/































































































































































































































Автор: Любимов А.К.
Теги: механика деформируемых тел упругость деформация гидромеханика механика жидкостей и газа физика программное обеспечение
ISBN: 5-85746-928-7
Год: 2006




Текст
НАЦИОНАЛЬНЫЙ ПРОЕКТ “ОБРАЗОВАНИЕ”
Инновационная
образовательная программа
Нижегородского государственного
университета им. Н.И. Лобачевского
ПРИМЕНЕНИЕ
СИСТЕМЫ ДАЮТ
К РЕШЕНИЮ ЗАДАЧ
МЕХАНИКИ
СПЛОШНОЙ СРЕДЫ
практическое руководство
2006
ПРИМЕНЕНИЕ СИСТЕМЫ ANSYS
К РЕШЕНИЮ ЗАДАЧ МЕХАНИКИ СПЛОШНОЙ СРЕДЫ
Практическое руководство
Отв. редактор А.К. Любимов
Компьютерная верстка: Ю.В. Прокофьев
Формат 70x108 1/16. Бумага офсетная. Печать офсетная.
Гарнитура Таймс. Уч.-изд. 23,8 л. Усл.-печ. 20,0
Тираж 1000. Заказ 1743.
Издательство Нижегородского госуниверснтета им. Н. И. Лобачевского
603950, Нижний Новгород, пр. Гагарина, 23
Типография ННГУ им. Н.И. Лобачевского
Лицензия ПД №18-0099 от 04.05.2001 г.
603000, Нижний Новгород, ул. Б. Покровская, 37
Федеральное агентство по образованию
Нижегородский государственный университет
им. Н.И. Лобачевского
Национальный проект «Образование»
Инновационная образовательная программа Нижегородского университета:
Образовательно-научный центр
«Информационно-телекоммуникационные системы:
физические основы и математическое обеспечение»
ПРИМЕНЕНИЕ СИСТЕМЫ ANSYS
К РЕШЕНИЮ ЗАДАЧ МЕХАНИКИ
СПЛОШНОЙ СРЕДЫ
Практическое руководство
Нижний Новгород
Издательство Нижегородского госуниверситета
2006
УДК 539.3+532
ББКВ251
П76
Рецензенты'.
В.М. Волков - профессор, д.т.н., зав. кафедрой строительной
механики корабля и сопротивления материалов НГТУ;
Нижегородский филиал Института машиноведения РАН
Авторский коллектив’.
А.К. Любимов (отв. редактор), Н.Н. Берендеев, М.Ю. Втюрин, А.В. Жидков,
Н.В. Леонтьев, В.В. Шабаров
П 76
Применение системы ANSYS к решению задач механики сплошной среды.
Практическое руководство / Под ред. проф. А.К. Любимова. Нижний Новго-
род: Изд-во Нижегородского госуниверситета, 2006. 227 с.
ISBN 5-85746-928-7
Руководство включает в себя работы по практическому применению системы
ANSYS к решению прикладных задач механики деформируемого твердого тела,
аэрогидродинамики. Системно рассматриваются вопросы постановок задач, соз-
дания конечно-элементных моделей, получения численных результатов. Значи-
тельное внимание уделено вопросам анализа полученных численных результатов
с позиции механики.
Для студентов, обучающихся по специальности «Механика», по направлени-
ям магистратуры «Механика», «Механика. Прикладная математика», а также
родственным специальностям и направлениям. Уровень выполненных разрабо-
ток позволяет активно использовать их специалистами предприятий соответст-
в\ ющего профиля для решения практических задач.
Издано в рамках Инновационной образовательной программы ИНГУ:
Образовательно-научный центр «Информационно-телекоммуникационные
системы: физические основы и математическое обеспечение»
> IN 5-85~46-928-7
ББКВ251
© Нижегородский госуниверситет
им. Н.П. Лобачевского, 2006
© Авторский коллектив, 2006
СОДЕРЖАНИЕ
Предисловие............................................................3
Геометрическое моделирование плоских и пространственных объектов.......5
Плоские задачи строительной механики и сопротивления материалов ......25
Модальный и гармонический анализ......................................57
Контактная задача.....................................................92
Расчет усталостной долговечности ....................................115
Гидрогазодинампческие задачи.........................................139
Симметричное обтекание уступа потоком вязкой несжимаемой жидкости 140
Сверхзвуковое обтекание цилиндра..................................154
Обтекание тела с теплообменом.....................................168
Гидродинамика течений со свободными границами: формирование
и распространение волн конечной амплитуды.........................178
Анализ решения одной задачи относительного равновесия жидкости
со свободными границами...........................................188
Симметричное погружение клиновидного профиля в несжимаемую
жидкость..........................................................195
Обтекание профиля потоком вязкого газа............................203
Распространение и взаимодействие ударных волн.....................219
Авторы.............................................:.................227
3
Предисловие
Подготовка специалистов-механиков университетского профиля предполага-
ет освоение ими не только фундаментальных положений и методов по общим и
специальным разделам математики и механики, но и владение профессиональ-
ными информационными технологиями, современными экспериментальными ме-
тодами.
Профессиональные информационные системы представляют собой эффек-
тивный инструмент для решения и анализа широкого круга задач механики
сплошной среды. Вместе с тем получение с их помощью достоверных результа-
тов требует глубокого понимания физико-механического смысла решаемых за-
дач.
Кафедра теории упругости и пластичности (ТУиП) механико-математи-
ческого факультета ИНГУ осуществляет подготовку студентов по специальности
«Механика» и направлению магистратуры «Механика». В рамках магистратуры
реализуются программы «Компьютерная механика», «Механика деформируемо-
го твердого тела».
Важной частью процесса обучения является освоение студентами современ-
ных программных систем, позволяющих решать обширный круг задач механики
сплошной среды. В частности, широко распространена коммерческая система
ANSYS.
Предлагаемое практическое руководство по применению системы ANSYS
подготовлено с учетом реализуемых на кафедре ТУиП учебных программ, науч-
ной тематики проводимых сотрудниками исследований и предназначено для на-
учно-методического сопровождения работ по освоению системы.
В то же время, как показал опыт, уровень анализа рассматриваемых в руко-
водстве задач, как в теоретическом, так и в методическом планах, делает предла-
гаемое руководство востребованным для сотрудников организаций и предпри-
ятий, занимающихся расчетами конструкций.
Большая работа по оформлению издания выполнена сотрудником кафедры
10.В. Прокофьевым.
А. К. Любимов,
отв. редактор, д.ф.-м.н., профессор, зав. кафедрой
теории упругости и пластичности, декан механико-
математического факультета Нижегородского
госуниверситета им. Н.И. Лобачевского,
член-корреспондент АПН РФ
4
ГЕОМЕТРИЧЕСКОЕ МОДЕЛИРОВАНИЕ
ПЛОСКИХ И ПРОСТРАНСТВЕННЫХ ОБЪЕКТОВ
М.Ю. Втюрин, А.В. Жидков
1. Введение
2. Геометрические построения на плоскости
2.1. Контрольное задание
3. Моделирование трехмерных объектов
3.1. Моделирование сверху вниз
3.2. Контрольное задание
4. Литература
1. Введение
В системе ANSYS существуют три разных способа построения геометриче-
ской модели: импорт модели, предварительно построенной другой программой;
твердотельное моделирование с использованием геометрических примитивов и
операций булевой алгебры; непосредственное создание модели в интерактивном
режиме работы с системой. Можно выбрать любой из этих методов или исполь-
зовать их комбинацию для построения расчетной модели [1—3].
Система ANSYS позволяет наносить конечно-элементную сетку на модель,
импортированную из другой программы, а также имеет возможность менять гео-
метрию модели с целью упрощения расчета [1]. Использование автоматических
средств позволяет улучшить модель за счет устранения ненужных зазоров, пере-
крытий или взаимных внедрений ее частей, а также выполнить слияние объектов
и создать объемы.
Средства твердотельного моделирования включают в себя представление
геометрии конструкции, основанное на использовании сплайновой технологии,
геометрических примитивов и операций булевой алгебры. В системе ANSYS
доступны следующие способы моделирования: нисходящий (сверху вниз) и вос-
ходящий (снизу вверх) [2]. В первом случае пользователь указывает только са-
мый высокий порядок сложности объектов модели. Используемые обычно объ-
екты (такие, как сферы и призмы, т. е. формы, которые называются геометриче-
скими примитивами) могут быть созданы за одно обращение к меню. Например,
пользователь определяет объемный примитив, а система автоматически находит
связанные с ним поверхности, линии и ключевые точки. Примитивы позволяют
непосредственно указывать геометрические формы. В системе ANSYS можно
легко и быстро определить в двумерном случае такие формы, как окружности и
прямоугольники, или параллелепипеды, сферы, конусы и цилиндры - в трехмер-
ном. После того как геометрические объекты указаны, к ним можно применять
операции булевой алгебры.
При непосредственном создании модели в интерактивном режиме чаще всего
применяется моделирование снизу вверх. При таком моделировании пользова-
тель строит модель, начиная с объектов самого низкого порядка. Сначала зада-
ются ключевые точки, затем связанные с ними линии, поверхности и объемы, -
именно в таком порядке.
Независимо от используемого способа построения модели имеется возмож-
ность применять операции булевой алгебры для объединения наборов данных и
5
за счет этого создавать «скульптуру» модели. Система имеет набор таких буле-
вых операций, как сложение, вычитание, пересечение, деление, склеивание и
объединение.
2. Геометрические построения на плоскости
Для иллюстрации и освоения возможностей системы ANSYS по геометриче-
скому моделированию плоских объектов рассмотрим следующую задачу: по-
строить точки сопряжения и сами сопряжения прямых, окружностей и дуг ок-
ружностей, представленных на рис. 1. Исходные данные: координаты точки
А (0, -23), координаты центров окружностей и радиусы приведены в табл. 1. Не-
указанные в таблице данные (координату Y центра и радиус окружности О1)
нужно определить в результате геометрических построений.
Таблица 1
Окружность Координаты центра Радиус
X Y
<91 0
02 55 -26 12
<93 0 0 16
<94 0 0 9
<95 55 -26 4
Решение начинаем с построения окружностей - сначала 04, затем 03. Для
этого в Main Menu выбираем:
Main Menu—Preprocessor—>Modeling—>Create—pines—>Arcs—>Fnil Circle,
в открывшемся окне в поле ввода указываем координаты (X, Y, Z) центра окруж-
ности, нажимаем клавишу Enter, затем вводим радиус окружности, нажимаем
клавишу Enter:
0,0,0 —> Enter —> 9 —> Enter.
Теперь можно, не выходя из окна команды Full Circle, построить аналогично
окружность (93. Выйти из окна команды Full Circle можно нажав кнопку ОК или
Apply, или Cancel. Следует отметить, что полная окружность создается четырь-
мя дугами по 90°.
Для построения других окружностей нам необходимо переместить рабочую
систему координат так, чтобы ее центр совпадал с центром окружности (это свя-
зано с тем, что в системе ANSYS радиус отсчитывается от начала системы коор-
динат). Для этого включаем рабочую плоскость:
Utility Menu->WorkPlane—>DispIay Working Plane,
перемещаем ее:
Utility Menu—>WorkPlane—>Offset WP by Increments.
В открывшемся окне Offset WP в поле Snaps XYZ Offsets вводим координаты но-
вого центра рабочей плоскости:
55,-26,0->Enter.
6
Теперь строим здесь окружности 05 и 02’.
Main Menu—Preprocessor—>ModeIing—>Create—pines—> A res—Pull Circle,
в поле ввода указываем координаты центра и радиус окружностей:
0,0,0 —> Enter —> 4 —> Enter и 0,0,0 -» Enter —> 12 —> Enter.
При этом необходимо отметить, что в данном случае следует активизировать пе-
реключатель WP Coordinates.
Копируем эти окружности:
Main Menu—preprocessor—>ModeIing—popy—Pines,
отмечаем курсором мыши дуги этих окружностей, нажимаем кнопку ОК и в от-
крывшемся окне Сору Lines в поле DXX-offset in active CS указываем величину
смещения вдоль оси Ох: -110 —> Enter. При этом значения незаполненных (пус-
тых) числовых полей по правилу умолчания считаются равными нулю.
Получаем шесть окружностей (рис. 2).
Рис. 2
Теперь построим касательную к двум окружностям 02 и ОЗ (см. рис. 1) и
симметричную ей. Для этого выбираем команду
Main Menu—Preprocessor—>ModeIing—>Create—>
Lines—Pines—>At angel to 2 Lines.
С помощью курсора мыши указываем две дуги окружностей, к которым нужно
построить касательные, и в окне At angel to 2 Lines нажимаем кнопку ОК. Далее,
не указывая никаких параметров (правило умолчания), в открывшемся окне
Straight Line at angel to 2 Lines нажимаем кнопку OK. Получим касательную к
.двум выбранным дугам окружностей. Симметричную касательную строим ана-
.тогично. Результат показан на рис. 3.
Рис. 3
Построим дугу окружности, касающуюся двух окружностей - 02 и симмет-
ричной ей (см. рис. 1) - и проходящую через точку А(0,-23). Для этого зададим
точку А:
Main Menu—preprocessor—>ModeIing—preate—>Keypoints—>In Active CS.
7
Выбор пункта меню In Active CS позволяет задавать положение ключевых
(опорных) точек в текущей глобальной системе координат (Coordinate System,
CS). В открывшемся окне в поле Keypoint number вводим номер первой ключевой
точки 1, а также в полях Location in Active CS-ec координаты A, Y, Z:
0-23,0 -> OK.
Заметим, что поля для ввода информации могут быть оставлены незаполненными
(принцип умолчания). Так, если оставить незаполненным поле Keypoint number,
то ключевой точке будет присвоен номер на единицу больше номера последней
заданной точки, если оставить незаполненными некоторые поля Location in Ac-
tive CS, то значения соответствующих координат ключевой точки будут равны
нулю.
Для того чтобы отобразить в графическом окне точки, необходимо в меню
утилит выбрать:
Utility Menu —plot->Keypoints—>Keypoints,
а чтобы отобразить линии -
Utility Menu —plot—Pines.
Для того чтобы геометрически определить центр окружности, касающейся
окружности 02 и симметричной ей и проходящей через точку А (внешнее каса-
ние), необходимо выполнить дополнительные построения (рис. 4).
А. Построим точку В на расстоянии
радиуса окружности 02 в направ-
лении радиуса искомой окружно-
сти. Точка В будет иметь коорди-
наты (0,-11,0). Зададим точку С -
центр окружности, симметричной
окружности 02. Ее координаты бу-
дут (-55,-26,0).
Б. Соединим точки В и С отрезком
прямой:
Main Menu—Preprocessor—>
Modeling—>Create—Pines—>
Lines—>Straight Line.
Курсором мыши указываем по
очереди точки В и С, после чего
нажимаем кнопку ОК в окне Cre-
ate Straight Line.
В. Теперь построим точку D, деля-
щую этот отрезок пополам:
Рис. 4
Main Menu-Preprocessor—>Modeling—>Crcate—>
Keypoints-»On Line w/Ratio.
В открывшемся окне в поле Line Ratio вводим отношение длин отрезков BD и
ВС, в данном случае 0.5—>ОК. Получаем точку D.
Г. Из точки D восстанавливаем перпендикуляр к отрезку ВС. Для этого строим
прямую, параллельную ВС
Main Menu—preprocessor—>Modeling—>Copy—pines,
8
указываем в поле DXX-offset in active CS смещение по оси X: 20; в поле
DY Y-offset in active CS смещение по оси Y: -130. Теперь из точки D можно
провести перпендикуляр к этой вспомогательной прямой, который будет так-
же перпендикуляром к отрезку ВС.
Main Menu-preprocessor->Modeling->Create->
Lines->Lines->Normal to Line.
Курсором мыши указываем вспомогательную линию, нажимаем кнопку ОК,
затем указываем точку D и нажимаем кнопку ОК.
Замечание. При построении прямой, параллельной ВС (копировании ВС),
смещения по осям Хи Y должны быть выбраны таким образом, чтобы перпен-
дикуляр к отрезку ВС пересекал направление диаметра искомой окружности
(продолжение отрезка ВА). В противном случае перпендикуляр к отрезку ВС
необходимо будет «удлинить». Для этого можно воспользоваться командой
Main Menu—preprocessor—>Modeling—>Operate—>Extend Line.
Затем курсором мыши указать удлиняемую линию, нажать кнопку ОК, ука-
зать точку, из которой будет удлиняться линия, и нажать кнопку ОК. В от-
крывшемся окне Extend Line в поле DIST Distance to Extend задать расстояние,
на которое необходимо удлинить линию, и нажать кнопку ОК.
Д. Построим линию диаметра окружности сопряжения. Для этого найдем вспо-
могательную точку (в данном случае она лежит на оси У):
Main Menu—preprocessor—>Modeling—>Create—>
Keypoints—>In Active CS.
В полях X, Y, Z задаем координаты 0,-150,0—>OK и проводим линию, совпа-
дающую с осью Y, соединяя эту точку с точкой А.
Е. Найдем центр окружности сопряжения (точка О) как пересечение перпенди-
куляра и линии диаметра (оси У):
Main Menu—preprocessor—>Modeling—>Operate—>Booleans—>
Divide->Line by Line.
Указываем сначала пересекаемые линии (в данном случае - одну), нажимаем
кнопку ОК, затем указываем пересекающие линии (в данном случае - тоже
одну), нажимаем кнопку ОК (линии, которые указываются последними, будут
удалены).
Найдем теперь точки сопряжения окружностей. Для этого соединим точку О
с центрами обеих окружностей - 02 и симметричной ей. Один из центров - это
точка С, а вторую задаем координатами (55,-26,0). Соединяем точку О с центра-
ми. Делим наши окружности этими линиями, получаем две точки: одну на ок-
ружности 02, вторую на симметричной окружности.
Строим дугу окружности сопряжения по трем точкам:
Main Menu—Preprocessor—>Modeling—>Create—>
Lines—> Arcs—/Through 3KPs.
Сначала указываем курсором мыши левую полученную точку, затем правую, а
потом среднюю, т.е. точку А.
Теперь можно удалить ненужные линии и дуги:
Main Menu—preprocessor—>Modeling—>Delete—>Line and Below.
9
Выбираем линию и нажимаем ОК. Получаем фигуру такую же, как в поставлен-
ной задаче.
Во время сеанса работы пользователя все выполняемые команды записыва-
ются в файл. Этот файл сохраняется па жестком диске под названием
<имя_задачи>.log. Имеется возможность сохранить только существенные коман-
ды, выполнив следующие действия:
Utility Menu—>File—>Write DB Log File...
В открывшемся окне Write Database Log нужно указать место, куда должен быть
записан командный файл, и его имя (по умолчанию предлагается файл с расши-
рением o.lgw).
Командный файл может быть использован для повторного выполнения неко-
торых действий и расчета аналогичных задач. Для исполнения содержащихся в
этом файле команд нужно выполнить:
Utility Menu—>File—>Read Input from...
В открывшемся окне Read File нужно указать место, откуда должен быть прочи-
тан командный файл, и его полное имя.
Приведем распечатку командного файла:
/BATCH
/innut.menust.tmo."... 1
/PREP7 ! запускает препроцессор для создания модели
FLST,2,2,8 ! информация для операций выбора ! 2 - номер поля, содержащего метку Р51Х ' 2 - количество выбранных объектов ! 8 - тип выбираемых объектов - координаты точек
! глобальной декартовой системы координат
FITEM,2,0,0,0 ! идентифицирует выбранный объект ! 2 - то же, что и для FLST ! 0,0,0 - координаты центра окружности
FITEM,2,9,0,0 ! точка, лежащая на окружности
CIRCLE,Р5IX ! построение окружности по центру и радиусу
FLST,2,2,8 ! аналогично 2-я окружность
FITEM,2,0,0,0 FITEM.2,16,0,0 CIRCLE,Р5IX
FLST,2,2,8 ! аналогично 3-я окружность
FITEM,2,55,-26,0 FITEM,2,59,—26,0 CIRCLE,Р5IX
FLST,2,2,8 ! аналогично 4-я окружность
FITEM,2,55,-26,0 FITEM,2,67,-26,0 CIRCLE,Р5IX FLST,3,8,4,ORDE,2 ! 4 - выбор линий ! ORDE- упорядоченный набор объектов ! 2 - количество команд выбора
FITEM,3,9 ! выбираются линии, начиная с номера 9
FITEM,3,-16 ! и заканчивая номером 16 ! (всего 8 дуг окружностей)
10
LGEN,2,P51X,, -ПО,,, ,0
L2ANG,22,6,„„
L2ANG,13,5,„„
К, ,0-23,0,
К, ,0-11,0,
К, ,-55,-26,0,
LSTR, 31, 30
KL.31,0.5,,
! копируем две окружности (8 дуг) со сдвигом
! вдоль Ох на -110
строим касательную к линиям с номерами 22 и 6
строим касательную к линиям с номерами 13 и 5
ключевая точка с координатами (0,-23,0) -А
ключевая точка с координатами (0,-11,0) - В
ключевая точка с координатами (-55,-26,0) - С
! соединяем ключевые точки с номерами 31 и 30
! отрезком прямой СВ
делим линию с номером 31 (отрезок СВ) пополам
FLST,3,1,4,ORDE,1
FITEM,3,31
LGEN,2,P51X,, ,20,-130,, ,0
LANG, 32, 32,90,,
К ,0,-150,0,
LSTR, 30, 36
LSBL, 34, 35
IK, ,55,-26,0, !
|LSTR,31,37 !
| LSTR, 36, 37 1
iLSBL, 24, 34
LSBL, 15, 35
LARC, 38, 39, 29
выбираем отрезок СВ
его номер-31
копируем этот отрезок со сдвигом
по оси X на 20, по оси Y на -130
! восстанавливаем перпендикуляр (угол 90 градусов)
! из точки D (ее номер 32) к линии с номером 32
дополнительная точка на диаметре окружности сопряжения
! линия диаметра
вычитаем линию с номером 35 из линии с номером 34,
получаем точку пересечения (центр окружности
сопряжения - точка О)
центр окружности (02)
отрезки, соединяющие центры
соприкасающихся окружностей
! определяем точки сопряжения окружностей,
! вычитая из дуг окружностей отрезки прямых
! строим дугу окружности сопряжения по
! трем ключевым точкам
Удаляем лишние линии:
LDELE, 28,, ,1
j LDELE, 36,, ,1
FLST,2,4,4,ORDE,3
FITEM,2,31
FTTEM,2,-33
FITEM,2,37
LDELE,P5IX,, ,1
1__________________________________________________________________
2.1. Контрольное задание
Провести анализ фигуры (различные варианты представлены в табл. 2) с це-
лью определения количества осей симметрии и обоснования решения о возмож-
ности построения половины или четверти фигуры. Построить точки сопряжения
и сами сопряжения прямых, окружностей и дуг окружностей фигуры, представ-
ленной соответствующим вариантом. Исходные данные: координаты опорных
точек И, В, ..., координаты центров и радиусы окружностей О1, 02, ... - приве-
дены в табл. 3. Отсутствующие в таблице данные (отмеченные многоточием) оп-
ределить в результате геометрических построений [4].
11
Таблица 2
12
Таблица 2 (продолжение)
13
Таблица 2 (продолжение)
14
I I'lllllllj
№ вари- анта Тонких, у (мм) Окружности хс, ус; R (мм)
А В С D Е 01 02 ОЗ 04 05 Об 07 08 09 010
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
1 20,0 0, 85 0,32 0, 62 • • ’9 .. • ) 15 27,48; 30 о, ...; 27,48; 18 0,...;
2 32,-38 -5,0; 28 0, —42; 10 32,...; 64, -42; 10 69,0; 28 -5,0; 16 • • *9 •• *9 7 64,0; 25 0,-42; 5 64, —42; 5
3 96,0 76,0 0,0; 14 • ♦ *5 • • *9 76 68, -55; 14 ...,0; 0, 0; 7 60, -22; 7 •••J • • ’9 6 • • '9 * 1 9 96 ...,0;
4 0, 140 32, 72 32, 60 20,50 20,0 0, ...; 34, 116; 16 34,...; 14 5
5 0, 0; 50 ...,0; • • • 9 • • "9 35 0,88; 25 0, 88; 10 0,43; 25 • ••,0; 0, 0; 38
6 40,0 0, ...; 40 35, 40; 18 0; 35,40; 8 0, 25; 10 0, 0; 25 0,25; 5 0, 0; 15
7 0,-11 0, 11 0, ...; 40,0; 25 0, 100; 40 0, 100;. 25 • • *9 .. 5 8 0, ...; 40,0; 15
Таблица 3 (продолжение)
1 2 3 4 5 7 8 9 10 11 12 13 14 15 16
8 55,0 0, ...; 20 26, 59; 15 >0; 26, 59; 8 0,0; 30 0, 0; 20
9 0, -5 0,5 0, 50 10 50,0; 20 0, ...; 0,50; 7 0, 50; 15 * • 1 9 • • 9 10 0, ...; 10 .., 10 50,0; 10
10 0, -3.5 0, ...; 32,0; 18 0, ...; 32,0; 9 0, -27; 12.5 0, -27; 6
11 18, 38 12,99 12, 111 0, Ю; 10 ...,38;
12 50,0 0, 60; 30 0, 60; 10 0, 60; 20 1 • 1 9 1 • 5 15 0,0; 36 0,0; 20
13 0, 26 0, 17 0, ...; •’ ‘5 •’ 1 9 8 60, 0; 24 60,0; 8 • ••9 ’ ‘9 5 0, ...; ...,0; 13
14 0, -23 0,...; 55, -26; 12 0,0; 16 0, 0; 9 55, -26; 4
15 50,0 ...,0 0,- 18.5; 44 0, 18.5; 44 0, -38; 18 0, -38; 10 •• *1 ‘ 9 7 0, 0; 37 7 • • "3 •• •> 7
16 35,0 85,0 85,20 0, 100 18, 160 ..., ..., 10 -35,40; 90 • • • 5 • 1 ' J 90 0, ...; -35,45; 70
17 32.5, 0 0, 110 0, 90 0, 15 ..., 10; 25 45, 100; 20 0, ...; 0, ...; 27,...; 13 12,...; 10
18 0,22 50, 0; 20 20 0, 50; 20 0, 50; 10 50,0; 10 15,0; 15 0, ...; 15,0; 5
3. Моделирование трехмерных объектов
Рассмотрим задачу построения правильной шестиугольной призмы с гори-
энтальным и вертикальным цилиндрическими отверстиями. Исходные данные
представлены полной геометрической информацией на комплексном чертеже
। рис. 5) - двумя основными проекциями (горизонтальной и фронтальной). Необ-
ходимо восстановить форму объекта по двум его изображениям; для выявления
формы внутренних поверхностей построить
профильную проекцию (вид слева) с верти-
>. лльным разрезом по середине; построить се-
ление объекта плоскостью А-А; получить ак-
нюметричсское изображение (изометрию)
Зъекта с вырезом одной четверти.
3.1. Моделирование сверху вниз
При нисходящем способе моделирования
пространственных объектов с помощью гео-
метрических примитивов важную роль игра-
ет рабочая плоскость (Working Plane). Как
I равило, она служит основанием примитива
плоскость, определяемая осями Wx и Wy), а
«мрмаль к ней (ось Wz) задает ось примитива.
В сачестве объемных примитивов в системе
SYS используются: прямоугольный па-
рлпелепипед (Block), цилиндр (Cylinder),
правильная призма (Prism) 3-, 4-, 5-, 6-, 7-, 8-
I >льная, сфера и сферический сегмент
sphere), конус и усеченный конус (Cone),
т» р и тороидальный сегмент (Torus).
Для решения поставленной задачи по-
К роим правильную 6-угольную призму. Чтобы
в дальнейшем использовать
.-андартные возможности системы ANSYS для получения различных видов объ-
cv а (слева, справа, сверху, снизу, спереди, сзади, изометрии и т.д.), направим
призмы вертикально вверх (на экране - вдоль оси Y глобальной системы ко-
•ипат). Для этого повернем рабочую плоскость вокруг оси Wx на 90° так, что-
ее нормаль (ось Wz) совпала с осью У глобальной системы координат.
Utility Menu—>WorkPlane—>Offset WP by Increments...
В открывшемся окне Offset WP в поле XY,YZ,ZX Angles вводим углы поворота
рабочей плоскости соответственно вокруг осей Wz, Wx, Wy (в градусах):
0, -90,0—>Enter.
еперь построим призму
Main Menu—>Prcprocessor->Modcling—>Creatc—>
-Volumes—>Prism->Hexagonal.
открывшемся окне Hexagonal Prism в полях WP X, WP Y, Radius, Theta, Depth
называем координаты оси и радиус цилиндра, в который будет вписана призма,
• гол поворота вертикального (бокового) ребра призмы и высоту призмы. В дан-
ном случае WPX = 0, WP Y = 0, Radius = 50, Theta = 90, Depth=\WT Результат
17
представлен на рис. 6а. Изометрическое изображение можно получить следую-
щим образом:
Utility Menu—>PlotCtrls->Pan, Zoom, Rotate...
В открывшемся окне Pan-Zoom-Rotate нажать кнопку Iso.
Рис. 6
Сделаем два цилиндрических отверстия - вертикальное и горизонтальное.
Для этого построим сначала один цилиндр:
Main Menu->Preprocessor—>Modeling->Create—>
-Volumes-Cylinder—>SolidCylinder.
В открывшемся окне Solid Cylinder в полях WPX, WP Y, Radius, Depth указываем
координаты оси, радиус и высоту цилиндра. В данном случае WPХ= О, WP Y= О,
Radius = 20, Depth = 100. Результат представлен на рис. 66. Вычтем из одного
объема (призма) другой (цилиндр):
Main Menu—>Preprocessor->Modeling—>Operate—>
-Booleans-Subtract—>Volumes.
Указателем мыши выбираем сначала призму (объем, из которого нужно вы-
честь), нажимаем кнопку Apply, указываем цилиндр (объем, который нужно вы-
честь), нажимаем кнопку ОК. Результат представлен на рис. 6в. Заметим, что
исходные объемы при этом уничтожаются. Чтобы сохранить исходные объекты
после выполнения логических (булевых) операций, нужно установить опцию со-
хранения исходных объектов:
Main Menu—preprocessor—>Modeling—>Operate->
-Booleans-Settings...
В окне Boolean Operation Settings установить флажок Keep input entities? No.
Аналогично делаем горизонтальное отверстие. Для этого сначала переместим
рабочую плоскость в основание этого отверстия:
Utility Menu—>WorkPlane—>Offset WP by Increments...
В открывшемся окне Offset WP в полях X, Y,Z Offsets и XY, YZ.ZX Angles указываем
координаты начала рабочей плоскости (0,50,50) и углы поворота рабочей плоско-
сти соответственно вокруг осей Wz, Wx, Wy (в градусах): 0,90,0—>Enter - относи-
тельного текущего положения рабочей плоскости. Теперь строим цилиндр
Main Menu—Preprocessor—>Modeling—>Create—>
-Volumes-Cylinder—>SolidCylinder.
18
В открывшемся окне Solid Cylinder в полях WP X, WP У, Radius, Depth указываем
координаты оси, радиус и высоту цилиндра. В данном случае WP Х= О, WP Y= О,
adius = 30, Depth = 100. Результат представлен на рис. 6г. Вычтем из одного
Зъема (призма) другой (цилиндр):
Main Menu-preprocessor->Modeling—>Operate->
-Boolean s-Subtract->Vohimes.
азателем мыши выбираем сначала призму, нажимаем кнопку Apply, указыва-
ем цилиндр, нажимаем кнопку ОК. Результат представлен на рис. 66. Геометри-
ческая модель объекта построена.
Приведем распечатку командного файла:
LBATCH
Unput, menust,tmp,"„„„„„„„„l
PREP7 ! запуск препроцессора
(WPSTYLE„„„„1 prot,0,-90,0 ! визуализация рабочей плоскости ! поворот рабочей плоскости на 90° вокруг оси Wx ! (нормаль будет направлена вертикально вверх - ! направление оси будущей призмы)
RPR4,6,, ,50,90,100 ! 6-угольная призма, вписанная в цилиндр радиуса 50, ! с вертикальным ребром, повернутым на 90° от ГТх к ! Wy, высотой 100 (объем № 1)
CYL4,, ,20,,, ,100 №BV, 1,2 ! цилиндр радиуса 20 и высотой 100 (объем № 2) ! вычитаем из объема № 1 объем № 2, получаем
Lpoff,0,50,50 bprot,0,90,0 ! объем № 3 (объемы № 1 и 2 - удаляются) ! перемещаем рабочую плоскость по осям Wx, Wy, Wz ! поворачиваем рабочую плоскость на 90° от Wy к Wz ! (нормаль направлена вдоль оси будущего цилиндра)
fcYL4,, ,30,,, ,100 \SBV,3, 1 L ! цилиндр радиуса 30 и длиной 100 (объем № 1) ! вычитаем из объема № 3 объем № 1, получаем ! объем № 2 (объемы № 1 и 3 - удаляются)
Для того чтобы получить вид объекта спереди (фронтальную проекцию),
л жно выполнить следующую последовательность действий:
Utility Menu->PlotCtrIs->Pan, Zoom, Rotate...
В открывшемся окне Pan-Zoom-Rotate нажать кнопку Front. Результат представ-
акн на рис. 1а. Для того чтобы получить вид объекта сверху (горизонтальную
проекцию), нужно в том же окне Pan-Zoom-Rotate нажать кнопку Тор. Результат
»гр. ставлен на рис. 76.
Для выявления формы внутренних поверхностей по условию задачи необхо-
димо получить вид объекта слева (профильную проекцию) с вертикальным раз-
резом по середине. Это можно сделать следующим образом. В том же окне Рап-
Zpom-Rotate нужно нажать кнопку Left (получим вид объекта слева). Затем вы-
полняем
Utility Menu->PlotCtrls->StyIe->Hidden-Line Options ...,
в открывшемся окне Hidden-Line Options в поле со списком [/TYPE] Type of Plot
ужно выбрать значение Capped Z-buffer. Получим разрез объекта плоскостью,
перпендикулярной вектору зрения и проходящей через фокус (центр окна), по
19
умолчанию автоматически определяемый системой как геометрический центр
объекта, зависящий от направления зрения наблюдателя и совпадающий в дан-
ном случае с центром призмы. Результат представлен на рис. 7в.
Рис. 7
Построим сечение объекта плоскостью А-А (см. рис. 5). По условию задачи
секущая плоскость перпендикулярна фронтальной плоскости. Кроме того, для
определенности будем считать, что секущая плоскость проходит через ось приз-
мы на расстоянии 60 мм от нижнего основания призмы под углом 50° к основа-
нию. Рабочая плоскость совмещена с глобальной декартовой системой коорди-
нат. Совместим рабочую плоскость Wx, Wy с секущей плоскостью:
Utility Menu->WorkPIane ->Offset WP by Increments ...,
в открывшемся окне Offset WP в поле X,Y,Z Offsets задаем величины смещений по
соответствующему направлению осей 0,60,0, в поле XY.YZ.ZX Angles задаем углы
поворота -40,90, -90 относительно осей координат Z, X, Y соответственно и на-
жимаем кнопку ОК. Затем устанавливаем направление зрения наблюдателя пер-
пендикулярно рабочей плоскости (поворачиваем секущую плоскость до совме-
щения с фронтальной плоскостью проекций):
Utility Menu—>PIotCtrls—>Pan, Zoom, Rotate ...,
в открывшемся окне Pan-Zoom-Rotate сначала нажимаем кнопку Front, затем на
шкале Rate устанавливаем угол поворота направления зрения 90 (в градусах) и
нажимаем кнопку/^ + Y (поворот относительно оси Y), на шкале Rate устанавли-
ваем угол 50 и нажимаем кнопку А + X (поворот относительно оси X), на шкале
Rate устанавливаем угол 40 и нажимаем кнопку Z- ^(поворот относительно оси
Z). Включаем режим сечения рабочей плоскостью:
20
Utility Menu—>PlotCtrls—>Stylc—>Hiddcn-Linc Options
в окне Hidden-Line Options в поле co списком [/TYPE] Type of Plot выбираем зна-
чение Section, в поле [ZCPLANE] Cutting plane is выбираем значение Work-
ing plane. Получим контуры сечения объекта рабочей плоскостью. Результат
представлен на рис. 7г.
Построим изометрию призмы с вырезом одной четверти. Проведем две вза-
ино перпендикулярные плоскости, проходящие через ось призмы. Совместим
рабочую плоскость с плоскостью АТ глобальной декартовой системы координат:
Utility Menu—>WorkPlanc—>Align WP with->GIobaI Cartesian.
Построим первую секущую плоскость:
Main Menu->Preprocessor->-Modeling-Create->
-Areas-RectangIe->By 2 Corners,
k<Mciie Rectangle By 2 Corners в полях WPXи WP Yуказываем координаты левого
ж» г него угла прямоугольника, в данном случае 0 и 0 (эти поля могут быть остав-
*. 1Ы пустыми - по умолчанию их значения будут равны нулю); в полях Width и
я,ght задаем ширину и высоту прямоугольника (их значения должны быть та-
выи, чтобы плоскость пересекала призму по ширине и высоте), в данном случае
етаточно 50 и 100; нажимаем кнопку ОК. Для построения второй секущей
К кости повернем рабочую плоскость на 90° вокруг оси У:
Utility Menu—>WorkPIane—>Offset WP by Increments
окне Offset WP на шкале Degrees устанавливаем угол поворота рабочей плос-
fatrn 90 (в градусах) и нажимаем кнопку У-О (поворот относительно оси У).
Втр им вторую секущую плоскость:
Main Menu->Preprocessor->-ModeIing-Create—>
-Areas-RectangIe->By 2 Corners,
вне Rectangle By 2 Corners в полях WP X и WP Y указываем координаты левого
^кнего угла прямоугольника 0 и 0; в полях Width и Height задаем ширину и вы-
у прямоугольника, в данном случае достаточно 50 и 100; нажимаем кнопку
Ок Результат представлен на рис. 7д. Прежде чем рассечь призму построенны-
Ьи секущими плоскостями, установим признаки сохранения элементов после
шения логических (булевых) операций для того, чтобы сохранить полный
йь.м, если он потребуется в дальнейшем:
Main Menu->Preprocessor->-ModeIing-Operate->-Booleans-Settings...,
I<иiHe Boolean Operation Settings в поле KEEP Keep input entities? установить
пение флажка - Yes и нажать кнопку ОК. Теперь все элементы будут сохра-
Ьгт »>ся после выполнения булевых операций. Теперь рассечем объем призмы се-
ними плоскостями:
Main Menu->Preprocessor->-Modeling-Operate->
-Booleans-Divide—>Volume by Area.
Курсором мыши нужно указать объем (объемы), который нужно разделить на
Ъсколько объемов, и нажать кнопку ОК (или Apply). Затем курсором мыши ука-
v все секущие плоскости (поверхности) и нажать кнопку ОК (или Apply). В
тьтате получим три объема: один - исходный объем и два получившихся
*. .е деления исходного объема секущими плоскостями. Для того чтобы полу-
21
чить изометрию призмы с вырезом одной четверти, выберем только один объем,
соответствующий трем четвертям призмы:
Utility Menu->Select->Entities...
В открывшемся окне Select Entities в раскрывающихся списках выбираем Vol-
umes (объемы) и By Num/Pick (по нумерации/указанием), устанавливаем опцию
From Full (из полного набора) и нажимаем кнопку ОК. Открывается окно Select
volumes. На графическом экране курсором мыши указываем объем, соответст-
вующий трем четвертям призмы, и нажимаем кнопку ОК. Теперь изометриче-
ское изображение можно получить следующим образом:
Utility Menu->PlotCtrIs->Pan, Zoom, Rotate...
В окне Pan-Zoom-Rotate нажать кнопку Iso. Результат представлен на рис. 7е.
Любое получаемое в процессе работы с системой графическое изображение
может быть распечатано или сохранено в файле в одном из графических форма-
тов (BMP, Postscript, TIFF, JPEG):
Utility Menu—>PlotCtrIs—>Hard Copy->To Printer,
Utility Menu->PlotCtrls->Hard Copy->To File.
В последнем случае в открывшемся окне Graphics Hard Сору нужно выбрать
графический формат, задать имя файла и нажать кнопку ОК.
3.2. Контрольное задание
Восстановить геометрическую форму пространственного объекта по его изо-
бражению на комплексном чертеже (табл. 4) - двумя основными проекциями
(горизонтальной и фронтальной). Для выявления формы внутренних поверхно-
стей построить профильную проекцию (вид слева) с вертикальным разрезом по
середине; построить сечение объекта плоскостью, указанной в варианте задания;
получить аксонометрическое изображение (изометрию) объекта с вырезом одной
четверти. В табл. 4 приведены чертежи четырех пространственных объектов, ка-
ждый из которых может быть представлен десятью вариантами геометрических
параметров, указанных в соответствующей графе вспомогательной таблицы, рас-
положенной под чертежом объекта [4].
22
Таблгща 4
muai
2 3 4 5 6 7 8 9 0 Вар 1 2 3 4 5 6 7 8 9 0
70 30 40 50 10 0 30 0 20 а 35 30 40 50 60 70 40 30 40 50
30 40 50 60 40 60 60 40 30 ь 70 60 50 40 30 70 60 50 40 20
Б-Б В-В А -А Б-Б В-В А -А Б-Б В-В А-А Сеч. А-А Б-Б В-В А-А Б-Б В-В А -А Б-Б В-В А-А
23
Таблица 4 (продолжение
Вар.
а
Сеч.
ОБЪЕКТ № 3
ОБЪЕКТ № 4
11
И
II
А
0Ь'
0Ь
0а
11
II
II
20
60
'.А-А
2
30
50
Б-Б
3
40
40
В-В
4
50
30
А-А
5
60
40
Б-Б
6
60
50
В-В
7
20
~40~
А-А
8
30
40
Б-Б
9
40
60
В-В
О
50
~50
А -А
Вар.
V
с
Сеч.
40
70
А-А
2
30
60
Б-Б
3
40
50
В-В
4
50
40
А-А
5
60
30
Б-Б
6
20
40
7
60
70
8
50
50
9
40
30
0
30
40
В-В А-А
Б-Б
В-ВА-1
4. Литература
1. Басов К. A. ANSYS в примерах и задачах/ Под общ. ред. Д.Г. Красковско-
го. - М.: Компьютер пресс, 2002. - 224 с.
2. Каплун А.Б., Морозов Е.М., Олферьева М.А. ANSYSepyKax
инженера: Практическое руководство. - М.: Едиториал УРСС, 2003. - 272 с.
3. Чигарев А.В., Кравчук А.С., Смалюк А.Ф. ANSYS для инжене-
ров: Справ, пособие. - М.: Машиностроение-1, 2004. - 512 с.
4. Начертательная геометрия и инженерная графика. Задания и методические
указания / Сост. С.А. Синицын. - М.: РГОТУПС, 1999. - 52 с.
24
ПЛОСКИЕ ЗАДАЧИ СТРОИТЕЛЬНОЙ МЕХАНИКИ
И СОПРОТИВЛЕНИЯ МАТЕРИАЛОВ
А.В. Жидков, Н.В. Леонтьев
1. Введение
2. Расчет ферменных конструкций
2.1. Контрольное задание
3. Плоский изгиб балок
3.1. Контрольное задание
4. Расчет плоских рам
4.1. Контрольное задание
5. Литература
1. Введение
В данной работе на примере решения плоских задач строительной механики
рчет ферм, балок, рам) рассмотрены основные этапы и возможности системы
C5YS численного моделирования на основе метода конечных элементов. В ча-
сти, приведено достаточно подробное описание препроцессорной подготов-
, получения решения, постпроцессорной обработки и работы с командным
fc м. В каждом из приведенных примеров рассмотрены некоторые особенно-
|Ьгих этапов, связанные с параметрическим описанием модели, выполнением
©вариантных расчетов, нестандартным заданием внешних воздействий, по-
Ьвением эпюр, моделированием шарнирных соединений.
2. Расчет ферменных конструкций
н качестве примера рассмотрим следующую задачу: определить перемеще-
И . лов, опорные реакции и усилия в стержнях фермы, изображенной на рис. 1,
и последовательном приложении нагрузок Рг, Рз, Ра, Ps и одновременном
вгжении всех нагрузок Р1-Р5. Геометрические размеры фермы задаются па-
рсграми d = 10 м и h = 12 м. Предполагается, что все стержни фермы имеют
виковую жесткость, которая определяется модулем упругости Е = 200 ГПа и
радью поперечного сечения А = 1СГ3 м2. Величина нагрузок Pis - 1 кН.
Рассматриваемая ферма является статически определимой, так как для нее
выполняется условие статической определимости плоских ферм: е = 2и — 3, где
с = 25 - количество стержней и п = 14 - количество узлов. Данная задача может
' ть решена методами сопротивления материалов, при этом для определения
25
опорных реакций и усилий в стержнях фермы параметры жесткости несущест-
венны.
Отнесем ферму к декартовой прямоугольной системе координат Оху, как по-
казано на рис. 1. Координаты узлов фермы могут быть вычислены по параметрам
dwh.
Рассмотрим последовательность решения данной задачи в интерактивном
режиме (GUI) системы ANSYS.
Для решения задачи нужно ввести некоторое количество переменных (пара-
метров):
Utility Menu->Parameters->Scalar Parameters...-»
В открывшемся окне в однострочном поле Selection вводим название и величину
параметров:
h = 12 ->Accept
d = 10 ->Accept
E = 2e” ->Accept
A = le-3 ->Accept
Pl = 1000 ->Accept
P2 = 0 -> Accept
1’3 = 0 ->Accept
P4 = 0 ->Accept
P5 = 0 —>Accept—>Close
После ввода каждого параметра и нажатия кнопки Accept он переводится в верх-
нее поле Items. Ввод всех параметров завершается закрытием окна кнопкой
Close. Заметим, что кнопка Delete окна Scalar Parameters позволяет удалить не-
нужный или ошибочно введенный параметр, для этого нужно выделить его мы-
шью в поле Items и нажать кнопку Delete. Справочную информацию (помощь) о
выполняемых действиях (командах) можно получить, нажав кнопку Help.
Как известно, ферма представляет собой конструкцию, состоящую из стерж-
ней, соединенных между собой шарнирами (узлами фермы). Поскольку силы,
действующие на ферму, прилагаются в шарнирах, то все стержни фермы испы-
тывают только осевые усилия растяжения-сжатия. Следовательно, подходящими
конечными элементами для стержней ферм являются стержневые элементы
LINK1 в случае плоских ферм (LINK8 в случае пространственных ферм). Узлы
конечно-элементной модели должны совпадать с узлами фермы, а каждый стер-
жень должен быть отдельным конечным элементом.
Для выбора типов элементов, используемых в расчете, из библиотеки
(Library of Element Types) необходимо выполнить следующие действия:
Main Menu->Preprocessor-»EIement Type->Add/Edit/DeIete ...->
□->Add ...->D->StructuraILink->2D Spar 1—>OK.
В окне Elements Types должна появиться запись
Type 1 LINK1.
26
ыбор типов элементов заканчивается закрытием окна Elements Types кнопкой
С lose.
Для конечного элемента LINK.1 (или LINK8) требуется задать по крайней
мгс одно свойство материала (модуль Юнга - ЕХ) и одну константу элемента
|п.ющадь поперечного сечения стержня - AREA).
Задание свойств материала осуществляется следующим образом:
Main Menu->Preprocessor->MatcriaI Props->-Constants-Isotropic ...—>
юявившемся окне в поле Specify material number указываем номер материала
данной задачи - 1). После нажатия кнопки ОК (кнопка Cancel прерывает
л свойств материалов) в соответствующее поле окна Isotropic Material Proper-
вводим значение модуля упругости (в данной задаче оно хранится в парамет-
Е)
ЕХ Е->ОК.
пка Apply (Применить) позволяет ввести значения свойств следующего ма-
тла, если в задаче их используется несколько.
• гобы задать геометрические размеры поперечного сечения стержня (кон-
,'ы элемента), нужно выполнить следующие действия:
Main Menu->Preprocessor->ReaI Constants->Add/Edit/Dclete ...—>
□->Add ...->П->Туре 1 Linkl—>OK—;>□—>AREA A->OK->Close.
(качение площади (AREA) поперечного сечения стержней хранится в пара-
е А.
1ля описания геометрического положения узлов и стержней фермы введем
свые (опорные) точки (Keypoints):
Main Menu—>Preprocessor->-ModeIing-Create—>Keypoints—>In Active CS...
эр пункта меню In Active CS позволяет задавать положение ключевых точек
щей глобальной системе координат (Coordinate System). Для данной задачи
аточно ввести семь ключевых точек: четыре по углам фермы, одну в верхней
дуги окружности и две точки для вспомогательных построений, позво-
ших не вычислять координаты узлов фермы «вручную». При этом узлы фер-
лдут получены с помощью стандартных операций системы ANSYS (см. ни-
В открывшемся окне в поле Keypoint number вводим номер первой ключевой
и 1, а также в полях Location in Active CS ее координаты X, Y, Z (0, 0, 0).
гка Apply позволяет ввести координаты следующей точки и т.д. Аналогич-
t образом задаются координаты остальных точек
2, 6*d, 0, 0 —>Арр1у
3, 0, h/2,0 ->Арр1у
4, 6*d, h/2,0 ->Арр1у
5, 3*d, h, 0 ->Арр1у
6, 0, 2*h, 0 ->Арр!у
7, 6*d, 2*h, 0 ->ОК
чения координат точек вычисляются системой ANSYS с помощью стандарт-
< математических операций (сложение - «+», вычитание - «-», умножение -
27
«*», деление - «/», возведение в степень - «**») через заданные геометрические
параметры. Заметим, что поля для ввода информации могут быть оставлены
незаполненными В этом случае системой ANSYS используется принцип умол-
чания. Так, если оставить незаполненным поле Keypoint number, то ключевой
точке будет присвоен номер на единицу больше номера последней заданной точ-
ки, если оставить незаполненными некоторые поля Location in Active CS, то зна-
чения соответствующих координат ключевой точки будут равны нулю.
Для того чтобы в графическом окне можно было увидеть номера введенных
ключевых точек, нужно выполнить следующие действия:
Utility Menu->PlotCtrls->Numbering...
В открывшемся окне Plot Numbering Controls включить (On) опцию Keypoint
numbers и закрыть окно нажатием кнопки ОК.
Ключевые точки с номерами 6 и 7 введены для дополнительных геометриче-
ских построений, связанных с необходимостью вычисления координат узлов
фермы, лежащих на дуге окружности. Предполагается получить эти координаты
как пересечение прямых, параллельных оси Оу, с дугой окружности.
Построим линии, на которых будут лежать узлы фермы, и вспомогательную
линию, точки которой будем использовать для построения прямых, параллель-
ных оси Оу.
Нижние узлы фермы лежат на отрезке прямой. Соединим между собой клю-
чевые точки с номерами 1 и 2 отрезком прямой:
Main Menu—preprocessor—>-ModeIing-Create->-Lines-Lines->Straight Line.
Курсором мыши отметим на графическом экране точки 1 и 2. Для построения
отрезка вспомогательной прямой курсором мыши отметим на графическом экра-
не точки 6 и 7. Ввод отрезков прямых заканчивается нажатием кнопки ОК или
Apply в открывшемся окне Create Straight Line.
Верхние узлы фермы лежат на дуге окружности. Построим ее по трем точкам
с номерами 3,4, 5:
Main Menu->Preprocessor->-ModeIing-Create->-Lines-Arcs—>Through 3 KPs.
Курсором мыши отметим на графическом экране точки 3 (начало), 4 (конец) и 5
(середина). Ввод дуги заканчивается нажатием кнопки ОК в открывшемся окне
Arc Thru 3 KPs.
Разделим отрезки прямых на участки, соответствующие стержням фермы.
Обе линии должны быть разбиты на 6 равных участков.
Main Menu—Preprocessor—>-Modeling-Operate—>
-Booleans-Divide->Line into N Ln’s.
