/

































































































































































































































Автор: Гольдфарб Л.С.
Теги: регулирование и управление машинами, процессами теория автоматического управления
Год: 1972




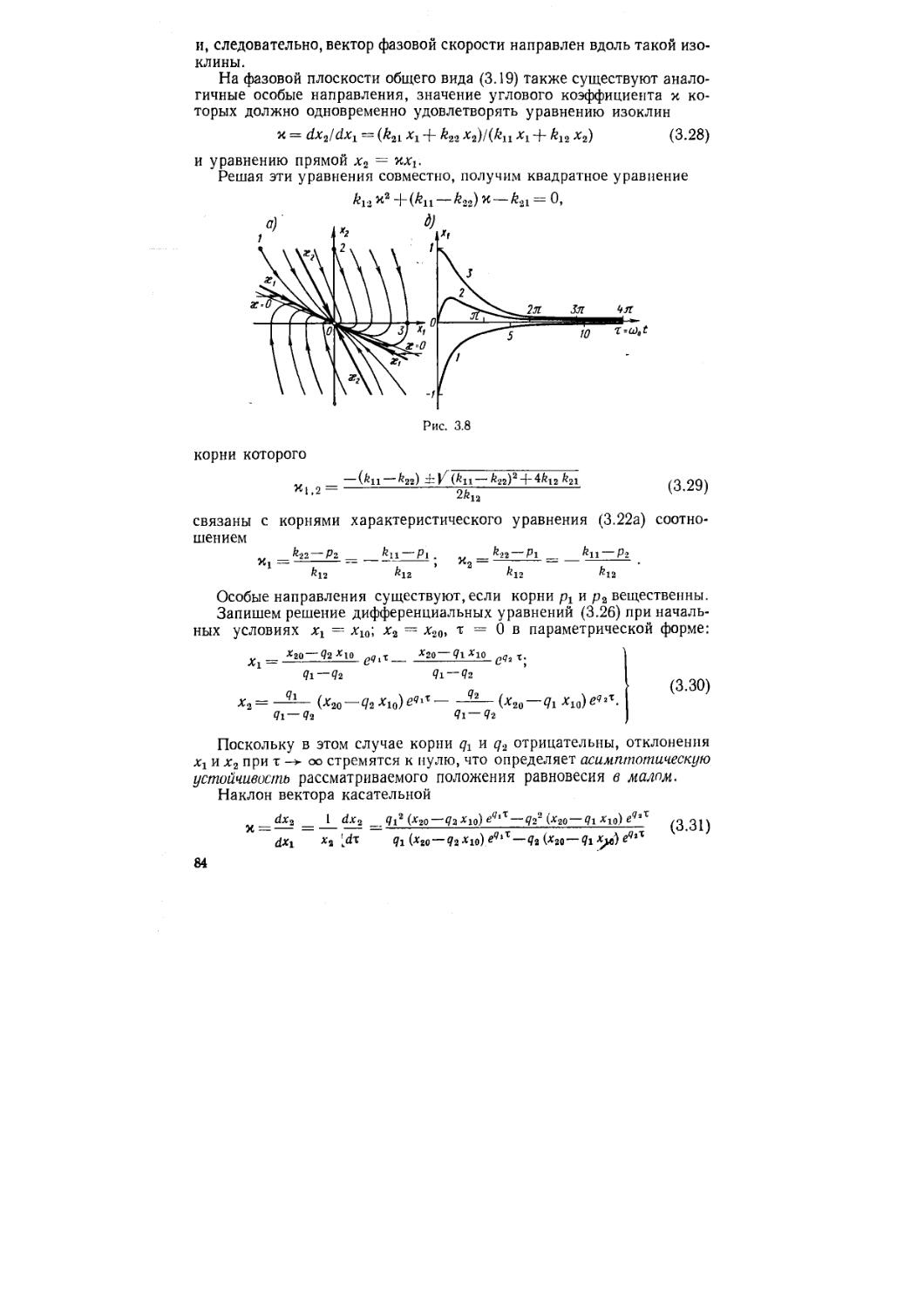
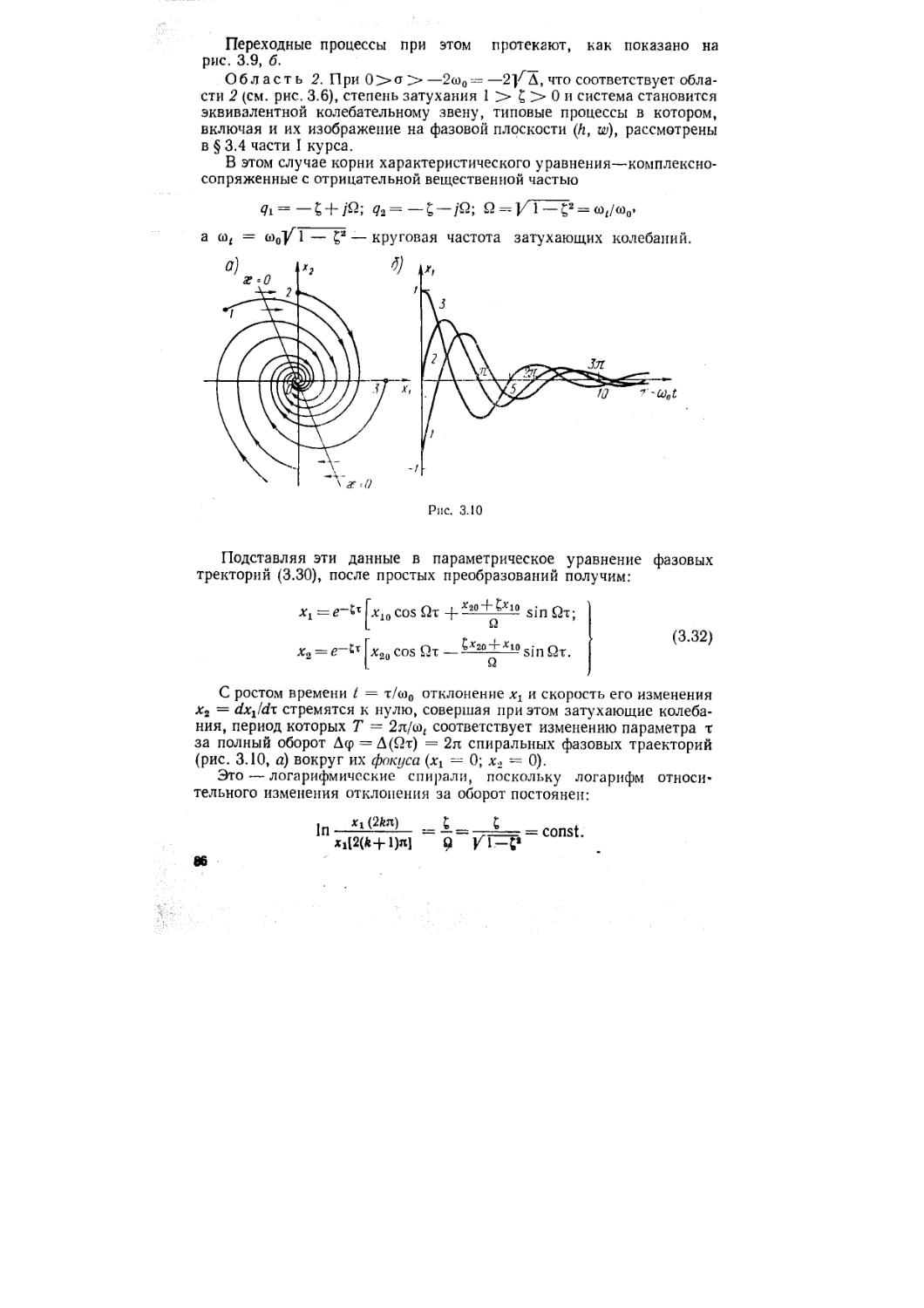
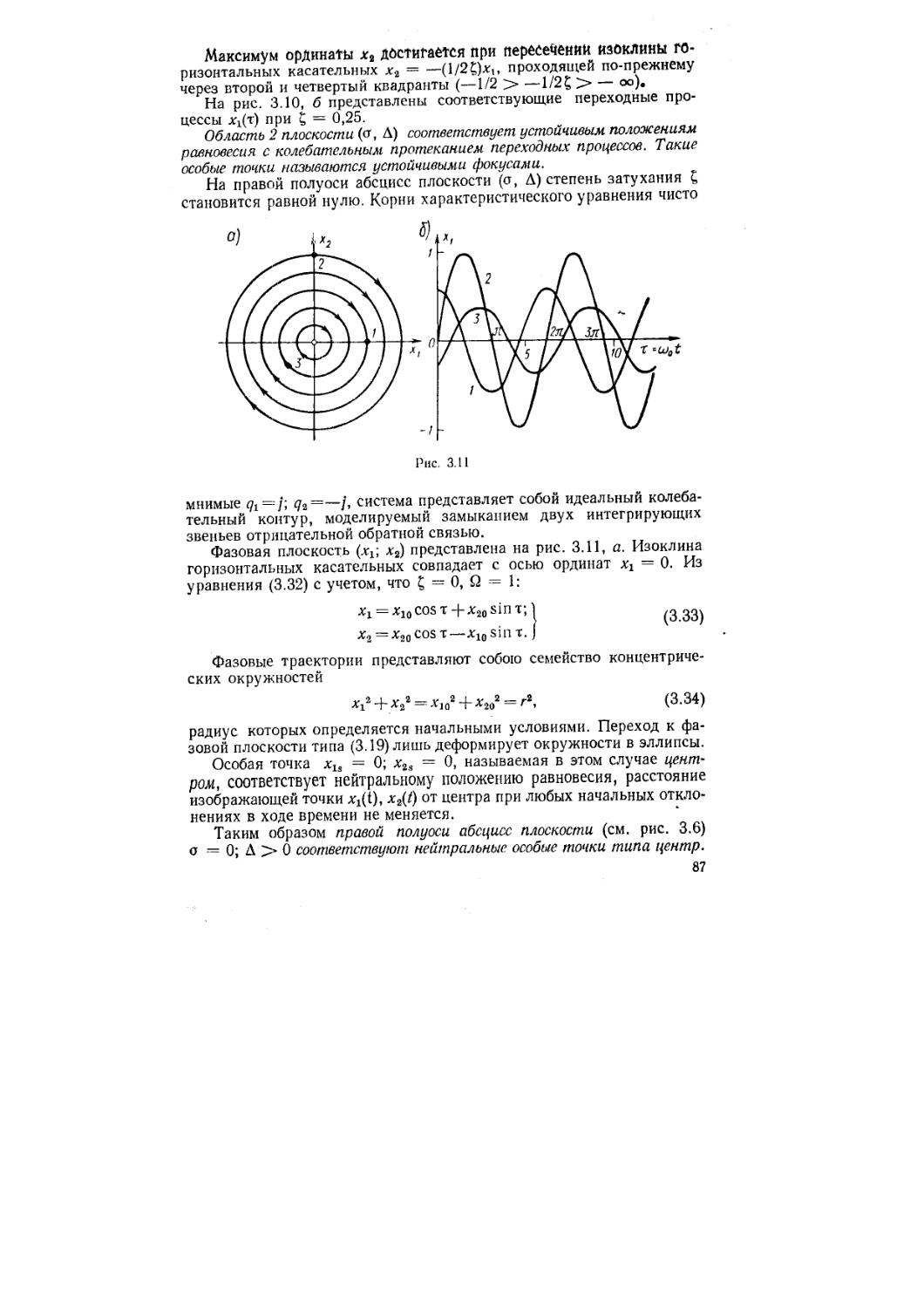
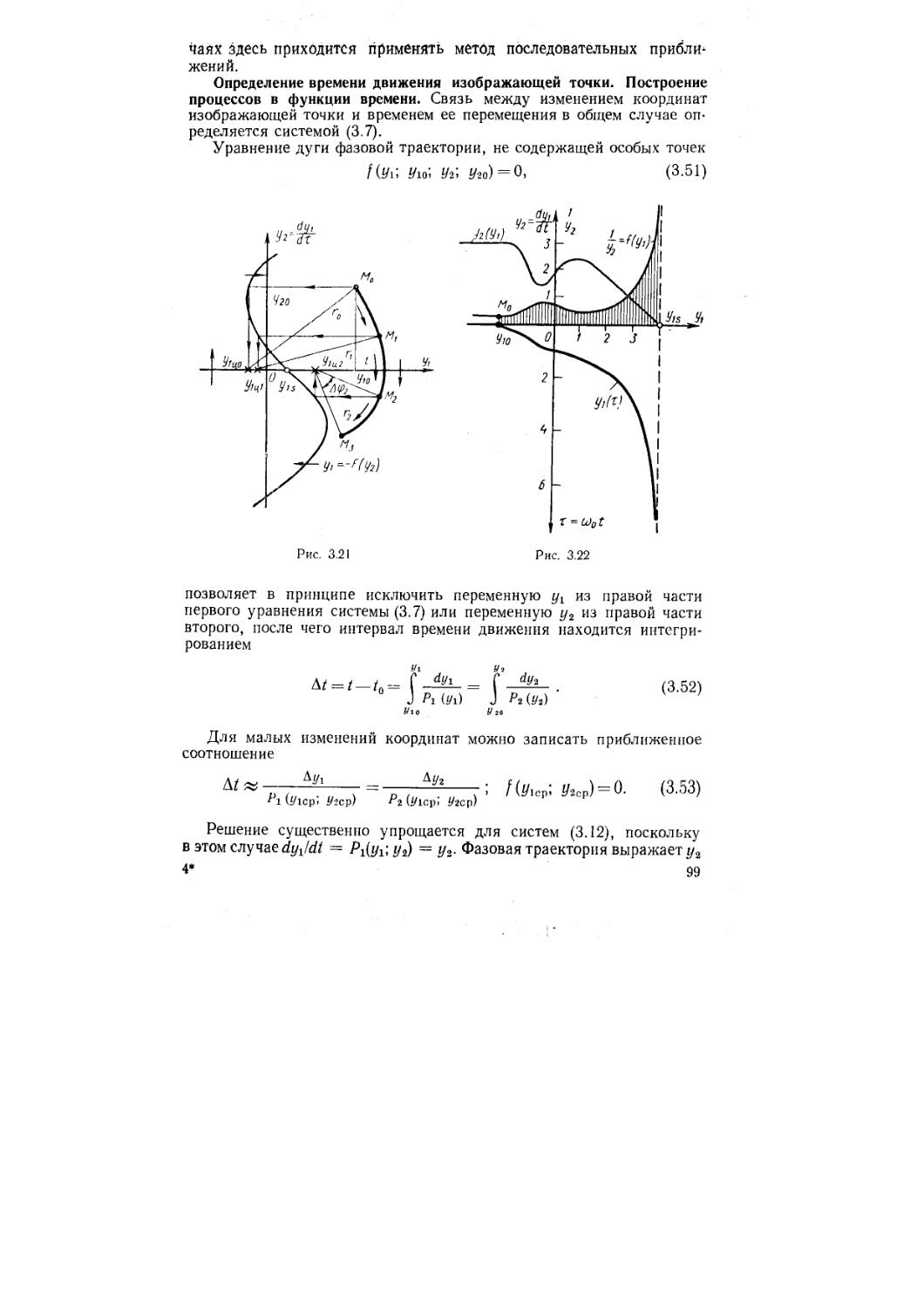
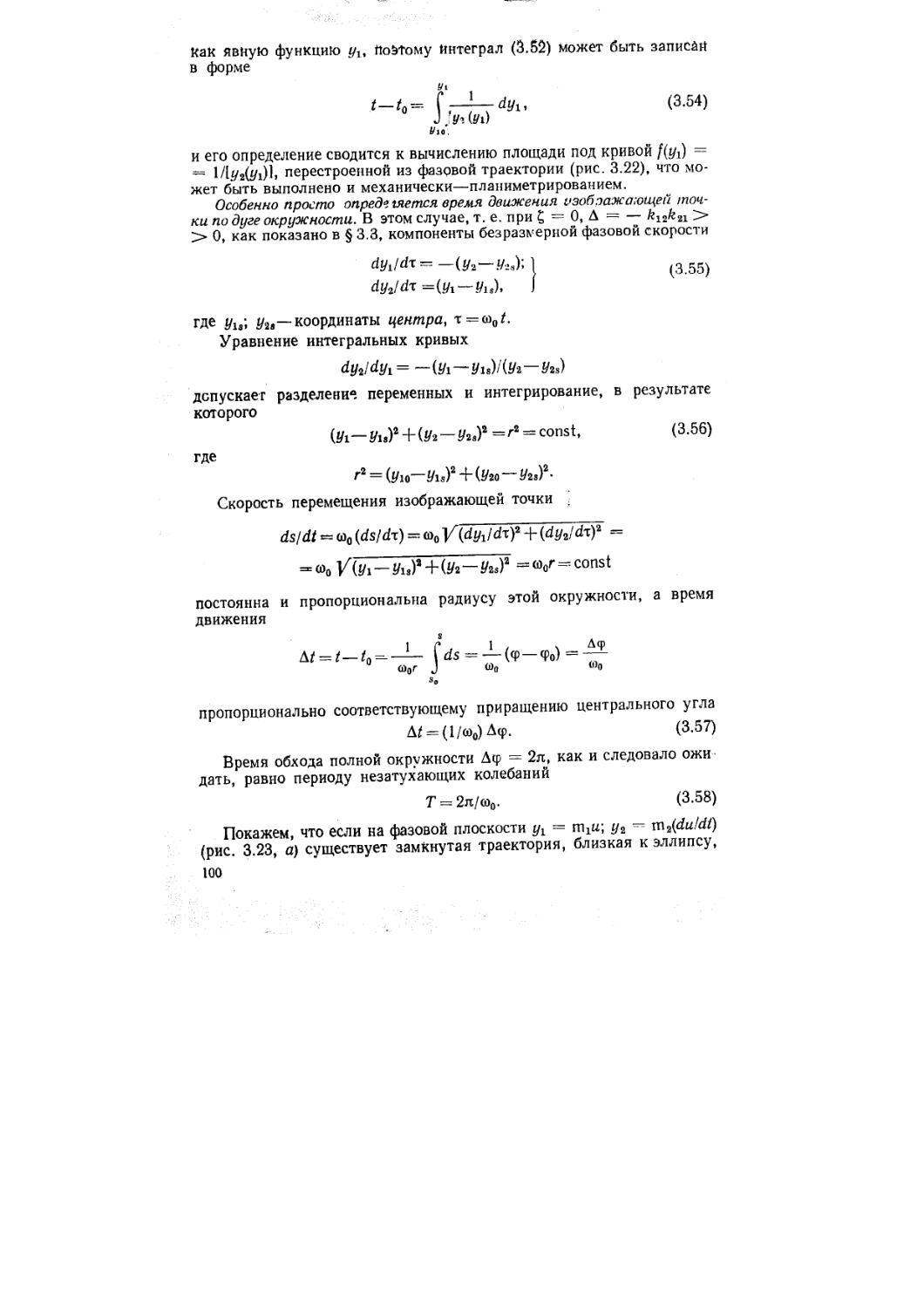
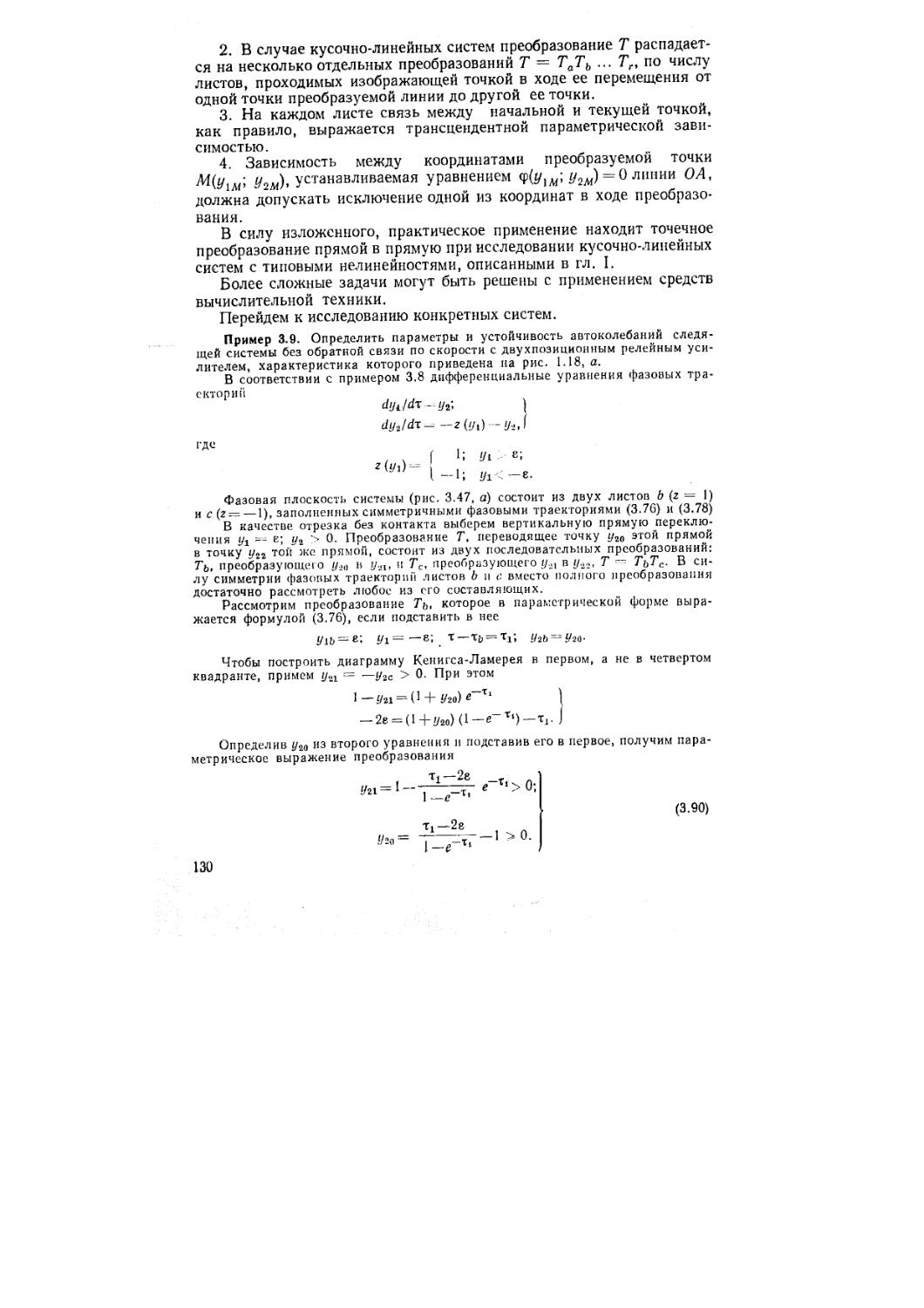
