/






















































































































Автор: Герман-Галкин С.Г. Кардонов Г.А.
Теги: электроэнергетика электротехника электромашины
ISBN: 5-7931-0203-5
Год: 2003




Текст
Компьютерная Лаборатория
С. Г. Герман-Галкин Г. А. Кардонов
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Лабораторные работы на ПК
Санкт-Петербург КОРОНА принт 2003
ББК 31.21
Г38
Серия «Компьютерная лаборатория» Г
Герман-Галкин С. Г., Кардонов Г. А. |
Электрические машины: Лабораторные работы на ITK. — СПб.: КОРОНА принт, 2003. — J 256 с., ил. г
i ;
ISBN 5-7931-0203-5 >'
Пособие адресовано студентам высших учебных заведений, изучающим такие предметы, как £ «Электрические машины», «Электроэнергетика» и т. п. Содержит теоретическую и практичес- 1 кую части. Позволяет решить проблему дистанционного обучения. Незаменимо в тех случаях, J когда учащиеся практически не имеют возможности работать на реальных установках. ?
I
ISBN 5-7931-0203-5 © КОРОНА принт, 2003.
__________________________ _______________ >
< КОРОПА IIPI ШТ-
Оптовая торговля: !
(«12) 259-68-17: (095) 1-18-35-I2
E-mail: coronapr^online.ru I
Книга - почтой: 198005, Санкт-Петербург, I
I l.i.Maii.ioHCKnii пр.. 29 (для КОРОПЫ принт) i
Сергей Германович Герман-Галкин Георгий Александрович Кардонов
Электрические машины
Лабораторные работы на ПК
Ответственный за выпуск Зимина М. С. Верстка Барышникова Т. К.
Редактор Синельников В. С. Обложка Чикулаев А. А.
ООО «КОРОНА принт» ЛР № 065007 от 18.02.1997 198005, Санкт-Петербург, Измайловский пр., 29. Издание подготовлено прн участии ООО «БИНОМ-пресс»
Подписано к печати 24.03.2003. Формат 70x100 '/,6. Бумага газетная.
Гарнитура «Таймс». Печать офсетная. Объем 16 п. л. Тираж 3000 экз. Заказ № 128
Отпечатано с готовых диапозитивов в ФГУП ордена Трудового Красного Знамени «Техническая книга» Министерства Российской Федерации по делам печати, телерадиовещания и средств массовых коммуникаций 198005, Санкт-Петербург, Измайловский пр., 29
Оглавление
Предисловие .....................................1...................... 7
Глава 1. Пакеты Matlab, Simulink и Power System Blockset
1.1. Введение ......................................................... 11
1.2. Simulink ......................................................... 13
1.2.1. Запуск Simulink .............................................. 13
1.2.2. Обозреватель разделов библиотеки Simulink .................... 15
1.2.3. Создание модели .............................................. 16
1.2.4. Окно модели................................................... 18
1.2.5. Операции с блоками............................................ 20
1.2.6. Форматирование объектов ...................................... 23
1.2.7. Установка параметров расчета и его выполнение................. 24
1.3. Пакет расширения Power System Blockset ........................... 27
1.3.1. Electrical Sources — источники электрической энергии...................................... 27
1.3.2. Library Power Elements — библиотека пассивных элементов ...................................... 29
1.3.3. Machines — библиотека электрических машин..................... 31
1.3.4. Connector-блоки связи между входами и выходами моделей библиотеки Power System Blockset ............................ 33
1.3.5. Measurement — блоки измерений................................. 35
1.3.6. Powerlib Extras — расширенные библиотеки...................... 35
1.4. Связь Matlab и MS Office.......................................... 41
1.4.1. Exelink....................................................... 41
1.4.2. Конфигурирование Excel ....................................... 41
1.4.3. Обмен данными между Matlab и Excel............................ 43
1.4.4. Обращение к основным функциям Exel Link ...................... 44
1.4.5. Функции Excel Link ........................................... 45
Гпава 2. Трансформаторы
2.1. Классификация трансформаторов ..................................... 49
2.2. Принцип действия трансформаторов .................................. 50
2.3. Режим холостого хода трансформатора ............................... 51
i ..................................... ................
2 4 Работа трансформатора под нагрузкой.............................. 55
2 5 Режим нормального короткого замыкания трансформатора............. 57
2.6. Внешняя (нагрузочная) характеристика трансформатора .............. 57
2.7. Коэффициент полезного действия трансформатора.................... 58
2.8. Рабочие характеристики трансформатора ............................ 59
2.9. Трехфазный трансформатор ......................................... 59
2.10. Моделирование трансформатора .................................... 61
2.11. Моделирование трехфазного трансформатора......................... 67
Глава 3. Асинхронные машины
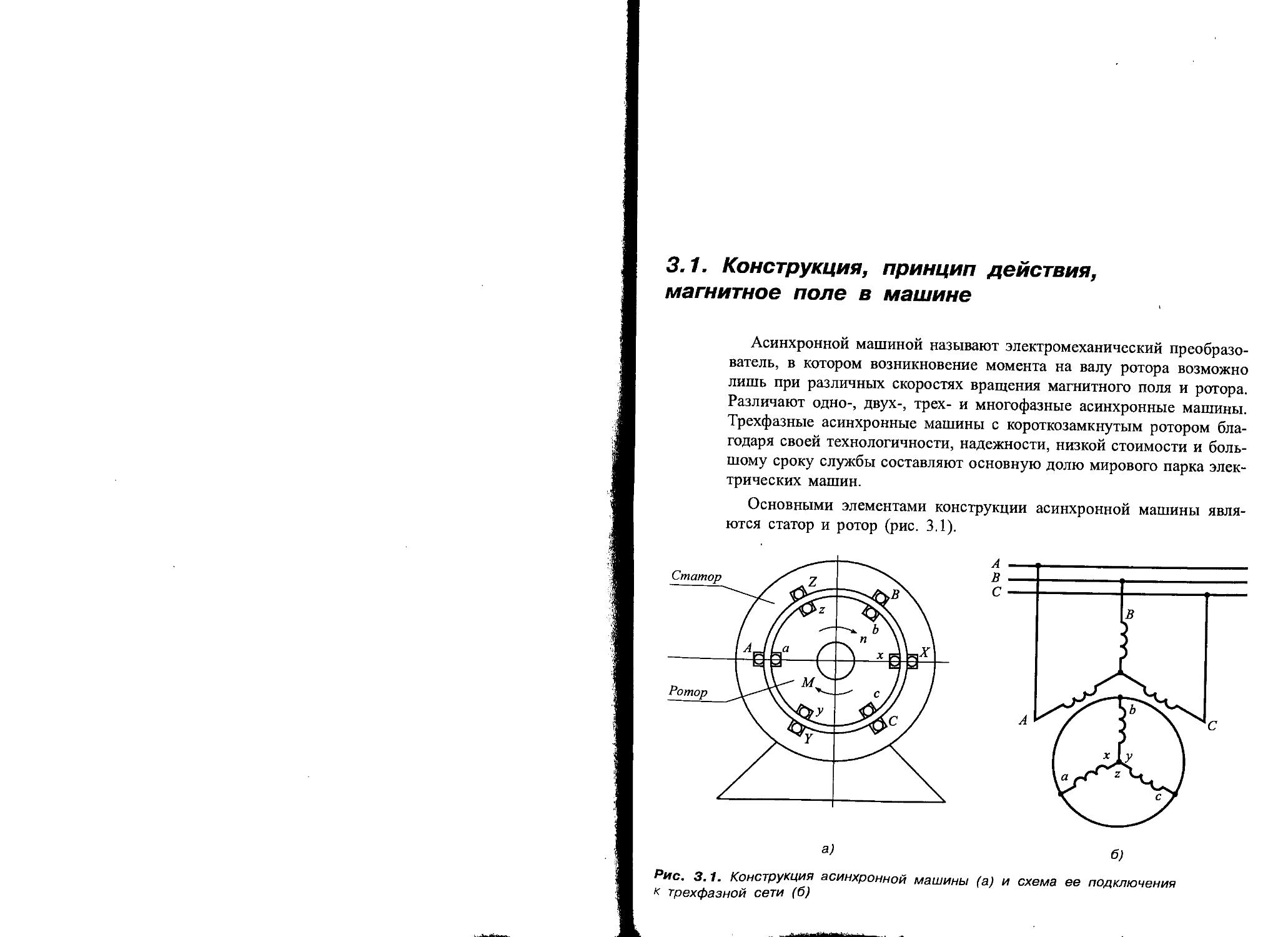
3.1. Конструкция, принцип действия, магнитное поле в машине............ 71
3.2. Схема замещения АКЗ .............................................. 75
3.3. Механические характеристики....................................... 80
3.4. Коэффициент полезного действия асинхронного двигателя............. 83
3.5. Устойчивость работы асинхронного двигателя........................ 84
3.6. Рабочие характеристики асинхронного двигателя .................... 85
3.7. Генераторный режим ............................................... 86
3.8. Режим противовключения............................................ 87
3.9. Режим динамического торможения.................................... 87
3.10. Моделирование асинхронной машины................................. 88
3.11. Моделирование асинхронного двигателя с фазным ротором............ 95
3.12. Асинхронные двигатели малой мощности ............................ 97
3.12.1. Общие сведения.............................................. 97
3.12.2. Однофазные и конденсаторные асинхронные двигатели .......... 98
3.13. Моделирование трехфазного двигателя при питании от однофазной сети . 101
Глава 4. Синхронные машины
4.1. Конструкция синхронных машин .................................... 105
4.2. Работа синхронного генератора при холостом ходе ................. 107
4.3. Реакция якоря в синхронной машине ............................... 109
4.4. Принцип действия синхронных машин ............................... 113
4.4.1. Работа на пассивную, автономную нагрузку ................... 113
4.4.2. Работа синхронной машины на жесткую сеть.................... 118
4.5. Энергетические диаграмма и КПД синхронной машины................. 120
4.6. Электромагнитная мощность и момент синхронной машины............. 121
4.7. Рабочие характеристики синхронного двигателя ........................ 124
4.8. Определение индуктивных сопротивлений ............................... 125
4.9. Моделирование синхронного генератора................................. 126
4.9.1. Опыт холостого хода ............................................ 132
4.9.2. Внешние характеристики синхронной машины........................ 133
4.9.3. Регулировочная характеристика .................................. 133
4.9.4. Угловая характеристика ......................................... 135
4.10. Исследование синхронной машины в двигательном режиме................ 136
4.10.1. Угловая характеристика ........................................ 136
4.10.2. Рабочие характеристики......................................... 137
4.11. Синхронные микродвигатели .......................................... 138
4.11.1. Назначение и классификация синхронных микродвигателей ......... 138
4.11.2. Синхронный реактивный микродвигатель........................... 138
4.11.3. Синхронный гистерезисный двигатель ............................ 142
4.11.4. Синхронный шаговый микродвигатель ............................. 145
4.12. Моделирование синхронного реактивного микродвигателя ............... 152
Глава 5. Машины постоянного тока
5.1. Конструкция, принцип действия ....................................... 157
5.2. Э.д.с. вращения и момент машины постоянного тока .................... 159
5.3. Реакция якоря машины постоянного тока................................ 160
5.4. Коммутация коллекторной машины постоянного тока ..................... 161
5.5. Потери мощности в электрических машинах постоянного тока............. 163
5.6. Генераторы постоянного напряжения.................................... 165
5.7. Энергетическая диаграмма генератора независимого возбуждения и его характеристики...................................................... 166
5.8. Генератор параллельного возбуждения.................................. 170
5.9. Генератор последовательного возбуждения.............................. 172
5.10. Генератор со смешанным возбуждением ................................ 173
5.11. Двигатели постоянного тока.......................................... 175
5.12. Энергетическая диаграмма двигателей постоянного тока................ 176
5.13. Механические характеристики двигателя с независимым возбуждением .. 176
5.14. Механические характеристики двигателя последовательного возбуждения ............................................ 179
5.15. Двига'гели постоянного тока смешанного возбуждения ................. 181
5.16. Рабочие характеристики двигателей постоянного тока.................. 181
5 17. Моделирование двигателя постоянного тока с независимым возбуждением ......................................... 182
5.17.1. Механические характеристики двигателя ...................... 185
5.17.2. Регулировочные характеристики ‘ при изменении напряжения на якоре .................................. 186
5.17.3. Регулировочные характеристики при изменении напряжения возбуждения................................ 186
5.17.4. Коэффициент полезного действия ............................. 188
5.18. Моделирование двигателя постоянного тока с параллельным возбуждением .......................................... 188
5.19. Моделирование машины постоянного тока с последовательным возбуждением....................................... 190
Глава 6. Виртуальные лабораторные работы
Лабораторная работа № 1. Исследование однофазного трансформатора ..... 195
Лабораторная работа № 2. Исследование трехфазного трансформатора...... 203
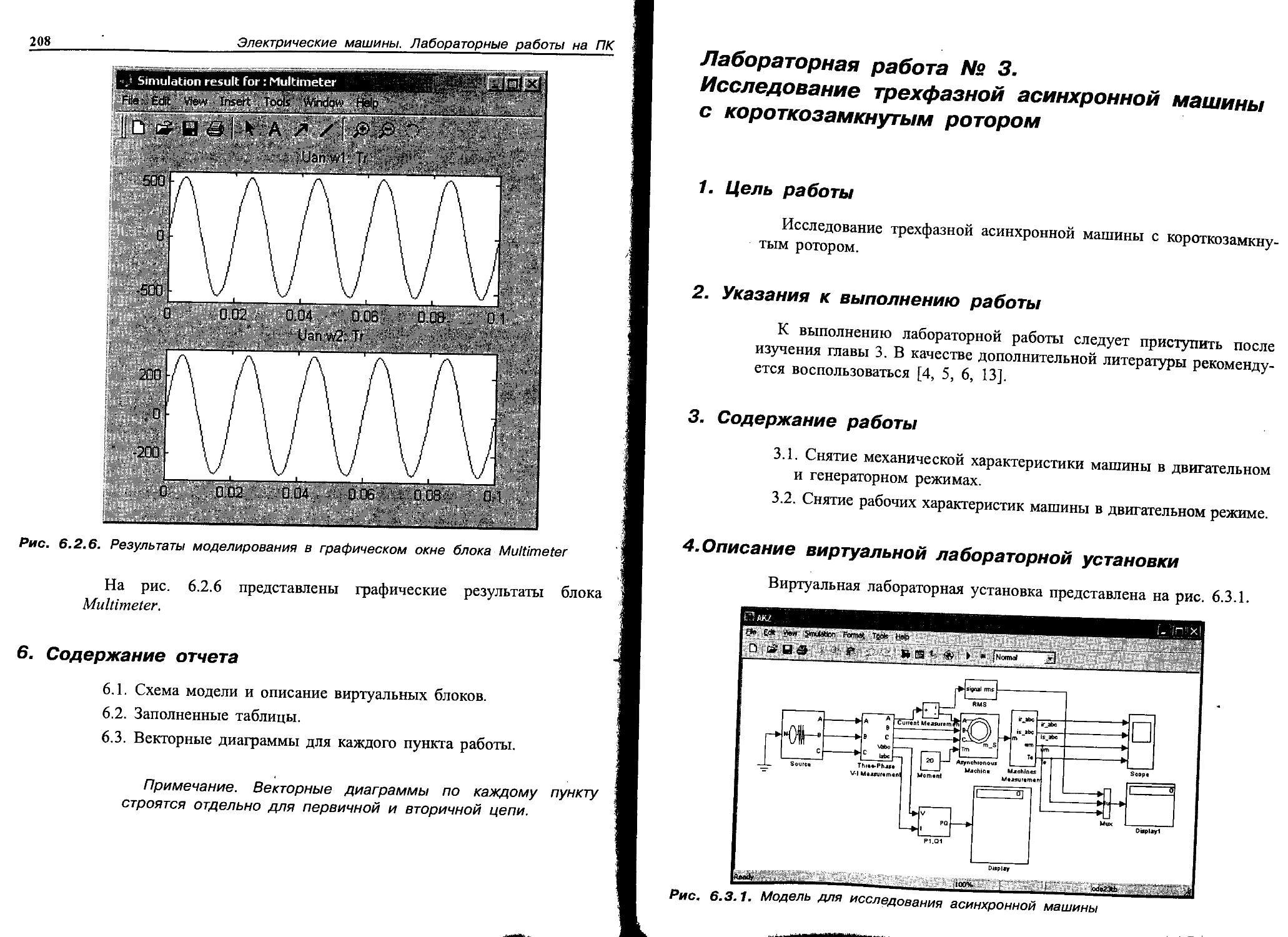
Лабораторная работа № 3. Исследование трехфазной асинхронной машины с короткозамкнутым ротором.......................................... 209
Лабораторная работа № 4. Исследование трехфазной асинхронной машины с фазным ротором ................................................... 218
Лабораторная работа № 5. Исследование трехфазной асинхронной машины с короткозамкнутым ротором при питании от однофазной сети .......... 221
Лабораторная работа № 6. Исследование трехфазной, магнитоэлектрической синхронной машины ............................. 228
Лабораторная работа № 7. Исследование синхронного генератора ............................................. 235
Лабораторная работа № 8. Исследование синхронного компенсатора при работе на «жесткую» сеть ....................................... 244
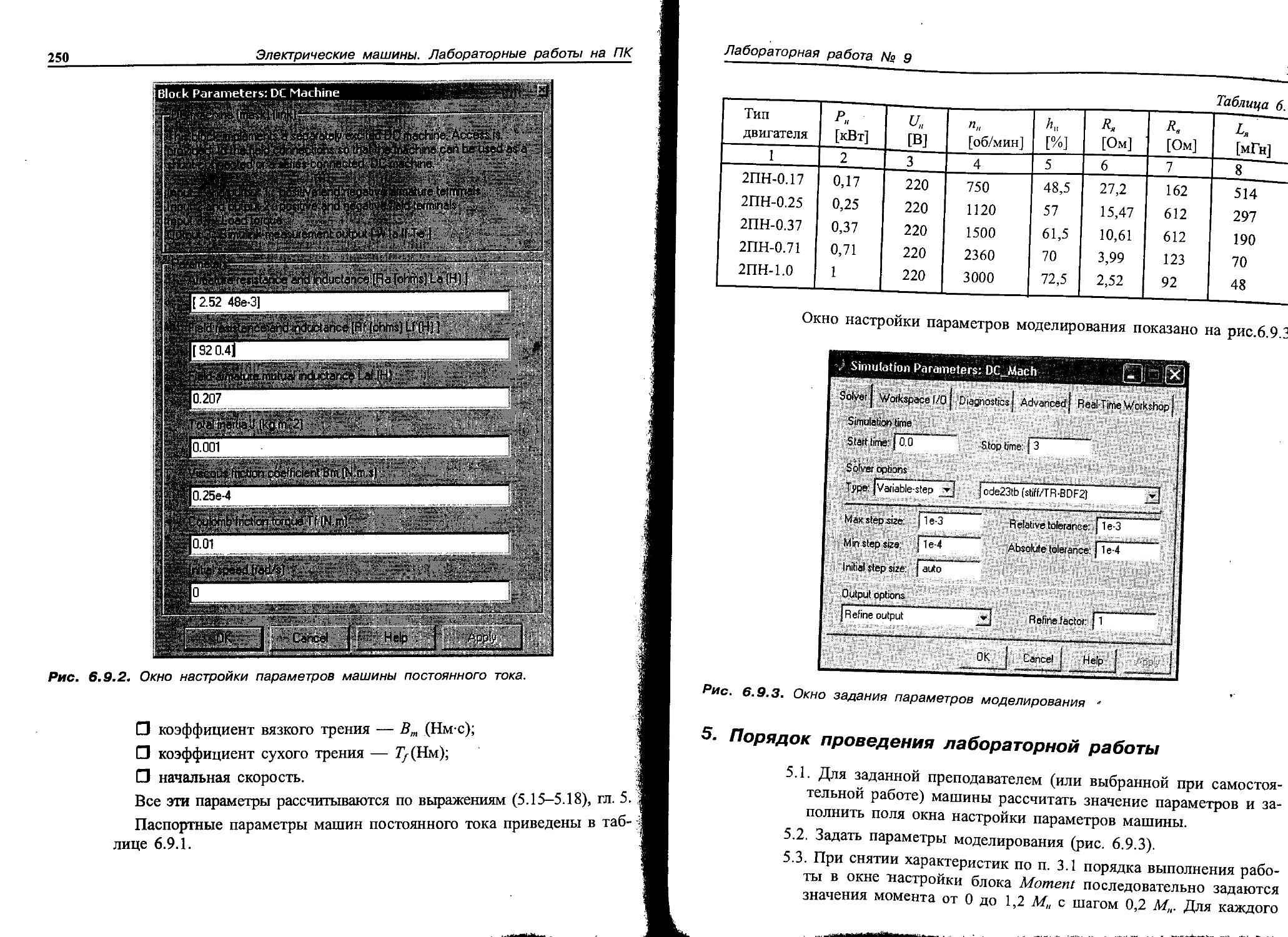
Лабораторная работа № 9. Исследование машины постоянного тока с независимым возбуждением ....................................... 248
Лабораторная работа № 10. Исследование машины постоянного тока с последовательным возбуждением..................................... 254
Предисловие
...Поспешим: мы пассажиры в поезде времени. Момент времени, в который я говорю, уже далек от меня.
Буало
Книга, которую (потенциальный) читатель держит в руках, является третьей в серии «Лабораторные работы на персональном компьютере». Первые две: «Линейные электрические цепи» и «Силовая электроника» — были выпущены в издательстве «Корона принт» в 2002 году. Авторы признательны всем тем, кто в той или иной форме дал свои отзывы об этих работах.
Причинами, побудившими написать все эти пособия, явились:
• заинтересованность студентов технических ВУЗов в новых, современных формах подачи материала;
• практическое отсутствие подобных публикаций в литературе.
Настоящая работа написана на основании опыта преподавания предметов Электрические машины, Судовая электротехника и Электроэнергетика в Высшей морской школе в Щецине (Польша) и в Санкт-Петербургском институте точной механики и оптики.
Авторы выражают благодарность А. Г. Ильиной за большую помощь в расчетах и оформлении настоящей работы.
Книга содержит шесть глав.
В первой главе, как это было и в предшествующих пособиях, помещен материал с описанием основных библиотек виртуальных блоков, используемых при моделировании.
На это повторение авторы пошли сознательно, так как по их мнению, каждая книга должна быть полностью самостоятельной и содержать весь необходимый материал для проведения виртуальных лабораторных работ на компьютере.
Теоретические вопросы, связанные с анализом электрических машин, наилучшим образом разработаны в трудах российских ученых. Поэтому при написании теоретической части (главы 2, 3, 4, 5) авторы использовали известные монографии М. П. Костенко, Л. М. Пиотровского [13] и Д. Э. Брускина [4].
Основные проблемы, связанные с моделированием электрических машин, изложены вместе с теоретической частью в гл. 2, 3, 4, 5.
Здесь читатель при желании может сравнить результаты теоретического анализа с результатом моделирования, а при необходимости использовать разработанные модели для исследования собственных задач.
В шестой главе описаны порядок проведения лабораторных работ и модели, которые использованы для их проведения. При разработке методики проведения этих работ использовался опыт проведения лабораторных работ в Высшей морской школе в Щецине (Польша) и в Санкт-Петербургском институте точной механики и оптики (техническом университете).
К книге прилагается дискета со всеми моделями, которые помещены в шестой главе монографии. Кроме того, на дискете помещены программы, разработанные для расчета параметров электрических машин.
При обработке результатов измерений широко использована связь пакетов MATLAB и Excel; читатель без труда определит графики и характеристики, построенные в Excel.
Авторы будут признательны всем, кто пришлет свои отзывы о данной книге.
Описание к дискете
К данной монографии прилагается дискета со следующими моделями виртуальных лабораторных работ по электрическим машинам:
ЛАБОРАТОРНАЯ РАБОТА № 1. Исследование однофазного трансформатора.
ЛАБОРАТОРНАЯ РАБОТА № 2. Исследование трехфазного трансформатора.
ЛАБОРАТОРНАЯ РАБОТА №3. Исследование трехфазной асинхронной машины с короткозамкнутым ротором.
ЛАБОРАТОРНАЯ РАБОТА № 4. Исследование трехфазной асинхронной машины с фазным ротором.
ЛАБОРАТОРНАЯ РАБОТА № 5. Исследование трехфазной асинхронной машины с короткозамкнутым ротором при питании от однофазной сети.
ЛАБОРАТОРНАЯ РАБОТА № 6. Исследование трехфазной магнитоэлектрической синхронной машины.
ЛАБОРАТОРНАЯ РАБОТА № 7. Исследование синхронного генератора.
ЛАБОРАТОРНАЯ РАБОТА № 8. Исследование синхронного компенсатора при работе на «жесткую» сеть.
ЛАБОРАТОРНАЯ РАБОТА № 9. Исследование машины постоянного тока с независимым возбуждением.
ЛАБОРАТОРНАЯ РАБОТА № 10. Исследование машины постоянного тока с последовательным возбуждением.
1.1. Введение
MATLAB является продуктом фирмы The Mathworks Inc. Первая версия пакета MATLAB была разработана уже более 20 лет тому назад. Развитие и совершенствование этого пакета происходило одновременно с развитием средств вычислительной техники. Название пакета MATLAB происходит от словосочетания Matrix Laboratory, он ориентирован в первую очередь на обработку массивов данных (матриц и векторов). Именно поэтому, несмотря на достаточно высокую скорость смены поколений вычислительной техники, MATLAB успевал впитывать все наиболее ценное от каждого из них. В результате к настоящему времени MATLAB представляет собой богатейшую библиотеку функций (более 800), единственная проблема работы с которыми заключается в умении быстро отыскать те из них, которые нужны для решения поставленной задачи.
Для облегчения работы с пакетом специалистам различных областей науки и техники вся библиотека функций разбита на разделы. Те из них, которые носят более общий характер, входят в состав ядра. Те же функции, которые являются специфическими для конкретной области, включены в состав пакетов расширения (Toolboxes).
Simulink— интерактивный инструмент для моделирования динамических систем.
Материал данной монографии опирается на версию MATLAB 6.1 (Release 12) и Simulink в версии 4. Следует обратить внимание читателя на то, что пакеты MATLAB, Simulink и их пакеты расширения (Toolboxes, Blocksets) постоянно развиваются и совершенствуются. Поэтому может случиться, что версия и ее библиотеки, которые инсталлированы в компьютере читателя, отличаются от использованных в книге. Несоответствие версий может быть несущественным и прояв-лятся в иных формах окон, несколько измененном интерфейсе, иных описаниях и т. д, но может привести и к невозможности использования моделей, помещенных на прилагаемой к книге дискете.
12
Электрические машины. Лабораторные работы на ПК
В настоящее время появилась принципиально новая версия MATLAB 6.5 (Release 13) и Simulink 5.
MATLAB 6.5 включает в себя новый ЛТ компилятор, который обеспечивает более быстрое выполнение программ. По мнению разработчиков, это делает MATLAB 6.5 мощнейшей альтернативой кодированию на С в области технических вычислений.
Одной из наиболее примечательных особенностей новой версии является повышение производительности /«-файлов. Изменения в алгоритме обработки /«-функций и сценариев позволили добиться существенного повышения производительности по сравнению с предыдущими версиями MATLAB.
Simulink 5 обладает следующими новыми свойствами:
□ Встроенная поддержка вычислений с фиксированной точкой. Теперь есть возможность легко модернизировать модель, переключаясь между вычислениями с плавающей точкой и вычислениями с фиксированной точкой (требуется установка Fixed-Point Blockset).
□ Инструмент Look-Up Table Editor обеспечивает удобный просмотр и редактирование данных в блоках таблиц. Вызов редактора выполняется из меню Tools окна модели.
□ Инструмент Model Discretizer обеспечивает выборочную замену непрерывных блоков на дискретные блоки (требуется установка Control System Toolbox, Версия 5.2). Вызов дискретизатора выполняется из меню Tools окна модели.
□ Улучшенное средство диагностики ошибок Diagnostic Viewer позволяет теперь конфигурировать сообщения об ошибках и включать в них гиперссылки.
□ Редактор маски Mask Editor теперь включает в себя инструмент для создания динамических окон диалога. Панель Callback на вкладке Parameters редактора маски позволяет задавать функции, обрабатывающие изменение параметров блока (подсистемы).
□ Блок S-function Builder содержит новую вкладку Data Properties, с помощью которой можно задавать тип данных портов, вид входных и выходных сигналов (действительный или комплексный), определять метки портов, задавать размерность сигналов и т. п.
О Добавлена новая библиотека Model Verification library. Библиотека содержит блоки, выполняющие проверку модели в процессе расчета.
□ Инструмент создания отчета Print details формирует HTML-документ со схемами модели и подсистем, а также перечнем параметров блоков и их значениями. Команда Print details включена в меню File.
Пакеты Matlab, Simulink и Power System Blockset
13
Настоящая монография представляет собой методические указания к проведению виртуальных лабораторных работ по электрическим машинам. «Приборной базой» проведения этих лабораторных работ являются пакеты расширения Simulink и Power System. В библиотеках этих пакетов имеются многочисленные виртуальные элементы и многочисленные измерительные приборы, что позволяет всесторонне исследовать электрическую цепь любой сложности. В данной главе описывается содержание основных библиотек этих пакетов расширения и рассматриваются основные приемы работы в них. При этом основное внимание уделено тем библиотекам, которые используются в дальнейшем при работе в виртуальной лаборатории по электрическим машинам. Более подробные сведения по пакетам MATLAB, Simulink и их пакетам расширения (Toolboxes, Blocksets) читатель найдет в специальной литературе [2, 6, 7, 8, 9, 10, 11, 12, 14]. Приемы работы в пакетах MATLAB, Simulink и их многочисленных пакетах расширения (Toolboxes, Blocksets) размещены на сайте www.matlab.ru. Авторы кроме цитированных монографий использовали материал этого сайта при написании первой главы.
1.2. Simulink
Simulink — интерактивный инструмент для моделирования, имитации и анализа динамических систем. Он дает возможность строить графические блок-диаграммы, имитировать динамические системы, исследовать работоспособность систем и совершенствовать проекты. Simulink полностью интегрирован с MATLAB, обеспечивая немедленный доступ к широкому спектру инструментов анализа и проектирования.
1.2.1. Запуск Simulink
После открытия основного окна программы MATLAB (рис. 1.1) нужно запустить программу Simulink. Это можно сделать одним из трех способов:
□ Нажать кнопку (Simulink) на панели инструментов командного окна MATLAB.
□ В командной строке главного окна MATLAB набрать Simulink и нажать клавишу <Enter> на клавиатуре.
О Выполнить команду Open... в меню File и открыть файл модели (mdl-файл).
14
Электрические машины. Лабораторные работы на ПК
МЛ11 лв
File Edit View Web Wliftow' Half' ‘ ’•
j" j ‘ ф I Currertbfraeiay. | F tMaBabtwork
To get started, select "MATLAB Help" from the Help menu.
Ж
Ready ' -
Рис. 1.1. Основное окно программы MATLAB
Использование первого и второго способов приводит к открытию окна Обозревателя (Browser) разделов библиотеки Simulink (рис. 1.2).
Sniiuhnk I ibi игу Bi щучн
3/Discrete
File Edit/Vi^Help
Discrete:
Щ • Я CDMA Reference Blockset Й •• M Communications Blockset i- -И Control System Toolbox SH DSP Blockset Й-Я Dials & Gauges Blockset El - Я Fixed-Point Blockset EJ Я Fuzzy Logic Toolbox : -Я MPCBlocks El Я Motorola DSP Blockset S-Я NCD Blockset IB - Я Neural Network Blockset S • Я Power System Blockset EJ- Я Real-Time Workshop
Я Report Generator S-Я SimulinkExtras
№ Stateflow Й- Я System ID Blocks Й-Я xPC Target
Continuous
Discrete '
Functions Mables
Math
Nonlinear
Signals & Systems
Sinks
Sources
Ready
Рис.
1.2. Окно Обозревателя разделов библиотеки Simulink
Пакеты Matlab, Simulink и Power System Blockset
15
1.2.2. Обозреватель разделов библиотеки Simulink
На рис. 1.2 выделена основная библиотека Simulink (в левой части окна) и показаны ее разделы (в правой части окна).
Библиотека Simulink содержит следующие основные разделы:
□ Continuous — линейные блоки.
□ Discrete — дискретные блоки.
□ Functions & Tables — функции и таблицы.
□ Math — блоки математических операций.
□ Nonlinear — нелинейные блоки.
□ Signals & Systems — сигналы и системы.
□ Sinks — регистрирующие устройства.
□ Sources — источники сигналов и воздействий.
□ Subsystems — блоки подсистем.
Список разделов библиотеки Simulink представлен в виде дерева, и правила работы с ним являются общими для списков такого вида. При выборе соответствующего раздела библиотеки в правой части окна отображается его содержимое. Для работы с окном используются команды собранные в меню. Меню Обозревателя библиотек содержит следующие пункты:
• File (Файл) — Работа с файлами библиотек.
• Edit (Редактирование) — Добавление блоков и их поиск (по названию).
• View (Вид) — Управление показом элементов интерфейса.
• Help (Справка) — Вывод окна справки по обозревателю библиотек.
Для работы с Обозревателем можно также использовать иконки на панели инструментов.
Кнопки панели инструментов имеют следующее назначение:
П Создать новую S-модель (открыть новое окно модели).
Са» Открыть одну из существующих S-моделей.
Чй Изменить свойства окна Обозревателя. Данная кнопка позволяет установить режим отображения окна Обозревателя «поверх всех окон». Повторное нажатие отменяет такой режим.
Find Поиск блока по названию (по первым символам названия). После того как блок будет найден, в окне Обозревателя откроется соответствующий раздел библиотеки, а блок будет выделен.
16
Электрические машины. Лабораторные работы на ПК
Если же блок с таким названием отсутствует, то в окне комментария будет выведено сообщение Not found <имя блока> (Блок не найден).
1.2.3. Создание модели
Для создания модели в среде SIMULINK необходимо последовательно выполнить ряд действий:
□ Создать новый файл модели с помощью команды File/New/ Model, или используя кнопку Q на панели инструментов. Вновь созданное окно модели показано на рис. 1.3.
File Edit View Simulation Format Tools Jjelp_______________________________________________
2 * ts ч V . 3
^„^,2 > Jr i........................
Ready - . fl00%‘ “Д ”2' '
Рис. 1.3. Пустое окно модели
□ Расположить блоки в окне модели. Для этого необходимо открыть соответствующий раздел библиотеки (Например, Sources— Источники). Далее, указав курсором на требуемый блок и нажав на левую клавишу «мыши» — «перетащить» блок в созданное окно. Клавишу мыши нужно держать нажатой. На рис. 1.4 показано окно модели, содержащее блоки.
Для удаления блока необходимо выбрать блок (указать курсором на его изображение и нажать левую клавишу «мыши»), а затем нажать клавишу Delete на клавиатуре.
Пакеты Matlab, Simulink и Power System Blockset
17
□ Далее, если это требуется, нужно изменить параметры блока, установленные программой «по умолчанию». Для этого необходимо дважды щелкнуть левой клавишей «мыши», указав курсором на изображение блока. Откроется окно редактирования параметров данного блока. При задании численных параметров следует иметь в виду, что в качестве десятичного разделителя должна использоваться точка, а не запятая. После внесения изменений нужно закрыть окно кнопкой ОК. На рис. 1.5 в качестве примера показано окно настройки параметров блока Sygnal Generator.
Рис. 1.4. Окно модели, содержащее блоки
Moi к |‘<1Г.иnet pi *• Sitjn.il liLiierdtoi
; Signal Generator - - - ---------------
О utput various wave fount j
- Parameters —-___________- ___________— - —— — ------------------------ 1
Wave form I sine Я! .
Amplitude !
: ; -i
, ................. 1 “............~.......... A
Units: | Herl;
P Interpret vector parameter as 1 -D
•"I -/-0K~" ] Cancel | Help | Apply ' | .
Рис. 1.5. Окно настройки параметров блока Sygnal Generator
18
Электрические машины. Лабораторные работы на ПК
□ После установки на схеме всех блоков из требуемых библиотек нужно выполнить соединение элементов схемы. Для соединения блоков необходимо указать курсором на выход блока, а затем нажать и, не отпуская левую клавишу мыши, провести линию к входу другого блока. После чего отпустить клавишу. Для создания точки разветвления в соединительной линии нужно подвести курсор к предполагаемому узлу и, нажав правую клавишу мыши, протянуть линию. Для удаления линии требуется выбрать линию (так же, как это выполняется для блока), а затем нажать клавишу Delete на клавиатуре. Схема модели, в которой выполнены соединения между блоками, показана на рис. 1.6.
□ После составления расчетной схемы необходимо сохранить ее в виде файла на диске, выбрав пункт меню File/Save в окне схемы и указав папку и имя файла.
Г е Eat View_ Simulation^ Format Joo's Help
► | N: mal I
Abs Display
Ready jl'00% ' ~ ,|ode45 '
Рис. 1.6. Схема модели
1.2.4. Окно модели
Окно модели имеет обычную для Microsoft Offise форму и содержит следующие элементы (рис. 1.6):
• Заголовок, с названием окна. Вновь созданному окну присваивается имя Untitled с соответствующим номером.
• Меню с командами File, Edit, View и т. д.
• Панель инструментов.
Пакеты Matlab, Simulink и Power System Blockset
19
• Окно для создания схемы модели.
• Строка состояния, содержащая информацию о текущем состоянии модели.
Меню окна содержит команды для редактирования модели, ее настройки и управления процессом расчета, работы файлами и т. п.:
• File (Файл) — Работа с файлами моделей.
• Edit (Редактирование) — Изменение модели и поиск блоков.
• View (Вид) — Управление показом элементов интерфейса.
• Simulation (Моделирование) — Задание настроек для моделирования и управление- процессом расчета.
• Format (Форматирование) — Изменение внешнего вида блоков и модели в целом.
• Tools (Инструментальные средства) — Применение специальных средств для работы с моделью (отладчик, линейный анализ и т. п.)
• Help (Справка) — Вывод окон справочной системы.
Для работы с моделью можно также использовать кнопки на панели инструментов (рис. 1.7).
D | I j ►( I Iftamal ' 3,.,;
1 2 3 4 5 6 7 8 9 10 И 12 13 14 15 16
Рис. 1.7. Панель инструментов окна модели
Кнопки панели инструментов имеют следующее назначение:
1.. New Model — Открыть новое (пустое) окно модели.
2. Open Model — Открыть существующий mdl-файл.
3. Save Model — Сохранить mdl-файл на диске.
4. Print Model — Вывод на печать блок-диаграммы модели.
5. Cut — Вырезать выделенную часть модели в буфер промежуточного хранения.
6. Сору — Скопировать выделенную часть модели в буфер промежуточного хранения.
7. Paste — Вставить в окно модели содержимое буфера промежуточного хранения.
8. Undo — Отменить предыдущую операцию редактирования.
9. Redo — Восстановить результат отмененной операции редактирования.
20
Электрические машины. Лабораторные работы на ПК
10. Library Browser — Открыть окно обозревателя библиотек.
11. Toggle Model Browser — Открыть окно обозревателя модели.
12. Go to parent system — Переход из подсистемы в систему высшего уровня иерархии («родительскую систему»). Команда доступна только, если открыта подсистема.
13. Debug — Запуск отладчика модели.
14. Start/Pause/Continue Simulation — Запуск модели на исполнение (команда Start); послё запуска модели на изображении кнопки выводится символ II , и ей соответствует уже команда Pause (Приостановить моделирование); для возобновления моделирования следует щелкнуть по той же кнопке, поскольку в режиме паузы ей соответствует команда Continue (Продолжить).
15. Stop — Закончить моделирование. Кнопка становится доступной после начала моделирования, а также после выполнения команды Pause.
16. Normal/Accelerator — Обычный/Ускоренный режим расчета. Инструмент доступен, если установлено приложение Simulink Performance Tool.
В нижней части окна модели находится строка состояния, в которой отображаются краткие комментарии к кнопкам панели инструментов, а также к пунктам меню, когда указатель мыши находится над соответствующим элементом интерфейса. Это же текстовое поле используется и для индикации состояния Simulink: Ready (Готов) или г Running (Выполнение).
1.2.5. Операции с блоками
Копирование блоков из одного окна в другое проводится следующим образом: открывается нужная библиотека или окно модели-прототипа и нужный блок перетаскивается мышью в окно создаваемой (редактируемой) модели.
Блоки можно копировать и при помощи команд меню. Последовательность действий при этом такова:
□ в окне библиотеки или модели выделяется блок (блоки), подлежащий копированию;
□ выбирается в меню Edit (Правка) активного окна команда Сору (Копировать);
□ сделать активным окно, в которое нужно скопировать блок, и выбрать в нем команду Paste (Вставить) из меню Edit (Правка).
Пакеты Matlab, Simulink и Power System Blockset
21
Каждому скопированному блоку Simulink присваивает имя.
Первый скопированный блок будет иметь то же имя, что и блок в библиотеке. Каждый следующий блок того же типа будет иметь такое же имя с добавлением порядкового номера. Пользователь может переименовать блок. При копировании блок получает те же значения настраиваемых параметров, что и блок-оригинал.
Перестановка блоков модели. Перестановка блока внутри модели осуществляется путем перетаскивания его мышью. При этом Simulink автоматически перерисовывает линии, связывающие этот блок с другими блоками. Чтобы переставить несколько блоков вместе с соединительными линиями и сохранением относительных расстояний, необходимо их выделить и перетащить мышью один из блоков. Все другие выделенные блоки также займут новые места.
Копирование блоков одной модели выполняют двумя способами:
□ перетащить блок в нужное положение, удерживая при этом клавишу <Ctrl>;
□ перетащить блок, удерживая нажатой правую кнопку мыши, при этом к новому блоку добавляется очередной порядковый номер.
