
















































































Автор: Шеваль В.В. Жуков Г.А. Давыдов В.И. Козлов П.В.
Теги: военная техника авиация авиационное оборудование военное оборудование военное дело издательство маи
ISBN: 978-5-4316-0248-1
Год: 2015

Г.А. Жуков
В.И. Давыдов
П.В. Козлов
В.В. Шеваль
с
ТЕОРИЯ
БОМБОМЕТАНИЯ
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ
РОССИЙСКОЙ ФЕДЕРАЦИИ
МОСКОВСКИЙ АВИАЦИОННЫЙ ИНСТИТУТ
(национальный исследовательский университет)
Г.А. ЖУКОВ, В.И. ДАВЫДОВ,
П.В. КОЗЛОВ, В.В. ШЕВАЛЬ
ТЕОРИЯ БОМБОМЕТАНИЯ
Под редакцией Г.А. Жукова
Допущено Учебно-методическим объединением
высших учебных заведений Российской Федерации
по образованию в области авиации, ракетостроения и космоса
в качестве учебного пособия для студентов высших
учебных заведений Российской Федерации, обучающихся
по специальности высшего профессионального образования 24.05.05
“Интегрированные системы летательных аппаратов”
Москва
Издательство МАИ
2015
ББК 68.8я73
Ж 86
ж gg Жуков Г.А., Давыдов В.И., Козлов П.В., Шеваль В.В.
Теория бомбометания: Учебное пособие / Под ред. Г.А. Жу-
кова. — М.: Изд-во МАИ, 2015. — 196 с.: ил.
ISBN 978-5-4316-0248-1
Рассматриваются способы решения задач прицеливания при
бомбометании с летательного аппарата, выполняющего различные
виды маневра, а также аналитические методы оценки точности
бомбометания.
Для студентов старших курсов, обучающихся по специальнос-
ти “Интегрированные системы летательных аппаратов”, и специа-
листов в области авиационной и ракетно-космической техники.
Рецензенты:
кафедра “Авиационное оружие и эффективность боевого приме-
нения” ВУНЦ ВВС “ВВА им. Н.Е. Жуковского и Ю.А. Гагарина” (на-
чальник кафедры канд. техн, наук, доцент, полковник Ф. Выпгриш-
ко);
д-р техн, наук, проф. ВЛ. Бухалев
ISBN 978-5-4316-0248-1
© Московский авиационный институт
(национальный исследовательский
университет), 2015
© Жуков Г.А., Давыдов В.И.,
Козлов П.В., Шеваль В.В., 2015
ПРЕДИСЛОВИЕ
Учебное пособие “Теория бомбометания” посвящено рассмот-
рению способов прицельного применения авиационных бомбовых
и торпедных средств поражения по наземным, морским подвиж-
ным и неподвижным целям. На основе анализа существующих ал-
горитмов приводятся алгоритмы прицеливания для многофункци-
ональных летательных аппаратов (ЛА), которые могут рассматри-
ваться как перспективные.
Актуальность тематики пособия обусловлена комплексностью
и широтой спектра проблем, изучаемых в рамках дисциплин
“Бортовые интегрированные информационно-управляющие сред-
ства оснащения летательных аппаратов” и “Обзорно-прицельные
системы” для студентов специальности “Интегрированные систе-
мы летательных аппаратов” по специализациям “Прицельно-нави-
гационные системы летательных аппаратов” и “Автоматизирован-
ные системы управления авиационными боевыми комплексами”,
а также фактическим отсутствием учебников, учебных пособий и
другой литературы по прицельным системам современных ЛА.
В первой главе даются основные понятия о бомбометании с го-
ризонтального полета. Рассматриваются способы решения задачи
прицеливания в системах координат, связанных с векторами воз-
душной и путевой скорости летательного аппарата, способы опре-
деления исходных данных, необходимых для вычисления пара-
метров прицеливания, и способы их реализации. Ответственным
этапом в прицеливании является вывод самолета в точку сбрасы-
вания бомбы. В связи с этим в заключительной части главы изла-
гаются способы выполнения прицеливания по направлению (боко-
вой наводке) и дальности. Материал первой главы послужил осно-
вой для написания последующих глав.
Вторая глава посвящена рассмотрению алгоритмов прицелива-
ния прицельной системы бомбардировщика. Даются теоретичес-
кие основы работы прицельной системы: определение фактичес-
3
ких координат цели и требуемых координат точки падения авиа-
ционных бомбовых средств поражения (АБСП), определение пара-
метров прицеливания по направлению для вывода самолета на
боевую траекторию, содержащую точку сбрасывания, и прицели-
вание по дальности. Приводятся векторные схемы, обеспечиваю-
щие вывод алгоритмов для случая прицеливания по самой цели,
либо по вынесенной относительно цели точке прицеливания, с
учетом выноса точки разрыва бомбы в плоскости цели, либо по
высоте относительно цели.
Важнейшими параметрами, без которых не может быть реше-
на задача прицеливания, являются баллистические элементы
бомбы, рассчитанные для случая поражения целей, расположен-
ных на уровне моря. В пособии даются алгоритмы, обеспечиваю-
щие пересчет баллистических элементов для условий атаки целей,
находящихся выше (ниже) уровня моря.
В заключительной части главы приводится полный математи-
ческий алгоритм, обеспечивающий работу прицельно-навигацион-
ной системы, а также уравнения связи с визирной системой радио-
локационной станции самолета.
В третьей главе рассматривается решение задачи прицелива-
ния при бомбометании с кабрирования с углами наклона траекто-
рии менее 90 и 120 . Особенностями первого способа прицелива-
ния являются выполнение боковой наводки на участке горизон-
тального полета и завершение на участке кабрирования, а прице-
ливание по дальности состоит в определении моментов ввода само-
лета в кабрирование и бросания бомбы. Рассматриваются вектор-
ные схемы, позволяющие определить алгоритмы для решения
указанных задач и задачи прицеливания.
Особенностью бомбометания с углом наклона траектории 120
также является определение момента ввода самолета в кабрирова-
ние. С этой целью в алгоритме этого способа предложено модели-
ровать прогнозируемые траектории горизонтального полета и каб-
рирования ЛА совместно с моделированием траектории падения
бомбы сразу после привязки к цели и до момента ввода самолета в
кабрирование. Для точного определения момента ввода самолета в
кабрирование моделирование проводится в ускоренном режиме (в
25 раз быстрее реального течения времени).
Результаты моделирования данного способа бомбометания
приведены в Приложении.
4
В четвертой главе рассматриваются теоретические вопросы
бомбометания с пикирования — три разновидности этого способа:
- бомбометание с непрерывно отрабатываемым углом прице-
ливания;
- бомбометание с постоянным углом прицеливания;
- бомбометание на выходе из пикирования.
Как и при кабрировании, в этих случаях решается задача оп-
ределения точки перехода самолета в пикирование, а в третьем
случае — ещё решается задача определения момента вывода ЛА
из пикирования. На основе векторных схем прицеливания состав-
лены алгоритмы решения перечисленных выше задач.
Во всех четырех главах описываются предполагаемые дейст-
вия летчика при выполнении прицеливания.
В заключительной пятой главе рассматривается аналитичес-
кий метод оценки точности бомбометания. Обосновываются груп-
пы факторов, влияющие на формирование погрешностей; выво-
дится общая формула вектора ошибки бомбометания. Путем лине-
аризации векторных уравнений и проектирования их на оси рассе-
ивания определяется модель ошибки бомбометания в скалярной
форме.
Заключительной частью главы является вывод зависимостей
для вероятностных характеристик оценки точности бомбометания.
К достоинствам учебного пособия следует отнести широту ох-
вата материала и глубину его рассмотрения применительно к под-
готовке студентов указанной выше специальности. Учебное посо-
бие представляет собой логически построенное и содержательно
наполненное руководство, которое может быть использовано для
практической деятельности. Оно дает возможность студентам рас-
ширить свои знания в области теории и практики прицельно-на-
вигационных систем летательных аппаратов.
Данное учебное пособие посвящается памяти первого заведую-
щего кафедрой 704 Б.Г. Доступова. Коллектив авторов благодарит
за помощь в подготовке рукописи Д.О. Кривенко и А.В. Василье-
ву.
5
ВВЕДЕНИЕ
Теория бомбометания изучает методы и способы решения за-
дачи прицеливания при применении авиабомб. Решение задач
бомбометания будем рассматривать применительно к поражению
подвижных и неподвижных наземных (морских) целей.
Прицеливание при бомбометании представляет собой частный
случай задачи прицеливания, когда начальная скорость снаряда
(авиабомбы) относительно летательного аппарата (ЛА) в большин-
стве случаев равна нулю. Следовательно, для бомбометания имеет
место равенство векторов абсолютной скорости снаряда и воздуш-
ной скорости летательного аппарата, т.е. = V\. В дальнейшем
вектор воздушной скорости V1 будем обозначать V. Другая особен-
ность бомбометания состоит в том, что вектор ошибки бомбомета-
ния А располагается в горизонтальной плоскости. Исключением
является бомбометание с выносом точки разрыва бомбы по верти-
кали, но в этом случае обычно учитывается проекция вектора ошиб-
ки на горизонтальную плоскость. При стрельбе по воздушной
цели вектор ошибки стрельбы рассматривается в плоскости, пер-
пендикулярной линии “ЛА — воздушная цель”. В качестве основ-
ных баллистических элементов снарядов при воздушной стрельбе
принимаются время полета Т и понижение Г| снаряда. При бомбо-
метании в качестве основных баллистических элементов использу-
ются штилевой относ Ао и время падения бомбы Т, а также ее ли-
нейное отставание от самолета Дб.
В принципе, бомбометание может выполняться как с прямо-
линейной, так и с криволинейной траектории, плоской или про-
странственной. Однако среди всех возможных способов бомбомета-
ния в данном разделе будут рассмотрены лишь три наиболее важ-
ных, а именно:
- бомбометание с горизонтального полета;
6
- бомбометание с кабрирования;
- бомбометание с пикирования.
Будет рассмотрено также решение задачи прицеливания при
бомбометании с горизонтального полета с использованием оптико-
телевизионной авиационной прицельной системы бомбометания.
Задача прицеливания — определение таких условий бомбоме-
тания и такого управления ЛА, при которых обеспечивается встре-
ча бомбы с целью. Причем условия бомбометания и условия встре-
чи бомбы с целью должны удовлетворять определенным ограниче-
ниям.
Под встречей бомбы с целью будем понимать или прямое попа-
дание бомбы в цель, или попадание ее в некоторую область, задан-
ную относительно цели из условий обеспечения максимальной эф-
фективности поражения цели.
Условия встречи бомбы с целью могут быть заданы также в
виде ограничений на промах, на скорость встречи бомбы с целью,
на взаимную ориентацию бомбы и цели в момент ее разрыва и т.д.
Ограничения на условия бомбометания определяются обычно
требованиями надежного захвата цели бортовой системой сопро-
вождения, требованиями безопасности собственного ЛА.
Задачи прицеливания при подробном их рассмотрении разли-
чаются между собою в зависимости от назначения ЛА, применяе-
мого типа бомб, типа цели, по которой производится бомбомета-
ние, и т.п.
Тем не менее, можно говорить и об общем содержании задачи
прицеливания, едином для различных случаев бомбометания.
Условия безопасности для собственного ЛА необходимо обес-
печивать как на этапе полета в район цели, так и непосредственно
при атаке цели. Особенно вопросы безопасности актуальны при
атаке наземной цели с пикирования, кабрирования и маловысот-
ного горизонтального полета. В этом случае необходимо предвари-
тельно определить как высоту ввода ЛА в пикирование, так и
обеспечить условия вывода самолета из пикирования. Для кабри-
рования очень важно точно определить момент ввода ЛА в кабри-
рование. При маловысотном бомбометании применяют специаль-
ные малоотносные бомбы.
Рассмотрим пространственную векторную схему, показанную
на рис. 0.1.
7
Рис. 0.1
В некоторый (текущий) момент времени после обнаружения
цели начался процесс сближения и прицеливания. Место располо-
жения бомбы в этот момент находится в точке О . Визирная систе-
ма (ВС), с помощью которой определяются координаты точки при-
целивания, смещена относительно точки подвески бомбы на вели-
чину Вв, называемую вектором выноса визирной системы. Цель в
данный момент времени находится в точке Ц и не может служить
в качестве точки прицеливания. Прицеливание в этом случае осу-
ществляется по вспомогательному ориентиру, находящемуся
вблизи цели, который может быть обнаружен визирной системой.
Точка, по которой производится прицеливание и которая не со-
впадает с целью, называется вынесенной точкой прицеливания
(ВТП). Положение ВТП относительно цели определяется вектором
выноса точки прицеливания Вп. Вектор D — вектор дальности
между ВС и ВТП. За время сближения и прицеливания Тс ЛА и
цель переместились соответственно в точки О и Ц. Векторы /л и
ZTT — это векторы перемещения ЛА и цели за время 7V. Через
время полета Т бомба окажется в точке Б, а цель в точке Цу. L и
Ру — векторы перемещения цели и бомбы за время ее полета Т.
Иногда наиболее эффективное поражение цели достигается при
попадании бомбы в некоторую точку, расположенную на опреде-
ленном расстоянии от цели. Точка, в которую должна попасть
бомба, называется заданной точкой разрыва (ЗТР). Ее положение
задается вектором выноса точки разрыва Вр. Например, наиболее
эффективное поражение цели осколочной бомбой достигается
тогда, когда бомба взрывается на некоторой высоте над целью.
8
Вектор Вр задается также при сбросе серии бомб для надежного
поражения цели. При этом рассчитывают так, чтобы в цель попа-
ла средняя бомба серии. В этом случае точка падения первой
бомбы должна быть вынесена относительно цели в сторону, проти-
воположную направлению полета, на расстояние, равное половине
длины серии. Вектор А, определяющий положение точки относи-
тельно ЗТР, называется вектором промаха (ошибкой бомбомета-
ния).
При составлении схемы все векторы перемещения ЛА (2Д),
цели (2Ц, L) и бомбы (Dy) рассматривались или относительно возду-
ха, или относительно Земли.
Из рис. 0.1 следует,что
А = пу-л+7л-7ц-1-вв + вп-вр, (0.1)
где Вп, Вв и Вр — заданные векторы, т.е. до решения задачи при-
целивания (в полете или на земле) эти векторы должны быть вве-
дены в прицельную систему. Сумму этих векторов будем обозна-
чать вектором Ву и называть вектором суммарного выноса
ВЕ = Вв + Вп + Вр. (0.2)
Вектор _Dy определяется по данным, характеризующим движе-
ние бомбы с учетом параметров атмосферы. Определение вектора
Dy будем называть задачей о движении бомбы (первая частная за-
дача прицеливания), решаемой с использованием основных поло-
жений внешней баллистики.
Векторы Z и L вычисляют в прицельной системе в процессе
решения задачи прицеливания. Эти векторы могут быть определе-
ны только в том случае, если известен закон движения цели на ин-
тервалах времении и Т. Обычно этот закон можно лишь пред-
положить, после чего векторы Z и L могут быть найдены путем
экстраполяции координат цели. Задачу об определении векторов
7Ц и L будем называть задачей экстраполяции движения цели (вто-
рая частная задача прицеливания).
Вектор D определяется по информации бортовой системы со-
провождения цели или ВТП (визирной системы). Задачу об опре-
9
делении вектора D будем называть задачей сопровождения цели
(третья частная задача прицеливания).
Вектор 1Л можно вычислять по данным бортового устройства
счисления координат ЛА, а в случае отсутствия такого устройства
по заданным параметрам движения ЛА, выдерживание кото-
рых возлагается или на летчика (при ручном пилотировании), или
на систему автоматического пилотирования. Задачу об определе-
нии вектора 7 назовем задачей о движении ЛА (четвертая частная
задача прицеливания).
Задачу об определении вектора Ву назовем задачей о вводе век-
тора суммарного выноса (пятая частная задача прицеливания).
Векторы Dy и D, вычисляемые в результате решения третьей
и первой частных задач и определяющие фактическое положение
цели и бомбы относительно ЛА, будем называть фактическими ра
диус-векторами цели (ВТП) и бомбы.
Отдельное решение перечисленных выше частных задач еще
не является решением задачи прицеливания. Исходя из приведен-
ного выше определения задачи прицеливания можно утверждать,
что для ее решения необходимо так изменять векторы, входящие
в уравнения (0.1) и (0.2), чтобы обеспечивалось равенство А = 0, т.е.
5у-5+7л-7ц-£-в£ = о. (0.3)
Отсюда возникает шестая частная задача прицеливания — за-
дача о точке встречи, которую рассмотрим ниже подробнее. Векто-
ры D или Dy, вычисляемые из условия решения задачи прицели-
вания на основании равенства (0.3) и определяющие требуемое
(расчетное) положение цели или бомбы относительно ЛА, будем
называть требуемыми радиус-векторами цели (ВТП) и бомбы со-
ответственно. Требуемые векторы, в отличие от фактических век-
торов, будем обозначать звездочкой. По определению, на основа-
нии равенства (0.3) имеем:
D* = D - 7Л + 7Ц - 7 - В^.; (0.4)
5* = 5у + 7л-7ц-7+вЕ. (0.5)
В зависимости от того, какой из двух векторов, Dy или Z)*, оп-
ределяется из равенства (0.3), процесс прицеливания осуществля-
ется путем сравнения значения требуемого вектора со значением
10
соответствующего фактического вектора Dy или D1. Процесс при-
целивания может считаться законченным в том случае, когда со-
ответствующая разность
д = Ьу-5; (0.6)
или
А = 5* -D (0.7)
станет достаточно (практически пренебрежимо) малой.
Заметим, что формулы (0.6) и (0.7) получаются на основании
равенств (0.1), (0.4) и (0.1), (0.5) соответственно. Как следует из
определения задачи прицеливания, процесс прицеливания не сво-
дится только к обращению в нуль разности (0.6) или (0.7). Как
было указано, условия бомбометания и условия встречи бомбы с
целью должны удовлетворять определенным ограничениям. Удов-
летворение этим ограничениям и обращение в нуль равенств (0.6)
или (0.7) может быть осуществлено за счет целесообразного выбо-
ра вектора Z:1, т.е. за счет соответствующего управления полетом
ЛА, и сброса бомбы в нужный момент времени. При решении за-
дачи прицеливания как кинематической необходимости в рас-
смотрении равенств (0.6) и (0.7) нет, их полностью заменяет урав-
нение (0.3). В действительности прицеливание является динами-
ческим процессом, протекающим в течение некоторого времени.
При этом разность (0.6) или (0.7) может служить мерой ошибки
прицеливания. Независимо от того, осуществляется ли прицели-
вание путем обращения в нуль разности (0.6) или (0.7), оно сво-
дится к определению управления ЛА и момента бросания бомбы.