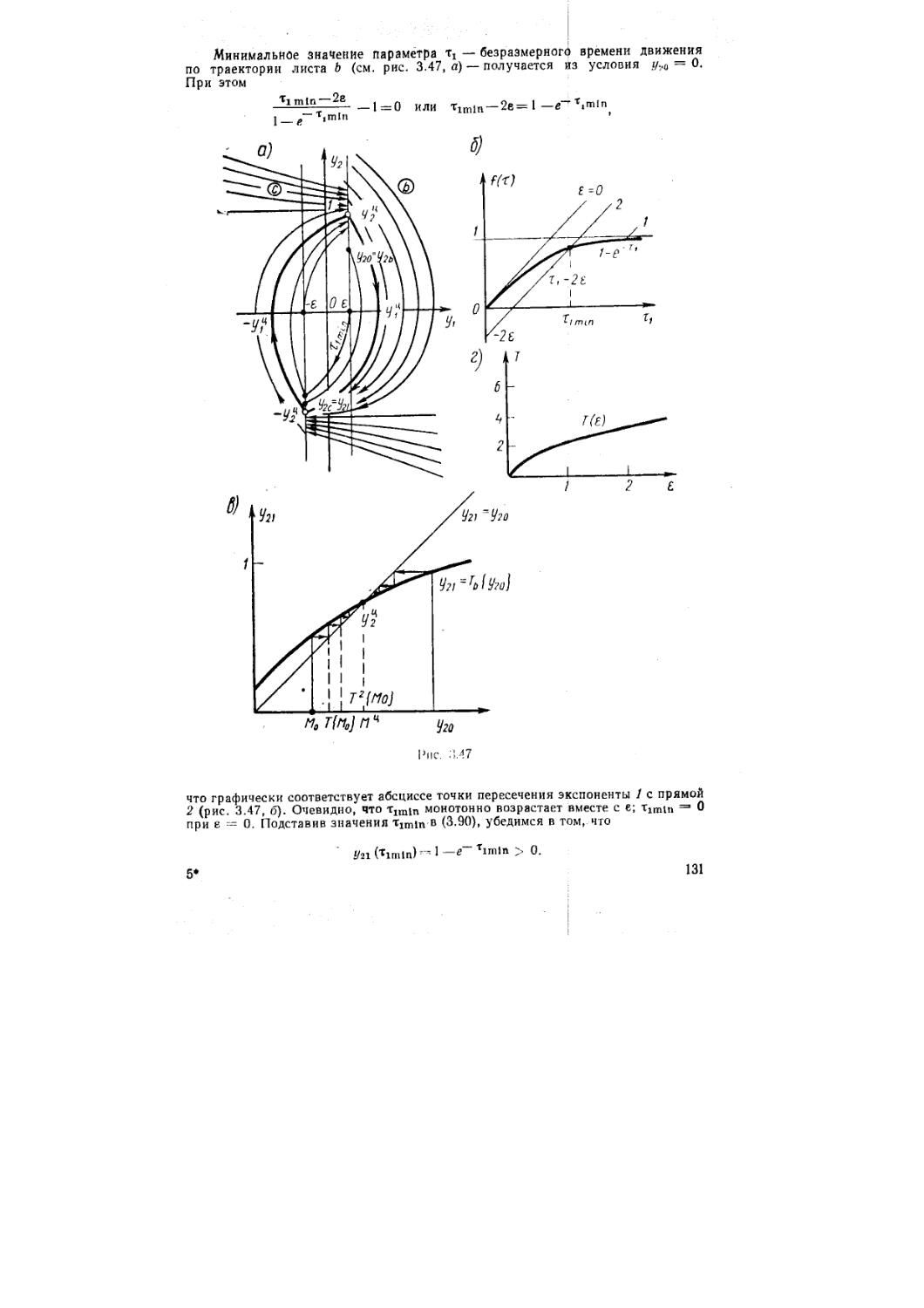
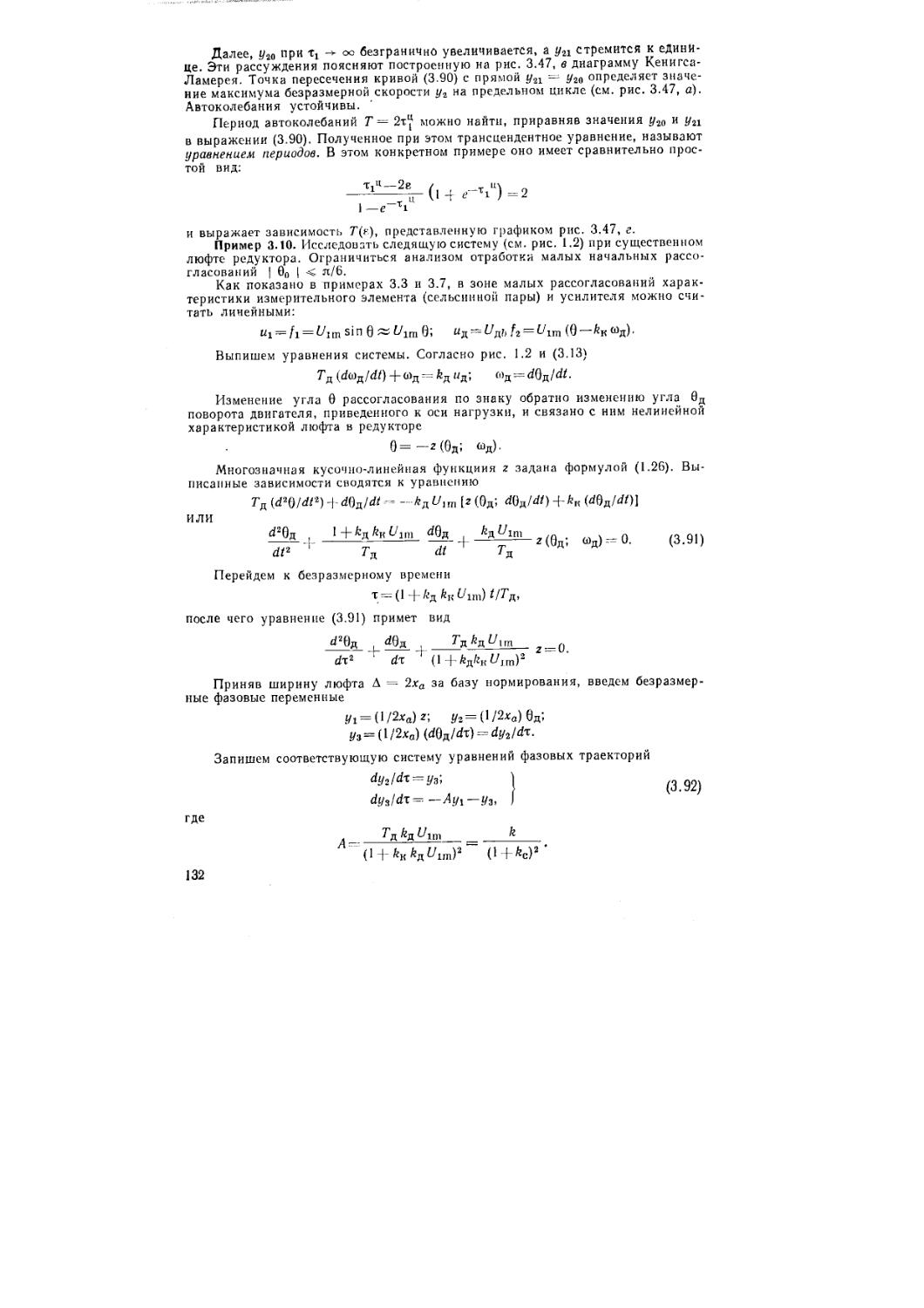
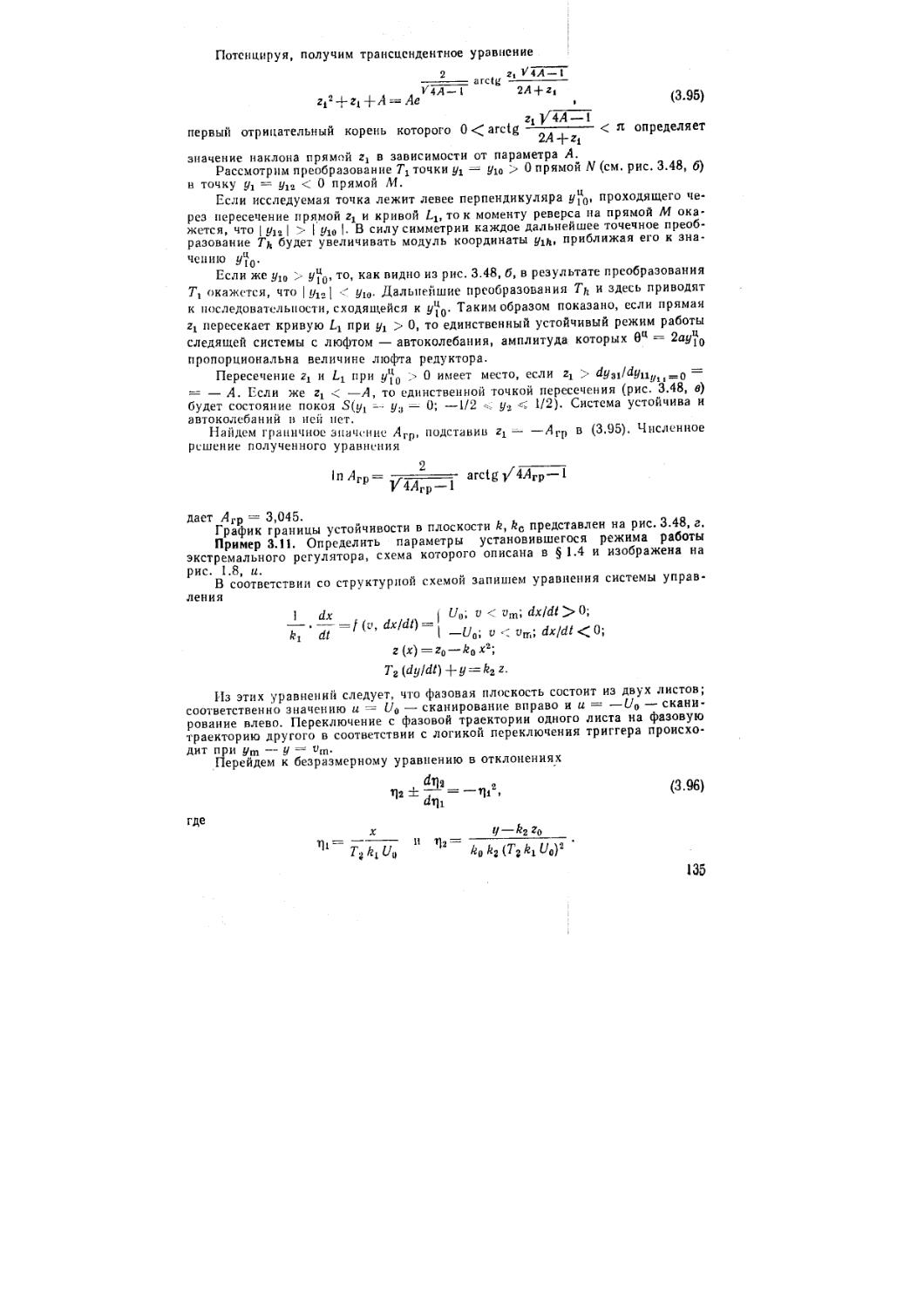
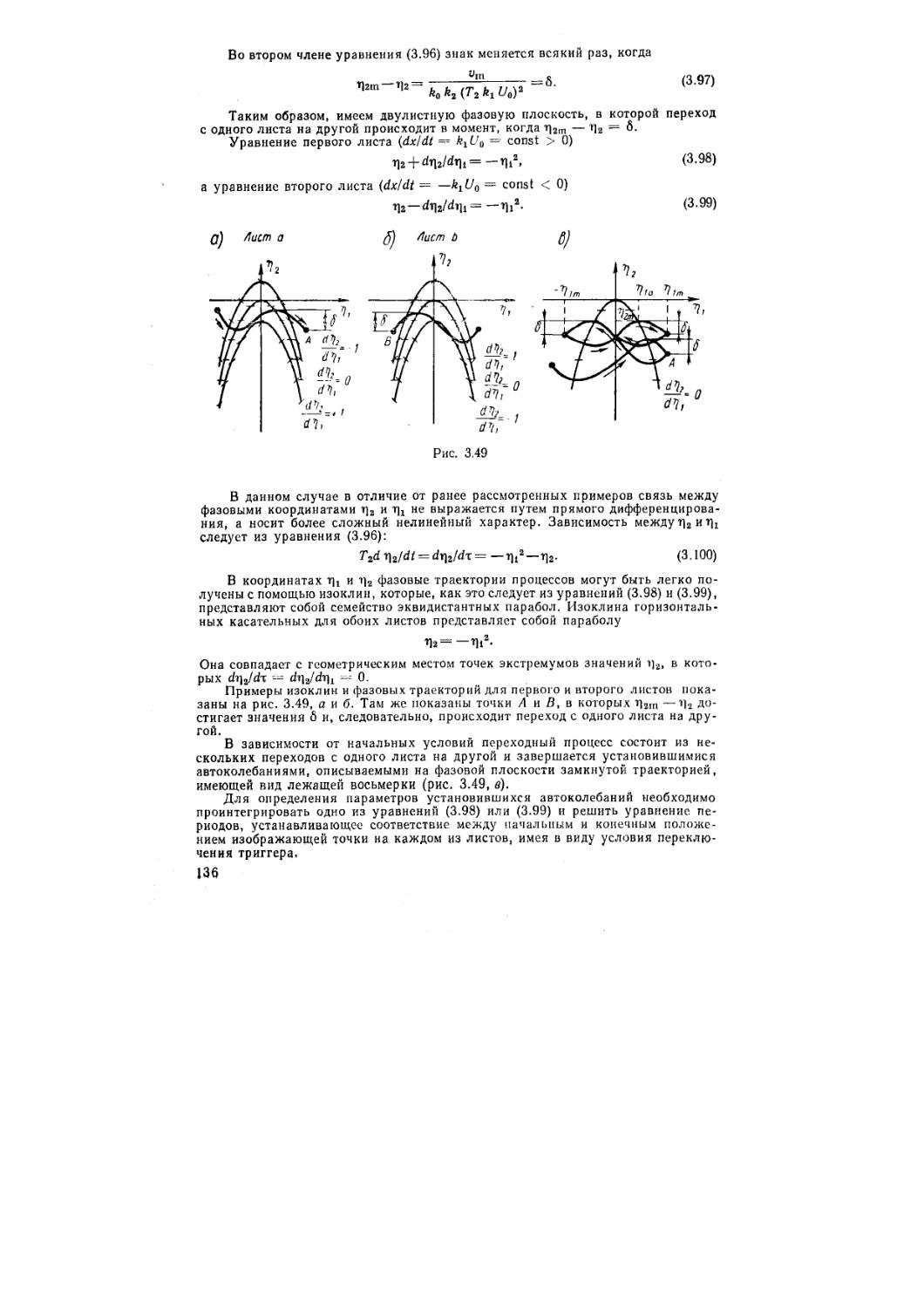
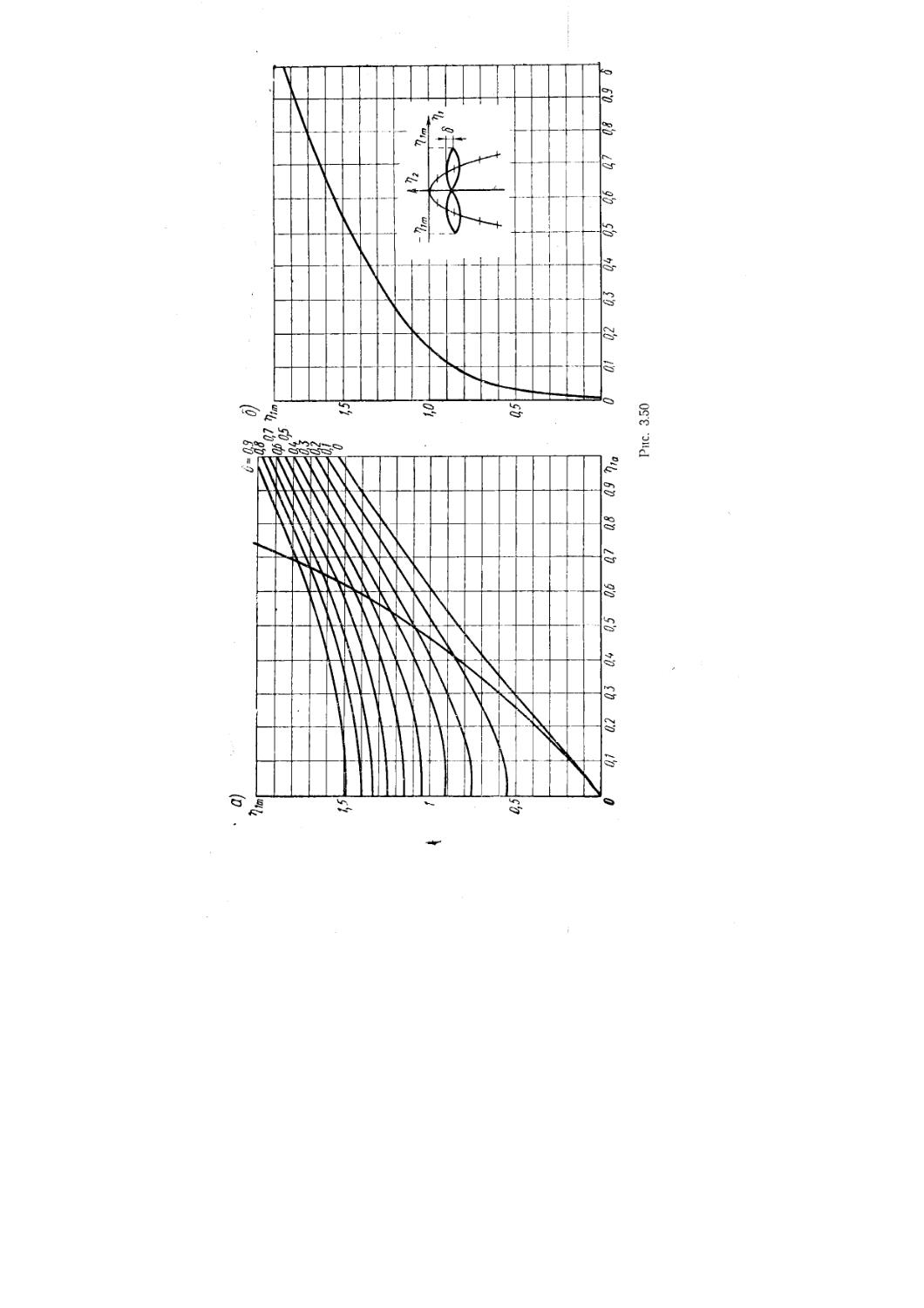
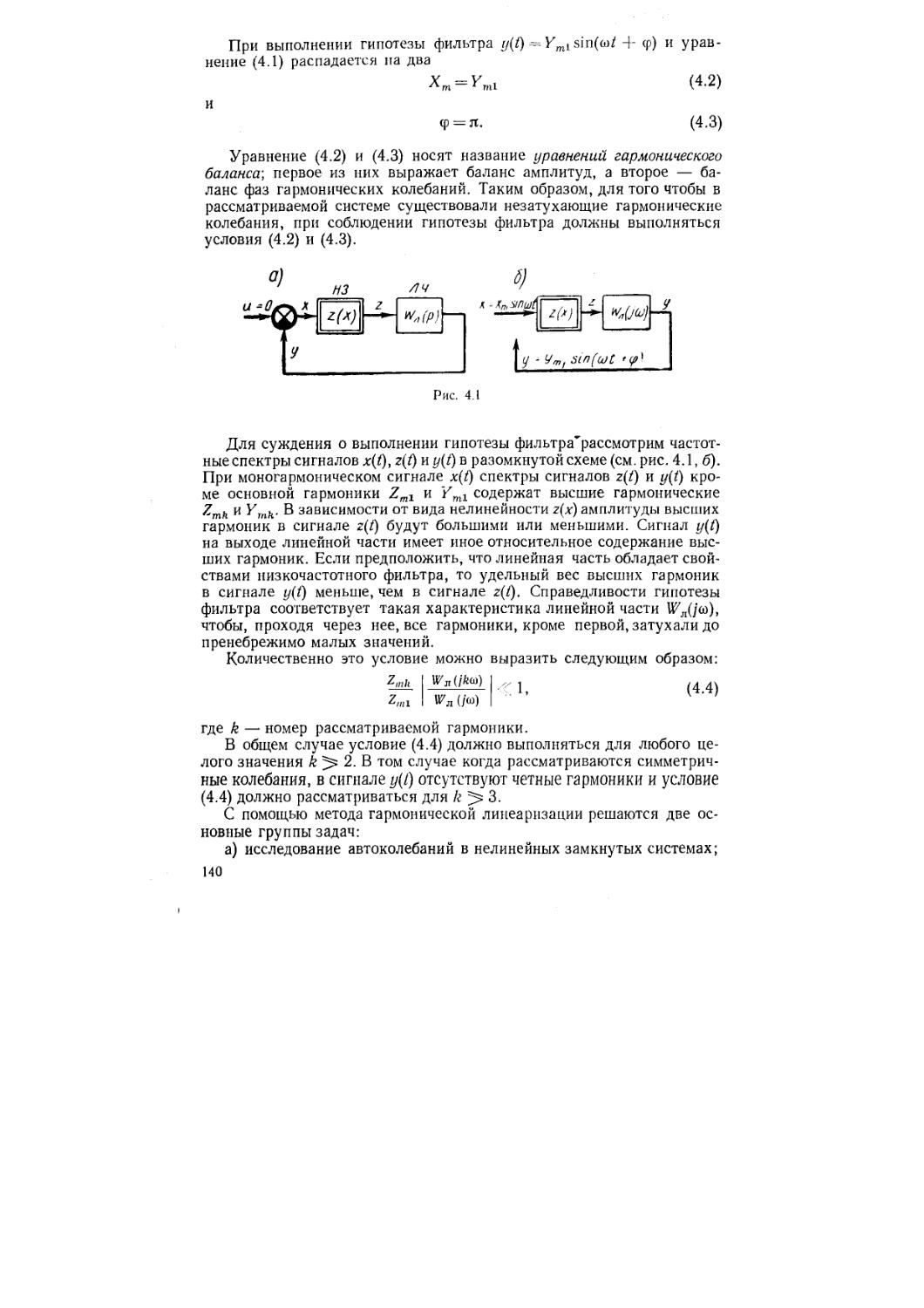
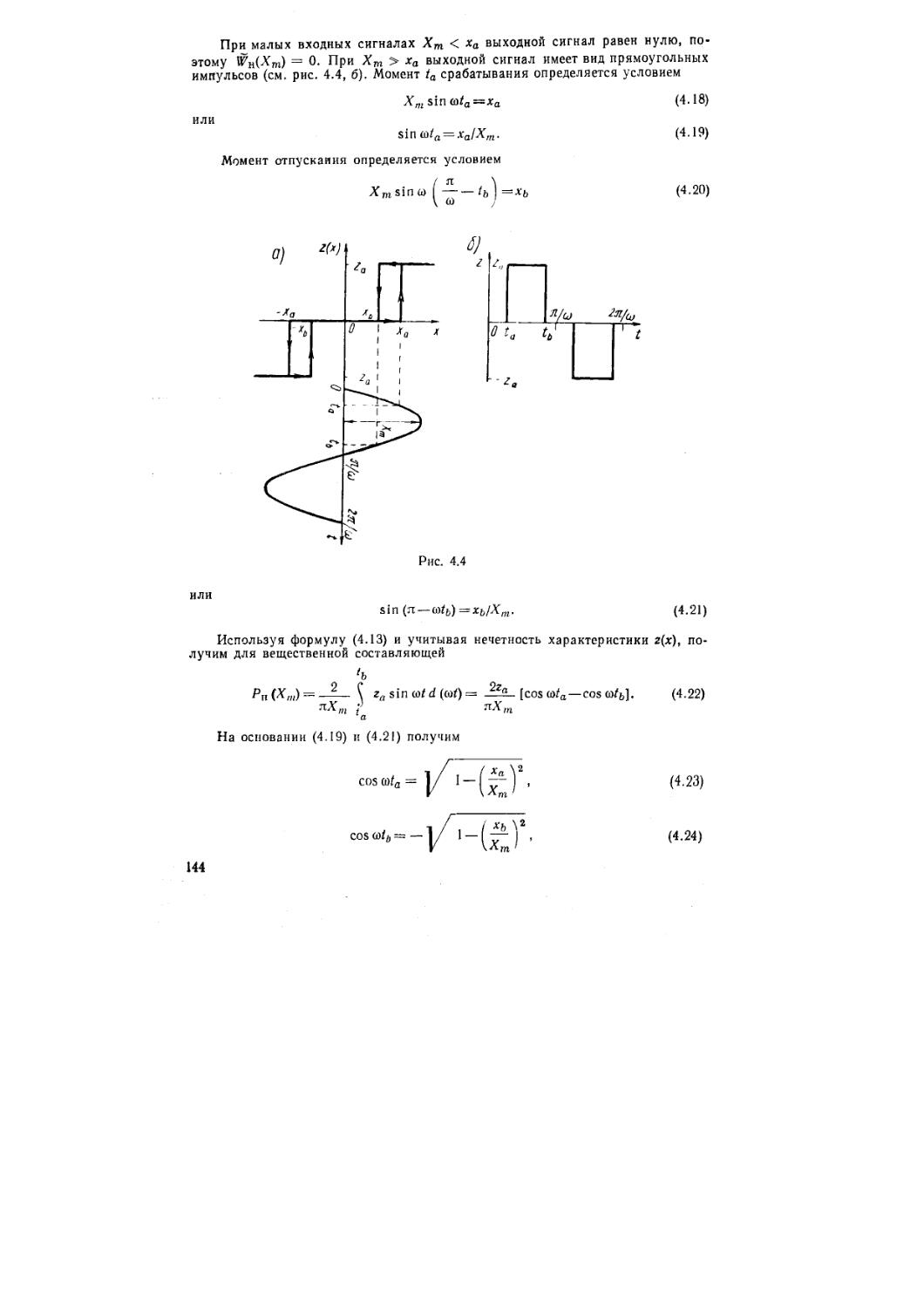
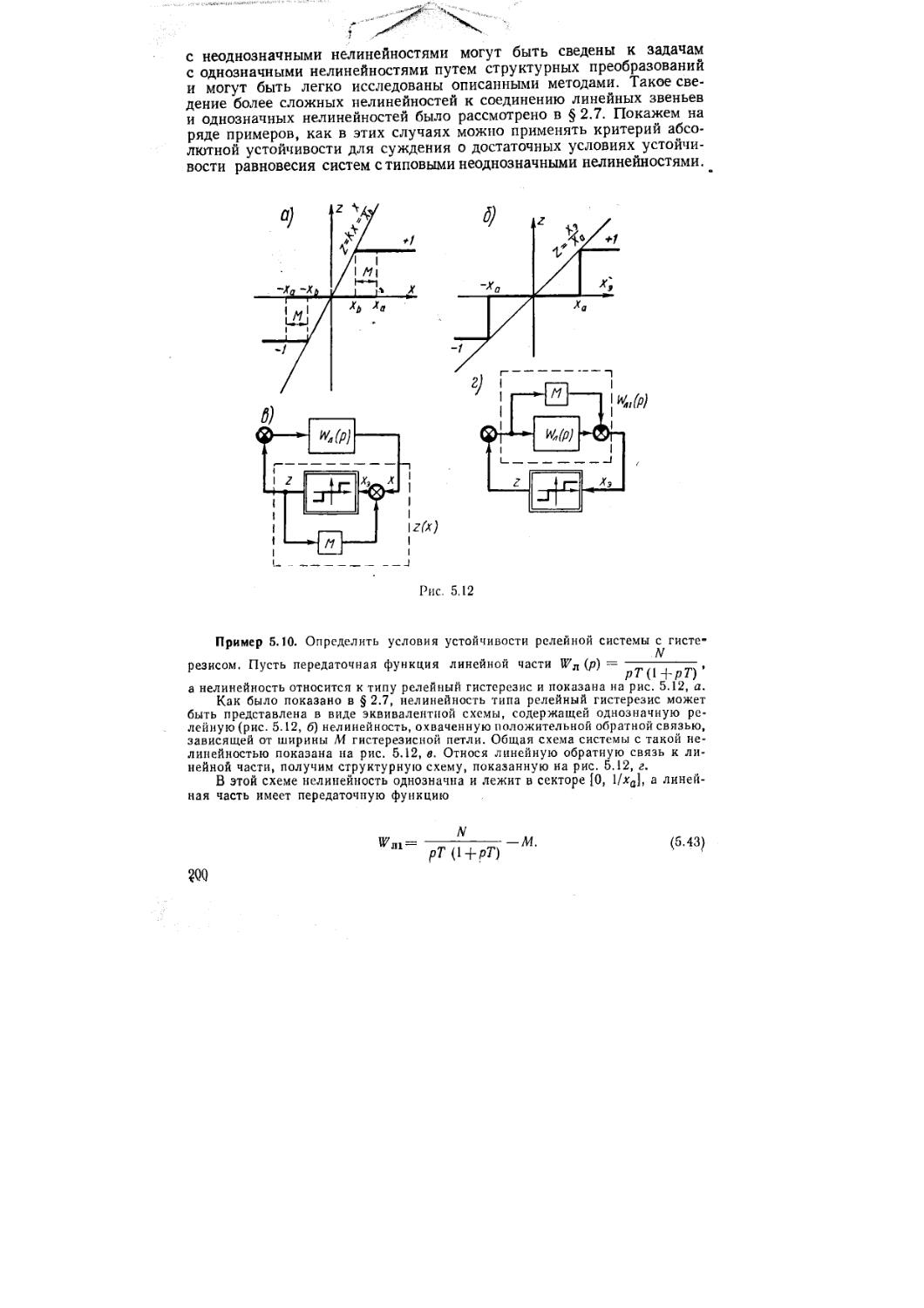
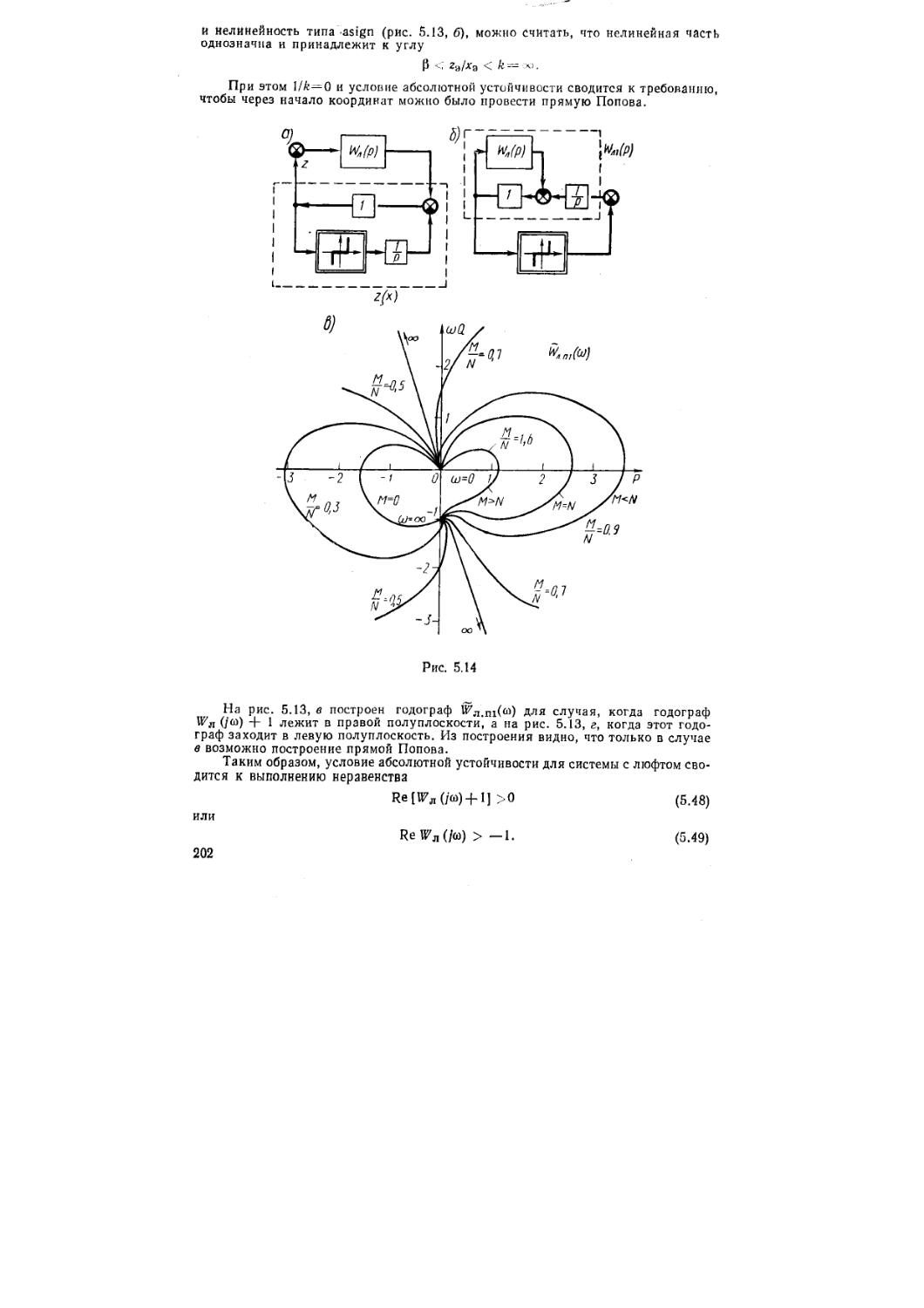
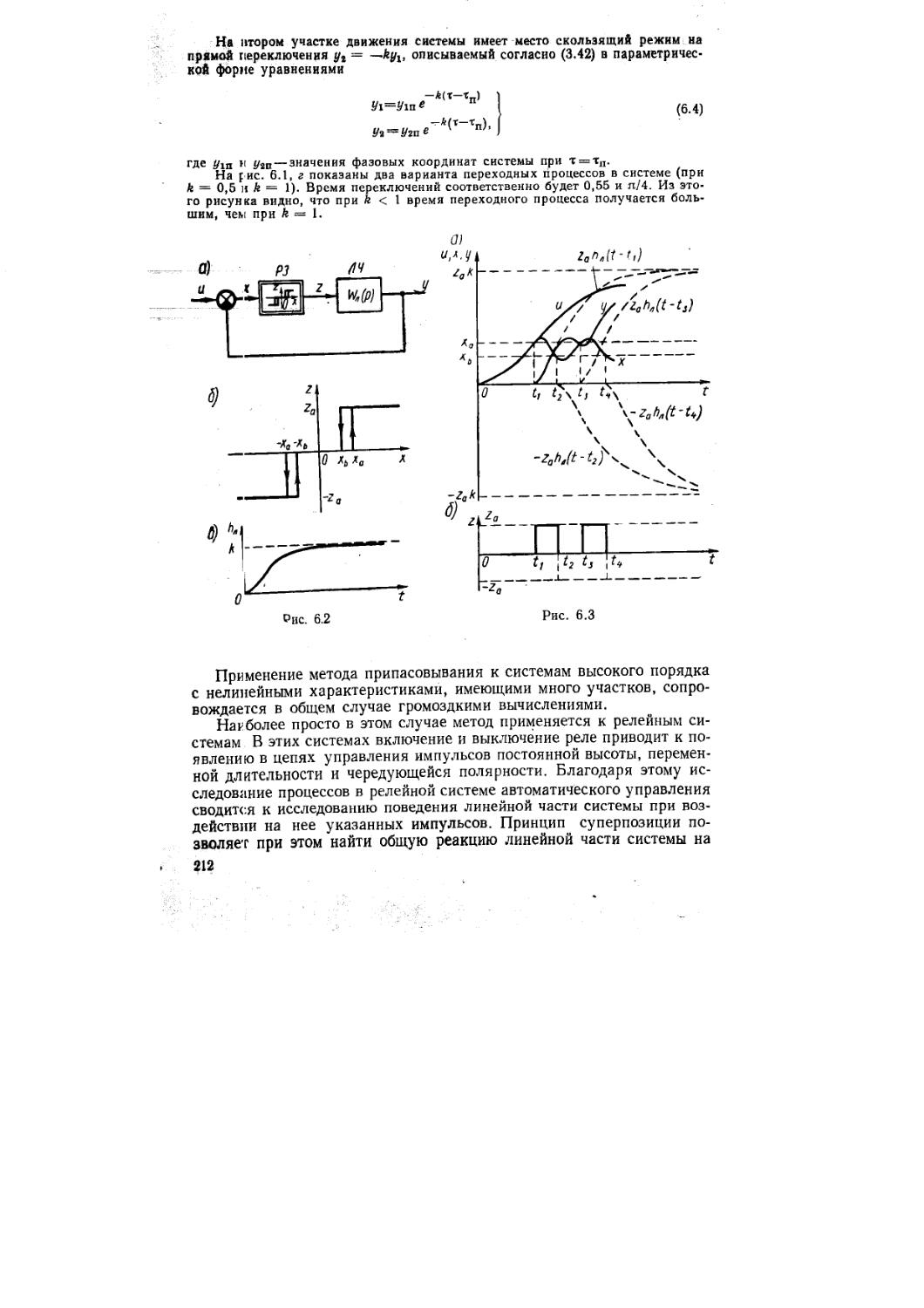
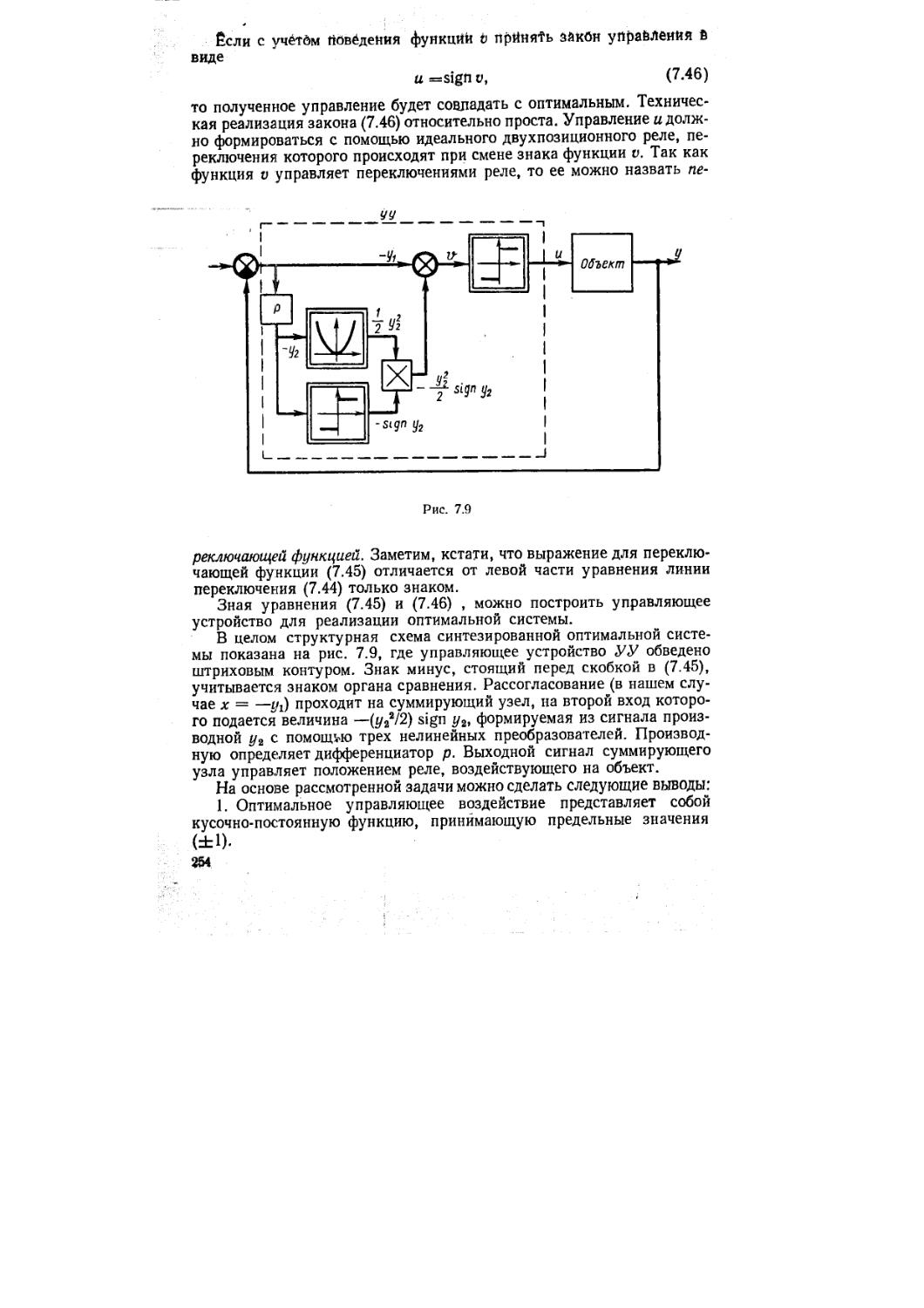
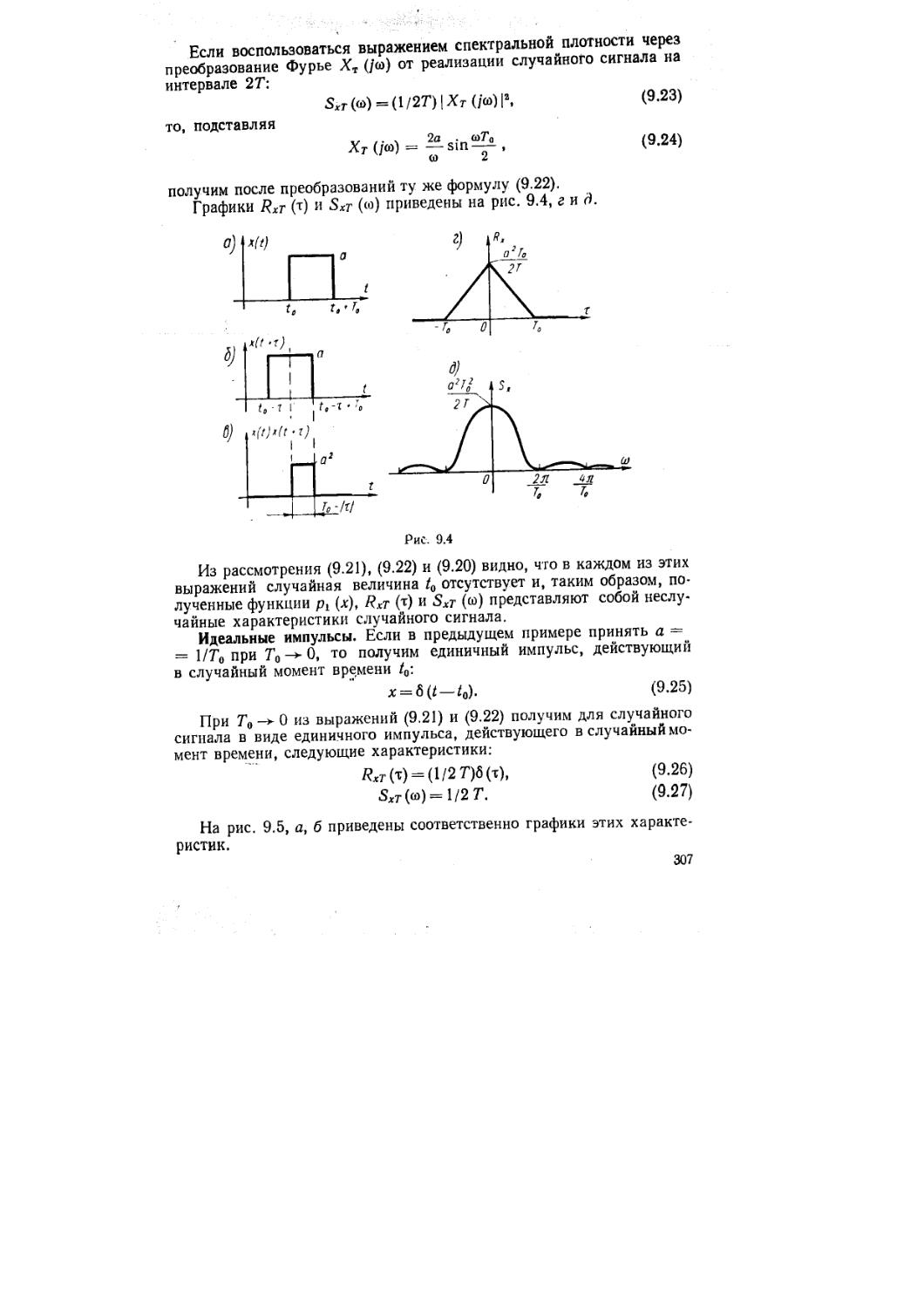
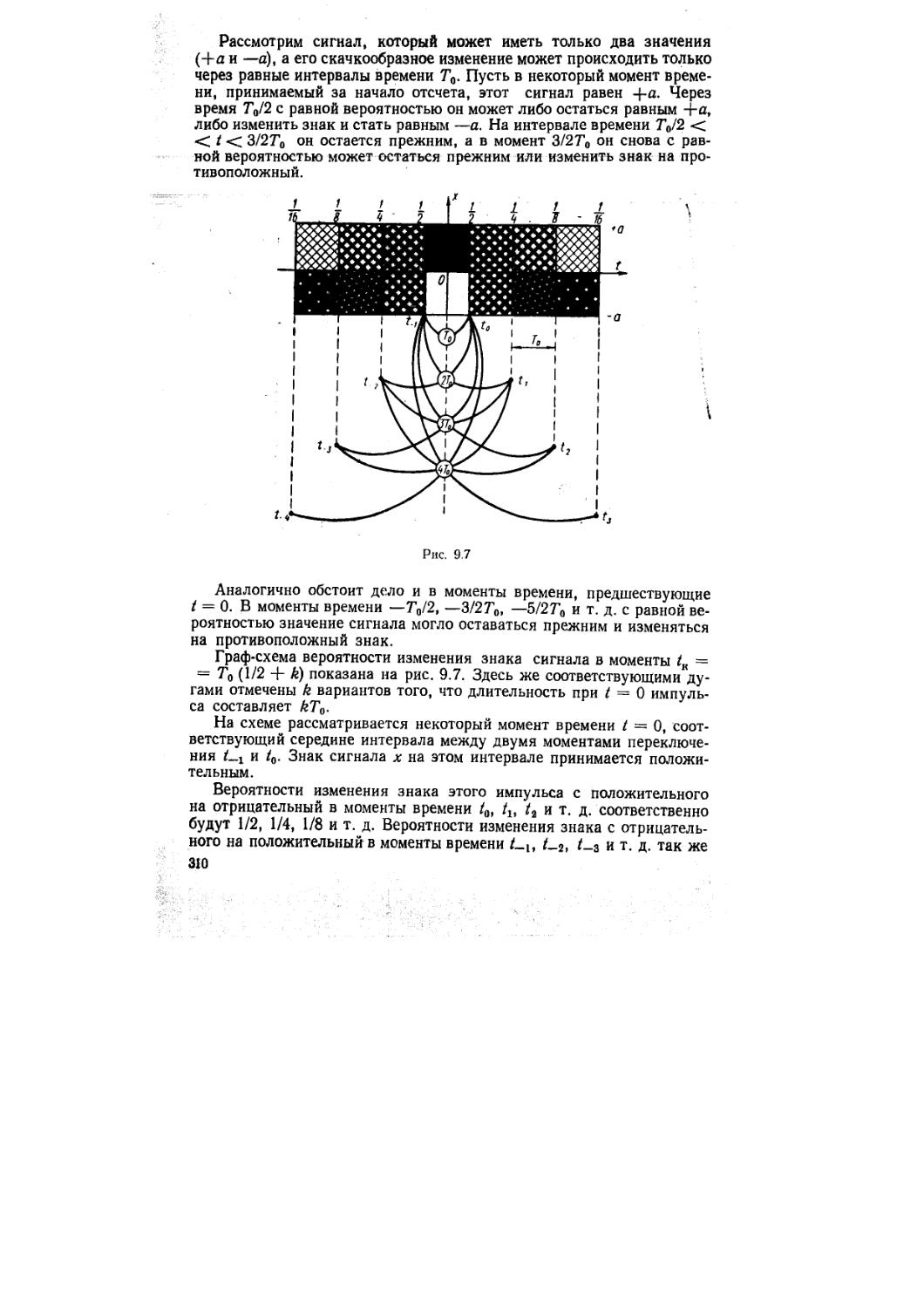
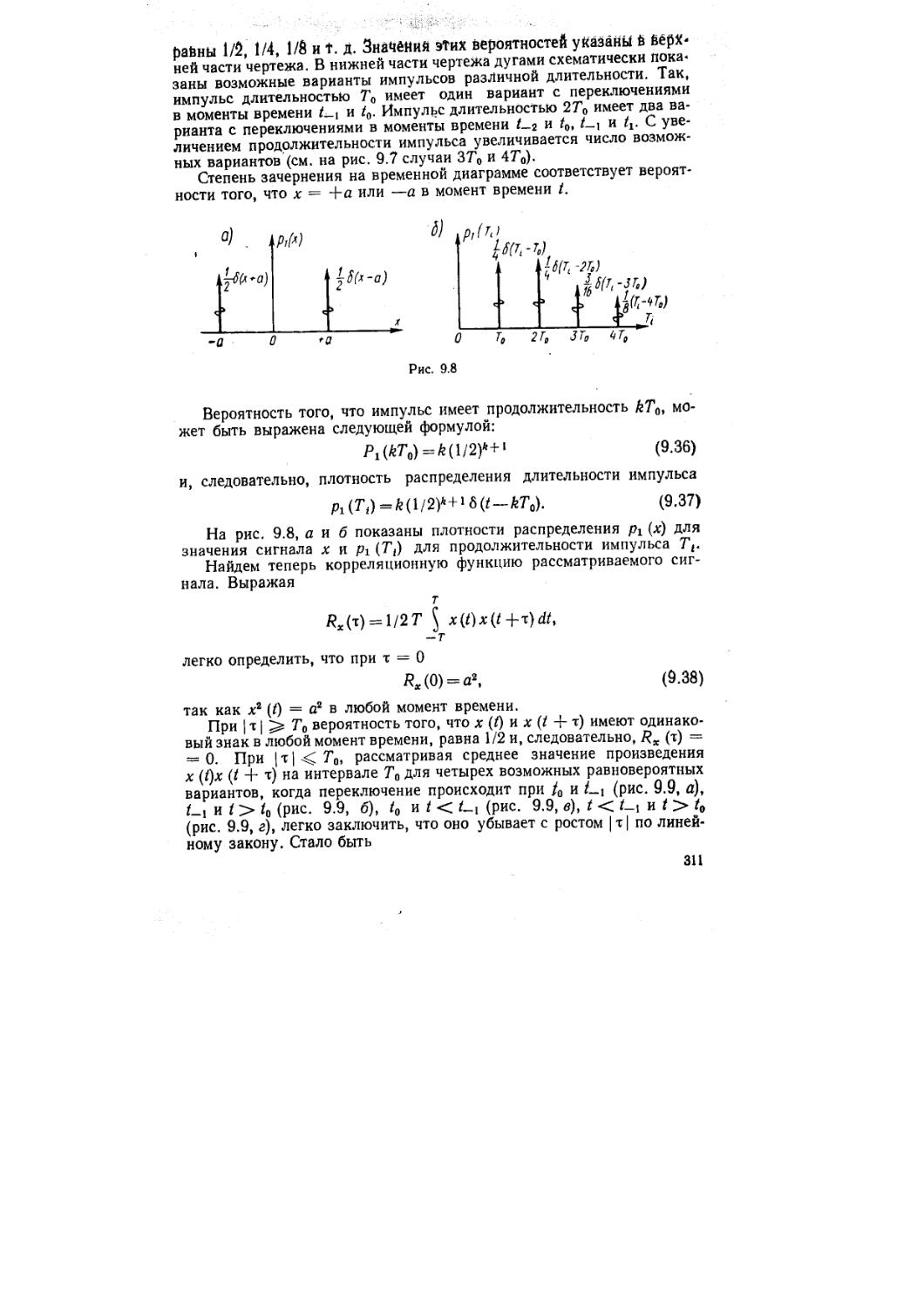
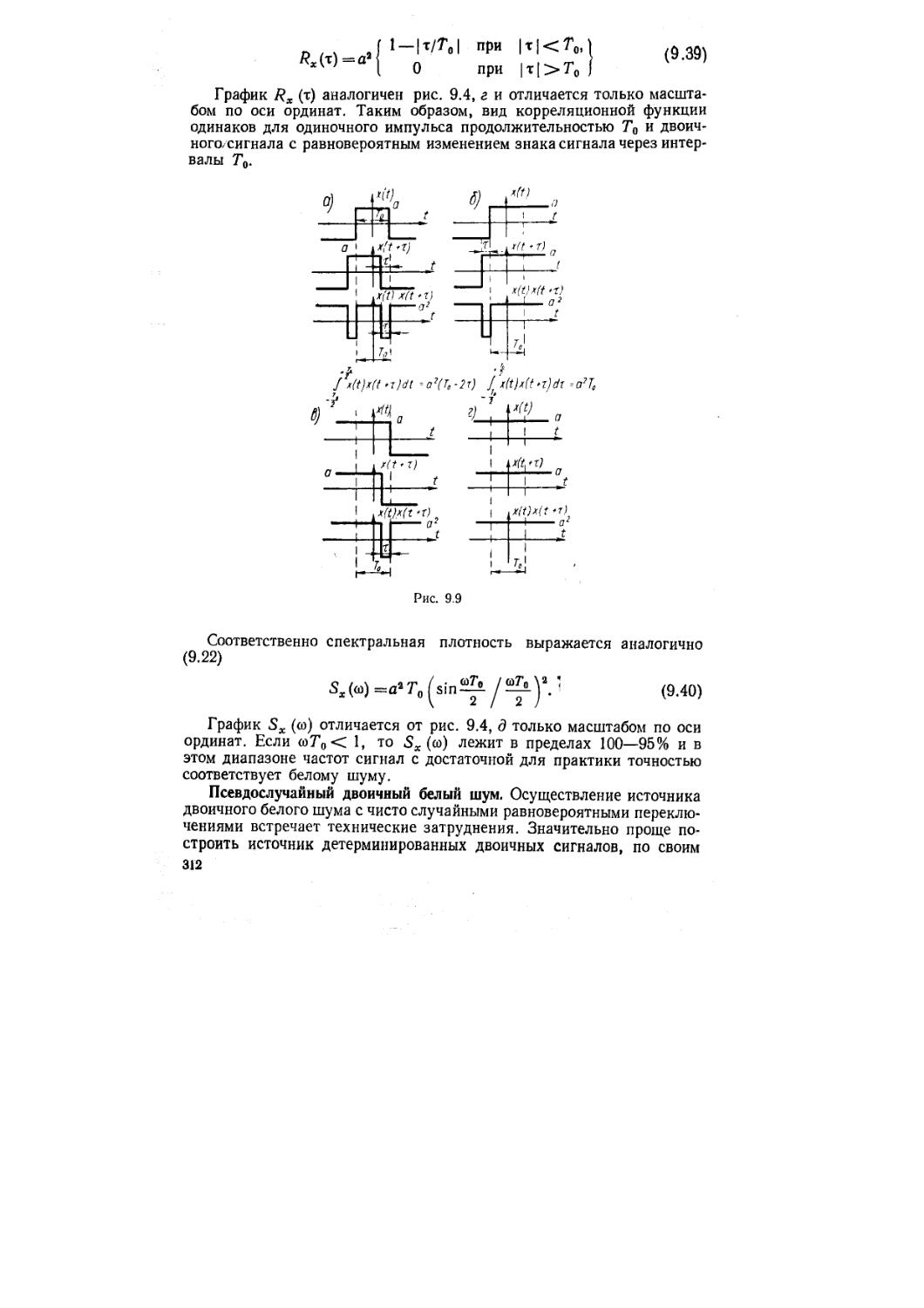
