd ~ Ah (p) aZd>
Гл. 9]
Сводка основных уравнений и расчетных формул
297
VI. Токи короткого замыкания (возбуждение
машины не регулируется).
1. Трехфазное замыкание.
а) Машина без демпферной обмотки.
Ток в фазе а:
ia = — Е~ cos (т Ц- 7о) — f-L — cos 90 cos (т + Io) е~'''Td 4-
xd \xd xd /
[/x; ~ J,,''cos(2т + ° + °o) + + vJcosMz~'/Ta
Токи в фазах b и с получаются заменой в приведенном выражении
угла у0 на у0 — 120 и у0 + 120.
Ток в обмотке возбуждения:
ifi = foo 4~ Xd х. Xd е COS 90 е” т/7(/ — Xd X<1 е COS (т + 90) е~ '-!Та .
xd xd
При коротком замыкании на холостом ходу машины в выражении
токов нужно положить равным нулю угол между э. д. с. Ео и напря-
жением е (90 = 0).
Графическое изображение токов во времени дано на рис. 43 и 44.
Максимальные (ударные) токи короткого замыкания при пре-
небрежении затуханием в момент времени т = л — 90:
фазный ток
__+ е
»
xd
где продольная э. д. с. за переходным сопротивлением
Edo = pfflO Т" foo — (Xd Xd) idO ~f~ ifo>
ток в обмотке возбуждения:
if3m — ifo 4-—!— e (1 + cos 60).
xd
б) Машина с демпферной обмоткой.
Ток в фазе а:
Zo==~^C0S (T + lo) — ecos9o[h^ — Л) X/T’d +
+ — V?) £~ VTd 1cos + To) — e sin 0O (4r — X/T4 X
Xsin(T-H0)4-| el7 1 ) cos(2^4-l04-90)4-
+ (^ + yx) C0S fro — M e~ X' Ta .
19 А. И. Важнов
298
Сводка основных уравнений и расчетных формул
[Гл. 9
Токи в фазах Ьпс получаются заменой в приведенном выражении
угла у0 на у0 — 120 и у0 + 120.
Ток в обмотке возбуждения:
I = /<0 4- е cos 90 (-4 — е“т/^ 4- е~ t/T'd —
7 * 7 ' \*d XfXd) Xf xd
— £? COS (т 4- 90) г~ Х/Га ,
ла
д___x9dxafd xasdxf9d
де •
При определении токов короткого замыкания, происходящего на
холостом ходу, нужно положить 90 = 0.
Отдельные составляющие токов и полные токи в функции вре-
мени представлены на рис. 61—65.
Ударные токи определяются достаточно сложно. Приближенно
• 1,8е Л Л
можно считать: в статоре tkim = , в обмотке возбуждения —
ха
по выражению, полученному для машины без демпферной обмотки,
в) Постоянные времени. Постоянные времени затухания аперио-
дических токов в обмотке возбуждения: *
для переходной составляющей Td=~TdQ, где Td0 = ^-,
xd rf
для сверхпереходной составляющей Td = Tld, где T’9d = ——
постоянная времени продольного демпферного контура при корот-
козамкнутых статоре и обмотке возбуждения,
_____ * лй, г ла»д
^3d—м Лц ,
xd______________________лй
Постоянная времени затухания апериодического тока в поперечном
демпферном контуре Тд=— Тв„, а 7’ =— собственная по-
хд 4 гэд
стоянная времени поперечного демпферного контура.
* Указанные соотношения в машине с демпферной обмоткой справедливы,
j" р"
если При соизмеримых гу и r9d: Td — d а постоянная вре-
7d "Ь (
мени затухания переходных токов становится равной Td + Здесь T9d =
^ad .
= —- — постоянная времени демпферного контура при короткозамкнутом ста-
Г Bd
торе и разомкнутой обмотке возбуждения.
Гл. 9} Сводка основных уравнений и расчетных формул 299
Постоянная времени затухания апериодических токов в статоре
Та^, =
*^2 - v" 1 v"
xd~l~xq
2 vz jv
*4 для машины без демпферной обмотки,
Xd'T~ Xq
для машины с демпферной обмоткой.
2. Двухфазное замыкание генератора на холостом ходу.
а) Машина без демпферной обмотки.
