/
































































































































































































































































































































Автор: Воронов А.А.
Теги: регулирование и управление машинами, процессами физика теория автоматического управления
Год: 1970




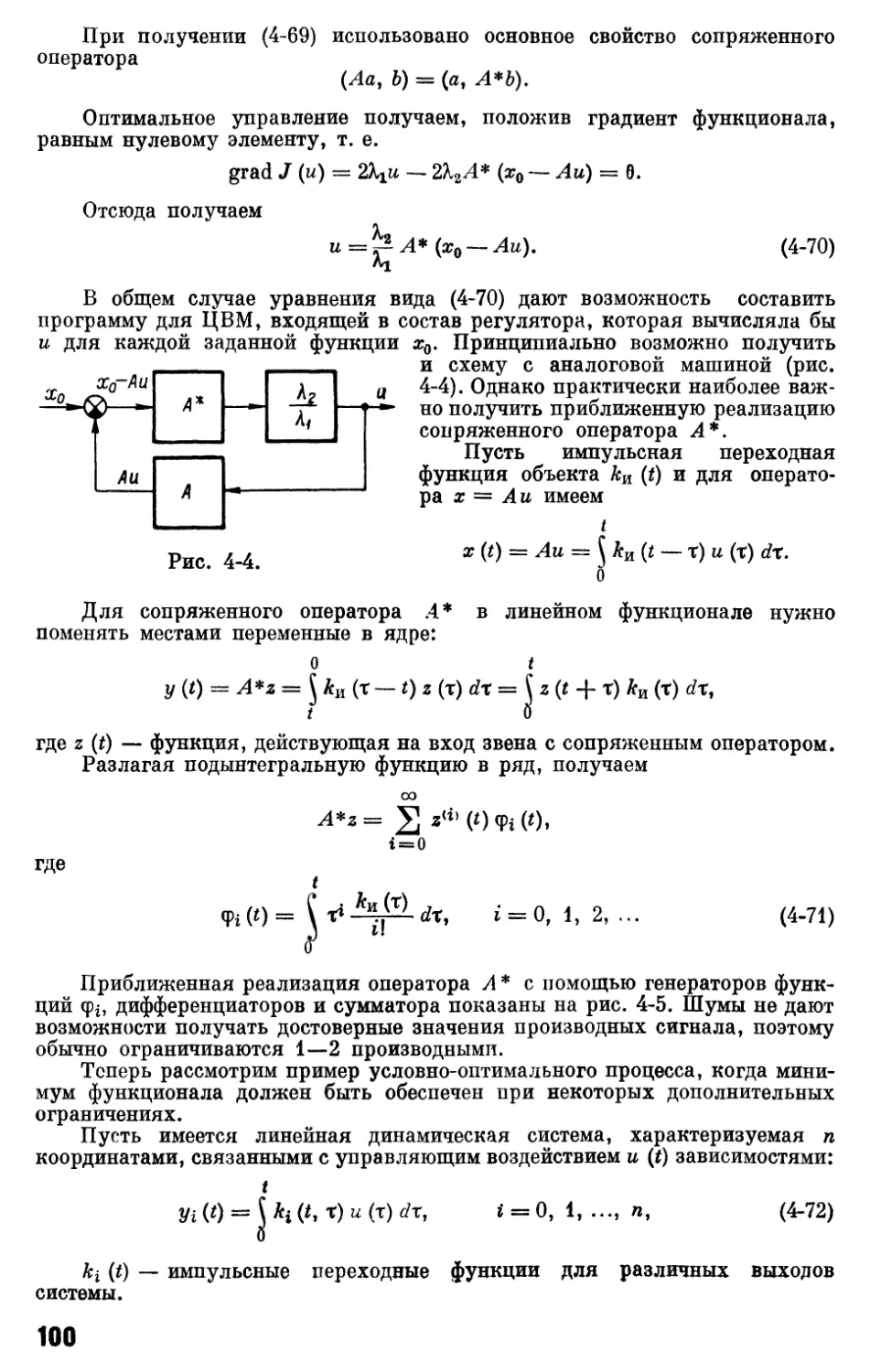
Текст
A. 1. ВОРОНОВ
ОСНОВЫ ТЕОРИИ
АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ
ЧАСТЬ III
ОПТИМАЛЬНЫЕ,
МНОГОСВЯЗНЫЕ
И АДАПТИВНЫЕ
СИСТЕМЫ
«Энергия»
Ленинградское отделение
1970
УДК 62-50
6П2.15
В 75
В части третьей изложены основы теории
оптимального управления, теории систем экстре-
мального регулирования, основные вопросы
теории многосвязного регулирования и некото-
рые разделы теории адаптивных систем. Рас-
смотрены самонастраивающиеся системы, ис-
пользующие методы идентификации объектов,
самонастраивающиеся системы с моделью и не-
которые алгоритмы для автоматических систем,
обучаемых распознаванию образов.
Книга предназначена для преподавателей и
аспирантов специальностей «автоматика и те-
лемеханика» и мо>цет быть также использована
студентами старших курсов тех специализаций,
в учебном плане которых содержатся соответ-
ствующие разделы, а также инженерами и на-
учными работниками при самостоятельном изу-
чении вопросов теории.
ВОРОНОВ АВЕНИР АРКАДЬЕВИЧ
ОСНОВЫ ТЕОРИИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Суперобложка и переплет Г. А. Гудкова
Научный редактор Ю. С. Попков
Редактор М. Н. Суровцева
Технический редактор О. С. Житникова
Корректор В. А. Кипрушев
Сдано в производство 4/XII 1969 г. Подписано
к печати 17/V 1970 г. М-15199. Печ. л. 20,5. Уч-
изд. л. 21. Бум. л. 10,25. Бумага типографская
№ 1. OOxOOVie. Тираж 20 000 экз. Цена 3 р. 01 к.
Заказ № 874.
Ленинградское отделение издательства
«Энергия», Марсово поле, 1.
Ордена Трудового Красного Знамени Ленин-
градская типография Ke 1 «Печатный Двор»
им. А. М. Горького Главполиграфпрома Коми-
тета по печати при Совете Министров СССР, .
г. Ленинград, Гатчинская ул., 26. 202-70
ВВЕДЕНИЕ
Третья часть книги «Основы теории автоматического управ-
ления» посвящена в основном новым разделам теории управ-
ления техническими системами, возникшими в 50—60-х годах.
Для предшествующего периода теории автоматического управ-
ления были характерны сравнительно простые цели процессов
управления (поддержание или изменение по заданному закону
некоторых регулируемых величин); простейший вид переработки
информации (выработка сигналов, линейно зависящих от откло-
нений, их производных и интегралов), простейший жесткий ал-
горитм управления, реализующий в основном принцип отрица-
тельной обратной связи. При этом специалист по автоматике,
как правило, не ставил целью сформулировать при проектиро-
вании задание для системы регулирования: он предпочитал по-
лучать это задание от технолога как одно из технических условий.
Прогноз последствий принимаемых решений также не входил
в функции автоматов. В лучшем случае простейшие прогнозы
частных случаев поведения автоматов делались в виде построе-
ния кривых переходного процесса при проектировании и расчете
системы. Для реализации таких условий можно обходиться про-
стейшими типами автоматических устройств с неизменной струк-
турой, которые состоят из элементарных датчиков для измере-
ния отклонений регулируемых величин, самых элементарных
вычислительных устройств типа усилителей, несложных преоб-
разователей и корректирующих цепей и исполнительных механиз-
мов, обычно стандартных. Но в 50-х годах начинается новый
этап развития промышленности, сопровождаемый развитием со-
временной мощной быстродействующей электронной цифровой
вычислительной техники.
Задачи этого периода находят соответственное отражение и в
развитии науки об управлении. Новый период характеризуется
ростом потребности в высококачественном многосвязном регули-
ровании, а также усложнением задач управления, повышением
требований к функционированию системы. Возникает проблема
выявления предельных возможностей систем и построения систем,
оптимальных по какому-либо технико-экономическому показа-
телю.
Задачи об улучшении различных статических и динамических
показателей систем управления ставились на протяжении всей
истории развития теории управления, но проблема создания оп-
тимальных, т. е. наилучших в каком-либо смысле, систем доста-
точно строго и четко сформулирована сравнительно не так давно,
когда было точно определено понятие критерия оптимальности,
по которому судят о качестве работы системы. Критерий опти-
мальности должен удовлетворять ряду условий. Это должен быть
совершенно ясный технический или технико-экономический кри-
терий, математическое выражение которого было бы функцией
или функционалом координат процесса и управляющего воздей-
ствия, достижение максимального (или минимального) значения
которого и указывало бы на оптимальное состояние или поведе-
ние системы. Критерий оптимальности должен выражать либо
технико-экономическую выгоду (к. п. д., производительность, при-
быль и т. п.), тогда оптимальным управлением будет такое управ-
ление, которое обеспечивает максимум критерия оптимальности.
Он может выражать также потери (расход энергии, средств и т. п.).
В этом случае, оптимальное управление должно обеспечить его
минимум. Выбор критерия оптимальности — это инженерная
или инженерно-экономическая задача, которая должна решаться
на основе глубокого изучения управляемого процесса.
Трудности установления критерия оптимальности связаны
с тем, что требования к системе очень часто оказываются проти-
воречивыми. Почти всегда заказчик системы хочет, чтобы она была
максимально простой, надежной, дешевой и т. п. Но при практи-
ческой реализации повышение надежности связано с усложне-
нием и удорожанием; упрощение с ухудшением некоторых
качественных показателей и т. д. Одновременно сделать систему
оптимальной по всем противоречивым критериям невозможно.
Возникает проблема формулировки некоторого единого кри-
терия, который давал бы компромиссное решение задачи.
Другая трудность связана с тем, что сложность решения за-
дачи зависит от сложности формулировки критерия оптималь-
ности.
Для решения задачи оптимального управления необходимо,
прежде всего, иметь инфрмацию о свойствах и состоянии объекта.
Эта информация дается в виде математического описания объекта
и ряда данных о результатах измерения текущих значений его
координат. Информация о свойствах объекта может быть в неко-
торых случаях полностью задана заранее, априори. В других
случаях априори может быть задана лишь часть информации,
другую часть придется получать в процессе эксплуатации либо
на основе только пассивного наблюдения за ходом процесса, либо
путем организации специальных пробных воздействий на объект.
Поэтому в зависимости от способа получения информации и спо-
соба действия системы оптимального управления можно раз-
делить па три класса: 1) системы с полной априорной информа-
цией об объекте, 2) системы с неполной информацией и незави-
симым или пассивным ее накоплением и 3) системы с неполной
информацией и активным ее накоплением в процессе работы.
В системах оптимального управления первого класса опти-
мальное управление вырабатывается на основе решения мате-
матической задачи об
отыскании экстремума
функции или функцио-
нала. Для этого в со-
став системы управле-
ния вводится в явном
или неявном виде ма-
тематическая модель
системы, которую мож-
но назвать детермини-
рованной моделью, по-
скольку априорная ин-
формация , используе-
мая для построения
модели, считается пол-
ной. В систему входит
также вычислительное
устройство для решения
экстремальной задачи.
Модель и вычислитель-
ное устройство могут
быть выполнены в виде
специального техниче-
ского устройства, но
они могут представлять
км
Рис. В-1.
собою и программу для решения задачи
в процессе проектирования на вычислительной машине, не вхо-
дящей в состав системы непосредственно.
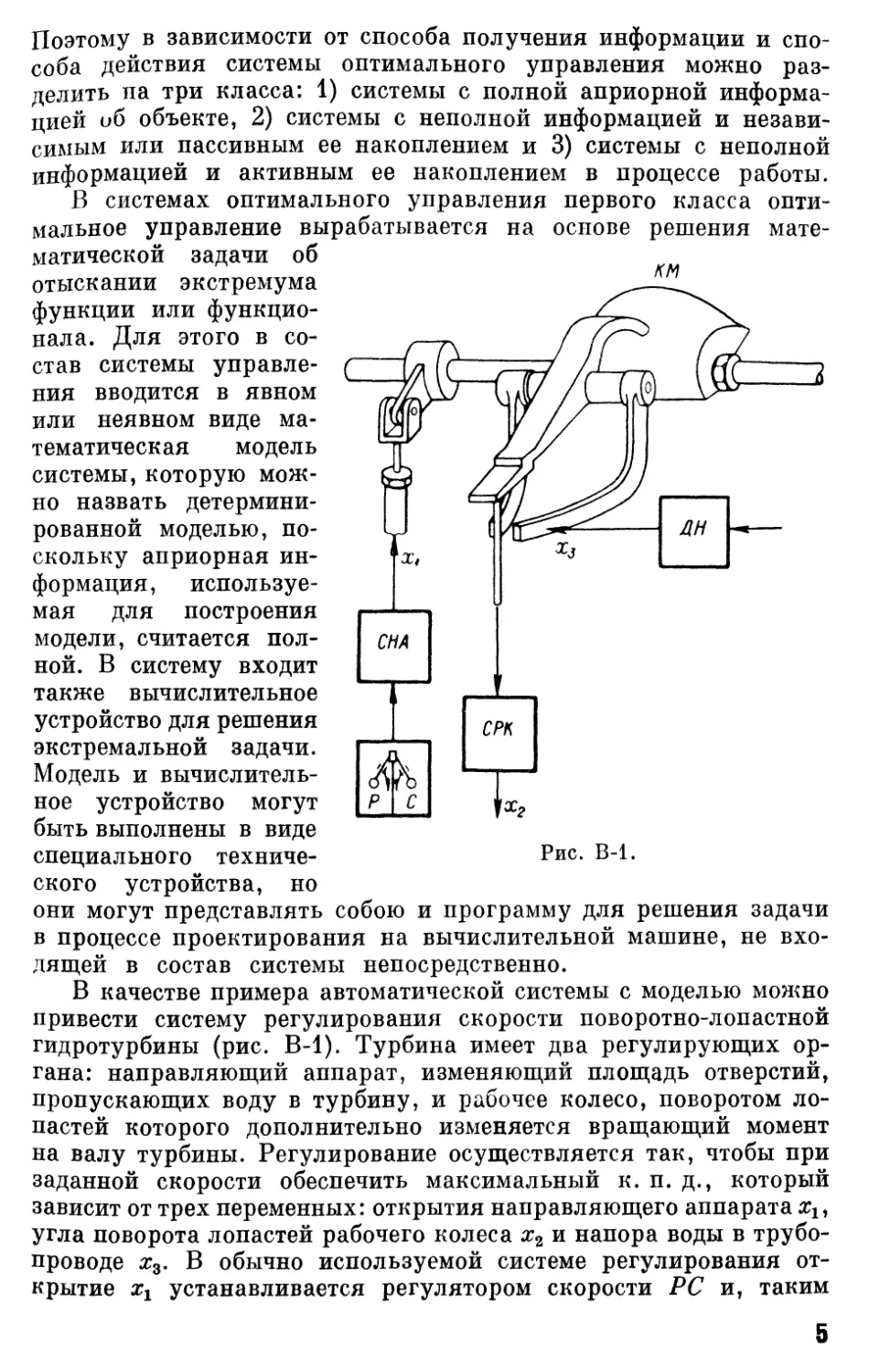
В качестве примера автоматической системы с моделью можно
привести систему регулирования скорости поворотно-лопастной
гидротурбины (рис. В-1). Турбина имеет два регулирующих ор-
гана: направляющий аппарат, изменяющий площадь отверстий,
пропускающих воду в турбину, и рабочее колесо, поворотом ло-
пастей которого дополнительно изменяется вращающий момент
на валу турбины. Регулирование осуществляется так, чтобы при
заданной скорости обеспечить максимальный к. п. д., который
зависит от трех переменных: открытия направляющего аппарата
угла поворота лопастей рабочего колеса и напора воды в трубо-
проводе гг3. В обычно используемой системе регулирования от-
крытие Xi устанавливается регулятором скорости PC и, таким
образом, может рассматриваться как заданная величина. Напор х3,
измеряемый датчиком напора ДЯ, также задан. Таким образом,
П = х2, х3) = <р(х2).
В точке экстремума справедливо уравнение
Эц = Q.
дх2 дх2
Это уравнение содержит три переменных х2 и х3. Решив
его относительно х2, будем иметь
^? = 'Ф(х1, я3),
где звездочка указывает на то, что это оптимальное значение,
при котором т) = Лмакс- В соответствии с определенными из
расчета или опыта на модели турбины значениями этой функции
строится кулачковый механизм КМ, устанавливающий золотник
сервомотора рабочего колеса СРК в положение, при котором
= #2- Кулачок устанавливается по двум осям с помощью
связей от сервомотора направляющего аппарата СНА (коорди-
ната х^ и датчика напора (координата х3).
Нетрудно видеть, что такого рода система оптимального управ-
ления состоит из обычных регуляторов с обратной связью со
сложным задающим устройством (кулачковым механизмом).
Последний представляет собою своеобразное вычислительное
устройство, воспроизводящее функцию для определения опти-
мального воздействия на рабочее колесо. Никакой коррекции
истинного положения экстремума в данной схеме нет. Такого
рода системы настолько близки к обычным системам программного
регулирования, что их даже не принято относить к оптимальным
системам.
Системы оптимального управления с детерминированной мо-
делью, использующие в качестве критерия оптимальности функ-
ционал, рассматриваются в первых четырех главах книги. Пер-
вые работы в этом направлении ставили целью найти способы по-
строения систем управления, оптимальных по быстродействию,
переводящих систему при заданных ограничениях из одного со-
стояния в другое в кратчайшее время. Пионерами этого направ-
ления были советсткие ученые [179, 100].
В 1949—1956 гг. выходят ряд теоретических работ, заложив-
ших фундамент и создавших основы общей теории детерминиро-
ванных систем оптимального управления. В этих работах, правда,
еще не привлекается к исследованию проблемы вариационное ис-
числение, что связано с несоответствием класса фукций, рассма-
тривающихся в работах систем релейного действия, тому классу,
который рассматривается в классическом вариационном исчис-
лении.
в
При изложении материала в данной книге мы несколько от-
ступили от хронологической последовательности и в гл. 1 рас-
смотрели задачи, решаемые классическими методами вариацион-
ного исчисления.
Глава 2 посвящена методам исследования систем при ограни-
чениях, накладываемых на величину управляющего воздействия
и на координаты системы. Для таких задач акад. Л. С. Понтря-
гиным и его учениками был разработан метод, получивший на-
звание «принцип максимума». В качестве иллюстраций приме-
нения этого метода использованы широко известные примеры,
с разработки которых фактически началась теория оптимального
управления. В гл. 3 рассмотрен также метод динамического про-
граммирования, разработанный в США Р. Беллманом примерно
в те же годы, что и принцип максимума. С помощью принципа
максимума и динамического программирования класс задач оп-
тимизации был существенно расширен. Методом динамического
Программирования, в частности, был решен ряд задач оптималь-
ного оперативного управления предприятиями, а также эконо-
мико-математических задач. Таким образом, в теории оптималь-
ного управления был переброшен один из первых мостиков,
связавших теорию автоматического управления техническими
объектами с современной общей теорией управления системами
более общего класса, ранее относившихся только к сфере со-
циально-экономических наук.
В последние годы внимание специалистов было привлечено
к использованию методов функционального анализа для иссле-
дования ряда задач управления, в том числе оптимального управ-
ления. Представление сложных ситуаций и процессов в функцио-
нальном абстрактном пространстве открывает перспективы для
широких обобщений, установления единого подхода к многооб-
разным явлениям. В теории оптимального управления эти методы
представляются весьма обещающими для полного изучения оп-
тимальных систем с различными ограничениями. Понятия абстракт-
ного пространства используются и в других разделах теории управ-
ления. В данной книге они частично используются при рассмо-
трении проблем оптимального управления и обучения автоматов
распознаванию образов.
Основная цель гл. 4 все же состоит не столько в достаточно
широком рассмотрении методами функционального анализа за-
дач различных типов, сколько в доведении этого аппарата до
сведения инженеров. Значительная часть главы — конспектив-
ное, справочное изложение некоторых основных положений функ-
ционального анализа, даваемое, естественно, без доказательств.
По-видимому, через некоторый промежуток времени этот ма-
териал, как известный инженерам, будет исключаться из курсов
теории управления подобно тому, как в настоящее время в них
уже не рассматривается аппарат преобразования Лапласа,
включавшийся в первые книги по современной теории регулиро-
вания.
В оптимальных системах с неполной информацией и пассивным
наблюдением, образующих второй класс по принятой нами клас-
сификации, для выработки решения об оптимальном управлении
используются статистические методы. Один из вариантов этих
систем представляет собой некоторый «фильтр», на который по-
ступают случайные полезный сигнал и шум. Сначала отыски-
ваются структура и параметры «оптимального фильтра», выходная
величина которого в некотором статистическом смысле будет наи-
более близка к желаемой, т. е. будет в наименьшей степени
искажаться помехами. Оценка близости производится по неко-
торому статистическому критерию оптимальности (например, по
ожидаемой среднеквадратичной интегральной ошибке). Когда
оптимальный фильтр найден, он разделяется на объект и управ-
ляющее устройство, и этим решение задачи теоретического син-
теза завершается. Часть примеров систем этого класса (класси-
ческие задачи Колмогорова, Винера и некоторые другие) рассма-
тривались нами в ч. 2 монографии. Здесь, в гл. 5, мы рассмотрим
некоторые дополнительные примеры, использующие методы тео-
рии статистических решений. В этой же главе рассматриваются
также системы третьего класса — с неполной информацией и ее
активным накоплением, в которых управляющее устройство
оказывает на объект специально организованные пробные по-
исковые воздействия. Анализируя реакцию объекта на эти воз-
действия, автомат восполняет информацию об объекте и опре-
деляет вид оптимального управляющего воздействия. Воздей-
ствие автомата на объект имеет, таким образом, двойственный
или, по терминологии А. А. Фельдбаума, дуальный характер:
оно является с одной стороны изучающим, с другой — направ-
ляющим.
Если критерий оптимальности выражается функцией текущих
значений координат системы, то задача автомата изменяется и
сводится к удержанию системы вблизи экстремума в каждый
данный момент времени. Наиболее распространенный путь оп-
ределения отклонения состояния системы в данный момент вре-
мени от экстремума — это также путь использования дуального
управления в виде поиска. Одним из видов систем дуального
управления, отыскивающих экстремум функции методом поиска,
являются группы систем экстремального регулирования, кото-
рые рассмотрены в гл. 6 и 7. Глава 6 содержит описание ряда
принципов построения систем экстремального регулирования,
седьмая — некоторые вопросы динамики действия этих систем.
Восьмая глава несколько выпадает из общего плана. Она
рассматривает некоторые проблемы, относящиеся к теории мно-
госвязного регулирования. Исторически один из ее разделов
(теория автономного регулирования) появился еще в «класси-
ческий» период развития теории автоматического регулирования.
Теория многосвязного регулирования рассмотрена неполно, из-
ложены лишь три своеобразных подхода к синтезу многосвязных
систем: 1) с позиций автономности, при котором стремятся сде-
лать независимыми друг от друга контуры регулирования от-
дельных величин; 2) с позиций инвариантности, при котором пре-
следуют цель подобрать связи в системе так, чтобы изменение
определенных внешних воздействий не сказывалось на изменении
некоторых (или всех) координат, и 3) с позиций уменьшения оши-
бок системы по всем координатам путем использования структур,
допускающих неограниченные коэффициенты усиления. В этой же
главе излагаются понятия управляемости и наблюдаемости.
В последние годы переход к управлению объектами с изменяю-
щимися случайным образом в широких пределах характеристи-
ками и параметрами вызвал к жизни новый класс систем управ-
ления — адаптивных, т. е. автоматически приспосабливающихся
к изменению внешних условий систем.
Последняя гл. 9 содержит изложение теории некоторых типов
адаптивных С АУ. Рассмотрены самонастраивающиеся системы
с моделью, системы, осуществляющие индентификацию объекта
(т. е. определение его характеристики) по данным опыта, и неко-
торые статистические методы индентификации. Далее рассматри-
ваются некоторые принципы обучения автоматических устройств,
позволяющие решать проблемы классификации сложных ситуаций.
Рассмотренные в главе пятой принципы дуального управления,
основывающиеся на методах статистических решений, представляют
большой интерес для осуществления оптимального управления сло-
жными системами и в условиях неопределенности, причиной кото-
рой могут быть случайные помехи или же недостаток информа-
ции о характеристиках объекта и среды. Но, как можно было ви-
деть из проводимых в главе примеров, даже для таких простых
систем, как линейные системы первого порядка, анализ и синтез
связаны с весьма громоздкими вычислениями. Поэтому в настоя-
щее время, когда ещё не разработаны достаточно удобные для прак-
тического использования методы, алгоритмы и вычислительные
программы для дуального управления, инженерные приложения
метода существенно ограничены. Тем не менее изложение теории
дуального управления в книге приводится, так как его основные
идеи представляются весьма перспективными.
В поисках более удобных для практической реализации мето-
дов оптимизации управления в условиях неопределенности мысль
исследователей обратилась к вероятностным итеративным мето-
дам, в частности — методам стохастической аппроксимации. Эти
методы были известны довольно давно,но до последних лет они прак-
тически не находили применения для решения технических за-
дач. В последнем параграфе главы девятой приводится краткое
изложение разработанного в [Л. 194] интересного общего подхода
к решению задач адаптации, обучения и самообучения, основанного
на методе стохастической аппроксимации. При этом подходе вы-
бор шага, приближающего систему к оптимальному значению сто-
хастического критерия оптимальности, осуществляется на основе
анализа по различным алгоритмам измеренных значений реализа-
ций приращений критерия оптимальности.
Рассмотренный материал подготавливает читателя в извест-
ной мере к изучению новейших разделов теории управления,
относящихся к исследованию «больших систем», в функциониро-
вании которых участвуют люди, машины, материальные и денеж-
ные средства. Это исключительно важная и большая проблема,
которой надлежит посвятить отдельную книгу.
Автор выражает глубокую благодарность чл.-корр. АН СССР
проф. А. А. Красовскому, внимательно прочитавшему рукопись
и в рецензии сделавшему много ценных замечаний, к. т. н.
Ю. С. Попкову, приложившему много труда для выполнения
трудной работы по научному редактированию и Э. С. Мезено-
вой, оказавшей большую помощь в быстром и качественном офор-
млении рукописи.
Пожелания и замечания просим направлять по адресу: г. Ле-
нинград, Д-41, Марсово поле, 1, Ленинградское отделение изда-
тельства «Энергия».
ГЛАВА ПЕРВАЯ
ВАРИАЦИОННЫЕ МЕТОДЫ РЕШЕНИЯ ЗАДАЧ
ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
1-1. Постановка вариационной задачи об оптимальном управлении
Для того чтобы поставить и решить задачу об оптимальном
управлении, нужно выполнить ряд условий. Прежде всего нужно
иметь достаточно точное математическое описание объекта, ко-
торым мы управляем; цели, которая поставлен^ перед управле-
нием; среды, в которой работает объект и которая влияет на ре-
зультат управления. Далее должна быть дана математическая
формулировка критерия оптимальности, имеющего в рабочей
области экстремум, достижение которого и указывает на опти-
мальное состояние или поведение системы.
Пусть критерий оптимальности выражается функционалом от
координат #!, , хп и управляющих воздействий (в дальней-
шем они для краткости называются просто управлениями) иг,
, ит, величина которого зависит от вида функций x(t) и u(t).
Задача состоит в выборе управления u(t) таким образом, чтобы
обеспечить экстремальное значение функционала за все время
процесса управления и, следовательно, движение системы по оп-
тимальной траектории, называемой экстремалью.
Решение этой задачи наиболее адекватным математическим
аппаратом осуществляется с помощью методов вариационного
исчисления. Вариационные задачи, рассматриваемые в данной
главе, детерминированные. Для их решения требуется полная
информация об объекте, среде, цели управления, ограничениях,
показателе оптимальности и состоянии системы. В терминах ва-
риационного исчисления должны быть заданы: 1) информация
об объекте и его связи со средой в виде дифференциальных, раз-
ностных или разностно-дифференциальных уравнений, связы-
вающих между собою координаты объекта, управления и воз-
мущения, на него действующие; 2) информация о среде в виде
задания управлений и возмущений, действующих на объект как
функций времени, и, если надо, координат системы; 3) информа-
ция о цели управления в виде граничных условий, например,
начальных значений координат, характеризующих состояние,
с которого начинается управление, и конечных значений, харак-
теризующих конечное состояние, в которое управление должно
привести систему; 4) информация о показателе оптимальности,
выраженная обычно функционалом потерь или выгоды, который
в процессе управления надлежит соответственно минимизировать
или максимизировать; 5) информация об ограничениях, выра-
женная в зависимости от природы ограничений уравнениями,
неравенствами и т. п. (например, изопериметрическая задача).
На основе всей этой информации строится детерминированная
модель системы.
Задача состоит или в анализе, т. е. нахождении оптимального
управления при заданных структуре системы, граничных усло-
виях, возмущающих воздействиях, ограничениях и показателе
оптимальности, или в синтезе управляющего устройства, т. е.
в нахождении его структуры и параметров при заданных прочих
данных.
Предполагается, что читатель знаком с основами вариацион-
ного исчисления, поэтому ниже приводятся в порядке напоми-
нания лишь краткие справочные сведения из вариационного
исчисления. При необходимости более детального и глубокого
изучения читателю рекомендуется ознакомиться с [97, 204].
В технике управления вначале делались попытки решения ча-
стных задач оптимизации, не прибегая к вариационному исчис-
лению, т. е. эвристическим путем. Эти попытки иногда приводили
к решениям, которые при последующей проверке оказывались
весьма близкими к оптимальным. К числу таких решений можно,
например, отнести введение в 1935 г. Д. И. Марьяновским и
Д. В. Свечарником квадратичной обратной связи для форсирования
переходных процессов в электроприводе нажимного устройства
блюминга. В конце 40-х годов при проектировании систем управ-
ления самолетами начала использоваться в качестве критерия
оптимальности квадратичная интегральная ошибка, однако при
этом подход к оптимизации был ограничен тем, что структуры
объекта и регулятора считались заданными и отыскивались лишь
параметры настройки регулятора, обеспечивающие при этих
ограничениях минимум среднеквадратичной ошибки. Задачи
такого рода не принято относить к теории оптимального управ-
ления, они были рассмотрены вч. I, в разделе качества [32, стр. 342]
Несколько иной была постановка задачи о получении мини-
мума среднеквадратической ошибки при воспроизведении в ра-
диолокационных системах управляющего воздействия при наличии
случайных помех. Эта статистическая задача об оптимальном
управлении была решена с помощью специального математиче-
ского аппарата, разработанного А. Н. Колмогоровым [67] и Н. Ви-
лером [269]. Ее результатом был синтез оптимального фильтра,
обеспечивающего воспроизведение сигнала на фоне шума с наи-
меньшей ошибкой. Теория оптимальной фильтрации вошла в
теорию оптимального управления как один из важных ее раз-
делов, но из чисто методических соображений в данной работе
она была также рассмотрена ранее, в ч. II [32, стр. 81—122].
К первым серьезным попыткам решить оптимальные задачи ав-
томатического управления на базе вариационного исчисления
относятся частные задачи управления ракетами. В период 1946—
1952 гг. был опубликован ряд работ по решению экстремальных
задач в теории движения объектов с переменной массой [69, 262].
К 50-м годам относится также ряд работ по постановке вариа-
ционных задач в технике управления электроприводами шахт-
ных подъемников и прокатных станов [65, 66, 156, 157]. В первых
из этих работ обнаружились трудности решения задач, связанные
с получением нереализуемых решений.
Проиллюстрируем постановку вариационной задачи управления на
простом примере.
Рассмотрим в качестве объекта управления двигатель постоянного тока,
уравнения которого имеют вид:
ii + = k2u — f; 1
i2 = xlt J
где xt — скорость вращения вала двигателя; х2 — угловое перемещение
вала; и — управление (напряжение, подводимое к якорю двигателя); / —
возмущение (нагрузка); кх, к2 — постоянные коэффициенты. Допустим, что
/ = const. (1-2)
Таким образом, мы сформулировали первые две группы заданий: урав-
нение объекта (1-1) и уравнение возмущений (1-2).
Требуется перевести бывший ранее неподвижным двигатель из состоя-
ния, определяемого углом поворота ротора х2 (0) = #21, в состояние х2 (Т) ~
= х22 (т. е. повернуть ротор на заданный угол Дх2 = х22 — х21) за наимень-
шее время Т.
Таким образом, третья группа заданий, описывающая цель управления,
формулируется в виде граничных условий:
*1 (0) = 0, х2 (0) = *21 при t = 0; |
(Г) — 0, х2 (Т) = х22 при t = Т. J
Т xgi xSi
Т — f dt — dx2 = — = min. (1-4)
J j 0^2 J xi
о x21 x2t
Часто удобнее вместо граничных условий х2 (0) = я21 и х2 (Т) = х22 и
функционала (1-4) использовать функционал
т
Дя2 =Д яч dt, (1-5)
0
величина Ля2 которого, равная полному перемещению вала, задана, и функ-
ционал (1-4) выразить в тривиальном виде:
т
Т = j dt = min. (1-6)
Задание приведенных выше четырех групп условий часто ока-
зывается недостаточным для решения задачи. Это выражается или
в том, что обнаруживается, что искомый экстремум не сущест-
вует, или в том, что наименьшее значение функционала дости-
гается при физически нереализуемых управлениях или координатах
(бесконечно больших по величине или же изменяющихся с бес-
конечно большими скоростями и т. п.). Поэтому решение задачи
ищется в классе допустимых функций (обычно непрерывных,
имеющих непрерывные производные), и, если решение в этом классе
функций не существует, на систему накладывают дополнитель-
ные ограничения, которые, с одной стороны, позволяют доста-
точно просто решить задачу, с другой стороны, имеют ясный фи-
зический смысл и техническое обоснование.
Так, часто используются ограничения, выражаемые интегра-
лами от квадратичных форм:
т
J ^(Yiaifrx^bu'jdt. (1-7)
о
Ограничение состоит в том, что задается максимально допу-
стимая величина J А.
Введение функционала (1-7) часто позволяет просто и изящно
свести задачу оптимального управления линейным объектом к
кусочно-линейной и даже просто к линейной задаче. Но прежде
чем поддаться соблазну использовать эту методику, необходимо
проанализировать, какой смысл имеет этот функционал для дан-
ной конкретной технической задачи.
В ряде случаев функционалы рассматриваемого типа имеют
более или менее ясный смысл и могут рассматриваться как пря-
мые или косвенные оценки качества управления. Так, в ч. I дан-
ной книги [32] мы имели дело с интегральной квадратичной ошиб-
кой dt, введенной взамен трудно вычислимой, но
о
несколько более ясной оценки | 8 | dt, которая косвенным
о
образом характеризовала время переходного процесса Т^, хотя
прямую связь между и Тр установить не удается. Довольно
сильная колебательность переходного процесса в системе, в ко-
торой выполнены условия минимизации J\, вынудила перейти
к другой косвенной так называемой «улучшенной» оценке
ОО ' ОО
\ (ж2 4 т2#2) dt и к обобщенным оценкам вида § т| [я^]2 dt. Влия-
б О
ние этих оценок на качество несомненно, но, так как все
это пока очень приблизительно и основывается на интуитивных
представлениях, системы, базирующиеся на их минимизации,
практик может считать оптимальными лишь условно.
Более ясный физический смысл функционал вида (1-7) имеет
тогда, когда он выражает величину энергии, затрачиваемой на
регулирование. Так, если за управляющее воздействие принят
т
ток якоря I двигателя, то i2Rdt выражает электрические потери
о
в двигателе, идущие в основном на нагрев обмотки. Ряд задач на
управление, минимизирующее этот функционал, рассмотрен в
[127, 156, 157]. При управлении от ограниченных по мощности
источников питания часто бывает важно минимизировать не по-
тери на нагрев, но полную затрату энергии на управление, опре-
т
деляемую в электрических установках интегралом вида $ ui dt.
о
Другой тип ограничений, рассматриваемых в вариационных
задачах, это голономные и неголономные связи. Для упрощения
исследования обычно «вырывают» объект из системы регулиро-
вания и ищут, каким должно быть воздействие на регулирующий
орган, не думая о том, что это воздействие вырабатывается управ-
ляющим устройством, обладающим инерцией. Если решение по-
лучается нереализуемым, то можно ввести управляющее устрой-
ство в рассматриваемую схему и искать уже воздействие на его
вход. Уравнение этого устройства даст дополнительное уравнение
связи — голономной, если оно не содержит производных, и не-
голономной, если оно их содержит. Обычно неголономные связи
выражаются дифференциальными уравнениями.
Кроме упомянутых ограничений, могут быть ограничения на
абсолютные величины координат, например \х{\^ Аи управ-
лений, например | щ В-. Такие ограничения переводят задачу
из открытой области в закрытую и для их решения классические
методы часто оказываются затруднительными или недостаточ-
ными. Классические вариационные задачи в закрытой области
и неклассические вариационные задачи будут рассмотрены в
следующих главах.
Напомним некоторые положения вариационного исчисления, которые
будут использованы в следующих примерах.
Пусть дан функционал J, зависящий от независимой переменной t (напри-
мер, эта зависимость может войти через возмущающее воздействие) и не-
скольких координат системы Х}, являющихся функциями независимой пере-
менной: t
J = xlt х[, ..., х<^\ ..., хп, х„, ..., <m)) dt. (1-8)
t.
Функция F — заданная функция всех своих аргументов, которая в не-
которой области В (я?!,..., хп) считается непрерывной вместе с ее производными.
Пусть также заданы значения функций xt Xj (^) и их производных до
т — 1 включительно на концах интервала
t = to, 0) = х™ (tj;
t = h, =
k — 0, 1, ... m — 1;
i = l,2, .. n.
(1-9)
Выделим класс допустимых функций, удовлетворяющих дополнитель-
ному ограничению: они должны иметь 2т непрерывных производных. Класс
допустимых в этом смысле функций называют классом С2т.
Задача вариационного исчисления состоит в том, чтобы найти такие
функции Xi (0 в классе допустимых функций, чтобы функционал (1-8) имел
при этом экстремальное значение.
Необходимые условия для решения поставленной задачи даются урав-
нениями Эйлера — Пуассона:
d d2 dm
\ - 7, 't, + да - -+<- *>" - о. «-'«>
xi
Каждое из уравнений (1-10) есть дифференциальное уравнение порядка
2т. Решение системы этих уравнений содержит 2тп произвольных постоян-
ных, так как всего таких уравнений п, и, следовательно, необходимо задать
2тп начальных условий вида (1-9). Решения уравнений Эйлера называются
экстремалями.
В практических задачах мы часто имеем дело с функциями F, завися-
щими только от координат
Эйлера принимают вид
и их первых производных. Тогда уравнения
^х.
dt dxi
(1-11)
Левая часть уравнений (1-10) и (1-11) представляет собой величину,
пропорциональную вариации bJ(xi), обусловленной вариацией
Поясним это следующим образом. Пусть функционал имеет вид
J = F (£, х, х) dt.
t9
Пусть х* (t) — функция, доставляющая экстремум функционалу. Заме-
ним ее в интервале [£0, М другой функцией
z(0 = z* (0 + 6 [х (0],
где 6 [х (0] — малая вариация функции ж* (0.
Полагаем, что б (х) функция, принадлежащая классу (т. е. имеющая
непрерывную первую производную в промежутке [г0, <l]» и обращающаяся
в нуль на концах промежутка:
6[^(/о)] = 6[^(«1)] = О.
Представим б [я (0] в виде
б[а?(0] = ат| (0,
где а — малая величина. Функционал J можно представить как некоторую
функцию а, стремящуюся к J* при а —* 0:
J (а) = $ F [г, я* (t) + ац (/), х* (Z) + ац (01
*0
Разлагаем J (а) в ряд по степеням а:
J (а) = [/ (а)]« -о + а J (ЦЦ + • • •
Если функцией х* (t) обеспечивается экстремум функционала, то первая
вариация этого функционала обращается в нуль:
87 (а)«-о = a = a jj | g Г) (0 + g пО)] dt = 0.
*0
Интегрируем по частям второе слагаемое:
QF * I dF\ti
d/о
dt = 0.
Первое слагаемое здесь равно нулю, так как ц (/0) = т] (/J = 0. Тогда
6J(a)= ( т)(0 1-^-4 Idt = °-
J 1 ' | дх dt \дх JJ
^0
Равенство должно быть справедливо при любой форме вариации, т. е. при
любой функции т] (t). Отсюда и вытекает уравнение Эйлера:
dF __ d_ / dF\ =
дх dt \дх J
Так же как при отыскании экстремума функции / (я), уравнения fx = О
было недостаточно для нахождения экстремума и требовалось еще исследо-
вание высших производных в точке, обращающей /х в нуль, так и в нашем
случае для нахождения экстремума функционала F необходимо, чтобы помимо
уравнений Эйлера выполнялся ряд дополнительных условий. Однако так
как нахождение необходимых и достаточных условий представляет собою
обычно весьма трудоемкую задачу, в практике ограничиваются исследова-
нием уравнений Эйлера и численной проверкой значений функционала в ок-
рестности найденной экстремали или же проверкой некоторых дополнитель-
ных условий, например, условий Лежандра, которые заключаются в сле-
дующем.
Чтобы на экстремали х* (t) имел место минимум функционала (1-8),
необходимо, чтобы вдоль экстремали выполнялось условие
F.. ^0.
XX
Аналогично, для того чтобы экстремаль давала функционалу максимум,
необходимо выполнение условия
F..
XX
(1-12)
Если кроме задания функционала (1-8) на систему накладываются до-
полнительные ограничения, то решение задачи несколько видоизменяется.
Рассмотрим основные виды ограничений, при которых вариационная задача
остается в рамках классических задач.
А. Изопериметрические ограничения, заключающиеся в том, что задается
ряд других функционалов:
Ji = $ Gi (t, х, х) dt — (1-13)
G
i == 1,2, ..., k,
которые должны иметь заданные постоянные значения Название «изопе-
риметрический» произошло от задач, в которых находилась максимальная
площадь, ограниченная кривой заданного периметра. При наличии изопери-
метрических ограничений уравнения Эйлера составляются для функции
k
H^F+^Gt, (1-14)
i = l
где Xi ~ постоянные произвольные множители Лагранжа.
Для определения произвольных постоянных и этих произвольных мно-
жителей к граничным условиям (1-9) добавляются условия (1-13).
Для изопериметрических задач весьма важное значение имеет принцип
взаимности. Если мы запишем функцию Н в виде
h
£T = V+ (1-15)
г=1
где — новый произвольный множитель, то экстремаль для Н не изменится.
Так как Fi и Gi входят в выражение Н симметрично, то, отыскивая экстре-
мум интеграла (1-8) при условии, что интегралы (1-13) сохраняют заданные
постоянные значения, мы получим ту же самую экстремаль, как и в резуль-
тате нахождения экстремума любого из интегралов (1-13) при условии, что
все остальные интегралы и интеграл (1-8) сохраняют постоянные значения.
Б. Ограничения типа голономных связей:
Gi(t, xlt ... , хп) = 0, i = 1, 2, ..., k. (1-16)
В этом случае функция Н имеет вид
k
H^F+^Ki(t)Gi. (1-17)
г = 1
Произвольные множители Xi в (1-17) являются в общем случае функ-
циями времени.
В. Ограничения типа неголономных связей, выражаемых дифференци-
альными уравнениями
Gi (t, х, х, х, ... > хп, хп, ...) = 0. (1-18)
Функция Н имеет также вид (1-17). В уравнения Эйлера войдут произ-
водные функций Xi (t) по времени.
Кроме приведенных ограничений, часто накладываются ограничения
вида
I xk
накладываемые на управления и координаты. Задачи при таких ограничениях
относятся к типу неклассических вариационных задач. Если ограничиваются
управления, то задача вообще не решается методами классического вариа-
ционного исчисления.
1-2. Некоторые задачи минимизации функционалов
от квадратичных форм при управлении линейными объектами
Рассмотрим сначала задачу, об оптимизации управления
линейным объектом, описываемым уравнением
D (р) х = (аорп +... + ап) х = и — р, (1-19)
где возмущающее воздействие р, считается постоянным, ц — const.
При управлении требуется минимизировать функционал
То
J = (х2 4 m2i2) dx. (1-20)
о
Если бы мы ограничились только такими условиями, то поста-
новка задачи была бы нестрогой, так как управление и не входит
в функционал J и никак не ограничено. К таким ничем не огра-
ченным функциям методы вариационного исчисления, упомя-
нутые выше, вообще применять нельзя. Чтобы можно было ре-
шить данную задачу классическим методом вариационного исчис-
ления, мы должны потребовать, чтобы функции i = 1,2,..., п
принадлежали к классу С2/г, т. е. имели бы 2п непрерывных
производных. Так как в (1-20) п = 1, функции х и и должны при-
надлежать к классу С2, т. е. иметь две непрерывных производных —
нулевую и первую. Это дополнительное ограничение, исключаю-
щее скачки функций и их первых производных, даст возмож-
ность решить задачу с помощью уравнений Эйлера. Допустим,
что х и и принадлежат к классу С2.
Составляем функцию Н:
Н = я2 + m2i2 + X [Z) (р)х — и]. (1-21)
Находим уравнения Эйлера
дЯ п । a d дН о о.. . /
—— =. 2х -|- Хлп, -j. -лт- — 2ш х -{- Хлп .
дх 1 n’ dt дх 1 п 1
Обратим внимание на то, что X оказалась постоянной вели-
чиной, тождественно равной нулю независимо от степени поли-
нома D (р). Это объясняется тем, что управление и входит в урав-
нения только линейно, а его производные не входят явным обра-
зом ни в исходное уравнение (1-19), ни в функционал (1-20).
Учитывая равенство X и его производных нулю, уравнение
Эйлера приводим к виду
т2х—х = 0. (1-23)
Решение этого уравнения имеет вид:
х* = (\е тХ +С2етХ.
Поставив найденное значение х * в (1-19), находим
= + + (1-25)
Пусть требуется перевести объект из состояния х (0) = х0
в состояние х (т0) = 0 за заданное время т0 так, чтобы величина
функционала J была минимальной. Граничные условия
т = 0, ж(О) = жо = С’1 + С2,
__1 JL
т = т0, х (т0) = 0 — Сге т Х° + С2ет Т°,
откуда находятся постоянные интегрирования
Т /г0/т
р __
1 Ло/т___е~ х0/т ’
(1-26)
~ Р—To/m v '
р ________________
2~ ет0/т __ е—r0/m *
Подставив найденные значения (\ и С2 в (1-24) и (1-20) и осуще-
ствив интегрирование, найдем
J — mxQ cth ~,
т '
т. е. J убывает с ростом т0 и при т0 = сю принимает минимальное
значение, равное тх^.
При т0 — сю получаем
х* ~хое~г/т, |
u* = D (— 1/т) xQe~ х/т. /
Экстремаль в данном случае является решением уравнения
(тр + 1)х* = 0 (1-28)
при начальном условии х (0) = xQ. Закон управления также
может реализоваться с помощью линейного управляющего устрой-
ства, описываемого уравнением первого порядка. Этот резуль-
тат был получен иным способом в ч. I (стр. 348).
Представляет интерес найти передаточную функцию управляю-
щего устройства, включенного как обычный регулятор по схеме
обратной связи. Так как порядок уравнения подобной системы
с одной стороны должен, как это вытекает из (1-27), равняться
единице, а с другой стороны он равен сумме порядков уравнений
объекта и регулятора, то реализация физически возможна лишь
в том случе, если D (р) имеет первый, а уравнение регулятора —
20
нулевой порядок, т. е. если регулятор безынерционный. В общем
же случае регулятор может осуществлять лишь приближенное
к оптимальному управление, как это было рассмотрено в ч. I.
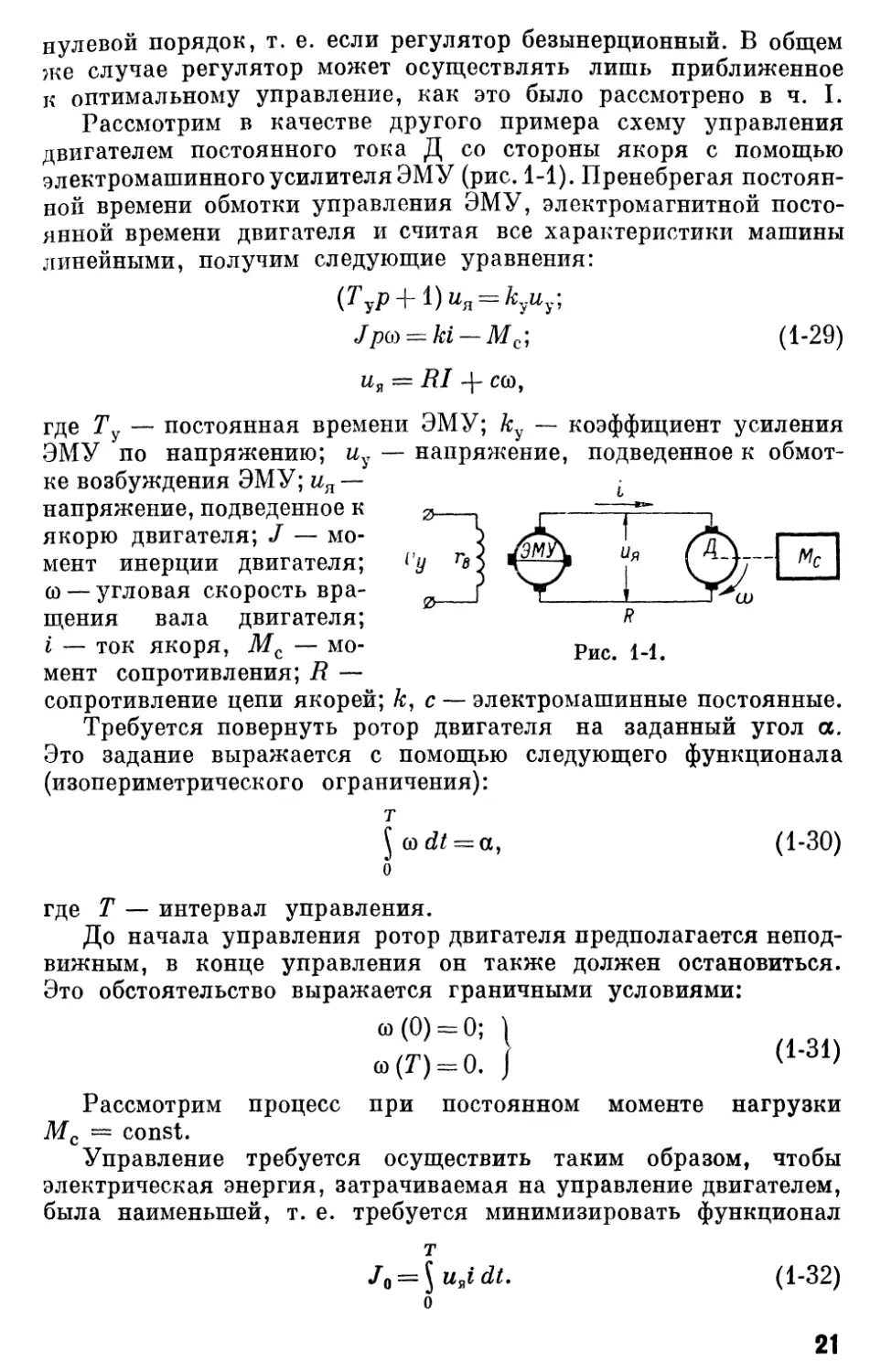
Рассмотрим в качестве другого примера схему управления
двигателем постоянного тока Д со стороны якоря с помощью
электромашинного усилителя ЭМУ (рис. 1-1). Пренебрегая постоян-
ной времени обмотки управления ЭМУ, электромагнитной посто-
янной времени двигателя и считая все характеристики машины
линейными, получим следующие уравнения:
(Тур 4-1) ия = куиу;
Jpa-ki-M^ (1-29)
= RI 4- ссо,
где Ту —- постоянная времени ЭМУ; ку — коэффициент усиления
ЭМУ по напряжению; иу — напряжение, подведенное к обмот-
ке возбуждения ЭМУ; ия —
напряжение, подведенное к 0______
якорю двигателя; J — мо-
мент инерции двигателя; гу гв
со —угловая скорость вра- _______
щения вала двигателя; /?
i — ток якоря, Мс — мо- рис.
мент сопротивления; R —
сопротивление цепи якорей; к, с — электромашинные постоянные.
Требуется повернуть ротор двигателя на заданный угол а.
Это задание выражается с помощью следующего функционала
(изопериметрического ограничения):
т
$ со dt — а,
о
(1-30)
где Т — интервал управления.
До начала управления ротор двигателя предполагается непод-
вижным, в конце управления он также должен остановиться.
Это обстоятельство выражается граничными условиями:
со (0) = 0; |
(о(Т) = О. J
(1-31)
Рассмотрим процесс при постоянном моменте нагрузки
Мс = const.
Управление требуется осуществить таким образом, чтобы
электрическая энергия, затрачиваемая на управление двигателем,
была наименьшей, т. е. требуется минимизировать функционал
т
Jo = $ dt.
о
(1-32)
Подставляя ия = Ri + со, получаем
т т
JQ = ^ i2R + c($i dt, (1-33)
о о
Рассмотрим второе слагаемое. Подставляя в нем i = — cd+^~,
получим
Т Т Ты (Т) т
I . 7, cJ С т, । сЛ/с С 7 cJ ( 7 । С 7,
с \ dt = т \ coo dt 4—~ \ ®dt = -r \о)б?о)4—\ о) dt.
J « J ft J Л J к J
О О О со (0) О
Учитывая, что верхний и нижний пределы в первом слагае-
мом одинаковы в силу (1-31), а интеграл во втором слагаемом на
основании (1-30) равен а, получаем
т
= (1-34)
О
Второе слагаемое в выражении JQ постоянно. Очевидно, чтобы
минимизировать /0, нам достаточно минимизировать первое сла-
гаемое, выражающее тепловые потери в обмотке якоря, или же,
опуская постоянный множитель R, минимизировать функционал
т
= (1-35)
О
При постоянном моменте 7ИС, минимизируя Jr, мы минимизи-
руем и полные электрические потери на управление. Если же
Мс является функцией времени, то данное утверждение уже не
будет справедливым.
Учитывая (1-29), (1-30) и (1-35), составляем функцию Н:
H = i2 + ^ (Туия + ия — куиу) + Х2 (/со —
— ki + Мс) + Х3 (ия — Ri — ссо) + %4со. (1-36)
Найдем уравнение Эйлера, составленное для переменной иу:
дН _ « , d дН __ п
диу~ dtduy-^
откуда
Лх = 0. (1-37)
Таким образом, уравнения усилителя мы можем не рассма-
тривать. Это обстоятельство облегчает задачу, но оно должно и
настораживать, так как отбрасывание ограничения может при-
вести к нереальным законам изменения иу, так как на эту величину
мы не накладывали пока никаких ограничений. Проделаем все
же эту задачу до конца. Учитывая = 0, получаем:
дН * • d дн 3’ dt дйя = 0; %3 —0. (1-38)
^ = 2*- di а 7 d дН W ~dfdF = 1 2г 0; 2i — к2к~О; (1-39)
дНd дН _
di дй>
х4-Л2=л4-^г=о,
(1-40)
Составляем систему уравнений объекта, усилителя и уравне-
ний Эйлера. При этом учитываем, что %4 как произвольный мно-
житель при функции, выражающей изопериметрическое ограни-
чение, равен постоянной. Перенесем эту, пока неизвестную, по
стоянную в правую часть.
киу — (Тур +1) ия = 0,
ия — Ri — сш = 0,
ki — Jpa) = Mc1
2Jpi = Н4.
(1-41)
Переменную иу содержит только первое уравнение, которое
поэтому может быть рассмотрено независимо от остальных. Чет-
вертое уравнение, поскольку %4 постоянная, также может быть
сразу решено независимо от остальных.
i = T0 + At. (1-42)
Так как граничные условия выражены для со, то нам удобнее
сначала на основании третьего уравнения системы (1-41) найти со:
k т kA t2 Мс .
или, обозначив Мс = к1с, где 1С — установившееся значение
тока, соответствующее моменту Мс, имеем
<В = |(/0_/с)/ + ^/2. (1-43)
Первое граничное условие о (0) = 0 в этом уравнении мы уже
использовали, положив равной нулю произвольную постоянную
при интегрировании. Используем второе граничное условие:
fi>(7’) = 4(/o-/c)^+^P = O,
откуда
и
1 о 1 с — 2
(1-44)
(1-45)
Использование граничного условия позволило нам уменьшить
число произвольных постоянных до одной. Чтобы найти эту произ-
вольную постоянную, воспользуемся условием (1-30):
т 7’3\ kAT2 2jr ( 2J_ 727-—«• (1-46) 0
Откуда (1-47)
Теперь ления Т\ все переменные выражаются через интервал управ- l~ k । kT2 Tj' (1-48) ua = ^ + ^[TmT + (T-2Tm)t--fi].
Графики этих функций показаны на рис. 1-2.
Решение может идти следующими тремя путями:
1. Интервал управления Т задан. Тогда задача нахождения
оптимальных со, i и ия решена.
2. Заданы допустимые потери в якоре W. Тогда минимально
возможное Т определяется из соотношения
т
R i*dt
о
MIR _ 12/U2a2
Т __________= w
№ ' k2T3 ’
(1-49)
после чего задача также будет решенной.
3. Т выбирается из условия минимума потерь в якоре. Нахо-
дим условие, при котором J становится минимальным:
dW M^R 36RJW
(1-50)
откуда оптимальное значение Т будет
гр ___ "J / Ct
7опт~ \ ж'
(1-51)
Мы видим, что оптимальное время управления и вообще опти-
мальные управление и координаты зависят от Мс. В частности,
из (1-51) видно, что чем сильнее загружен двигатель, тем меньше
величина Топт. На холостом же ходу минимизация расхода энергии
становится практически нереализуемой: Т увеличивается до бес-
конечности, а величины ия0 и /0 стремятся к нулю. Все это сильно
затрудняет реализацию автоматического управляющего устрой-
ства, осуществляющего оптимальное управление. Мы видим, что
уравнение для оптимального i получалось независимо от осталь-
ных. Поэтому решение задачи совпало с тем, которое было дано
в [127], где ток рассматривался как управление.
Мы уже отмечали, что это было связано с тем, что на иу ни-
каких ограничений наложено не было.
Определив теперь иу из первого из уравнений (1-29), мы видим,
что так как в начальный момент t — 0, ток i и напряжение ия
изменяются скачком, то иу должно
в момент времени t = 0 равняться
дельта-функции, т. е. представлять
собою импульс бесконечно большой
амплитуды. Управление в рассма-
триваемой схеме, таким образом,
оказывается нереализуемым. Резуль-
таты примера можно использовать
лишь в том случае, когда мы имеем
возможность скачком изменять на-
пряжение ия и когда можем прене-
бречь электромагнитной инерцией
якоря.
Чтобы найти реализуемое реше-
ние, следует наложить ограничение
на иу.
Один из способов косвенного его
ограничения состоит в том, что мы
вводим Uy в функционал, выражающий критерий оптимальности,
например, положив его равным суммарным потерям в силовой
цепи двигателя и в обмотке возбуждения ЭМУ:
(1-52)
Ход решения остается таким же, но задача сильно услож-
няется. Оптимальные управления теперь находятся, как решения
дифференциального уравнения четвертого порядка. Такой не-
сколько искусственный метод, позволяя решить задачу методами
классического вариационного исчисления, не гарантирует, од-
нако, от чрезмерно больших мгновенных значений иу при опти-
мальном управлении.
Более ясным физически будет ограничение управляющего
напряжения по модулю
| ^макс • (1-53)
Введение этого ограничения переводит, однако, задачу в раз-
ряд неклассических вариационных задач, рассмотрению которых
посвящается следующая глава.
1-3. «Аналитическое конструирование» оптимальных регуляторов
«Аналитическим конструированием» в [104] названа методика
нахождения дифференциальных уравнений устройства, осуще-
ствляющего автоматическую оптимизацию заданного объекта при
заданных ограничениях и критерии оптимальности. При этом учи-
тываются некоторые элементарные условия физической реализу-
емости получаемых уравнений.
Вообще уравнениями, описывающими поведение управляю-
щего устройства, могут быть уравнения Эйлера, но они не всегда
оказываются реализуемыми и, кроме того, обладают на первый
взгляд неприятным свойством: если время процесса управления
в непрерывной системе конечно, то уравнения Эйлера, рассма-
триваемые совместно с уравнениями объекта, соответствуют
неустойчивой системе регулирования. Так, в случае линейного
объекта и квадратичного функционала уравнения Эйлера полу-
чаются линейными, причем, как это будет показано в следующем
параграфе, среди корней характеристического уравнения обяза-
тельно будут как левые, так и правые корни.
Очевидно, что если присоединение регулятора делает систему
неустойчивой, то это присоединение не может быть длительным.
Если известно, что процесс оптимального управления носит спо-
радический характер, то можно пойти на использование неустой-
чивой системы, включая ее лишь на тот момент, когда возникла
необходимость осуществить оптимальное управление, и обяза-
тельно отключая ее после совершения управления.
В тех же случаях, когда регулятор должен быть все время под-
ключен к объекту, необходимо принять меры к обеспечению устой-
чивости системы.
Эта задача может быть решена с помощью приема, аналогич-
ного тому, который мы рассматривали в ч. II, в параграфе об оп-
тимальной фильтрации помехи. Неустойчивую структуру мы счи-
таем недопустимой, осуществляем расщепление и факторизацию
полученной при синтезе передаточной функции, выделив в ней
множители, обладающие только левыми и только правыми полю-
сами, и реализуем лишь первую ее часть.
В [104] эта задача решается путем отбрасывания в решении
уравнения составляющих, соответствующих положительным кор-
ням. При этом время управления становится бесконечно большим,
но зато функционал приобретает наименьшее из всех возможных
для разных Т значение. Частный случай такого рода системы был
уже рассмотрен выше в § 1-2. Рассмотрим примеры несколько
более общего характера.
Пусть дана замкнутая система регулирования (рис. 1-3), в
которой заданы уравнения объекта О:
п
$=2ЬгаТ1“+"^’/=1’2> •••’п' (1’54)
а=1
и ищутся уравнения регулятора
Dp(Pn=^^Mpi(p)^ (1’55)
действующего таким образом, чтобы при ликвидации возникших
скачкообразно возмущений на-
чальных условий
Л1(°) = 'Пю, •••> Лп(О) = Ппо,
(1-56)
регулятор привел систему в
устойчивое установившееся со-
стояние:
Т11 (оо) = Т]2 (оо) = . .. = (оо) =
= ^(со) = 0, (1-57)
так чтобы функционал
Рис. 1-3.
J® = \ Vdt
о
(1-58)
от положительно определенной квадратичной формы
(1-59)
имел минимальное значение.
Положим сначала к — 0. Составим функцию Я:
Я = 7 + 2Х; — mil
7 \ а
Имеем
дН с, v 1 к . d дН i
dt], — 2аЛ ’’ 'dt af|i ~
Уравнения Эйлера:
К =
i
Q = 2cg —
(l-60)
Определитель системы (1-54) и (1-60) имеет вид
z 7 т|
6ц~£•••• Ь1п 2с1
Д =
mimn
~2Г"
^„1 • • • • Ъпп--р
2ах . ... 0
2г
-Ьл-р....
тп
2с
(1-61)
0 ... . 2йп Ь1п .... Ъпп р
Если корни характеристического уравнения простые, то они
располагаются симметричными парами ±р2>---> (дока-
зательство см. ниже в § 1-4). Решение уравнения будет состоять
из линейной комбинации экспоненциальных функций вида
С.е-Р^ ..., СпГ^ С^, .... С2т/<
Чтобы система была устойчивой, выберем схему и параметры
регулятора так, чтобы постоянные С2п тождественно
обращались в нуль. Выписав 2п выражений для r)i и через
исключаем из этих выражений функции Che~Pk^ в резуль-
тате чего находим выражения
/ = 1, 2, .... п, (1-62)
а
где Р; а — постоянные.
Подставляя полученные выражения в (1-61), находим искомое
уравнение регулятора. При к = 0 оказывается, что оно имеет вид
£ = У, ТаПа, а = 1, 2, П,
а
(1-63
где уа — постоянные, т. е. регулятор должен быть безынерцион-
ным. Такие регуляторы нереализуемы, поэтому в [104] предла-
гается минимизировать другой функционал, в котором присут-
ствует g2 и к = 1. Решение задачи аналогично предыдущему.
Проиллюстрируем сказанное на примере.
Пример. Система первого порядка:
^ = 6т) + 'Ч. / = <И12-НВ2 + ?-
Составляем функцию Я:
Н = ац* + + g2 + X (ц - 6ц - mg);
(1-64)
дН о ..
-а— = 2аг\ — Ьм
дц 1
d дН
dt df) “
дН о . . d дН п=г
— — 2сН — Лам,-----------— 2 с
dt di
Система уравнений объекта и уравнений Эйлера:
т| = + т£;
Л = — b\ -J” 2fZT|j
2f = 2cg — znX.
Характеристическое уравнение имеет вид
/>4 —(Ь2 + с2) р2 + ат~ + cb2 = О
Уравнение имеет решение
п= С1е~»1*' + С2е~^;
t = _ Hi±± С1е~ Н.' _ H?+A с - ц,1.
т т '
t — Н'1 (Hi + Ь) . р-2 (^2 + Ь) £ tt
(1-65)
(1-66)
Приняв , + С2е~ за неизвестные, мы получим условие сов-
местности выписанных трех уравнений с двумя неизвестными:
1 1 — Т)
l^i 4~ ~Ь & £
т т ®
Hi (Hi Нг (Нг + &) ___________|
т т
Раскрывая, получаем уравнение регулятора*
^ + (Н1 + Нг+&)^ = --—7^-—Ч (1’67)
Аналогичным образом можно решить задачу и для объектов
более высокого порядка, только выкладки становятся гораздо
более громоздкими. Добавление каждой новой кооринаты добав-
ляет одну переменную вида Cke~ и одно уравнение; порядок
определителя, из которого находится уравнение регулятора ра-
стет, но уравнение регулятора продолжает оставаться уравнением
первого порядка. Задача сильно усложняется, если координаты
не могут быть непосредственно измерены. Тогда уравнение
регулятора будет иметь производные в правой части и, чтобы
можно было реализовать такой регулятор, нам придется добав-
лять в функционал члены, содержащие квадраты высших про^
изводных от £. При этом смысл самого критерия оптимальности
становится неясным, и об оптимальном управлении мы уже можем
говорить лишь условно Отметим также, что при возмущениях
иного типа, чем возмущения начальных условий, система пере-
стает быть оптимальной. Такого рода задачи обычно встречаются
в задачах типа стрельбы или погони, где задано начальное рас-
согласование, а в процессе полета возмущения отсутствуют.
Развитие аналитического конструирования с распростране-
нием его на разные случаи ограничений дано в [50, 64, 82, 83,
105, 160], где эти методы были существенно расширены. В этих
работах широко используется функциональное уравнение Бел-
мана, рассматриваемое ниже в гл. 3. Решение общих задач анали-
тического конструирования регуляторов линейных объектов до-
ведено до уравнений для определения коэффициентов оптимальных
управлений. В данной книге мы не имеем возможности более глу-
боко рассмотреть проблему аналитического конструирования,
хотя ниже частично касаемся некоторых методов (§ 3-2).
1-4. Обобщение на многомерные и на дискретные системы.
Свойства корней характеристических уравнений
линейных оптимальных систем
Пусть даны дифференциальные уравнения системы
y4x («) = /[<- x(t), U(<), v(«)], <T (1-68)
граничные условия g[T, x(i)] = 0 и критерий эффективности т J =Ap\t' T, x (f), u (£), v(t)]dt (1-69) (1-70)
или же разностные уравнения Дх[тп] = / (m, х[дп], u [m], v[m]) и критерий эффективности т J — (m, Т, x[m], и [ди], v[zn]). m = 0 (1-71) (1-72)
В этих выражениях х представляет собою n-мерный [п — порядок урав-
нений (1-68) или (1-71)] вектор состояния системы х = (х^ х2,..., хп); х±,
х2,..., хп — координаты системы; и — вектор управления, v — вектор неуп-
равляемых видов возмущения; А означает символ упреждающей разности;
v (t) есть функция класса DQ (непрерывная, за исключением, может быть,
конечного числа скачков первого рода); / и F -— функции класса С± (т. е.
имеющие непрерывные первые производные) относительно х и и и класса DQ
относительно t.
Система уравнений объекта, граничных условий и уравнений Эйлера
для данных систем имеет вид:
^х(г)=/{«, x(t), U(t), V(t)}, 0^/<7;
= Т, х(0, u(t), v(t)}-
х(0, и (г), v(«)}]7’l(0,
WX x(t), u(t), V («)}] =
= x(t), V(t), v(t)}]TX(0,
(1-73)
для разностных уравнений:
Дх[т] = Нт> *[4. «[»*]. v ["*]}]> w = 0, Гр, 27'р, ...» Г—Тр;
М[т} = \7хР {т, Т, x[m], u [m], v[m]} —
— [Jx(t{m, x[m], u[/n], v[m]})]T k[m];
\7mP <m> T> x twl> u lmL v HD =
= [.Im(f{/n, x[m], u[m], v[m]})]Tl[/n].
(174)
В принятых обозначениях отметим следующие особенности. В малые
квадратные скобки заключен дискретный аргумент [тп]. Большие квадратные
скобки обозначают: [ ] — прямоугольную матрицу, [ ]Т — транспониро-
ванную матрицу; ух — символ градиента:
J — символ Якобиана: dh
дхг дх2
Jx(f {*}) = df2 dfa dx-L дх2 •• (1-76)
_
В результате решения уравнений находим оптимальное управление
и* (/), экстремизирующее функционал J:
u*(z) = 8[z, х(г), v (Z) Т].
Заметим, что так как при Д О требуется существование только пра-
вого предела для х (t) и только левого предела для % (£), то х и X могут быть
не непрерывными. Таким образом, нет необходимости требовать непрерыв-
ности функций f, F, [Jx (f)], [Jm (f)], [vx F и W] B отношении i, но X должно
существовать и быть ограниченным так, чтобы 1 была дифференцируемой
функцией.
Приведенные решения справедливы для случая, когда Т фиксировано.
Нахождение «оптимума оптиморума» путем приравнивания нулю вариации Т
возможно, если g [f, х (71)] является дифференцируемой функцией по х (Т).
Для случаев, когда эта функция определена лишь для дискретных значений Т
еще нет общих методов решения, позволяющих точно найти оптимум опти-
морум.
Симметричные свойства матриц линейных уравнений Эйлера приводят
к неустойчивости решений этих уравнений.
Рассмотрим уравнения
х = [Р]х + [Я] X;
%=[(?]х- [Р]т X,
где
[<?] = Ихх] - [^xul ИииГ ИихГ.
(1-77)
(1-78)
[ ] 1 — обозначение обратной матрицы.
В последних выражениях приняты обозначения:
(f {« X*, u*, v})];
Ы = 1-MVuF {', Т, х*, u*. v})];
l^xl = [-MVx/qt, Т, х*, u*, v})];
[fu] = Pu(f К х*, u*, v})];
[^xu] = [/u(Vx^{<> Т, X*, u*, v})];
Huu] = [^u(Vu^{i, т, х*( 11*, V})].
(1-79)
Звездочками отмечены оптимальные решения уравнений. Если сущест-
вует точка равновесия, то в ее окрестности [Р], [Q] и [Я] — постоянны, по-
этому для исследования устойчивости в окрестности точки равновесия можно
использовать преобразование Лапласа уравнений (1-77):
{[Р] - [1] s} х (s) + [7?] Ц0 = const; |
[Q] х (s) -{[Pf + [!]«} % (s) = const. J '
Рассмотрим расположение корней полинома
D(s) =
|Г[Р]-[1Р
IL [Q1
[Л] 1
_[P]r + [l]sJ
(1-81)
в комплексной плоскости s.
Так как определитель матрицы равен определителю ее транспонирован-
ной матрицы, то
Г[Р] - [1] s [д|
[<?1 - И7- [i]d
[РГ-[ф [<?]
до - и—пр.
. (1-82)
Перестанавливая местами столбцы и затем строки во втором определителе,
меняя знаки одной из строк и одного из столбцов и заменяя $ на —получим
равенство
[Р]-[1Р
. [9]
[Л]
-[Pf_[l]s
PJ -llj(-s) [-R]
[<?] -UT-11K-O.
Таким образом, полином содержит лишь четные степени s, и поэтому корни
располагаются симметричными парами относительно не только веществен-
ной, но и мнимой оси. Аналогично, для разностных Эйлеровых уравнений
можно получить
|Г[Р1-[1]2 [Я]
IL -[<?] ^F-lip-1
-[Л] II
IQ1 - [Я d Г
Поэтому каждому корню в z-плоскости, расположенному внутри единичного
круга, соответствует взаимно-обратный корень вне круга.
В фазовой плоскости такие точки равновесия представлены неустойчи-
выми особыми точками типа седла.
В [236] показало, что при Т —► оо система становится устойчивой. Гра-
ничные условия становятся такими, что решение в фазовой плоскости по
мере стремления Т к бесконечности приближается к седловой точке.
ГЛАВА ВТОРАЯ
РЕШЕНИЕ «НЕКЛАССИЧЕСКИХ» ВАРИАЦИОННЫХ ЗАДАЧ
НА ОСНОВЕ ПРИНЦИПА МАКСИМУМА
2-1. Возникновение «неклассических» задач
оптимального управления
«Неклассические» задачи оптимального управления были пер-
выми по времени, и именно они послужили темой для ряда работ,
заложивших фундамент теории оптимального управления. В этих
работах в качестве показателя оптимальности принималось время
перехода системы из одного состояния в другое. Такие оптималь-
ные по быстродействию системы представляют значительный ин-
терес во многих устройствах — прокатных станах, подъемниках,
системах управления курсом подвижных объектов, системах по-
гони и т. д.
В 1949 г. выходит в свет работа А. А. Фельдбаума [179], в ко-
торой рассматривается релейная система с линейной частью вто-
рого порядка. Исследование ведется, не прибегая к вариацион-
ным методам, с помощью фазовой плоскости. Показывается, что
модуль ограничиваемой по техническим условиям величины в про-
цессе оптимального управления должен поддерживаться на мак-
симуме, а ее знак один раз изменится в процессе движения. В 1950 г.
сходная задача о системе второго порядка с кусочно-линейной ха-
рактеристикой типа насыщения была решена Хопкиным [226].
В работе А. Я. Лернера [100] дается дальнейшее расширение по-
становки задачи на некоторые системы n-го порядка с веществен-
ными корнями характеристического уравнения линейной части
при отработке начального рассогласования и нулевых начальных
условиях. В работе была высказана идея, что и при наличии не-
скольких ограничений модули ограничиваемых величин должны
поддерживаться на максимальном уровне. Полезным оказалось
введение понятия изохрон [101]. Эти результаты подытожены
в [102]. В этих работах были также указаны пути приближенной
реализации рассмотренных оптимальных систем с помощью
нелинейных обратных связей и построены быстродействующие
автоматические компенсаторы, работающие по этому принципу.
Таким образом было дано теоретическое обоснование средств реа-
лизации простейших оптимальных систем, которые ранее в том
или ином виде предлагались из чисто интуитивных соображений.
Не все процессы, предложенные в [100], оказались строго оп-
тимальными, хотя и довольно близкими к ним. Примерно в это
же время в зарубежной печати также выходит ряд работ, где рас-
сматриваются либо различные случаи систем второго порядка,
либо частные принципы, применение которых, позволяя улучшить
динамические характеристики системы, еще не делает ее оптималь-
ной. В работе [212] используется идея скачкообразного изменения
демпфирования, которое принимает малое значение в начале пе-
реходного процесса и большое — в конце.
Использование нелинейного элемента для управления реле,
осуществляющего переключения тормозного момента, рассмотрены
в [259]. В [246] показано, что существенное улучшение качества
систем второго порядка можно получить при переменном управ-
ляемом демпфировании, зависящем от координат.
Интересно отметить работу [213], в которой показано, что в оп-
тимальной по быстродействию системе второго порядка, характе-
ристический полином которой имеет комплексные корни, число
интервалов переключения в зависимости от начальных условий,
может быть сколь угодно велико, хотя и конечно.
Дальнейшее существенное развитие теория оптимального уп-
равления получила в работах [180, 181], где дано обобщение по-
нятия оптимального управления на случай неавтономной системы,
в которой требуется в кратчайшее время привести движение си-
стемы х (t) на заданную траекторию xQ (£). Там же впервые дока-
зана «теорема об п интервалах», рассмотренная ниже в 2-3.
В [193] были изложены основные положения теории оптималь-
ных процессов в релейных системах. В [100, 101] дано дальнейшее
развитие теоремы об п интервалах, для случая ограничений, на-
кладываемых на несколько координат.
К разработке проблем оптимального управления были привле-
чены крупные математики, так как дальнейшее развитие теории
сдерживалось отсутствием необходимого математического аппа-
рата. Цикл упомянутых выше работ послужил стимулом для соз-
дания такого аппарата. С небольшими интервалами времени в 50-х
годах получили развитие три новых направления: принцип мак-
симума в СССР, динамическое программирование в США, исполь-
зование методов функционального анализа в СССР и Польше.
Одновременно проводились работы и по распространению клас-
сических методов вариационного исчисления на новые задачи.
Трудности здесь связаны с тем, что расширение класса функций,
с которыми оперирует вариационное исчисление, приводит к на-
растанию трудностей при решении задачи. Введение изломов
в функцию приводит к необходимости помимо уравнений Эйлера
вводить для точек излома в рассмотрение дополнительные усло-
вия Эрдмана—Вейерштрасса. При появлении в функциях раз-
рывов выражения вариаций сильно усложняются, вследствие
чего в обычных курсах вариационного исчисления такие задачи
уже не рассматриваются. Замыкание области координат также
приводит к дополнительным усложнениям. Для преодоления этих
затруднений в рамках классического вариационного исчисления
был предложен ряд методов. К числу интересных работ, где для
решения неклассических задач применен формализм классиче-
ского вариационного исчисления, относятся работы Больца и Май-
ера [210], Н. Н. Гернет [43] и др. В последние годы расширение
круга неклассических задач, решаемых классическим вариацион-
ным исчислением, было дано в [177]. Тем не менее, потребность
в расширении рамок вариационного исчисления и в создании но-
вых методов, обладающих большей общностью, ощущалась все
сильнее, что в конце концов и привело к возникновению упомя-
нутых выше новых разделов вариационного исчисления.
2-2. Принцип максимума
Одним из наиболее часто встречающихся в технике видов огра-
ничений, налагаемых на переменные, к которым относятся как
координаты, так и управления, является ограничение по модулю,
налагаемое либо на отдельные координаты |#.| Ai9 |
либо на некоторые функции переменных и их производных. Так,
в системе управления самолетом ограничены перемещения рулей,
в электрических установках ограничиваются величины напряжений
по условиям электрической прочности, токов — по условиям на-
грева, моментов — по условиям механической прочности. Но
если в электрической цепи, описываемой уравнением (Lp + R) i =
= и, ограничено и, то тем самым ограничена и линейная форма
(Lp + R) i.
Если некоторое управление, изображаемое вектором и в п-мер-
ном пространстве и = {иг, и2, ... , ип},где и19 ... , ип — проекции
вектора и на координатные оси, принадлежит множеству U этого
пространства, то для технических задач обычно характерна зам-
кнутость множества U. Часто встречаются задачи, в которых ог-
раничены по модулю проекции вектора
| | uim = const, i = l, 2, ..., п.
Тогда множеству U соответствует тг-мерный параллелепипед.
В несколько более общем случае, когда ограничения выражаются
линейными неравенствами
У, 1. 2, т,
i= 1
множество U представляет собой замкнутый выпуклый многогран-
ник. В этом случае оптимальное управление, как мы увидим ниже,
осуществляется путем мгновенных переходов точки {и1У и2, ... ,
и„} в разные вершины многогранника. При решении подобных
задач классическими методами вариационного исчисления встре-
чаются серьезные затруднения. Принцип максимума дает один
из наиболее рациональных путей преодоления этих затруднений.
Пусть дана система дифференциальных уравнений, описываю-
щих движение рассматриваемого объекта:
ахг х /
-^- = /<(*1, U),
i = 1, 2, ..., п.
(2-1)
Пусть заданы начальные xi (0) и конечные xi (Т) состояния
системы:
Xi(0) = a:{0;
Xi (^) ~Xih’
i = 1, 2, ..., п.
(2-2)
Далее задано, что управление и, которое может перевести си-
стему из состояния х (0) в состояние х (Г), должно принадлежать
некоторой замкнутой области U*.
u е и, (2-3)
Затем задано также значение функционала J, которое надлежит
минимизировать надлежащим выбором и.
Z = f/o[x(0, u(/)]dt (2-4)
о
Введем в рассмотрение дополнительную координату х0, опреде-
ляемую из уравнения
^ — /0(^1» ^2, •••’ хп> и)- (2“5)
Тогда задача сводится к нахождению такого решения системы
уравнений:
$ = Л(»1. .......I». U). (2-И)
i = 0, 1, 2...«,
при котором дополнительная координата xQ (Т) = J имела бы
наименьшее значение, а остальные координаты удовлетворяли бы
граничным условиям (2-2).
В уравнениях (2-6) правые части не содержат явно t, т. е. си-
стема стационарна. Из стационарности системы вытекает, что при
сдвиге вдоль оси t свойства управлений не меняются в том смысле,
что если управление и (£), 0 Т переводит точку в фазовом
пространстве из положения xiQ в xik и придает функционалу (2-4)
значение Jih, то при любом вещественном т управление u (t + т),
т t Т + т также переводит фазовую точку из положения
Хц в положение xih, т. е. придает функционалу (2-4) то же значе-
ние Jih, и, кроме того, xt (t + т), обусловленное управлением
u (t + т), равно Xi (i), обусловленному управлением u (t).