Удаление блоков. Для удаления ненужных блоков из блок-схемы достаточно выделить эти блоки так, как было указано ранее, и нажать клавишу <Det> или <Backspace>. Можно также вызвать команду Clear (Очистить) или Cut (Вырезать) из меню Edit (Правка) окна блок-схемы. Если использована команда Cut, то в дальнейшем удаленные блоки можно скопировать в модель при помощи команды Paste (Вставить) того же меню.
Отсоединение блока. Чтобы отсоединить блок от линий, достаточно нажать клавишу <Shift> и, не отпуская ее, перетащить блок в другое место.
Изменение угловой ориентации блока. В начальном состоянии сигнал проходит через блок слева направо (по левую сторону располагаются входы блока, а по правую сторону — выходы). Чтобы изменить угловую ориентацию блока надо:
□ выделить блок, который нужно повернуть;
□ выбрать в меню Format (Формат) окна блок-схемы одну из следующих команд: Flip Block (Поворот блока на 180 градусов) или Rotate Block (Поворот блока по часовой стрелке на 90 градусов).
22
Электрические машины. Лабораторные работы на ПК
Изменение размеров блока. Изменение размеров блока выполняется следующим образом. Выделяется блок и устанавливается указатель мыши на одну из угловых меток блока. Форма указателя при этом изменится — он примет вид двунаправленной стрелки. Надо захватить мышью эту метку и перетянуть ее в новое положение.
Изменение и перемещение имени блока. Все имена блоков в модели должны быть уникальными и состоять хотя бы из одного символа. Чтобы изменить имя блока, нужно выполнить щелчок на имени, а затем, используя обычные приемы редактирования, внести необходимые изменения.
Для изменения шрифта следует выделить блок, вызвать команду Font (Шрифт) из меню Format (Формат) окна модели и затем выбрать шрифт в открывшемся диалоговом окне.
По умолчанию имя блока располагается следующим образом. Если блок ориентирован слева направо, то имя находится под блоком; если справа налево — над блоком; если же сверху вниз или снизу вверх — по правой стороне блока.
Изменить местоположение имени выделенного блока можно двумя способами:
□ перетащить имя мышью на противоположную сторону блока;
□ воспользоваться командой Flip Name из меню Format окна модели— она также переносит имя на противоположную сторону блока.
Скрыть имя блока можно, используя команду Hide Name (Скрыть имя) меню Format окна модели. Чтобы восстановить отображение имени, следует воспользоваться командой Show Name (Показать имя)
того же меню.
Проставление меток сигналов и комментариев. Для наглядности и удобства блок-схемы линии можно снабдить метками, указывающими, какие сигналы по ним проходят. Метки размещают под или над горизонтальной линией, по левую или по правую сторону от вертикальной линии. Метка может быть расположена в начале, в конце или на середине линии.
Создание и манипулирование метками сигналов. Чтобы создать метку сигналов, нужно дважды щелкнуть на сегменте линии и затем ввести текст метки. Причем двойной щелчок следует выполнять точно на линии, т. к. в противном случае будет создан комментарий к модели.
Пакеты Matlab, Simulink и Power System Blockset
23
Перемещение метки осуществляется путем перетаскивания ее мышью на новое место. Если при этом удерживать нажатой клавишу <Ctrl>, то метка будет скопирована в новое место. Скопировать метку можно также, выполнив двойной щелчок на другом сегменте линии.
Чтобы отредактировать метку, следует щелкнуть на ней и затем внести соответствующие изменения в ее текст.
Чтобы удалить метку, надо выделить ее, удерживая клавишу <Shift>, и нажать клавишу <Del> или <Backspace>. При этом будут удалены все метки этой линии.
Создание и манипулирование комментарием. Комментарии дают возможность сопровождать блок-схемы текстовой информацией о модели и отдельных ее составляющих. Комментарии можно проставлять в любом свободном месте блок-схемы. После двойного щелчка в любом свободном месте блок-схемы появляется прямоугольная рамка, в которую можно ввести текст комментария.
Перемещение комментария осуществляется путём перетаскивания его с помощью мыши.
Если при этом удерживать нажатой клавишу <Ctrl>, комментарий будет скопирован в новое место.
Созданный комментарий можно отредактировать. Для этого нужно выполнить на нем щелчок, а потом внести соответствующие изменения. Чтобы изменить при этом параметры шрифта комментария, необходимо выделить текст комментария и выбрать команду Font (Шрифт) из меню Format (Формат) окна блок-схемы. После этого появится диалоговое окно, в котором следует выбрать название шрифта, его размер, атрибуты и стиль и нажать кнопку ОК.
Комментарий можно удалить. Для этого выделите его, удерживая клавишу <Shift>, и нажмите клавишу <Del> или <Backspace>.
1.2.6. Форматирование объектов
В меню Format (также как и в контекстном меню, вызываемом нажатием правой клавиши мыши на объекте) находится набор команд форматирования блоков. Команды форматирования разделяются на несколько групп:
О Изменение отображения надписей:
• Font — Форматирование шрифта надписей и текстовых блоков.
• Text alignment — Выравнивание текста в текстовых надписях.
24
Электрические машины. Лабораторные работы на ПК
• Flip name — Перемещение подписи блока.
• Show/Hide name — Отображение или скрытие подписи блока.
□ Изменение цветов отображения блоков:
• Foreground color — Выбор цвета линий для выделенных блоков.
• Background color — Выбор цвета фона выделенных блоков.
• Screen color — Выбор цвета фона для всего окна модели.
□ Изменение положения блока и его вида:
• Flip block — Зеркальное отображение относительно вертикальной оси симметрии.
• Rotate block — Поворот блока на 90° по часовой стрелке.
• Show drop shadow — Показ тени от блока.
• Show port labels — Показ меток портов.
□ Прочие установки:
• Library link display — Показ связей с библиотеками.
• Sample time colors — Выбор цвета блока индикации времени.
• Wide nonscalar lines — Увеличение/уменьшение ширины нескалярных линий.
• Signal dimensions — Показ размерности сигналов.
• Port data types — Показ данных о типе портов.
• Storage class — Класс памяти. Параметр, устанавливаемый при работе Real-Time Workshop.
• Execution order — Вывод порядкового номера блока в последовательности исполнения.
1.2.7. Установка параметров расчета и его выполнение
Перед выполнением расчетов необходимо предварительно задать параметры расчета. Задание параметров расчета выполняется через меню Simulation/Parameters окна панели (рис. 1.8).
Окно настройки параметров расчета имеет 5 вкладок:
□ Solver (Расчет) — Установка параметров расчета модели.
□ Workspace I/O (Ввод/вывод данных в рабочую область) — Установка параметров обмена данными с рабочей областью MATLAB.
□ Diagnostics (Диагностика) — Выбор параметров диагностического режима.
Пакеты Matlab, Simulink и Power System Blockset
25
y-3 Simulation Paramptpt-5.* iintitlpil
Salver | Workspace I/O j Diagnostics] Advanced] Real Time Wo'kshopj
Start Wie |”ri । Stop time 111U
,‘m>r_.--------- '_____________
Tjqafc jVanabte-step v| | ode45 [Doimand-Pnnce] У1 -
' ” F"':
'»— — .......................——»<«W—..................-«** w.
H®. step size pp; Relative tolerance
' Mm step size рёп ЧиокЛе tolerance { -i-t'i **
Initial step size L’Xl
[0utpuloptoro_______________________, ______________________________________
' | Refine output Д Refine le-:t 11
<...................................................................— —,_^.
OK
Рис. 1.8. Окно задания параметров моделирования
О Advanced (Дополнительно) — Установка дополнительных параметров.
□ Real-time Workshop — инструмент для работы в реальном времени.
Установка параметров расчета модели выполняется с помощью элементов управления, размещенных на вкладке Solver. Эти элементы разделены на три группы (рис. 1.8): Simulation time (Интервал моделирования или, иными словами, время расчета), Solver options (Параметры расчета), Output options (Параметры вывода).
Время расчета (Simulation time) задается указанием начального (Start time) и конечного (Stop time) значений времени расчета. Начальное время, как правило, задается равным нулю. Величина конечного времени задается пользователем исходя из условий решаемой задачи.
При выборе параметров расчета (Solver options) необходимо указать способ моделирования (type) и метод расчета нового состояния системы. Для параметра Туре доступны два варианта— с фиксированным (Fixed-step) или с переменным (Variable-step) шагом. Как правило, Variable-step используется для моделирования непрерывных систем, a Fixed-step — для дискретных.
Список методов расчета нового состояния системы содержит несколько вариантов. Первый вариант (discrete) используется для расчета дискретных систем. Остальные методы используются для расчета непрерывных систем. Эти методы различны для переменного (Variable-step) и для фиксированного (Fixed-step) шага времени, но, по сути, представляют собой процедуры решения систем дифференциальных уравнений.
26
Электрические машины. Лабораторные работы на ПК
Ниже двух раскрывающихся списков Туре находится область, содержимое которой меняется зависимости от выбранного способа изменения модельного времени. При выборе Fixed-step в данной области появляется текстовое поле Fixed-step size (величина фиксированного шага) позволяющее указывать величину шага моделирования. Величина шага моделирования по умолчанию устанавливается системой автоматически (auto). Требуемая величина шага может быть введена вместо значения auto либо в форме числа, либо в виде вычисляемого выражения (то же самое относится и ко всем параметрам устанавливаемым системой автоматически).
При выборе Fixed-step необходимо также задать режим расчета (Mode). Для параметра Mode доступны три варианта:
□ MultiTasking (Многозадачный) — необходимо использовать, если в модели присутствуют параллельно работающие подсистемы, и результат работы модели зависит от временных параметров этих подсистем. Режим позволяет выявить несоответствие скорости и дискретности сигналов, пересылаемых блоками друг другу.
□ SingleTasking (Однозадачный) — используется для тех моделей, в которых недостаточно строгая синхронизация работы отдельных составляющих не влияет на конечный результат моделирования.
□ Auto (Автоматический выбор режима) — позволяет Simulink автоматически устанавливать режим MultiTasking для тех моделей, в которых используются блоки с различными скоростями передачи сигналов и режим SingleTasking для моделей, в которых содержатся блоки, оперирующие одинаковыми скоростями.
При выборе Variable-step в области появляются поля для установки трех параметров:
Q Max step size — максимальный шаг расчета. По умолчанию он устанавливается автоматически (auto) и его значение в этом случае равно ’/50 разницы между StopTime и StartTime. Довольно часто это значение оказывается слишком большим, и наблюдаемые графики представляют собой ломаные (а не плавные) линии. В этом случае величину максимального шага расчета необходимо задавать явным образом.
Q Min step size — минимальный шаг расчета.
□ Initial step size — начальное значение шага моделирования.
При моделировании непрерывных систем с использованием переменного шага необходимо указать точность вычислений: относительную (Relative tolerance) и абсолютную (Absolute tolerance). По умолчанию они равны соответственно 10~3 и auto.
Пакеты Matlab, Simulink и Power System Blockset
2
В нижней части вкладки Solver задаются настройки параметре! вывода выходных сигналов моделируемой системы {Output options') Для данного параметра возможен выбор одного из трех вариантов:
□ Refine output (Скорректированный вывод) — позволяет изменят! дискретность регистрации модельного времени и тех сигналов, которые сохраняются в рабочей области MATLAB с помощью блока То Workspace. Установка величины дискретности выполняется в строке редактирования Refine factor, расположенной справа. По умолчанию значение Refine factor равно 1, это означает, что регистрация производится с шагом D, = 1 (то есть для каждого значения модельного времени). Если задать Refine factor равным 2, это означает, что будет регистрироваться каждое второе значение сигналов, 3 — каждое третье и т. д. Параметр Refine factor может принимать только целые положительные значения
□ Produce additional output (Дополнительный вывод) — обеспечивает дополнительную регистрацию параметров модели в заданные моменты времени; их значения вводятся в строке редактирования (в этом случае она называется Output times') в виде списка, заключенного в квадратные скобки. При использовании этого варианта базовый шаг регистрации (D() равен 1. Значения времени в списке Output times могут быть дробными числами и иметь любую точность.
О Produce specified output only (Формировать только заданный вывод) — устанавливает вывод параметров модели только в заданные моменты времени, которые указываются в поле Output times (Моменты времени вывода).
1.3. Пакет расширения Power System Blockset
Библиотека Powerlib пакета расширения Power System Blockset (рис. 1.9) содержит 6 разделов, последний из которых, Extras, включает подразделы.
1.3.1. Electrical Sources — источники электрической энергии
Эта библиотека содержат неуправляемые и управляемые источники постоянного и переменного напряжения и тока (рис. 1.10). Окно настройки блока AC Voltage Source показано на рис. 1.11. В полях пара-
28
Электрические машины. Лабораторные работы на ПК
HU Library: powerlib2
File Edit View Help
Copyright 1997-2000 TEQSIM international. Inc., under sublioense from Hydro-Quebec, and The MathWorfc. Inc.
Рис. 1.9. Библиотека Powerlib
^Library. powerlib2/Electrical
File Edit View с0'Гю1 Help _______ , . >>..............:
“^~DC Voltage Source
(Л?) AC Voltage Source
AC Current Source
signal
Controlled Voltage Source
signal
Controlled Current Source
Рис. 1.10. Библиотека Electrical Sources
метров окна устанавливаются значения амплитуды напряжения, начальной фазы и частоты.
Поле Measurements позволяет подключать блок Multimeter для измерения и наблюдения выходных параметров источника.
Блоки управляемых источников позволяют связать структурные или функциональные схемы основных библиотек Simulink Block Library с элементами библиотеки Power System Blockset.
Пакеты Matlab, Simulink и Power System Blockset
29
Block Parameters: AC Voltage Source
-AC Voltage Source (mask) (link) -
Ideal sinusoidal AC Voltage source
f
Рис. 1.11. Окно настройки блока AC Voltage Source
1.3.2. Library Power Elements — библиотека пассивных элементов
На рис. 1.12. показаны пассивные элементы библиотеки:
1 — Последовательные и параллельные пассивные элементы R, L, С, которые могут быть заданы в параметрах этих элементов (Ом, Генри, Фарада — RLC Branch), а могут быть заданы значениями активной, реактивной индуктивной либо реактивной емкостной мощностей (RLC Load).
2 — Линейный трансформатор (Linear Transformer) и трансформатор с реальным магнитным сердечником, учитывающим его насыщение (Saturable Transformer).
3 — Магнито связанные цепи (цепи с взаимной индукцией, Mutual Inductance).
4 — Нелинейный элемент (Surge Arrester), позволяющий сформировать требуемую нелинейную зависимость между входным и выходным сигналами.
5 — Ключ (Breaker), параметры (сопротивление, индуктивность) которого в открытом состоянии задаются в полях настройки.
30
Электрические машины. Лабораторные работы на ПК
Там же задается состояние ключа (открыт, закрыт) при нулевом входном сигнале.
6 — Трехфазный двухобмоточный и трехобмоточный трансформаторы {Three-Phase Transformer, Two windings, Three windings).
7 — Блоки, реализующие параметры однофазной и трехфазной линии передачи (PI Section Line, Distributed Parameters Line).
Рис. 1.12. Библиотека Power Elements
На рис. 1.13 в качестве примера показано окно настройки блока трехфазного трансформатора {Three-Phase Transformer). В полях настройки задаются параметры трансформатора {Power and frequency), параметры первичной и вторичной обмоток {Windingparameters), схемы соединения первичных и вторичных обмоток (поля Winding 1 (ABC) Connection, Winding 2 (abc) Connection). Флажок {Saturable
Пакеты Matlab, Simulink и Power System Blockset
31
Core) позволяет учесть насыщение трансформатора. В выпадающем меню поля (Measurements) устанавливаются переменные состояния трансформатора, которые подлежат измерению при моделировании блоком Multimeter.
Block Parameters: Three-phase Transformer (Two Windings)
Three-Phase Transformer (Two Windings) (mask) (link)- - - -This transformers.
neutial point of the Wye
’ Nominal pawerand frequency [ Pn(VA), fn(Hz) ]
Winding 1 (ABC) connection fi ~~
Wmding parameters [ VI Ph-Ph(Vrms), R1 (pu). L1 (pu) ] jr^ 35^3,0 002 Го 08 ]
I------------------------
Winding 2 (abc) connection |Dolta (D1)
Winding parameters [V2 Ph-P‘i(Vtms). R2(pu), L2(pul ] |[315e3.0 002.0 08]
| Г Saturable core
] . Magnetization resistance Rm (pu)
_ j—-
I 'Magnetization reactance Lm (pu)
....7;..^^
I Measurements (None
s
Л1оск implements a three-phase transformer bv using three single-phase sformers Set the winding connection to'Yn‘ whenyouwantto access the Hal point of the Wye
4
OK I Cancel | • |
Рис. 1.13. Окно настройки блока Three-Phase Transformer
1.3.3. Machines — библиотека электрических машин
Эта библиотека содержит синхронные, асинхронные машины и машины постоянного тока (рис. 1.14). Все машины могут быть представлены как в абсолютных, так и относительных единицах. Универсальный блок измерений (Machines Measurement Demax) позволяет измерить требуемые переменные состояния машины.
32
Электрические машины. Лабораторные работы на ПК
Simplified Synchronous Machine
Permanent Magnet Synchronous Machine
Ab
m_pu >
Simplified Synchronous' Machine pu Unite
Simplified Synchronous Machine SI Units
) Tm
Permanent Magnet Synchronous Machine
DC Machine
DC Machine
Synchronous Machine
Asynchronous Machine
Synchronous Machine pu Fundamental
Synchronous Machine
pu Standard
Synchronous Machine
SI Fundamental
Asynchronous Machine pu Units
) Tm m$l ?
Asynchronous Machine SI Units
Prime Movers and Regulators
Measurement demultiplexer
> vref
> vd
Vf >
) vq
> vstab
Excitation System
> wref
) Pref Pm >
> we
Pe gate ? ) dw
НТО
> wref dw_5-2 > > Pref Tr5-2 > > wm gate > ) djheta pm > STG
is_abc > vs_abc > e_abc ? >m thetam ?
wm > Pe >
Machines • Measurement Demux
Рис. 1.14. Библиотека Machines
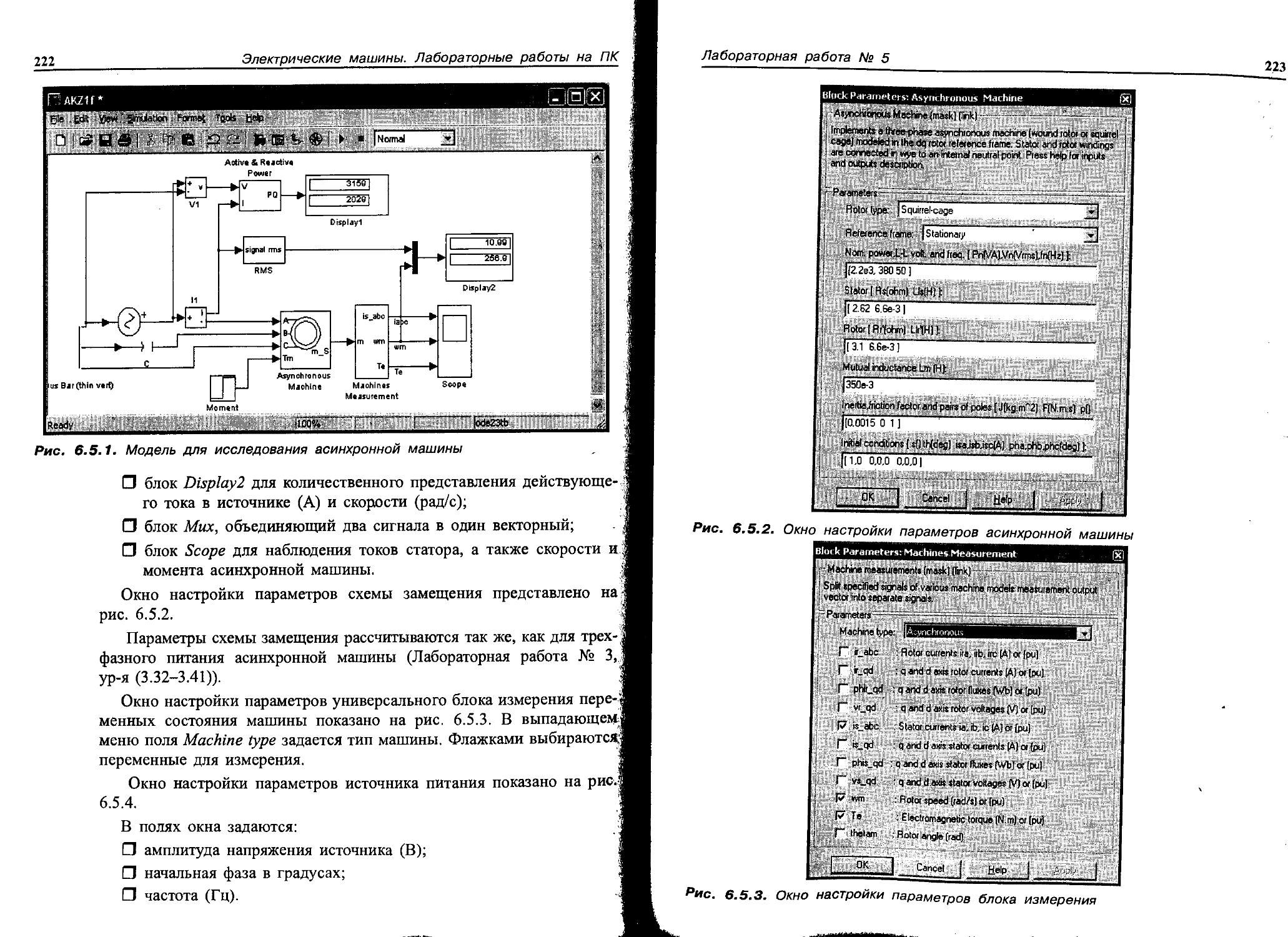
На рис. 1.15в качестве примера показано окно настройки параметров асинхронной машины.
В полях окна настройки задаются:
□ в первом поле — тип ротора (короткозамкнутый, фазный);
□ во втором поле — мощность, действующее линейное напряже-, ние, частота и ток; .1
□ в третьем, четвертом и пятом полях — параметры классической^ схемы замещения;
□ в шестом поле — момент инерции ротора, коэффициент вязкого i трения и число пар полюсов;
□ в последнем поле — начальные условия. ;
Пакеты Matlab, Simulink и Power System Blockset
Block Parameters: Asynchronous Machine (Ж
Asynchronous Machine (mask] (linkI
Implements a three-phase asynchronous machine (wound rotor or squirrel cage] modeled in the dq rotor reference frame. Stator and rotor windings are connected in wye to an internal neutral point. Press help for inputs and outputs description
-Parameters ----------------------------------------------------—
! Rotor type: f squirielcage у)
i Reference frame: | Stationary
Norn. powet.L-L volt and freq [ Pnf/A).Vn(Vrms),ln(Hz) ]
|[ 3e3,380 50 j
Stator [Rs(ohm) Lls(H]J:
3?28 3.9e-3 ]
Rotot I Rr'(ohm] Llr'iHl ]
| |[Tl673.9e-3]
I Mutual inductance Lm (H).
j |Тб7.1е-3 : *
lnertia,friction factor and pairs of poles [J(kg.m" 2] F[Nmsl p(J
i |[ 'об058 0 2 ]
Initial conditions [ s() th[deg) isa.isb,isc(A] pha.phb.phc(deg) ]
: ][ Тб ОДО0Д0 ]
OK 1 Cancel j Help I fii-p',' |
Рис. 1.15. Окно настройки блока Asynchronous Machine
Окно настройки универсального блока измерения переменных состояния показано на рис. 1.16.
В первом поле окна настройки (Machine type) указывается тип машины. В результате его выбора окно настройки изменяется под соответствующую машину.
В полях окна блока измерений галочками отмечаются величины, которые подлежат измерению или наблюдению.
1-3.4. Connector-блоки связи между входами и выходами моделей библиотеки Power System Blockset
Эти блоки показаны на рис. 1.17, назначение блоков раскрывает их графическое представление. На шкалах настройки Bus Bar указывается количество входов и выходов.
2 Зак. 128
34
Электрические машины. Лабораторные работы на ПК
Рис. 1.16. Окно настройки блока Machines Measurement Demax
Ground (input)
Ground (output)
Neutral (output)
Neutral (input)
Т connector
l_ connector
Sus Bar (thin vert)
Bus Bar (vert)
Bus Bar (thin horiz)
iBus Bar (horiz)
Рис. 1.17. Библиотека Connector
Пакеты Matlab, Simulink и Power System Blockset 3f
1.3.5. Measurement — блоки измерений
Эти блоки показаны на рис. 1.18. Блоки Voltage Measurement, Current Measurement предназначены для измерения напряжения и тока, а также для соединения измерительных блоков главной библиотеки Simulink с блоками библиотеки Power System BlocKsets. Блок Impedance Measurement позволяет измерить частотную зависимость полного сопротивления между двумя точками исследуемой схемы.
Voltage Measurement
Current Measurement
Multimeter
о Ь
> 1 zco
>[2_____
Impedance Measurement
Рис. 1.18. Библиотека Measurement
рис.1.19. Окно настройки блока Multimeter
36
Электрические машины. Лабораторные работы на ПК
Особый интерес представляет блок Multimeter. Этот блок позволяет измерить электрические переменные, выбранные в окне Measurement соответствующих элементов (см., например, рис. 1.12). Окно настройки блока Multimeter (рис. 1.19) содержит два поля. В первом (Available) после нажатия кнопки Refresh появляются соответствующие измеряемые переменные. Все или часть из них могут быть с помощью кнопки Select переведены во второе окно для измерения и регистрации результатов. Флажок Display signals at simulation stop позволяет вывести измеряемые сигналы в отдельное графическое окно в виде временных зависимостей. Этот блок очень удобен при исследовании и в дальнейшем часто применяется.
Блок Multimeter своим выходом может быть подключен и к внешним измерителям.
1.3.6. Powerlib Extras — расширенные библиотеки
Библиотека Powerlib Extras представлена на рис. 1.20. Эта библио-
1.3.6.1. Measurements — библиотека дополнительных блоков измерения
Расширенная библиотека Measurements показана на рис. 1.21. Библиотека содержит блок разложения несинусоидального периодического сигнала на гармонические составляющие (блок Fourier), блок измерения эффективного (действующего) значения несинусоидального периодического напряжения или тока (блок RMS), блок
Пакеты Matlab, Simulink и Power System Blockset
37
^Library: powerlib_extras/Measurements L T>;
File Edit View t srmc Help
Mag > > abc
Phase >
> signal THD >
3-Phase
Sequence Analyzer
> abc dqO ?
> sin_cos
abc_to_dqO T ransformation
> dqO abc >
> sin_cos
dqO_to_abc
T ransformation
Total Harmonic Distorsion
>A A >
В >
> В С >
ХйЬс >
С labc >
Three-Phase
V-l Measurement
Рис. 1.21. Библиотека Extras Measurements
измерения активной и реактивной мощности (блок Active & Reactive Power).
Имеются три блока преобразования трехфазных сигналов. Блок 3-Phase Sequence Analyzer вычисляет симметричные составляющие прямой, обратной и нулевой последовательностей. Блоки abc to dqO Transformation, dqO to abc Transformation осуществляют преобразование трехфазной системы к двухфазной и наоборот.
Блок Total Harmonic Distorsion измеряет коэффициент гармоник.
Блок Three-Phase V-I Measurement предназначен для измерений напряжений и токов в трехфазных цепях.
38
Электрические машины. Лабораторные работы на ПК
Block Parameters: Fourier
i - Fourier analyser (mask) (link)---------;
The Fourier block performs a Fourier analysis of the input signal over a running window of one cycle of the fundamental frequency Fust and second outputs return respectively the magnitude and phase (degrees) of , the harmonic component specified
Parameters----— ----------- "
Fundamental frequency f1 (Hz)
|50” ~ ~ ‘ .
Harmonic n (0=DC, 1 =fundamental; 2=2nd harm, ):
ОК
Cancel
!
Рис.
1.22. Окно настройки блока Fourier
Block Parameter
х
ActiveX Reactive Power (mask) (link)-- -------
This block measures the active power P and reactive power Q associated with a periodic set of voltage and current which may contain harmonics. P and Q are calculated by averaging the VI product with a running window over one cycle of the fundamental frequency so that the powers are evaluated at fundamental frequency
. input 1. Instantaneous voltage IV) input? Instantaneous current (A) Output PO measurement vector [P(W) Q Ivar)]. Current flowing into an RL circuit will produce positive active and reactive powers
-Parameters-----------------
Fundamental frequency (Hz)-
OK J Cancel j Help | Apply|
Рис. 1.23. Окно настройки блока измерения мощности
Пакеты Matlab, Simulink и Power System Blockset
3$
На рис. 1.22 в качестве примера показано окно настройки блока Fourier. В полях настройки блока отмечается основная частота и порядковый номер исследуемой гармоники.
Для измерения мощности в однофазных и трехфазных цепях служит блок Active & Reactive Power, окно настройки которого показано на рис. 1.23. В поле настройки задается частота, на которой производится измерение.
1.3.6.2. Three-Phase Library — библиотека трехфазных цепей
Расширенная библиотека Three-Phase Library содержит трехфазные цепи различного назначения (рис. 1.24). В этой библиотеке имеется набор последовательных и параллельных трехфазных нагрузок, заданных либо пассивными параметрами, либо значениями активной и реактивной мощности, блок источника питания, трехфазная индуктивносвязанная цепь, трехфазный трансформатор, трехфазный ключ'и блок, моделирующий повреждения в трехфазной сети.
Особый интерес при моделировании электрических цепей представляет блок Powergui основной библиотеки Power System Blockset. Этот блок, будучи установленным в исследуемую модель электрической цепи, позволяет измерить токи, напряжения и их начальные фазы на любом участке электрической цепи. Для связи блока с элекгричес-
^Library; powerhb.extras/ Three Phase l ibrary
Fite Edit View ;FW. Help
All these 3-phase elements are masked blocks built with single-phase elements of the powerlib library.
Look under mask to see how they are built.
____________Cj
Inductive source with neutral fA^lLr-A1 > в —в > > c—OW— c >
Z1-ZD
>A A >
> ВЧ TT l-B > > C 0 >
PI Line Section
Рис. 1.24. Библиотека Three-Phase Library
40
Электрические машины. Лабораторные работы на ПК
кой схемой служат блоки измерений Multimeter, Voltage Mesurement, Current Mesurement. Кроме того блок Powergui позволяет связать пакет расширения Power System Blockset с пакетом расширения Control System. Это позволяет исследовать частотные характеристики и пере- _ ходные процессы в электрических цепях. Окно настройки блока показано на рис. 1.25. В левом поле отражаются измеряемые величины. Справа кнопки и флажки позволяют выбрать величины для измерения. В выпадающем меню первого поля задаются измеряемые значения (амплитудное или действующее). В выпадающем меню второго поля задается частота. Включенный флажок States позволяет измерить переменные состояния (токи в индуктивностях, напряжения на конденсаторах). Включенный флажок Measurement позволяет измерить все величины, выбранные в окне блока Multimeter и зарегестрирован-ные блоками Voltage Measurement, Current Measurement. Включенный
Пакеты Matlab, Simulink и Power System Blockset
4
флажок Sources позволяет измерить токи и напряжения источников включенный флажок Nonlinear — токи и напряжения в нелинейны, элементах.
1.4. Связь MATLAB и MS Office
Среда MATLAB достаточно просто интегрируется с MS Word i MS Excel. Это позволяет создавать интерактивные документы дл$ последующей разработки обучающих программ. Такие обучающие программы, базирующиеся на современных Web-технологиях, пс мнению авторов, являются основой будущего образования. Уже сейчас в мире существует целая индустрия такого образования со своими стандартами. В настоящее время целый ряд международных организаций тесно сотрудничают в сфере разработки и стандартизации элементов дистанционного обучения и других обучающих систем, функционирующих на базе информационных технологий. Ведущая роль здесь принадлежит международному комитету Р1484, аккредитованному Институтом инженеров по электротехнике и радиоэлектронике (IEEE). Для создания содержательной части обучающих программ очень важна динамическая связь между различными приложениями. MATLAB, MS Word, MS Excel и ряд других приложений обладают такой связью. Ниже очень коротко описаны способы совместной работы MATLAB и Excel.
1.4.1. Excellink
Интегрирование MATLAB и Excel позволяет пользователю Excel обращаться к многочисленным функциям MATLAB для обработки данных, различных вычислений и визуализации результата. Надстройка excllink.xla реализует данное расширение возможностей Excel. Для связи MATLAB и Excel определены специальные функции.
1.4.2. Конфигурирование Excel
Перед тем как настраивать Excel на совместную работу с MATLAB, следует убедиться, что Excel Link входит в установленную версию MATLAB. В подкаталоге exlink основного каталога MATLAB или подкаталога toolbox должен находиться файл с над-
42
Электрические машины. Лабораторные работы на ПК
Рис. 1.26. Диалоговое окно настройки
стройкой excllink.xla. После запуска Excel в меню сервис выбирается пункт надстройки. Открывается диалоговое окно (рис. 1.26), содержащее информацию о доступных в данный момент надстройках.
Используя кнопку обзор, указывается путь к файлу excllinkxla. В списке надстроек диалогового окна появилась строка Excel Link 1.1.2 for use with MATLAB с установленным флагом. После нажатия ОК, требуемая надстройка будет добавлена в Excel. Следует обратить внимание, что теперь в Excel присутствует панель инструментов Excel Link, содержащая три кнопки — putmatrix, getmatrix, evalstring. Данные кнопки реализуют основные действия, требуемые для осуществления взаимосвязи между Excel и MATLAB — обмен матричными данными, и выполнение команд MATLAB из среды Excel.
Пакеты Matlab, Simulink и Power System Blockset 4
При повторных запусках Excel надстройка excllink.xla подключает ся автоматически. Избежать подключения надстройки можно сбросог соответствующего флага в диалоговом окне надстройки.
Согласованная работа Excel и MATLAB требует еще несколько ус тановок, которые приняты в Excel по умолчанию (но могут быть изме йены). В меню сервис в пункте параметры, открывается диалогово окно параметры. На вкладке общие следует убедиться, что фла Стиль ссылок RICI выключен, т. е. ячейки нумеруются Al, А2 и т. д На вкладке правка должен быть установлен флаг Переход к другое ячейки после ввода.
1.4.3. Обмен данными между MATLAB и Excel
Запустите Excel. Введите в ячейки с Al по СЗ Excel матрицу, дл; отделения десятичных знаков используйте запятую в соответствии < требованиями Excel.
Выделите на листе данные ячейки и нажмите кнопку putmatrix появляется окно Excel с предупреждением о том, что MATLAB нс запущен. Нажмите ОК, дождитесь открытия MATLAB (открываете} только командное окно MATLAB).
Появляется диалоговое окно Excel со строкой ввода, предназначенной для определения имени переменной рабочей средь MATLAB, в которую следует экспортировать данные из выделенных ячеек Excel. Введите, к примеру, М и закройте окно при помощи кнопки ОК. Перейдите к командному окну MATLAB и убедитесь, что в рабочей среде создалась переменная М, содержащая матрицу.
Проделайте некоторые операции в MATLAB с матрицей М, например, обратите ее:
»IM = inv(A/).
Замечание
Вызов inv для обращения матрицы, как и любой другой команды MATLAB, можно осуществить прямо из Excel. Нажатие на кнопку evalstring, расположенную на панели Excel Link, приводит к появлению диалогового окна, в строке ввода которого следует набрать команду MATLAB IM=inv(M). Результат аналогичен полученному при выполнении команды в среде MATLAB.
44
Электрические машины. Лабораторные работы на ПК
Вернитесь в Excel, сделайте текущей ячейку А5 и нажмите кнопку getmatrix. Появляется диалоговое окно со строкой ввода, в которой требуется ввести имя переменной, импортируемой в Excel. В данном случае такой переменной является IM. Нажмите ОК, в ячейки с А5 по С7 введены элементы обратной матрицы.
Итак, для экспорта матрицы в MATLAB следует выделить подходящие ячейки листа Excel, а для импорта достаточно указать одну ячейку, которая будет являться верхним левым элементом импортируемого массива. Остальные элементы запишутся в ячейки листа согласно размерам массива.
Вышеописанный метод является самым простым способом обмена информацией между приложениями — исходные данные содержатся в Excel, затем импортируются в MATLAB, обрабатываются там некоторым образом и результат импортируется в Excel. Пользователь переносит данные при помощи кнопок панели инструментов Excel Link.
Обмен данными между приложениями может быть осуществлен не только при помощи кнопок панели инструментов Excel Link, но и с использованием функций, определенных на надстройке Excel Link.
1.4.4. Обращение к основным функциям Excel Link
Всего в Excel Link определено одиннадцать функций, распадающихся на две категории: функции для обмена данных между MATLAB и Excel и функции, предназначенные для установления связи между приложениями. Для начала работы необходимы три основные функции, которые фактически дублируются кнопками панели инструментов Excel Link.
Функция MLPutMatrix служит для помещения данных из ячеек листа Excel в массив рабочей среды MATLAB. Первым входным аргументом MLPutMatrix является имя переменной, заключенное в кавычки, а вторым — пределы области ячеек. Обратную операцию производит функция MLGetMatrix, в первом аргументе указывается имя переменной рабочей среды MATLAB с данными, а во втором -пределы области ячеек рабочего листа. Оба аргумента заключаются в кавычки. Следует иметь в виду, что входные аргументы функций в Excel разделяются точкой с запятой при вызове функций из ячеек листа.
Обращение из Excel к командам MATLAB производится при помощи функции MLEvalString. Команды, подлежащие выполнению, зада
Пакеты Matlab, Simulink и Power System Blockset
45
ются в единственном входном аргументе MLEvalString, который заключается в кавычки. Возможно указание строки с несколькими командами, разделенными точкой с запятой, но все равно в кавычки берется вся строка, а не отдельные команды. Входной аргумент у MLEvalString только один.
Наберите в ячейках квадратную матрицу, затрм поместите в ячейку Е2 вызов функции = MLPutMatrix(PM»', А1:СЗ). Обращение к функции из ячейки рабочего листа начинается со знака «равно». Нажатие на клавишу <Enter> для завершения ввода в ячейку приводит к выполнению ее содержимого. В данном случае происходит считывание содержимого области ячеек с Al по СЗ в числовой массив (М). Занесите в ячейку Е4 вызов =MLEvalString(<<IM»=mxiM)>>). После выхода из Е4 MATLAB обращает матрицу М и записывает результат в IM. Вызовите из ячейки Е6 функцию =MLGetMatrix («77V/»; А5:С7), импортирующую обратную матрицу в ячейки Excel с А5 по С7.
1.4.5. Функции Excel Link
В Excel Link определено семь функций, обеспечивающих экспорт и импорт данных при совместной работе в MATLAB и Excel. Три из них: MLPutMatrix, MLEvalString, MLGetMatrix описаны в предыдущем разделе.
Функция MLAppendMatrix так же, как и MLPutMatrix, предназначена для экспорта данных в MATLAB. Основное отличие состоит в том, что в случае экспорта данных из ячеек в массив, существующий в рабочей среде, функция MLAppendMatrix пытается добавить данные к содержимому массива. Способ занесения данных требует совпадения числа строк или столбцов в массиве и области ячеек. В случае неоднозначности, т. е., когда содержимое ячеек может быть добавлено как в виде строк, так и в виде столбцов, создаются новые строки. Если же размеры области ячеек не соответствуют массиву, то функция MLAppendMatrix возвращает ошибку. Во внимание принимается также тип данных.
Удаление массива рабочей среды MATLAB производится при помощи функции MLDeleteMatrix, входным аргументом которой является имя массива, заключенное в кавычки. В случае отсутствия массива в рабочей среде выдается сообщение.
Четыре функции: matlabinit, MLAutoStart, MLClose, MLOpen, обеспечивающие согласованную работу MATLAB и Excel, образуют вторую группу функций Excel Link. Подробная информация
46 Электрические машины. Лабораторные работы на ПК о данных функциях содержится в справочной системе по Excel Link.
В новой версии MATLAB 6.5 имеется продукт MATLAB Excel Builder, который позволяет легко конвертировать сложные алгоритмы MATLAB в модули для Excel. Это дает возможность использовать гибкую, основанную на матричных вычислениях, среду программирования MATLAB с сотнями доступных математических и графических функций для быстрого проектирования.
ТРАНСФОРМАТОРЫ
Трансформатором называют статическое электромагнитное устройство с двумя или несколькими обмотками, использующее явление электромагнитной индукции для преобразования токов и напряжений одной системы в токи и напряжения другой. При этом может изменяться число фаз, а в некоторых случаях и частота переменного тока. Трансформатор является одним из самых экономичных электрических аппаратов; он используется во всех областях техники и в быту. Особо важную роль трансформаторы играют при передаче электрической энергии на большие расстояния, так как в этом случае до поступления ее потребителю она подвергается многократному (3-5 раз) преобразованию с низкого напряжения в высокое напряжение и наоборот.
2.1. Классификация трансформаторов
Основными признаками классификации трансформаторов являются:
•Назначение. Различают три основные группы трансформаторов: силовые, согласующие и импульсные. Первые предназначены для питания различной аппаратуры, они составляют основную долю существующих трансформаторов. Вторые подразделяются на входные, промежуточные и выходные; они могут работать на фиксированной частоте или в полосе частот. Третьи предназначены для передачи напряжения или тока различной формы из одной части электрической цепи в другую. В частности, трансформаторы, формирующие импульсы в виде острых пиков, принято называть пиковыми.
• Количество обмоток. Выделяются одно-, двух- и многообмоточные трансформаторы. Трансформаторы с одной обмоткой принято считать автотрансформаторами. Трансформаторы с двумя обмотками являются базой при анализе на моделях или при чисто теоретических исследованиях. При этом особенности трансформаторов специально
50
Электрические машины. Лабораторные работы на ПК
оговариваются. Многообмоточные трансформаторы являются чаще всего силовыми трансформаторами.