Курсором мыши отметим на графическом экране сначала один отрезок прямой. В
открывшемся окне Div Line into N Lines нажимаем кнопку Apply. При этом от-
крывается окно Divide Line into N Lines. В поле No. of lines to create указываем
количество участков разбиения, в данном случае - 6. В поле Existing line will из
списка выбираем опцию be modified (исходная линия будет удалена, второе зна-
чение Not be modified позволяет сохранить исходную линию, если в этом есть
необходимость). Нажимаем кнопку Apply. Отрезок прямой будет разбит на 6 от-
резков, и вновь откроется окно Div Line into N Lines. Курсором мыши отмечаем
на графическом экране второй отрезок и нажимаем кнопку ОК. В окне Divide
28
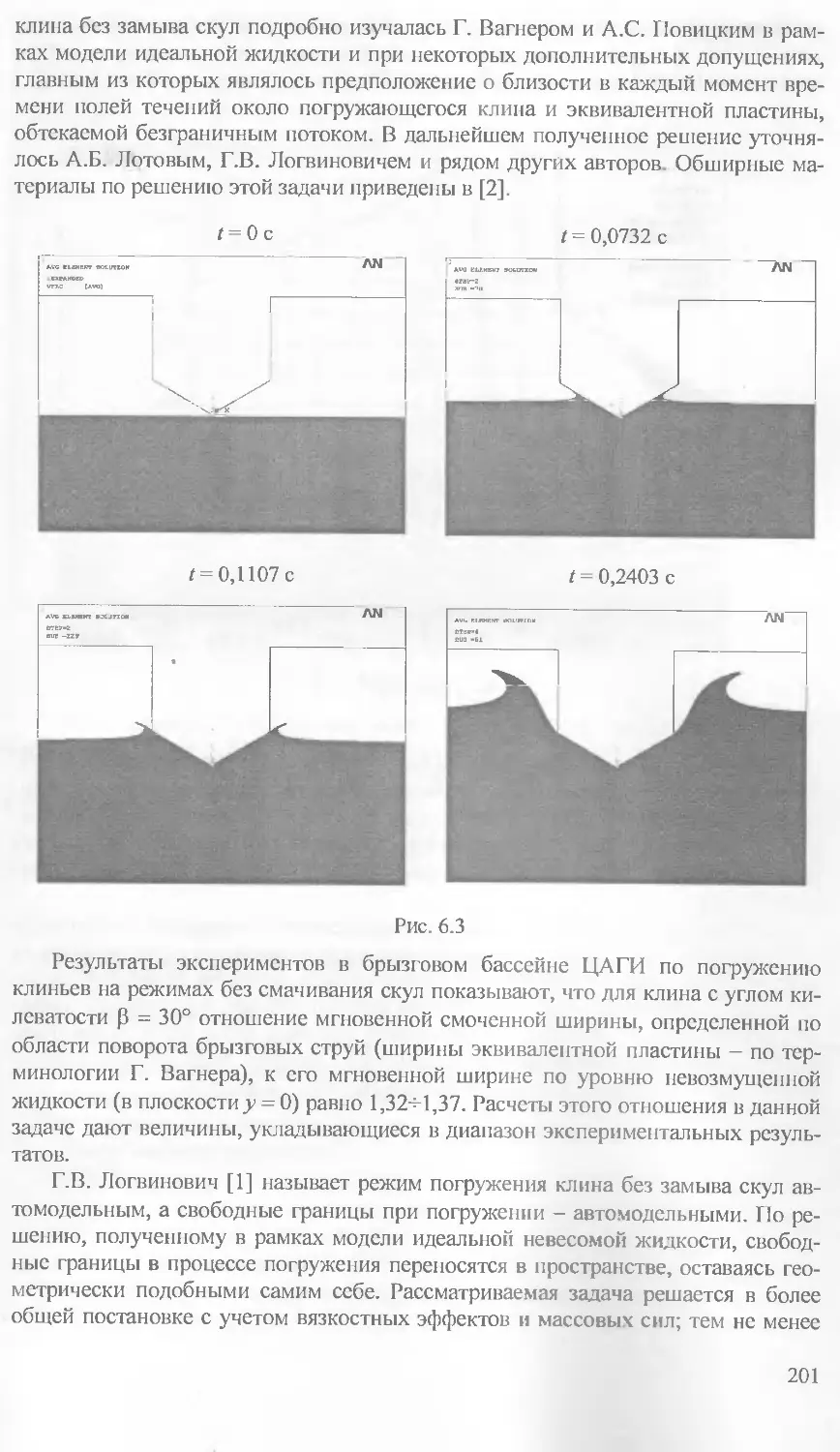
клина без замыва скул подробно изучалась Г. Вагнером и А.С. Повицким в рам-
ках модели идеальной жидкости и при некоторых дополнительных допущениях,
главным из которых являлось предположение о близости в каждый момент вре-
мени полей течений около погружающегося клина и эквивалентной пластины,
обтекаемой безграничным потоком. В дальнейшем полученное решение уточня-
лось А.Б. Лотовым, Г.В. Логвиновичем и рядом других авторов. Обширные ма-
териалы по решению этой задачи приведены в [2].
t = 0 с
VTT.C CAVC)
AN
Г =0,0732 с
t = 0,1107 с
/СХГЛЯРЕВ
Рис. 6.3
Результаты экспериментов в брызговом бассейне ЦАГИ по погружению
клиньев на режимах без смачивания скул показывают, что для клина с углом ки-
леватости р = 30° отношение мгновенной смоченной ширины, определенной по
области поворота брызговых струй (ширины эквивалентной пластины - по тер-
минологии Г. Вагнера), к его мгновенной ширине по уровню невозмущенной
жидкости (в плоскости у = 0) равно 1,32=1,37. Расчеты этого отношения в данной
задаче дают величины, укладывающиеся в диапазон экспериментальных резуль-
татов.
Г.В. Логвинович [1] называет режим погружения клина без замыва скул ав-
томодельным, а свободные границы при погружении - автомодельными. По ре-
шению, полученному в рамках модели идеальной невесомой жидкости, свобод-
ные границы в процессе погружения переносятся в пространстве, оставаясь гео-
метрически подобными самим себе. Рассматриваемая задача решается в более
общей постановке с учетом вязкостных эффектов и массовых сил; тем не менее
201
Main Menu—Preprocessor—>-Modeling-Create—>
-Lines-Lines—Straight Line.
Курсором мыши отмечаем на графическом экране по две точки. Ввод отрезков
прямых заканчивается нажатием кнопки ОК или Apply в окне Create Straight
Line.
Таким образом, геометрическая модель фермы будет построена, т.е. 14 клю-
чевых точек соответствуют узлам фермы и 25 отрезков прямых соответствуют
стержням фермы.
Зададим граничные условия и внешние воздействия на геометрической мо-
дели. Условия опирания фермы показаны на рис. 1. Правый нижний угол фермы
(ключевая точка с номером 2) закреплен неподвижно. Левый нижний угол фермы
(ключевая точка с номером 1) может свободно перемещаться вдоль оси Ох и не
может перемещаться вдоль оси Оу. Для того чтобы задать условия опирания,
нужно выполнить следующие действия:
Main Menu->Preprocessor->Loads->-Loads-Apply->
-Structural-Displacement—>On Keypoints.
Открывается окно Apply U,ROT on KPs. Курсором мыши отмечаем на графиче-
ском экране ключевую точку с номером 2 и в открывшемся окне Apply U,ROT on
KPs нажимаем кнопку Apply. В поле DOFs to be constrained из списка выбираем
All DOF (все степени свободы). В поле Apply as из списка выбираем опцию Con-
stant value (постоянное значение). В поле Displacement value заносим 0 (нет пере-
мещений, поле может быть оставлено незаполненным, в этом случае по умолча-
нию предполагается отсутствие перемещений). Нажимаем кнопку Apply. Пере-
ходим к заданию условий опирания в ключевой точке с номером 1. Курсором
мыши отмечаем на графическом экране ключевую точку с номером 1 и в окне
Apply U,ROT on KPs нажимаем кнопку ОК. Во вновь открывшемся окне Apply
U,ROT on KPs в поле DOFs to be constrained из списка выбираем UY (перемеще-
ние вдоль оси Оу). В поле Apply as из списка выбираем опцию Constant value (по-
стоянное значение). В поле Displacement value заносим 0. Нажимаем кнопку ОК.
Внешние воздействия прикладываются к нижним узлам фермы, лежащим
между ключевыми точками 1 и 2 (рис. 1). Чтобы задать узловые силы, нужно вы-
полнить следующие действия;
Main Menu—>Preprocessor—>Loads->-Loads-Apply—>
-Structural-Force/Moment—>On Keypoints.
Открывается окно Apply F/M on KPs. Курсором мыши отмечаем на графическом
экране первую нужную ключевую точку и в открывшемся окне Apply F/M on KPs
нажимаем кнопку Apply. В поле Direction of force/mom из списка выбираем на-
правление действия силы FY (вдоль оси Оу). В поле Apply as из списка выбираем
опцию Constant value (постоянное значение). В поле Force/moment value заносим
-Pl (знак указывает, что сила направлена в сторону, противоположную положи-
тельному направлению оси Оу). Нажимаем кнопку Apply. Переходим к заданию
воздействий в следующей ключевой точке (Р2). Аналогично для остальных клю-
чевых точек. Заканчивается ввод внешних сил нажатием кнопки ОК в окне Apply
F/M on KPs.
30
Условия опирания и приложенные узловые силы показаны на рис. 2.
ANSYS 5.6
DEC 11 2003
17:22:24
E-L-K-N
Powe ^Graphics
EFACET=1
U
F
Рис. 2
Перейдем к построению конечно-элементной модели. Поскольку каждый
кржень фермы должен быть одним конечным элементом, укажем системе, что
te линии должны представлять собой один конечный элемент:
Main Menu—preprocessor—>-Meshing-Size Ctrls—>-Lines-All Lines...
рывшемся окне Element Sizes on All Selected Lines в поле No. of element divi-
I вводим 1 (количество элементов разбиения). Остальные поля в этом окне
Ьвлясм незаполненными. Нажимаем кнопку ОК.
Теперь имеем всю информацию для создания сетки конечных элементов.
Вбиваем конструкцию на конечные элементы:
Main Menu-preprocessor->-Meshing-Mesh->Lines.
открывшемся окне Mesh Lines нажимаем кнопку Pick All. Система осуществ-
В) построение конечно-элементной сетки. Таким образом, будет построена и
вчно-элементная модель конструкции.
( .Ня изображения на графическом дисплее сетки конечных элементов с ука-
км номеров элементов (узлов) нужно сначала включить нумерацию при от-
Вже элементов и затем перерисовать на графическом дисплее изображение
Вентов:
Utility Menu-Plot Ctrls->Numbering...
(О 'крывшемся окне Plot Numbering Controls в поле Elem / Attrib numbering уста-
гь Elem numbers (для изображения номеров узлов - включить (On) опцию
le numbers). Для наглядности рисунка остальные опции, задаваемые в этом
К. должны быть отключены (Off). Тогда лишняя нумерация не будет загро-
Вкдать рисунок. Закрыть окно Plot Numbering Controls нажатием кнопки ОК.
Сражаем на графическом дисплее перенумерованные элементы:
Utility Menu-PIot->Elements.
I Теперь нужно перенести заданные нагрузки и условия закрепления с геомет-
еской модели на конечно-элементную модель. Для этого выполняется коман-
Main Menu—preprocessor—>Loads—>-Loads-Operate—>
-Transfer to FE-A11 Solid Lds...-»D-»OK.
Переходим к решению задачи. Указываем тип решаемой задачи (статиче-
31
Main Menu—>Solution—>-Analysis Type-New Analysis... —>□—>Static—>OK.
Для запуска задачи на счет нужно выполнить команду:
Main Menu—>Solution—>-Solve-Current LS—>□—>OK.
Это означает, что решение должно быть получено на текущем шаге нагружения
(Current Load Step).
После появления сообщения «Solution is done» нужно нажать кнопку Close в
этом окне и закрыть окно листинга.
Теперь можно просмотреть результаты расчета. Сначала нужно прочитать
нужные результаты из базы данных:
Main Menu—>General Posproc->-Read Results—>By Load Step...
В открывшемся окне Read Results by Load Step Number для полной модели (Entire
Model) установить номер шага нагружения - 1 (в поле Load step number), номер
последнего подшага - LAST (в поле Substep number) и масштабный множитель -
1 (в поле Scale factor). Закрыть окно нажатием кнопки ОК.
Для просмотра деформированного положения конструкции нужно выпол-
нить следующие действия:
Main Menu->General Posproc->Plot Results->Deformed Shape...
В открывшемся окне Plot Deformed Shape выбираем одну из трех возможных оп-
ций Def shape only (только деформированное положение), Def + undeformed (де-
формированное и недеформированное положения), Def + undef edge (деформиро-
ванное положение и недеформированные ребра (кромки, контуры)). Нажимаем
кнопку ОК. В результате получим изображение, показанное на рис. 3 (соответст-
вует второй опции - деформированное и недеформированное положения).
ANSYS 5.6
DEC 11 2003
16:43:45
DISPLACEMENT
STEP=1
SUE =1
TIME=1
PowerGraphics
EFACET=1
AVRES=Mat
DMX =.316E-03
U
F
DSCA=9488
ZV =1
DIST=33.725
XF =29.341
YF =3.334
Z-BUFFER
Рис. 3
Для изображения условий опирания и внешних воздействий на деформированной
конструкции выполним:
Utility Menu—>PIotCtrIs—>Symbols...
В открывшемся окне Symbols нужно включить опцию All Applied BCs (все при-
ложенные граничные условия) и нажать кнопку ОК.
32
Полученное графическое изображение может быть распечатано или сохране-
но в файле в одном из графических форматов (BMP, Postscript, TIFF, JPEG):
Utility Menu->PlotCtrls-»Hard Copy->To Printer,
Utility Menu—>PlotCtrls—>Hard Copy->To File.
В последнем случае в открывшемся окне Graphics Hard Сору нужно выбрать
Ьафический формат, задать имя файла и нажать кнопку ОК.
Построим эпюры внутренних усилий в стержнях фермы - усилий растяже-
я-сжатия. Для этого нужно создать (определить) две таблицы со значениями
илий в первом (начальном) и во втором (конечном) узле каждого элемента. В
яном случае усилие в стержне фермы есть величина постоянная по длине
гржня, поэтому обе таблицы будут содержать одинаковые значения. Создаются
&дицы следующим образом:
Main Menu—>GeneraI Posproc—>Element Table—>
Define Table..>Add...
открывшемся окне Define Additional Element Table Items в поле User label for
указываем имя значений в первом узле элемента, например F1. Затем в ле-
поле Results Data Item из списка выбираем значение By sequence num, в пра-
верхнем поле Results Data Item из списка выбираем значение SMISC и в пра-
нижнем поле Results Data Item указываем номер нужной компоненты, в дан-
случае 1. По описанию конечного элемента LINK1 (см. ANSYS Help) внут-
1нее усилие имеет обозначение MFORX (Member force in the element coordinate
fem X direction) и располагается в таблице выходной информации элемента в
деле, называемом SMISC, под номером 1 (см. ANSYS Help). Нажимаем кноп-
Apply. Аналогично определяем таблицу значений во втором узле с именем F2.
срываем окно Define Additional Element Table Items кнопкой OK и окно Element
ble Data кнопкой Close. Команда построения эпюр по созданным таблицам
эывается следующим образом:
Main Menu—>General Posproc—>Plot Results—>
-Contour Plot-Line Elem Res...
Открывшемся окне Plot Line-Element Results в поле Elem table item at node I из
срывающегося списка выбираем имя значений в первом узле элемента - F1. В
яс Elem table item at node J из открывающегося списка выбираем имя значений
втором узле элемента - F2. В поле Optional scale factor можно указать мас-
□бирующий множитель для графического построения эпюры (по умолчанию
равен 1). Кроме того, можно выбрать одну из трех возможных опций, позво-
©щих строить эпюры на недеформированной или деформированной геометрии
№ на недеформированных краях (ребрах кромках, контурах) (Def shape only,
lef + undeformed, Def + undef edge). Нажимаем кнопку OK. В результате полу-
им изображение, показанное на рис. 4 (соответствует первой опции - недефор-
нированное положение).
Числовые значения перемещений, деформаций, напряжений, усилий можно
Ьвучить, выполнив следующие действия:
Main Menu—>GeneraI Posproc—>List Results—>Nodal Solution...,
Main Menu—>GeneraI Posproc—>List Results—>Element Solution...
33
В открывающемся окне List Nodal Solution (соответственно List Element Solution)
в полях Item to be listed из списков выбираем названия нужных величин и нажи-
маем кнопку ОК.
ANSYS 5.6
DEC И 2003
16:45:38
LINE STRESS
STEF=1
SUB=1
TIME=1
Fl F2
MIN=-1217
ELEM=20
MAX =887.251
ELEM=1
-1217
-983.402
-749.571
t--- -515.739
-281.907
r_ -48.076
j j 185.756
I---1 419.588
I--- 653.419
887.251
Рис. 4
Во время сеанса работы пользователя все выполняемые команды записыва-
ются в файл. Этот файл сохраняется на жестком диске под названием
<имя задачH>.log. Имеется возможность сохранить только существенные коман-
ды, выполнив следующие действия:
Utility Menu->File->Write DB Log File...
В открывшемся окне Write Database Log нужно указать место, куда должен быть
записан командный файл, и его имя (по умолчанию предлагается файл с расши-
рением o.lgw).
Командный файл может быть использован для повторного выполнения неко-
торых действий и расчета аналогичных задач. Для исполнения содержащихся в
этом файле команд нужно выполнить:
Utility Menu->File—>Read Input from...
В открывшемся окне Read File нужно указать место, откуда должен быть прочи-
тан командный файл, и его полное имя.
Приведем распечатку командного файла:
! /BATCH
!/СОМ,ANSYS RELEASE 5.6 UP19991022 13:23:26 12/11/2003
! /input,menust,tmp,„„„„„„„„ 1
!* *SET,h,12 ♦SET,d, 10 *SET,E,2ell *SET,A,le-3 ♦SET,Pl, 1000 *SET,P2,0 задание параметров задачи ! геометрический размер ! геометрический размер ! модуль упругости ! площадь поперечного сечения стержней фермы ! величина внешнего воздействия в 1-й точке ! величина внешнего воздействия во 2-й точке
34
. .* ->,V
FT,P4,0
ГТ.Р5.0
tP7
J.LINK1
! величина внешнего воздействия в 3-и точке
! величина внешнего воздействия в 4-й точке
! величина внешнего воздействия в 5-й точке
! начало работы в препроцессоре
! 1 тип используемого конечного элемента (LINK1)
IP.l.EX,, ,Е,! для материала с номером 1 задание модуля упругости
! (ЕХ) равным значению параметра (Е)
Л , ! задание набора свойств с номером 1 для конечных
! элементов - площадь поперечного сечения (А)
, 0, 0,0, ! задание ключевых (опорных) точек
f>*d, 0,0,
0, h/2,0,
*d, h/2,0,
•d, h,0,
0,2*h,0,
•d,2*h,0,
.1,2 ! создание отрезков прямых по двум ключевым точкам
.6,7
3,4,5 ! создание дуги окружности по 3-м точкам
.1,, ,6,0 ! деление линии с номером 1 на 6 равных частей
.2,, ,6,0 ! деление линии с номером 2 на 6 равных частей
.1,6 ! создание вспомогательных отрезков прямых
. 8ДЗ
. 9,14
.10,15
.11,16
.12,17
- 2, 7
выбор прямых, параллельных оси Оу
2,7,4,ORDE,2 ! 2 - номер поля, содержащего метку Р5IX
! 7 — количество выбранных объектов
! 4 - тип объектов - линии
! ORDE - упорядоченный список
! 2 - количество команд, описывающих
! (создающих) список
W,2,14 ! 2 - то же, что и для FLST
! 14 - номер первого выбранного объекта
И,2,-20 ! 20 - номер последнего выбранного объекта
! знак минус указывает область выбора
„Р5IX,3 ! пересечение выбранных линий (Р5IX)
! с дугой (3 - номер)
выбор объектов для удаления (лишних линий)
,2,13,4,ORDE,7
ЕМ,2,2
ЕМ,2,9
ЕМ,2,-13
ЕМ,2,23
/М,2,-24
^1,2,30
£М,2,-34
ЕЕ,Р51Х,, ,1 ! удаление выбранных (Р51Х) лишних линий вместе
35
! с ключевыми точками, им принадлежащими (1)
NUMMRG,KP,,, ,LOW ! слияние близких ключевых точек (КР)
NUMCMP.KP ! остаются точки с меньшими номерами (LOW) ! компрессирование номеров ключевых точек (КР)
NUMCMP,LINE! компрессирование номеров линий (LINE)
LSTR, 3,11 LSTR,11,12 LSTR, 12, 5 LSTR, 5,13 LSTR,13,14 LSTR,14, 4 LSTR, 1,11 LSTR, 6,12 LSTR, 7, 5 LSTR, 5, 9 LSTR,13,10 LSTR,14, 2 FLST,2,1,3,ORDE,1 FITEM,2,2 DK,P51X,,, ,0,ALL,,, ! достраиваем стержни фермы как отрезки прямых ! выбор одной (1) ключевой точки (3) ! с номером 2 ,,,, ! закрепление (0) всех степеней свободы (ALL) ! выбранной точки (Р51Х)
FLST,2,1,3,ORDE,1 FITEM,2,1 DK.P51X,,, ,0,UY,,,: ! выбор одной (1) ключевой точки (3) ! с номером 1 ,,, ! закрепление (0) по оси Оу (UY) ! выбранной точки (Р51Х)
FLST,2,1,3,ORDE,1 FITEM,2,6 ! выбор одной (1) ключевой точки (3) ! с номером 6
FK,P51X,FY,-P1! приложение внешней силы, действующей вдоль
FLST,2,1,3,ORDE,1 НТЕМ,2,7 ! оси Оу (FY), величиной -Р1 ! к выбранной точке (Р5IX) ! выбор одной (1) ключевой точки (3) ! с номером 7
FK,P51X,FY,-P2! приложение внешней силы, действующей вдоль
FLST,2,1,3,ORDE,1 FITEM,2,8 ! оси Оу (FY), величиной -Р2 ! к выбранной точке (Р51Х) ! выбор одной (1) ключевой точки (3) ! с номером 8
FK,P51X,FY,-P3! приложение внешней силы, действующей вдоль
FLST,2,1,3,ORDE,1 FITEM,2,9 ! оси Оу (FY), величиной -РЗ ! к выбранной точке (Р51Х) ! выбор одной (1) ключевой точки (3) ! с номером 9
FK,P51X,FY,-P4! приложение внешней силы, действующей вдоль
FLST,2,1,3,ORDE,1 FITEM,2,10 ! оси Оу (FY), величиной -Р4 ! к выбранной точке (Р51Х) ! выбор одной (1) ключевой точки (3) ! с номером 10
FK,P51X,FY,-P5! приложение внешней силы, действующей вдоль
LESIZE,ALL, ! оси Оу (FY), величиной -Р5 ! к выбранной точке (Р51Х) ,1,! задание количества элементов (1) на всех (ALL) линиях
36
1 >T,2,25,4,ORDE,2 ! выбор всех (25) линий (4)
В м,2,1
ITEM,2,-25 (v SH,P51X ! разбиение всех выбранных линий (Р51Х) ! на конечные элементы
Ьк RAN ! перенос условий опирания и внешних воздействий ! с геометрической модели на конечно-элементную модель
F ;н в. и Its >н ! закончить работу в препроцессоре ! начать работу в процессоре ! решить задачу ! закончить работу в процессоре
Используя полученный командный файл, можно легко выполнить расчеты
к лриантов поставленной задачи: определить перемещения узлов, опорные
tan и усилия в стержнях фермы при последовательном приложении нагру-
|р.. Р2, Рз, Рл, Ps и одновременном приложении всех нагрузок P\-Ps. Изменяя
е значения параметров Р1-Р5, можно провести расчет любого варианта.
I мпуска командного файла нужно:
- очистить текущую базу данных
Utility Menu—>File—>Clear & Start New...—>OK;
I изменить имя задачи, если в этом есть необходимость
Utility Menu—>File—>Change Jobname...;
- прочитать командный файл и выполнить содержащиеся в нем команды
Utility Menu—>File—>Read Input from...
Числовые результаты расчетов всех вариантов рассматриваемой задачи пред-
ке ны в таблицах 1, 2, 3. В табл. 1 приведены реакции в опорах фермы. Вели-
численно полученной составляющей по оси Ох реакции в правой опоре
I номером 7) характеризует точность определения усилий в ферме. Эта
^•.ть имеет порядок КГ12. В табл. 2 приведены усилия растяжсния-сжатия,
(кающие в стержнях фермы при различных комбинациях внешних нагрузок.
«обства номера стержней рассматриваемой фермы показаны на рис. 5.
ь 2 в столбце ХР, приведены значения, полученные суммированием значе-
D предыдущих пяти столбцов (Pi, Р2, Р3, Р4, Р5). Сравнивая эти значения со
Вгчиями в столбце P^Pj можно судить о правильности решения (различие
»_• о с округлением системой значений, представленных в столбцах Рь Р2, Р3,
I и Pi4-P5). В табл. 3 приведены перемещения узлов фермы. Для удобства
г; узлов рассматриваемой фермы показаны на рис. 6.
Таблица 1
Узел 1 Узел 7
Ry 7С-1012 Ry
Pi 833,33 1,08000 166,67
Р2 666,67 0,79581 333,33
Рз 500,00 0,34106 500,00
Ра 333,33 -0,22737 666,67
Ps 166,67 -0,56843 833,33
Pi^Ps 2500,00 -0,45475 2500,00
37
№ Р\ Р2 Рз Л Л ZPi P^Ps
1 887,25 709,80 532,35 354,90 177,45 2661,75 2661,80
2 587,04 1174,10 880,57 587,04 293,52 3522,27 3522,30
3 416,67 833,33 1250,00 833,33 416,67 3750,00 3750,00
4 416,67 833,33 1250,00 833,33 416,67 3750,00 3750,00
5 293,52 587,04 880,57 1174,10 587,04 3522,27 3522,30
6 177,45 354,90 532,35 709,80 887,25 2661,75 2661,80
7 0,00 =0,00 =0,00 =0,00 «0,00 =0,00 0,00
8 =0,00 =0,00 =0,00 =0,00 =0,00 0,00 =0,00
9 659,08 527,26 395,45 263,63 131,82 1977,24 1977,20
10 -204,45 591,09 443,32 295,55 147,77 1273,28 1273,30
11 0,00 0,00 1000,00 0,00 0,00 1000,00 1000,00
12 147,77 295,55 443,32 591,09 -204,45 1273,28 1273,30
13 131,82 263,63 395,45 527,26 659,08 1977,24 1977,20
14 =0,00 =0,00 =0,00 0,00 =0,00 =0,00 0,00
15 -904,20 -723,36 -542,52 -361,68 -180,84 -2712,60 -2712,60
16 -588,26 -1176,5 -882,39 -588,26 -294,13 -3529,54 -3529,60
17 -294,13 -588,26 -882,39 -1176,50 -588,26 -3529,54 -3529,60
18 -180,84 -361,68 -542,52 -723,36 -904,20 -2712,60 -2712,60
19 =0,00 =0,00 =0,00 =0,00 =0,00 =0,00 =0,00
20 -1217,20 -973,79 -730,34 -486,89 -243,45 -3651,67 -3651,70
21 454,26 -702,54 -526,91 -351,27 -175,64 -1302,10 -1302,10
22 266,14 532,28 -577,07 -384,72 -192,36 -355,73 -355,73
23 -192,36 -384,72 -577,07 532,28 266,14 -355,73 -355,73
24 -175,64 -351,27 -526,91 -702,54 454,26 -1302,10 -1302,10
25 -243,45 -486,89 -730,34 -973,79 -1217,20 -3651,67 -3651,70
38
AN
Таблица 3
№ узла Pi P, Pi PS Pi+Ps
t/T103 L/v-102 СЛ-103 СЛ-102 t/r-103 СЛ-102 tZr-103 t/v-102 tA-103 C7v-io2 t/,-103 t7/102
1 -0,13893 0,00000 -0,22463 0,00000 -0,26629 0,00000 -0,22463 0,00000 -0,13893 0,00000 -0,99340 0,0000
2 -0,09457 -0,03017 -0,18914 -0,02928 -0,23967 -0,02602 -0,20688 -0,02004 -0,13006 -0,01097 -0,86031 -0,11648
3 -0,06522 -0,02928 -0,13043 -0,05099 -0,19565 -0,04636 -0,17753 -0,03629 -0,11538 -0,02004 -0,68420 -0,18296
4 -0,04438 -0,02602 -0,08876 -0,04636 -0,13315 -0,06344 -0,13586 -0,04636 -0,09455 -0,02602 -0,49670 -0,20820
5 -0,02355 -0,02004 -0,04710 -0,03629 -0,07065 -0,04636 -0,09420 -0,05099 -0,07372 -0,02928 -0,30920 -0,18296
6 -0 00887 -0,01097 -0,01775 -0,02004 -0,02662 -0,02602 -0,03549 -0,02928 -0,04436 -0,03017 -0,13309 -0,11648
7 0,00000 0,00000 0,00000 0,00000 0,00000 0,00000 0,00000 0,00000 0,00000 0,00000 0,00000 0,00000
8 -0,09103 0,00000 -0,15543 «0,0 -0,19004 «0,0 -0,15765 «0,0 -0,09976 «0,0 -0,69390 0,00000
9 -0,03917 «0.0 -0,06697 «0,0 -0,07625 «0,0 -0,06919 «0,0 -0,04792 «0,0 -0,29950 «0,0
10 0,00084 -0,02708 -0,06450 -0,02681 -0,10807 -0,02416 -0,09388 -0,01880 -0,06467 -0,01035 -0,33027 -0,10719
И -0,03950 -0,03044 -0,06116 -0,04763 -0,09759 -0,04384 -0,08161 -0,03461 -0,05667 -0,01920 -0,33653 -0,17573
12 -0,07188 -0,02602 -0,12104 -0,04636 -0,13315 -0,05744 -0,10358 -0,04636 -0,06705 -0,02602 -0,49670 -0,20220
13 -0,08226 -0,01920 -0,14301 -0,03461 -0,16870 -0,04384 -0,16347 -0,04763 -0,09943 -0,03044 -0,65687 -0,17573
14 -0,07426 -0,01035 -0,13075 -0,01880 -0,15822 -0,02416 -0,16013 -0,02681 -0,13977 -0,02708 -0,66313 -0,10719
UJ
2.1. Контрольное задание
Определить перемещения узлов, опорные реакции и усилия в стержнях фер-
мы (табл. 4) при последовательном приложении нагрузок Рь Р2, Рз, Рд, Р5 и Од-
новременном приложении всех нагрузок Рх—Р$. Геометрические размеры фермы
определяются параметрами а = 10ми/г = 12м. Предполагается, что все стерж-
ни фермы имеют одинаковую жесткость, которая определяется модулем упруго-
сти Е = 200 ГПа и площадью поперечного сечения А = 10-3 м2. Величина нагру-
зок Р] 5 = 1 кН. Правильность полученного решения показать, сравнив его с ана-
литическим решением. Сравнить различные варианты (в группе) ферменных
конструкций между собой и выбрать наилучшую.
Рассмотрим классическую задачу сопротивления материалов о прямом изги-
бе в одной плоскости упругой балки. Внешними силовыми факторами, вызы-
вающими такой изгиб, могут являться сосредоточенные силы, моменты и рас-
пределенные нагрузки с кусочно-непрерывным изменением интенсивности.
40
качестве примера возьмем
балку, показанную на рис. 7. Данная балка отне-
| екартовой системе координат Oxyz так, что ось Ох направлена вдоль оси
проходящей через центры тяжести поперечных сечений. Оси Оу и Oz на-
. ы вдоль главных осей инерции сечения, а начало отчета расположено в
конце балки. Прямой поперечный изгиб здесь осуществляется в плоскости
1лина балки I = 1 м, поперечное сечение - прямоугольник шириной
91 м и высотой h = 0,02 м, материал с модулем упругости Е = 200 ГПа и
ициентом Пуассона ц=0,3. Величина нагрузок q = 50 Н/м, F=100 Н,
) Н-м. Необходимо определить прогиб, перерезывающую силу и изгибаю-
* мент. Построить эпюры найденных величин.
осматриваемая балка является статически определимой. Решение таких за-
вестно из курса сопротивления материалов. На рис. 8 представлены эпюры
бывающей силы (Qy), изгибающего момента (A/z), угла поворота попереч-
гчения (0), и прогиба (W) балки.
•и этом реакции опор определяются следующим образом:
5 , 1 „ М пс 5
—ql Ч—1 ч-— 85—,
24 4 I 12
5 , 3n М .5
—ql+—P = 45-,
12 4 I 6
х = 0,
х = 1,
ывающая сила:
ад,
я(о)-^х--0
4
R(G)~— - Р+— х х ,
4 I I 4 Д 4)
ающий момент:
41
0<х<—,
4
-<х<-
4“Х<2’
-<х< —
2“Х<4’
^х±1
4
угол поворота поперечного сечения:
q+^ВДх2, 1 0<х<—, 4
С, + |/?(0)х2 -М ( И х 1 4J | CN V и VI — 1 Tt ~~ 1 1 к о 1
EJz0 = - С, +|/?(0)х2 -М ( х 1 4; 1 с* 1^2. и 1 1 + СЛ 1^2. Z и 1 1 ьэ | ~- 1Л и л
прогиб:
где
EJ,W=
0<х<—,
4
-<х<-
4~Х 2’
-<х< —
2-Х< 4’
—Ml——Pl2
96 128
1099 з
46080q
J2 - момент инерции поперечного сечения балки относительно оси Oz.
42
Рис. 8
dTPn»..
При численном решении задач плоского изгиба
Йо* в системе ANSYS подходящим конечным эле-
»том является балочный элемент ВЕАМЗ. Для
р элемента сосредоточенные силы Р считаются
Всгжительными, если их направления совпадаю! с
Вп ительным направлением оси Оу. Наоборот,
деленные нагрузки q считаются положитель-
Ьв, если их направления противоположны поло-
Ьглыюму направлению оси Оу. Наконец, моменты
• Л/- положительны при направлениях вращения
। часовой стрелки. Степенями свободы конеч-
« элемента ВЕАМЗ являются узловые перемеще-
В п Оу и угол поворота поперечного сечения О
lrz)-
L| лку необходимо разбивать на конечные эле-
ВЕАМЗ так, чтобы в пределах каждого эле-
Кгэ были постоянными изгибные жесткости EJZ,
^ределенные нагрузки менялись максимум ли-
а внутри элементов не находились опоры и
^м приложения сосредоточенных сил и моментов.
Идя решения рассматриваемой задачи достаточно всего четырех элементов
М3, пак как для данного элемента имеется возможность определения дефор-
, напряжений, внутренних усилий и изгибающего момента в промежуточ-
К р звноотстоящих друг от друга точках, количество которых задается опцией
’РТ(9) {Output at extra intermed pts K9). Эта опция может принимать значе-
О (по умолчанию), 1, 3, 5, 7, 9.
Однако при использовании стандартных средств для графического представ-
К* результатов расчетов в виде эпюр, которое опирается на команду [PLLS]
гт иессора /POST1, для этой команды нет доступа к данным в промежуточ-
точках, устанавливаемых по опции KEYOPT(9). Команда [PLLS] предназна-
для графического показа заданных характеристик в виде эпюр с обозначе-
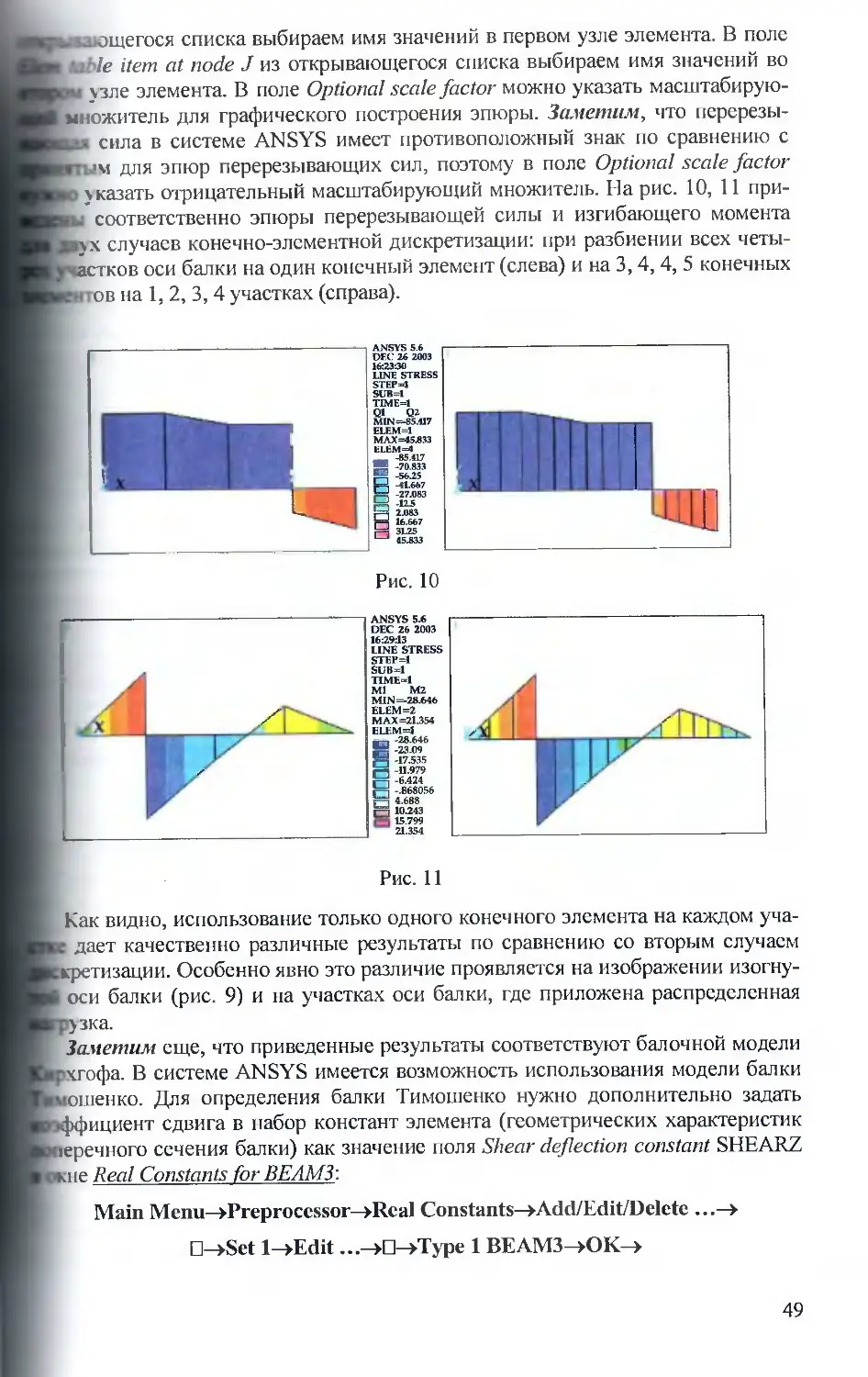
цветом диапазона рассматриваемой величины, но изображения этих харак-
'ик по данной команде линейны в пределах одного конечного элемента и
^ггся по значениям характеристик на концах элементов. Построение эпюр
Кв.пенно подобным истинным эпюрам требует достаточно мелкой (густой)
элементов. Добавление «лишних» элементов позволяет улучшить графиче-
представления результатов.
1 Р.1.смотрим последовательность решения данной задачи в интерактивном
ме (GUI) системы ANSYS.
I Для того чтобы иметь возможность решать однотипные задачи и управлять
Ьечно-элсмснтной сеткой, введем некоторое количест во переменных (парамет-
Utility Menu—parameters—»Scalar Parameters...-»
L=1
b=0.01
h=0.02
E=2ell
-►Accept (длина балки)
—►Accept (ширина поперечного сечения)
—►Accept (высота поперечного сечения)
-►Accept (модуль упругости)
43
nu=0.3 —►Accept (коэффициент Пуассона)
q=50 -►Accept (интенсивность распределенной нагрузки)
Р=100 -►Accept (сосредоточенная сила)
М=50 —►Accept (сосредоточенный момент)
nel=l -►Accept (количество конечных элементов на 1-м участке)
пе2=1 —►Accept (количество конечных элементов на 2-м участке)
пеЗ=1 -►Accept (количество конечных элементов на 3-м участке)
пе4=1 -►Accept —►Close (количество конечных элементов на 4-м участке)
Выберем тип элементов, используемых в расчете:
Main Menu—Preprocessor—plement Type->Add/Edit/DeIete ...—►
□—►Add ...-►□-►Structural Beam-»2D elastic 3->OK.
В окне Elements Types должна появиться запись
Type 1 ВЕАМЗ.
Опции элементов (в частности, KEYOPT(9)) можно изменить, нажав кнопю
Options .... Закрываем окно Elements Types кнопкой Close.
Зададим свойства материала:
Main Menu->Preprocessor->Material Props->-Constants-Isotropic ...—►
E\-bSpecify material number 1—>OK—>□—>EX E—►NL'XY nu—>OK.
Задаем геометрические характеристики поперечного сечения балки (констан
ты элемента):
Main Menu—>Preprocessor->Real Constants—►Add/Edit/Dclete ...-»
□-►Add ...-►□-►Type 1 BEAM3->OK->
□—►AREA b*h->IZZ b*(h**3)/12—►HEIGHT h-»OK-»Close.
Введем ключевые (опорные) точки:
Main Menu-preprocessor-►-Modcling-Create->Keypoints—>In Active CS...
1, 0, 0, 0 -►Apply
2, L, 0, 0 ->OK
Построим линию - ось балки, соединим между собой ключевые точки с н
мерами 1 и 2 отрезком прямой:
Main Menu—Preprocessor—►-Modeling-Create—►-Lines-Lines—►Straight Line.
Разделим ось балки на 4 участка в соответствии с приложенными воздейс
виями (рис. 7):
Main Menu-preprocessor—>-Modeling-Operate—>
-Booleans-Divide-Pine into N Ln’s.
Таким образом, геометрическая модель балки построена.
Зададим граничные условия и внешние воздействия на геометрической м>
дели. Заметим, что при использовании балочного элемента BEAM на геометр.'
ческой модели (с последующим переносом на конечно-элементную модель) мс
44
t быть заданы условия опирания, сосредоточенные силы и моменты, а распре-
эенные нагрузки должны быть заданы непосредственно на конечные элементы
,. не могут быть перенесены с геометрической модели на конечно-элемент-
р). Поэтому на геометрической модели задаем условия опирания, сосредото-
4ую силу и момент в точках:
Main Menu—>Preprocessor—>Loads—>-Loads-Apply—>
-Structural-Displacement—>On Keypoints,
Main Menu—>Preprocessor-»Loads—>-Loads-Apply—>
-Structural-Force/Moment-»On Keypoints.
Перейдем к построению конечно-элементной модели. Поскольку мы хотим
_ ь впоследствии возможность управления конечно-элементной сеткой, для
идого участка балки укажем свое количество элементов дискретизации в виде
1метров (nel, пе2, пеЗ, пе4):
Main Menu—>Preprocessor-»-Meshing-Size Cntrls-»-Lines-Picked Lines +.
Разбиваем конструкцию на конечные элементы:
Main Menu—>Preprocessor-»-Meshing-Mesh—>Lines.
Теперь можно задать распределенную нагрузку. На балочные элементы
кМ она прикладывается непосредственно на элементы специальной коман-
i. На втором участке балки действует постоянная распределенная нагрузка
рис. 7). Чтобы задать ее, выберем элементы, принадлежащие этому участку
ачала выбираем линию, затем элементы, принадлежащие этой линии):
Utility Menu—>Select—>Entities...
। ткрывшемся окне Select Entities в раскрывающихся списках выбираем Lines
-ши) и ByNum/Pick (по нумсрации/указанием), устанавливаем опцию
m Full (из полного набора) и нажимаем кнопку ОК. Открывается окно Select
es. На графическом экране курсором мыши указываем второй участок оси
ки и нажимаем кнопку ОК. Затем элементы, принадлежащие этой линии:
Utility Menu—>Select—>Entities...
вновь открывшемся окне Select Entities в раскрывающихся списках выбираем
ments (элементы) и Attached to (принадлежащие, присоединенные), устанав-
заем опции Lines (выбранным линиям) и From Full (из всех) и нажимаем кноп-
ок. Убедиться в правильности выбора можно, изобразив элементы на графи-
ком экране:
Utility Menu-»Plot-»Elements...
аем распределенную нагрузку:
Main Menu-»Preprocessor->Loads-»-Loads-Apply—>
-Structural-Pressure—>On Beams-»Pick All
открывшемся окне Apply PRES on Beams в поле Load key (ключ нагрузки) за-
гь 1, в поле Pressure value at node I задать q (остальные поля должны остаться
45
незаполненными) и нажать кнопку ОК. Проконтролировать правильность зада-
ния нагрузки можно, выполнив следующие действия:
- включить в набор все объекты
Utility Menu->Select->Everything;
- установить изображение распределенной нагрузки в виде стрелок
Utility Menu—>PIotCtrls->Symbols...,
в открывшемся окне Symbols в выпадающем списке Surface Load Symbol нужно
выбрать значение Pressures, в выпадающем списке Show pres and convect as нуж-
но выбрать значение Arrows и нажать кнопку ОК;
- изобразить элементы на графическом экране
Utility Menu—>PIot->Elements...
На четвертом участке балки действует линейно распределенная нагрузка (см.
рис. 7). Наиболее универсальный, на наш взгляд, способ, который позволит зада-
вать такую нагрузку при произвольном количестве конечных элементов, заклю-
чается в программировании команд приложения распределенного воздействия на
каждый балочный элемент четвертого участка. Для этого нужно в командном
окне (HASES Input) ввести следующие операторы:
*do,i,l,ne4
SFBEAM,nel+ne2+ne3+i,l,PRES,2*q-(i-l)*q/ne4,2*q-i*q/ne4,,,,,
*enddo
Здесь *do,i,l,ne4 - оператор начала цикла по переменной i от 1 до пе4 (количест-
во элементов на четвертом участке) с шагом 1; SFBEAM - команда задания рас-
пределенной нагрузки на балочный элемент с номером nel+ne2+ne3+i, направ-
лением перпендикулярно оси элемента (1) в виде давления (PRES), со значением
2*q-(i-l)*q/ne4 в узле I (первом) и значением 2*q-i*q/ne4 в узле J (втором);
*enddo - оператор окончания цикла.
Таким
образом, распределенные нагрузки
будут заданы.
Теперь
перенесем
нагрузки и условия опирания, заданные на геометрической модели, на конечно
элементную модель:
Main Menu-»Preprocessor—>Loads->-Loads-Operate->
-Transfer to FE-A11 Solid Lds..>OK.
Переходим к решению задачи. Указываем тип решаемой задачи (статиче-
ская):
Main Menu—>Solution->-Analysis Type-New Analysis... ->□—>Static—>OK.
Запускаем задачу на счет:
Main Menu—^Solution—>-Solve-Current LS—>П—>OK.
После появления сообщения “Solution is done” можно проанализировать ре-
зультаты расчета.
Приведем распечатку командного файла.
В
нем,
по сравнению
с командным
файлом предыдущей задачи, несколько проще записаны некоторые команды. Это
касается в первую очередь команд выбора объектов и связанных с выбранными
объектами действий.
46
ТСН
М,ANSYS RELEASE 5.6 UP19991022 17:32:11 12/20/2003
ut,menust,tmp,„„„„„„„„l
L,1 ! Параметры задачи
,b,0.01
Д0.02
T,E,2ell
jiu,0.3
,q,50
Д’,100
;m,50
\nel,l
\ne2,l
\ne3,l
,ne4,l
! Начать работу в препроцессоре
! Тип используемого конечного элемента
! Параметры элемента: площадь, момент
! инерции, высота поперечного сечения
P7
1 ВЕАМЗ
b*h,b*(h**3)/12,h,,,,
|Р,1,ЕХ, ,,Е,
IP.l.NUXY,, ,nu,
P.O,0,
L0,0,
R.1,2
V,l,, ,4,0
l.,,,0,UY,,,,,,
I,,, ,0,UX,UY,,,,,
FY,-P
|.MZ,M
IZE,1,, ,nel,,,, ,1
ZE,2,, ,ne2,,,, ,1
ZE,3,, ,ne3,,,, ,1
1ZE,4,, ,ne4,,,, ,1
ESH,ALL
-L,S,, ,2
LL,S
LSEL,ALL
! Свойства материала: модуль упругости,
! коэффициент Пуассона
! Координаты ключевых точек
! Построение оси балки
! Разбиение оси балки на 4 участка
! Условия закрепления
! Сосредоточенная сила в ключевой точке
! Сосредоточенный момент в ключевой точке
! Количество элементов на каждом из участков
! оси балки
! Построение конечно-элементной сетки
! Выбор второго участка оси балки
! Выбор элементов второго участка оси балки
ЕAM,ALL, 1,PRES,q,,,,,,! Приложение постоянной распределенной
! нагрузки на все элементы второго участка
! оси балки
! Выбор всех объектов
иложение линейно распределенной нагрузки на все
:менты четвертого участка оси балки
i,l, пе4
EAM,nel+ne2+ne3+i,l,PRES,2*q-(i-l)*q/ne4,2*q-i*q/ne4,,,,,
klo
TRAN
! Перенос воздействий с геометрической
! модели на конечно-элементную модель
47
FINISH !* /SOLU SOLVE FINISH ! Закончить работу в препроцессоре ! Начать работу в процессоре ! Решить задачу ! Закончить работу в процессоре
I*
/POST1 ЕТ ABLE,QI,SMISC,2 ETABLE,Q2,SMISC,8 ETABLE,Ml,SMISC,6 ! Начать работу в постпроцессоре ! Таблица значений перерезывающей силы в узле i ! Таблица значений перерезывающей силы в узле j ! Таблица значений изгибающего момента в узле i
ETABLE,М2,SMISC,12 ! Таблица значений изгибающего момента в узле j
PLLS,Ql,Q2,-3 FINISH ! Вывод эпюры перерезывающей силы ! Закончить работу в постпроцессоре
Чтобы проанализировать результаты, сначала прочитаем их из базы данных:
Main Menu—>GeneraI Posproc->-Read Results—>By Load Step...
Деформированное положение конструкции (графическое представление изо-
гнутой оси балки) получим, выполнив команду:
Main Menu—>GeneraI Posproc—>Plot Results—>Deformed Shape...
На рис. 9 приведено изображение прогиба балки при разбиении всех четырех
участков на один конечный элемент (слева) и на 3, 4, 4, 5 конечных элементов
соответственно на 1, 2, 3, 4 участках (справа).
Рис. 9
Аналогично тому, как это было сделано при построении эпюр внутренних
усилий для фермы, построим эпюры перерезывающих сил и изгибающих момен-
тов для этих же двух случаев расчета: при разбиении всех четырех участков оси
балки на один конечный элемент и соответственно на 3, 4, 4, 5 конечных элемен-
тов на 1, 2, 3, 4 участках. Для этого определим по две таблицы для перерезываю-
щих сил и изгибающих моментов со значениями в первом (начальном) и во вто-
ром (конечном) узле каждого элемента, используя команду:
Main Menu—>General Posproc-»ElementTable->
Define Table...->□—>Add...
По описанию конечного элемента ВЕАМЗ (см. ANSYS Help) значения перерезы-
вающей силы располагаются в таблице выходной информации элемента в разде-
ле SMISC под номером 2 для первого (I) узла элемента и под номером 8 для вто-
рого (J) узла. Значения изгибающего момента располагаются в разделе SMISC
под номером 6 для первого (I) узла элемента и под номером 12 для второго (J)
узла. Для вывода эпюр в графическое окно выполним команду:
Main Menu->General Posproc->PIot ResuIts->-Contour Plot-Line Elem Res...
В от крывшемся окне Plot Line-Element Results в поле Elem table item at node I из
48
. кающегося списка выбираем имя значений в первом узле элемента. В поле
le item at node J из открывающегося списка выбираем имя значений во
узле элемента. В поле Optional scale factor можно указать масштабирую-
множитель для графического построения эпюры. Заметим, что перерезы-
сила в системе ANSYS имеет противоположный знак по сравнению с
м для эпюр перерезывающих сил, поэтому в поле Optional scale factor
указать отрицательный масштабирующий множитель. На рис. 10, 11 при-
j соответственно эпюры перерезывающей силы и изгибающего момента
ух случаев конечно-элементной дискретизации: при разбиении всех четы-
астков оси балки на один конечный элемент (слева) и на 3,4, 4, 5 конечных
нтов на 1, 2, 3, 4 участках (справа).
ANSYS 5.6
DEC 26 2003
16:2350
LINE STRESS
STEP=1
SUB=1
TIME=1
Ql Q2
MIN =-85.417
ELEM=1
MAX=45.833
ELEM =4
-85.417
-70.833
-56.25
-27.083
-125
2.083
16.667
45-833
Рис. 10
ANSYS 5.6
DEC 26 2003
16:29:13
LINE STRESS
STEP=1
SUB=1
TIME=1
Ml М2
MIN =-28.646
ELEM =2
MAX=21.354
ELEM=1
-28.646
-23-09
-17.535
-11.979
-6.424
k=I -.868056
П 4.688
in чл-i
S10-243
( ) 15.799
21.354
Рис. 11
Как видно, использование только одного конечного элемента на каждом уча-
: дает качественно различные результаты по сравнению со вторым случаем
кретизации. Особенно явно это различие проявляется на изображении изогну-
оси балки (рис. 9) и на участках оси балки, где приложена распределенная
'узка.
Заметим еще, что приведенные результаты соответствуют балочной модели
лгофа. В системе ANSYS имеется возможность использования модели балки
мошенко.
Для определения балки Тимошенко нужно дополнительно задать
1ициент сдвига в набор констант элемента (геометрических характеристик
геречного сечения балки) как значение поля Shear defection constant SHEARZ
ше Real Constants for BEAM3'.
Main Menu—Preprocessor—peal Constants—>Add/Edit/Delete >
□—>Set 1—>Edit>Type 1 BEAM3—>OK—>
49
□->SHEARZ 6/5—>OK—>Close.
Значение коэффициента сдвига можно приближенно принять равным: 6/5 - для
прямоугольника; 10/9 или 32/27-для круга; 2 - для тонкостенного кольца; 12/5 -
для тонкостенного полого квадрата; A!(hd) - для двутаврового профиля, где А -
площадь, h - высота, d - толщина поперечного сечения двутавра.
3.1. Контрольное задание
Для конкретной балки, приведенной в табл. 5, определить и обосновать наи-
меньшее количество конечных элементов и места их сгущения, необходимые для
вычисления реакций опор, перерезывающих сил, изгибающих моментов, углов
поворота поперечного сечения и прогиба балки. Построить графическое изобра-
жение изогнутой оси балки, эпюры перерезывающих сил и изгибающих момен-
тов. Сравнить полученные результаты с аналитическими расчетами, методами
сопротивления материалов. Определить также существенность использования
модели балки Тимошенко для данных задач, сравнив расчеты по двум моделям
балки (обычной модели Кирхгофа и модели балки Тимошенко). Длина балки
I = 1 м, поперечное сечение - прямоугольник шириной Ъ = 0,01 м и высотой
h = 0,02 м, материал с модулем упругости Е = 200 ГПа и коэффициентом Пуас-
сона v= 0,3. Величина нагрузок q = 50 Н/м, Р = 100 Н.
Таблица 5
Варианты з
1 q
1ШШШ1Ш1
3 1 J 2g 1ШШ
>р >р ур >р 2q V£ К - X
5 Р/2 q / 4г \1г Фг -Jr Фг 4г \ %
V£ 1/
Г--_ >’1'4
7 ШШ1 7 р
q Н
9 2g У 11111111. хАх la la
заданий:
1 2q
Jr Jr Jx J Jf Jr Jr
Ч.
4 у P q
/1111111
Фг''" - 'S
6 q P /
Jr Jr '1/ Jr Jr Jr j- Jr Jr Jr Jr Jr Jr J- Jr\
8 q |P
1НИИМ9ШИН,
1/9 1/9
1"--. >>
10 2q 1Ш1Ш1
Vi,
I*--. ----- ^3
50
ш I'm.tl П
* 2q
vs vs
к-------Ж--------->1
4. Расчет плоских рам
.чет рам в системе ANSYS на этапах задания исходной информации в пре-
горе и процессоре во многом аналогичен решению задач об изгибе балок,
лоских рам по-прежнему достаточно использовать конечный элемент
3, так как он может работать как на изгиб, так и на растяжение-сжатие. В
явственном случае необходимо использовать конечный элемент ВЕАМ4.
дельное внимание уделим случаю наличия промежуточных шарниров. Это
необходимо и для задач об изгибе балок, но в предыдущем разделе этот
: не рассматривался. Пусть два конечных элемента ВЕАМЗ имеют общую
вую точку, в которой располагается шарнир. Очевидно, что тогда в этой
оба конечных элемента должны иметь одинаковые перемещения Ux и Uy,
1ы поворота 0 (ROTZ) могут быть, вообще говоря, различными. Именно
му в общей концевой точке для этих двух конечных элементов не может
общего узла. Здесь должны существовать два различных узла с одинаковы-
:^метрическими координатами. Кроме того, для таких узлов нужно связать
iy собой по отдельности узловые степени свободы UX и UY так, чтобы
1ечить их равенство. Данная процедура может быть осуществлена в системе
VS в интерактивном режиме (GUI) следующим образом:
Main Menu—>Preprocessor—>Coupling / Ceqn—>Couple DOFs.