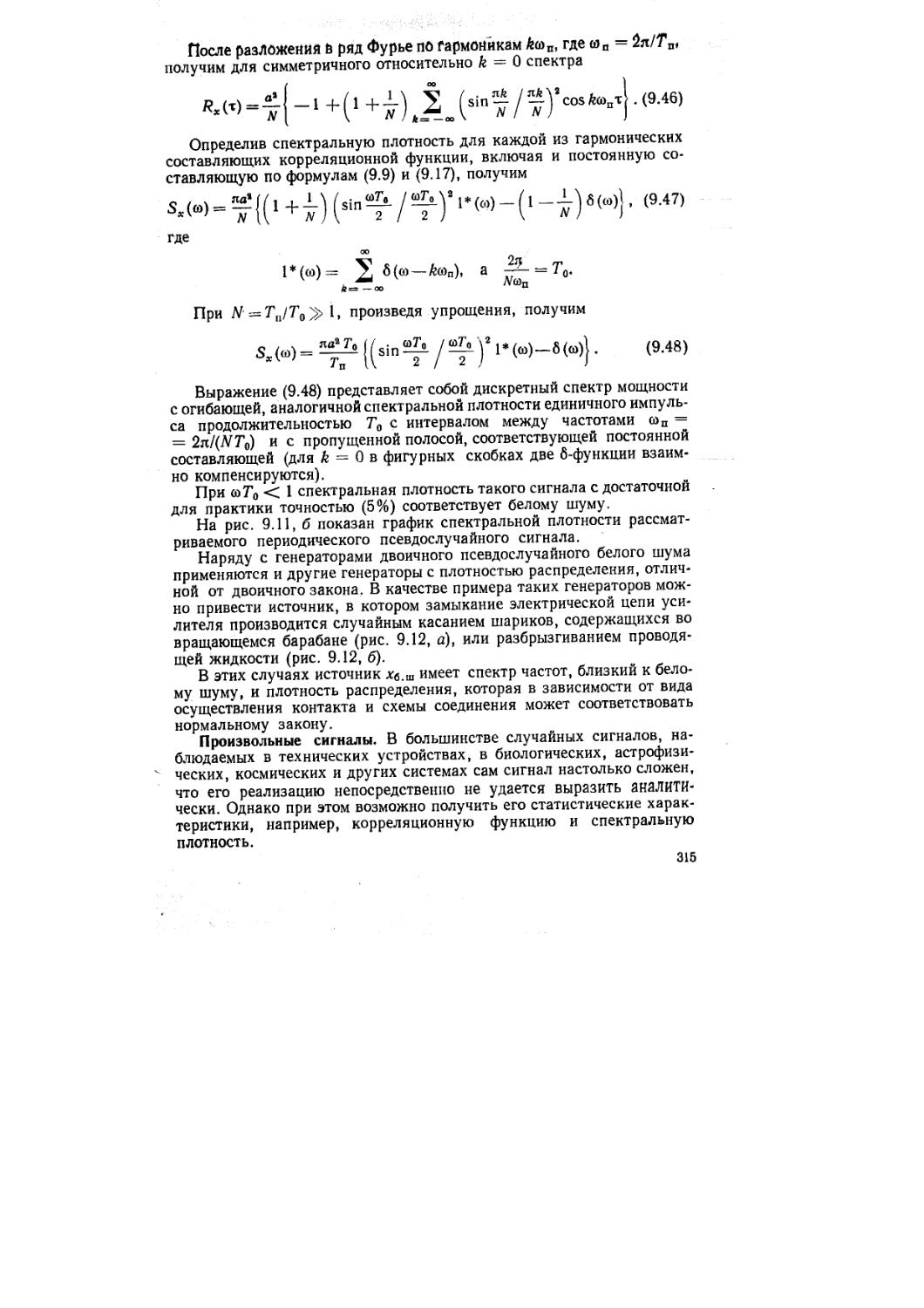
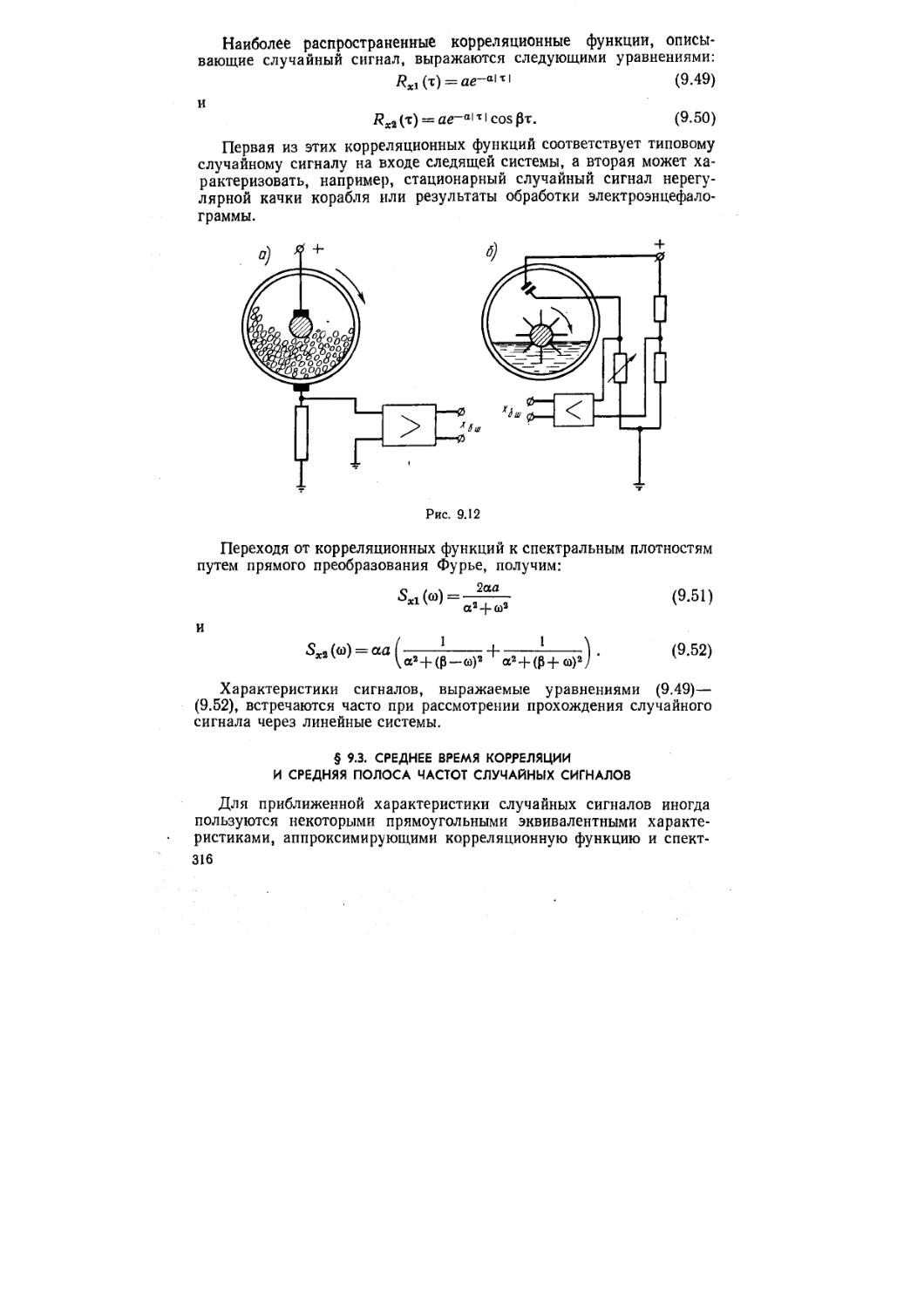
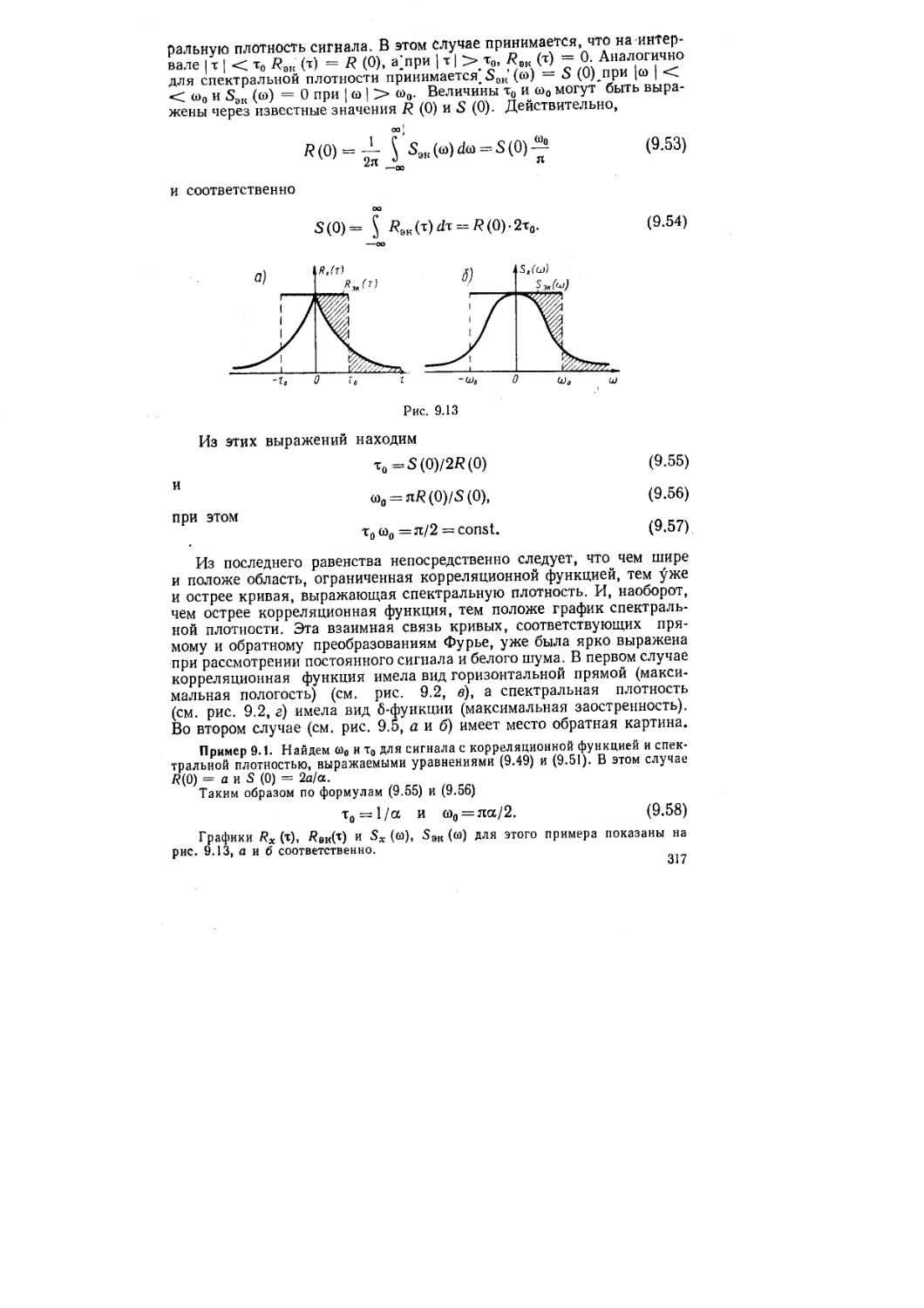
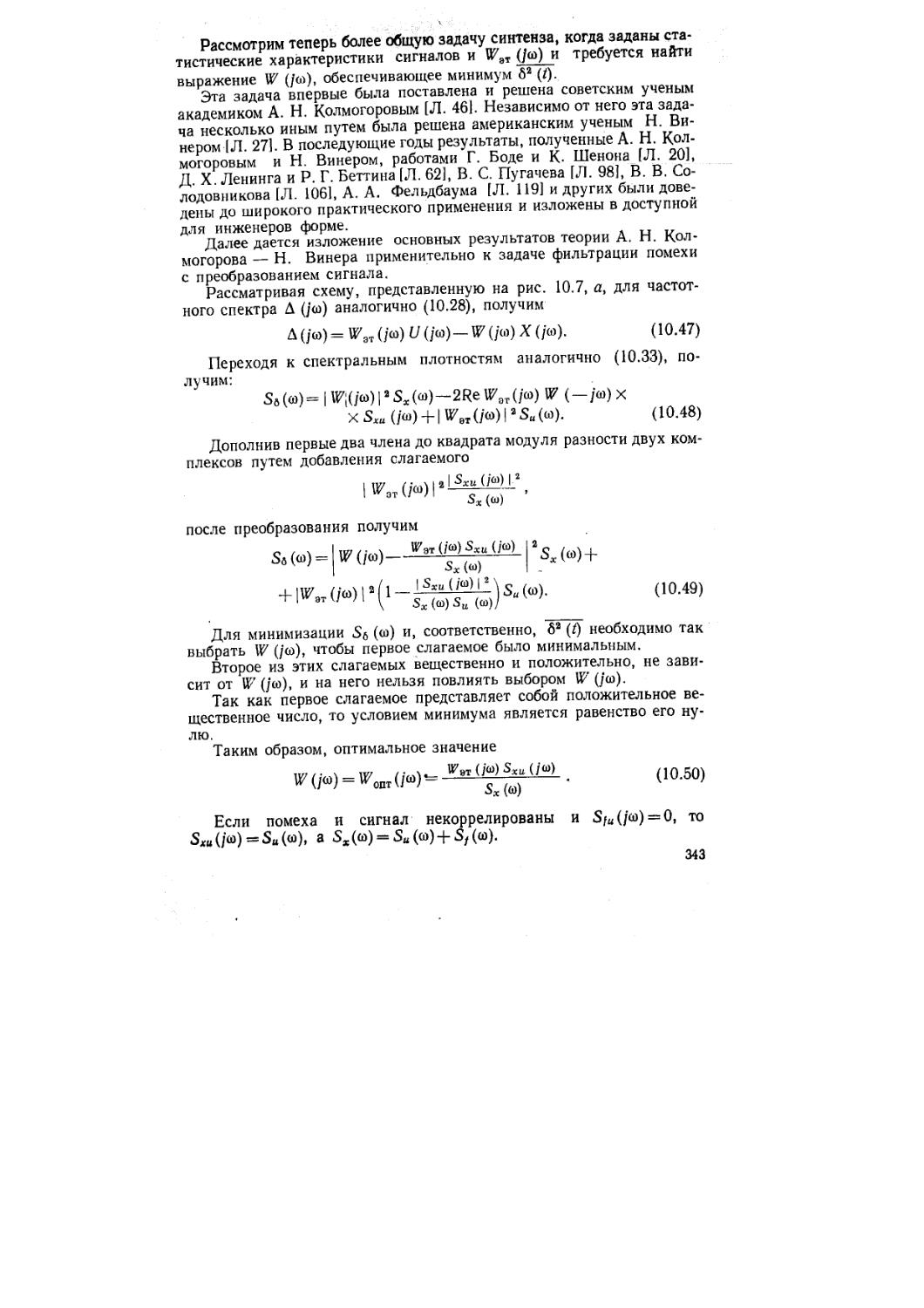
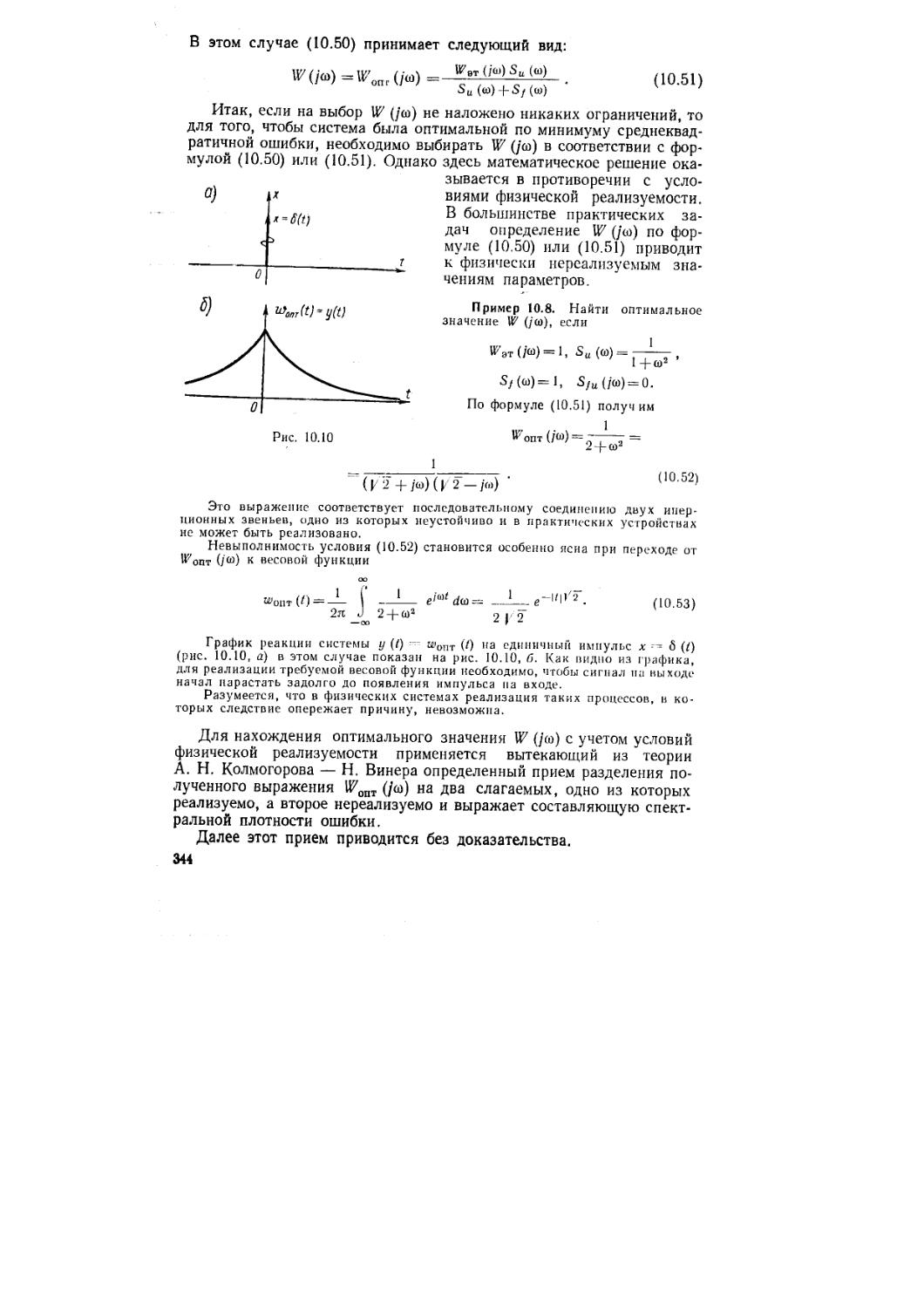
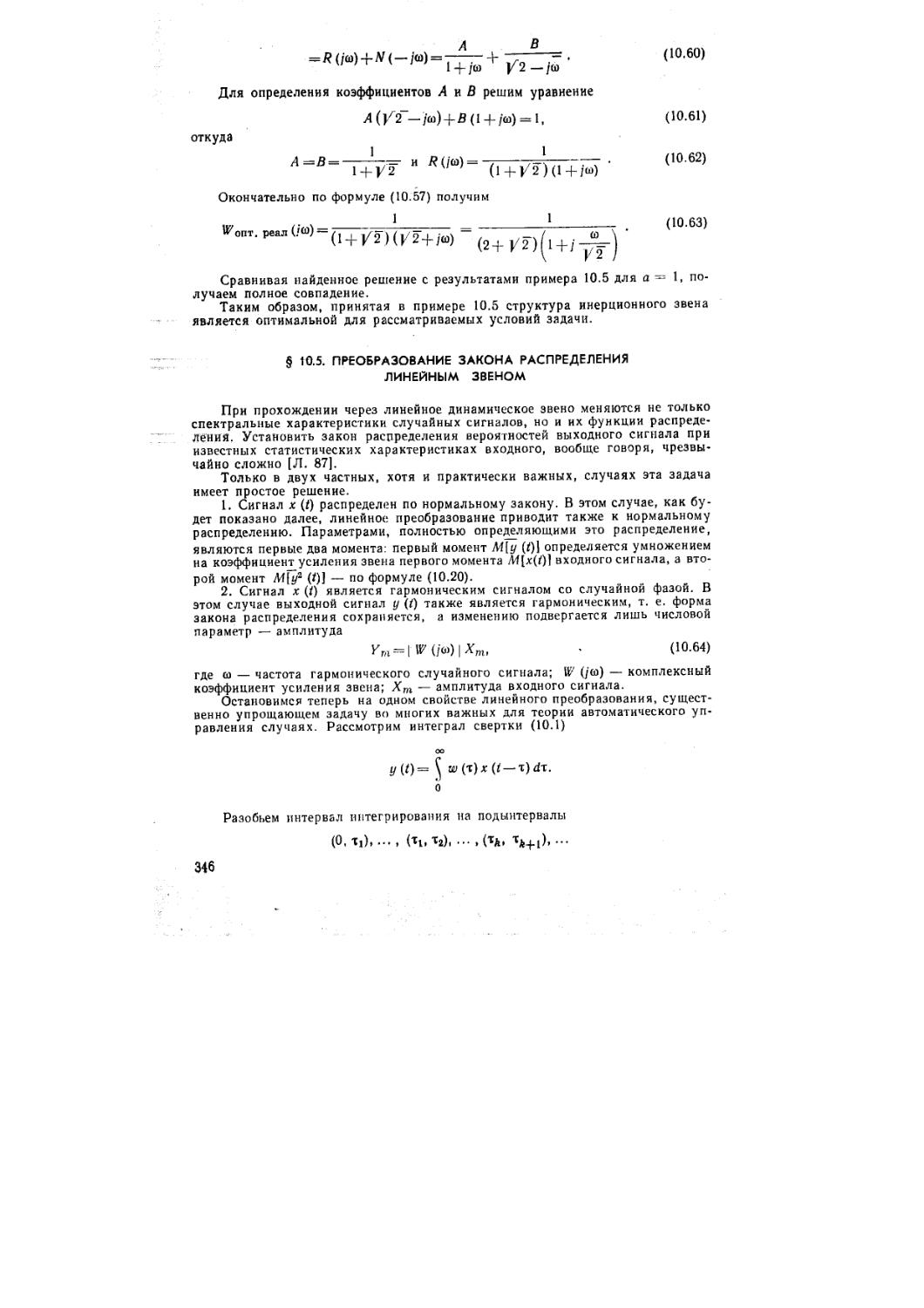
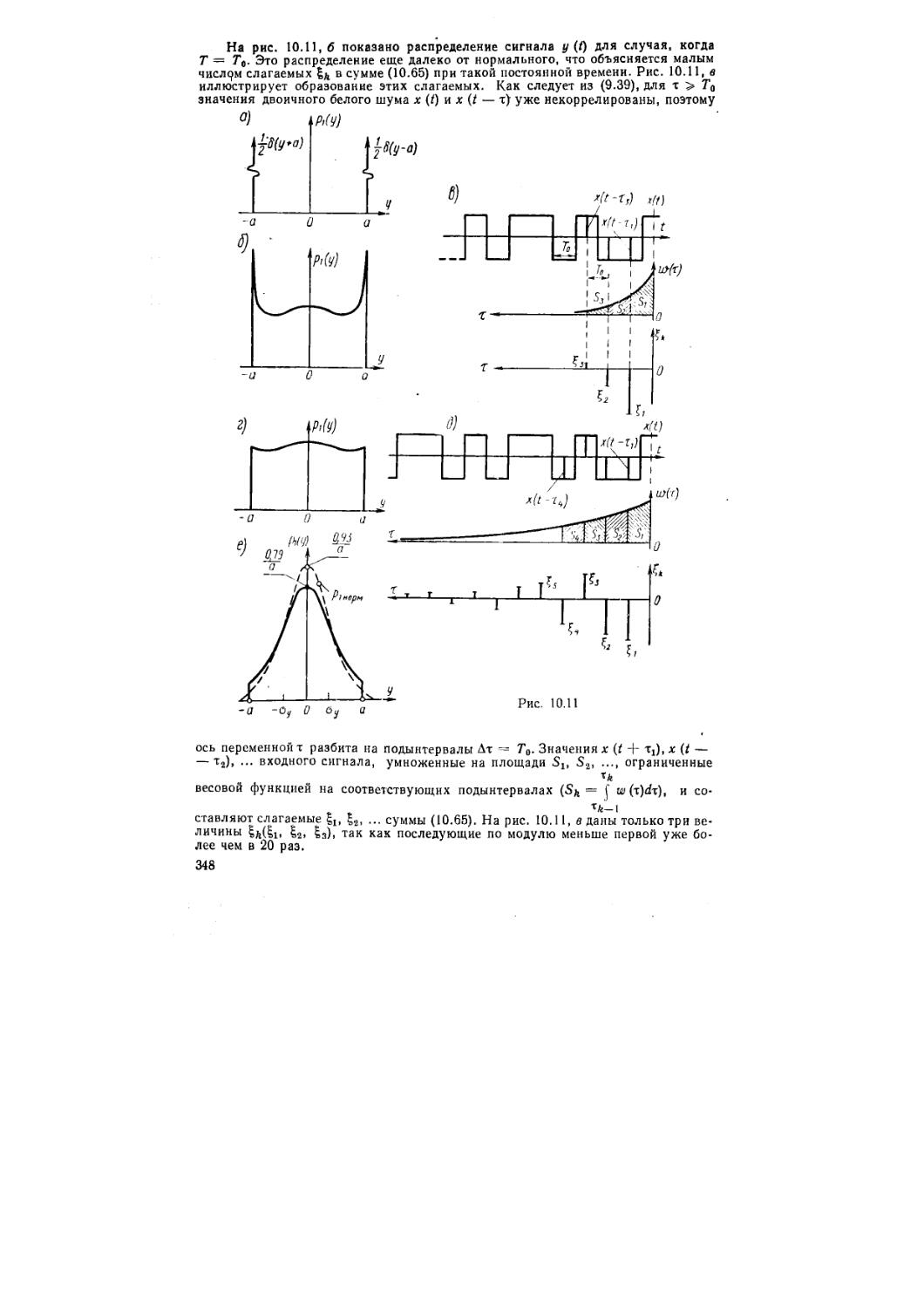
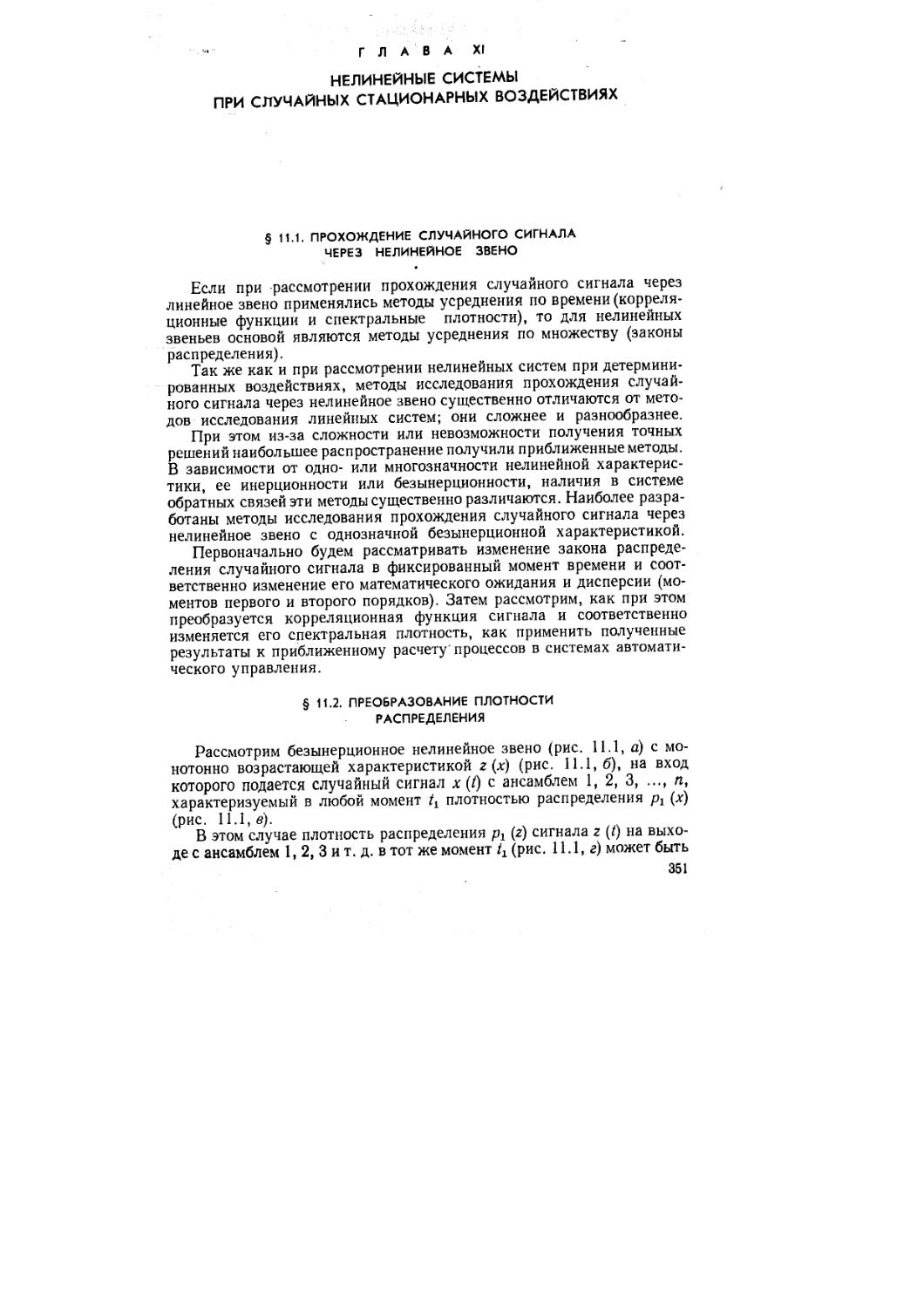
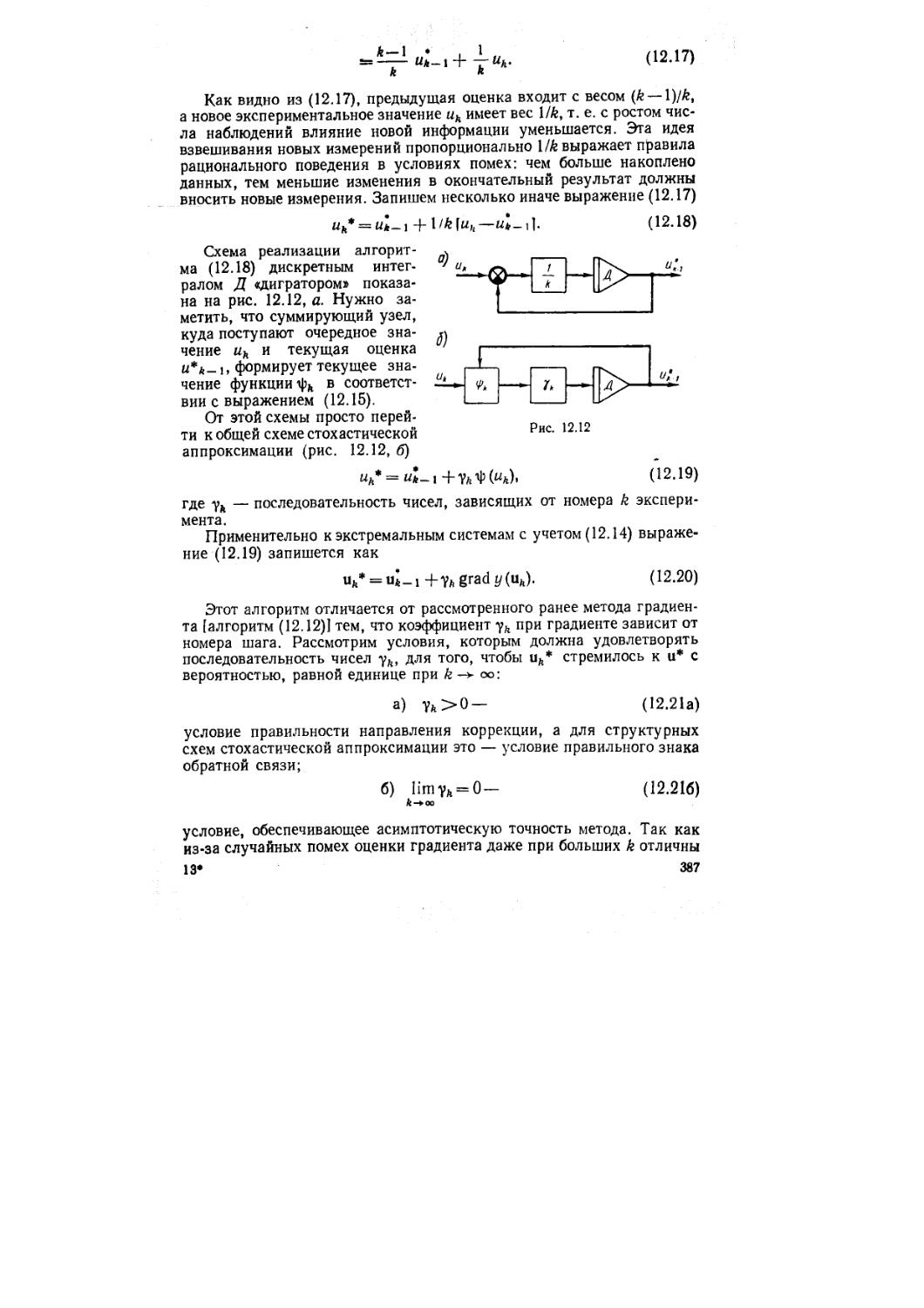
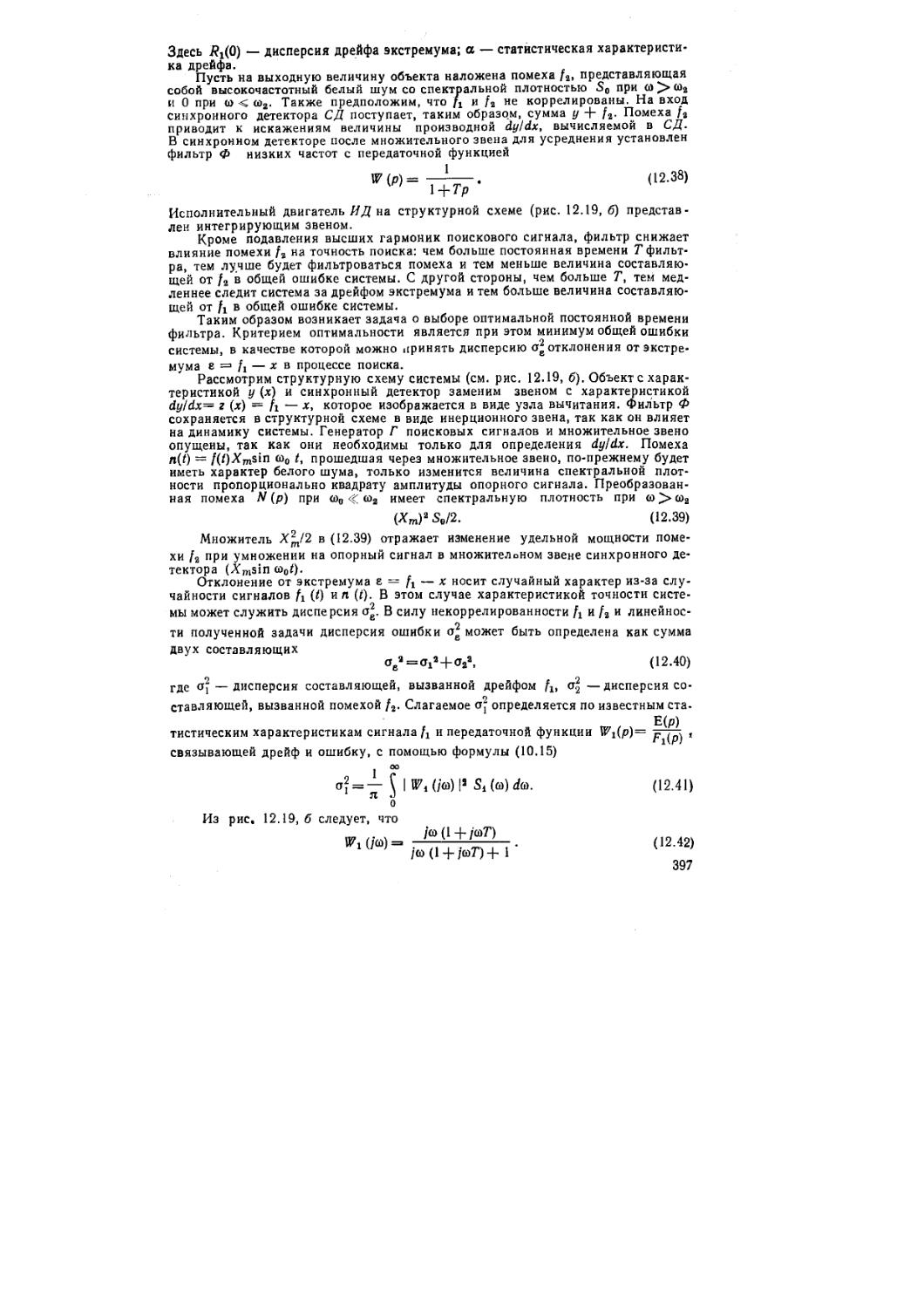
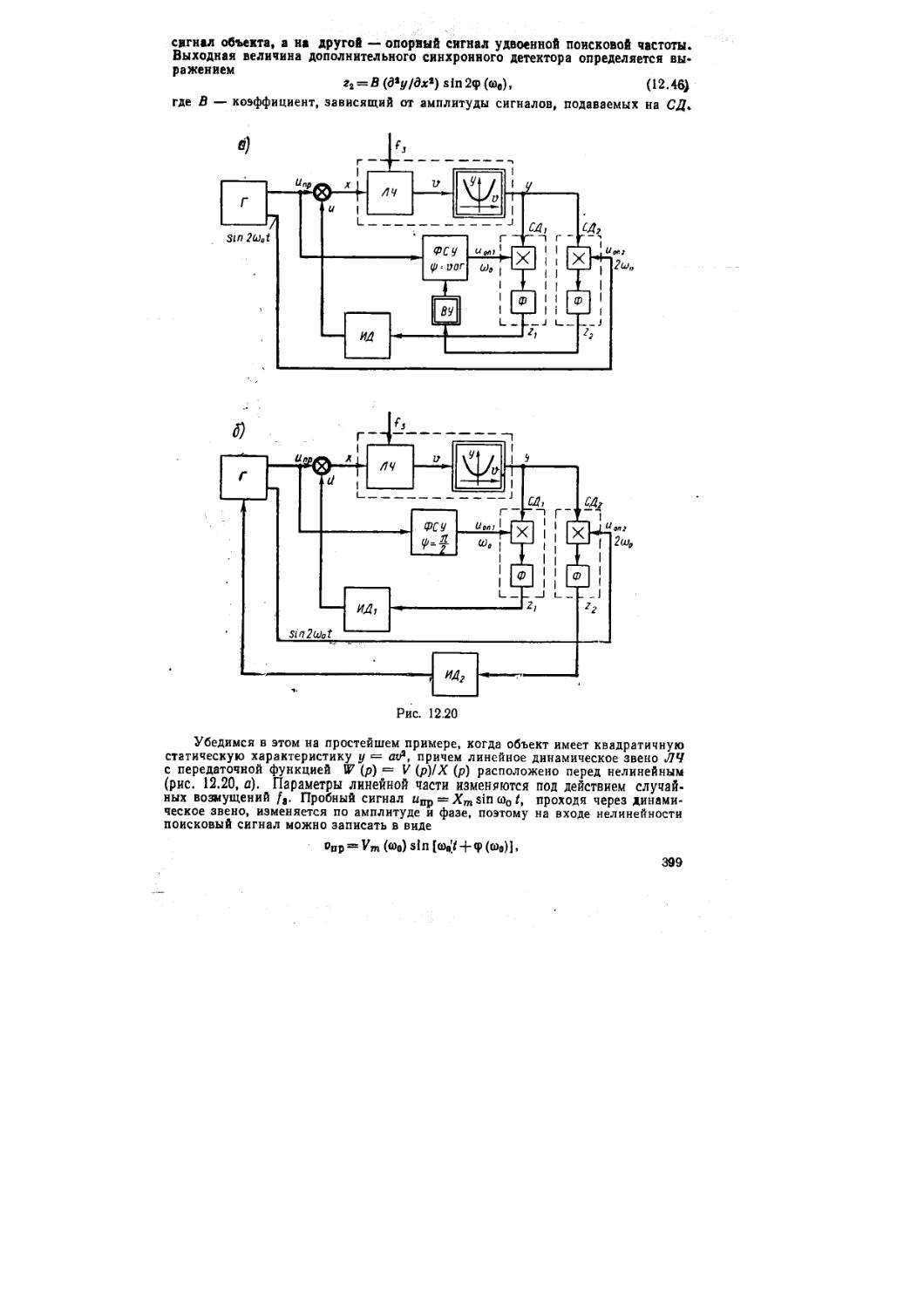
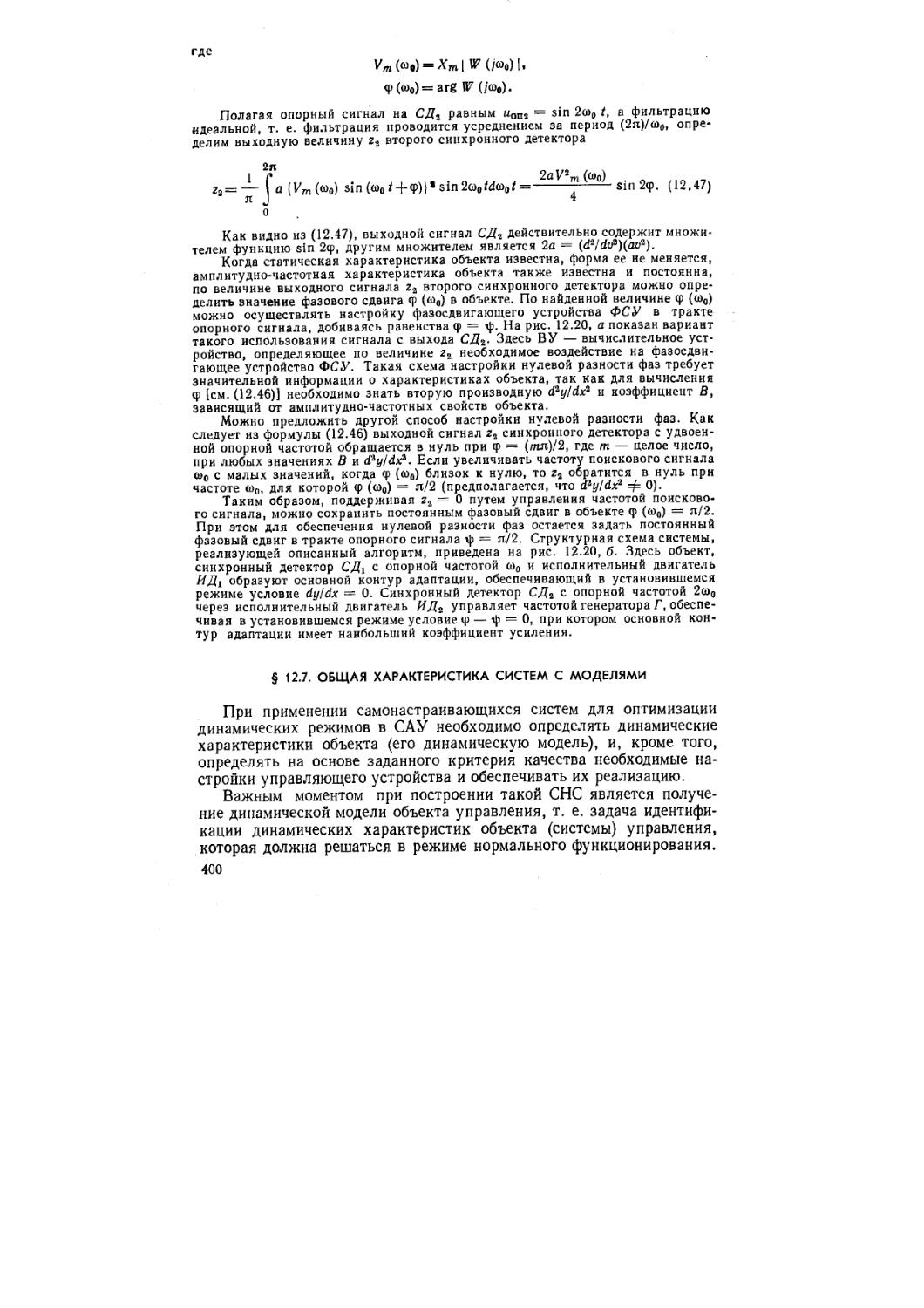
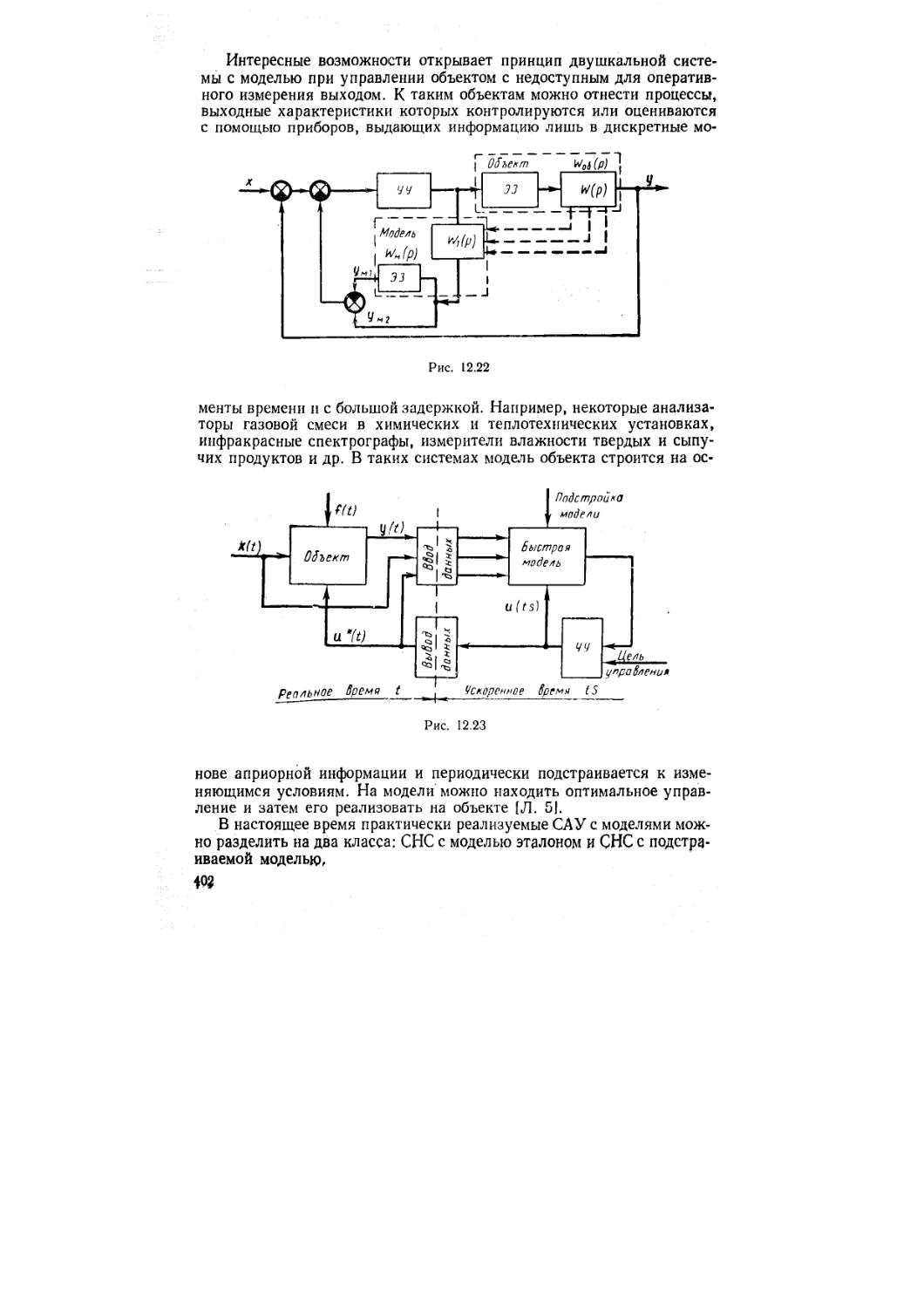
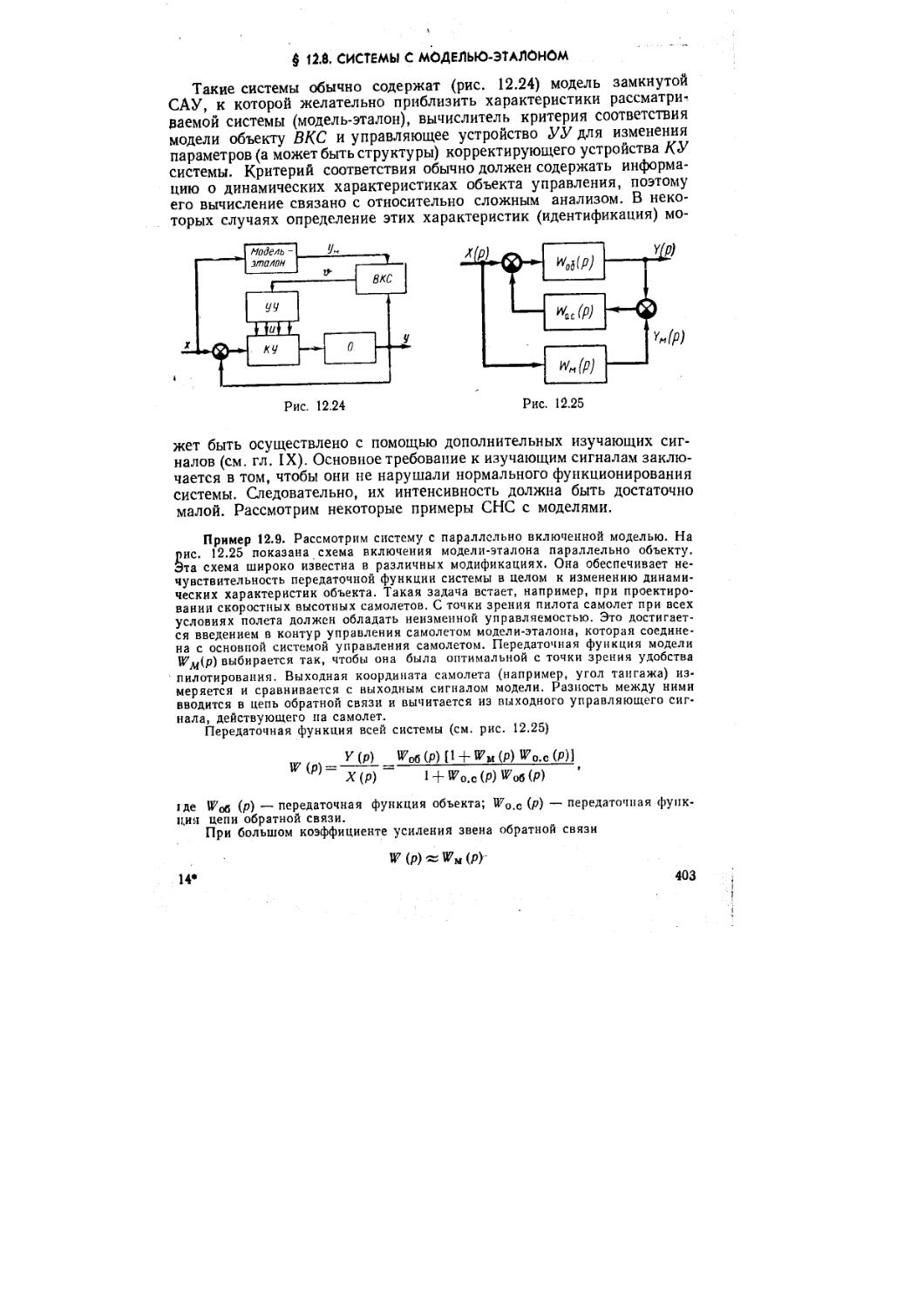
