/

























































































































































































































































































































































































































































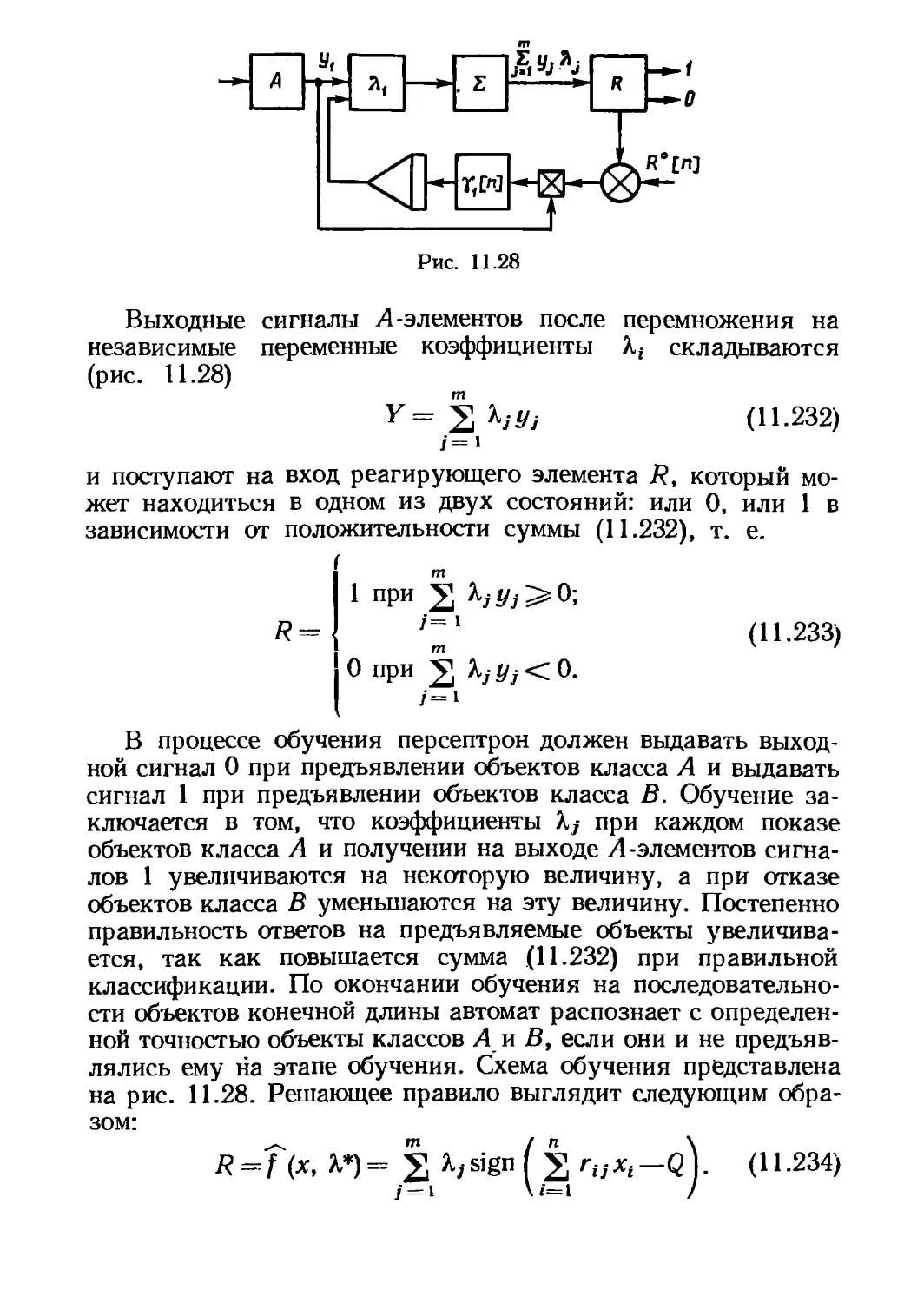

































Текст
ТЕОРИЯ
автоматического
УПРАВЛЕНИЯ
В двух частях
Под редакцией академика А. А. Воронова
Издание второе
переработанное и дополненное
Часть вторая
ТЕОРИЯ НЕЛИНЕЙНЫХ
И СПЕЦИАЛЬНЫХ СИСТЕМ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Допущено Министерством высшего
и среднего специального образования СССР
в качестве учебника для студентов вуюв,
обучающихся по специальности
.Автоматика и телемеханика"
МОСКВА
.ВЫСШАЯ ШКОЛА"
( 1986
ББК 32.965
Т 33
УДК 62-52
А. А. Воронов, Д. П. Ким, В. М. Лохин,
И. М. Макаров, П. Н. Попович, В. 3. Рахманкулов
Рецензенты:
кафедра Московского высшего технического училища
им, R Э. Баумана
(зав. кафедрой — чл.-кор. АН СССР Е. П. Попов),
чл.-кор. АН СССР С. В. Емельянов
(Всесоюзный научно-исследовательский институт
системных исследований)
Теория автоматического управления: Учеб. для ву-
ТЗЗ зов по спец. «Автоматика и телемеханика». В 2-х ч.
Ч. И..Теория нелинейных и специальных систем
автоматического управления. / А. А. Воронов. Д. П. Ким,
В. М. Лохин и др.; Под ред. А. А. Воронова.—
2-е изд., перераб. и доп. —М.: Высш. шк., 1986.—
504 с, ил.
в книге изложены методы исследования нелинейных систем, теория
линейных и нелинейных импульсных систем управления. Изложены
методы исследования качества линейных и нелинейных систем при
случайных воздеЛствиях. методы решения задач оптимального управления н
теория адаптивных систем управления. Второе издание (первое вышло
в 1977 г.) дополнено данными по абсолютной устойчивости и другими
материалами.
2404000000-328 ББК 32.965
* " оо1(01)-8б «64-86 еФе5
© Издательство «Высшая школа», 1977
© Издательство «Высшая школа», 1986, с изменениями
ОГЛАВЛЕНИЕ
Предисловие 3
Г лава 7. Нелинейные системы автоматического управления 4
§ 7.1. Основные типы нелинейных систем и характеристик 4
§ 7.2. Изображение движений в фазовой плоскости ... 9
§ 7.3. Автоколебания. Метод точечных преобразований 20
§ 7.4. Системы с переменной структурой 23
§ 7.5. Методы «припасовывания» граничных значений 31
§ 7.6. Приближенное исследование автоколебаний. Метод
эквивалентной линеаризации . . . : 34
§ 7.7. Метод гармонического баланса 40
§ 7.8. Устойчивость в малом, большом и целом 43
§ 7.9. Второй (прямой) метод Ляпунова 48
§ 7.10. Абсолютная устойчивость 50
Г лава 6. Имульсные системы автоматического управления , .73
§ 8.1. Понятие об импульсных системах автоматического
управления 73
§ 8.2. Исследование устойчивости и качества систем
управления с амплитудно-импульсной модуляцией. ... 83
§ 8.3. Исследование динамики цифровых систем
автоматического управления 105
§ 8.4. Исследование систем с широтно-импульсной
модуляцией .118
§ 8.5. Исследование систем с частотно-импульсной
модуляцией . . . . 128
Глава 9. Случайные процессы в автоматических системах
управления . . . 142
§ 9.1. Введение 142
§ 9.2. Случайные процессы и их основные статистические
характеристики 144
§ 9.3. Корреляционные функции случайных процессов 153
§ 9.4. Спектральные плотности случайных процессов . . 166
§ 9.5. Связь между корреляционными функциями и
спектральными плотностями случайного процесса на входе
и выходе линейной системы . 173
§9.6. Расчет линейных систем при случайных воздействиях 180
§ 9.7. Синтез линейных систем с минимальной средней
квадрэтической ошибкой 192
§ 9.8. Случайные процессы в линейных импульсных
системах 218
§ 9.9. Нелинейное преобразование случайных сигналов 225
§ 9.10. Статистическая линеаризация нелинейных
элементов 228
§9.11. Расчет нелинейных систем методом статистической
линеаризации 238
Глава 10, Методы теории оптимальных систем управления ... 245
§ 10.1. Общие положения. Постановка задачи.
Классификация 245
Общая постановка задйчи оптимального управления 246
Классификация задач оптимального управления . 252
§ 10.2. Метод классического вариационного исчисления
(метод множителей Лаграижа) 254
Задачи с закрепленными концами и
фиксированным временем 254
Задачи с подвижными концами и нефиксированным
временем 261
§ 10.3. Принцип максимума Понтрягина. Условие
нормальности. Теорема об п интервалах. Вырожденные и
особые задачи 267
Задача с закрепленными концами и фиксированным
временем , 268
Задача с подвижными концами i 271
Задача максимального быстродействия ...... 273
Задача с ограничением на фазовые координаты . . . 279
Вырожденные задачи 282
Особые задачи 284
§ 10.4. Метод динамического программирования. Теорема
Болтянского. Метод Кротова 285
Принцип оптимальности 287
Функция и уравнение Беллмаиа 289
Проблема обоснования метода динамического
программирования и достаточные условия оптимальности 294
Метод Кротова [11] 296
§ 10.5. Управляемость и наблюдаемость. Наблюдатели . 304
Управляемость . 304
Наблюдаемость и восстанавливаемость . . . . 314
Обнаруживаемость . . ... 319
Наблюдатели . . 320
§ 10.6. Методы синтеза оптимальных систем с обратной
связью. Синтез оптимальных линейных систем по
интегральному квадратичному критерию 326
Метод фазовой плоскости синтеза оптимальной по
быстродействию системы 326
Синтез оптимальных линейных систем по
интегральному квадратичному критерию . . ...... 329
§ lb.7. Стохастические оптимальные системы. Методы
синтеза. Методы оптимальной оценки состояния.
Принцип разделимости. . 351
Метод динамического программирования 352
Синтез стохастической оптимальной линейной
системы при полной информации о состоянии 356
Синтез стохастических оптимальных систем
управления при неполной информации 359
Стохастическая линейная оптимальная система
управления при неполной информации. Принцип
разделимости 382
§ 10.8. Оптимальные дискретные системы 388
Синтез оптимальной линейной системы при
квадратном критерии 389
Глава 11. Адаптивные автоматические системы управления . 402
§ 11.1. Введение . . 402
§ 11.2. Классификация адаптивных систем ... . . 404
§ 11.3. Самонастраивающиеся системы 406
Регулярные методы поиска экстремума 408
Примеры поисковых самонастраивающихся систем . 425
Примеры беспоисковых самонастраивающихся
систем 440
§ 11.4. Системы с адаптацией в особых фазовых состояниях 445
§ 11.5. Обучающиеся системы ... 456
§ 11.6. Адаптивные робототехнические системы . 472
Заключение . 481
Приложения . 482
Список литературы . . 491
Предметный указатель . . . . ... 494
ПРЕДИСЛОВИЕ
Настоящая книга является второй частью учебника по
теории автоматического управления для студентов специальности
«Автоматика и телемеханика». При ее написании авторы
руководствовались программой дисциплины «Теория
автоматического управления», утвержденной Министерством высшего и
среднего специального образования СССР для высших учебных
заведений по специальности «Автоматика и телемеханика».
Во вторую часть входят главы 7—И. В главе 7 приведены
такие методы исследования нелинейных систем, как методы
фазовой плоскости, припасовывания, точечных преобразований и
гармонической линеаризации, а также прямой метод
Ляпунова И частотные методы исследования абсолютной устойчивости.
Глава 8 посвяш.ена теории линейных и нелинейных импульсных
систем управления. Глава 9 знакомит с методами исследования
качества линейных и нелинейных систем, а также синтеза
линейных систем при случайных воздействиях. В главе 10
рассмотрены методы решения задач оптимального управления,
проблема управляемости и наблюдаемости, методы
оптимального оценивания состояния и синтеза оптимальных
детерминированных и стохастических систем управления. Глава 11
знакомит с определением, классификацией, различными
принципами построения адаптивных систем управления.
Второе издание существенно переработано и дополнено.
Заново написаны и дополнены новыми материалами § 7.10 и
главы 8 и 10. Значительно переработана глава 9 и дополнена
глава И.
В написании второй части учебного пособия принимали
участие: А. А. Воронов (главы 7,10), Д. П. Ким (глава 10),
В. М. Лохин (глава 8), И. М. Макаров (главы 8, 11), П. Н.
Попович (глава 9), В. 3. Рахманкулов (главы 8, 11).
Авторы выражают глубокую благодарность рецензентам—
— акад. АН СССР С. В. Емельянову, чл.-кор. АН СССР Е. П.
Попову, д-ру техн. наук, проф. П. Д. Крутько за* ценные
замечания, способствовавшие улучшению, книги, а также
сотрудникам кафедры «Проблемы управления» Московского
института радиотехники, электроники и автоматики за помощь при
подготовке рукописи к печати.
Все замечания и пожелания, касающиеся книги, просим
направлять по адресу: 101430, Москва, ГСП-4, Неглинная ул.,
29/14, издательство «Высшая штла».
Авторы
Глава 7
I
н
W
НЕЛИНЕЙНЫЕ СИСТЕМЫ
АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ
§ 7.1. Основные типы .
нелинейных систем
и характеристик
К нелинейным системам относят все
системы, которые не могут быть
описаны линейными дифференциальными
ур авнениями. Множество нелинейных
систем настолько широко и
многообразно, что практически нельзя говорить о
едином «классе» нелинейных систем,
противостоящем классу линейных систем.
В данной главе рассмотрен значительно
более узкий, хотя и широко
распространенный в практике управления, класс
нелинейных систем, характеризуемый
следующими особенностями: систему
можно представить в виде соединения
двух частей (рис. 7.1) — линейной части
ЛЧ, описываемой линейными
обыкновенными дифференциальными уравнениями
с постоянными коэффициентами, и
нелинейного элемента НЭ. Нелинейный
элемент является безынерционным, и его
входная X и выходная у величины
связаны между собой нелинейными
алгебраическими уравнениями. Таким
образом, нелинейность рассматриваемых
систем обусловлена нелинейностью
статической характеристики одного из ее
элементов.
Если система содержит несколько
нелинейных элементов, то ее в некото7
рых случаях можно свести к рас<;матри-
ваемому классу, заменив нелинейные
элементы одним с результирующей ста-
из
Рис. 7.1
Рис. 7.2
тической характеристикой. Например, при параллельном,
последовательном или встречно-параллельном соединении
нелинейных элементов такое сведение выполнимо.
На рис. 7.2 приведен пример нахождения результирующей
статической характеристики двух параллельно включенных
нелинейных звеньев. Построив на одном графике
характеристики J и // обоих звеньев, суммируем их ординаты и получаем
характеристику /// эквивалентного звена.
На рис. 7.3 показано нахождение результирующей
характеристики двух последовательно включенных нелинейных
звеньев. В первом квадранте
построена статическая
характеристика / входного звена
цепочки, во втором
квадранте — характеристика //
следующего звена, но так, что
оси ее повернуты на 90"": ось
абсцисс Хгвх совпадает с осью
ординат характеристики /. а
ось ординат Хзвых направлена
по отрицательной полуоси
абсцисс. Задаемся некоторым
значением х^^^ (точка l^^^y^^^г
XiBx)- Восставляем
перпендикуляр в точке / до
пересечения с характеристикой
/ (точка 2); проводим из точки
2 линию, параллельную
горизонтальной оси, до
пересечения с характеристикой //
(точка 5). Отрезок Оа от на-
Рис. 7.3
чала координат до основания перпендикуляра, опущенного
из точки 3 на ось абсцисс, равен искомому значению ->^2вых.
соответствующему XiBx. Неудобнее построить характеристику
/// в четвертом квадранте, поэтому перенесем точку 3 с
помощью биссектрисы OA квадрантного угла, пр.оведя из точки
3 вертикальную линию 3—4 до пересечения с OA (точка 4) и
из точки 4 горизонтальную линию 4 — 5 до встречи с
продолжением перпендикуляра /—2 (точка 5). Точка 5 принадлежит
статической характеристике /// эквивалентного звена.
Находя аналогичным способом ряд точек и соединяя их плавной
кривой, получаем результирующую характеристику ///.
Наиболее просто строится характеристика
последовательного соединения трех звеньев. Характеристики I и II
располагаются, как и в предыдущем случае, в первом и втором
квадрантах, характеристика /// третьего звена — в третьем
квадранте вместо биссектрисы с соответствующим поворотом осей
(рис. 7.4).
На рис. 7.5 построена результирующая характеристика
/// нелинейного звена 1, охваченного нелинейной
отрицательной обратной связью с характеристикой // (рис. 7.5, а), В
первом квадранте (рис. 7.5, б) построена характеристика звена /.
Задаемся некоторым значением х^ых (точка /) и найдем, чему
будет равно aj^x при наличии обратной связи. Без обратной
ш
а)
{IH
Рис. 7.5
связи Хвх находится непосредственно из характерисгики /: х^х
= Оа. Но при наличии отрицательной обратной связи отрезок
Оа будет равен результирующему входному воздействию: Оа
=Хех—Ф (^вых). г'Деф (^вых) — характеристика обратной
связи. Поэтому для нахождения х^х к Оа надо прибавить величину
воздействия обратной связи: х^х = Оа + q> (х^ых).
Если во втором квадранте построить характеристику //
обратной связи х^.^, ^ ф (х^ых). направив ось Хо-с влево,
то величина х^х будет равна сумме отрезков Оа и Ob, т. е.
расстоянию от точки 2 до точки /. Перенеся этот отрезок
измерителем по горизонтали вправо так, чтобы левый конец отрезка
лег на ось ординат, получим точку 3 результирующей
статической характеристики.
При положительной обратной связи Хвх— ф (Хвых)
характеристику // удобнее строить в первом квадранте,
совместив ось Хо-с с осью Хвх (рис. 7.5, в). Искомая абсцисса Ос
результирующей характеристики /// равна разности: Ос =
Оа — Ob, т. е. расстоянию Ьа между кривыми / и //.
Если же между нелинейными звеньями имеются
разделяющие их инерционные линейные, то систему уже не удается
свести к рассматриваемому классу. Она относится к классу систем
с несколькими нелинейностями, в данной книге не
рассматриваемому.
Если передаточная функция линейной части равна W (s) =
^ М {s)/N (s), а уравнение нелинейного элемента имеет вид
^ Ф (х), то дифференциальные уравнения системы
где р = d/dt, или
N (р)х + М (р) ф (х) = М (р) /. (7.16)
Часто систему приводят к виду
dxjdt^ 2 aijXj + bJ, /=1.2,..., п;
х„=ф(а); } (7.1 в)
/I
/= 1
Так, например, описывается система регулирования с
сервомотором, имеющим нелинейную характеристку ф (а).
Сервомотор воздействует на одну из координат х^, его входная
величина о в общем случае есть линейная функция остальных
координат. В частном случае, когда все с^, кроме одного, равны
нулю, уравнения (7.1 в) переходят в уравнения (7.16).
Некоторые наиболее распространенные типы нелинейных
характеристик показаны на рис. 7.6. Характеристика /
свойственна системам с насыщением, характеристика 2 —
электромагнитным устройствам с гистерезисом, характеристика 3 —
выпрямителям.
В практике часто встречаются элементы, характеристики
которых кусочно-линейны или аппроксимируются кусочно-
линейными графиками. Кривая 4 изображает
кусочно-линейную аппроксимацию кривой намагничивания, кривая 5 —
характеристики с насыщением, кривая 6 — характеристики
идеального выпрямителя. Кусочно-линейными характеристиками
обладают: идеальное поляризованное реле (кривая 7), трехпо-
зиционное поляризованное реле с зоной нечувствительности
(5), трехпозиционное реле с зоной нечувствительности и
гистерезисом (9), у которого величина срабатывания Оа больше
величины отпускания Ос, двухпозиционное реле с гистерези-
о
1Р
а X
9)
с а X
0x0
0
X
W) jr
£f If) у СП А f2) У
X -а-с
м
с а X
Рис. 7.6
COM (10), например поляризованное реле, которое не имеет
устойчивого, отключенного состояния и контакт которого всегда
замкнут в ту или другую сторону. Механизмы с мертвым ходом
имеют характеристику, изображенную кривой //. При
сцеплении передач перемещение ведомой шестерни происходит в
одну сторону по линии Л, в противоположную — по линии
Б, При изменении направления движения, пока выбирается
мертвый ход, ведомая шестерня неподвижна (горизонтальные
участки). Сходную характеристику имеют и элементы с сухим
трением, если по оси х откладывается прилагаемое к
подвижной части усилие, а по оси у — ее перемещение. Кривая 12
изображает характеристику нейтрального электромагнитного
реле с гистерезисом.
Для последующего изложения полезно в рассматриваемом
классе нелинейных систем выделить подкласс (О, оо), у
которого характеристика ф {х) проходит через начало координат
и укладывается в прямых углах, образованных осями хну
и лежащих в первом и третьем квадрантах. Поскольку первая
ось. имеет угловой коэффициент О, а вторая оо, введено
обозначение подкласса (О, оо). Внутри угла характеристики могут
располагаться произвольно, сколь угодно близко подходить к
сторонам угла и частично с ними совпадать. К этому
подклассу относятся кривые 1, 3, 4, 5, 6, 7, 8 и 9. Внутри подкласса
(О, оо) иногда выделяют более узкий подкласс (О, /<"), у
которого характеристики лежат в острых углах, образованных осью
X и проходящим через начало координат лучом с угловым
коэффициентом К, лежащим в первом и третьем квадрантах. К
данному подклассу относятся характеристики 1, 3, 4, 5, 6, 8 и 9.
Характеристики 2, 10, И и /2 к отмеченным подклассам не
относятся.
§ 7.2. Изображение движений в фазовой плоскости
Когда движение можно описать координатами х и у
посредством уравнений dx/dt = U i^^ У) и dy/dt (х, у), то для
исследования часто оказывается удобно изобразить движение
на плоскости в прямоугольной-системе координат х и у.
Координаты X и уъ этом случае называют фазовыми кеординшпами^
время t в явном виде в изображение движения не входит.
Косвенно оно отражается так: каждому моменту соответст-
вует фиксированное значение координат х и у (/„), изоб-
жаемое в осях х и точкой. При изменении / изображающая
точка перемещается по фазовой плоскости, прочерчивая на
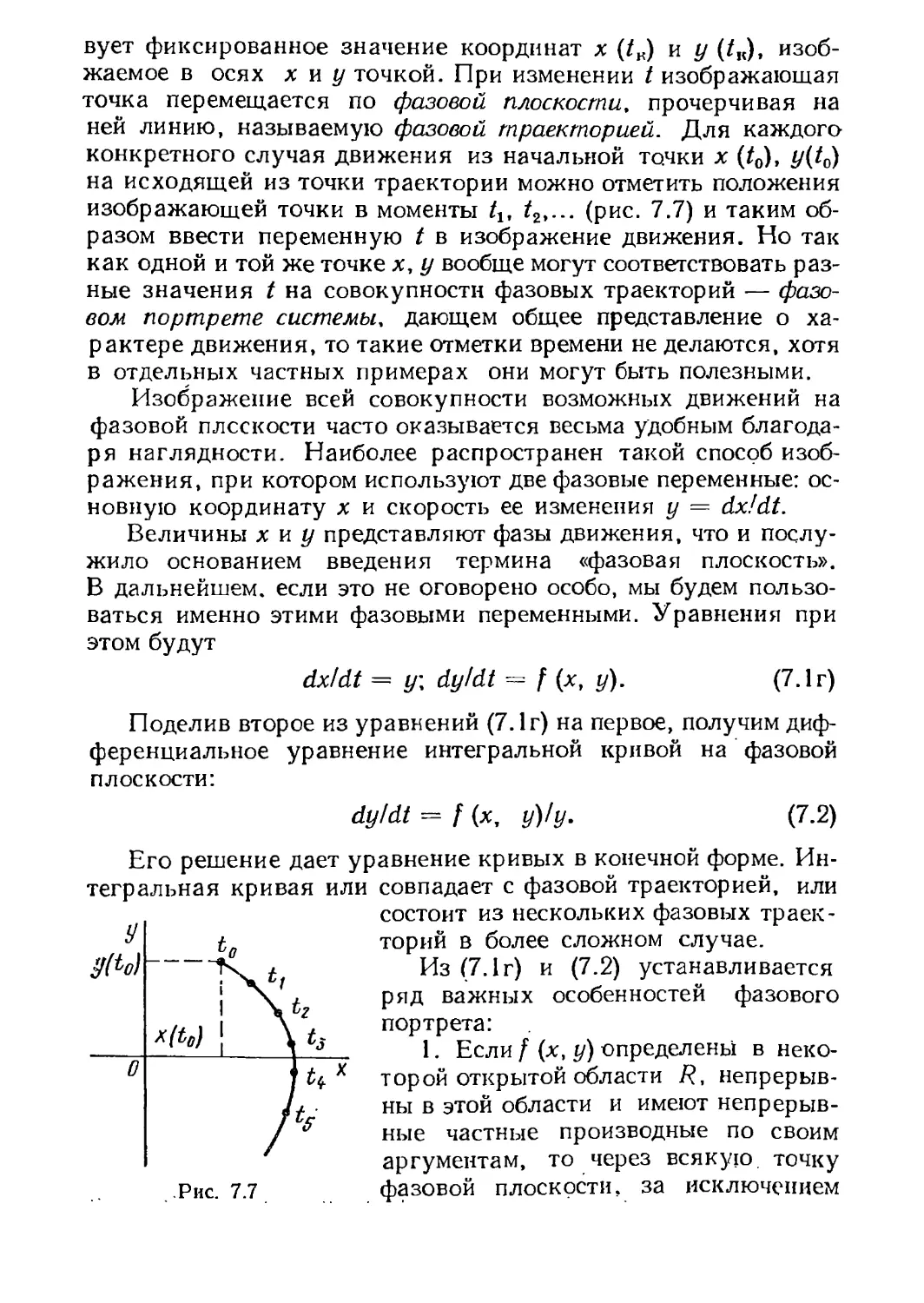
ней линию, называемую фазовой траекторией. Для каждого
конкретного случая движения из начальной точки х (to), у{1^)
на исходящей из точки траектории можно отметить положения
изображающей точки в моменты /j, t^,... (рис. 7.7) и таким
образом ввести переменную t в изображение движения. Но так
как одной и той же точке х, у вообще могут соответствовать
разные значения t на совокупности фазовых траекторий —
фазовом портрете системы, дающем общее представление о
характере движения, то такие отметки времени не делаются, хотя
в отдельных частных примерах они могут быть полезными.
Изображение всей совокупности возможных движений на
фазовой плсскости часто оказывается весьма удобным
благодаря наглядности. Наиболее распространен такой способ
изображения, при котором используют две фазовые переменные:
основную координату X и скорость ее изменения у =■ dx/dt.
Величины X и у представляют фазы движения, что и
послужило основанием введения термина «фазовая плоскость».
В дальнейшем, если это не оговорено особо, мы будем
пользоваться именно этими фазовыми переменными. Уравнения при
этом будут
dx/dt = у\ dyldt - f {х, у). (7.1 г)
Поделив второе из уравнений (7.1г) на первое, получим
дифференциальное уравнение интегральной кривой на фазовой
плоскости:
dyldt ^ fix, у)1у. (7.2)
Его решение дает уравнение кривых в конечной форме.
Интегральная кривая или совпадает с фазовой траекторией, или
состоит из нескольких фазовых
траекторий в более сложном случае.
Из (7.1 г) и (7.2) устанавливается
ряд важных особенностей фазового
портрета:
1. Если / (х, у) определены в
некоторой открытой области
непрерывны в этой области и имеют
непрерывные частные производные по своим
аргументам, то через всякую, точку
Рис. 7J фазовой плоскости, за исключением
у
1
\
0
А
состояний равновесия (особых точек), в которых
одновременно ^ = О и / (л:, ^) О, проходит единственная интегральная
кривая (теорема Коши). Это, в частности, означает, что
фазовые траектории не пересекаются в неособых точках подобно
силовым линиям магнитного спектра, что обеспечивает
наглядность картины.
Иногда приходится иметь дело с функциями /(х, у), не
удовлетворяющими условиям Коши (разрывными, имеющими
изломы, неоднозначными и т. п.). Тогда движение исследуют по
участкам, на каждом из которых / {х, у) удовлетворяет
условиям Коши. В тех случаях, когда / (х, у) неоднозначна и
касательных к траекториям в одной точке может быть несколько,
прибегают к изображению движения на многолистной
плоскости так, что на каждом листе условия Коши
удовлетворяются.
2. Так как при у = dxidt >0 значение х только
возрастает, то в верхней фазовой полуплоскости при возрастании t
изображающая точка движется по фазовой траектории слева
направо. Соответственно в нижней полуплоскости движение
происходит справа налево. Направление движения на
траекториях отмечают стрелками.
3. В точках f/ = О, / (л:, у) Ф О, т. е. в неособых точках оси
абсцисс, фазовые траектории пересекают ось абсцисс под
прямым углом сверху вниз в правой и снизу вверх в левой
полуплоскостях.
4. Значениям у ---- О, / (х, у) = О, т., е. особым точкам на
оси абсцисс, соответствует остановка движения с Решения
уравнений / (х, ^) = О, ^ = О дают значения абсцисс точек равно-
весия системы. Решение / (х, у) О, которому соответствуют
X = О, у Оу является тривиальным решением. В нелинейной
системе в зависимости от вида функции / существует одно или
множество решений, часть из которых могут быть
устойчивыми, а часть — неустойчивыми, поэтому в общем случае нельзя
говорить об устойчивости или неустойчивости нелинейной
системы, можно говорить лишь об устойчивости или неустюйчиво-
сти ее конкретных движений или состояний равновесия.
Некоторые наиболее характерные виды фазовых
траекторий, особых точек и других специфических линий
рассматриваются ниже на конкретных примерах.
Линейная консервативная система второго порядка.
Уравнение свободных колебаний линейной системы, в которой нет
сил сопротивления
движению, приводящих к
рассеянию энергии, можно
привести к виду
(7.3)
В механической системе
наличие члена х,
выражающего ускорение,
обусловлено массой движущегося
тела. Член оол: выражает
позиционную силу,
пропорциональную
перемещению. Она обычно обусловлена пружиной. Обозначив dx/df ==у,
d^xldf^ = dyldt, получим
Рис. 7.8
dx/dt=x\
dyldt = —cog X.
(7.4)
Уравнение фазовой траектории dy/dx = — iolx/y
приводится к уравнению с разделяющимися переменными ydy +
+ (i>oxdx и легко интегрируется в квадратурах
(7.5)
где произвольная постоянная С зависит от начальных условий:
С -V {/1 + ^1x1
Уравнение (7.5) приводится к каноническому уравнению
эллипса х^/а^ + уУЬ^ == .1, полуоси а и b которого равны: а =
= С/шо, b ^ С.
Фазовые траектории, представляющие собой семейство
вложенных друг в друга эллипсов с центром в начале координат,
показаны на рис. 7.8. Движение по эллипсу соответствует
незатухающему колебательному движению с угловой частотой со,
которое является решением уравнений (7.4) при начальных
условиях X (0) = jc^,, у (0) = уо, т- е.
0)0
sino)o/-bA:oCoscoo/;
—(HqXo sin COq t + Уо COS COo
(7.6)
Для изучения характера траектории часто удооно упростить
выражения, рассмотрев начало движения от одной из осей.
Так, если ^0, то
х^Хо COS Ш(, ^ = —0)0 дсо sin со^ /. (7.7)
Начало координат в рассмотренном примере представляет
собой особую точку, не принадлежащую ни одной из
траекторий и называемую точкой типа центра. Эта точка устойчива
lio Ляпунову. Действительно, если задано положительное,
сколь угодно малое число е, то мы всегда можем выбрать
эллипс, у которого большая полуось была бы меньше е, т. е. max
(С/(Оо, С) < |е|, и далее выбрать х^ и так, чтобы было у1 +
+ Ь}оХ^ < С^. Тогда X (t) и у (t) по модулю не превзойдут е
при любом /. Однако с практической точки зрения движение
консервативной системы трудно назвать устойчивым,
поскольку при наличии случайных помех возможно принципиально
неограниченное «блуждание» амплитуды колебаний.
Консервативную систему считают находящейся на границе
устойчивости. Это пример редкого исключения, когда определение
устойчивости по Ляпунову вступает в противоречие с
представлением об устойчивости на основе «здравого смысла».
Система с сухим кулоновским трением. Пусть теперь в
рассмотренной системе действует постоянная по значению сила
трения /тр, направленная навстречу движению. Для удобства
выразим эту силу в виде произведения соо на некоторое
положительное число 8, т. е.
,1 o.S.,i<0;|
I —o)ge, x>0.]
Когда система движется, динамическая сила, создающая
ускорение X, и сила пружины iolx уравновешиваются силой
трения:
x + iolx^f^^, хфО,
Это имеет место» когда |о)оА:|>|/тр1 и-ли \х\ >. е. Тогда избыток
силы (оол: — /^.р расходуется на создание ускорения. Если же
усилие, развиваемое пружиной, меньше силы трения, то
система не сможет сдвинуться с места:
x + (i)bx==0; |х|<,е, i=-0.
Таким образом, движение на разных стадиях описывается
различными дифференциальными уравнениями:
— oge, х>0, |а:|>е;
О, х^О, |х|^е; (7.9)
Woe, а:<0. |л:(>е.
Уравнение с верхней правой частью определяет фазовую
траекторию в верхней полуплоскости, с нижней правой частью
— в нижней полуплоскости, средняя правая часть
соответствует отрезку покоя на действительной оси — е < л:<е. Этот
отрезок является геометрическим местом бесчисленного
множества возможных точек равновесия.
В верхней полуплоскости движение определяется
уравнением
л: + ш§(л: + е) = (х + е)Ч-(х-f е)-0, х>0.
Сопоставляя с (7.3), видим, что это эллипс, центр которого
смещен в точку — е на оси х. Соответственно в нижней
полуплоскости
х+(о1{х~е)={х —е)" og (х— е) О, л: < О,
имеем семейство эллипсов с центром в точке + е на оси х
(рис. 7.9, а).
Смещение эллипсов приводит к тому, что изображающая
точка, пересекая ось л:, переходит на эллипс меньшего
размера и в конце концов приходит на отрезок покоя. Так как к
любой точке отрезка покоя фазовые траектории подходят сверху
и снизу, изображающая точка, попав на отрезок покоя,
остается на нем; следовательно, отрезок покоя устойчив.
Ось абсцисс точками •— е, е делится на три части:
внутреннюю — отрезок покоя и две внешних > е, на которых при
переходе из одной полуплоскости в другую происходит
изменение уравнения движения. Таким образом, ось абсцисс за
пределами отрезка покоя является линией перехода с одного
закона движения на другой. Такие линии называют линиями
переключения.
Уравнения движения, получаемые в результате решения
дифференциальных уравнений (7.9), при начальных условиях
X Хоу'у = Ус ^ О имеют вид:
1-й полуэллипс в нижней полуплоскости
X = е + cos о)о^, О < f < я/соо = ti\
1-й полуэллипс в верхней полуплоскости
X = — г -1 (Хо — г) cos сооЛ < ^ < 2/i;
2-й полуэллипс в нижней полуплоскости
л: = е + (Хо — 2е) cos соо^-.. и т. д.
Амплитуды последовательных колебаний убывают по
линейному закону (рис. 7.9, б), что качественно отличает характер
затухания колебаний в нелинейной системе с сухим трением от
экспоненциального затухания в линейной системе. Время
затухания в линейной системе бесконечно, в рассматриваемой
нелинейной — конечно.
В коротких и жестких пружинах возникает сила
внутреннего трения от смещения сечений во время изгиба пружины.
Внутренние напряжения перпендикулярны смещающимся
сечениям и пропорциональны деформациям. Сделав допущение,
чта силы внутреннего трения, подобно силам сухого кулонов-
Рис. 7.9
Рис. 7.10
Рис. 7.11
ского трения, пропорциональны нормальным давлениям, а по
направлению — противоположны скоростям движения,
получаем следующую систему уравнений:
(7.10)
X'h{iol-\-k^)x = о, sign л: = sign 'х\
X + (соо —k^) л: == о, sign х —sign х.
В первом и третьем квадрантах фазовой плоскости знаки
X и X совпадают и фазовыми траекториями будут отрезки
концентрических эллипсов с отношением вертикальной полуоси к
горизонтальной, равным Ь/а = Vcoo + k^- Во втором и
четвертом квадрантах это отношение равно Т/шо — k^- Фазовые
траектории скручиваются к началу координат (рис. 7.10),
Для малых движение будет близким к движению линейной
системы по уравнению
;с+ 2к^х + (а1х=-0,
где Лэ ^ к^/(топ) — эквивалентное демпфирование; =
— 03о — частота колебаний.
Система с отрицательной восстанавливающей силой. Для
получения быстрых перебросов механических деталей из
одного положения в другое используют пружины, стремящиеся
увеличить возникающее отклоненле (рис. 7.11). При малых
отклонениях от вертикальной линии (состояния равновесия)
уравнение системы будет
'х—(оЬх=0. (7.11)
Уравнен*1е фазовой траектории dy/dx = (Оох/у.
Интегрируя, получаем
(7.12)
Рис. 7.12
Это уравнение гиперболы (рис.. 7.12). Начало координат
представляет собой о(:об^/о точку типа седла, соответствующую
неустойчивому состоянию
равновесия.
Если упругая сила является
нелинейной функцией, т. е.
0)0 = ф (х), и при значении
л; = АГа обращается в нуль и
меняет знак, то на оси х фазовой
плоскости возникают две особые
точки: X =0 (центр) и л: = лТд
(седло). Фазовый портрет
системы показан на рис. 7.13.
Траектория, проходящая через седло-
вую точку и показанная на
рисунке жирной линией, делит
фазовую плоскость на три области
с различным характером
движения: область / с замкнутыми
траекториями и равновесием
типа центра п области Па и Иб
с траекториями, уходящими в
бесконечность, и седловой
особой точкой. Такие траектории,
разграничивающие области
качественно различных движений,
называют сепаратриссами.
Линейная колебательная
система с вязким трением. При
наличии силы сопротивления
движению. пропорциональной
скорости (так называемой силы
вязкого трения), уравнение
системы будет
'jt+2hx + (i^x=^0\
Л>0. V .
(7.13)
При этом корни характеристического уравнения
5i.2= —Л rtj/Zi'—cog.
При комплексных корнях, когда < соо, имеем
Решая уравнения (7.13) при начальных условиях х (0) = Xq,
У (0) = г/о, получим
X ■= [(^0 + hx^;)/(^)] е-^^ sin (0^ + Xq е -cos соЛ (7.И)
Для исследования характера траекторий поместим точку
Хо, i/q на ось абсцисс. Тогда х (0) = Xq, у (0) О и
х Хо е-'^^ (А sin cot/(О + cos о)/);
у^ — Xoe-'^'(^Vco2+<^)sino)^
(7.15)
Кривые л: (^) и i/ (t) представлены на рис. 7.14. Нетрудно
видеть, что каждое из последующих пересечений фазовых
траекторий с осью х будет ближе к началу координат, чем
предыдущее. Траектории представляют собой скручивающиеся к
началу координат
спирали (рис. 7.15, а).
Начало координат является
особой точкой типа
фокуса: любая траектория
с течением времени
приближается к ней сколь
угодно близко, но угол
вхождения траектории
в фокус установить
невозможно, поскольку
dy/dx в точке х = у = О
не существует.
При отрицательном
демпфировании Л < О
фокус неустойчив и
траектории будут от него
беспредельно
удаляться. Движение
представляет собой колебания с
нарастающей амплиту-
Рис. 7.15 дой (рис. 7.15, б).
Рис. 7.14
Рис. 7.16
Рис. 7.17
Линейная апериодическая система с вязким трением.
Пусть h> Оу > Wo, тогда корни характеристического
уравнения системы (7.13) действительны и отрицательны. В
фазовой плоскости существуют прямолинейные фазовые
траектории, проходящие через начало координат. В самом деле, пусть
существует траектория у ^kx. Найдем fe. Так как для этой
траектории dyldx = у/х = fe, то dy/dx = k = •— 2h —
— ogx/f/ = —2h— или + 2hk + o)B = 0.
Таким образом, уравнение для k совпадает с
характеристическим уравнением и, поскольку корни последнего
вещественны, существуют прямолинейные фазовые траектории, лежащие
между граничными траекториями Л и Б, с угловыми
коэффициентами, равными значениям корней. Вид траекторий показан
на рис. 7.16. Вне найденных траекторий остальные
траектории имеют вид параболического типа кривых,
приближающихся к началу координат и входящих в него под углами
arctg {min (sj, Sg)}. Прямая с наименьшим по модулю угловым
коэффициентом —это касательная к траекториям. Как видно
из рисунка, в таких системах число перерегулирований — не
более одного.
Точка равновесия — начало координат — в данном случае
является особой точкой типа ^зуга. Все фазовые траектории
(за исключением двух изолированных траекторий, лежащих на
более круто расположенной прямой) имеют в узле общую
касательную.
При /кС О фазовые траектории имеют вид, показанный на
рис. 7.17. Эта картина соответствует неустойчивым решениям
§ 7.3. Автоколебания. Метод точечных
преобразований
Начнем с примера. В системах с положительными
обратными связями при определенных условиях могут возникать
силы, приводящие к пополнению рассеиваемой на трении
энергии. Б таких системах могут возникать незатухающие
колебания.
На рис. 7.18 изображена схема лампового генератора.
Учитывая связь анодного тока с токами it и ic, проходящими
соответственно через индуктивность и конденсатор
колебательного контура RLC, составим для этого контура уравнение:
Ld'' ijdt^ + Rdiddt + idC ^ - - iJC.
Считаем характеристику лампы идеальной (рис. 7.19),
т. ё.
. f/, u,>0;
" lO, u^<0.
Сеточное напряжение уg равно напряжению вторичной
обмотки трансформатора Ug ^ — Mdijdt, поэтому, обозначая
it = X, RIL 2Л, \l{dC) wo. получим
cog Л х>0;
0. а:<0.
(7.16)
Фазовые траектории в верхней и нижней полуплоскостях в
соответствии с (7.14) представляют собой спирали,
скручивающиеся к точке а: = / на оси х в верхней и к началу координат
в нижней полуплоскости.
Рис. 7.18
Рис. 7.19
Эти уравнения определяют процесс преобразования точки
а на положительной полуоси х в точку с на этой же полуоси.
Если с < л, траектории будут скручиваться и генератор будет
совершать затухающие колебания. Если с > а, траектории
раскручиваются и колебания нарастают. Если с = О,
колебания становятся незатухающими и траектория превращается
в замкнутый цикл (рис. 7.20, б). Уравнения (7.17), называемые
уравнениями точечного преобразования, позволяют найти
параметры цикла. Положив а ^ с, решим уравнения (7.17)
относительно а и Ь\
а^ 11{\-у)\ 6=.Y//(1-Y). (7.18)
Если у Ф \, решение единственно и, следовательно, любая
другая точка в окрестности а уже не принадлежит
замкнутому циклу. Таким образом, найденный замкнутый цикл
является изолированным. Изолированную замкнутую траекторию
называют предельным циклом. Предельный цикл окружен
навивающимися на него или скручивающимися с него
траекториями. Если в результате малого смещения с
цикла в любом направлении мы попадаем на
траекторию, неограниченно приближающуюся к циклу, то цикл
устойчив. Устойчивый предельный цикл соответствует
устойчивым колебаниям, называемым самовозбуждающимися или
автоколебаниями. Отклонение параметров автоколебаний
(амплитуды, частоты и т. п.) малой помехой в процессе дальнейшего
движения уменьшается — этим автоколебания
принципиально отличаются от незатухающих колебаний в линейных
системах. Линейные генераторы не применяются, так как они не
обеспечивают устойчивого колебательного движения.
Пусть между сна существует зависимость
с^Т{а), (7.19)
где Т (а) — функция последования.
Если в результате возмущения точка сместится с цикла, то
по истечении периода получим приращения Да и Дс, связанные
зависимостью lim (Дс/Да) = dTlda.
Если dTlda < 1, то Дс <: Да, начальное отклонение
уменьшается и предельный цикл устойчив, в противном случае —
неустойчив. В рассмотренном примере
C'^ta + {\+y)l\ дТ/да=у^ = е-^^^'^< 1.
поэтому предельный цикл устойчив.
Рис. 7.21
фазовый портрет
системы представлен на
рис. 7.20,6. В начале
координат имеем
неустойчивый фокус. Где
бы внутри предельного
цикла ни находилась
изображающая точка, с
течением времени она
будет приближаться к
циклу. В такой системе
автоколебания Bosmi-
кают «сами собой», от
сколь угодно малого
возмущения. Возбуждение
колебаний такого рода
называют мягким. На рис. 7.21 представлен фазовый портрет с
двумя предельными циклами: внутренним неустойчивым и
внешним устойчивым. Начало координат — устойчивый фокус.
Движение, возникнув внутри внутреннего цикла, с течением
времени прекратится и автоколебания не возникнут. Чтобы
их возбудить, необходим достаточно сильный толчок,
выводящий начальную точку за предельный неустойчивый цикл. Это
система с оюестким возбуждением автоколебаний. Примерами
таких систем являются стенные гиревые часы с маятником или
плохо налаженный микрофон в аудитории, когда резкое
усиление голоса оратора приводит к микрофонному эффекту.
Неустойчивый предельный цикл соответствует наличию
формального периодического решения уравнений, но не физически су-
щесгвующим автоколебаниям. Он ограничивает в фазовой
плоскости область допустимых начальных возмущений, при
которых состояние равновесия еще остается устойчивым.
§ 7.4, Системы с переменной структурой
К системам с переменной структурой (СПС) относят
системы, структурная схема которых изменяется при переходе изоб-
ражаюн1ей точки через границы некоторых заранее
установленных областей фазового пространства. Примерами систем
с переменной структурой являются релейные системы,
замыкающие или размыкающие часть схемы при переходе через ли-
1/S
<
П
IE
Рис. 7.22
НИИ переключения. В
системах с пере-менной структурой
возможно при определенных
условиях получать виды
движения — более высокого
качества, чем в любой из
отдельно взятых структур,
образующих СПС. Один из
способов построения СПС состоит
в «сшивании» желаемым
образом отдельных областей
фазового пространства. Так, в
рассмотренной выше системе
с сухим постоянным трением
благодаря смещению
фазовых полуплоскостей замкнутые траектории превратились в
траектории, скручивающиеся к отрезку покоя. Еще более
быстрое затухание при схождении траекторий уже не к отрезку
покоя, а к началу координат, т. е. при более высокой точности
управления, имело место в системе с переменным сухим
трением. Упомянутые две системы можно рассматривать как
системы с переменной структурой, в которых переход от одной
структуры к другой обусловлен внутренними физическими
законами, действующими в данной системе. Любая из них может
быть воспроизведена искусственно путем введения в систему
переключающих логических элементов. На рис. 7.22 показана
СПС — аналог системы с переменным сухим трением. Схема
состоит из двух интегрирующих элементов, усилителей с
коэффициентами усиления 0)01 и о)02 и двухпозиционного
поляризованного реле Р, питаемого от блока произведения Я. Реле
реагирует на знак произведения xdxidt = хуи осуществляет
переключение цепи обратной связи по закону
[«01, ху>0;
«02, х^<0,
причем 0)01 > 0)02- Уравнения системы
0)§ ^
х + о)§1 х-О;
Х + (й^Х = 0\
sign x^-signx;
sign X = — sign X
и условия переключения хг/ = О подобны (7.10).
Другой способ состоит в получении вырожденных движений
по совокупности устойчивых фазовых траекторий. Если для йё-
которой линейной подструктуры 1С существует хотя бы один
действительный отрицательный корень характеристического
уравнения, то существует и соответствующая этому корню
совокупность устойчивых движений, занимающая в фазовом
пространстве некоторое подпространство.
Пусть характеристическое уравнение имеет т левых и п —
~ т правых корней. Тогда решение однородного уравнения
таково:
т . п .
где — произвольные постоянные, соответствующие
правым корням.
Выбирая соответствующим образом начальные условия,
всегда можно обратить в нуль любую из произвольных
постоянных. Выберем их так, чтобы все Бу обратились в нуль.
Тогда оставшиеся члены образуют совокупность устойчивых
движений:
т
д:=2С,е'*'. (7.20)
Если за фазовые координаты приняты л: и ее производные
до п — 1 включительно, то первые m координат дс, х, л:'"~*,
удовлетворяющие (7.20), будут линейно зависимыми и
образуют подпространство, попав в которое изображающая точка
будет двигаться в нем к состоянию равновесия.
Можно далее обратить в нуль и некоторые С,, тогда порядок
подпространства понижается. Если обращены в нуль все Ci,
кроме одной Ci, то подпространство вырождается в линию,
проходящую через начало координат.Такая прямая имеется на
рис. 7.12 и 7.16 и. соответствует частному решению с
отрицательным действительным корнем. Если оставить отличными от
нуля две постоянные и С^, соответствующие либо паре
действительных, либо паре сопряженных комплексных левых
корней, то подпространство вырождается в плоскость, вид
траекторий в которой соответствует рис. 7.16 при действительных
и рис. 7.15 при комплексных корнях. Подбирая
соответствующим образом законы переключения, можно обеспечить обяза-
Tj^jibHoe попадание изображающей точки в подпространство
у
X
i/S
1/S
ИЗ
ранств, не являющихся сово- ^ |
купностью фазовых траекторий Ч^^^
системы. Частным случаем такой
СПС является релейная система
с линейной частью в виде двух
интеграторов. На рис. 7.25
показана простейшая релейная систе- Рис. 7.25
ма. Ее линейная часть, состоит
из двух включенных последовательно идеальных
интеграторов, нелинейным элементом (НЭ) является реле. Если реле
заменить линейным усилителем с характеристикой z =^ Ф {х)=
= kx, замкнутая система будет линейной консервативной с
фазовым портретом в виде семейства концентрических
эллипсов. Уравнения релейной системы
dx/dt = у; dyldt = — Ф (х). (7.21)
Уравнение фазовой траектории dyldx = —Ф (х) у,
В случае идеального реле с характеристикой 7 (см. рис. 7.6)
г^Ф(х)=-Л *'^>^'
х<0..
Тогда из (7.21) получим
dyldx = dr kly или уЧ2 ±kx^ С. (7.22)
Верхний знак соответствует правой, нижний — левой
полуплоскости. Ось ординат является линией переключения.
Фазовые траектории — замкнутые кривые, образованные
отрезками парабол (рис. 7.26). Введение зоны не\чувствительности
приводит к появлению отрезка покоя и полосы, образованной ли-
Рис. 7.26
Рис. 7.27
((
i4
-b
0 b
-а
Рис. 7.28
НИЯМИ переключения x = a их^ — a, внутри которой
отрезки траекторий горизонтальны (рис. 7.27). При наличии
гистерезиса процесс расходится (рис. 7,28).
Стабилизировать подобную систему можно, охватив релей*
ный элемент отрицательной обратной связью по производной
выходной величины. В данной схеме этой производной равна
промежуточная координата у = dxidt, по которой и вводится
обратная связь (рис. 7.29).
Для случая идеального реле получаем:
yV2 + /гх = С; 0 = X + at/ > 0;
t/V2 — fcx=C;a=x + af/<0.
Линия переключения а = х -f at/ = О (рис. 7.30)
представляет собой прямую, проходящую через начало координат и
наклоненную к оси абсцисс
под углом arctg(—1/а). На
линии переключения
можно выделить три
характерных участка,
разграниченных точками касания Л и
В линии переключения с
показанными пунктиром
параболами. За пределами
Рис. 7.29 отрезка АВ фазовая траек-
<2Ь
Г
/
X
J
Л'
2
ИЗ
тория по одну, сторону линии переключения после перехода
через последнюю является продолжением траектории по
другую сторону линии. Внутри отрезка фазовые трактории
подходят к отрезку с двух сторон, встречаясь на нем. Попав на
отрезок АВ, изображающая точка уже не сможет сойти с
него, но не может и остаться на нем.
* Скорость движения на АВ не определена, но специальные
исследования показывают, что она конечна и по значению
колеблется вблизи значения ординаты точки. Изображающая
точка будет скользить по отрезку к началу координат—точке
равновесия типа устойчивого узла. Отрезок АВ называют
линией скольжения.
Уравнение движения вдоль линии скольжения
ау '\- X = adxidt + х = 0.
(7.23)
Как видно из уравнения, движение совершенно не зависит
от параметров линейной части и определяется только линией
переключения, т. е. обратной связью. Это исключительно
важное обстоятельство используется при построении многих
систем с переменной структурой.
На самом деле точное движение по линии скольжения
невозможно, оно может иметь место лишь при мгновенном
срабатывании реле. Немгновенность его действия приводит к
появлению следующих друг за другом с большой частотой замыканий
и размыканий, т. е. к появлению высокочастотных вибраций-
вокруг линии скольжения. В электрических реле это приво-
^ II
V ' \
Рис. 7.30
дит к обгоранию контактов. Поэтому вначале после
обнаружения скользящих режимов они считались вредными и
изыскивались пути их предотвращения. С появлением бесконтактных
реле скользящие режимы стали создаваться искусственно с
целью обеспечения заданного качества процесса управления
при сильно изменяющихся параметрах объекта.
Искусственно созданные скользящие движения интересны
тем, что закон движения в них определяется не исходными
уравнениями, т. е. не параметрами объекта, а параметрами
искусственно созданного подпространства скольжения.
Системы с переменной структурой позволяют получать
ускорение протекания переходных процессов, повышать
статическую и динамическую точность управления,
противодействовать влиянию внешних и параметрических возмущений.
В 1972 г. цикл работ по теории систем с переменной
структурой был удостоен Ленинской премии.
Многолистная фазовая плоскость. Если характеристика
нелинейного элемента неоднозначна, уравнение можно
представить как совокупность уравнений с однозначными функциями
и каждому из уравнений этой совокупности поставить в
соответствие некоторую определенную часть — «лист» фазовой
плоскости. Листы эти могут частично накладываться, тогда
имеем дело с многолистной фазовой поверхностью.
На рис. 7.31 показаны фазовые траектории для уравнений
dyldt = 1/Гс при X < е; dyldt = — 1/Гс при л: > — е;
dxIdt = у.
Подобными уравнениями описывается, например,
движение объекта первого порядка без самовыравнивания при
управлении сервомотором постоянной скорости при наличии зазора
2е между чувствительным элементом и золотником. В этом
случае фазовые траектории представляют собой параболы,
расположенные на двух листах: лист а соответствует первому
уравнению и лист б (заштрихован) — второму. Листы
накладываются так, что их оси хну совпадают. Разрежем листы по
линиям переключения ЛЛ, ВВ и отрезку оси х и наложим их
друг на друга (рис. 7.31, е). Правее линий разветвления А А и
ВВ, через которые происходит переход с одного листа на
другой, сверху лежит лист б, левее их — лист а. На рисунке
сплошной линией показана траектория, начинающаяся в
точке М нижнего листа. В полосе — е < х < е точка может
принадлежать обоим листам и, чтобы найти движение, начи-
Рис. 7.31
кающееся в этой полосе, надо дополнительно указать, какому
листу принадлежит начальная точка, т. е. кроме значений лго
и Уо ^ момент / = О указать также знак производной {dyldt)^.
Так, если точка М лежит на листе а {dyldt при ^ — О положи-
тельма), то движение пойдет по линии Мс^, показанной
пунктиром, поскольку она лежит па нижнем листе, и далее по
траектории С4; если же точка М принадлежит листу б, то движение
пойдет по траектории Мс^с^.
§ 7.5. Метод «припасовывания» граничных значений
Метод «припасовывания», или «сшивания», граничных
условий представляет собой точный метод определения
процессов в кусочно-линейных системах. Для каждого из линейных
интервалов выписывают решение уравнения, в которое входят
неизвестные произвольные постоянные. Приравнивая те
значения координат и их производных в конце предыдущего и
начале последующего интервалов, которые не совершают
скачков, находят произвольные постоянные.
Проиллюстрируем метод «припасовывания» на примере
нахождения параметров автоколебаний в системе с идеальным
поляризованным реле с симметричной характеристикой (7 на
рис. 7.6).
Пусть линейная часть системы имеет передаточную
функцию 1}7 (5) =^ Р (s)/Q (s). полюсы которой — простые, левые.
Степень полинома Р ниже степени Q. Этим исключаются скач-
у
м
о
-м
у
2М
м
о
г
л
т/2 [Г"
t
\ 1
1 '
1
/ 1
1
}
ки координаты х на стыках
интервалов. Допустим, что
автоколебания существуют и являются
простейшими, однопериодными:
интервалы включения реле, в каждом
направлении одинаковы (рис. 7.32),
На интервале / искомый процесс
Т/2
Х/^-Со - S С'
► е V
Г t
0<f<r/2.
где 5v — полюсы функции W (s);
Со, Су, — произвольные
постоянные; Т — пока неизвестный период
автоколебаний; знак минус в
формуле указывает на действие отри-
Рис. 7.32 цательной обратной связи в
замкнутой системе.
На следующем интервале // можно выделить две
составляющие процесса. Для этого два последующих включения
реле представим как наложение двух сдвинутых на Т/2
ступенчатых функций (рис. 7.32): M-l (О и --2МЛ {t + Г/2), где
М — модуль выходной величины реле, известный из его
характеристики. Первая слагающая вызывает продолжение
процесса xi на интервале //:
XI (И-Г/2) - -Со- 2 Cve
v= I
Переменная ^теперь отсчитывается от начала интервала //.
Вторая ступенчатая функция вызывает реакцию, которую
можно вычислить по формуле Хевисайда:
x{i)^2MP(0)/Q{0) + 2M yZlfllLl-.
Суммарный процесс на интервале //
+ 2M 2
(7.24)
Но в силу симметрии характеристики реле, если однопериод-
иые автоколебания существуют, Хц {t) будет равен Xj (t)
с обратным знаком:
xu{t) =-Xt{0. (7.25)
Из (7.25) и (7.24) получим
МР{
Q{0)
v= I
Sv<3'(«v)
(7.26)
Поскольку равенство (7.26) должно быть справедливым для
любых значений t, приравниваем порознь нулю свободный член
и множители при eV, v = 1, n, тогда
Co = AlP(0)/Q(0),
С,.= =-^^ 11 -th(s.7/4)1. (7.27)
^Q(M(e'v^/4.)
Таким образом, все произвольные постоянные выражены
через известные коэффициенты и полюсы передаточной
функции и через неизвестный период автоколебаний Т. Для
нахождения Т составим уравнение периодов, для чего используем
условия переключения: на границах интервалов х проходит
через нуль.
Для конца интервала /
Со+ 2 С^е^^^/'-О,
v=l
Подставив Со и Cv из (7.27), получим уравнение периодов
в виде
МР{0) I у 2mp{s^)^^'^'
или после несложных преобразований
у .^lf^[l + th(Svr/4)l = 0.
<2(0) ^vQ'C^v)
Это трансцендентное уравнение с одним неизвестным Т.
Его решение удобно выполнять графически. После
нахождения Т обязательна проверка выполнения условий
переключения
signxii (0) —singnt/i (+0), signal (772) = — sign (0),
или в данном случае:
- 2 Cv < 0. или 2 -^гу^ [1 -th (sv Г/4)] < 0;
v= I
- V с е 'v > 0; —11 + th (Sv 7/4)1 > 0.
в случае невыполнения условий переключения делаем
вывод, что автоколебания искомой формы не существуют.
В данном примере сделанное в его начале предположение о
том, что степень числителя Р передаточной функции
линейной части меньше степени знаменателя Q, существенно. В
самом деле, если линейная часть устойчива, то при одинаковых
степенях Р и Q в момент переключения реле переменная х
будет совершать скачок в том же направлении, в котором
сработало реле, что приведет вследствие действия обратной
связи к немедленному последующему включению реле после
скачка в противоположном направлении. Таким образом, при
равных степенях Р \\ Q условия переключения не будут
соблюдены и автоколебания искомой формы не возникнут,
зато при определенных условиях сможет возникнуть
скользящий режим.
§ 7.6. Приближенное исследование автоколебаний.
Метод эквивалентной линеаризации
Во многих динамических нелинейных системах
периодические движения на выходе инерционной линейной части,
возникли ли они в результате воздействия периодической, но не
синусоидальной, внешней силы или же возбудились как
автоколебания, оказываются близкими к синусоидальным. Это
дает основание считать, что система обладает свойством
низкочастотного фильтра, пропускающего без ослабления основную
и существенно ослабляющего высшие гармонические. «Гипо-
теза фильтра», принимаемая по отношению к нелинейным
системам с близкими к синусоидальным периодическими
режимами лежит в основе приближенных методов. По отношению к
близким к синусоидальным автоколебательным режимам
принимается другая гипотеза наряду с гипотезой фильтра —
гипотеза «авторезонанса», или «порождающей системы». В самом
деле, если нет вынуждающей периодической внешней силы, но
автоколебания возникают, причем по форме они близки к
колебаниям в линейных системах, то естественно предположить,
что по отношению к периодическому режиму, наблюдаемому в
нелинейной системе, последняя близка к линейной, в которой
могут возбуждаться незатухающие колебания. Такую близкую
линейную систему называют порождающей. Если порожда-
щая система существует, то нелинейное дифференциальное
уравнение может быть разложено на сумму линейного с чисто
мнимыми корнями и нелинейного уравнения, которое обычно
представляют как нелинейную функцию координаты и ее
производных, умноженную на «малый параметр». При обращении
малого параметра в нуль уравнение вырождается в
порождающее линейное.
Для приближенного анализа периодических режимов
Пуанкаре, Ван-дер-Полем и другими были разработаны методы,
малого параметра, строго обоснованные для нелинейностей,
выражаемых аналитическими функциями. Но в теории
управления в большинстве случаев приходится иметь дело с
неаналитическими, разрывными и неоднозначными
нелинейностями. Для таких систем получили распространение два типа
приближенных методов: эквивалентной линеаризации и
гармонического баланса. Для безынерционных нелинейных
элементов обе эти группы методов по существу идентичны и дают
совпадающие результаты.
Метод эквивалентной линеаризации в применении к
однозначным безынерционным нелинейностям состоит в следующем.
Пусть передаточная функция линейной части замкнутой
системы (рис. 7.1)
W {s)^ К {s) ID (s). (7.28)
Если трактовать р как символ дифференцирования р =
=dfdt, то дифференциальное уравнение замкнутой нелинейной
системы
D{p)x + K (Р) f (X) ^ 0. (7.29)
Пустьу (х) — однозначная функция. Заменим ее суммой
линейной функции и «малого» нелинейного слагаемого;
/ (х) =^ сх +щ (х). (7.30)
Выберем с так, чтобы уравнение
{D (р) + сК(р)]х - О, (7.31)
получающееся при (л О, было порождающим, т. е. имело бы
чисто мнимые корни s^y^ =^ ± Такую линеаризацию и
называют эквивалентной (она не обязательно совпадает с
линеаризацией посредством отбрасывания нелинейной части ряда
Тейлора: сх может отличаться от линейного члена ряда, а
(х) может содержать и линейный член). Эквивалентную
линеаризацию удавалось иногда успешно применять и в таких
случаях, когда \х не являлась малой или когда функция / (х)
не была аналитической и не разлагалась в ряд Тейлора.
В очень многих практических задачах при этом получалось
удовлетворительное приближение к истинному решению, но
строгого обоснования метода для таких задач в общем случае
найти еще не удалось.
Периодическое решение уравнения (7.31) приближенно
представляют так:
Хо (t) = Л sin й /. (7.32)
Выбор начала отсчета времени, при котором в решении
строят только синусную составляющую, не снижает общности,
если система стационарна. Амплитуда А пока не известна и
не может быть найдена из линейного уравнения. Получим ее из
нелинейного уравнения, воспользовавшись на этот раз
гипотезой фильтра.
В соответствии с этой гипотезой высшими гармониками на
выходе линейной части можно пренебречь и считать выход
равным Хо (О- Тогда на вход нелинейного элемента поступает
синусоидальный сигнал Xq (t), а выходная его величина будет
y{t)^yo + A {g sin Qt + Ь cos Qt). (7.33)
Коэффициенты gab при основной гармонике и Уо находят
по формулам Фурье, так как (7.33) есть часть ряда Фурье:
2п
яЛ
1* /(/Isinij)) sin
2л
—' Г /(i4sini|?)cosibdib;
J
2я
г/о--^ j /(4sin-il))d^,
(7.34)
гд^ = Qt.
При симметричных нелинейных характеристиках,
проходящих через начало координат, величина равна нулю.
Ограничимся в основном рассмотрением только таких
характеристик. Далее, так как f (х) однозначна, то у (t) совпадает по
фазе с Хо (О й. в соответствии с (7.32) не содержит косинусных
соста'вляющих, т. е.
b = 0. (7.35)
Так как высшие гармоники, пройдя через линейную часть,
в соответствии с гипотезой фильтра практически исчезнут и на
вход нелинейного элемента не пройдут, то при нахождении х
мы их можем не принимать во внимание и подставить в
уравнение (7.29) только X А sin Qt и у =^ gA sin Qt. При этом
у it) ^ gx (t) = сх (/).
Таким образом, коэффициент с эквивалентной
линеаризации равен g. Так как g (Л) — функция амплитуды А,
характеристика f (х) в результате линеаризации заместилась пучком
прямых, проходящих через начало координат и имеющ^их
наклоны, различные для разных Л. Из пучка надлежит выбрать
ту йрямую, при которой уравнение (7.31) становится
порождающим с частотой решения, равной частоте автоколебаний.
Подставляя в (7.31) р = /Q, получим
D i/Q) + g {А)К (/Я - О,
откуда
g (Л) = ~D {jQ)/K (/^) = - \'/W ijQ) =
- — G (/fi). (7.36)
G (jQ) — это обратная амплитудно-
фазовая характеристика линейной
части. Так как g (А) в
рассматриваемом случае — действительное число,
то частота Q определяется точкой
пересечения характеристики — G (jQ)
с действительной осью. Приравняв
—g{A) длине отрезка от начала
координат до пересечения — G (/Q) с
действительной осью, получим
уравнение, из которого можно найти А. Но
в общем случае эту задачу удобнее ре-
Pjjc 733 шать графоаналитически. Один из
методов графоаналитического решения
рассмотрен в следующем параграфе.
Если характеристика / (х) неоднозначна, то b отличен от
нуля, в выражении (7.33) присутствует косинусная
составляющая и выразить у = f (х) как линейную функцию х с
действительным коэффициентом нельзя. Заменив в (7.33) х и у
относительными переменными | = sin Qt = х/Л, т] = cos = у/А,
после несложных преобразований получим
Это уравнение эллипса, пересекающего ось | в точках go=
= ± bl{g^ + b^), а ось Г] в точках iio = + С помощью этого
эллипса можно определить значения g" и b из опыта.
Например, сняв на осциллографе в осях ^, т] гистерезисную петлю
при воздействии на вход синусоидального напряжения,
заменим ее приближенно эллипсом, проходящим через точки
пересечения петли с осями координат (рис. 7.33). Из приведенных
выше соотношений найдем
Поскольку линеаризация / (х) посредством функции сх в
данном случае невозможна, то порождающего решения в
указанном выше смысле не существует.
Но для установившегося периодического движения
эквивалентную линеаризацию дифференциального уравнения все
же можно формально выполнить, если аппроксимировать / (х)
линейной функцией не только х, но и его производной по вре-
мени. Так, в литературе получил широкое распространение
следующий способ линеаризации. Представим у в виде
у = gA sin Ш + {biQ) d {А sin m)ldt - {g Л- bp/Q) x.
Тогда (7.29) с учетом, что у f (л:), можно привести к виду
1^ (Р) Ч К (р) {g + bp/Q)] X - 0. (7.37)
Поскольку (7.32) удовлетворяет этому уравнению, то
характеристическое уравнение последнего имеет пару чисто мнимых
корней 4i /Q и уравнение (7.37) можно в этом смысле назвать
порождающим. Но таких «порождающих» уравнений можно
написать бесчисленное множество, поскольку
«линеаризующих» уравнений нелинейного элемента
d{p)y =К{р)х, (7.38)
которым удовлетворяли бы соотношения (7.32) и (7.33) также
существует бесконечно много. Для этого достаточно выбирать
коэс1х})ициенты полиномов d {р) и К (р) так, чтобы
соблюдались равенства
gd, - bd, = /е^; gd, + bd, - (7.39)
где
d, = Red if Q), d^ = 1ш d (/Q). =^ Re k (p).
Так, например, пусть нелинейный элемент замещается
звеном второго порядка с передаточной функцией
^к.э (S) = K{rs+ 1)/ {TW +7^+1).
Для данной функции d^ = 1—Q^T\, ^ ^Т^, = /С,
= /С^т. Подставляя последние выражения в (7.39),
получим
^(1 ^Q^r?)—ШТа^К,
gQT^ + b{\^Q.^T\)^QKx.
Для нахождения четырех неизвестных /С, т, Т\ и Т^, имея
два уравнения, двумя параметрами задаемся произвольно, а
из уравнений находим два остальные.
Подстановка (7.38) в (7.29) дает «порождающее» уравнение
Ю{р) d{p)^' K{p)k{p)\x^Q.
среди этих уравнений могут быть уравнения, имеющие
устойчивые и неустойчивые решения с различными переходными
процессами. Любое из них пригодно для нахождения
автоколебаний, но, если не дано специального обоснования для
каждого конкретного случая, в общем не позволяет исследовать
устойчивость и неустановившиеся режимы. Поэтому
эквивалентная линеаризация по рассмотренному выше способу для
нелинейных элементов с неоднозначными характеристиками может
быть использована только для нахождения параметров первых
гармоник автоколебаний, исследования же переходных
процессов, иногда рекомендуемые в литер;атуре, с помощью
описания нелинейного элемента уравнением (7.37) в общем случае
необоснованны.
§ 7.7. Метод гармонического баланса
Метод гармонического баланса не использует гипотезы
порождающей системы, а основан на следующих рассуждениях.
Разомкнем систему перед входом нелинейного элемента. В
автоколебательном режиме первые гармоники величин х и у на
входе и выходе нелинейного элемента соответственно равны:
X = А sin Й/; (/ = Л {g sin Qt + b cos Q^). (7.40)
Эти уравнения более удобно записать в комплексной форме:
х- АеШ^;
y^Aig^ib)ef^^^{g + jb)l
На выходе разомкнутой системы имеем
W iJQ) ig+jb)x=^ W m W^,, (Л) X.
Автоколебания в замкнутой системе будут существовать,
если выход и вход разомкнутой системы связаны соотнощени'-
^ями г = — X, которые имеют место и в
замкнутой системе (рис. 7.34), или
Рис. 7.34
[1 + U7(/Q) W-,M\x=^.
Так как равенство справедливо для
любых t, приравняем нулю выражение
в квадратных скобках:
1 + ^^(/Й)И^н.э(^)=0- (7.41)
о)
■ 'A
s^H.3 (A)
Рис. 7.35
(7.42)
Из (7.41) легко получить равенства
W 1 /«^н.э И) = -1 /(g + т = (А);
G(/Q) - Wh., (Л) = -(g + /Ь).
Первое из этих равенств было впервые предложено Л. С.
Гольдфарбом (СССР), второе, независимо, но несколько
позднее, — Р. Коченбургером (США).
Равенства используются для графоаналитического решения
задачи. '
По методу Гольдфарба строят (рис. 7.35, а): W (IQ) —
амплитудно-фазовую характеристику линейной части системы;
- С„.з {A) = -V(g+ ib) = — 1/1F„.3 — кривую гармо-
нического коэффициента передачи, или, по американской
терминологии, описывающей функции. На первой точками
отмечают ряд значений Qi,.q2,..., на второй — значения Л i, Л а,....
В точках пересечения кривых с помощью интерполяции между
соседними с ними значениями Qj, и Л^, Л/+1 находят
значения частоты и амплитуды Л о автоколебаний.
Пб Методу Коченбургера эти параметры сходным образом
находят по точкам пересечения кривых G (/Q) и — И^н.э (^)^
^-{g+ /6) (рис, 7.35,6).
Пример 7.1. Линейная часть системы состоит из двигателя
постоянного тока и безынерционного усилителя. Ее передаточная
функция
W{s)^K/lsa\ s2+r,s+l)].
где 7\ ^ электромеханическая постоянная времени; —
электромагнитная пoctoяннaя времени;./С — общий коэффициент усиления
линейной части.
Нелинейный элемент —
поляризованное реле с зоной
нечувствительности. Реле срабатывает мгновенно. Его
статические характеристики
f
л->а;
U^fm^i 0; ~а<Л'<а;
Рис. 7.36
Л' < — п,
где М ~ const.
Вычислить обратную амплитудно-
фазовую характеристику линейной
части. Подставляя п выражение
обратной передаточной функции s = /Q и разделяя вещественную и
мнимую части, получим
G iJQ) - {l/K)liQ{l-Q'- Т, Т^)-Q2 j.
Годограф С (/Q) (рис. 7.36) пересекает действительную ось, когда
его мнимая часть обращается в нуль, т. е. при 1 — QIT^T^ = 0.
Частота Qq. обращающая п нуль это выражение, является одновременно
порождающей частотой, т. е. частотой автоколебаний
Qo-1/1/(7-1 Га).
Отрезок с действнтельной оси от начала координат до точки перс-
сечения равен с Q^T^/K = X/iKT^).
Из (7.34) определим Уо ~ 0\ b ~ 0;
л/2
g=^=l4M/{nA)] f sinil^rfij) (4Ж/(лИ)]со8а.
о
где а находят из соотношения х ^ А sin а = а. или cos а =
Окончательно
пМ)-[ИМ/(пЛ)1 У\-а^/А-,
[о, Л<а.
Амплитуду колебаний найдем из уравнения
д{Л)..-г.[Ш/{пА)] У\-а'/А^- -.^с^ \ 1{КТ^),
В данном случае решение можно получить аналитически:
А^{2 У2 КТ^М/п) У\ ±У\ ~ n^a^im^-Tl М^у
Точка пересечения одна, но ей соответствуют два значения
амплитуд. Первое (меньшее) получается при движении вдоль оси в
направлении возрастания А при движении вправо, при дальнейшем
возрастании амплитуды направление движения в некоторой точке изменится.
Второе пересечение получится при большей амплитуде при движении
влево. Если 4К^Т^М^ < 3xV или а > 2КТ^М/п, то пересечения
характеристик не произойдет и автоколебания не возникнут.
об устойчивости автоколебаний- Рассмотренные методы
позволяют формально найти периодическое решение
линеаризованного уравнения системы, но не все эти решения будут
соответствовать реально существующим автоколебаниям.
Физически возможны лишь устойчивые периодические движения,
поэтому возникает проблема исследования устойчивости
найденных периодических решений. К сожалению, пока не
удалось найти необходимых и достаточных условий устойчивости
решений, полученных методом гармонического баланса, в
особенности для неоднозначных характеристик. Л. С. Гольдфарб,
используя критерий Найквиста, получил следующий
критерий. Пусть построены кривые W (Jco) и — С„.э И)- Будем
двигаться по кривой — С^.э И) в направлении возрастания
А. Если разомкнутая линейная система устойчива, то той
точке пересечения характеристик W (jw) и — G^.g (Л), в которой
мы входим в контур амплитудно-фазовой характеристики
W (у<о), соответствует неустойчивое периодическое решение,
в точке же выхода из контура решение устойчиво и эта точка
определяет параметры автоколебаний. Так, на рис. 7.35, а
точке М соответствуют устойчивые, а точке — неустойчивь][е
автоколебания. При использовании обратной
амплитудно-фазовой характеристики G О'со) и характеристики — W^.b (^)
также двигаемся в направлении возрастания Л, При этом
устойчивые автоколебания соответствуют точке входа в контур М,
неустойчивые — точке выхода из него (рис. 7.36, б).
Показано, что для однозначных характеристик этот
критерий является необходимым, но не достаточным, хотя в
практических задачах он приводит к правильным результатам. Для
неоднозначных же характеристик пока не удалось обосновать
даже только необходимости или только достаточности
критерия.
§ 7.8. Устойчивость в малом, большом и целом
В нелинейных системах движение или равновесие,
устойчивое в малом, может оказаться неустойчивым при больших
отклонениях и первый метод Ляпунова, рассмотренный в гл. 3 для
исследования устойчивости на основе уравнений
линейного приближения, уже недостаточен для полного
исследования устойчивости в нелинейных системах.
Анализ устойчивости движения можно свести к анализу
устойчивости равновесия (тривиального решения) в
преобразованном фазовом пространстве отклонений. Исследуемое
движение и его траекторию считают невозмущенными;
предполагается, что к моменту времени, принимаемому за начало отсчета,
возмущающие силы сместили изображающую точку с
невозмущенной траектории на другую —возмущенную, после чего их
действие прекратилось. Отклонения координат изображающей
точки л: = {Xj, Xg, .... х„} на возмущенной траектории в
каждый момент t от тех координат точки на невозмущенной траек-,
тории в тот же момент, которые имели бы место при
отсутствии возмущений, принимают за координаты нового фазового
пространства. На основе исходных уравнений движения
составляют уравнения в этих отклонениях. Но если для
линейных систем уравнения в отклонениях были подобны исходным
или даже несколько проще их. то для нелинейных систем
форма уравнения в отклонениях может оказать>ся
значительно более сложной, чем у исходных уравнений. Начало коорди.-
нат нового пространства будет устойчивой точкой равновесия,
если устойчиво невозмущенное движение.
Если точка равновесия х — О устойчива, то вокруг начала
координат существует область притяжения траекторий
^область G (на рис. 7.37 однократно заштрихована). Если
известно лишь то, что область притяжения существует, то считают,
что состояние равновесия устойчиво в малом, т. е.устойчивость
гарантируют лишь при достаточно малых отклонениях.
Пусть область G существует. Зададимся областью
допустимых начальных отклонений L, например, ё виДе гиперкуба
Рис. 7.37
с центром в начале координат, реора которого параллельны
осям координат и имеют длину 2Х (на рис. 7.37 — дважды
заштрихованный квадрат). В соответствии с определением
устойчивости Ляпунова равновесие устойчиво (в малом), если
можно выбрать такое X, что область L будет целиком
принадлежать областч G (рис. 7.37, а).
Для того чтобы определить устойчивость в большом,
нужно задаться, кроме того, областью Lq возможных (по
техническим условиям) в данной системе отклонений. Зададим Lq
также в виде соосного с L гиперкуба с длиной ребра 2 Kq, Если
гиперкуб Lq целиком принадлежит области G, равновесие
устойчиво в большом (рис. 7.37, а), если часть его находится
вне области G, равновесие устойчиво в малом, но неустойчиво
в большом (рис. 7,37, б). Математически сказанное
формулируется так: если при наперед заданном положительном е
(соответствует зачерненным квадратам е на рис. 7.37, а, б) можно
выбрать другое положительное число К (е) такое, что при
начальных отклонениях лг^, удовлетворяющих условию
UtoK^, ^' = 1. 2,
значения Xt (/), / = 1, п, при всех Сбудут удовлетворять
соотношению
\Xi (t) I <е, / = 1, л,
то равновесие устойчиво в малом.
Если, кроме того, возможные начальные отклонения
удовлетворяют условиям
max |x,o|=-Xo, Ко<К е=-1,2, л, (7.43)
то равновесие устойчиво в большом.
Если область G распространяется иа все пространство,
равновесие называют устойчивым в целом. Так как обычно
границы области G установить бывает трудно, об устойчивости
в целом судят по величине X: если она не ограничена, т. е.
условие \Xi {t)\ < е соблюдается при любом сколь угодно
большом 'К, имеет место устойчивость в целом.
Если приведенные условия соблюдаются при любом сколь
угодно малом е, говорят, что равновесие устойчиво
асимптотически.
Для исследования устойчивости в большом и целом
используют специальные методы, из которых ниже коротко
рассматриваются два второй (прямой) метод А. М, Ляпунова и ме-
тод Ь. М. Попова — для исследования абсолютной
устойчивости (т, е. устойчивости в целом для определенного класса
нелиней ностей).
Пример 7.2. Получим уравнения в отклонениях для исследования
устойчивости периодического движения
x«/loSin(Qo/ + W; I ^7
У =-■■ K^ \и sin (Qo t фо) Л- Ь cos (Qo tЛ- фо)] /'
выражающего основную гармонику автоколебаний и являющегося
точным решением уравнения (7.31)
D (р) \А sin (Q/ + ф)] = -ЬК (р) А \и sin (Й^ + Ф) + ^ cos (Q/ +
4- ф)], (7.45)
и приближенным решением уравнения (7.29). Считая (7.44), в котором
Qo = const и Фо = const, уравнениями невозмущенного движения,
зададим приращения двум основным параметрам и ("*"" Фо).
Ь.А = А ~ А^\ Аф = ф — Фо А (Q/).
Так как g и 6 зависят от А, они также получат приращения Ag
и А6, но найти их непосредственно из (7.34) нельзя, так как в
подынтегральные выражения теперь входит неизвестная функция времени
А (/). Чтобы обойти это затруднение, прибегают к приближенному
нахождению Ag и А г?, для чего предполагают, что А изменяется
настолько медленно, что в течение одного периода {Т = 2n/Qo) оно мало
отличается от постоянного и может быть заменено постоянным числом,
равным усредненному за период значению А. Тогда по (7.34) находят
g vib как функцию подобного изменяющегося ступенями от периода к
периоду аргумента А, Затем вводят еще одно допущение: в
полученных функциях g {А) и 6 (i4) аргумент А является уже не ступенчатой,
а непрерывной функцией и приращения Ag и А6 выражаются через АЛ
следующим образом:
Ag= (д^/дЛ)о АИ; ^b={дb|дA)^ АЛ. (7.46)
Используя (7.45) и известные в математике выражения для
преобразования действия линейного оператора Ы (р) (где Ы полином.
а р =^ d/dt) на произведения функций и (/) sin Oq (0. " (О cos QqI,
Qq = const, т. е.
М (р) [и (t) sin Qot] = sin Qo^i (p) и (t) + cos Qo f^z (P) « (0;
M (p) [u (t) cos Qot] = cos Qo^^^i (P) « (0 — sin ^о^^^г (P) « (/)»
где Ml (p) = Re M (p + j^o); (p)=: Im Ж (p + yQo), получим
sin Qt (Di (p) (A cos Я])) -D2 (p) (Л sin Ф) (P) (>^ cos я|?) —
-6 (Л sin я|?)] —/Ca (p) (Л sin iii)+b {A cos of)]) +cos Ш {(p) (A cos я|?)+
+ (P) Л (sin я|?)+/(2 (P) Ig {A cos я1?) -6 (A sin я]?)] +/Ci (p) [fif (Л sin ^J?) +
+ 6(^cos'*)])=0.
ся в сравнении с Q малыми высших порядков и отбрасываются.
Пренебрегая pVQ^ < I. v > I, оставляем в полиномах D^, D2, Ki и Кг
свободные члены и члены, содержащие р в первой степени, и получаем
пару уравнений первого порядка для приближенного описания
изменения переменных
Аа=^Асо8'ф и Адг^А sin i^.
§ 7.9. Второй (прямой) метод Ляпунова
Второй (прямой) метод Ляпунова основывается на
построении специальных функций Ляпунова, позволяющих получить
достаточные условия устойчивости равновесия в большом. В его
основе лежат две теоремы Ляпунова, приводимые ниже без
доказательства.
Теорема I.. Если суш^ествует знакоопределенная функция
V (Xi, х^), производная W = dV/dt копюрой по времени в
силу дифференциальных уравнений движения или
представляет собой знакопоспюянную функцию противоположного с V
знака, или тождественно равна нулю, то невозмущенное
движение устойчиво.
Теорема 2. Если, кроме того, функции W знакоопределена,
то невозмущенное движение успюйчиво асимптотически.
Отметим, что знакопостоянной называют функцию,
принимающую при всех значениях своих аргументов только значения
одного знака или нулевое, а знакоопределенной —
знакопостоянную функцию, принимающую нулевое значение только
при нулевом значении всех ее аргументов (в начале координат).
Уяснить смысл функций Ляпунова и сформулированных в
приведенных выше теоремах условий устойчивости легко с
помощью понятий фазового пространства.
Если I/ (Xi, .... х„) — знакоопределенная функция, то
уравнение V (xi. х^) = С = const обычно определяет в
фазовом пространстве {xi, х„} замкнутую поверхность,
охватывающую точку xi=0 (начало координат). Поверхность V =
находится внутри поверхности V =^ Cg, если Q < Cg. При
приближении С к нулю поверхность стягивается в точку х=0-
Если в силу уравнений движения
определенно-положительная функция V с течением времени только убывает, т. е. dV/dt
определенно-отрицательна, то это означает, что с течением
времени изображающая точка переходит с внешних поверхностей
на внутренние, все время приближаясь к началу координат.
Рис. 7.38
которое ъ этом случае является
точкой асимптотически устойчивого
равновесия.
Задача о нахождении функции
Ляпунова, которая для данной системы
дала бы необходимое и достаточное
условие устойчивости, весьма сложна
и практически пока неразрешима.
В зависимости от конфигурации
фазовых траекторий уравнение замкнутой
поверхности V = С, которая при
всех С пронизывалась бы
траекториями только снаружи внутрь или наоборот, найти весьма
трудно. Поэтому при отыскании функции Л1дпунова им обычно
заранее приписывают некоторую форму, параметры которой
сравнительно несложно вычисляются по исходным
уравнениям движения. Если функцию заданной формы при этом
найти удалось, можно быть уверенным, что равновесие
устойчиво. Если же это не удалось, это еш.е не означает, что
равновесие неустойчиво, может просто оказаться, что функции
Ляпунова данной формы не существует, но существует
функция другого вида.
Так, если фазовые траектории имеют вид, показанный на
рис. 7.38, и будем искать функцию Ляпунова в виде сферы V =
п
= 21 xf, то это вряд ли удастся, так как траекторий всегда
будут в некоторых точках входить в сферу, а в некоторых —
выхолить из нее, хотя равновесие устойчиво.
Для линейных систем функции Ляпунова представляют
собой квадратичные формы координат, координаты которых
находятся сравнительно несложно. Задаемся квадратичной
формой с неопределенными коэффициентами
и находим коэффициенты а^, из условия
(7.49)
(7.50)
dV/dt=^ S dV/dxydxj/dt = ~- А 2 4,
где л —любая постоянная. Подставляя в (7.50) выражения
d-Xi/dt из исходных уравнений движения и выражения dWdx,-,
из продифференцированного уравнения (7.49), сравниваем ко-
эффициенты при одинаковых членах ХиХ[ в левой и правой
частях и получаем алгебраические уравнения дня нахождения
коэффициентов а,,;.
Иногда функцию Ляпунова в виде квадратичной формы
удается отыскать и для нелинейных систем, близких к линейным,
но вообще такое ограничение формы резко сужает
возможности исследования. Довольно существенное расширение
возможностей дает форма функции Ляпунова, предложенная А. И.
Лурье и В. И. Постниковым. Если нелинейность обусловлена
введением в линейную систему одного безынерционного
нелинейного звена со статической характеристикой = ср (а),
принадлежащей классу (О, К), то функцию Ляпунова во
многих случаях удается построить в виде «интеграл от напинейно-
сти плюс квадратичная форма»:
V=^R{x) + b^^ip{l)dl, (7.51)
где квадратичная форма R (х) имеет вид
/?(х)=-х*Нх,
при этом x* — матрица-строка, полученная
транспонированием вектора х, а Н — квадратная определенно
положительная симметрическая матрица типа п х п, элементы которой
постоянны и рассматриваются как искомые неопределенные
коэффициенты.
§ 7.10. Абсолютная устойчивость
Рассмотрим свободное движение в системе, состоящей из
линейной части с передаточной функцией W (s) и нелинейной
отрицательной обратной связи с характеристикой | = ф (а)
(рис. 7.39). Уравнения для этой схемы можно записать в виде
а =^ _ (S) Г; 1 Ф (о); Ф (0) -0. (7.52)
Уравнения для линейной части записаны для изображений
Лапласа а и g переменных а и ^. Условие ф (0) = 0.
наложенное на функцию Ф (•). означает, что в точке а = О, ^ = О
система имеет состояние равновесия: пара ст = 0; ^ =0
является тривиальным решением дифференциальных уравнений
(7.52). Мы будем исследовать условия устойчивости этого
состояния равновесия, т. е. устойчивость тривиального решения.
Рис. 7.39
Уравнения (7.52) можно записать
также в переменных состояния:
х==Ах + Ь|; | = ф(а); о^с^'х, (7.53)
где x — п-мер ный вектор состояния;
А ^ постоянная {п X аг)-матрица; с —
постоянный {п X 1)-вектор; b —
постоянный (п X 1)-вектор. Между
передаточной функцией W (s) и
коэффициентами уравнений (7.53) существует
зависимость
U/(s)=c' (А—sE)-^b, (7.54)
где Е — единичная матрица. Передаточная функция W (s)
для уравнения (7.53) в общем случае равна отношению
полиномов:
U7 (5) М {s)/D (5).
где степень полинома D (s) равна числу переменных
состояния п. Равенство степени полинома D (s) числу переменных
состояния п существенно — это означает, что передаточная
функция W (s) невырождена, т. е. М (s) и D (s) не имеют
одинаковых множителей вида 5 — X, При этом условии система
(7,53) полностью управляема и эквивалентна системе (7.52).
Степень полинома М {$) вообще равна п — 1, но при некоторых
значениях коэффициентов матрицы А может быть и меньше,
вплоть до нуля. Если уравнения состояния имеют вид
x=Ax-hb|; &-=ф(а); o==c^^x + ql.
(7.55)
где q — отличное от нуля постоянное число, то степень М (s)
равна степени D (s).
Важной особенностью общей теории устойчивости
нелинейных систем указанного вида является то, что рассматриваются
не конкретные виды функций Ф (•) (т. е. не параболы,
экспоненты ИТ. п.), а классы функций, удовлетворяющих тем или
иным ограничениям. Если положение равновесия системы
(7.53) или (7.55) асимптотически устойчиво в целом при любой
нелинейной функции ф (•) из заданного класса, то она
называйся абсолютно устойчивой в этом классе. Мы будем
рассматривать класс функций ф (•). удовлетворяющих секторным
ограничениям. Их характеристики | = ф (а), построенные в плос-
кости (а, g), укладываются в угловом секторе, образованном
двумя прямыми:
где К2 > Ki.
Про такие нелинейности говорят, что они относятся к
классу (/Ci, /С2) или что они принадлежат сектору {Ки К2)-
Нелинейности из класса (/Ci, К2) определяются следующим
условием:
Kj <Ч> {о)/о < /Са для офО; Ф (0) = 0.
Это условие равносильно неравенству
fx (о. I) - Кго) > 0. (7.5'6)
Левая часть Fj (0, i) является квадратичной формой
вещественных переменных t и о. Очевидно, условие (7.56) является
частным случаем более общего условия
F (а, I) > О, (7.57)
где F (а, ^) — произвольная квадратичная форма
вещественных переменных | и а. Если характеристика | = ф (о) или
пара (I, ф) удовлетворяет неравенству (7.57), то говорят, что она
удовлетворяет локальной связи с формой F (а, |). Наряду с
классом нелинейности, определяемым локальной связью,
рассматривают класс нелинейных характеристик, который
задается интегральной связью.
Будем говорить, что характеристика Е — Ф (о)
удовлетворяет интегральной связи с формой F (^, а), если существуют
последовательность оо и число Г > О, такие, что
выполняется неравенство
jflKO. a(0|d<^-r. (7.58)
О
т. е. мы требуем, чтобы при возрастании / интеграл не
стремился к отрицательной бесконечности 1П1.
При выполнении локальной связи удовлетворяется и
интегральная связь с той же формой. Обратное утверждение не
имеет силы. Существуют функции, удовлетворяющие
интегральной связи, но не удовлетворяющие локальной связи с той
же формой.
Наконец, отметим, что при определении классов нелиней-
ностей ограничения могут накладываться ие только на | и с.
но также и на производную а = doldt. Поэтому, когда такие
ограничения накладываются, будут рассматриваться связи с
квадратичной формой F (|, а, а).
Отметим некоторые подклассы (Ки К^.
Подкласс (О, /С) удовлетворяет условиям
К,^0; /С2--К>0;
О < ф (а)/а < ТС, если а ^ 0; ф ((0) - О, (7.59)
или F{1, а)--(/Са-^)|>0.
Подкласс (G, оо) — любая Ф (а), расположенная
только в первом и третьем квадрантах плоскости (а. Е):
0<ф(а)/а<сю; о ^ 0; ф(0)=0, (
^или F(?, a)=ag>0. 1 ^ ' ^
Для практических целей наиболее удобной формой
определения устойчивости нелинейных систем являются частотные
критерии, в которых используется запись уравнений в виде
(7.52)' и частотная характеристика линейной части W (/со).
Для формулировки частотных критериев потребуется
предварительное преобразование квадратичных форм, входяндих в
локальные и.интегральные срязн. При этом используются
понятия эрмитовой формы и эрмитова расширения.
Напомним, что эрмитовой, формой от п действительных или
комплексных переменных Zi,...,.z„ называется многочлен
С (г)-- 2 a,:;2,2,=z*7'Az,
где А :— эрмитова матрица, т. е. матрица, в которой элементы,
расположенные симметрично относительно главной
диагонали, являются комплексно-сопряженными числами {а^ ~ ciij*).
Здесь звездочка обозначает комплексное сопряжение, / —
транспонирование Iz* = (zj, zl, zji)). Эрмитова форма
принимает только действительные значения^ Эрмитова форма
О {z),<€xr п комплексных переменных Zj...., называется
эрмитовым расширением квадратичной формы С (х) от п
действительных переменных Xi, ... х^, если при z =^ х эти формы рав-
ньг'(С (z)| = G (х)). В частном случае, когда
квадратичная форма С (х) представлена в виде произведения двух
линейных форм С, (х) и (X) [С(х) = Ci (х) G2 (х)], как легко
проверить, ее эрмитовым расширением будет форма
. С (Z)- Re [С, (Z) GI (z)l =-Re [GI (z) G, (z)]. (7.61)
Пусть рассматривается локальная или интегральная связь
с формой F {I, а, о). При формулировке частотного критерия
используется следующее преобразование. Находится эрмито-
^
во расширение F (Е, а, а) формы F а, а). Знак ^ над
переменной означает, что она принимает комплексные значения.
Переменные а, о можно рассматривать как изображения
Лапласа для переменных |, а, а. При использовании
уравнения а = — W {s)\ (см. (7.52)), переменные она
исключаются, а затем в передаточной функции W {s) производится
подстановка s = /со. В результате получается частотная
функция
F (I, /(О) - Г (/(О) Г, -/соЦ7 (/(О) Г].
В частном случае, когда F (£, а, а) представлена в виде
произведения двух линейных форм F^ (^, а. с) и (^» а, а), в
силу (7.61) имеем
У (I. /со) Re |Fu. (со, Г)* Fo.. (со, Г)1, (7,62)
где
FuA^y I) = F, [t ^ W (jay) I -/coU7 (/со) Г];
/^2лсо,Г)-^2|Г, -^(/co)f: -/coW/(/co)|].
Найдем частотные функции для нелинейностей подклассов
(^1. ^2)> (О, К) и (О, оо). Для подкласса (/С„ /Сз) из (7.56) и
(7.62) получаем F (/со, I) _Re { — [I + K^W (/со)1* [1 +
+ Ki Щ/со)]} 1*1 или, так как g*| ^
? (/О), Г)- - Re К(/со))* (1 + Кг W (/со)] 11 р. (7.63)
Для подкласса (0,/С), положив в (7.63) Ki = 0, /Cg =* О,
имеем
?(/со, I) = ^ Re И + /С\Г (/со)! I ^ р. (7.64^
Для подкласса (О, оо) из (7.60) получим
F (/со, I) Re аП = -Re \Г (/со) | g Р (7.65)
Введем понятие минимальной устойчивости.
Если равновесие х = О системы (7.53) будет устойчивым
хотя бы для какой-либо характеристики ф (а) из данного
класса, то равновесие называется минимально устойчивым в данном
классе. При использовании частотных критериев ооычно
начинают с проверки минимальной устойчивости. Это проще всего
сделать для линейных систем, получающихся из системы (7.52)
путем замены нелинейной характеристики | Ф (а)
линейной \р = М-^» М- = const, принадлежащей тому же классу.
Для нелинейностей из класса (/Cj, /С2) выбирается \i из условия
/Ci < jbb < Система (7.53) минимально устойчива, если
характеристический полином замкнутой линейной системы
D (S) + \iM (s)
удовлетворяет условию Гурвица или если матрица А =
= JX Ьс^' имеет все собственные значения, расположенные
слева от мнимой оси.
Квадратичный критерий абсолютной устойчивости. Пусть
функция Ляпунова для системы (7.53) ищется в виде
квадратичной формы
V(x) = x7'Hx, (7.66)
где Н — искомая положительно-определенная постоянная
симметричная матрица, которая ищется из условия, чтобы в
соответствии с условием устойчивости по Ляпунову полная
производная по времени V (х) была отрицательной в силу
уравнений (7.53). Продифференцировав V (х) по времени и
подставив значения х и х^' из (7.53), получим
V(x)-^x^'HxH-x^'Hx-=(Ax ^rЬlY\\x +
+ х^' Н (Ах + Ь|) 2х'^" Н (Ах + Ь|) < О (7.67)
для всех I и для всех х. (При получении (7.67) использовано),
что Н (Ах + Ъ\) = (Ах + bg)^ Нх, так как это скаляры.)
Однако найти Н только из одного неравенства (7.67)
невозможно нотой причине, что в нем не учтена связь между
переменными I и x и эти переменные рассматриваются, таким
образом, как независимые. Если считать ^ независимым от х,
то. при любом заданном х всегда можно выбрать столь большое
положительное |, что 2 х^' Н (Ах + Ь|) в (7.67) станет
положительным и, следовательно, положительно-определенной матри-
Н, при которой неравенство (7,67) удовлетворяется для всех
x и всех не существует. Для того чтобы решить
поставленную задачу, надо учесть связь | = ф (с^'х), добавив ее к
неравенству (7.67). Наиболее удобно добавить эту связь в виде
условия
F (x, 1)^ F (^ о) > О, (7.68)
где F — квадратичная форма (локальная квадратичная связь).
Тогда Н выбирается из условия, чтобы выполнялись
одновременно неравенства (7.67) и (7.68). Эти два неравенства можно
заменить одним эквивалентным:
xF (I, x) + 2х^ Н (Ах + Ь|)< О, (7.69)
где т > О — произвольная положительная портоянная.
Переход от двух неравенств (7.67) и (7.68) к одному
неравенству (7.69) называют S-процедурой, так как первоначально
форма F обозначалась через S. Доказательство
эквивалентности этих неравенств — «неущербности S-процедуры» —
сложно. Столь же сложно обоснование перехода от неравенства
(7.69) к неравенству (7.70), связывающему эрмитовы формы, -
оно основывается на теореме Крейна—Шмульяна. Эти
доказательства, так же как и полное доказательство частотной
теоремы ЯкубЬвича — Калмана, о которой говорится дальше, не
приводятся. Более подробно об этом см. в [И1,
Перейдем к комплексным переменным, при этом
неравенство (7.69) заменяется аналогичным неравенством для эрмитовых
форм, полученных из данных описанным выше способом» т. е,
неравенством
2 Re X* Н (Ах + Ь|) + ? (|, (усоЕ ^ А)-^ Ы) ^ О. (7.70)
В. А. Якубовичем и независимо Р. Калманом в 1962 г.
была доказана «частотная TieopeMa» (называемая также леммой
Калмана — Якубовича), на которой, по существу,
основывается современная теория абсолютной устойчивЬСти.
Применительно к рассматриваемому случаю содержание этой теоремы
можно изложить так: для того чтобы неравенство (7.70)
выполнялось для всех X и I, т. е. для того чтобы существовала
функция Ляпунова вида (7.66), необходимо и достаточно, чтобы для
всех со выполнялось частотное условие
F [I (/о)Е А)-1 Ь6 J < О, (7.71)
или в другой записи
Fit -W^(/o))|] <0. (7.72)
Показать, что условие (7.71) необходимо, несложно. Так
как неравенство (7.70) должно выполняться для всех х, ^, то
оно должно выполняться и для значений х, ^, связанных
соотношением
Ax + bf = /(ох, т. е. при х=^ (/о)Е—А)-^Ь g.
Но тогда X* Н (Ах + Ь^) = /сох* Нх. Так как х*Нх есть
вещественная эрмитова форма, то х*Н (хА + bg) — чисто
мнимое число Rex* (Ах + bg) = О и неравенство (7.70)
выполняется только если выполняется (7.71). Необходимость
условия (7.71) .оказана. Доказательства достаточности из-за
его громоздкости не приводим.