Ток в статоре
iki — — [cos а 4~ 6 cos За 4~ b1 cos 5а -j-.. .1 —
xd । х2
~У'ЪЕйй fcos а 4- ь cos За 4-
4- &г cos 5а 4-...] Б-4- х
X [ 1 4- 26 COS 2а 4- 2&2 cos 4а 4~ ...] е_ '/Та*.
Ток в обмотке возбуждения
Оо (xd — х ’н) (1 + b)
i/2 = if о 4---- , г(8)--[cos 2а 4- b cos 4а 4~ Z>2 cos 6а 4~...] 4~
\ v
‘ (xd+As,)(x^ + x4>) Х
X [ (1-+^Х- + COS 2а 4- 6 cos 4а 4- ...] е- -
— —— — [cos а 4~ 6 COS За 4~ 6г cos 5а 4~ ...] е~ VTa» ,
те , Vxq~ Vх j
где а == у — -у, о=——-----сопротивление обратнои последо-
вательности при двухфазном коротком замыкании Х2’=УхаХ^‘
Характер изменения токов во времени показан на рис. 49—51.
Ударные токи без учета затухания:
в статоре
. _ /ЗЕ00
— у' >
xd
в роторе
lf4m = z/0 (1 4~ 2-/ •
\ Ла J
19*
300 Сводка основных уравнений и расчетных формул 1Гл. 9
б) Машина с демпферной обмоткой.
Ток статора
_L I____1____________1 £~ Td2 _1------!____ у
1 \xd + x™ xd + x^) Ха + х£‘ j24
X (cos а 4- b COS За -4 № COS 5а -J-...) ~4
+ /3 £00gCOS^ (1 + 2b cos 2a + 2bi cos 4a + ) e-T/Tai (
в) Постоянные времени:
Т' — T X'd + XT . т- —Т’ X'd + XT . Т _42’
/</2 1,1й xd ± x'f'' Idi 13ti xd + xf ’ r’
где для машины без демпферной обмотки х& = У x'dxq, для машины
с демпферной обмоткой х<2> = ]/xdx".
3. Однофазное замыкание генератора на холостом ходу.
а) Машина без демпферной обмотки.
Ток в статоре
iki = — 3£°° L[ха + х^’+хь— xd+x“>+xt) е 1 +
Ь ~xd~+~4r,+ v] X (с os у+6 cos Зт+cos 5Т 4-...) 4-
4- о + cos 2?+cos 4Т+• • •) £~Т/Гв1 •
о ТА0
Ток в роторе
* * £
— xS)(1 4- b) * *
if i = 4» 4- ~ X17 - (cos 27 + b cos 4T + У cos 67 4- • • •) +
j TA0
* # *
ifo (xd — xd)s (1 + fe)
(xd + x'/1 4- x0) X (xd + xsll+ x0)
xd+^sl>+x0
(I + ^(Xa — Xj)
4 cos 27 4-
4- b cos 47 4- • • •
-VTdl ifo^—x^cos^O +b)
X(cos74-#cos37 4-^2cos574--..)s Z/Tal>
Гл. 9J
Сводка основных уравнений и расчетных формул
30!
* I/ ха — у хг, * *
где Ь= * xd = ха-\-0,оха-, xg = xg-^Q,bx„
V хч + У x'd
*
Ха = xd -f- О,5хо-
Сопротивление обратной последовательности при однофазном ко-
ротком замыкании
~1 г # *
у XaXq — О,5л'о.
Ударные токи без учета затухания:
в статоре
: ____ 3foo
^klm у' . ь »
xd
в роторе
где k-i — 1 + 0,5 4?.
ха
б) Машина с демпферной обмоткой.
Ток в статоре
1___________________1 \ s- ^П'ау. j________1
Хд -р Х^11 -|- Х0 Xd -|- Х^ -|- Хо / Xd -|- Xg1* -р Хо
X (cos у 4~ b cos Зу -ф /?2 cos 5-/ -j-. • ) +
+ О + cos cos 4T + • •) s~X/Tai >
4Ao ~i ''"0
* xa — xd * *
где ^ = -^7=^-x^^ + O,5%0; x"q = x" + O,5x0;
Vi'i+Vi
1 г * *
x1’ = У x'^t — O,5xo.
в) Постоянные времени:
__7, + -*» +X! x'J X x,1’X %o 2х'Гx„
1 di — 1 ao Xd _|_ x<> _|_ ; /tfi — r9d X-Та'1X Л'о ’ lal~ 3r ’
где при наличии демпферной обмотки хф = У x"dx"q — 0,5хо, без нее
хф = У x'dXq — О,5хо-
302 Сводка основных уравнений и расчетных формил [Гл. 9
VII. Напряжение на статоре синхронной
машины при двухфазном коротком замыка-
нии на ее зажимах (исходный режим — холостой ход).