• Рабочая частота. Различают трансформаторы: пониженной частоты— ниже 50 Гц; промышленной частоты — 50 Гц; повышенной частоты — диапазон 100-10 000 Гц. Мощные трансформаторы, как правило, питаются напряжением промышленной частоты. Повышение частоты работы силовых трансформаторов позволяет значительно улучшить их массогабаритные показатели.
• Число фаз. В промышленности используются одно- и трёхфазные трансформаторы. Если число фаз не оговаривается, но это имеет существенное значение, то имеется в виду однофазный трансформатор.
• Напряжение. Существуют низковольтные и высоковольтные трансформаторы. Высоковольтными принято считать и трансформаторы, в которых обмотки имеют высокий потенциал по отношению к корпусу.
• Мощность. По диапазону мощностей различают: малые (несколько десятков вольт-ампер); средние (до нескольких сотен вольт-ампер) и большие (до 109 вольт-ампер) трансформаторы.
• Конструкция. Различают броневой, стержневой и тороидальный трансформаторы.
• Охлаждение. Существуют трансформаторы с воздушным и масляным охлаждением.
2.2.
Принцип действия трансформаторов
Диапазон мощностей, в которых работают трансформаторы orpo-i
мен. Как уже было отмечено ранее, мощные силовые трансформаторы*
преобразуют мощности до 109 вольт-ампер, тогда как трансформаторы:
маломощные (например,
источниках вторичного
питания)
преобра
зуют мощность в несколько вольт-ампер. Диапазон напряжений, в ко-
торых работают трансформаторы, также огромен: от нескольких вольт до сотен киловольт. Такая разнородность условий работы трансформа-s тов обуславливает большое разнообразие их конструкций, однако фи-i зическая суть их работы остается всегда одной и той же. На рис. 2.1| показана электромагнитная схема обобщенного трансформатора, кот<
рая является основой для анализа любых конструкций.
в
На ферромагнитном сердечнике размещены две обмотки первична; с количеством витков wl и вторичная с количеством витков w2. Первичная обмотка подключается к источнику с напряжением ul, ко вто-
Трансформа торы
51
Рис. 2.1. Электромагнитная схема обобщенного трансформатора
ричной обмотке присоединяется нагрузка. Токи, протекающие по обмоткам, создают:
□ основной магнитный поток Ф, который является переносчиком энергии из первичной цепи во вторичную;
□ поток рассеяния первичной обмотки Фр] , сцепленный только с первичной обмоткой и замыкающийся в основном по воздуху;
□ поток рассеяния вторичной обмотки Фр2, сцепленный только со вторичной обмоткой и замыкающийся в основном по воздуху.
2.3. Режим холостого хода трансформатора
Для выяснения сущности физических процессов в трансформаторе рассмотрим вначале его работу в режиме холостого хода, когда ток во вторичной цепи равен нулю (нагрузка не подключена). При подаче на первичную обмотку трансформатора (рис. 2.1) синусоидального питающего напряжения по ней протекает ток. Под действием связывающего обе обмотки магнитного потока в обеих обмотках наводятся э.д.с. самоиндукции. При синусоидальном напряжении wl = Um} sin 2л ft форму кривой магнитного
52
Электрические машины. Лабораторные работы на ПК
потока в ферромагнитном сердечнике также можно считать синусоидальной. Форма же кривой тока в режиме холостого хода, вследствие насыщения магнитной системы, становится заостренной и имеет резко выраженную третью гармонику, амплитуда которой достигает 15-30% от амплитуды первой гармоники. С целью использования при расчетах трансформаторов символического метода действительную форму тока заменяют эквивалентной синусоидальной. Действующее значение эквивалентной синусоиды равно действующему значению реального тока, а фазовый сдвиг этой эквивалентной синусоиды относительно приложенного напряжения зависит от потерь в ферромагнитном сердечнике.
Следует при этом отметить, что режим холостого хода позволяет определить такие важные для практики параметры трансформатора, как коэффициент трансформации, потери в ферромагнитном сердечнике, индуктивное сопротивление контура намагничивания.
Магнитный поток рассеяния (рис. 2.1) находится в фазе с первичным током трансформатора, а основной магнитный поток вследствии потерь в сердечнике незначительно отстает по фазе от тока. Поэтому на основании II закона Кирхгофа для режима холостого хода можно записать:
С?1 = Д + Rjl0 + jxp ji0. (2.1)
Здесь (j — комплексы питающего напряжения, э.д.с. и эквивалентного тока первичной обмотки;
Ё,хр1 — ее активное сопротивление и индуктивное сопротивление рассеяния. В режиме холостого хода падения напряжения на активном и индуктивном сопротивлении малы по сравнению с э.д.с., поэтому уравнение (2.1) принимает вид
й^Ё,. (2.2)
Векторная диаграмма, построенная по уравнению (2.2), изображена на рис. 2.2.
Разложив вектор тока 710на две составляющие: — вектор тока намагничивания трансформатора, обеспечивающий протекание в ферромагнитном сердечнике потока Фт, и вектор ta — вектор тока, учитывающий активные потери на гистерезис и вихревые токи в сердечнике трансформатора, — можем получить схему замещения холостого хода трансформатора (рис. 2.3 а). В этой схеме замещения трансформатор представляется только как идеальный преобразователь э.д.с., коэффициент преобразования рассчитывается следующим образом.
Трансформа торы
53
Рис. 2.2. Векторные диаграммы трансформатора
б)
Рис. 2.3. Схемы замещения трансформатора для режима холостого хода (а), нагрузки (б)
54
Электрические машины. Лабораторные работы на ПК
Рис. 2.3. (Окончание). Схемы замещения приведенного трансформатора (в)
Учитывая связь э.д.с. самоиндукции e(f) с магнитным потоком Ф(Г), легко получить уравнение трансформаторных э.д с. на первичной и вторичной обмотках. Действующие значение этих э.д.с. равно:
£,=4,44^=4,44^5.
£2 =4,44w2/0„ = 4,44w2/Bm5,
где wt, w2 — числа витков обмоток, 5 — сечение сердечника трансформатора и / — частота питающей сети.
Коэффициент преобразования э.д.с., который называется коэффициентом трансформации, находится из (2.3):
« = — = — .
£2 w2
(2. 4)
В режиме холостого хода ток в первичной обмотке трансформатора составляет лишь 3-10 % (для трансформаторов средней и большой мощности) от номинального тока. Поэтому мощность, измеренная в первичной цепи, соответствует практически только потерям в сердечнике трансформатора.
В геометрически подобных трансформаторах, имеющих одинаковые электромагнитные нагрузки, при уменьшении номинальной Мощности отношение тока холостого хода к номинальному току нагрузки возрастает. Поэтому у трансформаторов малой мощности ток холостого хода может достигать 10-60% от номинального тока. В этом случае мощность в режиме холостого хода будет отражать не только потери в ферромагнитном сердечнике, но и потери в активном сопротивлении первичной обмотки трансформатора.
Трансформаторы
55
При синусоидальном питающем напряжении потери в ферромагнитном сердечнике можно считать приблизительно пропорциональными частоте в степени 1,25 и индукции в степени 2. Параметры режима холостого хода: номинальное напряжение, ток и мощность (Ц, /[(р р[о) заносятся в справочные данные на трансформатор на заводе-изготовителе. По этим данным рассчитываются параметры схемы замещения (рис. 2.3 а), необходимые для анализа трансформатора.
Ro ------1--- х0 =-------5— (р0 = arccos ——
Z10cos<p0’ /10sin<p0 иг110-
2.4. Работа трансформатора под нагрузкой
При подключении нагрузки ZH к вторичной обмотке трансформатора э.д.с. Е2 создает ток /2 во вторичной цепи. Так как трансформатор начинает отдавать нагрузке некоторую мощность, то возрастает и мощность, потребляемая из сети, т. е. к току /10 добавляется некоторый дополнительный ток /к, называемый компенсационным. При этом ток в первичной обмотке становится равным
А=4о + 4- (2.6)
Величину компенсационного тока можно найти из следующих соображений. Электромагнитная мощность полностью передается, идеальным трансформатором из первичной во вторичную цепь, поэтому
£
EJk ~ ^2^2 =— ^2 • (2-7)
п
Из уравнения (2.7) находится значение компенсационного тока
Схема замещения трансформатора для режима нагрузки (рис. 2.3 б) будет отличаться от схемы замещения, соответствующей холостому ходу, лишь добавлением параметров вторичной обмотки и сопротивления нагрузки трансформатора. В этом случае для математического описания трансформатора к уравнениям (2.1, 2.6) нужно добавить уравнение, составленное по второму закону Кирхгоффа для вторичной цепи;
56
Электрические машины. Лабораторные работы на ПК
тогда полная система уравнений, описывающая трансформатор, примет вид:
J71 = Д + У?)/, + jxpiit,
^2 = ^2 А ]Хр2^2 ^2’
Исследование трансформатора (аналитическое и экспериментальное) значительно облегчается, если реальный трансформатор с магнитно-связанными обмотками заменить эквивалентной схемой, элементы которой электрически связаны между собой. Для этого необходимо реальный трансформатор заменить эквивалентным (т. н. приведенным) трансформатором, у которого число витков первичной и вторичной обмоток равны. При таком приведении должны оставаться неизменными все энергетические соотношения в трансформаторе.
Нетрудно преобразовать два последних уравнения системы (2.9) с учетом (2.4) к виду:
Й] = + ДД1 + JXpj/],
Д = ^2 А + JXp2^2 ^2 ’ (210)
А ~ Ао “’’/г-
Параметры приведенного и неприведенного трансформаторов связаны соотношениями:
А = А0 + ^2 ’ Л = ^2 = п ^2’ Хр2 ~ п xpl 'i ZH =п ZH (2.11)
П
Схема замещения приведенного трансформатора изображена на рис. 2.3 в, а векторная диаграмма — на рис. 2.2 б. Число витков обеих его обмоток одинаково, что позволяет совместить их в одну. По этой обмотке протекает намагничивающий ток, обеспечивающий образование магнитного потока, который замыкается по сердечнику трансформатора.
Активная мощность, выделяемая в контуре намагничивания, определяется потерями в сердечнике трансформатора.
Параметры приведенной схемы замещения сравнительно легко определяются из режимов холостого хода и короткого замыкания; с ее помощью можно определить основные характеристики трансформатора.
Трансформаторы
57
Упоминавшийся режим холостого хода трансформатора не позволяет определить все параметры приведенной схемы замещения трансформатора. Поэтому завод-изготовитель на готовом трансформаторе проводит опыт «нормального» короткого замыкания.
2.5. Режим нормального короткого замыкания трансформатора
Вторичная обмотка при этом замыкается накоротко, а на первичную обмотку подаётся напряжение UK такой величины, при которой ток первичной обмотки имеет номинальное значение. Величина UK даже для трансформаторов малой мощности не превышает 10-25 % от номинального значения. Учитывая пропорциональную зависимость магнитного потока от напряжения, приложенного к первичной обмотке, и зависимость потерь в сердечнике трансформатора от квадрата магнитного потока, можно прийти к выводу, что в режиме «нормального» короткого замыкания потерями в сердечнике трансформатора можно пренебречь и считать показания ваттметра, включенного на входе трансформатора, соответствующими мощности потерь в активных сопротивлениях трансформатора. Это позволяет определить параметры схемы замещения приведенного трансформатора по формулам:
Uk cos cpk _ U к sin <рк =arccos-^- . (2.12)
iH к 4 ukiH
Таким образом, с учетом х0 и Ro, которые определяются в режиме холостого хода, мы имеем все параметры приведенной схемы замещения трансформатора.
2.6. Внешняя (нагрузочная) характеристика трансформатора
Из приведенной схемы замещения трансформатора (рис. 2.3 в) следует, что
[7, = {7/+ Д t7mp;
(2.13)
Электрические машины. Лабораторные работы на ПК
отсюда находим выражение для вектора падения напряжения на трансформаторе:
(2.14)
Модуль вектора падения напряжения на трансформаторе можно также получить, воспользовавшись выражением:
At/% = №.. cosy 4- U„ sin у) 4- ~ , (2 15)
где ика - п ’икг ;
Iho.w Ihd.vi
Iihom, Uihom — номинальные ток и напряжение первичной обмотки;
Р=-^; (2.16)
/ здесь Р — коэффициент нагрузки.
Вид внешней характеристики трансформатора определяется не только величиной нагрузки, но и ее характером. При увеличении тока нагрузки выходное напряжение трансформатора уменьшается при активном и активно-индуктивном и увеличивается при емкостном и активно-емкостном характерах нагрузки.
2.7. Коэффициент полезного действия трансформатора
Определение коэффициента полезного действия Г| трансформатора как отношение мощности выделяемой в нагрузке (Ри) к полной мощности (/]), потребляемой из электрической сети, может привести к значительным ошибкам, так как разность (Р„ - Pt) составляет, при КПД = 98%, всего лишь 2%, что соизмеримо с погрешностью измерительных приборов. Поэтому, согласно ГОСТ, величину КПД определяют косвенным способом:
р =_____5-____, (2.17)
Рн + Р^ + Рк
где Pa,Pk — потери холостого хода и короткого замыкания.
Трансформаторы
59
2.8. Рабочие характеристики трансформатора
Рабочие характеристики трансформатора представляют собой зависимости коэффициента полезного действия, коэффициента мощности, тока в первичной цепи и напряжения на нагрузке от тока в нагрузке. Все эти зависимости рассчитываются на основании приведенной схемы замещения (рис. 2.3 в). Характерный вид рабочих характеристик показан на рис. 2.4.
Рис. 2.4. Рабочие характеристики трансформатора
2.9. Трехфазный трансформатор
Энергетические соотношения, полученные для однофазных трансформаторов, справедливы и для трехфазных трансформаторов, но при обязательном условии их работы в режиме симметричной нагрузки. Причем, в качестве трехфазного можно использовать и систему их трех одинаковых однофазных трансформаторов. Энергетические характеристики второго варианта трехфазного трансформатора ниже, чем у первого, но он обладает более высокой эксплуатационной надежностью, т. к. при аварии, как правило, выходит из строя лишь один из трех трансформаторов, и устранение этой аварии обходится значительно дешевле. Поэтому, согласно ГОСТ, при мощностях, больших 1600 кВА, допускается установка трех одинаковых трансформаторов.
В отличие от режима холостого хода режим короткого замыкания не имеет существенных особенностей по сравнению с режимом короткого замыкания однофазного трансформатора. Это объясняется отсутствием насыщения в этом режиме ферромагнитного сердечника, в соответствии с чем токи и мощности распределяются между фазами равномерно и формы кривых э.д.с. синусоидальны.
60
Электрические машины. Лабораторные работы на ПК
Поэтому все выводы, полученные для однофазного трансформатора, остаются в силе для трансформатора трехфазного, считая, конечно, что они (выводы) соответствуют одной фазе.
Специфичными для трехфазных трансформаторов являются способы соединения его первичных и вторичных обмоток. Обмотки могут соединяться звездой (Y) или треугольником (А), при прямом и встречном включении. Полное число вариантов соединений обмоток высокой и низкой сторон трансформатора равно двенадцати.
При соединении звездой может использоваться нулевой провод. Способ соединения обмоток влияет как на отношение напряжений на фазах, так и на сдвиг фазы между напряжениями на входе и выходе транс форматора.
В зависимости от фазового сдвига трансформаторы различаются по группам.
Номер группы определяется фазовым сдвигом между одноименными линейными напряжениями первичной и вторичной сторон, разделенным на 30°. На рис. 2.5 в качестве примера показаны соединение и векторная диаграмма трехфазного трансформатора, соединенного по схеме 11-й группы.
Рис. 2.5. Соединение (а) и векторная диаграмма (б) трехфазного трансформатора по схеме 11-й группы
Трансформаторы
61
2.10. Моделирование трансформатора
Виртуальные модели различных трансформаторов находятся в библиотеке Powerlib2/Elements пакета расширения Power system (рис. 2.6)
I".Library. powerlib2/Elements 'i '!
Filyv EdiU^yfe^. Е-дт-с1Help•, < .' ,5'?
Surge Arrester
Рис. 2.6. Библиотека Powerlib2/Elements пакета расширения Power system
Здесь имеются два однофазных трансформатора — линейный (Linear Transformer) и такой трансформатор, в котором можно учесть нелинейность характеристики намагничивания сердечника (Saturable Transformer). Имеются также два трехфазных трансформатора (Three-Phase Transformer).
Окно настройки однофазного линейного трансформатора показано на рис. 2.7.
В полях окна настройки последовательно задаются:
□ полная мощность трансформатора в вольт-амперах и частота в герцах (полная мощность обычно обозначается буквой S, однако в поле окна она почему-то обозначена через Р, это следует помнить и не путать полную мощность с активной);
62
Электрические машины. Лабораторные работы на ПК
□ действующее напряжение на первичной обмотке в вольтах и относительные активное сопротивление и индуктивность рассеяния первичной обмотки;
□ действующее напряжение и относительные параметры вторичных обмоток;
□ относительные параметры ветви намагничивания;
□ в выпадающем меню поля Measurements задаются переменные состояния трансформатора, которые измеряются блоком Multimeter.
Параметры схемы замещения трансформатора представлены в относительных единицах.
Базовыми значениями параметров трансформатора являются: расчетная полная мощность S, обозначенная как Р(ВА), номинальная частота (Гц), действующее номинальное напряжение (В) соответствующей обмотки. Для каждой обмотки относительные сопротивления и индуктивность определяются выражениями:
Block Parameters: Linear Transformer
Linear T ransfqrmer (mask 1 [link]
I Three windings linear transformer
, Parameters - - -
Nominal power and frequency (Pnf/A | fr i| H z)].
1Бе3 50
Winding 1 parameters [VI IVrmsJ R11pu] L1 (pu)]
□[660 0.0125 0.0223]
I Winding 2 parameters [V2(Vrms)R2(pu]L2(pul]
;k|[4000ХП 25 6?0223]
| Winding 3 parameters [VSfVrms] R 3(pu) L3(pu)]
□[400 0.0125 0 0223] ‘
j Magnetization resistance and reactance [Rm(pu] Lm(pu)]
I’ |[128 V~4]
I Measurements I N one
OK Cancel | Help | j
Рис. 2.7. Окно настройки однофазного линейного трансформатора
Трансформаторы
63
/? х
RApu)=-^. Ln(pu) = -^ ^Ьп ^Ьп
(2.18)
U2 где Zbn = —7-.
О
Удобство задания параметров трансформатора в относительных величинах заключается в том, что относительные сопротивления и индуктивности первичной и вторичной обмоток оказываются равными (рис. 2.7).
Расчет относительных параметров трансформатора осуществляется на основании паспортных данных завода-изготовителя и уравнений (2.5), (2.12), (2.18) по выражениям:
Rm= — =------------ L
Ш rr г T T * W
Zb UlIwCOS(Po
— =----------- (p0 = arccos ту i qa
Zft Ц/10(2Л9)
/? - рх- Rk _Sukcos(Pk 2Zb 2U2Ih
T —t ' - ** _st4sin<&
1,2 2Zb 2U2Ih
Рк
<рк =arccos—— ukiH
В качестве примера в таблице 2.1 приведены паспортные данные трансформатора ТС-16-066. Заметим, что напряжение короткого замыкания и ток холостого хода даны в процентах от номинальных. При этом номинальный ток трансформатора следует определить из выражения
( 2.20).
t S
(2-21)
Таблица 2.1
Тип 5(кВА) С/, (В) ик (%) До (%) ’ Л (Вт) Рю (Вт)
ТС-16-066 16 660 4.5 • 5.8 400 125
64
Электрические машины. Лабораторные работы на ПК
Листинг^. 1________________________________________________________________
%Паспортные данные SH=16e3; UH=660; Pkz=400; Р0=125; Curr=5.8; Uolt=4.5;
o/оХолостой ход IH=SH/UH; IO=Curr*IH/1OO; SO=UH*IO; cosF0=P0/S0; ZO=UH/IO;
RO=ZO/cosFO; X0=Z0/sqrt(1-cosF0A2); Zb=(UH)A2/SH; Rm=R0/Zb; Lm=X0/Zb;
% Короткое замыкание Ukz=(Uolt/100)*UH; Zkz=Ukz/IH; cosFkz=Pkz/(Ukz*IH);
Rkz=Zkz*cosFkz; Xkz=Zkz*sqrt(1-cosF0A2); R1=0.5*Rkz/Zb; L1=0.5*Xkz/Zb;
% Вывод значений [IO Rm Lm;Ukz R1 LI]
Листинг программы расчета параметров трансформатора в пакете Matlab приведен в таблице 2.1.
Паспортные данные и результаты расчета относительных параметров трансфрматора ТС-16-066 помещены в соответствующие поля окна параметров трансформатора (рис. 2.7).
Модель для исследования трансформатора показана на рис. 2.8.
Виртуальная модель содержит:
Е, — источник переменной э.д.с. (библиотека Power System Blocset / Electrical Sources);
Vlt V2 — измерители напряжения в первичной и вторичной цепях трансформатора (библиотека Power System Blockset/ Measurement);
Рис. 2.8. Модель для исследования трансформатора
Трансформаторы
65
/2 — измерители тока первичной и вторичной обмоток трансформатора (библиотека Power System Blockset/Measurement);
Pt, Q} , P2, Q2 — измерители активной и реактивной мощностей в первичной и вторичной цепях однофазного трансформатора (библиотека Power System Blockset/Extras/Measurement);
Powergui — блок пользователя, в который записываются результаты измерений блоков Vt,V2,It,I2;
Display — блок количественного представления измеренных мощностей (библиотека Simulink/Sinks);
Scope — блок наблюдения кривых тока и напряжения (библиотека Simulink/Sinks);
Load — блок, моделирующий нагрузку (библиотека Powerlib2/ Elements).
При определении рабочих характеристик трансформатора изменяются только параметры нагрузки. Окно задания параметров нагрузки показано на рис. 2.9.
В полях окна задаются:
□I номинальное действующее напряжение;
□ номинальная частота;
Block Parameters. Load
ГParaUefRLCLoad(rriask)(link)----------t—--------‘--------- -
। Implements a parallel RLC load
-r-Parameters—------~•- —--------------—------------------;------- ->
J Nominal voltage Vn(VnnsT
ЗЙ4ОО “
| Nominal frequency In [Hz) •
I; J50 ' . !
J Isooo ‘
Inductive reactive Power QL (positive var) ' |
задания параметров нагрузки
Рис. 2.9. Окно
3 Зак. 128
66
Электрические машины. Лабораторные работы на ПК 1
□ активная мощность;
□ реактивная (индуктивная) мощность;
□ реактивная (емкостная) мощность.
Рабочие характеристики трансформатора снимаются на модели (рис. 2.8) при изменении нагрузки от нуля до номинальной. На рис. 2.10, 2.11 представлены рабочие характеристики для чисто активной нагрузки (соьф = 1).
Рис. 2.10. Рабочие характеристики трансформатора
Трансформа торы
67
2.11. Моделирование трехфазного трансформатора
Модель для исследования трехфазного трансформатора показана на рис. 2.12.
Inductive source with neutral
powergui
Multimeter
Рис. 2.12. Модель трехфазного трансформатора
Блок Multimeter измеряет напряжения на фазах трансформатора. С блока Powergui считываются значения этих напряжений и напряжений на входе и выходе трансформатора. Разность фаз между напряжением на входе и выходе трансформатора определяется по показаниям Display. Схема соединения первичных и вторичных обмоток задаются в раскрывающемся меню полей Widing 1 (ABC) connection, Widing 2 (abc) connection окна настройки параметров трансформатора (рис. 2.13)
Измерение производится для четырех вариантов соединения обмоток. В таблице 2.2 приведены результаты измерений.
Таблица 2.2
Схема соединения Y/Y Y/AH (одиннадцатая группа) Y/ А] (первая группа) Aj/Aj
Напряжение на фазе первичной обмотки (В) 380 380 380 660
Напряжение на фазе вторичной обмотки (В) 220 380 380 380
Напряжение на входе V, (В) 660 660 660 660
Напряжение на выходе И, (В) 380 380 380 380
Фазовый сдвиг между И, И, (град) 0 330 30 0
68
Электрические машины. Лабораторные работы на ПК
Block Parameters: Tr ®
Three-Phase Transformer (Two Windings) (mask) {link)
This block implements a thiee-phase transformer by using three ' single-phase transformers. Set the winding connection to Yn' when you want to access the neutral point of the Wye.
Parameters
Nominal power and frequency [ Pn(VA), fn(Hz) |
, {[ ЭООеЗТэЬ ]
Winding 1 (ABC) connection: p
Winding parameters [ V1 Ph-Ph(Vrms), R1(pu), L1(pu) ] j[660,0.02,0.8]'
Winding 2 (abc) connection: j Delta (DI)
Winding parameters [ V2 Ph-PhfVrms), R2(pu|, L2[puJ ] р"380,0.02 ' 0.8] ‘
f“ Saturable core
Magnetization resistance Rm (pu)
J500 ‘ "
Magnetization reactance Lm (pu)
Measurements (Winding voltages _
OK 1 Cancel | Help I Apply
Рис. 2.13. Окно настройки параметров трехфазного трансформатора
АСИНХРОННЫЕ МАШИНЫ
3.1. Конструкция, принцип действия, магнитное поле в машине
Асинхронной машиной называют электромеханический преобразователь, в котором возникновение момента на валу ротора возможно лишь при различных скоростях вращения магнитного поля и ротора. Различают одно-, двух-, трех- и многофазные асинхронные машины. Трехфазные асинхронные машины с короткозамкнутым ротором благодаря своей технологичности, надежности, низкой стоимости и большому сроку службы составляют основную долю мирового парка электрических машин.
Основными элементами конструкции асинхронной машины являются статор и ротор (рис. 3.1).
Рис. 3.1. Конструкция асинхронной машины (а) и схема ее подключения к трехфазной сети (б)
72
Электрические машины. Лабораторные работы на ПК
В пазах статора и ротора размещены соответствующие обмотки. Число пазов, приходящихся на одну фазу питающей сети, определяет тип обмотки: сосредоточенную или распределенную. При сосредоточенной обмотке статора (рис. 3.2 а) кривая распределения намагничивающей силы (НС) или магнитной индукции вдоль рабочего зазора машины имеют прямоугольный характер (рис. 3.2 б, кривая 1).
Рис. 3.2. Распределение намагничивающей силы в зазоре асинхронной машины при сосредоточенной (а) и распределенной (б, кривая 1) обмотках
Асинхронные машины
73
Для того чтобы получить в рабочем зазоре синусоидально распределенное магнитное поле и улучшить условия охлаждения обмотки, она, как правило, выполняется распределённой. Кривая НС имеет в этом случае синусоидальный характер (рис. 3.2 б, кривая 2):
^ = ^cos—, т
(3.1)
где
Fx — НС в точке х воздушного зазора;
Fnm — максимальное значение НС;
JtD г =-----полюсное деление
2р
( D,p — диаметр внутренней расточки статора и число пар полюсов).
При питании обмотки синусоидальным напряжением НС распределенной обмотки определится выражением
= sinew cos—. (3.2)
Такое поле, оставаясь неподвижным в зазоре, пульсирует во времени. Пульсирующий характер магнитного поля в рабочем зазоре машины, имеющий место при питании синусоидальным напряжением лишь одной из фаз, можно выразить зависимостью:
Fx = FcP c°s — = | sin(6X ~ +1+ (3-3>
T 2 T 2 T
Анализ ее позволяет сделать вывод о том, что пульсирующее магнитное поле можно представить в виде суммы двух бегущих в противоположные стороны и одинаковых по амплитуде волн НС (индукции) или в виде двух круговых полей: прямого и обратного.
Нетрудно показать, что в двухфазной обмотке с фазами, сдвинутыми в пространстве на половину полюсного деления, создается круговое магнитное поле, если по ее фазам протекают токи, обеспечивающие равенство НС и сдвиг во времени 90°:
^(2, = ^sin(<nr-^). т
(3.4)
74
Электрические машины. Лабораторные работы на ПК
Аналогично, для трехфазной машины с одинаковыми НС обмоток, со сдвигом в пространстве и времени на 120° будем иметь:
Ft<3) = — F sin(a>t - —). х /у mux v .. z
2 T
(3.5)
В общем случае, когда число фаз электрической машины равно m и сдвиг в пространстве и времени составляет величину, определяемую соотношением 360/ т, можно записать
т юс
2 Т
(3.6)
течение одной минуты мы будем иметь
Анализ выражения для бегущей волны НС показывает, что она за период изменения питающей сети пробегает расстояние, равное
_ nD , . „ _
2т =--- (р — число пар полюсов). Следовательно, один оборот кру-
Р
гового вращающегося магнитного поля произойдет за рТ периодов, а в
60
— оборотов вектора НС \РТ)
(индукции) поля, что позволяет представить выражение для скорости вращения кругового поля в виде
_ 60 _ 60/ -
П[~ рт~ р (°б/мин)>
(3.7)
где / — частота питающей цепи.
Это выражение показывает, что для обеспечения электрической редукции скорости вращения выходного вала машины достаточно увеличить число пар полюсов р. По конструктивным соображениям значение р не превышает 6.
Основным параметром при исследовании асинхронной машины является скольжение
«1 ~пг
ni
где ni, п2 — скорости вращения магнитного поля и ротора.
(3.8)
Асинхронные машины
75
В режиме работы трехфазной асинхронной машины с заторможенным ротором электромагнитные процессы, протекающие в ее обмотках, описываются такой же системой уравнений, что и процессы в трехфазном трансформаторе при симметричной нагрузке.
Однако это еще не позволяет использовать для асинхронной машины схему замещения трансформатора, т. к. при вращении ротора величина э.д.с. в его обмотке зависит от скольжения:
£2j.=s£2, (3.9)
где Е2 — величина э.д.с. роторной обмотки заторможенной электрической машины.
При заторможенном роторе скорость вращения бегущих волн НС статора и ротора одинаковы и равны щ. В режиме нормальной работы частота вращения НС ротора равна сумме частот вращения НС относительно самого ротора, равной («I - «2), и вращения ротора относительно неподвижного статора п2. Следовательно, во всех режимах работы асинхронной машины НС статора и ротора имеют одну и ту же частоту вращения я1; определяемую частотой питающей сети f и числом пар полюсов р.
Результатом взаимодействия бегущих волн намагничивающих сил статора и ротора является возникновение магнитного поля в рабочем зазоре машины, посредством которого и обеспечивается электромеханическое преобразование энергии: электрической в механическую энергию и обратно.
3.2. Схемы замещения АКЗ
Для изображения токов статора и ротора на общих векторных диаграммах в режиме вращения машины нельзя пользоваться их реальными величинами, так как частота изменения тока статора равна частоте питающей сети, а частота тока ротора зависит от скольжения. Поэтому необходимо привести режим работы вращающейся асинхронной машины к эквивалентному режиму при неподвижном роторе. Указанное приведение правомочно, т. к., как было показано выше, бегущие волны НС статора и ротора имеют одну и ту же частоту вращения nh определяемую лишь частотой питающей сети f и числом пар полюсов машины р.
Условием приведения является равенство токов, НС обмоток статора и ротора, а также их фазных сдвигов относительно друг друга. В этом
76
Электрические машины. Лабораторные работы на ПК
случае сохраняются величины результирующих магнитных потоков, потерь в ферромагнитном сердечнике и активном сопротивлении обмотки статора, величины передаваемой электромагнитным путем мощности и т. д. В неподвижной машине не происходит электромеханического преобразования энергии. Поэтому механическая мощность реальной машины должна быть представлена равной ей электрической мощностью.
Параметры каждой из фаз роторной обмотки можно считать одина- • ковыми. Это позволяет, используя указанные выше условия приведе- ; ния, преобразовать схему фазы роторной обмотки асинхронной маши- 1 ны (рис. 3.3 а): |
xp2s = ®Lp2 = 2pf2Lp2 = slpfL^ = sxp2, (3.10) I
здесь xp2s, xp2 - индуктивные сопротивления цепи рассеяния ротора в | режиме вращения и торможения ротора. |
Рис. 3.3. Схемы замещения роторной цепи асинхронной машины
Асинхронные машины л
Из этой схемы можно определить ток ротора.
Модуль тока в цепи ротора с учетом (3.9, 3.10) определяется выражением
С учетом этого выражения схему замещения роторной цепи асинхронной машины можно представить в виде последовательного соеди-
Я2 нения индуктивного сопротивления и активного сопротивления — 5
(рис. 3.3, б). Здесь э.д.с. Е2 и индуктивное сопротивление хр2 неизменны, а активное сопротивление меняется в зависимости от скольжения. Это сопротивление можно представить как сумму двух сопротивлений, одно из которых не зависит от скольжения, а другое является функцией скольжения (рис. 3.3 в).
R. „ '1-5
-+ = R2+R2----. (3.12)
При этом схема замещения асинхронной машины представляется в виде рис. 3.4. Электрическая мощность, выделяемая в сопротивлении
«2----равна механической мощности на валу асинхронной машины,
s
Так же, как и в трансформаторе, штрихи у всех величин свидетельствуют о приведении числа витков ротора к числу витков статора.
Рис. 3.4. Схема замещения асинхронной машины
78
Электрические машины. Лабораторные работы на ПК
На практике, как правило, используется Г-образная схема замещения, в которой контур намагничивания вынесен к цепи источника питания (рис. 3.5).
Коэффициент С, учитывающий замену Т-образной схемы замещения Г-образной, для асинхронных двигателей общего применения равен 1,01-1,05. Очень часто полагают 0=1, что существенно облегчает расчеты и мало сказывается на точности результатов.
Схема замещения (рис. 3.5) используется при расчете характеристик асинхронной машины.
Рис. 3.5. Г-образная схема замещения асинхронной машины
Энергетическая диаграмма работы машины в режиме двигателя изображена на рис. 3.6.
В двигательном режиме происходит электромеханическое преобразование электрической энергии, потребляемой из питающей сети, в механическую энергию на валу ротора двигателя. Передача энергии в схеме рис. 3.6 а происходит слева направо.
Мощность, потребляемая двигателем из сети, равна
Pt - mlUlIicos(pl (3.13)
(w7j — число фаз двигателя; Ux, 1х, (рх — напряжение, ток фазы и угол сдвига между ними).
Часть потребляемой мощности расходуется на потери в ферромагнитном сердечнике Пст, другая часть расходуется на активные потери П.1чХ в обмотке статора. Оставшаяся часть Рм, электромагнитным путем передается в ротор, где за вычетом потерь в активном сопротивлении ротора и механических потерь (определяемых трением в подшипниках
Асинхронные машины
79
в)
Рис. 3.6. Энергетическая диаграмма работы асинхронной машины в режимах: двигателя (а), генератора (б) и протиаовыключений (в)
и потерями на вентиляцию машины, обеспечивает выходную мощность Р2 на валу двигателя.
80
Электрические машины. Лабораторные работы на ПК
Мощность потерь в ферромагнитном сердечнике ротора не учитывается, т. к. она пренебрежимо мала вследствие низкой величины частоты изменения э.д.с. и тока ротора, определяемой выражением
Л = sfi
(3-14)
(/; — частота питающей сети).
Энергетическая диаграмма позволяет получить выражение для момента машины:
= Рзм ~ = sM(Pl;
М = ^- =-------—
.УЦ JCOj
(3.15)
Очевидно, что механическая мощность может быть представлена выражением
Рмех =Рг= m2i;2R;— = MCD, (3.16)
s
где М — электромагнитный момент двигателя, со — угловая частота вращения ротора:
<° = ^ = (1-Wi. (3.17)
3.3. Механические характеристики
Для оценки свойств асинхронного двигателя используется его механическая характеристика (зависимость скорости вращения ротора машины п2 от вращающего момента М).
Из схемы замещения (рис. 3.5) находим выражение для тока ротора:
(3.18)
Асинхронные машины
81
Подставив (3.18) в (3.15), получим
(3.19)
п cr2 /
Л, + +1 х j
s \
Для машин с мощностью более 10 кВт величину С можно считать равной 1, тогда
(3.20)
Скольжение, при котором момент достигает максимального значения называется критическим и обозначается через s^. Величины максимального момента и критического скольжения, можно определить, взяв производную от момента по скольжению.
(3-21)
(3.22)
Часто при анализе пользуются формулой Клосса, которая устанавливает связь между искомым значением момента асинхронной машины, ее максимальным значением Ммакс, критическим скольжением skp и скольжением s:
2 + «\Р
М=Ммакс s л
— + — + as
(3.23)
_ 27?i
где «--------7 — коэффициент, учитывающий соотношение активных
б^У?2
сопротивлений статорной и роторной обмоток асинхронной машины.
82
Электрические машины. Лабораторные работы и ПК
При значениях skp, не выходящих за пределы диапазона значний 0,15-0,30, можно воспользоваться упрощенной формулой Ювсса (ошибка при этом составляет 10-17%);
(324)
д/ -
s । s*p
S'P s
Рис. 3.7. Зависимость
момента от скольжения
Построив кривую М = fls) (рис. 3.7) и используя выражение для скольжения (3.8), можно получить механическую характеристикул2 = f{M) (рис. 3.8 а).
Из уравнений (3.21, 3.22) следует, что максимальный момент Минины не зависит от сопротивления цепи ротора, тогда как критическое скольжение является функцией этого сопротивления. Отмеченная зависимость позволяет регулировать пусковой момент асинхронного двигателя с фазным ротором, йзменяя добавочное сопротивление Rd, включенное последовательно с сопротивлением обмотки ротора (рис 3.8 б).
При /?()= 0 механическую характеристику асинхронной машины с фазным ротором называют естественной, при Rd 0 — искусственной.
Из выражения (3.19) следует, что величина момента асинхронной машины пропорциональна квадрату питающего напряжения. При снижении питающего напряжения на 30% величина момента падает почти в 2 раза, а при его увеличении на такую же величину, токи статора и ротора (вследствие расположения рабочей точки вблизи насыщения основной кривой намагничивания машины) возрастают
Асинхронные машины
83
Рис. 3.8. Механическая характеристика асинхронной машины (а)
и механические характеристики асинхронной машины с фазовым потоком (б)
настолько, что электрическая машина перегревается и выходит из строя даже в режиме холостого хода. Поэтому, согласно ГОСТ, изменение напряжения в электрических сетях, питающих силовое оборудование, должно быть в пределах +5% .
При изменении частоты питающего напряжения согласно выражению (3.21) максимальный момент асинхронной машины падает.
3.4. Коэффициент полезного действия асинхронного двигателя
Электромагнитная мощность связана с параметрами цепи ротора следующим образом:
Рэм = m2E2I2 cosi/2 = m2 —^I2 cosi/2. (3.25)
s
С учетом выражения E2s cos y2 = I2R2 можно записать
p ЛЧ
Р3м = m2 2-5
(3-26)
Соотношение между механической мощностью и потерями в сопротивлении ротора
84
Электрические машины. Лабораторные работы на ПК
показывает, что при заторможенном роторе вся мощность, передаваемая в ротор электромагнитным путем, превращается в тепло. В режиме же вращения ротора машины большая часть мощности передается на ее выходной вал.
Коэффициент полезного действия (КПД) асинхронной машины можно записать в виде
Р У 77 +Х77' (3‘28)
Полные потери X 77 определяются из выражения
X 77 = Т7Л7] + 77эл2 + 77ст + 77„и . (3.29)
Составляющие потерь Т7Л71, 77,,2, 77cm аналогичны потерям в трансформаторе. Потери Ц„кт соответствуют потерям мощности на трение, в подшипниках и на вентиляцию электрической машины.
Согласно ГОСТ для номинального режима работы машины механические потери составляют 0,1 %-0,5% выходной мощности.
3.5. Устойчивость работы асинхронного двигателя
Устойчивость работы двигателя — его способность восстанавливать свое первоначальное состояние при воздействии возмущений по ; сети и по нагрузке.
Согласно уравнению динамики электромеханической системы, ,, .. , d(o
M-MC=J~ (3.30)
at
(М„ J, со — статический момент нагрузки на валу машины, ее момент инерции и скорость вращения).
Машина находится в состоянии покоя, либо вращения с постоянной скоростью при условии М = Мс. Из зависимости М - f(s) (рис. 3.7) видно, что электромеханическая система имеет две точки равновесия А и В. При этом в точке В она находится в неустойчивом рав
Асинхронные машины
85
новесии, т. к. даже незначительное изменение нагрузки на валу машины приведет либо к ее остановке (п = 0), либо к увеличению скорости до момента, пока положение системы не будет соответствовать точке А, которая характеризует устойчивое состояние (при кратковременном изменении нагрузки система будет стремиться вернуться к своему первоначальному состоянию).
Нетрудно заметить, что участок ОК обладает свойством саморегулирования, остальная же часть кривой таким свойством не обладает.
Максимальный момент двигателя принято называть опрокидывающим моментом, т. к., когда двигатель работает при величинах1 момента нагрузки, меньших максимального момента, но близких к нему, случайная перегрузка двигателя приведет к его остановке. Поэтому на практике выбирают двигатель такой мощности, при которой выполняется неравенство
—й^>1,7, (3.31)
Мн
т. е. при выборе мощности двигателя предусматривается запас по мощности не менее 70%.
3.6. Рабочие характеристики асинхронного двигателя
В качестве рабочих характеристик приняты зависимости (рис. 3.9):
□ скорости вращения ротора п2 = ЦРУУ,
□ вращающего момент на валу машины М2 =
□ тока статора L =
О коэффициента полезного действия 7] = ftP-iy,
□ коэффициента мощности cos ф! =
Диапазон рабочих характеристик асинхронного двигателя соответствует его зоне устойчивой работы 0 < s < 1,2.
Эти характеристики позволяют находить все основные величины, которые определяют режим работы двигателя при различных нагрузках. Их можно получить либо расчетным путем по схеме замещения, либо экспериментально.
86
Электрические машины. Лабораторные работы на ПК
Рис. 3.9. Рабочие характеристики асинхронного двигателя
3.7. Генераторный режим
Асинхронная машина работает в генераторном режиме, если вал ее ротора вращать каким-либо другим двигателем (постоянного или переменного тока, внутреннего сгорания и т. п.) в направлении и со скоростью, превышающей скорость вращения магнитного поля. Величина скольжения машины, очевидно, в этом случае, будет отрицательной. По условиям механической прочности, ограничения потерь, нагрева и сохранения высокого КПД в генераторном режиме возможны значения абсолютных величин скольжения такого же порядка, как и в двигательном. Энергетическая диаграмма асинхронной машины в генераторном режиме представлена на рис. 3.6 б.