В этом смысле использование обеих разностей (0.6) или (0.7) экви-
валентно. Отличие в применении разности (0.6) или (0.7) проявля-
ется в случае ручного управления ЛА, когда ошибка прицелива-
ния в виде промаха отображается на прицельно-пилотажном визи-
ре (индикаторе) летчика (оператора). В случае использования раз-
ности (0.6) ошибка прицеливания будет отображаться на индика-
торе в направлении точки встречи бомбы с целью, т.е. летчик дол-
жен будет сосредоточивать свое внимание (зрение) в направлении
вектора Z)y. При применении разности (0.7) ошибка прицеливания
будет отображаться на индикаторе в направлении текущего поло-
жения цели, т.е. летчику нужно будет внимательно смотреть в
сторону цели.
11
1. РЕШЕНИЕ ЗАДАЧИ ПРИЦЕЛИВАНИЯ
ПРИ БОМБОМЕТАНИИ
С ГОРИЗОНТАЛЬНОГО ПОЛЕТА
Для упрощения задачи прицеливания при бомбометании с го-
ризонтального полета будем полагать, что:
• при прицеливании осуществляется непосредственное визи-
рование цели, иначе говоря, вектор выноса точки прицели-
вания относительно цели, обозначаемый Вп, равен нулю;
• вынос заданной точки разрыва (ЗТР) авиабомбы относительно
цели отсутствует, и в связи с этим вектор выноса ЗТР В = 0;
• сопровождение цели прицельным перекрестием (визирова-
ние цели) осуществляется от момента привязки к цели до
момента сбрасывания авиабомбы. Поэтому векторы переме-
щения ЛА /л и цели /ц будут равны нулю;
• величиной выноса бомбардировочной установки относитель-
но визирной системы можно пренебречь, т.е. Вв - 0;
• вектор скорости ветра считается постоянным U = const.
В этом случае общее векторное уравнение задачи прицелива-
ния будет иметь вид (см. рис. 0.1)
\=Dy-D-L. (1.1)
Уравнения задачи прицеливания существенно зависят от вы-
бора системы отсчета, так как содержание векторов упрежденной
дальности D и линейного перемещения цели L за время падения
бомбы Т, используемых для определения движения бомбы и цели,
в свою очередь зависит от выбранной системы координат. Наиболь-
ший интерес для практики представляют три системы координат,
связанные с землей, воздухом и целью. Для случая, когда движе-
ние цели и бомбы рассматривается относительно земли (рис. 1.1,а),
12
траектория бомбы представляет собой пространственную кривую
ОБ, а векторы Лу и L определяются по формулам (для движения
цели с постоянной скоростью)
D =H+A + UT;
(1.2)
где А, Т — относ и время падения авиабомбы; U — вектор скорос-
ти ветра; VK — вектор скорости цели относительно земли; Н —
вектор высоты полета самолета.
«)
Рис. 1.1
13
В случае, когда движение цели и авиабомбы определяется от-
носительно воздуха, перемещающегося со скоростью ветра U,
(рис. 1.1,6), траектория бомбы оказывается плоской кривой, рас-
положенной в вертикальной плоскости, а векторы Dy и L вычисля-
ются по формулам
Dy = H+A;
L = Twa- U)T = VUT,
(1.3)
где Жц — вектор скорости цели относительно земли; = W - U
вектор скорости цели относительно воздуха.
Возможна также схема, когда движение бомбы определяется
относительно цели (рис. 1.1,в). Для этой схемы векторы и L вы-
числяются по формулам
Dy = H +A + UqT;
L = О,
(1.4)
где Uq = -Иц = U - Ж — вектор скорости перемещения воздушно-
го слоя относительно цели (обобщенная скорость ветра). Подста-
новка выражений (1.2), (1.3), (1.4) в формулу (1.1) дает, как и сле-
довало ожидать, один и тот же результат:
A = H+A + (U- WJT - D.
(1.5)
Между основными баллистическими элементами существует
взаимная связь А = VT cosX. - Дб. Для горизонтального полета 2. = 0.
Тогда эта формула примет вид А = VT - Дб, которую в векторной
форме можно переписать в виде
А = VT-A6,
где Дб — вектор линейного отставания (вектор Дб коллинеарен век-
тору V).
Подставляя выражение для А в (1.5) и обозначая
w = v+u-w^ (1.6)
14
получим
\ = H + WT- &6-D, (1.7)
где W — вектор скорости ЛА относительно цели; в частном слу-
чае, когда цель неподвижна, т.е. = 0, вектор W = V + U пред-
ставляет собой вектор путевой скорости ЛА.
Из равенства (1.1) следует (см. рис. 1.1), что для рассматри-
ваемой прицельной схемы, когда вектор фактического положения
цели D непрерывно направлен на цель, требуемое положение
бомбы характеризуется требуемым вектором D*
Dj = D + Z, (1.8)
а фактическое положение бомбы в момент ее падения определяет-
ся вектором Dy. Этот вектор вычисляется по формуле (1.2), (1.3)
или (1.4) в зависимости от того, относительно земли, воздуха или
цели рассматривается движение бомбы.
Сущность задачи о точке встречи как обобщающей задачи
прицеливания состоит в том, что к моменту сбрасывания бомбы
разность между векторами Dy и D*, представляющая собой ошиб-
ку бомбометания, должна обратиться в ноль:
А = Dy - D* = 0. (1.9)
В отличие от воздушной стрельбы, где обращение ошибки А в
ноль достигается за счет поворота вектора й01 начальной скорости
снаряда, при бомбометании с горизонтального полета возможно
лишь изменение курса ЛА, т.е. разворот вектора й01 = V в горизон-
тальной плоскости. Следовательно, процесс прицеливания при
бомбометании с горизонтального полета должен содержать в себе,
во-первых, определение такой траектории движения ЛА, на кото-
рой существует точка сбрасывания бомбы, и, во-вторых, определе-
ние момента, когда ЛА достигает этой точки. Подчеркнем, что
указанная траектория носит название боевого пути ЛА. Вывод ЛА
на траекторию боевого пути составляет сущность прицеливания по
направлению, а определение момента сбрасывания бомбы есть
прицеливание по дальности. Прицеливание по направлению часто
называют боковой наводкой ЛА.
15
Введем еще понятие линии разрывов авиабомб. Линией разры-
вов авиабомб будем называть геометрическое место точек разрыва
бомб, сброшенных с ЛА при его движении по некоторой заданной
траектории. На рис. 1.2 в плане дана схема прямолинейного дви-
жения ЛА с путевой скоростью W. Бомба, сброшенная в точке Ор
под действием ветра выйдет из плоскости пути (вертикальной
плоскости, проходящей через вектор ТУ) и при падении окажется
в точке Бр Аналогично бомба, сброшенная в точке О2, в момент
падения окажется в точке Б2 и т.д. Отрезок Б^^ представляет
собой линию разрывов. Понятие линии разрывов может быть обоб-
щено и на случай криволинейного движения ЛА.
Рис. 1.2
Очевидно, что при высказанных выше предположениях задача
прицеливания по направлению сводится к совмещению линии раз-
рывов с целью. Практически решение задачи прицеливания при
бомбометании с горизонтального полета осуществляется по-разно-
му в зависимости от принятой системы координат и комплекса ис-
пользуемых датчиков первичной информации. Наибольшее рас-
пространение получили системы координат, связанные с вектора-
ми V и W. В дальнейшем эти системы координат будем обозначать
OXVYVZV и OXWYWZW. Указанные системы координат являются пря-
моугольными правыми. Начало координат совмещено с ЛА. Ось
OXV (или ОХЦ) направлена по вектору V (или W), ось OYV (или ОУЦ))
— вертикально вверх.
16
1.1. Решение задачи прицеливания
в системе координат OXVYVZV
Спроектируем векторное уравнение (1.7) при промахе А = 0 на
оси заданной системы координат, получим:
Д, = WXT- Дб - Z) = 0; (1.10)
V
Д„ =-H-Dy = 0-, (1.11)
Дг = Wz-Dx = 0. (1.12)
V
Так как проекция Dy вектора D на ось OYV равна с обратным
знаком значению высоты Н полета ЛА относительно цели, то
уравнение (1.11) превращается в условие, означающее, что для ре-
шения задачи прицеливания точка падения авиабомбы и цель
должны находиться на одном уровне относительно ЛА.
В случае прицеливания по вынесенной точке (Вп Ф 0) и при
выносе точки разрыва относительно цели (Вр •*. 0) условие (1.11)
будет иметь вид
Я = + (113)
где Нл — высота полета ЛА, измеренная относительно точки при-
целивания; Н — превышение ЛА над точкой разрыва бомбы;
В , Вру— проекции векторов Вп и Вр на ось OYV.
Обратимся теперь к равенствам (1.10) и (1.12). Так как рас-
сматривается бомбометание с горизонтального полета, то равенст-
во может быть реализовано путем выбора такого момента сбрасы-
вания бомбы, при котором уменьшающаяся в процессе полета про-
екция Dx вектора D на ось OXV становится равной сумме остальных
слагаемых правой части равенства (1.10). Обеспечение равенства
А„ = 0 составляет суть задачи прицеливания по дальности. Проек-
V
цию А„ называют параметром прицеливания по дальности и обо-
xv
значают буквой р. Равенство А. =0 может быть реализовано путем
17
такого разворота ЛА (вектора V) в горизонтальной плоскости, при
котором изменяющаяся проекция D_ вектора D на ось OZV стано-
вится равной W,T.
Однако прицеливание по направлению может выполняться и
другими способами. Более того, можно показать, что при наличии
ветра непрерывное обеспечение равенства OZV = 0 возможно лишь
при криволинейном полете ЛА.
В связи с этим в прицельных системах бомбометания выбира-
ется такой параметр прицеливания по направлению, при исполь-
зовании которого можно было бы предварительно вывести ЛА на
прямую, содержащую точку бросания бомбы. Для вывода форму-
лы, определяющей искомое значение параметра прицеливания по
направлению, спроектируем векторную схему (см. рис. 1.1,в) на
горизонтальную плоскость (рис. 1.3).
Рис. 1.3
На рис. 1.3 обозначено:
О — проекция центра масс ЛА на землю;
V — вектор воздушной скорости ЛА;
W — вектор скорости сближения ЛА и цели;
Uq — обобщенная скорость ветра, равная U — ТУ ;
ас — угол сноса ЛА относительно земли (при ТУ = 0 ас = осо,
где осо — обобщенный угол сноса);
18
Ц — цель;
Dx, Dz — координаты цели в системе OX Z \
ОБ{. — штилевой относ бомбы;
Дб — линейное отставание бомбы;
Б — точка падения бомбы;
ЦБ = А — вектор текущей ошибки бомбометания;
Д„, Д,— проекции вектора Д на оси ОХ.. и OZ...
Отрезки БЦ и ЦЦ0 параллельны соответственно осям OXV и
OZV.
Если в качестве параметра прицеливания по направлению
взять проекцию Д, , то при условии Д£ = 0 цель переместится на
I? V
линию отрезка БЦ . При последующем прямолинейном полете ЛА
относительное движение цели будет параллельным вектору W. Это
означает, что цель сместится с отрезка БЦ , вследствие чего пара-
метр Д, снова станет неравным нулю и потребуется новый поворот
zv
ЛА. Таким образом, движение ЛА вплоть до момента сбрасывания
бомбы будет криволинейным.
Если же разворот ЛА выполнить так, чтобы цель перемести-
лась не на прямую отрезка БЦ , а на прямую отрезка БЦ , то при
последующем прямолинейном движении ЛА цель будет находить-
ся на линии разрывов бомб. К моменту падения бомбы цель пере-
местится в точку Б. Таким образом, при указанных условиях вы-
полнения боковой наводки необходимость в непрерывном разворо-
те ЛА отпадает. Из рис. 1.3 следует, что для совмещения цели Ц с
отрезком БЦ достаточно в качестве параметра прицеливания по
направлению выбрать величину
Я. = А2 - Дх tga0. (1.14)
V V
W,
Подставляя значения Д„ , Д_ и tgan = Tjr в формулу (1.14),
v v х
получим
19
(1.15)
Из (1.15) следует, что в момент сбрасывания (при р = 0) вы-
полнение условия эквивалентно реализации равенства (1.12), что
и требуется.
Итак, при бомбометании с горизонтального полета при ис-
пользовании для решения задачи прицеливания системы коорди-
нат OXvYvZt, в качестве параметров прицеливания можно принять
величины:
Р = WXT - Dx;
( р \
4 = Т~^~ -°.:'
X
(1.16)
1.2. Определение исходных данных
для вычисления параметров прицеливания
Рассмотрим теперь как могут определяться исходные данные
для расчета параметров р и q.
Время падения Т и линейное отставание Аб являются баллис-
тическими элементами авиабомбы. Параметры Т и Аб могут вы-
числяться или непосредственно путем интегрирования системы
уравнений, описывающей движение бомбы, или же по формулам,
являющимся аппроксимацией табличных функций Т и А0:
Т = T(H,V,W6);
дб = Аб(Я,у,е,еб),
(1.17)
где 0 — угол наклона траектории.
В первом случае, если в качестве баллистической характерис-
тики выбирается кривая С
' — , соответствующая данной бомбе,
x0 CL
то в результате вычислений определяются функции:
20
Т = Tc(H,V,e);
Д6 = Аб (Н,Г,в).
С
(1.18)
В обоих случаях для вычисления Т и Аб необходимо знать ус-
ловия сбрасывания бомбы О, а также характеристическое время 0g
(вместе с 0б используется характеристическая скорость бомбы У0).
Координаты цели Dr и D_, фигурирующие в формулах (1.16),
обычно прямо измерены быть не могут. Дело в том, что визирная
система, как правило, ориентирована относительно осей ЛА. Поэ-
тому координаты цели, определяемые с помощью этих устройств,
должны быть предварительно пересчитаны к системе OX^Y^Z^.
Предположим, что с визирной системой связана прямоугольная
правая система координат OX Y Z t ось ОУпр которой верти-
кальна, а ось ОХпр расположена в одной вертикальной плоскости
с продольной осью ЛА. На горизонтальном полете ось ОХпр повер-
нута относительно оси OXv на угол скольжения Рск (рис. 1.4).
Из рисунка следует, что
D =D cosP +D sinp ~ В ;
Л- Л, J VXV 4г ’ кгГк Л-
пр пр пр
В7 = В cosp -В sinp ~В - РСКВ
/С ’ V1V A " kz XV 1 Lz XV
пр пр пр 1
(1.19)
21
Замена приближенных выражений возможна в связи с тем,
что в установившемся горизонтальном полете углы £ск малы. Фор-
мулы для определения проекций Dx и D, имеют различия в за-
пр пр
висимости от типа визирной системы (ВС).
Рассмотрим в качестве примера три ВС:
- оптическая ВС, сопряженная с высотомером;
- оптическая ВС, сопряженная с лазерным дальномером;
- радиолокационная ВС, сопряженная с высотомером.
На рис. 1.5 показано взаимное расположение ЛА (точка О) и
цели в момент измерения ее координат.
Рис. 1.5
При применении оптической ВС, сопряженной с высотомером,
для определения координат Dx и Л, измеряются:
пр ~пр
— высота Н полета ЛА;
- углы визирования цели: продольный (рв и боковой Uq.
Высоту Н полета ЛА определяют при помощи барометрическо-
го или радиовысотомера. Возможность измерения углов визирова-
ния цели (рв и относительно гировертикали прицельной систе-
мы обеспечивается оптической системой. Проекции Dv и мо-
пр ~пр
гут быть определены по формулам
22
Dx =
пр
Dz = Htgp0.
np J
(1.20)
В том случае, когда оптическая ВС применяется совместно с
лазерным дальномером, исходными параметрами для получения
Dx и D. являются:
пр пр
- наклонная дальность D до цели;
- углы визирования цели (рв и Цд.
Наклонная дальность измеряется с помощью лазерного даль-
номера, ось которого совмещена с осью оптической ВС. Для этого
варианта проекции Dx hD, могут вычисляться по формулам
Dx = D cosp sin<pB;
пр
Z). = D sinp,
пр
(1.21)
где угол р, в свою очередь, определяется по формуле
Р = arctg(tgp0 sin(pB). (1.22)
Высота полета Н, значение которой необходимо знать для вы-
числения баллистических элементов А, Т и Ag, в данном случае
может определяться по формуле
Н = D cosp sintpB.
Наконец, при использовании радиолокатора и высотомера для
получения Dx и D2 предварительно измеряют:
пр пр
- наклонную дальность D цели;
- высоту Н полета ЛА;
- азимутальный угол о разворота плоскости симметрии ан-
тенны РЛС.
Для этого варианта проекции Dx и D, вычисляются по фор-
пр ~пр
мулам:
23
Dx cos of
np
D = Vd2 - H2 si no.
гпр J
(1.23)
При сопряжении радиолокатора с оптической визирной систе-
мой азимутальный угол о вычисляют в соответствии с формулой:
о = arctg ----.
(1.24)
Эта формула справедлива лишь при движении ЛА без крена.
Если же ЛА имеет угол крена у, то он должен быть учтен при вы-
числении угла о, поскольку антенна РЛС вместе с ЛА будет тоже
наклонена на угол у.
Нетрудно установить, что величина угла о с учетом крена у
должна определяться по формуле:
о = arctg
^tgg0 + sin'/'
L ‘«Ч’в
Рассмотрим теперь вопрос об определении скоростей W и W,
входящих в выражения (1.16).
Если -Оцо = D радиус-вектор цели относительно ЛА, то радиус-
вектор -Ооц, определяющий положение ЛА относительно цели,
будет отличаться от вектора Пцо лишь знаком:
»оц =
Следовательно, скорость сближения ЛА с целью будет равна
Ж = ЭОц = -D.
Проектируя это равенство на оси OXV и OZV системы OXtY
которая в режиме горизонтального полета вращается только во-
круг оси OYV, получим:
(1.25)
24
По аналогии с Dx и D2 в прицельных системах измеряются не
скорости Wr и W7, a Wx и Wz , где
пр пр
wx = -bx , w2 =-Ьг . (1.26)
пр пр пр пр
Дифференцируя равенства (1.19) по времени t и учитывая, что
производная от угла скольжения Рск невелика, найдем:
WxaWx
пр
СК *
w ~W -W в
Z Z X Г|
пр пр
В прицельных системах бомбометания с горизонтального по-
лета применяются два основных метода для определения проек-
ций Wx и Wz : синхронный и базисный. В случае бомбометания
пр пр
по неподвижной цели применяется также векторный способ. Кро-
ме того, существует способ, основанный на использовании допле-
ровского эффекта в радиолокации.
1.3. Синхронный способ
определения параметров Wx и Wz
пр пр
Если с помощью соответствующей настройки визирной систе-
мы добиться синхронного движения цели и прицельного перекрес-
тия, то будут выполняться равенства (1.26). Тогда для определе-
ния скоростей Wx и W7 будет достаточно вычислить производ-
пр пр
ные Dv и D7 . В зависимости от типа ВС, применяемой в при-
пр пр
цельной системе, выражения для скоростей W и W будут раз-
пр ^пр
ными. Так, продифференцировав выражения (1.20) с учетом ра-
венства (1.26), получим для оптической визирной системы:
Wx
' пр
2
cos фв
(1.27)
пр
2 ^0’
COS ц0
где фв и ц0 представляют собой скорости изменения продольного и
бокового углов визирования, подбираемые оператором в процессе
25
синхронизации. После выполнения синхронизации цель и пере-
крестие прицельной системы должны двигаться синхронно, т.е.