Перейдем к формулировке квадратичного частотного крите-
т\ ИЯ
Пусть дана система (7.53), у которой матрица А не имеет
собственных значений на мнимой оси, пара А, b управляема,
а система (7.53) минимально устойчива в классе функций
<р (а), удовлетворяющей локальной или интегральной
квадратичной евязи с формой F а) > 0.
Тогда для абсолютной устойчивости системы в классе
данных функций достаточно, чтобы форма F (/со, ^) была
отрицательной для всех со, т.е. чтобы выполнялось неравенство (7.72)
для всех — оо<со<+оои любого ^фО,
При этом в случае выполнения локальной квадратичной
связи абсолютная устойчивость будет также экспоненциальной,
т. е. можно найти такие две положительные постоянные
О О и а > О, зависящие лишь от коэффициентов уравнений
и формы f', что при любых^ > to решение уравнений (7.53)
будет удовлетворять неравенству
|х(/; С Хо)|<|Схо|е-«<'-'о). (7.73)
Из этого достаточно общего критерия для различных
конкретных видов формы F получаются различные более
конкретные частные критерии. Рассмотрим некоторые из них.
Круговой Крит ер ий устойчивости.
Для'нелинейностей из класса (Ki, К^, удовлетворяющих
неравенству (7.57), эрмитова форма F (/ш, S) имеет вид (7.63)
и неравенство (7.72) после подстановки (7.63) и деления на
постоянное число принимает вид
Re {\+K^W (1 + KxW (/со) > 0. (7.74)
ОбозййЧим
W (/со) = Р + /Q; W* ^ /Q,
""Дс Р и Q — функции (О. Подставив эти значения в (7.74),
получим
\ + {Кг + К2)Р+ К1К2 (Р^ + Q') > 0. (7.75)
Это неравенство определяет область, в которой должны
располагаться частотные характеристики \^ (/о) линейной части
для того, чтобы нелинейная система из класса (/Ci. К2) была
абсолютно устойчивой. Границу этой области получим, заменив
в (7.74) знак неравенства на знак равенства. Это будет
уравнение окружности с центром на вещественной оси в точке
^ (т^ ТГ")' проходящей через точки — и
~\/К2 на оси Р. Неравенство (7.75) требует, чтобы
частотная характеристика располагалась вне круга, ограниченного
этой окружностью. На рис. 7,40 слева построены запретные
области (заштрихованные) для характеристик ф (а) для разных
Рис. 7.40
значений /Ci и /Сг и справа от них — соответствующие
запретные области для частотных характеристик W (/со).
Для нелинейностей из подкласса (О, К) окружность
вырождается в прямую, проходящую через точку — на оси Р,
параллельную оси jQ.
Для нелинейностей из подкласса (О, оо) окружность
вырождается в мнимую ось и внутренность круга перейдет в правую
полуплоскость.
Заметим, что круговой критерий справедлив и для
нестационарных характеристик ^ = ф (/, а), если только они при
любом t не выходят за пределы данного сектора. В этом
отношении критерий является весьма сильным. Но он обычно дает
1
1
Рис. 7.40. Продолжение
слишком большую избыточность. Для стационарных
характеристик, принадлежащих классу (О, значительно меньшую
избыточность дает частотный критерий В. М. Попова.
Критерий В. М. Попова. Нелинейные
характеристики из класса (О, К)у как стационарные, так и
нестационарные, как было показано, удовлетворяют локальной связи (7.59)
Fid. с) = (Ко-1)1>0. (7.76)
Стационарные характеристики из того же класса
удовлетворяют еще интегральной квадратичной связи по переменным
g и а.
Обозначим
ф{о)= f (p(a)da. (7.77)
i
Так как ф (а) > О, то Ф (а) > 0. Поэтому, полагая
f,(l.o)=ga.
для 5 Ф (а); а = а (t) имеем
1^2 IS (О, o{t)]dl= j ф[а(01^а(0 =
о а(0)
= Ф[а (01-Ф [о (0)] > -Ф [а (0)]. (7.78)
Таким образом, стационарная характеристика ф (о) из
класса (0. К) удовлетворяет локальной связи с формой и
интегральной связи с формой F2.
Составим форму:
F(^, a,a)=-Fi(?, a) + t^Fo(g, а). (7.79)
где :&Z> О — некоторое" вещественное положительное число.
Форма (7.79) удовлетворяет интегральной связи вида (7.58).
( {F [I (О, о (0. а т dt > -М) [а (0)].
о
Найдем расширение формы F до эрмитовой. Расширение формы
f 1 дано соотношением (7.69). Расширение формы F^
F, = Re а |* - Re [ -/со\^ (/со)1| I \\
Тогда получаем
F (/«, 1) - ^ Re [ 1 + /С(усо) /соО W (/со)] 11 \\
Частотное условие (7.72) принимает вид
Re [1 + KW (/ш) + jiof^W (уЧо)] > 0. (7.80)
Подставив W и<о) = Р + /Q и разделив на К, получим
1/К + Р — шт(2>0. (7.81)
где .х=К^^ Минимальная устойчивость имеет место,
если линейная часть устойчива, т. е. если матрица А
имеет все собственные значения в левой полуплоскости.
Действительно, характеристика ^ = О относится к классу (О, /С),
а при этой характеристике получаем линейную часть, которая,
по условию, устойчива.
Теперь сформулируем критерий В. М. Попова.
Пусть матрица А гурвицева (т. е. все полюсы передаточной
функции W (s) расположены в левой полуплоскости), пара А,
b управляема (т. е. функция W (s) невырождена) и система
(7.73) минимально устойчива. Тогда для абсолютной
устойчивости равновесия х = О для нелинейностей <р(-) класса (О, К)
достаточно, чтобы существовало такое число т, для которого
выполняется условие Попова (7.81) или (7.80).
Аналитическая проверка условия (7.81) для всех со весьма
сложна и выполнима практически в редких частных случаях,
поэтому для проверки используют либо графоаналитический
метод, либо вычислительный алгоритм, реализуемый на ЭВМ.
«Ручным» способом обычно является грас}юаналитический.
Для его использования дадим геометрическую интерпретацию
критерия (7.81).
Построим преобразованную частотную характеристику
Г" (/со) = Р + /coQ - Р + /Q",
у которой вещественная часть такая же, как у частотной
характеристики W (/со), а мнимая равна Q" = coQ, Очевидно,
что характеристика W" (/со) пересекает вещественную ось в
тех же точках, что и характеристика W (/со). Подставив coQ =
= Q" в неравенство (7.81), получим
\/К + Р—tQ">0. (7.82)
Заменив (7.82) знак неравенства знаком равенства, получим
Уравнение прямой В. М. Попова. Она проходит через точку —
У К на вещественной оси под углом arctg т-'. Неравенство
^•^2) выполняется, если преобразованная характеристика
(/о) располагается справа от прямой Попова. Таким
образом, геометрическую трактовку критерия Попова можно из-
S)
в)
-l/K
Рис. 7.41
ложить так: система с устойчивой и вполне управляемой
линейной частью абсолютно устойчива в классе стационарных
нелинейных характеристик ^ = ср (а), леоюащих в секторе
(О, К) у если через точку — \1К на вещественной оси
комплексной плоскости (Р. jQ) можно провести прямую так, чтобы
преобразованная частотная характеристика IF" (/со) лежала
справа от этой прямой.
На рис. 7.41 изображены случаи, когда условие Попова
выполняется при положительных т (рис. 7.1, а), при
отрицательных т (рис. 7.41, б), и случай, когда условие Попова не
может быть выполнено ни при каких т (рис. 7.41, в).
Примечание к критерию Попова.
1. При выводе критерия Попова из частотного условия для
облегчения доказательства принималось, что т > 0. На самом деле, если
условие (7.82) выполняется при отрицательном г, система также будет
абсолютно устойчивой. Доказательство этого здесь не приводится. Его
можно прочитать в [1, 5].
2. При получении условия Попова считалось, что матрица А
устойчива, т. е. что все ее собственные значения лежат слева от
мнимой оси. Но иногда приходится встречаться с системами, у которых это
условие не выполнено. Так, линейная часть часто бывает нейтральной
(астатической) и ее передаточная функция имеет один нулевой полюс,
т. е. полюс иа мнимой оси в начале координат, а остальные полюсы
лежат слева от мнимой оси. В этом случае можно воспользоваться слегка
модифицированным условием Попова. Вместо функции W (s) = Wq {s)/s
(где Wq (s) не имеет полюсов на мнимой оси) рассмотрим функцию
^0 (s)/(5 + р), где р положительно и сколь угодно мало. Если при
этом система замкнутая, образованная замыканием линейной части
линейной обратной связью | = —|ха (где О < ц< К предельно
устойчива, т. е. устойчива и остается устойчивой при р 0), то все условия
критерия Попова относительно линейной части соблюдаются. Но так
как линейная часть при этом изменена, хотя и на бесконечно малую
величину, зависящую от р, то, чтобы рассматриваемая система осталась
эквивалентной исходной, должна быть изменена и нелинейная часть.
Это изменение в данном случае состоит в том, что характеристика
теперь должна принадлежать не сектору (О, К), а сектору
(е а), т. е. удовлетворять условиям
е < <Р (^V^ < и-^и О < ф1 (а)/а (р (а)/а — е < К — е,
рде е — малая положительная величина, зависящая от р и также
стремящаяся к нулю при р ^ 0.
Таким образом, практически можно пользоваться условием
Попова и в этом случае нужно только исключить из класса (О, К) те
характеристики <р (а), которые могут касаться вещественно^ оси.
Точно так же можно иногда и сследовать с помощью критерия
Попова и системы, у которых матрица А имеет пару чисто мнимых
корней при остальных корнях в левой полуплоскости и даже при наличии
неустойчивой матрицы А. Для этого делается замена переменной
g — такой п-вектор, что матрица А + bgg становится гурвице-
вой. Для управляемой системы такой вектор g можно подобрать
всегда. При этом получаем систему, эквивалентную исходной, но с другими
линейной и нелинейной частями и другими входом и выходом.
Линейная часть имеет передаточную функцию
(s)=--^[sE-(A+bg3)l b.
ее вход и выход равны = g — g^x. = х, а нелинейная часть
удовлетворяет теперь квадратичной связи
x)=-f-lb-rg3X.c^x, J{A,x + hl,)]>0.
Если для этой новой нелинейности можно установить сектор
(О, К), в котором лежит характеристика 1^ = (pi (х), то можно
воспользоваться критерием Попова; если нет — нужно использовать
частотное условие (7.72) для повой нелинейности и новой частотной
характеристики Wj^ (/(о),
3. Так как преобразованная частотная характеристика (/со)
должна пересекать вещественную ось правее точки —!//(, то и
исходная частотная характеристика также должна пересекать вещественную
ось правее этой точки.
4. Если уравнения системы заданы в виде (7.55), то должно быть
1 + К<7 > 0. В самом деле, при s оо имеем
и точка q должна лежать правее точки —т. е.
^>-1/К; 1 + К^>0.
Таким образом, условие 1 + К<7 > О справедливо, без него условия
Попова не могут быть выполнены, но оно следует из критерия Попова
и поэтому не должно включаться в него, как предварительно
задаваемое условие.
5. Приведем без доказательства алгоритм проверки условия
В. М. Попова (12). Построим полином
I det (А~/(оЕ) |2 {/С-Ч- Re [(I + /сот) (Л^/соЕ)-! Ь» =
==Я(С0)=. 2 ^2ftC0^^
о
где п — степень характеристического полинома линейной части.
Составим таблицу:
(-l)"P2(n-U(-I)"-^^2 (n-i)
(-1)"2пЯ2п (-1)"-12 (/1-1) Яг u-^i) . , .-2^2
0)0=1 Po
Первые две строки таблицы образованы из коэффициентов
полинома Р (/со) (первая строка) и из производных <ХР (ya))/rf(o (вторая строка).
Элементы остальных строк вычисляются по правилу составления
таблицы Рауса, приведенному в первой части*. Если элементы первого
столбца данной таблицы удовлетворяют условию
Л^1(~1)«Р2п, (~1)"2пЯ2п Яо1-п. Я2п>0, (7.83)
где N — число перемен знаков в той последовательности, которая
заключена в (7.83) в квадратные скобки, то условие Попова (7.80)
выполняется при всех (о.
Гипотезы М. Айзермана и Р. Калмана. Устойчивость в гур-
вицевом угле. Заменим в системе (7.52) нелинейный элемент
линейной отрицательной обратной связью:
? = - tia. (7.84)
Тогда образуется линейная замкнутая система,
характеристический полином которой будет
D (S) + ухМ (S), (7.85)
где М (5) — числитель, а D (s) — знаменатель передаточной
функции М (5).
* Для вычисления данной таблицы удобно пользоваться
правилом Рауса в следующей формулировке: каждая строка таблицы
начиная с третьей получается из двух предыдущих строк вычитанием из
первой строки второй, умноженной на отношение элементов первой из
этих двух строк и второй, стоящих в первом столбце. Затем полученная
строка сдвигается на один шаг влево.
Эту систему называют системой сравнения. Пусть при
выполнении неравенства
[^т<[^<^1^м (7.86)
-полином (7.85) гурвицев, т. е замкнутая линейная система
устойчива. Наименьшее р,,^ и наибольшее [i^ значения р,, при
которых система попадает на границу устойчивости,
ограничивают угол (Рш. ^^м). называемый гурвицевым углом.
В процессе развития теории абсолютной устойчивости
были высказаны две гипотезы.
Гипотеза М. Айзермана. Пусть даны
уравнения (7.53), нелинейность принадлежит сектору {Кх, Kz) и для
всех К б {Ki, Kz) матрица А + Ъс^К гурвицева. Тогда
нелинейная система абсолютно устойчива. Иными словами, по
гипотезе М. Айзермана, угол (Ki, К2) равен гурвицеву углу (|ы,„,
(Хм), т. е. система абсолютно устойчива в гурвицевом угле.
Гипотеза оказалась в общем случае неверной (для нее был
указан противоречащий пример). Тогда была выдвинута
гипотеза Р. Калмана.
Г)ИпотезаР. Калмана. Пусть в уравнениях (7.53)
нелинейность удовлетворяет условиям
/^^^^^/^, (7.87)
do
и для всех К G {Къ К2) матрица А + Ъс^К гурвицева.
Тогда нелинейная система абсолютно устойчива.
Гипотеза оказалась неверной в общем случае.
Но для многих видов передаточных функций линейных
частей гипотезы либо М. Айзермана, либо Р. Калмана могут
выполняться. Отыскание условий, при которых выполняются эти
гипотезы, представляют существенный интерес для практики,
так как абсолютная устойчивость нелинейных систем, для
которых гипотезы выполняются, может исследоваться по линейным
критериям. Можно сказать, что такие системы абсолютно
устойчивы, если они минимально устойчивы.
Представим частотную характеристику W (/со) линейной
части в виде
W{j<o) = KoWo{i<o)i Wo(0) = 1,
где Ко — передаточный коэффициент линейной части; Wq (/со)—
«нормированная» частотная характеристика с передаточным
коэффициентом, равным единице. Выберем Ко достаточно
малым так, чтобы характеристика W (/со), а следовательно, и
(/со) располагались правее прямой Р = — \/К (рис. 7.42).
Пусть характеристика пересекает отрицательную
вещественную полуось и крайняя левая (т. е. наиболее удаленная от
начала координат) точка пересечения соответствует частоте со;^.
Пусть частотная характеристика Ч^" (/со) такова, что
касательная к ней в точке, соответствующей со ^ ф/,, не имеет
пересечений с кривой, т. е. характеристика w (/со) лежит правее
этой касательной, как показано на рис. 7.42. Назовем
касательную MN, правее которой расположена кривая, предельной
касательной. Проведем через точку — \/К на вещественной
оси прямую, параллельную предельной касательной.
Очевидно, что для нелинейностей из сектора (О, К) эта прямая будет
также прямой Попова. Начнем увеличивать Ко- Тогда размер
характеристики будет увеличиваться, но форма ее будет
сохраняться и предельная касательная будет перемещаться
влево параллельно самой себе (пунктирные кривая и касательная
на рисунке). Когда Ко достигнет такой величины, что левая
точка пересечения характеристики попадет в точку — l/K на
вещественной оси, будет иметь место равенство KqW^ (со„) =
= — 1//С, т. е. KoKWo (со„) ^ 1. Кривая Найквиста
разомкнутой системы/СоК^^оС/^)» таким образом, пройдет через
критическую точку —1, О и устойчивость линейной
замкнутой системы нарушится. Но одновременно и предельная
касательная совпадет с прямой Попова и нарушится
условие Попова для абсолютной устойчивости нелинейной системы
из класса (О, К)- В данном случае верхняя граница гурвицева
угла совпадает с углом (О, К). Нижняя граница, правда, не
совпадает, но нас она не интересует, поэтому мы назовем данную
систему абсолютно
устойчивой в гурвицевом угле.
Гипотеза М. Айзермана для нее
справедлива в
положительной части гурвицева угла.
Пусть теперь
характеристика (/со) такова, что
предельная касательная MN
к ней не проходит через
крайнюю левую точку пересечения
характеристики с отрицатель
ной вещественной полуосью
(рис. 7.43). В процессе
возрастания Ко при некотором его
Рнс. 7.42 значении Koi предельная ка-
Рис. 7.43
сательная совместится с
прямой Попова и условие
Попова для абсолютной
устойчивости нарушится,
хотя линейная замкнутая
система с тем же
значением К01 будет еще
устойчивой. Нарушение ее
устой чи вости произойдет
при значении К02 > Koiy
когда точка,
соответствующая со о)к частотной
характеристике, попадет
в точку— Система с такой характеристикой W (/со)
не будет абсолютно устойчивой в гурвицевом угле, и для нее
несправедливы ни гипотеза М. Айзермана, ни гипотеза Р. Кал-
мана.
С помощью описанных построений можно в плоскости (а,ф)
построить секторы абсолютной устойчивости Sy, асболютной
неустойчивости и неопределенности. Вещественная ось и
прямая 5 = КщО ограничивают в первом квадранте сектор
абсолютной устойчивости Sy (рис. 7.44). Прямая g = /Сог^
является нижней границей сектора абсолютной
неустойчивости S^^ (заштрихован однократно), в котором линейная систе-
ма неустойчива и не соблюдены условия Попова. Между
прямыми I = KqiO и I = К02О заключен сектор
неопределенности, в котором линейная система сравнения устойчива,
недостаточное условие абсолютной устойчивости не соблюдается
и мы не можем утверждать, что система абсолютно устойчива,
но и не можем сказать, что она неустойчива.
Графоаналитический метод позволяет легко определить,
будет ли система абсолютно устойчивой в гурвицевом угле
(или его положительном секторе), но аналитическое
определение этого весьма сложно. В настоящее время установлено,
что нелинейная система из класса (О, К) устойчива в
гурвицевом угле, если линейная часть состоит из любого числа
последовательно включенных устойчивых звеньев первого порядка.
В случае дифференцируемых монотонно возрастающих
нелинейных характеристик из класса (О, /Q, одновременно
удовлетворяющих неравенствам О <dф/da < /С, линейная часть
может кроме упомянутых звеньев первого порядка иметь в
последовательной цепи любое число колебательных звеньев,
передаточные функции которых имеют комплексные полюсы
Рис. 7.44
С отношением мнимой
части к вещественной,
не превышающим J/^S 15].
Определение
автоколебаний. Обычно при
приближенном
определении автоколебаний
исходят из
предположения, что существует
периодическое решение
исходного
дифференциального нелинейного
уравнения. В системах
второго порядка, как
следует из теоремы Бен
Диксона, действительно,
автоколебания, если они
существуют, будут
периодическими. Но в
системах более высокого порядка возможно существование
непериодических незатухающих колебаний, которые могут и не
обнаружить метод гармонического баланса и другие методы,
основывающиеся на предположении существования
периодического решения.
В ряде случаев частотные методы исследования абсолютной
• устойчивости и неустойчивости позволяют найти условия
возникновения не только периодических автоколебаний, но и
незатухающих непериодических колебаний.
Расширим понятие автоколебаний на непериодические
незатухающие колебания.
Пусть заданы два вещественных числа: а<0 и |3>0.
Решение X (/) называется (а, Р)-колебательным по выходу о (/),
если при t-^ оо выполняются условия:
а) \х (01 < const;
б) точка о (t) бесконечно много раз находится в каждом
из интервалов (—оо, а), (Р, оо) и, следовательно, в интервале
[а, р]. Если при этом время пребывания точки о (/) в каждом
из интервалов (—сю, а), (Р, сю) и (а. Р) (без выходов из него)
ограничено некоторой постоянной Г > О, то колебание
называется нерастягивающимся.
Если указанные свойства справедливы и. при /-> — оо,
то колебание: называется двустороннн1уь .. itfin
Двусторонние перастягивающиеся колебания называются
автоколебаниями.
Упрощенный критерий колебательности. Рассмотрим систе-
^му
Сделаем допущения:
1) передаточная функция невырождена;
2) система имеет единственное стационарное состояние
1 = 0, 0 = 0, т. е. прямая а + В?" (0)| = О пересекается с
графиком нелинейности ц> (о) только в начале координат,
если det А =^ О, и с прямой g О, если det А = 0;
3) существует производная ф' (0), функция ф' (а) кусочно-
непрерывна, линеаризованная в нуле система (т. е. система с
обратной связью | ^ — ф' (0) о) не имеет периодических
решений;
4) существует предел ^Ит
Пусть для рассматриваемой системы построены секторы
абсолютной устойчивости и абсолютной неустойчивости.
Тогда:
— если график нелинейности ф (а) целиком расположен в
секторе устойчивости Sy, то система устойчива в целом;
— если график ф (о) расположен целиком в секторе
неустойчивости S„, то система неустойчива в целом;
— если график ф (а) при |а| < Oq лежит в секторе
неустойчивости а при \о\ > 01 кривая ф (о) входит в сектор
устойчивости и остается там, вокруг точки о = О возникают
автоколебания [кривая ф (о) на рис. 7.441. При этом числа а, р
определяются как абсциссы точек пересечения
характеристики ф (а) с лучами, ограничивающими секторы неустойчивости
в верхней и нижней полуплоскостях.
Определение границ секторов абсолютной устойчивости
и неустойчивости выше иллюстрировалось на примере, где
нелинейность принадлежит сектору (О, К), и использовался
критерий Попова. При нелинейностях из другого класса
используются другие соответствующие частотные критерии.
Числа а и Р являются нижними оценками размаха
колебаний, истинная величина размаха может быть больше.
Пример 7.3. Покажем, как частотный критерий может быть ис-
пользова!! при неустойчивой линейной части.
Пусть передаточная функция W (s) равна
1
(s + a)(s-P) •
а>0; р>0.
(7.88)
т. с. в состав линейной части входит неустойчивое звено.
Представим схему системы в виде, изображенном на рис. 7.45, с
н запишем уравнения в переменных состояния в виде
^1 — ^НЛ-^г\ i2=~aA:2 + ^; ^ = Ф(а); а=—ati. (7.89)
Иногда удается преобразовать линейную часть наиболее простым
способом, охватив ее отрицательной обратной связью:
5 « ?1 — ^^1, > 0.
где g — скалярная постоянная. Тогда
ri(5) - W (s)/[ I + g^ir (s)J. (7.90)
Однако следует проверить, существует ли такое преобразование,
т. е. существует ли такое при котором характеристический полином
линейной части будет гурвицевым.
В нашем случае, подставив в (7.89) | = _ ^х,, получим новые
уравнения:
= Ф ((У) + go (а); а - .v,.
Характеристический полином новой системы
+ (а - Р) S + ^ ~ «р.
S)
П6)
VJip)
(2)V ^^^^
I \
\ \
1_.
Щр)
W,(p)
Рнс. 7.45
0
411-
P*0(
3i
Up)
p-p
Рис. 7.46
Отсюда видно,
вует, если а > р.
что такое стабилизирующее значение g сущест-
Пусть это условие выполнено. Тогда, включив обратную связь,
получаем устойчивую линейную часть с передаточной функцией (s)
и можем применить частотный критерий. Но чтобы схема с такой
преобразованной линейной частью осталась эквивалентной исходной,
нужно соответствующим образом видоизменить и нелинейный элемент.
Новая нелинейная характеристика теперь будет ф (о) + go, поэтому
на схеме нужно охватить нелинейный элемент ф (а) отрицательной
параллельной связью с тем же коэффициентом g (рис. 7.45,6)
Если характеристика ф (с) принадлежала, например, сектору
(О, К) и для нее можно было (в случае устойчивой линейной части)
использовать критерий Попова, то теперь нелинейность ф^ (о)
принадлежит другому сектору:
—fi^ < ф (<у)/<у — g = 1ч> — g<yVo ^ К —g.
Вместо критерия Попова теперь y>i<e нужно применить более
сложный критерий: или круговой, или, если система стационарна, его
можно усовершенствовать способом, аналогичным тому, который
использовался при получении критерия Попова. Такое расширение условия
Попова на системы с нелинейностью из нового сектора имеет вид
Re {11 + gW^ (уо))] [1 + (^ I К) 00))]* + /ТО) (/О))} > 0. (7.91)
Пусть теперь Р < а и стабилизация рассмотренного простейшего
вида невыполнима. Найдем ^ в виде вектора g = {gi, gg}^. Введем
переменную ^ = |j -f g^Xi + g2X2 и, подставив ее в исходные уравнения
(7.89), получим новые уравнения:
is- ^1^1 —(5^2—a)A'2 + gi;
gi- Ф (a) + g2 о +{gi-g2 P) а=ф1 (a);
(7.92)
Характеристический полином этой системы
s2 + (а - Р-Я2) S + Р to -1- a)~g,.
Так как р > а, то можно выбрать
g^a < ос ~ Р, gi < Р to " а)-
Преобразованные передаточная функция линейной части и
нелинейного элемента теперь будут
<р, |a|sL<p(a)+g2a+to—ЯгР)^.
Нелинейность получилась достаточно сложной (рис. 7.46),
зависящей не только от ^ = ф (о) и а, но и от а, и можно применить
общий частотный критерий, который можно будет вывести из общего
условия (7.72).
Глава;8
.б^^0вдб-4^Ь^^ СИСТЕМЫ
^ ^ i 1 АВТОМАТИЧЕСКОГО
J УПРАВЛЕНИЯ
§ 8.1. Понятие об импульсных
системах автоматического
управления
Бурное развитие счетно-решающих
устройств, автоматизированных систем
управления технологическими
процессами, радиолокации, телеуправления
привело в последние годы к
интенсивной разработке и использованию систем,
работа которых связана с воздействием,
передачей и преобразованием
последовательности импульсов.
В предыдущих главах учебного
пособия рассматривались системы
автоматического управления с непрерывной
передачей сигнала, при которой
передается и преобразуется каждое его
мгновенное значение. Передаваемый сигнал
в этом случае определяет закон
модуляции постоянной или гармонически
изменяющейся физической величины.
В отличие от этого при дискретном
способе процесс преобразования
непрерывного сигнала в импульсную
последовательность осуществляется в два
этапа. На первом этапе происходит
квантование сигнала по времени или по
уровню. При квантовании по уровню
осуществляется фиксация дискретных
уровней сигнала в произвольные моменты
времени (рис. 8.1, а), а при
квантовании по времени фиксируются дискретные
моменты времени, при которых уровни
сигнала могут принимать произвольные
значения (рис. 8.1, б). Возможно
применение одновременно как квантования по
6)
уровню, так и квантования по времени. В этом случае
непрерывный сигнал заменяется дискретными уровнями,
ближайшими к значениям непрерывного сигнала в дискретные момен
ты времени (рис. 8.1, в).
На втором этапе преобразования квантованный сигнал в
соответствии с одним из законов^ модуляции преобразуется в
импульсную последовательность, воздействующую на объект
управления. В системах
автоматического
управления наиболее часто
используются следующие
виды модуляции: 1) ам-
плитудно - импульсная
модуляция (АИМ); 2)
импульсная
манипуляция — (ИМ); 3) импульс-
но-кодовая модуляция —
(ИКМ); 4) широтно-им-
пульсная модуляция
(ШИМ); 5)
частотно-импульсная модуляция —
(ЧИМ).
Широкое применение
систем управления с
различными видами
модуляции сигнала объяс>
няется рядом их
преимуществ, таких, как
возможность
многоканального управления,
возможность стыковки с
цифровыми вычисли -
тельными устройствами,
возможность
длительного хранения и
запоминания информации,
высокая
помехозащищенность, повышенная
точность.
Задачей настоящей
главы является
изучение математических мо-
Рнс. 8.1 делей систем автоматиче-
1 1 1
1 » 1 \
1 1 1
i 1 1
! ! ! \
ского управления с
указанными видами
модуляции, а также методов
их исследования-
Структура и
уравнения импульсных
модуляторов. Система
автоматического управления
с импульсной
модуляцией сигнала отличается
от непрерывной системы
наличием импульсного
модул ятор а. Им пу л ьс-
ный модулятор
преобразует непрерывно
изменяющийся входной
сигнал в
последовательность импульсов, В
зависимости от того, какой
из параметров
импульсной последовательности
модулируется (т. е.
изменяется под действием
входного
модулирующего сигнала), мы будем
говор ить:
1) об
амплитудно-импульсном модуляторе,
если модулируется
амплитуда (высота)
выходных импульсов (рис.
8.2,(2); при этом
длительность импульсов
= const, период
следования Т = const;
2) о широтно-импульсном модуляторе, если
модулируется ширина (длительность) выходных импульсов (рис. 8.2, б);
амплитуда импульсов постоянна, период следования Т =
== const;
3) о частотно-импульсном модуляторе, если модулируется
частота повторения импульсов в выходной импульсной
последовательности (рис. 8.2, б); амплитуда и длительность
импульсов постоянны.
Рнс. 8.2
Будем полагать в дальнейшем, что при любом типе
модулятора полярность выходных импульсов будет изменяться при
изменении полярности модулирующего воздействия (рис. 8.2).
Эти модуляторы, которые в литературе иногда называются
двухтактными (двухполярньши), наиболее удобны с точки
зрения их применения в системах автоматического управления в
отличие от однотактных (однополярных).
Упомянутые выше виды модуляции принято подразделяГть
на модуляцию Ьго и 2-го рода. Считается, что при модуляции
1-го рода модулируемые параметры импульсов определяются
только значениями модулирующего сигнала в фиксированные
дискретные моменты времени и не зависят от изменения
сигнала между ними. При модуляции 2-го рода значения
модулируемого параметра определяются модулирующим сигналом
(или некоторым функционалом от него), определенным на
конечном интервале времени (например, в течение времени
действия импульса или в течение периода следования импульсов).
На этом классификация систем с импульсной модуляцией
в рамках настоящей главы ограничивается. Это связано с тем,
что рассмотренные выше виды модуляции, как показывает
практика, нашли наиболее широкое применение в различных
системах автоматического управления; именно для данных
систем в последующих параграфах будут описаны наиболее
удобные инженерные методы исследования. Более полная
классификация систем с импульсной модуляцией приведена в
работах [1, 2].
Структурная схема амплитудно-импульсного модулятора.
АИ-модулятор может быть представлен последовательным
соединением идеального импульсного элемента (иногда он
называется также простейшим импульсным элементом) и
формирователя импульсов (рис. 8.3). В импульсном элементе
осуществляется квантование входного сигнала х (t) по времени.
Выходной сигнал импульсного элемента у (t) может быть
представлен в виде последовательности дельта-функций, промоду-
лированных дискретными
значениями сигнала х, и определен
соотношением
"Л
XI
S
j
1
\
\ Импульсный Форм и рода'\
\ элемент тель \
U л
Рис. 8.3
y{t)^-2^x{tT)b{t~in (8.1)
где Т — период работы (такт)
импульсного элемента; / = 1,
2
формирователь импульсов
преобразует промодулированные
й-импульсы в импульсы
заданной формы. Для весьма распро-
гстраненного случая, когда
формируются импульсы
прямоугольной формы (длительности у),
передаточная функция формирова-
.теля имеет вид
W^{s)=ii-e~-y)/s. (8.2)
Если «у < Г, то выражение (8.2)
упрощается:
(s) « Y- (8.3)
Если Y ^ Г, то
W^{s)^(\-e-^^)/s. (8.4)
Такой формирователь
называется фиксатором нулевого
порядка, он преобразует
импульсный сигнал в ступенчатый
(рис. 8.4).
Рассмотренный АИ-модулятор осуществляет АИМ 1-го
рода (АИМ-1).
Структурная схема частотно-импульсного модулятора.
Частотно-импульсная модуляция (ЧИМ) предполагает
изменение частоты следования импульсов в линейном соответствии
с модулирующим воздействием. При этом частота следования
импульсов понимается как мгновенная частота
синусоидальных частотно-модулированных колебаний, у которых фазовые
значения
фп Фо + ^^^^ Фо ^ const, м = 1, 2,...,
совпадают по времени с моментами tn появления импульсов
13]. ЧИМ достаточно удобно интерпретировать геометрически
в комплексной плоскости, как это сделано в работе [4].
Модулируемый вектор (рис. 8.5)
Рис. 8.4
(8.5)
при отсутствии модулирующего воздействия х (t) вращается
с постоянной скоростью Шо-
Воздействие х (t) линейно управляет
скоростью изменения фазы вектора и:
(t)/dt - 0)0 + (0. (8.6)
где о)о = const; а = const.
Так как рассматриваемая ЧИМ
является однополярной, то скорость изме-
Рис. 8.5 нения фазы вектора и не должна менять
знак, т. е. должно выполняться условие
|соо1> \ах
Зафиксируем в комплексной плоскости вектор V,
совпадающий с положением модулируемого вектора и в момент
начала модуляции и определенный с точностью до 2л
К(п)-еЯ^('»> + 2лп) (8.7)
Тогда общая картина ЧИМ представляется следующим
образом. Скорость изменения фазы модулируемого вектора и
изменяется в линейном соответствии с внешним воздействием
X (/) точно так же, как в случае непрерывной модуляции
гармонического сигнала. Но в отличие от нее ЧИ-модулятор
фиксирует положения модулируемого вектора и дискретно в
моменты его совмещения с неподвижным вектором V (п),
т. е. когда выполняется равенство
u{tn) = V(n). (8.8)
Таким образом, ЧИ-модулятор фиксирует моменты tn
изменения фазовой функции ф (/) вектора и на величину 2л.
Указанным моментам времени соответствуют моменты
появления импульсов на выходе модулятора.
Подставляя в уравнение (8.8) соотношения (8.5) — (8.7),
получаем соотношение для определения tn'
^оК + (^\ X(t) dt - 2яАг + ф (д. (8.9)
о
Из геометрической интерпретации ЧИМ и уравнения (8.9)
вытекает структурная схема ЧИ-модулятора (рис. 8.6). Она
представляет собой последовательное соединение интегрирующего
звена, нелинейного элемента квантования приращений (НЭ)
и формирователя прямоугольных импульсов с передаточной
функцией (s) = 1 — е~^'^. На вход схемы подаются два
сигнала: входное воздействие х (/) и некоторый постоянный
сигнал
Величина кванта нелинейного элемента
А 2nta.
(8.10)
(8.11)
Таким образом, на выходе модулятора (рис. 8.6) получается
последовательность прямоугольных импульсов
длительностью у\ амплитуда импульсов определяется величиной
вертикальной ступени характеристики Н Э, а моменты их
появления определяются уравнением (8.9).
Выше рассмотрены уравнения и структурная схема одно-
полярной ЧИМ, которая достаточно широко распространена
в системах связи. Как указывалось выше, в системах
автоматического управления удобнее двухполярная ЧИМ.
Структурную схему для такого ЧИ-модулятора достаточно легко
получить,, используя схему однополярного ЧИ-модулятора.
Действительно, если положить Xq ~ О и предположить,
что полярность выходных импульсов определяется
полярностью входного сигнала х, то уравнение (8.9) с учетом
обозначения (8.11) можно привести к виду
=bj х(/)Л^=±А«+ф'(д^
(8.12)
Здесь ср' (^о) Ф {Qla-
Формиробатель
I—
X h I—I
И.д J
,-sr
J.
Рис. 8.6
1/S
у
.if
Z
М
Рис. 8.7
На интервале одного периода импульсной последовательности
tn~tn-^ уравнение (8.12) запишется в виде
=Ь j x{t)di = ±^. (8.13)
Структурная схема двухполярного ЧИ-модулятора,
построенная согласно уравнению (8.13), приведена на рис. 8.7. В
отличие от схемы рис. 8.6 в ней отсутствует сумматор, а
нелинейный элемент квантования представлен гистерезисной
характеристикой, у которой нижняя ветвь определяет
формирование импульсов положительной полярности, а верхняя —
отрицательной.
Нелинейный элемент квантования приращений (рис. 8.8,а)
обладает характеристикой, имеющей ряд общих моментов с
характеристикой квантования по уровню. Принципиальное
отличие состоит в том, что у характеристики квантования при-
^0 h^2\h l4
ill I
I I I I
Ml I
I
I
Рис, 8.8
4t
//.5.2.
H. 3.1. Формирователь
Рис. 8.9
ращений значения по
оси абсцисс
соответствуют не текущей
величине входного сигнала у,
а разности его со
значением у (to) ВХОДНОГО
сигнала в момент начала
преобразования. На
рис. 8.8, б
иллюстрируется во времени
процесс пр еобр а зо ва н и я
сигнала у (f) нелинейным звеном. Выходная величина {t)
представляет собой ступенчатую функцию, моменты
переключения которой совпадают с моментами определения
переменного параметра импульсной последовательности. В настоящее
время термин двухтактная или двухполярная ЧИМ
практически не употребляется. Модуляция, определяемая
уравнением (8.13), называется интегральной ЧИМ {ИЧИМ).
Структурная схема широтно-импульсного модулятора. Для
построения структурной схемы ШИ-модулятора удобно
использовать геометрическую интерпретацию, примененную при
построении структурной схемы ЧИ-модулятора.
При ШИМ производится управление фазой вектора и (t)
(см. рис. 8.5) в линейной зависимости от входного
воздействия X (t). Таким образом, уравнения (8.5), (8.7), (8.8)
дополняются при ШИМ уравнением вида
4>it)^coo{t) + ax{t). (8.14)
Решив совместно уравнения (8.5), (8.7), (8.8), (8.14) с
учетом (8.11), получаем соотношение для определения момента
tn появления модулируемого фронта импульса:
(8.15)
где соо — частота следования импульсной последовательности.
В соответствии с геометрической интерпретацией ШИМ и
уравнением (8.15) структурная схема ШИ-модулятора
построена на рис. 8.9. Она представляет собой последовательное
соединение сумматора, на вход которого подаются сигналы х (t) и
(Оо (/), нелинейного элемента квантования приращений (Н.Э1)
и формирователя импульсов, который в данном случае
выполнен в виде сумматора, на один вход которого подается сигнал
с выхода НЭ1, а на другой—сигнал с аналогичного
нелинейного элемента НЭ2 (рис. 8.9).
ШИ-модулятор, соответствующий предложенной
структурной схеме, обеспечивает изменение длительности выходных
импульсов пропорционально входному сигналу х (t) за счет
модуляции переднего фронта импульсов положительной
полярности (при X (t) > 0) или заднего фронта импульсов
отрицательной полярности (при л: (/) < О ). При отсутствии
входного сигнала выходная импульсная последовательность
отсутствует. Аналогичным образом на базе тех же элементов могут
быть построены схемы и Других ШИ-модуляторов (в частности,
двустороннего ШИМ, когда модулируются и передний и
задний фронты).
Структурные схемы частотно-импульсных и широтна
импульсных модуляторов 1-го рода. ИЧИ- и ШИ-модуляторы,
структурные схемы которых приведены выше, относятся в
соответствии с принятым в начале данного параграфа
определением к модуляторам 2-го рода.
Так как в модуляторах 1-го рода параметры импульсов
определяются только значениями модулирующего сигнала в
фиксированные моменты времени и не зависят от изменения
сигнала между ними, то структурную схему для них можно
составить, используя элементы, рассмотренные выше.
Действительно, схема модулятора 1-го рода может быть представлена
(рис. 8.10) последовательным соединением простейшего имп-
пульсного элемента, фиксатора нулевого порядка и
модулятора 2-го рода. Если в качестве модулятора 2-го рода в схеме
(рис. 8.10) использовать ИЧИМ (или ИЧИМ-2), то получим
структурную схему ИЧИ-модулятора 1-го рода (ИЧИМ-1),
а если соответственно в схеме рис. 8.10 использовать ШИМ-2,
то получим схему ШИМ-1.
Структурная схема системы управления с импульсной
модуляцией. Классификация систем управления с импульсной
модуляцией. На рис. 8.11 приведена простейшая структурная
схема системы управления с импульсной модуляцией сигнала
управления. В эту схему кроме одного из рассмотренных
типов модуляторов входит линейная часть (иногда ее называют
также непрерывной частью). Используя эту схему, а также
структурные схемы
рассмотренных
модуляторов, можно определить
место системы с любым
видом модуляции в
классификационной таблице,
принятой в теории авто-
X
1
Модулятор
s
Z-10 рода
Рис. 8.10
X
МодуляЛинейная
тор
Часть
Рис. 8.П
матического управления, а
именно: систему с АИМ
будем классифицировать как
линейную импульсную
систему, поскольку в
контуре преобразования сигнала
X (/) расположен
импульсный элемент. В отличие от этого системы с ИЧИМ-2 и ШИМ-2
следует отнести к классу нелинейных систем с нелинейным
элементом квантования приращений, а системы с ИЧИМ-1,
ШИМ-1 — к классу нелинейных импульсных систем.
Очевидно, что указанное классификационное деление систем с
различными видами модуляции отразится как на специфике
их математического описания, так и на специфике методов
исследования каждого из указанных видов систем.
§ 8.2. Исследование устойчивости и качества
систем управления с амплитудно-
импульсной модуляцией
Структурная схема и основные характеристики системы с
АИМ. Рассмотрим структурную схему системы
автоматического управления с АИМ , представленную на рис. 8.12. В ее
состав кроме импульсного элемента (И Э) и формирователя с
передаточной функцией (s) входит линейная часть с
передаточной функцией
W (s).
Последовательность импульсов с вы-
АИ-модулятора
РриВедеииай
линейная часть
хода л 1.Ж. t irix^^y vxyi ivjya. iOv^ A
воздействует на линей- j[
ную часть. Соединение
формирующего элемента
и линейной части
называют прыбеденной
линейной (непрерывной)
частыо. Ее
передаточная функция „ (5) =
Передаточная
функция W is) в больший-
fit)
fin]
/ г
J ^ 5 6
Рис. 8.12
стве случаев представляется дробно-рациональной
функцией:
Wis) = Pis)/Qis), (8.16)
где Р is), Q is) — многочлены по s; степень числителя не
превышает степень знаменателя /, поэтому переходная
характеристика h (/), представляющая собой реакцию на воздействие
вида единичного скачка, определяется для случая, когда
W is) имеет конечное число полюсов 5^,52 Si и эти полюсы
отличны друг от друга, по известной формуле разложения
hit)=^+i ^^e^i^ (8.17)
Значение переходной характеристики позволяет на основании
принципа наложения найти процесс, возникающий на выходе
линейной части при воздействии последовательности
импульсов.
Импульсная переходная характеристика линейной части
определяется как ее реакция на воздействие мгновенного
импульса, т. е. воздействия вида дельта-функции. Полагая, что у (/) =
~ б it), и учитывая, что изображение L {б it)} = 1, находим
изображение импульсной переходной характеристики,
которую обозначим W it), равное передаточной функции
непрерывной части:
оо
Wis)^L{wit)}^^ wit)e-''dt. (8.18).
о
Выражение для импульсной переходной характеристики в
соответствии с формулой разложения может быть записано с
учетом (8.16) и (8.17) в виде
wit)^y J^Le^^ (8.19)
Передаточная функция импульсной системы. Составим
основные уравнения рассматриваемой импульсной системы. Для
этого: 1) введем понятие относительного времени t^tlT,
где Т — такт работы импульсного элемента; 2) воспользуемся
дискретным преобразованием Лапласа.
Предварительно введем понятие решетчатой функции, диск-
кретного преобразования Лапласа и рассмотрим его основные
свойства.
Дискретное преобразование Лапласа и его основные свой--
ства. Решетчатой функцией называется функция, значения
которой изменяются только при целых значениях аргумента п=0,
I, 2, ... (рис. 8.12, б). Будем обозначать решетчатую функцию
символом / [п] и предполагать, что решетчатая функция
тождественно равна нулю при отрицательных значениях
аргумента. Рассмотрим ряд
f*((7)- 2 е-^«/[п1.
Данное соотношение устанавливает соответствие между
решетчатой функцией / tnl, называемой оригиналом, и функцией
комплексного переменного f * (q), называемой изображением
решетчатой функции flnh Это соответствие будем записывать в
виде
FUq) =D{f[n]}.
Преобразование решетчатых функций, определяемое данным
соотношением, назовем дискретным преобразованием Лапласа.
Рассмотрим основные свойства дискретного преобразования
Лапласа.
1. Теорема линейности
D
где
Fv{q)^D{fvln]}, av«= const.
2. Теорема сдвига
D (/[/г + k]} ^ e^^ [f* (q) f И
D(/(n-ft)}=e-</*f*(9).
3. Теорема смещения
D{e±««/[nl}=F*(<7±a).
4. Теорема о дифференцируемости по параметру
D {df [п, ШЦ = dF* (q. X)/dX.
5. Теорема умножения решетчатой функции на п
D {п* f [п]} = {-~lfd''F* {q)ldqK
6. Теорема свертывания
= D{hln]}D{h[n]}=F\ (q)F\(q).
7. Переменные значения решетчатой функции
lim/(n]= lim (е^ —1)F*(<7);
lim/[nl^ lim f* {q).
Воздействие импульсного элемента на приведенную
линейную часть определяется значениями х (/) в моменты съема
1 = п. Это значение может быть определено из уравнения
сумматора (рис. 8.12, а)
>:И1«^о("!—^выхИК (8.20)
где X (п) — решетчатая функция, совпадающая сх (/) в моменты
7- п.
Применив к соотношению (8.20) дискретное
преобразование Лапласа, получим уравнение замыкания системы:
X*{q)=XoiQ)~XluAQ). (8.21а)
где
X*lq)^D{x[n]} = 2 e-^"x[Azl; (8.216)
rt=0
D { } — символ дискретного преобразования Лапласа: q =
= sT,
Найдем связь изображений входного X* {q) и выходного
Хвых (я) сигналов разомкнутой импульсной системы.
Реакция hy линейной части системы на импульс, имеющий
относительную длительность 7о = у/Т, амплитуду, равную 1, и
действующий в момент t = т, определяется соотношением
h(t—m) при ^^/^m+Vo;
h(t—m)~h(t—m—'y^) при /?Ti+Yo<^<^.
(8.22)
где ft (/) вычисляется по формуле, аналогичной (8.17), если
предварительно в передаточной функции W {$) заменить 5 на
qlT.
hy (Т—т) =
Так как на линейную часть системы действует
последовательность импульсов амплитуды х (т) в моменты / = m = 0,1,2,
то в соответствии с принципом наложения реакция
линейной части будет равна сумме реакций от каждого импульса:
i x{m)h^{7~m). (8.23)
т--= О
Здесь + 1.
Для дискретных моментов времени
^выАп)- S ^{^)hy{n~rn). (8.24)
т= О
Заменяя формально величины, входящие в соотношение (8.24),
решетчатыми функциями, значения которых совпадают с ними
в дискретных точках, и применяя затем к обоим частям
дискретное преобразование Лапласа и теорему свертывания,
получим
^{^вых 1^1} xlm]hy[n^m] =
lm-=0
= D{x[n]}'D{hyln]}. (8.25a)
Принимая во внимание обозначения (8.21 б) и обозначая
D{hy[n]}^W*{g), (8.256)
запишем соотношение (8.25а) в виде
Wl,,.{q)^W^{q)X^q). (8.26)
соотношение (8.26) определяет связь между изображениями
решетчатых функций, соответствующих входной и выходной
переменным разомкнутой импульсной системы.
Величина W* (q) называется передаточной функцией
разомкнутой импульсной системы. Согласно (8.256) и (8.216),
она равна
W*{q)= £ ку\п\е-чгг^ (8.27)
Если принять, что обычно hy (0) ft (0) = О, то
2 ^^Ne-^". (8.28)
1
Для вычисления передаточной функции W* (q), определяемой
соотношением (8.28), найдем сначала
hy(t)^h(T)-h(t~y^), (8.29)
Так как h (t) может быть определена по выражению (8.17), если
в нем заменить tm t - Т it st иа qi/T, то
h. (Г) -Yo i; e'*'" (8.30)
Подставляя (8.30) при t =^ n в (8.28), после несложных вы
числений получаем
W*{c,)^y,y\ С,-^^, (8.31)
ami п qz
где
Если один из корней, например q^, равен нулю, то
слагаемое, соответствующее / — должно быть заменено на
у^^РЩ i-e-^^-^- е^^ ^ZJ2L_L-. (8.32)
Отметим некоторые особенности передаточной функции
разомкнутой импульсной системы W* (q).
1. W*{q) является функцией е^.
2. Так как е^-1-/2лт _ то \Г* (q) = IF* (q + 2nm),
т. е. W* (q) является периодической функцией вдоль мнимой
оси плоскости q.
Для определения передаточной функции замкнутой
импульсной системы решим совместно уравнение замыкания (8.21а)
и уравнение разомкнутой системы (8,26). В результате получим
Согласно (8,33), передаточная функция замкнутой системы
Wl{q)^J^^^^. (8.34)
Соответственно передаточная функция по сигналу х на входе
импульсного элемента {передаточная функция оилибки) имеет
вид
Wl{q)'~^ ! . (8.35)
Таким образом, можно предложить следующий порядок
составления уравнений импульсной системы:
1) в передаточную функцию линейной части подставить
s =^ qlT и привести ее к безразмерной переменной q\ тогда
W(q) = Р (q)lQ {q)\
2) по этой передаточной функции определить передаточную
функцию U^* {cj) разомкнутой импульсной системы, используя
соотношение (8.31);
3) определить передаточную функцию замкнутой системы
Wl {q)y пользуясь выражением (8.34).
Частотные характеристики импульсной системы. Если в
полученные выражения передаточных функций подставить
^/со, где со =■ со7 — относительная частота, то получим
соответствующие частотные характеристики. Частотные
характеристики W^* (/со) периодичны по со с периодом 2п. Эти
характеристики определяются полностью изменением относительной
частоты со в интервале —ох < со <С п. Если 1}^* (/со)
представить в виде li^* (/со) = Re W*_ (/со) + /Im.W^* (/со), где
Re vs7* (/со) — четная, а Im W* (/со) — нечетная функция со,
то несложно показать, что можно ограничиться интервалом
частот О < со < п.
Частотные характеристики играют такую же Важную роль
при исследовании импульсных систем, как и пр^^ исследовании
непрерывных систем, поэтому остановимся кратко на вопросе
построения частотных характеристик. Предварительно
запишем выражение (8.27) в виде
2 W(, + ;^nt) -'^^ (8.36)
(детальный вывод приведен в работе [1]). В данном выражении
передаточная функция разомкнутой импульсной системы W^iq)
определена непосредственно через передаточную функцию ли-
нейной части. Подставляя в выражение (8.36) /со и
учитывая, что
е- /"/^ (е^'"-/^ -е -/^/^) ^ sin (а/2) е"^'"^^
/а 2/а/2 а/2
получим выражение для частотной характеристики
разомкнутой импульсной системы в виде
sin ; То _/£±^Vo
соЧ- 2л/г
^ Vo
(8.37)
В соответствии с соотношением (8.37) можно предложить сле-
дуюи;ий порядок построения частотной характеристики
разомкнутой системы: _
1) строим частотную характеристику W (/со). Она
отличается от характеристики линейной части W (/со) только
масштабом частот, поскольку со ^ со Т (рис. 8.13). Сплошная
кривая соответствует со > О, а пунктирная кривая, симметричная
ей, со < 0;
2) задаемся некоторым значением частоты coi, из
интервала О <: coi < п и отмечаем на частотной характеристике
W (/со) следующие точки (рис. 8.13):
coi, coi—2я, coi—4я,..., C0i-^2nfe,
C0i4-2n, cOi + 4ji,..., coi + 2nfe;
3) строим векторы, выходящие из начала координат и
приходящие в указанные точки;
4) уменьшаем модуль каждого соответствующего вектора в
sin ^1+^
2
--раз.
2
Рис. 8.13
Рис. 8.14
Данную величину удобно определять по таблицам ^ -. По-
вернем соответствуюнлий вектор на угол —^
5) суммируя построенные векторы и умножая сумму на
величину -уо» определяем согласно (8.37) значение Ц^* (/coi)
частотной характеристики разомкнутой системы на частоте toj.
На рис. 8.14 процесс построения поясняется на примере точек,
соответствующих частотам coi, coj — 2я. coj + 2n. Цифрами 1,
2, 3 обозначаем векторы, преобразованные согласно п. 4
порядка построения. Сумма этих векторов с точностью до
коэффициента Yo определяет вектор (/Oj). Далее аналогично
строят точки частотной характеристики на других частотах
(со2, соз,...) из диапазона О < о < я. Соединяя построенные
точки, получаем годограф В^* (/со). ^
Во многих случаях при достаточно больших значениях со
значение (/со)| существенно уменьшается, поэтому в
выражении (8.37) можно ограничиться двумя слагаемыми для
упрощенного приближенного вычисления {jcd):
\^*(/co)-Vo
WiM— e ^ +
To
sin
(0 —2ji
(0—2л
■ Yo
(8.38)
Порядок построения W^* (/со) по выражениям (8.38)
иллюстрируется на рис. 8.15. На рис. 8.15, а показаны векторы WimO*
W J^jio^), а также векторы W (/зх), W I/ (2л; — щ)1 W [/ (2я—
— о) а)! и им сопряженные. На рис. 8.15, б у этих векторов
уменьшены модули, изменены фазы и произведено
суммирование согласно (8.38). Для того чтобы не перестраивать кривую
W (/со), изменяя ее в Yo раз. можно изменить масштаб по
действительной и мнимой осям в Yo рзз. Из соотношения (8.38),
а также из обихего выражения (8.37) достаточно очевидно, что
при со = л конец вектора W^* (/я) всегда лежит на действи-
Рис. 8.15
тельной оси, поскольку Im W^* (/n) = 0. Известны и другие
способы построения (/о)), которые достаточно подробно
описаны в работах [1,5].
Исследование устойчивости систем с
амплитудно-импульсной модуляцией. Пусть решетчатая функция х [п]
представлена в виде вынужденной и свободной составляюш.их, т. е.
определяется выражением вида
х[/г1^хЛп1^х^вИ. (8.39)
Вынужденная составляющая процесса х^ [п] определяется
видом внешнего воздействия. Свободная составляющая
характеризует отклонение процесса х (п) от вынужденной
составляющей Хв In] и определяет переходный процесс. Она может бьггь
представлена в виде
ХезИ=2^,е'Л (8.40)
i= 1
где di — некоторые коэффициенты; qt — основные полюсы
передаточной функции замкнутой импульсной системы, т. е.
основные корни характеристического уравнения вида
G*lq)=^] 4-W*(^)-0. (8.41)
Основными будет считать корни, расположенные в полосе —
— n<Z Im<7<: я, поскольку все остальные корни отличаются от
них на величину Ч= /2ят. Если W* (q) представить в виде
^*(^).^P*(^)/Q*(^),
то характеристическое уравнение замкнутой системы можно
записать в виде
G^q)^Q^{q) + P*(q)^0, (8.42)
Если с течением времени Хсв 1^1 стремится к нулю, т. е.
Итх^,в1п]-0, (8.43)
то импульсная система называется устойчивой.
Если с течением времени Хсв In] неограниченно
возрастает, т. е.
ИтХевИ-оо, (8.44)
, п-»-оо
то импульсная система называется неустойчивой. В
промежуточном случае, когда Хсв 1^1 с течением времени не стремится
к нулю и не возрастает неограниченно, импульсная система
называется нейтральной. В устойчивой системе процесс х (м)
с течением времени стремится к вынужденной составляющей.
Анализ выражения (8,40) с достаточной очевидностью
показывает, что если все основные полюсы qt имеют отрицательные
вещественные части, то при м-^ оо все слагаемые (8.40)
стремятся к нулю и, следовательно, выполняется условие (8.43),
соответствующее устойчивой импульсной системе. Если хотя
бы один из полюсов qi имеет положительную вещественную
часть, то соответствующее слагаемое в (8.40) неограниченно
возрастает и. следовательно, выполняется условие (8.44),
соответствующее неустойчивой импульсной системе. Наконец,
если хотя бы один из полюсов qi имеет вещественную часть,
равную О, а все остальные полюсы — отрицательные
вещественные части, то выполняется условие, соответствующее
нейтральной системе. Таким образом, для того чтобы импульсная
система была устойчива, необходимо и достаточно, чтобы
все полюсы ее передаточной функции имели отрицательные
вещественные части или чтобы все эти полюсы лежали в
левой части полосы — я < Im ^ < л комплексной плоскости q
(рис. 8.16). Так как основные полюсы W^* {q) совпадают с
полюсами W (q), то устойчивость линейной части системы
обеспечивает устойчивость разомкнутой импульсной системы. В
общем случае вычисление корней qi является трудной и
громоздкой задачей, однако для суждения об устойчивости нет
необходимости определять сами корни, достаточно лишь установить,
лежат ли все они в левой части полосы — я •< Imq
Ответ на этот вопрос дают критерии устойчивости.
Рассмотрим алгебраические и частотные критерии,
аналогичные тем, которые использовались для анализа
устойчивости линейных непрерывных систем.
Алгебраический критерий устойчивости (аналог критерия
Гурвица). Пусть характеристическое уравнение исследуемой
замкнутой импульсной системы имеет вид
G* (q) = Ui е'^ + а^-, е<'- + ... + а^. (8,45)
Произведем в характеристическом многочлене G* (q) замену
переменных:
Z = е^. (8.46)
Тогда получим
G (г) =-a,z^+ а,-1 + + «о- (8.47)
Плоскость tl
+J7l
Плоскость z
\ yey
Рис. 8.16
Рис. 8.17
Так как подстановка (8.46) преобразует полу полосу — п <
< Im 9 < Jt, Re <7 < О (рис. 8.16) во внутренность круга
единичного радиуса (рис. 8.17) |г| < 1, то применительно к
плоскости Z необходимое и достаточное условие устойчивости
формулируется следующим образом: замкнутая импульсная
система устойчива^ если все корни G (z) лежат внутри круга
единичного радиуса, т. е. все нули G (г) по модулю мень1ие единицы.
Для того чтобы привести условия устойчивости импульсной
системы к аналогичным условиям устойчивости Гурвица для
непрерывных систем, в многочлене (8.47) произведем
подстановку:
(г — l)/(z + 1) или Z = (1 + г;)/(1 — v), (8.48)
тогда характеристический полином принимает вид
(8,49)
Плосиость гг-
Так как подстановка (8.48) преобразует круг единичного
радиуса в комплексной плоскости z (рис. 8.17) в левую
полуплоскость V (рис. 8.18), то
условие устойчивости импульсной
системы формулируется так:
замкнутая импульсная система
устойчива у если корни G {v)
лежат в левой полуплоскости S
т, е. если выполняются условия
Гурвица
bi>0, Ak>0, ft = 1,2,..., /,
где Д/е — определители Гурвица
k-ro порядка (порядок
вычисления их полностью совпадает
с рассмотренным в гл. 3). Рис. 8.18
Частотный критерий устойчивости (аналог критерия Най-
квиста). Частотный критерий устойчивости импульсных
систем, аналогичный известному из гл. 3 критерию устойчивости
Найквиста для непрерывных систем, позволяет судить об
устойчивости замкнутой системы по частотным характеристикам
разомкнутой системы. Критерий Найквиста для непрерывных
систем, как было показано в гл. 3, основан на принципе
аргумента. Очевидно, что аналог принципа аргумента весьма
несложно сформулировать и для импульсной системы,
анализируя расположение корней, например, в плоскости z или
плоскости t;. Однако мы предлагаем это сделать читателю
самостоятельно и ограничимся здесь лишь формулировкой критерия
Найквиста для трех случаев, когда разомкнутая импульсная
система устойчива, неустойчива и нейтральна.
Если разомкнутая импульсная система устойчива (т. е,
устойчива линейная часть системы), то замкнутая
импульсная система регулирования устойчива, если годограф
частотной характеристики разомкнутой системы при изменении
(О от О до п не охватывает точку (— 1, / О ). _
На рис. 8.19 изображены годографы (/со), соответст-
вуюш.ие устойчивой (кривая 1) и неустойчивой (кривая 2)
системам.
Если разомкнутая импульсная система неустойчива, т. е.
если передаточная функция линейной части имеет г полюсов с
положительной вещественной частью, то замкнутая система
импульсного регулирования будет устойчива, если годограф
W* (/со) частотной характеристики разомкнутой системы
охватывает точку {— I, jO) в положительном направлении г/2
раз.
Если разомкнутая система нейтральна, т. е. если
передаточная функция содержит г полюсов, равных нулю, то
импульсная система будет устойчива, если годограф W* (/со),
дополненный дугой бесконечно большого радиуса, соответствующей углу—
— г я/2, не охватывает точку (— 1, / 0). На рис. 8.20 кривая
1 соответствует устойчивой, а кривая 2 — неустойчивой
замкнутой системе. Частотную характеристику разомкнутой
системы W * (/о) можно построить, пользуясь выражениями
(8.37), (8.38), или одним из способов, рекомендованных в [1,5].
Исследование качества систем с амплитудно-импульсной
модуляцией. При исследовании качества систем
автоматического управления возникают, как правило, три рода задач: 1)
оценка установившегося значения сигнала ошибки системы
Плоскость W*(Jw)
(0=0 w=0
/ lA
Плоскость W*(ja>)
X''''
—
Рис. 8.19
Рис. 8.20
(установившееся значение отклонения входного сигнала
импульсного элемента .х (см. рис. 8.12); 2) построение кривой
переходного процесса в моменты съема t =^ п\ 3) косвенная
оценка параметров переходного процесса, в первую очередь
оценка перерегулирования и времени регулирования.
Рассмотрим задачу оценки установившегося сигнала
ошибки системы. Сигнал на входе импульсного элемента и входной
сигнал системы Xq (см. рис. 8.12) связаны соотношением (8.35):
хчя)
\^W^ (q)
Xliq).
(8.50)
Запишем передаточную функцию (8.35) в виде отношения
двух многочленов Я* (q)lG^ \q), где Я* {q) — многочлен
степени /2; G * (^) — характеристический многочлен степени /.
Предположим, что Xq [м] имеет вид единичного скачка, т. е.
Хо [п]
1 при п=.0, 1,2,...;
О при п<; 0.
Тогда сигнал х [п] в дискретные моменты времени будет
определяться выражением
где
(8.51)
г dG* (q) -
q-4i
e ^
L dq \
4 = 4i
Если система устойчива, то действительные части корней Qi
характеристического уравнения отрицательны и все слагаемые
в (8.51) с ростом п будут стремиться к нулю. Таким образом,
X [оо] - lim X [п] ^Я* (0)/G* (0) = 1 /[1 -I- IF* (0)]. (8.52)
rt->-oo
Значение (8.52) характеризует установившееся значение
ошибки в системе с АИМ. Значение л: [ оо] ^0, если (0) Ф
Ф [со], и обращ^ается в нуль в астатической системе, т. е. в том
случае, когда в контуре системы имеется интегрирующее
звено (например, исполнительный элемент). Это несложно
показать, если проанализировать соотношение (8.52) с учетом
(8.32).
Задачу построения кривой переходного процесса можно
решить с помощью соотношения (8.51), однако данный подход
весьма неудобен уже при степени характеристического
уравнения / > 3, поскольку требует вычисления корней уравнения
С*(<?) =0.
Рассмотрим предложенные в [1] более удобные способы, не
требующие вычисления корней и позволяющие построить
процесс при любом внешнем воздействии.
Пусть передаточная функция замкнутой системы
представлена в виде
Я* (9) ^ Ьо + 6,е^+..-+Ьье^-^ .g53j
Разлагая ее в ряд по степеням е^ и применяя обратное
дискретное преобразование Лапласа, можно получить
X \п\ - Г;, \п -(/-1^ + /е)], (8.54)
где коэффициенты Г,^ определяются из рекуррентного
соотношения:
У Г/е_^,а/^^,1; (8.55)
6,2-^ = 0 при fe>/2; a/_^4 = 0 при [х>/.
Выражение (8.54) позволяет определить процесс регулирования
(для ^ = п) при любой форме \п\. Если Хо \п\ имеет вид
единичного скачка, то Xq In — (/ — + равно единице
при k <п — / + /г и нулю при k> п — I Л- 1ч, а
значения процесса находятся суммированием коэффициента Г^,.
RgW*(Jco)
Рис 8.21
Рис. 8.22
Второй способ построения кривой переходного процесса
основан на использовании частотных характеристик. По
известной IF* (/со) строится вещественная частотная
характеристика Re IF* (/со). Если представить ее в виде суммы
типовых трапецеидальных характеристик (рис. 8.21). то искомую
величину Г,, можно выразить в виде
г,-
i= \
sin ((Oj k)
CDi k
sin {Tj k)
(8.56)
Здесь Ai — площадь трапеции. Параметры произвольной i-и
трапеции обозначены на рис. 8.22. Пользуясь таблицами ^ ,
определяем Г,,, а затем по соотношению (8.54) строим кривую
переходного процесса х [п].
Косвенные методы оценки показателей качества процесса
регулирования в системах с АИМ играют такую же важную
роль, как и в системах непрерывного регулирования.
Рассмотрим следующие основные косвенные оценки: степень
устойчивости, степень колебательности и интегральные оценки.
Степенью устойчивости I будем называть минимальную
вещественную часть корня характеристического уравнения G*{g)
= О замкнутой системы:
S =min\Re<7i|.
(8,57)
Так как исследуемые процессы выражаются в функции
относительного времени / = п, то и степень устойчивости g является
относительной величиной. Примем обозначение для
абсолютной величины степени устойчивости 1, т. е. = i/T, Для
определения степе1ш устойчивости достаточно в передаточную
функцию разомкнутой системы (q) подставить q — |
вместо £ и полученную таким образом передаточную функцию
рассматривать как передаточную функцию некоторой «фиктивной»
системы, граница устойчивости которой соответствует линии,
равной степени устойчивости исследуемой системы. Задача,
таким образом, сводится к тому, чтобы определить параметры,
при которых «фиктивная» система находится на границе
устойчивости. В этом случае исследуемая система будет иметь
заданную степень устойчивости. Исследование системы с позиций
устойчивости может быть проведено по любому из
приведенных выше критериев.
Рассмотрим случай, характерный именно для систем с
АИМ. Пусть характеристическое уравнение замкнутой системы
G* (q) = ai е^^ + а,_г е^'~ + ... f - 0. (8.58)
Если параметры системы таковы, что выполняется условие
«о =^^1 <h= cii-i О, (8.59)
то
G*(^)=af е'-^-О. (8.60)
Так как корни уравнения (8.60) равны — оо, то степень
устойчивости рассматриваемой системы равна бесконечности.
Если известна передаточная функция разомкнутой системы
iq) IISS) ^о + ь;е^+...4-Ьа.^-^ (g ^ 1)
тс условие бесконечной степени устойчивости, аналогичное
(8.59), можно записать с учетом (8.59), (8.61):
^0=- -^о; —^ъ--.; fl^-i-^z-i. (8.62)
Физически бесконечная степень устойчивости означает, что при-
возмущениях типа единичного скачка процесс регулирования
заканчивается за конечное число тактов работы импульсного
элемента. Действительно, если справедливо соотношение
(8.59), то из рекуррентного соотношения (8.55) получаем
Г^^^^^при k^k; Г,^0 при k>k.
01
в этом случае в соответствии с формулой (8.54) х \п\
принимает значение
111
xln\^ 2
{[n—k—l + lz] при n</;
in]-2
k = 0
1
^•l2-h
ai \ + W*{0)
при n>L
Очевидно, что x [n\ при n > / не зависит от n. В частности,
если W^*(0) = оо, то X [п] = О при п ^ 1. Рассмотренное
свойство систем с АИМ можно использовать при построении
оптимальных по быстродействию систем. Принципиально можно
добиться того, чтобы переходный процесс заканчивался за один
такт работы импульсного элемента.
Степенью колебательности т] устойчивой импульсной
системы будем называть абсолютную величину отношения мнимой
части ближайшего к оси корня характеристического
уравнения к действительной части (рис. 8.23), т. е.
При расчете степени колебательности можно
пользоваться тем же подходом, что и при расчете степени
устойчивости. Разница состоит в том, что в передаточную функцию
системы подставляется
—5 + —1/Т]].
Применяя для исследования устойчивости «фиктивной»
системы один из известных критериев, можно определить,
обладает ли данная система .заданной
величиной т]. или подобрать
параметры системы, при которых т] равно
заданной величине. Отметим, что
степень колебательности относится к
дискретным значениям процесса в
моменты съема.
■ Связь ^ и т] с показателями
качества переходного процесса (в
частности, с перерегулированием и
временем регулирования) подробно
рассмотрена в гл. 4 при исследовании
качества линейных непрерывных
систем. Рис. 8.23
Интегральные оценки. Динамические свойства
переходного процесса в системе с АИМ, возникающего от воздействия
вида единичного скачка, по аналогии с непрерывными
системами можно охарактеризовать интегральными оценками вида
n=0 n^O
-x[oo]f. (8.63)
Оценка J-^ выражает собой площадь, заключенную между
графиком ступенчатой функции, образующейся из решетчатой
функции X [м], и графиком ее установившегося значения, т. е.
площадь отклонения ступенчатой функции от ее предельного
значения. Эта площадь на рис. 8.24 показана штриховкой.
Очевидно, что оценку следует применять только к
неколебательным процессам. Используя теорему о площади [1],
выражение для вычисления оценки при л: [ с»] = О можно получить
в виде
п=0
d
(8.64)
^=0
Оценку J 2 можно использовать и для колебательных
процессов. Вычисляют J 2 непосредственно по коэффициентам
передаточной функции замкнутой системы. Для воздействия вида
единичного скачка полиномы числителя Н] (q) и знаменателя
G* (q) передаточной функции запишутся в виде
Н\ (q) = е(Ь - И. + ес- + ... + d,;
G* (q)=ai е'^ + е^'-' J'? + ... + Со,
тогда при / — ^2 ~ ^
J2 =
Oj Go
Go Gi
при
/=/2=2
{dx+dl){a.,^ao)-'^dod, a,
(^2—Go) ((GoH-Oo)^—0?J
Оценку J 2 можно также определить, пользуясь частотной
характеристикой замкнутой системы:
dCD,
(8.65)
Рис. 8.24
т. е. оценка равна пло
щади квадоата модуля
Н] (/^)/G* (/со).
Непрерывное
регулирование как граница импульсного
регулирования. Естественно
ожидать, что по мере
увеличения частоты работы
импульсного элемента система
регулирования с АИМ по
своим свойствам будет все меньше и меньше отличаться от
соответствующей системы непрерывного регулирования. Это
означает, что при малых интервалах регулирования
характеристики импульсной системы должны мало отличаться от
соответствующих характеристик непрерывной системы и в
пределе при Г -> О эти характеристики должны совпадать.
Покажем, как это условие выполняется, для чего
рассмотрим частотную характеристику \F* (/со), представленную
в виде
^*(/со)—^ 2 ^-nlJ{^-\-kco,)l /8.66)
где соо = 2п/Т; Wj^^ (/со) — частотная характеристика
приведенной части (соотношение (8.66) выводится в работах [1,5]
и здесь приводится без доказательства).
Для того чтобы, пользуясь выражением (8. 66), построить
частотную характеристику импульсной системы, нужно
построить ряд характеристик непрерывной системы, смещенных
относительно друг друга вдоль оси со на частоту повторения coq
и просуммировать ординаты всех смещенных характеристик,
умноженные на 1/Т. На рис. 8.25, а построена вещественная
частотная характеристика Re W^^ (/со), а на рис. 8.25, б
вещественная частотная характеристика Re W* (/со). Полосу
частот — сОд < со < со^, за пределами которой
ординатами частотной характеристики приведенной непрерывной части
можно пренебречь, назовем полосой пропускания, -
Из рис. 8.25, б видно, что в полосе частот от — coq До
+ соо частотные характеристики импульсной и непрерывной
системы отличаются за счет того^ что происходит наложение
смещенных характеристик друг на друга. Физически такое
искажение частотной характеристики непрерывной части
означает определенную потерю информации из-за передачи импульс-
ReW^(Ja))
lVr}ReW„^lD)
^ НЫМ элементом только
Ф дискретных значений
сигнала. Если
увеличить частоту (Оо
работы импульсного
элемента до значения
соо > 2cOii, то
частотные характеристики
непрерывной системы
и импульсной в
полосе пропускания
совпадут. Отсюда
вытекает аналог
известной теоремы Котель-
никова: если спектр
Рис. 8.25 частот внешнего
воздействия ограничен в
интервале— сОп<:со<:<Оп, то свойства системы с АИМ, у
которой (Оо ^ 2(0п, тождественны свойствам эквивалентной
непрерывной системы с комплексным коэффициентом усиления
Очевидно, что в этом случае процесс исследования импульсной
системы полностью совпадает с процессом исследования
линейной непрерывной системы. С практической точки зрения можно
считать, что условие эквивалентности системы с АИМ и
линейной непрерывной системы выполняется, если наибольшая
постоянная времени линейной части существенно больше периода
работы Т импульсного элемента.
Пример 8.1. Сигнал x(t) на входе импульсного^ элемента
(рис. 8.12, а) представляет собой единичную функцию. Найти
изображение дискретной функции на выходе импульсного элемента.
Согласно (8.216),
По формуле суммы бесконечной геометрической прогрессии с первым
членом, равным 1, и знаменателем е"^ получим изображение У* =
^ _J е^
1 - е^ ~ е<? Г
Пример 8.2. Определить дискретную передаточную функцию
звена в случае импульсов вида решетчатой функции, если известна его
передаточная функция W (s) = l/(s + а).
Согласно (8.216),
где w [n] — дискретная весовая функция звена.
Так как w (t) ^ е"' для рассматриваемого звена, то w (7) =
Тогда соотношение для U^'* (q) запишется в виде
е
q
Пример 8.3. Построить амплитудно-фазовую частотную
характеристику для импульсной системы, если передаточная функция
непрерывной части W (s) = V(l -I- s^i) и формирователь импульсов дает
прямоугольные импульсы (О < 7о < О- Согласно (8.31),
^TyjT^ —1
В выражение для W* (q) подставляем q « /со и, изменяя со от О до л,
получаем требуемую характеристику. Она представляет собой
полуокружность, расположенную в нижней полуплоскости, причем в крайних
точках
W^- е--^/^» —— ; ап)^~к, е-^/^*
§ 8.3. Исследование динамики цифровых систем
автоматического управления
Цифровые вычислительные машины (ЦВМ) и различного
рода цифровые вычислительные устройства получили в
последнее время значительное распространение в различных системах
автоматического управления. Широкие возможности ЦВМ
позволяют использовать их в автоматических системах для
достижения высоких показателей качества процесса управления.
Включение в контур управления ЦВМ, хотя и требует
дополнительных вспомогательных устройств, позволяющих
осуществить преобразование непрерывных процессов в
дискретные и обратное преобразование, компенсируется
возможностью реализации практически любого закона управления, ко-
. торый делает всю систему в целом весьма эффективной.
Henpe-
w/л
pblOHQP
wocmb
Н/Д
Рис. 8,26
С динамической
точки зрения цифровые
системы характеризуются
наличием квантования
сигнала как по времени,
так и по уровню. Для
таких систем
характерна импульсно-кодовая
модуляция сигнала.
Наличие квантования по
уровню придает
цифровой системе существенно нелинейный характер, однако во
многих случаях, например когда в системе используются
многоразрядные цифровые датчики, эффектом квантования по
уровню можно пренебречь и рассматривать цифровую систему
как импульсную, в которой осуществляется квантование
сигнала только по времени.
Обобщенная структурная схема цифровой системы (ЦС)
представлена в виде, показанном на рис. 8.26. Здесь символом
Н1Д обозначено устройство преобразо"вания непрерывного
сигнала в дискретный. Преобразователь Я/Д можно
представить в виде последовательного соединения
многоступенчатого элемента квантования по уровню (рис. 8.27) и импульсного
элемента, осуществляющего амплитудно-импульсную
модуляцию [6] (рис. 8.28).
Символом Д1Н обозначено (рис. 8.26) устройство
преобразования дискретных сигналов в непрерывные. Оно может быть
представлено в виде формирующего устройства,
являющегося фиксатором нулевого порядка с передаточной функцией
И^Ф (5), определяемой выражением (8.4). В контур ПС входит
также объект управления
(непрерывная часть) с передаточной
функцией W (s) (рис. 8.28).
Упростим схему, приведенную
на рис. 8.28, перенося импульсный
элемент из цепи воздействия и
обратной связи в цепь ошибки
(рис. 8.29). Из схемы рис. 8.29
очевидно, что если квантованием по
уровню пренебречь, то
структурная схема ЦС (рис. 8.29)
полностью совпадает со структурной
Рис. 8.27 схемой системы с АИМ (см.
у-
0
X
1
"I ^
1
mm
W(S)
m
1
/
J
Рис. 8.28
(Приведенная
непрерывная часть
Г
Рис. 8.29
рис. 8.12). Следовательно, для исслед^ования ЦС без учета
квантования по уровню справедливы все результаты
предыдущего параграфа, полученные для исследования системы
с АИМ.
В настоящем параграфе целесообразно рассмотреть аппарат
логарифмических частотных характеристик (ЛЧХ), который
с успехом применялся для исследования линейных
непрерывных систем в гл. 3—5 настоящего учебника. Данная задача
весьма актуальна при исследовании устойчивости ЦС и систем
с АИМ, поскольку применение широко распространенного
критерия Найквиста требует построения частотной
характеристики IF* (/(о) разомкнутой системы, что в практике
инженерных расчетов может оказаться достаточно громоздким и
затруднительным.
Исследование цифровых систем методом логарифмических
частотных характеристик. Следует иметь в виду, что свойства
трансцендентности и периодичности \F* {с\) препятствуют при
исследовании ЦС и систем с АИМ использованию
логарифмических частотных характеристик.
Метод ЛЧХ может быть разработан на основе у-преобразо-
вания, которое, как было показано в предыдущем параграфе,
отображает полуполосы — я < Jm ^ < л, Re^ < О
плоскости q в левую полуплоскость переменной v.
Рассмотрим 1;-преобразование более подробно, для чего
запишем его в форме
^^.(е^ — 1)/(е9+ I).
Полагая q ^ получаем
V'~^~Z ^/tg —.
Так как правая часть данного равенства — мнимая величина,
то и левая часть будет величиной мнимой. Вводя обозначение
V ^ /со*, получим
/co*-/tg — ,
откуда со = 2 arctg со*. _^
При изменении со от О до п значения со* изменяются от О
до ос. Так как со = со7, то имеет место также соотношение
2 —
со — а rctg со*
Переменную со* называют безразмерной псеедочастотой.
Однако при исследовании ЦС в ряде случаев более удобна
размерная псевдочастота со*, которую введем с помощью соответст-
2 ~-
вия со* ^ ;^со *. Принимая во внимание это равенство,
получаем
^ 2 . с)Г
^ tg-
Г " 2
откуда следует, что при изменении со от О до я/Г,
псевдочастота со* принимает значение О < со* [с-Ц < оо. Ниже будем
пользоваться ^-преобразованием, связанным с размерной
псевдочастотой и записанным в виде соотношения
Т
9^1п (8.67)
I—--и
Используя результаты § 8.2, уравнение динамики
разомкнутой ЦС (без учета звена квантования по уровню) запишем в
виде (рис. 8.29)
XL,.(q)^W^(q)X^(q). (8.68)
Если теперь в уравнение (8.68) вместо переменной q ввести
переменную v в соответствии с соотношением (8.67), то
получим записанное через ^-преобразование уравнение динамики
разомкнутой ЦС:
^вых(^)-^^(^)^(^). (в.69)
Передаточная функция W {v) позволяет использовать для
анализа и синтеза ЦС логарифмические частотные характеристики.
При этом ЛЧХ, соответствующие частотной характеристике
разомкнутой ЦС 1^(/(о*), определяются теми же соотношениями,
что и для обычных непрерывных систем:
L(co*)-201glf^(/o3*)l; <р (со*) = arg W^/co*). (8.70)
Используя ЛЧХ, полученные в соответствии с
соотношением (8.70), можно сформулировать, например,
логарифмический частотный критерий устойчивости для ЦС и систем с APiM,
являющийся аналогом соответствующего критерия для
непрерывных chctcjm: система, устойчивая в разомкнутом состоянии,
устойчива и в замкнутом состоянии, если число переходов
фазовой частотной характеристикой разомкнутой системы
Ф ((О*) через ось — я сверху вниз равно числу переходов снизу
вверх е интервале частот, где логарифмическая амплитудно-
частотная характеристика разомкнутой системы L (ш*)
неотрицательная. Для удобства конкретных инженерных
расчетов, когда требуется переход от оригиналов к изображениям
с помощью дискретного преобразования Лапласа,
целесообразно пользоваться соответствующими таблицами,
приведенными, например, в [П. Аналогичными таблицами
целесообразно пользоваться и для определения передаточных функций
отдельных элементов ЦС в t/-преобразованном виде. В табл. 8.1
приведены решетчатые функции и их изображения, а в табл. 8.2
— передаточные функции 1^* {q) и W {v) разомкнутых
импульсных систем с прямоугольными импульсами.
Исследование цифровых систем с непрерывной передачей
данных. Выше был проведен анализ ЦС, структурная схема
которой показана на рис. 8.28, 8. 29, без учета нелинейности
Таблица 8.1
Оригинал
Изображение
Оригинал
Изображение
F* (9) = D [j \n])
f\n)
i 1«1
a"
(e'-e«)(e'-l)
е»е°(в^-|-е°)
cos ш n
sin co П
e2?_2e<' coso + l
sin to
e2e_2e«costo+l
(eg-e'^costo)
e29_2e«e°costo+e2°
e^e^sinto
квантования по уровню. В практике
систем автоматического управления
получили достаточно широкое
распространение так называемые системы с
непрерывной передачей данных. Они
применяются, в частности, в системах
программного управления станками, в систе-
Рис. 8.30 мах программного управления
механизмами прокатных станов и т. д.
Если, оперировать структурной схемой, приведенной на
рис. 8.29. то характерным признаком ЦС с непрерывной
передачей данных можно считать отсутствие импульсного элемента
в цепи рассогласования х {t). Если импульсная передача и
применяется, то частота съема информации выбирается
достаточно высокой, чтобы избежать потери информации и
накопления ошибки. К системам с непрерывной передачей данных
можно условно отнести и системы, у которых осуш.ествляется
импульсная передача, но параметры импульсной системы
соответствуют условиям ее эквивалентности непрерывной системе
(условие эквивалентности рассматривалось в § 8.2).
Эквивалентная структурная схема ЦС с непрерывной передачей
данных представлена на рис. 8.30.Очевидно, что
рассматриваемая система является нелинейной системой с нелинейным
элементом квантования по уровню (см. рис-. 8.27). Для
исследования данной системы можно использовать известные методы
исследования нелинейных систем, рассмотренные в гл. 7. Для
исследования абсолютной устойчивости ЦС с непрерывной
передачей данных воспользуемся критерием абсолютной
устойчивости нелинейных систем, приведенным в гл. 7: если замкнутая
система состоит из устойчивой линейной части с передаточ-
ной функцией Wnbi {s) (рис. 8.30) и нелинейности и
характеристикой i|5 (л:), лежащей в угле О ^ < k, то достаточным
условием устойчивости является выполнение неравенства
Re [(1 + / рсо) Wnn + > О, (8.71)
где Р — произвольное вещественное число.
В случае рассматриваемой ЦС /г »= б /(0,5 Д) = 26/Д.
Критерию абсолютной устойчивости можно дать удобную
геометрическую интерпретацию, введя понятие
модифицированной частотной характеристики Ш'цн (/со), где
О'со) =-Re W^,h (/со) + /со Jm (/со).
в этом случае критерий формулируется следующим образом:
ЦС с непрерывной передачей данных успюйчива, если при
устойчивой линейной части через т6чку^{—^/{26)\ /0) можно провести
прямую так, чтобы годограф W^^^ (/о) леоюал справа от нее.
Если достаточные условия абсолютной устойчивости для
ЦС не выполняются, то в ней могут возникнуть периодические
процессы. Исследование перирдических процессов можно
выполнить с помощью метода rapi40HH4ecKoro баланса. Будем
полагать, что внешнее воздействие на систему отсутствует, и
тогда условие существования периодического режима (в
предположении, что приведенная непрерывная часть удовлетворяет
гипотезе фильтра) можно записать в виде
(8.72)
где V/,^^{A) — комплексный коэ(|)фициент усиления
нелинейного элемента квантования по уровню.
Уравнение (8.72) удобно решать графически, переписав
его в виде \
WuAi^)--Wr.s4AY (8.73)
Если уравнение (8.72) или (8.73) HilieeT решение, то в
исследуемой ЦС существуют периодические колебания вида х {t) =
=у4 sin iot. Построив в общей системе координат годограф Ц^д„ х
X (/о) и инверсную характеристику^ комплексного
коэффициента усиления нелинейного элемента квантования — W^s (Л),
определим параметры колебаний /4, со в точках пересечения
данных характеристик. Аналитическое\выражение комплексного
коэффициента W^^^ (Л) можно записать в виде [91
И^нэ (^) -V i К4Л^-(2/-1Л (8.74)
где/е--число ступеней характеристики квантования,
захватываемых сигналов с амплитудой Л. \
Вывод (8.74) не приводится, поскольку методика
вычисления (Л) по существу не отличается^^от методики,
показанной на примерах типовых нелинейностей в гл. 7.
Соотношение (8.74) записано для б Ц Д == 1. На рис. 8.31
показаны амплитудно-фазовые характеристики Ц^„с (Л) и
^нэ^ (Л). Так как характеристика нелинейного элемента
квантования однозначна, то Ц^нэ (^) является действительным
числом и потому его характеристика совпадает с
действительной осью. Максимальное значение W^^ {А) равно 4/я = 1,27
при А = V2/2 = 0,707. На рис. 8.32 приведена логарифми^»
ческая амплитудная характеристика L (Л). Последнюю
весьма удобно применять для анализу- и синтеза ЦС с непрерывной
передачей данных методом ЛЧХ;
Исследование цифровых систем с учетом квантования по
уровню и по времени. Цифровые автоматические системы при
условии учета квантования как/по времени, так и по уровню
следует отнести к классу нелинейных импульсных систем (см.
рис. 8.29) и для исследования д^инамики таких ЦС привлекать
соответственно методы, разработанные для нелинейных
импульсных систем. Так, для исследования абсолютной
устойчивости ЦС используем критерий, разработанный Я-З. Цыпки-
ным [81: положение равновесия Нелинейной импульсной системы,
приведенная непрерывная част^ которой устойчива и
нелинейная характеристика принадлежит сектору (О, k), будет
абсолютно устойчивым, если для всех частот в диапазоне (О, л)
выполняется неравенство \
1//г + Ке/«^пн(/со)>0.
(8,75)
Геометрический смысл
амплитудно-фазовая харак!
-2
/
\
J
/
\
/
J
V
^2
7
/
Рис. 8.32/
iHoro неравенства весьма прост:
эисгика Wnu (/со) приведенной
линейной части должна
располагаться справа от
вертикальной прямой— 1/fe.
Согласно рис. 8.27,
характеристика квантования
по уровню принадлежит
сектору (О, 26/Д), поэтому
условие абсолютной
устойчивости положения
равновесия ЦС выполняется,
если годограф Wnn (/со)
располагается справа от
вертикальной прямой —■
Д/(2 6) (рис. 8.33).
В том случае, когда
приведенная линейная
часть неустойчива,
достаточный критерий
абсолютной устойчивости (8.75) не
выполняется. Это связано
с тем, что характеристика
Рис. 8.33
Рис. 8.34
квантования имеет зону
нечувствительности (— Д/2,
+ Д/2) и. когда процесс
попадает в эту зону, система
размыкается, а разомкнутая
система неустойчива.
Если условие абсолютной
устойчивости не выполняется,
то в ЦС могут возникнуть пе-.\
риодические режимы. Термин
«авколебания» в данном
случае неприменим, поскольку
частота периодических
режимов навязана тактом работы
импульсного элемента и.
значит, ЦС неавтономна.
Преобразуем структурную схему
ЦС, приведенную на рис. 8.29,
к схеме рис. 8.34. Будем полагать, что сигнал уставки равен
нулю и что постоянная составляющ.ая в периодическом
режиме отсутствует. Тогда, согласно методу гармонического
баланса, периодический процесс будет существовать, если
линейная часть является фильтром низких частот и
выполняется условие
где 157*3 {Ау. ф1, N) — эквивалентный комплексный
коэффициент усиления элемента квантования в нелинейной
импульсной системе.
Многоступенчатую
цели н ей и ость квантования
можно представить
параллельным соединением, в
ветвях которого включены
обычные релейные элемен-
tbi (рис. 8.35), т. е.
i я1),(х). (8.77)
Характеристики на
рис. 8.35 построены для
звена квантования (см.
г
J
'А
■3/}.
1'г
з/г
■S)(2
1' Г"
-1/
1
S/Z
r—V -,
1_Д J-
Рис. 8.35
рис. 8.27), у которого для упрощения принято 6 = Д = L
Характеристики -ф» (л:) определяются соотношениями
1 при д:>(2/ —1)/2;
О при \x\^{2i~-\)/2;
.1 при д!<(2/—1)/2
(8.78)
и представляют собой характеристики релейных элементов с
зоной нечувствительности (2i — 1).
Используя (8.77), эквивалентный коэффициент усиления
звена квантования W^b (А^, ц>[, N) можно представить в виде
суммы комплексных коэффициентов усиления
одноступенчатых релейно-импульсных элементов 1^нэ* (А^, ф1, Л^):
1=1
л
р sin-—(/j,; + /?2i + I)
2N
X
sin
X e
2N-
где k^i
2i~\
X
2A
E
4>i)
N 2i- I
Ki-E
(8.79)
N
— (arccosx
» 9i —|f амплитуда и фаза периодического
режима (дискретного гармонического сигнала); N —
величина, характеризующая / частоту колебаний в периодическом
режиме (или число так/ов работы импульсного элемента за
период колебания)
(рис. 8.36).; £
—целая часть.
Выражение для
^нэ {А^, <Pi, Л^) в
форме (8.79) приведено в
работе [81. Для
графического решения
уравнения (8.76)
мож но воспользовать
X
п
1., .
I
It
и
Т
L ч
NT
!'
ся соответствующими характеристиками, приведенными в 19J.
Особенность комплексного коэффициента усиления W^s {Л^,
ф^. Л/), характерная для всех нелинейных импульсных систем
и отличающая его от нелинейных систем, состоит в
следующем: 1) {Лг, <Pi, Л^) зависит не только от амплитуды Л^,
но и от относительного периода колебаний N и фазового
сдвига <Pi; 2) характеристики Whs (Л1, (pi, N) представляют
собой совокупность областей, соответствующих различным N\
каждая область заполнена семейством характеристик,
построенных для различных ф^.
Таким образом, если характеристика Wl^ (/to) пересечет
несколько областей характеристики [—W/*^!-*, то это будет
говорить о возможности существования периодических
режимов различной формы. По мере увеличения числа р
ступеней квантования количество разновидностей периодических
процессов на выходе элемента квантования значительно
увеличивается, опережая рост числа р.
Прилгер 8.4. Построить ЛАЧХ импульсной системы,
рассмотренной в примере 8.3, при Уо = 1 (случай цифровой системы с большим
числом разрядов).
Для рассматриваемой системы (см. пример 8.3)
W*{q)^kA^~^^-е -Р),
где р - Т/Т^.
При подстановке типа (8.67)
е'7= ■■
Т ,
l+—v'
^ ^ . 2
получаем W (и) — ki ----^
(l-e-P)(l-^.)
где Т'
2 1_е-Р ,
откуда после подстановки v = /со* находим ,
L ((о*)-20 lgki+20 Ig у 1 + -р- -20,lgVr+(fT^.
ЛАЧХ на интервале частот (1/7" |/Г> 1имеет наклон — 20^
дБ/дек, а за пределами данного интервала пapaлJffльнa оси частот ы*.
§ 8.4. Исследование систем с широтно-
импульсной модуляцией
В § 8.1 было показано, что система с ШИМ является нели»
нейной системой, поэтому к ней можно применить известные
методы исследования нелинейных систем. Однако при
определенных условиях, как было показано в работе [1], систему с
ШИМ можно рассматривать как линейную импульсную
систему, применив к ней разработанные методы исследования
систем с АИМ.
Исследование системы с ийиротно-импульсной модуляцией
по линеаризованной модели. Рассмотрим условия, при
которых система с ШИМ эквивалентна системе с А^ИМ. Для этого,
так же как это было сделано в § 8.2 составим основные
уравнения системы с ШИМ (рис. 8.37).
Определим реакцию линейной части системы на один
импульс длительности q. Здесь Ym. о — относительная
переменная ллительность импульса на выходе
широтно-импульсного модулятора, зависящая от величины сигнала на входе
модулятора, т. е. 'Vm.o У\х ifn] yjT\ X — постоянная
величина.
Реакция линейной части на такой импульс определяется
в момент ^ = т, по аналогии с (8.22), соотношением
I (8.80)
Тогда реакция линейной части системы на
последовательность импульсов постоя/нной амплитуды, равной 1, и
переменной длительности в моМент / п на основании принципа
суперпозиции будет /
^выхМ/= S signxlm|/Jvln-mL
где /
/. , ( — 1 при х|ш|<0;
^ 1^ N1 при .v|ml>0.
Предположим, что 1
/ У.г.и-^\х\>п\\<\. (8.82)
лж
шг
(2^
ШИМ
Непрерывная
часть
Рис. 8.37
Физически условие
(8.82) означает, что
рассматриваются малые
изменения управляющего
сигнала или что
фактически длительностью
управляющих
импульсов (по сравнению с
периодом их следования)
можно пренебречь.
Тогда после разложения h (t — т — у^^^^) в р_яд по ут.о с
учетом только первой степени ^ реакцию hy (t — т)
можно записать в виде
hy(t—m) = h(J~m) —Л(t—m —Ут,о ) ^
«Vm.oft'(^--m). (8.83)
Для момента t = n
hy(n—m)=yi\x[m]\h'{n—m), тфп.
(8.84)
. Если /г = m, то очевидно, что hy (0) = ^ (0).
Подставляя соотношение (8.84) в (8.81) и учитывая, что
sign х[т]\х[т]\ ^ х[т\, получаем соотношение,
связывающее входную и выходную переменные разомкнутой системы с
ШИМ в дискретные моменты времени t = п:
Хвых[п]='^ 2 x[m\h'[п-т].
(8.85)
т— О
Сопоставляя (8.85) с (8.24), приходим к выводу, что при
условии (8.82) система с ШИМ эквивалентна системе с АИМ
коэффициентом усиления х и реакцией ,линейной части
h,(i) = h'{t).
Отсюда следует, что все результать!, полученные в § 8.1
для систем с АИМ, могут быть использованы для систем с ШИМ
(если в соотношениях для систем с АИМ принять Уо <^ 1 ^
заменить уо на х). Так, выражение для передаточной функции
W* (q)^ аналогичное (8.31), можно представить в виде
i= 1
(8.86)
где для систем с ШИМ
Q' (яг)
Выражение для передаточной функции W* (q),
аналогичное (8.36), для систем с ШИМ записывается в виде
W*{q)^k 2° WiQ + i2nk).
k= — оо
(8.87)
Таким образом, уравнение разомкнутой системы с ШИМ
имеет вид
XLAQ)-^4Q)X'^(q) (8.88)
и полностью совпадает с уравнением разомкнутой системы в
АИМ, Передаточная функция замкнутой системы
определяется соотношением (8.34).
Для практического исследования систем с ШИМ удобно
использовать частотные характеристики разомкнутой системы.
Построение частотных характеристик можно выполнить,
используя соотношение
(8.87), положив в нем
предварительно q = /ш-
Так как выражение для
частотной хар а ктер истики
разомкнутой системы с
ШИМ W* (/о) получается
значительно более простым
по сравнению с
выражением (8.37) для систем с
АИМ, то и процесс
построения U^* (/(о)
упрощается. На рис. 8.38
иллюстрируется порядок
построения W* (/(о) для случая,
когда частотная
характеристика линейной части
существенно уменьшается по
мере роста частоты со.
Упрощенное выражение,
аналогичное соотношению
(8.38) для системы с АИМ,
Рис. 8.3$ в этом случае может быть
получено из (8.87), если в нем ограничиться двумя
слагаемыми наименьшей частоты:
W'''(j^)^n[W{j^)+ W [/(ш -2зх)]).
Годограф на рис. 8.38 nocrpoej^i^ по точкам, соответствующим
частотам со = coi, (0=6)2, со ^ я. Очевидно, что все
методы исследования устойчивости и качества,
разработанные в § 8.2 для систем с АИМ, могут быть применимы для
линеаризованной системы с ШИМ. Весьма удобным также для
рещения задач анализа и синтеза систем с ШИМ будет и метод
логарифмических частотных характеристик, изложенный в
§ 8.3 применительно к цифровым системам и системам с АИМ.
Исследование пермодмческих колебаний в системах с
широтно-импульсной модуляцией. Выше были рассмотрены
вопросы исследования систем регулирования с ШИМ-1 по
линеаризованной модели, т. е. при небольшой глубине
модуляции.
Б общем случае система с ШИМ-1 является нелинейной
системой и, следовательно, в ней возможны периодические
колебания. Здесь мы проведем исследование симметричных
периодических колебаний с помощью метода гармонического баланса.
Структурная схема рассматриваемой системы с ШИМ
приведена на рис. 8.37. Предположим, что модулируется задний
фронт импульса. Тогда импульная последовательность на
выходе модулятора может быть определена соотношением
МО'
б sign X (пТ) при nT<t< пТ+у [х (пТ)]-
О при пТ + у [х (пТ)] <:t<:{n + 1)7'
Здесь, как и ранее, б — амплитуда; Т — такт следования
импульсов; пи п + I — моменты появления п-го и {п У- 1)-го
импульсов. Моменты появления импульсов будем называть
тактовыми. Если тактовое значение сигнала на входе
модулятора превосходит некоторое пороговое значение 1/х, то
соответствующий импульс будет заполнять весь интервал
повторения.. Такие импульсы будем называть насыи^енными.
. Зависимость 1-^ i^T)] = у [х (пТ)]/Т изображена на
рис. 8.39. Аналитически она может быть выражена следующим
образом:
h при|х(пГ)|>(1/х).
ч/я
Рис. 8.39
Г^[х(пГ)] Таким образом, при \х (пТ) \ < (1/х)
длительность импульса
пропорциональна модулю входного воздействия,
а при больших значениях \х (пТ)
длительность постоянна и равна
интервалу повторения Т,
Если теперь принять во внимание
выводы §8.1 и соотношение (8.90), то
широтно-импульсную систему (см.
рис. 8.38) следует рассматривать как нелинейную, у которой
нелинейность обусловлена, во-первых, модуляцией по
длительности (квантованием) и, во-вторых, тем, что
длительность импульсов является нелинейной функцией входного
сигнала (рис. 8.39).
Положим л:о ^ О и предположим, что в рассматриваемой
системе установились симметричные колебания, при
которых число положительных импульсов в периоде равно числу
отрицательных и что период колебаний равен 2 NT, где N —
целое число. Тогда сигнал х (t) будет представлять собой
периодическую функцию с периодом, равным 2 NT (рис. 8.40, а).
С выхода модулятора на линейную часть будет в этом
случае поступать последовательность импульсов, длительности
которых также меняются периодически с тем же периодом 2 NT
(рис. 8.40. б). Эти длительности равны уо, о» Уъ о» V^^-i, о
и определяются значениями л: (0),
а)
т
1
б)
т г,
nt
2NT
£
Рис. 8.40
Х(Г),...,^ 1{N -\)Т]
С помош.ью соотношения
(8.90). Величины х (0),
х(Г),..., xl{N - 1) Л
являются параметрами пе-
р иоди ческ и X колеба н и й,
так как они полностью
определяют периодическую
последовательность
импульсов на выходе
модулятора, а следовательно,
и выходную величину
непрерывной части,
которая является реакцией
на эту последовательность.
Последовательность
импульсов, изображенную на
рис. 8.40, б, можно
разложить в ряд Фурье, т. е.
представить в виде суммы гармонических составляющих,
причем коэффициенты этого разложения можно выразить через
неизвестные параметры х (0), х (Г), д: l(iV — 1)Л [111:
a^s[x\{2m — \)--^t+ b^cos{2m — 1)-^ /
NT
NT
где
(8.91)
(2m—1) я
yv_ I
1 - У COS (2m ^ I) {i + Yo ix (iT)])
1 = 0
2
N
(2//i — 1) я
ctg(2^-I)^-.
