/













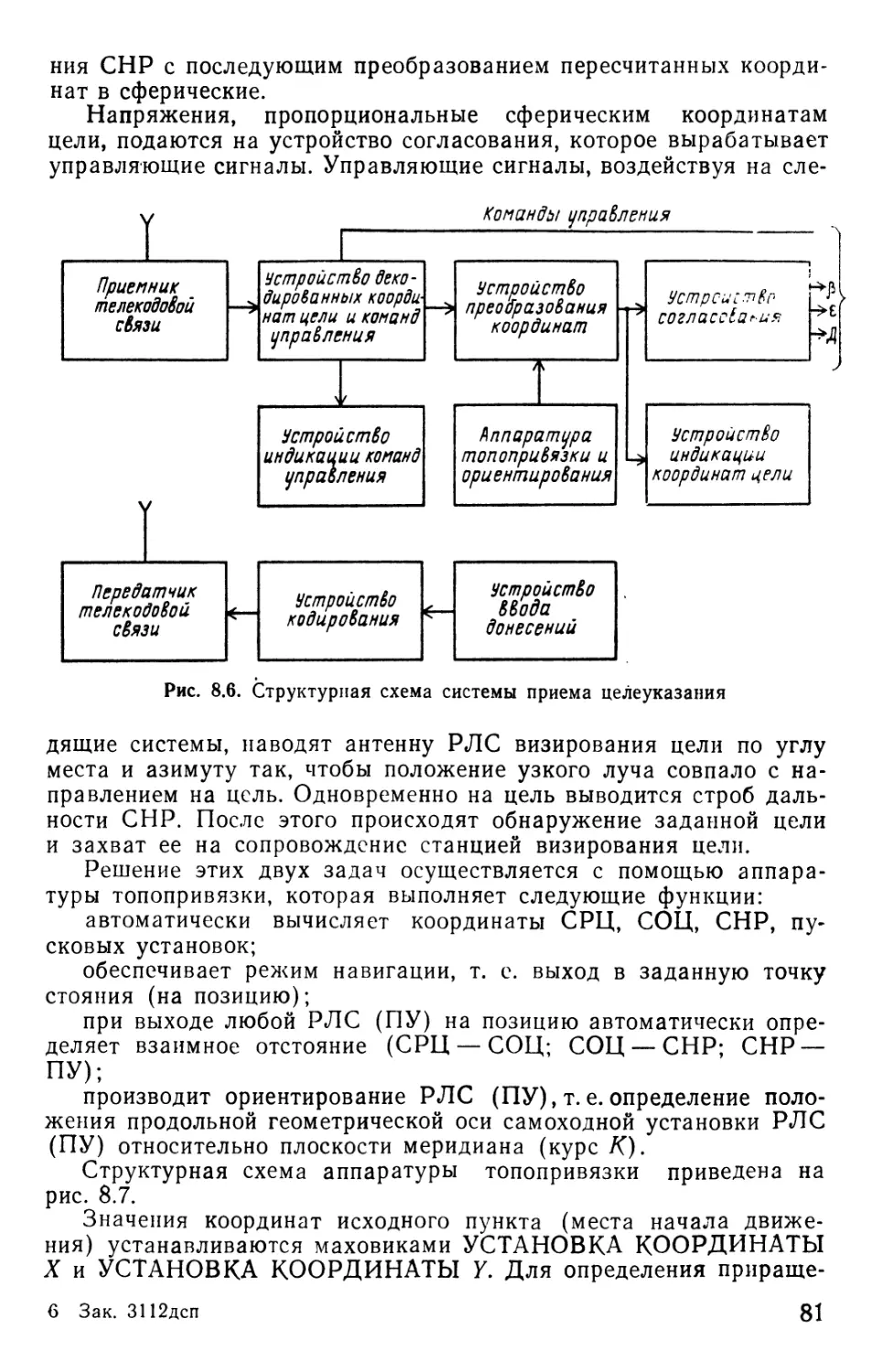










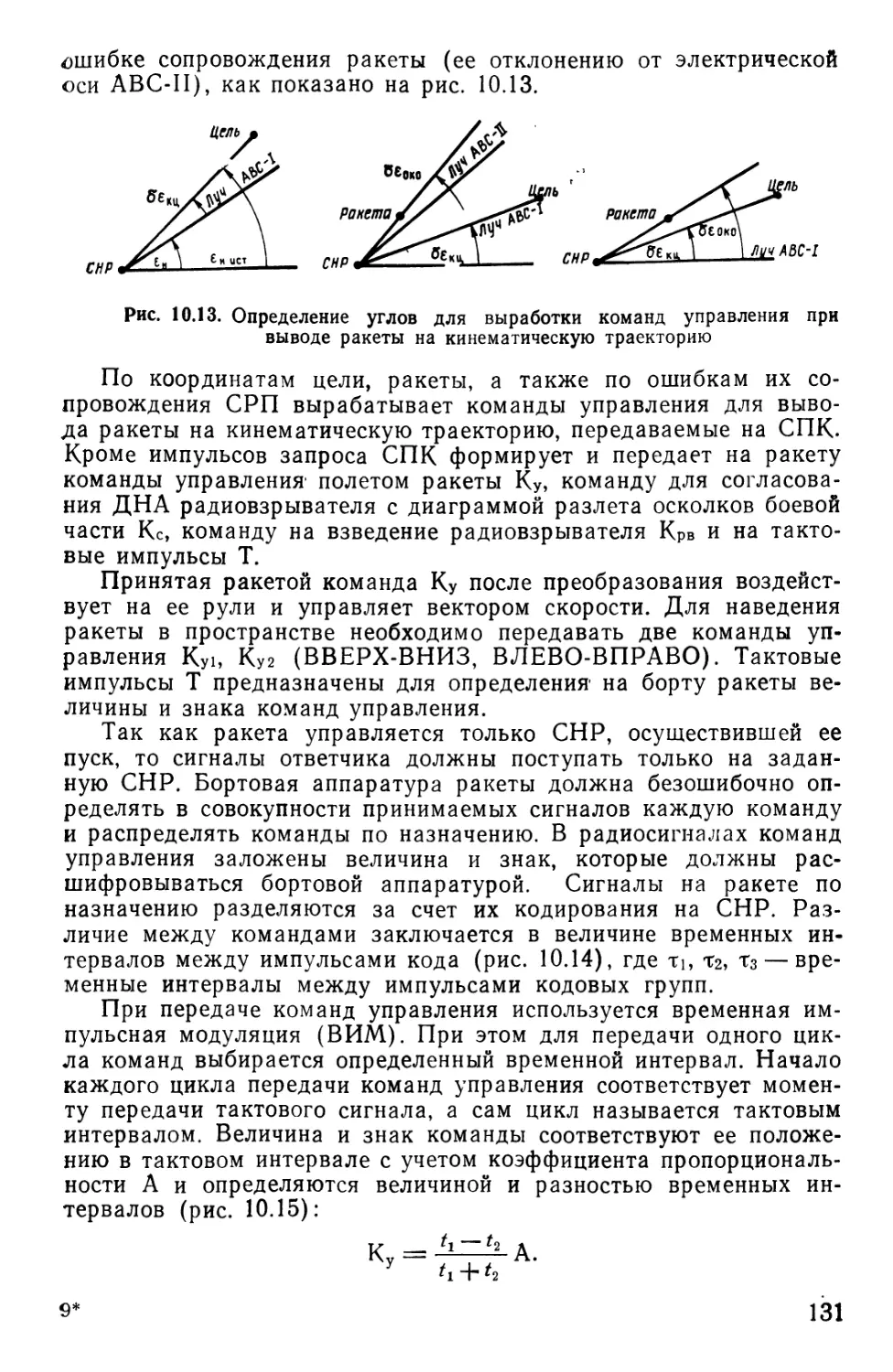
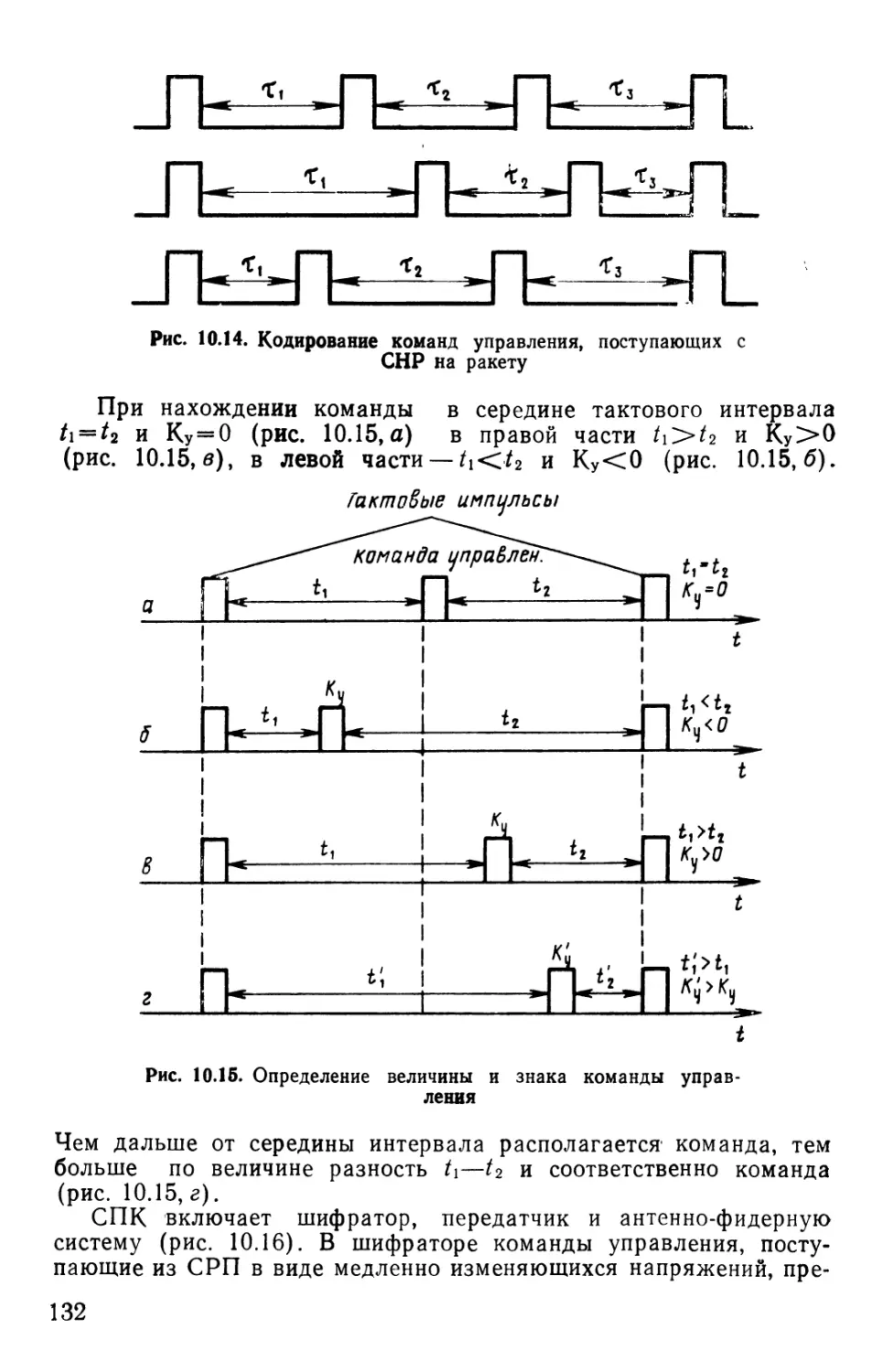
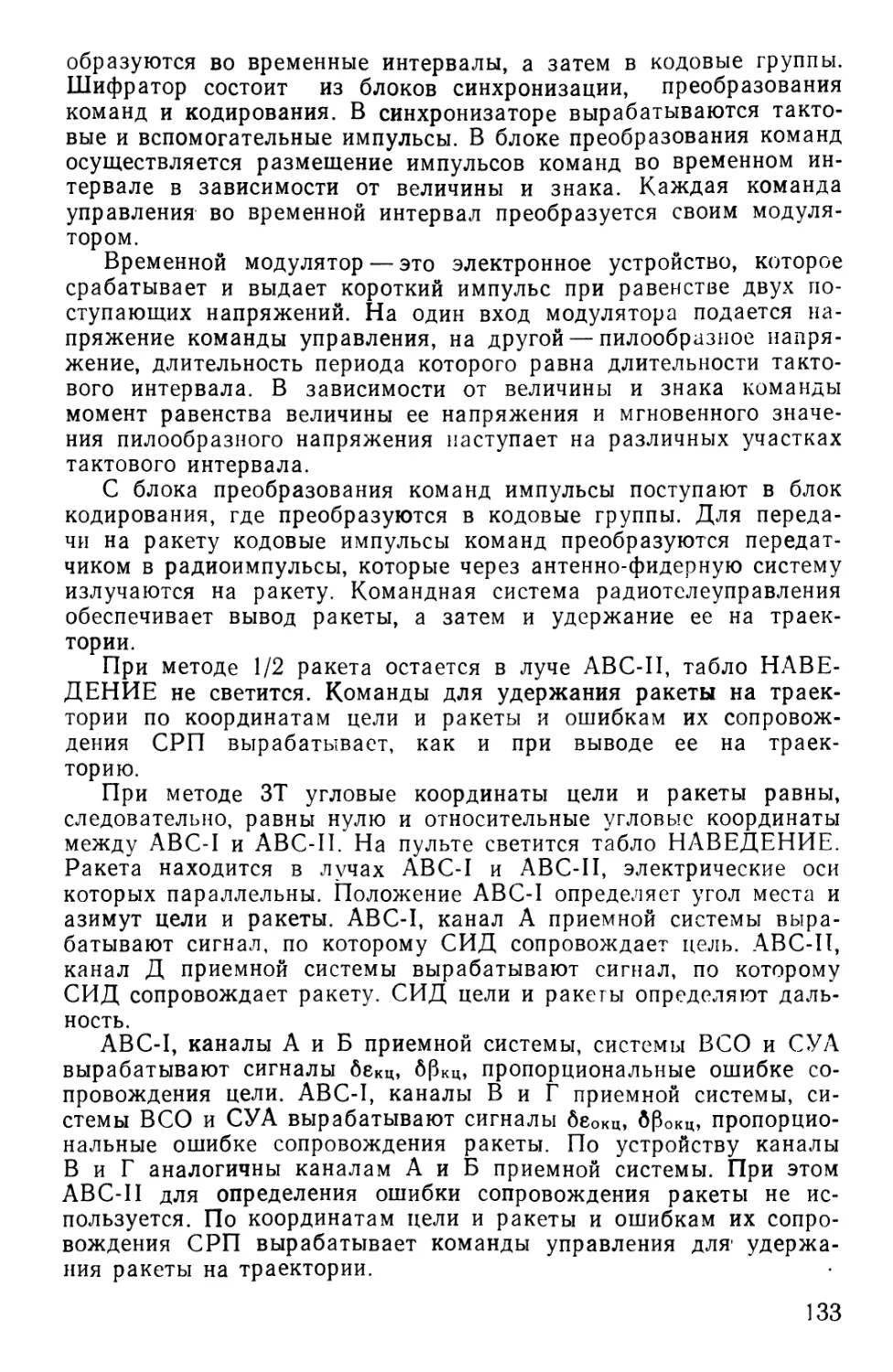
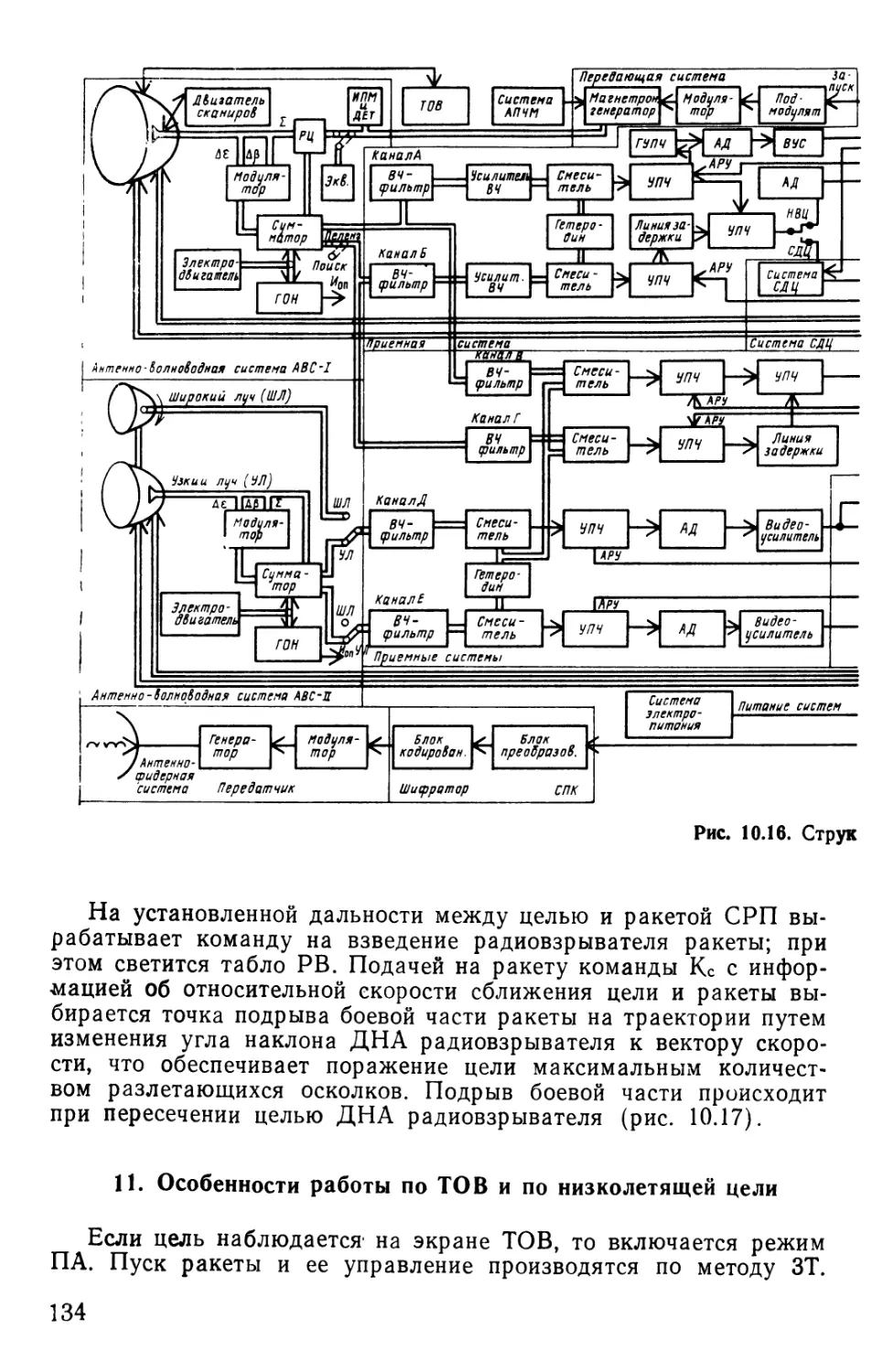






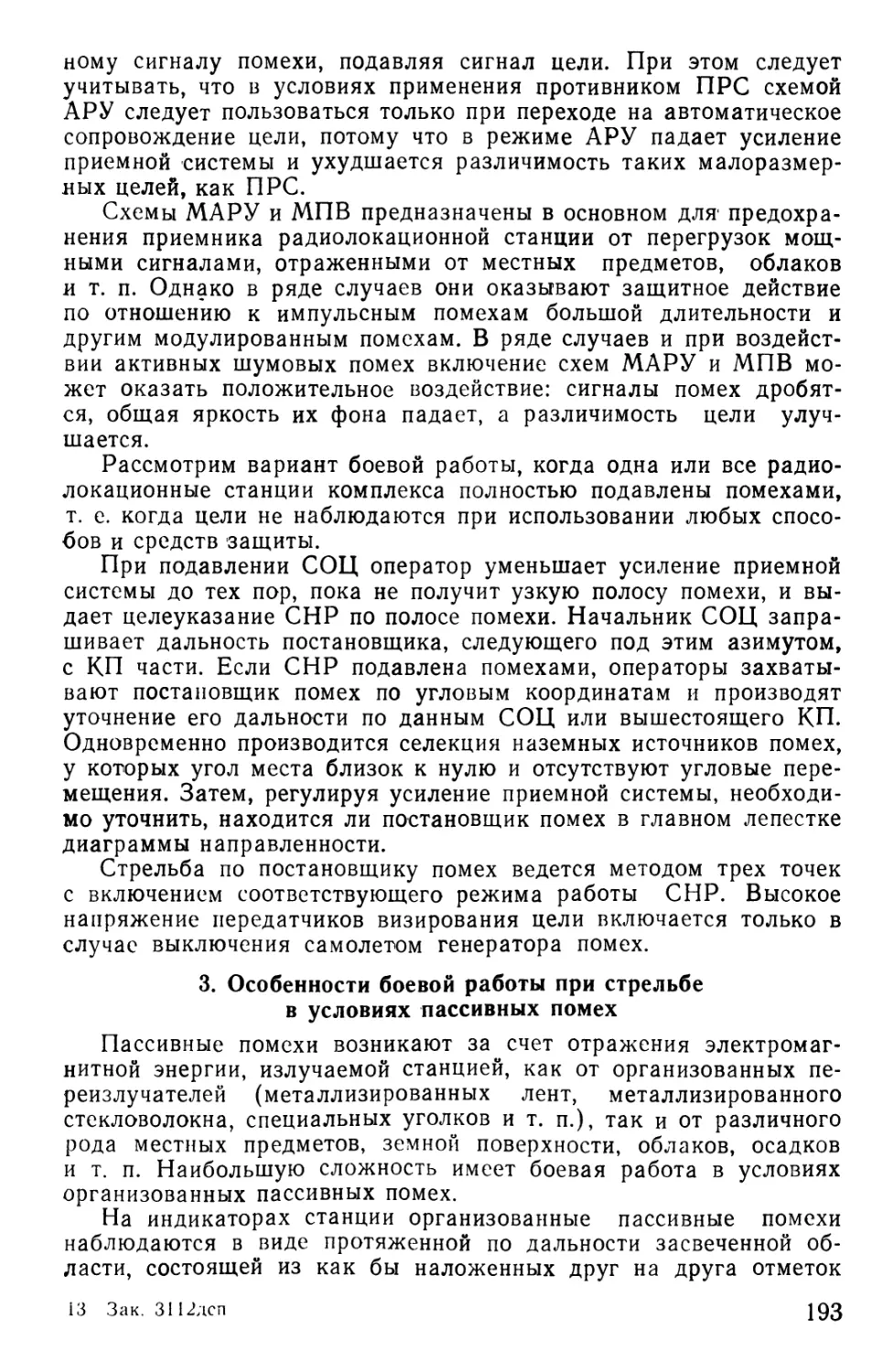

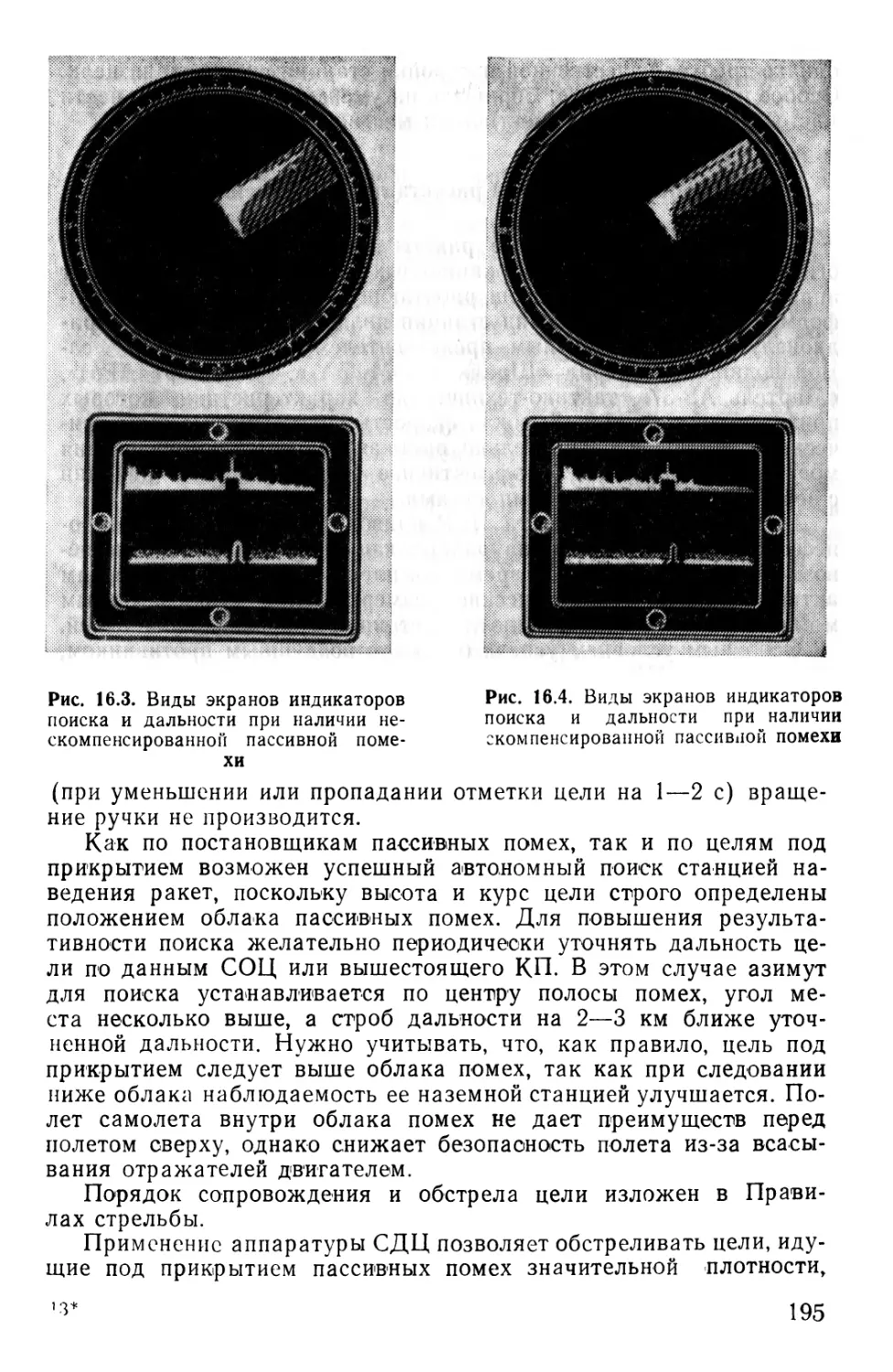





Текст
МИНИСТЕРСТВО ОБОРОНЫ СССР
Для служебного пользования
Экз. № 3088
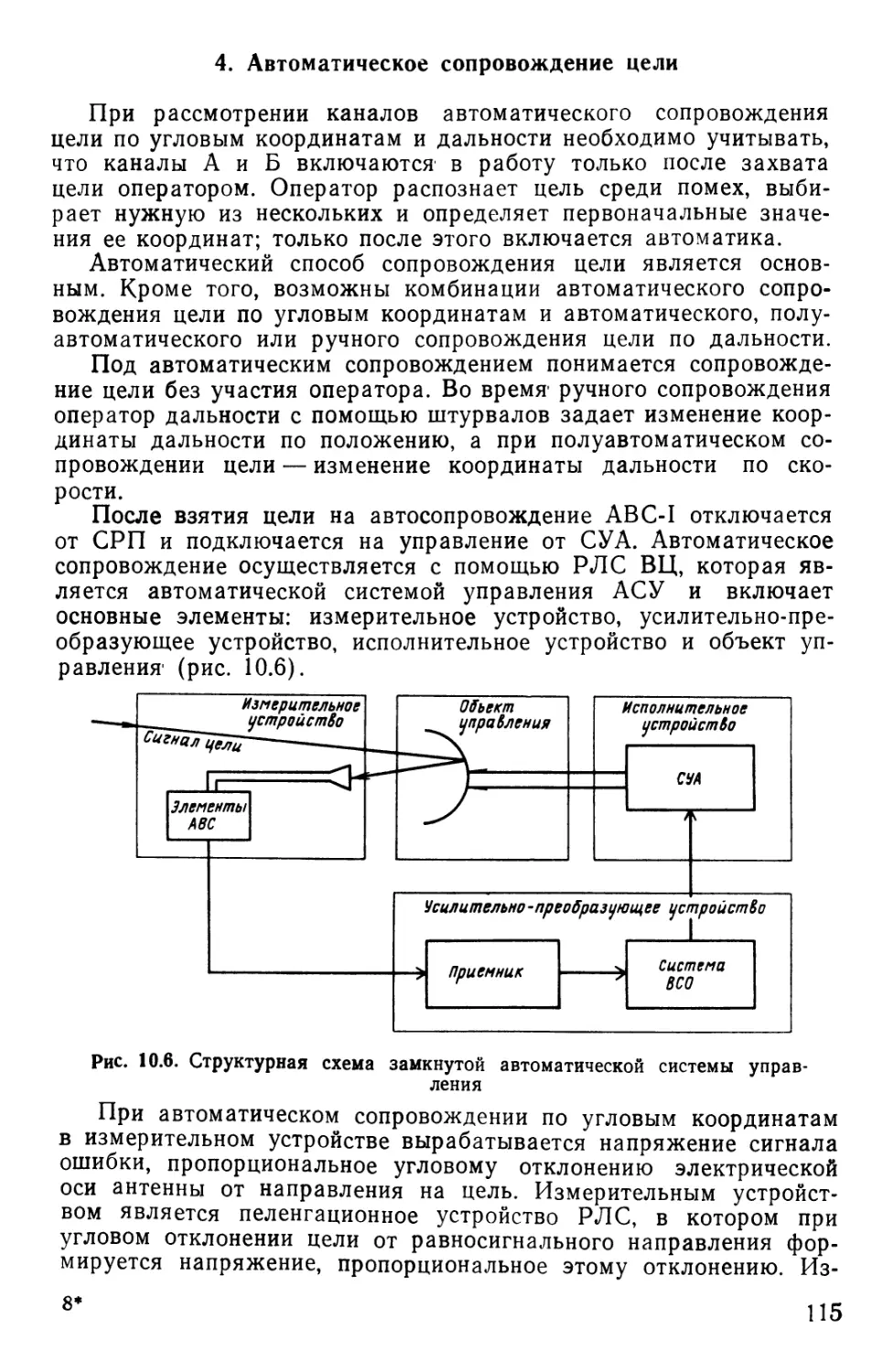
УЧЕБНИК
СЕРЖАНТА СУХОПУТНЫХ
ВОЙСК
ДЛЯ СЕРЖАНТОВ ВОЙСК ПВО СВ — КОМАНДИРОВ
ОТДЕЛЕНИЙ ЗРК С КОМАНДНОЙ СИСТЕМОЙ
НАВЕДЕНИЯ
МИНИСТЕРСТВО с
ВОЙСКА ПРОТИВОВОЗДУШНОЙ ОБ
Д^ЛЯ Слу^.
УЧЕБНИК
СЕРЖАНТА СУХОПУТНЫХ
ВОЙСК
ДЛЯ СЕРЖАНТОВ ВОЙСК ПВО СВ — КОМАНДИРОВ
ОТДЕЛЕНИИ ЗРК С КОМАНДНОЙ СИСТЕМОЙ
НАВЕДЕНИЯ
Утвержден главнокомандующим
Сухопутными войсками в качестве учебника
для сержантов войск ПВО СВ
МОСКВА
ВОЕННОЕ ИЗДАТЕЛЬСТВО
1 990
1
Учебник предназначен для обеспечения плановых занятий и самостоятель-
ной работы сержантов подразделений, вооруженных зенитными ракетными ком-
плексами с командной системой наведения, а также для курсантов школ млад-
ших специалистов войск ПВО СВ.
Учебник разработан авторским коллективом в составе генерал-лейтенанта
В. С. Кузьмичева, полковников В. Г. Жовнера, В. Р. Воляника, подполковников
Н. А. Литвинова, М. П. Кардаша, Г. С. Нупрейчика, майоров Р. С. Хисматул-
лина, В. Г. Кутаева и В. А. Евдокимова.
Редакция полковника М. А. Моргунова.
Общее руководство начальника войск ПВО Сухопутных войск генерал-
полковника Ю. Т. Чеснокова.
Редактор В. В. Мишуткин
2
РАЗДЕЛ ПЕРВЫЙ
ТАКТИЧЕСКАЯ ПОДГОТОВКА
Глава I
ХАРАКТЕРИСТИКА СРЕДСТВ ВОЗДУШНОГО
НАПАДЕНИЯ
1. Классификация средств воздушного нападения
и их основные характеристики
Под средствами воздушного нападения (СВН) понимают лета-
тельные аппараты, предназначенные для нанесения ударов по вой-
скам и объектам, а также для обеспечения боевых действий сухо-
путных войск и военно-морских сил.
Для нанесения ударов с воздуха по войскам на поле боя про-
тивник будет широко использовать все многообразие имеющихся
у него средств воздушного нападения: тактическую, армейскую, а
на приморских направлениях и авианосную авиацию, оперативно-
тактические и тактические ракеты, стратегическую авиацию и кры-
латые ракеты. Главной ударной силой по войскам на поле боя в
настоящее время у противника являются самолеты тактической и
вертолеты армейской авиации.
Качество каждого средства воздушного нападения, технические
и тактические возможности их применения для выполнения различ-
ных боевых задач определяются их боевыми свойствами.
Боевые свойства самолетов и вертолетов определяются их лет-
но-техническими характеристиками, количеством и тактико-техни-
ческими характеристиками вооружения, составом радиоэлектрон-
ного оборудования.
Основными летно-техническими характеристиками самолетов и
вертолетов являются: скорость, диапазон высот, дальность полета,
скороподъемность и маневренность, взлетно-посадочные характе-
ристики, величина полезной нагрузки.
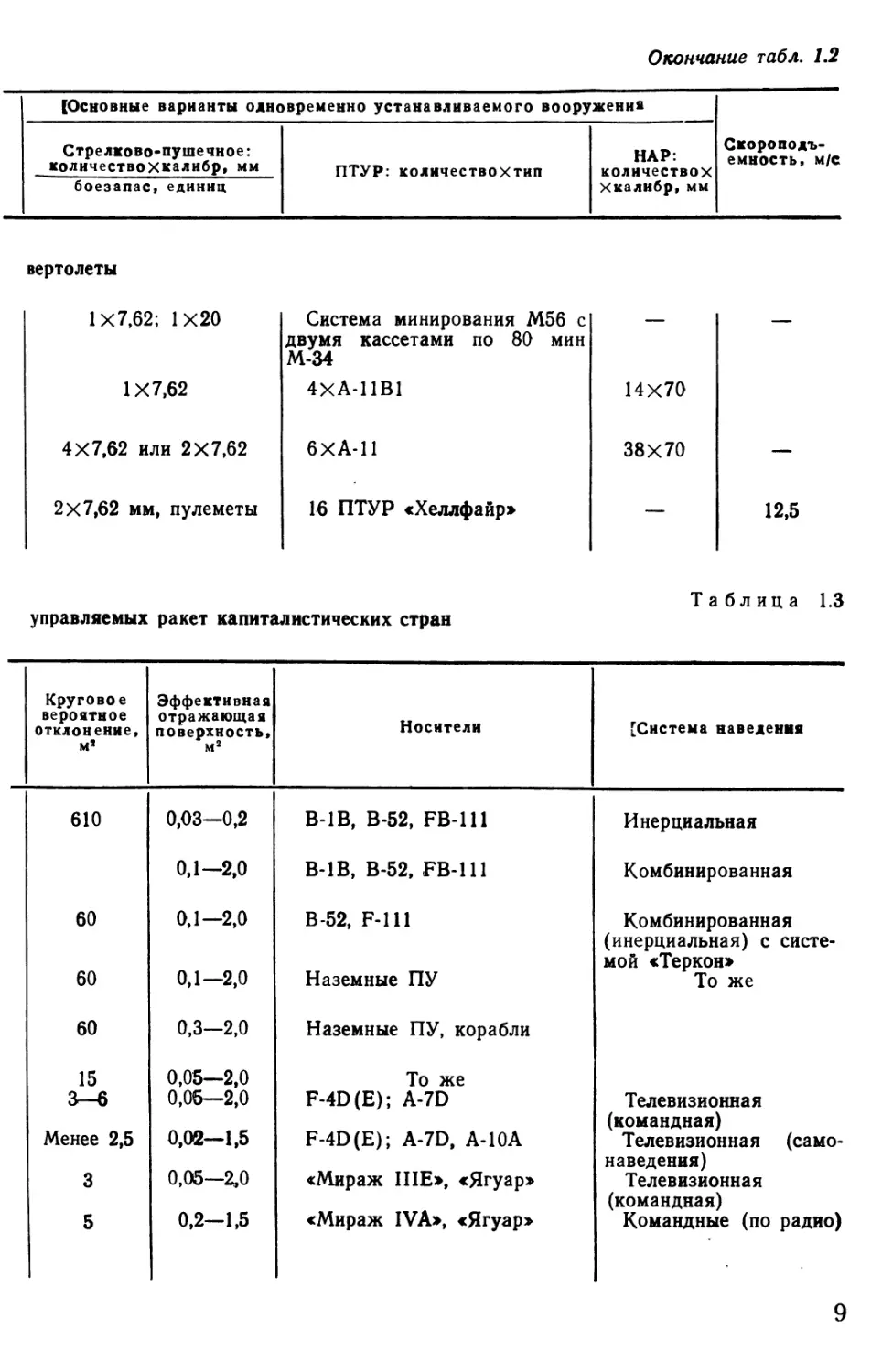
Вооружение самолетов и вертолетов включает: управляемые
ракеты «воздух — земля» и «воздух — воздух», неуправляемые
авиационные ракеты (НАР), управляемые и неуправляемые
авиационные бомбы, стрелково-пушечное вооружение, химиче-
ские, бактериальные (биологические) и зажигательные средства.
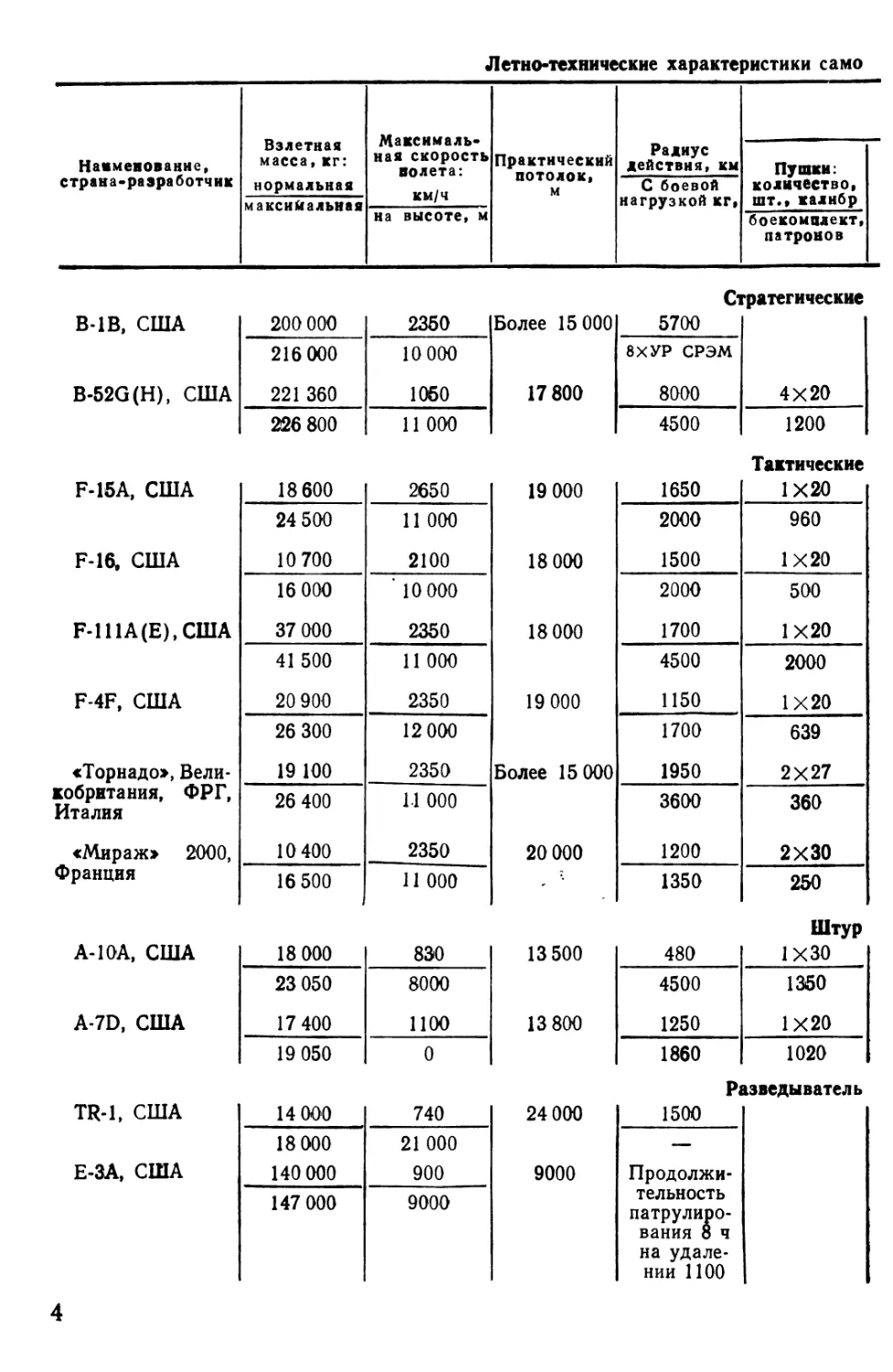
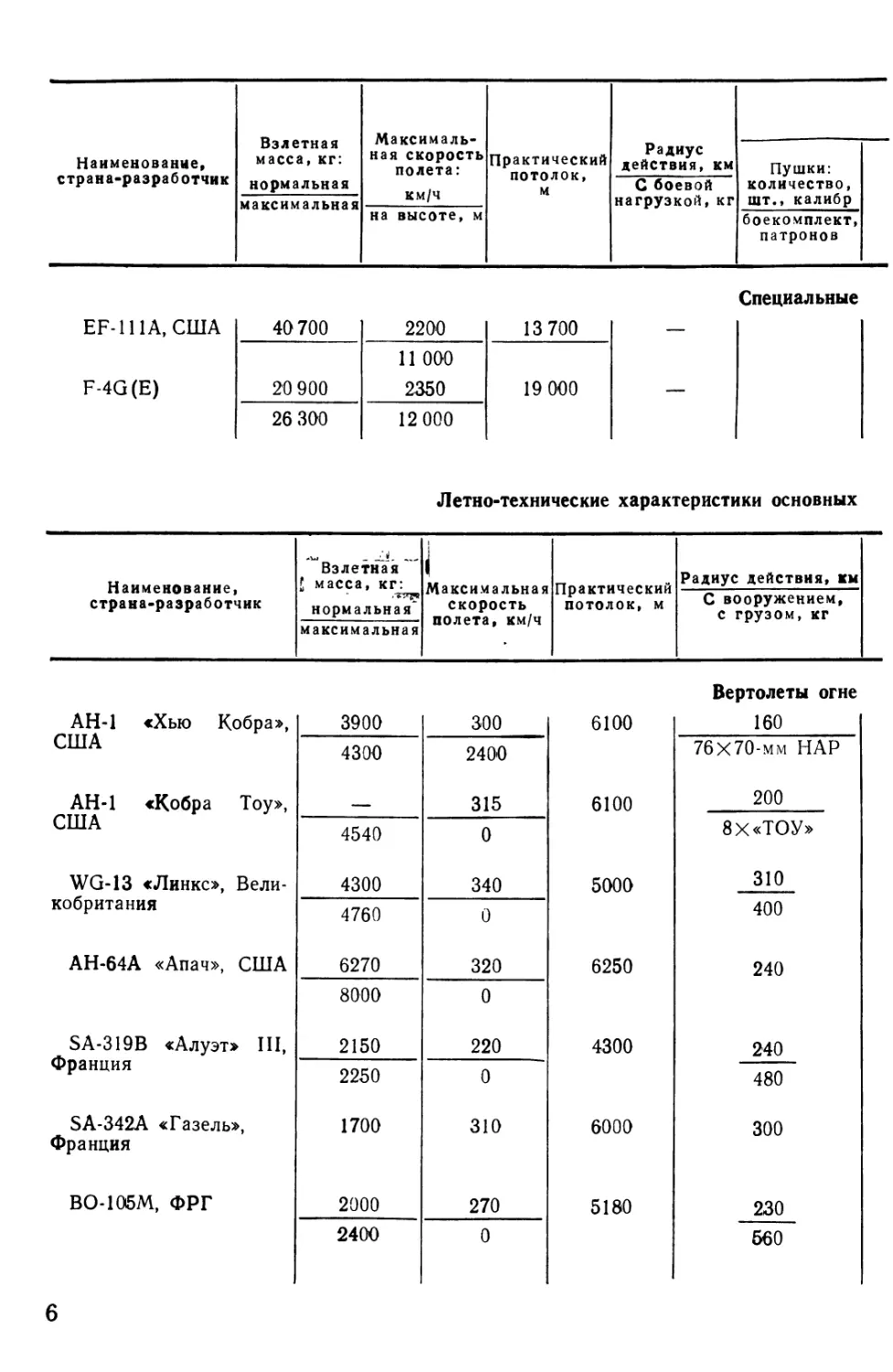
Летно-технические характеристики и вооружение основных са-
молетов и вертолетов капиталистических государств приведены в
табл. 1.1 и 1.2.
1* Зак. 3112ДСП
3
Летно-технические характеристики само
Взлетная масса, кг: Максималь- ная скорость волета:
Наименование, страна-разработчик Практический потолок, м Радиус действия, км Пушки:
нормальная км/ч С боевой количество, шт., калибр
максимальная нагрузкой кг.
на высоте, м боекомплект, патронов
В-1В, США 200 000 2350 Более 15 000 Ci 5700 гратегические
216 000 10 000 8ХУР СРЭМ
B-52G(H), США 221 360 1050 17 800 8000 4X20
226 800 11 000 4500 1200
F-15A, США 18 600 2650 19 000 1650 Тактические 1X20
24 500 11 000 2000 960
F-16, США 10 700 2100 18 000 1500 1X20
16 000 10 000 2000 500
F-lllA(E), США 37 000 2350 18 000 1700 1X20
41 500 11 000 4500 2000
F-4F, США 20 900 2350 19 000 1150 1X20
26 300 12 000 1700 639
«Торнадо, Вели- 19 100 2350 Более 15 000 1950 2X27
кобритания, ФРГ, Италия 26 400 11 000 3600 360
«Мираж» 2000, 10 400 2350 20 000 1200 2X30
Франция 16 500 И 000 1350 250
А-10А, США 18 000 830 13 500 480 Штур 1X30
23 050 8000 4500 1350
A-7D, США 17 400 ПРО 13 800 1250 1X20
TR-1, США 19 050 14 000 0 740 24 000 1860 Pi 1500 1020 ьзведыватель
Е-ЗА, США 18 000 140 000 21 000 900 9000 Продолжи-
147 000 9000 тельность патрулиро- вания 8 ч на удале- нии 1100
4
летов капиталистических стран
Таблица 1.1
Вооружение НАР: количествох X калибр, мм Скороподъ- *емность, м/с Максимальная бомбовая нагрузка, кг тротиловый •квивалент, кг
УР и УАК: количеетвохобозначеяие
бомбардировщики
22ХАЛКМ и 8ХСРЭМ или 38Х ХСРЭМ — 120 ( 52 000
),3 — несколько тыс.
20ХСРЭМ или 20ХАЛКМ истребители — НО 13800 0,05—10 000
4Х«Спарроу» и 4х«Сайдвиндер> или 4ХУАК «АСАТ» — 196 5500 0,05—1000
6Х«Сайдвиндер» и 6Х«АМРААМ»; 2х«Сайдвиндер» и бХ«Мейверик»; 48х«УСОП»; 4 X «АСАТ» 114X70 190 5000 0,05—1000
8х«Сайдвиндер»; 8Х«Спарроу»; 46Х«УСОП»; 4ХУАК «АСАТ»; 4Х«Шрайк» 456X70 140 9000 0,05—1000
4х«Спарроу» и 4х«Сайдвиндер»; бХ«Мейверик» и 2 X«Стандарт» АРМ 285X70 180 6800 0,05—1100
2х«Мартель> и 4х«Корморан; 6Х«Мейверик>; 2Х«Сайдвиндер» — 180 5500 10—400
2 X «Супер Матра» и 2х«Мажик» мовики 72X68 170 5000 до 150
6Х«Мейверик» и 2х«Сайдвиндер»; 72Х«УСОП»; 4ХУАК «АСАТ» 74X70 30,5 7300
2х«Сайдвиндер» и бХ«Буллпап»; бХ«Мейверик»; 4ХУАК «АСАТ»; 6Х«Шрайк> ные самолеты 76X70 83 6000 0,05—1100
РЛС бокового обзора, аппаратура радио- и радиотехнической разведки ПЛСС, аэрофотоаппаратура РЛС дальнего обнаружения, ЭВМ, аппаратура опознавания, отображе- ния и передачи данных
5
Наименование, страна-разработчик Взлетная масса, кг: нормальная Максималь- ная скорость полета: км/ч Практический потолок, м Радиус действия, км
Пушки: количество, шт., калибр
С боевой нагрузкой, кг
максимальная
на высоте, м
боекомплект, патронов
EF-111A, США F-4G(E) 40700 2200 13 700 — Специальные
20 900 11 000 2350 19 000
26 300 12 000
Летно-технические характеристики основных
Наименование, страна-разработчик Взлетная "" J масса, кг: нормальная^ i Максимальная скорость полета, км/ч Практический потолок, м Радиус действия, км
С вооружением, с грузом, кг
максимальная
Вертолеты огне
АН-1 «Хью Кобра», 3900 300 6100 160
США 4300 2400 76Х70-мм НАР
АН-1 «Кобра Тоу», — 315 6100 200
США 4540 0 8х«ТОУ»
WG-13 «Линкс», Вели- 4300 340 5000 310
кобритания 4760 0 400
АН-64А «Апач», США 6270 320 6250 240
8000 0
SA-319B «Алуэт» III, 2150 220 4300 240
Франция 2250 0 480
SA-342A «Газель», 1700 310 6000 300
Франция
ВО-105М, ФРГ 2000 270 5180 230
2400 0 560
6
Окончание табл. 1.1
Вооружение НАР: количествох X калибр, мм Скороподъ- емность, м/с Максимальная бомбовая нагрузка, кг тротиловый эквивалент, кг
УР и УАК: количествохобозначение
самолеты РЭБ
Комплексы РЭ подавления РЭС и
средств связи
4х«Шрайк», или 2Х «Стандартный
АРМ», или 4х«ХАРМ»
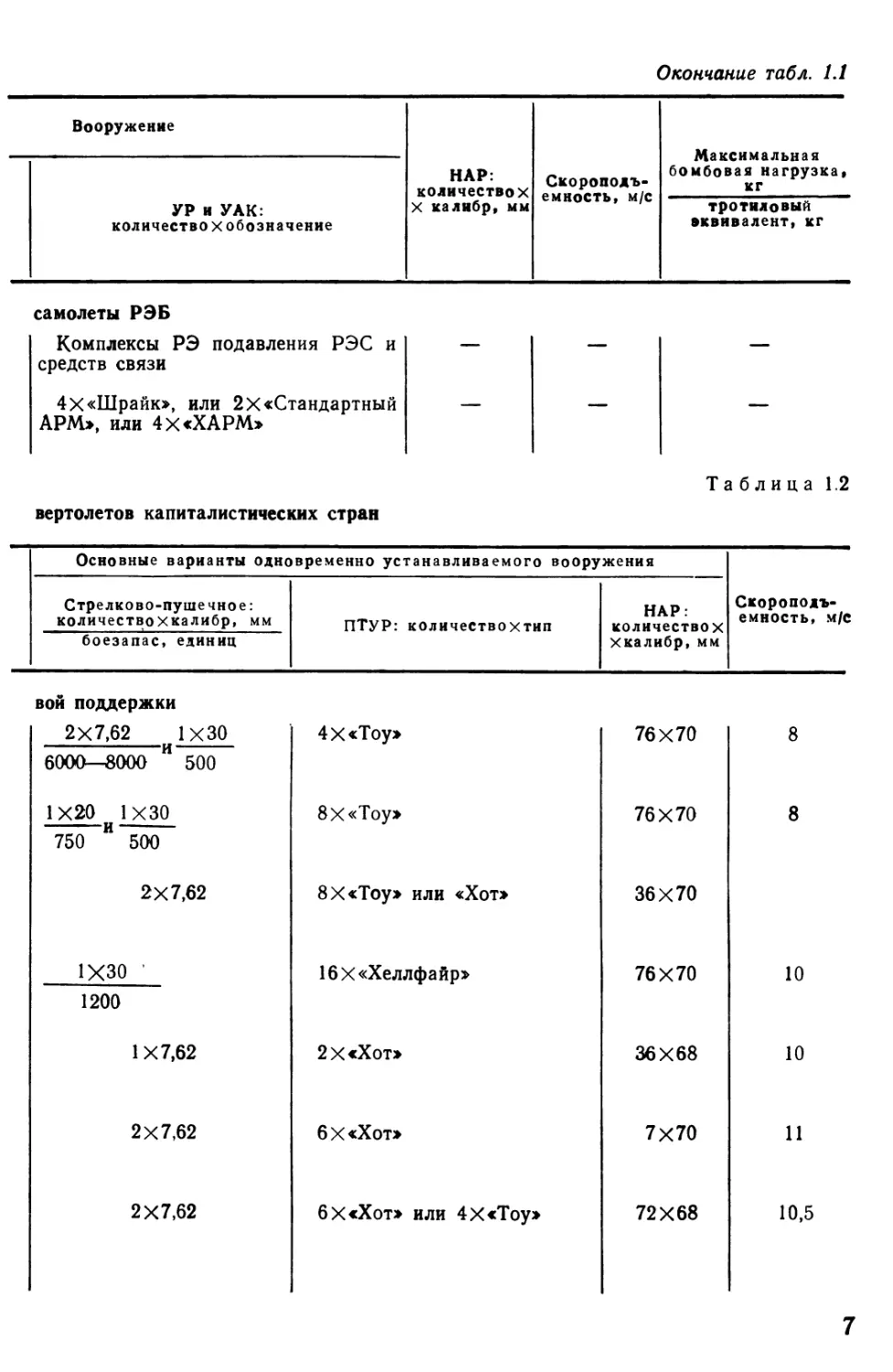
вертолетов капиталистических стран
Таблица 1.2
Основные варианты одновременно устанавливаемого вооружения Скороподъ- емность, м/с
Стрелково-пушечное: количествохкалибр, мм ПТУР: количествохтип НАР: количествох хкалибр, мм
боезапас, единиц
вой поддержки
2X7,62 1X30 и 6000—8000 500 4х«Тоу» 76X70 8
1X20 1X30 и 750 500 8х«Тоу» 76X70 8
2x7,62 8Х«Тоу» или «Хот» 36X70
1X30 ' 1200 16Х«Хеллфайр> 76X70 10
1X7,62 2х«Хот» 36X68 10
2x7,62 6 X «Хот» 7X70 11
2X7,62 6Х«Хот» или 4Х«Тоу» 72X68 10,5
7
Наименование,
страна-разработчик
Взлетная масса, кг: нормальная Максимальная скорость полета, км/ч Практический потолок, м Радиус действия, км
С вооружением, с грузом, кг
максимальная
Многоцелевые
UH-1Н «Ирокез», США ОН-58 «Кайова», США АВ-412, Италия Н-вОА, Блэк Хок, США 4300 240 4570 5400 5200 5800 200
4800 1200 0 240 1800 200
1360 0 230 550 150
5200 7450 0 300 1680 230
9185
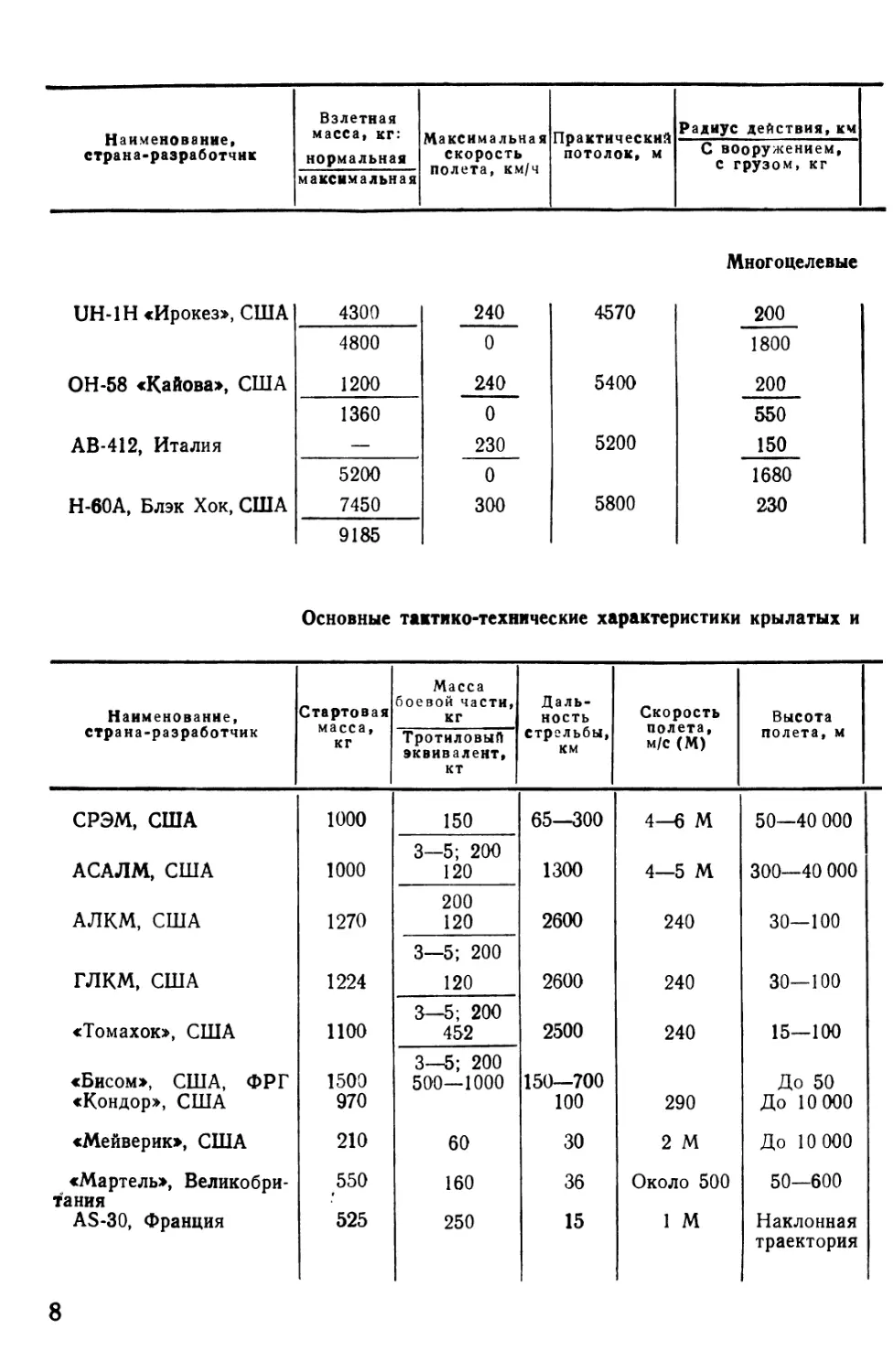
Основные тактико-технические характеристики крылатых и
Наименование, страна-разработчик Стартовая масса, кг Масса боевой части, кг Даль- ность стрельбы, км Скорость полета, м/с (М) Высота полета, м
Тротиловый эквивалент, кт
СРЭМ, США 1000 150 65—300 4—6 М 50—40 000
АСАЛМ, США 1000 3—5; 200 120 1300 4—5 М 300—40 000
АЛКМ, США 1270 200 120 2600 240 30—100
3—5; 200
ГЛКМ, США 1224 120 2600 240 30—100
«Томахок», США 1100 3—5; 200 452 2500 240 15—100
«Бисом», США, ФРГ «Кондор», США 1500 970 3-5; 200 500—1000 150—700 100 290 До 50 До 10 000
«Мейверик», США 210 60 30 2 М До 10 000
«Мартель», Великобри- тания AS-30, Франция 550 525 160 250 36 15 Около 500 1 М 50—600 Наклонная траектория
8
Окончание табл. 1.2
[Основные варианты одновременно устанавливаемого вооружения Скороподъ- емность, м/с
Стрелково-пушечное: количествохкалибр, мм ПТУР: количествохтип НАР: колнчествох хкалибр, мм
боезапас, единиц
вертолеты
1X7,62; 1X20 Система минирования М56 с двумя кассетами по 80 мин М-34 — —
1X7,62 4ХА-11В1 14X70
4X7,62 или 2X7,62 6ХА-11 38X70 —
2x7,62 мм, пулеметы 16 ПТУР «Хеллфайр» — 12,5
Таблица 1.3
управляемых ракет капиталистических стран
Круговое вероятное отклонение, м’ Эффективная отражающая поверхность, м2 Носители [Система наведения
610 0,03—0,2 В-1В, В-52, FB-111 Инерциальная
0,1—2,0 В-1В, В-52, FB-111 Комбинированная
60 0,1—2,0 В-52, F-111 Комбинированная (инерциальная) с систе- мой «Теркон»
60 0,1—2,0 Наземные ПУ То же
60 0,3—2,0 Наземные ПУ, корабли
15 0,05—2,0 То же
3—6 0,05—2,0 F-4D(E); A-7D Телевизионная (командная)
Менее 2,5 0,02—1,5 F-4D(E); A-7D, А-10А Телевизионная (само- наведения)
3 0,05—2,0 «Мираж 1ПЕ>, «Ягуар» Телевизионная (командная)
5 0,2—1,5 «Мираж IVA», «Ягуар» Командные (по радио)
9
Наименование, страна-разработчик Стартовая масса, кг Масса боевой части, кг Тротиловый эквивалент, кт Даль- ность стрельбы, км Скорость полета, м/с (М) Высота полета, м
Противорадиолока
<Шрайк», США 180 68 50—75 3—3,5 М 300—10 000
«Стандарт АРМ», США 620 117 80—100 Зг—3,5 М 150—16 000
«Куэйл» 560 120—150 175—400 1200 150—16 000
«ХАРМ», США 330 68 70 2—3,5 М
Радиоэлектронное оборудование современных самолетов может
включать: навигационно-бомбардировочную или прицельно-нави-
гационную систему; систему радиоэлектронной борьбы, радиосвяз-
ное оборудование; аппаратуру фото-, радио-, радиотехнической,
радиолокационной, телевизионной и инфракрасной разведки; вспо-
могательное оборудование.
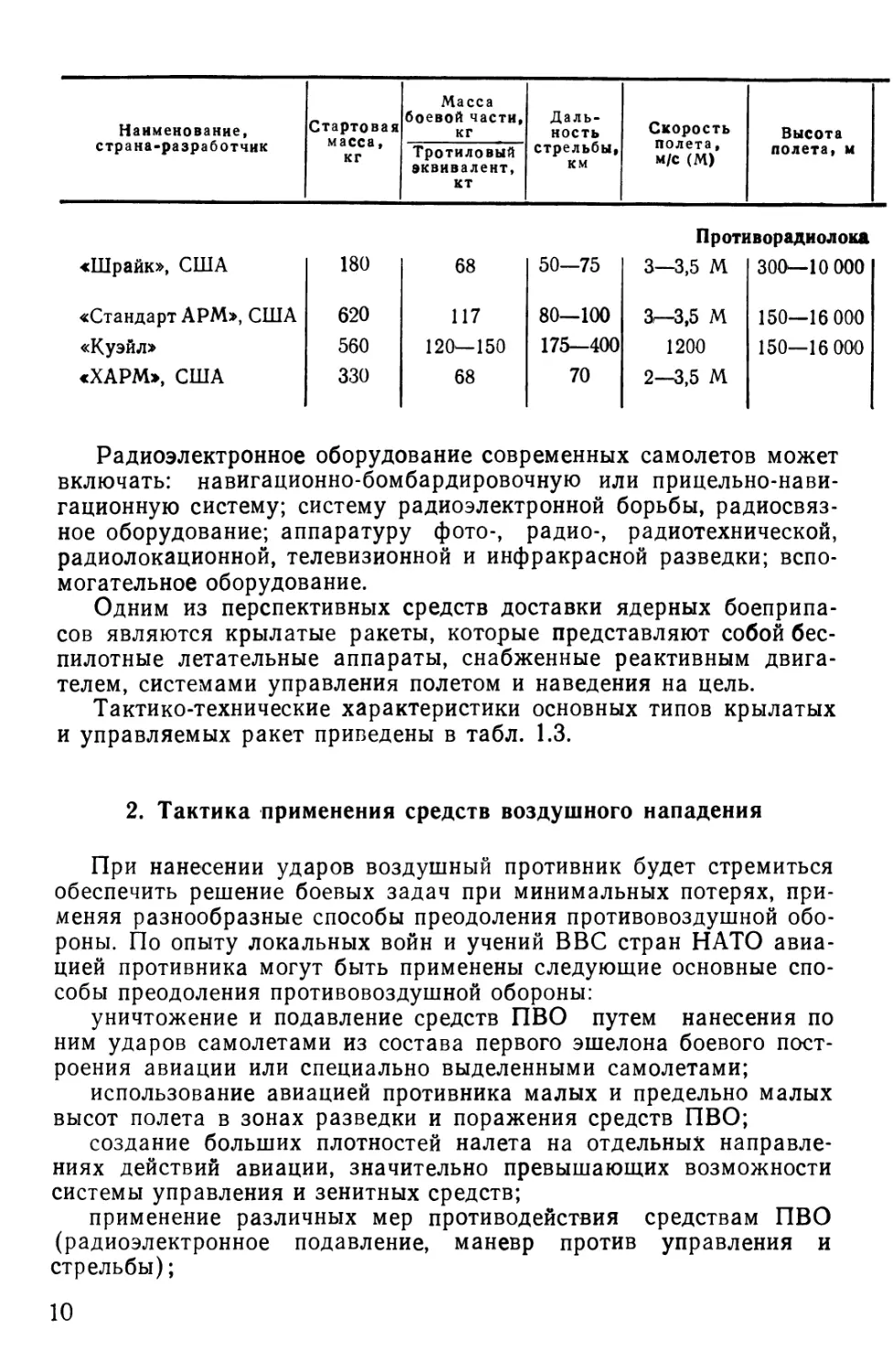
Одним из перспективных средств доставки ядерных боеприпа-
сов являются крылатые ракеты, которые представляют собой бес-
пилотные летательные аппараты, снабженные реактивным двига-
телем, системами управления полетом и наведения на цель.
Тактико-технические характеристики основных типов крылатых
и управляемых ракет приведены в табл. 1.3.
2. Тактика применения средств воздушного нападения
При нанесении ударов воздушный противник будет стремиться
обеспечить решение боевых задач при минимальных потерях, при-
меняя разнообразные способы преодоления противовоздушной обо-
роны. По опыту локальных войн и учений ВВС стран НАТО авиа-
цией противника могут быть применены следующие основные спо-
собы преодоления противовоздушной обороны:
уничтожение и подавление средств ПВО путем нанесения по
ним ударов самолетами из состава первого эшелона боевого пост-
роения авиации или специально выделенными самолетами;
использование авиацией противника малых и предельно малых
высот полета в зонах разведки и поражения средств ПВО;
создание больших плотностей налета на отдельных направле-
ниях действий авиации, значительно превышающих возможности
системы управления и зенитных средств;
применение различных мер противодействия средствам ПВО
(радиоэлектронное подавление, маневр против управления и
стрельбы);
10
Окончание табл. 1.3
Круговое вероятное отклонение, м2 Эффективная отражающая поверхность, Носители Система наведения
ционные ракеты
9 0,1—1,0 F-4C(D, Е); F-lll, А-7Е Пассивная (радиолока- ционная)
9 0,1—1,4 F-4E, А-10А То же
9 0,1—1,2 В-52Н, FB-111 Автономная программа
9 0,1—1,0 F-4E, А-10А Пассивная (радиолока-
ционная)
выбор оптимального маршрута полета и выгодного построения
средств воздушного нападения по фронту и глубине с учетом
разведанной группировки средств ПВО и их боевых возмож-
ностей.
Способы атаки авиацией противника наземных целей определя-
ются характером применяемых средств поражения, возможностя-
ми прицельных систем, метеоусловиями и степенью прикрытия объ-
ектов удара средствами ПВО.
Удары по наземным целям могут наноситься с горизонтального
полета, с пикирования и кабрирования.
Атака наземной цели начинается с занятия самолетом исход-
ного положения и включает:
маневр для выхода в точку начала прицеливания;
прицеливание;
применение средств поражения (огонь);
выход из атаки.