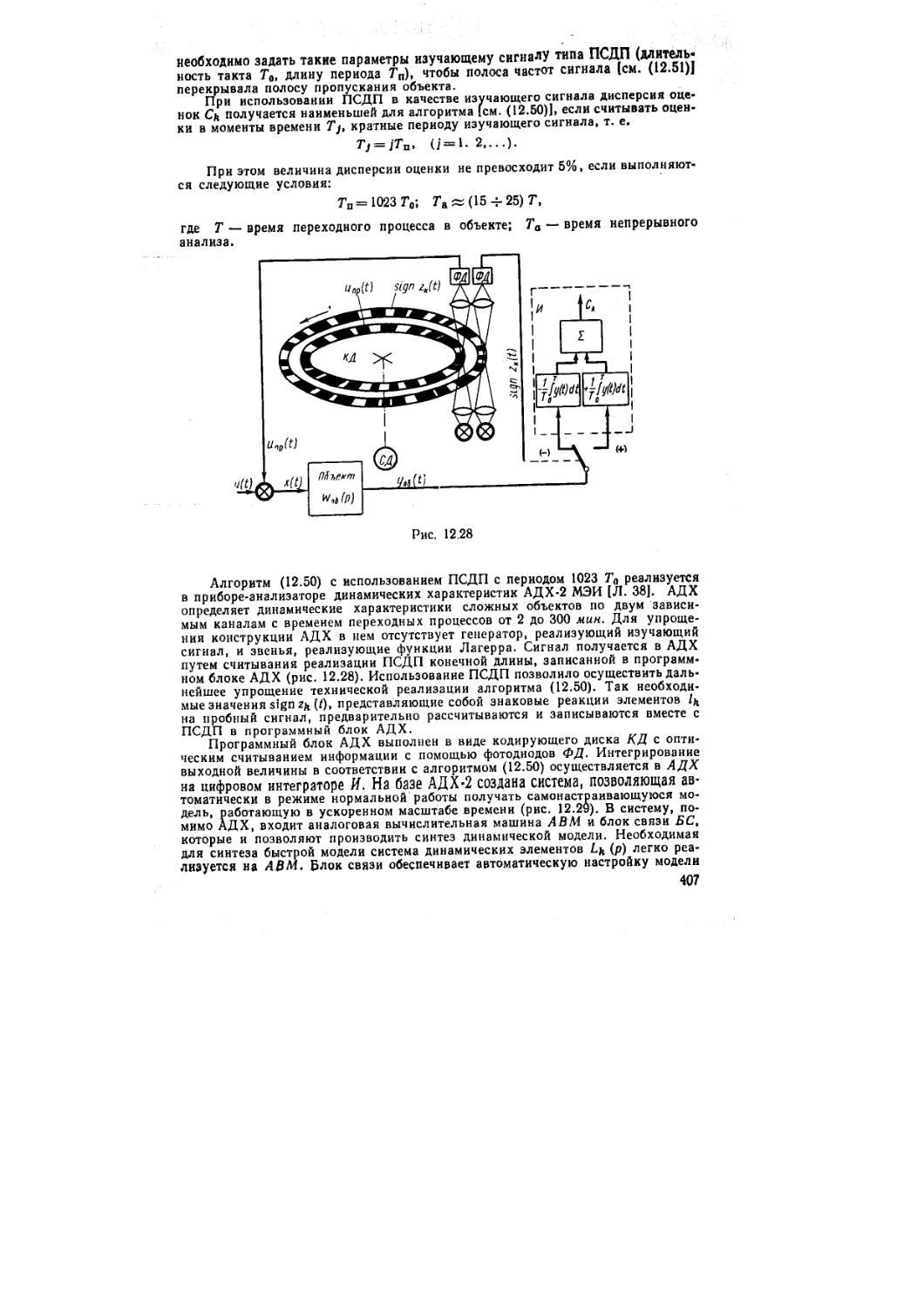
Текст
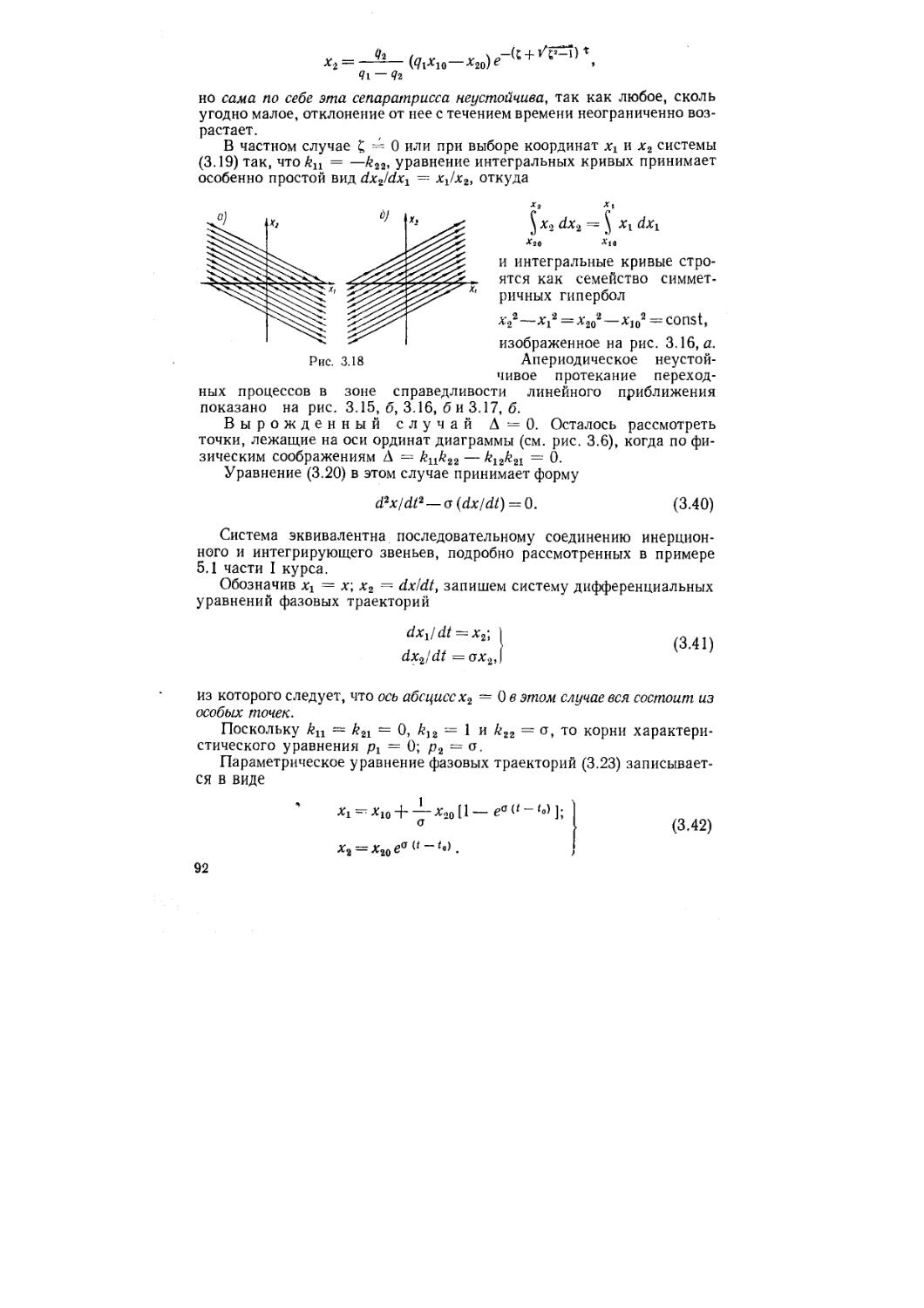
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
ЧАСТЬ II
Под общей редакцией А. В. НЕТУШИЛА
Допущено Министерством высшего и среднего специального образования СССР в качестве учебника для студентов вузов, обучающихся по специальностям «Автоматика и телемеханика», «Электронные вычислительные машины», «Информационно-измерительная техника»
ИЗДАТЕЛЬСТВО «ВЫСШАЯ ШКОЛА» МОСКВА — 1972
6Ф6.5
Til
УДК 62-50
Til Теория автоматического управления. Ч. II. Под ред. А. В. Нетушила. Учебник для вузов. М., «Высш, школа», 1972.