- 2 sin(2m-l)^(« + Yo[^('T)l)
/^0
(8.92)
Обозначим частотную характеристику непрерывной части
через W (/<о), а величины 6 и х учтем в приведенной
непрерывной части. Тогда частотная характеристика приведенной
непрерывной части Wjin (усо) запишется в виде
W^hh (/со) - 6kW (/со) = (со) е/о
(8.93)
Находя по известным правилам и складывая реакции
непрерывной части на каждую гармоническую составляющую
выражения (8.91), найдем выходную величину непрерывной части:
(2m—1)п
NT
Sin
(2m—1)—^ +
^ NT
+ е
2m—1
NT
+ COS
(2m--1)-^ H-e
2m —i
NT
• n
(8.94)
Если в системе установились периодические колебания, то N
значений переменной Хпых (О ^ тактовые моменты времени t =0
7", 2Г, (Л^ — 1) Т должны быть равны N значениям сигнала
X {f) с обратным знаком (см. рис. 8.38). Для этих моментов
времени можно записать
(2т-1)
N [
NT
2т—I
NT
.Mb'
+ cos
sin
^ ^ N
(2m-l)x
• я
}, fe^O, 1, 2, N^-\. (8.95)
Соотношение (8.95) представляет собой N уравнений
относительно// неизвестных х (0), х (Т),..., х [{N — 1)) Т]. В общем
виде аналитически найти решение весьма затруднительно,
поэтому сделаем предположение о том, что непрерывная часть
обладает фильтруюш,ими свойствами. Тогда если частота
о) =^ n/{NT), соответствующая периоду колебаний 2 Л^Т",
достаточно велика, то можно пренебречь всеми гармониками,
кроме основной, частота которой равна n/{NT), т. е.
положить
г ^ j ^ О при m ^ 2
и в выражении (8.94) ограничиться только членом,
соответствующим т — 1
asm
V А/Г jj [NT \ NT j
t4-
(8.96)
Тогда условия существования периодических колебаний (8.95)
запишутся так:
+ 6cosf—ft+e/—Ш. *!-0. 1.2 (8.97)
N \ NT )\)
где
а — а^-^
1- 2 cos3-(fe + volx(fer)
k = 0 i
в выражении (8.97) точки х (кТ) лежат на синусоидальной
кривой, период которой равен 2 NT. Для полного определения
данной синусоиды нужно знать две величины: либо амплитуду и
фазу, либо два каких-либо значения синусоиды. Зададимся
двумя значениями х (t), например обозначим х (0) = х^^ и
и X {NT/2) = Тогда все N параметров периодического
колебания X (0), X (Г),..., X 1{N — 1) Т] выражаются через эти два
значения л:^ и Xg, т. е. число параметров колебания сводится
к двум. Действительно записывая выражение (8.96) при
/ = О й t ^ NT/2, получим
а sin 6
+ 6cose(^).
+
а COS 6 X
(8.98)
откуда
а — — -
Ь= —■
'{ NT )
I
(8.99)
Подставляя эти выражения для аи b в (8.97), найдем
x(kT)= x^CGs — k-+x^s\n—k, k = 0, 1, 2, (TV-1). (8.100)
N N
Таким образом, задача состоит в определении двух величин х^
^ х^у удовлетворяющих соотношению (8.99). Для этого введем
в рассмотрение обратную частотную характеристику
w^'п„?, (т) = =^ (/ (со) + /У ((О).
Так как
и ((d) =. COS 0 (<0)/»Fn„ И, V (о) = -sin е ((й)/Г^ ((о),
то уравнение (8.99) перепишем в виде
Отсюда получим
I NT ) xl + xl \ NT I xl-\~xl ' '
КоэффиШ'1енты a и b, входяш.ие в эти выражения, являются
функциями л:1, и Xg, и, следовательно, мы имеем два уравнения
с двумя неизвестными: Хх и АГд.
Начало координат по времени выбрано так, что в моменты
/ = О, Г, 2Г, {N — I) Т на выходе модулятора
появляются только положительные импульсы, поэтому величинам % и
можно придавать только такие значения, при которых все
X (кТ), вычисляемые по (8.100), имеют положительные
значения, т. е.
jc,cos-^^+X2sin —fe>0, ft = О, 1. 2. ..„(/V —1). (8.103)
Эти неравенства определяют область возможных значений Хх и
Х2 в плоскости координат, у которой по оси абсцисс отложена
величина Xj, г по оси ординат — х^. Выражения (8.102)
отображают эту плоскость на плоскость обратной частотной
характеристики. Область возможных значений при этом
отображается в такую область на плоскости Wnn (/о)), что если в нее
попадет точка этой характеристики, соответствующая со =
= п/ (NT), то периодические колебания возможны.
Рассмотрим применение полученной методики на примере
простейших периодических колебаний /V = 1. В этом случае
выражение (8.102) и выражение для а и 6 из (8.97)
перепишутся в виде
ц[ п\ х,Ь~\~х,а , т// х,а-~х^Ь .g^^^.
I Т) х1Л~х\ ' \Т ] л1+4 ^
а = — ^ COS яуо ^sin nYo(^:i). (8.105)
п п п
Согласно (8.103), при N = 1 возможные значения х^ и
должны удовлетворять условию х (0) = Хх> О, т. е. область
возможных значений Xi и представляет собой правую
полуплоскость плоскости {Хх, Xg).
Рис. 8.41
Разобьем всю область возможных значений Xg) на две
области, границей которых является прямая = I.
Рассмотрим область л;1<! 1. Здесь колебания характеризуются тем,
что импульсы в них являются ненасыщенными, при этом
согласно формуле (8.90), в которой положено л: = I,
соотношения (8.105) принимают вид
а — (1 —cos KATi); b -^^ — sin пх^.
п
(8.106)
Рассмотрим область > 1. Здесь импульсы являются
насыщенными, т. е. Yo i^i) 1- Г^Р"
а ^
4/jt; b ■-- 0.
(8.107)
На комплексной плоскости (у^) (рис. 8.41) пунктирной
линией ограничена область, в которую обращается правая
полуплоскость плоскости (л:ь х^) согласно формулам (8.104), (8.106),
(8.107). Эта область заполнена семейством окружностей,
соответствующих постоянным значениям
Если точка частотной характеристики Wni ijiii) при о =
=^ п1Т попадает в данную область, то в системе с ШИМ-1
устанавливаются периодические колебания с N = 1. Меняя
параметры системы или видоизменяя частотную характеристику
за счет введения корректируюш.их устройств, можно вывести
точку Wnn и^/Т) за пределы
«запретной» области и
соответственно устранить в
реальной системе периодические
колебания.
Аналогичным обр азом
можно построить области,
соответствующие колебаниям
N - 2Д... (см. [11]).
В заключение подчеркнем,
что если точка Ц^пн^ (/я/Т)
при данном попадает внутрь
«запретной» области, то при
одном и том же N возможны
различные периодические
колебания (с различными
параметрами), а также возможны
как ненасыщенные, так и
насыщенные колебания.
«Запретные» области для насыщенных периодических
колебаний при различных от I до 4 приведены на рис. 8.42.
Рис. 8.42
§ 8.5. Исследование систем с частотно-
импульсной модуляцией
Системы с частотно-импульсной модуляцией, как было
показано в § 8.1, являются существенно нелинейными, при этом
такие системы (в отличие от систем с ШИМ) даже при малой
глубине модуляции не могут быть линеаризованы. Вследствие
этого к частотно-импульсным системам необходимо применять
известные методы исследования нелинейных систем, учитывая,
конечно, специфику частотно-импульсного модулятора (см.
§8.1, рис. 8.6, 8.7).
Отметим, что структурная схема модулятора, приведенная
на рис. 8.7 и построенная по уравнению ИЧИМ (8.13), не
является единственным вариантом структурного представления.
Ниже будут рассмотрены и другие структурные схемы.
Применение тех или иных структурных схем, с одной стороны,
обусловлено схемой реального модулятора, работающего в системе
автоматического управления, а с другой стороны, удобством
применения того или иного метода исследования.
в настоящем параграфе будут рассмотрены в основном
вопросы исследования систем управления с ИЧИМ-2, а также аг-
дельиые вопросы исследования систем с сигма-ЧИМ (2-ЧИМ).
понятие которой будет введено ниже, и ИЧИМ-1.
Исследованме систем с ИЧИМ 2-го рода методом фазовой
плоскости. Структурная схема системы управления с ИЧИМ
2-го рода приведена на рис, 8.43 (в дальнейшем будем исполь-
зорать сокращенный термин ИЧИМ). Она состоит из
модулятора и линейной части с передаточной функцией W (5).
Модулятор (рис. 8.7) представляет собой последовательное
соединение интегратора, нелинейного элемента (НЭ) квантования
приращений и формирователя с передаточной функцией
(1 - e-*v).
Нелинейный элемент квантования приращений
представляет собой кусочно-линейную характеристику (см. рис. 8.8. а),
особенности которой рассмотрены в § 8.1.
Так как на фазовой плоскости, как было показано в гл. 7,
удобно исследовать нелинейные системы не выше второго
порядка, то линейная часть (учитывая наличие интегратора в
контуре системы) должна быть не выше первого порядка. Пусть
W (S) = /(1 + S Ге).
(8.108)
где 7^0 — коэффициент передачи и постоянная времени
соответственно.
Фазовую плоскость рассмотрим в координатах у, dy/dt,
где у — сигнал на входе НЭ. а х — входной сигнал
модулятора.
Рис. 8.43
Импульсная последовательность на выходе модулятора
согласно (8.13) определяется соотношением
^^idsinx{tr,) при t„<:t^tr, + y;
1 О
при ^пЧ-Т<^<^п+1.
где tn, tn+i — моменты появления п-го и "(п + 1)-го
импульсов; у, 6 — длительность и амплитуда импульсов
соответственно.
Дифференциальное уравнение, связывающее вход НЭ и
вход линейной части и описывающее движение системы с
линейной частью (8.108), запишем в виде
Т^'у+У=-Кг, (8.110)
где г определяется соотношением (8.109).
Так как на линейную часть, согласно (8.109), действует
импульсный сигнал, принимающий значения + б, — б, О,
то фазовая плоскость заполняется тремя семействами кривых,
уравнения которых легко получаются из (8.110) с учетом
(8.109):
^ = — TqX + Ci при Z0;
(8.111а)
^ - То {kz In \х + VI— А + при 2 Ф 0.
(8.1116)
Вид кривых показан на рис. 8.44. Кривые на рис. 8.44, а
соответствуют сигналу z отрицательной полярности (z =^ —
— 6), кривые на рис. 8.44, б — положительной (г =^ + 6),
а прямые на рис. 8.44, в соответствуют паузе между
импульсами (Z 0).
Для построения траектории движения по полученным
фазовым траекториям необходимо определять моменты переклю-
(8Л 09)
Рис. 8.44
чения с траекторий импульса (C.iiio; на траектории паузы
(8.111а) и наоборот.
Отметим, что определение точек переключения в конце
каждого периода, т. е. в моменты t^, /g.---. трудностей не
вызывает, поскольку моментам i^, ^г»---» соответствует изменение
координаты у от момента на величину Д, 2Д, пД (в
соответствии с уравнением (8.13)).
Для определения координат точек переключения в моменты
.окончания импульсов, т. е. в моменты + у, ^2 Ь V»---»
tn + найдем приращение координаты у за время п-го
импульса А^/,г. Обратимся к уравнению (8.110). Его решение
имеет вид
y^yo-k8{t -I- Т (ко б + Хо) (1 - е<-^~ 'о)/0, (8.112)
где Хо\ Уо — значения у ъ момент t = t^. Отсюда, полагая,
что в качестве ^зят произвольный момент времени t^,
получаем
^Уп - У (tn + У)-У (tn) ^Ь-^ сх {in). (8.113)
где
Ь= ~-/^о6{т—Toll —e-v/T-oJl—const;
с = 7^ (1 — е-v/го) —const.
Таким образом, из соотношения (8.113) следует, что
приращение координаты у за время п-го импульса у линейно зависит от
значения х (Д) в момент появления п-го импульса. Как
показано на рис. 8.45, зависимость (8.113) удобно отобразить на
фазовой плоскости. По ней для значения х {tj^ определяется
величина Д«/„. Проводя вертикальную прямую, отстоящую от
прямой пД на величину Дг/п, находим точку пересечения ее
с фазовой траекторией импульса, проходящей через точку
(■^ (tn), пД). Точка пересечения соответствует окончанию п-го
импульса, т. е. моменту + у.
Далее процесс построения проводится аналогичным
образом. На рис. 8.46 построена траектория движения,
соответствующая затухающему процессу. Здесь на участке — ti, т.е.
до момента появления первого импульса, движение происходит
по траектории паузы (8.111а). В момент i^^ появляется импульс
положительной полярности z = -f б, так как х {t^ > 0;
точка, соответствующая моменту + y» определяется по
изложенному выше правилу. Движения на участке паузы ~\-
+ Y — ^2 происходит по траектории (8.111а). Изменение
координаты у за один период у (t^) — У (ti) == Д. За время паузы
/
Рис. 8.45
Рис. 8.46
1
0
/
/
/
г
Z1
/J
BO втором периоде, т. е. при t> + у, фазовая
траектория приходит к отрезку равновесия.
В случае, показанном на рис. 8.47, по окончании п-го
периода в момент tn+i возникает импульс отрицательной
полярности, поскольку у {tn+i) — У {tn) ^ —А- Определяя
последовательно координаты точек в моменты + у. tn+iy ^n+i+
+Y. ^n+2» несложно показать, что в этом случае образуется
замкнутый цикл л: (^п+г) = ^ (^м). соответствующий в
реальной системе режиму периодических колебаний,
представляющих собой чередование разнополярных импульсов (рис. 8.48);
число импульсов за период колебания N = 2.
i
1 XJ
if
-S
FT"'TT
......Д Ji-'
Рис, 8.47
Рис. 8,48
Частотно - импульсный
модулятор
пп п
да
"ШГТ
Рис. 8.49
Соотношение параметров системы с ИЧИМ, при котором
возможны периодические колебания (оно приводится без
доказательства), имеет вид
My > д- (8.114)
Пользуясь соотношением (8.114), можно выбрать
параметры модулятора (б, Y, А) или коэффициент передачи объекта
управления, чтобы устранить периодические колебания в
рассматриваемой системе с ИЧИМ.
Исследование устойчивости в целом частотно-импульсных
систем 2-го рода. Для исследования устойчивости в целом
системы с ЧИМ 2-го рода удобнее воспользоваться структурной
схемой, предложенной Я.З. Цыпкиным в работе [10]. Здесь
эквивалентная ЧМ-модулятору схема представлена в виде
релейной следящей системы, работающей в скользящем режиме
(рис. 8.49). Линейный фильтр К (s) в случае ИЧИМ имеет
передаточную функцию К (s) kjs, РЭ — релейный элемент,
характеристика которого показана на рис. 8.50;
Кос (5) н/г,
где г — \\msK{s) = kx.
(8.115)
Если в качестве фильтра К (s) использовать не интегратор, а
апериодическое звено с передаточной функцией К (s) ^ V
(1 + sT^ и соответственно в качестве звена обратной связи —
элемент с передаточной функцией К^^ is) = Xq//*, где,
согласно (8.115), /- =s Л- /Г*, то получим так называемую сигма-
ЧИМ(2.ЧИМ).
1<п —
п
-к„
р.э.
Рис. 8.90
Рис. 8.51
В соответсгвеии с предложенной структурной схемой
частотно-импульсная система может рассматриваться как
релейная система с внутренней обратной связью, предназначенной
для создания скользящего режима (рис. 8.51). Здесь
передаточная функция общей линейной части (s) имеет вид:
M^o(5)-IW'(s) +VH/^(5),
(8.116)
где W (s) — передаточная функция линейной части в
частотно-импульсной системе.
Таким образом, исследование частотно-импульсной
системы (с ИЧИМ или S-ЧИМ) сводится к исследованию релейной
системы. В этом случае, используя известный критерий
устойчивости релейных систем, можно сформулировать следующий
критерий устойчивости частотно-импульсной системы (101:
для того чтобы система с ЧИМ была устойчива в целом,
достаточно, чтобы обитая линейная часть эквивалентной релейной
системы была устойчива или нейтральна, а частотная
характеристика общей линейной части удовлетворяла условию
Re (1 + Р/со) Wo (/со) + Kxjk^ > 0. (8.117)
Используем понятие модифицированной частотной
характеристики Wq (/со), где
1^о(/оз)^1/Лсо)-|-/УеИ;
и о И = и о Н = Re Wo (До); (8.118)
У о Н =^oVo и = со Jm Wo (До).
Тогда критерий устойчивости в целом можно сформулировать
так: частотно-импульсная система управления будет
устойчива в целом, если модифицированная частотная
характеристика общей линейной части эквивалентной релейной системы ле-
V(<o)
\v
Рис. 8.52
жит справа от прямой Попова,
проходящей через точки ^1щ/к^
и имеющей неположительный
наклон (рис. 8.52).
Так как частотная
характеристика общей линейной части
получается из (8.116) при
подстановке s /со, т. е.
Wo (/со) - 1Щ/с0) + Хо/Н к (/со),
тр характеристику Wo (/со) можно построить следующим
образом (рис. 8.53):
1. Построим частотную характеристику линейной части
W (/со) = и (со) + /У (со) (кривая / на рис. 8.53, а).
2. Сместим ее вправо на величину к/г (кривая 2) и
перемножим с частотной характеристикой К (/со) (для 2-ЧИМ
кривая .3).
3. Таким образом найдена Wq (/со). Изменяя каждую
ординату ее в со раз, получаем Wq (/со) (рис. 8.53, б). Проводя
прямую Попова с неположительным наклоном, определяем
конкретные параметры, при которых частотно-импульсная система
устойчива в целом.
Для ИЧИМ, где
Wo (/со) =^ [W (/со) + хо/г] (8.119)
получаем
Оо (со) ^-^ V (со) ^. Jrn W (/со);
О) ш
Vo (со) [(/ (со) + Ко/Г] ky^-kyU (со) -Хо.
(8.120)
Таким образом, для ИЧИМ Wo (/со) можно построить
непосредственно по действительной и мнимой частям W (/со).
Рис. 8.53
н.э.
'hit
3
й
Рис- 8.54
Исследование периодических
режимов в системах с ИЧИМ. В системах с
ИЧИМ, как и d других нелинейных
системах, при невыполнении условий
устойчивости в целом возможно
возникновение периодических колебаний.
Колебания ранга 7V=2 мы уже наблюдали
при исследовании системы с ИЧИМ н
простейшим объектом управления
первого порядка, когда изучали метод
фазовой плоскости.
Исследование периодических
колебании в система.х с ИЧИМ произвольного
порядка удобно провести, пользуясь методом гармонического
баланса. Обратимся к структурной схеме, приведенной на
рис. 8.43, и преобразуем ее к виду рис. 8.54.
Преобразованная схема состоит из известного нелпнеЙ1юго элемента
квантования приращений и приведенной непрерывной части с
передаточной функцией
Условие существования периодических колебаний в
такой системе, согласно методу гармонического баланса, запи-
HieM в виде
W?'.,aH)M^'..„(yt0)= -1.
(8.121)
где W^„3 {А) эквивалентный комплексный коэффициент
усиления НЭ квантования приращений.
Особенности НЭ квантования приращений (и, в частности,
его отличие от характеристики квантования по уровню)
рассмотрены в § 8.1. Учтем эти особенности при выводе
комплексного коэффициента усиления. Если приведеш^ая непрерывная
часть является фильтром низких частот, то периодическ!1Й
процесс на входе НЭ имеет вид гармонического сигнала: 1/ (О =
= А sin ш^, где И, о)— амплитуда, частота гармонического
сигнала.
В зависимости от амплитуды А в периодическом процессе
будет участвовать различное число ступеней квантования и
соответственно на выходе модулятора будут иметь место
колебания различного ранга т. е. колебания с различным числом
N импульсов в периоде.
Для различных типов колебаний многоступенчатая
характеристика квантования приращений (аналогично тому, как это
делалось для характеристики квантования но уровню, см,
§8.3) может быть заменена либо типовой релейной
характеристикой, либо комбинацией типовых характеристик так. как
показано па рис. 8.55, а —г для 2, 4, 6. 8.
При таком представлении нелинейного элемента
квантования приращении его эквивалент1п^й комплексный коэффициент
усиления выражается суммой аналогичных коэффициентов
усиления типовых релейных элементов. Необходимо только
подчеркнуть, что типовые релейные элементы, из которых со-
о)
{
i
0
У
1
ML
. N
л
4
п п
■Уппп
в uuut
Рис. 8.55
ставляется схема замещения НЭ. квантования приращений,
принципиально отличается от обычных релейных элементов,
которые рассматривались, например, в гл. 7. Это отличие
состоит в том, что, согласно уравнениям ИЧИ-модуляции (8.12),
(8.13), моменты переключения определяются не абсолютным
значением входного сигнала, а величиной разности сигнала
y{t) и его значения у {Q в момент to начала преобразования.
Поскольку периодический режим представляет собой (рис.
8.55) чередование групп положительных и отрицательных
импульсов, можно условно за t^ принять момент появления пос-
следнего отрицательного импульса предыдущей группы.
Рассмотрим вывод эквивалентного комплексного
коэффициента усиления на примере N ^ 2 (рис. 8.55, а):
W,,,AA)^gAA) + jbM (8.122)
где ^2 (А) = ^ (cos ф1 — cos ф^); ^ (Л) - ^ (sin —
— sin фх); ф1 = 0)^1, фг = co/g — значения аргумента
периодического сигнала у (/), при которых происходит
скачкообразное изменение сигнала {у)\ соответственно t^, t^ —
моменты появления импульсов на выходе модулятора.
Выражение для определения ф1 и ф2 запишем в виде
У (к) - У (д-Д. У = У (to). (8.123)
а с учетом гармонического характера сигнала у (t) из
соотношений (8.123) получаем
Ф1-^агс8Ш^5шФ+ Ф2=Ф. (8.124)
где Ф — значение аргумента у (t) в момент начала
преобразования, т. е.
у (Q ^ А sin Ф.
Соотношения (8.122), (8.124) полностью определяют
значение 11^нэ,2(^) эквивалентного комплексного коэффициента
усиления нелинейного элемента квантования приращений для
режима колебаний ранга N == 2.
Аналогичные соотношения несложно получить для N = 4,
6, 8 ИТ. д. На рис. 8.56 для удобства графического решения
уравнения периодического режима (8.121) построены
нормированные обратные амплитудные характеристики
[и^2э. N (А)]-^ для 2, 4, 6, 8 и различных Ф:
IN (А)]-^ -1 W^h3. N (А)] 6/Д. (8.125)
Рис. 8.56
Как видим, эти характеристики занимают ограниченные
области комплексной плоскости, каждая из которых
соответствует одному определенному А/. При этом каждая область
объединяет семейство характеристик, соответствующих различным
значениям Ф при одном и том же N. Особенностью
полученных характеристик, помимо зависимости их от фазы Ф,
является то, что эти характеристики, соответствующие
определенным и Ф, имеют место лишь в определенной области
значений амплитуды А (или относительной амплитуды р = Л /Д),
как показано на рис. 8.56.
Построив в одних осях характеристику [Whs, n {А)\-^
и годограф — tt^jiH (/(о), по точкам пересечения определяем
наличие и параметры периодического режима. Если годограф
~ ^пн (до) пересечет несколько областей {W^3, n{A)\-^,
соответствующих различным то это означает, что в системе
с ИЧИМ при данных параметрах возможны периодические
режимы различных рангов (в зависимости от различных началь-
i^bix условий).
На рис. 8.57 для примера проведено графическое
исследование колебаний в системе с ИЧИМ, имеющей следующие па-
U/S--0.1 ^""X^
It
\ И.Э.
Фг1
0.1
Рис. 8.57
ИЧИМ 1-го рода
1-ё^
5
1/s
Рис. 8.58
раметры: W {$)] = kj(\ + sTo); К = 2; Го = 0,5 с; у =0,1
с; б/Д - 10.
Годограф — Гдн (/со) - j^^i+z^. 7,5) ^ случае
касается области [1J^h9, 2 (^)'~*. Если коэффициенты Jfeo
увеличить, например до feo ^ 4, то годограф — IF„„ (/(о) =
= /а)(1+0,5/ш) ^УЛ^^ пересекать о&яасть {W^^^^{A)]-\
что говорит о наличии колебаний N = 2 с параметрами А ^
^ 0,6 Д; (О л? 12 с~^
Исследование периодических колебаний в системах с
ИЧИМ 1-го рода. Используя структурные схемы ИЧИМ 2-го
рода (см. рис. 8.7) и общую структурную схему модулятора
1-го рода (см. рис. 8.10), можно построить структурную схему
системы управления с ИЧИМ 1-го рода в виде, показанном
на рис. 8.58.
Такая система является нелинейной импульсной системой,
однако если учесть, что последовательное соединение
фиксатора нулевого порядка и интегратора представляет собой
достаточно хороший фильтр, то, согласно выводам § 8.2,
импульсную часть можно рассматривать как непрерывную с
передаточной функцией f (] — e~^^)/s^, и, следовательно, система с
ИЧИМ 1-ро рода может рассматриваться как нелинейная
система с нелинейным элементом квантования приращений и
приведенной непрерывной частью
и^пн (/О)) ^ w (S) (1 -е-^0 (1 - е- ^y)/(Ts%
Очевидно, что в этом случае для исследования периодических
колебаний можно использовать результаты предудущего
параграфа, в первую очередь характеристики Ш^,э, n (А)]-^,
Решение уравнения периодического режима в системе с ИЧИМ
Ьго рода
\ + w„s,n{A)^ wUm^^o
можно выполнить графически, определив точки пересечения
характеристик И^^нэ. n {А)]~^ с годографом wln (/о)).
Глава 9
случайные процессы
в автоматических
I системах управления
§ 9Л. Введение
В предыдущих главах предполага-
лосъ, что все внешние воздействия
(управляющие и возмущающие),
приложенные к системе, являются
определенными известными функциями времени.
В этих случаях состояние системы^
описываемой обыкновенными
дифференциальными уравнениями, в любой
момент времени t однозначно определяется
состоянием системы в предшествующий
момент времени ^- Обычно выбирают
^0 = О и говорят, что состояние системы
однозначно -определяется начальными
условиями и может быть точно
предсказано для любого момента времени t.
Такие системы называют
детерминированными.
Однако на практике часто
встречаются воздействия, закон изменения
которых носит случайный характер и не
может быть заранее точно определен.
Такими случайными воздействиями являются,
например, суточные изменения нагрузок
энергосистемы, порывы ветра,
действующие на самолет; удары волн в
гидродинамических системах; сигналы
радиолокационных установок, отраженные от
цели; флуктуационные шумы в
радиотехнических устройствах и т. д. При
случайных воздействиях данных о
состоянии системы в момент to недостаточно
для того, чтобы сколь-либо полно можно
было судить о ее состоянии в
последующий момент времени t > /q.
Случайные воздействия могут прикладываться к системе
извне (внешние воздействия) или возникать внутри некоторых
ее элементов (внутренние шумы). Случайные изменения
свойств системы обычно можно свести к эквивалентному
влиянию некоторых случайных помех, воздействующих на нее,
поэтому в дальнейшем будем считать, что на систему действуют
только внешние случайные воздействия.
Исследование системы при наличии случайных воздействий
в принципе можно проводить обычными методами,
рассмотренными выше, обеспечивая, например, заданную точность
системы при самом неблагоприятном (максимальном) значении
случайного возмущения. Однако, поскольку максимальное
значение случайной величины наблюдается редко, в этом
случае к системе будут предъявляться заведомо более жесткие
требования, чем это вызвано сутью дела. Поэтому, хотя
подобный метод иногда оказывается весьма целесообразным или
даже единственно приемлемым, в подавляющем большинстве
случаев расчет системы при случайных воздействиях ведут не
по максимальному, а по наиболее вероятному значению
случайной величины. В этих случаях получают более
рациональные технические решения (меньший коэффициент усиления
системы, меньшие габариты усилительных и исполнительных
устройств, меньшие источники питания и т. д.), хотя мы
преднамеренно допускаем ухудшение качества работы системы для
Некоторого числа маловероятных ситуаций.
Расчет систем автоматического управления при
случайных воздействиях проводят с помощью специальных
статистических методов, вводя в рассмотрение определенные
количественные оценки случайных воздействий — статистические
характеристики случайных воздействий, которые,
характеризуя случайные воздействия, сами по себе являются уже
неслучайными зависимостями. Система автоматического
управления, спроектированная на основе статистических методов,
будет обеспечивать удовлетворение предъявляемых к ней
требований не для одного определенного (детерминированного)
воздействия, а для целой совокупности воздействий, заданных
с помощью статистических характеристик.
Так как предсказать ход единичного явления теория
вероятностей не может, то статистические методы позволяют
выяснить лишь закономерности, присущие случайным
явлениям массового характера. Например, если ошибка системы но-
сит случайный характер, то точное ее значение в какой либо
момент времени с помощью статистического расчета предска-
зать !1евозмож!1о. Однако если произвести множество
измерений ошибки в одинаковых условиях, то. например, среднее
значение ошибки, выявляющееся в результате таких массовых
измерений, может быть путем статистического расчета
предсказано с достаточной для практики точностью.
Статистические методы расчета систем автоматического
управления основаны на работах советских ученых: А. Я. Хинчи-
на (1938), А. Н. Колмогорова (1941). В. В. Гнеденко (1950),
В. В. Солодовникова (1950), В. С. Пугачева (1952), И. Е.
Казакова (1956) и др.. а также зарубежных ученых: Н. Винера
(1949). Л. Заде и Дж. Рагоцини (1950). А. М. Пелегрена (1953),
Р. Калмана и Р. Бьюси (1961) и др.
§ 9.2. Случайные процессы и их основные
статистические характеристики
Функцию, значение которой при каждом значении
независимой переменной является случайной величиной, называют
случайной функцией. Случайные функции, для которых
независимой переменной является время /, называют случайными
процессами или стохастическими процессами.
Так как в автоматических системах управления
процессы протекают во времени, то в дальнейшем будут
рассматриваться только случайные процессы. Если, например,
проведено п отдельных опытов, то в результате случайный процесс
X (О может принять п различных неслучайных (регулярных)
функций времени Xi (0. где / = I, 2 п.
Всякая функция Х| (0. которой может оказатся равным
случайный процесс X (f) ъ результате опыта, называется
реализацией случайного процесса (или возможным значением
случайного процесса). Сказать заранее, по какой из реализаций
пойдет процесс, невозможно.
Рассмотрим, например, случайный дрейф на выходе
усилителя постоянного тока при входном напряжении, равном нулю.
Чтобы изучить характеристики дрейфа, можно взять п
одинаковых усилителей, поместить их в одинаковые условия работы,
одновременно включить и получить п осциллограмм дрейфа на
выходах усилителей (рис. 9.1). Каждая из осциллограмм
является конкретной реализацией Xi {() случайного процесса X (/),
который можно рассматривать как совокупность (в общем
случае бесконечную) отдельных реализаций случайного процесса.
Для любого фиксированного момента времени, например
f = реализация случайного процесса (^J представляет
собой конкретную величину, значение же случайной функции
X (О является случайной величиной, называемой сечением
случайного процесса в момент времени t^. Поэтому нельзя
утверждать, что случайный процесс в данный момент времени
имеет такое-то детерминированное значение, можно говорить
лишь о вероятности того, что в данный момент времени
значение случайного процесса как случайной величины будет
находиться в определенных пределах.
Статистические методы изучают не каждую из реализаций
Xi (0. образующих множество X (0. а свойства всего
множества в целом с помощью усреднения свойств входящих в него ре-
О
О
о
А
л
\x.(tnl/t
л
/
\
\
А
Л
V
t.
V'
Рис, 9.1
ялизаций. Поэтому при исследовании автоматической системы
управления судят о ее поведении не по отношению к какому-
либо определенному воздействию, представляющ.ему заданную
функцию времени, а по отношению к целой совокупности
воздействий.
Как известно, статистические свойства случайной величины
X определяют по ее функции распределения (интегральному
закону распределения) F (х) или плотности вероятности
(дифференциальному закону распределения) w (х).
Случайные величины могут иметь различные законы
распределения: равномерный, нормальный, экспоненциальный
и др. Во многих задачах автоматического управления очень
часто приходится иметь дело с нормальным законом
распределения (или законом Гаусса), который получается, если
случайная величина определяется суммарным эффектом от действия
большого числа различных независимых факторов.
Напомним, что случайная величина х при нормальном законе
распределения полностью определяется математическим ожиданием
(средним значением) /п^ и средним квадратинеским отклонением о^.
Аналитическое выражение функции распределения в этом случае
;.(,)^_L_ Г e-<^-'"«)^/<^"*>d.. (9.1)
1/2я 0., J
— ОО
Следует обратить внимание на то, что, хотя в (9.1) переменная
интегрирования и верхний предел интегрирования обозначены одним
символом, это не отражается на конечных результатах и не должно
привести к недоразумениям.
Аналитическое выражение плотности вероятности для
нормального закона распределения
^ (,) ^ J£WL _ 1 ,-(^-"^.f 1(^-1), (9.2)
Типичные графики функций распределения F (х) и плотности
вероятности w (х) для различных значений приведены на рис. 9.2, а, б.
Изменение среднего значения ту. вызывает только смещение кривых
F (х) и w(x) вдоль оси абсцисс без изменения их формы, а изменение
величины 0х вызывает изменение масштаба вдоль обеих координатных
осей, причем площадь, ограничиваемая кривой w (х) и осью абсцисс,
всегда остается конечной и равной единице, т. е.
J w(x)dx^F(x) J =1, (9.3)
— оо ~ оо
поскольку F (оо) = 1, а f (—-оо) = 0.
Ю Щх)
При конечных пределах
интегрирования величина
интеграла, определяемого (9.3).
будет меньше единицы. Однако
уже при пределах
интегрирования от (Шх - 3oJ до (т^ +
+ ЗОзс) величина интеграла
равна 0,997. Так как
вероятность того, что X лежит между
— 30jc) и {т^ + 3aJ,
равна 0,997, то величину Зо^^ часто
используют в практических
расчетах в качестве верхней
границы отклонения от
среднего значения.
Для случайного
процесса также вводят
понятие функции распределения
F (х, f) и плотности
вероятности W (л:, t), которые
зависят от фиксированного
момента времени
наблюдения 1^ и от некоторого
выбранного уровня л:, т. е.
являются функциями двух
переменных: xwt.
Рассмотрим случайную
величину X (t^. т. е.
сечение случайного процесса в
момент времени t^. Одномерной функцией распределения
(функцией распределения первого порядка) случайного процесса
X (t) называют вероятность того, что текущее значение
случайного процесса X (tj) в момент времени ti не превышает
некоторого заданного уровня (числа) х^, т. е.
Рис. 9.2
Fy (^1. t,) = Р {X (t,) < xj.
(9.4)
Если функция Fi (Xi, О имеет частную производную по
^1. т. е.
W, (Хи к) = дРг (Хг, ^/axi, (9.5)
то функцию (Xi, ^i) называют одномерной плотностью ее-
роятности (плотностью вероятности первого порядка)
случайного процесса. Величина
(^1. ^i) - Р{х, < X (^) < ;ci + dx,}
(9.6)
представляет собой вероятность того, что X (t) находится в
момент времени t ii в интервале от лг^ дох^ 4 dx^.
В каждые отдельные моменты времени /j, t^y tn
наблюдаемые случайные величины (сечения случайного процесса)
X (^i), X (Q, X (tn) будут иметь свои, в общем случае
разные, одномерные функции распределения Fi (х^,- ^i), (Xg, ^2),
• • •> ^1 (^пу tn) и плотности вероятности Wi (xi, /1), Wi (Х2, ig),
... , Wi (Xn, tn).
Функции Fi (x, t) и Wi (x, t) являются простейшими
статистическими характеристиками случайного процесса. Они
характеризуют случайный процесс изолированно в отдельных его
сечениях, не раскрывая- взаимной связи между сечениями
случайного процесса, т. е. между возможными значениями
случайного процесса в различные моменты времени.
Знания этих функций еще недостаточно для описания
случайного процесса в общем случае. Необходимо
охарактеризовать также взаимную связь случайных величин в различные
произвольно взетые моменты времени.
Рассмотрим теперь случайные величины X (^i) и X (^2)»
относящиеся к двум разным моментам времени и tz
наблюдения случайного процесса.
Вероятность того, что X (t) будет не больше Xi при t = tx
и не больше Х2 при t — ^'
р2 (хи tx; Х2, t,) = Р{Х (t,) < хи X (t,) <хJ, (9.7)
называют двумерной функцией распределения (функцией
распределения второго порядка). Если функция f 2 (-^1» ^2^ '2)
имеет частные производные по Xi и Хд, т. е.
t,; X,, U) = . (9.8)
dxt дх2
то функцию (^i, ^1; -^2» ^2) называют двумерной плотностью
вероятности (плотностью вероятности второго порядка).
Величина
Щ {Хъ tx; Ха, /2) ^1 ^2 = <
<X{txXxx +dXx;x^ <Х(/а) ^
^Ха +dXa}, (9.9)
равна вероятности того, что Х(^) при t — tx будет находиться
в интервале от Xi до Xi + dxx, а при t—t^—ъ
интервале от Ха до Ха + d^a-
Аналогично можно ввести понятие от п-мерноа функции
распределения:
Fn {Хъ к\ Хп. tn) = Р{Х (tl) < xi;
X (U) < xg,...; X (tn) < xj. (9.10)
Если функция Fn имеет частные производные по всем
аргументам Xi, Х2» -"t -^nt Т. е.
^п{Хи ii\ X2f t^'f Хпу ^n) =
_ <^^/^п(д^1> хг. h\ Xn, tn) Jjv
^JCi dx^ ... dxn
TO функцию называют п-мерной плотностью вероятности.
Чем выше порядок п, тем полнее описываются
статистические свойства случайного процесса. Зная п-мерную функцию
распределения, можно найти по ней одномерную, двумерную
и другие [вплоть до (п—1)-й1 функции распределения более
низкого порядка. Однако многомерные законы распределения
случайных процессов являются сравнительно громоздкими
характеристиками и с ними крайне трудно оперировать на
практике. Поэтому при изучении случайных процессов часто
ограничиваются случаями, когда для описания случайного
процесса достаточно знать только его одномерный или двумерный
закон распределения.
Примером случайного процесса, который полностью
характеризуется одномерной плотностью вероятности, является так называемый
чистый случайный процесс, или белый шум. Значения X (i) в этом
процессе, взятые в разные моменты времени совершенно независимы друг
от друга, как бы близко ни были выбраны эти моменты времени. Это
означает, что кривая белого шума содержит всплески, затухающие за
бесконечно малые промежутки времени. Так как значения X (t), напрн-
*iep, в момент времени и ^2 независимы, то вероятность совпадения
событий, заключающихся в нахожен и и X (/) между дс^ и х^ + dx^ в
момент времени ti и между Xg н Xg + dX2 в момент t^, равна произведению
вероятностей каждого из этих событий, поэтому
(xi, h; Ха, У « (х^, t^) Wj, {х^, t^) (9.12)
и вообще для белого шума
= Wi(Xi, fi)W^(X2. (2) ..-Wii'Xn. tn). (9.13)
T. e. все плотности вероятности белого шума определяются из
одномерной плотности вероятности.
Для случайных процессов общего вида, если известно, какие
значения приняла величина X (tk) в момент времени thf тем самым
имеем некоторую информацию относительно X (/^). где m > Л, так как
величины X (tjf^) и X (tu), вообще говоря, зависимы. Если кроме
X (iff) известна X (//), где / < /г, то информация о X еще более
увеличивается. Таким образом, увеличение наших знаний о поведении
процесса до момента tf^ приводит к тому, что увеличивается
информация о X
Однако суш.ествует особый класс случайных процессов, впервые
исследованных известным математиком А. А. Марковым и называемых
марковскими случайными процессами, для которых знание значения
процесса в момент ^ уже содержит в себе всю информацию о будущем
ходе процесса, какую только можно извлечь из поведения процесса до
этого момента. В случае марковского случайного процесса для
определения вероятностных характеристик процесса в момент времени
достаточно знать вероятностные характеристики для любого одного
предшествуюш.его момента времени t^- Знание вероятностных
характеристик процесса для других предшествуюш.нх значений времени,
например ие прибавляет информации, необходимой для нахождения
^ (tm)-
Для марковского процесса справедливо следуюш.ее соотношение:
Wnixi^ ti\ а2, /2; Хп, tn)=^
^ Ц^2(^|, /п ^2. i2)W2{X2. h\ Х^у /3) ... ш2 (j^n и U-l'. ^П. tn)
tl)Wi{X2. /2) ... iii-i)
(9. 14)
т. е. все плотности вероятности марковского процесса определяются из
двумерной плотности вероятности. Другими словами, марковские
случайные процессы полностью характеризуются двумерной плотностью
вероятности.
Понятие о функции распределения и плотности вероятности
случайного процесса обычно используют при теоретических
построениях и определениях. В практике исследования
автоматических систем управления широкое распространение полу
чили сравнительно более простые, хотя и менее полные
характеристики случайных процессов, аналогичные числовым
характеристикам случайных величин. Примерами таких
характеристик служат рассматриваемые ниже математическое
ожидание, дисперсия, среднее значение квадрата случайного
процесса, корреляционная функция, спектральная плотность
и другие.
Математическим ожиданием (средним значением) m^.. (t)
случайного процесса X (t) называют величину
оо
Ап.^. (О ^М1Х (01 ^ J .Ш1 {X, t) dx, (9.15)
— 00
где Wi (х, t) — одномерная плотность вероятности
случайного процесса X (/).
Математическое ожидание случайного процесса X (t)
представляет собой некоторую неслучайную (регулярную)
функцию времени (t), около кйторой группируются и
относительно которой колеблются все реализации данного
случайного процесса (рис. 9.3).
Математическое ожидание случайного процесса в каждый
фиксированный момент времени равно математическому
ожиданию соответствующего сечения случайного процесса X (4)
И.^представляет собой операцию вероятностного усреднения
случайной величины X (tj,), при котором каждое возможное
значение для случайной величины х принимается с весом,
равным элементу вероятности {х , ^„) dx [см. (9.6)].
Математическое ожидание называют средним значением случайного
процесса по множеству (средним по ансамблю, статистическим
средним), поскольку оно представляет собой вероятностно
Рис. 9.3
усредненное значение бесконечного множества реализаций
случайного процесса.
Средним значением квадрата случайного процесса
называют величину
? (О -М1{Х (0}'1 = J W, (X, О dx. (9.16)
— оо
Часто вводят в рассмотрение так называемый
центрированный случайный процесс X (/). под которым понимают
отклонение случайного процесса X (/) от его среднего значения
т^ (/), или
X(0--A(0-m,(0. (9.17)
Тогда случайный процесс X (/) можно рассматривать как
сумму двух составляющих: регулярной составляющей, равной
математическому ожиданию (t), и центрированной
случайной составляющей X (/), т. е.
Х(0-тЛО + ^(0. (9.18)
Очевидно, что математическое ожидание центрированного
случайного процесса равно нулю:
М [X (/)) ^М[Х (О -т, {t)]^m, (t)-(/) = 0.
Для того чтобы каким-то образом учесть степень
разбросанности реализаций случайного процесса относительно его
среднего значения, вводят понятие дисперсии случайного
процесса, которая равна математическому ожиданию квадрата
центрированного случайного процесса:
ОА^)-М1{Х{1)У\ ^ ] {x-m,(t)YwAx, i)dx. (9.19)
— оо
Дисперсия случайного процесса является неслучайной
(регулярной) функцией времени (О» значение которой в
каждый момент времени /„ равно дисперсии соответствующего
сечения X (th) случайного процесса.
Легко показать, что математическое ожидание т^ (/),
дисперсия (t) и среднее значение квадрата х* (/)
случайного процесса, имеющие размерность квадрата случайной
величины, связаны соотношением
?(t)^D,{i) + mlit). (9.20)
Из (9.20) видно, что среднее значение квадрата случайного
процесса (О " определенной мере учитывает и сред11ее
значение случайного процесса, и степень рассеяния его
реализаций относительно этого среднего значения, поэтому оно
широко используется в качестве оценки точности систем
автоматического управления.
На практике часто бывает удобно пользоваться
статистическими .характеристиками случайного процесса, имеющими
ту же размерность, что и сама случайная величина. К таким
характеристикам относят;
среднее квадратическое значение случайного процесса
XcJt) =К^) = КоЛо^7о. (9.21)
равное арифметическому значению квадратного корня из
среднего значения квадрата случайного процесса;
среднее кеадратши^скос отклонение случайного процесса
o,it)^VD7{i). (9.22)
равное арифметическому значению квадратного корня из
днсперсин случайного процесса.
Из (9.21) и (9.22) видно, что среднее квлдратическое
значение Хек (О " среднее квадратическое отклонеш1е (t)
случайного процесса в общем случае не совпадают. Последняя
характеристика используется только для центрированных
случайных процессов.
В заключение заметим, что хотя ни Мспематичсскос
ожидание, ни дисперсия случайного процесса ни в какой мере не
характеризуют степень статистической зависимости между
сечениями случайного процесса в различные моменты времени,
знания этих характеристик часто достаточно для решения
многих задач теории автоматического управления.
§ 9.3. Корреляционные функции случайных процессов
Математическое ожидание и дисперсии иBv^яютcя важными
характеристиками случайного процесса, но они не дают
достаточного представления о том, какой характер будут иметь
отдельные реализации случайного процесса. Это хороню видно
"3 рис. 9.3, где показаны реализации двух случайных
процессов, совершенно различных но своей структуре, хотя и имею-
щих одинаковые значения математического ожидания и
дисперсии. Штриховыми линиями на рис. 9.3 показаны значения
За,,. (/) для случайных процессов.
Процесс, изображенный на рис. 9.3, а, от одного сечения к
другому протекает сравнительно плавно, а процесс на рис.
9.3, б обладает сильной изменчивостью от сечения к сечению.
Поэтому статистическая связь между сечениями в первом
случае больше, чем во втором, однако ни по математическому
ожиданию, ни по дисперсии этого установить нельзя.
Чтобы в какой-то мере охарактеризовать внутреннюю
структуру случайного процесса, т. е. учесть связь между
значениями случайного процесса в различные моменты времени
или, ииыми словами, учесть степень изменчивости случайного
процесса, необходимо ввести понятие о корреляционной
(автокорреляционной) функции случайного процесса.
Корреляционной функцией случайного процесса X (t)
называют неслучайную функцию двух аргументов {ti; t^), кото^
рая для каждой пары произвольно выбранных значений
аргументов (моментов времени) ti и равна математическому
ожиданию произведения двух случайных величин X (/J и X (t^)
соответствующих сечений случайного процесса:
R. {ti, к) - М (fi) X т = j j {Хг - [t,)} X
— оо — оо
X {х<,— т.^ Ш2 (xj, X2, ^2) dxxdx^, (9.23)
где ^2 {xy, ti\ Xg, ^2) — двумерная плотность вероятности;
X {t) = X {t) — (t) — центрированный случайный
процесс; /Пд. (t) — математическое ожидание (среднее значение)
случайного процесса.
Различные случайные процессы в зависимости от того, как
изменяются их статистические характеристики с течением
времени, делят на стационарные и нестационарные. Разделяют
стационарность в узком смысле и стационарность в широком
смысле.
Стационарным в узком смысле называют случайный
процесс X {t)y если его п-мерные функции распределения и
плотности вероятности при любом п не зависят от сдвига всех то-
чек ti, ^2У'"у hi вдоль оси времени на одинаковую величину т,
т. е.
Fni^ii ti'f Х2, 4i •••I -^п» tn)== Fn(Xi, ti -j-T,'
Щг(Хъ к. U\ Xn, tn)=Wn(Xi, ti + X',
X2. t^ + x; ... tn + T).
Это означает, что два процесса X (t) и X (t + х) имеют
одинаковые статистические свойства для любого т, т. е.
статистические характеристики стационарного случайного процесса
неизменны во времени.
Стационарный случайный процесс — это своего рода
аналог установившегося процесса в детерминированных системах.
Любой переходный процесс не является стационарным.
Стационарным в широком смысле называют случайный
процесс X {(), математическое ожидание которого постоянно:
М \Х {t)l = т^^ const, (9.24)
а корреляционная функция зависит только от одной
переменной — разности аргументов х = — ^1; при этом
корреляционную функцию обозначают
R. (т) ^R^tu h + т) М IX {t,) X (t. Л- т)1 =
оо сю
= J f {Хг - tn^ ih)) {хг - {t, + т)> х
— оо — оо
X w^ixi, Xg, x)dxidx2. (9.25)
Процессы, стационарные в узком смысле, обязательно
стационарны и в широком смысле; однако обратное утверждение,
вообихе говоря, неверно.
Понятие случайного процесса, стационарного в широком
смысле, вводится тогда, когда в качестве статистических
характеристик случайного процесса используются только
математическое ожидание и корреляционная функция.
Часть.теории случайных процессов, которая описывает свойства
случайного процесса через его математическое ожидание и
корреляционную функцию, называют корреляционной теорией.
Для случайного процесса с нормальным законом
распределения математическое ожидание и коор реляционная
функция полностью определяют его п-мерную плотность вероят-
ности. Поэтому для нормальных случайных процессов понятия
стационарности в широком и узком смысле совпадают.
Теория стационарных процессов разработана наиболее
полно и позволяет сравнительно просто производить расчеты
для многих практических случаев. Поэтому допущение о
стационарности иногда целесообразно делать также и для тех
случаев, когда случайный процесс хотя и нестационарен* но
на рассматриваемом отрезке времени работы системы
статистические характеристики сигналов не успевают сколько-нибудь
существенно измениться. В дальнейшем, если не будет
оговорено особо, будут рассматриваться случайные процессы,
стационарные в широком смысле.
При изучении случайных процессов, стационарных в
широком смысле, можно ограничиться рассмотрением только
процессов с математическим ожиданием (средним значением),
равным нулю, т. е. m^it) == О, так как случайный процесс
с ненулевым математическим ожиданием представляют как
сумму процесса с нулевым математическим ожиданием и
постоянной неслучайной (регулярной) величиной, равной
математическому ожиданию этого процесса (см. далее § 9.6).
При mjjt) = О выражение для корреляционной функции
RA'^)^M[X{t)X{t + x)\^ I J x^x^w^x
— оо — оо
X (Xi, Xg, t)dXidx2. (9.26)
В теории случайных процессов пользуются двумя
понятиями средних значений. Первое понятие о среднем значении —
это среднее значение по множеству (или математическое
ожидание), которое определяется на основе наблюдения над
множеством реализаций случайного процесса в один и тот же
момент времени. Среднее значение по множеству принято
обозначать волнистой чертой над выражением, описывающим
случайную функцию:
X (О - (О = ЛГ [Х (t)] = I xw^ (X. t) dx. (9.27)
— оо
в общем случае среднее значение по множеству является
функцией времени t.
Другое понятие о среднем значении — это среднее
значение по времени^ которое определяется на основе наблюдения
за отдельной реализацией случайного процесса x{it) на протя-
жении достаточно длительно-
го времени Т. Среднее
значение по времени обозначают
прямой чертой над
соответствующим выражением,
случайной функции и определяют
по формуле
т
5^1im-^ С x{t)dt, (9,28)
7-^00
Реализации Xi(t)
xi(t)
Xn(t)
если этот предел существует. г
Среднее значение по
времени в общем случае различ-
но для отдельных реализаций
множества, определяющих случайный процесс. Вообще говоря,
для одного и того же случайного процесса среднее по
множеству и среднее по времени значения различны. Однако
существует класс стационарных случайных процессов,
называемых эргодическими, для которых среднее по множеству равно
среднему по времени, т. е.
х^х. (9.29)
Корреляционная функция Rsc(r) эргодического
стационарного случайного процесса X{f) неограниченно убывает по
модулю при |т|->- оо.
Однако надо иметь в виду, что не всякий стационарный случайный
процесс является эргодическим, например случайный процесс X (Л,
каждая реализация которого Xi (О постоянна во времени (рис. 9.4).
является стационарным, но не эргодическим. В этом случае средние
значения, определенные по одной реализации и в результате обработки
множества реализаций, не совпадают. Один и тот же случайный
процесс в общем случае может быть эргодическим по отношению к одним
статистическим .характеристикам и неэргодическим по отношению к
другим. В дальнейшем будем считать, что по отношению ко всем
статистическим характеристикам условия эргодичности выполняются.
Свойство эргодичности имеет очень большое практическое
значение. Для определения статастических свойств
некоторых объектов, если трудно осуществить одновременное
наблюдение за ними в произвольно выбранный момент времени
(например, при наличии одного опытного образца), его можно
заменить длительным наблюдением за одним объектом- Иными
словами, отдельная реализация эргодического случайного
процесса на бесконечном промежутке времени полностью
определяет весь случайный процесс с его бесконечными
реализациями. Собственно говоря, этот факт лежит в основе
описанного ниже метода экспериментального определения
корреляционной функции стационарного случайного процесса
по одной реализации. ,
Как видно из (9.25), корреляционная функция представля^ет
собой среднее значение по множеству. Для эргодических
случайных процессов корреляционную функцию можно
определить как среднее по времени от произведения [x{t) — х] я
\x{t + т) — Зс], т. е.
Roc ('^) - М [Х (t) X {t + X)] {х {t)-x} {х (t + X) -^х} ^
т
где x{t) — любая реализация случайного процесса; х—
среднее значение по времени, определяемое по (9.28).
Если среднее значение случайного процесса равно нулю
(х - 0), то
т
RA'^)-lx{t)x(t+x)]=\\m -i- f х{()х{1 + т)Ш. (9.31)
-г
Основываясь на свойстве эргодичности, можно дисперсию
[см. (9.19)1 определить как среднее по времени от
квадрата центрированного случайного процесса, т. е.
D,-Ml{X{m=^{x{t)-^xr=^
= lim
т
1
г->оо 27
-т
{x{t)^x){x(t)^x}dL (9.32)
Сравнивая выражения (9.30) и (9.32) при х = О, можно
установить очень важную связь между дисперсией и
корреляционной функцией — дисперсия стационарного случайного
процесса равна начальному значению корреляционной функции:
D^=x.i?^(0) = const. (9.33)
Из (9.33) видно, что дисперсия стационарного случайного
процесса постоянна, а следовательно, постоянно и среднее
квадратическое отклонение:
= 1/D~I const. (9.34)
Статистические свойства связи двух случайных процессов
X{t) и G{t) можно характеризовать взаимной корреляционной
функцией R^g (^, /2)1 которая для каждой пары произвольно
выбранных значений аргументов и равна
00 00
- j J {x-m^(ti)}{g-mg{t^))Wi(x, g,U)dxdg. (9.35)
— 00 —00
Для эргодических случайных процессов вместо (9.35) можно
записать
г
Ro:, (т) = jim ^ j {х (t) ^х) {g (t + X) -i) dt, (9.36)
где x{t) и g{t) — любые реализации стационарных случайных
процессов X{t) и G(t) соответственно.
Взаимная корреляционная функция /?зс^(х) характеризует
взаимную статистическую связь двух случайных процессов X(t)
и G(t) в разные моменты времени, отстоящие друг от друга на
промежуток времени х. Значение /?л\^(0) характеризует эту
связь в один и тот же момент времени.
Из (9.36) следует, что
R.g{'^)-=R,A-^b (9.37)
Если случайные процессы X{t) и G{t) статистически не
связаны друг с другом и имеют равные нулю средние значения,
то их взаимная корреляционная функция для всех х равна
нулю. Однако обратный вывод о том, что если взаимная
корреляционная функция равна нулю, то процессы независимы,
можно сделать лишь в отдельных случаях (в частности, для
процессов с нормальным законом распределения), общей же силы
обратный закон не имеет.
Заметим, что корреляционные функции могут
вычисляться и для.неслучайных (регулярных) функций времени. Однако
когда говорят о корреляционной функции R^i^) регулярной
функции x(t), то под этим понимают просто результат формаль-
ного применения к регулярной функции х(/) операции,
выражаемой интегралом:
т
R,{x)==x(t)x{t + х) = \\т^{±^^ j x(t)x(t + i)dt.
Приведем некоторые основные свойства корреляционных
функций Rx('^)-
1. Начальное значение корреляционной функции 1см.
(9.33)] равно дисперсии случайного процесса:
RAO)=D^. (9.38)
2. Значение корреляционной функции при любом т не
может превышать ее начального значения, т. е.
R.{^>\R.m (9.39)
Чтобы доказать это, рассмотрим очевидное неравенство \x{t) ±:
±, x(t + О, из которого следует x\t) + x\t + х) >
> 2x{t)x(t + т).
Находим средние значения по времени от обеих частей
последнего нер а венства:
(1) + (/ + т) - (О + {t + т) = (О + х^ (/) = 2x2 -
- 2D^ = 2R^ (0) и 2х ^0 X (/ Н- т) -= 2R^ (х).
Таким образом, получим неравенство Ry,{0) > 1^х(т)|,
3. Корреляционная функция есть четная функция т, т. е.
^.(т)=^?.(-т). (9.40)
Это вытекает из самого определения корреляционной
функции. Действительно,
Rx (т)-[х(0~-х1[х(/ + т)~х1 =
«[х (/ -т) -х1 [X (О -х1 « R, (-т).
поэтому на графике корреляционная функция всегда
симметрична относительно оси ординат.
4. Корреляционная функция суммы случайных процессов
Z{t) = X\t) + G(/) определяется выражением
Rz i-^) = Rx (т) + R, (т) + R,^ (т) -Ь R^x (т). (9.41)
где Rxgi'^) и Rgxi'^) — взаимные корреляционные функции
Действительно.
iV - М [{X(О + G (/)} {X {t +т) G {t + x)}\«
«M[X(0X(/ + t)1 + M[G(0G(/ + t)J + M[X(0G(/ + t)I +
+ M [G (0 X + T)l = (t) + R, (T) + R,, (t) + R,, (x).
5. Корреляционная функция постоянной величины x{t) =
z= Ао равна квадрату этой постоянной величины А^ (рис. 9.5,
а), что вытекает из самого определения корреляционной
функции:
/?. (т) = ТЩ^аП^г) ^'А^Ао = Л§. (9.42)
6. Корреляционная функция периодической функции,
например x{t) ^ As\n{a)i t + ф), представляет собой
косинусоиду (рис. 9.5, д), т. е.
/?^(т)=(Л72)со5С01т. (9.43)
имеющую ту же частоту coi. что и x{t), и не зависящую от
сдвига фазы ф.
Чтобы доказать это, заметим, что при нахождении
корреляционных функций периодических функций x{t) можно
использовать следующее равенство:
т г.
lim
Y j x(t) X{t + T)dt x{t) x{t + x)dt.
где Tj, = 2л/шо — период функции x(t).
Последнее равенство получается после замены интеграла
с пределами от —Т до Т при Г оо суммой отдельных
интегралов с пределами от (Л — 1)То до /гГо, где /г = О, dtU
±2, .... ±:п. и использования периодичности
подынтегральных функций.
Тогда, учитывая сказанное выше, получим
т.
R^ (т) J~ j Л^ sin (6)1 / + Ф) sin (^ + т) + ф1 dt -
/12
2Го J
о
У..
[COS т — COS (cDi х + 2щ( + 2ф)] ^
:(Л*/2) cosoiT,
7. Корреляционная функция временной функции,
разлагаемой в ряд Фурье:
п
*= 1
о;
г)
д)
i
у
0 т
У
V
О ш
белый шум
/'
f
ч
1
f
1
Ч
?
?
1
f
CM
-0), t
7 (0 (k>
Рис. 9.5
Рис. 9.6
имеет на основании
изложенного выше
следующий вид:
RAt)^AI +
+ 2 M'/2)cosoj„T.
(9.44)
8. Типичная
корреляционная функция
стационарного случайного
процесса имеет вид,
представленный на рис. 9.6. Ее можно аппроксимировать
следующим аналитическим выражением:
Rxi^)^ Rx (0)е = е (9.45)
С ростом т связь между X{t) и X{t + т) ослабевает и
корреляционная функция становится меньше. На рис. 9.5, б, в
приведены, например, две корреляционные функции и две
соответствующие им реализации случайного процесса. Легко
заметить, что корреляционная функция, соответствующая
случайному процессу с более тонкой структурой, убывает
быстрее. Другими словами, чем более высокие частоты присутствуют
в случайном процессе, тем быстрее убывает
соответствующая ему корреляционная функция.
Иногда встречаются корреляционные функции, которые
могут быть аппроксимированы аналитическим выражением
R^-(T)=D^e «1^» соз Рт,
(9.46)
где — дисперсия; а = const — параметр затухания; р =
= const — резонансная частота.
Корреляционные функции подобного вида имеют, н?1при-
мер, случайные процессы типа турбулентности атмосферы,
фединга радиолокационного сигнала, углового мерцания
цели и т. п. Выражения (9.45) и (9.46) часто используются для
аппроксимации корреляционных функций, полученных в
результате обработки экспериментальных данных.
9. Корреляционная функция Стационарного случайного
процесса, на которой наложена периодическая составляющая
с частотой СО/,, также будет содержать периодическую
составляющую той же частоты.
Рис. 9.7
Это обстоятельство
можно использовать как
один из способов
обнаружения «скрытой
периодичности» в
случайных процессах, которая
может не
обнаруживаться при первом взгляде
на отдельные записи
реализации случайного
процесса.
Примерный вид
корреляционной функции
процесса X{t),
содержащего в своем составе
кроме случайной также и периодическую составляющую,
показан на рис. 9.7, где Ro (т) обозначена корреляционная
функция, соответствующая случайной составляющей. Чтобы
выявить скрытую периодическую составляющую (такая задача
возникает, например, при выделении малого полезного
сигнала на фоне большой помехи), лучше всего определить
корреляционную функцию Rx{^) для больших значений т, когда
случайный сигнал уже сравнительно слабо коррелирован и
случайная составляющая слабо сказывается на виде
корреляционной функции.
10. Чем слабее взаимосвязь между предыдущими X{t) и
последующими X{t + т) значениями случайного процесса, тем
быстрее убывает корреляционная функция
Время т/?, при котором имеет место неравенство |i?5c(''^/?)l <
< Д, где Д — достаточно малая величина, называют време-^
нем корреляции случайного процесса.
Случайный процесс, в котором отсутствует связь между
предыдущими и последующими значениями, называют чистым
случайным процессом или белым шумом, В случае белого
шума время корреляции т/? = О и корреляционная функция
представляет собой 6-функцию (рис. 9.5, г):
RA-^) m-^Y (9-47)
где N = const.
Заметим, что случайный процесс типа белого шума
является физически нереальным, так как ему соответствуют
бесконечно большое значение дисперсии и среднее значение
квадрата случайной величины Dy. ^ Rxi^) = оо, а
Ьледовательно, и бесконечно большая мои;ность.
При решении практических задач часто пользуются
нормированной корреляционной функцией
P.W-R.W/^.. (9.48)
Нормированная корреляционная функция удобна тем, что
всегда РхФ) ^ ^- Иногда в рассмотрение вводят
нормированную взаимную корреляционную функцию
P.g (т) «(x)/VR,(0)R,(0), (9.49)
причем можно показать, что (0)/?^(0) > Rlgi^^)*
Экспериментальное определение корреляционных функций. Пусть
имеется экспериментальная запись (осциллограмма) реализации
X {t) некоторого случайного процесса на достаточно длинном
интервале времени. В общем случае это может быть запись реализации
случайного процесса с наложенной на него регулярной составляющей. На
основании (9.31) корреляционная функция (т), соответствующая
записи л: (0. может быть приближенно вычислена следующим образом.
Весь интервал Т записи осциллограммы делится на / равных
частей, длительность которых = Т/1 выбирается такой, чтобы
реализация X (t) мало изменялась на протяжении интервала (рис. 9.8).
Значение ординаты реализации х (t) на некотором отрезке п
обозначим Хп, а значение ординаты этой же кривой, но смещенной на
величину т = шА/, т. е. JC (/ + г), обозначим Хп+т-
Задаваясь различными значениями т, находим для различных
значений т » шА/ среднее значение произведения ординат Хп и Xn+m-
Приближенное значение корреляционной функции
1-т
•'?:.(т)^[»/(7'-т)1 2 ^пА:п+т. (9.50)
п= I
В (9.50) уменьшение интервала Т на величину т обусловлено тем,
что ординаты JCn+m известны только до / — Г — т = (/ ~ т) АЛ
X(i) 3f(t*Z)X(t)
Рис. 9.8
Чем меньше длительность отрезков At и чем больше величина
интервала Г, тем точнее выражение (9.50) соответствует корреляционной
функции Rx (т). Для получения ошибки не более 2 % должно
выполняться неравенство m < О, t Т/At.
Приведенный способ определения корреляционной функции по
экспериментально полученной реализации случайного процесса
довольно трудоемок, поэтому на практике обычно корреляционные функции
находят с помощью специальных приборов — корреляпюров, которые
автоматически вычисляют средние произведения двух ординат
осциллограмм, находящихся друг от друга на расстоянии т.
Если запись реализации х (t) (осциллограмма) соответствует
случайному процессу, среднее значение которого равно "л:, то
экспериментально найденная по ней эквивалентная корреляционная функция
Rl (х) также будет содержать постоянную составляющую, которая (на
основании свойств 4 и 5 корреляционных функций) равна (х)^. Связь
между корреляционной функцией (т) случайного процесса и
эквивалентной корреляционной функцией R^ (т) определяется выражением
Rx(r)^Rl{T)~(^f. (9.51)
§ 9.4. Спектральные плотности случайных процессов
При исследовании автоматических систем управления
удобно пользоваться еще одной характеристикой стационарного
случайного процесса, называемой спектральной плотностью.
Во многих случаях, особенно при изучении преобразования
стационарных случайных процессов линейными системами
управления, спектральная плотность оказывается более
удобной характеристикой, чем корреляционная функция.
Спектральная плотность ^^^(о)) случайного процесса X{t)
определяется как преобразование Фурье корреляционной
функцией /?з,(т), Т. е.
S^o>)- [ R,{T)e-i'^^dx. (9.52)
Если воспользоваться формулой Эйлера е~''^'^ ^ cosodt —
— /sincoT, то (9.52) можно представить как
оо оо
5jc(^)= J Rx{'^)^os(i)xdx—j I" /?3,(t)sin6)tdt.
Так как /?3c('^)sinci)T — нечетная функция т, то в последнем
выражении второй интеграл равен нулю. Учитывая, что
t^^{x)cos(or — четная функция т, получаем
оо оо
Sy: (со) -= J (т) COS (oxdr = 2 J (т) COS oxdr. (9.53)
— оо о
Так как cosot cos(—сот), то из (9.53) следует, что
S.(o>) = S,(-o). (9.54)
Таким образом, спектральная плотность ЗхЫ) является
действительной и четной функцией частоты со.. Поэтому на
графике спектральная плотность всегда симметрична
относительно оси ординат.
Если спектральная плотность известна, то по формуле
обратного преобразования Фурье можно найти соответствующую
ей корреляционную функцию:
оо оо
Rx W == — Г (g)) е/^^ dco = — Г (о) cos coxdo). (9.55)
2л J jt J
— oo 0
Используя (9.55) и (9.38), можно установить важную
зависимость между дисперсией и спектральной плотностью
5эс((о)- случайного процесса:
оо оо
D, = (0) - ^ f (ш) do = ^ j И Ло. (9.56)
— оо о
Термин «спектральная плотность» обязан своим происхождением-
теории электрических колебаний. Физический смысл спектральной
плотности можно пояснить следующим образом.
Пусть X (f) — напряжение, приложенное к омическому
сопротивлению I Ом, тогда средняя мощность Рср. рассеиваемая на этом
сопротивлении за время 2Т, равна
7
Если увеличивать интервал наблюдения 2Т до бесконечных
пределов и воспользоваться (9.30), (9.38) й (9.55) при х = О и т = О, то
можно формулу для средней мощности записать так:
Рср- lim ( л:МО^/=^'=-^х(0)= — ГS<^(co)dcr). (9.
Г-^оо 2Т J Jt J
57)
РаБСлстпо (9.57) показыЕлст, что средняя мощность сигнала может
быть представлена в виде бесконсчиой суммы бсскоиечгго малых
слагаемых {^) rf^. которая распространяется на все частоты от О до с».
Каждое элементарное слагаемое этой суммы играет роль мощности, со-
отостствующей бесконечно малому участку спектра, заключенному в
пределах от со до со Каждая элементарная мощность - Sx ((^) dm
пропорциональна значению функции (о) для данной частоты о.
Следовательно, физический смысл спектральной плотности состоит в
том, что она характеризует распределение мощности сигнала по
частотному спектру.
Спектральная плотность может быть найдена экспериментально
через среднюю величину квадрата амплитуды гармоник реализации
случайного процесса. Приборы, применяемые для этой цели и состоящие
нз анализатора спектра н вычислителя среднего значения квадрата ам-
-плитуды гармоник, называются спектрометрами. Экспериментально
находить спектральную плотность сложнее, чем корреляционную
функцию, поэтому на практике чаще всего спектральную плотность
вычисляют гго известной корреляционной функции с помощью формулы
(9.52) или (9.53).
Взаимная спектральная плотнос/пь S^gU^) двух
стационарных случайных процессов X{t) и G(t) определяется как
преобразование Фурье от взаимной корреляционной функции
/?,,(т), т. е.
j /?,,(^)e~''-rfx. (9.58)
— оо
По взаимной спектральной плотности можно, применяя к
(9.58) обратное преобразование Фурье, найти выражение для
взаимной корреляционной функции:
оо
I 5,,0ш)е''"М«. (9.59)
— се
Взаимная спектральная плотность S3cg(/o)) является
мерой статистической связи между двумя стационарными
случайными процессами: X{t) и G{i). Если процессы X{t) и G{t)
нскоррелнрованы и имеют равные нулю средине значения, то
взаимная спектральная плотность равна нулю, т. е.
S,,(/o))-^^0. (9.60)
В отличие от спектральной плотности 5у,{со) взаимная
спектральная плотность ^^.^(/со) не является четной функцией
О) н представляет собой не вещественную, а комплексную
функцию.
Рассмотрим некоторые свойства спектральных плотностей
1. Спектральная плотность чистого случайного процесса,
или белого шума, постоянна во всем диапазоне частот
(см. рис. 9.5. г):
^ 5 Лео) = N = const. (9.61)
Действительно, подставляя в (9.52) выражение (9.47) для
корреляционной функции белого шума, получим
оо
5,и- { Л'6(т)е-'"Мт=-Л/|е-/<"1х=о'=Л'.
— ОО
Постоянство спектральной плотности белого шума во всем
бесконечном диапазоне частот, полученное в последне.м
выражении, означает, что энергия белого шума распределена по
всему спектру равномерно, а суммарная энергия процесса
равна бесконечности. Это указывает на физическую
нереализуемость случайного процесса типа белого шума. Белый шум
является математической идеализацией реального процесса.
В действительности частотный спектр S^(a)) западает на очень
высоких частотах (как показано пунктиром на рис. 9.5, г).
Если, однако, эти частоты настолько велики, что при
рассмотрении какого-либо конкретного устройства они не играют
роли (ибо лежат вне полосы частот, пропускаемых этим
устройством), то идеализация сигнала в виде белого шума
упрощает рассмотрение и поэтому вполне целесообразна.
Происхождение термина «белый шум» объъяспяется
аналогией такого процесса с белым светом, имеющим одинаковые
интенсивности всех компонент, и тем, что случайные процессы
типа белого шума впервые были выделены при исследовании
тепловых флуктуациоиных шумов в радиотехнических
устройствах.
2. Спектральная плотность постоянного сигнала x(t) = Aq
представляет собой 6-функцию, расположенную в начале
координат (см, рис. 9.5, а), т. е.
5^(с))«2пЛгб(ш). (9.62)
Чтобы доказать это, допустим, что спектральная
плотность имеет вид (9.62), и найдем по (9.55) соответствующую
ей корреляционную функцию. Так как
J 6(o>)e'''^''dco-e/^\
то при (i) = 0 получаем
сю
(т) J 2пА1 б И е'<"Мш = АЬ 1е""-Ч(о^о -= ^о-
<— оо
Это (в соответствии со свойством 5 корреляционных
функций) означает, что сигнал, соответствующий спектральной
плотности, определяемой (9.62), является постоянным
сигналом, равным Л о-
Тот факт, что спектральная плотность S^ico) представляет
собой б-функцию при со = О, означает, что вся мощность
постоянного сигнала сосредоточена на нулевой частоте, что и
следовало ожидать.
3. Спектральная плотность периодического сигнала x(t) =
= Asin{(i)it + <р) представляет собой две б-функции.
расположенные симметрично относительно начала кординат при
со (Oi и о) = —с0| (см. рис. 9.5, d), т. е.
(со) 2я — [б (со - coi) + б (О) -Ь coi)I. (9.63)
4
Чтобы доказать это, допустим, что спектральная
плотность имеет вид (9.63), и найдем по (9.55) соответствующую
ей корреляционную функцию:
оо
К^(т)=— г 2л -^Гб((о—o)i) ^6(o) + o)l)le/''>Mo)-:
2я J 4
— оо
оо оо
^ J е'"'^6(о)—coi)dco + J е'«^'^6(со4 coi)do)
оо — оо
= -— + е ~ ■'""'Я = 2 COS coj т —^ cos со^ т.
Это (в соответствии со свойством 6 корреляционных
функций) означает, что сигнал, соответствующий спектральной
плотности определяемой (9.63), является периодическим
Сигналом, равным а;(^) = >4sin(coi/ + ф).
Тот факт, что спектральная плотность Sx{<d) представляет
собой две 6-фуикции, расположенные при coi и —coi, означает,
что вся мощность периодического сигнала сосредоточена на
двух частотах: coi и —сО;. Если рассматривать спектральную
плотность только в области положительных частот, то по-
г- оо
-cOj -0)^ 0 <jjf
Рис. 9.9
1_L
0)k <0
лучим, что вся мощность периодического сигнала будет
сосредоточена на одной частоте coi.
4. Спектральная плотность временной функции, разлагае-
п
МОЙ в ряд Фурье л:(/) = + ^ Af^siui^t + ф^), имеет на
основании изложенного выше вид
Л§б(со)+ 2 -f-[6(^~<o,) + 6(co + (o,)l
(9.64)
Этой спектральной плотности соответствует линейчатый
спектр (рис. 9.9) с б-функциями, расположенными на
положительных и отрицательных частотах гармоник. На рис. 9.9
6-функции условно изображены так, что их высоты показаны
пропорциональными коэффициентам при единичной 6-функции,
т. е. величинам Лё и А1/4.
Заметим, что спектральная плотность 8х{(уу)г как это
следует из (9.64), не содержит, так же как и корреляционная
функция, определяемая (9.44), никаких сведений о фазовых
сдвигах отдельных гармонических составляющих.
5. Спектральная плотность случайного процесса, не
содержащего периодической составляющей, представляет собой
график без ярко выраженных пиков (см. рис. 9.5, б, в),
В этом случае спектральная плотность часто
аппроксимируется следующим аналитическим выражением:
S^(o))==2D^a/(a2 + (o2) = 2D^r^/(l +<^у'П), ^9.65)
где — дисперсия случайного процесса; а = const —
параметр затухания; = 1/а — постоянный коэффициент.
Спектральной функции, определяемой по (9.65),
соответствует корреляционная функция
которая полностью совпадает с корреляционной функцией,
определяемой по (9.45).
Из рис. 9.5, б,в видно, что чем шире график спектральной плотности
Sx (о>). тем ^же график соответствующей корреляционной функции
(т), и наоборот. Это соответствует физической сущности процесса:
чем шире график спектральной плотности, т. е. чем более высокие
частоты представлены в спектральной плотности, тем выше степень
изменчивости случайного процесса и тем з^же графики корреляционной
функции. Другими словами, связь между видом спектральной плотности
и видом функции времени получается обратной по сравнению со связью
между корреляционной функцией и видом функции времени. Это
особенно ярко проявляется при рассмотрении постоянного сигнала и
белого шума. В первом случае корреляционная функция имеет вид
горизонтальной прямой, а спектральная плотность имеет вид 6-функции
(см. рис. 9.5, а). Во втором случае (см. рис. 9.5, г) имеет место обратная
картина.
6. Спектральная плотность случайного процесса, на
которой наложены периодические составляющие, содержит
непрерывную часть и отдельные 6-функции, соответствующие
частотам периодических составляющих.
Отдельные пики на графике спектральной плотности ука-
зывают на то, что случайный процесс смешан со скрытыми
периодическими
составах М
Рис. 9.10
ляющими, которые
могут и не
обнаруживаться! при первом взгляде
на отдельные записи
процесса. Если,
например, на случайный
процесс наложен один ие-
р иоди ческий. сигнал = ,.€,
частотой б)д1, тохрафик;
сцектр ал ьной
плотности имеет вид,
показанный на рис. 9.10.
Иногда в расшот-г
рение вводят нормиро-
ванную спектральную плотность Рх{а>), являющуюся
изображением Фурье нормированной корреляционной
функции (9.48):
РхИ = J Р. (т) е-/-- = (<о)/0,. (9.66)
Нормированная спектральная плотность имеет размерность
времени.
§ 9.5. Связь между корреляционными функциями
и спектральными плотностями случайного
процесса на входе и выходе
линейной системы
Рассмотрим линейную систему автоматического
управления (рис. 9.11), имеющую передаточную функцию Wg^^^is) и
импульсную переходную функцию (функцию веса) k{t).
Предположим, чгго на вход этой системы подан
стационарный случайный процесс G{t) с равным нулю средним значением,
имеющий корреляционную функцию /?^(т) и спектральную
плотность 5^(со). Если рассматриваемая линейная система
устойчива и сама стационарна, то установившийся выходной
сигнал'X(if) также будет стационарным случайным процессом,
среднее значение которого будет равно нулю, однако его
статистические характеристики будут отличаться от
статистических характеристик входного
сигнала.
X(t)
гнала. G(t) I 1
Допустим, что случайный > \^gx(S)M^)
процесс X{t) имеет корреляцион- /^оСО» V^-^l —
Ную функцию /?я:(т) И СПСКТ-
ральную плотность5я:(со). Уста- р^^
новим связь между
корреляционными функциями и
спектральными плотностями случайных процессов на входе и
выходе системы. Связь между реализациями x{t) случайного про-
цесса X{t) на выходе системы и соответствующими
реализациями q{() Случайного процесса G(f) на вхрде системы на
основании формулы свертки выражается через импульсную пе-
реходную функцию k{t) следующим образом:
J k(t~K)gmdK^ [ g{t-K)k(K)dK (9.67)
— оо —оо
где К — независимая переменная интегрирования.
Для момента времени / + т получаем
x{t + T)== \ g{f + T-ri)k (7]) dri, (9.68)
— оо
где Г) — новое обозначение независимой переменной
интегрирования.
Корреляционная функция Rxi^^) стационарного
случайного процесса Х(^) на основании (9.31) равна
т
(т) lim — Га: (t) x{t + T)dt. (9.69)
Подставляя в (9.69) значение x{t) и x(t + т) и изменяя
последовательность интегрирования, получим
Т оо
~Т —оо
> г- Т
j kik)dl j" k(ri) lim^ g^t-K)git + T~rii)dt
— oo —oo L —T
dn.
Так как Urn — J git — K) g {t + x — x\) dtRg {x +
+ ?t — 1^), окончательно получаем
Rx (x)« f k (K) dX ^ k (r,) Rg (t + X -ti) йц. (9.70)
— oo —oo
Выражение (9.70) является основным интегральным
соотношением, позволяющим по известной корреляционной
функции Rg{t) случайного процесса на входе системы и известной
импульсной переходной функции k{t) системы найти
корреляционную функцию Rxi'^) случайного процесса на выходе
системы.
Определим теперь связь между спектральными
плотностями входного и выходного случайных процессов. В сротеетстэни
с (9.52) спектральная плотность случайного процесса X{t) на
выходе системы
оо
S«((o)= J R^{%)e~f<'-'dT. (9.71>
— оо
Подставляя в (9.71) значение R^{t) из (9.70) получаем
оо оо оо
oo oo
j dt J dX J A;(X)/j(ti);?g(t + X—г])е-'"»(х+я-г))е-/<оп X
-ос —oo —oo
— oo —oo —oo
Учитывая, что изображение Фурье импульсной переходной
функции есть частотная передаточная функция, т. е.
W
оо
(/со)= J fe(r))e-/«>idt];
(9.73)
выражение для спектральной плотности можно записать в
виде
оо
SxH = We^(j(i>)rg^{—la) j Rg(т + l—ri)e-'■^^^■^+^-^)dx.
— оо
оо
Принимая во внимание, что J Rg{T + X—r]) х
— оо
X е-/иг+я.-11)^^^5^^(^)^ окончательно получаем
S.(o)) = \r^,0-<o) «^,.(-/co)S,(co)=l W,MYS,{<^y (9.74)
Таким образом, спектральная плотность стационарного
случайного процесса на выходе линейной системы равна спект-
ральной плотности случайного процесса на входе системы,
умноженной на квадрат модуля частотной передаточной
функции этой системы.
Используя (9.55) и (9.74) можно найти формулу,
связывающую корреляционную функцию /?а;(т) выходного сигнала и
спектральную плотность 5^^(со) входного сигнала, т. е.
со
/?.'Л) = -^ J ir,,(HPS,((o)e/'«dco. (9.75)
— оо
Рассмотрим теперь более общий случай, когда линейная
система находится под воздействием двух взаимосвязанных
стационарных случайных процессов G{t) и F(t), приложенных
в различных точках системы.
Рассматриваемый случай имеет большое практическое
значение, так как на систему чаще всего действуют одновременно
два входных (внешних) сигнала: управляющий полезный
сигнал G(t) и эквивалентная помеха F{t).
Пусть передаточные функции, связывающие входные
сигналы и выходной сигнал Х(/). будут соответственно IFi(s)
и ^2(5). а импульсные переходные функции (функции веса)
будут fej (О и k^(t). Покажем, как в этом случае связаны
корреляционная функция Rx{'^) и спектральная плотность SJ^io)
выходного сигнала с корреляционными функциями и
спектральными плотностями входных сигналов.
Заметим, что рассмотренная ниже методика может быть
использована и в том случае, когда к системе приложено
большее число воздействий.
В нашем случае реализация x{t) случайного процесса Х(0
на выходе системы на основании принципа суперпозиции
связана с реализациями g(t) и /(/) входных случайных процессов
С(0 и F{t) следующим образом:
^(О- J g(^~^) (^) + I f{t-^lh(Ц dK (9.76)
— 00 — 00
где X, — независимая переменная интегрирования.
Для момента времени ^ + т получаем
со
xiObx)^ j g(/ + t-t])fei(n)dn +
+ j ni + x-n)kAr\)dr^. (9.77)
^,д^ новое обозначение независимой переменной инте-
гпирования.
Подставляя (9.76) и (9.77) в (9.31). получаем
г р оо
(т) = lira j J ^ (/ -К) k, (Ц dX +
оо 1 Г
+ J f{t-k)k^(k)d% J g(, + T-ti)*,(ri)dTi +
— оо J I оо
оо
J /(^ + т~т])^з(г1)^г1
Раскрывая скобки и меняя пределы интегрирования,
получаем
— €50 ~ оо L — 7*
CO p OO
X fti{r])dll +
OO eo
X
i
dt
k, (11) dn +
«9 oo p i
+ I dX J fe,(>-) [im-^ |/(г_?,)/(/ + т_,1)
— оо ^ OO L — r
dt
h (r\) dr\.
Нетрудно заметить, что выражения, заключенные в
квадратные скобки в первом и последнем слагаемых, равны
корреляционным функциям (т + X — т]) и /?/ (т + X — т])
соответственно, а аналогичные выражения во втором и третьем
слагаемых — взаимным корреляционным функциям Rgf {% +
Учитывая сказанное, окончательно находим
(т) = j j° fei (К) k, (11) (т + ^ -n) dTi +
— oo —oo
+ j J fej fe^ Rgf (t + -ri) dTi +
— c» —oo
oo oo
+ j dJt j k2(k)kAr\)R,g{t+l-r])dri +
— oo —oo
oo c»
+ j d/, j k^(K)kAr))R,{x + >'-4)dn. (9.78)
— OO —oo
Выражение (9.78) является основным интегральным
соотношением, устанавливающим связь между корреляционной
функцией /?эс('^) выходного сигнала и четырьмя
корреляционными функциями Rg{t), /?/(т), Rgf(t) и Rfg(t) двух
статистически взаимосвязанных входных сигналов.
Найдем для этого случая спектральную плотность S^(co)
выходного сигнала. Подставляя (9.78) в (9.52), получим
оо оо
X [Rg (t + A -ti) fei (Я,) (ti) + R„ {t + K-r,) A:, (Я) (ц) +
+ (T + X -tj) A:^ {K) К (ri) + (X + ?^ -Tl) h {Ц h t])! X
Меняя порядок интегрирования, получаем
оо оо
S,(a>)= J fe,(t])e-'*«idti J ki{K) ei^'^ dK X
^oo —CO
oo
X j /?g(T + A—Ti)e-'<*<^+>^-^>dT +
— oo
+ 1° fti (A) e/">- dJ^ J fea (11) e-dri X
— oo —oo
oo
X j /?в^(т + Я,—t))e-/*'<*+^-i)dT +
+ J" fei(t])e-/»4dt] j k^{X)e'<'^-dkx
— oo —oo
oo
— oo
+ J in) e-'-" dr] J (K) e/**dk j Rf{x4
— oo ^oo ~oo
Учитывая (9.73). формулу для спектральной плотности
можно окончательно записать следующим образом:
(со) - (усо) (-/со) ((0)+11^1 ( -/(0) (/со) (/со) +
+ (/со) (~/co)S^^ (/со)+«^2(/со) «^'о(- /со) 5Дсо) =
= I «^i(/co) I ? S» + U^,(~ /со) U7,(/c,))S^//co) + K7i(/o)) IT^ (-/со) X
xS/^(/co)+|«^,(/co)|2S,(co),
где Wi(—усо) — частотные передаточные функции,
комплексно-сопряженные с 11^,(/со).
оо
в (9,79) величины S^f (/со) « J Rgf (х + к —г]) х
— оо
оо
X e-Z^Cf 1^-^)сГт и SfgiM^ J ^?/^(т-|-Я.—r|)e-/^^('^+>^-^)dt
являются взаимными спектральными плотностями.
Формула (9.79) является выражением для спектральной
плотности выходного сигнала для общего случая, когда
система находится под воздействием двух статистически
взаимосвязанных стационарных случайных процессов G{t) и F{t), Если
случайные процессы G(t) и F{t) статистически независимы
(корреляция между ними отсутствует), то
S,f{j<^)^Sf,(-M-^0 (9.80
и выражения для корреляционной функции и спектральной
плотности выходного случайного процесса принимают вид
оо оо
— oo —oo
+ ^ d% ^ kAK)k^(ri)Rf(x + X~ri)dr]', (9.81)
— OO — oo
Sx и -1(/10) pS, (co) +1 (/6)) |2 S, ((0). (9.82)
§ 9.6. Расчет линейных систем при случайных
воздействиях
Рассмотрим замкнутую линейную следящую систему
(рис. 9.12), предназначенную для возможно более точного
воспроизведения полезного (управляющего) сигнала G(0,
Действующего на входе системы, при наличии помехи F(t),
приложенной в произвольной точке системы. В общем случае
действующие на систему внешние воздействия — полезный
сигнал G{t) и помеха F{t) — могут представлять собой
произвольно изменяющиеся во времени регулярные сигналы, на
которые наложены случайные процессы. В этом случае
сигнал G{t) и помеху F{t) удобно представить следующим
образом:
(9.83)
G{0-mg(0 + G(0;
Fit)=mf(i) + F{t),
(9.84)
где mg(t)y mf{i) — эквивалентные регулярные составляющие
полезного сигнала и помехи, включающие в себя как
математическое ожидание соответствующего случайного процесса.
f(t)
О It) ^E(i)
Mi)
Рис. 9.12
так и соответствующий регулярный сигнал; G{t), F{t) —
центр ированные случайные составляющие полезного сигнала и
помехи соответственно.
Тогда любую искомую координату системы можно также
представить в виде двух составляющих: эквивалентной
регулярной составляющей и центрированной случайной
составляющей. При расчетах систем автоматического управления
обычно интересуются динамической точностью системы,
характеризуемой ошибкой системы Е(^) = G{f) — X{t), На
основании изложенного выражение для ошибки системы при
случайных воздействиях может быть записано в виде
Е(0-те(0 + Ё(0. (9.85)
Таким образом, нахождение случайной ошибки Е(0
можно свести к нахождению ее регулярной составляющей те(0 и
центрированной случайной составляющей Е(^). При этом в
линейной системе на основании принципа суперпозиции
m^{t) и Е(^) складываются из составляющих от действия по
лезного сигнала и помехи, которые можно находить порознь.
Регулярную составляющую ошибки rndt) можно
рассматривать как реакцию линейной системы на регулярные
внешние воздействия mg{t) и rtifit) и определять через передаточные
функции системы:
те (О - W^s (S) (О + Wfe (s) (/) - mf (/) + ml (0. (9.86)
где Wgjs)==l/l\+ W{s)] — передаточная функция
замкнутой системы, связывающая ошибку и полезный сигнал;
Wfe{s) ^ W^isyil + W{s)] — передаточная функция
замкнутой системы, связывающая ошибку и помеху.
Установившееся значение (математическое ожидание)
ошибки те(0 при медленно меняющихся регулярных
функциях mg{t) и т/(/) обычно определяют методом коэффициентов
ошибок.
В частном случае если регулярные внешние воздействия
постоянны (либо отсутствуют), а случайные воздействия
представляют собой стациона[рные случайные процессы, то
= const и /П/ = const. В этом случае ошибка Е(/) будет
являться стационарным случайным процессом, математическое
ожидание которого т^ определяется через уравнение статики
системы:
те - (0) т^ + (0) - const. (9.87)
Центрированную случайную составляющую ошибки Ё(/)
можно рассматривать как реакцию системы на
центрированные случайные составляющие управляющего сигнала G{t) и
помехи F(t). Так как Ё(/) представляет собой случайный
процесс, то находят не мгновенные значения Ё(/), а некоторые ее
статистические вероятностные характеристики (дисперсию
ошибки и др.).
Центрированные случайные составляющие полезного
сигнала G{t) и помехи F{t) обычно задаются или
корреляционными функциями Rg{t) и Rf(t)y или спектральными
плотностями Sg{(x)) и S/(<o). Если полезный сигнал и помеха коррели-
рованы, то задается также взаимная корреляционная функция
Rgf{T) или взаимная спектральная плотность S^/(/co). На
основе выражений (9.78), (9.79) или (9.81), (9.82) по заданным
корреляционным функциям или спектральным плотностям
внешних воздействий полезного сигнала и помехи определяют
корреляционную функцию R е(т) или спектральную плотность
Se(co) ошибки, а затем, используя их, находят
статистические (вероятностные) характеристики ошибки.
Так, например, зная корреляционную функцию ошибки
/?£(т), можно, используя выражение (9.33) определить
дисперсию ошибки:
Дв = /?е(0). (9.88)
Если известна спектральная плотность ошибки Se(co), то
на основании (9.56) дисперсию ошибки можно найти по
формуле
оо оо
De Г Se(od)dcO-— Г Se (со) dco. (9.89)
2п J я J
— оо о
в практических расчетах дисперсию ошибки чаще всего
определяют через спектральную плотность, используя
формулу (9.89).
Спектральную плотность ошибки S£(a)) для
рассматриваемой системы (рис. 9.12) при коррелированных полезном
сигнале и помехе в соответствии с (9.79) вычисляют по формуле
Se И = \ (»Sg и + (-/со) Wf, (/«) Sgy (/со) +
+ (/со) Wf, (-/со) S,^ (/со) + \ Vr,e (/со) 1^ (со). (9.90
где 5g(co), S/( со) —
спектральные плотности центрированных
случайных составляющих
полезного сигнала G{f) и помехи
F(t)\ 5g/(/co), Sfgiiid) —
взаимные спектральные плотности
между т и F{t); 1Г^е(/со) =
— частотная
Рис. 9.13
передаточная функция, связывающая ошибку Е (/) и полезный
сигнал G(t)\ 1F/b(/co) = W^2(/co)/[l + W{m)\ — частотная
передаточная функция, связывающая ошибку Е(^) и помеху F{t);
If (усо) = Wi (усо) Wz (/со) — частотная передаточная функция
размокнутой системы; U^2(/co) — частотная передаточная
функция части разомкнутой системы между точкой приложения
помехи и выходом системы.
При отсутствии корреляции между полезным сигналом и
помехой их взаимные спектральные плотности равны нулю и
выражение для спектральной плотности ошибки упрощается:
Se (со) = I (/(о) Р S, (со) +1 Wf, (усо) 1^ S, (со). (9.91)
В частном случае, когда помеха действует на входе
разомкнутой системы (как это показано на рис. 9.13) и
корреляция между полезным сигналом и помехой отсутствует,
выражение (9.91) можно записать в виде
5е (со) --=
1 + 1^ (усо)
W (/со)
l+W^(/co)
Sy(co). (9.92)
Дисперсия ошибки, вычисляемая по (9.89), в общем случае
состоит из отдельных составляющих, определяемых
слагаемыми (9.90):
De - D| + Df + Dl^ + Di (9.93)
Обычно находят отдельно Df для 5^(со), для S^/(yu)) и
т. д., а затем суммируют все составляющие дисперсии в
соответствии с (9.93).
В соответствии с (9.20) среднее значение квадрата ошибки
равно
(9.94)
где m^{t) — регулярная составляющая (математическое
ожидание) ошибки, определяемая по (9.86); D ^ — дисперсия
оЩйбки. определяемая по (9,88) или (9.89).
Зная можно но (9.21) вычислить среднюю квадрати-
ческую ошибку:
^с.и (О = У^^' (О = y^r^l it) (9.95)
Заметим, что если регулярная составляющая
(математическое ожидание) ошибки, определяемая по (9.86), постоянна,
то
t^^ml + De - const. (9.96)
В частном случае, когда внешние воздействия не содержат
регулярных составляющих, а представляют собой
центрированные стационарные процессы, /п^ = О и критерием
динамической точности системы можно считать дисперсию ошибки,
которая в данном случае равна среднему значению
квадрата ошибки:
?-De. (9.97)
или среднее квадратическое отклонение ошибки
Ce^KD,. (9.98)
Чтобы по известной спектральной плотности найти
дисперсию ошибки при случайных воздействиях, необходимо
вычислить интеграл (9.89). Вычисление этого интеграла довольно
сложно, поэтому на практике его выполняют двояко: либо
аналитическим методом, используя стандартные (табличные)
интегралы, либо методом графоаналитического
интегрирования.
Аналитический метод определения дисперсии ошибки .Этот
метод основан па предположении, что как спектральные
плотности, так и частотные передаточные функции, входящие в
(9.90), являются дроб1Ю-рациональными функциями от со.
Тогда (9.90) для спектральной плотности ошибки можно
представить состоящим из слагаемых вида
S,(/o)) = \Ви<о)\Ч\ИЦ<о)\\ (9.99)
где ^(;о)), //(/(о) — некоторые полиномы от комплексной
переменной /о).
Вычисление отдельных составляющих дисперсии ошиб-.
к и сводится к вычислению интегралов стандартного
типа:
2л
f 6V(/o)) Jco ^ J-^ f ^03. (9Л00)
Рис. 9.14
ИЗ слагаемых вида (9.99), и находят коэффициенты и hi
полиномов Я(/о)) и М(/о)). После этого, пользуясь стандартными
интегралами определяют отдельные составляющие
дисперсии ошибки, а затем в соответствии с (9.93) находят дисперсию
ошибки Dfe.
Графоаналитическое определение дисперсии ошибки. Для
систем автоматического управления при п > 4 аналитический
метод нахождения дисперсии ошибки становится довольно
громоздким, поэтому в инженерной практике в таких случаях
широко применяют графоаналитический метод. Этот метод
особенно удобен в том случае, когда спектральные плотности
полезного сигнала и помехи, а также амплитудно-частотные
характеристики системы заданы графически.
Поясним сущность этого метода применительно к
вычислению составляющей дисперсии ошибки De от действия
помехи. Рассмотрим, например, рис. 9.14, на котором
приведены АЧХ замкнутой системы Л/е(<о) = |В^/е(/о))|.
связывающая ошибку с помехой, и график спектральной плотно
сти помехи S/(co).
Возводя в квадрат ординаты кривой Л/е (со), вычисляем и
строим график Л?е (со). Перемножая затем ординаты Лре (со) и
S/(co) при одних и тех же частотах со, получим график
спектральной плотности ошибки Se(co). После этого определяем
оо
значение интеграла J Se(<o)dco, для чего подсчитываем вели-
о
чину площади, заключенной между кривой 5е(о)) и осью
абсцисс.
Составляющую дисперсии ошибки от действия помехи Dl
в соответствии с (9.89) определяем путем деления полученной
площади на я, т. е.
оо
Di^~^ Se(a))d(o.
Аналогично можно найти другие составляющие дисперсии
ошибки, например от действия полезного сигнала и т. д.
Суммируя эти составляющие, находим в соответствии с (9.93)
дисперсию ошибки D
Как видно из рис. 9.14, величина составляющей дисперсии
ошибки De зависит от взаимного расположения графиков
Л/е (w) и S/(co). При совпадении максимумов этих
характеристик величина площади, заключенной между кривой Se((o) и
осью абсцисс, а следовательно, и величина составляющей
дисперсии ошибки D/e, оказывается большей и, наоборот,
разнесение этих максимумов выбором параметров системы приводит
к уменьшению дисперсии ошибки.
Таким образом, графоаналитический метод, отличаясь
простотой и наглядностью, позволяет указать, как следует
изменить частотные характеристики системы, чтобы при
заданных спектральных плотностях внешних воздействий
уменьшить дисперсию ошибки системы.
Если при расчете системы автоматического управления пользуются
логарифмическими частотными характеристиками, то составляющую
спектральной плотности ошибки, соответствующую, например, помехе,
в этом случае можно вычислить следующим образом. По известным
ЛАХ и ЛФХ разомкнутой системы находят ЛАХ замкнутой системы
^0 (со), а затем ее значение удваивают, т. е. определяют 2Lq ((о).
Значение 2Lq (со) суммируют с величиной L/ (со) =20 Ig Sf (со).
Спектральная плотность ошибки
2Lo(co) + A/ (со)
м - I ^'fs (^) Р 5/ (оз)« Antilg . (9.106)
По известной спектральной плотности S ^ (со) определяют затем
составляющую дисперсии Г>^. Аналогично определяют остальные со-
с^тавляющие дисперсии ошибки.
Пример 9.1. На входе замкнутой следищей системы с единичной
обратной связью (см. рис. 9.13) действует случайный полезный сигнал
^ (О, имеющий спектральную плотность Sg (со) = 2DgTg/(\ + со^Т|),
^ иа входе разомкнутой системы действует случайная помеха F {f)
типа «белый шум», спектральная плотность которой Sf (о) = N. Кор«
реляция между полезным сигналом и помехой отсутствует.
Передаточная функции разомкнутой следящей системы
W (S) = K/s (1 + sT).
Определить среднюю квадратическую ошибку системы при
Г>^=:100В; Tg^20c- Л^«0,01В^Гц; Г = 0.1с;. К = 51/с.
Заметим, что в данном случае внешние воздействия не содержат
регулярных составляющих и в соответствии с (9.97) средняя квадратиче-
ская ошибка совпадает с дисперсией ошибки D^.
1. Находим передаточные функции замкнутой системы по ошибке
и регулируемой величине:
M^ge («) = ^ /П + (s)] = S (I + Ts)/(Ts^ + s+K);
^'gx is) = Г(s)^W(s)/l\ + W (s)l -K/iTs' + s+/С).
2. Спектр ал ьнаи плотность ошибки в соответствии с (9.92)
+/toT)
2
Г(/шР+(/ш)+К
Г(/о)^+(/а)) + /С
5/(0).
3. Находим составляющую среднего квадрата ошибки е|
(совпадающую в данном случае с составляющей дисперсии ошибки Df),
обусловленную полезным сигналом:
00
ОО
<d?(l+(d''7-^)d(o
2я J ITUoif+ja+Kni+jwTgf'
« ^ 2я J jrr^(yto)»-f(r-|-rg)(/o))'' + (l+A:7'^)(iw)-f/CP
— ОО
Сравнивая полученное выражение с видом подынтегральной
функции (9.101), можно выписать полиномы Я (/со) и М (/ш), т. е.
Н (/й))«= Оо (/w)"+fli (/cD)n-i:f... +fl„ = rjg (7ш)9.+
следовательно, коэффициенты с,- равны Oq = УУ^; =■ Г -1- Tg;
а» = I -f КГ^; 03= К.
Полином М (/(I)) должен быть записан в виде
М (7«)=fe. •>+6х ... +''«-1.
в данном случае п = 3, поэтому
и следовательно, коэффициенты b} равны b,, = Т^; 6i = I, 62 = 0.
Из приложения 9.1 для п — 3 находим значение стандартного
интеграла J3. т. е. {а а +Ь)
2ао(аоаз-а,Пг) ~ 2Tg Т+Те + КЦ
Окончательно получаем
4. Находим составляющую среднего квадрата ошибки8|
(совпадающую в данном случае с составляющей дисперсии ошибки d|),
обусловленную помехой:
- 1 Г ^^1^
f 2я J /Г(Усо)^ + (/со) + КР '
— оо
сравнивая последнее выражение с видом подынтегральной функции
(9.101), выписываем полиномы Н (/со) и М (/со), т е.
И (/co)^flo(/o))" + cri (/co)«-i+ .., +ап^Т{!(оГ + иь>) К;
следовательно, коэффициенты щ равны — flj = 1, К
Полином М {jo) должен быть записан в виде
М (jco) = bo (/со)2 '>+bi (/со)2 ^> + ,.. +Ьп-1
В данном случае я = 2, поэтому М (усд) = 6^ (/сд)^ + = 1,
следовательно, коэффициенты bt равны = 0\ ^ \. Из приложения 9.1
для /1=2 находим
Ji^i-^bo + Qoby/fla)/(2оо fli) = i/2К.