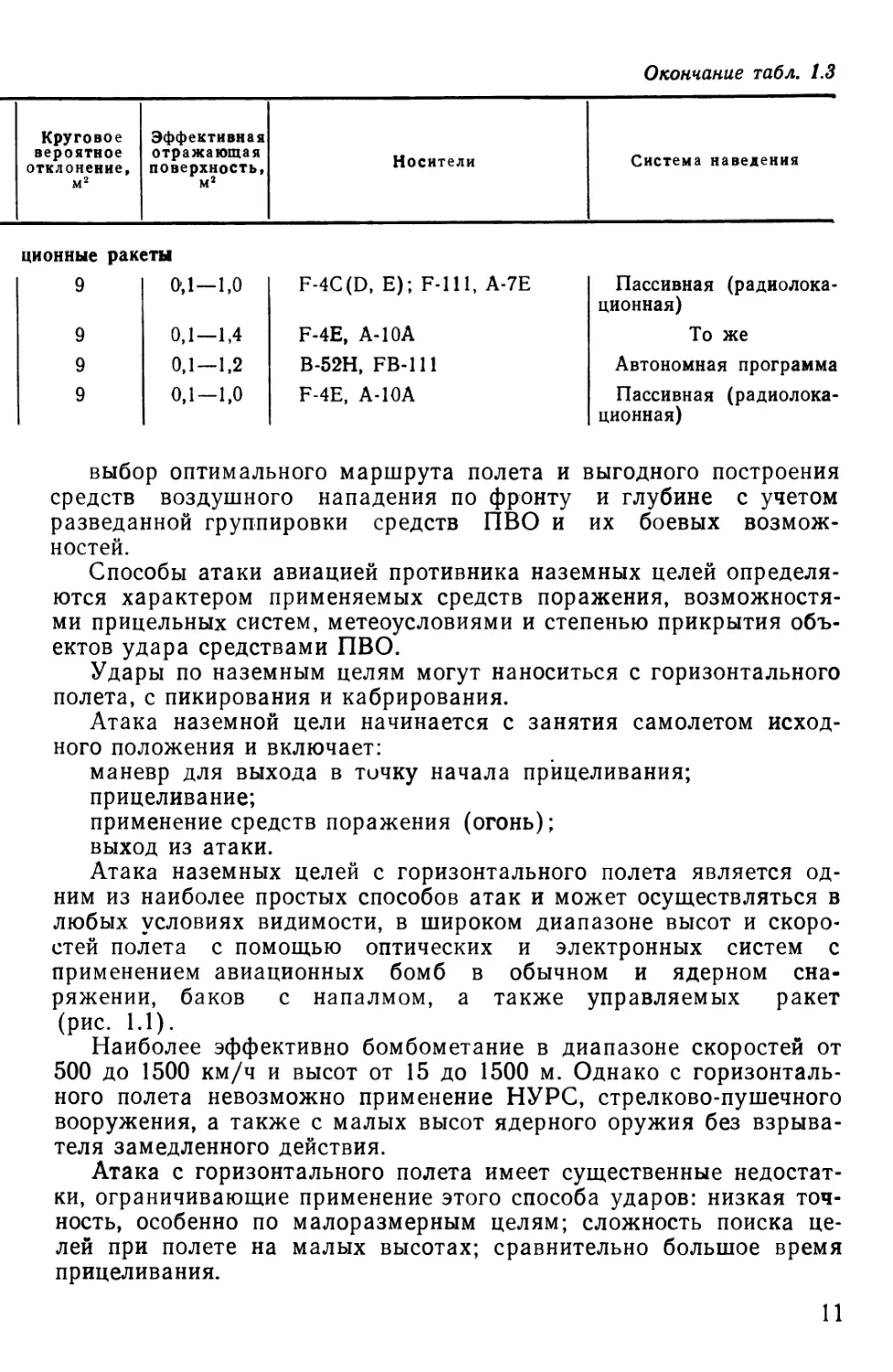
Атака наземных целей с горизонтального полета является од-
ним из наиболее простых способов атак и может осуществляться в
любых условиях видимости, в широком диапазоне высот и скоро-
стей полета с помощью оптических и электронных систем с
применением авиационных бомб в обычном и ядерном сна-
ряжении, баков с напалмом, а также управляемых ракет
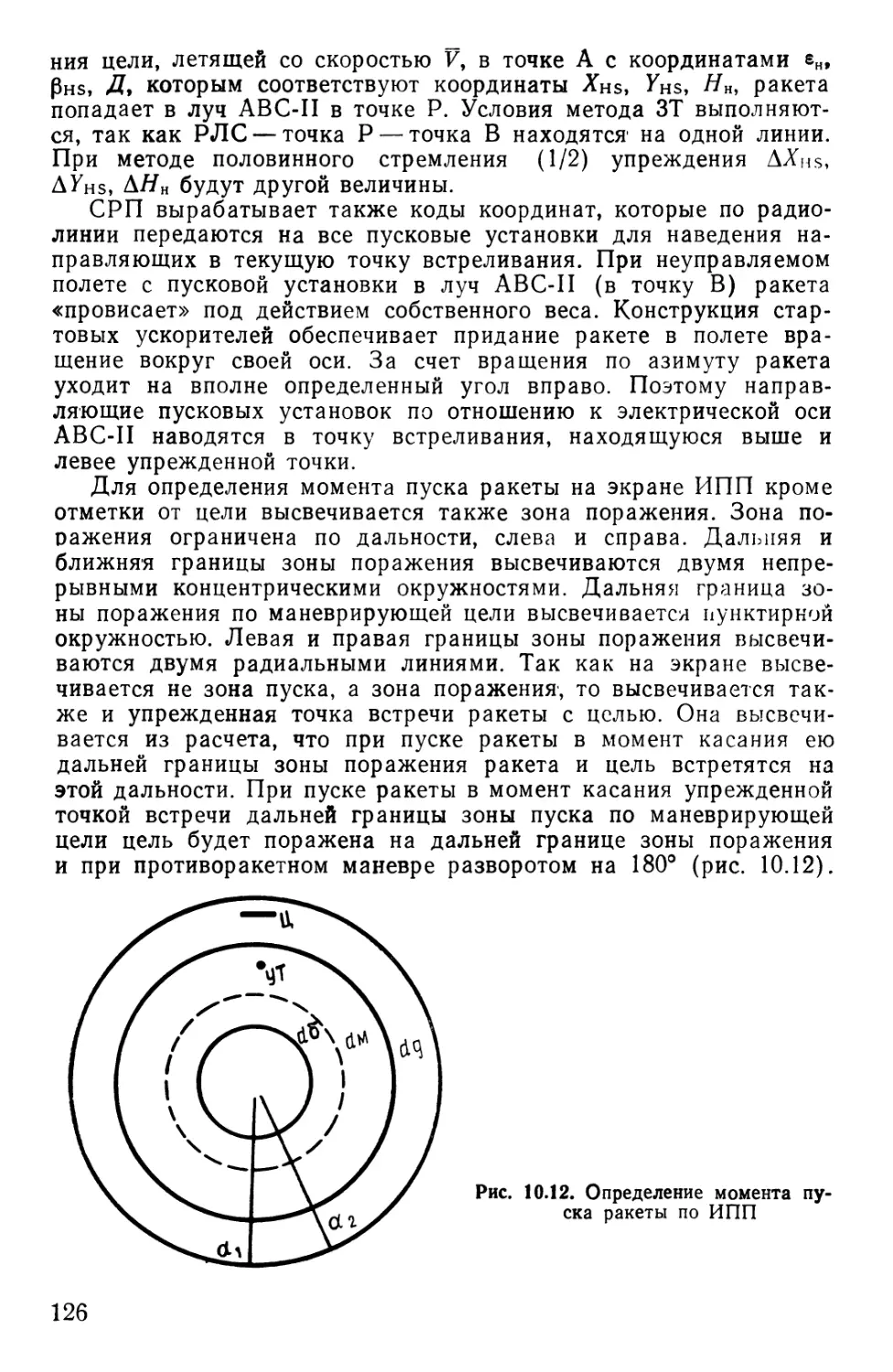
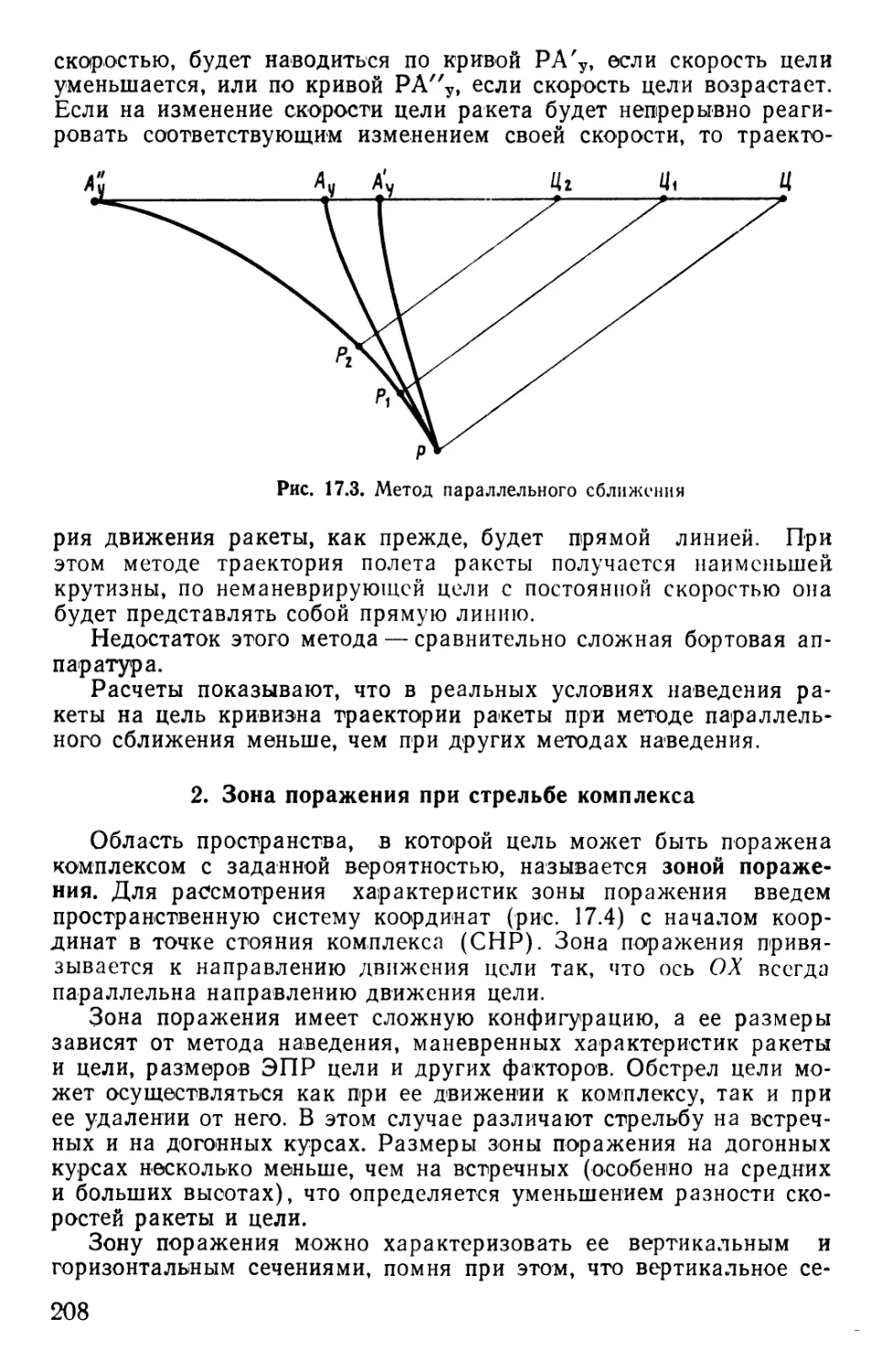
(рис. 1.1).
Наиболее эффективно бомбометание в диапазоне скоростей от
500 до 1500 км/ч и высот от 15 до 1500 м. Однако с горизонталь-
ного полета невозможно применение НУРС, стрелково-пушечного
вооружения, а также с малых высот ядерного оружия без взрыва-
теля замедленного действия.
Атака с горизонтального полета имеет существенные недостат-
ки, ограничивающие применение этого способа ударов: низкая точ-
ность, особенно по малоразмерным целям; сложность поиска це-
лей при полете на малых высотах; сравнительно большое время
прицеливания.
11
Уход
Маневр, выход в район цели
Прицеливав
ние боевой
курс
V, H.Ji-consl
Хцель
'7// W /// /7/ 77/ 777 ////// 7// ////// ///
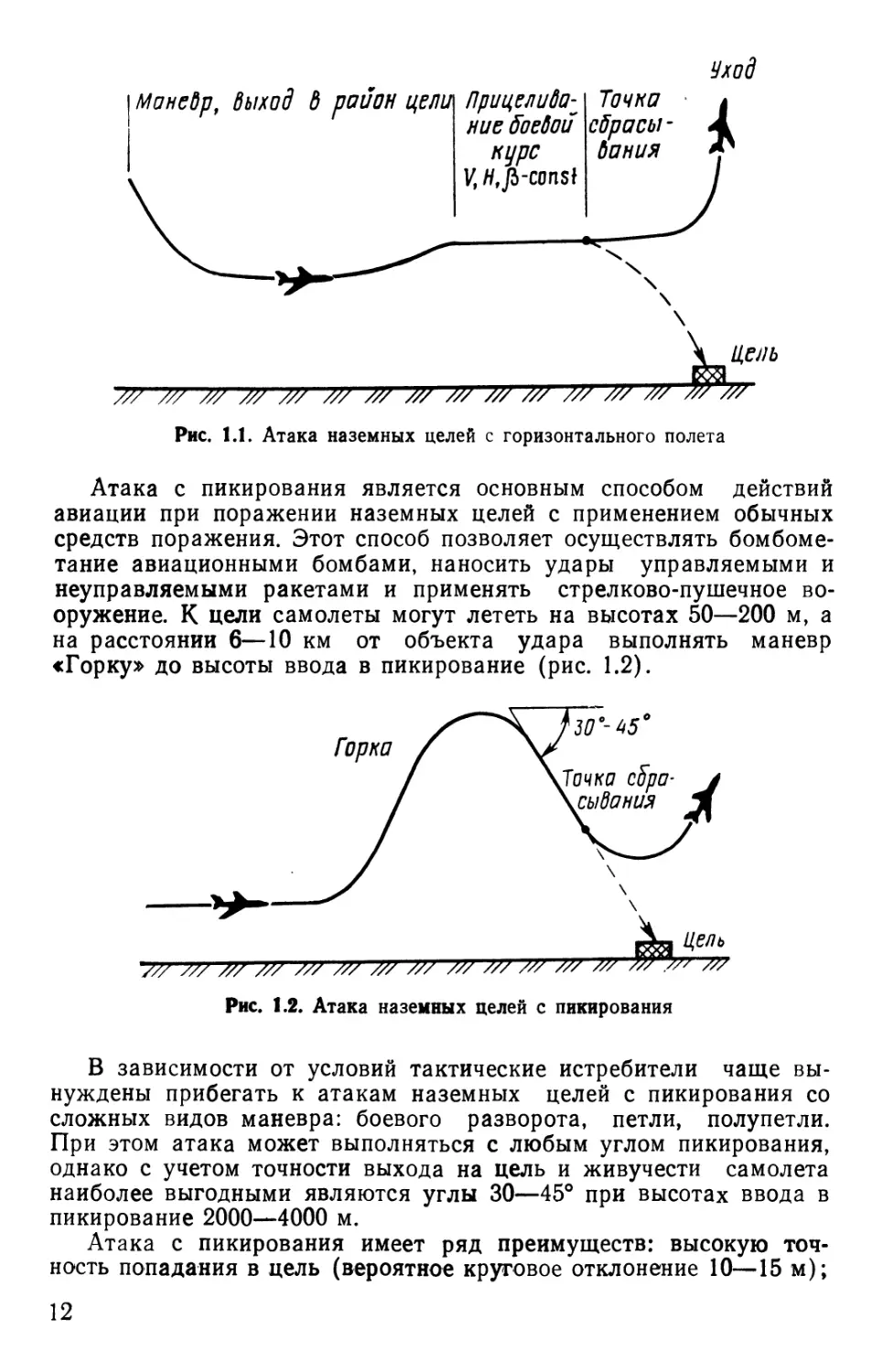
Рис. 1.1. Атака наземных целей с горизонтального полета
Атака с пикирования является основным способом действий
авиации при поражении наземных целей с применением обычных
средств поражения. Этот способ позволяет осуществлять бомбоме-
тание авиационными бомбами, наносить удары управляемыми и
неуправляемыми ракетами и применять стрелково-пушечное во-
оружение. К цели самолеты могут лететь на высотах 50—200 м, а
на расстоянии 6—10 км от объекта удара выполнять маневр
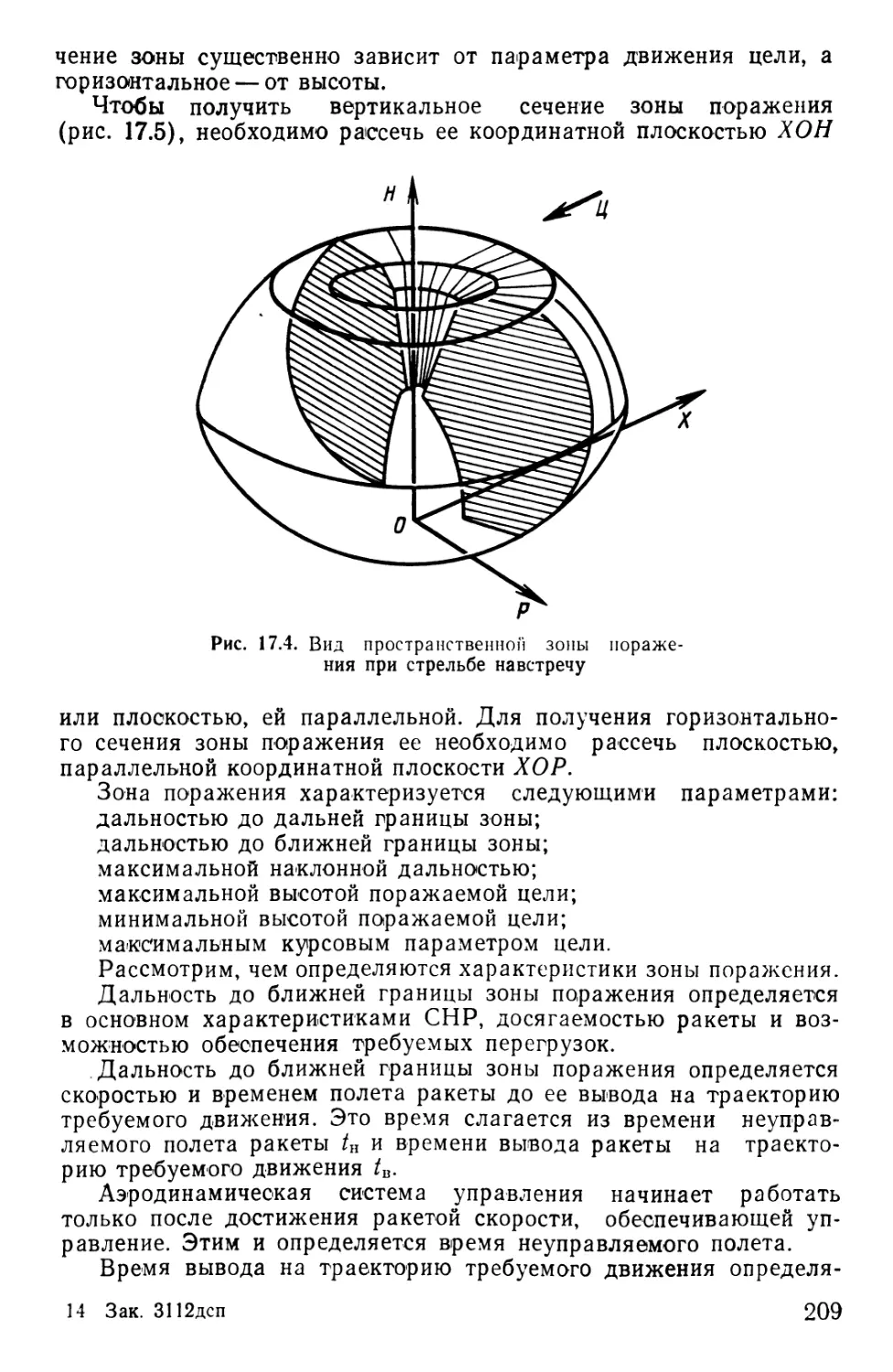
«Горку» до высоты ввода в пикирование (рис. 1.2).
Рис. 1.2. Атака наземных целей с пикирования
В зависимости от условий тактические истребители чаще вы-
нуждены прибегать к атакам наземных целей с пикирования со
сложных видов маневра: боевого разворота, петли, полупетли.
При этом атака может выполняться с любым углом пикирования,
однако с учетом точности выхода на цель и живучести самолета
наиболее выгодными являются углы 30—45° при высотах ввода в
пикирование 2000—4000 м.
Атака с пикирования имеет ряд преимуществ: высокую точ-
ность попадания в цель (вероятное круговое отклонение 10—15 м);
12
возможность применения в одной атаке нескольких видов оружия;
уменьшение вероятности поражения самолета средствами ПВО;
морально-психологическое воздействие на противника.
Основными недостатками атаки с пикирования являются необ-
ходимость визуальной видимости объекта и невозможность одно-
временной атаки группой самолетов.
Атака с кабрирования на малых высотах является одним из ос-
новных способов атаки при применении ядерных бомб. При кабри-
ровании самолет с помощью специального прицела выполняет
сложный вид маневра, обеспечивающий безопасность самолета и
экипажа при взрыве бомб. Различают три способа атаки с кабри-
рования, фиксируемые тремя углами бросания: 45—60, 90° (из по-
ложения вертикального набора высоты) и 110° (бомбометание
«через плечо» (рис. 1.3). Ввиду недостаточной точности бомбоме-
тания применение обычных бомб этим способом атаки неэффек-
тивно и может осуществляться при действиях по крупным (пло-
щадным) целям.
Для нанесения ударов по войскам в современном общевойско-
вом бою противник будет широко применять армейскую авиацию.
Вертолеты огневой поддержки (ВОП) могут применяться для
действий по передовым частям и подразделениям наших войск, в
первую очередь для уничтожения танков, боевых машин пехоты,
средств ПВО. Удары могут наноситься, как правило, из-за линии
фронта с дальностей 3—8 км при подъеме на высоту 50—100 м на
время 35—50 с.
13
Основными способами боевых действий вертолетов считаются
действия по заранее намеченному плану, по вызову, из засад и са-
мостоятельный поиск.
Для действий по объектам боевые вертолеты могут применять
различные способы атак, наиболее эффективными из которых сле-
дует считать атаку с горизонтального полета и атаку из состояния
зависания.
Наиболее целесообразным считается применение вертолетов в
составе боевых вертолетных групп, которые могут включать два —
семь ВОП и один — три разведывательных вертолета.
В последнее время для борьбы с бронированными целями нахо-
дят широкое применение смешанные самолетно-вертолетные груп-
пы, которые, как правило, включают четыре А— 10А, пять ВОП и
четыре разведывательных вертолета.
Крылатые ракеты предполагается применять массированно на
узких направлениях в целях создания большой плотности налета
для снижения эффективности системы ПВО. Полет крылатых ра-
кет может происходить на предельно малых высотах по ломаным
маршрутам с изменением курса на 90°.
При боевом использовании средств воздушного нападения пре-
дусматривается использование в широком масштабе средств ра-
диопротиводействия. Степень воздействия помех на радиолокаци-
онные станции зависит от способов их создания, характера и ин-
тенсивности источника помех, взаимного расположения источника
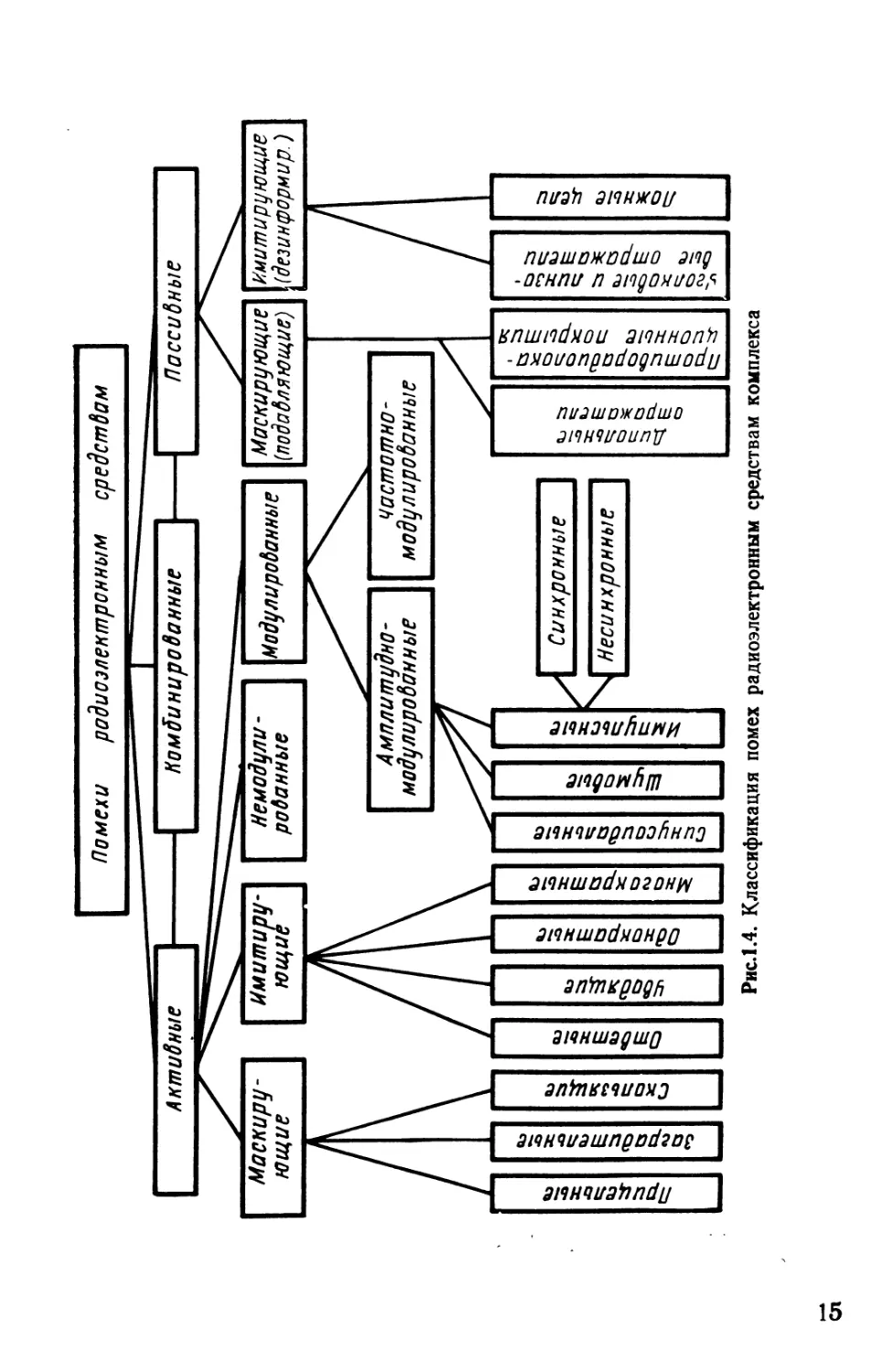
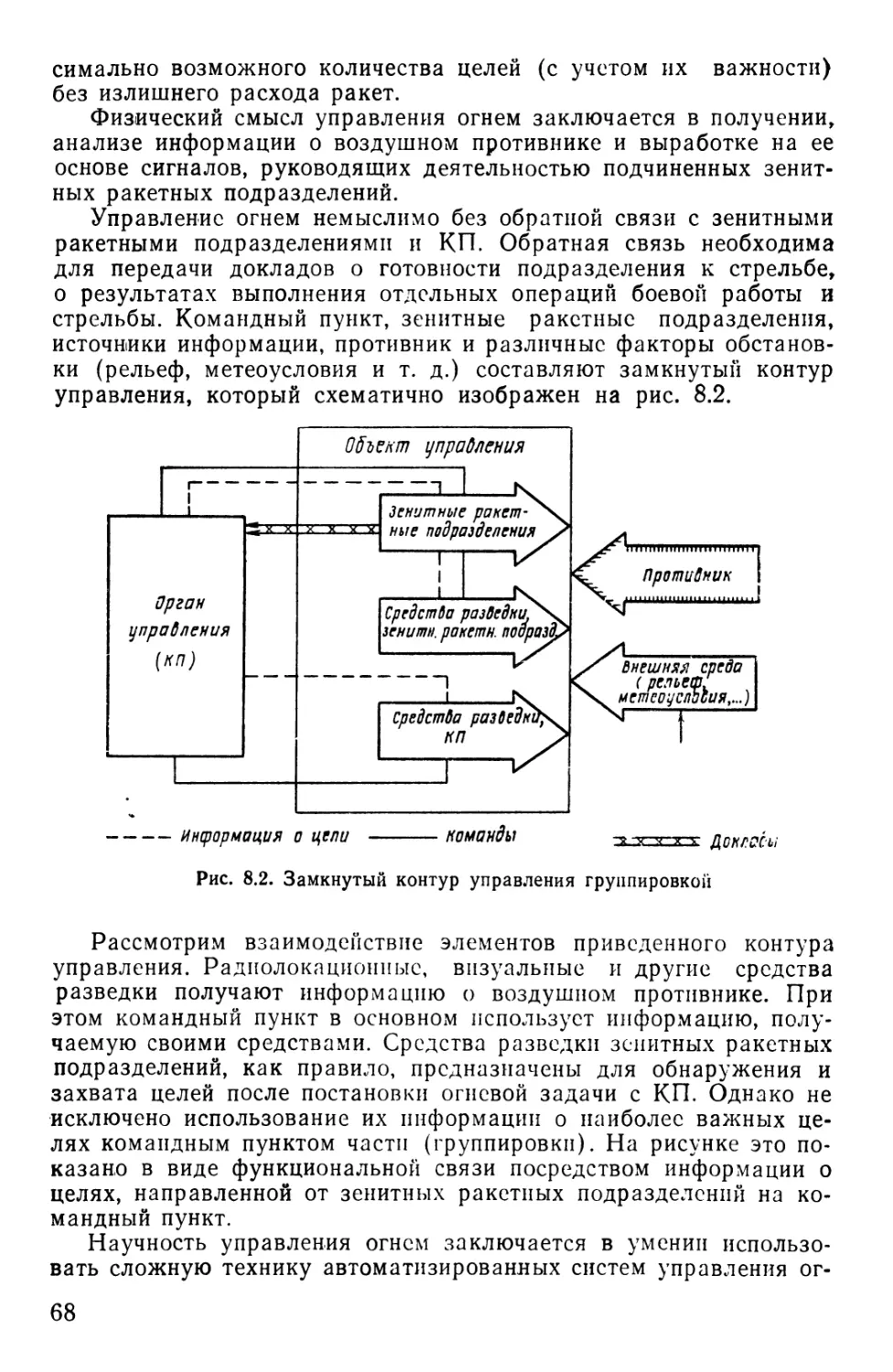
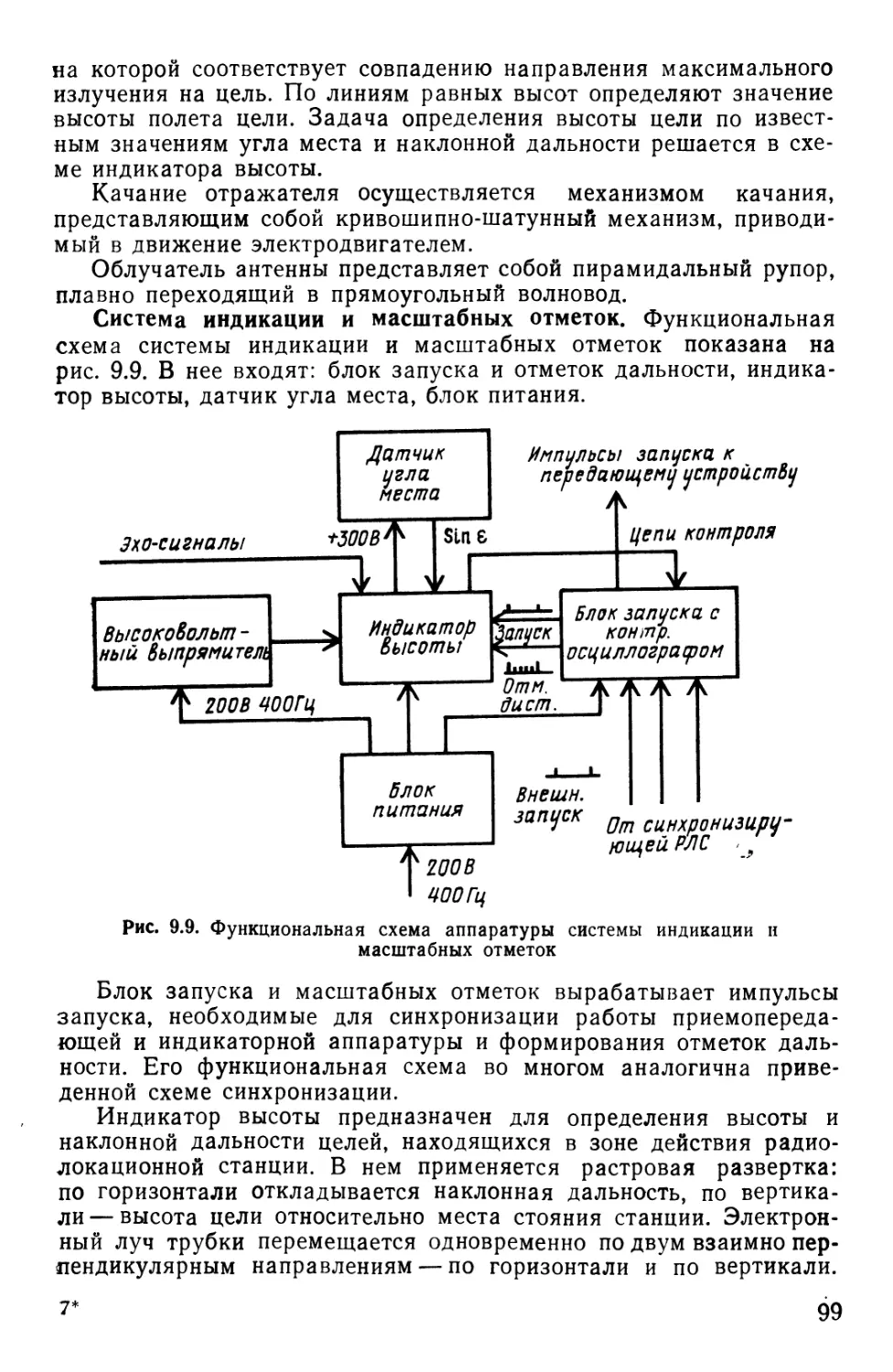
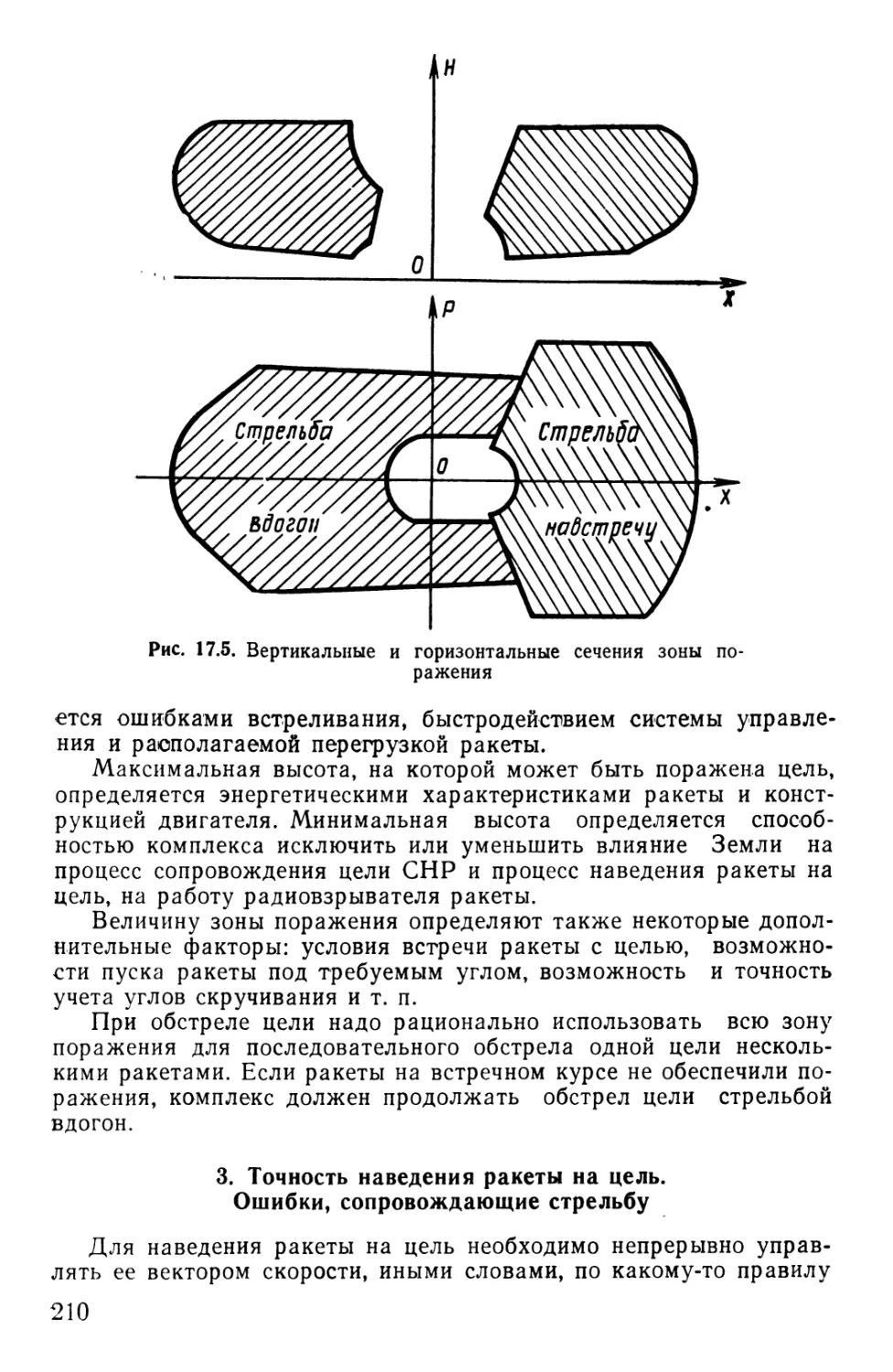
помех и подавляемой им станции. На рис. 1.4 приведена класси-
фикация помех радиоэлектронным средствам комплекса.
Как видно из приведенного рисунка, радиолокационные по-
мехи подразделяются на активные, пассивные и комбиниро-
ванные.
Активные помехи создаются с помощью специальных передат-
чиков помех, излучающих электромагнитную энергию, восприни-
маемую приемными устройствами подавляемого радиолокацион-
ного средства.
Сигнал маскирующей (подавляющей) помехи за-
крывает на экране индикатора РЛС отметку от цели, в результа-
те чего оператор не может определить координаты целей и па-
раметры их движения или определяет их с большими ошиб-
ками.
При воздействии имитирующих помех на экране инди-
катора наряду с отметками от реальных целей возникают ложные
отметки, которые создают у оператора неверное представление о
воздушной обстановке.
По характеру излучения активные помехи могут быть немоду-
лированные и модулированные.
Немодулированные помехи создаются передатчиками,
которые непрерывно излучают незатухающие колебания.
Модулированные помехи создаются передатчиками,
сигналы которых могут модулироваться по амплитуде или частоте.
14
Помехи радиоэлектронным средствам
Сп
Активные |.
^^^омЛын/роданны^^^
Маскиру-
ющие
Амплитудно-
модулированные
Не модули-
рованные
=3
е
5
ts
5
S3
Пассивные
Модулированные Маскирующие имитирующие
“ Mfjvvun к. (ппопПляюшии} прзишпопмип )
(подавляющие) (дезинформир.)
частотно-
модулированные
Синхронные
сз
=3 *
Рис.1.4. Классификация помех радиоэлектронным средствам комплекса
I
8
ь 5
Пассивные помехи — помехи, получаемые путем отражения ра-
диоволн от специальных дипольных отражателей или сред различ-
ного характера. На экранах радиолокационных станций пассивные
помехи создают засветы, конфигурация которых зависит от прост-
ранства, заполненного этими отражателями.
Комбинированные помехи создаются одновременным действи-
ем активных и пассивных помех.
Для прикрытия самолетов активными помехами применяются
различные способы защиты:
коллективный — когда специальные постановщики помех
из зон барражирования, расположенных вне зоны досягаемости
зенитных управляемых ракет, прикрывают помехами весь боевой
порядок авиации;
групповой — когда постановка помех осуществляется не-
сколькими самолетами РЭБ непосредственно из боевых порядков
ударных групп в целях скрытия замысла удара;
индивидуальный — когда постановка помех осуществляет-
ся с самолета для самозащиты.
Комплексом средств РЭБ индивидуальной защиты оснащается
каждый современный ударный самолет тактической (палубной)
авиации.
Пассивные помехи для создания засветки экранов индикато-
ров применяются, как правило, за 10—20 мин до подхода ударных
групп к зоне огня средств ПВО. Группа из четырех самолетов мо-
жет создать помехи в полосе шириной до 3 км и длиной 7 км.
В зависимости от размеров дипольных отражателей и метеоусло-
вий облако пассивных помех может держаться в воздухе от
40 мин до 5 ч и более.
Основным способом боевого применения противорадиолокаци-
онных ракет (ПРР) является их пуск по заранее разведанным и
назначенным для уничтожения РЛС, как правило, вне зоны дей-
ствия зенитных ракетных комплексов.
Для поражения радиоэлектронных средств войск ПВО против-
ника в ВВС США разработана принципиально новая автоматизи-
рованная разведывательно-ударная система ПЛСС. Она обеспечи-
вает распознавание, определение местоположения наземных РЛС
и наведения на них самолетов и оружия различных классов от
управляемых авиационных бомб до крылатых ракет. Точность на-
ведения оружия будет составлять 30—50 м, время от перехвата
излучений радиоэлектронных средств до определения их местопо-
ложения— 30 с, а до выработки команды на наведение оружия —
1—2 мин.
Систему ПЛСС планируется использовать совместно с подраз-
делениями самолетов «Уайлд-Уизл» F-4G(E), предназначенных
для огневого подавления РЛС ПВО противника. При этом (как
вариант) удар будет наноситься комбинированно двумя самоле-
тами: один — противорадиолокационными ракетами; другой —
бомбами.
16
Глава II
ОРГАНИЗАЦИЯ И ВЕДЕНИЕ РАЗВЕДКИ
ВОЗДУШНОГО ПРОТИВНИКА
1. Радиолокационная разведка воздушного противника
Радиолокационная разведка является основным видом развед-
ки воздушного противника в процессе ведения боевых действий
частями и подразделениями войск ПВО Сухопутных войск.
Основными задачами разведки являются:
своевременное обнаружение, определение координат, состава,
характеристик воздушных целей и непрерывное наблюдение за их
действиями;
обеспечение целеуказания огневым подразделениям (еди-
ницам);
опознавание своих самолетов (вертолетов) и наблюдение за
их полетами;
наблюдение за результатами стрельбы;
изучение средств воздушного нападения противника, тактиче-
ских приемов их действий, характера и интенсивности применяе-
мых помех;
взаимный обмен информацией о воздушной обстановке с при-
крываемыми войсками и взаимодействующими частями.
Радиолокационная разведка воздушного противника в подраз-
делении ведется расчетами радиолокационных станций.
Выполнение задач разведки достигается:
выбором позиций для радиолокационных станций, обеспечива-
ющих обнаружение воздушной цели на максимальных дально-
стях;
назначением ответственного сектора разведки;
составлением схемы местных предметов, наблюдаемых на эк-
ранах индикаторов радиолокационной станции;
получением данных о воздушной обстановке от средств развед-
ки старшего начальника;
поддержанием радиолокационной станции и аппаратуры опоз-
навания в технически исправном состоянии;
ведением непрерывного наблюдения за противником, своими
войсками, авиацией.
Воздушного противника необходимо обнаруживать на таких
дальностях, которые обеспечивали бы своевременную оценку воз-
душной обстановки, принятие решения, постановку и выполнение
огневой задачи.
Требуемая дальность обнаружения воздушных целей для обес-
печения централизованного управления огнем и своевременного
целераспределения может быть рассчитана по формуле
= А)е + ц^кп + V ц^бкп»
где Dp — требуемая дальность разведки воздушных целей;
2 Зак. 3112дсп 17
Doe — требуемая дальность до рубежа постановки задачи огне-
вой единице (огневому подразделению);
1/ц — скорость воздушной цели;
/кп— работное время командного пункта части;
/бкп—работное время батарейного командирского пункта.
Боевое дежурство станций организуется по графику. Радиоло-
кационные станции ведут, как правило, круговой поиск воздушных
целей. В сложной воздушной обстановке могут назначаться ответ-
ственные секторы с перекрытием границ секторов соседних
станций.
При проводке целей на фоне местных предметов огромное зна-
чение имеет тренированность операторов и их способность выде-
лять цели на фоне посторонних отметок.
Особое внимание при выборе позиций уделяется обеспечению
максимальных дальностей обнаружения воздушных целей, исклю-
чению взаимных помех и помех от местных предметов.
Наилучшими позициями для радиолокационных станций явля-
ются ровные площадки, расположенные на высотах с нулевым и
отрицательными углами закрытия, не имеющие высоких местных
предметов в радиусе до нескольких сотен метров.
Для защиты от воздействия помех и самонаводящегося оружия
указывается порядок работы станции на излучение, использования
аппаратуры защиты от помех, применения различных режимов ра-
боты станции и телевизионно-оптического визира.
Защита от самонаводящегося оружия обеспечивается высокой
специальной и морально-психологической подготовкой расчетов
радиолокационных станций и достигается предельным сокращени-
ем времени работы на излучение, своевременным обнаружением
пуска самонаводящихся снарядов и уничтожением самолетов-носи-
телей, применением штатных мер защиты в сочетании с перестрой-
кой частоты и сопровождением цели с помощью телевизионно-оп-
тических визиров.
Важнейшей составной частью разведки воздушного противника
является обеспечение целеуказания. Информация о воздушной об-
становке передается с помощью автоматизированной системы уп-
равления огнем, а также по радио- или проводным средствам свя-
зи. В некоторых случаях может применяться и смешанная схема
управления: до БКП огневого подразделения — автоматизирован-
ная система, далее — неавтоматизированная.
Передача и прием информации о воздушном противнике и сво-
ей авиации производятся по квадратам сетки целеуказания (ПВО),
по угловым координатам и дальности цели, по ориентирным на-
правлениям (странам света).
Сетка целеуказания наносится на индикаторах поиска и пуска
(кругового обзора).
Опознавание своих самолетов (вертолетов) осуществляется с
помощью наземных радиолокационных запросчиков и визу-
ально. ;
18
2. Визуальная разведка и ее организация в подразделениях
Визуальное наблюдение в частях и подразделениях организу-
ется для разведки воздушного противника во всех видах боевых
действий в целях: предупреждения личного состава о воздушной
опасности при появлении самолетов и вертолетов противника в
районах расположения подразделений; визуального опознавания
самолетов и вертолетов, пролетающих через районы расположения
подразделений; изучения характера и способов действий воздуш-
ного противника; уточнения результатов пусков ракет; определе-
ния мест и характера ядерных взрывов, а также направления расп-
ространения радиоактивных облаков; оповещения командиров о
выброске (высадке) воздушного десанта в районах расположения
подразделений.
Важное значение имеет визуальное наблюдение за действиями
низколетящих целей (особенно вертолетов), которые, используя
складки местности, небольшие лесные массивы, а также местные
предметы, могут скрытно подойти к объектам атаки.
В боевой обстановке на дальность визуального обнаружения
оказывает влияние состояние атмосферы в приземном слое возду-
ха (задымленность в результате пожаров, наличие пыли от взры-
вов снарядов и движущейся боевой техники, а также туман, дождь
и другие атмосферные явления).
Визуальная разведка ведется с помощью оптических приборов
и невооруженным глазом разведчиками-наблюдателями на команд-
ных (батарейных командирских) пунктах, стартовых и техничес-
ких позициях, а также в районах расположения тыловых подраз-
делений.
Для ведения визуальной разведки выставляется пост воздуш-
ного наблюдения.
Посты воздушного наблюдения оборудуются в инженерном от-
ношении и обеспечиваются приборами наблюдения (биноклями,
ТЗК), а иногда переносным радиопеленгатором и наземным ра-
диолокационным запросчиком, указателями ориентирных направ-
лений, компасом, часами, сигнальными средствами и средствами
связи, приборами радиационной и химической разведки, альбомом
силуэтов самолетов и вертолетов, журналом разведки поста воз-
душного наблюдения. Место расположения поста должно обеспе-
чивать круговое наблюдение за воздушным пространством и мест-
ностью.
Задачу посту воздушного наблюдения (наблюдателю) ставит
командир отделения управления. При постановке задачи он ука-
зывает состав наблюдательного поста, сектор наблюдения, поря-
док наблюдения и доклада.
В состав поста, как правило, назначаются два-три разведчика,
один из которых является старшим. Старший поста воздушного
наблюдения обязан: установить очередность наблюдения; органи-
зовать развертывание поста и его маскировку; проверить наличие
и исправность приборов наблюдения, средств связи и сигнализа-
2* 19
ции; вести запись результатов наблюдения, своевременно докла-
дывать о результатах наблюдения.
Наблюдателю указываются сектор наблюдения, порядок наб-
людения и доклада. Секторы наблюдения назначаются с таким
расчетом, чтобы обеспечить круговой обзор воздушного простран-
ства и перекрытие границ соседних секторов.
Количество наблюдателей зависит от воздушной обстановки.
В обычных условиях назначается один наблюдатель. При объяв-
лении готовности № 1 наблюдение ведут все разведчики.
Дальность обнаружения воздушных целей существенно зави-
сит от размеров сектора наблюдения. Так, при секторе наблюде-
ния 60—90° средняя дальность обнаружения составляет 2—3 км,
при секторе 30° достигает б—7 км. Наиболее благоприятные усло-
вия для обнаружения цели создаются при наблюдении в секторе
30—45°.
Наблюдатель ведет разведку путем последовательного обзора
воздушного пространства по секторам и полосам. Он обязан сво-
евременно обнаруживать воздушные цели в назначенном секторе,
особенно цели, действующие на предельно малых и малых высо-
тах. Наблюдение начинается с детального изучения местности,
уточнения сектора наблюдения, ориентиров и ведется непрерывно.
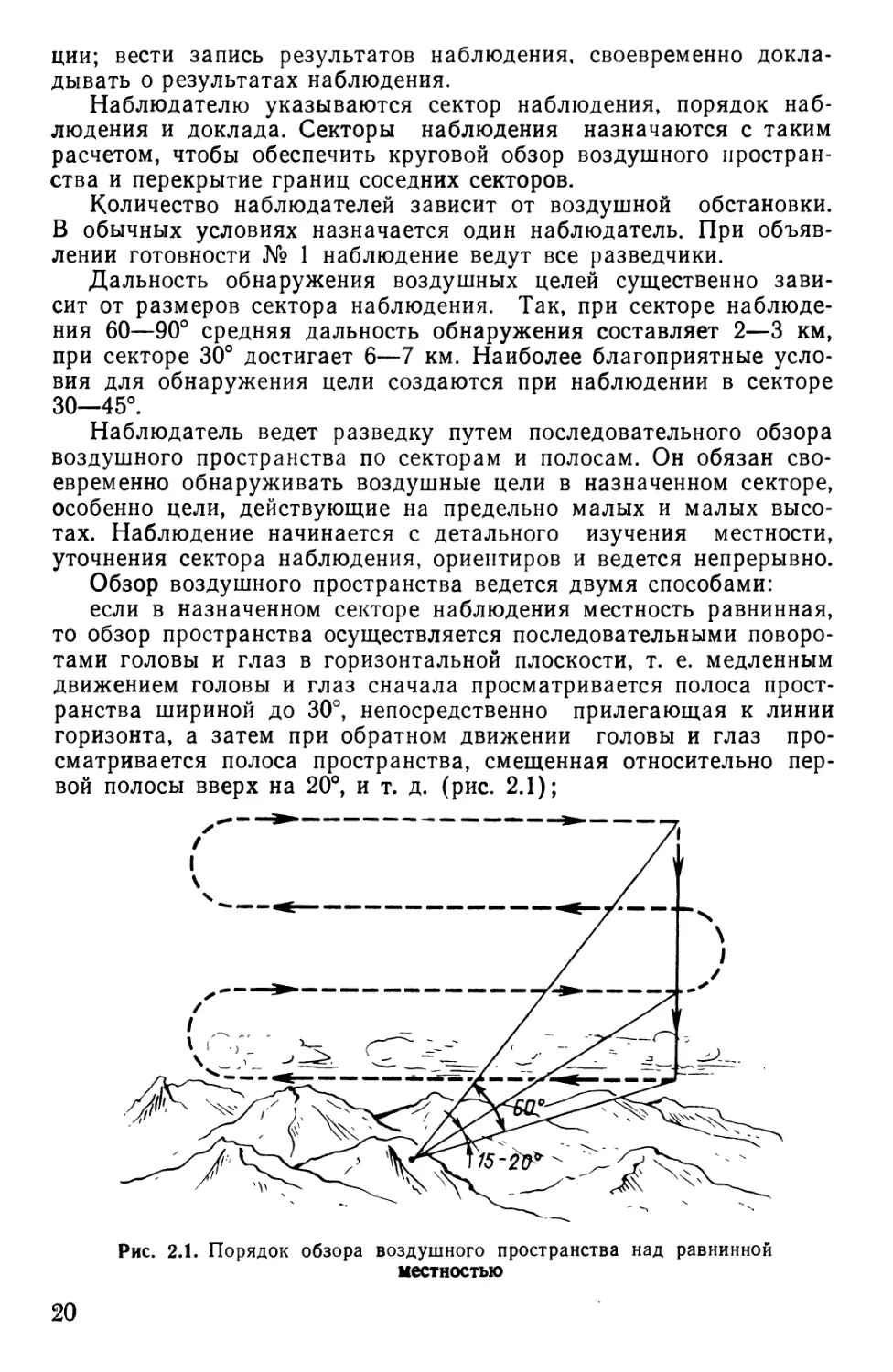
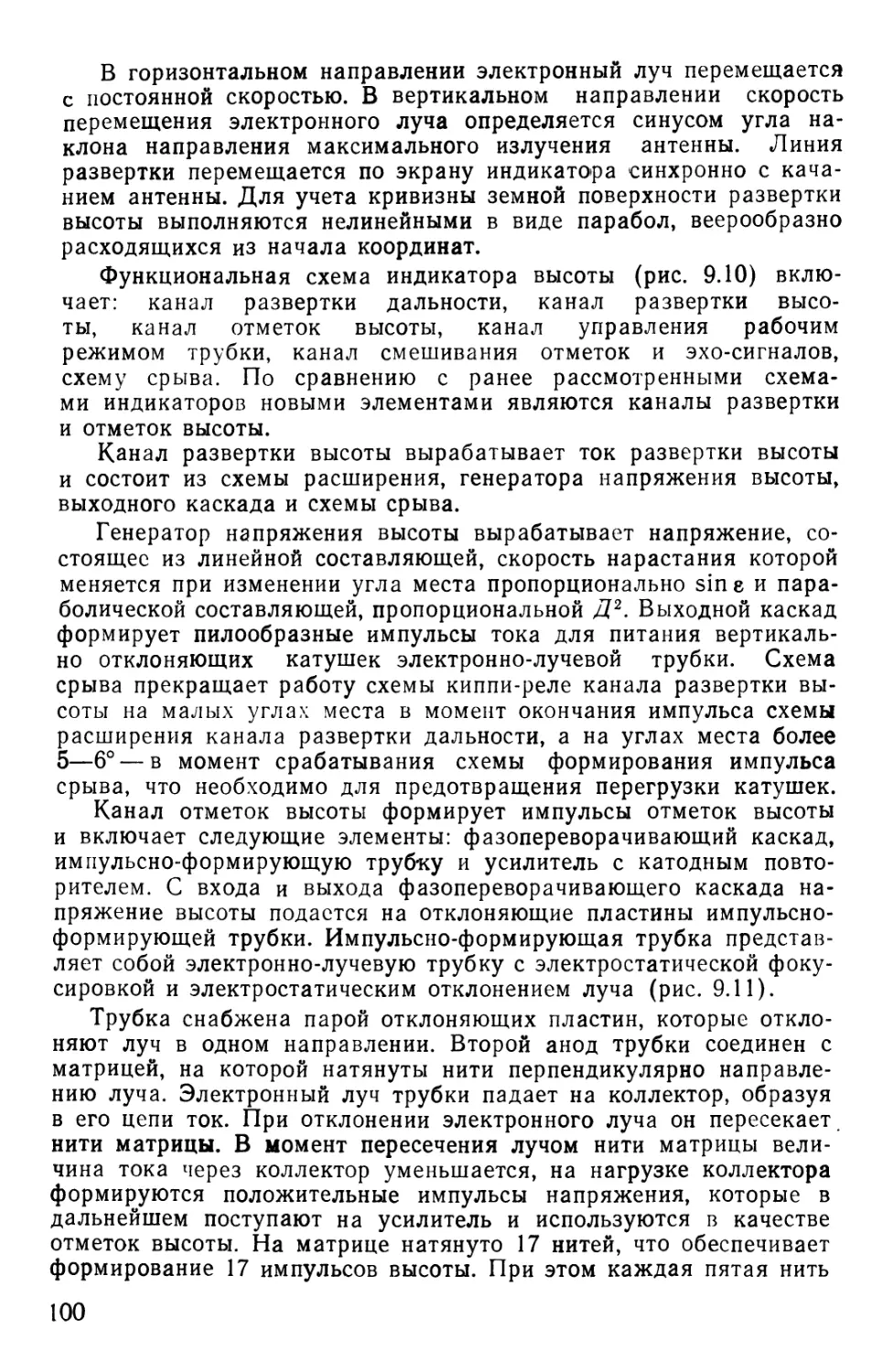
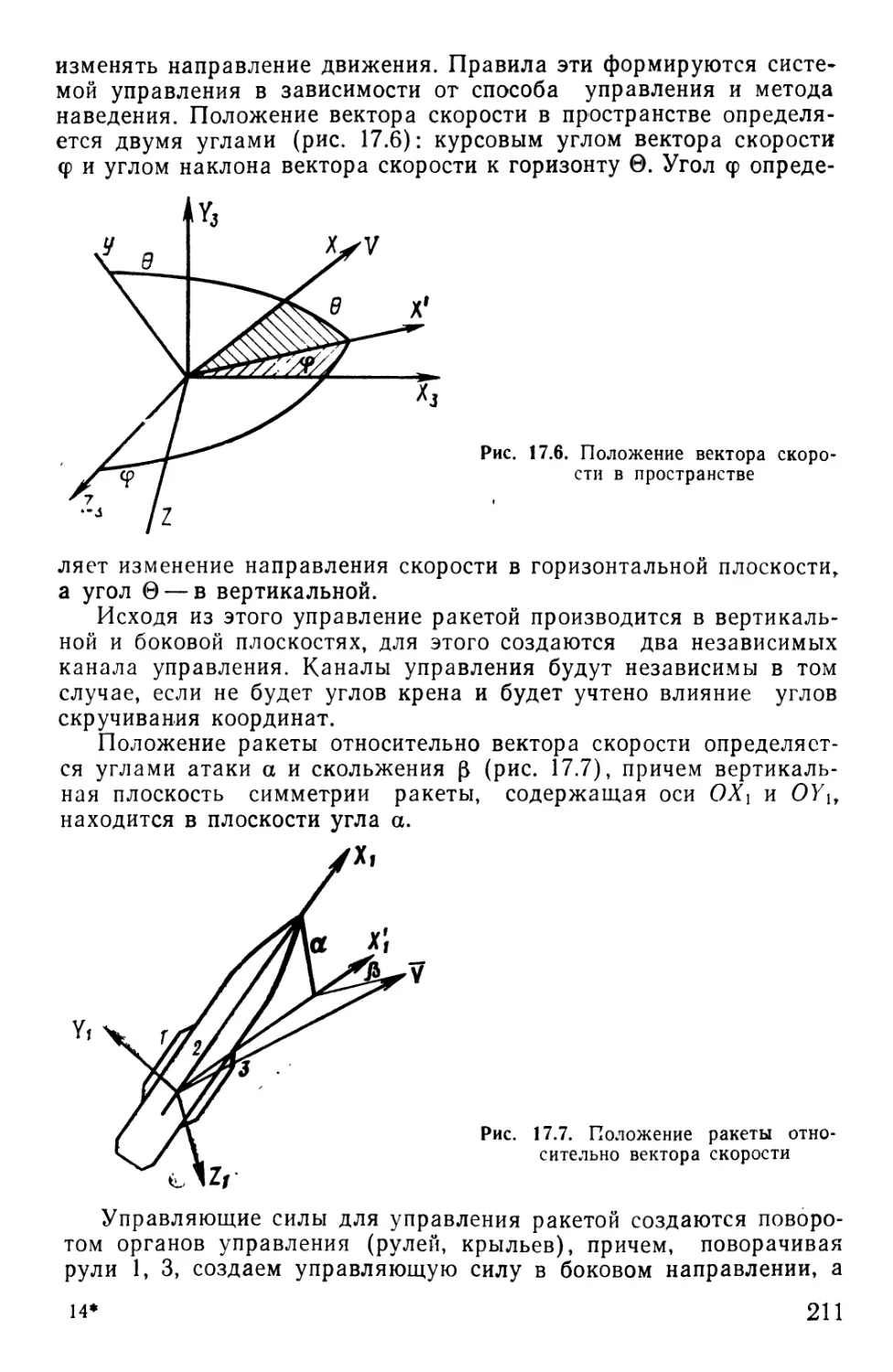
Обзор воздушного пространства ведется двумя способами:
если в назначенном секторе наблюдения местность равнинная,
то обзор пространства осуществляется последовательными поворо-
тами головы и глаз в горизонтальной плоскости, т. е. медленным
движением головы и глаз сначала просматривается полоса прост-
ранства шириной до 30°, непосредственно прилегающая к линии
горизонта, а затем при обратном движении головы и глаз про-
сматривается полоса пространства, смещенная относительно пер-
вой полосы вверх на 20°, и т. д. (рис. 2.1);
Рис. 2.1. Порядок обзора воздушного пространства над равнинной
местностью
20
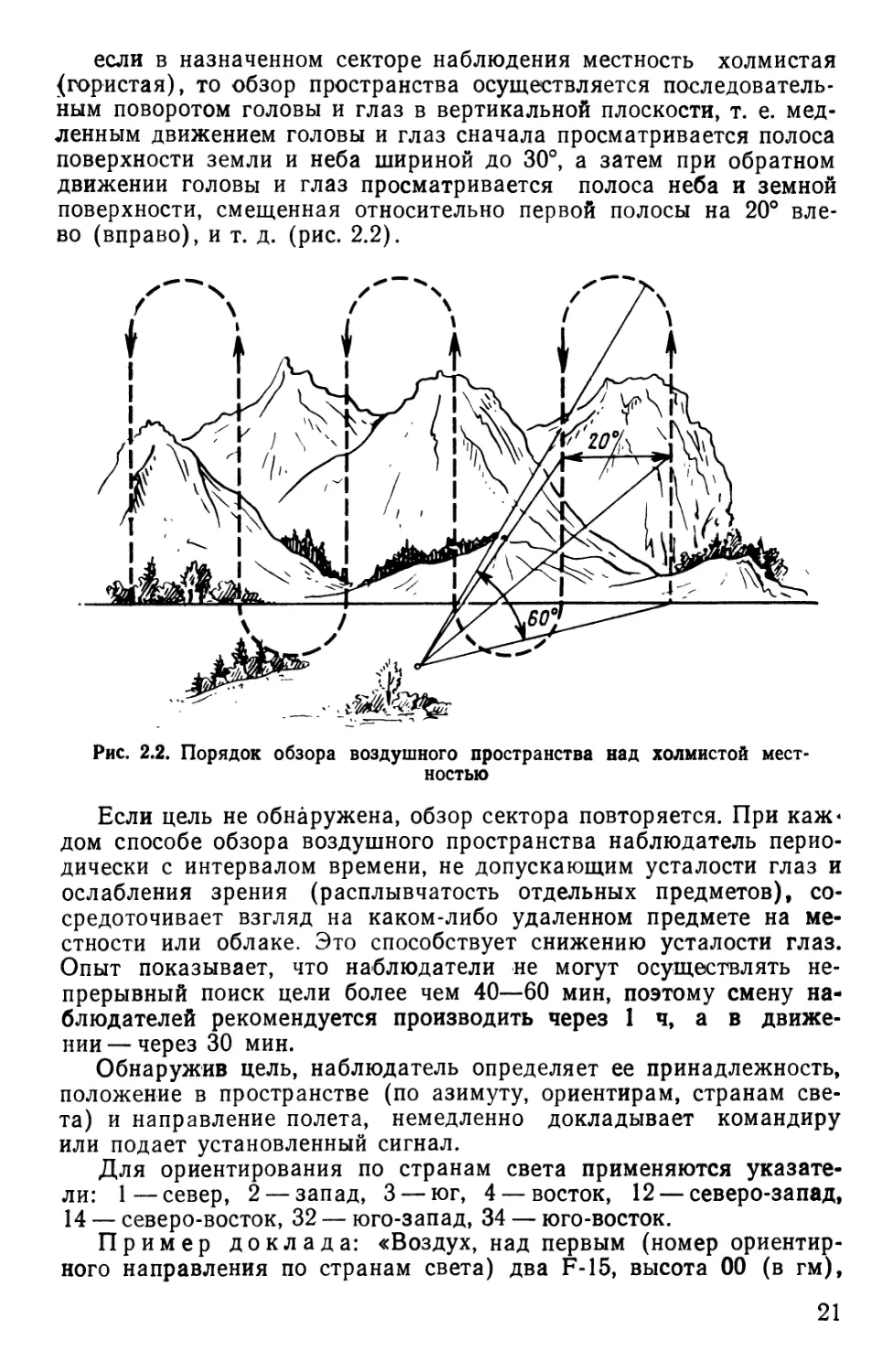
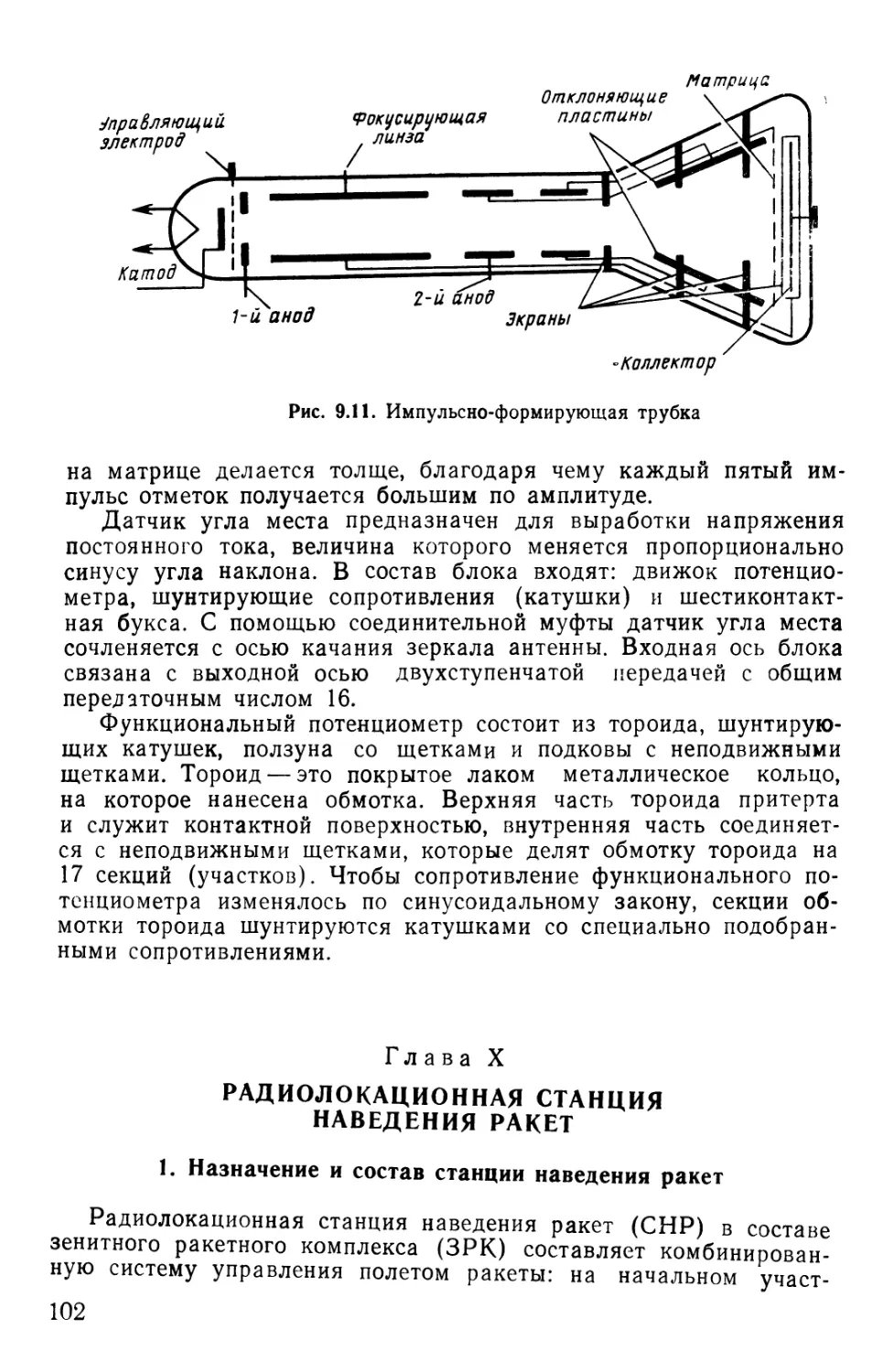
если в назначенном секторе наблюдения местность холмистая
{гористая), то обзор пространства осуществляется последователь-
ным поворотом головы и глаз в вертикальной плоскости, т. е. мед-
ленным движением головы и глаз сначала просматривается полоса
поверхности земли и неба шириной до 30°, а затем при обратном
движении головы и глаз просматривается полоса неба и земной
поверхности, смещенная относительно первой полосы на 20° вле-
во (вправо), и т. д. (рис. 2.2).
Рис. 2.2. Порядок обзора воздушного пространства над холмистой мест-
ностью
Если цель не обнаружена, обзор сектора повторяется. При каж-
дом способе обзора воздушного пространства наблюдатель перио-
дически с интервалом времени, не допускающим усталости глаз и
ослабления зрения (расплывчатость отдельных предметов), со-
средоточивает взгляд на каком-либо удаленном предмете на ме-
стности или облаке. Это способствует снижению усталости глаз.
Опыт показывает, что наблюдатели не могут осуществлять не-
прерывный поиск цели более чем 40—60 мин, поэтому смену на-
блюдателей рекомендуется производить через 1 ч, а в движе-
нии — через 30 мин.
Обнаружив цель, наблюдатель определяет ее принадлежность,
положение в пространстве (по азимуту, ориентирам, странам све-
та) и направление полета, немедленно докладывает командиру
или подает установленный сигнал.
Для ориентирования по странам света применяются указате-
ли: 1—север, 2 — запад, 3 — юг, 4 — восток, 12 — северо-запад,
14 — северо-восток, 32 — юго-запад, 34 — юго-восток.
Пример доклада: «Воздух, над первым (номер ориентир-
ного направления по странам света) два F-15, высота 00 (в гм),
21
дальность 00 (в гм)»; «Воздух, над сорок первым (номер ориенти-
ра на местности) два F-15, высота 00, дальность 00», а о своих са-
молетах— «Свой, над вторым один МиГ-21, высота 00, дальность
00». Кроме того, направление на цель может указываться рукой,
сигнальными флажками, стрельбой трассирующими пулями или
сигнальной ракетой в направлении цели.
Ориентиры на местности выбираются на удалении 2—5 км от
позиции и нумеруются с номера 41, начиная с севера (против хо-
да часовой стрелки).
Глава III
ОСНОВЫ БОЕВОГО ПРИМЕНЕНИЯ
ЗЕНИТНЫХ РАКЕТНЫХ КОМПЛЕКСОВ
1. Назначение и основы боевых действий зенитных ракетных
подразделений в современном бою
Зенитное ракетное оружие относится к ракетному оружию
класса «земля — воздух» и предназначено для уничтожения
средств воздушного нападения противника (тактических ракет,
крылатых ракет, самолетов, вертолетов и других летательных ап-
паратов). Зенитный ракетный комплекс (ЗРК) есть совокупность
зенитных управляемых ракет, систем и устройств, обеспечивающих
подготовку данных для стрельбы, старт, наведение ракет на цель
и поражение цели. В соответствии с этим в состав ЗРК входят:
боевые средства (устройства обнаружения и сопровождения цели,
устройства формирования и передачи команд, пусковые установки
с зенитными управляемыми ракетами); обеспечивающие средства
(средства управления и связи); транспортно-заряжающие машины
(ТЗМ) и др.
В современных ЗРК боевые средства могут размещаться на од-
ной гусеничной или колесной машине, называемой боевой маши-
ной (БМ).
В зависимости от дальности стрельбы ЗРК подразделяются на
ЗРК ближнего действия, малой дальности, средней дальности и
дальнего действия.
Зенитные ракетные подразделения, вооруженные ЗРК различ-
ной дальности стрельбы, выполняют свои задачи в ходе ведения
противовоздушного боя. Противовоздушный бой исключительно
скоротечен, динамичен и решителен. Решение задач противовоз-
душного боя достигается высокой выучкой боевых расчетов, быст-
ротой их действий и умелым использованием боевой мощи своего
оружия. Высокая точность стрельбы, возможность ведения огня с
места, с коротких остановок при любой погоде обеспечивают эф-
фективное поражение воздушного противника и тем самым надеж-
ное прикрытие войск.
22
В зависимости от условий обстановки и решаемых задач зе-
нитные ракетные подразделения могут выполнять свою задачу,
находясь в походных, предбоевых и боевых порядках.
Походный порядок — это построение подразделения для пере-
движения в колонне. Он должен обеспечить высокую скорость пе-
редвижения, быстрое развертывание в предбоевой и боевой поряд-
ки, наименьшую уязвимость от оружия массового поражения про-
тивника и надежное управление подразделением.