432 с. с илл.
На обороте тит. авт.: Л. С. Гольдфарб, И. М. Александровский, А. В. Балтрушевич и др.
Вторая часть написана в соответствии с программой подготовки специалистов по автоматике, информационно-измерительной и вычислительной технике. Вместе с первой частью, вышедшей в свет в 1968 г. под ред. ироф. А. В. Нетушила, она завершает курс теории автоматического управления. В ней изложена теория нелинейных и оптимальных автоматических систем при детерминированных воздействиях, рассмотрены системы автоматического управления при случайных воздействиях и элементы теории самонастраивающихся систем. Все теоретические положения книги широко подкреплены примерами и иллюстрациями. На первую часть учебника в журнале «Вестник высшей школы» в 1969 г. была опубликована положительная рецензия.
Учебник предназначен для студентов, специализирующихся по автоматике и телемеханике, вычислительной и информационной технике.
3—3—13
90—72
6Ф6.5
ПРЕДИСЛОВИЕ
Предлагаемый учебник содержит изложение ряда разделов курса, читающихся авторами в Московском энергетическом институте для специальностей «Автоматика и телемеханика», «Вычислительная техника», «Информационно-измерительная техника» и «Электропривод и автоматизация промышленных установок».
Вместе с частью I, вышедшей в 1968 г., книга составляет учебник по курсу «Теории автоматического управления», написанный в соответствии с программой, утвержденной Министерством высшего и среднего специального образования СССР.
На подбор материала и его изложение в книге большое влияние оказали лекции проф. Л. С. Гольдфарба и проф. Я. 3. Цыпкина по этому курсу, читавшиеся в МЭИ в течение ряда лет. Материал некоторых лекций Л. С. Гольдфарба включен в часть I и частично в часть II учебника.
При подготовке части II учебника авторы стремились сохранить как обозначения, так и стиль изложения, принятый в части I. Незначительные отступления в обозначениях связаны с различием символов, принятых в теории линейных систем и в теории оптимального управления.
Все теоретические положения подкреплены расчетными примерами, связанными с практическими системами, рассмотренными в вводной главе книги.
Последовательность изложения материала основывается на изучении логической <эвяз{1 между отдельными разделами курса. При заданном объеме программы в зависимости от места смежных курсов в учебном плане специальности возможна различная последовательность изложения’разделов курса. В настоящей книге принята последовательность изложения, предусматривающая минимизацию суммы разрывов во времени между логически связанными разделами данного курса.
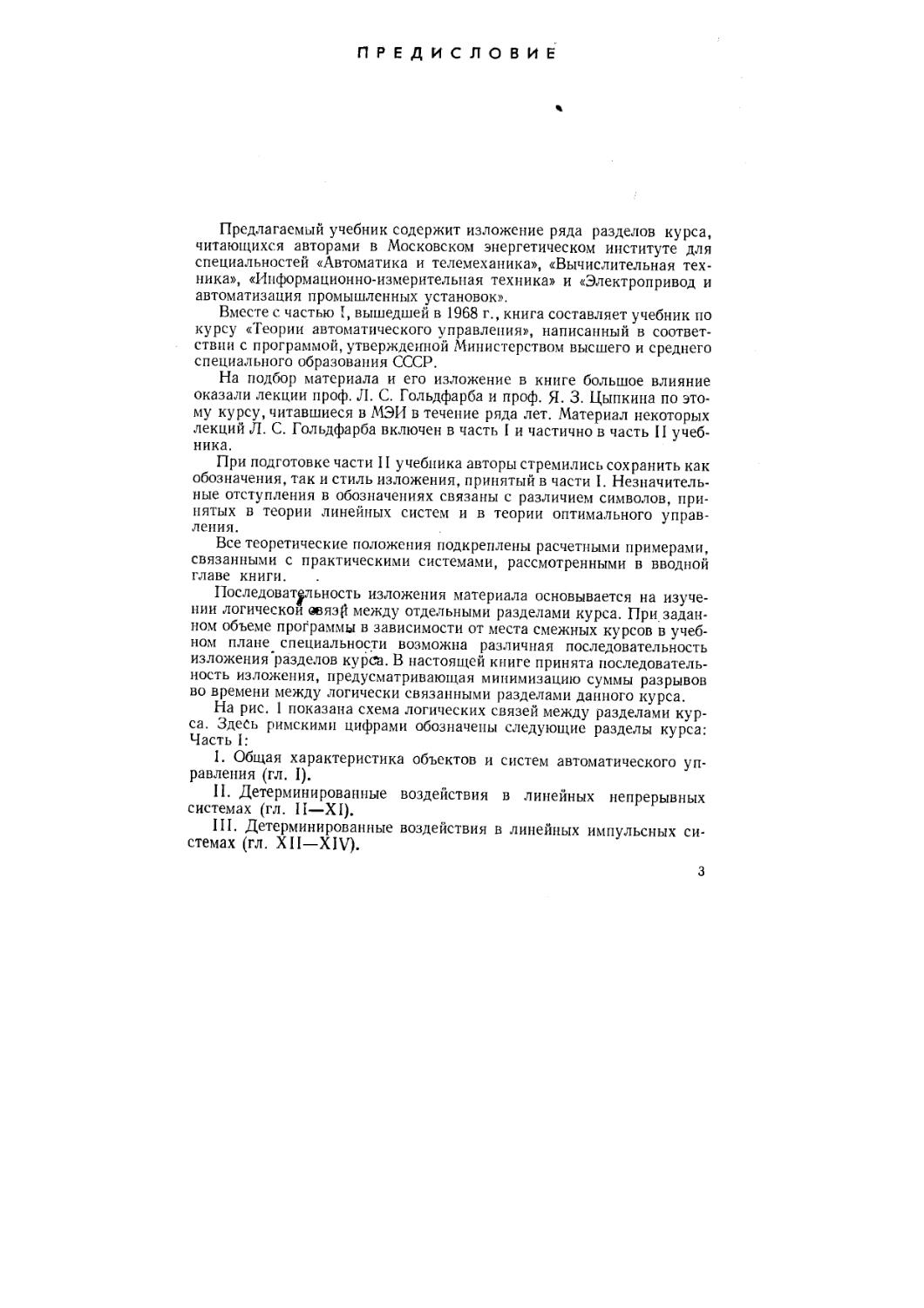
На рис. 1 показана схема логических связей между разделами курса. Здесь римскими цифрами обозначены следующие разделы курса: Часть I:
1. Общая характеристика объектов и систем автоматического управления (гл. I).
II. Детерминированные воздействия в линейных непрерывных системах (гл. II—XI).
III. Детерминированные воздействия в линейных импульсных системах (гл. XII—XIV).
з
Часть II:
IV. Детерминированные ействия в нелинейных системах (гл. I—VI).
V. Оптимальные системы (гл. "VII—VIII).
VI. Случайные воздействия в линейных системах (гл. IX—X). VII. Случайные воздействия в нелинейных системах (гл. XI). VIII. Самонастраивающиеся системы (гл. XII).
На рисунке сплошными линиями показаны основные связи, а штрихом — вспомогательные связи, зависящие от характера изложения. Из рассмотрения схемы видно, что правильная последовательность изложения допускает существование связей только слева направо. При этом возможны различные варианты последовательности изложения, так, например, раздел VI может излагаться сразу после раздела II, а раздел III — после раздела V или VII.
Часть /
Часть /?
Рис. 1
Некоторые вопросы, как, например, элементы теории чувствительности, теории инвариантности и теории нестационарных систем, в книге не рассматриваются, так как они относятся к материалу части I курса и включены в программу после ее выхода в свет.
Гл. I, II, IX, X, XI и приложение, а также §4.1, 4.3, 5.1, 5.3, 5.4 и 5.7 написаны А. В. Нетушилом; гл. III — Е. Б. Пастернаком; гл. IV, V и VI — А. В. Балтрушевичем с включением материалов Л. С. Гольдфарба, А. В. Нетушила и В. В. Бурляева; гл. VII и VIII — Н. М. Александровским и Р. Е. Кузиным совместно. Кроме того, Н. М. Александровским написаны § 12.1, 12.7—12.9, а«Р. Е. Кузиным — § 10.5, 12.2—12.6; § 4.4 — В. В. Бурляевым.
При подготовке рукописи к печати большую помощь оказали сотрудники кафедры автоматики МЭИ инж. Т. Д. Федорова, Е. С. Толкачева, Э. Ф. Ишмаева, взявшие на себя труд по вычитке рукописи и унификации обозначений, И. К- Скороход и В. И. Гаврилова, принимавшие участие в оформлении рукописи.
Большое значение для окончательной редакции рукописи имели рецензии проф. Н. Н. Миролюбова, проф. Л. Т. Кузина, проф. Я. 3. Цыпкина, проф. Е. Л. Львова, доц. С. В. Первачева и обсуждение рукописи на кафедре автоматики МЭИ.
Всем, принимавшим участие в рецензировании, обсуждении и оформлении рукописи книги, авторы выражают благодарность.
Замечания по книге просьба направлять в издательство «Высшая школа» по адресу: Москва, К-51, Неглинная, 29/14.
4
ГЛАВА I
ОБЩАЯ ХАРАКТЕРИСТИКА НЕЛИНЕЙНОСТЕЙ В СИСТЕМАХ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
§ 1.1. ВВЕДЕНИЕ
В части I учебника рассматривались системы управления, которые с той или иной степенью точности можно описать линейными дифференциальными уравнениями.
Для непрерывных систем эти уравнения имеют постоянные коэффициенты, а для импульсных систем коэффициенты уравнений, описывающих импульсные элементы, представляют собой дискретные функции времени. Во всех рассмотренных случаях широко применен принцип наложения.
Такое описание процессов в системах управления применимо далеко не ко всем системам. Существует множество систем, процессы в которых принципиально не могут быть описаны линейными дифференциальными уравнениями, и при их исследовании необходимо пользоваться нелинейными дифференциальными уравнениями.
Переход к нелинейным дифференциальным уравнениям определяется как учетом нелинейностей реальных характеристик элементов системы, так и дополнительным введением в систему элементов с существенно нелинейными характеристиками.
Обычно в первом случае нелинейности учитывают для рассмотрения изменения качества процесса управления за счет влияния нелинейностей, присущих реальной системе, и исправления нежелательного эффекта, возникающего под влиянием этих нелинейностей.
Во втором случае речь идет о повышении качества процессов или о получении принципиально новых алгоритмов в управлении за счет введения дополнительных нелинейных элементов. При этом удается повысить быстродействие и точность системы, уменьшить перерегулирование или компенсировать нежелательное действие имеющихся нелинейностей.
Кроме того, для управления нелинейными объектами с немонотонными экстремальными характеристиками применяют особые схемы управления с автоматическим поддержанием оптимального режима работы объекта. В этом случае решение задачи управления нелинейным объектом можно осуществить с помощью как линейных, так и нелинейных элементов.
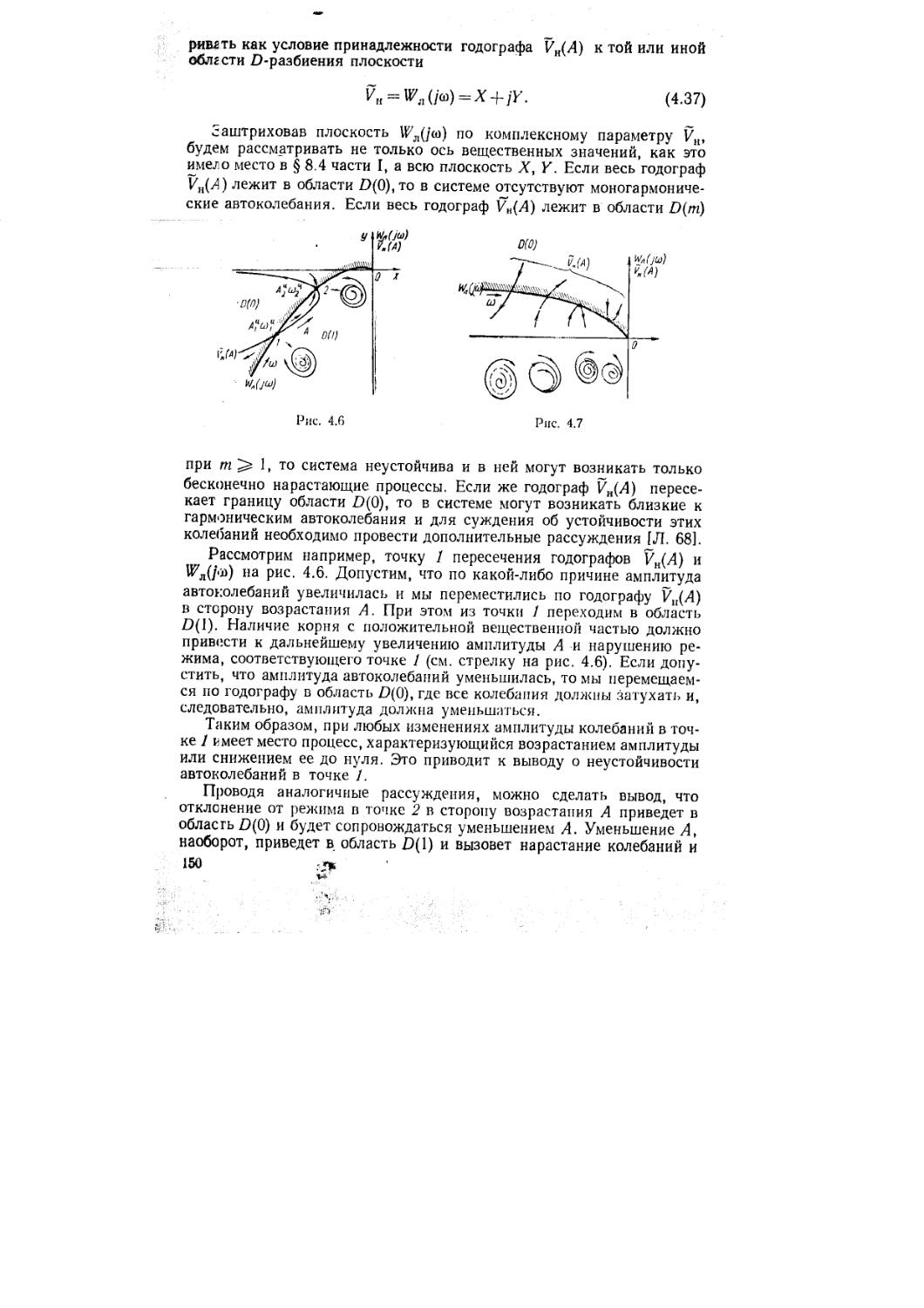
Если в линейных системах работоспособными оказываются только устойчивые системы и появление нарастающих колебаний рассматри-
5
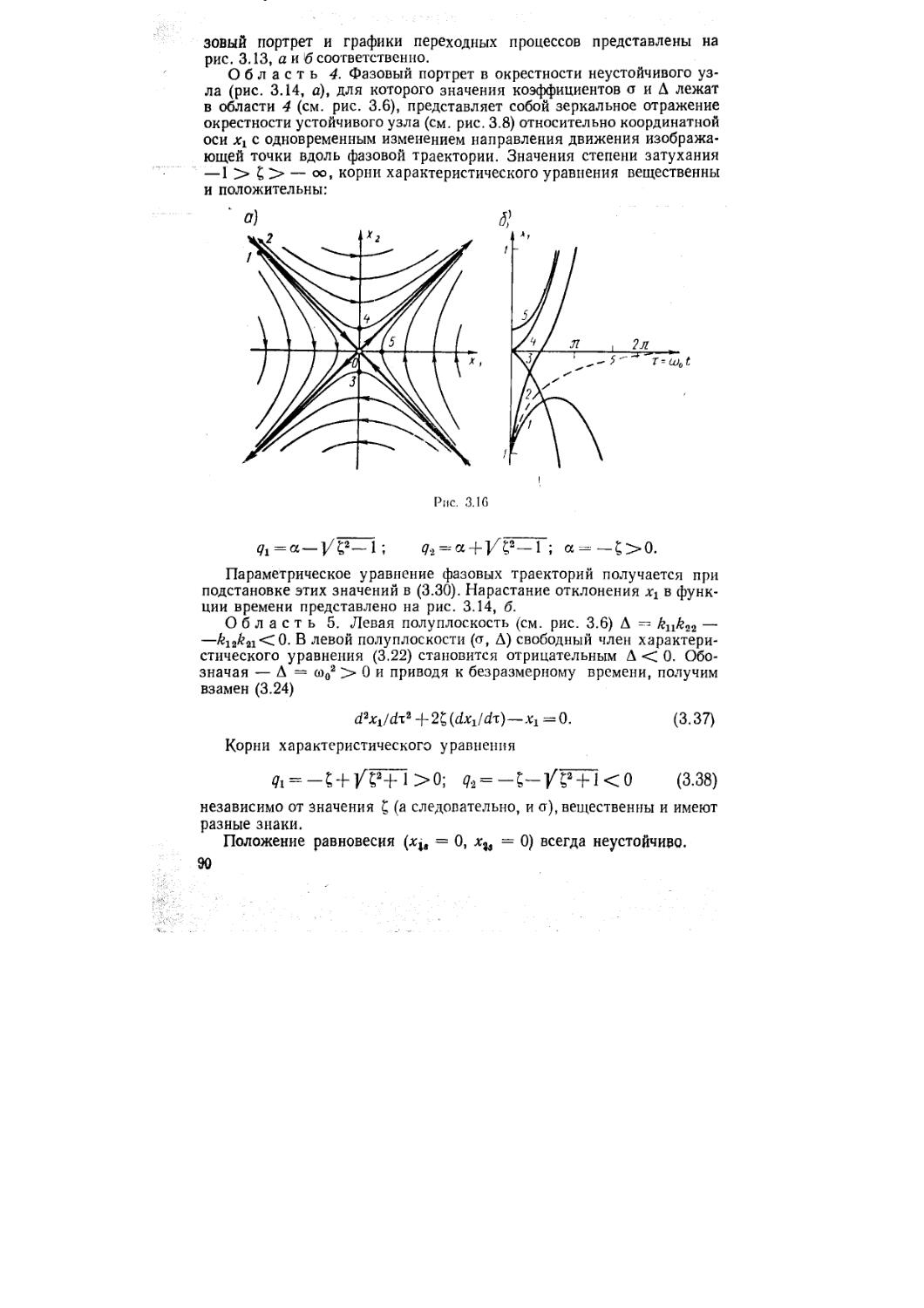
бают как недопустимое явление, то в нелинейных системах вопрос об устойчивости ставят иначе.
Существует большое число нелинейных автоколебательных систем управления, в которых колебания являются свойством нормального режима работы системы. В этом случае под устойчивой работой системы понимают устойчивость автоколебаний в неустойчивой, с точки зрения линейной теории, системе. Само по себе определение устойчивости в этом случае изменяется. В линейных системах признаком устойчивости является возврат системы в исходное состояние при снижении внешнего воздействия до нуля.
Такую устойчивость называют асимптотической, или устойчивостью в точке. Этим понятием можно пользоваться и для характеристики нелинейных систем.
Однако в нелинейных системах большее значение имеет устойчивость в некоторой области, характеризующаяся возвратом системы в заданную область при уменьшении внешнего воздействия до нуля. При оценке устойчивости обоих видов применяют понятия устойчивости в малом, в большом (см. гл. I части I) и в целом, введенные в связи с рассмотрением процессов в нелинейных системах. Все виды устойчивости будут рассмотрены далее при анализе различными методами конкретных систем управления.
При изучении нелинейных систем неприменим принцип наложения: при сложных воздействиях процесс в системе не может быть представлен как сумма процессов, получающихся от каждой из составляющих воздействия в отдельности. Это обстоятельство чрезвычайно осложняет количественный анализ нелинейных систем автоматического управления.
Математический аппарат анализа нелинейных систем связан с необходимостью исследования нелинейных дифференциальных уравнений, теория которых содержит множество индивидуальных методов, присущих различным видам уравнений, описывающих систему. Сложность решения нелинейных дифференциальных уравнений вызывает необходимость создания ряда приближенных методов, позволяющих судить о характере процессов, наблюдаемых в системе. При этом нелинейные характеристики реальных элементов системы заменяют некоторыми идеализированными приближенными характеристиками, которые обусловлены как характером нелинейного элемента, так и принятым методом анализа системы.
Таким образом, при анализе процессов в реальной системе пользуются двумя этапами приближения: первый этап—составление нелинейных дифференциальных уравнений, приближенно описывающих систему, а второй—приближенное решение этих уравнений.
Если для полученных на первом этапе приближения уравнений находится точное решение, то говорят о точном решении задачи. Если же имеют место два этапа приближения, т. е. полученные нелинейные уравнения решают рядом упрощений, то говорят о приближенном методе решения задачи.
Для решения нелинейных уравнений, кроме аналитических и графических методов, широко применяют методы моделирования с помо-6
щью аналоговой вычислительной техники и численное решение задач с помощью цифровых вычислительных машин.
§ 1.2. ПРИМЕРЫ УЧЕТА НЕЛИНЕЙНОСТЕЙ В РЕАЛЬНЫХ СИСТЕМАХ
В гл. I части I показано, что многие объекты систем регулирования, например генератор, двигатель, летательный аппарат и др., описывают нелинейными дифференциальными уравнениями, и только при
Рис. 1.1
небольших отклонениях исследуемых величин от номинальных значений для исследования этих отклонений систему можно приближенно рассматривать как линейную.
7
Кроме того, во всех механических системах не учитывались такие принципиально нелинейные явления, как сухое трение и влияние зазоров, ограничений и упоров в системах передачи. Однако при значительных возмущающих воздействиях и более детальном изучении процессов, происходящих в этих системах, учет нелинейных характеристик становится необходимым.
Рассмотрим примеры систем автоматического управления, в которых необходимо учитывать нелинейность характеристик.
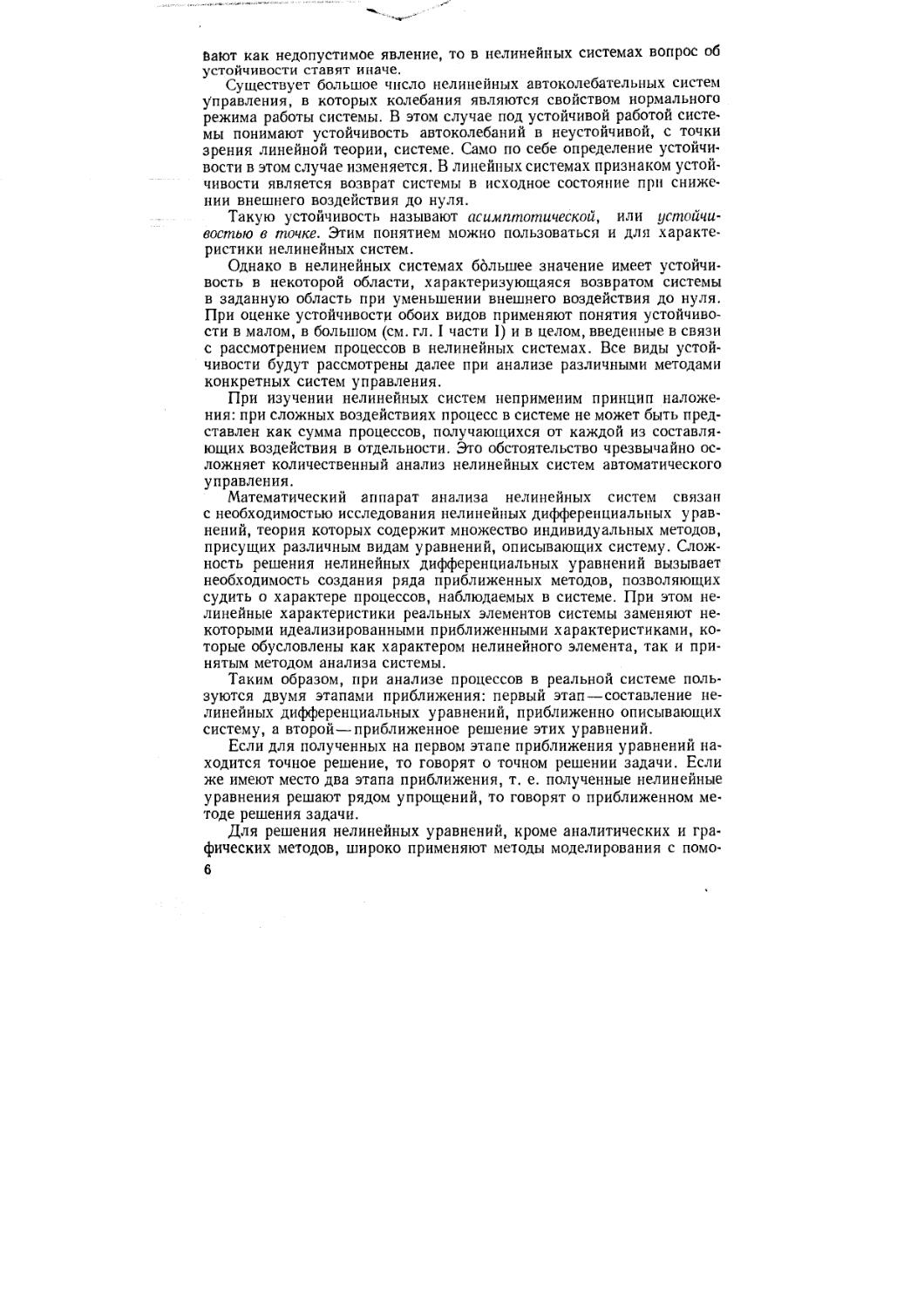
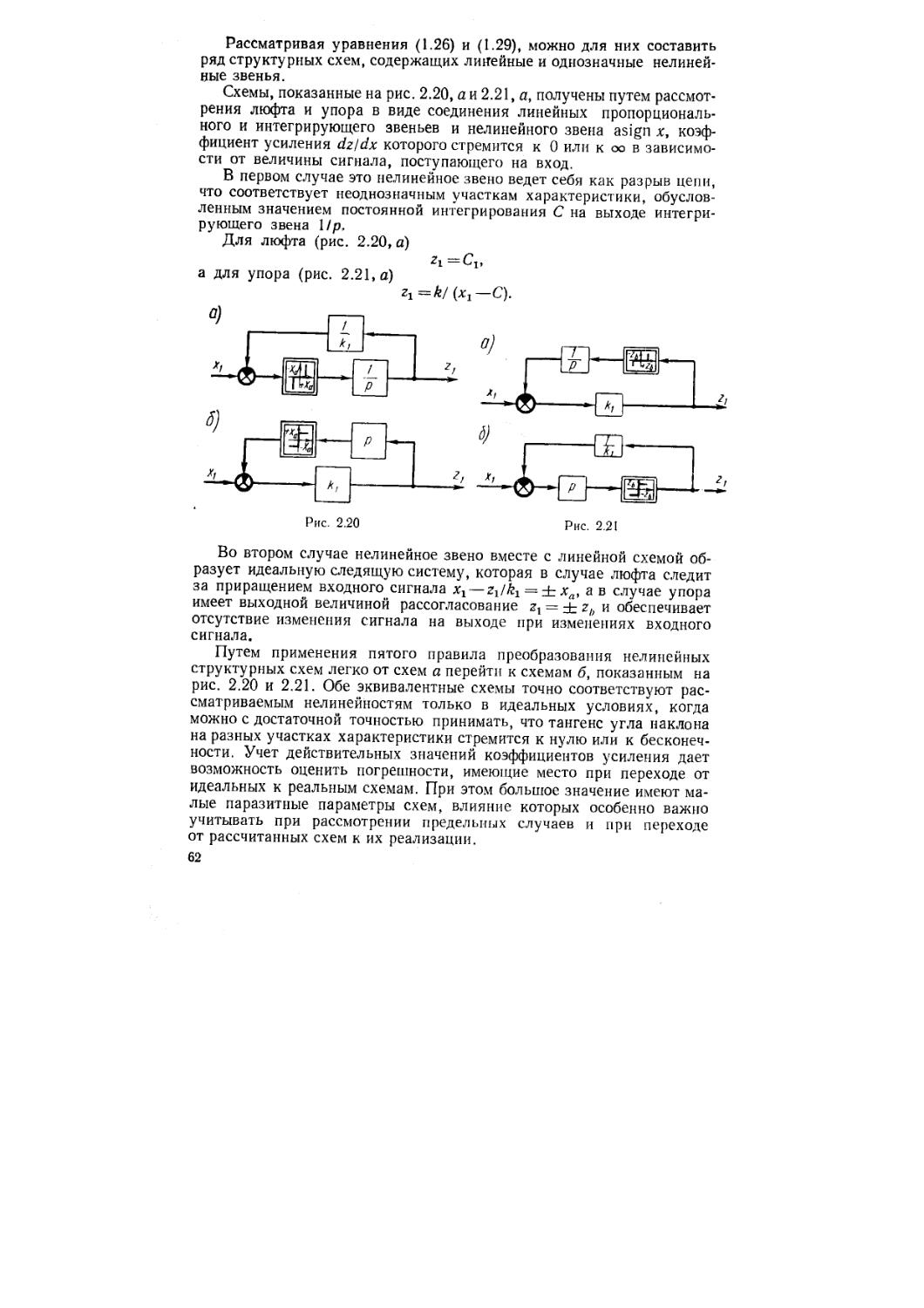
С истема авт матияш с абииизации напряжения генератора по стоянного тока. Статическая система автоматической стабилизации напряжения генератора постоянного тока схематически показана на ри4.1 . ,Д ля этой системы Цри лиженные линейные уравнения ы-ли рассмотрены в гл. VI части I. Если учесть нелинейные характеристики генераторов и усилителя, то уравнения этой системы, составленные по схеме (рис. 1.1, а) с учетом инерционности усилителя У, имеют следующий вид:
иу = иу(их)-,
~ Гв £у 4" = ГВ 1у 4" •
еа ав фв = «в (гв «у);
• । ^/фр • । rrt de?
^в = £в 4" .. ~ ГГ £В 4~ Л J, >
at at
ес = аг фг = ег(гг1п);
иц — ег — гя^и< x = Ea—kua,
(1-1)
где Тв-=щв/ав и Тг = а?г/аг.
Здесь обозначено: i — ток, и — напряжение; х — напряжение рассогласования; е — э. д. с.; ф — магнитный поток; г — сопротивление; Т — постоянная времени; w — число витков; а и k — коэффициенты пропорциональности; индексами в, г, у, и, я соответственно обозначены величины, относящиеся к возбудителю, генератору, усилителю, нагрузке и якорю генератора.
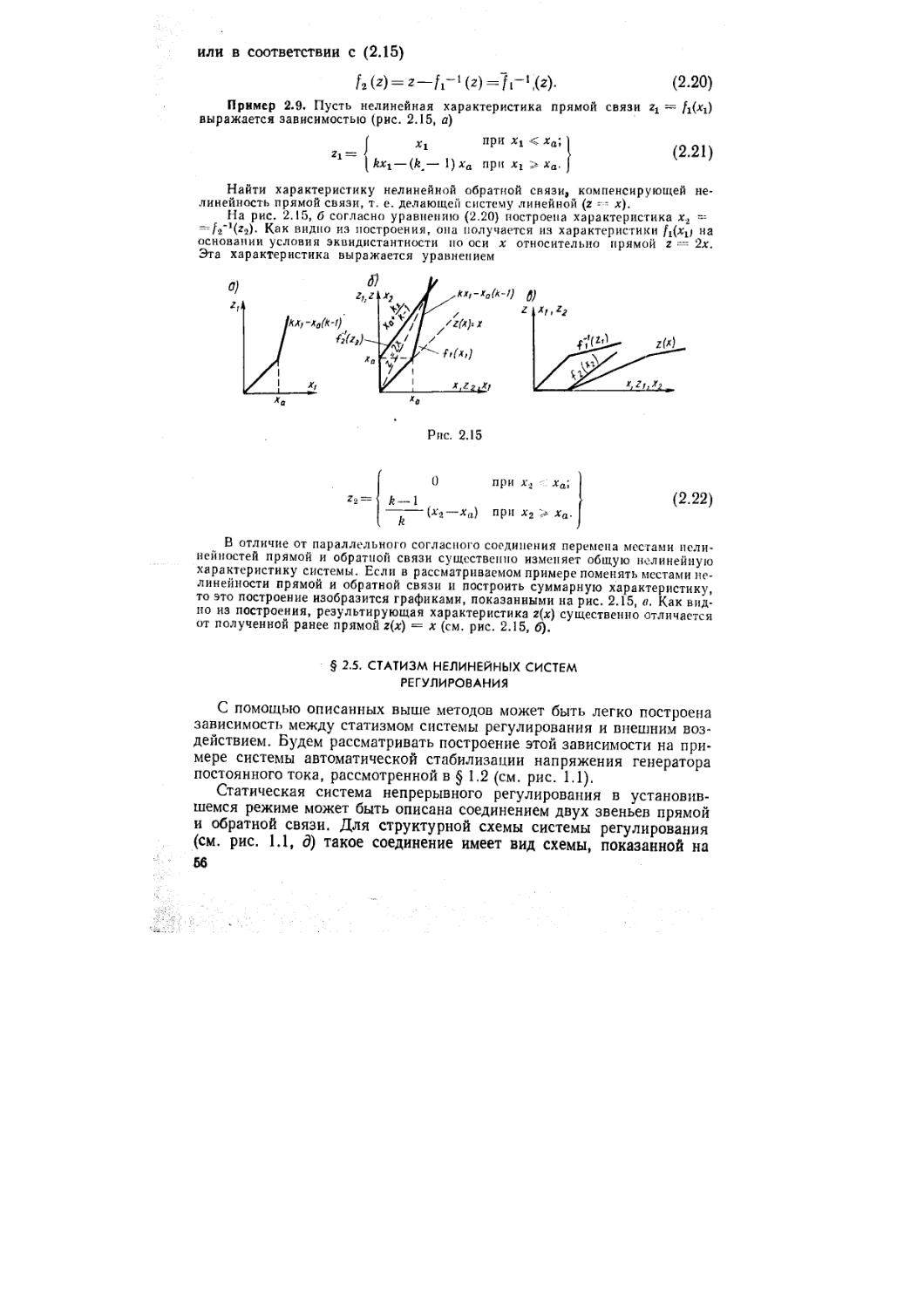
В этой системе уравнений нелинейные зависимости «у (их), еа (ty), er(iB) выражаются графиками (рис. 1.1,6, в и г). Если не учитывается гистерезис характеристики генератора, то имеет место однозначная зависимость (см. рис. 1.1, в и г) При учете гистерезиса необходимо было бы иметь дело с неоднозначной характеристикой ет(1ъ).