Пусть дана система точек xi0, ха, ... , xik фазового простран-
ства X и существует управление uz, переводящее фазовую точку
из положения ^,/-1 в полржение Хц и придающее функционалу
(2-4) значение J I = 1, 2, ... , к. Тогда существует управление и,
переводящее фазовую точку из положения xi0 в xik и придающее
функционалу (2-4) значение J = Это выте-
кает из указанной возможно-
сти сдвигать управления
вдоль оси времени и считать
поэтому отрезки, на которых
определены управления ut,
примыкающими друг к дру-
гу. Отсюда можно сделать
важный вывод: любой отре-
зок оптимальной траектории
(а также кривой, изобра-
жающей оптимальное управ-
ление и* (£), также являет-
ся оптимальной траекторией
(или кривой оптимального
управления).
В самом деле, пусть на
отрезках оптимальной траек- Рис. 2-1.
тории [zi0, яа]; Хц} и
Ц2> хг^ (рис. 2-1) значения функционала (2-4) равны соответст-
венно Jx, J2 и J3.
Предположим, что на отрезке [хг1, xi2\ управление и2 не опти-
мально, и существует некоторое управление р, переводящее фа-
зовую точку из Хц в Хц оптимальным образом и придающее функ-
ционалу (2-4) значение J'% < J2, Но тогда получим новое управле-
ние, придающее функционалу J' значение J' = Jr + J'% + J3 < J,
что противоречит условию, что и* оптимально и, следовательно,
J имеет наименьшее возможное значение.
Рассмотрим теперь, кроме основной системы уравнений (2-6),
систему, составленную относительно дополнительных перемен-
ных ф2, ... , фп:
~У^Х’ U4a> i=0,l, 2, ...» R.
dt Li дхл , , , ,
а —О
(2-7)
Введем функцию <S^ переменных xlt ... , хп, фп ... , ф„, и
(ф, X, и)= У, фа/а(х, и). (2-8)
а = 0
Тогда уравнения (2-6) и (2-7) можно объединить в одну систему
уравнений, называемую гамильтоновой системой:
^i = W. '
X <2-9>
dt дх^ ’ >
i = 0, 1, 2, ..., n.
Пусть существует такое допустимое управление и (£), что со-
ответствующая ему фазовая траектория проходит через точки
(0, ж10, а:20, ... хп0) и (L xlk, x2h, ... , xnh), где g = х0 (Т) — произ-
вольное число.
Л. С. Понтрягиным доказана [131, 132] следующая теорема:
Для того, чтобы управление u (t) было оптимальным, необходимо,
чтобы существовала такая ненулевая непрерывная вектор-функция
ф (t) = [ф0 (t), Ф1 (0, ••• » фп (£)], соответствующая в силу урав-
нения (2-9) функциям и (t) — [ur (t), u2(t), ... , ип (t)] и
х (t) — [rr0 (t), хг (t), ... , xn (t)], чтобы:
1) при любом t, взятом в рассматриваемом интервале времени
O^t^T, функция [ф (£), х (£), и], рассматриваемая как функ-
ция переменного и U, достигала в точке и = и * (t) максимума
о%^[ф*(/), х*(£), и* (Z)] = <^ [ф (£), х(£)], (2-10)
где
е^[ф(0, x(Z)] = supo%/’ (ф, х, и); (2-11)
и(1/
2) в конечный момент времени t = Т выполнялись бы соотно-
шения
ф0(7)<0, <^[ф(Г), х(Г)] = 0. (2-12)
Далее в [17] показано, что если величины ф * (£), х* (t) и
и* (0 удовлетворяют системе (2-8), (2-9) и условиям (2-10) и (2-11),
то функции ф0 (t) и [ф * (t), х * (t)] переменного t являются
постоянными, так что проверку соотношений (2-12) можно произ-
водить в любой момент t (а не обязательно t = Т).
Таким образом, для оптимальности u (t) необходимо, чтобы ©Ж"
в любой момент времени равнялась нулю, будучи отрицательной
при неоптимальных управлениях.
Условия, сформулированные в теореме, являются необходи-
мыми, но, строго говоря, недостаточными. Если найдена траекто-
рия, удовлетворяющая этим условиям, то из этого еще не следует,
что эта траектория оптимальна. Но если каким-либо образом до-
казано, во-первых, что оптимальная траектория существует, т. е.
что система управляема, и, во-вторых, что найденная тр* проходящая через точки (0, я10, ... , хп0) и (£, xlk, ... , х, ственна, то эта траектория и будет оптимальной. лектория, nh), един-
Теорема, изложенная выше, и называется принципе м макси-
мума [17, 16].
В случае оптимизации по быстродействию имеем J = т,
/0 (х, и) = 1, и функция принимает вид:
+ S Wv (х, и)-
v= 1
Обозначим
= У, Wv(x, и),
v== 1
уравнения (2-8) и (2-9) теперь принимают вид:
dxj = дН . dt difo ’ oh])* _ дН dt dxt * i = i, 2, ..., п, (2-13)
а условия (2-10) — (2-12) записываются так:
x*(t), u* (0] = M [$ (/), x(i)]— — i|?0^s где 0, (2-14)
Л7(ф, х) = М (ф, х) — ф0.
При м е р 1. Дано уравнение
d2x dP~U’ (2-15)
причем на управление и наложено ограничение
| u |s£l. (2-16)
Определим условия быстрейшего перехода фазовой точки из заданного
начального положения я10, я20 в начало координат.
Уравнение (2-15) преобразуем к виду
dxA ~dl=x*’ dx» ~dt~U' - Функция H имеет вид: (2-17)
Н = + ^2^. (2-18)
Это линейная функция переменной и, и свои наибольшие зна может принимать на границах интервала — 1 и 1. чения она
Для вспомогательных переменных и ф2 в соответствии с (2-13) полу-
чаем следующие уравнения:
dt дх± ’
= __ dJL = _
dt дх2
(2-19)
№
Рис. 2-2.
Откуда = с±1 ф2 = с2 —- где q и с2 - постоянные.
Управление и найдем из следующих соображений.
При положительных ф2 прямая Н в функции и имеет положительный
наклон к оси и и максимум Н достигается на правой границе интервала
— 1 и 1, т. е. при и — + 1. При отрицательных ф2 наклон прямой будет
также отрицательным и максимум
Н будет достигаться на левом
конце интервала, т. е. при и — —1.
Это можно записать так:
и (t) = sign ф2 (t) = sign (с2 — c±t).
(2-20)
Заметим, что если бы зависи-
мость Н от и определялась не вы-
ражением (2-18), а была нелиней-
ной, то максимум Н мог бы до-
стигаться как на концах интерва-
ла, так и в его середине, поэтому
потребовалось бы исследование
функции Щи) на максимум в пре-
делах интервала — 1 и 1.
Линейная функция с2 — crt на
отрезке 0 t Т меняет знак не
более одного раза (на любом от-
резке t± t t2 она меняет знак
только один раз). Поэтому u (t) представляет собою кусочно-линейную функ-
цию, принимающую значения ± 1 и имеющую не более двух интервалов по-
стоянства. Оптимальная система в данном случае оказывается релейной.
Такого рода системы, но иными методами, исследовались в [100, 179].
Для определения моментов переключения найдем на основании уравне-
ний (2-17) значения переменных хг и х2 для и = 1, равные
а?2 — Я'го “Ь
1 1 f xl '
Х1 ~ 2~ — ~2 (* + ^го)2 + (—2
Й + Л ) <2’21>
Фазовые траектории в плоскости х±, х2 представляют собой отрезки пара-
бол с вершинами, расположенными на оси xlf и с ветвями, расположенными
справа от вершин (рис. 2-2, кривые 1).
При и = — 1 имеем
г2
х2 = a?2Q t\ х± — 2 Н *^2о^ *^10 —
= - 4- (- г + *2о)2 + ко + ) = - С + в.
Ct \ Ci J Ct
(2-22)
Фазовые траектории — параболы с вершинами на вещественной оси и
ветвями, направленными влево от вершин (рис. 2-2, кривые 2),
Изменение знака и (переключение) происходит не более одного раза,
поэтому оно может происходить лишь на той траектории, которая проходит
через конечную точку — начало координат (на рис. 2-2 показана жирной
сплошной линией). Фазовые оптимальные траектории показаны на рис. 2-2
сплошными линиями.
Полученное решение применимо и к задаче об оптимальном по
быстродействию управлении системой, у которой ограничено зна-
чение второй производной. Для этой цели мы принимаем ограни-
ченную вторую производную в качестве управления и получаем
уравнение (2-15). Первоначально подобная задача была решена
в [100, 179] на основании сле-
дующих физических соображений.
Вначале, чтобы получить наибы-
стрейший разгон системы, следует
наращивать скорость наиболее
интенсивно, т. е. с максимально
возможным ускорением. Но чтобы
система пришла в заданную точ-
ку с нулевой скоростью, ее при-
дется в какой-то момент времени
до прихода в заданную точку
начать тормозить. При этом чем
интенсивнее торможение, тем
позже оно может быть начато,
тем больше средняя скорость пе-
рехода и тем меньше время тор-
можения. Следовательно, тормо-
жение также должно совершаться
с максимальной интенсивностью
при предельном значении отри-
цательного ускорения. Таким
образом, оптимальный процесс
должен состоять из двух интер-
валов: разгона при предельном
ускорении и торможении при
предельном замедлении. Принцип
максимума дает, как мы видели, строгое математическое обосно-
вание этого рассуждения.
Кривые оптимального процесса х * (t) и управления и * —
dPx/df2, при нулевых начальных условиях и значениях
\и\ 1, Т ~ 2 показаны на рис. 2-3.
Пример 2. Дано уравнение
х 2hx + — и, | и | sC 1. (2-23)
Приведем его, положив х = х1У к виду
dx*
dt 2
dx
—- 2hx2 + и.
Составим функцию Н:
Н = фгг2 — ©0^2*1 — 2/1ф2а72 + Фгы-
Уравнения для функций ф имеют вид:
с?ф1 дН 2,
<й|>а дн ,
dT = ~^2h^~J
Корни характеристического уравнения
Р —
1 p~2h
— р* — 2hp + cog = О;
(2-25)
(2-26)
= — Wo
отличаются от корней характеристического уравнения системы (2-24) лишь
знаком h.
Рассмотрим два случая:
1. \h\ > |соо|; корни характеристического уравнения вещественны.
При этом
I’l = ’Рю + A«P1' + A2e^;
= £ = eVlt p2A2 eV2t
T ©’ dt ©5 ~ ©3
(2-27)
Так же как и в предыдущем примере, оптимальное управление
и* (г) = sign ip2 = sign Г-^f-1 ер‘г + ер«' 1.
L wo wo J
(2-28)
(2-29)
Определим, сколько раз ф2 изменяет знак или сколько раз ф2 по мере
изменения t обращается в нуль.
Если ф2 = 0, то
El^l _ __ £2^2 p2t
<03 <03
или
е(р2—Р1)< _ Р1А1
~ РгА,’
In
г = —v гУ. (2-30)
Р2 — Р1
В зависимости от начальных условий решений для t либо нет совсем
(если число, стоящее под знаком логарифма отрицательно), либо существует
единственное значение t, при котором ф2 обращается в нуль. Итак, число
переключений — не больше одного. Но если вид функции и* (t) в рассматри-
ваемой задаче определяется так же просто, как и в предыдущей, то с опреде-
лением момента переключения дело обстоит значительно сложней.
Путь непосредственного вычисления t по формуле (2-30) требует предва-
рительного вычисления постоянных и А2 по начальным условиям, и вы-
числительное устройство для такого метода решения задачи получится доста-
точно сложным. Попробуем другой путь: установим связь между значениями х
и dx/dt. Расширим задачу, положив \и\ им.
Обозначив
и учитывая, что внутри интервалов между переключениями и — им постоян-
на, и ее производная по времени равна нулю, сведем уравнения (2-23) к
системе однородных уравнений
dxr
= 2/ixa,
(2-31)
Дифференциальное уравнение фазовой траектории
dx%
dx±
___ hl
--- dlfl (О Л
подстановкой z = х2/хх сведем к виду
I dz т (05
Z
Разделяя переменные, получим
z dz __________________________________ dxY
z2 -|~ 2hz -j- (0q xY '
(2-32)
При вещественных корнях знаменателя уравнение (2-32) имеет решение
1
2
In | z2 + 2hz + (Оз |
—-—_ .-In
2 /Л2 — ®o
Z + h — Уh2 — cog
z + h + УИ2 — ©)
+ In C = — In яр
Возвращаясь к переменным х± и х2, после несложных преобразований
получим
In I + 2/1^2 + ©^ I - A In С *2 = 0 (2-33)
«1 Х2 Т*1 у» т
или
л
xj 2hxxx2 -и ©fc; = С (Х2 (2-34)
\т2 + «j (h -j- hj)] ’ ' 7
где _____
/г, = /fta —©в.
Пусть построена картина фазовых траекторий для системы (2-31). Как
было показано в ч. II (стр. 133), эти траектории располагаются так, как
показано на рис. 2-4, а.
Чтобы получить фазовый портрет для уравнения (2-33), мы можем пере-
нести начало координат либо в точку х± = |им|для и > 0, либо в точку
ад — — им| /о>о для и < 0. Траектории, проходящие через эти точки, на
рисунке показаны жирной линией. В плоскости х, = х2 оптимальная
траектория, совпадающая с линией переключения, изображается траекто-
рией, полученной путем смещения отмеченных жирной линией отрезков
так, чтобы они прошли через начало координат (рис. 2-4, б). Смещением и
отрезанием частей, лежащих после линии переключения, получается и осталь-
ное семейство оптимальных траекторий.
2. Корни характеристического уравнения комплексны. При этом
% == Агем sin + Л2); 1
A. hf 1 (2-35)
ф2 = —т е [h sin + А) + cos (<М + А)],
(D5 /
где ©j = У©5 — №•
Обращение функции ф2 в нуль на интервале 0 < t < Т может иметь
место неоднократно, и, чем больше длительность интервала Т, тем большее
число переключений на этом интервале произойдет. Чтобы установить вид
оптимальных траекторий на фазовой плоскости, рассмотрим сначала более
простую задачу, в которой со2 = 1, h = 0, |u| 1.
Система уравнений принимает вид
dxr
----- — х2\
dt 2’
dx2
-Т~ “ ‘
dt
(2-36)
Фазовыми траекториями в плоскости х, х2 являются окружности с цент-
ром в начале координат, в плоскости rq, х2 —- окружности с центрами на ве-
щественной оси смещенными на +1 или —1, в зависимости от знака и. Дви-
жение фазовой точки по окружности совершается по часовой стрелке с посто-
янной угловой скоростью и за промежуток времени, равный л, точка описы-
вает половину окружности.
Начнем построение оптимальной фазовой траектории с ее конца, т. е.
от начала координат. Последним отрезком траектории (см. рис. 2-5) будет
часть полуокружности ОА1М1 (если на последнем интервале и = +1) или
OB1N1 (если на этом интервале и = —1). Пусть последний интервал соот-
ветствует OAiMi. Точка из которой начинается движение по полуокруж-
ности ОА-^М^ определяется фазой колебаний, т. е. в конечном итоге началь-
ными условиями.
Пусть каким-то образом положение точки Аг мы определили. До точки At
фазовая точка двигается по полуокружности В2Аг с центром в точке (0, —1)
и соответствующей и = —1. Так как интервал движения между двумя ли-
ниями переключения равен л, то дуга точно равна полуокружности и
точка В2 симметрична Ai относительно центра О_г, и поэтому точка В2 лежит
на полуокружности N±N2l симметричной полуокружности ОМг относительно
центра О-i. Точно также дуга В2Л3, предшествующая дуге А±В2, есть полуок-
ружность с центром O+i, и точка А3 лежит на полуокружности М2М3, которая
симметрична полуокружности N±N2 относительно центра О+11 и т. д.
Теперь можно указать общий способ получения любой оптимальной
траектории, начинающейся в заданной точке я (0), я (0). Если эта точка нахо-
дится в верхней полуплоскости, то на первом интервале и = — 1 и дуга
расположена вверх от центра, если х (0), х (0) — в нижней полуплоскости,
то на первом интервале и = +1 и дуга расположена вниз от центра.
Пусть х (0), х (0) лежит в верхней полуплоскости. Наносим линию пере-
ключения — ряд полуокружностей единичного радиуса OMlf
ONU NjNzf* Из точки с координатами х (0), х (0) проводим дугу с центром
O_t до пересечения с линией переключения в точке Alf затем из точки
в нижней полуплоскости проводим дугу А±А2 с центром в О+1 до пересечения
с линией переключения в точке А2 и т. д., пока в конечном итоге мы не придем
в начало координат. Очевидно, что время движения по оптимальной траек-
тории будет конечным.
Если h не равно нулю и Л2 < cog, то отрезками траекторий будут уже не
дуги окружностей, а отрезки скручивающихся к центру спиралей.
Линию переключения строим следующим образом. Выделяем спираль,
проходящую через точку + На рис. 2-6 эта спираль отмечена штрихо-
вой линией. Передвигаем виток спирали LXL2 влево, пока точка Lt не попадет
в начало координат, а точка L2 совпадет с точкой затем переворачиваем
виток L2L3 вокруг оси абсцисс так, чтобы он лег в верхнюю полуплоскость,
и передвигаем точку L3 влево до тех пор, пока она не совпадает с точкой 2VX,
и т. д. В нижней полуплоскости построение будет симметричным. Спирали,
лежащие выше линии переключения, получаются путем сдвига спиралей
на рис. 2-6 вправо на +и/®§, а ниже линии переключения — путем сдвига
их на —и/со§.
Приведенное выше построение было предложено Р. Бушау [213].
2-3. Теорема об п интервалах
Впервые эта теорема, но иным методом, была доказана
А. А. Фельдбаумом [180]. Пусть дана система уравнений
п г
+ 2 (» = 1Д .. ., п) (2-37)
V=1 Р=1
или в матричной форме
J = Ax + £u, (2-38)
где матрица
ап ai2 • • • а1п
имеет все вещественные собственные значения. Это равносильно
тому, что характеристическое уравнение системы
А/ ®12 ^1п
А = Я21 ^22 ’ а2п
ап1 йп2 • •
= 0
(2-40)
имеет только вещественные корни kk ,
На управления и9 наложены ограничения
ap^Up^Pp, р = 1, 2, г, (2-41)
т. е. область (7, к которой принадлежит вектор управления и
представляет собою р-мерный параллелепипед.
Тогда для каждого нетривиального значения вспомогательной
функции ф (t) однозначно определяется управляющая функция
u*(0 = {uf(0, u|(0, •••, ^*(0}.
При этом каждая из функций Up (0 кусочно-постоянна, при-
нимает только значения ар и |3Р и имеет не более п ~ 1 переклю-
чений (т. е. не более п интервалов постоянства), где п — порядок
системы (2-37).
Определим сначала функции Н и ф. В соответствии с изложен-
ными выше правилами
п п п г
Н = (чр, 4х) + (яр, Ви) = У, У + У, У, tfofyipUp. (2-42)
Ц=1 V=1 ц = 1р = 1
Вспомогательные функции ф определяются из уравнений
_____ ЗЯ _
dt dxj
Или в векторной форме
п
~ Ду^фу, / ~ •••
у= 1
п.
(2-43)
с?ф
dt
- Лтф,
где Ат по отношению к А является транспонированной матрицей.
Так как функция Я, рассматриваемая как функция перемен-
ной и, линейна, то она либо постоянна, либо достигает максималь-
ного значения лишь на границе многогранника Я, т. е. или в од-
ной вершине, или же на целой грани, причем в последнем случае
достижение максимума возможно, как показано в [132], лишь для
конечного числа значений t. Таким образом, функция и — ку-
сочно-постоянная и число ее переключений конечно.
На примере уравнения второго порядка мы видели, что число
переключений не превышает единицы (т. е. числа, на единицу
меньшего, чем порядок уравнения), если все корни вещественны,
и может быть сколь угодно большим, но конечным, если корни
комплексны. Можно показать, что в случае вещественных корней
в системе тг-го порядка число переключений не может превышать
п — 1.
Пусть все корни характеристического уравнения (2-40) веще-
ственны и среди них имеется т попарно различных корней
Х2, • •• » Чп» причем кратность i-ro корня равна г-. Очевидно,
так как общее число корней равно порядку уравнения, то
r1 + r2 + -.. + rm = n. (2-44)
Каждая из функций (£), полученная в результате решения
уравнений (2-43), будет иметь вид:
ЧЧ (0 = А1 (0 + А 2 (t) е^1 +... + fim (О , (2-45)
где (t) — полиномы степени г - — 1.
Пусть для некоторого т установлено, что функция (£),
определяемая формулой (2-45), имеет не более чем кг + к2 + •••
... + кт щ — 1 корней. Покажем, что в случае т + 1 слагаемых
функция
m-f- I
ФДО = s АДО^' (2-46)
j=l
имеет не более чем кг + к2 + ... + kvi + кт+1 + (гп + 1) —- 1
корней.
Предположим, что это не так и что в случае т + 1 слагаемых
функция (2-46) имеет большее число корней, скажем +
+ ... + + т + к, где к > 0. Умножим (2-46) на
что, очевидно, не изменит числа корней. Мы получим новую
функцию
Фг (0 = Фг (0 = Аie(%l-%m+l)' 4- •.. + 1 + А. „ИГ
По нашему предположению эта функция имеет к± + к2 + ...
... + кт+1 + т + к корней.
Возьмем кт + 1 производную этой функции. Так как степень
полинома Д, ma(t) равна кт^ то (ктП + 1) производная от него
равна нулю и мы имеем
Ф; W(ftjn+1+1) = е(Ч-Чг11)( н ... 4. s.m (/) (2-47)
Так как эта функция имеет тот же вид, что и (2-45) и число
слагаемых в ней равно т, то для нее число корней не превышает
К + к2 + ... + кт 4-771 — 1.
Вместе с тем, так как между каждыми двумя вещественными
корнями функции лежит по крайней мере один корень ее произ-
водной, то число корней функции (2-47) должно быть равным
ki + ••• + kv: + *„)+1 + т + к — (кт + 1) = кг + ... + кт +
+ т — 1 + к.
Отсюда видно, что к ~ 0, т. е. число корней для любого т
равно кг + ... + кт + т — 1.
Теперь достаточно указать какое-нибудь т, для которого наше
утверждение справедливо, чтобы показать, что оно в соответствии
с методом математической индукции будет справедливым для лю-
бого т. Нетрудно видеть, что утверждение справедливо для
ni = 1, так как функция Д (t) е7^ имеет те же корни, что и функ-
ция /х (0, и имеет поэтому не более кг корней.
Итак, учитывая, что ki — гг — 1, получаем, что число корней
функции не превышает числа
)Г1 - 1) + (г2 - 1) +... + (r„, - 1) + т - 1 = т\ + г2 4-...
... + гш — т^т-Л-п — 1.
Теорема об п — 1 переключении (теорема об п интервалах)
доказана.
2-4. Оптимальные процессы при ограниченных координатах
и управлениях
Пусть помимо управлений и = {иг (£), и2 (t), ... , ur (t)}
ограничены и координаты х = (£), х2 (0,... ,хп (t)} и граница
области, внутри которой должны находиться и за пределы кото-
рой не должны выходить х, определяется уравнением
g(x) = 0. (2-48)
Условие нахождения х внутри некоторой замкнутой области G
выражается неравенством
g(x) = g(Xi, Х2) .... £„)=С0.
Скалярная функция g (х) определена и имеет непрерывные
частные производные второго порядка вблизи границы, а вектор
нигде на границе в нуль не обращается.
Для того чтобы траектория х (0, соответствующая управлению
и (0, лежала на границе g (х) = 0, необходимо и достаточно, что-
бы она начиналась на этой границе g [х (i0)] = 0 и чтобы фазо-
вая скорость точки, движущейся вдоль траектории, в любой мо-
мент времени была касательной к границе, т. е. чтобы выполня-
лось равенство
/Дх, и] = 0,
где
Ul = 2a|^/a(X’ “)• (2‘49)
п — О
В [132] доказаны для этих данных следующие положения.
Оптимальная траектория может состоять из участков двух
видов: а) участки, лежащие внутри области G (т. е. принадлежа-
щие, как говорят, открытому ядру области G); б) участки, лежа-
щие на границе области G.
Для определения первых участков применим обычный принцип
максимума. Участки оптимальной траектории, лежащие на гра-
нице области G, определяются в соответствии со следующим видо-
изменением принципа максимума:
Пусть х (i), t0 t -С t± — регулярная оптимальная траекто-
рия уравнений (2-6), соответствующая оптимальному управле-
нию u * (t) и целиком лежащая на границе области G. Тогда най-
дется такая непрерывная вектор-функция ф (t) — [ф0 (£), ...
... , Фп (0L и такая кусочно-непрерывная, кусочно-
гладкая скалярная функция X (0, to t ix, что на отрезке
-С будут выполняться равенства:
dx _ (Ф, х> «) — / „V
~di~ ~мх’ и'’
= (ф, X, u) др (х, и).
dt дх ' ' ' дх '
(2-50)
(2-51)
о%^[ф(£), х(£), и (/)] = т [ф (Z), х (/)] = 0, (2-52)
где т(ф, х)~ sup <2%^
и соблюдаются условия:
а) Фо (0 — const -С 0;
б) вектор ф (£0) отличен от нуля и касается границы g (х) = 0
в точке х (£0);
в) во всех точках дифференцируемости функции X (t)
grad g [х («)] < 0,
(2-53)
т. е. вектор (2-53) направлен внутрь области G или обращается
в нуль.
В точках стыка траекторий двух указанных типов должно вы-
полняться одно из следующих условий скачка:
Ф+ (т) = 4? (т) + |i grad g [х (т)] (2-54)
ИЛИ
ф (т) + |Л grad g [х (т)] = 0, |1 0, (2-55)
где р — вещественное число.
Если участок траектории, содержащий точку стыка, лежит
на границе g (х) = 0, то
ф+(т) = ф (т).
(2-56)
Виды некоторых оптимальных процессов
1. Процесс с ограничением по модулю первой и второй произ-
водных:
dx . d2x
где хт, хт — постоянные.
Начальные условия: х (0) = 0, х (0) = 0.
d^x
В соответствии с принципом максимума управление zz* = Из-
будет равно хт до тех пор, пока х остается меньше хт. При
этом х и х, очевидно, изменяются по закону
х = t\
Это соответствует отрезку траектории, лежащей внутри об-
ласти G.
В момент
/ _ хт
хт
мы попадаем на границу области. Далее х остается постоянной
и равной хт, а х изменяется по закону
x — xmt.
Чтобы прийти в точку О с нулевой скоростью, мы должны в
некоторый момент времени начать торможение. Так же как и в за-
даче с ограниченной второй производной, так как начальные и ко-
нечные значения скорости равны, кривая х (t) должна быть сим-
метричной относительно точки 1/2 xk (рис. 2-7). Оптимальные
фазовые траектории показаны на рис. 2-8. Случай одновременного
ограничения нескольких координат детально изучен А. Я. Лер-
нером [101] с помощью пространства состояний и метода изохрон.
2. Пространством состояний названо многомерное простран-
ство, в котором по осям отложены все значения координат систе-
мы, включая входную. Каждому заданному закону изменения
входной координаты хп+1 = и в пространстве состояний соответ-
ствует единственная кривая, определяющая протекание процесса
в системе, но вместе с тем через каждую точку пространства со-
стояний проходит бесчисленное множество траекторий, определя-
емых законом изменения и. Ограничения рассматриваемого типа
выделяют в пространстве состояний область допустимых состоя-
ний (^-область).
Рассмотрим в области S некоторую точку а0 и найдем геометри-
ческое место точек, из которых путем выбора надлежащего за-
кона изменения управляющего воздействия, мы попадаем в точ-
ку а0 за одно и то же время (рис. 2-9).
Рис. 2-8.
Рис. 2-7.
Построить эти точки можно, приняв точку а0 за начальную,
задав некоторый произвольный закон изменения управления и
отсчитывая время в обратном направлении. Эти геометрические
места точек дают так называемую область изохрон для t =
И2 для t ~ t2 и т. д. Точка а0
, относительно которой выделяется
область изохрон, называется по-
люсом изохрон.
Можно также построить об-
ласть изохрон для кривой. Об-
ласть изохрон обладает следую-
щими свойствами: 1. Для любого
положительного область изо-
хрон имеет то же число измере-
ний, что и пространство состояний,
а все радиусы-векторы, проведен-
ные в любую точку границы обла-
сти изохрон, для любого положи-
тельного имеют конечную длину.
2. Каждая точка области изо-
хрон для времени tr принадле-
жит также и области изохрон для
большего времени ts > tr. Если точка, изображающая начальное
состояние, находится на границе области изохрон с временем tr,
то переход из этой точки за время tp в полюс изохрон возможен
только при условии движения изображающей точки по траекто-
рии, состоящей из отрезков кривых, расположенных на границе
5-области, и отрезков прямых, параллельных оси входной коор-
динаты системы, соответствующих скачкам координаты (рис. 2-10).
Число т этих скачков, необходимых для приведения системы
в заданное состояние за минимальное время, можно определить
следующим образом.
Пусть система представлена в виде последовательного соеди-
нения звеньев первого порядка (рис. 2-11). Это, очевидно, воз-
можно, если все корни характери-
стического уравнения системы веще-
ственны. Допустим, что ограничение
наложено только на входную коор-
динату хп+1. Тогда, как это следует
из теоремы об п интервалах чи-
сло переключений, не превышает
п — 1 (т. е. число интервалов не
превышает п). Введем в рассмотре-
ние число скачков т, которое равно
числу переключений координаты хп+1
плюс начальный скачок (включение)
и конечный скачок (отключение).
Таким образом, число скачков при
ограничении только координаты хплХ
не больше п + 1, т. е. индекса этой
координаты.
Пусть теперь, кроме входной,
ограничены также координаты
хрЛ, £ > Р- Если бы ограничение накладывалось только на
координату хра, то она совершила бы не более р + 1 скачков;
но так как ограничение наложено и на старшую по отношению
Рис. 2-11.
к хркоординату rrirl, то, для того чтобы смогла совершить
скачок, может потребоваться i — р + 1 скачков координаты хм,
а для скачка координаты xia, в свою очередь, может потребоваться
п — i + 1 скачков координаты хпП. Таким образом, общее число
скачков будет не более
т = (п - i + 1) (i - р + 1) (р + 1),
или, обозначая п — i=rni— p = s1
m - (г+1) (5+ !)(/> 4-1), (2-57)
где г, s, р — разности индексов двух ближайших друг к другу
ограниченных координат (для младшей координаты х +1 это
будет разность между ее индексом и индексом выходной величи-
ны ^1)-
Если ограничены все координаты, то число скачков не будет
превышать 2П, так как разность двух смежных индексов равна
единице, каждая из скобок в произведении (2-57) равна двум,
а число скобок равно числу звеньев п.
На рис. 2-12 показан ряд процессов перевода системы из од-
ного установившегося состояния равновесия в другое при огра-
ничениях, налагаемых на различные производные. Схема рис. 2-11
при этом будет состоять из интегрирующих звеньев. На рис. 2-12,а
показан процесс в системе при ограничении только первой про-
изводной. Порядок уравнения п — 1ит — тг + 1=2,т. е. имеет-
ся два скачка (включение и отключение), один интервал и число
переключений равно нулю. На
рис. 2-12, б показан процесс при
ограничении третьей производ-
ной, т = п + 1 = 3 + 1 = 4.
На рис. 2-12, в ограничены
третья и первая производная,
р = 3- 1 -2, г = 1—0 =
= 1, т = (/? 1) (г 1) = 6.На
рис. 2-12,г ограничены третья,
вторая и первая производные,
т — 23 = 8. На рис. 2-12, д
ограничена четвертая производ-
ная, т = 5; на рис. 2-12, е
ограничены четвертая и вторая
производные, т = (2 + 1) (2 +
-h 1)=9; на рис. 2-12, ж ограничены четвертая, третья и вторая
производные, лтг = (1 + 1) (1 + 1) (2 + 1) = 12; на рис. 2-12, з
ограничены все четыре производные, т — 24 = 16.
Если исходное и конечное состояния систем равновесны,
(^fe)(0) = ^ft)(7) = 0, Л=1, 2, ..., п -1),
то число скачков точно равно т, определяемому из (2-57), если же
начальные условия произвольны, то число скачков может быть
и меньшим. Минимальное число скачков, очевидно, равно двум,
что соответствует отсутствию переключений.
3. Задача А. А. Фельдбаума об оптимальной погоне. Задача
об оптимальной погоне детально рассматривалась в ряде работ.
Мы рассмотрим здесь лишь простейшую задачу, которая была по
времени первой [180].
Пусть к динамической системе приложено некоторое задаю-
щее воздействие xQ (t) (рис. 2-13). (Это, например, может быть ин-
формация о траектории движения экипажа, который мы должны
Догнать.) Требуется осуществить управление таким образом, что-
бы при ограничении по модулю ускорения нашей системы
I I А координата x (t) стала бы за возможно кратчайшее
время Т равной xQ (Z), причем в точке А встречи должны выпол-
няться условия касания кривых га-го порядка:
i(7) = i0(T).
(2-58)
Функцию х (£), удовлетворяющую поставленному ограничению,
будем называть допустимой. Считаем, что функция хь (t) также
является допустимой.
Рассматриваемая система является неавтономной, но на нее
также может быть распространен принцип максимума. Оптималь-
ное движение здесь также будет обладать кусочно-постоянной
второй производной
$ = (2-59)
Интегрируя, получаем
x = xH + iHi±4^ = ^±4<<-H)2, (2-60)
где хн, хн — значения координаты и первой производной в начале
рассматриваемого интервала; X и р, — постоянные, очевидным об-
разом зависящие от хн и хи. Движение совершается по параболе,
которая при изменениях X и р сохраняет форму, но перемещается
так, что ее ось остается параллельной оси х.
Чтобы построить оптимальный процесс, вырежем два парабо-
лических шаблона х— ^- At2.
Задав начальные значения х (0) = 0, х' (0) ггн, проведем
из начала координат прямую ОМ с угловым коэффициентом
х (0) и расположим первую параболу так, чтобы она проходила
через начало координат, касалась бы построенной прямой и ось
ее была бы параллельной оси х (рис. 2-14, б). Вторую параболу
располагаем так, чтобы она касалась первой параболы и кривой
,г0 (0» а вершина ее была направлена в сторону, противоположную
той, куда направлена вершина первой параболы и ось ее также
была параллельной оси х.
На рис. 2-14, а показан оптимальный процесс при нулевых на-
чальных условиях, а на рис. 2-14, б и в — при положительной
и отрицательной х' (0). На рис. 2-14, г показан случай, когда при
расположении первой параболы вершиной вниз не удается ре-
решить задачу (точка касания парабол получается в левой полу-
плоскости) и шаблоны приходится повернуть на 180°.
Различные виды задач с ограничениями рассмотрены в [189].
Рис. 2-15.
2-5. Пример оптимальной системы с двумя управлениями
Рассмотрим показанную на рис. 2-15 схему двойного управ-
ления двигателем постоянного тока Д [20], питаемого от электро-
машинного усилителя (ЭМУ). Требует-
ся за кратчайшее время перевести вал
из одного углового состояния в дру-
гое. Одним из управлений является
напряжение иу, подводимое к обмотке
управления ЭМУ; другим — напряже-
ние ив обмотки возбуждения двигате-
ля. Ограничения наложены на верхние
значения напряжений обеих обмоток
и на нижнее значение напряжения иу
обмотки возбуждения двигателя, чтобы
предотвратить опасность его разноса
при чрезмерном ослаблении поля возбуждения
I wy I ^== у. макс» ^в. мин ^== в. макс (2-61)
При учете инерционности обмоток возбуждения и поперечной
обмотки ЭМУ получается система уравнений четвертого порядка,
для которой точное аналитическое решение невозможно. Прибли-
женное решение и построение оптимизатора, реализующего при-
ближенное решение, приведены в [20]. Рассмотрим упрощен-
ную задачу, допускающую аналитическое решение: пренебрежем
постоянными времени обмоток управления и поперечной ЭМУ
и возбуждения двигателя. Уравнения системы:
i -ku i-ku- (2’62>
Д — &4zy; Er — cQzB = гя/?я.
Пренебрежем моментом нагрузки двигателя Ми и выберем в ка-
честве базовых значений С7у. макс, UB. макс и заданное перемеще-
ние вала xY Макс* Обычным способом приведем уравнения к виду
dXn о /г» РО\
-jr = *2’ u2x2 + autu2, (2-63)
где хг —- относительное перемещение вала; х2 — относительное
изменение угловой скорости; и± и и2 — относительные значения
напряжений управления ЭМУ и возбуждения двигателя; а — по-
стоянная величина.
Функция Гамильтона Н для этой системы имеет вид:
Н = ^гх2 4- ф2 (аи1и2 — х2щ).
Сопряженные вспомогательные уравнения:
chp! ___ дН
dt дхг
бЛ|)2 __ дН
dt дх2
(2-64)
(2-65)
— 0;
= + ф1.
Для определения максимума функции Н найдем ее частные
производные по управлениям.
Так как Н линейная функция и±, то максимальное значение
она может принимать на границах интервала —1, 1. Учитывая,
что и2 всегда положительно, имеем
и± = sign ф2. (2-66)
Частная производная Н по и2 в точке экстремума
= ф2 (awi - 2х2и2) — 0, (2-67)
откуда
(2-68)
Чтобы определить, какой из экстремумов определяется выра-
жением (2-68), найдем вторую производную Н по и2
5 = (2-69)
Рассмотрим область, в которой ф2> 0 и в соответствии с
(2-66) иг — 1. Из (2-69) следует, что при этом в верхней фазовой
полуплоскости, где х2 > 0, вторая производная Н по и2 отрица-
тельна и, следовательно, (2-68) определяет точку максимума,
если и2 находится в допустимых пределах, т. е.
или
(2-70)
За этими пределами и2 равно своим крайним значениям:
и2 = Х, если #2^ а > 2Л
и2 = 1, если Х2 < а 2"’
(2-71)
(2-72)
В нижней полуплоскости х2 < 0 (2-68) определяет точку ми-
нимума, поэтому и2 будет равно тому своему предельному значе-
нию, при котором величина ф2 (а ui иъ — х2 имеет наибольшее
значение. Очевидно, что это будет и2 = 1, если х2 < 0.
Перейдем к области, где ф2 < 0, иг = —1. В верхней полу-
плоскости вторая производная теперь, как это следует из (2-69),
положительна и максимум достигается при и2 = 1, в нижней же
полуплоскости
и2 — Z, если 1Ж21> 2% ; (2-73)
и2 = 1, если (2-74)
1 а 1 и*~ \ 2х2 ’’ если J 1 ж2 1 \ 2 V (2-75)
и2 = 1, если х2 0. (2-76)
Решение вспомогательных уравнений (2-65) выразим через и2,
считая и2 заданной функцией времени:
Лр! = COnst,
t t
J /Z2rf/r t — j uldt
ф2х=е° ° dt
0
(2-77)
Так как величины интегралов в (2-77) изменяются при возра-
стании t монотонно, то ф2 имеет не более одного перехода через
нуль.
При граничных условиях х2 (Т) = х± (Г) = 0 конечной точ-
кой будет начало координат. В окрестности начала координат,
если х2 положительно, то, чтобы система пришла в начало
координат, должна быть отрицательной. Это означает, что
в окрестности начала координат на фазовой траектории, лежащей
в верхней полуплоскости, проходящей через начало координат,
член а иги2 должен быть отрицательным, т. е. их — —1. Величина
при этом отрицательна, и в соответствии с неравенством (2-76)
и2 — 1. Уравнение фазовой траектории, лежащей в верхней по-
луплоскости и проходящей через начало координат, таким об-
разом, определяется из уравнений
Получим
(2-79)
Траектория показана на рис. 2-16, а (линия Симметрично
с ней относительно начала координат в четвертом квадранте рас-
положена траектория Л2. Чтобы любая траектория, лежащая
выше Li, ни при каких х2 не ушла в бесконечность, dxjdt должна
быть отрицательной, и из (2-63) следует, что при этом иг — —1.
Аналогично можно убедиться, что для траектории ниже£2 должно
быть 0 и и± = 1. Линия таким образом, есть линия
переключения, выше которой иг = — 1, ниже их = 1. Линии Гх =
= а/2 и Г2 = а/2% разграничивают части траекторий АВ, на
которых движение совершается по законам, определяемым усло-
виями (2-73) (выше Г2), (2-75) (между Гх и Г2) и (2-74) (ниже Ti).
В четвертом квадранте аналогичную роль играют прямые Г{ —
= —а/2 и Г2 - —а/2%.
На рис. 2-16, б показан оптимальный процесс, соответствую-
щий траектории АВО на рис. 2-16, а. Так же как и при управле-
нии двигателем при постоянном независимом возбуждении, их на
первом интервале ur — 1 разгоняет двигатель, на втором иг = —1
тормозит его; и2 создает дополнительное ускорение процесса.
При положительном иг и малой (или отрицательной скорости х2),
и2 способствует разгону и потому на первой стадии процесса имеет
наибольшее значение. По мере возрастания х2 и% начинает оказы-
вать тормозящее действие, поэтому в средней стадии, когда еще
процесс разгона не закончился, но скорость х2 достаточно велика,
и2 начинает снижаться. На последней стадии, когда = —1,
и2 начинает оказывать только тормозящее действие, и так как на
этой стадии торможение должно быть наиболее интенсивным, мы
прикладываем максимальное значение и2 = 1.
Другой пример системы оптимального управления с двумя
воздействиями рассмотрен в [155].
ГЛАВА ТРЕТЬЯ
ДИНАМИЧЕСКОЕ ПРОГРАММИРОВАНИЕ
3-1. Постановка задачи. Принцип оптимальности
Почти одновременно с опубликованием принципа максимума
американским математиком Р. Беллманом был разработан метод
динамического программирования. Работы в этом направлении
начались с 1949 г., и сначала их результаты помещались в не-
публикуемых широко отчетах фирмы Рэнд Корпорейшн в Санта
Моника. Широкая публикация метода началась с 1953 г. Наиболее
полное изложение метода дано в [205]. В этих работах предлагал-
ся общий метод сведения вариационных задач к решению функ-
циональных уравнений. Метод был разработан для исследования
систем оптимального управления значительно более широкого
класса, чем системы, описываемые дифференциальными уравне-
ниями, и он применим поэтому не только к оптимальным задачам
динамики, но и к весьма широкому кругу технических и эконо-
мических задач, в которых связи между координатами, управле-
ниями и критерии оптимальности могут задаваться как в виде
уравнений весьма произвольного вида, так и в виде эксперимен-
тально определенных графиков или таблиц численных данных.
Первоначально увлечение динамическим программированием бы-
ло столь же сильным, как и увлечение принципом максимума.
При обосновании метода динамического программирования
предполагается, что функционал, выражающий критерий опти-
мальности, является дифференцируемой функцией фазовых ко-
ординат. Так как в ряде случаев, решаемых методом динамиче-
ского программирования, упомянутое условие не выполнялось,
это дало основание Л. С. Понтрягину утверждать, что метод ди-
намического программирования скорее представляет собою хо-
роший эвристический прием, чем математическое решение задачи.
После того как предположение о дифференцируемости функ-
ционала сделано, метод приводит к уравнению в частных произ-
водных (уравнение Беллмана). Это вообще усложняет аналити-
ческое решение, но основная сила метода заключается в том
62
что он позволяет избежать аналитического решения и дает весьма
прозрачные, хорошо осмысливаемые физически алгоритмы при-
ближенного решения задачи путем расчленения ее на этапы, вы-
числений на каждом этапе локальных участков оптимальных
фазовых траекторий без «оглядки» на граничные условия и целена-
правленного перебора локальных вариантов для получения окон-
чательного решения. Здесь как бы сочетается кусочно-линейная
аппроксимация с методом динамического программирования, на
основе чего вырабатывается весьма общая процедура численного
определения оптимального управления.
Однако в сложных случаях объем вычислительной работы
при реализации этой процедуры также оказывается зачастую не-
посильным даже для самых крупных современных вычислительных
машин. Поэтому продолжаются попытки усовершенствовать вы-
числительную процедуру динамического программирования. Инте-
ресная попытка была сделана Мерриэмом [249; 2 50], предложившим
аналитическую формулировку закона управления, основывающую-
ся на беллмановском принципе оптимальности. Закон также форму-
лируется в виде уравнения в частных производных. В случае,
когда критерий оптимальности представляет собою квадратичный
функционал относительно управления, а уравнения системы ли-
нейны, задача сводится к обыкновенным нелинейным уравнениям
типа Риккатти. В других случаях уравнения решаются численно,
причем удается обойтись меньшим количеством вычислительных
операций, чем в процедуре Беллмана. Другое усовершенствова-
ние в виде метода последовательных вариантов было предложено
в [114].
В работе [158] были рассмотрены методы Понтрягина и Белл-
мана и выяснена связь между ними. Перейдем к формальному
изложению исходных этапов метода динамического программи-
рования.
Пусть математическое описание системы дается системой диф-
ференциальных уравнений
=/i (®i, • • •, ип), (3-1)
z = 1, 2, . . ., п
или в векторной записи
>=!(х, и). (3-2)
Число управлений т принято равным числу координат га,
но это не сужает задачи, так как, если т < га, то п — т управле-
ний в уравнении полагаются равными нулю.
На координаты и управления могут быть наложены различ-
ные ограничения. Пусть, например хин должны принадлежать
к некоторым, определенным образом заданным множествам или
областям X и U.
х е х, и е и. (з-з)
Пусть критерий оптимальности выражен функционалом /,
который может зависеть от координат х, управлений и и, в общем
случае, времени t
т
. .., хп, . .., uH,t)dt. (3-4)
^0
Функционал J выражает обычно или выгоду от управления
(полученное количество продукции, прибыль, к. п. д. и т. д.),
или же потери (расход энергии, штрафы и неустойки, расход ре-
сурсов и т. д.). Будем называть его в первом случае функционалом
выгоды, во втором — функционалом потерь.
Мы будем рассматривать применение метода к так называе-
мым терминальным задачам, где требуется перевод системы из на-
чального состояния х (to) в конечное х (Z). В этих задачах изме-
нение состояния системы изображается в фазовом пространстве
координат траекторией с закрепленными концами.
Оптимальные управления, доставляющие экстремум функцио-
налу, и соответствующие им оптимальные процессы будем отме-
чать звездочкой Ui(t), При найденном оптимальном
управлении функционал J будет функцией начальных условий и ин-
тервала времени управления Т. Его также будем отмечать звез-
дочкой — J * [х (£0), Т]. Для определенности в дальнейшем бу-
дем считать, что отыскиваются оптимальные управления, достав-
ляющие максимум функционалу выгоды. По определению
/*[х(^0), 74= шах /[х(0, и (О, Л- (3-5)
и с и
Соотношение (3-5) представляет собою функциональное урав-
нение, из которого может быть найдено оптимальное управление
и * (t).
Выберем на промежутке Т некоторую промежуточную точку
tk. Ей будет соответствовать точка х * (£й) на оптимальной траек-
тории, разделяющая траекторию на две части. Функционал
(3-4) также разбивается при этом на два слагаемых:
J [х (Zo), Т] = \F (х, u) dt + \F (х, и) dt. (3-6)
lk
Принцип оптимальности, сформулированный Р. Беллманом,
сводится к следующему: оптимальное управление таково, что ка-
ким бы ни было начальное состояние системы и начальное опти-
мальное управление (т. е. оптимальное управление, определенное
для интервала tQ t ^), всегда последующее управление и **(£)
(на интервале tk t Т) должно быть также оптимальным от-
64
посительно состояния, возникшего в результате первого этапа.
Это означает, что значение функционала J * в интервале tQ t^T
на управлениях u * (t) и u ** (t) должно быть одинаковым. Если
бы это было не так и значение функционала на управлении
u ** (I) оказалось бы, например, больше значения функционала
на управлении u * (t) и начальном состоянии х * (tk), то управ-
ление u * (t) можно было бы улучшить, заменив его управлением
v(0 =
Но если u * (t) оптимально, то оно не может быть улучшено,
поэтому и значения функционалов на управлениях и * и и**
в интервале (tk, Т) должны
быть одинаковы. Это озна-
чает, что и управление u * (t)
будет той же функцией, что
и u ** (i) в интервале tk
На рис. 3-1 показан при-
мер траекторий в плоскости
двух переменных t и х. Пусть
из состояния х (tQ) в состоя-
ние х (Т) ведет лишь одна оп-
тимальная траектория АВ2С.
Расчленим процесс на два
этапа: t0 —- и tr — Т. В на-
чале второго этапа исследуем
движение из нескольких точек — х{, х£, Х3. Принимая эти точки
за начальные, мы из каждой из них сможем на втором шаге при-
вести оптимальную траекторию. Траектории BjC, В2С, В3С будут
оптимальными для второго шага, для каждой из них можно со-
ответственно найти и оптимальные управления. Их называют
условно-оптимальными, так как они оптимальны лишь для рас-
сматриваемого отрезка времени и исходных точек. Но оптималь-
ной траекторией для обоих шагов будет лишь траектория В2С,
являющаяся частью оптимальной траектории АВ2С. Нахожде-
ние оптимального управления u * (t) на отрезке времени (i1? Г),
соответствующего отрезку оптимальной траектории В2С, можно
выполнить с помощью функционального уравнения
= max /[ж(^), 7, и]. (3-7)
u(0 € U
В соответствии с принципом оптимальности выражение (3-7)
Должно быть равно второму слагаемому в уравнении (3-6), по-
этому t ч
у*[я(г0), Г] = тах)И(^ Т]\ (3“8)
м Чо >
3-2. Уравнение Беллмана
Пусть в примере предыдущего параграфа конец оптимальной
траектории закреплен, т. е. х * (7) задано. Будем двигаться, как
это обычно делается в динамическом программировании, от кон-
ца траектории к началу, причем начало не фиксируется, и момент
t0 рассматривается как переменная величина. Поэтому начало
будет обозначать не х (i0), а х (t). Момент разделяющий
траекторию на две части, также будет переменной величиной,
которая сколь угодно близко может приближаться к t, поэтому
будем вместо t± подставлять величину t + kt. В соответствии
с этим уравнение (3-8) перепишем в следующем виде:
Р + а* )
J*[x(i), П = тах{ ( F(x, u)dT±J*[x(t + At), (3-9)
t )
Разложим интеграл в (3-9) в ряд Тэйлора в окрестности t по
степеням Ai
(t
u)dx4-
i 4- M
d г
d (t + At) j
t
F (x, u) dx
M -f-
n
+ 81 + J*[x(0, +
г= 1
dj*
d (t + At)
At + e2?. (3-10)
Здесь 82 и e2, содержащие члены ряда с производными выше
второго порядка, являются малыми высшего порядка по сравне-
нию с Ai.
t
Слагаемое F (х, и) dx, полученное в результате замены те-
t
кущего значения t + At значением, в окрестности которого про-
изводится разложение в ряд, очевидно, равно нулю.
При фиксированном t производная от определенного интеграла
в квадратных скобках равна производной по Ai и, в соответствии
с теоремой о дифференцировании интеграла по параметру, от
которого зависит верхний предел, равна подынтегральной функ-
ции F [х (i + Ai), u (i + Ai)].
Так как величина J * [х (i), 7], стоящая в фигурных скоб-
ках, не зависит от и, ее можно вынести из под знака max и сокра-
U
тить с тождественным выражением левой части уравнения. Раз-
делив после этого все члены уравнения на Ai и устремив At к ну-
лю, мы получим, учитывая, что 8i и 82 малые высших порядков
в сравнении с At
(и
г==1
= 0. (3-10)
#сли рассматривать это уравнение совместно с исходной системой
уравнений объекта (3-1), то мы получаем, заменяя-— их выра-
жениями из (3-1),
шах
и € и
' п
F[x(t),«(/)]+(о, «он
г = 1 1
(3-11)
Уравнение (3-11), называемое уравнением Беллмана, пред-
ставляет собой специфическое уравнение в частных производных,
решая которое, мы в конечном итоге находим и * (f) и х * (t).
Обычно непосредственное точное решение уравнений Беллма-
на связано с серьезными затруднениями и для решения задачи
применяют численные методы. Но в некоторых простейших зада-
чах удается непосредственно решить уравнение Беллмана.
В качестве одного из примеров приведем задачу, рассмотрен-
ную А. М. Летовым [104].
Даны линейные дифференциальные уравнения объекта:
-5~-= + bi2x2 + ... + binxn +
Требуется найти уравнения регулятора, который за бесконеч-
ное время осуществляет перевод системы из возмущенного состоя-
ния в заданное, минимизируя при этом функционал
I = \Vdt, V= У, ahxl + aou*,
о Л = 1
где ак и а0 — заданные положительные весовые коэффициенты.
Уравнения динамического программирования (3-11) примут
вид:
max
и € и
п
у + 2 +• • •+v»+miu)
г = 1 1-
= 0.
(3-12)
Чтобы найти и, доставляющее функционалу минимум, прирав-
ниваем нулю производную по и от левой части (3-12):
0F , V dfi dJ* „ , V о /п .QX
^г+ 2^-^ = 2а0“+ = (3’13)
г = 1 г = 1
Исключив из (3-12) и (3-13) и, получаем
п п / п \2
2+ 2 +• • •+45?(2• (3*14)
Л-1 i-1 \<-1 /
Решение этого нелинейного уравнения ищется в виде квадратич-
ной формы
7* = 22 Aaxix>- (3-15)
г j
Коэффициенты определяются сравнением коэффициентов
после подстановки (3-15) в (3-14). В результате параметр и находит-
ся в виде
и = к1Х1 4- к2х2 4- ... -4 кпхп.
Весьма интересно, что в этом случае бесконечного времени
регулирования функция J * оказывается функцией Ляпунова,
а функция V — ее полной производной, причем
т. е. в результате синтеза получается устойчивая система.
Пусть критерий оптимальности задан в виде функционала
потерь
j = f {X (а) [X (а) - х (а)] + /м [U (а) — и (а)]} do,
t
где U (а) и X (а) — желаемые векторы управления и состояния;
функции /х и fu обладают свойством /х (0) = fu (0) = 0 и явля-
ются строго вогнутыми; % (а) — неотрицательная функция веса,
учитывающая ценность критерия в различные моменты. Обычно
по прошествии большого времени практическое значение функ-
ций выгод и потерь падает.
Уравнение Беллмана (3-11) принимает вид (так как J * —
потери, их надо минимизировать):
min X (0 fx [X (0 - х (0] + fu [U (0 - u (0] +
u с u
, V dxi dJ*[x(t), J] , dJ*[x(0, *]l q
Zi dt dxi ф dt j ‘
Рассмотрим простейшую систему первого порядка
dx , 1
-^ + — х = аи.
Функции /х и fu задаются в виде:
fx(v) = fu(v) = V2,
Уравнение Беллмана принимает вид:
nin {х т [X (() - х («)] + [Р (<) “ “ (')]“ +
+ = (3.16)
Сначала рассмотрим случай отсутствия ограничений, налага-
емых на и (£). Продифференцируем (3-16) по и и приравняем
производную нулю:
-2[С7(0-м(0] + д^Ц^Л = О.
Отсюда находится оптимальное управление
Оптимальное управление выражено через неизвестные еще
производные J *. Подставив и * в (3-16), получим дифференци-
альное уравнение в частных производных:
1 (о [х со -х (op + +4 d}2+
+ [aCZ (0 - 4 - j-g(01t] = 0. (3-17)
L ox i q j ox
Так как наивысшая степень х (0 в этом уравнении равна двум»
то ограничимся при разложении функции J * [х (0, 0 в ряд по х
также второй степенью и положим
J* [х (0, 0 = Ко (0 + Кх (0 х (0 + Кг (0 [х (0]2, (3-18)
где Ко, Кг, К2 -— некоторые, пока неизвестные функции t.
Так как
= К'о (0 + Ki (0 X (0 + К’ (0 [х (0Г;
(3-19)
=^(0 + 2Ка(0х(0,
то подставив (3-18) и (3-19) в (3-17) и сгруппировав слагаемые по
степеням х (0, получим
{х (0 [X (0Р + Ко (0 - 4 [Ях (0]2 + аи (0 Ki (0} +
+ {—2Х(0Х(0 +K[(t) - ^№(0 +2J7(0tfa(0 - ^rKi(t)}x (0 +
+ {x (0 4- K, (0 - a2\K2 (0]2 - Д K2 (0} [x (0]2 = 0. (3-20)
Так как уравнение (3-20) должно быть справедливым для лю-
бых х (0, приравниваем порознь нулю каждую из фигурных
скобок и получаем три обыкновенных дифференциальных урав-
нения для определения функций Ко, К± и К2 при граничных ус-
ловиях, вытекающих из равенства:
J*[x(t + T), t+T] = O,
так как при этом верхний и нижний пределы интеграла, выра-
жающего J *, становятся одинаковыми. Отсюда нетрудно полу-
чить, что
KQ{t + T) = K1{t + T) = K2(t + T)^0.
Так как эти граничные условия являются конечными, а не
начальными, то уравнения удобно решать «ходом назад».
Даже для столь элементарного примера аналитическое реше-
ние уравнений оказалось в конечной форме неосуществимым.
Рис. 3-2.
Этим иллюстрируется прак-
тическая нецелесообразность
решения задач динамическо-
го программирования пря-
мым аналитическим методом.
Решение практически всегда
выполняется численным ме-
тодом, путем расчленения
процесса на ряд этапов, и
динамическое программиро-
вание дает для такого реше-
ния алгоритм, технический
смысл которого обычно весь-
ма ясен и нагляден. Это
обстоятельство и привлекло внимание к методу динамического
программирования.
Ниже рассмотрим пример численного поэтапного решения за-
дачи методом динамического программирования. Здесь же от-
метим, что с помощью уравнения
и* (0 = (0 -Кг (/)] - аК2 (О X* (/)
(3-21)
можно получить структурную схему моделирующей установки,
выполняющей решение задачи оптимизации (рис. 3-2). На этой
схеме В — объект регулирования; М3 — множительное звено,
функции 7Г0, К± и К2 получаются извне, от вычислительных
устройств, решающих уравнения, полученные путем прирав-
нивания нулю фигурных скобок в выражении (3-20). Извне по-
дается и желаемая функция U (t).
Если и (t) ограничено,
(3-22)
to решение принимает вид [104]:
где
и* [t) —
и0 (0> ^1 (0 ио (0 ^2 (0
•^г(0> wo (0 ^2 (0>
и0 (t) — U — 0,5аКг (0 — аК2 (t) х (0.
(3-23)
(3-24)
При этом, если Ux «2 uQ =С U2, функции KQ, Klt К2 по-преж-
нему определяются из (3-20), если же и0 выходит за допускаемые
неравенством (3-22) пределы, то К находятся из уравнений
к' («)=- аит (/) кг (о - и (/) - ит (о - х (о [х (ОЗ2;
К[ (0 = А (0 - 2aUm (t)Kt (0 + 2Х (0 X (0; . (3.25)
K^t)^ К2 (0 -Ц0,
которые получены из уравнений (3-16) подстановкой в них вме-
сто и (t) значения и (I) = Um, a J * — из (3-18). Um берется рав-
ным и± или U2 в соответствии с (3-23).
Решение задачи для уравнения n-го порядка рассмотрено
в [104, 236, 249, 250].
3-3. Пример решения одномерной задачи численным методом
Проследим путь численного динамического программирования
на следующем элементарном примере. Объект описывается урав-
нением
-g- = / (х, и) = и - 0,6х. (3-26)
Требуется найти оптимальное управление и * (£), при котором
объект переходит из состояния х (0) = 0 в состояние х (Т) = 10
за время Т = 1, причем функционал
т т
J = 5 (х2 + k2u2) dt = \ [х2 + (1,25и)2] dt (3-27)
о о
принимает минимальное значение.
Разбиваем Т и х^ = х (Т) — х (0) на интервалы. Так как
надо лишь проиллюстрировать методику, то мы используем весь-
ма грубую разбивку, расчленив Т на пять интервалов. Проведем
изохроны через точки: tQ = 0; fr = 0,2; t2 = 0,4; t3 = 0,6;
= 0,8; t5 = T = 1,0.
На каждом из ti величина x{ может принимать также множе-
ство значений, среди которых следует искать оптимальные.
При численном решении считаем, что х1 принимает также толь-
но дискретные значения. Для упрощения разбиваем xN лишь на
четыре равных интервала, тем самым считаем, что ж’ может при-
нимать одно из следующих значений: ж* = 0; ж* = 2,5; ж’ = 5,0;
ж* = 7,5; ж* = ж# = 10.
Дифференциальные уравнения заменяем разностными:
Ажй=:жй+1 —жй==/(жА, ик) Ath; (
&Jk = F(xk,uk)btk. J
В рассматриваемом случае
А^ = 0,2; 1
^xk=(uk - °>6жа) д^; ) (3’29)
AJft = (4 + 1,5625«£) Atft = [жД + 1,5625 (жй + 0,6жй)2] Мк ъ
ъ [жД +1,5625 + 0,6ж^2] А^. (3-30)
Нанесем точки, соответствующие разным хг и на график
(это будут узлы прямоугольной сетки) и построим в этих точках
окружности (рис. 3-3), в которых будем вписывать значения при-
ращения функционала AJ при перемещении из этой точки к сле-
дующей по приближенной условно-оптимальной траектории, ко-
торую будем считать прямолинейной.
В выражении (3-30) производная х заменена отношением при-
ращений Ах/At. Эта замена дает существенный источник погреш-
ности, уменьшить которую можно, увеличив число интервалов.
В нашей задаче все Д£Л приняты одинаковыми. Это существен-
но упрощает расчет, так как на каждом этапе, независимо от его
номера, для одинаковых значений х и \х будем иметь те же зна-
чения А/. Рассчитаем ряд приращений AJ для различных зна-
чений х и Аж. При этом заметим, что область, в которой следует
производить вычисления, может быть значительно сужена.
Прежде всего на всех перемещениях по вертикали Д£ = 0,
Аж Ф 0, и это обстоятельство сразу исключает вертикальные пе-
ремещения, которые, очевидно, не могут принадлежать оптималь-
ным траекториям, так как AJ обращается на них в бесконечность.
В данном случае, основываясь на априорном опыте решения
сходных оптимальных задач, можно сделать и другое сужение об-
ласти, исключив из рассмотрения отрезки, идущие сверху вниз,
так как есть все основания считать, что в данном случае процесс
будет монотонно возрастающим. Однако это предположение яв-
ляется эвристическим и в более сложных задачах может оказаться
неправильным.
В тех случаях, когда такого предположения сделать нельзя,
весьма полезными для сужения области вычислений оказываются
ограничения, налагаемые на величину координаты ж. Это выгодно
отличает метод динамического программирования от других ме-
тодов, где подобные ограничения обычно усложняют решение.
Решение задачи в методе динамического программирования
v1o/Kho начинать от одной из заданных точек — начальной или
конечной. Начнем, как это чаще всего делается, с последнего
этапа: найдем приближенные условно-оптимальные траектории,
ведущие в конечную точку х[. Так как вертикальные перемещения
исключаются, то нам достаточно рассмотреть лишь те траектории,
которые выходят из узловых точек предыдущего этапа х*, лежа-
щих не выше точки х[. При этом траектории, состоящие из двух
отрезков — горизонтального и вертикального (например, траек-
тория Х2 — Xi — £4), — исключаются по той же самой причине,
и остается лишь рассмотреть прямолинейные траектории, исхо-
дящие из точек жо, $1, #2, ^4 (рис. 3-3).
Величины приращений AJ (xj) для этих траекторий, вычислен-
ные по формуле (3-30), сведены в табл. 3-1. В этой таблице к вы-
числению приращений на последнем этапе относятся строки 1,
3, 6, 10 и 15. Величины AJ надписаны над отрезками (рис. 3-3),
они же вписаны в кружках, из которых эти траектории исходят.
Мы видим, что в нижележащих кружках эти цифры больше, чем
в вышележащих. Однако нельзя делать вывод, что отрезком окон-
чательной оптимальной траектории будет обязательно верхний
горизонтальный отрезок, хотя на нем AJ и имеет минимальное
значение, так как оптимальная траектория, включающая этот
отрезок, может и не пройти через начальную точку. Поэтому пока
оставляем все найденные отрезки как возможные отрезки дей-
ствительной оптимальной траектории.
Переходим к следующему шагу — предпоследнему (четвер-
тому) этапу, на котором траектории исходят из х] и входят в точ-
ки х^ (рис. 3-3). При этом исключаем вертикальные отрезки и от-
резки, имеющие отрицательный наклон. Расчет ведем так:
АУ* (я?) = min {(xl)2 +1,5625 + 0, ба:®)2 + ДУ* (х* + Дж)}. (3-31)
Уравнение (3-31) соответствует уравнению (3-9); только в со-
ответствии с требованиями задачи вместо максимума ищется ми-
нимум и вместо абсолютного значения J * — его приращение.
В цифрах расчет ведем по такой схеме:
А/ (xl) = АУ (х$ = 31,2 + 31,2 = 62,4;
(17,6 + 101,51
AJ (ж’) = min^1{)1 5 + 31>2}= Н9.1;
7,8 + 250
ДУ(xf) = min 80,2+ 101,5 = 181,7;
250 + 31,2
A J (xf) = min
г2,0 + 476,9 '
162,4+ 250
1220,7+ 101,5
1476,9 + 31,2 .
0 + 782
48,8 + 476,9
ДУ (ж’) = min {195+ 250
= 445.
440+101,5
782 + 31,2
Поясним эту схему. А/ (^4) — эта цифра, которая должна быть
вписана в кружок, соответствующий точке х[ (верхний в столбце
3). Она равна сумме приращения AJ на горизонтальном отрезке
верхней (четвертой) строки и цифры того кружка столбца 3,
в который этот отрезок входит. На всех этих отрезках AJ, как
это видно из первой строки табл. 3-1, равно 31,2, поэтому
А/ (х[) = 31,2 + 31,2 - А/ (хз) — цифра, которая должна быть
вписана в кружок, соответствующий точке х$. Из этой точки мо-
гут исходить, в соответствии с ограничениями данной задачи,
две траектории: одна — в точку х% с приращением ДУ, равным
17,6, входящим в кружок с цифрой 101,5, и вторая — в точку
х{ (на рис. 3-3 показана штриховой линией) с приращением
АУ = 101,5, входящая в кружок с цифрой 31,2. Суммы 17,0 +
+ 101,5 и 101,5 + 31,2, дающие результирующее приращение АУ
при переходе из точки х$ в конечную точку х^, показаны в фигур-
Таблица 3-1
хк хк а — Дх = "дГ ь = ~ °’6хк с== — a -f- b С2 d = = 1,5625С2 е = = 4-d д/ = = 0,2е
1 10‘ 100 0 0 6 6 36 56,25 156,25 31,2
2 7,5 56,25 0 0 4,5 4,5 20,25 31,6 87,85 17,6
3 7,5 56,25 2,5 12,5 4,5 17 289 451 507,25 101,5
4 5 25 0 0 3 3 9 14,06 39,06 7,8
5 5 25 2,5 12,5 3 15,5 240,25 376 401 80,2
6 5 25 5,0 25 3 28 784 1225 1250 250
7 2,5 6,25 0 0 1,5 1,5 2,25 3,52 9,78 2
8 2,5 6,25 2,5 12,5 1,5 14 196 306 312,25 62,4
9 2,5 6,25 5,0 25 1,5 26,5 702,3 1097 1103,3 220,7
10 2,5 6,25 7,5 37,5 1,5 39 1521 2378 2384,5 476,9
И 0 0 0 0 0 0 0 0 0 0
12 0 0 2,5 12,5 0 12,5 156,25 244 244 48,8
13 0 0 5 25 0 25 285 975 975 195
14 0 0 7,5 37,5 0 37,5 1410 2200 2200 440
15 0 0 10 50 0 50 2500 3910 3910 782
них скобках. Из них выбрана меньшая 119,1, и соответствующая
ей траектория на рис. 3-3 показана тонкой сплошной линией.
Так же подсчитаны и остальные приращения, но для остальных
точек не условно-оптимальные траектории уже не нанесены на
рисунке. Цифры, соответсвующие оптимальным траекториям,
в фигурных скобках выделены.
Приведем вычисления для последующих шагов. Третий этап:
AJ (^) = 31,2 + 62,4 = 93,6;
(17,6 + 119,11
\J (xg) = min|1015 б2)4 j = 136>7;
Д/ (х|) = min
7,84-181,7
80,2+119,1
.250 + 62,4
= 189,5;
(2,0 + 312,4 -j
Д/ («J) = min
220,7 + 119,1
= 244,1;
(.476,9 + 62,4
Д7 = min
0 + 445
48,84-312,4
195 + 181,7 [ = 361,2.
440 + 119,1
782 + 62,4
Второй этап:
AJ(a:J) = 31,2 • 4 = 124,8;
(17,6 4-136,71
AJ (ж|) = mm |101)5 + 936 j = 154,3;
Д J (я*) = min
7,84-189,5
80,2 + 136,7
.250 + 93,6 .
= 197,3;
AJ (xj) — min <
A J (xq) — min
2,0 4-244,1
62,4 +189,5
220,7+ 136,71 = 246,1
.476,9 + 93,6 J
0 + 361,3
48,84-244,1
195 + 189,5
440 + 136,7
782 + 93,6
= 292,9 ~ 293
Остается начальный этап. Так как на этом этапе оптимальная
траектория должна исходить из начальной точки xg, мы и здесь
сужаем область вычислений, ограничиваясь расчетами только для
этой точки:
0 4-292,9
A J = min -
(48,8)+ (246,2)
195 + 197,3
440 + 154,3
782 + 124,8
= 292,9 ~ 293
Заметим, что суммы цифр, стоящие в первой (292,2) и второй
(295) строках, отличаются лишь на 0,7%, что соизмеримо с
погрешностью расчета, поэтому оба варианта практически равно-
вероятны и оба нанесены на график (второй — двойной линией).
Теперь, идя от начальной точки по отрезкам условно-оптималь-
ных траекторий, т. е. по линиям, отмеченным стрелками, нахо-
дим приближенную оптимальную траекторию в виде ломаной ли-
нии, показанной на рис. 3-3 жирной линией. Оптимальное управ-
ление находится с помощью уравнения (3-13):
«^=0,6^+^.
Плавной прерывистой линией на рис. 3-3 нанесена точная
оптимальная траектория
* z.v sh mt nnShi
X* U) — xN —г—ж = 10-т-7.
' ' sh mT sh 1
В рассмотренном примере мы шли «обратным ходом»: от последнего этапа
к первому, как это чаще всего и делается. Заметим, что этот путь не обяза-
телен, и вся процедура динамического программирования может идти и
«прямым ходом»: от начального этапа к конечному, так как в силу прин-
ципа оптимальности начальной отрезок оптимальной траектории также яв-
ляется условно-оптимальной траекторией.
Проиллюстрируем решение того же примера прямым ходом.
Проведем границу первого этапа kt ~ 2,5 и выберем на этой границе
те же дискретные точки #J, ж}, х}21 я(|, х%. Переберем на этом этапе пути, веду-
щие в эти точки, и определим на них приращения А/ (яр. По той же причине,
что и раньше, вертикальные отрезки из рассмотрения исключаются, поэтому
условно-оптимальными приближенными траекториями на этом этапе будут
прямолинейные лучи, проведенные из точки х (0) в намеченные дискретные
точки. Из табл. 3-1 находим
AJ (o-J) = 0;
А./ (я}) = 48,8;
AJ (я?,) = 195;
kJ (я,|) = 440;
AJ (яр = 782.
Эти цифры проставлены в кружках I этапа на рис. 3-4.
Перебирая пути, ведущие из дискретных точек II этапа в дискретные
точки I этапа, так же как это делалось и при обратном ходе, получим:
(2,0 + 48,8)
48,8+„}-“л
7,8 + 195 ]
Д/ (х*) = min 62,4 + 48,8 > = 111,2;
Д7 (я|) — min
Д/ = min
На третьем этапе:
ДУ (х{) = min
195 + 0 J
' 17,6 + 440 '
80,2 + 195
220,7 + 48,8
440 + 0
31,2 + 782
101,5 + 440
< 250 + 195
476,9 + 48,8
. 782 + 0
= 269,5;
= 445.
ДУ = min
Г 2,0 + 48,8)
{ ’ > = 48,8;
I 48,8 + 0 /
7,8 + 111,2'
62,4 + 48,8 ? = 111,2;
Д<7 (xf) = min
ДУ = min
195 + 0
' 17,6 + 269,5
80,2 + 111,2
220,8 + 48,8
i 440 + 0
31,2 + 445 '
101,5 + 269,5
250+111,2
476,9 + 48,8
782 + 0 J
= 191,4;
= 361,2.
Так как для всех Д J (xty ~ 48,8 данные повторяются, на четвертом этапе
во втором, третьем и четвертом снизу кружках сразу проставляем цифры
48,8, 111,3 и 191,5. Остается вычислить лишь
ДУ (а?|) — min <
31,2 + 361,2
101,5 + 191,4
250 + 111,2
476,9 + 48,8
782 + 0
> = 292,9.
Дальнейшие построения очевидны. Решение пришло к тому же резуль-
тату, как и при обратном ходе. Заметим, что при построении «прямым» ходом,
даже если оптимальное решение на самом деле единственно, мы получали по
нескольку оптимальных условно траекторий, выходящих из одной точки
(точно также, как при решении «обратным ходом» несколько траекторий вхо-
дило в одну точку). Это лишь кажущееся противоречие с теоремой об един-
ственности решений, которое объясняется тем, что при квантовании х мы
объединяем как бы множество точек в одну.
На самом деле «прямой ход» определяет пучок оптимальных траекторий,
исходящих из начала xQ (рис. 3-5, б), а «обратный» — исходящих из конца
(рис. 3-5, а). Отсюда видно, что задача о нахождении траекторий с за-
крепленным концом и свободным началом удобнее решать обратным ходом,
а с закрепленным началом и свободным концом — прямым.
Заметим также, что в данном примере мы вычисляли приращения Д/
при переходе от точки к точке по приближенному разностному уравнению.
Но значения Д/ могут быть заданы экспериментально и надписаны над соот-
ветствующими отрезками. После этого методика определения оптимальной
траектории ничем не будет отличаться от рассмотренной.
Рис. 3-5.
Теперь получим точное решение. Рассмотрим уравнение
~ = и~аг (3-32)
и функционал
т
J* = min (х2 -I- к2и2) dt. (3-33)
и о
Так как явной зависимости J * от времени нет, уравнение
Беллмана записываем в виде
min [х2 + к2и2 + - аж) = ж*2 + Л2и*2 + (а* — аж*) ^- = 0.
Это функциональное уравнение равносильно следующим двум:
х2 + к2и2 + (а — ах) = 0;
(3-34)
Второе из уравнений получено путем дифференцирования пер-
вого по и и приравнивания производной нулю. Переменные х
и и должны отмечаться здесь и далее звездочками, но для упро-
щения записи зрездочку опускаем,
dj*
Исключая из уравнений (3-34), получаем
х2 — к2и2 4~ 2ак2их = 0. (3-35)
Продифференцируем (3-35) по времени
2а: - 2к2и + 2ак2и ~ + 2ак2х = 0
dt dt dt dt
и выразим и’ через xr, учитывая (3-32):
du Clk?U ~|— 37dx -j n * /п лл\
-г- =----— -г- = ak2u + x. (3-36)
dt и — ax dt ' '
Уравнение (3-36) и исходное уравнение (3-32) образуют си-
стему, из которой находятся оптимальные решения и * (t) и
х * (£). Нетрудно убедиться, что эта система совпадает с систе-
мой уравнений Эйлера — Лагранжа, полученных обычным мето-
дом вариационного исчисления. Решая эту систему при гранич-
т
НОМ условии ^xdt = XN, получим
о
Т* (t\ ~ Тлт Sh mt
Х (t)-XN sh mT
Am ch mt 4- a sh mt
u^t) = xN------------
где
m = у Kl + k2a2.
В нашем случае a = 0,6; к = 1,25; m = 1; T = 1; xN = 10
и мы имеем
х* (0 = 8,509 shZ; 1
и* (i) = 8,509 (ch t + 0,6 sh t). J (3‘37)
По формулам (3-37) и построена точная кривая на рис. 3-3
прерывистой линией.
3-4. 0 численном решении уравнений динамического
программирования
Если задано уравнение
dx р, .
U)
и функционал
т
J = F (х, u) dt,
о
где х, u — векторы; то функциональное уравнение для поэтап-
ного решения принимает вид:
/т = ти1р?(х, u) + f(x,
Для уверенного использования приближенного метода, ос-
нованного на замене дифференциальных уравнений разностными,
нужно установить, что поставленная вариационная задача экви-
валентна решению нелинейного уравнения, построенного на ос-
нове уравнения Беллмана, и затем показать, что метод конечных
разностей даст приближенное решение рассматриваемого диффе-
ренциального уравнения. Оба эти доказательства оказываются
несколько затруднительными, особенно при наличии ограничений.
Беллман предлагает следующий численный метод, позволяющий
обойти эти доказательства. Заменим первоначальную задачу за-
дачей об определении минимума (максимума) функции:
F({uk}) = \^F(xk, ик),
где N — число интервалов, на которые разбивается промежуток
(О, Z); А = TIN.
Минимум отыскивается по всем значениям uk, удовлетворяю-
щим условиям
xk+i = xh + &f(xk> uk)> =
где
xk = x(k&), uk = u(k&).
Полагая
J*N (x0) = min J ({uft}),
заменяем задачу минимизации рекурентными соотношениями:
Л(^о) = О;
(ж0) = min {A/1 (ж, и) + Jn[x0 + (х, и)]}. (3-31)
и
По существу, в рассмотренном примере численная процедура
реализовала вычисление по этим соотношениям для простейшего
случая. При высоком порядке уравнений приходится запоминать
столь большое число значений координат на каждом этапе, что
самые крупные современные вычислительные машины перестают
справляться с задачей.
Был предпринят ряд попыток упрощения процедуры. Одна из
них, предложенная Мерриэмом, была рассмотрена в § 3-2. В тех
случаях, когда критерий оптимальности выражается квадратич-
ными функционалами, а сами уравнения линейны, задача сво-
дилась к обычным нелинейным уравнениям типа Риккатти, ко-
торые рекомендовалось решать с помощью аналоговых моделей.
ГЛАВА ЧЕТВЕРТАЯ
ПРИМЕНЕНИЕ МЕТОДОВ ФУНКЦИОНАЛЬНОГО АНАЛИЗА
В ЗАДАЧАХ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
4-1. Общие сведения о множествах
и функциональных пространствах
Начиная с 1957—1960 гг.,для решения задач оптимального управления
начинают применяться методы функционального анализа [94, 80, 242]. Это
было связано с попытками создания общих методов исследования систем упра-
вления, применяемых для решения разнообразных задач. Аппарат функцио-
нального анализа оказался в этом смысле наиболее подходящим.
Хотя опыт использования нового подхода к решению оптимальных задач
еще недостаточен для окончательного суждения об области рационального
применения методов функционального анализа в технике управления, все же
полученные результаты представляются интересными и перспективными.
В данную главу для облегчения чтения введен справочный материал без
доказательств и развернутых пояснений, не исключающий необходимости
проработки его по одному из специальных курсов [35,109]. Необходимый ми-
нимум сведений изложен в [242].
Функциональный анализ изучает свойства операторов и функционалов
в абстрактных многомерных или бесконечномерных пространствах, элемен-
тами («точками») которых являются функции, числовые последовательности
или же объекты более общей природы, а также операции над этими элемен-
тами. Идеи и методы функционального анализа дают возможность широких
обобщений и установления связей между различными разделами математики,
ранее казавшимися разобщенными.
Множество состоит из элементов, обладающих некоторым
заданным свойством. Может случиться, что множество не содержит ни одного
элемента, обладающего заданным свойством, тогда оно называется пус-
тым по отношению к этому свойству. Понятие «пустое множество» можно
рассматривать как обобщение понятия «нуль» на совокупности элементов лю-
бой (не обязательно числовой) природы. Принадлежность элемента х к мно-
жеству X обозначается знаком включения £. Если каждый элемент множе-
ства А входит также и в множество В, то множество А или является частью
множества В (что обозначается символом A CZ В или В td А) и называется
его подмножеством, или же совпадает с ним, что обозначается зна-
ком равенства А = В. Если A cz В и В cz С, то, очевидно, A cz С. Элемен-
тами множества могут быть не только числа, но самые разнообразные объекты:
функции, операторы, матрицы и просто предметы, поэтому математические
действия над конкретными множествами требуют определения [5].
Суммой множеств 41? 42, ...» Ап называется множество В,
каждый элемент которого содержится хотя бы в одном из множеств А । и кото-
рое содержит все элементы этих множеств. Сумма обозначается символом
п
UA = b.
i=l
(4-1)
Сумма подчиняется переместительному и сочетательному законам:
А[]В = В U А; |
а и (В и С) = (А и В) и С. J
Аналогичными свойствами обладает и арифметическая сумма. Но если В
есть подмножество множества А, то A (J В — А, если В cz А. (4-3)
Свойство суммы (4-3) не имеет аналогии в арифметической сумме.
Пересечением (или произведением) множеств At,
42, Ап называется множество В, элементами которого являются все эле-
менты, общие для всех множеств Ai.
На рис. 4-1, а пересечение множеств
Alf А2, А3 заштриховано. На рис.
4-1, б пересечение множеств Ах и А2
есть пустое множество. Произведение
множеств обозначается символом
Г)Аг = В. (4-4)
г = 1
Разностью множеств А и В называется множество С, состав-
ленное из всех тех элементов множества А, которые не содержатся в мно-
жестве В. Разность обозначается символом \:
С = А\ В. (4-5)
Могут быть следующие четыре случая разности (рис. 4-2):
1) множества А и В не содержат общих элементов (рис. 4-2, а). В этом
случае С есть пустое множество, обозначаемое 0
С = А\В = 0; (4-6)
2)4 иБ содержат общую часть (рис. 4-2, б). Разность на рисунке заштри-
хована.
3) А есть подномножество множества В (A cz В). А в этом случае не со-
держит элементов, которых нет в В, и разность А \ В есть также пустое
множество (рис. 4-2, в).
4) В есть подмножество множества А (В cz А) (рис. 4-2, г). В этом случае
разность А \ В называется дополнением множества В и обозна-
чается символом В1
В 1 — А \ В, если В cz А. (4-7)
Чтобы сделать возможным сравнение элементов множества и распростра-
пение на них других математических действий, в множествах может быть
в ряде случаев установлено правило следования для всех, или
для некоторых пар его элементов. Если в соответствии с таким правилом,
например, установлено, что элемент а предшествует элементу 6, то этот поря-
док следования обозначается неравенством а < Ь. Если, кроме того, для
некоторой группы элементов множества установлено, что для каждой этой
группы а, &, с соблюдаются условия:
1) из а < Ь и Ъ < с следует а < с;
2) а <£ а (элемент не предшествует сам себе);
3) из а < ЬиЬ < а следует а — Ъ,
то множество называется частично упорядоченным, а элементы,
для которых могут быть установлены соотношения следования, называются
сравнимыми. Если для любых двух элементов множества а и & либо
а < &, либо Ъ < а, то множество называется упорядоченным.