цель не должна перемещаться относительно перекрестия.
Для оптической ВС, сопряженной с лазерным дальномером,
формулы для Wr и W_ могут иметь различный вид в связи с
X Z
тем, что кроме измерения координат D, (рв, Цф, необходимо вычис-
лить еще производные от двух параметров D и 11ф, или D и <рв, или
<рв и Поскольку лазерные дальномеры обеспечивают высокую
точность определения дальности, имеет смысл вычислить D. Из двух
углов (рв и ц0 выбираем второй. Дифференцируя равенства (1.21)
при условии |10 » const (при определении Wx ) и D = const (при оп-
ределении W, — это допущение справедливо для сравнительно
малых углов Цф, имеющих место при бомбометании), получим:
W„ - - D cosn sintp ;
Л ’ 1
w2
D cos ц cos(pB
(1.28)
где D — производная дальности, вычисляемая по данным лазерно-
го дальномера; угловая скорость визирного луча подбирается
оператором в процессе синхронизации. Первую формулу из (1.28)
можно получить из рис. 1.5.
Для радиолокатора после дифференцирования равенств (1.23)
с учетом равенства (1.26) при условиях <5 = const (для Wx ) и
пр
D = const (для W_ ) формулы для W„ и W, будут иметь вид:
Z X Z
W
х
D coso
- н2
Ь;
(1-29)
W = -Л'О2 - Н2 cos о о,
Z
где D, о — производные дальности и азимутального угла, вычис-
ляемые по данным радиолокатора в процессе синхронизации.
26
При применении радиолокатора, сопряженного с оптической
ВС, производная от дальности вычисляется не непосредственно, а
через уравнения связи. Например, если формула связи радиолока-
тора с оптической визирной системой имеет вид (см. рис. 1.5)
7. И
D COSJLL =-----,
COS(pB
то при условии, что ц = const, получим
Ь = D tg<pB Фв, (1.30)
где угловая скорость луча визирования (рв подбирается оператором
в процессе синхронизации.
Точно так же и производная от угла <5 разворота антенны вы-
числяется не непосредственно, а с помощью уравнения связи
(1.24). Дифференцируя обе части равенства (1.24) по времени и по-
лагая фв = const, найдем:
cos2а •
п =----ъ-------Но» (1-31)
cos ц0 tg<pB
где подбирается оператором в процессе синхронизации.
1.4. Базисный способ определения параметров Wx и Wz
пр пр
Сущность этого способа состоит в том, что составляющие про-
екции Wv и W„ вычисляются по величине смещения цели отно-
Л/ jv
пр пр
сительно перекрестия прицельной системы, измеренного за неко-
торое время и называемого временной базой. Из формулы (1.20)
следует, что при использовании оптической визирной системы
Wx и W, могут быть определены на основании соотношений:
пр пр
#<tg <РВ1 - tg фв2).
X 9
пр /^2
г _ H(tg НО1 - tg ЦО2)
Z — + + 9
пр ^2
(1.32)
где tp i2 — моменты времени первого и второго совмещений пере-
крестия прицельной системы с целью; (рв1, <рв2 — продольные углы
27
визирования цели в момент времени исоответственно; р01, ц02 —
боковые углы визирования цели также в моменты времени tj и t2.
В случае применения лазерного дальномера составляющие
Wx и W, определяются по формулам (см. рис. 1.5):
пр ~пр
W
X
пр
WZ
пр
. — (-01 cos Pi sin<pB1 - D2 cosp2 sm(pB2);
t2
t (1.33)
-------(Dj sin^! - Dx sinp2),
“ *1
где Dv D2 — дальности до цели в момент первого и второго совме-
щений прицельного перекрестия с целью.
При использовании радиолокационной визирной системы Wx
пр
и Wz на основании равенств (1.23) могут быть вычислены по фор-
пр
мулам:
Ж =
X
пр
=
пр
1
^2 ~ ^1
1
i2 - ^i
(Z)rl cos^ - Dr2 coso2);
(Drl sinG^ - Z)r2 sina2),
(1.34)
где Drl, Z>r2, Op o2 — горизонтальные проекции дальности до цели
и азимутальные углы в моменты первого и второго совмещений.
1.5. Синхронно-базисный (автосинхронный) способ
определения составляющих и W2
пр пр
Разновидностью синхронного и базисного способов определе-
ния составляющих W и W2 является синхронно-базисный (ав-
пр пр
тосинхронный). Сущность этого способа состоит в том, что состав-
ляющие W и W2 определяются в прицельной системе автома-
пр пр
тически как сумма составляющих Wx и W* , введенных в при-
пр пр
цельную систему, и поправок и AW2, вычисляемых по смеще-
нию цели относительно перекрестия прицельной системы за неко-
торое время т, которое называется временем автосинхронизации.
28
Для выяснения вопроса о том, каким путем могут быть опре-
делены поправки AWV и AW., рассмотрим схему, представленную
на рис. 1.6.
На схеме дана картина обращенного движения цели и ЛА в
продольной плоскости. В точке О находится визирная система ЛА.
Визирный луч вращается так, что его след на горизонтальной
плоскости (т.е. на отрезке О Цо) перемещается с некоторой посто-
янной (но корректируемой) скоростью ТУ*. в направлении, ука-
пр
занном на схеме. Цель из положения Цо перемещается с постоян-
ной скоростью Wr , подлежащей измерению. Предположим, что в
пр
начальный момент визирный луч направлен на цель, т.е. точки
АД*, и По, соответствующие положению цели и следа визирного
луча, совпадают. По истечении некоторого времени т след луча и
цель, вообще говоря, разойдутся за счет разности АТУХ скоростей
ТУ* и W и займут соответственно положения Пх и Ц^. Так как
пр пр
цель и след луча движутся с постоянной линейной скоростью, то
отрезок S = Ц1П1 будет равен
S = AWrT. (1.35)
Если теперь снова совместить визирный луч с целью и одно-
временно ввести поправку 5ТУ к скорости ТУ* , пропорциональ-
29
ную S, т.е. линейному перемещению следа визирного луча, то по-
лучим новое значение скорости следа луча, равное
ТУ* ,
X 1
пр
= W* +SVF .
Хпр х
(1.36)
По условию поправка 8W пропорциональна S, т.е.
8ТУХ = kS,
где k — коэффициент пропорциональности.
Подставив сюда выражение (1.35) и принимая во внимание,
что
\WX = WX
пр
пр
(1.37)
получим
= к Ж
хпр
х
пр
(1.38)
Следовательно, уточненное значение скорости
будет равно
ту* _ ту*
vv х I й*
пр ]
пр
- W
х :
пр
X
пр
т.
(1.39)
Отсюда
- W*
х
-ТУ* , = VV
X X 1 X
пр пр 1
пр
. -k ТУ
Пр
X
пр
Wx
пр
ТУ _ ТУ*
X X
пр пр
(1 - kT).
(1.40)
т =
Из полученной формулы следует, что при
k =-
т
можно после первой корректировки скорости
биться равенства
(1.41)
визирного луча до-
ТУ*
™х 1
(1.42)
пр
= ТУХ .
30
Таким образом, если измерять время т и непрерывно вычис-
лять коэффициент k, то, в принципе, можно найти искомую ско-
рость W по истечении времени т от момента первого совмеще-
пр
ния луча и цели. Если по каким-либо причинам измерение т неже-
лательно, то можно указать область значений коэффициента k,
при которых будет обеспечиваться сходимость процесса автосин-
хронизации при многократных повторениях описанных выше опе-
раций. В самом деле, на основании равенства (1.40) можем запи-
сать:
W -W* <
X X 1
пр пр
|1 - /?т|,
(1.43)
отсюда
W - W* л
X X 1
пр_____пр
W - W*
X X
пр пр
(1.44)
= 1 - /?т.
Очевидно, что после вторичного совмещения визирного луча с
целью скорость следа визирного луча приблизится к скорости
цели при условии
W - W* л
X X 1
___пр____пр
\v -w*
пр пр
(1.45)
Это условие эквивалентно неравенству
-1 < 1 - /г т < 1
или
(1.46)
Следовательно, если опытным путем может быть выявлено не-
которое среднее время т, то применительно к этому значению т
можно рассчитать коэффициент k, при котором обеспечивается
сходимость процесса автосинхронизации. В связи с отклонениями
фактического времени т от среднего значения определение скорос-
ти W будет производиться в результате нескольких (обычно
пр
двух-трех) последовательных совмещений луча с целью.
31
1.6. Векторный способ
определения параметров Wx и Wz
Остановимся теперь кратко на векторном способе определения
скоростей Wv и W,. Сущность этого способа состоит в том, что вы-
X 2
числяются проекции на оси OXV и OZV вектора W, который пред-
ставляет собой сумму векторов V и Uq‘.
W- v+ua.
(1.47)
где V — вектор воздушной скорости самолета; Uq — вектор ско-
рости обобщенного ветра.
На основании (1.6)
^0=С/-^ц’
(1.48)
где U — вектор скорости ветра; Жц — вектор скорости цели.
Так как вектор скорости цели, как правило, не известен, то
отсюда и следует сделанное ранее замечание, что векторный спо-
соб определения W„ и Wу может быть наиболее эффективно при-
менен при бомбометании по неподвижной цели, когда = 0.
Вектор скорости ветра может быть известен заранее по метеодан-
ным или же измеряется на маршруте с помощью бортовой аппара-
туры ЛА. Этот вектор вводится в прицельную систему в виде двух
проекций U и U7 на оси горизонтированной системы координат,
либо в виде двух параметров:
- модуля 17;
направления 8 относительно магнитного или географическо-
го меридиана.
Из треугольника скоростей (рис. 1.7) следует:
W = V + L7 cos(8 — К — р );
A J СГъ
(1.49)
W2 = U sin(8 - К - рск)
СК7’
где К — курс самолета, измеряемый при помощи курсовой систе-
мы ЛА.
32
Рис. 1.7
Заметим, что при векторном способе определяются не Wx и
пр
W , а непосредственно и W7, т.е. те величины, которые ис-
пр
пользуются при вычислении параметров прицеливания р и q по
формулам (1.16).
Если на борту самолета имеется доплеровский измеритель пу-
тевой скорости и угла сноса (ДИСС), то с его помощью измеряются
непосредственно составляющие W и W7 путевой скорости отно-
' пр ~пр
сительно осей самолета.
1.7. Способы реализации параметров
прицеливания
Линейный способ. Сущность линейного способа реализации
параметров прицеливания состоит в том, что вычисляемые по фор-
муле (1.16) линейные параметры прицеливания р и q поступают
соответственно в устройство автоматического сбрасывания бомб и
в систему автоматического управления самолетом. Самолет совер-
шает поворот всякий раз, когда q Ф 0. При q = 0 прицеливание по
направлению (боковая наводка) завершается. Прицеливание по
дальности заканчивается в момент сбрасывания бомбы, который
соответствует нулевому значению параметра р.
Угломерный способ. Для рассмотрения угломерного способа
реализации параметров прицеливания преобразуем первую фор-
мулу (1.16) к виду
33
_p_
н н н *
(1.50)
На рис. 1.8 представлена пространственная схема прицелива-
ния при бомбометании с горизонтального полета, соответствующая
решению задачи прицеливания в системе координат OXVYVZV (для
случая Жц = 0). Точка О соответствует текущему положению ЛА.
ОБ — траектория бомбы, сбрасываемой из точки О; ЦБ = А — век-
тор ошибки бомбометания.
Обозначим как (рп продольный угол визирования расчетной
точки падения авиабомбы Б, определяемый вычислительным уст-
ройством прицельной системы. Угол <р называется углом прицели
вания. Буквой <рв обозначим текущий продольный угол визирова-
ния цели, определяемый с помощью визирной системы.
Из рис. 1.8 следует, что
^гТ-Дб
tg<pn = * ; (1.51)
Г1
Dx
tg% = ^-. (1.52)
Тогда в качестве параметра прицеливания по дальности мож-
но принять (1.50)
Ар^ЕФп-^Фв- (153)
В этом случае сигнал на сбрасывание бомбы будет поступать
автоматически в момент равенства = 0, т.е. в момент равенства
углов визирования и прицеливания <рп — <рв.
Для формирования параметра прицеливания по направлению
углы осс и ссв определим из второй формулы (1.16). Для этого в
данную формулу подставим первое уравнение из (1.16) и, разделив
полученное выражение на сумму (Dx + Аб), получим:
34
Отсюда следует:
Здесь осс — угол сноса ЛА (если Жц Ф 0, то вместо ас необходи-
мо брать осо); схв — угол пеленга условной цели Цусл» отсчитывае-
мый от оси ОХ;. в горизонтальной плоскости.
Под условной целью будем понимать точку, смещенную по на-
правлению V относительно цели на величину Дб (рис. 1.8). Тогда
параметр прицеливания по направлению при угломерном способе
его реализации можно принять в виде (см. 1.54)
qa = tgac - tgaB. (1.57)
Рис. 1.8
35
Из этой формулы следует, что сигналы на поворот ЛА будут
поступать до тех пор, пока qa 0 (т.е. ав Ф ас), и лишь в том слу-
чае, когда ав = осс, разворот ЛА прекращается, что свидетельству-
ет об окончании прицеливания по направлению.
Из рис. 1.8 видно, что боковая наводка будет выполнена (да = 0)
в том случае, когда цель находится на линии разрывов авиабомб.
В этом случае условная цель сместится в точку ЦуСЛ и в дальней-
шем будет находиться на линии пути ЛА, расположенной вдоль
вектора W путевой скорости ЛА. При этом, очевидно, выполняет-
ся условие ав = ас. Момент сбрасывания наступает тогда, когда
цель, перемещаясь по линии разрывов авиабомб, переместится из
точки Ц* в точку Б. Это равнозначно перемещению проекции
точки Ц+ на плоскость Y ОХ (точки Ци) в точку Бу, что означает
выполнение равенства фв = фп •
1.8. Решение задачи прицеливания в системе
координат OXWYWZW
На рис. 1.9 показана векторная схема задачи прицеливания в
системе координат OXutYwZw.
Спроектируем векторное уравнение (1.7) на оси системы коор-
динат OX Y Z , получим:
(д.' СД- VV
= WT- Ag C0S(Xc - Dx\ (1.58)
Ay = -H-Dy; (1.59)
Д =AgSina -Z> . (1.60)
Подобно (1.11) условие (1.59) соответствует совпадению высо-
ты бомбометания Н с превышением самолета над целью Dy. Обес-
печение равенства Д = 0 происходит в процессе прицеливания по
дальности и может быть реализовано выбором момента сбрасыва-
ния бомбы.
36
Линия разрыва
\ АБ
Курсовая черта
В процессе прицеливания по направлению (боковой наводки)
устанавливается равенство Д2 = 0, что достигается соответствую-
щим разворотом ЛА в горизонтальной плоскости. В случае выпол-
нения равенства Аг = 0 цель сместится из точки Ц в точку Ц* и в
последующем будет перемещаться относительно ЛА вдоль линии
разрывов бомб. Но, так как значения Agsinac и D, при перемеще-
нии цели по линии разрывов бомб остаются постоянными, то и ра-
венство А_ = О будет сохраняться вплоть до момента сбрасывания
бомбы. Следовательно, после достижения равенства А. = О дальней-
ших доворотов ЛА не потребуется. В связи с этим величину А, при
решении задачи прицеливания в системе координат OX мож-
но принять в качестве параметра прицеливания по направлению.
Преобразование выражения для параметра прицеливания по
направлению состоит в следующем. Непосредственное измерение
координат Dx и Dz выполняется с помощью визирной системы.
Оси этой системы ОХпр и ОУпр в общем случае не совпадают с осями
OXW и OZW, а могут быть повернуты на некоторый малый угол 5а во-
37
круг оси OY. В связи с этим величины Dx и LY будут отличаться от
координат Dx и . Из рис. 1.9 вытекают следующие формулы
пр 'пр
перечета координат из системы OXnpYnpZnp в систему OXWYWZW:
D = D cos8 - D sin8 ; (1-61)
Л Л Cl СТ
пр пр
D^ = D cos8 + D sin8a. (1.62)
4 d X ст
пр np
Для малых углов 8a эти формулы могут быть переписаны в
виде
DX^DX ; (1.63)
пр
= +8aDr . (1.64)
пр пр
Для угла 8а из рис. 1.9 может быть записано выражение
8а = “в-“с-₽ск’ <165)
где ав — угол разворота визирной системы вокруг вертикальной
оси OY относительно продольной оси ЛА; осс — угол сноса ЛА под
действием ветра; |3СК — аэродинамический угол скольжения ЛА.
В прицельных системах, в которых решение задачи прицели-
вания производится в осях OXW, OZW, при развороте визирной сис-
темы вокруг оси OY одновременно осуществляется наклон плос-
кости визирования относительно оси ОХир на угол ц0. Линия пе-
ресечения плоскости визирования с горизонтальной плоскостью,
проходящей через цель, называется курсовой чертой.
Очевидно, что курсовая черта параллельна линии ОХпр (про-
екции оси ОХпр на горизонтальную плоскость). В том случае, ког-
да курсовая черта проходит через цель, расстояние между курсо-
вой чертой и осью ОХпр равно
D2 =Htgg0. (1.66)
пр
38
Выберем зависимость угла lIq наклона плоскости визирования
от угла разворота осв визирного устройства вокруг оси OYW в виде
Н tg|i0 = Дб sinOx^- рск). (1-67)
При непрерывном совмещении курсовой черты с целью будет
выполняться равенство (1.66), и зависимость (1.67) можно перепи-
сать в виде
D. = Лб sin(aB - ₽ск) = Дб (ав - рск), (1.68)
пр
поскольку угол (0Св - Рск) мал.
Решая совместно (1.61)—(1.62) с учетом (1.67)—-(1.68), а
также полагая sinac » ac, получим:
Лг = -(ОХ + A6)(aB - a - Р ) = —(D +Лб)8а. (1.69)
пр пр
При Dx + Дб * 0 условие Dt + Дб, соответствующее оконча-
пр пр
нию боковой наводки, выполняется, если угол 8а = 0. На основа-
нии равенства (1.66) заключаем, что в этом случае между углами
aB, ас и рск устанавливается соотношение
a = a + 3 , (1.70)
г> V Л
которое означает, что ось ОХпр совпадает с вектором путевой ско-
рости, т.е. с осью ОХи).
Согласно формуле (1.69) курсовая черта будет располагаться
относительно оси OXW на расстоянии
А> sin(aB - рск) = Дб sinac. (1.71)
Линия разрывов (см. рис. 1.9) сдвинута параллельно оси ОХ
также на расстояние Дб sinac. Таким образом, после завершения
боковой наводки курсовая черта оказывается совмещенной с ли-
нией разрывов.
Итак, с учетом (1.69) параметрами прицеливания в случае ре-
шения задачи в системе координат OXUYWZW являются:
39
р = \ = WT - AgCos ос - D ;
пр
(1.72)
? = Д =-(Dx + Дб)8а.
пр J
Баллистические элементы Т и Аб вводятся в прицельную сис-
тему так же, как и в случае решения задачи в системе координат
OXVYVZV.
Остановимся на способах определения величин D , W, За и
пр
0Сс, входящих в формулы (1.72) для параметров прицеливания.