Асинхронная машина в генераторном режиме отдает активную мощность Рх = совф1< 0 в сеть, преобразуя механическую энергию приводного двигателя в электрическую энергию питающей сети.
Реактивная мощность асинхронного генератора положительна Q\ = m,U.I,sin ф, > 0.
Это означает, что как в режиме двигателя, так и в режиме генератора асинхронная машина потребляет реактивную мощность из питающей сети, что указывает на необходимость использования в этих
Асинхронные машины
87
случаях источника реактивной мощности (синхронные генераторы, компенсаторы, или конденсаторы).
3.8. Режим противовключения
В этом случае подводимая из первичной сети электрическая энергия обеспечивает вращение кругового магнитного поля против направления вращения вала ротора машин, вследствие чего 1 < s < Практически величина скольжения лежит в пределах 1 < s < 2. Электрическая машина в режиме противовключения потребляет как электрическую мощность из питающей сети, так и механическую мощность с вала ротора. Поэтому температурный режим является самым напряженным, что говорит о необходимости использования режима противовключения лишь в короткие промежутки времени, до перегрева машины. Сказанное иллюстрируется энергетической диаграммой (рис. 3.6 в).
Этот режим наблюдается при реверсе двигателя, а также в тех случаях, когда необходимо замедлить, либо быстро остановить вращение производственного механизма. Механическая мощность в данном случае развивается за счет кинетической энергии вращающихся масс производственного механизма и ротора машины.
3.9. Режим динамического торможения
Так же, как и режим противовключения, режим динамического торможения используется для ускорения процесса превращения запасенной во всех движущихся частях электропривода кинетической энергии в энергию тепловую. В отличие от режима противовключения в этом случае в рабочем зазоре создается неподвижное в пространстве магнитное поле, для чего статорную обмотку асинхронной машины подключают к источнику постоянного напряжения. При вращении ротора в неподвижном поле в его обмотках наводится э.д.с. и протекает ток. Взаимодействие этого тока и потока статора приводит к появлению тормозного момента. Очевидно, что величину тормозного момента можно регулировать либо включением в цепь ротора регулировочного реостата, либо изменением величины постоянного тока, протекающего по обмоткам статора.
88
Электрические машины. Лабораторные работы на ПК
3.10. Моделирование асинхронной машины
Обобщенная модель виртуальной установки для исследования асинхронной машины показана на рис. З.Ю (файл AKZ.mdl).
Она содержит:
□ источник переменного трехфазного напряжения Source из библиотеки Power System Blockset/Extras/Electrical Sources;
□ измеритель трехфазного напряжения и тока Three-Phase V-I Measurement (библиотека Power System Blockset/Extras/ Measurement);
a исследуемая трехфазная асинхронная машина Asynhronous Machine (библиотека Power System Blockset/Extras/Machines);
□ блок Display для количественного представления измеренных мощностей Рх, <21 и блок Scope для наблюдения токов ротора и статора, а также скорости и момента асинхронной машины (главная библиотека Simulink/Sinks);
□ блок Moment для задания механического момента на валу машины (главная библиотека Simulink/Source);
Рис. 3.10. Модель виртуальной установки для исследования асинхронной машины
Асинхронные машины
89
□ блок Display 1 для количественного представления тока статора, электромагнитного момента и скорости машины (главная библиотека Simulink/Sinks);
О блок Мих, объединяющий три сигнала в один векторный (из главной библиотеки Simulink/Sygnal&System).
Окно настройки параметров асинхронной машины показано на рис. 3.11.
Параметры асинхронной машины (рис 3.11) частично берутся из паспортных данных машины, а частично рассчитываются на основании этих данных. Расчету подлежат параметры схемы замещения (активные сопротивления и индуктивности). Следует сразу обратить вни-
Block Parameters: Asynchronous Machine |XI
r Asynchronous Machine (mask) (link]--
' Implements a three:phase asynchronous machine (wound rotor or squirrel j । cage) modeled in the dq rotor reference frame. Stator and rotor windings । I are connected in wye to an internal neutral point. Press help for inputs : and outputs description. ,
~-....
I Reference frame: j Stationary ~ ,
; Norn. power.L-L volt, and freq. [ Pn(VA),Vn(Vrms],fn[Hz) ]: • |;
I |j3e-38050]
: Stator [ Rs(ohm) Lls(H)]:
|||||Гтдб7а9^з']'''"’.......... """..........
|ЙЙ(апсе)И[Н]сД^^
I ]l67.ie-3 —" ““ j
; Inertia.friction factor and pairs of poles (1(кд.тЛ2) F(N.m.s) p() j : {[0 0058 0 2 ] ' " ““||p j
I Initial conditions [ s() th(deg) isa.isb,isc(A) pha,phb,phc(deg) ]:
J |ПТТдо*^доГ—'
OK | Cancel | Help | др.у |
Рис. 3.11. Окно настройки параметров асинхронной машины
90
Электрические машины. Лабораторные работы на ПК
мание на то, что обозначения параметров, использованные в полях окна настройки (рис. 3.11), отличаются от тех, которые использованы выше при описании машины (см. схему замещения). Соответствие между параметрами схемы замещения и параметрами окна настройки следующее:
= > ^2 = Rr> Lpi =Lls', Lpl= Llr.
Точный расчет параметров схемы замещения асинхронной машины на основании ее паспортных данных является весьма трудной задачей, так как ее момент связан с параметрами нелинейной зависимостью. Кроме того, сама электрическая машина является, по существу, системой с переменными параметрами. Поэтому изложенная ниже методика не претендует на высокую точность расчета вышеуказанных параметров.
В качестве объекта исследования выбран асинхронный короткозамкнутый двигатель типа RA 100 LB4 Ярославского электромеханического завода, справочные параметры которого приведены в таблице 3.1. Номинальное линейное напряжение 380 В.
Таблица 3.1
Тип двиг. Л [кВт] Пн [об/мин] ц, % cos (р 1н. А 1н "о _Lj люкс ".макс . . М„ J, кГм2
1 RA100 LB 2 3 4 1420 5 81 6 0,81 7 7 8 6,2 9 - 2,2 10 2,6 11 0,0058
Исходя их данных этой таблицы определяются:
Скорость вращения магнитного поля (синхронная скорость вращения)
мин р
Величина номинального скольжения:
(3.31)
= . (3.32)
л. Номинальная угловая скорость вращения ротора:
рад р£ с 30
(3.33)
Асинхронные машины
91
Угловая скорость вращения магнитного поля
град^ Inf.
a>i[—] = -^ с р
(334)
Номинальный, максимальный и пусковой моменты:
М„(Ям)
_ Р.[Вг]
С
М.маКС = [НМ],
МП= тпМн [НМ].
(3.35)
Критическое скольжение
hp = S„(m.„aKe + 7Wt«- “О ' (3-36)
Приведенное активное сопротивление ротора
R 1 (Р.+^ег) 3 fl
* н
Пренебрегая потерями в ферромагнитном сердечнике и добавочными потерями в машине, можно считать, что мощность, выделяемая в активном сопротивлении статорной обмотки, определяется выражением:
Ям1 =3W„cos^(l-77)-3/„2/?rC2-n_ =3/,Х-
Отсюда находим величину активного сопротивления статора:
Л,
И cos <р (1-7?) C2R Пмех
(3.38)
где и =-~— фазное номинальное напряжение.
УЗ
При определении активных сопротивлений статора и ротора механические потери принимаются равными (0,01-0,05) от номинальной мощности. При этом меньшие значения соответствуют машинам с большей
9г
Электрические машины. Лабораторные работы на ПК
выходной мощностью. Коэффициент приведения С принимается равным 1,01-1,05 (меньшие значения для машин большей мощности).
Приведенная индуктивность рассеяния ротора
т = г =________Ч________ (3.39)
Л" г" 4^/,(1 + С2)^/н
Индуктивность статора
L =-------- .— U----------------------(3.40)
2л fj Jl-(cos <р)2 А-
3 Ри sKp
Индуктивность контура намагничивания
Lm=L-Lsp. (3.41)
Определение коэффициента приведения С1 осуществляется после расчета параметров по формуле
С1 = 1 + ^-.
Lm
Полученное значение следует сравнить с принятым коэффициентом С и при необходимости повторить расчет параметров.
Программа для точного расчета параметров приведена на листинге 3.1. В ней организованы циклы по параметру приведения С. Эта программа находится в файле as.m. После выполнения программы, результаты расчета появляются в окне Matlab. Из этих данных выбираются те, где заданная величина С и рассчитанная С, наиболее близки.
Рассчитанные по приведенным выше формулам параметры машины типа RA 100 LB4 помещены в окно настройки параметров (рис. 3.11).
Механическая характеристика, полученная на модели, приведена на рис. 3.12. Измерения проводились при изменении механического момента на валу (блок Moment рис. 3.10) от -30 Нм до критического 53 Нм.
Асинхронные машины
93
Листинг 3.1 “/□Справочные данные
РН=ЗеЗ; UH=380; f=50; n=1420; eff=O.B1; cosfi=0.81;
IH=7.0; ik=6.2; mk=2.2; mmax=2.6;
J=4e-4; p=2;
%Расчет параметров
Uf=UH/1.73; n1=60*f/p; sn=(n1-n)/n1; sk=(mmax+sqrt(mmax~2-1))*sn;
w1=2*pi*f; w=pi*n/30; MH=PH/w;
for c=1:0.01:1.08;
Rr=(1.015*PH)/(3*IH~2*((1-sn)/sn));
Rs=((Uf*cosfi*(1-eff))/IH)-(Rr*c~2)-(0.015*PH/(3*IH~2));
LI=Uf/(2*w1 *( 1 +c~2)*ik*IH);
Ls=Uf/(w1 *IH*sqrt( 1 -cosfr2)-(2*w1 *mmax*MH*sn/p)/(3*Uf*sk));
Lm=Ls-LI;
c1 = 1+LI/Lm;
[Rs Rr LI Lm c c1]
end
Механическая характеристика
Рис. 3.12. Механическая характеристика асинхронного двигателя
Для снятия режима короткого замыкания используется несколько измененная модель (рис. 3.13), в которой электромагнитный момент машины подается на ее механический вход. При этом скорость машины не равна нулю, но столь мала, что ее можно считать нулевой.
Электрические машины. Лабораторные работы на ПК
Рабочие характеристики двигателя определяются с использованием модели (рис. 3.11) при изменении механического момента от нуля до 1,5 Мн, эти характеристики показаны на рис. 3.14.
Display
Рис. 3.13. Модель для снятия момента короткого замыкания
Рабочие хар-ки
! О
О X 4 t
t
Выходная мощность (кВт)
Рабочие хар-ки
Выходная мощность (кВт)
6)
а)
Рис. 3.14. Рабочие характеристики двигателя
Асинхронные машины
95
3.11. Моделирование асинхронного двигателя с фазным ротором
В качестве объекта моделирования выбрана асинхронная машина типа RA 90L2, паспортные данные которой приведены в таблице 3.2
Таблица 3.2
Тип двиг. Р„ [кВт] Масса [кг] А [об/мин] П [%] cos (р I. [А] Л 4 .4® J [кгм2]
RA 90L2 2,2 15 2820 82 0,87 4 6,5 2,9 3,4 0,0015
Параметры, рассчитанные по изложенной выше методике, сведены в таблицу 3.3.
Таблица 3.3.
[Нм] Rr [Ом] Rs [Ом] " Ч [Гн] 4, [Гн]
7,45 3,1 2,62 0,0066 0,35
Основной особенностью асинхронной машины с фазным ротором является возможность регулирования скорости изменением внешних сопротивлений, включенных в цепь ротора. Модель для исследования механических характеристик двигателя при различных добавочных сопротивлениях в цепи ротора приведена на рис. 3.15 (файл AFR_l.mdt).
Значения добавочных сопротивлений, при которых проводилось моделирование, помещены в таблице 3.4.
Очевидно, первое из этих значений можно считать нулевым.
Таблица 3.4
№№ п/п 1 2 3 4 5
R [Ом] 3,49 6,98 17,45 42,62
Результаты моделирования показаны на рис. 3.16. Верхняя из этих характеристик соответствует нулевому добавочному сопротивлению. Эта характеристика называется естественной механической характери-
96
Электрические машины. Лабораторные работы на ПК
стикой двигателя. Все остальные механические характеристики называются искусственными. С ростом добавочного сопротивления в цепи ротора искусственные характеристики смещаются вниз.
Display!
Рис. 3.15. Модель Для исследования механических характеристик двигателя с фазным ротором
2
Ю О
3500,00
2500,00
2000^07
1500.00-
1900Ф&
500^0-
-Г
Г '0,00
-5,00 0,00 5,00 10,00 15,00 20,00 25,00
М[Нм]
Рис. 3.16. Механические характеристики асинхронного двигателя с фазным ротором
Асинхронные машины
97
По характеристикам (рис. 3.16) можно определить диапазон изменения добавочного сопротивления при заданном диапазоне регулирования скорости и заданном моменте. Так, из рис. 3.16 и таблице 3.4 следует, что при номинальном моменте диапазон регулирования скорости равен 10 при изменении сопротивления от нуля до 46,62 Ом.
3.12. Асинхронные двигатели малой мощности
3.12.1. Общие сведения
Асинхронные двигатели малой мощности (от долей ватта до 500 Вт) применяют в различных отраслях промышленности как в трехфазном, так и в однофазном исполнении. По своему устройству трехфазные асинхронные двигатели малой мощности, используемые в автоматических устройствах, не отличаются от трехфазных асинхронных двигателей общего применения. Маломощные асинхронные двигатели выполняют преимущественно с короткозамкнутым ротором. Однофазные двигатели отличаются от трехфазных лишь тем, что на статоре помещена однофазная обмотка, занимающая 2/3 пазов.
Работа трехфазных двигателей малой мощности не отличается от работы обычных трехфазных двигателей, рассмотренных ранее. Однако большинство асинхронных двигателей малой мощности выполняют однофазными. Эти двигатели при наличии только одной обмотки на статоре не обладают пусковым моментом, поэтому на статоре таких двигателей предусматривают вспомогательную обмотку или другие пусковые приспособления.
Однофазные асинхронные двигатели с вспомогательной обмоткой на статоре делят на следующие типы:
□ однофазные конденсаторные с конденсатором, постоянно включенным в цепь вспомогательной обмотки;
□ однофазные с конденсаторным пуском (при включении дополнительного конденсатора во вспомогательную обмотку на время пуска);
□ однофазные с реостатным пуском (при включении добавочного активного сопротивления во вспомогательную обмотку на время пуска);
4 Зак. 128
98
Электрические машины. Лабораторные работы на ПК
□ однофазные с расщепленными или экранированными полюсами, выполняемые с явнополюсным статором с сосредоточенной обмоткой и короткозамкнутыми пусковыми витками на частях полюсов.
В однофазных двигателях с вспомогательной обмоткой на статоре как основная, так и вспомогательная обмотки распределены в пазах статора и взаимно сдвинуты по окружности статора на половину полюсного деления или 90 эл. град. Роторы таких двигателей выполняют короткозамкнутыми или полыми в виде стакана из алюминиевого сплава.
3.12.2. Однофазные и конденсаторные асинхронные двигатели
Протекая по однофазной обмотке статора (рис. 3.17), переменный ток создает пульсирующее магнитное поле, которое можно разложить на два одинаковых круговых поля, вращающихся с синхронной частотой п1 в противоположные стороны.
При неподвижном роторе оба поля вращаются относительно него с одной и той же частотой п}. Каждое поле наводит в обмотке ротора равные токи. От взаимодействия с наводящими их потоками возникают два одинаковых, но противоположно направленных момента М, и Мн (рис. 3.17), разность которых создает результирующий вращающий момент однофазного двигателя М = - Мп. Результирующий пусковой момент при s = 1 равен нулю и поэтому ротор не приходит во вращение. Отсутствие пускового момента — основной недостаток однофазного двигателя.
Рис. 3.17. Механическая характеристика асинхронного двигателя при пульсирующем поле
Асинхронные машины
99
Если ротор привести во вращение в каком-нибудь направлении, то вращающееся в том же направление потокосцепление создаст те же эффекты, что и в обычном трехфазном двигателе, т. е. по мере разгона двигателя, скольжение 5 уменьшается, а момент увеличивается до определенного предела (рис. 3.17, кривая в первом квадранте). Скольжение ротора относительно прямого поля snp = (nl-n)/nl=s, а частота тока ротора, наведенного этим полем f2np =
Обратно вращающееся относительно ротора потокосцепление создает режим электромагнитного тормоза, при котором в роторе наводятся токи повышенной частоты, вследствие чего индуктивное сопротивление ротора возрастает, а момент Мп уменьшается (рис. 3.17, кривая Мп в четвертом квадранте). Скольжение ротора относительно обратного поля
_ «1 - (-«2 ) _ «I + «2 _ П1 + П1 0 ” *) _ о
So6p ~ ~ ~ ~ 2 S ’
n.t л, п{
а частота тока
f2обр ~ f\So6p ~ S) .
Следовательно, направление вращения ротора такого двигателя определяется направлением, в котором привели во вращение ротор.
Из рис. 3.17 видно, что двигатель с одной обмоткой (при s = 1) не обладает пусковым моментом, но, будучи приведенным во вращение, развивает результирующий момент.
Намагничивающий ток однофазного двигателя больше, чем трехфазного. Это приводит к снижению коэффициента мощности (cos ф) и КПД (т|) по сравнению с трехфазным.
Пуск однофазных двигателей осуществляется с помощью вспомогательной обмотки, которая укладывается на статоре под углом 90 электрических градусов к обмотке возбуждения. Если к двум таким обмоткам подвести токи, сдвинутые друг относительно друга по фазе на четверть периода, то возникает вращающееся магнитное поле.
Такой сдвиг может быть осуществлен путем включения конденсатора в цепь пусковой обмотки. При работе пусковая обмотка отключается. Следовательно, при пуске двигатель работает как двухфазный, а при нормальной частоте вращения, как однофазный.
Условия получения вращающегося магнитного поля выполняются только при включении вполне определенной емкости конденсатора. Эта емкость, а следовательно, габариты конденсаторов, получаются
100
Электрические машины. Лабораторные работы на ПК
значительными (например, для двигателей 50-200 Вт требуется конденсатор емкостью 20-30 мкФ), что ограничивает применение таких однофазных двигателей.
В настоящее время используют однофазные двигатели с пусковой обмоткой, занимающей 1/3 пазов статора и обладающей по сравнению с главной повышенным активным и малым индуктивным сопротивлениями. Пусковой момент таких двигателей достигает значений Мц ~(\-\,5)Мном . Наибольшее распространение получили однофазные асинхронные двигатели серии АОЛБ мощностью 18-600 Вт.
Конденсаторные асинхронные двигатели выполняют с короткозамкнутым ротором. В пазах статора укладывают две обмотки А и Б (рис. 3.18).
Конденсаторный двигатель хотя и питается от однофазной сети, по существу является двухфазным.
Рис. 3.18. Конденсаторные асинхронные двигатели
Выбирая конденсатор, следует иметь в виду, что напряжение на нем может выше напряжения сети U.
При пуске двигателя с включенным конденсатором поле принимает эллиптическую форму и пусковой момент составляет до 30 процентов от номинального. Для улучшения пусковых характеристик конденсаторного двигателя параллельно с конденсатором в цепь конденсаторной* фазы на период пуска включают дополнительный пусковой конденсатор; (см. рис. 3.18). Емкость этого конденсатора рассчитывают, исходя из условия получения достаточного пускового момента. По окончании пуска двигателя конденсатор отключают и двигатель работает только с конденсатором Ср.
Конденсаторные двигатели с пусковым и рабочим конденсаторами применяют для приводов с тяжелыми условиями пуска, т. е. частыми включениями под нагрузкой. Их недостаток — повышенная стоимость из-за наличия конденсаторных батарей. Характеристики конденсаторного двигателя лучше, чем однофазного. Коэффициент мощности cos (р = 0,8-0,95, Т| = 0,5-0,7.
Асинхронные машины
101
Маломощные трехфазные асинхронные двигатели также могут работать от однофазной сети. Схемы их включения приведены на рис. 3.19.
На рис. 3.19 а две фазы обмотки статора соединены последовательно и образуют главную обмотку А, а третья Б является пусковой (вспомогательной) и после пуска двигателя отключается вместе с конденсатором СЦ . Мощность двигателя в однофазном режиме при этом не превышает 60 процентов от номинальной мощности трехфазного режима.
Если после пуска двигателя конденсатор Сп отключить, оставив включенным только конденсатор Ср в цепи обмотки Б (рис. 3.19 б), то двигатель будет работать как конденсаторный, развивая мощность, приблизительно равную 75-80 процентов от номинальной мощности трехфазного режима.
На рис. 3.19 в, г приведены другие варианты схем питания трехфазных двигателей от однофазной сети.
При однофазном подключении трехфазного двигателя сильно падает пусковой и максимальный моменты.
Рис. 3.19. Схемы их включения трехфазного двигателя в однофазную сеть
3.13. Моделирование трехфазного двигателя при питании от однофазной сети
Исследование трехфазного двигателя при питании от однофазной сети реализуется на модели, показанной на рис. 3.20 (файл AKZ lf.mdl). В качестве объекта исследования выбран двигатель RA-
102
Электрические машины. Лабораторные работы на ПК
90L2, который исследовался выше. Для эксперимента выбран конденсатор емкостью 30 мкФ. При моделировании момент нагрузки подается с временной задержкой, т. е. пускается двигатель с нулевым моментом, а момент на вал прикладывается после окончания переходного процесса пуска. Механическая и рабочие характеристики, полученные на модели, показаны на рис. 3.21.
Интересно отметить, что коэффициент мощности при таком питании двигателя выше, чем при трехфазном подключении. Это объясняется наличием конденсатора, который компенсирует часть потребляемой двигателем реактивной мощности.
Рис. 3.20. Модель трехфазного асинхронного двигателя при питании от однофазной сети
Рис. 3.21. Механическая (а) и рабочие (б) характеристики двигателя
СИНХРОННЫЕ МАШИНЫ
4.1. Конструкция синхронных машин
Синхронной называют машину переменного тока, в которой скорость вращения ротора равна скорости вращения магнитного поля в ее рабочем зазоре. Синхронная машина может быть использована в качестве генератора напряжения стабильной частоты (турбогенератор, гидрогенератор и дизель-генератор), первичным двигателем в которых используются паровая или газовая турбина, или дизель. Часто синхронную машину используют в качестве двигателя с неизменной скоростью вращения ротора, приводящего во вращение крупные вентиляторы, компрессоры, центробежные насосы и генераторы постоянного тока и т. д. Кроме того, синхронную машину используют как компенсатор для повышения коэффициента мощности питающей электрической сети, а также для регулирования ее реактивной составляющей мощности.
Конструкция статора синхронной машины, называемого также якорем, практически ничем не отличается от конструкции статора асинхронной машины. Основное отличие синхронной машины заключается в устройстве ротора (индуктора), который представляет собой по существу явнополюсный или неявнополюсный электромагнит (рис. 4.1 а, б), обмотка которого через контактные кольца и щетки питается от внешнего источника постоянного тока. В качестве индуктора в синхронной машине может использоваться постоянный магнит.
Явнополюсный ротор (рис. 4.1 а) обычно используется в машинах с четырьмя и большим числом пар полюсов. Обмотка возбуждения выполняется в этом случае в виде цилиндрических катушек прямоугольного сечения, которые размещаются на сердечниках полюсов и укрепляются при помощи полюсных наконечников. Ротор, сердечники полюсов и полюсные наконечники изготовляются из листовой стали. Двухполюсные и четырехполюсные машины большой мощности, работающие при скорости вращения ротора 1500 и 3000 об/мин, изготовляются, как правило, с неявнополюсным ротором (рис. 4.1 б).
106
Электрические машины. Лабораторные работы на ПК
Рис. 4.1. Конструкция ротора (индуктора) явнополюсной (а) и неявнополюсной (б) синхронной машины
Применение в них явнополюсного ротора невозможно по условиям обеспечения необходимой механической прочности крепления полюсов и обмотки возбуждения. Обмотка возбуждения в такой машине размещается в пазах сердечника ротора, выполненного из массивной стальной поковки, и укрепляется в них немагнитными металлическими клиньями. В синхронных двигателях с явнополюсным ротором в полюсных наконечниках размещаются стержни беличьей клетки, выполненной из материала с повышенным удельным сопротивлением (латунь и др.). Эта клетка служит в качестве пусковой обмотки. Такая же беличья клетка, состоящая из медных стержней, применяется в некоторых синхронных генераторах, она называется успокоительной обмоткой, или демпферной, т. к. обеспечивает быстрое затухание колебаний ротора, возникающих при некоторых режимах работы синхронной машины. В последнее время синхронные двигатели часто выполняются без пусковой обмотки, но с массивными полюсами. В этих полюсах при пуске возникают вихревые токи, которые взаимодействуя с вращающимся магнитным полем, создают пусковой момент. Неявнополюсные машины также выполняются без успокоительной обмотки, роль которой выполняют вихревые токи, замыкающиеся в массивном роторе.
Синхронные машины
107
4.2. Работа синхронного генератора при холостом ходе
Как и все электрические машины, синхронная машина обратима, т. е. она может работать как в режиме генератора, так и в режиме двигателя. Рассмотрим случай, когда ротор синхронной машины приводится во вращение отдельным двигателем, а якорная (статорная) обмотка не нагружена. Так как линии магнитного поля статора являются продолжениями линий поля индуктора и они в этом случае не изгибаются в рабочем зазоре, то, оси вращающихся полей статора и ротора совпадают, т. е. угол 0 между ними равен нулю (рис. 4.2 а). В режимах нагрузки: в генераторном 0 > 0 (рис. 4.2 б), а в двигательном 0 < 0 (рис. 4.2 в)
При холостом ходе магнитный поток генератора создается только обмоткой возбуждения. Этот поток направлен по оси полюсов ротора и индуктирует в фазах обмотки якоря э.д.с, определяемую по той же формуле, что и для асинхронной машины:
£0 =4,44/б)1Лоб1Ф0. (4.1)
Характеристика холостого хода показана на рис. 4.3.
При небольших токах возбуждения магнитный поток мал и стальные участки магнитопровода машины не насыщены, вследствие чего их магнитное сопротивление мало. При этом магнитный поток практически определяется только магнитным сопротивлением воздушного зазора между ротором и статором и характеристика холостого хода (Ео = f(IB) или, в другом масштабе, Фо = f(IB) имеет вид прямой линии (рис. 4.3). По мере возрастания потока растет магнитное сопротивление стальных участков магнитопровода. При индукции в стали более 1,7-1,8 Тл магнитное сопротивление стали сильно возрастает и характеристика холостого хода становится нелинейной. Номинальный режим работы синхронных генераторов приблизительно соответствует «колену» кривой характеристики холостого хода; при этом коэффици-
ab , , , .
ент насыщения к , т. е. отношение отрезков —, составляет 1,1-1,4.
" ас
При рассмотрении работы синхронной машины в ряде случаев для облегчения математического анализа не учитывают нелинейность кривой холостого хода, заменяя ее прямой линией. При этом отпадает необходимость делать различие между магнитными характеристиками при холостом ходе и при нагрузке. Спрямленную характеристику проводят или как касательную к кривой холостого хода (прямая 1 на рис.
108
Электрические машины. Лабораторные работы на ПК
Рис. 4.2. Магнитное поле синхронной машины в режимах: холостого хода (а), генераторном (б) и двигательном (а)
Синхронные машины
109
Рис. 4.3. Характеристика холостого хода
4.3) , или через точку Ь, соответствующую рассматриваемому режиму работы, например, номинальному (прямая 2). Во втором случае спрямленная характеристика учитывает некоторое среднее насыщенное состояние магнитной цепи машины.
4.3. Реакция якоря в синхронной машине
Как было показано выше, в асинхронной машине изменение тока ротора автоматически приводит к изменению тока статора. В результате магнитный поток в рабочем зазоре остается практически не зависящим от режима работы машины. В синхронной машине такого автоматического слежения за током нагрузки нет.
В режиме холостого хода в синхронном генераторе существует только одна НС, а именно НС ротора, создающая основное магнитное поле в рабочем зазоре машины. При появлении тока в обмотках статора взаимодействие намагничивающих сил ротора и статора приводят к появлению результирующего магнитного поля генератора. Это поле как по величине магнитной индукции в рабочем зазоре машины, так и по характеру ее распределения в этом зазоре в значительной степени определяется величиной и направлением тока якоря.
по
Электрические машины. Лабораторные работы на ПК
Влияние тока якоря на картину распределения магнитного потока в рабочем зазоре машины принято называть (по аналогии с машинами постоянного тока) реакцией якоря. Форма кривой э.д.с. синхронного генератора, работающего в режиме нагрузки, определяется картиной распределения магнитной индукции в рабочем зазоре машины. Для того, чтобы генерируемая синхронной машиной кривая э.д.с. имела синусоидальную форму необходимо, чтобы форма кривой результирующей индукции в зазоре незначительно отличалась от синусоиды.
При рассмотрении реакции якоря в синхронном генераторе обычно считается, что он работает в режиме симметричной нагрузки. Различают три граничных режима действия реакции якоря при: а) чисто активной, б) индуктивной и в) емкостной нагрузках.
При активной нагрузке ток в фазе статора достигает максимума в тот момент, когда против этой фазы находится середина полюса. Поперечное поле реакции якоря в набегающем конце полюса ротора ослабляет магнитный поток, а в сбегающем конце — наоборот, усиливает (рис. 4.4 а). Следовательно, при активном характере нагрузки синхронного генератора реакции якоря вызывает смещение оси результирующего магнитного поля в сторону вращения ротора машины.
Следует заметить, что при насыщении ферромагнитного сердечника ослабление магнитного поля в набегающем конце полюса превышает его усиление в сбегающем конце. Поэтому, в том случае, когда помимо поперечной реакции якоря будет действовать и продольная, это приведет к уменьшению величины э.д.с. синхронного генератора.
На рис. 4.4 а кривая 1 соответствует распределению вдоль рабочего зазора НС ротора, а кривая 2 — НС якоря. В синхронных машинах с неявнополюсным ротором кривая индукции, от действия НС якоря будет совпадать с кривой 2. В явнополюсной машине асимметрия магнитной проводимости ротора приводит к появлению провалов, соответствующих промежуткам между полюсами, распределение магнитной индукции в этом случае соответствует кривой 3 рис. 4.4 а.
При индуктивной нагрузке максимальное значение тока в фазе будет в том случае, когда соответствующий полюс ротора переместится по направлению вращения на 90 электрических градусов (рис. 4.4 б). Из рисунка видно, что поток якоря направлен против потока ротора. Следовательно, при чисто индуктивной нагрузке реакция якоря синхронного генератора имеет продольно — размагничивающий характер (кривая 1 соответствует распределению НС ротора, кривая 2 — НС якоря, а также индукции для случая его неявнополюсной конструкции, а кривая 3 — для распределения-магнитной индукции в случае явнонолюсного ротора).
Синхронные машины
111
Если нагрузка имеет идеальный емкостный характер, то ток в фазе якоря будет достигать максимума в момент времени, когда соответствующий полюс ротора еще не достигнет этой фазы и будет на расстоянии 90 электрических градусов от ее середины (рис. 4.4 в).
Рис. 4.4. Реакции якоря в синхронном генераторе: при активной нагрузке (а), при индуктивной нагрузке (б)
112
Электрические машины. Лабораторные работы на ПК
Рис. 4.4. (Окончание). Реакции якоря в синхронном генераторе при емкостной нагрузке (в)
В этом случае реакция якоря синхронного генератора имеет про-дольно-намагничивающий характер (обозначения кривых 1, 2, 3 на рис. 4.4 в соответствуют обозначению при чисто индуктивном характере нагрузки синхронного генератора).
Синхронные машины
113
Для всех трех режимов работы синхронного генератора характерно изменение результирующего магнитного поля при действии реакции якоря и изменение его э.д.с.
Так как требования к величине и форме э.д.с. довольно жесткие, необходимо свести к минимуму реакцию якоря, что обеспечивается увеличением магнитного сопротивления машины. Проще всего это осуществляется увеличением рабочего зазора. При этом для того, чтобы сохранить неизменной величину магнитной индукции в рабочем зазоре машины, увеличивают НС возбуждения за счет увеличения НС возбуждения, для чего увеличивают ток возбуждения.
Явление реакции якоря наблюдается не только в синхронном генераторе, но и в двигателе. Однако, так как в двигателе форма кривой э.д.с. не имеет существенного значения, то реакция якоря в нем имеет второстепенное значение.
4.4. Принцип действия синхронных машин
Физические процессы, происходящие синхронной машине, тесно связаны с условиями ее работы. Выделим три типичных условия работы синхронной машины:
□ работа на пассивную, автономную нагрузку;
□ работа на жесткую сеть (сеть бесконечной мощности);
□ работа на мягкую сеть (сеть, мощность которой сравнима с мощностью синхронной машины).
Рассмотрим последовательно работу и свойства синхронной машины в первых двух отмеченных условиях работы. Свойства синхронной машины при работе на «мягкую» сеть являются промежуточными по отношению к рассматриваемым режимам.
4.4.1. Работа на пассивную, автономную нагрузку
В этом случае синхронная машина может работать только как генератор.
В генераторном режиме работы по обмотке статора (якоря) протекает ток нагрузки. Этот ток создает поток якоря, малая часть которого является потоком рассеяния Ф,,,, а основная часть, обозначенная через Ф|р, замыкается через ротор. Этот поток также называют потоком реакции якоря. Для исследования поведения синхронного генератора,
114
Электрические машины. Лабораторные работы на ПК
работающего на пассивную нагрузку, целесообразно рассмотреть его схему замещения и векторную диаграмму.
С учетом вышесказанного, схема замещения синхронного генератора, может быть представлена на рис. 4.5 а.
Рис. 4.5. Схема замещения синхронного генератора с учетом (а) и без учета (б) активного сопротивления обмотки якоря
В этой схеме замещения приняты следующие обозначения:
£ — э.д.с. индуктированная магнитным потоком возбуждения в обмотке якоря;
х, =ха + хр1 — синхронное реактивное сопротивление якоря, в котором;
ха — реактивное сопротивление якоря, учитывающее реакцию магнитного потока якоря Фа ;
xpi— реактивное сопротивление рассеяния якоря, учитывающее реакцию магнитного потока рассеяния Фр};
Ra— активное сопротивление обмотки якоря.
В явнополюсной машине ось, совпадающую с осью магнитного поля возбуждения (ротора) называют продольной и обозначают буквой d, а перпендикулярную ей ось называют поперечной и обозначают буквой q. Реактивные сопротивления якоря по продольной оси ха1/ и по поперечной оси xaq различны. При этом различаются и синхронные реактивные сопротивления по продольной и поперечной осям:
xd=xml+xp{, xq=xaq+xpl.
Синхронные машины U5
Активное сопротивление Ra мало по сравнению с синхронным сопротивлением, поэтому при качественном анализе его можно не учитывать. Упрощенная схема замещения синхронного генератора показана на рис. 4.5 б. Для этой схемы замещения на основании второго закона Кирхгофа можно записать:
Д) = + JXJa ’ (4-2)
где U{— напряжение на нагрузке.
Для построения пространственной векторной диаграммы следует заметить, что ось d магнитного потока ротора (потока возбуждения) и перпендикулярная ей ось q вращаются вместе с ротором. Векторная диаграмма строится во вращающейся системе координат d-q (рис. 4.6).
На векторной диаграмме потокосцепление возбуждения Фо направлено по продольной оси, э.д.с. Ё отстает от потокосцепления на 90 эл. градусов в соответствии с законом Фарадея. Направление тока якоря ia выбрано произвольно, а векторов [7, и xja в соответствии с уравнением (4.2).
‘оис. ^.S. Вехторная диаграмма синхронного генератора
116
Электрические машины. Лабораторные работы на ПК
Потокосцепление Т имеет то же направление, что и ток Ia в соответствии с законом Ома для магнитной цепи. Потокосцепление воздушного зазора — есть сумма потокосцеплений Т,, и То. Угол 0, который называется углом момента, отсчитывается от потока воздушного зазора до продольной оси. В данном случае этот угол положительный. На точно такой же угол сдвинуты вектора {7, и Ёо. В генераторном режиме работы напряжение на пассивной нагрузке U] зависит как от величины тока нагрузки, так и от сдвига по фазе <р между и i Угол может быть различный в зависимости от характера нагрузки. На рис. 4.7 без привязки к осям d и q представлены векторные диаграммы для пяти характерных случаев:
□ для чисто активной нагрузки <р = О(рис. 4.7 а),
□ для чисто индуктивной нагрузки <р = 90°(рис. 4.7 б),
□ для чисто емкостной нагрузки = -90° (рис. 4.7 е),
□ для активно-индуктивной нагрузки 0<<р<90° (рис. 4.7 г),
□ для активно-емкостной нагрузки 0><р >-90° (рис. 4.7 д).
а) б) в) г) д)
Рис. 4.7. Векторные диаграммы синхронного генератора
для актианой (а), индуктивной (б), емкостной (в), активно-индуктивной (г) и активно-емкостной (д) нагрузок
Рассматривая соотношение величин Ео и Ut, можно сделать вывод, что при активной и активно-индуктивной нагрузках величина напряжения [/, меньше, чем Ео, а при активно-емкостной нагрузке Ul, величина напряжении превышает Ео.
Отмеченные особенности легко проследить на характеристиках генератора, которые называются внешними и представляют собой зависимость напряжения на нагрузке Ut от тока нагрузки Ia при различных коэффициентах мощности нагрузки. Эти характеристики показаны на рис. 4.8.
Синхронные машины
117
Рис. 4.8. Внешние характеристики генератора
Для поддержания стабильного выходного напряжения необходимо с ростом тока нагрузки изменять э.д.с. f0, которая в свою очередь определяется током возбуждения. Зависимости тока возбуждения 1В от тока нагрузки Ia при U, = const и cos (р = const при различных видах нагрузки называются регулировочными характеристиками генератора, они представлены на рис. 4.9.
Рис. 4.9. Регулировочные характеристики генератора при активном (кривая 1), индуктивном (кривая 2) и емкостном (кривая 3) характерах нагрузки
118
Электрические машины. Лабораторные работы на ПК
4.4.2. Работа синхронной машины на жесткую сеть
Для подключения синхронной машины на сеть необходимо соблюсти условия синхронизации:
□ величина э.д.с. (Ео) должна быть равна напряжению £/, сети;
60/.
□ скорость вращения генератора должна быть равна п =----
Р
с тем, чтобы частота э.д.с. в точности совпала с частотой сети/;
□ напряжение сети и э.д.с. генератора должны быть в фазе;
□ очередность фаз генератора должна совпадать с очередностью фаз сети.
По реализации условий синхронизации синхронная машина может быть подключена своей якорной обмоткой к трехфазной сети. При этом машина будет находиться в режиме идеального холостого хода. Векторная диаграмма, соответствующая этому режиму, представлена на рис. 4.10 а.
4 4. I
а) б) в)
Рис. 4.10. Векторные характеристики генератора в режимах: идеального холостого хода (а), перевозбужденном (б) и недовозбужденном (в)
Параллельно с жесткой сетью синхронная машина может работать и как генератор, и как двигатель.
В режиме холостого хода машина не генерирует и не потребляет мощности. Любое изменение тока возбуждения и связанной с ним э.д.с. Ео, приводит к появлению тока в якоре генератора. Поскольку в жесткой сети напряжение Ut постоянно, то увеличение Ео по сравнению с приводит к появлению индуктивного тока в сети (рис. 4.10 б). Уменьшение Ео по сравнению с [/, приводит к появлению емкостного тока в цепи (рис. 4.10 в). Поскольку в обоих случаях угол 0
Синхронные машины
119
между и Ей равен 0, то машина не отдает и не потребляет активной мощности. Таким образом, изменяя ток возбуждения, можно изменять только реактивную мощность. Рассмотрим векторную диаграмму синхронной машины в общем случае, показанную на рис. 4.11.
б)
а)
Рис. 4.11. Векторная диаграмма синхронной машины при работе на сеть в генераторном (а) и двигательном (б) режимах:
Из векторной диаграммы следует
АО2 = xjncos(p, (4.3)
OtO2= x,/asin^.
Активная и реактивная мощности, отдаваемые генератором в сеть, определяются уравнениями
Pt = mlJ^cosrp,
г. тг г • (4.4)
Qi = m,U,Iasm(p.
Сравнение уравнений (4.3) и (4.4) показывает, что при постоянном напряжении сети (U, = const), отрезок АО2 в определенном масштабе— есть активная мощность, а отрезок t?tO2 — реактивная мощность.
Поэтому для изменения активной мощности при (Qi =const) конец вектора должен скользить по горизонтальной прямой (АВ). Для изменения реактивной мощности при (Р, = const) конец вектора ( Ёо) должен скользить по вертикальной прямой (АА'). Положение вектора (0О2) соответствует холостому ходу. Если вектор (Ёо) находится еле-
120
Электрические машины. Лабораторные работы на ПК
ва от прямой (ОО2), то машина работает в генераторном режиме (рис. 4.11 а). Если вектор (Ёо) находится справа от прямой (рис. 4.11 б), то машина работает в двигательном режиме. В генераторном режиме при скольжении вектора вниз по вертикали машина потребляет реактивную (индуктивную) мощность до тех пор, пока (Ео ></(). При (Еп < t/() машина потребляет реактивную (емкостную) мощность.
В двигательном режиме машина потребляет реактивную (емкостную) мощность до тех пор, пока (Ео > U]) и реактивную (индуктивную) мощность при (Ео <О{).
Все эти свойства синхронной машины при работе на жесткую сеть чрезвычайно полезны и часто используются (например, синхронные компенсаторы). Особенно важны эти свойства синхронной машины при работе на мягкую сеть. Именно такая работа характерна для синхронных генераторов, работающих параллельно в энергосистемах.
В этом случае рассмотренные свойства синхронной машины позволяют разделить активную и реактивную мощность в соответствии с номинальной установленной мощностью генераторов.