Предбоевой порядок — это такое построение подразделения,
когда его боевые машины (установки) следуют в походных (пред-
боевых) порядках прикрываемых войск, расчлененных по фронту
и в глубину. Он предназначен для быстрейшего развертывания
в боевой порядок и должен обеспечивать возможность ведения
огня с короткой остановки. Предбоевой порядок для подразделе-
ний, вооруженных ЗРК средней дальности и дальнего действия,
нецелесообразен.
Боевой порядок — это построение подразделения' на местности
или в колоннах прикрываемых войск для ведения боя.
Участок местности, на котором подразделение развернуто для
ведения боя, принято называть стартовой позицией (СП), а уча-
стки местности, на которых располагаются боевые средства под-
разделения, — позиция данного боевого средства. Зенитному ра-
кетному подразделению назначаются, как правило, одна стартовая
позиция, одна-две запасные и ложная СП. К стартовым позициям
зенитных ракетных подразделений, вооруженных ЗРК средней,
малой дальности и ближнего действия, предъявляются следующие
основные требования:
наличие прямой радиовидимости между боевыми средствами;
допустимый угол закрытия в ответственном секторе стрельбы
подразделения1 не более 0,5°;
наклон площадок под боевыми средствами не более 4°;
возможность проезда мимо боевых средств в радиусе до 5 м;
наличие местных видимых предметов на удалении до 1000 м
(для ориентирования боевых средств);
отсутствие в радиусе до 600 м источников теплового и радио-
излучения, а также линий электропередачи;
отсутствие в радиусе 100—150 м от огневых средств камней,
щебня, кирпичей и легковоспламеняющихся предметов;
иметь удобные подъездные пути (для быстрого занятия СП).
Зенитное ракетное подразделение (в последующем зенитная
ракетная батарея) является тактико-огневым подразделением, т. е.
способно действовать и выполнять тактические и огневые задачи
как в составе части (дивизиона), так и самостоятельно: имеет
в своем составе отделение управления, расчеты боевых средств
(БМ), отделение непосредственного прикрытия, отделение ТЗМ.
(для зрбатр средней дальности), а в зенитной ракетной батарее
ближнего действия — отделение технического обеспечения и об-
служивания.
В зависимости от воздушной обстановки и выполняемой зада-
23
чи зенитная ракетная1 батарея (зрбатр) может находиться в сле-
дующих степенях готовности к открытию огня:
наивысшая степень готовности: личный состав батареи (пол-
ный боевой расчет) находится на стартовой позиции на своих
рабочих местах; боевые средства (БМ) включены, проверены на
функционирование и в зависимости от воздушной и радиоэлект-
ронной обстановки работают с излучением в эфир или на экви-
валент; зенитные управляемые ракеты подготовлены к пуску; сред-
ства непосредственного прикрытия подготовлены к стрельбе; сред-
ства управления и связи проверены на функционирование, уста-
новлена связь со старшим начальником;
менее высшая степень готовности: из всего личного состава
подразделения выделяется сокращенный боевой расчет (дежурная
боевая смена), который находится на рабочих местах и способен
произвести боевые пуски ЗУР, остальной личный состав находит-
ся в районе стартовой позиции; боевая техника прогрета, подго-
товлена к включению, ракеты находятся в боевом положении,
питание на них не подано; средства непосредственного прикрытия
подготовлены к стрельбе; средства управления и связи находятся
в готовности к приему целеуказаний и их передаче на огневые
средства; со старшим начальником связь установлена и поддер-
живается;
низкая степень готовности к открытию огня: на стартовой по-
зиции на своих рабочих местах находится дежурная смена, спо-
собная обеспечить прием комад (сигналов), включить боевые сред-
ства и оповестить остальной личный состав, который располага-
ется на удалении, обеспечивающем своевременное его прибытие
на СП по оповещению и перевод подразделения в более высшие
степени боевой готовности в установленные сроки; боевые маши-
ны (БМ) и другие средства прогреты и подготовлены к включе-
нию; ракеты находятся в боевом положении, однако цепи пита-
ния их от наземного источника отключены; средства непосредст-
венного прикрытия подготовлены к стрельбе; средства управления
и связи находятся в готовности к приему и передаче команд
(сигналов), связь со старшим начальником установлена и под-
держивается; количество боевых машин (БМ) и других средств,
личного состава устанавливается командиром подразделения в
зависимости от указаний старшего начальника.
2. Боевые возможности зенитных ракетных комплексов
Под боевыми возможностями понимается способность ЗРК
обеспечить уничтожение воздушных целей в различных условиях
обстановки. Они зависят от реализованных в комплексе принципов
и состава аппаратуры.
К боевым возможностям относятся возможности по обнаруже-
нию и опознаванию воздушных целей, возможности по уничтоже-
нию целей в различных условиях боевой обстановки и возмож-
ности по совершению маневра.
24
Возможности по обнаружению воздушных целей характеризу-
ются способностями средств разведки подразделения обнаружи-
вать цели в воздухе с заданной вероятностью.
Основными количественными показателями возможностей по
обнаружению могут быть дальность обнаружения цели на соот-
ветствующей высоте ее полета и количество одновременно сопро-
вождаемых целей.
В общем случае дальность обнаружения ограничивается даль-
ностью прямой видимости, т. е.
£>обн •< £>пв =4,12 (/Яа + VTQ ,
где На, //ц — высота антенны РЛС и высота цели, м.
Для обеспечения встречи первой ракеты с целью на дальней
границе зоны поражения необходимо, чтобы выполнилось следу-
ющее условие:
Ообн потр /?обн,
где Ообнпотр—потребная дальность обнаружения, равная
•^обн потр •—= 4“ А ,
где с1л — горизонтальная дальность до дальней границы пораже-
ния;
Уц — скорость полета цели на соответствующей высоте;
t'L ===’ ^оп 4“ ^захв 4" ^подг 4” ^ст 4“ ^Р»
где /Оп, /захв, ^подг, /ст, /р— время, необходимое для опознавания
цели, захвата на сопровождение, подготовки данных для стрель-
бы, старта и наведения ракеты при нахождении точки встречи на
дальней границе зоны поражения соответственно;
±Д — расстояние средства разведки подразделения- относитель-
но огневого средства («4-», если средство разведки расположено
сзади огневого средства по курсу цели, и <—», если выдвинуто
перед огневым средством).
Технически возможная дальность опознавания цели выража-
ется формулой
P3G1G2X3 __ 1 /~ Р ОТВ^2^3^ОТВ
(4к)2 РПрз ' (4тс)2 Рпр отв
где Р3, Ротв—мощности излучения передатчиков запроса и от-
вета;
Gi, G2, Оз—коэффициенты направленного действия антенн за-
просчика и ответчика;
Х3, %отв — длины волны запросчика и ответчика;
Рпрз, Рпротв—чувствительности приемников запросчика и ответ-
чика соответственно.
Количество одновременно сопровождаемых целей равно коли-
честву реализованных в боевых средствах (БМ) целевых каналов.
Возможности по уничтожению целей — это способность раз-
25
вернутого в боевой порядок и изготовленного к бою подразделе-
ния уничтожать воздушного противника в различных условиях
обстановки. Обобщенным показателем возможностей по уничто-
жению целей является математическое ожидание числа уничто-
женных целей за налет (сосредоточенный удар) или до израс-
ходования установленного запаса ракет (боеприпасов).
Максимальное количество целей, которое может быть обстре-
ляно одновременно зенитным ракетным подразделением, опреде-
ляется количеством целевых каналов.
Целевой канал — это совокупность боевой техники, личного
состава, способных обнаружить, опознать и обстрелять одну цель.
В войсках ПВО за целевой канал принято считать зенитную ра-
кетную батарею (БМ).
Количество целей, обстреливаемых одновременно (М>оЦ), мож-
но выразить формулой
N ооц == N цкКучКбгКэупрКмКмВ,
где Л^цк — количество целевых каналов.
Коэффициенты в формуле учитывают эксплуатационную на-
дежность техники, противодействие противника, эффективность
системы управления, а также участие целевого канала в отраже-
нии удара воздушного противника.
Математическое ожидание числа уничтожаемых воздушных
целей за налет или до израсходования установленного запаса
ракет (боеприпасов) (Мц) будет зависеть от количества целей;
обстреливаемых одновременно (М>оЦ), вероятности поражения
воздушной цели ракетами (Rn) и количества стрельб, которые
может провести целевой канал за время- налета противника или
до израсходования установленного запаса ракет (т), т. е.
Мц
где Rn — вероятность поражения цели п ракетами, равная
По данным иностранной печати, современные ЗРК в состоянии
одновременно обстреливать от одной до 12 целей, а вероятность
поражения колеблется от 0,4 до 1,0.
Возможности по маневру зенитных ракетных подразделений
характеризуются их способностями по переводу в боевое и поход-
ное положения, скоростью передвижения, временем переноса огня
на новые цели, проходимостью и запасом хода, а также способ-
ностью вести огонь в движении и с коротких остановок. Они зави-
сят от технических характеристик боевых, обеспечивающих и
транспортных средств, а также от подготовки боевых расчетов,
условий обстановки и других факторов. Современные ЗРК обла-
дают высокими маневренными возможностями, достаточными для
своевременного прикрытия войск в современном динамичном
бою.
26
3. Боевой порядок зенитной ракетной батареи и его развертывание
Для ведения боя с воздушным противником зенитная ракетная
батарея развертывается на местности в боевой порядок.
К боевому порядку предъявляются следующие основные тре-
бования: полное использование боевых возможностей техники под-
разделения; возможность отражать нападение воздушного против-
ника с любого направления, быстро совершать маневр, исключить
взаимные помехи между соседними зенитными ракетными (и дру-
гими) подразделениями, а также лучше использовать местность
для скрытого расположения, инженерного оборудования в целях
сохранения' боеспособности подразделения и личного состава, воо-
ружения и техники.
Боевой порядок зенитной ракетной батареи включает позицию
батарейного командирского пункта (БКП), позиции пусковых ус-
тановок (ПУ), позиции средств непосредственного прикрытия и
позиции транспортно-заряжающих машин (ТЗМ).
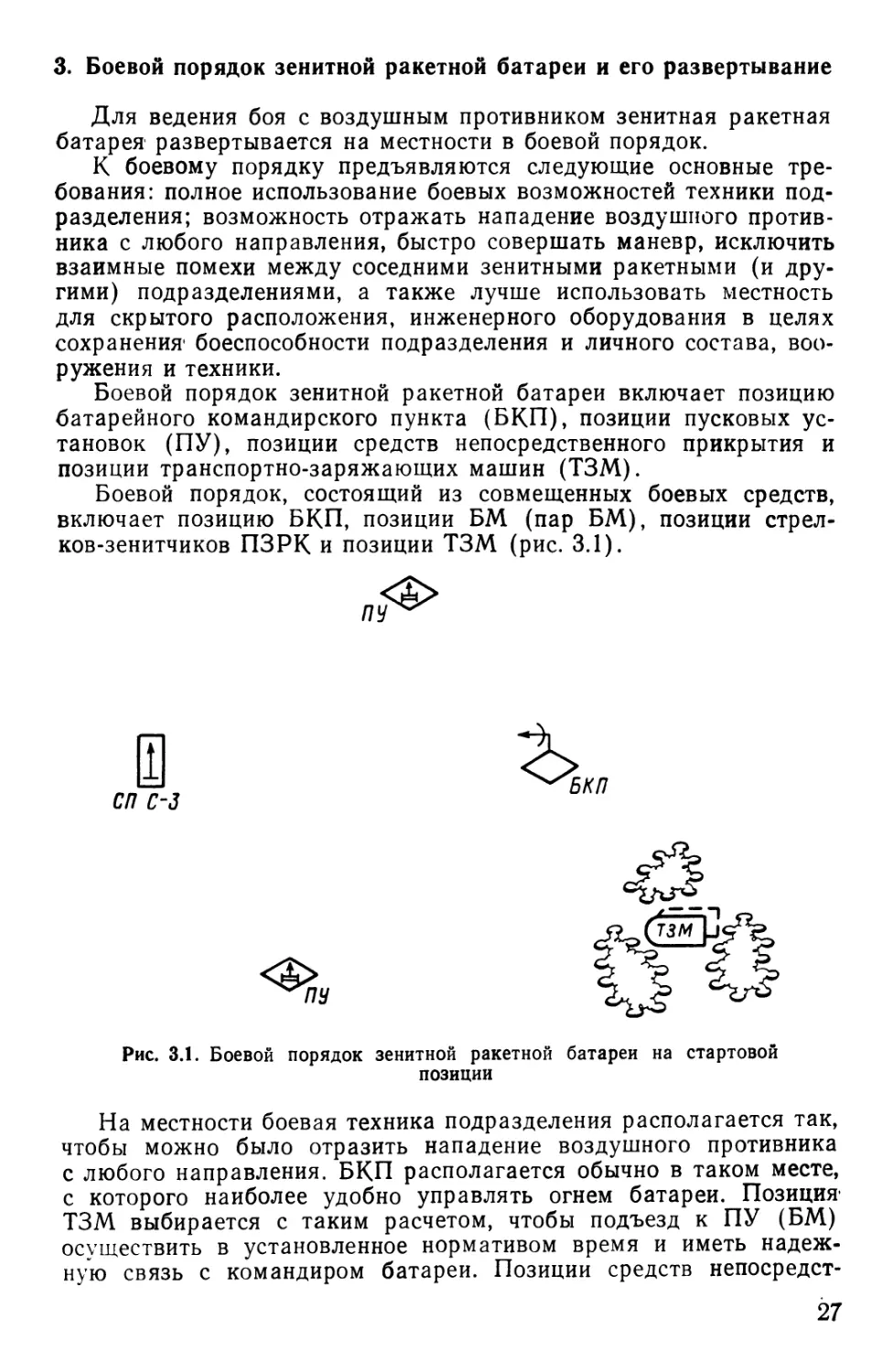
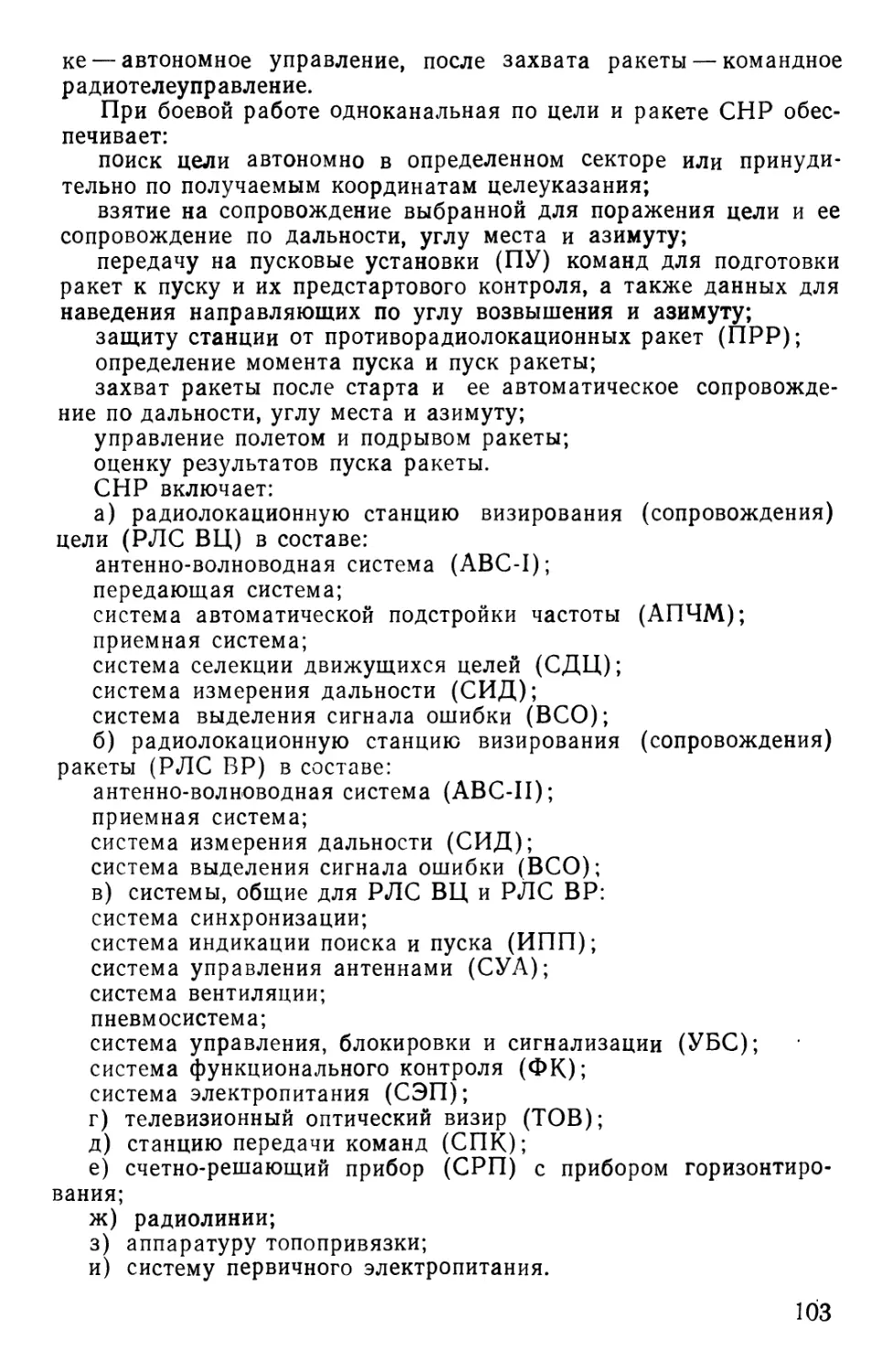
Боевой порядок, состоящий из совмещенных боевых средств,
включает позицию БКП, позиции БМ (пар БМ), позиции стрел-
ков-зенитчиков ПЗРК и позиции ТЗМ (рис. 3.1).
ПУ^
СП с-з
Рис. 3.1. Боевой порядок зенитной ракетной батареи на стартовой
позиции
На местности боевая техника подразделения располагается так,
чтобы можно было отразить нападение воздушного противника
с любого направления. БКП располагается обычно в таком месте,
с которого наиболее удобно управлять огнем батареи. Позиция1
ТЗМ выбирается с таким расчетом, чтобы подъезд к ПУ (БМ)
осуществить в установленное нормативом время и иметь надеж-
ную связь с командиром батареи. Позиции средств непосредст-
27
венного прикрытия батареи располагаются на направлении вне-
запного появления воздушного и наземного противника и должны
иметь связь с командиром батареи. На стартовой позиции бата-
реи организуется пост воздушного наблюдения (ПВН).
Зенитная1 ракетная батарея может занимать стартовую пози-
цию или с ходу, или с места последней остановки. Основной спо-
соб занятия СП — с ходу. Этот способ применяется в тех случаях,
когда заранее проводится рекогносцировка СП, а также в усло-
виях хорошей видимости и в других благоприятных условиях.
В назначенном районе по команде командира батареи (или сиг-
налу) вся техника батареи самостоятельно расчленяется- по фрон-
ту и в глубину на установленные интервалы и дистанции по
наиболее удобным маршрутам и занимает свои позиции.
Занятие стартовой позиции с места последней остановки про-
изводится в тех случаях, когда по условиям обстановки занять
с ходу ее нельзя (ночные условия, сильнопересеченная местность,
сложные метеорологические условия, необходимо провести реког-
носцировку СП и др.). Прибыв в назначенный район, командир
батареи останавливает колонну и с начальниками расчетов (БМ)
(командирами взводов) определяет места позиций для техники
батареи. Уяснив точку стояния своей техники, начальники расче-
тов (БМ) обозначают ее заметным ориентиром и самостоятельно
выводят технику на СП.
Для занятия СП зенитной ракетной батареей с несовмещен-
ными боевыми средствами выполняется следующее правило: на-
правление самоходов боевых средств должно совпадать с основ-
ным направлением стрельбы; пусковые установки должны зани-
мать свои позиции после проезда мимо БКП на расстоянии не
более 5 м.
Для обеспечения1 стрельбы с ТОВ необходимо учитывать на-
правление ветра, боевой порядок необходимо занять так, чтобы
при обстреле целей, летящих с основного направления, дымовое
(пылевое) облако во время старта ракеты не закрывало линию
визирования СНР —ПУ.
Глава IV
БОЕВЫЕ ДЕЙСТВИЯ РАСЧЕТА (ОТДЕЛЕНИЯ)
В ОСНОВНЫХ ВИДАХ БОЯ
1. Обязанности начальника расчета (отделения) по управлению
подразделением в бою
Современный высокоманевренный противовоздушный бой тре-
бует от командиров всех степеней четкого управления подчинен-
ным им подразделением. Управление заключается в постоянном
руководстве со стороны командира действиями расчета (отделе-
ния) при подготовке и в ходе выполнения поставленных боевых
задач. Командир отделения несет полную ответственность за бое-
28
вую готовность, подготовку своего отделения и успешное выпол-
нение боевых задач в установленные сроки, а также за воинскую
дисциплину и политико-моральное состояние личного состава.
Командир отделения обязан в совершенстве знать устройство и
боевую работу на технике отделения, порядок ее подготовки к
боевому использованию, обстановку и задачу своего отделения;
уметь водить боевую технику отделения, выполнять обязанности
любого номера отделения.
Командир отделения управляет своим отделением путем отдачи
устных боевых приказов (распоряжений) голосом, по внутренней
ГГС, а также командами и сигналами по телекодовой связи.
Получив задачу, командир отделения должен уяснить, где про-
тивник и что он делает, понять задачу своего отделения, порядок
и срок ее выполнения. Оценка обстановки при этом включает
оценку своих сил и средств, района боевых действий, времени и
других факторов, влияющих на выполнение боевой задачи.
При отдаче устного боевого приказа командир отделения ори-
ентирует личный состав на местности, указывает, в каком направ-
лении находится наземный противник, дальность до него и что
он делает (наступает, обороняется), с каких направлений, высот
возможны действия воздушного противника (особенно его скры-
тые подходы к стартовой позиции), характер помех, применяемый
им. Он указывает задачу отделению, порядок и срок ее выпол-
нения, в какой степени готовности находиться. В задаче отделения
указываются: место в колонне подразделения, дистанция1 и ско-
рость движения, порядок поддержания связи с командиром бата-
реи, порядок занятия позиции, основное направление (сектор)
стрельбы, сигналы управления, оповещения. Кроме того, коман-
дир отделения указывает мероприятия по маскировке, защите от
ОМП, какие окопы отрыть на позиции.
В ходе боевых действий командир отделения выполняет при-
казы (сигналы) своего начальника и руководит действиями отде-
ления. При этом он следит за точным выполнением команд всеми
номерами отделения, докладывает своему начальнику о резуль-
татах боя и расходе ракет, боеприпасов.
Основой управления отделением является точное и своевре-
менное выполнение команд непосредственного командира (на-
чальника).
2. Действия расчета (отделения) в составе батареи в наступлении
Главной задачей зенитных ракетных подразделений в наступ-
лении является уничтожение воздушного противника и надежное
прикрытие войск; кроме того, во всех видах боевых действий на
них возлагается задача по уничтожению воздушных десантов и
аэромобильных войск противника в полете.
В наступлении отделение (БМ) в составе батареи прикрывает
войска в исходном районе, при выдвижении их на рубежи развер-
тывания, развертывании в предбоевые и боевые порядки и в ходе
29
наступления. В некоторых случаях отдельные боевые машины
(зенитные отделения) могут выполнять самостоятельные задачи
при действиях из засад на наиболее вероятных или выявленных
направлениях скрытного подхода самолетов (вертолетов) против-
ника, при прикрытии командных пунктов и других объектов.
В исходном районе СП (позиция отделения) назначается с та-
ким расчетом, чтобы обеспечивалось уничтожение СВН против-
ника на подступах к прикрываемым войскам (объектам) и над
ними, а также своевременный выход на маршруты и включение
в колонны общевойсковых (прикрываемых) подразделений. В ис-
ходном районе командир отделения готовит свою технику и лич-
ный состав к боевым действиям, особенно тщательно проводит
маскировку техники, а также укрытия для личного состава и
техники отделения. Командир отделения должен твердо усвоить
ограничения, которые наложены на работу боевой техники и
средств связи, и порядок их снятия, свое место в колонне, поря-
док и сроки его занятия, какие установлены сигналы и порядок
действий по ним.
Зенитная ракетная батарея с несовмещенными боевыми сред-
ствами разворачивается в назначенном районе заблаговременно
для прикрытия войск, осуществляющих выдвижение на рубежи
развертывания, на рубеж атаки и в ходе наступления1. Если по
условиям обстановки заблаговременно занять СП невозможно,
тогда батарея выдвигается одновременно с прикрываемыми вой-
сками и развертывается на СП с ходу.
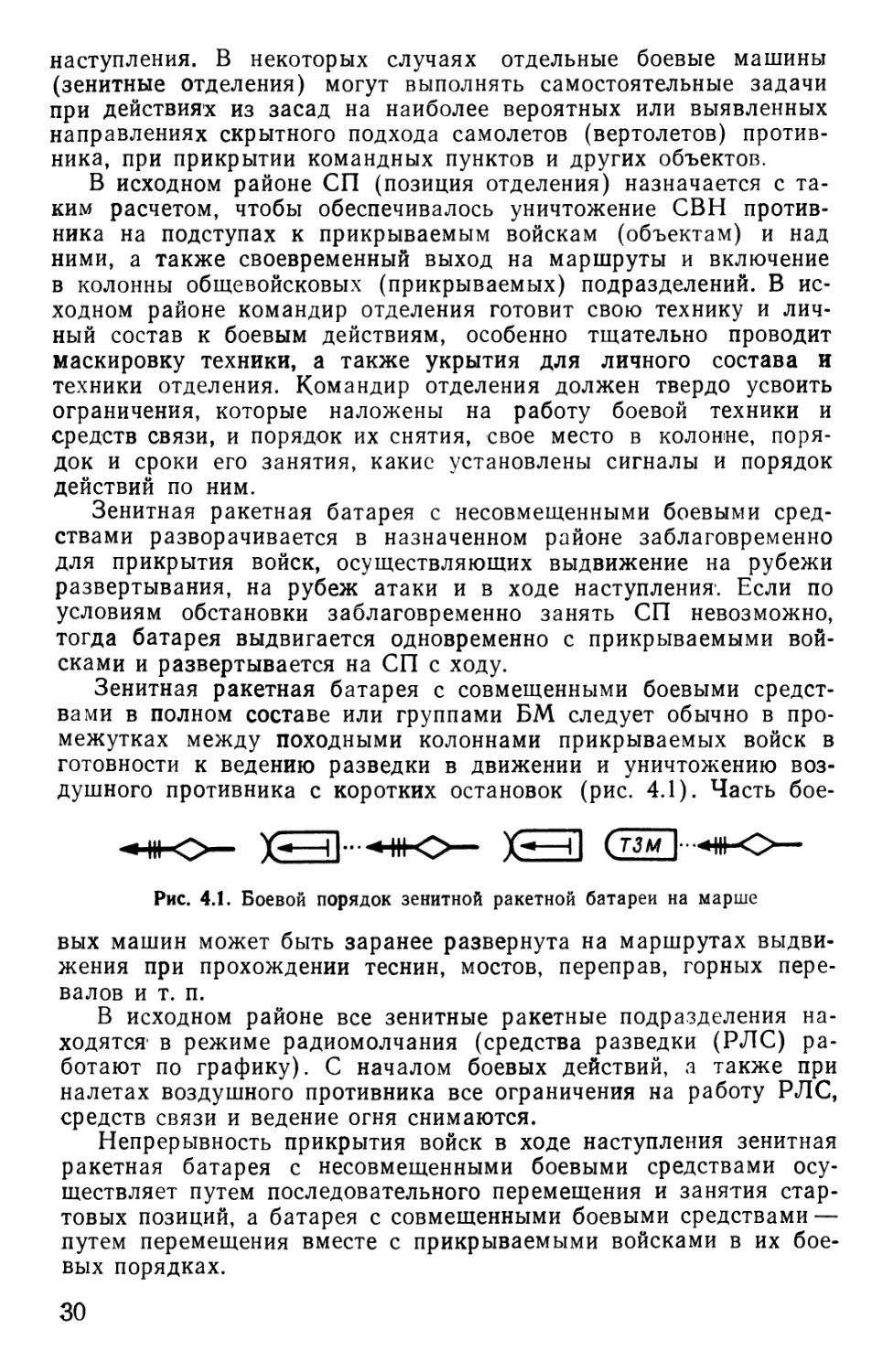
Зенитная ракетная батарея с совмещенными боевыми средст-
вами в полном составе или группами БМ следует обычно в про-
межутках между походными колоннами прикрываемых войск в
готовности к ведению разведки в движении и уничтожению воз-
душного противника с коротких остановок (рис. 4.1). Часть бое-
X-*—1| Сгзм
Рис. 4.1. Боевой порядок зенитной ракетной батареи на марше
вых машин может быть заранее развернута на маршрутах выдви-
жения при прохождении теснин, мостов, переправ, горных пере-
валов и т. п.
В исходном районе все зенитные ракетные подразделения на-
ходятся- в режиме радиомолчания (средства разведки (РЛС) ра-
ботают по графику). С началом боевых действий, а также при
налетах воздушного противника все ограничения на работу РЛС,
средств связи и ведение огня снимаются.
Непрерывность прикрытия войск в ходе наступления зенитная
ракетная батарея с несовмещенными боевыми средствами осу-
ществляет путем последовательного перемещения и занятия стар-
товых позиций, а батарея с совмещенными боевыми средствами —
путем перемещения вместе с прикрываемыми войсками в их бое-
вых порядках.
30
Отражение ударов воздушного противника батарея осущест-
вляет как с основных, так и с запасных стартовых позиций. Ма-
невр батареи с основной на запасную СП осуществляется по сиг-
налу старшего начальника и заключается в быстром и скрытном
выходе и развертывании в боевой порядок на запасной СП. Рас-
четы установок (БМ) должны уметь быстро, в установленные сро-
ки переводить технику в походное положение, готовить ее к
маршу, занимать новые позиции и вновь готовить технику к бо-
евой работе.
При перемещении на новые СП в ходе наступательных боевых
действий батарея всегда должна быть готова к развертыванию
в боевой порядок на неподготовленной СП, а боевые машины
(БМ)—к стрельбе с коротких остановок. Заграждения и другие
препятствия на пути движения установки (БМ) обходят или пре-
одолевают по проделанным войсками проходам.
При форсировании войсками водных преград зенитная ракет-
ная батарея в составе дивизиона выдвигается вслед за передо-
выми частями в район форсирования и занимает СП с таким
расчетом, чтобы к началу форсирования главными силами быть
в готовности к открытию огня; Переправу батарея на противо-
положный берег осуществляет по команде или сигналу старшего
начальника по наведенным (стационарным) мостам, на паромах
или вброд, боевые машины могут преодолевать водную преграду
вплавь. Рекогносцировка мест СП на противоположном берегу
осуществляется после захвата общевойсковыми частями плац-
дарма.
При переправе через водную преграду по льду предварительно
определяется толщина льда. Для техники батареи допустимая
толщина льда должна быть не менее 50 см. Техника по льду
двигается в строго определенном месте со скоростью не более
10 км/ч плавно, без рывков и разворотов машин; личный состав
спешивается и переправляется вслед за машинами. Дистанция
между машинами — не менее 40 м.
В ночных условиях особенно тщательно изучается маршрут
движения, готовятся к работе приборы ночного видения, внутрен-
нее и наружное освещение, подкузовная подсветка. Охрана боевой
техники усиливается.
3. Действия расчета (отделения) в составе батареи в обороне
При ведении нашими войсками оборонительных боевых дей-
ствий противник (как наземный, так и воздушный) будет стре-
миться всеми возможными способами вскрыть систему обороны
(в том числе и противосамолетную). Поэтому главная задача
средств ПВО на этот период времени — не допустить ведения
воздушной разведки, уничтожать самолеты-разведчики и другие
летательные аппараты, ведущие радио- и фоторазведку мест рас-
положения наших войск.
31
В оборонительном бою зенитная ракетная батарея может при-
крывать войска, обороняющиеся на главном направлении, контр-
атакующие войска и резервы, пункты управления, ракетные части
и артиллерию, а также важные объекты тыла.
Часть боевых машин может привлекаться для- прикрытия войск,
обороняющих полосу обеспечения, а также действовать из засад
или в качестве кочующих подразделений на наиболее вероятных
(скрытых) направлениях полета авиации противника.
Стартовые позиции выбираются, как правило, за противотан-
ковыми препятствиями с учетом общей системы ПВО части, сое-
динения. Расположение техники батарей на СП должно, как пра-
вило, исключать стандартные боевые порядки, чем обеспечивается
повышение живучести батареи. Кроме основной СП выбираются и
оборудуются в инженерном отношении 1—2 запасные и ложная
СП. Ложная стартовая позиция должна имитировать основную
СП, для чего используются резинонадувные макеты и подручные
средства. Временные СП для действий боевых машин из засад
занимаются скрытно и тщательно маскируются. Смена СП осу-
ществляется ночью или в других условиях ограниченной види-
мости.
Маневр зенитной ракетной батареи в оборонительных боевых
действиях приобретает решающее значение. Он предназначен для
усиления противовоздушного огня на направлениях главного уда-
ра противника, для замены подразделений, потерявших боеспо-
собность, прикрытия войск второго эшелона и резерва, при прове-
дении ими контратаки, а также для повышения живучести
подразделения. Начальники расчетов (командиры отделений)
должны заранее знать намеченные позиции для маневра, марш-
руты выдвижения на них и сигналы, а также время, отводимое
для совершения маневра.
До начала наступления противника или до массированного
(сосредоточенного) удара его авиации 'огонь по одиночным целям
ведут назначенные (дежурные) батареи (боевые машины), как
правило, с запасных стартовых позиций.
Дежурная зенитная ракетная батарея (БМ) должна всегда
находиться в готовности к уничтожению аэромобильных войск и
воздушных десантов на маршрутах их пролета и в районах вы-
садки, а также для стрельбы по внезапно появляющимся целям.
Остальные зенитные ракетные подразделения находятся в такой
степени готовности, которая обеспечивает перевод их в наивыс-
шую степень готовности за минимальное время. После стрельбы
производится смена стартовой позиции.
При массированном ударе авиации все зенитные ракетные под-
разделения ведут огонь и отражают удар воздушного противника
с максимально возможным напряжением. В случае вклинения
противника в оборону наших войск зенитная ракетная- батарея
осуществляет маневр по заранее установленному сигналу.
При отходе войск батарея развертывается в боевой порядок
на путях отхода главных сил в районах переправ, теснин, узлов
32
дорог и других важных объектов. Зенитная ракетная батарея с
совмещенными боевыми средствами прикрывает отходящие части,
подразделения от ударов воздушного противника, находясь в бое-
вых порядках прикрываемых войск.
4. Действия расчета (отделения) в составе батареи в особых
условиях
Под особыми условиями боевых действий зенитных ракетных
подразделений понимаются боевые действия по прикрытию войск
в горах, пустынях, северных районах, лесисто-болотистой мест-
ности и зимой. Для успешного ведения боевых действий в особых
условиях необходимо твердо знать влияние их на боевые возмож-
ности зенитно-ракетных подразделений, а также особенности дей-
ствий прикрываемых подразделений и частей.
В горах прикрываемые войска ведут боевые действия на ши-
роком фронте, по разобщенным направлениям, как правило, вдоль
дорог, £усл рек, долин, по горным плато. В целях захвата важ-
ных районов местности, таких, как горные перевалы, командные
высоты, узлы дорог, мосты через ущелья и др., широкое приме-
нение найдут обходящие отряды, тактические десанты.
Существенное влияние на боевые возможности техники зенит-
ных ракетных батарей оказывает пересеченность рельефа, ограни-
ченное количество дорог и мест, удобных для развертывания в
боевой порядок, экранирующее действие гор на работу РЛС и
средств связи, резкие изменения погоды как в течение суток, так
и с перепадами высот, возможности обвалов снежных лавин и
камнепадов (как в естественных условиях, так и при пусках ра-
кет), существенное снижение мощности двигателей и повышенный
расход горючего.
Горный рельеф создает условия для1 скрытного подхода авиа-
ции противника (особенно вертолетов) вдоль долин, ущелий,
русл рек. Наличие больших углов закрытия, а также экрани-
рующее действие гор снижает возможности по разведке и связи
до 50% и более; появление большого количества «местников» на
экранах РЛС затрудняет работу операторов по поиску целей и
их сопровождению. Снижение мощности двигателей, наличие кру-
тых спусков и подъемов, ограниченное количество дорог резко
снижает маневренные возможности подразделений, увеличивается
время на перемещение и марши. Наличие скального грунта за-
трудняет проведение инженерного оборудования СП, а порой
делает его невозможным без проведения взрывных работ.
Боевые действия' в горах зенитные ракетные подразделения
ведут по направлениям действий прикрываемых войск. Батареи с
совмещенными боевыми средствами могут выделяться для при-
крытия обходящих отрядов.
Стартовые позиции выбираются, как правило, вдоль дорог,
на горных плато, на склонах гор, обращенных к противнику, на
3 Зик 3112лсп
33
перевалах и в других возвышенных местах, обеспечивающих ра-
диолокационное и визуальное наблюдение за воздушным против-
ником и своевременное открытие огня по внезапно появляющимся
воздушным целям. Особое внимание уделяется организации визу-
альной разведки на направлениях, не просматриваемых радиоло-
кационными средствами. Стартовые позиции ввиду их возможного
затопления не рекомендуется выбирать в руслах пересохших рек
и ручьев, во впадинах и котловинах, а также у подножий гор и
на направлениях селевых потоков. Установки (БМ) на стартовой
позиции могут располагаться на минимальных интервалах и дис-
танциях. Взаимное превышение между элементами боевых средств
может быть не более 20—30 м. При невозможности выбора СП
с круговым обзором воздушного пространства ее выбирают так,
чтобы можно было вести секторный обзор.
Боевые действия в горах требуют повышенного запаса топлива
и более тщательной подготовки техники, особенно ее ходовой
части.
Пустынная местность оказывает существенное влияние на бо-
евые, действия зенитных ракетных подразделений и характеризу-
ется: наличием сыпучих песков, солончаков; высокой температу-
рой днем в летнее время и ее резкими колебаниями в течение
суток; сильными ветрами с переносом песчаных масс; отсутствием
естественных источников воды и почти полным отсутствием рас-
тительности и местных ориентиров.
При ведении боевых действий в пустынях необходимо прини-
мать меры по увеличению запасов технической и питьевой воды,
производить маскирующую раскраску техники (желто-коричневый
фон), принимать меры по предотвращению солнечных (тепловых)
ударов, более чаще проводить техническое обслуживание (осо-
бенно промывку фильтров).
Стартовые позиции выбираются на возвышенностях, среди
барханов, дюн, грядовых и бугристых песков, в зарослях камыша
и саксаула, в руслах высохших рек и в других складках местно-
сти. Выдвижение и занятие СП осуществляются, как правило,
ночью, в других условиях ограниченной видимости с соблюдением
светомаскировки. Особое внимание уделяется подготовке аппара-
туры топопривязки и ориентирования, что вызвано возникновени-
ем больших ошибок при определении координат и движением
по песку и солончакам; расстояния между позициями боевых
средств батареи увеличиваются на предельно допустимые рас-
стояния.
В момент пуска ракет образуется большое облако пыли, демас-
кирующее СП, поэтому необходима более частая смена позиций.
Количество запасных позиций увеличивается.
В северных районах и зимой на боевые действия зенитной
ракетной батареи оказывают влияние глубокий снежный покров,
низкие температуры, труднодоступный характер местности, огра-
ниченное количество дорог, сложные метеорологические условия,.
34
длительные периоды полярного дня и полярной ночи, обледенение
техники, ионосферные и геомагнитные возмущения, сильные,ветры
со снежными заносами.
Открытая местность и низкая тундровая растительность в
северных районах, действия войск вдоль дорог облегчают обна-
ружение войск воздушным противником, особенно в полярный
день, и способствуют повышению активности его авиации.
При ведении боевых действий в северных районах и зимой
командир отделения обязан принять меры по предупреждению
обморожения личного состава, для чего обеспечить личный состав
теплой одеждой; не допускать обледенения техники и попадания
снега внутрь агрегатов и механизмов; в летнее время для защиты
от москитов и гнусов выдать личному составу защитные сетки и
специальные маски. При этом запасы топлива и продовольствия
необходимо увеличивать, своевременно производить прогрев бое-
вой и другой техники, принимать меры к увеличению проходимо-
сти техники.
Стартовые позиции выбирают обычно вблизи дорог и маршру-
тов перемещения войск, особенно тщательно готовятся подъезд-
ные пути и дороги на запасные СП, а также подъезды на основ-
ные дороги.
Окопы и укрытия для личного состава и техники возводят
(кроме обычного способа) из снега и для большей прочности об-
ливают водой. Для личного состава необходимо оборудовать утеп-
ленные укрытия.
Маскировка техники производится маскировочным (защитным)
окрашиванием (белая краска, меловый или известковый раствор).
Лесные массивы и заболоченная местность резко снижают
маневренные возможности зенитных ракетных подразделений,
ухудшают возможности техники по разведке воздушного против-
ника, особенно низколетящих целей, а также затрудняют выбор
позиций для боевой техники и транспорта.
Стартовые позиции выбирают на опушках, вырубках, лесных
полянах, возвышенностях, широких просеках, вдоль дорог и в
мелколесье с таким расчетом, чтобы обеспечивалась необходимая
радиовидимость воздушного противника (особенно в ответствен-
ном секторе подразделения) и ее обстрел.
Командир отделения (расчета) помимо обычных вопросов ука-
зывает порядок преодоления лесных завалов, труднопроходимых
участков местности, меры по предотвращению ударов сучьев де-
ревьев о корпуса антенн и ракет, меры по борьбе с пожарами.
При ведении боевых действий в лесу принимаются меры по
исключению внезапного проникновения противника на стартовую
позицию.
В целом при ведении боевых действий в особых условиях не-
обходимо принимать меры к увеличению запасов материально-
технических средств и продовольствия, инженерного и других
видов обеспечения.
3*
35
Глава V
ПЕРЕДВИЖЕНИЕ ПОДРАЗДЕЛЕНИЙ ЗЕНИТНЫХ
РАКЕТНЫХ КОМПЛЕКСОВ
1. Цели и задачи передвижения
В современных высокоманевренных боевых действиях значи-
тельно возросла роль передвижения войск.
Основной целью передвижения зенитных ракетных подразде-
лений является своевременное прибытие их в назначенный район
в готовности выполнить задачу по прикрытию войск и объектов
от ударов воздушного противника. Батарея всегда должна быть
готова к передвижению на большие расстояния в условиях посто-
янной угрозы применения противником оружия массового пора-
жения, воздействия его авиации, воздушных десантов и разведы-
вательно-диверсионных групп.
В зависимости от выполняемых задач передвижение зенитных
ракетных подразделений может осуществляться своим ходом
(марш), железнодорожным, водным и воздушным транспортом
(перевозки), а также комбинированным способом. Каждый из
способов передвижения имеет свои преимущества и недостатки.
К преимуществам передвижения' своим ходом можно отнести:
сохранение высокой боевой готовности и способности подразде-
лений немедленно вступить в бой с воздушным противником;
высокие маневренные возможности подразделений. К недостат-
кам относятся: сравнительно небольшие скорости передвижения;
повышенный расход моторесурсов, горючего и смазочных мате-
риалов; усталость личного состава (особенно водителей).
При перевозках осуществляется экономия моторесурсов и
ГСМ, личный состав менее подвержен нагрузкам, дальности пере-
мещения увеличиваются. Однако подразделения теряют боеготов-
ность и маневренность.
Основным способом передвижения является передвижение сво-
им ходом. Оно проводится в целях выхода подразделений из
военных городков, при выдвижении войск из исходного района,
при перемещениях зенитных ракетных подразделений в ходе на-
ступления войск и в ходе преследования отходящего противника,
а также при совершении маневра в целях прикрытия наиболее
важных группировок войск как в наступлении, так и в обороне.
Перевозки зенитных ракетных подразделений и частей как
самостоятельно, так и в составе общевойсковых частей и соеди-
нений проводятся- в случае выдвижения их на большие рас-
стояния.
2. Действия расчета (отделения) в составе батареи на марше
Марш — организованное передвижение подразделений по доро-
гам, колонным путям, а в ходе боевых действий и по целине в
целях своевременного выхода в назначенный район. Марши зе-
36
нитных ракетных подразделений совершаются, как правило, ночью
или в условиях ограниченной видимости, но всегда должны про-
водиться скрытно. Порядок совершения марша устанавливается
старшим начальником.
Получив задачу на марш, командир расчета (отделения) до-
водит ее до личного состава, указывает, где находится наземный
и воздушный противник, какая до него дальность, что он делает;
доводит задачу батареи и расчета (отделения), указывает марш-
рут движения, дистанцию от идущей впереди машины, скорость
движения; назначает наблюдателей за воздушным и наземным
противником и порядок действий в случае его появления; доводит
сигналы управления, оповещения и порядок действий по ним; ука-
зывает данные для ввода в аппаратуру топопривязки и ориенти-
рования в начале марша и в ходе его совершения; указывает
район новой позиции, порядок ее занятия, время готовности на
новой позиции, в какой степени готовности находиться. Для бое-
вых машин, кроме того, указывается порядок разведки воздушно-
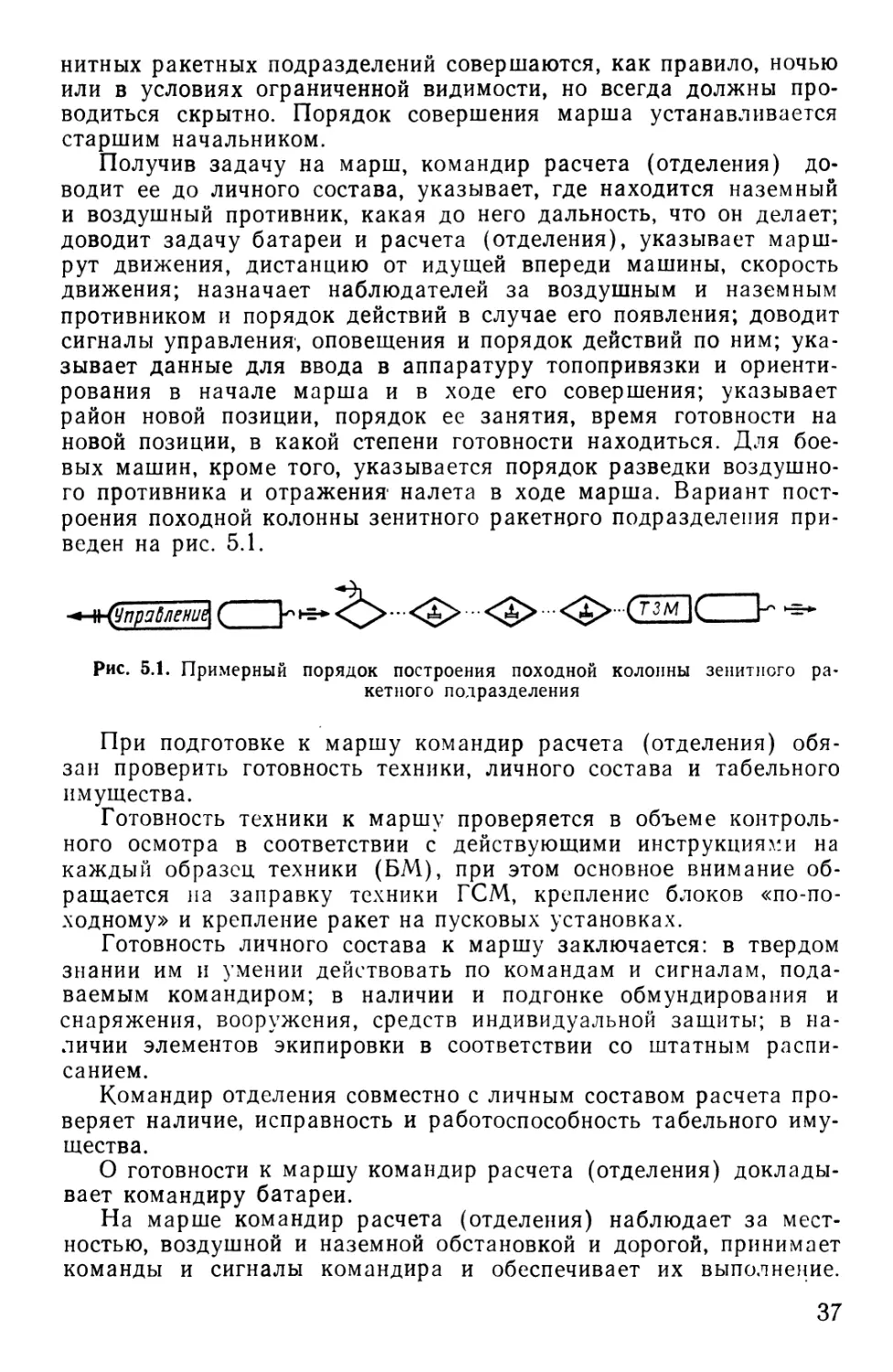
го противника и отражения налета в ходе марша. Вариант пост-
роения походной колонны зенитного ракетного подразделения при-
веден на рис. 5.1.
Рис. 5.1. Примерный порядок построения походной колонны зенитного ра-
кетного подразделения
При подготовке к маршу командир расчета (отделения) обя-
зан проверить готовность техники, личного состава и табельного
имущества.
Готовность техники к маршу проверяется в объеме контроль-
ного осмотра в соответствии с действующими инструкциями на
каждый образец техники (БМ), при этом основное внимание об-
ращается на заправку техники ГСМ, крепление блоков «по-по-
ходному» и крепление ракет на пусковых установках.
Готовность личного состава к маршу заключается: в твердом
знании им и умении действовать по командам и сигналам, пода-
ваемым командиром; в наличии и подгонке обмундирования и
снаряжения, вооружения, средств индивидуальной защиты; в на-
личии элементов экипировки в соответствии со штатным распи-
санием.
Командир отделения совместно с личным составом расчета про-
веряет наличие, исправность и работоспособность табельного иму-
щества.
О готовности к маршу командир расчета (отделения) доклады-
вает командиру батареи.
На марше командир расчета (отделения) наблюдает за мест-
ностью, воздушной и наземной обстановкой и дорогой, принимает
команды и сигналы командира и обеспечивает их выполнение.
37
Движение установок (БМ) осуществляется только по правой сто-
роне дороги с установленными скоростью и дистанцией. Боевые
машины совершают марш в готовности к отражению налетов
воздушного противника. При вынужденной остановке машина
(установка) отводится на правую обочину для устранения неис-
правности, после окончания работ она присоединяется к прохо-
дящей колонне. Свое прежнее место в колонне установка (БМ)
занимает на привале (остановках) или в районах отдыха. Обгон
движущихся колонн запрещен.
Управление движением колонны может осуществляться по ра-
дио, флажками (ночью — фонарями), сигналами и командами в
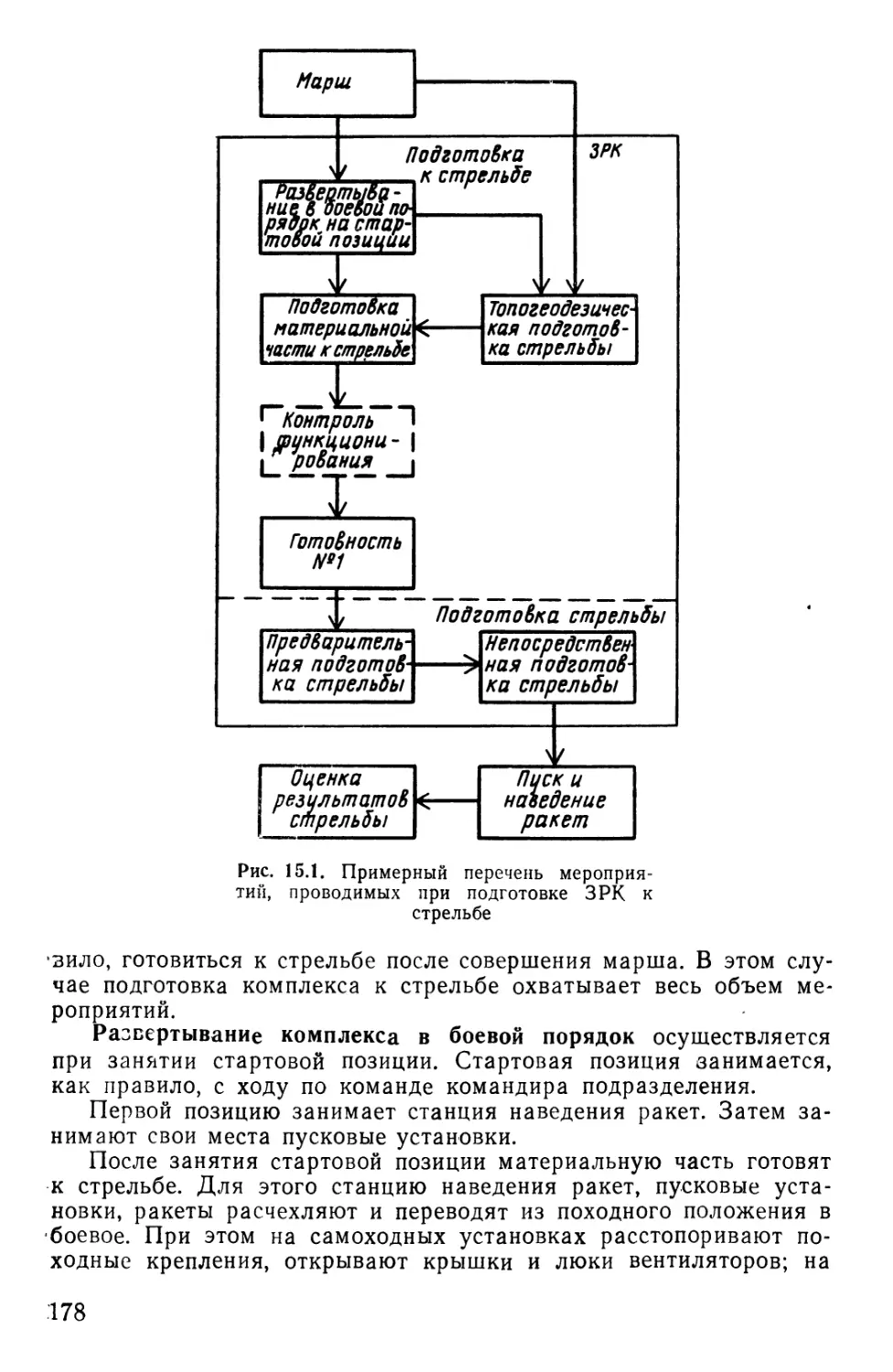
соответствии с приложениями 1, 2 Строевого устава ВС СССР,
а также действующими переговорными таблицами и сигнальными
средствами.
При отражении налета воздушного противника в ходе марша
боевые машины приводятся в готовность к открытию огня и по
команде командира батареи уничтожают его огнем в движении и
с короткой остановки; батарея с несовмещенными боевыми сред-
ствами продолжает движение или по команде развертывается в
боевой порядок вблизи дорог. Средства непосредственного при-
крытия батареи в любом случае находятся в готовности к унич-
тожению внезапно появляющихся воздушных целей.
Зараженные участки местности колонна батареи обходит, а
при невозможности обхода преодолевает их на максимальных
скоростях по кратчайшему направлению. Личный состав надева-
ет средства индивидуальной защиты; люки машин (БМ), жалюзи,
стекла закрываются, включаются системы противоатомной защи-
ты (ПАЗ).
При выходе из зараженного участка проводятся частичная
специальная обработка техники и вооружения и санитарная обра-
ботка личного состава. Полная специальная обработка проводит-
ся на привалах, в районах отдыха или после прибытия в назна-
ченный район.
При проезде виадуков, в лесу, под линиями электропере-
дачи принимаются меры по предупреждению задевания их
антеннами радиостанций, антенными колонками БМ и ракета-
ми ПУ.
При преодолении бродов, крутых подъемов и спусков, а также
при переправах по льду дистанция между машинами увеличива-
ется, движение техники осуществляется на пониженных передачах
без переключений. При движении в гололедицу на подъемах
очередная машина начинает движение после того, как предыду-
щая преодолеет весь подъем. Неохраняемые железнодорожные
переезды преодолеваются также на пониженных передачах и без
переключений (по команде командира батареи). При этом выстав-
ляются сигнальщики в обе стороны от переезда для наблюдения
за железнодорожным полотном на удалении, обеспечивающем
просмотр участка тормозного пути поезда протяженностью не
менее 1000 м. Наблюдатели должны иметь зрительную связь с
38
командиром батареи. На случай буксировки заглохшей машины с
обратной стороны переезда устанавливается дежурный тягач.
При вынужденных остановках в пути колонна останавливает^
ся на правой обочине на укороченных дистанциях между Маши-
нами, но не ближе 10 м одна от другой, при этом средства непо-
средственного прикрытия занимают позиции и изготавливаются
к стрельбе. На привалах длительностью до двух часов и в райо-
нах отдыха зенитные ракетные батареи по указанию старшего
начальника занимают стартовые позиции и переходят в указанную
степень боевой готовности.
3. Перевозка расчета (отделения) в составе батареи
Перевозка подразделений производится воинскими эшелонами,
которыми называется организованная для перевозки в одном по-
езде воинская- часть, одно или несколько подразделений, воинская
команда большой численности. При перевозках по железной до-
роге личному составу запрещается:
прыгать в вагоны или выскакивать из них на ходу поезда;
останавливать поезд стоп-краном, кроме необходимых слу-
чаев;
находиться на крышах и в тамбурах вагонов, на платформах,
тормозных площадках, в кабинах машин;
высовываться из дверей и люков вагонов, сидеть или стоять
в дверных проемах вагонов, опираться на закладные доски двер-
ных проемов;
делать на вагонах надписи, вывешивать плакаты, лозунги,
транспаранты и др.;
применять в вагонах неустановленные виды отопления и осве-
щения;
выбрасывать во время движения поезда что-либо из вагонов,
а также отправлять естественные надобности в неустановленных
местах.
При погрузке (выгрузке) техники на железнодорожный под-
вижной состав личный состав подразделений должен соблюдать
определенные требования безопасности:
открывая борт платформы, следует стоять так, чтобы борт,
падая, не задел открывающего;
при заезде техники на платформу в машине должен находить-
ся только водитель (механик-водитель);
водитель (механик-водитель) выполняет команды только лица,
руководящего заездом (съездом) машины;
заезд на платформу осуществлять на пониженной передаче
(без рывков и переключений).
Запрещается:
укладывать переходные мостки под движущийся транспорт;
находиться между стоящей на платформе машиной и другой
(приближающейся к ней) ближе 5 м;
39
закреплять технику на платформе во время движения поезда
или при маневрах;
сливать воду из системы охлаждения машин зимой на пол
платформы;
пролезать под вагонами стоящих железнодорожных составов;
на электрифицированных участках железных дорог становить-
ся на крыши вагонов, кабин машин и будок спецавтомобилей;
раскручивать мотки проволоки вблизи закрепляемых на под-
вижном составе машин и выдвигать антенные устройства, если
концы их при этом могут приблизиться к контактному проводу
ближе чем на 2 м.
Техника расчета (отделения) готовится к перевозке и погрузке
силами расчетов заблаговременно и включает проведение техни-
ческого обслуживания, заправку горючим и охлаждающей жид-
костью, проверку крепления оборудования, расположенного на
корпусе машины. Особое внимание уделяется проверке системы
управления и тормозов; натяжение гусеничных лент доводится
до нормы. Перед погрузкой техника расчета (отделения) выво-
дится в район ожидания, маскируется. Средства непосредствен-
ного прикрытия занимают позиции и готовятся к стрельбе. Де-
журные боевые машины также занимают позиции, переводятся
в повышенные степени боевой готовности и находятся в состоя-
нии, обеспечивающем немедленное открытие огня.
В районе ожидания начальник расчета (отделения):
готовит технику и имущество к погрузке;
уточняет место нахождения своего железнодорожного транс-
порта и порядок выдвижения на погрузку;
инструктирует личный состав и проводит опрос по мерам безо-
пасности при погрузке и в ходе переезда по железной дороге;
уясняет маршрут движения на погрузку;
проверяет знание личным составом порядка размещения и
крепления боевой техники, а также ее готовность к погрузке. Вы-
движение техники расчета (отделения) на погрузку осуществляет-
ся в составе колонны батареи. Прибыв к месту погрузки, началь-
ник расчета (отделения) по команде командира батареи приступа-
ет к погрузке. Заезд техники на погрузочное устройство, а с него
на подвижной состав осуществляется под руководством командира
подразделения (офицера), а руководство движением по железно-
дорожному подвижному составу осуществляют командиры расче-
тов (отделений) (сержанты).
Заезд и движение техники по платформам осуществляются на
низшей передаче плавно, без рывков. Механик-водитель должен
быть готов в любую минуту остановить машину по сигналу коман-
дира расчета (отделения). Установка техники на железнодорож-
ной платформе для1 ее крепления и крепление осуществляются в
строгом соответствии с инструкциями по перевозке техники желез-
нодорожным транспортом на каждый образец.
Крепление техники на платформе осуществляется расчетом (от-
делением). Экономичным и менее трудоемким является крепле-
40
ние гусеничного самохода с помощью упорных башмаков и дере*
вянных вкладышей. Крепление колесных машин осуществляется
с помощью упорных брусков и проволочных растяжек.
Боевые машины и зенитные установки, предназначенные для
прикрытия мест погрузки, грузятся на подвижной состав в послед-
нюю очередь.
После закрепления машин на платформе на них включаются
низшие передачи, закрываются и опечатываются люки, затягива-
ются ручные тормоза, техника зачехляется чехлами общего по
крытия, стяжные канаты чехлов пломбируются.
Личный состав осуществляет посадку в вагоны после погрузки
всей техники и имущества не позднее чем за 10 мин до отправки
эшелона.
По прибытии на станцию выгрузки технику выгружают и
скрытно выводят в район сбора, после чего она своим ходом вы-
двигается в назначенный район.
Потребное количество крепежного материала для крепления
техники расчета (отделения) на подвижной состав указано в
табл. 5.1.
Таблица 5.1
Потребное количество крепежного материала
для техники батареи с несовмещенными боевыми средствами
1 № п/п I Техника Количество крепежного материала Количество пр одольных вкладышей
подкладок брусьев скоб (косты- лей) растяжек нитей в растяжке погонная длина, м масса прово- локи, кг гвоздей
1 'ГАЗ-66 1 4 4 2 20 4,4 12 __
2 У-375 (ТЗМ) — 8 — 8 8 150 34 72 —
3 ПУ 4 4 12 4 4 55 12 — 8
4 СНР 4 4 12 4 4 55 12 — 8
5 ЗУ — — (9) — — — — — —
4. Передвижение в особых условиях
В горах марш зенитных ракетных подразделений осуществля-
ется по дорогам и колонным путям, которые могут прокладывать-
ся по долинам, лощинам, ущельям и на склонах гор по доступным
направлениям. Особенности горного рельефа местности снижают
скорости движения на марше и существенно сокращают величину
суточного перехода.
При подготовке техники к маршу особое внимание обращается
на наличие специальных приспособлений для торможения и удер-
жания техники на крутых спусках и подъемах. Особое внимание
уделяется проверке исправности ходовой части и механизмов уп-
равления техники.
41
Места привалов выбирают обычно перед трудными подъемами
или спусками на ровных участках маршрутов в местах, где нет
опасности камнепадов, снежных лавин, обвалов и селевых по-
токов.
Движение устанавливается в строгом порядке, обгон колонны
запрещается. При прохождении крутых подъемов и спусков, пе-
ревалов, узких проходов, каньонов и рек дистанции между маши-
нами увеличиваются, личный состав может спешиваться, органи-
зуется дополнительное регулирование движения, выделяются де-
журные тягачи для оказания помощи. Спуск по склонам крутиз-
ной до 25° осуществляется путем торможения двигателем, а при
более крутых спусках — с одновременным подтормаживанием
колес тормозами. В крайне тяжелых ситуациях (при отказе тор-
мозов, при невозможности торможения двигателем) торможение
машины (остановку) можно производить путем притирания ма-
шины к срезу горы (скале). Во время остановок на подъемах и
спусках используются дополнительные тормозные колодки, баш-
маки и просто бревна (камни).
В пустынной местности марш зенитного ракетного подразделе-
ния организуется после отрекогносцированного и обозначенного
маршрута движения.
Техника батареи готовится для движения в условиях высоких
температур и повышенной запыленности воздуха, большое внима-
ние уделяется работе аппаратуры топопривязки и ориентирования.
Марш совершается в ночное время (как правило) или в утренние
и вечерние часы. При этом обеспечивается скрытность движения
и лучшие условия для работы агрегатов и водительского состава.
Барханы преодолеваются с наветренной стороны, не допускается
движение по косогору. Трудные участки преодолеваются с разго-
на (без поворота колес в сторону). Следует помнить, что двига-
тель перегревается, падает его мощность и, следовательно, сни-
жается и проходимость. Солончаковые участки преодолеваются
на низших передачах (без крутых поворотов и остановок). Для
повышения проходимости используются приспособления для
предотвращения пробуксовки гусениц (колес).
Места для привалов и отдыха выбираются вблизи источни-
ков воды.
Во время песчаных бурь движение, как правило, прекращается,
установки (машины) останавливаются на сокращенных расстоя-
ниях. Запрещается оставление в пути одиночных машин. Механи-
ки-водители при совершении марша в пустынях могут подменять-
ся одним из подготовленных номеров расчета.
В северных районах марш зенитных ракетных подразделений
осуществляется в* условиях низких температур и бездорожья. При
этом в целях повышения проходимости машин применяются цепи
противоскольжения, якоря1 для самовытаскивания и т. п. На гусе-
ничных машинах ослабляются гусеничные цепи.
На технике принимаются меры по утеплению аккумуляторных
батарей. По сравнению с обычными условиями совершение мар-
42
ша в северных районах характеризуется повышенным расходом
горючего, снижением скорости движения и запаса хода, а также
увеличенным износом машин.
В северных районах в зимнее время возможно движение по
льду замерзших рек, озер и болот. При этом ледовые простран-
ства позволяют совершать марш на повышенных скоростях и
производить объезд остановившихся машин. Предусматриваются
меры по предупреждению обморожения личного состава зимой и
по защите от гнуса летом.
Управление колонной по радио часто нарушается из-за воз-
никновения геомагнитных возмущений. Поэтому . необходимо
предусмотреть дублирование команд световыми и сигнальными
средствами.
,В зимнее время часть техники оборудуется навесными при-
способлениями для расчистки дорог от снежных заносов, а также
для прокладки подъездных путей и оборудования съездов с основ-
ных маршрутов.
С началом пурги (метели) колонны могут останавливаться
или отводиться в ближайшие возможные укрытия, для* личнрго
состава оборудуются места для обогрева и размещения личного
состава, организуется круговое охранение.
Глава VI
ОБЕСПЕЧЕНИЕ БОЕВЫХ ДЕЙСТВИЙ
*•
1. Основы обеспечения боевых действий и виды боевого
обеспечения
Обеспечение боевых действий зенитных ракетных' Подразделе-
ний заключается в организации и выполнении мероприятий, обес-
печивающих поддержание высокой боевой готовности, сохранение
боеспособности для успешного и своевременного выполнения по-
ставленных задач.
Обеспечение боевых действий, организуется1 на основе дейст-
вующих приказов старших командиров и начальников и указаний
вышестоящих штабов и подразделяется на боевое, специально-тех-
ническое и тыловое. В данном Учебнике будут рассмотрены основ-
ные виды боевого обеспечения.
Боевое обеспечение предназначено для исключения внезапного
нападения наземного и воздушного противника, снижения эффек-
тивности его ударов по войскам и объектам и создания условий
для своевременного и эффективного вступления в бой с воздуш-
ным противником. Видами боевого обеспечения являются: раз-
ведка, защита от оружия массового поражения; радиоэлектронная
борьба; маскировка; инженерное и химическое обеспечение; охра-
43
нение и самооборона; топогеодезическое и гидрометеорологиче-
ское обеспечение.
2. Разведка местности в подразделении
В зенитных ракетных подразделениях разведка местности ве-
дется в целях выбора маршрутов движения, стартовых позиций
и батарейных командирских пунктов, а также для определения
влияния местности на выполнение поставленной боевой задачи.
Разведка местности в подразделениях возлагается на рекогнос-
цировочную группу, высылаемую командиром батареи.
На разведывательную группу возлагаются следующие задачи:
выбрать и обозначить стартовую позицию подразделения и
определить возможное направление скрытного подхода воздуш-
ного противника (особенно вертолетов) на нее;
разведать маршруты движения; определить и обозначить гра-
ницы участков заражения или путей их обхода;
определить защитные и маскирующие свойства местности на
маршруте движения и на новой (выбранной) СП;
(определить объем выполнения инженерных работ;
определить данные для топогеодезической подготовки, меро-
приятия по организации охраны и самообороны.
Основной задачей рекогносцировочной группы является выбор
стартовой позиции. Ее выбирают исходя из требований, предъяв-
ляемых к ней. При ее выборе начальник рекогносцировочной груп-
пы ориентируется на местности, сообщает координаты СП коман-
диру батареи, производит разбивку элементов боевого порядка
батареи, на позициях зенитных установок обозначает вехами ос-
новное направление стрельбы и ответственный сектор.
Если указанная командиром батареи СП не соответствует
требованиям, предъявляемым к ней, то начальник рекогносциро-
вочной группы вправе в радиусе до 1000 м для подразделений
ЗРК средней дальности и 500 м — ближнего действия и малой
дальности выбрать СП в новом месте.
Основной задачей разведки маршрута движения является обес-
печение подразделению беспрепятственного движения по намечен-
ному маршруту. Начальник рекогносцировочной группы определя-
ет проходимость дорог (состояние дорожного покрытия, извилис-
тость, уклоны подъемов и спусков, наличие бродов на водных пре-
градах, грузоподъемность мостов, высоту дорожных сооружений,
наличие труднопроходимых участков, возможности съездов с до-
роги и въезда на нее, наличие укрытий и объездов вблизи дорог
и др.), при наличии на маршруте мелких препятствий и повреж-
дений пути — устраняет их.
Рекогносцировочная группа возглавляется, как правило, одним
из офицеров батареи; в ее состав входят один-два разведчика,
радиотелефонист и водитель. На вооружение разведгруппы выде-
ляют автомобиль повышенной проходимости, радиостанцию, мино-
искатель, приборы радиационной и химической разведки, указа-
44
тели элементов боевого порядка, указатели обходов, разветвлений
пути, бродов, объездов, участков заражения, шанцевый инстру-
мент, карту, компас и др.
О всех препятствиях, встреченных на маршруте, о принятых
мерах и по другим вопросам начальник рекогносцировочной груп-
пы докладывает командиру батареи по радио с помощью пере-
говорных таблиц.
Разведгруппа высылается заблаговременно с таким расчетом,
чтобы она смогла выполнить возложенные на нее задачи и на-
чальник разведгруппы смог бы встретить колонну подразделения
в указанном месте и в указанное время.
3. Защита от оружия массового поражения
Защита от оружия массового поражения — это комплекс меро-
приятий, проводимых в целях недопущения поражения личного
состава, вооружения, боевой техники и материальных средств ядер-
ным и химическим оружием и бактериальными средствами или
максимального ослабления результатов применения противником
ОМП, сохранения боеспособности войск и обеспечения успешного
выполнения поставленных задач.
Мероприятия по защите войск от ОМП проводятся во всех
видах боевых действий и включают:
радиационную, химическую и бактериологическую (биологиче-
скую) разведку;
своевременное и умелое использование средств индивидуаль-
ной и коллективной защиты;
дозиметрический и химический контроль;
специальную обработку личного состава, боевой техники, воо-
ружения и материальных средств.
В батарее радиационная, химическая и неспецифическая бак-
териологическая (биологическая) разведка ведется специально
подготовленным отделением (расчетом), из состава которого вы-
деляется наблюдатель.
Наблюдатель обнаруживает радиоактивное и химическое за-
ражение, определяет уровень радиации или тип отравляющего
вещества и докладывает об этом командиру. По указанию коман-
дира, а при обнаружении отравляющих веществ самостоятельно
наблюдатель подает сигнал оповещения о радиоактивном и хими-
ческом заражении.