Будем по-прежнему рассматривать три варианта визирных сис-
тем.
Из рис. 1.9 видно, что положение цели Ц относительно ЛА в
случае применения оптической визирной системы может быть оп-
ределено двумя способами:
— по высоте 77 и углам (рв1 и l1q ;
- по высоте Н и углам (рв2 и .
Так как в соответствии с формулой (1.67) угол является
функцией Н, Дд, ОЦ., и £ск, то в конечном итоге для определения
положения цели относительно ЛА в системе координат исходной
информацией должны быть величины Н, ав, Рск или (рв2.
При этом координата Dx (см. рис. 1.9) определяется по фор-
пр
мулам
Dx =-^-tg<pB1 (1.73)
пр COS|10 bl
или
Dx = Htg<pB2. (1.74)
пр
В варианте оптической визирной системы и лазерного дально-
мера проекция Dx может определяться по формулам
пр
Dx =Hsin<pB1 (1.75)
пр
40
или
Dx = W2 - Д2 sin2(aB - Рск) sin фв2, (1.76)
пр
где Ag sin2 (ав - Р ) = В2 ,
пр
или
D = D cosц sin<рв2, (1-77)
пр
где
Ц = arctg(tgg0 cos(pB2). (1.78)
В варианте радиолокационной визирной системы, сопряжен-
ной с высотомером, проекция Dx (см. рис. 1.5 и 1.9) определяет-
' пр
ся по формуле
Dx = - IP cos (о - a ) = \D2 - Я2. (1.79)
пр
Путевая скорость W, необходимая для вычисления параметра р,
по-прежнему может измеряться синхронным, базисным, синхрон
но-базисным и векторным способами. Кроме того, при наличии
доплеровского измерителя путевой скорости и угла сноса вектор
W определяется по компонентам путевой скорости, измеренным
вдоль осей, связанных с ЛА.
Необходимо иметь в виду, что
, (1.80)
пр
т.е. достаточно определить скорость изменения координаты Dx .
пр
Поэтому для определения W могут служить формулы (1.73) —
(1.77), записанные для вычисления продольной координаты цели
применительно к различным вариантам визирных систем.
Для вычисления параметра q прицеливания по направлению
по формулам (1.72) необходимо знать Dv и Дд, а также угол
пр
8 = а - а - р .
а. V 1 vis,
Так как осв представляет собой угол разворота визирной систе-
мы относительно ЛА, а Рск измеряется с помощью датчика углов
41
скольжения, то определение угла 5а в конечном итоге сводится к
измерению или вычислению угла сноса. Угол сноса определяется
в процессе боковой наводки ЛА.
1.9. Способы прицеливания по направлению
(боковой наводки)
Различают следующие способы боковой наводки: синхронный
способ; способ подбора угла сноса; способ кратных углов; вектор-
ный способ; способ, основанный на использовании доплеровского
измерителя путевой скорости и угла сноса. Способ подбора угла
сноса, применявшийся ранее, в настоящее время уже практичес-
кого интереса не представляет.
Рассмотрим синхронный способ. Для простоты предположим,
что Дб = 0. При таком предположении ось ОХпр будет совпадать с
курсовой чертой прицельной системы (см. рис. 1.9).
Сущность синхронного способа боковой наводки (рис. 1.10) со-
стоит в том, что после обнаружения бокового смещения цели отно-
сительно самолета ЛА совершает разворот по дуге до такого мо-
мента, когда угол V между вектором R±, направленным на цель, и
некоторым стабилизированным вектором /?2 становится макси-
мальным, т.е. \|/ = Ymax*
Рис. 1.10
Вектор W путевой скорости ЛА, направленный по касатель-
ной к его траектории, в этом случае пройдет через цель, и боковая
наводка будет завершена. В момент, когда угол W = утя„> угловая
1 llLfAJk
42
скорость \|/ = О. Следовательно, условие \|/ = 0 может служить для
определения момента окончания разворота ЛА.
Рассмотрим теперь выполнение боковой наводки методом
кратных углов (рис. 1.11).
Рис. 1.11
Последовательность операций, выполняемых экипажем ЛА, в
этом случае сводится к следующему. На подходе к цели визирную
систему прицела разворачивают в горизонтальной плоскости до
совмещения курсовой черты с целью. Так как в общем случае кур-
совая черта не параллельна вектору скорости сближения с целью,
то цель будет смещаться с курсовой черты. По истечении некото-
рого времени снова разворачивают визирную систему относитель-
но ЛА и осуществляют вторичное совмещение курсовой черты с
целью. Угол поворота визирной системы при вторичном совмеще-
нии курсовой черты с целью служит основной величиной для рас-
чета необходимого угла разворота ЛА при выполнении боковой на-
водки.
На рис. 1.11 обозначено:
Щ и Ц2 — положения цели в моменты первого и второго со-
вмещения курсовой черты с целью;
At — временная база;
W — вектор путевой скорости ЛА;
43
otc — угол сноса;
КЧг и КЧ2 — курсовая черта прицельной системы в момент
первого и второго ее совмещения с целью;
ав1 и ав2 — углы разворота прицельной системы в моменты
первого и второго совмещения курсовой черты с целью;
Ц1Ц2 — линия перемещения цели относительно ЛА за время А/.
Предполагается, что при развороте визирной системы относи-
тельно ЛА на угол ав курсовая черта смещается параллельно оси
ОХпр на величину Ag sinaB « AgaB. Следовательно, K4j || ОХпр1 и
КЧ2 || ОХпр2- Из рис. 1.11 следует, что
WAt8a2 = - рск) = zV«B2 - ₽ск> + дх1<“в2 - «в1>
ИЛИ
WAf6a2 = (Dxl + Аб)(осв2 - aB1). (1.81)
Следовательно, угол За2 между направлением курсовой черты
прицельной системы в момент второго наложения ее на цель и
вектором путевой скорости будет равен
В. + Ag
S«2-^^(«b2-«b1)’ (1.82)
Предполагая, что при малых поворотах ЛА угол сноса 0Сс из-
меняется пренебрежимо мало, можем в качестве потребного угла
разворота ЛА принять ба2.
В самом деле, если считать, что при повороте ЛА на угол
За2 величина угла сноса не изменится, то вектор путевой скорости
после поворота ЛА установится вдоль направления ОХпр2, а цель
будет перемещаться вдоль курсовой черты.
Dxi + Аб
Величина —— называется коэффициентом кратности К
°Х1 + Аб
(1.83)
44
Угол Аав = ав2 - ав1 называется углом схода цели с курсовой
черты. Тогда угол поворота ЛА при боковой наводке будет равен
5а = 5а2 = А'(ав2 - ав1) = A"AaB. (1.84)
Необходимо иметь в виду, что после разворота самолета на
угол 5a разворот визирной системы относительно оси самолета
станет равным ac + f>CK вместо ав2. Расстояние между курсовой
чертой визирной системы и новым направлением оси ОХпр изме-
нится на величину Аа(ав2 - ав1 - Рск), и следовательно, цель смес-
тится с курсовой черты в сторону разворота ЛА. В связи с этим не-
обходимо дополнительно развернуть визирную систему и ЛА на
угол, равный
8a =jj^-(a - a - 3 ). (1.85)
их2
Сущность способа кратных углов состоит в том, что, измерив
угол схода цели с курсовой черты Дав за некоторое время At (назы-
ваемое временной базой), экипаж должен довернуть ЛА (не разво-
рачивая прицельную систему) на угол 5a, превышающий в К раз
угол Аав. Коэффициент кратности К зависит от условий полета и
визирования. Вычислительное устройство прицельной системы
должно определить значения коэффициента К и угла 5a и выдать
в систему управления ЛА сигнал на разворот. Способ кратных
углов можно применять и при отсутствии вычислителя (отказ),
что позволяет автоматизировать процесс боковой наводки. В этом
случае используется некоторое среднее значение коэффициента
кратности К. Можно показать, что применение среднего значения
этого коэффициента приводит к тому, что боковая наводка выпол-
няется в результате нескольких поворотов ЛА, величина которых
быстро убывает, т.е. получается сходящийся процесс последова-
тельных приближений.
Векторный способ боковой наводки предусматривает предва-
рительное знание вектора скорости ветра U.
При использовании системы координат OX X в этом слу-
чае предварительно определяется требуемый угол разворота ви-
45
зирной системы прицела оспр относительно ЛА, а следовательно, и
курсовой черты.
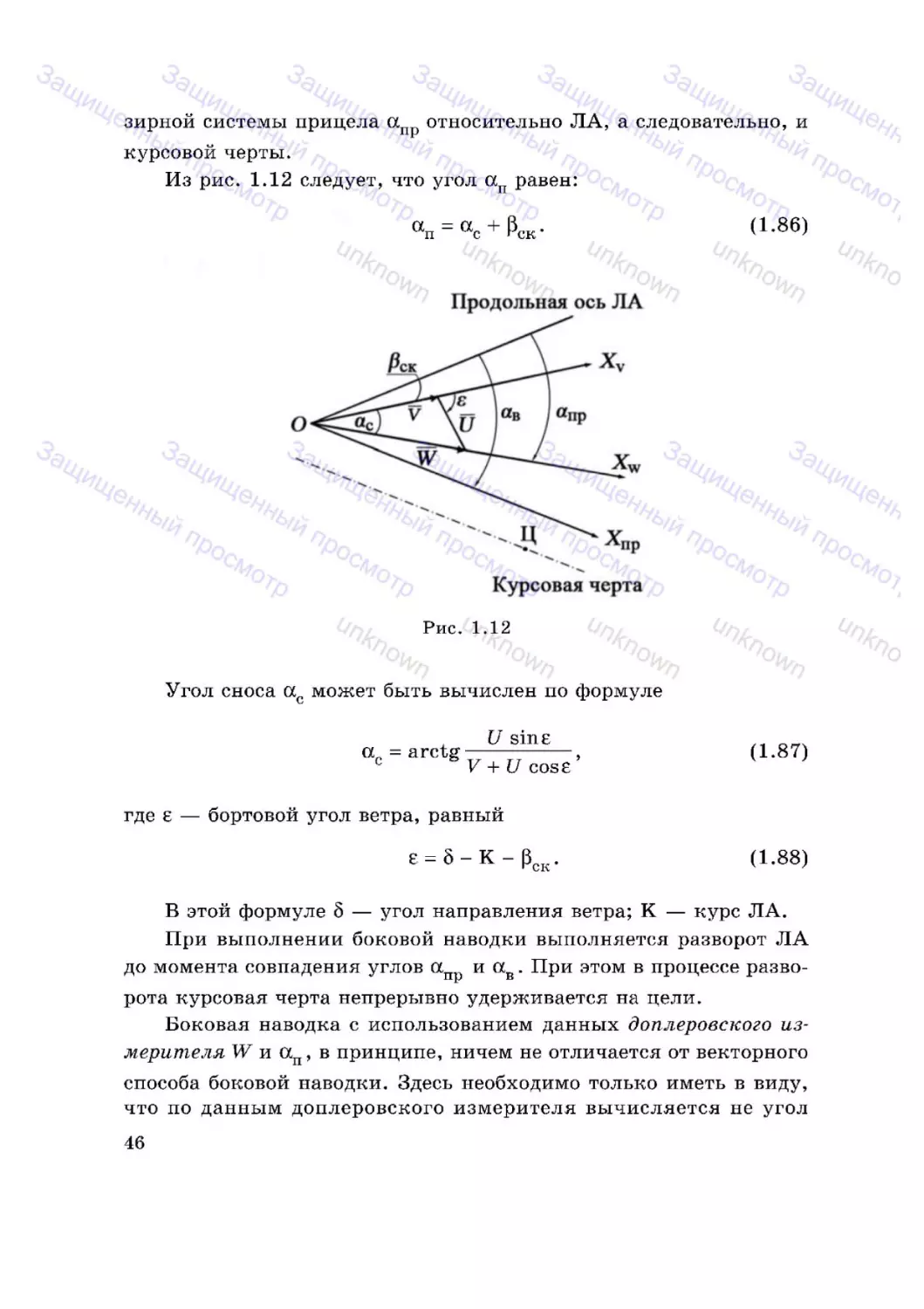
Из рис. 1.12 следует, что угол осп равен:
«П = “с + ₽ск- 0.86)
Угол сноса ас может быть вычислен по формуле
U sinE
а = arctg --------, (1.87)
С V + U COSE
где Е — бортовой угол ветра, равный
Е = 6-К-рск. (1.88)
В этой формуле 6 — угол направления ветра; К — курс ЛА.
При выполнении боковой наводки выполняется разворот ЛА
до момента совпадения углов а и ав. При этом в процессе разво-
рота курсовая черта непрерывно удерживается на цели.
Боковая наводка с использованием данных доплеровского из-
мерителя W и ап, в принципе, ничем не отличается от векторного
способа боковой наводки. Здесь необходимо только иметь в виду,
что по данным доплеровского измерителя вычисляется не угол
46
сноса, а непосредственно угол требуемого разворота прицельной
системы 0Спр:
°СЪО> °%0> °СЪО>
tg(ac + 30K) = tganp = ^( (1.89)
X
пр
где Wу и Wx — составляющие путевой скорости относительно
пр пр
осей ЛА, измеряемые при помощи доплеровского измерителя.
Так как для решения задачи прицеливания по направлению
необходимо в конечном итоге знать требуемый угол разворота ви-
зирной системы прицела оспр, то в случае использования доплеров-
ского измерителя отпадает необходимость в измерении угла сколь-
жения ЕС .
1 СК
47
2. АВИАЦИОННАЯ ПРИЦЕЛЬНАЯ СИСТЕМА
ДЛЯ БОМБОМЕТАНИЯ
2.1. Теоретические основы решения
задачи прицеливания при бомбометании
Предположим, что с самолёта в произвольный момент време-
ни бросается бомба. После сбрасывания бомба опишет в простран-
стве некоторую траекторию. Точка, в которой происходит сбрасы-
вание бомбы, называется точкой бросания и обозначается как
Обр, а точка, в которой происходит взрыв бомбы, называется точ-
кой падения (точкой разрыва) и обозначается как Б (рис. 2.1).
Рис. 2.1
Положение точки падения бомбы Б относительно точки броса-
ния Обр определяется вектором дальности точки падения Z)g. Век-
тор зависит от условий бомбометания: высоты Н, скорости V
полета ЛА, характеристического времени бомбы 0б, скорости
ветра U, т.е.
48
DB = DB(V,H,e6,U)
(2.1)
или
DB = DB(H,W,e^ (2.2)
где W — вектор путевой скорости самолёта, равный
W = v+U. (2.3)
Если в процессе полёта к цели для каждого текущего момента
времени условия бомбометания известны, то вектор DB можно
считать известным, т.е. известным является положение точки па-
дения бомбы относительно точки бросания. Для попадания бомбы
в цель необходимо выполнить условие равенства координат цели и
точки падения бомбы.
Иногда наиболее эффективное поражение цели может быть до-
стигнуто в том случае, если точка Б не совпадает с целью. Напри-
мер, при сбрасывании серии бомб точка падения первой авиабом-
бы должна быть вынесена относительно цели в сторону, противо-
положную направлению полёта. Необходимость в выносе точки
падения относительно цели возникает при сбрасывании специаль-
ных, светящих и фотографических бомб.
__ Вынос точки падения Б относительно цели задается вектором
Rc, который называется вектором, вы носа точки падения. Зная
вектор дальности точки падения 1>Б и вектор выноса R , можно
определить требуемое положение цели Цтр относительно точки
бросания для рассматриваемого момента времени. Это положение
определяется вектором Лтр, который называется вектором тре-
буемой дальности цели. Из рис. 2.1 следует:
^Тр = ^Б-^’ <2-4)
Фактическое положение цели относительно самолёта может не
совпадать с требуемым. Фактическое положение цели (см. рис.
2.1) определим вектором фактической дальности Du цели. Раз-
ность между фактической и требуемой дальностями цели носит
название вектора ошибки прицеливания А или вектора промаха:
д = ^ц-^тр« (2.5)
49
Очевидно, задача прицеливания при бомбометании будет за-
ключаться в том, чтобы к моменту сбрасывания бомбы эту раз-
ность свести к нулю, т.е.
5ц-5тр = о. (2.6)
Выражение (2.6) отражает условие решения задачи прицели-
вания в векторной форме. Таким образом, можно дать следующую
формулировку задаче прицеливания при бомбометании', вывести
самолет из данной точки пространства в такую точку, из которой
сброшенная бомба попадет в цель или в точку, отстоящую от цели
на заданном расстоянии. Следовательно, задача прицеливания
при бомбометании по своей сущности является задачей об управ-
лении полётом летательного аппарата.
Для практической реализации условий выполнения прицели-
вания в прицельно-навигационных системах (ПНС) все вычисле-
ния производятся на основании решения уравнений, записывае-
мых в скалярном виде. Скалярные уравнения можно получить,
проектируя векторы _ОЦ и D на оси определенной системы коор-
динат.
Удобной для решения задачи прицеливания является прямо-
угольная горизонтированная система координат OXYZ, начало ко-
торой находится на самолете (см. рис. 2.1). Ось OY направляется
вертикально вверх, а ось ОХ — горизонтальна, располагается в
вертикальной плоскости, проведенной через вектор V.
Проектируя векторное уравнение (2.5) на оси этой системы,
получим:
Ах = х - X;
Ау = у - Y; (2.7)
Az - z - Z.
Проекции х, у и z вектора фактической дальности цели 7>ц на-
зываются фактическими координатами цели. Проекции X, Y и
Z вектора требуемой дальности цели D называются расчетными
координатами цели. Проекции Ах, Ау и Az представляют собой со-
ставляющие вектора промаха. В процессе прицеливания состав-
ляющие Ах, Ау и Az должны быть сведены к нулю.
50
Проведем анализ составляющих вектора промаха. Текущая
высота Н, равная фактической координате у (у - Н), рассматрива-
ется как возможная высота бросания которая учитываетсяв
(2.1), (2.2) при определении вектора Dg. В этом случае автомати-
чески выполняется равенство Аг/ = 0.
Таким образом, правильная организация процесса прицелива-
ния будет зависеть от того, каким образом сводятся к нулю ошиб-
ки управления Аг и Ах. В соответствии с этим прицеливание раз-
деляется на две части: прицеливание по направлению и прицели-
вание по дальности.
Процесс управления самолетом с целью обнуления параметра
Аг называется прицеливанием по направлению (боковой навод-
кой), а сам параметр носит название параметра прицеливания по
направлению. После того как прицеливание по направлению вы-
полнено, самолёт будет перемещаться в точку бросания по траек-
тории, на которой соблюдается равенство Аг = 0. Такая траектория
имеет название боевого пути самолета, а её проекция на горизон-
тальную плоскость (на поверхность земли) — линии боевого пути.
Прицеливание по дальности состоит в том, чтобы при движе-
нии самолета по боевой траектории определить момент бросания.
Сброс бомб производится в тот момент, когда параметр Ах, кото-
рый называется параметром, сигнализации о наступлении момен-
та сбрасывания бомбы, будет равен нулю.
Таким образом, при выполнении условий Аг = 0 и Ах = 0 счи-
тается, что задача прицеливания по направлению и дальности ре-
шена.