Структурная схема системы, составленная по уравнениям (1.1), показана на рис. 1.1,3.
Геометрическая интерпретация системы уравнений (1.1) может быть дана как в виде структурной системы, так и в виде направленного графа (рис. 1.1, е). Направленный граф представляет собой совокупность 8
йёршйн, соответствующих физическим величинам, описывающим процесс. Вершины соединены между собой дугами, выражающими связи между этими величинами. Каждая дуга описывает некоторое преобразование передаваемой величины и соответствует звену в структурной схеме.
Операторы преобразования на графе указаны рядом с соответствующими дугами. Там, где дуга изображает передачу сигнала без его преобразования, оператор преобразования равен единице. Оператор
преобразования для линейных связей Дописывается передаточной функцией, а для нелинейных’безынерционных связей—некоторой функциональной зависимостью. Если к вершине подходит несколько дуг, то это выражает суммирование подводимых к ней величин.
Из рассмотрения структурной схемы и направленного графа (рис. 1.1, д, ё) видно, что они полностью эквивалентны и представляют собой различные способы начертания одной и той же структуры, описываемой определенной системой уравнений.
Для описания процессов в системах пользуются как структурными схемами, так и направленными графами. В дальнейшем изложении будем пользоваться структурными схемами, имея в виду, что каждая из них может быть представлена и в виде соответствующего направленного графа.
9
Следящая система. Астатическая следящая система показана на рис. 1.2, а. Приближенные линейные уравнения подобной системы были рассмотрены в гл. VI части I. Однако при более полном рассмотрении этой системы необходимо учитывать нелинейность характеристик измерительно-преобразовательного устройства, усилителя и механической системы передачи.
Для измерения угла рассогласования между задающим 0! и отрабатывающим 02 валами следящей системы, кроме потенциометрических датчиков, рассмотренных в гл. VI, применяются сельсины, работающие в трансформаторном режиме. Трехлучевые обмотки статоров сельсинов соединены между собой так, что появление пульсирующего магнитного поля в сельсине-датчике вызывает возникновение токов в обмотках статора сельсина-приемника, создающих магнитное поле в сельсине-приемнике, ориентированное так же, как и в сельсине-датчике.
Пульсирующее поле в сельсине-датчике создается обмоткой ротора, питаемой от источника синусоидального тока. Если ось ротора сельсина-приемника повернута на угол 90° по отношению к оси сельсина-датчика, то в обмотке ротора сельсина-приемника не будет наводиться э. д. с., так как магнитное поле направлено перпендикулярно оси обмотки ротора. Всякое отличие этого угла от 90° приведет к появлению э. д. с. в обмотке ротора сельсина-приемника. Наибольшая э. д. с. в этой обмотке имеет место, если угол между осями роторов сельсинов составляет 0 или 180°.
Принимая за начала отсчета углов положения роторов обоих сельсинов две перпендикулярные оси I—I и II—II и обозначая углы поворота роторов соответственно 0t и 02, получим следующее выражение для напряжения на роторе сельсина-приемника:
rza = f/msin(Oi — 02)sinW. (1.2)
Это напряжение подается на фазочувствительный усилитель-выпрямитель У, который преобразует модулирующее напряжение
(1.3)
в напряжение постоянного тока двигателя ид.
Питание усилителя от того же источника напряжения, что и обмотки ротора сельсина-датчика, обеспечивает учет знака фазы напряжения ид.
Если на вход усилителя дополнительно подать напряжение ик коррекции от тахометрического генератора, то выходная величина ия зависит от разности и± — ик, которую следует рассматривать как сигнал «2, подаваемый на вход усилителя.
В соответствии с выражением (1.3) характеристика сельсинной передачи «i(0i — 02) выражается нелинейной зависимостью (рис. 1.2, б).
Нелинейной зависимостью выражается и характеристика фазочувствительного усилителя ид(«2), упрощенно показанная на рис. 1.2, в.
Учет зазоров в системе механической передачи от вала двигателя к отрабатывающему валу следящей системы приводит к тому, что характеристика редуктора 02(0Д) не может быть представлена пропорциональным звеном, а имеет неоднозначный вид (рис. 1.2, г). При dS^dt > 0 эта зависимость выражается прямой, смещенной относительно начала координат на некоторую величину 0а вправо, а при 10
dQ2ldt <0 — аналогичной прямой, смещенной относительно начала координат на величину 0а влево.
При всяком изменении направления вращения имеет место холостой ход в течение времени, когда угол 0Д изменяется на величину 20а в ту или другую сторону. Это время называют временем отработки люфта.
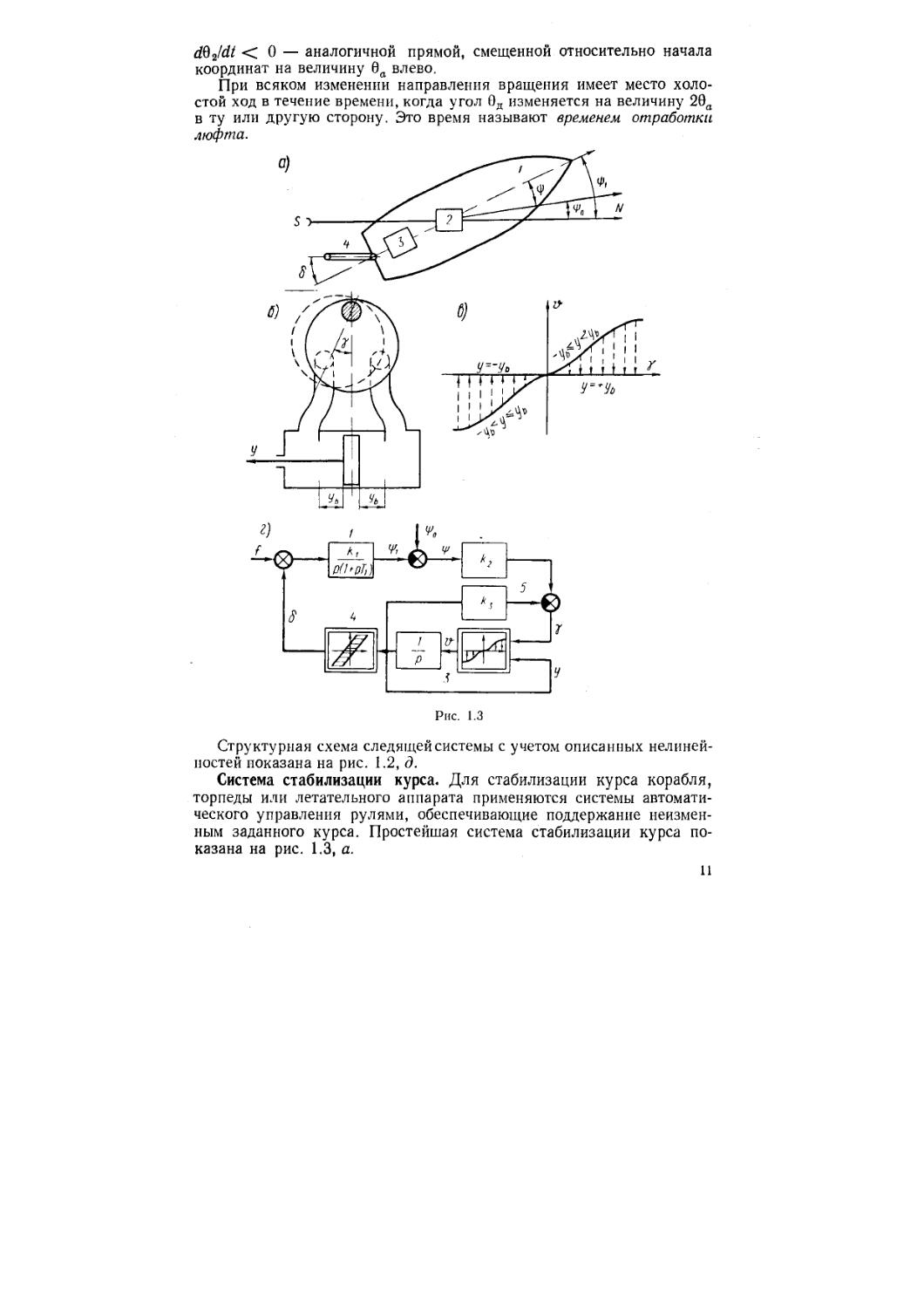
Рис. 1.3
Структурная схема следящей системы с учетом описанных нелинейностей показана на рис. 1.2, д.
Система стабилизации курса. Для стабилизации курса корабля, торпеды или летательного аппарата применяются системы автоматического управления рулями, обеспечивающие поддержание неизменным заданного курса. Простейшая система стабилизации курса показана на рис. 1.3, а.
11
Объект схематически изображен в виде корабля 1, ось которого составляет угол ф с заданным курсомф0, фиксируемым гироскопическим компасом 2. Отклонение от курса ф0 — фх воздействует при помощи усилителя гироскопического компаса на рулевую машинку 3, через соответствующую передачу, поворачивающую руль 4 корабля на угол 5.
На рис. 1.3, б схематически показан привод пневматической рулевой машинки. Заслонка, управляющая подачей воздуха в рабочий цилиндр двигателя, поворачивается на угол у, создавая этим перепад давления воздуха в рабочем цилиндре и перемещение у поршня. Перемещение рабочего поршня ограничено упорами и может происходить при —уь < у < + уь.
Зависимость между скоростью v = dyldt движения поршня и положением у управляющей заслонки выражается графиком (рис. 1.3, в). При любом значении у, лежащем в пределах от —уь до +уь, эта зависимость сохраняется и имеет вид симметричной кривой с областями нечувствительности и насыщения. Однако как только рабочий поршень достигает упора, он останавливается; если дальнейшее изменение у соответствует прижатию поршня к упору, то скорость поршня остается равной нулю при любом значении у.
Таким образом, скорость v движения поршня является функцией двух переменных ц(у, у) и выражается следующими уравнениями:
<р(т) ( при ~Уь^у< + Уь ДЛЯ 7>0;
( при — yh<y^+yb для у < 0;
при у= +уь для у >0; при у= — уъ для у<0.
(1.4)
Переход с кривой <р(у) на прямую и — 0 происходит скачком при у = ±уь (штриховая линия на рис. 1.3, в).
В системе передачи от рулевой машинки к перу руля могут быть зазоры, создающие неоднозначную зависимость типа 6 (г/), показанную на рис. 1.2, г.
Таким образом, даже при упрощенном рассмотрении система стабилизации курса содержит две нелинейности, обусловленные упорами и зазорами системы передачи.
Структурная схема рассматриваемой системы показана на рис. 1.3, г. Здесь принято, что объект описывается инерционно-интегрирующим звеном 1, а усилитель гироскопа и корректирующая обратная связь по положению руля—пропорциональными звеньями 2, 5 с коэффициентами передачи k2 и k3. Систему управления рулем описывают нелинейные звенья 3 и 4.
Случайные возмущающие воздействия, приведенные к углу поворота руля, обозначены составляющей/.
Рассмотрение структурных схем (см. рис. 1.1. д, 1.2, д и 1.3, г) показывает, что все они описываются нелинейными уравнениями, линеаризация которых может привести к очень грубым приближениям 12
и получению решений, недостаточно соответствующих процессам, наблюдаемым в реальных системах. Например, наличие зазоров в системе передачи исключает возможность суждения об асимптотической устойчивости, так как по окончании внешнего воздействия в зависимости от его знака возможны различные положения рабочих точек на характеристике (см. рис. 1.2, г). Неоднозначность этой характеристики может служить причиной автоколебаний, отсутствующих в линейных системах. Неучет насыщения в характеристике усилителей приводит к значительному преувеличению значений перерегулирования в системе по сравнению с реально существующими. Таким образом, нелинейности, существующие в системах, могут привести как к увеличению, так и к уменьшению показателей качества системы по сравнению с результатами анализа линеаризованной задачи.
§ 1.3. ПРИМЕРЫ СИСТЕМ СО СПЕЦИАЛЬНО ВВЕДЕННЫМИ НЕЛИНЕЙНОСТЯМИ
При изучении линейных систем рассматривались методы повышения качества переходных процессов за счет введения линейных корректирующих устройств. Применение нелинейных элементов в схемах управления значительно расширяет возможности повышения качества переходных процессов в системе.
Примерами таких нелинейных элементов являются нелинейные непрерывные и релейные усилители, функциональные преобразователи с несколькими входами, цифровые вычислительные устройства, включающие преобразователи «аналог — цифра» и «цифра—аналог».
Введение релейных усилителей в схему управления может перевести ее в режим малых автоколебаний, существование которых повышает ее быстродействие и уменьшает перерегулирование при скачкообразных воздействиях.
Рассмотрим некоторые простейшие примеры систем с нелинейными элементами, введенными специально для повышения качества переходных процессов.
Нелинейная коррекция непрерывных систем. Для знакомства с принципом нелинейной коррекции рассмотрим отработку скачка u(t) простейшей следящей системой при двух различных значениях коэффициента усиления (рис. 1.4, а).
При большом коэффициенте усиления [кривая ^(Z)] процесс носит резко колебательный характер, величина перерегулирования велика и время /], в течение которого наступает момент равенства уг и и, мало. При малом коэффициенте усиления [кривая р2(/)] процесс протекает апериодически, перерегулирование отсутствует, и время компенсации рассогласования /2 велико. Естественно, возникает стремление создать такую систему, которая, имея высокий коэффициент усиления при больших рассогласованиях х = и — у, уменьшала бы его по мере уменьшения рассогласования. В этом случае переходный процесс должен иметь вид кривой г/н(/). Уменьшение коэффициента усиления по мере уменьшения рассогласования достигается включением нелинейного усилителя с характеристикой (1.4, б).
13
Чтобы защитить исполнительный механизм от перегрузок при больших значениях управляющего воздействия, применяют усилители с насыщением, характеристика которых имеет перегиб при больших-значениях входного сигнала (см. рис. 1.4, б).
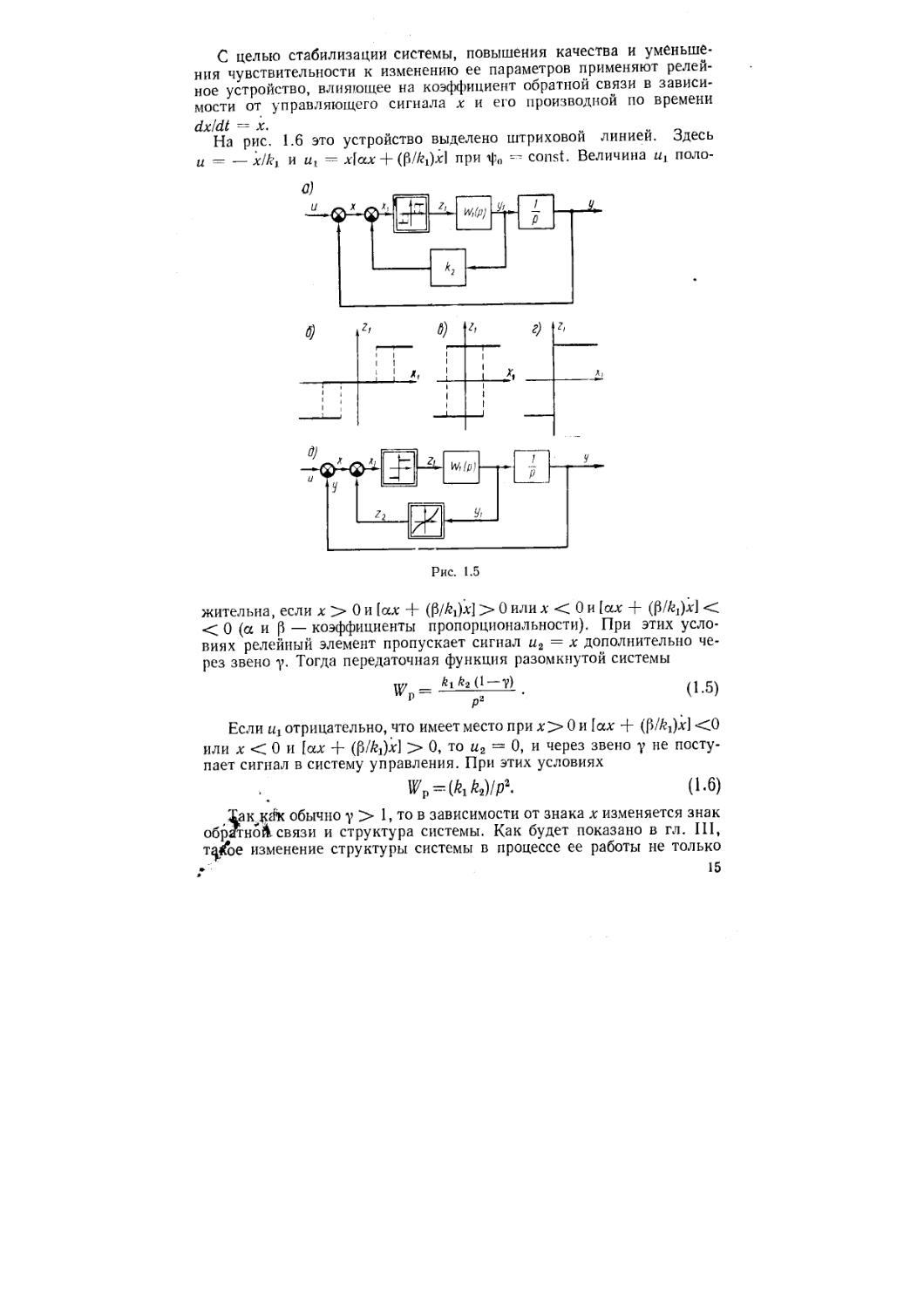
Релейные системы управления. Вместо непрерывных нелинейных усилителей (см. рис. 1.4, б) могут быть применены релейные усилители различных типов. Структурная схема системы управления показана на рис. 1.5, а. Характеристика релейного усилителя может быть трех- и двухпозиционной (соответственно рис. 1.5, би рис. 1.5, в, г). В первом случае в системе имеется зона нечувствительности, в пределах которой может изменяться рассогласование х = и — у без замы-
кания системы регулирования. Во втором случае система автоколебательная: в ней в рабочем режиме существуют автоколебания, величина которых зависит от динамических характеристик линейной части и ширины петли гистерезиса релейной характеристики (см. рис. 1.5, в). Всякое изменение управляющего воздействия и приводит к колебательному процессу уменьшения рассогласования. При этом длительность процесса может быть меньше, чем в непрерывных системах.
Для повышения качества релейной системы так же, как и в линейных системах, применяют корректирующую обратную связь, которая может быть как линейной (см. рис. 1.5, а), так и нелинейной (рис. 1.5, б). В последнем случае для систем второго порядка при отсутствии гистерезиса релейной характеристики (рис. 1.5, г) соответствующим выбором зависимости z2((/i) может быть получен оптимальный по быстродействию переходный процесс. Такое корректирующее устройство было предложено Д. И. Марьяновским и Д. В. Свечарником в 1935 г. [Л. 117].
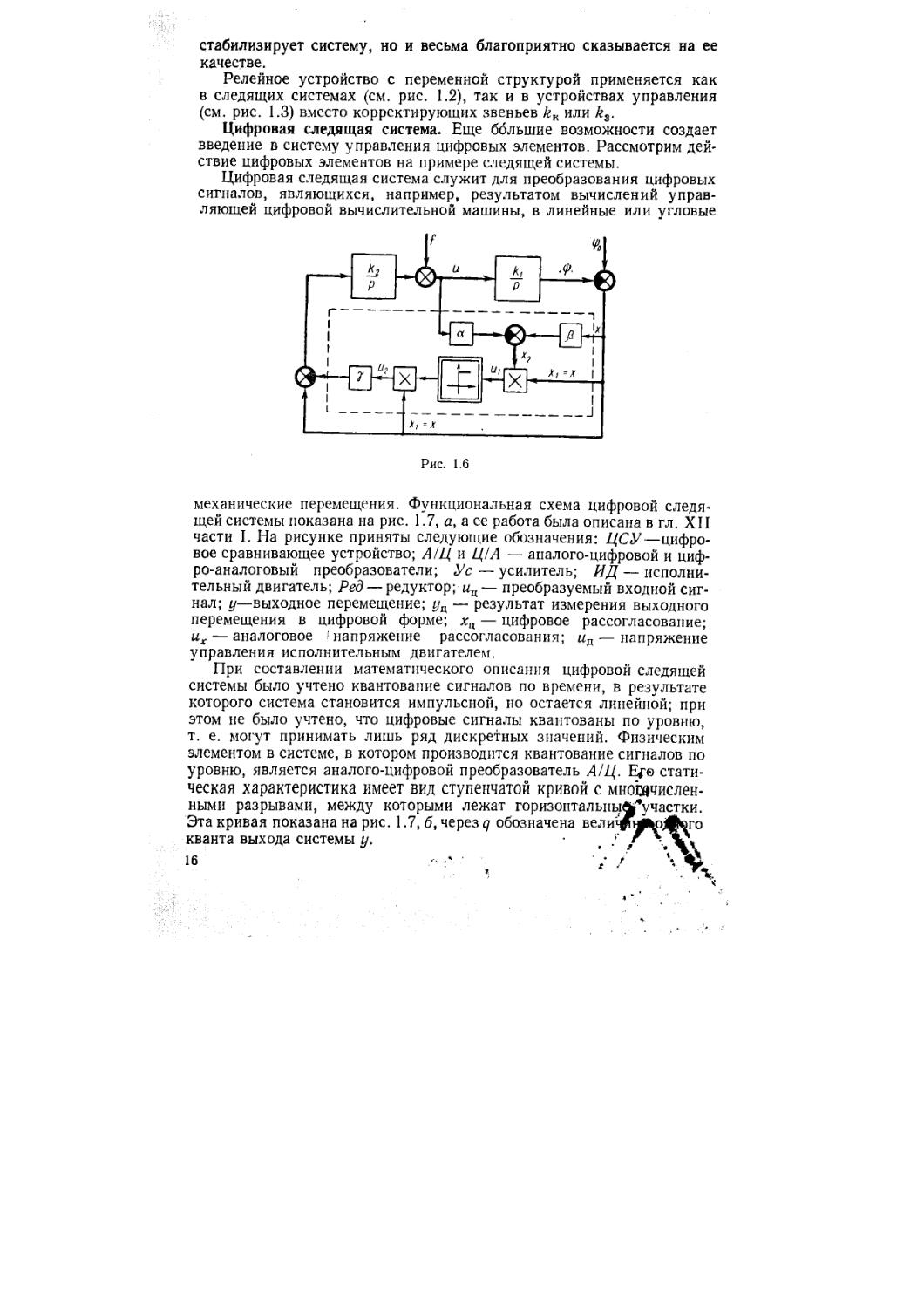
Системы с переменной структурой. На рис. 1.6 показана схема простейшей системы с переменной структурой, предложенная С. В. Емельяновым [Л. 39]. Рассмотрим структурную схему без участка, выделенного штриховой линией. Это — структурно-неустойчивая система с передаточной функцией разомкнутой системы (й1/г2)/р2.
14
С целью стабилизации системы, повышения качества и уменьшения чувствительности к изменению ее параметров применяют релейное устройство, влияющее на коэффициент обратной связи в зависимости от управляющего сигнала х и его производной по времени dxtdt = х.
На рис. 1.6 это устройство выделено штриховой линией. Здесь и = — x/kj ни, — х[ах + (P/^Jxl при ф() — const. Величина ut поло-
Рис. 1.5
жительна, если х > 0 и [ax + (P/^Jx] > 0 или х < 0 и [ах + (p/^jxl < <0 (а и р — коэффициенты пропорциональности). При этих условиях релейный элемент пропускает сигнал и2 = х дополнительно через звено у. Тогда передаточная функция разомкнутой системы
= kl-2p2~y) • О-5)
Если отрицательно, что имеет место при х> 0 и [ах + (p/^Jxl <0 или х < 0 и [ах + (р/А^х] > 0, то и2 — 0, и через звено у не поступает сигнал в систему управления. При этих условиях
№р-(М>2. (1.6)
Хакках обычно у > 1, то в зависимости от знака х изменяется знак обр£тгно&связи и структура системы. Как будет показано в гл. III, т^«ое изменение структуры системы в процессе ее работы не только ‘ 15
стабилизирует систему, но и весьма благоприятно сказывается на ее качестве.
Релейное устройство с переменной структурой применяется как в следящих системах (см. рис. 1.2), так и в устройствах управления (см. рис. 1.3) вместо корректирующих звеньев kK или k3.
Цифровая следящая система. Еще большие возможности создает введение в систему управления цифровых элементов. Рассмотрим действие цифровых элементов на примере следящей системы.
Цифровая следящая система служит для преобразования цифровых сигналов, являющихся, например, результатом вычислений управляющей цифровой вычислительной машины, в линейные или угловые
Рис. 1.6
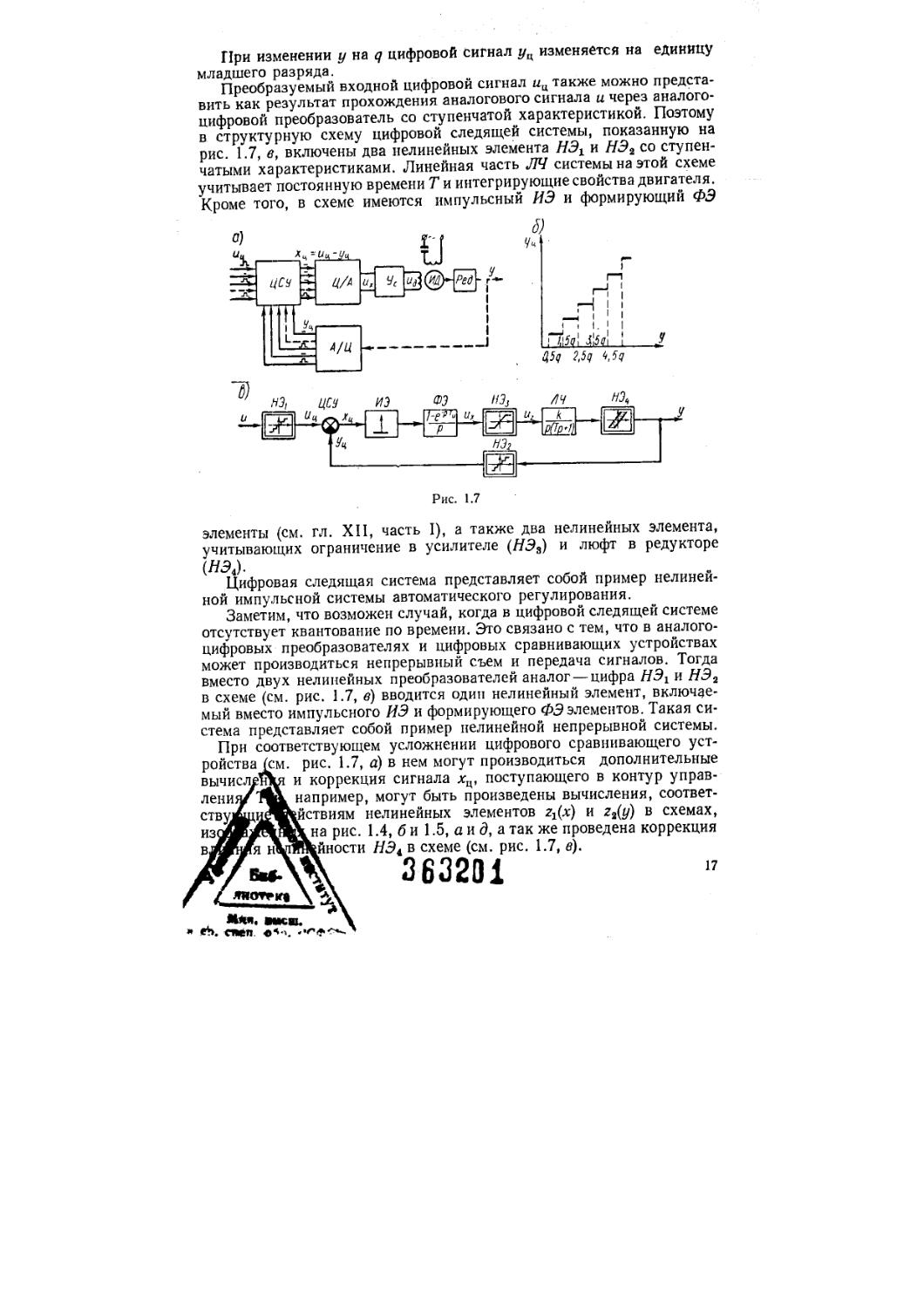
механические перемещения. Функциональная схема цифровой следящей системы показана на рис. 1.7, а, а ее работа была описана в гл. XII части I. На рисунке приняты следующие обозначения: ЦСУ—цифровое сравнивающее устройство; А1Ц и Ц/А — аналого-цифровой и цифро-аналоговый преобразователи; Ус — усилитель; ИД — исполнительный двигатель; Ред — редуктор; иц— преобразуемый входной сигнал; у—выходное перемещение; уц — результат измерения выходного перемещения в цифровой форме; — цифровое рассогласование; их — аналоговое > напряжение рассогласования; ия — напряжение управления исполнительным двигателем.
При составлении математического описания цифровой следящей системы было учтено квантование сигналов по времени, в результате которого система становится импульсной, но остается линейной; при этом не было учтено, что цифровые сигналы квантованы по уровню, т. е. могут принимать лишь ряд дискретных значений. Физическим
элементом в системе, в котором производится квантование сигналов по уровню, является аналого-цифровой преобразователь А1Ц. Ef® статическая характеристика имеет вид ступенчатой кривой с мносцчислен-ными разрывами, между которыми лежат горизонтальныв^участки. Эта кривая показана на рис. 1.7, б, через q обозначена велифЛЬоЛего кванта выхода системы у. , / f
16 • \ <ft.
При изменении у на q цифровой сигнал г/ц изменяется на единицу младшего разряда.
Преобразуемый входной цифровой сигнал иц также можно представить как результат прохождения аналогового сигнала и через аналого-цифровой преобразователь со ступенчатой характеристикой. Поэтому в структурную схему цифровой следящей системы, показанную на рис. 1.7, в, включены два нелинейных элемента НЭг и НЭ2 со ступенчатыми характеристиками. Линейная часть ЛЧ системы на этой схеме учитывает постоянную времени Т и интегрирующие свойства двигателя. Кроме того, в схеме имеются импульсный ИЭ и формирующий ФЭ
Рис. 1.7
элементы (см. гл. XII, часть I), а также два нелинейных элемента, учитывающих ограничение в усилителе (НЭа) и люфт в редукторе (НЭ4).
Цифровая следящая система представляет собой пример нелинейной импульсной системы автоматического регулирования.
Заметим, что возможен случай, когда в цифровой следящей системе отсутствует квантование по времени. Это связано с тем, что в аналого-цифровых преобразователях и цифровых сравнивающих устройствах может производиться непрерывный съем и передача сигналов. Тогда вместо двух нелинейных преобразователей аналог—цифра /7Эг и НЭ2 в схеме (см. рис. 1.7, в) вводится один нелинейный элемент, включаемый вместо импульсного ИЭ и формирующего ФЭэлементов. Такая система представляет собой пример нелинейной непрерывной системы.
При соответствующем усложнении цифрового сравнивающего устройства (см. рис. 1.7, а) в нем могут производиться дополнительные вычисления и коррекция сигнала х , поступающего в контур управления^ "Яа. например, могут быть произведены вычисления, соответ-ству;др,щ^^йствиям нелинейных элементов гл(х) и z2(y) в схемах, на рис. 1-4, б и 1.5, а и б, а так же проведена коррекция влития нмЖжйности ИЭ4 в схеме (см. рис. 1.7, й).
363201
Мчи. мкш. **\
* л. сяеп
§ 1.4. ПРИМЕРЫ СИСТЕМ УПРАВЛЕНИЯ ОБЪЕКТАМИ С НЕМОНОТОННЫМИ (ЭКСТРЕМАЛЬНЫМИ) ХАРАКТЕРИСТИКАМИ
При управлении объектом е нелинейной экстремальной характеристикой, произвольно изменяющейся во времени, возникает задача поддержания регулируемой величины в точке экстремума. Эта задача решается средствами непрерывной и импульсной техники. Рассмотрим примеры простейших решений задачи и встречающиеся при этом характерные нелинейности.
Непрерывная автоколебательная система экстремального регулирования. В системах экстремального регулирования для поддержания значения регулируемой величины вблизи экстремума применяются схемы, содержащие нелинейные звенья с еще более сложными характеристиками, чем рассмотренные ранее.