Оповещение о радиоактивном, химическом и бактериологиче-
ском (биологическом) заражении осуществляется с командных
пунктов по сетям оповещения о воздушном противнике и дубли-
руется по всем каналам связи. В подразделениях до всего лич-
ного состава сигналы доводятся по громкоговорящей связи и
средствами звуковой сигнализации. Оповещение о радиоактивном
заражении осуществляется сигналом «Радиационная опасность», о
химическом и бактериологическом (биологическом) заражении —
сигналом «Химическая тревога».
45
По сигналу «Радиационная опасность» личный состав, дейст-
вующий на открытой местности, не прекращая выполнения по-
ставленной задачи, надевает респираторы (противогазы) и за-
щитные плащи в виде накидки. В зависимости от обстановки по
распоряжению командиров личный состав может укрываться на
период выпадения радиоактивных веществ.
По сигналу «Химическая тревога» личный состав, находящий-
ся на открытой местности, немедленно надевает противогазы и
защитные плащи в виде накидки, а личный состав, находящийся
в негерметизированных сооружениях и кабинах без фильтровен-
тиляционных установок, — только противогазы.
Во время совершения марша по сигналам «Радиационная опас-
ность» и «Химическая тревога» автомобили останавливаются.
Личный состав при нахождении в крытых машинах и все водители
надевают противогазы (респираторы); при нахождении на откры-
тых машинах личный состав, кроме того, надевает защитные
плащи. Стекла кабин, люки, жалюзи и задние клапаны тентов
автомобилей (тягачей) закрываются. После этого движение во-
зобновляется.
Своевременное использование средств индивидуальной и кол-
лективной защиты и умелое их применение достигаются постоян-
ным контролем их наличия у личного состава, заблаговременной
подготовкой личного состава в пользовании этими средствами
защиты.
Сигнал оповещения об окончании радиоактивного, химического
и бактериологического (биологического) заражения не устанав-
ливается. Средства индивидуальной защиты снимаются по рас-
поряжению командира подразделения, после того как с помощью
приборов будет установлено отсутствие опасности поражения лич-
ного состава.
Целесообразные способы действий на зараженной местности
заключаются в том, чтобы не допустить или снизить поражающее
действие радиоактивных, отравляющих веществ и бактериальных
средств.
Контроль радиоактивного облучения офицеров, а также рядо-
вых и сержантов, выполняющих задачи в отрыве от своих подраз-
делений, осуществляется индивидуальным методом. Контроль
облучения остального личного состава осуществляется групповым
методом за каждый расчет, работающий в одинаковых условиях
радиоактивного заражения.
При действиях батареи на зараженной местности организуется
посменная боевая работа личного состава в средствах индиви-
дуальной защиты.
При организации посменной работы в условиях радиоактивного
заражения важным условием сохранения боеспособности являет-
ся принцип равнооблученности личного состава смен боевых рас-
четов.
Суммарные дозы излучения, предельно допустимые сроки ра-
46
бот и нормы зараженности поверхностей объектов указаны в
табл. 6.1—6.3.
Таблица 6.1
Суммарные дозы излучения на радиоактивной зараженной местности,
не приводящие к снижению боеспособности личного состава войск
(населения)
Продолжительность облучения Доза излучения, рад
До четырех суток Непрерывное или периодическое облучение в течение: 50 ;
одного месяца 100
трех месяцев 200
одного года 300
Примечание. При важных аварийно-спасательных работах может до-
пускаться доза излучения до 100 рад.
В исключительных случаях, когда при радиоактивном облу-
чении все смены расчета могут выйти из строя за определенный
период времени, а боевая обстановка требует продолжать работы,
может быть целесообразным такой график работы, по которому
предусматривается переоблучение одной смены в целях сохране-
ния боеспособности остальных в интересах дальнейшего выпол-
нения боевой задачи.
Целесообразные действия в условиях химического и бактерио-
логического (биологического) заражения заключаются в органи-
зации посменной работы с использованием средств индивидуаль-
ной и объектов коллективной защиты. Продолжительность рабо-
ты смен должна быть одинаковой и устанавливается с учетом
предельно допустимых сроков работы в средствах индивидуаль-
ной защиты.
При ведении боевых действий может возникнуть необходимость
прохождения зон заражения;
Преодоление зон заражения всех видов (радиоактивного, хи-
мического и бактериологического (биологического) должно осу-
ществляться на максимально возможной скорости и увеличенных
дистанциях между машинами, исключающими их запыление.
После преодоления зараженного участка делается остановка,
проводится дозиметрический или химический контроль заражен-
ности личного состава и техники. При необходимости проводится
специальная обработка личного состава, вооружения и техники.
Организация и осуществление специальной обработки зависят
от условий обстановки, в которой находится и действует подраз-
деление, от вида и степени заражения, наличия времени и средств
обработки. При недостаточности времени и средств проводится
частичная специальная обработка.
47
Таблица 6.2
Предельно допустимые сроки работ
в средствах индивидуальной защиты
/. При отрицательной температуре воздуха
Применяемые средства защиты и обмундирование Допустимое время работы, ч, при средней физической нагрузке, при температуре воздуха, С
40 30 20
Зимнее армейское обмундирование 4- фильтрую- щий противогаз 4- защитные чулки 4- защитные 0,7 1.2 3
перчатки Зимнее армейское обмундирование 4- общевой- сковой защитный комплект 4- фильтрующий про- тивогаз 1,5 4,0 ♦
II. При положительной температуре воздуха
Применяемые средства защиты и обмундирование Допустимое время работы, ч, при средней физической нагрузке, при температуре
10 воздуха, °C 40
20 30
ОКЗК 4- защитные чулки 4- защитные перчат- ки 4- фильтрующий противогаз ♦ * 4,0 2,0
ОКЗК 4- общевойсковой защитный комплект 4- 4- фильтрующий противогаз 4—5 0,6 0,5 0,4
* Время нахождения в средствах защиты определяется временем нахожде-
ния в противогазе, которое для натренированного личного состава не должно
превышать 8 ч.
Частичная специальная обработка проводится по решению
командира подразделения без прекращения боевой деятельности
и без снижения боевой готовности.
У личного состава при заражении радиоактивными вещества-
ми дезактивируются только средства защиты кожи, а сслгл они
не были надеты, то обрабатываются открытые участки кожных
покровов человека (лицо, шея, руки), обмундирование, снаряже-
ние и обувь.
При заражении капельно-жидкими ОВ и их аэрозолями дега-
зируются только средства защиты кожи, а если они не были на-
деты, то немедленно дегазируются открытые участки кожных
покровов человека с помощью индивидуального противохимиче-
ского пакета, а обмундирование заменяется.
48
Таблица 6.3
Безопасная зараженность поверхностей объектов
радиоактивными продуктами ядерного взрыва (мрад/ч)
Объекты Возраст радиоактивных продуктов, ч
до 12 12—24 более 24
Нательное белье, лицевая часть противогаза, обмундирование, снаряжение, обувь, средства ин- дивидуальной защиты, личное оружие, медико- санитарное имущество 200 100 50
Продовольственная тара, кухонный инвентарь, оборудование столовых, хлебопекарен, продоволь- ственных кладовых 200 100 50
Военная техника (автотранспорт, самолеты, спецмашины, артиллерийские установки, миноме- ты, ракетные комплексы, техническое имущество) Бронированные объекты (БТР, БМП, танки, пусковые установки) 800 400 200
1600 800 400
Примечания: 1. Если возраст радиоактивных продуктов неизвестен,
пользуются данными графы «более 24».
2. При измерении заражения объектов расстояние между датчиком прибора
и поверхностью должно быть 1—1,5 см.
Частичная специальная обработка ракетной
техники
Дезактивация: обметание или сдувание радиоактивной пыли,
протирание щетками комплектов ДК-1 и ДК-4 или влажной
ветошью с использованием дезактивирующих растворов, воды или
горючего.
Дегазация (дезинфекция): обработка дегазирующими раствора-
ми (при их отсутствии дезактивирующими растворами или горю-
чим) с помощью комплектов ДК-1 и ДК-4 или протирание вето-
шью, смоченной этими растворами.
При проведении частичной специальной обработки обрабаты-
ваются те места ракетной техники, с которыми личный состав
соприкасается при обращении с ней.
Полная специальная обработка проводится по приказу коман-
дира подразделения.
Дезактивация, дегазация и дезинфекция зенитной ракетной и
радиолокационной техники проводятся без разборки, за исключе-
нием снятия легкосъемных деталей, приборов, принадлежностей
и инструментов, которые обрабатываются отдельно.
Перед обработкой все люки (разъемы) тщательно заклеива-
ются изоляционной лентой во избежание попадания внутрь рас-
творов. Электрооборудование и блоки, не подлежащие смачива-
нию водой, обрабатываются сжатым воздухом или трехкратным
протиранием ветошью, смоченной горючим или спиртом.
4 Зак. 3112дсп 49
Обработка ракет, пусковых установок и всех радиотехнических
средств производится только после выключения питания аппара-
туры.
При необходимости дегазация внутри кабин управления, стан-
ции наведения- ракет, радиолокационной станции производится
трехкратным протиранием внутренних поверхностей ветошью, смо-
ченной дегазирующими растворами (панелей электрооборудова-
ния— ветошью, смоченной горючим или спиртом) с последующим
проветриванием с помощью вентиляторов, нагнетателей системы
защиты от ОМП и отопительно-вентиляционной системы при от-
крытых люках.
Обработка ракеты, находящейся в герметичной укупорке, за-
ключается в обработке самой укупорки без нарушения ее гер-
метичности.
При проведении полной специальной обработки обрабатыва-
ются все зараженные поверхности с помощью комплектов ДК-1,
ДК-4 или специальных машин подразделений химических войск с
использованием соответствующих растворов.
Ликвидация последствий применения противником ядерного,
химического и бактериологического (биологического) оружия •осу-
ществляется в целях восстановления боеспособности подразделе-
ний, спасения личного состава и оказания помощи раненым и
больным.
При ликвидации последствий применения противником оружия
массового поражения организуются спасательные работы (расчи-
стка завалов, розыск и спасение раненых из боевых машин, раз-
рушенных и поврежденных сооружений, оказание им первой по-
мощи, тушение пожаров, эвакуация раненых на медицинские
пункты и специальная обработка подразделений).
4. Радиоэлектронная борьба
В зенитных ракетных подразделениях основу радиоэлектрон-
ной борьбы составляет защита от различного рода радиопомех и
противодействие техническим средствам разведки противника в
сочетании с уничтожением средств постановки помех, и в первую
очередь самонаводящегося на излучение оружия.
Основной целью радиоэлектронной борьбы является скрытие
состава, размещения и технических характеристик работающих
средств РЛС подразделения, ослабление воздействия на них по-
мех, ионизирующих и электромагнитных излучений ядерного и
других видов оружия, обеспечение их электромагнитной совмести-
мости (ЭМС) и защиты от самонаводящегося на излучение
оружия.
Защита от радиопомех, самонаводящегося на излучение ору-
жия, а также обеспечение ЭМС радиоэлектронных средств в под-
разделении достигаются выполнением указаний старшего началь-
ника и путем использования технических возможностей аппара-
туры боевой техники подразделения.
50
В ходе боевых действий командиры подразделений, начальники
расчетов (отделений) должны определять:
характер радиопомех противника, способы и средства их по-
становки, а также способы применения самонаводящегося ору-
жия противника;
степень влияния взаимных помех между своими и соседними
радиоэлектронными средствами и порядок отстройки от них;
влияние экранирующего воздействия местности в районе пози-
ции на работу своих РЭС.
Начальник расчета (отделения), доводя до личного состава
задачи по радиоэлектронной борьбе и противодействию техничес-
ким средствам разведки противника, указывает:
порядок работы РЛС отделения на излучение в соответствии
со степенями боевой готовности;
порядок включения и настройки аппаратуры защиты от актив-
ных и пассивных помех;
способы защиты от поражения самонаводящимся на излуче-
ние оружием и воздействия ионизирующих и электромагнитных
излучений ядерного и других видов оружия;
порядок применения телевизионно-оптических визиров и опти-
ческих приборов в условиях применения противником радиопомех
и противорадиолокационных ракет;
разрешенные секторы работы на излучение при проверках (на-
стройке) РЛС;
порядок поиска и уничтожения передатчиков разового дей-
ствия;
порядок применения различных режимов работы станции.
Основным условием успешной борьбы с помехами различного
рода и противорадиолокационными ракетами противника являет-
ся качественная подготовка личного состава, техники и мораль-
но-психологическая подготовка личного состава.
5. Инженерное обеспечение и маскировка
Целью инженерного обеспечения и маскировки зенитных ра-
кетных подразделений является создание на местности условий
для успешного выполнения ими боевых задач и защиты личного
состава, вооружения и боевой техники от средств поражения
противника.
Инженерное обеспечение зенитной ракетной батареи включает:
проверку местности и стартовой позиции на наличие мин и их
обезвреживание;
подготовку, прокладку и содержание в исправном состоянии
подъездных путей;
устройство окопов и укрытий для техники и личного состава
батареи;
проведение маскировочных мероприятий табельными и подруч-
ными средствами на позиции;
4* 51
устройство заграждений, окопов для самообороны и пунктов
водоснабжения.
Работы по инженерному оборудованию СП выполняются сила-
ми и средствами батареи и приданными инженерными средст-
вами старшего начальника.
Перечень инженерных работ, их объем и последовательность
устанавливает командир батареи. При наличии 3—5 ч на пози-
ции выполняются работы первой очереди: оборудуются укрытия
для личного состава, подъездные пути для техники батареи, от-
рываются окопы самообороны.
При нахождении на позиции от одних до двух суток выпол-
няются инженерные работы второй очереди: работы первой оче-
реди; оборудование укрытий и окопов для- боевых средств бата-
реи, пункта водоснабжения. Работы третьей очереди выполняются
при нахождении на позиции более двух суток. При этой очереди
дополнительно оборудуются убежища (блиндажи) для личного
состава, причем они могут быть как открытого, так и перекры-
того типа. Инженерное оборудование проводится как основной,
так и запасных стартовых позиций (основной СП — в первую оче-
редь) .
Каждый расчет (отделение) должен оборудовать окоп (укры-
тие) для своей техники, один-два окопа для самообороны из рас-
счета один окоп на два-три стрелка и щель для укрытия личного
состава.
Инженерное оборудование производится в ночное время или
в других условиях ограниченной видимости с обязательным вы-
полнением условий маскировки. Маскировка должна быть под фон
окружающих предметов, она непрерывно подновляется в зависи-
мости от изменяющихся условий местности.
Маскировка подразделяется на естественную и техническую. К
естественной маскировке относится приспособление к окружаю-
щей местности с использованием подручных средств: дерна, тра-
вы, кустарника, ветвей деревьев, снега, верхнего слоя грунта. К
технической маскировке относятся: применение табельных маски-
ровочных средств, окрашивание материальной части и сооруже-
ний, устройство различных масок, ложных сооружений, макетов
и т. д. Боевая техника маскируется с помощью масок и покрытий
или путем окраски. Основой масок и покрытий являются сети,
которые могут быть летними и зимними. Летние маскировочные
сети имеют зеленый или бурый цвет с нашитыми поверх кусками
зеленой ткани. Зимняя маскировочная сеть имеет белый цвет с
нашитыми поверх кусками белой ткани.
Маскировочная окраска техники бывает одноцветной (защит-
ной или белой) и трехцветной (пятнистой). В любом случае окра-
ска должна подражать фону той местности, на которой распола-
гается боевая техника.
При выполнении маскировочных работ маскировка не должна
затруднять ведение боевой работы. Прежде чем приступить к
маскировке, необходимо выявить демаскирующие признаки, к ко-
52
горым относятся: специфическое расположение техники на пози-
ции, следы деятельности на позиции (движение техники, инже-
нерные работы и др.), наличие определенных по внешнему виду
и назначению сети дорог внутри СП, характерное расположение
окопов, укрытий и их размеры.
Для маскировки от воздушного радиолокационного обнару-
жения используются уголковые отражатели, которые на экране
самолетного локатора наряду с отметкой от боевой техники созда-
ют группу дополнительных отметок, искажающих конфигурацию
боевого порядка СП.
6. Топогеодезическое обеспечение
Целью топогеодезического обеспечения зенитных ракетных под-
разделений является топографическая привязка и ориентирование
радиолокационных станций, боевых машин (пусковых установок),
пунктов управления, а также учет влияния местности на их
работу.
Топогеодезическое обеспечение включает определение:
координат и высоты стояния СНР, батарейного командирского
пункта, пусковых установок, боевых машин;
дирекционных углов ориентирных направлений;
назначение и определение координат реперных (контрольных)
точек;
составляющих баз ПУ от СНР, боевых машин от батарейного
командирского пункта, СНР от средств разведки старшего на-
чальника;
расстояний до ориентиров (местных предметов);
углов закрытия позиций;
смещения точек стояния* СНР, батарейного командирского
пункта относительно средств разведки старшего начальника;
секторов аварийного пуска ракет.
Для топографической подготовки в зенитных ракетных под-
разделениях используются аппаратура, встроенная на технике, а
также топографические карты, получаемые командирами и на-
чальниками. Для определения углов закрытия позиций использу-
ется перископическая артиллерийская буссоль.
На рис. 6.1 показано влияние отстояний на передачу данных
о цели. Если их не учитывать, то для СОЦ цель как бы оказы-
вается в точке Ц1. Для удобства учета отстояний используют пря-
моугольную систему координат, которая может быть привязана
к сетке топографической карты. Учет отстояний базы может про-
изводиться двумя способами.
Первый способ. Все станции привязываются к единой системе
координат; отстояние получают как разности координат СРЦ и
53
СОЦ. Как видно на рис. 6.1, величины отстояний определяются
как разности координат:
X — Лсрц — Л"соц;
У = У срц — У соц;
Н — — Мзоц«
Если в этом случае измерить величины Хсрц и Усрц, т. е.
координаты цели относительно СРЦ, то для получения координат
этой цели относительно СОЦ достаточно к измеренным коорди-
натам прибавить величины ДХ и ДУ со своими знаками:
X* соц = Хъ срц + ^Х\
Кц соц — У и срц + &У\
соц = Mt срц + •
Второй способ. При учете отстояний выбирается фиктивная
точка в центре боевого порядка. В этом случае учитываются от-
стояния СРЦ и СОЦ от этой фиктивной точки (рис. 6.2):
АА’срц = X^T — А'срц; АА'сощ = ^фт — Jfcom;
&У СРЦ = Уфт — У срц; ^У СОЦ 1 = Гфт — У соц Г,
А^СРЦ •= ^фт — ^СРЦ‘, А/УсОЦ! = М1)Т — Ясощ.
При этом способе все станции оказываются- привязанными к
единой точке; если одна из них меняет позицию, то учет попра-
вок на базу производится только для нее.
В ходе боевых действий начальник расчета (отделения), коман-
дир боевой машины постоянно готовят аппаратуру топопривязкй
54
о
у
Рис. 6.2. Второй способ учета базы
и ориентирования к работе и осуществляют контроль за ее рабо-
той в движении, на остановках, вводят поправки на реперных
(контрольных) точках и докладывают координаты своего место-
положения.
7. Непосредственное охранение и самооборона
Основной целью охраны и обороны является предотвращение
внезапного нападения противника (пехоты, танков, диверсионных
групп, высадившегося десанта) и проникновения его в район стар-
товых позиций зенитных ракетных подразделений как своими
силами, так и во взаимодействии с прикрываемыми подразделе-
ниями. Непосредственное охранение и самооборона организуются
во всех случаях боевой обстановки и осуществляются без каких-
либо указаний старшего начальника.
Охрана и оборона позиции осуществляются в соответствии со
схемой охраны и обороны стартовой позиции, разрабатываемой
командиром подразделения.
Схема охраны и обороны СП доводится до всего личного со-
става батареи (рис. 6.3).
Охранение позиции подразделения осуществляется патрулями,
выделяемыми из личного состава подразделений и вооруженными
штатным оружием. Непрерывное круговое наблюдение обеспечива-
ется наблюдателями поста воздушного наблюдения. О появлении
противника патрули и наблюдатели поста воздушного наблюдения
докладывают комадиру батареи голосом или установленными сиг-
налами. Личный состав и техника пропускаются в расположение
подразделения по установленному паролю, который назначается
отдельно для темного и светлого времени суток и доводится толь-
ко до личного состава подразделения. В сложных условиях, в тем-
55
Си
СП
Схема охраны и обороны стартовой позиции
Ор.№1 - Р.нцо
во ом
Op.N'9-Дерево
300м
СНР
Расчет
Op.N-2- Пень
400 м ~
^Jdp.N-вТ-курган
1 ^ — ^СНР
с
^ОрНП-СтолЬ
Т\ 100м
ю
Op.N-6-Дерево j пу-2
400 м
Op. №5-кладбище
6ffOM ор.№4-дом
Легенда: 8 М
О маршрут движения патруля Н-1
@ Маршрут движения патруля U-2
w одиночные окопы для стрельбы
Траншея с кодом для сообщения
i
5 сектор стрельбы отделения
Op. №3-Столб
100 м
сил и средств батареи
Отде-
ление
ПУ-1
Старший
сектора
огня
Петров
количество вооружения
ЗУ-25-2
РПГ
А км
пм
2
^Гра-
наты
6
Приме-
чание
Рис. 6.3.
Командир батареи
к-н Сидоров
Схема охраны и обороны стартовой позиции
ное время суток и ночью для охраны позиции выставляются сторо-
жевые посты, которые подчиняются дежурному офицеру подразде-
ления и выполняют обязанности в соответствии с Уставом гарни-
зонной и караульной служб.
При организации обороны командир подразделения назначает
каждому расчету (отделению) сектор обороны с таким расчетом,
чтобы обеспечивалось отражение противника с любого направле-
ния. Границы секторов расчетов (отделений) определяются по ви-
димым ориентирам на местности. Зенитные установки подготавли-
ваются к стрельбе по наземным целям с любого доступного на-
правления.
Начальник расчета (отделения) в соответствии с указаниями
командира батареи:
ставит задачу на отрывку окопов самообороны сначала лежа,
а при наличии времени окоп углубляется до профиля стрельбы
стоя;
указывает каждому солдату ответственные секторы стрельбы с
учетом перекрестного огня;
определяет на местности и доводит до подчиненных ориентиры
и дальности до них;
производит боевой расчет и устанавливает порядок действий
каждого солдата на случай нападения наземного противника.
Нападение наземного противника на батарею (позиции БМ)
отражается огнем зенитных установок и стрелкового оружия. Тан-
ки и бронемашины, прорвавшиеся в район позиции, уничтожают
огнем ручных противотанковых гранат и гранатометов.
О нападении наземного противника командиры расчетов (отде-
лений) докладывают командиру батареи, а он — старшему началь-
нику.
Глава VII
МЕТОДИКА ПРОВЕДЕНИЯ ТАКТИКО-СТРОЕВОГО
ЗАНЯТИЯ С РАСЧЕТОМ
1. Задачи, формы и методы обучения расчета (отделения)
по тактической подготовке
Тактическая подготовка является основным видом боевой под-
готовки Войск противовоздушной обороны. Основная цель такти-
ческой подготовки — поддержание подразделений и частей в высо-
кой постоянной боевой готовности к безусловному выполнению по-
ставленных им боевых задач в сложных условиях современной
войны.
Основными задачами обучения расчета (отделения) по так-
тической подготовке являются:
изучение тактики, организации, вооружения, боевых возможно-
57
стей, способов и приемов боевых действий вероятного противника?
и своих войск;
боевое слаживание подразделений в подготовке и ведении ре-
шительных боевых действий с воздушным противником, применяю-
щим новые средства воздушного нападения и радиоэлектронного
подавления, разнообразные тактические приемы действий по объ-
ектам и войскам и при преодолении противовоздушной обороны;-
совершенствование подготовки личного состава, боевых расче-
тов в умелом применении оружия, боевой техники и АСУ в слож-
ных условиях подготовки и ведения боевых действий;
воспитание у военнослужащих высоких морально-политических,
боевых и психологических качеств.
В ходе тактической подготовки в войсках ПВО Сухопутных
войск применяются различные формы и методы обучения.
Формы обучения (виды учебных занятий, мероприятий)—это
организационная сторона обучения, определяющая состав и груп-
пировку обучаемых, место и продолжительность учебного меро-
приятия, порядок и последовательность отработки учебного мате-
риала и специфику деятельности обучаемых и командиров, прово-
дящих занятия.
Основными формами обучения, используемыми в ходе тактиче-
ской подготовки в подразделениях войск ПВО Сухопутных войск,
являются: тактико-строевые и тактические занятия, тренировки и
тактические (тактико-специальные) учения.
Каждой форме обучения соответствует основной и один или не-
сколько дополнительных методов обучения.
Методы обучения — это взаимообоснованная совокупность при-
емов работы командира (обучающего) и подчиненных (обучае-
мых), при помощи которых осуществляется вооружение подчинен-
ных знаниями, привитие им навыков и умений, а также формиро-
вание у них политических, морально-боевых и психологических ка-
честв.
Основными методами обучения личного состава и войск такти-
ке являются: устное изложение учебного материала, обсуждение
изучаемого материала, показ (демонстрация), упражнение (трени-
ровка), практическая работа, самостоятельная работа.
2. Подготовка и проведение тактико-строевого занятия
с расчетом (отделением)
Тактико-строевые занятия являются первой ступенью тактиче-
ской выучки и боевого слаживания подразделений и проводятся до
тактических учений. На тактико-строевых занятиях отрабатывает-
ся техника выполнения приемов и способов действий подразделе-
ний в различных видах боя и осуществляется их первоначальное
слаживание.
Сущность тактико-строевого занятия состоит в том, что с лич-
ным составом и подразделением отрабатываются приемы и спосо-
бы действий в различных видах боя сначала по элементам в мед-
58
ленном темпе, затем в целом в пределах установленных нормати-
вов. Приемы и способы действий (учебный вопрос) повторяются
до тех пор, пока обучаемые не научатся выполнять их правильно
и в нужном темпе. Затем отрабатывается следующий учебный
вопрос.
Тактическая обстановка на тактико-строевых занятиях создает-
ся для отработки каждого учебного вопроса. Для обозначения дей-
ствий наземного противника используется оборудование учебных
полей, а для создания воздушной обстановки используются реаль-
ные полеты авиации, различные имитаторы и тренажеры, радио-
управляемые мишени и имитаторы воздушных целей. Тактико-
строевые занятия обычно проводят непосредственные командиры.
Продолжительность каждого занятия может быть до 3 ч. Занятия
проводятся как днем, так и ночью. Темы для проведения тактико-
строевых занятий с боевыми расчетами (отделениями) выбирают в
соответствии с программой боевой подготовки.
Содержание и объем выбранной темы тактико-строевого заня-
тия должны учитывать возможность ее отработки в составе расче-
та (отделения) с использованием только штатного вооружения и
боевой техники. Задачи, решаемые во время проведения тактико-
строевого занятия, должны быть конкретными и немногочислен-
ными.
Командир расчета (отделения), изучая со своим личным соста-
вом вопросы тактической подготовки, должен учитывать различ-
ный уровень знаний и практических навыков своих солдат и ста-
вить конкретные посильные задачи перед каждым воином.
Подготовка тактико-строевых занятий включает: уточнение и
определение исходных данных, разработку плана проведения за-
нятия, подготовку района занятия и материального обеспечения,
подготовку к занятию командира и подразделения.
Исходными данными для подготовки занятия являются: тема,
учебные и воспитательные цели, учебные вопросы, состав обучае-
мых, время (продолжительность), район проведения занятия, нор-
мы расхода моторесурсов (на занятие с материальной частью),
имитационных и других материальных средств.
При подготовке занятия командир уясняет тему занятия, опре-
деляет, какие тактические приемы и действия на фоне какой об-
становки должны быть отработаны в ходе занятия, с чего следует
начать и чем закончить отработку темы.
Учебная цель тактико-строевого занятия определяется и форму-
лируется для расчета (отделения) в целом. Она должна содер-
жать сущность проводимого занятия, ожидаемые результаты и
учитывать выявленные ранее недостатки в подготовке отдельных
категорий личного состава.
Перечень учебных вопросов, включаемых в план проведения за-
нятия, определяется учебными целями. При этом нельзя стремить-
ся только к возможно большему количеству учебных вопросов.
Необходимо выбирать и отрабатывать наиболее важные вопросы
темы, которые в процессе занятия требуют активных действий все-
59
го личного состава и связаны с выполнением тех тактических
приемов и действий, без которых невозможно достичь слаженности
действий расчета, подразделения и части в целом при выполнении
боевых задач.
При определении времени на каждый учебный вопрос необхо-
димо учитывать сложность отрабатываемых приемов и действий,
навыки обучаемого личного состава и условия, в которых будет
проходить занятие.
При выборе района проведения занятия руководитель учиты-
вает удаление его от места расположения, доступность для боевой
техники, возможность применения средств имитации и возмож-
ность вести личное наблюдение за действиями подчиненных.
Подготовка района и материального обеспечения тактико-
строевого занятия включает:
определение сил и средств, порядка и способов для обозначе-
ния действий воздушного и наземного противника (имитация ог-
ня), количества материальных средств и сроки их подготовки;
подготовку вооружения и техники; организацию питания и ме-
дицинского обслуживания личного состава.
Подготовка к занятию командира и подразделения осуществ-
ляется заблаговременно. В процессе подготовки к занятию коман-
дир подразделения должен изучить положения уставов, наставле-
ний (руководств) по отрабатываемой теме, а также нормативы по
тактической подготовке и боевой работе, которые предстоит отра-
ботать на занятии, меры безопасности.
Личный состав на тактико-строевые занятия выводится, как
правило, со штатной техникой и вооружением.
План проведения тактико-строевого занятия разрабатывается
на схеме или на карте и включает: исходные данные, тактическую
обстановку для отработки каждого учебного вопроса, мероприя-
тия, проводимые командиром, с расчетом времени, порядок имита-
ции и обозначения противника, сигналы оповещения и взаимодей-
ствия.
План является рабочим документом и утверждается команди-
ром подразделения, а подписывается руководителем занятия.
Создаваемая тактическая обстановка должна отвечать учебным
целям занятия, обеспечивать поучительность его проведения, ак-
тивность обучаемых и отработку намеченных приемов и действий.
Форма плана может быть произвольной, но должна обеспечи-
вать удобство его использования в полевых условиях.
Один из вариантов плана тактико-строевого занятия с расче-
том (отделением) приведен в приложении 1.
60
ПРИЛОЖЕНИЕ 1
«УТВЕРЖДАЮ»
Командир подразделения
(звание, подпись)
«» 199_____________________г.
ПЛАН ПРОВЕДЕНИЯ ТАКТИКО-СТРОЕВОГО ЗАНЯТИЯ
С ___________РАСЧЕТОМ (ОТДЕЛЕНИЕМ) _________________ ПОДРАЗДЕЛЕНИЯ
(ЧАСТИ)
Тема 2. Действия расчета в обороне
Занятие 7. Действия личного состава при инженерном оборудовании,
маскировке, охране и обороне позиции. Отражение наземного противника, про-
рвавшегося в район позиции.
Учебные и воспитательные цели: научить личный состав расчета оборудо-
вать в инженерном отношении позицию, маскировать технику. Отработать дей-
ствия расчета при отражении наземного противника, прорвавшегося в район
позиции.
Состав обучаемых: личный состав расчета.
Время проведения: 3 ч.
Место: учебное поле.
Материальное обеспечение: стенды и плакаты по инженерному оборудо-
ванию позиции. Схема охраны и обороны позиции.
I. Подготовка к тактико-строевому занятию
Основные мероприятия:
провести с личным составом беседу на тему «Полевая выучка — школа
боевого мастерства»;
изучить с личным составом раздел Наставления по военно-инженерному
делу «Окопы, траншеи, ходы сообщения и сооружения для наблюдения»;
подготовить штатный шанцевый инструмент и личное оружие.
61
II. План-схема местности.
Тактическая обстановка
П1. Ход занятия
Учебные вопросы Время, мин Содержание вопросов
1. Постановка задачи 10 Объявление темы и учебной цели занятия. Объем учебных вопросов. Введение в общую и частную такти- ческую обстановку
2. Проверка знаний личным составом основных положений уставов и наставлений 20 Проверка знаний устройства и обо- рудования одиночных окопов для стрельбы лежа, с колена и стоя. Обязанности дозора и патруля в соответствии с Уставом гарнизонной и караульной служб
3. Практическая работа по инженерному оборудованию позиции для обороны 60 Отрывка окопов для стрельбы ле- жа, с колена и стоя. Правила обо- рудования окопов и их геометриче- ские размеры. Порядок отрывки оди- ночного окопа под огнем противника. Обозначение секторов стрельбы оди- ночных стрелков, выбор ориентиров
62
Окончание приложения 1
Учебные вопросы Время, мин Содержание вопросов
4. Действия расчета по от- ражению десанта противника 20 Сигналы о нападении. Занятие око- пов и ведение огня по противнику. Уничтожение отдельных групп про- тивника
5. Действия дозоров и пат- рулей 30 Обязанности дозоров и патрулей. Порядок оповещения о противнике и сигналы оповещения. Использование естественных укрытий для ведения огня по противнику
6. Разбор занятий 10 Итоги занятия. Недостатки и за- дачи по их устранению и совершен- ствованию знаний
Командир расчета (отделения)
(звание, подпись)
«» 199______________________________ г.
По прибытии в район занятия командир подразделения объяв-
ляет тему и цель занятия, а также учебные вопросы и порядок их
отработки, вводит обучаемых в тактическую обстановку, ставит
задачу подразделению и приступает к практическому обучению
подчиненных.
Изучение приемов и способов действий необходимо начинать в
медленном темпе по элементам, а затем переходить к отработке
приемов и способов в целом в пределах установленного времени.
После выполнения каждого элемента или учебного вопроса не-
обходимо указать на допущенные ошибки; если необходимо, еще
раз показать правильное выполнение приема или действия. Ко-
мандир не должен приступать к отработке следующего приема,
не убедившись в правильном и четком усвоении предшествующих
действий.
Если в процессе выполнения элемента или учебного вопроса
отдельные номера допускают ошибки и неточности, нет необходи-
мости сразу же останавливать занятие. Лучше запомнить ошибки
и указать на них всему расчету после выполнения учебного вопро-
са. Если допускаются грубые ошибки или ошибки влекут за собой
опасность для личного состава, или же могут привести к полом-
кам (авариям) боевой техники, необходимо немедленно прервать
занятие, проанализировать причины их появления (незнание ка-
ких-либо положений, беспечность или халатность при выполнении
и т. п.) и устранить возможность повторения в дальнейшем.
Если в расчете (отделении) имеются хорошо подготовленные
солдаты, из их числа командир назначает помощников (инструкто-
ров), на которых может возлагаться ряд задач, а именно: руко-
водство тренировками по отдельным вопросам занятия; работа на
6S
учебно-тренировочной аппаратуре в качестве инструктора; индиви-
дуальное обучение молодых солдат; контроль за действиями от-
дельных воинов и оценка их умений и навыков.
Обязательным элементом тактико-строевого занятия является
разбор действий подчиненных и их оценка. Разбор является одним
из учебных элементов занятия и имеет большое учебное и воспи-
тательное значение.
В начале разбора командир должен напомнить тему, учебные
вопросы, общую и частную обстановку по каждому вопросу и
учебную цель занятий. Это дает возможность солдатам оценить
свои действия и ошибки с точки зрения цели своего занятия. При
разборе действий подчиненных нельзя пропускать ни один из учеб-
ных вопросов. По каждому из них указываются положительные
результаты и выявленные или допущенные ошибки. В ходе разбо-
ра должны получить объективную и беспристрастную оценку все
воины расчета (отделения). В конце разбора дается общая оценка
подготовленности всего расчета (отделения) и указываются зада-
чи по устранению недостатков и совершенствованию полученных
знаний и навыков.
64
РАЗДЕЛ ВТОРОЙ
ТЕХНИЧЕСКАЯ ПОДГОТОВКА
Глава VIII
АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ
1. Состав зенитного ракетного комплекса,
назначение его основных элементов
Зенитным ракетным комплексом (ЗРК) называется совокуп-
ность минимально необходимого количества функционально свя-
занных средств, обеспечивающих обнаружение, опознавание и вы-
бор для обстрела воздушной цели, а также пуск и наведение ра-
кеты (ЗУР) на эту цель с задачей ее поражения.
Обнаружение, опознавание и выбор для обстрела воздушной
цели осуществляются с помощью средств обнаружения, опознава-
ния и целеуказания, которые в совокупности могут быть названы
системой обнаружения и целеуказания ЗРК.
Пуск ракеты осуществляется пусковыми установками (устрой-
ствами) с помощью стартовой автоматики по командам и сигна-
лам командиров (начальников) расчетов. Наведение ракеты на
цель, выбранную системой обнаружения и целеуказания, обеспечи-
вается средствами управления ЗУР. Цель поражается в точке
встречи с ракетой боевой частью (БЧ) ЗУР.
В соответствии с этими функциями строится схема зенитного
ракетного комплекса (рис. 8.1).
Зенитные ракетные комплексы с командной системой наведения
могут быть двух видов:
с совмещенными боевыми средствами, входящими в состав бое-
вой машины, которая называется тактико-огневой единицей;
с несовмещенными боевыми средствами, имеющими в своем со-
ставе отдельно систему обнаружения и целеуказания, средства уп-
равления ЗУР и пусковые установки; при этом средства управле-
ния ЗУР и пусковые установки объединяются в зенитные ракет-
ные батареи, являющиеся тактико-огневыми подразделениями (ог-
невыми единицами).
Первый вид ЗРК называется автономным войсковым зенитным
ракетным комплексом (АВЗРК).
В ЗРК первого вида обнаружение, опознавание и целеуказание
обеспечиваются для одной огневой единицы. В ЗРК второго вида
5 Зак. 3112лсп
65
Зенитный ракетный
комплекс (ЗРК)
Система обнаружения и целеуказания
Рис. 8.1. Схема построения зенитного ракетного комплекса
одной системе обнаружения и целеуказания придается несколько
огневых единиц.
Системы обнаружения и целеуказания «обрабатывают» по сво-
ему назначению все воздушные цели, находящиеся в зоне их дей-
ствий, т. е. являются многоканальными по целям.
Средства управления ЗУР, которые обслуживает система обна-
ружения и целеуказания, могут быть как многоканальными, так и
одноканальными по цели. Одноканальные средства управления
ЗУР объединяются в группы и стыкуются с многоканальной систе-
мой обнаружения и целеуказания.
Система обнаружения и целеуказания в своем составе имеет
станцию обнаружения целей (СОЦ), наземный радиолокационный
запросчик (НРЗ) и средства передачи информации о цели (радио-
линии передачи команд).
Радиолокационная станция обнаружения целей предназначена
для осуществления непрерывного обзора воздушного пространства,
индикации и оценки воздушной обстановки, определения коорди-
нат целей и передачи целеуказания средствам управления ЗУР.
Она является автономной станцией с непрерывным обзором прост-
ранства по азимуту. Обзор пространства по углу места осуществ-
ляется в одном или нескольких лучах обзора пространства.
Станция обнаружения целей АВЗРК может работать как на
месте, так и в движении. При работе в движении антенна станции
стабилизируется в пространстве гидравлической системой стабили-
зации.
Наземный радиолокационный запросчик предназначен для
установления принадлежности самолета (вертолета), находящего-
ся в зоне действия комплекса. Опознавание «свой — чужой» про-
водится по дополнительной световой отметке на индикаторе кру-
гового обзора (для своего самолета) и по отсутствию такой отмет-
ки для самолета противника.
Радиолиния команд обеспечивает передачу координат целей,
кодированных команд и донесений на огневые средства ком-
плекса.
Средствами управления ЗУР в зенитных ракетных комплексах
с командной системой наведения являются: станции сопровожден
66
ния целей (ССЦ), станции передачи команд (СПК), станции ви-
зирования ракет (СВР), счетно-решающие приборы (СРП) и
пусковые установки (устройства).
Во втором виде комплекса ССЦ (РЛС визирования цели),
СПК, СВР и СРП объединены в так называемую станцию наведе-
ния ракет (СНР).
Радиолокационная станция сопровождения (визирования) цели
обеспечивает непрерывное определение текущих сферических коор-
динат цели и их ввод в счетно-решающий прибор.
Станция передачи команд предназначена для передачи на борт
ракеты непрерывных и разовых команд управления и импульсов
запроса бортовых ответчиков.
Радиолокационная станция визирования ракет предназначена
для определения текущих координат ракет после их старта на
всех этапах полета до момента подрыва.
Счетно-решающий прибор предназначен для решения предстар-
товых задач, выработки команд управления ракетой и разовых ко-
манд.
Пусковые установки или пусковые устройства предназначены
для транспортирования, подготовки пуска и пуска ракеты в тре-
буемом направлении.
В следующих параграфах главы рассмотрим назначение, прин-
ципы управления огнем ЗРК.
2. Принципы управления огнем
В процессе отражения налета воздушного противника эффек-
тивность отдельно взятого зенитного ракетного комплекса опреде-
ляется количеством проведенных стрельб и результатом каждой
стрельбы. Эффективность группировки комплексов зависит, оче-
видно, от качества их совместных действий. Так, например, если
каждое зенитное ракетное подразделение будет выбирать цели для
обстрела самостоятельно (без учета возможных действий соседних
подразделений), то часть целей будет обстреляна несколькими
(может оказаться всеми) подразделениями, а часть целей пройдет
без какого-либо воздействия.
При самостоятельном ведении боя может расходоваться боль-
шое количество лишних ракет, так как каждое подразделение на-
значает расход, исходя из надежного поражения цели, не зная,
что соседнее подразделение предприняло такие же действия.
Управление огнем — главная составная часть управления бое-
выми действиями. Оно, как правило, является централизованным,
так как проводится с командного пункта (КП) части (группи-
ровки).
Задача управления огнем с КП группировки состоит в том, что-
бы имеющимися зенитными ракетными подразделениями с на-
ибольшей надежностью прикрыть войска или объекты тыла от
ударов авиации противника. Это достигается уничтожением мак-
5* 67
симально возможного количества целей (с учетом их важности)
без излишнего расхода ракет.
Физический смысл управления огнем заключается в получении,
анализе информации о воздушном противнике и выработке на ее
основе сигналов, руководящих деятельностью подчиненных зенит-
ных ракетных подразделений.
Управление огнем немыслимо без обратной связи с зенитными
ракетными подразделениями и КП. Обратная связь необходима
для передачи докладов о готовности подразделения к стрельбе,
о результатах выполнения отдельных операций боевой работы и
стрельбы. Командный пункт, зенитные ракетные подразделения,
источники информации, противник и различные факторы обстанов-
ки (рельеф, метеоусловия и т. д.) составляют замкнутый контур
управления, который схематично изображен на рис. 8.2.
Рис. 8.2. Замкнутый контур управления группировкой
Рассмотрим взаимодействие элементов приведенного контура
управления. Радиолокационные, визуальные и другие средства
разведки получают информацию о воздушном противнике. При
этом командный пункт в основном использует информацию, полу-
чаемую своими средствами. Средства разведки зенитных ракетных
подразделений, как правило, предназначены для обнаружения и
захвата целей после постановки огневой задачи с КП. Однако не
исключено использование их информации о наиболее важных це-
лях командным пунктом части (группировки). На рисунке это по-
казано в виде функциональной связи посредством информации о
целях, направленной от зенитных ракетных подразделений на ко-
мандный пункт.
Научность управления огнем заключается в умении использо-
вать сложную технику автоматизированных систем управления ог-
68
нем, а также в способности применять теоретические знания на
практике.
Предвидение заключается в способности командира и осталь-
ных номеров боевого расчета командного пункта заблаговременно
предусматривать возможные изменения воздушной обстановки, со-
стояния подчиненных подразделений и другие условия, а также
вероятный ход предстоящих боевых действий.
Необходимость предвидения вытекает из сущности вооружен-
ной борьбы средств ПВО и авиации, в которой каждая из сторон
стремится любым способом скрыть от противника свой замысел,
добиться внезапности и нанести ему наибольшее поражение.
Правильное предвидение немыслимо без хорошо налаженной
разведки, без глубокого знания техники и приемов боевой работы
в условиях сложной помеховой обстановки, без точных сведений
об организации ВВС, о летно-тактических характеристиках само-
летов и тактике действий противника.
Единоначалие является важнейшим принципом управления ог-
нем. Сущность единоначалия состоит в единовластном руководст-
ве командира подчиненными войсками на основе прав, регламен-
тируемых уставами, наставлениями и приказами вышестоящих на-
чальников.
Командир несет полную и личную ответственность за управле-
ние подчиненными зенитными ракетными подразделениями и за
успешное выполнение ими боевых задач, только он имеет право
принимать решение на бой.
Однако принцип единоначалия совершенно не исключает ини-
циативные и творческие действия боевых расчетов командного
пункта части, командирских пунктов зенитных ракетных подразде-
лений, направленные на повышение качества управления огнем.
Централизация управления огнем заключается в координации
усилий подчиненных подразделений по единому плану для дости-
жения общей цели боя. Принцип централизации управления огнем
не следует смешивать с аналогичным принципом операции целе-
распределения, под которой понимается назначение определенных
целей зенитным ракетным комплексам.
Целераспределение может быть централизованным, децентра-
лизованным и смешанным.
Централизованное — такое целераспределение, при кото-
ром все цели назначаются с командного пункта. При децентра-
лизованном (автономном) целераспределении все цели выби-
раются подразделениями самостоятельно (согласно предваритель-
ным распоряжениям). Смешанное — такое целераспределение,
при котором часть целей по каким-либо причинам выбирается под-
разделениями самостоятельно (согласно предварительным распо-
ряжениям).
Очевидно, наиболее полно задача управления огнем может
быть решена только при жестком соблюдении принципа централи-
зации с использованием централизованного целераспределения.
Переход к смешанному или к автономному целераспределению mq-
69
жет осуществляться только в качестве вынужденной меры, если
по каким-либо причинам имеющиеся возможности радиолокацион-
ных средств или средств управления командного пункта не обеспе-
чивают устойчивое централизованное целераспределение.
Непрерывность управления состоит в постоянном руководстве
командным пунктом действиями подчиненных подразделений без
каких-либо перерывов. Непрерывность управления обеспечивает-
ся высокой боевой готовностью как средств управления, так и зе-
нитных ракетных подразделений при перемещениях в ходе боя, а
также бесперебойной работой средств связи.
Принцип управления с использованием обратной связи состоит
в том, что любое решение о последующих управляющих действиях
командного пункта зависит от результатов предыдущих боевых
действий зенитных ракетных подразделений или от их состояния.
Без использования обратной связи замкнутый контур управления
нарушается.
3. Основные этапы обработки информации
Основными этапами обработки информации при управлении
огнем зенитных ракетных подразделений являются:
сбор и обработка радиолокационной информации;
анализ полученной информации о воздушных целях;
решение задачи распределения целей между подразделениями;
постановка подразделениям огневых задач.
Как правило, основным средством получения информации о
воздушных целях являются радиолокационные станции. Область
пространства, в которой вероятность обнаружения целей радио-
локационной станцией получается не ниже заданной, называется
зоной видимости.
Обработка радиолокационной информации — процесс получе-
ния сведений о средствах воздушного нападения противника и о
своих самолетах и вертолетах, находящихся в зоне видимости
станции.
Процесс обработки радиолокационной информации принято де-
лить на следующие этапы:
первичная обработка информации;
вторичная обработка информации;
третичная обработка информации.
Под первичной обработкой понимается обработка радиолока-
ционных сигналов, поступающих от РЛС за один обзор простран-
ства. В нее входит:
обнаружение сигналов от воздушных целей;
определение координат целей;
нумерация целей.
Обнаружение полезного сигнала заключается в нахождении
оператором отметки цели на индикаторе станции на фоне шумов
или помех. В процессе измерения координат положение обнару-
70
женных сигналов цели привязывается к шкалам датчиков угловых
координат антенн и масштабным меткам дальности.
Нумерация проводится для различения целей. После нумера-
ции вместо комплекса признаков конкретной цели достаточно пе-
редавать сокращенное условное наименование и при этом одно-
значно отличать ее от любых других целей.
Первичная обработка информации не позволяет достоверно су-
дить об обнаружении цели, так как шумовые или помеховые сиг-
налы периодически могут создавать отметки, аналогичные отмет-
кам цели. Измерение параметров движения цели (скорость, курс
и т. п.) вообще невозможно. Возникает необходимость в последую-
щей обработке информации, базирующейся на связях отметок,
принадлежащих одним и тем же целям, т. е. выделении траекто-
рии движущихся целей.
Если в какой-либо точке экрана появилась одиночная отметка,
оператор фиксирует ее как возможную цель. Если в следующем
обзоре отметка появилась вновь и, кроме того, сдвинулась на не-
которое расстояние, то уже имеется основание для принятия реше-
ния об обнаружении цели. Естественно, по отметкам, полученным
после трех последовательных обзоров, вероятность правильного
обнаружения цели будет еще больше. Одновременно можно опре-
делить направление и скорость движения цели.
Итак, при наблюдении сигналов на индикаторе РЛС можно за-
метить, что отметки от цели перемещаются и вырисовывают траек-
торию полета, повторяя с некоторой точностью движение цели в
пространстве. Вследствие этого отметки цели в основном сохраня-
ют те закономерности, которые свойственны самой цели.
Для реально движущихся объектов (целей) характерным явля-
ется то, что между предыдущим и последующим их положениями
существует связь, обусловленная инерционными свойствами реаль-
ных целей и их конечными маневренными возможностями. Поэто-
му можно утверждать, что через некоторое (достаточно малое)
время последующая отметка должна находиться в окрестности
предыдущей. Кроме того, можно с определенной точностью пред-
сказать координаты последующей отметки, если предварительно
вычислить величину и направление скорости полета цели. Подоб-
ные закономерности проявляются тем сильнее, чем меньше интер-
вал между предыдущими и последующими отметками.
Наиболее вероятные причины появления ложных отметок обу-
словлены случайными факторами. Ложные отметки возникают
хаотически, в различных местах экрана индикатора, в то время
как отметки цели располагаются (с некоторым разбросом из-за
ошибок измерения) вдоль траектории движения цели.
Наблюдая за положением отметок на экране индикатора от
одного обзора к другому, оператор РЛС отличает ложные отметки
цели от действительных.
Операции, выполняемые оператором, принципиально могут
быть формализованы, а их выполнение возложено на специализи-
рованную электронную цифровую вычислительную машину. Прц
71
этом в полуавтоматической системе обработки автоматизации под-
лежат только операции определения параметров движения целей
и выработки упрежденных координат. Другие задачи обработки
выполняются в полуавтоматической системе оператором визуально
или с помощью механизированных устройств (съемников), позво-
ляющих повысить темп и точность визуальной обработки.
В отличие от полуавтоматической автоматическая система об-
работки решает задачи обработки траекторий целей полностью с
помощью электронных цифровых вычислительных машин. При
этом ЦВМ, объем памяти и быстродействие которой должны быть
достаточными, анализирует изменение координат целей и уста-
навливает закономерности их изменения от обзора к обзору для
каждой цели в отдельности. На основании приведенного анализа
представляется возможным отбросить ложные цели из-за отсут-
ствия закономерности в их изменении.
Автоматическая или полуавтоматическая обработка информа-
ции, полученной за несколько обзоров РЛС с целью обнаружения
и непрерывного сопровождения траекторий целей, называется вто-
ричной обработкой радиолокационной информации. Она включает
в себя следующие операции:
определение параметров движения целей (курса, скорости,
ускорения и т. д.) по данным, полученным за несколько обзоров
РЛС;
выделение области пространства, в которой с некоторой вероят-
ностью ожидается появление отметки в следующем обзоре (экст-
раполяция отметок);
сличение экстраполированных координат с вновь полученными
и привязка новой отметки к траектории цели (продолжение траек-
тории). Устройство вторичной обработки выделяет траектории дви-
жущихся целей из отдельных отметок, выданных устройством пер-
вичной обработки.
Поскольку радиолокационная станция кругового обзора позво-
ляет грубо оценивать высоту цели, то в случае необходимости точ-
ное значение высоты измеряется с помощью радиолокационного
высотомера, управляемого по командам с радиолокационной
станции.
Параллельно проводится опознавание принадлежности цели к
своим вооруженным силам или к противнику («свой — чужой»).
Под третичной обработкой радиолокационной информации при-
нято понимать процесс отождествления трасс целей, сопровождае-
мых несколькими источниками. На командный пункт может посту-
пать информация от нескольких источников, причем каждый источ-
ник выдает донесения в произвольные моменты времени.
На основании донесений источников в процессе третичной об-
работки надо сформировать обобщенное донесение, для чего необ-
ходимо привести информацию к единому началу отсчета в прост-
ранстве и времени, отождествить донесения, принадлежащие од-
ним и тем же целям, произвести расчет метрических координат
обобщенных донесений.
72
Данные о целях, полученные в процессе первичной, вторичной
и третичной обработки, подаются на устройства отображения (на-
пример, на электронные индикаторы). На эти же устройства ото-
бражения наносятся дислокация зенитных ракетных подразделе-
ний и зоны их боевых действий (зоны обнаружения, пуска и пора-
жения). На основе анализа характеристик и параметров движения
целей принимается решение на их уничтожение или на уничтоже-
ние только наиболее важных. В результате оценки взаимного по-
ложения траекторий целей и дислокации зенитных ракетных под-
разделений задача целераспределения решается таким образом,
чтобы вероятность поражения конкретно выбранной цели была не
менее заданной.
Поскольку в процессе отражения налета стрельбы ведутся
практически непрерывно по потоку целей, при решении задачи це-
лераспределения, кроме того, необходимо учитывать:
состояние каждого подразделения (проводит оно стрельбу или
нет); потери в личном составе, исправность техники, наличие гото-
вых к пуску ракет и т. п.;
возможность применения самолетами противника маневра, по-
мех и противорадиолокационных самонаводящихся ракет (ПРР).
После решения задачи целераспределения осуществляется по-
становка огневых задач подразделениям, заключающаяся в выда-
че координат цели тому подразделению, которое должно произве-
сти пуск ракет по данной цели.
При управлении огнем расчетам командных пунктов приходит-
ся обрабатывать огромный поток информации, который тем боль-
ше, чем больше целей в воздухе. Высокие скоростные и маневрен-
ные возможности современных средств воздушного нападения
противника требуют, чтобы время, затрачиваемое на управление
огнем, было минимальным. В противном случае командный пункт
не будет успевать ставить огневые задачи за период нахождения
самолетов противника в зонах боевых действий зенитных ракет-
ных подразделений.
Для сокращения времени, расходуемого боевым расчетом ко-
мандного пункта на выполнение отдельных этапов управления, ис-
пользуются различные автоматические устройства, которые входят
в состав автоматизированной системы управления.
4. Принципы построения автоматизированной системы
управления (АСУ)
АСУ — это человеко-машинная система, обеспечивающая авто-
матизированный сбор, обработку и отображение информации, не-
обходимой для оптимизации управления боевыми средствами в
целях наиболее эффективного их применения.
Упрощенная структурная схема АСУ изображена на рис. 8.3.
В состав средств АСУ входят:
источники информации (радиолокационные средства раз-
ведки);
73
комплекс средств автоматизации системы, размещенный на
позиции командного пункта (управляющего органа);
аппаратура сопряжения с управляемыми объектами;
пункты приема целеуказания;
аппаратура ориентирования и топопривязки.
Рис. 8.3. Упрощенная структурная схема АСУ
К источникам информации в АСУ относятся разнообразные
средства, но основную роль играют радиолокационные станции
(РЛС) различного предназначения, размещаемые на всех ко-
мандных пунктах, входящих в систему, и передающие информа-
цию об обстановке на соответствующие командные пункты данной
системы или на командные пункты другой соседней АСУ. Кроме
того, информация на КП системы (управляющий орган) может
поступать от вышестоящего и соседних командных пунктов, осна-
щенных также комплексом средств автоматизации, по автоматиче-
ским каналам связи. Аппаратура сопряжения обеспечивает функ-
циональное сопряжение источников со всеми элементами системы
и с другими АСУ.
Комплекс средств автоматизации (КСА) представляет собой
совокупность технических средств, обеспечивающих сбор, обработ-
ку, отображение и выработку рекомендаций боевому расчету КП
в соответствии с заложенным алгоритмом, т. е. системой фор-
мальных правил и проверочных условий, выполнение которых в
заданной последовательности позволяет решить задачу без уясне-
ния ее сущности, а также доведение боевых задач до управляемых
объектов в масштабе данной системы.
В состав КСА входят:
электронная вычислительная машина (ЭВМ) или вычислитель-
ный комплекс (ВК), состоящий из двух и более ЭВМ;
аппаратура отображения информации;
аппаратура приема-передачи (АПП);
средства энергоснабжения. Основная часть КСА размещается
на КП системы, отдельные его элементы могут размещаться на
74
нижестоящих КП данной системы. В качестве примера ниже при-
ведена структурная схема средств автоматизации командного
пункта (рис. 8.4). Аппаратура отображения информации и ввода-
вывода данных предназначена для наглядного представления ин-
формации боевому расчету на командном пункте при решении за-
дач управления боевыми средствами.
Основу аппаратуры составляют устройства отображения ин-
формации (УОИ) и устройства (пульты), обеспечивающие ввод
команд в ЭВМ с рабочих мест операторов.
Аппаратура приема-передачи (АПП) данных служит для ав-
томатической передачи и приема информации как внутри системы
между ее элементами, так и для обмена информацией между дру-
гими системами, с которыми данная АСУ сопряжена функцио-
нально. Для обмена информацией между элементами системы
применяются разнообразные средства связи.
Средства энергоснабжения служат для обеспечения электропи-
тания всего комплекса средств автоматизации управляющего орга-
на системы.
Аппаратура сопряжения с управляемыми объектами предназ-
начена для обеспечения функционального сопряжения с аппара-
турой автоматизации управляемых объектов. Эта аппаратура
размещается, как правило, на позициях данных объектов.
Цифровая вычислительная машина как основная часть комп-
лекса средств автоматизации системы управления представляет
собой электронное устройство, предназначенное для автоматиза-
ции процесса обработки информации и производства вычислений
по определенному алгоритму. При создании алгоритмов боевых
действий в ряде случаев важно правильно сформулировать «ло-
гику боя», выработать критерии эффективности решаемой задачи.
Такие алгоритмы создаются обычно совместными усилиями офи-
церов-тактиков, математиков и инженеров-программистов.
Основными задачами, решаемыми на ЦВМ автоматизирован-
ных систем управления, являются:
обработка поступающей информации и решение информацион-
но-логических задач, кодирование и декодирование информации;
оценка эффективности используемого вооружения и выбор наи-
более эффективного боевого средства в конкретных условиях;
решение задач целераспределения, т. е. рациональное назначе-
ние активных средств по целям;
выработка расчетных данных, необходимых командиру для
принятия решения.
Следует, однако, учитывать, что никакая, даже самая совер-
шенная ЦВМ не способна полностью заменить человека, которому
свойственны творческие и интеллектуальные качества и широта
охвата явлений. Чаще всего вычислительные машины из состава
КСА вырабатывают не решение, а лишь основу, помогающую
командиру принять правильное решение.
Упрощенная структурная схема ЦВМ представлена на рис. 8.5.
В состав ЦВМ входят следующие основные устройства:
75
Рис. 8.4. Структурная схема средств автоматизации управления огнем, находящихся на командном пункте
Абоненты
Рис. 8.5. Упрощенная структурная схема ЦВМ
устройство управления (УУ);
арифметико-логическое устройство (АЛУ);
оперативное запоминающее устройство (ОЗУ);
постоянное запоминающее устройство (ПЗУ);
устройство обмена;
устройство контроля.
Устройство управления координирует работу всех блоков и
коммутирует цели передачи информации в процессе работы ЦВМ
путем выдачи командных импульсов.
Арифметическо-логическое устройство предназначено для вы-
полнения арифметических (сложение, умножение, деление) и ло-
гических (логическое умножение, сравнение чисел) операций.
Оперативное запоминающее устройство предназначено для хра-
нения промежуточных результатов выполнения операций.
Постоянное запоминающее устройство предназначено для хра-
нения постоянных коэффициентов, неизменных в процессе вычисле-
ния. Блоки ПЗУ заполняются информацией методом прошивки от-
дельных запоминающих элементов во время отладки программ.
Устройство обмена обеспечивает обмен информацией между
ЦВМ и абонентами.
Устройство контроля предназначено для проверки правильно-
сти работы машины в процессе выполнения операций и в ходе об-
мена информацией с абонентами.
Работа ЦВМ в целом. После включения ЦВМ начинает реали-
зовать тот алгоритм, который был заранее выработан и заложен
в вычислительную машину, последовательно команда за коман-
дой. Команды, считанные из ПЗУ, поступают в устройство управ-
ления, где каждая из них расшифровывается, т. е. определяются
операция, которая должна быть выполнена по данной команде, и
адреса операндов (двоичных чисел), участвующих в операции.
77
Затем по адресам выбираются сами операнды, после чего над
ними производятся операции в операционном устройстве. Напри-
мер, если это операция сложения, то она выполняется в суммато-
ре АУ. В случае обращения к ЦВМ через устройство обмена
одного из внешних абонентов, будь то пульт оператора или при-
нимающее устройство средств связи, выполнение команд по ал-
горитму приостанавливается на время выполнения операции обмена
с абонентом. После окончания обмена ЦВМ возобновляет работу,
оперируя уже с вновь поступившими данными.
По структурной и элементной базе ЦВМ условно подразделя-
ются на несколько поколений:
первое — ламповые машины с быстродействием порядка десят-
ков тысяч операций в секунду;
второе — транзисторные машины или машины на твердых схе-
мах с быстродействием порядка сотен тысяч операций в се-
кунду;
третье—машины на интегральных схемах и вычислительные
комплексы с быстродействием порядка миллионов операций в се-
кунду;
четвертое — многопроцессорные машины на больших интеграль-
ных схемах с быстродействием порядка десятков миллионов опе-
раций в секунду и более.
При автоматизированной обработке радиолокационной инфор-
мации задача обнаружения цели и измерения ее координат реша-
ется оператором с помощью устройств съема информации методом
выборочного электронного визирования, в основе которого лежит
принцип преобразования наблюдаемых координат отметок целей в
электрический сигнал. Для визуального съема координат отметок
с экрана устройства съема информации рабочие места операто-
ров оборудуются специализированными пультами съема коорди-
нат (ПСК).
При появлении на экране индикатора отметки от цели, коор-
динаты которой необходимо снять, оператор подводит электрон-
ный визир (маркер), наблюдаемый в виде яркой светящейся точ-
ки, в зону отметки от цели и нажатием кнопок НОМЕР ЦЕЛИ и
СЪЕМ вводит координаты отметки от цели в ЦВМ и присваивает
цели номер. На этом заканчивается этап первичной обработки ин-
формации.
Через один оборот антенны РЛС оператор, производя второй
съем переместившейся отметки от цели, выдает необходимые дан-
ные в ЦВД4 для проведения вторичной обработки информации,
т. е. для определения параметров движения цели.
Однако для качественного решения задачи цслсраспрсдслсния
знания траектории цели, построенной за счет информации, полу-
ченной в предыдущих обзорах РЛС, оказывается недостаточно.
Поэтому при определении местоположения координат будущих
положений отметок целей производится экстраполяция траек-
торий.
В результате экстраполяции появляется возможность опреде-
78
лить, где будет находиться цель через определенные промежутки
времени (например, через 10, 20, 30 с).
Отображение первичной информации осуществляется с часто-
той следования импульсов запуска. Отображение вторичной ин-
формации происходит за счет «вырывов» первичной инфор-
мации.
Отождествление отметок от разных источников, т. е. вопросы
третичной обработки сравнительно просто реализуются ЦВМ. при
полной автоматизации всех выполняемых операций. В качестве
дополнительных источников информации на КП могут применять-
ся индикационные устройства и информационные табло, на кото-
рых отображаются номера целей, параметры, служебная инфор-
мация о распределении целей между подчиненными подразделе-
ниями, номера команд и обратных донесений и т. и.
Поскольку в процессе отображения налета стрельбы ведутся
практически непрерывно по потоку целей, при решении задачи це-
лераспредсления, кроме того, необходимо учитывать:
состояние каждого подразделения (проводит оно стрельбу или
нет): потери в личном составе, исправность техники, наличие гото-
вых к пуску ракет и т. п.;
возможность применения самолетами противника маневра, по-
мех и противорадиолокационных самонаводящихся ракет (ПРР).
После решения задачи целераспределения осуществляется по-
становка огневых задач подразделениям, заключающаяся в вы-
даче координат цели тому подразделению, которое должно произ-
вести пуск ракет по данной цели. Выдача координат целей, ко-
манд боевого управления и прием обратных донесений осуществ-
ляется1 аппаратурой приема-передачи данных.
Обмен информацией в АСУ представляет собой передачу и
прием дискретных сообщений. Передача сообщений по каналам
связи осуществляется специальными сигналами, которые являются
носителями информации. Элементарными сигналами обычно слу-
жат одиночные импульсы постоянного тока. Для повышения до-
стоверности приема сообщений применяются корректирующие
коды.
Система передачи информации состоит из телепередатчика,
телеприемника и телекодового канала связи.
Телепередатчики преобразуют двоичный код сообщений, посту-
пающих от аппаратуры автоматизации, в сигналы, пригодные для
передачи по каналу связи, который имеет распределительное и
канальное устройства.
Распределительное устройство обеспечивает запоминание дво-
ичного кода сообщений, а канальное устройство — преобразование
кода в сигналы (например, в фазомодулированные), передаваемые
по каналу связи.
Телеприемник обеспечивает преобразования, обратные теле-
передатчику.
Информация, поступающая из командного пункта АСУ по ка-
налу телекодового обмена на пункты приема целеуказания, содер-
79
жит, как правило, координаты цели, составляющие скорости цели
и команды боевого управления.
С пунктов приема целеуказания на КП АСУ поступают доне-
сения о ведении боевых действий с помощью той же аппаратуры
приема-передачи данных и отображаются на информационных ин-
дикаторах КП.
При необходимости радиоканал аппаратуры приема-передачи
данных может быть заменен проводными линиями связи по каж-
дому направлению. В соответствии с присвоенным адресом каж-
дый пункт приема целеуказания получает и селектирует соответ-
ствующие координаты цели и команды.
5. Особенности и принципы работы систем
приема целеуказания и топопривязки
Системы приема целеуказания предназначены для приема це-
леуказания, команд управления и другой информации, пересчета
координат целей к точке стояния станции наведения ракет и пре-
образования пересчитанных координат целей из прямоугольной
системы координат (X, У, Н) в сферическую (р, е, Д) для авто-
матизированного наведения антенн СНР в направлении цели.
Место систем приема целеуказания в общей структуре АСУ можно
уяснить, пользуясь рис. 8.3. Каждая станция наведения ракет
имеет свою систему приема целеуказания, в состав которой
входят:
приемник телекодовой связи;
устройство декодирования координат целей и команд управ-
ления;
устройство преобразования координат;
аппаратура топопривязки;
устройства индикации команд управления и координат цели;
устройства согласования, ввода донесений, кодирования;
передатчик телекодовой связи.
Структурная схема системы, находящейся в одном пункте при-
ема целеуказания, представлена на рис. 8.6.
Рассмотрим назначение и принцип действия различных уст-
ройств системы приема целеуказания.
Приемник телекодовой связи предназначен для приема радио-
волн, передаваемых с командного пункта на данный пункт приема
целеуказания, усиления их и преобразования в видеосигналы, со-
держащие информацию о координатах цели и командах управ-
ления.
Устройство декодирования координат целей и команд управ-
ления предназначено для выделения закодированных координат
цели и команд управления из видеосигналов, поступающих с вы-
хода приемника телекодовой связи.
Устройство преобразования координат служит для пересчета
прямоугольных координат целей относительно точки стояния СРЦ
или СОЦ в прямоугольные координаты относительно точки стоя-
80
ния СНР с последующим преобразованием пересчитанных коорди-
нат в сферические.
Напряжения, пропорциональные сферическим координатам
цели, подаются на устройство согласования, которое вырабатывает
управляющие сигналы. Управляющие сигналы, воздействуя на сле-
Рис. 8.6. Структурная схема
системы приема целеуказания
дящие системы, наводят антенну РЛС визирования цели по углу
места и азимуту так, чтобы положение узкого луча совпало с на-
правлением на цель. Одновременно на цель выводится строб даль-
ности СНР. После этого происходят обнаружение заданной цели
и захват ее на сопровождение станцией визирования цели.
Решение этих двух задач осуществляется с помощью аппара-
туры топопривязки, которая выполняет следующие функции:
автоматически вычисляет координаты СРЦ, СОЦ, СНР, пу-
сковых установок;
обеспечивает режим навигации, т. е. выход в заданную точку
стояния (на позицию);
при выходе любой РЛС (ПУ) на позицию автоматически опре-
деляет взаимное отстояние (СРЦ — СОЦ; СОЦ — СНР; СНР —
ПУ);
производит ориентирование РЛС (ПУ), т. е. определение поло-
жения продольной геометрической оси самоходной установки РЛС
(ПУ) относительно плоскости меридиана (курс /С).
Структурная схема аппаратуры топопривязки приведена на
рис. 8.7.
Значения координат исходного пункта (места начала движе-
ния) устанавливаются маховиками УСТАНОВКА КООРДИНАТЫ
X и УСТАНОВКА КООРДИНАТЫ У. Для определения прираще-
6 Зак. 3112дсп
81
ГО JO
Установка У
Рис. 8.7. Структурная схема аппаратуры топопривязки
Координаты У
ний координат ДХ и ДУ используется входная информация, полу-
чаемая с датчика скорости и с гирокурсоуказателя (курс К).
Датчик скорости имеет механическую связь с ходовой частью са-
мохода; с помощью корректора скорости вводится поправка на про-
скальзывание и наклон трассы, по которой совершается марш.
Рассмотрим принцип определения приращения координат
(рис. 8.8.). Кривую движения самохода можно разбить на ряд ма-
лых прямолинейных участков Д5. Каждому пройденному участку,
расположенному под дирекционным углом К, соответствуют свои
приращения координат X, Y и т. д. Следовательно:
82
Ayj = AScos/Q; АЛГХ = AS sin Kr\
ДК2 = AS cos /C2; XX2 = AS sin K2,
АУ„ — AS cos/G; ±Xn = bSsinKn,
т. e. конечные координаты У1 и Xj будут иметь вид
Г1 = К0+ v aScos/G; —A"o+ S ^Ssin/C„..
n 1 Й-1.
Очевидно, чем меньше отрезки AS, тем точнее определяется
траектория движения самохода.
Для этого операция суммирования отрезков заменяется более
точной операцией интегрирования (суммирования бесконечно ма-
лых отрезков, производимого непрерывно).
Напряжение, пропорциональное скорости движения самохода
на местности I7V, подается на статорную обмотку синусно-косинус-
ного вращающегося трансформатора (СКВТ), ротор которого ки-
нематически связан с гирокурсоуказателем (ГАК), последний раз-
ворачивает ротор СКВТ на угол, пропорциональный курсу изделия.
С роторных обмоток СКВТ снимается напряжение, пропорцио-
нальное синусной (V\ = n V sin К) и косинусной (V\ = nV cos К)
составляющим вектора скорости самохода.
Эти напряжения поступают на электромеханические интегра-
торы. Угол поворота вала двигателя каждого из них представляет
приращение координаты ДА (ДУ). Текущие координаты (Ал =
= Хо+ДХ) и (Ki = У0+ДУ) можно наблюдать на шкалах блока
интегратора, одновременно они преобразуются в двоичный код и
подаются с СРП.
Глава IX
СОСТАВ РАДИОЛОКАЦИОННЫХ СРЕДСТВ ЗЕНИТНЫХ
РАКЕТНЫХ КОМПЛЕКСОВ. РАДИОЛОКАЦИОННАЯ
СТАНЦИЯ ОБНАРУЖЕНИЯ ЦЕЛЕЙ
1. Назначение и состав радиолокационных средств
Радиолокационные средства зенитных комплексов используют-
ся для получения информации о воздушных целях (самолетах и
других летательных аппаратах) с большой дальности, с высокой
точностью и в любых метеорологических условиях.