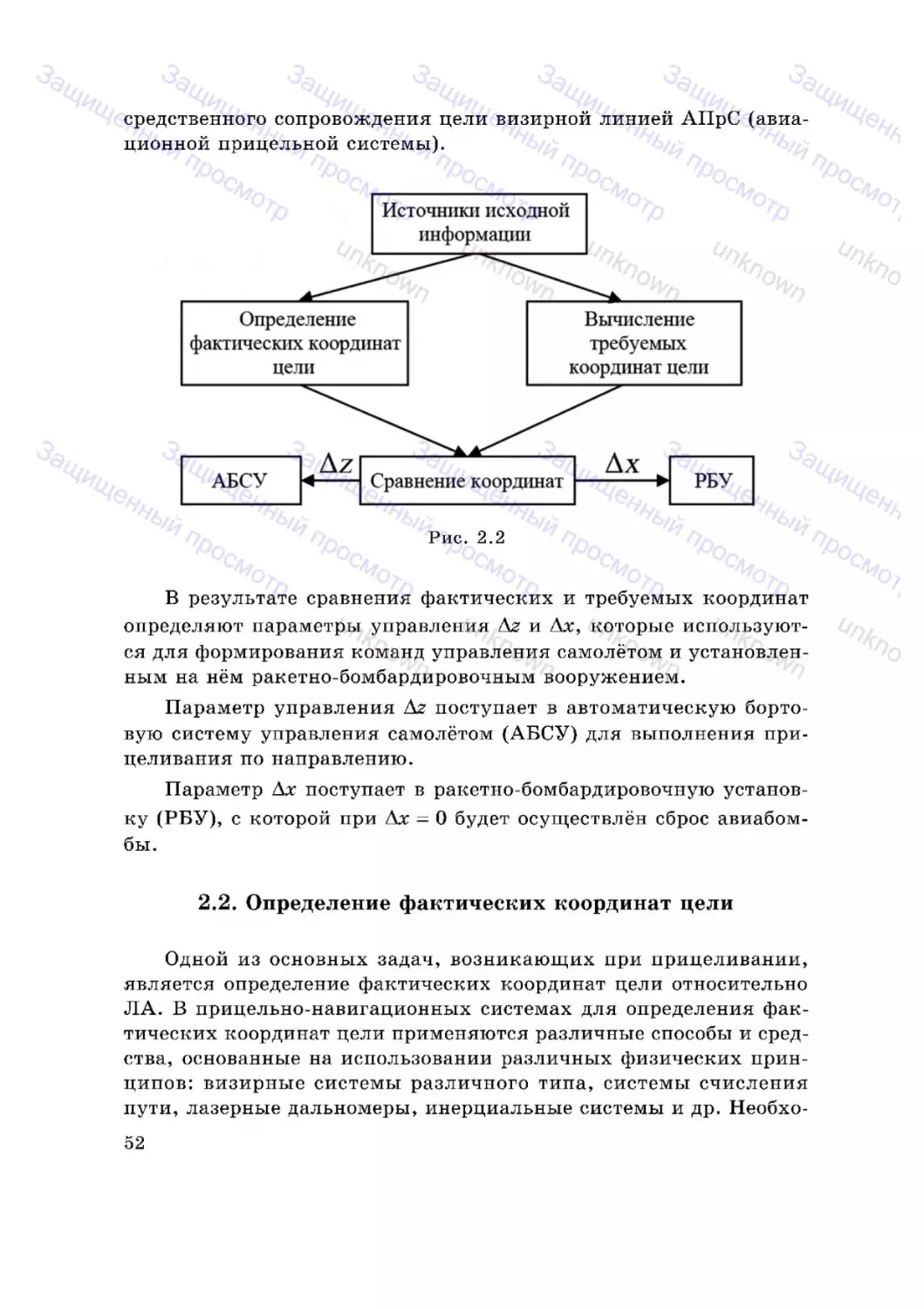
На основании изложенного последовательность решения зада-
чи прицеливания можно проследить по схеме, представленной на
рис. 2.2.
Из рис. 2.2 следует принцип формирования параметров управ-
ления: от источников исходной информации поступают значения
необходимых параметров, характеризующих условия полета ЛА
(высота Н, скорость V, курс К), параметры, характеризующие ве-
тер (скорость ветра U и курсовой угол 8), характеристики средства
поражения (характеристическое время 9б) и др.
На основании этих данных вычисляются требуемые координа-
ты цели. Фактические координаты определяются в процессе непо-
51
средственного сопровождения цели визирной линией АПрС (авиа-
ционной прицельной системы).
Рис. 2.2
В результате сравнения фактических и требуемых координат
определяют параметры управления Аг и Ах, которые используют-
ся для формирования команд управления самолётом и установлен-
ным на нём ракетно-бомбардировочным вооружением.
Параметр управления Аг поступает в автоматическую борто-
вую систему управления самолётом (АБСУ) для выполнения при-
целивания по направлению.
Параметр Ах поступает в ракетно-бомбардировочную установ-
ку (РВУ), с которой при Ах - 0 будет осуществлён сброс авиабом-
бы.
2.2. Определение фактических координат цели
Одной из основных задач, возникающих при прицеливании,
является определение фактических координат цели относительно
ЛА. В прицельно-навигационных системах для определения фак-
тических координат цели применяются различные способы и сред-
ства, основанные на использовании различных физических прин-
ципов: визирные системы различного типа, системы счисления
пути, лазерные дальномеры, инерциальные системы и др. Необхо-
52
димость применения разнообразных средств для определения ко-
ординат цели диктуется сложностью обстановки, в которой реша-
ется эта задача.
Рассмотрим, как практически определяются фактические ко-
ординаты цели с помощью визирных систем и систем счисления
пути, так как эти системы наиболее часто применяются в при-
цельно-навигационных системах.
2.2.1. Визирные системы и их применение
для определения фактических координат цели
Визирными системами называют устройства, обеспечиваю-
щие возможность наблюдения за целями и другими объектами с
борта ЛА и позволяющие определять их положение относительно
ЛА. При наблюдении с помощью визирных систем используется
энергия электромагнитных волн. Визирные системы разделяются
на оптические и радиолокационные. В свою очередь, оптические
системы подразделяются на телескопические, коллиматорные,
электронно-оптические и оптико-телевизионные.
Из всего комплекса визирных систем рассмотрим оптико-теле-
визионную.
Оптико-телевизионная визирная система (ОТВС) предназначе-
на для осуществления поиска, распознавания целей и измерения
их фактических координат. ОТВС может работать в видимой и ин-
фракрасной областях спектра электромагнитных колебаний.Схема
ОТВС приведена на рис. 2.3. Она состоит из оптической и телеви-
зионной систем. Основными элементами оптической системы яв-
ляются: подвижные призмы П, объектив ОБ, светоделительная
призма СП и формирователь прицельного перекрестия ФП. Основ-
ФП
Рис. 2.3
53
ными элементами телевизионной системы являются: передающая
телевизионная трубка В, усилительно-преобразовательные устрой-
ства УПУ и приемная телевизионная трубка К. Элементы телеви-
зионной системы связаны между собой линиями связи ЛС. Фор-
мирователь ФП создает на мишени передающей телевизионной труб-
ки изображение прицельной сетки. Основными элементами форми-
рователя перекрестия являются: лампа подсветки прицельной сет-
ки, прицельная сетка и объектив. Для изменения направления
светового потока от ФП служит светоделительная призма СП.
С помощью оптической системы ОТВС изображение рассмат-
риваемой местности проектируется на мишень передающей труб-
ки. Изображение на мишени создается при помощи объектива.
Для этого мишень располагается в его задней фокальной плоскос-
ти. Перед объективом устанавливается призменный узел, обычно
состоящий из двух визирных призм (на рис. 2.3 показана одна из
призм).
В призменных узлах применяются призмы различной формы,
но наиболее часто применяются прямоугольные кубические при-
змы. Куб-призма состоит из двух прямоугольных призм, склеен-
ных по гипотенузным граням (рис. 2.4). Гипотенузная грань АВСД
является отражающей и образует бесконечно тонкое плоское зер-
кало с двухсторонним отражением.
Экран
цели
Рис. 2.4
Линия, по которой направлен световой поток от земной по-
верхности (наблюдаемого объекта) до призм визирования, называ-
ется визирной, если после прохождения этих призм он следует по
главной оптической оси объектива. Изменение направления ви-
зирной линии в двух взаимно перпендикулярных плоскостях осу-
ществляется поворотом призм. Угол (рв между линией визирова-
54
ния и вертикалью является координатой точки, на которую наве-
дена линия визирования (рис. 2.5). Угол <рв называется углом ви-
зирования. Значение угла визирования определяется величиной
угла поворота призмы (рп. Угол визирования связан с углом пово-
рота призмы соотношением (рв = 2<рп.
Ц
Рис. 2.5
Оптическая система построена таким образом, что световой
поток, идущий по главной оптической оси объектива, совпадает со
световым потоком от центра прицельного перекрестия. При этом в
центре экрана приемной телевизионной трубки прицельное пере-
крестие окажется совмещенным с изображением того объекта на
местности, на который направлена визирная линия (ВЛ).
Оптическое изображение с помощью передающей телевизион-
ной трубки преобразуется в электрический сигнал, который через
УПУ поступает в приемную телевизионную трубку, где он преоб-
разуется в видимое изображение. В качестве передающих телеви-
зионных трубок в настоящее время применяют видиконы и супер-
ортиконы. Приемной телевизионной трубкой является кинескоп.
Основными преимуществами оптико-телевизионных визирных
систем являются: высокая точность измерения угловых коорди-
нат, возможность дистанционной передачи изображения к не-
скольким членам экипажа. На приемную трубку можно последо-
вательно подавать оптическое, радиолокационное или инфракрас-
ное изображение местности, обеспечивая наблюдение за объекта-
ми нижней полусферы, что особенно важно для одноместных ЛА.
55
Имеется возможность обеспечения автоматического сопровожде-
ния цели визирной линией, можно получить цветное и объемное
изображение, в поле зрения оператора и других членов экипажа
можно вводить разнообразную меняющуюся в процессе полета ин-
дикацию.
К недостаткам ОТВС следует отнести конструктивную слож-
ность, высокую стоимость, меньшую по сравнению с другими оп-
тическими визирными системами надежность в работе, возмож-
ность их применения только при наличии определенной освещен-
ности цели, при отсутствии тумана и облачности.
Для определения отклонения цели от визирной линии служит
прицельное перекрестие, видимое на экране приемной телевизион-
ной трубки. Перекрестие состоит из двух взаимно перпендикуляр-
ных линий. Одну из них, направленную обычно вдоль полета, на-
зывают курсовой чертой, а вторую — поперечной.
Отклонение цели от визирной линии определяется по смеще-
нию изображения цели относительно перекрестия сетки. На ЛА
оптическую систему располагают относительно прямоугольной го-
ризонтированной системы координат OXYZ так, чтобы в началь-
ном положении визирная линия совпадала с вертикалью, по кото-
рой направлена ось OY, а курсовая черта лежала в плоскости
OXZ (см. рис. 2.5).
Для определения фактических координат цели двумя последо-
вательными поворотами визирных призм изменяют направление
визирной линии, направляя ее на цель. Относительно начального
положения направление визирной линии определяется двумя уг-
лами (рв и ц, эти углы и будут являться координатами цели, кото-
рые измеряются ОТВС.
Угол (рв называется углом визирования, а угол ц — углом на
клона визирной линии. Значения углов <рв и ц можно определить,
измерив, например, углы поворота визирных призм.
Установим связь между углами, измеряемыми оптическими
системами, и прямоугольными координатами х, у, г:
X
tg<p» = -у;
Z
tgp = - cos(pB = tgii0 cos<pB,
£
где tgp.Q - — — угол наклона визирной линии при <рв = 0.
У
56
Таким образом, с помощью оптических визирных систем опре-
деляются две координаты: углы (рв и ц. Третьей координатой явля-
ется высота, которая определяется высотомерами.
2.2.2. Определение фактических координат цели
с помощью систем счисления пути
Методы счисления пути дают возможность определить рассто-
яние, пройденное ЛА, по известным значениям вектора путевой
скорости и времени. Если положение ЛА в начальный момент вре-
мени известно, то, используя результаты счисления пути, нетрудно
определить его текущее положение в произвольный момент времени.
Счисление пути можно автоматизировать, интегрируя составляю-
щие вектора путевой скорости по времени с помощью вычисли-
тельных систем. Задачу счисления пути можно решать в различ-
ных системах отсчета. Рассмотрим, как определяются фактичес-
кие координаты цели в подвижной горизонтированной стабилизи-
рованной по тангажу $ и крену у системе координат OX Y , на-
чало координат находится на ЛА (рис. 2.6).
Вначале найдем выражения для определения координат цели в
линейном виде. Так как координаты х и z являются проекциями век-
тора горизонтальной дальности Dr, то для их определения рассмот-
рим движение самолета в горизонтальной плоскости (см. рис. 2.6).
Пусть в момент времени
t = 0 (2.8)
самолет находился в точке О0 и имел скорость Уо. Через время t
самолет переместился по кривой О^О в точку О, в которой имел
Рис. 2.6
57
скорость V. Положение цели относительно точек О0 и О определя-
ется векторами соответственно DTO и DT. Будем считать, что ско-
рость цели относительно земли
Жц = 0. (2.9)
Из рис. 2.6 видно, что
5г = 5го-д5г, (2.Ю)
где Л£>г — изменение вектора горизонтальной дальности за время t,
причем
t
Д5Г = / AD^dt. (2.11)
о
Используя формулу для определения скорости изменения век-
тора, можно записать:
Dr = Ьг + со х Dr, (2.12)
где (0 — угловая скорость системы координат OXvrYvrZvr относи-
тельно земли (угловая скорость разворота самолета).
Используя выражения (2.11) и (2.12) и принимая во внима-
ние, что Dr — это путевая скорость самолета, т.е. Dr - W, выраже-
ние (2.10) запишем в следующем виде:
t
Dr = DrB-\(W + <oxDr>dt. (2.13)
о ' 7
Формулы для вычисления координат цели будут получены,
если спроектировать векторное уравнение (2.13) на оси системы
координат. Для этого предварительно найдем проекции на эти оси
вектора СОХ Df. Так как рассматривается движение самолета в го-
ризонтальной плоскости, то величина СО — это угловая скорость
разворота системы координат вокруг оси OYur, т.е. скорость изме-
нения курса К. Тогда получим
58
— — <Ж “0 , —0 -Ox <^К -О б/К —О /г» ч лх
СО X Л = -3— У Х(ХХ + 22 ) = -х ~ 2 + z -~--х . (2.14)
г dt dt dt
Принимая во внимание (2.14), после проектирования (2.13)
получим выражения для координат цели в линейном виде:
t дк
х = Xq - | Wxdt + J гб/К;
о о
t ДК
2 = 20 - J W2 dt - J xdK.
о о
(2.15)
(2.16)
Разделив уравнения (2.15) и (2.16) на высоту Н, получим вы-
ражения для фактических координат цели в безразмерном виде:
tg<pB = tg<pB(l- tw. A? J H dt + J tgn0 (ZK; (2.17)
0 0
tRHo = г w- - J J tg(pB dK. (2.18)
0 0
Обозначения углов, указанных в (2.17) и (2.18), показаны на
рис. 2.5.
Следует сказать, что в формулах (2.15)—(2.18) интегралы, где
переменной интегрирования является время, — это изменения ко-
ординат за счет поступательного движения самолета со скорос-
тью W, а интегралы, где переменной интегрирования является
курс, — это изменения координат за счет разворота самолета на
угол ДК.
2.2.3. Комплексное применение различных средств
определения фактических координат цели
Для успешного решения задачи прицеливания необходимо
располагать непрерывной и точной информацией о координатах
цели или вынесенной точке прицеливания. Для этого на ЛА уста-
навливаются различные средства, с помощью которых имеется
возможность определять координаты цели несколькими способа-
59
ми, поскольку ни один из способов, взятый в отдельности, не спо-
собен в полной мере обеспечить решения данной задачи.
Так, визирные системы обеспечивают высокую точность опре-
деления фактических координат цели, но применение их ограни-
чивается такими факторами, как недостаточная контрастность
целей, неблагоприятные условия наблюдения, демаскировка ЛА
(при применении радиолокационных визирных систем), постанов-
ка противником различного рода помех и т.д.
Системы счисления пути и некоторые другие системы обеспе-
чивают непрерывное получение информации о координатах цели.
Они обладают полной автономностью действия и не подвержены
влиянию помех. Однако эти системы не обеспечивают необходи-
мой точности определения фактических координат цели, так как
она убывает с увеличением пройденного пути.
В комплексных системах наиболее полно используются поло-
жительные стороны отдельных средств получения информации о
фактических координатах цели и взаимно компенсируются их
слабые стороны. В результате упрощается применение систем, по-
вышается надежность и точность получения информации.
Комплексное применение различных средств получения ин-
формации о координатах цели основано на следующих положени-
ях. Непрерывная информация о координатах, поступающая, на-
пример, с системы счисления пути, используется для программно-
го управления визирными системами. Визирные системы перио-
дически используются для коррекции счисляемых координат, по-
ступающих с системы счисления пути.
Для надежного определения фактических координат цели со-
временные ПНС, как правило, оснащаются радиолокационной ви-
зирной системой, одной из оптических визирных систем и систе-
мой счисления пути. Схема, поясняющая сущность программного
управления визирными системами, показана на рис. 2.7.
Система счисления пути ведет счисление текущих координат
цели, выраженных в безразмерном виде, т.е. в виде tg(pB и tgp0.
Начальные значения этих координат tgcp и tgpn задаются руко-
о о
ятками продольного и бокового визирования. С помощью оптичес-
кой визирной системы измеряются координаты цели фв и ц, а с
помощью радиолокационной визирной системы координаты: на-
клонная дальность D и угол бортового пеленга цели о (рис. 2.8).
60
Счисление координат
Преобразование
координат
Рис. 2.7
В результате счисления координат в преобразователь коорди-
нат непрерывно поступает информация о координатах tg (рв и tg ц0,
61
определяющих положение цели относительно ЛА. Используя фор-
мулы преобразования
(рв = arctg (tg (рв); Ц = arctg (tg ц0 cos q>B),
непрерывно находят счисляемые значения координат (рв и L1, кото-
рые используются для управления оптической визирной системой.
В соответствии с вычисленными значениями углов фв и цв оп-
тической визирной системе изменяется направление визирной
линии путем автоматического поворота призм визирования.
Формулами преобразования для управления радиолокацион-
ной визирной системой являются формулы, устанавливающие
связь между координатами, измеренными оптической визирной
системой, и координатами, измеренными радиолокационной ви-
зирной системой:
г. Н
D=------sec®.;
cosp
tgp0 + smy
где у — угол крена; о — угол пеленга цели.
В соответствии с вычисленными значениями координат D и
tga изменяются параметры, используемые для управления радио-
локационной визирной линией.
При абсолютно точном счислении координат цели визирные
линии визирных систем будут направлены на цель. Вследствие по-
грешностей в счислении координат направление визирных линий
не будет совпадать с направлением на цель. Но если погрешности
счисления сравнительно невелики, то цель длительное время бу-
дет оставаться в пределах поля зрения визирных систем. Это зна-
чительно облегчает обнаружение цели, а также последующее на-
блюдение за ней при движении ЛА.