юром мыши отмечаем на графическом экране два различных узла, для кото-
нужно связать между собой узловые степени свободы, и нажимаем кнопку
h. В открывшемся после этого окне Define Coupled DOFs в поле Set reference
‘ г указываем ссылочный номер (1, 2, 3, ...) множества связанных степеней
^ды. В поле Degree-of-freedom label из открывающегося списка выбираем
начение степени свободы для выделенной пары узлов (UX или UY) и нажи-
кнопку Apply. Заметим, что ссылочные номера должны быть различными
каждого множества связанных степеней свободы.
В пакетном режиме аналогичные действия выполняются с помощью команд:
СР, NSET1, UX, NODEI, NODE2,
СР, NSET2, UY, NODEI, NODE2,
SSETI и NSET2 - ссылочные номера множеств общих степеней свободы UX
У соответственно, a NODE1 и NODE2 - номера узлов с одинаковыми коорди-
ми, в которых располагается промежуточный шарнир.
Кроме того, элементы балок и рам могут иметь различные жесткостные ха-
теристики - различные геометрические характеристики поперечных сечений
51
*.b*(h**3)/12,h,,,,
I ЕХ,, ,Е,
I .MUXY,, ,nu,
2 ЕХ,, ,Е/2,
2 NUXY,, ,nu,
! Параметры элемента: площадь, момент
! инерции, высота поперечного сечения
! Свойства 1-го материала: модуль упругости,
! коэффициент Пуассона
! Свойства 2-го материала: модуль упругости,
! коэффициент Пуассона
! Координаты опорных точек:
• О,
-а.О,
•а,О,О,
АО,
*а,О,О,
*а,-а,О,
•а,-а,О,
*a+L,-a,0.
С,1,2,4,а,
С.2,3,4,а,
С,5,7,6,а,
L7,8
L, ,,,1,2
Т,1,1,1,,,
.3,4
дуги окружностей по начальной и конечной
точкам,центру и радиусу
! отрезок прямой
! выбрать линии с номерами 1 и 2 (дуги)
! приписать свойства 1-го материала и
геометрические характеристики
поперечного сечения
! выбрать линии с номерами 3 (дуга) и 4 (отрезок)
! приписать свойства 2-го материала и
LSEL,ALL
SIZE,1,, ,nel,,,, ,1
SIZE,2,, ,nel,,,, ,1
SIZE,3,, ,nel,,,, ,1
! SIZE,4,, ,ne2,,,, ,1
ESH, ALL
M,UX,nel+2,2*nel+2
2,UY,nel+2,2*nel+2
MSH
LU
.1,,, ,O,ALL,,,,,,
,8,,, ,O,ALL,,,,,,
K.2,MZ,M
К 3,FY,-P
геометрические характеристики
поперечного сечения
! выбрать все объекты
! количество элементов на 1-й линии (дуга)
! количество элементов на 2-й линии (дуга)
! количество элементов на 3-й линии (дуга)
! количество элементов на 4-й линии (отрезок)
! построить конечно-элементную сртку
на всех линиях
! связать узловые степени свободы UX
! связать узловые степени свободы UY
! Закончить работу в препроцессоре
! Начать работу в процессоре
! жесткая заделка 1-й опорной точки
! жесткая заделка 8-й опорной точки
! сосредоточенный момент во 2-й опорной точке
! сосредоточенная сила в 3-й опорной точке
I Приложение распределенной нагрузки:
LSEL,S,, ,4 ! выбор 4-й линии (отрезок)
aLL,S ! выбор конечных элементов на 4-й линии
FBEAM,ALL, 1,PRES,q,,,,,, ! распределенная нагрузка
LLLSEL,ALL
BCTRAN
! выбрать все объекты
! Перенос воздействий с геометрической
! модели на конечно-элементную
SOLVE FINISH ZP0ST1 ETABLE,Fl,SMISC, 1 ETABLE,F2,SMISC,7 ETABLE,QI,SMISC,2 ETABLE,Q2,SMISC,8 ETABLE,Ml,SMISC,6 ! Решить задачу ! Закончить работу в процессоре ! Начать работу в постпроцессоре ! Таблица значений нормального усилия в узле i ! Таблица значений нормального усилия в узле j ! Таблица значений перерезывающей силы в узле i ! Таблица значений перерезывающей силы в узле j ! Таблица значений изгибающего момента в узле i
ETABLE,M2,SMISC,12 ! Таблица значений изгибающего момента в узле j
! /pbc,u„l
! /рЬс,ср„ 1
! /pbc,f„l
! /pbc,m„l
! /psf,pres,norm, 1
! PLDISP,!
! /pbc,all„O
! /psf,pres,norm,0
! PLLS,F1,F2,1,0
! PLLS,QI,Q2,-1,0
! PLLS,M1,M2,1,O
FINISH
! показывать условия закрепления
! показывать связанные степени свободы
1 показывать сосредоточенные силы
! показывать сосредоточенные моменты
! показывать распределенные нагрузки
! вывести деформированную конфигурацию
! не показывать условия закрепления, силы, моменты
! не показывать распределенную нагрузку
! вывести эпюры нормальных усилий
! вывести эпюры перерезывающих сил
! вывести эпюры изгибающих моментов
! Закончить работу в постпроцессоре
Выполнив данный командный файл, можно получить графическое изображе-
ние исходной геометрии конструкции и схемы ее нагружения и закрепления (рис.
13); деформированную конфигурацию (рис. 14); эпюры нормальных усилий, пе-
ререзывающих сил и изгибающих моментов (соответственно рис. 15-17). Эпюры
построены при использовании 64 конечных элементов на каждой дуге, представ-
ляющей собой четверть окружности.
ANSYS 5.6
JAN 18 2004
12:40:18
LINE STRESS
STEP=1
SUB=1
TIME=1
Fl F2
MIN =-44.227
ELEM =109
MAX=38.857
ELEM=1
-44.227
Рис. 15
-34.996
-25.764
-16.533
-7.301
1.931
11.162
20.394
29.625
38.857
54
Рис. 16
ANSYS 5.6
JAN 18 2004
12:39:46
LINE STRESS
STEP=1
SUB=1
TIME=1
QI Q2
MIN=-44.227
ELEM=45
MAX =60.887
ELEM=204
-44-227
-32.548
-20.869
-9.189
=] 2.49
5 14.169
25.849
37.528
49.207
1 60.887
Изгибающий момент
Рис. 17
ANSYS 5.6
JAN 18 2004
12:38:48
LINE STRESS
STEP=1
SUB=1
TIME=1
Ml М2
MIN =-28.226
ELEM=1
MAX =31.534
ELEM =61
-28.226
-21.586
-14.946
-8.306
-1.666
4.974
11.614
18.254
24.094
31.534
В табл. 6 приведены полученные значения реакций опор и минимальные и
симальные значения нормальных и поперечных сил и изгибающих моментов.
Таблица 6
Реакции Внутренние усилия и момент
Fv м N Q М.
.вая сора 20,652 39,113 28,226 Минимум -44,187 -44,187 28,226
?авая Eg!*1 -20,652 60,887 -26,122 Максимум 38,052 60,887 31,539
Правильность и точность результатов легко проверить, используя методы
|ротивления материалов.
4.1. Контрольное задание
Для конкретной рамы, приведенной в табл. 7, используя систему ANSYS оп-
елить реакции опор, нормальные и поперечные силы и изгибающие моменты,
эеделить максимальные и минимальные значения всех определяемых вели-
I. Результаты представить в табличном и графическом виде, построив дефор-
юванную конфигурацию и эпюры нормальных и поперечных силы и изги-
»щих моментов. Исходные данные для всех вариантов: а = 1 м; q = 50 Н/м;
200 ГПа, v = 0,3; поперечное сечение всех элементов рамы - прямоугольник
:отой h = 0,02 м и шириной b = 0,01 м.
55
Таблица 7
5. Литература
1 .Г ал лагер Р. Метод конечных элементов. Основы. М.: Мир, 1984. 428 с.
2 . Каплун А.Б., Морозов Е.М., Олферьева М.А. ANSYS в руках инже-
нера: Практическое руководство. - М.: Едиториал УРСС, 2003. - 272 с.
56
МОДАЛЬНЫЙ И ГАРМОНИЧЕСКИЙ АНАЛИЗ
Н.В. Леонтьев
1. Введение
2. Теоретические основы
2.1. Уравнение движения конструкции
2.2. Модальный анализ
2.3. Модальный анализ предварительно напряженной конструкции
2.4. Гармонический анализ
2.4.1. Полный метод
2.4.2. Сокращенный метод
2.4.3. Метод суперпозиции мод
3. Проведение модального анализа
3.1. Основные шаги. Ограничения модального анализа.
Характеристика методов решения задачи на собственные значения
3.2. Модальный анализ жестко закрепленной цилиндрической оболочки
3.2.1. Просмотр решения
3.3. Анализ предварительно напряженной конструкции на примере
растянутой (сжатой) цилиндрической оболочки
4. Гармонический анализ
4.1. Методы гармонического анализа. Достоинства и недостатки
4.1.1. Полный метод
4.1.2. Сокращенный метод
4.1.3. Метод суперпозиции мод
4.2. Проведение гармонического анализа
-.3. Гармонический анализ - полный метод
4.3.1. Особенности задания воздействия в гармоническом анализе
- 4. Гармонический анализ - метод разложения по собственным модам
4.4.1. Получение решения модального анализа
4.4.2. Проведение гармонического анализа методом суперпозиции мод
4.4.3. Просмотр результатов
4.4.4. Пример гармонического анализа
Литература
1. Введение
.матривается технология решения задач модального и гармонического
с помощью «тяжелой» системы моделирования задач прочности и мате-
кой физики ANSYS. Под модальным анализом понимается задача опре-
| собственных частот и форм (мод) собственных колебаний, а под гармо-
м анализом - задача определения вынужденных колебаний конструкции
ствием периодической нагрузки, изменяющейся во времени по гармони-
(синусоидальному) закону. Модальный и гармонический анализ прово-
•отько в линейной постановке. В работе использовалась версия ANSYS
57
2. Теоретические основы
2.1. Уравнение движения конструкции
Используя метод конечных элементов, дискретные уравнения движения
конструкции можно представить в виде матричного уравнения
[M]{u}+[C]{u}+[K]{u}={F}, (1)
здесь {и} - вектор узловых перемещений для всего тела, {й} , {й} - векторы ус-
корений и скоростей точек тела, [К], [С], [М] - «глобальные» матрицы жестко-
сти, демпфирования и масс для всего тела, {F} — вектор эквивалентных узловых
сил для всего тела.
Матрицу демпфирования [С] можно формально получить, аналогично мат-
рицам жесткости и масс, введя некоторую константу внутреннего трения и сум-
мируя соответствующие матрицы элементов, однако в общем случае это не так.
Назначением матрицы демпфирования является аппроксимация диссипации
энергии. На практике матрица [С] задается постоянной, строится путем задания
величин демпфирования на различных собственных модах или аппроксимирует-
ся через матрицы [М] и [К] (по Рэлею)
[С]=а[М] + 0[К].
Используя уравнение движения (1) можно получить уравнения для различных
видов анализа: статического, модального, гармонического.
2.2. Модальный анализ
Модальный анализ проводится для определения частот и форм (мод) собст-
венных колебаний конструкций. Также модальный анализ может быть первым
шагом для других видов динамического анализа, таких, как анализ переходных
процессов, гармонический и спектральный анализ. Модальный анализ предпола-
гает, что система является линейной. Все виды нелинейности — нелинейное по-
ведение материала, контактные граничные условия, конечные перемещения -
игнорируются. Контакты, в зависимости от своего исходного состояния, остают-
ся открытыми или закрытыми.
Предполагается, что внешние силы и демпфирование равны нулю. Уравнение
свободных колебаний конструкции в матричной форме имеет вид
[М] {й} + [К]{и} = {0}. (2)
Для линейной системы свободные колебания являются гармоническими и могут
быть записаны в виде
{u} = {<p},cosco,7, (3)
где {<р},- - i-й собственный вектор, представляющий форму (моду) колебаний на
I-й собственной частоте, со, - z-я собственная круговая частота (радиан в единицу
времени), t - время.
Подставляя (3) в (2), получим:
М[М] + [К]){<р}, = {0}. (4)
Это равенство удовлетворяется, если {<р},- = {0} или определитель матрицы
([К] - со2 [М]) равен нулю. Первый случай дает тривиальное решение и поэтому
58
сен. Второй случай приводит к обобщенной проблеме собственных зна-
гнием обобщенной проблемы собственных значений являются п пар соб-
К частот со2 и собственных векторов {ср}, где п - порядок системы, т.е.
число степеней свободы конструкции.
ду с круговой собственной частотой со, также вводится собственная час-
цредставляющая собой число колебаний в единицу времени:
I (5)
2л
(юстью задачи на собственные значения является то, что собственные
определяются с точностью до постоянного множителя, поэтому их необ-
9 нормировать. Часто используется нормирование по отношению к матри-
с Кроме того, собственные формы ортогональны по отношению к матрице
М -ортогональны)
{<р}Г'[М]{(р}-5,. (6)
мнений (4) и (6) следует также условие ортогональности по отношению к
цс жесткости К (К-ортогональность)
{<[К]{ф}7=щ25,. (7)
2.3. Модальный анализ
предварительно напряженной конструкции
1одальный анализ предварительно напряженной конструкции выполняется
иове уравнения, аналогичного (2), но вместо матрицы жесткости [К] пе-
чется матрица [К]с = [К] + [К]я, где [К] - обычная матрица жесткости, а
• так называемая геометрическая матрица жесткости, получаемая на основе
ра предварительных напряжений и нелинейной части тензора деформаций
обнес см. [2, 3], ANSYS, Inc. Theory Reference, Charter 3 Structures with
etric Nonlinearities, 3.3 Stress Stiffening). Наличие этой добавки объясняет,
iy, например, собственные частоты изгибных колебаний предварительно
нутой балки выше, чем в балке без предварительных напряжений. Наобо-
наличие предварительных напряжений сжатия приводит к уменьшению соб-
нной частоты изгибных колебаний. При некотором значении напряжений
гня нижняя собственная частота изгибных колебаний может обратиться в
.. Этот момент может интерпретироваться как потеря устойчивости сжатой
я.
2.4. Гармонический анализ
Гармонический анализ предназначен для решения уравнений движения в
чае установившихся колебательных процессов (вынужденных колебаний),
сматривается общее уравнение движения
[M]{ii} + [C]{u} + [K]{u} = {F}, (8)
[М] - матрица масс, [С] - матрица демпфирования, [К] - матрица жесткости,
- вектор ускорений в узлах, {й} - вектор скоростей в узлах, {и} - вектор
смещений в узлах, {F} - вектор приложенных внешних усилий.
59
Предполагается, что при установившемся процессе все точки конструкции
движутся с одной и той же заданной частотой, но, возможно, с различными сдви-
гами по фазе. Причиной возникновения сдвига по фазе может явиться наличие
демпфирования. Следовательно, перемещения можно представить в виде:
{u} = {umaxe'4>}e°,
где u,nax - амплитуда перемещений, i - мнимая единица, £2 = 2nf- внешняя кру-
говая частота, f - частота внешних сил, t - время, ф - сдвиг фаз для перемещений
(в радианах). Заметим, что umax и ф могут быть различны для различных степеней
свободы.
Для формулировки проблемы вынужденных колебаний используются ком
плексные обозначения. В этом случае предыдущее уравнение можно представит!
в виде:
{«} = КиДсозф + гвшф)}^
или
{uHW+W", (9
здесь {ui} = {uinax cos ф} - действительная часть и {иг} = {umax sin ф} - мнимая Н
часть вектора перемещений.
Вектор сил может быть определен аналогично вектору перемещений:
или
{F} = {Fmax (cos V + i sin v)}e'n/,
или
{F} = ({FI} + r{F2}>'n', (10*
где Fmax - амплитуда сил, ф - сдвиг фаз для сил (в радианах), {F]} = {F,naxcos\|/}
- действительная часть вектора сил, {F2} = {Fmaxsin ф} - мнимая часть вектор^
сил.
Подставляя (9), (10) в (8), получим:
(-Q2 [М] + iO[C] + [К])( {u,} + i{u2})eini = ( {F,} + i{F2 })е°. (11
Так как зависимость от времени (еп‘) одинакова для обеих частей уравнения,
то она может быть опущена:
([К] - П2[М] + т«^[С])( {11,} + z{u2}) = ({FJ + i{F2}). (12)
Существуют три метода решения уравнений (12): полный, сокращенный и
метод суперпозиции мод [1].
2.4.1, Полный метод. При использовании полного метода уравнение (12
решается непосредственно с помощью комплексной арифметики.
2.4.2. Сокращенный метод. При использовании этого метода среди всех не-
известных выделяются наиболее существенные степени свободы, так называе-
мые «мастеря-неизвестные, определяющие поведение конструкции [1]. Считает
ся, что массы сосредоточены только в «мастеря-неизвестных. Оставшиеся неиз-
60
ыражаются через «мастер»-неизвестные, что приводит к уравнению,
жшому по виду (12), но меньшей размерности, которое затем решается
вино полному методу.
1 3. Метод суперпозиции мод. Метод суперпозиции мод (МСМ) использу-
онные частоты и формы колебаний для анализа установившихся выну-
гармонических колебаний.
нове МСМ лежит разложение неизвестного решения по собственным
переход к модальным координатам у,
{«}=£{<р1}л,
i=i
пело используемых мод.
ставляя последнее выражение в уравнение движения (8), получим
[М]£{<Р,}Л +[С]£{<Р,}Л +[К]£{<р,}у,- = {F}.
1=1 1=1 1=1
ив это уравнение на некоторую j-ю моду {ф,}т, получим:
У[М]£{ф7}у,. + {ф,У[С]Х{ф,.}л + {ф,}г[К]Х{фу.}л = {ф,У{Р}. (13)
1=1 1=1 1=1
ж уже отмечалось выше, собственные формы К и М ортогональны. Если
сложить также и С-ортогональность, систему уравнений движения (13)
к представить в виде п отдельных уравнений:
У + 2соД.уу + со>у=/у, (14)
- модальная координата, со7 - собственная круговая частота на моде j, -
ительная (к критическому) величина демпфирования для моды j,fj — сила,
-тствующая модальной координате,^ = {ф,} r{F}.
1зя установившихся гармонических колебаний fj имеет вид
. комплексная амплитуда силы, Q - круговая частота внешней силы.
Чтобы уравнения (14) выполнялись, модальную координату yj необходимо
(ставить в том же виде, что и fj, то есть
I У>=У*е™’
\- комплексная амплитуда модальной координаты для моды j.
С учетом вышесказанного уравнения (14) запишутся в виде
-n2y.eini + 2^Пу.е1П1) + = fjceini.
ирая коэффициенты при yjc и сокращая на е'п', получим уравнения:
(-Q2 + . + ^yjc = fjc, (15)
1ая которые, определим^
61
yjc (ш}-П2)-н(2ш7П^)’
Зная модальные координаты, можно определить вклад каждой моды в решение:
{С7} = {ф7}у7С,
где {С,} - вклад моды j, {ф,} - j-я собственная форма.
Окончательно, суммируя вклады каждой из мод, можно определить ком-
плексные перемещения
К-}=2<с7.},
/=1
где {пс} - комплексный вектор перемещений
3. Проведение модального анализа
3.1. Основные шаги. Ограничения модального анализа.
Характеристика методов решения задачи иа собственные значения
Процедура модального анализа состоит из четырех основных шагов:
1. Построение модели.
2. Определение типа анализа, задание опций, приложение воздействий и по-
лучение решения.
3. «Экспандирование» мод.
4. Анализ результатов.
Рассмотрим эти шаги несколько подробнее.
1. Шаг построения модели ничем не отличается от построения модели для
других видов анализа. Подчеркнем, однако, некоторые особенности:
- Как уже говорилось выше, в модальном анализе рассматриваются только
линейные модели. Все введенные нелинейности игнорируются. Например, если я
модель включены контактные элементы, их жесткость вычисляется на основании
начального статуса и далее в процессе решения не меняется.
- Свойства материала также должны быть линейными, изотропными или ор-
тотропными, постоянными или зависящими от температуры. Необходимо опре
делить как жесткостные (модули упругости), так и массовые (плотность) свойст
ва сред. Нелинейные свойства (нелинейная упругость, пластичность, ползучесть
игнорируются. Если в модели присутствует диссипация, должны быть определе-
ны диссипативные (демпфирующие) свойства материалов и элементов.
- В отличие от задач статики не требуется обязательно закрепление конст-
рукции. Модальный анализ может быть проведен и для свободной (незакреплен-
ной) конструкции.
2. Для модального анализа необходимо определить тип анализа ANTYPE,
MODAL (или ANTYPE, 2), метод решения и число определяемых мод MODOPT,
Method, NMODE, FREQB, FREQE, PRMODE, Nrmkey, число «экспандируемых»
мод, или мод, записываемых в файл решения MXPAND, NMODE, FREQB,
FREQE, Elcalc, SIGN1F. Значения параметров подробно определены в [2]. В гра-
фическом интерфейсе (GUI - Graphic User Interface) эти команды можно задать
в двух окнах, вызываемых из пунктов меню Solution (рис. 1а). В первом окне
нужно задать тип анализа (рис. 16), во втором - необходимые опции анализа
(рис. 1в).
ISYS МаИМепи?:
[-j Preference*
Ш Preprocessor
□ Solution
С2ЁЗ New Analysi*ZZ>
Eg ExpansiqnPass
<T^Analysis Option^?
Fast БоГп tiptn
E Define Loads
E Load Step Opt*
a)
: ’T] Mode extraction methc
Subspace
r
Power dynamics
Reduced
Unsymmetiic
Camped
C QR Damped ;
t be specified for al methods except the R educed method]
pamdj
ip=nd mode shape?
5DE Ng. of modes to expand
Calculate eJem results?
'MPtd] Use lumped mass approx?
Г No
TorPwe/dynarnics lumped mass approx wffl be used
JRESj Ind pieslressefecU?^>
и.-,AVE] Memory save
Г Nd
-wlyapplies if the PowerDynamic.(mefhcdJis selected.
OK
Cancel
ЦФ.- |
e)
6
Рис. 1
63
Необходимо определить метод решения задачи на обобщенные собственны;,
значения. Характеристики методов, применяемых для ее решения, приведены
в табл. 1.
Таблица 1
Характеристики методов решения задач на собственные значения
Метод решения Применение Требования к оператив. памяти Требования к дисковой памяти
Блочный метод Ланцоша Используется по умолчанию. Пред- назначен для отыскания большого числа мод (более 40) для больших моделей. Рекомендуется, когда мо- дель содержит 2- и 3-мерные элемен- ты «плохой» формы. Хорошо работа- ет, если модель содержит оболочеч- ные элементы или комбинации обо- лочечных элементов и солидов. Ра- ботает быстрее, но требует более чем на 50% больше памяти, чем метод итераций в подпространстве Средние Низкие
Метод итераций в подпростран- стве Предназначен для отыскания не- скольких (обычно не более 40) мод для больших моделей. Рекомендует- ся, когда модель содержит оболочеч- ные элементы и солиды «хорошей формы». Хорошо работает при огра- ниченном размере памяти Низкие Высокие
Power Dynamics Предназначен для отыскания не- скольких мод (до 20) больших моде- лей. Рекомендуется для быстрого вы- числения собственных значений мо- делей, содержащих более чем 105 степеней свободы. На моделях с гру- быми сетками значения частот полу- чаются приближенными. В случае кратных частот возможен пропуск мод Высокие Низкие
Сокращенный Предназначен для нахождения всех мод малых и средних моделей (до ЮК DOF1). Может применяться для нахождения нескольких (до 40) мод больших моделей при надлежащем выборе мастер-степсней свободы, но точность зависит от выбора мастер- степеней свободы Низкие Низкие
Число определяемых мод определяется потребностями задачи. Далее нужно
определить число «экспандируемых» мод. В системе ANSYS используется тер-
мин «expand», означающий «расширять, раскрывать». В буквальном смысле тер-
1 DOF - degree of freedom (степень свободы).
64
। expansion» означает расширение сокращенного решения до полного набора
It ей свободы. Термин «сокращенное решение» обычно относится к мастер-
,ням свободы. В полном методе модального анализа термин «expansion» оз-
вет запись собственных форм колебаний в результирующий файл. Таким об-
tet, термин «expanding the modes» применяется не только к сокращенному Me-
у. но и к полным методам модального анализа. Так, для того чтобы просмот-
моды колебаний в постпроцессоре, их необходимо «экспандировать».
к umped mass matrix» означает диагональную матрицу масс в отличие от
й, согласованной, полученной с использованием принятых аппроксимаций
смещений, которую рекомендуется использовать в большинстве случаев.
. Incl prestress effects» означает использование эффектов предварительного
тженного состояния. Позже эта опция будет рассмотрена подробно.
। 'обственно для модального анализа не требуется задания никаких воздейст-
1 кроме имеющихся нулевых заданных смещений (закреплений). Однако если
льный анализ предшествует, например, гармоническому анализу, проводи-
методом разложения по собственным модам, то на этом этапе должны быть
аны воздействия. Так, например, проведение гармонического анализа методом
южения по собственным модам требует задания нагрузок на этапе модально-
чализа.
} пункте главного меню Load Step Opts можно задать опции шага нагруже-
I (решения): управление выводом и демпфирование (рис. 2).
Е Define Loads
В Load Step Opts
Output Litis
13 Solution Ctrl
В Time/Frequenc
E Nonlinear
E ExpansionPass
E Other
S Reset Options
g Read LS File
S Write LS File
E Initial Stress
E Physics
E SE Management (CMS)
Ё5 Results Tracking
E Solve
Рис. 2
Запустить решение задачи модального анализа можно с помощью пункта
авного меню Solve\Current LS (рис. 3).
Q From LS Files
@ Partial Solu
H Zwiapltve Mesh
Рис. 3
65
3.2. Модальный анализ жестко закрепленной
цилиндрической оболочки
Пример командного файла организации модального анализа оболочки при-
веден ниже.
Файл Cyl_model.txt. Построение геометрической и конечно-элементной модели.
'Цилиндрическая оболочка,, жестко заделанная' по торцам
'Параметры' задачи (Система’1 Си)
[геометрия
Ъ=0.4 ! ! Длина
R=0.15 1 Радиус;
h=0,.001 !ТрлщиНа
!Материал Е=2Е+011 'Модуль Юнга
v=0.3 [Коэффициент Пуассона
го-7800 'Плотность
/PREP7 !вход в препроцессор
ЕТ,1,SHELL63 [Конечный элемент
R,l,h, . . RMORE, , , , RMORE RMORE, , 'Реальные' константы: толщина h
МРТЕМР,,,,, ,, ! Свойства материала
МРТЕМР,1,О
MPDATA,ЕХ,1,, Е
MPDATA,PRXY,1,,V
МРТЕМР,,,,,,,
МРТЕМР,1,О
MPDATA,DENS,1,,ГО
'Геометрическая модель
FLST,2,2,8
FITEM,2,0,0,О
1ТТЕМ, 2 , R, 0, С
CIRCLE,Р51Х, , , ,360’, , 1 Четыре дуги радиуса R с центром в
начале координат
К, , , , , [Две вспомогательные точки ;для создания1 ‘ли-
нии "вытягивания"
К, ,,,L,
6
LSTR,
вания"
!Вспомогательная лйййя "вытягй-
FLST,2,4,*4,ORDE, 2
66
felX, . , , , , 5 .[Создание [цилиндрических;
Естей’
к ! < ,30, .. . . , 0 [разбиение Образующей.
* ,25, , , , , о !разбиение туг
Ж ’ ,25, , , , , о
КЗ, . ,25, , , , ,0
1 4' ' ,25, , , , , 0
. D ! Ре улярная се ка четырехугольнх
[Построение сетки на цилиндрических’поверхностях
8,4,0RDE, 6
1
.2,-4
. 2,6
if 2,9
fc.2,11
.2,13
IX, ,ALL, 'Задание жесткой заде ки
!Выход из препроцессора
Файл Cyl_mod.txt. Выполнение модального анализа
ЬНацатБ .работу в SOLUTION’
ГРЕ, 2 !Задание типа анализа -jМодальный.
fc, О
T,LANB,6 'Блочный метод Ланцоша, отыскивается 6 мод
„У,SPAR !метод решения системы лин. уравнений. -
[метод разреженных матриц (SPAR)
-D,6, , ,О !"Экспандировать" 6 мод
?М, О
•ES,0 [Предварительных напряжений не учитывать.
. PT,LANB,6,0, 0, ,OFF
*Е [Решать
jciSH [Закончить работу в SOLUTION
В процессе работы будут построены геометрическая модель (рис. 4а), конеч-
алементная модель (рис. 46) и заданы граничные условия на линиях (рис. 4в).
67
Рис. 4
68
’2.1. Просмотр решения. Для просмотра решения модального анализа сле-
г использовать постпроцессор общего назначения «General Postprocessor»
15).
ANSYS Mairi Menu
Preferences
I S Preprocessor
1 S Solution
I El Genet al Postproc
E Data & File Opts
।' Swnntatj
X El Read Results
El Failure Criteria
El Plot Results
El List Results
| El Query Results
E Options for Outp
E Results Viewer
E Write PGR File
El Nodal Calcs
El Element Table
Рис. 5
|ункте Results Summary можно вывести таблицу, содержащую собственные
готы найденных мод (рис. 6).
Рис. 6
Видно, что оболочка имеет кратные собственные частоты, что характерно
конструкций с осевой симметрией.
Прочитать информацию о конкретной собственной моде можно с помощью
манд меню Read Results (рис. 7).
69
в
General Postproc
В Data t File Opts
В Results Summary
В
Set Num
В FLOTRAN 2.1A
В Failure Criteria
Рис. 7
В First Set
В Next Set
В Previous Set
В Last Set
В By Pick
В В У Load Step
В By Time/Freq
На следующих рисунках приведены формы собственных колебаний для раз-
личных тонов.
Все найденные формы имеют некоторое количество полуволн по окружности
и одну полуволну по длине образующей. На рис. 8 показана форма колебаний по
первой моде.
NODAL SOLUTION
STEP=1
SUB=1
AN
SEP 24 2005
11:58:09
FREQ =547.934
USUM (AVG)
RSYS=0
DMX=1 244
SMX =1.244
.276457 .552914 .82937
.138228 .414685 .691142
1.106
.967599
Рис. 8
Формы колебаний, соответствующие кратным частотам, сдвинуты на чет-
верть длины волны по окружной координате друг относительно друга. На рис. 9а
приведены формы первой и второй мод колебаний, на рис. 96- третьей и четвер-
той, на рис. 9в ~ пятой и шестой мод.
70
Рис. 9
71
3.3. Анализ предварительно напряженной конструкции на примере
растянутой (сжатой) цилиндрической оболочки
Покажем особенности проведения модального анализа предварительно на-
пряженной конструкции на примере той же оболочки. Предположим, что обо-
лочка была предварительно подвергнута однородному растяжению. Для опреде-
ления предварительного напряженного состояния решим вспомогательную зада-
чу о растяжении цилиндрической оболочки.
В этой задаче можно выделить следующие особенности. Во-первых, это ста-
тическая задача (ANTYPE, STATIC). В окне Solution Control необходимо вклю-
чить проверочный блок Calculate prestress effects - блок вычисления предвари-
тельных напряжений (рис. 10).
Рис. 10
fejru at' определении предварительного напряженного состояния может
» собет», ««ые граничные условия, отличающиеся от граничных условий
. • «швдын' о анализа. Так, для нашей задачи примем следующие гранич-
•ме |СМВв> (рм. 11).
веч «ижнего» основания НЕ, EF, FG, GH, задано смещение UZ = 0.
КЖЖ|т» . 'ещения как жесткого целого, в точках Е, G задано смещение
*- * I UX = 0. На линиях АВ, ВС, CD и DA задана погонная на-
м j. по оси Z) р = 200 000 Па/м. Такие граничные условия приве-
ВВЯ ВВО предварительных напряжений oz = 200 МПа.
Решение модальной задачи проводится точно так же, что и в случае отсутст-
я предварительных напряжений, только в опциях нужно указать, что необхо-
1мо учитывать предварительно напряженное состояние (рис. 12).
Рис. 12
Командный файл для решения задачи представлен ниже. Построение модели
пущено, так как ничем не отличается от приведенного ранее в п. 3.2.
73
!Цилиндрическая оболочка, жестко заделанная по торцам
!Предварительное однородное растяжение по оси цилиндра
!Предполагается, что конечно-элементная модель построена
[Первый шаг - определение предварительных напряжений'
/SOLU [Начать работу в SOLUTION
ANTYPE,0 [Задание типа анализа - Статический
PSTRES/1 [Учет предварительного напряженного состояния
[граничные условия для задачи определения
[предварительного напряженного состояния
FLST,2,4 4,ORDE,2
FITEM,2,1
FITEM,2,-4
/GO
DL,P51X, , UZ,0 [закрепление "нижнего" основания в осевом
направлении
[дополнительные закрепления точек нижнего основания
[для предотвращения движения тела как жесткого целого
[эти закрепления не должны приводить к возникновению, реакций
FLST, 2,2-, 3,ORDE, 2
FITEM,2,1
FITEM,2,3
/GO
DK,P51X, ,0, ,0,UY, , , , , , [по оси Y
FLST,2,1,3 , ORDE, 1
FITEM,2,2
/GO
DK,P51X, ,0, ,0,UX, , , , , , !по оси X
FLST,2,4,4,ORDE,4
FITEM,2,6
FITEM,2,9
FITEM,2,11
FITEM,2,13
/GO
SFL,P51X,PRES,-200000, [давление (погонная нагрузка)
на
["верхнем" контуре цилиндра
SOLVE !решение
FINISH [закончить работу в процессоре
[Второй шаг собственно модальный анализ
/SOL [Снова войти в SOLUTION
ANTYPE,2 [Задание типа анализа - Модальный
MSAVE, 0
МСЭСРТ,LANB,6 [Блочный метод Ланцоша, отыскивается 6 мод
74
, SPAR
ND, 6, , ,0
Л, 0
ES, 1
PT,LANB,6,0,0,
ения
OFF
,EAR,ALL
1"Экспандировать" 6 мод
’Учитывать предварительные на-
!уничтожить всю информацию
!о воздействиях
,2,8,4,ORDE,6
‘М, 2,1
ЕМ,2,-4
Ем,2,6
ЕМ,2,9
:м,2,и
ЕМ,2,13
Р51Х, ,ALL,О
модального анализа
’Жесткая заделка
граничные условия
.VE
• ISH
!решать
!Закончить работу в SOLUTION
лица найденных собственных частот показана на рис. 13.
Рис. 13
Видно, что первая собственная частота возросла на 7% по сравнению с пс-
иным примером. Если приложить сжимающие напряжения той же величины,
•рвая собственная частота уменьшится на 7,7% (рис. 14).
75
Рис. 14
4. Гармонический анализ
4.1. Методы гармонического анализа. Достоинства и недостатки
Для проведения гармонического анализа в системе ANSYS доступны три ме-
тода: полный, сокращенный и метод суперпозиции мод. Кроме того, задача о вы-
нужденных колебаниях может быть решена методами прямого интегрирования
уравнений динамики (Transient Dynamic Analysis), но это более «дорогой» в
смысле использования вычислительных ресурсов метод. Вначале коснемся плю-
сов и минусов каждого из методов.
4 1.1. Полный метод Имеет следующие преимущества:
- наиболее прост в использовании, так как не нужно заботиться ни о выборе
мастер-стспеней свободы, ни о получении мод собственных колебаний;
- использует полные матрицы, поэтому нет необходимости применять ап-
проксимации матрицы масс;
- может работать с несимметричными матрицами, используемыми в задачах
акустики;
- вычисляет все перемещения и напряжения за один проход;
- допустимы все виды нагрузок: узловые силы, ненулевые перемещения, по-
верхностные и объемные (элементные) нагрузки (давление и температура).
К недостаткам можно отнести то, что этот метод обычно более «дорогой» по
сравнению с другими, особенно при выборе фронтального решателя. Однако при
использовании JCG- или ICCG-решателей полный метод может быть очень эф-
фективным.
4 .1.2. Сокращенный метод. Сокращенный метод позволяет уменьшить раз-
мер задачи, используя мастер-степени свободы и сокращая размер матриц. После
того как вычислены мастер-степени свободы, решение «экспандируется» до пол-
ного набора степеней свободы. Достоинства метода таковы:
- быстрее и «дешевле» полного метода, когда используется фронтальный
решатель;
- могут быть учтены предварительные напряжения.
76
Недостатки метода:
к на первом шаге вычисляются только мастер-степени свободы; для на-
Вения полного набора степеней свободы требуется второй шаг — «экспан-
Ьвание»;
L нагрузки на элементы (давление, температура и т.д.) не используются;
- все нагрузки должны быть приложены к определенным пользователем
fcp-степеням свободы, что ограничивает применение поверхностных и
емных нагрузок.
< .1.3. Метод суперпозиции мод. Метод суперпозиции мод использует
мы собственных колебаний (собственные векторы) для того, чтобы опре-
tть отклик конструкции. Достоинства метода таковы:
ь быстрее и «дешевле» сокращенного и полного методов для большинст-
|Дач;
- нагрузки на элементы, прилагаемые в рассмотренном выше модальном
шзе, могут быть учтены и в гармоническом анализе с использованием
нды LVSCALE (исключая модальный анализ, выполненный методом
er Dynamics);
- позволяет получить решение, сгруппированное около собственных час-
конструкции, и точнее построить кривую зависимости отклика от часто-
- могут быть учтены предварительные напряжения;
- позволяет учитывать модальное демпфирование (коэффициент демпфи-
зния как функция частоты).
Недостатком метода суперпозиции мод является невозможность нагру-
:ния заданными напряжениями.
Ограничения, общие для всех трех методов:
- все нагрузки должны изменяться по времени по гармоническому закону
с одной и той же частотой;
- как и модальный, гармонический анализ применим только к линейным
рделям; все введенные нелинейности (контакты, нелинейные свойства ма-
1риала) игнорируются; необходимо определить как жесткостные (модули
вругости),
так и
массовые (плотность) свойства сред;
- эффекты, присущие переходным процессам, не вычисляются.
Преодолеть эти ограничения можно, используя динамический анализ не-
сходных процессов (transient dynamic analysis), задавая гармоническое изме-
ение нагрузки.
Максимальный отклик на гармоническое воздействие достигается, когда
частота воздействий совпадает с собственными частотами конструкции. По-
этому до проведения гармонического анализа следует провести модальный
анализ и определить собственные частоты.
4.2. Проведение гармонического анализа
Для проведения анализа необходимо задать тип анализа (Harmonic или
• 3») (рис. 15).
77
Рис. 15
С помощью пункта меню Analysis Option вызвать окно (рис. 16), с помощью
которого определяется метод анализа (полный, сокращенный или метод суперпо-|
зиции мод) и формат вывода результата (вещественная+мнимая части или ам-
плитуда+фаза).
Рис. 16
4.3. Гармонический анализ - полный метод
4.3.1. Особенности задания воздействия в гармоническом анализе. В
гармоническом анализе, по определению, предполагается, что любое прило-
женное воздействие изменяется во времени гармонически (синусоидально).
Чтобы полностью определить гармоническое воздействие, обычно требуются
три величины: амплитуда, фазовый угол и частота возбуждения.
Соотношения между действительной и мнимой компонентами, амплиту-
дой и углом фазы иллюстрируются на рис. 17.
78
Real
Amplitude
Phase angle
I < b
r
Amplitude
I .
cot
Freal= F0COS<F F0= ^Frea| + Fimag
Fimag = F0 sin 'I' 4'=arctg (Fjmag / Freal)
Рис. 17
и задании нагрузок и смещений для гармонического анализа предусмот-
|Д двух компонент - действительной и мнимой частей (рис. 18а, б). Таким
м, можно учитывать фазу действия нагрузки. На рис. 18а показано за-
лействительной и мнимой частей сил, а на рис. 186 — задание действитель-
мнимой частей смещений для гармонического анализа.
а)
{DLj App^.Oijpfecemems (LLFOT) on Lines
Lab? DOFs to be constrained
Apples
VALUE Real part of disp
VALUE? Imag part of disp .
OK | Apply | Cancel | Help
Рис. 18
79
Для проведения гармонического анализа необходимо определить следующие
опции шага нагружения:
- диапазон возбуждающих частот (HARFRQ) (рис. 19);
- демпфирование (рис. 20).
1Л
Hamonic Frequencyand Substep Options
. (HARFRQ] Harmoriic freq tange
INSUBST] Number of substeps
[KEC] Stepped or ramped he
1 itarmonic Frequen. and Substep ption*
C Stepped.
Рис. 19
Рис. 20
В гармоническом анализе необходимо определить демпфирование, иначе на
резонансных частотах отклик системы будет бесконечным. Имеется возможность
задать следующие виды демпфирования:
- Alpha Damping (ALPHAD) - «массовое»;
- Beta Damping (BETAD) - «жесткостное»;
Constant Damping Ratio (DMPRAT) - относящееся к моде постоянное, не
зависящее от частоты;
М . al Dependent Damping Multiplier (MP,DAMP) - материальное, завися-
щее oi «стоты;
ant Material Damping Coefficient (MP,DMPR) - материальное, не зави-
сз _ ты.
: . । в -мом гармоническом анализе (полном или сокращенном) демпфи-
ижк ме . гретелено, по умолчанию программа использует нулевое значение.
। армоии «сский анализ иллюстрируется на том же примере, что и модальный
- -лил Дм Я троения модели необходимо использовать файл CylmodeLtxt.
Файл Cyl_Harmic.txt
эпический Анализ' - полный"Метод
!Начать работу в SOLUTION
!Задание типа анализа - Гармонический
,! полный мет од
•OFF - перемещение как амплитуда/фаза
?Е,3
Г,FULL
; , OFF
, О
V, FRONT, lc-008,
RS, О ,!нет преднапряжений;
,2,8,4,ORDE,6
М, 2,1
М,2,-4
М, 2,6
М, 2,9
М, 2,11
М, 2, 13
Г5IX, ,ALL, !Задание жёсткой заделки
Т,2,1,1,ORDE,1
ИМ, 2', 96
51X,FX,1, ^возбуждающая: единичная сила в узле 96
FRQ, 520,780, Ддйапазон возбуждения: с 520 до 780 Гн
3ST,25, ! 2 5 прдшадов
.0
:iad,б,
АО, О ,
RAT,0.01, 'постоянное демпфирование 1%
.’ТЕ
IJISH
Постпроцессирование решения гармонической задачи имеет свои особенно-
I. Для анализа решения в зависимости от частоты используется специализиро-
1ный постпроцессор POST26. Этот же инструмент применяется для решения в
1ИСИМОСТИ от времени в анализе переходных процессов.
Во временном постпроцессоре POST26 присутствует менеджер временного
icTOTHoro) постпроцессирования, окно которого показано на рис. 21. С помо-
.ю инструментов этого окна легко строить, отображать, импортировать и т.д.
нкции, характеризующие изменения решения в зависимости от времени (час-
гы). Менеджер имеет интуитивно понятный интерфейс, которым очень легко
пьзоваться. Подробно работа с ним не рассматривается.
81
Calculator
Рис. 21
Первая переменная FREQ, которая создается по умолчанию, содержит значе-
ния частот, для которых получено решение. Создадим новую переменную — пе-
ремещение UX в узле 96 (имя по умолчанию UX_2, хотя можно задать любое
другое). Используя переключатель, отмеченный овалом на рис. 21, нарисуем гра-
фики изменения действительной (рис. 22а) и мнимой (рис. 226) частей, а также
FREQ
FREQ
82
FREQ
FREQ
Рис. 22
Видно, что из-за малого числа точек получены довольно грубые графики в
асти максимального резонанса. Уточним поведение системы. Для этого сузим
цпазон возбуждающей частоты с 712 до 740 Гц за 10 подшагов. При этом все
(числения, кроме построения модели, придется проводить заново! Изменим
мандный файл
lRFRQ, 712,740, ! диапазон .возбуждения8 с 712 до 740 Гц
;UBST,10, ’10 подшагоВ:
|остроим графики, аналогичные приведенным на рис. 22а-г, для более узкого
[иапазона (рис. 23).
83
716 724 732 740 748
FREQ
«)
748
FREQ
VALU
P0ST26
AMPLITUDE
UX_2
ANSYS
SEP 20 2006
05:13:57
715 724 732 740 748
FREQ
e)
84
г)
Рис. 23
Обратимся теперь к универсальному постпроцессору POST1, чтобы изобра-
ь форму вынужденных колебаний на определенной частоте. С помощью меню
rult Summary можно получить таблицу сохраненных решений для определен-
о набора частот (рис. 24). Из рисунка видно, что для каждой частоты записано
2 набора данных, которые соответствуют действительной и мнимой частям
:шения.
Рис. 24
Так как максимум амплитуды соответствует частоте 734 Гц, получим карти-
ны распределения действительной и мнимой частей перемещения UX для этого
значения частоты (рис. 25а, б).
85
Рис. 25
Видно, что экстремальные значения распределений согласуются с приведен-
ными выше графиками.
86
4.4. Гармоническим анализ - метод разложения
по собственным модам
етод суперпозиции мод использует найденные собственные моды для вы-
ния отклика на гармоническое воздействие. Процедура использования это-
I (да включает пять основных шагов:
Построение модели.
2 Получение решения модального анализа.
Получение решения гармонического анализа по методу суперпозиции
мод.
4. «Экспандирование» решения по методу суперпозиции мод.
Просмотр результатов.
Первый шаг такой же, как и для полного метода. Остальные шаги рассмотре-
ниже.
4.4.1. Получение решения модального анализа. В дополнение к требова-
м модального анализа небходимо выполнение следующих условий:
• модальная задача должна быть решена одним из методов: блочный Лан-
цоша, итераций в подпространстве, сокращенный, PowerDynamics или
QR damped; методы unsymmetric и damped в данном случае не допуска-
ются;
• необходимо учесть все моды, дающие существенный вклад в гармониче-
ский отклик;
• при использовании метода PowerDynamics, ненулевые воздействия недо-
пустимы; метод PowerDynamics не создает вектора нагрузки, поэтому
масштабный фактор для команды LVSCALE нужно задавать нулевым;
• для сокращенного метода нахождения собственных значений в число
мастер-степеней свободы нужно включать те, в которых приложены гар-
монические воздействия;
• если используется QR damped метод нахождения собственных мод, не-
обходимо определить любой из возможных видов демпфирования
(ALPHAD, BETAD, MP, DAMP, или элементное демпфирование, вклю-
чая гироскопическое), которое необходимо ввести в модель на шаге пре-
процессирования или модального анализа (система ANSYS игнорирует
демпфирование, определенное на шаге гармонического анализа методом
суперпозиции мод). В методе суперпозиции мод можно установить по-
стоянный (для всех мод) коэффициент демпфирования (DMPRAT), оп-
ределить постоянный коэффициент демпфирования материала (МР,
DMPR) или определить коэффициент демпфирования как функцию моды
(MDAMP);
• если необходимо учесть гармонически изменяющиеся элементные на-
грузки (давление, температура, ускорение и т.д.), определять их следует
на шаге модального анализа. Система ANSYS игнорирует нагрузки для
модального анализа, но формирует вектор нагрузки (load vector) и запи-
сывает его в файл форм колебаний (Jobname MODE). Затем этот файл
можно использовать при выполнении гармонического анализа. Мнимая
компонента вектора нагрузки, вычисляемого из элементной нагрузки,
будет всегда нулевой, кроме одного исключения: в полном гармониче-
ском анализе или гармоническом анализе методом суперпозиции мод
блочным методом Ланцоша. Мнимую часть давления можно учесть по-
средством элементов SURF153 или SURF 154;
87
• при использовании метода суперпозиции мод не обязательно «экспанди-
ровать» полученные моды. Однако чтобы просмотреть формы колеба-
ний, их необходимо экспандировать;
• нельзя изменять данные модели между модальным и гармоническим ана-
лизами.
4.4.2. Проведение гармонического анализа методом суперпозиции мод.
1. Определить тип анализа и опции. Они те же, что и для полного метода,
кроме следующих опций:
• определить моды, которые следует использовать для решения. Это оп-
ределяет точность гармонического анализа. Число мод должно быть таким, что-
бы более чем на 50% перекрывать частотный диапазон гармонических воздейст-
вий;
• путем задания опции (HROUT - опции кластеризации) имеется воз-
можность автоматически выбирать точки вычисления решения в заданном час-
тотном диапазоне таким образом, чтобы они находились вблизи определенных
ранее собственных частот. Это позволяет с наименьшими затратами наиболее
точно представить амплитудно-частотные кривые решения.
2. Особенности приложения нагрузок:
• для метода суперпозиции мод допускаются только узловые силы, ус-
корения и вектор нагрузки, созданный в модальном анализе. Вектор нагрузки из
модального анализа можно масштабировать с помощью команды LVSCALE (на
рис. 26 показано, как вектор нагрузки, созданный в модальном анализе, можно
увеличить в 10 раз).
3. Определить опции шага нагружения. Они те же, что и в сокращенном ме-
тоде. Кроме того, имеется возможность определить модальное демпфирование
(MDAMP). Команда NSUBST определяет число решений с каждой стороны соб-
ственной частоты, если выбрана опция кластеризации (HROUT). По умолчанию
вычисляются четыре решения, но можно определить любое число от 2 до 20.
Любое значение, выходящее за этот диапазон, заменяется граничными значения-
ми.
4. При использовании блочного метода Ланцоша или метода итераций в под-
пространстве (MODOPT, LANB or SUBSP), можно указать узловые компоненты
командой OUTRES, NSOL, чтобы ограничить запись перемещений и сократить
файл Jobname.RFRQ. Шаг «экспандирования» задается только для тех узлов и
элементов, для которых все узлы элементов были записаны в .RFRQ-файл. Чтобы
использовать эту опцию, нужно, во-первых, подавить всю выдачу командой
OUTRES, NSOL, NONE, а во-вторых, определить интересующие наборы коман-
дой OUTRES, NSOL, ALL, component. Повторить команду OUTRES для каждо-
го дополнительного узлового набора, который хотите записать в .RFRQ-файл.
88
Сохранить копию базы данных (SAVE).
Запустить решение (SOLVE).
Решение методом суперпозиции мод можно повторять (без дополнитель-
решения модальной задачи). Если планируется выполнять частотное пост-
дессирование (POST26), частотные диапазоны не должны перекрываться.
3 Закончить работу в SOLUTION (FINISH).
Гармоническое решение, полученное методом суперпозиции мод, записыва-
в файл для «сокращенных» перемещений Jobname.RFRQ, независимо от то-
какой метод (итераций в подпространстве, блочный Ланцоша, сокращенный
rerDynatnics или QR damped) был использован для модального анализа. По-
му необходимо «экспандировать» полученное решение. Для этого следует
е раз войти в процессор SOLUTION и, не меняя типа анализа, выбрать пункт
ansionPass (рис. 27а). В пункте Load Step Opts появился пункт ExpansionPass.
хь рекомендуется выбрать пункт Range of Solu’s (рис. 216).
El Solution
В Analysis Type
@ New Analysis
g Restart
@ Fast Sol'n Optn
a)
Рис. 27
[Load Step Opt'
El Output Ctrls
E Solution Ctrl
El Time/Frequenc
El Nonlinear
El ExpansionPass
El Single Expand
H By Load Step
0 By Time/Freq
[Г) Range of Solu's
S Expand Modes
El Other
появившемся окне (рис. 28) введите ALL для «экспандирования» всех мод и
ювь запустите решение.
BEGRNG Beginning time (or heq)
ENDRNG Ending time (or freq]
Elcafc Ca'culale elem results7
(HREXP) Phase angle (degrees) •
- for harmede andysb
(Enter ALL to expand both red end япздвзагу pari®)
OK | < Cancel | Help
Рис. 28
89
4.4.3. Просмотр результатов. Просмотр и анализ результатов осуществляет-
ся по той же схеме, что и для полного метода. При использовании опции класте-
ризации амплитудно-частотные кривые получаются более гладкими.
4.4.4. Пример гармонического анализа. Пример командного файла органи-
зации гармонического анализа методом суперпозиции мод приведен ниже.
Построение модели конструкции выполняется с помощью файла
Cyl_model.txt.
Решение модальной задачи приведено в файле Cyl_mod_Harmon.txt.
ANTYPE,2 !Задание типа анализа - Модальный
MSAVE,О
MODOPT,LANB,30 'Блочный метод Ланцоша, отыскивается 30 мод
EQSLV.SPAR !меод решения системы лин. уравнений -
'метод разрежёнйых матриц (SPAR)
MXPAND’,30, . , 0 Экспандиррвать" 30 мед
LUMPM,0
PSTRES,0 'Предварительных напряжений нё-учитывать
MODOPT; LANB,30,0,0, ,OFF
FLST, 2,8,4, ORDE, 6
FITEM, 2,1
FITEM,2,-4
FTTEM,2,6
FITEM,2,9
FITEM,2,11
FITEM,2,13
/GO
DL,P51X, ,ALL, IЗадание?жесткой заделки
FLST,2,1,1,ORDE,1
FITEM,2,96
/GO
F,P51X,FX,1, !возбуждающая единична» сила в узле 96
ALPHAD,0,
BETAD,0,
DMPRAT,0.01,
SOLVE
FINISH
'постоянное демпфирование 1%
!решать
'закончить работу в SOLUTION
Собственно гармонический анализ и «экспандирование» мод приведены в
файле Cyl_MSM_Harmon.txt.
/SOI.U 'Начать работу в SOLUTION
ANTYPE,3 !Задание типа анализа - Гармонический
HROPT,MSUP !метод суперпозиции мод
HROUT.OFF '
LUMPM,0
HROPT,MSUP,30,1, !метод суперпозиции мод, моды с 1 по 30
HROUT,OFF,ON,1 !задание опций вывода
IOFF - перемещение как амплитуда/фаза
!ON - кластеризация - группировка точек
!вычисления решения около резонансных частот,
90
!i- .печатать вклад мод на каждой- частоте
<Q, 500,1200, 'диапазон возбуждения с 500' до 1200 Гц
llPST,10, !
Г "
WJSH
InSS,1 !"Экспандирование" мод
WEXP,all,0,0,1 ЛДкспандир'овать всё моды
£ХР, ALL,
Re
ISH
5. Литература
1. Васидзу К. Вариационные методы в теории упругости и пластичности. М.:
), 1987.
2. Бате К., Вилсон Е. Численные методы анализа и метод конечных эле-
тов. М.: Стройиздат, 1982.
3. ANSYS 8.1 Theory Reference ANSYS. Документация.
4. Тимошенко С.П. Колебания в инженерном деле. М.: Наука, 1984.