Для этого в основном используется метод активной радиолока-
ции, основанный на облучении цели электромагнитной энергией и
приеме отраженных (рассеянных) целью радиоволн. Отраженные
радиоволны являются теми сигналами, с помощью которых и вы-
деляется информация о цели.
6* 83
Способностью отражать электромагнитную энергию обладают
аэродинамические летательные аппараты, автоматические дрейфу-
ющие аэростаты, крылатые ракеты, газовое облако, участок зем-
ной поверхности и т. п.
Отражающие свойства цели оказывают большое влияние на
дальность обнаружения воздушных целей РЛС.
Для увеличения дальности радиолокационного обнаружения
и сопровождения своих малоразмерных объектов (ракет, истреби-
телей) последние могут оборудоваться специальными ответчика-
ми, энергия излучения которых значительно превышает энергию
сигналов, отраженных от этих объектов.
Основными задачами, решаемыми с помощью РЛС зенитных
ракетных комплексов, являются обнаружение, опознавание и со-
провождение целей (самолетов, крылатых ракет, вертолетов
и т. п.), а также сопровождение ракет.
Обнаружение цели заключается в отыскании оператором ее
отметки на индикаторе РЛС на фоне шумов, помех, отражений
от местных предметов.
Опознавание целей состоит в определении принадлежности об-
наруженной цели к своим вооруженным силам или к противнику.
Под сопровождением цели понимается процесс непрерывного
получения информации о координатах цели и ее скорости. Измере-
ние координат заключается в определении местоположения цели
относительно точки стояния РЛС.
Если измеренные координаты цели необходимо использовать
не в точке стояния РЛС, а в любом другом пункте, относительные
координаты цели должны быть приведены к абсолютной (единой)
системе координат. Задача приведения относительных координат
цели к единым, пригодным к использованию в каждой точке бое-
вого порядка комплекса, решается с помощью аппаратуры топо-
привязки.
Как правило, в состав зенитного ракетного комплекса входят
следующие радиолокационные средства:
станции обнаружения целей (СРЦ, СОЦ);
станции сопровождения (визирования) цели (ССЦ, РЛС ВЦ);
станция визирования ракеты (РЛС ВР).
Рассмотрим порядок взаимодействия радиолокационных
средств зенитного ракетного комплекса (рис. 9.1). Станция обна-
ружения целей ведет обзор заданной области пространства плос-
ким лучом, диаграмма направленности которого в вертикальной
плоскости шире, чем в горизонтальной. Чтобы сектор обзора по
азимуту был равен 360°, луч непрерывно вращается с постоянной
угловой скоростью вокруг вертикальной оси.
Круговой обзор позволяет получить плоскую картину располо-
жения целей в пространстве: измеряются дальность и азимут,
можно оценивать также взаимное положение целей в системе ко-
ординат азимут — дальность. Чтобы получить возможность грубой
оценки положения целей в вертикальной плоскости, проводится
многозонный обзор. Поскольку ширина диаграммы направленно-
84
Антенна
Рис. 9.1. Упрощенная структурная схема РЛС обнаружения целей
сти антенны СРЦ (СОЦ) в горизонтальной плоскости значитель-
но меньше угловых размеров зоны обзора (360°), станция получа-
ет информацию об отдельной цели периодически (в моменты про-
хождения луча антенны через цель). Общая картина воздушной
обстановки наблюдается за счет длительного времени после све-
чения экрана индикатора РЛС. Каждая обнаруженная цель за-
прашивается с помощью аппаратуры НРЗ для определения
государственной принадлежности.
Если цель является самолетом (вертолетом, крылатой ракетой)
противника, то она не может правильно ответить на запросный
сигнал опознавания. В этом случае принимается решение на об-
стрел такой цели; по ней выдается целеуказание на РЛС сопро-
вождения1 (визирования) цели.
Это связано с тем, что с помощью станции обнаружения целей
производить наведение ракет нельзя, так как координаты цели оп-
ределяются ею недостаточно точно по двум причинам.
Во-первых, измерение координат происходит периодически (в
момент прохождения луча антенны через цель). Поскольку цель
движется с большой скоростью и может маневрировать, ее место-
положение в промежутках времени между прохождениями луча
антенны известно только приблизительно.
Во-вторых, угломестная координата цели оценивается очень
грубо.
Для измерения координат цели с точностью, обеспечивающей
надежное выведение ракеты в область срабатывания радиовзры-
вателя, требуется непрерывное поступление информации о коор-
динатах и ускорениях данной цели. Такие измерения производит
РЛС сопровождения (визирования) цели. Она является трехкоор-
динатной и измеряет азимут, угол места цели и наклонную даль-
ность. Высокая точность измерения угловых координат обеспечи-
вается за счет формирования узкого игольчатого луча антенной си-
стемы, ширина которого находится в пределах 1°. Поскольку
требуемый сектор работы такой РЛС по азимуту составляет 0—
360°, по углу места — 0—90°, становится очевидным, что про-
изводить обзор воздушного пространства такой РЛС затрудни-
тельно.
Итак, физический смысл необходимости двух различных ра-
диолокационных средств, работающих по воздушным целям, за-
ключается в том, что РЛС обзора воздушного пространства не
обеспечивает достаточной точности измерения координат цели
для наведения ракеты, а РЛС сопровождения цели не обеспечи-
вает проведения анализа воздушной обстановки для выбора це-
лей при стрельбе.
Наличие двух РЛС определило их функции следующим обра-
зом: СРЦ (СОЦ) ведет анализ воздушной обстановки и обнару-
жение (с опознаванием) всех целей в пределах зоны боевых дей-
ствий комплекса. Измерение координат СРЦ (СОЦ) проводится с
такой точностью, чтобы после выдачи целеуказания цель оказа-
лась по возможности в пределах сектора поиска РЛС сопровож-
86
дения, величина которого в основном определяется точностью
оценки угла места станцией обнаружения.
РЛС сопровождения обнаруживает цель в пределах указанно-
го сектора поиска. После обнаружения цели производится пере-
ход на автосопровождение. Для этого цель, находившаяся в пре-
делах диаграммы направленности антенны РЛС сопровождения,
выводится на равносигнальное направление; одновременно с от-
меткой цели совмещается измерительный строб дальности.
После захвата цели на автосопровождение ее координаты из-
меряются автоматически, при этом РЛС сопровождения представ-
ляет собой замкнутую следящую систему, одновременно определя-
ются исходные данные для стрельбы и момент пуска ракеты.
Радиолокационная станция визирования ракеты осуществляет
автоматическое сопровождение (определение текущих координат)
ракеты с точностью, обеспечивающей наведение на цель. В отли-
чие от РЛС сопровождения цели она работает только на прием
ответных сигналов бортового ответчика ракеты. Сопровождение
ракеты осуществляется по трем координатам.
2. Принципы определения и передачи координат
Для определения положения целей наиболее широко исполь-
зуются три системы координат: сферическая, цилиндрическая и
прямоугольная.
В сферической системе координат положение цели характери-
зуется угловыми координатами: азимутом, углом места и линей-
но-наклонной дальностью. Начало координатной системы нахо-
дится в месте стояния РЛС.
Азимут цели 0 — это угол, заключенный между направле-
нием на юг и проекцией цели на горизонтальную плоскость, отсчи-
тываемый против движения часовой стрелки.
Угол места цели е — это угол, заключенный между ли-
нией горизонта и направлением на цель.
Наклонная дальность Д — это кратчайшее расстояние
между целью и РЛС.
В цилиндрической системе координат положение цели опреде-
ляется одной угловой координатой — азимутом 0 и двумя линей-
ными— высотой Н и горизонтальной дальностью d.
Высота — это расстояние от цели до плоскости горизонта.
Горизонтальная дальность—это расстояние от РЛС
до проекции цели на горизонтальную плоскость.
Цилиндрическая система координат используется в счетно-ре-
шающих приборах. Кроме того, высота используется как характе-
ристика воздушной цели при постановке комплексу огневых задач.
В прямоугольной системе координат положение цели харак-
теризуется тремя линейными координатами — X, У, Н. Начало си-
стемы координат может совпадать с местом стояния РЛС либо с
выбранной точкой на местности. Направление осей координат X
и К в системе целеуказания совпадает с направлением на восток
87
и юг соответственно (в системе топографической привязки коорди-
ната X направлена на восток, a Y—на север). Координата Н, как
и в цилиндрической системе, является высотой.
Прямоугольная система координат используется при передаче
данных о положении цели от одной РЛС на другую (от СОЦ на
РЛС сопровождения). Это объясняется простотой перехода от
одной точки начала отсчета координат к другой. Например, пере-
ход от одной точки начала отсчета к другой в прямоугольной си-
стеме координат связан с линейной операцией сложения или вычи-
тания координат, в то время как изменение начала отсчета в
сферической системе координат требует более сложных тригоно-
метрических преобразований.
Угловые координаты измеряются в делениях угломера. Для
получения этой единицы измерения окружность разбивается на
60 больших делений, а каждое большое — на 100 малых делений
угломера. При написании большие и малые деления угломера
разделяются чертой. Например, (3=12—50 означает 12 больших
и 50 малых делений угломера.
Одному большому делению угломера соответствует 6°, одному
малому делению угломера — 3,6'. При обратном переходе одному
градусу соответствует примерно 17 делений угломера.
Азимут воздушной цели может изменяться от 0-00 до 60-00, а
угол места — от 0-00 до 15-00.
Линейные координаты измеряются в километрах, гектометрах
или метрах. '
Определение угловых координат воздушных целей радиолока-
ционными станциями заключается в определении направления
прихода радиоволн, излучаемых или переизлучаемых этими целя-
ми с помощью остронаправленных свойств антенны.
В станциях обнаружения и целеуказания для определения
угловых координат используются амплитудные методы, сущность
которых заключается в следующем. Если при повороте антенны
максимум ее излучения направлен строго на цель, то амплитуда
переизлученных сигналов на выходе приемника имеет максималь-
ную величину, а на индикаторе высвечивается яркостная отметка
цели. При дальнейшем повороте антенны амплитуда сигнала рез-
ко уменьшается и становится равной нулю. Поскольку антенна
РЛС вращается непрерывно, то на индикаторе последовательно
появляются отметки от целей, находящихся в зоне действия стан-
ции. Развертка индикатора синхронно связана с антенной, кото-
рая, в свою очередь, сориентирована относительно сторон света.
Поэтому положение отметки цели на экране индикатора соответ-
ствует положению цели относительно сторон света.
В станциях сопровождения для точного определения угловых
координат применяются равносигнальные методы.
Для определения одной угловой координаты необходимо иметь
две пересекающиеся диаграммы направленности антенны, макси-
мумы которых взаимно смещены в пространстве на небольшой
угол. Угловая координата соответствует равносигнальному на-
88
правлению этих диаграмм, если амплитуды сигналов, отраженных
от цели, соответствующие каждой диаграмме, равны.
Определение угловых координат в двух плоскостях может осу-
ществляться с помощью, как минимум, трех неподвижных диаг-
рамм направленности антенн. Иногда используются две пары диа-
грамм, расположенных взаимно перпендикулярно. В некоторых
РЛС сопровождения для создания равносигнальных направлений
используется одна диаграмма направленности антенны, максимум
которой смещен относительно фокальной оси зеркала и вращается
вокруг нее. В результате этого диаграмма направленности описы-
вает в пространстве конус, занимая последовательно правое, верх-
нее, левое и нижнее положения. Правое и левое положения ис-
пользуются для определения азимута цели, а верхнее и нижнее
положения — для определения угла места.
Дальность цели определяется по времени прохождения радио-
волн от РЛС до цели и обратно.
Дц—1/2С7,
где С — 300 000 км/с — скорость распространения радиоволн.
Из-за большой скорости распространения время прохождения
радиоволн составляет тысячные доли секунды (1 мкс соответству-
ет 150 м дальности), поэтому оно измеряется с помощью элек-
тронных схем.
Передача координат воздушных целей от СОЦ на СНР осу-
ществляется для обеспечения обнаружения и захвата цели на ав-
тосопровождение, а с СНР на пусковую установку — для наведе-
ния (разворота) артиллерийской части пусковой установки в на-
правлении точки встреливания.
Вследствие того что СНР может находиться на существенном
расстоянии от СОЦ, при передаче координат производится учет
взаимного смещения их точек стояния.
Координаты цели, обнаруженной СОЦ, из сферической системы
преобразуются в прямоугольную и по телекодовой связи (радио-
линии команд) передаются на СНР. Оси прямоугольной системы
координат на СОЦ и СНР взаимно сориентированы. За начало
системы координат обычно выбирается точка на местности. В СОЦ
и СНР с помощью аппаратуры топографической привязки осуще-
ствляется учет смещения точки стояния станции относительно
начала координат: Хосоц, Уосоц; ^оспр, Уоснр.
Прямоугольные координаты цели относительно СОЦ Хцсоц,
Уц соц из системы выработки координат вводятся в аппаратуру ра-
диолинии команд. Туда же вводятся координаты точки стоя-
ния СОЦ.
В аппаратуре радиолинии координаты преобразуются в цифро-
вой код, а затем складываются. В результате получаются прямо-
89
угольные координаты цели относительно общей системы коор-
динат:
А'цсоц + Хо соц=== А\)ц;
Yц соц + Y* соц = Yq ц.
В цифровом коде координаты передаются на СНР. В аппара-
туре радиолинии команд из принятых координат ХОц, Коц вычита-
ются координаты точки стояния СНР Хоснр, Уоснр. В результате
получаются координаты цели ХцСнр, Уцснр относительно СНР:
^цСНР = ^оц — Xq сир;
Гц снр = ГОц — Yo снр-
Третья координата — высота Н— передается без пересчета.
В счетно-решающем приборе СНР принятые прямоугольные
координаты преобразуются в сферические, с помощью которых ан-
тенна разворачивается по азимуту и углу места в направлении
на цель, а на дальномере устанавливается дальность цели.
Передача координат от СНР на пусковую установку произво-
дится так же, как и от СОЦ на СНР по радиолинии команд в
цифровом коде. Поскольку взаимные расстояния (СНР — пуско-
вая установка) незначительны, координаты передаются в сфери-
ческой системе без учета их взаимного смещения.
3. Радиолокационная станция обнаружения целей
РЛС обнаружения зенитного ракетного комплекса выполняет
следующие функции: обнаружение и опознавание воздушных це-
лей, определение координат выбранных целей и передача их на
СНР по телекодовой радиолинии.
В состав станции входят следующие основные системы и уст-
ройства: антенно-фидерная система; передающая система; прием-
ная система; система помехозащиты; система индикации; система
синхронизации; система выработки координат; система управле-
ния и защиты; система контроля; система питания; система опо-
знавания; аппаратура ориентирования и топопривязки; система
телекодовой связи.
Упрощенная структурная схема РЛС обнаружения целей при-
ведена на рис. 9.1. Рассмотрим назначение и принцип действия
основных систем и устройств станции.
Антенно-фидерная система предназначена для передачи элек-
тромагнитной энергии от передающей системы к антенне, направ-
ленного излучения и приема в заданном объеме пространства и
передачи принятой энергии на вход приемной системы.
Антенно-фидерная система состоит из следующих элементов:
зеркала антенны, облучателя; ферритового циркулятора; переклю-
чателя АНТЕННА — ЭКВИВАЛЕНТ; эквивалента антенны и уст-
ройства определения угла места цели.
90
Рассмотрим принцип работы АФС. Зондирующий импульс,
сформированный передающей системой РЛС, поступает во вход-
ное плечо ферритового циркулятора (рис. 9.2), позволяющего
Рис. 9.2. Схема ферритового циркулятора, используемого в качестве ан-
тенного переключателя
использовать один и тот же волноводный тракт как для работы
на излучение, так и на прием. При работе на излучение электро-
магнитная энергия, поступившая в плечо I ферритового циркуля-
тора, распространяется в направлении плеча IV и поступает через
устройство определения угла места целей на облучатель антенны.
Часть энергии, которая просочилась в плечо II, зажигает разряд-
ник защиты приемника, чтобы исключить мешающее воздействие
энергии передатчика на работу приемного устройства. После про-
хождения плеча IV ферритового циркулятора электромагнитная
энергия подается на устройство определения угла места целей.
Работа устройства определения угла места целей основана на
принципе отклонения максимума излучения параболической ан-
тенны.
Рис. 9.3 иллюстрирует принцип создания диаграммы направлен-
ности, состоящей из трех лучей. Очевидно, чем больше будет коли-
чество лучей, тем точнее будут определяться угломестные коорди-
наты целей, однако при этом антенно-фидерная система становит-
ся более громоздкой.
С облучателя электромагнитная энергия распространяется в на-
правлении зеркала антенны, где формируется в луч, размер и по-
ложение которого в пространстве определяются геометрическими
формами и размерами зеркала антенны и взаимным расположени-
ем облучателей относительно зеркала антенны. Для обеспечения
кругового обзора антенна вращается в горизонтальной плоскости
с помощью электромеханического привода.
91
321
Рис. 9.3. Принцип действия устройства определения уг-
ла места целей
При работе на прием энергия сигнала, отраженного от целиг
фокусируется зеркалом и, пройдя облучатель и устройство опре-
деления угла места целей, поступает в плечо IV ферритового цир-
кулятора, затем направляется им в плечо II на вход приемной
системы.
Используя дополнительный переключатель и нагрузку, при из-
менении направления поля в управляющих электромагнитах фер-
ритовый циркулятор направляет электромагнитную энергию пере-
датчика на эквивалент антенны.
Эквивалент антенны представляет собой согласованную нагруз-
ку, позволяющую проводить настройку передающей системы без
излучения электромагнитной энергии в пространство.
Передающая система предназначена для формирования мощ-
ных зондирующих импульсов, излучаемых антенной РЛС в про-
странство. Она состоит из элементов: умножителя частоты, уси-
лителей мощности, ферритовых вентилей, модуляторных уст-
ройств, системы охлаждения, устройства управления контроля и
защиты. Упрощенная функциональная схема системы приведена
на рис. 9.4. Рассмотрим принцип действия передающей системы.
Непрерывные колебания с высокостабильного задающего гене-
ратора, который одновременно является задающим генератором и
для приемной системы, поступают на вход умножителя частоты.
Умноженные и усиленные колебания поступают для усиления
на усилительные каскады по мощности. В первом каскаде исполь-
зуется1 лампа бегущей волны, в последующих каскадах — ампли-
троны.
Ферритовые вентили используются для развязки каскадов. Для
управления колебаниями усилителей служат отдельные импульс-
92
Модулятор
Модулятор
Модулятор
С задающего
генератора
Импульсы
запуска
Рис. 9.4. Упрощенная функциональная схема передающей системы
ные модуляторы, которые обеспечивают работу ЛБВ и амплитро-
нов только в моменты прихода запускающих импульсов. В осталь-
ное время каскады закрыты, высокочастотные колебания через них
не проходят.
Частота амплитронного передатчика изменяется за счет элек-
тронной перестройки задающего генератора. ЛБВ и амплитроны
ввиду их широкополосности не перестраиваются.
Система охлаждения служит для обеспечения нормального тем-
пературного режима элементов передатчика, имеющих тепловы-
деление.
Устройство управления, контроля и защиты служит для пра-
вильного включения, контроля электрических и тепловых режи-
мов каскадов передатчика, индикации этих режимов и сигнализа-
ции об отклонении режимов от нормальных эксплуатационных.
Приемная система служит для усиления в необходимых преде-
лах отраженных от цели сигналов и последующего преобразова-
ния их в сигналы промежуточной и видеочастоты, подаваемые на
вход системы помехозащиты.
Упрощенная структурная схема приемной системы приведена
на рис. 9.5. Рассмотрим принцип ее действия.
Рис. 9.5. Упрощенная структурная схема приемной системы
Отраженный от цели сигнал с выхода антенно-фидерного трак-
та через волноводный переключатель сигналов подается на вход
усилителя высокой частоты (УВЧ), выполненного на лампе бегу-
щей волны. УВЧ на ЛБВ служит для получения высокой чувст-
вительности приемника и предохранения кристаллического смеси-
теля первого преобразователя частоты от перегрузки просачиваю-
щихся импульсов передатчика РЛС.
Волноводный переключатель служит для подключения на вход
приемника эталонного генератора шума при контроле приемной
системы.
Усиленные по высокой частоте сигналы подаются на схему
двойного преобразования частоты, а затем на усилитель промежу-
точной частоты, где происходит основное усиление сигнала на вто-
рой промежуточной частоте. Для осуществления преобразования
сигналов на схему двойного преобразования подаются два гетеро-
94
динных напряжения, для получения которых используются коле-
бания высокостабильного задающего генератора. С выхода УПЧ
усиленные отраженные сигналы через когерентный выход подают-
ся на вход схемы селекции движущихся целей системы помехо-
защиты.
Продетектированные видеосигналы подаются на видеоусили-
тель, содержащий схему МПВ (малой постоянной времени), кото-
рая служит для борьбы с протяженными отражениями (от земли,
облаков и т. п.), и далее через систему помехозащиты на систему
индикации.
Система помехозащиты предназначена для устранения мешаю-
щего действия на боевую работу расчета РЛС: пассивных помех,
прицельных заградительных помех, заградительных активных по-
мех, несинхронных импульсных помех и т. п.
Система синронизации служит для согласованного во времени
запуска всех систем и устройств в станции.
Система индикации предназначена:
для отображения в полярных координатах первичной воздуш-
ной обстановки в зоне действия РЛС;
для определения координат целей и параметров их движения;
для съема координат целей и отображения вторичной обста-
новки. ;
Система управления, контроля и защиты обеспечивает включе-
ние РЛС, управление режимами работы станции, защиту аппа-
ратуры от перегрузок, контроль тепловых и электрических
параметров, а также выработку необходимых питающих на-
пряжений.
Структурная схема радиолокационного опознавания приведена
на рис. 9.6. В составе РЛС обнаружения содержится часть этой
аппаратуры, а именно наземный радиолокационный запросчик
(НРЗ). Аппаратура запросчика обеспечивает посылку запросного
сигнала, прием и автоматическую дешифрацию кодированных от-
ветных сигналов, излучаемых самолетным радиолокационным от-
ветчиком, а также формирование и выдачу отметок сигналов опо-
знавания для наблюдения на экранах индикаторов. Антенно-фи-
дерное устройство запросчика совмещено с соответствующими
элементами РЛС. Зеркало антенны РЛС используется для фор-
мирования диаграммы направленности запросчика.
При поступлении импульса запуска шифратор вырабатывает
кодированный сигнал, который служит для модуляции передатчи-
ка НРЗ. Кодирование запросного сигнала проводится в целях
исключения запуска ответчика противником или посторонними ра-
диолокационными устройствами. Высокочастотные импульсы с
передатчика НРЗ через антенный переключатель, высокочастот-
ный токосъемник, фидерную систему поступают на облучатель ан-
тенны НРЗ и излучаются в пространство в направлении опознава-
емой цели. Запросные сигналы принимаются и декодируются при-
емником ответчика, установленного на самолете.
95
При соответствии запроса заранее установленному коду ответ-
чик автоматически излучает кодированный ответный сигнал. Ко-
Рис. 9.6. Структурная схема канала опознавания целей
дирование ответного сигнала необходимо, чтобы затруднить ими-
тацию ответных сигналов противником.
Ответный сигнал, принятый антенной НРЗ, через фидерную
систему и антенный переключатель передается на вход приемного
устройства НРЗ. В приемнике ответный сигнал преобразуется,
усиливается, детектируется. Усиленный приемником сигнал пода-
ется на дешифратор, и, если коды запросчика и ответчика совпа-
дают, с выхода дешифратора на индикаторы РЛС выдаются сиг-
налы опознавания.
Кроме основной радиолокационной аппаратуры РЛС обнару-
жения целей может комплектоваться средствами связи, электро-
станцией, тренировочным устройством и т. п.
96
4. Особенности устройства подвижных
радиовысотомеров (ПРВ)
Подвижные радиовысотомеры предназначены для определения
высоты полета целей относительно своей точки стояния. Они обыч-
но используются вместе с радиодальномерами. Радиовысотомеры
определяют высоту целей по данным целеуказания с радиолока-
ционной станции обнаружения или пункта управления радиолока-
ционной роты. Кроме того, они могут использоваться как автоном-
ные радиолокационные станции обнаружения низколетящих целей
с определением их координат.
Принцип работы высотомера во многом аналогичен принципу
работы любой радиолокационной станции обнаружения. Поэтому
рассмотрим только особенности определения высоты.
Определение высоты полета целей в радиовысотомерах осно-
вано на использовании острой диаграммы направленности в вер-
тикальной плоскости и на се качании по углу места (рис. 9.7).
Качание диаграммы направленности в вертикальной плоскости
обычно осуществляется за счет качания отражателя. При одновре-
менном перемещении антенны высотомера по азимуту диаграмма
направленности последовательно проходит все углы места в опре-
деленных пределах на всех азимутах, просматривая, таким обра-
зом, все окружающее пространство. Соответственно линия разверт-
ки на экране индикатора перемещается синхронно с диаграммой
направленности в пространстве из горизонтального положения до
определенного угла места. Таким образом, каждому углу места
луча антенны соответствует свое положение линии развертки, по-
этому отметки цели высвечиваются в определенном месте экрана
индикатора в зависимости от высоты и дальности цели (рис. 9.8).
На индикаторе высвечиваются также линии равных высот.
7 Зак. 3112дсп 97
Наклонная дальности
Рис. 9.8. Вид экрана индикатора высоты ПРВ
Высота цели определяется автоматически путем решения аппа-
ратурой высотомера уравнения:
// = ^Sins+
где Н — высота полета цели, км;
Д — наклонная дальность цели, км;
8—угол места цели;
Д2/2ИЪ — поправка, учитывающая кривизну Земли;
/?э — эквивалентный радиус Земли; с учетом нормальной
рефракции /?э принимается равным 8500 км.
Антенное устройство высотомера состоит из параболического
отражателя, облучателя антенны и механизма качания.
Принцип работы антенного устройства на передачу заключа-
ется в следующем: импульсы электромагнитной энергии от маг-
нетронного генератора по волноводному тракту подводятся к об-
лучателю антенны, который излучает электромагнитную энергию
в сторону отражателя. В результате отражения высокочастотной
энергии от рабочей поверхности отражателя электромагнитная
энергия распространяется в пространство в виде узкого луча,
сильно сжатого в вертикальной плоскости и более широкого в го-
ризонтальной.
Для обзора пространства в вертикальной плоскости и опреде-
ления угла места цели отражатель антенны качается около своей
горизонтальной оси при неподвижном облучателе, что вызывает
качание диаграммы направленности в вертикальной плоскости.
При приеме на экране индикатора появляется отметка, середи-
98
на которой соответствует совпадению направления максимального
излучения на цель. По линиям равных высот определяют значение
высоты полета цели. Задача определения высоты цели по извест-
ным значениям угла места и наклонной дальности решается в схе-
ме индикатора высоты.
Качание отражателя осуществляется механизмом качания,
представляющим собой кривошипно-шатунный механизм, приводи-
мый в движение электродвигателем.
Облучатель антенны представляет собой пирамидальный рупор,
плавно переходящий в прямоугольный волновод.
Система индикации и масштабных отметок. Функциональная
схема системы индикации и масштабных отметок показана на
рис. 9.9. В нее входят: блок запуска и отметок дальности, индика-
тор высоты, датчик угла места, блок питания.
Рис. 9.9. Функциональная схема аппаратуры системы индикации и
масштабных отметок
Блок запуска и масштабных отметок вырабатывает импульсы
запуска, необходимые для синхронизации работы приемопереда-
ющей и индикаторной аппаратуры и формирования отметок даль-
ности. Его функциональная схема во многом аналогична приве-
денной схеме синхронизации.
Индикатор высоты предназначен для определения высоты и
наклонной дальности целей, находящихся в зоне действия радио-
локационной станции. В нем применяется растровая развертка:
по горизонтали откладывается наклонная дальность, по вертика-
ли— высота цели относительно места стояния станции. Электрон-
ный луч трубки перемещается одновременно по двум взаимно пер-
пендикулярным направлениям — по горизонтали и по вертикали.
7* 99
В горизонтальном направлении электронный луч перемещается
с постоянной скоростью. В вертикальном направлении скорость
перемещения электронного луча определяется синусом угла на-
клона направления максимального излучения антенны. Линия
развертки перемещается по экрану индикатора синхронно с кача-
нием антенны. Для учета кривизны земной поверхности развертки
высоты выполняются нелинейными в виде парабол, веерообразно
расходящихся из начала координат.
Функциональная схема индикатора высоты (рис. 9.10) вклю-
чает: канал развертки дальности, канал развертки высо-
ты, канал отметок высоты, канал управления рабочим
режимом трубки, канал смешивания отметок и эхо-сигналов,
схему срыва. По сравнению с ранее рассмотренными схема-
ми индикаторов новыми элементами являются каналы развертки
и отметок высоты.
Канал развертки высоты вырабатывает ток развертки высоты
и состоит из схемы расширения, генератора напряжения высоты,
выходного каскада и схемы срыва.
Генератор напряжения высоты вырабатывает напряжение, со-
стоящее из линейной составляющей, скорость нарастания которой
меняется при изменении угла места пропорционально sine и пара-
болической составляющей, пропорциональной Д2. Выходной каскад
формирует пилообразные импульсы тока для питания вертикаль-
но отклоняющих катушек электронно-лучевой трубки. Схема
срыва прекращает работу схемы киппи-реле канала развертки вы-
соты на малых углах места в момент окончания импульса схемы
расширения канала развертки дальности, а на углах места более
5—6° — в момент срабатывания схемы формирования импульса
срыва, что необходимо для предотвращения перегрузки катушек.
Канал отметок высоты формирует импульсы отметок высоты
и включает следующие элементы: фазопереворачивающий каскад,
импульсно-формирующую труб'ку и усилитель с катодным повто-
рителем. С входа и выхода фазопереворачивающего каскада на-
пряжение высоты подастся на отклоняющие пластины импульсно-
формирующей трубки. Импульсно-формирующая трубка представ-
ляет собой электронно-лучевую трубку с электростатической фоку-
сировкой и электростатическим отклонением луча (рис. 9.11).
Трубка снабжена парой отклоняющих пластин, которые откло-
няют луч в одном направлении. Второй анод трубки соединен с
матрицей, на которой натянуты нити перпендикулярно направле-
нию луча. Электронный луч трубки падает на коллектор, образуя
в его цепи ток. При отклонении электронного луча он пересекает,
нити матрицы. В момент пересечения лучом нити матрицы вели-
чина тока через коллектор уменьшается, на нагрузке коллектора
формируются положительные импульсы напряжения, которые в
дальнейшем поступают на усилитель и используются в качестве
отметок высоты. На матрице натянуто 17 нитей, что обеспечивает
формирование 17 импульсов высоты. При этом каждая пятая нить
100
импульс запуска
От датчика
Рис. 9.10. Функциональная схема индикатора высоты
Матрица
Рис. 9.11. Импульсно-формирующая трубка
на матрице делается толще, благодаря чему каждый пятый им-
пульс отметок получается большим по амплитуде.
Датчик угла места предназначен для выработки напряжения
постоянного тока, величина которого меняется пропорционально
синусу угла наклона. В состав блока входят: движок потенцио-
метра, шунтирующие сопротивления (катушки) и шестиконтакт-
ная букса. С помощью соединительной муфты датчик угла места
сочленяется с осью качания зеркала антенны. Входная ось блока
связана с выходной осью двухступенчатой передачей с общим
передаточным числом 16.
Функциональный потенциометр состоит из тороида, шунтирую-
щих катушек, ползуна со щетками и подковы с неподвижными
щетками. Тороид — это покрытое лаком металлическое кольцо,
на которое нанесена обмотка. Верхняя часть тороида притерта
и служит контактной поверхностью, внутренняя часть соединяет-
ся с неподвижными щетками, которые делят обмотку тороида на
17 секций (участков). Чтобы сопротивление функционального по-
тенциометра изменялось по синусоидальному закону, секции об-
мотки тороида шунтируются катушками со специально подобран-
ными сопротивлениями.
Глава X
РАДИОЛОКАЦИОННАЯ СТАНЦИЯ
НАВЕДЕНИЯ РАКЕТ
1. Назначение и состав станции наведения ракет
Радиолокационная станция наведения ракет (СНР) в составе
зенитного ракетного комплекса (ЗРК) составляет комбинирован-
ную систему управления полетом ракеты: на начальном участ-
102
ке — автономное управление, после захвата ракеты — командное
радиотелеуправление.
При боевой работе одноканальная по цели и ракете СНР обес-
печивает:
поиск цели автономно в определенном секторе или принуди-
тельно по получаемым координатам целеуказания;
взятие на сопровождение выбранной для поражения цели и ее
сопровождение по дальности, углу места и азимуту;
передачу на пусковые установки (ПУ) команд для подготовки
ракет к пуску и их предстартового контроля, а также данных для
наведения направляющих по углу возвышения и азимуту;
защиту станции от противорадиолокационных ракет (ПРР);
определение момента пуска и пуск ракеты;
захват ракеты после старта и ее автоматическое сопровожде-
ние по дальности, углу места и азимуту;
управление полетом и подрывом ракеты;
оценку результатов пуска ракеты.
СНР включает:
а) радиолокационную станцию визирования (сопровождения)
цели (РЛС ВЦ) в составе:
антенно-волноводная система (АВС-1);
передающая система;
система автоматической подстройки частоты (АПЧМ);
приемная система;
система селекции движущихся целей (СДЦ);
система измерения дальности (СИД);
система выделения сигнала ошибки (ВСО);
б) радиолокационную станцию визирования (сопровождения)
ракеты (РЛС ВР) в составе:
антенно-волноводная система (АВС-П);
приемная система;
система измерения дальности (СИД);
система выделения сигнала ошибки (ВСО);
в) системы, общие для РЛС ВЦ и РЛС ВР:
система синхронизации;
система индикации поиска и пуска (ИПП);
система управления антеннами (СУА);
система вентиляции;
пневмосистема;
система управления, блокировки и сигнализации (УБС);
система функционального контроля (ФК);
система электропитания (СЭП);
г) телевизионный оптический визир (ТОВ);
д) станцию передачи команд (СПК);
е) счетно-решающий прибор (СРП) с прибором горизонтиро-
вания;
ж) радиолинии;
з) аппаратуру топопривязки;
и) систему первичного электропитания.
103
Структурная схема СНР приведена на рис. 10.1.
Система синхронизации вырабатывает опорные импульсы с по-
стоянным или изменяющимся периодом повторения для синхрони-
зации во времени работы всех устройств и систем станции.
Передающая система генерирует мощные кратковременные им-
пульсы электромагнитной энергии сверхвысокой частоты (СВЧ),
передаваемые на антенно-волноводную систему (АВС-1).
Антенно-волноводная система АВС-I передает энергию СВЧ от
передатчика к антенне, излучает ее в пространство в определен-
ном направлении, принимает отраженные от цели сигналы и пере-
дает их на приемную систему канала цели.
Антенно-волноводная система ABC-11 принимает ответные сиг-
налы ракеты и передает их на приемную систему канала ракеты.
На этапе наведения по методу трех точек (3 Т) ответные сигна-
лы ракеты принимает и передает на приемную систему канала
ракеты также АВС-1.
Приемные системы каналов цели и ракеты преобразуют и уси-
ливают отраженные от цели и ответные от ракеты сигналы соот-
ветственно до величины, необходимой для надежной работы си-
стем сопровождения цели и ракеты по дальности и угловым ко-
ординатам.
Система АПЧМ автоматически подстраивает частоту передаю-
щей системы для поддержания стабильной промежуточной часто-
ты в приемной системе канала цели.
Система СДЦ обеспечивает защиту РЛС ВЦ от пассивных (ис-
кусственных и естественных) и несинхронных импульсных
помех.
Система измерения дальности цели обеспечивает сопровожде-
ние по дальности отраженных от цели сигналов.
Система измерения дальности ракеты обеспечивает захват и
сопровождение по дальности ответных сигналов ракеты.
Данные о наклонной дальности до цели и ракеты вырабатыва-
ются в виде временного интервала между опорным импульсом, со-
ответствующим условной «нулевой» дальности, и стыком полу-
стробов, непрерывно совмещаемых с сигналом цели и ракеты со-
ответственно.
Системы выделения сигнала ошибки каналов цели и ракеты
выделяют из импульсных сигналов промодулированные частотой
сканирования напряжения сигнала ошибки, компенсируют син-
фазные помехи, нормируют выходные сигналы для увеличения
точности сопровождения цели и ракеты соответственно по угло-
вым координатам.
Система индикации поиска и пуска обеспечивает обзор прост-
ранства, индикацию вывода электрической оси АВС-I на цель и
отображение данных, обеспечивающих пуск ракеты.
Система управления антеннами обеспечивает управление поло-
жением антенно-волноводных систем по углу места и азимуту.
Телевизионный оптический визир обеспечивает визуальное на-
блюдение за воздушной обстановкой в заданном секторе по углу
104
^4^ Цель
Передающ,
система
Система
СДЦ J
зондирУЮ1Аи
Запуск
СДЦ
ТОЗ
Система
ФК
СИЛ
Система
синхрониз.
Система
> ВСС
^5Ды
Система
электро-
питания
Система
вентиляции
JZ
ИПП
Ракета
АУС СПК
АВС-И
^Импульсы запроса, команда
СПК
В
Д
Е
Приемная
система
Система
Ъ ВСО
СУА
ТсоецЦУ.соЛиЦУ
Л^.Ч^Л
СИД
ракеты
ЯД,
яд
5£кц,ЭДкц.
Зона поражения, упрежденная точка
Углы положения АЗС-I и АВС-Цу
Система
УБС и
пневмосист.
Придар
горизонт
СРП
Рис. 10.1. Структурная схема СНР
Связь с СОЦ
Связь
с ПУ
Радио- <
линии
^Коорд. на РУ\
1еглы Ф ф 0 с
Аппаратур
о
места и азимуту в направлении положения электрической оси
АВС-1.
Счетно-решающий прибор обеспечивает:
управление АВС-I и дальномером цели при отработке целеука-
зания;
наведение ABC-11 в упрежденную точку и выдачу на ПУ дан-
ных, необходимых для их наведения в точку встреливания;
выработку данных для определения момента пуска ракеты и
выдачу их на ИПП;
выработку сигналов для встреливания ракеты в луч АВС-П;
выработку команд управления полетом и подрывом ракеты;
выработку сигналов для защиты СНР от ПРР.
Прибор горизонтирования определяет углы наклона платфор-
мы самоходного шасси вдоль продольной и поперечной осей.
Станция передачи команд преобразует и передает на борт ра-
кеты команды управления полетом и подрывом ракеты.
Система вентиляции обеспечивает нормальный температурный
режим работы аппаратуры.
Система управления, блокировки и сигнализации совместно с
пневмосистемой обеспечивает:
включение, выключение СНР, развертывание и свертывание
антенн станции и радиолиний;
выбор режимов работы и метода наведения;
управление боевыми режимами и аппаратурой помехозащиты;
техническую связь с СОЦ и всеми ПУ;
управление функциональным контролем и тренировочной ап-
паратурой.
Система функционального контроля обеспечивает проверку
правильности функционирования и настройки основных систем
СНР и выдачу нормированных сигналов при предстартовом конт-
роле бортовой аппаратуры.
Радиолинии обеспечивают передачу данных целеуказания и
команд управления с СОЦ на СНР и сигналов обратного контро-
ля с СНР на СОЦ, а также передачу данных наведения и команд
управления с СНР на все ПУ и сигналов обратного контроля с
ПУ на СНР.
Аппаратура топопривязки обеспечивает:
определение положения продольной оси самоходного шасси от-
носительно меридиана (направление на север);
вычисление текущих координат самоходного шасси на местно-
сти в выбранной на топокарте системе координат и выход в за-
данный район;
автоматическую привязку СОЦ и СНР и СНР со всеми ПУ к
местности при выходе на боевую позицию и определение их вза-
имного отстояния.
2. Включение аппаратуры станции
Система первичного электропитания обеспечивает питание
станции трехфазным напряжением 220 В 400 Гц. Необходимые
106
стабилизированные и нестабилизированные напряжения постоян-
ного тока вырабатываются системой электропитания. Аппаратура
станции включается при наличии питающих напряжений и их со-
ответствия требуемым номиналам.
Нормальный температурный режим работы аппаратуры после
включения СНР обеспечивается системой вентиляции. .Согласован-
ная работа всех систем СНР и СРП обеспечивается системой син-
хронизации. Управление работой станции производится системой
УБС совместно с пневмосистемой. Техническая свззь между СОЦ
и СНР, а также между СНР и всеми ПУ осуществляется по ра-
диолиниям. Радиолинии могут работать в режиме РАДИО или
для обеспечения скрытности и повышения помехозащищенности в
режиме ПРОВОД. Если связь между СНР и ПУ устойчивая, то
светится табло ОТВЕТ на пульте командира. При наличии связи
между СНР и СОЦ светится лампочка КОНТРОЛЬ СВЯЗИ на
радиолинии.
При наличии времени с помощью системы ФК проводится кон-
троль функционирования аппаратуры СНР, проверяется взаимо-
действие СНР и всех ПУ и оценивается их готовность к боевой
работе. По радиолинии с СНР на СОЦ включением тумблера вы-
дается сигнал ГОТОВНОСТЬ, светится табло ГОТОВНОСТЬ на
пульте командира.
3. Поиск цели
РЛС ВЦ в составе СНР предназначена для поиска, автосопро-
вождения цели и определения ее текущих координат (дальности
угла места и азимута) с точностью, обеспечивающей наведение
ракеты на цель. Поиск цели осуществляется в режимах ручного
управления (РУ), поиска (П) или целеуказания (ЦУ). Режимы
РУ и ПОИСК используются при самостоятельном автономном,
режим ЦУ — при принудительном поиске.
В режиме РУ возможен поворот АВС-I с игольчатой диаграм-
мой направленности антенны по азимуту относительно продоль-
ной оси самоходного шасси и по углу места при вращении штур-
валов ручного управления.
Импульсы электромагнитной энергии СВЧ вырабатываются пе-
редающей системой (рис. 10.16). Передающая система включает
подмодулятор, модулятор и магнетронный генератор. После вклю-
чения передающей системы (нажимая кнопку ВКЛ. ВЫСОКОЕ
РПУ) штурвалом индукционного регулятора высокого напряже-
ния устанавливается рабочее значение анодного тока, до нуля
снижается напряжение накала магнетрона. При этом включается
в работу система АПЧМ.
Подмодулятор управляется импульсами запуска передатчика,
поступающими из системы синхронизации. Эти импульсы неста-
бильны по амплитуде и длительности, имеют малую мощность,
по форме отличаются от прямоугольных. Подмодулятор выраба-
тывает импульсы необходимой амплитуды и длительности для
107
управления модулятором. Модулятор собран по схеме импульсно-
го удвоения напряжения на лампах с накопительными кондесато-
рами. Он формирует видеоимпульсы амплитудой до нескольких
десятков киловатт для модуляции магнетронного генератора, ко-
торый формирует импульс СВЧ. Частота магнетрона автоматиче-
ски подстраивается системой АПЧМ. Если открыть крышку отсека
передатчика, то при размыкании контактов блокировки разрыва-
ется цепь включения высокого напряжения, передающая система
выключается.
Импульсы СВЧ с магнетронного генератора поступают в вол-
новод, в котором включен измеритель проходящей мощности
(ИПМ). При этом измеряется средняя мощность передатчика
в рабочем диапазоне частот, которая контролируется по прибору.
В волновод включен также детектор для контроля формы и дли-
тельности огибающей СВЧ-импульса.
Волноводный переключатель АНТЕННА — ЭКВИВАЛЕНТ ро-
торного типа подключает магнетрон к АВС-I или к эквиваленту.
При подаче воздуха в пневмоцилиндр ротор переключателя пово-
рачивается и подключает магнетрон к эквиваленту. Можно про-
верять и настраивать передатчик
без излучения энергии СВЧ в эфир.
Это затрудняет разведку тактико-
технических характеристик и места
дислокации станции. При отсутст-
вии давления воздуха магнетрон
подключается к волноводному
тракту.
В режиме РУ с облучателя, ра-
ботающего в режиме ПЕЛЕНГ,
энергия излучается на зеркало ан-
тенны. Профиль зеркала представ-
ляет собой параболоид вращения, а
сама антенна называется' параболи-
ческой. Облучатель располагается в
фокальной плоскости. Формирова-
ние узкого луча диаграммы направ-
ленности антенны напоминает фор-
мирование узкого светового потока
в фаре. Энергия с облучателя по-
падает на зеркало и, отразившись
от него, параллельным потоком из-
лучается в пространство. При при-
еме энергия поступает на зеркало
антенны, отражается от него и со-
бирается в фокусе, где расположен
облучатель.
Для облегчения обнаружения
цели в режиме ПОИСК с помощью
облучателя производится сканиро-
\____________________
Рис. 10.2. Принцип отклонения
максимума излучения в пара-
болической антенне
108
вание (качание) диаграммы направленности антенны (ДНА) по
углу места. Диаграмма направленности сканирует за счет пере-
мещения точек излучения в облучателе по вертикали (рис. 10.2)
с помощью двигателя.
Отраженная от цели и принятая антенной системой электро-
магнитная энергия поступает в приемную систему. Приемная си-
стема— двухканальная. Каналы одинаковые и собраны по супер-
гетеродинной схеме. Принимаемые сигналы СВЧ поступают
в основной канал А, где преобразуются в сигналы промежуточной
частоты (ПЧ).
Каждый канал состоит из высокочастотной (ВЧ) части и трак-
та основного усиления. Основное усиление сигнала осуществля-
ется1 на промежуточной частоте.
ВЧ-часть состоит из усилителя высокой частоты (УВЧ), ча-
стотного селектора (ВЧ-фильтра), гетеродина и смесителя. Тракт
основного усиления содержит усилитель промежуточной частоты
(УПЧ), детектор, видеоусилитель (ВУС) и схему автоматической
регулировки усиления (АРУ).
На входе приемного устройства находится УВЧ. Для умень-
шения уровня собственных шумов приемника УВЧ сантиметрового
диапазона собирается на лампе бегущей волны (ЛБВ). Усиление
в ЛБВ осуществляется за счет взаимодействия электромагнитной
энергии принятого сигнала с собственным потоком электронов,
излучаемых катодом лампы.
С выхода УВЧ сигналы поступают на высокочастотный
фильтр — объемный резонатор, настроенный на частоту магнетро-
на. Электромагнитная энергия на частоте магнетрона проходит
через фильтр почти без потерь. Для сигналов с частотой, не соот-
ветствующей частоте магнетрона, фильтр представляет очень
большое сопротивление и практически не пропускает сигналы.
Таким образом, сигналы, отраженные от целей, встретившихся
на пути распространения зондирующего импульса СНР, пропу-
скаются через фильтр и подаются на смеситель, на который пода-
ется также напряжение гетеродина. Гетеродин представляет собой
маломощный генератор СВЧ. На смесителе вырабатываются сиг-
налы на промежуточной частоте, равной разности частот магне-
трона и гетеродина fr:
—fr.
Сигналы на промежуточной частоте усиливаются несколькими
каскадами УПЧ, включенными последовательно и охваченными
схемой автоматической регулировки усиления. В целом сигнал
усиливается в тысячи раз. Ручная при настройке или автомати-
ческая при работе регулировка усиления включается тумблером.
Далее сигналы поступают на главный усилитель промежуточной
частоты (ГУПЧ) канала дальности. С выхода ГУПЧ сигналы по-
ступают на амплитудный детектор, где преобразуются в низкую
видеочастоту. После усиления на видеоусилителях сигналы с ка-
109
нала А поступают на ИПП и в СИД цели. Отметка цели высве-
чивается в виде амплитудной отметки на индикаторе дальности
и в виде яркостной отметки на ИПП.
Основным элементом ИПП является электронно-лучевая труб-
ка (рис. 10.3). При включении питающих напряжений поток элек-
тронов, излучаемых катодом, движется к экрану и, ударяясь об
него, вызывает свечение в центре экрана. Для отклонения луча
в сторону на горловине трубки имеется отклоняющая катушка.
Если через отклоняющую катушку пропустить постоянный токг
то вдоль оси катушки возникает магнитный поток. Под действием
магнитного потока траектория полета электронов искривляется, в
результате светящееся пятно (яркостная отметка) сместится от
центра экрана. Если изменить направление тока в отклоняющей
катушке, а ток оставить прежним, отметка сместится в противо-
положную сторону на ту же величину.
В зависимости от величины тока в отклоняющей катушке
отметка смещается на различное расстояние. При непрерывном
увеличении тока отметка непрерывно перемещается от центра к
краю экрана. Поэтому для создания радиальной развертки на
отклоняющую катушку подается пилообразный (линейно-нараста-
ющий) ток, во время прямого хода которого луч с постоянной
скоростью отклоняется от центра к краю экрана и прочерчивает
на экране светящуюся линию, а во время кратковременного об-
ратного хода при резком уменьшении тока до нуля- быстро воз-
вращается в центр.
Для того чтобы развертка светилась только во время прямого
и не светилась во время обратного хода, на управляющий элект-
род трубки подаются импульсы подсвета положительной поляр-
ности. Режим работы электронно-лучевой трубки выбирается та-
ким, чтобы при наличии импульса подсвета электроны долетали
к экрану, а при его отсутствии не долетали.
Запуск развертки осуществляется одновременно с излучением
импульса электромагнитной энергии в пространство, поэтому на-
чало развертки соответствует началу отсчета дальности, а вся
длина развертки соответствует дальности обзора РЛС. При изме-
нении масштаба на развертке может высвечиваться1 выбранный
участок дальности.
Чтобы оператор имел возможность оценивать дальность до
цели, на развертке равномерно размещаются масштабные метки,
расстояние между которыми соответствует определенной дально-
сти. Масштабные метки создаются путем подачи на управляю-
щий электрод дополнительно кратковременных импульсов поло-
жительной полярности. Во время их действия скорость электрон-
ного потока увеличивается, а на развертке появляются точки бо-
лее яркие, чем сама развертка (рис. 10.4).
Сигналы, отраженные от цели, подаются1 из приемной системы
также на управляющий электрод в виде импульсов положитель-
ной полярности. В момент их прихода на развертке появляется
110
Сельсин
Сельсин
Схема
записка
Магнит-
ный у с и -
литель
Двигатель
секторного
обзора
Исполнит,
двигатель
Имп. синхр.
Канал
подсвета
Приемная
система
Усилитель
сигналов
Канал
И мп. синхр.
дальности
ГИТ
сектора
Рис. 10.3. Функциональная схема системы индикации поиска и пуска
яркостная отметка. По положению масштабных меток оператор
может приблизительно определять дальность до цели.
Для определения направления на цель (ее азимута) радиаль-
ная развертка индикатора синхронно связана с антенной. Связь
осуществляется с помощью электрической синхронной передачи.
При повороте антенны вращается ротор двигателя синхронной
передачи. Вместе с ротором вокруг горловины трубки поворачи-
вается связанная с ним отклоняющая катушка. В результате раз-
Масштабные метки
Рис. 10.4. Вид индикатора поиска
вертка на экране поворачивается. На обрамление экрана индика-
тора нанесена шкала, по которой оператор считывает азимут цели.
При обнаружении цели кроме дальности и азимута оператору
необходимо знать угол места. Для индикации угла места цели в
режиме поиска на экране индикатора высвечивается не радиаль-
ная, а секторная (растровая) развертка. Ширина прямоугольного
растра соответствует ширине сектора сканирования диаграммы на-
правленности антенны по углу места. При пропускании через
угломестную катушку пилообразного тока электронный поток
трубки кроме перемещения от центра к краю экрана начинает
совершать перемещение и в перпендикулярном направлении. Если
период повторения пилообразного тока угломестной катушки во
много раз больше периода повторения тока основной катушки, то
на экране будет высвечиваться прямоугольный растр.
В зависимости от того, как расположена цель относительно
середины угломестного сектора, отметка от цели будет высвечи-
ваться в различные моменты относительно начала угломестной
развертки. Поворачивая антенну по углу места штурвалом руч-
ного управления, отметку от цели выводят на середину растра.
При этом диаграмма направленности антенны направлена на цель
по углу места. Поворачивая антенну по азимуту штурвалом руч-
ного управления, выставляют наибольшую яркость свечения от-
метки цели. При этом диаграмма направленности антенны
направлена на цель по азимуту.
112
СИД цели обеспечивает сопровождение по дальности отражен-
ных от цели сигналов и вырабатывает данные о наклонной даль-
ности до цели в виде временного интервала между опорным
импульсом, соответствующим условной нулевой дальности, и сты-
ком полустробов, непрерывно совмещенных с сигналом, отражен-
ным от цели.
На двухлучевой электронно-лучевой трубке индикатора фор-
мируются развертки грубой и точной дальности. На развертке
грубой дальности отображается положительный строб цели, рав-
ный длительности развертки точной дальности. С началом и кон-
цом положительного строба на развертке грубой дальности свя-
заны стробные метки на ИПП. С помощью штурвала РУЧНОЕ —
ПОЛУАВТОМАТ или кнопок ПРИБЛИЖЕНИЕ — УДАЛЕНИЕ
строб цели перемещается на грубой развертке. На точной раз-
вертке высвечивается участок дальности, определяемый положе-
нием строба цели на грубой развертке. На средней части раз-
вертки точной дальности создаются две затемненные метки визи-
ра целей.
Если положительный строб на развертке грубой дальности
совпадает с отметкой цели, то положительная отметка цели появ-
ляется на точной развертке. Если же отметка от цели при этом
находится между затемненными метками визира цели, то стык
полустробов совпадает с центром импульса цели, амплитуда кото-
рого регулируется потенциометром УСИЛ. На ИПП отметка цели
находится между стробными метками.
При самостоятельном (автономном) поиске цели СИД цели
работает в режиме РУ или полуавтоматического сопровождения
(ПАС); при этом следящая система разомкнута (рис. 10.16). В
режиме РУ оператор управляет полустробами сопровождения
вручную с помощью штурвала РУЧНОЕ — ПОЛУАВТОМАТ или
кнопок ПРИБЛИЖЕНИЕ — УДАЛЕНИЕ, управляющее напряже-
ние с которых поступает на интегратор III, выходное напряжение
которого изменяется. При этом используется часть следящей си-
стемы: интегратор III, схема переменной задержки (СПЗ) и схема
формирования импульсов дальности. Управляющее напряжение с
интегратора III поступает на СПЗ, в которой имеется генератор
пилообразного напряжения, запускаемый импульсом «нулевой»
дальности. В момент равенства этих напряжений вырабатываются
полустробы сопровождения, совмещаемые с центром импульса
цели. Управление полустробами осуществляется только по поло-
жению.
В режиме ПАС оператор управляет полустробами вручную
штурвалом РУЧНОЕ — ПОЛУАВТОМАТ. При этом используется
часть элементов следящей системы: интеграторы II, III, СПЗ и
схема формирования импульсов дальности. Управляющее напря-
жение поступает на интегратор II, затем — на интегратор III.
Поэтому полустробы управляются по положению и скорости.
При целеуказании с СОЦ на СНР по радиолинии передаются
прямоугольные координаты цели и команды. На пульте загора-
8 Зак. 3112дсп
113
ются табло ЦУ ПРЕД, и ПРИН. ЦУ или только ПРИН. ЦУ. В
СРП поступает команда ПРИНЯТЬ ЦУ, которая дублируется
командой ЦУ при нажатии кнопки. По команде ЦУ к СРП под-
ключаются АВС-I и СИД цели.
СРП вырабатывает управляющие сигналы СО ец ЦУ, СО рц
ЦУ, по которым система управления- антеннами автоматически
поворачивает АВС-I в направлении на цель по углу места и ази-
муту. При повороте АВС-I по азимуту и углу места учитывается
разгоризонтирование (наклон) платформы самохода СНР вдоль
продольной и поперечной осей, а при повороте по азимуту учиты-
вается также и ориентирование продольной оси самохода отно-
сительно направления на север, т. е. путевой угол Qc (рис. 10.5).
Рис. 10.5. Определение путевого и курсово-
го углов самохода
СИД цели работает в режиме ЦУ. Полустробы сопровождения с
помощью сигнала 6Дцу, подаваемого на интегратор III, автома-
тически перемещаются на дальность целеуказания. На ИПП вы-
свечивается участок дальности, центр которого совпадает с пред-
полагаемым местом нахождения цели. Для обеспечения скрытно-
сти излучения передающая система до момента отработки
целеуказания работает на эквивалент антенны. После отработки
целеуказания передающая система тумблером переключается на
антенну. Уточняется отработка целеуказания. Штурвалами руч-
ного управления уточняются координаты цели. Отметка цели на
ИПП выводится на центр растровой развертки по углу места и
на максимальную яркость по азимуту. На индикаторе дальности
отметка цели совмещается с визиром на точной развертке, после
чего осуществляется переход на автоматическое сопровождение
цели по дальности нажатием кнопки А, а затем и по угловым
координатам нажатием кнопки АСЦ. Цель сопровождается по
дальности и угловым координатам автоматически. При переклю-
чении тумблера гаснет табло ГОТОВЫ., загорается ЦУ ПРИН.,
через радиолинию на СОЦ выдается сигнал ЦУ ПРИНЯТО.
114
4. Автоматическое сопровождение цели
При рассмотрении каналов автоматического сопровождения
цели по угловым координатам и дальности необходимо учитывать,
что каналы А и Б включаются в работу только после захвата
цели оператором. Оператор распознает цель среди помех, выби-
рает нужную из нескольких и определяет первоначальные значе-
ния ее координат; только после этого включается автоматика.
Автоматический способ сопровождения цели является основ-
ным. Кроме того, возможны комбинации автоматического сопро-
вождения цели по угловым координатам и автоматического, полу-
автоматического или ручного сопровождения цели по дальности.
Под автоматическим сопровождением понимается сопровожде-
ние цели без участия оператора. Во время1 ручного сопровождения
оператор дальности с помощью штурвалов задает изменение коор-
динаты дальности по положению, а при полуавтоматическом со-
провождении цели — изменение координаты дальности по ско-
рости.
После взятия цели на автосопровождение АВС-I отключается
от СРП и подключается на управление от СУА. Автоматическое
сопровождение осуществляется с помощью РЛС ВЦ, которая яв-
ляется автоматической системой управления АСУ и включает
основные элементы: измерительное устройство, усилительно-пре-
образующее устройство, исполнительное устройство и объект уп-
равления1 (рис. 10.6).
Рис. 10.6. Структурная схема замкнутой автоматической системы управ-
ления
При автоматическом сопровождении по угловым координатам
в измерительном устройстве вырабатывается напряжение сигнала
ошибки, пропорциональное угловому отклонению электрической
оси антенны от направления на цель. Измерительным устройст-
вом является пеленгационное устройство РЛС, в котором при
угловом отклонении цели от равносигнального направления фор-
мируется напряжение, пропорциональное этому отклонению. Из-
мерительное устройство конструктивно представляет собой рабо-
тающий в режиме ПЕЛЕНГ облучатель АВС-I с некоторыми вол-
новодными элементами.
В усилительно-преобразующем устройстве осуществляется ос-
новное усиление, преобразование его из высокочастотного диапа-
зона в диапазон промежуточной частоты и далее в видеочастоту,
а также выделение сигнала ошибки по соответствующей коорди-
нате. Это устройство конструктивно охватывает приемную систе-
му, систему выделения сигнала ошибки и элементы системы уп-
равления антенной.
Исполнительное устройство поворачивает объект управления
(зеркало антенны) под действием напряжения сигнала ошибки.
Поворот осуществляется в сторону уменьшения величины сигнала
ошибки и продолжается до тех пор, пока напряжение сигнала
ошибки не станет равным нулю. При смещении цели от равно-
сигнального направления в измерительном устройстве вновь воз-
никает сигнал ошибки. При этом исполнительное устройство
(электродвигатель) вновь повернет антенну так, чтобы сигнал
ошибки свести к нулю. На этом принципе работает РЛС при авто-
матическом сопровождении цели по угловым координатам.
Импульсы электромагнитной энергии от магнетронного генера-
тора через волновод, в котором включены измеритель проходя-
щей мощности и детектор огибающей, и через переключатель
АНТЕННА — ЭКВИВАЛЕНТ поступают в волноводный тракт и
далее через моноимпульсный облучатель излучаются в направле-
нии на цель. Облучатель совместно с зеркалом антенны форми-
рует суммарную (игольчатую) диаграмму направленности на пе-
редачу, совпадающую с электрической осью антенны. Моноим-
пульсный метод позволяет получать информацию об угловом по-
ложении цели по каждому излученному и принятому импульсам.
Облучатель совместно с зеркалом антенны на прием формиру-
ет три диаграммы: суммарную S и разностные в угломестной Де
и азимутальной плоскостях Д(3. Поэтому когда принятый антенной
отраженный сигнал цели поступает на облучатель, формируются
суммарный опорный и разностные угломестный и азимутальный
сигналы (рис. 10.1). Если цель сопровождается точно, то в раз-
ностных каналах Де и Д(3 сигналы отсутствуют. При смешении
цели в горизонтальной плоскости в азимутальном канале появля-
ется сигнал рассогласования, а при смещении цели в вертикаль-
ной плоскости сигнал рассогласования появляется в угломестном
канале. Величина сигналов в разностных каналах зависит от вели-
чины угла смещения цели относительно электрической оси АВС-1
(равносигнального управления). Информация о направлении сме-
щения (вправо-влево, вверх-вниз) содержится в фазе сигнала.
Разностные сигналы подключены к модулятору. В модуляторе
с помощью вращающейся с частотой сканирования петли связи
осуществляются геометрическое сложение сигналов и перенос ин-
формации о смещении цели относительно равносигнального на-
правления из диапазона СВЧ в диапазон низкочастотных колеба-
116
ний. На выходе модулятора импульсы имеют переменную во вре-
мени амплитуду. В огибающей импульсов UM содержится инфор-
мация об угловом положении цели:
UM=UQMcos(!2t + ср0),
где иом — геометрическая сумма сигналов азимутального и угло-
местного каналов;
Q —частота модуляции сигналов;
ф0 — фазовое смещение модулирующего напряжения отно-
сительно опорного.
Высокочастотные сигналы UM с модулятора и UQ> которые со-
держат полезный сигнал цели и паразитный сигнал помехи, из
суммарного канала поступают на входы сумматора. После их гео-
метрического сложения и вычитания в сумматоре формируются
два противофазных сигнала:
С71 = t70 f 1 +wcos(S/ + ?0)1;
J72 = t70 [1 —/ncos(L7 + ?0)b
которые поступают в основной и дополнительный каналы А и Б
приемной системы. Сигналы усиливаются и преобразуются, как и
npiii поиске цели. При этом принимаемые сигналы СВЧ через
УВЧ на ЛБВ и высокочастотный фильтр подаются на смеситель,
на который подается также напряжение гетеродина. В смесителе
вырабатываются сигналы на промежуточной частоте fnp. Сигналы
на промежуточной частоте предварительно усиливаются УПЧ,
охваченными схемами автоматической регулировки усиления
(АРУ).
Сигналы канала А поступают на главный усилитель промежу-
точной частоты (ГУПЧ), обеспечивая работу канала дальности,
и далее в системы ИПП и СИД цели, как и при поиске цели.
Отметка цели высвечивается на экранах индикатора дальности и
ИПП. Одновременно сигналы канала А поступают на УПЧ канала
угловой автоматики (КУА). Сигналы канала Б задерживаются
линией задержки относительно сигналов канала А и также посту-
пают на УПЧ КУА. После амплитудного детектирования и усиле-
ния сигналы каналов А и Б в виде прямоугольных импульсов,
которые в каналах А и Б имеют противофазную модуляцию с
частотой сканирования, поочередно с установленной задержкой
подаются на систему выделения сигналов ошибки (ВСО).
В ИПП с началом автосопровождения цели развертка, создан-
ная каналами развертки дальности и подсвета, приводится в не-
прерывное круговое вращение с установленной постоянной угло-
вой скоростью. При совпадении азимута развертки с азимутом
цели на экране высвечивается1 яркостная отметка.
При автоматическом сопровождении цели по угловым коорди-
натам в зависимости от помеховой обстановки и условий сопро-
вождения включается ручное, полуавтоматическое или автомати-
ческое сопровождение по дальности. Работа СИД цели при руч-
ном и полуавтоматическом сопровождении уже описана.
117
Когда отметка цели в режимах ручного, полуавтоматического
управления или целеуказания совмещается с визиром на точной
развертке индикатора дальности, то полустробы сопровождения
совмещены с отраженным от цели сигналом. Возможно включение
автоматического сопровождения, когда электронная следящая си-
стема замкнута. При этом обеспечивается непрерывное автомати-
ческое совмещение полустробов с отраженным от цели сигналом.
Измерительным элементом системы, который определяет вре-
менное рассогласование между стыком полустробов с центром
импульса цели и вырабатывает напряжение сигнала ошибки Л/р,
является схема выделения сигнала ошибки (ВСО). Знак и вели-
чина £7Р зависят от знака и величины временного рассогласования
между полустробами и серединой импульса цели (рис. 10.7).
ИЗП
Ими. цели
А ЧЗП
t
и.
"г
I полустроб /1
Д' полустроб Q
______________L
i
А. У СП 3 f- jL .
Имп. запуска А
h ‘Ди,
I полу строб /|
t
*-^Имп. дальн. СРП
Л_____________
U л
t
t
I
I полустроб _в___________________в____________.
I
Рис. 10.7. Эпюры напряжений, поясняющие работу автодаль-
номера цели
118
Выработанный сигнал <7Р интегрируется. С момента включения
автоматического сопровождения следящая система работает по
схеме с двумя интеграторами (с астатизмом II порядка) с одно-
временным расширением полосы пропускания и увеличением коэф-
фициента усиления, достаточного для захвата отраженного от
цели сигнала. После окончания переходного процесса следящая
система автоматически переключается и работает по схеме с тре-
мя интеграторами (с астатизмом III порядка) с одновременным
сужением полосы пропускания и уменьшением коэффициента уси-
ления, что повышает помехозащищенность в условиях несинхрон-
ных и скользящих импульсных помех.
Выходное напряжение с интегратора III управляет объектом
регулирования (СПЗ). Величина задержки выходного импульса
СПЗ пропорциональна величине управляющего напряжения Uy
на выходе интегратора III. Импульсом СПЗ запускается схема
формирования импульсов дальности. Вырабатываются полустро-
бы, которые перемещаются в сторону согласованного положения
с импульсом цели.
В схеме формирования импульсов дальности вырабатываются
импульсы запуска стробов приемника, которые подаются на стро-
бируемые каскады приемной системы РЛС ВЦ для1 того, чтобы
в каналы угловой автоматики (в каналы А и Б) поступали только
сигналы от цели, которая находится на автосопровождении, и не
поступали сигналы от других целей, находящихся в луче диаграм-
мы направленности АВС-1.
Достоинство следящей системы с астатизмом III порядка —
отсутствие в динамической ошибке сопровождения составляющей,
пропорциональной ускорению и скорости, и наличие «памяти» по
ускорению и скорости. При кратковременном пропадании импуль-
сов цели напряжение на выходе интегратора I сохраняется на
уровне, соответствующем ускорению, а на выходе интегратора
II — скорости цели в момент пропадания отраженных импульсов.
Полустробы в течение некоторого времени перемещаются с уско-
рением и скоростью, соответствующими ускорению и скорости ис-
чезнувшего сигнала.
Коррекция положения полустробов при неустойчивом автома-
тическом сопровождении цели осуществляется при вращении
штурвала ручного управления, при вращении которого напряже-
ние с токогенератора поступает на интегратор III.
Детекторы-селекторы разделяют сигналы каналов А и Б. Для
выделения информации об угловом положении цели и исключения
уводящих по угловым координатам помех осуществляется сум-
марно-разностная обработка сигналов, которая обеспечивается
двухканальным построением пеленгатора, начиная с сумматора в
АВС-I и кончая системой ВСО, выполняющей операцию:
^А~^Б
^а + ^б’
119
В зависимости от величины углового смещения цели от пелен-
гового направления (от электрической оси АВС-I) амплитуда сиг-
налов, подаваемых на систему ВСО, различная (при строгом на-
правлении на цель амплитуда сигналов постоянна).
Система ВСО выделяет из импульсных сигналов промодели-
рованное частотой сканирования напряжение сигнала ошибки,
компенсирует синфазные помехи (ответные угловые, флюктуаци-
онные и др.), нормирует выходной сигнал для увеличения точно-
сти сопровождения цели по угловым координатам. Напряжение
сигнала ошибки с выхода системы ВСО подается в систему управ-
ления антенной (СУА) на фазочувствительные элементы — фазо-
вые детекторы (ФД). Кроме того, на ФД подается напряжение с
генератора опорных напряжений (ГОН). Ротор генератора меха-
нически связан с модулятором, расположенным в антенно-волно-
водной системе. В ФД происходит дешифрование напряжения
сигнала ошибки. С него снимается постоянное напряжение, вели-
чина которого пропорциональна величине углового смещения, а
знак соответствует направлению смещения.
Для1 разделения напряжения сигнала ошибки по азимутальной
и угломестной плоскостям имеется два ФД. Опорное напряжение
поступает на них с взаимным сдвигом на 90°. С выходов детек-
торов напряжения сигналов ошибки подаются на соответствующие
усилители постоянного тока и далее на электромашинные усили-
тели для усиления по мощности. Усиленные сигналы подаются на
приводные (исполнительные) двигатели, которые поворачивают ан-
тенну вслед за целью. Поэтому сопровождение цели по угловым
координатам связано с необходимостью механического перемеще-
ния массивной антенной системы.
При движении цели величина отраженного сигнала изменяется
в значительных пределах. Так, например, при изменении дально-
сти до цели в 2 раза мощность принятого сигнала изменится в
16 раз, а при изменении дальности в 5 раз мощность изменится
в 625 раз. Если не принять специальных мер, то такой широкий
диапазон изменения входного сигнала может привести к большим
ошибкам определения угловых координат, а также к неустойчи-
вости и даже срыву сопровождения. Поэтому для поддержания в
приемной системе РЛС ВЦ примерно постоянного уровня вход-
ного сигнала используется автоматическая регулировка усиле-
ния (АРУ).
На схемы АРУ каналов А и Б системы ВСО подается напря-
жение, соответствующее среднему уровню входного сигнала. Если
это напряжение превышает заданный уровень (мощность вход-
ного сигнала начинает превышать номинальную), то в схемах
АРУ вырабатываются напряжения, которые подаются па управ-
ляющие сетки ламп первых каскадов УПЧ в виде отрицательного
смещения. При этом коэффициент усиления каскадов УПЧ умень-
шается, а мощность выходного сигнала в приемной системе ста-
новится номинальной. С помощью схемы АРУ можно только
уменьшить коэффициент усиления приемного тракта, поскольку
120
отсутствие напряжения АРУ соответствует максимальному коэф-
фициенту усиления, а его наличие — уменьшению.
5. Помехозащищенность СНР
СНР имеет защиту от различных активных и пассивных помех.
Для защиты от пассивных помех включается аппаратура системы
СДЦ, принцип действия которой основан на разделении сигналов,
отраженных от подвижных и неподвижных объектов по доплеров-
ской составляющей в частоте принимаемых сигналов. Система
СДЦ обеспечивает защиту РЛС как от преднамеренных (напри-
мер, сбрасываемая металлизированная лента), так и от непред-
намеренных пассивных помех (метеообразования, местные пред-
меты).
Поскольку воздушные цели, как правило, являются высокопод-
вижными объектами, то это качество положено в основу их отли-
чия от неподвижных и малоподвижных пассивных отражателей.
Известно, что радиосигналы, отраженные от неподвижных пред-
метов, имеют частоту, отличающуюся от частоты сигналов, отра-
женных от подвижных предметов. Это явление называется эффек-
том Доплера, а разница в частотах излученного и отраженного
сигналов называется доплеровской составляющей /д, которая за-
висит от длины волны Z и радиальной составляющей скорости
перемещения Vr (скорости изменения дальности) отражающего
предмета:
Если цель приближается, то частота отраженного сигнала уве-
личивается; при этом частота /д — величина положительная. Если
цель удаляется, то соответственно частота отраженного сигнала
уменьшается, а частота /д — величина отрицательная. В импульс-
ных РЛС в зависимости от скорости цели частота может быть
до сотен герц.