4.5. Энергетическая диаграмма и КПД синхронной машины
На рис. 4.12 изображена энергетическая диаграмма синхронной машины, работающей в генераторном режиме.
Мощность, передаваемая через вал ротора от внешнего двигателя частично расходуется на покрытие механических потерь 77н (в подшипниках и на самовентиляцию), потерь в ферромагнитном сердечнике генератора на гистерезис и вихревые токи П.,, и электрических потерь в обмотках возбуждения 77в0, и якоря ПЭ1. Последние являются переменными потерями, их величина определяется нагрузкой генератора; остальные же потери при n = const, Ue = const от изменения нагрузки не зависят.
Коэффициент полезного действия, как и в трансформаторах и в других типах машин определяется из уравнения
П =----------1--------- •
Р! + Пл, + Диг +
Синхронные машины
121
Рис. 4.12. Энергетическая диаграмма синхронной машины
Удельная мощность (величина мощности на единицу массы или объема) растет с увеличением мощности генератора. Поэтому для питания энергетических сетей используются генераторы со значительной единичной мощностью.
4.6. Электромагнитная мощность и момент синхронной машины
Как следует из энергетической диаграммы, выходная мощность синхронного генератора меньше электромагнитной на величину электрических потерь в обмотке статора, но так как последние уже для машин средней мощности меньше 1% номинальной мощности, то можно считать, что для /«/-фазной машины
=mlt//ocos^- (4-5)
Воспользовавшись векторной диаграммой (рис. 4.6), можно получить
Р>.„ = m\UJa cosC^P-0) = m|L/|/a(cos'Pcos0 + sin 4/sin0). (4.6)
ш
Электрические машины. Лабораторные работы на ПК
Из векторной диаграммы и уравнений (4.5, 4.6) имеем
t/j cos0 = £() - Idxd = £0 - /а sin Т xd;
=t/,sin0 = Ia cosT-x(;;
t/(sin0
Ia cos T = —-----.
(4.7)
Таким образом, выражение для электромагнитной мощности можно представить в виде:
рэл, = sin 0 + «Л-Ч, Л/ 2
1 1
-----sin 20
(4.8)
Электромагнитный момент, возникающий в результате взаимодействия тока статора с результирующим магнитным полем, определится выражением:
рэ« mi V T, sin0 "h U1
co cot xd 2 ft);
1 1
------sin 20
ч
(4.9)
Первая составляющая полученной суммы является основным (электромагнитным) моментом, а вторая — реактивным моментом, возникающим вследствие неравенства продольной и поперечной синхронных индуктивных сопротивлений в явнополюсной синхронной машине.
Зависимость (4.9) называют уптовой характеристикой синхронной машины, эта характеристика показана на рис. 4.13.
Если синхронная машина имеет неявнополюсную конструкцию, то второе слагаемое уравнения (4.9) равно нулю и угловая характеристика имеет форму кривой 1, в случае явнополюсной конструкции ротора — кривой 2 (кривая 3 соответствует реактивному моменту).
Если угол Q положителен, то положительный момент создает на валу ротора по отношению к первичному двигателю, вращающему ротор, тормозной момент; синхронная машина работает в режиме генератора и происходит преобразование механической энергий первичного двигателя в электрическую энергию сети. В противном случае момент на валу ротора отрицателен и является вращающим; синхронная машина работает в режиме двигателя и происходит преобразование электрической энергии сети в механическую энергию на валу ротора.
Синхронные машины
123
Рис. 4.13. Угловая характеристика синхронной машины
Работа синхронной машины в диапазоне изменения угла в (-90° +90°) устойчива, т. к. при любом увеличении или уменьшении нагрузки (механической на валу ротора или электрической, подключаемой к статорной обмотке) соответственно увеличивается или уменьшается момент на валу машины и устанавливается равновесие между моментом, развиваемым первичным двигателем, и генератором (или между механическим тормозящим моментом нагрузки на валу ротора и вращающим моментом синхронного двигателя). Значению 0=9ОР= соответствует максимальное значение и развиваемой мощности и момента на валу синхронной машины. При 0>90°= работа синхронной машины неустойчива. В этом случае, при работе машины в режиме генератора, вращающий момент, развиваемый первичным двигателем, превышает максимальный тормозящий момент генератора, т. к. увеличение угла 0 свыше 90 электрических градусов приведет не к увеличению момента, а к его уменьшению. В результате нарушается
124
Электрические машины. Лабораторные работы на ПК
равновесие между моментами: тормозящим генератора и вращающим первичного двигателя. Избыток вращающего момента приведет к еще большему увеличению 9 и уменьшению тормозящего момента.
Этот процесс будет происходить до момента, пока генератор не выпадет из синхронизма и система автоматики не отключит его от нагрузки, т. к. при этом наступает аварийный режим.
Аналогичные процессы происходят и у синхронного двигателя, когда угол 9 превышает 90 электрических градусов. В этом случае, аналогично, увеличение момента нагрузки на валу ротора приводит не к увеличению, развиваемого синхронным двигателем момента, а к его уменьшению. В результате нарушается равновесие между вращающим моментом машины и тормозящим моментом нагрузки. Избыток тормозящего момента приводит к еще большему увеличению угла и уменьшению вращающего момента.
Этот процесс будет протекать до момента, когда токи в обмотках не превысят величины, при которой произойдет срабатывание аварийной защиты и синхронный двигатель не будет отключен от питающей сети.
4.7. Рабочие характеристики *
синхронного двигателя j
Рабочие характеристики (рис. 4.14) представляют собой зависимое- 1 ти тока /а, электрической мощности Pt, поступающей в обмотку яко- | ря, КПД ц, и costp от отдаваемой механической мощности Р2 при 1 = const, = const и неизменном токе возбуждения. |
Поскольку скорость вращения двигателя постоянна, зависимость | n = f(P2) обычно не приводится; не приводится также и зависимость I М = f(P2), так как вращающий момент М пропорционален Р2. Зав и- I симости /г = f(P2) и Pt =f(P2) имеют характер, близкий к линейно-1 му. Ток холостого хода /а0 определяется реактивной составляющей и I активным током, компенсирующим потери в стали и механические 1 потери. Мощность холостого хода Ро равна сумме возникающих при! этом режиме потерь. Кривая rj = f(P2) имеет характер, общий для! всех электрических машин. Синхронные двигатели могут работать с I cos (р = 1, но обычно они рассчитываются на работу при номинальной | нагрузке с опережающим током, при этом cos <р = 0,9 -0,8. В этом ! случае улучшается суммарный coscp сети, от которой питаются синх- I ронные двигатели, т. к. создаваемая ими опережающая реактивная со- I
Синхронные машины
125
ставляющая тока компенсирует отстающую реактивную составляющую тока, которая обычно имеет место.
Рис. 4.14. Рабочие характеристики синхронного двигателя
4.8. Определение индуктивных сопротивлений синхронной машины
Опыты холостого хода и короткого замыкания. Индуктивное сопротивление синхронной машины может быть найдено по результатам опытов холостого хода и короткого замыкания. При опыте холостого хода определяют характеристику холостого хода El0 = (рис. 4.3) при номинальной скорости вращения машины, изменяя ток возбуждения IR. D
При опыте короткого замыкания обмотки якоря замыкают накоротко через амперметры, после этого ротор приводят во вращение с номинальной скоростью и снимают зависимость тока якоря от тока возбуждения Эта зависимость имеет прямолинейный
характер. Это объясняется тем, что при условии га ~ 0 сопротивление цепи якоря при коротком замыкании является чисто индуктивным,
126
__________________Электрические машины. Лабораторные работы на ПК I
вследствие чего ток короткого замыкания Ik отстает по фазе на 90 я градусов от вектора э.д.с. (рис. 4.7 б) и поток реакции якоря размагни- | чивает машину. При работе машины в рассматриваемом режиме на- 1 пряжение Ui = 0, поэтому уравнение (4.2) принимает вид: )
для явнополюсной машины Ео = jlaxail + jlaxpl = jlax<i > (4-Ю) |
для неявнополюсной машины &о = j ха + ШХР\ = Лk Ч. (4.11) а
Определение индуктивных сопротивлений xd и xq. Из формулы 1 (4.10) можно определить синхронное индуктивное сопротивление ма- | шины по продольной оси I
, <4.12) I
" I. I
где э.д.с. £10 и ток 1и должны быть взяты при одном и том же значе- 1 нии тока возбуждения. Для прямолинейного участка характеристики I холостого хода безразлично, при каком токе возбуждения определяет- 1 ся xd, т. к. во всех случаях xd - const. Чтобы определить сопротивле- 1 ние при любом значении тока возбуждения, величину Е10 находят по 1 спрямленной ненасыщенной характеристике холостого хода (рис. 4.3). 1 Однако полученное таким путем xd будет несколько большим, чем при учете насыщения машины. По полученному значению xd можно определить синхронное индуктивное сопротивление по поперечной я оси:
xq ~ (0.6-0.8)хг/. (4.13)
Е Я
В неявнополюсных машинах xd = xq=x}, х =——. (4.14) Я
4.9
Моделирование синхронного генератора
Виртуальные модели синхронных машин находятся в библиотеке Powerlib/Machine. Эти модели можно разбить на четыре группы (рис. 4.15). К первой группе относятся классические машины с демпферной обмоткой на роторе. Параметры этой машины задаются в абсолютных или относительных (pu-per units) величинах.
Синхронные машины
127
>\Д ______________m » Synchrensus Mschlns SI Fundsmtntsl
Synchronous Maohint pu Standard
Simplified Synchronous
»
>
> Tm
Permanent Magnet Synchronous Machine
pu Fundamental
Maohint SI Unite
Simplified Synchronous Machine pu Units
Рис. 4.15. Виртуальные модели синхронных машин
В поля окна настройки машины, представленной в абсолютных параметрах, вводятся (рис. 4.16):
□ тип ротора (в выпадающем меню этого поля можно выбрать явнополюсный и неявнополюсный ротор),
О номинальные полная мощность (ВА), действующее линейное напряжение (В), частота (Гц) и номинальный ток возбуждения (А) — ток возбуждения при котором напряжение на выходе равно номинальному,
□ параметры статора: активное сопротивление (Ом), индуктивность рассеяния и индуктивности по продольной d и поперечной q осям (Гн),
О приведенные параметры обмотки возбуждения ротора: сопротивление (Ом), индуктивность (Гн),
□ приведенные параметры короткозамкнутой обмотки на роторе: активное сопротивление и индуктивность по продольной и поперечной осям (Ом, Гн),
□ момент инерции (кгм2), коэффициент вязкого трения (Нмс), число пар полюсов,
□ начальные условия и напряжение, которое необходимо задавать на вход Vf блока. Это напряжение зависит от значения номинального тока возбуждения, которое введено в первое поле. Для вычисления Vf необходимо включить флажок в поле Display Vf which produces nominal Vt и на экране дисплея появится вычисленное значение требуемого напряжения. Следует заметить, что
128
Электрические машины. Лабораторные работы на ПК
если в данных отсутствует значение номинального тока возбуждения, то в первое поле можно ввести любое значение, даже ноль. При этом изменится значение Vf.
При включенном флажке Simulate saturation появляется дополнительное поле, в котором можно задать нелинейную зависимость характеристики холостого хода в виде матрицы из двух строк. В первую строку матрицы вводятся значения тока возбуждения, а во вторую — значения напряжения на выходе. При учете этой нелинейности номинальный ток возбуждения не может быть равным нулю. Параметры синхронной машины могут быть заданы в безразмерных (относительных) величинах (модель Synchronous Machine pu Fundamental, рис. 4.15).
Модель Synchronous Machine pu Standard (рис. 4.15) является типичным синхронным генератором.
Block Parameters. Synchronous Machine SI Fundamental (x)
- Synchronous Machine (mask) (link)................—....... .
Implements a 3-phase synchronous machine modelled in the dq rotor reference frame. Stator windings are connected in wye to an internal neutral point. Press help for inputs and outputs description.
Parameters'^^ -........................._...
Rotor type: | Salient-pole yj
Norn, power, volt., freq, and field cur. (Pn(VA) Vn(Vrms) fn(Hz) i
j[ 187E6 13800 601087]
Stator (Rs(ohm) LI,Lmd,Lmq(H] ]:
[(2.9069E -03 10892E-04 3.2164E-03 9.7153E-04 ] |
Field [ Rf'(ohm) Llfd'fH) ]:
J ,
I Dampers [ Rkd'.LIkd' Rkq1',Llkq1' ](R=ohm,L=H):
pg^[T1966E-O2 49076Б04 '.fffffc
Inertia, friction factor and pole pairs [J(kg.nT2] F(N.m.s) p(J):
IfВ||ПпГо 20] ‘
1 nit. cond. [ dw(%) th(deg) ia.ib,ic(A) pha,phb,phc(deg) Vf(V) ]: ,
. ..............jfliil
Г (Simulatesaturation
Г Display Vfd which produces nominal Vt
OK ~~~| Cancel [ Help j Apply I
Рис. 4.16. Окно настройки параметров Simplified Synchronous Machine
Синхронные машины
129
Модель Simplified Synchronous Machine является упрощенной моделью синхронной машины с неявнополюсным ротором. В полях окна настройки машины (рис. 4.17) вводятся:
□ номинальные мощность, напряжение и частота;
□ момент инерции, демпфирующий фактор и число пар полюсов;
□ параметры обмотки якоря (статора);
□ начальные условия.
При задании параметров модели Simplified Synchronous Machine необходимо согласовывать значения Р„, V„, fn, R, L так, чтобы выполнялось неравенство
7/?2+(2л:/1)2 ‘
Block Parameters: Simplified Synchronous Machine SI Units ®
-Simptfied Synchronous Machine (mask) (link]-----—---------------------,
° Implements a 3-phase simplified synchronous machine. Machine is { r modelled as an internal voltage behind a R-L impedance. Stator windings | j are connected'm wye to an internal neutral point I
1st input: Simulink signal: mechanical power supplied to the machine i (W_>0 for generator mode, <0 for motor mode) I
I 2nd input: Simulink signal: RMS value of phase-to-phase internal voltage i ! M ;
Fust 3 outputs Machine terrnmals = phases a, b and c
i 4th output: Simulink measurement output = vector (12x1) containing :
1 -3: Line currents flowing out of machine la. ib. ic (A) 4-6 Terminal voltages «a vt. vc f/J
' 7-Э: Internal voltages ea, eb, ec (V)
: 10 : Rotor angle theta (rad)
11 : Rotor speed wm (rad/s)
i 12 : Electrical power Pe (W)
"Parameters" ~ ~~~ ™ ~ ,
। Connection type: (з-wireY ~*1
Nom. power, L-L volt., and freq, f Pn(VA) VnfVrms) fn(Hz] J: >
j[100Ое6.315е3,60] ~~ ~ ~' j
i Inertia, damping factor and pairs of polesf J(kg.m*2) Kd(]p() J ' |
] |[ into,2 ] ‘ j
Interna! impedance [ R(ohm) ЦН)): ;
: |[1?9845,263.15e-3 ] j
Irft. j:ond. [ dw(X) thfdeg) ia,ib,ic(A) pha,phb,phc(deg] ]: ,
J j8|( 0 0 0.0,0 0,0,0]
I OK ~] Cancel | Help| Аи"» |
Рис. 4.17. Окно настройки параметров Simp/ified Synchronous Machine
5 Зак, 128
130
Электрические машины. Лабораторные работы на ПК
Последняя модель Permanent Magnet Synchronous Machine предназначена в основном для моделирования синхронных двигателей, эта модель описана ниже.
Модель для исследования основных характеристик синхронного генератора, работающего на пассивную нагрузку, представлена на рис. 4.18 (файл Synch_gen).
В качестве примера рассмотрена синхронная машина типа 150НР, имеющая следующие характеристики:
П тип ротора явнополюсный;
□ полная мощность (Рп = 111900 ВА);
□ действующее значение линейного напряжения (Vn = 762,1 В);
□ частота (fn = 60 Гц);
□ ток возбуждения (Ifn = 0);
□ активное сопротивление статорной обмотки (Rs = 0,26 Ом), ее индуктивность рассеяния (Д = 13,7-10"3 Гн) и индуктивности статорной обмотки по осям d (Lmd = 1,14-10”3 Гн) и q (Lmq = 1Г10-3Гн );
□ активное сопротивление обмотки возбуждения (= 0,13 Ом) и индуктивность =2,Г10"3Гн);
Рис. 4.18. Модель для исследования основных характеристик синхронного генератора
Синхронные машины
131
□ активное сопротивление демпферной обмотки и ее индуктивности по оси d (Rkd = 0,02240м , Llkll - 1,4 10"3Гн ) и по оси q (Я,/= 0,02 Ом, Llkq =110 3Гн);
□ момент инерции J - 24,9 кГм2, коэффициент вязкого трения F = 0 Нмс и число пар полюсов р = 2.
Перечисленные выше характеристики синхронной машины занесены в окно настройки параметров (рис. 4.19). Значение начальных условий (в поле init.cond) приняты не нулевыми для сокращения времени моделирования. В принципе их можно задать и нулевыми все, кроме значения напряжения возбуждения Vf. Значение напряжения возбуждения определяется при установке флажка в поле Display Vf which produces nominal Vt. Это же напряжение необходимо установить на входе Ромашины (рис. 4.18)
Block Parameters: Synchronous Machine (5§
Synchronous Machine (maskl (link) •
. Implements a 3-phase synchronous machine modelled in the dq rotor reference frame Stator windings are connected in wye to an internal
, neutral point. Press help for inputs and outputs description.
Parameters - . - -
' Rotor type: | Saiient-pole —*
Norn power, volt, freq and field cur. [ Pn(VA) Vn(Vrms) fn(Hz) (
| O0 440’sqrt(3) 60 0] ‘ !
Stator [Rs(ohm] U,Lmd,Lmq[Hj ]
I 0 261.14e-3137е<| 11?бе<1 ] I
Field [ Rf(ohm) Llfd'(H) ]:
( |[0.132Лв^З] “ I
Dampers [ Rkd'.LIkd' Rkql'.Ukql' ] (R=ohm.L=H):
। |[QQ2241;4e:3o'o2ie-3] ““
Inertia, friction factor and pole pairs [J(kg.rrT2] F(N.m.s) p(J]:
, p - 1 ,
Init. cond. [ dw(%) th(deg) ia,ib,ic(AJ pha,phb.phc(deg) Vf(V) ]:
|[ 0 335.9 55.^62^55.996255.9962 258^138,18 156624]
Г Simulate saturation
Г" Display Vfd which produces nominal Vt
OK } Cancel j Help | |
Рис. 4.19. Окно настройки параметров генератора
132
Электрические машины. Лабораторные работы на ПК
Block Parameters: Machines Measurement Demux ®
Machine measurements (mask) (link) • ...— ------ - —
i Split specified signals of various machine models measurement output vector into separate signals.
~Parameters~'==7r:™223~ZZL^Z2Z^^^221ZZZi^^^f'':
M achme type: {synchronous " ——
Г is_abc : Stator currents isa, isb, isc (A) or (pu)
Г iis_qd : q and d axis stator currents (A) or (pu)
F7 ifd : Field current (A) or (pu)
Г ik_qd : Damper winding currents ikq1, ikq2, ikd (A) or (pu) Г" phim_qd : q and d axis mutual fluxes
П vs_qd : q and d axis stator voltages (V) or (pu)
Г d_theta : Rotor angle deviation (rad)
p wm : Rotor speed (rad/s) or (pu)
p Pe : Electrical power (W) or (pu)
Г dw : Rotor speed deviation (pu)
Г theta Rotor mechanical angle (deg)
OK Cancel ] Help j Apply
Рис. 4.20. Окно настройки параметров блока Machines Measurement Demux
Для измерения переменных состояния машины используется блок Machines Measurement Demux (рис. 4.20), в полях настройки которого выбирается тип машины и галочками помечаются переменные состояния, выбранные для измерения. Заметим, что ток, обозначенный в модели через Ifd, является током возбуждения 1№.
4.9.1. Опыт холостого хода
Опыт холостого хода производится на модели рис. 4.18.
При этом мощность в нагрузке устанавливается 0,01% от номинальной мощности генератора.
По данным измерений построена кривая холостого ход синхронного генератора типа 150НР Ul =F(IB') (рис. 4.21).
Синхронные машины
133
Хар-ка хол.хода
Ток возбуждения (А)
Рис. 4.21. Кривая холостого хода синхронного генератора типа 150НР
4.9.2. Внешние характеристики синхронной машины
Внешние характеристики определяют зависимость выходного фазного напряжения синхронного генератора от тока нагрузки при неизменных токе возбуждения, коэффициенте мощности (cos ср) и частоте генерируемого напряжения. Эта характеристика снимается следующим образом: при IB = const изменяется мощность нагрузки. При этом задается величина генерируемой активной мощности и поддерживается неизменным значение коэффициента мощности. Опыты проводятся как для чисто активной (кривая 1), активно-индуктивной (cosrp = 0,5) (кривая 2) и активно-емкостной нагрузках (cos<p = 0,5) (кривая 3).
По результатам экспериментов на рис. 4.22 построены внешние характеристики синхронной машины типа 150НР.
4.9.3. Регулировочная характеристика
Регулировочная характеристика строится при U\- const, cos <р = const и f = const. Она показывает, как необходимо регулировать ток синхронного генератора, чтобы при изменении нагрузки выходное напряжение оставалось неизменным. Снятие характеристики осуществляется следующим образом: изменяется ток нагрузки и для каждого из его значений величина Vf регулируется так, чтобы напряжение на нагрузке сохранялось неизменным. Регулировочные характеристики при различных коэффициентах мощности в нагрузке показаны на рис. 4.23
134
Электрические машины. Лабораторные работы на ПК
Внешние хар-ки генератора
-^Ряд1
-*"Ряд2 РядЗ
Ток нагрузки (А)
Рис. 4.22. Внешние характеристики синхронной машины типа 150НР
Регулировочная хар-ка
Ток нагрузки (А)
Рис. 4.23. Регулировочные характеристики синхронной машины типа 150НР
Синхронные машины
135
4.9.4. Угловая характеристика
Угловая характеристика представляет собой зависимость момента на валу машины от электрического угла между осью магнитного поля и осью d ротора. Модель для снятия этой характеристики показана на рис. 4.24 (файл synch_genl).
В этом случае исследуемая синхронная машина подключается к электрической сети бесконечной мощности, начальные фазы А, В и С питающих э.д.с. устанавливаются соответственно равными: 270, 150 и 30 электрических градусов. Момент на валу машины пропорционален скорости, которая, если синхронный двигатель не выпадает из режима синхронизации, всегда пропорциональна механической мощности на валу машины или, примерно, — электрической мощности, генерируемой в сеть. Поэтому, изменение вращающегося момента на валу машины можно осуществлять в рассматриваемой виртуальной установке изменением подаваемой на вход Pm механической мощности. Для достижения устойчивой работы, как и в случае исследования основных характеристик, используется отрицательная обратная связь по мощности. Момент на валу машины рассчитывается как частное от деления мощности на угловую скорость (блок Product рис. 4.24). Определение характеристик машины осуществляется с помощью блока Display из библиотеки Simulink/Sinks.
Результаты моделирования представлены на рис. 4.25; заметим, что на экране дисплея значение угла определяется в радианах.
Рис. 4.24. Модель для снятия углоаой характеристики генератора
136
Электрические машины. Лабораторные работы на ПК
Угловая хар-ка
Рис. 4.25. Результаты моделирования
4.10. Исследование синхронной машины в двигательном режиме
4.10.1. Угловая характеристика
Угловая характеристика двигателя снимается на модели (рис. 4.24). При этом на вход Р„, подается отрицательный сигнал. Результаты моделирования представлены на рис. 4.26.
Угловая хар-ка двигателя
Рис. 4.26. Угловая характеристика синхронного двигателя
Синхронные машины
137
4.10.2. Рабочие характеристики
В качестве рабочих характеристик синхронного двигателя обычно рассматриваются зависимости тока статора (якоря) /д и коэффициента мощности от отдаваемой механической мощности на валу машины Р при Ut = const, f - const и Iв = const Так как скорость вращения выходного вала синхронного двигателя (при условии его работы в синхронном режиме) постоянна, то зависимости h = F(F2) и М = F(F2) обычно не приводятся.
Снятие рабочих характеристик осуществляется на модели (рис. 4.24) при отрицательном сигнале на входе Рт . Изменяя величину мощности Рт на модели (рис. 4.24), определяем ток якоря Ia и потребляемую из сети электрическую мощность Р.
По данным, полученным при моделировании, на рис. 4.27 построены зависимости: относительная величина тока якоря (/а//о„ом) и коэффициент мощности (cos(р) от относительной величины мощности нагрузки (Рт/Ртнои) на выходном валу синхронного двигателя типа 150НР.
Рис. 4.27. Зависимости: относительная величина тока якоря (I s /1sH) (кривая 1) и коэффициент мощности (cos (р) (кривая 2) от относительной величины мощности нагрузки на выходном валу синхронного двигателя типа 150НР.
138
Электрические машины. Лабораторные работы на ПК
4.11. Синхронные микродвигатели
4.11.1. Назначение и классификация синхронных микродвигателей
В автоматических устройствах широко применяются синхронные микродвигатели мощностью от долей ватта до нескольких сотен ватт. Характерной особенностью таких двигателей является то, что их скорость вращения п2 = п{ жестко связана с частотой питающей цепи f{, поэтому они используются в различных устройствах, где требуется поддерживать постоянную скорость вращения (в электрических часовых механизмах, лентопротяжных механизмах самопишущих приборов и киноустановок, в радиоаппаратуре, программных устройствах и пр.), а также в системах синхронной связи, где скорость вращения механизмов управляется изменением частоты питающего напряжения.
В зависимости от особенностей электромагнитной системы синхронные микродвигатели подразделяются на следующие типы:
О синхронные двигатели с постоянными магнитами;
□ реактивные двигатели;
□ гистерезисные двигатели;
□ индукторные машины (в том числе редукторные двигатели);
□ шаговые (импульсные) двигатели.
Все эти машины обычно выполняются без обмотки возбуждения на роторе, что значительно повышает их эксплуатационную надежность и упрощает конструкцию.
4.11.2. Синхронный реактивный микродвигатель
Принцип действия и устройство
Реактивным двигателем называется синхронный двигатель с явнополюсным ротором без обмотки возбуждения и без постоянных магнитов, у которого магнитный поток создается реактивным током, протекающим по обмотке статора. Вращающий момент в таком двигателе возникает из-за различия в магнитных проводимостях по продольной и поперечным осям. При этом явновыраженные полюса ротора стремятся ориентироваться относительно поля так, чтобы магнитное сопротивление для силовых линий поля было бы минимальным, вследствие чего появляются тангенциальные
Синхронные машины
139
।
Рис. 4.28. Магнитное поле синхронного реактивного двигателя
силы fT (рис. 4.28), образующие вращающий момент, и ротор вращается в том же направлении и с той же скоростью п., что и поле.
Статор реактивного двигателя выполняется так же, как и в обычной машине переменного тока. Ротор двигателя может иметь различное конструктивное исполнение. Наиболее распространены роторы с впадинами (рис. 4.29 а), из сплошного ферромагнитного материала с соответствующими вырезами (рис. 4.29 6) и секционированный (рис. 4.29 в).
Ротор со впадинами собирается из стальных листов, имеющих специальный профиль, для пуска в ход двигателя в роторе предусмотрена короткозамкнутая обмотка типа беличьей клетки. Ротор из сплошного ферромагнитного материала применяют в двигателях, предназначенных для пуска в ход без нагрузки. Пусковой обмотки такой двигатель
Рис. 4.29. Конструкции роторов синхронных реактивных двигателей: с впадинами (а), из сплошного ферромагнитного материала с соответствующими вырезами (б), секционированный (в) и с овальными пазами (г)
140
Электрические машины. Лабораторные работы на ПК
не имеет, но в нем создается небольшой пусковой момент в результате взаимодействия вращающегося поля статора с вихревыми токами, индуктированными в роторе. Секционированный ротор выполняется из алюминия, пластмассы или другого немагнитного материала, в который закладываются стальные секции (полосы). В роторе со впадина-
ми отношение — = 2 и максимальный момент двигателя небольшой. хч
В секционированном роторе — = 2,5-3,5, благодаря чему макси-, хч
мальный момент возрастает. Однако это достигается существенным усложнением конструкции ротора, вследствие чего стоимость машины увеличивается. Двигатели такой конструкции применяются главным образом в схемах синхронной связи. В некоторых реактивных двигателях разность магнитных сопротивлений по продольной и поперечной осям машины создается не за счет междуполюсных впадин, а в результате выполнения в роторе овальных пазов (рис. 4.29 г). Эти двигатели имеют больший КПД и несколько меньшие габаритные размеры, чем реактивные двигатели других типов.
Электромагнитный момент и угловые характеристики
Электромагнитный момент реактивного синхронного двигателя может быть определен по общей формуле (4.9) для синхронной машины при условии работы ее с током возбуждения равным нулю. В этом случае э.д.с. Е() = 0 и (4.9) принимает вид
М = _ mU±
с»! 2(0,
------— sin 20
(4.15)
Однако при выводе (4.15) не учитывались потери мощности ПмЛ в обмотке якоря и принималось, что электромагнитная мощность P3V равна мощности РЭ1, поступающей в обмотку якоря (в двигателе) или отдаваемой ею (в генераторе). В машинах большой и средней мощности это допущение не вносит заметных погрешностей в основные положения теории работы синхронных машин, так как активное сопротивление якоря обмотки якоря Ra у них значительно меньше реактивных сопротивлений xtl и хч. В микромашинах же сопротивле
Синхронные машины
141
ние якоря имеет такой же порядок, что и реактивные сопротивления, вследствие чего потери мощности в нем оказывают существенное влияние на величину электромагнитного момента и угловую характеристику. При учете активного сопротивления якоря выражение для момента синхронного реактивного двигателя принимает вид
Р
М = ^- = щ,
[(Л1;Л -/?2)sin20-2/?п(х(/ + х )sin2Qa + 2/?„xJ. (4.16) 2(0lxllxll(xllxq+Ra)L J
На рис. 4.30 приведены угловые характеристики реактивного двигателя при различных значениях /?а / xd .
Из этих кривых видно, что при увеличении /?а максимальный момент М шке уменьшается, а угловая характеристика сдвигается в область меньших углов 0. Максимальный момент реактивного двигателя соответствует углу 9 = 25 - 45° . При повышении этого угла двигатель выпадает из синхронизма, поэтому нагрузочный момент на валу двигателя не должен превышать Ммкс. Начальный пусковой момент у реактивных двигателей, так же как и у синхронных двигателей с обмоткой возбуждения и постоянными магнитами, равен нулю. Поэтому
Рис. 4.30. Угловые характеристики реактивного двигателя при различных значениях Ra/xa
142
Электрические машины. Лабораторные работы на ПК
эти двигатели должны иметь пусковую обмотку типа беличьей клетки для асинхронного пуска. Эта же обмотка выполняет роль демпферной, способствующей быстрому затуханию колебаний ротора.
Преимущества и недостатки
Реактивные двигатели проще по конструкции, надежнее в работе и дешевле по сравнению с синхронными двигателями с обмоткой возбуждения на роторе, для них не требуется иметь источник постоянного тока для питания цепи возбуждения. Основными недостатками реактивного двигателя являются сравнительно небольшой максимальный момент и низкий cos<p, не превышающий обычно 0,5. Последнее объясняется тем, что магнитный поток в этом двигателе создается только за счет реактивного тока обмотки якоря, величина которого из-за повышенного сопротивления магнитной цепи машины (наличия впадин на роторе, внутренних овальных пазов или вставок из немагнитного материала) довольно велика. По этим же причинам КПД меньше, а габаритные размеры у этих машин больше, чем у одинаковых по мощности и скорости вращения синхронных и асинхронных двигателей. В двигателях мощностью несколько десятков ватт КПД составляет 0,3-0,4, а мощностью до 10 Вт - менее 0,2. Другими недостатками этого двигателя являются большая чувствительность к колебаниям питающего напряжения (электромагнитный момент у них пропорционален U? и склонность к качаниям ротора при резких изменениях нагрузочного момента на валу или скорости вращения магнитного поля.
4.11.3. Синхронный гистерезисный двигатель
Принцип действия и устройство
Гистерезисным двигателем называется синхронный двигатель, у которого вращающий момент создается за счет явления гистерезиса при перемагничивании ферромагнитного материала ротора. Статор в гистерезисном двигателе выполняется так же, как и в обычной машине переменного тока, обмотка статора может быть трехфазной или двухфазной (с конденсатором в одной из фаз). Ротор двигателя представляет собой стальной цилиндр из магнитотвердого материала (имеющего широкую петлю гистерезиса) без обмотки. Применение обычной стали для изготовления ротора не позволяет получить достаточно большой электромагнитный момент, поэтому используют специальные магнитотвердые сплавы, например викаллой. С целью экономии доро
Синхронные машины
143
гих специальных сплавов роторы гистерезисных двигателей выполняют сборными: в виде массивного или шихтованного (из отдельных изолированных пластин) кольца из указанного сплава, насаженного на стальную или алюминиевую втулку.
В гистерезисном двигателе ротор, вращающийся с синхронной скоростью, представляет собой постоянный магнит. В таком магните из-за явления гистерезиса (молекулярного трения) ось намагничивания отстает от оси вращающегося магнитного поля статора на некоторый угол 9Г гистерезисного сдвига, вследствие чего возникают тангенциальные составляющие сил взаимодействия между полюсами ротора и потоком статора (рис. 4.31 а). Поскольку для данной машины угол 9Г определяется только свойствами материала ротора, то тангенциальные составляющие fT и создаваемый ими гистерезисный момент Мг не зависят от скорости вращения. Чем больше ширина петли гистерезиса ферромагнитного материала ротора, тем больше угол 9Г и тем больше гистерезисный момент Мг.
Электромагнитный момент
Если нагрузочный момент на валу электродвигателя превысит гистерезисный момент Мг, то двигатель перейдет в асинхронный режим.
Рис. 4.31. Магнитное поле (а) и характеристики синхронного гистерезисного двигателя (б)
144 Электрические машины. Лабораторные работы на ПК
При этом в машинах с массивным ротором кроме момента, появляется также асинхронный момент Мг, возникающий в результате взаимодействия вращающегося магнитного поля с вихревыми токами, индуктируемым этим полем в роторе. Так как ротор имеет большое активное сопротивление, то зависимость Ma= f (.v) близка к линейной и асинхронный момент Ма имеет максимум при s = 1. Результирующий момент
Мра=М+М0. (4.17)
Поскольку электромагнитная мощность Рэи, передаваемая ротору при асинхронном режиме, согласно (3.26), равна потерям в роторе, поделенным на скольжение s, то гистерезисный момент
,, Пг зПгн Пгн
Мг=-^- =—- =———-const (4 18)
<У] ®,.S’ 60(5- ’
а асинхронный момент
д/ = = = s _ ^в„ , (4.19)
tOj u\s (x\S (О,
где Пг — потери на перемагничивание ротора (гистерезисные потери), пропорциональные частоте перемагничивания ротора /2 = /| (, т. е. скольжению s;
Пв — потери на вихревые токи в роторе, пропорциональные /22, т. е. s1
Пг ц , ПВ11 — значения 77,- и 77в при неподвижном роторе (при 5=1).
На рис. 4.31 б изображена зависимость моментов Мг, Ма, М ра от скольжения s, из которой следует, что наибольшего значения вращающий момент Мрез достигает при а = 1, т. е. в начальный момент пуска.
Гистерезисные двигатели могут работать как в синхронном, так и в асинхронном режиме. Однако работа двигателя в асинхронном режиме неэкономична, так как при этом возникают значительные потери энергии на перемагничивание ротора:
П = ПГ + nnlxp = sI7rH + s2nmapII (4.20)
Поэтому при переходе гистерезисного двигателя в асинхронный режим его КПД резко уменьшается.
Синхронные машины
145
Преимущества и недостатки
Достоинствами гистерезисных двигателей являются: простота конструкции, надежность в работе, малый пусковой ток -^- = ^2-1,5, ном плавность входа в синхронизм, бесшумность и сравнительно высокий КПД — до 60%. К недостаткам относятся: повышенная стоимость из-за значительной стоимости магнитотвердых сплавов и трудности их обработки, низкий cos<p = 0,4-0,5 и склонность к качаниям при резких изменениях нагрузки. Гистерезисные двигатели выпускаются на мощность до 2000 Вт и частоту 50, 400 и 5000 Гц в трехфазном и двухфазном исполнениях.
4.11.4. Синхронный шаговый микродвигатель
Шаговые (импульсные) двигатели представляют собой синхронные микродвигатели, в которых питание обмоток статора осуществляется путем подачи импульсов напряжения от полупроводникового коммутатора. Под воздействием каждого такого импульса ротор двигателя совершает определенное угловое перемещение, называемое шагом. Коммутатор преобразует заданную последовательность управляющих импульсов в m-фазную систему однополярных или разнополярных прямоугольных импульсов напряжения.
В качестве шаговых двигателей обычно применяются синхронные микромашины без обмотки возбуждения на роторе: двигатели с постоянными магнитами на роторе и реактивные. Имеются и специальные виды импульсных двигателей, сконструированных для выполнения особых технологических операций. Применение шагового двигателя целесообразно для привода механизмов, имеющих старт-стопное движение, или механизмов с непрерывным движением, если управляющий сигнал задан в виде последовательности импульсов или может быть преобразован в эту форму (лентопротяжные устройства для ввода и вывода информации, счетчики, приводы станков с программным управлением и т. д.).
Шаговые двигатели с постоянными магнитами на роторе
Ротор двигателя (рис. 4.32) выполняется в виде постоянного магнита литой или составной конструкции без полюсных наконечников. Статор имеет явновыраженные полюса, вокруг которых в полузакрытых пазах размещается обмотка возбуждения. Последняя может быть двух-, трех- или четырехфазной.
146
Электрические машины. Лабораторные работы на ПК
Рис. 4.32. Положения ротора и алгоритм управления синхронного магнитоэлектрического двигателя: ток в первой фазе направлен от начала к концу, вторая фаза обесточена (а); ток во второй фазе направлен от начала к концу, первая фаза обесточена (б); ток в первой фазе направлен от конца к началу, вторая фаза обесточена (в); коммутация фаз обмоток (г)
Шаговые двигатели этого типа называются также магнитоэлектрическими. В двигателе, показанном на рис. 4.32, имеется двухфазная обмотка возбуждения, расположенная на четырех полюсах, поэтому; при последовательной подаче импульсов напряжения на катушки этих* полюсов будет происходить скачкообразное перемещение на 90 граду-1 сов оси магнитного потока. В результате под действием синхронизи-5 рующего момента при каждом импульсе ротор поворачивается на 90s градусов, т. е. делает шаг, равный 90 градусов. Возникновение синхро-1 визирующего момента в шаговом двигателе при подаче питания на| его обмотки статора происходит по той же причине, что и в обычному синхронном двигателе. J
Магнитное поле статора в рассматриваемом двигателе может иметь 3 четыре различных состояния, которым соответствуют различные на-1 правления тока в фазах 1 и 2 его обмотки возбуждения: 1
Синхронные машины
14:
□ ток в первой фазе направлен от начала к концу, вторая фаза обесточена;
□ ток во второй фазе направлен от начала к концу, первая фаза обесточена;
□ ток в первой фазе направлен от конца к началу, вторая фаза обесточена;
□ ток во второй фазе направлен от конца к началу, первая фаза обесточена.
Порядок переключения (коммутации) фаз 1 и 2 обмотки возбуждения представлен на рис. 4.32 г в виде временной диаграммы изменения токов и в этих фазах. Каждому импульсу тока соответствует определенное положение ротора двигателя (см. рис. 4.32 а, б, в). Рассмотренная схема переключения фаз 1 и 2 обмотки возбуждения называется схемой четырехтактной разнополярной коммутации и сокращенно обозначается в виде (И)—(+2)—(-1W-2)—(+1)—(..........
Каждым четырем тактам соответствует поворот ротора на одно полюсное деление. Для изменения направления вращения ротора следует изменить полярность включения одной из фаз обмотки возбуждения, не меняя очередность их коммутации. С целью уменьшения шага, шаговые двигатели обычно выполняются многополюсными. При этом число полюсных выступов на роторе равно числу полюсов статора. Наиболее часто используются восьмиполюсные шаговые двигатели. Шаг двигателя представляет собой угол поворота ротора за один такт:
360
аш =----, (4.21)
кр ’ \ '
где к — число тактов в одном цикле, р — число пар полюсов.
При четырехтактной коммутации шаг восьмиполюсного двигателя равен 22,5 град. Скорость вращения ротора двигателя зависит от частоты подачи импульсов:
= (4-22)
360 кр ' ’
Для лучшего использования обмоток в ряде случаев применяется четырехтактная коммутация с попарным включением обмоток: (+1)(+2)—(+2)(1)—(-1)(2)—(2))+1)—(+1)(+2)—(.... Попарное включение обмоток позволяет увеличить результирующий поток ротора, вследствие чего возрастает вращающий момент на валу двигателя примерно в полтора раза. Чаще всего шаговые двигатели имеют четы
148
Электрические машины. Лабораторные работы на ПК
рехфазную обмотку, которая в отличие от двухфазной может управляться однополярными импульсами напряжения; это упрощает конструкцию коммутатора. При подключении к полупроводниковому коммутатору фазы такой обмотки соединяются в четырехлучевую звезду с выведенной общей точкой. Коммутация четырехфйзной обмотки обычно выполняется чырсхтактной, парной: 12—23—34—41—12— , вследствие чего обеспечивается тот же эффект в части увеличения вращающегося момента двигателя, что и при парной разнополярности коммутации двухфазной обмотки. Шаговые двигатели с трехфазной обмоткой требуют шестикратной разнополярной коммутации.
Реактивные шаговые двигатели
Ротор реактивного шагового двигателя выполняется из магнитомягкого материала, так же как и ротор обычного синхронного реактивного двигателя. На статоре обычно располагается трехфазная сосредоточенная обмотка возбуждения, фазы которой получают питание от полупроводникового коммутатора. Шаговые двигатели этого типа называются также параметрическими. На рис. 4.33 схематично показаны три такта работы реактивного шагового двигателя.