91
КОНТАКТНАЯ ЗАДАЧА
Н.В. Леонтьев
1. Введение
2. Методические основы решения контактных задач
2.1. Описание возможностей решения контактных задач в системе
ANSYS 8.1
2.1.1. Классификация контактов: rigid-to-flexible и flexible-to-flexible
2.1.2. Виды контактов: поверхность-поверхность, узел-поверхность
узел—узел
2.1.3. Контактные элементы «поверхность-поверхность»
2.2. Выполнение контактного анализа «поверхность-поверхность»
Некоторые опции и реальные константы контактных элементов
2.2.1. Определение контактной пары
2.2.2. Статус контакта
2.2.3. Модель поведения контактной поверхности
2.2.4. Контактные алгоритмы
2.2.5. Начальная подстройка контактов, устранение начальных
зазоров и прониканий
3. Организация решения контактных задач с помощью менеджера
контактов
3.1. Инструменты менеджера контактов
4. Примеры решения контактных задач
4.1. «Два кирпича»
4.2. Задача Герца
4.3. Задача Герца с учетом пластических деформаций
4.4. Термоупругость. Задача о посадочных напряжениях
5. Литература
1. Введение
Учет контактного взаимодействия дает возможность моделировать взаи
действие тел в процессе деформирования и, следовательно, более точно опре
лять компоненты напряженно-деформированного состояния. Контактные зада
являются нелинейными, а следовательно, более трудными для решения. Систе
ANSYS имеет богатый набор средств решения разнообразных контактных зад
Основные из этих средств рассматриваются ниже. При разработке использо
лась версия системы ANSYS 8.1.
2. Методические основы решения контактных задач
2.1. Описание возможностей решения
контактных задач в системе ANSYS 8.1
Контактные задачи являются существенно нелинейными и требуют зна1
тельных компьютерных ресурсов для решения. При этом для выбора моде
приводящей к наиболее эффективному решению, очень важно понимать физи
ское содержание задачи.
Нелинейность контактных задач связана с двумя моментами. Во-первых,
ласть контакта, а следовательно, граничные условия до получения решения
92
1СЯ неизвестными. Во-вторых, во многих контактных задачах необходимо
~ывать трение. Имеется несколько моделей трения, и все они являются нели-
ными. Эффекты, связанные с трением, могут приводить к плохо сходящимся
>чам.
2.1.1. Классификация контактов: rigid-to-flexible и flexible-to-flexible.
тактные задачи условно делятся на два класса: абсолютно жесткое тело к де-
мируемому (rigid-to-flexible) и деформируемое тело к деформируемому
riblc-to-flexible). Первый класс либо является приближением ситуации, когда
ткость одного из контактирующих тел много больше, чем у другого (напри-
>, контакт резины с металлическим массивом), либо возникает из упрощений
едствие симметрии (задача Герца о контакте двух одинаковых шаров). Второй
сс представляет собой модель общей ситуации и является, безусловно, более
роким.
2.1.2. Виды контактов: поверхность-поверхность, узел-поверхность,
т—узел. Система ANSYS поддерживает три модели контакта «узел—узел»,
ел—поверхность» и «поверхность—поверхность». Каждый тип модели исполь-
особый набор контактных элементов ANSYS. Модель «поверхность-по-
хность» является наиболее универсальной (хотя не всегда самой экономич-
0 и пригодна для решения большого класса задач.
2.1.3. Контактные элементы «поверхность-поверхность». Система
4SYS поддерживает контактные элементы типа «поверхность-поверхность»
обеих моделей контакта: rigid-to-flexible и flexible-to-flexible. При формули-
вке элементов используются понятия «целевая поверхность» («target surface»)
^контактная поверхность» («contact surface»). Эти поверхности образуют кон-
тную пару:
- целевая поверхность моделируется элементами TARGE169 или TARGE170
зя 2D и 3D соответственно);
-контактная поверхность моделируется элементами CONTA171,
ONTA172, CONTA173 и CONTA174.
Элементы «поверхность-поверхность» годятся для таких приложений, как
кадочный или начальный контакт, ковка, задачи глубокого прессования (воло-
:ния). Элементы «поверхность-поверхность» имеют преимущества перед эле-
ентами «узел-узел» CONTA175.
Указанные элементы:
- поддерживают элементы низкого и высокого порядка на контактной и це-
свой поверхностях;
- позволяют получать лучшие результаты для контакта как с трением, так и
без него;
- не имеют ограничений на форму целевой поверхности. Разрывы поверхно-
. >и могут быть обусловлены как физически, так и дискретизацией (расчетной
сеткой).
Контактные элементы имеют многочисленные способы управления модели-
рованием. Средства управления сосредоточены в опциях элемента, реальных
константах, опциях решателя. Наиболее важные, на наш взгляд, возможности
\ правления будут рассмотрены далее.
93
2.2. Выполнение контактного анализа «поверхность-
поверхность». Некоторые опции и реальные константы
контактных элементов
Для моделирования контактного взаимодействия в системе ANSYS 8.1 име-
ется очень хороший инструмент - мастер контакта (Contact Wizard). С его по-
мощью даже неопытный пользователь сможет легко моделировать контактные!
граничные условия. Тем не менее контактные элементы имеют большое количе-1
ство настроек. Правильное использование этих средств может повысить эффек-
тивность проведения анализа. Рассмотрим некоторые моменты подготовки кон-
тактного анализа и возможные настройки.
Выполнение контактного анализа включает следующие шаги:
- создание геометрической и конечно-элементной (сеточной) моделей;
— задание граничных условий;
- определение контактной пары, назначение целевой и контактной поверхно-1
стей;
— установление управляющих параметров контакта;
- создание контактных элементов;
- задание опций решения;
- решение контактной задачи;
- анализ результатов.
2.2.1. Определение контактной пары. Вначале необходимо определить зо-
ны, по которым произойдет соприкосновение тел во время процесса нагружения.
Эти зоны желательно выделить в отдельные поверхности (в пространственном
случае) или линии (в двумерном случае). С одной стороны, контактная зона
должна быть достаточной, чтобы процесс взаимодействия тел за нее не выходил,
с другой — в целях экономии компьютерных ресурсов ее необходимо минимизи-
ровать.
В контакте необходимо выделить две взаимодействующие поверхности (или
два набора поверхностей) - контактную пару. Каждой контактной паре приписы-
вается индивидуальный номер и набор свойств. Число контактных пар неограни-
ченно. В каждой паре выделяются два элемента: собственно контактные (contact)
и целевые (target) элементы. Они отличаются друг от друга своей ролью в алго-
ритме решения контактной задачи. Контактные элементы не могут проникать
сквозь целевые, тогда как целевые могут проникать через контактные.
При контакте абсолютно жесткого тела с деформируемым жесткая поверх-
ность всегда целевая, а деформируемая - контактная. Для общего случая контак-
та «flexible-to-flexible» выбор не столь очевиден. Здесь выбор контактной и целе-
вой поверхности может стать причиной получения различных результатов моде-
лирования и, следовательно, влиять на точность решения. При выборе рекомен-
дуется учитывать следующие правила:
— при контакте выпуклой поверхности с вогнутой или плоской последняя
должна быть объявлена целевой',
- поверхность с более лучшей сеткой должна быть объявлена контактной с
более грубой — целевой;
- более податливая из двух поверхностей должна быть объявлена контакт-
ной, более жесткая — целевой;
- в случае если для аппроксимации используются различные элементы, по-
верхность с элементами высокого порядка должна быть контактной, а поверх-
94
с элементами более низкого порядка - целевой (для ЗВ-контакта типа
-поверхность» контактной должна быть поверхность с элементами более
го порядка, а элементы высокого порядка должны находиться на целевой
'хности);
если размеры одной из поверхностей заметно больше, чем у другой, или
поверхность охватывает другую, то эта (большая) поверхность должна быть
। й.
правила годятся для так называемого асимметричного контакта. Если
образом не удается достичь желаемого качества решения, рекомендуется
льзовать симметричный контакт. В этом случае для этих же поверхностей
ается еще одна контактная пара, контактная и целевая поверхности в которой
нялись местами. Такой контакт является более затратным по использованию
гьютерных ресурсов, но иногда позволяет получить хорошее решение (на-
пер, уменьшить проникновение).
Гимметричный контакт может потребоваться в следующих ситуациях:
различия между контактной и целевой поверхностями не ясны;
- обе поверхности имеют очень грубую сетку.
Симметричный алгоритм в этом случае накладывает большие ограничения
определение положения контактных поверхностей, чем асимметричный. Если
ки на обеих поверхностях достаточно высокого качества, то применение сим-
ичного алгоритма не может значительно улучшить процесс решения задачи,
делает его более дорогостоящим в смысле времени решения. В этом случае
есообразнее использовать асимметричный контакт.
2.2.2. Статус контакта. Состояние контактных элементов характеризуется
тактным статусом. Система ANSYS отслеживает поведение каждого контакт-
го элемента и присваивает ему статус:
- STAT = 0 - открытый «дальний» контакт;
- STAT = 1 - открытый «ближний» контакт;
- STAT = 2 - скользящий контакт (проскальзывание);
- STAT = 3 - жесткий, связанный контакт.
Считается, что элемент находится в открытом «ближнем» контакте, когда его
чки интегрирования (гауссовы или узловые точки, как установлено в системе)
находятся на определенной дистанции (задаваемой пользователем или вычис-
1яемой программой) от соответствующей целевой поверхности. Эта дистанция
азывается pinball region - область притяжения, область поиска контакта. Pinball
egion представляет собой окружность (в 2D) или сферу (в 3D) с центром в точке
интегрирования. Регулировать pinball region можно либо задавая реальные кон-
станты, либо через GUI, используя менеджер контактов.
2.2.3. Модель поведения контактной поверхности. Для задания поведения
контактной поверхности используется параметр KEYOPT(12). Возможны сле-
дующие значения этой переменной:
- KEYOPT(12) = 0 — моделирует стандартный контакт с трением и без тре-
ния. В последнем случае поверхности разделяются и нормальное давление равно
нулю;
- KEYOPT(12) = 1 - моделирует «грубый» фрикционный контакт с отсутст-
вием скольжения. Этот случай соответствует бесконечному коэффициенту тре-
ния и игнорирует свойство материала MU;
95
- KEYOPT(12) = 2 - моделирует контакт без разделения (no separation), в ко-
тором целевая и контактная поверхности сцепляются (хотя проскальзывание раз-
решено) до окончания анализа, если контакт был установлен;
- KEYOPT(12) = 3 - моделирует сковывающий (bonded) контакт, в котором
целевая и контактная поверхности сцепляются по всем направлениям до оконча-
ния анализа, если контакт был установлен;
- KEYOPT(12) = 4 - моделирует неразделяющийся контакт, в котором точки
определения контакта или изначально находятся внутри области притяжения,
или, однажды войдя в контакт, всегда притягивают целевую поверхность по нор-
мали к контактной (проскальзывание разрешено);
- KEYOPT(12) = 5 - моделирует связывающий контакт, в котором точки оп-
ределения контакта или изначально находятся внутри области притяжения, либо,
однажды войдя в контакт, всегда притягивают целевую поверхность в нормаль-
ном и касательном направлениях (полностью связывающий);
- KEYOPT(12) = 6 - моделирует связывающий (bonded) контакт, в котором
точки определения контакта, изначально находящиеся в «закрытом» состоянии,
остаются присоединенными к целевой поверхности, а точки, изначально находя-
щиеся в «открытом» состоянии, остаются открытыми на протяжении всего ана-
лиза.
2.2.4. Контактные алгоритмы. Для контактных задач с элементами «по-
верхность-поверхность» в системе ANSYS предлагаются различные контактные
алгоритмы. Выбор алгоритма производится заданием ключевой опции 2
(KEYOPT(2));
- метод штрафа (penalty) (KEYOPT(2) = 1);
- расширенный метод Лагранжа (augmented Lagrangian) (по умолчанию)
(KEYOPT(2) = 0);
- метод множителей Лагранжа для контакта по нормали и метод штрафа в
тангенциальном направлении (KEYOPT(2) = 3);
- чистый метод множителей Лагранжа по нормали и в тангенциальном на-
правлении (KEYOPT(2) = 4);
- метод внутренних многоточечных ограничений (МРС) (KEYOPT(2) = 2).
2.2.5. Начальная подстройка контактов, устранение начальных зазоров
и прониканий. В ситуации, когда движение твердого тела ограничивается лишь
контактными условиями, важно обеспечить, чтобы в начальном состоянии эле-
менты контактной пары находились во взаимодействии, то есть контакт был за-
крытым. Именно так и должна быть построена модель. Однако иногда контакт
все же изначально оказывается открытым. Это может происходить в следующих
случаях:
- контуры тела могут быть достаточно сложными, и бывает трудно точно оп-
ределить точку, в которой произойдет первый контакт;
- несмотря на то, что геометрическая модель построена без разрывов (gaps),
ошибки округления, возникающие при построении сеточной модели, могут при-
водить к появлению малых разрывов между элементами.
По этим же причинам может происходить слишком большое начальное про-
никание контактной поверхности в целевую. В этих случаях в контактных эле-
ментах возможно появление чрезмерно больших реактивных сил, а это может
привести к расходимости решения. Поэтому определение начального контакта
представляет собой, возможно, наиболее важный аспект построения модели для
контактного анализа. Чтобы определить, имеются ли проблемы с начальным кон-
96
Btw состоянием, можно запустить команду CNCHECK до начала решения.
I - .боты команда выдаст отчет, в котором есть рекомендации по устране-
лем.
ш гема ANSYS предлагает несколько путей подстройки начальных кон-
\ условий. Они подробно изложены в документации. Часть из них будет
Ь»онстрирована в примерах.
3. Организация решения контактных задач
с помощью менеджера контактов
3.1. Инструменты менеджера контактов
зктически все операции лучше осуществлять с помощью менеджера кон-
в, который вызывается нажатием кнопки (рис. 1а).
Кнопка для активизации
менеджера контактов
«)
Удалить контакт
Свойства контактов
Поменять местами Contact и Target Проверка статуса
I контактов
1 Развернуть нормали
I Показать нормали
Показать контактные пары
Contact Wizard
б)
Рис. 1
Назначение кнопок показано на рис. 16. Если к кнопке подвести маркер мы-
ши, появляется подсказка.
Кроме кнопок имеются три выпадающих меню (рис. 2). С помощью первого
(рис. 2а) можно выбрать, что именно будет отображаться: контактная и целевая
поверхности, только контактная или только целевая. С помощью второго меню
(рис. 26) можно выбрать вид отображения: модель не отображается (только кон-
тактные пары), отображается прозрачная модель. С помощью третьего меню
(рис. 2в) можно отображать компоненты решения из раздела Contact.
97
a)
б)
в)
Рис. 2
Чтобы управляющие элементы стали доступными, в MainMenu нужно войти
в подменю в соответствующий раздел (Preprocessor, Postprocessor).
Для создания новых контактных пар служит окно мастера контактов
(рис. 3).
Рис 3
Работа в мастере контактов не вызывает затруднений, так как снабжена под-
робными указаниями. Для управления контактами нужно вызвать окно «Свойст-
ва контактов» (рис. 4а). В нем на различных закладках сосредоточены управ-
ляющие элементы, относящиеся к рассмотренным выше опциям и реальным кон-
стантам.
На закладке «Initial Adjustment» (начальные настройки) собраны средства для
начальных настроек контакта (рис. 46).
98
б)
Рис. 4
Для задач, в которых рассматривается контакт с трением, сходимость, как
правило, затруднена, особенно на грубых сетках. При плохой сходимости реко-
мендуется применять опцию метода Ныотона-Рафсона с несимметричной мат-
рицей. Из-за наличия трения матрица становится несимметричной, а попытки ее
.иммстризовать приводят к ухудшению сходимости. Для включения этой опции
следует выбрать пункт меню MM\Solution\Analysis Options (это возможно только
и случае UnAbndged Menu), в появившемся окне выбрать опцию Full N-R un-
rymm.
4. Примеры решения контактных задач
4.1. «Два кирпича»
Рассмотрим модельную задачу о контакте двух прямоугольных тел, одно из
которых лежит на другом. На верхнее тело действует прижимающая сила. Из-за
.имметрии рассматривается половина тел. Расчетная модель показана на рис. 5.
Следует обратить внимание, что не на всей верхней грани нижнего кирпича
заданы контактные условия. В целях экономии ресурсов контактная зона выде-
лена специально.
ANSYS
SEP 27 2005
16:52:08
Рис. 5
99
Командный файл twobricks.txt решения задачи представлен ниже.
двумерная контактная задача
: ух кирпичей
:Д._ : тся вход в контакт и выход из контакта
(al- !размеры нижнего кирпича
Ь1=10
а2 = 5 '.размеры верхнего кирпича
Ь2=2
Е=2е11 'свойства материала
nu=0.3
Р=500 'нагрузка
/ргер7
!вход в препроцессор
et,1,р1апе42
mp,ex,1,Е
mp,nuxy,l,nu
k,1, , ,
k,2,al,
k,3,al,bl,
k,4,a2+l,bl
k,5,,bl
1,1,2
1,2,3
1,3,4
1, 4,5
1,5,1
al,1,2,3,4,5
rectng,0,a2,bl,bl+b2
fk,9,fy,-P
dl,1,1,all,
dl,5,l,ux
dl,9,2,ux
.' определение элемента
!задание свойств материала
!задание опорных точек
!создание опорных линий
!задание 1 тела
(2 тело
(задание силы
(закрепление на нижней грани нижнего кирпича
1 задание условий симметрии
lesize,1,0.5, ,
.lesize,2,0.5,,
lesize,3,0.5,,
lesize,4,0.5,,
lesize,5,0.5, ,
Iccat,3,4
mshkey,1
amesh, 1
lesize,6,,,12
lesize,8,,,12
lesize,7,,,5,
lesize,9,,,5,
amesh, 2
'разбиение линий нижнего кирпича
!конкатенация линий (нижний кирпич)
!сетка на нижнем кирпиче
(разбиение линий верхнего кирпича
!сетка на верхнем кирпиче
! number of elements 460
100
et,2,169 !задание типов контактных элементов
»et,3,172
Lsel,s,,,4 !определение целевой поверхности
cm,_target,line
type, 2
nsll,s,1
esln,s,0
I esurf,all
I Isel,s,,,6 'определение контактной поверхности
В cm,_contact,line
type,3
nsll,s,1
esln,s,0
I esurf,all
н allsel
hSinish !закончить работу в препроцессоре
t solu
► «olve 'решить задачу
finish
Результаты решения задачи о «двух кирпичах» представлены на рис. 6. Вид-
но, что правый край верхнего «кирпича» приподнимается и выходит из контакта
с нижним.
NODAL SOLUTION
STEP=1
SUB=1
TIME=1
SY (AVG)
RSYS=0
DMX=.182E-07
SMN—-2748
SMX =272229
-2748 -2077 -1406 -734 678 -63.473
-2413 -1741 -1070 -399.075 272.129
Рис. 6
101
Здесь рассмотрен стандартный контакт, т.е. значение KEYOPT(12)=0 по
умолчанию. Если установить другое значение KEYOPT(12)=1 (в принципе мож-
но любое другое), решение существенно изменится. На рис. 7 приведены резуль-
таты решения задачи о «двух кирпичах» в случае грубого контакта.
1
NODAL SOLUTION
STEP=1
SUB=1
TIME=1
SY (AVG)
RSYS—0
DMX=.0166E-07
SMN—-2749
S MX=271.327
AN
SEP 27 2005
18:58:44
-2749 -2078 -1407^ "" -735.601 -64.316
-2414 -1743 -1071 -399.959 271.327
Рис. 7
Как видно, разделения границ по краям верхнего «кирпича» не происходит.
4.2. Задача Герца
На примере этой задачи продемонстрируем важность настройки начальных
условий контакта.
Половина шара взаимодействует с абсолютно жесткой плоскостью. На верх-
ней грани полушара задано равномерное давление интенсивностью 100 единиц.
В силу симметрии рассматривается 1/4 часть модели (рис. 8).
Строится «свободная» сетка, которая затем последовательно четыре раза
подвергается процедуре «улучшения» (refine) около точки кон гакта. В результате
имеем следующую сетку из элементов второго порядка (рис. 9).
Сферическая поверхность объявляется контактной, абсолютно жесткая - це-
левой.
Решение задачи не приводит к успеху - процесс не сходится. Если заменить
давление на заданные вертикальные смещения, задача легко решается даже при
относительно большой величине смещений (до 20% радиуса).
102
Рис. 9
Для выяснения причин отсутствия сходимости запустим команду проверки
контактных элементов
CNCHECK.
Отчет о работе
команды
приведен ниже.
*** NOTE
СР= 60.197
Т1МЕ=
23:57:18
103
Rigid-deformable contact pair identified by real constant
set 3 and
contact element type 3 has been set up. please verify con-
straints on
target nodes which may be automatically fixed by ANSYS,.
Contact algorithm: Augmented Lagrange method
Contact detection at: Gauss integration point
Contact stiffness factor FKN 1.0000
The resulting contact stiffness 0.35180E-I14
Penetration tolerance factor FTOLN 0.10000
The resulting penetration tolerance 0.11370E-01
Frictionless contact pair is defined
Update contact stiffness for each sub-load step
Average contact surface length 0.14749
1 Average contact pair depth 0.11370
Default pinball region factor PINB 1.5000
The resulting pinball region 0.17055
*WARNING*: Initial penetration is included.
*** NOTE
CP= 60.197
TIME= 23:57:18
Min. Initial gap 5.668105958Е-05 was detected between con-
tact element
677 and target element 647.
You may move entire target surface by: x-'-5.518465781E-07,
У=
5.667784722E-05, z= -2.441631292E-07, to bring it in con-
tact .
************************ * * **************
*** WARNING *** CP- 60.197
TIME= 23:57:18
All selected contact pairs are initially open. Rigid body
motion can
occur. You may use auto CNOF/ICONT by setting KEYOPT(5) to
close
small gaps.
1 CONTACT PAIR IS SELECTED
CONTACT PAIR HAVING REAL ID - 3 IS INITIALLY OPEN
Оказывается, что контакт открыт, шар не закреплен от движения как жестко-
го целого. На первой итерации возникают чрезмерно большие смещения, выхо-
дящие за пределы области притяжения, контактные условия не срабатывают,
сходимости нет.
Исправим ситуацию, как показано на рис. 10.
104
^Contact Propertk £
Basic ] Friction I mitral Adjustment j M jsc ] .Rigid target ]
i Initial Allowable Penetration Range
Lower boundary|o <• factor constant
Upper boundary |0 !• factor Г" .constant
i
OK Cancel I 'Help
Рис. 10
Повторный запуск команды CNCHECK показал, что проблема решена,
агмент отчета приведен ниже.
•’* NOTE ***
СР= 63.441
Т1МЕ= 00:08:53
Min. Initial gap 5.6681059.58Е-05 was detected between con-
tact element
577 and target element 647.
|The gap is closed due, to initial adjustment.
X********************************* ******
1 CONTACT PAIR IS SELECTED
CONTACT PAIR HAVING REAL ID = 3 IS INITIALLY OPEN
BUT.MAY BE AUTOMATICALLY^CLOSED
Задача была решена за 4 итерации. Результаты решения приведены на рис.
11. Поле напряжений оу показано на рис. 11а, а поле эквивалентных напряжений
ои - на рис. 116.
105
.994Е+09 .284Е+10
469Е+10
-654Е+10 .838Е+10
Рис. 11
Отметим, что максимум напряжения с^, находится на пятне контакта, а мак-
симум интенсивности напряжений - на некотором расстоянии от площадки кон-
такта. Командный файл Hertz.txt для решения задачи приведен ниже.
106
г дача Герца в 3D постановке
Ь.какт полусферы с абсолютно жесткой плоскостью
: стройка, начального состояния контакта
ЕР7
И,1,SOLID95 [Задание типа элемёнта
fclEMP, ,,,,,,,
ГЕМР, 1, О
I DATA,EX,1,,2е11 !задание свойств материала
Г ГАТА,PRXY,1, ,0.3
к '4, ,1 [Генерируем объем: шар
1?W, 1 [разделим шар пополам рабочей плоскостью
F)
P"ELE, 2, , ,1 !одну половину удалим
^jro, , 90.000000, [повернем ЕП на: 90 вокруг оси Z
BW, 3 [разделим цоловину шара РП
V ELE 1, , ,1 [снова удалим половину
1го, ,90.000000, !
К го,,,90.000000 [позиционируем РП
BW, 2 [снова разделим
I.PSTYLE,,,,,,,, 0
ELE, 3, , , 1 ! и удалим, половину
WPSTYLE,,,,,,,,1
урго,,90.000000,
*-poff,,,-l [сместим РП к нижней точке шара
?ECTNG,-0.5,0.5,-0.5,0.5, [прямоугольник - жесткая граница
WPSTYLE,,,,,,,,0
[[SHAPE, 1,3D [установки сетки
KSHKEY,0
MESH,1 [сетка в объеме
.[улучшим сетку к предполагаемой точке контакта
ILST,5,1,3,ORDE,1
FITEM,5,5
CM,_Y,KP
• SEL, , , , Р51Х
?M,_Y1,KP
CMSEL,S,_Y
CMDELE,_Y
KREFINE,_Y1, , ,1,1,1,1 !l-e улучшение
CMDELE, _Y1
FLST,5,1,3,ORDE,1
FITEM,5,5
CM,_Y,KP
KSEL, , , ,P51X
CM,_Y1, KP
CMSEL,S,_Y
CMDELE,_Y
KREFINE,_Y1, , ,1,1,1,1 !2-e улучшение
CMDELE,_Y1
FLST,5,1,3,ORDE, 1
FITEM,5,5
CM,_Y,KP
107
KSEL, , , , P51X
CM,_Y1, KP
CMSEL, S,_Y
CMDELE,_Y
KREFINE,_Y1, , ,1,1,1,1 !3-e улучшение
CMDELE,_Y1
FEST,5,1,3,ORDE,1
FITEM,5,5
CM,_Y,KP
KSEL, , , ,P51X
CM, ...Yl,KP
CMSEL,S,_Y
CMDELE,_Y
KREFINE,_Yl, , .1,1,1,1 !4-e улучшение
CMDELE;_Y1
!теперь сетка готова
'контактные условия
СМ,_NODECM,NODE
CM,_ELEMCM,ELEM
CM,_KPCM,KP
CM,_LINECM,LINE
CM,_AREACM,AREA
CM,_VOLUCM,VOLU
MP,MU,1,
MAT, 1
MP,EMIS,1,7.88860905221e-031
E, 3
REAL,3
ET,2,170
ET,3,174
R,3,,,1.0,0.1,0,
RMORE,,,1.0E20,0.0,1.0,
RMORE,0.0,0,1.0, ,1.0,0.5
RMORE,0,1.0,1.0,0.0,,1.0
KEYOPT,3,4,0
KEYOPT,3,5,0 ! для закрытия контакта значение этой опции задать 1
KEYOPT,3,7, 0
KEYOPT,3,8,0
KEYOPT,3,9,0
KEYOPT,3,10,1
KEYOPT,3,11,0
KEYOPT,3,12,0
KEYOPT,3,2,0
KEYOPT, 2,1,.0
KEYOPT,2,2,0
KEYOPT,2,3,0
KEYOPT,2,5,0
ASEL,S,,,2
CM,-TARGET,AREA
AATT,-1,3,2,-1
TYPE,2
108
KESH,ALL
fc,,S, , ,3
И -CONTACT,AREA
Г..-Е.З
|LA,S,1
ELN,S,0
RF
I-£T,_REALID,3
Elsel
feEL.ALL
tESL,S,TYPE, ,2
E SL,A,TYPE,,3
KEL,R,REAL,,3
UEL,S,REAL,3
t-LSEL, ALL
Условия симметрии для шара
r,ST,2,2,5,ORDE,2
pTEM,2,5
•ITEM,2,-6
P51X,SYMM
давление на верхней границе
>LST,2,1,5, ORDE, 1
ITEM,2,1
30
aFA,P51X,1,PRES, 100000000
ALLSEL,ALL
INISH
4.3. Задача Герца с учетом пластических деформации
Включение других нелинейностей - пластических деформаций и больших
смещений - в методическом плане трудностей в решение не добавляет (хотя ре-
льные вычислительные трудности могут увеличиться многократно). Продемон-
стрируем это на следующем примере. Введем в указанную задачу двухзвенную
модель пластичности с изотропным упрочнением (предел текучести 2-108 Па,
модуль упрочнения 2- 1О10 Па) и включим опцию больших перемещений.
Добавления в командный файл будут следующие:
KEYOPT,3,5,1 [закрытие контакта
ТВ,BISO,1,1,2, [модель билинейного изотропного упрочнения
ТВТЕМР,0
TBDATA,,2е8,2е10, , , , [значения предела текучести и модуля
!упрочнения
NLGEOM,1 [включение геометрически нелинейных
!эффектов
На рис. 12 показана диаграмма деформирования материала.
109
Рис. 12
В итоге решение задачи получено за 33 итерации, причем программа ввела
автоматическое разбиение на подшаги. Процесс сходимости показан на рис. 13.
Cumulative Iteration Number
Рис. 13
Результаты решения представлены на рис. 14: а) - поле напряжений оу, б) -
поле эквивалентных напряжений (интенсивность напряжений), в) — контакт-
ное давление.
ПО
Рис 14
111
Рис. 14
4.4. Термоупругость. Задача о посадочных напряжениях
Несвязные задачи термоупругости с контактными условиями не имеют ка-
ких-либо особенностей по сравнению с задачами силового и кинематического
нагружения. Далее без комментариев приводится командный файл Posadka.txt
для решения задачи о температурной посадке круглого диска на вал.
Температурная посадка диска на вал
I
Rv=0.03 !радиус вала
Rd=0.1 .'радиус диска
:Hd=0.01 !высота диска
Hv=0.04 !высота вала
/PREP7
ET,1,PLANE82 'элемент и опции
KEYOPT,1,3,1
KEYOPT,1,5,0
KEYOPT,1,б,0
МРТЕМР,,,,,,,,
МРТЕМР,1,0
MPDATA,EX,1,, 2е11 !свойства материала
MPDATA,PRXY,1,,0.3
МРТЕМР,
МРТЕМР,1,0
112
| 1, REFT, , ,
ATA,ALPX,1, , 1.. 2 c- 5
TMG.RviC . 7e-4,Rd+O. 24e-3,0, Hd, 'диск
TNG, 0, Rv i 0. 7e-4, ,Hdi0. 001, ! вал
TNG,0, Rv i 0.7e-4, lid i 0.001, Hv, 'вал
ления
IDE, Is, ,20,4, , , ,0
IZE, 3, , ,20,1/4, , , ,o
TZE, 2, , .10,1/4, , , , о
ZZE, 4, , ,i?b,4, ’; , . !, 0
TZE, 5, , , 5 ,> , , , ,0
IZE, 9, , ,5, , , , /0
TZE, 8, , .5, , , , ,0
TZE, 12, , >,>7^ , , , , о
:sh
ESH
ESH
iAPE, 0,2D
PCEY, 1
1
2
3
____г. всех узлов! вала
BT,5,2,5,ORDE,2
ITEM,5,2
Кем, 5, -з
SEL,S, , , Р51Х
LLSEL,BELOW,AREA
:."<MRG, NODE, , , , LOW ! склейка узлов
LLSEL,ALL
L, 1, , SYMM !условия закрепления’
tL, 5, ,SYMM
lb, 8, , SYMM
II, 12, ,SYMM
FA,1,TEMP,-200 J охлдждаем диск? на -200 град
.: энтактные условия
CM, ..NODECM, NODE
CM,_ELEMCM,ELEM
CM,. КРСМ,КР
pi,_LlNECM, LINE
CM, ^AREACM, AREA
рм, ...VO LU CM, VO LU
MP,MU;T,
mat; 1
P.,3
REAL,3
ET,2,169
CT, 3,172
KEYOPT,S3,9,0
113
KEYOPT,3,10,1
R,3,
RMORE,
RMORE, , 0!
RMORE,0
LSEL,S, , ,6
CM,—TARGET,LINE
TYPE,2
NSLL,S,1
ESLN,S,0.
ESURF
CMSEL,S,-ELEMCM
LSEL,S,,,4
CM,-CONTACT,LINE
TYPE,3
NSLL,S,1
ESLN,S,0
ESURF
-ALLSEL
ESEL,ALL
ESEL,S.TYPE,,2
ESEL, A, TYPE, , 3
ESEL,R,REAL,,3
ESEL,ALL
ESEL,S,TYPE,,2
ESEL,A,TYPE, , 3
ESEL,R,REAL,,3
CMSEL,A,_NODECM
CMDEL._NODECM
CMSEL,A,_ELEMCM
CMDEL,_ELEMCM
CMSEL,S,_KPCM
CMDEL,_KPCM
CMSEL,S,_LINECM
CMDEL,_LTKECM
CMSEL,S,-AREACM
CMDEL,_AREACM
CMSEL, S, _VOLUCM
CMDEL,_VOLUCM
CMDEL,_TARGET
CMDEL,-CONTACT
FINISH
/SOL 'решение
SOLVE
FINISH'
5. Литература
1. Васидзу К. Вариационные методы в теории упругости и пластичности. -
М.: Мир, 1987.
2. ANSYS 8.1 Theory Reference АНСИС. Документация.
3. Решение контактных задач в ANSYS 6.1. Представительство CADFEM. -М.,
2003.
114
РАСЧЕТ УСТАЛОСТНОЙ ДОЛГОВЕЧНОСТИ
Н.Н. Берендеев
I. Введение
2. Основы расчета долговечности при многоцикловой усталости
2.1. Определение опасной точки
2.2. Определение истории нагружения
2.3. Задание свойств материала
2.4. Задание характеристик конструкции или ее элемента, влияющих
на изучаемый процесс
2.5. Расчет усталостной долговечности
3. Методики расчета повреждения при многоцикловой усталости
в системе ANSYS
3.1. Основная терминология
3.2. Методика оценки степени поврежденности
4. Расчет элемента конструкции с использованием модуля Fatigue
4.1. Последовательность выполняемых команд
4.2. Примеры расчета усталостного повреждения
5. Контрольные вопросы
6. Контрольное задание
7. Литература
1. Введение
В настоящее время при анализе конструкций и их элементов помимо тради-
онной задачи определения напряженно-деформированного состояния все ча-
: рассматриваются задачи определения ресурса конструкций. Одним из вопро-
в, которые необходимо изучить в данном случае, является вопрос об условиях
зрушения конструкций. На сегодняшний день в численных методах решения
1ач механики деформируемого твердого тела развиваются два основных под-
ода к решению указанной задачи. Первый подход - моделирование развития
ефектов (поры, трещины и т.п.) с учетом изменения граничных условий в рас-
матриваемом элементе конструкции и перестроение сетки при изменении раз-
|еров дефекта [1,2]. Второй подход — оценка степени поврежденности материа-
ла в элементах конструкции при условии, что дефекты и их рост в явном виде не
рассматриваются [3].
Согласно публикациям, посвященным применению первого подхода [2, 4—6],
он является индивидуальным для каждой конкретной задачи и приводит к напи-
санию собственного программного обеспечения или макросов в существующих
системах конечно-элементного анализа (ANSYS, NASTRAN и т.п.). Его приме-
нение требует от пользователя уровня знаний научного сотрудника, имеющего
опыт численного моделирования задач роста трещин.
Второй подход не позволяет в явном виде оценить момент разрушения кон-
струкции, но позволяет получить наглядную картину степени ее поврежденности
на основе используемых моделей накопления повреждений. Указанная картина
может применяться при оценке ресурса конструкции. Данный подход соответст-
вует требованиям, предъявляемым к методам исследования процессов разруше-
ния в массовых системах конечно-элементного анализа, используемых при ре-
шении инженерных задач. К недостаткам данного подхода можно отнести то, что
115
не учитывается деградация свойств материала вследствие накопления поврежде-
ний.
Одним из процессов, вызывающих разрушение конструкций и их элементов,
является многоцикловая усталость. Рассмотрим возможность определения степе-
ни поврежденности материала элементов конструкций в ходе многоцикловой
усталости с использованием конечно-элементной системы ANSYS.
В данной системе реализована возможность изучения разрушения, вызванно-
го многоцикловой усталостью, посредством второго подхода к исследованию
процессов разрушения. В случае многоцикловой усталости данный подход может
быть рассмотрен как корректный подход к описанию процесса разрушения, так
как процесс накопления повреждений при многоцикловой усталости, приводя-
щий к разрушению конструкций, локализован в малой области [7, 8], размеры
которой много меньше характерных размеров конечных элементов в сетках [2].
применяемых при моделировании элементов конструкций; разрушение происхо-
дит при напряжениях, меньших предела текучести, и не сопровождается возник-
новением макрообластей пластических деформаций [7]; в процессе разрушения
не происходит изменения геометрических размеров конструкций и их элементов.
2. Основы расчета долговечности
при многоцикловой усталости
При решении задачи оценки усталостной долговечности традиционно выде-
ляют ряд основных этапов [9]:
- определение опасной точки (сечения) в конструкции, в которой локализо-
ван процесс разрушения при многоцикловой усталости;
- определение истории нагружения в выбранной опасной точке;
- задание свойств материала;
- задание характеристик конструкции или ее элемента, влияющих на изучае-
мый процесс;
- расчет усталостной долговечности.
Рассмотрим каждый из указанных выше этапов
2.1. Определение опасной точки
Процесс многоцикловой усталости по определению относится к процессам
разрушения, не сопровождающимся развитой пластической деформацией [7-9].
Как следствие, данный процесс локализован в окрестности некоторой точки, в
которой возникают наиболее благоприятные условия для протекания изучаемого
процесса.
Указанная точка определяется не только видом напряженного состояния, но
и характеристиками самой конструкции.
2.2. Определение истории нагружения
При определении истории нагружения в выбранной опасной точке возникает
ряд проблем, связанных с тем, что в общем случае история нагружения пред-
ставляет собой случайную функцию, а напряженное состояние, как правило, яв-
ляется многоосным. Рассмотрим подробнее способы решения указанной задачи.
Традиционно принято разбивать все типы нагружения на два основных типа:
регулярное нагружение и случайное нагружение. В случае первого типа нагру-
жения зависимость параметра, характеризующего нагружение, от времени пред-
ставляет собой синусоиду или набор синусоид, последовательно сменяющих
116
!> г друга во времени. В случае второго типа нагружения зависимость парамет-
характеризукицего нагружение, от времени представляет собой случайную
нкцию или случайную функцию на некотором отрезке, которая периодически
вторяется во времени.
Все методы оценки усталостной долговечности используют внешнюю на-
,зку в том виде, который характерен для описания регулярного нагружения -
кл нагружения характеризуется средним и амплитудным значениями [9, 10].
Поэтому перед проведением расчета усталостной долговечности предвари-
1ьно проводят схематизацию истории нагружения, сводя историю случайного
ужения к блочному регулярному нагружению [9].
В настоящее время для решения указанной задачи применяются методы «па-
щего дождя» или полных циклов [9].
При характеристике истории нагружения в случае многоцикловой усталости
инято использовать три основных подхода [10]: внешнее воздействие описы-
яся зависимостью компонент тензора напряжений в опасной точке от време-
, зависимостью неупругой деформации в опасной точке от времени и зависи-
стью либо полной удельной энергии, либо какой-то ее части от времени. В
женерных приложениях традиционно для характеристики истории нагружения
пользуется первый подход [9].
В элементах реальных конструкций в основном возникает многоосное на-
яженное состояние. Большая часть экспериментальных данных, на которых
зируется расчет усталостной долговечности, получена в случае одноосного
ружения при симметричном цикле нагружения. Поэтому при использовании
йя описания внешнего воздействия зависимости компонент тензора напряжений
опасной точке от времени необходимо уметь переходить от многоосного на-
| эяженного состояния к одноосному и от асимметричного цикла нагружения к
лмметричному циклу нагружения. Для перехода от многоосного к одноосному
ряженному состоянию используются различные типы эквивалентного по по-
ждаемости одноосного напряжения. При переходе от асимметричного цикла
»ужения к симметричному циклу нагружения также используются различные
«пы эквивалентного напряжения. Для перехода от реальной истории нагруже-
ия
к ее схематизированному аналогу, который может быть сопоставлен с экспе-
иментальными данными, применяются различные подходы, основное отличие
рторых состоит в последовательности выполнения следующих операций: схема-
изация истории нагружения, переход от многоосного к одноосному напряжен-
ому состоянию и переход от асимметричного к симметричному нагружению.
Рассмотрим подробнее зависимости, описывающие перечисленные выше
перации.
Так как описание методов схематизации нерегулярного нагружения является
остаточно объемным, а знание используемой в них методологии не нужно при
ешении инженерных задач, то в данной работе указанные сведения не приво-
ознакомиться с данными методами могут рассмотреть работы
шггся, а желающие
(9,И].
Введем обозначения: с,у = ст,у (?) - зависимость компонент тензора напряже-
ний в опасной точке от времени, характеризующая историю нагружения; с/ - ка-
кой-либо параметр напряженного состояния после процесса схематизации исто-
рии нагружения.
Перечислим основные зависимости, используемые при переходе от многоос-
ного к одноосному напряженному состоянию.
117
Согласно результатам экспериментальных и теоретических работ, ход про-
цесса многоцикловой усталости обусловлен накоплением микропластических
деформаций в зернах материала конструкций [7-9]. Поэтому для проведения ука-
занного выше перехода традиционно используют гипотезы максимального каса-
тельного напряжения (Треска-Сен-Венана) и удельной энергии формоизменения
(Губера-Мизеса-Генки), в которых одноосное напряженное состояние, эквива-
лентное по поврежденности данному многоосному состоянию, описывается сле-
дующими выражениями соответственно
<^?v =|п1-аз|, G1
где <5eqv — эквивалентное напряжение, , Сг, <Тз - первое, второе и третье глав-
ные напряжения данного напряженного состояния.
Для описания перехода от асимметричного к симметричному циклу нагру-
жения используются следующие зависимости, связывающие амплитуду напря-
жения эквивалентного по повреждаемости симметричного цикла нагружения
<yaeqv с амплитудным и средним напряжением данного асимметричного цикла
нагружения.
Зависимость Серенсена-Кинасошвили
(3)
где сто, ат - амплитудное и среднее напряжение данного асимметричного цикла
нагружения, - коэффициент учета асимметрии цикла нагружения, который
определяется по формуле
2сг_] — а0
Va=-----’---".
здесь a_i - предел усталости при симметричном цикле нагружения (а,„ =
предел усталости при пульсирующем (отнулевом) цикле нагружения (ая
Зависимость Гудмана
(4)
= 0), п0 -
= пи).
П-1
eqv ~ ’
(5)
где <зв - предел прочности.
Зависимость Гербера
(6)
Зависимость Зодерберга
(7)
118
; оу - предел текучести.
Особняком от приведенных выше зависимостей стоит зависимость Саинса
nes) [12], которая изначально разрабатывалась для случая описания многоос-
го напряженного состояния для возможности получения амплитуды напряже-
- симметричного цикла нагружения, эквивалентного по повреждаемости с
1ным асимметричным циклом нагружения, в том случае если главные оси тен-
ов напряжений амплитудных и средних значений напряжения цикла не совпа-
эт (например, в случае симметричного цикла кручения при постоянном изгибе
Ь.п.):
eqv
(8)
с oct — касательное октаэдрическое напряжение тензора амплитуд напряже-
й, определяемое по формуле
'acct -а«2)2 +(°П2 -°яз)2 + (<\,1 > (9)
есь ani, аП2, спз — первое, второе и третье главные напряжения тензора ампли-
д напряжений, а,„ ж1 - октаэдрическое нормальное напряжение тензора средних
шряжений цикла, определяемое по формуле
п _ gCTl + Ст2 + °»,3
^moct
(10)
е ami, аш2, о„,3 - первое, второе и третье главные напряжения тензора средних
лряжений.
При определении последовательности выполнения действий для получения
ематизированной истории нагружения, применимой при оценке усталостной
злговечности, выделяют два основных пути:
- схематизация истории нагружения - переход от многоосного к одноосно-
му напряженному состоянию — переход от асимметричного цикла нагру-
жения к симметричному циклу нагружения;
- схематизация истории нагружения - переход от асимметричного цикла на-
гружения к симметричному циклу нагружения - переход от многоосного к
одноосному напряженному состоянию.
Результатом процесса схематизации и сведения к эквивалентным значениям
истории нагружения является последовательность значений эквивалентных ам-
плитуд напряжений при одноосном симметричном цикле нагружения c^,egv, где
1 = 1,Nb, a Nb - число циклов, выделенных при схематизации нерегулярного
нагружения.
2.3. Задание свойств материала
При описании процесса многоцикловой усталости основной характеристикой
материала, используемой для описания его способности сопротивления процессу
многоцикловой усталости, является кривая Велера (Wohler) (кривая усталости).
Эта кривая (рис. 1) описывает зависимость максимального значения напряжения
в цикле от числа циклов до разрушения при данном уровне максимального на-
пряжения, постоянного в ходе всего процесса нагружения.
119
Для различных типов материалов указанные кривые в области многоцикло-
вой усталости различны:
- для мало- и среднеуглеродистых сталей, мало- и среднелегированных ста-
лей данная кривая имеет горизонтальную асимптоту (рис. 1, кривая 7) и
как следствие - физический предел усталости aR (ордината асимптоты);
- для высокопрочных легированных сталей данная кривая состоит из одного
участка и не имеет горизонтальной асимптоты (рис. 1, кривая 2);
- для цветных металлов, их сплавов и нержавеющих сталей данная кривая
состоит из двух участков и также не имеет горизонтальной асимптоты
(рис. 1, кривая 3). В этом случае, так же как и в предыдущем, материал не
имеет физического предела усталости. Вместо него рассматривается ус-
ловный по базе предел усталости - уровень максимального напряжения
Од, при котором разрушение произойдет через заданное число циклов
(базу) N6.
Для описания наклонного участка (участков) кривой Велера при многоцик-
ловой усталости традиционно используется уравнение Басквина (Basquin)
п„=С7У'и, (11)
здесь N - число циклов нагружения до разрушения при амплитуде напряжения
равной с>я, т - константа материала, С — константа материала, которая для мате-
риалов первого типа имеет вид
С = ст_^-"', (12)
где Nc - абсцисса точки перегиба на кривой Велера.
2.4. Задание характеристик конструкции или ее элемента,
влияющих на изучаемый процесс
Согласно экспериментальным данным, на ход процесса многоцикловой уста-
лости помимо истории нагружения и усталостных свойств материала влияют
также размер конструкции (масштабный эффект), величины градиентов напря-
120
й в окрестности опасной точки (концентрация напряжений), наличие и Be-
ta остаточных напряжений в окрестности опасной точки, качество обработ-
верхности в области опасной точки, среда, в которой работает элемент кон-
ции.
дя учета указанных выше факторов при оценке уровня усталостной повре-
ности конструкции вводят коэффициенты пересчета предела усталости KF.
де исследования элементов конструкций вместо предела усталости образца
рассматривается предел усталости элемента конструкции стд , определяе-
I по формуле
(13)
ад_! - Адп-г
В инженерной практике принята следующая формула для определения коэф-
дента Хд с учетом указанных выше факторов [13]:
1
(14)
Д (KjKda + l/KF-\)/Kv’
Ка — эффективный коэффициент концентрации напряжений (отношение пре-
а усталости гладкого образца к пределу усталости образца с концентратором
ряжений), определяется по формуле
= 1 + («с “!)<?
(15)
сь ас - теоретический коэффициент концентрации напряжений, определяе-
и из номограмм (например, в работах [9, 14]), q — коэффициент чувствитель-
гги материала к концентрации напряжений1. Также в (14) Kdc — коэффициент
1яния абсолютных размеров поперечного сечения или масштабный фактор
ношение предела усталости образца заданного диаметра к пределу усталости
>азца со стандартным диаметром1 2), определяется на основе номограмм; KF -
(ффициент влияния качества обработки поверхности (отношение предела ус-
ости образца с рассматриваемым качеством обработки поверхности к пределу
гадости образца, на основании которого была получена кривая Велера), опре-
ляется на основе номограмм3; Kv— коэффициент влияния поверхностного уп-
чнения (отношение предела усталости образца с рассматриваемой обработкой
)верхности к пределу усталости неупрочненного образца), определяется на ос-
эве номограмм.
При проведении расчетов в формулах (3)-(8) вместо амплитуды напряжения
икла ст„ подставляется величина
(16)
1 Значения данного коэффициента можно найти в справочниках по прочности мате-
залов и конструкций, например в работах [9, 14].
2 В настоящее время данный диаметр равен 5 мм. В более ранних работах указанная
величина составляла 7,5 мм. Поэтому при нахождении данного коэффициента необходи-
мо знать диаметр образцов, с использованием которых была получена кривая Велера.
3 В настоящее время принятой нормой обработки поверхности образцов для построе-
ния кривой Велера является полировка. Ранее использовались шлифованные образцы.
121
2.5. Расчет усталостной долговечности
После того как получено схематизированное описание процесса нагруженщ!
в виде набора амплитуд эквивалентных напряжений <з1а eqv, Z = 1, Nb, задана
уравнение, описывающее кривую Велера, учтены особенности элемента kohctJ
рукции путем введения в рассмотрение предела усталости элемента конструкции*
пд > можно переходить к оценке поврежденное™ конструкции, накопленной о
ходе процесса многоцикловой усталости.
Предположим, что каждый l-й цикл нагружения в рассматриваемом процессе
разрушения конструкции повторяется kt раз.
При описании повреждения, накопленного в конструкции, наиболее часто
используется правило линейного суммирования повреждений Пальмгрена-4
Минера [9]. Согласно данному правилу, повреждение, накопленное в опасной
точке, определяется по формуле
v = ’ (17)
где п — число различных амплитуд напряжений в процессе нагружения, к, - число
повторений амплитуды с'я eqv в процессе нагружения, N, - число циклов до раз-
рушения при амплитуде напряжения а'я eqv, определяемое с использованием кри-
вой Велера.
С учетом соотношения (17), а также предположения о неповторяемое™ ам-
плитуд напряжений в процессе нагружения повреждение, накопленное в опасной
точке изучаемой конструкции при заданных условиях нагружения, будет опреде-
ляться по формуле
А к;
(18)
где - повреждение, накопленное в результате действия амплитуды a'aeqv за
время процесса нагружения, которое будет определяться по формуле
(19)
В случае описания процесса накопления повреждений уравнением (18) усло-
вие разрушения записывается в виде
(20) *
4 Традиционно ар = 1. Но в зависимости от характера нагружения ар может быть как
больше, так и меньше единицы [9, 11, 15]. Вместе с тем при нерегулярном нагружении с
хаотичным порядком изменения пиковых значений напряжений оценка ар = 1 является
корректной [9, 11].
122
3. Методики расчета повреждения
при многоцикловой усталости в системе ANSYS
3.1. Основная терминология
1ри работе в модуле Fatigue (усталость) системы ANSYS используется ряд
}вных терминов.
Location или Fatigue location или Fatigue stress location - точка в конструк-
в которой исследуется процесс многоцикловой усталости.
Event или Fatigue event - событие - аналог цикла нагружения. Данный тер-
введен в связи с тем, что в изучаемой системе при схематизации процесса
ркения процесс рассматривается не целиком, а по частям. Схематизация ка-
й указанной части должна приводить к одному циклу нагружения, исполь-
ому при оценке накопленного повреждения. Введенная выше часть процесса
лужения и носит название события.
Loading - момент времени в ходе события, в который задается напряженное
ояние.
Usage factor или Partial usage - повреждение, накопленное в изучаемой точке
Ктрукции за событие (или от многократного возникновения условий одного и
v же события).
Cumulative fatigue usage - суммарное повреждение, накопленное в изучаемой
ке конструкции за весь процесс нагружения.
Alternating stress - амплитудное значение напряжения в цикле.
Scale factor for stress - коэффициент (масштабный фактор напряжений), на
орый умножается текущий уровень напряжения5. Для каждого события может
ib задан по отдельности.
Stress concentration factor — коэффициент концентрации напряжений. Задает-
для Location, следовательно, одинаков для всех событий. Используется для
та воздействия на ход процесса накопления повреждений при многоцикловой
алости концентрации напряжений, масштабного эффекта, качества обработки
юрхности, среды, в которой происходит процесс нагружения.
3.2. Методика оценки степени поврежденностн
Модуль Fatigue системы ANSYS реализован в виде калькулятора в блоке
тпроцессора, поэтому история нагружения может быть как прочитана из фай-
в результатов, так и введена вручную. Подобный подход оправдан тем, что для
ючных элементов значения напряжений, полученных в результате расчетов в
истеме
ANSYS,
не отображаются в файле результатов.
Процедура оценки степени повреждаемости, возникающей в опасной точке
«обструкции, в модуле Fatigue содержит следующий основной набор действий:
- задание опасной точки;
5 Если история нагружения является последовательностью подобных циклов нагруже-
ния (ста, ст,я в циклах нагружения различны, а их соотношение одно и то же), то при расче-
«х удобно решить задачу об определении распределения напряжений только для одного
^зучая, а для других получить данные путем использования того же напряженного со-
.тояния, умноженного на соответствующий коэффициент пересчета (часто решают задачу
для случая единичной внешней нагрузки, а затем умножают на величину действительной
нагрузки).
123
- задание коэффициента концентрации напряжений в выбранной опасно
точке;
— задание истории нагружения в виде последовательности событий (числ!
событий т), с учетом числа повторений каждого события ру-, j = 1, т;
- введение масштабного фактора напряжений для каждого события;
- вычисление для каждого Loading эквивалентного одноосного напряжени
по гипотезе максимального касательного напряжения (1);
- схематизация процесса нагружения по методу «падающего дождя»; ре
зультатом данного действия будет набор амплитуд эквивалентных напря
жений eqv, длина которого равна 0,5G(G - 1), где G - суммарное числ.
Loading во всех событиях и числа повторений каждой из этих амплиту
напряжений А,;
— задание диаграммы усталости в виде набора точек (кривая Велера на ociij
ве этих точек интерполируется некоторым полиномом);
- вычисление повреждения (Usage factor) для каждого события по формуле
(19);
- оценка суммарного повреждения (Cumulative fatigue usage) по формуле
(18).
Рассмотрим подробнее результаты процесса схематизации и то, каким обра-
зом связаны величины pj и kj, а также амплитуды эквивалентных напряжений.
При проведении процесса схематизации в системе ANSYS получается набор
эквивалентных амплитуд напряжений которые являются амплитудами
цикла нагружения при условии, что пиковые значения данного цикла нагружения
(максимум и (или) минимум) соответствуют нагружению р события а и нагру-
жению 5 события у. При этом событие а имеетра повторений, а событие у имеет
повторений. Указанный выше набор величин группируется в порядке
убывания.
Рассмотрим процедуру определения величин ст' и kt на основе набора
величин реализованную в модуле Fatigue.
На первом шаге процедуры рассматривается первый элемент набора величин
_ CTof9v'S| • Данный элемент принимается за . Число повторений дан-
ной амплитуды определяется по формуле
К =min{/2ai,pyi}.
Затем производится пересчет величин рщ и р^ по формулам
Ра, = Ра,
Py^py.-V
(22)
На втором шаге процедуры рассматривается элемент сг“2Д2У282 . Производится
проверка условия
Ра2 >0П^2 >0.
(23)
124
Если данное условие не выполнено, то переходим к следующему шагу (спе-
ющему элементу набора).
Если выполнено, то &2а eqv = . Число повторений данной амплитуды
феделяется по формуле
к2 =шш{раг,рГ2}. (24)
Производится пересчет величин раг и руг по формулам
Ра = Ра
“2 “2 ,2 (25)
Р1г=Р1г~к2-
Рассмотрим i-й шаг процедуры.