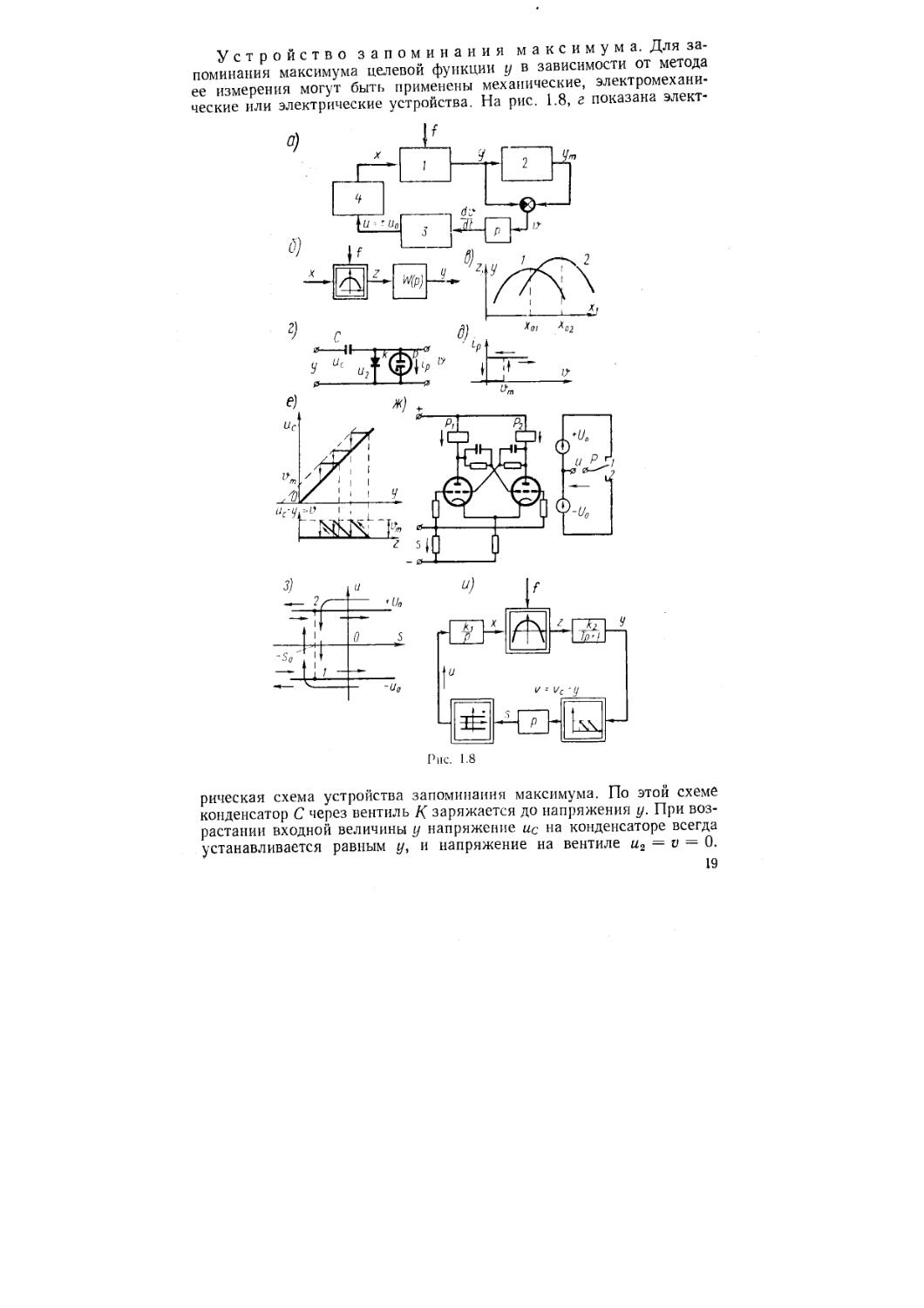
На рис. 1.8, а показана функциональная схема системы экстремального управления с непрерывным пробным движением, предложенная и разработанная В. В. Казакевичем. На ней объект управления с неконтролируемым воздействием f обозначен звеном 1. Система регулирования состоит из устройства 2 запоминания экстремума ут и определения величины отклонения от него ут — у = у, статического симметричного триггера 3, срабатывающего, когда отклонение от экстремума достигает заданного максимального значения, и исполнительного двигателя 4, управляемого триггером.
Нелинейными звеньями, кроме самого объекта управления, являются устройство запоминания экстремума и симметричный триггер. Рассмотрим каждое из этих устройств и его нелинейные характеристики.
Объект управления. Объектом управления может являться любое устройство с экстремальной характеристикой у(х), где х — управляющая величина, ay — целевая функция, служащая показателем качества процесса. Цель регулирования —поддерживать у на максимальном (или минимальном) уровне. Связь между х и у в общем случае зависит от скорости изменения х и может быть весьма сложной.
В наиболее простых случаях эту зависимость можно представить в виде соединенных последовательно нелинейного и линейного звеньев. В одном случае эта зависимость может быть представлена нелинейным звеном г(х) и линейным звеном с z на входе и у на выходе. В другом случае объекту соответствует линейное звено с х на входе и у на выходе и нелинейное звено z(y). На рис. 1.8, б изображена структурная схема, соответствующая первому случаю, а на рис. 1.8, в — примеры нелинейных характеристик z(x). Показаны две характеристики 1 и 2, соответствующие различным значениям f и, соответственно, различным координатам точек экстремума х01 и х02. В дальнейшем под величиной х будем понимать отклонение от координаты точки экстремума — — х01 при фиксированном значении х01. Простейшим линейид! звеном является инерционное звено первого порядка или звеДУгзайизды-вания. В качестве точки экстремума будем рассматриватщтакцййг у. Аналогичные рассуждения могут быть применены и для ^и^Имул^ТОРЙ функции. Л /
Устройство запоминания максимума. Для запоминания максимума целевой функции у в зависимости от метода ее измерения могут быть применены механические, электромеханические или электрические устройства. На рис. 1.8, г показана элект
Piic. 1.8
рическая схема устройства запоминания максимума. По этой схеме конденсатор С через вентиль заряжается до напряжения у. При возрастании входной величины у напряжение ис на конденсаторе всегда устанавливается равным у, и напряжение на вентиле u2 = v = 0.
19
Однако при убывании у напряжение на конденсаторе ис = ут и разность у — ут прикладывается к вентилю К-
При достижении на вентиле напряжения и2 = пт разрядник Р начинает пропускать ток, и напряжение на вентиле снижается до нуля за счет разряда конденсатора через цепь разрядника (ток гю). Характеристика ‘ разрядника показана на и ] ! рис. 1.8,5.
। । 1 t Для рассматриваемой схемы не-
। | линейные характеристики ис(у) и
— 1... ' v(y) показаны на рис. 1.8, е. На
ней характеристика ис = у соот-
Рис. 1.10
Рис. 1.9
ветствует dyldt > 0. Если dy/dt < 0, то при v < vm выполняются равенства Ис = ут и v = ут — у. При достижении равенства v = vm происходит разряд конденсатора до значения у, и снова восстанавливается равенство у = ис (т. е. v = 0).
Симметричный статический триггер. Пример симметричного статического триггера, выполненного на электронных лампах, показан на рис. 1.8, ж. Опрокидывание триггера происходит при отрицательных импульсах s, по величине превышающих $0. В анодные цепи электронных ламп триггера включены обмотки дифференциального поляризованного реле и Р2 так, что при всяком опрокидывании триггера переключается контакт реле Р, и напряжение и изменяется от +t/0 до — Ua или, наоборот, от —UQ до + U0.
Характеристика симметричного триггера как нелинейного звена изображена на рис. 1.8, з. На характеристике показаны скачкообразные переходы из точки 1 в точку 2 и обратно, когда^напряжение s убывает и достигает значения — s0.
^Структурная схема системы, включающая все три рассмотренных нелинейных звена, показана на рис. 1.8, и. При этом предполагают, 20
что линейная часть объекта может быть представлена инерционным звеном с постоянной времени Т, включаемым после нелинейности z(x), а исполнительный двигатель описывается интегрирующим звеном kjp.
На вход симметричного триггера поступают импульсы, получаемые путем дифференцирования величины и в схеме запоминания максимума.
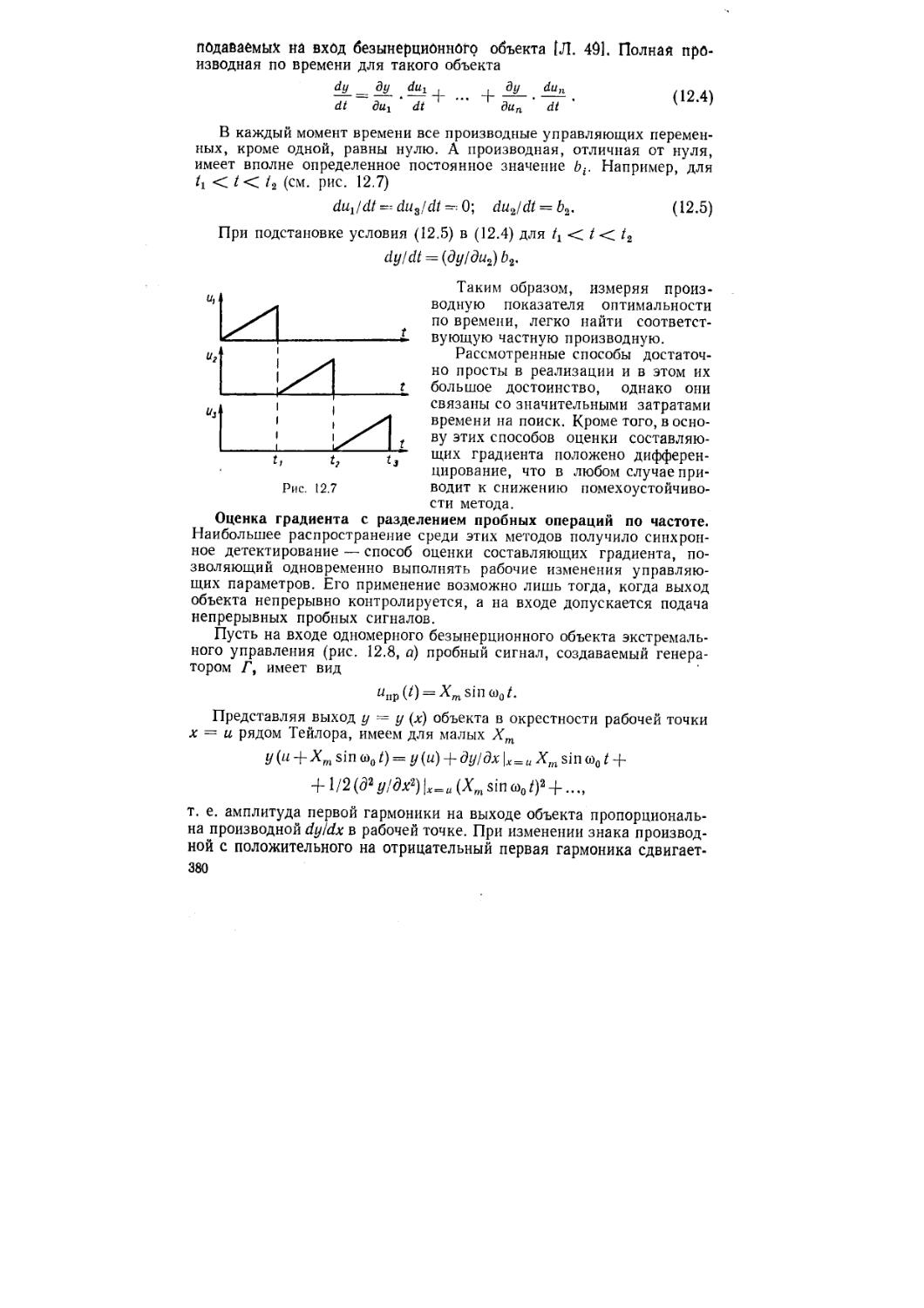
Временная диаграмма работы каждого из звеньев системы для случая Т = 0, т. е. безынерционного объекта, показана на рис. 1.9. Из графика видно, как в нормальном режиме работы системы периодически в моменты времени, когда уход от максимума достигает величины vm, происходит изменение направления вращения двигателя и у снова приближается к максимуму. Всякое изменение характеристики объекта и координат точки максимума за счет воздействия / автоматически сопровождается переходом в окрестность новой точки максимума у.
Импульсная система экстремального регулирования. В импульсной системе экстремального регулирования, функциональная схема которой показана на рис. 1.10, а, периодически через интервал времени Ти измеряется величина производной dzldx статической нелинейной характеристики объекта z(x) (на рис. 1.10, а приняты обозначения: О — объект; ИП — измеритель производной; ИУ — исполнительное устройство). Измеритель производной ИП представляет собой вычислительное устройство, которое на основании информации об изменениях сигналов z и х вычисляет dzldx. Время То, необходимое для измерения приращений г и х и вычисления dzldx, составляет некоторую часть общего периода Ти.
Измеритель производной ИП может иметь самые различные реализации, однако наиболее распространенным его видом является синхронный детектор. В этом случае на вход объекта О и на измеритель производной ИП дополнительно поступает периодический пробный сигнал х = Xnm sincon£, а в измерителе производной вычисляется произведение zx и путем интегрирования этого произведения по времени за время То выделяется постоянная составляющая, пропорциональная dzldx. Измеренные дискретные значения производной поступают в исполнительное устройство ИУ. Исполнительное устройство изменяет в течение времени ТР координату х0 со скоростью, пропорциональной значению dzldx. Во всех случаях То + Тр < Та. Если для управления п объектами в качестве управляющего устройства используют одну цифровую вычислительную машину, то
п
^СГо + Л.)^7^- (1-7)
Уравнение равновесного состояния системы имеет вид:
dzldx -- 0, что совпадает с условием экстремума.
21
На рис. 1.10, б показана структурная схема импульсной экстремальной системы, в которой объект регулирования О изображен последовательным соединением линейной части с передаточной функцией W0(p) и элемента с нелинейной характеристикой z(xx), имеющей экстремум. Дискретный характер системы отражен включением импульсного элемента ИЭ и формирующего элемента ФЭ с передаточной функцией
1 — й—рГр
. (1.8)
Р
что соответствует прямоугольной форме управляющих импульсов. Исполнительное устройство ИУ содержит интегрирующее звено с передаточной функцией kiiylp.
Заметим, что период Та и время часто выбирают такими, при которых переходные процессы в линейной части объекта практически заканчивались бы за время Т„. В этом случае передаточная функция объекта W0(p) при рассмотрении процесса в главном контуре управления может быть принята равной k0 = U/o(0).
При этом в измерителе производной в зависимости от соотношений периода пробных сигналов Тл = 2л/<оп, времени То и постоянных времени объекта динамические характеристики последнего могут оказывать влияние на работу системы.
В рассматриваемой системе имеется два нелинейных элемента: объект и измеритель производной, содержащий множительное звено.
Рассмотренная система экстремального регулирования представляет собой пример нелинейной импульсной системы, обеспечивающей поддержание оптимального значения регулируемой величины.
§ 1.5. НЕЛИНЕЙНЫЕ ЗВЕНЬЯ СИСТЕМ УПРАВЛЕНИЯ
Из рассмотрения приведенных ранее систем автоматического управления видно, что в них встречаются нелинейности самого различного вида. Будем характеризовать каждую нелинейность соответствующей функцией 2 = 2(х). При этом будем считать, что имеет место одномерная нелинейность, т. е. переменная z представляет собой функцию только одной переменной х. Возможны случаи и многомерных нелинейностей, когда переменная z— функция нескольких переменных. Примером двумерной нелинейности является рассмотренное в § 1.2 (рис. 1.3) звено, в котором скорость и движения поршня представляет собой функцию переменных у и у. В дальнейшем будем рассматривать одномерные нелинейности, а некоторые многомерные нелинейности сведем к соединению одномерных.
Нелинейные звенья можно классифицировать по различным показателям: симметрии, гладкости, однозначности характеристик. Рассмотрим каждый из этих показателей.
Симметрия. Для нелинейных характеристик можно указать два типа симметрии:
1) если функция z(x) удовлетворяет условию
z(x) = z( —х), (1.9)
22
то такую характеристику называют симметричной относительно оси ординат, или четно-симметричной. При однозначной зависимости такие характеристики могут быть представлены рядом с четными степенями х\
оо z(x) = 2 C2ix2/, 1 = 0
где С — постоянный коэффициент;
2) если функция z(x) удовлетворяет условию
z(x) =—z( — х), (1.10),
то характеристику называют симметричной относительно начала координат, или нечетно-симметричной. При однозначной зависимости z(x) такие характеристики могут быть представлены рядом с нечетными степенями х:
Z(x) = 2 C2i+lX2i+'.
i=--0
Характеристики, не удовлетворяющие ни одному из приведенных условий, называют несиммет
ричными.
В ряде случаев путем перемещения координат несимметричные характеристики могут быть приведены к симметричным. Перемещение
начала координат соответствует введению дополнительных слагаемых на входе и выходе звена. Например, для несимметричной характеристики z1(x1) (рис. 1.11, а, б) можно ввести подстановку х!==хо +х так, чтобы полученная характеристика z(x) = zx(x) оказалась симметричной относительно оси ординат. Такое преобразование координат соответствует введению сигнала х0 на входе звена и переходу от несимметричной характеристики z1(x1) к четно-симметричной z(x) (рис. 1.11, в, г).
Аналогично для характеристики гх(хх) (рис. 1.12, а, б) можно путем подстановки хх = х0 + х и zY = z0 + z получить нечетно-симметричную характеристику z(x). Структурная схема и характеристика z(x), соответствующая данному преобразованию координат, показаны на рИС. 1.12, в И 2.
Примером характеристик, которые путем преобразования координат сводятся к четно-симметричным, могут служить экстремальные характеристики, показанные на рис. 1.8, в. Примерами нечетно-симметричных характеристик являются графики, показанные на рис. 1.2,8, г;
23
1,3, в; 1.5, б, в, г. Характеристика сельсииа (см. рис. 1.2, б) в зависимости от выбора х0 может быть отнесена как к четно-симметричной, так и к нечетно-симметричной. К несимметричным характеристикам относятся графики, изображенные на рис. 1.1.6; 1.8, е, з и др,
Гладкость. Если в любой точке характеристики г(х) существует производная dzldx, то характеристика относится к гладким. Если на характеристике имеются изломы, в которых производная dzldx имеет разрыв, то характеристика относится к ломаным. Большую группу ломаных характеристик представляют кусочно-линейные характеристики, состоящие из отрезков прямых.
Примеры гладких характеристик показаны на рис. 1.1,6, в, г и 1.2, 6; ломаных кусочно-линейных характеристик — на рис. 1.2, в, г и др. При этом ломаные характеристики могут быть как непрерывными (см. рис. 1.2, в, г), так и разрывными (см. рис. 1.5, в, г). В ряде случаев с целью облегчения расчета гладкие характеристики бывает удобно приближенно заменять кусочно-линейными ломаными. Например, путем соответствующей аппроксимации и преобразования координат характеристика, изображенная на рис. 1.1,6, может быть сведена к ломаной кусочно-линейной характеристике (см. рис. 1.2, б).
Однозначность. Если каждому значению х соответствует одно определенное значение г, то характеристику называют однозначной. Если каждому значению х соответствует несколько значений г в зависимости от режима, предшествовавшего рассматриваемому моменту, то характеристику называют многозначной. При этом число возможных значений z может лежать в пределах от 2 до оо.
Примерами однозначных нелинейностей являются характеристики, показанные на рис. 1.1, б, г; 1.2, 6, в; 1.5, а; двузначных нелинейностей — на рис. 1.5, б, в; 1.8, д, з. Нелинейные звенья, характеристики которых представлены на рис. 1.2, г; 1.8, е, являются многозначными.
t Рассмотрим наиболее распространенные типовые звенья, характеристики которых при соответствующих упрощениях симметричны относительно начала координат (нечетно-симметричные) и могут быть достаточно хорошо представлены кусочно-линейными кривыми.
Звенья, встречающиеся реже, характеристики которых носят более сложный характер, будем относить к нетиповым, или особым, звеньям. К особым звеньям также будем относить искусственно создаваемые нелинейности, удовлетворяющие определенным задаваемым требованиям.
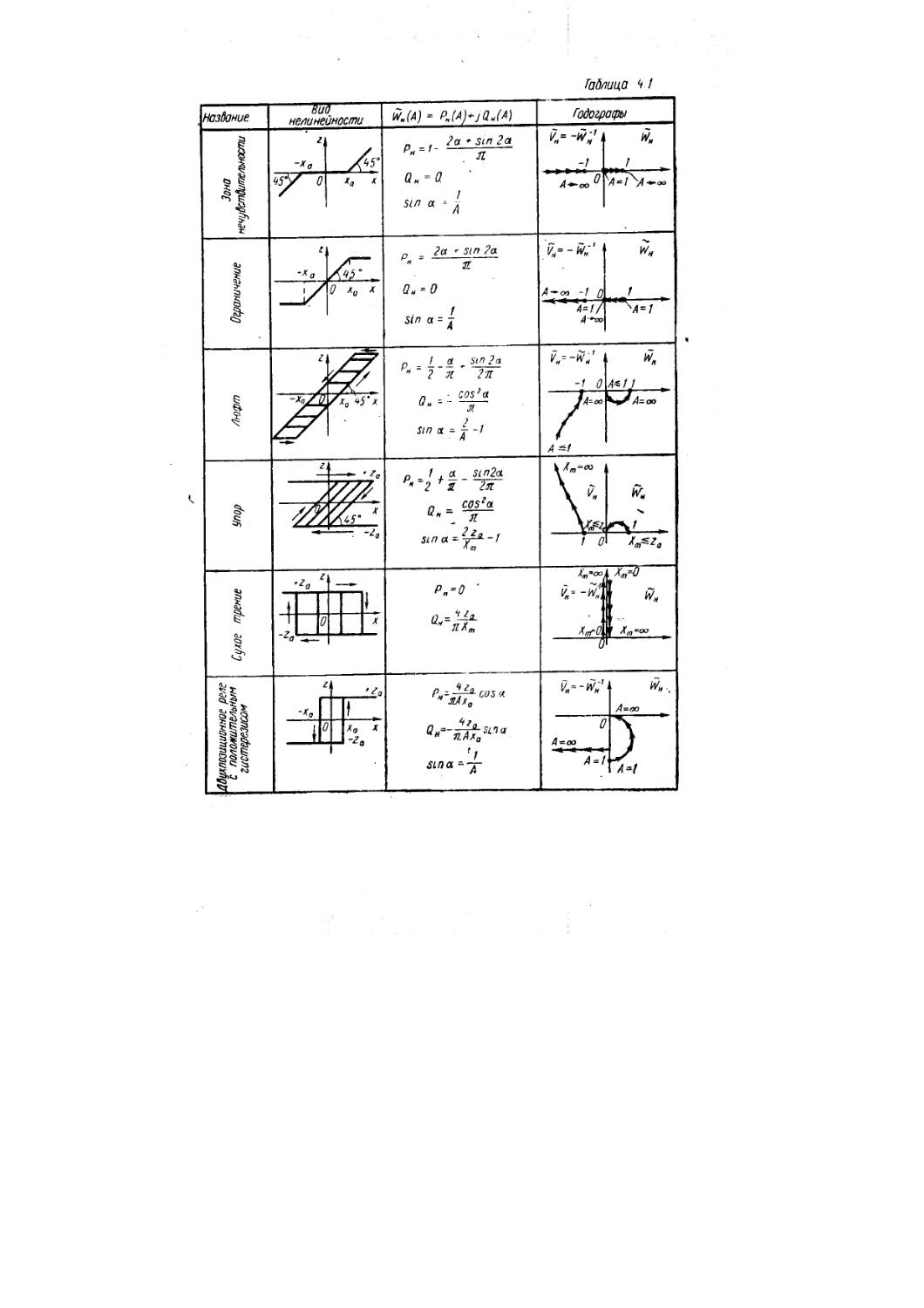
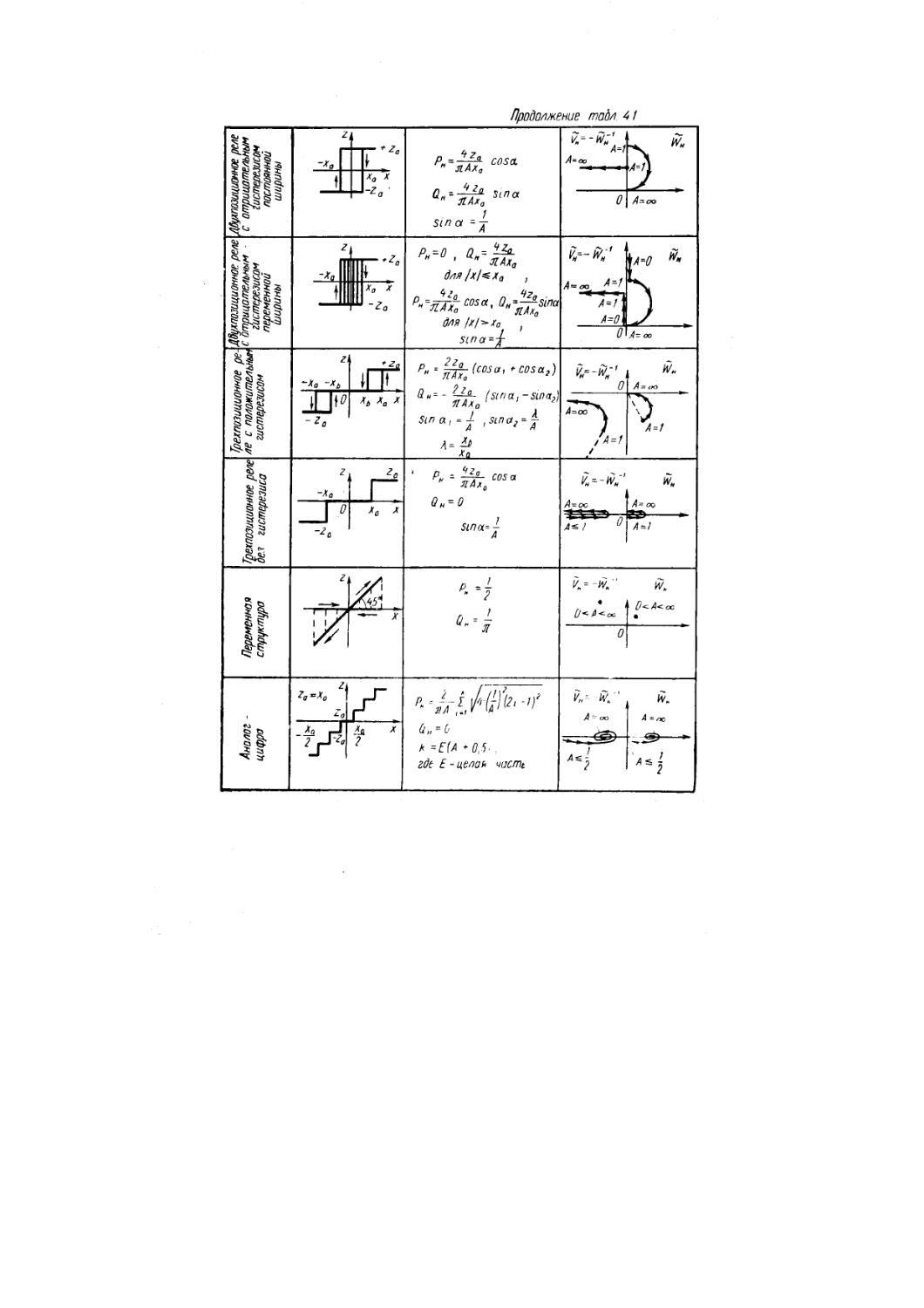
§ 1.6. ТИПОВЫЕ НЕЛИНЕЙНЫЕ ЗВЕНЬЯ
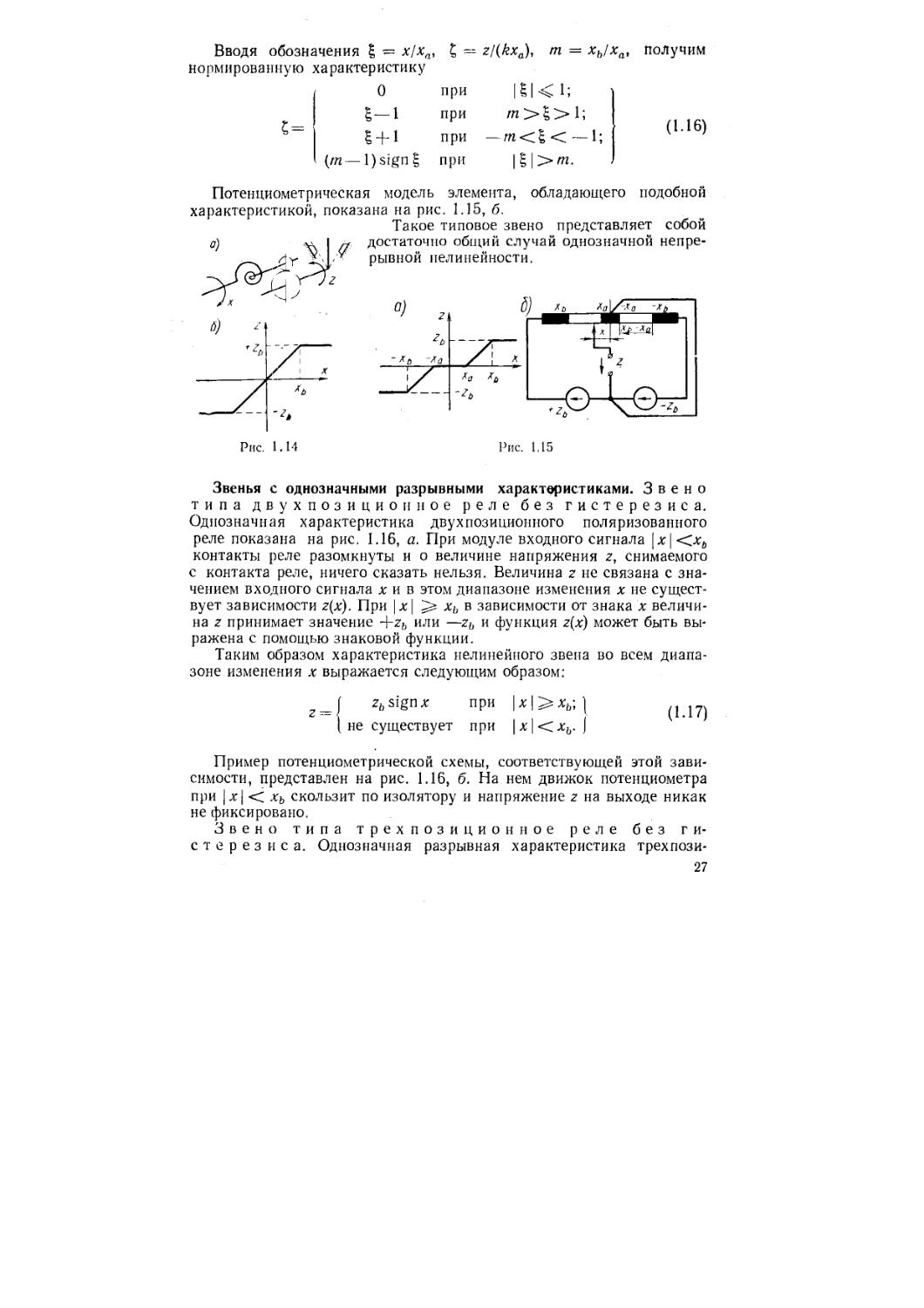
Типовые нелинейные звенья имеют как однозначные, так и неоднозначные характеристики. Эти характеристики могут быть всегда приведены к нормированному безразмерному виду путем изменения масштаба входной х и выходной z величин. Если известна характеристика z(x), то, вводя преобразование | = kxx иг = k2t,, которое выражает изменение масштаба, можно получить нормированную нелинейную характеристику £(|) в относительных единицах. Описанному преоб
разованию соответствуют структурные схемы, показанные на рис. 1.13, а, в. На них xakx = 1 и xak = kz. Типовые нелинейные звенья и их нормированные характеристики были введены Л. С. Гольдфарбом в 1947 г. [Л. 32] для приближенного анализа различных систем автоматического регулирования.
Рассмотрим основные нелинейные звенья, описывающие наиболее типичные нелинейности автоматических систем.
Звенья с однозначными непрерывными характеристиками. Звено типа зона нечувствительности. Характеристики звена типа зона нечувствительности показаны на рис. 1.13, б, г. Такими характеристиками обладают некоторые схемы электронных, магнитных и гидравлических усилителей в области малых входных сигналов. Простейшей механической моделью зоны нечувствительности является система соединения двух валов с пружинным возвратом ведомого вала в нейтральное положение при наличии участка свободного хода (люфта) в системе передачи. Такое соединение двух валов показано схематически на рис. 1.13, д. Здесь зона свободного хода ведущего вала имеет ширину 2ха. Характеристика звена (см. рис. 1.13, б) выражается следующими уравнениями:
25
о k(x—ха) k(x+xa)
при при при
Вводя переменные | = х/ха и £ = z/(£xo), получим нормированную характеристику
при при при
(1-12)
Звено типа ограничение (или насыщение). Характеристики звена типа ограничение или насыщение показаны на рис. 1.11, б, г. Подобными характеристиками обладают практически все реальные усилители (электронные, магнитные, пневматические, гидравлические), ограниченные по мощности в области больших входных сигналов. Примером простейшей механической модели ограничения является система соединения двух валов через упругую пружину при наличии ограничений или упоров в системе ведомого вала.
Такая связь схематически показана на рис. 1.14, а. Здесь зона рабочего хода ведомого вала имеет ширину 2гь.
Характеристика этого звена (рис. 1.14, б) выражается следующими уравнениями:
г=[ kx при |х|<хь;
I zbsignх при |х|>хь.
(1.13)
-Вводя переменные £ ную характеристику
х/хь и С = а/(&хь), получим нормирован-
I sign |
при при
ISI<1 1
|||>1.1
(1-14)
О ?= ё-i
В + 1
(1.11)
Звено типа ограничение с зоной нечувствительности. Многие элементы системы регулирования описываются нелинейной зависимостью, обладающей как зоной нечувствительности, так и ограничением. Характеристика звена, сочетающего оба этих типа нелинейностей, показана на рис. 1.15, а. При малых входных сигналах оно ведет себя подобно звену типа зона нечувствительности, а при больших сигналах—подобно звену типа ограничение.
Характеристика звена описывается следующими уравнениями:
0 при
6(х-ха) при
й(х+ха) при
zbsignx при
(1-15)
26
Вводя обозначения В = х/ха, нормированную характеристику
О
£-1
£ — z/(kxa), т = хь/ха, получим
при при при
(116)
(т— 1)sign g
при
Потенциометрическая модель элемента, обладающего подобной характеристикой, показана на рис. 1.15, б.