Пусть, например, рассматривая числовые множества, устанавливаем
такой порядок следования: меньшее по величине число предшествует боль-
шему. Тогда множество всех вещественных чисел будет упорядоченным.
Множество же комплексных чисел, если считать, что а + ib < с + id тогда,
когда а < с и b < d, будет частично упорядоченным, так как порядок следо-
вания, например, для 1 + 2i и 2 + i не установлен.
Подмножество Y частично упорядоченного множества ограничено
сверху, если существует элемент Ъ такой, что у < Ъ для всех у £ У. Эле-
мент Ь называется верхней границей множества У. Наи-
меньшая из всех верхних границ ув, принадлежащая подмножеству, назы-
вается его точной верхней границей или последним
(максимальным) элементом множества:
2/B = supv, У, Ув € Y;
Ув = min b, ув £ У.
(4-8)
Так, подмножество вещественных чисел — оо < у < 1 ограничено, но
не имеет последнего элемента, так как 1 не принадлежит множеству. Подмно-
жество — оо < у 1 имеет точную верхнюю границу, равную 1. Анало-
гично определяются нижняя си точная нижняя граница ун,
или первый элемент множества:
= у, ya£Y; 1
Л" Л7 ( (^"9)
Ув = max с, yufY. )
Пространства. Множества, в которых каким-либо способом
определены понятия последовательности и предела последовательности,
называются абстрактными пространствами, или просто
пространствами. Пространства, элементами кото-
рых являются функции, называются функцио-
нальными пространствами.
Множество X называется метрическим пространством,
если для него установлена метрика, т. е. каждой паре его элементов х±,
х2 поставлено в соответствие неотрицательное число р (xt, х2), называемое
расстоянием между элементами, которое удовлетворяет
следующим соотношениям, называемым аксиомами метрики:
1) р fo, х2) = 0 тогда и только тогда, когда х± = гг2 (а к с и ° м а тож-
дества);
2) р (х^ х2) ~ р (х2, хг) (аксиома симметрии);
3) р («1, х2) + р (х2, #3) р (ж1? я3) (аксиома треугольника).
Эти аксиомы имеют ясный геометрический смысл, если X есть множе-
ство всех точек плоскости или трехмерного евклидова пространства.
Для метрического пространства понятие предела последова-
тельности установлено так: последовательность элементов {^t, ж2, ...,
хп,. .} из X имеет предел, равный х, если р (хп, х) — 0 при п —> оо. Так же
как и в анализе, предел последовательности обозначается символами хп-+ х
или Ит хп = х. В функциональном анализе доказывается, что в метрическом
п-*оо
пространстве: 1) любая подпоследовательность сходящейся последователь-
ности сходится к одному и тому же пределу; 2) последовательность может
сходиться не более чем к одному пределу; 3) для всех элементов сходящейся
последовательности {яп} расстояния р (хп, а) до любой фиксированной точки а
пространства X ограничены.
Шаром S (а, г) в метрическом пространстве X с центром в точке
а С X и радиусом г называют совокупность точек х^Х, для которых удовлет-
воряется неравенство р (х, а) < г. Если удовлетворяется соотношение
р (х, а) г, шар называется замкнутым.
Окрестностью точки а £ X называют любой шар с центром в этой
точке. Точка х будет пределом последовательности лишь тогда, когда любая
окрестность этой точки содержит все элементы последовательности, начиная
с некоторого хп. Если дано множество Л/czX, то точка а называется пре-
дельной точкой множества М, если ее любая окрестность
содержит хотя бы одну точку множества М \ а, т. е. если для любого г спра-
ведливо соотношение S (а, г) Q (М \ а) = 0. Множество, не содержащее
своих предельных точек, называется открытым, содержащее все свои
предельные точки — замкнутым. Так, отрезки —1 < х < 1 и
—1 х 1 на прямой X имеют предельные точки —1 и +1; первый из
этих отрезков открыт, второй замкнут. Множество, полученное путем при-
соединения к М всех его предельных точек, называется замыканием
множества Л/ и обозначается М. Множество замкнуто, если М = М,
и открыто, если его дополнение X \ М замкнуто. Говорят, что множество М
плотно в множестве G, если G cz М и М всюду плотно в пространстве X,
если X = М. Множество нигде не плотно в пространстве X, если каждый
шар этого пространства содержит в себе некоторый шар, свободный от
точек множества М,
Функциональная зависимость. Оператор. Если
дано правило (закон), устанавливающее однозначное соотношение между
каждым элементом х £ X множества X и вполне определенным элементом
у £ Y другого множества У, то говорят, что задан оператор /, у = fx,
определенный на множестве (т. е. для всех элементов множе-
ства) X с областью значений, расположенной в множестве (т. е. для некото-
рых элементов множества) У. Элемент у при этом называют образом эле-
мента х, а элемент х — прообразом элемента у. Весьма важны два частных
случая операторов:
1. Когда значения оператора являются вещественными числами, опе-
ратор называется функционалом.
2. Когда х и у являются вещественными числами, оператор называется
функцией у = f (х).
Функция у = f (х), определенная на некотором множестве М простран-
ства X с областью значений в множестве У называется непрерывной в точке
rQ£M, если для любого вещественного числа 8 > 0 можно найти веществен-
ное число б > 0 такое, что бу [/ (х), f (я0)] < 8 для всякой точки х^М,
удовлетворяющей неравенству рх (х, xQ) < б (индекс у р означает простран-
ство, в котором определяется расстояние). Отсюда, если хп — х$, то и
/ (хп) —> / (я0). Если существует взаимно однозначное отображение некоторого
метрического пространства X на метрическое пространство У, эти про-
странства называют гомеоморфными.
Мера множества. Измеримые функции. Для пояснения понятия меры
множеств рассмотрим сначала одно из простейших множеств — точечное
множество на прямой линии. Пусть отрезок [а, &,] на прямой не содержит
граничных точек и является поэтому открытым. Длина интервала Za^, кото-
рая может служить простейшим примером геометрической меры
отрезка, обладает следующими свойствами: 1) как бы нц располагались
точки а, b на прямой, длина 1аъ или положительна, или равна нулю при
а — Ь, т. е. 1аЬ ~ неотрицательная функция интервала;
2) как бы мы ни делили отрезок [а, Ь] на т частей, соблюдая при этом, чтобы
он был суммой конечного числа т полуоткрытых промежутков (полуоткры-
тых для того, чтобы в сумму вошли все граничные точки промежутков, при-
m
чем каждая лишь по одному разу), lat, =2 , т- е- Ф У н к Ц и я lab а Д“
дитивна; 3) функция 1аъ стремится к нулю на исчезающей последова-
тельности промежутков, т. е. она нормальна.
При любом другом покрытии интервала [а, 6] (частичное наложение от-
резков, включение границ более чем по одному разу и т. п.), 1аъ £ I
поэтому из всех возможных значений сумм длина отрезка 1аЪ будет
равна точной наименьшей границе этих сумм.
На плоскости полуоткрытый промежуток определяется неравенствами
а > с > у d, а в качестве простейшей меры выступает площадь,
также обладающая тремя отмеченными свойствами — неотрицательностью,
аддитивностью и нормальностью.
Если множество наделяется, помимо геометрических, другими свойст-
вами, понятие меры будет усложняться. Так, если точка прямой (или пло-
скости) обладает массой, то в качестве меры может быть принята общая масса
данного отрезка (фигуры). Если масса равномерно распределена по линии
или площади, то меры, определенные на основе длины (или площади) и массы,
будут связаны пропорциональной зависимостью, при неравномерном же
распределении массы они будут существенно отличаться. Понятие меры
может быть обобщено на любую функцию, обладающую тремя отмеченными
свойствами.
Пусть на множестве А определена неотрицательная, аддитивная и нор-
мальная функция G (Д) полуоткрытых промежутков множества. Внешней
мерой |Л|$ множества А называется точная нижняя грань значений сумм
SG (Дп) при всех возможных покрытиях множества А промежутками Дп.
п
Если множество А можно покрыть открытым множеством В так, что разность
А \ В будет сколь угодно малой, то множество А называется и з м е р и-
м ы м. Внешняя мера измеримого множества называется простой мерой.
Так как в дальнейшем практически встречаются только измеримые множе-
ства, будем говорить просто о мере, опуская слово простая.
Пусть на измеримом множестве X задана функция / (х) точки множества,
принимающая вещественные значения. Введем обозначения X [f > а],
X [f а], X [/ = а], X If < а], X [/ а] для множеств точек, в которых
/ (я) принимает значения, определяемые соотношениями в квадратных скоб-
ках. Функция / (х) измеримого множества называется измеримой
функцией, если для любого вещественного а все пять выписанных
выше множеств измеримы. (Достаточно измеримости для любого а одного
из них, так как из этого будет следовать и измеримость остальных.) Непре-
рывные функции, функции с конечным числом разрывов непрерывности,
кусочно-постоянные функции, принимающие на X конечное или счетное число
постоянных значений измеримы.
Интеграл Лебега. Обобщение понятия меры приводит к обобщению
понятия интеграла. Пусть на измеримом множестве X конечной меры |X|G,
определенной на основе функции G (Д) определена измеримая ограниченная
функция / (х) L (L — некоторое положительное число). Разобьем X на
конечное число подмножеств Х^, не имеющих общих ^очек. Пусть т^ и Мь —
соответственно нижняя и верхняя границы значений f (х) на Хд. Составим
суммы
п п
*8 = S mkG(Xk), S5 = J] MkG(Xk), (4-10)
fe = i h = t
где 5 — символ способа подразделения X на подмножества Хп- Суммы и
S5 ограничены для любых д (т. е. для любых способов подразделения):
Ы \Sb\^LG(X) (4-11)
и поэтому имеют верхнюю (7) и нижнюю (0 точные границы.
i = inf|s5|, I = sup | 6*31. (4-12)
Если i = 7, то функция / (x) называется интегрируемой no G (X) в смысле
Лебега на множестве X, Интеграл
i = 7 = \f(x)G (dX) (4 13)
х
называется интегралом Лебега — Стильтьеса.
Если функция G (А) есть простейшая геометрическая мера, то интеграл
(4-13) называется просто интегралом Лебега.
Пусть т и М — точные нижняя и верхняя границы функции у = / (х).
Разобьем промежуток т, М на части точками уд:
™ = Уо < У1 < 2/г < ••• < Уп~1 <Уп = М.
Подмножества Хп, на которые разбивается X, определяются при этом так:
А = X [y.^f (х) ^yi], Xn^X[yk^f(x)^yn], ... (4-14)
k = 2, 3, , п.
Подразделение вида (4-14) называется подразделением Лебега, а суммы
и
2 ytfi — суммами Лебега. Очевидны неравенства (см. рис. 4-3, а и б):
k = l
п п \
^yh-iG(Xk)^S^S&^ J] yhG(Xk)-,
ft = 1 h = 1 1 ,,
n n | (4'15)
2 J/fe-iG (Xh) 2 yhG (Xh).
fe=i /1 = 1 J
Величина интеграла Лебега равна пределу сумм Лебега при бесконечном
измельчении подразделения промежутка [т, М] на части.
Интересно сопоставить обычный интеграл Римана с интегралом Лебега.
На рис. (4-3, виг) показано подразделение площади функции / (х) на эле-
ментарные площадки по Риману. Основой для деления служит деление оси
независимой переменной. Очевидно, что численные значения интегралов
Римана и Лебега получаются в этом примере одинаковыми. Если функция
интегрируема в смысле Римана, то она интегрируема и по Лебегу, причем
интегралы Римана и Лебега совпадают. Различие появляется тогда, когда мы
имеем дело с множествами и функциями более общего вида. Есть функции,
интегрируемые по Лебегу, но не интегрируемые по Риману. Так, функция,
равная единице во всех рациональных точках отрезка [0,1] и равная нулю
в остальных его точках, не интегрируема в смысле Римана, и интеграл Ри-
мана для нее не существует. Но интеграл Лебега для этой функции сущест-
вует. Так как множество рациональных чисел счетно и его мера равна нулю,
то интеграл Лебега этой функции также равен нулю.
Интеграл Стильтьеса. Интеграл Лебега можно рассматривать как обоб-
щение интеграла Римана. Другое важное обобщение интеграла Римана —
интеграл Стильтьеса. Пусть на отрезке [а, Ь] задана непрерывная интегрируе*
мая функция ф (0 и некоторая функция ограниченной вариации / (0. Разо-
бьем интервал [а, Ь] на интервалы tn так, чтобы
а ~ ~
и построим последовательность сумм вида
п — 1
*?= 5 <P(ift)[f(«A+i)-/(«fe)].
k = 0
Будем увеличивать число делений так, чтобы наибольший отрезок £д+1 — th
стремился к нулю.
Если ф непрерывна, a f — функция ограниченной вариации, то каждая
последовательность S имеет предел, не зависящий от способа разбиения интер-
Рис. 4-3.
вала [а, Ь], называемый интегралом Стильтьеса:
ь
а
при / (t) = t этот интеграл совпадает с интегралом Римана.
Наибольшее изменение функции f (t) на отрезке называется ее наи-
большей вариацией и обозначается
ь
V = max f (t) — min f (z);
a a^t^b.
Примеры метрических пространств. Сепара-
бельность. Компактность. Конечномерное евкли-
дово пространство Еп.
Элементами тг-мерного евклидова пространства являются упорядоченные
системы из групп по п вещественных чисел (координат). Расстояние между
двумя элементами х = g2, U и у = {гн, т)2, • ••, Пп} равно
р(®, у)=]/ЛД (416)
Простейшими видами евклидовых пространств являются геометрическое
(трехмерное) пространство, представляющее собою множество троек вещест-
венных чисел, плоскость — совокупность пар чисел, и линия. Аксиомы мет-
рики в геометрическом пространстве и плоскости выражают известные соот-
ношения для сторон треугольников и отрезков, давших имя аксиомам мет-
рики и для пространств более общего вида.
Пространство 1^. Пусть X — арифметическое n-мерное пространство,
т. е. множество всех упорядоченных систем из п вещественных чисел. Введя
метрику с помощью соотношения
/ п \ JL
р(*. У) = S I5i-nil₽ Р, (4-17)
\i = 1 /
получаем обобщение евклидова пространства, называемое пространством
1^. При р = 2 получаем n-мерное евклидово пространство.
Пространство числовых последовательностей 1Р. Когда число вещест-
венных чисел в группе, образующей элемент бесконечно велико, х =
= {£п ?2, ... 1т ...}> У = {Пп П2» -м Пп, •••}» то, ввеДя метрику с помощью
соотношения
/ ОО \JL
Р(*. У) = 1 5 l£i-nilpK (418)
\<«1 /
получаем пространство числовых последовательностей 1р. Выполнение аксиом
метрики проверяется с помощью неравенства Минковского для сумм.
При р = 2 получаем координатное гильбертово пространство Z2.
Пространство функций с интегрируемой по Лебегу р- степенью L [0,1].
Пусть X множество всех функций х (£), принадлежащих Lp [0,1], т. е.
заданных на отрезке 0,1. Если отрезок изменения переменной аЬ, то подста-
t — а
новкои т = ---
о— а
мы всегда можем
преобразовать
отрезок ab в отрезок
[0,1].
Полагая
/1 \1/р
р (*, у) = К I * (0 — у (01Р л ,
(4-19)
с помощью неравенства Минковского для интегралов проверяем выполнение
аксиом метрики. При р = 2 получаем гильбертово функциональное простран-
ство L2.
Пространство непрерывных функций С [0,1] с метрикой Чебышева. Мет-
рика вводится с помощью соотношения
р (х, у) = max IX (t) — у («) |. (4-20)
Пространство ограниченных вещественных функций М [0,1].
Метрика вводится следующим образом:
р (х, у) = sup | х (<) — у (t) |. (4-21)
Очевидно, С [0,1] с М [0,1].
Полнота пространства. Последовательность {хп} элементов метрического
Пространства называется сходящейся в себе или фундаментальной последова-
тельностью, если для любого е > О существует номер п0 (е) такой, что
р (^п» хт) < е ПРИ т по (е)- Метрическое пространство называется
полным, если в нем каждая сходящаяся в себе последовательность сходится
к пределу xQ, являющемуся элементом того же пространства.
Евклидово пространство Еп полно, что следует из критерия Коши суще-
ствования предела последовательности точек этого пространства. В курсах
теории функции вещественной переменной доказывается полнота пространств
Ь2 [0,1] и Z2, аналогичными методами доказывается полнота Lp [0,1] и 1р. На
основе условия Коши равномерной сходимости доказана полнота С [0,1].
Примером неполного пространства может служить множество рациональных
чисел г, в котором определено расстояние р (rlt г2) = |гх — г2], так как можно
указать последовательность рациональных чисел в этом пространстве:
которая сходится в себе, но имеет пределом иррациональное число е, не при-
надлежащее к данному пространству.
Пространство X, в котором существует счетное всюду плотное множество,
называется сепарабельным. Другими словами, в сепарабельном простран-
стве существует последовательность {яп}, такая, что для любого xQX най-
дется подпоследовательность {xnk} этой последовательности, сходящаяся
к х. Для метрического пространства это означает, что в последовательности
{хп^} можно найти такой элемент хП1, что р (х, хП1) < 8. Евклидово простран-
ство, пространства £2, Lp, l2, lp С сепарабельны.
Линейные нормированные пространства. Линейным, или векторным,
пространством называется множество А, для элементов которого определены
операции сложения и умножения, удовлетворяющие основной группе алгеб-
раических законов, а именно:
1. Для х, у, z£A, х + у = у + х (коммутативность сложения).
2. х + (у + z) = (х + у) + z (ассоциативность сложения).
3. Существование однозначно определенного нулевого элемента 0 такого,
что
х + 9 = х.
4. Существование для каждого элемента xQA противоположного эле-
мента (— х) £А такого, что
х -f- (— х) = 6.
5. % (рж) = (Хр) х (ассоциативность умножения).
6. % (х + у) ~ кх + ку 1 (дистрибутивность умножения
(X + р) х = кх + ря ) относительно сложения).
7. 1 -х = х (свойство неизменности при умножении на единицу).
Кроме того, отметим свойство, вытекающее из приведенных выше ак-
сиом: х-в ~ 6 (свойство умножения на нулевой элемент). Первые четыре
свойства характерны для абелевых групп.
В зависимости от того, вещественны или комплексны числа %, р,..., про-
странство называется соответственно вещественным, или комплексным.
Совокупность элементов вещественных векторов Еп, вещественных (ком-
плексных) пространств lp, Lp, С образуют вещественные (комплексные) линей-
ные пространства.
Непустое множество L элементов линейного пространства А называется
линейным многообразием, если вместе с элементами х1ч х2, ..., хп множество L
содержит любую линейную комбинацию а1х1 + а2гг2 + ... + апхп этих
элементов.
Линейное метрическое пространство называется нормированным, если
каждому его элементу х поставлено в соответствие вещественное число,
называемое нормой элемента х, обозначаемое || х || , которое удовлетворяет
следующим аксиомам нормы:
1. И х ||^0, причем || х || = 0, только если х = в.
2. ||* + У II ||*И + II у|| .
3. ИХ* ||= |Л| - || «||.
Линейное нормированное пространство метризуемо, так как в нем можно
ввести метрику, определив расстояние как:
Р (*, У) = И х — у ||.
(4-22)
Если для последовательности элементов {хп} нормированного простран-
ства определена сходимость из условия, что * = lim хп, если || хп — х || — 0
при п —+ со, то сходимость в этом смысле называется сходимостью по норме.
Линейное пространство, полное в смысле сходимости по норме (т. е.
такое, что сходимость по норме в себе имеет место для всех его последователь-
ностей), называется пространством Банаха (пространством типа В).
n-мерное векторное пространство с элементами х = {£х £2, ..., £п} может
быть сделано банаховым пространством путем введения нормы
(4-23)
\i= 1 /
с метрикой, определяемой равенством (4-22).
Lp [0,1] может быть сделано банаховым пространством при выполнении
условий:
/1 \1/р
Р (*> У) = К I х (0 — У (0 |р dt ; (4-24)
\о /
/1 \1/р
||Ж|| = Н|а;(г)|р^)
(4-25)
lp есть банахово пространство, так как можно положить
/ ОО \1/р
Р(*.У)= S ; (4-26)
\г= 1 I
/ оо \1/р
1И1= 2 iM с4-27)
\г = 1 /
С [0,1] — банахово пространство, для которого
р (х, у) = max I * (0 — у (0 |; (4-28)
|| х || = max | * (0 |. (4-29)
Абстрактным гильбертовым пространством Н называется линейное
пространство, в котором определено скалярное произведение элементов (х, у)\
х, у(^Н, удовлетворяющее условиям:
1. (х, у) = (у, х) (черта сверху означает сопряженное комплексное
число. В частности, (ж, х) — вещественное число).
2. (хг + яа, у) = (xlt у) + (х2, у).
3. (кх, у) = X (ж, у).
4. (х, х) 0, причем (х, х) = 0 только если х = 0.
Нормой элемента х-Н в абстрактном гибертовом пространстве назы-
вается число ___
|| аг || = х). (4-30)
Оно удовлетворяет всем требованиям нормы линейного нормированного
пространства.
Пространство Н полно в смысле метрики
Р(я, У) = II а? —У II-
(4-31)
Скалярные произведения, определенные выше, обладают следующими
свойствами:
1. (аг, аг) = | а21 (ж, х) (а — комплексное число).
2. | (х, у) | || х || • || у || (обобщение неравенства Шварца).
Пространство L2 [0,1], в котором скалярное произведение определено
как
1 ________
(я, У) = $ * (0 У (0 dt, (4-32)
о
является гильбертовым пространством.
Два элемента гильбертова пространства х, у^Н называются ортогональ-
ными, если (х, у) = 0.
Элемент х называется ортогональным подпространству L^H, если он
ортогонален любому элементу у QL этого подпространства. Обозначение орто-
гональности: Доказано, что если х^Н и LtzJI, то существует един-
ственное разложение элемента х вида:
* = */ + 2,
(4-33)
где y^L, z}_L, т. е. разложение на ортогональную подпространству L соста-
вляющую z и другую составляющую у, принадлежащую к L, которая назы-
вается проекцией элемента х на подпространство L.
Совокупность М всех элементов, ортогональных подпространству L,
есть также подпространство, называемое ортогональным дополнением к под-
пространству L. Элемент z при этом есть проекция х на М. Таким образом,
(4-33) представляет собой разложение элемента х на проекции на два взаимно
ортогональных пространства. Пространство Н является ортогональной сум-
мой подпространств L и М, что обозначается Н = L + М. Ортогональная
сумма есть частный случай суммы Н = L U М.
Система элементов ех, е2, ..., еп, ... гильбертова пространства назы-
вается ортонормальной, если для нее справедливо следующее соотношение
для скалярного произведения любой пары элементов этой системы:
(*г,^) = ^, (4-34)
где bij — символ Кронекера (д^ = 1 при i = /; d# = 0 при i = /).
Если в гильбертовом пространстве дана любая система линейно незави-
симых элементов hr, h2, ..., hn, ... QH, то всегда можно построить ортонор-
мальную систему е1У е2, ..., еп, ... £Н, выражаемую через элементы h соотно-
шениями:
Р — hl . р — & . . р — •
2~1Ы1.......... п~ 11^11....
где
ёч = h2 — с21ех, с2Х = (Ь2, ех);
(4-35)
Л-1
Sh = 2 Сkieii cki ~ ei)i
i — 1
Приведенный процесс определения ей называется процессом ортогона-
лизации Шмидта.
Пусть в пространстве Н задана ортонормальная система {ег}. Система
называется полной, если не существует элемента х^Н, отличного от нуле-
вого, который был бы ортогонален всем элементам {ej. Ортонормальная си-
стема {ej называется замкнутой, если порождаемое ею подпространство L
совпадает с Н. Замкнутая ортонормальная система называется также орто-
нормальным базисом гильбертова пространства.
Компактность. Множество М метрического пространства X £ М назы-
вается компактным, если любое бесконечное подмножество этого множе-
ства содержит сходящуюся последовательность. Если при этом пределы всех
сводящихся последовательностей принадлежат М, то М компактно в себе;
если они принадлежат X, но не принадлежат М, то М компактно в прост-
ранстве X.
Каждое ограниченное множество числовой оси компактно. В самом деле,
в силу ограниченности существует интервал /0, в котором лежат все эле-
менты данной последовательности {хп}. Выделим половину интервала, содер-
жащего конечное число точек последовательности; оставшуюся половину,
содержащую бесконечное число точек последовательности, обозначим /х.
В части выделяем половину с конечным числом точек и оставшуюся поло-
вину обозначаем J2 и т- Д- Интервалы /х, J2, ••• образуют убывающую после-
довательность интервалов {/п}, содержащих каждый бесконечное множество
точек, в то время как вне каждого интервала может лежать лишь конечное
число точек. Следовательно, для любого 8 > 0 можно найти интервал Jp
длиною меньше 8, в котором содержится бесчисленное множество элементов
{хп}, лежащих в окрестности 8 предельной точки. Любую предельную точку
последовательности {хп} можно считать пределом частичной подпоследова-
тельности этой последовательности. Множество компактно в себе.
Конечномерное эвклидово пространство, пространства lp, Lp не ком-
пактны, и в них существуют как некомпактные ограниченные множества,
так и компактные. Примером первого служит последовательность хг =
= (1,0, 0, ...), х2 = (0, 1, 0, ...), х3 = (0, 0, 1, ...), для которой в простран-
стве 12 справедливо равенство || хп — хт || = У 2, и любая подпоследова-
тельность последовательности {ж} расходится. Примером второй является
гильбертов параллелепипед, т. е. множество Р точек х = (хх, х2, ..., хп, ...),
для которых |жх|^1, Ы<1/2, •••» ...
Для установления компактности множеств предложен ряд критериев.
Достаточно общий, но мало удобный критерий дается теоремой Хаусдорфа,
излагаемой в курсах функционального анализа. Из менее общих, но более
удобных критериев отметим:
Критерий компактности в пространстве 1Р
Множество Mdlp компактно тогда и только тогда, когда: а) оно ограни-
чено; б) для любого 8 > 0 можно выбрать N (8) такие, что для всех т > N
и произвольного х = {#1, х2, ..., хт, выполняется неравенство
2 |^|₽<еР.
(4-36)
i = 1
Критерий компактности в пространстве Lp
(теорема Колмогорова)
Множество MaLp компактно тогда и только тогда, когда:
а) существует число К такое, что для любой функции х£_М имеем
| х (0 \р dt < КР;
(4-37)
б) для любого в > 0 можно выбрать число д > 0 такое, что для любой
х выполняется неравенство
если h < д.
t 4-Л
1 V , х л
х—2h } X^dX
t—h
<8,
(4-38)
Критерий компактности в пространстве С [0,1]
(теорема Арче л а)
Множество MczC компактно тогда и только тогда, когда:
а) существует число К такое, что для любой х справедливо
(4-39)
б) для любого 8 > 0 можно выбрать 6 > 0 такое, что для любой х (t)
справедливо неравенство
I « (*1) — ® М I < 8, 1
Л > (4-40)
если |*i —*2|<$, *ъ *2 € [ОМ]- J
Линейные операторы и функционалы. Оператор 4, определенный на
линейном метрическом пространстве Ех с областью значений в линейном мет-
рическом пространстве Еу, называется аддитивным, если для любых х1У
х2£Х имеет место соотношение
А (жт + ж2) = Ах1 + Ах2.
(4-41)
Оператор называется однородным, если выполняется условие
А (аж) = аАх (4-42)
для любого элемента х£Х и для любого числа а.
Если в множествах X и Y существуют нулевые элементы 0, то для адди-
тивного оператора справедливы равенства:
46 = 0;
А ( - ж) = — Ах.
(4-43)
Если оператор А аддитивел и однороден, то он также и дистрибутивен:
п п
А 2 nkxk = 2 (Axk)-
А=1 А=1
(4-44)
Аддитивный и однородный оператор называется линейным. Оператор
в метрическом пространстве непрерывен, если для любого в > 0 найдется
д > 0 такое, что совокупность образов элемента шара £ (ж, д) лежит в шаре
S (Аж, в). Линейный непрерывный оператор обладает тем свойством, что
если хп —► ж, то и Ахп —> Ах. Непрерывный и аддитивный оператор, опреде-
ленный в вещественном линейном пространстве Ех, однороден.
Оператор называется ограниченным, если существует такая постоянная Л/,
410 || Ах ||=СМ||« ||. (4-45)
Для того чтобы аддитивный оператор был линейным, необходимо и доста-
точно, чтобы он был ограниченным. Для линейного оператора А наимень-
шая постоянная М, при которой для всех ж £ X выполняется неравенство (4-45)
называется нормой оператора А и обозначается || А ||
Можно показать, что
|| А ||= sup || Ах I* (4-46)
или, что то же самое,
IIА ||= sup 1^-. (4-47)
llxll^O 11*11
Можно также показать, что для всех х^Х
(|ЛЖ||^||Л||.||х||.
Множество всех линейных операторов, определенных на X со значениями
в У, образует линейное пространство, которое относится к типу банаховых
пространств.
Функционал есть частный вид оператора, и по отношению к линейным
функционалам справедливы те же правила относительно аддитивности, огра-
ниченности, однородности, непрерывности, которые были приведены для
линейных операторов.
Множество всех линейных функционалов на некотором нормированном
пространстве X образует линейное нормированное пространство, называе-
мое пространством, сопряженным с X, и обозначаемое X. Сопряженное про-
странство всегда полное, независимо от полноты исходного пространства.
Для многих функциональных пространств можно указать общий вид всех
линейных функционалов, определенных на этих пространствах. Так, общий
вид линейного функционала fx в n-мерном эвклидовом пространстве будет:
(4-48)
2 = 1
где h — произвольные числа, a 5i определяются из равенства
* = £ li'i € Еп, (4-49)
i = 1
где {e1, e2, ..., en} — базис в Еп.
Общий вид линейных функционалов в С [0,1] определяется теоремой
Рисса: всякий линейный функционал, заданный в пространстве С [0,1], вы-
ражается с помощью интеграла Стильтьеса:
1
fx=\x (г) dg (г), (4-50)
о
ГДе ё (0 — функция с ограниченным изменением. Общий вид линейного
функционала в 1Р будет
/* = 3 eklh, (4-51)
А = 1
где l/i определяются из равенства (4-49), но для х£1р.
Общий вид линейного функционала в Lp [0,1]:
1
fx = х (t) a (t) dt, (4-52)
где a (t) — любая фиксированная функция a [0,1].
Числа р и q связаны соотношением
1 1
- + - = 1. (4-53)
Р Q
Нормы линейных функционалов общего вида равны:
п
в пространстве Еп 11/11= 2 IM; г=1 1 n/n = VteB 0 / оо \l/q (4-54)
« < С [0, 1]
« « 1р 11/11 = (2 U=i / /1 U/Q
< < Lv 11/11 = ((| a (0 dt j , \0 /
где V — символ, означающий полное изменение функции в интервале [0,1].
При исследовании линейных функционалов часто оказывается практи-
чески целесообразным следующий прием: функционал сначала определяется
не на всем пространстве X, а на некотором его подпространстве, представляю-
щем собою линейное многообразие. Далее делается попытка расширить об-
ласть, в которой первоначально был определен функционал так, чтобы
сохранить его наиболее существенные свойства, в частности норму.
Пусть линейный функционал Фх определен только для элементов x£G,
причем
||Ф||0= sup 1|Фх||, x^G.
llxil^l
Расширением функционала Ф с сохранением нормы называется такой
линейный функционал Fx, который определен в пространстве X и имеет норму
Н11х = SUP х С
причем для каждого элемента x£G справедливы равенства:
Fx = Фх, х £ G\
11^ Их = 11Ф|10.
Расширение функционалов базируется на теореме Банаха — Хана:
каждый линейный функционал, определенный на многообразии G, можно
расширить на все линейное нормированное пространство X, с сохранением
нормы.
Сопряженные пространства и операторы. Совокупность всех линейных
функционалов fx, определенных на линейном нормированном пространстве Е,
образует банахово пространство Е*, сопряженное с пространством Е.
Рассмотрим пространства Lp [0,1] и Lq [0,1], где
<4'55)
Каждому функционалу fx^L* [0,1] однозначно соответствует функция
a (t)^Lq [0,1] и обратно, поэтому между пространствами L* и Lq устанавли-
вается взаимно однозначное соответствие. Пространства L* и £д/таким обра-
зом, можно считать сопряженными. При р = 2 получаем q = 2 и [0,1] =
= Ь2 [0,1]. Поэтому пространство L2 [0,1] называется самосопряженным
пространством. Линейный функционал в гильбертовом пространстве порож-
дается элементом этого же пространства и гильбертово пространство также
является самосопряженным. По этой причине будет самосопряженным и эвк-
лидово пространство.
Пусть линейный ограниченный оператор у = Ах отображает линейное
нормированное пространство Ех в линейное нормированное пространство Еу.
Пусть на Еу определен линейный функционал фу. Тогда фу определен для
у = Ах, где х — любой элемент из Ех, и мы имеем ф*/ = ф (Ля) = /я, где
/я — линейный функционал, определенный на Ех. Каждому функционалу
ф^£* ставится в соответствие функционал Таким образом пост-
роен некоторый оператор, определяемый на £*, с областью значений в Е*.
Этот оператор обозначают Л* и называют оператором, сопряженным с Л.
Равенство фу = /я записывают в виде / = Л*ф. Рассмотрим линейный опе-
ратор в пространстве Ь2 [0,1]:
Ах = у (0 = К (t, s) х (s) ds, (4-56)
о
где К (J, s) — непрерывное ядро. Произвольный линейный функционал
в Ь2 [0,1] имеет вид
= /(ОСМО, 1]. (4-57)
о
Поэтому
1 Г1 1
/ (Ля) = \ / (0 К К («, $) я (s) ds\dt =
О 10 J
1 [i ) 1
= { я ($) К К (t, s) f (t) dt > ds — ( я (s) g (s) ds,
0 W J 0
где
1
g(s) = ^K(t, s)f(t)dt. (4-58)
Таким образом, переход к сопряженному оператору в пространстве
L2 [0,1] означает перестановку переменных в ядре.
Оператор Л*, сопряженный с линейным ограниченным оператором Л
и отображающий линейное нормированное пространство Ех в линейное нор-
мированное пространство Еу есть также линейный ограниченный оператор
с той же нормой:
|| Л* || = || Л ||. (4-59)
Понятие сопряженного оператора можно ввести и в случае неограни-
ченного оператора Л, определенного на линейном многообразии, всюду
плотном в линейном нормированном пространстве Ех со значениями в Еу.
4-2. Примеры решения задач оптимального управления
В терминах функционального анализа решение задач оптимального
управления формулируется следующим образом. Прежде всего предпола-
гается, что управляющий сигнал и (t) принадлежит к определенному функ-
циональному пространству. Чаще всего в качестве пространства выбирают
либо пространство функций с интегрируемым квадратом £2 в случае непре-
рывных систем (для большей общности часто рассматривается пространство
ip), либо пространство 12 (или 1Р) в случае дискретных систем. Это связано
с тем, что показатели качества, которые выражаются в виде функционалов,
действующих в том же пространстве, часто записываются в виде интегралов
(или сумм) от квадратов функций. Как мы видели выше, в функциональных
пространствах Lp (или 1Р) нормы элементов пространства выражались с по-
мощью такого рода интегралов (или сумм). Тогда задача оптимального
управления формулируется как задача определения функций (или комбинаций
функций, входящих в показатель качества), обладающих наименьшей нор-
мой в рассматриваемом пространстве.
Приведем несколько примеров подобной формулировки задач.
Для следящей системы, предназначенной для воспроизведения заданного
сигнала х0 (t), в качестве показателя качества удобно выбрать динамическую
ошибку 8, выражаемую как расстояние между х и х0 в метрическом про-
ст₽анстве: 8 = ||*-М. (4-60)
Норма (4-60) в пространствах L2 и 12 характеризует энергию, затрачи-
ваемую на управление. В пространстве С эта норма равна max ]х — х0 |,
т е. максимальному отклонению или перерегулированию.
Рассмотрим задачу о минимизации в пространстве С2п функционала
т
J(x) = 5 {х2 + Tfi2 + ••• + [т2пя{п)]2} dt, (4-61)
О
где под х понимается отклонение координаты от заданного значения. Функ-
ционал (4-61) характеризует обобщенную интегральную ошибку в следящей
системе. Необходимым условием минимума функционала является равенство
нулю его градиента:
grad J (х) = lim ----— — f (#, , (4-62)
где h — произвольная функция; у — вещественное число; yh — вариация
функции х, для которой выполняются условия
(0) = (Г) = 0. (4-63)
Чтобы найти выражение градиента, найдем так называемый слабый диф-
ференциал выражения (4-61).
В функциональном анализе вводится два понятия дифференциала и,
соответственно, производной — слабый и сильный дифференциалы. Выра-
жение (4-62) называют слабым дифференциалом (дифференциалом Гато),
предполагая, что предел, стоящий в правой части и понимаемый в смысле
сходимости по норме, существует. Сильный дифференциал определяется сле-
дующим образом. Пусть существует линейный оператор I такой, что
/ (х 4- h) — j (х) = lh + со (х, h), (4-64)
где
--i&Tp11-*0 при IIЛН-о.
II п II
Тогда lh называют сильным дифференциалом функции (дифференциа-
лом Фреше). Для отыскания градиента функционала используется понятие
слабого дифференциала.
Обозначая в (4-61) подынтегральную функцию через фх и
<РХ,Ъ = '^Ф[/’ Х' ••• ’
получим для слабого дифференциала
т
dJ (х, Л) = ф [г, х + yh, х' yh', ..., х(п) + Y^(n>] dt —
г О
т
= [ф h + ф ,h’ + ... + ф (пл(п’] dt. (4-65)
X ЭС «А* J
Применим формулу интегрирования по частям
т т
С (* d
J ФхЛ' dt = [<РхЛ]оТ ~ \ rff ^'h dt ’
О о
т
С <р (П)Л‘«’ Л = [ф <пЛ,п-1)]^ - Г£ Ф+ •..
) *V J I vv <* Iv
6
T
C dn
-+<-^n^^hdt-
Учитывая (4-65), получаем
т
0
Приравнивая градиент нулю, получаем, учитывая, что h — произволь-
ная функция
d dn
+ (4'6”
Таким образом, мы получили уравнение Эйлера [см. (1-10)].
Перейдем к другому примеру. Пусть оператор объекта А — линейный
и ограниченный оператор, действующий в гильбертовом пространстве Н;
уравнение объекта х = Ли, и — управление. Показатель оптимальности
выражается функционалом
J (и) = Хх || и ||2 + Х2 || — Ах ||2, я0, и £ Н. (4-68)
Так как норма элемента в гильбертовом пространстве || х || = ]/ (г, я),
где (х, х) — скалярное произведение, то
J (и) = Хх (и, и) + Х2 — Ах, xQ — Ах).
Для определения оптимального управления и, минимизирующего функ-
ционал, найдем сначала слабый дифференциал функционала. Введем произ-
вольную функцию h (t) и вариацию уЛ, удовлетворяющую условиям (4-63).
Получим, используя свойства скалярного произведения:
J (и + yh) = (и + уЛ, и + yh) + Х2 (2*0 — Аи — у Ah, х0 — Аи — у Ah) =
= %i (и, и) + 2Xi (и, yh) Xi (yh, yh) + X2 (xQ — Au, xQ — Au) —
— 2X2 (rr0 — Au, у Ah) + X2 (уЛЛ, у Ah) =
= J (u) + 2yXi (u, h) — 2ykz (Ah, xQ — Au) + у2Хх (h, h) 4- y3X2 (Ah, Ah);
J (u -|- yh) — J (u) — 2y [Xi (u, h) — X2 (Ah, xQ — Au)] -|-
+ Y2 Ri (hfh)+ X2 (Ah, Ah)].
Отсюда
dJ (u, h) = 2 [Xi (u, h) — X2 (Ah, xQ — Au)];
d*J (u, h) = 2 [Xi (h, h) + X2 (Ah, Ah)].
Представим, используя свойства скалярного произведения, выражение
для слабого дифференциала в виде:
dJ (и, h) = (2XiU, h) — [h, 2X2A* (xq — Au)], (4-69)
где A* — сопряженный оператор.
При получении (4-69) использовано основное свойство сопряженного
оператора
(Аа, Ь) = (а, А*Ь).
Рис. 4-4.
Для сопряженного оператора
Оптимальное управление получаем, положив градиент функционала,
равным нулевому элементу, т. е.
grad J (и) = 2KiU — 2Х2Л* (г0 — Аи) = 0.
Отсюда получаем
и=^«Л*(а:0 — Аи). (4-70)
В общем случае уравнения вида (4-70) дают возможность составить
программу для ЦВМ, входящей в состав регулятора, которая вычисляла бы
и для каждой заданной функции х0. Принципиально возможно получить
и схему с аналоговой машиной (рис.
4-4). Однако практически наиболее важ-
но получить приближенную реализацию
сопряженного оператора А*.
Пусть импульсная переходная
функция объекта кИ (t) и для операто-
ра х = Аи имеем
t
x(t) = Аи = $ Ли (Z — т) и (т) dx.
о
А* в линейном функционале нужно
поменять местами переменные в ядре:
0 {
у (t) = A*z = $ Ли (т — t)z (т) dx = ( z (t 4- т) (т) dx,
t о
где z (i) — функция, действующая на вход звена с сопряженным оператором.
Разлагая подынтегральную функцию в ряд, получаем
ОО
= 2 z‘i> (t) <Pi (t),
i = 0
где
t
4i(t)= tidx, i = 0, 1, 2, ... (4-71)
Приближенная реализация оператора A * с помощью генераторов функ-
ций ф|, дифференциаторов и сумматора показаны на рис. 4-5. Шумы не дают
возможности получать достоверные значения производных сигнала, поэтому
обычно ограничиваются 1—-2 производными.
Теперь рассмотрим пример условно-оптимального процесса, когда мини-
мум функционала должен быть обеспечен при некоторых дополнительных
ограничениях.
Пусть имеется линейная динамическая система, характеризуемая п
координатами, связанными с управляющим воздействием и (t) зависимостями:
t
yi(t) = х) и (т) dr, i = 0, 1, ..., n, (4-72)
ki (t) — импульсные переходные функции для различных выходов
системы.
Требуется найти такую функцию и (t) £ L2 [О, Г], которая доставила бы
минимум функционалу
т
J(u) = { | и (t) |2 dt (4-73)
при дополнительных условиях
т
Fi (и) = ki (Т, т) и (т) с?т = аъ (4-74)
о
т. е. управление должно привести систему в строго фиксированную точку
с координатами щ (Т) = а^. Эту задачу можно трактовать как задачу на-
хождения в пространстве £2 [О, Т] линейного функционала F (к), который
имеет минимальную норму || F || = || и || и принимает на заданных элемен-
тах kt £ L2 [О, Г] заданные значения щ.
В более общей постановке (определение
F (к) в пространстве Lq), имеющего мини-
мальную норму || F || q = || и || р и прини-
мающего заданные значения щ на элементах
кг £ hq, задача рассматривалась Н. Н. Кра-
совским [80], Р. Куликовским [242] и
для бесконечного числа п (для систем с
распределенными параметрами) А. Г. Бут-
ковским [23, 24].
Для решения подобных задач во мно-
гих случаях удобным оказывается метод,
базирующийся на L проблеме моментов
Крейна [12].
Пусть задача оптимального управле-
ния сформулирована следующим образом:
требуется найти такую функцию и (t) (т. е.
оптимальное управление), которая принадлежит либо пространству Lp [0, Г],
либо пространству М ограниченных измеримых функций и которая ограни-
чена по норме числом Z, I > 0:
II и \\^1, (4-75)
чтобы выполнялась система равенств
т
Щ — { к\ (t) и (t) dt, i = 1, 2, ..., п,
О
(4-76)
где а$ — заданные числа, а (t) — заданные линейно-независимые функции,
принадлежащие пространству Lp (если к этому же пространству принадлежит
и (t) или М (если и (t) £ М), и чтобы при этом Т было минимально.
Числа щ называются моментами функции и (t) относительно последова-
тельности функций ki (t). L — проблема моментов может быть конечномерной
(если I ограничено) или бесконечномерной (при неограниченном I).
Проиллюстрируем, что многие задачи об оптимальном по быстродейст-
вию управлении системами, описываемыми линейными дифференциальными
уравнениями, могут быть сформулированы именно так.
Пусть, например, дана система обыкновенных линейных уравнений
п г
Ф = 2 аУ«i=1- 2' ••••" (4‘77)
или в матричной форме
у = у1у-[-Ви. (4-78)
Заданы начальные условия
Уо = У(О)-
При этом ограничивается либо функционал
/Т г \1/р
(4-79)
либо выражение
max (। uj j, | 1, •
(4-80)
Ограничение (4-79) относится к случаю и (t) £ Lp, причем левая часть
неравенства представляет собою норму функционала || и || в пространстве
Lp, а выражение (4-80) — к случаю и (t) £ М, причем и (t) считается ку-
сочно-непрерывной функцией. Для первого случая при р = 2 неравенство
(4-79) обычно выражает ограничение энергии, затрачиваемой на управление.
Для второго случая (4-80) пример соответствует ограничению, налагаемому
на модули управляющих воздействий.
Решение дифференциального уравнения (4-78) при заданных щ (t)
имеет вид
у(0 = Ф(0 Уо + j Y(T)B(T)u(r)rfr ,
(4-81)
где Ф (t) есть матрица фундаментальных решений однородной системы урав-
нений
у = ^у.
а V (t) есть матрица, обратная Ф (t), т. е.
Y (г) = Ф-i (0.
Рассмотрим момент прихода системы в точку равновесия
У« = У(^)<
(4-82)
(4-83)
(4-84)
Подставив (4-84) в (4-81) и умножив слева на ¥ (Г) = Ф1 (Т) (что можно
сделать, так как в интервале [0, Т} функция V (t) не обращается в нуль),
получим
Обозначив
W)yGO = yo + $ WW«W dt.
о
имеем
Т(Г)у(Г)~у0 = а
W(t)B(t) = K(t),
(4-85)
T
a = f К (t) u (t) dt,
(4-86)
и
т. е. в данном случае задача свелась к проблеме моментов.
В качестве иллюстрации приведем пример, рассмотренный в
[24]. Дана
линейная система третьего порядка с двумя управляющими воздействиями,
уравнения которой имеют вид:
dy2
dt
dy9
dt
— Уз +
= u2.
(4-87)
Начальное состояние системы
1
О
0.
конечное заданное состояние — начало координат, т. е,
У (Т) = 0.
Решая однородную систему:
У1 = У2,
У г = Уз,
Уз = 0,
найдем у3 = const =
t
у%—\сг(11с2 = c±t + с2;
о
t
С г2
У1 = \ (с1г 4“ С2) dt + С3 = 6?! + czt + сз*
Для получения фундаментальной матрицы составим следующую систему
частных решений:
У1 = (с', c't + с‘, с> у + су + с' j ,
У3=^, Cjl + cl, d^+clt + cij,
У3 = Icj, eft -|- c|, cf у + су + cjA .
Выберем в матрице этих решений произвольные постоянные таким обра-
зом, чтобы
с? Г1 при i = j
г (0 при i уЬ jf
получим
(4-88)
О 0 1
Обратную матрицу в общем случае можно найти как матрицу, состав-
ленную из элементов
-1)
=Тф-
где Ф^- — алгебраические дополнения элементов матрицы Ф, | Ф | — оп-
ределитель последней. Но из теории линейных дифференциальных уравне-
ний известно, что
ф-1 (t) = (0 = Ф (— 0,
поэтому обратную матрицу в данном случае мы найдем сразу из фундамен-
тальной
1
^(0 = Ф(~0 =
О
О
1 —t
О 1
(4-89)
Матрица
В —
О
О
1.
(4-90)
поэтому
K(t)=W (Z) В =
1
О
О
— t
1
О
-L /2
2
— t
1
О
1
о
О
о
1
z2 t2
1-0—z-1 + ^- 0, 1-0 — Z-0+ —-1
0.0 + 1.1 — ГО, 0 . О + 1 . О — Z -1
О • О + О . 1 + 1 • О, 0 - 0 + 0 - 0 + 1 -1
1 — t
О 1
(4-91)
Учитывая, что требуется привести систему в начало координат и что,
следовательно, у (Т) = 0, из (4-85) получаем
« = — У о*
Уравнения моментов получим, выписывая равенства соответственных
строк матрицы:
т
а = — 2/о = + (Z) и (/) dt,
б
т. е.
т
а1 = — У or = — 1 — £— tui (0 + ~2 ^2w2 wj
О
т
«2 = — У02 = 0 = [ux (Z) — tu2 (Z)] dt\
6
T
«3 = — У оз -•= 0 = \ u2 (0 dt.
(4-92)
В теории моментов важную роль играет теорема: Для того чтобы в про-
странстве Lp (1 р гС оо) или М существовала функция и (t), 0 t Т
с нормой, не превосходящей числа Z, и последовательность п моментов кото-
рой относительно функций к± (Z), к2 (Z),..., кп (Z) была ап а2,..., ап, необхо-
димо и достаточно, чтобы существовало п чисел ДаюЩих реше-
ние одной из следующих задач:
1) найти
т
min. $
Вр • • • > О
при условии
2) найти
S 1;
i = l
п
шах У |ла/(I
61, |ПЛ=1
(4-93)
(4-94)
при условии
т
о
2 £Л(о
г = 1
Q
dt = 1.
Функция и (£), дающая решение проблемы, имеет вид
" (') = т
n <7'1 п
2 wo 2 w •
i = l г —1
(4-95)
В приведенных выше соотношениях i = 1, 2, тг, представляет
собой произвольный набор чисел, 1-f — те значения этих чисел, при кото-
рых достигаются экстремумы функционалов в (4-93) и (4-94), а X — множи-
тель Л ангранжа, определяемый как
(4-96)
Так как в доказательстве этой важной теоремы содержится по существу
основной процесс решения проблемы моментов, то приведем это дока-
зательство.
Сначала покажем, что для выполнения условия теоремы необходимо,
чтобы для всех конечных наборов чисел ..., %п для случая и (t) £ Lp выпол-
нялось неравенство:
п
г== 1
г = 1
1 \1/?
dt ।
(4-97)
где 1/р + 4q = 1, а для случая и (t) £ М — то же неравенство при q = 1:
п
S «ill
г = 1
2 Wb (О
г=1
dt.
(4-98)
Пусть и (t) £ Lp является решением бесконечномерной L — проблемы
моментов. Умножая обе части п первых равенств
т
04 = $ k^ultydt, i = l, 2, ... (4-99)
на 5п» складывая их почленно, используя неравенство Гельдера —
Рпсса и учитывая || и || < получим неравенство (4-97). Аналогичным
образом доказывается и (4-98).
Теперь покажем достаточность неравенств (4-97) и (4-98). Предположим,
что (4-97) выполнено для всех конечных наборов чисел ..., |п. Зафикси-
руем п и потребуем, воспользовавшись тем, что произвольны, чтобы вы-
полнялось дополнительное условие
п
У; а& ==
г=1
(4-100)
т
Тогда интеграл уг1 = \
n i/q
2 (0 dt имеет конечный минимум по
г=1
всем 51, удовлетворяющим условиям (4-100), так как в силу (4-97) и условия
(4-100) он не меньше l~Q. Найдем этот минимум с помощью правила множителей
Л ангранжа, для чего положим
функции
т
STl (^1» • • • > ^71) ==
О
равными нулю все частные производные от
S Witt)
i = l
Дифференцируя, получаем
п
7=1
Q-1 п
ki(t)sign
7 = 1
= 0.(4-101)
Умножив каждое из этих равенств на 5; и суммируя по j от 1 до п, полу-
чим, учитывая (4-100), что в точке экстремума
7=1
т
С , z ч 1
— \ (£)
о
Ikki («)
Сравнивая (4-103) и (4-99), получаем
1
и (0 = у
dt == X;
q—1 п
sign (/)
7=1
n q—1
sign
7=1
П
7=1
(4-102)
(4-103)
(4-104)
где % определяется из (4-96) или (4-102).
Таким образом, доказано существование функции и (t) и определен
ее вид.
Теперь воспользуемся полученным результатом для окончательного
решения начатого выше примера для случая, когда ограничивается функцио-
нал
т
$ [|M1(0l2 + |«2«l2H0,/*=£U.
о
(4-105)
Так как при этом q = р = 2, то из (4-104) и (4-102) имеем
«(«) = / 91 И (<)«-! sign (t),
(4-106)
так как в нашем случае
= ?2, Ы
— t
2
— t
1
— + I2
1
Отсюда:
»1 (0 = /2 (- lit + g2);
«2 w = /2 (4 Ь«2-^ + Ь).
(4-107)
Числа 5i, I2 и 5з определяются из уравнения
т
С Г /1 \21 1
min \ (-^ + 52)2+ т^2-^ + 5з ^ = 72’
ЬЬЬ J L \2 / J *2
n
причем условие 2 ^ai = 1 принимает вид
i=l
Ь=1.
Тогда необходимо минимизировать интеграл
т
7 = Ц(- z + Ь)2 + (у «2 ~ Ы + £з)2] dt.
и
Для этого нужно найти g2, удовлетворяющее системе уравнений
т
%=2 $ [(-t+^-(4z2-^+^)t]df==°;
т
^ = 2 \ (4«2-^ + bU = 0.
0
Интегрируя, получаем
T2 111
- у-' + UT - J У4 + у U3 - у ЬТ* = 0;
1 1
у Г3 - у £2^2 + 13Т = 0.
Решая эти алгебраические уравнения, найдем
62. 2 ’ 12’
Подстановка найденных значений в (4-107) и интегрирование дает
111
_ Т5 л — Т3 = —
720 ^2 Z2’
Наименьший положительный корень TQ этого уравнения и будет вре-
менем оптимального переходного процесса.
Вычислив То и подставив в (4-106), получаем, искомое решение:
«2 («) = I3 (у - •
(4-108)
Теперь рассмотрим случай ограничения по модулю управляющих воз-
действий
I ui (0 I I и2 (0 I h-
Введем новые переменные для выражения управляющих воздействий:
/ I
г>1(«) = ^«1(0- г>2 (0 = ^м2 (0-
Они, очевидно, ограничены по модулю одной и той же величиной I:
Положим р = оо и примем за норму величину
II и 11= max (I V^lt) I, I г>2(«) | )^Z.
<€[0, Т]
При р = оо из (4-106) получаем
г>1 (0 = I sign (— & + g2);
vi (0 = I sign — £2i + g3
(4-109)
где = 1, a £2 и g3 определяются из уравнения
т
С / 11 1 \ 1
min \ I | — £1/ + £21 + ~йг *2 — & + 5з ) dt =
ЬЬЬ J \ I 2 11 1
Минимум этого интеграла достигается при
Т ч
^=2 и Ь = з2^
Т найдется из уравнения
1 । 1 _ JL
32 + 4 I ’
Подставляя наименьший положительный корень TQ
в (4-109), получаем:
»i(0 = / sign —
r2 (0 = /sign Tl-^-t + t2\.
\O£i £» j
этого уравнения
(4-110)
Конечно, аналогичное решение можно было бы найти и с помощью прин-
ципа максимума, но получаемое при этом уравнение
Щ, (0 = /sign{Y [t)B}b
vj\e, Т определяется из уравнений
dt
дает семейство экстремалей, из которых надо выделить одну, удовлетворяю-
щую заданным краевым условиям. Это достаточно трудоемкая задача, и
в данном случае применение L-проблемы моментов приводит к цели более
быстро.
В более сложных задачах для отыскания коэффициентов g, используется
метод аппроксимации в пространстве Lg, которая давала бы наилучшим
образом (в смысле метрики пространства Lq)приближение функций линейными
комбинациями. Поскольку в теории аппроксимации получен ряд готовых
полезных результатов, которые непосредственно могут быть использованы
при решении задач оптимации, этот метод обладает определенными достоин-
ствами [242, 13, 152].
В частности, многие важные в практических применениях переходные
функции образуют системы Чебышева и позволяют поэтому использовать
аппроксимацию функционалов многочленами Чебышева, для которых в тео-
рии аппроксимации составлены детальные таблицы.
Решение ряда задач оптимального управления, базирующееся на /-проб-
леме моментов, приведено в [36—40] и [80, 81].
ГЛАВА ПЯТАЯ
СТАТИСТИЧЕСКИЕ МЕТОДЫ В ТЕОРИИ
ОПТИМАЛЬНЫХ СИСТЕМ
5-1. Развитие статистических методов
в теории оптимальных систем
Статистические методы в теории оптимального управления
применяются в тех случаях, когда информация о системе и среде
оказывается неполной: либо не известны воздействия на систему,
либо часть ее параметров изменяется не известным заранее, слу-
чайным образом и т. д.
В этих случаях возникает естественная мысль — восполнить
недостающие сведения путем задания на основе эксперимента
или же некоторой гипотезы каких-либо характеристик случай-
ных факторов (кривой распределения, плотности распределения,
моментов случайных функций и т. п.).
Статистическое направление в теории оптимальных систем перво-
начально возникло на основе теории оптимальной фильтрации
А. Н. Колмогорова — Н. Винера. Первой по времени была ма-
тематическая работа А. Н. Колмогорова [67], в которой излага-
лись вопросы интерполяции и экстраполяции случайных после-
довательностей и по существу был дан математический аппарат
для исследования нахождения уравнений стационарных дискрет-
ных систем, оптимальных в смысле средней квадратичной ошибки.
Непосредственное использование результатов А. Н. Колмогорова
в автоматике началось после появления работы Н. Винера [269],
который распространил теорию на непрерывные системы. С этого
момента началось интенсивное развитие теории статистически
оптимальных систем.
Простейшая линейная задача нахождения оптимального филь-
тра в системе, на которую действуют стационарные случайные
полезный сигнал и помеха, была рассмотрена в части II (гл. 3).
В [162] было показано, что при воздействии на вход системы
суммы математического ожидания полезного сигнала, выражен-
ного полиномом и центрированной стационарной случайной функ-
ции, методы определения, развитые Л. Задэ и Дж. Рагаццини
[270—272] полностью применимы и к более общему случаю, когда
входной сигнал содержит, кроме того, полином со случайными
коэффициентами.
В работах В. С. Пугачева [137, 139, 145] дается важное обоб-
щение проблемы оптимизации по минимуму среднеквадратичной
ошибки. Для нахождения линейного оператора А, преобразую-
щего входной сигнал 2, содержащий некоторый полезный сигнал
и помехи, w * = Az так, что выходной сигнал системы w * в лю-
бой момент времени приближается к требуемому сигналу w с наи-
меньшей среднеквадратической ошибкой, получено интеграль-
ное уравнение для матрицы весовых функций g (t, т), которая
и определяет оператор А:
t
$ g (t, т) Г2 (т, о) dx = (f, о), t — Т о t, (5-1)
t—т
где Г2 (i, t') и Twz (i, f) — соответственно матрица моментов вто-
рого порядка составляющих вектора входных сигналов z и
матрица смешанных моментов второго порядка составляющих век-
тора требуемых выходных сигналов w и вектора входных сигна-
лов z, a [t — Т, t] — интервал времени, в течение которого вход-
ной сигнал действует на систему. Т равно полному времени
работы системы или ее памяти. В [145] дано решение уравнения
(5-1) методом канонических разложений.
В [8—10] показано, что при любом критерии, представляющем
заданную функцию моментов ошибки системы первого и второго
порядков (критерий экстремума заданной функции математи-
ческого ожидания и дисперсии ошибки)
/ (М {£}, D {£}) = extremum, (5-2)
задача также сводится к уравнению (5-1).
В [47] исследован вопрос о реализации оптимальных систем
с помощью аналоговых вычислительных устройств.
К сожалению, общие методы дают лишь общую характеристику
оптимальной системы в целом. Для получения оптимальных ха-
рактеристик корректирующих цепей в замкнутой системе прихо-
дится делать пересчеты, оказывающиеся сравнительно неслож-
ными лишь в простейших линейных стационарных системах. Не-
смотря на большое число работ в этом направлении, задача не-
посредственного определения характеристик реализуемых цепей
еще далека от завершения в основном из-за отсутствия достаточ-
ного числа исходных статистических характеристик.
Параллельно с исследованием линейных велись работы и по
нелинейным системам. Основополагающей работой в этом направ-
лении является работа В. А. Котельникова [72], в которой впер-
вые решалась задача об обнаружении сигнала на фоне белого
шума по критерию минимума вероятности ошибки.
Разработка теории нелинейных оптимальных систем шла по
двум основным направлениям. Одно из них основывается на кано-
нических разложениях случайных функций [145]. Разработанные
методы позволяют, решая систему линейных интегральных урав-
нений, определять весовые функции для нелинейных оптималь-
ных систем, приводимых к линейным по тем же критериям, для
которых развиты методы оптимизации линейных систем.
Второе направление основывается на теории статистических
решений.
Интересен результат, полученный с помощью общей теории
статистических решений: в случае нормально распределенных
сигналов и помех при любой функции потерь, представляющей
собою неубывающую функцию модуля ошибки, получается одна
и та же оптимальная система, причем эта система линейна [141,
145, § 143]. Эта система может быть получена, следовательно, и по
критерию минимума средней квадратической ошибки, для кото-
рого разработано наибольшее количество практических примеров
решения [141—144].
Для решения нелинейных задач, относящихся к замкнутым
системам со случайными помехами, необходимо учитывать и не-
полноту информации об объекте и его характеристиках и случай-
ные шумы. Это потребовало привлечения новых математических
средств (динамическое программирование, теория статистических
решений). Одним из направлений в этой области была теория
дуального управления [185, 188, 189], рассматривающая замкну-
тые системы, в которых управляющее устройство имеет непол-
ную информацию об объекте, а случайные помехи и изменения
характеристик объекта не дают возможности мгновенно получить
требуемую информацию. В таких системах оптимальное управ-
ление имеет двойственный (дуальный) характер — изучение об-
становки и направление системы к желаемому состоянию. Ниже
будут рассмотрены основные положения этой теории, которую
можно рассматривать как мост, связывающий оптимальные и са-
монастраивающиеся системы автоматического управления.
5-2. Системы без накопления информации
Реализации процессов в системах с неполной информацией не
могут быть строго оптимальными, и можно говорить лишь отно-
сительно оптимизации тех или иных вероятностных характери-
стик процессов в таких системах.
Рассматриваемые в настоящем параграфе системы могут быть
сведены к общей структурной схеме, показанной на рис. 5-1.
Замкнутая линейная система состоит из управляемого объекта О
и корректирующего звена КЗ. На систему действуют задающее
воздействие х{) (t) и помеха z (t). Обе эти величины рассматрива-
ются в случае многомерных систем как векторы. Задача состоит
в том, чтобы выработать управляющее воздействие и (t) (т. е. в ко-
нечном счете синтезировать корректирующее устройство КЗ) так,
чтобы обеспечить минимизацию некоторого критерия оптималь-
ности. В этом смысле задача аналогична задачам, рассматривав-
шимся в предыдущих главах. Однако в ней имеется и ряд суще-
ственных отличий, обусловленных тем, что переменная z (t)
является случайной функцией времени. Даже если бы мы знали те-
кущее значение z и все его предшествовавшие значения, то такое
полное знание текущего состояния и предыстории помехи не дает
возможности точно и определенно предсказать будущее поведение
системы в любой момент времени. Текущее состояние и вся пред-
ыстория не содержат полной информации, необходимой для стро-
гого решения задачи об оптимизации, если только хотя бы одно
из воздействий на систему оказызвается случайной функцией вре-
мени. Поэтому системы со случайными переменными относятся
Рис. 5-1.
к классу систем с неполной ин-
формацией.
Среди систем с неполной ин-
формацией наиболее близки к си-
стемам с полной информацией
такие системы, в которых нет на-
добности накапливать информа-
цию о предыстории системы. Ра-
зумеется, такое отсутствие изуче-
ния предыстории должно оправдываться тем, что мы заранее
знаем ряд свойств и характеристик случайной функции z (£),т. е.
располагаем априорной информацией о случайной функции. Один
из основных подходов к решению подобного рода задач и со-
стоит в том, что мы заменяем точную и полную информацию о
состоянии и поведении системы информацией о вероятностных
характеристиках, которая считается полной. При этом решение
становится возможным, но, конечно, в статистическом смысле:
определяются вероятностные характеристики оптимального про-
цесса, минимизируется вероятностная характеристика (обычно
математическое ожидание) показателя оптимальности и т. д.
Наиболее развитой в этом смысле является теория оптималь-
ных чисто случайных и марковских процессов. Накопление ин-
формации в таких системах бесполезно.
В том случае, когда знаем, что z (t) представляет собою чисто
случайный процесс (или марковский процесс), знаем его распре-
деление вероятности, измеряем текущие значениям (t) и всех осталь-
ных необходимых переменных, полностью знаем воздействие
(t) и оператор объекта, то мы имеем дело (в соответствии с тер-
минологией А. А. Фельдбаума) с системой с максимальной (но
неполной) информацией [188].
С подходом и методикой решения задач об оптимальном управ-
лении в системах с максимальной информацией познакомимся на
несложном примере непрерывной системы. Более сложные виды
систем и помех рассматриваются в работах [119, 187, 206, 220,
222, 227, 228] и др.
Начнем с рассмотрения довольно общей постановки задачи
оптимального управления для случая, когда помеха представляет
собою чисто случайный процесс, представляющий собою ди-
скретную последовательность независимых случайных величин
с нормальным распределением. Интервал между дискретами ра-
вен Ai. Помеха % является аддитивной (т. е. арифметически
суммируемой с неслучайными воздействиями).
Пусть уравнение системы — обыкновенное нелинейное диффе-
ренциальное уравнение первого порядка:
| = /(г,М)Ш (5-3)
где х — координата; и — управление; £ — характеризуется мате-
q2(z А
матическим ожиданием тп (х, i) и дисперсией —-. Наличие t
в аргументах вероятностных характеристик указывает на то, что
процесс в общем случае нестационарный. Процесс х (t) представ-
ляет собой реальный марковский процесс. Малое приращение
Аг, как вытекает из (5-3), может быть записано в виде
kx = fkt + %M, (5-4)
где £ Ai также распределена нормально, имеет среднее значение
о2
тп Ai и дисперсию (AZ)2 = о2 Ai.
Плотность распределения вероятности
(5'5)
Условная плотность вероятности для приращения \х при
фиксированных х и i получится, если мы в (5-5) заменим g Ai его
выражением, определенным из (5-4):
р (М X't} = ехр Ь • (5‘6)
у 2лси Ai I 4и ш j
Пусть критерий оптимальности, сформулированный по тех-
нико-экономическим соображениям для системы в предположении
отсутствия помех, т. е. первичный критерий, выражается функ-
ционалом
т
= Г(х, и, t)dt. (5-7)
io
При наличии помех становится случайной величиной и, сле-
довательно, задача о минимизации его становится бессмысленной.
Чтобы можно было решить задачу об оптимальном управлении,
необходимо вместо случайной величины J\ выбрать в качестве
критерия детерминированную величину — статистический кри-
терий оптимальности. Наиболее естественно для формирования
статистического критерия оптимальности использовать первичный
критерий, например, принять в качестве статистического крите-
рия оптимальности математическое ожидание величины J\:
(т )
J = M F(x, и, t)dt . (5-8)
Uo /
Для нахождения оптимального управления и * (/) можно
воспользоваться методом, применяемым в динамическом програм-
мировании. Разобьем интеграл в (5-8) на два интеграла:
т /о+Д* т
\F(x, и, t) dt = $ F (х, и, t)dt± $ F (х, и, t) dt
Iq to /о4~Д^
T
^F (х0, u0, tQ) kt + J F(x,u,t)dt. (5-9)
Первое слагаемое получено в результате разложения в ряд
Тейлора по степеням малого Д£ первого из интегралов и отбрасы-
вания малых выше первого порядка.
Предположим пока, что за время Д£ перемещение определено
при некотором фиксированном на интервале Д£ значении uQ,
и считаем, что в дальнейшем при t > tQ + kt управление опти-
мально. Тогда в соответствии с принципом оптимальности
гт \ г т \
М'К F(x, и, t) dt'( = F (х0, и0, Q Д^ + пвпЛ/Ч \ F(x, и, £)а?Л =
Чо J Ьо+Д* J
= F (ж0, и0, tQ) Д£ + J* (xQ + Дж, tQ + Д0, (5-10)
где звездочкой отмечено минимальное значение критерия при за-
данных ограничениях и U и t0 4- Д£ t Т.
Через М' мы в этих формулах обозначили математическое ожи-
дание критерия при некотором определенном перемещении Дж.
Но так как Дж величина случайная, то действительное зна-
чение статистического критерия должно быть получено путем
усреднения величины Мг по всем Дж, т. е. путем выполнения опе-
рации нахождения математического ожидания.
Обозначим эту операцию М^х. Тогда
J (*о. Q = Мьх {F (х0, и0, t0) + J* (х0 + Ах, t0 + At)} =
= F (х0, Uq, t0) + Мдж {J* (x0 + Ax, tQ 4- At)}.
Первое слагаемое как величина определенная из-под знака
математического ожидания вынесена. Раскрывая операцию мате-
матического ожидания (см. часть II, стр. 87), получаем
J*(x0, Q = w0, t0)M +
+ J J* (x0 4- Arc, tQ + AZ) P (Arc | xQ, Zo) dQ (Arc)l.
Й (Дх) J ’
Так как за начальную точку х0, t0 можно принять любую
точку начальной траектории, будем опускать индексы «О»:
J* (х, t) = min (гс, и, t) kt +
+ J* (x + Arc, t + AZ) P (kx | x, t) dQ (Arc)l (5-11)
Й(Дх) /*
Так как P — плотность вероятности, то
jj Р (Arc | rc, Z) б/Q (Arc) = 1.
й (Дх)
(5-12)
Разложим функцию J * (x + Arc, Z + Az) в степенной ряд,
сохранив в разложении члены до второго порядка малости. Част-
ные производные J * по х и по Z, не содержащие переменной ин-
тегрирования Аге вынесем из-под знака интеграла. Получим
J* (rc, z) = min (Р(х, и, Z) kt-г J* (rc, Z) P (kx | Z, x) dQ (Arc) +
U I Q (Дх)
+ bxP(&x\x,t)dQ(kx)+^bt $ Р(Дх\х, t)dQ(£x) +
Й (Дх) Й (Дх)
+ (^P(^\t,x)dQ^x) +
Q (Дх)
P(Ax\x,t)d£l(bx) +
Й(Дх)
ArrP (Arc| rr, Z)dQ (Arc) +.. .1.
Й (Дх) J
Учтем равенство (5-12), вынесем J * (x, Z) из-под знака мини-
мума и сократим его с тождественным выражением в левой части;
разделим почленно полученное равенство на kt и устремим kt
к нулю. Учтем также, что в соответствии с определением матема-
тического ожидания
§ кхР {кх | х, Z) rfQ (Arc) = / kt + т kt.
Из теории вероятности также известно, что
$ (Ля)2 Р (Ля | я, t) dQ (Ля) = о2Л£ + (т Л/)2 о2Дг,
так как т2 (At) 2 имеет второй порядок малости.
Приняв во внимание все сказанное выше, получим следующее
уравнение в частных производных:
—^- = min{F(®’ + + +(5-13)
(/<* "X Af UJb J
Уравнение (5-13) представляет собою распространение урав-
нения Беллмана на случайные процессы. Из этого уравнения на-
ходятся оптимальное управление и * и J *. Для объекта высокого
порядка, описываемого уравнениями
§ = /i(®1,...,x„,u) + ^, (5-14)
где i = 1, 2, ... , j, ... , n, i j п; 6^ — символ Кронекера,
если | чисто случайный процесс со средним значением т и диспер-
сией o2/At, то уравнение Беллмана принимает вид:
dJ* • г/
-з— = min{F(x, и,
д£ и
. (5-15)
Рассмотрим пример, когда объект описывается линейным диф-
ференциальным уравнением первого порядка:
(5-16)
На величину и никаких ограничений не накладываем. Задаю-
щее воздействие я2 представляет собой марковский случайный
процесс. Для математического описания часто оказывается удоб-
ным представить марковский случайный процесс как результат
воздействия белого шума £ (чисто случайного процесса) со сред-
ним значением т = 0 на инерционное звено
dx2
dt
—
(5-17)
Уравнения (5-16) и (5-17) можно рассматривать как уравне-
ния некоторого эквивалентного объекта, находящегося под воз-
действием белого шума. Пусть далее первичный критерий опти-
мальности задан в виде функционала
т
Л = $ [(x1 — x2)2 + u2]dt.
tv
(5-18)
Уравнение (5-15) при этом примет вид:
dJ* . , dJ* dJ*
-г?-= min {(а;.—х2у* + и2 + и ------х2 —
dt u I' дач z dr2
о2 d2J*\
2 dxfj
(5-19)
Дифференцируя правую часть (5-19) по и и приравнивая про
изводную нулю, находим условие ее минимума:
2и*4-
dj*
дхг
0.
Отсюда находим оптимальное управление
“* = —2^- (5-20)
Подставим (5-20) в (5-19):
dJ* , ,2 1 /3/*\2 dJ* , a2dV*
Эг — 'Ж1 Х*' 4 (За-! ] Ж2 dx2 + 2 dxl •
(5-21)
Для решения задачи удобно перейти к «попятному движению»,
введя переменную т = Т — t. Тогда (5-21) принимает вид:
dJ* , Ч2 1 /а/*\2 dJ* . a2 5V* 99ч
1Г =(*1-*2)2-4^) <5’22)
Граничные условия:
J* (яп ж2, т = 0) = 0 для всех хи х2,
г*/ ч ^->оо
J* («1, *2» Т) -> ОО При
2
В самом деле, при т = 0 имеем t0 — t = Т, и интеграл (5-18)
обращается в нуль.
Ищем решение уравнения (5-21) J * (ж, т) в виде ряда
J * (х, т) = к0 (т) + 2 К (т) Xi + 2 S kij (?) 4- • • •. (5-23)
который подставляем в (5-21) и, приравнивая коэффициенты при
одинаковых степенях х^ находим Сразу убеждаемся, что лишь
kQ (т) и к{- (т) отличны от нуля, причем можно выбрать к^ = к^.
Получаем дифференциальные уравнения относительно к0, к119
^12, к22, которые решаем при начальных условиях к0 (0) =
= к^ (0) = 0. В конечном итоге получаем
(хъ х2, т) = kQ (т) + kL1 (т) х] + 2/с12 (т) х±х2 + к22 (т) х% (5-24)
и из (5-20) и (5-24)
и* = —^(т)^ —&12(t)z2. (5-25)
На рис. 5-2 показаны графики, изображающие решение этих
уравнений.
Управляющее устройство может быть выполнено по структур-
ной схеме, показанной на рис. 5-3. Блок D на самом деле не ну-
жен: он лишь показывает, как
в соответствии с уравнениями
(5-17) чисто случайный процесс
| преобразуется в марковский
(t). Блок В представляет со-
бой объект, блок А — управляю-
щее устройство. Оно состоит
из двух блоков умножения МЗГ
и М32. Сомножители — к1± (т)
и —к12 (т) вырабатываются в вы-
числительном устройстве ВУ, ко-
торое приближенно можно вы-
полнить в виде программного
устройства, реализующего заранее
построенные графики (на рис. 5-2)
11» ^12
Рис. 5-2.
для решений уравнений относительно коэффициентов &0, к
и k<2ft.
Рис. 5-3.
5-3, Системы с независимым накоплением информации
В предыдущем параграфе были рассмотрены системы, в ко-
торых накопление информации о предшествующем поведении бес-
полезно и поэтому не производится. Но гораздо чаще накопление
информации и последующее ее использование для управления
процессом позволяет существенно улучшить управление. Очевид-
но, что накопление информации может оказаться полезным в тех
случаях, когда воздействия на систему представляют собою слу-
чайные процессы, более сложные, чем марковские, но даже и в слу-
чае марковских процессов накопление информации будет полез-
ным, если измерение полезного сигнала происходит с погрешностью
или если результат измерения проходит через канал с шумами.
При наличии накопления и последующей обработки накоп-
ленной информации схема системы естественно усложняется.
Рассмотрим простейшую разомкнутую систему с накоплением
информации (рис. 5-4). В этой схеме безынерционный объект В
на выходе х должен воспроизводить задающее воздействие xQ.
Имеются два безынерционных канала связи с помехами: канал
Яо, связывающий управляющее устройство А с задающим воз-
действием я0, и канал (?, связывающий объект В с управляющим
устройством. В канале Яо действует шум Ло, в канале G — шум
g. Вследствие наличия шумов входы управляющего устройства
у и объекта v отличаются соответственно от задающего воздей-
ствия xQ и выработанного
ющего воздействия и.
Кроме того, непосредст-
венно на объект действует
помеха z.
Требуется выработать
управляющим устройством управля-
такое управляющее воз-
действие, чтобы показа- Рис. 5-4.
тель оптимальности, или,
как его принято называть в задачах подобного рода, функция
потерь W (xQ, х), был минимальным. Поскольку, однако, величи-
ны xQ и х случайные, то и РИ оказывается случайной функцией,
поэтому при построении оптимального управления надо говорить
о минимизации не самой функции W, а некоторых ее вероятно-
стных характеристик. Будем в качестве вторичного критерия
оптимальности использовать математическое ожидание функции
r = M{W(x0, х)}
(5-26)
и называть это математическое ожидание удельным ри-
ском. Задающее воздействие х0 в рассматриваемых задачах также
является случайным процессом. Если бы х$ был полностью де-
терминирован, то задача его измерения теряла бы смысл. Но
если х^ случайный процесс, то и риск г будет случайной функцией,
поэтому для получения регулярного критерия оптимальности г
нужно усреднить по всей области Q (Хо) возможных сигналов.
В результате такого усреднения находится полный или
средний риск В*.
R = M{r}=\jr (Хо, X) Р (Хо) (5-27)
Так же как и в предыдущем разделе, для того чтобы можно
было решить задачу об оптимальном управлении, нужно задаться
априори рядом зависимостей и характеристик, а именно:
1. Априорные вероятностные характеристики случайного про-
цесса xQ (например, плотность вероятности Р (#0)). Отметим, что
в практических задачах эти априорные характеристики могут
быть заданы не всегда.
2. Вероятностные характеристики шума hQ в канале HQ.
3. Способ комбинации сигнала х0 и шума hQ в канале Яо.
4. Оператор объекта х = F (z, v).
5. Априорные вероятностные характеристики случайного про-
цесса z.
6. Вероятностные характеристики шума g.
7. Способ комбинации шума g и сигнала и в канале G.
8. Выражение функции риска W.
Требуется выработать оптимальное управление и *, т. е. та-
кое управление, которое минимизировало бы средний риск R.
В изложенной постановке задача пока принципиально не от-
личается от задачи
Рис. 5-5.
без накопления информации, рассмотренной
в предыдущем параграфе, различие пока
состоит лишь в количестве данных (три
помехи вместо одной). Существенное раз-
личие, однако, возникает тогда, когда
на основании ряда измерений величины у
в предшествующие моменты времени мы
можем уточнить вероятностную характе-
ристику процесса я0, т. е. найти его
апостериорную вероятностную характе-
ристику.
В том случае, когда характер процесса измерения и обработки
измеренной информации не зависит от процесса управления и,
мы имеем дело с независимым накоплением ин-
формации.
Для того чтобы ознакомиться с методикой решения задач дан-
ного типа, начнем с рассмотрения одной из составных частей си-
стемы, а именно той ее части, где происходит измерение и уточне-
ние вероятностных характеристик задающего воздействия я0.
Блок-схема этой части показана на рис. 5-5. На ней показаны:
канал связи Яо и часть управляющего устройства ПР, выраба-
тывающая некоторый сигнал d, содержащий в себе указание, ос-
новывающееся на результатах наблюдения предыстории у (t)
о том, как надлежит действовать дальше. Этот сигнал d назовем
решением о том, к какому классу следует отнести поступивший
на вход устройства принятия решения ПР сигнал. В зависимости
от типа требуемого решения d можно указать следующие основ-
ные типы теории статистических решений.
1. Теория двуальтернативных решений. Случайный процесс
зависит от одного неизвестного параметра %:
Например:
xQ = X sin (w0Z + ф0),
где (oo и ф0 заданы.
Параметр X при этом может принимать лишь одно из двух зна-
чений: либо Х1? либо Х2.
В частном случае, когда Х2 = 0, Хх ф 0, получаем задачу
обнаружения сигнала.
В более общем случае X может быть многомерным вектором,
каждая компонента которого может принимать одно из двух зна-
чений Хг1 или Хг2:
( ^11> ^12> • • ‘ » ^lm
I ИЛИ Х21, Х22, ...»
В этом случае могут быть два решения, каждое из них должно
выражаться определенным сигналом.
2. Теория многоальтернативных решений. В этом случае па-
раметр X может иметь г различных значений, и решения d должны
выражаться посредством г различных сигналов, соответствующих
г значениям параметра X.
3. Теория оценки параметров. Параметр X может принять лю-
бое из бесконечного множества значений в некоторой области
Q (X) с априорной плотностью вероятности Р (X). Теория оценки
параметров дает возможность выработать бесчисленное мно-
жество сигналов d, обычно в форме функции d (X).
4. Теория оценки процессов. Параметр X является функцией
времени X (t), и требуется оптимальным в каком-либо смысле об-
разом оценить форму и параметры этой функции.
Мы можем представить себе три конечно- или бесконечномер-
ных, в зависимости от характера задачи, пространства; простран-
ство сигналов Хо = (гг01, я02, ... , хОг), пространство наблюдений
Y = (г/i, г/2, ... , уг) и пространство решений D = (dn d2, ... ,
dz). Так как каждому наблюдению уг должно соответствовать свое
решение dv то пространство решений представляет собою ото-
бражение пространства наблюдений, а правило отображения,
которое является одновременно и алгоритмом управляющего
(или приемного) устройства, в теории статистических решений на-
зывается стратегией устройства.
Возможны два типа стратегий — регулярные, где каждой
точке пространства Y соответствует определенная точка простран-
ства Z), и случайные, где каждому фиксированному Y соответст-
вует некоторая плотность распределения вероятности Д (D/Y) то-
чек пространства D.
Регулярную стратегию можно рассматривать как предел слу-
чайной стратегии, когда дисперсия точек пространства D, со-
ответствующих наблюдаемому вектору Уо» стремится к нулю и
точки D пространства концентрируются в бесконечно малой
окрестности точки 2)0, соответствующей Хо по регулярной стра-
тегии. В пределе для регулярной стратегии
Л(2>|У0) = 6[Я--^(У0)1, (5-28)
где 6 — дельта-функция.