1. Максимальное напряжение на свободной фазе (без учета зату-
хания)
для машины без демпферной обмотки
eflm = «/o(2 J-— 1);
для машины с демпферной обмоткой
/ х№ \
eam == z/0 ( 2 I ) •
\ xd 1
2. Максимальное напряжение между свободной и короткозамкну-
той фазами в 1,5 раза больше напряжения еат.
VIII. Электромагнитный момент.
1. Установившийся режим:
'о —
eE'do А еЧ 1 1 \ . од
= -7- sin 90 — у -р--------------------— sin 290,
-6 \ Л& Aq j
где Йо = P'frfo Н- £оо — — x'd) id»
2. Трехфазное короткое замыкание:
ТИфз = Л4фз ТИфз Л/фз,
где М'^3— знакопеременная составляющая, М'^3 и M"i3— аперио-
дические составляющие, обусловленные активным сопротивлением
соответственно статора и ротора.
а) Машина с демпферной обмоткой
где г =2(г2— [см. выражение (157)1.
Гл. 9] Сводка основных уравнений и расчетных формул 303
б) Машина без демпферной обмотки
М'^= [е COS 0о (4- - дМ е" t/7iT • г;
L xd \xd xd j J
в) При пренебрежении активным сопротивлением цепей и0в = О
при наличии демпферной обмотки:
I | | \
M^=-^ sint ——/ —— — sin 2т,
xd z \xd xq /
при отсутствии демпферной обмотки:
е- е8! 1 1 \ о
/Иф3= — Sin т — -о (—----sin 2т.
* xd 2 \Xd хч/
Максимальные моменты в этих условиях
либо
xd xd
3. Двухфазное короткое замыкание. При пренебрежении актив-
ными сопротивлениями цепей:
а) Машина с демпферной обмоткой
[sin То (— cos у -ф- 3b cos З7 — ЪЬг cos 67 +...) -ф-
+ ~~ ~dsin2To) (sin 2? — 2b sin 4T -ф- 3b1 sin 67 —...)]
d "T” 2 •'^2 / j *
где x'3' = Ух, x’’-, b = .
V Xq + V Xd
Наибольшие значения /И^2 при у0 = у.
б) Машина без демпферной обмотки
2^2 г
x'd -р'х<Д S^n То (~ cos 7 ф- 3b cos З7 — 5&2 cos 07 -ф-...) -ф-
+ \x’d ---------~х^, ‘ sin270j (sin 27 — 2b sin 47 -ф 3b'1 sin 67 —.. J
Yxq + V x'd
304 Сводка основных уравнений и расчетных формул [Гл. 9
Наибольшие значения Мф2 при у0 = у-
в) Неявнополюсная машина
ЛД2= -.Лщдг, (sin т — 0,5 sin 2т).
Ла “т Л2
4. Малые гармонические колебания ротора, накладывающиеся
на синхронное вращение.
Дополнительный электромагнитный момент AM , возникающий
при малых гармонических изменениях угла А9, равен:
а) При пренебрежении активным сопротивлением статора:
Коэффициент синхронизирующего момента
^5Д>
где основная составляющая:
М50 = cos 90 4- е2 (--Ц cos 290,
ss> xd 01 \хч xdJ
добавочная составляющая, обусловленная изменением токов и регу-
лированием возбуждения:
М5д = е2-
nS б0 [ у — Т^-1 + cos2 0О
-4-e sin9 •
S 0 Af- j
1
.ЗДЛ)
z>2 ( Г 1 11 г 1
Md = ^ Im {sin2 90 [-^ - —J + cos2 9.
, e sin . Г G (jh) A<y 1
h (Xd(jh)' дё]’
Комплексы Xd(jh.), X^jh), G(jh) получаются из операторных вели-
чин Xd(p), Х“(р), G(p) заменой р на jh, где h — относительная час-
тота колебаний.