Окончательно получаем
_ 5. Находим результирующее значение среднего квадрата ошибки
ь^, равное в данном случае дисперсии ошибки
'l^--^1l+l]r=.Dg(T+Tg+KTTg)I(T+Tg+ KTl)+KNI2,
Подставляя числовые значения параметров, получаем
ёе-юо ОИ+20 + 5-0.1-20 50.01 ^
0,1 + 20+ 5-20* ^ 2
Среднее квадратическое отклонение ошибки
08«V^=1.22B. ,
Рис. 9.15
Пример 9.2. Решить предыдущую задачу графоаналитическим
методом.
1. Находим выражение для спектральной плотиости ошибки:
5,(0))-
/со(1 + /соЛ
Г(;со)2 + (/о)) + /С
+
К
Г(/ш)2+(/са) + /С
[Г2со<» + (1~2/СГ)со2 + Д'21(|+о)2Г|) •
Подставляя числовые значения параметров, получаем
5е (со) = (40о>4 + 400g)2 + 0,25)/ [(0,01 со^ + 25) (400со2 + 1)].
Задавая различные значения со в пределах от О до 20, вычисляем
5g (со) и записываем результаты:
со . . О 0,1 1 2 3 5 8 10 15 20
S^(o)) 0.01 0,32 0.4 0.425 0,425 0,4 0,25 0,16 0,06 0,03
2. Строим график 5^ (со) (рис. 9.15), разбивая который на типовые
фигуры (прямоугольники, треугольники, трапеции) находим величину
площади Я^, ограниченной кривой (со) и осью абсцисс:
оо
//^=J Sg(co)dco^4,7.
3. Определяем среднее значение квадрата ошибки, равное в данном
случае дисперсии ошибки:
оо
- о
S- (со) dco ^
4,7
= 1,49,
и среднеквадратическое отклонение ошибки:
Следует отметить, что рассмотренная выше задача быстрее
и проще решается аналитическим методом, который к тому же
позволяет установить аналитическую связь между величиной
средней квадратической ошибки и параметрами системы.
Приближенный графоаналитический метод интегрирования
спектральной плотности целесообразно применять лишь при
значениях п > 4, когда аналитический метод оказывается
слишком громоздким.
Пример 9.3. Решить предыдущую задачу при условии, что на
входе замкнутой системы действует регулярный полезный сигнал
^(/) —«+ Vt, где в = 10 В; V = \ В/с. Случайная помеха F (t)
типа «белый шум» имеет спектральную плотность Sf (о) = Л^.
1. Так как полезный сигнал g (i) — регулярная функция времени,
то среднее значение квадрата ошибки в соответствии с (9.94)
где /ttg (О = ^ ge (s) 6 (О — динамическая составляющая ошибки,
обусловленная регулярным полезным сигналом g (/); "е^ == D| —
среднее значение квадрата случайной составляющей ошибки,
обусловленное случайной помехой F {t). Величина ef была определена в
примере 9.1, она равна "if = KN/2.
2. Определим установившееся значение регулярной составляющей
ошибки {t) методом коэффициентов ошибок:
di 2\ di^
(О =^0^ (О + —77- +
Для нахождения коэффициентов ошибок с^^ Су, с^, ... разложим
передаточную функцию (s) = 1/[1 + W (s)], связывающую
полезный сигнал и помеху, в ряд по возрастающим степеням s, что удобно,
например, сделать, разделив числитель выражения для ^g^{s) на его
знаменатель:
5 + rs2 1 КТ—\ ^
-Со-1-е, 5 + -^ 5^+....;
следовательно, О; = \/К; cj2\ = {КТ — 1)/К\
В нашем случае dg (t)/dt = V, а все последующие производные от
полезного сигнала равны нулю. Поэтому окончательно получаем
de it) Co.
(t)« О (/) + ci + О = Ci (/)Idt = VIK.
3 Находим результирующее значение среднего квадрата ошибки;
Е^=ст1 (О + е/ «(И//С)з + /С///2.
Подставляя числовые значения коэффициентов, получаем
Гз=(!/5)а4-(50.0!)/2 = 0.065.
Средняя квадратическая ошибка
§ 9.7. Синтез линейных систем с минимальной
средней квадратической ошибкой
Рассмотрим систему автоматического управления с
передаточной функцией Wr^(s), служащую для усиления и
преобразования управляющего полезного сигнала С(/) при наличии
случайной помехи F{t). Это преобразование в о^цем случае
производится в соответствии с некоторым заданным
оператором (алгоритмом преобразования) H(s) (рис. 9.16).
В общем случае система должна возможно более точно
воспроизводить на своем выходе не само управляющее
воздействие С(/). а некоторую функцию от управляющего
воздействия
Z(t) = H{s)G{ty (9.107)
В системах, находящихся под воздействием случайного
(или регулярного) полезного сигнала и случайной помехи,
возникает задача отделения полезного сигнала от помехи и
подавления (фильтрации) последней. Эту задачу называют
задачей фильтрации илн
C(t)
Sf {О))
, V(t)
1а/ / г 1
) *
E(i)
Рис. 9.16
сглаживания.
Введение
преобразующего оператора H{s)
обобщает задачу не
только на обычные
следящие системы, у
которых Z(0 = С(0 1т. е.
Н{$) = П, но и на
другие классы систем,
выполняющие различные
преобразования
управляющего сигнала.
в зависимости от вида оператора H{s) задача фильтрации
сочетается с задачей воспроизведения [если M{s) = const],
упреждения (предсказания), или экстраполяции [если H{s) =
= е^^], интегрирования [если H{s) =
дифференцирования [если H{s) = si и др. В общем случае преобразующий
оператор H{s) может быть произвольным. Идеальное
преобразование полезного сигнала в соответствии с (9Л07) невозможно
из-за динамических ошибок системы, а также из-за наличия
возмущающих воздействий (помех). Поэтому выходной
сигнал (регулируемая величина) X{t) будет отличаться от
воспроизводимого сигнала Z{t). Разность
E{t) = Z(t)-X{t) (9.108)
называют случайной ошибкой системы.
Синтез систем при случайных воздействиях заключается в
определении динамических характеристик системы,
наилучшим образом обеспечивающих выполнение некоторого
статистического критерия оптимальности. Существуют различные
статистические критерии оптимальности. Однако наиболее
часто за статистический критерий оптимальности принимают
критерий минимума средней квадратической ошибки [см.
(9.95)"
ес.и-^>=|/^^im-L jeMOd^ (9Л09)
где е(/) — любая реализация случайной ошибки.
В этом случае задача синтеза состоит в том, чтобы найти
такую физически реализуемую оптимальную передаточную
функцию замкнутой системы Wz.om (^)» при которой было бы
минимальным среднее значение квадрата ошибки:
е2 = {Z (О {t)y = mln. (9.110)
Согласно критерию средней квадратической ошибки оценка
точности системы производится в зависимости от среднего, а не
мгновенного значения ошибки, что ие всегда является достаточным, например
тогда, когда требуется, чтобы ошибка не выходила за заданные пределы.
Применение этого критерия может оказаться нерациональным и в тех
случаях, когда требования к величине ошибки в разные моменты
времени неодинаковы.
Однако несмотря на то. что этот критерий, впрочем, как и всякий
другой косвенный критерий, не является универсальным, он благодаря
своей' простоте получил широкое практическое применение.
близок К белому шуму (рис. 9.18. б), то в этом случае форма
ямплитудно-частотной характеристики |U^(/co)| разомкнутой
системы должна выбираться при низких частотах, где |U^(/gd)|>
NS 1 и сконцентрирована основная энергия управляющего
угнала, возможно более близкой к форме спектральной
плотности управляющего сигнала 5^,(оз). а затем должна быстро
убывать, по возможности следуя за убывающей
характеристикой 5^(о)). В общем случае, когда спектры частот полезного
сигнала и помехи накладываются друг на друга и имеют
произвольную форму (рис. 9.18. б), определение оптимальных
параметров системы становится довольно сложным.
При синтезе систем со случайными воздействиями
различают два вида задач:
1. Синтез при заданной структуре системы управления,
когда добиваются минимума средней квадратической ошибки,
выбирая оптимальные
параметры корректирующих й)
звеньев системы на осно-
вании известных
статистических характеристик
полезного сигнала и помехи.
2. Синтез при
произвольной структуре системы
управления, когда по
заданным статистическим
характеристикам полезного
сигнала и помехи
определяют оптимальную
структуру и параметры
системы, при которых
обеспечивается минимум средней
квадратической ошибки.
Синтез при заданной
структуре системы, В этом
случае задача * синтеза
формулируется следующим
образом. Заданы
статистические характеристики
полезного сигнала и помехи,
на пр имер с пектр ал ьные
плотности S^(co) и 5/((о);
структура сисгемы н ее
передаточная функция
Рис. 9.18
W{s) = W{s, Pi, Pn)» Pi параметры
системы.
Требуется найти оптимальные параметры системы Рюпт»
Р20ПТ» Рп .ШТ1 "РИ которых обеспечивается минимум
средней квадратической ошибки.
Эта задача решается следующим образом: зная спектралы
ные плотности и 5у(о)) и передаточную функцию
системы, определяют спектральную плотность ошибки Se(o), а
затем, пользуясь табличными интегралами, находят
аналитическое выражение среднего значения квадрата ошибки
которое получается зависящим от параметров системы:
e^-f(Pi,P2,....Pn). (9.111)
Дифференцируя (9.111) по Pi, где i =^ 1, 2, л, и
приравнивая нулю частные производные, находят п уравнений, из
которых определяют оптимальные параметры системы рюпг»
Р20ПТ' Рпоиг» обеспечивающие минимум средней
квадратической ошибки.
Как правило, большинство параметров системы изменять
трудно либо невозможно, так как они определяются заданными
техническими или конструктивными соображениями.
Поэтому обычно выбирают два-три параметра, например
постоянные времени корректирующих звеньев, коэффициент
усиления разомкнутой системы и др. Если число переменных п
невелико, то отыскание экстремума функции не вызывает
затруднений. При большем числе п, когда явное выражение среднего
значения квадрата ошибки через параметры системы
определить затруднительно либо оно слишком громоздко,
используют приближенные методы отыскания минимума выражения
(9.111) путем числового задания интересующих параметров и
построения соответствующих графиков.
Параметры системы, выбранные по критерию минимума
средней квадратической ошибки, оценивают затем, исходя из
возможности их технической реализации и допустимых
динамических показателей системы (времени регулирования,
наличия и величины перерегулирования и т. д.).
Заметим, что указанная выше методика выбора
оптимальных параметров системы может применяться и при
одновременном воздействии на систему регулярных и случайных
сигналов.
Пример 9.4. Условия задачи такие же. как и примере 9.1.
Требуется определить оптимальное зиачслнс коэффициента усиления
разомкнутой системы Копт, соответствующее минимуму средней
квадратической ошибки, и вычислить среднюю квадратическую ошибку при
^ Ранее (в примере 9.1) было получено выражение для среднего
значения квадрата ошибки
pi ^ е2 +7/ = (Г+ Tg-\-KTTgy/(T + 7-^ + /(Г|) + KN /2.
Для исследования на минимум средней квадратической ошибки
:Нео.бходимо приравнять нулю производную от этого выражения по ко-
эффициелту усиления разомкнутой системы. В результате получаем
TE^/dK^-Dg [Tg (Tl-^T^)]/[T -\-Tg + -f N/2,
Из последнего уравнения определяем оптимальное значение
коэффициента усиления разомкнутой системы:
/Сопт « V^Dg(Tl^T-)/(NTl)^{Tg + Т)/Т1.
Подставляя числовые значении параметров, получаем
Кспт - V2• 100 (203 _о. /(0.01.203) _ (20 -f О, I) /20^ ^30 I/с.
Подставляя Копт в выражение для среднего значения квадрата
ошибки, получаем
^min = 100 (0.1 -Ь 20 + 30.0.1.20)/(0.1 + 20 + 30.20^) ^
+ 30-0.01/2 «^0,816.
Средняя квадратическая ошибка, соответствующая Konxi
ес.к mm ^K^^^VOIe ^0.904 В.
Пример 9.5. Условия задачи такие же, как и в примере 9^.
Требуется определить оптимальное значение коэффициента усиления
разомкнутой системы Копт и вычислить среднюю квадратическую
ошибку при к = Копт.
Ранее (в примере 9.3) было получено выражение для среднего
значения квадрата ошибки
{i)-hBf =^| + е7 =(V/K)«-h/C^/2.
Приравниваем нулю производную от этого выражения по коэффи
Циенту усиления разомкнутой системы:
Из последнего выражения определяем Копт = 'Y^WN.
Подставляя числовые значения параметров, получаем
Копт = У47о:оГ= ^400=7,38 I/с.
Среднее значение квадрата ошибки; соответствующее Коит.
=(1/7.38)2 + 7,38-0.01/2 =0.055.
средняя квадратичсская ошибка
ес.иш1п-Кб^„-У0.055 = 0.234 В.
Графики изменения е|. г) н в функции коэффициента
усиления системы К приведены иа рис. 9.17.
Синтез при произвольной структуре системы. Пусть на
систему действуют полезный сигнал G(t) и помеха F{t), которые
приложены к одному и тому же входу (см. рис. 9.16) и
являются стационарными случайными процессами с равными нулю
средними значениями. Если полезный сигнал и помеха
приложены к разным входам, то методом эквивалентных
преобразований нх всегда можно привести к одному входу. Таким
образом, суммарный сигнал на входе системы будет равен
U{t) =^ G(t) + f (/).
Выходной сигнал системы X(i) связан с входным сигналом
U(t) уравнением
X(t) = WAS) U{t) = W^s) lG(t) + f (/)!,
где W^s) — передаточная функция замкнутой системы.
Допустим, что система должна воспроизводить некоторую
функцию от управляющего сигнала
Z(t) = H(s) G(t).
Ошибка воспроизведения равна
£(/) Z{t) - Х(/).
Задача синтеза о случае произвольной структуры линейной
системы состоит в том, чтобы при известных
статистических характеристиках полезного сигнала и помехи найти
такую физически реализуемую оптимальную передаточную
функцию замкнутой системы IFg.onx (^). ^Р" которой среднее
значение квадрата суммарной ошибки было бы минимально, т. е.
_ (2 (/) X (t)y - min, (9.112)
Рассмотрим задачу синтеза оптимальной передаточной
функции Ti^g.onx (^). считая, что нам заданы спектральные
плотности полезного сигнала 5^((о) и помехи 5/(со). а также
преобразующий оператор (алгоритм преобразования) Ji(s).
Решение проведем для упрощенного, но часто встречающегося
случая, когда полезный сигнал и помеха не коррелированы.
Выражение для любой реализации случайной суммарной
ошибки можно записать следующим образом:
е(0 = z(0- x{t) = H(s) g(t) - W,{sMf) = Wis) -
- WM^ g(t) - WMit).
Выражение для спектральной плотности ошибки
■ И = I Я (/со) - (/о) 1^ S, (со) +1 W, (/со) \^ Sf (со),
а среднее значение квадрата ошибки
сх>
ё'' = (1/2л) J {1ЯО-со)-1Гз(/о)|''5^И +
— оо
+ [^Vs{M\'Sf(<o)}di^>. (9.113)
Для минимизации ошибки необходимо выбрать
соответствующую частотную передаточную функцию системы
1Гз.опт (/о>).
Основная трудность в минимизации выражения (9.113)
связана с учетом условий физической осуществимости
передаточной функции системы А^з.опт (^)- Найдем сначала
^з.опт (^) без учета этого условия, а затем на основе
полученного решения построим лучшую из физически реализуемых
систем.
Записав частотные передаточные функции Я(/со) и (/со)
в виде
Н (/со) = Н (со) е/*«^) = Н (0) cos (со) -|- /Я (со) sin 'ф (со);
^3 (/^) = А (^) е'Ф<®> = /4 (со) cos ф (со) + /Л (©) sin ф (со),
вычислим
|Я(/(о) — (/со)р = НЦо) + л2(со) — 2Я(со) Л(со) x
x cos [•ф(о)) — ф(со)].
Тогда (9.113) принимает вид
оо
e^^JL j {{я2(ш) + ЛМ«)—2Я(со)Л(о) x
— оо
x cos [яр (со) —ф (со)]} Sg (со) + л2 (со) 5/ (со)} dco. (9.114)
Из (9.114) необходимо найти такие значения Л (со) и ф(со),
при которых выполнялось бы условие = min. Это
типичная вариационная задача, решаемая, например, с помощью
уравнений Эйлера.
Учитывая, что Я(а)), /1(a)), 5^^(со) и S/(co) положительны
при любом значении со, для минимизации необходимо,
чтобы член 2Я((о)Л(со) cos[ip((o) — ф((о)] был наибольшим, т. е.
ЧТОбЬ!
яр(со) = ф(со). (9.115)
Тогда (9.114) примет вид
оо
1- J {lH^io) + A^((i>)~2H{w)A(ii>)]Sg{(o) +
2я
— ОО
оо
+ i4M(o)5,(o>)}do)=-^ J Qdw.
— оо
Так как все члены в последнем подынтегральном
выражении положительны, то минимум среднего значения
квадрата ошибки будет при минимальном значении функции Q.
Приравнивая dQldA{(il) = О, получаем
12А{<о) — 2Я(со)]5^(со) + 2Л(со)5Дсо) = О.
откуда находим выражение для оптимальной
амплитудно-частотной характеристики замкнутой системы:
Аоиг и = , , и (со). (9.116)
5^ (со)+ 5/(со)
Имея в виду, что W^.^ut (/^) = -^оптС^)^'"^^"^^» выражения
(9.115) и (9.116) можно объединить в одно уравнение:
Sg((u) + Sf{w)
Как следует из (9,117), единственными статистическими
характеристиками полезного сигнала и помехи, необходимыми
для определения оптимальной частотой передаточной функции
замкнутой системы, являются их спектральные плотности.
Оптимальная частотная передаточная функция системы,
определяемая по (9.117), была найдена без учета возможности ее
физической реализуемости.
Условием физической реализуемости системы является равенство
А (/) = О при / < О,
т. е. реакция системы на 6-фуикцию, действующую в момент i = О,
равна нулю при / < 0.
Частотная передаточная функция Ws.out И^) физически
реализуемой системы должна иметь все полюсы в верхней полуплоскости кор-
ней. а соответствующая ей передаточная функция и^з.оит (s) должна
иметь только левые корки. Однако оптимальная частотная
передаточная функция, определяемая (9.117), может оказаться в общем случае
физически нереализуемой. Это можно показать на частном
простейшем примере. Пусть решается задача воспроизведения, т. е. // (оз) = 1,
и пусть помеха представляет собой единичный белый шум, т. е. 5/ (<о)
==1. Тогда
S^((o) + Sy((o)
и так как 1 + Sg {т) — положительная величина, то она
раскладывается на комплексные множители, один из которых всегда будет иметь
полюсы в нижней полуплоскоств корней. Импульсная переходная функ-
цяя k (0. найденная для такой частотной передаточной функции, будет
существовать и для отрицательных значений времени / < О, т. е. до
приложения возмущения. Это и свидетельствует о нереализуемости
1^я.опт (М-
Оптимальная частотная передаточная функция, определяемая
(9.И7), оказалась физически нереализуемой потому, что в реальных
системах всегда существует связь между амплитудно-частотной А {(а)
и фазовой <р (<!)) характеристиками, которая ие была учтена при выводе
формулы (9.117). При выводе (9.117) решались уравнения (9.115) н
(9.116), которые, как правило, являются несовместимыми j т. е. нельзя
найти* одно решение, одновременно удовлетворяющее обоим этим урав-
невиям.
Для ТОГО чтобы реализовать функцию, наиболее близкую
к оптимальной, необходимоиз В^з.опт 0^) выделить физически
реализуемую часть с полюсами, находящимися в верхней
полуплоскости корней, а остальные члены отбросить.
Для этого, пользуясь методикой, предложенной Г. Боде
и К. Шенноном, разлагают сначала знаменатель выражения
(9,117) на комплексные множители (операции «факторизации»):
Sg (О) + 5Дсо) = I ¥ (У<о)«| ^ ¥ Ош) (-/со). (9.118)
fAe Y (/о) — функция, все нули и полюсы которой лежат в
верхней полуплоскости комплексного переменного /(о;
У(—/со) — функция, комплексно-сопряженная с 'F(/oi)), все
нули и полюсы которой лежат в нижней полуплоскости комп-
лассного переменного /©.
Затем производят разделение 1^з.опт U<i>) на реализуемые
и нереализуемые слагаемые (операция «фасщепления»):
Sg(<o)//(/M)
+
liUdnm.] , (9.119)
причем реализуемая часть отмечается знаком плюс, а
нереализуемая — знаком минус.
Отбрасывая члены, соответствующие нереализуемой части,
условие оптимальности с учетом физической реализуемости
записывают следующим образом:
^3 опт (М —^ г ^^^"^^ Н (/0))1 . (9.12б)
Физически реализуемая частотная передаточная функция
оказывается уже неоптимальной в прежнем понимании, но
среди физически реализуемых функций в соответствии с
принятым критерием она является наилучшей.
Таким образом, когда полезный сигнал и помеха не
коррелированы, нахождение оптимальной физически
реализуемой частотной передаточной функции М^з.опт (/^)
производится в следующем порядке:
1. Вычисляем суммарную спектральную плотность
управляющего сигнала и помехи и представляем эту сумму в виде
двух комплексных сомножителей:
Su И « 5^ И + S, (со) = ^ ijio) V (^/со).
2. Выделяем составляющую 1/Ч^(/со).
3. Раскладываем на простейшие слагаемые выражение
S^(co) Я(/со)/^(-/со) = Mi(/cd)/P(/co) + M2(/co)/P(-/co) и.
отбрасывая члены с полюсами, расположенными в нижней
полуплоскости корней, т. е. М2(/со)/Р(—/со), выделяем из него
физически реализуемую часть Mi(/co)/P(/co).
4. Определяем оптимальную физически реализуемую
частотную передаточную функцию системы:
""з.овт = Мг (/со) Р (/со). (9.121)
Можно показать, что при наличии взаимной корреляции
полезного сигнала и помехи оптимальная частотная
передаточная функция
(9.122)
4^(^/(0)
где Y(/co) W (~/co) = (со) = S^(co) + S^/(/co) + S/^(/co) +
+ S/(co); 5^Д/со), S/5(/co) — взаимные спектральные
плотности управляющего сигнала и помехи.
Оптимальную передаточную функцию Н^з.опт (^)
получают по найденной оптимальной частотой передаточной
функции 1Гз.опт (/w). подставляя в последнюю 5 вместо /со.
Затем в соответствии с полученной передаточной функцией
\у (s) выбирают элементы системы. Если часть
элементов задана и изменить их параметры не представляется
возможным, то в таких случаях задача сводится к выбору
параметров корректирующих цепей при найденной отпимальной
передаточной функции системы управления в целом и
известных передаточных функциях отдельных заданных элементов
системы.
В системе, имеющей оптимальную передаточную функцию,
получается теоретически достижимый минимум среднего
квадрата ошибки:
со
ёг„„ = -^ j {1//(;о))Г5,((о)-|иГ,.„„0'«)Р5„И}^со. (9.123)
Пример 9.6. На входе следящей системы действует случайный по-
лезный сигнал G (/). имеющий спектральную плотность
(о) ^ 2Dg Г^/(1 +ш« Г|) « 5^ (0)/(1 + со« Г|) .
где Sg (0) = 2Dg Tg — значение спектральной плотности полезного
сигнала иа нулевой частоте.
На полезный сигнал наложена случайная помеха F (/) типа
«белый шум», спектральная плотность которой равна 5/ ((о) = 5/ (О) =
= N, где Sf (0) — значение спектральной плотности помехи на
нулевой частоте. Корреляция между полезным сигналом и помехой
отсутствует.
Требуется определить оптимальную передаточную функцию
следящей системы и соответствующую ей дисперсию суммарной ошибки.
1. Вычисляем спектральную плотность суммарного входного
сигнала (/(/) = G (О + f (О и представляем ее о виде произведения
комплексных сомножителей:
Sg (0)+.S/ (0) (l+to^ П)
Su (t^) ^Sg (CO) + Sf (Ш) = rr^^^ ^
2. Определяем Y (/ш) и ^ (—/ь>). Д-^я чего раскладываем
полученное выражение иа комплексно-сопряженные мнoжитev^и:
(0) + 5/ (0) (1 + Г|) (1 + /соа) (I - /соа)
l+cu^rj i\+jii^Tg){\--]uTg)
ГАС а«Г^/уГр7: p = S^j(0)/5/(0).
Следовательно.
1 + /ша
Y ( -^/со) - VSg (0)+5/(0) ' .
3. Находим составляющую — • И (/со). В нашем случае для
V(—/со)
следящей системы Н (/(о) = 1, поэтому получаем
V<-/to) (1 + rj) У5д (0) + (0) (1 -/ша)
^. SgJO)
VSg{0) + Sf (0) (1 + /шГ,) (1 - /ша)
4. Раскладываем последнее выражение на простые слагаемые:
.IjlS^hu.^ ^Ji^l^l^ L_+_2 L_b
_ Ml (/о) М, (/ш)
ЯОш) Я (-/о) •
отбрасывая члены с полюсамп, расположенными в правой
полуплоскости, выделим физически реализуемую часть:
Mt (/со) Sg (0) Г,
1_
5. Находим оптимальную частотную передаточную функцию
физически реализуемой системы:
,. , 1 (/ш) (0)
^_iV___J ^
,г ^1 <°> Р
где л = -— = ■ mzzr ^
5^(0)+ 5/(0) а+ 7-^ (1+Р)(1 + 1/УГТр")
« I —1/-J/1 _^р— коэффициент усиления замкнутой оптимальной
системы; Г = а = Tgf^l + р — постоянная времени замкнутой
оптимальной системы.
6. Подставляя в последнее выражение s вместо /со, находим опт-и
мальную передаточную функцию замкнутой системы:
«^8.с,пт(5) = /С/(1+5Л.
Подставляя числовые значения коэффициентов, получаем
/(=^1 —l/Vl+2.100.20/0,01 = 1—0,00156 1/с;
Г-=20 1/1+2.100.2/0,01 =0.032 с.
Следовательно, в нашем случае оптимальная передаточная функция
замкнутой системы
й^з,опт(5)=1/(1+5Г).
7. Определяем оптимальную передаточную функцию разомкнутой
системы:
«^опт (s) = й^э.опт (s)/ri - И^'з.опт (s)I= l/(sT).
8. Определяем передаточную функцию замкнутой системы по
ошибке:
И^йеопт(*)= 1/(1 +WonT {s)]=sTiO+sT).
9. Определяем спектральную плотность ошибки:
(«^) = I И^веопт W Р (со) +1 И^э.опт (/со) I* Sy (to) =
= [7^ (оV(I +<о« Г«)] {2Dg + со» Т"!)] +7V/( 1 + со» Я).
10. Определяем дисперсию ошибки:
оо
^8=-^ J Se(co)dco = Dgr/(74-7'g) + 7V/(2r) =
ОО
= 100.0,032/(0,032 + 20)+ 0.01/(2.0,032) =0,316.
Средняя квадратичсская ошибка, совпадающая в данном случае со
средним квадратическим отклонением, равна
ес.к = ае = 1/'^е= V0.316 = 0,562 В.
Оптимальный фильтр Винера. В тех случаях, когда иа
входе системы автоматического управления (см. рис, 9.16)
действуют полезный сигнал G{t) и помеха F{t), которые являются
коррелированными между собой стационарными
случайными процессами с равными нулю средними значениями,
оптимальная импульсная переходная функция системы йоат (0.
удовлетворяющая условию физической реализуемости lk{t) =
О при 01 и обеспечивающая минимум средней квадра-
тической ошибки, должна удовлетворять следующему
интегральному уравнению:
*»,»R.fr-4i»'-R»W-o, х-»0. (9.124)
где Rji) - /?^(т) + /?/(т) + Rgf(i) + Rfgi-z) -
корреляционная функция суммарного входного сигнала U{t) = G{t) +
I т
+ ^(0'. Rzu (^) = lii^ ^ j 2(0 г/ (/ + т) — взаимная кор
реляционная функция воспроизводимого выходного сигнала
Z (О и суммарного входного сигнала U (i).
Уравнение (9.124) было получено Н. Винером в 1949 г. и
называется интегральным уравнением Винера — Хопфа.
На основе решения уравнения (9.124) Н. Винером была
предложена общая формула для нахождения реализуемой
оптимальной частотной передаточной функции (оптимального
фильтра Вннера)
W^3.cn.(/'co) '
2лУ(/ы) .
оо
di f Aid/^ е/^'dco. (9.125)
где 5^^, (/со) = 5,.. (/со) + S^f (/со) — взаимная спектральная
плотность воспроизводимого выходного сигнала Z{t) и
суммарного входного сигнала (У(/). причем Y(/co) Y (—/со) =
- |¥(/со)Р = SJco) = S^co) + S/(co) + S^/(/co) + S/^(/co).
Следует обратить внимание, на то. что в (9.125) нижний
предел внешнего интеграла должен быть равен нулю.
Если корреляция между управляющим сигналом и
помехой отсутствует, то при применении (9.125) следует учесть,
что
(/со) =5,^ (/со) = (/со) 0. (9.126)
На основе общей формулы (9.125) как частные случаи могут
быть получены выражения для оптимальных частотных
передаточных функций систем (оптимальных фильтров),
осуществляющих при наличии помех воспроизведение полезного
сигнала, статистическое упреждение (предсказание),
дифференцирование и другие линейные преобразования управляющего
сигнала в соответствии с (9.107).
Например, если рассматривают задачу воспроизведения
полезного сигнала при наличии помех, то преобразующий
оператор H{s) =^ 1, тогда
Z (О - G (0; (со) ^ Sg (со) 4- Sf (со) + (/со) +
+ 5,, (/со);
(/со) = S,^ (/со) ^ S, (со) + (/со).
(9.127)
в этом случае (9.125) может быть представлено в более
простом виде:
^^з.опт И^) - В (У^)/"^ (;<^). (9-128)
Чтобы найти числитель выражения (9.128), разложим
5 ^(/ш)/^ (—/w) на простые дроби:
Il2L^^ У ^^^+ Х-_^+ у (9.129)
где ki — полюсы 5^ц(/(о), расположенные в верхней
полуплоскости; tii — полюсы Sg^ (/О)), расположенные в нижней
полуплоскости; Yi — нули Ч^(—/со).
Затем, отбрасывая слагаемые, имеющие полюсы в нижней
полуплоскости, 1юлучнм
где коэффициенты at определяют по формуле
а, =l(co-Xj)5^,(/co)/T(-/cD)l„_x... (9.131)
Формулы (9.129) и (9.131) относятся к тому случаю, когда
отношение Sg^^ (/{о)/Ч'(—/(о) не имеет кратных полюсов.
Если это отношение имеет кратные полюсы, то методика
определения B(jw) остается прежней, но формулы разложения
5^^(/со)/^(—/со) на простые дроби будут другими.
Частным, но весьма важным и распространенным на
практике является случай, когда помеха является белым шу.мом со
спектральной плотностью S/(o)) = 5/(0) = const, а
спектральная плотность управляющего сигнала S ^,(w) описывается
дробно-рациональной функцией
S^(co)«C,(co^/C2(co^. (9.132)
где порядок ^^(со^) превышает порядой Gi((d^).
Полезно запомнить, что в этом случае оптимальная
частотная передаточная функция может быть определена
следующим образо.м:
^п.оп. - I -КЗД /W (/(О). (9.133)
пример 9.7. Условия зада^^и такие же, как в примере 9.6.
Определить оптимальную частотную передаточную функцию системы.
Так как спектральная плотность помехи
Sf (ш) - 5/ (0) - - const,
а спектральная плотность полезного сигнала
Sg (со) =-5^ (0)/(1 +ш2 Г|) = 2Dg Tgl{\ +(0^ Г|).
то оптимальная частотная передаточная функция может быть
определена по (9.133):
«^З.ОПТ (/Ш) = 1 - 1/Sy (0)/ЧГ (/(О).
Подставляя в выражение для и^з.оцт (/^) Значение
^ (/со) - VS^(0)-!-S/(0) (I + /(dos)/(1 + /соГ^),
найденное в примере 9.6, получаем
ySg(0) + S/(0) l+zwos
VSg (0) + SylO) + ys7(0) ^ g V57(0)+S7(0) -Tg УЩЩ
ySg(0) + S;(0)(H-/c)a) "l/Sg(0) + Sy(0)(l + /(oa)
Так как (см. пример 9.6)
а = Г^/Vr+F= Tg VS7(0)/VSg(0)+Sy(0).
ТО второе мнимое слагаемое равно нулю и поэтому оптимальная частот-
ная передаточная функция системы
»^з.овт(/со) =
VSg(0)-\-Sf (0)(1+/оа)
где Р = 5^(0)/5у(0).
Найденное выражение для Wz.Qut U^)^ как и следовало ожидать,
полностью совпадает с результатом, полученным в примере 9.6.
Основополагающие результаты Н. Винера были получены
для случая, когда ко входу линейной системы приложены
стационарные случайные воздействия с равными нулю средними
значениями (центрированные случайные процессы).
В результате дальнейшего развития и обобщения методов
синтеза динамических систем при случайных воздействиях
были разработаны, например, методы синтеза при случайных
воздействиях, приложенных в разных точках системы;
методы синтеза при одновременном воздействии на систему
регулярных и случайных сигналов; методы синтеза систем с
ограниченной длительностью переходного процесса (с «конечной
памятью»); методы синтеза систем, содержащих случайные
параметры; методы синтеза систем при нестационарных слу-
чайных воздействиях; методы синтеза нелинейных систем, в
том числе с применением цифровых вычислительных машин,
и т. д.
В последнее время при расчете систем, находящихся под
воздействием случайных (в том числе и нестационарных)
процессов, широкое применение нашла теория оптимальных
фильтров, разработанная Р. Калманом и Р. Бьюси.
Оптимальный фильтр Калмана—Бьюси. Нахождение
оптимального фильтра Винера основывалось на использовании
интегрального уравнения Винера — Хопфа, при решении
которого стационарные случайные процессы рассматривались
в частотной области. В 1960 г. Р. Калман и Р. Бьюси
рассмотрели проблему линейной фильтрации во временной области
и, используя концепцию «пространства состояний»,
предложили новый эффективный метод синтеза оптимальных
систем по критерию минимума математического ожидания
квадрата случайной ошибки, применимый как для стационарных,
так и для нестационарных марковских случайных процессов.
Так как в основе используемой Калманом и Бьюси концепции
«пространства состояний» лежит предположение о том, что
случайный процесс является марковским, то их подход к
синтезу оптимальных линейных систем иногда называют
марковской теорией оптимальной линейной фильтрации.
Описывая все случайные процессы не с помощью
корреляционных функций или спектральных плотностей, а cf помощью
дифференциальных уравнений или уравнений состояния,
Калман и Бьюси показали, что при случайных воздействиях
оптимальная линейная система (оптимальный фильтр
Калмана — Бьюси) должна удовлетворять некоторой системе
неоднородных линейных дифференциальных уравнений.
Нахождение оптимальной системы по этим дифференциальньпу!
уравнениям намного легче, чем по интегр|1льным уравнениям
Винера — Хопфа, особенно в случае нестационарных
случайных процессов.
Вывод уравнений оптимального фильтра был выполнен
Калманом и Бьюси для многомерных случайных процессов.
Познакомимся с основной идеей метода Калмана — Бьюси на
примере более простых, но часто встречающихся на практике
одномерных фильтров.
Допустим, что синтезируемая система должна
воспроизводить некоторый сигнал Z(0. представляющий собой в общем
случае нестационарный случайный процесс. Пусть на входе
системы кроме этого сигнала действует также помеха F(t),
представляющая собой в общем случае нестационарный
случайный процесс типа «белый шум» с нулевым средним
значением. Таким образом, суммарный входной сигнал
U(t) ^ Z(t) + F(i). (9.134)
Для вывода уравнения одномерного оптимального
фильтра Калмана — Бьюси существенным является то. что
случайный процесс Z(t) должен быть сначала представлен диффе-
ренциальны.м уравнением первого порядка следующего вида:
dZ(t)/di = A(t)Z it) + К(/). (9.135)
где А (/) — некоторая функция времени, зависящая от
статистических характеристик случайного процесса Z(t)\ V(() —
нестационарный случайный процесс типа «белый шум» с
нулевым средним значением.
Корреляционные функции нестационарных случайных
процессов V(() н F(t) имеют вид
(^ т) =M [V^ (О V (т)1 = L{t)6(t^ т);|
R^^ (t, x)^MlF (О F (т)1 = TV (О 6 {t -т); (^• 136)
R.f{t. т)=0,
где L(t) и Л^(^) — непрерывные, непрерывно
дифференцируемые функции времени, причем
L(t) > 0; N (О > 0. (9.137)
В частном случае для стационарных случайных процессов
V{t) и F{t) их корреляционные функции
(т) = L6 (0; Rf (т) = N6 (/); (т) = 0. (9.138)
где L = const; N = const.
Если случайный процесс на выходе системы равен X(t), то
случайная ошибка системы £(/), равная разности между
воспроизводимым сигналом Z{i) и выходным сигналом X{t), имеет
вид
E{t) = Z(i) - X{t). (9.139)
Калман и Бьюси показали, что оптимальная система
(оптимальный фильтр Калмана — Бьюси), обеспечивающая в
любой момент времени i > Iq воспроизведение сигнала Z{f) при
минимуме математического ожидания квадрата случайной
ошибки, должна описываться неоднородным
дифференциальным уравнением вида
dX{t)/dt = Q(t) X{t) + C(t) U{ty (9.140)
Таким образом, при синтезе оптимального фильтра
Калмана — Быоси задача сводится к нахождению таких функций
времени (?(/) и С(/) в дифференциальном уравнении (9.140).
при которых обеспечивался бы минимум математического
ожидания квадрата случайной ошибки, т. е.
М1{ЕЦ)у] = Ml{Z{t) ХЦ)У] = min. (9.141)
'-Предполагая, что случайный процесс Z{t) представлен в виде
(9.135), приведем без доказателы-тва формулы для нахождения
функций Q{t) и С(0. при которых обеспечивается минимум
(9.141).
Прежде чем определить функции Q{t) и С(/), находят
некоторую функцию времени /'(/), равную математическому
ожиданию квадрата -случайной ошибки (дисперсии ошибки):
r(t) - Ml{Eit)yi (9.142)
она определяется как решение следующего
дифференциального уравнения Риккати:
dr{t)/dt = Ut) + 2A{t) r(f) — r\f)lN{t). (9.143)
Для решения (9.143) нужно знать начальное значение
r{Q при /о = 0. Обычно Х(^о) = О, поэтому
E{h)^Z(t,)^X{t,)^Z{UY
г (/о) = М \{Е {t,)Y\ = М [{Z (t,)Y\ ^ /?„ (/о. д. (9.144)
После нахождения функции r{t) определяют функцию
С{{) по формуле
С(0 ^ r{t)/N{t) (9.145)
и функцию Q{t) по формуле
Q{t) = Л(0-С(/). (9Л46)
Наиболее сложным этапом синтеза оптимальных фильтров
методом Калмана — Бьюси является решение уравнения
Риккати (9.143). В общем случае оно требует применения
ЭВМ.
Важное самостоятельное значение имеют также вопросы
исследования существования решения уравнения (9.143). его
единственности и устойчивости.
Считывая (9.146), уравнение оптимального фильтра
Калмана—Бьюси иногда записывают в следующем виде:
dX{f)/di = A(f) X(t) + C(i) lU{t) ^ X(f)\. (9.147)
Дифференциальному уравнению (9.140) соответствует
структурная схема оптимального фильтра, показанная на
рис. 9.19, а; дифференциальному уравнению (9.147)
соответствует структурная схема, показанная на рис. 9.1Q, б.
Таким образом, оптимальный фильтр Калмана—Бьюси можно
рассматривать как некоторую динамическую систему с обратной
связью, имеющую структурную схему, приведенную либо на
рис. 9.19, а, либо на рис. 9.19,6. Естественно, что обе эти
структурные схемы эквивалентны.
Для нестационарных случайных процессов функции А (/),
С(0. Q(0 зависят от времени и оптимальный фильтр Калмана—
Бьюси получается нестационарным.
Для стационарных случайных процессов функции A(t) =
= i4, а также в установившемся режиме функции C(t) = С;
Q(0 = Q = Л — С не зависят от времени, поэтому
оптимальный фильтр Калмана—Бьюси в этом случае является cmai^up-
парным, определяемым дифференциальным уравнением с
постоянными коэффициентами
dXit)/dt = (Л — С) X{t) + CU{t). (9.148)
Система описываемая (9.148), будет в установившемся
режиме воспроизводить на своем выходе стационарный
случайный сигнал Z{t) с минимальной средней квадфатической
ошибкой.
а)
u(t)
т
' I— " " "
Q(t)
X(t)
X(t)
Ad)
Рис. 9.19
- \Z(t)
A(t)
I
Рис. 9.20
Естественно, что для
стационарных процессов
результаты, полученные методом
Калмана—Бьюси и методом
Винера, совпадают.
Уравнение (9.148), полученное во
гвременной области, эквива-
!.лентио оптимальному
фильтру Винера, определяемому в
частотной области
уравнением (9.125).
Остановимся кратко на очень существенном для фильтров
Калмана—^Бьюси вопросе о возможности представления
случайного процесса Z(/) в виде дифференциального уравнения
(9Л35).
Нахождение (9.135) связано с задачей определения
формирующего фильтра (стационарного или нестационарного),
который при воздействии на его вход белого шума V(t) позволяет
получить на своем выходе заданный случайный процесс Z{i).
Структурную схему такого формирующего фильтра в
соответствии с (9.135) можно представить так, как показано на
рис. 9.20.
Для стационарных случайных процессов методы
определения параметров формирующих фильтров разработаны хорошо.
В этих случаях формирующий фильтр можно описать
обыкновенным дифференциальным уравнением с постоянными
коэффициентами или соответствующей передаточной функцией
формирующего фильтра (s). Особенно просто находится
передаточная функция формирующего фильтра в том случае,
когда выражение для спектральной плотности (со)
стационарного случайного процесса Z{f) имеет вид
дробно-рациональной функции частоты, т. е. когда выражение для спектральной
плотности может быть представлено в виде произведения двух
коми лек сно-сопр яжен ных множителей:
5, (со) = Si(/(o) Si(—/0)).
(9.149)
Пусть на входе формирующего фильтра действует стацио
нарный случайный сигнал V{t) типа «белый шум», имеющий
спектральную плотность Sp(co) == L, тогда спектральная
плотность сигнала на выходе формирующего фильтра
(со) I (усо) Г (со) </со) (~ /со) (со).
Учитывая (9.149). можно записать
S, (уш) S, (^/ш) « [VSA^) (Н] [VSA^) ( - /со)].
откуда частотная передаточная функция формирующего
фильтра
И^Ф (/о>) = 5, (/со)/]/5, (со) (/co)/l/i-. (9.150j
Подставляя в последнее выражение s = /со, получаем
выражение для передаточной функции формирующего фильтра
W^(s)^SAs)/VT, (9.151,
Зная передаточную функцию формирующего фильтра,
находим ди(})ференциальиое уравнение вида (9.135),
связывающее случайные процессы Z{t) и V(t).
Если спектральная плотность (ш) не является дробно-
рациональной функцией частоты или получена
экспериментально, то для нахождения формирующего фильтра ее нужно
сначала аппроксимировать дробнограциональной функцией
частоты.
В заключение следует отметить, что если входные
воздействия являются стационарными случайными процессами, то
метод Калмана—Бьюси не имеет преимуществ перед методом
синтеза оптимальных фильтров Винера. Этот метод в основном
применяют для синтеза оптимальных нестационарных
линейных фильтров.
Он позволяет также достаточно просто находить
структуру и параметры оптимального фильтра и в том случае,
когда воспроизводимый сигнал Z(t) описывается полиномом со
случайными коэффициентами:
Z(/)-flo+Oi^ + ...-bo,r.
где Со. «1 — случайные величины с известными
статистическими характеристиками.
Синтез оптимальных линейных фильтров
Калмана—-Бьюси, проведенный первоначально для помехи в виде белого
шума, был в дальнейшем развит на более общие случаи,
например иа случай коррелированных' помех, имеющих
неравномерную спектральную плотность, на случай нелинейной
фильтрации и др. Заметим, наконец, что оптимальные
фильтры Калмана—Бьюси, как и оптимальные фильтры Винера,
позволяют решать не только задачу оптимального воспроизве-
дения сигнала на фоне помех (фильтрации), но и задачи
статистического упреждения, статистического
дифференцирования и т. д.
Пример 9.8. На входе линейной следящей системы действует
стационарный случайный процесс G (0. спектральная плотность которого
5^ (0d) = 5^ (0)/(1 +0)2 Tl)^2Dg Tg/(\ +0)2 Г|)
'и случайная помеха F (f) типа «белый шум», имеющая спектральную
плотность
5Пш) = 5/(0) = Л^.
Числовые значения коэффициентов
0^=100 В2; Г^ = 20с; = 0.01 В/Гц.
Определить методом Калмана—Бьюси оптимальную передаточную
функцию системы, обеспечивающую минимум средней квадратической
ошибки.
1. Так как система предназначена для воспроизведения
полезного сигнала G (t), то преобразующий оператор Н (s) = 1,
воспроизводимый сигнал Z (/) = С (/) и, следовательно, 5^ (со) = Sg (о)).
В соответствии с (9.149) представляем выражение для спектральной
плотности 5^ (о)) в виде произведения комплексно-сопряженных
сомножителей ^
и находим
S, (/a)) = VS^10)/(l+W.
2. Рассматривая заданный стационарный случайный процесс G (i)
как реакцию некоторого формирующего фильтра на стационарный
случайный процесс V (/) типа «белый шум», имеющий спектральную
плотность Si, (а) = L, находим частотную передаточную функцию этого
формирующего фильтра по (9.150):
VSi,(o)) V L l—jcaTg
3. Находим передаточную функцию формирующего фильтра:
^Ф^'^- V(t) V L \+sTg
4. Полученной передаточной функции формирующего фильтра
соответствует следующее дифференциальное уравнение, связывающее
случайные процессы G (/) и V {():
п. (О -л (0) dGj[t) 1
Чтобы привести последнее дифференциальное уравнение к виду
(9.135), примем, что спектральная плотность белого шума равна
Sv (CD) «= L = 2Dg/Tg, тогда VSg (0)/£Г| = 1 и окончательно
случайный процесс G (/) можно представить как
dG (tydt = (О + V (О,
где А = —
Соответствующая этому дифференциальному уравнению
структурная схема формирующего фильтра показана на рис. 9.21, а,
5. Уравнение (9.143) в данном случае имеет вид
dr {t)/di = L + 2i4r (t) - г2 (t)/N.
При постоянных значениях коэффициентов А, L и N это
дифференциальное уравнение является уравнением с разделяющимися
переменными и приводится к следующему виду:
J dr/{L + 2Ar rVN) 1 d/ = 0.
Интегрируя no общим правилам, получаем
\^r/N + A — УЖГШ
In
где — постоянная интегрирования.
Последнее выражение можно переписать следующим образом:
(^rlN + A + yA^ + L/N)C
Новую постоянную интегрирования С находят из начальных
условий при ^ = /о = 0. В соответствии с (9.144), начальное значение
дисперсии ошибки г (/о) = Rgg (/ft, /о) ^ Rg Ф) ~ ^gt поэтому
постоянная интегрирования получается равной
-^Dg/N+A^yA^ + L/N
- Dg/N + А + y^fljN
Таким образом, можно записать
{^r/N + A^УЖfШ){-Dg/N + A + УA^TШ) _
{^rJN + A^yA^ + L/N){^Dg/N + A-^yA^+LiN)
Учитывая, что L = 2Dg/Tg, А = —\/Tg, и производя
соответствующие преобразования, окончательно получаем
r(t) = — Q'5p(l + Vr+p)-0>5p(l + yr+pje^' ^^2)
T'g (1+0,5р-~УГ:Г^)-(1+0,5р + УТТр)еР' ' \
где р == (0)/5/ (0) — отношение спектральных плотностей воспро-»
изводимого сигнала и помехи, на нулевой частоте.
О)
V(t)\
I
V(t)\
*—11/Ts h I
V(t)\
Рис. 9.21
Подставляя в (9.152) oo, находим выражение для дисперсии
ошибки в установившемся режиме:
* 1+0.5P4-VT+P
2Д
yi+P+1
6. в соответствии с (9.145) находим функцию С (0:
г(0 1
С(/) =
X
0.5р(1 -Vl+p)-0.5(l+Vl+p)eP*
(9.153)
(1+0,5р - Ун-р)-(14-0,5р + УТ+р) еР'
Из (9.153) находим начальное значение коэффициента С (0) (при
/в=0). т. е.
С(0) = р/2Г^ = О^/ЛГ,
и значение коэффициента С (оо) в установившемся режиме (при tоо)
т. е.
C(oo) = p/[7-g(l+yi+p)l.
7. Дифференциальное уравнение оптимального фильтра
Калмана—Бьюси в соответствии с (9.147) имеет вид
dX {f)/dt - —X {t)/rg + C(t)lU {t) — X (f}b
Структурная схема, соответствующая этому дифференциальному
уравнению, приведена на рис. 9.21, б. Заменяя интегрирующее звено,
охваченное обратной связью, инерционным звеном, можно представить
структурную схему так, как показано на рис. 9.21, в. Используя эту
структурную схему и значения передаточных функций отдельных ее
динамических звеньев, определяем для установившегося режима
передаточную функцию замкнутой оптимальной системы:
«^з.опт (S) = [С (оо) Tg/(\^sTg)]/l\+C {со) Tg/(\+sTg)]=K/{\ -hTs).
где
^^_CJco)7^^ р _!
Tg Tg Tg
\+c{co)Tg ,+p/(i4.yr+^) УТТР
Полученное выражение для передаточной функции
оптимального фильтра Калмана—Бьюси полностью совпадают с
выражением для передаточной функции фильтра Винера,
найденного в примерах 9.6 и 9.7.
Следует обратить внимание на то, что даже при
стационарных случайных воздействиях в переходном режиме
оптимальный фильтр Калмана—Бьюси является нестационарным,
поскольку коэффициент C{f) изменяется во времени.
§ 9.8. Случайные процессы в линейных
импульсных системах
Аналогом непрерывной реализации Xi{t) случайного
процесса Х(7) для импульсных систем является дискретная
(решетчатая) реализация jc^ 1л1 (рис. 9.22, с), представляющая
собой последовательность ординат, совпадающих с
соответствующим значением непрерывной реализации Xi(f) в
дискретные моменты относительного времени t = tIT = м, где Т —
период квантования.
Совокупность решетчатых реализаций Xi In] называют
дискретным {решетчатым) случайным процессом Х[п1. Дискретные
случайные процессы, по аналогии с непрерывными случай-
О)
К
7 -J-2'to 12 3m 'ЗЯ-2Я'Я 0 Ti гя ЗЛ
Рис. 9.22
ными процессами, могут характеризоваться такими
статистическими характеристиками, как математическое ожидание
(момент первого порядка), корреляционная функция (момент
второго порядка) и т. д.
Математическое ожидание и корреляционная функция (а
также любые моменты т-го порядка) дискретного случайного
процесса равны математическому ожиданию и
корреляционной функции (моменту т-го порядка) соответствующего
непрерывного случайного процесса, взятым в дискретные
моменты времени 7 = п.
В дальнейшем будем рассматривать стационарные эрго-
дические случайные процессы. В этом случае среднее значение
по множеству (математическое ожидание) равно среднему
значению по времени, которое определяется следующей суммой:
1
2 -^w.
(9.154)
где X In] — любая реализация дискретного случайного
процесса.
Среднее значение квадрата стационарного случайного
процесса (с равным нулю средним значением) называют
дисперсией дискретного случайного процесса:
lim
I
2 ^^иь
(9.155)
Корреляционной функцией стационарного дискретного
случайного процесса (с равным нулю средним значением)
X [п] является неслучайная дискретная (решетчатая) функция
R^lml^Vm-—^ 2 xln]x[n + ml (9.156)
где m = О, 1, 2, ... —дискретные значения относительного
времени.
Дискретная корреляционная функция обладает
следующими основными свойствами:
1. Начальное значение дискретной корреляционной
функции (при /72 = 0) равно дисперсии дискретного случайного
процесса:
[0] =. Ilm —' У л:^ [п] D^.
2. Дискретная корреляционная функция при m = О
достигает наибольшего значения:
/?Л01>/?^ [mj.
3. Дискретная корреляционная функция является четной:
[ml = R^\—mV
При наличии двух дискретных случайных процессов.,
Х{п\ и С1/г1, вводят понятие взаимной корреляционной функции
/?,,[ml=Iim—i— У x{n]g{n + fnl (9.157)
Пак —^/
свойства которой схожи со свойствами взаимной
корреляционной функции для непрерывных случайных процессов. Так,
например,
а в случае, если Х\п\ и С[/г] статистически независимы
(взаимно некоррелированы), имеем ,
Спектральная плотность дискретного случайного процесса
по аналогии с обычной спектральной плотностью находится
как дискретное преобразование Фурье от ординат дискретной
корреляционной функции:
2 ^?Л^]е~/-", (9.158)
т= — оо
где 1о = (оТ — относительная круговая частота.
Спектральная плотность Sx((o) дискретного случайного
процесса связана со спектральной плотностью 5д.((о)
соответствующего ему непрерывного случайного процесса:
2 5Л« + 2ял). (9.159)
Из (9.159) видно, что спектральная плотность дискретного
случайного процесса является периодической функцией
частоты со.
Графики типичной корреляционной функции R^lfn]
дискретного стационарного случайного процесса и
соответствующей ему спектральной плотности 5л(со) приведены на
рис. 9.22, б, в.
Взаимную спектральную плотность двух дискретных
случайных процессов можно определить через взаимную
корреляционную функцию:
S:Ai^= i /?.^/nIe-/--. (9.160)
Корреляционные функции и спектральные плотности диск*
ретного случайного процесса связаны следующими
зависимостями:
St
Rx I'"! J wmdco; (9.161)
0
л
Rxglm] = -^ J S;g(/^e/"'»d©. (9.162)
— л
Ha основании (9.161) полагая m == О, получаем
л
= (01 = ^ j'S: (ю) rf©. (9.163)
Из (9.163) видно, что дисперсия дискретной случайной
функции пропорциональна значению интеграла от О до л от ее
спектральной плотности.
Методы расчета импульсных систем автоматического
управления при случайных воздействиях аналогичны методам
расчета непрерывных систем. Как и в непрерывных системах
(см. § 9.6). каждую координату линейной импульсной
системы можно представить в виде двух составляющих:
эквивалентной регулярной составляющей и центрированной
случайной составляющей. Каждую из составляющих находят
отдельно, а затем на основании принципа суперпозиции
складывают. По аналогии с непрерывными системами чаще всего
при практических расчетах используют зависимости между
спектральными плотностями дискретных случайных сигналов
входной величины G[n] и ошибки Е1л1.
Рассмотрим линейную импульсную систему, дискретная
передаточная функция которой, связывающая входной сигнал
в ошибку, равна Wg^(z)- Пусть на вход этой системы поступает
стационарный случайный процесс G{i), равный С(0 = /п^ +
где /п- = const — математическое ожидание (среднее
значение) стационарного случайного процесса; С(/) —
центрированная составляющая случайного процесса. Для
центрированной составляющей случайного процесса должна быть
задана спектральная плотность 5^(а)).зная которую, ^ожно
определить по (9.159) спектральную плотность S^(co).
Тогда дискретная спектральная плотность Si (со) ошибки
импульсной системы определяется по формуле
Sl(io)=^\WlAM\'Sl(^, (9.164)
где Wis (/ю) = Wg^{z)\^_^^- — частотная передаточная
функция замкнутой импульсной системы по ошибке.
Зная спектральную плотность ошибки Sc(o)), можно по
(9.163) определить дисперсию ошибки D ^.
Регулярная составляющая (математическое ожидание)
дискретной случайной ошибки в данном случае определяется
через частотную передаточную функцию замкнутой
импульсной системы по ошибке:
Ше = (0) = const. (9.165)
в общем случае, когда эквисалеитпая регулярная
составляющая входного сигнала т g{t) (включающая в себя как
математическое ожидание входного случайного процесса, так
и регулярный внешний сигнал) изменяется во времени,
регулярная составляющая ошибки т J.n] также будет изменяться
во времени.
Регулярную составляющую дискретной ошибки mj^n],
обусловленпую, например, действием регулярного входного
сигнала m^^t), можно определить, используя различные
способы. В общем случае по известной дискретной передаточной
функции Wgt{^) сначала находят Z-изображеиие регулярной
составляющей ошибки rnjj), а затем находят регулярную
составляющую (оригинал) ошибки, вычисляя интеграл
обращения с помощыр теоремы вычетов.
При медленно изменяющемся входном сигнале mg{i)
установившееся значение регулярной составляющей ошибки т ^[п\
можно определить, например, способом, аналогичным
способу коэффициентов ошибок для непрерывных систем,
разлагая изображение регулярной составляющей ошибки ni^{z)
в степенной ряд.
Расчет дисперсии по формуле (9.163) существенно
упрощается в тех случаях, когда случайная функция G{f)
представляет собой центрированный случайный процесс, эффективное
врем51 корреляции которого меньше периода квантования.
В этом случае считают, что
Rg [т] - О при |т| > Г.
и представляют случайный процесс как белый шум с
корреляционной функцией
Rg [ni\ = Rg[0\ 6o[m],
где R= — дисперсия входного воздействия; [т] —
единичная решетчатая импульсная функция, равная единице
при ш = О и равная нулю при т Ф 0. Этому белому шуму
соответствует спектральная плотность
S;(w)=/?[0]=D,.
При расчете замкнутых импульсных систем, на которые од-
новременно воздействуют полезный сигнал п помеха, часто
интересуются точностью системы, характеризующейся
средним значением квадрата дискретной случайной ошибки и
определяемой по формулам, аналогичным по своей структуре соот-
ветствующим формулам для непрерывных стационарных
систем.
Например, если на вход импульсной системы поступают
случайные стационарные статистически не связанные
(некоррелированные) полезньтй сигнал G (t) и помеха F (/), то
спектральная плотность Sc (со) дискретной случайной ошибки
где SI (со), Sf (со) — дискретныеспектральные плотности вход-
дого сигнала и помехи; W^z (/со), Wfe (/со) — частотные
передаточные функции замкнутой импульсной системы,
связывающие соответственно полезный сигнал и помеху с ошибкой.
Дисперсию дискретной ошибки определяют через
спектральную плотность по формуле (9.163).
Среднее значение квадрата установившейся дискретной
ошибки
где m^ln] — эквивалентная регулярная составляющая
ошибки; Z)e — дисперсия ошибки.
Аналитические вычисления по (9.165) в общем случае
являются достаточно трудоемкими, однако при определенных
условиях их можно свести к вычислению табличных
стандартных интегралов, с помощью которых, аналогично тому, как
это делается для непрерывных систем, можно выразить
значение дисперсии ошибки через параметры импульсной системы
и дискретных спектральных плотностей внешних воздействий.
Приведенные выше формулы записаны для дискретных
относительных моментов времени (моментов квантования),
соответствующих значениям п = О, 1, 2, ... . Однако они могут
бьггь записаны не только для моментов квантования, но и для
любого момента времени между ними (л + где О < | < L
В последнем случае рассматривают смещенные дискретные
(решетчатые) функции х [п, g], е [п, El, соответствующие
передаточные функции импульсной системы Wgx (/со, I), Wfe{i<0,
I) и корреляционные функции Rxirn, Й, Reifn,
Следует отметить, что имеются также аналитические
методы решения задач оптимизации импульсных систем при слу-.
чайных воздействиях, которые аналогичны методам
оптимизации для непрерывных систем, однако они применимы только
для ограниченного класса систем и довольно громоздки.
Поэтому на практике в большинстве случаев исследования
импульсных систем при случайных воздействиях проводят
методами моделирования.
§ 9.9. Нелинейное преобразование случайных сигналов
Нелинейные элементы в общем случае вызывают
искажение входного случайного сигнала. В нелинейных системах
принцип суперпозиции неприменим, поэтому при
одновременном воздействии на систему, например, полезного
регулярного сигнала и случайной помехи из-за нелинейного
преобразования этих сигналов помеха может значительно
уменьшить эффект действия полезного сигнала.
Допустим, что на вход нелинейного элемента поступает
случайный сигнал
Y{t)=^my{t) + Yif), (9.166)
где niy^f) — математическое ожидание (среднее значение)
входного воздействия; Y{t) — центрированная случайная
составляющая входного воздействия.
Предполагая, что случайный процесс является
стационарным, т. е. my{t) = /Пу == const, рассмотрим, как будет
искажаться входной случайный сигнал при прохождении его,
например, через нелинейный безынерционный элемент с зоной
насыщения (рис. 9.23).
При малом уровне помех, когда входное воздействие не
выходит за пределы линейного рабочего участка, имеющего
угол наклона а, выходной сигнал равен
X{t)^kY{t) ^k[my + Y{t)] -m^+ X{t), (9.167)
где = tga—коэффициент усиления элемента; m^==^kmy—
математическое ожидание сигнала на выходе элемента; X[t) =
= kY{t) — центрированная случайная составляющая
сигнала на выходе элемента.
В этом случае среднее значение выходного сигнала
пропорционально среднему значению входного сигнала гПу,
С ростом уровня помех, когда входное воздействие
выходит за пределы линейного уч ютка, среднее значение выходного
сигнала уменьшается и при очень большом уровне помех
оказывается близким к нулю.
Таким образом, увеличение уровня помех, определяемого
дисперсией случайного входного сигнала, уменьшает
полезный сигнал на выходе нелинейного элемента, что
эквивалентно уменьшению коэффициента преобразования нелинейного
элемента.
Одновременно с этим выходной сигнал обогащается как
высокочастотными, так и низкочастотными гармониками, т. е.
происходит изменение спектрального состава выходного
случайного процесса по сравнению со спектральным составом
входного случайного процесса.
Допустим, например, что на нелинейный элемент типа
насыщения поступает случайный сигнал, среднее значение
которого/?! у, а плотность вероятности w{y) соответствует нормальному
закону распределения (рис. 9.24).
Линейный участок характеристики в пределах ±:Ь не
оказывает влияния на форму кривой плотности вероятности,
т. е. ш(х) = w{y) при < ^.
Выходной сигнал нелинейного элемента не может
превышать уровня насыщения В, поэтому вероятность появления
сигнала, большего по абсолютной величине, чем Б. равна нулю,
т. е. w{x) О' при \у\ > Ь.
xfif
Рнс. 9.23
Всем значениям
входного сигнала у > b у\ли у <
будет соответствовать
значение выходного сигнала х = В
^j^^ ^ ^ поэтому
вероятность получения величины
В или —В на выходе
нелинейного элемента сильно
возрастает и становится равной
величине заштрихованной
площади под участком
кривой плотности вероятности
входного сигнала, лежащей
в пределах от у = Ь до г/ = со.
Это выразится в том, что
плотность вероятности
выходного сигнала w{x) в точках
у = -^Ь будет представлять
собой 6-функции, т. е.
импульсы бесконечно большой
величины и бесконечно малой
ширины, площадь S которых
равна заштрихованной
площади под соответствующим
(правым или левым)
участком кривой плотности вероятности входного сигнала.
Таким образом, выражение для плотности вероятности
выходного сигнала можно записать так:
w(jy) при \у\<.Ь\
w{x)^ 6(i/Tb) прн li^I-b; (9.168)
О при \у\>Ь,
Общая площадь под кривой плотности вероятности выходного
сигнала, естественно, остается равной единице, т. е. [ ш (х)с(ш =
Исследование нелинейных систем, находящихся под
воздействием случайных процессов, значительно сложнее, чем
линейных систем.
Обш^их точных методов исследования подобных систем нет.
и для изучения систем в этом случае обычно используют
приближенные методы.
§ 9.10. Статистическая линеаризация нелинейных
элементов
Наибольшее распространение в практике расчета
нелинейных систем при случайных воздействиях получил
приближенный метод, называемый методом статистической
линеаризации, разработанный в 1954 г. одновременно И. Е.
Казаковым в СССР и Р. Бутоном в США.
Идея метода основана на приближенной замене
нелинейных преобразований процессов, происходящих в системе,
статистически эквивалентными им линейными
преобразованиями, при этом нелинейный элемент заменяется
статистически эквивалентным линейным элементом. В результате такой
замены система в целом линеаризуется и для ее исследования
можно применять аппарат линейной теории.
Возможны различные критерии статистической
эквивалентности, которые могут быть положены в основу метода
статистической линеаризации. В тех случаях, когда линеаризуют
безынерционный нелинейный элемент, у которого
нелинейная зависимость между входным y(t) и выходным x{t) сигналами
имеет вид
^(0 = ф 1^/(01. (9-169)
где ф — статическая характеристика нелинейного
элемента, применяют следующие два критерия:
1. Критерий равенства математического ожидания и
дисперсии случайного процесса на выходе нелинейного элемента
и эквивалентного ему линейного элемента.
2. Критерий минимума математического ожидания
квадрата разности случайных процессов на выходе нелинейного
элемента и эквивалентного ему линейного элемента.
Познакомимся с этими критериями, ограничиваясь
рассмотрением только однозначных нелинейных Характеристик,
которые могут быть либо нечетными, либо четными.
Напомним, что для нечетных и четных характеристик
соответственно справедливы соотношения
ф(-1/) == -ф(у); (9-J 70)
Ф(-У) - фО/)- (9171)
Случайные процессы на входе и выходе нелинейного
элемента могут быть представлены следующим образом:
yit)-niy{t) + Y(t): (9.172)
Х(/)=тЛО+Х(0. (9.173)
где ту{0* — математические ожидания входного и
выходного сигналов соответственно, включающие медленно
меняющиеся регулярные составляющие; Y{t), X(t) —
центрированные случайные составляющие процессов на входе и
выходе нелинейного элекеита соответственно.
Заметим, что для четных нелинейных характеристик,
обладающих выпрямляющими свойствами, математическое
ожидание тдс(0 отлично от нуля даже при my{t) = 0.
В общем случае для однозначной нелинейной функции
ц>(у) произвольного вида сигнал на выходе эквивалентного
линеаризованного элемента
и (t) = Фо {^у) -Ь ^1 у (О -т, (О + и (0. (9.174)
где Фо i^y) математическое ожида1П1е нелинейной функции
<p(i/)» '^i эквивалентный статистический коэффициент
усиления по случайной центрированной составляющей.
Таким образом, в общем случае нелинейный
безынерционный элемент (рис. 9.25. а) заменяют двумя безынерционными
элементами: нелинейным по математическому ожиданию
и линейным по случайной центрированной составляющей
(рис. 9.25, б).
В частном случае, когда нелинейный безынерционный
элемент имеет нечетную характеристику, функция фо может быть
представлена в виде
Фо - k,m,{t), (9.175)
где — эквивалентный статистический коэффициент
усиления нелинейного элемента по математическому ожиданию (по
средней составляющей).
В этом случае нелинейный элемент можио эквивалентно
заменить двумя линейными элементами с коэффициентами
усиления и ki (рис. 9.26). Числовые значения этих
коэффициентов при заданной нелинейной зависимости ф определяются
значениями математического ожидания и дисперсии случайного
сигнала на входе неляненного элемента.
Покажем сначала, как находят ко?>(}у}лплиенты ф^,, Л©» в
случае статистической линеаризации, основанной на первом
а)
YU)
9
Xlt)
yft)
U(t)
Рис. 9.25
Рис. 9.26
Критерии статистической эквивалентности^ состоящем в
выполнении равенства математического ожидания и
дисперсии случайного процесса на выходе нелинейного элемента и
эквивалентного ему линейного элемента, т. е. когда
mAt)^mAt)\ (9.176)
DAt)^DAr)- (9.177)
Принимая во внимание (9.174). получаем
Фо=-т,(0-/пЛО. (9.178)
Для нечетных нелинейностей. учитывая (9.175). получим
/jo = m^(0/mj,(0. (9.179)
Чтобы найти статистически эквивалентный коэффициент
ky, перепишем (9.177) следующим образом:
(О ^(О ^М\{и {t)Y\ ^= М Y + ft? D, (0.
откуда
k, ^kV'== VD, {t)/Dy (/) = ±c^ {t)/Oy (0. (9.180)
Обозначение ft*/^ показывает, что коэффициент ki найден
по первому критерию эквивалентности.
Статистические коэффициенты фо. ft о и ftj^' можно также
выразить через нелинейную зависимость ср и плотность
вероятности w{y) случайного сигнала Y{t) на входе нелинейного
элемента:
Ф,:=^т,(0« J ^(y)w(y)dy\
(9.181)
oo
= « -—I— [ ^(y)w (y) dy; (9.182)
— oo
oo
j ^''{y)w{y)dy -ml{t)
VDy(t)
9.183)
Знаки в (9.180) и (9.183) следует выбирать такими, чтобы
знаки X(t) и U{t) совпадали.
Второй критерий статистической эквивалентности
требует выполнения условия минимума математического
ожидания квадрата разности процессов на выходе нелинейного
элемента и эквивалентного линейного элемента, т. е.
(О- V (t)Y\ = min. (9.184)
Подставляя в (9.184) значения X{t) и f/(/). определяемые
по (9.173) и (9.174), получим
ё^^ уМ [{т^ (О + X (0~ Фо -k^y (t)Y\ = min.
После выполнения операции возведения в квадрат и
вычисления математического ожидания имеем
? = ml (t) + (О + + *i (О -
^ 2(ро (О о (0) - miп, (9.185)
где mJJ) — математическое ожидание случайного процесса
на выходе нелинейного элемента; Dy{t) = УИ[{К(/)}^1, D^it) =
=^ Al[{Xo(OF] —дисперсия центрированного случайного
процесса на входе и выходе нелинейного элемента соответственно;
(^) (^) = ^^1^ (О ^ (01 — математическое
ожидание (среднее значение) произведения двух случайных
функций >?^(?/) и Y{t)y равное начальному значению взаимной
корреляционной функции (0).
^^=Шри заданных значениях m^it), Dy(t), D^{t), R^°y{0)
величина является функцией параметров фо и k^.
Значения фо и ki, при которых выполняется (9.184),
найдем, если приравняем нулю частньге производные функции
по параметрам фо и kj^. Имеем deVd^>q = 2фо — 2m^; {t) =
== О, откуда
Ф,^-т,(0. (9.186)
в случае нечетной нелинейной характеристики ф,
учитывая (9.175), получаем следующее выражение для
коэффициента k^:
ko^m^{t)/my{t). (9.187)
Значение коэ(1х|)ициента находим из
d'eVdk, -2ft,D,(0-2/?^j (0) =0,
откуда
k,^k\''=R^, (0)/D^(0 = /?,j KO)fRs (0). (9.188)
Обозначение k\^^ показывает, что коэффициент найден
по второму критерию эквивалентности.
Статистический коэффициент ki^^ можно выразить также
через плотность вероятности w(y) входного случайного
сигнала Y{t) и нелинейную зависимость ф, т. е.
(!/-rn,)^(y)w{y)dy. (9.189)
где J {у-т^)ф{у)w(у)dy ^ х(t) °y{t)=D^<^=R^. (0).
— сх>
Обычно значение коэффициента k\^\ определенное из
первого критерия по (9.180), является несколько завышенным,
а fti^\ определенное из второго критерия по (9.188), —
несколько заниженным, поэтому при расчетах рекомендуется
брать их среднее арифметическое значение, т. е.
ifei-(M*'+*n/2. (9.190)
Сравнивая (9.178), и (9.179) с (9.186) и (9.187), видим, что
коэффициенты фо и получаются одинаковыми при
статистической линеаризации как по первому, так и по второму
критерию.
Из (9.181), (9.182), (9.183) и (9.189) видно, что
статистически эквивалентные коэффициенты усиления зависят не только
от вида характеристики нелинейного элемента ф((/), но и от
закона распределения (плотности вероятности) случайного
процесса на входе нелинейного элемента w {уУ
При использовании метода статистической линеаризации
приближенно полагают, что закон распределения случайного
процесса является нормальным. Такое предположение можно
сделать потому, что при прохождении случайного сигнала с
любым законом распределения через линейные инерционные
звенья на выходе последних закон распределения случайного
сигнала оказывается близким*к нормальному. При этом чем
инерционнее система, тем закон распределения случайного
сигнала на ее выходе ближе к нормальному. Наличие
нелинейного элемента в системе нарушает это, однако при
достаточно узкой полосе пропускания линейной части системы
имеется тенденция к восстановлению нормального закона
распределения.
При нормальном законе распределения плотность
вероятности однозначно определяется математическим ожиданием и
дисперсией случайного процесса, поэтому в этом случае
коэффициенты ко и fti будут лишь функциями математического
ожидания гПу и дисперсии Dy входного сигнала, т. е.
ko^koitrty, Dy)\ k,=:k,{my, Dy), (9.191)
To обстоятельство, что коэффициенты и зависят
от параметров Шу и Dy входного сигнала, отражено на
рис. 9.26 пунктирными линиями.
Формулы (9.181), (9.182), (9.183) и (9.189) при нормальном
законе распределения будут иметь следующий вид:
Фо = ? Ф {у) е-С -'%)V(^^) dy; (9.192)
J 1/2 л Dp
—■ ОО
k,^l-l ^^y)-4—e-(y--ym^^y)dy- (9.193)
YOy I У2лОу
(9.194)
Если умножить выражение (9.193) на т^, затем
продифференцировать произведение к^Шу по гПу и сопоставить
полученное выражение с (9.195), то можно убедиться в выполие
НИИ следующего равенства:
к\^' (Ло my)/dmy ^dmjdniy -dfgjdniy. (9. i 96)
1
V2nDy
1/2
Соотношение (9Л96) может быть использовано как для
нахождения коэффициента k\^^ вместо (9.195), так и для
проверки правильности определения коэффициентов фо, ко и k[^\
Пример 9.9. Ва входе нелинейного элемента, имеющего
статическую квадратичную зависимость х ~ ц> [t/) ^ kt/^ между входным и
выходным сигналами, действует случайный сигнал Y{t)^ гПу-bf'U),
имеющий нормальный закон распределения. Определить эквивалентные
статистические коэффициенты усиления фд и fz^K
1. Так как характеристика нелинейного элемента является
четной, то в соответствии с (9.181) функция фо равна
^k(ml^ Dy) ^kDy (1 + m2/0„).
2. Ha основании (9.196), дифференцируя полученное выражение
для Фо. определяем коэффициент A;<f>:
Пример 9.10. На входе нелинейного элемента типа идеального
реле (рис. 9.27, а) с характеристикой
.\:=ф {у)=^В sign 1/^
В при [/>0;
~В при [/ <0
действует случайный сигнал У (/) = гПу (t) + ^ (О» имеющий
нормальный закон распределения. Определить эквивалентные статистические
коэффициенты усиления нелинейного элемента fep. ^'i*-
1. Определяем эквивалентный статистический коэффициент
усиления по математическому ожиданию ко по (9.193), т. е.
Вводя обозначение
((/—ту)/Уо;=г.. (9.197)
а)
I)
В.8
к'
/
t 2
Рис. 9.27
получаем
У:
»/у^
''2л i VI
— у/У",
2В
У2^
[Ф (т„/Уо„1. (9.198)
где
Ф (m„/yzj;;) —^ с e-*'/^J^
У2л J
-"■«/У'^у
2. Определяем эквивалентный статистический коэффициент уси-
лемия к^\^ по случайной составляющей по (9.183).
Учитывая, что
со
_ оо
получаем
И—4ФЧт^/У5:)1^/-. (9.199)
3. Определяем эквивалентный статистический коэффициент
усиления ft<}> по случайной составляющей по (9.195):
о
Учитывая (9.197), получаем
^ (9.200)
Из (9.198), (9.199) и (9.200) видно, что при нормальном
законе распределения коэффициешъг k^. ki^^ и k\^^
выражаются через функцию Крампа (нормированный интеграл
плотности вероятности)
X
Ф(^с)=(1/1/"2^) je-^'/2d2. (9.201)
о
Для вычисления коэффициентов статистической
линеаризации достаточно знать математическое ожидание Шу и
дисперсию Dy случайного процесса на входе нелинейного элемента и
значения функции Крампа для аргументов, определяемых
через гПу и Dy.
Построенные по (9.198), (9.199), (9.200) графики
коэффициентов k, « ко (т^, Dy), kV^ = k\'> {ту. Dy) и k\'^ ^ {ту,
Dy) статистической линеаризации идеального реле приведены
на рис. 9.27, б, е. Из этих графиков видно, что релейный
элемент по отнои1ению к среднему значению входного сигнала
ту ведет себя как линейное звено, коэффициент усиления
которого к^ зависит от величины my/\^Dy,
Таким образом, случайная составляющая входного
сигнала создает эффект линеаризации нелинейного элемента для
регулярной составляющей (среднего значения) сигнала. Метод
статистической линеаризации формально похож на метод
вибрационной линеаризации нелинейного элемента колебаниями
высокой частоты постоянной амплитуды.
В свою очередь, регулярная составляющая входного
сигнала оказывает влияние на прохождение случайной
составляющей. Так, например, для рассмотренного нелинейного
элемента типа идеального реле передача случайной
составляющей ослабляется за счет насыщения нелинейного элемента
регулярной составляющей сигнала, поскольку коэффициенты
ft{*> и k\^^ уменьшаются с ростом т^.
Ограничения в использовании метода статистической
линеаризации обусловлены требованиями нормального закона
распределения случайного процесса на входе нелинейного
элемента, что выполняется достаточно хорошо, если линейная
часть системы будет обладать свойствами низкочастотного
фильтра.
Для нормального закона распределения значения коэ({х})и-
циентов Фо, ко, М^' и к\^^ для различных типовых
нелинейных элементов заранее определены по (9.192), (9.193),
(9.194), (9.195) и приведены в виде графиков зависимости этих
коэффициентов от математического ожидания Шу и дисперсии
Dy входного случайного сигнала. Использование этих
графиков значительно упрощает расчет конкретных систем
автоматического управления методом статистической
линеаризации. В приложении 9.2 приведены для примера формулы и
графики Фо {/Пу, Dy), feo {/Пу, Dy), к\^^ (/Пу, Dy), ^i^> {tUy, Dy)
для некоторых наиболее часто всгречающихся типовых
нелинейностей.
Метод статистической линеаризации особенно эффективен
при анализе стационарного режима рабогы системы
автоматического управления. В этом случае Шу = const, Dy ~ const
и коэф(|)ициенты статистической линеризации не зависят от
времени. Линеаризованная система является при этом
системой с постоянными параметрами и ее исследование может
быть проведено сравнительно просго.
В нестационарном режиме, который может быть вызван,
например, переходным процессом, нестационарностью
воздействий или самой системы, коэ({хрициенты статистической ли-
иеаризаиин изменяются во времени. Лниеаг)\13С'\^г'п\ц'{
система оказывается при этом системой с пе()ем1 riii;.:-!. >1)имет-
рами и ее исследование усложняется. Исследования системы
в этом случае могут производиться с помои.1,ью аналоговых или
цифровых вычислительных машин.
§ 9.П. Расчет нелинейных систем методом
статистической линеаризации
При расчете нелинейных систем ставится задача
определения в стационарном режиме статистических характеристик
любой координаты системы [регулируемой величины Х(/),
ошибки Е(/) и др.] по известным статистическим
характеристикам входного случайного сигнала. Входной сигнал G{t) в
данном случае может представлять собой либо полезный
сигнал, либо линейную комбинацию полезного сигнала и
помехи. При этом должны быть заданы передаточная функция
линейной части системы W{s) и характеристика нелинейного
элемента ср.
Рассмотрим применение метода статистической
линеаризации для расчета как разомкнутых, так и замкнутых систем,
содержащих один безынерционный нелинейный элемент.
Расчет разомкнутых нелинейных систем. Структурная
схема разомкнутой системы, имеющей нелинейный элемент с
характеристикой ф и линейную часть с передаточной
функцией W (s), показана на рис. 9.28. а.
Пусть на входе нелинейного элемента действует
стационарный случайный процесс G{t) с нормальным законом
распределения:
С(0-т^ + 6(0. (9.202)
где rrig ~ математическое ожидание входного сигнала; С (/) —
центрированная составляющая случайного входного сигнала.
Искомая выходная величина системы X{t) будет
представлять собой также стационарный случайный процесс:
X{f)^m^ + X{t). (9,203i);
.На основе метода статистической линеаризации исходную
структурную схему (рис. 9.28. а) можно эквивалентно
заменить двумя структурными схемами: для расчета
математического ожидания выходной величины т^. (рис. 9.28. б) и для
расчета центрированной составляющей случайного процесса
„а выходе системы X{i) а)
(рис. 9-28. fl).
Используя приведенные
схемы можно найти математиче-
цесса па выходе системы
(9.204)
G(t)
X(t}
s)
е)
СИ)
е-
X(t)
УН]
WfSJ
и центрированную
составляющую случайного процесса на
выходе системы
X (О - С (/) k, {т,, D^) W (5). Рис. 9.28
(9.205)
где ко {nig, D^) — эквивалентный статистический коэффициент
усиления элемента по математическому ожиданию; к^ (т
D g) — эквивалентный статистический коэффициент успле-
ния нелинейного элемента по случайной составляющей;
W(0) = \F(s)U = o — коэффишгент передачи линейной части
системы.
Центрированная составляющая G{t) случайного процесса
иа входе системы обычно задается своими статистическими
характеристиками: центрированной корреляциошюй функцией
Л^(т) или центрированной спектральной плоскостью 5^ (со),
зная которые можно найти центрированную корреляционную
функцию R ^ (т) и центрированную спектральную плотность
S"^ (ш) случайного процесса X{i) на входе системы:
/?; (т) « к\ (т^. Dg) ^ dX ^ к (X) к (ц) (т-ьХ^г^) dv,\ (9.206)
5; (со) - I Г (/03) 1^ \к^ (т^. D^)p (о)). (9.207)
где к{%) м к{г\) — импульсная переходная функция
(функция веса) линейной части системы; W{jio) — частотная
передаточная функция линейной части системы.
Дисперсия Dx центрированной составляющей X{t)
случайного процесса на выходе системы
D, = ;?^o(0)==(l/n) |5;(со) Jco.
(9.208)
W(S)
X{t) Расчет замкнутых нели-
^ нейных систем.
Структурная схема замкнутой
системы автоматического
управления с одним нелиней-
Рис. 9.29 ным безынерционным
элементом всегда может быть
приведена к виду, показанному на рис. 9.29.
Допустим, что входной сигнал G(/), который в общем
случае может представлять собой линейную комбинацию полезного
сигнала и помехи, является стационарным случайным
процессом с нормальным законом распределения:
G{t)^mg-\-Q{t). (9.209)
В результате расчета требуется по заданным статистическим
характеристикам входного сигнала определить
математическое ожидание, дисперсию или другие статистические
характеристики любой интересующей нас координаты системы,
например ошибки Е(/), регулируемой величины X{f) и т. п.
Рассмотрим метод расчета замкнутых систем на примере
определения статистических характеристик ошибки Е(/)
системы.
Заметим, что закон распределени^[ случайного сигнала на
выходе нелинейного элемента в общем случае отличается от
нормального закона распределения, однако, проходя через
линейную часть системы, обладающую в большинстве
случаев свойством низкочастотного фильтра, он нормализуется и,
таким образом, закон распределения выходного сигнала Kit)
будет близок к нормальному. На основе этого можно считать,
что случайная ошибки Е(/) на входе нелинейного элемента
также имеет нормальный закон распределения. Поэтому при
расчетах можно пользоваться формулами и графиками
эквивалентных статистических коэффициентов усиления и ftj,
приведенных в приложении 9.2.
Ошибка системы будет представлять собой стационарный
случайный процесс
Е(О=те+Ё(0, (9.210)
где — математическое ожидание (среднее значение)
ошибки; Е(^) — центрированная составляющая случайной ошибки.
Для простоты будем считать, что нелинейный элемент
имеет однозначную нечетную характеристику и = ф(£). В этом
"1
U(i)
Рис. 9.30
случае на основе метода
статистической линеари- i%
зации сигнал на выходе
нелинейного элемента
приближенно может
быть записан следующим о
образом:
U(t)^m^ +0(1)=^
(9.211)
где — математическое ожидание сигнала на выходе
нелинейного элемента; V{f) — центрированная составляющая
случайного процесса на выходе нелинейного элемента:
ko{m^, De) — эквивалентный статистический коэффициент
усиления нелинейного элемента по математическому
ожиданию; ^1 (/Пе, Dg)—эквивалентный статистический
коэффициент усиления нелинейного элемента по случайной
составляющей.
В результате статистической линеаризации нелинейный
элемент эквивалентно заменяется двумя линейными
безынерционными элементами: один из них с коэффициентом усиления
ко и второй — с коэффициентом усиления А^. При этом
исходная нелинейная замкнутая система (рис. 9.29) эквивалентно
заменяется двумя замкнутыми связанными
линеаризованными систсхмами (рис. 9.30): по математическому ожиданию;
по центрированной случайной составляющей.
Передаточные функции разомкнутых линеаризованных
систем равны: по математическому ожиданию
W.,As) = ko{ms, Ds)W{s), (9.212)
по центрированной случайной составляющей
с (S) = А, (/пе, Ds) W (s). (9.213)
Передаточные функции замкнутых линеаризованных
систем относительно ошибки равны:
по математическому ожиданию
1 1
W.
те
: (9.214)
по центрирован1гой случайной составляющей
I !
(9.215)
Передаточные функции (9.212) и (9.213) взаимосвязаны
через коэффициенты и к^, которые являются функциями
неизвестных величин и D ^.
Заметим, что полученные таким образом две связанные
линеаризованные системы будут линейными только при
определенных постоянных значениях т^и D ^.,г, е. при стационар-
1ГОМ режиме системы. При нестационарном режиме система
остается нелинейной, так как коэффициенты п /г^,
зависящие от и Dg. будут перемеи1гыми.
Если случайный процесс G(i) на входе системы
стационарный, то = const. В этом случае математическое ожидание
/Пе ошибки связано с математическим ожиданием
входного сигнала следующим соотношением:
пк. (9.216)
n,m,(0);;u
Дисперсия ошибки
De = -y^ 5^^(fo)da)---L j" I ll^g-^- (/a))|'^5|(a))dG). (9.217)
где 5^ (o)) " спектральная плотность центрированной
случайной составляющей G(0 входного сигнала; S(-ш) = l^gc ^
X (/fo)|^ 5 °g (ct>) — спектральная плотность центрированной
случайной составляюи;ей ошибки.
Уравнения (9.216) и (9.217) образуют систему
алгебраических уравнений:
I
/По
1 + ^0 К' D,)W^(0)
= 0;
О,
(9.218)
Система уравнений (9.218) содержит два неизвестных и
De и коэффициенты Uq и к^, являющиеся функциями этих
неизвестных. Решая сиг^ем\ уравнений, можно найти мате-
Рнс. 9.31
матическое ожидание т ^ и дисперсию D ^ ошибки в
установившемся режиме. Решение системы уравнений (9.218) можно
произвести либо методом последовательных приближений,
либо графоаналитическим методом.
При решении методом последовательных приближений
задаются вначале некоторыми значениями коэффициентов /с^
и и по (9.216) и (9.217) находят т^ и в первом
приближении. По найденным значениям т^м D ^ уточняют величины
ко и пользуясь (9.193), (9.194). (9.195). (9.190) или
графиками зависимостей к^ {ту, Dy), к^ {ту. Dy), приведенными в
приложении 9.2. Затем весь цикл вычислений коэффициентов
кр и к^ повторяется многократно до тех пор. пока в процессе
приближений последующие значения коэффициентов не будет
с достаточной точностью совпадать с предыдущими
значениями.
Решение графоаналитическим методом производится
обычно тогда, когда уравнения системы (9.218) имеют сложный вид.
В этом случае в координатах т^-—строят кривые,
соответствующие обоим уравнениям системы (9.218); точка
пересечения этих кривых дает решение указанной системы уравнений.
Графоаналитическое решение уравнений (9.218)
целесообразно проводить в такой последовательности:
1. Строят семейство функций /^^ ^ fi{m^) (рис. 9.31. а),
ир^прльзуя первое уравнение системы (9.218) для различ1гых
фШсированных значений D const
2. Проводят прямую из начала координат под углом 45°
и по точкам пересечения ее с кривыми семейства строят
График D^ ^ fi(m^) (рис. 9.31, в),
3. Строят семейство функций F^ F^ (D ^) (рис. 9.31, б),
используя второе уравнение системы (9.218) для различных
фиксированных значений т^-, ^ const.
4. Проводят прямую из начала координат под углом 45"*
и по точкам пересечения ее с кривыми семейства F2 строят
график т^== (Dg) (рис. 9.31, в).
Точки пересеченных кривых Df^{m^ и /Пе = f^SP^
определяют математическое ожидание т^уа и дисперсию
DeycT ошибки В установившемся (равновесном) состоянии
нелинейной системы.
После того как будут определены математическое ожидание
и дисперсия ошибки, по известным методам линейной теории
можно при необходимости рассчитать математическое
ожидание и дисперсию случайного сигнала в любой интересующей
нас точке системы.
В заключение следует отметить, что метод статистической
линеаризации может быть применен и к системам с
несколькими нелинейными элементами. Если несколько нелинейных
элементов включены последовательно друг с другом, то они
могут быть заменены одним нелинейным элементом с
результирующей нелинейной характеристикой, построенной по ха-
рактеристикам отдельных нелинейных элементов. После этого
производят статистическую линеаризацию результирующего
нелинейного элемента и методом, изложенным выше, находят
математическое ожидание и дисперсию в любой интересующей
нас точке системы.
Если нелинейные элементы разделены друг от друга
инерционными линейными звеньями, то каждый из нелинейных
элементов заменяется статистически эквивалентным линейным
элементом. Так как для каждого линейного элемента нужно
определить два статистически эквивалентных коэффициента
и /^1, то в результате, чтобы найти все коэффициенты
линейных элементов, приходится решать систему уравнений,
содержащую q уравнений, где q — число нелинейных элементов
в системе, В результате, естественно, расчеты значительно
усложняются.
Хотя метод статистической линеаризации и является
приближенным, он нашел широкое применение при инженерных
расчетах нелинейных систем автоматического управления,
описываемых дифференциальными уравнениями высокого
порядка. Точность метода статистической линеаризации тем
выше, чем уже полоса пропускания линейной части систем и чем
болулне плотность вероятности на входе нелинейного элемента
прг.блпжается к нормальной.
методы теории
оптимальных
систем управления
§ ЮЛ. Общие положения.
Постановка задачи. Классификация
В гл. 5 н 9 уже разбиралась задача
синтеза оптимальных систем
управления с заданной структурой — задача
синтеза оптимальных параметров. В этой
главе будут рассмотрены постановка н
методы решения более общей задачи
синтеза оптимальных систем управления —
задачи синтеза оптимальной системы
управления при нес1)ИКсированнон
структуре.
В общем случае автоматическая
система управления состоит из объекта
управления ОУ, регулятора Р и програм-
матрра (задагчика) П, вырабатывающего
задающее воздействие (программу,
программное движение) (рис. ЮЛ). На
схеме // обозначает совокупность внешней
информации, которая поступает на
программатор. Задача синтеза оптимальной
системы состоит в том, чтобы для за
тайного объекта синтезировать регулятор и
программатор, которые в определенном
смысле наилучшим образом решают
поставленную задачу управления. В
соответствии с этим рассматриваются две
родственные задачи: синтез оптимального
программатора и синтез огггимального
регулятора. Математически эти задачи
могут быть сформулированы
единообразно и решаться одними и теми же
методами, но в то же время эти задачи имеют
специфические особенности, которые
делают целесообразным на опредс/теи-
п
о
Рис. 10.1
НОМ этапе нх раздельное
рассмотрение. Особенности
обусловливаются тем. что
решение первой задачи
связано, как правило, с
определением
программного управления, а решение
второй задачи — с
определением управления
с обратной связью.
Программным управлением
называют управление в виде
функции от времени. управлением с обратной
связыо — управление в виде функции от фазовых координат.
Системы с оптимальным программатором называют
оптимальными по режиму управления, а системы с оптимальным
регулятором — оптимальными по переходному режиму.
Система автоматического управления называется оптимальной,
если оптимальными являются программатор и регулятор. Часто
программное движе1гие бывает задано и требуется определить
только регулятор. В этом случае САУ называется оптимальной
(или оптимальной по переходному режиму), если оптимальным
является регулятор.
Общая постановка задачи оптимального управления
Задача синтеза оптимальных систем управления
относится к классу задач оптимального управления и формулируется
как вариационная задача. При этом кроме уравнения
объекта управления должны быть заданы ограничения на
управление и фазовый вектор, краевые условия и выбран критерий
оптимальности.
Пусть уравнение объекта задается в нормальной форме ^
х-! (x. ii, .0 (10-0
или в скалярном виде
X, «/i (x. ii. /), i - 1.2 п,
где x = (д:,. .... ХгУ — фазовый вектор; и = (w,. .... Ur)^ —
управление или вектор управления. Как отмечалось в гл. 2,
любое уравнение, разрешимое относительно старшей
производной, можно преобразовать к равносильной нормальной
системе.
На управление и фазовый вектор еще могут быть наложены
ограничения в виде конечных соотношений — равенств,
неравенств. Их в общем виде можно записать так:
u(oeu,. х(оех,. (10.2)
Здесь и — некоторые заданные множества, зависящие,
вообще говоря, от времени, причем ^ и ^ jR",
т. е. Ut — подмножество г-мерного пространства; —
подмножество л-мерного пространства. В (10.2) первое
соотношение называется ограничением на управление, второе
соотношение — ограничением на фазовый вектор или фазовым
ограничением. Ограничения на управление и фазовый вектор
могут быть не разделены, и в общем случае они записываются
в виде
(u(ax(0)€V„ v,e^?"+^
Краевые (граничные) условия — ограничения на фазовый
вектор в начальный и конечный tf моменты времени в общем
виде можно записать так:
х(/о)€Хо.х(/,)еХ,. (10.3)
Вектор х(/о) называют левым, а вектор х(^/) — правым
концом траектории. Краевые условия имеют вид (10.3), если
ограничения на левый и правый конец трактории разделены.
В противном случае они записываются в виде
(х(^о).х(/,))е Vo. V,c:R2^
Критерий оптимальности, который является числовым
показателем качества системы, задается в виде функционала
J^J(u(t), х(0). (10.4)
Задача оптимального управления формулируется
следующим образом: при заданных уравнении объекта управления
(IQ.l), ограничениях (10.2) и краевых условиях (10.3)
требуется найти такие программное управление \x*(t) или управление
с обратной связью и*(х(/), /) и фазовую траекторию х*(/), при
которых критерий (10.4) принимает минимальное {или
максимальное) значение. Дальше для определенности примем, что
функционал (10.4) минимизируется. Задачу максимизации
выборрм нового критерия = —/ всегда можно свести к
задаче минимизации. Управления \x*{t) и и*(х (/), t) и траектория
х*(^) называются оптимальными. При решении . задач синте- ^
за оптимальных систем управления- обычно бывает достаточно
найти оптимальное управление.
Примеры постановки задач оптимального управления.
1.Задачи оптимального управления
летательным аппаратом (ЛА). Уравнение ЛА
(объекта управления) в вертикальной плоскости
mv=^p + q
или в проекциях на горизонтальную ^ и вертикальную г] оси
неподвижной системы координат
где m = т/ + /тхр (/) — масса ЛА; (t) — «реактивная»
масса; V (I, т|) — скорость ЛА; р = (р^, р^ — реактивная
сила; q = {q^, q^) — равнодействующая всех остальных сил
(сила притяжения Земли, сила сопротивления воздуха и др.).
Реактивная сила
р —mw, |wl = const,
где w = (t^i, — относительная скорость отделяющихся
частиц; |w | + W2 — евклидова норма вектора w;
|гл| = |/Пр|—секундный расход реактивной массы. Обозначая
Xi = 1\ Хо== г\\ Хз = ^; = г\; = pjm\ = pz/m;
Я\ = Я\1^\ Я2 ~ qj^, уравнение ЛА можно записать в виде
нормальной системы
Х1=Хз; Х2=-Х^\ X3=Ui + 9i; X4=«2 + 92
или В векторной форме
х = Ax + Bu+q.
В последнем уравнении
/хД /О О 1 0\
х =
^2
Хз
\xj
А =
0 0 0 1
0 0 0 0
Vo о о о у
/о 0\
0 о
1 о
\0 1/
(10.5)
(10.6)
Отношение реактивной силы к массе ЛА принимается за
управление. Траектория ЛА не должна пересекать земную
поверхность, т, е. должно выполняться фазовое ограничение
Хо > 0. (10.7)
Задача 1 вывода ЛА в заданную точку фазового
пространства за минимальное время. Пусть реактивная сила
ограничена: |р| < Рт- Требуется вывести ЛА из
фиксированной начальной точки \(t^ = в фиксированную конечную
точку х(//) = за минимальное время. Эта задача является
задачей оптимального управления с уравнением объекта (10.5),
<10.6), фазовым ограничением (10.7), ограничением на
управление
|"К"т; «m=Pm/m. (10.8)
краевыми условиями х(/о) == х®. х(//) = и критерием
оптимальности J = tf — /о, где /о — начальный момент (будем
считать его фиксированным); if — конечный момент — момент
времени достижения ЛА точки (не фиксирован).
Задача 2 вывода ЛА в заданное положение за
минимальное время. При ограничении на управление (10.8)
требуется вывести ЛА из заданной точки х (tf) = фазового
пространства в заданное положение {x^itf), x^itf)) = {х[, xl) на
вертикальной плоскости за минимальное время. В данной
задаче левый конец х(^о) фиксирован (т. е. положение и скорость
Л А в момент заданы), а правый конец х(//) не фиксирован,
т. е. в момент tf положение ЛА задано, а на его скорость
никаких ограничений не наложено. Эта задача оптимального
управления отличается от задачи 1 только условием на
правом конце траектории x^{tA = х{, x^itf) = л:^. В задаче 1
каждое из множеств Хо и X/ [см. (10.3)1 состояло из одной точки,
в данном же случае множество Xq состоит из одной точки, а
множество X/ есть плоскость х^ = х[, Xz — ^
четырехмерном фазовом пространстве.
Задача 3 перевода Л А на максимальную дальность.
В данном случае важно учитывать, что реактивная масса,
или, что то же самое, начальная масса m{Q = т^, конечна.
Так как
|ul = |pl/m=|m| \w\/m,
то конечность реактивной массы накладывает следующее
ограничение на управление:
^\u\dt^B^; Bi = IWIIn{гщ/mf), (10.9)
/о
Ограничение такого вида называется изопериметрическим'.
Конечный момент определяется из условия x^itf) = О
(высота равна нулю). Задача оптимального управления
формулируется следующим образом: при заданных уравнении
объекта (10.5), фазовом ограничении (10.7), ограничении на
управление (10.9), краевых условиях х(^о) = х^{Ь) = О найти
управление, минимизирующее функционал J = —x^(tf),
В этом случае множество Xq состоит из одной точки, а
множество X/ есть трехмерное пространство, определяемое
соотношением Х2 = 0.
Задача 4 вывода ЛА на максимальную высоту. В
данном случае также важно учитывать ограниченность
реактивной массы. Задача оптимального управления формулируется
точно так же, как и задача 3, но при краевом условии х(/о) =
= X® и критерии оптимальности / = —^zitf). В этой задаче
правый конец свободен: на него никаких ограничений не
наложено. Множество X/ совпадает со всем фазовым
пространством
Сделаем общие замечания. Реактивная масса, естественно
всегда конечна, но тем не менее это ограничение не
учитывалось при формулировке задач I и 2. Принималось, что для
них. оно несущественно, т. е. не влияет на их решения. Точно
так же принималось несущественным и не учитывалось
ограничение на величину управления в задачах 3 и 4, хотя оно,
естественно, всегда имеет место. Но в то же время в задачах
1 и 2 нельзя не учитывать ограничение на величину
управления, так как если его отбросить, то оптимальное управление
и*(/) получается нереализуемым: при и^-^ оо
максимальное значение |и*(/)|--^ оо и J -^0. Точно так же нельзя не
учитывать ограничение на реактивную массу (изопериметри-
ческое ограничение) в задачах 3 и 4, так как в противном
случае, как это ясно из физических соображений, существует
бесконечное множество управлений, при которых J = —оо.
2. Задачи оптимального управления
двигателем. Уравнение двигателя постоянного тока
где / — момент инерции вращающейся части двигателя-
Ф — угол поворота вала двигателя; — ток в якорной цепи;
кф — конструктивная постоянная; Ф — магнитный поток;
VWc — момент сопротивления.
Используя обозначения
его можно записать в виде
Хх — Хд. Х2 = Ьи —
или в векторной форме
x — Ах -f Ви + q.
(10.10)
; А =
\Х2 /
[о 0} \
где
Здесь для получения простой модели объекта, которая дальше
часто будет использоваться, за управление принимается ток
в якорной цепи. Но следует иметь в виду, что в
действительности управляющим воздействием двигателя при управлении
со стороны якор1юй цепи является напряжение на якоре и к
приведенному уравнению моментов необходимо добавить
уравнение для напряжения и тока якорной цепи. Поэтому
примеры, связанные с моделью объекта (1.10), (1.11). являются
чисто иллюстративными.