Статор имеет трехфазную обмотку и шесть выступов на статоре: на роторе имеются только два выступа. Когда по фазе 1 проходит ток возбуждения, ротор занимает положение, показанное на рис. 4.33 а. В следующий момент времени питание подастся одновременно на фазы 1 и 2, и ротор поворачивается в положение (рис. 4.33 б), соответствующее наибольшей магнитной проводимости для потока, созданного указанными обмотками. Далее питание с фазы 1 снимается' и ротор перемещается в положение, показанное на рис. 4.33 в. Таким образом, коммутация обмоток статора происходит в следующем по-; рядке: 1—12—2—23—3—31—1— , т. е. коммутация является не-: симметричной, шестикратной, однополярной (рис. 4.33 г). При этом] шаг двигателя осш = 30°. I
Возможна и трехтактная коммутация по схеме: 1—2—3—1— ...| или 12—23—31—12— ... 1
Однако, как правило, применяется шестикратная коммутация, кото-| рая дает меньший шаг и большую устойчивость работы двигателя. 1
Уменьшить шаг двигателя можно путем увеличения числа выступ] пов на роторе. На рис. 4.34 показаны три такта работы шагового дви-| гателя с крестообразным ротором. В таком двигателе при той же пос«| ледовательности импульсов, что и для двигателя с двумя выступами! на роторе, шаг составляет 15 градусов. |
Синхронные машины
149
Дальнейшее уменьшение шага, т. е. увеличение точности работы двигателя, можно обеспечить путем увеличения числа выступов на статоре и роторе. При очень малом шаге (порядка 5-1 град) применяется реактивный редукторный шаговый двигатель с гребенчатыми выступами на статоре. В настоящее время наиболее широко применяются реактивные шаговые двигатели этого типа.
а)
Рис. 4.33. Положения ротора при токах возбуждения в фазе 1 (а); в фазе 1 и 2 (б); и в фазе 2 (в), и алгоритм управления синхронного реактивного двигателя (г)
Рис. 4.34. Положения ротора синхронного реактивного двигателя при различной полярности токоа в фазах: ток возбуждения в фазе 1 (а), в фазах 1 и 2 (б) и в Фазе 2 (в)
150
Электрические машины.
Лабораторные
работы
на ПК
Характеристики шаговых двигателей
Для работы шагового двигателя характерным
является частотное
регулирование скорости вращения в широком диапазоне. Путем изме-
нения частоты осуществляются также
фиксированная остановка,
пуск
в ход и изменение направления вращения. В зависимости от частоты управляющих импульсов различают следующие режимы работы шаговых двигателей: статический, квазистатический, установившийся и пе-
реходный.
Статический режим соответствует прохождению по обмоткам возбуждения постоянного тока, создающего неподвижное поле. При питании одной фазы зависимость электромагнитного момента от угла
рассогласования О близка к синусоидальной (рис. 4.35 а).
Поскольку при 0=0 синхронизирующий момент равен нулю, возникает статическая ошибка в положении ротора; она тем больше, чем больше нагрузка и меньше максимальный момент.
Квазистатический режим имеет место при отработке единичных шагов, например, в приводах различных старт-стопных, лентопротяжных и других подобных механизмов. Он характеризуется тем, что перед отработкой каждого следующего шага, ротор должен прийти в неподвижное состояние. Предельная частота квазистатического режима ограничена временем затухания колебаний ротора, которые могут
Рис. 4.35. Характеристики шагового двигателя в статическом (а) и квазистати-ческом (б) режимах работы
Синхронные машины
151
возникнуть при переходе ротора из одного устойчивого положения в другое (точки О и О' на рис. 4.35 а), аналогично тому, как это происходит с обычной синхронной машиной при резком изменении угла в. Для устранения колебаний ротора в конце шага применяют различные демпфирующие устройства. Увеличить предельную частоту квазиста-тического режима можно путем увеличения числа обмоток управления или числа тактов коммутации (восьмитактная коммутация при четырехфазной обмотке, шеститактная — при трехфазной). Во всех этих случаях при отработке шага уменьшается угол перемещения и кинетическая энергия ротора, что уменьшает его склонность к колебаниям.
Установившийся режим соответствует постоянной частоте управляющих импульсов. При частоте управляющих импульсов f, меньшей частоты свободных колебаний двигателя /0, угловое перемещение ротора при каждом шаге сопровождается свободными колебаниями, которые существенно увеличивают динамическую ошибку при отработке ротором заданного перемещения. При малых возмущениях собственная частота колебаний ротора
1 1^млксР
2тг у J р + J
(4.23)
где Ммлкс — максимальный электромагнитный момент при неподвижном роторе,
JP,Jн — моменты инерции ротора и нагрузки, приведенные к валу ротора.
При частоте управляющих импульсов
f = f° к ’
где к— целое число, возникает явление электромеханического резонанса, которое при слабом демпфировании колебаний может вызвать нарушение переодичности движения ротора и привести к выпадению его из синхронизма. При частоте fx > f0 имеют место вынужденные колебания с частотой управляющих импульсов; амплитуда их монотонно уменьшается с увеличением частоты. Для устойчивой работы
шагового двигателя необходимо, чтобы й—<0,3 —0,5, а
МШКС
/«-<1-2.
J р
152
Электрические машины. Лабораторные работы на ПК
Переходный режим является основным эксплуатационным режимом шаговых двигателей и включает в себя пуск, торможение, реверс, переход с одной частоты на другую. Максимальная частота управляющих импульсов, при которой возможен пуск без выпадения из синхро- > низма, называется частотой приемистости fn. Частота приемистости j растет с увеличением синхронизирующего момента, уменьшением yr- j лового шага, величины нагрузки и момента инерции. Предельная час- J тота fT , при которой осуществляется торможение шагового двигателя без выбега (с сохранением синхронизма), как правило, выше частоты приемистости . Предельная же частота реверса fp, при которой реализуется реверс без выпадения из синхронизма, всегда меньше f и составляет (0,2-0,5) . Только в двигателях с большим демпфи-
рованием и при больших электромагнитных постоянных времени обмоток возбуждения предельные частоты ft реверса и приемистости , сближаются и иногда бывают равными.
Основными характеристиками шагового двигателя являются пре- ; дельная механическая характеристика и предельная динамическая ха- рактеристика приемистости. Предельная механическая характеристика | (кривая 1, рис. 4.35 б) представляет собой зависимость частоты подачи управляющих импульсов от максимального момента Ммакс на валу ротора, при котором не происходит выпадения двигателя из сип- хронизма. Она снимается при плавном увеличении частоты , постоян- я ном напряжении питания и постоянном суммарном моменте инерции Л ротора и нагрузки двигателя. Предельная динамическая характеристи- Я ка приемистости (кривая 2 на рис. 4.35 б) представляет собой зависи-Я мость частоты приемистости от момента Мммс при динамическом Я режиме (при пуске двигателя из неподвижного состояния). Я
4.12. Моделирование синхронного Я
реактивного микродвигателя Я
Модель для исследования синхронного реактивного двигателя по-Я казана на рис. 4.36 (файл Synchr). Я
Окно настройки параметров двигателя показано на рис. 4.37. В по-Я лях окна настройки вводятся: .Я
□ активное сопротивление статора (Ом); Я
□ индуктивность статора по продольной и поперечной оси (Гн); Я
□ поток возбуждения (Вб); Я
□ момент инерции ротора (кгм2), коэффициент вязкого тренияЯ (Нмс), число пар полюсов. Я
Синхроннее машины
153
Рис. 4.36. Модель для исследования синхронного реактивного двигателя
Stock Parameters: Permanent Magnet Synchronous Machine ®
.- PM Synchronous Machine (mask] (link)-----—
implements a 3-phase permanent magnet synchronous machine wth i •sinusoidal flux distribution. The machine is modelled in the dq rotor ,
I reference frame. Statot windings are connected in’v^'tp^jSisrr!^5g4r
• neutral point. •,
First 3 inputs. Machiheierminals WljWase^pK-ahdeiiOIKilalfiiHJ
4th input: Simulink signal = mechanical torque (N.m)
(>0 for motor mode,<0 for generator mode]
i output: Simulink measurement output a vector (10x1) containing
(all currents flowing into machine]
1 -3: Stator line currents ia, ib. ic (A]
4-5: Stator currents id. iq (A)
67: Stator voltages vd, vq (V)
! 6 : Rotor speed wm (rad/sj
9 : Rotor angle thetam (tad) ‘
iJHfltijK Electromagnetic torque Te (M
’Parameters*"-’ ’ r -”-='
Kertesistahca R(ohmj. <
— -
ШИШКЫЗ *iis* * ** ЗзЗй
Inductances [ Ld(H) Lq(H) ]:
Jis'e-il......................
Flux induced by magnets [Wb]: *' ::7з*зТ
||IF~ ~ ~—
. Inertia, friction factor andpairs of poles (3{кд.тл2) F(N.m.s) p() '
— ——— >
OK j Cancel j зз:Не1р*.. *.| * -iiApply
Рис. 4.37. Окно настройки параметров двигателя
154
Электрические машины. Лабораторные работы на ПК
В реактивном двигателе поле возбуждения отсутствует. Поэтому в | поле Flux induced by magnets введен ноль. Для определения угла мо- ч мента использовано ур-е 4.7, откуда при Ео=0 можно найти ]
9 = arctg ——-’ Xd
(4-24)
Уравнение 4.24 не учитывает активного сопротивления якоря. Значения токов Iq, Id с блока измерения умножаются на значения реактивных сопротивлений по продольной Iq=2nfxLq и поперечной оси Id = 2nj\xil в блоках Gain, Gainl, в блоке Product реализуется деление (ур-е 4.24), блок Fc„ вычисляет угол момента в градусах по формуле
(4.25)
о 180 Iqxq 9 =---arctg —----
Я
Угловая и рабочие характеристики двигателя, полученные на моде- i
ли, представлены на рис. 4.38. 1
Рис. 4.3В. Характеристики реактивного двигателя: угловая (а) и рабочие (б)
МАШИНЫ ПОСТОЯННОГО ТОКА
5.1. Конструкция, принцип действия
Электрической машиной постоянного тока принято считать машину, которая генерирует в сеть или потребляет из нее постоянный ток. Работа машины постоянного тока, как и машин переменного тока, основана на законе электромагнитной индукции. Устройство машины постоянного тока подобно устройству обращенной синхронной машины, у которой неподвижная часть — индуктор — создает основной магнитный поток Фв, а в находящемся внутри якоре происходит процесс электромеханического преобразования энергии: электрической в механическую (двигатель) или обратно — механическую в электрическую (генератор).
Электромагнитная схема машины постоянного тока приведена на рис. 5.1.
Индуктор состоит из главных полюсов (ГП), станины (ярмо) и дополнительных полюсов (ДП) (в микромашинах они, как правило, отсутствуют). Главные полюса создают основной магнитный поток в
Рис. 5.1. Электромагнитная схема машины постоянного тока
158
Электрические машины. Лабораторные работы на ПК
машине, для чего на них устанавливаются либо постоянные магниты (электрические машины с магнитоэлектрическим возбуждением) либо катушки возбуждения, токи которых обеспечивает требуемое значение основного магнитного потока машины. Число главных полюсов всегда четное, причем северные и южные полюса чередуются, что достигается соответствующим соединением катушек возбуждения отдельных полюсов. Мощность, потребляемая цепями возбуждения, составляет примерно 0,5-3,0% от номинальной мощности машины постоянного тока. Причем с увеличением мощности машины относительная величина потерь мощности на возбуждение падает. Сердечники полюсов изготовлены в виде пакета из листов электротехнической стали толщиной 0,5-1,0 мм. Если машина не является универсальной, т. е. магнитный поток не изменяется ни во времени, ни в пространстве, то в шихтовке ферромагнитного сердечника нет необходимости, т. к. активных потерь в сердечнике в этом случае, очевидно, нет. Крепление главных полюсов к ярму осуществляется с помощью болтов.
Так как машина постоянного тока является, по существу, электромеханическим преобразователем одного вида энергии в другой и работает на основании электромагнитной индукции, очевидно, необходимо чтобы хотя бы по части ее обмоток протекал переменный ток. В машине постоянного тока эту функцию выполняет якорная обмотка, которая уложена в пазы сердечника якоря, изготовленного в виде пакета из листов электротехнической стали.
Для получения переменного тока в обмотке якоря на валу машины устанавливается механический коммутатор — коллекторно-щеточный узел. Якорная обмотка соединяется с коллектором, который представляет собой набор медных пластин толщиной 3-15 мм, изолированных друг от друга непроводящими ток прокладками толщи-' ной 1 мм. В маломощных машинах постоянного тока коллекторные^ пластины запрессовываются в пластмассу. Для подвода (и отвода)] тока к коллектору используются щетки. •
Одноякорные машины постоянного тока изготавливаются мощное-^ тью до 10 000 кВт и напряжением до 1000 В. При необходимости? обеспечить на выходном валу большую величину мощности строятся двух-, трех- и четырехъякорные машины. 1
При вращении якоря в неподвижном магнитном поле со скоростью! п в секциях его обмотки наводится э.д.с., частота изменения которой| определяется выражением 1
г -Рп 1
h 60' 1
Машины постоянного тока
159
Коллектор преобразует переменную э.д.с. (рис. 5.2), индуктированную в последовательно соединенных секциях якорной обмотки, в постоянную э.д.с. Е между коллекторными щетками А и В. Посредством этих щеток вращающаяся обмотка якоря соединяется с внешней цепью постоянного тока. Между диаметрально расположенными щетками А и В, как это видно из рис. 5.2 б, действует переменное напряжение, вектор которого не изменяется во времени и равен для верхней и нижней ветвей якорной обмотки величине Е. Для уменьшения пульсации э.д.с. при переходе щеток с одной коллекторной пластины на другую в каждую параллельную ветвь обмотки якоря обычно включается не менее 16 активных проводников.
Рис. 5.2. Образование э.д.с. якоря
5.2. Э.д.с. вращения и момент машины постоянного тока
Из рис. 5.2 б видно, что при одинаковых параметрах нижней и верхней ветвей якорной обмотки и разомкнутой внешней цепи ток в обеих ветвях равен нулю, т. к. э.д.с., действующие в обеих ветвях, направлены навстречу и равны друг другу. Максимальное же значение э.д.с. будет в случае установки щеток по линии геометрической нейтрали (линии, проходящей через центр якоря и перпендикулярной оси главных полюсов). На этой линии и устанавливаются, как правило, щетки А и В. При вращении якоря машины вектор э.д.с. Е изменяться не будет, а величина его модуля определится выражением:
160
Электрические машины. Лабораторные работы на ПК
N N
2«
f = =сс0ф) (5.1)
(=1 м
где Ф — магнитный поток;
va — окружная скорость якоря;
la — длина части проводника, пересекаемой линиями магнитного поля;
Вк — магнитная индукция в точке х воздушного рабочего зазора машины;
N— число активных проводников якорной обмотки;
a — число параллельных ветвей;
pN
се - — конструктивный коэффициент, определяемый парамет-
рами машины постоянного тока и не зависящий от режима ее работы.
Величину электромагнитного момента машины постоянного тока М можно определить по формуле:
(5.2)
где — ток якорной цепи;
с,, — конструктивный коэффициент машины.
Так как направление тока якоря зависит от режима работы машины (двигатель или генератор), то и момент двигателя будет либо тормозным (генераторный режим), либо вращающим (двигательный режим).
5.3. Реакция якоря машины постоянного тока
Электромагнитный момент машины постоянного тока является ре-| зультатом взаимодействия намагничивающих сил обмоток возбужде-i ния и якоря. Под влиянием поля якоря характер результирующего маг-1 нитного поля в рабочем зазоре машины искажается. Это явление! принято называть реакцией якоря. Если магнитная цепь машины не] насыщена, то поперечная реакция якоря лишь искажает картину поля! в рабочем зазоре, однако величина магнитного потока остается прак-1 тически неизменной. 1
Машины постоянного тока
161
С целью улучшения массогабаритных показателей машин постоянного тока индукцию в рабочем зазоре повышают до такой степени, что рабочая точка кривой намагничивания машины находится вблизи участка насыщения. В этом случае увеличение потока на краю ГП, где поля суммируются, будет меньше, чем его уменьшение на том краю, где они вычитаются. Это объясняется тем, что насыщение проявляется в большей степени в той части ГП, где поля складываются. В результате поток ГП уменьшается, иными словами, поперечная реакция якоря размагничивает машину.
В некоторых случаях, когда магнитный поток ГП ослаблен, размагничивающее действие поперечной реакции якоря может привести к изменению направления («опрокидыванию») поля под одним краем полюса. Поэтому в машинах постоянного тока с мощностью, большей 50 кВт, величину рабочего зазора выбирают такой, чтобы при максимальной нагрузке не происходило «опрокидывания» поля. С этой же целью в мощных машинах величину зазора на краю ГП делают большей, чем в центре.
Самым эффективным средством борьбы с вредным влиянием реакции якоря является использование компенсационной обмотки (КО) (рис. 5.1). Эта обмотка размещается в пазах башмаков ГП. Величина и направление тока в этой обмотке выбираются из условия нейтрализации искажения формы в рабочем зазоре от действия реакции якоря.
В случае, если ферромагнитный сердечник КО изготовлен из литой стали, при скачках тока якоря магнитное поле компенсационной обмотки вследствие экранирующего действия вихревых токов отстает от магнитного поля реакции якоря. Поэтому целесообразно в качестве ферромагнитного сердечника КО использовать листовую электротехническую сталь.
Компенсационная обмотка требует большого расхода обмоточного провода и потому используется лишь в случаях, когда машина предназначена для работы в тяжелых условиях эксплуатации.
5.4. Коммутация коллекторной машины постоянного тока
Процесс коммутации связан с переходом секции обмотки якоря из одной параллельной ветви в другую и с происходящим при этом изменением направления тока в этой секции. В начале процесса коммутации
б Зак. 128
162
Электрические машины. Лабораторные работы на ПК
секция якорной обмотки замыкается накоротко, а в конце — она включается в цепь другой ветви якорной обмотки. Качество коммутации в значительной степени определяет работоспособность машины и ее эксплуатационную надежность. Коммутация приводит к искрению под щетками. Помимо электромагнитных причин на качество коммутации влияют причины механические. Борьба с механическими причинами в силу целого ряда обстоятельств весьма затруднительна. Электромагнитные причины вызваны неудовлетворительным характером протекания тока в короткозамкнутой секции. Изменив этот характер, можно значительно улучшить коммутацию коллекторной машины.
В современных машинах постоянного тока средняя скорость изменения тока коммутируемой секции очень велика. Поэтому в ней может возникать значительная величина э.д.с. как от действия коммутации самой секции, так и от коммутации секций, находящихся под соседними полюсами, если стороны этих секций имеют взаимоиндуктивную связь, вызванную расположением коммутируемых секций в общих пазах.
Обычно э.д.с. само- и взаимоиндукции объединяют в общую, так называемую реактивную э.д.с. В машинах мощностью 5 кВт и выше эта э.д.с. имеет значительную величину. Потому компенсацию этой э.д.с. осуществляют с помощью дополнительных полюсов (ДП) (рис. 5.1), которые создают внешнее поле необходимой интенсивности и направления:
^+^=0, (53)
где е, ек — реактивная и коммутирующая э.д.с.
Дополнительные полюса имеют узкие сердечники, которые крепятся болтами к ярму между ГП. Обмотку дополнительных полюсов соединяют последовательно с обмоткой якоря, сечение магнитопровода должно обеспечить отсутствие насыщения в нем. Поэтому при номинальной нагрузке величина индукции не должна превышать 1 Тл. Сердечники изготавливаются литыми либо шихтованными.
Дополнительные полюса применяются в машинах с мощностью выше 0,3 кВт, их применение позволяет увеличить линейную нагрузку машины и тем самым улучшить ее массогабаритные показатели и уменьшить сто- ! имость. ;
С целью уменьшения влияния на внешнюю аппаратуру радиопо-’ мех, создаваемых коммутацией производят симметрирование цепи’ якоря машины постоянного тока, для чего обмотку ДП разбивают на, две части, которые подсоединяют к щеткам противоположной поляр-! ности. Между корпусом машины и щетками устанавливают конденса-:
Машины постоянного тока
163
торы для шунтирования высокочастотной составляющей напряжения на зажимах машины.
Коллекторные машины имеют ряд существенных недостатков:
1) опыт эксплуатации коллекторных машин показал, что в среднем 25% отказов (а в транспортном приводе и того больше — 44-66%) происходит по вине коллекторно-щеточного узла;
2) использование щеточного контакта в естественных условиях при высотах более 20 км практически невозможно, а в агрессивных средах наличие щеточного контакта вообще недопустимо;
3) условия коммутации не допускают превышения предельных линейных скоростей в контакте. Это не позволяет реализовать высокоэффективные конструкции электромеханических преобразователей, рассчитанные на предельные механические нагрузки и обладающие наилучшими массогабаритными характеристиками;
4) Щеточный контакт резко снижает ресурс работы машины постоянного тока.
Все это объясняет появление в последнее десятилетие большого количества электрических машин с полупроводниковыми коммутаторами.
5.5. Потери мощности в электрических машинах постоянного тока
Потери в электрических машинах делятся на основные и добавочные. Первые определяются характером и интенсивностью электромагнитных и механических процессов. Вторые же обусловлены различными вторичными явлениями при работе электрической машины в режиме нагрузки.
Основные потери подразделяются на механические, магнитные и электрические (в проводниках обмоток, переходном сопротивлении щеточных контактов) потери. Механические потери в свою очередь делятся на потери в подшипниках, на трение в щетках и на вентиляцию самой машины. В электрической машине постоянного тока механические потери зависят только от скорости вращения выходного вала машины и не зависят от ее нагрузки. В машинах мощностью 10-500 кВт механические потери составляют 0,5-2,0% от номинальной мощности (меньшие значения соответствуют машинам большей мощности).
Магнитные потери вызваны действиями переменного и вращательного перемагничивания различных частей машин постоянного тока.
164
Электрические машины. Лабораторные работы на ПК
Первый вид потерь относится к зубцам якоря, а второй — к сердечнику якоря машины постоянного тока. В обоих случаях магнитные потери состоят из потерь на гистерезис и вихревые токи и могут быть определены по формулам:
Пм=Пса + П^, (5.4)
Пса =(2,4-4)77, (5.5)
750 DU
77„ =(1,7-2)Л1ху50(^/В32с/,Сс.3, (5.6)
где
77с.а,77сз— потери в спинке и зубцах якоря;
^.о/— удельные потери при 5=1 Тл и/=50 Гц;
f — частота перемагничивания стали;
Ва,Взср — индукция в спинке якоря и средняя индукция в зубце;
(2,4—4), (1,7-2) — коэффициенты, учитывающие увеличение суммарных потерь в спинке якоря и в зубце;
Gce,G<.3 — масса спинки якоря и зубцов;
Р =1,2-1,5.
Электрические потери в каждой из обмоток (возбуждения и якорной) определяются по формуле, представляющей собой произведение квадрата действующего значения тока на суммарное сопротивление обмотки. Согласно ГОСТ, сопротивления обмоток с различными классами изоляции должны соответствовать температуре этих обмоток при номинальном режиме работы машины.
Потери в переходных сопротивлениях щеточных контактов определяются выражением
77м,„,= (5.7)
где A Uut — падение напряжения на переходных сопротивлениях между щеткой и коллектором.
Согласно ГОСТ для угольных и графитных щеток АПи( = 1В, а для металлоугольных — 0,3 В.
Добавочные потери в машине постоянного тока возникают вследствие искажения кривой магнитного поля от действия поперечной реакции якоря и действия коммутации. На практике, согласно ГОСТ,
Машины постоянного тока
165
их величина равна: при отсутствии компенсационной обмотки 1%, а при наличии — 0,5% от отдаваемой мощности для генератора и подводимой мощности для двигателя.
5.6. Генераторы постоянного напряжения
Несмотря на то, что основная доля потребляемой электроэнергии приходится на переменный ток, имеется целый ряд областей техники (транспорт, предприятия химической, металлургической промышленности и т. д.), которым необходим постоянный ток. Этот ток может быть получен с помощью статических или электромеханических преобразователей энергии. В качестве электромашинного преобразователя энергии используются генераторы постоянного тока:
□ независимого возбуждения (обмотка возбуждения питается от постороннего источника постоянного тока);
□ параллельного возбуждения (с самовозбуждением);
□ последовательного возбуждения (сериесный, с самовозбуждением);
□ со смешанным возбуждением (компаундные).
Принципиальные схемы перечисленных генераторов изображены на рис. 5.3 а, б, в и г.
+
а) б)
Рис. 5.3. Принципиальные схемы генератороа постоянного тока: С независимым возбуждением (а) и параллельным возбуждением (б)
166
Электрические машины. Лабораторные работы на ПК
в)
Рис. 5.3. (Окончание). Принципиальные схемы генераторов постоянного тока с последовательным (в) и смешанным (г) возбуждением
Основным их отличием является выполнение обмотки возбуждения: в генераторах независимого и параллельного возбуждения эта обмотка наматывается тонким проводом, в сериесных и компаундных генераторах обмотки возбуждения и якоря имеют проводники одинакового сечения. Генераторы малой мощности иногда имеют магнитоэлектрическое (от постоянных магнитов) возбуждение, их характеристики аналогичны характеристикам генераторов независимого возбуждения.
5.7. Энергетическая диаграмма генератора независимого возбуждения и его характеристики
На рис. 5.4 показана энергетическая диаграмма генератора независимого возбуждения. Мощность, передаваемая в цепь возбуждения, расходуется на потери в цепи возбуждения.
Двигатель, вращающий вал якоря генератора, передает ему мощность Р}, часть которой расходуется на механические (Пмх) и магнитные ( Пмг) потери в машине, а также на дополнительные потери (ГЦ). Оставшаяся часть преобразуется в электромагнитную энергию, определяемую электромагнитной мощностью:
Машины постоянного тока
167
Л.„ = = Л -(Пмх + Пж + Пд). (5.8)
Мощность, отдаваемая генератором в электрическую сеть [ P = [j] равна разности электромагнитной мощности P}v и потерь — активных сопротивлениях цепи якоря (77эл) и на переходе коллектор-щетка
(Лмщу.
UI я = IИЕ - (J^R* + &U щ1 я), откуда
и = (5.9)
где R £ — суммарное сопротивление якорной цепи машины, учитывающее сопротивление перехода коллектор-щетка.
Рис. 5.4. Энергетическая диаграмма машины постоянного тока
О свойствах генератора можно судить по его основным характеристикам: холостого хода, внешней, регулировочной и нагрузочной.
Под характеристикой холостого хода понимают зависимость выходного напряжения генератора от тока обмотки возбуждения в режиме холостого хода, т. е. при разомкнутой цепи нагрузки (при этом n=const, рис, 5.5 а).
При снятии характеристики щетки должны находиться на геометрической нейтрали. Изменение тока возбуждения следует производить только в одном направлении, т. к. в противном случае будет происходить переход на другие кривые намагничивания, не соответствующие снимаемому циклу. При больших значениях тока возбуждения генератора вследствие насыщения его магнитопровода кривая будет иметь резко выраженный участок насыщения. Точка характеристики, соот-
168
Электрические машины. Лабораторные работы на ПК
Рис. 5.5. Основные характеристики генератора постоянного тока: холостого хода (а), внешняя (б) и регулировочная (в)
ветствующая номинальному режиму работы генератора, обычно лежит на колене кривой, т. к. работа генератора на прямолинейном участке неустойчива, а работа на участке ее насыщения не позволяет регулировать выходное напряжение.
При нулевом токе возбуждения генератора напряжение на его выходе составляет 2-4 % от номинального значения.
Под внешней характеристикой понимается зависимость выходного напряжения от тока нагрузки U = при n = const и Ie — const. При снятии этой характеристики вначале устанавливаются номинальные ток возбуждения генератора и ток нагрузки 1ян, затем генера
Машины постоянного тока
169
тор постепенно разгружается до режима холостого хода. По полученной кривой определяется падение напряжения UH (рис. 5.5 б).
Уменьшение напряжения на выходе генератора независимого возбуждения с увеличением тока его нагрузки объясняется двумя причинами:
1) падением напряжения от протекания тока нагрузки во внутреннем сопротивлении генератора;
2) размагничивающим действием поперечной реакции якоря.
Изменение напряжения обычно определяется в процентах по отношению к номинальному напряжению:
ДП= -у~-^100%.
и.
Регулировочная характеристика Iй = f (/я) при и = const и U = const показывает по какой зависимости необходимо увеличивать ток возбуждения (при увеличении тока нагрузки 1я), чтобы при неизменной скорости вращения ротора выходное напряжение генератора оставалось неизменным (рис. 5.5 в).
Внешняя и регулировочная характеристики генератора могут быть построены по известным кривым нагрузочной характеристики: U = f(lв) при п = const и Iя = const (рис. 5.6).
Рис. 5.6. Нагрузочная характеристика и характеристические треугольники генератора независимого возбуждения
170
Электрические машины. Лабораторные работы на ПК
Кривая 1 соответствует режиму холостого хода, а кривая 2 — режиму номинальной нагрузки (/„=/„„)• Прямоугольный треугольник АВС называют характеристическим. Катет ВС этого треугольника пропорционален падению напряжения на активном сопротивлении якоря /л , его величина остается неизменной (ВС = B,Ct = В2С2и т. д.) при изменении тока возбуждения машины. Катет АВ характеризует размагничивающее действие поперечной реакции якоря, его величина увеличивается по мере увеличения насыщения магнитной цепи генератора (А,В, < А В < А2В2 и т. д.). Основным достоинством генератора постоянного тока независимого возбуждения является возможность регулирования в широких пределах выходного напряжения изменением тока возбуждения, а недостатком — необходимость использования для питания обмотки возбуждения отдельного источника.
5.8. Генератор параллельного возбуждения
Схема генератора изображена на рис. 5.3 б. В отличие от генератора независимого возбуждения в данном случае не требуется отдельного источника питания. В этом типе генератора используется принцип самовозбуждения, который основывается на том, что в обесточенной машине существует небольшой — 1-3% номинального остаточный поток Фо. Если обмотка возбуждения включена так, что ее НС направлена согласно с направлением остаточного потока, то при вращении ротора генератор входит в режим работы с током возбуждения ie и э.д.с. Е, определяемыми величиной регулировочного сопротивления в цепи возбуждения.
На основании II закона Кирхгофа
+ (5.Ю)
at
где Re Le — активное сопротивление и индуктивность обмотки возбуждения генератора.
На рис. 5.7 показан процесс самовозбуждения генератора.
Точка пересечения кривой холостого хода генератора 1 с прямой 2, являющейся зависимостью = /(zs) определяет установившийся режим работы генератора (рис. 5.7). Переходный процесс изменения тока возбуждения, очевидно, характеризуется увеличением с течением времени падения напряжения на активном сопротивлении обмотки
Машины постоянного тока
171
Рис. 5.7. Процесс самовозбуждения генератора с параллельным возбуждением
возбуждения. С ростом тока возбуждения от 0 до установившегося значения э.д.с. возбуждения, очевидно, будет определяться изменением разности ординат кривых 1 и 2 при движении от 0 до точки А,.
Регулирование выходного напряжения генератора осуществляется изменением Re. Сопротивление Reisp, при котором машина уже не возбуждается, называют критическим (кривая 3, рис. 5.7).
Ток возбуждения генератора параллельного возбуждения составляет всего 1-3 % от номинального тока якоря, поэтому характеристика холостого хода этого генератора практически совпадает с аналогичной характеристикой генератора независимого возбуждения. То же самое можно сказать о регулировочной и нагрузочной характеристикам генератора.
Внешняя характеристика генератора параллельного возбуждения (рис. 5.8) представляет собой зависимость выходного напряжения U от тока нагрузки IH U = f при n = const и неизменной величине сопротивления в цепи возбуждения Rn = const.
Помимо падения напряжения в цепи якоря и влияния реакции якоря в этом случае на характер внешней характеристики влияет уменьшение магнитного потока с ростом нагрузки. Поэтому внешняя характеристика этого типа генератора (кривая 1, рис. 5.8) располагается ниже аналогичной характеристики генератора независимого возбуждения (кривая 2, рис. 5.8).
172
Электрические машины. Лабораторные работы на ПК
Рис. 5.8. Внешняя характеристика генератора параллельного возбуждения
При значении тока возбуждения, соответствующего изгибу характе- I ристики холостого хода, ток нагрузки достигает своего критического 1 значения 1кр (обычно не превышающем номинального значения тока 1 нагрузки в 2-2,5 раза). До критической точки часть внешней характе- 1 ристики генератора соответствует его установившемуся режиму рабо- | ты; при дальнейшем увеличении нагрузки наступает неустойчивый 1 режим работы, в результате величина напряжения на его выходе и ток | возбуждения становятся равными нулю, а величина тока якоря опреде- 1 ляется остаточным магнитным потоком Фо. |
При резком увеличении нагрузки вплоть до короткого замыкания | изменение магнитного потока, ввиду большой величины электромаг- | нитной постоянной цепи возбуждения, отстает от темпа нарастания 1 тока нагрузки. Поэтому в якоре генератора наводится та же величина j э.д.с., что и до режима перегрузки. В результате ток якоря может до- а стигнуть величины, значительно превышающей 1кр и вызвать круго- я вой огонь на коллекторе машины. I
5.9. Генератор последовательного возбуждения
В этом типе генератора (рис. 5.3 в) токи возбуждения и нагрузки оди- j наковы. В этом случае характеристики холостого хода и нагрузочную снять нельзя. Внешняя характеристика (рис. 5.9) имеет вид кривой 2. ]
Машины постоянного тока
173
Рис. 5.9. Внешняя характеристика генератора последовательного возбуждения
Кривая 1, соответствующая режиму холостого хода, лежит выше кривой 2. При значительных перегрузках машины выходное напряжение падает, т. к. вследствие насыщения магнитопровода машины магнитный поток практически не возрастает, а поток реакции якоря становится весьма значительным.
Выходное напряжение генераторов последовательного возбуждения в значительной степени определяется величиной нагрузки, а в режиме холостого хода оно даже становится равным нулю. Поэтому этот режим работы машины постоянного тока последовательного возбуждения используется лишь при торможении.
5.10. Генератор со смешанным возбуждением
В этом типе генератора (рис. 5.3 г) совмещаются свойства генераторов постоянного тока параллельного и последовательного возбуждения. Его рассчитывают таким образом, чтобы при холостом ходе напряжение на выходе определялось параметрами параллельной обмотки (ОВ1). При работе на нагрузку падение напряжения в якоре и
174
Электрические машины. Лабораторные работы на ПК
реакцию якоря компенсирует последовательная обмотка (ОВ2). Это позволяет в определенных пределах автоматически регулировать напряжение на нагрузке.
Характеристика холостого хода генератора при п =
const и /я = 0) ничем не отличается от аналогичной характеристики генератора параллельного возбуждения.
Нагрузочная характеристика (U = f(iB) при п - const и /я = const) имеет тот же вид, что и в генераторе параллельного и независимого возбуждения (кривая 1, рис.5.10), но она располагается, как правило, выше, т. к. за счет действия последовательной обмотки возбуждения (ОВ2) падение напряжения в цепи якоря, вызванное увеличением нагрузки, компенсируется (кривая 2, рис. 5.10).
а) б)
Рис. 5.10. Характеристики генератора со смешанным возбуждением: внешняя (а) и регулировочная (б)
Внешняя характеристика представляет собой зависимость U при п = const и RB = const. В зависимости от степени вли-
яния последовательной обмотки возбуждения (ОВ2) можно получить четыре различных вида характеристик.
При компенсации реакции якоря и падения напряжения в якорной цепи для номинального тока нагрузки имеем характеристику вида 1 (рис. 5.10 а), в этом случае генератор смешанного возбуждения приня
Машины постоянного тока
175
то называть генератором с нормальной последовательной обмоткой возбуждения. В случае, если необходимо компенсировать дополнительное падение напряжения в длинной линии связи нагрузки с генератором, то еще в большей степени увеличивают ампер-витки последовательной обмотки возбуждения (ОВ2) и кривая внешней характеристики приобретает вид 2, а генератор смешанного возбуждения называют генератором с усиленной последовательной обмоткой возбуждения.
В некоторых случаях (в сварочных генераторах, прожекторных установках) необходимо иметь внешнюю характеристику вида 4, когда НС последовательной обмотки возбуждения направлена встречно и не компенсирует падение напряжения в якорной цепи, а, наоборот, делает внешнюю характеристику более мягкой.
Регулировочная характеристика (ie=f(Jn) при n - const и U = const) имеет вид кривой 1 (рис. 5.10 б) для генераторов с нормальной и 2 — для генераторов с усиленным вариантом последовательной обмотки возбуждения.
Выпускаемые в нашей стране генераторы постоянного тока имеют, как правило, параллельное возбуждение с небольшой последовательной обмоткой, обеспечивающей улучшение вида внешней характеристики. Эти генераторы могут работать также в режиме независимого возбуждения. Генераторы с параллельным возбуждением используются только при большой мощности и низкой величине генерируемого напряжения. В них независимо от величины напряжения на якоре обмотка возбуждения рассчитана на одно из стандартных напряжений 110 или 220 В, что позволяет унифицировать регулирующую аппаратуру.
5.11. Двигатели постоянного тока
Классификация двигателей та же, что и генераторов. Различаются двигатели постоянного тока: независимого, параллельного, последовательного и смешанного возбуждения.
С независимым возбуждением выполняются мощные двигатели с целью более удобного и экономичного регулирования тока возбуждения. По своим характеристикам они ничем не отличаются от двигателей с параллельным возбуждением.
176
Электрические машины. Лабораторные работы на ПК
5.12. Энергетическая диаграмма двигателей постоянного тока
Энергетическая диаграмма двигателя постоянного тока изображена на рис. 5.11.
Рис. 5.11. Энергетическая диаграмма двигателя постоянного тока
Входная мощность Р{, передаваемая двигателю из электрической сети, определяется выражением:
Pt =Р.+РЯ (5.Н)
Часть этой мощности расходуется на покрытие потерь в обмотке возбуждения Пв = I2RB и в цепи якоря 77м = I2RxZ Оставшаяся часть, равная электромагнитной мощности за вычетом магнитных потерь 77Ис,, потерь на трение в подшипниках и вентиляцию Пмех и дополнительных потерь, обеспечивает на валу машины постоянного тока выходную мощность Т’ .
5.13. Механические характеристики двигателя с независимым возбуждением
На основании II закона Кирхгофа для цепей возбуждения и якоря (рис. 5.1), а также учитывая связи, выраженные зависимостями (5.1, 5.2), для установившегося режима можно записать:
Машины постоянного тока
177
U =1Кк,Ф = к1 1 в в в 7 в
ия=1яКя^+сеФ(о; > М=смф1я.
Здесь КяЪ Re — суммарное сопротивление якорной цепи и сопротивление обмотки возбуждения.
Под механической характеристикой двигателя принято понимать зависимость его скорости вращения от момента нагрузки = Статическую механическую характеристику легко получить из второго и третьего уравнений системы (5.11):
<0 = ^------
сесмФ
(5.12)
Из уравнения (5.12) следует, что при постоянных напряжении на якоре и потоке скорость машины падает с ростом момента.
Включение в цепь якоря добавочного сопротивления, изменение потока и изменение напряжения изменяют вид механических характеристик. Механические характеристики машины с независимым (па-
Рис. 5.12. Виды естественных механических характеристик (а) и реостатные характеристики (б) двигателя параллельного возбуждения
178
Электрические машины. Лабораторные работы на ПК раллельным) возбуждением при различных сопротивлениях в якорной цепи показаны на рис. 5.12 б, механические характеристики при различных потоках представлены на рис. 5.13 а, а при различных напряжениях на якоре — на рис. 5.13 б.
Вид этих характеристик определяет и область их использования при регулировании скорости вращения двигателя постоянного тока: в области скоростей, меньших номинальной используется регулирование напряжения на якоре, а в области больших — уменьшение магнитного потока машины.
Увеличение напряжения на якоре для регулирования скорости выше номинальной обычно не используется (исключением являются некоторые типы двигателей краново-металлургических серий, в которых допускается двукратное увеличение якорного напряжения), т. к. оно приводит к значительным коммутационным осложнениям в работе механического коллектора. Увеличение магнитного потока также нецелесообразно, т. к. рабочая точка машины находится на колене кривой намагничивания машины, вблизи участка насыщения.
Регулирование скорости вращения (в сторону ее уменьшения по отношению к номинальной) увеличением сопротивления в цепи якоря в настоящее время используется крайне редко, т. к. резко ухудшает энергетические характеристики электропривода.
а)
б)
9ис. 5.13. Механические характеристики при различных потоках (а) г при различных напряжениях на якоре (б)
Машины постоянного тока
179
5.14. Механические характеристики двигателя последовательного возбуждения
В двигателе с последовательным возбуждением поток и момент зависят от тока якоря. Поэтому механические характеристики машины определяются выражением
Ця М(1я)Ря,
кФ(1я} к2Ф\1я)' (5ЛЗ>
Форма этих характеристик (рис. 5.14) при малых нагрузках имеет гиперболический характер, что говорит о необходимости исключения такого режима работы машины.
У двигателей независимого (параллельного) возбуждения М ~ 1я, а у двигателей последовательного возбуждения приблизительно М ~ I2. Поэтому последние при пуске развивают значительно больший момент. Если скорость первых можно считать не зависящей от момента со = const, то скорость вторых зависит от него, примерно, в соответствии с выражением
Поэтому для двигателей независимого возбуждения
Р2 = соМ ~ М, а для двигателей последовательного возбуждения
Р2 = соМ ~ у/ИГ.
Следовательно, при изменении момента нагрузки в широких пределах диапазон изменения мощности у двигателей с последовательным возбуждением значительно меньше, что и обусловило их широкое использование в тяговом электроприводе.
Так как рассчитать механические характеристики последовательного возбуждения, в связи с нелинейностью кривой намагничивания машины, весьма затруднительно, в каталогах приводятся естественные характеристики ю = /(7я) и М =/(!,).