Для машины без демпферной обмотки:
Ms!i е Sln +
Md = e2sin2 90 {-L
\ xd
1 \ Td
xd)l + h4d*-
б) Дополнительные составляющие коэффициентов синхрони-
зирующего (A/V1J и демпферного (AM ) моментов, обусловленные
Гл. 9J
Сводка основных уравнений и расчетных формул
305
активным сопротивлением обмотки статора:
AA4S = - r[[ sin 0О (J-- 2zd^) - е2 sin 290 -
— I _ да C0S *«Лг “Ь [(Z'd^ ~Х^] sin2 00 ~Ь
4“ (^qhx Ха 'j iqhr COS 9q •
Л Л, „IT 2e sin e0 [Eoo — ecos 0O , ecos90_.
h Xa lahr-V Xq lqhr]
— Iе'2 cos2 eo iqbr+ e3 sin2 90 idhr— e’ sin2 90 4rf/ix — -T) —
-[f= + c cos - i)]’}]],
где величины idhx, idhr, iqhx, iqhr являются вещественными и мни-
мыми частями комплексов , v L.:
XdW Xq(lh)
Xd (jh) = idhx ~b •/Zdftr;
1 । ;!
Xq (jh) ~ Ч- Jl(lbr-
5. Асинхронное вращение с постоянным скольжением. При корот-
козамкнутой обмотке возбуждения (е} = 0) и пренебрежении активу
ным сопротивлением статора момент равен:
= М^а /Ифп,
где средний асинхронный момент
______£_ / COS 9^ t COS \ e
2 \ Z^s ZqS j
знакопеременный момент
_____ e2 Г cos (2st — y<?)_cos(2st — yrf)~l
2 | 2qS Zds J ’
где ids, zqs — модули сопротивлений jXd(js) и jXg(js), (prf =
==arCtg 7^’ = arctg Xds, Xqs — соответственно
эквивалентные активные и индуктивные сопротивления машины по
осям d, q, т. е. вещественные и мнимые части комплексов jXd(js)
И jXg(js).
6. Внезапное нарушение режима
ЛЛ • Д I С2 ( 1 1 \ • од
Мф = 7-8Ш0 + 1’ X---------V- sin 29.
¥ Xd Z. \Xg Xd J
ПРИЛОЖЕНИЕ
Численные значения основных параметров синхронных машин
крупной мощности (индуктивные сопротивления даны
в относительных единицах)
• Параметры Гидрогенераторы * Турбогенераторы двухполюсные Компенсаторы
Xd 0J—1,4 1,2—2,2 1,6—2,4
Xq 0,45—0,70 1,2—2,2 0,8—1,2
x'd 0,20—0,35 0,15—0,24 0,25—0,50
xd 0,14—0,26 0,10—0,15 0,15—0,30
хч 0,15—0,35 0,10—0,15 0,15—0,30
Td0 сек 2—7,5 3—12 4,5—10
T'd сек 0,8—3,0 0,4—1,6 0,8—2,4
T"d сек 0,02—0,06 0,03—0,11 0,007—0,03
Ta сек 0,08—0,40 0,04—0,40 0,1—0,3
Нj сек 3—9** 7 14** 2—4,5
* В некоторых гидрогенераторах, выполненных для работы в системе
с дальней электропередачей, индуктивные сопротивления имеют пониженные
значения.
** С учетом махового момента турбины.
ЛИТЕРАТУРА
1. Arnold Е., Die Wechselstromtechnik, т. IV, 1913.
2. К a r a p e t о f f V., The magnetic circuit, 1911.
3. Doherty R., Nickle C., Synchronous machines, p. I, An exten-
sion of Blondel’s two-reaction theory, Tr. AIEE, 1926, v. 45.
4. Горев А. А., Переходные процессы синхронной машины, ГЭИ, 1950.
5. Rankin A., a) The equations of an idealized synchronous machine,
General Electric Review, 1944, june. 6) Per-unit impedances of synchronous ma-
chines, p. I, II, Tr. AIEE, 1945, v. 64.
6. Ломоносова Л. А., Учет непостоянства индуктивного сопротив-
ления нулевой последовательности в случае несимметричных установившихся
коротких замыканий трехфазной синхронной машины, Труды ЛПИ, 1936, № 14.
7. Н е й м а н Л. Р., Физические основы электротехники, ГЭИ, 1941.
8. ЩедринН. Н., Токи короткого замыкания высоковольтных систем,
ОНТИ, 1935.
9. Костенко М. П., Электрические машины (специальная часть),
ГЭИ, 1949.
10. Лютер Р. А., Расчет моментов вращения синхронных машин при
коротких замыканиях, Сборник «Электросила», 1950, № 7.