Для того чтобы выделить из принятого сигнала частоту и
определить, объект подвижный- ил^ нет, необходимо «запомнить»
частоту излученного станцией сигнала, сравнить частоты излу-
ченного и принятого сигналов и выделить частоту как их разность.
Частоту излученного сигнала «запоминает» когерентный гете-
родин, который запускается импульсом СВЧ-энергии, вырабаты-
ваемым магнетронным генератором. В течение каждого периода
следования когерентный гетеродин генерирует непрерывные высо-
кочастотные стабильные колебания, сохраняя частоту и фазу из-
лученного в эфир зондирующего импульса.
В качестве сравнивающего элемента используется фазовый де-
тектор (ФД). При одновременной подаче на ФД двух сигналов
на одной частоте с него снимается постоянное напряжение, вели-
чина которого пропорциональна фазовому сдвигу между сигнала-
ми. При подаче на ФД двух сигналов на разной частоте фазовый
121
сдвиг между ними непрерывно изменяется. Поэтому напряжение»
снимаемое с детектора, не будет постоянным. Таким образом, если
на ФД подавать сигналы от когерентного гетеродина и импульс-
ные сигналы, отраженные от неподвижного объекта, то с него
будут сниматься импульсные сигналы постоянной амплитуды. При
подаче на детектор сигналов, отраженных от подвижных объектов,
изменение фазы этих сигналов от периода к периоду по отно-
шению к постоянной фазе колебаний гетеродина преобразуется в
изменение амплитуды выходных сигналов ФД. Видеоимпульсы
подвижной цели промодулированы по амплитуде с частотой
(рис. 10.8).
Помеха
О
t
Сигнал
хтТШГГГГг^...............
Рис. 10.8. Работа схемы селекции движущихся целей
122
Сигналы с ФД подаются на схему череспериодной компенсации
(ЧПК). В схеме ЧПК амплитуда сигналов в одном периоде запо-
минается, а затем из пришедших в следующем периоде сигналов
вычитаются запомненные сигналы. В результате вычитания посто-
янные по амплитуде сигналы вычитаются, а сигналы, отраженные
от подвижных объектов, снимаются в виде их разности. Одновре-
менно с вычитанием пришедшие сигналы запоминаются для их
вычитания в следующем периоде и т. д. (рис. 10.9).
Рис. 10.9. Схема череспериодной компенсации
Реально создаваемое облако пассивной помехи перемещается
вместе с потоком воздуха. Поэтому в сигналах, отраженных от
помехи, также может содержаться доплеровская составляющая.
Для ее исключения в стабильном гетеродине имеется схема ком-
пенсации скорости ветра. С помощью потенциометра этой схемы
оператор имеет возможность изменять в небольших пределах
частоту гетеродина. Оператор, наблюдая на экране индикатора
помеху, вращает потенциометр схемы компенсации ветра, подби-
рает частоту гетеродина и визуально наблюдает на экране инди-
катора дальности уменьшение плотности помехи или ее полное
пропадание.
Следует учитывать, что при поиске целей станцией одновре-
менно принимаются сигналы от объектов, имеющих различную
скорость. Даже различные части облаков помехи, местные пред-
меты и воздушные цели имеют неравную скорость перемещения.
На фоне местных предметов трудно различаются вертолеты, осо-
бенно при их зависании в воздухе. Вследствие этого успех работы
в условиях пассивных помех прежде всего зависит от степени
подготовленности и натренированности оператора.
В канале угловой автоматики выделение из помехи сигналов
целей для определения сигнала ошибки, необходимой для доворо-
та АВС-I в направлении на цель, осуществляется с помощью схе-
мы квадратурной обработки и низкочастотной фильтрации.
Для защиты от активных помех используются перестройка
несущей частоты РЛС, двухканальная обработка сигнала, ампли-
тудная и временная селекция, изменяемая частота следования
зондирующих импульсов РЛС.
Двухканальная обработка сигналов в приемных системах и
системах ВСО применяется для защиты от преднамеренной актив-
ной угловой помехи при автосопровождении цели.
При воздействии активной (шумовой, синхронной или несин-
хронной) помехи оператор с помощью органов управления за
123
очень короткое время перестраивает РЛС. В момент перестройки
волны изменяются частота магнетронного генератора, гетероди-
на и частота пропускания высокочастотных фильтров.
Амплитудная селекция применяется для защиты от синхрон-
ных и несинхронных импульсных помех большой амплитуды во
время поиска цели, если не включена система СДЦ. Такие помехи
часто возникают за счет работы вблизи расположенных РЛС.
Из-за большой их амплитуды и скорости перемещения «загряз-
няются» экраны индикаторов и затрудняется процесс поиска. В
случае превышения амплитуды помех заранее установленного
уровня ограничения схема амплитудной селекции срабатывает, в
приемной системе сигнал не «обрабатывается».
Временная селекция применяется для защиты РЛС от несин-
хронных импульсных помех во время поиска и сопровождения
цели. Разделение сигнала осуществляется по времени задержки
принимаемых сигналов в соседних периодах повторения. Сигналы,
отраженные от целей, имеют в соседних периодах повторения
малое взаимное временное смещение (доли микросекунды), в то
время как сигналы несинхронных импульсных помех имеют боль-
шое временное смещение (единицы и десятки микросекунд). С
помощью этого признака происходит разделение сигналов целей
и помех. Несинхронная импульсная помеха подавляется при вклю-
чении схемы подавления НИП, если не включена система СДЦ.
Изменение частоты следования импульсов применяется для
защиты от преднамеренных ответных синхронных импульсных по-
мех. В положении ШТ-П синхронная помеха превращается в не-
синхронную.
6. Решение задач встреливания ракеты
Если ракеты состыкованы с разъемами, то с каждой пусковой
установки по радиолинии поступают сигналы УСТАНОВЛЕНО.
На выбранные пусковые установки тумблером с пульта команди-
ра РЛС подается команда ПОДГОТОВИТЬ, по которой произ-
водится автоматический цикл подготовки ракеты. С пусковых
установок на РЛС поступают сигналы ГОТОВО, РАЗРЕШЕНИЕ.
На пульте командира светится табло УСТАН., ГОТ., РАЗР. При
больших углах возвышения направляющих пусковой установки
сигнал РАЗРЕШЕНИЕ вырабатывается во всей зоне. При малых
углах возвышения имеется сектор запрета стрельбы (рис. 10.10).
С началом автосопровождения РЛС ВЦ определяет сфериче-
ские координаты цели: дальность Д, угол места е и азимут (3.
По этим координатам с учетом путевого угла и углов наклона
платформы самохода СРП вырабатывает сигналы для наведения
АВС-П, входящей в состав РЛС ВР, с помощью СУА в текущую
упрежденную точку (рис. 10.11).
ABC-11 необходимо наводить с упреждением на величины
A^hs, A/hs, А//н для учета времени неуправляемого полета раке-
ты. Если ракета сходит с пусковой установки в момент нахожде-
124
Рис. 10.10. Определение сектора запрета стрель-
бы при малых углах возвышения
Рис. 10.11. Определение текущей упрежденной точки
125
ния цели, летящей со скоростью V, в точке А с координатами ен>
0hs, Д, которым соответствуют координаты Xhs, Khs, #н, ракета
попадает в луч АВС-П в точке Р. Условия метода ЗТ выполняют-
ся, так как РЛС — точка Р — точка В находятся на одной линии.
При методе половинного стремления (1/2) упреждения AXhs,
ДУнб, ДЯН будут другой величины.
СРП вырабатывает также коды координат, которые по радио-
линии передаются на все пусковые установки для наведения на-
правляющих в текущую точку встреливания. При неуправляемом
полете с пусковой установки в луч АВС-П (в точку В) ракета
«провисает» под действием собственного веса. Конструкция стар-
товых ускорителей обеспечивает придание ракете в полете вра-
щение вокруг своей оси. За счет вращения по азимуту ракета
уходит на вполне определенный угол вправо. Поэтому направ-
ляющие пусковых установок по отношению к электрической оси
АВС-П наводятся в точку встреливания, находящуюся выше и
левее упрежденной точки.
Для определения момента пуска ракеты на экране ИПП кроме
отметки от цели высвечивается также зона поражения. Зона по-
ражения ограничена по дальности, слева и справа. Дальняя и
ближняя границы зоны поражения высвечиваются двумя непре-
рывными концентрическими окружностями. Дальняя граница зо-
ны поражения по маневрирующей цели высвечивается пунктирной
окружностью. Левая и правая границы зоны поражения высвечи-
ваются двумя радиальными линиями. Так как на экране высве-
чивается не зона пуска, а зона поражения, то высвечивается так-
же и упрежденная точка встречи ракеты с целью. Она высвечи-
вается из расчета, что при пуске ракеты в момент касания ею
дальней границы зоны поражения ракета и цель встретятся на
этой дальности. При пуске ракеты в момент касания упрежденной
точкой встречи дальней границы зоны пуска по маневрирующей
цели цель будет поражена на дальней границе зоны поражения
и при противоракетном маневре разворотом на 180° (рис. 10.12).
Рис. 10.12. Определение момента пу-
ска ракеты по ИПП
126
Координаты зоны поражения и упрежденной точки встречи выра-
батываются в СРП по координатам цели, скорости и направле-
нию полета.
С началом автосопровождения цели полустробы СИД ракеты
выведены на установленную дальность.
На начальном участке грубой развертки индикатора дально-
сти высвечивается1 визир ракеты. СИД ракеты готова к захвату
ракеты на автосопровождение в конце неуправляемого участка
ее полета. При этом светится табло ГОТОВ.
СРП решает задачи встреливания ракеты и готов к ее управ-
лению в полете. При этом горит табло СРП / = 0.
7. Защита РЛС от ПРР
Для защиты РЛС от противорадиолокационных ракет (ПРР)
и улучшения условий работы при воздействии активных помех в
РЛС используются режимы программного наведения станции
(ПНС), прерывистого излучения (ПИ) и полуавтоматического со-
провождения по телевизионному оптическому визиру (ПА по
ТОВ).
При нахождении упрежденной точки вне зоны поражения мож-
но включить режим ПНС. Через установленное время после на-
жатия и удержания кнопки ПНС запоминаются координаты и ско-
рости полета цели, прекращается излучение магнетронного гене-
ратора. Загорается табло ИЗЛУЧЕНИЕ ВЫКЛЮЧЕНО. Отметка
цели на экранах индикатора дальности и ИПП исчезает. АВС-1
и полустробы СИД цели управляются по программным коорди-
натам, вырабатываемым в СРП. СОЦ передает на СНР коорди-
наты сопровождаемой цели. Разность между программными и
принимаемыми координатами цели является ошибкой работы СРП
и, следовательно, ошибкой управления АВС-I и полустробами
СИД цели. Ошибка работы СРП контролируется оператором по
стрелочному прибору. Быстрое отклонение стрелки прибора озна-
чает маневр цели. При этом режим ПНС выключается, при необ-
ходимости (потере цели) осуществляются поиск и взятие цели на
автосопровождение. Если упрежденная точка находится вне зоны
поражения, РЛС может быть снова переведена в режим ПНС.
В момент вхождения упрежденной точки в зону поражения
или при достижении выбранного рубежа обстрела цели режим
ПНС выключается, кнопка ПНС отпускается. РЛС переводится
в режим автоматического сопровождения цели с прерывистым
излучением. Если после отработки целеуказания и взятия цели
на автосопровождение упрежденная точка находится в зоне пора-
жения или вблизи ее, то станция переводится в режим автосо-
провождения цели с прерывистым излучением без включения ре-
жима ПНС, т. е. режим ПИ может быть использован как после
режима ПНС, так и сразу после взятия цели на автосопровож-
дение. Использование режима ПИ приводит к увеличению пред-
127
пускового времени ПРР примерно в 2—3 раза, ухудшает условия
самонаведения их на РЛС как на источник излучения.
В режиме ПИ магнетронный генератор автоматически вклю-
чается и выключается по специальной программе. Время «мол-
чания» станции зависит от положения упрежденной точки относи-
тельно границ зоны поражения. Управление АВС-I и полустроба-
ми СИД цели во время «молчания» магнетронного генератора
производится по запомненным координатам в СУА и в СИД цели.
Для исключения срыва автосопровождения* цели, совершающей
маневр с большими перегрузками, режим ПИ выключается авто-
матически при выполнении одного из требуемых условий.
Режим ПИ выключается автоматически при ошибках сопро-
вождения цели более допустимых, при нахождении ракеты в поле-
те более установленного времени, при дальности между целью и
ракетой менее допустимой и при большом угле места цели.
Если после отработки данных целеуказания и взятия цели на
автосопровождение по дальности и угловым координатам она
наблюдается на экране ТОВ, то РЛС может быть переведена в
режим ПА. Включение режима ПА после нажатия кнопки авто-
матически задерживается на время, требуемое для выработки
дальности до цели при ее автосопровождении. При переходе в
режим ПА автоматически выключается излучение магнетронного
генератора. В СРП поступает экстраполированная дальность с
СИД цели. По углу места и азимуту цель сопровождается полу-
автоматически с помощью штурвалов ручного управления, пово-
рачивая АВС-I вместе с телекамерой ТОВ и совмещая цель с
визиром на экране ТОВ.
Режимы ПНС, ПИ являются основными штатными боевыми
режимами работы, а режим ПА на ТОВ — дополнительным (дуб-
лирующим), так как работа по ТОВ возможна только при метео-
видимости.
8. Предстартовый контроль и пуск ракеты
По результатам анализа обстановки, отражаемой на экранах
индикатора дальности и ИПП, и светящимся1 табло на пульте
командира, характеризующим состояние станции и готовность ра-
кет на пусковых установках, выбирается метод наведения, пуско-
вая установка и ракета для пуска. Ракета на цель может наво-
диться методом трех точек (ЗТ) и половинного спрямления (1/2).
Метод наведения выбирается согласно Правилам стрельбы. Он
может быть изменен при полете ракеты, если дальность между
целью и ракетой больше допустимой. При невозможности опреде-
ления станцией дальности до цели при большой интенсивности
помех выбирается метод ЗТ. При включении режима ПА по ТОВ
автоматически включается метод ЗТ. При выполнении определен-
ных условий автоматически включается метод 1/2.
При наличии времени с пульта командира по радиолинии на
пусковую установку и далее на выбранную ракету выдается
128.
команда КОНТРОЛЬ для предстартового контроля основных па-
раметров бортовой аппаратуры. Через установленное время после
выдачи команды КОНТРОЛЬ с пусковой установки на станцию
поступают сигналы ИСПРАВНО или ОТКАЗ о результатах конт-
роля ракеты. При наличии сигнала ОТКАЗ пуск ракеты невоз-
можен.
Момент пуска ракеты определяется на ИПП по вхождению
упрежденной точки в зону поражения. Прохождение команды
ПУСК со станции через радиолинию на пусковую установку и
далее на ракету сигнализируется по свечению табло ПУСК на
пульте. В радиолинии имеется схема защиты, которая обеспечи-
вает выдачу команды ПУСК только при нажатии на пульте кноп-
ки ПУСК.
Электропитание бортовой аппаратуры переключается с назем-
ного на бортовое; при этом подрываются пиропатроны стартовых
ускорителей ракеты. Ракета сходит с направляющих пусковой
установки. Гаснет табло УСТАН., загорается табло СХОД. Вклю-
чается временной механизм СРП, гаснет табло СРП / = 0.
СРП по команде ПУСК обеспечивает стопорение АВС-П в
пространстве до захвата ракеты ее широким лучом, после чего
АВС-П отключается от СРП и подключается на управление от
РЛС ВР.
9. Захват и автоматическое сопровождение ракеты
РЛС ВР в составе СНР предназначена для захвата ракеты
и ее автосопровождения (определения текущих координат) с точ-
ностью, обеспечивающей наведение на цель. В отличие от РЛС
ВЦ она работает только на прием ответных сигналов бортового
ответчика ракеты.
Командой пуск включается станция передачи команд (СПК).
На ракету с системы синхронизации через СПК передаются им-
пульсы запроса, от каждого импульса бортовой ответчик излучает
на станцию ответный сигнал. Ответные сигналы ракеты, принятые
широким лучом АВС-П со сканирующей диаграммой направлен-
ности, через высокочастотный фильтр канала Д приемной систе-
мы ОКО поступают на смеситель, на который поступает также
напряжение гетеродина ответа. Сигналы СВЧ преобразуются в
сигналы промежуточной частоты и усиливаются. После амплитуд-
ного детектирования и усиления на низкой частоте сигналы посту-
пают в СИД ракеты. В канал угловой автоматики сигналы ответ-
чика не проходят, так как стробируемые каскады УПЧ приемной
системы закрыты.
Захват ракеты по дальности осуществляется с помощью полу-
стробов, предварительно установленных на определенную даль-
ность. После удаления ракеты на заданную дальность задержка
времени прихода сигналов ракеты относительно импульсов запро-
са становится равной задержке полустробов относительно начала
дальности. СИД срабатывает. Начинается автосопровождение ра-
9 Зак. 3112дсп
129
кеты по дальности. Гаснет табло ГОТОВ, светится' СОПР. Р.
Дальность до ракеты определяется по временному интервалу ме-
жду импульсом запроса и импульсом ответа.
Одновременно сигналы начинают проходить через стробируе-
мые каскады угловой автоматики приемной системы, так как сиг-
налы ракеты и стробы на УПЧ поступают одновременно. Сигналы
канала Д поступают в систему ВСО; при этом формируется сиг-
нал ошибки, который подается в СУА. Под действием этого сиг-
нала СУА разворачивает АВС-П и ее электрическую ось в на-
правлении на ракету. Ракета, которая еще не управляется, после
поворота АВС-П будет находиться не только в широком, но и в
узком луче АВС-П. Поворот АВС-П на ракету происходит за
вполне определенное время, после чего происходит автоматиче-
ское переключение с широкого на узкий луч. Светится табло
ТАСР. Начинается автосопровождение ракеты по угловым коор-
динатам. Сопровождение ракеты по дальности, углу места и
азимуту осуществляется1 только автоматически.
Ответный сигнал ракеты принимается узким лучом АВС-П.
АВС-П формирует на прием три диаграммы направленности: сум-
марную S и разностные в угломестной Ае и азимутальной Ар
плоскостях. Если ракета отклонена от электрической оси АВС-П,
то появляется сигнал ошибки. В каналы Д и Е приемной системы
ОКО поступают два противофазных сигнала. Сигналы преобра-
зуются, усиливаются и поступают в СИД ракеты (с канала Д)
и в систему ВСО (с каналов Д и Е). Визир ракеты на индикаторе
перемещается в сторону увеличения дальности. Сигнал ошибки с
системы ВСО поступает в СУА для удержания АВС-П в направ-
лении на ракету.
10. Управление полетом и подрывом ракеты
Теоретически при встреливании ракета должна попасть в рас-
четную точку кинематической траектории. Но из-за рассеяния
траекторий, метеоусловий, ошибок встреливания и других причин
ракета не находится на кинематической траектории. Начинается
вывод ракеты.
При автосопровождении цели и ракеты определяются их теку-
щие координаты. Положение АВС-I определяет угол места и ази-
мут цели, а положение АВС-П — угол места и азимут ракеты
относительно АВС-I; канал А приемной системы вырабатывает
сигнал, по которому СИД автоматически сопровождает цель;
АВС-П, канал Д приемной системы вырабатывают сигнал, по
которому СИД автоматически сопровождает ракету; СИД цели
и ракеты определяют дальности.
АВС-I, каналы А и Б приемной системы, системы ВСО и СУА
вырабатывают сигналы беКц, бркц, пропорциональные ошибке со-
провождения цели (ее отклонению от электрической оси АВС-1).
АВС-П, каналы Д и Е приемной системы ОКО, системы ВСО и
СУА вырабатывают сигналы беоко, б0око, пропорциональные
130
ошибке сопровождения ракеты (ее отклонению от электрической
оси АВС-П), как показано на рис. 10.13.
Рис. 10.13. Определение углов для выработки команд управления при
выводе ракеты на кинематическую траекторию
По координатам цели, ракеты, а также по ошибкам их со-
провождения СРП вырабатывает команды управления для выво-
да ракеты на кинематическую траекторию, передаваемые на СПК.
Кроме импульсов запроса СПК формирует и передает на ракету
команды управления1 полетом ракеты Ку, команду для согласова-
ния ДНА радиовзрывателя с диаграммой разлета осколков боевой
части Кс, команду на взведение радиовзрывателя Крв и на такто-
вые импульсы Т.
Принятая ракетой команда Ку после преобразования воздейст-
вует на ее рули и управляет вектором скорости. Для наведения
ракеты в пространстве необходимо передавать две команды уп-
равления Kyi, КУ2 (ВВЕРХ-ВНИЗ, ВЛЕВО-ВПРАВО). Тактовые
импульсы Т предназначены для определения на борту ракеты ве-
личины и знака команд управления.
Так как ракета управляется только СНР, осуществившей ее
пуск, то сигналы ответчика должны поступать только на задан-
ную СНР. Бортовая аппаратура ракеты должна безошибочно оп-
ределять в совокупности принимаемых сигналов каждую команду
и распределять команды по назначению. В радиосигналах команд
управления заложены величина и знак, которые должны рас-
шифровываться бортовой аппаратурой. Сигналы на ракете по
назначению разделяются за счет их кодирования на СНР. Раз-
личие между командами заключается в величине временных ин-
тервалов между импульсами кода (рис. 10.14), где ti, Тг, т3 — вре-
менные интервалы между импульсами кодовых групп.
При передаче команд управления используется временная им-
пульсная модуляция (ВИМ). При этом для передачи одного цик-
ла команд выбирается определенный временной интервал. Начало
каждого цикла передачи команд управления соответствует момен-
ту передачи тактового сигнала, а сам цикл называется тактовым
интервалом. Величина и знак команды соответствуют ее положе-
нию в тактовом интервале с учетом коэффициента пропорциональ-
ности А и определяются величиной и разностью временных ин-
тервалов (рис. 10.15):
ку = А^а.
^1 + ^2
9
131
Рис. 10.14. Кодирование команд управления, поступающих с
СНР на ракету
При нахождении команды в середине тактового интервала
/1 = ^2 и Ку = 0 (рис. 10.15,а) в правой части ti>t2 и Ку>0
(рис. 10.15, в), в левой части — Л</2 и Ку<0 (рис. 10.15,6).
Рис. 10.15. Определение величины и знака команды управ-
ления
Чем дальше от середины интервала располагается команда, тем
больше по величине разность Л—t2 и соответственно команда
(рис. 10.15, г).
СПК включает шифратор, передатчик и антенно-фидерную
систему (рис. 10.16). В шифраторе команды управления, посту-
пающие из СРП в виде медленно изменяющихся напряжений, пре-
132
образуются во временные интервалы, а затем в кодовые группы.
Шифратор состоит из блоков синхронизации, преобразования
команд и кодирования. В синхронизаторе вырабатываются такто-
вые и вспомогательные импульсы. В блоке преобразования команд
осуществляется размещение импульсов команд во временном ин-
тервале в зависимости от величины и знака. Каждая команда
управления во временной интервал преобразуется своим модуля-
тором.
Временной модулятор — это электронное устройство, которое
срабатывает и выдает короткий импульс при равенстве двух по-
ступающих напряжений. На один вход модулятора подается на-
пряжение команды управления, на другой — пилообразное напря-
жение, длительность периода которого равна длительности такто-
вого интервала. В зависимости от величины и знака команды
момент равенства величины ее напряжения и мгновенного значе-
ния пилообразного напряжения наступает на различных участках
тактового интервала.
С блока преобразования команд импульсы поступают в блок
кодирования, где преобразуются в кодовые группы. Для переда-
чи на ракету кодовые импульсы команд преобразуются передат-
чиком в радиоимпульсы, которые через антенно-фидерную систему
излучаются на ракету. Командная система радиотелеуправления
обеспечивает вывод ракеты, а затем и удержание ее на траек-
тории.
При методе 1/2 ракета остается в луче АВС-П, табло НАВЕ-
ДЕНИЕ не светится. Команды для удержания ракеты на траек-
тории по координатам цели и ракеты и ошибкам их сопровож-
дения СРП вырабатывает, как и при выводе ее на траек-
торию.
При методе ЗТ угловые координаты цели и ракеты равны,
следовательно, равны нулю и относительные угловые координаты
между АВС-I и АВС-П. На пульте светится табло НАВЕДЕНИЕ.
Ракета находится в лучах АВС-I и АВС-П, электрические оси
которых параллельны. Положение АВС-I определяет угол места и
азимут цели и ракеты. АВС-I, канал А приемной системы выра-
батывают сигнал, по которому СИД сопровождает цель. АВС-П,
канал Д приемной системы вырабатывают сигнал, по которому
СИД сопровождает ракету. СИД цели и ракегы определяют даль-
ность.
АВС-I, каналы А и Б приемной системы, системы ВСО и СУА
вырабатывают сигналы 6еКц, бркц, пропорциональные ошибке со-
провождения цели. АВС-I, каналы В и Г приемной системы, си-
стемы ВСО и СУА вырабатывают сигналы 6еОкц, брокц, пропорцио-
нальные ошибке сопровождения ракеты. По устройству каналы
В и Г аналогичны каналам А и Б приемной системы. При этом
АВС-П для определения ошибки сопровождения ракеты не ис-
пользуется. По координатам цели и ракеты и ошибкам их сопро-
вождения СРП вырабатывает команды управления для- удержа-
ния ракеты на траектории.
133
Рис. 10.16. Струн
На установленной дальности между целью и ракетой СРП вы-
рабатывает команду на взведение радиовзрывателя ракеты; при
этом светится табло РВ. Подачей на ракету команды Кс с инфор-
мацией об относительной скорости сближения цели и ракеты вы-
бирается точка подрыва боевой части ракеты на траектории путем
изменения угла наклона ДНА радиовзрывателя к вектору скоро-
сти, что обеспечивает поражение цели максимальным количест-
вом разлетающихся осколков. Подрыв боевой части происходит
при пересечении целью ДНА радиовзрывателя (рис. 10.17).
11. Особенности работы по ТОВ и по низколетящей цели
Если цель наблюдается1 на экране ТОВ, то включается режим
ПА. Пуск ракеты и ее управление производятся по методу ЗТ.
134
турная схема СПК
Так как дальность видимости по ТОВ меньше видимости РЛС,
то используется комбинированный метод. Пуск ракеты произво-
дится при сопровождении цели радиолокационным методом, а при
появлении цели на экране ТОВ осуществляется переход в режим
ПА, если пуск ракеты произведен по методу ЗТ. В режиме ПА
по ТОВ радиовзрыватель взводится через установленное время
полета ракеты. Используется команда Кс постоянной величины.
Если угол места цели менее установленного, то такая1 цель
считается низколетящей, светится еу^5°. Пуск ракеты произво-
дится методом ЗТ. В этом случае наведение АВС-П в упрежден-
ную точку и направляющих пусковых установок в точку встрели-
вания ограничено с помощью СРП по углу места снизу установ-
ленной величиной. Ракета встреливается выше кинематической
траектории и по вырабатываемым в СРП командам наводится
на цель сверху.
135
Рис. 10.17. Определение момента подрыва боевой
. части ракеты
Если 8У менее установленного, то светится НЛ ТОВ. Если
СНР работает в режиме ПА по ТОВ, то после схода ракеты цель
сопровождается по нижнему перекрестию ТОВ.
12. Оценка результатов пуска ракеты
Результаты пуска ракеты наблюдаются визуально на индика-
торе дальности и по показаниям индикаторных сельсинов коор-
динат цели и ракеты. При наведении ракеты на цель сближаются
их отметки на индикаторе дальности, уменьшаются показания
индикаторных сельсинов относительных угловых координат АВС-П
при методе 1/2. При методе ЗТ показания этих сельсинов равны
нулю с момента загорания табло НАВЕД. При поражении цели
отметка ракеты на индикаторе дальности пропадает, показание
сельсина угла места цели резко уменьшается. При включенном
ТОВ результаты пуска наблюдаются на экране.
Для повторного пуска ракеты по цели при промахе СРП и
другие системы РЛС приводятся в исходное состояние нажатием
кнопки ПОЛУСБРОС; при этом гаснут табло СХОД, ТАСР. Про-
должается автосопровождение цели. При наличии времени про-
изводится контроль ракеты. Если упрежденная точка находится
в зоне поражения, возможен повторный пуск ракеты.
При поражении цели снимается сигнал ЦУ ПРИН. Нажима-
ется кнопка СБРОС. СНР переводится в исходное состояние. Гас-
нут табло ТАСЦ, СХОД, ТАСР. Цикл работы может быть по-
вторен.
136
: Г л а в а XI
СТАРТОВОЕ И ТЕХНОЛОГИЧЕСКОЕ ОБОРУДОВАНИЕ
1. Назначение и состав стартового и технологического
оборудования
Стартовое оборудование предназначено:
для хранения и транспортирования ракет;
заряжания пусковой установки ракетами;
проведения предстартовой подготовки и контроля ракет;
пуска исправных ракет;
предотвращения пуска неисправных ракет.
В состав стартового оборудования входят самоходная пуско-
вая установка и транспортно-заряжающая машина.
В состав технологического оборудования входят заправщики
горючим и воздухом, контрольно-испытательная аппаратура,
транспортные машины и другие приборы, которые обеспечивают
сборку, заправку и проверку готовности ракет.
2. Пусковая установка
Самоходная пусковая установка предназначена для наведения
и пуска ракет в точку встреливания, а также для транспортиро-
вания и хранения зенитных управляемых ракет. Она состоит из
артиллерийской части, аппаратуры и оборудования, системы элек-
тропитания и самоходного шасси.
Артиллерийская часть предназначена для* размещения и за-
крепления двух ракет, придания им нужных углов наведения в
точку встреливания и направления при пуске.
Артиллерийская часть состоит из вращающейся и качающейся
частей, а также из механизмов артиллерийской части.
Вращающаяся часть служит основанием качающейся части и
обеспечивает поворот артиллерийской части по азимуту.
В состав вращающейся части входят тумба и станок.
Станок и тумба жестко скреплены между собой болтами. Тум-
ба устанавливается в боевом отделении самоходного шасси и
крепится корпусом к днищу шасси, верхняя часть тумбы через
радиальный подшипник опирается на плиту крышки шасси.
Станок представляет собой балку коробчатого сечения, сред-
няя расширенная кольцевая часть которой соединена с фланцем
тумбы. Корпус станка сварен из стальных листов, труб и сталь-
ных литых деталей.
Качающаяся часть служит для размещения и закрепления двух
ракет, придания им требуемого угла возвышения и направления
при пусках.
В состав качающейся части входят люлька и передняя опора.
Люлька служит основанием качающейся части, она шарнирно
соединена цапфами со станком, а проушинами — с двумя испол-
137
нительными цилиндрами уравновешивающих механизмов. Основа-
ние люльки — конусная труба, сваренная из отдельных секций,
усиленных кольцами и шпангоутами. Передний торец закрыт кры-
шкой, там же снизу приварен платик для1 крепления корпуса
передней опоры. Задняя часть люльки оканчивается уширенной
коробкой, набранной из отдельных листов и имеющей два крон-
штейна с наметками, образующими цапфы. Этими цапфами люль-
ка закрепляется на осях станка. Цапфы являются осью качания
люльки по углу возвышения. Слева и справа на коробке имеются
платики для крепления кронштейнов, на которых размещены зад-
ние направляющие, механизмы осевого крепления ракет и ште-
керные устройства.
Передняя опора служит основанием для установки передних
направляющих. Передняя опора состоит из двух независимых
(одинаковых) опорных устройств, объединенных одним корпусом
и местом крепления в передней части люльки.
Ракеты располагаются па передних и двух задних направляю-
щих симметрично по обе стороны люльки. Задние и передние на-
правляющие левой ракеты расположены на 100 мм выше правых,
что обеспечивает ступенчатое расположение ракет с перекрытием
крыльев и стабилизаторов для1 уменьшения боковых габаритов
пусковой установки. Конструкция передних и задних направляю-
щих обеспечивает установку каждой ракеты на «три точки» (на-
правляющие «нулевой» длины); при этом ракета жестко фикси-
руется во всех направлениях и может двигаться только вперед
при условии, что страгивающая сила от стартовых двигателей
достигнет 600—1200 кг. Усиление такого порядка от инерционных
сил при наведении не возникает, что обеспечивает надежное удер-
жание ракет на качающейся части при наведении. На марше
ракеты удерживают механизмы осевого крепления ракет.
К механизмам артиллерийской части относятся:
поворотный механизм;
подъемный механизм;
два уравновешивающих механизма;
два штекерных устройства;
пневмокомпенсатор;
механизмы крепления по-походному, в состав которых входят
переднее походное крепление, две походные опоры и два меха-
низма осевых креплений ракет.
Поворотный механизм — шестеренного типа (с электрическим
следящим и ручным приводами), предназначен для наведения
артиллерийской части по азимуту. Он расположен в боевом отде-
лении шасси и крепится к плите крыши самоходного шасси. Ме-
ханизм состоит из редуктора и тормоза.
Подъемный механизм винтового типа с электрическим следя-
щим и ручным приводами предназначен для наведения качающей-
ся части по углу возвышения. Механизм укреплен на станке под
кожухом, состоит из редуктора, исполнительного узла и тормоза.
Уравновешивающий механизм предназначен для снятия части
138
нагрузки от веса ракет с исполнительных узлов подъемного меха-
низма. Он состоит из независимых (одинаковых) механизмов (для1
каждой из ракет):
исполнительного цилиндра;
аккумулятора;
гидрораспределителя;
насоса;
редуктора;
фильтра;
предохранительного клапана;
бака;
трубопроводов.
Расположен каждый механизм сбоку на задней части станка
под кожухом.
Штекерное устройство (ШУ) предназначено для соединения
электрических цепей ракеты и ПУ через отрывной разъем. Каж-
дое ШУ состоит из подвижной и неподвижной частей, механизма
движения.
Пневмокомпенсатор служит для поддержания в процессе экс-
плуатации давления сжатого воздуха в аккумуляторах уравнове-
шивающего механизма в пределах (30±1,5) ати. Пневмокомпен-
сатор представляет собой пневмосистему замкнутого типа, состоя-
щую из баллона, находящегося1 в передней части станка, маномет-
ра, вентилей и трубопроводов, соединяющих баллон с воздушной
полостью аккумулятора.
Механизмы крепления по-походному предназначены для жест-
кого закрепления станка, качающейся части и ракет, располо-
женных на люльке, при движении, хранении или транспортиро-
вании ПУ. Переднее походное крепление расположено на передней
части станка и предназначено для закрепления станка с шасси
и люлькой, а также для фиксации двух ракет, находящихся на
люльке ПУ. Походные опоры прикреплены к средней части станка
и предназначены для1 исключения упругих и остаточных дефор-
маций ракет от прогиба при движении и хранении на ПУ. Каждая
опора является регулируемым параллелограммным устройством.
Механизм осевого крепления предназначен для надежного за-
крепления ракеты от перемещения в направлении пуска и рас-
положен в задних направляющих и кронштейнах люльки.
Аппаратура и оборудование пусковой установки размещены в
самоходном шасси и на артиллерийской части. В состав аппара-
туры и оборудования входят:
электрический следящий привод;
аппаратура предстартовой подготовки, контроля и пуска ракет;
счетно-решающий прибор;
прибор горизонтирования;
радиолиния команд;
аппаратура топопривязки.
Электрический следящий привод предназначен для автомати-
ческого наведения артиллерийской части по азимуту и углу воз-
139
вышения (по данным счетно-решающего прибора), а также для
автоматического приведения артиллерийской части к фиксирован-
ным углам заряжания. Электрический следящий привод состоит
из приводов вертикального наведения, горизонтального наведения
и общих элементов обоих приводов.
Усилителем мощности полезного сигнала в электрическом сле-
дящем приводе является электромашинный усилитель (ЭМУ), в
котором происходит двухступенчатое усиление сигнала до мощно-
сти, необходимой для нормальной работы исполнительных двига-
телей приводов вертикального и горизонтального наведения. ЭМУ
представляет собой электрическую машину, на одном валу кото-
рой размещены приводной двигатель переменного тока и генера-
тор-усилитель мощности. Особенностью устройства генератора яв-
ляется то, что наряду с парой щеток по продольной оси выпол-
нены еще и щетки по поперечной оси, замкнутые накоротко. При
поступлении на обмотку управления полезного сигнала создается
магнитный поток обмотки управления. При вращении якоря гене-
ратора в этом потоке в цепи короткозамкнутых щеток протекает
весьма значительный ток (практически ток короткого замыкания
Из-за малого сопротивления контура в цепи короткозамкнутых
щеток). Этот ток создает относительно большой магнитный поток,
вызывая значительный ток и э.д.с., в выходной обмотке. Тем
самым полезный сигнал усиливается до мощности, необходимой
для нормальной работы исполнительного двигателя.
Аппаратура предстартовой подготовки, контроля и пуска ракет
обеспечивает автоматическую предстартовую подготовку и непре-
рывную готовность к пуску ракет, последовательный автоматиче-
ский предстартовый контроль бортовой аппаратуры, последова-
тельный пуск, аварийный пуск в случае необходимости немедлен-
ного освобождения пусковой установки от неисправной ракеты по
команде с пульта оператора, проведение самоконтроля* АПКП и
учебных занятий расчета с помощью имитатора борта ракеты.
Счетно-решающий прибор предназначен для выработки угло-
вых координат фв и рв точки встреливания по координатам упреж-
денной точки еу и ру, полученным с СНР по радиолинии с учетом
поправок на наклон плоскости самохода относительно горизонта,
отстояние ПУ от СНР, баллистическое понижение ракеты до точ-
ки встреливания, вращение ракеты на начальном участке полета,
ориентирование продольной оси пусковой установки по отноше-
нию к основному направлению. Кроме того, в приборе вырабаты-
вается сигнал РАЗРЕШЕНИЕ СТРЕЛЬБЫ в зависимости от на-
правления артиллерийской части по азимуту. СРП установлен в
центре боевого отделения и состоит из входных цифровых сле-
дящих систем, электромеханического преобразователя координат
и блока питания.
Прибор горизонтирования предназначен для* определения углов
наклона плоскости самохода к плоскости горизонта и ввода их
величин в СРП. Определение углов наклона осуществляется с
помощью маятников. Плоскость качания одного из них совпадает
140
с продольной осью самохода, другого — с поперечной. После заня-
тия позиции и включения питания маятники отстопоривают, и они
занимают вертикальное положение, разворачивая роторы вращаю-
щихся трансформаторов. С обмоток трансформаторов значения
углов наклона самохода 0, V поступают в СРП в виде перемен-
ного напряжения и учитываются при выработке азимута и угла
возвышения точки встреливания ракеты.
Радиолиния предназначена для передачи по радио или кабе-
лю от СНР на ПУ команд управления, координат наведения еу,
Ру и для передачи от ПУ на СНР сигналов обратного контроля.
Радиолиния состоит из ведущей станции, размещенной на СНР,
и ведомых станций, размещенных на пусковых установках. Ведо-
мая станция, размещенная на пусковой установке, состоит из ап-
паратурного шкафа и антенно-фидерного устройства. Аппаратур-
ный шкаф состоит из блоков преобразования, кодирования, пита-
ния, контроля и приемопередатчика. Радиолиния работает в ре-
жимах РАДИО, ПРОВОД. При работе радиолинии в режиме
ПРОВОД координаты, команды и сигналы обратного контроля
принимаются и передаются по кабелю. Режимы работы радиоли-
нии переключаются тумблерами на блоках.
Аппаратура топопривязки предназначена для определения кур-
са, определения текущих координат движущейся ПУ, определения
параллакса — удаление ПУ от СНР при занятии стартовой по-
зиции.
Аппаратура топопривязки состоит из двух систем: гирокурсо-
указателя и курсопрокладчика. Гирокурсоуказатель служит для
определения курса (К)—угла между продольной осью самохода
и меридианом. Данные с выхода этой системы передаются в СРП
в виде путевого угла Qn и в курсопрокладчик. Курсовой угол К
индицируется на шкалах системы (на пульте управления).
Курсопрокладчик, используя данные, поступающие от гирокур-
соуказателя, производит определение текущих координат ПУ (X,
У) и параллакса (Пх, Пу). Текущие координаты на марше опре-
деляются по скорости движения методом интегрирования. Значе-
ние скорости поступает от датчика скорости, связанного с ходо-
вой частью ПУ. Параллакс определяется механизмом выработки
отстояния при занятии стартовой позиции.
Система электропитания (СЭП) предназначена для обеспече-
ния1 аппаратуры и оборудования пусковой установки трехфазным
переменным током напряжением 220 В, частотой 400 Гц и посто-
янным током напряжением 27 В. В СЭП входят генераторы пере-
менного тока напряжением 220 В, частотой 400 Гц, выпрямитель-
ное устройство, регулятор тока, элементы защиты и распределе-
ния электроэнергии. Каждая ПУ имеет свой автономный источ-
ник электропитания.
Приводом основного генератора переменного тока явля-
ется газотурбинный двигатель, приводом дублирующего гене-
ратора переменного тока является двигатель самоходного
шасси.
141
Самоходное шасси представляет собой закрытую броневую ма-
шину на гусеничном ходу и служит основанием для размещения
артиллерийской части, аппаратуры и экипажа.
Шасси по конструкции и оборудованию, относящемуся к нему»
имеет в своем составе:
корпус;
силовую установку;
силовую передачу;
ходовую часть;
оборудование, куда входят электрооборудование, система про-
тивоатомной защиты и вентиляция, система обогрева, средства
связи, приборы наблюдения, креномер, противопожарное обору-
дование;
запасные части, инструмент и принадлежности (ЗИП).
Корпус шасси сварен из броневой стали и обеспечивает защи-
ту экипажа и аппаратуры от воздействия газовых струй ракет
при пусках, а также от поражения осколками и ружейно-пулемет-
ным огнем. Корпус разделен перегородками на четыре отделения:
силовое, боевое, отделение агрегата питания, отделение механика-
водителя. Все отделения изолированы друг от друга. Боевое отде-
ление занимает центральную часть корпуса по всей ширине. В
боевом отделении находятся командир ПУ и оператор, в нем рас-
положена основная часть аппаратуры и оборудования. В средней
части установлено основание артиллерийской части — тумба. От-
деление имеет три люка: люк командира, люк оператора и ава-
рийный.
Силовое отделение расположено в передней части корпуса
(справа от отделения механика-водителя). В нем находятся дви-
гатель самоходного шасси, коробка передач, повышающий редук-
тор для привода дублирующего генератора, дублирующий генера-
тор, системы, обслуживающие двигатель. Доступ к оборудованию
силового отделения осуществляется через верхний и передний от-
кидывающиеся листы корпуса.
Отделение механика-водителя расположено в левой передней
части корпуса. В нем находятся* все элементы управления само-
ходным шасси, аккумуляторные батареи, креномер и приборы на-
блюдения.
Отделение агрегата питания расположено в кормовой части
корпуса по всей его ширине. С ле^ой стороны отделения на спе-
циальной раме смонтирован агрегат электропитания. С
правой стороны смонтированы электромашинные усилители
электрического следящего привода и выпрямительное устрой-
ство.
В условиях боевого использования ПУ с марша располагаются
на стартовой позиции на определенном расстоянии от СНР. После
занятия позиции включается система электропитания ПУ, и через
пульт оператора АПКП происходит распределение электропитания
на все системы и блоки ПУ (рис. 11.1).
142
1 dvj шо ни :
'пнь'йшэша он ougoduou*
ЗСП
£
СРП
I
Е=
СНР
СЭП
Команды и СОК подготовки, контроля и пуска
команды и сигналы
£<!>
Команды на отридотку
угла возвышения <рв «5
к
, Вкп. <РК "________
„ Ответ ФК *
Координаты уп- j t
решенной mnu- I w
ни иели
L&7/7/HW7W**1
*
glWOZk
Радио-
линия
£ ГКО
(5
BS
включение и
Е—---------Э АП КП
выдача злек-
тропитания у ।
Сигналы „ PC,f, „z4^26,f (от СРП)
контроль связи, СОК, координаты
упрежденной точки цели 6У Ji у
подготовки контроля и пуска
Запрос Фк” и „ Ответ ФК "
Рис. 11.1. Структурная схема пусковой установки
С помощью аппаратуры топопривязки каждая пусковая уста-
новка предварительно ориентируется относительно географическо-
го меридиана с основным направлением на юг, определяется курс
(К), который с помощью СРП пересчитывается в путевой угол
(Qn). Аппаратура топопривязки обеспечивает также автоматиче-
ское определение отстояний Пх, Пу ПУ от СНР при выбранном
основном направлении на юг. При сквозном контроле пусковой
установки от СНР на ПУ поступает команда ЗАПРОС ФК, по
которой проверяется прохождение информации по радиолинии, а
также отработка следящими системами СРП и ЭСП определенных
значений углов наведения. При правильной отработке следящими
системами заданных углов СРП формирует сигнал ОТВЕТ ФК,
который поступает по радиолинии на СНР. При боевой работе
по командам, переданным с помощью радиолинии от СНР к ПУ,
проводятся автоматическая предстартовая подготовка ракет к пу-
ску и пуск. Сигналы обратного контроля об исполнении передан-
ных команд и о готовности и исправности ракеты передаются по
радиолинии на СНР. СНР передает на ПУ угловые координаты
упрежденной точки цели еу, ру. Эти координаты поступают в СРП
пусковой установки. В СРП автоматически вводятся также от
аппаратуры топопривязки величины отстояний ПУ от СНР (Пх,
Пу), а также значения1 крена 0 и дифферента Т пусковой уста-
новки, выработанные прибором горизонтирования. Кроме того, в
СРП вручную вводится значение путевого угла Qn, определенное
с помощью аппаратуры топопривязки при ориентировании пуско-
вой установки. СРП но полученным входным данным вырабаты-
вает угловые координаты <рв, рв наведения артиллерийской части
ПУ в точку встреливания. Угловые координаты <рв, (Зв отрабаты-
ваются электрическим следящим приводом и с помощью исполни-
тельных двигателей подъемного и поворотного механизмов ‘наво-
дят артиллерийскую часть в’ точку встреливания с учетом балли-
стического понижения траектории ракеты и поправки на вращение
ракеты при полете ее на начальном участке. При значении угла
упрежденной точки цели еу^26° СРП формирует данный сигнал,
который поступает через АПКП на ракету для перевода марше-
вого двигателя ракеты на работу в режиме больших высот. При
нахождении артиллерийской части вне зоны запрета стрельбы
СРП вырабатывает сигнал PC — разрешение стрельбы, который
поступает на АПКП, где при наличии сигналов о боевом положе-
нии ПУ, о включении электрических следящих приводов и отра-
ботке ими заданных углов наведения артиллерийской части с
необходимой точностью формируется общий сигнал РАЗРЕШЕ-
НИЕ СТРЕЛЬБЫ, поступающий через радиолинию команд на
СНР, как необходимое условие выдачи команды на пуск ракеты.
В момент входа упрежденной точки цели в зону поражения от
СНР по радиолинии на ПУ поступает команда на пуск ракеты.
Ракета встреливается в точку встреливания, лежащую в луче
СНР, и далее наводится на цель по командам СНР, поступающим
на борт ракеты.
144
3. Транспортно-заряжающая машина
Транспортно-заряжающая машина (ТЗМ) предназначена для
самопогрузки, транспортирования и погрузки окончательно снаря-
женной и заправленной ракеты на пусковую установку.
ТЗМ представляет собой самоходный крановый погрузчик,
смонтированный на базе автошасси повышенной проходимости
Урал-375Е, оборудованный ложементами для транспортирования
одной окончательно снаряженной ракеты.
ТЗМ оборудована крановым механизмом, обеспечивающим по-
грузку ракеты на пусковую установку через правый или левый
борт путем навешивания ракеты над направляющими, подачей
в правую или левую сторону, подъемом или опусканием, а также
перемещением ракеты в продольном направлении. Гибкая подве-
ска ракеты на канате позволяет производить наклон и разворот
ее при погрузке.
Для переноса ракеты на правый или левый борт стрела, из
походного положения перекатывается в балке соответственно на
правую или левую сторону машины и закрепляется.
Перемещение стрелы производится грузовыми лебедками, при-
водимыми в действие гидромоторами. Подъем и опускание ракеты
выполняются этими же лебедками. Перемещение ракеты на пра-
вый или левый борт ТЗМ осуществляется гидравлическими ци-
линдрами, которые поворачивают балку с закрепленной в ней
стрелой на левых или правых гнездах. Стопорение правых или
левых гнезд производится в зависимости от того, на какой борт
происходит погрузка. Продольное перемещение ракеты на длину
±100 мм для компенсации неточности подъезда производится от
гидроцилиндра поворотом гуська стрелы посредством канатно-ры-
чажной передачи при погрузке на левый борт или другого гуська
стрелы и канатно-рычажной передачи при погрузке на правый
борт.
Крановый механизм ТЗМ имеет гидравлический привод. Рабо-
чая жидкость в гидросистему подается от шестеренного насоса
НШ-40, приводимого во вращение от коробки дополнительного
отбора мощности автомобиля через карданный вал и редуктор.
Для заполнения1 гидросистемы маслом и выполнения отладочных
операций в гидросистему включен ручной насос.
На ТЗМ ракета транспортируется на двух ложементах со сня-
тыми верхней и нижней плоскостями. Для перевозки плоскости
размещаются в обоймах на настиле.
На ТЗМ имеются ограждение и маскировочный тент, настил,
предусмотренный для удобства обслуживания механизмов и пре-
дохранения их от загрязнения при транспортировании. На ТЗМ
смонтирована световая сигнализация, ТЗМ придается ЗИП, шан-
цевый инструмент и огнетушитель. В ящиках размещены средства
индивидуальной противоатомной и противохимической защиты и
прибор ночного видения.
Основными частями ТЗМ являются:
10 Зак. 3112дсп
145
переоборудованный автомобиль Урал-375Е;
оборудование для крепления и транспортирования ракеты;
крановый механизм;
гидропривод кранового механизма;
электрооборудование;
радиостанция;
прибор ночного видения.
4. Технологическое оборудование
Контрольно-испытательная подвижная станция (КИПС) пред-
назначена для проведения комплексного контроля ракет. Она
смонтирована на шасси автомобиля. В состав КИПС входят
контрольная аппаратура и вспомогательное оборудование. Вспо-
могательное оборудование включает системы электропитания,
пневмопитания, гидропитания, освещения, обогрева, вентиляции,
связи и сигнализации, прибор ночного видения. В кузове КИПС
размещен эксплуатационный ЗИП.
Первичным источником электропитания является бензоэлект-
рический агрегат, выдающий переменный ток напряжением
3X220 В 400 Гц. Источник гидропитания — гидроагрегат, который
выдает рабочую жидкость под давлением. Источником пневмо-
питания является пневмоагрегат. В основу комплексного контроля
бортовой аппаратуры положен контроль выходных параметров,
характеризующих работу аппаратуры ракеты в реальных усло-
виях полета.
Все органы управления1 и индикации, необходимые при прове-
дении комплексного контроля, сосредоточены на передних пане-
лях блоков. Измерение величины параметров, кроме параметров
сигнала ответчика ракеты, основано на определении нахождения
данного параметра в допуске или вне его, а проверка релейных
команд — по их наличию или отсутствию. В КИПС предусмотрен
самоконтроль контрольной аппаратуры, который проводится после
перемещения на новую позицию, а также после обнаружения не-
исправного параметра ракеты в целях проверки исправности
контрольной аппаратуры КИПС.
Заправщик горючим предназначен для хранения, транспорти-
рования горючего и заправки ракет. Кроме того, заправщик мо-
жет быть использован как подвижная насосная установка для
перекачивания жидкости из одной емкости в другую. Заправщик
горючего состоит из шасси, цистерны, переднего шкафа с армату-
рой, заднего шкафа с арматурой, боковых ящиков, пневмосистемы,
электрооборудования, комплекта ЗИП.
Управление рабочими операциями производится с пульта уп-
равления с помощью сжатого воздуха, поступающего от компрес-
сора базового автомобиля, через пневмосистему заправщика к
воздухораспределителю и далее к гидравлическим клапанам.
Передвижная унифицированная компрессорная станция пред-
назначена для наполнения баллонов и систем сжатым воздухом.
Станция представляет собой компрессорную установку, смонти-
146
рованную на шасси автомобиля. Станция состоит из пятиступен-
чатого поршневого компрессора с приводом от двигателя ЯМЗ-236,
межступенчатых и конечного холодильников, водомаслоотделителя,
приборов пуска и управления, устройства для очистки и осушки
воздуха, контрольно-измерительных приборов и электрооборудо-
вания. Заправщик воздуха предназначен для раздачи воздуха
необходимого давления потребителю из собственного запаса или
от компрессорной станции через магистрали заправщика. Он
представляет собой передвижную заправочную установку.
Заправщик воздуха состоит из шасси, кузова, щита управле-
ния, комплекта узлов и деталей воздушной коммутации, батареи
баллонов, электрооборудования, шлангов и ЗИП. Для защиты от
воздействия солнечных лучей и атмосферных осадков все агрега-
ты заправщика смонтированы внутри металлического кузова.
Контрольные приборы и приборы управления заправщиком выне-
сены на щит управления, установленный в задней части кузова.
Автомобильный кран грузоподъемностью 7 т на шасси высо-
кой проходимости предназначен для погрузки и выгрузки штучных
грузов и для производства монтажных работ. Кран используется-
для различных операций при сборке ракет, погрузке их на транс-
портные машины и других работ. Автомобильный кран состоит
из ходовой части и крановой установки.
Транспортная машина (ТМ) предназначена для перевозки и
временного хранения ракет, как собранных и снаряженных, так
и в контейнерах. Она состоит из оборудованного тягача с актив-
ным полуприцепом и съемного оборудования для размещения,
крепления и обслуживания ракеты.
Унифицированная спецпалатка используется как производст-
венное помещение при работе с ракетами в полевых условиях.
Основа палатки — металлический каркас, собираемый из отдель-
ных элементов трубчатого сечения. Двойная оболочка, наружный
и внутренний наметы палатки, изготовленные из плотной водо-
упорной пропитки с достаточно плотным соединением отдельных
частей наметов между собой и с грунтом, позволяют изолировать
внутреннюю часть палатки от непосредственного воздействия
солнца, ветра, осадков и резких изменений температуры. Свет в
палатку в дневное время поступает через окна в боковых (про-
дольных) стенках наметов. С наступлением темноты общее осве-
щение помещения палатки и местное освещение рабочих мест
осуществляются светильниками со светомаскировкой от сети пе-
ременного тока напряжением 220 и 12 В. Электроэнергия подается
от бензоэлектрического агрегата через распределительную ко-
робку.
Теплофикационная1 сеть предназначена для отопления палатки
в холодное время, а также для обогрева несамоходного оборудо-
вания. Она представляет собой комплект оборудования, имеющий
подогреватель воздуха, набор гибких рукавов, переходники, па-
трубки и подставки; работает от сети 220 В 50 Гц или от бензо-
электрического агрегата.
10*
147
Технологическая стыковочная тележка (ТСТ) предназначена
для транспортирования ракет по технологическому потоку и про-
ведения сборочных работ. ТСТ представляет собой специальный
неподрессоренный прицеп на пневмоколесном ходу.
Козловой кран с комплектом навесного оборудования пред-
назначен для выполнения сборочных и ремонтных работ с ра-
кетами.
Глава XII
ЗЕНИТНЫЕ УПРАВЛЯЕМЫЕ РАКЕТЫ
1. Аэродинамические схемы ЗУР
ЗУР представляет собой беспилотный летательный аппарат с
реактивным двигателем, предназначенный для поражения воздуш-
ных целей. Основной несущей поверхностью ЗУР является планер,
который предназначен для соединения всех элементов ракеты в
единую, достаточно прочную конструкцию. Кроме того, планером
создаются аэродинамические силы для управления и стабилиза-
ции полета ракеты.
Планер состоит из корпуса, неподвижных и подвижных аэро-
динамических поверхностей.
Корпус планера обычно цилиндрической формы с конической
головной частью. Аэродинамические поверхности планера служат
для создания подъемной и управляющих сил. К ним относят
крылья, стабилизаторы (неподвижные поверхности), рули (под-
вижные поверхности). По взаимному расположению рулей и не-
подвижных аэродинамических поверхностей могут быть аэроди-
намические схемы ракет: «нормальная», «бесхвостка», «утка», «по-
воротное крыло» (рис. 12.1).
Рис. 12.1. Аэродинамические схемы управляемых ра-
кет:
а — «нормальная»; б — «бесхвостка»; в — «утка»; г — «поворот-
ное крыло»
148
В нормальной схеме рули располагаются позади крыльев в
хвостовой части ракеты. Стремление получить значительную пло-
щадь крыльев при небольшом их размахе приводит к увеличению
бортовой хорды крыла. При этом рули оказываются расположен-
ными непосредственно за крыльями и связываются с ними конст-
руктивно. Такую разновидность нормальной схемы принято назы-
вать «бесхвосткой». В комплексах с командной системой наведе-
ния могут применяться аэродинамические схемы «утка» и «пово-
ротное крыло».
В схеме «утка» рули вынесены далеко вперед от центра раке-
ты, а стабилизаторы (могут быть в виде вращающегося крылье-
вого блока) расположены в хвостовой части корпуса. Достоинство
этой схемы в том, что ее рули, имея малую поверхность, обес-
печивают быстроту в реализации маневра при их повороте. Недо-
статком схемы является вредное воздействие потока воздуха от
рулей на стабилизаторы.
В схеме «поворотное крыло» подвижные поверхности (пово-
ротные крылья) располагаются в районе центра ракеты, а непод-
вижные (стабилизаторы)—в хвостовой части корпуса. Преиму-
щество этой схемы — в удобстве компоновки ракеты (аппаратура
управления и автопилот могут располагаться в средней части
корпуса непосредственно возле крыльев), а также в маневре,
совершающемся практически без изменения углов атаки, что не-
возможно в схеме «утка». Это облегчает работу сверхзвукового
прямоточного воздушно-реактивного двигателя (СПВРД) и со-
гласование области срабатывания1 неконтактного радиовзрывателя
(РВ) с областью разлета осколков боевой части (БЧ) ракеты.
Недостаток схемы — большая площадь поворотных крыльев, что
вызывает рост лобового сопротивления и требует мощности, а
значит, и большой массы приводов их поворота.
2. Общая компоновка ракеты, назначение и принцип работы
основных элементов
В состав ракеты входят агрегаты и оборудование, обеспечива-
ющие управляемый полет и поражение цели. Для выполнения этих
задач ракета имеет:
двигательную установку;
пневмогидросистему;
бортовую аппаратуру управления полетом;
источники электропитания;
боевое снаряжение.
Все агрегаты и оборудование размещены на планере ракеты.
Для удобства изготовления ракеты и монтажа оборудования
корпус ракеты разделен на отсеки.
В переднем отсеке размещаются антенны радиовзрывателя,
боевая часть с радиовзрывателем и предохранительно-исполни-
тельным механизмом, емкость для сжатого воздуха и пневмо-
оборудование.
149
В средних отсеках ракеты размещается аппаратура радиоуп-
равления, топливные баки (запас твердого топлива), система
электропитания, пневмогидравлическая, воздушная системы и ап-
паратура управления полетом.
В заднем отсеке находятся камера сгорания (двигатель), бло-
ки антенн радиоуправления и радиовизирования, а также разъ-
емы, служащие для связи бортового оборудования с пусковыми
устройствами при подготовке, контроле и пуске ракет.
Двигательная установка ракеты служит для создания реак-
тивной силы, обеспечивающей полет ракеты на стартовом и мар-
шевом участках траектории.
Двигатели управляемых ракет делятся на две группы: воздуш-
но-реактивные и ракетные.
Воздушно-реактивные двигатели (ВРД)—двигатели, в кото-
рых окислителем служит кислород, забираемый из окружающего
воздуха. В результате на борту ракеты содержится только горю-
чее, что позволяет увеличить запас топлива. Недостатком ВРД
является невозможность их работы в разреженных слоях атмос-
феры. Они могут применяться на ракетах при высотах полета до
35—40 км.
Ракетным называют двигатель, который использует топливо,
полностью находящееся на борту ракеты. Для его работы не тре-
буется забора кислорода из окружающей среды. По виду топлива
ракетные двигатели разделяются на ракетные двигатели твердого
топлива (РДТТ) и жидкостные ракетные двигатели (ЖРД). В
качестве топлива в РДТТ используются ракетные пороха.
Преимущество РДТТ — простота устройства, постоянная готов-
ность к пуску, высокая надежность действия и простота эксплуа-
тации, большой удельный вес и возможность получения большой
тяги при небольшой массе двигателя.
Недостатком РДТТ является зависимость тяги и давления в
камере сгорания от температуры заряда (температуры окружаю-
щей среды), меньшая по сравнению с ЖРД удельная тяга, труд-
ность регулирования тяги.
РДТТ применяются как в качестве ускорителей при старте
ракет, так и в маршевых ступенях. По своему назначению двига-
тели подразделяются на стартовые и маршевые.
Стартовый двигатель, работающий несколько секунд, обеспе-
чивает разгон ракеты на начальном участке траектории полета и
создает условия для нормальной работы маршевого двигателя
(СПВРД).
После выработки топлива стартовый двигатель автоматически
отделяется с помощью специальных крепежных устройств, сраба-
тывающих после выхода на рабочий режим маршевого двигателя.
В некоторых ракетах стартовых двигателей нет. В этом случае
разгон на начальном участке траектории осуществляется старто-
вой ступенью основного двигателя за счет более интенсивного го-
рения топлива.
Маршевый двигатель служит для обеспечения полета ра-
150
кеты на маршевом участке траектории. Маршевый двигатель
может быть сверхзвуковым прямоточным воздушно-реактивным
(СПВРД) или ракетным.
Сверхзвуковой прямоточный воздушно-реактивный двигатель
(рис. 12.2) состоит из воздухозаборника, камеры сгорания, сопла
и герметизирующих устройств.
Рис. 12.2. Схема сверхзвукового воздушно-реактивного
двигателя:
/ — входной диффузор; 2 — камера сгорания; 3 — выходное соп-
ло; I — сжатие; II —вспрыск горючего и стабилизация пламени;
III — сгорание; IV — расширение
Воздухозаборник СПВРД служит для преобразования кине-
тической энергии набегающего потока воздуха в потенциальную
энергию статического давления и подвода сжатого воздуха в каме-
ру сгорания.
Камера сгорания служит для равномерной подачи топлива по
всему поперечному сечению, смешения топлива с воздухом и обра-
зования процесса горения.
Сопло служит для преобразования тепловой энергии газовой
смеси в кинетическую энергию потока, истекающего из сопла.
В начале камеры сгорания располагаются стабилизирующие ус-
тройства, которые стабилизируют фронт горения смеси в камере
сгорания. Для запуска СПВРД топливно-воздушная смесь поджи-
гается за стабилизирующими устройствами с помощью внешнего
источника воспламенения. После этого процесс горения становится
непрерывным. Герметизирующие устройства предохраняют камеру
сгорания и внутренний канал воздухозаборника СПВРД от по-
падания влаги, пыли, снега и посторонних предметов.
Ракетный двигатель твердого топлива (РДТТ) включает ци-
линдрическую часть, называемую камерой сгорания, и сопло.
В РДТТ в камере сгорания помещается твердое топливо
(рис. 12.3).
При работе происходит сгорание топлива, в результате обра-
зуются газы, представляющие рабочее тело двигателя. Если бы
камера сгорания была закрытой, то продукты сгорания создава-
ли бы некоторое давление равномерно на все стенки камеры, в
151
Рис. 12.3. Схема работы ракетного двигателя:
а - камера сгорания закрыта; б — камера сгорания с соплом
результате чего тяга не возникает. При наличии сопла газы, нахо-
дящиеся в камере под давлением, устремляются через сопло с
большой скоростью, величина которой растет по мере приближе-
ния их к срезу сопла. Как следствие этого, давление вдоль камеры
сгорания и сопла будет изменяться. На срезе сопла оно будет
минимальным, тогда как у торцевой стенки внутри камеры сго-
рания, противоположной срезу сопла, максимальным. Часть сил
давления оказывается неуравновешенной, что и создает тягу дви-
гателя.
Пневмогидравлическая система ракеты обеспечивает работу
источников электропитания, маршевого двигателя, автопилота и
других элементов. В своем составе она имеет емкость для воздуха
(воздушный аккумулятор давления — ВАД), манометр, редукто-
ры, блоки подачи, сигнализаторы давления, фильтры, клапаны,
мембранные узлы, коллекторы воздушного командного давления.
Бортовая аппаратура управления полетом ракеты является со-
ставной частью системы управления. Она обеспечивает прием
сигналов управления, подаваемых с наземных радиолокационных
средств комплекса, их преобразование в электрические сигналы,
которые управляют положением ракеты на траектории ее дви-
жения.
Автопилот (АП) предназначен для стабилизации угловых дви-
жений ракеты относительно центра масс. Кроме того, АП является
составной частью системы управления полетом ракеты и управ-
152
ляет положением самого центра масс в пространстве в соответ-
ствии с командами управления. В первом случае АП выполняет
роль системы стабилизации ракеты, во втором — роль элемента
системы управления. Для стабилизации ракеты в продольной, ази-
мутальной плоскостях и при движении относительно продольной
оси ракеты (по крену) используются три независимых канала ста-
билизации — по тангажу, курсу и крену. В состав АП входят чув-
ствительные элементы, преобразовательно-усилительные устройст-
ва, исполнительные и задающие устройства.
Чувствительные элементы измеряют угловые откло-
нения ракеты, угловые скорости, линейные ускорения центра масс
ракеты и скоростной напор. В качестве датчиков (устройств, из-
меряющих физические величины и преобразующих их в электри-
ческие сигналы) углового положения, угловых скоростей и уско-
рений обычно применяются гироскопические приборы (гироскопы).
Преобразовательно-усилительные устройства
автопилота чаще представляют собой электронные преобразовате-
ли токов и напряжений. Для этого применяют магнитные и тран-
зисторные усилители — преобразователи, обладающие высокой
стабильностью работы и надежностью в условиях вибраций и пе-
регрузок ракеты. Их назначение —формирование управляющих
команд, подаваемых в исполнительные устройства.
Исполнительные устройства автопилота служат для
перемещения рулей ракеты. Они могут быть пневматическими,
гидравлическими и электромоторными. Их назначение — преобра-
зование электрической энергии команд управления в угол пово-
рота рулей ракеты. Эти устройства называют рулевыми машинами.
Задающие устройства — устройства управления полетом
ракеты на автономном участке траектории. В их задачу входит
изменение режима работы бортовой аппаратуры по заранее задан-
ной программе.
Источники электропитания предназначены для обеспечения бор-
товой аппаратуры электроэнергией. В качестве источников элек-
тропитания на борту ракеты используются электрогенераторы пе-
ременного и постоянного тока (электромеханические источники
питания), ампульные батареи, преобразователи тока. Электроге-
нераторы имеют высокую удельную мощность, что достигается в
основном за счет высокой скорости вращения якоря, приводимого
в движение турбиной, на лопатки которой воздействует холодный
или горячий газ.
Ампульная батарея является источником питания одноразово-
го действия и представляет собой гальванический аккумулятор, в
котором электролит помещается отдельно от рабочих электродов.
Приведение батареи в рабочее состояние осуществляется сжатым
воздухом.
Преобразователи тока предназначены для преобразования по-
стоянного тока в трехфазный переменный, служащий для питания
б'схов бортовой аппаратуры во время пуска и полета ракеты.
Боевое снаряжение зенитных ракет есть сочетание боевой части .
153
(БЧ) и взрывателя. Боевая часть имеет боевой заряд, детонатор
и корпус. По принципу БЧ могут быть осколочными и осколочно-
фугасными.
Поражающими элементами БЧ могут служить осколки, а так-
же и готовые элементы, размещенные на поверхности корпуса.
В качестве боевых зарядов применяют бризантные (дробящие)
взрывчатые вещества (тротил, смеси тротила с гексогеном и др.).
Поражение цели происходит как поражающими элементами, так
и фугасным действием боевой части.
Взрыватели ракет могут быть неконтактными и контактными.
Неконтактные взрыватели в зависимости от места положения ис-
точника энергии, используемой для его срабатывания, подразде-
ляются на активные, полуактивные и пассивные. Кроме того, не-
контактные взрыватели делятся на электростатические, оптические,
акустические, радиовзрыватели.
В основу работы радиовзрывателя положены принципы радио-
локации. Поэтому такой взрыватель представляет собой миниатюр-
ный радиолокатор, формирующий сигнал подрыва при определен-
ном положении цели в луче антенны взрывателя.
Боевая часть ракеты подрывается радиовзрывателем. Подрыв
должен произойти в такой момент или при таком положении ра-
кеты относительно цели, чтобы максимальное число осколков БЧ
попало в уязвимые агрегаты цели.
Для анализа уязвимости цели ее делят на так называемые
уязвимые отсеки. Под уязвимым отсеком понимается жизненно
важная часть, поражение которой приводит к уничтожению всей
цели. К уязвимым отсекам (рис. 12.4) можно отнести конструкцию
самолета, экипаж, органы управления, двигатели, топливные баки,
кислородные баллоны и гидроаккумуляторы, боеприпасы (снаря-
ды, бомбы, ракеты и т. д.), кислородное оборудование кабин.
Для повышения вероятности поражения цели осколками БЧ
производится согласование области срабатывания взрывателя с
областью разлета осколков.
Под областью срабатывания радиовзрывателя понимается часть
пространства, при нахождении цели в которой происходит подрыв
БЧ ракеты.
154
Для обеспечения своевременного подрыва БЧ необходимо, что-
бы от биссектрисы угла разлета осколков цель находилась на та-
ком расстоянии, которое она пройдет за время пролета осколков
пути, равного промаху, точнее величине пути от точки подрыва БЧ
до точки встречи осколков с целью (рис. 12.5).
В
Рис. 12.5. Согласование области срабатывания радио-
взрывателя с конусом разлета осколков
Другими словами, взрыватель должен обеспечить выполнение
следующего соотношения:
АС _ АВ
^оск ~ ’
где АС и АВ —расстояния, изображенные на рис. 12.5;
Vock — СКОрОСТЬ ОСКОЛКОВ;
Уц — скорость цели.
Обеспечение взаимного расположения области срабатывания
радиовзрывателя и конуса разлета осколков таким образом, чтобы
цель находилась на середине конуса разлета осколков, называется
согласованием области срабатывания радиовзрывателя с конусом
разлета осколков. При удовлетворительном согласовании проис-
ходит следующее: цель движется справа налево навстречу ракете
и входит в диаграмму направленности антенн радиовзрывателя;
радиосигналы, отраженные от цели, принимаются взрывателем
(точка В), который выдает команду на подрыв БЧ. За время про-
лета осколками расстояния СА цель перемещается в точку А, где
и поражается ими.
155
Предохранительно-исполнительный механизм (ПИМ) является
промежуточным элементом между радиовзрывателем и детонато-
ром взрывчатого вещества боевого заряда БЧ. ПИМ предназначен
для замыкания детонационной цепи, обеспечивающей подрыв БЧ
по возможности ближе к цели, для предотвращения преждевре-
менного срабатывания БЧ на траектории, для обеспечения безопас-
ности работ с ракетами при их эксплуатации и для обеспечения
временной самоликвидации ракеты после пролета цели.
3. Хранение ракет и подготовка их к стрельбе
Хранение ракет может осуществляться в отапливаемых и не-
отапливаемых хранилищах, на открытых площадках, на транс-
портных, транспортно-заряжающих машинах, пусковых установ-
ках и стеллажах.
В хранилищах, на открытых площадках и на транспортных
машинах ракеты, как правило, хранятся в контейнерах, а на ТЗМ,
ПУ и стеллажах — без контейнеров. На открытых площадках
ракеты хранятся под навесом или брезентом. В соответствии с
требованиями инструкции по эксплуатации при хранении и экс-
плуатации ракет проводятся технические обслуживания в следую-
щие сроки: ежедневно, еженедельно, один раз в месяц, один раз
в три месяца, один раз в год. С ракетой, хранящейся без контей-
нера на ТЗМ, ПУ, стеллажах, проводить технические обслужива-
ния ежедневно, еженедельно, ежемесячно и раз в квартал.