Функция Д (D 1 Yq) называется решающей функци-
е й. Теория статистических решений указывает методы опреде-
ления оптимальных решающих функций на основе критериев оп-
тимальности, связанных с ошибками решения. Если решение D
оказалось неправильным в оценке сигнала Хо, то ошибка реше-
ния оценивается функцией потерь W = W (Хо, D), которая
должна иметь наименьшее значение при правильном решении.
Часто в качестве функций потерь принимаются функции вида
с Е (xt — 2, с Е | Xi — di | и т. д. Простой или эле-
ментарной функцией потерь называют функцию
вида:
( -оэ, X0 = D
W (X0,D) = i — 8(X0 — D) = \ X°^D^ (5-29)
Условным риском называют математическое ожида-
ние функции потерь при фиксированном сигнале Хо:
г (Хо, D) = М {W (Хо, D)} = W (Хо, D) Р (D |Х0) dfi. (5-30)
Й(Н)
При этом, если известен закон действия решающего устрой-
ства, то
P(D\XQ) = 5 Д(Д|У)Р(У|ХО)ЙЙ. (5-31)
Й(Г)
Плотность вероятности Р (У|Х0) может быть найдена, если
заданы вероятностные характеристики шума и способ комбина-
ции сигнала с шумом.
Полный (средний) риск выражается зависимостью:
R = M{r}= г(Х0, A)P(X0)dQ. (5-32)
Й(ХО)
Задачи теории статистических решений — это задачи о на-
хождении решающих функций, минимизирующих средний риск.
Очевидно, что вид оптимальной решающей функции зависит от
вида выбранной функции потерь.
Теория статистических решений дает возможность на основе
данных наблюдений оценивать вероятностные характеристики
Р (Х0|У) (или Р (Х|У), если X параметр, характеризующий Хо.
При этом могут быть два основных типа задач. В первом типе
(бейесовы задачи) до наблюдения известны некоторые априор-
ные характеристики, например Р (Хо). В результате решения за-
дачи происходит уточнение априорной плотности вероятности
Р (Хо) и находится апостериорная плотность вероятности Р (Хо | У).
Во втором типе задач априорные плотности вероятности неиз-
вестны совершенно.
Рассмотрим на простейшем примере двуальтернативного ре-
шения бейесову задачу.
Пусть задан вид функции измеряемого воздействия xQ(t, X),
где X — параметр, принимающий одно из двух значений Хх или Х2.
Заданы априорные вероятности этих значений рг и р2. Решение
d может принимать также два значения:
( dx (решение Х=Хх)
\ d2 (решение Х = Х2).
Выберем функцию потерь в виде
| 0, d =
I 1, d^k]
(5-33)
т. е. при правильном решении потери равны нулю, при непра-
вильном — единице. Пусть условные вероятности решений dr
и d2 ПРИ фиксированном X равны р (dx|X) и р (d2|X). Удельный
риск (5-30) определится суммой
г (X, А) = W (X, dJ pfaW + W (X, d2) р (d21 X).
Выпишем значения удельного риска для значений Хх и Х2 и
учтем, что в соответствии с (5-33)
W (Хх, dJ = W (Х2, d2) = 0, W (Xn d2) = W (Х2, dJ = 1.
Тогда:
г (Xt, А) = W (Х1? d±) р (dx | Хх) -f- W (Xn d2) p (d21 X-J = p (d21 Лг); 1
r (X2, A) - W (X2, dJ p (dr 1X2) + W (X2, d2) p (d21X2) = p (^ | X2). J
(5-34)
Интеграл в формуле (5-32) среднего риска также заменяется
суммой
R = г (Хь А) рг + г (Х2, А) р2.
Подставив (5-34), получим
R = Р1Р №1 ^1) + P2P (di I ^)- (5-35)
Величина р (d21 Хх) = а есть вероятность получить решение
X = Х2, в то время как X = т. е. вероятность ошибки при
X = Х2; величина р (dr | Х2) = р есть вероятность ошибки при
X = Xv В задачах об обнаружении сигнала на фоне шума, где
Хх = 0, а называется ошибкой «ложной тревоги» (решаем, что
сигнал есть, хотя на самом деле его нет), ар — ошибкой «ложного
отбоя» (решаем, что сигнала нет, хотя он есть). Тогда средний риск
равен безусловной вероятности ошибки
7? = g = Pia + p2p. (5-36)
В теории связи критерий оптимальности, равный безусловной
вероятности ошибки, называется критерием Котель-
никова. Таким образом, функция потерь, выраженная в виде
(5-29), приводит к критерию Котельникова.
Название «бейесовы задачи» дано потому, что их решение
может быть выполнено с помощью формул Бейеса, позволяющих
определить апостериорные плотности вероятности по заданным
априорным.
Пусть К может принимать г значений Хп Х2, ..., Хг с априорными
вероятностями р (Хх), р (Х2), ..., р (Хг). Введем понятие о простран-
стве наблюдений вектора Y = (ух, у2, ..., */г). Если известна плот-
ность вероятности в точке пространства Р (г/х, j/2,..., j/r), то вероят-
ность попадания конца вектора внутрь элементарного объема
dQ (Y) пространства наблюдений Q (У) равна Р (У) dQ (У), ве-
роятность же попадания в одну из точек всего пространства Q
равна единице:
$ Р(У)й£2(У) = 1. (5-37)
Вероятность того, что вектор параметров имеет значение
% и одновременно того, что конец вектора У находится в объеме
dQ (У) есть вероятность сложного события, которая, согласно
теории вероятностей, может быть определена через произведение
вероятностей двояким образом: либо через вероятности р (X) и
Р (У | Л,), либо через р (X | У) и Р (У) посредством выражения
р (X) [Р (Y | X) dQ (У)] = р (X | У) [Р (У) dQ (У). (5-38)
Сократив на dQ (У), получим формулу Бейеса для апостериор-
ной вероятности
-• <5'39)
Функция Р (У | X), выражающая вероятность получить наб-
людение У при фиксированном значении параметра X, называется
функцией правдоподобия. Эта функция обычно
может быть заранее установлена на основе рассмотрения конкрет-
ной задачи, поэтому представляет интерес в правой части формулы
Бейеса выразить Р (У) через Р (У | X). Сделать это можно, просум-
мировав для разных j = 1, 2, ..., г левые и правые части выраже-
ний
р(^)Р(У|Л,) = Р(У)р(^|У).
В результате суммирования получим
S р (%,) Р (У I у = Р (У) 2 Р (*, IY) = Р (У), (540)
j = i j=i
Г
гак как сумма р(%^|У) = 1. Тогда формула Бейеса принимает
i=i
вид
р I У) = р(М^(У1М
S р(М^(У IM
j=l
Точно так же можно получить формулу Бейеса и для случая
непрерывного распределения вектора X с априорной плотностью
вероятности Р (X):
Р (Л I У) = -р—f (Г|Х)----. (5-42)
17 \ Р (к) P(Y\K)dQ (к) v '
QW
Можно показать 1189], что если в качестве критерия оптималь-
ности принять критерий В. С. Котельникова (5-36) или в качестве
функции потерь — функцию вида (5-29), то решение бейесовой
задачи выбора или оценки параметра сводится к нахождению
такого значения X, при котором апостериорная вероятность
Р (X | У) принимает максимальное значение.
В зависимости от конкретных условий иногда при решении
задач типа бейесовых применяют видоизмененные критерии.
Так, в теории связи часто применяются критерии, учитывающие,
какая из ошибок («ложной тревоги» или «пропуска») наиболее
опасна, которые содержат эти ошибки с различными весами.
В частности, применяется критерий Неймана — Пирсона [252] —•
наименьшая вероятность пропуска сигнала при заданной вероят-
ности ложной тревоги.
Если, что часто встречается в практических задачах, мы имеем
дело с совершенно новой системой, о поведении которой еще не
накоплено никаких статистических данных и априорные вероят-
ности в которых неизвестны, то такие задачи не относятся к типу
бейесовых. Для их решения приходится прибегать к различного
рода гипотезам, основываясь на здравом смысле и интуиции.
Еще на ранней стадии развития математической статистики со
времен Лапласа, в случаях, когда априорное распределение веро-
ятности Р (X) неизвестно, часто прибегали к гипотезе о том, что
все значения % равновероятны, т. е. принимали априорную плот-
ность вероятности постоянной.
Если мы считаем Р (X) = const и Р (У) = const, то в формуле
(5-39) апостериорная вероятность оказывается пропорциональной
функции правдоподобия. Это дает основание в качестве одного из
методов в теории статистических решений принять, в случае, если
априорные плотности распределения неизвестны, в качестве эври-
стического критерия оптимальности критерий макси-
мума правдоподобия.
Если задан вектор У, то функция правдоподобия Р (У | X) за-
висит только от X:
Р(У|Х) = Л(Х). (5-43)
В соответствии с правилом Р. Фишера, наиболее правдоподоб-
ным считается то значение параметра X, при котором функция прав-
доподобия L (X) максимальна.
Другим распространенным в теории статистических решений
методом решения является наиболее пессимистический метод
минимакса. В соответствии с этим методом сначала отыски-
вается «наихудший» сигнал X**, при котором условный риск г
при данном Д будет максимальным:
г(Х**, Д) = шахг(Х*, Д) (5-44)
X*
далее находится такая решающая функция Д*, для которой наи-
худший риск будет минимальным:
r(X**, A*) = minr (X**, Д) = min max г (X*, Д). (5-45)
Д Д X*
Решение Д* называется минимаксным, а соответствующая
ему стратегия — минимаксн о-о птимальной.
Минимаксная стратегия дает наилучшие результаты в наихуд-
ших условиях. Она появилась в теории игр, где игрок ожидает
наибольшего ущерба от противника. В случае же, когда наихуд-
шие условия маловероятны, минимаксная стратегия может ока-
заться не наилучшей.
Основные понятия теории статистических решений, изложен-
ные выше, весьма наглядно интерпретируются в «пространстве
риска». Рассмотрим двуальтернативные решения, для которых
пространство вырождается в плоскость и имеет наглядную гео-
метрическую трактовку. Регулярные стратегии изображаются
на плоскости риска точками, координаты которых равны условным
рискам для каждой из двух альтернатив. Значения риска г (Хх, D)
откладываются по оси абсцисс, значения г (Z2, D) — по оси орди-
нат. Стратегию можно считать тем лучшей, чем меньшие значения
риска ей соответствуют. С этой точки зрения можем утверждать,
что страстегия Dr лучше стратегии D3 (рис. 5-6), так как оба услов-
ных риска для нее меньше, но сравнить стратегии D± и D2 по этому
признаку уже нельзя.
Случайные стратегии на плоскости риска могут быть изобра-
жены следующим образом. Пусть мы выбираем одну из двух стра-
тегий: либо Dy с вероятностью qt, либо D2 с вероятностью q2.
Такая случайная стратегия D[ (рис. 5-6) имеет условный риск
г (Xv Z)4) — qxr (Zp Dy) + q2r (Xx, Z>2); 1 (5-46)
r (X2, D'&) = дгг (X2, Dy) + q2r (X2, D2). j
Если одна из стратегий Dy или Z>2 выбирается обязательно, то
+ ^2 = 1 и все стратегии
значениям будут изобра-
жаться точками, лежащими
на прямолинейном отрезке
DyD2. Стратегии, при кото-
рых многократно случайным
образом применяются раз-
личные регулярные страте-
гии, называются смешан-
ными стратегиями.
Соединим прямой точки
Z)3 и D4 (прерывистая линия
на рис. 5-6). Любая точка Z>5
соответствующие различным
Рис. 5-6.
на этой прямой соответст-
вует новой смешанной стра-
тегии, для которой применяется стратегия Z>3 с вероятностью q3
и стратегия D[ с вероятностью ^4, причем q3 + r/4 = 1. Нетрудно
видеть, что эта же точка соответствует применению стратегии D1
с вероятностью qxq4, стратегии Д2 с вероятностью q2q± и стратегии
D3 с вероятностью q9. Выполняя все аналогичные построения
для нескольких регулярных стратегий Dy, D2, D3, D±, D$
(рис. 5-7, а), убедимся, что любая из внутренних точек выпукло-
го заштрихованного многоугольника, вершины которого соот-
ветствуют первичным регулярным стратегиям, соответствует не-
которой смешанной стратегии.
В бейесовых задачах средний риск равен
7? = ppr (Xn D) + p2r (Х2, D). (5-47)
Линия R = const на плоскости риска представляет собой пря-
мую линию с угловым коэффициентом — р^р^- Величина риска R
для этой прямой пропорциональна длине перпендикуляра, опу-
щенного на прямую из начала координат, поэтому уменьшению
среднего риска R соответствует движение прямой влево, по направ-
лению к началу координат. Для многоугольника Z>1? Z>2, D3, Z>4, Z>5
на рис. 5-7, а наименьшему значению риска соответствует вершина
Dr, В общем случае прямая с наименьшим R проходит через одну
из вершин многоугольника стратегий и поэтому в общем случае
бейесова стратегия есть стратегия регулярная. Лишь в частном
случае, когда прямая для наименьшего R совпадет с одной из
сторон, бейесова стратегия может оказаться смешанной.
При минимаксном подходе оптимальная стратегия 7)* обеспе-
чивает наименьшее значение максимума условного риска, т. е. для
рассматриваемого изображения на плоскости — максимального
из двух возможных значений г (Хп 2)*) и г (Х2, 2)*). Для определе-
ния минимаксно-оптимальной стратегии проведем биссектрису
OF в первом квадранте. Будем двигаться из начала координат по
биссектрисе. Если биссектриса пересекается с многоугольником
стратегий, то точка первой встречи D* и определит минимаксно-
оптимальную стратегию. Действительно, для этой точки оба зна-
чения риска равны между собою и меньше максимального риска
для любой другой точки многоугольника. В общем случае мини-
максно-оптимальная стратегия будет смешанной, поскольку встре-
ча биссектрисы с контуром многоугольника в общем случае про-
исходит не в вершине.
Если биссектриса OF не пересекает многоугольника (рис. 5-7,6),
то для определения минимаксно-оптимальной стратегии с движу-
щейся по биссектрисе точкой L надо связать вертикальную линию
LG и горизонтальную LH. Оптимальная стратегия соответствует
точке многоугольника, впервые встретившейся с одной из этих
линий (на рис. 5-7, б — точка Di). В общем случае это вершина, и
тогда минимаксно-оптимальная стратегия регулярна.
Рассмотрим систему, в которой задающее воздействие имеет вид:
= (5-48)
где / (t) — заданная функция времени; X — параметр, который может при-
нимать два значения Xi и Х2 с вероятностями и р2 соответственно. Так как
одно из этих двух значений параметра возникает обязательно, то
Pi + Рч ~ (5-49)
Пусть шум h (t) складывается в канале связи с полезным сигналом
(t) аддитивно:
3/(0 = хо (0 + М0- (5-50)
В системе делается г наблюдений в моменты flt t2, ..., tr величин уг,
у г» Очевидно,
У г — xoi + hi = (^г) 4“ (5-51)
Шум hi представляет собою последовательность независимых случайных
величин с нормальной плотностью распределения и дисперсией о2:
1
P(/ii) = —„ехр
а У 2л
(5-52)
I 2о2/
Требуется оценить значение параметра X, т. е. установить, будет ли
X ~ Хх или X = Х2 по данным наблюдений y1<t у2,..., Уг-
При решении задачи как с помощью формулы Бейеса, так и по методу
максимального правдоподобия, нам нужно будет определить функцию правдо-
подобия Р(К|Х). Из (5-51) имеем
Ьг = У1-Щ1г). (5-53)
Подставляя (5-53) в (5-52), найдем
Р (У11 %) = -1= exp / - [yi^-(4)]2} • (5-54)
а У 2л ( J
Так как отдельные значения hi при разных i статистически независимы,
то независимы и у^ — X/ (^), а плотность вероятности для множества вели-
чин у1т у2,..., уг равна произведению
Р(У|Х)= П P(j/i|l) =
i = 1
(Г )
Х ' (5'55’
г = 1 '
Апостериорные вероятности найдем по формуле Бейеса:
<5-55’
Нам надо выбрать то из значений X, которое дает максимум либо апосте*
риорной вероятности, либо функции правдоподобия. Поэтому удобно найти
отношение правдоподобия, равное
Л --Р (У Их)
k ’ LQ*) Р(У\ЪУ
Отношение апостериорных вероятностей равно
Р (К I у) Pi Л
р(^|У) Pi 1
(5-57)
(5-58)
При решении задачи по методу максимума апостериорной вероятности,
получим
Xi,
Х2,
если
если
— Л (У) > 1
Pi
^Л(У)<1
Pi
(5-59)
При решении по методу максимума правдоподобия получим другое зна-
чение порога:
( Хх, если Л (У) > 1 |
t Х2, если Л (У) < 1 J ’
(5-60)
В случае нормального распределения логарифмируем (5-55) и обозна-
чаем
£ \Уг ~ W (QF ~ 5 [2/i - W («.)]’ = F (У). (5-61)
г=1 г = 1
Неравенства (5-59) и (5-60)
апостериорной вероятности
при этом сводятся к виду: для максимума
Хь /"(У) < 2cr2 In —
Pz
Xj, /’(У)>2а21п —
Pz
для максимума правдоподобия
%!,
А-2,
F (У) < 0П
F (У) > 0. J
(5-62)
(5-63)
Х =
Рассмотрим числовой пример. Определить, присутствует ли сигнал вида
х0 (I) = 0,25е~б/ (5-64)
в наблюдаемой последовательности:
2/1 = У (0,2) = 0,20;
2/2 = 2/ (0,4) = 0,30;
2/з = 2/(0,6) =0,15;
2/4 = У (0,8) = 0,10;
?/о = 2/(1,0) = 0,05.
Характер шума тот же, что и выше, дисперсия шума о2 = 1. Находим
= 0,25; Л2 = 0;
5 -5/ п 5
ЛУ)= S к-°>25е =
г=1 г=1
= (0,2 — 0,25е-1)2 + (0,3 — 0,25<Г2)2 + (0,15 - 0,25е~з)2 (0,ю - 0,25е“4)2 +
+ (0,05 — 0,25е~*)2 — 0,22 — 0,32 — 0,152 — 0,102 — 0,052 = — 0,0521. (5-65)
В соответствии с принципом максимума правдоподобия искомый сигнал
присутствует, так как F (У) < 0.
В соответствии с принципом максимума апостериорной вероятности
при = р2 имеем тот же результат, но при рг р2 ответ будет зависеть от
величины дисперсии о2 и отношения Pi/p2-
Чтобы получить алгоритм для обнаружения сигнала при непрерывном
измерении, разделим время наблюдения Т на к равных интервалов и
устремим к •— оо, Дг — 0. Получим
т т
F (У) = \’ [у - XJ <0]2 Л - Пг/ - Xjf (г)]2 dt. (5-66)
0 о
При использовании правила максимума правдоподобия и обнаружении
сигнала (%2 = 0) получим условие существования сигнала в виде
Т
ь \ (5-67)
о
т
где = %2 \ [/ (t)]2 dt — энергия сигнала.
о
На основании (5-67) можно построить схему оптимального обнаруже-
ния (рис. 5-8). В момент t = Т происходит сравнение выхода интегрирую-
щего звена с величиной О,5£о. Эту схему на-
зывают синхронным детектором.
Рассмотрим разомкнутую систему
управления (рис. 5-4). Задача оптими-
зации для нее отличается от рассмо-
тренной выше задачи непринципиально.
Отличия сводятся к тому, что в звеньях
A, G, В' которые можно рассматривать
как обобщенное приемное устройство,
Рис. 5-8.
действуют внутренние
шумы, и к тому, что ищется алгоритм не всей этой части, а лишь
части А»
Пусть задающее воздействие х0 (I) дискретно и действует в мо-
менты времени $:
xQs =$0s (5> М» (5-68)
1 — вектор со случайными координатами
Дд). (5-69)
Задана априорная плотность вероятности вектора 1, т. е. сов-
местная априорная плотность вероятности величин
Р^Р^,^,...^). (5-70)
Шум h представляет собой чисто случайную последовательность
величин \ с заданной плотностью вероятности Р (Л{). Заданы также
способ комбинации сигнала xOs и шума Л, оператор безынерцион-
ного объекта
Xts=F(zs, vs), (5-71)
где F — заданная функция; вид функции
zs = zs (.9, Ji), (5-72)
где fi — случайный вектор:
ц = (|*ь ц2, ... , цт). (5-73)
Априорная плотность вероятности Р (ц) задана. Плотность
шума Р (gs) считается постоянной.
Функция потерь, соответствующая дискретному времени s,
задана в виде
zOs, х8).
8 = 0
(5-74)
Требуется определить оптимальную стратегию управляющего
устройства А. В числе величин, подлежащих определению, харак-
теризующих оптимальную стратегию, наиболее существенна оп-
тимальная плотность вероятности Г (us). Эта величина зависит от
всей информации, накопленной управляющим устройством в виде
последовательности значений у0, ..., узЛ.
Введем в рассмотрение временные векторы:
(5-75)
ys = (?/o> Vv , ys);
^Os = (Ж00, • • • » *06)-
Очевидно, Г8 (us) — Г8 (us | у8_х). Надо выбрать Г8 так, чтобы
обеспечивался минимум среднего риска R.
Рис. 5-9.
Чтобы найти выражение для среднего риска, нам надо знать ряд
условных вероятностей: Р (х8|р8), Р (i>s|us), Г8 (us |ysJ),
P (ys | xOs) (см. рис. 5-9). Из этих вероятностей Р (vs | us) находится
по заданным Р (gs) и закону смешивания шума g с сигналом и\
Р (xs | vs) выражается через заданную Р (fi) и найденную Р (vs | us)
по формулам (5-71) и (5-72); Г8 (^s|ys_i) является искомой;
Р (ys л | xOs л) при безынерционном канале связи и случайном
характере помехи может быть выражено в виде
Р (У,-1 I Хо, s-l) = Р (Уо> Уъ , Уз-1 I Хо, S-1) =
= П Р (^ I хо.«-1) = П Р 1 (5’76)
г=0 г = 0
(так как в безынерционном канале Р (уг) зависит только от xOi,
а не от предыдущих значений х) плотности же Р (yt | xOi) могут быть
найдены по исходным данным.
Напишем сначала выражение для условного удельного риска
при фиксированном векторе xOs:
rs = M | xOe} = J Wx (s, xOs, xs) P (xs | x08) dQ. (5-77)
a(x8)
Так как xs зависит от ps, то, зная вероятностную характери-
стику помехи, можно найти Р (rrs|ps), но сама величина vs также
случайна и закон ее распределения зависит от xOs, т. е. представ-
ляет собой функцию распределения Р (vs | xOs)
Р (ха I х0,8) = 5 р I v«) Р (”« I xos) dQ, (5-78)
Q(°s)
которая выражается в виде суммы вероятностей для xs попасть
в диапазон xs, xs + dx* при различных vs, но фиксированном xOs.
Подставив (5-78) в (5-77), получим
гз = 5 ws(s, x0s, xs)p(xs\vs)P(vs\xOs)dQ, (5-79)
я (xs- ®s)
где интегрирование уже ведется по двумерной области (т. е. имеем
упрощенную запись двукратного интеграла).
Средний удельный риск Rs равен
Т?8 = J rsP(k)d£l. (5-80)
q(x)
Подставляя (5-79) в (5-80) и производя дальнейшее разворачи-
вание выражений P(®s|ps)h Р (vs\xOs), получим окончательно
Рз = 5 W* («» ®0s, Хз) Р (Хз I »s) P (»s I “s) X
B(WWs-l’X)
x rs (us I y0, 8_x) P (y0, 8_x Ix0,,_,) P (X) dQ. (5-81)
Полный риск равен
(5-82)
8 = 0
Выделим под интегралом функцию £s (us, y0,s_i), зависящую
от искомого управления us и компонент вектора наблюдения:
?з («з» Уо, s-1) = $ Р (Хз I »з) Р (V3 I Ms) X
° (xs* ®s)
х/ 5 ^[S.z0s(«,X)x8]P(y0>s_1|x0,s_1)P(X)dQ(X)UQ(a:8,re).(5-83)
(q(x) '
Из (5-81) и (5-83) можно видеть, что
Rs= $ /(yo.s-J^Cys-O. (5-84)
й(Уз-1)
где
Луо. 3-1) = $ Г3 (из I Уо, s-1) Bs (*3. Уо. s-i)(«з)- (5-85)
а(“з)
На основании теоремы о среднем, учитывая положительность
подынтегральных функций, можно записать:
I (Уо» • 1) — (^s)cp J Ц? (Us I Уо, 8—1)
но, так как Г5 есть плотность вероятности, то
\ r(«,|y0.e.1)dQ = l,
(“.)
I (Уо, в — i) = (£s)cp .
(5-86)
(5-87)
Отсюда видно, что минимально возможное значение функции I
равно (£s)min для каждого у0( sl. Однако, когда I минимально при
каждом у0 8_х, минимален и средний удельный риск 7?s, а следова-
тельно, и полный риск R.
Пусть ut — значение us, при котором достигается минимум
функции (us) в области Q (us) возможных значений us.
g(tt*) = min gs(ws).
Рассмотрим функцию
rs(ws) = S(tts — ^).
(5-88)
(5-89)
Очевидно Г8 удовлетворяет условию JFsdQ = l. Далее, учи-
о
тывая, что так как
$ 6(х — х*) <р (х) dx == <р (х*) (5-90)
— 00
и подставляя (5-90) в левую часть (5-87), получаем
[^(Уо, s-l)]ro = d(us — и*) = 5 $ (Ws й*) £s (й8, Уо, s — 1) dQ =
= Bs (us ) = (£s)mln — tOmin* (5-91)
Следовательно I достигает своего минимума при использовании
стратегии (5-89). Но как мы видели, стратегия типа дельта-функ-
ции есть регулярная стратегия; таким образом, в данном примере
подтвердилось утверждение о регулярности бейесовой стратегии,
ранее полученное путем геометрической интерпретации.
Оптимальный алгоритм управляющего устройства сводится
к выбору и*, минимизирующего |8 с учетом всех наблюдаемых зна-
чений ys_i
Ь (и*, У* 8-1) = min (м8, уо,»-i). (5-92)
(us)
Таким образом, является в данной задаче критерием опти-
мальности для выработки оптимального управления регулярными
методами, рассмотренными нами в предыдущих главах. Если
функцию |в можно рассчитать заранее, то структурная схема уп-
равляющего устройства будет состоять из блока памяти БП, блока
формирования функции £ и автоматического оптимизатора одного
из типов, например рассмотренного в [183, 184] или в [186]. Если
же получение функции £ в явном виде затруднительно, то блок g
может быть построен в виде вычислительного устройства, выпол-
няющего интегрирование в соответствии с (5-83).
Численный пример на вычисление оптимальной стратегии рас-
смотрен в [189]. Не останавливаясь на детальных выкладках, мы
приведем лишь общую схему решения.
Уравнения системы имеют вид:
ys = xOs + hs:,
(5-93)
Плотности вероятности шумов и параметра р нормальны:
Далее zOs = X, где X нормальная случайная величина. (5-95)
P<4 = 7Vsexp{-'&^]' (5‘96>
]/ 2л I 2а )
Функция потерь задается в виде
W=^Ws=yt(zOs-zsy. (5-97)
S = 0 8 = 0
Найдем сначала интеграл, заключенный в фигурные скобки
в формуле (5-83),
= $ Ws в *os (s, V, xs] P (y0, I Xo.sJ P (X) dQ (X) =
Й (%) 1
— J [^Os (^) XsV П (Уог I X0i) P (^) (^) =
ЩЛ) i»0
= Г (* - О2 п P (^Oi I *) P (*) dK. (5-98)
Так как hx — yoi — xOi = yoi — X, то вероятность того, что yt
окажется в интервале от yoi до yQi + dyQi равна вероятности того,
что помеха в канале Я окажется в интервале от yoi — X до yoi —
% + dyoi, поэтому
р 14 = TVs ехр Ь • <5-">
аЛ 2л L 2ог£ J
Дальнейшее сводится к подстановке в интегралы полученных
функций и нахождению определенных интегралов. Даже в таком
элементарно простом случае (все каналы и объект безынерционны,
помехи аддитивны, чисто случайны и имеют нормальные априор-
ные распределения) выкладки получаются довольно громоздкими,
хотя и несложными. Читатель может проследить их в [189]. В ко-
нечном итоге получается
£с = 2)8[1 + е2(^8-1)3], (5-100)
где Ds, е и О — постоянные на каждом шаге 5 (в том смысле, что
они не зависят от us). Поэтому минимум находится из условия
$us — 1 = 0
или
При s = 0 оптимальное значение и должно быть просто равным
значению xQ0 = на входе А; при достаточно больших $, когда
накопится значительная величина суммы и* приближенно
равна
S— 1
(5-102)
г = 0
Таким образом, в данном случае управляющее устройство просто
должно усреднять входную наблюдаемую величину. Этот резуль-
тат вполне соответствует интуитивным представлениям.
5-4. Системы с активным накоплением информации.
Синтез систем дуального управления
В замкнутой системе (рис. 5-10) процесс изучения помехи z,
действующей на объект, может быть сделан активным. Задавая
на объект «пробные» воздействия, можно получить изменения вы-
хода объекта х, изучая которые и сопоставляя их с воздействиями
на объект, мы сможем получать более полную информацию о по-
мехе z (в которую могут входить также и случайные изменения
характеристик объекта). Управляющие воздействия в системе
вообще нужны для приведения объекта в желаемое состояние, но
они могут использоваться и для изучения помехи. В этом случае
они носят двойственный «дуальный» характер. Управление, при
котором используются управляющие воздействия такого двойст-
венного характера, называется дуальным управле-
нием.
Рассмотрим изображенную на рис. 5-10 систему при следую-
щих данных относительно ее элементов, координат и воздействий.
Все величины в системе рассматриваются в дискретные моменты
времени £ = 0, 1, м, где п фиксировано. Значения пере-
менных, соответствующие текущему моменту t = s, обозначаются
индексом s. Задающее воздействие zOs подводится к управляющему
устройству А через безынерционный канал связи Яо, в котором
Рис. 5-10.
оно смешивается с шумом hQ. В результате этого смешения на вход
управляющего устройства подается не величина xOs, a yOs, которая
является заданной функцией yOs = yOs (a:Os, hOs).
Управляющее устройство вырабатывает управление usJ кото-
рое, пройдя через безынерционный канал G, смешивается с шумом
gs в этом канале и превращается в величину ps, определяемую за-
данным законом vs = vs (us, gs), которая подводится ко входу
объекта В. На объект действует помеха zs, в состав которой могут
входить случайные изменения нагрузки и характеристик объекта.
Считаем, что объект не обладает памятью и его выходная коорди-
ната xs определяется функцией xs = F (vsJ zs), которую мы счи-
таем конечной, однозначной и дифференцируемой. К объектам без
памяти можно относить не только безынерционные объекты с одно-
значными статическими характеристиками, но и динамические
объекты, для которых рассматриваются только установившиеся
значения xs при входной величине vs.
Выходная величина объекта xs, смешиваясь с шумом в
безынерционном канале обратной связи образует величину
ys = ys (xs, hs), которая с обратным знаком подается на вход
управляющего устройства А.
Рассмотрим бейесову задачу, считая заданными априорные
вероятностные распределения Р (feOs), Р (fes), Р (gs) случайных
последовательностей hOs, hs и gs, которые мы считаем чисто слу-
чайными. Воздействие xOs и помеху zs мы будем считать случай-
ными функциями, зависящими от случайных векторов X и р, со-
ответственно:
XQs — X0s (5, > 1
Х = (Х1, Х2, ..., Xg); j
= М*, и);
(5-103)
(5-104)
Плотности вероятности векторов Р (X) и Р (р,) также считаются
заданными. Все внешние воздействия zs, xs, xOs, hOs, hs и gs счи-
таются статистически независимыми.
Так как функции vs = vs (us, gs), ys = ys (xs, hs), yQs =
= yQs (xOs, hQs) известны, то мы можем определить условные плот-
ности вероятности Р (vs\us), Р Q/osl^oJ и Р (us\xs)i которые по-
этому также считаются заданными. Для определения оптимальной
стратегии введем функцию потерь W, равную сумме удельных
функций потерь:
п
W='ZlWs(s,xs,zOs) (5-105)
8=0
и средний риск Л, равный сумме удельных рисков Rs:
R= S *3= s M {иу. (5-106)
s = 0 8 = 0
Введем также временные векторы:
us = («о, «1, • • • . Ms)>
Vs = (v0, vlt vs),
xs = (x0, Xi, ...» xs),
X0s — V^OO» *01, • • • , *0s/»
yos~(^ooi ••• , Z/os)»
Уз = (Уо, Уъ ys)-
(5-107)
Каждый из этих векторов представляет собою совокупность
всех дискретных значений соответствующих координат в мо-
мент t = s и все предшествующие моменты и таким образом во-
площает в себе первичную информацию о соответствующей вели-
чине, накопленной к моменту t = s.
Найдем оптимальные плотности вероятностей
/’s(«e) = rs(w,|ui_1, ys_b yOs),
(5-108)
при которых полный риск R будет минимальным.
Индексами $ у плотностей вероятности будем отмечать услов-
ные апостериорные вероятности, вычисленные с учетом накоплен-
ной к моменту t — s информации. В расшифровке, при каких пере-
менных вычисляется условная вероятность Ps (us), фигурируют
не только текущее значение yOs> но и вся его предыстория yOs,
а также предыстория связанных с управляющим устройством
величин ys l и us х, имевших место до прихода очередного сиг-
нала yQs.
Так как Г8 плотность вероятности, то для нее справедливы сле-
дующие дополнительные соотношения:
Г8^0;
$ rs(ug)dQ = l.
(5-109)
Величины Г- (i = 0, 1, ..., ri) назовем удельными стратегиями,
а их совокупность — полной стратегией.
Решение задачи о нахождении оптимальной стратегии начнем
с установления выражения для условного удельного риска. Ус-
ловный удельный риск выражается кратным интегралом от произ-
ведения удельной функции потерь Ws на апостериорные вероят-
ности всех случайных величин, от которых она зависит:
rs = $ Ws [s, *03 (К °), Xs] Ps (1) P, (xg) Ps (n) Ps (uB) dQ. (5-110)
a(x,u,xs>ug)
При определении апостериорной плотности вероятности уч-
тем, что канал HQ не входит в замкнутую цепь и поэтому оценка X
будет зависеть только от фиксированных значений у0. Поэтому
мы можем для совместной плотности вероятности Р (X, yOs) напи-
сать
р (К yos) = Р (х) Р (Уоз I *) = Р (ЬI Уоз) Р (УоЛ (5-111)
Откуда
Ps (1) = Р (к | yog) = . (5-Ц2)
В этой формуле типа Бейеса Р (X) — априорная плотность
вероятности для X; Р (yOs) — априорная (безусловная) плотность
вероятности для yOs; Р (yOs | X) — функция правдоподобия, опре-
деляемая из свойств канала Яо. Так как по предположению зна-
чения hOi независимы для различных i, а канал Но безынерцион-
ный, то
*>(Уоз|Ь) = П ^(Ии|Ь)- (5-113)
i = 0
Напомним, что безусловная вероятность Р (yOs) может быть вы-
ражена через суммы (при конечно-альтернативных задачах) или
через интегралы от произведений Р (X) на Р (yOs | X), как это было
сделано в (5-41) и (5-42).
Вычисление апостериорной плотности вероятности Ps (X), та-
ким образом, в данной задаче выполняется так же, как это дела-
лось и в предыдущем параграфе при рассмотрении обычных
разомкнутых систем с пассивным накоплением информации, что
связано с обособленностью контура Яо. Гораздо сложнее обстоит
дело с вычислением апостериорной вероятности Ps (р), так как
для этого вычисления уже используется вся информация об объек-
те, и в каждом такте априорная плотность вероятности Р (р)
заменяется апостериорными плотностями Ps (р), все более точно
характеризующими вектор р.
Выразим через произведения вероятностей совместную плот-
ность вероятности
^(g. ug-i, ys_! I yOs) = P (us_x, ys-i|H, yOs)^(p) =
= P (HI usi, Уз-Ъ yOs)p (Us-1, ys-i I Уо«), (5-114)
где P (p) = PQ (p) — априорная (безусловная) плотность вероят-
ности р. При этом вместо Р (р, yOs) мы пишем Р (р) потому, что
р не зависит от X или yOs.
Отсюда
р hn - Р (п I и v v Уз-ilg, Уоз) _
Р3 (g) - Р (g I us_x, ye_lt yOs) - _
__ Р (р) Р (цз-1> Уз-1 I Р> Уоз_ /е: л л ел
Р (Щ_1, ys_! | р, У оз) Р(рИЙ • '
Q(M)
Для вычисления функции правдоподобия Р (us х, ys i | р, yOs)
в замкнутой системе рассуждаем следующим образом. Плотность
вероятности появления сначала пары значений и0, у0, затем после-
довательно пар их, и2, у2 и т. Д- при фиксированном р равна
произведению следующих сомножителей:
1) плотности вероятности первого из этих событий Р (u0, у01 Р>
у00); 2) плотности вероятности второго события уг при усло-
вии, что произошло первое — Р уг | р, и0, у0, у01); 3) плотно-
сти вероятности третьего события м2, у2, при условии, что произош-
ли первые два Р (и2, у2| р, щ, уп у02) и т. д.
P(usl, ys_x| g, y0s) = ^(«0, Уо I g, Уоо) X
X P (ub | g, w0, y0, y01) P (u2, y21 g, ult yb y02) ... X
X... Р(и$_ъ ^Ig, us_2, ys_2, y0,s i). (5-116)
Рассмотрим i-й множитель 0 f xc s — 1
P (щ, У г I g> ui-l, У1-1, Уог) =
= P(yi|g, u4_v y{_lt yOi)P(»Jg. иг_ь у{_х, yOi). (5-117)
В первом сомножителе правой части (5-117) у^ если фиксиро-
вать ц и иг, не изменится, если фиксировать также у^х, х
и yOi; поэтому этот сомножитель можно обозначить Р | цх, uj;
второй же сомножитель на основании аналогичных рассуждений
можно обозначить (ujyoi, щ х, yi х), поскольку он представ-
ляет собой выражение случайной стратегии управляющего устрой-
ства. Сокращенно будем обозначать ее просто 1\. Итак,
(5-118)
где Го обозначает Ро (и0) (величина, не зависящая от наблюдений,
которой при t = 0 еще не было). Подставив (5-118) и (5-112)
в (5-115) и учтя, что Ps (us) = Г5, получим
rs= J IVS[s, xs, xOs (s, 1)]x
Й (X, Ц, xs, и J
s — 1
P wll P I J1’ »
X P (xs | p, 8, us) D.i = °----.--r— IT Г/ZQ.
V sl ’ ’ s’ ^(Уз-1. «з-11Уоз) 1.1 г
1 = 0
(5-119)
Для получения выражения для среднего риска учтем, что век-
торы yOs, us_x и у8_х, вообще говоря, заранее неизвестные, могут
принимать различные значения. Пусть Р (yOs, us_x, ys_x) совмест-
ная плотность вероятности этих векторов. Тогда средний удель-
ный риск получим, усредняя rs по этим значениям
= $ ^(Уоз» «s ь
Й (*08- U3-P У.-1)
(5-120)
Учитывая, что
Р (Уоз, «3-1. Уз-1) = Р (цз-1. Уз 1 I Уоз) Р (Уо«),
получим
) ws [s, zOs, (s, 1) zj X
X P(X) П p (у0. |X) p (zs i Ц, s, us) X
.1 = 0
(5-121)
Риск оказался, как и следовало ожидать, зависящим от полной
стратегии, что обусловлено именно дуальностью управления.
Для определения оптимальной стратегии рассмотрим, в соот-
ветствии с методом динамического программирования, риск Нп
на последнем этапе, для последнего момента времени s — п. Пред-
ставим его в виде
Rn = 5 Уп-1’ Уоп) dQ, (5-122)
о(ип-1>Ул-1>У0п)
где
Х„ (U>.-1. Уп-1, Увп) = 5 “n (Un> un-l’ Уп-1. Увп) X
Q (un)
хгп (ип I un_j, уп_ъ yOn) ЙЙ; (5-123)
ап(«п, un ъ yn_v уОп) = Wn[xOn(n, 1), жи]Р(Ь)Х
а (Л, м, хп)
п
п- 1
х IPWb) «„)Р(М) Пр(у*1н, и{) dQ,
Ц=0 j Li = o J
₽п-1=пЧ
г = 0
(5-124)
(5-125)
где а, р и х — вспомогательные функции.
При рассмотрении последнего этапа считаем, что предшествую-
щие стратегии Го, Гп-1 каким-либо образом фиксированы, сле-
довательно, Рп_х при интегрировании на этом этапе может рассмат-
риваться как некоторая фиксированная величина.
Тогда из (5-122) видно, что минимальный риск Rn будет иметь
место при минимальном значении функции х. Из (5-123), на осно-
вании теоремы о среднем, имеем
%п (^п)ср 5 Гп^ (^n)cp (^n)min*
Q(un)
Оптимальная стратегия Гп выражается формулой
Г£ = 6(ап-г4),
(5-126)
(5-127)
где — значение управления на интервале t = п, минимизирую-
щее функцию а,
а* = ап(и*, un l, yn_v у*) = min а„(и„, u,^, упЛ, yj. (5-128)
u«Q(un)
В самом деле, подставив (5-127) в (5-123), получим
xn“(an)u =u* “ (an)min- (5-129)
п п
Следовательно, при стратегии (5-127) хп минимальна, и стра-
тегия Гп оптимальна. Этот вывод сделан точно так же, как это
было сделано и в предыдущем параграфе. Мы пришли, таким
образом, к тому выводу, что оптимальная стратегия регулярна.
Далее, рассматривая стратегию на этапах t — п — 1 и t = п,
затем t = п — 2, п — 1, пит. д., аналогичными рассуждениями
мы можем показать, что на всех этих этапах оптимальная страте-
гия регулярна и оптимальное управление определяется, так же
как и в регулярных методах в соответствии с (5-128), из условий
минимизации функции а, определенной по формуле (5-129).
Используя эти выводы, проследим теперь решение задач
о нахождении оптимальной стратегии на следующем примере,
заимствованном из [189].
Рассмотрим дискретно-непрерывную систему t = 0, 1, 2,
5, п.
Пусть помехи в каналах Но и G аддитивны:
ys = XOs + hO> 1
ys = «s+gs- i
Уравнение объекта имеет вид:
= + = +
Задающее воздействие и помеха z = ц равны случайным
постоянным величинам:
— X = const;
Zs = ц = const.
Обратная связь — единичная, и шум в ней отсутствует:
(5-130, а)
-130.
У8=Х8‘
Распределения величин %, ц, gs и hOs нормальные, причем:
п/ ч 1 ( йЬ
р (Л°в) = ехр { " :
Р(и)=77^ехр{“Й}'
Удельная функция потерь задается в виде
Ws = (xs-xOs)* = (xs - %)2.
Вычисляем в соответствии с (5-129) функцию
afe —
$ (xk
Q (%, Ц, Xft)
- k
-A)W) Пр(^1х) р(и)х
Li=o J
- k
x ГР(*11н. Щ) dQ. (5-131)
4=0 J
Из (5-130, б) можно заключить, что вероятность нахождения
х между фиксированными значениями и xi + dxL равна вероят-
ности того, что g окажется между двумя фиксированными значе-
ниями хг — (и; + ц) и хг — (izi + и) + dx^ следовательно,
р fa IН> ui) = P(Xi-Ui-n) =
=d^expHl~Vl'l-<М32)
Из (5-130, а) следует:
hos = ys-xOs^ys-K. (5-133)
Поэтому вероятность попадания величины у между фиксиро-
ванными значениями уг и уг + равна вероятности нахождения
значения шума hQ в интервале между у{ — X и уг — % + dy{,
поэтому
Р (У, 14 = Р, (/. - ч = »р{ (5-134)
Подставляя (5-132) и (5-134) в (5-131) после ряда промежуточ-
ных преобразований и вычислений интеграл принимает вид:
где введены обозначения:
Wk = Uk ~~ X0h>
хехр{-8^
у*2
(5-135)
h -1
UiV>
i==0
_____1
2o2 * *
k -1
S (Хг Ui)2’
i=0
(5-136)
k
__ g __ i
'h ~ f2<&J (2n)h'V'rk ’ h ~ 2<Jksc (2n)fe/2(2e, )?/~7 '
or* о г* К
Произведем в формуле (5-135), выписанной для ап, минимиза-
цию по величине ип. Прежде всего заметим, что ип содержится
только в wn, поэтому достаточно рассмотреть лишь ту часть интег-
рала, которая содержит в качестве множителя выражение (wk&k +
+ Zk_1)/2og)2. Хотя ип и min ап зависят от iz0, и±, ..., ип 1? при-
чем ип_г содержится в членах Sn х и 0n п можно показать, что
любое Ug может быть найдено минимизацией as по us. Так как
2bk/&k и экспонента не содержат ип, то их при минимизации можно
не принимать во внимание. Итак, остается минимизировать по us
величину
со
JQ— [us^s +
S J \
-----ПГ) ' ®
8
2
esxY Р (X) П Pv ~ Х) (5-137)
/ Li«0
Полагая
найдем:
со Г s
Jm.s= 5 ГКй/i-^)
—оо Li = o
dk,
(5-138)
Ь 2а21)*^0’5 2ss fue8s + 2(j21 A,s~l~8sA,s’
Из условия = находим
s — 1
J. У_ Л,з Es-1 ____ J\ts г = 0
8~J<m 2esg| J01S /Gg_V '
(5-139)
Разделим числитель и знаменатель первого слагаемого в (5-139)
на Р (ys). Тогда можно видеть, что это слагаемое равно математи.
ческому ожиданию величины % в момент t = s
M»s (к) dk
'j Ps (X) dk
(5-140)
Выполняя интегрирование, получим
r = 0
M{X|ys} = ^
J o,s
(5-141)
Подставляя (5-141) в (5-139), окончательно найдем
(5-142)
При возрастании 5 величина u*s приближается к среднему ариф-
метическому от значений уг минус среднее арифметическое от зна-
чений хг — ut.
Некоторые более сложные примеры, в частности при неадди-
тивных помехах, но еще допускающие решения с помощью цифро-
вых вычислительных машин, рассмотрены в [189, 222].
ГЛАВА ШЕСТАЯ
СИСТЕМЫ ЭКСТРЕМАЛЬНОГО РЕГУЛИРОВАНИЯ
6-1. Основные особенности систем экстремального регулирования
Системами экстремального регулирования называют системы,
управляемый объект в которых имеет статическую характери-
стику с экстремумом, положение и величина которого точно неиз-
вестны, а регулятор осуществляет поиск таких значений входных
координат объекта хг, i — 1, ..., п, при которых выход его
J = f(xr, хп) (6-1)
достигает экстремума. Например, если оптимальным экстремаль-
ным значением является минимум, то
х%, ..., я*) = min / (а^, х2, ..., хп). (6-2)
Системы экстремального регулирования стремятся удержать
систему вблизи экстремального значения функции / в каждый те-
кущий момент времени.
Применять экстремальное регулирование целесообразно тогда,
когда: 1) существует физически ясный показатель качества, с
уменьшением (или возрастанием) которого происходит достаточно
ощутимое увеличение технико-экономической эффективности про-
цесса, выгоды от которого в достаточной степени перекрывают
затраты на усложнение системы управления; 2) когда существует
единственная функция наблюдаемых координат системы, выражаю-
щая показатель качества, которую можно изменять в любом на-
правлении, воздействуя на регулирующие органы системы и ко-
торая имеет экстремум в данной области.
Примером экстремального регулирования может служить наст-
ройка приемной радиостанции на частоту передающей. Очевидно,
что существует функция, обладающая резко выраженным экстре-
мумом в области оптимального режима — одна из резонансных
характеристик контура приемника. Совершенно ясно, что удер-
жание станции в точке резонанса или в достаточно малой ее окре-
стности не только целесообразно, но и необходимо. Отметим одну
из характерных особенностей настройки на экстремум.
При настройке приемника наблюдаемой координатой является
либо громкость звука, либо яркость свечения индикаторной лам-
почки. Однако только по одной величине яркости мы еще не можем
судить о том, оптимален режим или нет, и пробными движениями
рукоятки настройки мы определяем, в каком направлении следует
повернуть рукоятку, чтобы яркость возрастала. Таким образом,
для суждения о том, находимся ли мы в точке экстремума, нужно
изучить не только текущее состояние системы, но и обследовать
смежные состояния.
Другая особенность экстремального управления состоит в том,
что экстремальная характеристика объекта нестабильна и точка
экстремума в процессе работы смещается под действием различных
неучитываемых факторов. Если бы частота передатчиков не «пла-
вала», а собственная частота приемника не изменялась бы под
влиянием различных случайных факторов, то мы могли бы раз и
навсегда отметить на шкале приемника волны принимаемых стан-
ций и без настройки устанавливать приемник на желаемое деле-
ние. Такие деления и наносятся на шкалах, но опыт показывает
нам, что эти деления, существенно ускоряя процесс настройки,
вместе с тем не устраняют необходимости в настройке путем эк-
стремального регулирования.
В качестве второго примера рассмотрим некоторый транспорт-
ный экипаж, движение которого описывается уравнением
d2x . 1 о [dx\% /Р
= > <6’3)
где х — величина перемещения экипажа; q — регулирующее воз-
действие —- расход носителя энергии (например, расход горючего
в единицу времени, пропорциональный открытию регулирующего
органа); kQ — сопротивление движению, не зависящее от скорости
движения экипажа; — сопротивление движению, пропор-
циональное квадрату его скорости.1 Требуется осуществить такое
управление движением, при котором расход горючего на любом
отрезке пути был бы минимальным (или же при заданном расходе
горючего пройденный транспортом путь был бы максимальным).
Рассмотрим решение, основывающееся на предположении
о том, что полный расход горючего на любом заданном пути будет
1 Обычно квадратичное сопротивление выражается в виде
1 dx I dx 7 . . [dx \2
М dd ^=*i(signa:) Ы ’
но мы предполагаем, что в процессе управления экипаж не может изме-
нить направления движения. Тогда х не изменяет знака и мы можем
воспользоваться формулой (6-3).
минимальным, если в каждый момент времени будет минимальным
удельный расход горючего на километр пути. Нужно проверить
несколько положений, заключающихся в этом предположении.
Прежде всего проверим, существует ли функция координат си-
стемы, выражающая сформулированный критерий оптимально-
сти, имеющая в рабочей области наименьшее значение. Выразим
удельный расход J горючего на километр пути следующим обра-
зом:
j dQ dQ . dx q (6-4)
dx dt dt x
где Q — абсолютный расход горючего; q = dQ/dt — удельный
расход горючего в единицу времени.
Приняв гипотезу о том, что за критерий оптимальности можно
принять величину J, мы получаем возможность решить задачу,
не прибегая к сложным математическим операциям, на основе
лишь измерения текущих значений q (расходомером) и х (спидо-
метром) и деления первого на второе.
Пусть в данной задаче имеется только один регулирующий ор-
ган, управляющий поступлением горючего в двигатель, и переме-
щение этого органа пропорционально д, будем поэтому рассматри-
вать в качестве управляющего воздействия величину q. Выразим
J через q. Из (6-3) следует что
•_dx___ 1 । г------..
x~dt~k^ У q — k0 — mx>
откуда
Мы видим, что J не определяется однозначно управлением q,
а зависит также от изменений нагрузки kQ и от ускорения экипа-
жа х.
При этом ускорение х не является независимой координатой.
Его изменение зависит не только от текущего значения q, но и от
того, как q изменяется во времени. Строго говоря, точно решить
задачу о минимизации расхода горючего в динамике мы могли бы
методами оптимального управления, рассмотренными в прошлых
главах, а именно: найти управление q (t), минимизирующее функ-
ционал
XN
Q=\q(t)dt (6-6)
при граничных условиях х (0) = х0, х (Т) = xN, заданном воз-
мущении к0 и при ограничении типа неголономной связи, выражае-
мом уравнением (6-3). Однако даже в рассматриваемом случае,
который относится к простейшим, решение оптимальной задачи
сталкивается с серьезными аналитическими трудностями, свя-
занными с необходимостью решать систему нелинейных уравне-
ний, и с практическими трудностями реализации довольно слож-
ной схемы оптимизатора.
Для упрощения подобных задач часто принимают, что наруше-
ниями оптимальности в динамическом режиме можно пренебречь
и достаточно осуществлять оптимальное управление лишь в ста-
тике. Это можно сделать, если мы знаем заранее, что динамические
режимы, вызванные, например, изменениями нагрузки, редки и
на большей части траектории движения происходит установив-
шееся движение. Эта же гипотеза может быть принята, если мы
априори знаем, что в динамике на траектории движения ускоре-
ние х будет пренебрежимо мало.
Полагая х = 0, из (6-3) получим
J = -rhL= = -Д5- + к\х. (6-7)
Vq-х '
Нетрудно видеть, что J, определяемое уравнением (6-7), имеет
минимум в точке д* = 2к^ причем
/*=^14 = 2^^. (6-8)
При изменении нагрузки kQ точка экстремума смещается.
На рис. 6-1, а показаны кривые J — / (q) при значениях = 1
и kQ = 0,6; 0,8; 1,0 и 1,2. На рис. 6-1, б даны кривые J = ф (х).
Кривые удельного расхода горючего, сходные с приведенными
кривыми, характерны для ряда управляемых подвижных объектов.
На рис. 6-2 показаны кривые зависимости расхода q горючего
на километр пути в функции скорости полета v для различных по-
летных весов G для одного из типов самолетов [57]. Полет на даль-
ние расстояния с наивыгоднейшей (крейсерской) скоростью, при
которой удельный расход горючего на единицу пути минимален,
имеет очевидный технико-экономиЧеский эффект. Так как с умень-
шением веса самолета наивыгоднейшая скорость уменьшается, то
при дальних полетах, когда вес горючего может достигать поло-
вины полетного веса, поддержание экстремума удельного расхода
топлива становится необходимым.
Первые упоминания в технической литературе об экстремаль-
ных регуляторах содержатся в статье Леблана 1922 г., где описан
регулятор для колебательного
контура для электропоезда (на
повышенной частоте), по суще-
ству, действующий как экстре-
мальный регулятор [245], и в
1926 г. в книге Штейна [261]
высказывалась идея регулиро-
вания топки парового котла с
обеспечением минимума потерь
в дымовой трубе за счет из-
менения избытка воздуха. В
1940 г. Ю. С. Хлебцевичем
была предложена схема элект-
рического регулятора экономичности для поддержания макси-
мума к. п. д. [192]. В 1943 г. В. В. Казакевич предложил ряд схем
экстремальных регуляторов; в последующие годы сделал теоре-
тический анализ переходных процессов, вывел критерий устойчи-
вости процессов оптимизации и провел соответствующие экспери-
ментальные исследования [56, 57]. Несколько позднее появилась
работа А. П. Юркевича об оптимизации скорости вращения авиа-
ционного двигателя [201].
Широкую известность принцип экстремального регулирования
приобретает в 50-х годах, после опубликования главы об экстре-
мальном регулировании в книге Цян Сюэ-сеня в 1954 г. [263],
книги и серии статей Дрейпера и Ли [219] и других американских
авторов. Первые обзоры и разработки вопроса в отечественной
литературе публикуются с 1957 г. [121, 116].
6-2. Основные схемы систем экстремального регулирования
одной величины
Пусть х — координата объекта; у = / (х) — показатель экст-
ремума; z — координата регулирующего органа. Рассмотрим
сначала управление безынерционным линейным объектом, для
которого можно принять z = х. Необходимыми и достаточными
условиями нахождения в точке экстремума (минимума) будут
Эу.
дх'
дх2
= 0,
0.
(6-9)
(6-10)
Допустим сначала, что в рабочей области изменения х сущест-
вует три (рис. 6-3) экстремума типа минимума z/M1, уМ2 и умз. Ка-
ждый из этих экстремумов называется локальным экстремумом.
Наименьший из минимумов (на рис. 6-3 это уМ2) или наибольший из
максимумов называется глобальным экстремумом. Все существую-
щие системы экстремального регулирования строятся так, что
они оказываются в состоянии привести систему лишь в тот локаль-
ный экстремум, в окрестности которого они начинают действовать.
Окрестностью локального экстремума при этом называют ту об-
ласть изменения координаты, в которой знак производной по одну
сторону экстремума остается неизменным. Так, окрестностью ло-
область изменения х, в которой
минимума называют ту
кального
остаются
справедливыми неравенства:
ду
(6-11)
где через обозначена та величина ж, которая соответствует ло-
кальному минимуму yMi. Так, окрестность минимума уМ2 на рис. 6-3
ограничена интервалом [гг3, х4] (на рисунке заштрихован).
Если в системе существует несколько локальных экстремумов,
то единственный известный на сегодня путь приведения системы
к глобальному экстремуму состоит в предварительном прощупыва-
нии всей рабочей области, нахождении окрестности глобального
экстремума, приведении системы экстремального регулирования
в одну из точек этой окрестности и затем включении в действие
устройства поиска экстремума. При всех дальнейших рассмотре-
ниях мы будем считать, что в рассматриваемой области сущест-
вует единственный экстремум, или что если экстремумов несколь-
ко, то мы уже находимся в окрестности глобального экстремума,
и не выходим из нее в процессе работы системы.
Рассмотрим рис. 6-4. При принятых условиях, нетрудно ви-
деть, что зная fx = dftdx, мы имеем возможность принять решение
о том, в какую сторону следует изменять х, чтобы приблизиться
к экстремуму. Так, в случае регулирования на минимум, если
fx отрицательна, то х надо увеличивать, если положительна —
уменьшать. Эти условия можно записать следующим образом:
-^>0 если /х<0;
S<° если /х>°-
(6-12)
Очевидно, что в случае поиска максимума, будем иметь
dx
dx
dt
>0
если
/ х <\ 0 ’
/х>0.
(6-13)
Эти неравенства показывают, что если мы априори знаем, что
находимся в окрестности искомого экстремума, то знание знака
Рис. 6-5.
частной производной fx достаточно, чтобы определить направ-
ление требуемого изменения координаты объекта, обеспечиваю-
щего приближение к требуемому экстремуму. Используя знак /х,
можем построить релейную систему экстремального регулирова-
ния, используя знак и величину/х, можно построить непрерывную
систему экстремального регулирования.
Системы с прямым использованием сигнала по частной произ-
водной. Если бы мы имели хорошо действующий измерительный
элемент для мгновенного измерения /х, то структурная схема
системы экстремального регулирования выглядела бы так, как
показано на рис. 6-5.
На рис. 6-5, а изображена схема непрерывной системы. Произ-
водная fx выходной величины у объекта О определяется измери-
тельным элементом ИЭ. Значение fx подается на усилитель
с коэффициентом усиления к, управляющий сервомотором пере-
менной скорости (интегрирующим звеном). На рис. 6-5, б сер-
вомотором постоянной скорости С управляет реле Р, реаги-
рующее на знак fx.
К сожалению, измерение /х оказывается трудной задачей, и та-
кого рода схемы пока еще не удается реализовать. Измерить
fx в статике невозможно, так как по самому определению произ-
водной для ее измерения необходимо менять аргумент и функцию.
На рис. 6-6 показана схема, осуществляющая измерение dy/dt
и dx/dt и деление их друг на друга. В результате деления полу-
чаем fx = dy/dx. Если в качестве исполнительного органа исполь-
зуется интегрирующий элемент, то dx/dt — его входная величина,
поэтому специального органа для измерения dx/dt в схеме
не нужно.
Трудности в реализации схемы состоят в следующем. Во-пер-
вых, сигнал на входе управляющего устройства получается путем
дифференцирования, при этом же возрастает влияние высокоча-
стотных помех, и если схема подвержена действию таких помех,
то реализация схемы сильно затрудняется. Далее, дифференци-
рующие элементы, как показано в части I, имеют неизбежную
динамическую погрешность, и измерение L становится неточным
Серьезные затруднения воз-
никают при измерении ма-
лых значений /х. Поэтому,
чтобы исключить такую об-
ласть, приходится искусст-
венно вводить зону нечувст-
вительности.
Системы с синхронным
детектором. В практике для
непосредственного измерения
fx в ряде случаев исполь-
Рис. 6-6.
зуется модуляция системы посредством вспомогательного гармо-
нического сигнала [1, 75].
На рис. 6-7 показан результат воздействия на объект синусои-
дального сигнала малой амплитуды в разных точках экстремаль-
ной характеристики. В точках Л± и А2, расположенных слева от
экстремума, выходной сигнал будет иметь ту же частоту, что и
входной, фаза же его будет противоположной фазе входного сиг-
нала. Если считать, что амплитуда а входного сигнала настолько
мала, что кривая у = / (х) в интервале х ± а близка к прямой, то
амплитуда основной гармоники выходного сигнала будет пропор-
циональна крутизне характеристики, т. е. пропорциональна /х.
В точке А4 справа от экстремума частоты и фазы кривых у и х
совпадают. В точке Л3 экстремума выходное колебание имеет двой-
ную частоту и малую амплитуду, основная же гармоника отсут-
ствует. Итак, величина fx может быть измерена путем измерения
амплитуды основной гармоники выходного сигнала у, знак же fx
определен с помощью измерения фазы выходных колебаний. Вы-
деление первой гармоники колебаний осуществляется с помощью
синхронного детектора, на входы которого подаются у = / (х)
и Ах = a sin со/. Определим среднее за период йа выходе синхрон-
ного детектора:
2л 2л
/ (х) Ах d<dt — [/ (xk + Ах) Ах dat —
о о
2л
= jj [/ (xk) + /х (xk)A* + ~2 fxx (xk) А2х + ...] Дх d<ot =
2л 2л
= а/ (xft) $ sin (dt d(dt + а2 $ fx (xk) sin2 (dt dart + ... =
о 0
= ™7X fe) + TJ-Лсхх + • • • (6“14)
Рис. 6-7.
Таким образом, средняя, если отбросить малые высших поряд-
ков, пропорциональна fx (xk) в точке xk. Поставив за блоком умно-
жения фильтр Ф, получаем постоянное воздействие, пропорцио-
нальное /х, прикладываемое через усилитель У к сервомотору С,
но, конечно, вместе с тем вносим и элемент запаздывания (рис. 6-8).
В инерционных объектах выходное колебание оказывается сдвину-
тым относительно входного по фазе, что создает дополнительные
затруднения, связанные с необходимостью компенсации фазового
сдвига с помощью дополнительных схем. Частоты модуляции
следует выбирать так, чтобы они были достаточно высоки в срав-
нении с частотами основных процессов и вместе с тем далеки от
частот помех.
Наиболее удобным применение синхронных детекторов оказы-
вается в случае, когда показатель экстремума является функцией
нескольких переменных. Тогда, задавая воздействия различных
частот одновременно на разные регулирующие органы, получаем
возможность одновременно управлять всеми этими органами
с целью наибыстрейшего приближения к экстремуму. Периодиче-
ский пробный сигнал в схемах
текторов может быть произ-
вольной формы и удовлетво-
рять лишь условиям центри-
рованности и ортогонально-
сти. В [77], в частности,
описана схема с пробными
сигналами прямоугольной
формы.
Пусть в г-м канале =
== xip + 6xi? где #iP — рабочая
составляющая координаты х{\
с использованием синхронных де-
Рис. 6-8.
6xi — наложенное периодическое
поисковое воздействие, которое является центрированной (6xi = 0)
и ортогональной функцией по отношению к периодическим воз-
действиям в других каналах: усредняя переменные за достаточно
большой промежуток времени, имеем
fix! при / = Z,
0 при / ф I,
(6-15)
8xi6xj8xk=^0 и 8хг8х£хк8х^ = 0 при неравных индексах. <
Разлагая функцию / (#i, •••» в РЯД Тейлора в окрестности
рабочего значения /р = f (я1р, я2р, ..., хпр) и считая медленно из-
меняющиеся функции /р постоянными за период изменения 8х^
получим следующее выражение для выходной координаты син-
хронного детектора:
= /рИ'фу (р) бх, + 2 W<t,i (р) (бх^х,) + • • • =
г = 1
= \ (т) /р&Гу + 2, + • •. рт, (6-16)
(Г \ i=l * )
где W&v (р) — передаточная функция v-ro фильтра; kv (т) — им-
пульсная переходная функция этого фильтра.
Функции в круглых скобках под интегралом берутся при зна-
чении аргумента t — т.
При ортогональности функций 8xi члены, содержащие
S^-6^6xv и большее число сомножителей, будут или равны нулю,
или (при малых отклонениях) иметь высший порядок малости.
Для центрированных колебаний
VKov (р) 6х„ = О,
^w(^.)=L °- ’Г . (М7)
W$v(0)6zi, v = i. )
Тогда
64IT®v(0)-^-,
т. е. выходные сигналы синхронных детекторов с точностью до
малых высших порядков пропорциональны частным производным
показателя экстремума по соответствующим переменным.
В случае инерционных объектов выходы синхронных детекто-
ров будут уже не просто пропорциональными соответствующим
а будут представлять собой линейные преобразования этих
производных, что сильно усложняет процесс определения fx^
В [77] показано, что если линейные многомерные части объекта
описываются системами уравнений с автономными правыми ча-
стями вида
ж. = а.Л + ai2z2 +... + ainxn +
то при достаточно высоких частотах поиска можно считать, что
выход каждого синхронного детектора практически зависит лишь
от производной по одной координате, так как входной сигнал
многосвязной линейной части объекта передается в основном
только на один выход этой части. Практически для реализации
такой «высокочастотной автономности» необходимо, чтобы низшая
частота поиска превосходила собственные частоты объекта. Но,
удовлетворив условиям автономности по низшей частоте, затруд-
няем выявление производной по другим координатам на более вы-
соких частотах, кроме того, наивысшая частота должна быть
меньше частоты высокочастотных помех. Все это существенно
затрудняет использование синхронного детектирования в много-
связных системах с большим числом каналов.
Релейный регулятор. Перейдем к релейному принципу по-
строения системы экстремального регулирования. Две особен-
ности экстремальной системы дают возможность упростить схему:
1) требуется выявлять только знак производной /х; 2) знак х
определяется направлением движения сервомотора. Пусть мы
имеем измерительный орган, определяющий знак /х. Если /х
отрицательна, то у убывает, т. е. приближается к требуемому
экстремуму, направление движения сервомотора правильное и
регулятор не должен вмешиваться в работу сервомотора. Когда
становится положительной, у удаляется от экстремума, серво-
мотор движется в неправильную сторону и регулятор должен осу-
ществить переключение с целью изменить направление движения.
Таким образом алгоритм работы идеального регулятора должен
обеспечить выполнение условий (6-12) и может быть записан сле-
дующим образом:
R = 0 при /х О,
7? = 6(^) при
где через R обозначена реакция регулятора. Она или равна
нулю, или представляет собою единичный импульс, приводящий
в действие механизм переключения сервомотора.
Реальный измерительный орган всегда будет обладать опреде-
ленной зоной нечувствительности. По этой причине, а также для
ослабления действия помех целесообразно будет выбрать в каче-
стве порога переключения не величину fx = 0, а некоторую вели-
чину +е (для регулирования на минимум) или — 8 (для регулиро-
вания на максимум):
Регулирование
на минимум
Регулирование
на максимум
2? = 0,
7? = 0,
7? = Д1,
(6-18)
где Д-l — символ, обозначающий выработку единичного импульса
при прохождении через порог ±8 в направлении, определяемом
неравенствами /х 8 (или fx — е).
При таком выборе порога переключение будет происходить
после прохождения экстремума (регулирование безынерционного
объекта на минимум показано на рис. 6-9). Пусть в начальный
момент включения регулятора в работу у, у и х соответственно
имели значения у0, у0 < 0, >> О (рассматриваем регулирование
на минимум). Отрицательность у0 указывает на то, что у прибли-
жается к экстремуму, следовательно, сервомотор движется в пра-
вильном направлении. Поэтому регулятор дает возможность дви-
гаться в этом направлении. Когда экстремум будет пройден, у
станет положительной и превзойдет порог 8 (в момент t = ^),
произойдет переключение сервомотора и последний начнет дви-
гаться в обратном направлении. Так как объект безынерционный,
то у сразу же начнет возрастать и у, как показано на рис. 6-9,
скачком изменит знак на обратный. Уменьшение х будет происхо-
дить до момента где у снова достигнет величины 8. Далее про-
цесс становится периодическим.
Отметим, что если бы в начальный момент х было отрицатель-
ным, а у — также отрицательным, то регулятор разрешил бы
дальнейшее уменьшение х и изменения х происходили бы так, как
это показано на рис. 6-9 прерывистой линией. Поэтому в схемах
подобного рода измерение х для выявления необходимости пе-
реключения не нужно, и утверждения в [51, 521 относительно
невозможности обойтись без логических элементов, реагирующих
на знак i, слишком жестки.
Мы видим, что в схеме рассматриваемого типа, где харак-
теристика релейного элемента не имеет гистерезисной петли,
обязательно возникает автоколе-
бательный режим вблизи экстре-
мума, носящий название рыс-
канья. В процессе рысканья
система и осуществляет поиск эк-
стремума. Но наличие рысканья
приводит к тому, что средняя
величина будет теперь отличать-
ся от оптимальной. Отклонение
средней величины от оптимума
называется потерей рыс-
канья. Его величина возрастает
с увеличением амплитуды коле-
баний, а последняя возрастает
с увеличением абсолютной вели-
чины порога е, поэтому 8 с точки
зрения потерь рысканья выгодно
уменьшать. Но предел уменьшению
ставят помехи: надо, чтобы частота
рысканья и его амплитуда достаточно отличались от частоты и амп-
литуды помех, чтобы предотвратить ложные срабатывания системы.
Нетрудно понять, почему
порог 8 выбирается так,
чтобы переключение проис-
ходило после прохожде-
ния экстремума. Если бы мы
переключали систему до про-
хождения экстремума, то
среднее значение у во время
рысканья на величину 8 уда-
лилось бы от экстремального
значения и потери рысканья
возросли бы на эту величину.
В рассмотренной схеме от-
сутствовал гистерезис, что
приводило обязательно к автоколебаниям. При определенных дина-
мических характеристиках объекта и регулятора можно, вводя
гистерезис, получить устойчивое состояние равновесия вблизи
экстремума. Для этого надо, чтобы при подходе к экстремуму,
немного не доходя до него (на величину 8), сервомотор был оста-
новлен.
Рассмотрим регулирование на максимум (рис. 6-10). Пусть
в начальный момент (точка Ло) у > 0, у растет, сервомотор рабо-
Рис. 6-10.
тает правильно и регулятор не должен вмешиваться в его работу.
По мере приближения к максимуму /х, оставаясь положительной,
убывает по величине, и когда fx становится равным 8Х (точка Лг),
регулятор должен подействовать так, чтобы сервомотор отклю-
чился. Тогда, если момент отключения подобран правильно, у
будет по инерции еще некоторое время возрастать и остановится
вблизи экстремума. Колебательного движения, таким образом,
не будет.
Рис. 6-11.
На рис. 6-11 показана схема экстремального регулятора, реа-
лизующего подобный алгоритм [57]. Стрелка прибора, измеряю-
щего у, и связанный с ней рычаг 1 поворачиваются от горизон-
тального положения по часовой стрелке при у > 0 и против часо-
вой стрелки при у < 0. Момент отключения регулирующего
органа определяется парой контактов73 и74, замыкаемых рычагом!
при небольшом положительном значении у — 8V Обратим внима-
ние на следующее обстоятельство. Если в начальный момент, когда
система включается в работу, у > 8Х, то стрелка из нулевого по-
ложения быстро переместится вниз и рычаг коснется контактов.
Но он не должен их замкнуть, так как сервомотор работает
правильно. Замыкание должно произойти лишь при убывании у
до величины Чтобы это условие выполнялось, конструкция
контактов выполняется так, что они замыкаются лишь в том слу-
чае, если рычаг движется против часовой стрелки; при движении
по часовой стрелке он коснется контактной пружины нижнего
контакта, но не замкнет контактов.
Сервомотор 2 в схеме не реверсируется. Реверсирование ре-
гулирующего органа происходит с помощью электромагнитных
муфт 3 и 4, включаемых переключателем 5. Тяга переключателя
5 связана с храповым колесом 44, приводимым в движение электро-
магнитами 12 и 13. При повороте храпового колеса на один зуб
происходит переключение муфты с одного направления на дру-
гое; при повороте на х/2 зуба муфта либо переходит с включенного
положения на отключенное, либо наоборот. Замыкание контактов
73 и 74 приводит к срабатыванию электромагнита 13, который пово-
рачивает храповое колесо на г/2 зуба и тем самым переводит муфту
из включенного положения 3 в отключенное.
С целью изменения величины е при настройке регулятора поло-
жение контактов 13 и 14 может в некоторых пределах изменяться.
Если контакты 13 и 74 оказались установленными слишком
близко к нулевому положению (или же если в системе вблизи
экстремума подействовала помеха, приведшая к запозданию от-
ключения муфты), то после отключения может оказаться, что
система по инерции перейдет за экстремум слишком далеко и у
начнет уменьшаться. При этом, если у станет меньше величины
—82, произойдет замыкание контактов и 42, что приведет к сра-
батыванию электромагнита 12, повороту храповика на один зуб
и включению муфты 4, т. е. к реверсированию регулирующего
органа.
Рассмотренная схема обладает существенным неприятным свой-
ством. Пусть, например, у <; 0 и рычаг 1 произвел выключение
контактов 1г и 72, вследствие чего регулирующий орган начал идти
в правильном направлении. Пусть в этот момент на прибор дей-
ствует кратковременная помеха, приводящая к тому, что еще до
перемены знака у стрелка прибора совершает ложное качание по
часовой стрелке и затем, после исчезновения помехи, снова воз-
вращается в первоначальное положение, вторично замыкая кон-
такты 7Х и 72. Это вторичное замыкание приводит к срабатыванию
электромагнита 12, повороту храповика и реверсированию регу-
лирующего органа, который начинает двигаться в неверном на-
правлении, уменьшая у. Но так как у при этом была отрицатель-
ной и рычаг 1 был повернут против часовой стрелки, то он теперь
в этом положении и залипает, не производя необходимого реверса.
Работа системы полностью расстраивается. Для предотвращения
подобных неприятностей в схеме предусмотрены периодические
принудительные реверсирования регулирующего органа. На
рис. 6-11 такое принудительное реверсирование осуществляется
вращаемым с постоянной скоростью кулачком 15, который один
раз за оборот приводит к повороту храпового колеса и переключе-
нию направления вращения. Таким образом исправляется ложное
действие схемы, вызванное сбоем. Если же принудительное ревер-
сирование произойдет во время нормальной работы, то начав-
шееся после этого отклонение от экстремума приведет к замыка-
нию контактов 1г и 12 и повторному реверсированию привода
в нужном направлении. Время одного оборота кулачка 21 выби-
рается таким, чтобы за это время изменение у под воздействием
сервомотора не превысило бы некоторой допустимой величины
Ду его отклонения от экстремума.
На рис. 6-11 показаны две муфты 6 и 7, включаемые поперемен-
но рычагом 9, связанных с кулачком 8, вращающимся с постоян-
ной скоростью. При включении муфты 6 приходит во вращение
вал 10, связанный с одним из двух регулирующих органов; муфта
7 приводит во вращение вал 11 другого регулирующего органа.
С добавкой муфт 6 и 7 валков 10 и 11 получаем экстремальный регу-
лятор, обеспечивающий экстремум функции двух переменных (так
называемый двухканальный оптимизатор). Такой вариант орга-
низации поиска экстремума функции двух переменных (по методу
Гаусса — Зайделя) не является единственным. Другие виды мно-
гоканального поиска будут рассмотрены ниже, в § 6-3. Рассмотрен-
ная схема была одной из первых по времени, но в настоящее время
используются менее громоздкие решения.
Релейный регулятор с логическими элементами. Релейное
управление можно осуществить также с помощью устройств логи-
ческого действия [215; 53].
Введем следующие обозначения логических элементов для
схемы регулирования на максимум:
— если х > 0, у > 0, то х должен продолжать двигаться
в сторону открытия регулирующего органа РО (опера-
ция ах);
И2 — если х > 0, у < 0, то х должен изменить направление и
двигаться в сторону закрытия РО (операция а2);
И3 — если х < 0, у > 0, то х должен продолжать двигаться
в сторону закрытия РО (операция а2);
И4 — если х <С 0, у < 0, то х должен изменить направление
вращения и двигаться в сторону открытия РО (опера-
ция аг);
ИЛИХ — если имеет место условие Их или И4, то х увеличивается
(операция ах);
ИЛИ2 — если имеют место условия И2 или И3, то х уменьшается
(операция а2).
Схема включения логических элементов, обеспечивающая
описанный алгоритм, приведена на рис. 6-12.
На этом рисунке сигналы -\-х и +у на входах логических эле-
ментов появляются соответственно при положительных значениях
производных х и у, а сигналы —у и — х при отрицательных. Реа-
лизация схемы с помощью поляризованных реле [52; 53] показана
на рис. 6-13.
Обратим внимание на то, что сигналами а± и а2 в данной схеме
являются не сигналы переключения (реверсирования), как это
было в предыдущей схеме, а сигналы непосредственно управляю-
щие движением регулирующего органа вперед (сигнал а±) и назад
(а2). Это потребовало выявления знака производных не только у,
но и х. Схема в логическом отношении стала несколько сложнее,
Рис. 6-12.
0 0
но зато отпала необходимость в устройстве периодического прину-
дительного реверсирования (устройство 21 на рис. 6-11).
Однако в реальных условиях схему приходится усложнять,
так как наличие инерционности в объекте приводит к тому, что
изменения у начинаются не сразу после изменения х, а спустя
некоторое время и потому мгновенное соотношение знаков х и
у не всегда точно определяет целесообразность немедленного
выполнения соответствующей операции. Необходимо фиксировать
лишь длительно существующие соотношения. Анализ показывает,
что при этом надо добавить следующие условия:
1) операции И4 и И4 должны выполняться с некоторой задерж-
кой после выполнения операции И2;
2) сигнал а2 должен оставаться неизменным в течение некото-
рого времени после выполнения операции И2;
3) операции И2 и И3 должны выполняться с некоторой задерж-
кой после выполнения операции И4;
4) сигнал аг должен оставаться неизменным в течение некото-
рого времени после выполнения операции И4.
Реализация этих операций осуществляется путем введения до-
полнительных логических
(рис. 6-14). Однако, рас-
сматривая схему, мы
видим, что величина аг
имеет место, когда а2
отсутствует, и наобо-
рот, таким образом а2
может быть получена
путем использования
логического элемента
НЕ при подаче на его
вход величины аг. Это
позволяет исключить
элемент ИЛИ2 и свя-
занные с ним элементы
из схемы рис. 6-14. По-
лучается более простая
схема, показанная на
рис. 6-15.
На рис. 6-16 пока-
элементов НЕ и элементов задержки 3
зана схема оптимизато-
ра, предложенная в Рис. 6-14.
[191]. Требуется поддер-
живать минимальное значение у на выходе объекта О. Дифферен-
цирующий блок Д, выполняющий также роль логического блока,
Рис. 6-15.
выдает сигнал у, пропорциональный производной у = kQpy, если у
изменяется в правильном направлении, т. е. если ру < 0, и не
выдает сигнала (у = 0), если ру 0> что условно отмечено
включением вентиля на выходе D. Сигнал у подводится ко
входам усилителей Уа и Ур в каналах аир, обладающих характе-
ристикой с насыщением:
а а <ат, ₽<pm; 1<Лт
I ат. = const,
аир могут принимать только положительные значения а > О,
6 > 0, если £ > 0.
Если £ 0, то а, р = 0
Выходные сигналы с усилителей подводятся к сумматору на
входе регулирующего органа: а — непосредственно, р — со зна-
ком минус. Уравнение регулирующего органа:
рх = кг (а — Р). (6-19)
В схеме предусмотрены отрицательные обратные связи по
производным в каналах аир. Блоки Da и аналогичны блоку
D с той разницей, что их сигналы пропорциональны производным
при положительных значениях производных и равны нулю при
отрицательных значениях
ра^>0
ра^О;
/Ф>0
(6-20)
1 В [191] а и р могут принимать только отрицательные значения, так
как используются операционные усилители.
Пусть мы находимся на возрастающей ветви характеристики
у = / (х). Тогда правильным движением будет то, при котором
рх < 0. Из (6-19) имеем р > а, тогда ру — fx (х) -рх, fx > 0.
Линеаризуя уравнение в окрестности некоторого х = xQ, полу-
чаем
РУ = fx (*о) Рх = кзРх • (6-21)
Коэффициент /с3 зависит от х и изменит знак при переходе на
падающую ветвь характеристики.
Уравнения для координат аир будут:
а = — KV (РУ + къР$У’ 1 /6 22}
$ = —Ку(ру + К2ра); /
сГ>0, Р^>0, /?р>0, ру<Л
Подставляя (6-21) в (6-22), после несложных преобразований
получаем
^р = -(7Г + 1)а + 7Гр; ]
Тра = — Ка + (К — 1)Р; (6-23)
рх<^0, /ю^>0, рР>0, а^>0, Р^>0, J
где
Т = Кук2, К = Кук1к3.
Построим фазовый портрет системы в плоскости а, р. Для
этого разделим первое из уравнений (6-23) на второе:
dp — + 1) g +
da ~~ — Ka + ~ 1) Р *
Сделав замену переменных
получим уравнение с разделяющимися переменными:
[(7^ — 1) z— К] dz _da
— (К — 1) z2 ^2Kz — (К + 1)~~~а '
Учитывая, что корни знаменателя левой части вещественны,
интегрируя и возвращаясь к переменным аир, после некоторых
преобразований получим
(р_а)(Р-ха)-С2 = р2-гф(1+х) + х«2С2-0; |
а^>0, р^>а, ра^>0, рР^>0, /
где х = С— произвольная постоянная (неравенство
Р > а эквивалентно неравенству рх < 0).
Решая уравнение относительно р, получаем уравнение фазо-
вых траекторий в виде
Р = 0,5 [(х +1) а ± К(х —1)2а2 + 4С2]. (6-25)
Фазовые траектории при х > О показаны на рис. 6-17. На
рисунке показаны только физически существующие части траек-
торий, удовлетворяющие всем неравенствам (6-24). Они лежат
внутри треугольника ОАБ, гипотенуза р = а которого является
биссектрисой координатного угла, и отсутствуют внутри клина,
образованного прямыми р = и Р = ' При
К < 1 и х < О направление движения по траекториям не соот-
ветствует неравенствам, следовательно, траектории физически
«ГП
Рис. 6-17.