11. Л ю т е р Р. А., О моментах вращения синхронной машины при пери-
одических ее качаниях, «Электричество», 1940, № 2.
12. Постников И. М., В а ж и о в А. И., Электромагнитный момент
синхронной машины при малых качаниях, «Электричество». 1951, № 8.
13. Лютер Р. А., Расчет коэффициента демпфирующего момента син-
хронной машины с учетом влияния сопротивления статорной обмоткн, «Вест-
ник электропромышленности», 1953, № 5.
14. К а з о в с к и й Е. Я-, Влияние активного сопротивления в цепи ста-
тора синхронной машины на ее качания, Сборник «Электросила», 1955, № 13.
15. Сыромятников И. А., Режимы работы синхронных генерато-
ров, ГЭИ, 1952.
16. Лебедеве. А., Анализ искусственной устойчивости генераторов,
«Электричество», 1938, № 4.
17. N i с k 1 е С., Р i е г с е С., Stability of synchronous machines, Tr.
AIEE, 1930.
18. Казовскнй E. Я., Исследование нелинейных колебаний син-
хронной машины при набросе нагрузки, Сборник «Электросила», 1946, № 5.
19. Жданов П. С., Устойчивость электрических систем, ГЭИ, 1948.
20. Костенко М. П., Моделирование электромашинного оборудова-
ния при изучении устойчивости параллельной работы энергосистем, связан-
ных с дальними линиями передачи, Известия АН СССР, отд. техн, наук, 1953,
№ 12.
21. Kron G., Equivalent circuits of the primitive rotating machine with
asymmetrical stator and rotor, Tr. AIEE, 1947, v. 66.
22. Rankin A., The direct-and quadrature-axis equivalent circuits
of the synchronous machine, Tr. AIEE, 1945, v. 64.
* Первые 29 названий приведены в порядке ссылок в тексте книги. Ли-
тература к отдельным главам указана дальше.
308
литература
23. Щ е д р и н Н. Н., К вопросу о емкостном самовозбуждении синхрон-
ных и асинхронных машин, Труды Института энергетики и автоматики АН
УзССР, 1958, вып. 11.
24. D о h е г t у R., S h i г 1 е у О., Reactance of synchronous machines
and its application, Tr. AIEE, 1918, v. 37.
25. Важвов А. И.,Левинштейн M. Л., Установившийся режим
работы блочной электропередачи при выключенной фазе, Труды ЛПИ, 1954, № 1
26. Щедрин Н. Н., Определение напряжений здоровых фаз при несим-
метричных коротких замыканиях линий передачи, Труды ЛПИ, 1941, № 2.
27. Л у р ь е А. И., Операционное исчисление и его приложения к за-
дачам механики, ГИТТЛ, 1951.
28. В а ж н о в А. И., Движение ротора синхронного генератора при вне-
запном коротком замыкании, Труды ЛПИ, 1958, № 195.
29. П а п п А. Л., Самовозбуждение в схемах дальних электропередач
с промежуточными компенсированными синхронными компенсаторами, кан-
дидатская диссертация, ЛПИ, 1955.
Общие вопросы
30. Л ю т е р Р. А., Теория переходных режимов синхронных машин
с применением операторного анализа, 1939.
31. К а з о в с к и й Е. Я., Обобщенное рассмотрение переходных режи-
мов в асинхронных и синхронных машинах, Сборник «Электросила», 1945,
№ 2—3.
32. С о п с о г d i а С., Synchronous machines, New-York, 1951.
33. Казовский E. Я., Некоторые вопросы переходных процессов
в машинах переменного тока, ГЭИ, 1953.
34. Г р у з о в Л. Н., Методы математического исследования электри-
ческих машин, ГЭИ, 1953.
35. А л я б ь е в М. И., Параметры и переходные процессы синхронных
машин, изд. академии им. А. Н. Крылова, 1953.
36. Веников В. А., Ж у к о в Л. А., Переходные процессы в электри-
ческих системах, ГЭИ, 1953.
37. Л а й б л ь Т., Теория синхронной машины при переходных процес-
сах (перевод), ГЭИ, 1957.
38. Веников В. А., Электромеханические переходные процессы в элек-
трических системах, ГЭИ, 1958.
К главе первой
39. К о с т е н к о М. П., К о н и к Б. Е., Определение основной и 3-й
гармоник поля якоря и поля полюсов явнополюсной синхронной машины,
«Электричество», 1951, № 3.