При ежедневном осмотре ракет удаляется скопление льда, сне-
га, инея, пыли. Если ракета находится под чехлом, то проверяется
его целость. Во время осмотра проверяются узлы крепления раке-
ты, а также отсутствие течи топлива.
При еженедельном осмотре ракет проводятся все работы в
объеме ежедневного осмотра с дополнительным расчехлением их и
проверкой наличия и сохранности всех пломб, давления воздуха
по показаниям бортового манометру. Кроме того, проверяется на-
личие и сохранность чехла воздухозаборника, заглушек на соплах
двигательной установки, крышки на разъеме для подстыковки бор-
та ракеты к ПУ, заглушки на блоке антенн аппаратуры управле-
ния полетом.
При ежемесячном осмотре ракеты проводятся все работы в
объеме еженедельного осмотра и дополнительно осматривается
корпус ракеты для выявления механических повреждений, тре-
щин и забоин (отдельные царапины, вмятины не более 2 мм).
Внешний осмотр предполагает устранение нарушений герметиза-
ции, лакокрасочных покрытий, проверку состояния смазки в узлах
крепления.
По истечении трех месяцев проводятся работы в объеме месяч-
ного осмотра и, кроме того, ракета может подвергаться комплекс-
ному контролю.
Сроки гарантийного хранения ракет в зависимости от условий
могут колебаться от одного года до нескольких лет. При этом
156’
следует иметь в виду, что в случае перевода ракет из режима
хранения с большим гарантийным сроком в режим хранения с
меньшим гарантийным сроком последний не изменяется, а при
переводе ракет из режима хранения с меньшим гарантийным сро-
ком в режим с большим гарантийным сроком хранения пропор-
ционально уменьшается.
При поступлении ракет на хранение в технические подразделе-
ния они проходят так называемый входной контроль, при котором
осуществляются внешний осмотр ракеты или контейнера и про-
верка соответствия комплектности поставки ракеты и маркировки
на контейнере прилагаемому формуляру. В некоторых случаях при
входном контроле проводится комплексный контроль бортовой ап-
паратуры с помощью КИПС (АКИПС).
Проверка ракет осуществляется при поступлении на хранение,
в периоды хранения и при передаче в огневые подразделения, не-
посредственно перед пуском.
В периоды хранения и при передаче в огневые подразделения
по их целевому назначению ракеты подвергаются комплексному
контролю, который осуществляется с помощью КИПС (АКИПС).
При этом проверяются параметры основных агрегатов и блоков
бортовой аппаратуры ракет: радиовзрывателя, автопилота, блоков
управления и т. п. По результатам проверки параметров бортовой
аппаратуры дается заключение о готовности их к пускам.
Непосредственно перед пуском осуществляется так называемый
предстартовый контроль на пусковых установках с помощью пред-
стартовой автоматики для проверки основных цепей ракеты и под-
готовки их к пусковому циклу. При отрицательных результатах
предстартового контроля ракеты отправляются в технические под-
разделения, где подвергаются комплексному контролю в целях
выявления имеющихся неисправностей и последующего их устра-
нения.
Глава XIII
УЧЕБНО-ТРЕНИРОВОЧНЫЕ СРЕДСТВА
1. Средства обеспечения занятий и их назначение
Подготовка воина-специалиста к овладению сложной боевой
техникой проводится в течение всего периода службы. Овладение
своей специальностью предполагает знание теоретических и науч-
ных основ, устройства, принципов работы материальной части и
умелое владение способами и приемами боевого применения во-
оружения, закрепленного за личным составом.
Учебно-тренировочные средства (УТС) предназначены для обу-
чения и тренировок операторов станций разведки и целеуказания,
станций сопровождения целей, пусковых установок и других эле:
157
ментов комплекса. Кроме того, УТС используются для выполнения
других вспомогательных задач (проверки трактов прохождения
сигналов, настройки аппаратуры и т. п.). Применение УТС позво-
ляет сделать режим тренировок операторов независимым от нали-
чия целей, погодных условий и других обстоятельств, а также в
ряде случаев позволяет одновременно обучать большее количество
воинов-специалистов.
Для решения этих задач применяются разнообразные средства
обеспечения занятий, позволяющие ускорить процесс обучения и
повысить его качество. В их состав входят:
учебные и методические пособия по устройству и эксплуатации
вооружения;
плакаты, рисунки и схемы, поясняющие принципы устройства
и взаимодействие элементов материальной части;
узлы, блоки, разрезы деталей, макеты и стенды, показывающие
внутреннее устройство боевой техники;
имитаторы отдельных систем, процессов и сигналов;
тренажеры;
учебно-боевая аппаратура.
Учебные и методические пособия по устройству и эксплуатации
вооружения содержат описание принципов работы и устройства
боевой техники и предназначены для индивидуального и группо-
вого изучения материальной части и правил ее эксплуатации.
К ним относятся технические описания и руководства, инструкции
по эксплуатации, различные методические пособия и наставления.
Плакаты, рисунки и схемы, поясняющие принципы устройства
и взаимодействия элементов материальной части, служат для на-
глядного изображения узлов, деталей и отдельных агрегатов, от-
ражают последовательность действий и некоторые процессы в
условном изображении. Этот вид средств обеспечения занятий
использует зрительную память человека, формирует в его созна-
нии наглядные образы по внутреннему устройству и процессам.
Узлы, блоки, разрезы деталей, макеты и стенды предназначены
для формирования объемно-образного представления об устрой-
стве и о взаимодействии отдельных частей в системах и агрегатах
материальной части. Данные пособия дают представление об
объеме, о реальных размерах и материалах, из которых изготов-
лены отдельные элементы материальной части.
Имитаторы отдельных систем, процессов и сигналов использу-
ются в комплексе с боевой техникой и обеспечивают имитацию
условий, возникающих в боевой обстановке. Например, имитатор
борта ракеты позволяет расчету пусковой установки выполнять
ряд операций, аналогичных операциям, проводимым с боевыми
ракетами.
Тренажер —это учебное техническое средство, позволяющее
формировать навыки, умения и способности, необходимые в ре-
альных условиях боевой деятельности. Тренажеры обеспечивают
подготовку воинов-специалистов при малых затратах ресурса бое-
вой техники и часто заменяют сложную и дорогостоящую внеш-
158
нюю обстановку, т. е. создают сигналы, соответствующие реаль-
ным целям и помехам, получающимся при боевой работе техники.
Тренажеры могут имитировать либо боевую технику, либо
внешние условия. Во втором случае личный состав работает на
боевой аппаратуре (с помощью тренажера задаются внешние ус-
ловия). Подобные тренажеры часто называются имитаторами или
тренировочными устройствами.
2. Оборудование учебных классов
В соответствии с приказом Министра обороны СССР в каждой
части должны быть оборудованы учебные классы по всем разде-
лам боевой подготовки. Большая часть оборудования учебных
классов поставляется централизованно, однако ряд пособий, ма-
кетов, стендов и других учебных пособий изготавливается сила-
ми войск.
В соединении и частях оборудуются классы по основным раз-
делам боевой подготовки и по видам вооружения (например, клас-
сы материальной части радиолокационных средств и средств уп-
равления комплекса, стартового и вспомогательного оборудования,
материальной части автомобилей, гусеничных тягачей и других
элементов и видов вооружения).
Большая роль в оборудовании классов для подготовки воинов-
специалистов принадлежит сержантскому и рядовому составу рас-
четов, отделений. Командиры отделений обычно назначаются от-
ветственными за учебный класс. Они содержат его и постоянно
улучшают оборудование класса.
При оборудовании учебных классов необходимо учитывать сле-
дующее: большое количество наглядных пособий будет рассеивать
внимание обучаемых. Классное помещение должно быть свобод-
ным и использоваться для размещения доски и тех пособий, кото-
рые командир решил применить на данном занятии.
В учебных классах по материальной части отдельных элемен-
тов комплекса могут устанавливаться стенды (схемы) по устрой-
ству, эксплуатации и боевой работе, функциональные и принципи-
альные схемы аппаратуры и стенды с деталями и узлами мате-
риальной части.
В классах общевойсковой подготовки обычно устанавливаются
стенды и плакаты, иллюстрирующие основные положения данного
раздела боевой подготовки, макеты и разрезы основных предметов
общевойскового вооружения и оборудования, электрифицирован-
ные стенды по устройству стрелкового вооружения, приборов хи-
мической и радиационной разведки и т. п.
Командир отделения (расчета) должен постоянно совершен-
ствовать оборудование учебных классов. Совершенствование
учебно-материальной базы включает поддержание существующего
оборудования в хорошем состоянии, его усовершенствование, раз-
работку и создание новых учебных пособий.
159
3. Учебно-тренировочная аппаратура
Основным видом занятий являются тренировки на учебно-
тренировочной аппаратуре и на материальной части, которые обес-
печивают выработку навыков, необходимых воинам при веде-
нии боя.
От того насколько прочны и совершенны эти навыки, зависят
эффективность и правильность действий каждого солдата, а следо-
вательно, расчета, подразделения и части в целом. Качество тре-
нировок в большей степени зависит от использования в практике
обучения технических средств, прежде всего, разного рода имита-
торов и тренажеров.
Достижение слаженности и четкости действий личного состава,
обслуживающего зенитный ракетный комплекс, при быстроменяю-
щейся сложной обстановке может быть обеспечено только за счет
систематической тренировки каждого номера расчета в отдельно-
сти и в составе расчета или подразделения.
В связи с этим возрастает роль тренировочных устройств в
обучении операторов и расчетов зенитного ракетного комплекса.
Для тренировки расчетов СРЦ и СОЦ имеются тренировочное
устройство и тренажер. Тренировочное устройство позволяет ими-
тировать две независимые цели и две — зеркальные этим целям.
Цели могут быть одиночными или групповыми, но 6 целей —
в каждой группе. При этом на экранах индикаторов станций могут
наблюдаться одновременно до 24 целей. Для имитации своих само-
летов две цели в каждой группе отвечают на запрос сигналом
опознавания. Кроме того, тренировочное устройство имитирует
маскирующую непрерывную шумовую помеху. Для проведения
тренировок расчетов устройство подключается к СРЦ или СОЦ,
после чего включается индикаторная аппаратура этих станций.
Тренажер имеет в своем составе кроме средств имитации воз-
душной и помеховой обстановки устройства, предназначенные для
обучения расчетов без использования боевой техники. Аппаратура
тренажера позволяет создавать на экранах СРЦ и СОЦ воздуш-
ную обстановку, подобную обстановке, создаваемой тренировочным
устройством, обеспечивая автоматическое изменение скорости, вы-
соты, курса цели и выделение одной цели из каждой групповой
с изменением ее курса. Кроме того, имитируются флюктуация сиг-
налов цели, активные и пассивные помехи.
Достоинством тренажера является возможность объективной
оценки точности съема координат целей с помощью встроенной ап-
паратуры. На аппаратуре тренажера могут отрабатываться все
вопросы боевой работы операторов при поиске, обнаружении, оп-
ределении координат и съеме данных о целях.
Для обучения операторов СНР также имеется тренировочное
устройство, которое вырабатывает сигналы целей как при наличии
помех, так и без них. С помощью этого устройства отрабатывают-
ся следующие вопросы боевой работы: поиск цели в условиях по-
мех и без них, захват и автоматическое сопровождение цели по
160
угловым координатам и дальности, имитация пуска ракеты. На-
личие различного рода помех обеспечивает тренировки операто-
ров по распознаванию помех на индикаторах и по использованию
имеющихся в станции наведения средств защиты от помех.
Для расчетов КИПС применяется тренажер, обеспечивающий
в классных условиях тренировку операторов в установке исходных
положений органов управления, в подготовке и проведении само-
контроля КИПС и комплексного контроля ракет. Наличие свето-
плана функциональной схемы комплексного контроля ракет обес-
печивает наглядное отображение процессов, происходящих в схе-
ме при контроле ракет.
Тренировка расчета высотомера может осуществляться с по-
мощью имитатора сигналов, который находится непосредственно
в индикаторном отсеке. Расчет может работать без включения
передающей и приемной систем и без качания антенны. С помощью
этого имитатора командир расчета может обучать операторов об-
наружению целей и определению их высоты.
4. Работа на учебно-тренировочных средствах
При отработке задач программы боевой подготовки с исполь-
зованием УТС для каждого практического занятия согласно со-
держанию отрабатываемой задачи должна составляться програм-
ма имитации. Для записи программы может использоваться таб-
лица, в которой указываются количество целей, направление поле-
та, маневр, время включения активных помех, их интенсивность и
указания по продолжительности и интенсивности тренировки.
До начала занятий командир отделения (расчета) проверяет
готовность учебно-тренировочной аппаратуры и знакомит личный
состав с учебной целью, содержанием отрабатываемой задачи и
нормативными требованиями по ее выполнению.
Командир — руководитель занятия должен хорошо знать коман-
ды управления расчетом при боевой работе, определяемые настав-
лениями, и при обучении расчета требовать четких и правильных
команд, докладов и действий.
При тренировках необходимо осуществлять контроль за точно-
стью считываемых координат, выполнением функциональных обя-
занностей и другими действиями обучаемых.
В ходе тренировок и обучения должны непрерывно усложнять-
ся условия выполнения учебных задач посредством увеличения
количественных условий (целей, их характеристик и т. п.) или
сокращения времени, отводимого на решение учебно-тренировоч-
ной задачи.
Для операторов РЛС после отработки начальных навыков в
поиске, сопровождении и определении координат одиночной цели
создается усложненная воздушная обстановка. Постепенно увели-
чивается количество целей, одновременно наблюдаемых на экра-
нах, и усложняется помеховая обстановка. От имитатора последо-
вательно подаются на индикаторы пассивные, активные шумовые
11 Зак. 3112дсп
161
и несинхронные помехи. Командир отделения (расчета) поясняет
характер изображения различных видов помех на экранах инди-
каторов, признаки, по которым можно отличать один вид помех
от другого, порядок применения технических способов ослабления
помех и порядок определения и передачи основных данных о по-
мехах. После показа различных помех и разъяснения порядка
ведения боевой работы в условиях их применения на индикаторы
согласно разработанной программе подаются различного вида и
интенсивности помехи. Операторы тренируются в распознавании
видов помех, в определении данных о них и технических способов
ослабления их воздействия на РЛС.
После приобретения операторами соответствующих навыков
проводятся тренировки в поиске и сопровождении целей в усло-
виях помех. Тренировки повторяются несколько раз, при этом из-
меняются время и место входа целей в зону обнаружения, интен-
сивность и виды помех и другие условия тренировки.
На последующих занятиях производится обучение операторов
работе в условиях комбинированных помех (активных и пассив-
ных). При этом также постепенно увеличивается интенсивность
помех.
Тренировка операторов пусковых установок, КИПС и других
специальностей также строится по принципу «от простого к слож-
ному». При этом усложнение условий тренировки осуществляется
различными факторами: можно увеличивать количество выполняе-
мых действий, сокращать время на их выполнение либо вводить
мешающие факторы (шум, световые сигналы, неисправности
и т. п.).
В целом эффективность тренировок с использованием УТС оп-
ределяется не только умелой организацией, интенсивностью, но и,
правильным сочетанием их с работой на боевой технике.
Глава XIV
ТЕХНИЧЕСКОЕ ОБСЛУЖИВАНИЕ
1. Основы организации эксплуатации вооружения
в подразделениях
Основное требование, предъявляемое к эксплуатации вооруже-
ния в войсках, заключается в том, чтобы постоянно содержать
вооружение в исправном и годном к боевому использованию со-
стоянии. Это обеспечивает высокую боевую готовность подразде-
лений к защите нашей социалистической Родины. Весь личный
состав должен бережно относиться к боевой технике, постоянно
изучать ее устройство, боевое применение, правила эксплуатации
и сбережения.
Эксплуатация боевой техники и вооружения в войсках начи-
162
кается с момента поступления ее в часть. Под эксплуатацией тех-
ники (вооружения) следует понимать боевое применение и те ор-
ганизационно-технические мероприятия, которые проводятся в под-
разделениях, чтобы обеспечить постоянную боевую готовность и
наибольшую эффективность его боевого применения. В понятие
оксплуатация боевой техники и вооружения» входит:
хранение и сбережение боевой техники и боеприпасов, уход
за ними и поддержание их в состоянии боевой готовности;
боевое применение вооружения, приборов и радиолокационной
техники;
ремонт вооружения в подразделении;
освоение боевой работы на технике, а также обучение личного
состава приемам и правилам ухода за боевой техникой.
Эксплуатация боевой техники возлагается непосредственно на
тех лиц, за которыми она закреплена.
Применяться по прямому назначению может только боегото-
вое вооружение. Вооружение считается боеготовым, если его так-
тико-технические характеристики и параметры соответствуют дан-
ным, записанным в формуляр, если имеются в наличии подготов-
ленный расчет, боекомплект, если вооружение укомплектовано
ЗИП и эксплуатационной документацией.
Командиры и личный состав расчетов (отделений) должны
принимать все меры к тому, чтобы в процессе использования бое-
вой техники в боевых и учебных целях поддерживать ее боеготов-
ность.
Важной стороной эксплуатации техники является соблюдение
я выполнение требований безопасности, что предупреждает тяже-
лые происшествия, связанные с жизнью и здоровьем личного со-
става, и вывод из строя вооружения. Командиры подразделений,
расчетов (отделений) должны всегда помнить, что никакие обстоя-
тельства или срочность не могут быть причиной для нарушения
требований безопасности.
Безопасность эксплуатации техники и вооружения обеспечи-
вается:
твердым знанием материальной части, умелым обращением с
ней и точным выполнением требований инструкций по эксплуа-
тации;
обучением личного состава безопасным методам работы на бое-
вой технике и приемам оказания первой помощи при поражении
электрическим током и механических травмах;
допуском личного состава к работе на кранах, компрессорном
и электросиловом оборудовании только после проверки знаний;
своевременным доведением до всего личного состава требова-
ний безопасности и контролем выполнения их при проведении за-
нятий, учений и других работ на боевой технике;
применением специальных защитных средств при работе на
электросиловом оборудовании;
своевременным техническим освидетельствованием объектов
Котлонадзора и защитных средств;
л
163
немедленным выполнением команды СТОЙ, поданной любыкг
номером расчета при работах на технике;
соблюдением особых мер предосторожности при работах, свя-
занных с применением горючего и агрессивных жидкостей, при
гидравлических и пневматических испытаниях, а также при работе
на аппаратуре, находящейся под электрическим напряжением;
запрещением выполнения последующих операций до устране-
ния неисправностей, обнаруженных во время проверок воору-
жения;
строгим соблюдением правил погрузки (выгрузки) и транспор-
тирования техники;
запрещением устранения неисправностей аппаратуры, находя-
щейся под электрическим напряжением;
использованием исправного инструмента, приспособлений и
оборудования, а также подъемно-транспортных средств соответ-
ствующей грузоподъемности;
строгим соблюдением правил пожарной безопасности.
Особое значение приобретают требования безопасности при
боевой работе с ракетами, боеприпасами и другими взрывоопас-
ными средствами, их снаряжении и транспортировании.
Командиры подразделений, расчетов (отделений) отвечают за
организацию эксплуатации вооружения и поддержание его в ис-
правном состоянии и обязаны:
знать вооружение своего подразделения и правила его экс-
плуатации;
принимать меры по хранению, содержанию в исправном со-
стоянии и правильному техническому использованию вооружения,
лично проверять его состояние и боевую готовность;
организовывать работы по своевременному техническому обслу-
живанию, ремонту и эвакуации вооружения;
проверять знание личным составом устройства, правил экс-
плуатации вооружения и их соблюдение;
принимать меры по предупреждению аварий, поломок и соблю-
дению требований безопасности при эксплуатации вооружения;
лично проводить осмотры вооружения в сроки, указанные в
Уставе внутренней службы, и принимать немедленные меры к ус-
транению вскрытых недостатков.
2. Обязанности номеров расчетов
при проведении технического обслуживания
Все виды технического обслуживания и войсковой ремонт про-
водят боевые расчеты. Для выполнения сложных работ могут
привлекаться1 специалисты отделений регламентно-настроечных
работ и ремонтных мастерских. Обязанности номеров расчетов
при проведении технических обслуживаний определены персональ-
но эксплуатационной документацией. Если такого распределения
нет, обязанности номеров определяет командир.
164
При проведении любого вида обслуживания номера расчетов
обязаны:
знать требования безопасности при проведении данного вида
работ;
знать устройство, принцип работы обслуживаемой аппаратуры,
регулировок и проверок;
знать объем, характер и физический смысл проводимых на-
строек, регулировок и проверок;
применять инструмент и материалы только в соответствии с
эксплуатационной документацией;
строго соблюдать последовательность выполнения работ, ука-
занную в инструкциях и сетевых графиках;
уметь проводить мелкий ремонт электро-, радиоаппаратуры,
восстановление изолирующих покрытий и т. п.;
помнить, что при проведении обслуживания подвергают раз-
борке такой объем аппаратуры, чтобы время на сборку и перевод
ее в боевую готовность было не выше установленного команди-
ром части.
Удаление грязи с окрашенных поверхностей проводят так, что-
бы сохранить защитную окраску. Применение различных раство-
рителей (бензина, ацетона и т. п.), а также моющих веществ
(мыла, соды) приводит к нарушению покрытия либо разрыхляет
краску, и в дальнейшем она быстро разрушается. Для удаления
пыли (грязи) с окрашенных поверхностей используют чистую во-
ду. Вначале загрязненные места смывают ветошью, обильно смо-
ченной водой, а затем протирают насухо.
Для удаления коррозии применяют следующие способы:
легкий налет коррозии с полированной или шлифованной по-
верхности удаляется с помощью деревянного скребка или мягкой
тряпки, пропитанной веретенным маслом АУ, АМГ-10 или бензи-
ном (керосином);
с хорошо обработанной поверхности, но не полированной, кор-
розия удаляется с помощью порошка, мела, пемзы или древесного
угля, просеянного через сито и смоченного в минеральном масле,
бензине или керосине, а также с помощью фетровых кругов; если
коррозия не поддается удалению порошком, можно применить
шлифовальную шкурку (не грубее № 140), предварительно смочив
ее веретенным маслом;
с грубо обработанной поверхности коррозия удаляется шлифо-
вальной шкуркой или стальными щетками;
с окрашенных поверхностей коррозия удаляется вместе со ста-
рой краской с помощью шкурки, металлических скребков, щеток
или пемзы с последующей подготовкой к покраске и окрашиванием.
Удалять ржавчину другими средствами (кирпичным порошком,
напильниками и т. п.) запрещается. При удалении коррозии не
допускать повреждения поверхности деталей.
Смазку узлов и механизмов, а также различных поверхностей
необходимо проводить в соответствии с картами смазки, в которых
указываются точки смазки и марки масел.
165
Новые изделия необходимо смазывать чаще. В процессе при-
работки узлов и деталей происходит начальный износ трущихся
поверхностей, частицы металла наполняют смазку, что приводит
к более быстрому износу. Поэтому частая замена смазки способ-
ствует удалению вместе с ней различных частиц и предотвращает
дальнейший износ.
При проведении смазки следует соблюдать следующие правила:
перед смазкой необходимо тщательно удалить грязь с масле-
нок, пробок, заливных горловин и т. п.;
принадлежности для смазки (кисть, лопаточка, тавот-пресс, во-
ронка и т. п.) должны быть чистыми;
нанесение смазки голыми руками запрещается;
во время смазки необходимо следить за тем, чтобы в масло
не попала грязь или вода;
заливать масло в картеры редукторов следует через заливную
воронку с частой сеткой;
после слива отработанного масла в картер редукторов следует
залить подогретое до 85—90° С маловязкое масло (например, вере-
тенное АУ или АМГ-10) и на холостом ходу прокрутить механизмы
в течение 2—3 мин, после чего слить промывочное масло и залить
свежее в соответствии с картой смазки;
в холодное время года масло для ускорения заправки подогре-
вают до 80—90° С в водяной или паровой бане; подогревать масло
в ведре или бачке пламенем костра или паяльной лампы запре-
щается;
при подаче смазки с помощью тавот-пресса необходимо сле-
дить за тем, чтобы свежая смазка дошла до поверхностей трения
и выдавила старую смазку (там, где это требование выполнить
нельзя, следует подавать определенное количество смазки, указан-
ное в картах смазки и инструкции); выжатую из зазора смазку
следует удалить, это место протереть насухо;
при смазке деталей и поверхностей вязкими смазками необхо-
димо применять кисточки, щетки или тампоны из ветоши и нано-
сить смазку равномерным слоем.
В случае нарушения окраски поврежденные места обезжирива-
ются, грунтуются и окрашиваются в первоначальный цвет. При
подготовке поверхностей к окраске удаляют коррозию, пыль и
грязь и обезжиривают поверхность с помощью различных раство-
рителей. При обезжиривании поверхность моют тряпкой, смочен-
ной в растворителе, и сразу протирают насухо чистой и сухой ве-
тошью. На обезжиренную поверхность наносят кистью или
пульверизатором грунт ГФ-020, который предварительно
фильтруют через специальную сетку или марлю, сложенную
вчетверо.
После полного высыхания слоя грунта производится окраши-
вание поверхности в требуемый цвет. Для предотвращения закра-
шивания различных табличек, указателей, стеклянных окон и т. п.
перед покраской на них наносят тонкий слой вязкой смазки, после
высыхания слой краски легко удаляется с этих мест.
166
В процессе выполнения работ по техническому обслуживанию
возникает необходимость в разборке узлов и механизмов, вскры-
тии крышек технологических отверстий и т. п. При этом необходи-
мо применять соответствующий инструмент: ключи, отвертки»
съемники.
При откручивании гаек и болтов предварительно снимают
шплинты, фиксирующие шайбы, и применяют ключи только соот-
ветствующих размеров. При этом запрещается ударять молотком
по противоположному концу ключа, так как это может привести
к поломке ключа или срыву резьбы.
Выкручивание винтов проводят отверткой, ширю ю лезвия кото-
рой равна или больше диаметра головки винта Г'.ели винт не
сдвигается, можно вставить отвертку в паз вин:а, поставить ее
строго по оси и слегка ударить по ней.
Для разборки двигателей, редукторов и т. п. следует приме-
нять специальные съемники или выколотки из мягкого металла
или дерева. Необходимо принимать все меры, предотвращающие
расклепывание концов валов, входных отверстий и деформацию
деталей.
При работе с контрольно-измерительными приборами необхо-
димо соблюдать требования безопасности и строго руководство-
ваться правилами пользования приборами. Например, при измере-
нии рабочих и питающих напряжений на гнездах и контрольных
точках аппаратуры надо соблюдать такую последовательность:
поставить прибор так, чтобы измерительные проводники сво-
бодно доставали до точек измерения;
установить на приборе род работы и диапазон в соответствии
с измеряемым напряжением и родом тока;
подключить вначале корпус или общий провод, затем вставить
в гнездо или щупом прибора коснуться контрольной точки, в ко-
торой измеряется напряжение; при этом нельзя держать в одной
руке прибор, а другой подключать щуп прибора к контрольной
точке или подключать прибор к контрольной точке, а затем к кор-
пусу (массе, общей шине).
При измерении сопротивления изоляции необходимо предвари-
тельно отключить источник напряжения и нагрузку. При измере-
нии с помощью мегаомметра не касаются руками и токонесу-
щих жил.
Текущий ремонт включает: замену неисправных блоков, узлов
п панелей без применения приборов и приспособлений, не имею-
щихся на боевой машине; замену отдельных радио- и электро-
деталей (тумблеров, переключателей, реле и т. п.); изготовление
простейших деталей (шайб, шплинтов, заглушек и т. п.) и ремонт
чехлов. Все эти операции выполняются номерами расчетов при
проведении технического обслуживания и способствуют поддержа-
нию техники в исправном состоянии и готовности к боевому при-
менению.
167
3. Организация и проведение текущего обслуживания
Текущее обслуживание боевой техники и вооружения в подраз-
делении проводится после стрельб, боевой работы, учений, заня-
тий, а также не реже одного раза в две недели, если вооружение
не использовалось. При текущем обслуживании выполняются сле-
дующие основные работы:
пополнение ЗИП и расходных материалов;
чистка, мойка, удаление нагара и продуктов коррозии (плесе-
ни) с поверхностей вооружения;
чистка и просушка чехлов, футляров, ранцев и укладочных
ящиков;
проверка отсутствия течи жидкостей и утечки воздуха (газа),
проверка уровня электролита и степени разряженности аккумуля-
торов (при необходимости производится подзарядка аккумулятор-
ных батарей);
проверка по наружному виду и крепление комплектующего
оборудования, ЗИП, кабелей (проводов), узлов, механизмов, изме-
рительных приборов и аппаратуры;
проверка состояния наружной изоляции, штепсельных разъе-
мов, контактов, клеммных зажимов;
проверка целости стекол, амортизаторов, наличия пломб на
приборах и в местах опломбирования;
проверка средств противопожарного оборудования;
обновление загрязненной смазки и смазки вооружения соглас-
но таблице (карте);
проверка функционирования узлов, механизмов, систем и аппа-
ратуры в соответствии с эксплуатационной документацией;
устранение выявленных неисправностей и недостатков.
Перечень проверок текущего обслуживания излагается в ин-
струкции по эксплуатации на изделие.
Работу по текущему обслуживанию в подразделении выполняет
весь личный состав на закрепленной технике. Командир отделе-
ния (расчета) организует и непосредственно руководит выполне-
нием работ личным составом отделения (расчета).
Перед началом работ командир отделения (расчета) ставит
задачу каждому воину, указывая при этом объем работы, необхо-
димые инструменты, материалы и приборы. В процессе проведения
работ по текущему обслуживанию необходимо следить за качест-
вом их выполнения и за соблюдением требований безопасности.
Особое внимание командир отделения (расчета) обращает на
безопасность при опробовании работы систем и механизмов.
При обнаружении недостатков и неисправностей, которые не-
возможно устранить силами расчета (отделения), командир до-
кладывает о них командиру взвода (подразделения).
По окончании работ по текущему обслуживанию командир
расчета (отделения) проверяет качество их выполнения, указыва-
ет на недостатки, принимает меры к их устранению и доклады-
168
вает командиру о проведении текущего обслуживания на закреп-
ленном за расчетом (отделением) образце вооружения.
4. Организация и проведение технического обслуживания № 1
Техническое обслуживание № 1 проводится после истечения
установленной эксплуатационной документацией наработки (ча-
сов, моточасов, циклов, пусков, выстрелов, километров пробега
и т. п.) не реже одного раза в год, а также при постановке тех-
ники на кратковременное хранение.
При техническом обслуживании № 1 выполняют следующие
основные виды работ:
все работы, входящие в текущее обслуживание;
проверку функционирования всех систем, узлов, механизмов и
аппаратуры;
проверку состояния измерительных приборов;
настройку и регулировку всех систем, узлов, механизмов и ап-
паратуры с помощью контрольно-измерительных приборов, встро-
енных в аппаратуру, а также инструмента и приборов, входящих
в комплект образца вооружения;
частичную разборку узлов и механизмов с заменой смазки, из-
носившихся прокладок, сальников и других деталей;
удаление нагара и окислов с контактов, коллекторов, клемм,
зажимов, токосъемных колец, выключателей и т. п., притирку
щеток;
промывку, чистку или замену фильтров;
смазку согласно таблицам (картам) смазки;
подкраску оголенных мест;
устранение выявленных неисправностей и недостатков.
Перечень проверок технического обслуживания излагается в
инструкции по эксплуатации на изделие.
Техническое обслуживание № 1 проводится расчетом (отделе-
нием) с привлечением специалистов, оборудования и приборов ре-
монтных органов части, соединения. Целью технического обслу-
живания является проведение планово-предупредительных и ре-
монтно-восстановительных работ, увеличивающих срок эксплуата-
ции боевой техники.
Техническое обслуживание проводится в соответствии с планом
эксплуатации вооружения части (соединения), на основе которого
в подразделении составляется план-график проведения работ и
проводится подготовка личного состава, инструмента, материалов
и приборов. По распоряжению командира подразделения коман-
диры расчетов (отделений) проводят занятия с личным составом
по изучению инструкций, наставлений и правил безопасности при
проведении технического обслуживания № 1.
На этих занятиях командиры расчетов (отделений) изучают
с личным составом объем работ, последовательность их выполне-
ния, рассматривают порядок проведения наиболее сложных опера-
ций при проведении технического обслуживания. С молодыми вби-
169
нами проводятся практические занятия по технологии выполнения
основных операций. Для этих занятий могут привлекаться солда-
ты, имеющие отличные знания и хорошие навыки в проведении
данных операций.
Темами занятий при подготовке к проведению технического об-
служивания могут быть следующие: «Порядок проверки состояния
контрольно-измерительных приборов», «Правила измерения на-
пряжений, токов, сопротивлений и других параметров схем с по-
мощью штатной контрольно-измерительной аппаратуры», «Спосо-
бы удаления нагара и окислов с контактных поверхностей», «Сма-
зочные материалы, их назначение и использование в боевой тех-
нике». 4
Параллельно с изучением специальных вопросов, связанных с
выполнением работ по техническому обслуживанию, с личным
составом расчетов (отделений) рассматривается план-график или
сетевой график проведения работ. При этом командир отделения
показывает зависимость качества и сроков выполнения отдельных
^операций от каждого воина и их взаимосвязь во времени. Разъяс-
нение последовательности выполнения операций и взаимозависи-
мости воина расчета способствует повышению чувства ответствен-
ности каждого за свой участок (сектор) работы.
' В период подготовки к проведению технического обслуживания
командир отделения (расчета) на основе технической документа-
ции составляет список потребных материалов (ветошь, смазки,
моющие средства, краски, ЗИП, инструмент и т. п.) и передает
его командиру подразделения.
К дню начала работ по техническому обслуживанию № 1 дол-
жна быть подготовлена площадка, где будут проводиться работы.
На этой площадке должны быть сосредоточены все необходимые
материалы и изготовленные приспособления, а также организаци-
онная и техническая документация.
В процессе проведения работ по техническому обслуживанию
командир расчета (отделения) обязан контролировать качество
проведения отдельных операций и следить за соблюдением требо-
ваний безопасности и за выполнением плана-графика (сетевого
графика).
По окончании работ командир расчета (отделения) должен
проверить:
объем выполненных работ;
выполнение требований технической документации;
правильность сборки (разборки) узлов, механизмов и изделия
в целом и соответствие их требованиям эксплуатационной доку-
ментации;
наличие и состояние пломб;
правильность заполнения формуляров (паспортов).
После проверки командир расчета (отделения) докладывает
командиру подразделения о результатах выполнения работ по тех-
ническому обслуживанию, а также о выявленных недостатках (не-
170
исправностях), их устранении и представляет заполненные фор-:
муляры (паспорта).
5. Войсковой ремонт техники комплекса
Своевременный и качественный ремонт боевой техники является
одним из средств поддержания ее в исправности и боеготовности.
В условиях войсковой эксплуатации вооружения проводится
текущий ремонт боевой техники. Его проведение возможно как
в полевых условиях, так и в условиях ремонтных органов части и
соединения.
Текущий ремонт заключается в восстановлении или замене
неисправных составных частей образца, его комплексной проверке
и регулировке и выполняется силами расчета (отделения) с при-
влечением ремонтной мастерской. Необходимость в проведении
текущего ремонта может возникнуть в процессе эксплуатации бое-
вой техники в любое время и в любой обстановке. Личный состав
расчета (отделения) должен быть обучен основным операциям,,
необходимым для проведения ремонтно-восстановительных работ
в процессе изучения материальной части и эксплуатации воору-
жения.
К проведению ремонта допускаются операторы, изучившие ма-
териальную часть и основные правила эксплуатации, поэтому,
командир отделения (расчета) перед практической работой на
боевой технике должен провести проверку знаний личным соста-
вом отделения (расчета) материальной части, эксплуатации и пра-
вил безопасности.
Неисправности вооружения выявляются в ходе контрольных
осмотров и контроля функционирования аппаратуры. Обнаружен-
ные и выявленные неисправности должны быть изучены с точки
зрения влияния их на боеспособность вооружения. Исходя из этого
определяются необходимость и очередность их устранения, а так-
же возможности расчета. В случае сложных неисправностей, ус-
транение которых требует привлечения сил и средств ремонтных
органов, необходимо немедленно доложить о них по команде.
Восстановление боевой техники методом замены деталей и узлов,
имеющихся в ЗИП, должно проводиться быстро и умело силами
расчета.
Весь личный состав отделения (расчета) должен знать, что на
технике, не выработавшей гарантийного срока, определенная часть
узлов и агрегатов опломбирована пломбами I и II категорий, сры-
вать которые нельзя, даже если точно установлено место неис-
правности. В этом случае необходимо доложить командиру под-
разделения о возникшей неисправности и действовать по его ука-
заниям.
Изделия и образцы вооружения, у которых не вышел гаран-
тийный срок эксплуатации, в случае возникновения неисправно-;
стей восстанавливаются силами и средствами завода-изготовителя. '
Однако, если изделие эксплуатировалось с нарушениями инструк-
171
ции, претензии (рекламации) не будут приняты. Восстановление
в этом случае осуществляется за счет виновных.
В процессе изучения материальной части и эксплуатации весь
личный состав отделения (расчета) должен овладеть приемами
разборки и сборки узлов, агрегатов и систем, замены сменных
деталей.
Обнаружение и устранение неисправностей производятся в та-
кой последовательности:
определение и уяснение признаков неисправности;
установление причины неисправности, т. е. нахождение вышед-
ших из строя или изменивших свои параметры приборов, деталей
схемы;
устранение неисправности, т. е. замена приборов, деталей, вос-
становление нарушенных контактов и т. п.;
проверка и настройка отремонтированной аппаратуры.
Большую опасность для аппаратуры представляют даже про-
стые неустраненные неисправности или неправильные действия
операторов, так как они могут повлечь за собой возникновение
других, более сложных повреждений. При устранении неисправно-
стей запрещается производить какие-либо изменения, не преду-
смотренные схемой и спецификацией.
Основными причинами, вызывающими появление неисправно-
стей, являются:
выход из строя электровакуумных приборов, полупроводников,
электромашин и отдельных элементов, деталей;
механические повреждения, приводящие к обрывам, замыка-
ниям и понижению сопротивления изоляции в цепях электрических
соединений между блоками;
нарушение гальванического контакта в штепсельных разъемах,
фишках, ламповых панелях вследствие загрязнения, окисления и
обгорания контактных поверхностей или недостаточно плотного
механического соединения;
несвоевременное и некачественное проведение текущего обслу-
живания, а также несвоевременное устранение выявленных неис-
правностей.
Для определения причин неисправности и места ее возникнове-
ния, а также для обнаружения неисправного прибора, детали или
элемента используют различные методы.
Метод внешнего осмотра используют при установлении при-
чин неисправностей в механических и электромеханических узлах
и блоках, в антенно-волноводной системе, приводах, штепсельных
и высокочастотных разъемах, при проверке блоков перед изме-
рениями.
При осмотре осуществляют такую последовательность:
осматривают блок, узел, элемент, прибор, деталь, в которых
предполагается неисправность, обращая внимание на механиче-
скую исправность, отсутствие окисления, обгорания и загрязнения
электрических контактов и соединений;
172
проверяют тепловой режим работы аппаратуры и убеждаются
в отсутствии ее перегрева;
проверяют прочность паек монтажа, отсутствие нарушений их
контрольного лакового покрытия, отсутствие замыканий в местах
пайки оголенных проводников между собой и с корпусом шасси;
проверяют заземление и пайку экранов;
проверяют механическую исправность предохранителей и убеж-
даются в целости плавких вставок;
проверяют качество покрытия лаком, краской, эмалью и дру-
гими видами покрытий; проверяют, нет ли следов перегрева и
обгорания;
контролируют состояние изоляции кабелей и монтажных про-
водников;
проверяют показания контрольных приборов и сигнальных
ламп.
Метод измерений используется при проверке электрических
цепей схем блоков, электрических соединений между блоками си-
стем и системами станции. Для руководства при измерениях ис-
пользуются принципиальные и функциональные схемы проверяе-
мых систем, шкафов и блоков.
Измерения первоначально проводятся в тех цепях, каскадах и
элементах, где предполагается неисправность, и, если она не
обнаружена, проверяют последовательно (от входа до выхода)
весь блок. Во время измерений проверяются напряжения на кон-
трольных точках, контролируются форма и амплитуды осцилло-
грамм напряжений и токов, измеряются величины сопротивлений
и проверяются электрические цепи. При необходимости определя-
ются параметры электронных приборов на соответствие их пас-
портным данным.
Электрические соединения между блоками систем, а также пра-
вильность монтажа проверяются по принципиальным и монтаж-
ным схемам. Проверка производится в такой последовательности:
проверяют общую цепь, в случае неисправности разделяют ее на
несколько частей; затем проверяют поочередно отдельные участки
цепи, разъединяя их на более мелкие, для нахождения места и
причин неисправности.
Метод исключения состоит в том, что блок (элемент, деталь),
в котором предполагается неисправность, исключается из общей
схемы; по изменению признаков неисправности делают вывод о
правильности предположения. Пользуясь этим методом, можно
установить, при исключении какой детали или прибора неисправ-
ность исчезает.
Методом исключения можно установить блок, элемент, деталь,
вызывающие уменьшение сопротивления изоляции, помехи на эк-
ранах индикаторов, наводки и другие неисправности, связанные
со взаимным влиянием систем, блоков и элементов.
Метод замены сводится к последовательной замене отдельных
элементов, деталей, вызывающих сомнение в их исправности или
в соответствии их параметров табличным, заведомо исправными
173
элементами и деталями того же типа. Наиболее часто этот метод
применяется для обнаружения неисправных ламп, предохраните-
лей, кристаллов, т. е. легкосъемных деталей; им пользуются также
для обнаружения неисправностей реле, конденсаторов, сопротив-
лений и т. п.
Однако методом замены следует пользоваться осторожно. Это
связано с тем, что причиной выхода из строя какой-либо детали
может быть не ее плохое качество или большой срок службы, а
неправильный (в силу определенных причин) режим работы этой
детали в схеме (повышенные токи и напряжения, замыкания, пе-
регрев и т. п.). Поэтому ее замена новой, исправной деталью при-
ведет не к устранению неисправности, а к выходу из строя еще
одной детали.
Все возникающие неисправности, в том числе и простейшие
(выход из строя элементов вследствие выработки срока эксплуа-
тации и т. п.), должны быть зарегистрированы в бортовом журна-
ле и затем аккуратно занесены в формуляр данного изделия.
Строгий и правильный учет неисправностей и причин их возник-
новения обеспечивает возможность точного определения потреб-
ного количества ЗИП, а также позволяет в дальнейшем быстрее
устранять неисправности, используя накопленный опыт и знания
по характерным признакам и причинам возникновения неисправ-
ностей.
6. Ремонтное оборудование
Для ремонта, настройки и проверки аппаратуры радиолокаци-
онных станций и пусковых установок используется контрольно-
ремонтная автомобильная станция (КРАС). В КРАС включена
следующая аппаратура: контрольно-ремонтные стенды; контроль-
но-измерительная аппаратура; первичные и вторичные источники
питания; тренировочные устройства; вспомогательное оборудова-
ние и имущество; комплект ЗИП для ремонта.
Каждая из машин КРАС смонтирована в специальном кузове
на автошасси. Электропитание мастерской осуществляется от
внешней сети переменного трехфазного тока 220 В 400 Гц.
В каждой машине имеется собственный агрегат питания
АБ-4-0/230, вырабатывающий переменный однофазный ток 220 В
50 Гц.
7. Техническая документация
На каждый образец вооружения, находящийся в эксплуатации
в отделении (расчете), имеется комплект документации, в который
обычно входят:
техническое описание с комплектом схем и рисунков, поясняю-
щих устройство;
инструкция по эксплуатации;
технический формуляр или паспорт;
технические формуляры или паспорта на комплектующие при-
боры и узлы;
174
описания и формуляры на контрольно-измерительные приборы»
входящие в комплект данного образца вооружения. Кроме того,
на боевых машинах обычно ведется бортовой журнал учета не-
исправностей и наработки, журнал боевой работы или учета тре-
нировок, количества проводок целей и т. п.
Техническое описание со схемами, рисунками, фотографиями
и т. п. является основным руководством по изучению принципов
устройства и работы данного образца вооружения. В нем содер-
жатся сведения о технических характеристиках изделия, его эле-
ментах, узлах и деталях. Схемы и чертежи, прилагаемые к техни-
ческому описанию, документально отображают устройство, кон-
струкцию изделия, служат руководством при ремонте (поиске не-
исправностей) и изучении принципов работы. Техническое описа-
ние, как и все другие документы, входящие в комплект образца
вооружения, при передаче изделия, отправке его на ремонт и т. п.
передаются и отсылаются вместе с ним. Поэтому командир отде-
ления (расчета) должен разъяснить воинам необходимость береж-
ного отношения к технической документации и постоянно контро-
лировать ее состояние.
Инструкция с приложениями схем, рисунков, фотографий опре-
деляет порядок и правила эксплуатации данного изделия. В ин-
струкции указываются сроки, объем и последовательность выпол-
нения работ при всех видах обслуживания и боевой работы; из-
лагается методика проведения технического обслуживания и оп-
ределяются параметры и характеристики работы узлов, систем и
изделия в целом, определенные техническими условиями на него.
В ней же определены требования безопасности, относящиеся кон-
кретно к данному образцу вооружения, которые должен знать каж-
дый воин отделения (номер расчета).
Командир отделения (расчета) со своими подчиненными дол-
жен постоянно и тщательно изучать положения инструкции по
эксплуатации, разъяснять смысл проверок, настроек и регулиро-
вок и неукоснительно их выполнять при техническом обслужива-
нии и при ведении боевой работы.
Формуляр (технический паспорт) на конкретный образец во-
оружения содержит основные технические данные, комплектность,
индивидуальные особенности, данные контрольных испытаний об-
разца вооружения. Кроме того, в специальных разделах регистри-
руются:
свидетельство о приемке;
гарантийные обязательства;
свидетельства о консервации и расконсервации;
сведения о движении изделия в эксплуатации (о закреплении
изделия за расчетом, отделением);
итоговый учет работы в часах, циклах работы и других коли-
чественных характеристиках интенсивности эксплуатации;
неисправности при эксплуатации и их причины, признаки про-
явления;
особые замечания по эксплуатации и аварийным случаям;
175
данные о проведении технических обслуживаний (регламент-
ные работы, профилактические осмотры и т. п.);
данные о поверке измерительных приборов изделия повероч-
ными органами;
сведения о конструктивных и схемных изменениях, произведен-
ных в процессе эксплуатации и ремонта;
сведения о замене основных частей изделия за время его экс-
плуатации и хранения;
сведения о доработках по бюллетеням и о ремонте изделия в
ремонтных органах;
сведения по хранению и об установлении категории изделия;
заключения о результатах проверки изделия инспектирующими
и проверяющими лицами.
Формуляр входит в комплект поставки данного изделия и дол-
жен постоянно находиться при нем. Все записи в формуляре дол-
жны производиться только чернилами, отчетливо и аккуратно.
Подчистки, помарки и незаверенные исправления не допускаются.
Запрещается делать какие-либо пометки и записи на обложке
формуляра.
К формуляру должны быть приложены паспорта на комплек-
тующие изделия и узлы. Необходимые записи в паспортах должны
производить лица, обслуживающие эти изделия. •
В целях безошибочного и аккуратного ведения формуляра ос-
новные текущие показатели обычно записываются в бортовой жур-
нал учета неисправностей и наработки и регулярно, не реже одно-
го раза в месяц, переносятся в формуляр.
Бортовой журнал представляет собой общую тетрадь, проши-
тую и пронумерованную. Страницы журнала разбиваются на гра-
фы, удобные для регистрации количественных показателей (часов,
циклов и т. п.) и учета неисправностей, их признаков, причин.
Бортовой журнал постоянно находится на изделии; командир от-
деления (расчета) регулярно заносит в него количественные пока-
затели и данные по проявлению, признакам и причинам неисправ-
ностей. В этом же или в специально заведенном журнале ведется
учет боевой работы. Обычно регистрируются все тренировки, про-
водимые расчетом на данном изделии: количество развертываний
и свертываний, циклов контроля аппаратуры, заряжаний, запра-
вок и т. п., проведенных целей, циклов стрельбы и т. д.
За состояние технической документации, журналов учета несет
ответственность командир отделения (расчета); он должен прини-
мать все меры для сохранения и бережного отношения к ним лич-
ного состава отделения (расчета).
176
РАЗДЕЛ ТРЕТИЙ
СПЕЦИАЛЬНАЯ ПОДГОТОВКА
Глава XV
РАБОТА РАСЧЕТА ПРИ ПОДГОТОВКЕ КОМПЛЕКСА
К СТРЕЛЬБЕ
1. Назначение и виды подготовки к стрельбе
В зависимости от обстановки зенитный ракетный комплекс мо-
жет находиться в различных состояниях: в походном или в бое-
вом положении; в готовности № 1, в готовности № 2 или в готов-
ности № 3; в режиме длительного хранения, на техническом об-
служивании и т. п.
Высшей степенью готовности комплекса к ведению боя с воз-
душным противником является готовность № 1 — готовность к не-
медленному открытию огня.
Первая часть подготовки к стрельбе содержит мероприятия,
проводимые до перевода комплекса в готовность № 1. Вторая
часть начинается с объявления готовности № 1 и заканчивается
подготовкой исходных данных для стрельбы и определением мо-
мента пуска ракеты.
Подготовка комплекса к стрельбе включает ряд мероприятий,
направленных на приведение его в такое состояние, при котором
комплекс может начать стрельбу в минимально допустимые сроки,
а также включает подготовку стрельбы (рис. 15.1).
Подготовка комплекса к стрельбе включает следующие меро-
приятия:
развертывание комплекса в боевой порядок на стартовой по-
зиции;
подготовку материальной части к стрельбе;
топогеодезическую подготовку стрельбы;
подготовку стрельбы.
В зависимости от состояния комплекса перечисленный объем
мероприятий может проводиться полностью или частично. Напри-
мер, если комплекс находится на оборудованной стартовой пози-
ции в готовности № 2 или в готовности № 3, то для подготовки
к стрельбе необходимо провести мероприятия, связанные только с
ее подготовкой.
Войсковые зенитные ракетные комплексы вынуждены, как пра-
12 Зак. 3112дсп 177
Рис. 15.1. Примерный перечень мероприя-
тий, проводимых при подготовке ЗРК к
стрельбе
‘вило, готовиться к стрельбе после совершения марша. В этом слу-
чае подготовка комплекса к стрельбе охватывает весь объем ме-
роприятий.
Развертывание комплекса в боевой порядок осуществляется
при занятии стартовой позиции. Стартовая позиция занимается,
как правило, с ходу по команде командира подразделения.
Первой позицию занимает станция наведения ракет. Затем за-
нимают свои места пусковые установки.
После занятия стартовой позиции материальную часть готовят
к стрельбе. Для этого станцию наведения ракет, пусковые уста-
новки, ракеты расчехляют и переводят из походного положения в
боевое. При этом на самоходных установках расстопоривают по-
ходные крепления, открывают крышки и люки вентиляторов; на
178
ракетах устанавливают крылья и стабилизаторы, состыковывают
разъемы. Затем включают источники питания, аппаратуру и раз-
ворачивают антенны. При подготовке материальной части пуско-
вой установки наиболее часто допускаются1 ошибки: при установке
верхнего стабилизатора ракеты, при стыковке основного бортово-
го разъема, при установке антенны радиостанции в боевое поло-
жение. При подготовке материальной части станции наведения ра-
кет допускаются ошибки при горизонтировании и установке необ-
ходимого режима вентиляции.
В зависимости от наличия времени и воздушной обстановки
после включения аппаратуры комплекс либо сразу же перево-
дится в готовность № 1, либо сначала проводятся контроль функ-
ционирования аппаратуры, автономные и взаимные проверки, а
затем уже он переводится в готовность № 1.
Контроль функционирования содержит минимум проверок,
после проведения которых можно с достаточной степенью надеж-
ности сделать вывод об исправности аппаратуры. При жестком де-
фиците времени контроль функционирования может проводиться
сокращенный, т. е. не в полном объеме. Во время контроля функ-
ционирования проверяются основные системы СНР и ПУ с по-
мощью встроенной аппаратуры контроля, при этом на любой ста-
дии контроля функционирования можно перевести аппаратуру из
режима контроля в режим боевой работы. Контроль функциони-
рования является наиболее трудоемким и требует систематиче-
ской тренировки и закрепления навыков.
В тех случаях, когда позволяет время и обстановка, проводят-
ся дополнительно автономные проверки. Они являются выбороч-
ными проверками из перечня технического обслуживания.
В первую очередь проверяются блоки, узлы, параметры кото-
рых влияют на стрельбу и ее результат.
При проведении автономных проверок блоки могут выдвигать-
ся из стоек, к схемам подключаются внешние измерительные при-
боры, производится коммутация некоторых схем. Однако эти опе-
рации не должны задерживать при необходимости перевод аппа-
ратуры в режим боевой работы.
Для проверки работоспособности комплекса в целом подготов-
ка материальной части к стрельбе заканчивается взаимными про-
верками. Звено СОЦ — СНР проверяется с помощью выдачи це-
леуказания по контрольным точкам, по местным предметам или
по реальным воздушным целям. В звеньях СНР — ПУ — ракеты
одновременно проверяется правильность прохождения информации
и правильность ее отработки пусковой установкой, а также ис-
правность ракет по программе предстартового контроля.
Топогеодезическая подготовка стрельбы содержит определение
и ввод в аппаратуру радиолокационных станций координат точек
стояния (X, У), базовых смещений между СНР и ПУ, ориентиро-
вание радиолокационных станций и пусковых установок. Необхо-
димо помнить, что ошибки при вводе координат, учет углов пере-
коса платформы, базовых смещений приводит к ошибкам при вы-
12*
179
даче целеуказания и встреливания ракеты. Кроме того, при топо-
геодезической подготовке определяются для оценки возможности
стрельбы по низколетящим целям с различных направлений. Гра-
ницы секторов для аварийного пуска ракет определяются на слу-
чай сброса ракет с пусковых установок, если дальнейшее их пре-
рывание угрожает жизни расчетов или сохранности техники.
Заключительным этапом подготовки является подготовка
стрельбы, которая состоит из предварительной и непосредственной.
2. Предварительная подготовка стрельбы
Предварительная подготовка стрельбы начинается с момента
объявления готовности № 1 и должна быть закончена до полу-
чения огневой задачи.
До начала боя с воздушным противником комплекс может на-
ходиться в боевом положении (в одной из степеней готовности)
или в походном. В том случае, когда комплекс находится в бое-
вом положении, при объявлении готовности № 1 предварительная
подготовка начинается с включением аппаратуры СОЦ, СНР и
ПУ, поэтому в общем виде она содержит включение СОЦ, СНР
и ПУ, оценку воздушной обстановки, включение ракет на подго-
товку, оценку готовности комплекса к стрельбе.
Аппаратура элементов комплекса должна включаться с таким
расчетом, чтобы к моменту подхода цели к дальней границе зоны
пуска подготовка стрельбы была закончена. Из рис. 15.2 видно,
Рис. 15.2. К вопросу определения рубежа включения аппа-
ратуры комплекса
что удаление рубежа включения аппаратуры от стартовой пози-
ции можно рассчитать по формуле
-Овкл дп — У/~“1“ V*ц/п стр)2 + Яц ,
где б/д—горизонтальная дальность границы зоны пуска;
Уц—скорость цели;
Яц—высота цели;
стр—время подготовки стрельбы комплекса.
180
Поскольку время подготовки стрельбы в различных условиях
отличается незначительно, а высота цели заметно меньше горизон-
тальной дальности до рубежа включения аппаратуры, то основной
величиной, от которой зависит удаление этого рубежа, является
скорость цели. Очевидно, чем больше скорость цели, тем раньше
нужно включать аппаратуру и начинать подготовку стрельбы.
Удаление рубежей включения СНР в зависимости от условий по-
лета цели лежит в пределах 140—270 км., В случаях когда коман-
да на перевод комплекса в готовность № 1 поступает с некоторым
опозданием, имеется возможность несколько сократить удаление
рубежа включения аппаратуры за счет использования глубины
зоны пуска, т. е. расчеты вести из условия пуска ракеты до бли-
жайшей границы зоны пуска.
Для принятия решения на бой с воздушным противником про-
изводится оценка воздушной обстановки. Она осуществляется по
данным, поступающим от вышестоящего пункта, и по результатам
наблюдений за целями на экранах индикаторов радиолокацион-
ных станций.
По результатам оценки воздушной обстановки определяются:
количество целей, ожидаемых в зоне пуска, и временные интер-
валы между ними;
характер и степень важности ожидаемых целей;
подлетное время целей до дальней границы зоны пуска;
виды радиопомех и возможность применения противником про-
тиворадиолокационных снарядов;
наличие и местоположение в воздухе своей авиации.
Количество целей, ожидаемых в зоне пуска, определяется пу-
тем прокладки курса целей на экране кругового обзора СОЦ или
на планшете. Кроме того, по проложенному курсу определяются
подлетные времена целей:
4тОДЛ = Т'/Кц,
где L — удаление цели от дальней границы зоны поражения.
Временные интервалы между целями определяются как раз-
ность между их подлетными временами, например:
ДЛ, 2 — ^ПОДЛ 1 ^подл, •
Очевидно, цели могут быть обстреляны последовательно, если
временные интервалы между ними не превышают цикла стрель-
бы — времени занятости комплекса на обстрел одной цели.
Характер и важность ожидаемых целей оцениваются по их со-
ставу (одиночные, групповые), по типу (самолеты, крылатые ра-
кеты, вертолеты и т. п.), по высотам полета (низколетящие, летя-
щие на больших или средних высотах), по направлению полета
(приближающиеся, удаляющиеся), по виду противодействия (по-
становщики помех, летящие под прикрытием помех носители
ПРР) и т. п.
По типу наиболее важными являются те цели, которые могут
быть носителями ядерного оружия.
181
По составу являются наиболее опасными многочисленные и
компактные группы, по направлению полета — те цели, курс ко-
торых проходит через прикрываемые объекты. Из других целей
наиболее важными являются постановщики помех.
В результате оценки воздушной обстановки выбираются наи-
более важные для обстрела цели и уточняется очередность их
обстрела. Оценка воздушной обстановки продолжается в течение
всего времени отражения налета.
Включение ракет на подготовку осуществляется с таким расче-
том, чтобы обеспечить пуск на дальней границе зоны пуска. В за-
висимости от наличия времени и воздушной обстановки ракеты на
подготовку могут включаться в период как предварительной, так
и непосредственной подготовки. Дальность включения ракет на
подготовку в основном зависит от скорости цели и лежит в преде-
лах 54—99 км.
При оценке готовности комплекса к стрельбе определяются
исправность и качество функционирования аппаратуры всех его
элементов, количество боеготовых целевых и ракетных каналов
СНР, пусковых установок и ракет. Исправность аппаратуры оп-
ределяется по результатам контроля функционирования, автоном-
ных и взаимных проверок. В этом случае, если контроль функ-
ционирования и проверки не проводится, исправность аппаратуры
проверяется расчетом по индикаторам, табло и сигнальным лам-
почкам. Комплекс считается боеготовым, если к стрельбе готовы
СОЦ, СНР и не менее двух пусковых установок (с двумя ракета-
ми на каждой).
3. Непосредственная подготовка стрельбы
Непосредственная подготовка стрельбы начинается с момента
получения огневой задачи с командного пункта и должна закан-
чиваться до подхода цели к дальней границе зоны пуска. Одним
из видов постановки огневой задачи является автоматизирован-
ное целеуказание.
В состав непосредственной подготовки стрельбы входят:
переход СНР в режим приема целеуказания или в режим ав-
тономного поиска цели;
оценка помеховой обстановки;
включение аппаратуры и режимов защиты от ПРС;
поиск и обнаружение постановщика активных помех или цели
под прикрытием;
включение аппаратуры защиты от помех;
захват цели на сопровождение;
определение исходных данных для стрельбы;
выбор пусковых установок и ракет для стрельбы;
’ проведение предстартового контроля ракет;
< выбор метода наведения;
определение момента пуска первой ракеты.
При получении с командного пункта команды ПРИНЯТЬ ЦУ
182
расчет СНР должен обнаружить цель по данным ЯйтОМатизиро-
ванной системы целеуказания. При этом антенна СНР автомати-
чески выводится в направление цели, а строб дальности — в рай-
он ее дальности. Переключатель АНТЕННА — ЭКВИВАЛЕНТ
станции визирования цели становится в положение АНТЕННА.
Для компенсации ошибок целеуказания проводится дополни-
тельный поиск по азимуту в небольших пределах вручную.
Высокое напряжение визирования цели не включается. Если
на рабочей частоте излучение помех не обнаружено, производится
перестройка на запасные частоты до обнаружения излучения по-
становщика помех. Одновременно в случае оптической видимости
цель — постановщик помех отыскивается в секторе целеуказания
по экрану оптического визира.
Если цель — постановщик помех в секторе целеуказания обна-
руживается по ее излучению или по экрану оптического визира,
начальник расчета докладывает ее координаты на командный
лункт и уточняет дальность пуска первой ракеты по данным СОЦ.
В случае когда цели — постановщики помех по данным целе-
указания не обнаружены, включается высокое напряжение пере-
датчика визирования цели с одновременным включением аппара-
туры защиты от ПРР. Производится поиск и обнаружение цели.
При этом включение передатчика визирования цели производится
на том участке диапазона рабочих частот, который по результа-
там разведки постановщиков активных помех оказался наименее
«забитым».
После перехода на сопровождение проводится определение ис-
ходных данных для стрельбы, главными из которых являются ха-
рактер цели, параметры движения (скорость, курсовой параметр,
высоты, вид совершаемого маневра), границы зоны пуска (даль-
няя и ближняя) и время пребывания цели в зоне пуска.
Знание характера цели необходимо для правильного назначе-
ния количества ракет для ее надежного поражения. Так, для по-
ражения групповых целей и целей, не израсходовавших свой бое-
комплект, назначается большее количество ракет, чем по одиноч-
ным, неманеврирующим или идущим на удаление. Большее коли-
чество ракет назначается также при стрельбе в сложных услови-
ях: по постановщикам помех, по целям, летящим под прикрыти-
ем интенсивных помех, по поздно обнаруженным низколетящим
целям и т. п.
Определение параметров движения цели необходимо для пра-
вильного назначения вида огня (одиночными, очередью), метода
наведения ракет и дальности открытия огня.
Границы зоны пуска определяются для правильного выбора
моментов начала стрельбы и конца ее, после которых пуски ракет
проводить нецелесообразно.
Время пребывания цели в зоне пуска позволяет расчету ком-
плекса судить о том, возможен ли повторный обстрел цели в слу-
чае ее непоражения или нет.
Если автоматизированное целеуказание с командного пункта
183
не выдается, расчет СНР может проводить автономный поиск в
назначенном командиром секторе. В первую очередь следует без
включения высокого напряжения передатчика визирования произ-
водить поиск и обнаружение постановщиков активных помех.
Если после обнаружения радиолокационным каналом цель будет
наблюдаться на экране оптического визира, высокое напряжение
передатчика выключается, а цель сопровождается с помощью оп-
тического визира. При отсутствии оптической видимости цель со-
провождается радиолокационным каналом.
Сопровождение цели осуществляется при использовании аппа-
ратуры защиты от ПРР.
Чтобы исключить ухудшение различимости ПРР, схема авто-
матической регулировки усиления приемной системы не включа-
ется. Для этого применяется смешанный способ сопровождения
цели. Переход к автоматическому сопровождению цели осущест-
вляется только на конечном участке наведения ракеты согласно
рекомендациям правил стрельбы относительно порядка перехода
от одного способа сопровождения к другому.
Определение дальности пуска ракет производится с помощью
счетно-решающего прибора, который непрерывно вырабатывает
положение дальней и ближней границ зоны поражения, а также
положение упрежденной точки встречи ракеты с целью. Все это
отображается на индикаторе пуска.
После выбора ракет для стрельбы проводится предстартовый
контроль, который необходим для исключения пуска внезапно от-
казавшей ракеты.
Если СНР работает без излучения передатчика РЛС визирова-
ния цели, пуск первой ракеты производится в момент прохождения
целью дальней границы зоны пуска. В это время упрежденная
точка встречи ракеты с целью на индикаторе пуска проходит
дальнюю границу зоны поражения.
Для снижения эффективности противоракетного маневра пуск
первой ракеты при работе передатчика РЛС визирования цели на
излучение производится, если упрежденная точка встречи ракеты
с целью войдет в пределы гарантированной зоны поражения. Гра-
ницы гарантированной зоны поражения также высвечиваются на
индикаторе пуска.
В момент открытия огня заканчивается непосредственная под-
готовка стрельбы, начинается стрельба.
4. Возможные пути сокращения времени
подготовки к стрельбе
При отражении налета воздушного противника одним из реша-
ющих факторов является своевременная подготовка комплекса к
стрельбе. Поэтому расчеты должны постоянно совершенствовать
приемы боевой работы и добиваться сокращения времени на вы-
полнение всех операций при подготовке к стрельбе и ведении боя.
Объективной оценкой, характеризующей работу расчета, яв-
184
ляется время, затрачиваемое на выполнение различных нормати-
вов (например, переход из походного положения в боевое, прове-
дение контроля функционирования и взаимных проверок, поиск
цели, переход на автосопровождение цели, подготовка исходных
данных для стрельбы). Расчеты должны стремиться к сокращению
времени на выполнение нормативов без ухудшения качества их
выполнения.
Имеется несколько путей сокращения времени подготовки ком-
плекса к стрельбе. Основными из них являются следующие:
совершенствование практических навыков номеров расчета;
повышение слаженности расчетов;
освоение номерами расчетов смежных и новых специальностей;
углубление знаний физического смысла процессов, происходя-
щих в аппаратуре, и функциональных связей между системами;
разработка новых схем выполнения этапов ведения боевой ра-
боты и новых форм проведения проверок.
Каждый из перечисленных путей способствует улучшению вре-
менных характеристик работы расчетов, однако наибольший эф-
фект дает использование всех путей.
Практические навыки номеров расчетов прежде всего зависят
ст знания ими материальной части, умения по памяти проводить
все этапы боевой работы и различные проверки. Каждый номер
расчета должен уметь быстро отыскивать и устранять простейшие
неисправности, такие, как смена предохранителей, ламп и панелей,
соединение разъемов фишек, восстановление цепей блокировок.
Перечисленные неисправности наиболее часто встречаются после
совершения марша, т. е. во время подготовки комплекса к стрель-
бе. Поэтому очень важным моментом является1 внешний осмотр тех-
ники при переводе ее из походного положения в боевое. Операто-
ры должны тщательно осматривать аппаратные отсеки, обращая
внимание на наличие предохранителей в держателях, прочность
кабельных соединений, состояние блокировочных цепей.
Наряду с отличным знанием материальной части и приемов
ведения боевой работы каждым оператором успех выполнения бо-
евой задачи зависит от качества работы расчета в целом, т. е. от
его слаженности. Высокая слаженность расчетов достигается
только систематическими тренировками. В начале учебного про-
цесса тренировки охватывают отдельные этапы боевой работы.
После отработки приемов по отдельным элементам с расчетами
проводятся комплексные тренировки, охватывающие все этапы
боевых действий: марш, занятие позиции, развертывание в боевой
порядок, подготовку к стрельбе, отражение налета воздушного
противника, свертывание комплекса в походное положение.
Подготовка к стрельбе часто может начинаться при нахожде-
нии комплекса на позиции в одной из степеней готовности. Если
комплекс находится в готовности № 3 (2), то в боевых машинах
остается минимальное количество номеров расчета (дежурная сме-
на), которые должны поднять личный состав по тревоге и прове-
сти подготовительные операции до прихода полного боевого расче-
185
та: включить питание и аппаратуру, провести самые необходимые
проверки. В дежурной смене могут находиться операторы различ-
ных специальностей, поэтому при подготовке к стрельбе на на-
чальном этапе (до прихода полного боевого расчета) операторы’
из дежурной смены должны выполнять как свои операции, так и
операции других номеров. Очевидно, объем выполненных под-
готовительных действий при этом будет тем больше, чем лучше
освоены номерами смежные специальности. Из этого следует, что
освоение номерами расчетов смежных и новых специальностей в
первую очередь способствует сокращению времени подготовки
комплекса к стрельбе.
К сожалению, случается, что при подготовке комплекса к
стрельбе нс все параметры соответствуют допуску. В этом случае
расчет должен в минимально короткое время настроить аппаратуру
или устранить неисправность. Однако чаще всего параметр, вы-
шедший за пределы допуска, или неисправность обнаруживаются
не прямым путем, а по косвенным признакам. Знание функцио-
нальных связей между системами и блоками, физического смысла
процессов, происходящих в аппаратуре, является необходимым
условием правильной и быстрой настройки или устранения неис-
правности. Для этого операторы должны уметь читать и практи-
чески пользоваться различными схемами: функциональными, тест-
трактовыми, ремонтными, мнемоническими, межблочных соедине-
ний и т. п. Вместе с тем каждый оператор должен помнить функ-
циональные связи между системами и блоками, твердо знать по-
рядок прохождения и обработки сигналов, а также расположение
инструмента и запасных частей (деталей) в ЗИП.
5. Подготовка технологического потока к боевой работе
Установка и развертывание технологического оборудования и
специальных машин на технической позиции производятся на всех
пунктах одновременно. Для этого:
на пункт управления батареи выдвигается машина радиоотде-
ления; расчет пункта управления по команде командира радио-
отделения ПУНКТ УПРАВЛЕНИЯ РАЗВЕРНУТЬ производит
развертывание и включение радиостанций, установление радио-
связи с командным пунктом бригады и проводной связи с пунк-
тами технологического потока и пунктами хранения ракет;
на пункт № 1 выдвигается, автокран, транспортная машина с
ракетой и автомашина с комплектами технологического оборудо-
вания; производится разгрузка накатников, траверсы № 1, захвата
№ 1, лестницы, площадки МС-1515, подставки № 2 и развертыва-
ние автокрана;
на пункты № 2 и 5 выдвигаются заправщики воздуха, ком-
прессорные станции и производится их развертывание;
на пункт № 3 выдвигается контрольно-испытательная подвиж-
ная станция; производится развертывание КИПС, при необходи-
мости производится установка палатки;
186
на пункт № 4 выдвигается заправщик горючего и производится
его развертывание.
Для установки палатки командир технического подразделения
создает сводный расчет в составе 17 человек.
Подготовка ракет на технологическом
потоке
На пункте № 1 производятся прием и разгрузка ракет, их рас-
консервация, перегрузка второй ступени ракеты на ТМ, установка
стартовых двигателей, крыльев и стабилизатора № 1 на ракету.
На пункте № 2 производится заправка ракет воздухом.
На пункте № 3 производятся комплексная проверка бортовой
аппаратуры ракеты, стыковка, контровка и пломбировка ОРУ. На
пункте оборудуются два рабочих места. На первом рабочем ме-
сте проводится комплексная проверка бортовой аппаратуры раке-
ты. На втором рабочем месте осуществляются стыковка, контров-
ка и пломбировка ОРУ.
На пункте № 5 производится дозаправка ракет воздухом.
На пункте № 6 производятся установка дуг, зачехление ТМ и
формирование транспортов с ракетами.
Глава XVI
РАБОТА РАСЧЕТА ПРИ СТРЕЛЬБЕ
В РАЗЛИЧНЫХ УСЛОВИЯХ БОЯ
1. Работа расчета при стрельбе по одиночной
цели без помех
Одиночной целью называется цель, которая наблюдается на
экранах индикаторов в виде отдельных отметок.
Раздельное наблюдение целей на экранах индикаторов про-
исходит в том случае, когда расстояние в пространстве между
целями превышает разрешающую способность РЛС по дальности
или угловым координатам. Разрешающая способность РЛС по
дальности зависит главным образом от длительности зондирую-
щего импульса, а разрешающая способность по угловым координа-
там— от ширины диаграммы направленности антенны.