лю, и в соответствии с первым
не существуют и схема нера-
ботоспособна. При малейшей
случайной помехе, приводя-
щей изображающую точку в
область, не заполненную
траекториями, мы получаем
перемещение регулирующего
органа лишь в момент дей-
ствия помехи (если она вы-
шла за пределы зоны нечув-
ствительности), и как только
помеха исчезает, движение
прекращается. При «пра-
вильном» же направлении
помехи изображающая точка
придет по фазовой траекто-
рии на линию |3 = [Зт, после
чего изменение |3 прекра-
тится, рР станет равным ну-
из уравнений (6-23)
_ К R
“ К + 1
(6-26)
что соответствует точке М на рис. 6-17. Тогда из (6-19)
= к2 -1) = - гтг <6'27)
Если бы у линейно зависела от х, и fx была постоянной, то зна-
чения а и р в дальнейшем сохранялись бы постоянными, а регули-
рующий орган двигался бы равномерно в соответствии с уравне-
ниями (6-26) и (6-27). Но так как обычно по мере приближения
к экстремуму fx уменьшается, то это приводит к уменьшению коэф-
фициента К2, а следовательно, и К, и изображающая точка в конце
концов начинает двигаться к началу координат по траектории,
зависящей от вида функции / (х). Заметим, что если начальное воз-
мущение таково, что изображающая точка попадает на траекто-
рию, близко подходящую к линии ОБ, то движение в силу уравне-
ния (6-19) может прекратиться вблизи этой линии. Если остановка
произойдет вдали от экстремума, то она не будет длительной. Под
рчпянием любой помехи, действующей в правильном направлении
п вышедшей за пределы зоны нечувствительности, система по-
падает на одну из фазовых траекторий и описанный выше цикл
повторяется. Если же помеха действует в неправильную сторону,
она может вызвать лишь кратковременное смещение регулирую-
щего органа, которое прекращается, как только исчезает помеха.
Схема имеет некоторое сходство с системами с логическими эле-
ментами, рассмотренными выше, но отличается от них в основном
юм, что она реагирует на дрейф характеристики вдоль оси у.
Так, если х соответствует наименьшему значению г/, но это наи-
меньшее значение достаточно быстро увеличивается, то происходит
срабатывание схемы. Неправильное движение не приводит к ревер-
сированию регулирующего органа, а просто прекращается, дви-
жение же в правильном направлении из состояния покоя возникает
под действием помех и затем поддерживается системой. Случайные
помехи играют здесь роль поисковых движений, но организация
движения к экстремуму в данной схеме более проста и эффективна,
чем в системе с синхронным детектированием, рассмотренной ниже
(см. рис. 6-22).
Для того случая, когда мы находимся на падающей ветви харак-
теристики, /с3, а следовательно, и К изменяют знак фазовые траек-
юрии, имеют аналогичную форму, но располагаются теперь
в треугольнике под биссектрисой ОБ. Не будем рассматривать
этого случая, предоставив сделать это читателю. Наличие инер-
ционности в объекте приводит к таким же затруднениям, какие
имели место и в логических схемах, описанных ранее.
Схемы с запоминанием экстремума. Экстремальное управление
целесообразно использовать тогда, когда экстремальные значения
показателя у могут в процессе работы изменяться заранее не из-
вестным образом. Но мы видели, что в экстремальных системах
в процессе поиска экстремума обычно совершается рысканье, при-
чем регулятор настраивается так, чтобы в каждом периоде
рысканья величина у обязательно проходила через свое экстремаль-
ное значение. Таким образом, используя соответствующие запо-
минающие устройства, мы можем запоминать каждый из экстре-
мумов и сохранять его значение на последующий период. Наиболее
Употребительными элементами запоминания экстремума являются:
механический датчик знака — рычаг, насаживаемый с трением
На ось прибора, измеряющего показатель эктремума (рис. 6-18, а),
и конденсатор (рис. 6-18, б).
Ход рычага с трением ограничен контактами-упорами Кх и
К2. При возрастании у замыкается контакт при убывании —
Контакт К2. Положение рычага между упорами соответствует
экстремуму.
Конденсатор подключен к датчику, напряжение выхода кото-
рого пропорционально у. При возрастании питающего напряжения
возрастает и напряжение на обкладках конденсатора. При убыва-
нии напряжения диод не дает возможности конденсатору разря-
жаться и на его обкладках сохраняется напряжение, соответствую-
щее экстремуму. В конце цикла рысканья необходимо предусмот-
реть кратковременное подключение к конденсатору разрядного
сопротивления г.
На рис. 6-19 показана схема релейного регулятора с запомина-
нием экстремума. На ось 1 стрелки измерительного прибора, угол
поворота которой пропорционален показателю экстремума у
насажен механический датчик знака 2. При повороте стрелки от
положения экстремума у* на угол, соответствующий убыванию
величины г/* на Az/*, замыкается контакт 5, включающий обмотку 4
шагового искателя. Шаговый искатель срабатывает и поворачи-
вает щетку распределителя 5 на один шаг. Заметим, что включение
происходит лишь при убывании z/, т. е. после прохождения эк-
стремума. Поворот щетки приводит к реверсированию исполни-
тельного двигателя 6.
В схеме не происходит выявление знака х, поэтому для предот-
вращения ложных срабатываний под влиянием помех необходимо
устройство, аналогичное принудительному коммутатору в схеме
рис. 6-11.
Если в результате помех произойдет ложное срабатывание иска-
теля при движении системы в направлении максимума, то произой-
дет неправильное реверсирование двигателя, которое приведет
к убыванию у. Контакт, соответствующий убыванию z/, будет
продолжать оставаться включенным, и реверсирование двигателя
в нужном направлении не произойдет. Чтобы восстановить пра-
вильную работу, используется
времени S, который размыкает-
ся через некоторое время после
срабатывания искателя. Обмот-
ка реле 8 включается блок-кон-
тактом 9 искателя. Рис. 6-20
поясняет работу отдельных эле-
ментов схемы. Эта временная
диаграмма отличается от диа-
граммы рис. 6-9 тем, что момент
переключения в данной схеме
соответствует изменению у* на
величину Ау*, а не изменению
?/. Другие схемы описаны в
1121, 58, 221, 46].
Так как при дифференциро-
вании происходит усиление вы-
сокочастотных помех, то релей-
дополнительный контакт 7 реле
ная схема с запоминанием эк-
стремума оказывается наиболее предпочтительной при регулиро-
вании малоинерционных объектов, подверженных заметным высо-
кочастотным флуктуациям, релейная схема, действующая по
производным — при регулировании малоинерционных объектов,
слабо подверженных действию помех; шаговая релейная схема —
при регулировании сильно инерционных объектов.
Импульсные (шаговые) экстремальные регуляторы отличаются
тем, что у них производится принудительная дискретизация (кван-
тование по времени) воздействий на систему для осуществления
принудительного поиска. Воздействия производятся в дискретные
равноотстоящие интервалы времени в виде импульсов, параметры
которых зависят от результатов действия управляющих импульсов
на предыдущем шаге. Для этой цели в системе имеются устройство
Для измерения результатов действия управляющего импульса,
Устройство их запоминания и вычислительное устройство для
обработки хранящихся в запоминающем устройстве величин.
После получения результатов обработки, подается очередной уп-
равляющий импульс, старые результаты в памяти стираются и
взамен записываются и обрабатываются результаты следующего
импульса.
Шаговые системы разделяются на ряд типов.
Введение импульсного устройства в пропорциональную си-
стему, реагирующую на знак и величину производной /х, превра-
щает ее в пропорционально импульсную систему. В принципе
возможно измерять Дя[тг], Аг/[лг] в момент времени t = пТ, где
Т — период чередования импульсов, и следующий импульс на
управляющий орган в момент t — (п + 1) Т сделать
Однако в практике большее распространение получили более
простые в осуществлении релейно-импульсные схемы, реагирую-
щие не на величину &у/&х, а на ее знак. На регулирующий орган
в моменты времени Д£, 2Д£, ..., тгД£, ... подаются импульсы по-
стоянной амплитуды, сообщающие регулирующему органу оди-
наковые перемещения \х. Направление перемещения определяется
знаком Ду/Дя. При этом, так же как и в обычном релейном ва-
рианте, могут быть два исполнения системы. В первом исполнении
определяется знак только Дг/ и при перемене знака осуществляется
реверсирование регулирующего органа. В этом случае для устра-
нения возможных ложных действий системы под влиянием помех
необходимо предусмотреть коммутатор, периодически осуществ-
ляющий принудительное реверсирование двигателя. Во втором
исполнении изменяются знаки обоих перемещений на предыдущем
этапе sign Ду и sign \х и решение о направлении следующего
перемещения принимается логической схемой.
На рис. 6-21 показана схема шаговой релейно-импульсной си-
стемы, реагирующей на оба знака sign у и sign ж, разработанной
в Институте электротехники АН УССР [53]. Командный генера-
тор 4, непрерывно вращаясь, замыкает по очереди контакты:
1 — подающий питание в обмотку реле, включающего цепь 5
измерения показателя экстремума у контакт II включает дви-
гатель 9 на промежуток времени Д£1? в течение которого совер-
шается один шаг перемещения регулирующего органа; контакт III
включает цепь 6 измерения значения показателя экстремума
у (t2) в конце шага; контакт IV включает элемент сравнения, ко-
торый при у2 > у± не производит переключений и дает возможность
двигателю совершить следующий шаг в том же направлении, а
при у2 <Z У1 реверсирует его. Тахогенератор 8 измеряет х и подает
его на логическую схему 7, действие которой было описано выше
(см. рис. 6-13). Замедления, необходимые для правильного сужде-
ния о знаках производных в инерционных объектах, можно полу-
чить, подбирая соответствующим образом скорость вращения гене-
ратора 4. На рис. 6-21 показаны измерительные элементы 1 и 2
п вычислительное устройство 3 для выработки показателя экстре-
мума у.
Системы со случайными сигналами поиска. Кроме детермини-
рованных сигналов поиска, в системах экстремального регулиро-
вания могут применяться и случайные сигналы [76, 77, 170, 195,
Рис. 6-22.
196], если эти сигналы могут быть каким-либо образом измерены.
Для экстремального регулирования в этом случае могут быть ис-
пользованы схемы с синхронными детекторами СД (рис. 6-22),
в которых поисковые сигналы 6Х подаются на синхронные
детекторы либо от внешнего генератора шумов, либо от датчиков,
измеряющих естественные шумы в объекте. В последнем случае
сигнал помехи пропускается через фильтры, выделяющие высоко-
частотные составляющие помехи, которые и подводятся к синхрон-
ным детекторам в качестве опорных сигналов.
Пусть
Хг = xiP + 8xi<
где хгр — то положение i-ro регулирующего органа, которое было
бы при отсутствии флуктуации, назовем его рабочим положением;
бх — шум в i-м канале.
Предположим, что 8xi в разных каналах представляют собою
независимые центрированные случайные функции времени, для
которых справедливы соотношения:
7И{6^} = 0;
М =
= бг при f — i
при / 7= г,
(6-28)
М {8xi8xj...8xv} = 0,
по крайней мере, при i Ф j 7^ /с, ...
Выходные величины синхронных детекторов будут
= W-Ov (р) f8xv + 21^ $х^хч +
~-8х,8ху,4-...j dx,
oxi i v 1 ’
(6-29)
где (p) — линейные операторы фильтров синхронных детек-
торов; kv (t) — весовые (импульсные переходные) функции.
Значения функций в круглой скобке под интегралом берутся
при аргументе t — т. Находя математическое ожидание и учиты-
вая свойства центрированных функций (6-28), получаем
uv = PFov(p) + • ..^ = § Цт)
Обычно члены, имеющие высший порядок малости, могут быть
отброшены. Если случайные колебания поиска стационарны, а ра-
бочие составляющие координат постоянны, то
8х2 = const, = const
7 дх
и
U у
(0) № 8xl (т) dx.
(6-30)
Таким образом, математические ожидания выходных сигналов
синхронных детекторов с точностью до малых высших порядков
пропорциональны соответствующим частным производным. Но так
как центрированные случайные составляющие выходных сигналов
множительных звеньев не подавляются фильтрами полностью, то
выходные сигналы также содержат в своем составе случайные
помехи. В [77] для квадратичных характеристик объекта, стацио-
нарных и постоянных х^ определена дисперсия
(uv — uv)2 = /26x^tv kv (т) dx
о
и отношение сигнала к шуму
(6-31)
(6-32)
оценка им-
где через Jv обозначена интегральная квадратичная
пульсной переходной функции:
Jv == jj k'v (т) dx. (6-33)
о
Из (6-32) видно, что для увеличения А целесообразно умень-
шать время корреляции поисковых сигналов. Однако возможность
уменьшения ограничивается инерционностью объекта.
В инерционных объектах определение частных производных,
так же как и в случае регулярных поисковых воздействий, значи-
тельно усложняется в связи с тем, что выходные величины син-
хронных детекторов будут в общем случае содержать составляющие,
пропорциональные всем частным производным. В частном случае,
как показано в [77], когда степень числителя передаточной функ-
ции объекта (т. е. части системы, входом которой является пере-
мещение регулирующего органа z, а выходом — результаты из-
менения координат объекта х) на единицу меньше знаменателя,
а в качестве поисковых сигналов используются независимый белый
шум или шум с равномерной спектральной плотностью в диапазоне
частот, намного превосходящем полосу собственных частот объек-
та, синхронное детектирование можно использовать в таком же
виде, как и в безынерционных системах.
6-3. Основные методы поиска экстремума
функции многих переменных
Различные виды поиска можно разделить [186] на две ос-
новные группы: 1) слепой поиск; 2) поиск с анализом промежуточ-
ных результатов.
При слепом поиске необходимо знать область рабочих (или до-
пустимых) значений аргументов xi функции у = / (zj. Другой
информации о функции / почти не требуется (если не считать, что
подразумевается ограниченность этой функции и наличие конеч-
ного числа экстремумов в рабочей области, расстояние между ко-
торыми больше, чем расстояние между шагами поиска). Одна из
форм поиска — сканирование, т. е. последовательный просмотр
всей допустимой области значений аргументов. Сканирование мо-
жет быть организовано различными регулярными способами:
построчное — как в телевизорах, спиральное — как в радиоло-
каторах и т. д. В процессе просмотра запоминается наибольшие
(или наименьшие) из всех предыдущих значений функции и в конце
цикла сканирования выбираются те значения х, которые соответ-
ствуют наибольшему из максимумов (или наименьшему из мини-
мумов). Этот вид поиска решает задачу глобального поиска эк-
стремума. Однако трудно представить себе промышленную или
транспортную установку, для которой осуществление такого спо-
соба поиска было бы позволительным. Этот способ используется
в математических приборах, в вычислительных устройствах для
нахождения экстремумов и других особенностей функций. В про-
мышленной установке глобальный поиск мог бы осуществляться
на модели установки, соответствие которой оригиналу проверяется
и корректируется в процессе работы.
Интересной формой слепого поиска является случайный поиск.
Предложен ряд вариантов случайного поиска. Один из вариантов
состоит в том, что устройство поиска задает по случайному закону
ряд комбинаций {жх, х2, ..., хп}. При каждой комбинации проис-
ходит измерение у и отбрасывание его, если оно (при поиске ми-
нимума) оказалось больше предыдущего, или же при запоминании
его и стирании из памяти предыдущего значения, если оно оказа-
лось ближе к искомому значению. После достаточно большого
числа поисковых попыток поиск прекращается и последние значе-
ния г/* (я*, х*. .... Хп) считаются оптимальными.
Чрезмерно большая длительность этой процедуры привела
к разработке других вариантов, в которых время поиска сокра-
щается. Так, например, в другом варианте случайный поиск раз-
деляется на этапы. По окончании каждого этапа происходит пере-
распределение вероятностей выбора различных значений х{ так,
чтобы те значения, для которых вероятнее меньшее значение у,
выбирались чаще. Возможны также комбинации регулярных и
статистических процедур [186]. Среди видов поиска второй группы
(поисков с анализом промежуточных результатов) происходит
постепенное накопление информации, позволяющее ускорить
процесс приближения к экстремуму. Наибольшее распростра-
нение получили следующие виды регулярных поисков этой
группы.
1. Метод Гаусса — Зайделя. Устанавливается очеред-
ность изменения координат хг, х2, ..., хп. Пусть она совпадает с
очередностью индексов 1, 2,..., п. Сначала шагами изменяем первую
координату хх. Пусть отыскивается минимум и сделан первый проб-
ный шаг Д^. В конце каждого шага определяем знак приращения
Ду. Если Ду положительно, первый шаг сделан в ложном направ-
лении, изменяем направление и движемся до тех пор, пока Ду в
конце каждого шага остается отрицательно. Когда Ду станет равным
нулю (или переменит знак), прекращаем изменение хг и начинаем
изменять сохраняя все остальные координаты постоянными.
Изображение идеальной (с бесконечно малыми шагами) траекто-
рии поиска по методу Гаусса — Зайделя экстремума функции
двух переменных показано на рис. 6-23, где тонкими линиями нане-
сены линии у = const. Вид траектории существенно зависит от рас-
положения поверхности у и на-
чальной точки Ао. Линия 1 со-
ответствует наиболее благо-
приятному расположению, при-
ход к экстремуму происходит
за один цикл изменения только
координаты хг. При том же
расположении осей, но ином
расположении начальной точки
BG приближение к экстремуму
происходит за несколько этапов
(кривая 2). Процесс поиска су-
щественно удлиняется. На бы-
строту и даже на сходимость
поиска может оказать влияние
и величина шага. При этом
возможны колебания вдали от
экстремума. На рис. 6-24, а движение начинается из точки Ло.
Первый шаг сделан, допустим, в точку А1Ч где Ду оказалось поло-
жительным. После этого следуют три шага снова в точку Ао, за-
тем в точки А2 и Л3. В точке А3 произошла смена знака, и процесс
изменения х2 прекращается, начинается изменение координаты
хг. Делается шаг в точку Л4. Так как в ней Ду > 0, делается обрат-
ный шаг в точку А3 и еще шаг в точку А5. В точке Л5 Ду снова стало
положительным, поэтому изменение х2 прекращается и начинается
изменение хх. Рис. 6-24, а показывает, что процесс оказался рас-
ходящимся. Во избежание этого в [190] предложено чередовать
направление первого шага в повторных циклах: если в первом
цикле первый шаг по переменной был положительным, то во вто-
ром цикле он делается отрицательным и т. д. На рис. 6-24, б
показан поиск в той же системе при тех же начальных условиях
при соблюдении чередования направлений. Отличаясь сравни-
тельной простотой в конструктивном воплощении, метод Гаусса —
Зайделя отличается наибольшим временем поиска по сравнению
с другими методами, поэтому он используется обычно в малока-
нальных оптимизаторах.
2. Метод градиента. Предположим, что на предыду-
щем шаге были определены все частные производные fxl1 fx%, ...,
f . Тогда следующий шаг делается одновременно по всем коорди-
натам так, чтобы перемещение по каждой координате было про-
порционально соответствующей частной производной при шаговом
поиске или же чтобы скорость изменения координаты была про-
порциональна соответствующей f при непрерывном поиске.
Шаговый поиск Дя, = ±а/„., 1 „
. ,г > (6-34)
непрерывный поиск рх{ — ~±'а1 , I х ’
где а >* 0; верхние знаки соответствуют поиску максимума, ниж-
ние — поиску минимума.
Каждый рабочий шаг при этом методе поиска является одно-
временно пробным шагом для последующего рабочего шага. Сов-
мещение пробных и рабочих движений
и одновременное выполнение переме-
щений по всем координатам во многих
случаях обеспечивает существенное со-
кращение времени поиска. Однако ор-
ганизация движения к экстремуму по
методу градиента не всегда является
самой совершенной.
При непрерывном движении по гра-
диенту траектория движения будет нор-
мальной к линиям у = const (кривая 1
на рис. 6-25). При неблагоприятном
Рис. 6-25. расположении поверхности и исходной
точки движение будет происходить по
сильно искривленной траектории (особенно заметно это при на-
личии гребней и оврагов на поверхности у (кривая 2 на рис. 6-25).
В природе путь по линии градиента представляется естественным:
так именно стекает капля воды на рельефной местности. Но при
неблагоприятном рельефе реки получаются сильно извилистыми,
рационализируя движение, можно сократить путь движения к
экстремуму. Один из путей рационализации состоит в том, чтобы
в зависимости от характера поверхности и от динамических свойств
объекта выбирать различные коэффициенты воздействия по произ-
водным осуществляя поиск по закону:
при шаговом поиске Д^ = а|/Х.,
dx *
при непрерывном поиске -— = aifx.-
(6-35)
Некоторые примеры выбора коэффициентов будут рассмот-
рены ниже.
3. Метод наискорейшего спуска. Метод был
предложен Л. В. Канторовичем [59] для широкого класса функ-
ционалов. В соответствии с этим методом сначала определяется
направление градиента в начальной точке и затем производится
прямолинейное движение по этому направлению до тех пор,
пока не обратится в нуль (или не станет положительной в случае
поиска минимума) производная dftdl вдоль этого направления.
Далее снова производится измерение градиента (которое в случае
остановки точно в точке ~ ~ 0 будет, очевидно, перпендикулярно
предыдущему направлению) и снова выполняется движение до
обращения производной вдоль нового направления в нуль и т. д.
(рис. 6-23, прерывистая линия 5).
Нетрудно видеть, что метод наискорейшего спуска представ-
ляет собой усовершенствование метода Гаусса — Зайделя в том
смысле, что путь к экстремуму хотя и зависит от расположения
начальной точки, но теперь он инвариантен по отношению к поло-
жению координатных осей: движение можно представить себе
в новой системе координат, повернутой таким образом, чтобы одна
из них (та, по которой будет совершено первое движение) совпала
с направлением градиента в начальной точке. В остальном методы
сходны. Во многих случаях метод наискорейшего спуска по срав-
нению с методом Гаусса — Зайделя дает заметное сокращение
времени выхода в окрестность экстремума. Метод обычно рацио-
нально применять в начале, вдалеке от экстремума. На первых
этапах шаги получаются крупными. При приближении к экстре-
муму продолжение поиска может осуществляться уже другим
методом, например градиентным.
4. Статистический поиск. Возможно построить
такие алгоритмы, которые позволяют для осуществления поиска
использовать элемент случайности. Один из подобных алгоритмов
описан в [149].
Пусть каким-либо образом (по некоторому алгоритму А выбора
регулирующего воздействия) к регулирующим органам приложены
воздействия {и±, ..., ип}. Регулирующие органы при этом
начнут двига1ься со скоростями, пропорциональными иъ\
В результате этого начинает изменяться и величина у ~
f (х^ ..., хп). Определение правильности изменения у прово-
дится по следующему алгоритму сравнения (алгоритм 5).
Чтобы избежать необходимости дифференцирования у и уси-
ления при этом влияния высокочастотных помех, сравнивается
величина у с величиной некоторого сигнала сравнения ц, который
вырабатывается генератором сигнала сравнения (ГСС) и подвер-
гается принудительно медленным изменениям. При этом устанав-
ливаются два режима работы системы: режим подготовки и режим
поиска. В режиме подготовки (в случае поиска минимума) вели-
чина т] медленно возрастает со скоростью т] = с > 0, при этом
регулирующие органы неподвижны и при отсутствии помех
в объекте, приводящих к блужданию экстремума, у остается
постоянным. Предполагается, что перед этим, в предшествующем
режиме, величина ц была меньше у. Когда по мере роста ц станет
равным у (или т] + 8Х — у при наличии зоны нечувствительности
8Х), происходит переключение на режим поиска: регулирующим
органам по алгоритму А сообщаются новые скорости и у начинает
изменяться. Величина сигнала сравнения ц в режиме поиска
медленно убывает со скоростью tj = q < 0. Режим поиска про-
должается до тех пор, пока снова у не станет равным ц (или
ц — е2 = у при наличии зоны нечувствительности е2). Характе-
ристики режимов сведены в табл. 6-1. При этом могут быть два
случая: 1) изменение у совершается в правильном направлении;
Таблица 6-1
Режимы Критерий У ч
Подготовка со1 1 Л $=• const с > 0
Поиск У < п (у < Г) + е2) var У < 0
2) направление изменения у неправильно. В первом случае (поиск
на интервале времени Тг, рис. 6-26) величина у уменьшается,
т. е. изменение происходит в том же направлении, как и изменение
сигнала сравнения у, время поиска получается длительным и
величина у успевает приблизиться к экстремуму. После того как
величины ц — 82 и у сравняются, происходит переход на режим
подготовки. Во втором случае (поиск на интервале времени 5%)
величина у возрастает, удаляясь от экстремума. Так как измене-
ния у и ц совершаются в противоположных направлениях, у
быстро догоняет т], неудачный поиск
заканчивается быстрее и снова на-
ступает режим подготовки.
Описанный алгоритм, таким об-
разом, состоит из двух частей:
алгоритм А выработки решения и
алгоритм В оценки результатов. Ха-
рактерным для предлагаемого мето-
да является вторая часть — алго-
ритм В. Для алгоритма А при этом
можно предложить любую процеду-
ру — детерминированную или слу-
чайную. Автор метода в [149] описал
систему, где в качестве алгоритма А
использовалась случайная процедура, сходная с той, которая
использовалась в «усилителе отбора» Р. Эшби [203]. Из источника
возможных случайных состояний ИС (рис. 6-27), например таб-
лицы случайных чисел в памяти цифровой машины, с помощью
генераторов случайных сигналов ГС, число которых равно числу
Рис. 6-27.
регулирующих органов объ-
екта, производится каждый
раз случайная выборка зна-
чений, преобразуемых в воз-
действия на регулирующие
органы [и1ч и2, ип}.
Другие методы исполь-
зования случайного поиска,
и их исследование даны в
[151, 150, 48]. Исследования
показали, что потери на поиск
для метода случайного по-
иска с возвратом в исходное положение после неверного шага и
пересчетом оказались меньше потерь на поиск по соответст-
вующим модификациям метода градиента, если число каналов
системы больше трех. На этом основании автор рекомендует
случайный поиск как основной метод для многоканальных систем.
6-4. Примеры выполнения многоканальных оптимизаторов
с различными методами поиска
Приводимые ниже краткие описания основных узлов много-
канальных оптимизаторов в большинстве своем касаются лабора-
торных опытных образцов и приводятся с целью иллюстрации
ожидаемых возможностей оптимизаторов.
Мы уже видели выше, что обычные экстремальные регуляторы
экстремума функции одной переменной могут снабжаться устрой-
ствами для поочередного включения одного и того же регулятора
в разные каналы управления (рис. 6-11). Однако независимые
фиксированные заранее величины тактов работы каналов обра-
зуют далеко не лучший способ поиска. При этом движение данного
регулирующего органа может прекратиться принудительно за-
долго до достижения частного экстремума по данной координате
либо, наоборот, данный канал будет долгое время, пока не сра-
ботает кулачок 16, оставаться включенным после достижения
экстремума только по данной координате. Все это создает излишние
Рис. 6-28.
потери и затягивает цикл поиска. Сделав работу переключателя
каналов зависимой от знака Ду, мы можем получить многоканаль-
ный оптимизатор, работающий более организованно и осуществ-
ляющий поиск, например по методу Гаусса — Зайделя.
Для экстремального управления безынерционными многокоор-
динатными объектами возможно применение многоканальных
систем, осуществляющих движение к экстремуму по методу гра-
диента, использующих измерение частных производных df!dxi
(например, с помощью синхронного детектирования) или же
производных dyldt по методу, рассмотренному выше. Блок-схемы
этих устройств показаны на рис. 6-28 и 6-29. Рассмотренные выше
одноканальные оптимизаторы (рис. 6-8 и 6-16) здесь просто повто-
ряются в различных каналах.
В качестве примера системы, работающей по методу градиента,
рассмотрим двухканальный автоматический оптимизатор ДАО-2
[7]. Блок-схема оптимизатора показана на рис. 6-30. Относительно
объектов, для которых предназначается оптимизатор, предпола-
180
гается, что они могут быть представлены в виде соединения линей-
ных динамических звеньев Lr и Ь2 и нелинейного безынерционного
звена с характеристикой у = / (^i, х2), имеющей в рабочей области
Рис. 6-29.
х2С X экстремум (рис. 6-30). На входы Lr и Ь2 подаются соот-
ветственно управляющие воздействия иг и и2. Каналы управле-
ния считаются незави-
симыми.
Оптимизатор рассчи-
тан на два варианта:
1) вариант, при котором
скорость блуждания эк-
стремума достаточно ма-
ла в сравнении со ско-
ростью переходных про-
цессов в и 1/2,
2) вариант, при котором
эти две скорости соиз-
меримы.
В первом варианте
схема работает следую-
щим образом. Про-
граммное устройство ПУ
дает команду на изме-
рение показателя каче-
ства у в исходной точке
Рис. 6-30.
и на направление ре-
зультата измерения в операционный блок ОБ1 первого канала.
Дискретный фильтр Ф преобразует отфильтрованный от помех пока-
затель качества у в число пп, пропорциональное у, которое посту-
пает в реверсивный счетчик блока ОБ1. После этого в первом
канале производится первый пробный шаг, а в реверсивном счетчи-
ке блока ОБ1 записывается код числа [— пп]обр (путем замены еди-
ниц числа нулями и наоборот). По окончании пробного шага
производится новое измерение у и результат измерения поступает
в реверсивные счетчики операционных блоков ОБ1 и ОБ2 обоих
каналов. В результате в счетчике ОБ1 образуется обратный код
разности [п12 — пп]обр, а в ОБ2 прямым кодом записано число п12.
После этого делаются пробный шаг по второму каналу и изме-
нение прямого кода тг21 в блоке ОБ2 на обратный [— п12]обр.
В конце второго шага снова измеряется у и превращается в число
п22, которое поступает в ОБ2 и образует код [п22 ~ /г121обР-
Счетчики в обоих каналах имеют разряды знака разности.
Если разность n2i — пи положительна, то в знаковом разряде
появляется единица, если отри-
цательна — нуль. Следующий про-
граммный импульс дает команду
на считывание знака разности.
По этому знаку дается команда
на включение исполнительного
двигателя ИД в том или ином
направлении (двигатель ревер-
сируется, когда у начинает уда-
ляться от эсткремума). После
этого дается команда одновремен-
но на пуск двигателя и на счи-
тывание числа в счетчике. Счи-
тывание этого числа — величины
разности — производится импульсами, поступающими в счетчик
с постоянной частотой. Так как в счетчике записан обратный код
разности, то после поступления числа импульсов, равных раз-
ности, счетчик оказывается заполненным: во всех его разрядах
появляются единицы. Следующий импульс переполняет счетчик,
и импульс переполнения (смена единицы на нуль в старшем раз-
ряде) отключает двигатель. Таким образом, перемещение двига-
теля будет пропорциональным времени, в течение которого шло
считывание, а оно, в свою очередь, будет при заданном числе
импульсов обратно пропорционально частоте. Изменяя частоту
считывающих импульсов, можно изменять коэффициент пропор-
циональности между величиной рабочего шага и производной.
Система осуществляет поиск по методу градиента, но рабочему
циклу предшествуют два поочередных пробных шага. Схема дви-
жения в фазовой плоскости показана на рис. 6-31.
Во втором варианте, рассчитанном на блуждание экстремума со
скоростью, соизмеримой со скоростью процессов в объекте, при-
няты меры для ускорения процессов во время пробных шагов.
Для этой цели в операционных блоках добавлены еще два счетчика,
осуществляющие форсировку исполнительных двигателей по упро-
щепному закону (с постоянными моментами переключений),
близкому к оптимальному по быстродействию.
Амплитуда форсирующего импульса ит выбирается пропор-
циональной разности n2i — пи, а его длительность постоянна и
рассчитана заранее (рис. 6-32). Описанная система предназначена
для работы в химических установках (в частности, для оптими-
зации процесса контактного разложения спиртовой шихты до
дивинила).
В качестве примера оптимизатора, работающего по методу
наискорейшего спуска, рассмотрим двухканальный оптимизатор,
предложенный А. А. Фельдбаумом и Р. И. Стаховским [183].
Ответственной задачей при построении оптимизаторов является
выбор величины шага. При крупном шаге ускоряется поиск, но
снижается точность поддержа-
ния экстремума, при мелком —
повышается точность, но замед-
ляется поиск. При практических
решениях часто идут на двой-
ную систему с «грубым поиском»
(обычно вдали от экстремума) и
«точным поиском» (вблизи от него).
Переход к точному поиску осу-
ществляется после того, как гру-
быми шагами оптимизатор перей-
дет через экстремум. Возможно
вообще использование систем с
переменным шагом, например,
пропорциональным градиенту или первой разности функции Ду
на предыдущем шаге. Были предложены также способы, основы-
вающиеся на экстраполяции по параболе по результатам изме-
рения на трех смежных шагах. При этом вычисляется экстремум
на параболе, аппроксимирующей функцию у, и система приводится
в точку рассчитанного экстремума, после чего поиск продолжается.
Возможна и интерполяция по результатам измерения на двух
шагах по разные стороны экстремума. В рассматриваемой схеме
был принят вариант, при котором в качестве меры принята вели-
чина
и заданы два ее пороговых значения и |2 > При £ >
осуществляется грубый, при |х < I < |2 точный поиск, при |
поиск прекращается, система останавливается на некоторое время
т, по истечении которого производится контрольное измерение
градиента. Объект, выходная величина у которого подлежит мини-
мизации, имеет п входов хп.
Схема основного блока оптимизатора показана на рис. 6-33.
Первый цикл работы схемы начинается с определения градиента.
Контакты KQ на выходе объекта и Кг в схеме усилителя по-
стоянного тока У± отпираются управляющим блоком на время т,
а затем вновь запираются. Напряжение их на выходе при замы-
кании Кг возрастает по закону, определяемому передаточной
функцией усилителя Уи и в течение времени т успевает стать
равным у с обратным знаком, т. е. —у0 = — f (хГ1 ..., хп). Таким
образом, осуществляется запоминание величины у.
На следующем шаге цикла замыкается ключ 7Г61, задающий
малое приращение Дгсх координате хг, после чего сигналом «старт»
включается регулирующий орган объекта и совершается рабочий
такт, в результате которого регулирующий орган отрабатывает
перемещение Д^ и через некоторое время на выходе объекта уста-
навливается значение уг = / (хг + Дя, ..., #п). Ключ Кх запи-
рается, но на некоторое время т отпираются ключи 7Г0, К21 и 7Г31,
в результате чего на выходе У2 появляется напряжение и2 =
= Уо — У1 = f (*i, ж2, •••, хп) — t (^1 + Аж, ж2, хп) = — Дух.
К концу времени т на выходе усилителя У31 устанавливается,
а в дальнейшем после запирания К21 и 7Г31 запоминается напря-
жение и31 — Дух. Приращение Дя мало и примерно постоянно,
поэтому Дг/х примерно пропорционально производной dy!dxr.
Таким образом, к концу второго шага запоминается значение
производной . Далее, на третьем, четвертом и т. д. — до
п + 1-го шага включительно совершенно аналогичным образом
происходит запоминание производных /Х2, /Хз, ..., f в остальных
каналах. На этом заканчивается операция определения градиента.
В завершающей части большого цикла происходит выработка
величины ^ = 2 |Д|.
сравнение ее с пороговыми значениями и
подача команды на следующий цикл поиска. Величина £, равная
сумме модулей частных производных, вырабатывается с помощью
схемы, показанной на рис. 6-34. Напряжения w31, ..., и3п, про-
порциональные частным производным, через соответственные
пары диодов Д1Ч Д\, ..., Дп, Дп проходят либо на левую (если
u3i < 0), либо на правую (при и3} > 0) сетку двойного триода Л1.
Напряжения с левой сетки, пройдя через катодный повторитель,
попадают с обратным знаком на правую сетку, и в конечном итоге
приращение потенциала на пра-
вом аноде лампы Л1 оказывается
пропорциональным С помощью
не показанных на схеме несим-
метричных триггеров выявляются
знаки разностей | и £ — £2
и в соответствии с приведенными
выше неравенствами принимается
решение о характере дальнейшего
цикла. Если £2 > t то вклю-
чаются на известное время ключи
7£51, ..., КЪп и начинается точный
поиск, если £>£2, то включаются
одновременно ключи и
зарядный ток в цепях емкостей
интегрирующих звеньев У4? увеличивается, шаги становятся круп-
нее и происходит грубый поиск.
Операция грубого поиска происходит следующим образом.
На некоторое время отпираются ключи Ки и К5г. Тогда значения
<1у1(1хг (напряжения u3j), умноженные на некоторый коэффициент,
поступают на вход интегрирующих усилителей У41 п величины хг
получают приращения, пропорциональные /Лг. Далее, после уста-
новления Д^ на выходе этих блоков управляющее устройство
дает сигнал на отработку этих перемещений регулирующими
органами и после изменения Ду анализирует знак разности
Ду;Ч1 — У j+i — образующейся на выходе усилителя У2 при
отпертом ключе Ко. При Ду^+1 > 0 такт повторяется, при Ду;+1<0
происходит переход на цикл измерения градиента.
Точный поиск осуществляется точно также, по при этом вклю-
чаются только ключи Kbi.
По описанному принципу были построены образцы двух- и
двенадцатиканальных оптимизаторов [166 —169].
ГЛАВА СЕДЬМАЯ
МЕТОДЫ ИССЛЕДОВАНИЯ ДИНАМИКИ ЭКСТРЕМАЛЬНЫХ СИСТЕМ
7-1. Общие сведения
Экстремальное регулирование обладает рядом особенностей,
сильно усложняющих исследование динамики. Процесс экстре-
мального регулирования можно расчленить на ряд составляющих
процессов, для описания каждого из которых зачастую нужен
специфический математический аппарат. Отметим эти процессы.
а) Процесс измерения показателя качества у. Специфика
состоит в том, что непосредственное измерение у, как это имеет
место в обычных системах регулирования, возможно далеко не
всегда. Часто у представляет собою сводный показатель, измерение
которого состоит из измерения ряда координат системы хг и затем
вычисления сводного показателя с помощью вычислительного
устройства. Обычно значения координат поступают на входы
динамических звеньев, изображающих простейшие измерительные
устройства, а операция вычисления у должна быть произведена
над выходами этих звеньев Во многих случаях процесс экстре-
мального регулирования происходит весьма медленно в сравнении
с процессами в измерителях, и тогда последние можно представить
в виде безынерционных преобразователей. Но иногда с инерцион-
ностью измерителей нельзя не считаться.
б) Процесс измерения параметров, характеризующих положе-
ние текущего значения у относительно экстремума. Этот процесс
является первой стадией поиска. Для своего осуществления он
требует вмешательства в работу объекта и приложения к нему
дополнительных поисковых воздействий либо в виде детермини-
рованных заданных воздействий, либо в виде случайных флуктуа-
ций. В результате этого процесса система, в зависимости от ее
принципа действия, вырабатывает величины, характеризующие
либо производные f , либо их знаки sign/x_, либо знаки первых
разностей yi+1 — уг и — х^ либо знаки и величины произ-
водных у и х^ либо осуществляет запоминание или предсказание
экстремума у* и определение разностей у — у*, х — х* и т. д.
в) Процесс выработки управляющих воздействий состоит в логи-
ческой или математической обработке информации, полученной
па предыдущих этапах и формировании на их основании сигнала,
прилагаемого к регулирующему органу системы.
г) Производство рабочего шага, реализующего управляющие
воздействия. Динамика рабочего шага обычно не отличается от
динамики обычных систем регулирования. Рабочий шаг в некото-
рых системах совмещается с поисковым, и его результаты служат
для выработки решения о следующем шаге, но в некоторых систе-
мах рабочие и поисковые шаги производятся и обрабатываются
раздельно. На каждом из перечисленных этапов может исполь-
зоваться свой алгоритм, отличный от алгоритмов на других этапах.
Все эти процессы объединяются в единый процесс экстремального
регулирования.
Математическим аппаратом для исследования экстремальных
систем должен быть такой, который позволил бы рассматривать
общую совокупность алгоритмов на отдельных этапах, подобно
тому, как теория импульсного регулирования в ряде случаев
дает возможность исследовать общую совокупность процессов,
происходящих в системе во время импульсов и во время пауз.
Такого рода теория экстремального управления пока еще не
создана, и исследование обычно ведется раздельно на каждом
этапе.
7-2. Уравнения организации движения к экстремуму
в непрерывных идеальных (квазистационарных)
экстремальных системах
Идеальной непрерывной системой назовем такую систему,
в которой все значения частных производных fxi в любой момент
времени считаются измеренными и которые непрерывно преобра-
зуются в сигналы, используемые в качестве входных сигналов
для системы управления, также непрерывной. Несмотря на то,
что в идеальной системе исключаются из рассмотрения процессы
измерения и поиска, исследование представляет в ряде случаев
определенный интерес для практики. В частности^ это имеет место
тогда, когда рабочие составляющие координат изменяются мед-
ленно в сравнении с поисковыми составляющими и ширина полос
частот поисковых сигналов значительно шире частот основного
процесса экстремального регулирования. Режимы, удовлетворяю-
щие этим условиям, называются квазистационарными режимами.
К квазистационарным близки, в частности, режимы в системах
с гармонической модуляцией и синхронным детектированием.
Для систем, режимы которых близки к квазистационарным, дина-
мическая модель идеальной непрерывной системы представляет
непосредственный интерес. Далее, в системах шагового типа для
наилучшей организации следующего шага также в ряде случаев
могут быть использованы результаты теоретического анализа
идеальной дискретной системы, а при достаточно малой длитель-
ности шагов — и идеальной непрерывной системы. Кроме того,
анализ идеальных систем позволяет более наглядно выяснить ряд
существенных особенностей процессов экстремального регулиро-
вания, которые при исследовании только частных составляющих
процесса остаются часто в тени. Во многих практических случаях
структурную схему объекта экстремального управления можно
представить так, как показано на рис. 7-1. Управляющие воздей-
ствия и = {u1? и2, ..., ип} прикладываются к исполнительным
устройствам ИУ, на выходе которых вырабатываются перемеще-
ния регулирующих органов z = \zr, z2, ..., zn}. Регулирующие
органы, воздействуя на входы объекта О, вызывают изменение
основных координат объекта х = {^, х2, ..., хп]. Показатель ка-
чества у представляет собою
функцию координат
У = К*1, х2, хп),
(М)
имеющую экстремум нужно-
го вида в рабочей области.
Здесь, как уже отмечалось в
§ 6-1, нужно различать два
основных случая: в пер-
вом — показатель у имеет
физический смысл только в
статике. Тогда динамические
процессы в объекте не представляют интереса непосредственно
для процесса экстремального управления, так как во время
их протекания экстремальное регулирование не дает никакого
определенного эффекта; эти процессы следует при существую-
щих ограничениях завершить возможно быстрее для уменьше-
ния потерь качества; в этом случае можно исследовать дина-
мику изменения установившихся значений xiy (или, если xiy
являются монотонными функциями z, динамику изменения поло-
жений регулирующих органов z), т. е. динамику действия только
управляющего устройства. Относительно текущих значений х
добиваемся лишь того, чтобы они возможно быстрее и устойчиво
приближались к установившимся значениям. Во втором случае,
когда показатель качества существует и в динамике, задача иссле-
дования может состоять в том, чтобы минимизировать потери
качества и в процессе регулирования, для чего уже должны рас-
сматриваться совместно уравнения объекта и управляющих
устройств.
При рассмотрении схемы рис, 7-1 можем выделить следующие
случаи:
1. Объект управляем и наблюдаем непосредственно по коорди-
натам х и показателю у. Это наиболее простой для исследования,
но не столь часто встречающийся случай. К нему сводят обычно
исследование безынерционных объектов, у которых координаты
х11 ..., хп зависят однозначно (обычно пропорционально) от пере-
мещений соответствующих регулирующих органов z. Для таких
систем z можно вообще не рассматривать и считать, что коорди-
наты х представляют собою входные воздействия на объект
(рис. 7-2, а). Поисковые воздействия могут также прилагаться,
Рис. 7-2.
как показано на рис. 7-2, а, к регулирующим органам непосредст-
венно.
2. Объект наблюдаем непосредственно по координатам х и у,
но оказать воздействие на координаты х непосредственно управ-
ляющим устройством невозможно, оно может быть приложено
только ко входам объекта, т. е. к регулирующим органам. Поиско-
вые воздействия здесь уже будут Az, а не Ах (рис. 7-2, б). Приме-
ром такой системы является рассмотренный в § 6-2 двигатель транс-
портного экипажа. Мы можем измерять его путь х и скорость х,
но непосредственно изменять можем не скорость, а открытие регу-
лирующего клапана или расход горючего д.
3. Объект непосредственно наблюдаем лишь по координатам £,
являющимся выходами устройств для измерения х, и координате ц
на выходе устройства, измеряющего у, и управляем непосредст-
венно по координатам х (рис. 7-2, в). Такого рода схему получаем
тогда, когда инерционностью объекта можно пренебречь, но
нельзя пренебречь инерционностью измерительных элементов.
4. Объект непосредственно наблюдаем по координатам | и ц
и непосредственно управляем по координатам z (рис. 7-2, г). Эта
схема получается тогда, когда нельзя пренебречь инерционно-
стями ни объекта, ни измерительных элементов.
Начнем с рассмотрения первого типа систем, где доступно
непосредственное воздействие на х и непосредственное измерение
хи у (рис. 7-2, а).
Пусть критерий качества выражается функцией (7-1). Пред-
полагается что функция / дифференцируема по всем аргументам и
имеет экстремум нужного типа в рабочей области значений хг(^Х.
Продифференцируем (7-1) по времени:
р-2)
г=1 г—1
Если критерий качества сохраняет свой смысл только в статике,
то мы будем интересоваться в первую очередь организацией дви-
жения к экстремуму в соответствии с уравнениями
/г--* = 2,...,». (7-3)
Один из способов синтеза управляющих воздейс1вий состоит
в том, что функции cpz в уравнениях (7-3) выбираются так, чтобы
в силу этих уравнений функция
f*-' м (7-4)
была определенно-положительной в случае регулирования на
максимум, и определенно-отрицательной в случае регулирования
на минимум [75, 77, 34, 55]. При этом, как нетрудно видеть, точка
экстремума будет устойчивой по Ляпунову, а движение к экстре-
муму из любой точки в его окрестности будет таким, что функция у
будет приближаться к своему экстремуму монотонно.
В самом деле, если движение определяется полностью урав-
нениями (7-2), то функция
У — У* = V (жх, х2, ..., хп) (7-5)
в окрестности минимума у* = min определенно-положительна,
а производная
= = W (7-6)
at dt v '
в силу уравнений (7-3) по условию выбора <рг, определенно отри-
цательна. Функция V есть функция Ляпунова, и состояние равно-
весия у = у* устойчиво асимптотически. Аналогично доказы-
вается и асимптотическая устойчивость максимума, при которой V
будет определенно-отрицательной, а И7 — определенно-положи-
тельной. Если же движение определяется не только уравнениями
(7-3), но и другими дифференциальными уравнениями* например
объекта и измерительных устройств, то функции V и W, так как
теперь они будут зависеть не от всех координат системы (включая
/ и £), а лишь от их части, не будут относиться к классу знако-
определенных функций, поэтому для определения устойчивости
и вообще характера движения к экстремуму потребуется рассмот-
рение всей совокупности уравнений.
Заметим, что даже в первой группе систем (с безынерционными
объектами и измерительными элементами) обеспечение условий
знакоопределенности функции (7-4) не гарантирует хорошего
качества регулирования по всем координатам х. Система в данном
случае существенно нелинейна и при монотонном изменении у
иожет иметь место сильно колебательное изменение координат х.
Для того чтобы наглядно уяснить это положение, представим себе
гору, на которую ведет дорога, все время поднимающаяся вверх,
но извивающаяся в виде серпантина или многократно оборачи-
вающаяся вокруг вершины спиралью. Поэтому достаточное условие
монотонности приближения у к экстремуму не всегда будет доста-
точным условием приемлемого качества регулирования.
Наиболее просто реализуемой в технических условиях формой
функций очевидно, является линейная форма, рассмотрением
которой и ограничимся. Наиболее общей линейной формой будет
ia, которая включает все переменные задачи:
=aiif4 + aJX2 + --- + ainfXn, г = 1, 2, п. (7-7)
Уравнения (7-7) содержат п2 коэффициентов аг^ выбор которых
ограничивается условиями знакоопределенности формы W. Необ-
ходимые и достаточные условия знакоопределенности (условия
Сильвестера, [197]):
П11&12
^21^22
ап а12... а1п
а21 а22 • • • а2п
^0,
(7-8)
ап1 ^п2 • • • ^пп
где верхние знаки неравенства соответствуют определенной поло-
жительности, а нижние — определенной отрицательности формы.
Обычно п2 произвольных постоянных — слишком большое
число и для практического решения задачи бывает достаточно
ограничиться меньшим числом параметров настройки. В этом
случае можно ввести более простые способы выбора произвольных
коэффициентов, основывающиеся на достаточных условиях знако-
определенности, выражаемых равенствами. Так, подставляя (7-7)
в (7-2), получим
п п
i=W= 2 («О + ая) kfi + 2 • <7-9)
г, j— 1 k = 1
Рассмотрим следующие виды частных достаточных условий
знакоопределенности:
1) + = ± 2агга„. (7-10)
При этом
w==± (741)
4 = 1 '
и число произвольно выбираемых коэффициентов
c^ii = (n+l)nj (7.12)
что составляет 1, 3, 6, 10 для п — 1, 2, 3, 4 соответственно.
2)
(7-13)
Этот способ выбора коэффициентов был предложен в [33,
34, 55]. Здесь число произвольно выбираемых коэффициентов
также определяется формулой (7-12). Уравнения (7-7) принимают
вид (если выбраны положительными):
"j/ — — allAi “И + а1з/л3 + • • • + alnfxn ;
dt a\ifxx а2зА2 4" Л2зАз + • • • + a%Jxn »
§ = — W*! - «2з/х3 а33/Хз + ...{- a3nfXn ;
dt Q'Znfxt a&nfxi • • * -^—^nnixn^
Функция W при этом имеет вид
w = ± 2
г = 1
(7-14)
(7-15)
Верхние знаки в выражениях (7-14) и (7-15) соответствуют
поиску максимума, нижние — поиску минимума.
3)
ао = 0.
г £ j
(7-16)
Число произвольно выбираемых коэффициентов при этом
равно п
4) ац — а, = (7-17)
г Ф j
При данном выборе коэффициентов движение к экстремуму
осуществляется вдоль направления градиента.
7-3. Динамика непрерывных идеальных экстремальных систем,
работающих по методу градиента
Динамика градиентных квазистационарных систем детально
рассмотрена А. А. Красовским [77]. Структурная схема управле-
ния безынерционным объектом показана на рис. 7-3. Звенья
с передаточными функциями Wi могут представлять инерцион-
ность фильтров и исполнительных устройств.
Относительно функции у = f (хх, х2, ..., хп) делаем предполо-
жение, что она является (или может быть в рассматриваемой
области аппроксимирована)
гиперповерхностью
у-у* =
i, 5 = 1
(7-18)
имеющей в точке У* ~ f (х*,
•••> хп) экстремум типа
минимума или максимума. В
[197] показано, что при сечении
этой гиперповерхности плоскостью у = const мы получаем гипер-
поверхность второго порядка, называемую квадрикой, которая
в данном случае представляет собою многомерный эллипсоид,
центр которого совпадает с центром координат &Х{ = Xi — х£.
Уравнение вида
— X Ь12 ... Ь1п
^21 ^22 • • • ^2п
(7-19)
&п1 ^п2 • • • ^пп
называется вековым уравнением. Все корни векового уравнения,
составленного для коэффициентов эллипсоида, вещественны, поло-
жительны для экстремума-минимума и отрицательны для экст-
ремума-максимума, а их модули обратно пропорциональны квад-
ратам полуосей определяющего эллипсоида
п
j1; bijAXiAXj= 1.
i. J = 1
(7-20)
В случае функции двух переменных поверхность у = / (ж1? х^
будет представлять собою эллиптический параболоид в простран-
стве (хх, х2, у), сечение которого плоскостью, перпендикулярной
оси у, дает эллипс, а плоскостью параллельной оси у — пара-
болу.
Уравнения движения к экстремуму (7-7) при использовании
метода градиента в случае безынерционных объекта и каналов
управления в соответствии с условиями (7-17) имеют вид
§= + а(/Ж{ + |{), (7-21)
где воздействие (см. рис. 7-3) может включать в себя поисковые
воздействия и шумы.
В случае линейных инерционных каналов
(7-22)
где W — передаточная функция канала. (Мы будем считать, что
передаточные функции во всех каналах одинаковы.) Из (7-18)
следует, что
_ а (у — у*) _ ay _ v Л/г /7
dxi ~dxi~ bU^X3’ (1-23)
j = l
при наличии переменных во времени воздействий точка экстре-
мума также будет изменяться («дрейфовать»), поэтому после
подстановки (7-23) в уравнения (7-21) и (7-22) получим для безы-
нерционного канала
п
i = I
1 dAx
a dt
a dt ‘
(7-24)
Запишем уравнение в виде отношения определителей:
(7-25)
где А — определитель системы, равный
bn + f &12 ••• bln
7 -- Р_ 7
А — Ь21 22 а • • •
Ьп1 Ьп2 • • • J) ~7~ Л
иПП~Т~ а
(7-26)
Ai — определитель присоединенной матрицы, получаемый из
А путем замены i-ro столбца столбцом из правых частей уравнения
(7-24); А-;- — алгебраическое дополнение элемента i-ro столбца
и /-й строки определителя А.
Корни характеристического уравнения системы (7-24), как
это видно из (7-26), с точностью до множителя х!а совпадают
с корнями векового уравнения (7-19). В случае экстремума-макси-
мума корни векового уравнения отрицательны, в (7-25) берется
верхний знак, такой же, как в вековом уравнении, следовательно,
корни А также отрицательны. В случае экстремума-минимума
корни (7-19) положительны, но в (7-25) берется нижний знак,
противоположный знаку при % в вековом уравнении. Отсюда сле-
дует, что все корни характеристического уравнения замкнутой
безынерционной идеальной системы непрерывного экстремального
регулирования, работающей по методу градиента, вещественны и
отрицательны. Степень устойчивости
|а I
(7-27)
где Стах — длина наибольшей полуоси определяющего эллип-
соида.
Это дает возможность либо оценить время регулирования
(7-28)
либо выбрать а по заданному времени регулирования (оно должно
быть примерно на порядок больше периода шумов).
В случае инерционных каналов с одинаковыми передаточными
функциями W из (7-25) и (7-26), заменяя а на W, получим
ДаГ{~д 2 Aij'(w(p) ^)’
(7-29)
j=i
где
А =
h — р h
011 ичр) ”• 1п
(7-30)
ъ________
пп W (р)
Так как (7-30) получается из (7-19) заменой % на plW (р),
то все корни характеристического уравнения А = 0 получаются
из соотношения
где —- полуоси определяющего эллипсоида. Так как коэффи-
циент их усиления W (0) отрицателен в случае регулирования на
минимум и положителен в случае регулирования на максимум, то
соотношение (7-31) можно привести к виду
(7-32)
Отсюда следует, что для устойчивости градиентной идеальной
непрерывной системы с безынерционным объектом и одинаковыми
каналами необходимо и достаточно, чтобы были устойчивы п
изолированных каналов, представляющих замкнутую цепочку,
состоящие каждая из данного канала, интегрирующего звена и
безынерционного звена с коэффициентом усиления (рис. 7-4).
г
При инерционном объекте задача усложняется. В результате
синхронного детектирования на выходе каждого из детекторов
появляется величина, линейно зависящая не только от fr. данного
детектора, но и от остальных частных производных. Это равно-
сильно появлению перекрестных связей в системе. Получается
система многосвязного регулирования. Для таких систем метод
градиента становится уже обычно недо-
статочно эффективным.
Метод градиента представляется впол-
не естественным, когда определяющий
эллипсоид представляет собою шар. Если
же полуоси эллипсоида имеют разные
длины, то постоянные времени движения
по разным осям получаются также раз-
Рис. 7-4. личными, пропорциональными квадратами
полуосей. Получается несоответствие: чем
больше полуось, тем медленнее происходит изменение коорди-
наты по этой оси. Рассмотрим некоторые другие способы выбора
коэффициентов.
Пусть
У - У* = + Ъ22Ьх%.
Будем считать, что положение экстремума неизменно. Тогда
^- = 2ЬцАа:1, ^-=2b2^x2.
ЭАя?! 11 v dAa?a аа а
Выбираем коэффициенты а в соответствии с (7-14). Тогда,
так как функция имеет минимум у* = 0, то
Выбирая
получим
dt — — 2а11Ь11Аа;1;
= #22/^2= 2&22Ь22&х2.
ап^и= ^22^22 ==:
а
a22==V -
(7-33)
(7-34)
В тех случаях, когда воздействия по частным производным
выбираются прямо пропорциональными квадратам соответствую-
щих полуосей определяющего эллипсоида, при функции / вида
У = s b^xl,
1 = 1
(7-35)
для которой полуоси эллипсоида совпадают с координатными
осями, получается автономное экстремальное регулирование,
при котором процессы во всех каналах протекают в соответствии
с независимыми друг от друга урав-
нениями первого порядка вида
|$ + г, = 0. (7-36)
Нетрудно видеть, что в данном
случае движение осуществляется по
линии пересечения поверхности у =
= /(#!, ..., хп) с плоскостью, прохо-
дящей через ось у и начальную точку
Уа = / С*1о, •••. *по) (рис. 7-5).
В более общем случае, когда опре-
деляющий эллипсоид повернут отно-
сительно осей, задача об автономном
регулировании с равными постоян-
ными времени также может быть решена путем введения воздей-
ствий по всем частным производным в каждом из каналов.
Пусть
у = Y + + 4 ’
(7-37)
причем Ь1Ь2 — Ъ\2 > 0 и, следовательно, при у = const получаем
эллипс. Функция у имеет минимум в начале координат. Выбираем
для движения регулирующих органов уравнения:
— anfxi + albfx2\
dx2 > । *
— z= a21fXt -f- a22Jx2-
Находим
Ai == + ^12*^2 »
/x2 — — b12xx + b2x2.
Подставляя (7-39) в (7-38), получим
= (#11^1 + (а11^12 4" ^12^2) Х2 '>
-|- #22^12) х\ + (#21 ^12 “1" #22^а)*2'2 • t
(7-38)
(7-39)
(7-40)
Условия автономности получаем в виде:
^11^12 Н“ ^12^2 “
а21Л1 +а22^12 = 0; (7-41)
^11^1 4“ ^12^12 ~~
^21^12 4~ ^22^2 ,
где а — некоторая произвольно выбираемая положительная по-
стоянная. Решая четыре уравнения (7-41) с четырьмя неизвест-
ными находим
«и = — cb2\
«12 = «21 “ ^^12’ (7"42)
«22 ^^1»
_ а
где с — __ . уравнения (7-40) принимают вид:
^ + axi = 0. (7-43)
Движение по-прежнему будет совершаться в плоскости, про-
ходящей через ось у. При учете инерционностей задача соответст-
венно усложняется. В ряде случаев при этом на систему могут
быть наложены более общие условия динамической автономности,
которые будут рассмотрены ниже, в гл. 8.
7-4. Определение периодических режимов методом гармонического
баланса
В конечном результате действия релейных и шаговых систем
экстремального регулирования в системе устанавливается при
неизменных возмущающих силах периодическое движение вблизи
экстремума, получившее название «рысканье». В процессе ры-
сканья точка экстремума периодически проходится системой,
среднее же значение показателя оптимальности будет при поиске
минимума больше, а при поиске максимума — меньше экстремаль-
ного значения. Среднее (а иногда средне-квадратическое) устано-
вившееся отклонение величины показателя качества от экстре-
мума называется потерей на рысканье. Очевидно, так как нижняя
(при поиске минимума) граница у = 2/min фиксирована, то потеря
на рысканье будет тем больше, чем больше будет верхняя граница
у в процессе рысканья, т. е. тем больше, чем больше амплитуда
колебаний. Частотные характеристики линейной части системы
дают возможность установить связь между амплитудой и частотой.
В большинстве случаев в рабочей зоне с возрастанием частоты
колебаний их амплитуда уменьшается. Поэтому на первый взгляд
представляется, что с точки зрения уменьшения потери рысканья
выгоднее увеличивать частоту и уменьшать амплитуду рысканья.
До известных пределов это действительно так. Но в процессе
Рис. 7-6.
рысканья система все время осуществляет поиск экстремума.
Это означает, что параметры периодического режима должны быть
такими, чтобы система могла надежно и четко отличать полезный
сигнал от помехи, т. е. чтобы амплитуда и частота полезного
сигнала (рысканья) отличались от амплитуды и частоты помехи
примерно на порядок.
Определение параметров рысканья представляет собою важ-
ную задачу исследования, которой в литературе было уделено
достаточно много внимания.
Трудность исследования обусловлена тем, что уравнения
системы экстремального регулирования, из которых могут быть
найдены параметры рысканья, существенно нелинейны. Точное
решение этих уравнений удается выполнить лишь в простейших
случаях. Естественно обратиться к приближенным методам опре-
деления параметров рыс-
канья, в первую очередь —
к методу гармонического ба-
ланса.
При применении метода
гармонического баланса ис-
следователь сталкивается с
характерной особенностью,
отличающей экстремальные
системы от обычных нелиней-
ных систем регулирования, а
именно: характер нелинейно-
сти в этих системах таков, что
при периодическом движении регулирующего органа с частотой Q
показатель качества в идеальном случае будет совершать движе-
ния с двойной частотой и определенной фазой, в более общем слу-
чае кривая у будет иметь постоянную составляющую, составляю-
щие с частотой Q и 2Q и фазу, зависящую от Q. Конечно, движение
будет содержать и высшие гармонические, но в первом прибли-
жении они могут быть отброшены, упомянутые же выше состав-
ляющие существенны: двойная частота в кривой у наиболее
характерна и существенна, постоянная составляющая определяет
потери рысканья.
Необходимость одновременно учитывать две частоты услож-
няет применение метода гармонического баланса и он оказывается
достаточно эффективным лишь для простейших идеализированных
систем.
Начнем с рассмотрения упрощенной схемы, довольно широко
используемой в литературе [116, 219] и др.
Объект в этой схеме расчленяется на две части: нелинейную
безынерционную с характеристикой у = f (ж), имеющей экстре-
мум (звено I на рис. 7-6), и линейную инерционную с переда-
точной функцией W± (р) (звено II). В схеме учитывается также
инерционность линейного измерительного устройства передаточной
функции W2 (р) (звено III). Характеристика / аппроксимируется
параболой у = ах2 (при поиске минимума), т. е. считается симмет-
ричной. Для некоторых систем такая модель дает удовлетво-
рительное приближение.
Исследование этой модели методом гармонического баланса
было выполнено И. С. Моросановым [116].
Хотя наличие колебаний двойной частоты и существенно для
схемы, но симметричность функции f и безынерционность цент-
ральной части объекта I дают возможность считать, что для
входной переменной х существенна только первая гармоника,
а для выходной переменной у — только вторая (для нее можно
отбросить не только высшие, но и первую гармонические). Эти
обстоятельства существенно упрощают исследование.
Положим в соответствии с методом гармонического баланса
я Л sin со/. (7-44)
Тогда
у = ах2 у А2 (1 — cos 2(0/). (7-45)
Так же как и в методе гармонического баланса, удобно перейти
к комплексной форме записи переменных:
х = А№;
т/9 — '~2
У2ы — 2 С ’
(7-46)
где через z/2(0 обозначена переменная составляющая у. Постоянная
составляющая yz? — — aA2 и переменная составляющая у^
пройдя через линейное звено III, приводят к появлению на выходе
этого блока величины £ = £Ср + ^2(0 •
£ср — (0);
§2o, = 4a4W(2/®)^e
(7-47)
. л
> 1 2
Обе эти составляющие поступают на нелинейный блок НЭ,
осуществляющий переключение регулирующего органа. Уравне-
ние блока НЭ зависит от способа экстремального регулирования.
В качестве примера рассмотрим способ с запоминанием экстре-
мума, при котором реверс регулирующего органа происходит1
тогда, когда величина %, пройдя минимальное значение, начинает
возрастать и достигает порога е, т. е. при g = gmin + е и^>0.
Пусть НЭ генерирует прямоугольные импульсы постоянной высоты
| т| | — В = const, частота которых вдвое меньше частоты £ (рис. 7-7).
Сдвиг по фазе этих импульсов, измеренный относительно |, но
выраженный по отношению к основной частоте со, равен фнэ.
Переменная составляющая вектора £ равна — у W21 (2/со) | аА2х
xcos 2(х>£; срабатывание элемента НЭ происходит при выполнении
равенства *
±1W2 (2/о) | аА2 (1 - cos 2<oZ) = e, (7-48)
поэтому сдвиг по фазе, выраженный относительно частоты со,
равен
. < 1 1а *>'
фнэ = о^ = у arccosll--^
(7-49)
где через М обозначена амплитуда переменной составляющей
M = ||lV2(2/o))|aA2.
(7-50)
Будем отсчитывать все фазовые углы относительно кривой х.
Угол сдвига г/2(|) относитель-
но I/, выраженный по отно-
шению к частоте 2со, равен
—л/2, по отношению же к
частоте со он будет в 2 раза
меньше:
^о = ~Т- <7’51)
Угол сдвига фазы £2С1) по
отношению к у равен:
Ч’2 = 4аГ8Ж2
(7-52)
Основная гармоника
пройдя через звено II, получает дополнительный сдвиг
^! = arg W± (/со).
(7-53)
Амплитуда на выходе звена II в разомкнутой системе будет
равна произведению амплитуды основной гармоники Вг импульсов
на модуль И\ (у со). С другой стороны, в замкнутой системе она
должна равняться амплитуде х, т. е. величине А, Фаза же выход-
ного колебания в разомкнутой системе должна быть равна, в соот-
ветствии с методом гармонического баланса, —2л. Итак, уравне-
ния гармонического баланса в рассматриваемом случае будут
Л=51|Ж1(/«>)|; | (754)
Ч’о + '1’1 + 11’2 + г1’нэ = — 2л, J
где углы г|) определяются из уравнений (7-49) — (7-53), а Вх
связана с высотой В прямоугольной волны зависимостью
В, = ^. (7-55)
Из уравнений (7-54) с помощью любой из разновидностей
метода гармонического баланса можно найти со и Л, а следова-
тельно, и амплитуду аЛ2/2 основной (частоты 2со) гармоники
рысканья. Необходимые, но недостаточные условия устойчивости
[186] найденных автоколебаний определяются условием
д
дА
(CD) I
А
(7-56)
Для случая, когда звенья II will являются звеньями первого
порядка, т. е.
= р (7\р-|- 1) ’ ИЛ2^) = ^1Р + 1>
в [116] построены графики, позволяющие определить со7\ и потери
на рысканье, а также дано сравнение результатов, полученных по
методу гармонического баланса и точным методом.
7-5. Определение периодических режимов точными методами
Первые работы в этом направлении были выполнены В. В. Ка-
закевичем [57]. В наиболее простых случаях удается получить
точное решение на фазовой плоскости.
Пусть структурная схема системы может быть сведена к схеме,
изображенной на рис. 7-6. Передаточная функция звена III
Передаточная функция звена II:
w2(P)=±.
Уравнение звена III:
T0^ + z = y = f(z). (7-57)
Уравнение звена II:
Пусть нелинейный управляющий элемент представляет собой
релейный элемент, осуществляющий реверс сервомотора при
отклонении величины z от ее экстремума на величину в:
и = ±к, (7-59)
где к = const > 0.
Подставив (7-59) в (7-58), перенеся z в правую часть и разделив
(7-57) на (7-58), получим уравнение фазовой траектории в виде
Й=±й=;1/М-’1- <7-6»)
Построим фазовую плоскость, приняв за ось абсцисс ось х,
а за ось ординат ось z. Нанесем в фазовой плоскости статическую
характеристику, которая, учитывая (7-57), имеет вид:
2уст ~ У “ / (^)* (7-61)
Характеристика показана на рис. 7-8.
Пусть в начальный момент мы находились в точке Мо. Так как
точка MQ лежит ниже статической характеристики, то / (х) > z.
Знак правой части в (7-60) при этом может быть любым. Допустим,
что он положителен, т.е. ^^>0. Тогда движение будет происхо-
дить в сторону увеличения z и х (кривая М0М±), При пересечении
кривой М0Мг со статической характеристикой dz/dx обращается
в нуль и в дальнейшем меняет знак (кривая М1М2), Последова-
тельное построение приводит
циклу (обведен на рисунке
жирной линией). Фактически
мы имеем дело с двулистной
плоскостью, поэтому при из-
ображении на одном листе
появились взаимные пересе-
чения фазовых траекторий.
Перенесем начало коорди-
нат в точку экстремума. Если
кривая у = / (х) симметрич-
на, то достаточно для опреде-
в конце концов к предельному
if
Рис. 7-8.
ления предельного цикла рассмотреть лишь одну половину цикла.
Рассмотрим пример аналитического определения параметров пре-
дельного цикла для случая, когда у = ж2.
Уравнение фазовой траектории (7-60), выбрав произвольный
знак, например верхний, перепишем в виде
(7-62)
Это линейное относительно переменной z дифференциальное
уравнение с правой частью. Его общее решение:
г = Ае-ж/йг» + а:2 — 2кТйх + 2к2Т^ (7-63)
Пусть х0, z0 — неизвестные пока нам координаты крайней
точки цикла (рис. 7-8). Подставляя эти значения в (7-63), находим
Z = (ZO - xl + 2кТ Л - 2й2^) е + Х2—2кТ ох + 2к2Т20,
поскольку наша система работает по принципу запоминания экст-
ремума, то условие реверса, соответствующее крайней правой
точке предельного цикла (так как в ней z, пройдя минимум воз-
растает), будет z0 = z*4-8,
где через z* обозначено минимальное значение z.
Величину z* найдем, прйравняв производную dz/dx нулю:
£ = - W. + 2кТ^ - 2к^Х
X е ИтГ + 2х* - 2кТ0 = 0. (7-64)
Подставив в уравнении (7-63) z* + 8 вместо z0 и xQ вместо ж,
а в уравнении (7-64) z* + 8 вместо z0, получаем два трансцен-
дентных уравнения, содержащих два неизвестных z* и xQ. Решая
их численно или графически, найдем эти величины.
7-6. Приближенное определение периодических режимов
методом Галеркина
Задача, аналогичная рассмотренной в предыдущем параграфе,
была решена в [58] с помощью метода Галеркина. Первая публи-
кация метода Галеркина для расчета экстремальных систем была
дана В. В. Казакевичем в Трудах ЦИАМ № 1869, 1948. По про-
стоте решения в данной конкретной задаче (система с сервомотором
с постоянной скоростью) этот метод не уступает методу гармони-
ческого баланса, но он, не нуждаясь в гипотезах фильтра или
авторезонанса, дает более точные результаты.
Рассмотрим систему экстремального управления, описываемую
следующими уравнениями:
; »; <7'65>
x — xn±kt.
В системе используется сервомотор с постоянной скоростью,
переключение которого осуществляется с помощью реле, либо
в те моменты, когда у, пройдя экстремум, возрастает на величину А
(в системах с запоминанием экстремума):
Уп = Уппп + А, (7-66)
либо, когда после прохождения экстремума производная у примет
значение А (в системах с измерением производной):
j/n = A. (7-67)
Примем интервал времени между двумя переключениями за
полупериод искомого периодического движения и обозначим его
через TJ2. Введем переменную
u = t — Q, (7-68)
тогда в интервале времени, соответствующем возрастанию х,
будем иметь:
х = хи + kt = хи + к у + ки = хв + ки, (7-69)
где «в = а;н+-22.
— (7-70)
В интервале же времени, соответствующем убыванию ж, при
отсчете времени от того же момента — начала периода:
х — хн + *Го — kt = xB — ки, (7-71)
0 =С и < Tq/2.
Учитывая (7-70) и (7-71), уравнения (7-65) приведем к виду:
Л (у) = т й + У - С (хв + киу = 0;
— ro/2^M<O; (7.72)
£2(i/)=.71g + i/-c(xB-A:ur = 0;
0<u<70/2.
Периодическое решение уравнений (7-72) будем искать в виде
ОО оо
У = S с№ = Во+ У) (^jSinitou Вi cos iatu), (7-73)
i=0 i—1
где
= Cq = Bq\ С1 = Л1; С2 = Б1; С'3 = Л2; С^ — В^ ...
1 о
В соответствии с методом Галеркина составляем равенство:
0 _ Го/2
5 4(?)1Й + $ Щу)у1йи = Ъ, г = 1,2,...
- Т./2 О
Это равенство дает нам бесконечную систему уравнений для
определения параметров периодического движения:
0 _ То/2 _ )
$ £1(j/)50du+ J Z2(y)5odw=O;
- То/2 О
О _ То/2
Lr (у) А± sinam du + J Z2 (у) Xxsin аш du — 0;
— To/2 0
0 _ To/2
Lr (y) Br cos ош du + J Z2 (y) B± cos &u du = 0; (7-74)
- То/2 0
0 _ To/2
$ £x (y) 242sin2<oudu+ $ £2 (*/) Л28И12ашйи = 0;
- To/2 0
0 _ To/2
Lr (y) B2 cos 2(du du + b2(l/) 7?2cos2<oudzz = 0.
- To/2 о
Коэффициенты Во, А19 В19 А2, В2) ... как постоянные множи-
тели могут быть сокращены, и мы получаем уравнения вида:
О _ То/2
L1(y)du+ $ Z,2(y)du = 0;
- То/2 О
О _ То/2
§ Z1 (у) sin i&u du-\- J Lz (у) sin i&u du = 0;
-To/2 0
0 _ T„/2
Lr (y) cos i(f>u du-}- \ L2 (y) cos i&u du = 0.
- Г./2 0
(7-75)
Выражения Д (у) и La (у) имеют вид:
Д (у) =2 К—+ ^i) sin i&u + (toiTAi + Bf) cos i®u] +
i=l
+ Bo — cxl — c№u2 — 2cxBku;
oo
Z2 (y) = К— ^TiBi + A J sin i(du + (toiTAi + В J cos iou] +
i=l
+ BQ — cxl — ck2u2 + 2cxBku.
Члены, общие для Д (у) и Ь2 (у), очевидно, могут интегриро-
ваться за весь период, поэтому мы получаем
То/2 ( оо
$ Й [(“ iBi + Ai)sin i(t)u + (^TiAi + cos iau] +
-To/2 4=1
+ Bq — cxl-
о
J — J ( i—2cxBkuydu
-To/2 0 И
(7-76)
Интегрируя, получаем для средних значений следующее урав-
нение:
(5о-с^)То-^ + ^!^=0. (7-77)
Второе из уравнений (7-75) дает
(4{-®1Т54)Го = О. (7-78)
Для третьего из уравнений (7-75) получаем:
1 (&iTAi + Bi) То - g? (-iy - [1 - (_l)ij. (7-79)
Рассмотрим условия переключения. По условию переключения,
так как характеристики симметричны и кривые у не должны
иметь разрыва,
Подставляя эти равенства в (7-73), получаем
Во — В} + В.2 — В3 + . . . = Во 4- Вг + В2 + В% + • • •
Откуда следует, что коэффициенты В{ для всех нечетных гар-
моник равны нулю. Тогда из (7-78) следует, что и все Ai для нечет-
ных гармоник обращаются в нуль. Отсюда следует, что при сим-
метричных характеристиках у не содержит нечетных гармоник.
Но тогда из (7-79) получаем
с№Т* 2огвЩ
2л2/2 л2/2
или
(7-80)
Подставляя (7-80) в (7-77) — (7-79), окончательно получаем
О __ ^2Г0 „ ckW
“ 48 ~ 12<о2 ;
л __ 2ck*TTQ ___ 4с£2Т
“ л (1 4- <о2^2) “ ® (1 + <о2^2); 8
л _ ck*T* __ 4с&2 1 ’
“ л2/ (1 4- <о2№) “ *w2 (1 4- (o2i2T2) ‘
f = 2, 4, 6, . ..
Таким образом, все коэффициенты 7?0, А{, Вг выражены через
параметры системы с, к, Т и неизвестный период основной гармо-
ники движения сервомотора То (или частоту со). Чтобы опреде-
лить То, составим условия переключения. Ограничт
рением лишь низшей (второй) гармоники. Тогда
. _ 4с£2Т
Л2“а)(14-4о)2Т2) ;
р _ 2ck2
“ W2 (1 + 4со2Т2) ’
Экстремальные значения уэкстр определяются
= 2<о (Л2 cos 2сш* — В2 sin 2ош*) == 0,
откуда
и* = Д- arctg ~ arctg 2ш7;
2оо ° В2 2(0 ®
z/экстр = Bq 4- А2 sin arctg 2<о7 4- Вг cos arctg 2(оТ =
= В0± г______________
° со2 /1 + 4(о2Т2
Минимуму соответствует знак минус.
рассмот-
(7-82)
из
условия
2с^2
В моменты переключения и = —TqI2, 0, TqI2, ..., sin 2ош =0,
cos 2(0 и — 1
Утш + А = ^о + ^а = ^о------/ 2cfe" + А. (7-83)
* 0 2 0 (О2 /1 + 4со2Т2 1 v 7
Подставляя в (7-83) выражения для BQ и В2, определенные из
(7-81) и (7-82), получим уравнение, из которого найдется со:
2ск* (1 + /1+4о>2Т2) = ®2 (14- 4(о27’2) А.
Решение наиболее удобно выполнить графо-аналитически.
Для системы с измерением производной момент переключения
определяется из условия
= 2(0 (Л2 cos 2сш* — В2 sin 2<ou*) = A.
При этом и* = — Го/2, 0, TqI2, ...
Что дает для определения со следующее уравнение:
Ш2
8cfc2T _ д
4Т2Д
(7-84)
7-7. Приближенное приведение нелинейных систем к простейшей
модели с линейной динамической и безынерционной
нелинейной частями
В более сложных задачах (более высокий порядок уравнения,
несимметричность кривой показателя оптимальности, неприводи-
мость объекта к последовательно включаемым линейному звену
и безынерционного нелинейного элемента) метод гармонического
баланса также становится практически неприемлемым из-за его
громоздкости. Например, при несимметричных характеристиках
надо вводить в рассмотрение постоянные составляющие, первые
и вторые гармоники одновременно, что приводит к настолько
сложным нелинейным уравнениям, связывающим параметры иско-
мых автоколебаний, что метод гармонического баланса, сохраняя
свою грубость, теряет простоту и лишается всех своих преиму-
ществ.
В [58] показано, что применение к схеме «линейное звено —
симметричная безынерционная нелинейность» метода Галеркина
позволяет получить линейные уравнения, из которых можно найти
параметры нескольких гармонических составляющих автоколеба-
ний, что представляет преимущества. Но если система не приво-
дится к этой схеме, то метод Галеркина также приводит к нели-
нейным уравнениям и его удобство утрачивается. Поэтому пред-
ставляет интерес задача приближенного сведения неприводимой
нелинейной системы к простейшей.
Можно предложить следующий эвристический прием для
такого построения упрощенной модели системы: нелинейная
система n-го порядка так заменяется последовательно включенным
линейным звеном тг-го порядка с передаточной функцией W (р)
и безынерционным нелинейным элементом, характеристика кото-
рого совпадает со статической характеристикой исходной нелиней-
ной системы, чтобы линеаризованные в рассматриваемой точке
уравнения исходной и преобразованной системы совпадали.
В качестве примера рассмотрим систему, рассмотренную
в § 6-1 [уравнения (6-3)].
Обозначим х = v и перепишем уравнение (6-3) в виде
mpv + k[v2 + kQ — q = 0. (7-85)
Введем переменную у = q/v. Имеем
v = qly, (7-86)
Подставляя (7-86) в (7-85), линеаризуя в окрестности у0 =
= const, qQ = const и исключая уравнение статики, после некото-
рых преобразований получаем
Ду = тУоР~у*. bq. (7-87)
У т9оР + 2Уо (Уо — *о) 7
Уравнение статики при этом легко приводится к виду
= (7-88)
7о — *0 у #о Ло
Обратимся теперь к схеме замещения. Рассматривая (7-87)
видим, что передаточную функцию линейной части в схеме заме-
щения следует искать в виде
w(p) = K^±±, <7-89)
где К, т и Т — пока не известные параметры. Характеристику
нелинейного звена ищем в виде
У2 = Г^к> (7-90)
а коэффициент передачи линейной части принимаем равным еди-
нице. Тогда в установившемся режиме у — yQ, £0 = qQ и уравне-
ния (7-90) и (7-88) совпадут. Найдем линеаризованное уравнение
схемы замещения.
Уравнение (7-90) перепишем в виде
ly2~kQy2 = k^.
Линеаризуя, получаем
^ъУо&У “Ь Az/ =
Учитывая, что — q0, получим
Д^=1ЙН$)Д^ (7-91)
“Уо \Qo — Ло)
Далее,
Д| = ^±1д9. (7-92)
Подставляя Д£ из (7-92) в (7-91) и сопоставляя результат
с (7-87), найдем т и Т:
т = ту° = mv° = т^о~^о __
2&1<7о У о ^ivq ^i(^o—2&0)
__ m
~Уо Vyl-^oW"
у __ т?о m „ m =
2у0 (?о ~ *о) 2Аг^0 VqQ — к0
__ ш
Уо + И Уо — ^o^i
(7-93)
Мы видим, что в данном примере параметры замещающего
линейного контура не остаются постоянными и зависят от рассмат-
риваемой точки q0, Уо, параметры же нелинейного элемента
остаются неизменными. Непостоянство Гит указывает на невоз-
можность точного приведения схемы к простейшей.
Для нахождения периодического режима рысканья в системе
уравнение статической характеристики удобно привести к осям,
помещенным в точку экстремума. Введем переменные \q и Ду,
равные
Ду=у-у*; |
&У = У -?/*• J
(7-94)
Значения переменных у*, у* и и* в точке экстремума равны
У* = 2Л0;
у* = 2*1}/^;
72* — ^0
кг •
(7-95)
Уравнение статической характеристики представим в виде
у* + Ду-2^1/^+Ду = ^4-^; (7-96)
= = + (7-97)
где через р, обозначено относительное отклонение от экстремума
_____________________________Ад __ Ад
^~2ft0~g*-
Разложим выражения v и r/v в степенные ряды по р:
___ V *0 / Л I 1 .. 1 .. 2 I 1 ..3 _ 5 4 | \ .
~ 32 й + 128^ 2048 ' ''' / ’
kj 1 _
1 f \ ! 1
|/ 1+-2-Ц
*1 Л 1 , 3 2 . 5 - , 35 4 \
~ /Ло \1 '4 11 + 3211 + 128 + 2048 ‘ ‘'
Подставив (7-98) в (7-96) и вводя обозначение
Ау _ Ау_
у* 2/rx/V
получим
1 2 1 ч , 15 4
11 ~ 3211 64^ ^2048
Ограничившись первыми двумя членами, получим
Т) ~ и2 (1 - —
32 • \ 2/’
Несколько более точное приближение будет:
1 р2
^32/ М •
\ 2/
(7-98)
(7-99)
(7-100)
(7-101)
ГЛАВА ВОСЬМАЯ
ТЕОРИЯ МНОГОСВЯЗНОГО РЕГУЛИРОВАНИЯ
8-1. Общие понятия. Передаточные и весовые матрицы
многомерных объектов
Системы, в которых регулируются несколько величин, назы-
вают многомерными [61] или многосвязными [112]. Примерами
многосвязных систем могут служить: паровой котел, в котором
одновременно регулируются давление пара, его температура,
разрежение в топке, процент СО2; самолет, у которого регу-
лируются курс, угол тангажа, угол крена, скорость, высота; про-
катный стан, где регулируются скорость и толщина прокатывае-
мой полосы и т. д.