40. В а й н т р у б П. М., Об определении коэффициентов продольного
и поперечного намагничивания в синхронных машинах, «Электричество»,
1939, № 3.
41. Сорокер Т. Г., Горжевский И. И., Расчет магнитных
полей в зазоре явнополюсной синхронной машины, «Электричество», 1952, № 6.
42. Wiese man R., Graphical determination of magnetic fields; prac-
tical application to salient-pole synchronous machine design, Tr. AIEE, 1927.
43. Stevenson A., Park R., Graphical determination of magnetic
fields, Tr. AIEE, 1927, v. 46.
К главе второй
44. Park R., Definition ol an ideal synchronous machine and formula
for the armature flux linkages, General Electric Review, 1928, v. 31.
Литература
309
45. Park R., Robertson В., The reactances of synchronous machi-
nes, Tr. AIEE, 1928, v. 47.
46. Park R., Two reactions theory of synchronous machines, Tr. AIEE,
1929, v. 48; 1933, v. 52.
47. Crary S., Two reaction theory of synchronous machines, Tr. AIEE,
1937, v. 56.
48. С о n с о r d i a C., Two reaction theory of synchronous machines with
any balanced terminal impedance, Tr. AIEE, 1937, v. 56.
49. Ломоносова Л. А., К вопросу теоретического исследования
индуктивных сопротивлений трехфазной синхронной машины, Труды ЛПИ,
1936, № 5.
50. П а л ь Е. А., Косвенный метод определения индуктивного сопротив-
ления обратной последовательности трехфазной синхронной машины, Труды
ЛПИ, 1946, № 1.
51. Concordia С., Relations among transformations, General Elect-
ric Review, 1938, № 7.
52. И о с и ф ь я н А. Г., Теория преобразований дифференциальных
уравнений синхронных машин, Доклады АН Арм. ССР, 1947, т. V, № 3.
53. И о с и ф ь я н А. Г., О линейных преобразованиях токов электри-
ческой машины, Бюллетень ВЭИ, 1940, № 8.
54. Грузов Л. Н., Преобразование координат как метод исследования
электрических машин и каскадных установок, Труды Академии ВКАС, 1947,
Хв 17.
55. Л ю т е р Р. А., Влияние насыщения на параметры синхронных машин,
Сборник «Электросила», 1951, № 10,
К главе третьей
56. Doherty R., A simplified method of analyzing short-circuit problems,
Tr. AIEE, 1923, v. 42.
57. Костенко M. П., Эквивалентные схемы н постоянные времени
затухания симметричных составляющих токов внезапного короткого замыка-
ния, Энергетический сборник ЛОЭКНИТО, 1934, вып. I.
58. М а м и к о н я н ц Л. Г., О переходных процессах в синхронных
машинах с успокоительными контурами на роторе, «Электричество», 1954, Xs 7.
К главе четвертой
59. Л ю т е р Р. А., Методика расчета токов короткого замыкания син-
хронной машины с использованием теоремы о постоянстве потокосцеплений
для сверхпроводящих контуров, Сборник «Электросила», 1947, Xs 4.
60. Doherty R., Nickle C., a) Single phase short circuits, Tr. AIEE,
1928, v. 47; 6) Three-phase short circuit synchronous machines, Tr. AIEE,
1930, v. 49.
61. Waring M., Crary S., The operational impedances of a synchro-
nous machine, General Electric Review, 1932, v. 35.
62. С 1 а г k e E., С о n с о r d i a C., W e у g a n d t C., Overvoltages
caused by unbalanced short circuits, Tr. AIEE, 1938, v. 57.
63. Щ e д p и н H. H., Упрощение расчетов коротких замыканий про-
дольно-компенсированных линий электропередачи, «Электричество», 1953, Xs 1.
К главе пятой
64. Ждано в П. С., Асинхронный режим в электрических системах,
«Электричество», 1936, Хв 21.
65. Г о р о д с к и й Д. А., Асинхронный ход синхронной машины,
«Электричество», 1944, Xs 1—2.
66. Г о р о д с к и й Д. А., Асинхронный ход синхронной машины в си-
стеме, «Электричество», 1945, Xs 3.
310
Литература
67. Б р у к И. С., Асинхронный ход невозбужденного турбогенератора.
Доклады АН СССР, 1947, т. 57, № 3.