Производится проверка условия
Ра, >0пръ >0. (26)
Если данное условие не выполнено, то переходим к следующему шагу (спе-
ющему элементу набора).
Если выполнено, то u'aeqv - Число повторений данной амплитуды
пределяется по формуле
1(.=тш{ра.,рГ(}. (27)
Производится пересчет величин ра и ру по формулам
4. Расчет элемента конструкции с использованием
модуля Fatigue
При описании использования модуля Fatigue для оценки поврежденное™
цементов конструкций выберем следующую методику: на первом этапе приве-
ем последовательность команд в системе ANSYS и пути к соответствующим
унктам меню; на втором этапе рассмотрим ряд примеров, позволяющих пока-
1ть особенности работы модуля.
4.1. Последовательность выполняемых команд
Для вхождения в модуль Fatigue надо пройти следующий набор меню и
подменю:
Main Menu > General Postproc > Fatigue.
1 шаг. Задание размерности задачи: определение максимального числа точек
и конструкции, в которых будет проводиться вычисление усталостного повреж-
дения; определение максимального числа событий при усталостном нагружении;
определение максимального числа нагружений в одном событии6. Для данной
6 По умолчанию в программе выставлены следующие значения перечисленных выше
параметров: число точек - 5, число событий - 10, число нагружений - 3. Если задается
только одно событие для каждой точки, то оно должно содержать не менее трех нагруже-
ний.
125
цели служит команда FTSIZE. Путь через систему меню и подменю для выпо
нения тех же действий следующий:
Main Menu > General Postproc > Fatigue> Size Settings.
2 шаг. Задание и описание каждой из точек, в которых будет проводит^
вычисление усталостного повреждения. При этом определяются следующие и
раметры: номер точки; номер узла, которому соответствует данная точка; зна>-
ния коэффициентов концентрации напряжений по каждой из осей в глобалыи
системе координат. Для данной цели служит команда FL. Путь через систе1
меню и подменю для выполнения тех же действий следующий:
Main Menu > General Postproc > Fatigue>Stress Location.
В зависимости от того, будет ли история нагружения вводиться вручную и
данные будут браться из файла результатов расчета, выполняется соответствен
шаг 3 или шаг 47.
3 шаг. Задание напряженного состояния, соответствующего одному нагр
жению одного из событий одной из точек, вручную8. Для данной цели служ
команда FS. Путь через систему меню и подменю для выполнения тех же деш
вий следующий:
Main Menu > General Postproc > Fatigue>Store Stresses>Specified Vai.
4 шаг. Задание напряженного состояния, соответствующего одному нагр
жению одного из событий одной из точек, из файла результатов. Для данной i
ли служит команда FSNODE. Путь через систему меню и подменю для выпол!
ния тех же действий следующий:
Main Menu > General Postproc > Fatigue> Store Stresses>From rst File.
Шаг 3 или шаг 4 повторяются число раз, необходимое для задания истори
.агружения во всех рассматриваемых точках.
5 шаг. Построение графика истории нагружения выбранной компоненты н;
ряженного состояния в пределах заданного события для заданной точки. Дг
денной цели служит команда FSPLOT. Путь через систему меню и подменю дг
выполнения тех же действий следующий:
Main Menu > General Postproc > Fatigue>Store Stresses>Plot Stresses.
6 шаг. Вывод в виде списка истории нагружения по всем компонентам н;
пряженного состояния или для всех точек по всем событиям, или для выбранных
точек по выбранным событиям. Для данной цели служит команда FSLIST. Путь
через систему меню и подменю для выполнения тех же действий следующий:
Main Menu > General Postproc > Fatigue>Store Stresses>List Stresses.
7 шаг. Описание каждого события. Для события с заданным номером опре-
деляется число повторений данного события; масштабный фактор9. Для данной
7 Первый подход к заданию истории нагружения может использоваться как в случае,
если известна полученная извне история нагружения, так и в случае, если элемент конст-
рукции изучался в системе ANSYS, но моделировался балочными конечными элементами.
8 Если для описываемого нагружения все компоненты напряженного состояния равны
нулю, то надо ввести хотя бы один ноль. Неввод ни одного нулевого значения приведет к
ошибке.
9 По умолчанию для каждого события в программе выставлены следующие значения:
число повторений — 1; масштабный фактор - 1.
126
Ври служит команда FE. Путь через систему меню и подменю для выполнения
е* же действий следующий:
Main Menu > General Postproc > Fatigue>Assign Events.
[ £ шаг. Вычисление набора амплитуд эквивалентных напряжений по всей ис-
fc. ни нагружения для заданной точки10 11. Для данной цели служит команда
BTCALC. Путь через систему меню и подменю для выполнения тех же действий
Ирдующий:
Main Menu > General Postproc > Fatigue> Calculate Fatig.
9 шаг. Задание кривой усталости в табличном виде. Задается таблица, в пер-
I • столбце которой вводятся долговечности, а во втором — соответствующие им
f вни амплитуд напряжений11. Для данной цели служит команда FP. Путь через
I ему меню и подменю для выполнения тех же действий следующий:
Main Menu > General Postproc > Fatigue>Property Table> S-N Table.
10 шаг. Вычисление повреждений, накопленных за каждое из событий, и
чммарного повреждения для заданной точки. Для данной цели служит команда
f TCALC. Путь через систему меню и подменю для выполнения тех же действий
|с дующий:
Main Menu > General Postproc > Fatigue> Calculate Fatig.
Действия, необходимые при осуществлении тагов 8 и 10, совпадают. Отли-
I е в результатах объясняется тем, что в модуле Fatigue при отсутствии сведе-
[ш,щ о кривой усталости (случай шага 8) производится только расчет амплитуд
нвивалентных напряжений.
4.2. Примеры расчета усталостного повреждения
Пример 1. Дан стальной стрежень круглого поперечного сечения площадью
И = 5-10-5 м2. Один торец стержня закреплен. К другому концу приложена осевая
;лла F, изменяющаяся во времени по синусоидальному закону F= Ff,sinoj/ с ам-
Ьчитудой F„= 10 кН. Определить усталостное повреждение, накопленное в
I стержне в ходе десяти циклов нагружения. Диаграмма усталости представлена в
'.|бл. 1.
Таблица 1
N 100 1000 10000 100000 1000000 10000000
ст„, МПа 400 350 300 250 200 150
Решение. Для решения данной задачи будем использовать модуль Fatigue
системы ANSYS. При нахождении распределения напряжений можно было бы
применить стержневые конечные элементы (тип Link), но результаты подобного
анализа не могут быть использованы в рассматриваемом модуле. Поэтому исто-
рию нагружения будем вводить вручную.
10 Вычисленные значения выводятся в файл, который открывается в отдельном окне и
может быть в дальнейшем сохранен.
11 Точки кривой усталости должны вводиться в порядке возрастания долговечности.
127
• Хорелечим историю нагружения. Напряженное состояние одноосное. Нор-
л »е напряжение в поперечных сечениях стержня изменяется по закону
ст = п/иг.. г, । де ст. = 200 МПа.
Прове 1см расчет оценки степени поврежденности, сохраняя порядок и номе-
ра шагов из пункта 4.1.
1 ши Так как нагружение является регулярным и любое сечение стержня
является равноопасным, то может быть использована размерность задачи по
умолчанию. Тогда соответствующая команда имеет вид
FTSIZE.5.10,3,
2 шаг. Из замечаний, приведенных выше, следует, что процесс накопления
повреждений можно рассмотреть в одной точке. Остальные точки будут равно-
опасны. Соответствующая команда имеет вид
Параметры данной команды следующие: «1» - номер узла12, дальнейшее пе-
речисление запятых в команде показывает, что коэффициенты концентрации на-
пряжений по каждой из осей равны единице13.
3 шаг. Так как нагружение является регулярным, то для описания истории
нагружения достаточно одного события. Цикл нагружения в общем случае может
быть охарактеризован максимальным и минимальным значениями напряжения в
цикле. В модуле Fatigue если событие только одно, то для его описания нужно
три нагружения. Поэтому к двум указанным выше значениям напряжения цикла
добавим еще одно - среднее значение напряжения в цикле. Для нашей задачи три
указанные величины равны соответственно: 200 МПа, —200 МПа, 0 МПа. В ре-
зультате ввода истории нагружения был получен следующий набор команд
FS,1,1,1,1,0,,,,,,
FS,l,l,2,l,200e6„„„
FS,1,1,3,1,-200000000,,,,,,
Опишем подробнее параметры рассматриваемой команды FS. Первый пара-
метр - номер узла или точки (в нашем случае это 1 (см. шаг 2)). Второй параметр
- номер события (в нашем случае событие одно). Третий параметр - номер на-
гружения в событии (в нашем случае, как отмечено выше, три нагружения). Чет-
вертый параметр - тип напряженного состояния14. Последующие шесть парамет-
ров описывают напряженное состояние в данном нагружении (в нашем случае
ненулевой была только одна компонента напряженного состояния15).
6 шаг. Команда вывода всех компонент напряженного состояния для всех
точек и всех событий имеет вид
FSLIST,ALL,„ALL,ALL,
Приведем результаты действия команды:
1 В случае нашей задачи фиктивная величина, введенная для возможности решения
13 Концентрация напряжений отсутствует.
14 Данный параметр имеет следующие значения: 1 - трехмерное напряженное состоя-
ние (массивное тело), 8 - пластины, оболочки, мембраны, 7 - температурное воздействие.
15 Напряжения заданы в Па.
128
LIST FATIGUE STRESSES FOR LOCATIONS 1 TO 5 IN STEPS OF 1
EVENTS 1 TO 10 - LOADS 1 TO 3
*** POST1 FATIGUE STRESSES***
LOCATION 1 NODE 1
EVENT 1
(TOTALSTRESS-ITEMS 1-7) LOCATION 1 EVENT 1 LOAD 1
SX.SY.SZ 0.0000 0.0000 0.0000
SXY.SYZ.SXZ.TEMP 0.0000
(TOTAL STRESS - ITEMS 1-7)
SX.SY.SZ 0.20000E+09
SXY.SYZ.SXZ.TEMP 0.0000
(TOTAL STRESS - ITEMS 1-7)
SX.SY.SZ -0.20000E+09
SXY.SYZ.SXZ.TEMP 0.0000
0.0000 0.0000 0.0000
LOCATION 1 EVENT 1 LOAD 2
0.0000 0.0000
0 0000 0.0000 0.0000
LOCATION 1 EVENT 1 LOAD 3
0.0000 0.0000
0.0000 0.0000 0.0000
7 шаг. По условию задачи надо оценить поврежденность после десяти циклов
агружения. Поэтому число повторений события равно 10. Соответствующая
команда имеет вид
FE,1,10,1,
Первый параметр — номер события, второй параметр — число повторений со-
бытия, третий параметр - масштабный фактор для данного события
8 шаг. Команда запуска процедуры расчета в модуле Fatigue в данном случае
имеет вид
FTCALC,!
Параметр - номер узла или точки. Результаты работы данного модуля, со-
держащие все амплитуды эквивалентных напряжений за историю нагружения,
выглядят следующим образом:
PERFORM FATIGUE CALCULATION AT LOCATION 1 NODE 0
"* POST1 FATIGUE CALCULATION ***
LOCATION 1 NODE 1
***NOTE*** CP= 3.500 T1ME= 11:21:40
No N values defined Fatigue evaluation will not include usage
factors.
EVENT/LOADS 1 2 AND 1 3
PRODUCE ALTERNATING SI (SALT) = 0.20000E+09 WITH TEMP = 0.0000
EVENT/LOADS 1 1 AND 1 2
PRODUCE ALTERNATING SI (SALT) = 0.10000E+09 WITH TEMP = 0.0000
EVENT/LOADS 1 1 AND 1 3
PRODUCE ALTERNATING SI (SALT) = 0.10000E-HJ9 WITH TEMP = 0.0000
9 шаг. Задание кривой усталости, данные для которой были взяты из табл. 1,
было осуществлено следующим набором команд
FP,1,100,1000,10000,100000,1000000,10000000
FP,21,400e6,350e6,300e6,250e6,200e6,150e6
129
Данные об усталостных свойствах в модуле Fatigue хранятся в виде одно-
мерного массива, поэтому первый параметр в команде («1», «21») указывает н
номер элемента массива, с которого начинается рассматриваемая характеристик
ка, и соответственно указывается на тип характеристики (1 - число циклов, 21
амплитуда напряжения)16.
10 шаг. Команда та же, что и на 8-м шаге. Приведем результаты вычислений:
PERFORM FATIGUE CALCULATION AT LOCATION 1 NODE О
*" POST1 FATIGUE CALCULATION ***
LOCATION 1 NODE 1
EVENT/LOADS 1 2 AND 1 3
PRODUCE ALTERNATING SI (SALT) = 0.20000Е-Ю9 WITH TEMP = □ 0000
CYCLES USED/ALLOWED = 10.00 /0.1000Е+07 = PARTIAL USAGE = 0.00001
CUMULATIVE FATIGUE USAGE = 0 00001
В данном случае программа определила, что история нагружения состоит из
одного цикла нагружения с амплитудой = 200 МПа (что и было задано), и вь
числила накопленное повреждение за 10 циклов нагружения по формуле (19).
Пример 2. Рассматривается шарнирноопертая стальная балка квадратного
поперечного сечения (сторона квадрата 0,1 м, длина балки 1 м). По верхней
плоскости балки задано давление, изменяющееся во времени по синусоидально-
му закону р = p„sin a>t, где ра = 2,93 МПа. Диаграмма усталости представлена
табличном виде (табл. 1).
Оценить максимальное повреждение, возникающее в балке после 100 циклов
нагружения.
Решение. При нахождении распределения напряжений в данной задаче ис-
пользуем трехмерные конечные элементы (тип Solid). Поэтому историю нагру-
жения будем брать из файла результатов.
Проведем расчет оценки степени поврежденности, сохраняя порядок и номе-
ра шаго! из пу нкта 4.1.
1 шаг. Так как нагружение является регулярным и для данной конструкции
имеются две равноопасные точки (крайнее верхнее и крайнее нижнее волокно в
нормальном сечении, расположенном по середине балки), и из этих двух точек
достаточно рассмотреть одну, то может быть использована размерность задачи
по умолчанию. Тогда соответствующая команда имеет вид
FTSIZE,5,10,3,
2 шаг. Из замечаний, приведенных выше, следует, что процесс накопления
повреждений можно рассмотреть в одной точке. Эта точка соответствует поло-
вине длины балки, крайнему нижнему волокну в нормальном сечении. Соответ-
ствующая команда имеет вид
FL,1,171„„
Параметры данной команды следующие: «1» - номер точки, «171» - номер
узла в конечно-элементной модели, соответствующий данной точке.
Первые двадцать элементов отданы под значения чисел циклов, элементы с 21 по
40 - под соответствующие значения амплитуд напряжений.
13С
4 шаг. Так как нагружение является регулярным, то для описания истории
агружения достаточно одного события. Цикл нагружения в общем случае может
Быть охарактеризован максимальным и минимальным значениями напряжения в
цикле. Но в случае модуля Fatigue если событие только одно, то для его описа-
ния используются три нагружения. Поэтому к двум указанным выше значениям
напряжения цикла добавим еще одно - среднее значение напряжения в цикле.
Едя получения каждого из трех нагружений были решены три статические зада-
чи, в которых внешнее давление принимало максимальное, минимальное и сред-
нее значение в цикле. Все три решения были записаны в один файл результатов,
абор команд, позволяющий получить историю нагружения в данном случае,
имеет вид
SET,1,LAST,1,
FSNODE,171,1,1,
SET,2,LAST,1,
FSNODE,171,1,2,
SET,3,LAST,1,
FSNODE,171,1,3,
Команда SET служит для задания номера шага нагружения (первый пара-
ыетр данной команды), чтобы результаты данного шага нагружения могли быть
шлечены из файла результатов.
В команде FSNODE первый параметр - номер узла, для которого извлекают-
ся данные; второй параметр - номер события; третий параметр - номер нагруже-
ния.
6 шаг. Команда вывода всех компонент напряженного состояния для всех то-
чек и всех событий имеет вид
FSLIST,ALL,„ALL,ALL,
Приведем результаты действия команды:
LIST FATIGUE STRESSES FOR LOCATIONS 1 TO 5 IN STEPS OF 1
EVENTS 1 TO 10 - LOADS 1 TO 3
*** POST1 FATIGUE STRESSES ***
LOCATION 1 NODE 171
EVENT 1
(TOTAL STRESS - ITEMS 1-7) LOCATION 1 EVENT 1 LOAD 1
SX.SY.SZ 0.20000E+09 0.11097Е-ЮБ 0.0000
SXY.SYZ.SXZ.TEMP 0.90206E-04 0.0000 0.0000 0.0000
(TOTAL STRESS - ITEMS 1-7) LOCATION 1 EVENT 1 LOAD 2
SX.SY.SZ -0.2CC0CE+09 -0.11097Е-ЮБ 0.0000
SXY.SYZ.SXZ.TEMP -0.90206E-04 0 0000 0.0000 0.0000
(TOTAL STRESS-ITEMS 1-7) LOCATION 1 EVENT 1 LOAD 3
SX.SY.SZ 0.68269E-04 0.37878E-07 0.0000
SXY.SYZ.SXZ.TEMP 0.29Б13Е-16 O.OCOO 0.0000 0.0000
7 шаг. По условию задачи надо оценить поврежденность после ста циклов
нагружения. Поэтому число повторений события равно 100. Соответствующая
команда имеет вид
FE,1,100,1,
131
‘ шаг. Команда запуска процедуры расчета в модуле Fatigue в данном случае
имеет вид
FTCALC, ,171
Первый параметр пропущен, так как он задается, если расчет ведется для
точки, а не для узла.
Второй параметр появляется, только если расчет ведется для узлов, и опре-
деляет номер узла (в данном случае 171). Результаты работы данного модуля,
содержащие все амплитуды эквивалентных напряжений за историю нагружения,
выглядят следующим образом:
PERFORM FATIGUE CALCULATION AT LOCATION О NODE 171
— POST1 FATIGUE CALCULATION ***
LOCATION 1 NODE 171
mNOTE*" CP= 34.594 TIME= 22:02:17
No N values defined. Fatigue evaluation will not include usage
factors.
EVENT/LOADS 1 1 AND 1 2
PRODUCE ALTERNATING SI (SALT) = 0 20000E+09 WITH TEMP = 0.0000
EVENT/LOADS 1 2 AND 1 3
PRODUCE ALTERNATING SI (SALT) = 0.10000E+09 WITH TEMP = 0.0000
EVENT/LOADS 1 1 AND 1 3
PRODUCE ALTERNATING SI (SALT) = 0 10000E+09 WITH TEMP = 0.0000
9 шаг. Задание кривой усталости, данные для которой были взяты из таблица
1, было осуществлено следующим набором команд
FP,1,100,1000,10000,100000,1000000,10000000
FP,21,400e6,350e6,300e6,250e6,200e6,150e6
10 шаг. Команда та же, что и на 8 шаге. Приведем результаты вычислений:
PERFORM FATIGUE CALCULATION AT LOCATION 0 NODE 171
POST1 FATIGUE CALCULATION *”
LOCATION 1 NODE 171
EVENT/LOADS 1 1 AND 1 2
PRODUCE ALTERNATING SI (SALT) = 0.20000E+09 WITH TEMP = 0.0000
CYCLES USED/ALLOWED = 100.0 /0.9999Е+06 = PARTIAL USAGE = 0 0CC10
CUMULATIVE FATIGUE USAGE = 0 ОСОЮ
С учетом найденного значения повреждения, накопленного за 100 циклов на-
гружения, найдем число циклов до разрушения изучаемого элемента конструк-
ции. Найденное повреждение равнялось 0,0001 (см. результаты 10-го шага), тог
по формуле (20) число блоков данной длины составит 10000. С учетом того, что в
блоке 100 циклов, число циклов до разрушения будет равняться 1000000. Так как
в данном случае нагружение было регулярным, то можно оценить точность вы-
числений. Согласно результатам 8-го шага амплитуда, эквивалентного цикла на-
гружения равняется 200 МПа. С учетом данных табл. 1 полученная долговеч-
ность является правильной.
132
Пример 3. Дан стальной стержень круглого поперечного сечения, закреп-
енный одним концом. К другому концу элемента конструкции приложена осе-
1я сила F, изменяющаяся во времени нерегулярным образом. Кривая усталости
гали, из которой изготовлен стержень, задана в табличном виде (табл. 1). По
.зультатам оценки процесса нагружения было получено, что для нормальных
апряжений, возникающих в поперечных сечениях стержня, закон изменения во
эемени является блочным. В каждом блоке можно выделить три набора макси-
альных и минимальных значений напряжений, которые приведены в табл. 2.
звестно среднее по всему процессу нагружения число появлений этих наборов в
аждом блоке (также приведено в табл. 2). Данные наборы в блоке могут быть
еремешаны хаотично.
Таблица 2
Номер набора 1 2 3
^тах> МПа 200 600 400
G\ninj МПа -200 100 -100
Число повторений набора 10 1000 100
Оценить величину усталостного повреждения, возникающего за блок нагру-
. ения.
Решение. Перед началом решения необходимо сделать ремарку. При описа-
нии истории нагружения базовым является предположение о том, что наборы в
блоке перемешаны хаотически, так как если бы данного предположения не было,
• о наборы шли бы последовательно и используемая в модуле Fatigue процедура
схематизации процесса нагружения привела бы к ошибке17. В данном случае сле-
довало бы каждый набор рассмотреть с использованием указанного модуля са-
остоятельно и затем полученные повреждения суммировать вручную.
Каждый набор рассмотрим как отдельное событие. Так как событий больше
одного, то событие можно составить только из двух нагружений.
Проведем расчет оценки степени поврежденности, сохраняя порядок и номе-
а шагов из пункта 4.1.
1 шаг.
FTSIZE,5,10,3,
2 шаг. Из замечаний, приведенных выше, следует, что процесс накопления
ювреждений можно рассмотреть в одной точке. Остальные точки будут равно-
опасны. Соответствующая команда имеет вид
FL, ,1„„
3 шаг.
FS,l,l,l,l,-200e6„„„
FS,1,1,2,1,200000000,
FS,1,2,1,1,100000000,,,,,,
FS,1,2,2,1,600000000,,,,,,
FS,1,3,1,1,400000000,,,,,,
FS,1,3,2,1,-100000000,,,,,,
17 Подробнее данный вопрос будет разобран при анализе результатов оценки суммар-
ного усталостного повреждения за блок нагружения.
133
ш.17 Команда вывода всех компонент напряженного состояния для всех то
чек и х событий имеет вид
FSLIS Г. ALL,,, ALL,ALL,
Ре о тьтаты действия команды выглядят следующим образом:
'UST FATIGUE STRESSES FOR LOCATIONS 1 TO 5 IN STEPS OF
EVENTS 1 TO 10 - LOADS 1 TO 3
1
P0ST1 FATIGUE STRESSES
LOCATION 1 NODE
EVENT 1
(TOTAL STRESS - ITEMS 1-7) SX SY.SZ -0.20000Е-Й9 SXY.SYZ.SXZ.TEMP 0.0000 LOCATION 0.0000 0.0000 1 EVENT 0 0000 0.0000 1 LOAD 0.0000 1
(TOTAL STRESS - ITEMS 1-7) SX.SY.SZ 0 20000E+09 SXY.SYZ.SXZ.TEMP 0.0000 LOCATION 0.0000 0.0000 1 EVENT 0.0000 0.0000 1 LOAD 0 0000 2
EVENT 2
(TOTAL STRESS - ITEMS 1-7) SX.SY.SZ 0.10000E-HE SXY.SYZ.SXZ.TEMP 0.0000 LOCATION 0 0000 0.0000 1 EVENT 0.0000 0.0000 2 LOAD 0.0000 1
(TOTAL STRESS - ITEMS 1-7) SX.SY.SZ О.БООООЕ-ИВ SXY.SYZ.SXZ.TEMP 0.0000 LOCATION 0.0000 0.0000 1 EVENT O.OCOO 0 0000 2 LOAD 0.0000 2
EVENT 3
(TOTAL STRESS - ITEMS 1-7) SX.SY.SZ 0 40000Е-Л9 SXY.SYZ.SXZ.TEMP 0 0000 LOCATION 0.0000 0 0000 1 EVENT 0 0000 0.0000 3 LOAD 0.0000 1
7 шаг. По условию задачи надо оценить поврежденность за блок нагружения
Число повторений каждого набора, а следовательно, и соответствующих им со-
бытий приведено в таб. 2. Набор команд, устанавливающий свойства каждое
события, имеет вид
FE,1,10,1,
FE,2,1000,1,
FE,3,100,1,
8 шаг. Команда запуска процедуры расчета в модуле Fatigue в данном случ ..
имеет вид
FTCALC,1
Приведем результаты работы данного модуля, содержащие все амплитуд
эквивалентных напряжений за историю нагружения:
134
PERFORM FATIGUE CALCULATION AT LOCATION 1 NODE 0
" POST1 FATIGUE CALCULATION "
LOCATION 1 NODE 1
*** NOTE *** CP= 3.703 TIME= 14:46:31
No N values defined. Fatigue evaluation will not include usage
factors.
EVENT/LOADS 1 1 AND 2 2
PRODUCE ALTERNATING SI (SALT) = 0.40000E-f09 WITH TEMP = 0.0000
EVENT/LOADS 2 2 AND 3 2
PRODUCE ALTERNATING SI (SALT) = 0.35000E+09 WITH TEMP = 0.0000
EVENT/LOADS 1 1 AND 3 1
PRODUCE ALTERNATING SI (SALT) = 0.30000E+09 WITH TEMP = 0.0000
EVENT/LOADS 2 1 AND 2 2
PRODUCE ALTERNATING SI (SALT) = 0.25000Е-Ю9 WITH TEMP = 0 0000
EVENT/LOADS 3 1 AND 3 2
PRODUCE ALTERNATING SI (SALT) = 0.25000Е-Ю9 WITH TEMP = 0.0000
EVENT/LOADS 1 1 AND 1 2
PRODUCE ALTERNATING SI (SALT) = 0.20000Е-Ю9 WITH TEMP = 0.0000
EVENT/LOADS 1 2 AND 2 2
PRODUCE ALTERNATING SI (SALT) = 0.20000Е-Ю9 WITH TEMP = 0 0000
EVENT/LOADS 1 1 AND 2 1
PRODUCE ALTERNATING SI (SALT) = 0.15000Е-Ю9 WITH TEMP = 0.0000
EVENT/LOADS 2 1 ANO 3 1
PRODUCE ALTERNATING SI (SALT) = 0.15000E+09 WITH TEMP = 0.0000
EVENT/LOADS 1 2 AND 3 2
PRODUCE ALTERNATING SI (SALT) = 0.15000ЕД® WITH TEMP = 0.0000
EVENT/LOADS 1 2 AND 3 1
PRODUCE ALTERNATING SI (SALT) = 0.10000Е-Г09 WITH TEMP = 0.0000
EVENT/LOADS 2 2 AND 3 1
PRODUCE ALTERNATING SI (SALT) = 0.10000Е-Ю9 WITH TEMP = 0.0000
EVENT/LOADS 2 1 AND 3 2
PRODUCE ALTERNATING SI (SALT) = 0.10000Е-Ю9 WITH TEMP = 0.0000
EVENT/LOADS 1 2 AND 2 1
PRODUCE ALTERNATING SI (SALT) = 0.50000E+08 WITH TEMP = 0 0000
EVENT/LOADS 1 1 AND 3 2
PRODUCE ALTERNATING SI (SALT) = 0.50000Е-Ю8 WITH TEMP = 0 0000
9 шаг. Задание кривой усталости, данные для которой были взяты из табл. 1,
было осуществлено следующим набором команд
FP,1,100,1000,10000,100000,1000000,10000000
FP,21,400e6,350e6,300e6,250e6,200e6,150e6
10 шаг. Команда та же, что и на 8 шаге. Приведем результаты вычислений:
135
PERFORM FATIGUE CALCULATION AT LOCATION 1 NODE 0
*** POSH FATIGUE CALCULATION “
LOCATION 1 NODE I
EVENT/LOADS 1 1 AND 2 2
PRODUCE ALTERNATING SI (SALT) = 0 40000E-t09 WITH TEMP = 0.0000
CYCLES USED/ALLOWED = 10 00 / 100.0 = PARTIAL USAGE = 0 10000
EVENT/LOADS 2 2 AND 3 2
PRODUCE ALTERNATING SI (SALT) = 0 35QQ0E+O9 WITH TEMP = 0.0000
CYCLES USED/ALLOWED = 100.0 / 1000. = PARTIAL USAGE = 0.10000
EVENT/LOADS 2 1 AND 2 2
PRODUCE ALTERNATING SI (SALT) = 0.25000E-t09 WITH TEMP = 0.0000
CYCLES USED/ALLOWED = 690.0 / 0.1000Е-Ю6 = PARTIAL USAGE = 0 00890
CUMULATIVE FATIGUE USAGE = 0.20890
Согласно полученным данным, появился цикл с амплитудой 400 МПа, к
есть в данном случае рассмотрено смешение минимального значения из перво!.
набора и максимального значения из второго набора. Цикл с данной амплитуде!
повторяется 10 раз. Если же, как было указано выше, наборы в блоке шли после-
довательно, то такой цикл мог бы появиться только один раз. Поэтому при опи-
сании истории нагружения при работе в модуле Fatigue необходимо очень вни-
мательно относиться к первоначальной подготовке данных, так как в противно^
случае может оказаться, что система оценит повреждение не от реальной, a on
некоторой виртуальной системы нагружения.
На основании приведенного выше можно высказать две основные рекомен
дации:
• если нагружение является блочным и в пределах каждого блока есть неко
торые регулярные отрезки, то при расчете повреждения, вносимого блоком, не
эходимо каждый из этих регулярных отрезков рассмотреть по отдельное^
писывать одним событием, повторяющимся несколько раз, см. пример 1, 2), г
затем самостоятельно просуммировать вручную полученные повреждения;
• если нагружение является блочным и в пределах блока наборы пиковы?
значений параметров нагрузки расположены хаотично, то каждый набор пиковы?
значений можно рассмотреть в виде события, а все их вместе рассмотреть в мо
дуле Fatigue.
5. Контрольные вопросы
1. Элемент конструкции представляет собой вал, находящийся под дсйствисл
знакопеременного во времени крутящего момента, имеющего постоянную во време
ни скручивающую составляющую. Будет ли при оценке поврежденности данной
конструктивного элемента с использованием методики модуля Fatigue возникал
ошибка? Если да, то оцените ее величину.
2. Ответьте на предыдущий вопрос в предположении, что элемент конструкцш
нагружен симметричным циклом изгиба при постоянном кручении.
3. Влияет ли порядок приложения разных по величине эквивалентных амплиту
напряжений циклов нагружения на величину накопленного повреждения, если про
цесс накопления повреждений описывать формулой (19)?
4. Может ли для описания всей кривой Велера для цветных металлов, их сплаво!
и нержавеющих сталей применяться уравнение Басквина? Если да, то приведите спо
соб определения параметров данного уравнения на основе кривой усталости.
5. При каких условиях, накладываемых на процесс нагружения, корректна мето
136
дика схематизации процесса нагружения, используемая в модуле Fatigue и описанная
в пункте 2.2?
6. В предположении, что зависимость Сайнса полностью адекватна эксперимен-
1альным данным, проверьте - присутствует или нет погрешность при вычислении
повреждения в примере 3. Если присутствует, то оцените ее величину.
6. Контрольное задание
1. Дан стальной стрежень круглого поперечного сечения площадью А = 1 -10-4 м2.
Один торец стержня закреплен. К другому концу стержня приложена осевая сила F,
изменяющаяся во времени по синусоидальному закону F = Fm + F„sin го/ с амплиту-
дой Fa = 50 кН и средним усилием Fm = 5 кН. Определить усталостное повреждение,
накопленное в стержне в ходе десяти циклов нагружения. Диаграмма усталости пред-
ставлена в виде таблицы (табл. 3).
Таблица 3
N 100 1000 10000 100000 1000000 10000000
МПа 450 400 350 300 250 200
2. Решить предыдущую задачу с учетом масштабного эффекта: учесть, что дан-
ные в табл. 3 получены для образцов диаметром 5 мм.
3. Решить задачу 1 в предположении, что в стержне сделана круговая выточка
радиусом 1 мм и глубиной 1 мм.
4. Оценить число блоков нагружения, которое стержень из примера 3 выдержит
до разрушения, с учетом предположения, что наборы в блоках идут последовательно.
5. Решить пример 3 с учетом предположения, что поверхность стержня получена
в результате точения, а образцы, которые были использованы при получении данных
в табл. 1, имели полированную поверхность. Предел прочности стали <т/; = 600 МПа.
6. Дана стальная пластина с круглым вырезом. Длина пластины I = 0,5 м, шири-
на b = 0,05 м, толщина h = 0,001 м, диаметр отверстия d. = 0,02 м. Один торец пла-
стины жестко закреплен. К другому торцу приложена изменяющаяся во времени по
синусоидальному закону сила F = Fnsin го/ с амплитудой Fa = 10 кН. Поверхность
образца получена путем фрезерования. Предел прочности стали св = 600 МПа. Диа-
грамма усталости стали представлена в табл. 3. Образцы, которые были использова-
ны при получении данных в табл. 3, имели полированную поверхность. Оценить чис-
ло циклов до разрушения пластины.
7. Литература
1. Морозов Е.М., Никишков Г.П. Метод конечных элементов в механи-
ке разрушения. - М.: Наука, 1980. - 256 с.
2. Карзов Г.П., Марголин Б.З., Швецова В.А. Физико-механическое
моделирование процессов разрушения - СПб.: Политехника, 1993. - 391 с.
3. ANSYS theoretical manual.
4. О zen М. Analysis of interfacial cracks in ANSYS // Proceedings ANSYS Confer-
ence 2000. — 2000.
5. Sharma V.B., Sardana В. Elimination of bandage roll failures of roller press
at cement plant // Proceedings ANSYS Conference 2000. — 2000.
6. Peters M., Hoppe U., Hackl K. Simulation of crack-propagation using
embedded discontinuities // Proceedings of the Second international conference Lifetime-
oriented design concepts. Bochum, Germany, 1-3 March 2004. Bochum, 2004. - P. 141-
147.
7. Форрест П. Усталость металлов. - M.: Машиностроение, 1968.-352 с.
137
8. Иванова В.С., Терентьев В.Ф. Природа усталости металлов. — MJ
Металлургия, 1975. - 456 с.
9. Когаев В.П. Расчеты на прочность при напряжениях, переменных во вре-
мени. - М.: Машиностроение, 1993. - 364 с.
10. Павлов П.А. Основы инженерных расчетов элементов машин на уста-
лость и длительную прочность. - Л.: Машиностроение, 1988. - 321 с.
11. Болотин В.В. Прогнозирование ресурса машин и конструкций. - М.: MaJ
шиностроение, 1984. - 312 с.
12. Failure of Materials Under Combined Repeated Stresses with Superimposed
Stresses: Tech. Note / NACA; G. Sines - 3495. — Lengley, 1955. - 23 p.
13. Когаев В.П., Махутов H.A., Гусенков А.П. Расчеты деталей
машин и конструкций на прочность и долговечность. — М.: Машиностроение, 1985.
563 с.
14. Сопротивление усталости металлов и сплавов / В.Т. Трощенко, Л.А.
Сосновский. - Киев: Наукова думка, 1987. Ч. 1.-520 с.
15. Трощенко В.Т. Деформирование и разрушение металлов при многоцик-
ловом нагружении. - Киев: Наукова думка, 1981. - 344 с.
138
ГИДРОГАЗОДИНАМИЧЕСКИЕ ЗАДАЧИ
В.В. Шабаров
Введение
В настоящее время в гидродинамике значительно возрос интерес к числен-
btv методикам, позволяющим напрямую получать решения общих уравнений
Ь амики вязкой жидкости, в том числе с учетом сжимаемости и турбулентного
t актера течения. Реализация таких методик граничит с проведением вычисли-
тельного эксперимента.
По сравнению с физическим вычислительный эксперимент экономически
Ь щественно дешевле, а в ряде случаев, когда физический эксперимент трудно-
.. ществим из-за сложностей режимов течения, является единственным инстру-
ментом исследования.
Становление вычислительной гидродинамики происходило на основе суще-
р иовавшей в 60-е годы прошлого века сравнительно небольшой группы методов,
оеющих в основе конечно-разностную аппроксимацию. Указанные методы при-
менялись для решения так называемых укороченных уравнений динамики жид-
кти.
В последующие десятилетия развитие осуществлялось в направлении расши-
рения и углубления гидродинамического описания явлений с привлечением бо-
ре полных уравнений, использованием для их решения не только конечно-
; ностных, но и интегральных методов невязок. В эти годы отрабатываются
«“оатегия и тактика численного решения нелинейных систем транспортных
равнений: использование псевдостационарных подходов для решения стацио-
нарных задач; практическое применение и совершенствование методов расщеп-
ления как по физическим зависимым переменным (проекционные методы), так и
) пространственным независимым (методы ADI); разработка и применение
. гем «против потока» с целью обеспечения устойчивости численного счета;
эимснение разнесенных сеток для уменьшения пространственных флюктуаций
1вления; оптимизация этапов глобальной итерации на основе раздельного ре-
ения системы уравнений для каждой зависимой переменной (использование
параллельных вычислений на многопроцессорных системах).
Разработка и совершенствование прикладной методологии, а также прогресс
а вычислительной технике вели к повышению эффективности алгоритмов и рас-
ширению класса решаемых задач.
Все эти факторы позволили в конце 80-х годов прошлого столетия создать
первые прикладные гидрогазодинамические пакеты, основанные на прямом ре-
шении общих уравнений динамики вязкой жидкости.
Стратегия этих пакетов такова, что позволяет на базе заложенных и перечис-
ленных выше фундаментальных идей развивать и наращивать эти пакеты как в
плане гидрогазодинамики (включение, например, в пакет новой модели турбу-
лентности не меняет его идеологию), так и в математическом плане (улучшение
консервативности и устойчивости) и в части сервиса.
Возможности наиболее мощных в настоящее время коммерческих систем
(ANSYS CFX, ANSYS/FLOTRAN, STAR CD) таковы, что позволяют, в принци-
пе, решать разнообразные задачи гидрогазодинамики вязкой жидкости, а именно:
ламинарные и турбулентные течения сжимаемых и несжимаемых потоков, в том
числе с различными видами теплообмена, моделировать течение сред с поверх-
139
ностями раздела, моделировать течения гетерогенных и неньютоновых сред,
следовать течения с физико-химическими превращениями и т.д.
Ниже рассмотрен ряд задач, решаемых с использованием сиси
ANSYS/FLOTRAN. Задачи расположены в порядке возрастания сложности,
мимо достаточно подробного описания различных этапов решения даются анз
полученных результатов, комментарии ряда аспектов методологии, рсализо<
ной в системе ANSYS/FLOTRAN.
1. СИММЕТРИЧНОЕ ОБТЕКАНИЕ УСТУПА
ПОТОКОМ ВЯЗКОЙ НЕСЖИМАЕМОЙ ЖИДКОСТИ
1.1. Постановка задачи
1.2. Решение задачи
1.3. Постпроцессорная обработка результатов
1.3.1. Построение векторного поля скоростей
1.3.2. Построение скалярных полей
1.3.3. Построение и отображение линий тока
1.3.4. Оперативный запрос численных результатов в узлах
1.3.5. Построение графиков по заданному маршруту
1.3.6. Анимация
1.4. Выход из системы
1.5. Замечания
1.6. Литература
1.1. Постановка задачи
На рис. 1.1 показано продольное сечение симметричного расширяющей
канала. Геометрия продольного сечения задается характерными точками А, В,
F. К, L, ALKF - твердая стенка.
Рис. 1.1
На вход канала ABAt при стандартных атмосферных условиях подается вс
дух со скоростью Vx =10 м/с, Vy = 0 м/с. Среда предполагается несжимаемой, р
жим течения - турбулентным, массовыми силами пренебрегаем.
При использовании к-в-модели турбулентности математическая модель т
чения среды имеет вид:
а(р^) , ^(р^) ; 0
сх 8у
(1-1
140
др д
/-(Р^Л) +/-(PVxVy) = -^ Ре~
эк?
дх ,
дх
дх дх
ду
-^(рУхУу) + ^-(рУуУу) = -^ + ^-[ре^-
дх ду ду дх\ дх
эк
>
ду)
' эк?
д
+ ду
+ ^-| Ре-7Г
ду\ Г
ду )
(1-2)
L/ 5
рг ду
?-(рКхЕ)+-^-(рК е)=-^-
ду дхСие дх
Эк
Эк
(Р)/хк)+^—(Р^к) = т- И,— +— Ц/Т“ +Ц/Ф-РЕ,
z-} ” н* I Су
ц, Эе
дх
дх ) ду
ц, Эе
дДаг ду)
к2
Не=Н+М„ М,=Ср—
Е
2 П-3)
Е Е
+С1сН,-Ф-С2р—,
к к
дУх
дх
dVy]
дК
ду
д
д
д
д
д
2
6 = 2
2^ дх ду
ie р - заданная плотность воздуха (р = const), V„ Vy- проекции вектора скоро-
ги жидкости, р - давление в жидкости, р - заданная физическая (ламинарная)
Ьйзкость (ц =const), pt - турбулентная (вихревая) вязкость, ра — эффективная вяз-
I #сть, к - кинетическая энергия турбулентности, отнесенная к единице массы
идкости, е - скорость диссипации в тепло кинетической энергии турбулентно-
сти в единице объема жидкости, Cfl, С1с, С2, о£ - эмпирические константы к-е-
ыодели, = 0,09, С1с= 1,44, С2 = 1,92, <тс= 1,3.
Уравнения неразрывности (1.1), движения (1.2) и уравнения к-е-модели (1.3)
«писаны в консервативном виде; неизвестными являются функции Vx, Vy,p, к
US-
Граничными условиями для системы транспортных уравнений (1.1)—(1.3) яв-
ляются
- условия на входе Vx= 10 м/с, Vy = 0 м/с на АВ;
- условия симметрии Vy = 0 м/с на BCD;
- условия прилипания Vx= 0 м/с, Vy = 0 м/с на ALKF;
- условия на выходной 1ранице1 2/> = 0 Н/м2 на DEF.
1.2. Решение задачи
Шаг 1. Определение директории, имени задачи и выбор пакета программ.
После создания директории, где будут размещаться все файлы задачи, вы-
полняются действия:
ANSYS INTERACTIVE > C/YSTYP, и в окне Initial jobname набирается имя за-
дачи. Далее Run, входим в ANSYS.
1 О граничных условиях для кие см. 1.5. Замечания.
2 В рассматриваемой задаче возможна другая форма условия на выходной границе (см.
1.5. Замечания).
141
Main Menu > Preference. Возникает диалоговая панель Preference for GUI Fil-
tering, в которой с помощью курсора и левой кнопки мыши активизируем пакет
программ гидрогазодинамики FLOTRAN CFD. Затем ОК.
Шаг 2. Определение типа конечного элемента.
Main Menu > Preprocessor > Element Type > Add!Edit!Delete. В появившемся
окне Element Types нажимается кнопка A dd, и в диалоговой панели Library of Ele-
ment Types выбирается элемент ID FLOTRAN 141. Далее OK и Close.
Дополнение. Элемент FLOTRAN 141 используется для решения 2В-задач. По
умолчанию считается, что задача плоская, а система координат — декартова. Для
решения плоских задач в полярной системе координат или осесимметричных
задач следует использовать в окне Element Types кнопку OPTIONS и выбрать в
окне Element coordinate system соответствующую систему координат. Все даль-
нейшее решение задачи будет происходить в выбранной системе. При геометри-
ческом моделировании следует иметь в виду, что радиальная координата должна
принимать только неотрицательные значения.
Шаг 3. Создание расчетной области.
Подшаг 3.1. Ввод характерных точек.
Main Menu > Preprocessor > Modeling > Create > Keypoints > In Active CS.
В выпадающей таблице Create Keypoints In Active Coordinate Systems последова-
тельно вводятся номера и координаты (в метрах) точек А, В, С, D, Е, F. К, L:
(т. A) №1 x= 1 y= i Apply,
(t.B) №2 x= 1 У =1,5 Apply,
(t.Q №3 x = 2 У =1,5 Apply.
(t.D) №4 x = 9 У= 1,5 Apply,
(t.£) №5 x = 9 y= 1 Apply,
(t.B) №6 x=9 У =0,9 Apply,
(t.K) №7 x= 2 У =0,9 Apply,
(t.Z.) №8 x = 2 У = 1 OK.
Отображаем на экран номера точек:
Utility Menu >Plot Ctrls > Numbering > Keypoints number,
Utility Menu >Plot/Keypoints.
Подшаг 3.2. Создание и отрисовка линий.
Main Menu > Preprocessor > Modeling > Create >Lines!Lines/Straight Line. Ле-
вой кнопкой мыши последовательно отмечаем т. №1 (начало создаваемой пря-
мой линии) и т. №2 (конец линии), т. №8 и т. №3, т. №5 и т. №4, далее т. №1 и т.
№8, т. № 2 и т. №3; затем т. №3 и т. №4, т. №8 и т. №5, т. №7 и т. №6 и, наконец,
т. №7 и т. №8, т. №6 и т. №5. Закрываем окно Create Straight Lines, OK.
Указанная последовательность начала и конца каждой линии связана с удоб-
ством дальнейших действий по построению упорядоченной неоднородной сетки.
Отображаем на экран номера линий:
Utility Menu > Plot Ctrls > Numbering > Line number, Utility Menu > Plot/Lines.
Подшаг 3.3. Создание и отрисовка площадей.
Main Menu > Preprocessor > Modeling > Create >Areas/Arbitrary/By lines. Ле-
вой кнопкой мыши в произвольном порядке указываем линии №№ 1, 2, 3, 4; да-
лее Apply - создана площадь № 1, ограниченная прямыми №№ 1, 2, 3,4.
Аналогично создаем площадь №2, ограниченную линиями №№ 2, 5, 7, 6, и
площадь №3 (границы - прямые №№ 6, 10, 8, 9). Закрываем окно Create Area b)
Lines - OK.
142
Расчетная область создана.
Шаг 4. Построение конечно-элементной сетки.
Перед построением сетки отобразим линии и их номера на экране: Utility
Ы > Plot С tris > Numbering >Line number, Utility Menu >Plot/Lines.
Далее проводим разбиения этих линий.
Main Menu > Preprocessor > Meshing/Size Ctrls/ManualSize/Lines/Picked Lines.
Левой кнопкой мыши отмечаем линии №№ 1, 2, 7; нажимаем ОК в окне
merit Sizes и в появившейся на экране таблице в строке NDIV No.Of element
tdons вводим число делений указанных линий: 10. В строку SPACE spacing
вводим число, характеризующее неравномерность разбиений указанных
ши: 10, ОК.
Дополнение. Величина SPACE определяет степень и направление сгущения
ек, которыми делится указанная линия (линии). По умолчанию разбиение ли-
I равномерное (SPACE = 1). Если SPACE > 1, то точки, которыми разбивается
ния, сгущаются к ее началу; если же 0 < SPACE < 1, то точки сгущаются к кон-
линии. Если (-1) < SPACE < 0, то сгущение точек задается к середине линии,
м SPACE < (-1) точки одинаково сгущаются как к началу, так и к концу линии.
Разбиваем точками линии №№ 5, 6, 8: Picked Lines => NDIV = 80, SPACE = 10,
С Линии №№ 3, 4, разбиваются точками с NDIV = 10, SPACE = 0,1, ОК; линии
9 и № 10 - NDIV= 10, SPACE = 1 (равномерно), OK.
Строим упорядоченную конечно-элементную сетку:
Main Menu > Preprocessor > Meshing/Mesh/Areas/Mapped/3 or 4 sided.
В появившемся окне Mesh Areas нажимаем кнопку Pick All (для всех площа-
й). На экране отображается построенная сетка, фрагмент которой в области
тупа приведен на рис. 1.2.
Рис. 1.2
Расчетная область разбита на 1700 элементов, общее количество узлов 1811
(см. Utility Menu >List/Elements/Nodes+Attributes, а также List/Nodes).
Шаг 5. Задание модели течения жидкости.
Main Menu > Preprocessor >Flotran Set Up/Solution Options. В диалоговой па-
143
нели Flotran Solution Options выбираются опции: Steady State (стационарное те-
чение), Adiabatic (течение с постоянной полной энтальпией), Turbulent (режи
течения турбулентный), Incompressible (жидкость несжимаема).
Шаг 6. Выбор алгоритма решения.
Main Menu > Preprocessor >Flotran Set Up/Algorithm Ctrl. В диалоговой пане-
ли Algorithm Control выбираем алгоритм Simplen. Алгоритм Simplen реализует
проекционный метод [2] решения уравнений динамики жидкости в варианте,
разработанном группой Патанкара, и обладает улучшенными показателями схо-
димости по сравнению с другими вариантами алгоритмов семейства Simple [1].
Шаг 7. Управление прерыванием задачи, выводом результатов на экран и в
выходной (.rfl) файл.
Main Menu > Preprocessor >Flotran Set Up/Execution Ctrl. В открывшейся
диалоговой панели Steady State Control Setting следует назначить: число глобаль-
ных итераций ЕХЕС= 1000; число итераций, через которое пополняется выход-
ной файл, SUMF = 50. При необходимости в этой диалоговой панели можно за-
дать дополнительные критерии прерывания. В решаемой задаче 5 неизвестных
функций: Vx, Vy, р,к и е. Если в ходе решения для всех этих функций будут вы-
полнены условия
-iJ—„-------Тегтч, (1.4)
zki
1=1
то решение задачи будет остановлено. В условиях (1.4): N - общее число узлов,
<р={Кх, Еу, р, к, е }, Тегтч - задаваемая в соответствующих строках таблицы
Termination Criteria панели Steady State Control Setting точность решения задачи
ю каждой искомой функции.
Шаг 8. Задание свойств жидкости.
Main Menu > Preprocessor >Flotran Set Up/Fluid Properties. В соответствии с
поставленной задачей физические свойства воздуха считаем неизменными; со-
глашаемся с предложенными по умолчанию условиями таблицы Fluid Properties.
ОК. Вводим в соответствующих колонках появившегося диалогового окна зна-
чение плотности воздуха (density) р = 1,225 кг/м3 и динамической вязкости
(viscosity) ц = 0,0000181 Н-с/м2.
Дополнение. Как известно [3], при решении задач динамики сжимаемой жид-
кости плотность (density), динамическая вязкость (viscosity), теплопроводность
(conductivity), удельная теплоемкость при постоянном давлении (specific heat)
являются функциями координат, времени, температуры, и вообще говоря, давле-
ния. Вместе с тем в модуле ANSYS/FLOTRAN возможно задание этих величин в
функции от температуры при решении задач динамики несжимаемой жидкости.
Для того чтобы учесть изменение физических свойств жидкости (или некоторых
ее свойств), следует в полях Allow density (viscosity,...) поставить флажок Yes.
Поскольку задачи в блоке FLOTRAN решаются в терминах избыточного давле-
ния, необходимо при этом задать базовое (ref) состояние жидкой среды в меню
Flotran Set Up/Flow Environment/Ref conditions.
Шаг 9. Задание граничных условий.
Main Menu > Preprocessor >Loads/Define Loads/ Apply/Fluid CFD/l 'elocity/ On
lines. Левой кнопкой мыши указываем входную границу - линию №1, ОК. В диа-
144
говом окне вводим Vx = 10, Vy = 0. В поле Apply to endpoints ставим Yes - ука-
зные значения скорости приложены и в границах линии, ОК. Граничные усло-
1я на линии №1 заданы.
Аналогично задаем условия прилипания на линиях №№ 4, 8, 9 (твердая стен-
0: On lines... Vx= 0, Vy = 0, Yes, OK и условия симметрии на линиях № 5 и № 6:
л lines... Vy = 0, Yes, ОК. При задании условий симметрии поле для Vx оставля-
л свободным - значения горизонтальной составляющей скорости на этой линии
.дут определяться решением задачи.
Задаем граничное условие на выходной границе: ... Fluid CFD/Pressure
F/On Lines и с помощью левой кнопки мыши указываем линии №№ 3, 10 -
гходную границу расчетной области, ОК. В появившемся диалоговом окне
>lly Pres on lines в поле Pres Pressure Value вводим 0 (избыточное давление на
1ходной границе равно 0), далее ОК.
Граничные условия для неизвестных функций к-е-модсли по умолчанию
армируются автоматически.
Шаг 10. Решение.
Препроцессорная подготовка к решению задачи завершена, и можно начи-
пъ решение: Main Menu > Solution > Run Flotran. Процесс решения задачи ото-
эажастся в окне вывода ANSYS.
Дополнение. Следует иметь в виду, что стационарные задачи решаются в
есвдонестационарной постановке: каждому расчетному моменту времени соот-
ветствует номер
шага глобальной
итерации, указываемый
в окне вывода. Если
заданная точность задачи не будет достигнута за установленное в задании число
глобальных итераций ЕХЕС (см. шаг 7), то можно продолжить счет командой
Run Flotran', при этом результаты решения предшествующего задания будут на-
чальными условиями (в статической интерпретации - начальным приближением)
последующего задания.
1.3. Постпроцессорная обработка результатов
Выполнение следующей команды обязательно для отображения результатов
расчета: Main Menu > General Postproc > Read Results/Last Set. По прохождении
этой команды пользователь получает доступ к результатам расчетов, получен-
ным на последнем шаге (Last Set) итеративной процедуры.
Дальнейшие действия в постпроцессорной обработке могут быть различны-
ми. Укажем наиболее типичные из них.
1.3.1. Построение векторного поля скоростей. General Postproc > Plot Re-
sults/Vector Plot/Predefended. После OK в графическом окне ANSYS появляется
векторное поле скоростей. Пользователь имеет возможность представить в гра-
фическом окне интересующий его фрагмент расчетной области с увеличенным
масштабом поля скоростей (команды Utility Menu >Plot Ctrls > Ran Zoom
Rotate/Box Zoom, и указать мышью, не отпуская ее левой кнопки, нужный фраг-
мент области). Векторное поле скоростей в области уступа показано на рис. 1.3.
145
1.3.2. Построение скалярных полей. General Postproc > Plot Results/ Con-
tour Plot/Nodal Solutions. Эта команда позволяет в скалярном виде отображать
поля скоростей, давлений, температур, плотностей и т. д. Например, при скаляр-
ном отображении поля скоростей нужно в открывшемся каскадированном меню
Item to be contoured указать сначала Dof Solution, а затем VSUM. После OK в гра-
фическом окне появится поле скоростей, фрагмент которого показан на рис. 1.4.
Рис. 1.4
В строке Dof Solution содержатся те функции, в терминах которых решается по-
ставленная задача гидродинамики (в рассматриваемом случае Vx, Vy , р, к, с), а
также VSUM=у/кх +V?. Другие функции, которые могут быть найдены про-
146
.im пересчетом из полученного решения, содержатся в строке Other Quantities
|ример, /ле).