В терминах «многомерные» и «многосвязные» системы понятия
«мерности» и «связности» не совпадают с понятием порядка или
размерности системы. Так, в двухмерной системе, в которой
регулируются две величины, порядок уравнения, определяющий
размерность системы, может быть любым.
Для многосвязных систем характерно наличие связей между
регулируемыми величинами. Связи эти могут быть двух родов.
Первый род связей обусловлен физическими свойствами регули-
руемого объекта. Так, если мы увеличиваем подачу топлива
в котел, то при этом повышаются и температура и давление пара.
Увеличение скорости вращения синхронной машины одновременно
приводит к увеличению частоты и напряжения переменного тока.
Связи первого рода будем называть внутренними связями. Второй
род связей накладывается на систему по условиям, определяемым
технологическим процессом. Например, летчику могут задаваться
отдельно курс и высота полета, а скорость должна регулироваться
таким образом, чтобы обеспечивался минимальный расход топ-
лива. В этом случае требуется, чтобы часть регулируемых коорди-
нат была независимой друг от друга (курс и высота), а координаты
другой части (высота и скорость) были связаны между собою,
причем эта связь определяется выбранным для системы критерием
оптимальности. В системах контурного программного управления
копировал-ьйым станком подачи по осям связываются через контур
обрабатываемого изделия. Связи, обусловливающие требуемую
зависимость (или независимость) регулируемых координат друг
от друга, как правило, не существуют в объекте. Более того,
существующие в нем внутренние связи обычно обеспечивают не
ту зависимость, которая требуется. Устранение противоречия
между существующей и требуемой зависимостями регулируемых
координат друг от друга достигается введением дополнительных
регулирующих органов и связей второго рода, которые мы будем
называть внешними связями.
В качестве примера рассмотрим линеаризованные уравнения
паровой турбины с отбором пара [61] (рис. 8-1). На входе камеры
высокого давления первый регулирующий орган (заслонка РО1)
изменяет поступление пара в турбину. Изменение количества
поступающего пара иг в линеаризованном уравнении принимается
пропорциональным перемеще-
нию заслонки. Изменения рас-
хода Х2 отбираемого для про-
мышленных целей пара на
выходе камеры высокого дав-
ления и момента нагрузки
на турбину рассматриваются
как внешние возмущения. От-
носительное перемещение и2
второго регулирующего органа
(заслонки РО2) приводит к пере-
распределению пара между камерами низкого давления и отбора.
Выходными регулируемыми координатами турбины являются
относительное изменение хг угловой скорости ее ротора и отно-
сительное изменение х2 давления пара в камере отбора. Линеари-
зованные уравнения турбины [164, 199] имеют вид:
Z1 4“ Р11#1 Р12Ж2 — 4“ ^12^2 \
Т2 4~ Р22*^2 “ ^21^1 4“ ^22^2 ^2 •
(8-1)
Изображения по Лапласу Хл и регулируемых координат
выражаются через изображения управляющих и± и U2 и возму-
щающих Лх и Л2 воздействий так:
-^i == д- [$и?%Р 4“ &11Р22 4- &21Р12) “И
4- $12? ъР 4" &12Р22 4~ &22Р12) ^2 “ (?ъРЛ- Р22) — Pi2A2];
Х2 = — [&21^1 4~ &22^2 ~ Л2] (?1Р + Рп) >
где определитель системы А равен
А = (?1Р 4- Рп) (Т2р+ Ргг)-
(8-2)
Необходимость и достаточность наличия двух регулирующих
воздействий в данном случае поясняется следующим образом.
Пусть мы имеем лишь один регулирующий орган Ur. Тогда
U2 = 0. Если нам каким-то образом задан закон изменения
координаты хх при заданных возмущениях и то это означает,
что мы знаем желаемое значение изображения Хг. Тогда из пер-
вого из уравнений (8-2) мы можем найти требуемое управление
tj _4~ Ри) (Т*р Р22) + Р22) Ai + Р12Л2 /о эч
1 2Р + ^11?22 + Р 12^21
Подставив найденное во второе из уравнений (8-2), найдем:
у ________^2Р 4~ ?22___ v
2 К1Р 2Р + &11Р22 + Р 12^21
X [&21 (?1Р -|- рц) (Т2Р + Р22) Н“ 'iP “Ь Р22) (^21^1 ” (8’4)
Из (8-4) можно видеть, что при наличии только одного регу-
лирующего органа х2 оказывается связанным через объект с коор-
динатой и уже не может изменяться произвольно, если зафик-
сировано изменение^. Добавление второго регулирующего органа,
если оно произведено правильно, дает возможность управлять
одновременно изменениями х± и х2 в желаемом направлении.
Необходимым и достаточным условием осуществимости регу-
лирования нескольких координат в системе является условие
равенства числа регулирующих органов числу регулируемых
координат, но число регулирующих органов может быть и больше
числа регулируемых координат. Тогда помимо изменения регули-
руемых величин по желаемому закону мы получаем возможность
осуществить дополнительные функции, обеспечивающие качество
регулирования. Так, наличие двух регулирующих органов в по-
воротно-лопастной турбине (направляющего аппарата и механизма
поворота лопастей рабочего колеса) позволяет помимо регулиро-
вания скорости оптимизировать процесс регулирования, обеспе-
чивая наивысший к. п. д. Дополнительные регулирующие органы
часто применяются для форсировок переходных процессов при
больших отклонениях от заданного состояния. Таковы, например,
релейные управляющие органы в цепях возбуждения, осуществ-
ляющие форсировку возбуждения при больших отклонениях и
отключаемые при приближении системы к заданному состоянию;
таковы системы грубого отсчета в следящих системах, устройства
форсирующего впрыска в паровых котлах и т. д.
Математическое описание объекта упра-
вления. Состояние объекта в любой момент времени выражается
либо через существующие физически, наблюдаемые и измеряемые
координаты, либо с целью упрощения или унификации урав-
нений — через абстрактные координаты — величины, не всегда
имеющие физический смысл, но являющиеся функциями физи-
ческих координат. Обозначим реальные координаты объекта
через у., абстрактные координаты — через х{.
На основании изучения физических процессов, протекающих
в многосвязных объектах, получают математическое описание
объектов посредством уравнений, связывающих реальные коорди-
наты уг объекта с управлениями и возмущениями
Будем считать, что число координат равно числу управлений.
Это не снижает общности, так как если число управлений меньше
числа координат, то мы просто полагаем в уравнениях часть
управлений тождественно равными нулю. Если же число управ-
лений оказывается большим числа координат, то задача становится
неопределенной и для определенности необходимо либо объеди-
нить управления в группы, либо ввести в уравнения дополнитель-
ные координаты.
Ниже рассматриваются линейные многосвязные объекты, опи-
сываемые обыкновенными линейными дифференциальными урав-
нениями с постоянными коэффициентами. В общем случае уравне-
ния таких объектов могут быть приведены к виду:
п п т
S аИ Уз = 2 bU W из + 2 = 1, 2, ..., (8-5)
3 = 1 3 = 1 3 = 1
где D = d/dt, ai} (Z>), (Z>), (D) — полиномы от D.
Совокупности координат у = {у1? у2, ..., уп}, управлений
u — {^i, zz2, ип} и возмущений 12, ..., можно
рассматривать как векторы, соответственно, состояния системы,
управления и возмущения, и уравнения (8-1) записать в более
компактной матричной форме
A(D)y(t) = B(D)u(t) + C(D)b(t),
(8-6)
где Л, В и С — операторные матрицы:
-«и (D) 6712 (^) • ’ • «ш(7>)'
4(27) = а21 С®) а22 (^) • • • я2п (77)
[пХ п] 1 ' О & £ 2 ап2 (77) • • • ^пп (^)-^
7? (77) = [пхп] J>nl(Z)) . ••• bnn(D)
(8-7)
<7 (77) = >и(77) .. • янп (77)-
cmi(77).. 1 • ^mn (P)
[mXn]
У>
и и 1 — матрицы-столбцы
у(0 = vAt)
[nxl] ...
-уп (0 -
Mi (О
и(0 =
[иХ1] • • •
-«п (О
Л(0 -
1(0 =
[mxl] • • *
К (о J
(8-8)
Расширим понятие передаточных функций, введя понятие
передаточной матрицы системы.
Уравнение для изображений по Лапласу при нулевых началь-
ных условиях, полученное из (8-6), будет
A(p)Y(p) = B(p)U (р) + С (р)А.(р)9
где У, U и А — лапласовы изображения функций у, и и 1 соот-
ветственно.
Умножая слева на обратную матрицу А"1 (р), получим
У (р) = А'1 (р) В (р) U (р) + Л-i (р) С (р) А (р).
Матрицу G (р), равную
G (р) = А~> (р)В (р) = А (р) В (р), (8-9)
в которой А (р) = [А^ (р)]т — присоединенная матрица для мат-
рицы А и А^ — алгебраические дополнения элементов назо-
вем передаточной матрицей объекта по отношению к управляющим
воздействиям. Условием существования передаточной матрицы
является линейная независимость исходных уравнений А (р) ^0.
В результате выполнения операций умножения над матрицами,
получим G (р) в виде матрицы
wl2.,
G(p) = W22.. • • w2n (8-10)
Wn2. Wnn^
Элементы этой матрицы = У JU $ представляют собою
передаточные функции для различных координат по соответствую-
щим управлениям.
Аналогично, заменяя В и С, можно получить передаточную
матрицу для координат по соответствующим возмущениям. В тео-
рии многосвязных систем вводится также понятие весовой или им-
пульсной переходной матрицы б?и(£, т), элементами которой явля-
ются весовые или импульсные переходные функции gnij (t, т),
равные реакциям координаты на управляющее воздействие типа
дельта-функции == S (t — т) в момент t = т при нулевых пред-
начальных условиях:
Г Su
^12 ••• Sin
_Snl
Srft • • • Snn
В этой матрице Z-й столбец есть частное решение неоднородной
системы (8-6) при ut = 6 (t — т) и при всех остальных uif равных
нулю. Частное решение системы (8-6) можно найти следующим
образом:
t
У (Очастн = \GK(t-r)u (т) dr. (8-10')
io
Для любой реальной системы весовая матрица удовлетворяет
условию
GH(Z —т) = 0, при t>Z. (8-11)
Физический смысл условия (8-11) состоит в том, что движение
в системе не может предшествовать вызвавшей его причине.
Условие (8-11) называют часто условием физической реализуе-
мости.
Весовая и передаточная матрицы связаны соотношениями
G (р) = L {Си (0} = (0 e~ptdt-, 0 а-Н 00 GK(t) = L^{G(p)} = ^. j G(p)eptdp. а—joo (8-12)
В этих выражениях L есть символ прямого, a L 1 — обратного
преобразования Лапласа.
Пример. Рассмотрим систему регулирования двух величин ух и у2,
исходные уравнения которой имеют вид:
«и (В) У1 + «12 (-0) У2 = bn (В) Ui + ^12 (В) и2 + cii Ф) + ci2 (В) Х2;
a2i (В) У! -|- а22 (В) у2 = 621 (D) иг + Ь22 (D) и2 + c2i (D) %i -f- с22 (D) Х2.
Имеем
л. . ри (?) «12 Ср)]
а Ср) == t ч , •»
L«21 (?) «22 (p)J
в( . = RllCP) *12 (р)1
W 1А1(р) б22 (/>)]’
'£YI
и =
«11 «12
«21 «22
— «11«12 — «12«21*
Алгебраические дополнения А у равны
Ац = Я22» -^12 = — «21» *^21 ~ — «12» -^22 = «!!•
Здесь и в дальнейшем для сокращения записи опускаем в операторах
обозначение аргумента р. Присоединенная матрица равна транспонирован-
ной матрице алгебраических дополнений
Mil Аг]Т Mil All Г «22 «12
>4 = —• —
Мг1 -^22. М12 ^22J _— «21 «11J
Произведение матриц А и В равно
% Г «22611 — «126ц «22612 — «12622I
ЛВ = I
L— «216ц + «11621 — «21612 + «I1622J ’
Выражение GU равно произведению АВ на матрицу-столбец U, делен-
ному на |Л| :
ABU = 1 [ ^22^U — Л12^21) + (а22^12 — ^12^22) ^2!
I А I L(a 11Л21 а21^11) #1 + (а11а22 — я21^1г) 2J
Множители при U± и U2 называются передаточными функциями для соот-
ветствующих координат по соответствующим управлениям.
тхт ^1 Л22^11 a12^21 ТТ7 ^1 а22^12 Л12^22 „ m „
И/11=7?- =-------------, уУ12= ТГ =-------------- И Т. Д.
(71 #11^22 — й12а21 U 2 Яцй22 — й12я21
Простейшим видом системы многосвязного регулирования
можно считать систему с сепаратным подключением регуляторов.
При этом нужно, для каждой регулируемой величины выделить
соответствующий ей регулирующий орган, который оказывает на
нее наибольшее влияние. Так, если в закрытой камере одновре-
менно регулируются температура, давление и влажность воздуха,
то регулирование температуры следует осуществлять, изменяя
поступление тепла от нагревателя, давление — изменяя подачу
воздуха от компрессора, влажность — посредством увлажнителя,
хотя изменение каждой из этих величин приводит к некоторому
изменению всех остальных. Это означает, что в уравнении (8-6)
для координаты у{ отношение коэффициентов feu/a.. при щ долж-
но быть заметно больше остальных отношений коэффициентов
bi}laih> b i к.
На рис. 8-2 изображены некоторые структурные схемы систем
двухсвязного регулирования. На этих схемах О — объекты регу-
лирования; г/i и г/2 — регулируемые координаты; Р1 и Р2 — регу-
ляторы величин уг и у2 соответственно; РО1 и РО2 — регулирую-
щие органы в каналах уг и у2.
Общая структурная схема раздельного подключения двух
регуляторов изображена на рис. 8-2, а. Связи между регулируе-
мыми величинами в данном случае осуществляются только через
объект.
Раздельное подключение регуляторов эффективно, например,
когда постоянные времени процессов достаточно сильно отличаются
друг от друга, и регулятор в одном из контуров успевает осуще-
ствить процесс регулирования практически еще до того, как
начал действовать регулятор второго контура. Так, долгое время
раздельно осуществлялось регулирование частоты и напряжения
синхронных генераторов, так как контур регулирования частоты,
включающий медленно действующие сервомотор и регулятор
скорости, обладал постоянными времени, на порядок большими,
чем контур регулирования возбуждения. В настоящее время,
когда постоянные времени этих двух контуров сближаются,
начинают прибегать к введению связей между регуляторами
частоты и напряжения [62, 161, 198].
Уже давно было замечено, что такая схема с сепаратным вклю-
чением регуляторов не наилучшая и что наиболее простой путь
улучшения качества регулирования состоит в наложении допол-
нительных связей между каналами для отдельных координат.
Связи можно накладывать в различных местах; так, например,
в зависимости от конструктивных или схемных особенностей можно
связывать между собою либо входы регуляторов (рис. 8-2, б),
или же их выходы (рис. 8-2, в), или непосредственно регулирую-
щие органы (рис. 8-2, г); могут применяться также и смешанные
связи; например, на рис. (8-2, д) показана схема, где дополни-
Рис. 8-2.
тельная связь от у2 к у± выполнена на входе регулятора Р1, а от
У1 к ^2 — на выходе регулятора Р2. Связь может в одном из кана-
лов отсутствовать. Так, на рис. 8-2, е изображена каскадная схема
включения регуляторов, где выход регулятора у2 воздействует
на вход регулятора но связи от уг к у2 нет. Каскадная схема
обычно оказывается удобной при связывании регуляторов с раз-
личающимися постоянными времени: медленно действующий регу-
лятор одновременно с выполнением своей основной функции дей-
ствует на вход быстродействующего регулятора, изменяя его
уставку. На рис. 8-2 показана лишь часть возможных типов
связей, на самом деле их намного больше даже для двусвязной
системы, так как к изображенным на рисунке связям между и и у
могут добавляться связи между возмущениями и управлениями
или возмущениями и координатами входов или выходов регуля-
торов (в так называемых комбинированных системах).
На рис. 8-3 и 8-4 показаны примеры некоторых реализаций
различных типов связывания регуляторов. Рис. 8-3 изображает
схему регулирования частоты (РЧ) и напряжения (РН) однофаз-
ного синхронного генератора Г, приводимого во вращение дви-
гателем постоянного тока Д [198]. Измерительным элементом
регулятора напряжения служит управляющая обмотка 1 магнит-
ного усилителя, подключенная к напряжению генератора через
выпрямитель 5. К рабочим обмоткам 2 и 3 магнитного усилителя
подключена через выпрямитель 6 катушка 7 угольного регулятора
напряжения, угольный столбик 8 которого включен последова-
тельно в цепь обмотки возбуждения генератора ОВГ. Посредством
выпрямителя 10 и стабилизатора 9, питающего обмотку подмагни-
чивания 4 магнитного усиления задается опорное напряжение, на
отклонение от которого реагирует схема.
Измерительным элементом регулятора частоты служит резо-
нансный контур II, через выпрямитель 12 питающий управляющую
обмотку 13 магнитного усилителя. К рабочим обмоткам 14 и 15
последнего через выпрямитель 18 включена обмотка возбуждения
ОВД двигателя Д. Обмотка 16 магнитного усилителя, шунтирую-
щая последовательную обмотку 19 двигателя, служит корректи-
рующим звеном, демпфирующим качания ротора. Связи между
регулируемыми координатами, осуществляющиеся, если нужно,
на входах регуляторов, показаны прерывистыми линиями. Связь,
осуществляющая воздействие по частоте на вход регулятора на-
пряжения, действует через конденсатор связи 20; связь напря-
жения со входом регулятора частоты осуществляется посредством
обмотки подмагничивания 17 магнитного усилителя в канале
частоты, подключенной к напряжению обмотки возбуждения гене-
ратора ОВГ, снимаемого с делителя напряжения 21,
Рис. 8-4.
На рис. 8-4 изображена схема регулирования ректификацион-
ной колонны для разделения бинарных нефтяных смесей [60, 175].
На рис. 8-4 показаны следующие основные части установки:
колонна 7, конденсатор — холодильник II, флегмовая емкость III
и кипятильник (ребойлер) IV, Сырье (двухкомпонентная нефтя-
ная смесь) поступает в колонну I по трубе 1, В кипятильник IV
по трубе 2 поступает пар, который смешивается с жидкостью и
в виде парожидкостной смеси по трубе 3 подается в колонну.
Основными элементами колонны являются тарелки, на которых
происходит контакт между разделяемой смесью и восходящим
паровым потоком. Отдельные фракции смеси — тяжелая (мазут)
и легкая (бензин) — имеют различные температуры кипения.
В результате контакта восходящие пары обогащаются на тарелках
низкокипящей компонентой, а находящаяся в колонне жидкость —
высококипящей.
Для создания восходящего парового потока и нисходящего
потока жидкости производится отбор тепла из верхней части
колонны: пар по трубе 4 поступает в конденсатор 7/, в котором
охлаждается потоком жидкости, подводимой по трубе 5. Из кон-
денсатора конденсат направляется в бак — флегмовую емкость III,
откуда часть его в виде флегмы возвращается по трубе 6 в колонну
для орошения, а оставшаяся часть по трубе 7 выводится как
готовый продукт — дестиллат. По трубе 8 осуществляется сброс
излишнего газа.
На схеме показаны следующие регуляторы: регулятор 9
соотношения количеств флегмы и сырья, на вход которого подаются
воздействия от расхоломеров 10 потока сырья и 11 — потока
Рис. 8-5.
флегмы, а выход воздействует на вен-
тиль подачи флегмы 12; регулятор тем-
пературы дестиллата 13, получающий
воздействие от датчика температуры 14
и управляющий вентилем 15 подачи
охлаждающего агента в конденсатор;
регулятор 16 давления в колонне, вход
которого связан с датчиком давления
17, а выход воздействует на вентиль 18
трубы 8 сброса газа; регулятор уровня
жидкости 19 в кипятильнике измеряет уровень и управляет вен-
тилем подачи 20 тяжелой фракции из колонны в кипятильник.
Эти четыре регулятора включены сепаратно. Регулятор 21
расхода дестиллата, реагирующий на показания расходомера 22
и воздействующий на выходной вентиль 23 получает корректирую-
щее воздействие от регулятора уровня флегмы 24, т. е. регуля-
торы 24 и 21 включены каскадно. Каскадно включены также регу-
лятор давления пара 25, реагирующий на показания датчика
давления 26 и воздействующий на вентиль 27, и корректирующий
его уставку регулятор температуры пара 28, реагирующий на
показания датчика температуры 29. Несмотря на весьма большое
многообразие возможных вариантов включения связей, их иссле-
дование можно выполнить на основе единообразного по струк-
туре математического описания. Это обстоятельство связано с тем,
что, применяя правило переноса воздействий и связей, описанное
в ч. I (стр. 83—84), при котором соответствующим образом видо-
изменяются передаточные функции звеньев, связанные с перено-
симыми связями, можем преобразовать структурную схему любой
многосвязной системы к одному из типов. В качестве такого общего
типа выберем схему, в которой внешние связи между каналами
выполнены на входах регуляторов, а внутренние связи действуют
па вход объекта (рис. 8-5). На рисунке изображен один из каналов
регулирования по координате yk. Связи показаны как от различ-
ных регулируемых координат, так и от возмущений, т. е. система
комбинированная.
В дополнение к введенным ранее обозначениям введем в рас-
смотрение передаточные функции регуляторов по отклонению
(р) для управления по координате у^ и регуляторов по на-
грузке Qik для управления иг по нагрузке Тогда, видоизменив
соответственным образом уравнения объекта, прибавив к ним
уравнения регуляторов, получим уравнения системы в виде:
Y(p) = G(p)U(p) + P(p)A(p); 1
U (р)=-R(p) Y (p) + Q(p) Л (p)J }
где Р (р) — передаточная матрица объекта по возмущениям.
Знак минус во втором уравнении учитывает отрицательный
характер основной обратной связи, осуществляемой регулятором
по отклонению. Подставляя U (р) из второго уравнения в первое,
получаем после некоторых преобразований
[G (р) R (р) + Е] У (р) = [Р (р) - G (р) Q (р)] Л (р), (8-14)
где Е — единичная матрица.
8-2. Управляемость и наблюдаемость
Рассмотрим систему, структурная схема которой показана
на рис. 8-6, а. В этой системе включены последовательно два
линейных звена, одно из которых имеет передаточную функцию
Wr (р) = 7—а ДРУгое ^2 (р) = ~т »
1 vr/ (р + ^)(р + с) р + а
Передаточная функция последовательного соединения таких
звеньев вследствие сокращения множителей р + а в числителе
и знаменателе имеет второй, а не третий порядок, в то время
как сумма порядков передаточных функций звеньев равна трем.
Однако физически множители р + а присутствуют, и можно
ожидать, что в результате сокращения их мы теряем информа-
цию о каких-то динамических свойствах системы. Это действи-
тельно так. Передаточная функция представляет собою отношение
преобразований Лапласа выходной и входной величин при нуле-
вых предначальных условиях. Если же предначальные условия
отличаются от нулевых, то отношение изображений выхода и
входа уже не определяется классической теоремой о последова-
тельном соединении звеньев. С помощью обычной передаточной
функции можно исследовать лишь такие движения, которые об-
условлены входным сигналом при нулевых предначальных усло-
виях во всех звеньях. Этот факт легко обнаруживается в не-
сложных системах, когда устанавливаем связь между реальными
координатами. Но в сложных системах для упрощения уравнений
(например, для приведения их к канонической форме или нормаль-
ной форме Коши и т. п.) часто сразу же при описании системы вво-
дят новые координаты и исследуют, не прибегая к составлению пе-
редаточных функций. Совокупность величин, которые мы называли
координатами объекта, характеризует состояние объекта в каж-
дый данный момент времени. Определение понятия «состояния»
динамической системы, данное Р. Калманом [61, 232, 233], фор-
мулируется так: состояние динамической системы — это наимень-
ший набор чисел, который необходимо точно определить в момент
времени t = £0, чтобы была возможность, пользуясь математиче-
ским описанием системы, предсказать ее поведение в любой момент
времени t > £0.
Этот наименьший набор чисел, упомянутый выше, и представ-
ляет собою совокупность координат системы. Заметим, что факти-
чески это совокупность координат модели, а не реального объекта.
Координаты не обязательно совпадают с выходами системы, т. е.
с физическими величинами, интересующими нас в процессе управ-
ления, которые наблюдаем и которыми управляем. Так, при работе
синхронного генератора мы обычно интересуемся частотой, напря-
жением, активной и реактивной мощностью, но состояние и пове-
дение генератора не может быть полностью описано лишь этими
четырьмя величинами, так как уравнение модели одного лишь
генератора с двумя демпферными обмотками имеет седьмой поря-
док, если же составлять уравнения для комплекса котел — тур-
бина — нагрузка, он будет еще выше, а число координат должно
равняться порядку уравнения системы.
С другой стороны, можно указать на ряд случаев, когда с целью
упрощения математической записи вместо реальных координат
вводят в рассмотрение абстрактные координаты, являющиеся
функциями реальных, но позволяющие привести уравнения
системы к более компактной форме (нормализованной, канони-
ческой, форме Вышнеградского и т. д.).
Будем рассматривать линейный стационарный объект. Его
уравнения в векторной форме в общем случае можно записать
в виде
У^Сх,
(8-15)
где х = {#!, •••> — n-мерный вектор состояния системы,
компоненты этого вектора i = 1, 2, ..., п — абстрактные
координаты системы; у = {ух, у2 •••» Ущ} — вектор выхода системы;
компоненты которого суть реальные координаты; и = {их, и2,
..., иг} — вектор управления, А, В и С — числовые матрицы.
Для рассмотрения управляемых систем удобно ввести понятие
пространства состояний или фазового пространства X, которое
представляет собою совокупность всех возможных значений
векторов х^Х.
Выберем в пространстве X такой набор векторов е = {еп е2,
..., еп}, чтобы любой вектор х можно было выразить через его
компоненты следующим образом:
х = + е2х2 +... + епхп. (8-16)
Совокупность векторов е = ..., еп} образует базис про-
странства X. Так, например, если е есть совокупность векторов
единичной длины, направленных по взаимно перпендикулярным
осям n-мерного пространства X, т. е. совокупность ортов, то мы
имеем дело с обычным эвклидовым n-мерным пространством.
Выбрав другой базис е = {^, ..., еп\ так, чтобы имело место ра-
венство х = е1х1 + ... + епхп, получим новое пространство X.
Зададим в пространстве состояний X два множества Гх CZ X и
Г2 CZ X. Система будет управляемой относительно множеств Гх и Г2,
если существует такое управление u (t), определенное на конечном
интервале О t Т, которое переводит изображающую точку
в фазовом пространстве X из подобласти Гх, в подобласть Г2 за
конечное время t = Т. В дальнейшем ограничимся рассмотрением
случая, когда исходной точкой может быть любая точка про-
странства X, т. е. область совпадает со всем пространством X,
а конечной точкой является начало координат, т. е. Г2 вырож-
дается в точку, лежащую в начале координат. Для этого случая
состояние х объекта считается управляемым, если имеется управ-
ление и (£), определенное на конечном интервале О t Г,
такое, что из интеграла движения
х(/) = (1ф, х(0)] (8-17)
следовало бы
х(71)-Ф[7, х(0)] = 0. (8-18)
Если каждое состояние управляемо, то система называется
полностью управляемей. Но для установления факта, будет дан-
ная система управляемой или нет, удобнее сформулировать
несколько иное определение управляемости [61, 171].
Пусть дана система (8-15) с базисом е. Введя некоторое неособое
линейное преобразование
х = /?х, |Д|^0, (8-19)
где R — числовая матрица, мы преобразуем систему (8-15) в дру-
гую систему
= Лх + 5и,
у = Сх
с другим базисом е. Матрицы Л, В и С связаны с матрицами
Л, В и С соотношениями
A=RAR Ч
(8-20)
Перейдем к изображениям переменных L {х} и L {и} по Лапласу
при нулевых начальных условиях. Мы получим
L{x} = (Ep- А) 1В,й (8-21)
где Е — единичная матрица.
Для некоторой компоненты вектора L {хг} получим
L {хг\ — д {^7 А + ^г2и2 + • • • + AjZUz}, (8-22)
где Д = \(Ер — Л)| — определитель системы; Да, Д?2, ..., AiZ —
миноры определителя присоединенной матрицы. Может оказаться,
что все До«, 7 = 1, 2, ..., Z обращаются в нуль, тогда хг совершенно
не будет зависеть от управлений и1ч ..., uz. В этом случае говорят,
что координата хг полностью инвариантна по отношению к воз-
действиям щ или неуправляема по этим воздействиям.
Если все координаты хг при всех возможных базисах е управ-
ляемы по всем воздействиям, то система будет полностью управ-
ляемой. Может оказаться, что при некотором базисе е какая-
либо из координат хг будет неуправляемой по одному из воздей-
ствий но управляема по другим воздействиям, остальные же
координаты управляемы по всем воздействиям. В этом случае
система также будет полностью управляема, поскольку можно
выбрать вектор и, переводящий систему в заданное состояние, но
она будет частично инвариантной по координате хг и управле-
нию Uj.
Если же при некотором базисе е некоторая координата хг
оказывается совершенно неуправляемой, то система будет непол-
ностью управляемой.
В неполностью управляемой системе уравнения (8-20) можно
разбить на следующие группы
= АцХ1 + Л 12х2 + Ви;
(8-23)
у = Сх.
Для упрощения черточки над буквами, указывающие на про-
извольный выбор базиса, опущены.
х2 — это совокупность тех х^ которые оказываются полностью
не зависящими от управлений и ни непосредственно, ни через
компоненты векторов х1.
Проиллюстрировать полную независимость х2 от и можно
на следующем простейшем примере. Пусть система — двухмерная,
и х1 = хг и х2 = х2 с одним управляющим воздействием и. Из
уравнений . , , _ .
*1 = «11*1 + «12*2 + Ъи, 1
находим
£{*i} =
{^2} —
I bu — a12 I
I 0 P — «22 I ____________(P — «22) u_________
\P — «11 --«12 I P2 ---- («11 + «12) P + «11«22
I 0 p — Л22 I
|p —«11 bu\
I 0 01
p2 — («11 + «22) P + «11«22 ’
т. e. координата x2 не выражается через управление и.
Чтобы установить, будет ли система полностью управляемой
при всех возможных базисах, Каллманом был выведен критерий
управляемости, который мы приводим без доказательства.
Размерность v управляемой части системы [т. е. порядок
первой группы уравнений (8-23)] ^== Л11х1 + ^12х2 + ^и сов-
падает с рангом матрицы
= АВ, (А)*В, (Л)" (8-26)
Если v = п, система полностью управляема; если 0 < v < п
система неполностью управляема; если v = 0, то система пол-
ностью неуправляема.
Если система неполностью управляема, то в ней можно выде-
лить управляемую часть с координатами х1 и неуправляемую
часть с координатами х2. В обыкновенных линейных системах
неуправляемая часть возникает тогда, когда часть полюсов пере-
даточной функции системы компенсируется нулями, т. е. когда
в числителе и знаменателе передаточной функции появляются
одинаковые множители. Обычно эти множители сокращают,
понижая тем самым порядок уравнения. Однако при этом часть
информации о возможных поведениях системы теряется и опи-
сание системы становится неполным, справедливым лишь в опре-
деленных режимах. Проиллюстрируем это на некоторых примерах.
Пусть система с одной координатой х и одним управляющим
воздействием и описывается дифференциальным уравнением
(p + a)N (р)х = (р + а)М (р)и, (8-27)
т. е. числитель и знаменатель передаточной функции содержат
одинаковый операторный множитель (р + а). Обычно этот мно-
житель сокращают, передаточную функцию записывают в виде
(8-28)
и заменяют уравнение (8-27) уравнением
N(p)x — M(p)u. (8-29)
Проиллюстрируем, что подобная замена справедлива не всегда.
Применим к (8-27) преобразование Лапласа
(р + a) N (р) L {а:} = (р + а) М (р) L {и} + No (р, х^>, uty),
где Nq — полином от р, зависящий от начальных условий. Если
предначальные значения х и и в момент приложения и нулевые,
то Nq равно нулю и уравнение (8-29) оказывается справедливым
для нахождения переменной х. Однако если ищутся промежуточные
координаты системы, исключенные
Рис. 8-6.
при составлении уравнения
(8-27), или же если имеются
другие воздействия на систе-
му в промежуточных звеньях,
то в переходном процессе
может появиться составляю-
щая, пропорциональная еа\
которая не обнаруживается,
если переходный процесс
отыскивается с помощью
только передаточной функ-
ции (8-28).
Рассмотрим пример [61].
Одномерная система состоит
из последовательно включен-
ных звеньев с передаточными
функциями (р) = е) (звено на входе) и WJp) =
(звено на выходе). Схема показана на рис. 8-6, а. Полная система
уравнений имеет вид:
(р + а)х = у + и2;
(Р + Ь) (р + с)у = (р + а) иг
(8-30)
При отсутствии воздействия и2 в промежуточном звене множи-
тель (р + а) (если нас интересует только х) можно сократить и
найти х из решения неполного уравнения
(р + Ь) (p + c)^ = ttr
Пусть оба воздействия (на входе системы иг — е~& и в проме-
жуточном звене и2 = const) прикладываются к системе в один
и тот же момент времени t = 0 при нулевых предначальных усло-
виях. Тогда изображение Лапласа для решения уравнений (8-30)
L {uj L {ц2} ________________________1______________. и2
(р + Ь) (р + с) “Г р + а ~~ (р + Р) (р + Ь) (р + с) + р (р + а)'
Решение уравнения по формуле Хевисайда
х (А - -1- е~Ы j- e~ct 4-^(1- e'ai)
Решение сокращенного уравнения совпадает при и2 = 0 с полу-
ченным решением.
Величина у. равная решению второго из уравнений (5-18)
__ (а — Р) (а — b) e~bt (а — с) ect
У ~ (&-р)(с-р) + (р-6) (с—6) + (р-С) (6-С) ’
не может быть найдена из сокращенного уравнения. Последнее
обстоятельство оказывается связанным с неполной управляе-
мостью системы.
Для проверки управляемости по воздействию иг с помощью
критерия (8-26) положим и2 = 0 и приведем уравнения (8-30)
к нормальной форме. Можно попытаться привести их к форме
(8-23). В данном случае это нетрудно, но в системах высокого
порядка это связано с довольно громоздкими выкладками. Совер-
шенно произвольно положим х = у = у2 и иг = и. Первое
из уравнений (8-30) принимает при этом сразу нормальную форму:
а^ + Хг (8-31)
Второе уравнение приведем к виду
~dt — а22х2 + a23xs + b2u;
dx, (0-0Z)
+ ®32^-2 = ®33^3
Приведение (см. ч. I, стр. 58—60) выполним, приравнивая
определители Д и Ди системы (8-32) и операторы второго урав-
нения (8-30):
Д =
Р ^22 ®23
^32 Р ®33
Ап =
ъ2и
Ъ3и
— (Р ~ я2г) (Р ®3з) ~ ®23®32 —
= (Р + Ъ)(р + с).
®23
Р ®33
= [Ь2 (Р - ®3з) + Мгз] и = (р + а)и.
(8-33)
(8-34)
Уравнения (8-33) и (8-34) содержат пять неизвестных, из
которых, так как уравнений два, можно произвольно выбрать
три. В простейшем варианте полагаем а32 == 0, тогда из (8-33)
можно видеть а22 == — Ь, тогда а33 = — с; из уравнения (8-34)
следует = 1; — 62а33 + 63а23 = с + 63а23 = а.
Выбрав третью величину Ь3 = 1, получим а2з = а — с. При
таком выборе уравнения (8-32) принимают вид:
= — Ьх2-\-(а — с)х3 + и;
dx* .
-^ = -С*з + ®-
(8-35)
Находим выражения матриц, входящих в (8-26):
ГО]
В= 1
11
АВ =
1
а— Ъ — с
А2В =
-(Ь + с)
Ь2 — (а — с) (& + с)
с2
Нетрудно убедиться, что определитель матрицы U равен
нулю, что свидетельствует о неполной управляемости системы.
Нетрудно также видеть, что существуют миноры второго порядка
этой матрицы, отличные от нуля (в частности, С733 = 1), следова-
тельно, ранг матрицы равен двум и порядок управляемой части
равен двум.
Физические величины, характеризующие полностью или ча-
стично состояние системы, которые мы можем непосредственно
измерять, называются наблюдаемыми (выходными) величинами.
Координаты системы, полностью описывающие ее состояние,
могут не совпадать с наблюдаемыми величинами и число их может
быть больше, чем число наблюдаемых величин. Но если любая
из координат системы может быть выражена через значения на-
блюдаемых выходов, то система будет наблюдаемой. Если же
некоторые из координат не могут быть выражены через наблюдае-
мые выходы, то система будет неполностью наблюдаемой.
В неполностью наблюдаемой системе уравнения (8-20) можно
разбить на следующие группы:
^А^+В^,
^ = Л21х1 + А^х2 + В2и; ’
y=G^.
(8-37)
Для этих уравнений характерно, что координаты х2 не входят
ни в выражения для у, ни в первое из уравнений, содержащее
только координаты х1 первой группы. Поэтому координаты х2
ненаблюдаемы.
Проиллюстрировать независимость х2 от у можно также на
следующем простейшем примере. Пусть система двухмерная,
х1 = ггх, х2 = rr2, а у и и одномерные. Рассматривая и как неиз-
вестную, а у как известную величину, составим систему:
(Р - au) хг - bju = 0; ]
- a2lxt + (р - а22) х2 - Ь2и = 0; ? (8-38)
СЛ = 2/- '
Находим
р — «и о —
— ^21 0 — Ь2
Г d L{y} 0 ^2? + £1^21 ^2gll Т f.A
1^2 J Р — а11 0 — Cibi(p~a22) ХУ1’
— а21 Р — й22 — ^2
ех 0 0
Таким образом, х2 выражается через у посредством дифферен-
циального уравнения и зависит не только от у, но и от t.
Калманом [232] установлено, что размерность v наблюдаемой
части системы (т. е. порядок первой группы уравнений)
1 1 I ту
= Л11х14-//1и совпадает с рангом матрицы
7 = АТСТ, (AtYCt, (Л7)”-1 Ст|. (8-39)
Если v = п, система полностью наблюдаема; при v < п и v = 0
она, соответственно, неполностью наблюдаема или полностью
ненаблюдаема. В неполностью наблюдаемой системе можно выде-
лить полностью наблюдаемую часть с координатами х1 и ненаблю-
даемую часть с координатами х2. Появление ненаблюдаемой
части также связано с компенсацией части полюсов передаточной
матрицы ее нулями. Такая компенсация приводит к появлению
либо неуправляемой, либо ненаблюдаемой части, либо их обеих
вместе.
В рассмотренном выше примере [уравнения (8-31), (8-32)],
если наблюдаемой величиной является только координата х = ях,
то, так как х = {ггх, 0, 0}, С = | 1, 0, 0 |.
Имеем
'—а 0 0 И ~—а
лт = 1 — Ъ 0 , ст = 0 , АТСТ = 1
0 а —с —с oJ . 0
(лт?=
а2
— (а + Ь)
а —с
0 0
Ь2 0
— (а — с) (& + с) с2
(Ат')2Ст =
0
Ь2 ;
— (а -с)(Ь + с).
Определитель матрицы V отличен от нуля, поэтому система
полностью наблюдаема. Из уравнений (8-31) и (8-32), выражая
z2 и через наблюдаемую координату хг, получаем
хг = (Р + а)
т. е. в любой момент времени эти координаты выражаются через
наблюдаемую величину хг и ее первую производную.
Рассмотрим теперь систему, в которой звенья имеют те же
передаточные функции, но поменялись местами в структурной
схеме (рис. 8-6, б).
Уравнения принимают вид
(р + Ъ) (р + с)х = (р + а)у,
(р + а)у = и.
(8-40)
Способом, аналогичным рассмотренному выше, приведем урав-
нение к следующей нормальной форме:
dxr dt — Ъхг -f- (a — c) z3 4- u\ ।
dx2 dt — ax2-\-u\ (8-41)
dx3 dt — cx3-\-u.
Если наблюдаемая координата х = хг и у — х2, то
— b 0 а — с
А = о —а о
L 0 0 —с
’Г
В = 1 ,
_1_
С = 0 0];
б2—(а — с) (б + с)
а2
с2
Определитель матрицы U отличен от нуля и система управ-
ляема.
АТСТ
(АТУСТ =
_-(а-с)(Ь + с)_
Г1 — Ъ Ь2
V= 1 О о
_1 а —с —(а — с)(&4с)-
Определитель матрицы V равен нулю, и система неполностью
наблюдаема. Размерность наблюдаемой части равна рангу мат-
рицы, т. е. двум.
Рассмотренные структуры, в которых имелась либо только
неуправляемая, либо только ненаблюдаемая части, относятся
к частному случаю. В общем случае система может быть разделена
на четыре части:
Часть I — управляемая, но ненаблюдаемая часть;
часть II — полностью управляемая и наблюдаемая;
часть III — неуправляемая и ненаблюдаемая часть;
часть IV — неуправляемая, но наблюдаемая часть.
Это означает, что в пространстве состояний системы существует
базис, в котором можно выразить х так:
х =
-х1-
х2
X3
-х*-
а матрицы Л, В и С принимают вид
С = [0 Сг О С4].
(8-42)
Дифференциальные уравнения такой системы можно привести
к виду: £! = 4UXX4- Л12х2 + 413ж3 + А^А-В^щ
х2 = А22х3 + Л24а:4 + В2и;
7*3 — Д 7*3 I Л т»4»
т»4 — Д т»4 •
vV - ,
у = С^с2 + Сих4.
Характеристический определитель этой системы разлагается
на четыре сомножителя:
ЕР~Аи А12 А13 ^14
Ер — А | = 0 Ер - А22 0 ^24
0 0 Ер -4зз ^34
0 0 0 £>-Л44
= \Ер —Лп|х|^- А22\х\Ер - А33\х\Ер- At\. (8-43)
При этом каждый из сомножителей соответствует одной из
частей системы.
Система устойчива, если устойчива каждая из упомянутых
частей. Но каждая передаточная функция неполностью управляе-
мых или неполностью наблюдаемых частей содержит полюсы,
компенсированные ее нулями. Отсюда следует, что при коррекции
системы нельзя компенсировать нулями правые полюсы, если мы
хотим, чтобы полная система была устойчивой. Если такая ком-
бинация все же выполнена, то малейшая ошибка в компенсации,
или же появление помехи в любом из звеньев, приведет к нару-
шению устойчивости, т. е. система будет негрубой и неработо-
способной.
Рассмотренные выше понятия управляемости и наблюдаемости,
в том смысле как их ввел Р. Калман, представляют большой
интерес и расширяют наши представления о проблеме оптималь-
ного управления. Но следует отметить, что они все же не всегда
полностью соответствуют практическим представлениям и не
охватывают всех практических аспектов наблюдаемости и управ-
ляемости.
С практической точки зрения наблюдаемыми координатами
являются те координаты, которые можно непосредственно изме-
рить. Если какая-либо величина является функцией физически
наблюдаемых координат и времени, но настолько сложной, что
для ее вычисления требуются сложные вычислительные устрой-
ства или программы, то мы не считаем ее наблюдаемой, хотя она
и наблюдаема по Калману.
Наблюдаемыми координатами мы считаем в практике только
те, которые можно измерять непосредственно, не используя связи,
выраженные в уравнениях объекта.
8-3. Автономное регулирований
Первые серьезные работы в области теории многосвязных
систем были посвящены проблеме автономности регулирования
[29—30]. Термин «автономное регулирование» введен И. Н. Воз-
несенским. Автономным И. Н. Вознесенский назвал такое регули-
рование, при котором изменение какой-либо одной регулируемой
величины не приводит к изменению других. Так как регулируемые
величины связаны между собою через объект, то для того чтобы
нейтрализовать действие этих связей, накладываются другие
связи (между входами или выходами регуляторов). При опреде-
ленном подборе параметров этих связей достигается независи-
мость регулирования в различных каналах друг от друга, т. е.
система как бы распадается на ряд независимых систем регулиро-
вания одной величины. При этом можно использовать методы
синтеза односвязных величин для обеспечения требуемого каче-
ства регулирования. И. Н. Вознесенский решил задачу об авто-
номном регулировании для объектов, которые по каждой регули-
руемой величине описываются линейными дифференциальными
уравнениями первого порядка, а регуляторы — безынерционны.
В работах учеников И. Н. Вознесенского [14, 15, 68, 128, 133, 134]
рассмотрены условия автономности для более сложных случаев.
Представление многосвязной системы как совокупности не-
скольких независимых односвязных представлялось настолько
многообещающим, что долгие годы проблема автономности была
центральной в теории многосвязных систем, но при этом до на-
чала 50-х годов рассматривались в основном вопросы реализации
условий автономности в различных конкретных структурах
систем управления. Существенным вкладом в развитие теории
автономного регулирования явилась работа Боксенбома и Худа
[209], в которой авторы, используя матричный аппарат, устано-
вили, что для автономности необходимо и достаточно, чтобы пере-
даточная матрица системы была диагональной, получили общие
выражения условий автономности, не связанные с порядком
уравнений, и рассмотрели также задачу об автономности в си-
стеме, где число регулирующих органов больше числа регулируе-
мых величин. На основе этих результатов в [223, 224, 234 и др.]
были рассмотрены различные структуры систем автономного
регулирования.
Рассмотрим систему с п регулируемыми величинами уг, ...,
уп и регулирующими воздействиями их, ..., ип. Приведем уравне-
ние объекта к виду
Yi = S wUUi + 5 ci (8‘44)
где it, с — дробно-рациональные функции аргумента р\ У, U
и F — лапласовы изображения регулируемой величины,
управления и возмущения соответственно. Уравнение регулятора
(включая измерительные и исполнительные устройства) будем
искать в виде
= / = 1, 2, (8-45)
k = l
где г;- — передаточная функция неизменной части регулятора;
djh — искомые передаточные функции связей, посредством кото-
рых мы хотим обеспечить автономность регулирования.
Условия автономности требуют независимости координат друг
от друга:
-^ = 0, (8-46)
Продифференцировав (8-44) с учетом (8-45), получим
п
= i, к=1, 2, и; k^i, (8-47)
j=l k
но из (8-45)
ди, л
dYh — ridik-
Поэтому уравнения (8-47) можно записать в виде
У Wifjdfa = О, Z, к = 1,2, ..., тг, i #=/. (8-48)
; = 1
Число неизвестных связей d{- равно числу элементов этой мат-
рицы, т. е. п2; число у которых t = j, равно п; число d^
с неравными i и j равно п2 — п. Система (8-48), таким образом,
содержит п2 — п однородных уравнений с п2 неизвестными.
С помощью этих уравнений можем выразить вспомогательные
связи d-, i j через основные du.
Запишем левую часть уравнения (8-48) в виде
У = 2 ^ikwijridik, 1, 2, ..., п, (8-49)
j = l j=l
где 8ik = 0 при i 76 к и 8ik = 1 при i = к (символ Кронекера).
Обозначим через алгебраическое дополнение элемента
определителя | W | и воспользуемся известными соотношениями:
XwUWik = ° при/^Л;
2 = 1
Y>wijWih = \W\ при ] = к- I
»=1 )
(8-50)
Умножим обе части уравнения (8-49) на Wtl и выполним сум-
мирование по индексу i от единицы до п:
п п п п
U S wu^iirjdjti = 2 2 Wifiihwaridjh’ (8-51)
j = 1 г = 1 г = 1 j — 1
r^d^k можно вынести из-под знака суммы по i и левую часть
равенства (8-51) привести к виду
У ridik У wuWii=ridik 1^1.
7 = 1 г = 1
так как внутренняя сумма в левой части последнего выражения
в соответствии с (8-50) отлична от нуля и равна |ТУ| лишь при
7 = I. В правой части (8-51) вынесем за знак суммы по / множи-
тель Wn, приведя ее к виду
i — 1 j — 1 7 = 1
так как внутренняя сумма в левой части последнего выражения
отлична от нуля лишь при I = к.
Тогда п
\W\rldlk = Whl^iwhjrjdjh. (8-52)
7 = 1
В частности, полагая I = к, находим
\w\rhdhh = wkhywkjrjdjk. (8-53)
7 = 1
Разделив (8-52) на (8-53), получим соотношение, из которого
недиагональные элементы dlh выражаются через диагональные
dhh следующим образом:
ridik = ^rkdkk- (8-54)
Подставляя в (8-44) уравнения (8-45), затем (8-54) и учитывая
(8-51), после несложных преобразований получаем
п
[1 +^m]r,= V
7=1
i = 1, 2, ..., п.
Или
г Lwii + \W\ridii-
7 = 1
Коэффициенты связи dti могут при этом выбираться произ-
вольно и быть как вещественными числами, так и операторами.
Для удобства выполнения эти связи можно, например, считать
вещественными числами и выбирать их из условий статики регу-
лирования, например, если у и / — относительные отклонения
регулируемой величины и возмущения, то
где 6i — коэффициент статизма регулирования. Тогда, устрем-
ляя в передаточных функциях р ->0 и обозначая
kQi = Иш | Wu |, fc0 = lim | W
p->0 p-*0
Л p-*0 h 1 p^o г
можно положить
kQikfi — б
Откуда
В этом случае неосновные (перекрестные) связи в регуляторах,
согласно (8-54), будут операторами.
Полученные условия являются динамическими условиями
автономности, однако они обеспечивают взаимную независимость
координат лишь в отношении вынужденной составляющей движе-
ния при нулевых начальных условиях. При ненулевых началь-
ных условиях (хотя бы по одной из координат) выражения (8-44)
и (8-45), в которых фигурируют лапласовы изображения при
нулевых начальных условиях, теряют силу. При этом свободные
движения могут возникнуть по всем координатам.
В ряде случаев автономность в системе оказывается целесооб-
разной. В практике используются системы автономного регули-
рования паровых котлов. Имеются системы, где автономность
принципиально недопустима и, наоборот, необходимо обеспечи-
вать определенную зависимость между координатами, обеспечи-
вающую оптимальность управления в том или ином смысле.
В [61] показано, что оптимальная в смысле минимума квадратич-
ной ошибки система будет автономной лишь при некоррелиро-
ванности входных сигналов различных каналов, когда данные,
поступающие по каждому из входов, не несут информацию отно-
сительно других сигналов.
8-4. Инвариантность
Одновременно с возникновением проблемы автономности в
1938 г. Г. В. Щипановым [200] была выдвинута идея инвариант-
ности. Он предложил выбирать связи в системе таким образом,
238
чтобы обеспечить независимость регулируемых координат от
возмущений. Однако в работе [200] содержалась существенная
неточность, что вызвало длительную острую дискуссию [31,
41, 42].
Неточность Щипанова состояла в том, что он пытался реализо-
вать идею инвариантности в системах регулирования по откло-
нению, где это невозможно. Некоторые из выступавших в дискус-
сии, показав неосуществимость инвариантности в системах регу-
лирования по отклонению, впали, однако, в другую крайность,
объявив принцип инвариантности нереализуемым вообще, а опуб-
ликованные к тому времени работы по инвариантности (или по
«идеальному регулятору») — абсурдными лженаучными, что за-
держало практическое использование инвариантных систем и
развитие их теории.
Позднее было показано, что принцип инвариантности возможно
реализовать в комбинированных системах. В 1967 г. установ-
ление принципа инвариантности Г. В. Щипановым было приз-
нано открытием.
В § 8-2 мы видели, что понятие инвариантности тесно связано
с понятием неуправляемости. Инвариантная в смысле Щипанова
система «неуправляема» по отношению к возмущающим воздей-
ствиям и для проверки выполнения условий инвариантности
могут быть использованы критерии Р. Калмана (8-26), в которых
матрицы С и U составляются не для управляющих, а соответ-
ствующих возмущающих воздействий.
В системе, полностью инвариантной к возмущениям, будет
отсутствовать установившаяся ошибка и в ряде случаев будет
малой динамическая ошибка. При приближенном выполнении
условий инвариантности («инвариантность с точностью до 8»)
установившаяся ошибка будет существовать, но при выполнении
условий устойчивости и качества она, так же как и динамическая
ошибка, может быть сделана малой. Таким образом, обеспечение
инвариантности является одним из способов повышения точности
работы систем управления [106, 107].
Рассмотрим систему, описываемую уравнениями (8-44) и (8-45).
Определитель этой системы имеет вид
А = | V | = п п п 3=1 j = l 3 = 1 n n n У “>2/Al 1 + S ... 2 w2]rAn 3=1 3=1 3=1 . (8-57)
n У vAi i=i n n 1 4“ 2 jdjn 7 = 1 j = 1
Обозначим элементы этого определителя через v-. Выразив Y
через F, получим выражение вида
Y = AF.
Полная инвариантность по всем возмущениям (или как ее
называют — поливариантность) будет иметь место, когда все
элементы матрицы А будут тождественно равными нулю. Это при-
водит к системе уравнений
Zci}\Vik\ = 0, к, /=1, 2, п. (8-58)
1=1
В общем случае при произвольных сг- эта система может удо-
влетворяться лишь при тождественном равенстве нулю всех
алгебраических дополнений Vik = 0 для любых /, к. т. е. при
равенстве нулю всех элементов определителя
Условия автономности систем регулирования по отклонению
требовали, как это было показано в предыдущем параграфе, ра-
венства нулю лишь недиагональных элементов vik1 i ft; усло-
вия полиинвариантности таких систем, кроме того, требуют равен-
ства нулю и всех диагональных элементов = 0. Таким обра-
зом, условия автономности являются необходимыми, но недоста-
точными условиями полиинвариантности. Условия автономности
давали выражения недиагональных элементов через диагональные,
определяемые формулами (8-54). Присоединяя к ним п уравнений
1 + Swkiridik = 0, * = 1, 2, п, (8-59)
j=i
можно найти выражения для всех коэффициентов связи в виде
“ г; | W | * (8-60)
Однако при этих значениях d^ не только сам определитель
системы, но и все его элементы обращаются тождественно в нуль
и система по существу перестает быть системой регулирования,
теряя всякую управляемость не только по возмущениям, но и по
величинам uii. Примером такой системы является, как отмечено
в [91], уравновешенный мост Уитстона: ток в его диагонали не
зависит от напряжения источника питания, но зато мы не можем
влиять на величину этого тока, не нарушая равновесия моста,
т. е. не отходя от условий инвариантности.
Осуществление принципа инвариантности в системах регули-
рования по отклонению с сохранением управляемости теорети-
чески возможно при помощи введения дополнительных связей
в самой системе. Так, в [70—71, 95, 96] были рассмотрены си-
стемы, где для получения инвариантности используются внутрен-
ние обратные связи, по крайней мере одна из которых является
положительной. В [112] показано, что упомянутые системы часто
получаются физически нереализуемыми, так как требуют для
своего осуществления введения чистых производных, но даже
если допустить, что это препятствие преодолено, системы оказы-
ваются зачастую либо неустойчивыми, либо негрубыми в том
смысле, что при сколь угодно малых нарушениях условий инва-
риантности они становятся неустойчивыми. Поэтому вопрос о
реализуемости условий инвариантности исключительно важен.
Но прежде чем перейти к его рассмотрению, мы сначала рассмо-
трим в общем виде условия инвариантности в комбинированных
системах регулирования.
Осуществление инвариантности становится возможным при
наличии регуляторов, реагирующих на отклонения как регули-
руемой величины у, так и возмущений /.
Пусть к объекту, описываемому уравнениями
Y = WU + CF, (8-61)
подключен регулятор, уравнение которого
U= —RDY + RGF, (8-62)
где R — матрица неизменяемой части регулятора; D — матрица
связей по отклонениям; G — матрица связей по возмущениям.
После подстановки (8-62) в (8-61) получим систему уравнений
(£ + WRD) Y = (С + WRG) F. (8-63)
Условия инвариантности выразятся системой из п2 уравнений
(£ + WRD) 1 (С + WRG) = 0, (8-64)
из которой найдутся п2 неизвестных gn, g12, ..., gln, g22, ..., g2n,
Snn'
Заметим, что в общем случае величины будут зависеть от
выбранных связей dhl в регуляторе по отклонению.
Отметим отдельно случай, когда связи dkJ выбраны так, чтобы
обеспечивалась автономность системы в смысле независимости
координат друг от друга. Как было показано выше, определитель
системы (8-63) при этом становится диагональным:
|Я + И7?Р| = П (1 +
i=l \ 3 = 1 /
а уравнение (8-64) при этом превращается в систему уравнений
«р/ + S “’p^igip
------------= 0, р= 1, 2, п, 1=1, 2, п. (8-65)
1 + S “’рЛ^гр
г=1
Так как множители вида 1 + 2 wrd отличны от нуля (в про-
тивном случае мы получили бы тождественное обращение в нуль
определителя системы и всех его адъюнктов), то должно быть
п
1>рЛ&р + ср* = 0’
1=1
р, I = 1, 2, ..., п.
(8-66)
Для каждого фиксированного I получаем систему из п уравне-
ний, решая которую, находим
X <»<!» М
ги = ^,уГ. (8-67)
Таким образом, в одновременно автономной и инвариантной
системе коэффициенты связи по возмущениям g выбираются,
независимо от коэффициентов d и зависят от передаточных
функций объекта неизменной части регулятора и от коэффи-
циентов ckl, указывающих в уравнении объекта на степень
влияния возмущения ft на координату yk в объекте (без регу-
лятора).
Теперь перейдем к вопросу о реализуемости условий инва-
риантности.
Сложность многосвязных систем приводит к тому, что вопрос
о реализуемости операторных тождеств, выражающих условия
инвариантности, зачастую оказывается далеко не ясным «с пер-
вого взгляда» и требует дополнительных исследований. Длитель-
ная дискуссия по работам Г. В. Щипанова, непрекращающиеся
попытки предложения нереализуемых систем — наглядная иллю-
страция этого положения.
Пока еще трудно указать необходимый и достаточный ком-
плекс условий, точно выражающих условия физической и тех-
нической реализуемости сложных систем через параметры описы-
вающих их уравнений или операторов, и мы перечислим здесь
те основные условия, которые обычно проверяются при практи-
ческом синтезе.
Обычно условия физической реализуемости, т. е. непротиво-
речивости основным физическим законам, характеризующие прин-
ципиальную возможность построить систему, имеющую данные
математические описания, выражаются через параметры переда-
точных функций двумя основными условиями: 1. Степень числи-
теля передаточной функции должна быть не выше степени ее зна-
менателя. 2. Коэффициент передачи должен быть конечным. Пер-
вое условие, вообще говоря, фактически недостаточно жестко:
оно сформулировано с учетом некоторых условностей, допускае-
мых при синтезе систем, а именно — допущения в некоторых
элементах безынерционности (допущение существования абсо-
лютно жестких механических деталей, не обладающих инерцией
чисто активных сопротивлений и т. д.). Хотя на самом деле таких
элементов не существует, строгое выражение условий реализуе-
мости в этом смысле должно быть дополнено условиями, выра-
жающими невозможность мгновенных скачков всех физических
координат системы.
К этим двум условиям необходимо добавить условия работо-
способности системы, т. е. условия устойчивости и грубости.
Условие грубости требует, чтобы при некоторых конечных ва-
риациях параметров система оставалась бы устойчивой. (Очевидно,
что физически реализовать неустойчивую и негрубую систему во
многих случаях возможно, поэтому не совсем верно относить эти
условия к условиям физической реализуемости.)
Кроме условий физической реализуемости, приходится учи-
тывать условия технической реализуемости, выражающие воз-
можность реализовать систему с помощью существующих в на-
стоящее время технических средств. Но по мере развития тех-
ники эти условия изменяются, и их изучение выходит за рамки
общей теории управления.
Для практических целей представляют интерес структурные
условия реализуемости инвариантности, сформулированные
Б. Н. Петровым [124—126].
Если в системе с конечными коэффициентами усиления во всех
звеньях реализованы условия инвариантности для координаты xi
по воздействию Д и координата х{ совершенно не изменяется при
изменениях возмущения, то очевидно, что размыкание связей, по
которым эта координата воздействует на другие координаты, не
должно изменить состояния системы х. Решения уравнений системы
при этом (разумеется, при нулевых начальных условиях и отсут-
ствии других воздействий, кроме рассматриваемого), не должны
измениться при размыкании всех связей, по которым координата
хг воздействует на систему. Разомкнем эти связи. Тогда, поскольку
решение уравнений для системы не должно измениться, инва-
риантность для данной координаты xi по отношению к воздей-
ствию Д должна сохраниться и для разомкнутой системы. Но это
означает, что в разомкнутой системе должно существовать не
менее двух параллельных каналов для прохождения воздействия
в той части системы, которая расположена между точками прило-
жения воздействия и измерения координаты.
1 И. Н. Вознесенский использовал это утверждение в качестве опровер-
жения возможности построить инвариантную систему регулирования по от-
клонению: если xi = 0, то регулятор по отклонению бездействует и не ну-
жен, так как его можно изъять, не изменив состояния системы.
В самом деле, в одном канале, представляющем собою после-
довательную цепочку звеньев, при приложении воздействия на
входе движение всех элементов цепочки неизбежно, и устранить
его можно с помощью второго
параллельного канала, переда-
точная функция которого равна
передаточной функции первого
канала, взятой с обратным
знаком. Этот необходимый (но
не всегда достаточный) струк-
турный признак реализуемости
условий инвариантности полу-
чил название принципа двух-
канальности. В системах с пря-
мым измерением возмущения
цепь измерения и образует вто-
рой канал, благодаря которому
инвариантность становится до-
стижимой.
С помощью различного рода
внутренних связей в системе
можно образовать второй канал
для прохождения воздействия
и реализовать условия инва-
риантности, хотя при этом
явного измерения и нет; этот
второй канал можно трактовать
как канал косвенного измере-
ния воздействия и отнести си-
стему также к классу комби-
нированных систем.
В качестве примера рассмотрим систему, описываемую урав-
нениями в терминах преобразования Лапласа:
Xi ^13^3 “ ^1/^ 1>
^21^ 1 “Ь ^2 ^23^3 == ^2/-^2’
^зД1 ^32^2 Ч" Х3 — W3fF3*
(8-68)
Структурную схему этой системы можно изобразить так, как
показано на рис. 8-7 [ИЗ].
Пусть Хг — изображение регулируемой координаты, а пер-
вое из уравнений есть уравнение объекта. и Х3 рассматриваем
как два регулирующих воздействия. Инвариантность системы
для координаты Хг по возмущению Fr недостижима, так как
существует лишь один канал для передачи воздействия от Fr к
что легко видеть непосредственно на схеме рис. 8-7 (этот канал
показан пунктиром). В этом же можно убедиться и рассмотрев
решения уравнений для замкнутой и разомкнутой систем.
В замкнутой системе при выполнении условия инвариантности
(8-70)
ТУП = О (8-69)
и при F2 = F3 = 0 имеем
У __ ^12 /? Y ____ ^13 т?
^1’ А3“—д ^1»
где определитель Д и его алгебраические дополнения соответ-
ственно равны
Д — И/11 — 21 ~ 31’
^11 = 1-^23^32’ W21 = w12 + w13w32, W31 = w13 + w12w23;
1+12=^21+^23^31’ ^22=1-^13^31’ ^32 = ^23 + ^13^2V
1+13 = ^31 + ^21^32’ ^23=^32 + ^12^31’ 1+33 = 1 ~ ^12^21*
Разомкнем связи, по которым координата воздействует
на остальные элементы системы, т. е. положим ш21 = ш31 = 0.
При этом W12 = W13 = 0, Д = Wn. Определитель Д при выпол-
нении условий инвариантности тождественно обращается в нуль
и система (8-68) становится особой. Ее формальные решения
^ = ^1’ *з = |Л (8-72)
неопределенны и отличаются от (8-70), что также указывает на
нереализуемость условий инвариантности. Если бы мы все же
попытались, не выполняя проверки, расшифровать условие (8-69),
то получили бы
И/11 = 1 — iz?23ip32 = 0;
1
^23 = -—-
u>32
(8-73)
Такого рода равенства реализуемы или в безынерционных
системах или в системах с передаточными функциями, у которых
степень числителя равна степени знаменателя; они получались
при пренебрежении малыми параметрами звеньев. Для таких
передаточных функций, казалось бы, условие (8-73) можно реа-
лизовать. Но при этом получается для замкнутой цепочки, со-
стоящей из звеньев и^з^зг
d 1 — w32w23
Здесь малыми параметрами уже пренебрегать нельзя, поскольку
при таком пренебрежении мы получаем физически не реализуемое
звено с бесконечным коэффициентом передачи в структуре, не
допускающей беспредельного увеличения коэффициента.
Нетрудно убедиться, что система при выполнении условий
инвариантности оказывается негрубой. Обозначим
тп. . = —ьс
где Кгз и — полиномы. Тогда выражение (8-71) для А приво-
дится к виду:
Д ^12^21^13^31 (^23^32 — -^23^32) — ^21^31^23 (^12^13^32 4~ ^13^12^32) _
А. 2^21^13^23^32
__ -^31^21^32 (^12^2зАз + 'KisAaAs) /О П А\
£>12 Al D13D23D32D31 *
Полином, стоящий в числителе (8-74), является характеристи-
ческим полиномом. Первое слагаемое в нем имеет наивысшую
степень (так как в него входят множителями все полиномы Di3\
но при выполнении условий инвариантности D23D32 — К23К32 = О
это слагаемое обращается в нуль и характеристический полином
вырождается в полином низшей степени. При этом произвольные
малые изменения коэффициентов при старших членах, которые
могут иметь место при нарушении условий инвариантности, можно
всегда выбрать так, что знаки отбрасываемых старших членов
будут противоположны знакам остальных, т. е. система станет
неустойчивой. Это и указывает на то, что система негрубая.
Проверим выполнимость условий инвариантности для коор-
динаты Хг по возмущению F2. Это возмущение действует на Хг
по двум каналам: w2f, w32, w13 и ш2/, w12 (на рисунке эти каналы
показаны прерывистой линией) и в соответствии с принципом
двухканальности инвариантность реализуема. Проверим это утвер-
ждение, рассмотрев решения уравнений замкнутой и разомкнутой
систем при выполнении условия инвариантности
^21 = ^12 -г ^13^32 = 0 (8-75)
и при Fr = F3 = 0 имеем
А = Wn ~ IV31W31 = 1 — 1^23^32 - w31 (w12w23 + W713) =
- 1 - w23w3X — w31w13 (1 — w23w32) = (1 - ш23н;32) (1 - iZ713^31),
Y _________^21^32^2/^2__________ Q .
^(l — IP13U?31)(1 — U?23U732)““ ’
x _________W22w2fF2_______= w2fF2 i
2 (1 — ^13^31) (1 — ^23^32) 1 — 1^23^82 ’ V ’' /
Y _________23^2_________ _____ W32W2jF2
3 ~ (1 —^13^31) (1 — ^23^32) 1 — ^23^32 * .
При размыкании связей от координаты Хг имеем ш21 = ш31 = О,
но эти значения не входят в выражения для Х2 и Х3, следо-
вателыю, размыкание связей от Хг не изменяет состояния системы
и инвариантность возможна.
Реализация равенства (8-77), требующая равенства по вели-
чине и противоположности по знаку передаточных функций в
двух параллельных каналах, также достижима.
В [126] доказывается следующее общее положение: если 1-я
координата воздействует только на первый элемент (объект),
а возмущение приложено к l-му элементу, то инвариантность
нереализуема. Если же при этом l-я координата действует более
чем на один элемент, то условие инвариантности реализуемо.
Разумеется, реализуемость условий инвариантности еще не
означает работоспособности инвариантной системы: необходимо
также выполнить проверку выполнения условий устойчивости.
В тех случаях, когда невозможно точное выполнение условий
инвариантности, можно при определенных условиях добиться,
чтобы эти условия выполнялись приближенно, например, чтобы
разность D23D32 — в примере на стр. 246 была бы не равна
нулю, а представляла бы собою полином, все коэффициенты кото-
рого не превышают некоторой малой величины 8. В этом случае
говорят о том, что система инвариантна с точностью до 8. Теория
таких систем была дана в [95, 107, 178]. В системах, инвариантных
с точностью до 8, происходит вырождение уравнения при отбра-
сывании малых параметров, поэтому в таких системах нужно
соблюдать условия, при которых система остается устойчивой при
сколь угодно малом е. Структуры реализуемых инвариантных
с точностью до 8 систем, как показано в [112], — это структуры,
допускающие сколь угодно большое увеличение коэффициента
усиления, детально рассматриваемые в [111].
Определение условий инвариантности можно выполнить также
на основе вариационного подхода [159].
Пусть для системы уравнений
xt (0) = xf, i = 1, 2, .. . , п
задан функционал от ее решения
У(г) = Ф{я(т), t}.
(8-77)
(8-78)
В частности, во многих практических задачах теории опти-
мального управления функционал выражается интегралом
т
J — jj F (х, и) dt.
б
Введением дополнительной переменной х0, удовлетворяющей
уравнению
d-^ = F{x, и),
минимизация этого функционала сводится к минимизации одной
дополнительной координаты xQ. Поставим более общую задачу,
из которой задача минимизации одной координаты вытекает как
частный случай, а именно: рассмотрим функционал вида
j(0=2 (о, <8-79)
1 = 0
где сг — постоянные, а в число входят и дополнительные коор-
динаты, производные от которых равны подынтегральным функ-
циям исходных функционалов.
Систему назовем инвариантной, если значения функционала
J (t) не зависят от внешнего воздействия и (t). В «слабо инвариант-
ной» системе независимость от и (t) имеет место в определенный
момент времени t = 7, в «сильно инвариантной» — при любых i,
принадлежащих некоторому отрезку [0, Л. Это более общее
понятие инвариантности, чем данное выше. В частности, если
J (t) = xk (t), то мы получаем обычную проблему инвариант-
ности.
Запишем уравнения (8-78) в гамильтоновой форме
dx^ дН \
(8-80)
d ipj дН ' '
dt дх^ 9 <
где гамильтониан Н выражен через специально введенные функ-
ции следующим образом:
п
# = 2 Wifo, и). (8-81)
1 = 1
Функции же удовлетворяют уравнениям (8-80) при гранич-
ных условиях:
ф.(Т) = -^ (8-82)
Зададим воздействию и (t) приращение Au (t). В общем случае
при этом получит приращение и функционал (8-79). Это прира-
щение будет
п Т
А/=2 ^А^ДЛ == —5 'Ф» и + Au, t) — H(x, ф, u, t)]dt — ц,
1=1 0
(8-83)
где оценка остаточного члена дается выражением
/т \2
| Ц I С ($ |Au(t)|dT (8-84)
\о !
С — постоянная, не зависящая от Ди.
Если система линейна и стационарна и описывается уравнением
= Ах + Ьи, (8-85)
где х — n-мерный вектор; А — квадратная; b — столбцовая мат-
рицы, то необходимым и достаточным условием инвариантности
(как сильной, так и слабой), при которой Д/ = 0, как показано
в [159], будет выполнение соотношений
(с, Л*&) = 0, (8-86)
где с= (q, ..., сп), к —О, 1, 2, ... , п — 1.
Круглыми скобками здесь обозначено скалярное произведение.
Например, для системы
d^ = a11x1 + a1^ci+blu,
dx» . . 7
^22^2 ^2^
функционал
J = 4- с2х2
инвариантен по отношению к и, если выполняются соотношения
(с, Ь) = 0, (с, АЬ) = О,
которые расшифровываются так:
Cj&i + с2Ь2 = 0; (
С1 (Й11Ь1 + «12^2) + С2 («21&1 + а22Ь2) = °- I
Условия инвариантности, полученные обычным способом, в дан-
ном случае будут:
+ с2Ъ2 = 0;
(^12^2 ^22^1) “Ь ^2 (^21^1 = 0*
Эти условия эквивалентны (8-87), в чем нетрудно убедиться,
выполнив замену
^1^11^1 ~ ^2^2^11» ^2^22^2 = C-jbyd22,
Вариационный подход позволяет получить условия инвариант-
ности для более широкого класса систем, чем обыкновенные ли-
нейные. Так, для нестационарной линейной системы, описываемой
уравнениями
^ = А (t)x + b(t)u (8-89)
(элементы матриц А и Ъ в этой системе являются функциями
времени), необходимым и достаточным условием сильной
инвариантности на отрезке О t Т является тождественное
равенство нулю скалярных произведений
(с(О, <?^Ь(0) = 0, fc = 0, , п-1, (8-90)
где Q — оператор, равный
Q = D — A (t),
D — оператор дифференцирования.
Так, в предыдущем примере, если а, Ь и с — функции времени,
то эти условия примут вид
(<=, 4 = 0, (с, 4)-(£, 6) Ч», АВ) = 0.
Или
С1&1 4~ ^2^2 “ 0»
— q (anb1 + ai2&2) - с2 (a2Lb1 + a22b2) =
” С1 а11^1 Л1262) + C2 a2%b2 — Л21^1) = 0 .
Для нелинейной системы, описываемой уравнениями
^ = /,(«1, ... , хп, их, ... , ur); i = l, 2, ... , п, (8-91)
необходимым и достаточным условием совершенной инвариант-
ности от и (для всех начальных условий и t Т) функционала
= ••• (8-92)
будет независимость от и функций
F0^F-, F1=D(f)F0, ... Fn^ = D(f)Fn_it (8-93)
где оператор D (/) определен из условия:
п
с «''= 2 £/•• (8-м>
г = 1
8-5. Структуры многосвязных систем, допускающие
неограниченное увеличение коэффициентов усиления
Так же как и в односвязных системах, увеличение коэффициен-
тов усиления в отдельных контурах регулирования приводит
к уменьшению статических ошибок по координатам, к уменьшению
коэффициентов ошибок и к ослаблению влияния координат друг
на друга. В связи с этим представляет интерес использование
в многосвязных системах структур, допускающих неограниченное
увеличение коэффициента усиления без нарушения устойчи-
вости системы. Этот вопрос детально исследован в [111]. Для
одноконтурных систем он был рассмотрен в ч. I, стр. 228—233.
Рассмотрим один из типов таких структур, допускающих во
многих случаях наиболее простую реализацию (рис. 8-8), в част-
ности, не требующих введения идеальных производных.
На рис. 8-8 изображена схема регулирования i-й координаты.
Основная цепь в этой схеме состоит из трех последовательно
включенных частей. Средняя часть охватывается корректирую-
щей обратной связью с дробно-рациональной передаточной функ-
цией Fni (p)/Fmi (р), где и Fmi — полиномы от оператора р.
Без коррекции передаточная функция этой части обозначена
A^i0XB/Mi0XB (индекс «охв» означает — «охватываемая» часть), где
Л\охв ~ коэффициент уси-
ления охватываемой части
по i-й координате, кото-
рый считается не завися-
щим от р. Передаточные
функции остальных двух
частей показаны на схеме;
М, D и F -— полиномы,
К — вещественные числа.
Воздействия от связей по
другим координатам по-
даются на вход третьей
части. Коэффициенты свя-
Рис. 8-8.
зей (р) могут быть
операторами, содержащими р. Уравнение системы при такой
структуре имеет вид
{РЛР)^выр(Р) [Мг охв (р) В mi + К i охв^'ni(р)]+
+ Kio6Fmi (Р)} Y (Р) = Kio6Fmi (Р) Уг0 (р) -
-Кг[М
г охв (p)Fmi(p) + K
г охв^ni (р)1 X
п
гвыр (Р) S (Р) (Р) + fk (P)h
Ь=1
' k
i = l, 2, ... , п,
(8-95)
где Kin6 = KiBapKi охв К.} — общий коэффициент усиления рас-
сматриваемой (некорректированной) цепочки; fk (р) — возмущаю-
щее внешнее воздействие; У;о (р) — задающее воздействие.
Введем обозначения:
TLi(p) = Di(p)M
гвыр (Р) -^гохв (Р) mi (Р)>
(р) = D{ (р) -Л^гвыр (Р) Bni + Кi&i выр^тлг(р);
Ci(p) = KiMi0XB (p)Fmi(p).
(8-96)
Тогда
{пж охв^i(p)}^(p) + [G(p) + (р)] х
= Kio6Fmi(p)Yio(p). (8-97)
Полагаем, что степень Fni (р) не выше степени Fmi (р) и что
степень aih (р) не выше степени Бг (р) для любых j, к. Характе-
ристический определитель системы
^4 и
^21
-412, » ^1п
^22» , ^2n
^nl •Д-п2)
Л
^пп
где
Лг = П| (Р) + К^вВ,(Р).
Aik = \Рг (/О “Ь -^Чохв^Ч^пг (Р)1 ^гвыр (Р) (Р)
г ф k
можно раскрыть по степеням Ki0XB:
&—FNq (р) + A’ioxB^l (р) + (р) + ... + K^^F^n (р) =0.
(8-98)
При принятых допущенных относительно а, Рп0 (р) имеет р
в наивысшей степени. Устремляя Ki0XB к бесконечности, получим
(как это имело место в § 7-9 ч. I) вырожденное уравнение и ряд
вспомогательных [112]. Для того чтобы в системе с п связанными
между собою через объект регулируемыми величинами можно
было в каждом контуре регулирования неограниченно увеличи-
вать коэффициент усиления без нарушения устойчивости в каж-
дом контуре и во всей системе в целом, необходимо и достаточно
чтобы:
а) каждая отдельная система без учета взаимовлияния других
регулируемых величин имела структуру, устойчивую при сколь
угодно большом коэффициенте усиления;
б) вырожденное и вспомогательное уравнения для всей много-
связной системы, каждое в отдельности, удовлетворяли усло-
виям устойчивости.
Вспомогательные уравнения при этом имеют следующий вид:
«оо5’, + Я1о9П1 + -- +-«„ = 0 при TVi^TVo —1, N2 = N0 — 2 т. д.;
(8-99)
t 2. 1
«oo92n+1 + т 2 «ох?2” + Лю?2”"1 + т 2 аи72П“2 + «го?2”-3 + ™ 2 а21д*п~4 +
J.
Ц-... + т2апЛ = 0 при — 2, N2 = NQ — i и т. д.; (8-100)
<Wn+2 + a10qn г+аидп + a20qn~1 + a21qn'2 + ...
••• + aNo_|_19 + %o_T_2 = 0’ (8‘101)
если разность степеней стоящих рядом полиномов уравнения (8-98)
неодинакова.
В этих уравнениях
1
т = -; д — тр.
*Чхов
8-6. Двухканальные системы с антисимметричными связями
Среди многосвязных систем важное практическое значение
имеет один их частный вид — двухканальные системы с идентич-
ными каналами. Примеры таких систем — следящие системы
в станках с программным управлением по двум координатам,
Рис. 8-9.
системы пространственного углового сопровождения, гировер-
тикали и т. п.
Одинаковые и одинаково расположенные на пути распростра-
нения сигналов звенья в двух идентичных каналах называются
идентичными звеньями. Для повышения устойчивости и качества
в двухканальных системах получили широкое распространение
два вида перекрестных связей между каналами: прямые и обратные
антисимметричные связи, т. е. связи, имеющие равные, но обрат-
ные по знаку, передаточные функции. Прямая связь передает воз-
действие со входа некоторого звена в одном канале на выход иден-
тичного звена в другом канале (связи VTn. с и — Wu_ с на рис. 8-9, а).
Обратная связь передает воздействие с выхода некоторого звена
в одном канале на вход идентичного звена в другом канале (связи
Ж0.с и -Ж0,с на рис. 8-9, б) [74, 115].
Выпишем уравнения звеньев с антисимметричными перекрест-
ными связями.
Уравнения прямых связей
#12 — ^п. С#21»
#22 = ^К#21 4“
(8-102)
Уравнения обратных связей
#12 — сГИкж22*,
$22 = К$21 + И^о. С^К$12* j
(8-103)
В этих уравнениях лапласовы изображения соответствую-
щих координат.
Умножив вторые уравнения в каждой паре на j = ]/ —-1
и сложив с первыми, получим после несложных очевидных пре-
образований.
Для прямых связей
®з = (Игк + 7ТГ11.с)х1.
(8-104)
Для обратных связей
$2 = ^К$1 /^к^о. С$2
ИЛИ
и х2 могут рассматри-
Рис. 8-10. ваться как векторы входной
и выходной величин некото-
рого сложного звена с двумя
входами и выходами, имеющего комплексную передаточную функ-
цию, равную Wk + 7 Wn с в случае прямых и WhH + jWkW0^c в
случае обратных связей.
Нетрудно показать, что комплексная передаточная функция
замкнутых двухканальных идентичных систем с произвольным
числом q не накладывающихся прямых антисимметричных свя-
зей (т. е. таких, что точки присоединения любой связи не нахо-
дятся между точками присоединения других), изображенных на
рис. 8-10, а, будет равна
W - ГЯ 1 Ofi'
1 + (wq +zwn.cl) (ж2 + zwn.C2)... (Жх+уЖп.с^) •
Аналогично передаточная функция замкнутой двухканальной
системы с q антисимметричными ненакладывающимися обратными
связями будет (как видно из рис. 8-10, б).
п
i=i_______
Q
Ц (l + 7Wo.ci^0
W = ——--------------------. (8-107)
П Wi
i-l-------—----------
1 q
1+ П (1 + Жо.сг^г)
г = 1
Рассмотрим пример [74], иллюстрирующий влияние антисим-
метричных связей на динамику системы.
Рис. 8-11.
На рис. 8-11 показана структурная схема следящей системы
углового сопровождения радиолокационной станции. Сдвиг фа-
зы ф опорного напряжения обусловливает прямые антисиммет-
ричные связи с коэффициентами передачи ± sin ф, а гиро-
скопический момент, создаваемый вращающимися частями
следящей платформы, — обратные антисимметричные связи с пе-
редаточными коэффициентами dz ар. Передаточные функции серво-
мотора W2 и усилителя Wlt равны
W — Ку W — — 1
1 ту? + 1’ 2~р(^ + 1)‘
Уравнения систем имеют вид:
{Wr [(ягх — яг2) cos ф -- (яВ1 - яВ2) sin ф] — архв2} = xv2\
{Wt [(яВ1 - а:в2) cos ф + (жг1 - яг2) sin ф] + а/хгг2} = яВ2.
(8-108)
Вводя комплексные переменные
= £Г1 р 7^в1, ^2 “ *^Г2 "Ь 7^В2?