68. Л ю т е р Р. А., Моменты вращения синхронной машины в асинхрон-
ном режиме, «Вестннк электропромышленности», 1948, Ks 10.
69. L i n v i 1 1 e T., Starting performance of salient pole synchronous
motors, Tr. AIEE, 1930, v. "'9.
70. Concordia C., Carter G., Negative damping of electrical
machinery, Tr. AIEE, 1941, v. 60.
71. Liwschitz M., Positive and negative damping in synchronous
machines, Tr. AIEE, 1941, v. 60.
72. Concordia C., Synchronous machine damping and synchronizing
torques, Tr. AIEE, 1951, v. 70.
73. D о h e r t у R., N i c k 1 e C., Torque angle characteristics under
transient conditions, Tr. AIEE, 1927, v. 46.
74. С г а г у S., W a r i n g M., Torque angle characteristics of synchro-
nous machines following system disturbances, Tr. AIEE, 1932, v. 51.
75. К i r s c h b a u m H., Transient electrical torques of turbine genera-
tors during short circuit and synchronizing, Tr. AIEE, 1945.
76. Казовский E. Я., Энергетические соотношения при внезапном
коротком замыкании синхронной машины, «Электричество», 1954, № 7.
77. К а з о в с к и й Е. Я., Вращающие моменты синхронных машин при
больших качаниях, Сборник «Электросила», 1945, № 1.
78. П е т р о в Г. Н., Влияние насыщения на угловые характеристики
синхронной машины, «Электричество», 1945, Ks 4.
К главе шестой
79. Ляпунов А. М., Общая задача об устойчивости движения, ОНТИ,
1935.
80. К р ы л о в Н. М., Боголюбов Н. М., О колебаниях синхрон-
ных машин, ОНТВУ, 1932.
81. Брук И. С., Об определении статической устойчивости синхронной
машины, «Электричество», 1937, № И.
82. Б о т в и и н и к М. М., О влиянии колебаний напряжения возбуж-
дения на малые колебания ротора синхронной машины, «Электричество»,
1938, № 6.
83. Матюхин В. М., Динамическая устойчивость синхронных двига-
телей, «Вестник электропромышленности», 1939, № 7.
84. П о с т и и к о в И. М., К вопросу о перегрузочной способности син-
хронного двигателя при толчкообразных нагрузках, Труды ЛПИ, 1938, № 2,
вып. 1.
85. Р о г а ч е в И. С., Динамическая устойчивость синхронных двига-
телей, «Электричество», 1940, № 7.
86. Кантор Р. М., Устойчивость электрических систем, ГЭИ, 1940.
87. В е и и к о в В. А., Упрощенный расчет динамической устойчивости
электрических систем, «Электричество», 1941, № 5.
88. Ц у к е р н и к Л. В., Повышение устойчивости электрических систем
посредством компаундирования синхронных машин, «Электрические станции»,
1941, № 23—24.
89. ЩедринН. Н., К вопросу о статической устойчивости электроэнер-
гетических систем, «Электричество», 1945, № 9.
90. Брук И. С., О колебаниях синхронной машины, Доклады АН СССР,
1947, т. 4, № 9.
91. Жежерин Р. П., О влиянии момента инерции на устойчивость
одиночного синхронного генератора, «Электричество», 1947, № 1.
92. Щедрин Н. Н., Простейшее истолкование явления параметричес-
кого самораскачнвания синхронной машины, соединенной с шинами постоян-
ного напряжения н постоянной частоты, Труды ЛПИ, 1948, № 3.
Литература
311
93. Анисимов С. Н., Явление самораскачивания ротора синхронной
машины, Труды ЛПИ, 1948, № 3.
94. Веников В. А., Жуков Л. А., Влияние демпферного момента
и демпферных обмоток иа динамическую устойчивость электрических передач,
«Электричество», 1951, № 4.
95. Лютер Р. А., Приближенный способ проверки устойчивости ра-
боты синхроииой машины по угловым характеристикам синхронизирующего
момента вращения, Сборник «Электросила», 1951, № 8.
96. Kron G., A new theory of hunting,. Tr. AIEE, 1952, v. 71.
97. Геффрон, Розенбери, Рот, Обобщенные уравнения качаний
энергетических систем, перевод из Tr. AIEE, 1952, v. 71.
98. Б о т в и н н и к М. М., Регулирование возбуждения и статическая
устойчивость синхронной машины, ГЭИ, 1950.