Таким образам, при комплексном использовании различных
средств получения информации о координатах цели обеспечивает-
ся непрерывное и более точное определение координат цели. При
62
этом независимо от используемых в данный момент времени средств
получения информации определение координат цели приводятся
к единой системе отсчета. Последнее обстоятельство обеспечивает
независимость методов решения задачи прицеливания и навига-
ции от используемых в данный момент времени средств получе-
ния информации, что значительно упрощает решение указанных
задач и облегчает подготовку экипажей.
2.3. Определение требуемых координат цели
Для определения требуемых координат цели, соответствую-
щих моменту бросания бомбы, необходимо построить прицельную
схему, показывающую положение самолёта относительно цели в
момент сбрасывания при условии, что бомба попадает в цель.
2.3.1. Прицельная схема бомбометания
при безветрии
Предположим, что на высоте Н самолёт, летящий с воздушной
скоростью V, подошел к точке О и сбросил бомбу. Через время па-
дения бомбы Т самолёт, двигаясь равномерно с постоянной скорос-
тью и с неизменным курсом, окажется в точке /п, пройдя путь,
равный VT. Бомба за это время пройдёт путь меньший, чем само-
лёт, отстав от него на величину вектора отставания Дб. Путь бом-
бы за время Т в горизонтальном направлении называется штиле-
вым относом Ао.
Из прицельной схемы (рис. 2.9) видно, что для попадания бом-
бы в цель необходимо:
• развернуть самолёт так, чтобы линия его пути (в данном
случае она совпадает с направлением вектора V) проходила
строго через цель;
• в момент, когда самолет будет проходить от цели на рассто-
янии штилевого относа, сбросить бомбу.
Требуемые координаты цели в прямоугольной системе коорди-
нат будут:
X Д g >
2 = 0.
(2.19)
63
Рис. 2.9
Требуемые угловые координаты цели, измеряемые оптической
визирной системой, определяются формулами:
tg'|i = О,
(2.20)
где фп — угол прицеливания; Т А = -== — время пролёта самолётом
li Ут. f—f
расстояния, равного штилевому относу Aq.
2.3.2. Прицельная схема бомбометания
при наличии ветра
При построении прицельной схемы будем полагать, что вектор
скорости ветра U постоянен по высоте и имеет горизонтальное на-
правление.
Самолёт, перемещаясь с воздушной скоростью V, сбросил
бомбу в точке О (рис. 2.10). Так как на самолёт действует ветер, то
скорость движения самолёта относительно земли будет равна
W = V + и.
(2.21)
Скорость W называется путевой скоростью самолёта.
64
Рис. 2.10
Треугольник, образованный векторами V, U и W, называется
навигационным треугольником скоростей, а угол между вектора-
ми V и W — углом сноса (Х(,. Вертикальные плоскости, проходя-
щие через векторы V и W, называются соответственно плоскостью
курса и плоскостью пути.
Определим точку падения бомбы. При отсутствии ветра само-
лёт, двигаясь с постоянной скоростью V, за время падения бомбы
Т оказался бы в точке т, а бомба в этом случае упала бы в точке Б(,,
пролетев в горизонтальном направлении расстояние, равное шти-
левому относу Aq . При этом бомба отстанет от самолета на вели-
чину Дд. При наличии ветра самолёт будет снесён за время Т на вели-
чину ветрового относа UT и вместо точки т он окажется в точке п,
проекция которой на плоскость X OZ является п . Таким обра-
зом, самолёт относительно земли пройдёт путь, равный произведе-
нию WT.
Так как ветер оказывает на бомбу такое же действие, что и на
самолёт (перед сбрасыванием бомба приобрела уже скорость
ветра), то за время Т её снесёт на ту же величину ветрового относа
и в том же направлении, на которую снесло самолет за это же
время. Следовательно, бомба попадет в цель (точка Ц) тогда, когда
эта точка будет отстоять от плоскости пути в направлении ветра
65
на расстояние ДЦ = Э. Величина Э называется боковым смещением
бомбы и определяется по формуле: Э = Аб sinac.
Если самолёт сбрасывает не одну бомбу, а серию одинаковых
бомб, то точки их разрывов расположатся на одной линии, отсто-
ящей от следа плоскости пути на расстояние бокового смещения д.
Прямая, проходящая через точки разрывов, называется линией
разрывов.
Определим требуемые координаты цели в системе координат
OXmYmZvr:
X=Aa + UT,
z-щт.
(2.22)
В системе координат, в которой работают оптические визир-
ные системы, требуемые координаты цели определяются по фор-
мулам:
X A0 + UxT ТГГА , тт т ]
tg(pn-H- Н ~V Н U* Н ’
I (2.23)
Z игт
tg|l =~СОвфп = tgg0 СО8фп. I
2.4. Определение путевой скорости
Путевая скорость является одним из основных навигацион-
ных элементов, который необходимо знать при решении задач
прицеливания. Информация о путевой скорости используется при
определении фактических координат цели (в системе счисления
пути), а также при вычислении параметра управления р для при-
целивания по дальности.
Путевая скорость может быть определена различными спосо-
бами. В настоящее время наибольшее практическое значение
имеют способы, в основу которых положены следующие принци-
пы и действия:
• решение навигационного треугольника скоростей (вектор-
ный способ);
* измерение конечных приращений с]эактических координат
объекта (цели);
66
• использование эффекта Доплера в радиолокации (доплеров-
ский способ);
• измерение и последующее интегрирование ускорений (инер-
циальный способ).
Более подробно рассмотрим два первых способа.
2.4.1. Векторный способ определения
путевой скорости
Векторный способ определения путевой скорости основан на
автоматическом решении навигационного треугольника скоростей
(рис. 2.11). На первом этапе автоматизации решение навигацион-
ного треугольника обеспечивалось построением его векторной мо-
дели. Существовали векторные построители, с помощью которых
строились векторы V и U и определялся вектор W. Абсолютная ве-
личина вектора находилась по его длине, а направление определя-
лось углом сноса «с. С развитием средств вычислительной техни-
ки автоматизация решения стала обеспечиваться другими путями,
основанными не на геометрических построениях, а на аналитичес-
ких методах.
В качестве исходной зависимости используется векторное ра-
венство W = V + U. Таким образом, векторный способ предполага-
ет, что известны векторы V и U. Воздушная скорость определяется
в полете непрерывно с помощью специальных датчиков и автома-
тически вводится в ПНС. Скорость ветра может быть введена в
ПНС заранее или определяется в полете. Если ось ОХ направлена
по вектору воздушной скорости V, то соответствующие проекции
вектора путевой скорости могут быть вычислены по формулам:
Wx = V+Ux'>
w=u.
z z
67
2.4.2. Определение путевой скорости
по конечным приращениям фактических координат цели
Путевую скорость можно определить по наблюдениям в тече-
ние конечного промежутка времени т = t - t0 за изменениями ко-
ординат объекта (цели), определяющих его положение относитель-
но самолета. Среди способов этой группы различают:
- базисный;
- синхронный;
— автосинхронный.
Общей характерной особенностью названных способов являет-
ся то, что они позволяют определить только среднее значение пу-
тевой скорости за время полета т. Поэтому они могут обеспечить
достаточную точность только при прямолинейном и равномерном
полете. При рассмотрении указанных выше способов измерения пу-
тевой скорости удобно предполагать, что система отсчета непо-
движна, а объект движется относительно нее со скоростью —W,
равной по значению и противоположной по знаку путевой скорости.
Рассмотрим синхронный и автосинхронный способы определе-
ния путевой скорости как наиболее часто применяемые в совре-
менных ПНС. Определение путевой скорости синхронным и авто-
синхронным способами основано на достижении синхронного дви-
жения визирной линии и наблюдаемого объекта. Эти способы
могут быть реализованы при наличии программного управления
визирными системами от системы счисления пути (ССП).
Синхронный способ определения
путевой скорости ЛА
Допустим, что координаты объектов определяются ССП и оп-
тической визирной системой, например ОТВС. ССП определяет ко-
ординаты в прямоугольной системе координат в безразмерном
X Z
виде, т.е. в виде tg(pB = — и tgp0 = —, а оптическая визирная сис-
тема — в виде углов (рв и ц. Программное управление оптической
визирной системой от ССП осуществляется через преобразователь
координат. Схема, обеспечивающая определение путевой скорости
синхронным способом, показана на рис. 2.12.
68
С помощью ССП координаты объекта при прямолинейном по-
лете определяются по формулам:
tg<PB = tg (PBq
tg|H0 = tg hOq
По
введенным в
wx Wy
ССП величинам и ~~ вычисляются интег-
t
ралы J
dt. Перед началом
измерения путевой
скорос-
*0
Рис. 2.12
W
t
69
ти в вычислитель величин
]V W7
X 2
~у~ И с помощью рукояток
1
и 2
вводятся некоторые приближенные значения проекций путевой
скорости самолета Wx и W*. В момент времени t0 с помощью ру-
кояток визирования 5 и 6 совмещают перекрестие визирной систе-
мы с изображением выбранного объекта Ц (цели). Тем самым
будут определены координаты объекта tg<p и tgun (рис. 2.13).
во ио
Как только перекрестие будет совмещено с изображением объекта
Ц, с помощью кнопок 3 и 4 ССП подключается к управлению ви-
зирной системой.
Рис. 2.13
К моменту времени t = 4- т счисленные значения координат
будут определяться по формулам:
г W*
tg<p* = tgcp^ - J -fi-dt',
P W*
tgp* = tgp0o - J jfdt.
fo
70
Если предварительно введенные значения TV* и TV* не соответ-
ствуют их истинным значениями TVr и TV^, то счисленные коорди-
наты tg(p* и tg^Q не будут равны истинным координатам tg(pB и
tgp0. Ошибки в счислении координат определяются по формулам:
Ошибки с течением времени будут возрастать, если не будут
ликвидированы ошибки в проекциях путевой скорости
Обнаружив разницу между счисляемыми и истинными коор-
динатами (что проявится в сходе перекрестия с изображения объ-
екта Ц), с помощью рукояток 1 и 2 вводят поправки в проекции
путевой скорости такие, чтобы ошибки в счислении координат в
дальнейшем не изменялись (рукоятки 1 и 2 вращают до тех пор,
пока не прекратится смещение объекта Ц относительно перекрес-
тия). После этого объект и перекрестие будут двигаться синхрон-
но, но с постоянным смещением их относительно друг друга. Тем
самым будет выполнено условие
ATV = 0; ATV = 0.
Л £
(2.24)
После выполнения условий (2.24) с помощью рукояток визи-
рования 5 и 6 производят повторное совмещение перекрестия с
изображением объекта, т.е. добиваются выполнения условия
Atgq>B = 0 и Atgp0 = 0.
Учитывая трудность точного удовлетворения условий (2.24)
коррекцию составляющих путевой скорости и счисленных коорди-
71
нат объекта приходится выполнять несколько раз, что требует
значительной затраты времени.
Автосинхронный способ определения
путевой скорости
Автосинхронный способ является дальнейшим развитием син-
хронного способа определения путевой скорости. Сущность этого
способа состоит в том, что истинные составляющие W и W опре-
деляются в прицельной системе автоматически как сумма прибли-
женных значений составляющих W* и W*, введенных в ССП, и
поправок АИ'^. и AH\, вычисляемых по величине смещения изо-
бражения объекта F относительно перекрестия визирной системы
за некоторое время т, которое называется временем автосинхрониза-
ции.
Рассмотрим, каким путем могут быть вычислены поправки
ДЖГ и AWZ. Схема, обеспечивающая определение путевой скорос-
ти автосинхронным способом, показана на рис. 2.14. В этой схеме
имеется устройство автосинхронизации, с помощью которого при
включении выключателей 7 и 8 можно управлять визирной ли-
нией от рукояток 1 и 2 ввода составляющих путевой скорости.
Как и при синхронном способе, в ССП перед началом измере-
ния от рукояток 1 и 2 вводятся приближенные значения W* и
W* составляющих путевой скорости и включаются выключатели
автосинхронизации 7 и 8. В начальный момент времени с помо-
щью рукояток визирования 5 и 6 направляют визирный луч на
объект наблюдения и кнопками 3 и 4 включают ССП. Через
время, равное t = + т, счисленные значения координат при пря-
молинейном и равномерном полете будут
W*
tg<P* = tg(pBo--^T;
* <
tgHo = tgHoo--^T-
72
отвс
Рис. 2.14
Истинные значения координат изменяются по закону
Wx 1
tg4’B = tg<pBo--7rx;
vr
tOo - “ н т-
Разности между счисленными координатами и истинными
будут определяться по формулам:
*
Atg<pB = tg(pB - tg(pB =
Atg|.l0 = tgp0 - tg|i0 =
(2.25)
К
73
или
Atg<pB = -^AWx; Atg|l0=-^AIV2, (2.26)
где AWV = Wv - W*; ДЖ_ = - W*— разности истинных и при-
ближенных значений составляющих путевой скорости.
В момент времени t, управляя визирной линией от рукояток 1
и 2, снова совмещают перекрестие с изображением объекта F. При
этом в ССП будет введена поправка в путевую скорость, пропорци-
ональная смещению изображения этого объекта относительно
перекрестия, которое накопилось за время т и было ликвидирова-
но вращением рукояток 1 и 2. Таким образом, введенные поправ-
ки в составляющие путевой скорости будут
ДЖ* = k Atg(p*;
(2.27)
ДЖ* = /г Atgp*,
где k — коэффициент пропорциональности.
Из уравнений (2.27) получим
f (2.28)
AtguJ = | AW*
ИЛИ
Atg<p* = П АИ'* ;
AtguJ = T)AW*,
(2.29)
где Т| — коэффициент автосинхронизации.
Сравнивая формулы (2.26) и (2.29), замечаем, что если коэф-
фициент автосинхронизации Г[ равен величине ту , то с помощью
М
устройства автосинхронизации можно автоматически решать фор-
мулы
74
Atg(pB = r|AWx;
(2.30)
Atgp,o =
определяющие истинные поправки АТУ и AW' добавляемые к
приближенно введенным составляющим W*x и W\. Для этого в уст-
ройство автосинхронизации поступают значения величин W„, ТУ,,
Н и Т, а вычисляемые им величины Atg(pB и Atgp0 поступают на уп-
равление визирной линией. При этом выдаваемые в устройства авто-
синхронизации величины А1У„ и АТУ, должны быть вполне опреде-
ленными, отвечающими равенствам (2.30). Одновременно величины
АТУГ и ATF, поступают в ССП для коррекции путевой скорости.
Таким образом, при автосинхронном способе одновременно осущест-
вляется коррекция счисляемых координат и коррекция путевой ско-
рости, что значительно сокращает время для определения путевой
скорости.
2.5. Определение скорости ветра
Для решения прицельных задач необходимо знать скорость
ветра. Скорость ветра требуется при определении угла прицелива-
ния, путевой скорости векторным способом, а также при определе-
нии параметра управления JIA при прицеливании по направле-
нию. Существует много способов определения скорости ветра. В
настоящее время наиболее часто применяются следующие спосо-
бы: векторный, синхронный, автосинхронный, штилевой синхро-
низации, использование метеоданных о ветре в районе цели.
Для реализации этих способов применяются различные техни-
ческие средства: доплеровские измерители скорости и угла сноса
(ДИСС), радиосвязь, бомбардировочные прицельные системы и др.
С помощью бомбардировочных прицельных систем скорость
ветра может быть определена синхронным и автосинхронным спо-
собами, а также методом штилевой синхронизации.
Рассмотрим синхронный и автосинхронный способы определе-
ния скорости ветра как наиболее часто применяемые в современ-
ных бомбардировочных прицельных системах. Определение ско-
рости ветра этими способами возможно в том случае, когда путе-
75
вая скорость определятся векторным способом. При рассмотрении
векторного способа определения путевой скорости указывалось,
что если ось ОХ прямоугольной горизонтированной системы коор-
динат OXYZ направить по вектору воздушной скорости V при ус-
ловии горизонтального полета, то проекции путевой скорости
будут:
Wx = V+Ux>
Из второго уравнения следует, что проекция путевой скорости
Wz равна боковой составляющей ветра Uz. Следовательно, измере-
ние синхронным и автосинхронным способами проекции путевой
скорости W7 равносильно измерению этими способами проекции
скорости ветра U7.
При определении проекции скорости ветра Ux так же, как и
при определении путевой скорости W в ССП, вводится прибли-
женное значение продольной составляющей путевой скорости W*x,
определяемое как сумма двух величин: воздушной скорости V и
приближенной продольной составляющей скорости ветра С7* ,
wx = v+u*x.
(2.31)
При отсутствии синхронного движения визирного луча и цели
в продольном направлении производят уточнение продольной со-
ставляющей путевой скорости синхронным или автосинхронным
способами. В результате уточнения будет определена поправка
XWx, которая на основании формулы (2.31) будет равна соответст-
вующей поправке к продольной составляющей скорости ветра, т.е.
будет справедливо равенство - XU.
Таким образом, значения проекции ветра синхронным и авто-
синхронным способами определяются в соответствии с формула-
ми:
Ux = U*x + XUx;
uz = u* + \и2.
76
При этом поправки ДС7Х и &U при автосинхронном способе оп-
ределения ветра вычисляются автоматически:
Atg(pB = Т|ДЕ/Х;
Atgp0 = Т|АП2,
(2.32)
Ч - а-
где Т| = — — коэффициент автосинхронизации; т — время авто-
М 'I
синхронизации.
Правильное решение формул (2.32) может быть обеспечено
только в том случае, если поправки Atg<pB и Atg будут вводиться
через время т мгновенно. В действительности невозможно мгно-
венно ввести поправки Atg (рв и Atgp0, иначе говоря, невозможно
мгновенно совместить перекрестие сетки визирной системы с изо-
бражением объекта (цели). С учетом времени совмещения форму-
лы, по которым вычисляются поправки Д(7Х и Д(7г при автосин-
хронном способе определения скорости ветра, запишутся в следу-
ющем виде:
ли
X
Atg(pB = Jn^x;
о
Atg Но
MJ
Z
= fn^2.
о
Схема, обеспечивающая определение скорости ветра U и U,
синхронным и автосинхронным способами, показана на рис. 2.15.
Эта схема отличается от схемы, изображенной на рис. 2.14, тем,
что с помощью рукояток 1 и 2 вводятся составляющие скорости
ветра Uх и Uz,
В схеме имеется сумматор, с помощью которого суммируются
значение скорости V, поступающее, например, с датчика воздуш-
ной скорости, и значение Ux, вводимое от рукоятки 1. При реше-
нии задачи прицеливания предполагается, что вектор ветра посто-
77
янен по высоте и направлению. Так как при изменении курса
самолета изменяется в пространстве положение осей горизонтиро-
ванной системы координат, то возникает необходимость в этом
случае пересчитывать проекции ветра. При этом будет обеспечена
стабилизация вектора ветра в пространстве.
отвс
Рис. 2.15
На основании рис. 2.16 можно получить формулы, по кото-
рым можно определять текущие значения проекций вектора ветра
Ux и U 2:
UX = Ux0CO8<K - К<Р + иг sin {К - ко);
U2 = U^cos (К - Ко) - [7 sin (К - Ко),
(2.33)
где U и U
о о
— начальные значения проекций вектора ветра; К и
Ко — начальное и текущее значения курса самолета.