показаны (в полулогарифмическом м
умножая второе из уравнений (8-108) на / и складывая с первым,
получим после преобразований
Ж Kxt
х2 — —г----------х. = —---------------±,
1 __ Ja . V < W к + Р С1 + + ТР^ - + ТуР^
\ 1 + Тр
(8-109)
где W - WtW2;
К = Куе№ — комплексный коэффициент передачи. Подстав-
ляя р = /со в (8-109) и
выполняя D-разбиение по
параметру К, получим
^ = -/(о(1+/Ту<в)(1 +
+/?©) —а® (1 +/Туш)
или
TyK=-]\^ + j<*i) (1 +
+ /dcjJ-acoJl+ /(!>!),
где
т
co1=Tvco, d = 7r.
1 у
Кривые D-разбиения
для d = 1 и трех значений
а, равных 0, 10 и 100,
сштабе) на рис. 8-12. Мы
видим, что по сравнению со случаем а = 0 (отсутствие анти-
симметричной обратной связи) два другие случая дают резкое
расширение области устойчивости.
Эффективное повышение устойчивости достигается именно
при комплексных значениях К (когда изображающая точка имеет
достаточно большую мнимую ординату). Таким образом, правиль-
ная комбинация прямых и обратных связей дает весьма сильный
положительный эффект. Заметим, что в данном случае комплекс-
ный коэффициент усиления уже не является чисто абстрактным
понятием, а представляет собою вполне ясную реализуемую физи-
ческую величину.
ГЛАВА ДЕВЯТАЯ
АДАПТИВНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
9-1. Возникновение адаптивных систем и их виды
Возникновение теории адаптивных систем относят ко второй
половине 50-х годов, хотя отдельные адаптивные системы (системы
экстремального регулирования) и посвященные им теоретические
разработки появились значительно раньше.
Термин «адаптация» заимствован теорией управления из био-
логии. Adaptio в латинском языке означает приспособление.
В биологии Э1им термином обозначают приспособление организма
к условиям существования, т. е. к изменениям внешней среды,
влияющей на жизнедеятельность организма.
Непосредственное применение столь широкого термина к си-
стемам управления неудобно, так как любая система с обратной
связью или с воздействием по нагрузке по существу автомати-
чески приспосабливается к изменениям внешних возмущений,
поэтому к адаптивным относят лишь такие системы, которые авто-
матически приспосабливаются к непредвиденным изменениям
параметров объекта и внешней среды.
В обычных системах управления параметры объекта либо
считались неизменными (стационарные объекты), либо изменялись
во времени по известным заранее законам (нестационарные
объекты). В данной главе речь идет о системах, в которых пара-
метры объекта изменяются неизвестным образом. Изменения пара-
метров могут приводить к существенным изменениям качества
процесса управления и даже к потере устойчивости.
Восстановление нормального режима в некоторых адаптивных
системах осуществляется изменением параметров системы путем
поиска, либо путем анализа ситуации и принятия решения на
основе этого анализа. Такого рода системы управления, получив-
шие название самонастраивающихся, появились первоначально,
по-видимому, для управления летательными аппаратами, совер-
шающими полет на больших высотах, за пределами атмосферы
[217, 247, 266]. Цепь адаптаций у самонастраивающихся систем
обычно сама по себе представляет замкнутую систему.
На рис. 9-1 показана одна из возможных схем самонастраиваю-
щейся системы с моделью [176, 217]. В схеме имеется (в явном
или неявном виде) модель 7И, параметры которой установлены
так, чтобы обеспечивались некоторые желаемые свойства системы.
Входное воздействие g (t) подается одновременно на входы управ-
ляющего устройства У У системы и модели, выходные коорди-
наты х объекта О и модели х^ сравниваются и, как в обычной
системе с обратной связью, определяется ошибка £. Далее сигнал
ошибки поступает в анализирующее устройство А У, которое
анализирует сигнал ошибки, определяет происшедшие изменения
параметров системы (т. е. выполняет автоматическую идентифи-
кацию объекта) и вырабатывает команды на изменение некоторых
Рис. 9-1.
настраиваемых параметров
системы, обычно управ-
ляющего устройства УУ.
К преимуществам само-
настраивающихся систем с
моделью относятся: неза-
висимость контура самона-
стройки от основной цепи
управления, что обеспечи-
вает возможность работы
системы некоторое время
при выходе из строя контура самонастройки; это же обстоятельство
дает возможность сравнительно легко добавлять контур само-
настройки к существующим системам без их радикального изме-
нения; одновременность действия помех на систему и на модель
приводит к тому, что их действие на сигнал ошибки значительно
ослабляется и влияние помех слабо сказывается на процессе
оптимизации системы. В подобных системах не возникает необ-
ходимости вводить запаздывания в вычислительное устройство,
что приходится делать в схемах, где модель заменена вычисли-
тельным устройством.
Непрерывная аналоговая модель системы сравнительно проста
по конструкции. Этим и объясняется достаточно широкое исполь-
зование самонастраивающихся систем с моделью при управле-
нии, например, самолетами. Однако для выработки по результа-
там наблюдений ошибки управляющего сигнала требуется уже
выполнять довольно сложные операции, что в конечном итоге, по
мере повышения требований к точности и сложности вычисления
требуемого управления, вынуждает прибегать к использованию
цифровых вычислительных машин. Но при введении в цепь управ-
ления вычислительной машины возникает естественное стремление
возложить на нее и функции, выполняемые моделью, устранив
тем самым из системы специальный моделирующий блок. Одна
из возможных схем системы, управляемой ЦВМ, показана на
рис. 9-2.
Процесс определения параметров или характеристик объекта
гораздо сложнее, чем простейшее пропорциональное или функцио-
нальное преобразование. Он состоит из ряда вычислительных
операций и выполняется универсальными или специализирован-
ными вычислительными устройствами. В литературе этот процесс
определения параметров или характеристик объекта на основе
наблюдения за процессом получил название идентификации.
Классические методы определения параметров динамических
систем на основе тех или иных снятых экспериментально харак-
теристик (временных, частотных и т. п.), как правило, оказы-
ваются непригодными для
стройкой, так как они тре-
буют длительного време-
ни. В реальных условиях
идентификацию нужно вы-
полнять быстро, «на ходу»,
при этом зачастую наибо-
лее эффективные формы
искусственных воздейст-
вий на объект (ступенча-
тые, импульсные, перио-
дические) оказываются ча-
сто недопустимыми по
условиям эксплуатации.
В настоящее время наибо-
лее употребительные де-
идентификации в системах с самона-
Рис. 9-2.
терминированные методы идентификации основываются на опре-
делении импульсной характеристики объекта или матрицы им-
пульсных характеристик [217] в минимальное время. Из стоха-
стических методов определения динамических параметров весьма
плодотворными оказались дисперсионные методы. Подробнее за-
дача идентификации рассматривается в § 9-4.
Экстремальные и самонастраивающиеся системы упомяну-
тых выше типов возникли в результате решения технических задач.
По времени эти разработки совпали с периодом повышенного
интереса к кибернетическим аспектам управления и, естественно,
внимание ряда теоретиков обратилось к проблеме адаптации
в живых организмах. Адаптация, наблюдаемая в живой природе,
иногда оказывается настолько быстрой и совершенной, что она
кажется в наши дни недосягаемой для самых совершенных техни-
ческих устройств (например, поведение искусного лыжника-сла-
ломиста при сложном спуске). При попытках найти в природе
некоторые принципы построения схем адаптации, с одной стороны,
и использовать технические модели поведения живых орга-
низмов, с другой, возникло научное направление, получившее
название бионики. Изучая модели (точнее, устройства имита-
ции) процессов адаптации в живых организмах, исследователи
предложили ряд чрезвычайно интересных схем. Эти схемы можно
разбить на три основные группы: а) самообучающиеся; б) само-
организующиеся; в) обучаемые системы.
Наиболее известными самообучающимися моделями являются
«мышь в лабиринте» Шеннона, «черепаха» Уолтера и др. Эти
устройства, в основном, предназначаются для имитации выработки
условных рефлексов. Системы совершают пробные движения.
Результаты пробных движений запоминаются в памяти вычисли-
тельного устройства и анализируются. Приводящие к цели движе-
ния «поощряются», уводящие от нее — «наказываются», в резуль-
тате чего система в конце концов вырабатывает алгоритм своего по-
ведения, наиболее быстро приводящий к цели. Самообучающуюся
систему можно построить в тех случаях, когда конструктор машины
четко представляет себе, как надо действовать, чтобы придти к
цели, что следует поощрять и что запрещать, и может дать фор-
мализованное описание последовательности действий автомата.
Примерами более сложного типа адаптивных систем — само-
организующихся — является гомеостат Эшби.
Самоорганизующимися системами называют такие системы,
которые способны сохранять работоспособность при достаточно
больших возмущениях, изменяя характер своего функциониро-
вания. Эти системы строятся как модели систем регуляции в жи-
вых организмах (система регулирования температуры тела, хими-
ческого состава крови и т. д.).
Группа обучаемых машин представляет пока наибольший
интерес для технических приложений. Ряд сложных процессов
высококвалифицированный оператор успешно выполняет, но при
этом он не может точно объяснить, как он это делает, что не дает
возможности полностью формализовать его действия в виде про-
граммы для вычислительной машины. Процесс обучения, например
классификации наблюдаемых зрительных или звуковых образов,
состоит в том, что информация о классифицируемом образе посту-
пает и в обучаемую машину и к обучающему человеку. Человек
определяет класс образа и сообщает его машине. После много-
кратного повторения процессов обучения машина начинает с той
или иной степенью достоверности выполнять классификацию
самостоятельно, и в ряде случаев вероятность ошибки машины
становилась меньшей, чем вероятность ошибки обучавшего машину
человека, т. е. ученик — машина в некоторых отношениях пре-
восходила учителя — человека.
9-2. Самонастраивающаяся система с моделью
Одним из возможных способов построения самонастраиваю-
щихся систем с моделью является использование структур, допу-
скающих весьма большие коэффициенты усиления. На рис. 9-3
изображена схема, в которой в цепь обратной связи основ-
ного контура, состоящую из управляющего устройства Wy и
объекта ТУо, включено звено с большим коэффициентом усиления К
[78, 217]. Для этой системы имеем
Х(Р) _Ж0Жу(1 + ^Ж0.сЖм) ,п п
G (р) l + KWQWyW0.c * V 4
В той области частот, где ЯТУ01УуИ7о с > 1 и 7П7О Р1УМ 1,
имеет место приближенное равенство
Й? О-2)
т. е. передаточная функция системы, несмотря на изменения пара-
метров объекта, приблизительно равна передаточной функции
модели, и, следователь-
но, реакция системы на
задающее воздействие
приблизительно совпа-
дает с реакцией модели.
Другой пример ис-
пользования системы с
большим коэффициен-
том усиления показан
на рис. 9-4.
В практике регули-
рования было известно,
что автоколебательные
системы способны в до-
Рис. 9-3.
вольно широких преде-
лах противостоять влиянию изменения коэффициента усиления
объекта. Это свойство также можно трактовать как свойство
адаптации. В 1950 г. вышла в свет работа Р. Коченбургера
[237], которая способствовала широкому обсуждению упомяну-
тых свойств релейных систем. Схема, рассмотренная Р. Кочен-
бургером, показана на рис. 9-4, а.
В системе имеется объект с изменяющимися непредвиденным
образом в широких пределах коэффициентом усиления К. Для
компенсации этих измерений в схему вводится последовательно
элемент с искусственно изменяемым коэффициентом усиления ц
так, чтобы произведение цЛ? оставалось постоянным. Схема пред-
ставляет интерес тем, что в ней не используются сложные вычис-
лительные устройства и используется метод поиска. Поисковыми
воздействиями являются искусственно создаваемые во вспомога-
тельном контуре обратной связи автоколебания. В контур входят:
ограничивающий усилитель N с большим коэффициентом усиле-
ния и линейная цепь с обратной связью, имеющая передаточную
функцию Wo с (р). Характеристика усилителя N выбрана так,
чтобы при отсутствии сигнала у среднее значение z равнялось
нулю. При появлении постоянного у нарушится симметрия выход-
ных колебаний усилителя и появится среднее значение z, которое
при надлежащем выборе а, Л и jyo>c (р) будет приблизительно
пропорциональной у\ z цу. Вычислив значение ц по методу
гармонического баланса, можем убедиться, что ц можно сделать
примерно обратно пропорциональным К и тем самым решить
поставленную задачу.
Иное решение этой задачи предложено в [112] (рис. 9-4, б).
Последовательно с объектом, передаточная функция которого
Рис. 9-4.
Жо (р) равнялась К/D (р), были включены три линейных усили-
теля с достаточно большими коэффициентами усиления К%
и К3. Два из этих усилителей охватывались обратными связями
с передаточными функциями
Передаточная функция системы
X (р) _ К (Т1Р1) (Т2р1)
G(P)~ Рг ’ (9’3)
где
Рх = К (1 + Т1Р) (1 + т2р) + т2 [(7\ + 7\) р + 2] + m} D (р) +
+ К(Д + Т1Р)(1 + Т2р), (9-4)
где
1
А'б = Kt — К2 — К3 — большой коэффициент усиления.
При m -> 0 имеем
1,
(9-5)
т. е. влияние переменного коэффициента К практически исклю-
чается. Исследование вспомогательного уравнения вида (8-99)
(так как убывание степеней стоящих рядом полиномов уравнения
равно единице) позволит нам найти условия устойчивости системы.
Так, если/) (р) =(1 -f- 0,2/?)2 (1 + 0,05р), то характеристическое
уравнение имеет вид:
т? (1 + Т1Р)(1 + Т2р) (1 + 0,2/)2 (1 + 0,005/) + [(7\ + Т2) р + 2] х
X (1 + 0, г/?)2 (1 + 0,005/) + m (1 + 0,2/)2 (1 + 0,005/) +
+ К(Д + Т1Р)(1 + Т2р) = 0.
Раскрывая скобки, после вычислений получим вспомогатель-
ное уравнение в виде
0,0002Т1Т2д3 + 0,0002 (Т1 + Т2) q* + 0,0002g + КТ\Т2 = 0.
Условие устойчивости
0.0002 (7\ + Т2)
Т\-Т1
(9-6)
Естественно, что в данной схеме проявляются недостатки,
связанные с повышенным уровнем широкополосных шумов.
В рассматриваемой схеме модели в явном виде нет, так как
в ней требовалось просто с наименьшими искажениями воспроиз-
вести задающее воздей-
ствие (программное уп-
равление). В том слу-
чае, когда хотим, чтобы
выход объекта совпадал
с выходом модели, мы
просто можем включить
модель на входе систе-
мы, приложив g (t) на
ее вход.
Рассмотрим самона-
О
Рис. 9-5.
страивающуюся систему
с моделью, показанную на рис. 9-5, в которой модель играет
роль эталона для основного контура [85]. В этой схеме модель М
используется для получения ошибок, управляющих перестройкой
регулятора Р непосредственно в течение переходного процесса.
В такой схеме возможно сделать время настройки меньше вре-
мени переходного процесса.
Модель на схеме рис. 9-5 включена параллельно основной схеме
управления, включающей регулятор Р и объект О, Модель воз-
действует на коэффициент усиления К контура самонастройки.
Уравнения системы можно записать следующим образом:
объект: Do (р)х = KQ (р) у\
регулятор: R (р) у = К (р) x — Kgg (£);
модель: М (р) хм=-g (t).
(9-7)
В этих уравнениях Do (р) и KQ (р) — полиномы, коэффициенты
которых в общем случае могут быть функциями как времени, так
и координат системы; R (р) и М (р) — полиномы с постоянными
коэффициентами; g (t) — управляющее воздействие.
В правой части уравнения регулятора К (р) представляет
собою полином с переменными, перестраиваемыми коэффициен-
тами к:
к (р) = + &ipp 4-... + fcp_ip + fcp.
Коэффициенты кг представляют собою функции координат
объекта и модели, производных и интегралов, которые в общем
случае могут иметь вид:
^Р = Ф1(^ц(жм, x)dt, vr2(xM, х, i);
Vi3(*M, ж, x, x), ... , vi,p4.2 (Чр),x,x ... ,
А-p _ i = ф2 [J v21 (жм, x) dt, v22 (zM, x, x);
x> x< x \ ••• > V2, p+2 (4P>, ж, x, ... , x<p>)];
(9-8)
ko = <Pp+i IJvp+i, i (*(p), *(p)) dt, Vp+1,2 .
^ = <PgUvgl(xM, x) dt, vg2 (x„, xM,x), ...
••• - ^,p+2(a:M, xM, ... , x%\ ж(р)]. (9-9)
Одним из наиболее простых вариантов выполнения контура
самонастройки является вариант, в котором контур описывается
уравнением первого порядка и изменение коэффициента контура
происходит в соответствии с зависимостями:
— ^10 klu I 811^ ^1£812’
&0 ~ *00 *ое822*>
kg = kg0 + kgu f 8glrf/ + kg^g2>
(9-10)
где fc00, kQu, kQS, /c10, klu, fc18, /cg0, kgu, kge — постоянные величины;
8 — ошибки.
Введение высших производных в законы формирования к
усложняет схему, но позволяет приблизить процесс к желаемому
при произвольных изменениях коэффициентов полинома D (/?).
Постоянные коэффициенты /с10, /с00, kgQ вводятся в закон форми-
рования как начальные уставки коэффициентов. Введение инте-
грала необходимо, когда параметры системы непостоянны во вре-
мени или имеют значительную область разброса, а также при
наличии в основном контуре нелинейных связей, которые не
могут быть точно учтены. Интеграл придает системе свойство
астатизма по рассогласованиям. Алгоритмы для перестройки
коэффициентов к целесообразно делать по возможности простыми,
например, для перестройки kg, к±
можно рекомендовать зависимости
вида:
8==(ХМ“Х) signz;
е = signzM;
e = (xM-x)signxM,
(9-11)
для выбора kQ:
е2 = I —Ы ;
е2 = (ЖМ — sign х> (9-12)
82 = (*м —signxM.
В [85] рассмотрены различные
виды простейших алгоритмов, по-
строены графики изменения g и х
для некоторых характерных слу-
чаев и сделаны рекомендации от-
носительно выбора алгоритмов в
тех или иных случаях.
В [85—87] рассмотрены и со-
поставлены динамические про-
цессы в нескольких вариантах
исполнения самонастраивающихся
Рис. 9-6.
систем первого порядка с моделью.
Ограничимся здесь рассмотрением
одного из вариантов. Урав-
нения системы имеют вид:
объект: (Тр-\-В)х — у,
регулятор: y = kgg—krx\
контур само- kg = 1 + к&г (g — ах) sign g;
(9-13)
настройки: кг — а — k*z(g— ах) sign х, .
где kg1 kl, Т и В — постоянные; а — заданное соотношение
между g и х в статике, которое должно поддерживаться при лю-
бых В, Ошибки е в данном случае определяются по алгоритмам
8Х = (g — ах) sign х; 1
8g = (g — ах) sign g, J
т. е. выход х сравнивается не с выходом некоторой явной обособ-
ленной модели, а непосредственно с g. Структурная схема имеет
вид, показанный на рис. 9-6.
При g — О имеем
Трх = — ах~ Вх — к'\?ах2 sign х.
Введем фазовые координаты
у = ах, ty = Tpx
и построим фазовую плоскость. Уравнение фазовых траекторий
ф = — (Ь + 1) ф — &ie<p2 sign ф,
где Ъ = В!а, к1& = к*г/а.
На рис. 9-7 показаны фазовые траектории, для которых:
7) Ъ = 0; 2) Ъ > 0; 3) — 1 < Ъ < 0; 4) Ъ < — 1. Для траекторий
1—3 начало координат является устойчивым узлом, для траек-
тории 4 оно представляет собою неустойчивый узел. Точки устой-
чивого равновесия для этой траектории Ог и О2, в которых #ст =
= ± (1 — tylk^a. При введении самонастройки неустойчивая
система (так как Ь < — 1) становится устойчивой, но появляется
статическая ошибка, знак которой зависит от знака начального
отклонения. Величина ошибки убывает с ростом /с1е.
При постоянном воздействии g = const = g0 > 0 введем пере-
менную 8 = g0 — ах. Уравнения примут вид:
— (Г/а) рь = 8 — b (g0 — е) + kgegQz + kle (g0 — 8) 8 sign х.
Движение системы изобразим на фазовой плоскости с координа-
тами 8, ф, где ф = (Т/а) р&. Уравнения фазовых траекторий:
( — [&(g'o-e) + l+^ego]8-/c18(go-8), при e<g0; 1
I — [Ц&>- е) + 1+ А*г?0]8 + fclg(g0 — е), при e>g0. /
Фазовые траектории показаны на рис. 9-8. Они имеют точки
равновесия Ох, О2, О31 О±. Система устойчива при любом 6, но
имеется установившаяся ошибка.
Введение самонастройки в данном случае позволило сделать
систему устойчивой при отрицательных коэффициентах самовы-
равнивания объекта и уменьшить статические ошибки надлежа-
щим выбором kie и kg8, но для полного устранения этих ошибок
необходимо в законы изменения коэффициентов ввести интегралы.
Исследование динамики системы первого порядка с введением
интегралов выполнено в [85—87]. Интеграл оказалось целесооб-
разным вводить только в закон формирования коэффициента /сх.
Введение его в kg ухудшало качество процесса.
9-3. Об использовании ЦВМ в адаптивных системах
В качестве примера использования ЦВМ для выработки управ-
ляющего сигнала рассмотрим схему, показанную на рис. 9-9.
В этой схеме желаемая реакция вырабатывается моделью. Так как
уравнение модели известно, то эту задачу можно выполнить и не
вводя специального блока
модели: тогда задача све-
дется к программированию
на ЦВМ решения задан-
ного уравнения. Мы не
будем рассматривать эту
задачу, рассмотрим лишь
Рис. 9-9.
метод определения с по-
мощью ЦВМ воздействий на перестраиваемые параметры системы.
Пусть в некоторый момент времени реакция системы С на
внешнее воздействие г (t) равна с± (t), желаемая реакция (выход
модели М) cd (t); фактическое воздействие управляющего устрой-
ства на систему, вызвавшее реакцию с± (t), равнялось т1 (Ц;
требуемое воздействие, которое привело бы к правильной реак-
ции, равной cd (i), равно md (t); импульсная переходная функция
системы g (t). Делаем следующие допущения: а) считаем малыми
изменения г (£), с (£), ошибки е (t) = cd (t) — q (t) и воздействия
Am = md (t) — m1 (t), происходящие за интервалы времени А 7,
по истечении которых ЦВМ выдает корректирующие импульсы.
Это дает возможность считать, что за время АТ1 систему можно
рассматривать как линейную, стационарную. Тогда для нахожде-
ния требуемой реакции cd (t) можно написать следующее выраже-
ние интеграла свертки:
t
Сг(*) = ci(z) +«(0 = 5
— оо
t t
= mA(x)g(t — 1)^x4- Am(x)g(Z —x)dx.
— оо —ос
Вычислительное устройство строится так, чтобы вычислять
и выдавать корректирующие импульсы Am (t) в дискретные
моменты времени через каждые ДТ секунд. Пусть t — изменение
времени в каждом интервале управления (т. е. время, отсчитывае-
мое всякий раз от начала данного интервала). Тогда, так как
Дт (t) = 0 при t < 0, то мы можем в нижнем пределе второго
интеграла заменить — оо на 0 и написать
t
е (t) = $ Дт (т) g (t — т) с?т.
о
(9-16)
Для вычисления требуемого значения Дт (t) воспользуемся
разложением в ряды Маклорена функций е (t) и g
е (0 — ^0 + + ^2 of + •••» I
/2 (9~17)
S (0 — Go + Gxt + G2 + • • • j
Соответственно преобразования Лапласа для е (t) и g (i) будут
Е^р^Еор-1 + Е1Р~2 + Е2р~3 +
G(p) = Gop 14-G1p=2 + G2p"3 +... / ( ‘
Изображение по Лапласу уравнения (9-16) имеет вид:
E(p) = bM(p)G(p), (9-19;
где ДМ (р) — изображение искомого приращения Дт (t).
Отсюда
А М (тЛ - Е - Е*р 1 + Е'р~2 + Е*р~* + "• -
(Р) “ G (р) G»p-' + G1P~2 + G,p з + ... ”
= ДМ_! 4- АМор-1 + AMxp~2 + ..., (9-20)
где величины ДМ*, получаемые в результате разложения дроби
Е (p)/G (р), равны
ДМ_1 = ^; ДМ0 = ——; (9-21)
ДДг + 1 ^0 ’
Оригинал выражения (9-20) имеет вид:
Дт (Z) = (Z) + ДМ01 (Z) + \Mxt 4-... (9-22)
Первое слагаемое в (9-22) представляет собою импульсную
функцию с площадью ДМ_1? второе — ступенчатую функцию
высотой ДМ0, третье — линейную функцию с угловым коэффи-
циентом ДМХ и т. д. Практически обычно ограничиваются этими
тремя слагаемыми. Итак, на выходе машины должны стоять па-
раллельно включаемые генераторы функций 6 (£), 1 (f) и t, коэф-
фициенты при которых АМ0, АМХ вырабатывает вычисли-
тельное устройство (рис. 9-10).
Вычисление величин АМ^ может осуществляться по форму-
лам (9-21). В этих формулах необходимо знать коэффициенты
ошибки вычисляются по измеренным значениям величин с
и их производных в начале каждого интервала управления:
E0 = cd (-0) -С1(-0);
гр __ fdcd _
1 \dt dt jt = —о ’
гр — (d2cd d2ci\
2 \ dt2 dt2 jt — о ’
(9-23)
..................J
Знак минус перед нулем указывает на то, что измерение произво-
дится перед приложением импульса Am (t) (т. е. что определяются
предначальные значения).
Несколько сложнее обстоит дело с определением коэффициен-
тов G. Если бы параметры системы не менялись, то их можно
было бы вычислить заранее, но так как мы имеем дело с изменяю-
щимися неизвестным образом параметрами, то бг{ также необхо-
димо определять на основании результатов измерений. Такие
изменения могут быть сделаны в результате измерения резуль-
тата приложения Ат, но само Ат должно вычисляться с учетом Gv
Это противоречие можно устранить, если для вычисления Ат
на данном интервале мы воспользуемся результатами измерений,
полученными на предшествующем интервале. При этом, так как
будем пользоваться «устаревшей» информацией, мы введем неко-
торую ошибку. Для уменьшения этой ошибки интервал АТ дол-
жен быть выбран достаточно малым.
Пусть на предыдущем интервале приращение управляющего
воздействия равнялось Am* (f), тогда можно показать [217], что
коэффициенты Gt на данном интервале могут быть вычислены по
выражениям:
0 — ’
, E*-EM*G%
1
, _ Е* - (AMfGj + ДЛ/?С0).
Г2 ДЛ/?Х
(9-24)
где G* — значения соответствующих коэффициентов на преды-
дущем интервале, а величины Е* определяются по результатам
наблюдений регулируемой величины с (t) и ее производных непо-
средственно перед импульсом и сразу же после него следующим
образом:
р*__( __ I
1 “ \dt) / = 4-0 \dt jt = — o’
F* __ (d^c\ _ (d*c\
2 \dt2 J i = -[-0 \dt2 j t = — 0 ’
(9-25)
9-4. Статистические методы идентификации
статических характеристик объектов
В практических задачах часто приходится сталкиваться с необ-
ходимостью находить математическое описание или, как часто
говорят, строить математическую модель сложного, уже работаю-
щего дорогостоящего объекта, процессы в котором изучены не
полностью или же не изучены совсем, а условия эксплуатации
совершенно не допускают подачи на входы системы возмущений
специальной формы, при которых обычно определяются детерми-
нированные характеристики объекта. Возникает задача — опре-
делить динамические и статические характеристики объекта (или
построить его математическую модель) на основании результатов
наблюдения за изменением входных и выходных величин в про-
цессе нормальной эксплуатации. Естественно, что получение
точной математической модели практически невозможно. Модель
получается приближенной. В последние годы был разработан ряд
методов определения динамических характеристик объекта с по-
мощью различных статистических характеристик, снимаемых
в процессе нормальной эксплуатации. Применение статистиче-
ских методов, естественно, требует большего объема вычисли-
тельной работы, но они дают возможность решить задачу иденти-
фикации там, где обычные «детерминированные» методы оказы-
ваются непригодными.
Начнем с рассмотрения определения статических характери-
стик одномерных безынерционных объектов. Мы одновременно
наблюдаем и регистрируем ряд значений входной величины
объекта: х (^), х (£2), ..., х (tn) и его выходной величины у (^),
У (t2), •••> У (tn). Если бы в объекте не действовали случайные
шумы и каждому значению xh соответствовало бы определенное и
единственное значение yk, то проблема решалась бы детермини-
стическими методами. Мы могли бы построить график у — / (х)
и найти функцию /, пользуясь любым известным методом аппро-
ксимации функций. Но при наличии случайных шумов искомая
кривая может оказаться сильно размытой (рис. 9-11), и задача
аппроксимации сильно усложняется.
В процессе нормальной эксплуата-
ции значения х (t) сами по себе носят
случайный характер; поэтому мгно-
венные значения х можно рас-
сматривать как реализации случай-
ной величины X. Значения у (^),
очевидно, также будут реализациями
случайной величины Y, а связь ме-
жду реализациями у и х также будет
носить случайный характер. В этом
случае из опыта оказывается удобнее
определять не трудно обнаруживае-
Рис. 9-11.
мую функцию у = f (х), а оператор,
преобразующий какую-либо характеристику случайной величины^
в аналогичную характеристику случайной величины У. Тогда най-
денный оператор позволит нам всегда по заданной характеристике
входной величины определить характеристику выходной величины.
Одной из достаточно полных вероятностных статических харак-
теристик объектов является кривая условной плотности вероят-
ности ф (г/|я). Рассмотрим методику определения этой кривой из
опыта на примере одномерного объекта [148]. Для этого мы про-
изводим запись результатов большого числа одновременного
измерения хну. Пусть проведена запись 100 измерений и эти
результаты изображены графически на рис. 9-12. Каждая из точек
на графике изображает пару одновременно наблюдаемых значе-
ний х и у. Обработку результатов начнем с построения прямо-
угольника, ограничивающего область наблюдаемых точек, и
разбивки этого прямоугольника на т2 прямоугольных подобла-
стей, где число интервалов разбиения т приближенно опреде-
ляется по формуле 1
т 1 + 3,32 lg п, (9-26)
1 См. Миллс Ф. «Статистические методы». Госстатиздат, 1958, стр. 49.
где п число измерений. Для п = 100 получаем т = 7,64. При-
нимаем т = 8 и подсчитываем число точек, попавших в каждый
из интервалов. Разделив это число на общее число наблюдений
п = 100, получаем значения частот совместного появления х и у
в данном интервале.
Так, например, в интервале 54,1 < х < 54,3 и 42,15 < у < 42,25
мы наблюдаем две точки, поэтому частота для этого интервала
42,8- У X X X X
42,7- X X Хх хХ х X х х X, X х X X _х
42,6- X X X X X X X хх\ х XXX X X XX хХх
42,5 - х х х X X X * хх X XX ХХ X X X
42,4- хх х X X хХ 'X Xх
42,3- X х Х X X ХХХ X X X
42,2- - X X х х х х X X
42,1- ——J—— 1 - < ,х
54,2 54,4 54,6 54,8 55,0 55,2 55,4 55,6
Рис. 9-12.
равна 0,02. Значения частот помещены в табл. 9-1. Примем эти
частоты за оценки вероятностей р (у, х) одновременного появле-
ния х и у. Просуммировав р (у, х) по горизонтали, получаем ве-
Таблица 9-1
Оценки вероятностей совместного появления х и у
Середина интервала X Середина интервала у
42,1 42,2 | 42,3 42,4 42,5 42,6 42,7 42,8 I р(х)
54,2 0,01 0,02 0,03
54,4 0,04 0,03 0,03 0,05 0,01 0,16
54,6 0,02 0,04 0,04 0,06 0,02 0,18
54,8 0,03 0,06 0,06 0,04 0,19
55,0 0,07 0,09 0,03 0,19
55,2 0,02 0,06 0,05 0,13
55,4 0,06 0,01 0,07
55,6 0,02 0,03 0,05
Р (у) 0,01 0,08 0,10 0,13 0,26 0,22 0,16 0,04 1,00
роятности р (х) появления х для данного интервала величины z/,
а просуммировав их по вертикали — вероятности р (у) появле-
ния у, если х находится в данном интервале.
Теперь можно найти оценки условных вероятностей р (у | х)
появления у при данном х и р (х\у) появления х при данном у.
Для этого воспользуемся известными формулами теории вероят-
ностей:
Р (* I у)
Р(у\х)
Р (У, У) . '
Р(У) ’
Р (х, У)
р(х) •
(9-27)
Значения этих оценок вероятностей приведены в табл. 9-2
и 9-3. Так как плотность вероятности р (ту) есть вероятность того,
что данная величина х находится в интервале между х2 и хг dx,
Таблица 9-2
Оценка условных вероятностей у относительно х
Середина интервала X Середина интервала у
42,1 | 42,2 | 42,3 | 42,4 | 42,5 42,6 42,7 42,8 | 2 р (у/х)
54,2 0,333 0,667 1,0
54,4 0,25 0,186 0,186 0,312 0,062 1,0
54,6 0,111 0,222 0,222 0,333 0,111 0,999
54,8 0,158 0,316 0,316 0,210 1,0
55,0 0,368 0,474 0,158 1,0
55,2 0,154 0,462 0,384 1,0
55,4 0,857 0,143 1,0
55,6 0,400 I 0,600 1,0
Оценки условных вероятностей х относительно у
Таблица 9-3
Середина интервала X Середина интервала у
42,1 | 42,2 | 42,3 42,4 42,5 | 42,6 42,7 42,8
54,2 1 0,25
42,4 0,5 0,3 0,23 0,19 0,05
54,6 0,25 0,4 0,31 0,23 0,09
54,8 0,3 0,46 0,23 0,18
55,0 0,27 0,41 0,19
55,2 0,08 0,27 0,31
55,4 0,37 0,25
55,6 0,13 0,75
2р Му) 1,0 1,0 1,0 1,0 1,0 1,0 1,0 1,0
то мы принимаем найденные р (х\ у) и р (у \х) за оценки плотно-
стей вероятностей Р (х | у) и Р (у | х) соответственно для значений
х я у, соответствующих середине рассматриваемого интервала.
За полные статистические характеристики объекта часто при-
нимают условные плотности вероятности Р (у\х). Эти характе-
ристики изображаются поверхностями. Максимумы кривых
Р (у\х)1 построенных в функции ж, определяют наиболее вероят-
ные значения у, которые можно получить при заданном х. Гра-
фическое изображение полученной статической вероятностной
характеристики одномерного объекта можно изобразить в виде
семейства кривых Р (у | х) для разных значений х или в виде по-
верхности в пространстве координат {х, у, Р (у\х)} (рис. 9-13).
В более сложных случаях многомерных объектов графическая
интерпретация опыта, изображенная на рис. 9-12, и характери-
стик (рис. 9-13) становится затруднительной в связи с повыше-
нием размерности пространства. При повышении размерности
требуется уже значительно больший экспериментальный материал
и более трудоемкая статистическая его обработка, для выполнения
которой прибегают к цифровым вычислительным машинам. Прак-
тически описанный метод ис-
пользуется для одно- и двумер-
ных законов. В случае более
сложных объектов обычно ис-
пользуются более наглядные и
удобные, но и более бедные
моментные характеристики слу-
чайных величин. Довольно
часто можно ограничиться пер-
выми двумя моментными харак-
теристиками: условным матема-
тическим ожиданием, которое
является аналогом статиче-
ской характеристики, связы-
вающей между собою ожидаемые
средние значения случайных
координат объекта, и дисперсией, характеризующей рассеяние,
разброс опытных данных от усредненной характеристики.
Условное математическое ожидание случайной переменной У
(для одномерного объекта) относительно случайной входной
переменной X может быть выражено через величину X с помощью
уравнения регрессии:
М{У|Х} = а(я),
(9-28)
где а (х) есть некоторая функция гг, которая связывает среднее
значение величины У относительно X при каждом данном зна-
чении х случайной величины X. Условная дисперсия выходной
переменной У относительно входной также может быть выражена
через каждое заданное значение х посредством скедастического
уравнения
D {У | X} = р (х). (9-29)
Наиболее простым является случай линейной регрессии:
M{Y\X} = a + bx.
(9-30)
В этом случае [148] оказывается, что постоянная а и коэффи-
циент регрессии b выражаются через математические ожидания
М {У}, М {X}, коэффициент корреляции рух величин у и х и
среднеквадратические отклонения ву и <зх следующим образом:
поэтому
a = M{Y}-рух%М {X};'
Ь = Р^Х>
M{Y\X} = M{Y} + pyxa£(X-M{X}).
(9-31)
(9-32)
Условная дисперсия D {У | X}, по определению дисперсии
равная
со
£>{У|Х}= $ [y-M{Y\X}]*P(y\x)dy, (9-33)
— оо
в ряде практических случаев может быть принята постоянной.
В этих случаях корреляция между величинами У и X называется
гомоскедастической корреляцией.
Так, разброс в размерах обрабатываемой партии деталей может
считаться одинаковым, не зависящим от порядкового номера
детали, если на протяжении всего процесса обработки техноло-
гические условия остаются неизменными. Если же с возрастанием
X происходит ощутимый износ режущего инструмента, то D[Y | X}
будет возрастать при возрастании X.
В случаях, когда D {У|Х} непостоянна, т. е. зависит от X,
корреляция между величинами У и X называется гетероскедасти-
ческой.
Общая дисперсия на выходе системы складывается из двух
составляющих: дисперсии, характеризующей рассеивание выход-
ной переменной У относительно линии регрессии М {У | X}
(т. е. относительно математического ожидания условной диспер-
сии), и средней дисперсии самой линии регрессии относительно
математического ожидания выходной переменной:
D{Y} = M{D[Y\X]} + D{M [У ] X]} =
оо оо
= И [У -M{Y\X}]*Pyx(y, X)dydx +
—00 —оо
оо
+ 5 [М{У|Х}-М{У}]2Рх(^)^. (9-34)
—оо
При гомоскедастической корреляции, т. е. при постоян-
ной D {У | X}, дисперсия условной средней D {М [У | X]}
характеризует ту часть общего рассеивания на выходе, которая
обусловлена влиянием входной переменной X. Она равна
D{M[Y\X]}=M{(a + bx-M{Y})2}^
^M{[a + bx~-(a+bM{X})]2} = M{[b(x-M{X})]2} =
= b2M {х — М{Х})2} = b2D {X}. (9-35)
Тогда из (9-34)
D {У} - b2D {X} + M{D[Y\ X]}. (9-36)
Если случайные величины не коррелированы, то рух = О,
Ь — 0 и общая дисперсия D {У} = М [D [У | X]} полностью
определяется погрешностями, вносимыми самим объектом, и не
зависит от погрешностей входной переменной X. В противопо-
ложном случае, когда корреляция полная и рух — 1,М {£>[У | X} =
= 0 и D {У} = b2D {X}, т. е. дисперсия выхода полностью опре-
деляется дисперсией входа.
Для практических расчетов оказываются удобными выраже-
ния дисперсии среднего и средней дисперсии через дисперсии
переменных X и У и коэффициент корреляции. Воспользовавшись
понятием дисперсионного отношения
3 _D{M[Y\X\\
получим
и. учитывая (9-34),
М Р[У|Х]НЯ{Г} (1-т^).
(9-37)
(9-38)
(9-39)
Для случая линейной регрессии дисперсионное отношение
легко выражается через модуль коэффициента корреляции. Учи-
тывая (9-37) и (9-35), имеем
2 _ М {М [У I X] — М [У]}2 _ М {[(а + bx) — (а + М [Z])2} _
Лда- - D {¥\ -
_ Ь*М {(я - М [Х])2) _ 3 D Ш _
- D^Y\ -° 0у-р»х’
т. е.
Пух I Рух I* (9-41)
Тогда для линейной регрессии
D{M[Y\X]} = D{Y}p~x; )
М {Я[У |Х]} = 2) {У} (1- р^). /
Рассмотрим теперь процесс, представляющий собою такую
последовательность операций, что выходная переменная каждой
предыдущей является входной для одной последующей, т. е.
операции представляют собой разомкнутую цепочку последова-
тельно включенных звеньев, для каждого из которых заданы
условные дисперсии D (Х{ | X,- [146] (рис. 9-14). В случае ли-
нейной регрессии
М {Хп I Xn_lt Хп_2, ..., Хо} = ьп + Ь^Х^ +... + Ь0Х0, (9-43)
где
Ьп = М {Хп} - ЬпЛМ {Хп_г} - ... - Ь0М {Хо}. (9-44)
Коэффициенты Ъ могут быть определены по значениям коэф-
фициентов рассеяния D {XJ и коэффициентов парной корреля-
Рис. 9-14.
ции р между входом и выходом
стемы уравнений:
по всем операциям из си-
b„ 1D {Xn х} + bn а COV (Хп_г, Хп_2) -| ...
... M>0cov(X„ j, X0) = cov(X„ !, Х„);
1 cov (^„ 2» Хп 1) + г} +
••• + &0COV (Х„ 2, X0) = cov(X„ 2, Х„);
Ь„ 1 cov (Хо, Хп j) -ь Ь„ 2 СОV {Хо, Х„ 2} + • •
... Н МЦХ0} = cov (Хо, Х„),
где
cov (Xit Xj) = M {[Zi-M to}] to ~м И,}]}
(9-45)
(9-46)
Общая дисперсия выходной величины цепочки операций
аналогично (9-34) может быть представлена как сумма сред-
него условной дисперсии относительно поверхности регрес-
сии М {D \Хп | Хп_17..., Хо]} и средней дисперсии поверхно-
сти и дисперсии условной средней поверхности регрессии
D {MiX^X^..., Хо]}:
D {Xn} = M{D [Хп | Х„ п ... , Хо]} + D {М [Хп | Хп_х +... + Хо]}.
(9-47).
Первое слагаемое представляет собою собственную суммарную
погрешность, возникающую на всех операциях цепочки, а вто-
рое — часть погрешности на выходе, вызванную суммарными
погрешностями входов каждой из операций.
Эти слагаемые, аналогично предыдущему, можно выразить
через коэффициенты множественной корреляции следующим обра-
зом:
D {М [Хп | Хп_ь ... , Хо]} = D {Хп} р*п, Яп_, >я;( (9-48)
М {D (Хп | Х^, ..., Хо]} = D {Xn} (1 -р^) । Xn_t (9-49)
Коэффициент множественной корреляции рХп । х7г_1 >в х0 выра-
жается через коэффициенты парной корреляции по фор-
муле [148]
/п — 1
2 ^P*i | Хп, (9-50)
г = 0
где определяются из системы уравнений:
Рхп, Л’п-Лп-I + ^n-2Pxn_b хп_2 + ••• + ^iPjci. хп-]_ + ^оРхо, хп_у
Рхп, хп—2 ~ \г-1РхП—1, п—2 + 2 “Ь * * * + ^iPxx, xn_2 + ^Орхо, xn_2i
РхП’ xi “ \г-1Рхп-1, + ^n-2Pxn-2, xj + • • • + М + \Рх0, xt;
Рхп, ХО ~ K-lP^n-l, Хо + Кг-2рхп__2, х0 "Ь • • • ”Ь ^iPxi, Хо + ^0-
Коэффициенты Ъг определяются из равенств
(9-51)
Z-0, 1, ... , п-1. (9-52)
Парные же коэффициенты корреляции должны быть опреде-
лены из опыта. Для этой цели в формуле
о = М {[х,~ М {Х^- М {Х^}]} 9 3
PXj, Xj $ V )
математические ожидания и среднеквадратичные отклонения
заменяются их оценками. Так, если мы наблюдаем значения
ж1 = {5; 4; 3; 4,5; 5,5} и ^2 = {1; 0,8; 1,2; 1,1; 0,9}, то
М{Х.}^ L+4+A+_4_A+A=4>4.
м{х2}^1 + 0’8 + 1’52 + 1’1 + °'9 = 1;
хг-М {^^{О.б; —0,4; —1,4; 0,1; 1,1};
хг-М {Х2}^{0; —0,2; 0,2; 0,1; —0,1};
[Zj-М {Хх}][х2-М {Х2}]№ {0; 0,08; —0,28; 0,01; —0,11};
0 + 0,08 - 0,28 + 0,01 -0,11 ЛПП
-------------------= _ 0)06 .
а уГ°’62 + № + м2 + o.i2 + 1,р _ 0 86.
^0 + 0,22 + 0,22+0,12 + 0,12==0)14)
0,06 _ п г
Р**’ х‘^ 0,86 0,14 ~ и,° •
Рассмотрим пример определения характеристик автоматической линии
цеха массовых подшипников первого ГПЗ [146]. Из 200 опытов
были определены средние размеры, среднеквадратичные отклонения разме-
ров и значения парных коэффициентов корреляции для пяти операций,
и результаты вычислений сведены в табл. 9-4.
Таблица 9-4
Основные экспериментальные характеристики автоматической линии
по обработке наружного диаметра подшипника
Наименование операции Обозначение операции Средний размер оценка М {х-} Среднеквад- ратичное отклонение Значения парных коэффициентов корреляции
х0 ХЛ х2 х3 х4
Заготовка (поковка) ж0 139,478 0,6552 1 0,328 0,322 0,188 -0,140
Токарная 135,390 0,0720 0,328 1 0,907 0,272 —0,220
Термическая х2 135,570 0,1028 0,322 0,907 1 0,380 —0,221
Предваритель- ное шлифова- ние 135,084 0,0083 0,188 0,272 0,380 1 -0,394
Окончательное шлифование 134,985 0,0018 -0,140 —0,220 -0,221 -0,394 1
Составляем систему уравнений:
Рх4, х3 = ^3 4" \fix2i Х3 4" \Рхх, х3 4" \)Рх0, Х3»
Рх4, х2 \Рх3, х2 4- ^2 4" \Рхх, х2 4е \)Рх0, х2’
Рх4, хх \jPx3, Xi + ^2р^2, хх 4" \ 4~ ^оРхо, хх’
Рх4, х0 = \рх3, х0 4“ \Рх2, х0 4- \Рхх, х0 4“ Ч
или:
Х3 + 0,380%2 + 0,272^ + 0,188Х0 = — 0,394;
0,380^з + Х2 + 0,907Xi + 0,322Х0 = —0,221;
0,272Х3 + 0,907Х2 + + 0,328%0 = — 0,220;
0,188Х3 + 0,322Х2 + 0,328^ + Хо = — 0,140.
Решая эти уравнения, найдем
Z3 = —0,4927; Х2 = 0,6161;
Xi = 0,7740; Хо = 0,4019.
Тогда из (9-50) коэффициент множественной корреляции будет равен
Рх4, х3, x2s х1г х0
= /— 0,4019 • 0,140 + 0,7740 • 0,220 — 0,6161 • 0,221 + 0,4927 • 0,394 = 0,5334.
Далее по (9-52) находим:
ьо = Хо = 0,4019 = 0,0011; Ь2 = 0,0108;
(У Q
ft, = X, = — 0,7740 = _ 0,01935; Ь3 = — 0,1069.
(J4 VjU/ZU
Из (9-44) находим
b4 = М {X,} - Ь3М {Х8} - Ь2М {^2} - Ь±М {Хг} - Ь0М {Хо} =
= 134,985 + 0,1069 • 135,084 — 0,0108 • 135,570 + 0,01935 • 135,390 —
— 0,0011 • 139,478 = 150,4277.
Теперь по (9-49) пайдем среднюю дисперсию относительно поверхности
регрессии:
М {D [Л I Х3, Хг, Хо]} = D {Х4} (1 - Pi4> Хз1 Xj> Хо) =
= 0,00182 (1 — 0,53342) = 231,7896 • 10 8 мм,
а по (9-48) — дисперсию средней поверхности регрессии:
D {М [Л'4 | Х3, Х\, Xs, Хо]} = П {Х4) р84> л>> а.2> Xi> ао =
= 0,00182.0,53342 = 92,1780 • 10 8 мм.
После расчетов полезно выполнить проверку. Подставив в формулу
(9-43) вместо Xj их средние значения М {Хг} из таблицы, получим M{Xj} =
~ 134,985 мм, что совпадает с данным в таблице.
По формуле (9-47) получаем
D {Х4} = (231,7896 + 92,1780) 4 0 8 ==- 323,9676 • 10 8 мм,
что практически совпадает со значением
D {Х4} = о* = 0,00182 = 324 • 108 мм.
В случае нелинейной регрессии и гетероскедастической кор-
реляции можно применить кусочно-линейную аппроксимацию
нелинейной регрессии на участках с постоянными значениями
D {У|Х}. Проверку близости к линейности производят путем
сопоставления определенного из опыта дисперсионного соотно-
шения и расчитанного по формуле tfyx = b2 . При значитель-
°У
ном расхождении производится кусочно-линейная аппроксимация.
Если кривая регрессии разбита на р прямолинейных участков
и на каждом участке отрезок ломаной линии, аппроксимирующей
линию регрессии, определяется уравнением
М {У, I XJ = а; + bmxh l = i, 2, (9-54)
а вероятность попадания X на Z-й участок равна WZ(AZ), то
р р
D {Г} = 2 b3yxD {Х;} W {Хг} + 2 М {D [У, | XJ} W (Xt) +
1=1 1=1
р
+ ^D{M[Yl]}W(Xl). (9-55)
1=1
При точном задании уравнений линии регрессии
M{Y\X} = a(x)
скедастической линии
D {У | X} = р (х)
и плотности вероятности Р (х) входной переменной X, величины
М {У} и D {У} могут быть вычислены по уравнениям:
1
М{У} = j а (х) Р (ж) dx\
ОО
D {У} = jj [а2 (х) + р (я)] Р (ж) dx —
— со
jj а (х)Р (х) dx
'• (9-56)
9-5. Статистические методы идентификации
динамических характеристик объектов
Для определения динамических характеристик статистическими
методами используются методы теории случайных функций.
При этом полные вероятностные характеристики, многомерные
плотности вероятности практически не используются из-за чрез-
вычайно большого объема вычислений. Для идентификации ли-
нейных объектов (т. е. объектов с линейной регрессией выходной
переменной относительно входной и гомоскедастической корреля-
цией) наибольшее распространение получили корреляционные,
а для нелинейных объектов — дисперсионные методы.
Корреляционные методы основываются на использовании кор-
реляционных функций, которые в случае линейных объектов, дос-
таточно хорошо характеризуют тесноту связи между значениями
переменных в различные моменты времени.
Рассмотрим одномерный объект, на вход которого действует
случайная функция X (Z), а выход характеризуется случайной
функцией У (Z). Авто- и взаимно-корреляционные функции вы-
ражаются следующим образом:
со со
ji J I*3' Gl) ““ mx Gl)] \X G2) ~~ (^2)]
— co — co
xPix{x(ti), Х(Ц), *1, t^dx^dx (^);
Rxy («1. 4) = f Г [У (*i) - mv (O] k (<2) - mx (*2)] X
— 00 — CO
X ^2xy (^2)? У Gi), ^2] dx (Z2) dy (Zi).
(9-57)
Если из опыта определены корреляционные функции входного
и выходного процессов, то мы прежде всего можем с их помощью
приближенно определить детерминированные динамические ха-
рактеристики объекта [99, 216]. Так, если на вход объекта подать
гармонический сигнал х (Z) = D sin coZ, а на выходе его обра-
зуется гармонический сигнал, на который наложен стационарный
шум п (Z), математическое ожидание которого М {п (Z)} = О,
y(t) = B sin (со/ + 6) п (Z),
то нетрудно убедиться в справедливости равенств:
т
Rw (0) = lim 4? \х (t) у (t) dt = BD cos 6;
т
T?2X (0) = lim \x(f)z(t)dt —
t^1 J z
(9-58)
где z (t) = D cos (o£, a R (0) и R2X (0) представляют собой зна-
чения взаимно корреляционных функций для одного и того же
момента времени = t2). Отсюда определяются амплитуда А
и фаза 6 частной характеристики объекта
Л = ^Кй^(0) + ^х(0);
0 - arctg
(9-59)
Здесь для вычисления корреляционных функций использовано
их определение через среднее по времени, а не среднее по мно-
жеству, фигурирующее в (9-57). Как известно, среднее по вре-
мени и множеству совпадают для эргодических процессов, в част-
ности для стационарных. Поэтому если объект и шум п (t) ста-
ционарны, то при воздействии типа гармонических функций,
мы получаем стационарные эргодические процессы. Однако так
как предельный переход для случайных процессов при Т -> оо
в формулах (9-58) неосуществим, то величины Ryx и Rzx заме-
няются их оценками:
т-4 /о
^(0) = ^ y(t)x(f)dt\
t 1‘т (9'6°)
Я2Ж(0) = у z(t)x(t)dl,
to
которые будут тем точнее, чем больше время интегрирования.
Важно при этом производить вычисления для значений t > tQ
где tQ — время, по истечении которого собственные движения
системы практически прекращаются.
Схема для определения характеристик R показана на рис. 9-15.
На схеме 1 — генератор синусоидальных и косинусоидальных
сигналов, 2 — объект, 3 — аналоговое вычислительное устрой-
ство, вычисляющее оценки Ryx и R2X по формулам (9-60). Вычис-
лительное устройство включает в себя умножители М, операцион-
ные усилители У и потенциометры, с помощью которых устанав-
ливаются их постоянные времени. Значения R (0) равны устано-
вившимся значениям выходных напряжений.
Описанный способ может быть уточнен, если применить так
называемый метод нулевой фазы [98]. Однако при этом для изме-
рения требуются значительное время и специальные гармони-
ческие сигналы.
Если дан линейный объект, на который действует шум п (£),
причем записать этот шум невозможно и статистические характе-
ристики шума неизвестны, то по записям процессов при нормаль-
ной эксплуатации объекта оказывается возможным определить
функцию веса (реакцию на импульсную функцию) объекта Ли (£).
Если х (t) и п (i) коррелированы между собой, то для опре-
деления ки (t) необходимо иметь запись трех функций: входных
х (t) (коррелированной с п (£)), z (t) (кор-
релированной с х (fy) и выходной у (t)
(рис. 9-16) [225]. Тогда
Ryz (О = \ки (x)Rxz (t~ т) dt. (9-61)
y(t)
Рис. 9-16.
О
Имеем интегральное уравнение, в ко-
тором функции R предполагаются известными. Решая это урав-
нение, найдем ки (т).
Если заранее известно, что х (t) и п (t) некоррелированы, то
достаточно записать лишь функции а: и у и решить уравнение
т
Ryx(t) = \ku СО Ry (t - О dr.
о
(9-62)
Решить уравнения (9-61) и (9-62) можно, например, методом
последовательных приближений [98, 99]. Нулевое приближение
&и0 (t) выбирается произвольно, а последующие приближения
определяются по формуле
т
^ип+1 (0 ~ kyin (0 а J Ry G т) ^ип (т) ~~ Rxy (0 >
L0
(9-63)
коэффициент а выбирается из условия а 1/А.тах, где А,тах —
наибольшее собственное число ядра (корреляционной функции Ry).
В большинстве случаев можно положить а = х/2.
Корреляционный метод может быть также применен для на-
хождения условного математического ожидания случайной функ-
ции М {Y (t)} и его дисперсии D {М [У (£)]} [148].
В каждый момент времени ^41 выходная случайная функция
У (t) определяется значениями X (^) в предшествующие моменты
i = 1, 2,..., п. Условное математическое ожидание выражается
уравнением регрессии
M{Y(lnn)\Xl, Х2, =
п
= t2, /2, •••, ^+1М^), (9-64)
2=1
где Аг — коэффициенты множественной регрессии.
Составляющие общей дисперсии выходной величины можно
найти из соотношений:
D{M[Y(tnll)\X(t1), =
= D {Y RyX(tv •••> (9 65)
M{D[Y(tnvl)\X(t1), ..., X(Q]} =
= Z) {У (^n+i)} [1 — (Zi, ..., £n+i)].
Во всех этих выражениях учитывается связь У (£п+1) в момент
tn+1 со всеми значениями X (^) в предшествующие моменты вре-
мени fx, f2, ..., tn. В весьма важном частном случае, когда плот-
ность вероятности функций X и У и их совместная плотность
вероятности нормальны, их математические ожидания тпх (£) и
тпу (£) и дисперсии Dx (t) и Dy (t) будут постоянными, а корреля-
ционные функции будут функциями разности tn+1 — т. При
этом условное математическое ожидание У (Zn+1) по-прежнему
определяется уравнением (9-64), а безусловное математическое
ожидание
М (^п+1)} “ а Gn+1 • • • > ^/111 ~ ^п)
+ 2 • • • ’ ~ ^п) М {А? (£|)} =
2=1
= a(T) + mx(02;4i(i). (9-66)
i=i
Дисперсию можно выразить следующим образом:
D{M[Y(tM1)\X(tl), X (/„)]} =
п п-2 71 — 1
= Ря(0£Ж) + 21)ж(0£ 2 4{(т)ЛДт)ряя(т^), (9-67)
2=1 2=1 j=2-f-l
где Рхх (Tij) — коэффициент корреляции X (t) в моменты и т^.
Коэффициенты регрессии определяются из системы уравнений:
У, Аг К P.vx (Tli) °х (Ti) = Рух К) Оу (t)‘,
(9-68)
У. Ai К Рхх Ki) ох К)=рух К) оу (О,
а параметр
71 — 1
а (т) = ту (0 - тх (Z) (т).
2=1
(9-69)
При малых т и больших п полученные уравнения могут быть
использованы для идентификации при непрерывных функциях
X (0 и Y (£).
В общем случае, когда рассматриваемый объект не является
линейным, коэффициент корреляции уже не может служить в ка-
честве общей характеристики случайных величин X и Y. В этих
случаях в качестве характеристики связи можно принять диспер-
сионное отношение. Если внутренняя структура функций X и Y
неизвестна заранее, то корреляционные методы также могут при-
вести к существенным погрешностям. Методы идентификации,
основанные на использовании дисперсионных отношений и дис-
персионных функций, называются дисперсионными.
Автодисперсионная (или просто дисперсионная) функция опре-
деляется следующим образом:
0х h) = М {[М {X (г2) IX &)} -М{Х (z2)]}2} =
= 5 $ Я (Z2) Р [ж (/2) MZ1)1 Сг) -
— СО--со
- 5 х К) р Iх (z2)] dx (Z2)
2
Plx^dx^), (9-70)
иными словами, дисперсионная функция есть дисперсия условных
математических ожиданий значений X (t2) относительно X (£х)
6» К, <1) = P{M[X(Z2)|X(O]}. (9-71)
Часто удобнее воспользоваться нормированной дисперсионной
функцией (£2, ^1), представляющей собой дисперсионное от-
ношение случайной величины при различных аргументах:
чж, (9-та>
При линейной регрессии дисперсионная функция бх (t2, ^)
следующим образом выражается через коэффициент регрессии
^х (^2? ^1)
^х (^2* Ч) “ (^2, tl) D {X (ti)} == ^l)^x(^)’ (9-73)
Для этого же случая нормированная дисперсионная функция
Лх(^2» Ч) = |Рх(^2, 01’ (9-74)
При равных значениях аргументов t± — t2 = t дисперсионная
функция, так же как и корреляционная функция, становится
равной дисперсии случайной функции:
М0 = ^х(0>
(9-75)
а нормированная дисперсионная функция становится равной еди-
нице:
Лх(0 = 1Рх(01 = 1-
(9-76)
Если для двух заданных значений аргументов tr и t2 X (tj и
X (t2) независимы, то дисперсионная функция равна нулю. В дис-
персионном анализе используется также понятие взаимной дис-
персионной функции
ex, (z2> g)=м {[м {У (<2) | х &)} -M{Y (z2)}н =
DO Г оо ОО “12
= $ $ УгР (У21 *i) dy2 - У^Р{У^Лу2 P^dx^ (9-77)
Аналогично предыдущему определяется нормированная взаим-
ная дисперсионная функция
Ч.-Л. '.) = /^5Г' <9’78)
которая может принимать значения только в пределах от нуля
(когда X и Y некоррелированы) до единицы (когда между X и Y
существует функциональная зависимость).
Рассмотрим одномерный объект, на который условия нормаль-
ностей плотностей вероятности, линейности регрессии и гомо-
скедастичности корреляции не накладываются.
Пусть уравнения регрессии и скедастической поверхности
заданы в виде
М {У (Zn+1) I X (Zj, ..., X (tn)} = a (t,, .... Zn+1); |
M{D[Y(tn^\X(tl)t .... X(Zn)} = P(Z1, Zn+1). J (y’Z9)
Математическое ожидание и дисперсия выходной величины
для любого заданного значения аргумента £п+1 могут быть най-
дены по заданным уравнениям регрессионной и снедаетической
поверхности и плотности вероятности входной величины следую-
щим образом:
00 оо
М (^п+1)} “ • • ’ 5 а ’ ^+1)
— 00 — оо
X рп (*!, • • •, хп, tx, .... tn) dxlt dxn\ (9-80)
ОО оо
/>{УСп+1)} = _$ ...j {[aCl C+1)]2 +
+ р С1, • • • » ^п+1)} (^Т» • • • » • . ., tn) dxlt . . . , dxn —
оо оо
— S • • • 5 a (^1’ • • • ^п+1) ($1, • • • , Xnt ^1» • • Qx
-—00 — оо
“2
X dxr, ... , dxn . (9-81)
В настоящее время возможности приведенного решения огра-
ничены, так как n-мерная плотность вероятности и уравнения
регрессионной и скедастической поверхностей для сложных
объектов заранее неизвестны, а их экспериментальное определе-
ние дорого и трудоемко. Поэтому многомерные законы распреде-
ления случайных функций устанавливаются только для массо-
вых производственных процессов, в которых продукция остается
длительное время однородной.
Решение уравнений (9-80) и (9-81) также можно выполнять
приближенно, использовав кусочную линеаризацию уравнения
регрессии путем разбивки ее на участки с постоянными значе-
ниями математического ожидания условной дисперсии случайных
функций.
Совершенно очевидно, что математические модели, построен-
ные статистическими методами, из-за неучтенных связей, различ-
ных упрощающих предположений и т. д., будут не полностью от-
ражать свойства объекта. В качестве оценки степени соответствия
(изоморфности) математической модели реальному объекту пред-
ложена мера определенности [148]. Процесс называется неопреде-
ленным (нерегулярным), если выходные переменные не опреде-
ляются заданием входных переменных и свойствами объекта.
В определенном (детерминированном, регулярном) процессе вы-
ходные переменные полностью определяются входными перемен-
ными и свойствами объекта. Фактически процесс лишь частично
определяется входными данными.
Общую дисперсию случайной функции Yk (tn+1) на выходе
объекта можно представить как сумму дисперсий условного
математического ожидания и математического ожидания условной
дисперсии:
Я {Yh G„+i)} = D {М[У,( (in+1) | X (G), ..., X (/J, Z («J, ..., Z (Q]} +
[-М {D {Yh(fnn)\X •••, X(tn), Z(tJ........Z(tn)]}, (9-82)
где£ — функция, характеризующая внутреннее состояние объекта.
Дисперсию D {М [Yh (£n+1) | X (£), Z (£)]} называют множест-
венной дисперсионной функцией Yk относительно X и Z. В ка-
честве количественной оценки степени определенности процесса
по данному выходу Yk принимается отношение дисперсии услов-
ного математического ожидания к общей дисперсии выходной
функции
Q {Yh (Q | X (t), Z(t)} = ZW1} • (9-83)
Это отношение названо мерой определенности (детерминиро-
ванности) процесса. Величина этой меры равна нулю при пол-
ностью неопределенном, и единице при полностью детерминиро-
ванном процессе, для не полностью же определенного процесса
она положительна и заключена между нулем и единицей. Чем
выше степень определенности, тем больше соответствие между
математической моделью и реальным объектом.
Расчеты меры определенности для некоторых типов объектов
приводятся в [148].
9-6. Распознавание образов
Сама проблема распознавания образов относится к сфере
высшей деятельности мозга и, несмотря на довольно большое
число работ в этом направлении, разработана еще слабо. До сих
пор не сформулированы четко понятия большинства различных
встречающихся в жизни образов и отличающих их признаков.
Неясно, например, по каким признакам распознаются сложные
образы (например, по каким признакам человек сразу отличает
женское лицо от мужского и т. д.). Естественно, что при отсут-
ствии четкой и строгой постановки задачи нельзя ожидать эффек-
тивных и надежных методов ее решения. Тем не менее, практи-
ческое значение проблемы исключительно велико [2].
Для адаптивных систем, как мы видели, характерен процесс
обучения, состоящий в накоплении (запоминании) необходимой
информации и в ее анализе для последующего принятия решения.
В простейших случаях, когда конструктору автомата или обуча-
ющему автомат оператору ясно, какие решения следует принимать
при различных исходных данных, процесс обучения может про-
изводиться по алгоритмам, заложенным в автомат конструктором.
Но существуют важные для практики задачи, в которых среди
множества сложных ситуаций требуется отличать ситуации, отно-
сящиеся к определенным классам, причем четко охарактеризовать
эти классы заранее очень трудно. Несмотря на это, квалифици-
рованный человек выполняет эту классификацию довольно легко,
хотя и не может четко объяснить, как он это делает.
В таких случаях основной метод обучения одним человеком
другого состоит в показе ему ряда ситуаций и пояснению, к ка-
кому классу эту ситуацию следует отнести.
Ребенка, да и взрослого человека, гораздо легче обучить рас-
познавать буквы алфавита, показывая и называя эти буквы, чем
пытаясь точно описать, как эти буквы строятся. Практически
невозможно научить узнавать обыденное человеческое лицо, опи-
сывая его словами, но это можно легко сделать, показав фотогра-
фию человека. Показом целесообразно обучать распознавать
силуэты кораблей и самолетов, почерк определенных лиц, звуко-
вые образы (слова, фразы, тембр голоса и т. д.).
Наблюдаемую в данный момент ситуацию будем называть
объектом. Группа различных объектов, характеризуемая опре-
деленной совокупностью признаков, свойственных объектам только
данной группы, называется образом. Так, если мы к признакам,
по которым устанавливается образ, относим черты человеческого
лица, то образом для группы лиц может быть женское или муж-
ское лицо; лицо ребенка, подростка, юноши, взрослого человека;
лицо русского, грузина, еврея, но невозможно установить, на-
пример, образ множества лиц, проживающих в данном доме.
Признаки, по которым устанавливается образ, называются
информативными признаками. Любой объект помимо информатив-
ных имеет множество других признаков, не существенных для
опознавания образа. Так, для выделения мужского лица совер-
шенно не имеет значения цвет волос, глаз, кожи и т. п., зато для
выделения образов «брюнетов», «шатенов» и т. д. эти признаки
будут информативными, а признаки, по которым женское лицо
различалось с мужским, не информативными.
Одна из основных трудностей при распознавании образов
состоит в том, что очень часто информативные признаки не могут
быть полно и точно описаны на математическом, логическом или
каком-либо другом языке, но известно, что они существуют и что
оператор достаточно уверенно с малой вероятностью ошибки их
обнаруживает.
При автоматизации процесса опознавания помимо этой труд-
ности часто сталкиваемся и с другой. Чтобы можно было «пока-
зать» автомату объект, мы встраиваем в автомат систему датчиков,
«рецепторов», как их принято называть по аналогии с соответ-
ствующим физиологическим термином, которые воспринимают
некоторые количественные характеристики не всего объекта,
но его отдельных элементов. Задача существенно облегчилась бы,
если бы мы всегда умели строить рецепторы, воспринимающие
непосредственно информативные признаки образа. Но по разным
причинам (конструктивным, физическим и т. п.) построить рецеп-
тор, выдающий на своем выходе число, характеризующее одно-
значно тот или иной информативный признак, почти никогда не
удается. (Когда это удается, вся специфика проблемы распознава-
ния образа теряется и мы получаем обычный прибор автомати-
ческого контроля. К таким автоматам относятся, например, устрой-
ства для чтения печатного текста определенного шрифта и раз-
мера.)
Информативный признак должен быть выработан на основании
выходных координат рецепторов. Эта задача оказывается за-
частую весьма нелегкой даже в тех случаях, когда мы можем
точно описать информативный признак. Пример — выделение из
множества геометрических фигур кругов, треугольников, квад-
ратов, полукругов и т. п., разного размера и расположенных
произвольным образом. Человеческий глаз это делает мгновенно.
Алгоритм же, основанный на точном описании фигур уравнениями
или же счетом углов, криволинейных или прямолинейных участ-
ков, и т. п., оказывается весьма трудно реализовать технически.
Практически в таких случаях часто приходится отказаться от
попыток использования наших исчерпывающих знаний описаний
информативных признаков из-за их сложности и переходить
к методу обучения показом.
Распознавание образов на основе обучения показом основы-
вается на преобразовании данных наблюдения объектов в сово-
купности чисел и на обработке этих чисел по специальным ал-
горитмам.
Для преобразования данных о наблюдаемом объекте в сово-
купность чисел и последующей обработки этих данных весьма
полезным оказывается понятие метрического пространства. Каж-
дому признаку (не только информативному) объекта можно при-
писать некоторое число, такое, чтобы оно не совпадало с числами,
приписанными другим признакам. Тогда всей совокупности N
признаков объекта будет соответствовать совокупность чисел,
которые можно рассматривать как координаты некоторой точки
в A-мерном пространстве признаков. Таким образом, каждый
объект в данном пространстве отображается точкой, а образ —
совокупностью точек, обладающих общими информативными при-
знаками. Если удалось выполнить отображение признаков в про-
странстве или, как говорят, построить пространство признаков
так, что образам будут соответствовать непересекающиеся об-
ласти, внутри которых точки расположены достаточно близко
друг к другу, и между этими областями могут быть проведены
разделяющие их гиперповерхности, то решение задачи распозна-
вания образа облегчается.
Гипотеза о том, что пространство признаков обладает упомя-
нутыми свойствами (близостью точек и разделимостью областей)
была выдвинута в [21] под названием «гипотезы компактности».
Однако так как понятие компактности множества не совпадает
с данным понятием (математическое понятие компактности оказы-
вается весьма суровым и встречающиеся в практике ситуации
обычно не удовлетворяют математическим условиям компакт-
ности), то мы будем избегать в дальнейшем этого термина и гово-
рить о «гипотезе разделимости образов поверхностями».
К сожалению, проблема построения пространств признаков,
в котором гипотеза разделимости оказывается справедливой, не
Рис. 9-17.
имеет общего решения. Пока удалось решить на основе этой
гипотезы лишь ряд частных задач. Во многих же задачах области,
соответствующие образам, взаимно проникают друг в друга,
напоминая, по образному выражению М. Бонгарда [19], губку
с водой, что делает практически невозможным построение авто-
матом поверхности, отделяющей губку от воды. Но, тем не менее,
на основе гипотезы разделимости, удалось построить алгоритмы
для опознавания цифр, некоторых топографических знаков на
карте и некоторых других простейших образов.
Ниже мы рассмотрим некоторые из алгоритмов распознавания.
Пандемониум. Одной из первых машин для распознавания
образов был «пандемониум», построенный О. Селфриджем в 1958 г.
[260]. Название «пандемониум» навеяно известными рассужде-
ниями Д. К. Максвелла о «демоне», который противодействует
росту энтропии, открывая дверцу в разделяющей два закрытых
сосуда перегородке перед быстролетящими молекулами газа, и
закрывая ее перед медленнолетящими молекулами [248], в ре-
зультате чего происходит повышение температуры газа в одном
сосуде и понижение ее в другом.
Упрощенная схема пандемониума для выработки двух взаимно
дополнительных понятий показана на рис. 9-17.
Образ характеризуется совокупностью величин и ~ {и±, и2,..., un}
в пространстве признаков [7, воспринимаемых датчиками Д.
Области, соответствующие двум образам, могут оказаться раз-
деленными сложной поверхностью (рис. 9-18, а), что затрудняет
построение алгоритма распознавания, поэтому предварительно
Рис. 9-18.
с помощью вычислительного устройства ВУ производится по-
строение «спрямляющего пространства» X, на которое отобра-
жается пространство признаков U. С этой целью вычислительные
устройства вырабатывают некоторые функции состояния дат-
чиков
= и2, • • • > М- (9-84)
Функции Д выбираются так, чтобы множество точек хг£Х
в пространстве X, соответствующих одному образу, попало в об-
ласть Е1 (рис. 9-18, б), другому образу — в область Е2,
и между областями Ег и Е2 можно было бы провести множество
разделяющих гиперплоскостей
N
а = 2 + Ху +1 = 0. (9-85)
г==1
Если такая гиперплоскость (в дальнейшем для краткости будем
говорить о разделяющих поверхностях и плоскостях, опуская
приставку «гипер») существует и построена, то для любой точки
области Е± линейная форма о будет иметь один знак (например, +),
а для области Е2 — противоположный (—). Поэтому по знаку о
можно судить, к какому из двух классов (образов) принадлежит
показанный объект.
На схеме рис. 9-17 значения поступают на усилители с пере-
менными коэффициентами усиления Функция о образуется
путем суммирования выходов усилителей и величины Адг-н и
поступает в решающий блок РБ, выявляющий знак о и выдаю-
щий в соответствии с этим знаком код образа. Этапу распозна-
вания предшествует этап обучения, который заключается в том,
что оператор показывает пандемониуму серию объектов и контро-
лирует правильность его ответов. Если пандемониум ошибся, то
оператор подает сигнал на управляющее устройство УУ. Число
Рис. 9-19.
ошибок за некоторый промежуток времени Т представляет собой
некоторую функцию F (Х1? Х2, Предполагается, что эта
функция имеет минимум в пространстве X. Управляющее устрой-
ство изменяет Х1? Х2, ..., KN так, чтобы минимизировать F. Так как
функция F заранее неизвестна, УУ осуществляет поиск по методу
наискорейшего спуска, т. е. действует как многоканальный опти-
мизатор.
Пандемониум действует, исходя из того, что самая трудная
задача — построение пространства признаков U, в котором спра-
ведлива гипотеза о разделимости плоскостью для данных образов,
уже выполнена. На практике, однако, воспринимаемые рецепто-
ром входные величины, не соответствуют информативным при-
знакам образа, и не гарантируют выполнения гипотезы разде-
лимости плоскостью. Примером попыток преодоления этой труд-
ности является построение в 1958 г. Ф. Розенблатом классифи-
цирующей машины, названной им «перцептрон» [153, 257—258].
Перцептрон. Перцептрон (от perception—восприятие) был
задуман как модель восприятия изображений системой зрения
живого организма. Подобно тому, как зрительный образ вос-
принимается по элементам рецепторами сетчатки глаза, в
перцептроне восприятие объекта осуществляется группой элемен-
тов, называемых рецепторами (элементы группы S на рис. 9-19).
Каждый из рецепторов может находиться либо в возбужденном,
либо в невозбужденном состоянии, но пространство рецепторов
не удобно для построения разделяющих поверхностей и для его
преобразования в перцептрон введена вторая группа — ассоциа-
тивные элементы (элементы группы Л). Так как требуемый закон
преобразования неизвестен, то связи между рецепторами и ассо-
циативными элементами также неизвестны. Розенблат предлагает
перед началом работы перцептрона установить некоторую слу-
чайную структуру связей, которая в дальнейшем уже не изме-
няется (если только в надежде улучшить работу перцептрона
испытатель не пожелает сделать попытку перейти к другой, также
случайной структуре). Каждый из рецепторов может быть под-
ключен к данному Л-элементу или со знаком плюс (возбуждаю-
щая связь) или со знаком минус (тормозящая связь), или вообще
не подключен. Л-элемент работает как сумматор с порогом: он
возбуждается, если сумма сигналов, поступающих к нему от
рецептора, превысит некоторый порог. Выходы Л-элементов
через усилители с переменными коэффициентами передаются
в сумматор R. Значения устанавливаются в процессе обучения.
Разобьем все рецепторы на две группы — возбуждающую и
тормозную, в зависимости от знака связи с Л-элементом. Если
в первой группе Z, а во второй т элементов, то в некоторый дис-
кретный момент п имеем
I т
о Ы = S №н l«] — S Ч Н,
1=1 j=1
где индексами 1Z отмечены рецепторы первой, индексами 2j —
второй групп. На выходе элемента R вырабатываются два сиг-
нала:
(9-87)
Рг [«] = 1 - Pl М-
Сигнал подается па рецепторы р2 — на Z2j и изменяет
их коэффициенты по закону:
И = [n + 1] - А.н [и] = (хи [п] - kllkli [и] Р1 [п]); )
Al2j [n] = [и + 1] - [и] = (х2} [лг] - k2}k2i [n] р2 [zi]). J
Обучение сводится к тому, что мы производим в моменты вре-
мени t = 1, 2, ..., п показы перцептрону серии объектов данного
образа. Перцептрон сам вырабатывает при этом сигналы изме-
нения X и, в конце концов, если классификация удалась, после
достаточно большого числа показов начнет выдавать при после-
дующем появлении одного класса объектов 1, другого — 0, для
некоторых же объектов будет наблюдаться чередование единиц
и нулей. Перцептрон далеко не всегда в состоянии вырабатывать
понятия или системы, которые совпадают с понятиями оператора.
Это вполне понятно: при построении его конструктор не знал
точно, какой должна быть внутренняя структура машины, пы-
тался воспроизвести в какой-то степени схему зрительного аппа-
рата, хотя и она также не была ему известна во всех деталях,
понадеялся на удачный случай (первоначальный выбор связей)
и на то, что процесс обучения в какой-то мере выправит ошибки.
Значительное место в процессе построения машины (что довольно
часто происходит, когда используется подход «черного ящика») за-
нимала «надежда на чудо». Перцептроны различных типов де-
тально рассмотрены в [122, 258, 267, 268], их анализ дан в [21,
18, 44, 45]. В [21], в частности, рассмотрены способы определения
возможности классификации перцептроном при заданных струк-
туре (значениях XJ, характере образа (вида функций х) и стати-
стике показа (видом функции плотности вероятности появления
объектов разных классов). Оказалось, возможности перцептрона
довольно ограничены. В [123] приведены примеры задач, оказав-
шихся для перцептрона «трудными». При различении прямо-
угольников, вытянутых в горизонтальном и вертикальном направ-
лениях, после показа 15 фигур в дальнейшем перцептрон при
30 испытаниях сделал 6% ошибок; при различении произвольно
расположенных окружностей и треугольников разных размеров
число ошибок достигло 33%, при различении прямоугольников
и эллипсов число правильных ответов было 50%. Иными словами,
первая задача решалась более или менее удовлетворительно,
вторая очень плохо, а в третьей перцептрон фактически не
работал. По-видимому, успех в первой задаче в значительной
мере объяснялся тем, что малые размеры растра дали возмож
ность перцептрону запомнить почти все возможные фрагменты
фигур, т. е. работа перцептрона приближалась к работе автомата
«с полной памятью».
В рассмотренных выше примерах для решения задачи распозна-
вания использовались специально построенные для этой цели
машины — «пандемониум» и перцептроны различных типов
(«Марк I» и др.). Были сделаны попытки построить и другие типы
машин («Адалина», «Мадалина») [267, 268]. В настоящее время
интерес к построению специализированных машин (в конечном
итоге мало эффективных) ослаб и значительно больше внимания
уделяется построению различных программ распознавания для
универсальных вычислительных машин.
Рассмотрим некоторые из алгоритмов, на основе которых
строятся такие программы.
Метод случайных плоскостей [11, 22]. Пред-
ел агается, что построение пространства признаков выполнено
и что гипотеза разделимости образов в этом пространстве соблю-
дается.
При показе подряд двух точек, которые обучающий относит
к разным образам, машина, получив от него эти указания, про-
водит в пространстве признаков случайным образом произвольную
разделяющую плоскость. При показе каждой следующей точки
машина не реагирует на показ,
же образу, что и предыдущая, и
разделяющую плоскость, когда
образу.
если точка принадлежит к тому
каждый раз проводит случайную
точка будет отнесена к другому
В конце процесса обучения в памяти машины накапливается
большое число разделяющих плоскостей. Затем по определенному
алгоритму из памяти машины стираются те части плоскостей,
по обе стороны которых оказались одноименные точки. На рис.
9-20, а показана разделяющая плоскость 7, проведенная между
точками 1 и 2\ на рис. 9-20, б добавлена плоскость II, разделяю-
щая точки 2 и 3; на рис. 9-20, в добавлена еще плоскость III, от-
делившая точки 4 и 5 и плоскость IV, проведенная между точ-
ками 5 и 6. На рис. 9-20, г показаны прерывистыми линиями
стертые части этих прямых. Оставшаяся ломаная линия принята
за разделяющую поверхность. Как видно, эта поверхность не сов-
сем точно разделяет области, хотя вероятность правильной клас-
сификации довольно высока. Удлинняя процесс обучения, точ-
ность разделения можно повысить.
Метод потенциальных функций. При показе
некоторой точки х, принадлежащей образу X (х X), машина
296
строит поверхность, соответствующую некоторой функции, всюду
положительной, достигающей максимума в данной точке и умень-
шающейся при удалении от нее в любом направлении. Для всех
показанных точек, принадлежащих одному образу, такие функ-
ции строятся для каждой из точек и затем суммируются. В ре-
зультате для каждого из двух образов получаются две потен-
циальные поверхности, одна из которых имеет «горб» над областью,
принадлежащей первому образу, другая — над областью вто-
рого образа (рис. 9-21). При показе новой точки сравниваются
значения потенциальных функций, определяемых поверхностями
I и II, и точка относится к тому образу, для которого значение
потенциальной функции оказалось большим.
Пусть срг (х) есть некоторая функция и пусть существует раз-
деляющая поверхность, г
функции <pi следующим
образом:
N
1~1 (9-88)
(т. е. ф (х) разлагается в
конечный ряд по функциям
<р). Введем в рассмотрение
потенциальную функцию
К (х, х*) =
(9-89)
где х * — показываемая в
Функция К зависит от этой точки, как от параметра. Припишем
этой функции знак + , если показанная точка принадлежит об-
разу А, и знак — , если она из образа 5. Так, для точки х х:
точка.
если х1 £ А
если х1 £ В.
(9-90)
Если после г показов построен потенциал Кг (ж), то для сле-
дующей точки г + 1 имеем
/ Кг(х), если ^г(^г+1>)>0, и ж‘г+1’СИ;
I или если Кт (ж(г+1)) 0, и ж(г+1)^5;
^r+1= Kr(x) + K(x, z<r+1>), если Кг(х(г+»)<0 и
Кг(х) — К(х, ^г+1)), если ^r(x(rF1))>0 и х^£В. .
(9-91)
Последние две строки соответствуют нарушению правила
знаков, например г + 1-я точка оказалась из образа Л, но потен-
циальная функция для нее отрицательна. Это означает, что клас-
сификация г + 1-й точки оказалась ошибочной. Каждое изме-
нение функции Кг (х) путем добавления или отнятия К (х, х^г +
называется «исправлением ошибки». В конце обучения после по-
каза TV-й точки получаем функцию KN (х), которая и принимается
за разделяющую поверхность. В [3, 4] доказана сходимость алго-
ритма за конечное число шагов с любой наперед заданной точ-
ностью. Там же показано, что перцептрон «Марк I», построенный
Розенблатом, реализует алгоритм потенциальных функций для
того частного случая, когда в качестве функций (х) прини-
маются пороговые функции и доказано, что перцептрон будет
обучаться и в том случае, если вместо пороговых элементов будут
установлены любые функциональные преобразователи, реализую-
щие некоторую систему функций, по которой разлагаются разде-
ляющие функции.