Вид статических характеристик двигателя постоянного тока последовательного возбуждения при различной величине сопротивления в цепи якоря и величины питающего напряжения показаны на рис. 5.14 а, б.
180
Электрические машины. Лабораторные работы на ПК
б)
Рис. 5.14. Характеристики двигателя постоянного тока последовательного возбуждения при различной величине сопротивления в цепи якоря (а) и величины питающего напряжения (б)
а)
Из этих характеристик видно, что с уменьшением питающего напряжения уменьшается и скорость, жесткость же механических характеристик практически не меняется. Характеристика при U* = 0 соответствует режиму динамического торможения двигателя при при замкнутой накоротко якорной цепи. Очевидно, что тормозной момент в этом случае возможен лишь при самовозбуждении машины. Существуют два условия самовозбуждения:
1) направление вращения машины в режиме торможения должно быть противоположно направлению в режиме двигателя. Поэтому для обеспечения режима торможения не только в четвертом и втором квадрантах необходимо поменять полярность выводов обмоток либо якоря, либо возбуждения;
2) самовозбуждение возникает лишь при определенной скорости вращения якоря машины. При увеличении сопротивления в цепи якоря величина критической скорости (т. е. минимальной скорости, при которой еще возможно самовозбуждение) также возрастает.
Машины постоянного тока
181
5.15. Двигатели постоянного тока смешанного возбуждения
Эти двигатели используются в тех случаях, когда по условиям протекания технологического процесса необходима механическая характеристика, имеющая форму, среднюю между жесткой — двигателя независимого (параллельного) возбуждения и мягкой — двигателя последовательного возбуждения. Обычно одна из обмоток является основной и дает 70% НС машины, а другая — дополнительной. Если основной является параллельная обмотка, то машину называют параллельно-последовательной, в противном случае — последовательно-параллельной. Различают согласное и встречное включение обмоток. При согласном включении характеристика машины занимает промежуточное положение, но ближе к характеристикам параллельного возбуждения.
В некоторых случаях необходимо иметь достаточно стабильную скорость вращения машины. Это можно обеспечить, исцользуя встречное включение обмоток так, чтобы ее действие, совместное с реакцией якоря уравновесило падение напряжения в цепи якоря. Следует иметь в виду, что в этом случае работа двигателя может быть неустойчивой.
Достоинством двигателя смешанного возбуждения является ограничение, по сравнению с двигателем последовательного возбуждения, скорости холостого хода машины, т. к. в этом случае она (теоретически и практически) имеет конечное значение.
Для обеспечения лучших условий торможения при переходе в генераторный режим работы последовательная обмотка отключается. При этом механическая характеристика становится линейной со значительной жесткостью.
5.16. Рабочие характеристики двигателей постоянного тока
Рабочие характеристики двигателя постоянного тока представляют собой зависимости момента, скорости вращения, тока якоря и коэффициента полезного действия от выходной мощности двигателя. Качественный вид этих характеристик для двигателей с параллельным (независимым) и последовательным возбуждением представлен на рис. 5.15 а, б.
182
Электрические машины. Лабораторные работы на ПК
Рис. 5.15. Рабочие характеристики даигателя постоянного тока с независимым параллельным (а) и последовательным (б) возбуждениями
5.17. Моделирование двигателя постоянного тока с независимым возбуждением
Модель для исследования машины постоянного тока с независимым возбуждением показана на рис. 5.16. (файл dc_mash).
Рис. 5.16. Модель для исследования машины постоянного тока с независимым возбуждением
Машины постоянного тока
183
Рассматриваемая схема включает:
□ источники постоянного напряжения (7, для питания якоря двигателя, a V2 для питания его обмотки возбуждения; эти блоки берутся из библиотеки Power System Blockset/Electrical Sources), □ блок Moment для задания момента нагрузки, в качестве которого используется блок Constant из библиотеки Simulink/ Sources,
□ машину постоянного тока (блок DC Machine из библиотеки Power System Blockset/ Machines),
О прибор для измерения переменных состояний машины Display из библиотеки Simulink/Sinks.
Окно настройки машины показано на рис. 5.17.
Block Parameters: DC Machine ®
< DC machine (mask) (link)
| This block implements a separately excited DC machine. Access is
I provided to the field connections so that the machine can be used as a j shunt-connected or a series-connected DC machine.
| Input 1 and output 1: positive and negative armature terminals
; I nput 2 and output 2: positive and negative field terminals
I Input 3 : Load torque
* Output 3: Simulink measurement output [ w la If Те ]
p Parameters ” — • “ — .=.
Armature resistance and inductance [Ra (ohms) La (H) ] ||||p252TfeV“
; Field resistance and inductance (Rf (ohms) Lf (H) ]
; р20."4] :
j Field-armature mutual inductance Laf (H):
। j— —
j Total inertia J (kg.mA2)
; [o'ddij..............
i Viscous friction coefficient В m (N ,m. s)
j [a25e~4 “ ‘ ..
i Coulomb friction torque Tf (N.m)
! [o.o"i.............................
। Initial speed (rad/s):
! fo
OK | Cancel | Help I , APP?^
Рис. 5.17. Окно настройки параметров машины
184
Электрические машины. Лабораторные работы на ПК
В полях настройки задаются:
О параметры обмотки якоря-— Ra [Ом], Lf [Гн];
□ параметры обмотки возбуждения— Rf [Ом], Lf [Гн];
О взаимная индуктивность между обмоткой возбуждения и обмоткой якоря Laf [Гн];
□ суммарный момент инерции машины и нагрузки — J [кг];
□ коэффициент вязкого трения — Вт [Нмс];
□ коэффициент сухого трения — Tf [Нм];
О начальная скорость [рад/с].
Момент нагрузки исследуемой машины определяется величиной, задаваемой в блоке Moment. Выход т предназначен для измерения и наблюдения переменных состояний машины в следующей последовательности: угловая скорость [рад/с], ток якоря [А], ток возбуждения [А], электромагнитный момент [Нм].
Параметры машины, вводимые в окно настройки, определяются из паспортных данных.
В каталоги на электрические машины постоянного тока приводятся
следующие данные:
□ мощность Рц [кВт];
□ напряжение питания якоря U я [В];
□ напряжение питания возбуждения U в [В];
□ скорость вращения якоря пи [об/мин];
□ КПД 7],, [%];
□ сопротивление обмотки якоря R* [Ом];
□ сопротивление обмотки возбуждения /?в[Ом];
□ индуктивность обмотки якоря £я [Гн].
Кроме перечисленных параметров, необходимо определить ную индуктивность между обмотками возбуждения и якоря.
взаим-
Для машины с независимым возбуждением ее величина определяется последовательным расчетом, используя следующие выражения:
U Р ЗОР
Ц=— Мн=-^ = -^- I
R' со,, яп ’ '
/ р = „ « , «Г , , .
UV 1ЯН18
(5.15).
Индуктивность обмотки возбуждения при исследовании установившихся процессов может быть принята близкой к нулю. При исследов-нии переходных процессов значение Le для машин обычного исполнения выбирается из неравенства
Машины постоянного тока
185
Le>(2-5)^
(5.16)
Момент инерции для двигателей обычного исполнения определяется из неравенства
(5-10)L„ • я2-Ч2Л2„
(5.17)
Момент сухого трения и коэффициент вязкого трения определяются из следующих соображений. Общие механические потери для машин обычного исполнения составляют Пмех=(0,5-2%)Рн. Кроме того эти потери равны Пмсх= 7) со, + BmaJ*. Если считать, что потери на трение и вентиляционные потери приблизительно равны, то
Т. =—Вт
1 2со т
мех
2й>;
(5.18)
Ниже исследована машина постоянного тока типа 2ПН-90М. В таблице 5.1 представлены каталожные данные этой машины. Параметры машины, взятые из таблицы, и рассчитанные по описанной методике, занесены в соответствующие поля окна настройкй (рис. 5.17).
Таблица 5.1
h [мм] Л [кВт] и„ [5] [об/мин] [%] R, [Ом] RB [Ом] 4 [мГн]
90 1 220 4000 72,5 2,52 92 48
5.17.1 . Механические характеристики двигателя
Механические характеристики, представляющие зависимость скорости от момента при различных напряжениях на якоре, снимаются на модели (рис. 5.16) при изменении механического момента на валу (блок Moment рис. 5.16). Результаты моделирования показаны на рис. 5.18 для 1 — U„ = 220 В (естественная характеристика); 2 — ия- 160 В; 3 — U„ = 80 В; 4 — и„ = 20 В; 5 — U„ = 10 В (порядковые номера характеристик соотвествуют убыванию якорного напряжения).
186
Электрические машины. Лабораторные работы на ПК
Рис. 5.18. Механические характеристики двигателя типа 2ПН-90М
5.17.2 . Регулировочные характеристики при изменении напряжения на якоре
При снятии регулировочных характеристик определяется зависимость скорости вращения выходного вала машины от напряжения на якоре при различных постоянных значениях ее выходного момента. Результаты моделирования представлеы на рис. 5.19.
5.17.3 . Регулировочные характеристики при изменении 1апряжения возбуждения
Зависимости скорости вращения ротора от изменения напряжения на обмотке возбуждения при неизменных значениях момента нагрузки (М = 0, 239 Нм; М = 1,19 Нм; М = 2,39 Нм; М = 4,78 Нм) и напряжения на якоре (Uя - 220В) машины постоянного тока с независимым возбуждением типа 2ПФ-90М, полученные на модели, представлены на рис. 5.20.
Машины постоянного тока
187
4500,00
4000,00
3500,00
„ 3000,00 т
| 2500,00
о, 2000,00
С 1500,00
1000,00
500,00
0,00
0,00 50,00 100,00 150,00 200,00 250,00
U[B]
Рис. 5.19. Семейство регулировочных характеристик машины постоянного тока с независимым возбуждением типа 2ПФ-90М: 1 — естественная характеристика (верхняя); 2 — М=2,387 Нм (средняя); 3 — М=4,774 Нм (нижняя)
Рис. 5.20. Регулировочные характеристики при изменении напряжения на обмотке возбуждения при: 1 - М = О, 239 Нм, ия = 220 В (верхняя); 2 - М = 1,19 Нм, U„ = 220 В (средняя); 3 - 2,39 М, UB = 220 В (нижняя)
188
Электрические машины. Лабораторные работы на ПК
5,17.4 . Коэффициент полезного действия
Для определения КПД изменяется механический момент Мт на входе машины от 0,1 до 2,5 Мн и снимается зависимость скорости вращения и выходного момента Ме от момента Мт. КПД и выходная мощность рассчитывается по формулам
Мт
1=-^ Рвых=Мта М,
Результаты моделирования видны из рис. 5.21.
Рис. 5.21. Результаты моделирования
5.18. Моделирование двигателя постоянного тока с параллельным возбуждением
Виртуальная лабораторная установка представлена на рис. 5.22. (файл DC Mash Par).
Схема включает источник постоянного напряжения V\ для питания машины (из библиотеки Power System Blockset/ Electrical Sources), блдк Moment (из библиотеки Simulink/Sources) для задания момента на валу, блок для измерения переменных состояния машины Display (из библиотеки Simulink/Sinks') и прибор для визуального наблюдения токов, скорости и момента исследуемой машины Scope (из библиотеки Simulink/Sinks).
Машины постоянного тока
189
Dlspty
Рис. 5.22. Модель для исследования машины постоянного тока с параллельным возбуждением
Для того чтобы снять механическую характеристику исследуемой машины, необходимо, задаваясь различными значениями момента нагрузки на ее валу, определять величину выходной скорости. Характеристики снимаются при различных значениях питающего напряжения. Результаты исследования видны из рис. 5.23.
При снятии регулировочных характеристик определяется зависимость скорости вращения выходного вала машины от питающего на-
Рис. 5.23. Механические характеристики машины постоянного тока с параллельным возбуждением при напряжениях 220 В, 200 В, 160 В, 80 В, 40 В (более высокий уровень характеристики соотвествует более низкому значению напряжения питания)
190
Электрические машины. Лабораторные работы на ПК
пряжения при различных постоянных значениях момента. Результаты моделирования представлены на рис. 5.24.
Рис. 5.24. Семейство регулировочных характеристик машины постоянного тока с параллельным возбуждением при М=1 Нм (верхняя); 2.5 Нм (средняя); 4 Нм (нижняя)
5.19. Моделирование машины постоянного тока с последовательным возбуждением
Модель для исследования машины постоянного тока с последователь-
ным возбуждением представлена на рис. 5.25 (файл DC Mach sier).
Схема включает источник постоянного напряжения V для питания машины (из библиотеки Power System Blockset/Electrical Sources), блок Step (из библиотеки Simulink/Sources) для задания вращающего
момента на валу машины и снятия ее динамических характеристик,
исследуемую машину постоянного тока с последовательным возбуждением (из библиотеки Power System Blockset/Machines/DC Machines),
прибор для измерения переменных состояния машины Display (из
библиотеки Simulink/Sinks), блок Demux разделяющий входной вектор на его составляющие (из библиотеки Simulink/ Signals&Systems) и прибор для визуального наблюдения токов и напряжений, а также
кривых переходных процессов изменений скорости и момента исследуемой машины Scope (из библиотеки Simulink/Sinks).
Рис. 5.25. Модель машины постоянного тока с последовательным возбужД$мём
Угловая хар-ка двигателя
Рис. 5.26. Результаты моделирования
На рис. 5.26 показаны результаты моделирования. Здесь построены естественная (верхняя) и искусственные механические характеристики исследуемой машины постоянного тока с последовательным возбуждением.
192
Электрические машины. Лабораторные работы на ПК
Для снятия регулировочных характеристик необходимо экспериментально определить зависимость скорости вращения выходного вала машины от напряжения на якоре при различных постоянных значениях ее выходного момента. Результаты эксперимента представлены на рис. 5.27.
[нии/до]и
Рис. 5.27. Результаты моделирования
U[B]
ВИРТУАЛЬНЫЕ ЛАБОРАТОРНЫЕ РАБОТЫ
7 Зак. 128
При проведении виртуальных лабораторных работ преподаватель, проводящий эти работы, заранее задает каждому студенту или группе студентов тип устройства (машина, трансформатор). Студент должен дома рассчитать параметры устройства и подготовиться к проведению работы. Подготовка к выполнению лабораторной работы включает:
1. Изучение соответствующей теоретической части.
2. Ознакомление с содержанием лабораторной работы.
3. Расчет параметров исследуемого устройства.
4. Составление таблиц для заполнения на лабораторной работе.
Лабораторная работа №1.
Исследование однофазного трансформатора
1. Цель работы
Исследование однофазного трансформатора, нагруженного активным сопротивлением.
2. Указания к выполнению работы
К выполнению лабораторной работы следует приступить после изучения разделов 2.2-2.7. В качестве дополнительной литературы рекомендуется воспользоваться [4, 5, 13].
3. Содержание работы
3.1. Определение параметров схемы замещения при помощи опытов холостого хода и короткого замыкания.
3.2. Снятие нагрузочной и рабочих характеристик трансформатора.
4. Описание виртуальной лабораторной установки
Виртуальная лабораторная установка представлена на рис. 6.1.1.
Модель содержит:
□ источник переменного напряжения £, из библиотеки Power System Blockset/Electrical Sources;
□ измерители напряжения V\, V2 и измерители тока Ц, /2 в первичной и вторичной цепях трансформатора из библиотеки Power System Blockset/Measurement;
а исследуемый трансформатор {Linear Transformer) и нагрузку (R Load) из библиотеки Power System Blockset/Elements;
□ измерители активной и реактивной мощности в первичной и вторичной цепях трансформатора (Рх, Q\, Р2, Q2) из библиотеки Power System Blockset/Extras/Measurement;
196
Электрические машины. Лабораторные работы на ПК
Simulation Fermat Тдай tH>. . .............
D ЙОД Jt ЙПЭ», » «"iNormal
км*.------л
Рис. 6.1.1. Модель для исследования однофазного трансформатора
О блок пользователя (Powergui), который измеряет значения V,, V2, Ц> hi
□ блоки Display 1, Display2 для количественного представления измеренных мощностей и блок Scope для наблюдения формы кривых тока и напряжения во вторичной цепи являются блокам главной библиотеки Simulink/Sinks.
Параметры трансформаторов для выполнения лабораторной работы приведены в таблице 6.1.1.
Таблица 6.1.1
Тип трансформатора SH [кВА] ик [%] Рк [Вт] Р.о [Вт] 1.0 [%]
ТС-10/066 10 4,5 280 90 7
ТС-16/066 16 4,5 400 125 5,8
ТС-25/066 25 4,5 560 180 4,8
ТС-40/066 40 4,5 800 250 4,0
ТС-63/066 63 4,5 1090 355 з;з
ТС-100/066 100 4,5 1500 500 2,7
ТС-160/066 160 4,5 2060 710 2,3
Лабораторная работа № 1
197
Ниже исследуется трансформатор типа ТС-100/066. Расчет параметров схемы замещения трансформатора осуществляется по выражениям (2.18-2.21) или используя программу, представленную листингом 2.1, (гл. 2).
Окно настройки параметров трансформатора показано на рис. 6.1.2.
Blink Р<н ши li-гъ: I пи-иг ri<iii<>ruiniei
|-LineM(T«ns^Dtmet (mask] (link)-------------------- 1
Three',Miidings linear Iran furrier ।
______________________________________________________J
j Nomjrjal power and frequency (Pn(VA) tn(HzJJ-
, |[-e5-50]
I Winding 1 parameters [VI [Vrms] R1 (pu) LI [puj]
( f[660 0 00755 D 022]
i Winding 2 parameters (V2(Vrms) R 2(pu| L2[pu]]-
1 j[400 0 0075 0 022]
Winding 3 parameters |V3f/rms) R3(pu] L3(pu]J.
] |[400 0 015 0 022]
{ M agnelization resistance and reactance [Rm(pu] Lm[pu)] !
1 j---”] ;
i Measurements |n^ 3 1
ПК Cancel | Help | , |
Рис. 6.1.2. Окно настройки параметров трансформатора
В полях окна последовательно задаются:
а мощность трансформатора и частота;
О действующее напряжение и относительные параметры схемы замещения первичной обмотки;
П действующее напряжение и относительные параметры схемы замещения вторичных обмоток;
□ относительные параметры ветви намагничивания;
□ переменные состояния трансформатора, которые измеряются блоком Multimeter.
Поскольку блок Multimeter не используется, то в поле Measurement из выпадающего меню выбрана опция None.
198
Электрические машины. Лабораторные работы на ПК
Окно настройки параметров источника питания показано на рис. 6.1.3. <
В полях окна задаются: •
□ амплитуда источника (В);
□ начальная фаза в градусах; 1
□ частота (Гц);
□ образец времени (с); .
□ переменные, измеряемые блоком Multimeter.
Напряжение и частота источника должны соответствовать параметрам трансформатора.
Рис. 6.1.3. Окно настройки параметров источника питания
Рис. 6.1.4. Окно настройки параметров нагрузки
Лабораторная работа Ns 1
198
Окно настройки параметров нагрузки показано на рис. 6.1.4. В полях окна задаются R, L, С параметры нагрузки. Для исключения реактивных элементов индуктивность должна быть задана равной нулю, а емкость — бесконечности (inf). В окне настройки параметров измерителя мощности (рис. 6.1.5.) указывается частота, на которой измеряется активная и реактивная мощность. Окно настройки дисплея показано на рис. 6.1.6. В полях окна настройки указывается формат представления числовых результатов, в поле Decimation (разбивка) задается число шагов вычисления, через которые значения выводятся на дисплей.
Рис. 6.1.5. Окно настройки измерителя активной и реактивной мощности
Рис. 6.1.6. Окно настройки дисплея
200
Электрические машины. Лабораторные работы на ПК
5. Порядок выполнения работы
Тип трансформатора для выполнения работы задается преподавателем. При самостоятельной работе эти данные можно взять из рис. 6.1.2. Окно настройки параметров моделирования показано на рис. 6.1.7.
Simulation Parameters: transf_lf
Solver | Workspace I/O | Diagnostics | Advanced| Real-Time Workshop |
Simulation time Start time. p) 0
Stop timer | 01
Solver options
Type. | Variable step |ode23tb (stiff/TR-BDF2)
Max step size j auto * Relative tolerance: j auto M in step size. | auto . Absolute tolerance: j auto
Initial step size' | auto / -
Output options
[Re7ne output Refine factor. 11
Рис. 6.1.7. Окно настройки параметров моделирования
Определение параметров схемы замещения по п. 3.1 содержания работы и сравнение их с заданными в окне настройки (рис. 6.1.2) производится при помощи методов холостого хода и короткого замыкания. При холостом ходе нагрузка отключена, трансформатор запитан номинальным напряжением. Действующие значения напряжений и токов трансформатора при холостом ходе определяются в окне блока Powergui (рис. 6.1.8).
Напомним, что активная мощность в режиме холостого хода равна потерям в сердечнике трансформатора.
Относительные параметры ветви намагничивания рассчитываются по выражениям (2.18-2.21) (программа,, листинг 2.1).
Лабораторная работа Ns 1
201
steady State Vnlbiqes пп.1 currents for: transf_lf
V2 II 12
398.6
4.075 0
Iu.3
0.00"
THIS rms rms
0.01
-79.32 0.00
IBMS value. V
I states.Jc iL
Measuremen Г" Sources (VI) Г Nonlinear
V A A
Рис. 6.1.8. Окно блока Powergui с результатами измерения
Опыт короткого замыкания проводится при коротком замыкании во вторичной цепи. При этом напряжение источника питания должно быть равно напряжению короткого замыкания трансформатора, (Uk = 29,7 В).
Напомним, что активная мощность в режиме короткого замыкания 'при первичном токе короткого замыкания равным номинальному, определяет потери в обмотках трансформатора. После проведения опытов и расчета параметров следует сравнить их с теми, которые были введены в окно параметров (рис. 6.1.2).
Снятие нагрузочной и рабочих характеристик трансформатора производится на модели (рис. 6.1.1) при изменении сопротивления нагрузки (0,24-1,2) R„0M. При этом для каждого значения сопротивления нагрузки осуществляется моделирование. Номинальное сопротивление нагрузки рассчитывается по формуле
R
К-НОМ $
(6.1.1)
Обозначения соответствуют таблице рис. 6.1.2. При проведении исследований заполняется таблица 6.1.2.
Табл.6.1.2
Harp. Измерения Вычисления
R„ Р. 0! Л Л 02 Ui 11 Фг Cos<Pi Л
[Ом] [Вт] [ВАР; [В] [А] [Вт] [ВАр] [В] [А] [град] [град]
202
Электрические машины. Лабораторные работы на ПК
Вычисления производятся по выражениям:
п - Р2 . &
<Pi =arctg — . ri
(6.1.2)
По данным таблицы строится нагрузочная характеристика трансформатора и на отдельном рисунке — рабочие характеристики. Формы напряжения и тока на вторичной обмотке трансформатора, полученные с помощью осциллоскопа Scope представлены на рис. 6.1.9.
Рис. 6.1.9. Формы напряжения и тока на вторичной обмотке трансформатора
6. Содержание отчета
6.1. Схема модели и описание виртуальных блоков.
6.2. Сравнительная таблица заданных и определенных из опытов холостого хода и короткого замыкания параметров трансформатора.
6.3. Нагрузочная характеристика трансформатора J72=/(Z2)
6.4. Рабочие характеристики трансформатора г), coscp, Z] , U2
Лабораторная работа № 2.
Исследование трехфазного трансформатора
1. Цель работы
Исследование трехфазного трансформатора при различных схемах соединения первичных и вторичных обмоток.
2. Указания к выполнению работы
К выполнению лабораторной работы следует приступить после изучения разделов 2.2-2.10. В качестве дополнительной литературы рекомендуется воспользоваться [4, 5, 13].
3. Содержание работы
3.1. Определение параметров трансформатора при соединении «звезда-звезда» (Y/Y).
3.2. Определение параметров трансформатора при соединении «звезда-треугольник» (Y/Д).
3.3. Определение параметров трансформатора при соединении «треугольник-треугольник» (Д/Д).
3.4. Определение параметров трансформатора при соединении «треугольник-звезда» (A/Y).
4. Описание виртуальной лабораторной установки
Виртуальная лабораторная установка представлена на рис. 6.21.
По сравнению с моделью однофазного трансформатора (рис. 6.1.1) здесь не используются блоки для измерения основных характеристик (основные характеристики трехфазного трансформатора и однофазного трансформатора идентичны), но добавлен блок Multimeter, измеряющий токи и напряжения трансформатора. Значения этих токов отчитываются с окна блока Powergui. Там же снимаются значения входного U,l и выходного U2 напряжений и разность фаз между ними.
204
Электрические машины. Лабораторные работы на ПК
| Lab_6_2_l
F.le Ed: Цен Simulation Format Tools Help
with neutral
powergui
Multimeter
2 i
Рис. 6.2.1. Модель трехфазного трансформатора
Окно настройки параметров трехфазного трансформатора показано на рис. 6.2.2. В отличие от окна настройки параметров однофазного трансформатора оно содержит два дополнительных поля:
□ Winding 1 (ABC) connection — схема соединения первичных обмоток;
□ Winding 2 (abc) connection — схема соединения вторичных обмоток.
В выпадающем меню этих полей задается схема соединения. В поле Measurement выбрана опция Windind Voltage, при которой измеряются напряжения обмоток.
5. Порядок проведения лабораторной работы
Порядок проведения лабораторной работы по всем пунктам содержания работы 3.1-3.4 остается неизменным. Параметры источника питания Inductive source (рис. 6.2.1) задаются в соответствии с параметра-
Лабораторная работа Ns 2
2
Block Parameh'rs. Tr
Transformer [Two Windings) (mask) (link)-----------------,
implements a three phase transformer by using three J transformers. Set the winding connection to Yn' when you j the neutral point of the Wye «
______________----------------------------1______J
si power and frequency [ Pn(VA). fn(Hz) ]
- ‘«Winding 1 f4FT, cinn₽- inn | '
4 .y/rqding parameters [V1 Ph-Ph(Vrm'J, P1(pu), L1 (pu) ] ^*[660,002 0 8]
i 9Winding 2 (abc j connection | Delta <D1 J
j’lWInding parameters [ V2 Ph-Ph(Vrms). R2lpu). L2(pu) ]
I я.ы
. - J50O Magnetization reactance Lm (pu) [ioo Measurements [Winding ,oltage-
OK I Cancel
Apply
Рис. 6.2.2. Окно настройки параметров трехфазного трансформатора
ми трансформатора. Окно настройки источника питания показано на рис. 6.2.3.
Параметры моделирования видны из рис. 6.2.4
Для каждого пункта (3.1-3.4) проводится моделирование и заполняется отдельная таблица 6.2.1.
Табл.6.2.1
Схема соедин. Измерения Вычисления
и1ф Лф Ц Ч>1 Чф Лф L4 <Pl2 Коэффициент трансформации
[В] [А] [В] [град] [В] [А] [В] [град]
206
Электрические машины. Лабораторные работы на ПК
Рис. 6.2.3. Окно настройки параметров трехфазного источника
Siniiil.ilion р.п diiicli'i >; I ub <> ? 1
•Stop time: [КТ
Solver] Wcrksp*
..'Sirirufationtime
-Start time [Ko
Рис. 6.2.4. Параметры моделирования
Лабораторная работа Ns 2
2
На рис. 6.2.5 показано окно блока Powergui с результатами модел рования при соединении обмоток по схеме «звезда-звезда». В леве колонке представлены измеряемые переменные, в средней — их де ствующие значения, в правой — их начальные фазы.
Коэффициент трансформации и разность фаз между входным (L и выходным (С/2) напряжениями рассчитывается по выражениям
Ui
П=~’ Ф = <Р1-<Р2-
17 2
ркс. 6.2.5. Результаты моделирования при соединении обмоток Y/Y
208
Электрические машины. Лабораторные работы на ПК
s Simulation result for: Multimeter
Fite Edit View Insert Tools Window Help
Uan wV Tr
Uan w2. Tr
Рис. 6.2.6. Результаты моделирования в графическом окне блока Multimeter
На рис. 6.2.6 представлены графические результаты блока Multimeter.
6. Содержание отчета
6.1. Схема модели и описание виртуальных блоков.
6.2. Заполненные таблицы.
6.3. Векторные диаграммы для каждого пункта работы.
Примечание. Векторные диаграммы по каждому пункту строятся отдельно для первичной и вторичной цепи.
Лабораторная работа Ns 3.
Исследование трехфазной асинхронной машины с короткозамкнутым ротором
1. Цель работы
Исследование трехфазной асинхронной машины с короткозамкнутым ротором.
2. Указания к выполнению работы
К выполнению лабораторной работы следует приступить после изучения главы 3. В качестве дополнительной литературы рекомендуется воспользоваться [4, 5, 6, 13].
3. Содержание работы
3.1. Снятие механической характеристики машины в двигательном и генераторном режимах.
3.2. Снятие рабочих характеристик машины в двигательном режиме.
4.Описание виртуальной лабораторной установки
Виртуальная лабораторная установка представлена на рис. 6.3.1.
Рис. 6.3.1. Модель для исследования асинхронной машины
210
Электрические машины. Лабораторные работы на ПК
Она содержит:
□ источник переменного трехфазного напряжения Source из библиотеки Power System Blockset /Extras/Electrical Sources;
□ измеритель трехфазного напряжения и тока Three-Phase V-I Measurement из библиотеки Power System Blockset/Extras/ Measurement;
□ исследуемую трехфазную асинхронную машину Asynhronous Machine из библиотеки Power System Blockset/Machines;
□ измеритель активной и реактивной мощности Pb Qt из библиотеки Power System Blockset/Extras/Measurement;
□ блок Display для количественного представления измеренных мощностей и блок Scope для наблюдения тока ротора и статора, а также скорости и момента асинхронной машины из главной библиотеки Simulink/Sinks;
□ блок Moment для задания механического момента на валу машины из главной библиотеки Simulink/Source;
□ блок Machines Measurement из библиотеки Power System Blockset/Machines;
□ блок Displayl для количественного представления измеренных электромагнитного момента (Нм) и скорости (рад/с) машины из главной библиотеки Simulink/Sinks;
□ блок Мих, объединяющий три сигнала в один векторный из главной библиотеки Simulink/Sygnal & System.
Окно настройки параметров асинхронной машины показано на рис. 6.3.2.
В полях окна последовательно задаются:
□ тип ротора (Rotor Туре), в выпадающем меню этого поля можно задать либо короткозамкнутый, либо фазный ротор;
□ система отсчета при анализе (Reference frame)-,
□ мощность, номинальное действующее линейное напряжение и частота;
О параметры схемы замещения статора;
□ параметры схемы замещения ротора;
□ параметры ветви намагничивания;
□ момент инерции, коэффициент вязкого трения, число пар полюсов;
□ начальные условия для моделирования (скольжение, положение ротора, токи статора и их начальные фазы).
Лабораторная работа № 3
211
Block Parameters: Asynchronous Machine fx|
Asynchronous Machine (mask) (link) -- ...............
Implements a three-phase asynchronous machine (wound rotor or squmel cage) modeled in the dq rotor reference ttame Stator and rotor windings are connected in wye to an 'nternal neutral point Press help for inputs and outputs description
* Parameters ~ ; • " ; ....
Rotor type: | Squirrel-cage 3
\ Reference frame: (Stationary 3
Norn poweil-L volt and tieq [ Pn(VA).Vn(Vrms).fn(Hz) ]
|[3e3.380 501 ' ’’’
Stator [ Rs(ohm) Lis(Hj ]
|( 3 28 ЗЭе-З )
Rotor [ Rr'fohm) Lk'(HJ ]•
|[ 1.167 39e-3] '
Mutual inductance Lm (H)
jl671e-3 “
Ineiti3.fnchon factor and pairs of poles [J (I g rrT2) FIN m s) p()
|ГооЬ58-о7] •
Initial conditions [ s() th(deg) isa.isb.isclA] pha.phb.phc(deg) ]
][ 1,0 0,0.0 0,0.0] ‘ ' ““ ~~
OK Cancel | Help | j.rpy |
Рис. 6.3.2. Окно настройки параметров асинхронной машины
Параметры машины частично берутся из паспортных данных, а частично рассчитываются по уравнениям 3.32—3.41 (гл.З), либо используя программу (листинг 1, файл as.m).
Таблица 6.3.1
Тип двигателя Л [кВт] п [об/мин] И. [%] cos (р [А] к = ^-‘ I,. II 5й _ макс м"‘с м„ J [кГм2]
1 2 3 4 5 6 7 8 9 10
RA71B2 0,55 2850 74 0,84 1,8 6,5 2,3 2,4 0,0005
RA80A2 0,75 2820 74 0,83 2 5,3 2,5 2,7 0,0008
RA80B2 1,1 2800 77 0,86 2 5,2 2,6 2,8 0,0012
RA80A4 0,55 1400 71 0,8 1 5 2,3 2,8 0,0018
RA80B4 0,75 1400 74 0,80 2 5 2,5 2,8 0,0023
RA90S2 1,5 2835 79 0,87 3 6,5 2,8 3 0,0010
212
Электрические машины. Лабораторные работы на ПК
Продолжение таблицы 6.3.1
1 2 3 4 5 6 7 8 9 10
RA9OL2 2,2 2820 82 0,87 4 6,5 2,9 3,4 0,0015
RA100LA4 2,2 1420 79 0,82 5 6 2,2 2.6 0,0048
RA100LB4 3 1420 81 0,81 7 6,2 2,2 2,6 0,0058
RA112M2 4 2895 84 0,87 9 6,8 2,2 3,3 0,0082
RA112M4 4 1430 85,5 0,84 9 6,5 2,2 2,9 0,0103
RA132SA2 5,5 2880 89 0,89 11 6,5 2,4 3 0,0155
RA132SB2 7,5 2890 89 0,89 15 7 2,5 3,2 0,0185
* Линейное номинальное напряжение для всех машин 380 В.
Окно настройки параметров универсального блока измерения переменных машины показано на рис. 6.3.3. В выпадающем меню поля Machine type задается тип машины. Флажками выбираются переменные для измерения.
Block Parameters: Machines Measurement
И
Machine measurements (mask) (link)----- ------------.------------
Split specified signals of various machine models measurement output , vector into separate signals.
- Parameters ~
Machine type: (Asynchronous >e.
* 1 rrijiwro
Г
! Asynchronous
Simplified synchronous Synchronous
Г phir_qd : q and d axis rotor fluxes (Wb) or (pu)
Г vr_qd q and d axis rotor voltages (V) or (pu)
р is_abc : Stator currents ia, ib, ic (A) or (pu)
г is_qd : q and d axis stator currents (A) or (pu)
Г phis_qd : q and d axis stator fluxes (Wb) or (pu)
Г vs_qd . q and d axis stator voltages (V) or (pu)
R wm : Rotor speed (rad/s) or (pu)
р Те : Electromagnetic torque (N.m) or (pu)
г thetam Rotor angle (rad)
ОК
Cancel | Ijelp j
Рис. 6.3.3. Окно настройки параметров блока измерения
Лабораторная работа Ns 3
21
Окно настройки параметров источника питания показано на рис 6.3.4. В полях окна задаются:
О амплитуда фазного напряжения источника (В);
О начальная фаза в градусах;
□ частота (Гц);
□ внутреннее сопротивление (Ом) и индуктивность источника (Гн).
Block Parameters: Source ’ ®
3-phase inductive source Ungrounded neutral (mask) (link) -
This block implements a three-phase source in series with a serie RL branch, the common node (neutral) of the three sources is accesrble via
' input one (N) of the block
' Parameters'
Phase-to-ground peak voltage (V):
[310
Phase angle of phase A (Degrees]:
| IS ' I
Frequency [Hz]'
j [50 I
Source resistance fOhmsJ:
| |CL024 I
Source inductance (H)
I I5 ' ' i-
DK j Cancel | Help J |
Рис. 6.3.4. Окно настройки параметров трехфазного источника питания
Напряжение и частота источника должны соответствовать параметрам асинхронной машины.
Окно настройки параметров блока измерения активной и реактивной мощности показано на рис. 6.3.5.
Здесь задается только один параметр — частота, которая должна быть равно частоте источника питания.
Окно настройки дисплея показано на рис. 6.3.6. В полях окна настройки указывается формат представления числовых результатов, в поле Decimation (разбивка) задается число шагов вычисления, через которые значения выводятся на дисплей. Установка в поле Sample time значения -1 синхронизирует работу блока с шагом вычислений.
214
Электрические машины. Лабораторные работы на ПК
Block Parameters: Pl,QI ®
Active 8c Reactive Power (mask) (link) —............-
This block measures the active power P and reactive power Q associated with a periodic set ot voltage and current which may contain harmonics. P and Q are calculated by averaging the V.l product with a running window over one cycle of the fundamental frequency so that the powers are evaluated at fundamental frequency.
input 1: Instantaneous voltage (V)
input 2: Instantaneous current [A]
Output: PQ measurement vector (P|W) Q (var)]. Current flowing into an RL circuit will produce positive active and reactive powers.
Parameters------------------ -------------------------------------
Fundamental frequency (Hz):
I [50 ' ~
OK | Cancel | Help j |
Рис. 6.3.5. Окно настройки блока измерения мощности
Block Parameters: Display ®
-Display -........................ -
Numeric display of input values.
Parameters _____
'l Format: | short
Decimation'
| Г
Г Floating display
Sample time:
OK | Cancel | Help | Арр1‘л
Рис. 6.3.6. Окно настройки параметров дисплея
Окно настройки блока Мих, объединяющего два сигнала в один векторный, показано на рис. 6.3.7. В полях окна настройки задаются число входов и внешний вид представления блока.
Лабораторная работа № 3
215
Block Parameters: Мик ®
-Мих----------------- --- ------- -------
j Multiplex scalar, vector, or matrix signals into a bus. |- Parameters-----—------ '--- - — -------
j Number of inputs:
i Display option, [none
OK | Cancel [ Help [ Apply |
Рис. 6.3.7. Окно настройки блока Мих
5. Порядок выполнения работы
Параметры асинхронной машины для выполнения работы задаются преподавателем. При самостоятельной работе эти данные выбираются из таблицы 6.3.1 и рассчитываются, пользуясь паспортными данными (гл. 3). Окно настройки параметров моделирования показано на рис. 6.3.8.
J Simulation Parameters: AKZ
Solver j Workspace I/O j Diagnostics] Advanced] Real-Time Workshop
Simulation time
Start time: | 0 0 Stop time: p
Solver options
Type' | Variable-:tep ▼[ |ode23tb (stiff/TR-BDF2l jr]
Max step size, [le-3 Relative tolerance [ auto
Min step size- [ auto Absolute tolerance: j auto
Initial step size: [ auto
Output options
| Retine output Refine factor p
OK Cancel Help
Рис. 6.3.8. Окно настройки параметров моделирования
216
Электрические машины. Лабораторные работы на ПК
Снятие механической характеристики машины в двигательном и генераторном режимах в соответствии с и. 3.1 содержания работы производится на модели (рис. 6.3.1) при изменении нагрузочного момента во всем диапазоне -1,5-1,5 от номинального. При этом для каждого значения момента нагрузки осуществляется моделирование. При проведении исследований заполняется таблица 6.3.2.
Таблица 6.3.2
М [Нм] со [рад/с]
Снятие рабочих характеристик двигателя в соответствии с п. 3.2 содержания работы проводится на модели (рис. 6.3.1) при изменении нагрузочного момента в пределах 0-1,2 от номинального. При этом для каждого значения момента нагрузки осуществляется моделирование. При проведении исследований заполняется таблица 6.3.3.
Таблица 6.3.3
М [Нм] Измерения Вычисления
Л [Вт] [ВАр] С. [В] [А] 0) [рад/с] <Р [град] cos (р Л [Вт] П [%] 5 [%]
Вычисления производятся по выражениям:
(р = arctg —, Р^-М(О, Г}- — , s = ——— • Pt ‘ Р,
По данным таблиц строится механическая характеристика машины и на отдельном графике — рабочие характеристики.
Временные зависимости переменных состояния машины можно наблюдать на экране осциллографа (рис. 6.3.9). Здесь видны и переходной процесс при пуске машины, и установившиеся процессы.
6. Содержание отчета
6.1. Схема модели и описание виртуальных блоков.
6.2. Механическая характеристика машины в двигательном и генераторном режимах.
6.3. Рабочие характеристики машины в двигательном режиме.
Лабораторная работа № 3
217
Рис. 6.3.9. Временные зависимости переменных состояния машины при работе в двигательном режиме
Лабораторная работа Ns 4.
Исследование трехфазной асинхронной машины с фазным ротором
1. Цель работы
Исследование трехфазной асинхронной машины с фазным ротором.
2. Указания к выполнению работы
К выполнению лабораторной работы следует приступить после изучения разделов гл. 3. В качестве дополнительной литературы рекомендуется воспользоваться [4, 5, 13].
3. Содержание работы
Снятие механических характеристик машины в двигательном режиме.
4. Описание виртуальной лабораторной установки
Виртуальная лабораторная установка представлена на рис. 6.4.1.
Сравнивая модель (рис. 6.3.1) с представленной можно убедиться в их полной аналогии. Разница состоит в том, что в цепь ротора включены одинаковые по величине сопротивления 7?1=7?2=^з- Отличие окна настройки асинхронной машины с фазным ротором от аналогичной короткозамкнутой (рис. 6.3.2) состоит в том, что в поле Rotor type введен фазный ротор.
Все остальные блоки и их настройки остались без изменения (см. Лабораторную работу № 3).
5. Порядок выполнения работы
Параметры асинхронной машины для выполнения работы задаются преподавателем. При самостоятельной работе эти данные можно рассчитать, пользуясь паспортными данными.
Лабораторная работа Ns 4
219
Рис. 6.4.1. Модель для исследования асинхронной машины с фазным ротором
Снятие механических характеристик машины в двигательном режиме в соответствии с п. 3.1 содержания работы производится на модели (рис. 6.4.1) при изменении нагрузочного момента от 0 до 1,4 номинального и изменении сопротивления в цепи ротора от 0 до 5 Rs-При этом последовательность выполнения работы следующая:
□ задается значение сопротивления в роторе;
□ для каждого значения момента нагрузки осуществляется моделирование. При проведении исследований заполняется таблица 6.4.1.