Задача 5 поворота вала двигателя на заданный угол
без остановки за минимальное время. Сила тока в якорной
цепи должна быть ограничена, иначе сгорят обмотки якоря.
Задача оптимального управления формулируется следующим
образом: при заданных уравнении объекта (1.10), (1.П),
ограничении на управление
|h|<w^.
краевых условиях
x(g=-x^ xi(//)=x/
(10.12)
найти управление, минимизирующее функционал У = // —
- /о.
Задача 6 поворота вала двигателя на заданный угол с
остановкой за минимальное время. Задача оптимального
управления формулируется так же. как и задача 5, но при краевых
условиях
х Uo) ^1 (0) - ; (д =0. (10.13)
Задача 7 поворота вала двигателя на заданный угол
за время Т при минимальном расходе энергии. Энергия
пропорциональна интегралу от квадрата управления (силы тока).
Так как постоянный множитель перед функционалом не
влияет на решение вариационной задачи, за критерий
оптимальности принимается интеграл
где Iq и // фиксированы, // — = Т. Ограничение на
управление не учитывается. Краевые условия совпадают: а) с
условием (10.12). если двигатель после поворота на заданный
угол не нужно останавливать; б) с условием (10.13), если
двигатель после поворота на заданный угол нужно остановить.
Клдссификация задач оптимального управления
1. По виду ограничения различают задачи оптимального
управления:
а) классического типа, когда ограничения задаются в виде
равенства
фЛх. u, 0«»0. а-1.2 т;
б) неклассического типа, когда ограничения задаются в
виде неравенств
Фь(х. и,/)<0. А: = 1,2,..., т. (10.14)
К классическому типу относятся также изопериметричес-
кие задачи, т. е. задачи с изопериметрическими
ограничениями:
j /п+Пх.и,0л = 6,.. /==1,2....,/. (10.15)
и
Введением дополнительных переменных от изопериметриче-
ских ограничений всегда можно избавиться. Достаточно вме<?-,
то изопериметрических органичений (10.15) в условие задачи
ввести следующие уравнения и краевые условия:
^п+у-/п+п^."'0; ^п+дд-о; х„+ло)-ь^ /-1.2 J.
Формально задачи неклассического типа введением
дополнительных переменных можно преобразовать к задачам
классического типа. Действительно, ограничения (10.14) можно
заменить ограничениями типа равенств
Фь(х, U,/)-Ь"г%л==0, т.
Задачи оптимального управления неклассического типа
могут иметь ограничения вида
/n+s(x,u,Od/<C„ 5 = 1,2,..., р.
Введением дополнительных переменных эти ограничения могут
быть заменены соотношениями
-^п+я=/п+Лх.и, О, >^п+Л^о)=0; >^n+s(^/XC„ S=I,2,...,/7.
Примерами задач классического типа являются задачи 3, 4 и
7, некласснческого типа — задачи 1, 2, 5 и 6.
2. По виду краевых условий различают задачи:
а) с фиксированными (закрепленными) концами, когда
каждое из множеств Х^, и X/ состоит из одной точки 1х(/о) =
= х**, х(//) = x^ х° и xf — заданные точки];
б) с подвижным правым концом (X/ состоит более чем из
одной точки), с подвижным левым концом (Хо состоит более
чем из одной точки), с подвижными концами (оба конца
подвижны);
в) со свободным правым концом (X/ совпадает со всем
фазовым пространством, т. е. на правый конец никаких
ограничений не наложено).
В рассмотренных выше примерах задачами с
фиксированными концами являются задачи 1 и 6, с подвижным правым
концом — задачи 2, 3 и 5, со свободным правым концом —
задача 4.
3. По времени начала и окончания процесса различают
задачи:
а) с фиксированным временем, когда начальный и
конечный tf моменты фиксированы;
б) с нефиксированным временем, когда один из моментов
времени to или V; не фиксирован.
4. По критерию оптимальности различают:
а) задачу Больца; при этом критерий имеет вид
б) задачу Лагранжа; при этом критерий имеет вид
to
в) задачу Майера; при этом критерий имеет вид
Solvit,), x{t,l t,, t,l
Задача Майера в частном случае, когда функционал имеет
вид J = goM^f)f называется задачей терминального
управления: когда функционал имеет вид J {tf — i^) — задачей
максимального {оптимального) быстродействия. 0}юрмули-
рованная выше задача 7 является задачей Лагранжа,
остальные задачи — задачами Майера, причем задачи I, 2,5 и 6
являются задачами максимального быстродействия.
Задачи Больца, Лагранжа и Майера эквивалентны в том
смысле, что путем преобразования переменных можно от
одной задачи перейти к другой.
§ 10.2. Метод классического вариационного исчисления
(метод множителей Лагранжа)
Задачи с закрепленными концами
и. -фиксированным временем
Если концы закреплены и время фиксировано, то в
классическом случае задачу оптимального управления в общем виде
можно сформулировать как следующую задачу Лагранжа:
х,-Д-(х.и.О. t==1.2 п; ,^
ср;^(х. U. О ^0» л 1.1,..., /;
^i(g--^?; xAtf)-x\, 1=1.2 n;
у - J /о(х, ij./)d/->-min.
Предполагается, что функции Л (х. и, /). / = 0. 1..., /г. и
Ф/Дх, ii. f), к ^ 1,2 /, являются непрерывными и
дифференцируемыми по всем сЬоим аргументам, управление u(f)
принадлежит классу кусочно-непрерывных функций, а
траектории х(/) — классу кусочно-гладких функций.
Напомним, что функция u(t) называется
кусочно-непрерывной иа 1^0. ^/1. если она непрерывна всюду на [to, //), за
исключением конечного числа точек, где она имеет разрывы первого
рода. Функция х(/) называется кусочно-гладкой на I/^,. ^1.
если на (^о. tj] она сама непрерывна, а ее производная
кусочно-непрерывна.
Управление и(/) из класса кусочно-непрерывных функций
назовем допустимым управлением, а траекторию \{t) из
класса кусочно-гладких функций — допустимой траекторией.
Пару (и(/), х(0) назовем допустилюй, если допустимыми
являются u(t) и x(t).
Уравнения Эйлера. Рассмотрим сначала простейшую
задачу классического вариационного исчисления:
Ну) - \ foU/^y^ndt-^exir, (10.16)
i/(g=i/^ y(h)-y^' (10-17)
Пока для простоты будем считать, что y{t) является скалярной
функцией и принадлежит классу C4Wo. ^/1) непрерывно
дифференцируемых функций на интервале [/д, tf\. Экстремум
ищется среди функций указанного класса, удовлетворяющих
заданным краевым условиям. Такие функции будем называть
допустимыми функциями или допустимыми точками (имеется в
виду точка в функциональном пространстве).
Пусть экстремум достигается в допустимой точке у* (/).
Точка y{t) = y*{t) + е^(/), где б — число, будет допустимой,
если 1/(0 t С*(|/о. ^/1) и выполняются краевые условия
i/(g-0; y{tf)^0. (10.18)
При каждом фиксированном y(t) получаем функцию от
числового аргумента
Ф ^е) - J (i/* + ty) ^ j /о (у* Н- ву, у* + еу, () dt.
ydt=Q. (10.19)
которая, очевидно, достигает экстремума при е = 0. Поэтому
согласно теореме Ферма, произюдная
. ~ .
Ф; (0) = f [Пу {у*, y*,r,y+foi(y*,y*,t)y]dt=0.
Интегрируя второе слагаембе по частям и учотывая краевые
условия (10.18), получим
Ф; (0) - J [Гоу (i/*. У"". О ~ 'у (У*^ f/*' О
Согласно основной лемме вариационного исчисления,
последнее равенство возможно при произвольной y(f) £ СЦИо, tf\),
y{t^ = y(tf) = О, если только
Г^у {У\ У\ ^)-'^f'oy (^*. 0=0. (10.20)
Итак, если функция y*{t) доставляет экстремум функционалу
(10.16), то она удовлетворяет уравнению (10.20), которое
называется уравнением Эйлера. Допустимая функция,
удовлетворяющая уравнение Эйлера, называется экстремалью или
стационарной точкой задачи (10.16), (10.17). Следовательно,
решения задачи (10.16), (10.17) являются экстремалями;
обратное в общем случае неверно.
Как легко проверить, все выкладки остаются
справедливыми и в случае, когда у(0 — векторная функция {{р XI) —
матрица). При этом уравнение (10.20) является векторным.
Покажем, как из равенства (10.19) получается векторное
уравнение Эйлера (10.20).
По определению, производная от скалярной функции
/o(z) по векторному'аргументу z = {z^, Zp)^' есть вектор-
строка
Напомним, что индекс Т обозначает операцию
транспонирования. Перемножив под интегралом (10.19) вектор-строку на
вектор-столбец по правилу перемножения матриц, получим
и.
yidt^O.
Это равенство должно выполняться при произвольной у(^) £
£ 0{Uo, tf]), в частности когда все ее компоненты, кроме
одной, равны нулю: у$ф = О при всех i Ф /. Полагая, что
/ пробегает значения от I до из последнего равенства
получим систему уравнений
Ч
откуда в соответствии с основной леммой вариационного
исчисления найдем
Я=-^/;^^ = 0. /-1.2....,л (10.21)
Эта система представляет собой скалярную форму записи
векторного уравнения (10.20).
Уравнения Эйлера—Лагранжа. Рассмотрим задачу Ла-
гранжа:
ФПг,г,/)=0, 1-1.2 р; (10:22)
Ф,(г,/)=.0, fe=l,2,...,/; (10.23)
z(g-z^z(/;)=z^ (10.24)
Ь
У= f Фо(2. 2. Orf^->extr, (10.25)
I
где Z — вектор столбец размера s; (t = О, 1, р). Фл
= I, 2, /) — дифференцируемые по всем своим аргументам
функции. Эта задача отличается от простейшей вариационной
задачи тем, что на аргументы функционала помимо краевых
условий наложены дополнительные ограничения [связи (10.22)
и (10.23)1 и они уже не являются независимыми. Для
получения необходимого условия воспользуемся приемом
Лагранжа 111.
Составим функцию:
L (Z, Z, я]?, X. О = S + S Фй +*оФо.
где i = 1. 2, р — функции времени; k^ifi = 1,2,/)
и -фо — константы.
Эта функция называется функцией Лагранжа, а функции
•vpj(i = 1. 2, р) и числа (к = 1, 2, .... /) и г|;о—
множителями Лагранжа. Прием Лагранжа (в настоящее время он
строго обоснован) состоит в том, что задача (10.22)—(10.25)
преобразуется в простейшую задачу вариационного исчисления:
\ L{z,z, ф, К t) dt extr; z [t^) = z (tj) = zK
и
Очевидно, последняя задача имеет смысл, если
множители Лагранжа не равны одновременно нулю. Под равенством
нулю множителей ifi(f = 1,2,..../?), являющихся функциями ,
понимается их тождественное обращение в нуль. Кроме того,
заметим, что если "фо = О, то функционал J не зависит от
исходного функционала. Этот случай назовем особым.
Важнейшим является неособый случай, когда -фо ф 0.
В преобразованной задаче роль независимого аргумента
играет вектор у (z, -ф, X), а роль подынтегральной
функции — функция Лагр.анжа. С учетом того, что функция
Лагранжа не зависит от производных-ф и X, уравнения Эйлера
принимают вид 1см. (10.21)]
Ц--^Ь^=0, ^•--=l,2,...,s; (10.26)
Li. = 0, j^\X....P\ ft = 1,2....,/. (10.27)
Уравнения (10.27), как легко проверить, совпадают с
уравнениями (10.22) и (10.23), поэтому достаточно ограничиться
уравнениями (10.26) и решать их совместно с уравнениями (10.22)
и (10.23) при краевых условиях (10.24). Уравнения (10.26)
называются также уравнениями Эйлера—Лагранжа.
Вернемся теперь к задаче оптимального управления.
Приведем ее, несколько видоизменив запись уравнений объекта:
/i(x,u,0-Xi-0, f = l,2,...,n; (10.28)
Ф,(х,и,0=0, ft = 1,2,...,/; (10.29)
Xi{to)=xl, xt{tf)^x\, f==l,2....,n; (10.30)
J - (/o(x,u,0*->min. (10.31)
Составим функцию Лагранжа:
В ней роль агрумента z играет вектор (х, и), и так как в нее
не входит производная и, то уравнения Эйлера—Лагранжа
имеют вид
Ц^-^Ц=^0, f = l,2,...,n; Ц=0, /=.1,2 г. (10.32)
Уравнения Эйлера—Лагранжа записывают также, используя
функцию
которая называется функцией Гамильтона или
гамильтонианом. Очевидно,
поэтому из (10.32) получаем
дН
—i=1.2.....n; (10.33)
4^=0. 5 = 1.2,.... л: (10.34)
Уравнения (10.34) называют условием стационарности. Это
условие показывает, что на экстремали гамильтониан, рас
сматриваемый при каждом фиксированном ( G I/^, t^] как
функция от управления, удовлетворяет необходимому
условию экстремума. Как увидим дальше, оказывается, что
действительно, на оптимальной траектории гамильтониан как
функция от u достигает максимума (или точной верхней грани) при
оптимальном управлении. Сформулируем основной результат.
Правило множителей Лагранжа. Если
допустимая пара (н(0. ^(0) является решением задачи опти-
мального управления (10.28)—(10.31), то найдутся такие не
равные одновременно нулю множители Лагранжа, что эта пара
удовлетворяет уравнениям Эйлера—Лагранжа (10.33) и (10.34).
В соответствии с этим правилом, чтобы найти оптимальное
управление и оптимальную траекторию, надо решить
совместно уравнения (10.28), (10.29), (10.33) и (10.34) при краевых
условиях (10.30). Уравнения Эйлера—Лаграижа получены при
предположении, что управление u{t) является непрерывной
функцией, а траектория х(/) — гладкой на интервале [/о, ^/1,
Правило множителей Лаграижа остается справедливым и в
том случае, когда u(t) принадлежит классу
кусочно-непрерывных функций, а х(^) — классу кусочно-гладких функций.
Только если оптимальное управление u(t) имеет разрыв 1-го
рода в каких-либо точках (эти точки называются угловыми),
то оно само и соответствующая ему траектория \(t) должны
удовлетворять указанным выше уравнениям лишь в точках
непрерывности управления. В угловых точках должны
выполняться так называемые условия Вейерштрасса—Эрдмана
П. 7]
Н-=^Н+, (10.35)
где индексы «—» и «+» обозначают левый и правый пределы
соответствующих функций.
Множители Лагранжа определяются с точностью до
постоянного множителя. Действительно, они входят в
уравнения Эйлера —Лагранжа линейно н однородно, и уравнения не
изменяются, если все множители умножить на одно и то же
постоянное число. Поэтому один из постоянных множителей
Лагранжа, не равный нулю, можно приравнять любому
отличному от нуля заданному числу. Условимся в неособом
случае (ifo 0) принимать 1^0 = —I. Дальше, если особо не
оговаривается, будет подразумеваться неособый случай.
Для определения 2п + г + I неизвестных xi, =-- I, 2, ...
• м п, г]),., 1-^1, 2, nuj, i = I, 2, ...,r, и ^ = 1.2, /,
имеется столько же уравнений. Но среди них имеется 2п
дифференциальных уравнений, при решении которых появится 2п
неизвестных (постоянные интегрирования). Эти неизвестные
можно найти из краевых условий (10.30), которые содержат
2п соотношений. Таким образом, решение исходной
вариационной задачи свелось к решению краевой задачи Коши.
Отметим еще раз, что уравнения Эйлера—Лагранжа
являются только необходимым условием, т. е. любое решение
исходной задачи является экстремалью, но не любая
экстремаль, удовлетворяющая граничным условиям, является
решением. Но если решение задачи существует и экстремаль,
удовлетворяющая граничным условиям, единственна, то,
очевидно, эта экстремаль и будет решением.
Пример ЮЛ. Рассмотрим задачу поворота пала двигателя на
заданный угол при минимальном расходе энергии:
х^ = и\ Jfi(0)=^2(0)-=0;
I
jci(l)=l; JC2(I) = 0; / = [«2^/-»-min.
о
Здесь для простоты принимается «с = 0. Составим гамильтониан:
// ^ —«2 ^ я1?1Х2 + ФзИ. Уравнения Эйлера—Лагранжа и их решения
имеют вид
дН ^ . дН дИ
" = г^2/2 = (-С^/ + Са)/2.
Подставив полученное выражение для управления в уравнения объек
та и решив их, получим
-Ci^V4-hC2//2-bC3; Jc, = ~С, /з/12 + Q/V4 + С3 f-HQ.
Используя краевые условия, получим:
Л2(0)=^Сз=0; JC, (0)-С4 = 0; С2=12; Ci=-I4.
Поэтому для оптимальных управления и фазовой траектории имеем:
Задачи с подвижными концами
и фиксированным временем
Если концы подвижны, то в классическом случае задача
оптимального управления отличается от задачи (10.28)—(10.31)
тем, что изменяются краевые условия и критерий
оптимальности может иметь любой из указанных при классификации
видов, т. е. в этом случае задача оптимального управления может
быть задачей Лагранжа. Больца и Майера. Когда концы
закреплены и время фиксировано, задача оптимального
управления может быть только задачей Лагранжа.
Получим необходимые условия. Начнем с простейшей
вариационной задачи с подвижными концами и фиксированным
временем J = \y{Q. y(ti)\ + Г /о {у. У. t) dt-^ extr. Функ-
дни g-Q и /о непрерывны и дифференцируемы по всем своим
аргументам. Порядок вывода несйбходимых условий такой же,
как и в случае задачи с фиксированными концами. Некоторые
особенности появляются из-за того, что в силу подвижности
граничных точек их также нужно варьировать. Опять все
выкладки будем выполнять, предполагая, что y{t) принадлежит
к классу гладких функций: y{t) £ C\[to, //]).
Пусть экстремум достигается в точке y*{t). При
произвольной фиксированной точке y{t) функционал
= ^0 \У* (to) + ^^У у* Uf) + ey{tj)i^
+ (foiy* + ^^^ y* + t^tt)dt^O{e)
является функцией от числового аргумента е. Эта функция
достигает экстремума при е = 0.-Поэтому по теореме Ферма
(0)=y(Q+-^ У Hi)+
\\royy~nyy)dt--0.
4-
Интегрируя по частям второе слагаемое под интегралом
получим •
^e{0)==-^y(t,)+-^y(tf)+n^y 'i+
dy{to) oy(tf) <„
функция y*{t) должна доставлять экстремум функционалу J
при фиксированных граничных точках y(t^ =^ У*{^о) ^ yi^f) ~
y*(if)y поэтому она должна удовлетворять уравнению
Эйлера
С учетом этого уравнения имеем
в силу произвольности и независимости y(to) и y(tf) из
последнего равенства получаем соотношения
которые называются условиями трансверсальности. Если
у(/) = yp{t)V — вектор, то условия
трансверсальности в скалярной форме принимают вид
Уравнения Эйлера в скалярной форме были уже приведены
(см. (10.21)]. Итак, решение вариационной задачи с подвижны-
мы концами кроме уравнений Эйлера должно удовлетворять
условиям трансверсальности.
Получим необходимые условия оптимальности для задачи
оптимального управления:
л:/=/Их, U. 0. 1 = 1.2,...,гг; (10.36)
Фй(х, U, 0=0, k = l,2,,..J; (10.37)
^Лх(^о)'Х(//)]-0, /-1,2,...,(7<2/2; (10.38)
J = gol^ (^oh X (//)1 + f /о (X, U, /) dt^ min. (10.39)
to
граничные условия (10.38) предполагаются независимыми,
функции ^Дх(^о). х(//)], / =0, I — непрерывными и
дифференцируемыми по всем своим аргументам. На остальные
функции накладываются такие же требования, как и в случае
задачи с фиксированными концами. Используя прием
Лагранжа, преобразуем эту задачу в простейшую задачу Больца:
•^ = G[x(g.x(^^v]+J L(x(/), x(/),u(0, it(t),'k)dt^min,
где
,-=1 k=^i i^l
Уравнения Эйлера—Лагранжа для этой задачи совпадают
с уравнением (10.32) или (10.33) и (10,34).
С учетом равенств —if^ = L'^^ , £ = 1, 2, /2, условия
трансверсальности принимают вид
^i(g--^^; ^i.,(/,)^_^,t^l,2 п. (10.40)
dxi (to) dxi (/у)
Отдельные координаты граничных точек могут быть
фиксированы. Соотношения, определяющие эти координаты, в
выражение для G не включаются, и так как при определении
необходимых условий они не варьируются, то в условия
трансверсальности не должны входить соотношения, содержащие
частные производные по этим координатам; их из (10.40)
нужно исключить. В частности, если начальная точка
фиксирована, т. е. фиксированы все координаты точки x{t^), то условия
трансверсальности (10.40) принимают вид
^i(tj)-dG/dx,(ti). t = l,2,...,n.
Если часть координат точки x{tf) также фиксирована, то в
последнем условии i пробегает только значения индексов
нефиксированных координат.
Правило множителей Лагранжа для
задачи с подвижными концами и
фиксированным временем. Если допустимая пара
(и(0, х(/)) является решением задачи (10.36)—(10.39), то
существуют такие не равные одновременно нулю мнооюители
Лагранот, что эта пара удовлетворяет уравнениям Эйлера—
Лагранжа (10.33), (10.34) и условиям трансверсальности
(10.40).
Если управление терпит разрыв, то решение (и(/), х(/))
должно удовлетворять уравнениям Эйлера—Лагранжа в
точка непрерывности управления. В угловых точках (в точках
разрыва управления) должно выполняться условие
Вейерштрасса—Эрдмана (10.35).
Таким образом, чтобы получить решение задачи (10.36)—
(10.39), нужно решить уравнения (10.36) и (10.37) совместно
с уравнениями Эйлера—Лагранжа при краевых условиях
(10.38) и условиях трансверсальности (10.40). Этих
соотношений достаточно, чтобы определить все неизвестные
величины.
Пример 10.2. Рассмотрим задачу
iifc=^2, i^ = u\ ;fi(0)«=^2(0)=0,
I
0
Эта задача отличается от задачи, рассмотренной в примере 10.1,
только тем, что правый конец не закреплен: координата (1) не
фиксирована. Поэтому уравнения Эйлера—Лагранжа и их решения получаются
такими же, что и в примере 10.1:
= ^2=-Ci/ + Q; г/ = я1),/2 = (-С,/+С2)/2.
Функция G = о и условия трансверсальности принимают вид
^2 (1) = dGldx^ (1) = 0.
С учетом этого условия имеем фа = (1 — /), w = (1 — /)/2.
Подставив полученное выражение для управления в уравнения объекта
и решив их при заданных краевых условиях, получим:
(0=3(1-/); x\(t)== L^3+A/2. ,,.(,)__J_^2_|_3^.
Задача с нефиксированным временем. Рассмотрим задачу
с подбижными концами, В условие задачи с нефиксированным
временем в отличие от задачи (10.36)—(10.39) с
фиксированным временем могут явно входить начальные и конечные
моменты времени. Задача оптимального управления в этом случае
формулируется следующим образом:
^г«/г(х,и,0, 1-1,2,,.., п; (10.41)
Фл(х.и,0--О, ft = 1,2,..., г; (10.42)
гЛх(д, х(//) ^0.^/1=0, /-1,2,...,^; (10.43)
J -^о[х(0, х(9, /о. ^/1+ //о(х,и , t)dt^ir\m. (10.44)
Очевидно, если допустимая пара (и*(/), х*(/)) при t g [/о,
//] является решением задачи (10.41)—(10.44), то она будет
решением этой же задачи при фиксированном времени: = /о>
tf = t^. Поэтому решение задачи (10.41)—(10.44) должно удов-
летЁорять уравнениям Эйлера—Лагранжа и условиям
трансверсальности, причем условия трансверсальности дополня-
ются соотношениями, обусловленными вариацией начального
и конечного моментов времени, и принимают вид [13]
^^^^«^^--ТТ^: ^^(^/)^^7^' ^'-^2,...,^; (10.45)
dxi (to) dxi {if)
Н \t^t, ^dG/dfo H\i^t^ - ~dG/dtf, (10.46)
Условия (10.45) совпадают с условиями (10.40).
Дополнительными являются соотношения (10.46). Их приведенным выше
элементарным способом не удается получить.
Задачи с подзижными концами и нефиксированным
временем являются наиболее общими. Из них как частные случаи
получаются задачи с фиксированным временем и
закрепленными или неподвижными концами.
Правило множителей Лагранжа формулируется точно так
же, как и в случае задачи с фиксированным временем.
Приведем его в несколько иной, чем выше, формулировке.
Правило множителей Лагранжа для
задачи с подвижными концами и
нефиксированным временем. Для того чтобы
допустимая пара (ii{t), x{t)) была решением задачи (10.41)—(10.44),
необходимо, чтобы существовали такие не равные
одновременно нулю множители Лагранжа, что эта пара удовлетворяет
уравнениям Эйлера—Лагранжа (10.33), (10.34) во всех точках
непрерывности управления и условиям трансверсальности
(10.45), (10.46). В точках разрыва управления {если таковые
существуют) выполняется условие Вейерштрасса—Эрдмана,
Пример 10.3. Дано:
уравнения объекта
А
изопериметри^^еское ограничение J u^dt = b\ краевые условия (0) ==
= ^2(0)^0; xi(/f) = d; ^2(^/) = 0.
Требуется определить оптимальное по быстродействию управление:
J = tj min.
Преобразуем изопериметрическое ограничение:
ловия трансверсальност!
46)]:
Функция G = —tf и условия трансверсальности записываются
следующим образом [см. (10.46)]:
Гамильтониан и уравнения Эйлера—Лагранжа имеют следующий вип:
Из последних уравнений имеем:
^C^t~Cb. Г:4=С,/(2Сз). С5 = С2/(2Сз).
Подставив полученное выражение для управления в исходные
уравнения и решив их с учетом краевых условий, получим
I
Следовательно, правилу множителей Лагранжа удовлетворяет
управление
Здесь, как и в примерах 10.1 и 10.2, предполагается, что решение
задачи существует, поэтому единственное управление, удовлетворяющее
правилу множителей Лагранжа, будет оптимальным. В данном примере
условия трансверсальности при определении оптимального
управления не использовались. Они потребовались бы, если нужно было бы
определить множители Лагранжа.
§ 10.3. принцип максимума Понтрягина.
Условие нормальности. Теорема об п
интервалах. Вырожденные и особые задачи
Во многих прикладных задачах на управление
накладывается ограничение типа неравенства. Часто оптимальное
управление в таких задачах имеет разрыв. Метод множителей
Лагранжа не позволяет определить число и местоположение точек
разрыва, и поэтому в этих случаях он не позволяет находить
оптимальное управление. Такие задачи эффективно решаются
с помощью принципа максимума Понтрягина.
Принцип максимума, сформулированный Л. С. Поитря-
гиным в 1953 г. как необходимое условие экстремума для
задач оптимального управления, был доказан и развит
впоследствии им, его учениками и сотрудниками [I. 4, 17].
Задача с закрепленными концами
и фиксированным временем
При отсутствии фазового ограничения задачу оптимального
управления в этом случае в общем виде можно
сформулировать как следующую задачу Лагранжа:
Xi (g = X?; X, (tf) = X?, / = 1,2,..n;
-1 /o(x. u, /)d/->min(inf).
to
(10.47)
Bee функции fi непрерывны no совокупности переменных Xi, ...
...yXn,Ui,--.UrJ и непрерывно дифференцируемы по Xj, .... Xj^, t.
Эта задача отличается от задачи (10.28)—(10.31) с
закрепленными концами и фиксированным временем, рассмотренной в
предыдущем параграфе, тем, что ограничение задается в виде
включения U g и, где U — допустимое множество значений
управления. Кроме того, здесь не требуется гладкость
(непрерывная дифференцируемость) функций ft (1 = 0, 1, п)
по управлению и.
Допустимым принимается управление и(/),
принадлежащее к классу кусочно-непрерывных функций и принимающее
значение из допустимого множества U. Фазовая траектория
х(/) называется допустимой, если она является
кусочно-гладкой. При допустимом управлении фазовая траектория задачи
(10.47) является кусочно-гладкой: координаты Xi{t) (i = 1,
2, п) непрерывны всюду на интервале [fg, ^/1. а их
производные могут иметь разрыв 1-го рода в точках разрыва
управления. Пара (и(0^ х(0) называется допустимой для задачи
(10.47), если и(0^и являются допустимыми управлением
и траекторией к \{t) при u{t) = u(t) удовлетворяет
уравнениям и краевым условиям этой задачи.
Применим к задаче (10.47) прием Лагранжа (П. Составим
функцию Лагранжа:
где гамильтониан
Я - 2 г!;,/,. (10:48)
1 = 1
функцию Н называют также функцией Понтрягина 11].
Функции Лагранжа и Понтрягина имеют такой же вид. что и
соответствующие функции в вариационных задачах
классического типа, рассмотренных в предыдущем параграс{)е, только в
эти функции не входит ограничение на управление, имеющее
в данном случае вид включения « £ (У, В соответствии с
приемом Лагранжа задача (10.47) сводится к задаче
7= f L (x, x, u, /) dt max;
xdQ = ^L x,(t,):^4, i = l,2,..., n. (10.49)
Функционал J максимизируется, хотя функционал J в
исходной задаче требуется минимизировать, так как множитель
•фо при /о. или, что то же, при J, в кеособом случае
принимается отрицательным ("Фо = — О- В особом случае (ярд = 0)
функционал 7 не зависит от У.
Пусть (x*(t), u*{f), il)*(0) — решение задачи (10.49).
Очевидно, задача (10.49) равносильна следующим двум:
'/
Jj= Г L(x, x, u*,-ф,/)d^"^max;
J Х,ф
f L(x*,x*, и.ф*,/)Л-^тах.
или
7. = /
п
7^= г ^/(x^u,l^^o- S яргд:^
d^-->inax; (10.50)
rf/-->max. (10.51)
леи
при тех же граничных условиях, что и в задаче (10.49).
Естественно, задачи (10.49)—(10.51), как и исходная задача,
рассматриваются в классе допустимых функций, причем функция
ф(/) называется допустимой, если она, как и х(/), является
элементом множества кусочно-гладких функций.
Задача (10.50) — простейшая задача вариационного
исчисления. Для нее необходимые условия (уравнения Эйлера)
имеют вид
ij^^dH/dxj, /=1,2 п;
х^-=дН1д'^^, /= 1,2,...,п.
(10.52)
(10.53)
Решение задачи (10.51) очевидно: управление и*(/) доставляет
максимум в этой задаче в том и только в том случае, если
всюду на [^0» ^/Ь кроме точек разрыва и*(/), выполнено
равенство
max Н (X*, и, г^*, t) - Н (х*, и*, ф*, 0. (10.54)
Необходимые условия задачи (10.50) совместно с условием
(10.54) составляют необходимые условия задачи (10.47),
называемые принципом максимума или принципом максимума
Понтрягина. Уравнения (10.53) совпадают с уравнениями
объекта, и поэтому их можно не рассматривать. Уравнения
(10.52) называют сопряженными уравнениями или сопряженной
системой.
Принцип максимума. Для того чтобы допусти-
мая для задачи (10.47) пара (и*(0, х*(0) была ее решением,
необходимо, чтобы суи^ествовали такие не обращающиеся
одновременно в нуль константа гро < О решение г|)* = {^\, ...
.^..^fnVсопряженной системы (10.S2) при x{t) = х*(/) и u(t) =
=u *{t)^ что при любом t G 1^о» tf], кроме точек разрыва \x*{t),
функциям {и = //(%*, и, гр*, () достигает при и = u*{t)
максимума, т. е. выполняется соотношение (10.54).
(10.55)
max.
Задача с подвижными концами
Рассмотрим следующую задачу Больца:
^,'^Л(х, U,/), i = J.2....,n,ueU;
^,(х(/,),х(/,). /,)-0, /=.!,..., 7;
//
J ^ёЛ^ X (//), //) + j /о(х, U. /)Л-^тш:
'о
Функции (/= о, 1, 7) непрерывны и непрерывно
дифференцируемы. Функции fi(i^O, 1, ... п) обладают такими же
свойствами, что и в задаче (10.47).
Используя прием Лагранжа. эту задачу можно свести к
следующей простейшей вариационной задаче:
где
Дальше, как и в случае задачи с закрепленными концами,
последняя задача расщепляется на две и получаются
необходимые условия в форме принципа максимума. Допустимая
пара (и(/), х(/)) для задачи (10.55) определяется так же, как и
для задачи (10.47).
Принцип максимума. Для того чтобы
допустимая для задачи (10.55) пара {и* {t), х*(/)), i£ иЬ,1}],былаее
решением, необходимо:
1) существование таких не обращающихся одновременно в
нуль константы iJ?S < О, констант vj [j ...^ q) и решения
•ф* = (\j)J, i^^T сопряо1сеннойсистемы (10.52) при и(/) =
= и*(/) и X (/) = х*(0, что при любом t £ [/о, /fl, кроме
точек разрыва и*(/), функция И(и) =//(х*, и, -ф*, t) достигает
при U и*(/) максимума, т. е. выполняется соотношение
(10.54);
2) выполнение условия трансверсальности (10.45), (10.46).
Рассмотрим, какова связь между принципом максимума
и методом множителей Лагранжа. Функция Понтрягина
(гамильтониан) (10.48) отличается от гамильтониана,
введенного в предыдущем параграфе, тем, что в ней не учтено ограни-
чение на управление. Сопряженные уравнения (10.52)
совпадают с уравнениями Эйлера—Лагранжа (10.33), если
фазовое ограничение отсутствует (функция сг,, от фазовых
координат не зависит). Они не содержат уравнений
Эйлера—Лагранжа (10.34), которые определяют условия стационарности.
Вместо них имеется условие максимума (10.54). Если ограни-
чение на управление задается в виде соотношений типа
равенства, то, используя метод неопределенных множителей
Лагранжа нахождения экстремума функции, из (10.54) по*
лучим недостающие уравнения Эйлера—Лагранжа.
пример 10.4. Пусть при наличии ограничения иа управление
требуется повернуть вал двигателя за заданное время Т на максимальный
угол. Эта задача формализуется следующим образом:
Xi^x^\ Х2 = и; \и\<а\
а:,(0) = л'2(0)=:0; л:ПЛ=-0;
У= -^Xi (Г) -j-min.
Сначала попытаемся решить эту задачу методом множителей Лагранжа.
Для этого преобразуем ее к задаче классического типа. Представим
ограничение на управление в виде двух неравенств:
—а < «, « < о.
Введем переменные и к заменим эти неравенства равенствами и +
-\- а ^ z\, и — а = —г|. Перемножив последние равенства и положив
г — ZiZzf получим — а + 2^ = 0.
Таким образом, введением только одной дополнительной
переменной ограничение типа неравенства преобразовано в эквивалентное
ограничение типа равенства. Гамильтониан для преобразованной задачи
имеет вид Н = ipjAJg + ^2" + Я, (w^ _ д2 _^
Выпишем уравнения Эйлера—Лагранжа и условия трансверсальности:
:^ ^дИ/dxi = 0; я|>2 = — дН/дх2 —Ь\
G==--^oXi{T) =^xi (Т); (Г) = дО/дх, (Г) I.
Отсюда t]3i = I; фз^С, —/; « —Ci)/(2?i).
Так как управление ограничено, то ?^ =^ О, поэтому из уравнений
Эйлера—Лагранжа (последнего) получаем z — О и из уравнения
ограничения « = ± о. Однако, проинтегрировав исходные уравнения с
учетом краевых условий иа левом конце, убеждаемся, что ня одно из
управлений « = о и U == —а не обеспечивает выполнения краевого
условия на правом конце Х2 (Т) = 0. Это означает, что^ решение задачи
надо искать в классе кусочно-постоянных управлений,
удовлетворяющих уравнениям Эйлера—Лагранжа во всех точках интервала [0. Л.
за исключением точек разрыва управления. Однако число и
местоположение точек разрыва методами классического вариационного
исчисления определить не удается.
или
Теперь попытаемся решить эту задачу, используя принцип
максимума. Функция Понтрягина
Сопряженные уравнения совпадают с первыми двумя уравнениями
Эйлера—Лагранжа, поэтому с учетом условий трансверсальности
имеем = Ci — /. Из условия максимума
max W=^iJt2+ max tj)2«
|ul<a |ы|<а
сдЗД'ет, что оптимальное управление принимает только крайние
значения (а или —а) и его знак всюду в точках непрерывности совпадает
со знаком функции ^2 U):
и = а sign = а sign (С^ — t).
Так как линейная функция может изменить знак иа интервале не более
одного раза, то оптимальное управление
а при О < ^</i;
—с при /i < / < Г,
—а при О < / < /i;
а при /i < / < Г.
Но по условию задачи нужно повернуть вал двигателя иа
максимальный (положительный) угол. Поэтому оптимальным может быть только
первое из двух приведенных управлений. Остается определить точку
ti переключения (разрыва) управления. Проинтегрируем уравнения
объекта при выбранном управлении с учетом начальных условий
(краевых условий иа левом конце траектории):
at при О < / < /j;
Са—а/ при ^ < / < Г.
Используя непрерывность ^2(0, т. е. равенство at^ == С2 — at^, можно
представить
f at при О ^ / <
\ a{2ti^t) при /1 < / < Г.
Из краевых условий на правом конце траектории (Г) = а (2ti —
— 7^ г= О получаем ti = Т/2. Итак, окончательно для оптимального
управления имеем
А при О < / < Т/2;
— а при Г/2 < г < Т.
Задача максимального быстродействия
Эта задача формулируется следующим образом: найти
допустимое управление, переводящее заданный объект из
начальной точки (множества) в конечную точку (конечное мно-
Х2 =
жество) за минимальное время. Разработка принципа
максимума началась с решения этой задачи. Она является частным
случаем задачи с подвижными концами и нефиксированным
временем. Если положить -= О, то критерий оптимальности
имеет вид J — tf, поэтому в данном случае go == //, fo = 0
п
И функция Понтрягина Н = ^'^ifi- Если концы закреплены,
тоС = —go= —tf и условия трансверсальности принимают вид
И U^i^ - —dG/dtf== 1.
Пример 10.5. Решим задачу
Xi{0) = x2(0) = 0; xi(/,)=d>0; а:2(/,) = 0;
J =.if min.
Гамильтониан, сопряженные уравнения и их решения имеют такой вид:
Из принципа максимума
max H==s'^iX2 -h niax фа и
\и\ <Са \и\<Са
получаем и* = а sign фг (О- как фз (О — линейная функция, то
на интервале О < / < // функция фд (/) может изменить знак не более
одного раза, причем из условия задачи (см. граничные условия) ясно,
что вначале и* = а илн на всем интервале О < f < //
а при а < / < /i;
" I —а при /, < ^ < //.
Подставив это выражение в уравнения объекта и решив их, получим
' C/V2 + Ci / + Сз при О < ^ < /i;
. —a/2/2+C2^-f С4 при
g/ + Ci при 0</<^; ,
— а/+ Са при /1 < / < tf\
Из краевых условий на левом конце следует Ci = О и С3 = О, на
правом конце Са = а//, С4 = —aip2 + d. В силу непрерывности фазовой
траектории в точке / = /1
ati = ~a/i + atfi at\l2 => — ЫУ2 + atf + d—a/f/2,
откуда /i = /i/2 и 21/570.
Таким образом, оптимальное управление
п при о < / < V^/o;
-а при Yd/a < ^ < 2yd/a.
Рассмотрим задачу максимального оыстродействия, когда
объект является линейным (описывается линейными
дифференциальными уравнениями):
cti<.4^^h aj<0. P>0. /=-1,2,....г;
^i{to)=^'\ Xiltf)^0, /=1.2,..., n;
У =/y~>min.
(10.56)
Эта задача называется линейной задачей максимального
быстродействия, В матричной форме уравнения объекта принимают
вид
х = Ах + Ви.
Предполагается, что эти уравнения являются уравнениями в
отклонениях и поэтому конечное состояние, в которое нужно
перевести объект, есть начало координат {x{tf) = 0).
Функция Понтрягина
я = ,|,7{Ах + Ви) =2 Ь ^7"Л
1==\ \k=\ /=| /
где = (г|>,, tj?n) подчиняется сопряженному уравнению
Y = _.dHfdx,
или сопряженной системе уравнений
«ф == ^дН/дх1у /=-1.2..-.,/2.
Согласно принципу максимума, оптимальное управление
находят из условия
шах Я - У фг У а,,, х,, + max У Фё 2
или
max У uj у 6,;ф, = ^ ^^^l^J S ^о'^Л
где
U = {u:a,<u^<p;, /=1,2,...,г}.
Если выполняется так называемое условие нормальности (см.
л
ниже), то сумма 2 ^tj'^i обращается в нуль только в изолиро-
ванных точках. В этом случае из последнего тождества
следует, что координаты и^- U = \ у .... г) оптимального управления
U* кусочно-постоянны и принимают крайние значения cCj или
aj при 2'''-/^'<°'
»■= I
при 2 *W-^i>0. /=1.-.
1=1
В частном случае, когда ограничение имеет вид |«/| < а/,
п.
и] =aj sign 2 ^ii "Фь /=«=1.2 г.
Условие нормальности. Введем в рассмотрение (п X п)-мат-
рицы
М[/)=[В,.(АВ)^... (А"-^ В),.), /-1,2,..., г,
где В^, (АВ)^ (А"-^ В)^ есть у-е столбцы матриц В, АВ,...
...,А""~*В соответственно.
Для объекта х = Ал: + Ви выполнено условие
нормальности или условие общности положения [4, 12], если матрицы
М [/] (при / = 1, г) невырождены, т. е. их столбцы линейно
независимы, или det М [у] Ф О (при у = 1, .... г). Объект, для
которого выполнено условие нормальности, будем называть
нормальным.
Пример 10.6. Для системы
условие нормальности выполнено. Действительно,
A=(gi). В=(1?). AB=('i)
и матрицы
м [ii=[i i] .M[2]=[j
невырозкдены.
Покажем, что для объекта
Со У ^"^ + «1У^''-{'...+ а,у = Ьи,
О, 6^0,
(10.57)
всегда условие нормальности выполнено. Не нарушая
общности, примем Go = \. Преобразуем приведенное уравнение к
нормальной форме, приняв у ^ х^:
Х2 = Хз,
Х^-г^х^,
Хп = —aiX^~a2X^-2 — -^'—cinXi + bu,
В векторной форме эта система уравнений принимает вид
x = Ах + Ви, где
А -
0
1
0
0
0
0
1
0
0
0
0
1
—а
. —а
f 0 \
; в =
\ 0 ,
Как легко вычислить,
АВ =
А«В==
О
b
—a^b
\ —«2 b+a\b
.... А"-' В =
поэтому
/00 b
О О ... —Oib
detM = det
\
О b
b —a^b
о равен —1 или 1 в зависимости от п. В данном случае г = 1
и условие нормальности выполнено.
Необходимое и достаточное условие
оптимальности. В случае линейной задачи
максимального быстродействия при выполнении условий
нормальности принцип максимума является не только необходимым,
но и достаточным условием оптимальности. Справедливо
следующее утверждение [4]; если выполняется условие
нормальности, то, для того чтобы допустимая для линейной задачи
максимального быстродействия пара (и*(/), х*(/)) была ее
решением, необходимо и достаточно, чтобы она
удовлетворяла принципу максимума.
В оптимальном по быстродействию управлении линейным
объектом функции uj{t) (при у = 1, г) принимают только
граничные значения при любых собственных значениях
матрицы А, если выполнено условие нормальности. В общем
случае эти функции имеют произвольное число точек
переключений — точек перехода с одного граничного значения на
другое. В частном случае справедлива следующая теорема [4].
Теорема об п интервалах. Если в линейной задаче
максимального быстродействия объект является нормальным
{выполняется условие нормальности) и его характеристическое
уравнение
(let (А — sE)= О
имеет только действительные корни, то оптимальные
управления {t) кусочно-постоянны, принимают только крайние
значения и имеют не более п интервалов постоянства, т. е.
не более п — 1 переключений.
Впервые теорему об п интервалах для нормального
объекта, который описывается дифференциальным уравнением
вида (10.57), сформулировал и доказал А. А. Фельдбаум. Как
было показано, условие нормальности для такого объекта
всегда выполняется, поэтому для справедливости теоремы об
п интервалах необходимо и достаточно, чтобы все корни его
характеристического уравнения были действительны.
Если характеристическое уравнение имеет комплексные
корни, то число переключений зависит от начальных условий.
В каждом конкретном случае оно возрастает при удалении
начальной точки от начала координат и может быть сколь
угодно большим, но всегда конечным при любой начальной
точке.
Задана с ограничением на фазовые координаты
Если на некоторые из координат фазового вектора
накладывают ограничение, то, вообще говоря, теорема об п
интервалах неверна. Более того, принцип максимума в том виде,
как он был сформулирован, несправедлив. Формулировка
принципа максимума при наличии ограничений на фазовые
координаты намного сложнее, и здесь она не будет приведена.
Чтобы познакомиться с некоторыми особенностями
решения задачи с ограничением на фазовые координаты, рассмотрим
простой пример.
пример 10.7. Пусть требуется перевести из начального состояния
в конечное за минимальное время объект, который описывается
уравнениями Xi = Х2 — и при ограничениях \и\ < с, ^ и
краевых условиях Xi (0) = Х2 (0) = 0; х^ {tf) = xf^, (tf) = 0. Примем, что
х[ > 0. Тогда, пока (/) ^ Ла^, оптимальное управление а* = а
и фазовые координаты jtj — at, xl = atV2. Очевидно, координата jcJ
достигает значения Jtgm в момент времени t^ = x^mf^- Начиная с этого
момента времени начинается второй этап, на котором w* = О и
координата JcJ остается постоянной и равной Хд^,
а фазовая координата jc* = ШУ2 +
+ X2rn{t-h),
Чтобы удовлетворить условию иа
правом конце траектории, должен
существовать третий этап — этап торможения, иа
котором и* = —а. Зависимости и* (t),
(t) и х1 (/) от времени показаны на
рис. 10.2. Оптимальные управление и
траектории имеют вид, приведенный на
Этом рисунке, если оптимальное время
if > 2/1, в противном случае ограничение
на фазовую координату не будет влиять
на решение н оптимальное управление
будет состоять из двух интервалов
постоянства. Рис. 10.2
Задачи с несколькими ограничениями. С увеличением числа
ограничений, при которых находятся оптимальные управления
и траектория, как правило, решение задачи усложняется. При
наличии нескольких ограничений может оказаться, что при
их одновременном учете задача аналитически неразрешима,
тогда как при их частичном учете задача легко решается. В
подобных случаях полезно начинать решение с упрощенных
задач, которые получаются из исходной при отбрасывании
каких-либо ограничений. В результате их решения может
выявиться следующее:
1. Найденные оптимальные управления и траектория
какой-либо упрощенной задачи удовлетворяют неучтенным
ограничениям. Это означает, что временно не учтенные
ограничения являются несущественными в том смысле, что они не
влияют на решение задачи и могут бьггь совсем отброшены. В этом
случае найденное решение упрощенной задачи и будет
решением исходной задачи.
2. Оптимальные управление и траектория ни одной
упрощенной задачи не удовлетворяют неучтенным ограничениям;
эти ограничения являются существенными и задачу нужно
решить заново с учетом последних. Но и в этом случае решения
упрощенных задач бывают полезными, так как они могут
«подсказать» решение исходной задачи.
Пример 10.8. Рассмотрим уравнение двигателя х=Х2, X2=w при огра-.
ничениях [ul < а, J u^dt < b. Последнее соответствует одно времен-
о
ному ограничению по току якоря и по иагреву. Пусть требуется
определить управление и* (/), переводящее вал двигателя из начального
состояния в конечное за минимальное время при краевых условиях
^ (0) = Д^а (0) = О, (tf) = d > О, (tf) = 0.
Нетрудно убедиться, что в этой задаче не могут быть
несущественными оба ограничения, поэтому простейшее упрощающее
предположение — это допущение, что существенным является только одно
из данных ограничений.
Предположим, что таким ограничением является первое. Второе
пока в расчет ие будем принимать. Тогда рассматриваемая задача
совпадает с примером 10.5 н оптимальное управление
а при О < / < tf/2;
-а при f//2 < / < //, tf=-2yd/h.
Вычислим интеграл в левой части второго ограничения:
tf _
{t)dt^a^tf-=2ayad.
Принятое допущение правомерно, если 2a'\/ad < Ь. В противном
случае необходимо при решении учитывать второе ограничение. Пусть,
действительно, последнее неравенство не выполняется. Тогда
естественно предположить, что при оптимальном управлении интеграл
примет максимально возможное значение, поэтому неравенство в
ограничении можно заменить равенством. Решим эту задачу без учета первого
ограничения. Решение задачи в такой постановке было получено в
примере 10.2: оптимальное управление
«*=r«(2) = 6d(l-2///y)//f, // = v^T2dVb.
Это выражение принимает по модулю максимальное значение в
начальный и конечный моменты
max и* (/)=и*(0) = «* {tf)===^ed/tf ^зУь^/Ш
и найденное управление будет удовлетворять ограничению \и\ ^ а,
если ЗУ bVlSd ^ а. Если это неравенство, как и ранее полученное
неравенство, ие выполняется, то необходимо учитывать оба ограничении.
Итак, пусть оба ограничения существенны. В этом случае
интегральное ограничение приобретает вид равенства
//
о
и исходную задачу неклассического типа можно преобразовать к
следующей задаче классического типа:
Xi = X2\ Х2^и; Xs = u^; и^^а^ + г^ = 0;
Д1(0) = д:2(0)-д:з(0) = 0; x,{tf) = d>0;
Jf2(//) = 0; xMf)^t', J=://-^min.
Решим эту задачу методом множителей Лагранжа. Выпишем
гамильтониан и уравнения Эйлера—Лагранжа:
дН/ди = Ц)2 + 21133^ + 2hi = 0; dli/dz = 2X2 -^-^ О.
Из этих уравнений следует: ifi = if>2 = —C^t + "Фз = Cg.
Если Я =?t О, то из последнего уравнения Эйлера —Лагранжа г = 0
и в силу уравт^еиия ограничения и « w<0 = ±а, т. е. в этом случае
оптимальное управление, как и оптимальное управление в
упрощенной задаче, когда не учитывается интегральное ограничение,
принимает только крайние значения. Из условия стационарности {дН/ди = 0)
и = --я1)2/[2 + ^)1 = (Crt - С2)/[2(Сз +1)].
и если Я = О, то
u^i^) = Cii^Ci, гдеС; = С1/(2Сз), С^'= С2/(2Сз).
Управление и(^) имеет такой же вид, что и оптимальное управление
в упрощенной задаче, когда первое из двух ограничений не
учитывается.
Таким образом, оптимальное управление и* состоит из управлений
вида u = g, w — —а ий- причем с увеличением а длины
интервалов, на которых и* = а или и* = —с, должны уменьшаться. Эти
интервалы должны выродиться в пустое множество, когда а настолько
велико, что ограничение \и\ ^ а становится несущественным, при
этом на всем интервале [О, tf] оптимальное управление и* = иС^) =
==и(^'К И наоборот, с ростом b должен выродиться в пустое множество
интервал, на котором и* =. и(^), так как в этом случае начиная с
определенного значения b становится несущественным интегральное
ограничение. Как отмечалось, управление принимает по абсолютной
величине максимальное значение, и оно прежде всего может не
удовлетворять ограничению jw| < й иа концах интервала [О, tf]. Из
изложенного следует, что оптимальное управление
g при О < / <
M(\-2t/tf)/tf при < / < h\
—а при ^2 < ^ <
где ^2 и h определяются из краевых условий. Дальнейшие вкладки
предлагаем проделать самостоятельно в качестве упражнения.
Вырожденные задачи
Методы классического вариационного исчисления и
принцип максимума не всегда позволяют найти оптимальное
управление. Существуют задачи, в которых необходимые условия
оптимальности, даваемые этими методами, выполняются
тривиальным образом и им помимо одного оптимального
управления удовлетворяет множество других управлений, среди
которых могут быть как оптимальные, так и неоптимальные
управления. Задачи этого класса иазываюгг вырожденными. К числу
вырожденных относятся линейные задачи, для которых
условия общности положения не удовлетворяются.
Если обнаруживается, что внутри интервала [t^, tf]
имеется конечный отрезок времени [^i, такой, что на нем вдоль
соответствующих управлению и* (t) траектории х* (t) и
сопряженной функции -ф* (t) выполняются тождества
аЯ(я|з*,х*,и*,0/^" = 0, а^Я(ф*,х*,и*,0/^"' = О (10.58)
или
Е (ф*, х=^-, u^ uj)^H (ф=^-, x*. u^ t)~-H (ф=^л х=^-, и, о ^ о, (10.59)
то оптимальное управление называют вырожденным в
классическом смысле в случае (10.58) или вырожденным в смысле
принципа максимума в случае (10.59). Вообще говоря, условия
(10.58) и (10.59) не всегда выполняются одновременно.
в вырожденных задачах оптимальное управление нельзя
найти только из (10.58) или (10.59) и требуются
дополнительные условия. Одним из необходимых дополнительных
условий для вырожденных скалярных управлений являются
неравенства
(-1)
д
ди
<0, k^lX,..,
При пользовании этим условием производится
последовательное дифференцирование дН/ди по времени, пока в
одной из производных не появится и, что и даст возможность
найти оптимальное управление. Доказано, что при таком
последовательном дифференцировании s раз управление может
появиться лишь при четном s = 2k.
Такого рода вырожденные задачи встречаются, в
частности, когда гамильтониан Н линейно зависит от и.
Пример 10.9. Пусть
10
х=^и; \и] ^ 1; А(0)=4; x(IO) = 0; J= f x^dt -> min.
d
Тогда
H=^ilm~x^; дИ/ди=-\\>\ -i^)^ —дИ/дх = 2х.
В соответствии с принципом максимума и* = signij). Если на
каком-либо отрезке времени интервала [О, 10] получится ф (t) — О,
управление будет вырожденным. Допустим, что такой отрезок существует.
Для такого отрезка справедливы
dH/du='ii> = 0; d{dH/du)/dt^{\>^2x = 0; dHdH/du)/dt^^2х^2и-^0,
откуда для вырожденного управления получаем и* = 0.
Таким образом, оптимальное управление может принимать только
крайние значения: —1 или 1, когда ф О, и О, когда -ф = 0. Одним
из управлений, удовлетворяющих этому условию, является
управление
-I. 0< ? < t^;
О, /, </<10.
Проинтегрируем уравнение объекта при этом управлении с учетом
граничных условий. Тогда получим
4 —Л О ^ / <
О, (i<i ^ 10.
Из условия непрерывности траектории следует х (tj) = 4 — = О,
откуда ti= 4.
Рассмотренная задача является вырожденной как в
классическом смысле, так и в смысле принципа максимума на
отрезке.
Особые задачи
п
Как отмечалось, в гамильтониане // = 2 '^ifi сопряжен-
ную координату яр^ обычно выбирают равной -ф^ = —1.
Однако встречаются задачи, в которых оптимальным
управлению и траектории соответствует фо = 0. Такие задачи
называют особыми.
Примером особых задач могут быть неудачно
сформулированные задачи оптимального управления, например такие,
решение которых не зависит от критерия оптимальности или
имеет только одно возможное допустимое управление. Для
последних задач не суш.ествует возможности выбора наилучшего
решения и сама постановка задачи об оптимальном
управлении становится бессодержательной.
Пример 10.10. В качестве примера рассмотрим задачу x = u,
\и\ < 1, л; (0) - 0. х (1) - 1, / = — J У\ — u4t min. где х и
и — скалярные величины. о
Составим гамильтониан Н и сопряженное уравнение:
И= —фо1/1 —«2 + '*i —дИ/дх = 0.
Из последнего уравнения получаем ф^ = С.
В соответствии с принципом максимума если w* — оптимальное
управление ид:* — оптимальная траектория, то
И{х*. и*, ф*) > /7(а:*, и, ф*).
причем Фо = const ^ 0.
Возможное допустимое управление — кусочно-непрерывная
функция, удовлетворяющая поставленному ограничению и переводящая
точку из X (0) за время = 1 в точку л; (1)= 1, — единственно и равно
W (/) = 1. Так как других возможных управлений нет, оно и должно
быть решением задачи: и* (/) = 1. При этом Н (х*, ц*, ф*) = ф1 = С
и по принципу максимума должно быть С ^ —Фо!/'! — + Си.
Легко проверить, что .если фд =^ 0. то последнее неравенство выполняется
при всех значениях константы С > 0. Но при фо = —1 нельзя
подобрать С так. чтобы последнее неравенство выполнялось при всех
допустимых управлениях. Следовательно, в данной задаче оптимальному
решению соответствует фо = 0.
§ 10.4. Метод динамического программирования.
Теорема Болтянского. Метод Кротова
Динамическим программированием называется
разработанный Р. Беллманом в начале 50-х годов метод оптимизации
многошаговых процессов различной природы. Основу
динамического программирования как метода оптимизации составляют
[3, 7]: 1) принцип оптимальности; 2) инвариантное
погружение, т. е. включение исходной задачи в семейство аналогичных
ей задач; 3) функциональное уравнение, получаемое на
основе принципа оптимальности и инвариантного погружения.
Основная идея метода заключается в следующем. Вместо
того чтобы решать исходную задачу, ее включают в некоторое
семейство задач оптимизации (инвариантное погружение). При
этом может оказаться, что между отдельными задачами
существуют простые соотношения и среди задач семейства найдется
такая, которая легко решается. Тогда, используя решение
последней и соотношения, связывающие отдельные задачи
семейства, получаем решение исходной задачи.
Проиллюстрируем сказанное на простейшем примере.
Пусть требуется найти минимум функции / (х) специального
вида:
п
где G" — прямое произведение областей (множеств) Gj
определения функций fi (xj):
G-^G,xG^x,.,xG^; Xt^G^, / = 1,2,....n.
Рассмотрим семейство задач
т
/(/Tzj^xC"))^ Х/Пл:!-)--^ min , m-=l,2..... (10.60)
В последнем соотношении х<'") = (Xi, л:„^^. Исходная
задача погружена (инвариантное погружение) в построенное
семейство задач в том смысле, что она входит в это семейство как
частный случай (при т = п). В задаче (10.60) параметр m
можно трактовать как дискретное время. Введем так
называемую функцию Беллмана
fim= min 'Etfi{Xi).
Очевидно,
min
т
/m+l(An, i)+ ^fi{Xi)
= inin
i= I
m
/m+i(WiJ+ rnin S/Ла:,)
Ho второе слагаемое в последнем выражении есть В^,
поэтому функция Беллмана удовлетворяет функциональному
уравнению
fim+i= min I/„,+i(x^+i) + B^J
или, так как в данном случае не зависит от лг^+г,
fim+i = min /„,^1 (x^+i) 1- (10.61)
причем
fii = min /i(;^i).
Решая (10.61) с учетом последнего условия, получим Bj'
Bg, Вл и л:1, дгп. Решением исходной задачи будут Вп
и X* = (xI, xS)^.
Как видно, метод динамического программирования
сводит задачу минимизации скалярной функции от п переменных
к п задачам минимизации скалярных функций от одной
переменной. В результате при числовом решении задачи
существенно сокращается объем вычислений. Действительно, пусть
Gj (/ = 1, п) — конечные множества и каждое из них
состоит из / точек. Тогда при решении исходной задачи методом
перебора без использования метода динамического
программирования потребуется рассмотреть вариантов, а с
использованием метода динамического программирования — всего in
вариантов.
При использовании уравнения (10.61) вычисление В^^
производится в направлении возрастания аргумента, т. е. в
прямом «времени», поэтому уравнение (10.61) иногда называют
уравнением Беллмана в прямом времени или прямым
уравнением Беллмана в отличие от уравнения Беллмана в обратном
времени или обратного уравнения Беллмана, при
использовании которого вычисление Bra производится в направлений
убывания времени. Для получения обратного уравнения про-
изведем инвариантное погружение исходной задачи в
семейство задач
m^n, n —1,..., 1,
где
При rn = 1 -и'меем / (x) = Введем функцию Беллмана
n
Sm - min 2 (^i).
Очевидно,
Sjn-i^ min (x,„_i) + min 2 /'/(^^i)!
или
- min (x^._,) 4- (10.62)
Уравнение (10.62) есть обратное уравнение Беллмана.
В рассмотренном простейшем примере вывод уравнения
Беллмана основывался на очевидных соотношениях. В более
сложном случае при выводе уравнения Беллмана
используется принцип оптимальности.
Принцип оптимальности
В обш.ем виде этот принцип можно сформулировать следую-
илим образом: оптимальная стратегия {поведение) обладает
тем свойством, ч/по, каковы бы ни были начальное состояние
и решения на начальном этапе, решения на последующем эта-
пе должны составлять оптимальную стратегию относительно
состояния, которое получается в результате принятия
решений на начальном этапе,
В задачах оптимального управления оптимальность
определяется функционалом (критерием оптимальности) J{u{t),
x (/)), состояние— фазовым вектором х (/), стратегия — это
управление и (/) на всем интервале [/о. решение — это
выбор управления.
Для задачи оптимизации справедлив принцип оптималь-
исчгти, если она обладает марковским свойством или. как еще
говорят, оптимизационный процесс является марковским.
По определению, задача оптимального управления обладает
марковским свойством, если после выбора управления на
интервале [/о. ^'1 влияние процесса управления (и (/), х (/)) на
оставшемся интервале I/', tf\ на величину функционала
J (и (О, x (/)) зависит только от состояниях (/') в конце
начального интервала и выбора управления в последующие
моменты времени, т. е. на интервале [/', tf].
Чтобы сформулировать принцип оптимальности
применительно к задачам оптимального управления, рассмотрим
задачу
x =.f(x,u.o; u(06iJ,;
x(/o)-xO;x(/,)gX,;
J-gol^itf), ^/l-H J /o(x.u,/)d/.
(10.63)
Условимся функцию u (/) на интервале la, b] обозначать
и la. fcl; u [a, b] = (u (/), a < / < fc). Если интервал слева
или справа является открытым, то соответственно слева или
справа будем писать круглую скобку: и (а. Ь) = (и (/), а <
< / < fc) ни (а, Ы - (и (/). а < Ь < Ь).
Для задачи (10.63) справедлив принцип оптимальности,
и он может быть сформулирован следующим образом: для
оптимальности допустимой для задачи (10.63) пары (и* (/).
х* (t)) необходимо, чтобы при любом f ^ [t^, tf\ управление
u*[^', tf] было оптимальным относительно состояния х* (/'),
е котором окао/сется объект в момент f при использовании на
начальном отрезке времени t^ <: t <^ f управления и* [^o» ^'1.
Этот принцип оптимальности иногда также будем называть
прямым принципом оптимальности.
Это утверждение легко доказывается от противного.
Допустим, что оно неверно и существует допустимое
управление [/', tf], переводящее объект из точки х* (/') в точку
х®(/") £ Xf в момент при котором функционал
'/
Л(" и\ tf]) - go (x (//). tf) + ( /о (x, u, t) dt
Г'
принимает меньшее значение, чем при управлении и* [f,
/р. т. е.
л(и''[^'./Л)<лк1^'.^;1).
Тогда критерий оптимальности в задаче (10.63) при
управлении
и*(0. to<t<i'\
и»(О, f ^t^if
принимает меньшее значение, чем при управлении и* [t^,
t}], т. е.
J (u» [to, /П)=Л ("* 1^0..^'])+л. (ио [Г, tn) < J (u* [to. 1П) =
= Jг(u*lt„t•])+Mu*ll',ti]).
a это противоречих оптимальности управления и* 1/о, tJ].
Принцип оптимальности для задачи оптимального
управления является частным случаем следующего более общего
утверждения: если допустимая для задачи (10.63) пара (и* {t),
x*{t)) оптимальна, то, каков бы ни был подынтервал [t^, /gl cz
<^ Uq, tf], управление и* (t) на этом подынтервале является
оптимальным относительно граничньих точек л* {t^ и х* {t^.
Это утверждение доказывается точно так же, как и принцип
оптимальности. В частном случае, когда = /о»
приведенное утверждение называют обратным принципом оптималь-
ности [71. Приведем несколько иную формулировку этого
принципа.
Обратный принцип оптимальности.
Для оптимальности допустимой для задачи (10.63) пары
(и* (/), x* (t)) необходимо, чтобы при любом f ^ Uq, tj]
управление и* Uq, t'] было оптимальным относительно конечного
для интервала Uq, f] состояния х (/') = х* (/').
Функция и уравнение Беллмана
Произведем инвариантное погружение задачи (10.63) в
семейство задач, которое получается из задачи (10.63) при
замене начального условия х (to) = х° параметрическим
условием х(/')= х', /' £ 1/о. ifh в новом условии f и х'
рассматриваются как параметры. В частном случае, когда f = to и
х' = х°, из введенного семейства выделяется исходная
задача.
Минимальное значение критерия оптимальности при
параметрическом начальном условии зависит от выбранных
значений Г и x (f):
t' <t<tf
jf,(x, u,i)dll
r
причем 5 (X (t,), t,) = g„ (X {tf), tf).
Функция S (x (/'), t') называется функцией Беллмана,
Получим уравнение Беллмана. Очевидно,
S\x{t'—Lt),t'min
u(/)eu,.
I' —t^i <t Ktf
go (x (//).//)+
^-
Для краткости записи аргументы функции /о(х» О опущены.
В силу принципа оптимальности
S [x (/' —А/), f —At] = min
-f min lgo(x(0),//)-h \fodt].
или
Slx(r —Д/),/'—A/]= min
J^d/ + S[x{/'),n
Фазовый вектор x — Д/) и соответственно функция
Беллмана в левой части последнего соотношения не зависят от
управления на интервале W — Д/, /'1, поэтому в этом отношений
функцию Беллмана левой части можно перенести в правую
часть и внести под знак минимума:
0 =
min f fodt^S[x{nj']-S[x{t' -
t'—M<t<t' *
—ДО. t' — Aoj.
В полученном уравнении интеграл представим в виде
j /о dt = /о (X (П U (П. t')At + 0 (М).
f -м
Затем, разделив обе части на А/, устремим &t к нулю. Тогда,
приняв f = t, в пределе получим уравнение
0= min {h{x,\xJ)-tdS{\{f)J)ldt), (10.64)
или
О = min I/о (X. u. О + У 4^ fi (X, u. D^dSldt
„ l^\rl^. OX;
1= 1
)
которое называется уравнением Беллмана или обратным
уравнением Беллмана. Так как функция S (х (/), t) не зависит от
управления и (t), последнее слагаемое в правой части можно
вынести за скобки и уравнение Беллмана записать в виде
mm
или в векторной форме
2as
. -dSldt,
fo {x,u./)+ — Ux.u./)
as/a/.
(10.65)
Напомним, что, по определению, производная от скалярной
функции по векторному аргументу есть вектор-строка:
as/ax = {ds/дхг..... as/ax„).
Сформулируем основной результат: если функция
Беллмана дифференцируема, то, для того чтобы допустимая пара
(и {{), X (t)) для задачи (10.63) была ее решением, необходимо.
чтобы она удовлетворяла уравнению Беллмана (10.65) при
граничном условии
S{x{if)Jf)==g,{x(tf).ff). (10.66)
Если минимум в левой части (10.65) достигается во
внутренних точках множества L^,, то уравнение Беллмана можно
представить в виде
/о (X, U, О + f (X, U. t)« —dS/dt; (10.67)
dS
|/o(x,u,0+-^f(x,u,/)| = 0. 7«l,2....,r. (10.68)
Уравнения (10.68) выражают необходимое условие минимума
левой части (10.65) и заменяют опущенную в уравнении (10.67)
операцию минимизации по управлению.
Если правые части уравнений объекта и подынтегральное
выражение в критерии оптимальности, т. е. функции i —
= О, 1, 2, п,'явно не зависят от времени и конечный момент
не фиксирован, то функция Беллмана не зависит явно от
времени и dS/dt = 0.
Оптимальное управление методом динамического
программирования находится следующим образом:
1) из уравнений (10.68) определяется управление как
функция от S, т. е. и* = и* (5);
2) подставив и* (S) в уравнение (10.67) и решив его при
краевом условии (10.66), находят функцию Беллмана;
3) подставив найденную функцию Беллмана в выражение
U* = U* (S), получают оптимальное управление как функцию
фазовых координат.
Пример 10.11. Пусть требуется найти оптимальное управление с
обратной связью в задаче:
где и JtJ — произвольные заданные числа, момент // не фиксирован.
Для решения этой задачи воспользуемся методом динамического
программирования. Выпишем уравнения (10.67) и (10.68). В данном
случае dS/di = О и эти уравнения имеют вид
dxi дХ2 . ^Х2
Из второго уравнения и* = —IdS/dXz- Подставим это выражение в
первое уравнение:
I fdS Y
Нужно решить это уравнение при граничном условии 5 (х (tf )) = 0.
Будем искать решение в виде квадратичной формы
которая, очевидно, в силу краевых условий задачи удовлетворяет
указанному граничному условию. Подставив это выражение в
уравнение Беллмана, получим
'^f - i (2a,2^i +2а22>^г)^ +(2au^i 4-2^712^2^2 =0
или
(1 -2)j^i + (2^11 -2^^2^22) x,X2 + (2^7,2~al20.
Последнее равенство будет выполняться тождественно, если
1—of2=0. «,1 — О1гС22=^0, 2oi2—0^2 —О-
Эта система имеет следующие решения:
ai2 = l. «22= ± V2. аи= ±У2.
Так как, по определению, функция Беллмаиа
//
i
то S >► о при всех / Ф tf. Поэтому квадратичная форма,
удовлетворяющая уравнению Беллмана, будет функцией Беллмана, если она
является положительно-определенной. Этому условию удовлетворяет
решение
поэтому функция Беллмана
5 = V2 .лЛ-2х»Х2 + У2 xi
и оптимальное управление имеет вид
"*(х)= - 1~ =- - V^x,).
2
Как отмечалось, вариационные методы позволяют находить
оптимальное управление как функцию времени. Достоинством
метода динамического программирования является то, что он
позволяет находить оптимальное управление как функцию
фазовых координат, т. е. позволяет решать задачу синтеза
оптимального регулятора. Недостатком метода динамического
программирования является то, что он исходную задачу
оптимального управления сводит к решению
трудноразрешимого нелинейного уравнения в частных производных.
Проблема обоснования метода динамического
программирования и достаточные
условия оптимальности
Уравнение Беллмана как необходимое условие
оптимальности получено при предположении, что функция Беллмана
является гладкой (непрерывно дифференцируемой). Это
допущение не вытекает из условия задачи оптимального управления
и часто не выполняется, поэтому применительно к задачам
оптимального управления метод динамического
программирования требует обоснования, и в тех случаях, когда обоснования
нет, метод динамического программирования может быть
использован как эвристический прием. При определенных
условиях метод динамического программирования дает достаточное
условие оптимальности.
Пусть S (х, t) — гладкое решение уравнения Беллмана
(10.65) при граничном условии (10.66) и функция и* (х, t)y
вычисленная из условия
/о (X, U*, 1)+-^! (X. U*, О + = niin
порождает единственную траекторию х* (t), удовлетворяющую
уравнениям и граничным условиям задачи (10.63), вдоль
которой функция U* (t) = U* (х* (О, t) кусочно-непрерывна.
Тогда функция U* (х, t) является оптимальным управлением
задачи (10.63).
Докажем это утверждение. В силу определения функции
U* (х, /) в каждой точке ее непрерывности справедливо
равенство [см. (10.64)]
/о (X* (О, U* (О, о + dS (X* (О, t)/dt = 0.
Проинтегрируем обе части по / от to до tfi
if
' /о IX* (0> "* (t)> t]dt+s [х* (tfi tf]~s [X* (g, t,] - 0,
откуда с учетом условия (10.66) и равенства х* {Q = х®
находим
5 (x^ g = ^0 [X* (//), tf] + j\ [X* (О, u* (О, t] dt, (10.69)
Рассмотрим допустимую пару lu (/), х (/)], где и (/) —
произвольное допустимое управление. В силу определения
функции U* (t) = U* (х* (/), t) справедливо неравенство
/о (х, и, t) + dS (X, t)/dt >(X*, u*, О + dS (X*, О/Й/ - 0.
Интегрируя обе части по t вдоль траектории х (/), получим
^ ^
j /о (X (0." (0. t)dt + S (X (//). /,) -S (X (g. g > 0.
или с учетом условия (10.66) и равенства х (д = х°
//о (X (0. U (0. Л d/ + йГо (X (/у), tf) > S (хо, д.
Из этого неравенства следует [см. также (10.69)], что при
U (t) = U* (х, t) критерий оптимальности принимает
минимальное значение. Следовательно, управление и* (х, /)
является оптимальным.
В том случае, когда функция Беллмана является
негладкой, достаточное условие оптимальности дает теорема В. Г.
Болтянского. В ее формулировке используется понятие
кусочно-гладкого множества. Определение этого понятия
дается в [4, 7]. Здесь только отметим, что всякая замкнутая
гладкая поверхность размерности, меньшей п, является кусочно-
гладким множеством в /?" [4]. Напомним, что гладкой
поверхностью или гладким многообразием размерности п — k в
пространстве называется множество точек, удовлетворяющих
системе уравнений
Ф,. (a:i, ...,л:п)=0, /-l,...,fe,
где (jc^, ,..,Хп) — гладкие функции и их градиенты difjdx =
= {d^i/dxi, d(pi/dxn) (t = 1, ...» n) линейно независимы.
Теорема Болтянского: пусть существует
непрерывная функция S (х; /), обладающая непрерывными
производными по всем своим аргументам и удовлетворяющая урав-
нению Беллмана (10.65), всюду на прямом произведении
X X 1^0. кроме точек кусочно-гладкого множества М
размерности ^ меньшей п + \ \ при t =^ tf эта функция
подчиняется граничному условию (10.66). Допустимая для задачи (10.63)
пара (и* (t), x* (0), удовлетворяющая почти всюду на [t^, tf\
уравнению Беллмана, является ее решением.
На основании теоремы Болтянского можно рекомендовать
следующий порядок решения задач оптимального управления
[71. Выписывается уравнение Беллмана. Находятся функции,
удовлетворяющие этому уравнению в различных областях
пространства 7?"*^^ = X X /?, где производные этих функций
непрерывны. Далее, если удается непрерывно «склеить»
полученные функции, то «склеенная» функция, как правило, и
есть искомая функция Беллмана. Чтобы убедиться в этом,
нужно проверить, является ли множество, где производные
найденной функции разрывны, кусочно-гладким.
Метод Кротова [11]
В начале 60-х годов В. Ф. Кротов разработал новый метод
решения вариационых задач, который основан на достаточном
условии оптимальности, названном впоследствии принципом
оптимальности Кротова [7]. Но прежде чем познакомиться с
этим принципом, рассмотрим более общую постановку задачи
оптимального управления.
Решение задачи оптимального управления в классе
кусочно-непрерывных управлений и (/) и кусочно-гладких
траекторий x (i) не всегда существует. Целесообразно обобщить ее
так, чтобы расширить класс задач оптимального управления,
обладающих решением.
Пусть объект, ограничения и краевые условия задаются
следующим образом:
x=f(x,u,o; (u,x)€V(0; x(g€Xo, x(^^)gx,. (10.70)
Здесь V (t) при каждом фиксированном t £ It^y tf] является
некоторым множеством пространства /?" *Обозначим через
D множество пар (и (/), х (/)) кусочно-непрерывных функций
11 {t) и кусочно-гладких (непрерывных и
кусочно-дифференцируемых) функций x (f), определенных на Uq, tf] и
удовлетворяющих уравнению на этом интервале, за исключением
конечного числа точек, ограничению на всем интервале и краевым
условиям (10.70). Множество D называют допустимым мно-
океством, а его элементы — допустимыми парами. На
множестве d задан функционал
J (u (О, X (/)) = ^0 (X (g, X {tj)) -Ь /о (X, u, t) dt. (10,71)
Требуется найти последовательность допустимых пар {u<s)
x(s) (0). на которой функционал (10.71) стремится к своему
наименьшему значению на множестве d:
lim J (u<^) (О, х<^) (0) = • inf J (u (О, X (0).
(u(O.x(O)eD
Такая последовательность называется минимизирующей.
Последовательность допустимых пар будем также называть
допустимой последовательностью.
Основным обобщаквдим моментом в новой постановке
является то, что в качестве решения задачи оптимального
управления принимается минимизирующая последовательность, а
не определенная допустимая пара, В частном случае, когда
существует допустимая пара (и* (f), х* (f)), доставляющая
минимум функционалу (10.71), все члены минимизирующей
последовательности равны этой паре: u<s) {t) == u* (/), х<«> (/) =
= X* (0.
Пример 10.12. Рассмотрим несколько видоизмененный
пример Больца (!]:
k^u\ 1; х(0)=41) = 0;^
Наименьшее значение (точная нижняя грань) функционала равно
нулю и достигается на последовательности
«(«)(/) = sign sin 2nst\ хЩ1)^ I sign sin 2я5Т^т.
Действительно, [п<*) (t)Y = 1 при любом s и jc<«) (t) равномерно
стремится к нулю прИ5-»-оо. Кроме того, эта последовательность
принадлежит допустимому множеству: при каждом фиксированном s
функция ({) является кусочно-непрерывной, jc(^) (t) — кусочно-
гладкой и пара (/), х(^) (/)) удовлетворяет заданным условиям
(уравнению, ограничению и краевым условиям). В обычном смысле задача
решения не имеет: иет допустимой пары, при которой функционал
принимает нулевое значение.
Принцип оптимальности Кротова. Сначала рассмотрим
задачу оптимального управления с фиксированным временем:
моменты /о и tj фиксированы. Пусть /С (х, t) — произвольная
скалярная функция, которая определена, непрерывна и имеет
непрерывные частные производные по всем своим аргументам
на прямом произведении X Uq, tf\. Допускается, чтобы
частная производная по времени имела разрывы 1-го рода в
конечном числе точек на интервале 1^о. ^/1- Построим функции
^ dxi dt дх
/= 1
+ -/«; (10.72)
at
F (X (g, X (ti)) (X (g. X (t,)) + /((X (tj), ti) -
-/((x(g.g. (10.73)
где f — правая часть уравнения (10.70); /о и go — функции,
входящие в функционал (10.71). Введем обозначения
fi(0- sup /?(х,и,0; (10.74)
(u.x)gV(O
inf F{x(t,)Mtt))> (10.75)
Относительно функции К (х, t) также предполагается, что она
обладает такими свойствами, что соответствующая ей функция
R (х, U, /) определена и непрерывна всюду на х х
X 1^0. ^у], а \1 (t) — кусочно-непрерывна на [/о, tf]. Функцию
К (х, /), обладающую указанными выше свойствами, будем
называть функцией Кротова,
Принцип оптимальности Кротова можно сформулировать
следующим образом: для того чтобы допустимая
последовательность (и(«> (О, x<s) (t)) была решением задачи (10.70).
(10.71), достаточно существования такой функции Кротова
K{^yt), что: 1°) /?(х(5) (t)M'^ (t)J)^N> —со при всех
t£{toJi\ и 5; 2°) R(?(^) (0,u(^> (t)J)^At) на \f,Jf\\
3°) /(х(^) (07х(^) (tf)) ^m>^oD.
м
Символ обозначает сходимость по мере.
Для доказательства этого принципа введем в рассмотрение
множество d пар (и (О, х {t)) из кусочно-непрерывных на Uqj
tf] функций U (/) и X (О, удовлетворяющих ограничению (и (/),
X (0) С ^ (0. и определим на нем функционал:
L (U, x)^F{x (g, X (/;)) - j (X (о, u (о, ол. (10.76)
Очевидно, допустимое множество является подмножеством
d, т. е. d ci: d. Поэтому функционал (10.76) определен и на
причем на d в силу уравнения из условия (10.70)
/?(х,и,0- —х+ — -/„^ __/,
и функционалы (10.71) и (10.76) совпадают:
L(U,X) ==f (X{Q, X(tf)-IK(x{tf),tf)-K{x(to),to)] +
if
Обозначим
-f j/o(x,u,0*=y(u.x).
Z= inf L(x,u)= inf f (x(/o,x (/,)) —
(и,х)^ъ x(<o)tXo,x(<y)€X/
- sup ^ (R{x{t),u(t),t)dt.
(".x)€D
В силу непрерывности (x (/), u (/), /)
sup (R{x{t),u{t),t)dt^ ( sup R{x(t),u(t)j)dt
•o
И., следовательно.
Из неравенства
l^m— j^li{t)dt.
inf y(u,x)= inf L(u,x)> inf _L(u,x) = Z
(u,x)6D (u,x)^D (u,x)^D
следует, что / является нижней гранью функционала J (и, х).
Если выполняются соотношения 1^—3°, то, очевидно,
lim J (u(*) (О, х^'^ (0) Ит L (и(^) (/), х<^) (0) - /.
Таким образом, I является точной нижней гранью
функционала (10.71) и достигается на последовательности (и^«> (t),
х<«> (/)). Следовательно, эта последовательность является
решением задачи (10.70), (10.71), что и доказывает принцип
оптимальности Кротова. Если и(«) (f) = и* (/) и х<«) {t) = (^),
т. е. решением является допустимая пара, принцип
оптимальности Кротова формулируется следующим образом: для гтюго
чтобы допустимая пара (и*(^), х* (t)) была решением задачи
(10.70), (10.71), достаточно существования такой функции
Кротова К (х, t), что
R (X* (/). U* (/), О - И it). F (X* (U. X* (/,)) ^ т. (10.77)
где \х (t) и т по-прежнему определяются соотношениями
(10.74) и <10.75).
Как решается задача оптимального управления на основе
принципа оптимальности Кротова? Допустим для простоты
рассуждения, что.решение существует в классе допустимых
пар. Подход, основанный на принципе оптимальности
Кротова, состоит в том, что вместо непосредственного отыскания
допустимой пары (и* (О, X* (0). доставляющей минимум
критерию оптимальности, отыскиваются функция Кротова и
допустимая пара, удовлетворяющие условиям (10.77). В общем
случае такой подход сводит вариационную задачу к задачам
нелинейного программирования в конечномерном пространстве.
Как следует из формулировки принципа оптимальности
Кротова, существует достаточно большой произвол в выборе
функции К (х, /). Этот произвол иногда позволяет преодолеть
те трудности, которые при других методах преодолеть не
удается. Способ задания функции К (х, /) определяет метод решения.
Путем определенного способа задания функции К (х, t)
можно получить уравнение Беллмана и принцип максимума
Понтрягина.
Рассмотрим два различных способа задания функции
Кротова. Пусть область ограничения V (t) можно представить
в виде прямого произведения: V (t) =-= X X^ Тогда
первое соотношение в (10.77) можно представить в виде
/?(х*(0.и*(0,0=- sup sup R{K{t),u{t)J). (10.78)
Один из возможных способов задания функции Кротова
заключается в таком ее выборе, что функция R (х и (/), /)
не зависит от x(t). При таком способе соотношение (10.78)
принимает вид
Л (х*(/),и* (/)./)= sup i?(x(0.u(0.0. (10.79)
При другом способе функцию Кротова выбирают таким
образом, чтобы функция R (х (О, U (0. t) не зависела от и (/). В этом
случае соотношение (10.78) записывается в виде
/?(х*(0,и*(0.0= sup /?(х(/).и(0,0. (10.80)
Способ задания функция К (х, /) зависит от задачи, и успех
ее решения в значительной степени определяется тем, как
задается функция Кротова.
Пример 10.13. Рассмотрим задачи из \[7].
Первая задача: лг=«, |«| < 1, л(0)=л(1)=-0, J{x. u)«s:
1
J —u)J/ -> inf.
b
Здесь и, X — скаляры. Составим функцию R {х, «,
дх dt
Так как концы траектории закреплены, функция F (х (/о), х (tf)) не
рассматривается. Выберем функцию К {х, t) так, чтобы функция
R {х, и, t) не зависела от управления. Это условие будет выполнено,
если
дК (дг. t)/dx = —1 или К (дг. О = + с (0.
где с (t) — произвольная гладкая функция. В этом случае
R {х, и, t) = --х^ + дК/dt ^ + dc/dt и соотношение (10.80),
принимает вид
--^*2 + dc/d/=:^sup (—x^-hdc/dt),
X
откуда х* = 0. В силу уравнения объекта х* = w* = 0. Пара и* = О,
X* = О является допустимой и удовлетворяет достаточным условиям
оптимальности. Следовательно, это пара является искомым решением.
Заметим, что решить рассмотренную задачу методом
динамического программирования или используя принцип максимума Понтрягина
ие удается.
Вторая задача: пусть уравнения, ограничение и краевые условия
те же, а критерий оптимальности имеет вид
J(x. и)= j(jt»-hl--«2)<i/.
О
в этом случае
дх dt
Примем К (х, t) =0. Тогда R (х, и, t) ~ ~—х^ г- I + и максимум
этой функции достигается при и* ^ ±\, х* = О и равен нулю, т. е.
\i (t) = 0. Пара (и* (t), X* (t)) не' удовлетворяет заданному уравнению
X* (/) ^ и* (t) н, следовательно, не является решением.
^ Попытаемся иайти допустимую последовательность пар fti<*) (/),
х(^) (/)), иа которой достигается нижняя грань функционала, равная
нулю. Рассмотрим последовательность пар
t
(^)=^sign sins я/. r(*)(0 = lsign sin sntdt.
0
Функции ui^){t) a x(^){t) при каждом фиксированном s являются
соответственно кусочно-непрерывными и кусочно-гладкими, удовлетворяют
всем условиям задачи. Таким образом, последовательность пар
(ui^) (t), х(^) (t)) является допустимой. Последовательность {xi^) (t))
равномерно стремится к нулю, а все члены последовательности
{ui^) (t)} принимают только значения ±1. Поэтому
Таким образом, приведенная выше последовательность удовлетворяет
достаточным условиям оптимальности и, следовательно, является
искомым решением.
Рассмотрим задачу с нефиксированным временем. Пусть
to фиксировано, а tf может изменяться в интервале [to, ^il,
условия совпадают с (10.70), а критерий оптимальности имеет
вид
ч
J (U, X) ^ go (X (g, X (g, g + f ^ (x, u, t) dt. (lo.si)
Обозначим
F (X (g, X {tf), tf) - go (x (g, X (g, t^) + /с (x (g, g ^
-/C{x(g,g;
inf f (x(/o).x(g,g.
х(/о)6Хо.хадеХ/,
tfeUo.h]
В данном случае, если решение существует в классе
допустимых пар, принцип оптимальности Кротова формулируется
следующим образом: для того чтобы допустимая пара (и* (/),
X* (0) ^^^^^ решением задачи (10.70), (10.81) с
нефиксированным временем, достаточно суш^ествования функции Кротова
X (X, О " времени t] 6 l^o. ^il таких, что:
Г) ^i(/) ==0, / е [fo. М;
2°)/?(х*(0. и*(0. 0 = 0 почти всюду на [/о, //1;
3°)F(x*(g, х*(/;), ^;)=^-
Это утверждение доказывается аналогично принципу
оптимальности Кротова для задачи с фиксированным временем
(111
Установим связь между достаточными условиями в методе
Кротова и уравнением Беллмана в методе динамического
программирования.
Рассмотрим задачу (10.63). Обозначим
Я(х. 0= sup /?(х, U, 0= sup f-^f-/о
Допустим, удалось найти такую функцию Кротова, что
функция Р(х. /) не зависит от х, а функция F (х (д, х (Л), tf) не
зависит от X (tf) и tf. Тогда
Я(х, О - sup Я(х, 0 = 1^(0; F{x(to), xitf) tf)^
хех^
inf F(x(g, x(0), tf)=m.
в последнем соотношении опущена операция минимизации по
начальной точке х (to), так как она фиксирована. Для
задачи (10.63) функция
f (х(/о). X(tf),tf)^go(X(if), tf) + K{x(tf), tf)~K(x(to). to)
и не зависит от х (tf) и если
К (X (//), tf) = -go (X (tf). tf). (10.82)
Очевидно, условие 3® в принципе оптимальности Кротова
совпадает с (10.82), условия Г и 2"* принимают вид
М«)=-р(х,0-д{^Ч-^-7.)-0,
или, так как К (х, t) не зависит от управления,
дК
sup
ах
dt
При К (х, /) = —S (х, /) последнее соотношение совпадает с
уравнением Беллмана (10.65), а соотношение (10.82) — с
условием (10.66). Таким образом, при специальном выборе
функции Кротова достаточные условия Г—3"* совпадают с
уравнением Беллмана с соответствующим краевым условием.
§ 10.5. Управляемость и наблюдаемость.
Наблюдатели
Управляемость
Для решения задач управления важно знать, обладает
ли объект свойством управляемости в смысле возможности
его перевода из заданной начальной точки (или области) в
заданную конечную точку (или область). Выше при
рассмотрении задач оптимального управления предполагалось, что
объект таким свойством обладает, иначе не имело бы смысла
ставить эти задачи. Кроме того, обычно разработчик, выбирая
структуру системы управления, прежде всего заботится о том.
чтобы то, что мы называем объектом управления, обладало
свойством управляемости, и делает он это на основе
инженерных знаний и опыта. Но в сложных случаях не исключена
ошибка в выборе структуры системы управления, из-за чего
объект не будет обладать указанным свойством. Поэтому
возникает проблема управляемости — проблема установления
обладания объектом свойства управляемости. Эта проблема
впервые была поставлена лишь во второй половине нашего
века.
Перейдем к строгому определению свойства
управляемости объекта и установлению критерия управляемости.
Пусть объект задается уравнением
Здесь пока принимается, что допустимое множество щг-
чений управления совпадает со всем пространством R'^ и
допустимым управлением является любая
кусочно-непрерывная вектор-функция, принимающая значения из /?''.
Объект называется вполне или полностью управляемым,
если для любой пары точек х° и х^ из /?" суш,еспъзует
допустимое управление на конечном интервале Uq, tA, переводящее
объект из точки х (/о) = х*^ в точку xiif) == х'.
в случае стационарного оОъекта всегда можно принять
= 0. Если объект является линейным, т, е. задается
уравнением вида .
x=Ах+Ви; x е U е ^?^ (ю.вз)
в приведенном определении можно одну из точек х** или х^
зафиксировать, например положить х^ = О или х^ = 0.
Действительно, так как решение (10.83) при произвольном
начальном условии X (to) = х^ имеет вид
t
x(t) = \(t, ro)x«-f JX(/. T)B(r)u(T)dT
/о
и при X (to) о
x(/)=jX(^ T)B(T)u(T)dT.
то задача перевода объекта (10.83) из произвольной начальной
точки х (^о) ^ х'' в точку х (tf) = xf равносильна задаче его
перевода из начальной точки х (to) = О в точку х (//) = х^ —
X (tf, to) х^. Аналогично, задача перевода объекта (10.83)
ИЗ'начальной точки х (to) = х*^ в произвольную конечную
точку x (tf) = х^ равносильна задаче его перевода из начальной
точки x (to) = х« — (tf, to) X (tf) в точку x (tf) == 0.
Таким образом, в случае линейного объекта свойство
управляемости можно еще определить следующим образом; объект
(10.83) называется вполне управляемым, если для любой точки
х^ из /?" существует допустимое управление на конечном
интервале [to, tj], переводящее объект из точки х (to) = О в точку
X (tf) = XI, или объект (10.83) называется вполне
управляемым, если для любой точки х** из /?" существует допустимое
управление на конечном интервале [to, tf], переводящее объект
из точки X (to) = х^ в точку х (tf) == 0.
Управляемость линейных стационарных объектов. Пусть
матрица А и В в (10.83) постоянны. Введем в рассмотрение так
Называемую матрицу управляемости
У = [В АВ А^В ... А^-^В], (10.84)
которая состоит из столбцов матрицы В и произведений
матриц А В, А^В, А"-^В и имеет размерность (п X пг).
Справедлив следующий критерий управляемости: линейный
стационарный объект (10.83) вполне управляем тогда и
только тогда, когда ранг матрицы управляемости (10.84) равен п.
Ниже при доказательстве этого критерия используется
теорема Гамильтона—Кэли, согласно которой любая (п X п)-
матрица А удовлетворяет своему характеристическому
уравнению
det (sE — А) = s« —Ci s"-» —c-j s"-2 = 0.
Ha основании этой теоремы имеем
A'' = CiA"-» + С2А"-2 + ...+с„Е. (10,85)
Необходимость. Решение уравнения (10.83) при
постоянных матрицах А и В можно представить в виде
t
X (О - еА' X (0) + J еА ('-^) Ви (т) dr, (10.86)
где матричная экспоненциальная функция е^' определяется
равенством
e^^ = E + At + l^ (Af)^ + .... (10-87)
Для X (//) из (10.86) и (10.87) при х (0) = О получаем
х(д= Вао + АВа^ + А^Ва^ + ....
где
а^== j <^/р^' u(T)dT, Л«0. 1, 2
Умножив обе части равенства (10.85) справа на В, получим
А«В =CiA"-» В+^2А"-2В + ...+СпВ.
Умножив обе части последнего равенства слева на А и
подставив выражение для А^В, получим
Ап + 1В=с;^'А«-'В+4'^А"""^В+ -
Далее, проделав аналогичные операции над получаемыми
соотношениями, будем иметь
А"+'В=.с<') А"-1 В4-с</> A^-^B-I-...
...-Ьс<'>В. /-1,2.
Следовательно, х (tf) представляется в виде линейной
комбинации векторов, представляющих собой столбцы матрицы
управляемости (10.84), и при любом допустимом управлении
точка x (tf) принадлежит подпространству, порожденному
столбцами матрицы управляемости У. Поэтому если ранг
матрицы У меньше п, то существуют точки, не принадлежащие
указанному подпространству, куда нельзя перевести объект
(10.83) из точки x (0) = 0.
Достаточность. Пусть ранг матрицы У равен п.
Из (10.86) при x (0) = О и t= tf имеем
x(/,)=j e'^('/~')Bu(T)dT.
Объект (10.83) вполне управляем, если интегральное
уравнение
xf=-
f e^(V-^)Bu(T)dT
о
при произвольном х^ из имеет решение в классе допустимых
управлений. Будем искать решение в виде [61
и(т) =(e^('/^^)B)'z.
где Z — вектор из R'^. Подставив это выражение в
интегральное уравнение, получим
xf =-Dz,
где
D^f'e^<V-^>B(e^^'/-"^> В)^^т.
о
Таким образом, вопрос о существовании решении
интегрального уравнения свелся к вопросу о существовании решения
алгебраического уравнения. 11олученное алгебраическое
уравнение имеет решение при произвольном x^ если det D # 0.
Допустим противное: det D = 0. Тогда соответствующее
однородное уравнение имеет ненулевое решение, т. е. сущест-
вует вектор х^фО такой, что dx_l = 0. Умножив слева на
Хх и подставив выражение для D, получим
х\ Dx, \ х\ е^ <'/-В (е^ ^^> Bf х, йт
о
-| |x^^e^^'/-^>BrdT=0.
В силу непрерывности подынтегрального выражения
последнее равенство возможно, если при всех О < т <
хг е^^'/"^^В = 0. (10.88)
Используя (10.87), нетрудно показать, что
=.АеА'.
dt
Дифференцируя тождество (10.88) по т, получим
хг А*е''^'/-"'^^В = 0, ft-О, 1, 2, .... п-1,
или при Т = tf
х^ А*В-0, А=^0, 1, 2, п —1.
Заметим, что А" == Е. Из последних равенств следует, что
ненулевой вектор х± из /?" ортогонален всем вектор-столбцам
матрицы управляемости У, а это невозможно, так как по
условию ранг матрицы У равен п. Следовательно, допущение о
том, что det D =^ О, неверно. Критерий управляемости
полностью доказан.
Управляемость объекта (10.83) полностью определяется
матрицами А и В, поэтому используют еще следующую
терминологию: пара (А, В), б которой А и Ъ — матрицы
размерности п X п и п X г соответственно, называется вполне
управляемой, если объект (10.83) вполне управляем.
Рассмотрим неособое (невырожденное) преобразование
х^^Тх, йеПфО.
В новых переменных уравнение (10.83) принимает вид
х=Ах + Вгг, (10.89)
^,де АТ-^АТ. В=Т-*В. Как легко проверить. А'^ =
_ у^1д^Т, ^ = 1, 2, п — 1. Поэтому матрица
управляемости объекта (10.89)
У=-[вДВА'В... А"^'В]-.Т-МВАВ А^В.-.А" ^ B] = T-iy.
Так как ранг матрицы Т~* равен п, то ранг матрицы У
совпадает с рангом матрицы У. Таким образом, свойство
управляемости не зависит от выбора системы координат.
Назовем областью управляемости линейного
стационарного объекта область, состоящую из точек, в которые может
быть переведен объект из точки == О за конечное время или,
что то же самое, из которых объект может быть переведен в
точку х^ = О за конечное время. Очевидно, если объект
вполне управляем, то его область управляемости совпадает со всем
фазовым пространством. Если объект не вполне управляем, то,
как было показано при доказательстве критерия
управляемости, объект не может быть переведен из точки х" = О в
точку, которая не принадлежит подпространству Ry —
подпространству, порожденному вектор-столбцами матрицы
управляемости. Можно показать, что область управляемости
совпадает с подпространством /?у, поэтому подпространство R^
называют подпространством управляемости.
Пусть ранг матрицы управляемости объекта (10.83)
равен /(/ < п). Сформируем матрицу Т преобразования х = Тх
в виде Т = (TiTg), где вектор-столбцы матрицы Ti образуют
базис /-мерного подпространства управляемости (в
частности, ими могут быть / независимых столбцов матрицы
управляемости), а вектор-столбцы матрицы Tg вместе с вектор-
столбцами матрицы Ti образуют базис п-мерного
пространства. Тогда уравнение (10.83) в новых переменных приобретает
вид так называемой канонической формы управляемости (101:
X =
^Ац Ai2^
^0 A^-j
или
(10.90)
где х<1> — /-вектор; х<^> — {п — /)-вектор; Ац, А^^. А^^,
Bj — матрицы соответствующей размерности.
Из структуры системы уравнений (10.90) видно, что
вектор х<^5 неуправляем: закон его изменения во времени никак
не зависит от управления. Наоборот, вектор х<^> и
соответственно пара (Ац, Bi) вполне управляемы: состояния, вида
X = col (х(^)О) («со1» обозначает столбец) принадлежит
подпространству управляемости. Используя представление
уравнения объекта в канонической форме управляемости, можно
сформулировать следующий критерий управляемости: объект
вполне управляем в том и только в том случае, если его
уравнение нельзя неособым преобразованием привести к виду
(10.90), где множество координат вектора х<^) не пусто.
Стабилизируемость. Если линейный объект не вполне
управляем, то его вектор состояния можно представить в виде
X^Xy + Xj^,
где Ху — вектор из подпространства управляемости Ry\ х^ —■
вектор, ортогональный всем элементам из /?у, т. е. элемент из
ортогонального дополнения Ry. Подпространство Ry
называют подпространством неуправляемости. Из доказательства
критерия управляемости следует, что объект не может быть
переведен из точки х° в точку х<^>, если х^ (х^ Ф 0) или х^^>Х
X (х^^> Ф 0) принадлежат подпространству неуправляемости.
В связи с этим возникает вопрос, всегда ли необходимо,
чтобы объект был вполне управляем, если условия работы
синтезируемой системы управления таковы, что она в процессе
функционирования попадает в подпространство
неуправляемости. Оказывается, что для синтеза устойчивой системы
управления важным является не полная управляемость, а
стабилизируемость.
Стационарный линейный объект
X = Ах i- Bu
называется стабилизируемым, если в представлении х = х^ +
+ Хх неуправляемая составляюищя х^-^О при t-^ оо.
Непосредственно из определения следует, что вполне
управляемый объект является стабилизируемым, так как в этом
случае х^ =^ 0. Точно так же асимптотически устойчивый
объект является стабилизируемым, так как в этом случае
X -> О при f со, когда U {() = 0.
Если выбрана такая система координат (такой базис), что
уравнение объекта принимает вид канонической формы управ-
ляемости (10.90), то неуправляемая составляющая имеет вид
X = col (О, х^2>). Поэтому в этой системе координат Xjl = О
в том и только в том случае, когда х<^> = 0. Из канонической
формы управляемости (10.90) видно, что объект является
стабилизируемым в том и только в том случае, если матрица
является асимптотически устойчивым, т. е. ее собственные
значения имеют отрицательные вещественные части.
Стабилизируемость объекта
x=-Ax + Bu,
как и управляемость, полностью определяется матрицами А
и В, поэтому используют еще следующую терминологию:
пара (А, В), в которой А и В — матрицы размерности
п X п и п X г соответственно, называется стабилизируемой,
если стабилизируемым является соответствующий им объект,.
Пример. 10.14. Исследуем управляемость объекта, описываемого
уравнениями
Xi=Xi^ах^ + и^+и^, х^^'Х^ + Ьи^,
или в матричной форме уравнением
x=:Ax + Bu.
где
Так как
• 1 а'
11
; в
.01,
. 0 ^.
I а-
11"
.01.
. 0 ^ .
0 ь
то матрица управляемости
В АВ
1 I I l-ho6
0^0 Ь
Если 6 =?fc О, то ранг матрицы У равен л = 2 и объект вполне
управляем. Если ^ = О, то ранг матрицы У равен единице и объект не
вполне управляем: он управляем только по одной координате. То, что объект
njJn г? о не вполне управляем, видно также из его уравнений: они
имеют вид канонической формы управляемости. Матрица А22 = i
1см, (10.90)]. Ее собственное значение, равное корню уравнения
det (EX — А22) = Л 1 = О, является действительным
положительным числом. Следовательно, при 6 = О также объект не является ста-
бвлнзируемым.