99. Г о р е в А. А., О статической устойчивости системы из двух син-
хронных машин, питающих общую нагрузку с заданными характеристиками,
Труды ЛПИ, 1954, № 1.
100. Левинштейн М. Л., Хуторецкий Г. М., Щ е р-
бачев О. В., Приближенный способ определения пропускной способности
дальних электропередач, Труды ЛПИ, 1954, № 1.
101. Веников В. А., Жуков Л. А., Упрощенная методика оценки
динамической устойчивости электрических передач, «Электричество», 1954, № 4.
102. Веников В. А., Иванов-Смоленский А. В., Горуш-
ки н В. И., К вопросу об эффективности форсирования возбуждения генера-
торов, «Электричество», 1955, № 1.
103. Веников В. А., Л и т к е н с И. В., О влиянии регулирования
возбуждения на пропускную способность дальних электропередач, «Электри-
чество», 1955, Ns 11.
104. Цукерник Л. В., Дифференциальные уравнения возмущенного
движения сложной энергосистемы для анализа ее статической устойчивости,
Известия ОТН АН СССР, 1956, № 3.
105. Трофименко Д. Е., Динамическая устойчивость дальней
электропередачи при пропорциональном регулировании возбуждения, «Элек-
тричество», 1956, Ns 10. .
106. Цукерник Л. В., Качанова И. А., Анализ статической
устойчивости сложных энергосистем при помощи электронных счетных машин,
«Электричество», 1957, Ns 7.
107. Я н к о-Т р и н и ц к и й А. А., Электромеханические переходные
процессы в синхронных машинах, «Электричество», 1957, Ns 8.
108. Воронов А. А., Элементы теории автоматического регулирова-
ния, изд. Министерства Обороны СССР, 1954.
К главе седьмой
109. Жежерии Р. П., Схема замещения явнополюсной синхронной
машины, «Электричество», 1945, Ns 4.
ПО. М а т ю х и н В. М., Новая эквивалеитиая схема синхронной машины
с выступающими полюсами, Известия ОТН АН СССР, 1948, № 4.
111. Щедрин Н. Н., Бесконечные цепные схемы несимметричных цепей,
питаемых генераторами с одноосной обмоткой ротора. Труды ЛПИ, 1947,
Ns 5.
112. Kron G. a) Equivalent circuit of the salient-pole synchronous machine,
General Electric Review, 1941, Ns 12; 6) Equivalent circuits for hunting of elec-
trical machinery, Tr. AIEE, 1942, v. 61; в) Equivalent circuits of the primitive
rotating machine, General Electric Review, 1946, Ns 3; r) Steady-state equiva-
lent circuits of synchronous and induction machines, Tr. AIEE, 1948,
v. 67.
113. Rankin A., Asynchronous and single-phase operation of synchro-
nous machines, Tr. AIEE, 1946, v. 65.
312
Литература
К главе восьмой
114. Щедрин Н. Н., Процесс короткого замыкания цепей, содержащих
последовательно включенную емкость, докторская диссертация, ЛПИ, 1940.
115. Л е в и и ш т е й н М. Л., Явление параметрического резонанса при
работе синхронной машины на емкостную нагрузку, Труды ЛПИ, 1948, № 3.
116. Кантор Р. М., Некоторые вопросы нз теории динамических пере-
напряжений в электрических системах, «Электричество», 1951, № 5.
117. Веников В. А..Жуков Л. А..Анисимова Н. В., Холо-
стые режимы дальних электропередач, «Электричество», 1953, № 7.
118. Розовский Ю. А., Марченко Е. А.,Андреюк В. А.,
О самораскачивании и самовозбуждении компенсированных синхронных ком-
пенсаторов, «Электричество», 1956, № 5.
119. Федоров Д. А., Услоиия самовозбуждения явнополюсной син-
хронной машины, имеющей продольно-поперечную успокоительную обмотку,
Труды МЭИ, 1956, вып. 20.
120. Поляк Н. А., Инженерный метод расчета зоны асинхронного
самовозбуждения электрической машины, «Электричество», 1956, № 11.
121. Д о л г и н о в А. И., Резонанс в электрических цепях н системах,
ГЭИ. 1957.
122. Щедрин Н. Н., Некоторые методы расчета границ самовозбужде-
ния асинхронных и синхронных машин, Труды Института энергетики н авто-
матики АН УзССР, 1958, вып. 11.