Метод обобщенного портрета. Метод обобщен-
ного портрета для обучения распознаванию образов подробно
изложен в [25—28].
Пусть имеется множество объектов Я, распадающееся на п
непересекающихся подмножеств Я1? Я2, ..., Яп. Объекты имеют
однозначные отображения в пространстве рецепторов X. Про-
странство X представляет собой некоторое абстрактное про-
странство, свойства которого определяются видом преобразова-
ния характеристик объекта в векторы Хг, т. е. физическими свой-
ствами воспринимающего образ устройства (рецептора). Если
существуют образы, соответствующие подмножествам Ях, ..., Яп,
то в общем случае разделяющая поверхность в пространстве X
(если она вообще существует) обычно слишком сложна. Поэтому
подобно тому, как в предшествующих методах прибегали к пост-
роению «спрямляющего пространства», в котором разделяющими
поверхностями являются гиперплоскости, в методе обобщенного
портрета также прибегают к построению вспомогательного метри-
ческого пространства Т так, чтобы каждому образу Я; (или его
изображению х{ в пространстве X) можно было бы поставить
в соответствие точку <р{ в пространстве Т так, чтобы выполнялись
соотношения
Р(М>,)<Р(Ш (9-92)
где fi — точка пространства Т, соответствующая элементу образа
Я*; Д — точка того же пространства, соответствующая образу Яу,
р (/г» Фг) расстояние точки Д от точки <ре
Неравенство (9-92) можно трактовать так: расстояние между точ-
кой ф| и любой точкой «постороннего» для точки ф; образа Д всегда
больше расстояния между точкой ф^ и любой точкой «своего» обра-
за Д. Если удалось построить пространство Т, обладающее отмечен-
ными свойствами, то точка ф^ называется обобщенным портретом
образа Неравенство (9-92) можно также записать:
р(А, (9.93)
P(/i, /
где 2?fe = supp(/ft, <pft).
Таким образом, если обобщенные портреты образов существуют,
то для того чтобы точка Д в пространстве Т принадлежала к обра-
зу необходимо, чтобы она находилась внутри сферы с центром
в точке фч имеющей радиус Rk называется порогом узнавания
образа Hk. Попадание точки внутрь сферы является необходимым, но
не достаточным условием для опознавания образа, так как из непере-
секаемости образов еще не следует непересекаемость сфер и в про-
странстве Т могут быть области, принадлежащие нескольким
сферам одновременно. Точки, находящиеся внутри этих областей,
не могут быть опознаны неравенствами (9-93) и, в соответствии
с определением, не будут принадлежать образу.
В [25] процесс распознавания предложено подразделять на
две разновидности: различение и узнавание образов. Различение
соответствует случаю, когда мы заведомо знаем, что изображение
Xi принадлежит одному из образов (например, если мы опознаем
женское лицо, то в случае показа человеческого лица нам необ-
ходимо лишь определить, к какому из двух образов оно отно-
сится). Если же мы заранее не знаем, что объект принадлежит
к одному из образов, процесс распознавания называется узнава-
нием образа.
В случае различения выполнения неравенств (9-93) (т. е. попа-
дания точки внутрь одной из сфер) достаточно, чтобы установить
образ. В случае узнавания, кроме этого, надо установить, при-
надлежит ли данная точка вообще какой-либо из сфер и только ли ей.
Вид пространства Т зависит от способа преобразования векто-
ров X в вектора /. В частности, если выбрать это преобразование
так, что пространство Т будет представлять собою единичную
сферу в гильбертовом пространстве, то неравенства (9-93) перейдут
в неравенства для скалярных произведений:
(Л, <h)s^;
(Л,
где порог узнавания Ki определяется так:
(9-94)
Ki = inf (fi <Pi)-
Если все отличны от нуля, то, обозначив
неравенства (9-94) перепишем в следующим виде:
(/i si) 1 > (Л> 5г) для всех 1 Л (9-95)
откуда
(/Hi)X/Hi)* (9-96)
Последнее неравенство можно принять за условие различения
образов. Его удобно несколько преобразовать. Введем в рассмот-
рение пороговую функцию
0[(/, ^)] = 2/Ь
которая равна единице, если произведение (/, ф^ превышает
порог а (/, > 1, т. е. если / принадлежит к образу и
равна нулю, если (/, <р.) меньше этого порога:
( 0 при z 1 1
0(*)= , (9-98)
( 1 при z^ 1. J
Верхний индекс при у указывает на индекс системы однород-
ных образов, содержащих образ Условие узнавания образа Hi
можно записать так:
N
ER=* (9-99)
1 = 1
Отсюда видно, что операция узнавания не заканчивается
преодолением порога узнавания, а требует еще проверки выпол-
нения условия (9-99).
Таким образом, для распознавания образа нужно сличить
описание показанного объекта со всеми обобщенными портретами
однородных систем, хранящимися в памяти; выдать сигнал о пре-
одолении порога; в случае узнавания — проверить выполнение
требования (9-99).
Уравнение
(А <р<)=^,
где вектор ф{ фиксирован, есть уравнение гиперплоскости, пер-
пендикулярной вектору ф^. Это означает, что в евклидовом про-
странстве метод обобщенного портрета сводит задачу к разделе-
нию образов в пространстве гиперплоскостями.
Заметим, что при практическом построении обобщенного порт-
рета можно обойтись без точного отыскания преобразования про-
странства X на единичную сферу. Чтобы соблюдались условия
(9-94), нужно стремиться к тому, чтобы скалярные произведения
(/, ф) были тем больше, чем ближе число /, выражаемое кодом
объекта к числу ф, выражаемому кодом обобщенного портрета ф.
Такому свойству удовлетворяют, например, бинарные коды объек-
тов. Скалярное произведение двух бинарных кодов равно сумме
попарных (поразрядных) произведений чисел этих кодов. Произве-
дение двух одинаковых кодов равно сумме единиц, входящих
в этот код. Если объект будет незначительно отличаться от порт-
рета, что отразится на изменении одной из цифр кода, то скаляр-
ное произведение или сохранится (если один из нулей заменится
единицей) или уменьшится (если единица заменится нулем). Таким
образом, при удалении объекта от образа скалярное произведе-
ние их кодов убывает.
Чтобы метод обобщенного портрета дал эффективные резуль-
таты, надо стремиться кодировать объекты так, чтобы при не-
больших их отличиях коды этих объектов также мало различались.
Процедуру классификации по методу обобщенного портрета
можно разделить на три основные этапа:
1) кодирование признаков показываемых объектов;
2) построение обобщенного портрета по данным показа;
3) классификация объектов путем сличения их кодов с кодом
обобщенного портрета.
Второй этап (построение обобщенного портрета), как правило,
требует использования для обработки полученных при показе
объектов данных на вычислительной машине. Первый и третий
этап могут выполняться вручную. Это делает метод практически
удобным для исполнителей, которые не имеют возможности при
выполнении непосредственной классификации новых объектов
пользоваться вычислительной техникой, например для врачей,
ставящих диагноз вдали от крупных центров, для геолого-развед-
чиков, определяющих характер разведуемых пластов, для крими-
налистов и т. д. Отправляясь на места, где надлежит выполнять
распознавание классов объектов, они берут с собой обобщенный
портрет, вычисленный в центре, который имеет вид таблицы.
Рассмотрим все упомянутые этапы распознавания.
7. Кодирование объектов в процессе показа. Для кодирования
объектов в процессе их показа необходимо заранее установить
признаки, существенные для классификации объектов. Если
какая-то часть информативных признаков известна, то эта часть
кодируется. Но обычно информативные признаки неизвестны.
Тогда на основании знания свойств объектов или же интуиции
устанавливаются легко наблюдаемые, но не информативные при-
знаки, о которых известно лишь то, что они с высокой степенью
вероятности связаны со скрытыми от нашего наблюдения инфор-
мативными признаками. При этом мы, конечно, привносим элемент
неопределенности, который в конечном итоге будет приводить
к ошибкам в результате классификации.
Далее, когда выбраны признаки для суждения об объекте,
им приписываются тем или иным способом числа. Простейший
способ кодирования, который обычно и используется, состоит
в том, что мы приписываем единицу наличию признака и нуль
его отсутствию, т. е. применяем двоичную систему кодирования.
Так, например, мы поступаем, кодируя объекты типа рукописных
букв,
На рис. 9-22 показан способ кодирования рукописной буквы б.
Область, в которой могут появиться элементы этой буквы, де-
лится на квадраты (для простоты на рисунке не пронумерованы
те части поля, в которые заведомо никакая часть буквы не попадет).
Каждому квадрату приписывается номер, соответствующий раз-
ряду двоичного числа, изображающему код объекта. Порядок
разрядов (т. е. порядок нумерации при этом) выбирается произ-
вольно. Число разрядов обычно выбирается интуитивно. Можно
считать очевидным, что если число признаков (разрядов) выбрано
слишком малым, то вероятность правильных ответов после окон-
I 1И
Код: 00000000000111000411....
Рис. 9-22.
чания обучения будет весьма малой.
Увеличение числа признаков сначала
будет улучшать качество работы обу-
чаемой системы, но, по-видимому, уве-
личение их числа свыше какого-то
порога становится практически бес-
полезным. По-видимому, это связано
с тем, что при превышении некоторого
предела мы уже начинаем вводить в
рассмотрение больше ложных, несу-
щественных признаков, чем существен-
ных, т. е. «засорять» информацию. Кро-
ме того, увеличение числа признаков,
т. е. увеличение размерности задачи,
приводит к усложнению процедуры
вычислений.
В случае кодирования буквы далее
мы можем поступать следующим обра-
зом: если в квадрат с номером К не
попала часть изображения буквы (или
же попавшая часть изображения зани-
мает менее половины квадрата), то в я-м разряде числа записы-
вается нуль, в противном случае — единица.
В тех случаях, когда признаки характеризуются непрерыв-
ными функциями, например кодируется тоновое изображение или,
скажем, в геологоразведке используется такой признак, как
электрическое сопротивление зонда, введенного в породу, при-
бегают к квантованию характеристики признака по уровню.
Так, если сопротивление превышает некоторый порог, то в /с-м
разряде записывается нуль, в противном случае — единица.
Иногда приходится разбивать диапазон изменения сопротивле-
ния на несколько уровней и вводить соответственно несколько
признаков для описания.
В табл. 9-5 показаны примеры такого кодирования. Если фи-
зический параметр удовлетворяет неравенству (или другому усло-
вию), записанному в заголовке столбца, то в соответствующей
строке ставится единица; если не удовлетворяет — ставится нуль.
В результате описанной процедуры каждому из показанных
объектов приписывается TV-разрядное двоичное число, где N —
число признаков, т. е. сопоставляется точка в TV-мерном про-
странстве признаков.
К» пласта oooo-oocnrfsooroo № пласта Таблица 9-5, а I Класс — нефтеносные пласты
оооооооооо =5 2 Кажущееся сопротивление на градиент-зонде длины 4,25 м (ом)
оООоООоООо 2<р<5 ьэ
оооооооооо р 5 со
| Коды
ООООо^ОООО 1 =5 р =<3 Кажущееся сопротивление на градиент-зонде длины 0,75 м, ом
Оь^Он^оООО^О ьэ
ОООООООООО ы ООоОООООоО ьн 3 < р =510 с^
оооооооооо
§ ОООоОООООО S» р >10 ст Кажущееся сопротивление на градиент-зонде длины 0,45 м, ом
ОООООООООО СП
8 | оооооооооо -3 Сопротивление вмещающей породы больше сопротивле- ния пласта
ОООоОооООО О)
ОооООООоОО
О Я ^^ООООоООО а завышено 00 Влияние экранировки
оОООоООООо GO
1 1 0 0 1 0 0 1 0 0 осны занижено ст
ООООООООоО со
0<O<O0O00O<OO о CD „ ОООООООООО =5 0,4 ст Относительная амплитуда потенциалов собственной поляризации, в
ОооОО>ОООоО н* § ОООООООООО н > 0,4
ООООоООоОо СО Е •-* оооооооооо >2 го Мощность пласта, м
оооооооооо со оооооооооо =5 1,5 со Сопротивление бурового раствора, ом
оооооооооо !> О^^Ои^ОО^О > 1,5 !>
оОООООооОО СП S » ь^ООь^ОООь^ОО О\ >d 5 Диаметр скважины
О о О О о о О О о О ст 0000001^00^ -g < 0,3 | ст Показания нейтронного гамма-метода
ОООООООоОо оооооооооо >0,3 |
оооооооооо оо Ot * ОоООоь^ООоО О\ >0,1 Показания гамма-метода
Как отмечалось выше, при кодировании мы должны стремиться
к тому, чтобы возможно лучше выполнялись условия (9-94),
т. е. чтобы при малых деформациях объекта возможно меньше из-
менялось расположение единиц и нулей в коде. Это обстоятель-
ство дает основание стремиться, например, располагать буквы
возможно наиболее одинаковым образом по отношению к коди-
руемому полю, чтобы ослабить влияние ракурса, размера и т. п.
и оставить признаки, характеризующие почерк.
2. Вычисление обобщенного портрета. Вычисление обобщенного
портрета — наиболее трудоемкая часть вычислительной процеду-
ры, которая,'! как правило, требует использования вычислитель-
ных машин. Лишь в очень редких случаях, когда число призна-
ков не более 3—4, эту процедуру в приемлемое время можно вы-
полнить вручную.
В [25] показано, что в случае существования образов их обоб-
щенные портреты могут быть найдены следующим образом.
Пусть при обучении было показано п объектов, из которых I
оказались принадлежащими к образу а остальные п — I не
принадлежащими к нему. Перенумеруем объекты так, что номера
I = 1, 2, ..., I соответствуют объектам, относящимся к образу
а у = I + 1, Z + 2, ..., п, не относящимся к этому образу. Тогда
существует вектор фо для которого удовлетворяются условия
(9-94):
+ £ РЛ (9-100)
1=1 j=z-l-l
где 0, 0 — постоянные весовые коэффициенты; —
векторы объектов образа fj — векторы объектов, не принадле-
жащие образу.
Коэффициенты ai и [3;- можно выбрать так, чтобы вектор ф!
имел наименьшую длину. При этом порог узнавания
7?{ = min(/{, <р{)
fi
будет иметь наибольшее значение.
Знания ai и (3^, при которых выполняется это условие, могут
быть найдены как координаты устойчивой особой точки следую-
щей системы уравнений (при е ->0):
$ = + Л £ (Д, Д)рД
L л=1 fi=z+i J
i = l, 2, I;
5 = -epj + /’2r^-2(/ft,/J.)aA t (fk, Л)рД
L a=i л=;+1 J
j = I-f-1, Z-+-2, zi,
• (9-101)
функции же Fr и F2 определяются из условий:
Fd^ =
Решить эти уравнения можно на
схема которой показана на рис. 9-23.
моделирующей установке,
На этой схеме скалярные
произведения обозначены: Величина е определяет
точность решения и выбирается настолько малой, чтобы ошибка,
возникающая при 8^0, была соизмерима с прочими погрешно-
стями.
Вычисление обобщенного портрета можно выполнять и на
цифровой вычислительной машине. При этом после показа не-
скольких объектов, принадлежащих данному образу, коорди-
наты этих объектов записываются в блоке памяти. Затем вычи-
сляется матрица || II скалярных произведений векторов, с
помощью которой находятся коэффициенты ai и р^, так как они
соответствуют точке равновесия, то их можно найти из системы
уравнений (9-101) при^ = ^ = 0. После этого вычисляется
обобщенный портрет по формуле (9-100).
Портрет запоминается блоком памяти. Из числа векторов,
предъявленных при обучении, исключаются из памяти те, которые
вошли в обобщенный портрет с нулевыми коэффициентами. В по-
следующей итерации проверяется, правильно ли опознается
объект при «экзамене», т. е. предъявлении следующей обучающей
последовательности. Векторы неправильно опознанных объектов
вводятся в блок памяти с указанием, принадлежит или не принад-
лежит этот вектор к данному образу. Далее вычисляется расши-
ренная матрица скалярных произведений с включением нового
вектора. Если же в памяти места нет, то один из ранее входивших
в обобщенный портрет векторов (лучше — входящий в него с наи-
меньшим весом) исключается чтобы освободить место новому
вектору, и вычисляется новый обобщенный портрет. Процедура
дродолжается до тех пор, пока вероятность ошибки не снизится
до заданной величины. Кроме обобщенного портрета, для после-
дующего узнавания образов надо знать порог узнавания. Порог
вычисляется по формуле
Если требуется разделение объектов только на два образа,
то удобно вычислить обобщенный портрет фх: сначала для одного
образа, потом обобщенный портрет ф2 для другого, и в результате
принять за единый обобщенный портрет вектор фХ2 = фх — ф2.
Этот обобщенный портрет выдается в виде таблицы, состоящей из
двух строк. В первую выписываются коэффициенты при коорди-
нате хг образа фх, а во второй — коэффициенты при хг образа ф2.
Порог узнавания для такого обобщенного портрета равен нулю.
3, Опознавание образов после обучения. В режиме узнавания
получается код объекта, который прикладывается к таблице обоб-
щенного портрета так, чтобы номера соответствующих столбцов
(координат) портрета и таблицы совпадали. После этого вычис-
ляется скалярное произведение: оно равно сумме попарных произ-
ведений одинаковых координат объекта и портрета. Если эта
сумма превышает порог, объект принадлежит к образу.
Если имеется несколько образов, то скалярные произведения
составляются для данного объекта с каждым из обобщенных порт-
ретов. Объект считается принадлежащим к образу, если одно
и только одно скалярное произведение превысит порог. В против-
ном случае объект считается не принадлежащим ни к одному из
образов.
В том случае, когда имеется только два образа и составлен
обобщенный портрет ф12 = <Pi — ф2, поступают так. Если i-я
координата объекта равна единице, то берется число из первой
строки i-ro столбца обобщенного портрета. Если i-я координата
объекта равна нулю, то выписывается число из второй строки
i-ro столбца портрета. Все выписанные числа складываются, и
если их сумма оказывается больше нуля, то объект относят к об-
разу фх, если меньше нуля — к образу ф2.
Пример. Рассмотрим различение нефте- и водоносных пластов в гео-
логоразведке. Пласт может быть или нефтеносным (образ <рх), или водоносным
(образ <р2). В табл. 9-6 в первой строке помещены номера координат, во вто-
рой и третьей даны коэффициенты обобщенного портрета ОП ф12, в четвер-
той — код опознаваемого пласта.
Таблица 9-6
№ коорди- наты 1 2 3 4 5 6 7 8 9 10
Ф1 —6 4-8 +4 +2 -15 -10 +3 +3 +5 —2
Фа —4 —2 —2 +1 +3 +2 —1 —2 -3 +1
Код пласта 1 1 0 0 1 0 1 0 0 1
В первом столбце координата пласта равна единице. Берем цифру из
строки фх, т. е. —6. Для второго столбца берем +8. В третьем столбце коор-
дината пласта нуль, берем цифру —2 из нижней строки ОП и т. д. Конеч-
ный результат:
8 — 2 + 1 ~ 15 + 2 + 3 — 2 3 — 2 = — 16<0
Так как результат отрицателен, пласт принадлежит к образу ф2, т. е.
является водоносным.
В [103] описана доступная для ручного счета процедура распознавания
образов, несколько напоминающая процедуру метода обобщенного портрета
и в ряде случаев показавшая вполне удовлетворительные результаты.
В табл. 9-5, а показано, как формируются совокупности координат, обра-
зующие коды нефтеносных пластов. При обучении показано десять пластов
(этого для практических задач мало, так же как мало и число признаков.
Уменьшенные цифры приведены лишь для наглядности иллюстрации).
В табл. 9-5, б помещены полученные аналогичным способом коды водо-
носных пластов. Для получения аналога обобщенного портрета (это не будет
обобщенный портрет, так как при этом не обеспечивается минимизация
длины вектора ф$.) сначала найдем вероятности появления единиц и нулей
для каждого столбца таблицы с обучающей последовательностью. Так,
в первом столбце табл. 9-5, а девять нулей и одна единица, поэтому, принимая
частоту появления нуля за вероятность, получаем р01 = 0,9. Вероятность
появления единицы рц = 0,1. Для первого столбца табл. 9-6, б соответ-
ственно р02 = 0,6, Pia — 0,4.
Строим новую табл. 9-7, в которой в верхнюю строку записываем раз-
ности 7?oi = 1g Poi ~ 1$ Р02 Для каждого из столбцов, а в нижнюю — раз-
ности Лог = Рп - te Pia- Т»к как Poi = 1g 0,9 = 1,954,1g р02 = 1g 0,6 =
— 1,778, то 7?01 = 1,954—1,778 = 0,176; /?п = — 0,602 и т. д. При
Таблица 9-7
Коэффициенты для вычисления принадлежности пласта к I или II классу
1 и 1 2 3 4 5 6 7 8 9
Ло +0,176 -0,064 0 -0,051 -0,051 +0,109 +0,109 —0,067 -0,176
Ri -0,602 +0,125 0 +3,301 +0,301 -0,477 -0,477 +0,125 +0,602
1 Коды I 10 11 12 13 14 15 10 17 18
Л» +0,125 0 +0,155 0 -0,301 0 +0,125 +0,051 -0,222
Ri -0,301 0 -10 0 -0,301 0 —0,301 -0,301 + 10
расчетах принято 1g 0 = — 10 (не бесконечное, но достаточно большое отри-
цательное число).
Код опознаваемого пласта прикладывается к таблице так, чтобы сов-
пали номера столбцов. Далее, из ряда табл. 9-7 выписываются числа,
против которых в коде стоят нули, а из ряда — числа, против которых
стоят единицы. Все выписанные числа складываются. Если их сумма оказа-
лась больше нуля, то объект относится к классу Хх, если меньше — то к клас-
су Х2.
Таблица 9-8
К» пласта Коды
1 2 3 4 5 6 71 8 1 91 10 111 121 13 14 | 151 161 17 18
1 1 0 0 0 0 1 0 0 0 1 0 0 0 0 0 1 0 0
2 1 0 0 0 0 0 0 0 1 0 0 0 0 1 0 0 0 1
3 0 0 0 0 1 0 0 0 1 0 1 0 0 0 0 0 1 0
4 0 1 0 0 0 0 1 0 0 0 0 0 1 0 0 0 1 0
5 0 0 0 1 0 0 0 0 0 0 0 0 0 1 0 0 0 1
6 0 0 1 0 0 1 0 0 0 1 0 0 0 0 0 1 0 0
В табл. 9-8 приведены пласты, показываемые при экзамене. Читателю
предлагается проверить, что коды 2, 3 и 5 относятся к нефтеносным пластам,
а остальные — к водоносным.
Если бы мы проверили предложенную процедуру на уже показанных
объектах табл. 9-6, аи 9-6, б, то убедились бы, что алгоритм ошибается в пяти
случаях из 20, т. е. дает 80% правильных ответов. Более совершенные про-
цедуры позволяют повысить число правильных ответов.
9-7. Методы последовательных приближений в адаптации
В [194] сделана весьма интересная попытка дать обобщающую
концепцию, позволяющую с единой точки зрения рассмотреть
результаты и задачи теории адаптации, обучения и самообучения.
Процессы обучения и адаптации можно трактовать, как про-
цессы последовательных приближений.
Многие экстремальные задачи сводятся к отысканию экстрему-
мов функций или функционалов многих переменных
/ = №, ...» cn) = Q(c). (9-102)
Оптимальное значение вектора с, при котором функция Q (с)
достигает экстремума, обозначим через с*. Если функция Q
задана и дифференцируема, для отыскания с* можно приравнять
нулю градиент функции Q:
....^} = °- (9-103)
При трудностях аналитического решения уравнения (9-103)
можно воспользоваться различными итерационными методами,
в частности градиентным, в котором координаты текущей точки
с [п] связываются с координатами предшествующей точки с [и 1]
и градиентом у Q (с) посредством разностного уравнения вида
с [п] = с [п — 1] + yyQ (с [п — 1]). (9-104)
Вид функции у определяет различные формы итерационных
методов. Если метод сходится, то с течением времени с [п] прибли-
жается к оптимальному значению
Иш с [п] = с ♦. (9-105)
П->ОО
Алгоритм (9-104), который можно назвать регулярным алго-
ритмом, применим, если функция Q задана и является аналити-
ческой. В случаях, когда она не задана или недифференцируема,
можно применить приближенный поисковый алгоритм:
с [п] = с [п - 1] + у {Q+(с - Ц’ а (с h ~1]’ а W)j, (9-106)
где приняты обозначения
(?±(с, a) = {Q(c±ae1), Q(c±ae2), Q(c±aeN)},
e1 = {l, 0, 0, 0}, е2 = {0, 1, 0, 0}, ... ^={0, 0, .... 0, 1}
(9-107)
Ц — базисные векторы; а — скалярная величина, характеризую-
щая приращение векторов с.
Если Q (х | с) является случайной функцией, то естественно
искать экстремум ее математического ожидания, однако, так как
плотность распределения Р (х) часто заранее неизвестна, то ана-
литическое определение математического ожидания невозможно,
и в этом случае прибегают к методу стохастической аппроксима-
ции, идея которого была изложена Роббинсом и Монро [256].
При стохастической аппроксимации градиентный метод при-
меняется не к математическому ожиданию, а к реализациям
Vc Q {x | с). Алгоритмы определения с с ♦ по методу стохасти-
ческой аппроксимации принимают вид:
с [и] = с [п — 1] + yycQ (х [п] | с [и — 1]), (9-108)
если Q (х\ с) аналитически задана и дифференцируема. В про-
тивном же случае можно использовать алгоритм
c[n] = c[n-l] + 2^j-{^+(x[n]|c[n- 1], а[п]) —
- Q_ (х [п] | с [п - 1], а [п])}. (9-109)
Формула (9-108) представляет собою многомерный вариант
процедуры Робинса — Монро, а (9-109) — многомерный вариант
процедуры Кифера — Вольфовица [235]. Для сходимости алго-
ритмов (9-109), как показано в [194], необходимо соблюдение
условий:
оо оо
У, т=оо, уа<°°;
п=1 п=1 I (9-110)
infllf {(с —с*)тусС(ж|с)}>0, е>0; ' ’
M{NTcQc{x\c)^cQ(x\c)}^d{i + cTc\ d>0. ,
Первое из этих условий соответствует требованию, чтобы ско-
рость уменьшения у [п], с одной стороны, обеспечивала бы исчез-
новение с ростом п дисперсии I (с), ас другой стороны, часто за
время изменения у [тг] можно было использовать достаточно
большое число данных, при котором еще справедлив закон боль-
ших чисел.
Помехоустойчивость стохастических алгоритмов высока, слу-
чайные аддитивные помехи практически не влияют на результат.
Рассмотренная в предыдущем параграфе задача обучения
распознаванию образов сводилась к построению разделяющей
поверхности y~f(x}, где х — n-мерный вектор в пространстве
рецепторов (или признаков), а у — величина, характеризующая
класс показанного объекта. В частности, можно принять за
условие распознавания
,z ч ( +1, если х£А;
sign/(:r) = { л
( - 1, если х^В.
N
Аппроксимируем / (х) суммой f(x) — cvq)v (ж) = ст<р (х).
V —1
Примем в качестве показателя качества аппроксимации мате-
матическое ожидание некоторой выпуклой функции F от разности
/(®)-/(ж) = у-стф (ж):
I(с) = М {F(y — cTq(x)\. (9-111)
Наилучшая аппроксимация, при которой I (с) достигает мини-
мума, найдется из условия
V/ (с) = М {F [у - (х)] ф (х)]} = 0, (9-112)
где F' — производная функции F по ее аргументу.
Но так как плотность вероятности Р (х) показа вектора х,
а следовательно, и математическое ожидание (9-111) неизвестны,
то для определения с мы можем воспользоваться лишь отдельными
Рис. 9-24.
реализациями, т. е. стохастической аппроксимацией. Применяя
алгоритм (9-105) к нашей задаче, получим
с [и] = с [п - 1] + т {Р' (У [га] - Ст [п - 1] ф (х [п]) (ф (х [п])}. (9-113)
Для сходимости алгоритма необходимо выполнение условий
(9-110).
Схема, реализующая алгоритмы (9-14), показана на рис. 9-24.
На этой схеме векторные связи показаны двойными линиями.
Такой подход позволяет объединить многие результаты, полу-
ченные в теории оптимального управления, идентификации, обу-
чения, построения адаптивных систем, и представляет интерес
как попытка с новых, позиций представить «старые» проблемы,
такие, как проблема устойчивости (сходимость алгоритмов), ка-
чества (скорости сходимости), а также и ряд проблем теории
надежности и исследования операций [194].
ЛИТЕРАТУРА
1. Автоматическая оптимизация управляемых систем. Сборник перево-
дов под ред. Б. Н. Петрова. Изд-во иностр, лит., 1960.
2. Айзерман М. А., Браверман Э. М., Глушков В. М.,
Ковальский В. А., Летичевский А. А. Теория распозна-
вания образов и обучающих систем. Изв. АН СССР, «Техническая кибер-
нетика», 1963, № 5.
3. Айзерман М. А., Браверман Э. М., РозоноэрЛ.И.
Теоретические основы метода потенциальных функций в задаче об обучении
автоматов разделению входных ситуаций на классы. А и Т, т. 25, 1964, № 6.
4. Айзерман М. А. Задача об обучении автоматов разделению
входных ситуаций на классы (распознавание образов). В кн. Тр. II между-
народного конгресса Международной федерации по автоматическому управ-
лению, Дискретные и самонастраивающиеся системы. «Наука», 1965.
5. Александров П. С. Введение в общую теорию множеств и
функций. Гостехиздат, 1948.
6. Александровский Н. М., Кузин Р. Е. Особенности
автоматических оптимизаторов для промышленных объектов одного класса.
Тр. МЭИ, вып. 59, 1965.
7. Александровский Н. М., Кузин Р. Е. Двухканаль-
ный автоматический оптимизатор ДАО-2. В кн. Доклады первой Всесоюзной
конференции по самонастраивающимся системам, т. I. «Наука», 1965.
8. Андреев Н. И. Определение оптимальной динамической си-
стемы по критерию экстремума функционала частного вида. А и Т, т. 18,
1957, № 7.
9. Андреев Н. И. К теории определения оптимальной динами-
ческой системы. А и Т, т. 19, 1958, № 12.
10. Андреев Н. И. Общее условие экстремума заданной функции
среднеквадратической ошибки и квадрата математического ожидания ошибки.
А и Т, т. 20, 1959, № 7.
И. А р к а д ь е в А. Г., Браверман Э. М. Обучение машины
распознаванию образов. «Наука», 1964.
12. Ахиезер Н. И., Крейн М. Г. О некоторых вопросах теории
моментов. УССР, Харьков, Гостехиздат, 1938.
13. А х ие з е р Н. И. Лекции по теории аппроксимации. «Наука», 1965.
14. Бейрах 3. Я. Динамика регулирования барабанного парового
котла. А и Т, 1939, № 2.
15. Бейрах 3. Я. Автоматическое регулирование котельных уста-
новок. В кн. «Автоматизация электростанций и энергоустановок». Оборон-
гиз, 1948.
16. Болтянский В. Г. Математические методы оптимального
управления. «Наука», 1966.
17. Болтянский В. Г., Гамкрелидзе Р. В., Пон-
трягин Л. С. К теории оптимальных процессов. ДАН СССР, т. НО,
1956, № 1.
18. Бонгард М. М. Моделирование процесса обучения узнаванию
на универсальной вычислительной машине. В сб. «Биологические аспекты
кибернетики». Изд-во АН СССР, 1962.
19. Б о н г а р д М. М. Проблема узнавания. «Наука», 1967.
20. Б о р-Р аменский А. Е., Сун Цзянь. Оптимальный сле-
дящий привод с двумя параметрами управления. А и Т, т. 22, 1961, № 2.
21. Браверман Э. М. Некоторые вопросы построения машин,
классифицирующих объекты по не заданному заранее признаку. А и Т,
т. 21, 1960, № 10.
22. Б р а в е р м а н Э. М. Опыты по обучению машин распознаванию
зрительных образов. А и Т, т. 23, 1962, № 3.
23. Бутковский А. Г. Расширенный принцип максимума для
задач оптимального управления. А и Т, т. 24, 1963, № 3.
24. Б у т к о в с к и й А. Г. Теория оптимального управления систе-
мами с распределенными параметрами. «Наука», 1965.
25. В а п н и к В. Н., Лернер А. Я. Узнавание образов при
помощи обобщенных портретов. А и Т, т. 24, 1963, № 6.
26. В а п н и к В. Н., Червоненкис А. Я. Об одном классе
перцептронов. А и Т, т. 25, 1964, № 1.
27. В а п н и к В. Н., Червоненкис А. Я. Об одном классе
алгоритмов обучения распознаванию образов. А и Т, т. 25, 1964, № 6.
28. Вапник В. Н., Лернер А. Я., Червоненкис А. Я.
Системы обучения распознаванию образов при помощи обобщенных порт-
ретов. Изв. АН СССР, «Техническая кибернетика», 1965, № 1.
29. Вознесенский И. Н. К вопросу о выборе схемы регулиро-
вания теплофикационных турбин. В сб. «За советское энергооборудование».
Госэнергоиздат, выл. 6, 1934.
30. Вознесенский И. Н. О регулировании машин с большим
числом параметров. А и Т, 1938, № 4—5.
31. Вознесенский И. Н. Теория автоматического регулирова-
ния в журнале «Автоматика и телемеханика». Вестник АН СССР, 1941,
№ 5-6.
32. В о р о н о в А. А. «Основы теории автоматического управления».
Ч. I, Линейные системы регулирования одной величины, 1965. Ч. II, Спе-
циальные линейные и нелинейные системы автоматического регулирования
одной величины, 1966, «Энергия».
33. В о р о н о в А. А., Гарбузов А. Р., Ермилов Б. Л.,
Игнатьев М. Б., Корнитенко Г. Г., Соколов Г. Н.,
Ян Си-зен. Цифровые аналоги для систем автоматического управления.
Изд-во АН СССР, 1960.
34. В о р о н о в А. А., Игнатьев М. Б. Об отыскании экстре-
мумов функций в автоматических системах. В кн. Труды II международного
конгресса Международной федерации по автоматическому управлению, Дис-
кретные и самонастраивающиеся системы. «Наука», 1965.
35. В у л и х Б. 3. Введение в функциональный анализ. Физматгиз,
1958.
36. Габасов Р. К вопросу о единственности оптимального управ-
ления в оптимальных системах. Изв. АН СССР, «Энергетика и автоматика»,
1962, № 5.
37. Г а б а с о в Р. Об оптимальном быстродействии в линейных раз-
ностных уравнениях. В сб. докладов II Сибирской конференции по матема-
тике и механике. Изд-во Томского университета, 1962.
38. Габасов Р., Кириллова Ф. М. Об одном способе реше-
ния некоторых задач оптимального регулирования. А и Т, т. 25, 1964, № 3.
39. Г а б а с о в Р., Кириллова Ф. М. Оптимизация выпуклых
функционалов на траекториях линейных систем. ДАН СССР, т. 156, 1964,
№5.
40. Габасов Р., Кириллова Ф. М. О решении некоторых
задач теории оптимальных процессов. А и Т, т. 25, 1964, № 7.
41. Гантмахер Ф. Р. О работе проф. Г. В. Щипанова «Теория и
методы проектирования автоматических регуляторов». Изв. АН СССР, ОТН,
1940, № 3.
42. Гантмахер Ф. Р., Христианович С. А. Анализ ос-
новных положений работы Г. В. Щипанова «Теория и методы проектирова-
ния автоматических регуляторов». А и Т, 1940, № 5.
43. Гернет Н. Н. Об основной простейшей задаче вариационного
исчисления, СПБ, 1913.
44. Г л у ш к о в В. М. Теория обучения одного класса дискретных
перцептронов. Журнал вычислительной математики и математической фи-
зики, 1962, № 2.
45. Г л у ш к о в В. М. Введение в теорию самосовершенствующихся
систем. Киев, изд-во АН УССР, 1962.
46. Гришко Н. В. Экстремальный регулятор с отслеживанием экс-
тремума. А и Т, т. 20, 1959, № 4.
47. Г у л ь к о Ф. Б., Новосельцева Ж. А. Решение неста-
ционарных задач фильтрации и упреждения методами моделирования.
А и Т, т. 27, 1966, № 4.
48. Г у р и н Л. С., Растригин Л. А. О сходимости метода
случайного поиска в обстановке помех. А и Т, т. 26, 1965, № 9.
49. 3 а й ц е в А. Г. Аналитическое конструирование систем, вос-
производящих полезный сигнал в присутствии помех. А и Т, т. 24, 1963,
№ 2, № 4.
50. Зубов В. И. К теории аналитического конструирования регуля-
торов. А и Т, т. 24, 1963, № 8.
51. Ивахненко А. Г. Задачи экстремального регулирования.
«Автоматика», 1956, № 3.
52. И в а х н е н к о А. Г. Самонастраивающиеся системы автомати-
ческого регулирования. Киев, изд-во АН УССР, 1956.
53. И в а х н е н к о А. Г. Системы автоматического регулирования
с элементами логического действия. В кн. Сессия АН СССР по научным
проблемам автоматизации производства 15—20 окт. 1956 г. Основные проб-
лемы автоматического регулирования и управления. Изд-во АН СССР,
1957.
54. И в а х н е н к о А. Г. Связь теории инвариантности с теорией диф-
ференциальных регуляторов. «Автоматика», 1961, № 1.
55. Игнатьев М. Б. Голономные автоматические системы. Изд-во
АН СССР, 1963.
56. Казакевич В. В. Экстремальный регулятор. Авторское сви-
детельство № 66335 (приоритет от 25. II. 1943). Бюллетень изобретений,
1946, № 10.
57. Казакевич В. В. Об экстремальном регулировании. В сб.
«Автоматическое управление и вычислительная техника», вып. 6. «Машино-
строение», 1964 (сокращенное изложение кандидатской диссертации
1944 г.).
58. Казакевич В. В. Системы экстремального регулирования и
некоторые способы улучшения их качества и устойчивости. В сб. «Труды
конференции по теории и применению дискретных автоматических систем».
Изд-во АН СССР, 1960.
59. Канторович Л. В. Об одном эффективном методе решения
экстремальных задач для квадратических функционалов. ДАН СССР, т. 48,
1945, № 7.
60. К а р п о в П. П. Переработка нефти. Гостоптехиздат, 1953.
61. Катко вник В. Я., Полуэктов Р. А. Многомерные
дискретные системы управления. «Наука», Гл. ред. физ-мат. лит., 1966.
62. Каштелян В. Е. Регулятор напряжения электромагнитный.
Регулятор напряжения электронный. Энциклопедия современной техники.
Автоматизация производства и промышленная электроника, т. 3. «Советская
энциклопедия», стр. 215—221.
63. Кириллова Л. С. Задачи об оптимизации конечного состоя-
ния регулируемой системы. А и Т, т. 23, 1962, № 12. Оптимизация конечного
состояния системы, т. 24, 1963, № 8.
64. Кириллова Ф. М. К задаче об аналитическом конструирова-
нии регуляторов. ПММ, т. 25, 1961, вып. 3.
65. Кожевников К. И. Диаграмма тока двигателей вспомога-
тельных механизмов прокатных станов. «Электричество», 1956, № 6.
66. Кожевников К. И. Выбор передаточного числа редукторов
приводов вспомогательных механизмов прокатных станов. «Электричество»
1957, № 7.
67. Колмогоров А. Н. Интерполирование и экстраполирование
стационарных случайных последовательностей. Изв. АН СССР, серия мате-
матическая, 1941, № 1, 3.
68. К о р н и л о в ГО. Г. Автономное регулирование как экстремаль-
ная задача. Изв. АН СССР, ОТН, 1954, № 4.
69. Космодемьянский А. Б. Экстремальные задачи для точки
переменной массы. ДАН СССР, т. 53, 1946, № 1.
70. К о с т ю к О. М. Корекщя по температур!, петл! пстерезису та
нелшшност! в системах автоматичного регулювання за допомогою звичай-
них зворотних звъязшв. «Автоматика», 1960, № 3.
71. Костюк О. М. Условие эквивалентности систем дифференциаль-
ного управления и систем управления по возмущениям. «Автоматика»,
1961, № 1.
72. Котельников В. А. Теория потенциальной помехоустойчи-
вости. Госэнергоиздат, 1956.
73. Коченбургер Р. Д. Метод самонастройки систем управления
при больших изменениях коэффициента усиления. В кн. «Труды II Между-
народного конгресса международной федерации по автоматическому управ-
лению. Дискретные и самонастраивающиеся системы». «Наука», 1965.
74. К р а с о в с к и й А. А. О двухканальных системах автоматиче-
ского регулирования с антисимметричными связями. А и Т, т. 18, 1957, № 2.
75. К р а с о в с к и й А. А. Динамика непрерывных систем экстре-
мального регулирования, основанных на методе градиента. Изв. АН СССР.
«Энергетика и автоматика», 1959, № 3.
76. Красовский А. А. Динамика непрерывных систем экстре-
мального регулирования при случайных сигналах поиска. Изв. АН СССР.
«Энергетика и автоматика», 1960, № 3.
77. Красовский А. А. Динамика непрерывных самонастраиваю-
щихся систем. Физматгиз, 1963.
78. Красовский А. А., Поспелов Г. С. Основы автоматики
и технической кибернетики. Госэнергоиздат, 1962.
79. Красовский Н. Н. К теории оптимального регулирования.
А и Т, т. 18, 1957, № И.
80. К р а с о в с к и й Н. Н. Об одной задаче оптимального регулиро-
вания. ПММ, 1957, в. 5.
81. Красовский Н. Н. К теории оптимального регулирования.
ПММ, 1959, в. 4.
82. Красовский Н. Н., Лидский Э. А. Аналитическое
конструирование регуляторов в системах со случайными свойствами. А
и Т, т. 22, 1961, № 9, 10.
83. Красовский Н. Н. Об аналитическом конструировании опти-
мальных регуляторов в системах с запаздыванием времени. ПММ, 1962,
т. 26, вып. 1.
84. Красовский Н. Н., Летов А. М. К теории аналити-
ческого конструирования регуляторов. А и Т, т. 23, 1962, № 6.
85. Крутова И. Н., Рутковский В. Ю. Самонастраиваю-
щаяся система с моделью. Изв. АН СССР, «Техническая кибернетика»,
1964, № 1, 2. Динамика самонастраивающейся системы первого порядка
с моделью. А и Т, т. 25, 1964, № 2.
86. К р у т о в а И. Н., Рутковский В. Ю. Влияние интегра-
лов изменения перестраиваемых коэффициентов на динамику самонастраи-
вающейся системы с моделью. А и Т, т. 25, 1964, № 4.
87. К р у т о в а И. Н., Рутковский В. Ю. Исследование ди-
намики самонастраивающейся системы с моделью при нелинейной характе-
ристике объекта и переменных параметрах. А и Т, т. 25, 1964, № 6.
88. Кузин Р. Е. Оптимальный фильтр для автоматического опти-
мизатора. Тр. МЭИ, вып. 59, 1965.
89. Кулебакин В. С. Общие основы автоматического регулирова-
ния. А и Т, 1940, № 4.
90. К у л е б а к и н В. С. Об определении основных параметров авто-
матических регуляторов. А и Т, 1940, № 6.
91. Кулебакин В. С. О применимости принципа абсолютной ин-
вариантности в физических реальных системах. ДАН СССР, т. 60, 1948,
№ 2.
92. К у л е б а к и н В. С. Об основных задачах и методах повышения
качества автоматических управляемых систем. Тр. II Всесоюзного совеща-
ния по теории автоматического регулирования, т. II, изд-во АН СССР,
1955.
93. Кулебакин В. С. Теория инвариантности автоматически регу-
лируемых и управляемых систем. Тр. I Международного конгресса между-
народной федерации по автоматическому управлению, т. II, изд-во АН
СССР, 1961.
94. Куликовский Р. К оптимальным процессам и синтезу опти-
мальных систем с линейными и нелинейными неизменяемыми элементами.
Тр. I Международного конгресса международной федерации по автомати-
ческому управлению, т. II, изд-во АН СССР, 1961.
95. К у х т е н к о А. И. Задачи инвариантности до 8 для систем регу-
лирования по отклонению. В кн. «Теория инвариантности и ее применение
в автоматических устройствах». Киев, изд-во АН УССР, 1959.
96. Кухтенко А. И. Проблема инвариантности в автоматике. Гос-
техиздат, Киев, 1963.
97. Лаврентьев М. А., Люстерник Л. А. Курс вариа-
ционного исчисления. Гостехиздат, 1950.
98. Леонов Ю. П. О приближенном методе синтеза оптимальных
систем для выделения полезного сигнала из шума. А и Т, т. 19, 1958, № 8.
99. Л е о н о в Ю. П., Липатов Л. Н. Применение статисти-
ческих методов для определения характеристик объектов (обзор). А и Т,
т. 20, 1959, № 9.
100. Лернер А. Я. Улучшение динамических свойств автомати-
ческих компенсаторов при помощи нелинейных связей. А и Т, т. 13, 1952,
I, № 2; II № 4.
101. Лернер А. Я. О предельном быстродействии систем автомати-
ческого управления. А и Т, т. 15, 1954, № 6.
102. Лернер А. Я. Введение в теорию автоматического регулиро-
вания. Машгиз, 1958.
103. Лернер А. Я. Начала кибернетики. «Наука», 1967.
104. Летов А. М. Аналитическое конструирование регуляторов.
А и Т, I—III, т. 21, 1960, № 4, 5, 6; IV, т. 22, 1961, № 4; V, т. 23, 1962,
№ 11.
105. Литовченко И. А. К изопериметрической задаче аналити-
ческого конструирования. А и Т, т. 22, 1961, № 12.
106. Лузин Н. Н. К изучению матричной теории дифференциальных
уравнений. А и Т, 1940, № 5.
107. Л у з и н Н. Н., К у з н е ц о в П. И. К абсолютной инвариант-
ности и инвариантности до 8 в теории дифференциальных уравнений. ДАН
СССР, т. 51, 1946, № 4, 5, т. 80, 1951, № 3.
108. Лукомский Я. И. Теория корреляции и ее применение к ана-
лизу производства. Госстатиздат, 1958.
109. Люстерник Л. А., Соболев В. И. Элементы функ-
ционального анализа. «Наука», 1965.
110. Медведев Г. А., Т а р а с е н к о}лВ. П. Вероятностные
методы исследования экстремальных систем. «Наука», 1967.
111. Мееров М. В. Синтез структур систем автоматического регу-
лирования высокой точности. Изд. 1. Физматгиз, 1959. Изд. 2. «Наука»,
1967.
112. Мееров М. В. Системы многосвязного регулирования. «Наука»,
Гл. ред. физ.-мат. лит., 1967.
113. Менский Б. М. Принцип инвариантности в автоматическом
регулировании. Изд. ВЗЭИ, ч. 1, 1965, ч. 2., 1966.
114. Михалевич В. С. Последовательностные алгоритмы оптими-
зации и их применение. «Кибернетика», 1965, № 1, 2.
115. Морозовский В. Г. К теории однотипных связанных систем
автоматического регулирования с симметричными перекрестными связями.
А и Т, т. 22, 1961, № 3.
116. Моросанов И. С. Методы экстремального регулирования.
А и Т, т. 28, 1957, № И.
117. Моросанов И. С. Релейные экстремальные системы. «Наука»,
1964.
118. Муценкис В. А., Растригин Л. А. Экстремальное ре-
гулирование непрерывных многопараметрических систем методом случай-
ного поиска. Изв. АН СССР «Техническая кибернетика», 1964, № 1.
119. Новосельцев В. Н. Оптимальное управление в релейно-
импульсной системе второго порядка при наличии случайных возмуще-
ний. А и Т, т. 22, 1961, № 7.
120. Новосельцев В. Н. Оптимальные по быстродействию си-
стемы управления при наличии случайных помех. А и Т, т. 23, 1962, № 12.
121. Островский Ю. Н. Экстремальное регулирование (обзор).
А и Т, т. 28, 1957, № 9.
122. Паск Г. Обучающиеся машины. Тр. II Международного конгресса
международной федерации по автоматическому управлению. Дискретные и
самонастраивающиеся системы. «Наука», 1965.
123. Петров А. П. О возможностях перцептрона. Изв. АН СССР,
«Техническая кибернетика», 1964, № 6.
124. Петров Б. Н. О применении условий инвариантности. Тр.
II Всесоюзного совещания по теории автоматического регулирования, т. II.
Изд-во АН СССР, 1955.
125. Петров Б. Н., Уланов Г. М. Вопросы теории комбини-
рованного управления. Сессия АН СССР по научным проблемам автоматиза-
ции производства, Научно-техн, проблемы электропривода. Изд-во АН
СССР, 1957.
126. Петров Б. Н. Принцип инвариантности и условия его приме-
нения при расчете линейных и нелинейных систем. Тр. I Международного
конгресса международной федерации по автоматическому управлению,
т. II. Изд-во АН СССР, 1961.
127. Петров Ю. П. Оптимальное управление электроприводом
Госэнергоиздат, 1961.
128. Пивень В. Д. Проблема инвариантности в технике автомати-
ческого регулирования. Тр. I Международного конгресса международной
федерации по автоматическому управлению, т. 2. Изд-во АН СССР,
1961.
129. Пинскер Р., Новодворский Б. П. Процесс уравни-
вания экстремумов, Успехи математических наук, 1961, вып. 6.
130. Полуэктов Р. А. Об улучшении качества переходных про-
цессов в системах регулирования нескольких величин. Тр. Ленинградского
политехнического института, № 226, 1963.
131. Понтрягин Л. С. Некоторые математические задачи,
возникающие в связи с теорией оптимальных систем автоматического
регулирования. Сессия АН СССР по научным проблемам автоматизации произ-
водства. Основные проблемы автоматического регулирования и управления.
Изд-во АН СССР, 1957.
132. Понтрягин Л. С., Болтянский В. Г., Гамкре-
лидзе Р. В., Мищенко Е. Ф. Математическая теория оптимальных
процессов. Физматгиз, 1961.
133. Поповский А. М. О свободе выбора параметров автономных
процессов регулирования нескольких взаимосвязанных величин. А и Т,
1944, № 6.
134. Поповский А. М. Об одном случае решения задачи И. И. Воз-
несенского для систем регулирования взаимосвязанных величин высокого
порядка. Тр. II Всесоюзного совещания по теории автоматического регулиро-
вания, т. I. Изд-во АН СССР, 1955.
135. Приспосабливающиеся автоматические системы. Под ред. Э. Миш-
кина и А. Брауна. Изд-во иностр, лит., 1963.
136. Пропой А. И. О принципе максимума для дискретных систем
управления. А и Т, т. 26, 1965, Кг 7.
137. Пугачев В. С. Общее условие минимума средней квадрати-
ческой ошибки динамической системы. А и Т, т. 17, 1956, № 4.
138. Пугачев В. С. Применение канонических разложений слу-
чайных функций к определению оптимальной линейной системы. А и Т,
т. 14, 1956, № 6.
139. Пугачев В. С. Возможное общее решение проблемы определе-
ния оптимальной динамической системы. А и Т, т. 17, 1956, № 7.
140. Пугачев В. С. Состояние и задачи развития теории случай-
ных функций. Сессия АН СССР по научным проблемам автоматизации произ-
водства. Основные проблемы автоматического регулирования и управления.
Изд-во АН СССР, 1957.
141. Пугачев В. С. Определение оптимальной системы по произ-
вольному критерию. А и Т, т. 19, 1958, № 6.
142. Пугачев В. С. Метод определения оптимальной системы по
общему бейесову критерию. Изв. АН СССР. «Энергетика и автоматика»,
1960, № 2.
143. Пугачев В. С. Эффективный метод нахождения бейесова ре-
шения. Тр. II пражской конференции по теории информации. Прага, 1960.
Transactions of the second Prague conference. Information theory, statistical
decisions functions, random processes. Prague, 1960.
144. Пугачев В. С. Метод определения оптимальной системы при
нелинейной зависимости наблюдаемой функции от параметров сигнала.
Тр. I Международного конгресса международной федерации по автомати-
ческому управлению, т. 3. Изд-во АН СССР, 1961.
145. Пугачев В. С. Теория случайных функций и ее применение
к задачам автоматического управления, изд. 2. Физматгиз, 1962.
146. Райбман Н. С. Корреляционные методы определения прибли-
женных характеристик автоматических линий. Изв. АН СССР, «Энергетика
и автоматика», 1961, № 1.
147. Райбман Н. С. Корреляционные методы определения при-
ближенных характеристик многомерных процессов автоматических линий.
Изв. АН СССР, «Энергетика и автоматика», 1961, № 2.
148. Райбман Н. С., Ча деев В. М. Адаптивные модели
в системах управления. «Советское Радио» (Биб-ка технич. кибернетики),
1966.
149. Растригин Л. А. Экстремальное регулирование методом слу-
чайного поиска. А и Т, т. 21, 1960, № 9.
150. Растригин Л. А. Сходимость метода случайного поиска при
экстремальном регулировании многопараметрических систем. А и Т, т. 24,
1963, № 11.
151. Растригин Л. А. Случайный поиск в задачах оптимизации
многопараметрических систем. Рига, Изд-во АН Латв. ССР, 1965.
152. Ремез Е. Общие вычислительные методы чебышевского прибли-
жения. Задачи с линейно входящими вещественными параметрами. Изд-во
АН УССР, 1957.
153. Розенблатт Ф. Обобщение восприятий по группам преобра-
зований. Кибернетический сборник, № 4. Изд-во иностр, лит., 1962.
154. Розенвассер Е. Н. О преобразовании уравнения нелиней-
ной системы автоматического регулирования. Тр. Ленинградского корабле-
строительного института, вып. XXXI, 1960.
155. Розенман Е. А. Оптимальное управление объектом с двумя
управляющими воздействиями. А и Т, т. 20, 1959, № 10.
156. Розенман Е. А. Об оптимальных переходных процессах
в системе с ограниченной мощностью. А и Т, т. 18, 1957, № 7.
157. Розенман Е. А. О предельном быстродействии следящих
систем с ограничением по мощности, скорости и моменту исполнительного
механизма. А и Т, т. 19, 1958, № 7.
158. Розоноэр Л.И. Принцип максимума Л. С. Понтрягина в тео-
рии оптимальных систем. А и Т, т. 20, 1959, I, № 10; II, № 11; III,
№ 12.
159. Розоноэр Л. И. Вариационный подход к проблеме инва-
риантности систем автоматического управления. А и Т, т. 24, 1963,
№ 6, 7.
160. Салуквадзе М. Е. Аналитическое конструирование регу-
ляторов. Постоянно действующие возмущения. А и Т, т. 20, 1961, № 10;
Об аналитическом конструировании оптимального регулятора при постоянно
действующих возмущениях, т. 23, 1962, № 6; К задаче синтеза оптимального
регулятора в линейных системах с запаздыванием, подверженных постоянно
действующим возмущениям, т. 23, 1962, № 12.
161. Семенов В. В. Регулятор электрогидравлический. Энцикло-
педия современной техники. Автоматизация производства и промышленная
электроника, т. 3. «Советская энциклопедия», стр. 231—233.
162. Семенов В. М. К теории экстраполирования случайных про-
цессов. Сб. научных тр. ВВИА им. Жуковского, т. I, 1954.
163. Смирнов Н. В., Дунин-Барковский И. В. Крат-
кий курс математической статистики для технических приложений. Физ-
матгиз, 1961.
164. Соловей В. Е. Регулирование паровой турбины с двумя от-
борами пара. А и Т, 1939, № 2.
165. Солодовников В. В. Введение в статистическую динамику
систем автоматического управления. Гостехиздат, 1952.
166. Стаховский Р. И. Двухканальный автоматический опти-
мизатор. А и Т, т. 19, 1958, № 8.
167. Стаховский Р. И. О сравнении некоторых методов поиска
для автоматического оптимизатора. В кн. «Конференция по теории и приме-
нению дискретных автоматических систем». Изд-во АН СССР, 1958.
168. Стаховский Р. И. Многоканальный автоматический опти-
мизатор для решения вариационных задач. А и Т, т. 20, 1959, № 11.
169. Стаховский Р. И. Выступление по докладу А. А. Красов-
ского. В кн. Тр. I Международного конгресса международной федерации
по автоматическому управлению, т. 2. Изд-во АН СССР, 1961.
170. Стаховский Р. И. Поиск статистический «Энциклопедия сов-
ременйой техники», автоматизация производства и промышленная электро-
ника, т. 3. «Советская энциклопедия», 1964.
171. Ст р а ш а к А. Управляемость, «Энциклопедия современной
техники», Автоматизация производства и промышленная электроника.
«Советская энциклопедия», 1965, т. 4.
172. С у д-3 лочевский А. И. К вопросу о связанном регулиро-
вании нескольких параметров. «Автоматика», 1959, № 3.
173. Сун Цзянь. Оптимальное управление в одной нелинейной
системе. А и Т, т. 21, 1960, № 1.
174. Сысоев А. И. Оценка параметров и обнаружение сигналов,
нелинейно зависящих от случайных параметров. В сб. «Автоматическое регу-
лирование и управление». Изд-во АН СССР, 1961.
175. Теория автоматического регулирования, книга 1, 2. Серия инже-
нерных монографий «Техническая кибернетика». «Машиностроение», 1967.
176. Т р а к с е л Дж. Г. Самонастраивающиеся системы. В кн. Тр.
II Международного конгресса международной федерации по автоматическому
управлению, Дискретные и самонастраивающиеся системы. «Наука», 1965.
177. Троицкий В. А. Задача Майера — Больца вариационного
исчисления и теория оптимальных систем, ПММ, т. 25, 1961, № 4; О вариа-
ционных задачах оптимизации процессов управления, ПММ, т. 26, 1962,
вып. 1, 3; Вариационные задачи оптимизации процессов управления для
уравнений с разрывными правыми частями, ПММ, т. 26, 1962, вып. 2.
178. У л а н о в Г. М. Регулирование по возмущению. Госэнергоиздат,
1960.
179. Фельдбаум А. А. Простейшие релейные системы автомати-
ческого регулирования. А и Т, т. 10, 1949, № 4.
180. Фельдбаум А. А. Оптимальные процессы в системах авто-
матического регулирования. А и Т, т. 14, 1953, № 6.
181. Фельдбаум А. А. О синтезе оптимальных систем с помощью
фазового пространства. В сб. Тр. II Всесоюзного Совещания по теории авто-
матического регулирования, т. 2. Изд-во АН СССР, 1955.
182. Фельдбаум А. А. Электрические системы автоматического
регулирования. Оборонгиз, 1954, изд. 2, 1956.
183. Фельдбаум А. А., Стаховский Р. И. Устройство
для автоматического определения минимума (или максимума) функции п
переменных. Авторское свидетельство № 123759, Класс 42cZ, 10, Бюллетень
изобретений № 21, 1959.
184. Фельдбаум А. А. Автоматический оптимизатор. А и Т,
т. 19, 1958, № 8.
185. Фельдбаум А. А. О проблемах теории дуального управления.
Тр. II Международного конгресса международной федерации по автомати-
ческому управлению, Дискретные и самонастраивающиеся системы. «Наука»,
1965.
186. Фельдбаум А. А. Вычислительные устройства в автомати-
ческих системах. Физматгиз, 1959.
187. Фельдбаум А. А. Установившийся процесс в простейшей
дискретной экстремальной системе при наличии случайных помех. А и Т,
т. 20, 1959, № 8.
188. Фельдбаум А. А. Теория дуального управления. А и Т,
т. 21, 1960, № 9, 11; т. 22, 1961, № 1, 2.
189. Фельдбаум А. А. Основы теории оптимальных автомати-
ческих систем. «Наука», 1966.
190. Фицнер Л. Н. Автоматическая оптимизация пространствен-
ного расспределения. А и Т, т. 22, 1961, I — № 1; II — № 7; III — № 8.
191. Фицнер Л. Н. Об управлении многокоординатными системами.
А и Т, т. 26, 1965, № И.
192. Хлебцевич Ю. С. Электрический регулятор экономичности,
авторская заявка № 231496, 1940. Авторское свидетельство № 170566, Бюл-
летень изобретений № 9, 1965 г.
193. Цыпкин Я. 3. Теория релейных систем автоматического регу-
лирования. Гостехиздат, 1955.
194. Цыпкин Я. 3. Адаптация и обучение в автоматических систе-
мах. «Наука», 1968.
195. Челюсткин А. Б., Иванов В. А. Самонастраиваю-
щаяся система автоматического управления режимом сварки электротрубо-
сварочных станов. «Электричество», 1960, № 2.
196. Челюсткин А. Б. Применение вычислительных устройств
в системах автоматического управления прокатными станами. Тр. I Между-
народного конгресса международной федерации по автоматическому управ-
лению, т. 6. Изд-во АН СССР, 1961.
197. Ч е т а е в Н. Г. Устойчивость движения. Гостехиздат, 1946.
198. Чинаев П. И. Многомерные автоматические системы. Киев,
Гостехиздат УССР, 1963.
199. Шифрин М. Ш. Автоматическое регулирование судовых паро-
силовых установок. Судпромгиз, 1963.
200. Щипанов Г. В. Теория и методы проектирования регулято-
ров. А и Т, 1939, № 1.
201. Юркевич А. П. Экстремальное регулирование оборотов авиа-
мотора на самолете. Научно-технический сб. НИИВВС, 1946, № 4.
202. Я г л о м А. М. Введение в теорию случайных функций, Успехи
математических наук, т. 7, 1952, в. 5.
203. Эшби У. Р о с с. Схема усилителя мыслительных способностей,
в сб. «Автоматы». Изд-во иностр, лит., 1956.
204. Современная математика для инженеров. Под ред. Э. Ф. Беккен-
баха. Изд-во иностр, лит., 1959.
205. Беллман Р. Динамическое программирование. Изд-во иностр,
лит., 1960.
206. Bellman R. A Markovian decision process. Journ. Mathem.
and Meehan., 1957, v. 6.
207. Bellman R. E., Glicksberg I., Gross O. A. Some
aspects of the mathematical theory of control processes. The Rand Corpora-
tion, Santa Monica, California, 1958.
208. Блисс Г. А. Лекции по вариационному исчислению. Изд-во
иностр, лит., 1950.
209. Boksenbom A. S., Hood R. General algebraic method
applied to control analysis of complex engine types. NASA Tech. Rept., 980,
1950.
210. В о 1 z a O. Vorlesungen uber Variationsrechnung, Teubner, Ber-
lin, 1909, reprinted by K. F. Koehlers, Leipzig, 1933; Lectures on the cal-
culus of variations, Stechert — Hafner, N. Y. 1946.
211. В о о t о n R. C. An optimization theory for time varying linear
systems with nonstationary statistical inputs. Proc. IRE, v. 40, 1952, No. 8.
212. Burns K. N. The transient response of a single point nonlinear
servomechanism, Proc. Nat. Electron. Conf., 1953, v. 8.
213. В us h aw D. W. Ph. D. Thesis, Department of Math. Princeton
Univ., 1952.
214. Byron W. The quarie optimal controllers. Instruments and
Automation, 1956, No. 11.
215. Косгрифф P. Л. Система с элементами логического действия
для автоматической оптимизации, в книге «Автоматическая оптимизация
управляемых систем». Под ред. Б. Н. Петрова. Изд-во АН СССР, 1960.
216. Cowley Р. Е. The application of the analog computer to the
measurement of process dynamics, Trans. ASME, v. 79, 1957, No. 4.
217. Дель Торо В., Паркер С. Р. Принципы проектирования
систем автоматического управления. Машгиз, 1963.
218. Dolph С. L., Woodbury М. A. On the relation between
Green’s functions and covariences of certain stochastic processes and its appli-
cation to unbiased linear prediction, Trans. Amer. Math. Soc., v. 72, 1952,
No. 3.
219. Дрейпер Ч. С. и Ли И. T., Принципы автоматической опти-
мизации, в сборнике Л. I.
220. Eaton J. Н., Zadeh L. A. Optimal pursuit strategics in
discrete state probabilistic systems, Trans. ASME, Journ. of Basic Engineering,
1962, March.
221. Фарбер Б. Вычислительные устройства для автоматического
поиска экстремума, в кн. «Автоматическая оптимизация управляемых систем».
Изд-во АН СССР, 1960.
222. Florentin J. J. Optimal control of continuous time, Markov
stochastic systems, Journ. Electron, and Control, set. I, v. 10, 1961, No. 6.
223. Freeman H. A synthesis method for multipole control systems,
Trans. AIEE, pt. 11, v. 76, 1957.
224. Freeman H. Stability and physical realisibility considerations
in the synthesis of multipole control systems, Trans AIEE, pt. 11, v. 77, 1958.
225. G о о d m an T. P., Reswick Y. B. Determination of sys-
tem characteristics from normal operating record, Trans. ASME, v. 78, 1956,
No. 2; v. 79, 1957, No. 3.
226. H о p к i n A. M. Phase-plane approach to the compensation on of
saturating servomechanisms, Trans. AIEE, part. 1, v. 70, 1950.
227. Howard A. R. Dynamic programming and Markov processes,
Technology Press of MIT, 1960.
228. Huggins W. H. Signal-flow graphs and random signals, Pros.
IRZ, v. 45, 1957.
229. Джеймс X. M., Николс H. Б., Филипс P. С. Теория
следящих систем. Изд-во иностр лит., 1951.
230. К а л м а н Р. Е. Об общей теории систем управления, в кн.
«Труды I Международного конгресса международной федерации по автома-
тическому управлению, т. 2, 1961. Изд-во АН СССР.
231. Kalman R. Е. Canonical structure of linear dynamical sys-
tems, Proc. Nat. Acad. Sci. USA, 1962, v. 48.
232. Kalman R. E., H о Y. C., Narendra K. S. Controll-
ability of linear dynamical systems, Contr. to differential equations, 1963,
vol. No. 4.
233. Kalman R. E. Mathematical description of linear dynamical
systems, SIAM Journ. Control, ser. A, 1963, No. 1.
234. Kavanagh R. S. The application of matrix methods multi-
variable control systems, J. Franklin Inst., 1956, Nov.
235. Kiefer E., Wolfowitz J. Stochastic estimation of the
maximum of a regression function, Annals of Math. Statistics, v. 23, 1952, No. 3.
236. К i p i n i a k. W. Dynamic optimization and control, a variational
approach, The MIT Press and J. Wiley Sons, N. Y., London, 1961.
237. Kochenburger R. J. A frequency response method for ana-
lyzing and synthesizing contactor servomechanisms, Trans. AIEE, part I,
v. 69, 1950.
238. Kulikowski R. On optimal control with constraints, Bull.
Acad. Pol. Sci., CL IV, 1959, No. 2.
239. Kulikowski R. On optimum control with constraints, Bull.
Acad. Pol. Sci., Cl IV, 1959, No. 4.
240. Kulikowski R. Concerning the synthesis of the optimum
nonlinear control systems, Bull. Acad. Pol. Sci., Cl IV, 1959, No. 6.
241. Kulikowski R. О ukladach optymalnych regulacji automa-
tycznej, Archiurum Automatyki i Telemechaniki, No. 6, 1961.
242. Куликовский P. Оптимальные и адаптивные процессы в
системах автоматического регулирования. «Наука», 1967.
243. Лэнинг Дж. X., Б э т т и н Р. Г. Случайные процессы в за-
дачах автоматического управления. Физматгиз, 1958.
244. LaSalle J. Р. The time optimal control problem, Ann. Math.
Studies, No. 45, Contributions to the theory of Nonlinear Oscillations, V 5,
Princeton univ. Press, 1960.
245. Leblanc M. Sur 1’elecfrification des ch emins de fer au moyen
des courants alternatifs de frequence elevee. Revue Generale de L’Electriute.
1922, t. XII, No. 8.
246. Lewis I. B. The use of nonlinear feedback to improve the transient
response of a servomechanism, Trans. AIEE, pt. 11, v. 71, 1952, p. 449—453.
247. Li Y. T., Whitaker P. Some research work in self-adaptive
systems in MIT aeronautical and astronautical eng. dept., Proc. IFAC Sympo-
sium on Optimizing and Adaptive Control, ISA, Pitsburg, June 1963,
322
248. Maxwell J. G. Theory of heat. London, 1870.
249. Merriam C. W. III. A class of optimum control systems J. Frankl.
Inst., 1959, v. 267, № 4.
250. Мерриэм К. У. Теория оптимизации и расчет систем управле-
ния с обратной связью. «Мир», 1967.
251. Mesarovic М. D. The control of multivariable systems, John
Wiley. New York, London, 1960.
252. Мидлтон Д. Введение в статистическую теорию связи, т. 1—2.
«Советское радио», 1961.
253. Miele A. General variational theory of the flight paths of rocket
powered aircraft, missiles and satellite carriers Astronaut, acta, 1958, No. 4.
254. Ньютон Дж., Гулд Л. А., Кайзер Дж. Ф. Теория
линейных следящих систем. Физматгиз, 1961.
255. Пелегрен М. Статистический расчет следящих систем. Изд-во
иностр, лит., 1957.
256. Robbins Н., Monro S. A stochastic approximation method,
Annals of mathem. statistics, v. 22, 1951, No. 1.
257. Rosenblatt F. Two theorems of statistical separability in
the perceptron, Mechanisation on thought processes, Proceedings of Symposium,
Nat. Phys. Lab., v. 1, 1958, London, 1959.
258. Розенблатт Ф. Принципы нейродинамики (перцептроны
и теория механизмов мозга). «Мир», 1965.
259. Schwarz I. W. Piecewise linear servomechanisms, Trans. AIEE,
pt. 11, v. 71, 1952, p. 401-405.
260. Selfridge O. G. Pandemonium: a paradigm for learning,
Mechanisation on thought processes, Proceedings of Symposium, Nat. Phys.
Lab., v. 1, 1958, London, 1959.
261. Штейн T. Регулирование и выравнивание в паровых установках.
ГОНТИ, 1931.
262. Tsien Н. S., Evans R. С. Optimum thrust programming
for a sounding rocket, J. Amer. Rocket Soc., v. 21, 1951, No. 5.
263. Цян Сюэ-сень. Техническая кибернетика. Изд-во иностр, лит.,
1956.
264. Wald A. Statistical decision functions, John Wiley, N. Y., 1950.
265. Westcott J. H. Design of multivariable optimum filters,
Trans. ASME, v. 80, 1958.
266. Whitaker H. P., Yarmon J., Kezer A. Design of
a model preference adaptive control system for aircraft, MIT Instrumentation
Laboratories, Report R-164, Sept. 1958.
267. W i d г о w B. Pattern recognition and adaptive control, Trans.
IEEE on Applications and Industry, 1964.
268. W i d г о w B. A statistical theory of adaptation, adaptive control
systems, Ed. F. F. Cakuthers, H. Levenstein, Pergamon Press, 1963.
269. Wiener N. Extrapolation, interpolation and smoothing of sta-
tionary time series, J. Wiley, New York, 1949.
270. Zadeh L. A. Optimum nonlinear filters, Journ. Appl. Physics,
v. 24, 1953, No. 4.
271. Zadeh L. A. A contribution to the theory of nonlinear systems,
Journ. of Franklin Inst., v. 255, 1953, No. 5.
272. Zadeh L. A., Ragazzini I. R. Extension of Wiener’s
theory of prediction, Journ. of Applied Physics, v. 21, 1950, No. 7.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Абстрактное пространство 84
Автономное регулирование 235
Автономности условия 237
Адалина 295
Адаптация 257
Адаптивные системы 258, 260
Активное накопление информации 136
Аналитическое конструирование ре-
гуляторов 26
Антисимметричные связи 253
Апостериорная вероятностная харак-
теристика 120, 123
Априорная вероятностная характе-
ристика 120, 122
Ассоциативные элементы перцептрона
294
Базис пространства 93
Банаха пространства 91
— Хана теорема 96
Бейеса формулы 124
Беллмана уравнения 67
Боксенбома и Худа условия 235, 237
Большой коэффициент усиления в
многосвязных системах 250
— — — в адаптивных системах 262
Бушау метод 45
Вариация 16
— функции наибольшая 88
Вариационные методы 13
Весовая матрица 216
Вознесенского метод автономности
235
Вольфовица — Кифера метод 310
Вспомогательные уравнения 252
Галеркина метод исследования ко-
лебаний 204
Гамильтона уравнения 38
Гармонического баланса метод ис-
следования рысканья 198
Гато дифференциал 98
ГауссаЗайделя метод поиска 174
Гетероскедастическая корреляция
275
Голономные связи 18
Гомеоморфные пространства 85
Гомеостат 260
Гомоскедастическая корреляция
275
Граничные условия 13
Граница множества верхняя 84
------- точная 84
Двухканальности принцип 253
Двухканальные системы с антисим-
метричными связями 253
Демоны Максвелла 291
Детектирование синхронное 153,171
Динамическое программирование 62
Дисперсионные методы 281, 285
— функции 285
— — множественные 288
— отношение 276
Дисперсия 274
— общая 275
— среднего 276
— средняя 275
— условная 274
Дифференциал сильный и слабый
(Гато) 98
Допустимые функции 16
Дуальное управление 111, 136
Идеальная экстремальная система
187
Идентификация 259
— статистическая статистических
объектов 270
— — динамических объектов 281
Изопериметрические ограничения 18
Изоморфность модели 287
Изохроны 52
Импульсная переходная матрица 216
Инвариантности условия 241, 242
Инвариантность 238
— полная (полиинвариантность) 240
— - слабая 248
— с точностью до 8 247
Информативные признаки 289
Информации накопления 118
— — активное 136
— — независимое 118
Калмана условия наблюдаемости и
управляемости 227, 231
Квазистационарные экстремальные
системы 187
Кифера процедура 310
Компактности критерии 93
— образов гипотеза 290
Компактность 93
Корреляции коэффициент 275
— множественной коэффициент 277
— парной коэффициент 278
Корреляционные методы 281
Корреляция 275
Котельникова критерий 124
Крейна L — проблема моментов 101
Лагранжа множители 18
Лебега интеграл 86
Лежандра условия 17
Линейное многообразие 90
L — проблема моментов 101
Ложного отбоя ошибка 124
Ложной тревоги ошибка 123
Максвелла демоны 291
Мадалина 295
Максимума принцип 35
Максимального правдоподобия кри-
терий 126
Марк I (перцептрон) 295
Матрица весовая 216
— импульсная переходная 216
— передаточная 216
Мера множества 85
Мера определенности 287
Мерриема метод 68
Метрика 84
Минимаксная стратегия 126
Многомерные системы 212
Многообразие линейное 90
Множества 82
Моментов проблема 101
Наблюдаемость 230
Наискорейшего спуска метод 177
Накопление информации 118
Неголономные связи 18
Неймана — Пирсона критерий 125
Норма 90
Нормированное пространство 90
Нулевой фазы метод 283
Обнаружения сигналов теория 121
Обобщенного портрета метод 298
Образов различение 299
— распознавание 288
— узнавание 299
Обучение автоматов 260
Окрестность точки 85
Оператор 85, 94
Оператора норма 96
Определенности мера 287
Оптимальное управление II
Оптимальности критерий (показа-
тель) II
— принцип 37, 62
Оптимизатор многоканальный 179
Ортогональная и ортонормальная
система функций 92
Оценки процессов теория 121
Пандемониум 291
Передаточная матрица 216
Перцептрон 293
— поисковый 312
Петрова условия реализуемости ин-
вариантности 243
Пирсона — Неймана критерий 125
Поиска экстремума методы 173
_____ Гаусса — Зайделя 174
— — — градиента 176
— — — наискорейшего спуска 177
— слепой 173
— — — статистический 174
Полиинвариантность 240
Полнота пространства 90
Понтрягина принцип максимума 35
Портрет обобщенный 298
Последовательных приближений ме-
тод в адаптации 308
Потенциальных функций метод 296
Потери рыскания 158
Потерь функция 122
Правдоподобия максимального кри-
терий 126
Признак образа 289
Принцип максимума 35
Проекция элемента на подпростран-
ство 92
Пространство 84
— абстрактное 84
— Банаха 91
— Гильберта Н 91
— евклидово 89
— линейное 90
- tp 89
— с интегрируемой по Лебегу сте-
пенью Lp 89
— метрическое 84
— наблюдений 121
— нормированное 90
— ограниченных функций 89
— полное 90
— признаков 290
— рецепторов 294
— риска 126
— решений 121
— сепарабельное 90
— с метрикой Чебышева 89
— сопряженное 95
— спрямляющее 292
— функциональное 84
— числовых последовательностей
89
Пуассона — Эйлера уравнения 16
Разделяющая поверхность 291
Распознавание образов 288
Рассеяния коэффициенты 277
Расстояние в метрическом простран-
стве 84
Регрессии коэффициент 275
— поверхность 277
Регрессия линейная 274
— нелинейная 280
Рецепторов пространство 290
Решающая функция 122
Решения двухальтернативные 120
— минимаксные 126
— многоальтернативные 121
— статистические 122
Римана интеграл 87
Риск 122
Роббинса — Монро процедура 310
Розенблатта перцептрон 293
Рысканье 158
Самонастривающиеся системы 257
Самообучающаяся система 260
Селфриджа пандемониум 291
Сепарабельность 90
Сильвестера условия 191
Система многосвязанного регулиро-
вания 212
— — — автономная 235
-------инвариантная 239
— — — каскадная 219
— — — комбинированная 239
_ — __ с сепаратным включением
регулятора 218
Система оптимизации с максималь-
ной информацией 112
— — с независимым накоплением
информации 118
— — с активным накоплением ин-
формации 136
Скедастическое уравнение 274
Слепой поиск 173
Случайных плоскостей метод 295
Спрямляющее пространство 292
Статистический метод поиска 177
Статистических решений теория 122
Стильтьеса интеграл 87
Стохастическая аппроксимация 309
Стратегия поиска 121
— — минимаксно-оптимальная 126
— — регулярная 121
— — случайная 121
— — смешанная 127
Сходимость по норме 91
Теорема об п интервалах 46
Удельный риск 122
Узнавание образов 299
Управляемость 223
Условный риск 122
Фишера критерий 126
Функционал 85, 94
— потерь и выгоды 64
Функционалов линейных общий вид
95
— — норма 96
Функция 85
— потенциальная 296
— правдоподобия 124
— решающая 122
Худа и Боксенбома условия 235
Чебышева метрика 89
Шар в метрическом пространстве 85
Шмидта процесс ортогонализации 92
Щипанова принцип инвариантности
238
Эйлера уравнения 16
Экстремаль 16
Экстремальное регулирование 146
Экстремального регулятора схема
импульсная (шаговая) 169
— — — релейная 156
— — — с измерением частной про-
изводной 152
— — — с запоминанием экстре-
мума 167
— — — с логическими элемента-
ми 161
— — — —со случайным поиском
171
— — — с синхронным и детекто-
рами 153
ОГЛАВЛЕНИЕ
Введение ........................................................... 3
Глава первая. Вариационные методы решения задач оптимального уп-
равления
1-1. Постановка вариационной задачи об оптимальном уп-
равлении .............................................. И
1-2. Некоторые задачи минимизации функционалов от квад-
ратичных форм при управлении линейными объектами ... 19
1-3. «Аналитическое конструирование» оптимальных регуля-
торов ................................................ 26
1-4. Обобщение на многомерные и на дискретные системы. Свой-
ства корней характеристических уравнений линейных
оптимальных систем.................................... 30
Глава вторая. Решение «неклассических» вариационных задач ’ на
основе принципа максимума
2-1. Возникновение «неклассических» задач оптимального уп-
равления ............................................. 33
2-2. Принцип максимума................................ 35
2-3. Теорема об п интервалах.......................... 46
2-4. Оптимальные процессы при ограниченных координатах и
управлениях........................................... 49
2-5. Пример оптимальной системы с двумя управлениями ... 57
Глава третья. Динамическое программирование
3-1. Постановка задачи. Принцип оптимальности......... 62
3-2. Уравнение Беллмана............................... 66
3-3. Пример решения одномерной задачи численным методом . . . 71
3-4. О численном решении уравнений динамического програм-
мирования ............................................ 80
Глава четвертая. Применение методов функционального анализа
в задачах оптимального управления
4-1. Общие сведения о множествах и функциональных простран-
ствах ................................................ 82
4-2. Примеры решения задач оптимального управления...... 97
Глава пятая. Статистические методы в теории оптимальных систем
5-1. Развитие статистических методов в теории оптимальных
систем............................................... 109
5-2. Системы без накопления информации...................... 111
5-3. Системы с независимым накоплением информации .... 118
5-4. Системы с активным накоплением информации. Синтез си-
стем дуального управления............................ 136
Глава шестая. Системы экстремального регулирования
6-1. Основные особенности систем экстремального регулирова-
ния...................................................146
6-2. Основные схемы систем экстремального регулирования од-
ной величины..........................................150
6-3. Основные методы поиска экстремума функций многих
переменных............................................173
6-4. Примеры выполнения многоканальных оптимизаторов с
различными методами поиска........................... 179
Глава седьмая. Методы исследования динамики экстремальных систем
7-1. Общие сведения...................................... 186
7-2. Уравнение организации движения к экстремуму в непре-
рывных идеальных (квазистационарных) экстремальных
системах............................................. 187
7-3. Динамика непрерывных идеальных экстремальных си-
стем, работающих по методу градиента................. 193
7-4. Определение периодических режимов методом гармониче-
ского баланса........................................ 198
7-5. Определение периодических режимов точными методами 202
7-6. Приближенное определение периодических режимов мето-
дом Галеркина.........................................204
7-7. Приближенное приведение нелинейных систем к простей-
шей модели с линейной динамической и безынерционной не-
линейной частями......................................208
Глава восьмая. Теория многосвязного регулирования
8-1. Общие понятия. Передаточные и весовые матрицы много-
мерных объектов...................................... 212
8-2. Управляемость и наблюдаемость........................223
8-3. Автономное регулирование............................ 235
8-4. Инвариантность...................................... 238
8-5. Структуры многосвязных систем, допускающие неогра-
ниченное увеличение коэффициента усиления........250
8-6. Двухканальные системы с антисимметричными связями . . 253
Глава девятая. Адаптивные системы автоматического управления
9-1. Возникновение адаптивных систем и их виды............257
9-2. Самонастраивающаяся система с моделью............... 260
9-3. Об использовании ЦВМ в адаптивных системах...........267
9-4. Статистические методы идентификации статических харак-
теристик объектов.................................... 270
9-5. Статистические методы идентификации динамических ха-
рактеристик объектов..................................281
9-6. Распознавание образов................................288
9-7. Методы последовательных приближений в адаптации . . . 308
Литература......................................................312
Предметный указатель............................................324