Отметим связь между условиями управляемости и
нормальности. Очевидно, объект управляем, если выполняется условие
нормальности. Обратное в общ.ем случае неверно. Однако если
управление скалярное, то оба условия совпадают: условие
нормальности выполняется в том и только в том случае, если
объект вполне управляем.
Управляемость при наличии ограничения на управление.
Пусть имеется ограничение на управление и объект
описывается уравнением
x = f(x. U, 0. x£R\ uGUc:/?^ (10.91)
Допустимым для объекта, описываемого уравнением (10.91),
управлением является кусочно-непрерывная вектор-функция,
принимающая значения из множества U. Введем понятие об
управляемости относительно заданной точки.
Объект называется вполне управляемым относительно
точки xf, если, какова бы ни была точка х® ^ Л", сугцестзует
допустимое управление на конечном интервале Uq, tf],
переводящее объект из точки х (4) = х® в точку х (//) = хЛ
Введенную выше полную управляемость можно
определить как полную управляемость относительно любой точки
е Л". Заметим, что при наличии ограничения на
управление полная управляемость и полная управляемость
относительно заданной точки не совпадают и в случае линейного
объекта. Как было показано выше, при отсутствии ограничения
на управление для линейного объекта оба эти понятия
совпадают. .
пример 10.15. Рассмотрим объект, который описывается
скалярным урависнием х = —х + и\ |«| < «т-
В данном случае А = — 1* В = 1 и пара (А, В) вполне
управляема. Но D то же время объект вполне управляем не относительно любой
точки. Например, он вполне управляем относительно точки ~ О,
но в то же время он ие вполне управляем относительно любой точки
xf, для которой |д/| > и^. Покажем это.
Решение рассматриваемого уравнения при х (0) ~ )fi имеет вид
илн при и ~ ifi const
jc(0=-(a:O—мО) е~' + г/о.
Примем х« > 0. Тогда при и = —и-т, и t = tf имеем
9то выражение обращается в нуль при if ^ 1п [(л" + ttm)/«m]-
Полученное время // является конечным при любом л<» > 0. Очевидно, объект
переводится в точку = О из произвольной точки л** О за конечное
время tf = In Ul^l + «m)/«ml. если принять и (t) = sign
О < ^ <
Теперь покажем, что нет допустимого управления, которое
переводит объект в точку х^, для которой \х^\ > из точки X (0) = 0.
При JC (0) = О имеем
При любом допустимом управлении справедливо неравенство
/
|д:(01 < max I е"* w(T)dT = u^(l-е~'< «„г.
\Щ<и^ о
поэтому равенство х {tf) == 'xf невозможно при любом tf > О, если
\xf\ > «т.
Рассмотрим достаточное условие управляемости для
линейного стационарного объекта с ограничением на управление:
х = Ах + Ви, xg Л";
а,-^«,.<р,-, а,<0, р,.>0. / = 1, 2, г.
(10.92)
Для этого объекта справедливо следующее утверждение [131:
объект (10.92) вполне управляем относительно точки xf = О,
если пара (А, В) вполне управляема и собственные значения
матрицы А, т. е. корни уравнения det [КЕ — AI = О, имеют
отрицательные веи^ественные части при векторном
управлении (г >/) или неположительные веьцественные части при
скалярном управлении (г = I).
Пример tO.te. проверим управляемость объекта, описываемого
уравнениями
JCi=Jfa. Х2^и, |а|< К
В данном случае управление скалярное и
; det (ЛЕ~А) = Х2.
Как легко проверить, пара (А, В) вполне управляема и собственные
значения матрицы А равны нулю. Следовательно, объект вполне
управляем относительно точки х** — 0.
0 1 ■
0
.0 0.
. 1.
Наблюдаемость и восстанавливаемость
При синтезе оптимальных систем с обратной связью
управления получаются как функции от фазовых координат. В обш.ем
случае фазовые координаты являются абстрактными величина^
ми и не могут быть измерены. Поддается измерению
(наблюдению) вектор у (z/i, t/p)^, который обычно называют
выходным вектором или выходной переменной, а его
координаты — выходными величинами. Выходная переменная
функционально связана с фазовыми координатами, ь для реализации
управления с обратной связью необходимо определить
фазовые координаты по измеренным значениям выходной
переменной. В связи с этим возникают проблемы наблюдаемости и
восстанавливаемости, заключаюш.иеся в установлении
возможности определения состояния объекта (фазового вектора) по
измеренным значениям выходной переменной на некотором
интервале.
Пусть объект описывается уравнением
x=f(x, U. О, xG/?", (10.93)
а выходная переменная связана с фазовыми координатами
соотношением
y-F(x, U, 0. уе^^Р. (10.94)
которое называется уравнением набл1одения.
Система (10.93), (10.94) называется вполне или полностью
наблюдаемой, если существует такое t^, t<:ti<i оо, что по
данным измерения у (т) и и (т) на интервале / < т < можно
определить состояние х (t). Полная наблюдаемость означает,
что имеется возможность определить состояние х (t) по
будущим значениям выходной переменной. Однако в задачах
управления текущее состояние объекта должно определяться по
прошлым значениям выходной переменной, поэтому более
важным обстоятельством является полная
восстанавливаемость [10].
Система ((10.93), (10.94) называется вполне или полностью
восстанавливаемой, если существует такое to, — оо< t,
что по данным измерения у(т) и и (т) на интервале to < т </
можно определить состояние х {t). Нетрудно заметить, чт^б
для стационарных систем из полной наблюдаемости следует
полная восстанавливаемость и наоборот, поэтому в таких
случаях можно эти понятия не различать.
Наблюдаемость линейных стационарных систем.
Рассмотрим линейную стационарную систему
x=Ax + Bu, xg/?"; (10.95)
y=Cx + Du, yG/?P. (10.96)
Введем так называемую матрицу наблюдаемости
Н- [С^А7 ... (А0«-1 СП. (10.97)
Эта матрица состоит из столбцов матрицы С^, произведений
матриц А^С^, (А^)^ (А^)"-^ С^и имеет размерность
{п X рп).
Для линейной стационарной системы справедлив
следующий критерий полной наблюдаемости: система (10.95), (10.97),
вполне наблюдаема {восстанавливаема) тогда и только тогда,
когда ранг матрицы наблюдаемости (10.97) равен п.
Транспонированная матрица
Н
т ^\ СА
(10.98)
^CA"-^/
имеет такой же ранг, что и матрица (10.97), поэтому вместо
исходной матрицы наблюдаемости можно рассматривать
транспонированную. Ниже приводится доказательство критерия
наблюдаемости [б, 101.
Необходимость. Пусть ранг матрицы меньше
/г. Тогда размерность пространства , порожденного
строками матрицы Н^, меньше п, т. е. Rw является собственным
подпространством пространства Поэтому существует
ненулевой вектор Xj^ G R"^, ортогональный всем строкам
матрицы (таким вектором является любой вектор из не
принадлежащий подпространству /?н):
Сх^^О, САх^ =-0..... СА«-»х^ -0. (10.99)
Из теоремы Гамильтона—Кэли 1см. (10.85)1 по индукции
следует, что матрицы А^ при к > п линейно выражаются через
Е. А, А«-"*, поэтому из (10.99) получаем, что СА'=0
при всех / = О, I, 2, .... Следовательно,
СеА' = С (Е -f А^ -f 4- А2/2 +...) Xj. = 0. (10.100)
21
Пусть некоторому начальному условию х (0) = х<*> соот*
ветствует выходная переменная у^^>(/). В силу соотношения
(10.100) всем начальным условиям вида х (0) = х<^> + х_^
соответствует та же выходная переменная у<^^ {f):
i
у (t) = Сх (/) + Du = СеА' (х(^) + X,) + С je^ <'-'^> В (т) и (т) dx +
+ Du = СеА' х<^> Н- С J е^ В (т) и (т) йт + Du == y<i) (О.
Это и доказывает невозможность определения состояния
X (0) по значениям выходной переменной, если ранг матрицы
наблюдаемости меньше п.
Достаточность. Пусть ранг матрицы
управляемости равен п, В силу стационарности системы достаточно
показать возможность определения состояния х (0) по
известным значениям выходной переменной и управления на
некотором интервале Ю, t^\. Имеем
t
у (О = Се А' X (0) + С J е^ - В (т) и (т) dT + Du.
о
или
Ду (О = У (О —С f е^ <^-^) В (т) U (т) dt ^-Du = Се^^ х (0),
о
Так как у (/) и и (t) измеряются, матрицы С и А заданы, то
функция Ду (t) и ее производные любого порядка являются
известными функциями времени. Из последнего соотношения
при / — О получаем
Лу (0) Сх (0); Ду (0) = САх (0),Лу(«- О (0) = СА'»-' х (0),
или
/Дг/(0) \ /С X
At/(0)
СА
х(0)=Н^х(0).
Полученное векторное уравнение с п неизвестными Xi (0)
(t = 1, п) равносильно системе из пр уравнений. Так как
по условию ранг матрицы Н'' равен п, то среди пр уравне-
НИИ имеется ровно п независимых уравнений. Выделив эти
уравнения и решив их, однозначно определим искомый
вектор X (0). На этом доказательство заканчивается.
Наблюдаемость (восстанавливаемость) системы (10.95),
(10.96) полностью определяется матрицами А и С, поэтому
используют следующую терминологию: пара (А, С), в которой
д и С — постоянные матрицы размерности /г X п и р х п,
fio^ieaemcn вполне наблюдаемой {восстанавливаемой), если
сполне наблюдаема {восстанавливаема) система (10.95), (10.96).
Подпространство Rh, порожденное строками
транспонированной матрицы наблюдаемости или, что то же,
столбцами матрицы наблюдаемости Н, называют
подпространством наблюдаемости {восстанавливаемости). Смысл такого
названия будет ясен из дальнейшего изложения.
При неособом преобразовании
х = Тх, det ТфО
уравнения (10.95), (10.96) принимают вид
x = Ax + Bu, y = Cx + Du,
где
А = Т->АТ, В = Т--1В, С = СТ.
Как легко проверить, транспонированная матрица
управляемости преобразованной системы
Нт
СА
С
СА"~1
Так как ранг матрицы Т равен /г, то ранг матрицы
совпадает с рангом матрицы Н^. Таким образом, свойство
наблюдаемости (восстанавливаемости), как и свойство
управляемости, не зависит от выбора системы координат.
Пусть ранг матрицы наблюдаемости системы (10.95), (10,96)
равен / (/ < п). Сформируем матрицу Т преобразования
X = Тх в виде
где вектор-строки матрицы образуют базис /-мерного
подпространства наблюдаемости Rn (в частности, ими могут
быть / независимых строк транспонированной матрицы
наблюдаемости НП, а вектор-строки матрицы Tg вместе с
вектор-строками матрицы Tj образуют базис л-мерного
пространства. Тогда система (10.95), (10.96) в новых переменных
приобретает вид так называемой канонической формы
наблюдаемости [10]:
X
или
An о \
А21 А22- /
х +
\ В2 /
"(0; y(0 = (Ci O)x(0 + Du
x(»)=AuX(^) + BiU(0;
х<2> -A2ix(O+A22x(2) + B,u(0;
y(/) = CiX<i)-l-Du,
(10.101)
2»
r^e х<1) — /-вектор, х*^) — (п — /)-вектор; Ац. А21, В^, В
Cj — матрицы соответствующей размерности, причем пара
(Ац, Cj) вполне наблюдаема. Из структуры системы
уравнений (10.101) видно, что вектор х^^> никакого влияния на
выходную переменную не оказывает, поэтому его координаты
не могут быть определены по наблюдениям вектор-функции
у (/). Эти координаты естественно называть ненаблюдаемыми
или невосстанавливаемыми. Проекция фазового вектора на
7?н. определяемая равенством х<^> = О и имеющая вид х =
= col (х<^>, 0), вполне наблюдаема. Другими словами, если
система движется в подпространстве Rwy то она вполне
наблюдаема. Отсюда и название /?н подпространства
наблюдаемости. Полностью невосстанавливаемый вектор имеет вид
Col (О, х(^>). Если множество координат вектора х^^> пусто,
то система называется полностью ненаблюдаемой (невосспшнав-
лиеаемой). Используя каноническую форму наблюдаемости,
можно сформулировать следующий критерий наблюдаемости
(восстанавливаемости): линейная стационарная система
(10.95), (10.96) вполне наблюдаема (восстанавливаема) в том
и только в том случае, если в ее канонической форме
наблюдаемости множество координат вектора х^^^ является пустым.
обнаруживаемость
Если система не вполне наблюдаема, то любой фазовый
вектор можно представить в виде суммы: х (t) = Хн (О + Xjl (/).
где хн (О вектор из подпространства наблюдаемости;
(t) — полностью не восстанавливаемый ненулевой вектор.
Вектор X (/) восстанавливается по наблюдениям у (т) и и (т)
на интервале to ^ х к t q точностью до невосстанавливае-
мого вектора Xj^ (t). Вектор х (/) в асимптотике становится
восстанавливаемым, если Xj^ (^)О при оо. Поэтому
важным является следующее понятие.
Система (10,95), (10.96) называется обнаруживаемой, если
невосстанавливаемые координаты при нулевых остальных
координатах и нулевом входном воздействии стремятся к
нулю при /-^ оо. Непосредственно из определения следует,
что вполне наблюдаемая система является обнаруживаемой.
Также является обнаруживаемой любая асимптотически
устойчивая система. Из канонической формы наблюдаемости
(10.101) следует, что система является обнаруживаемой в том
и только в том случае, если матрица А22 является
асимптотически устойчивой, т. е. все ее собственные значения имеют
отрицательные вещественные части.
Пример 10.17. Рассмотрим систему Хх ^ Xg. x^ = w, у ^ cxi +
+ Xz- В данном случае
А=(«;);С = (с.,. СА-(О.Ь Н^=(;;).
Если О, то ранг матрицы равен двум и система вполне
наблюдаема. Если = 0. то ранг матрицы равен единице и система не
вполне наблюдаема. При с ~ О система имеет вид каноннческон
формы наблюдаемости и вывод о ее неполной наблюдаемости можно также
сделать непосредственно по виду уравнений. Ненаблюдаемой является
координата х^. Матрица, определяющая обнаруживаемость системы,
равна нулю, и ее собственное значение также равно нулю.
Следовательно, при с = О система является также и необнаруживаемой.
Принцип двойственности управляемости и
наблюдаемости. Рассмотрим наряду с системой
x = Ax + Bu; у=Сх (10.102)
так называемую двойственную ей систему
x^A^i + C^u; у^В^х. (10.103)
Здесь принято D = О, так как эта матрица не влияет на
управляемость и наблюдаемость систем. Из установленных
критериев управляемости и наблюдаемости систем (10.102) и (10.103)
легко получить следующий принцип
двойственности (дуальности): система (10.102) вполне наблюдаема
тогда и только тогда, когда двойственная ей система (10.103)
вполне управляема, и система (10.102) вполне управляема
тогда, и только тогда, когда двойственная ей система (10.103)
вполне набл^одаема.
Наблюдатели
Перейдем от вопроса возможности восстановления к
вопросу синтеза устройства, восстанавливающего текущее
значение фазового вектора. Восстановленное значение фазового
вектора называется его оценкой, а устройство, обеспечивающее
получение оценки по измерениям управления и (т) и выходной
переменной у (т) на интервале to </, — наблюдателем
(101. Точнее, устройство, описываемое уравнениями
q=Fqf Gy + Hu;
z-Kq + Ly+ Mu,
называется наблюдателем для системы
А Ах + Ви;
У = Сх.
(10.104)
(10.105)
если для каждого начального состояния х° системы (10.105)
существует такое начальное состояние q° для системы (10.104),
что при X (^о) = X** и q (^о) q° справедливо равенство
Z (О - X (0. t > to,
при всех U (/), t > to.
Заметим, что для наблюдателя (10.104) управление и (/)
и выходная переменная у {t) системы (10.105) являются
входными переменными, а переменная z — выходной переменной.
Устройство, описываемое уравнением
)Г = Р^ +Gy + Hu, (10.106)
называется наблюдателем полного порядка для системы
(10.105). если при х (t^) = к (Q справедливо равенство
х(/)-х (/)./>
при всех U (/), t > /о-
Устройство, описываемое уравнением (10.106), называется
наблюдателем полного порядка, так как его порядок
совпадает с порядком исходной системы. Если наблюдатель
описывается уравнением более низкого порядка, чем сама исходная
система, то он называется наблюдателем пониженного
порядка-
Устройство, описываемое уравнением (10.106), является
наблюдателем для системы (10.105) в том и только в том
случае, если
F(/)==A(/)~K(/)C(/); G(0=«K(0. Н(/) = ВХО, (10.107)
где К (О ~~ произвольная переменная во времени матрица,
котор^ую называют матрицей коэффициентов усиления.
Действительно, вычитая из первого уравнения системы
(10.105) уравнение (10.106) и подставив в него выражение
для у (i) из (10.105), получим
X—зГ=(А—GC)x—Fx^ + (B—Н)и.
Из этого уравнения следует, что если х (t) = х (О для всех
t > to и и (f), t > to, то справедливо (10.107), И наоборот,
если выполняется (10.107), то последнее уравнение приобре-
тает вид
х—х^(А—КС)(х—х), (10.108)
откуда следует, что х (^ = х (t) для всех t > to и и (t),
t > to, если X (to) = хИо)^
При подстановке (10.107) в уравнение (10.106) получаем
уравнение наблюдателя системы (10.105):
'х -(А - КС) ^ + Ку -Ь Ви, (10.109)
или
^=А^ +Ви + К(у—Сх). (10.110)
Иодель системь!
1 л
Рис. 10.3
Из последнего уравнения следует, что математическая модель
наблюдателя включает в себя как составные части модель
исходной системы и дополнительное слагаемое, пропорцио-
нальное разности У (О — У (О выходной переменной и ее
оценки 7 (О = Сх (О (рис. 10.3).
Из (10.109) следует, что устойчивость наблюдателя
определяется матрицей А — КС. Выпишем уравнение для
ошибки e{f)^x (f) — X (О. Из уравнения (10.108) имеем
е(П=(А-КС)е(0.
Отсюда следует, что е (/)О при оо независимо от
начальной ошибки е (/о) тогда и только тогда, когда
наблюдатель является асимптотически устойчивым. Поэтому при
выборе матрицы коэффициентов усиления К необходимо прежде
всего позаботиться о том, чтобы наблюдатель был
асимптотически устойчивым. Но от матрицы А — К С и
соответственно матрицы К зависит еще и качество наблюдателя, т. е. то,
насколько быстро ошибка оценки стремится к нулю.
Следовательно, выбор матрицы К, к которому сводится синтез
наблюдателя вида (10.106), должен производиться из условия
устойчивости и заданных требований к его качеству. В том
случае, когда все матрицы системы и матрица коэффициентов
усиления постоянны, т. е. наблюдатель является
стационарным, устойчивость и качество наблюдателя зависят от
расположения корней его характеристического уравнения, т. е.
собственных значений матрицы А—КС на комплексной
плоскости. Можно показать [10], что собственные значения
матрицы А — КС могут быть произвольно размещены на
комплексной плоскости путем соответствующего выбора
постоянной матрицы в том и только в том случае, если исходная сИ-
стема. т. е. пара (А, С), вполне наОлюдаема. 1асли система не
вполне наблюдаема, то можно найти такую постоянную ма-
тоицу К, при которой наблюдатель асимптотически устойчив
в том и только в том случае, если система обнаруживаема.
В случае стационарного наблюдателя ошибка е (t) тем
быстрее сходится к нулю, чем дальше от мнимой оси
расположены корни характеристического уравнения наблюдателя
на комплексной плоскости. Этого можно достичь при большой
матрице коэффициентов усиления. Однако с увеличением
коэффициентов усиления наблюдатель становится
чувствительным к произвольным шумам измерения. Поэтому оптимальная
матрица К может быть определена только с учетом реальных
помех.
Наблюдатели пониженного порядка. Рассмотрим
стационарную систему
x=Ax + Bu, у=Сх. (10.П1)
где x — п-вектор; у — р-вектор, причем п > р; А, В, С —
постоянные матрицы соответствующей размерности. Пусть
ранг матрицы С максимальный, т. е. равен р. Тогда уравнение
наблюдения дает р независимых линейных уравнений для
неизвестного состояния х {f). Чтобы определить х (f),
необходимо получить дополнительно п — р соотношений для
координат этого вектора.
Введем такой (п — /)-вектор р (t), определяемый
соотношением
р(/)=С'х(0. (10.112)
что матрица
(с-)
является неособой. Из уравнения
следует
(п:)=(с.)-
Используя представление
(с.)
— 1
iUUh (10J13)
где Li и Lg — (п X р)- и [п X (п — р)1-матрицы
соответственно, получаем
x^Liy + Lop. (10.114)
Если получить оценку р (/) для введенного вектора, то для
оценки фазового вектора имеем
"x-Liy+L.'p. (10.115)
Таким образом, задача восстановления фазового вектора
свелась к задаче восстановления вектора р (/) меньшей
размерности. Для построения наблюдателя для переменной р (/)
найдем для этой переменной дифференциальное уравнение.
Дифференцируя (10.112) и используя (10.111), получим
р=С' Ах + С Bu,
или с учетом (10.113)
р-С ALp + С ALi у + С Bu. (10.116)
Чтобы воспользоваться структурой наблюдателя (10.110) для
системы (10.111), необходимо уравнение (10.116) дополнить
соотношением, которое служило бы для него уравнением
наблюдения. Таким уравнением не может быть исходное
уравнение наблюдения
y=Cx=CLiy + CL2P,
так как CLg = О и переменная у не зависит от р.
Действительно, из (10.113) имеем
[с'1
I CL, CLj
, С Li С L,
откуда CLa = 0. Примем в качестве уравнения наблюдения
уравнение, которое получается дифференцированием вьфа-
жения у == Сх:
у=Сх=САх + CBu=CALa р + CALj у + СВи.
Тогда наблюдатель для р описывается уравнением
=С' ALo7+ С ALi у + С Bu + К (у — CALg? —
—CALiy-CBu). (10.117)
В это уравнение входит производная у. Чтобы избавиться от
нее, введем дополнительную переменную q = р — Ку.
Легко проверить, что
q=(C' AL2—KCAU) q + (С ALg К + С ALi —
—KCALi—KCAL2K)y + (C' В—KCB)u(0 (10.118)
и искомая оценка
^ = L2q+(Li + L2K)y. (I0.U9)
Уравнения (10.118) и (10.119) определяют искомый
наблюдатель. Он имеет такую же структуру, что и наблюдатель
(10.104).
Пример 10.18. Построим наблюдатели полного и пониженного
порядков для системы
В данном случае
Кдк следует из (10.110), наблюдатель полного порядка имеет вид
/ \
к.
О 1
ИЛИ в скалярной форме
Для построения наблюдателя поиижеииого порвдка, как это видно из
(10.118) и (10.119), нужно определить матрицы С, Li, Lg. Матрица С
должна быть такой, чтобы квадратная матрица ^^^j была неособой.
В остальном она может быть произвольной. Такому условию
удовлетворяет матрица С = (О I). Из соотношения (10.113), которое в данном
случае принимает вид
(с.г-(;:г-(;:)='^--
имеем
Подставив выражения для А. В, С, С, и Lo в (10.118) и (10.119),
получим
Напомним, что матрица или в случае наблюдателя пониженного
порядка в данном примере скалярная величина k выбирается из условия
устойчивости и заданных требований к качеству наблюдателя.
§ 10.6. Методы синтеза оптимальных систем
с обратной связью. Синтез оптимальных
линейных систем по интегральному
квадратичному критерию
Метод фазовой плоскости синтеза
оптимальной по быстродействию системы
Пусть задан вполне управляемый линейный
стационарный объект
x = Ax~f-Bu,
все корни характеристического уравнения которого
действительны. Управление скалярное и подчиняется ограничению
|м| < 1. Более общее ограничение вида а < w < р, где
а <: О и Р > О, введением новой переменной г = 2w — (а +
+ Р)'^(Р — ot) всегда приводится к этому виду. Рассмотрим
задачу синтеза оптимального по быстрЗодействию регулятора,
обеспечивающего перевод системы из произвольной
начальной точки в начало координат.
Так как управление скалярное, условие нормальности
совпадает с условием полной управляемости, поэтому
выполняются все условия теоремы об п интервалах. В соответствии
с этой теоремой оптимальное управление, имея не более п
интервалов постоянства, принимает только крайние
значения: —1 или 1. Если представить его как функцию фазовых
координат и* и (х), то ясно, что все фазовое пространство
можно разбить на два подпространства: подпространство, в
котором и* = —1, и подпространство, в котором м* = 1. Ги-
перповерхиость (при п = 2 — кривая, при п 3 —
поверхность), которая делит фазовое пространство на указанные
подпространства, называют гиперповерхностью {кривой,
поверхностью) переключения. Если записать уравнения
гиперповерхности о (х) = О, то, как известно из аналитической
геометрии, о (х) > О по одну сторону от гиперповерхности
переключения и о (х) < О по другую. Всегда (при необходимости
умножением на —1) можно добиться того, чтобы функция
Й (ix) была отрицательна в подпространстве, где и* = —^^1,
и положительна в подпространстве, где и* = I. Тогда,
очевидно, и* = sign о (х). Поэтому нахождение оптимального
алгоритма управления сводится к определению функции
переключения а (х).
При /г = 2 для нахождения функции переключения
можно воспользоваться методом фазовой плоскости. На фазовой
плоскости строятся семейства фазовых траекторий,
соответствующих управлениям и* = —1 и и* = I. Оптимальная
траектория представляет собой часть траектории или соединение
частей двух траекторий из построенных семейств. В силу
граничного условия X (tf) = О она должна оканчиваться в
начале координат. Используя эти свойства оптимальных
траекторий, нетрудно определить кривую переключения, а по
ней — функцию переключения. Проиллюстрируем изложенное
на примере.
Пример 10.19. Произведем синтез оптимального по быстродействию
регулятора двигателя, описываемого уравнениями = х^, ~ и, |«K
<1. В данном случае оптимальное управление имеет два интервала
постоянства. Найдем уравнение фазовых траекторий при£г = — I ии=1.
При и t= — 1, разделив второе уравнение на первое, получаем
dxJdXy^ = — \/х2, откуда после интегрирования находим
Аналогично при и = 1 находим х1 = 2Xi + Cg.
Семейства фазовых траекторий, соответствующие каждому из
полученных уравнений, приведены на рис. 10.4; а. Оптимальная фазовая
траектория должна состоять из участка траектории одного семейства,
проходящей через начальную точку, и участка траектории другого
семейства, проходящей через начало координат. Из сказанного следует,
что переключение должно произойти на полутраекториях АО или ОБ
(рис. 10.4, а). Очевидно, если вначале «* = — 1, то переключение
должно произойти на полутраектории ВО, которая описывается вторым
уравнением при == 0:
4-2x1-0.
Рис, 10.4
И если вначале w* «= 1, то переключение должно произойти на полу-
траектории ОЛ, уравнение которой получается из первого
соотношения при Ci 0:
х| + 2л:, =^0.
Фазовый портрет оптимальной системы показан иа рис. 10.4, б.
Уравнение линии переключения АОВ можно записать так (оно легко
получается из уравнений для полутраекторий АО и ОВу.
х| —2xj sign Х2«0, или о(х)^(х|/2) sign xj—xi = 0.
Нетрудно проверить, что функция о (х) отрицательна справа от
линии переключения, где £/* = — !, а положительна слева, где и*=1,
поэтому — sign (х\ sign xj2 — xj). Реализовать этот закон
управления можно посредством устройства, схема которого приведена иа
рис. 10,5. В его состав входят нелинейный преобразователь Яр,
вырабатывающий совместно с усилителем К значение хщ = х% sign х2/2,
сравнивающее устройство, формулирующее разность е = х^ — х^,
и поляризованное реле, иа выходе которого получается оптимальное
управляющее воздействие и*. Объект
I л, и а схеме представлен двумя инте-
(/Р I \ ^ граторами (1/р).
Теперь рассмотрим, как
происходит движение
изображающей точки при алгоритме
управления и = sign с (х), и поясним,
каким образом в п-мерном
пространстве при наличии лишь
одной (м — 1)-мерной
гиперповерхности переключения а (х)=0
получается процесс, состоящий
из п интервалов. В случае
идеального оптимального
процесса 1х* (О, «* {t)] все пере-
sign
Пр
.Рис. 10.5
ключения знака управления (/) происходят на
гиперповерхности о (х) = О, причем после первого переключения
изображающая точка идеального оптимального процесса
движется по гиперповерхности переключения.
Естественно, алгоритм управления и = sign о (х) не может обеспечить
такой процесс. Реальный процесс 1х (/), и (/)], определяемый
этим алгоритмом протекает следующим образом. В момент
tl, когда изображающая точка идеального оптимального
процесса в первый раз попадает на гиперповерхность о (х) = О
и управление и* (f) меняет знак, изображающая точка х
реального процесса «протыкает» гиперповерхность
переключения и в момент / = + А/ (А/> О, At—бесконечно малая
величина) оказывается по другую сторону гиперповерхности.
Поэтому функция о (х) и управление и (/) меняют знак.
Дальше до следующего момента переключения знака управления
и (О изображающая точка х движется по «другой» стороне
гиперповерхности вблизи траектории х* (/) идеального
процесса. И лишь каждьш раз в момент, когда управление и (t)
меняет знак, точка х «протыкает» гиперповерхность
переключения и функция а (х) и соответственно управление и (t)
меняют знак. Поэтому в реальном процессе fx (/), и (t)]
управление и (t) имеет столько переключений (интервалов
постоянства знака), сколько и идеальное оптимальное управление
и* if).
Синтез оптимальных линейных систем
по интегральному квадратичному критерию
Рассмотрим задачу синтеза оптимальной системы при
условии, что объект описывается уравнением
i (/)=А (О X {() + В (О U (О + h (t) (10.120)
и критерий оптимальности имеет вид
'о
+ и^(/)К(/)и(/)]Л. (10Л21)
Здесь h (/) — известная вектор-функция; F и Q (/) —
неотрицательно-определенные матрицы (х^Рх > О и x^Qx > О
при всех х ^ О и / € f/о. R (О —
положительно-определенная матрица (u^Ru > О при всех х О и t ^ Но, tf\).
функции А (/). В (/). h (/), Q (/) и R (t) являются
непрерывными па интервале fifo, tf]. Требуется найти управление с
обратной связью, при котором при произвольном начальном
условии x (/о) = x® функционал (10.121) принимает
минимальное значение.
К такой постановке сводится задача управления, если
(10.120) является уравнением в отклонениях и соответственно
желаемым является нулевое состояние. Первое слагаемое п
(10.121), представляющее квадратичную
терминальную.ошибку, включается, если необходимо обеспечить максимальную
близость состояния системы в конечный момент времени к
желаемому состоянию. Слагаемое
if
\x4t)Q(t)x(t)dt
является интегральной квадратической ошибкой и
характеризует качество регулирования на всем интервале [/q, //].
И наконец, интеграл
'/
есть взвешенная «энергия» управления; он включается в
критерии для того, чтобы ограничить управление. Требуемое
ограничение на управление, которое в явной форме не
учтено в постановке задачи (10.120), (10.121), может быть
обеспечено соответствующим выбором весовой функции R (/).
Матрицы Q (О и R (t) в общем случае выбирают
зависящими от времени. Такой выбор, в частности, связан с тем, что
начальные отклонения от свойства систем не зависят: они
определяются начальными условиями. Поэтому их следует
выбрать такими, чтобы начальные ошибки меньше влияли на
величину критерия, чем такие же ошибки, возникающие в
последующие моменты времени.
На основе приведенных соображений нельзя
выработать рекомендации, которые позволили бы однозначно
определить Матрицы, входящие в критерии оптимальности. Один
из возможных способов выбора этих матриц предложили А.
Брайсон и Хо Ю>ши [51. Они рекомендуют брать их
диагональными со следующими элементами: обратные элементы
Iff а матрицы F равными максимально допустимым
значениям 1л:- (tf)]^, обратные элементы 1/дц матрицы Q — произве-
дениям (// — to) на максимально допустимые значения [xt (t)V,
обратные элементы 1/гц матрицы R — произведениям
(// — ^о) максимально допустимые значения [щ (t)V.
Если // является конечным, то независимр от того,
являются ли матрицы А, В, Q, R постоянными или зависящими
от времени, сформулированную задачу назовем задачей
синтеза оптимального нестационарного линейного регулятора
состояния или коротко — нестационарной задачей.
Оптимальное управление имеет вид
и*= —Б^Кх+ —В^р), (10.122)
где симметричная (п X /г)-матрица К и п-вектор р
определяются из системы уравнений
К= _КА — А^ К + KBR-» В^ К—Q; (10.123)
p=KBR-i В^р~А^р—2Kh (10.124)
при граничных условиях
K(//)=F; р(//)=0. (10.125)
При оптимальном управлении для любого t £ [to, t^]
справедливо равенство
х^ (/) К (/) X (О 4 р^ ({) x(f) + q (t)=x^ (tf) Fx (tf) +
Ч
+ f Ix4T)Q(T)x(T) + u*^(T)R(T)u*(T)]dT, (10.126)
i
где q (t) — скалярная функция, которая определяется из
уравнения
^ = J- рг BR~ I вз^ р р^ h (10.127)
при граничном условии q (tf) = 0. Функция q (t) не входит в
(10.122)—(10.124), и уравнение (10.127) при нахождении
оптимального управления не используется.
Решение задачи синтеза оптимального нестационарного
линейного регулятора состояния существует и единственно.
Заметим, что в этой задаче не требуется, чтобы объект был
вполне управляем. Решение существует и единственно даже
в том случае, когда объект является полностью
неуправляемым. Это обусловлено тем, что управляемый процесс
рассматривается' на конечном интервале и вклад неуправляемых ко-
ординат в значении критерия оптимальности является
конечным даже если они расходятся (т. е. стремятся к
бесконечности при оо).
Векторное дифференцирование. Прн выводе соотношений (1'0.122)
— (10.127) используется векторное дифференцирование. Напомним
основные определения и правила векторного дифференцирования.
Здесь, как всюду в этой главе, под вектором понимается вектор-стол-
def
бец. Символ = означает «фавно по определению»:
I) производная вектора по скаляру
dt
del
dt
dxn
\ df/
dx
T del
dt
2) производная скаляра по вектору
dx \dxj' ' dxn;
3) производная вектора по вектору
= grad S;
dx -
('^^^ \
dx ^
dx„.
dfm
dfm
■ dxn
Используя приведенные определения и обычные правила
дифференцирования, нетрудно установить следующие правила векторного
дифференцирования:
' dt Ж dt~ ^ dt ^ dt'
2°. --Ах = —х + А —, А—(т X/г)-матрица.
dt dt dt
30 djy'^z) _ dy^ Tdz ^ jrdy , Tdt.
' dx dx dx dx^^ dx '
4°. ~(x^Qx) =2 x^Q,
ax
Q — симметричная (n X п)-матрнца, не зависящая от х.
Для получения соотношений (10.122)—(10.127)
воспользуемся методом динамического программирования.
Уравнение Беллмана (10.65) и граничное условие (10.66) для
задачи (10.120), (10.121) соответственно принимают вид
x^Qx + u^Ru+ — (Ax + Bu + h)l=—as/a/; (10.128)
дк J
S{x(tf)Jf)=x^(tf)Fxit^). (10.129)
min
u
в уравнении (10.128) выражение в квадратных скобках есть
квадратный трехчлен относительно векторного управления,
и так как нет ограничения на управления, то он достигает
минимума в стационарной точке. Поэтому уравнение (10.128)
равносильно системе уравнений
x^Qx + u^Ru+ i^(Ax4-Bu + b)=—as/a/; (10.130)
дх
2u^R+ —В-0. (10.131)
dx
8 левой части (10.131) стоит производная по управлению от
левой части (10.130). Из уравнения (10.131) находим
„=_J.R-.B^(0 „0.,32)
Подставив это выражение в (ЮЛ30), получим
xQx_J-ilBR-'B^№4
4 дх \ ах ;
+ ii(Ax + h)=--^. (10.133)
дх dt
Решение последнего уравнения будем искать в виде
квадратного трехчлена:
S (x,/)-x^K(/)x + p40x+q(0, (10.134)
где К (О — симметричная (п Х/г)-матрица, являющаяся
функцией времени; р (/) — векторная функция размерности п;
9 (О — скалярная функция.
Используя то, что а = а^, если а — скалярное выражение
уравнение (10,133) после подстановки квадратного
трехчлена (10-134) преобразуют к виду
х^ (Q—KBR- i К + КА + К) X~х^ (KBR- > В^ р ~-
А^ р -2Kh) — — р^ BR- > В^р + рз^ h-
4
= —(х^ кхЧ-x^p + q).
Приравняв в обеих частях полученного соотношения
выражения при одинаковых степенях х, получим уравнения (10.123),
(10.124), (10.127). Подставив квадратный трехчлен (10.134)
в (10.132), получим оптимальный закон управления (10.122).
Подставив его в (10.129), получим граничные условия
К(//)-= F; р(/,)=0; q{ti)=Q. (10.135)
Квадратный трехчлен (10.134), если К, р и ^ определяются
из уравнеиий (10.123), (10.124) (10.127) при граничных
условиях (10.135), является функцией Беллмана, причем
эта функция является гладкой. Как легко проверить,
выполняются все условия, при которых уравнение Беллмана
является достаточным условием оптимальности, поэтому
соотношения (10.122)—(10.125) действительно определяют
оптимальный закон управления. Существование и единственность
решения задачи синтеза оптимального нестационарного
линейного регулятора состояния следует из существования и
единственности решения уравнений (10.123), (10.124) при
граничных условиях (10.125).
Осталось доказать равенство (10.126). Оно получается из
определения функции Беллмана:
f
S(x./)= min x^(/y)Fx(g+ f(x^Qx-f
+ u^Ru)JtJ. (10.136)
Уравнение (10.123) называется матричным уравнением
Риккати. Оно является нелинейным, и в общем случае его
не удается решить аналитически, если да>1<е матрицы А, В,
R и Q постоянны. Уравнение (10.124) является линейным и
может быть решено только после того, как будет получено
решение уравнения (10.123).
Матричное уравнение Риккати можно решить численным
методом или путем моделирования в обратном времени
начиная с момента tf. При моделировании (решении на аналоговой
ЭВМ) вводится новая независимая переменная т = — / и
уравнение (10.123) и граничное условие (10.125) преобразуются
к виду
^ =KA + A^K-KBR-^B^K + Q, 0<т^Л;
от
K(0)=F (К(т;=К(^,-т),...). (10.137)
Заметим, что в силу симметричности матрицы К уравнение
(10.137) равносильно системе {п + \) п/2 скалярных
дифференциальных уравнений.
Получим решение задачи синтеза оптимального
нестационарного линейного регулятора состояния, когда внешнее
воздействие h (t) = 0. В этом случае система из двух
уравнений (10.124), (10.127) является однородной. Ее решением,
удовлетворяющим нулевым граничным условиям, являются
р (/) = О и 9 (О = О, поэтому при h (О = О оптимальный
закон управления (10.122) принимает вид
и*=—R-iB^^Kx, (10.138)
где К — по-прежнему удовлетворяет матричному уравнению
Риккати (10.123) при граничном условии (10.125).
Соотношение (10.126). принимает вид
'/
(/) К (/) x (0=х^ {t,) Fx [tf) + f [x^ (т) Q (T) x (t) Ч-
t
+ u*^ (t) R (t) u* (t)] dx: (10.139)
Оптимальные стационарные линейные системы. Рассмотрим
теперь задачу синтеза оптимальной системы при интегральном
квадратичном критерии оптимальности, когда матрицы А,
В^ Q и R постоянны, h (/) = О и = оо. В этом случае
X (со) = О и уравнение объекта и критерий оптимальности
принимают ВИД
оо
i=Ах + Ви; У=J (х^ QX + Ru) dt.
Здесь принимается, что Q и R —
положительно-определенные (п X п)- и (г X г)-матрицы соответственно. Требуется
найти управление с обратной связью, при котором замкнутая
система асимптотически устойчива и критерий оптимальности
принимает минимальное значение. Эту задачу назовем
задачей синтеза оптимального стационарного линейного
регулятора состояния или коротко — стационарной задачей.
Решение стационарной задачи существует тогда и только
тогда, когда пара (А, В) стабилизируема. Оптимальное
управление является линейной функцией от фазовых координат и
имеет вид
u*=_R-»B3^Kx,
(10.140)
где К — постоянная положительно-определенная матрица,
определяемая из так называемого алгебраического уравнения
Риккати:
—КА-A^K + KBR-' B^K--Q-0.
(10.141)
При оптимальном управлении для любого / > О справедливо
равенство
оо
(О Кх (t) = j [х^ (т) Qx (х) + и*^ (т) Ru* (т)Ыт. (10.142)
Уравнение (10.141) имеет не одно решение. Но решение,
удовлетворяющее критерию Сильвестра положительной
определенности матрицы К
^11
>0,...,
>0, (10.143)
единственно.
Соотношения (10,140)—(10.142) получаются точно так же,
как и аналогичные соотношения при решении нестационарной
задачи. Только в этом случае функция Беллмана
отыскивается в виде квадратичной формы S (х) = х^Кх, где К -~
постоянная матрица.»
Следует иметь в виду, что если tf является конечным, то,
хотя матрнць! А, В, Q и R являются постоянными, матрица
К в оптимальном законе управления зависит от времени и
находится из дифференциального уравнения Риккати.
Покажем, что стабилизируемость является необходимым
и достаточным условием существования решения задачи
синтеза оптимального стационарного линейного регулятора
состояния. Необходимость очевидна. Действительно,'
стабилизируемость означает, что неуправляемая составляющая
Xj, О при t-^ оо. Если это условие не выполняется, то
фазовый вектор замкнутой системы при Xj^ О не будет с
течением времени стремиться к нулю, так как управление и
соответственно присоединение регулятора к объекту никакого
влияния на неуправляемую составляющую х^ не оказывают.
Чтобы доказать достаточность, нужно показать, что
существует положительно-определенная симметричная матрица,
удовлетворяющая алгебраическому уравнению Риккати, и что
замкнутая система асимптотически устойчива. Представим
критерий оптимальности в виде
У- lim f (:
(х^ Qx + u^Ru)d/.
При конечном и F = О имеем [см. (10.136) и (10.139)1
S (х, t\ tf) - х^ (/) К (О X (О = j (х^ Qx + u*^ Ru*) dx =
= min Г (x^Qx+u7'Ru)dx. (10.144)
Функция Беллмана S (x, /; tf) при фиксированных / и x
является функцией от //, причем функцией монотонно
неубывающей. Действительно, если t'i > t)> то
f?(x./;^,') J (x^Qx + u*^Ru*)dT+ J (х^ОхЧ-
+ u*'" Ru*) dx > j (x^ Qx+u*^ Ru*) =S (x, //),
так как под интегралом стоит неотрицательное выражение.
Покажем, что функция ограничена сверху. Так как объект
стабилизируем, существует управление с обратной связью,
при Котором замкнутая система асимптотически устойчива.
При таком управлении выражение под знаком минимума в
(10.144) сходится к конечному пределу при оо.
Очевидно, этот предел является верхней границей функции S (х, /;
//). Таким образом, S (х, t\ tj) как функция от tf является
монотонно неубывающей и ограниченной функцией.
Следовательно, существует предел этой функции при оо. Из
равенства
S(xJUi)-^4t)K{t)xit),
где справа от tf зависит только К (/). следует, что существует
предел функции К (О при tf-^oo, причем этот предел,
который обозначим Кц, не зависит от F, т. е. от граничного условия
К (tf) = F:
(О Кп x(0== lim [ (х^Qx + u*^ Ru*) йт=
= lim |х^ (tf) Fx (tf) + f (x^ Qx -f u*^ Ru*) dx
t
= j (x^Qx + u*^Ru*)dT, (10.145)
так как x (//) 0 при tf-^ со. Из этого равенства также
следует, что матрица Кп, являющаяся единственным
установившимся рзшением дифференциального уравнения Риккати,
положительно определена, так как положительно определены
матрицы Q и R. Из (10.142) и (10.145) имеем
хЧ/)К„х(0=х^(ОКх(0«
откуда получаем К = К^. Таким образом, К является
единственной положительно-определенной матрицей,
удовлетворяющей алгебраическому уравнению Риккати.
Асимптотическая устойчивость замкнутой системы, по
существу, доказана. 1Хокажем ее еще с помощью прямого
метода Ляпунова. Подставив управление (ЮЛЩ в уравнение
объекта, получим уравнение замкнутой системы
i=(A--BR->B^K)x.
(10.146)
Покажем, что функция Беллмана является функцией
Ляпунова для замкнутой системы. Функция S (х) = хП<х, как было
показано, является положительно-определешюй. Ее полная
производная по времени, вычисленная в силу (10.146), равна
dSldt^yJ Кх + х^Кх=^х?'(А^^К + КА-~2KBR-» К) х,
или с учетом алгебраического уравнения Риккати
JS/J^-—x^(KBR-i B^K + Q)x.
Матрица KBR~^B^K является
неотрицательно-определенной. Действительно, так как R и соответственно R-^
положительно определены, то z^R-^z > О при произвольных z.
Поэтому, если положить z = В^Кх. то x^KBR~*B^Kx > 0.
Матрица Q положительно определена по условию.
Следовательно, производная dSldt является
отрицательно-определенной.
Пример 10.20. 'ху^х^\ х^^и; У = J (xl+q xl + ru^)dt\ V > 0;
г > 0.
В данном случае
х-
В соответствии с (10.140) имеем
где коэффициенты кц должны удовлетворять уравнению (10.141):
U,*.Jlooj \\o}\iH,kJ^ Лk,,kJ\^r
или равносильной ему системе
fe»,/r^l = 0: + А = 0; -2 k,^ + klJr-q = 0.
которая имеет решения
Условию (10.143) удовлетворяет решение:
оо
Пример. 10.21, i,=Xi+«;4 = oA:2; ^ S (^l-^xl + u^) dt,
о
В этом случае
"--<'°>(t"t)(:)-»"-'^
- 2^ii + ^fi-l=0; -2 ^11^12 = 0; -2« ^fa" 1 =^ 0.
Последние уравнения имеют решения
kn^l drzy^; ^,2 = 0; ^22-~-1/(2о).
Чтобы матрица К была положительно-определенной, необходимо
выполнить неравенства Kji > О» ^22 > О, но последнее из неравенств
соблюдается, если с <: 0. При а > О задача не имеет решения. Это
связано с тем, что объект неуправляем, и поэтому решение существует
только при условии, что неуправляемая координата — в данном случае
Х2 — асимптотически устойчива, что и имеет место при с < 0.
Синтез оптимального линейного
регулятора выхода. Рассмотрим систему
x=Ax + Bu + h; (10.147)
у«Сх, (10.148)
где (10.147) — уравнение объекта, (10.148) — уравнение
наблюдения, и критерий оптимальности
=x^(0)Fx(^,)+ j vy'^Qy4-u^Ru)d/. (10.149)
Здесь h — известная векторная функция времени; F —
неотрицательно-определенная матрица; Q и R —
положительно-определенные матрицьг^ зависящие в общем случае от
времени. Матрицы А, В, С, Q, R как функции от времени
предполагаются непрерывными на интервале Ко. Требуется
определить управление с обратной связью, при котором
критерий оптимальности принимает минимальное значение. Эту
задачу назовем задачей синтеза оптимального линейного
регулятора выхода, причем если tf конечно, то назовем задачей
синтеза оптимального нестационарного линейного регулятора еьк
хода или коротко — нестационарной задачей выхода: если
^ с» и матрицы А, В, С, Q, R постоянны, то назовем
задачей синтеза оптимального стащюнарного линейного ре-
гулятора выхода или коротко — стационарной задачей выхода,
В стационарной задаче выхода дополнительно требуется,
чтобы замкнутая система была асимптотически устойчива.
Задача синтеза оптимального линейного регулятора
выхода отличается от рассмотренной задачи синтеза оптимального
линейного регулятора состояния тем, что в критерии
оптимальности (10.149) входит интегральная квадратичная
ошибка выходного (наблюдаемого) вектора, а не вектора состояния,
и условие задачи дополняется уравнением наблюдения.
Подставив выражение (10.148) для выходного вектора в
функционал (10.149), получим
J-x^(//)Fx(//)-t- f (x^r7QCx + u^Ru)rf/. (10.150)
*0
Таким образом, формально приходим к задаче синтеза
оптимального линейного регулятора состояния (10.147), (10.150).
Отличие этой задачи от ранее рассмотренной заключается в
том, что .здесь роль матрицы Q играет произведение C^QC,
поэтому решение задачи синтеза оптимального
нестационарного линейного регулятора выхода совпадает с решением
(10.122)—(10.125) задачи синтеза оптимального
нестационарного линейного регулятора состояния при условии, что в
матричном уравнении Риккати Q = C^Q С. И решение
существует и единственно независимо от свойств стабилизируемости
и обнаруживаемости системы. Существование и единственность
решения следует из существования и единственности решения
уравнений (10.123), (10.124) при граничных условиях (10.125).
Решение задачи синтеза оптимального стационарного
линейного регулятора выхода совпадает с решением (10.140),
(10.141) задачи синтеза оптимального стационарного
линейного регулятора состояния при условии, что в алгебраическом
уравнении Риккати Q — C^Q С. Это решение существует
и единственно в том и только в том случае, если система
(10.147), (10.148) стабилизируема и обнаруживаема ПО].
На строгом доказательстве последнего утверждения
останавливаться не будем. Ограни^шмся общими рассуждениями.
Так как на неуправляемые координаты воздействовать нельзя,
для возможности решения задачи синтеза асимптотически
устойчивой системы необходимо, чтобы они стремились со вре-
менем к нулю. Точно так же, нельзя воздействовать должным
образом на невосстанавливаемые координаты, так как
неизвестно, как они изменяются. Поэтому необходимо, чтобы они
также стремились со временем к нулю (обиаруживаемость).
То, что обиаруживаемость и восстанавливаемость являются
достаточным условием существования решения, следует из
того, что всегда можно выбрать такое управление с обратной
связью, при котором восстанавливаемые и управляемые
координаты стремятся асимптотически к нулю.
Теперь рассмотрим алгебраическое уравнение Риккати
A^K + KA-^KBR- VB^K + C^QC=0, (10.151)
которое необходимо решить, чтобы определить оптимальный
закон управления в задаче синтеза регулятора выхода.
Матрица C^'Q С в общем случае является
неотрицательно-определенной, хотя матрица Q положительно определена.
Очевидно, она является положительно-определенной в том и только
в том случае, если у = О только при х = 0.
В том случае, когда матрица C^QC не является
положительно-определенной, искомым решением уравнения
(10.151), т. е. решением, определяющим оптимальный
закон управления, может быть неотрицательно-определенная
матрица. При этом уравнение (10.151) не имеет решения,
которое было бы положительно-определенной матрицей.
Как увидим на примере, из того, что матрица C^QC не
является положительно-определенной, не следует, что и
искомое решение уравнения (1G.151) также не является
положительно-определенной матрицей. Можно показать [10],
что искомое решение (10.151) является
положительно-определенной матрицей в том и только в том случае, если
система (10.147), (10.148) вполне восстанавливаема.
Таким образом, если уравнение (10.151) не имеет
положительно-определенного решения, т. е. решения, которое
является положительно-определенной матрицей, следует искать
неотрицательно-определенное решение.
Критерий неотрицательной
определенности. Для того чтобы симметричная матрица
К была неотрицательно определена, необходимо и достаточно,
чтобы все главные миноры определителя det К (tn. е. все миноры,
получающиеся из этого определителя вычеркиванием строк и
столбцов с одними и теми же номерами, или, иначе говоря, все
миноры, симметричные относительно главной диагонали
этого определителя) были неотрицательны.
со
Пример 10.22. Xi = X2. х^ = и, y = Xi, У = J (//^-Ь^^) dt,
о
В данном случае
^=(оо)= ^ = ('°)''^-='='^='-
Алгебраическое уравнение Риккати имеет вид
/о о j , /о А„\ _/ A,2ft« fcwft^a /1 0\ р
или в скалярной форме
-kU+l^O; ft^j = 0; 2 Л.^-ft|j = 0.
Оно имеет положительно-определенное решение
т
хотя матрица С QC не ивляется положительно-определенной.
Метод решения алгебраического
уравнения Риккати. Алгебраическое уравнение
Риккати является нелинейным, и в общем случае
аналитически решить его не удается. Как было показано, решение этого
уравнения совпадает с установившимся решением
(дифференциального) матричного уравнения Риккати. Поэтому один из
возможных способов его решения основан на нахождении
установившегося решения матричного уравнения Риккати (10.137),
записанного в обратном времени, при начальном условии
К (0) == F. где F — произвольная
неотрицательно-определенная симметричная матрица.
Рассмотрим еще численный метод Ньютона-Рафсона [10].
Запишем алгебраическое уравнение Риккати в виде
KA + A^K~KSK + Q-=0,
где S = BR~^ В^; Q — в общем случае
неотрицательно-определенная матрица (в частности, она может быть равна C^QC).
Введем матричную функцию
F (К)=КА + А^ К ~ KSK + Q.
Задача заключается в том, чтобы определить неотрицательно-
определенную матрицу К, удовлетворяющую условию F (К) =
= 0. Построим итерационную процедуру. Пусть —
решение, которое получается на /-м шаге. Положим
К('+|) = к<'>+ДК. (10.152)
Предполагая, что ДК является малой величиной, и
пренебрегая квадратичным относительно ДК членом, получим
F (К<' +'>) = F (К«'>) -Ь ДК (А- SK«'>) + (А^ ~К<^> S) ДК.
Приравняв правую часть нулю, получим линейное уравнение
F (К<'>) -Ь ДК (А—SK<'>) + (А'^ --К<^> S) ДК=0,
откуда находится ДК.
Таким образом, имеем следующую итерационную
процедуру:
а) вначале полагается i = О и выбирается К^^Ч
б) из последнего уравнения находится ДК;
в) если ДК не превышает допустимой ошибки
(допустимая ошибка задается), то итерационная процедура
заканчивается; в противном случае увеличивается / на единицу и по
формуле (10.152) вычисляется К^^\ соответствующее новому
значению а затем происходит возврат к п. б).
Процедура сходится, если правильно выбрать начальное
приближение К^^^ Справедливо следуюи;ее утверждение 1101:
если алгебраическое уравнение Риккати имеет единственное
неотрицательно-определенное решение, то
К'/-и)^К<^ 1=0,1,2,..., и ИтК^'> = К
при условии, что начальное приближение К^**> выбрано
таким образом, что матрица А — SK^**> асимптотически
устойчива (т. е. ее собственные значения имеют отрицательные
вещественные части).
Если начальное приближение выбрано неудачно, то
может наблюдаться сходимость к произвольному решению
алгебраического уравнения Риккати или вообще не сходится.
Если матрица А асимптотически устойчива, то целесообразно
принять К^о> = 0.
Метод прогонки решения задачи
синтеза оптим1альной линейной системы.
Выше задача синтеза оптимальной линейной системы (при
Л = 0) методом динамического программирования была сведе-
на к решению матричного уравнения Риккати. Здесь
рассматривается еще один метод решения этой задачи, основанной на
вариационном методе и прогонке (переносе) граничных
условий с одного конца на другой. Этот метод, как увидим на
примере, иногда позволяет получить аналитическое выражение для
оптимального закона управления и тогда, когда матричное
уравнение Риккати аналитически решить не удается.
Итак, рассмотрим задачу синтеза оптимальной линейной
системы при условии, что уравнение объекта, граничные
условия и критерий оптимальности имеют следующий вид:
x=Ax + Bu; x(g-x^ J^2^\xT(t^)fx(t,) +
+ jVQx + u^Ru)d/|.
Здесь для удобства в качестве критерия оптимальности
принят функционал (10.121), поделенный на два. Это, очевидно,
не должно сказаться на решении задачи, т. е. иа оптимальном
законе управления.
Составим гамильтониан (принимаем яро = —1):
Я= — -i- (х^ Qx + Ru) + V (Ах + Ви).
Найдем уравнения Эйлера-Лагранжа:
ip^-(^Y=.Qx^A^^; ^^„и^К + я^т'В-О.
Из последнего уравнения
u = R~^B7'яJ). (10.153)
Подставив это выражение, запишем уравнение объекта совме
стно с первым уравнением Эйлера—Лагранжа:
(:)-(Г-Г)(;)
или 2=D2, где 2=
Условие трансверсальности (10.40) принимает вид
^{tf)=-Fx(tf), (10.155)
Запишем решение уравнения (10.154), используя его
нормированную фундаментальную матрицу Z (/, /'), удовлетворяюи;ую
условию Z(t\ t') = Е при любом f G [i^o. tf]:
z(0 = Z(/,Oz(^'). (10.156)
Представим фундаментальную матрицу в соответствии со
структурой уравнения (10.154) в виде
Unit Л Z,,{tJ')l
где Z^y— матрицы размерности п х п.
Используя это представление и приняв f = из (10.156)
получим
X (О - (Л tf) X (tf) + Z,2 (t, tf) Ф (tf)',
* (t)=-Z^ (Л tf) X (//) + (t, tf) Ф (tf),
или после подстановки (10.155)
^{t)=lZu(tJf)-Z,,(tJf) F]x(tf),
^(t) = [Z,,(t,tf)-Z,,(tJf)F]x(tf).
Исключим из полученной системы уравнений х (tf):
^(t) = [In(t. tf)-Z^(t, tf) FI [Zn (/, tf)-Zi3(t, tf) F]-' X(/).
При этом, по существу, граничное условие из точки tf на
временной оси переносится в точку t G f^o. ^/1- Сравнивая
оптимальный закон управления (10.153) после подстановки в
него последнего выражения для ф с оптимальным законом
управления (10.138), получаем
К(/)- [Z^i (t, tf)-(Z^ (t, ^)Fl[Zn (t. tf)-Z^^ (/,/;) F|-^ (10.157)
и в частном случае, когда F = О,
4t)^Zn(t,tf)Zu\t,tf), П0.158)
Соотношения (10.157) и (10.158) определяют решение
матричного уравнения Риккати через фундаментальную матрицу
системы, состоящей из уравнения объекта и уравнения
Эйлера—Лагранжа для сопряженной координаты. Они могут быть
использованы для определения матрицы К (t) при решении
задач синтеза оптимального линейного регулятора.
Рис. 10.6
Пример 10.23.
Простейшая задача пере-^
хвата. Решим изложенным
методом прогонки задачу
перехвата, несколько отличную от
задачи, рассмотренной в [5].
Пусть цель движется
равномерно и прямолинейно со
скоростью Vjx. Перехватчик ^
движется с постоянной
скоростью i^n. Курсовые углы цели и перехватчика (рис. 10.6)
достаточно малы:
При этом условии в первом приближении можно записать =
== — I'n^Di Яи ^ ^п» где Оц — угловая скорость перехватчика.
Принвмая угловую скорость сод за управление и введя обозначения
Яп ^2* = можно записать
X = А хЦ-В ы,
где
(::)-=(:i')-(:)-
Примем за начальное время = 0. Время перехвата if = r(/vc, Го —
— начальное расстояние, Vq, —скорость сближения перехватчика и
цели. В силу (10.159) в первом приближении
Vc = v^ + vc* г^\ОЦ\
и промахом будет х^ (if). Потребуем, чтобы промах был равен нулю.
Тогда граничные условия имеют вид
x(io)^x^ xAtf)=-0.
Рассмотрим задачу синтеза оптимального управления с обратной
связью при двух разных критериях оптимальности.
1. Пусть критерий оптимальности имеет вид
'if
В этом случае
/О О \
и матрица D принимает вид
Непосредственно соотношениями (10.157) или (10.158) воспользоваться
нельзя, так как они получены при условии, что правый конец
траекторий свободен, а в рассматриваемой задаче координата (tf)
закреплена. В данном случае условие трансверсальности имеет вид apg (if) =0.
Из (10.153) оптимальное управление
ив=яр2. (10.160)
поэтому задача сводится к определению ярд как функции от х. Так как
матрица D постоянна, фундаментальная матрица 2 (/, t') = 2 (/ — f')=
= W^ij (^ — ^')11.С учетом граничных условий из соотношения z (/) =
= Z(T)z(^,),
где
( If ) " ^ — ^^h' получаем:
(t) = 2l2 (T) x^ (tf) + (T) % (tf)\
X2, (t) = 222 (T) X2 (/,) + (т) ^1 (//) ;
^2 (t) = 242 (T) ^2 (tf) + (T) ^1 (tf).
Из первых двух уравнений найдем х^ (if) и яр^ (tf) и подставим в
последнее уравнение. Тогда получим
% (О- f ^''^ ^^^"-^^^ (01+243 (Т) I2i2 (Т)Х
Х^2 (0-^22 (T)Xj (ОН, (10.161)
где
А = (Т) 223 (Т) - 222 (т) 2^3 (т). ( Ю. 162)
Найдем фундаментальную матрицу 2 (т). При постоиииой матрице D
2(т) = е^^^==Е+От+-^02т2+...+-^1>"т''+... (10.163)
Как нетрудно вычислить
^0 0 0 -1»Д /О-г^пб^ —i;nO>
02^, « О \ ^3^ О О О е«
0000 Г 10 о 00
^0 о о J \0 е* v^e^ 0^
02fe^^2(ft-i)p2. D2ft+l_e2<*-'>D^ Jfe = 2,3 (10.164)
Подставив (10.164) в (10.163), получим:
^.■<"-«.('+",т+";т+-)=-|<'"-'-"'^
.«W=f„(x+e^|-+e*-|-+... )= f (e--e-).
Подставив эти выражения в (10.160)—(10.162). оптимальный закон
управления можно записать следующим образом:
fn e"-e-«''-et (е"+е
При «С 1, разложив экспоненциальные функции в ряд и отбросив
члены, содержащие множитель е выше пятой степени, получим
и* (х)^{3 + 0,2е2 т2) (^ ^) .
В исходных переменных это соотношение принимает вид
о = (3 + 0,2е2 т«) f-^+-2l2.V
с учетом (10.159) имеем (см. рис. 10.6)
Xi
или
. (Яп , Jh_\
(10.165)
Используя это соотношение, оптимальный закон управления можно
записать в виде
Это соотношение определяет закон пропорционального сближения с
переменным коэффициентом навигации.
2. Пусть теперь критерий
оптимальности имеет, вид
в этом случае
V0 о/
и, как легко проверить, имеем:
^0 ^t^n О О
0 0 0 1
О О О
^0 О О
D2 =
D3 =
О
'^п О
О О
\ О -E^Vn
1 '
0 0
0
0
0
0
—
0
0 0
0
0
0
/
Точное выражение для фундаментальной матрицы получить не удается.
При < 1, используя (10.163) и отбрасывая малые члены более
высокого порядка, чем 8^, получим:
71
6f
^42 (T) = —e2 t^n — ; (т) -1;,, т-е^ с;» — .
31
После подстановки этих выражений в (10.160)—(10.161) оптимальный
закон управления записывается в виде
или в исходных переменных
Используя (10.165), получаем
"=^('+^^"^*^)""
или, учитывай, что Vc{ff — f) = г.
Таким образом, опять оптимальное управление определяет закон
пропорционального сближения с переменным коэффициентом
навигации. При = О оба оптимальных закона управления совпадают и при-
ции
обретают вид
§ 10.7. Стохастические оптимальные системы.
Методы синтеза. Методы оптимальной
оценки состояния. Принцип разделимости
Для детерминированных систем управления не имеет
значения, какое управление — программное или с обратной
связью — используется, так как знание управления и начального
состояния позволяет однозначно определить состояние
системы в любой момент времени. Наблюдение за текущим
состоянием системы не дает новой информации. В стохастических
системах управления, т. е. в системах управления, подверженных
случайным воздействиям, по известным управлению и
начальному состоянию предсказать ход протекания процесса
невозможно, так как он зависит еще от случайных воздействий. И
возможности управления такими системами существенно
зависят от той информации, которая может быть получена путем
измерения и обработки выходной (наблюдаемой) переменной.
Поэтому стохастические оптимальные системы управления
должны быть замкнутыми, т, е. системами управления с
обратной связью.
В теории детерминированного управления основное
внимание также уделяется замкнутым системам, так как практически
все системы управления подвержены случайным воздействиям.
Детерминированные системы рассматриваются как модели,
которые используются в процессе синтеза, ввиду их простоты
по сравнению со стохастическими системами. Предполагается,
что в действительности в процессе функционирования они
будут подвержены случайным воздействиям.
Задача синтеза стохастической оптимальной системы
управления в общем случае ставится следуюпщм образом.
Задаются дифференциальные уравнения объекта, ограничения,
краевые условия, уравнения наблюдения, критерий оптимальности
и характеристики случайных воздействий и параметров. Тре-
буется найти управление как функцию от измеренных значений
выходной переменной у (т) на интервале < t.
Для решения стохастических задач оптимального
управления разработаны методы, в том числе стохастический
принцип максимума, метод динамического программирования и
другие [5, 9, 17, 18, 19]. Ниже будут рассмотрены метод
динамического программирования и методы, основанные на
сведении стохастических задач оптимального управления к задачам
оптимальной оценки состояния и синтеза детерминированной
оптимальной системы управления.
Метод динамического программирования
Пусть объект описывается уравнением
X =f(x,u. t) + Vo(0. (10.166)
где Vjj (t) — белый шум с характеристиками
М \,{t) = 0; М[Vo miit')] = QSnt-а (10.167)
При условии, что X (to) = и и {t)£ Uj, требуется найти
допустимое управление и* (х (О. 0. при котором критерий
оптимальности
;^
y=-M{goIx(//), tf]+ J U^.u,t)dt} (10.168)
'о
принимает минимальное значение.
Таким образом, рассматривается стохастическая задача
оптимального управления, в которой случайное воздействие
является белым шумом и входит в уравнение объекта
аддитивно; ограничение на правый конец траектории отсутствует,
фазовый вектор измеряется полностью и без помех, т. е. в ка^едый
момент времени точно известно состояние объекта. В этой
задаче X (i) является марковским процессом (так как случайное
воздействие является белым шумом) и вся информация,
используемая при определении характеристики будущего
состояния объекта, содержится в х(/). Поэтому оптимальное
управление должно быть функцией только от текущего состояния
X (/). Здесь, как всюду в этой главе, управление и 1х'(/), /1
называется допустимым, если функция и (О = и 1^ (/), /1
кусочно-непрерывна и принимает значение из множества U|.
Кроме того, предполагается, что уравнение
X = Цх, и(х, О, /1
при каждом фиксированном х (/о) = х° имеет единственное
решение на интервале [<о. ^/1. Функции /о (х, и. t), f (х. и. f)
и Qo W предполагаются непрерывными.
Для решения сформулированной задачи воспользуемся
уравнением
dS
ПИП
ах 2i,/=i ax|dxi
(I0.I7I)
а/ '
(10.169)
где —элементы матриць! Qo, при граничном условии
Slxitf), tf]^go[x{t,), tfl (10.170)
Уравнение (10.169) является функциональным уравнением
динамического программирования для стохастической задачи
оптимального управления (10.166)—(10.168) и также
называется уравнением Беллмана, Скалярная функция S (х, t) есть
функция Беллмана, Если множество U (/) открыто и минимум
левой части уравнения (10.169) достигается в стационарной
точке, то уравнение Беллмана можно представить в виде слег
дующей системы уравнений:
/о(х. U. /) + -^f(x. U t) + ',±^^,u^^ - - ^
|7{/o(x.u.0+ |lf(x, u. 0}=0.
Достаточное условие
оптимальности [181. Пусть существуют скалярная функция S (х, /).
обладающая непрерывными частными производными S}, Si,
SxK. и допустимое управление и* (х, t), удовлетворяющие
уравнению Беллмана (10.169) или (10.171) и граничному
условию (10.170). Тогда управление и* (х, f) является оптимальным.
Обычно уравнение Беллманй записывают, используя след
матришаГ. Следом (или шпуром) (п х п)-матрнцы А ==
(обозначают tr А или Sp А) называется сумма элементов ее
главной диагонали:
trA== iQ„.
Как легко проверить непосредственным вычислением,
поэтому уравнение (10.169), очевидно, можно представить в
виде
dS
min
№.U.O+gl,X. „,„+Mr(Q.£|;.)
dt
Вывод уравнения Беллмана. Пусть в
момент t фазовый вектор х (t) принимает определенное значение.
Обозначим J [х (/), u (-), t] значение функционала (10.168)
при to = t, указанном значении х (t) и некотором
фиксированном управлении и (•) = {и (т), / < т <
mt), u (.), о = М { lg„ (х(//), tf) + J /о(х, U, т) d т]/х (t) }.
Минимальное значение этого функционала
Slx{t),t]^ min У[х(0, u(-), /]
u(t) е Ut;.
есть, по определению, функция Беллмана. Опуская для
краткости записи аргументы функций, представим функцию
Беллмана в виде
S
i ' t+At J
x(0 .
или
S[x{t),t]= min M
U (T) g
fo{x[t),u{t),t)At +
+ o(A0 +
V 1 /
tUt J/
= min
u (T)eiiT
/(X (0.
u {t),f)At + o(Ы) + M
x(0
. (10.172)
Используя свойства условного математического ожидания
М [М (|/т1)/1] = М (|/т1).
можно записать
М {(^ ] /о dx +g„'jl X (/)} = М М ^ /о dx +
/Л
xit)
Подставив это выражение в (10.172) и используя принцип
оптимальности, получим
S[x(0.min
11 (oe^'t
fo(x{t),u{t). i)At + o{M) +
+ min M|m
Ho так как
x(0
min MIM
min M
u (x)QVj: .
f fodx + go^jjxit +^t) jxU)
( podT + go)|^(^+AO ^x(o| =
= M [S{x(t + &t),t + At)/x{t)],
TO
5(x(0, 0 niin {/o(x(0. u(n, /)A/ + o(A/) +
+ M[S(x(^ + A/), / + A/)/x(/)]}. (10.173)
Представим (10.166) в виде разностного уравнения
Ax,=f,M + VotM+o(M), t-1,2, ....п. (10Л74)
Если Vo (О — белый шум с характеристиками (10.167), то
по определению белого шума Ag (/) = Vo (f) А/ является
случайным процессом с характеристиками
М А Ut) - О, М Mit) ЧШ) = Qo(/)A/.
Моменты более высокого порядка являются малыми
величинами более высокого порядка, чем At, поэтому из (10.174) имеем:
M{Axi/x(/))=/,(x. U, i)M'^M{V^tM/4t)}=fAt;
М {Д^.., Axj/x(f)} = М {(ft At + V^At) if At +
+ \\}А^Ш} + о (At) - {t)At +0 (ДО;
M{AxiAxiAxi/xiq}=o(At)
Разлагая 5 [л (/ + Д^, t+ At]B ряд в точке Ix (t), t] и
используя последние соотношения, получим
М {S [Kit +At). t + ДЛ/х(/)} = S[x(0, /] +
Подставив это выражение для М {S [х (t + А^. ^ + А/]/х(0}.
из (10.173) предельным переходом при А^->0 получаем
(10.169).
Граничное условие (10.170) получается непосредственно из
определения функции Беллмана.
Синтез стохастической оптимальной
линейной системы при полной
информации о состоянии
Рассмотрим стохастическую задачу оптимального
управления при линейном объекте, квадратичном критерии и полной
информации о состоянии системы:
X = А(Ох + В (О U + Vo; х(/е) х«; (10.175)
Ч
У = М {х^(tf) F х(//) + \ (yJ Q (т)х + u^^ R(T)u) dx} -> min.
(10.176)
Здесь Vo — белый шум с характеристиками
М Vo = 0; М {Vo (t) \l (0} = Qo it) б (/- Г); (10.177)
x° — случайная величина с характеристиками
Мх^^хО; М{х«-хО)(х«-хГ} = Ро; (10.178)
р,0 — неотрицательногопределенные симметричные матрицы;
R ' ■— положительно-определенная симметричная матрица.
Задача заключается в определении оптимального закона
управления. Критерий оптимальности (10.176) имеет такой
же смысл, что и критерий оптимальности (10.121) в
детерминированной задаче оптимального управления. Здесь только
производится усреднение по всем случайным факторам.
Решение этой задачи совпадает с решением (10.138), (10.123),
(10.125) детерминированной задачи (10.120), (10.121) при h(t) =
= 0.
Оптимальное управление
и*[х(0, Л = -R-^ В^Кх(0. (10.179)
где симметричная матрица К определяется из матричного
уравнения Риккати
К = — КА- А^ К + В^ К—Q (10.180)
при граничном условии
K(//) = F. (10.181)
Таким образом, случайное воздействие V© и случайное
начальное условие на оптимальный закон управления не влияют.
Они сказываются только на значении критерия
оптимальности: оно, естественно, увеличивается. При оптимальном
управлении критерий оптимальности (10.176) принимает следующее
значение:
J^x^r К(дх° + 1г[К(/о)Ро+у/ооКЛ1. (10.182)
Для получения решения (10.179)—(10.181) воспользуемся
методом динамического программирования. Уравнения
(10.171) в данном случае принимают вид
x^Qx+u^Ru+ -£-(Ax+Bu) + i^'ho^]'^-
dS
dt
2u^R+ ^B=0.
dx
Из второго уравнения полученной системы
u^-±R-^Br[^f. (10.183)
Подставив это выражение в первое уравнение, получим
dS ^ \ dS
x'Qx+ -^Ах LJl!i_BR-iB^
дк 4 дк
dS^
"дк
d^S \ dS
т
+
dt
Будем искать решение этого уравнения в виде квадратичной
формы:
s^x^m^-^Kif).
где К (О — симметричная матрица, (t) — скалярная
функция. Подставив ее, получим
хг (Q _ К BR-1К + К А + А'' К Н- Y tr^Qo К) = - Кх -ft^.
откуда
к = — Q + KBR-^ к -КА-А^ К.
fto=-(l/2)tr(QoK). (10.184)
Граничное условие (10.170) принимает вид
х^ (/,) К (tf) X (tf) + k, (ti) = x^ (ti) F X (ti),
поэтому
K(V) = F; K(ti) = Q, (10.185)
Подставив выражение для S в (10.183), получим оптимальный
закон управления (10.179). Осталось получить (10.182). Из
определения функции Беллмана следует, что
У=М[5(х(д. g]=M{x«^KxO} + feo(^o). (10.186)
Вычислим математическое ожидание от квадратичной формы':
М {х«'' К (to) х«} = М {(хО—хР + ху К (^о) (х°— х» + х^)} -
= М {(хо - х«)^ К (^о) (X' —х«)} ^"^"^ К (to) х«.
Как легко проверить непосредственным вычислением,
если а и b являются произвольными векторами (столбцами)
одного и того же размера, то
a^b==tv(ba'r). (10.187)
Используя это соотношение, окончательно получаем
М {хОт К (д хО} =: tr (К (/о) Ро) + к (<о) х". (10.188)
Для второго слагаемого правой части (10.186) из уравнения
(10.184) с учетом граничного условия (10.185) имеем
поэтому действительна из (10.186) получаем (10.182).
Синтез стохастических оптимальных
систем управления при неполной информации
Измерение (наблюдение), как правило, всегда
сопровождается помехами, и состояние системы никогда точно не
известно, поэтому более практичной является стохастическая
задача оптимального управления при неполной информации
о состоянии системы. Эта задача намного сложнее, и для ее
решения часто используют эвристический прием (метод
разделения), при котором стохастическая задача синтеза при
неполной информации разделяется на две задачи: задачу оптимальной
оценки состояния и детерминированную задачу синтеза или
стохастическую задачу синтеза при полной информации. В
общем случае система, синтезированная таким приемом, не
обязательно является оптимальной. Но возможно, что, как,
например, при линейных уравнениях объекта и наблюдения и
среднеквадратичном критерии, метод разделения позволяет
синтезировать оптимальную систему управления. Таким
образом, со стохастической задачей оптимального управления
тесно связана задача оптимальной оценки. Перейдем к
рассмотрению этой задачи.
Наблюдатель (оцениватель, фильтр) Калмана—Бьюси.
Рассмотрим следующую задачу оптимального оценивания
(восстановления). Пусть объект и наблюдение описываются
уравнениями
x = А(0 x + В(0 u + Vo; х(0 - х«; (10.189)
y^C(Ox+V„ (10.190)
1^де \q и V^j — гауссовские белые шумы с характеристиками
М Vo = 0; М {Vo it) VI it')) = Q„ it) Ь it-1');
M V„ = 0; M {V„ it) Vl it')} = Ro it) Ь it-t');
iA{\,it)\lit')) = %it)bit-t'):
х» — гауссовская случайная величина с характеристиками
М хО = х^; М {хо --х^) (х«— xY) = Ро;
Qo. Ро — неотрицательно-определенные симметричные
матрицы (Qo > О, Ро > 0); Ro — положительно-определенная
симметричная матрица (Rq > 0).
Случайные процессы V^'^ и \1Р называются
соответственно шумом объекта и шумом наблюдения или измерения. Они
не коррелированы со случайной величиной х°. Требуется,
используя измеренные значения выходной переменной у (т)
на интервале Uq, Л, найти несмещенную оценку х (/),
обеспечивающую минимум среднего квадрата ошибки:
Jo - М [(X (t) ~^{t)V (х it) -x{t)] min. (10.191)
Условие Ro > О, т. е. условие положительной
определенности матрицы интенсивности шума наблюдения, означает,
что ни одна компонента выходной переменной у (t) не
измеряется точно. В этом случае задача оценивания называется не-
сингулярной 110]. Таким образом, задача (10.189)—(10.191)
является несингулярной задачей оценивания (фильтрации).
Ее решение, т. е. несмещенная оптимальная оценка х (t),
определяется из уравнения
^ - А 7 + В U + К« (у--- С X); (д - х«, (10.192)
где матрица коэффициентов усиления
Ko = (PC^+So)R7^ (10.193)
В (10.193) Р является дисперсионной матрицей ошибки
е = X — X (Р(0 = М {е (t) (t)}) и находится из так
называемого дисперсионного уравнения:
Р = (А -So С) Р + Р (А- So R-' С)^-
-PC^R-i CP + Qo-SoR7^ SJ; t > t^. P(g = Po. (10.194)
Если шумы объекта и наблюдения не коррелированы
(So = 0), то из (10.193) и (10.194) получаем
K°=-PC^R-';
Р = АР + РА^— РС^ R-' CP + Qo; (10.195)
t>torP{t,)^Po- )
Рис. 10.7
Несингулярная
задача оценивания
(10.189)—(10.191) при
некоррелирова н ных
шумах впервые была
решена Р. Калманом
и Р. Бьюси. Ее
решение, представляющее
собой оптимальный
наблюдатель,
называется наблюдателем
(оценивателем) или
чаще фильтром
Калмана—Бьюси,
Заметим, что Р. Калман и
Р. Бьюси
рассмотрели случай, когда
U = 0.
Сравнивая уравнения объекта (10.189) и оптимального
наблюдателя (10.192), замечаем, что их правые части
отличаются только последними слагаемыми: в уравнении
наблюдателя вместо шума объекта появляется слагаемое,
пропорциональное разности у — Сх. Эта разность между измеренным те-
кущим значением выходной переменной и его оценкой у = Сх
называется невязкой. Структурная схема наблюдателя
Калмана—Бьюси /рис. 10.7, а) включает в себя как составную часть
модель исходной системы (рис. 10.7, б). Ее отличие от
заданной системы состоит только в том, что она имеет
дополнительно обратную связь по невязке. Интересно отметить, что
наблюдатель Калмана—Бьюси имеет такую же структуру, что
и наблюдатель полного порядка в детерминированном случае
(см. рис. 10.3).
Соотношения (10.192)—(10.195) определяют также
решение задачи линейного оптимального оценивания, которая
отличается от задачи оптимального оценивания (10.189)—
(10.191) тем. что: а) о законах распределения шумов и
начального состояния никаких предположений не делается (не
требуется, чтобы они были гауссовскими); б) нужно найти
линейный оптимальный наблюдатель, т. е. оптимальный наблюдатель
в классе линейных систем. Другими словами, если шумы
^0 и V„ и начальное состояние х° не я1зляются гауссовскими,
го наблюдатель Калмана — Бьюси является оптимальным.
вообще говоря, только среди линейных наблюдателей
(систем).
Покажем, что наблюдатель Калмана—Бьюси является
линейным оптимальным наблюдателем. Достаточно доказать, что
оценка, определяемая наблюдателем Калмана—Бьюси,
минимизирует функционал
У {а^ x (О—а^^(ОР (10.196)
при произвольном /2-векторе а. Действительно, если оценка
x (/) минимизирует функционал (10.196) при произвольном а,
то она,' очевидно, минимизирует функционалы
Л-М {Xiit) ~Mf)Y. I = 1,2, ... , п,
которые получаются из (10.196) при соответствующем выборе
вектора а, и соответственно сумму
п п
/=-1 1=1
представляющую средний квадрат ошибки оценивания (10.191).
Сначала примем и = 0. Воспользуемся схемой
доказательства, основанной на преобразовании задачи линейного
оптимального оценивания к задаче оптимального управления [161.
Так как отыскивается линейный оптимальный наблюдатель,
то линейная комбинация а^х (^J, как и сама оценка х (у,
представляет собой линейный функционал от функции у (т),
to < г ^ ty, которая является входным воздействием
искомого наблюдателя:
a'^x(ti) = j u^(T)y(T)cfT+b^xo. (10.197)
tc
Найдем весовую функцию u (т) и постоянный вектор Ь, при
которых оценка х (^), определяемая последним соотношением,
является несмещенной и оптимальной в смысле минимума
критерия (10.196).
Подставим в (10.197) выражение для у (т) из (10.190):
^ tl
а^х (/i)=^ J [u7'(x)C(t)x(t) +u^(t)X
tc
XV^T)ldT + b^x^ (10.198)
Введем векторную переменную х, определяемую уравнением
х- —А?^х + С^и, to<t^t,, (ШЛ99)
при граничном условии
x(/i)=^a. (10.200)
Очевидно,
X it,) = х^ X (/о) + J d[xr (т) х (т)].
Так как в силу уравнений (ЮЛ88) и (10.199) (напомним, что
рассматривается случай и (t) = 0)
d f х^ х] =х^ xdT + х^ X Лт = (и^ Сх + х^ Y^) dr,
то
X ih) = х^: (/о) X (^о) +1 Сх + х^ Vo) dx.
Вычитая из этого соотношения (10.198), получим
а^х (/,)~а^ X (^0=х^(/о) X (Q -Ь^ х' +
+ J(Fv,-uW„)dT,
откуда
М 1а^ X (/О- а^^(^х)] = 1х^ (to) ~Ъ^] х.
Из последнего равенства следует^ что при
х(/о)-^Ь (10.201)
оценка а^ х (/|) линейной комбинации а^х (Z^), определяемая
соотношением (10.197), будет несмещенной при всех а и и (t).
Из него также следует, что
7 - М [а^ X (^) — а"^ X (t^f - М [ х"^ (/„) х (to) -
М {[х^х) V„(г)-У (т) Vh(т)] X
X [x4T')V„(t')- u^(^')V„(-t'>l^JdT'dT.
и ввести новую независимую переменную X = — /,
уравнение и граничное условие для х и выражение для J
преобразуются к виду
7 - (^) Ро Z (t^) + J (2^ Qo г Ro v) dX.
(10.204)
Таким образом, задача линейного оптимального
оценивания свелась к задаче оптимального управления (10.204), где
нужно найти «управление» v, минимизирующее критерий J.
Задача (10.204) эквивалентна задаче оптимального
управления (10.120), (10.121) при h {t) = О, причем между матрицами,
входящими в условия этих задач, имеется следующее
соответствие:
Ач--^А^ Bч-^~>C^ Рч^-^Ро, ^Qo, R^^Ro.
Используя решение задачи (10.120), (10.121) при ft = О,
получим [см. (10.138)1
v==R-^CPz,
где Р определяется из уравнения [см. (10.123), (10.125)1
dP/d?^= --РА' —АР + РС' R-'CP-^Qo, Р(^) = Ро.
Возвращаясь к независимой переменной полученное
соотношение можно записать следующим образом (заметим, что
Р(^)=Р(^2—О и P = —dP/dX):
и' =R*^CPx; Р = РА'7^ + А' P^PC7^R-iCP +
+q;; P(g=Po.
принимая во внимание обозначения (10.202) и (10,203),
получаем:
- U « х; К« - (PC^ + So) R-\ (10.205)
Р - Р (А --So Ro~' С)^ + (А-So Ro"^ С) Р- РС^ R-^ CP +
+ Q0-S0 Ro"-^ S^; P (/0) - Po^ (10.206)
Итак, установлено, что соотношение (10.197) определяет
несмещенную оптимальную оценку х (t), если весовая функция
U (t) удовлетворяет (10.205), (10.206), а постоянный вектор
b — условию (10.201). Выражение для К° из (Ю.205) и
уравнение (10.206) совпадают с (10.193) и (10.194) соответственно.
Следовательно, остается доказать, что оценка, определяемая
из соотношения (10.197), после подстановки в него весовой
функции U (/) из (10.205) удовлетворяет уравнению (10.192).
Подставив выражение для и из (10.205) в (10.199), получим
X ^ .—(AT- —С^ X. (10.207)
матричного уравнения
(А—K°C)Z(^ х) (10.208)
Пусть Z (/, х) — решение матричного уравнения
dZ(/. т)
dt
при единичном начальном условии
Z(^, ^)-Е.
Тогда (см. § 8.2) решение уравнения (10.207)
x(0 = Z4^, t)x{t,)
и в силу (10.200) и (10.201)
x{t)^Z^{t,, t)a\ (10.209)
b = x(g = Z4^i, ^о)а. (10.210)
Из (10.205) и (10.209) имеем
u(0-K040Z4^. О а.
При подстановке этого выражения и выражения (10.210)
соотношение (10.197) при t^^ t преобразуется к виду
йТ X (О = f Z (Л т) К» (т) у (т) dT + Z {t, t^) хо.
откуда следует, что оценка
X (О = J Z (t, т) К» (т) у (т) dx + Z {t, дТо (10.211)
является несмещенной и доставляет минимум (10,196) при
любом а. Продифференцируем (10.211) и, используя (10.208),
получим
t
х=:-К«у + (А—К«С)
5Z(^T)K«>(x)y(T)dT-bZ(/, gxo
или, принимая во внимание (10.211),
Г= у ^(А— К« С)'х А^+ К" (у--- Сх).
Из (10.211) при t ^ получаем х (4) = х®.
Итак, для случая и (О = О показали, что наблюдатель
Калмана—Бьюси действительно является линейным
оптимальным наблюдателем.
Перейдем к случаю и (/) Ф 0. Представим фазовый вектор
в виде суммы 191: х = х(^> + х^^>. где слагаемые удовлетворяют
уравнениям
x^»>=.Ax<^>+Vo; х<^>(^о) = хО;
х^'>=гАх<^> + Ви; x'^'iQ^O.
Вектор наблюдения также представим в виде двух
составляющих: у = у^^> + у^^\ где
y<i>=.Cx^^> + V„; у'^'=Сх'^\
Составляющие х(^> (t) и у<^> (/) однозначно определяются
из уравнений.
Составляющая у^*> (t) легко определяется по измерениям
у it):
у'"(О=у(0-у*"(0.
Таким образом, задача оптимальной оценки при и (/) =5^ О
свелась к оценке х<^^ {t) по у^^> (х), to <:Г К t, — задаче
оптимальной оценки при U {t) = 0.
Для линейной оптимальной оценки х<*> имеем [см. (10.192)1
1^<'>=Ах^^^+КМУ-Сх<^>);9^> (д -хО,
где К° определяется из (10.193)—(10.195).
Очевидно, оптимальная оценка х (t) равна сумме:
1х=.х<^> + х^^>.
Продифференцировав это выражение, получим
или, принимая во внимание равенство у^^> = Сх^^К
х = Ах+ Ви + К« (у -Сх), X (^о) = х«.
На этом заканчивается доказательство, что наблюдатель
Калмана—Бьюси, определяемый соотношением (10.192)—
(10.195), является линейным оптимальным наблюдателем.
Пример 10.24. Рассмотрим задачу определения оптимальной
оценки скалярной постоянной величины х по намерениям у (f) = д:+ V„ (/)>
где Vii (/) — белый шум с интенсивностью Го.
До начала измерения известны следующие характеристики х:
Mjc == m; М (д: — т)^ = ро.
Искомая величина и шум независимы. Учитывая уравнение х =0,
рассматриваемую задачу можно сформулировать как задачу линейной
оптимальной оценки. В данном случае
A=zO. в=0, Qo = 0
и наблюдатель Калмана — Бьюси описывается уравнением
где /г*> = р/го; р определяется из уравнения
р «-р2/го. р(Го)=Ро.
Как легко проверить.
Заметим, что хотя х — константа, ее оценка х является функцией
времени: с течением времени оценка уточняется и при / -> оо стремится
к X. Это следует из того, что дисперсия ошибки при i^oo стремится к
нулю:
limp-lim [РоГо/{Го + Ро01=0.
Дисперсионное уравнение. Покажем, что
матрица Р, .определяемая из уравнения (10.194), является
дисперсионной матрицей ошибок для оценки, получаемой
наблюдателем Калмана—Бьюси. С этой целью сначала получим урйв-
нение для дисперсионной матрицы стохастического процесса
Z (О, описываемого уравнением
i«G(02 + H{0w-fh(0; 2(g=z«, {10.212)
где G (/) — (/г X /г)-матрица; Н (/) — (п х т)-матрица;
h (t) — детерминированная функция; w (t) — белый шум с
интенсивностью S {t)\ — случайный вектор с
математическим ожиданием г*^ и матрицей дисперсий Q {t)\ и w не
коррелированы.
Пусть Z to) — нормированная фунцаментальная
матрица. Тогда
z{t. to)-G{t)Z{t, to); Z{to. to)^E;
t
z(0 = Z(^ fo)z«H- f Z(^ T)[H(T)w(T)-f h(T)lcfT.
to
Так как, очевидно,
z(0-Mz(0 - Z(^ fo)z^+|Z(^ T)h(T)dT,
TO для центрированного процесса z (О == z {t) — z (/) имеем
t
z (0 Z g z (^o) 4- j Z T) H (T) w (T) dx.
(10.213)
Используя это выражение, для корреляционной матрицы
Кг Q получаем
Rz(fb y«Z(^, ^)QoZ^(f2. g +
min ft)
+ J Z (^1, T) H (x) S (X) (x) Z^ x) dx. (10.214)
Дисперсионная матрица
Q(0 = Rz(^ 0 - Z(^ ^o)QoZ4^ ^o) +
+ JZ(^ T»H(x) S(x)H7^(x)Z7'(f, x)rfx. (10.215)
Используя тождестба Z (fg, т) = Z (fg- 'i) Z (Ifi, т) при
|4> 'i. Z (fi, t) = Z (^1, g Z (/2. t) при 4 > и выражение
;|10.125) для Q (/). соотношение (10.214) для корреляционной
матрицы можно преобразовать к виду
lZ(/i,<2)Q(<«) при
Это соотношение потребуется в дальнейшем при
доказательстве принципа разделения. Из (10.215) путем
дифференцирования получаем следующее уравнение для дисперсионной
матрицы (дисперсионное уравнение):
Q = GQ + QG^ + HSH^. (10.217)
Из (10.215) также имеем
Q(g-Qo- (10-218)
Теперь получим уравнение для дисперсионной матрицы
ошибки. Вычитая (10.192) из (10.189), получаем уравнение для
ошибки е =^ x — х:
е = (А ^ К« С) е -1- Vo—К« V„. (10.219)
Начальное значение е (Q имеет следующие характеристики:
Ме(д^О; М{е(деЧд}-Ро.
Оно не коррелировано с шумами. Уравнение (10.219)
получается из (10.212) при Z = е, G = А К*^С, Н = Е,
Получим выражение для интенсивности шума S
S (О б (f -Г) = м {[Vo (О - к« (О v„ (01 \< (П-
~yfl (П K""" it')] = [Qo (t) + К» (t) Ro (t) K"^ (0 -
- K« (/) (0- So (t) K*"" (01 б it -n,
откуда
s (0 Qo (0 - K« (0 (0 - So (t) (0 + Qo (0 +
+ K«(0Ro(0K°40.
Дисперсионное уравнение (10.217) в этом случае принимает
вид
Q-(A- K«C)Q + Q(A^K«C)^ + Qo-K«S^-
-So + К« Ro Q (to) =-Ро.
Если предположить, что дисперсионная матрица оценки Q =Р,
и подставить выражение для К® из (10.193), то последнее
уравнение преобразуется к виду (10.194). Следовательно,
действительно матрица Р, определяемая из матричного уравнения
Риккати в наблюдателе Калмана—Бьюси. является
дисперсионной матрицей ошибки.
Наблюдатель Калмана—Бьюси при цветном шуме
объекта. Рассмотрим задачу линейного оптимального
оценивания при условии, что шум объекта является небелым, т. е.,
как принято еп;е говорить, является цветным. Пусть объект
и наблюдение (измерение) описываются уравнениями
х<= Ai х'^> + Biu + х'^>; х^^> (to) - xj^>;
y^C,x^^> + V„(0.
где Vj, — белый шум наблюдения с характеристиками
MV^ = 0; M{VJ0V];(r)}=Ro(06(/-O; Ro>0;
Хо^^ — случайный вектор с характеристиками
Мх<"= M{[x»'.-xi"]lx»' -x<"]'"}=Pio;
х(2) — шум объекта.
Предполагается, что шум объекта является цветным и
удовлетворяет уравнению
x^^>=A2X^^>+V,. x'''{to)=-<'\
где —- белый шум с характеристиками
М1/, = 0; М {V, (О \1 (Г)} ^Qo (О 8 (/ ~Г);
х\)^^ — случайный вектор с характеристиками
Мх^^> =х^'\ М{К^>- <^>1К^^- СМ^}- Ро2.
Последнее уравнение называется уравнением
формирователя (формирующего фильтра) или просто формирователем
(формирующим фильтром). Формирователь формирует из
белого шума с известными характеристиками заданный цветной
шум. Введя обозначения
-<^.»'-=(в)-"=(|:>--(о\").
приведенные уравнения можно представить в виде
x=Ax + Bu+GVo, y = Cx + V„.
Здесь, как всюду в этой главе, все нулевые и единичные
матрицы независимо от их размера обозначаются О и Е.
В преобразованных уравнениях шумы объекта и
наблюдения являются белыми. Шумом объекта является GV^ с
интенсивностью GQqG^, поэтому наблюдатель
Калмана—Бьюси при цветном шуме объекта описывается теми же уравнениями
(10.192)—(10.195), но при условии, что в дисперсионное
уравнение вместо Qo подставляется GQoG^. При некоррелирован-
ribix шумах Vo и Уд имеем:
'5Г-А? + ви+к«(у-с^); ^(^o)=v, K^-pc^Ro^;
Р = АР + РА^ — РС^^ R,"^ CP + GQoG^;
P(^o)-Po.
Представив дисперсионную матрицу в виде блоков
Pi Pi
Р^
^Рг! Р;
:)
и принимая во внимание введенные обозначения, матрицу
К^ и уравнение для оценки можно представить следующим
образом:
X'" = А,?<^' + х'^' + в,U + Ki (у-с, х<");
х<^' = Аг х'^' + Кг (y-Ci9^' {to) = A''-
Из уравнения для Р нетрудно получить уравнения для
Pj, и Pjj. Наблюдатель Калмана-—Бьюси при цветном
шуме объекта помимо модели исходной системы включает еще
модель формирователя (рис. Ю.8).
Пример 10.25. Пусть заданы уравнение и начальные условия
где Х2 — стационарный случайный процесс с характеристиками
Модель системы
J(0
J
I
\
J
Модель фор-
мирователя
Рис. 10.8
jcj — случайная величина с характеристиками
Требуется найти оптимальную оценку по наблюдению:
где — белый шум с интенсивностью Го.
Шумы Ха. Vh и случайная величина х\ не коррелированы между
собой.
Путем преобразования Фурье от корреляционной функции находим
спектральную плотность шума объекта:
5(0))= ' = ' .
откуда для передаточной функции формирователя получаем
«^ф(Р) = 1/(Р+1).
Следовате.пьио, уравнение формирователя имеет вид
х^-=- —X2-\-Vo.
где V'o— белый шум с нулевым средним и единичной иитенсивиостью.
Наблюдатель Калмана — Бьюси описывается уравнениями
где
Дисперсионное уравнение имеет следующий внд;
^Рп РгЛ ^ /О 1\/Р«1 Pi2\ IPn 0\
<P2i pJ ->Ap2i pJ \P2i pj\\ -\)
или в скалярной форме
P11=2P21—-7-pfi; P21^P22 — P21——P21^
'^0 Го
При записи скалярных уравнений использована снмметричиость
дисперсионной матрицы (pig — P2i)- Начальные условия имеют вид
Рц (to) = Ру, Р21. (to) = О, Р22 (/о) = 1/2.
Наблюдатель Калмана—Бьюси при цветном шуме
наблюдения. Пусть объект и наблюдение описываются
уравнениями
X ^ Ах + Bu -hV^; X (g = x«, (10.220;
y = Cx + z. (10.221)
Здесь Vo — белый шум с интенсивностью Qo(Oi
случайный вектор х^ имеет характеристики
Мх (to) - х«; М I [х (to) ~ хо] [х (to) -И П = Ро;
шум наблюдения z подчиняется уравнению
z = Dz + w, (10.222)
где w — белый шум с интенсивностью Rq > 0.
Шумы и w не коррелированы со случайным вектором
х^, но могут быть коррелированы между собой:
М {V, (t) (Г)} ^ S (О б (/-1'); S (О > 0.
Задача линейного оптимального оценивания с цветным
шумом наблюдения решается также преобразованием ее в
задачу линейного оптимального оценивания с белыми шумами.
Из (10.221)—(10.222) получаем
y = Cx + z = (C + CA)x +CBu + Dj.^ CVq + w.
Введем новый вектор наблюдения
у_У_СВи—Dy, (10.223)
После подстановки выражений для у и у получим
y=.Cx + V„, (10.224)
где
С - С + СА ^DC; V,, =-CV^ + w. (10.225)
в преобразованном уравнении наблюдения (10.224) шум
Vh является белым. Его будем называть обобщенным шумом
наблюдения. Как легко показать, его интенсивность Rq (/)
и взаимная интенсивность Sq (t) (шумы и V„ коррелиро-
ваны и в том случае, когда шумы и w не коррелированы)
определяются следующ^им образом:
Ro^-CQoC'^+S'^C^ + CS + Ro; So-QoC + S. (10.226)
Предположим, что матрица R© не вырождена. Тогда
наблюдатель Калмана—Бьюси описывается соотношениями
(10.192)—(10.194), где матрицы С, R© и Sq определяются из
(10.225) и (10.226). Вектор наблюдения у вычисляется по
(10.223). В (10.223) входит производная у, которая может быть
получена дифференцированием измеряемой переменной у^
Однако такая операция нежелательна, так как
дифференцирование повышает уровень помех. Чтобы избежать
дифференцирования, нужно произвести дальнейшее преобразование.
Введем вектор х^ определяемый соотношением
7(0 = х(0 + К«у(0- (10.227)
Продифференцировав это соотношение по времени и под-
ставив выражения для х из (10.192) и для у из (10.223),
получим
X = (А - К" С) X + (В - СВ) U _(ко + к« D) у,
или, принимая во внимание (10.227),
X = (А— К" С) X + (В— К*^ СВ) U + ((А К° С) X
XK^-k^-K°D]y, x(g-xO—K^(gy(g. (10.228)
В последнее уравнение производная у не входит. Из
него сначала вычисляется х, а затем из (10.227) находится
искомая оценка.
Пример 10.26. Пусть объект и наблюдение описываются
скалярными уравнениями х = 0; ^г=- х + z; Мх (0) = 0; М [л (О)]^ = ро-
Шум наблюдения имеет следующие характеристики:
Мг = 0; М{г(0г(/ + т)}=е-"'^72.
в примере 10.25 для такого шума было получено уравнение
формирователя
г = —?-Ьву; Мш = 0; М [ш (О = fi (/ — /').
^ В данном случае А = О, и = О, С = 1, Qo - 0; D = — I, Ro = 1,
'S = О, позтому из (10.225) и (10.226) получаем:
С=1. Ro=l, So = 0.
Из (10.228) и (10.227) находим
'I^.^A'Ox-KA'O-l + Цр-; Г(0) = —/jO(0)J'(0); 7 = Z+ko^.
Так как So = О, то и р определяются из (10.195):
feO„p; р ^^р^; я(0) = Ро.
Как легко проверить,
Р = РоП1+РоП, Ло=Ро/(1+РоО.
Сингулярная (вырожденная) задача линейного опти*
мального оценивания. Задача линейного оптимального
оценивания называется сингулярной или вырожденной, если
матрица интенсивности шума наблюдения вырождена.
Сингулярные задачи возникают, когда часть компонент
выходной переменной измеряется точно или когда шум
наблюдения является цветным и матрица интенсивности
обобщенного шума наблюдения является вырожденной. Если задача
оценивания сингулярна, то приведенные выше оптимальные
наблюдатели использовать нельзя, так как в их описании
используется обратная матрица Но**.Если шумы являются
цветными, то согласно выше описанным процедурам
исходная задача может быть преобразована. Поэтому
рассмотрим сингулярную задачу линейного оптимального
оценивания с белым шумом.