Цели могут наблюдаться на экранах индикаторов раздельно,
если расстояние между ними по дальности больше расстояния, ко-
торое занимает в пространстве излученный радиоимпульс. Напри-
мер, импульс длительностью в 1 мкс соответствует расстоянию, рав-
ному 300 м. Дополнительными факторами, влияющими на разре-
шающую способность, являются масштаб развертки индикатора,
контрастность изображения меток целей на экранах индикаторов,
ширина полосы пропускания приемника и т. п. Разрешающая спо-
собность по угловым координатам превышает ширину диаграммы
направленности антенны в 1,3—1,5 раза.
.187
Стрельба по одиночной цели без помех ведется при автомати-
ческом сопровождении по дальности и угловым координатам.
В зависимости от характера движения цели выбирается метод на-
ведения, обеспечивающий наиболее выгодную траекторию полета
ракеты и лучшие условия встречи ракеты с целью.
Пуск ракеты осуществляется на максимально возможной даль-
ности из расчета, чтобы ракета встретилась с целью на дальней
границе зоны поражения. Данное условие вызвано необходимо-
стью уничтожения воздушной цели до выполнения ею боевой за-
дачи— сброса бомб, пуска ракет по наземным целям и т. п. Кро-
ме того, ранний обстрел цели позволяет произвести дополнитель-
ные пуски в случае непоражения цели первой ракетой.
Во время стрельбы операторы контролируют качество сопро-
вождения цели и находятся в готовности в любой момент пере-
вести РЛС в другой, более выгодный режим работы или перейти
к другому способу сопровождения.
Возможен случай, когда во время стрельбы цель разделяется
на две и более целей. Это происходит, когда до пуска ракеты цели
находились близко друг к другу и не разрешались радиолокацион-
ной станцией, а затем стали расходиться. Очень важно своевре-
менно обнаружить момент разделения меток целей на экранах ин-
дикаторов и вовремя изменить способ сопровождения с автоматиче-
ского на полуавтоматический или ручной. Последнее связано с тем,
что в момент разделения сигналов целей системы автоматического
сопровождения по дальности и угловым координатам начинают
работать неустойчиво.
Важную роль играет качество подготовки материальной части
к боевой работе. Отсутствие, например, достаточной контрастно-
сти изображения на экранах индикаторов может привести к позд-
нему обнаружению разделения одиночной цели на несколько це-
лей, что вызовет нежелательные переходные процессы в аппара-
туре автосопровождения и увеличение ошибок наведения ракеты.
Неудовлетворительная настройка аппаратуры автосопровождення
может привести вообще к срыву сопровождения и потере цели или
ракеты. Если загрубить или, наоборот, вывести из устойчивого со-
стояния автодальномер ракеты, то не произойдет захвата ракеты по
дальности. Незахват ракеты может также произойти в случае ус-
тановки в приемнике малого или слишком большого усиления.
В полете ракеты может случиться ее раскачка из-за неправильно
или плохо настроенной системы угловой автоматики. Поэтому опе-
ратор должен знать и уметь самостоятельно проводить проверку
и настройку различных систем РЛС визирования ракеты.
После пуска расчет контролирует работу РЛС визирования
ракеты на этапах захвата ракеты на автосопровождение, вывода
ее на кинематическую траекторию и наведения на цель. Особенно
ответственным моментом является захват ракеты на автосопро-
вождение. Поэтому после пуска ракеты индикаторы, предназначен-
ные для последовательного наблюдения цели или ракеты, перево-
дятся в режим наблюдения ракеты.
188
После захвата ракеты на автосопровождение более важным
объектом наблюдения вновь становится цель, так как ее поведе-
ние зависит от действий противника. В это время цель и ракета
наблюдаются поочередно, а цель сопровождается автоматически,,
полуавтоматически или вручную. Ракета сопровождается только
автоматически.
При подходе ракеты к цели расчет контролирует выдачу на
ракету команды для взведения радиовзрывателя по загоранию
соответствующего табло. В момент встречи ракеты с целью конт-
ролируется подрыв ракеты и осуществляется оценка результатов
стрельбы по экранам индикаторов и с помощью других средств.
Частным случаем стрельбы по одиночной цели является
стрельба на догонном курсе. Она ведется в случае невозможности
обстрела цели на встречном курсе из-за малой дальности обнару-
жения или может быть продолжением стрельбы на встречном
курсе при непораже.нии цели. Возможен случай стрельбы вдогон
при маневре цели в зоне пуска или при обнаружении цели, летя-
щей на удалении от комплекса.
При стрельбе вдогон необходимо учитывать, что время пре-
бывания цели в зоне пуска сокращается, при полете цели на уда-
ление увеличивается влияние различных возмущающих факторов^
на качество ее сопровождения. Например, возрастает влияние по-
мех; при стрельбе по низколетящим целям большое мешающее
действие оказывает Земля. При удалении цели энергия отражен-
ного от нее сигнала все время уменьшается, а мощность отражений
от Земли увеличивается, так как угол места уменьшается; следо-
вательно, эффективность стрельбы вдогон может в некоторых
случаях уменьшаться.
Работа расчета при стрельбе вдогон не имеет существенных
отличий от работы при стрельбе навстречу. Вместе с тем по мере
удаления цели расчет должен быть в готовности к быстрому из-
менению способа сопровождения.
2. Особенности боевой работы при стрельбе
в условиях активных помех
Воздействие активных помех снижает как результативность
каждой стрельбы, так и общее количество стрельб. Причинами
этого являются:
уменьшение глубины зон разведки и поражения за счет сниже-
ния дальности обнаружения цели;
затруднение оценки обстановки, выбора цели и момента пуска;
увеличение времени поиска цели СНР и перехода на сопро-
вождение;
ухудшение точностей сопровождения цели и наведения ракет;
нарушение нормального функционирования радиоканалов ком-
плекса (срыв сопровождения цели или ракеты, подавление линии
радиоуправления, ложное срабатывание радиовзрывателя);
189,
ухудшение согласования области срабатывания радиовзрыва-
теля с областью возможного поражения цели.
Уменьшение воздействий активных помех может достигаться
как рациональным использованием конструктивных особен-
ностей СОЦ и СНР, так и проведением организационных ме-
роприятий.
Для уменьшения влияния помех могут использоваться наряду
с аппаратурой защиты и простейшие технические способы: регу-
лировка усиления приемника, изменение масштаба развертки и
применение секторных режимов работы индикаторов, изменение
положения диаграммы направленности антенны станций, измене-
ние скорости вращения антенны СОЦ, регулировка уровня яркости,
усиления эхо-сигнала на индикаторах и т. д.
Техническая защита от активных помех осуществляется:
перестройкой рабочей частоты РЛС;
изменением частоты повторения и длительности импульсов;
включением схемы защиты от несинхронных импульсных
помех;
«использованием схем автоматической регулировки усиления
(АРУ), малой постоянной времени (МПВ) и мгновенной автома-
тической регулировки усиления (МАРУ).
Организационные методы защиты заключаются в различных
способах использования существующих средств (например, в сов-
местном использовании радиолокационных и оптических средств
обнаружения цели, смене позиций РЛС, высокой натренированно-
сти расчетов и т. п.). Большое значение для борьбы с помехами
имеет также и подготовка материальной части станции.
Мощность передатчика визирования цели должна быть не
меньше номинальной. Особое внимание нужно уделять правильной
выставке частот приемной и передающей систем и качественному
функционированию устройств автоматической подстройки частоты
этих систем, так как даже незначительная их взаимная расстрой-
ка по частоте приводит к тому, что не вся энергия передатчика,
облучающая цель и возвращающаяся обратно, будет приниматься
приемником.
При несовпадении частот приемника и передатчика приемная
система вместо усиления полезных сигналов, отраженных от цели,
будет выдавать на индикаторы преимущественно усиленные сиг-
налы помех.
Рассмотрим порядок действия боевых расчетов в условиях по-
мех. После переключения станции на антенну необходимо оценить
помеховую обстановку и определить виды помех. Определение
вида помех играет исключительно важную роль для правильного
использования необходимых мер защиты. Особенно важно уметь
отличать активные помехи от пассивных, так как включение аппа-
ратуры СДЦ для отстройки от активных помех в большинстве
случаев усиливает их действие.
Основными отличительными признаками пассивных помех яв-
ляются: расположение в определенной части пространства по
190
дальности; практически неподвижное положение; наличие границ
зоны помех.
По степени воздействия (интенсивности) помехи принято де-
лить:
на слабые, при которых применение простейших способов за-
щиты от помех позволяет обнаруживать (сопровождать) эти цели;
на средние, при которых использование технических средств и
простейших способов защиты от помех позволяет с определенны-
ми затруднениями обнаруживать (сопровождать) цели (при этом
возможны периодические потери цели или срывы сопровожде-
ния);
на сильные, при которых обнаружение (сопровождение) целей
невозможно.
В любом случае ведения боевой работы расчеты должны стре-
миться сначала использовать простейшие способы защиты от по-
мех и только в случае неудачи переходить к применению техниче-
ских средств защиты. Это объясняется тем, что включение практи-
чески любой схемы защиты от помех ухудшает характеристики
станции. Перестройка рабочих частот РЛС допускается только в
случае, когда все остальные меры не дали положительного эф-
фекта.
Очевидно, что для ситуации, изображенной на рис. 16.2, доста-
точно использование простейших способов защиты, а в ситуации,
изображенной на рис. 16.1, необходимо применять перестройку ча-
стоты.
Рассмотрим порядок использования технических средств защи-
ты от помех. Перестройка рабочих частот радиолокационных
станций может проводиться как автоматически, так и вручную.
Если автоматическая перестройка рабочей частоты производится
непрерывно, это свидетельствует о том, что противник создает
сильные помехи на всех запасных частотах (или во всем диапа-
зоне перестройки) либо скорость перестройки передатчика помех
выше скорости перестройки рабочей частоты станции. В этом слу-
чае следует перейти на ручной способ переключения частот и вы-
брать рабочую частоту, наименее забитую помехами.
Если противник создает синхронные импульсные ответные по-
мехи и при этом невозможно выделить истинную отметку цели на
фоне ложных, необходимо использовать переключение частот по-
вторения и длительности импульсов. При этом особое внимание
следует обращать на выделение отметки цели в моменты пере-
ключения.
Несинхронные импульсные помехи образуются, как правило,
за счет взаимного влияния радиолокационных станций одного ча-
стотного диапазона. Примерный вид индикаторов СНР при воз-
действии таких помех изображен на рис. 16.2. В случае возраста-
ния их уровня рекомендуется включение схемы защиты (подавле-
ния) несинхронных импульсных помех (НИП, ПНП), в крайнем
случае—использование перестройки рабочей частоты.
Схемы защиты (НИП, ПНП) работают по принципу совпаде-
шь
Рис. 16.1. Виды экранов индикато-
ров поиска и дальности при наличии
активной шумовой помехи (отстрой-
ка невозможна)
Рис. 16.2. Виды экранов индикаторов
поиска и дальности при наличии не-
синхронных импульсных помех
ния сигналов, отраженных от цели, и этих же сигналов, задержан-
ных на период повторения станции. Импульсы несинхронной по-
мехи (первичные и задержанные) приходят на схему совпадения
в различные моменты времени и через схему не проходят, так как
она остается закрытой. Очевидно, что отстройка от синхронной им-
пульсной помехи такими схемами защиты (НИП, ПНП) невоз-
можна.
Основным внешним отличием синхронных и несинхронных по-
мех является то, что скорость перемещения импульсов синхронной
помехи близка к скорости целей. Импульсы несинхронной помехи
бегут по развертке со значительно большей скоростью.
При воздействии активных шумовых помех слабой интенсив-
ности определенное улучшение наблюдаемости отметок целей вы-
зывает включение автоматической регулировки усиления. При
этом общий контраст изображения на индикаторе увеличивается.
Если помеха средняя, а тем более сильная, включение автоматиче-
ской регулировки усиления только ухудшает различимость целей
на фоне помех, так как схема АРУ будет работать по более силь-
192
ному сигналу помехи, подавляя сигнал цели. При этом следует
учитывать, что в условиях применения противником ПРС схемой
АРУ следует пользоваться только при переходе на автоматическое
сопровождение цели, потому что в режиме АРУ падает усиление
приемной системы и ухудшается различимость таких малоразмер-
ных целей, как ПРС.
Схемы МАРУ и МПВ предназначены в основном для1 предохра-
нения приемника радиолокационной станции от перегрузок мощ-
ными сигналами, отраженными от местных предметов, облаков
и т. п. Однако в ряде случаев они оказывают защитное действие
по отношению к импульсным помехам большой длительности и
другим модулированным помехам. В ряде случаев и при воздейст-
вии активных шумовых помех включение схем МАРУ и МПВ мо-
жет оказать положительное воздействие: сигналы помех дробят-
ся, общая яркость их фона падает, а различимость цели улуч-
шается.
Рассмотрим вариант боевой работы, когда одна или все радио-
локационные станции комплекса полностью подавлены помехами,
т. е. когда цели не наблюдаются при использовании любых спосо-
бов и средств защиты.
При подавлении СОЦ оператор уменьшает усиление приемной
системы до тех пор, пока не получит узкую полосу помехи, и вы-
дает целеуказание СНР по полосе помехи. Начальник СОЦ запра-
шивает дальность постановщика, следующего под этим азимутом,
с КП части. Если СНР подавлена помехами, операторы захваты-
вают постановщик помех по угловым координатам и производят
уточнение его дальности по данным СОЦ или вышестоящего КП.
Одновременно производится селекция наземных источников помех,
у которых угол места близок к нулю и отсутствуют угловые пере-
мещения. Затем, регулируя усиление приемной системы, необходи-
мо уточнить, находится ли постановщик помех в главном лепестке
диаграммы направленности.
Стрельба по постановщику помех ведется методом трех точек
с включением соответствующего режима работы СНР. Высокое
напряжение передатчиков визирования цели включается только в
случае выключения самолетом генератора помех.
3. Особенности боевой работы при стрельбе
в условиях пассивных помех
Пассивные помехи возникают за счет отражения электромаг-
нитной энергии, излучаемой станцией, как от организованных пе-
реизлучателей (металлизированных лент, металлизированного
стекловолокна, специальных уголков и т. п.), так и от различного
рода местных предметов, земной поверхности, облаков, осадков
и т. п. Наибольшую сложность имеет боевая работа в условиях
организованных пассивных помех.
На индикаторах станции организованные пассивные помехи
наблюдаются в виде протяженной по дальности засвеченной об-
ласти, состоящей из как бы наложенных друг на друга отметок
13 Зак. 3112дсп
193
групповых целей. Иногда помехи ставятся с разрывами. Часто
применяется выстреливание или периодический сброс одиночных
отражателей, создающих отметки, имитирующие цели.
При обнаружении начала постановки пассивных помех опера-
тор СОЦ докладывает об этом командиру расчета и оценивает
плотность постановки помех. Если постановщик помех наблюда-
ется на фоне помех, а включение схемы МПВ уменьшает яркость
полосы помех до яркости отметок цели, включение аппаратуры
СДЦ не производится. Боевая работа проводится обычным поряд-
ком, однако усиливается наблюдение за началом облака пассив-
ных помех для своевременного обнаружения целей, пытающихся
войти в зону боевых действий комплекса под прикрытием помех.
Если полоса помех наблюдается очень яркой и постановщик
помех не различим на их фоне, в секторе помех включается ап-
паратура СДЦ. Для облегчения обнаружения целей под прикры-
тием пассивных помех расчет СОЦ должен стремиться выдать це-
леуказание на СНР как можно раньше, по возможности до входа
цели в зону помех.
Рассмотрим особенности работы расчета СНР. После получе-
ния целеуказания по постановщику помех или цели, следующей
под прикрытием, оценивается интенсивность помех и принимается
решение на включение аппаратуры СДЦ. Аппаратура СДЦ вклю-
чается, если цель неразличима, а яркость полосы помехи значи-
тельно превышает яркость обычно наблюдаемой отметки цели
(рис. 16.3).
После включения аппаратуры СДЦ выставляется оптимальное
усиление приемной системы в режиме СДЦ. Ручкой КОМПЕН-
САЦИЯ ВЕТРА выбирается наилучший диапазон работы допле-
ровского селектора, при этом яркость наблюдаемого облака помех
должна быть в несколько раз меньше обычной яркости отметки
цели. Для наилучшей различимости цели облако помех полностью
компенсировать не следует. Контур помех должен наблюдаться
почти полностью (рис. 16.4).
После обнаружения отметки цели осуществляется переход на
ее сопровождение. Главной особенностью работы в условиях пас-
сивных помех является наличие большого количества нераскрыв-
шихся пачек дипольных отражателей, которые дают отметки, ана-
логичные отметкам цели. Поэтому после захвата отметки цели на
сопровождение немедленно измеряется ее скорость; если скорость
окажется недостаточной, проводится повторный поиск.
В процессе сопровождения цели необходимо постоянно про-
водить докомпенсацию помех, так как с приближением цели ме-
няется радиальная составляющая ее скорости. Качество компенса-
ции изменяется и при маневрах цели.
В отличие от обнаружения цели в процессе ее сопровождения
компенсация проводится для получения максимальной амплитуды
отметки цели и устранения изрезанности этой отметки. Вращение
ручки КОМПЕНСАЦИЯ ВЕТРА проводится очень плавно и пре-
имущественно в одну сторону. При кратковременных замираниях
194
Рис. 16.3. Виды экранов индикаторов
поиска и дальности при наличии не-
компенсированной пассивной поме-
хи
Рис. 16.4. Виды экранов индикаторов
поиска и дальности при наличии
скомпенсированной пассивной помехи
(при уменьшении или пропадании отметки цели на 1—2 с) враще-
ние ручки не производится.
Как по постановщикам пассивных помех, так и по целям под
прикрытием возможен успешный автономный поиск станцией на-
ведения ракет, поскольку высота и курс цели строго определены
положением облака пассивных помех. Для повышения результа-
тивности поиска желательно периодически уточнять дальность це-
ли по данным СОЦ или вышестоящего КП. В этом случае азимут
для поиска устанавливается по центру полосы помех, угол ме-
ста несколько выше, а строб дальности на 2—3 км ближе уточ-
ненной дальности. Нужно учитывать, что, как правило, цель под
прикрытием следует выше облака помех, так как при следовании
ниже облака наблюдаемость ее наземной станцией улучшается. По-
лет самолета внутри облака помех не дает преимуществ перед
полетом сверху, однако снижает безопасность полета из-за всасы-
вания отражателей двигателем.
Порядок сопровождения и обстрела цели изложен в Прави-
лах стрельбы.
Применение аппаратуры СДЦ позволяет обстреливать цели, иду-
щие под прикрытием пассивных помех значительной плотности,
1 з*
195
однако требует качественной настройки станции визирования цели.
Особое внимание следует обращать на уменьшение нестабильности
частот передатчика, когерентного и местного гетеродинов.
4. Особенности работы расчета при применении ПРР
Противорадиолокационные ракеты (ПРР) применяются для
огневого подавления радиолокационных средств ПВО. Они имеют
аппаратуру самонаведения на работающую РЛС. Источником ин-
формации о местоположении станции является ее собственное ра-
диоизлучение. Характерным представителем ПРР является са-
монаводящийся снаряд «Шрайк (AGM-45A)», «Стандарт АРМ»,
«Мартель AS-37», тактико-технические характеристики которых
приведены в табл. 1.3. Высокая скорость полета, малые геометри-
ческие размеры и сравнительно высокая точность самонаведения
могут превратить ПРР в эффективное средство борьбы авиации
с зенитными ракетными комплексами.
Высокая скорость полета ПРР приводит к скоротечности про-
цесса самонаведения его на радиолокационную станцию и к не-
возможности в настоящее время комплекса 2К11 бороться с ним
активно. Малые геометрические размеры делают малозаметным
момент пуска ПРР, особенно для станции сопровождения целей.
Основным условием успеха борьбы с воздушным противником,
применяющим ПРР, является уменьшение времени излучения элек-
тромагнитной энергии радиолокационной станцией.
Перед пуском ПРР на борту самолета-носителя осуществля-
ются поиск радиолокационной станции и подготовка ракет к пус-
ку. Это требует определенного времени. Поэтому главной задачей
операторов станции наведения ракет является проведение поиска,
обнаружения и захвата на автосопровождение цели за время, не
превышающее время подготовки ПРР к пуску. После захвата це-
ли на автосопровождение включаются специальные регламентации
радиоизлучения. Опыт и расчеты показывают, что если время на
поиск, обнаружение и захват цели на автосопровождение мень-
ше, чем требуется для выполнения этих нормативов на оценку
«хорошо», общий багаж времени складывается в пользу расчета
станции наведения ракет.
При сопровождении цели оператор должен внимательно сле-
дить за меткой цели на экране индикатора дальности. В момент
пуска ПРР метка цели начинает флюктуировать, одновременно ис-
кажается и форма импульса цели; импульс несколько растягива-
ется. В некоторых случаях возможно наблюдение отрыва ПРР
от самолета в виде дробления импульса цели.
Необходимо учитывать, что не в каждом случае может быть
обнаружен пуск ПРР, поэтому расчет должен строить свою ра-
боту из предположения, что любая цель может произвести пуск
ПРР по станции. В этом случае основными мерами по защите
от ПРР являются:
196
проведение поиска цели и оценка результатов стрельбы в ми-
нимально короткое время;
постоянное использование аппаратуры и режимов защиты от
ПРР;
неукоснительное соблюдение требований радиомаскировки.
Большое значение при защите от ПРР имеют пассивные режи-
мы сопровождения целей. В этих режимах прежде всего исполь-
зуется излучение целей в инфракрасном и оптическом диапазо-
нах. Переход на сопровождение цели с помощью оптических
средств осуществляется немедленно при обнаружении цели на со-
ответствующих экранах индикаторов как до пуска, так и после
пуска ракеты. Поэтому при сопровождении цели один оператор
должен внимательно следить за меткой цели на экране индикато-
ра для своевременного обнаружения пуска ПРР, а другой опе-
ратор — за экраном оптического визира для своевременного об-
наружения на нем цели и изменения способов сопровождения.
При сопровождении цели с помощью оптического визира рас-
чет должен быть в постоянной готовности к переходу на радиоло-
кационное сопровождение, если цель окажется закрытой облаком
или дымом и пылью после старта ракеты.
5. Особенности стрельбы по целям, совершающим
маневр высотой и курсом
Воздушная цель может совершать маневр как до пуска раке-
ты, так и после пуска. До пуска ракеты цель совершает маневр
для затруднения и срыва сопровождения ее радиолокационной
станцией, уменьшения времени на подготовку исходных данных
для стрельбы, увеличения ошибок определения исходных данных.
После пуска ракеты совершается противоракетный маневр с мак-
симально возможной скоростью изменения высоты и курса. При
этом процесс наведения ракеты на цель может затягиваться. В ре-
зультате этого у цели появляется возможность выйти из зоны по-
ражения раньше, чем произойдет встреча ракеты с ней.
Воздушные цели могут осуществлять маневр курсом, скоро-
стью и высотой. Расчет должен своевременно определять момент
начала маневра и его вид. Например, маневр высотой может по-
влечь за собой изменение способа сопровождения и метода наве-
дения; маневр курсом требует изменения момента пуска ракеты
и т. п.
Признаками маневра высотой являются изменения значений
высоты, считываемых со стрелочного прибора, изменение угла ме-
ста цели, а также перемещение ближней и дальней границ зоны
поражения, высвечиваемой на экране индикатора пуска. Послед-
нее объясняется тем, что дальность до ближней и дальней границ
зоны поражения зависит от высоты цели.
Признаком маневра скоростью является изменение расстояния
между лепестками целей и упрежденной точкой на экране инди-
1 f; 7
катора пуска, так как величина упреждения пропорциональна
скорости цели.
Признаком маневра курсом является поворот зоны поражения
на экране индикатора, поскольку зона поражения на индикаторе
всегда сориентирована относительно направления полета цели.
При наличии достаточной оптической видимости маневр цели
можно обнаружить с помощью оптического визира по изменению
ракурса цели.
Главной особенностью стрельбы по целям, совершающим ма-
невр курсом, является пуск ракеты не на дальней границе зоны
пуска, а в глубине зоны. Для этого на экране индикатора кроме
зоны поражения для неманеврирующих целей высвечивается даль-
няя граница гарантированной зоны поражения. Гарантированная
зона построена с таким расчетом, что при любом возможном ма-
невре цель будет поражена с определенной вероятностью. Таким
образом, при совершении целью маневра курсом командир расче-
та принимает решение на обстрел цели при входе упрежденной
точки в пределы гарантированной зоны поражения.
6. Особенности стрельбы по низколетящим целям
Низколетящей целью называется цель, угол места которой в
момент пуска ракеты меньше определенной величины.
Наиболее характерной особенностью низколетящих целей яв-
ляется малая дальность обнаружения, что приводит к значитель-
ному сокращению времени, которым располагает комплекс от мо-
мента обнаружения цели до выхода ее из зоны пуска.
Основными причинами, вызывающими уменьшение дальности
обнаружения низколетящих целей, являются кривизна земной по-
верхности, искажение формы диаграммы направленности антенны
и маскирующее действие отражений от местных предметов.
Вследствие того что электромагнитная энергия ультракорот-
ких волн распространяется прямолинейно, цели, находящиеся за
горизонтом, не могут быть обнаружены из-за экранирующего дей-
ствия земли (рис. 16.5).
Рис. 16.5. Дальность прямой видимости РЛС
198
Дальность прямой видимости ДПр зависит от высоты полета
цели hi и высоты расположения антенной системы Л2 и выража-
ется формулой _^пр — 1ЮК(Л1 + Л2), где ДПР, Ль h2 выражены
в километрах.
Практически высота цели во много раз превосходит высоты ан-
тенны станции (Ai » Л2), поэтому можно считать
Дпр == 110 У
Из формулы следует: если цель, летящую на высоте 10 км,
можно обнаружить на дальности, равной 350 км, то цель, летя-
щую на высоте 100 м, можно обнаружить только на дальности,
равной 35 км.
При поиске и сопровождении низколетящих целей диаграмма
направленности антенны радиолокационной станции касается зем-
ли. В результате этого к цели кроме прямого луча от станции при-
ходит луч, отраженный от земли. В зависимости от величины угла
места прямой и отраженный лучи приходят к цели с различным
сдвигом по фазе. Если лучи приходят в фазе, дальность действия
станции может несколько увеличиваться; если же лучи приходят
в противофазе, результирующий сигнал уменьшается и соответст-
венно уменьшается дальность действия станции.
Диаграмма направленности антенны возле земли имеет много-
лепестковый характер (рис 16.6). В «провалах» диаграммы на-
правленности цель может вообще не обнаруживаться станцией.
Но поскольку цель перемещается в пространстве, она поочередно
пересекает лепестки диаграммы направленности (точки Аь А2,
Аз и т. д.) и обнаруживается расчетом.
Рис. 16.6. Влияние земной поверхности на диаграмму направлен-
ности антенны РЛС
Сильное мешающее воздействие оказывают маскирующие
свойства отражений от местных предметов. При малых углах ме-
ста на вход станции поступает энергия, отраженная от поверхно-
сти земли, которая во много раз превосходит сигналы, отражен-
ные от воздушных целей. При этом экраны индикаторов засвечи-
ваются, вероятность обнаружения цели становится очень малой.
По мере приближения цели величина угла места возрастает, ди-
аграмма направленности все меньшей частью касается земли,
энергия сигналов, отраженных от земли, уменьшается. Вместе с
тем энергия, отраженная от цели, увеличивается; соответственно
увеличивается и вероятность обнаружения цели.
199
Таким образом, малая дальность обнаружения низколетящих
целей присуща как радиолокационным станциям разведки, так и
станциям сопровождения. Это приводит практически к невозмож-
ности работы комплекса с разнесенными СОЦ и СНР по обыч-
ной схеме: обнаружение цели с помощью СОЦ, передача коорди-
нат цели на СНР, принудительный поиск ее радиолокационной
станцией визирования цели, обнаружение и захват на автосопро-
вождение. Поэтому поиск низколетящих целей осуществляется
всеми станциями. Радиолокационными станциями сопровождения,
имеющими невысокие поисковые возможности, выделяются секто-
ры для самостоятельного поиска низколетящих целей.
Во время поиска оператор устанавливает антенну по углу ме-
ста на угол 1-00, затем, плавно поворачивая антенну по азимуту
в пределах назначенного сектора, осуществляет поиск. При силь-
ном мешающем воздействии отражений от местных предметов
включается режим СДЦ. Вращая ручку компенсации ветра, опе-
ратор добивается подавления на экранах сигналов, отраженных
от местных предметов, и выделения сигнала подвижной цели. При
этом необходимо учитывать, что режим СДЦ несколько снижает
и без того малую дальность обнаружения, вследствие чего режим
применяется только в случае сильного влияния местных предме-
тов на обнаружение целей (например, при работе станции на
сильнопересеченной местности).
Отраженные сигналы от местных предметов затрудняют не
только обнаружение, но и сопровождение низколетящих целей.
Большая мощность сигналов, отраженных от местных предметов,
может привести к неустойчивому автосопровождению цели по
дальности или к срыву автосопровождения. В этом случае расчет
переходит на смешанное сопровождение цели: полуавтоматическое
или ручное по дальности и автоматическое по угловым коорди-
натам.
В радиолокации так же, как и в оптике, существует понятие
зеркального отображения предмета-антипода. Яркость антипода
зависит от подстилающей поверхности. Она особенно велика при
полете цели над равнинной поверхностью, над заснеженными мас-
сивами, над водной гладью.
Угловое расстояние между целью и ее антиподом зависит от
высоты и дальности до цели. Для каждого значения высоты име-
ется свой отрезок дистанции, на котором угловое расстояние меж-
ду целью и антиподом не превышает ширины диаграммы направ-
ленности антенны. Поэтому при сопровождении приближающейся
цели, которая была обнаружена на большей дальности, угловое
расстояние между целью и антиподом сначала минимальное.
Цель и антипод одновременно находятся в диаграмме направлен-
ности антенны. При уменьшении дальности угловое расстояние
между целью и ее антиподом увеличивается.
Участок дистанции, на котором цель и антипод могут одновре-
менно находиться в диаграмме направленности антенны станции,
является наиболее тяжелым и неустойчивым для автосопровожде-
200
ния. На данном участке угловая автоматика отслеживает энерге-
тический центр между двумя блестящими точками. Из-за сильной
флюктуации сигналов цели и антипода энергетический центр по-
стоянно изменяет свое положение, а антенна совершает «клевки»
от цели к земле и назад. При этом расчет должен находиться в
постоянной готовности к срыву автосопровождения по угловым ко-
ординатам и немедленному поиску потерянной цели. В тех случа-
ях, когда на участке слияния цели с антиподом автосопровожде-
ние систематически срывается, цель от момента обнаружения до
окончания прохождения этого участка сопровождается по угловым
координатам вручную в режиме ПОИСК.
Пуск ракеты осуществляется после прохождения целью участ-
ка неустойчивого автосопровождения, т. е. после разделения цели
и антипода.
По мере накопления опыта в поиске и сопровождении низколе-
тящих целей на данной позиции операторы привыкают к местно-
сти и правильно выбирают наиболее подходящий способ сопро-
вождения цели, момент пуска ракеты и оценивают необходимость
включения режима СДЦ.
Устойчивость и точность сопровождения цели по угловым ко-
ординатам можно повысить, используя оптический визир. Поэтому
при обнаружении цели на экране оптического визира расчет дол-
жен переходить к сопровождению цели с его помощью.
Жесткий лимит времени при стрельбе по низколетящим целям
приводит к необходимости держать пусковые установки и ракеты
в готовности к немедленному пуску, т. е. электроприводы пусковых
установок должны быть включенными, а ракеты находиться на
подготовке.
7. Оценка результатов стрельбы
При встрече ракеты с целью проводится оценка результатов
стрельбы, на основании которой должен быть сделан вывод о по-
ражении или непоражснии цели. После этого принимается реше-
ние о прекращении стрельбы или о необходимости повторного об-
стрела.
Поскольку оценка результатов стрельбы должна быть прове-
дена в минимально короткий срок, она проводится путем анализа
нескольких признаков.
При сближении ракеты с целью контролируется выдача коман-
ды на взведение ее радиовзрывателя. В момент подрыва ракеты
пропадает ответный сигнал. Подрыв сопровождается значитель-
ным кратковременным увеличением эффективной площади рас-
сеяния, в результате чего на экране индикатора появляется сиг-
нал, отраженный от обломков ракеты. Длительность этого сигна-
ла превосходит длительность импульса цели, а форма — сильно
изрезанная. Вид экрана индикатора дальности при встрече раке-
ты с целью и при подрыве ракеты показан на рис. 16.7 и 16.8.
201
л л
V
Рис. 16.7. Вид экрана индикатора дальности в момент встречи ра-
кеты с целью:
/ — импульс цели; 2 — ответный сигнал ракеты
Рис. 16.8. Вид экрана индикатора дальности в момент подрыва
ракеты у цели
Угловое смещение цели и ракеты контролируется по показани-
ям шкал положения антенн радиолокационных станций визирова-
ния цели и визирования ракеты. В момент подрыва угловые коор-
динаты цели и ракеты должны быть одинаковыми, т. е. не иметь
взаимного смещения. В качестве вспомогательного источника ин-
формации о результате стрельбы может быть использована вели-
чина команд управления, выдаваемых на ракету. При подходе ра-
кеты к цели величина команд должна быть близкой к нулю.
При поражении цели на экране индикатора наблюдается дроб-
ление сигнала цели; высота полета цели и угол места резко умень-
шаются. Если цель являлась постановщиком помех, то прекраща-
202
ется сброс дипольных отражателей пассивной помехи или наблю-
дается пропадание сигналов активных помех.
В условиях достаточной видимости на экране оптического ви-
зира наблюдается сближение ракеты с целью, подрыв ракеты,
воспламенение или разрушение цели.
Совокупность перечисленных признаков позволяет расчету в
течение нескольких секунд правильно оценить результат
стрельбы.
В некоторых случах бывает достаточно наблюдения одного
признака, чтобы с уверенностью сделать вывод о результате
стрельбы. Чаще всего это бывает при непоражении цели. К таким
признакам относится подрыв ракеты (пропадание ответного сиг-
нала) до встречи ее с целью или нелропадание ответного сигнала
ракеты после встречи ракеты с целью.
Глава XVII
РАКЕТНО-СТРЕЛКОВАЯ ПОДГОТОВКА
1. Методы наведения
Совокупность объекта управления (ракеты) и автоматического
устройства, предназначенного для обеспечения управляемого дви-
жения ракеты, называется системой автоматического управления
зенитной ракетой или просто системой управления.
Система телеуправления характеризуется тем, что команды
управления вырабатываются вне ракеты и передаются на нее по
радио.
Управлять ракетой — это значит изменять ее скорость как по
величине, так и по направлению, что достигается непрерывным из-
менением положения органов управления. Порядок отклонения
органов управления определяется принятой системой управления,
характером движения ракеты (цели) и методом наведения.
Метод наведения — это закон сближения ракеты с целью, обес-
печивающий при любом способе перемещения заданное движение
ракеты для встречи ее с целью. При телеуправлении используются
следующие методы наведения:
метод трех точек (метод накрытия цели);
методы спрямления траектории движения цели;
метод параллельного сближения.
Метод трех точек
Методом трех точек называется такой метод наведения, при
котором на протяжении всего времени движения центр масс раке-
ты находится на прямой, соединяющей пункт управления с целью.
Пусть цель движения по траектории АОАВ со скоростью Удо,
203
а пункт управления ракетой находится в точке О (рис. 17.1). Тог-
да при нахождении цели в точке Ао ракета должна находиться на
линии ОАо, предположим, в точке Ро. За это время, пока цель пе-
рейдет в точку Ai, ракета должна переместиться на прямую OAi
РИС. 17.1. Траектория движения ракеты при наведении мето-
дом трех точек или методом спрямления
и находиться в точке Рь Продолжая построение траектории таким
же путем, получим точку Р2 и, наконец, точку встречи ракеты с
целью в точке Ав.
Очевидно, для такого построения траектории необходимо за-
даться скоростью движения ракеты V и цели Уц, а также проме-
жутками времени А/ и предварительно вычислить отрезки:
A$u. = IZuA/z;
bSpl = V
которые за определенный промежуток времени А/ пройдут ракета
и цель.
Из рассмотрения следует, что ракета будет двигаться по тра-
ектории, заданной методом наведения, в том случае, когда углы,
определяющие положение ракеты и цели (азимут 0 и угол места
е), будут равны, т. е. если
Р(0 = ?ц(0.
Эти уравнения и есть уравнения метода трех точек.
Если углы не будут равны, т. е. имеет место сигнал-ошибка:
As = £ц - ед;
др Рц рД)
где ед, рд — действительные значения углов, определяющих поло-
204
жение ракеты и цели, то необходимо ввести корректуру, обеспечи-
вающую устранение ошибок Де и Д0.
Если ракета находится на дальности г, то линейные отклоне-
ния можно записать в следующем виде:
Лг = г(гц —е);
А3= г(?ц — Ю COS ец.
Умножение на cos ец позволяет определить линейные отклоне-
ния в горизонтальной плоскости.
Рассмотрим возможности использования метода трех точек при
наведении ракеты на цель. Предположим, что цель движется в
вертикальной плоскости, проходящей через пункт управления
Рис. 17.2. Возможность использования метода
трех точек
Пусть цель движется по траектории АВ со скоростью Уц.
Рассмотрим процесс наведения ракеты на цель и выясним ха-
рактер движения ракеты при заданном движении цели.
Прежде всего заметим, что для непрерывного наведения раке-
ты на цель необходимо, чтобы радиус — вектор ракеты вращался
с той же скоростью, что и радиус — вектор цели, иначе при на’ве-
дении ракета отстанет от цели, т е. должно быть выполнено сле-
дующее условие:
W wu.
где w и Wn — угловые скорости вращения радиусов — векторов ра-
кеты и цели соответственно.
Нормальную составляющую скорости радиуса-вектора можно
представить в виде гцадц. С другой стороны, проектируя вектор
скорости цели на нормаль, получщм нормальную составляющую
скорости, т. е. Гц sin 8Ц.
205
Сравнивая эти выражения, получим
Vusin ец
^ц =--------- .
г ц
Если обозначить направление вектора скорости ракеты углом
0, то, рассуждая аналогично, получим
V sin (0 — е)
w =-----------.
. г
Подставляя эти зависимости в выражение получим
V sin (0— е) Уц81пец
Г Г
Если 0 — е = 90°, т. е. если вектор скорости ракеты перпенди-
кулярен радиусу-вектору, то при заданных V и г левая часть до-
стигает максимального значения. Это предельное положение век-
тора скорости, при котором еще возможно наведение, так как при
0 — е >90° ракета будет не приближаться, а удаляться от цели.
Поэтому, полагая sin (0 — е) = 1 и решив уравнение относитель-
но г с использованием только знака равенства, получим
V 1
г = Гц----------.
I/ Ц S1 11 Сц
Проанализируем эту зависимость.
При V= Иц, а г = Гц и sin 8= 1 получаем предельную точку,
где еще может осуществляться наведение. Очевидно, что это одна
из точек, граничащих с кривой. Если менять 8Ц от 0 до 180°, то по-
лучим граничную кривую R. Выше этой кривой наведение невоз-
можно при V Иц и возможно только при V > Ип. Ниже этой
кривой возможно наведение даже при условии, что И < Иц.
Характер траектории движения ракеты будет зависеть от угла
пуска. При углах пуска от 0 до 38° траектории заканчиваются на
правой ветви кривой R. Кривизна такой траектории изменяется от
нуля в начале траектории и достигает бесконечности. Если угол
пуска изменяется от 38,5 до 90°, то траектория ракеты, начинаясь
в первой четверти координатной плоскости, заканчивается во вто-
рой четверти, асимметрически приближаясь к прямой АВ. Кривиз-
на траектории достигает максимума где-то на середине траекто-
рии, а затем уменьшается и стремится к нулю.
Метод трех точек нашел широкое применение благодаря про-
стой приборной реализации, высокой надежности при стрельбе по
малоскоростным, маневрирующим целям, а также по постановщи-
кам помех. Но при стрельбе по скоростным целям ракеты имеют
большую крутизну траектории и, следовательно, большие пере-
грузки. Кроме того, во всех случаях в момент сближения ракеты
с целью возрастают нормальные кинематические ускорения. Все
эти недостатки ограничивают применение метода.
206
Методы спрямления траектории
Команды управления можно сформулировать так, что ракета
будет находиться в упрежденной точке (рис. 17.1), а затем наво-
диться на цель с уменьшением угла упреждения. При этом весь-
ма выгодно, чтобы на последнем участке траектория ракеты пред-
ставляла собой прямую линию.
Уравнения метода спрямления будут иметь следующий вид:
е = ец-----Ьг,
v hr
где we и tc’p—скорости изменения величин углов е и 0;
VSr — скорость изменения величины Аг;
Дг — расстояние между ракетой и целью.
we
Значение угла упреждения, определяемое величинами ~
V&г
и Ьт , может достигать 15—20°, что вызывает затруднения в
Дг
приборной реализации: нужны различные антенны слежения за
ракетой и целью. Кроме того, при маневре цели заметно меняется
угол упреждения, а это приводит к отклонению траектории от
прямой линии. Поэтому метод спрямления в таком виде не нашел
практического применения. На практике используется метод по-
ловинного спрямления, уравнения которого записываются в сле-
дующем виде:
Как видно из формулы, угол упреждения в два раза уменьша-
ется, что облегчает приборную реализацию и уменьшает влияние
маневра цели, но недостатком является необходимость измерения
дальности до цели и ракеты.
Метод параллельного сближения
Можно найти такой способ введения корректур, при котором
линия, соединяющая ракету и цель, не вращается. Такой метод
наведения называется методом параллельного сближения. Из
рис. 17.3 видно, что линии РЦ, Р1Ц1, Р2Ц2 и т. д. параллельны
друг другу.
Метод параллельного сближения характерен тем, что наведе-
ние ракеты все время производится в упрежденную точку Ау, в
которой ракета должна встретиться с целью. Если цель движется
по прямой с постоянной скоростью, то и ракета, двигаясь с посто-
янной скоростью, будет наводиться по прямой РАУ. Когда цель
движется с переменной скоростью, ракета, летящая с постоянной
207
скоростью, будет наводиться по кривой РА'У, если скорость цели
уменьшается, или по кривой РА"У, если скорость цели возрастает.
Если на изменение скорости цели ракета будет непрерывно реаги-
ровать соответствующим изменением своей скорости, то траекто-
рия движения ракеты, как прежде, будет прямой линией. При
этом методе траектория полета ракеты получается наименьшей
крутизны, по неманеврирующей цели с постоянной скоростью она
будет представлять собой прямую линию.
Недостаток этого метода — сравнительно сложная бортовая ап-
паратура.
Расчеты показывают, что в реальных условиях наведения ра-
кеты на цель кривизна траектории ракеты при методе параллель-
ного сближения меньше, чем при других методах наведения.
2. Зона поражения при стрельбе комплекса
Область пространства, в которой цель может быть поражена
комплексом с заданной вероятностью, называется зоной пораже-
ния. Для рассмотрения характеристик зоны поражения введем
пространственную систему координат (рис. 17.4) с началом коор-
динат в точке стояния комплекса (СНР). Зона поражения привя-
зывается к направлению движения цели так, что ось ОХ всегда
параллельна направлению движения цели.
Зона поражения имеет сложную конфигурацию, а ее размеры
зависят от метода наведения, маневренных характеристик ракеты
и цели, размеров ЭПР цели и других факторов. Обстрел цели мо-
жет осуществляться как при ее движении к комплексу, так и при
ее удалении от него. В этом случае различают стрельбу на встреч-
ных и на догонных курсах. Размеры зоны поражения на догонных
курсах несколько меньше, чем на встречных (особенно на средних
и больших высотах), что определяется уменьшением разности ско-
ростей ракеты и цели.
Зону поражения можно характеризовать ее вертикальным и
горизонтальным сечениями, помня при этом, что вертикальное се-
208
чение зоны существенно зависит от параметра движения цели, а
горизонтальное — от высоты.
Чтобы получить вертикальное сечение зоны поражения
(рис. 17.5), необходимо рассечь ее координатной плоскостью ХОН
Рис. 17.4. Вид пространственной зоны пораже-
ния при стрельбе навстречу
или плоскостью, ей параллельной. Для получения горизонтально-
го сечения зоны поражения ее необходимо рассечь плоскостью,
параллельной координатной плоскости ХОР.
Зона поражения характеризуется следующими параметрами:
дальностью до дальней границы зоны;
дальностью до ближней границы зоны;
максимальной наклонной дальностью;
максимальной высотой поражаемой цели;
минимальной высотой поражаемой цели;
максимальным курсовым параметром цели.
Рассмотрим, чем определяются характеристики зоны поражения.
Дальность до ближней границы зоны поражения определяется
в основном характеристиками СНР, досягаемостью ракеты и воз-
можностью обеспечения требуемых перегрузок.
Дальность до ближней границы зоны поражения определяется
скоростью и временем полета ракеты до ее вывода на траекторию
требуемого движения. Это время слагается из времени неуправ-
ляемого полета ракеты /н и времени вывода ракеты на траекто-
рию требуемого движения tB.
Аэродинамическая система управления начинает работать
только после достижения ракетой скорости, обеспечивающей уп-
равление. Этим и определяется время неуправляемого полета.
Время вывода на траекторию требуемого движения определя-
14 Зак. 3112дсп 209
н
Рис. 17.5. Вертикальные и горизонтальные сечения зоны по-
ражения
ется ошибками встреливания, быстродействием системы управле-
ния и располагаемой перегрузкой ракеты.
Максимальная высота, на которой может быть поражена цель,
определяется энергетическими характеристиками ракеты и конст-
рукцией двигателя. Минимальная высота определяется способ-
ностью комплекса исключить или уменьшить влияние Земли на
процесс сопровождения цели СНР и процесс наведения ракеты на
цель, на работу радиовзрывателя ракеты.
Величину зоны поражения определяют также некоторые допол-
нительные факторы: условия встречи ракеты с целью, возможно-
сти пуска ракеты под требуемым углом, возможность и точность
учета углов скручивания и т. п.
При обстреле цели надо рационально использовать всю зону
поражения для последовательного обстрела одной цели несколь-
кими ракетами. Если ракеты на встречном курсе не обеспечили по-
ражения, комплекс должен продолжать обстрел цели стрельбой
вдогон.
3. Точность наведения ракеты на цель.
Ошибки, сопровождающие стрельбу
Для наведения ракеты на цель необходимо непрерывно управ-
лять ее вектором скорости, иными словами, по какому-то правилу
210
изменять направление движения. Правила эти формируются систе-
мой управления в зависимости от способа управления и метода
наведения. Положение вектора скорости в пространстве определя-
ется двумя углами (рис. 17.6): курсовым углом вектора скорости
ср и углом наклона вектора скорости к горизонту 0. Угол ф опреде-
Рис. 17.6. Положение вектора скоро-
сти в пространстве
ляет изменение направления скорости в горизонтальной плоскости,
а угол 0 — в вертикальной.
Исходя из этого управление ракетой производится в вертикаль-
ной и боковой плоскостях, для этого создаются два независимых
канала управления. Каналы управления будут независимы в том
случае, если не будет углов крена и будет учтено влияние углов
скручивания координат.
Положение ракеты относительно вектора скорости определяет-
ся углами атаки а и скольжения £ (рис. 17.7), причем вертикаль-
ная плоскость симметрии ракеты, содержащая оси ОХх и ОУЬ
находится в плоскости угла а.
Рис. 17.7. Положение ракеты отно-
сительно вектора скорости
Управляющие силы для управления ракетой создаются поворо-
том органов управления (рулей, крыльев), причем, поворачивая
рули 1, 3, создаем управляющую силу в боковом направлении, а
14*
211
поворачивая рули, им перпендикулярные,— 2, 4, создаем управ-
ляющую силу в вертикальной плоскости. Таким образом, ориенти-
ровка управляющих сил жестко связана с ориентировкой ракеты,
с положением связанной с ракетой системы координат ОХЬ Уь Zb
Пусть аир равны нулю. Тогда ось ракеты ОХ\ будет совпа-
дать с вектором скорости Г. При повороте рулей 1, 3 создается уп-
равляющая сила в вертикальной плоскости. Она приводит к изме-
нению направления вектора в боковой плоскости. Меняя положе-
ние рулей 2, 4, можно изменить направление вектора скорости в
вертикальной плоскости. Если же ракета совершит поворот вокруг
оси 0X1 (создается угол крена ракеты), управляющие силы будут
лежать не в своих плоскостях; при этом согласованность управле-
ния будет нарушена. Отсюда следует необходимость стабилизации
ракеты по крену или учета этого угла.
В процессе наведения положение цели и ракеты фиксируется в
измерительной системе координат: 0 — азимут, е — угол места,
Д — наклонная дальность (рис. 17.8). Команды же управления от-
рабатываются в исполнительной системе координат (OX\Y\Zx).
Рис. 17.8. Измерительная и исполнительная си*
стемы координат
Измерительная система координат в процессе наведения на цель
непрерывно проворачивается вокруг оси ОУз, а исполнительная
система координат непрерывно движется и поворачивается вместе
с ракетой.
Очевидно, законы вращения для этих систем координат будут
разными. Этот процесс называют скручиванием координат. По-
скольку команды управления вырабатываются в измерительной
системе координат, а действуют в исполнительной системе, возни-
кает обязательное требование учета скручивания координат, т. е.
учета проворачивания исполнительной системы координат относи-
тельно измерительной. В противном случае происходит завязка ка-
налов управления: команды вертикального канала попадают в бо-
ковой, и наоборот.
212
Угол скручивания учитывают различными методами. Если
скручивание координат скомпенсировано достаточно точно, каналы
управления становятся независимыми.
Заметим дополнительно, что при больших углах атаки и сколь-
жения также возникает связь между каналами, поэтому систему
управления проектируют так, чтобы эти углы были небольшими.
Для наведения ракеты создается система управления, которая
должна быть устойчивой, с требуемым качеством управления. Как
любая система управления, система наведения работает с ошибка-
ми, которые можно разделить на динамические, инструментальные
и флюктуационные.
Сущность динамической ошибки сводится к тому, что происхо-
дит отставание или опережение в выработке требуемой величины
команды. Пусть требуется выработать команду, соответствующую
кривой а (рис. 17.9). На участке О А величину команды необходи-
мо непрерывно увеличивать. Однако система управления в силу
своей инерционности не в состоянии следить за нарастающей по-
требностью в команде, поэтому величина вырабатываемой коман-
ды будет все время меньше требуемой (кривая б). Разница между
ординатами и есть динамическая ошибка йд.
После точки 1 темп нарастания команды меняется, система же
управления в силу своей инерционности начинает работать с опе-
режением, поэтому суммарная ошибка через некоторое время по-
лучится положительной. Если бы к точке А динамическая ошибка
была компенсирована, то на участке АВ произошло опережение по
величине команды, при этом ошибка была бы положительной.
Это можно проследить на следующем аналогичном примере.
Предположим, что на железнодорожной платформе лежит шар.
Если платформа стоит на месте, шар тоже стоит на месте. С на-
213
чалом движения шар отстает (катится назад относительно плат-
формы); чем больше нарастает скорость (чем больше положитель-
ное ускорение), тем дальше катится шар по платформе назад от
своего исходного положения. Но вот платформа замедлила движе-
ние, скорость начала падать (ускорение изменило знак, стало от-
рицательным), шар, поначалу замедлив движение назад, остано-
вился, а затем начал двигаться вперед. Его положение относитель-
но исходного и характеризует влияние динамичности процесса.
Как видно, величина динамической ошибки тем больше, чем
быстрее нарастает потребная команда, и тем меньше, чем чувст-
вительнее система, т. е. менее инерционная. Поэтому приближенно
ее вычисляют по формуле
где w — ускорение;
К— коэффициент усиления системы.
Динамическая ошибка обычно компенсируется в системе управ-
ления.
Инструментальная ошибка определяется теми допущениями и
неточностями, которые возникают при выработке, передаче, преоб-
разовании команд и при их отработке ракетой. Как правило, вели-
чина и знак этих ошибок случайны, поэтому учесть их невозмож-
но. При проектировании системы управления стремятся к тому,
чтобы инструментальные ошибки были в допущенных пределах.
Флюктуационная ошибка определяется флюктуацией (пульса-
цией) отраженного от цели сигнала, сигнала от ракеты и шумами
устройств системы управления.
Флюктуация отраженного от цели и ракеты сигнала — неиз-
бежное явление. Цель непрерывно меняет свое положение относи-
тельно измерительной системы координат, изменяется эффектив-
ная поверхность рассеивания электромагнитной энергии. Флюктуа-
ции увеличиваются при появлении активных и пассивных помех,
при стрельбе по групповой цели, так как в этом случае происходит
случайное сопровождение одной из нескольких целей или энерге-
тического центра.
Флюктуация в аппаратуре системы управления является след-
ствием внутренних шумов, температурного и вибрационного воз-
действия и т. п.
В результате воздействия всех этих факторов ракета не точно
наводится на цель, а с какой-то ошибкой, которую можно пред-
ставить как ошибку в картинной плоскости (рис. 17.10). В принци-
пе можно выделить систематическую и случайную йСл составляю-
щие ошибки наведения. Ошибка стрельбы включает кроме ошибки
наведения ошибку в срабатывании радиовзрывателя и боевой ча-
сти. Поэтому под ошибкой стрельбы понимают случайный вектор
а, начало которого в момент разрыва боевой части ракеты совме-
щено с центром цели, а конец — с центром боевой части.
214
Рис. 17.10. Вид ошибок стрельбы в кар
тинной плоскости
4. Понятие эффективности стрельбы комплекса.
Оценка эффективности стрельбы комплекса
Эффективность стрельбы — это важнейшее свойство комплекса,
характеризующее соответствие комплекса способности уничтожать
воздушные цели. Она существенно зависит от следующих фак-
торов:
характеристик комплекса: дальности обнаружения целей, точ-
ности наведения ракеты, мощности боевой части, дальности дейст-
вия и согласования работы радиовзрывателя с боевой частью;
характеристик воздушной цели: типа цели, ее размеров, числа
и расположения уязвимых отсеков, прочности отсеков;
условий встречи ракеты с целью: взаимного расположения ра-
кеты и цели в момент подрыва боевой части, скорости и направле-
ния движения цели, расположения точки встречи ракеты с целью
в зоне поражения;
противодействия противника: применения помех радиотехниче-
ским устройством комплекса, маневра цели против управления ог-
нем и против стрельбы, огня воздушного противника, артиллерии
и ракет по району расположения комплекса, ведения огня борто-
вым оружием по приближающимся ракетам;
качества работы боевого расчета и материальной части комп-
лекса: своевременного обнаружения цели (самостоятельно или по
целеуказанию), объективного и своевременного опознавания госу-
дарственной принадлежности цели, своевременной и точной подго-
товки исходных данных для стрельбы, своевременного осуществле-
ния пуска ракет; устойчивого и достаточно точного сопровождения
215
цели в любых условиях воздушной обстановки (в условиях радио-
помех, при маневре цели, использовании целью маскирующих
свойств местности и т. п.), быстрой и объективной оценки резуль-
татов стрельбы, своевременного принятия решения на повторный
обстрел цели в случае ее непоражения.
Рассматривая факторы, влияющие на эффективность стрельбы,
можно заметить, что практически все они существенно зависят от
умелых и слаженных действий боевых расчетов, качества подго-
товки материальной части к стрельбе, поддержания комплекса в
необходимых степенях готовности. Таким образом, чем выше уро-
вень знаний и практических навыков по ракетно-стрелковой под-
готовке и боевой работе у личного состава боевых расчетов и чем
лучше качество подготовки материальной части к ведению боя,
тем выше эффективность стрельбы комплекса.
Рассмотрим наиболее употребительные показатели эффективно-
сти стрельбы.
Если в область боевых действий комплекса входит одиночная
цель, то в результате обстрела она может быть поражена, т. е.
приведена в такое состояние, которое не позволяет ей выполнить
боевую задачу, или не поражена. Оба исхода являются случайны-
ми событиями, им отвечают определенные вероятности, которые
показывают, как часто будут повторяться эти исходы при много-
кратном проведении подобных стрельб. Вероятность является пол-
ной характеристикой случайного события. На этом основании в
качестве показателя эффективности стрельбы по одиночной цели
принимается вероятность ее поражения.
При стрельбе по групповой цели могут быть уничтожены все
самолеты или часть их, входящая в групповую цель. Каждый из
исходов имеет определенную вероятность. Следовательно, резуль-
тат стрельбы по групповой цели является случайной величиной;
его необходимо характеризовать законом распределения случайной
величины. Обычно расчет совокупности таких вероятностей связан
с большими вычислительными трудностями, поэтому на практике
пользуются более простым показателем, а именно математическим
ожиданием числа пораженных самолетов, которое показывает,
сколько в среднем будет поражено самолетов из состава группо-
вой цели при многократном проведении аналогичных стрельб.
Рассмотрим методы расчета эффективности стрельбы комплек-
са по одиночным и групповым целям.
Эффективность стрельбы одной ракетой по одиночной цели обо-
значим Ее содержание рассмотрим на следующем примере.
Допустим /?! = 0,6, это означает, что 60% пущенных ракет будут
сбивать воздушные цели, 40% пусков ракет не наносят ущерба
обстреливающим целям.
Эффективность стрельбы очередью, состоящей из п ракет, по
одиночной цели обозначим Rn. Под очередью понимается обстрел
цели несколькими ракетами без оценки результатов отдельных пу-
сков. Эффективность такой стрельбы является сложным событием,
216
представляющим собой нанесение поражения цели несколькими
ракетами.
Допустим, что каждая ракета имеет следующую вероятность
поражения цели:
первая — /?*!;
вторая — R2i;
третья — ;
n — Rni.
Искомая вероятность поражения цели вычисляется из следую-
щей зависимости:
= —/??) (1 ... Х(1-/??)•
Выражения в скобках представляют собой вероятности непора-
жения цели первой^второй, третьей, , n-й ракетами. Обозначим
их соответственно Я1!, jh2i, ...» Rn\. Произведение вероятностей
непоражения цели первой, второй, ... , n-й ракетами представляет
собой _вероятность_ непоражения цели очередью _п ракет. При
Л11 = 7?21= ... =jR3i=7?i эта вероятность равна (Л1)п, а вероят-
ность противоположного события, состоящего в поражении цели
какой-либо ракетой очереди, равна
Пример. Стрельба ведется двумя ракетами очередью. Ве-
роятность поражения цели одной ракетой (как первой, так и вто-
рой) /?1 = 0,6.
Вычислим вероятность поражения цели двумя ракетами (/?2).
Для проведения расчета воспользуемся выражением Rn=\—(Ri)n,
предварительно определив вероятность непоражения цели одной
ракетой:
д1=1—Я1==1—0,6=0,4;
= 1 - Ш2 = 1 - (0,4)2 = 0,84.
Эффективность стрельбы по групповой цели обычно оценивает-
ся математическим ожиданием числа сбитых самолетов (других
летательных аппаратов), образующих групповую цель. При расче-
те математического ожидания числа сбитых целей будем полагать,
что одна ракета может сбить только один самолет, входящий в
состав групповой цели.
Последовательность определения математического ожидания
сбитых самолетов рассмотрим на конкретном примере. Стрельба
ведется двумя ракетами очередью по групповой цели, состоящей
из двух самолетов. Примем, что вероятность поражения одного са-
молета одной ракетой /?ь тогда вероятность непоражения самоле-
та одной ракетой R\ = 1—R{. При обстреле групповой цели из двух
самолетов могут быть получены следующие результаты:
Ai = 0 (ни один самолет не сбит);
А2= 1 (сбит один самолет);
А3=2 (сбито два самолета).
217
Вычислим вероятность Р получения таких результатов.
Для А1 = 0 Pi=(7?i)2 — вероятность того, что оба самолета бу-
дут не поражены. _
Для Аг=1 Р2=2 —вероятность того, что один самолет
сбит, а другой — нет. Таких комбинаций может быть две: пер-
вый — сбит, второй — нет; второй — сбит, первый — нет.
Для Аг= 1 Рз=(/?1)2 — вероятность того, что оба самолета
сбиты.
Ai, Аг, Аз представляют собой частные значения случайной ве-
личины (случайной величиной является результат стрельбы), а
Pi, Р2, Рз — вероятности их появления. Искомое математическое
ожидание М равно сумме произведений частных значений случай-
ной величины на вероятности их появления, т. е.
М = AjPj 4~ А2Р2 + А3Р3.
Примем Ri = 0,6 и вычислим величину М:
М = Aj 4“ A22R1R1 4* A3R2 = 0-0,42 4“ 1 *2 -0,6 -0,4 4-
+ 2 • 0,62 = 0 4- 0,48 + 0,72 = 1,2.
Полученное число показывает, что при большом количестве
стрельб, произведенных двумя ракетами, имеющими эффектив-
ность стрельбы Ri = 0,6, по парным групповым целям, в среднем
будет сбиваться за одну стрельбу один-два самолета; иными сло-
вами, например, из двухсот самолетов, образующих сто парных
целей, за сто стрельб двумя ракетами может быть сбито 120 са-
молетов.
218
ПЕРЕЧЕНЬ УСЛОВНЫХ СОКРАЩЕНИЙ
ABC АВЗРК АЛУ АПКП АП АПП АПВ АПЧ АПЧМ АРУ АС АСУ АСЦ АФС БКП БМ БЧ ВВС ВАД вк ВИМ ВОП ВРД всо вч ГАК ггс ГУПЧ гш ДНА ЖРД ЗИП зрбатр ЗРК ЗУР ипм ИПП — антенно-волноводная система — автономный войсковой зенитный ракетный комплекс — арифметическо-логическое устройство — аппаратура предстартового контроля и пуска — автопилот — аппаратура приема-передачи — автомат перестройки волн — автоматическая подстройка частоты — автоматическая подстройка частоты магнетрона — автоматическая регулировка усиления — автоматическое сопровождение — автоматизированная система управления — автоматическое сопровождение цели — антенно-фидерная система — батарейный командирский пункт — боевая машина — боевая часть — Военно-Воздушные Силы — воздушный аккумулятор давления — вычислительный комплекс — временная импульсная модуляция — вертолет огневой поддержки — воздушно-реактивный двигатель — выделение сигнала ошибки — высокая частота — гироазимут-компас — громкоговорящая связь — главный усилитель промежуточной частоты — генератор шума — диаграмма направленности антенны — жидкостный ракетный двигатель — запасной инструмент и принадлежности — зенитная ракетная батарея — зенитный ракетный комплекс — зенитная управляемая ракета — измеритель проходящей мощности — индикатор поиска и пуска
219
КИПС —контрольно-измерительная подвижная станция
КП — командный пункт
КРАС — контрольно-ремонтная автомобильная станция
КСА — комплекс средств автоматизации
КУА —канал угловой автоматики
ЛБВ —лампа бегущей волны
МАРУ — мгновенная автоматическая регулировка усиления
МПВ —малая постоянная времени
НИП —несинхронная импульсная помеха
НАР —неуправляемая авиационная ракета
НРЗ —наземный радиолокационный запросчик
НУРС — неуправляемый радиоактивный снаряд
ОЗУ —оперативное запоминающее устройство
ОМП —оружие массового поражения
ПА —полуавтомат
ПАЗ — полуавтоматическое сопровождение
ПВН —пост воздушного наблюдения
ПЗРК —переносной зенитный ракетный комплекс
ПЗУ —постоянное запоминающее устройство
ПИ —прерывистое излучение
ПИМ —предохранительно-исполнительный механизм
ПНС —программное наведение станции
ПРВ — подвижной радиовысотомер
ПРР —противорадиолокационная ракета
ПСК — пульт съема координат
ПУ — пусковая установка
РВ — радиовзрыватель
РДТТ —ракетный двигатель твердого топлива
РЛС —радиолокационная станция
РЛС ВР —радиолокационная станция визирования ракеты
РЛС ВЦ —радиолокационная станция визирования цели
РУ —ручное управление
РЭБ — радиоэлектронная борьба
РРУ — ручная регулировка усиления
СВН —средства воздушного нападения
СВР —станция визирования ракеты
СВЧ —сверхвысокая частота
СДЦ — селекция движущихся целей
СИД — система измерения дальности
СКВТ —синусно-косинусный вращающийся трансформатор
СНР — станция наведения ракет
СОЦ —станция обнаружения и целеуказания
СП —стартовая позиция
СПВРД —сверхзвуковой прямоточный воздушно-реактивный
двигатель
СПЗ — схема переменной задержки
СПК —станция передачи команд
СРЦ —станция разведки целей
СРП —счетно-решающий прибор
220
ССЦ — станция сопровождения целей
СУА —система управления антеннами
СЭП — система электропитания
ТАСР — точное автоматическое сопровождение ракеты
ГАСЦ — точное автоматическое сопровождение цели
ТЗК —труба зенитная командирская
ТЗМ —транспортно-заряжающая машина
ТМ —транспортная машина
ТОВ —телевизионный оптический визир
ТСТ —технологическая стыковочная тележка
УБС — управление блокировкой и сигнализацией
УВЧ —усилитель высокой частоты
УОИ —устройство отображения информации
УПЧ — усилитель промежуточной частоты
УТС — учебно-тренировочные средства
УУ —устройство управления
ФД — фазовый детектор
ФК —функциональный контроль
ЧПК — череспериодная компенсация
ЦВМ —цифровая вычислительная машина
ЦУ — целеуказание
ЭВМ —электронная вычислительная машина
ЭМС —электромагнитная совместимость
ЭПР —эффективная площадь рассеивания
221
ОГЛАВЛЕНИЕ
Стр.
РАЗДЕЛ ПЕРВЫЙ. Тактическая подготовка............................................. 3
Глава I. Характеристика средств воздушного нападения .... —
1. Классификация средств воздушного нападения и их основные характе-
ристики .............................. . ......................—
2. Тактика применения средств воздушного нападения................................10
Глава II. Организация и ведение разведки воздушного противника 17
1. Радиолокационная разведка воздушного противника.................................—
2. Визуальная разведка и ее организация в подразделениях .... 19
Глава III. Основы боевого применения зенитных ракетных комплексов 22
1. Назначение и основы боевых действий зенитных ракетных подразделений
в современном бою....................................................... —
2. Боевые возможности зенитных ракетных комплексов...............................24
3. Боевой порядок зенитной ракетной батареи и его развертывание . 27
Глава IV. Боевые действия расчета (отделения) в основных видах боя 28
1. Обязанности начальника расчета (отделения) по управлению подразде-
лением в бою................................. ....................—
2. Действия расчета (отделения) в составе батареи в наступлении . . 29
3. Действия расчета (отделения) в составе батареи в обороне 31
4. Действия расчета (отделения) в составе батареи в особых условиях 33
Глава V. Передвижение подразделений зенитных ракетных комплексов 36
1. Цели и задачи передвижения........................................... ... —
2. Действия расчета (отделения) в составе батареи на марше —
3. Перевозка расчета (отделения) в составе батареи...............................39
4. Передвижение в особых условиях...................................... ... 41
Глава VI. Обеспечение боевых действий.............................................43
1. Основы обеспечения боевых действий и виды боевого обеспечения —
2. Разведка местности в подразделении............................................44
3. Защита от оружия массового поражения .... 45
4. Радиоэлектронная борьба............................................ ... 50
5. Инженерное обеспечение и маскировка .... ... 51
6. Топогеодезическое обеспечение...................................... ... 53
7. Непосредственное охранение и самооборона .... . . 55
Глава VII. Методика проведения тактико-строевого занятия с расчетом 57
1. Задачи, формы и методы обучения расчета (отделения) по тактической
подготовке............................................................ —
2. Подготовка и проведение тактико-строевого занятия с расчетом (отде-
лением) ................................... . . .... 58
РАЗДЕЛ ВТОРОЙ. Техническая подготовка.............................................65
Глава VIII. Автоматизированная система управления огнем ... —
1. Состав зенитного ракетного комплекса, назначение его основных эле-
ментов ................................................................. —
2. Принципы управления огнем.......................................... .... 67
3. Основные этапы обработки информации...........................................70
4. Принципы построения автоматизированной системы управления (АСУ) 73
222
Стр
5. Особенности и принципы работы систем приема целеуказания и топо-
привязки ................................. . . .... 80
Глава IX. Состав радиолокационных средств зенитных ракетных комп-
лексов. Радиолокационная станция обнаружения целей......................83
1. Назначение и состав радиолокационных средств........................................—
2. Принципы определения и передачи координат..........................................87
3. Радиолокационная станция обнаружения целей.........................................00
4. Особенности устройства подвижных радиовысотомеров (ПРВ) 97
Глава X. Радиолокационная станция наведения ракет....................................102
1. Назначение и состав станции наведения ракет ..................................... —
2. Включение аппаратуры станции ...... . . 106
3. Поиск цели.................................................................... 107
4. Автоматическое сопровождение цели .... ... 115
5. Помехозащищенность СНР.................................................... .... 121
6. Решение задач встреливания ракеты .... ... 124
7. Защита РЛС от ПРР............................................................. 127
8. Предстартовый контроль и пуск ракеты .... . . 128
9. Захват и автоматическое сопровождение ракеты....................................129
10. Управление полетом и подрывом ракеты.............................................130
И. Особенности работы по ТОВ и по низколетящей цели .... 134
12. Оценка результатов пуска ракеты............................................. ... 136
Глава XI. Стартовое и технологическое оборудование...................................137
1. Назначение и состав стартового и технологического оборудования —
2. Пусковая установка................................................................ —
3. Транспортно-заряжающая машина...................... . . 145
4. Технологическое оборудование..................... ... 146
Глава XII. Зенитные управляемые ракеты...............................................148
1. Аэродинамические схемы ЗУР ...... .... —
2. Общая компоновка ракеты, назначение и принцип работы основных
элементов.................................... . .... 149
3. Хранение ракет и подготовка их к стрельбе.........................................156
Глава XIII. Учебно-тренировочные средства............................................157
1. Средства обеспечения занятий и их назначение........................................—
2. Оборудование учебных классов................................ ... 159
3. Учебно-тренировочная аппаратура.............................. . 160
4. Работа на учебно-тренировочных средствах .... . . 161
Глава XIV. Техническое обслуживание..................................................162
1. Основы организации эксплуатации вооружения в подразделениях —
2. Обязанности номеров расчетов при проведении технического обслу-
живания .................................................................... .... 164
3. Организация и проведение текущего обслуживания....................................168
4. Организация и проведение технического обслуживания № 1 . . 169
5. Войсковой ремонт техники комплекса .... ... 171
6. Ремонтное оборудование.................... .... 174
7. Техническая документация................... ... —
РАЗДЕЛ ТРЕТИЙ. Специальная подготовка................................................177
Глава XV. Работа расчета при подготовке комплекса к стрельбе . —
1. Назначение и виды подготовки к стрельбе ... . —
2. Предварительная подготовка стрельбы .... ... 180
3. Непосредственная подготовка стрельбы..............................................182
4. Возможные пути сокращения времени подготовки к стрельбе . . 164
5. Подготовка технического потока к боевой работе...................................166
Глава XVI. Работа расчета при стрельбе в различных условиях боя 187
1. Работа расчета при стрельбе по одиночной цели без помех ... —
2. Особенности боевой работы при стрельбе в условиях активных помех 189
3. Особенности боевой работы при стрельбе в условиях пассивных помех 193
223
Стр.
4. Особенности работы расчета при применении ПРР....................196
5. Особенности стрельбы по целям, совершающим маневр высотой и
курсом.................................... .........................197
6. Особенности стрельбы по низколетящим целям.......................198
7. Оценка результатов стрельбы.................................. ... 201
Глава XVII. Ракетно-стрелковая подготовка............................203
1. Методы наведения................................................... —
2. Зона поражения при стрельбе комплекса ... ... 208
3. Точность наведения ракеты на цель. Ошибки, сопровождающие стрельбу 210
4. Понятие эффективности стрельбы комплекса. Оценка эффективности
стрельбы комплекса.................................................. 215
Перечень условных сокращений.................................... ... 219
Технический редактор Н. С. Шуршалова
Корректор Н. Д. Ключева
Сдано в набор 06.03.90. Подписано в печать 08.10.90.
Формат 60Х90Лв. Печ. л. 14. Усл. печ. л. 14. Усл. кр.-отт. 14,0. Уч.-изд. л. 15,43
Изд. Кв 13/5470дсп. Зак. 3112дсп
224