78
о
Рис. 2.16
Продифференцировав уравнения (2.33) по курсу К, будем
иметь
dUx 1
= “Uxosin<K - Ко) + %cos(K - Ко);
> (2.34)
dU,
= -U sin (К - Ко) - U cos (К - Ко). I
На основе формул (2.33) и (2.34) получим
dUx = U2dK;
(2.35)
dU = UdK.
£ A
Проинтегрировав выражения (2.35), получим формулы для
определения текущих значений проекций вектора ветра в интег-
ральном виде:
К
их = их, + \иг<^
Ко
К
U=U - Г UdK.
г. j х
(2.36)
79
Рис. 2.17
Решение формул (2.36), по которым вычисляются текущие
значения величин Uх и U7 при разворотах самолета, производит-
ся с помощью преобразователя координат ветра (ПКВ). Схема,
обеспечивающая стабилизацию вектора ветра с помощью ПКВ,
приведена на рис. 2.17.
2.6. Выполнение прицеливания при бомбометании
с горизонтального полета
2.6.1. Прицеливание при бомбометании
Как было выяснено ранее, для попадания бомбы в цель само-
лет в момент ее сбрасывания должен занимать относительно цели
определенное положение. Во-первых, он должен быть определен-
ным образом ориентирован относительно цели, т.е. должен иметь
определенное направление движения. Во-вторых, он должен нахо-
диться от цели на требуемой дальности. Вывод самолета в точку,
из которой сброшенная бомба попадает в цель (точку сбрасыва-
ния), осуществляется в результате прицеливания. Так как само-
лет обладает ограниченными маневренными возможностями, не
позволяющими мгновенно изменять направление его движения с
тем, чтобы придать при требуемой дальности необходимую ориен-
тацию его относительно цели, то прицеливание при бомбометании
с помощью современных ПНС разделяется на два этапа.
На первом этапе производится прицеливание по направле-
нию, в результате которого движение самолета направляется по
боевой траектории, которая содержит точку сбрасывания. Для вы-
вода самолета на боевую траекторию используется параметр уп-
равления dq = q - Q, где q и Q — фактическая и расчетная коор-
динаты наведения по направлению в общем виде. В зависимости
80
от выбранной системы координат величины q и Q приобретают
конкретный вид. При движении самолета по боевой траектории
dq = 0.
На втором этапе осуществляется прицеливание по дальности,
сущность которого состоит в том, чтобы при движении самолета
по боевой траектории определить момент сбрасывания бомбы. Для
определения момента сбрасывания используется параметр сигна-
лизации dp = р - Р, где р и Р — фактическая и расчетная коорди-
наты наведения по дальности в общем виде, конкретный вид кото-
рых также зависит от выбранной системы координат.
2.6.2. Понятие о псевдоцели
Для выполнения точного бомбометания желательно, чтобы го-
ризонтальная проекция боевой траектории, которая называется
линией боевого пути (ЛБП), представляла собой прямую линию.
Однако, если при прицеливании по направлению использовать
параметр управления в виде dq = z - Z или в виде dq = tgji - tgM,
где фактические и расчетные координаты наведения по направле-
нию выражены в прямоугольной системе координат в линейной
и угловой мерах, то при наличии ветра непрерывное обеспече-
ние равенства dq = 0 возможно лишь при криволинейном полете
самолета. Это можно пояснить на следующем примере. Предпо-
ложим, что на самолет, имеющий скорость V, действует боковой
ветер U (рис. 2.18). В момент времени tl самолет выполнил прице-
ливание по направлению и находится в точке Ор Следовательно,
dq = - Z = 0, где Z = U7 Т. В момент времени t2 самолет окажет-
ся в точке О 2. В этой точке dq = z2 - Z * 0, так как z2± z-^. Поэто-
му необходимо снова произвести прицеливание по направлению и
т.д. Таким образом, при использовании для прицеливания по на-
правлению параметра управления в виде dq = z - Z линия боевого
пути представляет собой кривую линию. Аналогичное явление
будет происходить и при параметре управления dq - tgp - tgM.
В связи с этим в прицельных системах бомбометания для оп-
ределения параметра управления выбирают такие фактические и
расчетные координаты наведения по направлению, которые позво-
лили бы вывести самолет в точку сбрасывания по прямой линии
81
боевого пути. Для определения таких координат изобразим схему,
показывающую положение самолета относительно цели в горизон-
тальной плоскости в момент сбрасывания бомбы при условии, что
бомба попадает в цель (рис. 2.19). Бомбометание производится при
наличии ветра, имеющего скорость U. На рис. 2.19: О — точка
Рис. 2.19
82
сбрасывания бомбы; Бу — точка, в которую упала бы бомба при
безветрии; Ц — положение цели; Аб — отставание бомбы.
Из рис. 2.19 видно, что в момент сбрасывания бомбы плоскость
пути проходит через точку Р, расположенную на линии пути. Из
подобия треугольников пЦР и Отп определим отрезок РЦ:
РЦ =
П1П
От
пЦ,
где
От - УТ; тп = UT-, ?1Ц = Аб,
поэтому
РЦ
У
где Тд — время пролета самолетом базы, равной отставанию бом-
бы от самолета Ад. Так как отставание Ад не зависит от курса само-
лета, то при фиксированных значениях Н, У, 0 и U отрезок РЦ
остается постоянным при любом направлении выхода на цель. Из
этого следует, что при любом направлении выхода самолета на
цель линия его боевого пути пересекает линию ветрового относа в
одной и той же точке Р. Следовательно, точка Р при данных усло-
виях является неподвижной. Эту точку называют полюсом или
псевдоцелъю, так как при любом направлении выхода на цель (при
заданных условиях полета ЛА) все линии боевого пути самолета
пройдут через точку Р. Заметим, что расстояние между линиями
боевого пути и разрыва определяется выражением ЦТ) - Ag sinac.
2.6.3. Определение фактических и расчетных
координат прицеливания по псевдоцели
Свойство псевдоцели иметь независимое положение от направ-
ления выхода самолета на цель при постоянных значениях парамет-
ров полета самолета Н, У, 6 и ветре U используется для формирова-
ния параметра управления, позволяющего выводить самолет в
точку бросания по прямой линии боевого пути. Так как плоскость
пути должна пройти через псевдоцель, то в качестве такой линии
можно взять любую прямую, проходящую через псевдоцель.
83
Из рис. 2.19 и 2.20 видно, что при движении самолета по пря-
мой, проходящей через псевдоцель, угол бортового пеленга псев-
доцели равен углу сноса. Отсюда следует, что в качестве парамет-
ра управления при прицеливании по направлению можно исполь-
зовать разность между углом бортового пеленга на псевдоцель и
углом сноса q = ав - ас, где ав — фактическая координата наведе-
ния по направлению (угол бортового пеленга псевдоцели); ос
расчетная координата наведения по направлению (угол сноса).
Рис. 2.20
Запишем зависимости, определяющие величины ос и ос. Для
этого рассмотрим схему прицеливания по направлению (рис. 2.21).
На этом рисунке точка О определяет положение самолета относи-
тельно псевдоцели Р и цели Ц в горизонтальной плоскости в мо-
мент, когда прицеливание по направлению еще не выполнено. Из
рис. 2.21 видно, что
Uz S„z
tgac“Wx“y+(7 ; ’
л.
где Snv и S"— проекции вектора Sn на оси координат ОХ и OZ со-
ответственно.
84
Рис. 2.21
Так как Sp = S - РЦ, а РЦ = UT^,
то
S,-U,TA _ г-игГд
sx-uxt& х-ихТ&'
(2.37)
где S = х и = 2 — проекции вектора S на оси координат ОХ и
OZ соответственно. Разделив числитель и знаменатель в выраже-
нии (2.37) на высоту И, получим значение tg в следующем
виде:
U ТА
z А
tg Цд —
tg =
2.7. Учет выноса точки прицеливания
и точки падения бомбы
2.7.1. Учет выноса точки прицеливания
Для наблюдения земной поверхности с помощью радиолока-
ционных и оптических визирных систем доступны только те объ-
екты, которые обладают достаточной радиолокационной или опти-
85
ческой контрастностью. Между тем, часто возникает необходи-
мость получать точную информацию о координатах объектов, не
обладающих такими свойствами. Например, многие цели не обла-
дают радиолокационной контрастностью и не доступны для визу-
ального наблюдения. Для определения координат таких целей с
помощью визирных систем и выполнения прицеливания исполь-
зуется вспомогательная точка визирования (прицеливания), выне-
сенная на определенное, известное расстояние относительно цели.
В качестве вынесенной точки прицеливания (ВТП) выбирают ори-
ентир, обладающий высокой радиолокационной контрастностью
или хорошо видимый визуально. Положение ВТП относительно
цели в горизонтальной плоскости можно определить вектором
Вп (рис. 2.22). Вектор Вп обычно задается в ПНС модулем и на-
правлением. Координаты цели определяются по измеренным ко-
ординатам ВТП путем ввода поправок, учитывающих вынос точки
прицеливания.
Рис. 2.22
Из рис. 2.22 находим 8Ц = S - Вп.
Проектируя это векторное равенство на оси координат ОХ и
OZ, получаем
<5ЦЛ. = S — В ; S = S — В
86
или
х = х — В : 2 = z — В ,
Ц ИХ ’ Ц П2*
где хци гц — координаты цели; х и 2 — координаты ВТП, опреде-
ляемые с помощью визирных систем. Проекции вектора выноса
точки прицеливания на оси ОХ и OZ можно определить по форму-
лам:
впх = вп cos(Sb - к) = вп cos(eB);
►
Вп2 = Вп sin<5B - К) = Вп sin(EB),
где К — курс самолета; §в— направление выноса точки прицели-
вания; £в — курсовой угол выноса точки прицеливания.
2.7.2. Вынос точки падения (разрыва) бомбы
Как уже отмечалось ранее, наибольшая эффективность приме-
нения авиабомб может быть достигнута в том случае, если точки
их падения (разрыва) не совпадают с целью. Вынос точки падения
в этих случаях может производиться как в вертикальном, так и в
горизонтальном направлениях. Примером применения вертикаль-
ного выноса точки падения служит воздушный взрыв бомбы со
специальным снаряжением. Вертикальный вынос точки падения
осуществляется также при применении светящих, фотографичес-
ких и других бомб.
Горизонтальный вынос точки падения производится при се-
рийном, групповом и серийно-групповом бомбометании.
При серийном бомбометании с самолета на цель сбрасывается
последовательно, через определенные интервалы, несколько бомб.
Последовательно брошенные бомбы образуют серию бомб.
При серийном бомбометании прицеливание обычно выполня-
ется при бросании первой бомбы серии. Сбрасывание остальных
бомб серии через установленные интервалы обеспечивается систе-
мой управления сбрасыванием бомб. Расстояние между точками
падения двух смежных бомб серии называется интервалом серии i.
Сумма всех интервалов составляет длину серии L. При равных ин-
тервалах длина серии равна
87
L = (n-l)i,
где L — длина серии; n — число бомб серии; i — интервал серии.
Серия бомб обычно бросается с таким расчетом, чтобы с цент-
ром цели совместилась средняя бомба серии. Точка же падения
первой бомбы выносится с недолетом относительно центра
цели. Так как при серийном бомбометании точки падения бомб
располагаются на линии разрывов, то в случае горизонтального,
прямолинейного и равномерного полета вектор выноса точки паде-
ния (рис. 2.23) первой бомбы серии параллелен плоскости пути.
Поэтому вектор выноса R = - ~~ W0, где 1У0 — единичный вектор
С 2
путевой скорости.
Если бомбометание выполняется группой самолетов, построен-
ных в боевом порядке, то прицеливание в этом случае может вы-
полняться не каждым экипажем в отдельности, а только ведущим
в группе. Ведомые экипажи бросают бомбы по сигналу ведущего
одновременно с ним. Одновременное сбрасывание бомб по сигналу
ведущего в группе называют групповым бомбометанием. Расстоя-
ние между ведущим и замыкающим самолетами группы называют
глубиной строя. При групповом бомбометании точку падения
бомбы, брошенной ведущим самолетом в группе, выносят в плоскос-
ти курса с перелетом относительно цели (рис. 2.24) на величину
В = — V0
С 2 ’
где Г — глубина строя; Vго — единичный вектор воздушной скорости.
88
Если бомбометание осуществляется в составе группы самоле-
тов и с каждого самолета сбрасывается серия бомб, то такое бом-
бометание называется серийно-групповым. Можно показать, что
вектор выноса точки падения первой бомбы серии, брошенной ве-
дущим, в этом случае составит
Rc = | <гй° - 1ЛУ°\
2.7.3. Определение фактических и требуемых
координат цели при серийно-групповом бомбометании
Определим фактические и требуемые координаты наведения
по дальности и направлению при серийно-групповом бомбомета-
нии с прицеливанием по ВТП. Прицельная схема бомбометания
для этого случая показана на рис. 2.25.
Рис. 2.25
89
Положение ВТП относительно самолета определяется вектором
R = Н + Ао + UT - Rc + Вп.
(2.38)
Расчетная координата наведения по дальности X определяется
положением ВТП вдоль оси ОХ. Для ее определения спроектируем
векторное равенство (2.38) на ось ОХ и получим
X=AQ + U T-R +В .
Учитывая, что R,.,. = 77 Гг - L cosot\ а Аа = VTл , получаем
X = VT + UT-1 (Г - L cosa А + В . (2.39)
! V I НА
Так как угол сноса 0Сс имеет значения, лежащие в пределах ±20“, где
функция cos а, а 1, то выражение для R„v можно записать в виде
и СЛ
| (г - 1.)^ (2.40)
Такое допущение не влияет на точность прицеливания, а при-
водит лишь к изменению фактической длины серии, которая
будет в этом случае определяться по формуле
где — фактическая длина серии.
Таким образом, определяя величину R по формуле (2.40), за-
даются не длиной серии, а ее проекцией на ось ОХ. Значение про-
екции длины серии на ось ОХ будет равно L, а длина серии будет
определяться формулой (2.41), т.е. будет зависеть от ветра.
Выражение (2.38) будет иметь вид
Х = КГЛ+ихТ-|(г-ь)+В„.
Разделив правую и левую части этого выражения на высоту
(высота полета самолета над вынесенной точкой прицеливания), а
также вынося за скобку знак минус, получим выражение расчет-
ной координаты наведения по дальности в безразмерном виде:
ТА Т Г - L впх
tg(Pn = V~EF + Ux ± +
11 Н л Г1 4П Г1
где <рп — угол прицеливания.
90
Фактическая координата наведения по дальности х определяет-
ся проекцией текущего вектора R на ось ОХ. Безразмерная форма
X
фактической координаты обозначается tg<pB, причем tg <рв = —, где
(рв — угол визирования цели. Параметр сигнализации о моменте
бомбометания определится по формуле
dp = tg<pB - tg(pn.
Наведение самолета по дальности будет выполнено, когда
dp = О. При определении фактических и расчетных координат на-
ведения по направлению будем считать, что прицеливание по на-
правлению производится по псевдоцели. Рассмотрим случай, наи-
более часто встречающийся на практике — бомбометание произво-
дится группой самолетов, в которой ведущий самолет находится
по фронту в середине боевого порядка (рис 2.26).
Рис. 2.26
При таком бомбометании линия разрывов ведущего самолета
должна проходить через цель, а линия пути — через псевдоцель.
Тогда линии разрывов других самолетов будут проходить справа и
слева от цели. Поэтому при выполнении прицеливания по направ-
лению в этом случае нет необходимости учитывать вынос точки
91
падения бомбы. Схема наведения самолета по направлению для
этого случая в общем виде изображена на рис. 2.27.
Вектор Sp
прохождение
Фактическая
вид
наведения самолета по направлению, обеспечивающий
линии разрывов через цель, равен S = S - R — В .
11
координата наведения по направлению будет иметь
S, - R - Впг Z - U 7\ - вп?
. z рг пг z л nz
tga =-------L------
S -R -Bnv
£ jJ «А/ .1 X e* V
х - Ux Тд - Впг
Разделив числитель и знаменатель
чим
на высоту полета Н, полу-
игт&
teRo-—ТГ
tg
Ux
tg<PB--^-
Впг
впг
Расчетная координата наведения по
сноса, который определяется формулой
направлению равна углу
92
Наведение самолета по направлению будет выполнено, если
параметр управления dq станет равным нулю: dq = tgocB - tgocc = 0.
2.8. Определение баллистических элементов авиабомб,
учет высоты и скорости полета ЛА
2.8.1. Определение баллистических элементов
Баллистическими элементами авиабомбы называются время
падения бомбы Ту штилевой относ Aq и отставание Ag бомбы от
самолета (см. рис. 2.9). В прицельно-навигационных системах,
предназначенных для бомбометания с горизонтального полета,
вместо элементов Aq и Ag используются элементы ТА и Т При
этом Т = ТА + . Это следует из формулы VT = Ао + Аб, которую
можно получить из рис. 2.9. Баллистические элементы Т и ТА в
этих ПНС необходимы для определения угла прицеливания <рп, а
баллистический элемент Тд — для определения угла бортового пе-
ленга псевдоцели а .
.ь
Точные значения этих элементов находятся путем интегриро-
вания дифференциальных уравнений движения бомбы, что связа-
но с определенными трудностями. Они вызываются тем, что бал-
листические элементы являются в общем случае функциями четы-
рех аргументов Н, V, 60, 0g (0О — угол наклона траектории, 0б —
характеристическое время бомбы), и поэтому они не выражаются
аналитически в конечном виде через указанные параметры.
Для упрощения способа определения баллистических элемен-
тов имеется несколько путей. Рассмотрим два из них, применяю-
щиеся в настоящее время. Первый путь состоит в том, что значе-
ния баллистических элементов, соответствующие условиям броса-
ния бомбы, находятся из баллистических таблиц, а затем вводятся
вручную в ПНС. Имеются баллистические таблицы со значения-
ми элементов Т и ТА. Величина Тд определяется по формуле
93
Т^ = Т — Тд. Однако такой путь требует строгого выдерживания
заданных начальных условий бросания и поэтому не обеспечивает
высокой точности бомбометания. В ПНС указанный способ ис-
пользуется в качестве запасного.
Второй путь заключается в том, что на основе аппроксимации
табличных значений баллистических элементов с помощью вспо-
могательных функций одного или двух аргументов эти элементы
вычисляются в зависимости от введенных в ПНС значений вели-
чин, определяющих начальные условия бросания бомбы. В дан-
ном случае при известном значении характеристического времени
бомбы 0б и автоматическом вводе высоты Н, воздушной скорости
V и начального угла наклона траектории 0О обеспечивается непре-
рывное определение баллистических элементов. Такой путь реше-
ния баллистической задачи не ограничивает возможность манев-
рирования ЛА при подходе к цели.
В ПНС бомбометания с горизонтального полета баллистичес-
кие элементы определяются по формулам:
T = F1(Hc,Q6)f1(V);
TA = F2(Hcfe6)+F3(HctQ6)f2(V),
где F1(HC,Q6), ^2(Нс,0б), ^3(Нс,0б), f^V), f2(V) — вспомогательные
функции, с помощью которых осуществляется аппроксимация таб-
личных значений элементов Т и ТА. Следует сказать, что указанные
вспомогательные функции также являются табличными, но они
зависят не более чем от двух аргументов, а это позволяет воспро-
изводить такие функции с помощью несложных устройств.