Представим уравнения объекта и наблюдения следующим
образом:
x«Ax4-Bu+Vo; x(g-xO; (10.229)
y<^>=CiX(0 + VH, (10.230)
у<='=С2Х. (10.231)
Шумы имеют следующие характеристики:
Mv,=0; M{V,(ov[(0}-Qo(06(^-^');
Qo(0^o;
Mv„=0; M(V„(ovr(0}-Ro(06(^-^'); Ro(0>o;
M{Vo(0 vr(0}-So(06(i-0; So(0>o.
Они не коррелированы со случайным вектором х",
имеющим следующие характеристики:
Мх« ==х^\ М {(хо —х^) (хо—x^Y\«: Ро.
Компоненты вектора у<^> измеряются точно. Пусть размер
этого вектора равен pi и матрица Cj имеет ранг р,. Тогда
соотношение (10.231) дает pi линейных независимых уравнений для
неизвестного фазового вектора. Поэтому достаточно получить
еще л — Pi уравнений, которые совместно с (10.231) позволят
определить оценку х.
Введем переменный (л — pi)-BeKTop:
q(/)^Cix(0. (10.232)
где Сг — выбирается так, чтобы (п х п)-матрица L J была
невырожденной. Зная q (t), можно однозначно восстановить
х (О- Действительно, из (10.231) и (10.232) имеем
Введем (л х р,)'Матрицу и 1л X (л — р1)1-матрицу Lg
следующим образом:
(LaU) =
/ Со \ ~*
1=( М (10.233)
Тогда
:,(2)
x ,0 = (Li U) ) = Li у'^' + U q. (10.234)
Очевидно, если "q — оптимальная оценка для q, то
1^ = Liy'*'+Uq. (10.235)
Поэтому задача свелась к определению оптимальной оценки
для q. Продифференцировав (10.232), получим
q-c;x+c;i=(c;+ciA)x+c;Bu +c;v„,
или, учитывая (10.234),
q = (с; + с; А)Uq + (CJ + С,' Д)у'^' + С; Ви + V„.
Последнее уравнение можно представить в виде
q^Aq + u-b V^, (10.236)
где
a=(c; + c;aju u = (c; + c;a)L,y^^» -ь
+ C;Bu; V, = C;v,. (10.237)
Преобразуем уравнения 'наблюдения: нужно получить
уравнения, связывающие измеряемую величину с переменной
q. Подставив выражения для х из (10.234) в (10.230), получим
где
y(i)=y(i)_CiLiy(2); Ci^C,U. (10.238)
Продифференцировав (10.231) и используя (10.229) и (10.234),
получим
где
у<2) = у(2) _(с^ + Q А) L, у<2' -с, Bu,
C2=(C2 + CiA)L,. (10.239)
Используя обозначения
v„ =
уравнение наблюдения можно представить в виде
P = Cq + V„.
(10.240)
(10.241)
Таким образом, чтобы найти оценку q, нужно найти фильтр
Калмана—Бьюси для системы (10.236), (10.241). Найдем
характеристики для шумов и У„._Из (10.237) и (10.240)
следует, что интенсивность Qo шума V„, интенсивность шума
V„ и взаимная интенсивность этих шумов определяется
следующим образом:
Qo = C2QoC2
■т g ^/Ro SlCl \
So=(C2S„ C2QoC7)-
(10.242)
Для линейной оптимальной оценки q имеем:
^=Aq+ и+КЦу—Cq); (10.243)
K« = (PC^+S,)R^-
P-(A--S,R5">C)P + P(A-SoRo^C)^-
- Р Ro * С Р + Qo-So R^-* Я
В данном случае не просто определить начальные
значения^ q {Q и Р (/о). Простейший путь — это принять х {tf) =
= Хо, Т. е. игнорировать начальное измерение у<^> {tf). Тогда
из (10.132) имеем
^{tf)^C2X^; P(g = C2PoC7.
Для определения составляющей у<^> вектора наблюдения
у необходимо, как это следует из (10.239), вычислять
производную у<^>. Путем дальнейших преобразований можно избежать
вычисления этой производной [101.
Пример 10.27. Рассмотрим сингулярную задачу линейного
оптимального оценивания при следующих исходных данных;
ГЛ{х, Цо)х^ (/о)}=0.
Шумы объекта V02 и наблюдения являются белыми с интенсив-
ностями и '"и соответственно. Шумы не коррелированы между
собой и с вектором начального состояния. В данном случае в принятых
выше обозначениях имеем:
А= Jj; В= ( ^ ): С, = {\ 0); С, = (0 I); yi^) = yrl «/<«) = !/a.
Примем С^ = (1 0). Тогда q=C'j^x = Xi,
Из равенства
получаем Li= | ^ j; 1^= ^ ^ j.
Из (10.237)—(10,240). (10.242) имеем:
^ ^ ^ ^ ^ . ^ ^ I у{1) \
А-=0; и =у2; y<^> = yi\ Ci=\; у^^) = у^—и\ с2 = 0; у = _ ) =
Соотношение (10.243) принимает вид
7 = ^2 + *? (Sri~-T) + Ml/a-~«); i^i = P 1глх\ k2 = 0; р ^р^/гц.
Для искомой оценки из (10.235) получаем = q; = ^2-
Линеаризованный наблюдатель Калмана—Бьюси.
Рассмотрим алгоритмы оценивания фазовых векторов
нелинейных систем, основанные на линеаризации. Пусть объект и
наблюдение описываются уравнениями вида
i=f(x.u, 0 + Vo; х(/о)-хО; y-g(x.O + V„.
Шумы и случайный вектор х° не коррелированы между
собой и обладают следующими характеристиками:
МхО=х«; М{(хО—хЬ)(хО—xYl-P^; Ро>0;
Mv,=o; M{v„(OvS(0}-Qo(Ofi(^-0; Qo^o;
MV„=o; M{VH(ovr(0}=Ro(06(^-0; Ro>o.
произведя линеаризацию относительно некоторой
траектории X* {t), получим
к = f (х*. U. t) + (^)^ (х-х*) + V„;
y = gix*. o + f-^)^(x-x*) + V„
где индекс О при производной означает, что она вычисляется
в точке X = х*.
Учитывая, что наблюдатель Калмана—Бьюси состоит из
модели системы и обратной связи по невязке, можно записать:
1^=f (X. U, О -f К» (у-g 01: х(д=X (д;
р(д=Ро.
(10.244)
Здесь в уравнении для оценки применяется точная модель
системы. Линеаризованная модель используется при
вычислении матрицы коэффициентов усиления и дисперсионной
матрицы.
Теперь остановимся на выборе траектории х* (f),
относительно которой производится линеаризация- В качестве
траектории можно принять номинальную траекторию, которая
выбирается до начала процесса получения оценки. Такой
способ удобен тем, что производные и соответственно матрицу
коэффициентов усиления можно вычислить заранее. Это
важно, когда нужно получать оценку в реальном масштабе
времени. Его недостаток состоит в том, что при неудачном выборе
номинальной траектории (траектории х* (/) и х (/) сильно
отличаются) возможны большие погрешности в оценке. А чтобы
выбрать траекторию х* (/), близкую х (/), нужна большая
априорная информация. Указанного недостатка лишен
расширенный фильтр Калмана—Бьюси [191. Так называется
наблюдатель (10.244), если линеаризация производится относительно
точки X (/), т. е. в качестве траектории х* (/) принимается
оценка. Недостатком этого наблюдателя является то, что
матрицу коэффициентов усиления заранее вычислить нельзя и
возникают трудности получения оценки в реальном масштабе
времени из-за увеличения объема вычисления в процессе
получения оценки. Еще большей точности можно добиться, если
использовать итерационный фильтр Калмана—Бьюси [19].
Так назьшается наблюдатель (10.244), если после
линеаризации относительно номинальной траектории и получения
оценки X it) вновь производится линеаризация относительно х (О
и получается новая уточненная оценка х<*> {t). Эта процедура
продолжается до тех пор, пока изменение оценки не станет
малым. Недостаток итерационного фильтра Калмана—Бьюси
очевиден — большой объем вычислений.
Пример 10.28. Самолет летит на постоянной высоте с постоянной
скоростью V, Измеряется угол 6 направления на радиомаяк М (рис. 10.9).
Требуется определить высоту и дальность в текущий момент
времени. Имеем:
Н'^1;;.х2 = 0; !/ = e = arctg—+ Vh; Мл:,(0) = /о; AU2(0) = /io.
л:,
М(1х(/о)-хО][х(/о)-х<)=Ро. МУн-О; МКн(ОК„(Л)-
^ГоЬ{1—Г)\ Го>0.
Расширенный фильтр Калмана —
^ Бьюси описывается следующими уравне-
г/ киями:
=v^ki [В—arctg (Тз/!^)]; (/о) = /о;
^2 = ^2[0 —arctg (ла/л^)]; ^z(to) = ho\
-J-] Р/го; Р(/о) = Ро;
v Эх /о
\ ах /о I (9^1 /о
Стохастическая линейная оптимальная
система управления при неполной
информации. Принцип разделимости
Рассмотрим задачу синтеза стохастической линейной
оптимальной системы управления при неполной информации о
состоянии. Пусть объект и наблюдение описываются
уравнениями
x=Ax + Bu+V,; x(g = x«; y = Cx + V„, (10.244)
критерий оптимальности имеет вид
x^(//)Fx(g+ j" (x^-Qx+u^Ru)* . (10.245)
Шумы Vo и V„ являются белыми с интенсивностями Qo (/)
и Ro (/) соответственно; начальное состояние х° — случайный
вектор со средним значением х° и матрицей дисперсий Pq-
Шумы и начальное состояние не коррелированы между собой.
Матрицы R (/) и Ro (t) положительно определены. Задача
состоит в определении такой функции (функционала)
U = U {у (т), /о < т < ^0 < ' <
при которой критерий оптимальности принимает минимальное
значение.
Решение этой задачи, т. е. оптимальный закон управления,
имеет вид
U* - —R-1 В?- К МО. (10.246)
где К — матрица, определяемая из уравнения
К=.—КА-A^K + KBR-^B^K—Q, K(/y)=-F; (10.247)
— линейная оптимальная оценка, получаемая
наблюдателем (фильтром) Калмана—Бьюси:
х-Ах+Ви + К^(у—Сх); х(д=Хо; K« = PC^R5-*;
Р = АР + РА^ - РС^ Rr* CP + Qo; Р {to) - Ро.
(10.248)
Соотношения (10.246), (10.247) совпадают с
соотношениями (10.138), (10.123), (10.125) и (10.179)—(10.181),
определяющими оптимальный регулятор в детерминированной задаче
синтеза оптимальных систем и задаче синтеза стохастических
линейных оптимальных систем управления с полной информа-
цией, с той лишь разницей, что в (10.246) входит оценка х,
а в (10.138) и (10.179) — сам вектор х. Таким образом,
стохастический линейный оптимальный регулятор состоит из
линейного оптимального наблюдателя и детерминированного
оптимального регулятора (рис. 10.10). Этот результат известен
как принцип разделения 1101 или принцип стохастической эк-
еивалентности [51. В соответствии с этим принципом задача
синтеза стохастической линейной оптимальной системы управ-
u1
Модель системы
Объект
Измеритель
Стохастический оптимальный ^регуллтор^^
Детерминированный
оптимальный
регулятор
Фильтр
Колмано -
6ь tec и
Рис. 10.10
ления при неполной информации о состоянии разбивается на
две: задачу синтеза линейного оптимального
наблюдателя и детерминированную задачу синтеза оптимальной
системы. Если шумы и начальное состояние подчиняется гауссов-
скому закону распределения, то соотношения (10.246)—(10.248)
определяют стохастический оптимальный регулятор, т. е.
регулятор, оптимальный в классе всех систем, а не только
линейных.
Для доказательства принципа разделения сначала пока-
жем, что ошибка е == х — х и оценка х не коррелированы.
Уравнение для оценки из (10.248), используя (10.246) и
(10.244), можно преобразовать к виду
^=«(A-~BK*)x^+K^Ce+K^V„; K*=R-*B^K.
Это уравнение совместно с уравнением (10.219) для ошибки
можно представить в виде
где
z = Gz + Hw,
А—К«С
е А
\х} \ К^С А--ВК*/
Дисперсионное уравнение (10.217) в данном случае
принимает вид
\, К" С А-ВК*/
Q + Q
+
где
/А—КС
К°С А
/Е
О у
-вк*/
+
/Е -KON^/E -Коу /Е -К«)з~/Е -KV ^0.249)
VORo^
Представим матрицу -Q в виде
(10.250)
где Qii - дисперсионная матрица ошибки (Q^ = Р); Qig
взаимная корреляционная матрица ошибки и оценки.
Из уравнения (10.249) нетрудно получить
Qi2 - (А - К« С) + (А ~ ВК*)^ -hQ„ К^^- -Ro К^^.
В силу равенств = Р и К° ^PC^Ro"^ последние два
слагаемых в правой части сокращаются, поэтому уравнение для
Qi2 является линейным и однородным. И так как Qj^ (^о) ^ О,
то оно имеет единственное решение Qig (/) =• 0. Это и
доказывает, что ошибка е (t) и оценка х (/) не коррелированы.
Преобразуем критерий оптимальности (10.245). Используя
(10.187). получаем
М {е' Qe} = tr М {ее' Q) = tr {PQ};
М {е' 0^) - tr М {^е^ Q} - tr [Q,^ Q) = О,
поэтому
М {х^ Qx} М {(х —Г+х)^ Q (x —"х + x)} =
= М {е' Qe) + 2М {eQx} + М (х^ Qx} tr (PQ) + М (ij Qx)]
М (x'- (tf) Fx (tf)) = tr {P (tf) F} + M (i^ (tf) (/,)}
и критерий оптимальности (10.245) можно преобразовать к
виду
x4//)Fx(g + J [x4/)Q(0x(/)-f
-Hu^(/)R(Ou(/)ld/
+ tr
P (0 Q (/) dt
Последние два слагаемых в этом выражении не зависят от
управления. Таким образом, исходная задача свелась к
следующей стохастической задаче линейного оптимального
управления с полной информацией;
X = Ах+ Ви + КО (у -С X); х (д = х^;
(tf) f7 (tf) + (? ц'- Ru) dt ^
J
• mm.
Решение этой задачи, как это следует из решения (10.179),
(10.180) задачи (10.175), (10.176), определяется
соотношениями (10.246) и (10.247), если слагаемое К® (у — Сх) или его
сомножитель у — Сх является белым шумом. Невязка будет
белым шумом, если интеграл от нее, т. е. стохастический
процесс 11(0. определяемый уравнением
^=-У-Сх, г](д-0,
является процессом с независимыми прираш.ениями. Чтобы
доказать это, рассмотрим совместно процессы r\{t) и е(/).
Подставив выражение у, последнее уравнение можно
преобразовать к виду т] == Се -f V„. Это уравнение совместно с
уравнением (10.219) для ошибки можно записать в виде
Z =^ Gz + Hw, где в данном случае
U г [о A-K«cj' U.J и -K«j
Дисперсионное уравнение для рассматриваемого процесса
имеет вид 1см. (10.217). (10.218), (10.250)1
+
Q =
/О
/о с
^0 А-
е -к»До rJU -к
о
'ОТ
+
О о \
Представим матрицу Q в виде
Q =
\
.12
(10.251)
где Q^i — матрица дисперсии т]; Q^j — дисперсионная
матрица ошибки (Q22 == Р). Из дифференциального уравнения
для Q имеем:
Qii=+ Q12 +Ro; Qu (to)=0;
Q12 = CQ,, -Qi„ (A^ -C^ K^O -Ro
Qi2(g=o.
в силу равенств Qj^ = Р и К" = Р c'Ro ^ второе уравнение
является однородным, поэтому оно имеет единственное
нулевое решение: йхг (О = О, t > U. Уравнение для Оц
принимает вид
откуда
(10.252)
Для корреляционной матрицы имеем [см. (10.216)]
^ (^j, /,) = I ^<^1> '^2. и) при > и;
\ Z{t^,ti)Q(t^) при
где Z (/, /„) — фундаментальная матрица уравнения
z=Gz
или
^0 с
,0 А-К» С
(10.253)
(10.254)
Представим фундаментальную матрицу в виде
Тогда решение (10.254) примет вид
Ч (О = Zu (/. /0) 11 (/0) f Zi2 (t, t,) e (g;
e (0 = Z,i (/, g ц (g -f Z,, (/, g e (<o).
С другой стороны, из уравнений
ё = (А —K'Qe; 4 = Се
имеем
(10.255)
е (О = (t,i,) е (^о). Л (О = Л (^о) + J (т. g е (^о) Л.
где 4^22 — фундаментальная матрица перБого уравнения
системы (10.255). Следовательно, фундаментальную матрицу
системы (10.253) можно записать в виде
Представим корреляционную матрицу Rj (^,, в виде
4^21 ^22/
где Rii — корреляционная матрица для ц {t).
Используя (10.251)—(10.253) и (10.256), из (10.253)
получаем
Rii (Л> Q = [ Ro (^) t' =min Л),
откуда следует, что процесс т] (/) является процессом с
независимым приращением (161.
§ 10.8. Оптимальные дискретные системы
В этом параграфе рассматриваются дискретные системы,
т. е. системы, которые описываются разностными
уравнениями. Большинство понятий, введенных при рассмотрении
непрерывных систем, без изменений переносятся на дискретные
системы. В частности, как в случае непрерывных систем,
определяются такие понятия, как управляемость, стабилизируе-
мость, наблюдаемость, восстанавливаемость,
обнаруживаемость.
Если дискретная система линейна и стационарна, т. е.
описывается уравнениями
X (/ + 1) - Ах (О + Ви (0; У (О =Сх (О + Du (О,
то критерии управляемости, стабилизируемости,
наблюдаемости (восстанавливаемости) и обнаруживаемости формули^-
руются так же, как и для непрерывной системы, описываемой
уравнениями
X (О Ах (О + Ви (О; У it) - Сх (О + Du (О.
в силу специфических свойств дискретных систем отдельные
определения требуют уточнения. В случае непрерывного
линейного объекта в определении полной управляемости одну
из точек (начальную или конечную) можно зафиксировать и
сформулировать его следующим образом: объект вполне
управляем, если, какова бы ни была начальная точка х (Q = х^,
существует допустимое (т. е. кусочно-непрерывное)
управление, переводящее объект из точки х^ в начало координат
X (tf) = О за конечное время. Полную управляемость
дискретного линейного объекта так определять нельзя. Если принять
такое определение, то вполне управляемым был бы объект,
который описывается уравнением
x(t+l)--0. x(g==x«,
хотя яс1ю, что он в действительности не является
управляемым.
Синтез оптимальной линейной системы
при квадратном критерии
Пусть объект описывается линейным уравнением
X (i I) = А (О X (О + В (О U (I) + h (О (10.258)
и задан квадратичный критерий оптимальности
y=x4t'/)Fx(tV)+ У\ (x4/)Q(/)^(/)u4/)R(/)u(/)J. (10.259)
где h (i) — известная векторная функция; F, Q (/) —
симметричные неотрицательно-определенные матрицы (Р > О,
Q (О > О, /о < / < // — 1); R (О — симметричная,
положительно-определенная матрица (R (О > 0. Iq < i < г/ — 1).
Требуется найти оптимальное управление с обратной
связью, т. е. управление, при котором критерий (10.259)
принимает минимальное значение при произвольном начальном
условии X («о) = х^. Критерий (10.259) имеет такой же
физический смысл, что и критерий (10.121) в непрерывном случае.
Оптимальное управление с обратной связью имеет
следующий вид:
K(i-M)A(Ox(0 +
(10.260)
Здесь
L (О = В'^ (О К (i + 1) В (О + R (О, (10.261)
где К (О — симметричная неотрицательно-определенная
матрица, определяемая из уравнения
-К (I -Ь 1) В (О L-^ (О В^ (О К (1 -1-1)1 А (О (10.262)
при граничном условии
K{if) = f\ (10.263)
р (О — вектор-столбец размера л, определяемый из уравнения
р (О 2АГ (О |К (i + I) h (О + -f Р ('■ + 1) -
-к (1 + 1) в (О L-MOB40
при граничном условии
Ка--Ы)Н (0+ ур(« + 1)
(10.264)
(10.265)
Р('/)
некогда объект задается уравнением
x(i + l) = A(i)x(0 + B(Ou(0.
т. е. h (i) = О, то оптимальное управление с обратной связью
принимает вид
u* (1)= -L-' (О В'^ (О К (t + 1) А (О x (i). (10.266)
где L ((■) определяется из (10.261). а
неотрицательно-определенная матрица К (О — из (10.262), (10.263). Действительно, при
h (О = О уравнение (10.264) становится однородным и в силу
граничного условия (10.265) его решением является р (i) = 0.
Для доказательства полученного решения (10.260)—(10.265)
воспользуемся методом динамического программирования.
Введем функцию Беллмана:
5(х(«-|-1). (4-1J-
mm
u(f+ i) U(l^-l)
x'-(«".,) Fx(i,)-f
+ 2 ['^4/)Q(/)x(/) + u47)Rfy)"(/)l
Slx{i,),ij\^K^(if)Fx(i,).
(10.267)
Уравнение Беллмана имеет вид
5 [X (О, i\ ^ min (х'^ (О Q (О X (О + (t) R (i) и (i) -Ь
U(L)
-h5[x(t + l).
Используя уравнение объекта (10.258) и опуская для
краткости записи аргумент получим
5(х. /)^niin{x^Qx+u'^Ru + 5(Ax+Bu+h, И- I)}. (10.268)
U
Решение этого уравнения будем искать в виде
5 (X (О, О = х'^ (О К (О X (О + р'^ (О X (О + q (О, (10.269)
где К (/) -- симметричная матрица; р (/) — вектор-столбец
размера п; q {{) — скалярная функция.
В силу граничного условия (10.267) имеем:
K(f,) = F; p(t/)==0; qiif)=^0. (10.270)
Таким образом, получили граничные условия (10.263) и.
(10.265).
Подставим (10.269) в (10.268). Тогда получим
х' Кх + р'^х + q =-min (х^' Qx + Ru (Ax + Bu X
u
X к (t + 1) (Ax + Bu -hh) + (i + 1) X
X(Ax + Bu + h) + ^(t+l)}.
Правая часть полученного соотношения как функция от
управления является матричным квадратным трехчленом,
причем квадратный член имеет вид и'^ [ В^К (t + 1) В + R] и и
является положительно-определенной квадратичной формой,
так как, по условию, R > О и, как будет показано дальше,
К (О > О, to < i < if' Поэтому указанный трехчлен имеет
минимум, который достигается в стационарной точке, и
последнее уравнение можно представить в виде следуюихей
эквивалентной системы уравнений:
х^ Кх + p^x + 9=x^Qx + u^Ru +
-h(Ax + Bu4'h)'^K(t+l)(Ax + Bu + h) +
-f рг + 1) (Ах + Bu + h) + ^ (t + 1), (10.271)
-iii^ ^ 2uMB^ К (t + 1) В + Rl+
ди
+ 2x^A7^K(t + l)B + 2h^K(/ + l)B-bp^(i4-l)B=-0.
Из последнего уравнения имеем
(x'A^ + hOK(t4-l)-h
B1B'-K(t+ l)B+R]-i,
откуда, произведя транспонирование, получим соотношение
для оптимального управления (10.260). Подставив выражение
для управления и используя обозначение (10.261), уравнение
(10.271) можно преобразовать к виду
Кх + р?' X + (7 =-х'" [Q 4- К (t + О А -
—А^ К (i 4-1) BL-1 К (t + 1) А] X —2
h^K(t + l) +
+ -^р^(( + 1) BL-iB^K(t + l)Ax-
h-^K(i + l)+^-p^(i+l)
X
K(( + l)h+-^p(t + l)
+ 2
BL-'B' X
h^K(( + l) +
+урЧг + 1)
Ax + К (i n 1) h + pMf" + 1) h -b q (i + 1)-
Из последнего уравнения, приравняв отдельно матрицы
при квадратичных и лилейных относительно х членах,
получим соотношения (10.262) и (10.264). Приравняв свободные
члены, получим уравнения
9(0 = -
X
1
h^(OK(i-hl)+YP'(^ + l)
K(t+l)h(o + -jp(i+l)
B(0L-40 ВМО X
-bh40K(t+i)h(0 +
-\-p^ii+l)h{i) + g(i + l). (10.272)
Теперь докажем, что матрица К является неотрицательно-
определенной. Как отмечалось, функция р (i) = О при
h (О = 0. Уравнение (10.272) при р (t) = О и h (О = О
становится линейным однородным и имеет единственное решение
q (О = О, удовлетворяющее граничному условию (10.270),
поэтому при h = о функция (10.269) принимает вид
S(x(0.0 = x^(OK(Ox(0-
в этом случае из соотношения (10.267) следует
неотрицательная определенность квадратичной формы S (х (О, О и
соответственно матрицы К (О при любом i б [(о, ^'/1- '^^к как
уравнение (10.262), из которого находится матрица К (i). не
зависит от h, то сказанное остается справедливым и при
произвольной функции h.
Стохастическая оптимальная линейная система при
полной информации о состоянии. Пусть объект описывается
уравнением
X (t + 1) + А (О X (О + В (О U (О + h (О + Vo (О (10.273)
и задан критерий оптимальности
J М (хFx ii,) + '2 (х^ (/) Q (/)X if) +
+ uM/)RO)u(/)l
(10.274)
О
Здесь h {i) — известная функция; (i) —
последовательность некоррелированных случайных величин с нулевым
средним и дисперсноннон матрицей Qq (t); матрицы F, Q, R и
симметричны, причем F > О, Q > О, R > О, Qq > 0. Шум
Vj, (г) не коррелирован с начальным значением х (Iq).
Требуется найти оптимальное управление с обратной связью, т. е.
управление, доставляюилее минимум функционалу (10.274)
при произвольном начальном состоянии объекта.
Принимается, что фазовый вектор х (t) известен без ошибки. Эта задача
является стохастическим аналогом детерминированной
задачи (10.258)—(10.259) и отличается oi' нее тем, что объект
подвержен случайному воздействию и критерий оптимальности
представляет математическое ожидание от функционала,
совпадающего с критерием оптимальности в детерминированной
задаче. Как и в непрерывном случае, ее решение совпадает с
решением детерминированного аналога, т. е. стохастическое
оптимальное управление определяется соотношениями
(10.260)—(10.265) или в частном случае, когда h =0,
соотношениями (10.266), (10.261)—(10.263). Вывод основывается на
методе динамического программирования. .
функция Беллмана в данном случае определяется
следующим образом:
S(x(rH-l), 1+1)=: min X
u{£-|-1)...;. iJ(ty-l-I)
X М x4^/)Fx(tV)+ V fx4/)Q(/)x(/) +
+ uM/)R(/)u(/)I/x(t + l)
Уравнение Беллмана принимает виц (для краткости
опускается аргумент /)
5(х, 0^niinM{(Ax + Bu+h4-V)^Q(t+l) X
или
X (Ax + Bu + h + V) + 5(Ax + Bu+h-f V, t+l)/x},
5 (х, О =^min {(Ах+ Bu + h)^ Q it + 1) (Ax + Bu -[- h) +
-b Ж [Q [i + 1) V] + M [5 (Ax -I- Bu + h + V. t + 1 )/xl}.
Решение последнего уравнения ищется в виде «трехчлена»
(10.269). Далее, проделав те же выкладки, что и в
детерминированном случае, можно получить искомые соотношения для
оптимального управления.
Наблюдатель (оцениватель, фильтр) Калмана. Как
отмечалось, задача синтеза стохастической оптимальной
системы при неполной информации обычно разделяется на
задачу оптимальной оценки и задачу синтеза оптимальной
системы при полной информации. Рассмотрим задачу
оптимальной оценки в дискретном случае. Пусть объект и
наблюдение описываются уравнениями
X (f + П - А (/) X (/) + В (О U (О + Vo. X (g Хо; (lо.275)
y(0-C(Ox(/) + V„(0, (10.276)
где Vq (/) и V„ (i) — последовательность гауссовских
случайных величин с характеристиками
MV, (О ^0; МIV^ (О \1 (/)! - Qo (О Ьа\
MV„ (0-0; M[Vh(0V^(/)1-^Ro(0 6,,;
m{v,(OVhO')--o;
(10.277)
dij—символ Кронекера {Ь^ = 1 при i = / и б^у = О при
/ 4^ /); — гауссовская случайная величина с
характеристиками
Мх^ = хО. дд [(хО»_хО) (хО_х<>)^1 = Ро; (10.278)
Qo (0. Ro (0. Ро — симметричные матрицы, причем Qo (О >
> О, Ro (О > О, Ро > 0.
Случайные последовательности (/) и V„ (0)
называются соответственно шумом объекта и шумом наблюдения или
измерения, и они не коррелированы со случайной величиной
х^
Требуется, используя измеренные значения переменной
у (/) при £о. 'о + 1 ^ найти несмещенную оценку
X (t) вектора х (i), обеспечивающего минимум квадрата ошиб-
ки е (/) = X (О — X (/):
J-M[e^(t)e(0]->min.
Напомним, что оценка х (i) называется несмещенной,
если Me (i) = 0. Условие R (iq) > О означает, что ни одна
координата выходной переменной не измеряется точно. В этом
случае задача оценивания называется несингулярной или не-
вырооюденной (неособой).
Решение невырожденной задачи определяется следующим
образом [51:
^ (Л = X (О -Ь (О \У (О - С (О X (01; (10.279)
X (£Ч-1) = А пух (О + В (О U vO; X (g -x^ (10.28О)
(О Р (О С^- (П (С (О Р (О С^' (О + Ro (01-^; (10,281)
Р (О = [Е -к« (О с (01 Р (О [Е (О с (01/ +
h К« (О Ко (О (I) Р (О- Р (О С^' (О [С (О^Р (О (О -f
+ Ro(01-^C(0P(0. (10.282)
Р и + 1) = А (О Р (О (О'-Ь Qo (0. (10.283)
Здесь X (t) является математическим ожиданием вектора
х (О и служит его априорной оценкой, т. е. оценкой, которая
получается до измерения у (0; Р (О — дисперсионная матри-
ца ошибки е (i) = х (i) — х ((), т. е. ошибки априорной
оценки; Р (i)—дисперсионная матрица ошибки е (i) -=x(i)— х (/).
т. е. ошибки искомой (апостериорной) оценки.
Выражение для оценки содержит кроме априорной оценки
поправочный член, пропорциональный невязке — разности
между измеренным значением переменной у (i) и ее оценкой.
При вычислении оценки на каждом шаге нужно начинать с
определения априорной дисперсионной матрицы Р(0.
Далее нужно вычислить матрицу коэффициентов усиления
К** (О и дисперсионную матрицу Р (t), затем априорную
оценку X (i) и в последнюю очередь искомую оценку х (/). Так как
матрицы Р (i), Р (i) и К (О не зависят от измерений, их можно
вычислить заранее при всех необходимых значениях t.
Соотношения (10.279)—(10.283), определяющ.ие
оптимальный фильтр (оце}Шватель, наблюдатель), впервые были
получены Калманом, поэтому оптимальный дискретный линейный
фильтр называют фильтром Калмана.
Установим физический смысл или роль матрицы К° (О-
Для этого рассмотрим случай, когда х (/) и у (i) являются
скалярными переменными и С (t) = 1. При этом соотношения
(10.279)—(10.283) принимают следующ^ий вид:
X (О ^x{i) 4- К' (01у (О -^(01; x{i+i)=A (ifx (О + В (О и (0;
х(д=^>,
/с«(0-=Р(0/[^(0 + ^о(0);
Р (О =^[\-К' (ОГ Р (О + К'^" (О Ro (i) =
^Р(о-р^ {i)/iP{i)+Rom
P(i+i)^-A' (О р (О+Qo (0; Р (to) = ^0-
Пусть {{) = 0. в этом случае х {i)=x (i) (искомая
оценка равна априорной оценке) и измерение, которое
производится в /-Й момент, при определении оценки х {() не
используется. Из физических соображений ясно, что i-e измерение не
должно учитываться, если оно никакой информации не несет,
т. е. дисперсия его ошибки очень велика (Rq (i) оо). Этот
вывод также следует из приведенного соотношения для
/(^(0:Л(0->0 при R^(i)-^co.
Если (i) = 1, то л; (О = ^ (0. т. е. в этом случае
оценка полностью определяется последним измерением. Измерения,
произведенные до ^го момента, а также другая априорная
информация никак не используются. Очевидно, такая
ситуация возникает, когда очень велики (по сравнению с
дисперсией ошибки ^го измерения) дисперсии ошибок до / го момента
или дисперсии шума объекта или когда i-e измерение
производится без ошибки. Такой вывод следует также из соотношений
для K'ii) и Р(0.
Таким образом, выбором величины ({) регулируется
влияние априорной и текуи;ей информации на определение
оценки X (i). Задача оптимальной оценки состоит в выборе
такого /С^(0, при котором наилучшим образом (в оптимальной
пропорции) используются априорная и текущая информации.
■ Перейдем к выводу равенств (10.280)^(10.283). В
соответствии с принятыми обозначениями
X (О - М {X (0); Р (О - М [е (Ое^ (i)];
Р(0--М[е(0 е^т
где е(0=-х(0~х(0; е(i) = x(i)-x(/).
Уравнение (10.280) непосредственно следует из (10.275).
Вычитая (10.280) из (10,275), находим
e(t + l) = A(Oe(0+V,(0,
откуда
М (е (t + 1) е^ (/+1)} - М {[А Ц) е (i) +
+ V,(0][A(0e(0 + V,(t)O.
В силу независимости е (/) и (/) из последнего
соотношения получаем (10.283).
Для доказательства первой части равенства соотношения
(10.282) подставим в (10.279) выражение для у (О из (10.276).
Затем, вычтя каждую часть полученного равенства из х (/).
преобразуем его к виду
е(О (О- К«(О [С (О + V, (i)]
или
е (О = [Е-^ К« (О С (0]е(О- (О V„ (i).
Так как е (i) и V„ (i) независимы, то из последнего
соотношения следует первая часть равенства (10.282).
Остается доказать, что средний квадрат ошибки е (/),
равный следу матрицы Р (i), принимает минимальное
значение, если в (10.279) матрица К° (i) определяется соотношением
(10.281). Как легко проверить, первую часть равенства
(10.282) Р (О = [ Е - К« (О С (01 Р (О [ Е - К« (О С (01^ +
-Ь К° (i) Ro (О К^^ (О (опустив для краткости аргумент {)
можно представить в виде
р=[КО —PC7(CPC7 + Ro)~'l (CPC^ + Ro) X
X [К' — РС'^ (СРС^ 4- Ro)-4^ -I- Р —
— РС^ (СРГ/ + Ro)-' СР. (10.284)
Если К^ определяется из (10.281), первое слагаемое
правой части последнего равенства обращается в нуль.
Оставшуюся часть обозначим Р*:
р* =.р _рс^ (СРС^ + Ro)-^ СР.
Эта матрица в силу свойств дисперсионных матриц
является неотрицательно-определенной, поэтому ее диагональные
элементы не отрицательны (последнее следует из неравенств
Pu^f > О, i = 1, 2, которые получаются из х'^Р*х > О
при л:^=0, /=5^г, Pit—^диагональные элементы матрицы
Р*). Так как матрица СРС^ + Ro является положительно-
определенной, то первое слагаемое в (10.284) также является
неотрицательно-определенной при произвольной матрице К^.
Поэтому след матрицы Р будет минимальным при такой
матрице К°, когда первое слагаемое в (10.284) обращается в нуль,
т. е. когда К° определяется соотношением (10.281). При этом
из (10.284) получаем вторую часть равенства соотношения
(10.282).
Заметим, что здесь вывод соотношений, определяющих
фильтр Калмана, был несколько упрощен тем, что структура
уравнения (10.279) была задана. Задача оптимальной оценки,
таким образом, была сведена к определению оптимальной
матрицы коэффициентов усиления.
Стохастическая линейная оптимальная система
управления при неполной информации. Пусть объект и
наблюдатель описываются уравнениями
X (£ -f 1) = А (О X (О + В (О U (О + V, (0;
y(O^C(/)x(0 + VH(0
и критерий оптимальности имеет вид
f '■/-'
J=M x'-OV)Fx(iV)+ 2 [x4/)Q(/)x(/)4-u4/)R(/)u(/)]
Шум объекта V^, (i) и шум наблюдения V„ (/) представляют
последовательности независимых гауссовских случайных
величин с нулевыми средними, дисперсионными матрицами
Qo (О и Ro (О соответственно; матрицы F, Q (/), R (t). Qq (i)
и Ro (О симметричны, причем F > О, Q (/) > О, R (О > О,
Qo (/) > О и Ro (О > О при i'o ^ i < if — I. Начальное
состояние X (/о) ^ Xq явля^ется гауссовской случайной величиной
со средним значением Хо и дисперсионной матрицей Ро и не
зависит от шумов (i) и V„ (/).
Требуется найти такое управление
^{i) = u{y{ih io
при котором критерий принимает минимальное значение.
Для этой задачи справедлив принцип разделения, или
принцип стохастической эквивалентности [51. Поэтому ее
решение имеет следуюнхий вид:
U (О = -L-^ (О (О К {i -Ь 1) А (О Г(0;
L(0-B5^(0K(t + l)B(0 + R(0;
К (О Q (О + А^ (О [К (t + П-К (t + 1) В (i) L-1 (О X
X В^ (О к (t + 1)1 А (0; К (if) - F, (10.285)
^ (О =^ X (О + К« (О [у (О -С (О X (01;
X (/ +1) А (0^(0 + В (О U (0; X (д - х«;
К« (О = Р (О (О [С (О Р (О с/ (О + Ro (01-^;
р (О = [Е - к« (О с (t-)] Р (О [Е ^ к« (О с (01^ +
+ K«(0Ro(OK«40.
P(t + l)=-A(OP(t)A^(t) + Q(0;
P(g--Po. (10.286)
Соотношения (10.285) определяют оптимальное управление
с обратной связью. Они совпадают с соотношениями (10.266),
(10.261)—(10.263), определяющ.ими оптимальный регулятор в
случае полной информации, за исключением того, что в
(10.285) входит оценка х (i) вместо х (i). Оценка х (/)
получается на выходе фильтра (10.286), совпадающего с
фильтром Калмана (10.279)—(10.283). Таким образом, дискретная
оптимальная система управления в случае неполной
информации, как и аналогичная непрерывная оптимальная система
управления, состоит из оптимального фильтра (наблюдателя) и
оптимального «детерминированного» регулятора.
Если шумы или значение фазового вектора в начальный
момент не являются гауссовскими, то соотношения (10.285),
(10.286) определяют линейную оптимальную систему
управления, т. е. систему управления, вообще говоря, оптимальную
только в классе линейных систем.
О расходимости фильтров и методах их регуляризации.
По мере обработки новых данных, получаемых в результате
наблюдений, фильтры Калмана—Бьюси и Калмана
теоретически дают все более точную оценку. Поэтому среднеквадратиче-
ские ошибки должны монотонно убывать со временем (или с
числом измерений в дискретном случае). Однако на практике
иногда ошибки оценок могут не убывать, а монотонно
возрастать. В этом случае говорят, что фильтр Калмана—Бьюси
или фильтр Калмана расходится.
Чем вызвана расходимость фильтров? При их синтезе
используются модели объекта и измерительного устройства, а
также характеристики шумов и начальных условий. Фильтры
строятся применительно к этим данным в предположении, что
они являются точными. Oj^HaKOB действительности такое
предположение, как правило, не выполняется. В этом
расхождении априорных данных от истинных и заключена причина
расходимости. Кроме того, фильтры могут расходиться из-за
ошибок округления при их реализации на вычислительной
машине.
Для предотвращения расходимости фильтров
используются разные методы, которые можно назвать методами
регуляризации фильтров. Один из таких методов основан на увеличении
элементов ковариационной матрицы объекта. Это
соответствует введению дополнительного шума объекта, чем и
учитываются ошибки в априорных данных. Этот метод позволяет
обеспечить сходимость фильтров всегда, когда расходимость
обусловлена ошибкой округления, и в большинстве случаев, когда
расходимость вызывается ошибками в моделях объекта и изме-
рител ького устр ойства.
Другой метод основан на введении старения прошлых
данных. Например, в дискретном случае это можно сделать еле-
дующим образом. Если в текущий момент т корреляционная
матрица измерения равна Ro (m), то при использовании
этого измерения в момент п (п > т) матрицу шума т-го
измерения нужно принять равной 5"'''"Ro (m), 5> 1. При этом
получается регуляризованный (модифицированный) фильтр,
который отличается от обычного фильтра Калмана (10.279)—
(10.283) только последним уравнением. В регуляризованном
фильтре Калмана уравнение (10.283) принимает вид
Р (/ + 1) = sA (/) Р (О (О + Qo (/).
Множитель 5 выбирается экспериментальным путем.
Возможен и третий метод регуляризации, который основан
на оценке и использовании дополнительных, неучтенных
параметров путем включения их в число компонент оцениваемого
вектора. При этом методе размерность оцениваемого вектора
и соответственно размерность регуляризованного фильтра
увеличиваются. Поэтому использование этого метода
ограничено, так как увеличение размерности фильтра усложняет его
практическую реализацию и, более того, увеличивает
вероятность расходимости фильтра из-за ошибок округления.
Глава 11
адаптивные
автоматические
системы управления
§ ПЛ. Введение
Термин «адаптация» заимствован
теорией управления из биологии, где
им обозначают свойство приспособления
организма к изменениям внешней среды.
Так как элементы приспособления или
адаптации существуют в любой автома-
тической системе, как в замкнутой, так
и разомкнутой, то для выделения
класса адаптивных систем необходимо дать
характеристику тем условиям или
требованиям, которые предъявляются к
автоматическим системам управления и
не могут быть качественно разрешены
традиционными методами неадаптивного
управления.
Прежде всего необходимость в
адаптивных системах управления возникает
в связи с значительным усложнением
решаемых задач управления, причем
специфическая особенность такого
усложнения заключается в отсутствии
практической возможности для
подробного изучения и описания процессов,
протекающих в управляемом объекте.
Примерами таких объектов могут
служить многокомпонентные
технологические процессы в химической
промышленности, где не представляется
возможным описание всей совокупности
химических реакций, термодинамических и
других физических процессов, или
современные высокоскоростные летательные
аппараты, точные априорные данные о
характеристиках которых во всех уело-
ВИЯХ функционирования не могут оыть получены из-за
значительных разбросов параметров атмосферы, больших
диапазонов изменения скоростей полета, дальностей и высот, а
также из-за наличия широкого спектра параметрических и
внешних возмущений.
Неадаптивные методы управления, как правило,
предусматривают наличие достаточного объема априорных сведений
о внутренних и внешних условиях работы объекта еще на
предварительной стадии разработки системы, которые затем
используются при проектировании автоматической системы. Чем
полнее априорная информация о характеристиках системы и
условиях ее работы, тем обычно выше качество неадаптивного
управления. Отсюда видно, что создание адаптивных систем
управления осуществляется в принципиально иных условиях, т. е.
адаптивные методы должны способствовать достижению
высокого качества управления при отсутствии достаточной
полноты априорной информации о характеристиках управляемого
процесса или в условиях неопределенности.
Вполне очевидно, что по мере усложнения задач,
возлагаемых на автоматические системы управления, указанная
неопределенность растет, т. е. становится все сложнее заранее
определять характер изменения динамических свойств
системы и управляемого процесса. Поэтому трудности в
обеспечении надлежащего качества управления также возрастают по
мере уменьшения объема априорных знаний о системе.
Благодаря адаптивным методам управления найдены
достаточно эффективные способы преодоления указанных
трудностей.
Эффект приспособления к изменяющимся условиям в
адаптивных системах достигается за счет того, что часть функций
по получению, обработке и анализу недостающей информации
об управляемом процессе осуществляется уже не
проектировщиком на предварительной стадии, а самой системой в
процессе ее нормальной эксплуатации.
Такой частичный перенос функций способствует не только
более полному использованию рабочей информации
(совокупности данных о состоянии системы, получаемой
непосредственно в процессе управления) при формировании управляющих
воздействий, но и позволяет существенно снизить влияние
неопределенности на качество управления, компенсируя в
определенной степени недостаток априорного знания
проектировщика об управляемом процессе.
Таким образом, к адаптивному управлению приходится
обращаться тогда, когда сложность управляемого процесса
достигает такого уровня, при котором влияние
неопределенности или «неполноты» априорной информации об условиях
работы системы становится существенным для обеспечения
заданного качества процессов управления.
§ 11.2. Классификация адаптивных систем
Поскольку адаптивные системы широко используют
рабочую информацию для анализа динамического состояния
системы управления и организации контролируемых изменений
свойств, параметров, управляющих воздействий и структуры
системы управления, то в зависимости от способов реализации
контролируемых изменений в процессе нормальной
эксплуатации системы можно провести следующую классификацию
адаптивных систем: самонастраивающиеся системы, системы с
адаптацией в особых фазовых состояниях и обучающиеся
системы (рис. П.1).
Самонастраивающиеся системы (СНС) характеризуются
наличием специальных контуров самонастройки, с помощью
которых оцениваются динамические и статические свойства
Адаптивные
системы упродлеиия
Самонастрои-
бающиеся
системы (сне)
flouc-
ноВые
сис
беспоис-
яоВые
СНС
Системы с
адаптацией В
особых фазовых
состояниях
Релей -
ныв аВта
кодеЬа -
тельные
системы
Адаптивные
системы с
переменной
структурой
D5y4awawe
ся
системы
Обучаю-
щиесй с
поощрением
Самооду
^latauiue-
СР
системы
Рис. 11.1
системы и формируются такие контролируемые воздействия,
что система самопроизвольно приближается к определенному
эталону, часто задаваемому математически в виде критерия
качества функционирования. При этом контур самонастройки
служит для изменения параметров или структуры основного
контура с целью обеспечения заданного критерия качества
управления. Обычно критерий качества управления
выражается в виде функционала или функции от параметров и
измеряемых координат системы. В процессе работы системы значение
функционала качества изменяется и задача контура
самонастройки сводится к обеспечению экстремального
(минимального или максимального) значения критерия. Нахождение и
поддержание экстремального значения критерия качества
управления может производиться или с помощью пробных
отклонений системы, или путем аналитического определения
условий экстремума. В зависимости от указанных способов
нахождения экстремума самонастраивающиеся системы
подразделяют на поисковые и беспоисковые. В свою очередь,
поисковые самонастраивающиеся системы в зависимости от
применяемых методов поиска делят на системы со случайным поиском,
с поиском по методу Гаусса—Зайделя, с поиском по методу
градиента, с поиском по методу наискорейшего спуска. В
классе беспоисковых СНС можно выделить
самонастраивающиеся системы, использующие информацию о частотных
характеристиках, СНС с контролем временных характеристик и
границы устойчивости, СНС с эталонными моделями,
градиентные СНС.
Системы с адаптацией в особых фазовых соспгояниях
используют особые режимы или свойства нелинейных систем,
например режимы автоколебаний, скользящие режимы для
организации контролируемых изменений динамических
свойств системы управления. Специально организованные
особые режимы в таких системах либо служат дополнительным
источником рабочей информации об изменяющихся условиях
функционирования системы, либо наделяют систему управле-
рия новыми свойствами, за счет которых динамические
характеристики управляемого процесса поддерживаются в
желаемых пределах независимо от характера возникающих при
функционировании изменений. Эти системы можно
подразделить на релейные автоколебательные системы и адаптивные
системы с переменной структурой.
Обучающиеся системы управления характеризуются
наличием специальных процессов обучения, которые заключаются в
постепенном накапливании, запоминании и анализе информации
о поведении системы и изменении законов функционирования
в зависимости от приобретаемого опыта. К процессу обучения
приходится прибегать тогда, когда не только мал объем
априорных сведений об объекте, но и отсутствует возможность
установления детальных причинно-следственных связей в
структуре самой системы из-за ее сложности.
Накопление и обобщение информации в процессе
обучения можно осуществлять за счет внесения «эталонного опыта»
в систему извне либо путем формирования такого опыта
внутри системы. Например, в первом случае обучаемой системе
предъявляют последовательность ситуаций, образов или
режимов', которые имеют заранее известные характеристики или
различаются по принадлежности определенным классам.
Поведение системы в ответ на такую обучакнцую
последовательность ситуаций формируют на основе принципа «поощрение—
наказание», т. е. правильная реакция системы на
предъявленную ситуацию запоминается и используется для
организации контролируемых изменений динамических свойств
системы управления. В зависимости от способов накопления
опыта указанные системы разделяют на обучающиеся с
поощрением и обучающиеся без поощрения (самообучающиеся)
системы.
Значительный интерес к адаптивным системам управления
ведет к созданию разнообразных типов систем,
предназначаемых для решения широкого круга задач автоматического
управления. При построении адаптивных систем часто
используют сочетания различных принципов, например
самонастройки и обучения, в этом случае создаются комбинированные
адаптивные системы управления, наделяемые полезными
свойствами различных систем.
§ 11.3. Самонастраивающиеся системы
Структурная схема самонастраивающейся системы
управления представлена на рис. 11.2. К основному контуру
управления, состоящему из регулятора Р и объекта О, добавлен
контур самонастройки КС, с помощью которого
осуществляется коррекция параметров и алгоритма управления регулятора.
Основная задача самонастраивающейся системы
заключается в поддержании заданной в виде функционала J Ix (/),
КС
fit)
y(t)
Рис. 11.2
€ (/), У {t), и it), r {th t\ меры
качества системы вблизи
экстремального значения при
изменениях в процессе
функционирования системы входных
управляющих воздействий х (t),
возмущающих воздействий / а
также динамических
характеристик объекта.
Так как значение
функционала качества J изменяется
при действии указанных
возмущений, то для выполнения
основной задачи возникает необходимость в определении
условий экстремума.
Если время, требующееся для определения условий
экстремума, не является критическим фактором, например в
случае сравнительно медленного изменения значейий
функционала качества / в процессе управления, тогда целесообразно
применять для определения условий экстремума поисковые
методы.
Беспоисковые методы определения условий экстремума
не требуют специальных затрат времени на поисковые
движения и используют, как правило, аналитические методы
определения указанных условий.
Сравнивая поисковые и беспоисковые
самонастраивающиеся системы, можно сказать, что для определения условий
экстремума поисковые системы нуждаются в меньшей
информации, но обладают небольшим быстродействием при наличии
процесса поиска, а беспоисковые системы при прочих равных
условиях обладают более высоким быстродействием, но
требуют более полной информации об управляемом процессе.
Принципы построения поисковых самонастраивающихся
систем. Задача поисковой самонастройки формулируется
следующим образом. Предполагается, что имеется
множество состояний системы (л^ь^г,Хп)'=Х, которое является
областью определения целевой функции или функционала
качества системы
J (Хг, ^2, ... х^)- (111)
Из множества состояний X необходимо выбрать
определенные состояния
hj^hjixi, х^^,..„ Хп), (11.2)
где / = 1. 2, при которых обеспечивается
экстремальное значение функционала качества
J (xi, х^) = Уо- (И.З)
Связь между экстремальным значением функционала
качества и предпочтительными состояниями системы из
множества X не задана в явном виде, и требуемый выбор
обеспечивается путем последовательного приближения к решению в
результате опробования различных состояний системы. Таким
образом, существенной чертой самонастраивающихся систем
данного класса является наличие процесса поиска как
последовательной, итеративной процедуры выбора одного из
множества возможных путей для достижения поставленной
цели.
Поиск экстремума может осуществляться различными
способами, начиная от простого просмотра всех имеющихся в
наличии состояний системы и кончая сложными вероятностными
процедурами сравнения вариантов выбираемых путей. На
сложность процедуры поиска влияют многие факторы: а)
общее число состояний или параметров системы в области
поиска (с увеличением множества состояний приходится
принимать специальные меры для ускорения процедуры поиска
экстремума); б) вид целевой функции, которая может быть
унимодальной или обладать многими экстремумами (в случае
многоэкстремальных функций процедуры поиска не должны
заканчиваться в окрестности локальных экстремумов); в)
дрейф экстремума, приводящий к ошибкам и нарушениям в
поиске; г) ограничения области поиска, длительности
поиска и точности используемой информации; д) непрерывность
или дискретность поиска и т. д.
Все методы поиска подразделяются на регулярные и
случайные. В регулярных методах поиска выбор направления
поискового движения осуществляется по заранее заданному
закону, а в случайных методах направление к экстремуму «на-
щупывается» случайным образом.
Регулярные методы поиска экстремума
Сканирование. Сканирование или полный перебор
используют для определения экстремума функционала качества
J (л:*), где X* — значение управляемого параметра а точке
экстремума, в том случае, если имеется информация только
о наличии свойства экстремальности у J (л:) и о необходимости
соблюдения условия
J (X*) <J (х). (11.4)
где X — допустимая область изменения управляемого
параметра.
Отсутствие любой другой информации о свойствах
функционала J (х) приводит к необходимости последовательно
определять значения функционала качества внутри
допустимой области изменения управляемого параметра.
Если обозначить допустимый интервал изменения
параметра X через А, а заданную точность в достижении
экстремума — через Е >0, то в результате сканирования определяют
п значений функционала качества в точках Ху, Xg, .... Хп'.
Ji(x,), J.,(x^), Jn(Xn). (11.5)
где n =s: /1 /е + 1.
После перебора всех значений У» (xt) выбирают
максимальное или минимальное значение:
У(х*)=т1п{Л(х,-)}, t-l,2....,n. (11.6)
Длительность процедуры поиска при сканировании в
основном определяется задаваемой точностью е. Например, при
допустимом интервале изменения Л = 5 единиц и заданной
точности 10 % необходимо сделать замеры в
п = Л/е + 1 - 5/1 + 1 - 6 точках. (11.7)
При заданной точности =^ 1 % количество замеров
существенно увеличивается:
п = 5/0,1 + 1-51. (11.8)
Регулярность метода сканирования определяется заранее
задаваемым порядком перебора значений. Чаще всего
используют два способа при обходе точек: строчная развертка и
спиральная развертка (соответственно рис. 11.3 и П.4). Оба
правила обхода обеспечивают просмотр всех допустимых точек
без пропусков.
Метод Гаусса—Зайделя. В методе Гаусса—Зайделя
используют дополнительную информацию о виде функционала
качества J (xj, в частности предполагают, что J (х) является
унимодальной функцией, т. е. функцией, имеющей один экстре-
Х2
2
1
Ч
J
2
1
5 Xf
Рис. И.З
/ 2 J
Рис. П.4
мум. Условие унимодальности можно записать следующим
образом (для поиска минимума):
y(xi)<y(x2) при Xn,in<^i<X2;
J (xi) >J (л:^) при Xl < Х2< x^i^,
::1
(11.9)
где Xmin — положение минимума; х^и х^ — произвольные
положения относительно точки минимума.
Условие унимодальности позволяет значительно
сократить число просматриваемых точек по сравнению с полным
перебором.
В основу метода поиска положено исследование полной
производной экстремизируемого функционала
dJ(x)ldt^ у [dJ(x)/dxt]x,.
(11.10)
где X, =^ 2 Ш {x)/dxi] / = 1,2, .., м; /-1,2. /г;
1=1
аи— коэффициенты, характеризующие отклонение от
экстремума.
Отсюда
dJ {x)/dt ^ ^ a,f \dJ (x)/dxi\[dj {x)/dxil (11.11)
1=^1. /=1
В точке экстремума Xt = л:/extr имеем [dJ(x)/dx\^y^ij, = О,
поэтому во всех точках, кроме x^xtr* функция (11.11) должна
удовлетворять условию монотонного приближения к
экстремуму:
dJ{x)ldt>0 для максимума; | (И 12)
dJ {x)/dt<zO для минимума. '
Пример 11.1. Пусть функция качества имеет вид, представленный
на рис. И.5:
J (А-,. Хг) + х| -fax, . (11.13)
где а — const, а = 1,5 и поиск начинается из точки =3. Xg =- 3.
Изменяем координату Xj, оставив х^ постоянной.
Тогда функция качества
3)=A:f-f 9-1-4.5а:,. (П.И)
Минимум i (х^, 3) находим, приравнивая нулю частную
производную di (х,, 3)/dXi, т.е.
dJ (Xi, 3)/axi = 2xi 4- 4.5 0. (11.15)
Отсюда первый экстремум по х^ равен
Xi - - 2.25 (11.16)
и ему соответствует на рис. 11.5 точка А2 с координатами Xj ^ 2,25,
Х2 =-3.
Теперь оставим координату Xj на уровне — 2,25 и будем изменять
(11.19)
У ((~-2.25).X2i-(5 + X2—3.4х,). (1|.|7)
Находим минимум функции по Xg:
dJ К—2.25). XgJ/^Xa = 2x2 —3.4 =1 О, Xg = 1.7. (11.18)
Данному экстремуму соответствует точка И 3 на рис. 11.5 с
координатами Xi = — 2,25, Х2 = 1,7. Повторяем цикл вычислений для
координаты Xj. закрепляя найденное значение Xg =■ 1.7, т. е.
У (X,. l,7)-=xf-b2.9 4-2.55x,;
dJ (X,. 1.7)/ах, =.2x,-f 2.55 = 0. л, =—1,27.
В результате поисковых
движений получаем ломаную
линию, состоящую из взаимно
перпендикулярных прямых,
точки излома которой
находятся D местах касания этих пря«
мых с кривыми:
J (Xi, Х2) ^ const.
В методе
Гаусса—Зайделя производится
поочередное изменение
координат Xi. Xz и
определяются частные
экстремумы dJ {K)/dXi = О по
каждой из координат, при этом
все координаты, кроме
выбранной, закрепляются.
Взяв координату Xi, при
Рис. 11.5
постоянных или нулевых значениях остальных координат
отыскивают минимум dJ {у)/дх^. После обращения в пуль
dJ {х)/дх = О найденное значение закрепляется и
изменяется координата х^ до обращения в нуль частной
производной dJ {х)/дх2 = 0. Таким образом находят частные
экстремумы по всем п координатам. Затем осуществляют
повторный цикл изменений начиная с координаты xi; и так до тех
пор. пока найденная точка экстремума не окажется
экстремальной для всех координат.
Таким образом, регулярность метода определяется
очередностью изменения координат, однако к недостатку данного
метода следует отнести произвольность в выборе нумерации
координат, что может в отдельных случаях существенно
удлинять поиск.
Метод градиента. Градиентом выпуклой дифференцируемой
функции J (Xi, Xz, ...) называют вектор, проекции которого
на оси координат Xi, Xg. ... соответствен 1ю равны частным
производным дЛдх^. dJ/dxz
Каждая из составляющих градиента может быть
приближенно определена по двум замерам значений функции J (х)
в близких точках х +- Л, т. е.
grad У (X) = |У (X -h А) - У (X - Л)1/(2А).
В том случае, если функция J (х) зависит от нескольких
переменных, т. е. J (Xj. Xg х,,), градиент определяют по
всем переменным:
(l/Aj {/[(Xi + Aj, X,...., xj —У [X,. Хг...., xj}\
(I/A2) {J Ix, (X, + AoJ...., xJ-J [X,. A'2 x„};
(I/Aj{./|x„X2....,(x„+Ajl-ytXi,x.3,..., xj}.
(П.20)
После определения направления градиента осуществляют
переход в новое положение по каждой координате в
зависимости от максимальной величины и направления градиента.
В методе градиента используют свойство уменьшения
величины градиента по мере приближения к экстремуму. Это
легко проследить на рис. 11.6, наблюдая за изменением
наклона касательных к кривой J (х).
Рис. п.6
Координаты каждого последующего положения определяют
таким образом:
х<^>^х(/>+«(1/А2){У(х<'),(хМ) + Аз),...,х<'>]--- .
— У[л'</>, 4*^]}; Г ('^-20
Следовательно, в методе градиента процесс поиска
разделяется иа два этапа. Вначале делают пробный шаг для
определения величины и направления градиента в соответствии с
алгоритмом
Х| Хо + g^i. i = 1, 2, .... п.
(11.22)
где Хо — координата вектора начального состояния; х,- —
координата вектора пробного состояния; g — величина
пробного шага; Д,- — единичный вектор отклонения по заданной
координате.
Затем осуществляют одновременное рабочее смещение в
направлении градиента всех координат в соответствии с
уравнением
X Хо dz с grad J (X),
(11.23)
Рис. 11.8
где X — вектор нового рабочего состояния; а — величина
рабочего шага.
Иногда для ускорения поиска пробные и рабочие шаги
совмещают, т. е. каждый рабочий шаг становится пробным
шагом для последующего состояния.
На рис. 11.7 показаны траектории движения из начальных
точек А, В, С к экстремуму по направлению градиента.
Кривые движения нормальны к линиям постоянных значений
функции качества / (х). Нетрудно видеть, что при наличии у
функции качества так называемых «оврагов» или «гребней»
движение по градиенту может стать очень извилистым,
кроме того, направление градиента зависит от выбранных
масштабов изменения координат по каждой оси, т. е. при
неблагоприятных масштабах по осям поиск может значительно затянуться.
Метод наискорейшего спуска. Метод наискорейшего
спуска является модификацией метода градиентного поиска.
Здесь также определяют градиент в исходной точке, но затем
движение происходит по выбранному направлению (Л, ...)
до тех пор, пока функция качества продолжает уменьшаться
(рис. 11.8). Затем вновь определяется направление градиента
и организуется прямолинейное движение в этом направлении
до уменьшения функции качества и получения минимального
значения ее по данному направлению. Метод наискорейшего
спуска значительно сокращает процедуру поиска экстремума
по сравнению с методом градиента, поскольку в нем
уменьшается количество точек, в которых осуществляется
определение величины и направления градиента.
Пример 11.2. Пусть функция качества имеет следующий вид:
J (X,, Ха) -xf }-х| Н- 1,5л-, (II .24)
Найдем минимум J методом наискорейшего спуска из точки'(xj[ = 2,
х'^ =t 3). В исходной точке частные производные
dJ {Ху. X2)/dxi
dJ (.V,, Xz)/dx2
, =.2.vi' +1.5x2=-8,5;
, =-2x2 + 1 .5x{ = 9.
(11.25)
Двигаясь D направлении, обратном полученному градиенту,
найдем координаты следующей точки (х^, Xg). т. е.
л;' =^х; -а IdJ (Л-,, x^ydx.l , ^2-fl.8.5;
Хо =Х2 —а [dJ (X,. x2)/dv2l. , /ч =3—9а.
(11.26)
где а — пока неизвестный шаг перехода из точки (х;, х'^) в точку (xj*
<).
Шаг определяем, подставляя (11.26) в (11.24), т. е.
J (л,, ,V2)= / х[—а \dJ (Xi, X2)/'^Xj]
(11.27)
-j- j X2-a \dJ (xj, X2)/ax2l^^ . ^,jj4-
-f 1.5 jx; i^y (A-,. А-2)/ал-1)^^, X
X jXg —a \dJ (X,, x.,)/ax2l^^,.^ ^,^1
или, учитывая (11.26),
J (a) - (2 — 8.5a)^+ (3 — 9a)^ + K5 (2 — 8.5 a) (3—9a). (11.28)
Преобразуя (11,28), получим
J {a) 268a2 — 166.75a 22. (11.29)
Находим a,nax "3 условия
(a)/da - 0. (11.30)
или
dJ (a)lda = 536a — 166.75 = 0, (11.31)
откуда «тач ~ 0,31. Подставив a^ax в (11.26), находим координаты
точки {xl х;'):
x'l =^2—0.31-8,5= —0.635; Xg = 3 —0.31-9 = 0,21. (11.32)
Поступая аналогичным образом на второй итерации, получим
следующие значения координат:
x^"=:0,037; х^'=^—0,16. (11.33)
Итак, практически за две итерации поиска система оказалг1с1.
достаточ1[о близкой к минимуму (xj = О, = 0).
Методы экстраполяционного поиска. Экстраполяционные
методы поиска строятся на базе двух предположений: либо
заранее известно значение экстремума функции качества J (х).
либо функция J (х) может быть приближенно представлена
какой-нибудь известной функциональной зависимостью.
Простейшие методы экстраполяционного поиска
предполагают замену реальной функции качества кусочно-линейной
функцией или квадратичной параболой.
В первом случае (линейная экстраполяция) по двум замерам
У (Хо + А) и J (Хо — А) и истинному значению экстремума
Усхц определяют положение точки экстремума Xi, т. е.
^1 = ^г. + А + 2А [Уех1г-У (Хо + А)]/Г7 (X, + А)-^У {х^ — А)|.
(П.34)
Проверка истинности полученного положения экстремума
осуш.ествляется с помощью равенства
У (Xi)-yextr. (П.35)
При невыполнении равенства (П.35) процедура линейной
экстраполяции повторяется, но для замеров х^ ± Ai.
Во втором случае (квадратичная экстраполяция) по трем
замерам функции качества J ^ J (jt^ — А). J^ = J (^о). -^з
= У (-^0 + А) записывают три линейных уравнения второго
порядка:
а (Хо - А)2 + b (Хо - А) + с ^ У^; |
flxg-f 6Хо+с = У2; (П-36)
a(к^ + ^f + b (Хо + А)н--с==Уз. .
Решая систему уравнений (П.36). находят значения
коэффициентов а, b н с:
о=(Л-.2У, + Уз)/(2А2);
(^^-^^^^--2^0 (Л-2Уз + Уз)1; (11.37)
c=J^^-(J^-J^f Хо/(2А)+ (yi-2y,-f Уз)х?/(2А^).
Учитывая, что минимум квадратичной параболы У ~
= ах- + Ьх с расположен в точке x^^i^ —fe^/(4a) и равен
-^miii = ^ — Ь^ЧЩ. можно получить величину шага для
смещения в экстремум
X, ^Хо - (А/2) (Уз - У1)/(У, - 2^2 + -^з) (П.38)
и величину предполагаемого экстремума
^шш (Js -Л)'/(8 (J, - 2Л + (11.39)
Сравнивая действительное значение функции качества в
точке J (х) с предполагаемым минимумом из (11.39), можно
судить о близости к действительному экстремуму. Поиск
заканчивается при совпадении с заданной точностью е
предполагаемого значения минимума и получаемого значения
функции качества в смещенной точке.
Все рассмотренные регулярные методы поиска, кроме
полного перебора, обладают существенным недостатком,
проявляющимся при наличии у функции качества нескольких
экстремумов, один из которых глобальный. Если исходная
точка поиска окажется на склоне локального экстремума, то
поиск прекратится в окрестности этого локального
экстремума. Указанная трудность в поиске глобального экстремума
часто устраняется с помощью методов случайного поиска.
Методы случайного поиска
В основу случайного поиска положен известный
метод проб и ошибок, в соответствии с которым удачно
найденное решение принимается, а неудачное — отвергается.
«Разумность» метода проб и ошибок базируется на
предположении о том, что случайный выбор содержит все
возможные решения, в том числе и искомое.
Методы случайного поиска применяют при определении
положения как локального экстремума, так и глобального
экстремума. Часто локальный случайный поиск хорошо
дополняет методы регулярного поиска, ускоряя их на начальных
этапах.
Локальный случайный поиск с возвратом. В данном
методе первоначально производится фиксированный шаг в
случайно выбранном направлении. Если значение функции
качества в новом состоянии J (Xi + А) превышает исходное
значение J {Xi) или остается неизменным, т. е. случайный выбор
оказался неудачным, то происходит возврат в исходное
состояние откуда осуществляется новый niar в случайном
направлении. Если значение J {х^ + А) уменьшилось, то следующий
шаг в случайном направлении делается уже из точки (Xi + Д).
Алгоритм поиска можно записать в следующем
рекуррентном виде:
Хе+1 =-Xi -h^Xi+i,
где Ах,+ . = И ■ "Р« ^ ') < (^')' (11.40)
\ О при J{xi+i)^J (xi);
а — величина шага смещения; E^+i — случайный единичный
вектор; Е = (^i,
еп).
На рис. 11.9 представлена блок-схема алгоритма (11.40).
В начальный момент система делает шаг Дх^+1 в случайном
направлении из исходного состояния Xi, причем в памяти уже
находится значение функции качества J (х,) для этого
состояния. Затем определяется новое значение функции качества
(Xi+i). которое сравнивается с запомненным J (xij, В
случае уменьшения функции качества (АУ < 0) вновь делается
случайный шаг AXj-+2 и запоминаются его компоненты. В
случае увеличения функции качества (АУ > 0) система делает
обратный шаг— Ax^+i, компоненты которого были
запомнены раньше. Функция качества в этом состоянии J (xt)
определяется вновь и запоминается, после чего делается новый шаг
в случайном направлении. Алгоритм эффективен даже в
случае нестационарных функций качества, изменяющ^ихся во
времени по тем или иным причинам.
Локальный случайный поиск с пересчетом. Этот метод
поиска отличается от предыдущего тем, что система не
возвращается при неудачном шаге назад в исходное
состояние, а делает «пересчитанный» случайный шаг в новое
состояние, при котором учитывается исходное состояние.
Алгоритм поиска
записывается в виде следующей
рекуррентной формулы:
Ах/ + | =
а Ей при J{Xi)<J*_^;
— AXi + aE/+i при
J (xi)>y;+,;
(И.41)
где Ji = min J (xy) — наи-
2 /
меньшее значение функции
качества за / предыдущих
шагов поиска.
Случайный
Запоминание
шаг JaEiH
шага лх^^^
Определение
Сравнение
Запоминание
[А >0
Обратный шаг
Определение
Рис. 11.9
Случайный
шаг
(Определение
Сравнение
{Пересчет
обратного шага
Запаминаиие
шаеа
Запоминание
Рис. 11.10
Этот алгоритм используется в основном для случаев
стационарной функции качества или при отсутствии помех. Поиск
с пересчетом сокращает количество измерений функции
качества, что оправдано при отсутствии помех.
Блок-схема поиска представлена на рис. П. 10. Из
схемы видно, что в процедуре поиска отсутствует определение
J (Xf) после неудачного шага, а устройство памяти / (х)
освобождается от дополнительной информации.
Локальный случайный поиск по наилучшей пробе.
Данный метод поиска содержит операцию накопления,
состоящую из нескольких пробных шагов. По совокупности
независимых проб принимается решение о выборе наиболее
удачного состояния.
В соответствии с методом из исходного состояния Xt
делается/п случайных пробных шагов aE/+i,aEf+i, ...,aEf!|.|.
В полученных смещенных точках xj+i = х^-+ aEi'+i, где
j =^ 1, 2, /п, производится вычисление значений функции
качества J {x\j^\) и запоминается состояние, которое привело
й минимальному значению:
У* (х{^-)-min У (X, +aE/^j), /== 1, 2,m. (И.42)
Далее производится рабочий шаг в этом выбранном
направлении:
Ах,-+,-аЕ!^,. (11.43)
где Е/-|_1 — случайный единичный вектор наилучшей пробы.
с увеличением числа пробных шагов т случайно выбранное
направление поиска все больше приближается к направлению,
обратному градиенту.
Алгоритм поиска (11.42) имеет недостаток, связанный с
возможностью попадания в такую зону, когда рабочий шаг
делается в сторону увеличения функции качества, например если
все пробные шаги привели к увеличению функции качества.
Модификация в этом случае осуществляется таким образом:
[ О при л>У (хг);
при j^x{^,)<:j{x,).
в соответствии с (11.44) система сделает рабочий шаг
вдоль наилучшей пробы только тогда, когда минимальное
значение У* (Хг+ |) из всех проб не превышает исходного значения
J (Xj). Если это условие не выполняется, тогда повторяется
цикл из т пробных случайных шагов.
Локальный случайный поиск по статистическому
градиенту. Данный метод поиска используется в тех случаях, когда
функцию качества J (х) нельзя представить в регулярном
виде и она определяется в зависимости от регулярных параметров
(Xi, Х2, Хп), а также от случайных параметров (е^, eg,
е^^). Такая ситуация возможна, например, при поиске
экстремума в условиях действия помех.
Так как случайный поиск по статистическому градиенту
близок по своей сущности к методам стохастической
аппроксимации, то рассмотрим предварительно некоторые процедуры
стохастической аппроксимации.
При наличии случайных параметров (е^, г^, е^)
регулярную функцию качества J (х) представим в виде случайной
функции
Н (х, Е)-=Я (xi, Х2,..., х^, е„ 62, ..., ej, (11.45)
где X = (Xi, Х2, Хл) — вектор состояний поиска; е =
= (^1, eg, гт) — вектор случайных помех.
Зная вероятностные характеристики параметров (е^, г^,
е^), например плотность распределения р (е), можно ос-
реднить функцию И (х, е) по этим параметрам и перейти вновь
к осредненной регулярной функции качества
/(х) = ^Я(х.е)р(е)йе, (11.46)
или
У(х) = Л<Ге[//(х.е)], (11.47)
где Me — математическое ожидание.
Из (11.46) можно сделать вывод о том, что получение
функции качества в детерминированном виде связано с
необходимостью вычисления интеграла либо при жестких
ограничениях на характер случайных воздействий е, либо при
известных вероятностных характеристиках изменения таких
воздействий. Однако обычно имеется только информация об
отдельных реализациях случайной функции Я (х, в).
При поиске экстремума дифференцируемой функции
качества J (х) все п частных производных dJ {Xi)fdXi, i = \,
2, /г, должны обраихаться одновременно в нуль, т. е.
grad J (х) = 0. (11.48)
В результате замены J (х) на Me [Н (х, е)1 условия
экстремума принимают следующий вид:
grad Me (//(X, 8)1 = 0, (11.49)
или, учитывая линейность операций, можно записать
Me [grad Н (X, 8)1 = Me [grad {дН (х.
8/axi.a// (х. е)/Эхо.....ая(х. 8)/axj = o. (11.50)
Осуществляя итеративную процедуру стохастической
аппроксимации, определяем состояние х*. соответствующее
экстремальному значению Н* (х, в), постепенно приближаясь
к нему:
Xi^i^Xi—Ai grad Я (Хь ej. (П.51)
Таким образом, при отсутствии точного знания функции
качества J (х) следует заменить ее стохастической оценкой
Я (х, г) и далее оперировать с этой оценкой при поиске точки
экстремума х*.
В том случае, если Я (х, в) представима в виде скалярной
функции скалярного аргумента х и случайного параметра е,
процедура стохастической аппроксимации сводится к
процедуре определения корня этой скалярной функции или к так
называемой процедуре Роббинса—Монро.
Пусть
Я(х.е) = ^(х,е), (11.52)
где L (х, е) — скалярная функция от параметра состояния х.
функцию L (х, е) можно представить в виде суммы
регулярной составляющей / (л:) и случайной составляющей е, причем
математическое ожидание М (е) = О, т. е. случайная
составляющая центрирована.
В результате поиска определяют корень х* регулярной
составляющей / (х), т. е.
f{x-) - О, (11.53)
в соответствии с процедурой
Xi + i =-Xi—aaL Xj). (11.54)
где а — знак наклона регулярной составляющей / (х) в
точке X* (для минимума «-f», для максимума «—»); а —
постоянная, определяющая наклон аппроксимированной прямой к f (х).
Если функция L (х, е) является однопараметрической
функцией регрессии, задана своими реализациями Я (х,-, е^) и
можно дать точечную оценку ее градиента grad Я (х, е) =
= dH (X, e)/dx, т. е.
ёН (xi, e)/dx - (1/2Д,)[Я (х, + д„ г,)-^Н (х,-~^д„ е,)). (11.55)
где д^ — интервал оценки производной, то поиск экстремума
функции L (х, е) сводится к поиску корня функции
регрессии регулярной части L (х, е) в соответствии с процедурой
Кифера—Вольфовица:
х,+ 1 =Xi—а (а,/2Д0 [Н (х^ + д„ г,)^Н (х^-д„ Ео)), (U.56)
+ 1 для min,
— 1 для max.
В случайном поиске по статистическому градиенту из
исходного состояния Xi делается т случайных пробных шагов:
аЯ^^р с?£?ц.р ^^Т+г ^ новых точках x{_^j =
= Xi + ciEi^^, i ^ 1, 2, m, вычисляют значения функции
качества Ji (х>у + 1), / = 1. 2, m, и соответствующие
приращения функции качества:
ду/ = Л (X, + 1) — У (Xi). (11.57)
После этого вычисляется вектор статистической оценки
градиента в точке х^, т. е.
Vy'(;Ci)= S ^И-'Ч;с.+ 1)-У(х,)1,1 = 1,....п. (11.58)
где а:
в пределе при т-^ оо ^^(х)
статистическая оценка VJ'{Xi)
совпадает с направлением
градиента функции качества,
поэтому рабочий шаг
производится в направлении
полученной оценки
ii (X,) ii ,
(11.59)
— — — -у
\
к/
\
V
\,
Рис. 11.11
где ||V/'(-^i)ll — норма вектора статистического градиента;
а — величина рабочего шага.
Таким образом, в случайном поиске по статистическому
градиенту число точечных измерений статистической оценки
градиента может быть меньше по сравнению с методами
стохастической аппроксимации {m<in).
Глобальный случайный поиск с независимым выбором
плотности распределения пробных шагов. Процедура поиска
значительно усложняется в тех случаях, когда функция
качества является не унимодальной, а многоэкстремальной
(рис. 11.11). Практически все рассмотренные способы поиска
локального экстремума не могут быть использованы без
специальных модификаций для поиска глобального экстремума.
Исключение составляет метод полного перебора. Однако на
практике им пользоваться бывает неудобно из-за слишком
больших затрат времени на поиск. Как правило, методы
поиска глобального экстремума базируются на статистических
принципах.
Это объясняется тем, что поиск статистическими методами
позволяет управлять плотностью распределения независимых
пробных шагов и сосредоточивать поисковые шаги в местах
наиболее вероятного нахождения глобального экстремума.
Глобальный случайный поиск с независимым выбором
плотности распределения пробных шагов может быть описан
следующей рекуррентной формулой:
Xi^x при 3 (хг) > Г (x/^i);
xt при J(x,)<r (х,_,);
r{Xi-x) при У (x,)>/(x,-i);
r{Xi) при У (Xi)</(Xi-.i),
(11.60)
(1К62)
где xl — это /-е пробное состояние, выбранное случайно и
сохраненное в памяти в случае удачной пробы; Р {Xi) —
вычисленное в i~u пробном состоянии значение функции
качества и сохраненное в памяти в случае удачной пробы; x^-j —
пробный uiar; J {xi) — значение функции качества на i-ы
пробном шаге.
При равномерной плотности распределения пробных
шагов поиск разделяется на k этапов из Nj пробных шагов, где
1= 1. 2, .... k.
Каждый пробный этап осуществляется внутри
гиперпараллелепипеда в пространстве состояний X, т. е.
^\'^ t=l. 2, (П.61)
причем стороны гиперпараллелепипеда с каждым /-м этапом
уменьшаются в с > 1 раз по сравнению с (/ — 1)-м этапом
в соответствии с формулой:
cf/) = xj"'/-1) + [а\{-" -ajp ")/ 2с;
где x/'"^-i)— точка, соответствующая пробному шагу с
наименьшим значением функции качества из всех проб на (/ — 1)-м
этапе.
Несмотря на равномерную плотность распределения
пробных шагов внутри каждого этапа, происходит увеличение
плотности распределения от этапа к этапу за счет уменьшения
зоны поиска (П.62), т. е.
/'ИхХс/"! ПДа/„-а/^), (11.63)
где Pj {х) — плотность распределения пробных шагов на /-м
п
этапе; П (а{- — а{,) — объем гиперпараллелепипеда на /-м
этапе.
Таким образом, на каждом пробном этапе осуществляются
случайные пробные шаги, из которых выбирается шаг с
наименьшим значением функции качества, а затем зона поиска
сужается около этой выбранной точки и снова производятся
случайные пробные шаги до попадания в окрестность
глобального экстремума.
Иногда целесообразно пробные шаги на каждом
последующем этапе распределять не равномерно, а по нормальному
закону, например
Р (x) = il/(2n)"/2a-j ехр {-(l/2af) | х-х,-П, (11.64)
где
Оо при J (xj) < J (x,_i);
О; =:
a,_,~7f_, при У ^х^) > У (x/„i).
с§ — исходная дисперсия; О < <7 < ^ •
Итак, случайные пробные шаги нормально распределены со
средним значением, совпадающим с наилучшей величиной
функции качества из всех проб этапа, а дисперсия уменьшается при
неудачных шагах и увеличивается до исходного значения при
удачных шагах.
Обычно время, отводимое на поиск, ограничено, поэтому
целесообразно управлять не только плотностью
распределения пробных шагов внутри этапов, но и количеством таких
проб. Например, в начале поиска количество пробных шагов
внутри этапа может быть относительно небольшим, что
связано с приблизительным выделением «подозреваемой» на
глобальный экстремум подобласти, а затем для более точного
определения патожения глобального экстремума используется
оставшееся количество пробных шагов.
Примеры поисковых самонастраивающихся систем
Самонастраивающаяся система с поиском по методу
градиента. Блок-схема системы представлена на рис. 11.12.
Система работает по принципу синхронного детектирования с
модуляцией, основанному на методе градиента.
На рабочее движение системы накладывается гармоническое
поисковое движение с небольшой амплитудой, вырабатываемое
генератором Г и устройством формирования опорного сигнала
УОС, т. е.
^^i = ^io + ^oi sinOi t. (11.65)
На выходе объекта колебательная составляющая функции
качества У (х) изменяет фазу в зависимости ст текущего
положения рабочей точки относительно экстремума (рис. 11.13).
ИУ
г
УОС
ОСоп
Дф
1
ф
Рис. 11.12
С помощью
синхронного детектора
фазы ДФ
осуществляется перемножение
сигнала J (х) и
опорного сигнала с
генератора:
О^оп = «оп 51п(со/ + ф).
(11.66)
После отфильтро-
вания переменной
составляющей с
помощью фильтра Ф
получают сигнал, пропорциональный производной функции
качества по X, т. е. dJ {x)/dx, поступающий на исполнительное
устройство И У. В точке экстремума этот добавочный сигнал
равен нулю.
Многоканальный статистический оптимизатор со случай-
ным поиском. Схема и принципы работы
самонастраивающейся системы со случайным поиском описаны в [21. В системе
реализован ряд шаговых алгоритмов поиска, например поиск с
возвратом, поиск с пересчетом и т. д. Система состоит из
одинаковых, параллельно работающих каналов, выбранных по числу
оптимизируемых параметров объекта. Блок-схема одного из
каналов представлена на рис. 11.14, а.
Рис. 11.13
Блои определения
а) знака приращения
фуи{<ции f^avecmSa
Блок
Блок
сравнения
принятия
и \3anoMU'
решенания
ний
Генератор
случайных сигналов
1
Источник
Память
Блок
запоминания
Блок
самообучения
Ключ
Схема
реверса
— Ключ
Рис. 11.14
Основным блоком оптимизатора является блок генераторов
случайных сигналов, с помощью которого вырабатываются
последовательности разнополярных импульсов с одинаковой
амплитудой и длительностью. Эти импульсы через ключевые
схемы поступают на исполнительные устройства для изменения
регулируемого параметра объекта в положительную и
отрицательную стороны поиска экстремума. В результате воздействия
исполнительных устройств изменяется функция качества. Знак
приращения функции качества фиксируется и запоминается в
блоке определения знака. Работа оптимизатора
осуществляется циклически с помощью блока команд, на вход которого
подается сигнал |Li = /2 G/. где
0 при Д/(х)<О (удачны й шаг);
1 при (х) > О (неудачный шаг);
ДУ (х) = У[х,1~У [x,._il; (11.67)
О при Я ^ О (ограничения соблюдаются);
^ ^ ^ 1 при Н<:0 (ограничения не соблюдаются, следует
сделать обратный шаг).
Сигнал \1 изменяется следующим образом:
у 0 0 11
к 0 10 1
\^-h{y.y) 0 111
Значения \i определяют так:
0 при ДУ (х)< О Л Я > 0;
1 при [ДУ (х) > О Л Я < 0] [ДУ (х)< О Л Я < (11.68)
< 0] V [ДУ (х) > О Л Я > 0].
На рис. 11.14, б, в представлены направле1П1ые графы
последовательного изменения состоящей блока команд для
поиска с возвратом и пересчетом. Индексы у стрелок, соединяющих
вершины графа,, соответствуют возможному переходу блока
команд из одного состояния в другое в зависимости от
поданного сигнала и, определяемого из (11.68).
Состояния блока команд пронумерованы следующим
образом: / — определение знака приращения показателя
качества ДУ (х); 2 — запоминание показателя качества; 3 —
обратный шаг; 5 — сброс памяти генератора случайных сигналов;
6 — запуск генератора случайных сигналов; 7 — рабочий
шаг; 8 — установление функции качества на выходе объекта.
Принципы построения беспоисковых
самонастраивающихся систем. Такие самонастраивающиеся системы обладают
существенным преимуществом по сравнению с поисковыми
системами в отношении быстродействия, поскольку в них
отсутствуют процессы поиска, замедляющие работу системы. Кроме
того, поисковые движения, как правило, создают заметные
возмущения для работы основного контура. Часто такие
возмущения становятся недопустимыми по конструктивным
соображениям, например поисковые колебательные возмущения
могут преждевременно выводить из строя исполнительные
механизмы системы управления.
Однако беспонсковые самонастраивающиеся системы, так
же как и поисковые, решают аналогичную задачу адаптации
динамических характеристик системы в услови51Х изменения
меры качества под воздействием управляющих,
параметрических и внешних возмущений. Беспоисковое определение
условий экстремума функционала качества позволяет получить
темп процесса адаптации, соизмеримый с темпом переходных
процессов в системе.
В беспоисковых системах используют несколько различных
принципов аналитического определения условий экстремума,
которые базируются на компенсационных подходах, например
принцип инвариантности или сравнения с эталоном-моделью,
либо на идентификационных подходах, позволяющих
определять связанные с функционалом качества параметры или
характеристики управляемого процесса.
Принцип инвариантности. Если в системе автоматического
управления предусматривается компенсация влияния
возмущающих воздействий на регулируемые координаты, то такая
система становится инвариантной, т. е. независимой, по отно*
шению к этим воздействиям. Так как в самонастраивающихся
системах функция качества управления может изменяться под
действием параметрических и внешних возмущений, то,
компенсируя влияние этих возмущений, можно добиться
стационарности функции качества и обеспечить работу системы в
экстремальном режиме.
Пусть система автоматического управления описывается
уравнениями вида
flu (р. О ^1 +«12 (Р. О +... + Ха - ^1 (Р, /) h
«21 О ^1 + «22 {Р> О ^2 + ... + «2п = ^2 о h (0;
dm t) + «П2 {p. 0 -^2 + - -. + ^nn = bn {p. t) fn (0.
(11.69)
где Xi, Xn — регулируемые координаты; (p, /), bi (p, t) —
дифференциальные операторы (полиномы от /? с
переменными коэффициентами); (/)—внешние возмущения; /-^1,2,
п] j = и 2, п, или в более компактной форме
S «Я (Р^ О X, - bj (р, /) /, (О, f, /= 1. 2..... п. (11.70)
i= 1
При действии параметрических возмущений происходит
отклонение операторов системы от номинальных значений,
равных
aji{p.t) = aji(p), (11.71)
на величины
ДaJ^ (р, /) =- ац {р, t) -а^ (р). (11.72)
Тогда (11.70) можно записать в виде
S '^Ji (Р) ^« = (Р^ ^) fj(О- 21 ^aji (р, t) Xi, /= 1. 2, .... п.
(11.73)
Условие инвариантности любой из координат Х| по
отношению к некоторым из воздействий (параметрических и
внешних), например Aajt {р. t) и fj, определяется тождественным
равенством нулю минора Ал определителя системы (11.73),
т. е.
а„ (р, I (р. 0. (р. О-Ощ (Р, t)
= 0.
1 (Р, t)...ai-i. i-i (р, t\,ai_i,i^i {р, t) ...
...a,:_i.„(p, t)
Of+i, 1 {p, t)...ai+i. /-1 (/7, 0. /+1 (p.
... a.+i. л (p.O
a„i (p, 0- an. /-1 (p, 0. «п. /4-1 (p. 0 ••• ann (p. 0-
(11.74)
В результате преобразования (11,73) это условие можно
записать так:
S (Р) - bf (р. о (О - S ^^^-^ о +
+ Cn4-i(p, 0^м+1=0. (11.75)
где (р, /) х„+1 — операторы и координата
компенсационного члена.
Следовательно, для выполнения условия инвариантности
(11.74) необходим второй канал для компенсации возмущений,
с помощью которого обеспечивается равенство
с„+, (р, О Хп+1 —fry (р, t) fj (t) + 2 Да,-, (р, О Xt. (11.76)
Операторы Cn+i (р, О дорого канала должны
перестраиваться в зависимости от изменения операторов (р, t) и Аал (р, #).
Принцип эталонной модели. Эффективным способом
поддержания экстремального режима при функционировании
самонастраивающейся системы является введение в контур само-
9(t)
м-э
УС
at)
y(t)
Рис. 11.15
настройки
модели-эталона. В этом случае
процессы, протекающие в
модели-эталоне,
соответствуют задаваемым
экстремальным условиям.
Сравнивая динамические
процессы, происходящие
в реальном объекте, с
процессами в модели,
можно подстраивать
характеристики системы управления таким образом, чтобы эти
процессы достаточно близко совпадали, тем самым
обеспечивается функционирование реальной системы в экстремальном
режиме.
На рис. 11.15 показана блок-схема самонастраивающейся
системы с моделью-эталоном М-Э, Управляющее воздействие
g (t) подается одновременно на вход основного замкнутого
контура управления и на вход модели-эталона. В устройстве
сравнения УС вырабатывается отклонение сигнала у (/) от
f/M (/) и в зависимости от этого сигнала отклонения
изменяются параметры регулятора Р в основном контуре.
Пусть уравнение основного контура системы
А(р, Оу^В (р, t)b + C (р, t) /, (11.77)
где у — выходная координата объекта О; б — координата
исполнительного механизма; / — возмущение, поступающее на
объект; А (р, t), В (р, t), С (р, t) — операторы.
С учетом стационарного режима работы системы
операторы Л, Б и С можно записать
Л (р. f) = Ло (р) - АЛ (/?, t)\ В{р, t)^ В, (р) + ^B (р, t);
dp, t) = ДС(р, tl (11.78)
где АЛ (р, АВ (р, 0. АС (р^ t) — отклонения от расчетного
стационарного режима, причем порядок приращений не
превышает порядка операторов стационарного режима.
Уравнение движения объекта в расчетном режиме
Ао{р)у- Во(р)Ь, (11.79)
если объект соответствует минимально-фазовому звену.
Уравнение длтд модели-эталона
AoM{p)yiA = Bo^{p)g. (11.80)
уравнение системы вместе с моделью можно записать
следующим образом:
A{p,t)y=^B [р, О fi +С (/7. О /; D ip, t) б = (/7) (g-ri);
(р) Г1=Ш (р. t)y + AN ip, t) /; Лом {p) Ум = bom (p) ^.
(11.81)
где (p)y D {p, i) — операторы рассогласования в основном
контуре; т; — суммарный сигнал обратной связи в основном
контуре; ДМ (р, t), ДЛ/ (р, t) — отклонения от расчетного
режима для операторов координаты у и возмущения / в обратной
связи; d (р, /) = do (р) + ad (р. О-
При выполнении условий
^0 (Р) - ^01 (Р) - ^02 (Р) = (р) ^ Вом (Р) (П.82)
получим
^0 (Р) - Угл) = [ДЛ (р, О ~ (р, 01 i/ + (Р. О -
- ^D (р, 01 б ^ [АС (р, О — (Р. 01/. (И.83)
Переходя от операторной формы к дифференциальной,
получим
£(') + 2^ е^^^ '2 l^^v (О-(01 +
+ ^ [дь„ (О-ada (01 fi'"' + i: [д^р (О -д«р (01 /'р'.
а=0 (5=0
(П.84)
где е =^ // — //м.
Для асимптотического приближения к нулю
рассогласования по регулируемой координате между основным контуром и
моделью необходимо, чтобы параметрические рассогласования
операторов в (11.84) были равны тождественно нулю, т. е.
Ху^ I =-e<v) ^ 0; фу+ 1 = [^ay (t) — Дт^ (01 ^ 0; ]
zc+, = [ДЬ„ (О -Д^а (01 ^0; (П .85)
Следовательно, для выполнения (11.85) необходимо
синтезировать законы самонастройки:
d^my {t)/dt=—\\>^; d^da it)/dt =^—у^га] ^Дпр {t)/di - —^ргр.
(11.86)
Выбор грф^, ярга. Ч^гр можно осуществить, применяя
прямой метод Ляпунова.
Если Aav(/), АЬа(0. Аср(0 дифференцируемы
соответствующее число раз. то основной контур с моделью можно
представить в виде системы уравнений:
где
X Ах + f; 4J) ^ + со^;
Z =
0 10 0
0
X =
. А =
0 0 1 0
;
Хп
—а8 —о? ... —
(11.87)
р = о
^ф. / -1
«70
0^2. h
wt. s
СОфУ - d^Qy (t)/dt\ iOza =^d^ba (t)ldt\
(OTp=d^cp {t)ldt.
Если процесс самонастройки происходит несравненно
быстрее, чем параметрические изменения, то
(11.88)
Тогда искомые векторы ч])ф, 4j?2, Ч'т можно определить,
задавая функцию Ляпунова в виде квадратичной формы:
у _х',р X + ср' El ср + z' Z 4- Г' Ез Г, (11.89)
где K=const>^. El, Eg, Eg—единичные матрицы, Р=(|Р,у//^.
Из (11.84) имеем
Ь X х' (А' Р + РА) X -Ь 2х X' Р/ + 2гр' Е, -|-
+ 2z' Е,1^, + 2Г Е^^т^ (11.90)
Так как матрица А — неособая с отрицательными
действительными частями корней характеристического уравнения,
то отрицательно-определенной квадратичной форме х' (А'Р +
+ РА) X в (11.90) соответствует положительно-определенная
квадратичная форма х'Рх в (11.89).
Обеспечивая отрицательность величины
xxPf + cp' Ei^t^ + z' E2% + r Езфг <0, (11.91)
можно получить устойчивость нулевого решения системы
X = 0; ф- 0; Z = 0; Г = О, (И.92)
а следовательно, и сходимость (11.90) в виде
у = >йх'(А'Р + РА)х. (11.93)
Из условия (11.91) получаем искомые функции в контуре
самонастройки:
^^^—Mi/y^] ха6<«);фгр= —ка/<Р), (11.94)
/- 1
где а= 2 Рг-Ы./-^v+»» Pv+»—элементы матрицы Р.
Условие (11.91) можно представить в виде
\V=0 a=o p=0
+ '2 h I ^vv + i 2ан. 1 ^za + Гр-к 1 г^гр) < 0. (1 1.95)
v=o a-0 P--0 /
Таким образом, рассогласования операторов модели и
основного контура сводятся за конечный промежуток времени к
нулю.
Принципы определения градиента функции качества. В
отличие от поисковых методов определения градиента функции
качества в беспоисковых системах градиент определяют без
введения специальных пробных воздействий. Однако
отсутствие поисковых движений приводит к необходимости иметь
большее количество априорных сведений об управляемом
объекте при создании беспоисковых систем. Чаще всего такими
дополнительными сведениями может быть информация о зависимости
функционала качества не только от рассогласования между
математической моделью системы и реальной системой, но и от
настраиваемых параметров контура самонастройки:
У = / (е, X), (11.96)
где е — рассогласование между моделью и системой, е =
= М — Y] X — настраиваемые параметры.
Для обеспечения экстремального значения J контур
самонастройки должен перестраивать параметры х в направлении
градиента
dJ/дх = (df/de) (де/дх), (11.97)
где де/дх ~дУ/дх, поскольку математическая модель не
зависит от настраиваемых параметров. Зная компоненты,
можно перестраивать параметры х по закону
dx/dt — MJ/dx. (11.98)
Компоненты градиента могут быть определены методом
вспомогательного оператора, суть которого заключается в
следующем. Пусть система состоит из объекта с передаточной
функцией Wo (р. о), где а — переменные параметры объекта, и
регулятора с передаточной функцией W^er (Р- •^)» ^ —
настраиваемые параметры. Следовательно, выходная
координата
Y^W,{p,a)W^,,(p,x)E. (11.99)
Частная производная dY/дх из (11.97)
dY/dx=^W, {р. а) (dlFper (Р. х)1дх) 8 + W, (р, а) W^, (р, х)дЕ/дх
(11.100)
В то же время из (11.97) де/дх ^ —дУ/дх, поэтому,
исключая дУ/дх; получим
де/дх =~lWo (р, a)d\V^^^ (р, х)/дх] е/[ 1 + W, (р, а) W^,, (р, х)]
(11.101)
Таким образом, можно определить компоненты градиента
функции качества, определяя де/дх с помощью ошибки е и
вспомогательного оператора В^всп (Р. т. е.
de/dx=-W,,„{p,x,a)E, (11.102)
где
^всп ip, X, а) = (U^'o (р, а)/[1 + W, (р, а) W^,, (р, х)]) X
X [dW^^{p,x)ldx\.
при определении компонент градиента можно
использовать методы теории чувствительности. Используя соотношение
дг1дх = —дУ/дХу обозначим величину дУ/дх = и, т, е. при
определении компонент градиента необходимо определять и —
функцию чувствительности. Учитывая связь выходной Y (р)
и входной g (р) координат
Y(p)= W{p, fl. x)g(pl (П. 103)
где W (р, а, х) — передаточная функция замкнутой системы,
функцию чувствительности можно представить следующим
образом:
и - дУ{р)/дх = [dW {/?. а, х)1дх] g (р), (11.104)
т. е. функцию чувствительности можно получить, пропуская
входную координату g (р) через звенья dW (р, а, х)/дх.
Однако звенья dW (р, а, х)/дх или модели
чувствительности не могут в точности воспроизводить реальные
характеристики системы (например, из-за переменных параметров а),
поэтому точное получение градиента дУ (р)/дх затруднено.
Но в сочетании с другими методами, например эталонной
модели, удается по приближенным функциям чувствительности к
подстраиваемой модели определять достаточно точно градиент
дУ {р)/дх.
Принципы идентификации динамических свойств системы
управления. При решении экстремальных задач управления
часто не удается непосредственно выразить желаемый
функционал качества через регулируемые и настраиваемые параметры
системы. Однако при этом возможна косвенная оценка
функционала качества по отдельным динамическим характеристикам
системы, например по импульсным переходным
характеристикам, по частотным характеристикам и т. п. Следовательно,
задача синтеза самонастраивающейся системы в этих случаях
фактически сводится к идентификации требуемых
динамических характеристик системы.
Рассмотрим принцип построения аналитической
самонастраивающейся системы на основе идентификации ее
импульсных переходных функций. Как известно, импульсная
переходная функция достаточно хорошо отражает динамику
системы управления и может быть получена непосредственно по
передаточным функциям системы управления. Предположим, что
известна импульсная переходная характеристика о (/, т)
разомкнутой системы, соответствующая экстремальному
значению функционала качества, которая связана с импульсными
переходными функциями объекта соц (Л т) и регулятора copei^
т) с помощ.ью интегрального уравнения
м (Л т)« j сорер (Х, т) (^ X) dK. (11.105)
Определяя импульсную переходную функцию объекта
корреляционным методом с помощью уравнения
оо
«i/.xW = J Яуу{К^)<^о{^Л)ах, (11.106)
о
где Ryy (X, т) — автокорреляционная функция входа; Ry^. (т)
— Бзаимокор реляционна я функция между входом и выходом,
можно из (11.105), (11.106) получить импульсную переходную
функцию регулятора.
Согласно гипотезе квазистационарности, корреляционные
и импульсные переходные функции можно определять
независимо от начала отсчета f в соответствии с условиями
R (/, / + т) ^ R ((\ Г +т); со (Л t-x) ^иу {t\ Г~т);
R (/, t^r) ^ О, с) (/. / —т) ;^0 при т > т^, /
где Т — период определения функций т^ <^ Т.
Тогда интегральные уравнения (11.105), (11.106)
упрощаются:
(11.107)
М = f Ког (x-X)co{^(X)dX.
/?^^(t--X)co^J^)dX, (11.108)
о
где со^ (Г, т), со'р^, {t, т), (t, т), (Л т), (Л т)
определяют в интервале (/, t — Tq) независимо от начала отсчета
где t—T^<r<:t,
Таким образом, сначала необходимо определить
корреляционные функции. Это можно сделать с помощью дискретного
коррелографа:
п п
(Ц) = (1/п) 2 yv yv + ц; Ryx (l/n) V 1/v ATv-I-n.
I I
(11.109)
где уу, — ординаты функций: — сдвиг во времени.
Выбор п, |Li и интервала между значениями у^,
определяется с заданной точностью. Затем вычисляют спектральные
плотности:
оо оо
^vv Н = \ Ryy ('f) cos сот^т; Sj/^ (fo) = j Ry^ (t) cos cot^t,
— oo — oo
(11.110)
где S,^x (w) — действительная часть взаимно корреляционной
функции.
Или в соответствии с приближенными формулами
Syy (ai) 2 ^yj (f^) cos cojx, Sy^^ (m) - 2 (}^) cos со^д.
- ri — /I
(11.111)
Зная спектральные плотности Syy (со) и 5,^:^: (со), можно
определить вещественную частотную характеристику:
P{uy)==Sy,iuy)/Syy{uyl (11.112)
а затем и импульсную переходную функцию:
(О, (О - (2/л) 2 ^ И cos /03. (11.113)
о
Некоторые методы позволяют, не определяя импульсной
переходной функции, поддерживать ее на заданном уровне за
счет других параметров, влияющих на вид импульсной
переходной функции. Пусть основной контур системы
описывается дифференциальным уравнением
y!dt^ + 2^со„ {dyldt) + cog =^ cogx (О, (11.114)
где у выходная координата; х — входная координата;
(Оо — частота собственных колебаний; % — коэффициент
относительного демпфирования колебаний.