1.3.3. Построение и отображение линий тока. General Postproc >Plot Re-
ts/Flow Trace. Это меню позволяет построить и отобразить линии тока, прохо-
жие через заданные точки расчетной области. С помощью команды Plot
ults/Defi Trace Pt в диалоговом окне вводятся абсциссы и, через запятую, ор-
наты точек, через которые будут проходить линии тока. После ввода коорди-
каждой точки - Apply, затем ввод координат следующей точки и т.д., ОК.
nee Plot Results/Plot Flow Тга, и в графическом окне будут отображены линии
ка.
На рис. 1.5 показаны линии тока, проходящие через точки с абсциссами х,- =
2,25 и ординатами у,- = 0,92 + 0,02(z - 1), i = 1,18.
Рис. 1.5
1.3.4. Оперативный запрос численных результатов в узлах. Командой
General Postproc > Query Results/Subgrid Solution открываем окно Query Subgrid
Solution Data и выбираем идентификатор интересующей переменной, ОК. Курсо-
ром указываем узел и нажимаем левую кнопку мыши: на экране высвечивается
численное значение указанной переменной в этом узле.
1.3.5. Построение графиков по заданному маршруту. Командой General
Postproc >Path operations/Define Path/By Location открывается диалоговая панель
By Locations, в которой следует указать:
- имя файла, в который будут отбираться (при необходимости с интерполя-
цией) результаты расчетов, соответствующие заданному на плоскости (в про-
странстве) маршруту (ломаная линия);
- количество точек ломаной маршрута;
- количество выводимых величин;
147
- количество интервалов, на которые делится маршрут.
После заполнения диалоговой панели By Locations - ОК, и открывается па-
нель By Locations in Global Cartesian, в окна которой последовательно вводятся
номер точки маршрута и координаты этой точки. Идентификатор системы коор-
динат - CS (CS = 0 для декартовой системы координат, CS = 1 для цилиндриче-1
ской системы с осью Z, CS= 2 для сферической системы, CS= 5 для цилиндри-1
ческой системы координат с осью У)- Затем ОК, вновь открывается панель Д
Locations in Global Cartesian, и вводятся номер и координаты следующей точки.
Дополнение. Маршрут можно также создать с использованием окна By Nodes
{Define Path/By Nodes) и курсора; кроме того - совместным использованием
Utility Menu > Select и меню By Locations.
После создания маршрута командой Path operations!Map onto Path открываем
окно MapResult Items onto Path и указываем идентификатор выводимой на график!
величины (например, давления — Pres). Командой Path Operations/Plot Path Items
On Graph открываем окно Plot of Path Items и указываем выводимую величину
(Pres), ОК. На экране возникает зависимость выводимой величины от расстояния
(DIST) вдоль маршрута. На рис. 1.6 показана зависимость давления вдоль мар-
шрута, определяемого точками (2.25,0.9), (2.25,1.5).
При необходимости зависимость p(DIST) может быть сохранена в графиче-
ском виде (Utility Menu >Plot Ctrls/Hard Copy/To file) или в файле в табличном
виде (Path Operations/Plot Path Items/List path Items/Save as (имя файла)).
1.3.6. Анимация. Система ANSYS обладает анимационными возможностями.
Для создания анимационной картины движения частиц жидкости вдоль линий
тока, используем Utility Menu > Plot Ctrls/Animate/Particle Flow. В открывшейся
диалоговой панели: No. of frames to create — количество кадров, из которых со-
стоит анимационная картина; Time delay - время задержки между кадрами в про-
цессе анимации; Particle Spacing factor - опция, используемая для определения
расстояния между соседними частицами на линии тока (чем меньше эта величи-
на, тем больше частиц); Particle Size factor — поперечный размер частиц на экране
(если 0, то вместо частиц будет линия); Particle Length fraction - переменная, ис-
пользуемая для определения доли линии тока, занимаемой частицами (чем
меньше эта величина, тем при прочих равных условиях меньше продольный раз-
148
р частиц на экране); Mxloop Max number of loops — целая величина, ограничи-
ощая при визуализации число оборотов частиц вокруг ядер вихрей (использу-
:я для удобства визуализации в районе ядра вихря); Item to be contoured along
се - указатель функции (Их, Vy, p, pe и т.д.), численные значения которой ви-
глизируются цветами вдоль линии тока.
После ОК создается анимационная картина, затем появляется управляющее
но Animation и воспроизводится «мультфильм».
1.4. Выход из системы
Выход из системы ANSYS производится командой Utility Menu >File >Exit.
открывшейся диалоговой панели пользователю предоставляется несколько воз-
>жностей выхода из программы.
Если будет выбрана опция Save Geom + Loads, то после выхода будут сохра-
нны геометрия расчетной области, конечно-элементная модель и граничные ус-
овия. Если выбрана опция Save Geom +Ld + Solu, то будут сохранены и резуль-
лы решения. При выборе Save Everything будет сохранено все, включая резуль-
ггы постпроцессорной обработки результатов расчета. Наконец, опция Quit-No
ave! обеспечивает выход из программы без сохранения каких-либо результатов,
ем не менее в рабочей директории будут сохранены логический файл, файл
шибок и т. д. Если эти файлы в дальнейшем не понадобятся, то их лучше уда-
ить.
1.5. Замечания
Ниже, на примере разобранной задачи, рассмотрены некоторые аспекты ре-
шения задач гидрогазодинамики с использованием современных программных
комплексов CFD (ANSYS/Flotran, STAR-CD, CFX, TASKFLOW и т.д.).
Замечание 1. Решение задач внешней гидрогазодинамики в пакетах CFD
осуществляется в конечной области. Местоположение дальних границ (линий
АВ, DF в задаче об уступе) должно выбираться таким образом, чтобы выставляе-
мые на них граничные условия максимально возможно соответствовали реаль-
ному течению вдали от источников возмущений. В рассмотренной задаче воз-
мущения, вносимые уступом в поток, переносятся вниз по течению и диссипи-
руют, поэтому с известной долей приближения можно считать, что на границе
DEF давления восстанавливаются (р = const). Возможен и другой вариант зада-
ния граничных условий на DEF. 8р/дх = (А (естественное условие Неймана).
Однако поскольку задачи динамики несжимаемой жидкости решаются в
ANSYS/Flotran по алгоритмам задач динамики сжимаемой жидкости с весьма
большой величиной скорости распространения возмущений (по умолчанию с ~
~ 3-107 м/с), то в одной из точек границы DEF следует задать величину реперно-
го давления (р = 0).
В любом случае соответствие положения удаленных границ выставляемым
на них граничным условиям должно контролироваться численно: удаление гра-
ниц от тела не должно приводить к изменению решения. Гак, в рассматриваемой
задаче увеличение продольного размера расчетной области в два раза переносом
границы DEF по х приводит к изменению скоростей в области уступа не более
чем на 0,5%. Неплохим оперативным контролем положения удаленной границы
DEF является смена на ней граничного условия р = 0 на естественное условие
Неймана с реперной точкой с последующим сопоставлением результатов реше-
149
ния. Такой подход не требует дополнительных компьютерных ресурсов и мож
указать на неудачное (слишком близкое) расположение выходной границы.
Замечание 2. Решение задач в пакетах CFD проводится сеточными метод;
ми:
результат решения
в значительной степени зависит от качества сетки
и раз-
меров ее элементов. Известно [1], что предпочтительнее использовать се'
близкие к ортогональным, сгущая их к местам предполагаемого резкого измене
ния решения. По возможности следует исследовать влияние измельчания сет
на результат решения. На рис. 1.7-1.9 показаны результаты расчета распредел<
ния соответственно горизонтальной, вертикальной составляющих скорости
давления в сечении х — 2,25 м при сетках одинаковой топологии (NDIV - сетг д!
разобранной выше задачи, 4-NDIV - сетка, у которой разбиения всех линий в 4
раза больше, чем в сетке NDIV).
1 —NDIV, 2 — 4 • NDIV
Рис. 1.7
Замечание 3. Большинство важных для практики задач связано с необходи-
мостью расчета течений при больших числах Рейнольдса, т.е. расчета турбулент-
ных течений. В задаче об уступе режим течения изначально считался турбулент-
ным1; для замыкания осредненных уравнений движения привлекалась к-а-модель
турбулентности.
Все существующие модели турбулентности, в том числе и к-а-модель, дают
неточные представления о внутренних физических явлениях. Это общепризнан-
ный факт [4], который, тем не менее, заслуживает упоминания.
1 Можно провести численный эксперимент: попробовать решить рассмотренную выше
задачу в предположении ламинарного режима течения. Для этого в меню Flotran Solution
Options (см. шаг 5 п. 1.2) следует выбрать опцию Laminar и, далее, запустить задачу на
счет. Задание не будет выполнено - итеративная процедура окажется расходящейся.
Этот результат не противоречит тезису о неустойчивости (нереализуемости) ламинарных
режимов течения при больших числах Рейнольдса
150
Рис. 1.8
1 —NDIV, 2 —4 • NDIV
Рис. 1.9
Версии системы ANSYS предоставляют пользователю возможность выбрать
модель турбулентности из ряда моделей. В версиях ANSYS 6.0. ..7.1 предлагают-
ся алгебраическая модель турбулентности (Zero Equation) и различные варианты
полуэмпирической к-Е-модели, каждый из которых включает в себя уравнения пе-
реноса для кинетической энергии турбулентности к и ее скорости диссипации е.
151
Алгебраическая модель турбулентности является наиболее экономичной^
достоинством этой модели является ее надежность при расчетах течений в по-
граничных слоях. Однако в более сложных течениях, где существенен конвек-
тивный перенос турбулентности (например, взаимодействие вихревых потоков а
обтекаемыми телами), алгебраическая модель далеко не в полной мере учитывав!
конкретные особенности течений.
Модели к-е, базирующиеся на гипотезе Колмогорова-Прандля [4], являютс»
более строгими. Вместе с тем их главным недостатком является предположение
об изотропности турбулентной вязкости, что, по крайней мере, несправедлива
вблизи твердых границ потока. Поэтому вблизи твердых границ вводятся специ-
альные пристенные функции, в которых обычно предполагают подчинение тан-
генциальной составляющей скорости в направлении нормали закону «стенки-
[5]; предполагается также, что в области действия закона «стенки» генерации
турбулентной кинетической энергии равна ее диссипации.
В качестве иллюстрации на рис. 1.10 приведено распределение эффективн<
вязкости в сечении х = 2,25 м с использованием алгебраической и к-е моде-
лей турбулентности.
«—* к-е-модель
«--<> алгебраическая модель,
Рис. 1.10
Характеристики пристеночного слоя и турбулентности набегающего потока
(свободной турбулентности) устанавливаются, соответственно, в меню Ргергос-
essor(Solution)/Flotran Set Up/Turbulence/Wall Parameters и Flotran Set Up / Turbu-
lence/Turbulence Parameters (подробнее см. [5,7,8]).
В системе ANSYS/Flotran предлагаются следующие альтернативы вариантов
к-Е-моделей:
- стандартная к-Е-модель (предполагается универсальное применение);
- RNG-модель или к-Е-модель для «ренормализованной» группы (теоретиче-
ски модель более точна в областях с возвратно-циркуляционным течением);
- NKE-модель (считается, что эту модель предпочтительнее использовать
152
для моделирования турбулентности во вращающихся потоках);
- GIR-модель (предполагается использовать при расчете взаимодействия
вихревых потоков с обтекаемыми телами, вторичном вихреобразовании и разру-
шении вихрей);
- SZL-модель (рекомендуется использовать в потоках с большим градиентом
скоростей, для моделирования предотрывных и отрывных течений).
В последних версиях системы ANSYS/Flotran дополнительно введены к-со-
модель Уилкокса и K-co-SST-модель Ментора. В работе [6] было проведено под-
робное тестирование этих и ряда других моделей для 10 различных типов тече-
ния, включающих как простые сдвиговые течения, так и сложные отрывные те-
чения с учетом сжимаемости. По результатам тестирования к-со-модель показала
более качественные результаты в сравнении с к-в-моделью Лаундера-Шарма, но
только в пристеночной области. Модель к-co-SST является комбинацией к-со-
модели (более точное описание течений вблизи стенок) и к-Е-модели (моделиро-
вание течений вдали от твердых границ).
Следует отметить, что в настоящее время большинство проектных задач ре-
шается с максимальным использованием ресурсов компьютера. Ограничения по
памяти и скорости так или иначе сказываются на качестве сетки. С этой точки
зрения, приведенные выше рекомендации по применению моделей турбулентно-
сти носят, зачастую, условный характер: на конкретной сетке грубая модель тур-
булентности может дать более близкие к реальности результаты, чем более стро-
гая модель.
1.6. Литература
1. Флетчер К. Вычислительные методы в динамике жидкостей. Т. 1, 2. - М.:
Мир, 1991.
2. Пейре Р., Тейлор Т. Вычислительные методы в задачах механики жид-
кости. -Л.: Гидрометеоиздат, 1986.
З. Лойцянский Л.Г. Механика жидкости и газа. - М.: Наука, 1971.
4. Фрост У., Моулден Т. Турбулентность. Принципы и применения. — М.:
Мир, 1980.
5. Рейнольдс А. Турбулентные течения в инженерных приложениях. - М:
Энергия, 1979.
6. Bardina J., Huang Р., Coakley Т. Turbulance modeling validation, test-
ing and development, NACA Technical Nemorandum 110446,1997.
7. ANSYS Basic Analysis Procedure Guide. ANSYS Rel. 7.0. ANSYS Inc., 2001.
8. ANSYS Theory Reference. ANSYS Rel. 7.0. ANSYS Inc., 2001.
153
2. СВЕРХЗВУКОВОЕ ОБТЕКАНИЕ ЦИЛИНДРА
2.1. Постановка задачи
2.2. Препроцессорная подготовка: создание расчетной области
и конечно-элементной сетки
2.3. Препроцессорная подготовка: задание физических условий течения
2.3.1. Задание модели течения жидкости
2.3.2. Задание граничных условий
2.3.3. Задание свойств жидкости
2.3.4. Задание термодинамических характеристик невозмущенного
потока
2.3.5. Активизация рабочей модели турбулентности
2.4. Решение задачи
2.5. Постпроцессор: результаты расчетов
2.6. Выход из системы
2.7. Замечания
2.8. Литература
2.1. Постановка задачи
Цилиндр бесконечной длины обтекается сверхзвуковым потоком вязкого га-
Термодинамические параметры газа подчиняются уравнению Клапейрона,
величины абсолютного давления, плотности и температуры в набегающем пото-
ке далеко перед телом заданы. Источники и стоки тепла в потоке отсутствуют;
течение рассматривается в предположении отсутствия теплообмена между ци-
линдром и газом. К. Флетчер [1] называет установившиеся течения вязкой сжи-
маемой жидкости без внешнего теплообмена течениями с постоянной полной
энтальпией; в таких течениях в предположении постоянства энтальпии диффе-
154
.циальное уравнение энергии может быть заменено алгебраическим уравнени-
I, связывающим в явном виде значения температуры и скорости.
Математическая постановка задачи при замыкании осредненных уравнений
рбулентного движения жидкости ЖЛ-моделью турбулентности имеет вид:
Э(рКх) । 8(pVy) Q
дх ду
(2.1)
д д др д ( дУ
= + Ре-Т-
ох оу ох ох\. ох
дУ,
дх
д ( дУ
ду J
бг/
дх ,
д . т. . д . TZ т. др д ( о,
— (рРЛ)+^-(рРЛ) = ~—+—
дх оу ду дх[ дх
д ( 8Vy}
ду^ ду)
(2.2)
^ = (ср-^)Т, (2.3)
С 8 / TZ \ 8 ( 8 ( ^*0 -г.
— (рР^к) + —(рГ к)=— ц,— +— ц,— +Ц,Ф Р8,
X оу Ох{ OX J бу^ оу'
С . т. . б . TZ ч 8 (ц( бе ] б (ц. бе I
—(рРге)+---(рК е)=— —— +— П----------
х ду дх^<ус dxj 6y^crE6yJ
F ~ F
+С1сЦ,-Ф-ЛГ2р—,
к к
(2.4)
(2.5)
„ к
Pe=P + H> Н=СиР-->
е
Лг+П + Лз^’
ГбК 6Г?
----1---
чбу дх '
дУу
дх
\(дУу dvX
ч—-----1---
2 дх дуJ
где р - плотность воздуха, Ух, Уу - проекции вектора скорости жидкости, рл6с -
абсолютное давление в жидкости, р - избыточное давление, Т - температура, То
- температура торможения, ср, су - удельные теплоемкости жидкости соответст-
венно при постоянном давлении и объеме, р. - заданная физическая (ламинарная)
вязкость, ц, — турбулентная (вихревая) вязкость, рс — эффективная вязкость, к —
кинетическая энергия турбулентности, с - скорость диссипации кинетической
энергии турбулентности, Ast, As2, As3, Cic, C2, сгЕ - эмпирические константы SZL-
модели турбулентности, Asl = 0,667, As2 = 1,25, Лз= 0,9, CiE = 1,44, C2 = 1,92,
gc=1,3.
155
Пусть в области невозмущенного потока далеко перед цилиндром термоди-
намические параметры состояния равны своим значениям в условиях стандарт-
ной атмосферы. Задавая скорость набегающего потока далеко перед телом (Vx ~ |
= 1 000 м/с, Vy = 0), определяем температуру торможения:
То = 293+ 1000 = 791°АГ. I
° 2-1004
Температура и скорость в каждой точке области, занятой газом, находятся
строгом соответствии, определяемом алгебраическим аналогом (2.4) уравнения |
энергии. С учетом алгебраических уравнений состояния и энергии в системе
уравнений в частных производных фигурирует пять неизвестных функций: V t
Vy,p, к, Е.
Сформулируем граничные условия для системы уравнений в частных произ-1
водных, учитывая симметрию потока (рис. 2.1):
Vx = 1 000 м/с, Vy = 0 м/с, р = 0 Н/м2 на АВ,
Vy = 0 м/с на АК и ED,
Vx = 0 м/с, Vy = 0 м/с на КЕ,
Vx = 1 000 м/с, Vy = 0 м/с, р = 0 Н/м2 на ВС,
QV SVv др
—— = 0, —— = 0, -------= 0 на CD.
дх дх дх
При постановке граничных условий учтены рекомендации [1], согласно ко- j
торым при моделировании вязких сжимаемых течений на входной границе
должны выставляться граничные условия типа Дирихле на каждую неизвестную
функцию; на выходной границе на все неизвестные функции ставятся естествен
ные условия Неймана. Вид условий на границах ВС и CD предполагает, что Э1
границы расположены на значительных расстояниях от источника возмущений!
потока - цилиндра; при этом граничные условия на ВС могут быть заменены на]
естественные условия Неймана. В рассматриваемом примере радиус цилинд: :
принят равным г = 0,01 м; АВ = ВС - 1 м, АК - 0,09 м.
2.2. Препроцессорная подготовка: создание расчетной
области и конечно-элементной сетки
Создаем директорию, где будут храниться файлы задачи, определяем имя за-
дачи (Initial jobname => Sverxzvuk) и через Run входим в ANSYS.
Активизируем пакет программ гидрогазодинамики FLOTRANCFD-.
Main Menu > Preference > FLOTRAN CFD, OK.
Определяем тип конечного элемента:
Main Menu > Preprocessor > Element Type > Add/Edit/Delete > 2D FLOTRAN 141> |
OK > Close.
При создании геометрической модели и конечно-элементной сетки учтем,
что наиболее резкое изменение решения должно наблюдаться в подобласти,
примыкающей к обтекаемому телу. Поэтому сначала создадим подобласть
AFEKHG (рис.2.1).
Строим полуокружность с центром в т. (0,1; 0) радиуса г = 0,01. В паке
ANSYS возможны различные варианты ее построения, один из которых состоит
в предварительном построении полукруга и последующем удалении его площа-
ди.
156
Main Menu > Preprocessor > Modeling > Create/Areas/Circle/Partial Annulus и
левой кнопкой мыши открываем окно Part Annular Circ Area, в котором указыва-
ем абсциссу и ординату центра полуокружности, в окне Rad 1 - радиус, в окне
Theta 1 - центральный угол полуокружности в градусах (180), ОК. Далее удаляем
площадь полукруга:
Main Menu > Preprocessor > Modeling >Delete/Areas Only и указываем с по-
мощью левой кнопкой мыши на полукруг, ОК. Затем Utility Menu > Plot > Multi-
Plots. Рекомендуется удалить и нижнюю границу полуокружности. Main Menu >
Preprocessor > Modeling >Delete/Line and Below — указываем левой кнопкой мы-
ши на радиусы нижней границы, ОК.
Далее вводим дополнительные точки, определяющие границы ближней об-
ласти течения, создаем границы ближней области и саму эту область.
Main Menu > Preprocessor > Modeling > Create > Keypoints >In Active CS.
В выпадающей таблице Create Keypoints In Active Coordinate Systems после-
довательно вводятся номера и координаты (в метрах) точек A. G. Н, К:
(т. А) №3 х = 0 у = 0 Apply,
(т. G) №4 х=0 у =0,1 Apply,
(т.Н) №5 х = 0,2 у =0,1 Apply,
(т.К) №6 х = 0,2 у=0 ОК.
Отображаем на экран номера точек: Utility Menu > Plot Ctrls > Numbering >
Keypoints number, Utility Menu >Plot/Keypoints.
Создаем граничные линии: Main Menu > Preprocessor > Modeling > Create
>Lines/Lines/Straight Line.
Левой кнопкой мыши последовательно отмечаем т. №2 (начало создаваемой
прямой линии) и т. №3 (конец линии), т. №1 и т. №6, т. №3 и т. №4, далее т. №6 и
т. №5, затем т. №4 и т. №5. Закрываем окно Create Straight Lines, OK.
Отображаем на экран номера линий: Utility Menu > Plot Ctrls > Numbering >
Line number, Utility Menu > Plot/Lines.
Создаем ближнюю область AFEKHG: Main Menu > Preprocessor > Modeling
> Create > Areas/Arbitrary/By lines. Левой кнопкой мыши в произвольном порядке
указываем границы области - линии №№ 1, 2, 3, 4, 5, 6; далее ОК - область соз-
дана.
Строим конечно-элементную сетку на созданной области. Для создания сет-
ки, близкой к ортогональной, воспользуемся опцией Concatenate, позволяющей
при построении сетки «сцеплять» (concatenate) фрагменты границ. Будем интер-
претировать область AFEKHG как четырехугольник, у которого противополож-
ными сторонами являются AF и ЕК, а также FE и ломаная AGHK.
Проводим разбиения этих линий: Main Menu > Preprocessor > Meshing/Size
Ctrls/ManualSize/Lines/Picked Lines.
Левой кнопкой мыши отмечаем линии № 2 (AF) и № 3 (ЕК), нажимаем ОК в
окне Element Sizes и в появившейся на экране таблице в строке NDIV No. Of
element divisions вводим число разбиений указанных линий: 20; в строке SPACE
spacing ratio задаем неравномерность разбиений этих линий: 20, ОК. Направле-
ние сгущения узлов - к полуокружности (к т. F и т. Е).
Разбиваем точками линию № 1 (FE): Picked Lines => NDIV = 60, SPACE = (по
умолчанию; по умолчанию разбиение равномерное), ОК. Суммарное число точек
на противоположной FE ломаной AGHK также должно равняться 60. Разобьем
линии № 4 (AG), № 5 (КН) с NDIV— 15, SPACE = (по умолчанию), ОК; линию №
6 (GH) с NDIV= 30, SPACE = (по умолчанию), ОК.
157
Проводим «сцепление» линий №№ 4, 6, 5: Main Menu Preprocessor -
Meshing /Concatenate/Lines, указываем с помощью левой кнопки мыши на Э1
линии, ОК.
Строим упорядоченную конечно-элементную сетку: Main Menu '
Preprocessor > Meshing/Mesh/Areas/Mapped/3 or 4 sided, указываем с помощью
левой кнопки мыши на построенную область, ОК. На экране отображается по-
строенная сетка; она же приведена на рис. 2.2.
Рис. 2.2
Прежде чем переходить к дальнейшим действиям по геометрическому моде-
лированию расчетной области, необходимо в обязательном порядке удалить
«сцепленные» линии: Main Menu >Preprocessor >Meshing /Del Concats/Lines.
Теперь создадим дальнюю от цилиндра область GHKDCB (рис. 2.1). Введем
координаты точек В, С, D. Main Menu > Preprocessor > Modeling > Create > Key-
points >In Active CS. В таблицу Create Keypoints In Active Coordinate Systems вво-
дим номера и координаты (в метрах) точек В, С, D:
(т. В) №7 х = 0 у = 1 Apply,
(т. Q №8 х = 1 у = 1 Apply,
(т. £)) №9 х=1 у = 0 ОК.
Отображаем на экран номера точек: Utility Menu > Plot Ctrls > Numbering > Key-
points number, Utility Menu >Plot/Keypoints.
Создаем дальние границы области GHKDCB: Main Menu > Preprocessor >
Modeling > Create > Lines/Lines/Straight Line.
Левой кнопкой мыши последовательно отмечаем т. №4 (начало создаваемой
прямой линии) и т. № 7 (конец линии), т. № 6 и т. № 9, т. № 7 и т. №8, т. №8 и т.
№9. Закрываем окно Create Straight Lines, OK.
Отображаем на экран номера линий: Utility Menu >Plot Ctrls > Numbering
>Line number, Utility Menu >Plot/Lines.
Создаем область GHKDCB: Main Menu > Preprocessor > Modeling > Create >
Areas!Arbitrary!By lines.
Левой кнопкой мыши в произвольном порядке указываем границы области -
линии №№ 5, 6, 7, 8, 9, 10; далее ОК- область GHKDCB создана.
158
При построении конечно-элементной сетки для области GHKDCB и учете
граничений учебных версий на максимальное число элементов {ANSYS/
LOTRAN ED - 2000 элементов) рекомендуется принять следующую стратегию:
область GHKDCB интерпретировать как четырехугольник с противолежащими
сторонами GB и KD, а также «сцепленными» GHK и BCD. Тогда число разбиений
Пиний GB и KD должно быть одинаково; по ограничению учебной версии задн-
им его равным 15. Общее число разбиений границы BCD должно быть равно
числу разбиений границы GHK. Рекомендуется принять число разбиений линии
С равным 20; соответственно число разбиений CD должно быть равно 25.
Сгущение подберем из соображений плавного сопряжения сеток областей
FEKHG, GHKDCB-. для линий GB (№ 7) и KD (№ 8) эта величина примерно рав-
на 15, линии ВС (№ 9) и CD (№ 10) лучше разбить равномерно.
fain Menu > Preprocessor > Meshing/Size Ctrls/ManualSize/Lines/Picked Lines.
Левой кнопкой мыши отмечаем линии № 7 {GB) и № 8 {KD), нажимаем ОК в
кне Element Sizes и в появившейся на экране таблице вводим NDIV =15, SPACE
*15, ОК; для линии № 9 {ВС) - NDIV =20, SPACE = (по умолчанию), ОК; для ли-
ни № 10 {CD)-NDIV =25, SPACE = (по умолчанию), ОК.
Проводим «сцепление» линий № 5 и № 6: Main Menu > Preprocessor > Mesh-
ing /Concatenate/Lines, указываем с помощью левой кнопки мыши на эти линии,
। Ж; затем «сцепляем» линии № 9 и № 10: Main Men >Preprocessor Meshing
Concatenate/Lines, указываем на линии, OK.
Строим упорядоченную конечно-элементную сетку: Main Menu >Preproces-
sor Meshing/Mesh/Areas/Mapped/Ь or 4 sided, указываем с помощью левой кноп-
и мыши на дальнюю от цилиндра область, ОК. Удаляем «сцепленные» линии:
Main Menu > Preprocessor > Meshing /Del Concats/Lines. Конечно-элементная сет-
ка всей расчетной области приведена на рис. 2.3.
1
ELEMENTS
ANSYS
FEB 15 2005
19:20:09
Рис. 2.3
Суммарное число элементов равно 1875, число узлов - 1971.
159
2.3. Препроцессорная подготовка:
задание физических условий течения
2.3.1. Задание модели течения жидкости. Main Menu > Preprocessor >1
Flotran Set Up/Solution Options. В диалоговой панели Flotran Solution Options вы-1
бираются опции: Steady State (стационарное течение), Adiabatic (течение с посто-
янной полной энтальпией), Turbulent (режим течения турбулентный), Compressi-1
ble (жидкость сжимаема).
2.3.2. Задание граничных условий. Main Menu > Preprocessor > Loads/ De-1
fine Loads/Apply/Fluid CFD/Velocity/On lines.
Левой кнопкой мыши указываем входную границу - линии № 4, 7, ОК. В
диалоговом окне вводим Vx= 1000, Vy = 0. В поле Apply to endpoints ставим Yes -J
указанные значения скорости приложены и в граничных точках линии, ОК. Н*1
линиях входной границы задаем также значение избыточного давления: ... Fluic
CFD/Pressure DOF/On Lines, указываем на линии №№ 4, 7 и в диалоговом окне
Aplly Pres on lines в поле Pres Pressure Value вводим 0, в поле Apply to endpoints
ставим Yes.
Задаем условия прилипания на линии № 1 (твердая стенка): ... Fluid CFD
Velocity/CFD/On lines... Vx= О, Vy = 0, Yes, OK и условия симметрии на линиях
№№ 2, 3 и № 8: On lines.,.Vy = 0, Yes, OK. При задании условий симметрии поле
для Vx оставляем свободным - значения горизонтальной составляющей скорости
на этой линии будут определяться решением задачи.
Задаем граничное условие на верхней границе - линии № 9: On lines...
= 1000, Vy = 0, Yes, OK , ... Fluid CFD/Pressure DOF/On Lines - указываем Hai
верхнюю границу расчетной области, ОК. В появившемся диалоговом окне Ар1
Pres on lines в поле Pres Pressure Value вводим 0 (избыточное давление на грани-
це равно 0), далее ОК. Естественные условия Неймана на выходной границе
формируются по умолчанию.
2.3.3. Задание свойств жидкости. В системе ANSYS/FLOTRAN весьма просто
задаются свойства воздуха с учетом переменной температуры1. Командой Main
Menu >Preprocessor >Flotran SetUp/Fluid Properties открываем таблицу Fluid
Properties. В колонках плотности воздуха (density), динамической вязкости (vis-
cosity), теплопроводности (conductivity), удельной теплоемкости при постоянном
давлении (specific heat) выбираем AIR-SI (свойства воздуха в системе единиц
СИ). Во всех окнах Allow density (viscosity,...) variations ставим флажок Yes. Да-
лее OK
2.3.4. Задание термодинамических характеристик невозмущенного пото-
ка. Для задач, решаемых по модели сжимаемой жидкости, необходимо задать
базовое (ref) состояние жидкой среды. Для течений типа Adiabatic следует также
задать температуру торможения, согласованную со скоростью невозмущенного
потока и его температурой.
Командой Flotran Set Up/Flow Environment/Ref conditions открываем окно
Reference conditions. В строку Stagnation (total) temp вводим величину температу-
ры торможения: 791. Соглашаемся со всеми остальными численными значения-
ми, предложенными по умолчанию и соответствующими стандартным атмо-
сферным условиям. Далее - ОК.
1 Свойства иных сред задаются либо через константы в известных формулах для газов
(формулы Саттерлэнда) и капельных (Liquid) жидкостей, либо в табличном виде, либо
через подпрограммы пользователя [6, 7].
160
2.3.5. Активизация рабочей модели турбулентности. Main Menu > Pre-
о.essor >Flotran Set Up/Turbulence/Turbulence Model. В открывшемся окне вы-
см модель турбулентности Ши-Зу-Ламли, ОК, ОК. Граничные условия для
известных функций кис формируются автоматически. Вместе с тем степень и
и штаб турбулентности набегающего потока, частота его турбулентных пульса-
Ьй, турбулентные числа Шмидта, вид пристеночных функций, т.е. данные, оп-
еделяющие значения к и е на границах потока, могут быть при необходимости
Ьменены с помощью меню Turbulence/ Turbulence Parameters и меню Turbu-
Л'-.e/Wall Parameters.
2.4. Решение задачи
Выбираем алгоритм решения: Main Menu > Preprocessor > Flotran Set Up/
U orithm Ctrl. В диалоговой панели Algorithm Control устанавливаем алгоритм
j& mplen. Командой Main Menu Preprocessor > Flotran Set Up Execution Ctrl от-
бываем панель Steady State Control Setting и устанавливаем число глобальных
тераций задачи: ЕХЕС= 1000.
Далее, устанавливаем ограничения на численные значения температуры и
ввления. Дело в том, что в процессе решения при использовании начальных ус-
ловий (начального приближения) по умолчанию, значения термодинамических
Параметров состояния на начальных шагах интегрирования могут оказаться не-
[физичными1 (абсолютная температура - ниже абсолютного нуля, абсолютное
давление - отрицательным). Продолжение расчетов в этом случае невозможно.
Для исключения выхода значений зависимых функций в нерасчетную область в
ANSYS/FLOTRAN предусмотрена возможность ограничений численных значений
этих функций по схеме:
если Ф < Фт!п, то Ф = 0min;
если Ф > Ф1гах, то Ф = Фтах.
Командой Main Menu Preprocessor > Flotran Set Up/Relax/Stab/Cap > Results
Capping открываем окно velocity, temperature & press capping и указываем Yes в
строках TEMP и PRESS, OK. В открывшееся окно Set capping values вводим ми-
нимальные значения абсолютной температуры (TMIN = 100) и избыточного дав-
ления (PMIN = -100000), ОК. Отметим, что минимально-допустимое значение
абсолютного давления остается положительным.
Запускаем задачу на счет: Main Menu > Solution Pun Flotran.
2.5. Постпроцессор: результаты расчетов
Осуществляем доступ к результатам расчетов, полученным на последнем ша-
ге интегрирования (Last Set): Main Menu > General Postproc > Read Results/Last
Set.
Дальнейшие действия в постпроцессоре будем увязывать с наиболее инте-
ресными с точки зрения аэродинамики результатами решения задачи.
Командой General Postproc > Plot Results/Vector Plot!Predefended, OK строим
векторное поле скоростей и с помощью Utility Menu > Plot Ctrl > Ran Zoom
Rotate/Box Zoom указываем мышью с нажатой левой кнопкой фрагмент расчет-
1 Рекомендуется самостоятельно убедиться в выходе задачи в нерасчетную область
при счете без ограничений на pmm и Tmin. Подробнее, о действиях пользователя в случае
получения нефизических или расходящихся результатов на начальном этапе решения, а
также повышении скорости сходимости см п. 2.7. Замечания
161
ной области в районе цилиндра. Векторное поле скоростей в этой
приведено на рис. 2.4.
подобласти
1
VECTOR
NODE=884
MIN=O
>
AN
FEB 21 2005
1931:54
229597 458.794 688.191 917388
114.698 344395 573.492 802.889 1032
Рис. 2.4
7
Отчетливо виден головной криволинейный скачок (головная ударная волна)
отсоединенный от обтекаемого тела. В ближнем следе за телом образуется об
ласть возвратно-циркуляционного течения, отделенная от сверхзвуковой области
по терминологии Чэпмена [5] контактной поверхностью. Горловина следа нахо
дится на расстоянии, примерно равном диаметру обтекаемого тела, что не проти
воречит экспериментальным данным Маккарти и Куботы, приведенным в [2].
Построим скалярное поле температур в расчетной области. Для этого ис
пользуем команду General Postproc > Plot Results/Contour Plot/Nodal Solutions. В
открывшемся окне Item to be contoured указываем Dof Solution, затем Tempera
ture, OK. В графическом окне появляется поле температур; оно же приведено на
рис. 2.5 (Win 32С).
О.М. Белоцерковский [2] отмечает существование внутреннего и внешнего
следов при сверхзвуковом обтекании тел вязкой жидкостью. Внутренний вязкий
след образован вязким пограничным слоем нателе, а внешний — криволинейным
головным скачком уплотнения. Оба эти следа видны на рис. 2.5.
Отметим также весьма близкое расположение зон максимальной и мини
мальной температур за миделем тела Близкое расположение этих зон приводит к
появлению нисходящего потока, вследствие которого точка отрыва пограничного
слоя несколько смещается в корму в сравнении с ее расположением, полученным
расчетом по модели несжимаемой жидкости при том же числе Рейнольдса.
162
Построим график изменения избыточного давления на поверхности обтекае-
ыго тела. Командой Utility Menu!Plot!Multi-Plots восстанавливаем на экране ко-
счно-элементную сетку. Далее, с помощью Utility Menu/PlotCtrls/Box просмат-
••ваем узлы сетки, расположенные на цилиндре. Затем, используя General
Ustproc > Path operations/Define Path/By Nodes с помощью левой кнопки мыши
оследовательно указываем узлы сетки, находящиеся на полуокружности, начи-
1ая от переднего по потоку узла. После указания всех узлов - ОК.
Рис. 2.5
В открывшемся окне набираем имя {Name =1) файла, в котором будут хра-
ниться результаты расчетов в отобранных узлах, оставляем предложенное по
умолчанию количество выводимых величин {nSets = 30) и отказываемся от ин-
терполяционного определения значений этих величин между отобранными узла-
ми {nDiv =1), ОК. Командой Path operations /Map onto Path открываем окно Map
Result Items onto Path и указываем идентификатор выводимой на график величи-
ны (давления - Pres). Командой Path Operations/Plot Path Items/On Graph откры-
ваем окно Plot of Path Items и указываем выводимую величину {Pres), ОК. На
экране возникает зависимость выводимой величины от расстояния {DIST), отсчи-
тываемого от первого указанного в By Nodes узла. Распределение избыточных
давлений по поверхности цилиндра показано на рис. 2.6.
По приведенному графику легко определить примерное положение точки от-
рыва пограничного слоя. Эта точка в начале зоны стабилизированного давления,
т.е. на дуговом расстоянии, отсчитываемом от носовой точки полуокружности,
равном примерно 0,025 м.
Определим численные значения вертикальной скорости жидкости при пере-
ходе через головной скачок по отрезку горизонтальной линии с координатами
(0,05; 0,015), (0,45 ;0,05).
163
Командой General Postproc >Path operations/Define Path/By Location откры-
вается диалоговая панель By Locations, в которой указываем имя файла результа-
тов {Name = 2), количество характерных точек маршрута (nPts = 2), количество
выводимых величин (по умолчанию), количество интервалов, на которые делится
маршрут-отрезок (nDiv = 200).
POST1
ЗТЕР=1
SUB =1
PATH PLOT
NOD1=82
NOD2=62
PRES
ANSYS
FEB 22 2005
16:56:13
Рис. 2.6
После заполнения диалоговой панели By Locations - ОК и открывается па-
нель By Locations in Global Cartesian, в окна которой последовательно вводятся
номер точки маршрута и координаты этой точки. Идентификатор системы коор-
динат - CS = 1.
Далее, так же как и при построении предыдущего графика, используя Path
operations/Мар onto Path открываем окно MapResult Items onto Path и указываем
идентификатор выводимой на график величины VY. Командой Path Орега-
tions/Plot Path Items/ On Graph открываем окно Plot of Path Items и указываем
выводимую величину (PY), ОК. На экране возникает зависимость вертикальной
скорости от расстояния (DIST) вдоль маршрута (рис. 2.7).
Приведенный график иллюстрирует степень возмущений, вносимых цилин-
дром в поток: вертикальная скорость резко меняет величину от нуля до сверхзву-
ковой величины.
Аналогично могут быть построены графики изменения температуры, давле-
ния, числа Маха и т. д. при переходе в направлении х через ударную волну (см.
зависимость плотности на рис. 2.8) или в любых других направлениях.
164
Зависимость изменения плотности показана на рис. 2.8.
2.6. Выход из системы
Выход из системы ANSYS производится командой Utility Menu >File >Exit.
В открывшейся диалоговой панели выбираем, например, Save Everything - со-
хранить все.
165
2.7. Замечания
Решение уравнений динамики жидкости в системе ANSYS/FLOTRAN базиру-
ется на современной стратегии численного решения систем нелинейных транс-
портных уравнений в частных производных [3], основными моментами которой
являются:
- использование псевдонестационарных подходов для решения стационар-
ных задач;
- применение методов расщепления как по физическим зависимым перемен-
ным (проекционные подходы), так и по пространственным независимым пере-
менным (схемы ADI [3], в отечественной литературе - продольно-поперечные
схемы [4]);
- использование схем «против потока» для рационального обеспечения ус-
тойчивого счета;
- организация этапов глобальной итерации на основе раздельного решения
блоков дискретизированной системы уравнений для каждой зависимой перемен-
ной.
Вместе с тем при решении многих задач, и в частности задач динамики сжи-
маемой жидкости, от пользователя требуются дополнительные действия для
обеспечения устойчивости счета, сходимости решения, уменьшения его флук-
туаций в процессе интегрирования.
Система ANSYS/FLOTRAN обладает достаточно широким набором про-
граммных процедур, позволяющих во многих случаях обеспечить устойчивость
счета даже на грубых сетках. Важнейшими из них являются различные релакса-
ционные процедуры, введение дополнительной вязкости, ограничение решения в
процессе интегрирования (итеративных процедур); см. меню Flotran Set Up/ Re-
lax/Stab/Cap.
Классическая релаксация предполагает коррекцию вычисленного значения
по схеме
фн =(1-гф)^+гФ^ыч,
где Ф,с - значение зависимой переменной в z-м узле в предшествующий момент
времени, У7,. - найденное на локальном шаге глобальной итерации значение в
расчетный момент времени, Ф" — скорректированное значение зависимой пере-
менной в расчетный момент времени (именно эта величина используется в по-
следующих вычислениях), гф- показатель релаксации (0 < гф< 1).
Классическая релаксация может быть применена для любой зависимой пере-
менной, и, собственно говоря, алгоритмы SIMPLEQ и SIMPLEN используют ее с
вполне конкретными численными значениями. Тем не менее при необходимости
Ф
пользователь может изменить показатели г , предложенные по умолчанию.
Классическую релаксацию рекомендуется использовать в первую очередь для
уменьшения флуктуаций зависимых переменных в процессе решения задачи.
Инерционную релаксацию (Relax/Stab/Cap> Stability Parms) рекомендуется
применять на начальных этапах расчета в случае расходящегося характера реше-
ния. Суть процедуры инерционной релаксации заключается в искусственном
увеличении элементов матрицы на главной диагонали на локальном шаге гло-
бальной итерации по следующей схеме:
166
Гл((+-^6; +5>„d- =fi +^-О-,
V ь°) ' 7 7 ь° '
де Ь° - показатель инерционной релаксации, О," - значение зависимой перемен-
lb эй в i-м узле в предшествующий момент времени (на предыдущем шаге итера-
тивной процедуры), О- — искомое значение зависимой переменной в i-м узле в
расчетный момент времени.
По умолчанию показатели инерционной релаксации для различных зависи-
• ых переменных имеют порядок 1О15...1О20. В практических задачах значения Ь°
меньшаютдо 10“7.
Дополнительная вязкость (меню Relax/Stab/Cap > Stability Parms/ Artifical
, Ftscoxify) вводится на начальных этапах решения стационарных задач (Steady
State) для создания или увеличения диагонального преобладания в матрицах
СЛАУ на локальных шагах глобальной итерации1. Введение дополнительной
зязкости весьма эффективно на начальных стадиях численного моделирования
отрывных течений и часто позволяет получить приемлемые для дальнейших рас-
ютов начальные приближения (начальные условия). Используемые в предвари-
тельных расчетах значения дополнительной вязкости: 10°-Н0 6. Ликвидацию до-
полнительной вязкости, особенно при задании ее большими величинами, следует
проводить последовательно, постепенно уменьшая ее значение до 0.
Ограничения на численные значения искомых функций (меню
Relax/Stab/ Cap >Results Capping) позволяют избежать выхода задачи в процессе
ее решения в нерасчетную область, например в область температур или давле-
ний, которые не описываются или не вполне адекватно описываются данной мо-
делью жидкости.
Помимо указанных процедур возможны другие способы устранения расхо-
дящихся результатов или улучшения сходимости задачи. Результативной может
оказаться смена модели турбулентности на каком-либо этапе решения задачи;
смена методов решения СЛАУ по некоторым зависимым функциям (меню
Flotran Set Up/CFD Solver Controls)', взаимозамена конечно-элементных пред-
ставлений Галеркина и Петрова - Галеркина по некоторым искомым функциям
(меню Flotran Set Up/Advectiori).
2.8. Литература
1. Флетчер К. Вычислительные методы в динамике жидкостей. Т. 1, 2. - М •
Мир, 1991.
2. Белоцерковский О.М., Давыдов Ю.М. Метод крупных частиц в га-
зовой динамике. - М.: Наука, 1982.
3. Пейре Р., Тейлор Т. Вычислительные методы в задачах механики жид-
кости. -Л.: Гидрометеоиздат, 1986
4. Самарский А. А. Теория разностных схем - М.: Наука, 1977.
5. Chapman D., Kuehn D., Larson H. Investigation of Separated Flows in
Subsonic Streams with Emphasis on the Effect of Transition. NACA Rept., 1356, 1958.
6. ANSYS Theory Reference. ANSYS Rel. 7.0. ANSYS Inc., 2001.
7. ANSYS Basic Analysis Procedure Guide. ANSYS Rel. 7.0. ANSYS Inc., 2001.
1 Локальный шаг глобальной итерации - решение системы линейных алгебраических
уравнений (СЛАУ) по какой-либо зависимой переменной.
167
3. ОБТЕКАНИЕ ТЕЛА С ТЕПЛООБМЕНОМ
3.1. Постановка задачи
3.2. Создание расчетной области и конечно-элементной сетки
3.3. Задание физических условий течения
3.4. Решение задачи
3.5. Результаты расчетов
3.6. Замечания
3.7. Литература
3.1. Постановка задачи
\\а ъход канала. с. ладанной скорсслтло и теглперггеурой пода?
поток (рис. 3.1). Скорости обтекания таковы, что числа Маха Л/<
пература тела ТьиПс в предположении отсутствия конвективного
окружающей средой. Требуется определить нижнюю границу ci
ния, при которой максимальная температура на теле не будет пре
торой заданной величины Т .
Воздух считается несжимаемой невесомой вязкой теплопр
стыо; обтекание симметричное {Ох - ось симметрии), режим т
лентный. Внутренние источники и стоки тепла отсутствуют, гр«
батическая стенка.
У
При сделанных допущениях движение жидкости описывается
системой уравнений в частных производных
5(рКл) । g(p^)^Q
дх ду
j-(pVxvx)+/-(pyxyy) = -^+/-\i
дх ду ох дх{
/-(рУхУу)+-^-(рУуУу) = -^+/-[.
дх 'ду Оу дх\
dVx
С/Х
я
дх
д (
ч-----
д (
Ч-----LI
dv
ду
8Vy
е Sy
168
±(pVxcpT)+^-(pVycpT)=-f-
дх 8 у дх
kEL
е дх
8
+ ду
. дУ)
(3.3)
/ тл \ . т, . д f 6кЛ д ( ,
--(рГ к)+—(рГ к) = — И/— +— Н,— +pz0-pe,
оу ох[ ox J оуу^ оу)
^-(ег-ег)г,
к2
це =ц+ц,, р,=Ср---,
£
ке=к+к к = 1 р ,
Рг,
Q __ __^Sl___
" Аг+П+Лз^’
ц, дг
(pVx£)+^-(pV г}=~[
су ох\оЕ дх
д
ду
ц, Зе
ду
£ Е2
+С1сЦ, - ф-С2р— >
к
к
дУ dV
—-+—-
ду дх
к сУх дУу
£ ду дх
есь р - плотность жидкости (р = р (7)), Ух, Уу - проекции вектора скорости
жидкости, /?абс - абсолютное давление в жидкости, р - избыточное давление, Т—
температура, ср, cv - удельные теплоемкости жидкости соответственно при по-
. тоянном давлении и объеме, р. — заданная физическая (ламинарная) вязкость
I =ц(7)), Ц/- турбулентная (вихревая) вязкость, ре- эффективная вязкость, к—
► оэффициент теплопроводности, kt - турбулентная теплопроводность, ке - эф-
фективная теплопроводность, к — кинетическая энергия турбулентности, £ — ско-
рость диссипации кинетической энергии турбулентности, Asl, As2, As3, Си , С2,
I - эмпирические константы ЖЛ-модели турбулентности, Asl = 0,667, As2 = 1,25,
Гз = 0,9, Си = 1,44, С2 = 1,92, оЕ = 1,3, Prt - турбулентное число Прандтля,
Prt = 0,9.
В уравнениях неразрывности (3.1), импульсов (3.2), энергии (3.3) и уравне-
иях к-Е-модели (3.4) неизвестными являются функции Ух, Уу, Т,р,ки е.
Гидродинамическими граничными условиями для системы уравнений явля-
ются:
- условия на входе Ух= Узад, Уу = 0 м/с на OF,
- условия симметрии Уу = 0 м/с на ОА и CD,
- условия прилипания Ух= 0 м/с, Уу - 0 м/с на АВС и FE,
- условия на выходной границе р = 0 Н/м2 на ED.
169
Тепловые граничные условия формируются следующим образом1. На входе
(граница OF) задается температура воздушного потока Т= 293 К. Границы ОА,
CD, FE и ED считаются адиабатическими стенками, и на них должно выполнять-
ся естественное условие Неймана
ат Л
— = 0,
дп
где п — нормаль к соответствующей границе.
На границе обтекаемого тела АВС выставляется граничное условие 3-го рода,
выражающее закон теплообмена между телом и обтекающим его потоком жид-
кости
k^+a(T-Tblllk) = O,
on
где к- коэффициент теплопроводности, а - коэффициент теплоотдачи; в рассма-
триваемой задаче а считается постоянным, о=10 кг/(с3-град), температура тела в
предположении отсутствия теплообмена между телом и воздухом 7'buik = 350 К.
3.2. Создание расчетной области
и конечно-элементной сетки
Создаем директорию, где будут храниться файлы задачи, определяем имя за-
дачи и через Run входим в систему ANSYS. Активизируем пакет программ гид-
рогазодинамики FLOTRAN CFD: Main Menu > Preference FLOTRAN CDF, OK.
Определяем тип конечного элемента: Main Menu>Preprocessor>Element Type
> Add/Edit/Delete > 2D FLOTRAN 141, OK, Close.
Создадим геометрическую модель и конечно-элементную сетку.
Введем координаты характерных точек:
Main Menu > Preprocessor > Modeling > Create > Keypoints > IN Active CS. В таб-
лице Create Keypoints In Active Coordinate System вводятся номера и координаты
точек (в метрах):
№1 х = 1,25 y = D Apply,
№2 х = 2 y = Q Apply,
№3 х = 2,25 У = 0,25 Apply,
№4 х = 2,5 Г = 0 Apply,
№5 х = 3,25 У =о Apply,
№6 х = 3,25 У = 1 Apply,
№7 х = 1,25 У = 1 Apply,
№8 х = 0 у = 0 Apply,
№9 х = 0 У = 1 Apply,
№10 х = 9,25 J = 0 Apply,
№11 х = 9,25 У = 1 Apply.
Отображаем на экране номера точек: Utility Menu > Plot Ctrls > Numbering >
Keypoint numbers, Utility Menu > Plot/Keypoints.
Создаем граничные линии: Main Menu > Preprocessor > Modeling > Create >
Lines/Lines/Straight Line. Левой кнопкой мыши последовательно отмечаем точки:
№1 (начало создаваемой линии) и №2 (конец линии), №4 и №5, №5 и №6, №1 и
№7, №7 и №6, №8 и №9, №10 и №11, №8 и №1, №5 и №10, №9 и №7, №6 и №11,
ОК
1 О тепловых граничных условиях в системе ANSYS/FLOTRAN см. п. 3.6. Замечания.
170
Строим границу обтекаемого тела: Main Menu > Preprocessor > Modeling >
Create >Lines/Splines/Splyne Thru KPs; отмечаем точки №2, №3 и №4, OK - на
'.зданных точках строится сплайн. Отображаем на экране номера линий: Utility
Menu > Plot Ctrls > Numbering > Line numbers, Utility Menu >Plot/Lines.
Создаем области: Main Menu > Preprocessor > Modeling > Create > Ar-
. as/Arbitrary/By Lines. В произвольном порядке отмечаем линии №№ 1, 2, 3, 4, 5,
12 — Apply; №№ 4, 6, 8, 10 — Apply; №№ 3,7, 9, 11 — Apply.
Для созданных областей строим конечно-элементную сетку. Равномерно раз-
биваем линию №5 на 30 частей: Main Menu > Preprocessor > Meshing/Size
Cntrls/Manual Size/Lines/Picked Lines. Левой кнопкой мыши указываем на линию
№5 - ОК. В окне Element Sizes on Picked Lines вводим NDIV= 30, OK.
Аналогично разбиваем линии №3, №4, №6, №7, №8 и №10 на 15 частей; №9
, №11 на 35 частей; №12 на 60 частей.
Линии №1 и №2 разбиваем неравномерно. Для линии №1 в окне Element
Sizes on Picked Lines вводим NDIV= 20, SPACE =0,1 (сгущение к концу линии),
ОК. Для линии №2 - NDIV = 20, SPACE = 10 (сгущение к началу линии). Цен-
тральную область рассматриваем как четырехугольник с противоположными
сторонами £1 и L2, а также £12 и стороной, состоящей из линий L3-L5-LA. Для
этого “сцепляем” линии № 3, № 4 и № 5: Main Menu > Preprocessor > Mesh-
ing/Concatenate/Lines. Отмечаем линии № 4, № 5 и № 3, OK.
Строим упорядоченную конечно-элементную сетку для центральной облас-
ти: Main Menu > Preprocessor > Meshing/Mesh/Areas/MappedE> or 4 side и указы-
ваем с помощью левой кнопки мыши на центральную область, ОК. Удаляем
“сцепленные” линии: Main Menu > Preprocessor > Meshing / DelConcats/ Lines.
Строим конечно-элементную сетку, покрывающую левую и правую области:
Main Menu > Preprocessor > Meshing/Mesh/Areas/Mapped/3 or 4 side и указываем
мышью на эти области, ОК. На экране отображается сетка. Построенная сетка
состоит из 1950 элементов: Utility Menu > List > Elements/Nodes + Attributes.
Фрагмент построенной сетки изображен на рис. 3.2.
AN
Рис. 3.2
171
3.3. Задание физических условии течения
Задаем модель течения жидкости: Main Menu > Preprocessor > Flotran Sei
Up/Solution Options. В окне FLOTRAN Solution options выбираем Steady State (ус-
тановившееся течение), Termal (решается дифференциальное уравнение энер-
гии), Turbulent (турбулентный режим течения), Incompressible (жидкость несжи-
маема), ОК.
Задаем свойства жидкости: Main Menu>Preprocessor>Flotran Set Up/Fluid
Properties. В окне Fluid Properties для всех физических свойств {Density,
Viscosity, Conductivity, Specific heat) выбираем AIR-SI - плотность, динамическая
вязкость, теплопроводность, удельная теплоемкость при постоянном давлении
воздуха используются в системе единиц СИ. Во всех окнах Allow density
variations (Viscosity...) ставим Yes — физические свойства воздуха есть функции
температуры.