Таблица 6.4.1
М [Нм] а> [рад/с]
220 Электрические машины. Лабораторные работы на ПК
По данным таблицы строятся механические характеристики двигателя при различных добавочных сопротивлениях в цепи ротора.
Временные зависимости переменных состояния машины можно наблюдать на экране осциллографа (рис. 6.4.2). Здесь виден и переходной процесс при пуске машины, и установившиеся процессы.
6. Содержание отчета
6.1. Схема модели и описание виртуальных блоков.
6.2. Механические характеристики машины в двигательном режиме.
Рис. 6.4.2. Временные зависимости переменных состояния машины при работе в двигательном режиме
Лабораторная работа № 5. Исследование трехфазной асинхронной машины с короткозамкнутым ротором при питании от однофазной сети
1. Цель работы
Исследование трехфазной асинхронной машины с короткозамкнутым ротором при питании от однофазной сети.
2. Указания к выполнению работы
К выполнению лабораторной работы следует приступить после изучения главы 3. В качестве дополнительной литературы рекомендуется воспользоваться [4, 5].
3. Содержание работы
3.1. Снятие механической характеристики машины в двигательном режиме.
3.2. Снятие рабочих характеристик машины в двигательном режиме.
4. Описание виртуальной лабораторной установки
Виртуальная лабораторная установка представлена на рис. 6.5.1.
Она содержит:
□ источник переменного однофазного напряжения;
□ конденсатор (С) в цепи питания;
□ измеритель напряжения и тока в источнике питания F,, Л;
□ исследуемую трехфазную асинхронную машину Asynhronous;
О измеритель активной и реактивной мощности Р, Q в источнике питания;
□ блок Displayl для количественного представления измеренных мощностей; блок Moment для задания механического момента на валу машины из главной библиотеки Simulink/Sinnks;
□ блок Machines Measurement',
□ блок RMS для измерения действующего тока в источнике;
222
Электрические машины. Лабораторные работы на ПК
Рис. 6.5.1. Модель для исследования асинхронной машины
□ блок Display2 для количественного представления действующе- ? го тока в источнике (А) и скорости (рад/с);
□ блок Мих, объединяющий два сигнала в один векторный; <
□ блок Scope для наблюдения токов статора, а также скорости и.; момента асинхронной машины. 3
Окно настройки параметров схемы замещения представлено на; рис. 6.5.2.
Параметры схемы замещения рассчитываются так же, как для трех- ;
фазного питания асинхронной машины (Лабораторная работа №
ур-я (3.32-3.41)).
Окно настройки параметров универсального блока измерения пере-, менных состояния машины показано на рис. 6.5.3. В выпадающем; меню поля Machine type задается тип машины. Флажками выбираются'; переменные для измерения.
Окно настройки параметров источника питания показано на рис.' 6.5.4.
В полях окна задаются:
□ амплитуда напряжения источника (В);
□ начальная фаза в градусах;
□ частота (Гц).
Лабораторная работа № 5
223
film к PariiuHers Лчуш humous Machine*
Asynchronous Machine (mask) (ink)
Implements a three-phase asynchronous machine (wound rotor or squirrel , cage) modeled in lhe dq rotor reference frame. Stator and rotor windings are connected in wye to an internal neutral point Piers help lor inputs and output? description
: ----------------------------------------~~~~~—--------------j
Rotor type: | Squirrel-cage ~t| !
Reference framer | Stationary ! ~*1 |
Now. powerl-L volt and freq. [ Ph^A).Vn|Vtms).fn(He) ]: |
|(2 2e3.380 50 ]... j
Stator (Rs(ohm) Lls(H) f i
[(2.62 6.6е-3 ] I
Rotor [ Rr'(ohm) ЩН))
|(3.l’ 66e-3) ‘ ‘ —- J
Mutual inductance Lm (Hjt , I
|350е-3 . I
Inertia,friction factor.and pairs of poles [J(kg.m'‘2J F(N.m,s) p() - ;
-----
Initial conditions (s() thfdeg] isajsbdsc(A) pha,phb.phc(deg)): |
fi <0 0,0.0 0,0,01 ' ‘ J
| , OK Cancel | Help | - Apply ' |
Рис. 6.5.2. Окно настройки параметров асинхронной машины
Block Parameters: Machines Measurement |Х]
- Madiine measurements (mask) (link) - -- " ..........
; Split specified signals of various machine models measurement output
•.vector into separate signals. •
Psameters^^^^iT'Z^J—jT—T—^ZZ^ZZZZ7'
Machine type: |ИВЯ!В!ЯМЙИМЙЙИИИИИИиГ^~1 s_abc .Rotorcurrentsira,irb.irc(A)or(pu)
' Г* ir_qd :q and d axis rotor currents (A) or (pu)
’ Г phif_qd :q and d axis rotor fluxes (Wb) or (pu)
Г vr_qd : q and d axis rotor voltages (V) or (pu)
fu is_abc : Stator currents ia.ib.ic (A) or (pu)
Г* is_qd : q and d axis stator currents (A) or (pu) Г phis_qd : q and d axis stator fluxes (Wb) or (pu)
I” vs_qd q and d axis stator voltages IV) or (pu)
1 Fz wm : Rotor speed (rad/s) or (pu)
Р Те : Electromagnetic torque (N.m) or (pu)
i Г* thetam : Rotor angle (rad)
OK , I Cancel j (teip | .gX'ly j
Рис. 6.5.3. Окно настройки параметров блока измерения
224
Электрические машины. Лабораторные работы на ПК
Рис. 6.5.4. Окно настройки параметров источника питания
Напряжение и частота источника должны соответствовать параметрам асинхронной машины.
Остальные блоки уже были описаны в Лабораторной работе № 3.
5. Порядок выполнения работы
Параметры асинхронной машины для выполнения работы задаются преподавателем. При самостоятельной работе эти данные выбираются из таблицы 6.3.1 и рассчитываются по паспортным данным (гл. 3). Окно настройки параметров моделирования показано на рис. 6.5.5.
Снятие механической характеристики машины в двигательном режиме в соответствии с п. 3.1 содержания'работы производится на модели (рис. 6.5.1) при изменении нагрузочного момента от нуля до номинального. При этом для каждого значения момента нагрузки осуществляется моделирование. Наброс момента нагрузки осуществляется с задержкой по отношению к началу моделирования с тем, чтобы переходные процессы при пуске закончились. Окно настройки блока Moment показано на рис. 6.5.6.
При проведении исследований заполняется таблица 6.5.1.
Лабораторная работа № 5
2
Рис. 6.5.5. Окно настройки параметров моделирования
Рис. 6.5.6. Окно настройки параметров моделирования
Таблица 6.5.
М [Нм]
со [рад/с]
Снятие рабочих характеристик двигателя в соответствии с п. 3.2 содержания работы проводится на модели (рис. 6.3.1) при измененш нагрузочного момента от нуля до номинального. При этом для каждой
8 Зак. 128
226
Электрические машины. Лабораторные работы на ПК
значения момента нагрузки осуществляется моделирование. При проведении исследований заполняется таблица 6.5.2.
Таблица 6.5.2.
Измерения Вычисления
М Pi Qi и, h СО (Р cos ср Р2 *1 5
[Нм] [Вт] [ВАр] [В] [А] [рад/с] [град] [Вт] [%] [%]
Вычисления производятся по выражениям:
С „ Р2 со.—СО
cp = arctg—, Р, =Мсо, Т] =—, s = —---
Pi Pi
По данным таблиц строится механическая характеристика машины и на отдельном графике — рабочие характеристики.
Временные зависимости переменных состояния машины можно наблюдать на экране осциллографа (рис. 6.5.7). Здесь виден и переходной процесс при пуске машины, и переходной процесс при набро-сс момента нагрузки, и установившиеся процессы.
Рис. 6.5.7. Временные зависимости переменных состояния машины при работе в двигательном режиме
Лабораторная работа № 5 227
6. Содержание отчета
6.1. Схема модели и описание виртуальных блоков.
6.2. Механическая характеристика машины в двигательном режиме.
6.3. Рабочие характеристики машины в двигательном режиме.
Лабораторная работа № 6.
Исследование трехфазной магнитоэлектрической синхронной машины
1. Цель работы
Исследование трехфазной явнополюсной, магнитоэлектрической синхронной машины.
2. Указания к выполнению работы
К выполнению лабораторной работы следует приступить после изучения гл. 4. В качестве дополнительной литературы рекомендуется воспользоваться [4, 6, 13].
3. Содержание работы
3.1. Снятие рабочих характеристик машины в двигательном режиме.
3.2. Снятие зависимости потребляемой из сети мощности от потока возбуждения машины.
4. Описание виртуальной лабораторной установки
Виртуальная лабораторная установка представлена на рис. 6.6.1.
Она содержит:
□ источник переменного трехфазного напряжения Source из библиотеки Power System Blockset/Extras/Electrical Sources;
□ измеритель трехфазного напряжения и тока Three-Phase V-I Measurement из библиотеки Power System Blockset/Extras/ Measurement;
□ исследуемую трехфазную синхронную машину Permanent Magnet Synchronous Machine из библиотеки Power System! Blockset!Machines',
П измеритель активной и реактивной мощности Ръ Qx из библиотеки Power System Blockset/Extras/Measurement;
□ блок измерения переменных состояния машины Machines Measurement из библиотеки Power System Blockset/Machines;
Лабораторная работа Ns 6
229
Рис. 6.6.1. Модель для исследования синхронной машины
г блок Display для количественного представления измеренных мощностей (в трех первых окнах блока представлены активные мощности в каждой фазе машины, в трех последних — реактивные мощности);
□ блок RMS из библиотеки Power System Blockset/Extras/ Measurement, измеряющий действующий ток в фазе машины;
□ блок Moment для задания механического момента на валу машины из главной библиотеки Simulink/Source;
□ блок Product из главной библиотеки Simulink/Math, вычисляющий механическую мощность на валу машины;
□ блок Scope для наблюдения тока статора, момента и механической мощности синхронной машины из главной библиотеки Simulink/Sinks;
□ блок Displayl для количественного представления измеренных тока (А) и электромагнитного момента (Нм) машины из главной библиотеки Simulink/Sinks;
О блок Мих, объединяющий два сигнала в один векторный из главной библиотеки Simulink/Sygnal & System.
230
Электрические машины. Лабораторные работы на ПК
Block Parameters: Permanent Magnet Synchronous Machine [XI
-PM SynchronousMachine (mask) (link)—:-——------—'— -i
, Implements a 3-phase permanent magnet synchronous machine with fl sinusoiddflux distribution: The machine is modelled in the dq rotor j
i reference frame. Stator windings are connected in wye to an internal i neutral point
i First 3 inputs: Machine terminals = phases a. b and c 4th input: Simulink signal = mechanical torque (N.m) (>0 for motor mode.<0 for generator mode)
output: Simulink measurement output = vector (10x1) containing | (all currents flowing into machine): j
1-3: Stator line currents ia.ib.ic (A) ' I
4-5: Stator currents id, iq (A) i
6-7: Stator voltages vd, vq (V] I
, 8 : Rotor speed wm(rad/s) !
: Э : Rotor angle thetam (rad) I
: 10 ; Electromagnetic torque Те (N.m) ' I
‘Parameters” ~ ‘ ~~ . - z (
[ Resistance R(ohm): . I
p—~— Inductances [ Ld[H) Lq(H) ]:
||й|[9е5'4"5Й] '
Flux induced by magnets (Wb): ;
Joi : “ , - . .
Inertia, friction factor and pairs of poles (J(kg.m?2) F(N.m.s) p() : |( d8e-2?0174] ;
— ~1 ^ancel | Help | 'Asp-. |
Рис. 6.6.2. Окно настройки параметров синхронной машины
Окно настройки параметров синхронной машины показано на рис. 6.6.2.
В полях окна последовательно задаются: \
□ активное сопротивление обмотки статора (Ом); ’
□ индуктивности по продольной и поперечной оси (Гн); ;
□ максимальный поток в машине (Вб); I
□ момент инерции (кгм2), коэффициент вязкого трения (Нмс), чис-1 ло пар полюсов. 1
Окно настройки блока измерения переменных состояния машины1: показано на рис. 6.6.3. '*
Тип машины выбирается в поле Machine type. В выпадающем* меню этого поля следует выбрать Permanent magnet synchronous. Флажки слева включаются у тех переменных состояния, которые подлежат измерению.
Лабораторная работа Ns 6
231
Окно настройки параметров источника показано на рис. 6.6.4. Напряжение и частота источника должны быть согласованы с напряжением, скоростью и числом пар полюсов машины.
Рис. 6.6.3. Окно настройки измерителя переменных состояния машины
Block Parameters: Source §Cj
' 3-phase mduct've source - Ungrounded neutral (mask) (Ink)
i This block implements a three-phase source in senes with a sene RL branch, the common node (neutral) of the three sources is accesible via
I input one IN) of the block
Phase-to-ground peak voltage (V)
j
Phase angle ol phase A ID egrees).
j-
Frequency (Hz) •
] ' |эо ‘ ''
Source resistance (Ohms)
I |O24 “ ‘
i Source inductance (H)
n “ 1 : ‘ !
I'4 _________•_ - • , ,.____________________________________,
0K 1 Cancel | Help | Apply |
Рис. 6.6.4. Окно настройки параметров источника питания
г
232
Электрические машины. Лабораторные работы на ПК
5. Порядок выполнения работы
Параметры синхронной машины и источника питания для выполнения работы задаются преподавателем. При самостоятельной работе 1 данные машины можно принять такими, как на рис. 6.6.2, а данные 1 источника — как на рис. 6.6.4. Окно настройки параметров моделиро- Я вания показано на рис. 6.6.5. |
Рис. 6.6.5. Окно настройки параметров моделирования
Снятие механической и рабочих характеристик машины в двига- 1 тельном режиме в соответствии с п. 3.1 содержания работы произво- | дится на модели (рис. 6.6.1) при изменении нагрузочного момента от | нуля до 1,4 от номинального. Номинальный момент определяется из | выражения |
_ —соФт)р fM,
где Um, а>-2тт/ — амплитуда и частота источника питания, Фт, Rs, р — максимальный поток, сопротивление статора и число пар полюсов машины (рис. 6.6.2).
Лабораторная работа № 6
233
Для каждого значения момента нагрузки осуществляется моделирование. При проведении исследований заполняется таблица 6.6.1.
Таблица 6.6.1
Измерения Вычисления
м Pi & Uy Л со Л 1 <Р cos ср П
[Нм] [Вт] [ВАр] [В] [А] [рад/с] [Вт] [А] [град] [%]
Вычисления осуществляются по формулам:
cp = arctg^, П = ^,Р1=РА+РВ+РС, Q^=Qa+Qb+Qc.
По данным таблицы строятся рабочие характеристики I, cos ср, h =Ж).
На рис. 6.6.6 видны зависимости переменных состояния машины.
Снятие зависимости потребляемой из сети мощности от потока возбуждения машины в соответствии с п. 3.2 содержания работы осуществляется на модели (рис. 6.6.1) при постоянном моменте нагрузки (задается преподавателем). Максимальный поток в поле Flux induced magnets (рис. 6.6.2) следует задавать в диапазоне 0,6-1,2 Вб с шагом 0,05 Вб. Для каждого значения потока проводить моделирование, по результатам заполнить таблицу 6.6.2.
Таблица 3.7.2
Фт Qy Ру cos (р
[Вб] [ВАр] [Вт]
6. Содержание отчета
6.1. Схема модели и описание виртуальных блоков.
6.2. Рабочие характеристики машины в двигательном режиме.
6.3. Зависимости Pt, Qx, cos ср от Фт.
234
Электрические машины. Лабораторные работы на ПК
Рис. 6.6.6. Временные зависимости переменных состояния машины
Лабораторная работа № 7.
Исследование синхронного генератора
1. Цель работы
Исследование синхронного генератора с электромагнитным возбу-жением при работе на пассивную нагрузку.
2. Указания к выполнению работы
К выполнению лабораторной работы следует приступить после изучения главы 4. В качестве дополнительной литературы рекомендуется воспользоваться [4, 13].
3. Содержание работы
3.1. Снятие угловой характерце гики генератора.
3.2. Снятие внешней (нагрузочной) и рабочих характеристик генератора при активной нагрузке.
3.3. Снятие внешней (нагрузочной) характеристики генератора при активно-индуктивной нагрузке.
3.4. Снятие внешней (нагрузочной) характеристики генератора при активно-емкостной нагрузке.
4. Описание виртуальной лабораторной установки
Виртуальная лабораторная установка представлена на рис.*16.7.1.
Она содержит:
□ исследуемую трехфазную синхронную машину Simplified Synchronous Machine из библиотеки Power System Blockset/ Machines;
О измеритель параметров состояния машины Machines Measurement из библиотеки Power System Blockset/Machines;
□ трехфазную нагрузку 3-Phase Load из библиотеки Power System Blockset/Extras /Three-Phase Library;
Электрические машины. Лабораторные работы на ПК
Рис. 6.7.1. Модель для исследования синхронного генератора
□ блок RMS.Vs, для измерения действующего значений напряжения на нагрузке;
□ блоки Fourier, Fourier 1, измеряющие амплитуды и начальные фазы напряжения на нагрузке и э.д.с. генератора из библиотеки Power System Blockset/Extras /Measurements;
□ блоки Display 1, Display2, Display3 для количественного представления измеренных величин и блок Scope для наблюдения тока якоря, скорости и электромагнитной мощности синхронной машины из главной библиотеки Simulink/Sinks;
□ блок Еа для задания э.д.с. возбуждения из главной библиотеки Simulink/Source;
□ блоки Mux, Demax из главной библиотеки Simulink/Sygnal & : System.
Окно настройки параметров синхронной машины показано на рис. 6.7.2.
В полях окна последовательно задаются:
□ схема соединения обмоток статора машины. В выпадающем меню этого поля можно выбрать соединение звездой без нулево-- го и с нулевым проводом;
Лабораторная работа № 7
237
Block Parameters: Simplified Synchronous
Simplified Synchronous Machine (mask) (link)
Implements a 3-phase simplified synchronous machine Machine is 1 modelled as an internal voltage behind a R-L impedance Stator windings are connected in wye to an internal neutral point.
1st input1 Simulink signal* mechanical power supplied to the machine (W,>0 for generator mode, <0 for motor mode)
2nd input: Simulink signal: RMS value of phase-to-phase internal voltage M
First 3 outputs: Machine terminals = phases a, b and c
. 4th output Simulink measurement output = vector [12x1) containing:
1 -3: Line currents flowing out of machine ia, ib, ic (A)
1 4-6: T erminal voltages va, vb, vc (V)
' 7-9; Internal voltages ea, eb, ec (V)
10 : Rotor angle theta (rad)
11 : Rotor speed wm (rad/s)
12 : Electrical power Pe (W)
’ Parameters :
Connection type: 13-wire Y ▼ j
Norn, power, L-L volt., and freq [ Pn[VA) VnjVrms) fn(Hz) ] j————
Inertia, damping factor and pairs of poles[ J(kg тл2) Kd() pl) ].
|[ inf ,0,2]
Internal impedance [ R(ohm) L(H] ]:
|[ 0.2 9 8e-3]
Init. cond. [ dw[%) th(deg) ia,ib,ic(A) pha,phb.phc(deg) ]
|[ 0 0 0,0,0 0,0,0]
OK | Cancel | Help j |
Рис. 6.7.2. Окно настройки параметров синхронной машины
О полная мощность (ВА), действующее линейное напряжение и частота;
□ момент инерции (кгм2), коэффициент демпфирования, число пар полюсов;
□ активное сопротивление и индуктивность обмотки якоря (статора);
О начальные условия при пуске модели.
Окно настройки блока измерения переменных состояния машины показано на рис. 6.7.3.
238
Электрические машины. Лабораторные работы на ПК
Тип машины выбирается в поле Machine type. Флажки слева включаются у тех переменных состояния, которые подлежат измерению.
Рис. 6.7.3. Окно настройки блока измерения переменных состояния машины
Block Parameters: RMS.VI |Х|
RMS (mask) (link]- -- - - -- -----...-------
This block measures the root mean square value of instantaneous 1 current or voltage signal connected to the input of the block. The RMS value is calculated over a running window of one cycle of the specified ' fundamental frequency Parameters-- - - - — ----- '
Fundamental frequency [Hz] 1
' __ j
OK | Cancel | Help [ ' |
..... .....-ТГ--Г—'..' - .. “»»,
Рис. 6.7.4. Окно настройки измерителя действующих значений
Блок настройки измерителя действующих значений показан на рис. 6.7.4. В окне настройки этого блока задается частота, на которой производятся измерения.
Окно настройки блоков Fourier, Fourierl показано на рис. 6.7.5. В полях окна задается частота и первая гармоника измеряемого напряжения. Разность фаз между измеряемыми напряжением и э.д.с. — есть угол нагрузки (см. гл. 4).
Лабораторная работа Ns 7
23»
Окно настройки параметров нагрузки показано на рис. 6.7.6
В поля окна вводятся действующее линейное напряжение и частота, которые должны быть согласованы с напряжением и частотой re-
Block Parameters: Fourier
। Fourier analyser (mask] (link) --------- • ------------------------------
The Fourier block perfoims a Fourier analysis of the input signal over a running window of one cycle of the fundamental frequency. First and second outputs return respectively the magnitude and phase (degrees) of • 1 the harmonic component specified.
Parameters - - — . ... .... «. ............. .. .......... .
Fundamental frequency 11 (Hz):
Я - .............. ....— I:
] Harmonic n(0=DC, ^fundamental; 2=2nd harm;....]: ;
Cancel
АрГ ‘Л
Рис. 6.7.5. Окно настройки блоков Fourier
Block Parameters: 3-Phase Load
3-phase parallel RLC load (mask) (link)
This block implements a three-phase parallel RLC load connected in Y configuration, with the neutral connected to the ground Each phase consist of one parallel RLC load block connected between the phase ' input and the ground.
Parameters
Nominal phase-phase voltage (Vims)
Nominal frequency (Hz):
Three-phase active power P (W):
i ' |l0e3“0.8
Three-phase inductive reactive power QI (varj гЮеЗ’О. “ ‘ ‘
Three-phase capacitive reactive potoer Qc (var): ' (l ЬеЗ'О
w
“J.
Help j
Рис. 6.7.6. Окно настройки параметров нагрузки
240
Электрические машины. Лабораторные работы на ПК
нератора (рис. 6.7.2), активная, реактивная (индуктивная) и реактивная (емкостная) мощности нагрузки. Удобней эти мощности задавать как номинальную мощность генератора, умноженную на коэффициент.
Содержание и настройка остальных блоков модели подробно описаны ранее.
5. Порядок выполнения работы j
Параметры синхронной машины и источника питания для выпол- | нения работы задаются преподавателем. При самостоятельной работе | данные машины можно принять такими, как на рис. 6.7.2. Значение | э.д.с. возбуждения (блок Ео, рис. 6.7.1) при проведении измерений ос- | тается постоянным, равным 380 В (номинальное линейное напряже- Я ние генератора в режиме холостого хода). Окно настройки параметров | моделирования показано на рис. 6.7.7. |
Снятие угловой характеристики генератора в соответствии с п. 3.1 | содержания работы производится на модели (рис. 6.7.1) при измене- -а нии активной мощности нагрузки от 0 до 1,6 от номинальной мощно- Я сти генератора. При этом коэффициент при активной мощности изме- Я
Рис. 6.7.7. Окно настройки параметров моделирования
Лабораторная работа № 7
няется от 0 до 1,6 с шагом 0,2. Коэффициенты при реактивных мо ностях равны нулю.
Для каждого значения активной мощности осуществляется моде; рование. При проведении исследований заполняется таблица 6.7.1.
Таблица 6.
Измерения Вычисления
РГ [Вт] со [рад/с] 0 [град] Л/ [Нм]
Момент на валу генератора вычисляется по формуле М = ~.
По данным таблицы строится зависимость М = Д0).
Снятие внешней и рабочих характеристик генератора при активн< нагрузке производится на модели (рис. 6.7.1) при изменении активн< мощности нагрузки в диапазоне 0-1,2 от номинальной с шагом 0,2 1 По данным измерений заполняется таблица 6.7.2.
Таблица 6.7
Измерения Вычисления
р 1 (tarp [Вт] 0нагр [ВАр] со [рад/с] Рг [Вт] Uy [В] cos ср 4 [А]
Вычисления производятся по формулам:
ср = аге# —— нагр
р
г __ нагр
UJ cos ср ‘
По результатам измерений и вычислений строится внешняя xapai теристика U, = flla) и рабочие характеристики Ub cos <р, 1а = flPr)-
Снятие внешних характеристик при активно-индуктивной и актш но-емкостной нагрузках в соответствии с пп. 3.3, 3.4 производятс аналогично предыдущему пункту. При изменении мощности нагрузк
242
Электрические машины. Лабораторные работы на ПК
необходимо соблюдать условие @н"гр = const. По результатам измере-^нагр
ний заполняется таблица, аналогичная таблице 6.7.2, и строятся внешние характеристики на том же графике, на котором построена внешняя характеристика предыдущего опыта.
Мгновенные значения токов в фазах якоря генератора, скорость и мощность генератора можно наблюдать на экране осциллоскопа (рис. 6.7.8).
Рис. 6.7.8. Мгновенные значения токов в фазах якоря генератора, скорость и мощность генератора
Лабораторная работа Ns 7
243
6. Содержание отчета
6.1. Схема модели и описание виртуальных блоков.
6.2. Угловая характеристика генератора.
6.3. Внешние характеристики генератора при различных коэффициентах мощности нагрузки.
6.4. Рабочие характеристики генератора.
Лабораторная работа № 8.
Исследование синхронного компенсатора при работе на «жесткую» сеть
1. Цель работы
Исследование синхронной машины с электромагнитным возбуждением, работающей в режиме синхронного компенсатора.
2. Указания к выполнению работы
К выполнению лабораторной работы следует приступить после изучения разделов гл. 4. В качестве дополнительной литературы рекомендуется воспользоваться [4, 13].
3. Содержание работы
Снятие характеристик синхронного компенсатора.
4. Описание виртуальной лабораторной установки
Виртуальная лабораторная установка представлена на рис. 6.8.1.
В отличие от модели Лабораторной работы № 7 в данной модели вместо нагрузки включен источник трехфазного напряжения Source, блок для измерения тока и блок для измерения активной и реактивной мощности (Active & Reactive Power). Дополнительные блоки Gain и Display4 вычисляют и представляют в цифровом виде мощность трехфазной машины.
Окно настройки параметров источника питания показано на рис. 6.8.2. Напряжение источника, которое задается в первом поле окна,
V2V
должно быть согласовано с параметрами машины (V = ). Началь-
ная фаза напряжения фазы А (второе поле окна), по существу, определяет ) угол момента 0, знак этой фазы определяет режим работы машины. Он ч отрицательный для генераторного режима и положительный для двига- 5 тельного режима (см. гл. 4). При исследовании машины в режиме 1 синхронного компенсатора этот параметр устанавливается равным нулю, i Внутренний параметр источника 7?, должен быть согласован с пара- ] метрами машины R, L так, чтобы соблюдалось неравенство Jr2 + (2л:/L)2 > 10/?,, параметр L источника должен быть равным нулю. ]
Лабораторная работа № 8
245
Рис. 6.8.1. Модель для исследования синхронного компенсатора
В окне настройки блока Active & Reactive Power задается частота, на которой осуществляются измерения (рис. 6.8.3).
5. Порядок выполнения работы
Параметры синхронной машины и источника питания для выполнения работы задаются преподавателем. При самостоятельной работе данные машины можно принять такими, как на рис. 6.7.2. Окно настройки параметров моделирования показано на рис. 6.7.7.
Снятие характеристик синхронного компенсатора в соответствии с п. 3.1 содержания работы производится на модели (рис. 6.8.1) при изменении э.д.с. возбуждения (блок Ео, рис. 6.8.1) от 200 до 500 В через каждые 50 В. Для каждого значения Ео осуществляется моделирование и определяются:
□ действующее значение напряжения в сети (блок Dislay 1);
□ реактивная мощность в сети (блок DislayPy,
□ сдвиг по фазе между током и напряжением в сети.
246
Электрические машины. Лабораторные работы на ПК
Block Parameters: Source ®
- 3-phase inductive source Ungrounded neutral (mask) (link)——-•
T his block implements a three-phase source in series with a serie RL ; branch, the common node (neutral) of the three sources is accesible via J input one (N) of the block
“Parameters ,:..p
Phase-to-ground peak voltage (V):
(aib""’’
Phase angle of phase A (Degrees):
И
I Frequency (Hz), I
i [50 “ 11
Source resistance (Ohms); (
llipST “ ““ ||||j
Source inductance (H):
Г — ——
Рис. 6.8.2. Окно настройки параметров источника питания
Block Parameters: Active & Reactive Power ®
; Active & Reactive Power (mask) (link)-- - --- ------------ -
I This block measures the active power P and reactive power Q j associated with a periodic set of voltage and current which may contain-I harmonics. P and Q are calculated by averaging the V.l product with a i running window over one cycle of the fundamental frequency so that the j powers are evaluated at fundamental frequency.
i input 1: Instantaneous voltage (V)
i input 2: Instantaneous current (A)
Output; PQ measurement vector (P(W) Q (varJ). Current flowing into an . RL circuit will produce positive active and reactive powers.
p Parameters’-—™—--— — —rr
j Fundamental frequency (Hz):
।
IBt !Яя1»0^ч1ЙМ
Рис. 6.8.3. Окно настройки блока Active & Reactive Power
Лабораторная работа Ns 8
24:
При проведении исследований заполняется таблица 6.8.1.
Таблица 6.8.1
Измерения
Ео [В] С, [В] Q [Вар] Ф [град]
По данным таблицы строится зависимости U\, Q, q - j{E0).
6. Содержание отчета
6.1. Схема модели и описание виртуальных блоков.
6.2. Характеристики синхронного компенсатора.
Лабораторная работа Ns 9.
Исследование машины постоянного тока с независимым возбуждением
1. Цель работы
Исследование машины постоянного тока при работе в двигательном и генераторном режимах.
2. Указания к выполнению работы
К выполнению лабораторной работы следует приступить после изучения разделов гл. 5. В качестве дополнительной литературы рекомендуется воспользоваться [4, 5, 6, 13].
3. Содержание работы
3.1. Снятие механической и расчет рабочих характеристик машины в двигательном режиме работы.
3.2. Снятие механической и расчет рабочих характеристик машины в генераторном режиме работы.
3.3. Снятие механических характеристик при различных напряжениях питания в цепи якоря.
3.4. Снятие механических характеристик при различных сопротивлениях в цепи якоря.
3.5. Снятие механических характеристик при различных потоках возбуждения.
3.6. Снятие регулировочных характеристик при изменении напря-„ жения якоря.
4. Описание виртуальной лабораторной установки.
Виртуальная лабораторная установка представлена на рис. 6.9.1.
Она включает источники постоянного напряжения (Р] для питания якоря машины, С2 для питания обмотки возбуждения из библиотеки Power System Blockset/Electrical Sources), блок Moment для задания момента нагрузки (блок Constant из библиотеки Simulink/Sources),
Лабораторная работа № 9
249
саму машину постоянного тока (блок DC Machine из библиотеки Power System Blockset/Machines), блок для измерения переменных состояния машины Display и осциллограф Scope для визуального наблюдения процессов из библиотеки Simulink/Sinks.
Рис. 6.9.1. Модель для исследования машины постоянного тока с независимым возбуждением
Цепь якоря и цепь возбуждения видны из графического начертания блока, на вход TL подается момент нагрузки, выход m предназначен для измерения и наблюдения переменных состояния машйны в следующей последовательности: угловая скорость (рад/с), ток якоря в (А), ток возбуждения (А), электромагнитный момент (Нм).
В полях настройки машины (рис. 6.9.2) задаются:
□ параметры обмотки якоря — Ra (Ом), La (Гн);
□ параметры обмотки возбуждения — 7?/ (Ом), Lf (Гн); .
□ коэффициент
□ суммарный момент инерции машины и нагрузки — J (кГм2). Следует подчеркнуть, что параметры J) важны при исследовании переходных процессов. На установившиеся режимы они не влияют;
250
Электрические машины. Лабораторные работы на ПК
Block Parameters: Dr Machine
0.25e-4
re mutual inductance Laf (H):
0.001
is friction coefficient Bm (N m s)
NS&s^arbteb> «садйНЙг machine. Access is ' <
thfcfiercTcdnnetliohs so that Wmichine can be used as a 1
teirrinelt terminals
mulnk iqeasuiement output {-A la If -Те ]
resistance'and inductance [Ra [ohms] La (H) ] [ 2 52 48e<3]
0 207
lai mertta J (kg m?2)
friction torque'Tt [N mJ" 0 01
s.
.I-OK j Cancel | Help [ ]
Рис. 6.9.2. Окно настройки параметров машины постоянного тока.
□ коэффициент вязкого трения — Вт (Нмс);
О коэффициент сухого трения — 7} (Нм);
□ начальная скорость.
Все эти параметры рассчитываются по выражениям (5.15-5.18), гл. 5.
Паспортные параметры машин постоянного тока приведены в таблице 6.9.1.
Лабораторная работа No д
Таблица 6.
Тип двигателя Л [кВт] и„ [В] п„ [об/мин] hn [%] R. [Ом] Rs [Ом] L„ [мГн]
1 2 3 4 1 5 6 7 8
2ПН-0.17 0,17 220 750 48,5 27,2 162 514
2ПН-0.25 0,25 220 1120 57 15,47 612 297
2ПН-0.37 0,37 220 1500 61,5 10,61 612 190
2ПН-0.71 0,71 220 2360 70 3,99 123 70
2ПН-1.0 1 220 3000 72,5 2,52 92 48
Окно настройки параметров моделирования показано на рис.6.9.3
. Simulation Parameters: DC_Mach |::'n]X|
Solver | Workspace (/01 Diagnostics j Advanced] Real-Time Workshop
Simulation time
Start time’, j ДО " Stop time: [з
Solver options
Турес |va?abie-step”_2 !°дйЗЛ (stiff/TR~BDF2) "" 2
Relative tolerance;. pie-3
Absolute tolerance: 11 e-4 J
Refine factor: 11 rf
Max step size: j 1e-3
Min step size: ГТе-4*
Initial step size: I auto
Output options (Refine output
Cancel
Help
Рис. 6.9.3. Окно задания параметров моделирования *
5. Порядок проведения лабораторной работы
5.1. Для заданной преподавателем (или выбранной при самостоятельной работе) машины рассчитать значение параметров и заполнить поля окна настройки параметров машины.
5.2. Задать параметры моделирования (рис. 6.9.3).
5.3. При снятии характеристик по п. 3.1 порядка выполнения работы в окне настройки блока Moment последовательно задаются значения момента от 0 до 1,2 Ми с шагом 0,2 М„. Для каждого
252
Электрические машины. Лабораторные работы на ПК
значения момента осуществляется моделирование и заполняется таблица 6.9.2 измеренных и рассчитанных значений.
Таблица 6.9.2
Задание Измерения Расчет
М [Нм] со [рад/] /я [А] 4 [А] Р\ [Вт] Рг [Вт] И
Вычисления осуществляются по выражениям:
Р =U(J„ +IA, Р2=Мнсо, т] = ^.
5.4. При снятии характеристик по п. 3.2 порядка выполнения работы в окне настройки блока Moment последовательно задаются значения момента от 0 до -1,2 М„ с шагом -0,2 Ми. Для каждого значения момента осуществляется моделирование и заполняется таблица 6.9.2. измеренных и рассчитанных значений. Коэффициент полезного дей-
ствия в этом случае вычисляется по формуле Tj = —.
> Рг
5.4. Снятие механических характеристик при различных напряжениях питания в цепи якоря по п. 3.3 содержания работы следует провести для двух значений напряжения на якоре 0,6 ия и 0,8 ия, где ия — первоначальное напряжение на якоре, при котором выполнялись п.п. 3.1, 3.2. При этом момент нагрузки следует изменять от -1,2 М„ до 1,2 М„ с шагом 0,2 М„. Для каждого значения напряжения на якоре и момента проводится моделирование и заполняется таблица 6.9.3.
Табл.6.9.3
М [Нм] (0 [рад/с]
5.5. Снятие механических характеристик при различных сопротивлениях в цепи якоря по п. 3.4 содержания работы следует провести для двух значений сопротивления якоря 2/?я и 47?я, где 7?я первоначальное значение сопротивления. Изменение сопротивления якоря осуществляется в поле окна настройки параметров машины. При этом момент нагрузки следует изменять от -1,2 Мн до 1,2 Мн с шагом 0,2 Мп. Для каждого значения сопротивления якоря и момента проводится моделирование и заполняется таблица 6.9.3.
Лабораторная работа № 9
253
5.6. Снятие механических характеристик при различных потоках возбуждения по п. 3.5 содержания работы следует провести для двух значений потока 0,6 Фн и 0,8 Фн- Для этого в поле Field-armature mutual inductance необходимо установить значение Laf вначале 0,6, а затем 0,8 от первоначальной величины.
При этом момент нагрузки следует изменять от -1,2 Мн до 1,2 AfH с шагом 0,2 Мн. Для каждого значения потока и момента проводится моделирование и заполняется таблица 6.9.3.
5.7. Снятие регулировочных характеристик при изменении напряжения якоря по п. 3.6 содержания работы проводится для постоянного момента нагрузки, равного номинальному, и изменению напряжения в цепи якоря от 0,4 до 1,2 исходного значения с шагом 0,2 исходного значения напряжения. Для каждого значения напряжения проводится моделирование и заполняется таблица 6.9.4.
Табл. 6.9.4
Ся [В] о) [рад/с]
*
6. Содержание отчета
6.1. Схема модели для проведения лабораторной работы.
6.2. Расчетные формулы параметров машины.
6.3. Расчетные формулы для мощностей Рь Рг и КПД.
6.4. Заполненные таблицы.
6.5. Графики рабочих характеристик машины в двигательном и генераторном режимах.
6.6. Графики механической характеристики машины при различных напряжениях на якоре.
6.7. Графики механической характеристики машины при различных сопротивлениях якоря.
6.8. Графики механической характеристики машины при различных потоках.
6.9. Регулировочная характеристика двигателя.
Лабораторная работа Ns 10. Исследование машины постоянного тока с последовательным возбуждением
1. Цель работы
Исследование машины постоянного тока при работе в двигательном режиме.
2. Указания к выполнению работы
К выполнению лабораторной работы следует приступить после изучения разделов главы 5. В качестве дополнительной литературы рекомендуется воспользоваться [4, 5, 6, 13].
3. Содержание работы
Снятие механической и расчет рабочих характеристик машины в двигательном режиме работы.
4.Описание виртуальной лабораторной установки
Виртуальная лабораторная установка представлена на рис. 6.10.1.
“ IK M,ich1 * MSJtel
tfr, Mt- view-' Simulation Format Tgifa Help________________________________ __________________
□ i-os ее • x i-v e i <г < * Г» и • ► * 1^' d
*eady (100% ~ ~~ I.............------..... otteZJtb........................... /;
Рис. 6.10.1. Модель для исследования машины постоянного тока с последовательным возбуждением
Лабораторная работа № 10
255
Она включает источники постоянного напряжения (К для питания машины из библиотеки Power System Blockset/Electrical Sources), блок Moment для задания момента нагрузки (блок Constant из библиотеки Simulink/Sources), саму машину постоянного тока (блок DC Machine из библиотеки Power System Blockset/Machines), блок для измерения переменных состояния машины Display из библиотеки Simulink/Sinks.
Окно настройки параметров машины постоянного тока показано на рис. 6.10.2. Окно настройки параметров источника питания показано на рис. 6.10.3. Окно настройки параметров моделирования показано на рис. 6.10.4.
I Block Parametei s: t>C Machine ~ _________________ 8
I This block implements a separately everted DC machine. Access is i providedto thefieldconnections so that themachinecanbeused OA Hhunt-cohnectedi^eseries-connectfedDCmachin^
’ Input 1 and output 11 positive and negative armature terminals 2dndputpU 2 - positive and negative field terminals a
| 0 utput3;:S tmulihkmeasurement output £w 1 а
-Parameters'’^-''^' ~ "-гтттт-- "~_-
ЛВЩArmature resistance and inductance (Ra (ohms) La OilrPI/ffiWS /ЛЦГазтабгаj~“~~ “Jg
Reld-armature mutual inductance Laf (H) t
•Hi )nri5 ““ ~ ~ ~«»
Total
, Viscous friction coefficient Вт (N m.sj
Coulomb friction torque Tf (N.mJii
•( Л Initial speed (<ad/s): lllpOO —
[... Ch j Cancer ) jtep | .................
Рис. 6.10.2. Окно настройки параметров машины
Block Parameters: V 8
; DC Voltage Source (mask)
: Ideal DC voltage source.
Parameters
/ Л An^rtude (V]:
i i660
Л?: Measurements j None
Рис. 6.10.3. Окно настройки параметров источника питания
256
Электрические машины. Лабораторные работы на Г1К
Рис. 6.10.4. Окно задания параметров моделирования
5. Порядок проведения лабораторной работы
5.1. Параметры машины и источника задаются такими, как на рис.
6.10.2,6.10.3. '
5.2. Задать параметры моделирования (рис. 6.10.4).
5.3. При снятии характеристик по п. 3.1 порядка выполнения работы в окне настройки блока Moment последовательно задаются значения момента от 5 Нм до 100 Нм с шагом 10 Нм. Для каждого значения момента осуществляется моделирование и заполняется таблица 6.9.5 измеренных и рассчитанных значений.
Табл. 6.9.5
Задание Измерения Расчет
М [Нм] со [рад/с] 1я [А] 1в [А] Р, [Вт] Рг [Вт) < .4
> - •м.. t .
Расчет осуществляется по выражениям:
Ж?
Ж
Pt=UI, Р2=Мсо, Г] = ^-
Л
6. Содержание отчета
6.1.
6.2.
6.3.
6.4.
Й,
Схема модели и описание блоков.
Заполненные таблицы.
Механические характеристики машины
Рабочие характеристики машины со, I, М\ Р}, т] = /(У^)