2.8.2. Учет превышения точки падения бомбы
над уровнем моря
Баллистические таблицы, являющиеся основой для определе-
ния баллистических элементов упрощенным способом, составлены
для такого случая, когда точка падения бомбы находится на уров-
не моря. Если точка падения бомбы не находится на уровне моря,
то плотность воздушной среды, в которой движется бомба, не
будет соответствовать плотности, принятой при составлении бал-
94
листических таблиц. В подобных случаях приведенные в таблицах
значения баллистических элементов будут отличаться от их дейст-
вительных значений. Допустим, что в точках и О2, располо-
женных на высоте Ни1 и Н а2 над уровнем моря (рис. 2.28), броса-
ют две одинаковые бомбы при одной и той же скорости V.
Точка падения Cj первой бомбы находится на уровне моря, а
точка падения С2 второй бомбы располагается с превышением
he над уровнем моря. В обоих случаях превышение точки броса-
ния над точкой падения одинаково и равно Не:
He=HaX=Ha2-he.
Очевидно, что вторая бомба будет двигаться в среде менее
плотной, чем первая. Вследствие этого траектория второй бомбы
будет более настильной, чем траектория первой бомбы. Если бал-
листические элементы будем определять в виде Г, ТА и Т&, то у
второй бомбы величина ТА будет больше, так как больше штиле-
вой относ Aq, а величины Т и Тд меньше, чем у первой бомбы.
Поэтому, если точка падения бомбы не совпадает с уровнем моря,
необходимо при определении величин Т, ТА и учитывать не
только высоту над точкой падения, но и превышение точки hp па-
95
дения над уровнем моря. Учет превышения he производится путем
замены характеристического времени 0б бомбы на условное харак-
теристическое время 0б, которое определяется по формуле
еб = а + (9б-а)е“Ч,
где а = 20,193 с; Ь = 1,0510“* м'1.
В общем случае превышение h точки падения над уровнем
моря складывается из превышения цели над уровнем моря и
из превышения h точки падения бомбы над целью: h = &Н + h .
U, с Ц, И,
При воздушном взрыве под точкой падения бомбы понимается
точка разрыва бомбы. В этом случае величина Лц называется вер-
тикальным выносом точки взрыва над целью.
Таким образом, при наличии превышения he точки падения
бомбы над уровнем моря баллистические элементы будут опреде-
ляться так:
Т = Т (0б, V, Нс);
ТА = ТА^НеУ^ ° °
^=t^v,hc),
где 0б = 0б(0б,/ге).
2.8.3. Определение высоты и скорости полета ЛА
Для решения задачи прицеливания в общем случае необходи-
мо знать высоту полета самолета над точкой прицеливания Н и
высоту полета самолета над точкой падения бомбы Нс.
Высота Нс необходима для определения баллистических эле-
ментов Г, ТА и или Т, Ао и Ag, а высота Н — для определения
величины tg(рв, tgp0, tg<pn, tgocB> Из рис. 2.29 видно, что высоты
Н и Нс можно определить по формулам
96
(2.42)
Н = На-ЛН;
НС = Н - h, (2.43)
где На — высота полета самолета над уровнем моря; АН — превыше-
ние точки прицеливания над уровнем моря; h = + Лц - АН —
высота точки падения бомбы над точкой прицеливания; АНЦ —
превышение цели над уровнем моря; /?ц — превышение точки па-
дения бомбы над целью. Формулы (2.42) и (2.43) решаются в ПНС.
Для этого в них автоматически вводится высота, определяемая на
современных ЛА централью скорости и высоты (ЦСВ), и задаются
вручную величины АН и h.
Скорость самолета V используется для определения угла при-
целивания <рп, а также для определения составляющей путевой
скорости W . В ЦСВ летательного аппарата определяется воздуш-
ная скорость самолета, но она несколько отличается от истинной
воздушной скорости. Определение воздушной скорости в ЦСВ ос-
новано на измерении избыточного давления, поступающего в при-
емник воздушного давления (ПВД). Отличие воздушной скорости
от истинной скорости вызвано искажениями воздушного потока,
обтекающего ПВД. Для определения истиной воздушной скорости
необходимо в воздушную скорость, определяемую ЦСВ, ввести
аэродинамическую поправку, учитывающую искажение воздуш-
97
ного потока, обтекающего ПВД. Поэтому в ПНС истинная воздуш-
ная скорость определяется по формуле:
V=Va + AV, (2.44)
где Va — воздушная скорость, определяемая ЦСВ; АУ — аэродина-
мическая поправка.
Для определения истинной воздушной скорости по формуле
(2.44) в ПНС обычно воздушная скорость V из ЦСВ вводится
автоматически, а аэродинамическая поправка АУ задается вруч-
ную.
2.9. Рабочие формулы ПНС
Вопросы, рассмотренные в гл. 2, являются основой для состав-
ления рабочих формул, по которым может осуществляться работа
ПНС. Для примера ниже приведены рабочие формулы для ПНС, с
помощью которых производится прицеливание при бомбометании
с горизонтального полета. Эти формулы разделены на девять
групп.
1 группа:
2 группа:
t UZ к
f ^х Г
*£ФВ = tg(pBo - J dt + | tgpodK;
fo Ko
f ’f
tg|i0 = t&Mo “ J dt - J tg(pBdK;
ДУ
X
Atgq>B = J r\dUx;
о
\u
z
Atgp0 = / т|бН72;
0
98
2 группа:
3 группа: < ( „ т'ь Wo Uz н н tgaB- . ; * „ В..х tglPB Ux и Н ' и, tga^ = v+ux;
4 группа: ТА Т Впх L - Г tg<Pn ~V н +и^ Н+ Н + 2Н ’
5 группа: г =F1(Hc,06)/-1(V); .7’л = г2(нс;еб) + ?3(нс,еб)/2<Ю; 7Д = т - ТА;
6 группа: н = на-^н-, Hc = H-h; ‘v=va + /!.v-, Wx = V+Uxi
7 группа: вп« = вп cos(8B-K); в„г = в„ sin(»B-K);
99
Фв = arctg(tg(pB);
ц = arctg(tgp0 coscpB);
8 группа: «jD = — seco ;
cosp B
tg|i0 + sin у
tga =-------------;
*S<Pb
dq = tgaB - tgac;
dp = tg(pB - tg(pn;
9 группа:
^ = aB-ac;
ф = Фв-фп.
Первая группа формул обеспечивает определение фактических
координат цели tgфв и tgс помощью систем счисления пути. С
помощью формул второй группы производится определение и ста-
билизация скорости ветра U.
По формулам третьей группы определяются фактическая и
требуемая координаты наведения самолета по направлению tg(pB и
Ьёфс« Четвертую группу составляет формула, определяющая тре-
буемую координату прицеливания по дальности tg'<Pn; по форму-
лам 5 группы определяются баллистические элементы Т, ТАи Тд.
С помощью формул шестой группы находятся основные нави-
гационные элементы: высота полета над точкой прицеливания Н,
высота полета над точкой падения Нс, истинная воздушная ско-
рость V, проекция путевой скорости Wx.
Определение проекций вектора выноса точки прицеливания
Вх и В2 производится по формулам седьмой группы.
В восьмую группу входят формулы, по которым осуществляет-
ся преобразование координат, необходимое для программного уп-
равления визирными системами. Для управления оптическими
визирными системами определяются координаты фв и ц, а для уп-
равления радиолокационными визирными системами — коорди-
100
наты D, tgo. Девятая группа формул обеспечивает определение
параметров управления dq и сигнализации dp.
Для решения формул, указанных выше, в ПНС должны вво-
диться следующие исходные данные: высота полета над уровнем
моря На; превышение точки прицеливания над уровнем моря АН;
высота точки падения (разрыва) бомбы над точкой прицеливания h;
воздушная скорость Va; аэродинамическая поправка АУ; курс К;
условное характеристическое время 0; величина выноса точки
прицеливания Вп; направление выноса точки прицеливания 5В;
„ L-Г D
угол крена у; поправка на серию и строи —. В современных
ПНС величины На, У , К, у вводятся автоматически от соответст-
вующих датчиков с помощью следящих систем, а величины АН,
_ L-Г
h, АУ, 0, В , о„, огг — вручную с помощью рукояток.
11 в ЛИ
Для автоматического решения рабочих формул в ПНС приме-
няются различные вычислительные средства. К ним относятся:
суммирующие, интегрирующие и функциональные механизмы,
координаторы, электрические счетно-решающие и преобразова-
тельные устройства.
101
3. РЕШЕНИЕ ЗАДАЧИ ПРИЦЕЛИВАНИЯ
ПРИ БОМБОМЕТАНИИ С КАБРИРОВАНИЯ
3.1. Векторное выражение ошибки
бомбометания
Бомбометанием с кабрирования называется такой способ бом-
бометания, при котором бомба сбрасывается на траектории кабри-
рования ЛА, Основные преимущества этого способа — подход ЛА
к цели на малой и предельно малой высотах и обеспечение ухода-
ЛА от цели до момента падения бомбы на сравнительно большие
расстояния. Первое преимущество выгодно с точки зрения пре-
одоления системы ПВО противника, а второе — в смысле возмож-
ности применения бомб больших калибров. Основным недостат-
ком бомбометания с кабрирования является сравнительно малая
точность, в связи с чем оно применяется главным образом для по-
ражения площадных целей.
При решении задачи прицеливания для бомбометания с каб-
рирования обычно принимают следующие допущения:
• выносом бомбардировочной установки относительно визир-
ной системы можно пренебречь, т.е. Вв = 0;
• цель неподвижна, т.е. = 0;
• вектор скорости U ветра постоянен по величине и направле-
нию.
При этих допущениях общее векторное уравнение задачи при-
целивания будет иметь вид
д = 5у-5 + 7л-вп + вр, (3.1)
где Dy — вектор, характеризующий положение бомбы в момент
взрыва относительно точки ее бросания; D — вектор, определяю-
щий положение вынесеной точки прицеливания (ВТП) относи-
102
тельно ЛА в момент прекращения её визирования; I — вектор пере-
мещения ЛА от момента прекращения визирования цели; Вп -
вектор выноса ВТП относительно цели; Вр — вектор выноса задан-
ной точки разрыва (ЗТР) бомбы относительно цели. Для большей
наглядности в дальнейшем в качества ЛА будем иметь в виду
самолет. На рис. 3.1 дана схема бомбометания с кабрирования.
Точка О соответствует положению самолета в момент окончания
визирования ВТП. В общем случае от точки О до момента перехо-
да в кабрирование самолет движется горизонтально по некоторой
криволинейной траектории ОК, уточняя при этом боковую навод-
ку. В точке К начинается кабрирование самолета, которое продол-
жается в течение времени до момента бросания бомбы, после чего
самолет переходит на выполнение маневра ухода от цели. Сбрасы-
вание бомбы осуществляется в точке С с таким расчетом, чтобы
общий относ бомбы с учетом действия ветра соответствовал ее по-
паданию в заданную точку разрыва (ЗТР). Вследствие неизбежных
ошибок бомбометания бомба попадает в точку Б, смещенную отно-
сительно ЗТР на величину ошибки А. Кроме основной траектории
ОКСБ самолета и бомбы относительно земли на схеме пунктирной
линией ОЛТ С Б показана горизонтальная проекция траектории
самолета и бомбы, а также штилевая траектория KCvbv самолета
Рис. 3.1
103
и бомбы от момента начала кабрирования самолета до сбрасыв-
ания бомбы и ее горизонтальная проекция К CVBV.
На векторной схеме прицеливания вектор А = С , Бр = Бг , как
обычно, представляет собой штилевой относ бомбы, а символом
0О обозначен угол кабрирования самолета. Из схемы следует, что
вектор перемещения бомбы с учетом действия ветра определяется
по формуле
Dy = H + A+UT, (3.2)
где Н — высота бомбометания; U — вектор скорости ветра; Т —
время падения авиабомбы.
Введем величину
5* = 5-Тл-вп + вр, (3.3)
физически представляющую собой радиус-вектор заданной точки
разрыва относительно текущего положения самолета. Для крат-
кости будем ниже именовать его вектором дальности цели. С уче-
том (3.2) и (3.3) векторное уравнение (3.1) примет вид
А = Н + Д + UT - D*. (3.4)
Бомбометание с кабрирования может выполняться при углах
90 < 90° и 0q > 90°. В первом случае прицеливание, как правило,
производится по ВТП, а не по цели Ц. Это вызывается тем, что от-
носы бомб при 0О < 90 обычно велики, и поэтому цель в момент
перехода самолета в кабрирование находится на значительном
удалении. В связи с этим цель трудно распознаваема. Кроме этого,
будут иметь место большие ошибки измерения координат цели от-
носительно самолета. Во втором случае при 0О > 90 в схеме прице-
ливания вектор Вп, как правило, отсутствует, так как переход
самолета в кабрирование осуществляется непосредственно над
целью или вблизи цели.
Задачу прицеливания при бомбометании с кабрирования бу-
дем рассматривать применительно к двум вариантам боковой на-
водки:
104
- боковая наводка выполняется до момента перехода самолета
в кабрирование;
— боковая наводка выполняется на траектории кабрирова-
ния.
3.2. Решение задачи прицеливания
в случае выполнения боковой наводки
до перехода ЛА в кабрирование
Выберем правые прямоугольные системы координат: невра-
щающуюся, связанную с вектором Vq, OXqYqZq, и горизонтиро-
ванную систему координат CXvrYL,rZvr, связанную с вектором V, с
началом в точках О и С соответственно. Оси и CXvr направле-
ны по линиям пересечения горизонтальных плоскостей, проведен-
ных через точки О и С, с вертикальными плоскостями, содержа-
щими векторы Kq и V. Оси OY® и СУуг направлены вертикально
вверх. Система координатных осей OXqYqZq неподвижна, а систе-
ма CXvrУргZvr перемещается вместе с самолетом.
Для вывода формул параметров прицеливания спроектируем
векторное равенство (3.4) на оси системы координат СХ Y Z , по-
лучим:
^x=A + UxT~Dx^
=-Н - D’y-, j- (3.5)
Д = и Т - Ь‘,
Z Z Z ' 7
где на основании выражения (3.3):
= Dx~ \лх ВПХ + Врх,
Dy = Dy~ 1Лу ~ Впу + Вру ’ > (3.6)
= DZ~ Впг + Врг-
Из вторых равенств систем (3.5) и (3.6) следует, что для реше-
ния задачи о точке встречи по оси OY, т.е. для выполнения усло-
105
вия Д = 0, необходимо, чтобы высота сбрасывания Н вычислялась
по формуле
р=-п;=но+/лу+днп-днр, (з.7)
где I — изменение высоты полета за текущее время; HQ = Dy —
высота полета самолета в точке О относительно вынесенной точки
прицеливания ВТП; ЛНп — превышение ВТП относительно цели
(ДПп > 0, если ВТП расположена выше цели); — превышение
ЗТР бомбы относительно цели.
Формула (3.7) используется для определения высоты бомбоме-
тания, по которой должны вычисляться баллистические элементы
бомбы.
Перейдем теперь к параметрам прицеливания по дальности и
направлению. В отличие от бомбометания с горизонтального поле-
та задача прицеливания по дальности состоит из двух этапов:
- определение момента перехода самолета в кабрирование;
- определение момента сбрасывания бомбы на траектории каб-
рирования.
На параметре, определяющем момент начала кабрирования,
остановимся ниже, а пока рассмотрим параметр, определяющий
момент сбрасывания бомбы.
Проекция Дх представляет собой ошибку бомбометания по
дальности. Очевидно, что в процессе кабрирования момент сбра-
сывания бомбы должен определяться из условия Дх = 0. Следова-
тельно, на основании (3.4) в качестве параметра, определяющего
момент сбрасывания бомбы, можно взять непрерывно вычисляе-
мую величину р, определяемую по первой формуле (3.5):
р = Ax=A + UxT-Dx. (3.8)
При отсутствии изменений курса К самолета и угла скольже-
ния Впт, величина
t
D*=D* - ( (v cos0n + uAdt, (3.9)
Л'q с I «Л- I
(Л '
106
где t — время, отсчитываемое от момента окончания визирования
ВТП; D* — значение D* в момент t = 0 (в точке О); V — воздуш-
ная скорость самолета; Ux — проекция вектора скорости ветра на
ось CXvr.
Аналогично:
t
П'г = D*o - f U„dt,
о
(3.10)
где D* — значение D* в момент t = 0 (в точке О); U, — проекция
го z г
вектора скорости ветра на ось CZur.
За счет изменений курса К и угла скольжения 0СК величины
D*x и D*z получают дополнительные приращения:
К Рек
•Л- •/V
К0 РскО
К Рек
D* = D* - £*с?Рск,
jC- 4/q J Jv J Jv UrV
K0 PCkO
где Ko, К, рск0, pCK — значения курса самолета и угла скольже-
ния, измеренные для точки О, а также в текущий момент времени
(точка С).
3.3. Алгоритм определения
параметров прицеливания по дальности
Для вывода формул (3.11) рассмотрим рис. 3.2, где дана про-
екция на горизонтальную плоскость дальности цели Ц относитель-
но самолета С. На схеме обозначено: К, Рск — текущие значения
курса самолета и угла скольжения; Кц — пеленг цели; D* — про-
екция вектора дальности до цели на горизонтальную плоскость.
107
Рис. 3.2
Запишем (см. рис. 3.2) следующие зависимости:
D*=D* cosfK.-K-PJ;
•A- J- I -U, I
v / >
= НКц-К-М-
(3.12)
Продифференцируем эти равенства, считая, что изменяются
только курс самолета и угол скольжения, тогда:
108
dD*x = D* sinfKu - К - ₽ VdK + < j = DVdK + d₽CK\
л ' ' из.13)
dfl- = -I>; cosfa - К - ₽ VdK + d₽> = -uVdK + d₽cA
Взяв интерграл от обеих частей этих равенств, получим выра-
жения (3.11).
Учитывая одновременно поступательное и вращательное дви-
жение самолета, можем на основании (3.9)—(3.11) записать выра-
жения для проекций Dx и D_ текущего вектора дальности до за-
данной точки разрыва:
t к Р,
t К Рек
- J иг dt - .[ D'xdK - J D-d₽CK,
0 к» ₽«»
(3.14)
где D* , D*_ — проекции вектора начальной дальности до ЗТР на
хо о
оси OXq и OZq . Поскольку в точке О вектор /л = 0, то в соответст-
вии с формулами (3.6) значения D* , D* будут равны:
о о
О' = D - В + В = const; '
Д-0 IJLvV
D* = D - В + В = const.
(3.15)
Здесь записаны следующие проекции векторов на оси OXq и
OZn: £>, — проекции вектора начальной дальности до ВТП;
В , В — проекции вектора выноса точки прицеливания; В ,
11 I/•Л
В^, — проекции вектора выноса заданной точки разрыва.
Для определения проекций Dx и Dz используем прямоуголь-
ную правую систему координат, начало которой совмещено с точ-
кой О, ось ОУП направлена вертикально вверх, а ось OZnp распо-
109