Устанавливаем модель турбулентности: Main Menu>Preprocessor>Flotran Set
Up/Turbulence Model и выбираем модель SZL, соглашаясь при этом с предложен-
ными численными значениями ОК, ОК.
Вводим ограничения на температуру и давление, которые в ходе итеративно-
го решения задачи могут принимать нефизичные значения: Main Menu >
Preprocessor Flotran Set Up/Relax/Stab/Cap>Rezults Capping. В окне velosity, tern
perature & press capping выбираем Yes в строках TEMP и PRESS, OK. В окне Ser
capping values вводим минимально-допускаемые в ходе решения значения тем-
пературы и давления: TMIN= 100, PMIN= -50000, OK.
Задаем термодинамические граничные условия. На входной границе, соглас-
но условию задачи, температура потока постоянна и равна 293° К. Команде!
Main Menu > Preprocessor >Loads/Loads/Apply > Termal/ Temperature/On Line c
использованием мыши выбираем линию №6, ОК. В окне Apply TEMP on Linet
задаем температуру входящего воздушного потока VALUE = 293. В строке Apply
TEMP to endpoints ставим Yes - значение температуры приложено на всем отрез-
ке, включая крайние точки. Далее, задаем тепловое граничное условие 3-го ро .а
на обтекаемом теле: Main Menu > Preprocessor >Loads/Loads/Apply
Termal/Convention/On Lines. Выбираем линию №12, OK. В окне Apply CONV on
Lines вводим VALI = 10, VALJ= 10 (коэффициент теплоотдачи постоянен вдоль
границы, включая крайние точки), VAL2I= 350, VAL2J= 350 (температура грани-
цы при отсутствии теплообмена постоянна вдоль всей границы), ОК. На остал
ных границах расчетной области задаются адиабатические граничные условия
(эти условия ставятся по умолчанию).
Перейдем к заданию гидродинамических граничных условий. На выходной
границе ED ставится динамическое граничное условие: Main Menu >
Preprocessor > Loads I Loads I Apply > FluidICFDIPressure DOF/On Lines и мышью
выбирается линия №7, ОК. В окне Pressure Contraint on Lines задаем давление
PRES = 0.
Задаем условия симметрии на ОА и CD: Main Menu > Preprocessor >
LoadsILoadslApply > Fluid! CFDIVelocityl On Lines. Выбираем мышью линии №lt
№2, №8 и №9, OK. В окне Velocity Contraint on Lines вводим VY = 0 — состав-)
ляющая скорости по оси Y равна нулю (условие симметрии). В поле VX при этом
никаких численных значений не вводится.
Задаем кинематическое граничное условие на входе OF в расчетную область^
Main Menu > Preprocessor >Loads/Loads/Apply > Fluid/CFD/Velocity/On Liner.
выбираем линию №6, в окне Velocity Contraint on Lines вводим VX =20, VY = 0,
172
гавим флажок Yes- указанные значения скорости приложены и в граничных
>чках линии1. Далее, задаем граничные условия на твердых границах АВС и FE
словия прилипания): Main Menu Preprocessor > Loads/Loads/Apply> Fluid/
FD/ Velocity/On Lines, выбираем линии №5, №10, №11 и №12; в окне Velocity
ontraint on Lines вводим VX= 0, VY= 0 и ставим флажок Yes - значения скоро-
гей приложены и в граничных точках линий. Отметим, что при указанной по-
тедователыюсти задания скоростей скорость в т. О равна скорости входного
отока, а скорость в т. F равна нулю.
3.4. Решение задачи
Устанавливаем число глобальных итераций задачи: Main Menu > Solution
{Preprocessor) >Flotran Set Up/Execute Ctrls. В открывшемся окне Steady State
Control Settings вводим ЕЖОЮОО. Запускаем задачу: Main Menu > Solution >
Run Flotran.
3.5. Результаты расчетов
Доступ к результатам, полученным на последнем шаге интегрирования, осу-
ществляется командой Main Menu>General Postproc>Read Results/Last Set. Век-
торное поле скоростей выводится на экран командой Main Menu >General
Postproc > Plot Results > Vector Plot/Predefinded, OK. На рисунке 3.3 приведен
фрагмент векторного поля при скорости входного потока 20 м/с. Для наглядно-
сти визуализации здесь отображена и симметричная относительно плоскости Y =
0 часть течения {Utility Menu > Plot Ctrls/Style/Symmetry Expansion!
Periodic/Cyclic Symmetry > Reflect about XZ).
VECTOR
ARBYS
0 8.558 17.117 25 675 34 233 "
4.279 12.837 21.396 29.954 39.124
Рис. 3.3
1 Граничные условия на входе будут меняться в вариантах расчета.
173
Исследуемое тело - плохообтекаемо, и за кормовой частью тела формирует-
ся обширная область отрыва с возвратно-циркуляционным течением.
Построим линии тока, проходящие вблизи обтекаемого тела, используя ко-
манду Main Menu > General Postproc > Plot Results > Defl Trace Pt. В окне Deft
Trace Pt... вводим абсциссы и, через запятую, ординаты точек, через которые
будут проходить линии тока (х, = 2,6, у, = 0,1- i , i = 1,8). Далее, командой Plot
Flow Тга... строим линии тока (рис. 3.4).
За телом образуются мощные дискретные вихри, которые заметно искажают
линии тока основного потока. Как известно [1], плохообтекаемые тела разделяют
на тела с фиксированной и перемещающейся точками отрыва. Исследуемое тело
имеет плавные обводы, и при его обтекании реализуется перемещающийся от-
рыв. Положение точки отрыва зависит от числа Рейнольдса (режима течения),
при турбулентном режиме эта точка расположена ближе к корме, чем при лами-
нарном режиме течения. Положение точки отрыва удобно определять на эпюре
распределения давления по поверхности тела.
Построим зависимость распределения давления по верхней части обтекаемо-
го симметричного тела. Командой Main Menu > General Postproc > Path
Operations > Define Path > By Nodes открываем панель By Nodes и последова-
тельно указываем мышью все узлы обтекаемого тела от т. А до т. С (рис. 3.1).
FLOW TRACE
STEP=3
EXPANDED
VSUM
SMX =39.124-
0 8.558 17.117 25.675 34.233
4.279 12.837 21.396 29.954 39.124
Рис. 3.4
Далее, OK и открывается окно By Nodes Define Path specifications, в котором в
строке Name: Define path Name указывается имя массива введенных узлов (на-
пример — 1), в строке nSets Number of data sets - количество выводимых величин
по введенному массиву узлов (по умолчанию эта величина равна 30), в строке
174
>:Div Number of divisions вводится число делений между соседними узлами (реко-
мендуется ввести число 1, т. е. не интерполировать значения в промежуточных
ючках). Командой Path operations/Map onto Path открываем окно MapResult Items
onto Path и указываем выводимую величину - Pres, ОК. На экране возникает
распределение избыточного давления на обтекаемом теле. Эта распределение
приведено на рис. 3.5.
Давление на теле за точкой отрыва не восстанавливается, его величина весь-
ма слабо меняется за точкой отрыва. Положение точки отрыва (рис. 3.5) опреде-
ляется криволинейной координатой soip ~ 0,44 м, отсчитываемой вдоль тела от
его носика. Сопротивление обтекаемого тела складывается из главного вектора
сил трения (сопротивление трения R-f} и главного вектора сил давления (сопро-
тивление формы Лф0р). Для плохообтекаемых тел составляющая сил давления в
общем балансе сопротивления является доминирующей. В самом деле, на носо-
вой части тела реализуются положительные избыточные давления (нагнетание), а
за точкой отрыва избыточные давления практически неизменны и отрицательны
(разрежение).
В технических приложениях результирующую проекцию положительных из-
быточных давлений на направление набегающего потока называют лобовым со-
противлением, а результирующую отрицательных избыточных давлений за точ-
кой отрыва - донным сопротивлением. Эти сопротивления складываются и су-
щественно превосходят по величине сопротивление сил трения (/?7р/Дф„р =
= 0,03-Н), I)1. Построим график распределения температуры вдоль обтекаемого
тела. По аналогии командой Path operations/Map onto Path открываем окно
1 Рекомендуется самостоятельно убедиться в величинах сопротивлений формы и тре-
ния, построив зависимость распределения касательных напряжений вдоль тела — Map onto
Path => MapResult Items onto Path => TAUW.
175
MapResult Items onto Path и указываем выводимую величину - TEMP. Зависи-
мость изменения температуры от криволинейной координаты, отсчитываемой от
носика тела, представлена на рис. 3.6.
Конвективный теплообмен, т. е. процесс переноса тепла, происходящий в
движущихся текучих средах, обусловлен совместным действием двух механиз-
мов переноса тепла — собственно конвективного переноса и теплопроводности
[1]. При безотрывном обтекании роль конвективного переноса весьма велика по
сравнению с теплопроводностью; теплопроводность в этом случае ведет лишь к
переносу тепла в направлении, поперечном направлению течения. В то же время
эффекты теплопроводности весьма существенны в срывных течениях, в особен-
ности в зоне границ основного потока и возвратного течения.
Результаты, представленные на рис. 3.6, свидетельствуют о существенном
влиянии отрыва потока на распределение температур по поверхности тела.
Рис. 3.6
Максимальное значение температуры реализуется на небольшом расстоянии
за точкой отрыва потока. Вниз по потоку за точкой отрыва охлаждение тела реа-
лизуется за счет конвективного переноса мощного возвратного течения за телом.
Частица жидкости, находящаяся на линии тока возвратно-циркуляционного те-
чения, циклически охлаждается основным потоком в зоне его границы с возврат-
ным течением за счет поперечного переноса тепла, обусловленного теплопро-
водностью с последующим конвективным теплообменом с поверхностью тела,
относительно отдаленной от точки отрыва. В области же точки отрыва эффекты
конвекции снижаются как за счет малости скоростей возвратного течения, так и
за счет повышения температуры воздуха после обтекания им нижней кормовой
части тела. Расчеты обтекания тела проводились при различных скоростях пото-
ка на входе OF в канал. Диапазон исследованных скоростей составлял V= 0...50
м/с. На рис. 3.7 показана зависимость максимальных температур тела при раз-
личных скоростях обтекания.
Расчеты, проведенные в указанном диапазоне скоростей по модели сжимае-
мой жидкости (FLOTRAN Set Up/Solution options => Compressible), дают результа-
ты, отличающиеся от полученных не более чем на сотые доли процента.
3.6. Замечания
В задачах теплового анализа граничные условия могут быть заданы следую-
щими тремя способами.
1. Граничное условие первого рода задается в виде распределения темпера-
тур на любых границах расчетной области (Main Menu > Preprocessor > Loads >
Loads-Apply > Thermal/Temperature...). В рассмотренной задаче это условие зада-
валось на входе в расчетную область. Для нестационарных задач это условие за-
дается в каждый момент времени.
2. Граничное условие второго рода задается в виде плотности теплового по-
тока в общем случае только на твердых границах расчетной области (Main Menu
> Preprocessor > Loads > Loads-Apply > Thermal/Heat Flux...). Если плотности
теплового потока равны нулю, то это условие есть условие адиабатической гра-
ницы и может задаваться на любой границе расчетной области. В рассмотренной
задаче граничное условие второго рода в таком виде задавалось по умолчанию на
верхней твердой границе, границе симметрии и выходной границе. Если плотно-
сти теплового потока положительны, то тепловые потоки направлены внутрь
расчетной области. Для нестационарных задач это условие задается в каждый
момент времени.
3. Граничное условие третьего рода формируется посредством задания тем-
пературы окружающей среды и закона теплообмена между границей и окру-
жающей средой (Main Menu>Preprocessor>Loads>Loads-Apply >Thermal
/Convection...). Этот вид теплообмена называется теплоотдачей, и закон теплооб-
мена определяется с помощью коэффициента теплоотдачи. Граничное условие
третьего рода задается только на твердых границах расчетной области. В рас-
смотренной задаче граничное условие третьего рода задавалось на поверхности
обтекаемого тела. Кроме того, в системе ANSYS можно задавать (по терминоло-
гии, принятой в термодинамике) так называемые внутренние граничные условия
в виде источников и стоков объемной скорости выделения или поглощения тепла
(Main Menu > Preprocessor > Loads > Loads-Apply > Thermal/Heat Generat...).
Источники и стоки тепла относят к единице объема и задают, при необходимо-
177
ста, в любой внутренней подобласти расчетной области. В рассмотренной задаче
внутренние граничные условия не ставились.
3.7. Литература
1. Кутателадзе С.С. Основы теории теплообмена. - М.: Наука, 1979.
2. Флетчер К. Вычислительные методы в динамике жидкостей Т 1, 2. - MJ
Мир, 1991.
3. ANSYS Basic Analysis Procedure Guide. ANSYS Rel. 7.0. ANSYS Inc., 2001.
4. ANSYS Theory Reference. ANSYS Rel. 7.0. ANSYS Inc., 2001.
4. ГИДРОДИНАМИКА ТЕЧЕНИЙ CO СВОБОДНЫМИ
ГРАНИЦАМИ: ФОРМИРОВАНИЕ
И РАСПРОСТРАНЕНИЕ ВОЛН
КОНЕЧНОЙ АМПЛИТУДЫ
4.1. Постановка задачи
4.2. Препроцессорная подготовка: создание расчетной области и конечно-
элементной сетки
4.2.1. Создание расчетной области
4.2.2. Создание конечно-элементной сетки
4.3. Определение свойств жидкости, начальных и граничных условий
4.4. Решение задачи
4.4.1. Первый этап
4.4.2. Второй этап
4.5. Постпроцессорная обработка результатов
4.6. Литература
4.1. Постановка задачи
Рассмотрим задачу о движении воды под воротами шлюза (рис. 4.1).
У
А
Е
С D
Рис. 4.1
L х
178
В начальный момент времени жидкость покоится и занимает область ОАВ
1CDKL; течение жидкости развивается под действием сил тяжести, свободная по-
верхность жидкости в начальный момент времени совпадает с горизонтальными
поскостями АВ и DK\ BCDEF и AOL — твердые стенки.
Расчетная область OABCDEFLO при решении задач со свободными граница-
ми должна создаваться таким образом, чтобы положение так называемых вспо-
могательных границ не влияло на решение задачи. Вспомогательными границами
в рассматриваемой задаче являются EF, а также частично ED и FK. Эти границы
служат для замыкания расчетной области; в процессе решения задачи EF не
должна замываться водой.
Для исследования течения используется модель несжимаемой весомой жид-
кости. Течение жидкости нестационарное, турбулентное. Для замыкания уравне-
ний турбулентности течения жидкости используется /WG-модель турбулентно-
сти.
Математическая модель течения жидкости имеет вид:
g(PFJ [ д(рУу) q
дх ду
-^-(pVx)+^-(pVxVx)+^-(pVxVy)= 8р 8(
dt дх ду
(4-1)
^(р^)+^-(р^Л)+^-(р^Л)=
dt дх ду
^(P^+~(.pVx^+^-(pVy^)=~[—
dt дх ду дх\с£
1
дх дх к
8р + д I
Р£ 8У дх
Эк с (
7 — + — - ц
дх )
де.' д ( В,
дх j ду Uc
Эк
ЙЕ
eV,
ду)’
8Vy}
. 8 У J
+ Ц,0-рЕ,
(4.2)
2 (4.з:
Е ~ Е
+ С1с1Д-Ф-Л/2Р —>
К К
д
дх J ду
. J 8 У
д
+ В, = Ср—,
Е
с
т|(1-т|/4,38)
’ 1 + 0,12г]3 ’
1Е
k ду дх
где р - заданная плотность жидкости (р = const), g - ускорение свободного паде-
ния, Vx ,Vy - проекции вектора скорости жидкости, р - избыточное давление
жидкости, р. - заданная физическая (ламинарная) вязкость, ц, - турбулентная
(вихревая) вязкость, це — эффективная вязкость, к - кинетическая энергия турбу-
179
лентности, £ - скорость диссипации кинетической энергии турбулентности, Сц,
С2, ак, оЕ - эмпирические константы TWG-модели турбулентности, См = 0,085,
С2=1,68, ок=ое=0,72.
Как известно [1], специфика задач гидродинамики течений со свободными
границами заключается в задании граничных условий на неизвестной до решения
задачи границе раздела сред различных плотностей: кинематического и динами-
ческого граничных условий. Если F{t,x,y) = 0 - уравнение свободной поверхно-
сти, то кинематическое граничное условие имеет вид
~+^(FVx)+-^{FVy) = Q. (4.4)
St Sx Sy
Условие (4.4) означает, что частица жидкости, вышедшая на свободную по-
верхность, остается на ней во всем последующем движении. Динамическое гра-
ничное условие имеет вид
р =0HaF(r,x,y) = 0 (4.5)
и выражает непрерывность давления при переходе через свободную границу.
На неподвижных твердых стенках AOL, BCDEF в каждый момент времени
должны выполняться условия прилипания
Vx = 0 м/с, Vy = 0 м/с.
Л 7 у
Границу FKL будем считать выходной и полагать, что на ней должны выпол-
няться естественные условия Неймана
SV SVv Sp
Sx Sx Sx
Течение жидкости нестационарно (следует иметь в виду, что и стационарные
задачи со свободными границами решаются в системе ANSYS/FLOTRAN только в
нестационарной постановке): в задаче помимо граничных условий должны вы-
ставляться и начальные условия. Начальные условия примем тривиальными для
Vx, Vy и р; начальное положение свободных границ, как указывалось выше, сов-
падает с АВ и DK.
4.2. Препроцессорная подготовка: создание расчетной
области и конечно-элементной сетки
4.2.1. Создание расчетной области. Создаем директорию, где будут хра-
ниться файлы задачи, определяем имя задачи {Initial jobname => Svoboda) и через
Run входим в систему ANSYS.
Активируем пакет программ гидродинамики FLOTRAN CFD: Main Menu
>Preference > FLOTRAN CFD. OK.
Определяем тип конечного элемента:
Main Мепи> Preprocessor Element Type>Add/Edit/Delete>2D FLOTRAN 141 >
OK > Close.
При создании геометрической модели и конечно-элементной сетки учтем,
что наиболее резкое изменение решения должно наблюдаться в области CD.
Вводим координаты характерных точек, определяющих границы исследуе-
мой области течения: Main Мепи> Preprocessor Modeling>Create> Keypoints>
In Activ CS.
180
В выпадающей таблице Create Keypoints In Activ Coordinate Systems последо-
вательно вводятся номера и координаты (в метрах) точек О, А, В, С, D, Е, F, К. L:
(т.О) №1 х = 0 У = 0 Apply,
(т.Л) №2 х = 0 у=5 Apply,
(т.5) №3 х= 1 У=5 Apply,
(t.Q №4 х = 1 у = 0,5 Apply,
(t.D) №5 х= 1,5 у = 0,5 Apply,
№6 х = 1,5 У = 0 Apply,
(т.Е) №7 х= 1,5 У=2 Apply,
(т.Е) №8 х=7,5 У = 2 Apply,
(т.Е) №9 х = 7,5 У = 0 Apply,
№10 х= 1 у=0 Apply,
(т.70 №11 х = 7,5 У = 0,5 Apply,
№12 х = 0 У = 0,5 OK.
Отображаем на экран номера точек: Utility menu >Plot Ctrls > Number-
ing>Keypoints number, Utility menu>Plot/Keypoints.
Соединяем введенные точки прямыми линиями: MainMenu> Preproces-
sor>Mocleling>Create>Lines/Lines/Straight Line. Левой кнопкой мыши последова-
тельно отмечаем точки начала и конца линии: т. №1 и т. №12, т. №2 и т, №3, т.
№4 и т. №3, т. №1 и т. №10, т. №4 и т. №5, т. №5 и т. №7, т. №7 и т. №8, т. №6 и
т. №9, т. №9 и т. №11, т. №10 и т. №6, т. №10 и т. №4, т. №6 и т. №5, т. №11 и т.
№8, т. №12 и т. №2. Закрываем окно Create Straight Line, OK.
Указанная последовательность начала и конца каждой линии связана с удоб-
ством дальнейших действий по созданию упорядоченной неоднородной сетки.
Отображаем на экран номера линий: Utility menu > Plot Ctrls>Numbering>
Lines number, Utility menu>Plot/Lines.
Создаем поверхности по построенным линиям: Main Мепи> Preprocessor
>Modeling>Create>Areas!Arbitrary I By lines.
Левой кнопкой в произвольном порядке вводим линии, которые будут слу-
жить границей площади: №№1, 2, 3, 4, 11, 14; далее Apply - создана поверхность
№1, ограниченная линиями №№1, 2, 3, 4, 11, 14. Аналогично создаем поверх-
ность №2, ограниченную линиями №№5, 10, 11, 12 и поверхность №3, ограни-
ченную линиями №№6, 7, 8, 9, 12, 13. Закрываем окно Create Areas by Lines - OK.
Расчетная область создана.
4.2.2. Создание конечно-элементной сетки. Перед построением отобразим
линии и их номера на экране: Utility Menu>Plot Ctrls>Numbering>Line number,
Utility Menu>Plot>Lines.
При построении конечно-элементной сетки следует учесть, что по ограниче-
ниям учебного пакета ANSYS ED при решении задач аэрогидродинамики число
узлов сетки не должно превышать 2000. Для достижения в этих ограничениях
наибольшей точности построение сетки проводим следующим образом.
Пользуясь командой Main Menu > Preprocessor > Meshing > SizeCtrls >
ManualSize>Lines>PickedLines, левой кнопкой мыши отмечаем линии №№ 1, 5,
9, 10, 11, 12, нажимаем ОК, в окне Element Sizes и в появившейся таблице в стро-
ку NDIV вводим число делений указанных линий: 5; в строку SPACE вводим чис-
ло, характеризующее неравномерность разбиения указанных линий: -5; далее
ОК. Аналогичную операцию проводим при разбиении линий:
№№2,4 NDIV=\0 SPACE=-5,
№№ 3, 14 NDIV=45 SPACERS,
181
№№6,13 NDIV=\5 SPACERS,
№№ 7,8 NDIV=6Q SPACE=-5
Далее, для построения конечно-элементной сетки необходимо объедин
линии №№1 и 14, 3 и 11, 6 и 12, 9 и 13. Для этого воспользуемся командой: Ма
Menu > Preprocessor > Meshing>Concatenate>Lines. Открылось окно Concaten.:
Lines. Левой кнопкой мыши вводим линии №№ 1,14, затем Apply, линии № 3
№11, Apply, линии № 6 и №12, Apply, линии № 9 и №13, ОК.
Строим конечно-элементную сетку: Main Мепи> Preprocessor'-^ Meshing
Mesh> Areas>Mapped>3 or 4 sided.
В появившемся окне Mesh Areas нажимаем кнопку Pick all (для всех плоша
дей). На экране отображается построенная сетка; она же приведена на рис. 4.2.
Рис. 4.2
В обязательном порядке удаляем объединения линий: Main Мепи> Preproc-
essor'^ Meshing> Concatenate>Del Concats>Lines.
4.3. Определение свойств жидкости,
начальных и граничных условий
Задаем начальное положение жидкости: Main Menu > Preprocessor >Loads >
Apply >Fluid/CFD > Volume Fraction »Init Loads>On Elements.
В открывшемся окне ставим метку на Box, затем левой кнопкой мыши выделяем
область, в которой в начальный момент находится вода (сначала резервуар - левый
прямоугольник, затем все пространство под воротами шлюза - рис. 4.1), далее ОК, и
в открывшемся окне Initialize VFRC on Elems в графе VFRC вводим значение 1, далее
ОК, ОК. Этап «заливания» жидкости в часть расчетной области проиллюстрирован
рис. 4.3.
Далее, определим поведение жидкости на входе АВ в резервуар (рис. 4.1): Main
Menu>Preprocessor>Loads> Apply>Fluid/CFD>Volume Fract>Bound Loads > On
182
= 1000 кг/м3 и динамической вязкости (viscosity) р = 0,001 Н-с/м. Далее ОК.
Устанавливаем модель турбулентности: Main Menu>Preprocessor> FLO1
Set Up > Turbulence > Turbulence Model. В окне Turbulence Model указываем на
(/WG-модель турбулентности для «ренормализованной» группы), ОК.
4.4. Решение задачи
Интегрирование нестационарных уравнений динамики жидкости в сисл
ANSYS/FLOTRAN можно проводить с заданным постоянным временным ша
(User Defined) или с переменным шагом (Advection), выбираемым алгоритм
FLOTRAN исходя из выполнения обобщенного условия Куранта-Фридрихса-Л
(КФЛ) устойчивости счета [2]. Второй путь более рационален, но его использова
предполагает существование в начальный момент времени отличного от нуля п
скоростей, при помощи которого выбирается текущий шаг интегрирования.
В рассматриваемой задаче начальные и граничные кинематические условия г
виальны и поэтому использование изначально автоматического выбора шага
КФЛ приведет к ошибочным результатам.
।
В связи с этим задача решается в два этапа. Первый этап - интегрирование
нений с постоянным малым временным шагом для формирования поля скора
Второй этап - интегрирование с оптимальным переменным временным шагом,
ределяемым в каждый расчетный момент времени из обобщенного условия КФЛ.
4.4.1. Первый этап. При реализации этого этапа решения используется оп
ределенный пользователем шаг времени интегрирования. Командой Main Menu
Solution>FLOTRAN Set Up > Execution Ctrl открываем окно Time Step Controls.
графе Step Select time step control производится выбор управлением шага инте.
рования: Advection — выбор шага с использованием обобщенного условия КФЛ; Us
defined
шаг интегрирования неизменен и определяется пользователем. Выбираем
User defined. В графе Base output control on выбираем Time Values — пополнение вы-
ходного файла осуществляется через конкретный интервал времени интегриро-
вания. Далее ОК.
В открывшемся окне Transient Control в графе STEP ставим значение шага
интегрирования (0,001 с), в графу TEND вводим конечное время интегрирования
(0,05 с). Далее, в строку Glob. Global iter... вводим число локальных итераций на
шаге интегрирования: 5. Критерии выполнения локальной итерации на шаге ин-
тегрирования (Vx, Vy,...ENDS) принимаем предложенными по умолчанию. В
строках TIME, OVER... и TIME, АРРЕ... вводим величину 0,05 - через такой
временной шаг будут осуществляться записи в выходной (.rfl) файл и выводиться
подробная информация о расчете на экран монитора.
Запускаем задачу на счет: Main Menu > Solution > Run Flotran.
4.4.2. Второй этап. По окончании расчета первого этапа переходим на реше-
ние с автоматическим выбором шага по условию КФЛ. Отметим, что результаты
расчетов первого этапа являются начальными условиями для дальнейшего реше-
ния. Используем команду Main Menu>Solution >FLOTRAN Set Up>Execution Ctrl и
вновь откроем окно Time Step Controls. В графе Step Select time step control выбира-
ем теперь Advection, в графе Base output control on - Time Values, OK. В окне Tran-
sient Control в графе STEP ставим величину начального шага интегрирования (0,001
с), в графе TEND ставим время окончания решения (1,6 с). В графах TIME, OVER и
TIME, АРРЕ ставим значения (0,05 с): запись в файл результатов будет происходить
примерно через каждые 0,05 секунд интегрирования. Все остальные значения оста-
ются без изменения.
184
4.5. Постпроцессорная обработка результатов
Отображение и обработка результатов расчетов проводятся в меню постпро-
iccopa: Main Menu > General Postproc.
Построим анимационную картину формирования волны. Анимация дает на-
глядное визуальное представление решения задачи о движении воды под ворота-
ми шлюза и начального этапа распространения волн по шлюзу.
Для создания анимационной картины используем команду Utility Menu >Plot
Ctrls/Animate/Over Results. В открывшемся диалоговом окне Animate Over Results
- построение анимации по полученным результатам (результатам, хранящимся в
*.г/7-файле) — в графе Model result data выбираем Result Set Range, в графе Anima-
tion time delay <sec> вместо 0,5 ставим 0,13 (время задержки между кадрами
анимации) и далее в графе Display Туре в левом окошке выбираем VOF data (по-
казывать изменение положения жидкости), ОК.
Изложенная схема действий иллюстрируется на рис. 4.4.
Рис. 4.4
В результате будет построен «мультфильм», часть кадров которого приведе-
на на рис. 4.5.
Процесс формирования нелинейной волны (волны конечной амплитуды) це-
лесообразно рассмотреть с энергетических позиций. Кинетическая энергия не-
стационарного потока жидкости, возникающего из-за перепада высот в шлюзе,
частично преобразуется в потенциальную энергию одиночной нелинейной вол-
ны, имеющей вид бугра на поверхности жидкости. Скорость переноса волны в
период ее формирования оказывается весьма малой - примерно на порядок
меньше скоростей потока воды под воротами шлюза и потока ниже волны. К мо-
менту завершения формирования волны (г = 0,941 с, рис. 4.5) угол между каса-
тельными к волновым склонам составляет примерно 110° (как известно [3], пре-
дельная величина этого угла для прогрессивных нелинейных волн составляет
120°). На заднем склоне из-за продолжающегося истечения жидкости из резер-
вуара происходит формирование и разрушение вторичных волн (/ = 0,941-4,35 с),
185
энергия которых наряду с кинетической энергией увлекающего основного потока
под одиночной волной приводит к заметному нарастанию скорости движения
одиночной волны. При этом форма ее трансформируется: передний фронт стано-
вится все более крутым, задний - более пологим, т.е. формируется волна Римана
Построим векторное поле скоростей в момент времени t = 1,35 с, для которо-
го передний фронт волны имеет касательную, близкую к вертикальной.
Рис. 4.5
Для построения векторного поля скоростей в момент времени t= 1,35 с сна-
чала указываем этот момент времени с помощью команды: Main Menu > General
Postproc>Read results/By Time/Freq. В открывшемся окне Read Results by Time or
Frequency. Read results for выбираем:
Read results for — Entire model,
TIME -1.35,
LSTEP - At TIME value,
FACT — 1, затем OK.
Далее, используем команду Main Menu>General Postproc>Plot Results/Vector
Plot/Predefended, OK. В графическом окне ANSYS появится векторное поле ско-
ростей, увеличенный фрагмент которого (команда Utility Menu >Plot Ctrls >Ran
Zoom Rotate/Box Zoom) представлен на рис. 4.6; этот рисунок поясняет механизм
формирования волны Римана.
186
Рис. 4.6
Относительные горизонтальные скорости частиц жидкости на переднем
склоне волны складываются со скоростью переноса волны, причем величина от-
носительных скоростей максимальна в области вершины волны. На заднем скло-
не горизонтальные относительные скорости и скорость переноса волны противо-
положны по знаку, в результате чего абсолютные скорости частиц жидкости на
заднем склоне меньше, чем на переднем, - передний фронт волны становится
более крутым, а задний — более пологим. Предельная, в действительности не дос-
тижимая конфигурация волны Римана определяется вертикальной касательной к
переднему фронту волны. По достижении конфшурации, близкой к предельной,
волна разрушается с образованием волнового пакета: начало формирования вол-
нового пакета видно на рис. 4.5 (/ = 1,6 с).
4.6. Литература
1. Логвинович Г.В. Гидродинамика течений со свободными границами. -
Киев: Наукова думка, 1969.
2. Флетчер К. Вычислительные методы в динамике жидкостей. Т. 1, 2. - М.:
Мир,1991.
3. Стокер Дж. Волны на воде. - М.: ИЛ, 1959.
4. ANSYS Basic Analysis Procedure Guide. ANSYS Rel. 7.0. ANSYS Inc., 2001.
5. ANSYS Theory Reference. ANSYS Rel. 7.0. ANSYS Inc., 2001.
187
5. АНАЛИЗ РЕШЕНИЯ ОДНОЙ ЗАДАЧИ ОТНОСИТЕЛЬНОГО
РАВНОВЕСИЯ ЖИДКОСТИ СО СВОБОДНЫМИ ГРАНИЦАМИ
5.1. Постановка задачи
5.2. Решение задачи
5.3. Результаты расчетов
5.4. Литература
5.1. Постановка задачи
Рассматривается задача относительного равновесия тяжелой несжимаемой
жидкости в сосуде, вращающемся с постоянной угловой скоростью со вокруг вер-
тикальной оси Oz (рис. 5.1).
Эта задача подробно рассмотрена, например, в [1, 2] и является одной из не-
многих задач гидродинамики течений со свободными границами, для которой
получено аналитическое решение без использования каких-либо упрощающих
предположений.
(5.1)
В осесимметричном случае уравнения равновесия жидкости в цилиндриче-
ской системе координат имеют вид (ось Оу - ось симметрии)
др др
— = pFr, — = pFz
dr dz
где p - избыточное давление, р = p(r, z), р - плотность жидкости, Fr, Fz - на-
пряжения массовых сил.
В случае относительного равновесия жидкости в сосуде, вращающемся с уг-
ловой скоростью со вокруг оси Оу, имеем
др г др
-^ = par, — = -pg,
dr cz
где g — ускорение свободного падения.
(5-2)
188
Общее решение уравнений относительного равновесия (5.2) имеет вид
2
p = C-pgz+^-r2. (5.3)
Для точки г = 0, у = уо на свободной поверхности имеем р = р0, т.е.
c = Po+PgZo-
Тогда
2
, 0(0 2
P = Po+Pg(Zo-z) + —^r -
На свободной поверхности жидкости выполняется динамическое граничное ус-
ловие р = ро. Поэтому уравнение свободной поверхности имеет вид
со2 2
z = z0+—г. (5 4)
2g
Постоянная z0 определяется из закона сохранения массы жидкости, налитой в
сосуд
pQ = pjzJS, (5.5)
где Q - объем жидкости, налитой в сосуд
Для прямого кругового цилиндра радиуса R из (5.4) и (5.5) имеем
со2 2
zo ~ *0 ’
4g
где h0 - высота столба жидкости в сосуде до вращения цилиндра.
Тогда уравнение свободной поверхности (5.4) примет вид
2
z = A0+y-(r2-7?2/2). (5.6)
В проведенных ниже исследованиях принято (см. рис. 5.10)
ОА = 1,0 м, 2? = ОЕ- 0,5 м, h0 = ОА = 0,5 м, со = -6,0 рад/с.
Рассмотрим теперь постановочную часть задачи согласно методологии сис-
темы ANSYS/FLOTRAN.
Прежде всего отметим, что задачи гидродинамики со свободными границами
решаются в системе ANSYS/FLOTRAN только в нестационарной постановке. Ре-
шение рассматриваемой задачи в нестационарной постановке означает нахожде-
ние стационарного решения системы гидродинамических уравнений, описываю-
щих неустановившееся течение жидкости. Кроме того, задачи гидродинамики со
свободными границами решаются системой ANSYS/FLOTRAN только в 2£>-по-
становке.
Классическая осесимметричная постановка гидродинамических задач пред-
полагает отсутствие окружных скоростей жидкости (Ус = 0). В рассматриваемой
задаче КЕ отличны от нуля, но не зависят от полярного угла с. В системе
ANSYS/FLOTRAN существует возможность решения задач с ненулевыми окруж-
ными скоростями, величины которых не зависят от окружной координаты (опция
189
Swirl). Однако такие задачи не рассмотрены в литературе поддержки систем
ANSYS', эти задачи отсутствуют также и в материалах CADFEM конференций.
Вместе с тем в химической технологии существует ряд практических задач
вращением различных сосудов, частично заполненных жидкой средой, и с поел
дующим выдавливанием этой среды в осесимметричных, но неоднородных Tei
левых полях. Аналогичные задачи существуют в некоторых технологически
стадиях металлургических процессов.
Рассмотрим математическую постановку задачи вращения прямого круговс
го цилиндра, частично заполненного жидкой средой, в рамках методологии сис
темы ANSYS/FLOTRAN с активизацией опции Swirl в предположении ламинарнс
го режима течения на всем исследуемом интервале времени:
8{гУг) , 8(гУу)
8г
8у
(5.7)
8У 8V 8V V2
—N+V —^+y
8t r 8r У 8y r
др
~+ М
дг
82V }8V V d2V
___r^ + r_ r_ + I
dr2 r 8r r2 Sy2
, (5.81
sv 8v акЛ
-^-+Vr—^- + Vv—?-
8t r 8r y 8y
Pg + P
8V, 8V, 8V VrV,
—- + V. —- + E —-+——
8t 8r y 8y r
82Уу I 8Уу 82Уу
8г2 г 8г ду2
82VE 1 6ГЕ ГЕ S2V^
dr2 r 8r г2 8y2 ,
(5-9)
(5.10)
Ф
= Р
где p - заданная плотность жидкости (p = const), Vr, Vy , УЕ - проекции вектора
скорости жидкости на оси цилиндрической системы координат, р - давление в
жидкости, ц - заданная ламинарная динамическая вязкость жидкости (ц = const),
g - ускорение свободного падения.
В уравнениях неразрывности (5.7), количества движения (5.8)-(5.10) неиз-
вестными являются функции Уг, Уу, У„ р. Рассматриваемая задача - задача гид-
родинамики со свободными границами, поэтому геометрия свободных границ 1
(рис. 5.16) известна только в начальный момент времени и определяется в про-
цессе решения задачи с использованием кинематического и динамического гра-
ничных условий, выставляемых на неизвестной свободной поверхности [3].
Если F(t, г, у) = 0 - уравнение свободной поверхности, то кинематическое
граничное условие имеет вид
8F 8 FV 8
— + —-{РУГ) + -^ + — (FV ) = 0. (5.11)
8t 8г г 8у
Условие (5.11) означает, что частица жидкости, вышедшая на свободную по-
верхность, остается на ней во всем последующем движении.
Динамическое граничное условие в рассматриваемой задаче имеет вид
/7 = 0 на F(t,r,y) = 0 (5.12)
и выражает непрерывность давления при переходе через свободную границу.
Помимо (5.11), (5.12) граничными условиями для системы уравнений явля-
ются:
- условие симметрии Уг = 0, V, = 0 на ОБ (при г = 0 ),
190
- условие на твердых границах цилиндра Vr= 0, Vy = 0 на ОЕ, ЕС и ВС,
- условие вращения цилиндра VE = 3 м/с на ЕС (при г = R).
Отметим, что, несмотря на необходимость решения в данной задаче всех
трех уравнений количества движения, эта задача, строго говоря, не является гид-
родинамической задачей размерности 3D, поскольку все искомые функции не
зависят от окружной координаты.
Если предположить, что Vc = orR (а именно такое распределение окружной
скорости является решением рассмотренной выше задачи), то из уравнения ко-
личества движения (5.10) имеем
2р- ($-(0 = 0, откуда Vr = 0 в любой точке области жидкости.
Тогда из уравнения неразрывности следует, что Vy = 0 и жидкость находится в
относительном равновесии.
Целью данной работы является нахождение стационарного решения задачи
(5.7)-(5.12) и сопоставление этого решения, полученного на различных сетках, с
точным решением (5.6).
5.2. Решение задачи
Активизируем систему FLOTRAN CFD и выберем тип конечного элемента:
Main Menu > Preprocessor > Element Type > Add/Edit/ Delete, в окне Element Types
нажимаем кнопку Add и в окне Library of Element Types выбираем элемент 2D
FLOTRAN 141, OK. Далее нажимаем Options и во вкладке Element coordinate sys-
tem выбираем Axisymm about Y. OK, Close.
Создаем расчетную область. Сначала введем характерные точки: Main Menu
> Preprocessor Modeling > Create > Keypoints > On Working Plane. В окне Cre-
ate KPs on WP последовательно вводятся координаты (в метрах) точек О (0;0),
Л(0;0,5), В(0; 1), С(0,5;1), £>(0,5 ;0,5), £(0,5;0).
Соединяем введенные точки прямыми линиями: Main Menu>Preprocessor
>Modeling>Create>Lines>Lines>Straight Line. Отображаем на экран номера по-
строенных линий: Utility Menu>PlotCtrls>Numbering >Line numbers, Utility Menu
> Plot > Lines (рис. 5.2).
1
LINES
LINE NUM
ANSYS
Рис. 5.2
191
Создаем площади: Main Menu > Preprocessor > Modeling > Create > Areas >
Arbitrary > By Lines. Левой кнопкой в произвольном порядке указываем линии
№№ 1, 6, 2, 4, Apply (создана площадь №1, ограниченная линиями №№ 1, 6, 2,4)
Аналогично создаем площадь №2, ограниченную линиями №№ 2, 7, 3, 5. Расчет-
ная область создана.
Разбиваем линии для построения упорядоченной конечно-элементной сетки'
Main Menu >Preprocessor > Meshing > Size Cntrls > Manual Size > Lines > Picked
Lines. Левой кнопкой отмечаем линии №№ 1, 2, 3 (ширина области), ОК. В окне
Element Sizes on Picked Lines указываем параметры NDIV = 50 (количество деле-
ний), SPACE = 1 (разбиение равномерное). Аналогично для линий №№ 4, 5, 6, 7
NDIV= 50 (область по высоте разбивается 100 точками), SPACE = 1.
Строим упорядоченную конечно-элементную сетку: Main Menu >Preproces-
sor > Meshing > Mesh > Areas > Mapped > 3 or 4 sides. В окне Mesh Areas нажи-
маем кнопку Pick All (для всех площадей).
Задаем граничные условия: Main Menu > Preprocessor > Loads > Define Loads
> Apply > Fluid/CFD > Velocity > On Lines. Открылось окно Apply V on Lines. Вы-
деляем линии №№ 4, 5, OK. В окне Apply VELO load on lines вводим VX= 0, VZ =
0 (VX - радиальная, KZ - окружная скорости). Аналогично, на линиях №№ 1,3
VX= 0, VY= 0; на линиях №№ 6,7: VX= 0, VY= 0, VZ= 3.
Определим положение тяжелой жидкости до начала вращения. Выделим
нижнюю подобласть (площадь № 1): Utility Menu > Select > Entities. В окне Select
Entities в верхней вкладке выберем Areas, ОК. Левой кнопкой выделим площадь
А1, OK. Utility Menu > Plot > Areas. «Заливаем» жидкость во все элементы выде-
ленной площади: Main Menu > Preprocessor > Loads > Define Loads > Apply >
Fluid/CFD > Volume Fract > Init Loads > On Elements. В окне Apply VFRC on Elems
выбираем Pick All, а в окне Initialize VFRC on Elems вводим VFRC= 1, OK. Отме-
тим, что по умолчанию все начальные условия считаются нулевыми.
Теперь в обязательном порядке следует вернуться ко всем элементам расчет-
ной области: Utility Menu > Select > Everything, Utility Menu > Plot > Lines.
Задаем модель течения жидкости и опции решения: Main Menu >Solutiori>
Flotran Set Up > Solution Options. В окне FLOTRAN Solution Options присваиваем
значения: TRAN = Transient, TEMP = Adiabatic, TURB = Laminar, COMP = Incom-
pressible', активизируем опцию VOF течения co свободными границами (флажок
Yes) и опцию вращения SWIRL (Yes).
Далее, выбираем алгоритм решения: Main Мепи> Solution >Flotran Set Up
>Algorithm Ctrl. В окне Algorithm Control ставим переключатель на SIMPLEN,
OK
Задаем схему выбора шага интегрирования, число глобальных итераций на
шаге интегрирования, момент времени прекращения интегрирования, интервал
времени, через который пополняется результирующий (*rfl) файл: Main Menu >
Preprocessor > Flotran Set Up > Execution Ctrl. В окне Time Step Controls во
вкладках выбираем Advection и Time Values, OK. В окне Transient Controls вводим
значения STEP = 0,00001 (начальный шаг), TEND = 5000 (время завершения ин-
тегрирования в секундах), GLOB = 5 (число итераций на шаге).
Определяем свойства жидкости: Main Menu > Solution > Flotran Set Up >
Fluid Properties. Открылось окно Fluid Properties, OK, в соответствующие строки
которого вводим Density = 3200 (плотность), Viscosity = 10000 (динамическая
192
вязкость)1. Значения теплопроводности и теплоемкости в решении данной задачи
не задействуются.
В соответствии с постановкой задачи жидкость находится в поле сил тяже-
сти: Main Menu > Solution > Flotran Set Up > Flow Environment > Gravity. В окне
Gravity Specification введем ACELY = 9,81.
Подготовка к решению завершена, решаем задачу: Main Menu > Solution
> Run FLOTRAN.
5.3. Результаты расчетов
Для принятых исходных данных аппликаты характерных точек свободной
поверхности жидкости, вычисленные по (5.6), равны zT(r = 0) = 0,271 м (на оси
симметрии цилиндра), zT(r = R = 0,5) = 0,729 м (на стенке цилиндра).
Задача решалась на различных сетках. В приведенной ниже таблице 5.1
представлены результаты расчетов в характерных точках, а также относительные
ошибки в процентах ст = |(zp — zT)/zT 1100% .
Таблица 5.1
(Число разбиений по ширине)х (число разбиений по высоте) o' L 2 G (г = 0), % 2 а _ S' II SB । L
50x24 0,290 7,01 0,750 2,88
50x50 0,240 11,44 0,760 4,25
50 х 100 0,230 15,13 0,760 4,25
50 х 200 0,190 29,89 0,775 6,31
100 х 24 0,290 7,01 0,750 2,88
100 х 50 0,280 3,32 0,760 4,25
100 х100 0,240 11,44 0,770 5,62
' 100 х 200 0,215 23,49 0,775 6,31
200 х 24 0,290 7,01 0,750 2,88
200 х 50 0,280 3,32 0,740 1,51
200 х100 0,270 0,37 0,750 2,88
200 х 200 0,240 11,44 0,765 4,94
Область, занятая жидкостью, для сетки (200x100) приведена на рис. 5.3.
(Main Menu > General Postproc >Read Results >Last Set, Main Menu >General
Postproc > Plot Results > Contour Plot > Volume Fraction).
Из всех полученных численных решений результаты, представленные на рис.
5.3, наилучшим образом согласуются с теоретическими и удовлетворяют требо-
ваниям инженерной точности расчетов. Вместе с тем значения осевых и радиаль-
ных скоростей оказываются несколько отличны от нуля; эти значения весьма ма-
лы в сравнении с максимальной окружной скоростью. Распределение окружной
скорости по радиусу цилиндра весьма близко к линейному при различных осе-
вых координатах за исключением аппликат, весьма близких к свободной границе.
Максимальное отличие от линейного закона наблюдается при осевой координате,
совпадающей с z (г = 0).
1 В качестве исходных данных приняты характеристики расплава сульфида мышьяка -
субстанции, используемой при вытяжке световодов.
193
AVG ELEMENT SOLUTION
STEP=3
SUB«=756
TIME=5000
VFRC (AVG)
SMX-1
AN
Рис. 5.3
На рис. 5.4 и 5.5 представлены соответственно радиальные и осевые поля
скоростей для сетки (200 х 100). Максимальные значения скоростей наблюдают-
ся в области свободной границы, что связано, по-видимому, с ошибками в опре-
делении окружных скоростей в этой области.
Рис. 5.4
Рис. 5.5
В целом, система ANSYS/FLOTRAN обеспечивает инженерную точность ре-
шения задач динамики и равновесия жидкости со свободными границами при
действии полей массовых сил тяжести и инерции.
5.4. Литература
1. Седов Л.И. Механика сплошной среды. Т. 2. - М.: Наука, 1970.
2. Лойцянский Л.Г. Механика жидкости и газа. - М.: Наука, 1971.
3. Логвинович Г.В. Гидродинамика течений со свободными границами. -
Киев: Наукова думка, 1969.
4. ANSYS Basic Analysis Procedure Guide. ANSYS Rel. 7.0. ANSYS Inc., 2001.
5. ANSYS Theory Reference. ANSYS Rel. 7.0. ANSYS Inc., 2001.
194
6. СИММЕТРИЧНОЕ ПОГРУЖЕНИЕ КЛИНОВИДНОГО
ПРОФИЛЯ В НЕСЖИМАЕМУЮ ЖИДКОСТЬ
6.1. Постановка задачи
6.2. Препроцессорная подготовка
6.3. Постпроцессор: результаты расчетов
6.4. Литература
6.1. Постановка задачи
Рассматривается симметричное относительное погружение с постоянной
скоростью клиновидного профиля в несжимаемую весомую жидкость - воду
(рис. 6.1). В начальный момент времени жидкость покоится и занимает область
ODEF (учтена симметрия); свободная поверхность совпадает с горизонтальной
плоскостью OD.
Профиль В А\ОАВ представляет собой прямощекий клин со скулой, угол ки-
леватости р = 30°, ширина по линии скул 2с = 1 м. Размеры расчетной области
достаточно велики, что связано с минимизацией влияния местоположения даль-
них границ на течение в ближней области.
Для исследования течения используется модель несжимаемой весомой жид-
кости. Течение жидкости нестационарное, турбулентное. Для замыкания уравне-
ний турбулентного течения жидкости используется к-в-модель турбулентности.
Математическая модель течения жидкости имеет вид:
(61)
дх ду
195
— (Р^х) + —(Р^х)+ —(Р^) = -—+ — М.
dt дх ду дх дх
д
дх
dVx ]
|(рг,)+£(ргл,)+^(рГЛ,)=^+А|'и,
+аДи'1Г
8V^
дх ,
(6.2)
8V>
5 . . d , т, . д д ( бк') д f 5кЛ -
—(Р«)+—(Р^к)+—(рРк) = — р,— +— ц,— +ц,Ф-р£,
dt дх ду дх\ дх ) ду)
д . д д д [ р, дг
— (рЕ)+--(РГХ£)+—(рК £>— ——
dt дх ду дх\асдх) ду
(6.3)
д
£ е2
р,-ф-С2р-,
к к
к2
P,=CRP—,
Е
Jr^Y P^Y l(dvy 8VxT
I дх ) dy J 2^ дх dy )
где p - заданная плотность жидкости (p = const), g - ускорение свободного паде-
ния, Vx, Vy - проекции вектора скорости жидкости, р - избыточное давление в
жидкости, р. - заданная физическая (ламинарная) вязкость, р, - турбулентная
(вихревая) вязкость, ре - эффективная вязкость, к - кинетическая энергия турбу-
лентности, Е — скорость диссипации кинетической энергии турбулентности, С(1,
С1е , Сг , <э£ - эмпирические константы к-Е-модели, Си = 0,09, = 1,44, Сг =
= 1,92, ос = 1,3.
На неизвестной свободной границе жидкости ставятся кинематическое и ди-
намическое граничные условия. Если F(t,x,y) — 0 - уравнение свободной поверх-
ности, то кинематическое граничное условие имеет вид
—+—(FKJ+—(FE)-O. (6.4)
dt дх х ду у)
Динамическое граничное условие имеет вид
р- 0 на F(/,x,y>) = 0 (6.5)
и выражает непрерывность давления при переходе через свободную границу.
На поверхности клина ОАВ в каждый момент времени должны выполняться
условия прилипания
Vx = 0 м/с, Vy = 0 м/с.
Граница FE есть входная граница; на FE задаются условия однородного по-
тока
196
Vx = 0 м/с, Vv = 2 м/с.
На границе OF выставляются условия симметрии: Vx - 0 м/с и однородные
условия Неймана по Vy и р.
На остальных границах расчетной области задаются однородные условия
Неймана на Vx, Vy и р.
Течение жидкости нестационарно: в задаче помимо граничных условий
должны выставляться и начальные условия. Будем считать, что в начальный мо-
мент времени в области, занятой жидкостью, заданы значения
Vx = 0 м/с, Vy = 2 м/с, р = 0 Н/м2.
6.2. Препроцессорная подготовка
При погружении клина со скулами в жидкость вблизи щеки клина формиру-
ется брызговая струя, скорости движения частиц жидкости в которой существен-
но превосходят скорость погружения тела [1]. Это обстоятельство следует иметь
в виду при геометрическом моделировании и построении сетки.
После активизации системы FLOTRAN CFD и выбора типа конечного эле-
мента FLOTRAN 141 вводим координаты характерных точек границ расчетной
области и координаты вспомогательных точек (№№6, 7, 8, 9, 5, И). Номера и
координаты точек приведены в табл. 6.1.
Таблица 6.1
№ точки х, м у, м
1 0,0 0,0
2 0,5 0,28865
3 0,5 1,0
4 5,0 1,0
5 5,0 0,0
6 0,4 0,0
7 0,9 0,28865
8 0,9 1,0
9 5,0 0,28865
10 0,0 -з,о
11 0,4 -з,о
12 5,0 -з,о
Соединяем введенные точки линиями (номера точек и линий показаны на
рис. 6.2).
Далее последовательно строим поверхности, ограниченные следующими
группами линий:
{L16, L14, LI, L13}, {LI, L4, L6, L2}, {L6, L7, L8, L3}, { L7, L5, L12, L9},
{L4, LIO, Lil, L5}, {L14, L17, L15, L10}.
197
1
LINES
ANSYS
LINE NUM
Рис. 6.2
Разбиваем узлами все линии. В табл. 6.2 даны номера линий, число разбие-
ний каждой линии {NDIV) и величина, характеризующая сгущение разбиений
линии {SPACE). В этой же таблице приведены номера граничных точек каждой
линии с указанием точек ее начала и конца. Если SPACE = 1, то разбиение линий
равномерное, если же SPACE > 1, то сгущение точек разбиения линии задается к
ее началу (см. задачу 1).
Таблица 6.2
№ линии № точки на- чала линии № точки кон- ца линии Разбиение {NDIV) Сгущение {SPACE)
1 1 6 50 10,0
2 1 2 100 1,0
3 2 3 100 1,5
4 6 7 100 1,0
5 7 9 100 3,0
6 2 7 50 “1 10,0
7 7 8 100 1,5
8 3 8 50 10,0
9 8 4 100 3,0
10 6 5 100 з,о
11 5 9 100 1,0
12 9 4 100 1,5
13 1 10 100 20,0
14 6 11 100 20,0
15 5 12 100 20,0
16 10 11 50 10,0
17 11 12 100 з,о
198
Строим конечно-элементную сетку: Main Menu > Preprocessor > Meshing/
Mesh/Areas/Mapped/3 or 4 sided > Pick All.
Задаем модель жидкости: Preprocessor > Flotran Set Up/Solution Options. В
диалоговой панели Flotran Solution Options выбираются опции: Transient (неста-
ционарное течение), Adiabatic (течение без теплообмена), Turbulent (течение тур-
булентное), Incompressible (жидкость несжимаема). В строке VOF Activate VOF
advection в обязательном порядке ставим флажок Yes — решается задача гидроди-
намики со свободными границами.
Задаем свойства жидкости: Preprocessor > Flotran Set Up/Fluid Properties.
Физические свойства воды считаем неизменными; вводим в колонках диалогово-
го окна значение плотности воды {density) р =1000 кг/м3 и динамической вязко-
сти {viscosity) ц = 0,001 Н-с/м2, ОК. Далее, задаем массовые силы: Flotran Set Up
> Flow Environment/Gravity и в строке ACELY Accel in Y direction вводим пере-
носное ускорение g = 9,81 м/с2.
Устанавливаем алгоритм решения: Preprocessor > Flotran Set Up/Algorithm
Ctrl. В диалоговой панели AIgorithm Control выбираем алгоритм Simplen.
Задаем граничные условия: Preprocessor > Loads/Define Loads/ Apply/ Fluid
CFD/Velocity/On lines. Указываем входную границу - линии №16 и №17 (рис.