Для постоянных значений ^ и coq можно получить
выражение для импульсной переходной функции
МО = («о кГЗр) е - S i п (к r=F) с)„ Л (11.115)
При постоянной частоте Wq и при медленных изменениях
коэффициента демпфирования \ можно считать, что за время
проводимых измерений эти параметры не изменяются,
поэтому, измеряя коэ(^)фициент демпфирования \ и поддерживая его
на определенном уровне, можно обеспечить постоянство им-
пульсной переходной функции k (t). Имеется ряд способов
измерения |. При непосредственном измерении по уравнению
(ИЛИ) без правой части
1^ -{d^ y/dt^+iob у)/2иу, dyldt (11 Л 16)
возникает необходимость в получении информации о второй
производной d^yldt^. Если возможность получения информации
о второй производной отсутствует, то можно воспользоваться
способом амплитудного сравнения, т. е.
А, =ae-'W(2 Vr^; (П 1
ае-(Н-г)п^/(2 V^rrO. (11Л18)
Тогда разность значений амплитуд зависит от исходного
коэффициента \q и текущего коэффициента ^j, т. е.
Д.4. ^a^-^^^'^^У'^'Ц\-l^^~^^l'V^'). (ИЛ 19)
В линейных системах частотные передаточные функции
также достаточно полно характеризуют динамические свойства
системы управления, поэтому идентификация и последующая
стабилизация амплитудной и фазочастотной характеристик
могут служить эффективным способом адаптации свойств
самонастраивающейся системы в процессе ее функционирования.
Общий принцип определения одного или нескольких
значений частотных характеристик заключается в подаче на вход
системы гармонического сигнала заданной частоты и амплитуды:
Xi == Ai sin 0)1^, i - 1, 2, п. (11.120)
Выходной сигнал пропускают через фильтры, настроенные
на заданную частоту. В результате можно получить значения
амплитудной В (со,) и фазовой ф (о^) частотных характеристик,
а также вещественной Р (о,) и мнимой Q (оО характеристик:
Г (yo,)-P(6),)-hQ(co,)y -В(о),)е'''<"*\ (11.121)
Амплитудно-частотная характеристика В (о^)
получается простым сравнением амплитуд входных гармоник и гармоник
на выходе фильтра. Труднее определять фазочастотную
характеристику.
Один из способов определения заключается в подаче
гармонических сигналов Xi = AiSin cat (на систему) и x^i =
= Ai cos (Oit (на эталонный фильтр). Выходные сигналы
системы У1 и эталонного фильтра y^i после перемножения дают
Уг Уо1 ^Ai В (о|) sin (со; t + ф) А^ В^ (о>,-) cos (щ t + ф^;) ^
= 0,5Л?Б(со,) В, (щ) fsin (фi~Фзi) + sin(2o)f./ + ф,+фз,)].
(11.122)
Разность фаз системы и эталонного фильтра на частоте со;
определяют по постоянной составляющей (11.122).
Если на систему и эталонный фильтр подается один и тот
же сигнал Xi =^ Л» sin со,-/, то выходные сигналы системы и
фильтр а вы чита ются:
Уы—yi^Ai Вз(о);) sin((i)i ^ + ф^.) —Л, В (со,) sin (СО; /4-ф|) =
==Ai дВ(ш,.) sin (о, ^ + ДФi), (11.123)
где Дф, -arctg --Ш^ ^
В (со,) cos фэ7— d ((о,) cos
при в (o3i) Вэ ((О,) разность фаз
Аф^ = 2 arcsin [ДВ (о)ё)/2Вз (озОЬ (11.124)
Вещественную и мнимую частотные характеристики можно
определять, перемножая выходной сигнал системы Л (сэ^) X
X sin (iOit + фi) соответственно на sin (Oit и cos оз,/ и
интегрируя эти выражения на интервале Т 2nn/(0i, где п —
целое число, т. е.
т
Р {o)i) ^12B (iOi)/T] cos ф,- ^ sin^ co,. tdt^B (со,) cos ф,-;
0
T
Q ((0,) =|2B (co;)/7'l sin ф,- ^ cos^ io^t dt=^B (ш,) sin ф,.
0
(11.125)
Примеры беспоисковых самонастраиваюи^ихсп систем
Самонастраиваюишяся система измерения скорости
движения с коррелятором. Систему используют для измерения
скорости движения листового металла при прокатке. Блок-
схема системы приведена на рис. 11.16. От двух источников
S)
m
Рис. 11.16
света JI-i и /1^ (рис. 11.16, a) на движущийся металл
проецируются световые пятна, которые, отражаясь от неровностей
поверхности металла, попадают на фотоэлементы и Ф^.
После усиления сигналы fi (t) и (О поступают в коррелятор,
причем сигнал (t) пропускают предварительно через
устройство переменной задержки времени т. Задержка т
регулируется до значения тт, равного времени перемещения полосы
металла на расстояние L между двумя источниками с
постоянной скоростью Vy т. . е.
Тт ^ L/V.
(11.126)
Именно для такого момента задержки почти полностью
совпадают искусственно задержанная функция (/ — т) и
функция /2 (/), как естественно отстающая функция /1 (/)
(рис. 11.16, б), т. е.
/i(/-Tr)«/2(0.
(11.127)
Основной контур
git)
Модель
JJy(t)
Ум
y(t)
Настройка т на
экстремальное значение тт
осуществляется по вы-
I ходному сигналу корре-
I лятора, вырабатываю-
j щего взаимно корреля-
J ционную функцию R (т),
т. е.
/?(т)=(1/Г) \h X
о
X {t -X) h it) dt,
(11.128)
которая имеет
максимум при т = Тт (рис.
11.16, в).
Зная величину Тт,
легко определить
скорость прокатки V =
= L/tt\ при изменении скорости прокатки система
автоматически перестраивается на новое значение тт.
Самонастраивающаяся система с моделью. Структурная
схема системы с моделью представлена на рис. 11.17. Синтез
системы проведен прямым методом Ляпунова. Объект в
основном контуре имеет переменный параметр
а (О = aS + Да (О, (11.129)
где ао = const.
Задача контура самонастройки заключается в том, чтобы
за счет перестройки коэффициента в обратной связи
основного контура обеспечить минимум рассогласования е между
выходом объекта у (t) и выходом модели при изменениях
параметра а (О, т. е.
Рис. 11.17
^ = yit) — Ум.
Модель имеет передаточную функцию
WtA{p)= 1/(р + Ь),
(11.130)
(11.131)
где Ь = ао + ко; величина ко получена из к^ (е) = kl +
+ ДА (/).
Исходные уравнения с учетохм введенных обозначений:
уравнение основного контура
y+lb + Aa,{t)+Ak{t)]i/=g{f)\ (П. i 32)
уравнение модели
y^ + by^ = g{t). (11.133)
Учитывая (11,130), получим
е + бе- —г^, (11.34)
где Z - Дао (t) + Ak (t).
При 2 = О и 6 > О рассогласование е асихмптотически
сходится к нулю.
Выбирая устройство перестройки коэффициента (е) в
виде интегрирующего звена, можно записать
dAk (f)/dt = я1? (/), (11.135)
где (f) — искомый закон управления в контуре
самонастройки.
Далее из (11.134) и (11.135) имеем систему уравнений
е = —Ье'~гу, 2= я]? (О + ^д^о (/)/Л. (11.136)
Выбрав функцию Ляпунова в виде
V (е, г) = хе^ + (11.137)
и считая dAa^ {t)/dt = О (т. е. парамегры объекта за время
перестройки feo^ не изхменяются), находим производную и, т. е.
и — 2х6е2 — 2'кигу + 2ггр. (11.138)
Если я]? = Tiey, то и = —2 кбе^ является
неположительной функцией при положительно-определенной функции v,
поэтому нулевое решение е = О, 2 = О устойчиво.
Следовательно, закон изменения коэффициента обратной
связи с основном контуре выбран в следующем виде:
А^о(е) = ^о + А^(0. (11.139)
где d^k (t)ldt - — шу (0.
Градиентная самонастраивающаяся система. Контур
самонастройки в градиентной системе (рис. 11.18) обеспечивает
настройку параметров Xi, Хг, .... х^ параллельного устройства
коррекции из условия минимума квадрата рассогласования
1/р
5{i
Up
Чз(Р)-^%'>(Р)-\
^м(Р)
Рис. 11.18
между выходным сигналом модели г/м и выходным сигналом
основного контура у (t), т. е.
J = min £2 ^ min — У (t)V- (IIЛ40)
Минимизация осуществляется по методу градиента:
deVdxt - 2в5е/Эл', « ~-2еаг//Эх, -2ell/,,„ , (р, х) Км, (11Л41)
где и^всп ё (Р» >^) — вспомогательные операторы.
Вспомогательные операторы представлены параметрическими
передаточными функциями
-УСз{р. X) It^'o, {р)
i + WosiP) S -v.- VC, (p) + nfo. (/•) Wo, (P) W^'ua (/') И>'о4 (p)
(11.142)
где
1Гз (р, X) =
^01 (Р) 4^02 (Р) Ц^ОЗ (Р) Ц^04 (Р)
1 Ч-^ОЗ (Р) 2 (Р)+ ^^«^^ ^^«2 (Р) 1^03 (Р) W^04 (Р)
2 «.
Настройка параметров Xi,X2, производится в
соответствии с уравнениями
dx,/dt='- -KdeVdx,=KieW^^^i (/7, х) Ум; (1М43)
dXi/dt ^ K^Ui. (11.144)
§ 11.4. Системы с адаптацией в особых
фазовых состояниях
Рассмотренные в предыдущем параграфе адаптивные
системы с контурами самонастройки обладают весьма существенным
недостатком, вызванным наличием в них сложно
реализуемых вычислительных блоков для поискового или
аналитического определения условий экстремума заданного функционала
качества. Часто реализация контура самонастройки приводит
к усложнению конструкции системы управления и к снижению
надежности ее функционирования.
В отдельных случаях удается решить задачу адаптации
более простыми средствами, используя, например, особенности
нелинейных систем.
В нелинейных системах могут возникать при определенных
условиях особые режимы — автоколебательные или
скользящие. Иногда такие режимы бывают вредными или
недопустимыми с точки зрения функционирования объекта управления,
тогда приходится принимать специальные меры для ослабления
действия этих режимов. Однако в адаптивных системах факт
возникновения особого режима может быть использован для
получения дополнительной информации об управляемом
процессе либо особый режим преднамеренно организуется в
системе, придавая ей новые свойства, в частности свойство
адаптации к параметрическим или внешним возмущениям.
Рассмотрим два класса систем с адаптацией за счет особых
режимов: релейные автоколебательные системы и адаптивные
системы с переменной структурой.
Релейные автоколебательные системы управления. В
нелинейной системе, состоящей из релейного элемента и
линейной части с передаточной функцией Wo{p) (рис. 11.19),
используя метод гармонической линеаризации, можно определить
зависимость параметров автоколебаний от параметров
линейной части. Предположим, что передаточная функция
линейной части
Wo (Р) = К тр (1 + Т^Р) (1 + Т,р)]. (11.145)
где 7^1, — const; (t) — переменный коэффициент
усиления.
Уравнение релейного элемента
F (х) = «о sign X. (11.146)
При g (t) = О можно записать общее уравнение для
оператора нелинейной системы:
ТгТ^ P^ + {Ti + T^)p^ + P + k^{t)u^ sing х=0. (11.147)
Гармоническая линеаризация релейного элемента дает
следующую зависимость:
F (х) = 4«о/(яа). (11.148)
Поэтому (11.147) можно записать так:
7^1 Р^ + (7^1 + Т^) Р^ + Р + К it) ^Щ/{па) =-0. (11.149)
Находя периодическое решение уравнения (11.149) при
условии р = /О), находим амплитуду и частоту автоколебаний:
а = [4^0 it) Щ/п] [Т, TJ{T, + Г,)]; со = 1 /УТУГ^. (11.150)
Отсюда видно, что при параметрическом возмущении в
виде изменения коэффициента усиления объекта (t)
амплитуда автоколебаний также будет изменяться. Поддерживая
амплитуду автоколебаний на заданном первоначальном уровне,
можно создать систему, адаптирующуюся к указанному
параметрическому возмущению. Таким образом, параметры
особого режима в нелинейной системе могут быть использованы в
9(t)
Г(х;
ylt)
Рис. 11.19
качестве допол н ител ь-
ной рабочей информации
для обеспечения
стабильной работы системы
вблизи экстремального
режима.
На рис. 11.20
приведена структурная
схема адаптивной
автоколебательной системы с
регулируемым уровнем
ограничения релейного
элемента. На основании
(11.150) амплитуда
автоколебаний может
поддерживаться на постоянном уровне при изменениях kg (t) за
счет изменения уровня ограничения реле Iuq + /^Uq (f)].
Уравнения системы записываются следующим образом:
уравнение релейного элемента
F [х, Аыо (01 = + At/o (t)] sign X (0; (11.151)
уравнение фильтра, настроенного на частоту автоколебаний Со,
y^ = k^pyitb (И.152)
уравнение двухполупериодного выпрямителя сигнала
автоколебаний
Рис. 11.20
га = \Уф\;
(11.153)
уравнение исполнительного устройства для перестройки
уровня ограничения релейного элемента
А«о (О = (kjp) Az,
(11.154)
где Аг^ Z (а^) —
уравнение основного контура
Тг П + (Л + Р'^РЛ-К (О ["о + Д Мо (Olsign X {$) = 0.
(11.155)
После гармонической линеаризации (11.155) получим
Т^хТ^гр"+{Ti + r2)V' + P + *o (04 [«o + A«o (01/"С = 0,
(11.156)
параметры автоколебаний
а mjn) [щ + Awo (011Л 7^2/(^1 + Ш (11.157)
Пусть экстремальный режим определяется следующими
значениями:
а = ао; К (О = К\ А^о (О = 0; ^2 = 0. (11.158)
тогда можно определить значение опорного напряжения
г (Go):
Ha,)=^z, = \y^\=-k^\y{t)\ (П.159)
Линеаризация (11.159) по постоянной составляющей дает
2(ао) = 2VoO)o/". (11.160)
Учитывая (11.157) и (11.158), получим
^(^о) =^^о(8/ефАо/я') [VTYhHT.+T^Y (И. 161)
Таким образом, при изменении коэффициента (t) будут
изменяться ахмплитуда автоколебаний и среднее выпрямленное
значение напряжения 2fa. Появляющееся рассогласование
= z (uq) — Za будет воздействовать на изменение уровня
ограничения релейного элемента Д^о (О таким образом,
чтобы у1меньшалась до нуля величина Кг.
В случае необходимости регулирования нескольких
параметров автоколебательная система может содержать большее
число нелинейных взаимосвязанных контуров что позволяет
организовать многочастотные автоколебательные режимы.
Адаптивные системы с переменной структурой. В системах
с переменной структурой за счет нелинейного сочетания
различных линейных структур удается организовать
специфическое вырожденное движение — скользяш.ий режим, или режим
перехода от движения, соответствующего одной линейной
структуре, к движению, соответствующему другой линейной
структуре, с помощью логического переключения связей в
системе в зависимости от ее фазового состояния. Такой переход
осуществляется с высокой частотой, в пределе стремящейся
к бесконечности. После возникновения скользящего режима
движение системы происходит вдоль гранивд переключения
и становится независимым от параметров управляемого
объекта. Если параметры объекта изменяются в процессе функцио-
нирования системы, то такие изменения не оказывают влияния
на динамические свойства системы с переменной структурой,
находящейся в скользящем режиме. Следовательно,
организуя в системе с переменной структурой скользящий режим,
удается добиться независимости ее движения от
параметрических возмущений.
Пусть система с переменной структурой описывается
дифференциальными уравнениями
'dxi/dt = Xi+i, 2, n—1;
^ /А (П.162)
i= I
где Xi — фазовые координаты; at (/) — переменные параметры
системы; и — управление.
Обычно диапазоны изменения параметров at {t) бывают
известны:
a/mrn<aaO<«^max, 1-1, 2, П. (11.163)
Управление выбирают в следующем виде:
«=i%-^i> (И-164)
i= 1
где коэффициенты ф, являются разрывными функциями
фазового состояния системы
^^^(а,при^.х,>0; ^^^^
1Рг при gXi<:Q,
П
g= 2 ^пФ^^ —постоянные величины.
1
Гиперплоскость = О является поверхностью разрыва
коэффициентов т. е. вдоль этой поверхности происходит
движение в скользящем режиме. Так как уравнение движения
по поверхности g" = О зависит только от постоянных
коэффициентов Си выбираемых из условия обеспечения требуемого
качества переходных процессов, то движение в скользящем
режиме не зависит от переменных параметров at {t).
Для .обеспечения существования скользящего режима
необходимо выбирать значения постоянных коэффициентов
и в соответствии с условием gdgldt^
ствами
: О или неравен-
> max \Ci^^ —(О —^n-i q + (О ^Л;
(11.166)
Р,. <min -а^ (О —Сп-хq + (О Ci\.
Очевидно, при постоянных значениях а, и условия
(11.166) накладывают ограничения на выбор коэффициентов
поверхности скольжения Ct из допустимой области q^jin =^
< < ^imax при изменениях Параметров at {t) в заданном
диапазоне a.mln < (О < ^^гаах.
На рис. 11.21 для двумерного случая штриховкой показана
допустимая область изменения коэффициентов поверхности
скольжения q, полученная из условий обеспечения
скользящего режима. Фазовой траектории, охватывающей наибольшую-
площадь, соответствует наиболее быстрый переходный
процесс, поэтому Cniax выбрано из условия (11.166), а Cmin —
из условия максимальной заданной длительности
переходного процесса /j^ax- Если в экстремальном режиме
функционирования системы необходимо поддерживать максимальное
быстродействие в переходных процессах, то в процессе изменения
параметров объекта ai {f) необходимо определять значение
^гаах И перестраивать коэффициенты поверхности скольжения
при их несоответствии этому значению. Такая задача может
быть решена адаптивной системой с переменной структурой,
использующей информацию о наличии скользящего режима в
системе.
Принцип действия адаптивной системы с переменной
структурой заключается в следукхцем. В начале переходного
процесса в регуляторе
формируется
функция переключения
— ^mln ^1 ~Ь -^2»
(11.167)
где Cmin —
определяется либо по
максимальной заданной
длительности
переходного процесса,
либо из условия
Рис. 11.21
5 = W^f^^2=^
Рис. 11.22
(11.166) при
минимальных значениях
ai {t) из диапазона
aim\n< di (0<^f max-
Ha поверхности go
(B данном случае
прямая) возникает
скользящий режим при
любых значениях щ (t)
из заданного
диапазона. Факт
возникновения скользящего
режима регистрируется
индикатором
скользящего режима, выходной сигнал которого скачкообразно
изменяется при уменьшении относительной длительности
пребывания системы в состоянии одной из имеющихся структур,
т. е. при повторных изменениях знака функции go- Г1о
сигналу индикатора скользящего режима функция переключения
перестраивается с на gi
gl = (Cmin + Ac) X1 + X2. (11.168)
В системе вновь возникает скользящий режим, но уже на
линии переключения gi = 0. С помощью индикатора
скользящего режима происходит дальнейшее перестроение функции
переключения
gi^iCmin -4- iAc) Xi + Х2 (11.169)
до тех пор, пока значение коэффициента (Cf^in-t-^Ас) не
превысит значение c^^ax, после чего скользящий режим по условию
(11.166) возникнуть не сможет и перестроение функции
переключения закончится. Движение фазовой точки после того
момента будет происходить по близкой к границе grnax^^max -^1+
+ Х2 = о фазовой траектории одной из структур без
скользящего режима (рис. 11.22). На этом же рисунке видно, что шаг
приращения Ас должен выбираться в зависимости от
допустимого значения перерегулирования г\ в переходном процессе.
Таким образом, за счет поиска предельного по условию
(11.166) режима работы поддерживается максимальное
быстродействие системы управления при изменениях параметров
объекта.
Адаптивная система с переменной структурой,
использующая информацию о внутренних координатах, На основании
yy
Jit
p
Z2
Рис. 11.23
(11.165) поверхность скольжения g=^-0 формируется из п
фазовых координат системы jcj, / = 1, 2, п. Поэтому при
создании системы с переменной структурой требуется
информация о производных сигнала ошибки х. Количество
производных определяется порядком исходного дифференциального
уравнения. Хорошо известно, что получение точных значений
производных ы>1сокого порядка путем многократного
дифференцирования сигнала х является сложной технической
задачей. На практике при высокой размерности исходных
уравнений приходится заменять часть недоступных точному
измерению фазовых координат xt различными внутренними
координатами системы, связанными с фазоы>1ми координатами через
параметры объекта управления или регулятора. При этом
удается получить преимущество в точности воспроизведения
значений координат и снизить влияние помех на систему.
Однако в системах с переменной структурой указанная
замена часто оказывается неэквивалентной. На рис. 11.23
представлена система с переменной структурой. В
управляющем устройстве УУ формируется закон управления
п- 1
i= 1
где
р1 при xig<:0.
Pa при Х2^<0,
(11.170)
я = 2 ciXi = CyXi + CjjXg + Xs = 0 — поверхность сколь-
1
жения; Ai, A^, ai, pi, a^, ^ постоянные величины; ^
= — pi, ag = —Р2» ^1. ^2 —постоянные коэффициенты.
Для формирования закона управления (11.170) необходимо
продифференцировать сигнал ошибки х^ два раза и получить
фазовые координаты х^ и Хд, где Ха =^ dxi/di, х^ = d^xjdt^.
После двукратного дифференнирования сигнала ошибки х^
с помощ.ью реальных дифференциаторов уровень помех на
выходе второго дифференциатора может возрасти до
недопустимых значений. В этом случае может оказаться более
выгодным использовать вместо координаты х^ внутреннюю
координату доступную для точного измерения непосредственно с
объекта управления.
Тогда поверхность скольжения будет иметь следующий вид:
g= CiXi4- с^х^ + 2з = 0. (11.171)
Внутренняя координата связана с координатой ошибки х,
cooTHouieHHCM
z^^[\lk^{t)kAt)\p\\ +T^{t)p]x^. (11.172)
Подставив (11.172) в (11.171), получим
g (О + с^х^ + [\lk^ (t) k, (01 р [1 + Гз (t) р] X, =
- с, (О .^1 + (t) Х2 + Хз = 0. (11.173)
где с, (О - c,k, (t) k, {t)/T, (0; с, (t) == [{c^k^ {t)4t)lr,{t) + 1].
Таким образом, после замены Xg на положение
поверхности скольжения в фазовом пространстве определяется в
зависимости от переме1П1ых парамстров объекта управления
^2 (0. (0. '^3 (О- Следовательно, дпнжение в скользящем
режиме, происходящее по указанной поверхности, теперь уже
не будет независимым от параметрических возмущений,
поскольку сама поверхность скольжения при изменениях
указанных параметров будет подвижна. Это приведет к тому, что
качество переходных процессов в системе будет существенно
изменяться при параметрических воздействиях. Например, при
значительных диапазонах изменения параметров (/), /гз (О,
Гз (О длительность переходных процессов может изменяться
в несколько раз. Если показатели качества должны
поддерживаться в жестких пределах независимо от изменяющихся пара»,
метров, тогда произвольные смещения поверхности
скольжения должны устраняться, т. е. поверхность скольжения долж-
на в процессе изменений возвращаться в исходное состояние.
Однако такой способ адаптации требует дополнительной
информации об изменяющихся параметрах объекта
управления. Обычно возможности для получения такой информации
ограничены. Поэтому возможен другой способ адаптации
характеристик системы в условиях действия параметрических
возмущений, который базируется на использовании не только
разрывных коэффициентов г|}^ в функции управления w, но
и разрывных поверхностей скольжения g. В фазовом
пространстве системы (рис. 11.24) формируются две поверхности
скольжения, так же как и в случае (11.173), т. е. с помощью
внутренней координаты Zgi
gi (О=(О ^1 + (О ^2 4 X, ^ 0.
(11.174)
Причем коэффициенты (t) и (/) подбирают, исходя
из заданных требований к качеству переходных процессов,
но так, чтобы во всем диапазоне изменения параметров
объекта траектории движения в скользящем режиме по поверхности
были только апериодические, что соответствует сильно
демпфированному движению. Коэффициенты с?* (/) и с^^ (/)
поверхности = О, наоборот, подбирают из условия слабо
демпфированных движений по траекториям скольжения на
fii = 0.
Адаптивный закон управления позволяет объединить обе
поверхности скольжения в одну, но разрывную поверхность
скольжения, что эквивалентно скачкообразному изменению
положения поверхности скольжения в фазовом пространстве:
« 'ФХ^! + ^2^2 (11.175)
где
IPi при xigit)<0,
1р2 при X2g(0<0,
\g^(t) при Xi(Dxi + x^)<0;
gi (О = (t) x^ + cl' (t) + JCa = сГ ^1 + ^2 + Zs = 0;
g2(0 = (0Хг + (Оx^ + x,^cl'xi + + Zs = 0.
Рнс. 11.24
Все коэффициенты ai, а^,
Pi. Р2. с\\ с1\ с\\ с1\ D
являются постоянными
величинами. Только коэсрфициен-
ты cV(t\ cV{t\ cV(t).
cV (О — переменные в силу
связи внутренней координаты
Zs и Хз. D выбирают из
условий перехода изображающей
точки с gi{t) на go{t). Разрыв
поверхности скольжения g (t)
производится в месте
пересечения (t) с плоскостью
В = Dxi + Х2 = 0. Все
постоянные коэффициенты (в V
частности, коэффициент D)
выбирают как из условия
попадания изображающей точки
из любых начальных гюложений на обе поверхности
скольжения, так и из условий обеспечения скользящих режимов
на каждой поверхности скольжения gi(0 и gj^t) при всех
изменениях параметров объекта внутри заданного диапазона.
На рис. 11.24 показана фазовая траектория, начинающаяся
в точке М. Изображающая точка, попав на поверхность
скольжения g^, далее перемещается по этой поверхности
в скользящем режиме вплоть до плоскости В. В этот
момент происходит разрыв и перемещение поверхности
скольжения [изменение g^ (t) на g^ (t)]. В результате этого
скользящий режим прекращается изображающая точка в силу
уравнений одной из структур движется в направлении
измененной поверхности скольжения, попадает на эту поверхность
и заканчивает движение в скользящем режиме уже по
поверхности Эффект адаптации здесь проявляется за счет того,
что. хотя обе поверхности скольжения g^ (t) и g^ (t) в
результате параметрических возмущений смещаются в фазовом
пространстве, это практически не сказывается на показателях
качества переходных процессов, поскольку заключительный
этап движения всегда происходит по сильно демпфированной
траектории скольжения на поверхности gg (t).
При очень больших диапазонах изменения параметров
объекта разрыв поверхности скольжения g (t) на пересечении
с неподвижной плоскостью В — DX| + = О оказывается
эф(})ективным только для части диапазона изменения парамет-
ров. Этот недостаток устраняется за счет формирования
подвижной плоскости В (/), обеспечива10ш.ей разрыв и
переключение g (/). Такой эффект получается при введении в уравнение
плоскости разрыва В внутренней координаты вместо
фазовой координаты Xg. Плоскость В, перемещаясь вверх или вниз
однозначно с изменениями параметров объекта, вносит
соответствующее опережение или запаздывание по моменту
разрыва плоскости скольжения g (t), тем самым улучшаются
условия для попадания изображающей точки после разрыва с
поверхности скольжения g^ на поверхность g^- Закон
управления в этом случае приобретает следующий вид:
а, при xi^(0>0, |г}),1^ Ль
Pi при x,g{t)<:0, ItfzK Л2;
aa при Х2 g (О > О,
р2 при Х2 g (П < 0;
gi(i) при x,iD,x, + F,z,)>0,
g2 (t) при х^ (Di Xi -f Z2) < 0-
(11.176)
Все коэффициенты являются постоянными величинами,
а ^1 (О и ^2 (О такие же, как и в (11.175).
К преимуществу адаптивных систем с переменной
структурой указанных типов следует отнести высокую
эффективность адаптации при простом конструктивном исполнении
системы. Выбор постоянных настроек регулятора н логическая
коррекция структуры в зависимости только от фазового
состояния системы управления существенно упрощают ее синтез.
§ 11.5. Обучающиеся системы
Обучающиеся системы являются наиболее сложным и пока
мало изученным классом адаптивных систем. Такие системы
создаются на основе принципа обучения, заключаюи;егося в
постепенном накоплении опыта формирования поведения
системы при высокой степе1Ш неопределенности ее исходных
состояний, по результатам которого происходит улучшение
функционирования системы. Характер накопления опыта при
обучении весьма многообразен, например опыт может быть
накоплен положительный или отрицательный,
систематизированный или случайный, собственный или привнесенный
извне, имитационный (искусственный) или естественный и т, д.
Однако у всех способов накопления опыта есть достаточно
общая черта — постепенное выделение «области знаний» из всей
совокупности «незнания». Поэтому в теории обучающихся
систем эта особенность нашла отражение в достаточно быстро
развивающемся направлении, связанном с созданием
автоматических систем классификации или распознаванием образов.
Под классификацией или распознаванием образов здесь
понимается установление по результатам накопленного опыта
границ между определенными классами сложных ситуаций.
Задачи распознавания и классификации встречаются часто
не только в технических приложениях, но и в таких областях,
как медицинская диагностика, геологическая разведка
месторождений, прогнозирование погоды и т. д.
Задача автоматического обучения классификации
формулируется следующим образом. Каждой возможной ситуации
из множества рассматря^ваемых ставится в соответствие
точка некоторого пространства х. Заранее известно, что в
пространстве X необходимо выделить две или большее число
областей или классов ситуаций. Расположение границ между
областями неизвестно и нет определенных правил, по которым
можно определить принадлежность той или иной точки любой
из заданных областей. Цель обучения заключается в
построении поверхности, разделяющей предъявляемые точки из
указанного множества на заданное число классов.
Принципиально существует два подхода к обучению такому разделению.
В первом случае, при обучении с поощрением,
классифицирующему автомату предъявляют ряд случайных точек из
множества в пространстве х и сообщают информацию о
принадлежности этих точек определенным классам. После определенного
цикла обучения на таких примерах автомат строит
разделяющую поверхность и может в дальнейшем отличать
принадлежность разным классам не только предъявленных ему
точек-примеров, но и любых других точек в пространстве х.
В случае обучения без поощрения информация о
принадлежности точек разделяемым классам отсутствует. Здесь
автомат по наблюдению предъявляемых точек определяет факт
компактного расположения нескольких из них и затем
строит разделяющие поверхности на основе выОраьшон меры бли
зости компактных групп точек к разделяющей поверхности
Объективная сложность обучения как с поощрением, так
и без поощрения заключается в том, что не всегда классы из
близко расположенных друг к другу точек строго отделимы,
т. е. возможны пересечения классов, когда одни и те же точки
принадлежат разным классам.
На рис. 11.25 показаны различные классы множества
точек (отмеченные в одном случае X и в другом 0). В первом
случае (рис. 11.25, а) классы просто могут быть разделены
прямой линией (показана пунктиром); в другом случае
(рис. 11.25,6) классы можно разделить достаточно сложной
кривой; в третьем случае (рис. 11.25, в) невозможно разделение
классов какой-либо одной прямой или кривой линией.
Для хорошо разделимых классов используют достаточно
простые алгоритмы автоматической классификации,
основанные на аппроксимации разделяющих поверхностей отдельными
участками гиперплоскостей. Для менее разделимых классов
приходится использовать вероятностные методы, основанные
на определении, вероятностных характеристик принадлежности
точек пересекающимся классам.
Метод секущих плоскостей. Пусть требуется разделить
три фигуры, состоящие из набора точек. В автомат вначале
вводят значения двух точек 1 и 2 (рис. 11.26, а). Автомат
запоминает их и строит произвольную плоскость, разделяющую
эти точки, причем точка 2, лежащая выше плоскости /,
относится к классу В. После предъявления точки 5 эта точка
оказывается выше плоскости / и, следовательно, должна быть
отнесена к классу В, однако известно, что эта точка из
класса Л. Это противоречие между точками 2 и 3 разрешается
построением новой плоскости //. При появлении следующих
точек 4 и 5 противоречий не возникает и автомат не проводит
новых плоскостей. При появлении точки 6 (рис. 11.26, б)
возникает противоречие между этой точкой, принадлежащей
о;
Рис. 11.25
Рис. !1.26
классу В, и точками 4 и 5. Тогда сначала строят плоскость
///, разделяющую точки / и б, а затем плоскость /1/,
разделяющую точки 5 и 5. Постепенно области, где точки
противоречат разделению, сужаются и вероятность возникновения
противоречий уменьшается. После определенного цикла
обучения построению разделяющих поверхностей можно и
запомненных поверхностей отбросить лишние участки и получить
разделяющую поверхность, состоящую и нескольких
гиперплоскостей. В дальнейшем обучение заканчивается и все
последующие точки будут отнесены к соответствующим фигурам
или близким к ним областям.
Метод потенциальных функций. Обычно без нарушения
общности задача обучения классификации рассматривается
как задача разделения на два класса: Q и /?. В
детерминированной постановке оба класса не пересекаются друг с другом
и могут быть четко отделены один от другого.
Метод потенциальных функций позволяет за конечное
число показов входных сигналов из обучающей
последовательности построить разделяющую функцию Ф(х),
принимающую положительные значения в точках, соответствующих
классу Qy и отрицательные значения в точках,
соответствующих 'классу R. При построении в режиме обучения с
поощрением используется информация о знаке разделяющей функции,
т. е. восстанавливается функция Ф(х) по нерегулярно
появляющимся отдельным ее точкам. После построения разделяющей
функции, т. е. по окончании процесса обучения, любая
входная ситуация, принадлежащая классам Q или R и
появляющаяся на входе автомата, правильно опознается автоматом.
функция Ф(л:) в 'УУ-мерном пространстве признаков
должна быть ограничена и представима линейной комбинацией
ограниченных на X функций
Ф(х)= 2 ^'Ф'М' (i^-^^^)
1
где Ci — неизвестные коэсрфициенты, обеспечивающие
«достаточную гладкость» Ф(х); {х) — система функций
разложения.
Пр1гчем должно соблюдаться условие
2 lCilXif<^, (11.178)
1= 1
где Xi — последовательность положительных чисел, для
которой
2 <оо.
1
Каждой входной ситуации {(х)\ (ху, .... (х)^) в
пространстве X ставится в соответствие потенциальная функция двух
переменных:
К\{х), (х)*|-- i 'Х1^Лх)<^{х)\ (11.179)
/= 1
Ввиду ограниченности линейно независимой системы
функций ф^ (х) функция K\ix), (х)*1 ограничена но модулю при
(X) е QUR.
При появлении точек из обучающей последовательности
Xi. Хг X,. строится потенциальная функция для каждой
точки.
Для первой точки х^
К(х, Xi) прих^еС; (11.180)
— К (х, Ху) при
/С, (X)
Для второй точки Xg
/^2W--Kl (X)
если Х2 е Q и (.ti) > 0; ^^^^
или Х2 6 и /Ci (х.) < 0.
При невыполнении (11.180) Kzi^) получается из Ki{x)
добавлением со знаком множества Q или R (по
принадлежности Хг) потенциала К (х,, х^.
па п~м шаге ооучения строится потенциальная функция
. Knix) =2 ^')- Е ^')' (11.182)
где л:^ и — значения, подстановка которых в предшествую-
ш,ий потенциал приводила к ошибке.
На {п + 1)-м шаге обучения возможны следуюш.ие
сочетания:
1) е Q. Кп iXn+i) > 0; 3) е Q, /С^ (x,+i) < 0;
2) Хп,., е R. Кп ixn+i) < 0; 4) е /?, /Сп (Xn+i) > 0.
(11.183)
При совпадении знаков множества Q или /? (по
принадлежности X^,i) и функции Кп (^n+l)
/Сп+1(х^-/СЛ^). (11.184)
При несовпадении знаков необходимо исправление Кп (х):
Кп^Ах)^Кп{х)±К{х, x,+i), (11.185)
где К {х, ATn+i) имеет знак «+» в (11.183) для /г 3 и знак
«—» в (11.183) для п - 4.
Таким образом, алгоритм построения разделяюш^ей
функции можно записать в следуюш.ем виде:
Ф^,., (X) =^ Ф„ (X) + [sign Ф (х„+,)- sign Ф„ {Хп+гП К (X, x^+i).
(11.186)
Алгоритм (11.186) обеспечивает конечное число
исправлений ошибок, если функция Ф(а') строго разделяет множества
Q и R и представима разложением (11.177). Число
исправлений в этом случае, не превышает т. е.
sup /С(х. X*)/ inf \Ф{х)\\ (11.187)
X&QUR X&QUR
На основании (11.187) следует вывод об уменьшении числа
исправлений k при прочих равных условиях с увеличением
inf |Ф(х)|^, т. е. чем более компактны разделяемые
множества, тем меньше требуется исправлений ошибок для полного
разделения множеств.
Сходимость алгоритма за конечное число итераций с
вероятностью, равной единице, доказывается при соблюде1ши
условий, кроме вышеназванных на статистику предъявления
обучаюш.ей последовательности: точки обучаюш^ей
последовательности появляются независимо; для любого /г — к п-
итерации имеется строго положительная вероятность
исправления ошибки, если до п не произошло полного разделения
множеств Q и R функцией (х).
Качество обучения характеризуется той вероятностью
ошибки, которая может быть получена в процессе экзамена
после обучения на обучающей последовательности
определенной длины. Поскольку максимальное число исправлений
ошибки, определяемое (11.187), фактически участвует в
определении длины обучающей последовательности, то требуемое
качество может быть получено при использовании
последовательности
Lo - kT, (11.188)
где Т — произвольное число показов, следующих после
исправления ошибки и не приводящих к исправлению.
Для заданного качества с вероятностью ошибки /? < е,
большей, чем 1 — 6, величина Т оценивается как
Т >(1п т)Пп (1 — е), где е > О, 6 > 0. (11.189)
Если учитывать число всех предшествующих исправлений
ошибок, то доверительная длина обучающей
последовательности будет
2 Lt^kz + k(k'^l)/2, (11.190)
где г =- То — S, То — общее число показов; S — число
предшествующих исправлений ошибок.
Вероятность ошибки р < е превысит 1 — 6, если выбрать
г> In еЧ\п (1 — е), где е > О, 6 > 0. (11.191)
Вероятностные алгоритмы обучения. Трудноразделимые
классы ситуаций требуют применения при автоматической
классификации и распознавании образов вероятностных
методов. При этом существенное значение приобретают априорные
сведения о вероятностных характеристиках принадлежности
объектов к тем или иным классам. Если априорные сведения
достаточно полны, тогда можно использовать классический
байесовский подход теории статистических решений,
основанный на минимизации функции среднего риска R:
« = 2 S \ PkmPHPA^)dx. (11.192)
где X ~— предъявляемые для классификации ситуации; X —
пространство ситуаций с классами Х^, Х^,. Pf^ (л) —
условная плотность распределения ситуаций класса X,,; Р^^ —
априорная вероятность ситуаций в X,,; f— функция
потерь, характеризующая ошибочность отнесения ситуации
класса Xh к классу Х^\ Л. m 1. 2 М — число не известных
заранее классов, причем функция потерь Fj^rn в
классическом подходе выбирается либо постоянной, либо ее можно
представить в виде
Fu„.{x.7), (11.193)
где с — фиксированный вектор параметров.
Границы между классами Х^ и Х^ определяются с
помощью характеристических функций типа
1 при х^ Х-
(11.194)
О при х^Х^,
также зависящих от вектора параметров с.
Подставляя (11Л93) и (11.194) в (11.192), имеем
параметрическую форму записи функции среднего риска R (с):
/?(0-2 21 {^mi^>'^)Ff,m(X.7)P,p^(X)dx. (11.195)
Учитывая, что в (11.195) средний риск R (с) зависит
только от вектора параметров с, можно получить необходимые
условия минимума среднего риска за счет приравнивания
градиента R (с) по с нулю:
V->/?(;0» 2 2 \^m(x.^^-Fumix.~^)P,PAx)dx^^
+ S 2 J^7®m(^.0^:m(X. 7;P,/7,(x)ax. (И.196)
Второе слагаемое в (11.196) определяет чувствительность
характеристических функций (х, с) и, по существу,
граничную или разделяющую любые классы Xi и Х^ функцию
//гЛ^.О= 2 1Р^1(х^Ъ-Ркпг(х^)]Р,Р,{х)^д. (11.197)
по знаку которой можно определить принадлежность
ситуаций X к классу Xi или (соответственно при (х, с) < О
или fi^ (х, с) > 0)
Результатом решения уравнения (11,196) является
экстремальное значение вектора параметров с. Как правило, решение
такого нелинейного уравнения в общем виде затруднено,
->
поэтому экстремальное значение вектора с определяется с
помощью итеративных процедур в виде разностных уравнений,
связывающих предшествующие и последующие дискретные
значения с:
с\п\ ^ с[п~\\ — Т{п) S/R (с1п—II). (11.198)
или в виде дифференциальных уравнений в случае
непрерывных c(t)
dc(i)ldt^ ~T{t) SJR (dt)), (11.199)
где Г[п] и Г(/) — квадратные матрицы, определяющие шаг
итерации и сходимость значений вектора с к с*.
В случае разделения пространства ситуаций X только на
два класса и средний риск R {с) равен
R (О - j ^11 "^) Pi Pi (^) dx + ^ F,, (X, 7) Р^Р2 (х) dx -^-
X. X,
-hf F,oAx,7)P,pAx)dx + ^ F^o{x,7)P2P^{x)dx. (11.200)
Необходимые условия минимума среднего риска
\'Г/?(Г)-0. (11.201)
Отсюда разделяющая функция До (х, с) получает следующий
вид:
/i.oU', c) = [f„ (X, n-^F,,{x, OI^PiW-l-
+ [Ргг {X. с) - F,, (хЛ)] Р, Р2 {X) =0; (11.202)
правило решения об отнесении ситуаций к классам выглядит
так:
если /i.2(>^, с)<0, то X относится к классу Xi, ^^^^
если fio (х, с) > О, то X относится к классу Xg.
(11.207)
В классическом подходе используются постоянные
функции потерь fii, /^j2. ^21» ^22 d 1^ВДе
^12(х,Г)^ /li2>0; f„(x, Г) = Лн<0; (11 204)
/^21 (X, Г) - Л21 > 0; ^) 5 О,
поэтому разделяющую функцию /12 (х, с) можно записать
иначе:
/12 О (Лп ~- Л12) /^1 Pi {х) + (Л21 - Л,2) Р2 Р2 (X) О (11.205)
или
где р, (х)/р2 [х) —отношение правдоподобия / (х), ~^—. , °
(Л,2 -^uJ/^i
— фиксированный порог Л. Следовательно, правило
классификации (11-203) можно теперь представить таким образом:
если / {х) > Л, то X £ XjI
если / (л:) < Л, то х £ Х^.
Отсюда классическое байесовское правило классификации
заключается в вычислении отношения правдоподобия / (л:)
и сравнении его с фиксированным порогом h, который зависит
от выбранного правила оценки априорных вероятностей
и Яз- Нетрудно видеть, что отсутствие априорной информации
о значениях Р^ и Р^ или инфорхмации об отношении
правдоподобия лишает возможности использовать классический
подход в задачах классификации и распознавания образов. В
случае такой неопределенности эффективным средством решения
задач оказывается применение методов обучения. При этом с
помощью методов обучения удается либо аппроксимировать
неизвестную заранее разделяющую функцию и затем
адаптивно отслеживать ее отклонения от действительной разделяющей
функции, либо восстановить из опыта не известную заранее
совместную плотность распределения ситуаций по классам.
Несмотря на то что включение обучения в классическую
байесовскую процедуру классификации замедляет работу
системы, применение обучения оправдывается снижением
требований к объему априор1ЮЙ информации в задаче
Наиболее общие алгоритмы обучения классификации в
вероятностной постановке разработаны Я. 3, Цыпкиным [71
как для обучения с поощрением, так и для самообучения.
Обучение с поощрением. Пусть разделяющая функция
имеет вид
?==/(х, с). (П.208)
На этапах обучения сообщается информация о
принадлежности ситуаций X к классам Х? и Х?:
— 1; если X принадлежит классу A'J;
+ 1, если X принадлежит классу XJ.
Поощрение правильного распознавания или его ошибочность
определяются в соответствии с неравенствами
у у > О — правильное распознавание;
^/(/< О—неправильное распознавание
и функцией штрафа в виде выпуклой функции разности у и у
Р{у-Ъ- (11-209)
Учитывая то, что точная разделяющая функция у неизвестна,
ее аппроксимируют комбинацией линейно независимых
функций cpv V = 1, 2. Л^,
с)^с^Ч>{х) = 2 ^v9vW. (11.210)
v= 1
тогда функция штрафа F {у — у) принимает вид
F{y-^-F{y-c^^p{x)). (11.211)
Подставив ее в выражение среднего риска R из (11.200),
получим
R^^F{y-^cr^> (х)) P(x)dx^ (11.212)
где Р (х) = PiPi (х) + Р2Р2 {х) — совместная плотность
распределения
В соответствии с условиями среднего риска
S/cR = j Ve f (i/— с'^ Ф (x)) p (x) dx -
л
= J iy-c^ Ф W) Ф W) Pi^)^^ (П .213)
определяются итеративные алгоритмы обучения в дискретном
виде
сШ^с [п — \] + Г[п] F' {у [п] — [п — 1) ф (X \п\)) X
X ф {х1п]) (11.214)
и в непрерывном виде
dc {t)/dt = Tit) F' {у (t) - (t) ф Ix (01} ф (x (01. (11.215)
Если вместо функции штрафа (11.211) взять выпуклую
функцию J (с) в виде среднейвадратической ошибки
аппроксимации разделяющей функции с.помощью у ф (х), т. е.
(с) = J Ifn{х)~с^Ф (x)j2rfx, (11.216)
X
то минимизацию J (с) можно осуществить в соответствии
с условием
УУ(с)- -2 |1/12(х)-с^ф(х)1ф(х)^х-0 (11.217)
или
с|ф(х)фЧ^)^>^ - ]/12(х)ф(х)ах==0. (11.218)
Обозначив Я = I ф (х) ф^ (х) dx,
получим
Яс~-|/12(х)ф(х)ах-0. (11.219)
X
Учитывая, что f^^ (л:, с) = /12 (х) = (шц — Шда) PiPi (х) +
+ (о)21 — 0)22) Р2Р2 (х)у получим
ЯС —J 1(0)11—i0i2) PlPi (Х) + («21—(О22) X
хР2Р2(^)1ф(^)^^ = 0, (11.220)
откуда можно получить дискретные алгоритмы:
с [П1,= с In — ]] — Tin] [Не [rt — 11 — (0)ii — (О12) Ф (х X
X [п1)1,
если X — из класса Х^;
C[n]=^Cln~l]—Tln] [Я С[П-~11~-((021—(022)ф(Х[П1)],
(11.221)
если X — из класса Х2.
Таким образом, неизвестная разделяющая функция у =
== / (л:, с) адаптивно восстанавливается в результате обучения
с помощью аппроксимирующей ее функции у = ц> {х).
Самообучение. В отличие от обучения с поощрением
самообучение происходит только по предъявляемым ситуациям,
без дополнительной информации о принадлежности ситуации
к определенному классу. Теперь система должна
автоматически определить не только принадлежность ситуации к
классам, но и количество классов, которое, очевидно, не должно
быть равно числу предъявляемых ситуаций, а меньше его.
Информация о количестве классов может быть получена
из выражения совмест1юй плотности распределения
р{х)^ ^ Р,р,(х), (11.222)
входящей в формулу среднего риска
^ 2 f Pk{x.'^)P{x)dx.
(11.223)
где F^, (X. с) — функция потерь; с — не известный заранее
составной вектор параметров. По числу максимумов М
совместной плотности распределения р (х) определяется число
классов, поэтому при самообучении задача заключается в
восстановлении совместной плотности распределения р (х)
путем ее аппроксимации в виде
7(х)=.а^ф(х), (11.224)
где Ф (х) —- выбранная вектор-функция с ортонормированны-
ми компонентами; а^'= (а^, gn) — неизвестные
коэффициенты.
В результате минимизации функционала
J (с) - j [р (х) -^а^ ф (х)]Мх (11.225)
получаем в дискретном виде алгоритм определения а^:
а\п]^а[п^\] - {а[/г - I]-ф {хИ)}. (11.226)
Далее, минимизируя средний риск (11.223), можно получить
разделяющие функции fj^^n- Например, для случая двух
максимумов М = 2 (или классов) средний риск
R - f FAx,7)p{x)dx -h j* F2(xJ)p{x)dx, (11.227)
Xt x^
Условия минимума R:
min {0i(x,c)Vcfi(x,c) + e2(x.OV^^2(^,?)} = O, (11.228)
где 01 (x, c) <
О при X £ Ха;
Разделяющая функция / 12 имеет вид
0 при X £ Xi;
1 при X £ Х2.
/12 (л:, с) - f 1 (х, с)—f 2 с) =- 0.
Отсюда дискретные алгоритмы самообучения
7ln] - с1п~ 11 — Г1 [п] VcFi (X [nl 7ln —11), (11.229)
если /12 (л: [n],"Tin —11)= Fi{xln\,7ln — l]) ~
-FAxlnl7ln^\])<z0,
и
с [n] - с [rt — 1] —Г2[nl y^F^ix [nl с [n - 1]), (11.230)
если /i2,(^[n],c [n— 1]) >0,
где Tl и Га — матрицы коэффициентов, определяющие
сходимость вектора с к оптимуму.
Персептронная модель автоматической классификации.
Впервые принципы автоматической классификации были
реализованы американским ученым Ф. Розенблатом в автомате,
названном им «персептроном» (от слова «perception» —
восприятие).
Рассмотрим принцип действия автомата на примере пер-
септрона МАРК-1 (рис. 11.27). В качестве воспринимающего
устройства в персептроне использовано поле рецепторов в
виде фотоэлектрического устройства, состоящего из нескольких
сотен фотоэлементов. Каждый фотоэлемент может
находиться в одном из двух состояний: О и 1. Выходные сигналы
фотоэлементов поступают на входы «ассоциативных элементов» А,
число которых сравнимо с числом фотоэлементов. Каждый А-
элемент имеет несколько входов и один выход. Входы
Л-элементов соединяются с выходами фотоэлементов случайным
образом и со случайными знаками. В процессе обучения случайные
связи сохраняются неизменными. Л-элементы осуществляют
алгебраическое суммирование поданных на их входы сигналов
с фотоэлементов и сравнивают получаемую сумму с
постоянным числом Q в соответствии с алгоритмом
где -
{ rt \
1 при 21 ^ii^i— Q >0;
о при^ V г,,х,—qJ<0,
+ 1 при подключении /Л-элемента со
знаком « + »;
— 1 при подключении /Л-элемента со
знаком <<—»;
о при неподключенном /Л-элементе»
(11.231)
Рис. 11.27
-о
Рис. 11.28
Выходные сигналы Л-элементов после перемножения на
независимые переменные коэффициенты складываются
(рис. 11.28)
У - Ъ (11.232)
и поступают на вход реагирующего элемента R, который
может находиться в одном из двух состояний: или О, или 1 в
зависимости от положительности суммы (11.232), т. е.
1 при 2 hyj>0;
О при 2 hyj<^-
(11.233)
В процессе обучения персептрон должен выдавать
выходной сигнал О при предъявлении объектов класса А и выдавать
сигнал 1 при предъявлении объектов класса В. Обучение
заключается в том, что коэффициенты при каждом показе
объектов класса А и получении на выходе Л-элементов
сигналов 1 увеличиваются на некоторую величину, а при отказе
объектов класса В уменьшаются на эту величину. Постепенно
правильность ответов на предъявляемые объекты
увеличивается, так как повышается сумма (11.232) при правильной
классификации. По окончании обучения на
последовательности объектов конечной длины автомат распознает с
определенной точностью объекты классов Ли В, если они и не
предъявлялись ему на этапе обучения. Схема обучения представлена
на рис. 11.28. Решающее правило выглядит следующим
образом:
(X, К*)= 2 ^7 sign
(11.234)
Значения коэффициентов изменяются в соответствии с
правилом обучения:
XjW^'kjln — ^ + yjln] sign 2 —Usignx
X j;, rijXi[n]-Q]\sign \ rtjXtln]-Q], (11.235)
\i=i I] I/-1 I
§ 11.6. Адаптивные робототехнические системы
При решении задач комплексной автоматизации
производства большое значение придается робототехнике как
эффективному и достаточно универсальному средству замены наиболее
трудоемких, вредных или опасных для здоровья людей форм
ручного труда, одновременно резко повышающему
производительность труда, ритмичность производства и значительно
улучшающему качество продукции. Наукой и
промышленностью созданы самые разнообразные робототехнические
системы — от простейших манипуляторов-автоматов До
сложнейших кибернетических машин, подобных, например, луноходам,
в которых технически реализован целый ряд функций,
свойственных интеллектуальной деятельности человека, — анализ
внешнего мира, планирование действий, принятие решений
и т. п.
Роботы в зависимости от сложности их систем управления
делятся на три поколения.
Первое поколение — роботы с программным
управлением. При этом под программным управлением
понимается жестко запрограммированная последовательность
выполняемых операций. Такие роботы могут действовать лишь в
хорошо организованной внешней среде.
Второе поколение — роботы, снабженные
техническими органами чувств, или очувствлейные роботы. Роль
органов чувств выполняют разнообразные датчики —■
тактильные, силовые, визуальные, локационные и пр. Такие роботы
могут работать как по заранее заданной программе, так и в
зависимости от корректирующих команд, поступающих с
информационных датчиков очувствления и сигнализирующих об
изменениях состояний внешней среды или внутренних
состояний самого робота. Главная особенность очувствленных робо-
тов — способность к адаптации и обучению в процессе
функционирования, а следовательно, возможность работы в
недостаточно упорядоченной, частично изменяющейся среде.
Третье поколе,ние — роботы с техническим или
искусственным интеллектом. Такие роботы являются
дальнейшим развитием очувствленных адаптивных роботов. Они
обладают развитыми средствами анализа окружающего мира
и планирования своего поведения, что позволяет использовать
их для работы в условиях значительной неопределенности и
случайной организованности внешней среды.
Следует отметить, что к настоящему времени
промышленностью хорошо освоено производство роботов первого
поколения. Однако роботы второго и третьего поколений все еп;е
находятся в стадии экспериментальных разработок, хотя очувст-
вленные роботы уже пробивают себе дорогу в
производственную практику. Прежде всего это относится к роботам,
снабженным техническим зрением — телевизионным или
фотооптическим. Как показывает опыт, зрительное очувствление
значительно расширяет возможности робота по точности,
гибкости и качеству управления. Устройства силомоментного и
тактильного ощущения также начинают широко применяться в
робототехнике. Такие системы очувствления, совмещенные с
автоматами обучения и классификации, образуют
эффективные системы адаптивного управления роботами.
Задача построения адаптивного управления роботом
включает в себя три важных раздела: создание чувствительных
информационных устройств, обработка информации с
чувствительных устройств, синтез адаптивных законов управления.
Средства очувствления роботов. Необходимость создания
средств очувствления для роботов можно понять, если
представить себе, насколько беспомощен человек, лишенный
зрения, слуха и способности чувствовать соприкосновения с
окружающими предметами. Точно так же беспомощен и робот,
не снабженный аналогами подобных ощущений в виде
технического зрения, слуха и т. п. в условиях, когда предметы
труда или окружающая обстановка не остаются неизменными или
заранее известными для оператора, программирующего
действия робота. Робот без систем очувствления не может искать
требуемые предметы или детали среди других предметов,
такой робот трудно заставить работать с высокой точностью, он
не замечает препятствия и ломает их либо повреждается сам.
Поэтому наделение роботов техническими органами чувств
является естественным и в то же время эффективным средст-
BOM для успешного решение двух главных залач — повышения
точности работы манипуляционного робота и. обеспечения
автономности функционирования робота в самых различных
изменяющихся условиях. Для того чтобы решить эти главные
задачи, необходимо придать роботу ощущения двух типов:
во-первых, робот должен чувствовать «себя», т. е. с
помощью датчиков фиксировать результаты всех своих движений
и оценивать правильность этих движений; во-вторых, робот
должен чувствовать окружающую обстановку, т. е.
соотносить свое расположение и свои перемещения с расположением
внешних для него предметов и их движениями.
Чувствительные датчики информации, используемые для
создания ощущений указанных типов, называются
сенсорными устройствами или просто сенсорами (от англ. sence—
чувство, ощущение).
Ощущение роботом «себя» создают с помощью сенсоров
в виде датчиков обратной связи, измеряющих положения
отдельных узлов робота, скорости перемещения по каждой
степени подвижности, величины ускорений либо торможений
звеньев манипулятора.
Информация об окружающем пространстве создается с
помощью сенсорных устройств, регистрирующих
геометрические, физические или химические свойства окружающей сре-
дЬ1 и предметов труда. В настоящее время промышленность
выпускает много самых разнообразных типов указанных
сенсоров и их совершенствование продолжается. Кроме того,
появляются новые и более интересные приборы, основанные на
новых принципах и открытиях в области полупроводников,
лазерной и ультразвуковой техники.
С позиций адаптивного управления роботами наибольший
интерес представляют сенсоры второго типа, снабжающие
робот информацией от внешнего по отношению к нему мира.
Сенсоры геометрических свойств
выполняют целый ряд функций:
1. Ограничивают движения звеньев робота в результате
соприкосновений или контактов робота с предметами во
внешней среде. Сюда относятся так называемые тактильны^
датчики в виде концевых выключателей или пьезоэлементов.
2. Определяют расстояния до окружающих предметов
или размеры и ориентацию предметов путем локационных
измерений. К таким сенсорам относятся оптические,
ультразвуковые и радиотехнические дальномеры, а также системы
кабельного телевидения.
Сенсоры физических свойств выполняют
функции: измерения усилий и моментов; измерения плотности
и давления жидких, твердых и газообразных веществ;
измерения температуры; определения цвета и запаха.
Сенсоры химических свойств
определяют химический состав веществ с помощью анализаторов
типовых химических реакций.
Несмотря на столь большое разнообразие сенсорных
устройств, их использование для создания адаптивного
управления роботами оказалось непростым главным образом по двум
причинам: во-первых, из-за сложности технической реализации
адаптивных законов управления средствами традиционной
автоматики и, во-вторых, из-за экономически невыгодного пути,
связанного с применением до недавнего времени больших
ЭВМ для обработки информации в системах очувствления,
адаптации и управления роботами.
Современные сверхэкономичные и малогабаритные
микропроцессорные средства управляющей и вычислительной техники
открыли путь для более широкого внедрения в практику
роботостроения более совершенных методов управления роботами
со сложными, но легко реализуемыми на микропроцессорах
алгоритмами обработки информации и адаптивного
управления.
Методы обработки сенсорной информации для адаптивного
управления роботами. Сами по себе сенсоры еще не решают
задачу создания адаптивного управления, так как на выходе
сенсоров образуются только исходные данные в виде токов,
напряжений, интенсивностей освещения, чисел и т. п. В
результате обработки этих данных формируется информационный
образ или информационная картина об объектах внешней
среды, по которым уже можно адаптировать движение робота,
поэтому среди многочисленных методов обработки информации
широкое распространение получили методы распознавания
образов.
Распознавание образов — это общее название для
процессов обработки сенсорной информации, связанных с
определением чаще всего геометрических форм, места расположения и
ориентации в пространстве предметов.
Распознавание образов — обязательный элемент для
визуальных систем очувствления, построенных с применением
телевизионных или фоточувствительных сенсоров. Адаптивные
роботы с техническим зрением на основе видиконов, линеек
и матриц ПЗС (приборов с зарядовой связью), фотодиодных
элементов начинают широко внедряться в практику, поэтому
подробно рассмотрим методы обработки визуальной сенсорной
информации.
Большинство таких методов имеет универсальный
характер и с незначительной модификацией применимо также для
обработки сенсорной информации иной природы, например
тактильной, звуковой и т. п.
На рис. 11.29 представлена общая схема адаптивного
робота с телевизионным визуальным очувствлением. Назначение
робота заключается в снятии с движущейся конвейерной
ленты произвольно ориентированной детали путем
определения с помощью телевизионной камеры ее положения,
ориентации и скорости движения и формирования с помощью ЭВМ
в зависимости от полученных данных адаптивных сигналов
управления на приводы робота. Заметим, что для решения
задачи необходимо воспринять изображение телекамерой,
разложить полученную сцену на информативные области, дать
описание образа детали, распознать деталь, интерпретировать
полученный образ и
передать
необходимые команды
управления на робот для
захвата детали.
Таким образом,
процесс ада птивн ого
визуального
управления включает в себя
несколько этапов
(рис. 11.30): восприя-
ятие изображения
объекта или сцены;
представление
образа; распознавание
образа;
интерпретация сцены; синтез
адаптивного закона
управления.
Восприятие
изображения объекта —
это процесс
преобразования оптических
сигналов в
аналоговые электрические
Сенсоры
и приводи
робото
Сенсоры
положения и скорости
конвейера
ТВ камера
Интерфейс внешни к устройств
I Мииро
ЭВМ
Рис. 11.29
Аналоговый
электрический
I сигнал
Цифровой сигнал
Рис. 11.30
сигналы в зависимости от яркости или интенсивности
отражающих поверхностей объекта. Качество восприятия изображения
определяется не только характеристиками визуальных
датчиков, но и возможностями для предварительной обработки
оптической информации. Основным способом предварительной
обработки является использование так называемого
структурированного освещения сцены. Дело в том. что произвольное
освещение рабочей сцены, как правило, непригодно для
получения изображений с необходимой контрастностью, без
бликовых отражений, затенений и загораживаний посторонними
объектами. Структурированное освещение дает возможность
минимизировать сложность изображения, но при этом
максимизировать объем получаемой от изображения информации,
которая затем передается на дальнейшую обработку.
Подбор методов структурированного освещения
осуществляется в зависимости от специфики освещаемых объектов. Для
достаточно регулярных сглаженных объектов применяют
диффузионное освещение (рис. П.31), т. е. освещение
рассеянным светом, но с различных сторон — справа, слева, спереди»
сверху. Совместная обработка теневых линий позволяет полу-
Тень
WJF Источиии
поберхиость
Рис. 11.31
Рис. 11.32 .
ТВ Камера
Источник
Рис. 11.33
Рис. 11.34
чить необходимую информацию об объекте по изображениям.
Для контурных или силуэтных объектов эффективна задняя
подсветка (рис. 11.32). Для негладких поверхностей полезным
методом оказывается направленное освещение (рис. 11.33),
которое усиливает и подчеркивает характер неровностей, В
случае объектов сложной формы целесообразно применение
модулированного освещения (рис. 11.34) с проекцией на объект
световых пятен, полос, сеток и пр.
Таким образом, предварительная обработка оптической
информации с помощью структурированного освещения
основана на управляемом изменений отражающих свойств
объекта с целью усиления его восприятия системой очувствления.
Представление образа — это следующий этап обработки
визуальной информации, который позволяет преобразовать
изображение в форму, удобную для цифровой обработки, а
затем кодировать изображение для дальнейшего распознавания.
Представление образа в свою очередь можно разделить на
два этапа: на первом обработке подвергается аналоговый
сигнал, полученный по результатам восприятия изображения;
на втором этапе проводится анализ сигналов,
преобразованных в дискретный вид.
Обработку изображения в аналоговой форме часто также
называют «препроцессингом», поскольку она предваряет
дальнейшую цифровую обработку. Основой препроцессинга
служит сегментация — процесс декомпозиции изображения на
информативные составляющие. Сегментация, с одной стороны,
как бы «обостряет» зрение визуальной системы и, с другой
стороны, позволяет преобразовать в цифровую форму не все по-
jie изображения, а только часть его точек. Обычно наиболее
распространенные способы сегментации сводятся к
использованию двух принципов: фиксации разрывов непрерывности и
обнаружению схожести соседствующих точек изображения.
Первый принцип реализуется в методах оконтуривания
или выделения границ. При этом изображение дискретно
сканируется специально формируемой маской. По разрывам
изображения под маской вычисляются значения градиента, в
результате чего от изображения сохраняются только контурные
кривые в местах резких изменений интенсивностей и значений
градиента. Дальнейшая обработка контурных изображений
упрощается ввиду значительного сокращания объема
вводимой в ЭВМ информации.
Второй принцип — обнаружение схожести — реализуется
в методах пороговой логики.
Пусть (х/, yi) — координаты точек изображения с интен-
сивностями с (х, у), где t = 1, 2, Л^; — общее число
точек.
Пороговое изображение формируется с помощью
сегментированной функции S (х, у) и пороговых значений
интенсивности А^:
Si(x, = если Лй<Сг(х, ^)< Л^+ь
где = О, 1, 2, М — 1; М — число порогов яркости.
В случае единственного порога яркости а имеем бинарную
сегментацию
5(^, ,)^|0, если С,(х,у)<:а;
[ 1, если СДх, у)'^а.
Если пороговое значение Л,^ является только функцией
интенсивности С (х, у), то такой порог называется глобальным
и используется для сегментации хорошо отделимых от фона
изображений. Глобальным порогом может быть
монохроматическая интенсивность (например, изображения силуэтных
объектов, получаемые задней подсветкой). Отличающийся
цвет объекта также является глобальной пороговой
характеристикой.
Дальнейшие этапы обработки — распознавание образов,
интерпретация сцены и синтез адаптивного управления —
осуществляются в цифровой форме с помощью
вычислительных устройств или ЭВМ. На этих этапах система, обучается
отнесению объектов к разным классам, строится модель
внешней сцены, координаты полученного образа преобразуются
в команды коррекции исходной программной траектории
робота. Теоретические аспекты распознавания образов и
синтеза адаптивных законов управления подробно рассмотрены в
предыдущих параграфах.
W В заключение отметим, что адаптивное управление
выполняет значительную роль в создании перспективных
поколений робототехники, базирующихся на современных
достижениях в области искусственного интеллекта.
ЗАКЛЮЧЕНИЕ
Теория автоматического управления непрерывно
развивается. Разрабатываются новые подходы к решению
традиционных задач, создаются новые направления в данной области
науки. Если на начальной стадии создания теории
автоматического управления, в 40—50-х годах нашего века, большее
внимание уделялось частотным методам, то в дальнейшем в
основном развивались методы, основанные на пространстве
состояний.
Интенсивное развитие теории автоматического
управления тесно связано с быстрым развитием областей науки- и
техники, в которых находят применение ее методы и принципы,
со все большим распространением и расширением
возможностей ЭВМ, с проникновением последних во все области управ-
л ен чес кой деятельности.
В настоящее время уже невозможно в одном учебнике в
полной мере изложить все вопросы теории автоматического
управления. Выбор материала при этом зависит как от
назначения (программы учебного курса), так и от субъективной
оценки авторами значимости тех или иных вопросов. В
первой части настоящего учебника достаточно полно изложена
теория линейных стационарных систем, большое место отведено
исследованиям линейных стационарных систем с применением
ЭВМ. Вопросы математического описания и исследования
линейных нестационарных систем, затронутые в этой части,
рассмотрены не столь полно. По этим вопросам имеются
монографии, которыми при необходимости можно воспользоваться.
Из-за ограниченности объема учебника сравнительно сжато
изложены темы отдельных глав второй части. Так, например,
несмотря на значительный объем гл. 10, посвященной теории
оптимальных систем управления, в ней не нашли отражения
численные методы решения задач оптимального управления,
теория идентификации (методы математического описания
систем по измерениям их входных и выходных переменных)-,
хотя она важна и сравнительно хорошо развита.
Читателям, которые желают углубить свои знания по тем
или иным вопросам, можно рекомендовать обратиться к
специальной лит-ературе, в частности к той, список которой дан
в настоящем издании.
ПРИЛОЖЕНИЯ
Приложение 9.1
Таблица стандартных интегралов
2п j /^{/co)f (-^/cb)
где F (/co) = ao (/со^- * -h .
и все корни F (/«) расположены в верхней полуплоскости.
При п = I
При п = 2
При /г «= 3
= (~6о+ а^Ь^а^)/2а^ау.
При /г — 4
^ ^ /jq ( — ci q4 + 02 q3) —qo q3 ^ 4-со qi ^2 4- (qq ^3/04) (до аз —cix cg)
* 2оо («о al 4- of 04 —oi 02 из)
При rt 5 Уб = Мб/2аоДб,
Л1б== 6о (—оо 04 об-f oi a\-)rcil 05 —02 03 ^4)4-00 61 (—оо ов+оз 04)-+-
+ оо ^2 («о «6 — Oi 04) 4- Оо ^3 (--оо оз + «1 4- (оо VOfi) (—оо о, об +
4-оо с| ho| 04 —0102 03).
Afi = og о| —2оо Oj 04 об —оо ог 03 об 4-оо о| 04 + о| о| + «1 о| об —
— oi02%«4-
Приложение 9.2
Формулы и графики для определения статистических коэффициентов
усиления некоторых типовых нелинейных элементов
Типовой нелинейный элемент
Формулы для статистических
коэффициентов
Идеальная релейная
иорактеристина
23
в
-в
0 а
в
(в при у>о:
^"уВ при у<В
у
/2
2о:
Однозначная релейная харанте-
ристика с зоной нечувстдительноста
X
В
►в
Ob 9
В при у^ь:
о при у< Ь;
-8 при у<-Ь
в
1 _Шпу
2 0.
2 \ 01 j
где т^^-Шу/Ь; ау==.'Уй^/Ь
Линейная карантеристина
с насыщением
к iycc
X
В при у>Ь:
кх при
-8 при у<-Ь
1^/1-т, \«1 I
- е 2 ^ ^ J Г
арооолжение приложения 9.2
Типовой нелинейный элемент
Формулы для статистических
коэффициентов
X
(1+т,) е
2 V 0, j .,
+ (l-m,)
Линейная характеристика с зоной
нечувствительности и-насыщением
X
W
а Ь у
В при у>Ь;
И (У-а) при a-^y<bi
< О при lill «о.
\h{y*a) при -Ь<у<-а;
\'В при у<-Ь
В
(1-Ьтз)ФХ
т,) Ф X
/1 —тЛ
X -l-i^i-^-v) X
\ Oi J
(m, 4-v\
ХФ
X
1 / 1 -m, \2
2 \ o. J _
1 rv + m, Y
+
(l+>n,)(l-/n,-2v)-af
X
Продолжение приложения 9,2
п/п
Типовой нелинейный элемент
Формулы для статистических
коэффициентов
_ (1—mi)(l + mi —2у) —а,
XL(l+//ii-'2v) e 2^ ^« '
+ (l~^i-2v)e 2^ ' +
+ Ф
; где Vz=^a/b
харамтеристина
0 У
ft(.) kDy [ 15 + SGm^/Dj, +
+ 9mJ/Djl*/«;
Продолжение приложения 9.2
Типовой нелинейный элемент
Формулы для статистических
коэффициентов
Нечетная нбадратичиая
характеристика
X
т
1
о у
Четная ндадратичная
харантеристина
О
2kDy
trill
X
+1
+
X
у 2nDy
e V
My
X
+
X (2+4mB/Dy)'''sign//iy;
Продолжение приложения 9.2
Типовой нелинейный элемент
Формулы для статистических
коэффициентов
Диодная квадратичная
характеристика
ку^ при у>0\
О при у^О
Фо = Ш,((.+^)(Л +
+
+
V 2nDy
2D
е "
1
3+-
Dl }
X
X
■+
Хе У
+
У2я
/2
X
3
X
X
Шу
1 + 2Ф
iyk)
X
Нелинейная характеристика
типа „ идеального диода "
+
О при у^В
У2п
Продолжение приложения 9.2
Типовой нелинейный элемент
Формулы для статистических
коэффициентов
x(.+f) +
X
+
т,,
У
V —
при y>Oi
при у<0
:2Ф X
X
т./
1 +Л}1.-
1/2
В при у>0
О при у^О
Ф„ = fi [ I /2 + Ф {т„ lyOy )1;
В
в
■У2п Dy
Продолокение приложения 9.2
Типовой нелинейный элемент
Формулы для статистических
коэффициентов
В при у>Ь
О при у^Ь
Уд
fi2
-"(—). ■■
В 2 I а. j
гдет, =my/fc. а, —
k-tgci
/
б
Га при у>Ь
\о при у^О
Ч-.,[ф(^) + ф(^) +
-т {^У
— е
1_ / I —т, Y
2\ а, )
ХФ
l\~-m. \
^ +(тП-о!)Х
\ Од /
Ф( —
—+
I / т, \г
. miffi 2 V о, /
2 V 01 j
где m^^rriylb, Oi = VDy/b
список ЛИТЕРАТУРЫ
К главе 7
1. Айзерман М. А., Гантмахер Ф. Р, Абсолютная устойчивость
регулируемых систем. М., 1963.
2. А. А. Андронов и АР- Теория колебаний. М., 1959.
3. Вавилов А/Л. Частотные методы расчета нелинейных систем.
М., 1970.
4. Воронов А, А. Основы теории автоматического управления.
Особые линейные и нелинейные системы. М., 1981.
5. Воронов А. А, Устойчивость. Управляемость. Наблюдаемость.
М., 1979.
7. Емельянов С. В. Системы автоматического управления с
переменной структурой. М.. 1967.
8. Наумов Б. Н. Теория нелинейных автоматических систем.
М., 1972,
9. Попов Е. П. Прикладная теория процессов управления в
нелинейных системах. М., 1973.
10. Попов Е. П., Пальтов И, П. Приближенные методы
исследования нелинейных автоматических систем. М., 1960.
11. Якубович В. А. Методы теории абсолютной устойчивости.—
— В кн.: Методы исследования нелинейных систем автоматического
управления/ Под ред. Р. А. Нелепяиа. М., 1975.
12. Siljak D. D. Large — scale dynamic Systems. Stability and
Structures. North Holland. 1978.
К главе 8
1. Цыпкин Я- 3. Теория линейных импульсных систем. М.,
1963.
2. Кунцевич В. Я., Чеховой Н. Нелинейные системы
управления с частотно- и широтно-импульсной модуляцией.
3. Теоретические основы связи и управления/ А. Л. Фельдбаум,
А. Д; Дудыкин, А^ П. Мановцее, Я. Я. Миролюбов. М., 1963^
4. Державин О. М, Структурные схемы временных импульсных
модуляторов 1-го рода.— Автоматика и телемеханика, 1967, № 4.
5. Воронов А. А. Основы теории автоматического управления:
Особые линейные и нелинейные системы. М., 1981.
6. Цыпкин Я' 3, Элементы теории цифровых автоматических
систем. Труды I Международного конгресса Международной федерации
по автоматическому управлению, М., 1961, т. 2.
7. Николаев Ю. А„ Петухов В, П., Секлисов Г. Я., Чемоданов B.KJ
Под ред. Б, К. Чемоданова, Динамика цифровых следящих систем.
М,, 1970.
8. Цыпкин Я' 3., Попков 10. С. Теория нелинейных импульсных
систем. М., 1973.
9. Метод Гольдфарба в теории регулирования. Сборник статей.
М., 1962.
10. Цыпкин Я- 3. Релейные автоматические системы. М., 1974.
П. Пышкин И. В. Автоколебания в широтно-импульсных
системах регулироваиня,— В кн.: Теория и применение дискретных
автоматических систем. М., 1960.
К главе 9
1. Астапов Ю. М., Медведев В. С. Статистическая теория систем
автоматического регулирования и управления. М., 1982.
2. Бессекерский В. А,, Попов Е, П. Теория систем автоматического
регулирования. М., 1975.
3. Вентцель Е. С. Теория вероятностей. М., 1964.
4. Воронов А. А. Основы теории автоматического управления.
Ч.П. М., 1966.
5. Казаков И. Е. Статистические методы проектирования систем
управления,1969.
6. Основы автоматического управления/Под ред. В, С. Пугачева.
М., 1974.
7. Первачев С. В,,Валуев А, А., Чиликин В. М. Статистическая
динамика радиотехнических следящих систем. М., 1973.
8. Пугачев В. С. Теория случайных функций и ее применение к
задачам автоматического управления. М. 1962.
9. Пугачев В. С, Казаков Я. ЕвлановЛ. Г. Основы
статистической теории атоматических систем, 1974.
10. Солодовников В.В., Матвеев П. С. Расчет оптимальных систем
автоматического управления при наличии помех. М., 1973.
П. Техническая кибернетика. Теория автоматического
регулирования/Под ред. В.В. Солодовникова. М., 1967. Кн. 2.
12. Теория автоматического управления:: Нелинейные системы,
управления при случайных воздействиях/ А. В. Нетушил, А. В,
Балтруилевич, В. В. Бурляев и др.; Под ред. А. В. Нетушила. М., 1983.
к главе 10
1. Акексеев В. М., Тихомиров В. М., Фомин С. В, Оптимальное
управление. М.. 1979.
2. А тане М. и Фалб П. Оптимальное управление. М., 1964,
3. Беллман Р. Процессы регулирования с адаптацией. М., 1964.
4. Болтянский В. Г. Математические методы оптимального
управления. М., 1969.
5. Брайсон А., Хо Ю-Ши. Прикладная теория оптимального
управления. М., 1972.
6. Воронов А. А. Устойчивость, управляемость, наблюдаемость.
М., 1979.
7. Габасов Р., Кириллова Ф. М. Основы динамического
программирования. Минск, 1975.
8. Иванов В. А., Фалдин Н. В. Теория оптимальных систем
автоматического управления. М., 1981.
9. Казаков И. £. Статистическая теория систем управления в
пространстве состояний. М., 1975.
10. КвакернакХ.^Сиван Р. Линейные оптимальные системы
управления. М., 1977:
11. кротов В. Ф., Гурман В. И. Методы и задачи оптимального
управления. М., 1973.
12. Летав А. М. Динамика полета и управление. М., 1969.
13. Ли Э. Б., Маркус Л. Основы теории оптимального
управления. М., 1972.
14. Моисеев И. И. Элементы теории оптимальных систем. М.,
1975.
15. Олейников В. А., Зотов И. С, Пришвин А, М. Основы
оптимального и экстремального управления. М., 1969.
16. Острем К. Введение в стохастическую теорию управления.
М., 1973.
17. Понтрягин Л. С, Болтянский В. Г., Гамкрелидзе Р. В.,
Мищенко Е. Ф. Математическая теория оптимальных процессов. М.,
1969.
18. Ройтенберг Я- П. Автоматическое управление. М., 1978.
19. Фильтрация и стохастическое управление в динамических
системах/ Под ред. £. Т. Леондеса. М., 1980.
К главе 11
1. Красовский А. А. Динамика непрерывных
самонастраивающихся систем. М.. 1963.
2. Красовский А. А,у Поспелов Г. С. Основы автоматики и
технической кибернетики. М., 1962.
3. Козлов Ю. М., Юсупов P.M. Беспонсковые
самонастраивающиеся системы. М., 1969.
4. Принципы построения и проектирования
самонастраивающихся систем/ Б. И. Петров, В. Ю. Рутковский, И, И. Крутова, С, Д,
Зеляков, М.. 1972.
5. Самонастраивающиеся системы: Справочник/Под общ. ред.
проф. П. И. Чапаева. Киев. 1969.
6. Солодовников В. В., Шрамко Л.С. Расчет и проектирование
аналитических самонастраивающихся систем с эталонными моделями.
М.. 1972.
7. Цыпкин Я. 3. Основы теории обучающихся систем. М., 1970.
Автоколебания 2 20. 2i3, 34^ . 43.
69
Автоматизация 1 14
Адаптация 2 4i0!2i
Алгоритм движения вдоль
границы I 363
— обучения вероятностный 2 462
— обхода по вершинам 1 366
— управления 1 16
— функционирования системы 1
16
Быстродействие I 179» 236
Вектор возмущения 1 89
— состояния 1 89
— фазовый 1 89; 2 246
Векторное дифференцирование 2
332
Вершина графа 1 7i2
Весовая функция I 95
нормальная 1 97
сопряженная \ 97
Воздействие возмущающее 1 1в2
— задающее i 1Ш; 2 245
~ управляющее 1 1=23'
Возмущение 1 89*
Восстанавливаемость 2 3)14. 3<88
Временные характеристики 1 49
Время запаздывания 1 16-7, 172.
17.3, 174
— регулирования 1 185
Выбор корректирующих устройств
1 274
Вычисление машинное 1 287
Гамильтониан 2 269
Гиперповерхность переключения
2 3127
Гипотеза Айзермана 2 65
— Калмана 2 65
— фильтра 2 34, 35. 36
Годограф затухания 1 200, 201
— корневой I 194
— Михайлова 1 140
Граф 1 71
~ конечный 1 72
Примечание:
Полужирными цифрами 1 и 2 в указателе
обозначены соответственно части
первая и вторая учебника.
— ориентированный 1 72
— системы управления . 1 73
Гурвицев угол 2. 65
Дельта-фуикция 1 50
Динамическое программирование
2 285
Дисперсия ошибки 2 1вЗ.. ' 1'84,
186, 137
— случайного процесса 2
1'5в
дискретного процесса 2 '219
Дифференцирование вектор>1ое 2
3132
— оригинала 1 38
Дуга 1 7(2
Задача Больца 2 254, 261
— вырожденная 2 2i8i2, 3.76
— выхода нестационарная 2 340
стационарная 2 341
— Лагранжа 2 (254, 261
— Майера 2 264, .261
— максимального
быстродействия 2 264, 2Г7б1
линейная 2 275., 278
— оптимального управления 2
246, 247, 252
иэопериметрическая 2 252
классического типа 2 262
неклассического типа 2
252
с несколькими
ограничениями 2 280
с нефиксированным
временем 2 2Вд^ 266
-с ограничением на
фазовые координаты 2 '279
с подвижными концами 2
253,26)1, 266,12I7-I
с подвижным левым
концом 2 263
с подвижным правым
концом 2 253
^ с фиксированным
временем 2 253. 264, 261
с фиксированными =
(заиленными) концами 2 253^ 254,
-—со свободным концом 2
2.53
— особая 2 284
— оцеинваиия вырожденная 2
3*76
невырожденная 2 395
несингулярная 2 ЗвО, 395
■' сингулярная 2 3-76
— терминального управления 2
2'54
Задатчик 2 245
Закон регулирования 1
— — пропорционально-иятеграль-
но-дифференциальный 1. 3i2
пропорционально-интегральный 1 321
'- пропорциональный I 3(2
Запас устойчивости по амплитуде
I 162, 180, 1Щ
по фазе I 1'52, 180, 187. 1в8.
2i3il
Звено 1 5i2
— апериодическое 1 55
второго порядка 1 59, 62
— астатическое 1 24
— дифференцирующее 1 56
— изодромное 1 2i5i3
— «нерцнониое 1 бб
первого порядка I 55
— интегрирующее 1 54
— иррациональное I 174
— колебательное I 59
— консервативное I 69, 61
— линейное I 36
— неминимально-фазовое 1 62
— охваченное обратной связью I
66
— пропорциональное I '53
—. форсирующее I ©7
— — второго порядка I Ь2
первого порядка I 57
— чистого запаздывания I 63
Изамплита 1 339
Изображение по Лапласу 1 38
— решетчатой функции 2 %
Изофаза 1 3i3^
Импульсный элемент идеальный
(простейший) 2 76
Инвариантное погружение 2 28(5
Ииварнантиость I 254, 255, 256,
257
Интегральные оценки 2 102
Интегрирование оригинала I 39
Каноническая форма
наблюдаемости 2 3»l8i
— управляемости 2 309
Колебательность 1 179, 1<91
Контур 1 72
— адаптации 1 30
Координата невосстана вливаема я
2 &Ш
— ненаблюдаемая 2 3'1в
— фазовая I 89; 2 9
Корень левый 1 1*25
— правый I 1'25
Корреляционная функция 2 164,
173, 174, .21'9
взаимная 2 159, 220
нормированная 2 165
Коэффициент демпфирования I
59
— критический I Ь5|2
— ошибки 1 1*81,, 1'82
— передаточный 1 44
— передачи регулятора I 3i2
Кривая переключения 2 327
— Михайлова I 140^ 141, 142, Ш
Критерий абсолютной
устойчивости 2 55, 57
— Гурвица I 1:29, 131. 1вЗ. 170,
286, 296
— Зубова I 2198
— Льенара — Шипара I 135. 136.
2186, 296
— Михайлова I Ш. 141, 144, 170,
284, 286, 296
— Найквиста I И5, 148, 151, 152,
154, 170, 175, |2в4, 2i96
— неотрицательной
определенности 2 3^il2
— оптимальности 2 2.47, 347, 3>52,
393
интегральный
квадратичный 2 3-219
квадратичный 2 .356, 389
— полной наблюдаемости 2 3|15
— Попова 2 60, 6.1;, 52
— Рауса I т, 170, 197. 296
— Сильвестра 2 336
— статистической
эквивалентности 2 230. 231
— управляемости 2 30i5. ЗЮ
~ устойчивости алгебраический I
1:27, Ш
• круговой 2 57, 59
— ~ матричный I в()7, 312
- частотный 1 127, 137; 2 96
С/?-алгоритм I 286
Линеаризация 1 36
— статистическая 2 22S
Лииейиая часть 2 4
Линия переключения 2 14
— скольжения 2 29
Мажоранта 1 1Ш
Марковское свойство 2 288
Маршрут ориентированный 1 72
Математическое ожидание 2 1*50
Матрица весовая (импульсная
переходная) 1 86
— наблюдаемости 2 3)1.5
— передаточная I 84
— передаточных функций I 84
— управляемости 2 Э06
— фундаментальная 1 8<9
• нормированная 1 80
—
функционально-преобразовательная 1 29-9, ЗОО. 3.1'0, ЗМ. 3115
~ Хассенберга 1 2i86, 287
Матричный экспоненциал 1 90
Метод гармонического баланса 2
3S, 40
— Гаусса — Зайделя 2 409, 411
— Гольдфарба 2 41
— Данилевского 1 294
— динамического
программирования 2 285, 315:2
~ Л-разбиения 1 1Й5, 161, ЮЗ,
285, 2(90, 2i9l.. 2921,. 34il
по двум параметрам I 169
по одному параметру 1 I6i7
— замороженных коэффициентов
1 1Ш, 176
— Ивенса I 196, 203
— корневого годографа 1 194
— корневой 1 Ii8i9
— Коченбургера 2 41
— Кротова 2 2.96
— Крылова 1 '295
— Леверьс — Фадеева 1 295
— локализации 1 286
~ Ляпунова второй (прямой) 2
48
— малого параметра 2 35
— множителей Лагранжа 2 264
— наискорейшего спуска 2 ^l^
— переменного состояния 1 284,
285
— поиска экстремума 2 408
регулярный 2 4i08
— случайный 2 408
— потенциальных функций 2 459
— припасовывания 2 Я1
— прогонки 2 344
— регуляризации фильтра 2 4'0О,
4-01
— с прогнозом и коррекцией 1
331
— секущих плоскостей 2 458
— случайного поиска 2 417
— статистической ланеаризацни 2
228. 238
— топологический 1 285
— трапеций 1 218
— треугольников 1 220
— Удермана 1 200
— фазовой плоскости 2 129
— частотный 1 214
— эквивалентной линеаризации 2
3.4, 36
— экстраполяционного поиска 2
416
Механизация 1 13
Миноранта I 193
Множество допустимое 2 296
Множитель Лагранжа 2 258, 260
Модель математическая 1 33
Модулятор
амплитудно-импульсный 2 75
~ двухтактный (двухполярный)
2 76
— однотактиый (однопол ярный)
2 76
— частотно-импульсный 2 75
— широтно-импульсиый 2 75
Наблюдаемость 2 314, 388
— линейных стационарных
систем 2 316
Наблюдатель 2 Э20
— Калмана 2 3194
— Калмана — Бьюсн 2 359, 361
— — лниеаризоваинын 2 380
при цветном шуме
наблюдения 2 374
объекта 2 371
— полного порядка 2 321
— пониженного порядка 2 321,
323
Надграф 1 72
Невязка 2 361
Нелинейный элемент 2 4
квантования приращений 2
78
Неособый случай 2 2i58, 2т
Несоприкасающиеся контуры 1
75
Обиаруживаемость 2 3.19
Обратная связь 1 24i2
гибкая 1 240. 241. 242
— — главная 1 -21
жесткая 1 '240, 241, 24'2
корректирующая 1 240
отрицательная 1 66
положительная 1 66
Обучение с поощрением 2 466
Объект безынерционный 1 Г6
— вполне (полностью)
управляемый 2 304
— многомерный 1 81
стационарный 1 82
линейный 1 S2
— многосвязного управления 1
81
— стабилизируемый 2 З'Ю
— статический 1 16
— управления 1 14
Ограничение изопериметрическое
2 2б0„ 'Ж
— на управление 2 247
— иа фазовый вектор 2 247
Оператор системы 1 34
Операция рабочая 1 13
— управления 1 1в>
Оптимизатор 2 426
Оригинал 1 37; 2 85
Ориентированный маршрут 1 72
замкнутый 1 72'
незамкнутый 1 712.
Освещение диффузионное 2 477
Особый случай 2 25В
Отклонение 1 20'
Отрезок устойчивости 1 159
О цени вате ль Калмана 2 394
Оценка 2 .320
Оценки интегральные 2 101
Ошибка средняя квадратическая 2
1в4
— статическая 1 SSi
— установившаяся 1 180, '250
Пара вполне (полностью)
восстанавливаемая 2 1317
наблюдаемая 2 .3il7
управляемая 2 308
— допустимая 2 '2156. -268. 297
— стабилизируемая 2 311
Передаточная функция 1 41, 42
в изображениях Лапласа 1
42
в операторной форме 1 41
генератора 1 107, 108
двигателя I 109
делителя напряжения 1 111
замкнутой цепи 1 67
импульсной системы 2 84,
87, 88
многокоитуриой системы 1
70
одноконтурной системы 1 60
ошибки 2 ее
параметрическая I 99
частотная 1 99
усилителя 1 lill
частотная 1 45
Перенос сумматора 1 68
— узла 1 68
Перерегулирование 1 179^ 186,
193, 217. 260
Перестановка узлов и
сумматоров 1 69
Плотность вероятности 2 146
двумерная 2 ИЗ
п-мерная 2 149
одномерная 2 147
Поверхность переключения 2 3©7
Подграф 1 72.
Подпространство
восстанавливаемости 2 3.17
— наблюдаемости 2 317
— неуправляемости 2 310
— управляемости 2 309
Показатель качества 1 179
— колебательности 1 Ш7, 2i2i9,
230
Полоса пропускания 1 188; 2 ЬОЗ
Последовательность допустимая 2
297
— минимизирующая 2 297
Постоянная времени 1 32^ 44
Правило множителей Лагранжа 2
259, Ш„ -266
— модулей и аргументов 1 53
— построения асимптотической
ЛАЧХ 1 81
ЛЧХ I 79
Предельный цикл 2 2l2
Представление образа 2 47S
Преобразование дифференциаль-
иых уравнений к нормальной
системе I 192
— Лапласа 1 37
дискретное 2 85
Приведенная линейная
(непрерывная) часть 2 83!
Принцип аргумента 1 107
— двойственности (дуальности) 2
320
управляемости и
наблюдаемости 2 3'19., 320'
— инвариантности 1 19; 2 429
— компенсации \ 18
— максимума (Понтрягина) 2
270,, 271
— обратной связи 1 20
— оптимальности 2 285, 287, 288
Кротова 2 аде, 2^8
обратный 2 289
прямой 2 288
— разделимости (разделения) 2
333,, 384, 3>94
— разомкнутого управления I 17
— симплексный слежения вдоль
границы 1 Збв
— стохастической
эквивалентности 2 383. 384, Э99
— суперпозиции 1 44
— управления 1 1'6
Программа 2 246
Программирование динамическое
2 285
Программное движение 2 246
Программатор 2 245
Пространство коэффициентов 1
165
Процесс переходный 1 lf26, 185,
216
— случайный 2 114
— стохастический 2 144
Прямая особая 1 161, 162
Псевдочастота 2 108
Путь I 72
— простой 1 73
Распознавание образов 2 475
Расходимость фильтров 2 4О0
Реализация случайного процесса 2
144
Ребро 1 72
Регулирование 1 ^21
— астатическое I 24
— по отклонению I 20
— прямое 1 21
— статическое I 23
Регулятор 2 246
— автоматический I 21
— И I Э2
— оптимальный 2 246
стохастический 2 384
— П I 32
— ПИ I 32
— ПИД 1 32
— статический 1 23
Робот 2 472
Самообучение 2 468
Свойство линейности ! 38
Связь обратная I- '23t9. 242
Сенсор 2 474, 475
Сепаратрисса 2 17
Сечение случайного процесса 2
145
Симплексный принцип слежения
вдоль границы 1 850
Синтез машинный I 286
— по корневому годографу 1 264
— по ЛЧХ I -268
— при заданной структуре
системы 2 195
— при произвольной структуре
системы 2 108
Система автоматизированная 1
14
— автоматическая 1 14, 114
одномерная I 77
— автоматического
регулирования (САР) I т
— адаптивная I 30, 2 404
——с переменной структурой 2
448
— двойственная 2 319
— замкнутая I 148
— импульсная 2 7*3
нейтральная 2 94
неустойчивая 2 93
устойчивая 2 93i
— квазистацнонарная 1 103
— комбинированного
регулирования 1 254
— комбинированная следящая 1
258
— линейная 1 36'
нестационарная 1 94, 175
с переменными параметрами
I 94
стационарная 1 37
— многоконтурная 1 70
— многомерная 1 81
стационарная 1 S2
линейная 1 82
— многосвязного управления t 81
— нелинейная 2 4
— непрямого регулирования 1 21
— нестационарная 1 ^7, 04
— обнаруживаемая 2 319
— обучающаяся 2 4iOi5, 406
— оптимальная 2 2'4i6
по переходному режиму 2
246
по режиму управления 2 2i46
— полиостью наблюдаемая 2 3)14
■ ненаблюдаемая (невосста-
иавливаемая) 2 3;Ш
— порождающая 2 36
—. разомкнутая 1 14^
— с адаптацией в особых
фазовых состояниях 2 405, 445
— с амплитудно-импульсной
модуляцией 2 83, 96
— с непрерывной передачей
данных 2 1112:
— с переменной структурой 2 23
— с переменными параметрами 1
37
— с поиском экстремума
показателя качества 1 26
— с частотио-импульсной
модуляцией 2 1(28, 1133, 1G4
— с широтно-импульсной
модуляцией 2 М8, 121
— самонастраивающаяся 1 30; 2
404, 406, 40J6
беспонсковая 2 407, 440
градиентная 2 443
измерения скорости
движения 2 4*40
поисковая 2 40t7, 425
с моделью 2 44(2
с поиском по методу
градиента 2 4(2iS{
— самоорганизующаяся 1 30
тт- следящая I 25
— сопряженная ^ '270
— сравнения 2 66
— стабилизации 1 2l2
— стационарная I 37
— технически устойчивая 1 177
управления 1 14
— уравнений в нормальной
форме Кошн ] 88
— цифровая 2 105. 107. Ш9, 114
Сканирование 2 406
След матрицы I 2»93; 2 353
Случайная функция 2 144
Случайный поиск глобальный 2
423
—— локальный по наилучшей
пробе 2 419
по статистическому
градиенту 2 420
с возвратом 2 417
с пересчетом 2 418
Случайный процесс 2 144
дискретный (решетчатый) 2
iM8
марковский 2 150
— — нормальный 2 156
стационарный в узком
смысле 2 154
в широком смысле 2 155
центрированный 2 152
эргодический 2 157
Соединение звеньев параллельное
1 66
последовательное 1 65
Спектр матрицы 1 293
Спектральная плотность 2 166,
17i3. 175
взаимная 2 168
ошибки 2 183
Среднее значение по времени 2
156, 157
по множеству 2 156
— квадратическое значение 2 153
отклонение 2 15в
Средняя каадратическая ошибка
2 184
Стабилизация 1 22,, 236
Стабнлнэируемость 2 310, 388
Стандартная форма записи
линейных дифференциальных
уравнений 1 43
Статизм 1 23
Степень колебательности 2 101
— устойчивости 2 99
Стохастический процесс 2 144
Структурная схема 1 64
амплитудно-импульсного
модулятора 2 76
системы управления с
импульсной модуляцией 2 83
цифровой системы 2 106
частотно-импульсного
модулятора 2 77, 70
широтно-импульсного
модулятора 2 81. 82
Теорема Болтянского 2 295
— запаздывания 1 30
— о свертке I 39
— об п интервалах 2 27S
— разложения 1 39
Теоремы о предельных значениях
1 39
Точка допустимая 2 265
— особая типа седла 2 17
узла 2 19
фокуса 2 18
— стационарная 2 266
— типа центр 2 13
— угловая 2 260
Траектория допустимая 2 255, 268
— оптимальная 2 247
Угол гурвицев 2 65
Управление 1 89; 2 246
— допустимое 2 255-, 26^
— оптимальное I 2i8; 2 247
— по возмущенню 1 18, 107
— программное 1 24; 2 246
— с обратной связью 2 246
Управляемость 2 304. Зв8
— линейных стационарных
объектов 2 305
~ относительно точки 2 312. 313
— при наличии ограничения иа
управление 2 3ill2
Уравнение Беллмана 2 286, 291,
333, 353v 394
обратное 2 286, 2в7, 291
прямое 2 286
— Вннера — Хопфа 2 206
— генератора 1 05, 1<0б, 107
—- двигателя 1 108, 109
— делителя напряжения 1 110
— динамики 1 34
— дисперсионное 2 360, 368, 370
— наблюдения 2 314
— периодов 2 33
— Риккати 2 334, 335
алгебраическое 2 336. 343
матричное 2 334, 336
— сопряженное 2 270
— статики 1 36
— усилителя 1 ПО
— формирователя 2 371
— характеристическое 1 124, 293;
2 93
— Эйлера 2 255, 256
— Эйлера — Лагранжа 2 257,
25в, 269
Условие Вейерштрасса —
Эрдмана 2 260
~ краевое 2 246
— нормальности 2 276
— общности положения 2 276
— оптимальности достаточное 2
353
— стационарности 2 259
— трансверсальности 2 263, 264,
265. 266
— устойчивости 1 123, 128
необходимое и достаточное
1 128, 129. 134, 135
— физической осуществимости I
96
реализуемости 1 96
Устойчивость абсолютная 2 46,
50, 61
— асимптотическая 1 124, 126;
2 46
— в большом 1 115; 2 45
— в малом 2 43, 44, 46
— в целом 1 116; 2 45
— минимальная 2 54
— нестационарных систем 1 175.
312
— по Ляпунову 1 117, 121
— систем с запаздыванием 1 167,
168
с иррациональными
звеньями 1 167, 175
Устройство корректирующее 1 237
— — параллельно-встречное 1 239,
24-2
— — последовательное 1 237, 238,
276
Фазовая плоскость 2 10
многолистная 2 30
— траектория 2 10
Фазовый портрет 2 10
Фиксатор нулевого порядка 2 77
Фильтр Винера 2 205i,. 206
— Калмана 2 394
— Калмана — Бьюси 2 209, 359,
361, 3f94-
.итерационный 2 381
расширенный 2 3S\
— регуляризоваииый 2 Ш1
— формирующий 2 3i71
Формирователь 2 371
— импульсов 2 76
Формула Коши \ 90^ 105
— Мейсоиа \ 74
— Парсеваля 1 2Ш
— Рэлея 1 -20^
ФП-матрица 1 Э18
Функция Белламана 2 2i85, 2i90,
3t53, 3i94
— весовая 1 49, 95
— Гамильтона 2 269
" допустимая 2 2i55
— знакоопределенная 2 4в
— знакопостоянная 2 48
— импульсная переходная 1 49
— Кротова 2 2т, 300, Э01
— Лагранжа 2 258, 269
— переключения 2 3i27
— переходная 1 49
— Понтрягина 2 269
— последования 2 212
— распределения 2 146
• двумерная 2 148
— — п-мерная 2 149
< одномерная 2 147
— решетчатая 2 85
— случайная 2 144
— чувствительности 1 233, 234
Характеристика двухпозициоино-
го реле с гистерезисом 2 8
идеального выпрямителя 2 8
поляризованного реле 2 8
— импульсная переходная 1 49
~ нейтрального
электромагнитного реле с гистерезисом 2 9
— переходная 1 49
— разгонная 1 49
— с насыщением 2 8
— статическая 1 16, Зб
— трехпозициониого
поляризованного реле с 'зоной
нечувствительности 2 8
реле с зоной
нечувствительности и гистерезисом 2 8
Цепь обратной связи \ 20
— прямая 1 69
Цикл предельный 2 22
Частота 1 45
— пропускания 1 187
— резонансная 1 187
— сопр^ягающая 1 57, 58
— среза 1 187, 188
Частотная функция амплитудно-
фазовая 1 45
амплитудная 1 46
вещественная X 45
—'— логарифмическая
амплитудная 1 46
фазовая \ 46
мнимая 1 45
фазовая 1 45
Частотная характеристика
амплитудная 1 4<5
—'—■ амплитудно-фазовая
(АФЧХ) I 45, 146, 149, 151
вещественная 1 45, 215, 224,
226, 2Ш
логарифмическая
амплитудная (ЛАЧХ) 1 46
• желаемая 1 271, 275,
277, 281
фазовая (ЛФЧХ) \ 46
мнимая 1 45, 228
— — модифицированная 2 11'2
фазовая 1 46
Четырехполюсники переменного
тока I 249, 250
— постоянного тока активные 1
247
— — — пассивные I 245, 276
Шум белый 2 149, 164
— наблюдений 2 3i&0, 395
— объекта 2 360, 396
— цветной 2 371
Экстремаль 2 266
Элементы преобразовательные 1
244