6.2), ОК. В диалоговом окне вводим КЛ= 0, Vy = 2. В Apply to endpoints ставим Yes
- указанные значения скорости приложены и в границах линий. В задачах гидро-
динамики со свободными поверхностями граничное условие на входной границе
требует дополнительного уточнения: в системе ANSYS/Flotran допускается по-
ступление в расчетную область как тяжелой жидкости (воды), так и «пустой» по
терминологии системы Flotran жидкости, не имеющей плотности. Ввод «пустой»
жидкости дает возможность моделировать эффекты вытеснения тяжелой жидко-
сти. В рассматриваемой задаче через входную границу непрерывно поступает
тяжелая жидкость. Такой вариант граничного условия реализуется в системе
ANSYS/Flotran следующим образом: Preprocessor {Solution) > Loads/Define
Loads/Fluid CFD/ > Volume Fract > Bound Loads > On lines, и в открывшемся ок-
не следует задать Boundary Value = 1, Wetting Status = 1. Отметим, что при зада-
нии Wetting Status = 0 в расчетную область будет поступать «пустая» жидкость.
Задаем условия прилипания на контуре клиновидного тела (линии №2 и №3)
Fluid CFD/Velocity/ On lines... Vx= 0, Vy = 0, Yes, OK и условия симметрии на ли-
нии № 13: On lines...Vx= 0, Yes, OK.
Переходим к заданию начальных условий. В рассматриваемой задаче следу-
ет, во-первых, задать область занятую тяжелой жидкостью, в начальный момент
времени. Для этого используем Solution>Define Loads >Apply > Fluid
CFD>Volume Fract>Init Loads>On Elements и, далее, с помощью Box и мыши
точно указываем прямоугольник ODEF, нажимаем ОК и в открывшемся окне в
поле VFRC ставим цифру 1, ОК - область ODEF в начальный момент времени
«залита» тяжелой жидкостью.
Далее, задаем кинематические и динамические начальные условия: Solution >
Define Loads > Apply > Fluid CFD >Initial Condit'n > Define и в открывшемся
вспомогательном меню указываем Pick АН, в открывшемся диалоговом окне Lab
DOF to be specified соглашаемся с формулировкой ALL DOF, в окне VALUE Initial
value of DOF устанавливаем 0 - значения всех зависимых переменных в началь-
ный момент времени равны нулю. Затем «поверх» заданных нулевых значений
задаем начальные условия по скорости Vy. вновь используем команду Solu-
199
tion>Define Loads>Apply>Fluid CFD>Initial Condit'n >Define > Pick All, в окне
Lab DOF... устанавливаем Vy, а в окне VALUE ... вводим начальные условия по
вертикальной скорости - величину 2,0.
Заключительный шаг препроцессорной подготовки заключается в численном
задании группы управляющих решением задачи параметров: шага интегрирова-
ния или алгоритма его выбора, времени интегрирования, числа локальных итера-
ций на шаге глобальной итерации, критериев прерывания решения на шаге гло-
бальной итерации, а также шага пополнения файла результатов и шага вывода
подробной информации о решении на экран в процессе счета.
Командой Solution > Flotran Set Up >Execution Ctrl открываем окно Time Step
Controls', в строке Step Select time step control выбираем Advection — шаг интегри-
рования будет выбираться автоматически с использованием обобщенного усло-
вия Куранта-Фридрихса-Леви. В строке Base output control on выбираем Time
Values — пополнение выходного файла осуществляется через конкретные интер-
валы времени интегрирования, ОК. Открывается диалоговая панель Transient
Controls. В строке ISTEP Initial... вводим начальный шаг интегрирования: вели-
чину 0,000001. Отметим, что в процессе счета этот шаг будет меняться, посколь-
ку выбрана опция Advection. В строку TEND STOP time вводим величину конеч-
ного времени интегрирования: 0,25 (в секундах). Далее, в строку Glob. Global
iter... вводим число локальных итераций на шаге интегрирования: 5.
Критерии выполнения глобальной итерации (Vx, Vy,...ENDS) принимаем
предложенными по умолчанию. В строках TIME, OVER... и TIME, АРРЕ... вво-
дим величину 0,02 - примерно через такой временной шаг будут осуществляться
записи в выходной (.rfl) файл и выводиться подробная информация о расчете на
экран монитора. Далее - ОК и запускаем задачу на счет: Solutiori> Run Flotran.
6.3. Постпроцессор: результаты расчетов
Представим результаты расчетов формы свободной поверхности (области,
занятой жидкостью) в некоторый момент времени. Для этого используем коман-
ду: General Postproc>Read Results> /By Time/Freq(By Pick} и в открывшемся окне
укажем интересующий расчетный момент времени. Далее, Plot Results!Element
Solution(Volumefraction), OK.
На рис. 6.3 показаны мгновенные положения свободных границ жидкости в
процессе погружения клиновидного профиля. Для наглядности представлена и
полуплоскость х < 0 (Utility Menu > PlotCtrls/Style/Symmetry Expansion/ Peri-
odic/cyclic Symmetry > Reflect about YZ, OK).
На первой стадии погружения вершины брызговых струй не доходят до ли-
нии скул (t = 0,0732 с, рис. 6.3). В области щек клина наблюдаются брызговые
струи. Переходная стадия погружения реализуется в момент времени t~ 0,1107 с,
когда область поворота брызговых струй достигает линии скул. Дальнейшее по-
гружение клина характеризуется формированием внутренних свободных границ
[1], которые образуются частицами жидкости, сошедшими с поверхности клина.
Течение, показанное в момент времени t = 0,2403 с, типично для больших отно-
сительных погружений A-ctg Д/ с, где h — мгновенное отстояние острия клина от
свободной поверхности при х —> ±оо. При больших относительных погружениях
течение жидкости около клина характеризуется отрывом мощных брызговых
струй с линии скул.
Остановимся подробнее на первой стадии погружения. Задача о погружении
200
клина без замыва скул подробно изучалась Г. Вагнером и А.С. Повицким в рам-
ках модели идеальной жидкости и при некоторых дополнительных допущениях,
главным из которых являлось предположение о близости в каждый момент вре-
мени полей течений около погружающегося клипа и эквивалентной пластины,
обтекаемой безграничным потоком. В дальнейшем полученное решение уточня-
лось А.Б. Лотовым, Г.В. Логвиновичем и рядом других авторов. Обширные ма-
териалы по решению этой задачи приведены в [2].
t = 0 с
AN
I
.жхглиоео
wnc t*w>)
Г =0,0732 с
Г = 0,1107 с
t = 0,2403 с
Рис. 6.3
Результаты экспериментов в брызговом бассейне ЦАГИ по погружению
клиньев на режимах без смачивания скул показывают, что для клина с углом ки-
лсватости р = 30° отношение мгновенной смоченной ширины, определенной по
области поворота брызговых струй (ширины эквивалентной пластины - по тер-
минологии Г. Вагнера), к его мгновенной ширине по уровню невозмущенной
жидкости (в плоскости у = 0) равно 1,32=1,37. Расчеты этого отношения в данной
задаче дают величины, укладывающиеся в диапазон экспериментальных резуль-
татов.
Г.В. Логвинович [1] называет режим погружения клина без замыва скул ав-
томодельным, а свободные границы при погружении - автомодельными. По ре-
шению, полученному в рамках модели идеальной невесомой жидкости, свобод-
ные границы в процессе погружения переносятся в пространстве, оставаясь гео-
метрически подобными самим себе. Рассматриваемая задача решается в более
общей постановке с учетом вязкостных эффектов и массовых сил; тем не менее
201
свободные границы на стадии погружения без замыва скул близки к автомодель-
ным. На рис. 6.4 представлено поле скоростей жидкости вблизи клина и свобод-
ных границ (Main Menu>General PostproO Plot Results! Vector Piot/Predefended}.
Рис. 6.4
За исключением области поворота брызговой струи свободные границы ока-
зываются ортогональными [1]: векторы скоростей частиц жидкости направлены
по нормали к свободной поверхности. Скорость в брызговой струе Сбр по экспе-
риментальным данным [1] для рассматриваемого угла килеватости и скорости
погружения составляет Сбр к 8,5 м/с - результаты расчета и эксперимента близки
друг к другу.
Согласно решению Г. Вагнера, подтвержденному экспериментами, макси-
мальное избыточное давление при погружении без замыва скул реализуется на
участке клина, вблизи которого находится область поворота брызговой струи.
Этот результат наблюдается в полученном решении. На рис. 6.5 приведен график
изменения избыточного гидродинамического давления вдоль щеки клина (Gen-
eral Postproc>Path Operations>Define Path>By Locations, далее указать коорди-
наты точек №№ 1, 2 и в Map Onto Path выбрать Pres - давление).
202
P03T1 ANSYS
STEP=2
SUB =70
TIMB=.O732
PATH PLOT
PRES
(острие (скула
клина) клина)
Рис. 6.5
6.4. Литература
1. Логвинович Г.В. Гидродинамика течений со свободными границами. -
Киев: Наукова думка, 1969.
2. Григолюк Э.И. Взаимодействие упругих конструкций с жидкостью (Удар
и погружение). - Л.: Судостроение, 1976.
3. ANSYS Basic Analysis Procedure Guide. ANSYS Rel. 7.0. ANSYS Inc., 2001.
4. ANSYS Theory Reference. ANSYS Rel. 7.0. ANSYS Inc.,2001.
7. ОБТЕКАНИЕ ПРОФИЛЯ ПОТОКОМ ВЯЗКОГО ГАЗА1
7.1. Постановка задачи
7.2. Построение расчетной области
7.3. Задание свойств жидкости, граничных условий и решение задачи
7.4. Постпроцессор: некоторые результаты расчетов
7.5. Приложение: результаты расчетов срывного обтекания профиля
несжимаемой жидкостью
7.6. Литература
1 Работа выполнена совместно со студентом механико-математического факультета
ННГУ С. Филипповым.
203
7.1. Постановка задачи
Профиль крыла самолета обтекается сверхзвуковым потоком вязкого газа
воздуха (рис. 7.1). Термодинамические параметры газа подчиняются уравнсни:
Клапейрона, значения абсолютного давления, плотности и температуры в на&
гающем потоке далеко перед телом известны. Источники и стоки тепла в пото*
отсутствуют; теплообменом между профилем и потоком пренебрегаем.
Рис. 7.1
Математическая постановка задачи при замыкании осредненных уравнений
турбулентного движения жидкости к-е-моделью турбулентности имеет вид:
ЗД, а(ри,) 9
8х ду
—(pVxVx )+—(pVxV ) =
дх ду дх дх
—(Р^Л )+—(pVyVy) = ~—+—
дх х у ду у у ду дх
8VX\
8х )
8Vy}
ме —
дх
8Vr )
Не— >
8У J
8 У С е 8 у ) ’
£^-=(ср-Сг)т.
И2
Т+— = ТО,
2ср
(7.1)
(7.2)
(7-3)
(7.4)
8
8 (
204
a , w ч э z „ 4 a f эк"| э ( ЭкЛ
—(pVxK)+—(pV K)=— Ц,— +— И,— +Ц,ф-рЕ,
ox oy ox J oy^ oy J
Э Э Э [ щ Эе
—(рУлЕ)+—(рУЕ) =—1 -L—
ox oy
Эх ^aE Эх
Э ц, Эе
ЭДстЕ Эу
£ £2
+ GeH/-^-C2p—>
К к
(7-5)
Це =Р + Р1,
к
И, =СцР —-
Е
(dVy
kЭх ду j
Ф
где р - плотность жидкости, V„ Vy - проекции вектора скорости жидкости, ра6с -
абсолютное давление в жидкости, р - избыточное давление, Т - температура, То
- температура торможения, ср, cv- удельные теплоемкости жидкости соответст-
венно при постоянном давлении и объеме, ц - заданная физическая (ламинарная)
вязкость, р - турбулентная (вихревая) вязкость, р - эффективная вязкость, к -
кинетическая энергия турбулентности, Е - скорость диссипации кинетической
энергии турбулентности, Сц , С]Е, С2, оЕ - эмпирические константы к-Е-модели,
Q= 0,09, С1Е = 1,44, С2 = 1,92, стЕ = 1,3.
Расчет проводится для скорости набегающего потока Ул = 400 м/с, Vy - 0;
температура торможения при этой скорости:
Г. =293+ -400 =372,68°К.
° 2-1004
Граничными условиями для системы уравнений в частных производных
(7.1), (7.2) являются:
Vx -- 400 м/с, Vy = 0 м/с, р = 0 Н/м2 на АВ;
Vx = 400 м/с, Vy = 0 м/с, р - 0 Н/м2 на BD и АЕ;
Ул = 0 м/с, Vy = 0 м/с на профиле OF;
^ = 0, -^ = 0, ^ = 0 на DE.
Эх Эх дх
7.2. Построение расчетной области
Процесс построения расчетной области разобьем на два последовательных
шага:
- построение двумерных геометрических подобластей;
— построение конечно-элементной сетки.
Шаг 1. Построение кривых, описывающих границу профиля.
При описании геометрии расчетной области начнем с построения кривой,
описывающей границу профиля. Используя команду: Main Мепи> Preprocessor
Modeling > Create > Keypoints > In Active CS, введем набор точек. Точки
(х, у, z) профиля с соответствующими им номерами приведены в табл. 7.1.
Затем командой: Main Мепи> Preprocessor>Modeling>Create>Lines> Splines
>Spline thru KPs и последовательным указанием всех введенных точек строим
сплайн. Необходимо отмстить, что при построении этого сплайна точки указы-
205
ваются в такой последовательности: 17, 16, 15, 14, 13, 12, 11, 10, 9, 8, 7, 6, 5, 4, 3,
2, 1, 18, 19, 20, 21, 22, 23, 24, 25, 26, 27, 28, 29, 30, 31, 32. Затем, выполняя коман-
ду: Main Menu>Preprocessor> Modeling>Create>Lines>Lines> Straight Line и
указывая последовательно точки 32 и 17, замыкаем кривую, описывающую гра-
ницу профиля. В результате получаем кривые, показанные на рис. 7.2.
Таблица 7.1
№ точки X У Z № точки X У Z
1 0,0 0,0 0,0 17 1,20 0,0 0,0
2 0,03 0,04104 0,0 18 0,03 -0,02964 0,0
3 0,06 0,0564 0,0 19 0,06 -0,039 0,0
4 0,09 0,0672 0,0 20 0,09 -0,04476 0,0
5 0,12 0,07464 0,0 21 0,12 -0,0492 0,0
6 0,18 0,0852 0,0 22 0,18 -0,05412 0,0
7 0,24 0,09072 0,0 23 0,24 -0,05664 0,0
8 0,30 0,0942 0,0 24 0,30 -0,05796 0,0
9 0,36 0,09504 0,0 25 0,36 -0,05832 0,0
10 0,48 0,08856 0,0 26 0,48 -0,0564 0,0
11 0,60 0,07656 0,0 27 0,60 -0,05172 0,0
12 0,72 0,06348 0,0 28 0,72 -0,0456 0,0
13 0,84 0,04788 0,0 29 0,84 -0,03816 0,0
14 0,96 0,0336 0,0 30 0,96 -0,02832 0,0
15 1,08 0,01632 0,0 31 1,08 -0,01464 0,0
16 1,14 0,0078 0,0 32 1,14 -0,00744 0,0
Шаг 2. Дополнительные построения.
Следующим важным шагом в построении расчетной области будет построе-
ние подобластей, часть границ которых совпадает с границей профиля. При этом
для более корректного описания течения в пограничном слое, т.е. вблизи грани-
цы профиля, размеры этих подобластей в направлении нормали к кривой, описы-
вающей границу профиля, должны быть малыми по отношению к размерам всей
расчетной области, о которых будет сказано ниже.
Попробуем вписать профиль в некоторый эллипс несколько большей площа-
ди, чем сам профиль. Для этого произведем следующие вспомогательные опера-
206
ции. Поставим точку с координатами (-0.7, 0, 0). Соединим эту точку с точкой (0,
0, 0) прямой линией. Далее, с помощью команды Main Menu > Preprocessor >
Modeling> Operate> Booleans> Divide> Line by Line разделим линию LI на две
линии, при этом линия L3 исчезнет. Командой Main Menu > Preprocessor > Mod-
eling > Operate > Booleans > Add > Lines из линий L2 и L5 сделаем одну единую
линию. Указываемое предупреждение игнорируем. Вновь восстанавливаем ли-
нию, соединяющую точки с координатами (-0.7, 0, 0) и (0, 0, 0). С помощью ко-
манды: Main Menu>Preprocessor>Modeling > Operate > Extrude > Lines > Along
Lines, движением только что построенной линии вдоль линии L4, мы образуем
поверхность. Для этого на запрос: Pick or enter lines to be swept, указываем линию
которая должна двигаться, а на запрос: Pick or enter lines defining the sweep path.
указываем линию, направляющую движение. Результат построения показан на
Далее, командой Main Menu > Preprocessor > Modeling > Delete > Areas Only
удаляем только что построенную поверхность и выполняем команды, упорядо-
чивающие номера точек и линий: Main Menu > Preprocessor > Numbering Ctrls >
Merge Items и Main Menu > Preprocessor > Numbering Ctrls > Compress Numbers,
выбирая в выплывающих окнах строку All.
Командой Main Menu > Preprocessor>Modeling>Operate>Extend Line увели-
чиваем длину линии L1 на 1,5 единиц, указывая это число в строке DIST. Далее,
удаляем линию L6, соединяющую точки 1 и 34, и строим линию по точкам 32 и
34. С помощью команды Main Menu > Preprocessor > Modeling > Operate > Ex-
trude > Lines > Along Lines строим поверхность движением линии L6 вдоль L5.
Вновь удаляем построенную поверхность и выполняем команды: Main Menu >
Preprocessor > Numbering Ctrls > Merge Items и Main Menu > Preprocessor >
Numbering Ctrls > Compress Numbers, выбирая в выплывающих окнах строку All.
Разобьем линию L8 на две линии командой Main Menu > Preprocessor > Mod-
eling > Operate > Booleans > Divide > Line into 2 Ln's, указывая примерно точку в
области середины линии. Увеличиваем длину линии L6 на 4 единицы. Затем уда-
ляем вновь построенную линию и соединяем линией точки 34 и 36. Движением
207
линии L10 вдоль L8 строим поверхность. Линию L9 снова разбиваем на две час-
ти. Движением линии L11 вдоль L9 строим еще одну поверхность.
Далее, удаляем все поверхности. Выполняем команды Main Menu > Preproc-
essor > Numbering Ctrls > Merge Items и Main Menu > Preprocessor > Numbering
Ctrls> Compress Numbers, выбирая в выплывающих окнах строку All. Удаляем
линии: LIO, Lil, L14, L6, L7, LI, L3. С помощью команды: Main Menu > Preproc-
essor > Modeling > Operate > Booleans > Add > Lines, соединяем между собой
линии: L12 и L15, L8 и L9. Линию, соединяющую точки 35 и 39, удаляем вместе
с точкой №35. В итоге имеем картину, показанную на рис.7.4.
Как и ранее, выполним команды: Main Menu > Preprocessor > Numbering
Ctrls > Merge Items и Main Menu > Preprocessor Numbering Ctrls> Compress
Numbers, выбирая в выплывающих окнах строку All.
Отобразим линии L3, L4, L5 относительно плоскости уг командой Main Menu
> Preprocessor > Modeling>Reflect> Lines', при этом указывается отображаемая
линия и плоскость, относительно которой ее следует отобразить. Линии, полу-
ченные отображением, следует переместить в направлении оси х на некоторое
число единиц. Покажем, как это делается, на примере линии L6.
Выполним команду Main Menu > Preprocessor > Modeling > Move/Modify >
Lines, указывая при этом число единиц, на которое следует переместить линию в
направлении каждой из осей координат. Для нашего случая кривую L6 следует
перенести в направлении оси х на 1,2 единицы, а в направлениях у и z на 0 еди-
ниц. То же следует проделать с линиями L7 и L8, перемещая каждую на 1,2 еди-
ницы в направлении оси х.
Рис. 7.4
Далее, командой Main Menu > Preprocessor > Modeling > Operate > Booleans
> Divide > Line into N Ln's делим линии L3, L6, L4, L7, L5, L8 (именно в такой
последовательности) на 10 частей, указывая это число в строке NDIV. Удаляем
все линии, кроме Ы и L2. Также следует удалить точки с №№ 39, 61, 60, 50, 59,
61, 52, 33 и воспроизвести команды Main Menu > Preprocessor > Numbering Ctrls
> Merge Items и Main Menu>Preprocessor> Numbering Ctrls> Compress Numbers,
выбирая в выплывающих окнах строку All.
Следующий момент является очень важным в ходе дальнейшего построения.
208
Если посмотреть координаты всех точек, то среди них окажутся точки с ненуле-
вой z-координатой. Это противоречит постановке решаемой задачи (решается
плоская задача). Необходимо вернуть все точки на плоскость z = 0, для чего в
командную строку следует ввести следующий блок операторов, составленный на
встроенном в систему ANSYS языке программирования APDL:
♦ dim, kax, array, 58
♦ dim, kay, array, 58
* do,j, 1,58
♦ get, kax(j), kp, j+31, loc, x
♦ get, kay(j), kp, j+31, loc, у
♦cnddo.
После выполнения этих команд следует удалить все точки, за исключением
точек с № 1 по № 31, и выполнить еще один цикл:
!Построение только что удаленных точек, но уже с нулевой z-координатой:
♦ do, i, 1,58
k,, kax(i), kay(i), 0
♦enddo
На экране монитора должна быть картина, показанная на рис. 7.5.
Дополнительные построения закончены, следующий этап — построение по-
добластей.
Шаг 3. Построение подобластей.
Проведем сплайны через следующие группы точек: {32, 42,43, 44, 45, 46, 47,
53, 52, 51, 50, 49, 48, 37}, {33, 54, 55, 56, 57, 58, 59, 60, 61, 62, 35, 39, 71, 70, 69,
68, 67, 66, 65, 64, 63, 38}, {34, 72, 73, 74, 75, 76, 77, 78, 79, 80, 36, 41, 89, 88, 87,
86,85, 84, 83,82,81,40}.
Построим линию, соединяющую точки 17 и 50. Командой Main Menu > Pre-
processor > Modeling > Operate > Booleans > Divide > Line by Line разделим ли-
нию L3 на две части с помощью линии L6. Затем вновь соединим точки 17 и 50.
Теперь отобразим относительно плоскости xz линии с номерами L7, L8, L4, L5.
Выполним команды Main Menu > Preprocessor > Numbering Ctrls > Merge Items и
Main Menu > Preprocessor > Numbering Ctrls > Compress Numbers, выбирая в вы-
209
плывающих окнах строку АП. Проведем прямые линии через следующие пары
точек: 17 и 90, 32 и 1, 33 и 32, 37 и 38, 33 и 34, 38 и 40.
Следующим шагом будет, собственно, построение подобластей. Делается это
командой Main Menu > Preprocessor > Modeling > Create > Areas > Arbitrary >
By Lines', для каждой отдельной поверхности указывается группа линий, ограни-
чивающих эту поверхность. Построим поверхности, соответствующие следую-
щим группам линий: {L3, L12, L9, L8}, {L13, LI, L12, L6}, {L13, L7, L3, L2},
{L14, L4, L15, L8, L7}, {L14, LIO, L15, L9, L6}, {L16, L5, L17, L4}, {L16, L11,
L17, L10}.
Для построения внешней границы расчетной области введем точки с коорди-
натами: (-60; 0; 0), (-60; 120; 0), (-60; -120; 0), (180; -120; 0), (180; 120; 0), (180;
0; 0). Также в качестве промежуточных следует ввести точки: (-60; 60; 0), (62; 0;
0), (-60; -60; 0). Далее, соединим линиями пары точек с номерами 91 и 97, 97 и
92, 92 и 95, 95 и 96, 96 и 94, 94 и 93, 93 и 99, 99 и 91, 91 и 34, 98 и 40, 98 и 96.
Опустим перпендикуляры из точек 97, 99, 98, 98 соответственно на линии L21,
L22, L30, L32. Перпендикуляры следует опустить из точки 102 на линию L20 и из
точки 103 наЬ23.
Построим теперь поверхности, ограниченные следующими группами линий:
{L18, L33, L34, L27, L5, L26}, {L25, L26, Lil, L27, L36, L35}, {L34, L30, L29,
L28}, {L36, L28, L22, L32}, {L19, L20, L39, L33}, {L39, L38, L21, L30}, {L41,
L32, L31, L23}, {L24, L35, L41, L40}.
Вновь выполним команду: Main Menu > Preprocessor>Numbering Ctrls>
Compress Numbers.
Па рис. 7.6 показана расчетная область и номера ее граничных линий.
Шаг 4. Построение сетки конечных элементов.
Ниже будет описано построение сетки только для части расчетной области,
лежащей в верхней полуплоскости у > 0. Построение сетки для нижней части
расчетной области проводится аналогично.
Перед построением сетки отобразим линии и их номера на экране: Utility
Menu > Plot Ctrl > Numbering > Line number, Utility Menu > Plot /Lines.
Начнем с построения сетки в подобластях, непосредственно примыкающих к
границе профиля.
Проводим разбиение линий, ограничивающих эти поверхности. Так как в по-
добласти, примыкающей к границе профиля, следует ожидать наиболее резкого
изменения решения, то сетка в этой области должна быть по возможности наибо-
лее мелкой по сравнению с другими подобластями.
Рассмотрим подобласть АЗ. Сначала произведем разбиение линий L2, L7, L3,
L13, ограничивающих эту подобласть. Разбиение проводится с помощью коман-
ды: Main Menu>Preprocessor>Meshing>Size Cntrls>ManualSize>Lines> Picked
Lines. Левой кнопкой мыши указывается выбранная линия; далее ОК в окне Ele-
ment Sizes и в появившейся на экране таблице в строке NDIV No. Of element divi-
sions вводится число делений указанных линий. В строке SPACE spacing ratio
вводится число, характеризующее неравномерность разбиений указанных линий
(степень сгущения). Ниже величина SPACE будет указываться в круглых скобках
рядом со значением ND1V (по умолчанию разбиение считается равномерным).
210
AREAS
TYPE NUM
ANSYS
Рис. 7.6
Для разбиваемых линий L2, L7, L3, L13: L2 {NDIV = 100(—12)), U{NDIV =
= 100(—2)), L3{NDIV= 80(20)), L13(AD7C= 80(1/20)).
Строим теперь на подобласти АЗ конечно-элементную сетку: Main Menu
>Preprocessor>Meshing>Mesh>Areas>Mapped>3 or 4 sided, указываем с по-
мощью левой кнопки мыши на подобласть АЗ, ОК.
Для подобласти А2. L6{NDIV = 100(-2)), L12(AZW = 80(1/21)), LI {NDIV=
= 100(-12)).
Подобласть А1 имеет границу, составленную из четырех линий: L12, L3, L8,
L9, но фактически это есть треугольная область. Такую область также можно
разбить на четырехугольные элементы. Для этого необходимо произвести такое
разбиение линий L12 и L3, чтобы число делений на каждой из них было числом
четным, что уже сделано. Далее нужно произвести «сцепление» линий L8 и L9:
Main Menu > Preprocessor > Meshing > Concatenate > Lines, указываем с помо-
щью левой кнопки мыши на эти линии, ОК.
Строим конечно-элементную сетку на подобласти Al: Main Menu > Preproc-
essor > Meshing > Mesh > Areas > Mapped > 3 or 4 sided, указываем с помощью
левой кнопки мыши на подобласть А1, ОК.
Прежде чем переходить к дальнейшим действиям, нужно в обязательном по-
рядке снять «сцепление» с линий: Main Menu > Preprocessor > Meshing > Del
Concats > Lines.
Полученная часть конечно-элементной сетки показана на рис. 7.7.
Для подобласти А4: L14 {NDIV = 20(1/6)), L15 {NDIV = 20(1/6)), L4 {NDIV =
= 140(1/2)). Здесь также необходимо произвести «сцепление» линий L7 и L8, а
после построения сетки на данной подобласти не забыть снять его.
211
Рис. 7.7
Подобласть А6: L16 {NDIV= 16(1/2)), L17 {NDIV= 16(1/2)), L5 {NDIV= 140).
Подобласть A8: L26 {NDIV = 100(1/2)), L27 {NDIV = 100(1/2)), L34 {NDIV = 35),
L33 {NDIV = 70), LI 8 {NDIV = 35). Здесь необходимо произвести «сцепление»
линий L34, L33, L18.
Подобласть А10: L19 {NDIV= 20(7)), L38 {NDIV= 20(1/7)), L20 {NDIV= 70).
Подобласть All: L30 {NDIV = 50(1/6)), L21 {NDIV = 20(1/3)), L37 {NDIV -
= 50).
Подобласть A12: L28 {NDIV= 50(6)), L29 {NDIV= 35).
Полученная в итоге конечно-элементная сетка показана на рис. 7.8.
Рис. 7.8
212
На этом этап построения расчетной области заканчивается, и можно перехо-
дить к следующим шагам решения задачи.
7.3. Задание свойств жидкости, граничных условий
и решение задачи
Задание модели течения жидкости
Main Menu > Preprocessor > Flotran Set Up/Solution Options. В диалоговой
панели Flotran Solution Options выбираются опции: Steady State (стационарное
течение), Adiabatic (течение с постоянной полной энтальпией), Turbulent (режим
течения турбулентный), Compressible (жидкость сжимаема).
Задание свойств жидкости
Командой Main Menu > Preprocessor > Flotran SetUp/Fluid Properties откры-
ваем таблицу Fluid Properties. В колонках плотности воздуха (density), динамиче-
ской вязкости (viscosity), теплопроводности (conductivity), удельной теплоемко-
сти при постоянном давлении (specific heat) указываем AIR-SI — свойства воздуха
в системе единиц СИ. Во всех окнах Allow density (viscosity, ...) variations ставим
флажок Yes. Далее OK
Задание термодинамических характеристик невозмущенного потока
Командой Flotran Set Up/Flow Enviroment/Ref conditions открываем окно Ref-
erence conditions. В строку Stagnation (total) temp вводим величину температуры
торможения: 452,36 К. Соглашаемся с остальными численными значениями,
предложенными по умолчанию, - ОК.
Задание граничных условий
Main Menu > Preprocessor > Loads/Define Loads/ Apply/Fluid CFD/Velocity/ On
lines. Левой кнопкой мыши указываем входные границы (см. рис. 7.6): линии
L24, L25, L18, L19, а также все линии верхней и нижней границ расчетной облас-
ти: L20, L37, L39, L23, после чего - ОК. В диалоговом окне вводим Vx= 400, Vy =
= 0. В поле Apply to endpoints ставим Yes — указанные значения скорости прило-
жены и в граничных точках линии, ОК.
Далее, задаем избыточное давление на входе, а также верхней и нижней гра-
ницах: Main Menu > Preprocessor > Loads/Define Loads /Apply/Fluid CFD / Pres-
sure/On lines. Указываем все линии левой, верхней и нижней границы, ОК. В
диалоговом окне Aplly Pres on lines в поле Pres Pressure Value вводим 0, далее
OK.
Задаем граничные условия на профиле (условия прилипания): ... Apply/Fluid
CFD/Velocity/ On lines - указываем на LI, L2 и вводим Vx = 0, Vy = 0, Yes, нажи-
маем OK.
Выбор алгоритма, задание ограничений и управление решением
Выбираем алгоритм решения: Main Menu > Preprocessor > Flotran Set Up I
Algorithm Ctrl. В диалоговой панели Algorithm Control устанавливаем алгоритм
Simplen. Командой Main Menu > Preprocessor > Flotran Set Up / Execution Ctrl от-
крываем панель Steady State Control Setting и устанавливаем число глобальных
итераций задачи: ЕХЕС= 500.
Командой Main Menu>Preprocessor > Flotran Set Up /Relax /Stab / Cap > Re-
sults Capping открываем окно velocity, temperature & press capping и указываем
Yes в строках TEMP и PRESS, OK. В окно Set capping values вводим ограничения
снизу на значения абсолютной температуры (TMIN = 100) и избыточного дав-
ления (PMIN= -100000), ОК.
Далее, командой Main Menu > Solution > Flotran Set Up / Relax / Stab / Cap >
213
Stability Parms открываем окно Stability Parameters. Заданием численных значе-
ний в этом окне будем обеспечивать устойчивость счета на начальных этапах
решения задачи.
1. Устанавливаем в строке Artificial viscosity значение 1, в строке Pressure in-
ertia величину 0,001, ОК. Запускаем задачу на счет: Main Menu > Solution > Run
Flotran.
1. Устанавливаем в строке Artificial viscosity значение 0,1, OK и вновь запус-
каем задачу: Main Menu > Solution > Run Flotran.
3. Удаляем «искусственную» вязкость - Artificial viscosity = 0 и проводим
следующие 500 итераций.
4. Меняем коэффициент инерционной релаксации по давлению - Pressure in-
ertia = 0,1, проводим 500 итераций.
5. Увеличиваем коэффициент инерционной релаксации по давлению - Pres-
sure inertia = 1, проводим 500 итераций.
6. Устанавливаем коэффициент инерционной релаксации по давлению до его
величины по умолчанию Pressure inertia = 1015 и проводим 4000...5000 итераций
(команда Main Menu >Preprocessor > Flotran Set Up/Execution Ctrl, EXEC = 5000).
7.4. Постпроцессор: некоторые результаты расчетов
Командой Main Menu > General Postproc > Read Results/Last Set получаем
доступ к результатам последнего шага решения задачи. Поле давлений около
профиля (General Postproc > Plot Results/Contour Plot/Nodal Solutions > Pres) по-
казано на рис. 7.9.
В районе задней кромки отчетливо видны скачки уплотнения, в которых по-
токи, обтекающие тело сверху и снизу, поворачивают и сливаются вдоль общей
границы. Векторное поле скоростей в области кормового скачка показано на рис.
7.10 (General Postproc > Plot Results/Vector Plot / Predefended и увеличение об-
ласти путем Utility Menu > Plot Ctrl > Ran Zoom /Box Zoom).
Рис. 7.9
214
Рис. 7.10
Как известно [1], при сверхзвуковом обтекании профилей с тупой лобовой
частью перед профилем возникает искривленный ударный фронт - так называе-
мый отсоединенный скачок уплотнения. Его лучше наблюдать в поле чисел Ма-
ха, применяя команду General Postproc > Plot Results/Contour Plot / Other Quanti-
ties>Mach number (рис. 7.11).
NODAL SOLUTION
STEP =12
SL'B—1
TIME=1
MACH (AVG)
SMX=1.44
AN
.314918 .629837 .944755
.472377 .787296 1.102
Рис. 7.11
В узкой области между отсоединенным скачком (центральная часть которо-
215
го, по существу, является прямым скачком уплотнения) и носиком профиля име-
ет место область дозвукового течения, ограниченная звуковыми линиями (М= 1),
отсоединенным скачком и носовой частью профиля. Таким образом, профиль с
тупой передней кромкой при сверхзвуковых скоростях набегающего потока об-
текается смешанным потоком, в котором наравне со сверхзвуковым потоком бу-
дет область с дозвуковыми скоростями.
Применение профилей с тупой передней кромкой ведет к росту волнового
сопротивления (см., например, [1]). На рис. 7.12 представлено распределение из-
быточных давлений 1 по профилю и распределение избыточных давлений 2, по-
лученное при решении этой задачи по модели несжимаемой жидкости на той же
сетке (см. пункт 7.5). Распределение давлений было получено использованием
General Postproc > Path operation > DefinePath > By Nodes с последовательным
указанием всех узлов на профиле, начиная от задней кромки по нижней поверх-
ности профиля.
Если при дозвуковых (точнее, докритических) скоростях основная часть со-
противления профиля связана с силами трения, то при сверхзвуковых скоростях
сопротивление определяется силами давления. В отличие от докритических ско-
ростей при сверхкритических скоростях давление в носике профиля возрастает, а
разрежения в его передней части уменьшаются. В задней части профиля при
свехкритических скоростях происходит существенное возрастание разрежения
(рис. 7.12). Все эти причины значительно повышают роль давления в создании
сопротивления на сверхзвуковых скоростях.
На рис. 7.13 представлено распределение избыточного давления при у = 0,3 и
-2 < х < 2 {General Postproc > Path operation > Define Path > By Locations,
Map onto Path —> Pres). Указанный маршрут пересекает головной скачок, волны
разрежения между головным и хвостовым скачками и захватывает часть области
за хвостовым скачком. График иллюстрирует изменение величин давления в по-
токе при прохождении через ударные фронты.
216
7.5. Приложение: результаты расчетов срывного
обтекания профиля несжимаемой жидкостью
Построенная сетка может быть испо ювана для исследования обтекания
профиля на взлетно-посадочных режим.ix, г жтеризуемых достаточно широ-
ким диапазоном углов атаки и умеренным,! (И. < 0,3) скоростями обтекания.
Расчеты при этом рационально проводин» i и несжимаемой жидкости.
Для этого следует в меню Flotran Set Г > .. Optons выбрать опцию
Incompressible, изменить модель турбу" • к- (ссм расчет ведется на срыв-
ных режимах) и граничные условия. Ниже црагю СП к-ил последовательность
действий при расчете профиля Me-163 н режиме Г t '• •• и *тле атаки а =
0,349 рад.
В меню Flotran Set Up / Turbulence/Turbvinta МвЛИ амвмумсм модель тур-
булентности Ши-Зу-Ламли, ОК.
Изменяем граничные условия. Удаляем гуиимикх рис.
7.6) : линиях L24, L25, L18, L19 (Solution > 1ал+ t [K'k-t
CFD / On lines > Pres). Рекомендуется также у s&wf* асммасс -c L3
величину избыточного давления р = 0 на вых< .ных гуммиНЕ ММмаа I
L29, L21 (Solution > Loads /Define Loads /Apply F .ad CFD ОьЛшо > Ле i Нл
линиях L23, L39, L24, L25, L18, L19, L20 задаем - • -?t-i arfrat .-
потока:
Vx = V cos a = 79,876 м/с,
Vy= V sin a = 29,066 м/с;
для чего используем Solution > Loads /Define Loads f v'. Fbcf CFD1
On lines.
Далее, не рекомендуется использовать в качестве им**М* ОНМИММЬ
(начального условия) результаты решения предыду;.... цмw ЯМНКВУ
маемой жидкости, поскольку поля плотности и ламинариов
лись функциями температуры. Используем опции меню Ketaarr Мнм
lution I Flotran Set Up > Restart options > Restart I Set и в открывшемся окне Enter
restart set вводим цифру 1 - счет начинается с первого шага; результаты послед-
него шага решения предыдущей задачи игнорируются. В то же время эти резуль-
таты можно сохранить для последующей обработки, если в окне Save copy of ini-
tial .rfl file поставить Yes.
Рекомендуется активизировать расчет напряжений трения на профиле, для
чего использовать Main Menu > Solution I Flotran Set Up > Additional Out > RFL
Out Derived и в открывшемся окне поставить флажок в строке TAUW Output wall
shear stress. Устанавливаем число глобальных итераций ЕХЕС= 1500 и запуска-
ем задачу на счет.
Приведем некоторые результаты расчета. На рис. 7.14 представлено семейст-
во линий тока (построение линий тока см. в задаче 1- обтекание уступа).
На рассматриваемом угле атаки профиль является плохообтекаемым телом.
За точкой отрыва (т. О) пограничный слой оттеснен от поверхности. В зоне от-
рыва виден сформировавшийся крупный дискретный вихрь.
В отрывной зоне давление на профиле не восстанавливается (рис. 7.15), что
ведет к перераспределению баланса сил сопротивления: в отличие от безотрыв-
ных режимов обтекания доминирующую роль в создании сопротивления играют
силы давления (сопротивление формы). Сопротивление формы и сопротивление
трения может быть определено выделением узлов профиля с последующим ис-
пользованием команды Main Menu>General Postproc >Nodal Calcs>Surface Inte-
gral', в открывшемся окне следует выбрать Both - проекции главного вектора по-
верхностных сил, действующих на профиль, формируются как давлениями, так и
напряжениями трения.
Рис. 7.14
218
ЕОЯТ1 ANSYS
ЗТЕ₽=4
SUB =1
FATH PLOT
KOP1=2
NOD2=5101
Рис. 7.15
7.6. Литература
1. Петров К.П. Аэродинамика элементов летательных ani^l
шиностроение, 1985.
2. ANSYS Theory Reference. ANSYS Rel. 7.0. ANSYS Inc., 2001.
3. ANSYS Basic Analysis Procedure Guide. ANSYS Rel. 7.0. ANS
8. РАСПРОСТРАНЕНИЕ И ВЗАИМОДЕЙСТВИЕ
УДАРНЫХ ВОЛН
8.1. Постановка задачи
8.2. Препроцессорная подготовка
8.3. Решение задачи и некоторые результаты расчетов
8.4. Литература
8.1. Постановка задачи
Воздух в цилиндрической мембране 1 с бесконечной образующей находится
под высоким избыточным давлениемр = 6406 Н/м2. Температура воздуха внутри
мембраны Т= 1000 К, мембрана теплоизолирована. Воздушная среда, окружаю-
щая мембрану, находится в стандартных атмосферных условиях (избыточное
давление р = 0, Т = 293 К). Границами объема окружающей среды являются по-
верхность мембраны и твердые стенки. Расчетная область показана на рис. 8.1,
задача решается в 277-постановке.
219
До некоторого момента времени мембрана и окружающая среда находятся в
равновесии. В момент времени t = 0 мембрану разрывает. Задача заключается в
определении возникающего течения воздуха в последующие моменты времени.
Задача ставится в рамках модели вязкой сжимаемой жидкости с учетом эф-
фектов конвективного теплопереноса и теплопроводности. Массовыми силами
пренебрегаем. Течение жидкости турбулентное, для замыкания уравнений дви-
жения используется к-г-модель турбулентности.
др t д(рУх) । д(рУу)
dt дх ду
—(pVx)+—(pVxVx)+~(pVxVy) = -~+—[pe—
dt дх х ду у дх дх{ е
dVr'
дх .
dVy}
Be— >
. 8У )
dt дх ду ду 5x1 дх
д
+ ду
£™=(Ср-су)Т,
Р
^(P«ZO)+^(P^Zo)+^-(P^«p7o) =
dt дх ду
дх у е дх )
+ W +Ек +б +—
dt
(8-1)
(8-2)
(8-3)
(8-4)
дУ„'
дх ,
220
V1
т = т0-—
д . . д . т. . д 8( ск' с [ ск |
—(Рк)+—(рГлк)+—(рГуК) = — И,—Ь—i и — |4-И/ф_рЕ>
dt дх ду дх\ дх
у(р«О +у<Р ^е)+-^-(Р ^у£)=-^-[
dt дх ду 8х\ и. дх
(8.5)
(8.6)
2
Ре=Р + Р/. Р/=С,Р—
с
р,с.
ke=k + k„ k,=----- .
е ‘ ‘ Prt
( 8 -* i ( с
W=VYu\ ДГ+—divK +К,ц ДГ„ +—div^
v x I Sx ) y dy
д k d fl S k d f l
ак[сгаД2 Jj
Здесь p - плотность жидкости, Vx, Vy - проекции вектора ^ьоросгм жидкости,
- абсолютное давление в жидкости, у? - избыточное давленае. Т — . ^п гатура,
То - температура торможения, ср, су - удельные теплоемкости жид» сти зоответ
ственно при постоянном давлении и объеме, ц - заданная фвшиксхяа
ная) вязкость, ц, - турбулентная (вихревая) вязкость, р- - ММОПК
к- коэффициент теплопроводности, kt - турбулентная тяммрНШМКЖ t,
эффективная теплопроводность, к - кинетическая эн ’< кв ' < -
скорость диссипации кинетической энергии турб>теь: х«.тЧ»
- турбулентное число Прандтля, Prt = 0,9.
Уравнение энергии (8.4) записано в форме, принята!
FLOTRAN в терминах температуры торможения Tq. Связь
ливается (8.5). С учетом алгебраического уравнения сос
ний в частных производных фигурируют шесть неизаес
Т0, К, £.
Аэродинамическими граничными условиями для
зодинамики являются условия прилипания на всех тверди*
области (Ух = 0 м/с, Уу = 0 м/с, на OABCDEFGHKLMNPtf)
Тепловыми граничными условиями являются ecrecrai
на всех твердых границах
"1=0.
дп
Начальными условиями, как указывалось выше, являются равновесие любой час-
тицы жидкости в начальный времени (Vx = 0, Vy = 0), стандартные атмосферные
условия во всех точках расчетной области за исключением полукруга А1СВ (рис.
8.1), т. е.р = 0, Т= 293 К, а также заданные температура и избыточное давление
и во внутренней области мембраны А1 СВ Т~ 1000 К,р = 6-106 Н/м2.
8.2. Препроцессорная подготовка
Создаем директорию, где будут храниться файлы задачи, определяем имя за-
дачи (Initial jobname => Membr) и через Run входим в систему ANSYS.
Активизируем пакет программ гидрогазодинамики FLOTRAN CFD'. Main
Menu > Preference > FLOTRAN CFD, OK.
Определяем тип конечного элемента: Main Menu > Preprocessor > Element
Type > Add/Edit/Delete > 2D FLOTRAN 141 > OK > Close.
Вводим координаты характерных точек, создаем границы расчетной области
и саму эту область: Main Menu > Preprocessor > Modeling > Create > Keypoints >
In Active CS. Номера и координаты (в метрах) характерных точек приведены в
таблице.
Таблица
№ точек X, м у, м
1 0,0 0,0
2 0,0 0,6
3 0,0 0,7
4 0,0 0,8
5 0,0 2,0
6 1,0 2,0
7 1,0 1,0
8 1,2 1,0
9 1,2 2,0
10 2,0 2,0
11 2,0 0,0
12 1,2 0,0
13 1,2 0,6
14 1,0 0,6
15 1,0 0,0
Отображаем на экран номера точек: Utility Menu > Plot Ctrls > Numbering >
Keypoints number, Utility Menu >Plot/Keypoints. Создаем границы расчетной об-
ласти: Main Menu>Preprocessor>Modeling >Create >Lines/Lines/Straight Line. По-
следовательно, согласно нумерации точек, соединяем точки прямыми линиями.
Кроме того, для упрощения построения сетки соединяем линиями т. №7 и т.
№14; т. №8 и т. №13.
Отображаем номера линий: Utility Menu > Plot Ctrls > Numbering > Line num-
ber, Utility Menu > Plot/Lines. В результате на экране монитора воспроизводится
картина, представленная на рис. 8.2.
Строим вспомогательные подобласти: Main Menu > Preprocessor > Modeling
> Create > Areas /Arbitrary /By lines. Границами подобласти №1 являются линии
№№ 1,2,3, 4, 5, 6, 16, 14, 15; подобласти №2 - линии №№ 16, 7, 17, 13; подоб-
ласти №3 - линии №№ 12, 17, 8, 9, 10, 11.
222
1
I.TNBS
LINE NUM
L3
L2
LI 6
14
LI
LM
LI 5
15
iU
5
4
3
2
f
X
Рис. 8.2
Проводим разбиения всех линий: Main Menu Pi , • •
Ctrls / ManualSize / Lines / Picked Lines. В окне Element Sta <» _ Ц
All. В открывшемся диалоговом окне Element Size on Pick. //jMi*
SIZE Element edge length вводим величину 0,01 - длин
которыми делятся все линии (например, линия единим i I хм
элементарных отрезков).
Строим упорядоченные конечно-элементные сет» « на жМ
стях. Для подобласти №1 воспользуемся опцией Со- М
построении сетки объединять фрагменты границ. Обь. • •е*
4: Main Menu > Preprocessor > Meshing /Concatenate I I'MI
левой кнопки мыши на эти линии, ОК. Далее, объе ВI1
.. .Meshing /Concatenate!Line, OK.
Строим упорядоченную конечно-элементную сет» т«» Я
Menu > Preprocessor > Meshing /Mesh / Areas /MappedZ
помощью левой кнопки мыши на подобласть, ОК. В oSfll
ляем «сцепленные» линии: Main Menu > Preprocessor I
Lines.
Для подобласти №2 пет необходимости объеди
именованными границами подобласти являются ч . фС |
напрямую строить упорядоченную сетку: ... Meshin. ЦЦ «
or 4 sided, ОК Для подобласти №3 нужно провести ...си
17, 8, построить сетку и удалить «сцепление».
Следующими шагами препроцессорной подгото «
течения жидкости, а также граничных и начальных у слМ^В
Задаем модель течения: Main Menu > • *
Options В диалоговой панели Flotran Solution Option
sient (неустановившееся течение), Thermal (интегрир. «
гии), Turbulent (режим течения - турбулентный), t «мрЯ
маема). Определяем свойства жидкости: Main Menu > Preprocessor > Flotran
SetUp / Fluid Properties, в открывшейся таблице Fluid Properties в колонках плот-
ности воздуха (density), динамической вязкости (viscosity), теплопроводности
(conductivity), удельной теплоемкости при постоянном давлении (specific heat)
выбираем AIR-SI (свойства воздуха в системе единиц СИ). Во всех окнах Allow
density (viscosity,...) variations ставим Yes. Далее OK.
Задаем граничные условия: Main Menu > Preprocessor > Loads I Define Loads I
Apply I Fluid CFD / Velocity / On lines. Левой кнопкой мыши указываем все гра-
ничные линии расчетной области - L1...L15, ОК. В диалоговом окне вводим Vx=
= 0, Vy = 0. В поле Apply to endpoints ставим Yes — указанные значения скорости
приложены и в граничных точках линий, ОК. Адиабатические тепловые условия
формируются по умолчанию.
Следующий шаг заключается в задании начальных условий: Main Menu > So-
lution > Define Loads > Initial Condit'n > Define’, в окне Define Initial С... нажимаем
кнопку Pick All. В открывшейся таблице Define Initial Conditions в строке Lab
DOF to be specified указываем All DOF, а в строке VALUE Initial value of DOF
вводим число 0, OK Затем вновь Initial Condit'n > Define >Pick All и в первой
строке открывшейся таблицы выбираем TEMP, а во вторую строку вводим зна-
чение температуры: 293, ОК В результате этих действий в начальный момент
времени во всех точках расчетной области, включая точки внутри мембраны,
скорости и избыточные давления равны нулю, а температура определена равной
293 К. Далее, задаем «поверх» этих значений избыточное давление и температу-
ру в области внутри мембраны. Предварительно рекомендуется отобразить ли-
нии на экране: Utility Menu > Plot / Lines, затем Initial Condit'n > Define’, в окне
Define Initial С... выбираем теперь Circle. Используя левую кнопку мыши прово-
дим окружность с центром в т. № 3 радиусом, равным длине L2 или L3, ОК В
таблице Define Initial Conditions в строке Lab DOF to be specified выбираем PRES,
во второй строке VALUE Initial... вводим величину избыточного давления внутри
мембраны: 6106, ОК Аналогично задается темперазура внутри мембраны: Initial
Condit'n > Define > Circle, проводится окружность с тем же центром и радиусом,
в первой строке таблицы Define Initial Conditions выбирается TEMP, во вторую
строку вводится значение температуры: 1000, ОК. Начальные условия заданы.
Отметим, что абсолютные значения давлений в любой точке расчетной области
определяются сложением избыточных давлений и базового (ref) давления, вели-
чина которого по умолчанию равна 101350 Н/м2. При необходимости эта величи-
на может быть изменена (Solution > Flotran Set Up > Flow Enviroment > Ref Con-
ditions).
Модель турбулентности и ее параметры принимаются предложенными по
умолчанию (к-£-модель).
8.3. Решение задачи и некоторые результаты расчетов
Выбираем алгоритм решения: Main Menu > Preprocessor > Flotran Set Up /
Algorihthm Ctrl. В диалоговой панели Algorithm Control устанавливаем алгоритм
Simplen. Командой Main Menu > Preprocessor > Flotran Set Up / Execution Ctrl
открываем окно Time Step Controls, в строке STEP выбираем User Defined, в стро-
ке Base output con... устанавливаем Time Values, OK (см. задачу № 4). В открыв-
шейся диалоговой таблице Transient Controls вводим STEP = 0,000001, TEND =
= 0,0001, GLOB = 5, TIME, О VER = 0,0001, TIME.APPE = 0,0001, OK.
Реализуем первый этап решения задачи с постоянным шагом интегрирова-
224
ния: Main Menu > Solution > Run Flotran
После завершения первого этапа перемлж*
тематическим выбором шага по обобщенной, J
Execution Ctr; в строке STEP окна Time Step С.
ке Base output control on — Time Values, OK В - st
ливаем ISTEP = 0,000001, TEND = 0,0045, оста, ьныс
менения. Решаем задачу: Main Menu > Solution > R
Из результатов решения задачи наибольший иг
распространения возмущений в воздушной среде 5 Ч'
подробно проанализировать поведение каждой из полу'кан
момент времени (см. предыдущие задачи), построить
распространения и взаимодействия возмущений.
Рассмотрим развитие процесса, отображая в поссде
времени скалярные поля скоростей. Для этого испаяь' . -
Postproc / Read Results / By Pick, после выбора интерсч *НЯМ
следует нажать кнопку Read. Далее, General Postpone * МЫ
Plot /Nodal Solutions и в окне Item to be contoured ныбумь/"
При переходе к следующему интересующему ыошм,
вторить изложенную процедуру. На рис. 8 _ ; • —
скоростей в различные моменты времени.
XSLM
VSUM TIME=.210E-03
0
881.695
Рис. 8.3
0
Рис. 85
На рис. 8.9 представлена укрупненная векторная картина одного из много-
численных взаимодействий ударных волн в рассматриваемой задаче. Указывая в
General Postproc / Read Results / By Pick момент времени t = 0,001665 с и приме-
няя команду General Postproc > Plot Results / Vector Plot / Predefended, OK, полу-
чаем картину векторного поля скоростей для указанного момента времени.
Рис. 8.9
8.4. Литература
1. Флетчер К. Вычислителын Рис. 8.9 в динамике жидкостей. Т. 1, 2. - М.:
Мир, 1991.
2. ANSYS Theory Reference. ANSYS Rel. 7.0. ANSYS Inc., 2001.
3. ANSYS Basic Analysis Procedure Guide. ANSYS Rel. 7.0. ANSYS Inc., 2001.
226
АВТОРЫ
Берендеев Н.Н. - к.ф.-м.н., доцент кафедры теории упругости и пластич-
ности механико-математического факультета Нижегородского госуниверси-
тета им. Н.И. Лобачевского (ННГУ);
Втюрин М.Ю. - ассистент кафедры теории упругости и пластичности ме-
ханико-математического факультета ННГУ;
Жидков А.В. - к.т.н., доцент кафедры теории упругости и пластичности
механико-математического факультета ННГУ;
Леонтьев Н.В. - к.ф.-м.н., доцент кафедры теории упругости и пластично-
сти механико-математического факультета ННГУ;
Любимов А.К. — д.ф.-м.н., профессор, зав. кафедрой теории упругости и
пластичности, декан механико-математического факультета ННГУ, член-
корр. АИН РФ;
Шабаров В.В. - к.т.н., доцент кафедры теории упругости и пластичности
механико-математического факультета ННГУ.
227