Такое типовое звено представляет собой
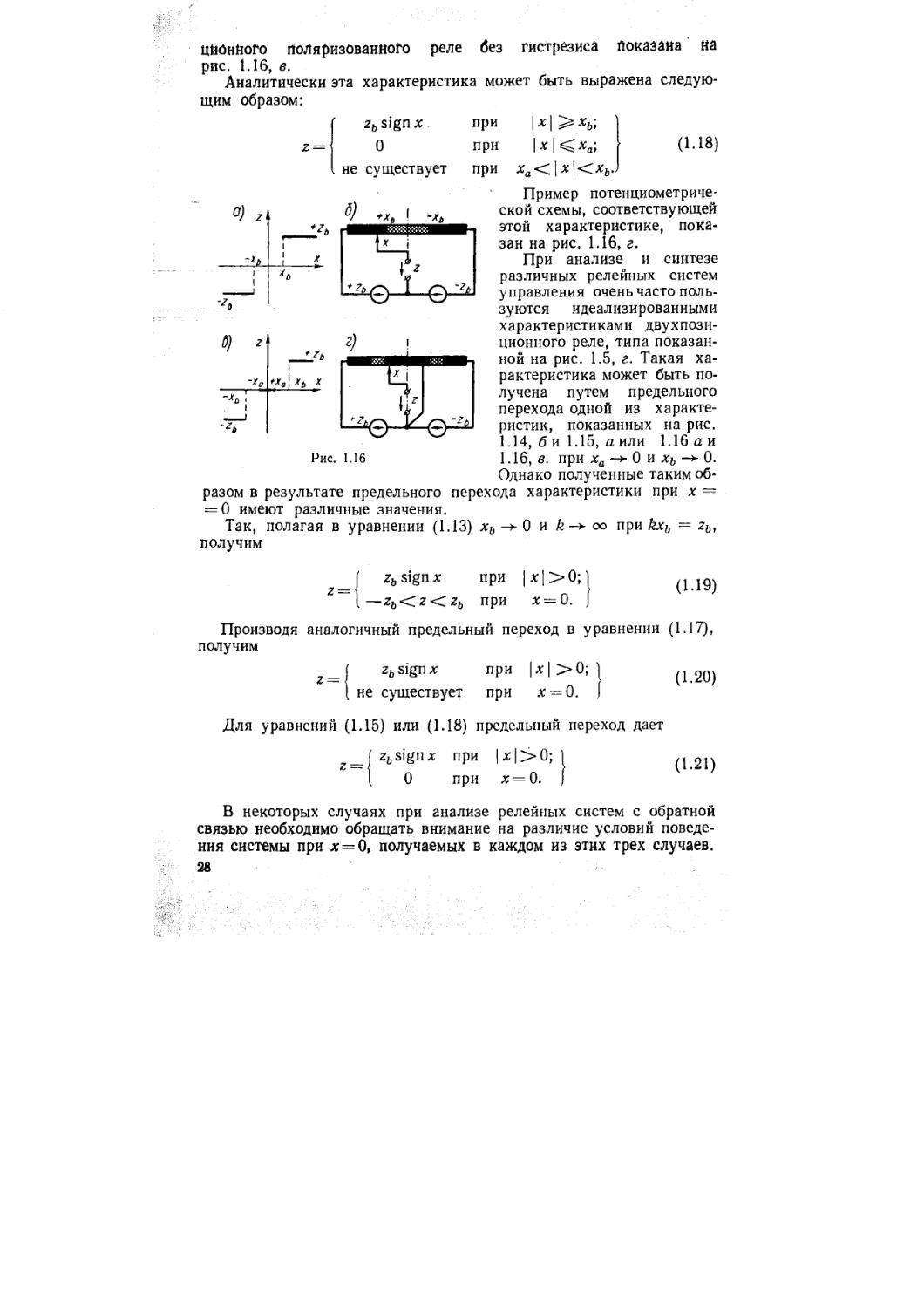
Звенья с однозначными разрывными характеристиками. Звено типа дву х поз и ци он ное реле без гистерезиса. Однозначная характеристика двухпозиционного поляризованного реле показана на рис. 1.16, а. При модуле входного сигнала |х|<хй контакты реле разомкнуты и о величине напряжения г, снимаемого с контакта реле, ничего сказать нельзя. Величина z не связана с значением входного сигнала х и в этом диапазоне изменения х не существует зависимости z(x). При |х| xh в зависимости от знака х величина z принимает значение +zb или —zh и функция z(x) может быть выражена с помощью знаковой функции.
Таким образом характеристика нелинейного звена во всем диапазоне изменения х выражается следующим образом:
z=f zbsignx при |х|>хь;| ( не существует при | х | < xb. J
Пример потенциометрической схемы, соответствующей этой зависимости, представлен на рис. 1.16, б. На нем движок потенциометра при |х| •< хь скользит по изолятору и напряжение г на выходе никак не фиксировано.
Звено типа трехпозиционное реле без гистерезиса. Однозначная разрывная характеристика трехпози-
27
ционйого поляризованного реле без гистрёзиса показана на рис. 1.16, в.
Аналитически эта характеристика может быть выражена следующим образом:
zb sign х
z = О
при при при
IX К ха; ха<|х|<хь..
не существует
Пример потенциометрической схемы, соответствующей этой характеристике, показан на рис. 1.16, г.
При анализе и синтезе различных релейных систем управления очень часто пользуются идеализированными характеристиками двухпозиционного реле, типа показанной на рис. 1.5, г. Такая характеристика может быть получена путем предельного перехода одной из характеристик, показанных на рис. 1.14, б и 1.15, а или 1.16аи 1.16, в. при ха -> 0 и хь -> 0. Однако полученные таким об-
разом в результате предельного перехода характеристики при х = — 0 имеют различные значения.
Так, полагая в уравнении (1.13) хь 0 и k -> оо при kxb = zb, получим
I zb signх при |х|>0;1 I—zbCz<Zzb при х = 0. J
(1-19)
Производя аналогичный предельный переход в уравнении (1.17),
получим
zb sign х не существует
при при
(1-20)
И >0; 1 х — 0. J
(1-18)
Для уравнений (1.15) или (1.18) предельный переход дает
г_Д zb sign х при | х | >0;
1 0 при х = 0.
(1-21)
В некоторых случаях при анализе релейных систем с обратной связью необходимо обращать внимание на различие условий поведения системы при х=0, получаемых в каждом из этих трех случаев. 28
Ё дальнейшем под нелинейностью типа sign будем пбнймйТь характеристику, выражаемую уравнением (1.19).
Эта характеристика может быть аналитически выражена параболой нечетной степени 2n + 1 при п —> оо
z = гь sign х zb lim x<2'1 + 1) 1 п —>оо
(1.19а)
Обратную зависимость x(z) будем обозначать
х = asign z[zb = 1 ini (z/zZl)2n +1. (1.196)
П -+OO
Рис. 1.17
Рис. 1.18
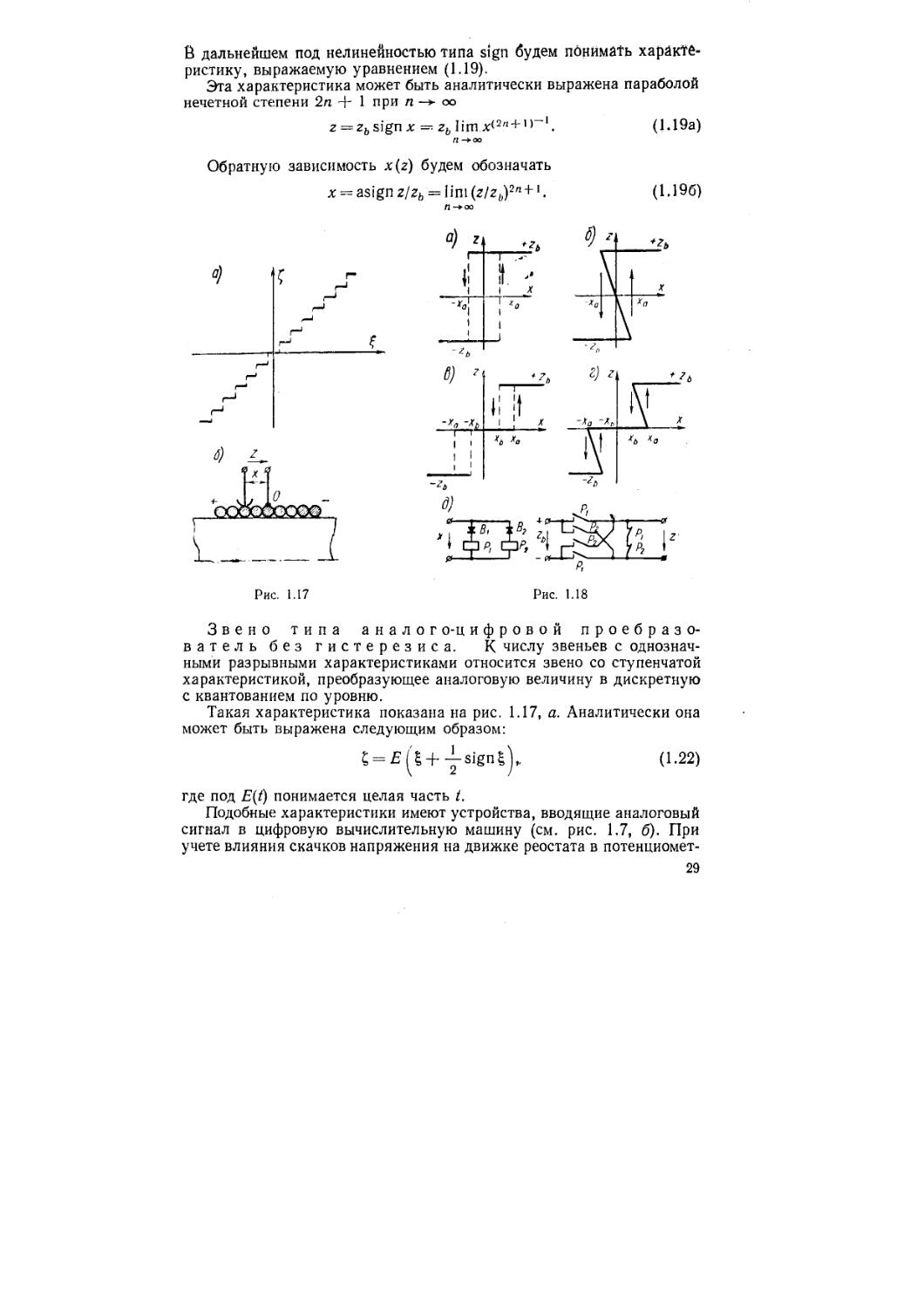
Звено типа аналог о-ц ифровой проебразо-ватель без гистерезиса. К числу звеньев с однозначными разрывными характеристиками относится звено со ступенчатой характеристикой, преобразующее аналоговую величину в дискретную с квантованием по уровню.
Такая характеристика показана на рис. 1.17, а. Аналитически она может быть выражена следующим образом:
? = £^+ysign^„ (1.22)
где под £(/) понимается целая часть t.
Подобные характеристики имеют устройства, вводящие аналоговый сигнал в цифровую вычислительную машину (см. рис. 1.7, б). При учете влияния скачков напряжения на движке реостата в потенциомет-29
ричёёких приборах при переходе движка от одного витка к другому (рис. 1.17, б) получим аналогичную зависимость между положением: движка и снимаемым напряжением. Величина скачка напряжения и0 равна напряжению на одном витке реостата. В этом случае
а = п0£(х/Д+0,5sign х), (1-23)
где Д — толщина провода реостата.
Звенья с двузначными характеристиками. Звено типа двухпозиционное реле с гистерезисом. Рассмотренные выше однозначные релейные характеристики соответствуют некоторой идеализации реальных систем. В действительности обычно величина входного сигнала, при котором происходит скачок выходной величины 2, бывает различной для переключения контакта в прямом и обратном направлениях. Например, в двухпозиционном поляризованном реле при его симметричной регулировке переключение контакта в одном направлении происходит при некотором напряжении, а переключение в обратном направлении —при таком же напряжении противоположного знака.
Характеристика двухпозиционного реле показана на рис. 1.18, а. Математически она выражается следующим образом:
( +?b При —Ха<Х<оо; | (124)
I— 2Ь При — ОО<Х<Ц-Ха. I
На участке — ха<Z. x<Z ха величина z имеет два значения+zb или —zb в зависимости от предшествовавших значений х. Условия скачка при переходе с нижней ветви на верхнюю выражаются следующим образом: х = ха, z = — zb, dx/dt > 0. Аналогично могут быть записаны условия скачкообразного перехода с верхней ветви на нижнюю: х = — ха, z — zb, dx/dt < 0.
Свойствами релейного элемента с характеристикой двухпозиционного реле обладают охваченные положительной обратной связью усилители с характеристикой типа ограничение (см. рис. 1.14, а). В этом случае характеристика имеет вид непрерывной кривой (рис. 1.18, б).
Участок характеристики при —ха < х < ха для —zb < z < zb имеет отрицательный наклон и обычно неустойчив. Таким образом, хотя при —xa<Zx <. ха каждому значению х и соответствуют три значения z, только два из этих значений гь и —zb отвечают устойчивому состоянию схемы и, следовательно, характеристика (см. рис. 1.18, б) сводится к рассмотренной ранее двузначной характеристике (см. рис. 1.18, а).
Эквивалентность рассматриваемых двух видов характеристики может быть использована при анализе релейных автоматических систем.
Звено типа трехпозиционное реле с гистерезисом. При учете различия в значениях входной величины, соответствующих переключениям контактов в одном и другом направ-' лении, характеристики трехпозиционного реле приобретают неоднозначный характер.
30
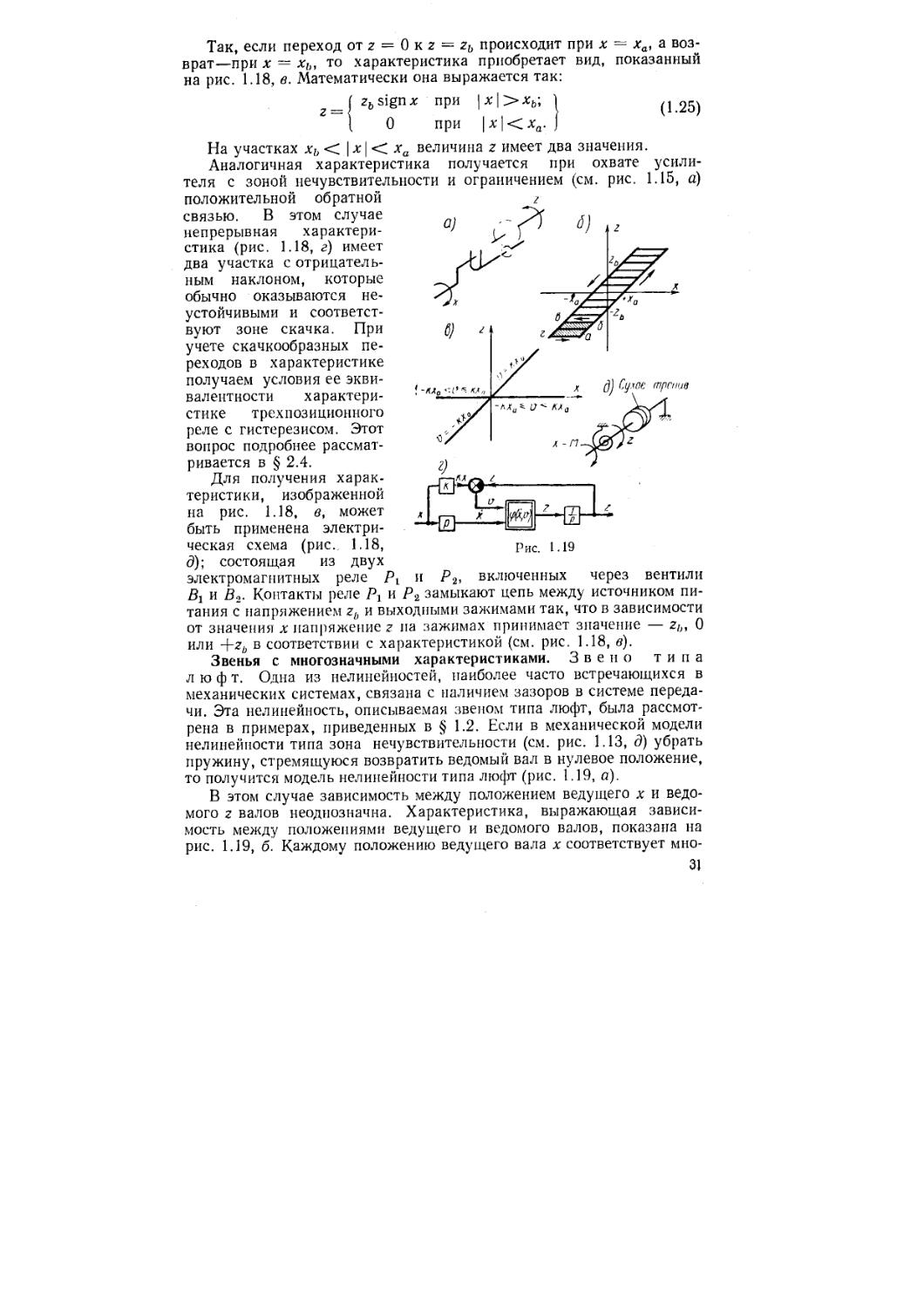
Так, если переход от z = 0 к z = zb происходит при х = ха, а возврат—при х = хь, то характеристика приобретает вид, показанный на рис. 1.18, в. Математически она выражается так:
г=( zb sign х при |x|>xb; 1
( 0 при |х|<ха. /
На участках хь < |х| < ха величина z имеет два значения.
Аналогичная характеристика получается при охвате усилителя с зоной нечувствительности и ограничением (см. рис. 1.15, а)
положительной обратной связью. В этом случае непрерывная характеристика (рис. 1.18, г) имеет два участка с отрицательным наклоном, которые обычно оказываются неустойчивыми и соответствуют зоне скачка. При учете скачкообразных переходов в характеристике получаем условия ее эквивалентности характеристике трехпозиционного реле с гистерезисом. Этот вопрос подробнее рассматривается в § 2.4.
Для получения характеристики, изображенной на рис. 1.18, в, может быть применена электрическая схема (рис. 1.18, д); состоящая из двух электромагнитных реле
Рис. 1.19
и Р2, включенных через вентили
Bi и В2. Контакты реле Pj и Р2 замыкают цепь между источником пи-
тания с напряжением zb и выходными зажимами так, что в зависимости от значения х напряжение z па зажимах принимает значение — zb, О или -\-zb в соответствии с характеристикой (см. рис. 1.18, в).
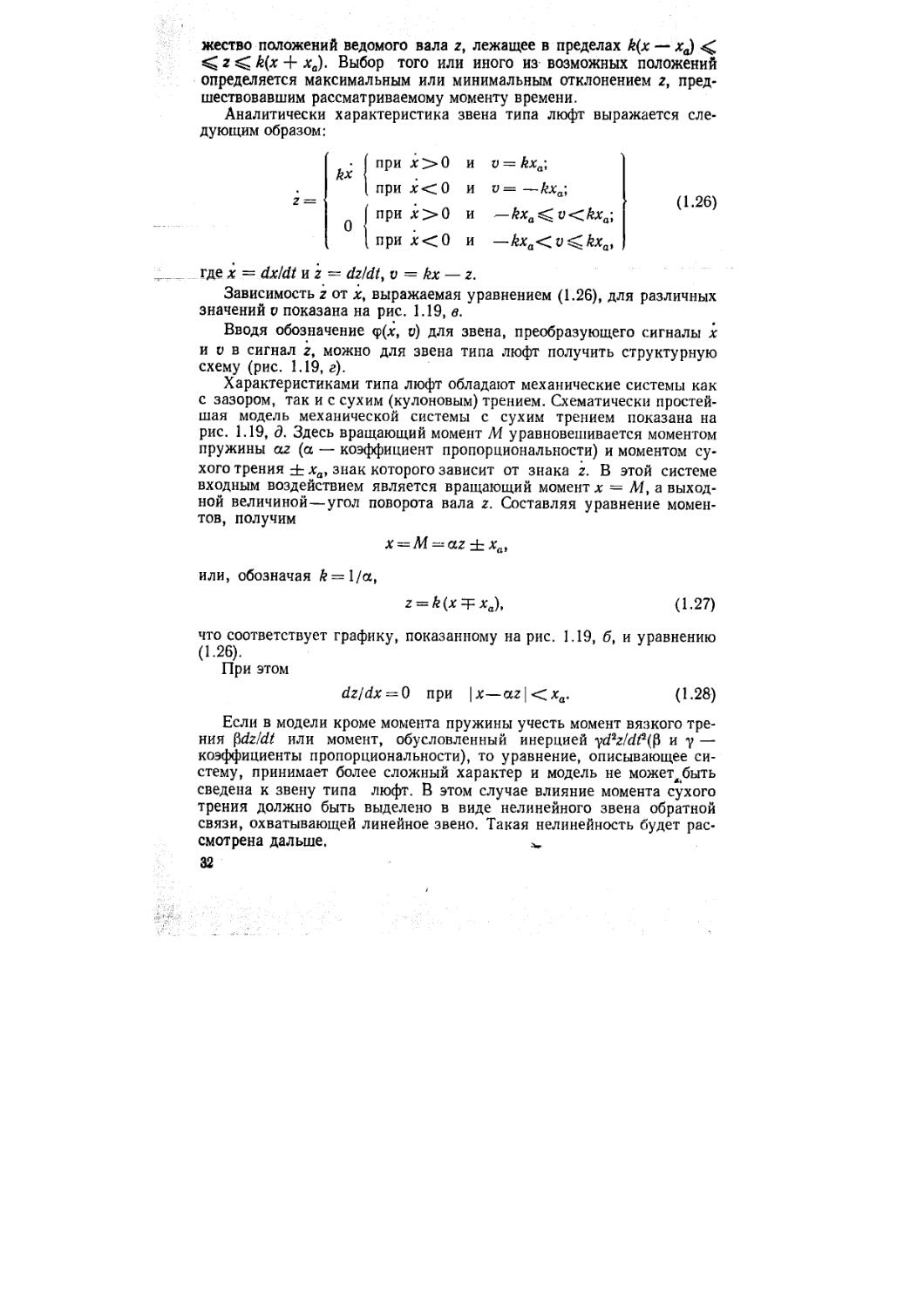
Звенья с многозначными характеристиками. Звено типа люфт. Одна из нелинейностей, наиболее часто встречающихся в механических системах, связана с наличием зазоров в системе передачи. Эта нелинейность, описываемая звеном типа люфт, была рассмотрена в примерах, приведенных в § 1.2. Если в механической модели нелинейности типа зона нечувствительности (см. рис. 1.13, д) убрать пружину, стремящуюся возвратить ведомый вал в нулевое положение, то получится модель нелинейности типа люфт (рис. 1.19, а).
В этом случае зависимость между положением ведущего х и ведомого z валов неоднозначна. Характеристика, выражающая зависимость между положениями ведущего и ведомого валов, показана на рис. 1.19, б. Каждому положению ведущего вала х соответствует мно
31
жество положений ведомого вала г, лежащее в пределах k(x — ха) <;
+ ха). Выбор того или иного из возможных положений определяется максимальным или минимальным отклонением г, предшествовавшим рассматриваемому моменту времени.
Аналитически характеристика звена типа люфт выражается следующим образом:
при х > 0 и v = kxa\ прих<0 и v=—kxa; при х>0 и — kxa^.v<Zkxa\ при х<0 и — kxa<v^kxa,
(1.26)
где х = dxldt и z = dzldt, v = kx-— z.
Зависимость z от x, выражаемая уравнением (1.26), для различных значений v показана на рис. 1.19, в.
Вводя обозначение <р(х, и) для звена, преобразующего сигналы х иов сигнал г, можно для звена типа люфт получить структурную схему (рис. 1.19, г).
Характеристиками типа люфт обладают механические системы как с зазором, так и с сухим (кулоновым) трением. Схематически простейшая модель механической системы с сухим трением показана на рис. 1.19, д. Здесь вращающий момент М уравновешивается моментом пружины аг (а — коэффициент пропорциональности) и моментом сухого трения ± ха, знак которого зависит от знака z. В этой системе входным воздействием является вращающий момент х = М, а выходной величиной—угол поворота вала г. Составляя уравнение моментов, получим
х = М =-- az ± ха,
или, обозначая & = 1/а,
z = k{x^xa\ (1.27)
что соответствует графику, показанному на рис. 1.19, б, и уравнению (1.26).
При этом
dzldx = 0 при |х—az|<xa. (1.28)
Если в модели кроме момента пружины учесть момент вязкого трения fidzldt или момент, обусловленный инерцией yd2z/d^(p и у — коэффициенты пропорциональности), то уравнение, описывающее систему, принимает более сложный характер и модель не можетдбыть сведена к звену типа люфт. В этом случае влияние момента сухого трения должно быть выделено в виде нелинейного звена обратной связи, охватывающей линейное звено. Такая нелинейность будет рассмотрена дальше. 32
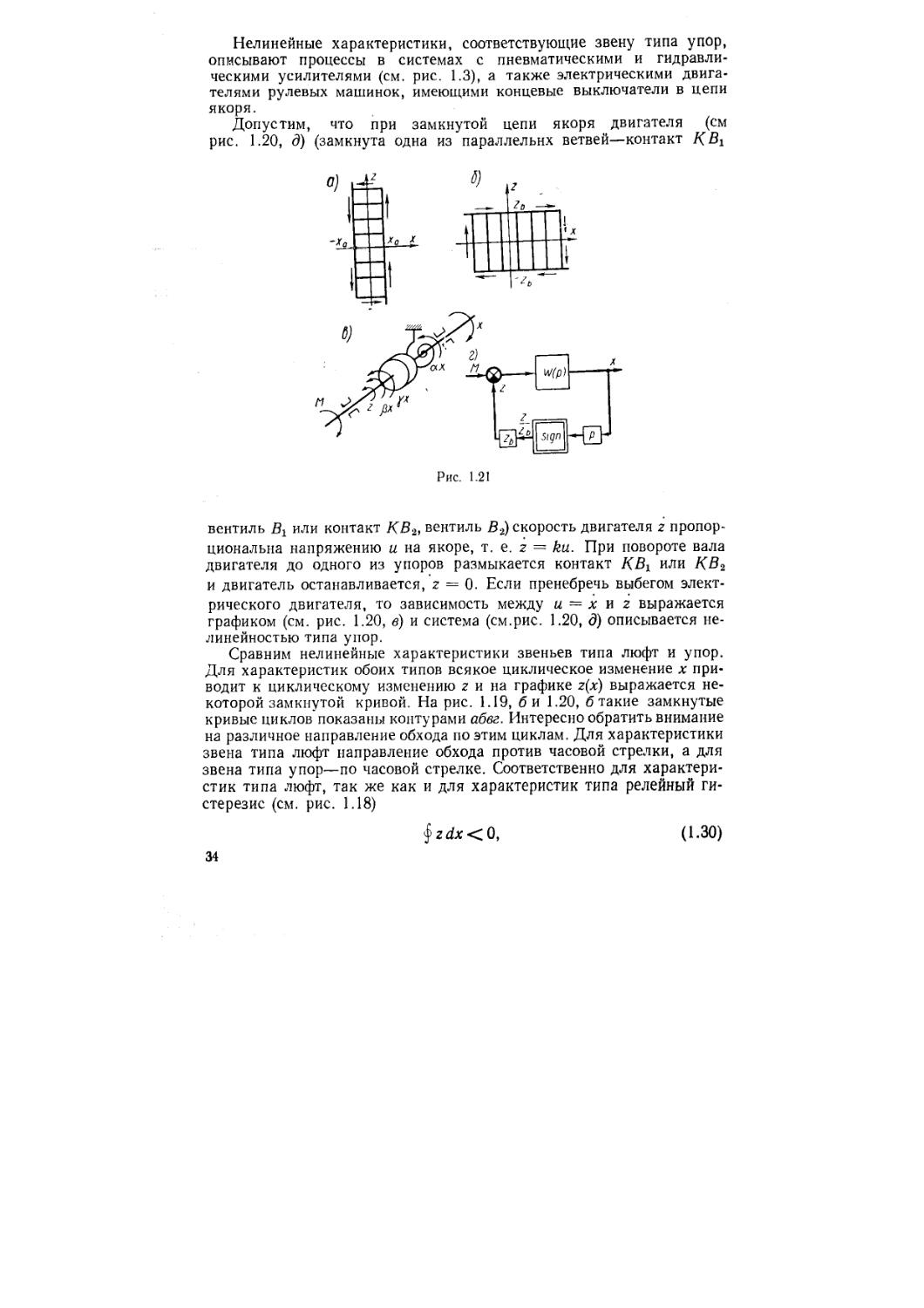
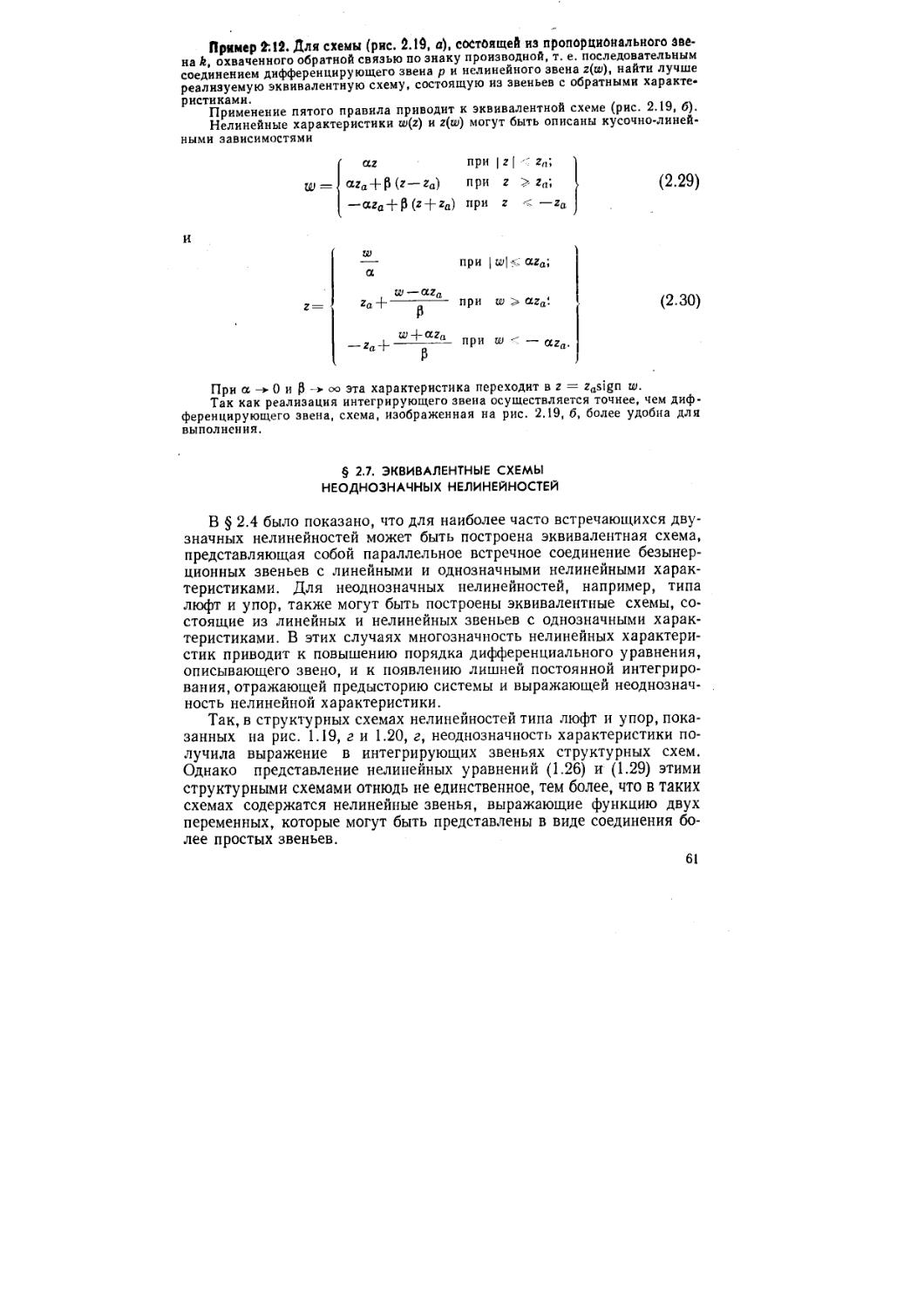
Звено типа упор. В различных механических системах перемещение одной из частей механизма бывает ограничено в двух направлениях и при этом ведущая часть может неограниченно перемещаться. Примером устройства, обладающего таким свойством, является механизм, показанный на рис. 1.20, а. Здесь ведущий вал связан с ведомой частью с помощью фрикционной муфты, которая расцепляется как только момент сопротивления превышает некоторую предельную величину. Ведомая часть механизма имеет упоры с двух сторон, поэтому как только она доходит до упора и возникает большой момент соп
ротивления, фрикционная Рис. 1.20
муфта расцепляется и ве-
дущий вал начинает проворачиваться при неподвижной ведомой части. Однако как только направление вращения ведущего вала изменяется, муфта снова входит в зацепление и ведомая часть меха-
низма приходит в движение вместе с ведущим валом.
Если обозначить углы поворота ведущего и ведомого валов через х и z, то зависимость между ними выразится графиком, показанным на рис. 1.20, б.
Каждому положению ведущего вала х в этом случае соответствует множество положений ведомого вала в пределах—zb^Cz^4-zb.
Аналитически характеристика такого звена, называемого звеном типа упор, записывается так:
. I при х>0 и kx i .
I при 0 и
( при х>0 и
° •
I при х < 0 и
(1.29)
Зависимость z от х, выражаемая уравнением (1.29), показана на рис. 1.20, в. Структурная схема, соответствующая этому уравнению, изображена на рис. 1.20, г.
2 Зак. 447 33
Нелинейные характеристики, соответствующие звену типа упор, описывают процессы в системах с пневматическими и гидравлическими усилителями (см. рис. 1.3), а также электрическими двигателями рулевых машинок, имеющими концевые выключатели в цепи якоря.
Допустим, что при замкнутой цепи якоря двигателя (см рис. 1.20, д) (замкнута одна из параллельнх ветвей—контакт КД
Рис. 1.21
вентиль Вг или контакт КД, вентиль В2) скорость двигателя z пропорциональна напряжению и на якоре, т. е. z = ku. При повороте вала двигателя до одного из упоров размыкается контакт KBt или К,В2 и двигатель останавливается, z = 0. Если пренебречь выбегом электрического двигателя, то зависимость между и = х и z выражается графиком (см. рис. 1.20, в) и система (см.рис. 1.20, 0) описывается нелинейностью типа упор.
Сравним нелинейные характеристики звеньев типа люфт и упор. Для характеристик обоих типов всякое циклическое изменение х приводит к циклическому изменению г и на графике z(x) выражается некоторой замкнутой кривой. На рис. 1.19, б и 1.20, б такие замкнутые кривые циклов показаны контурами абвг. Интересно обратить внимание на различное направление обхода по этим циклам. Для характеристики звена типа люфт направление обхода против часовой стрелки, а для звена типа упор—по часовой стрелке. Соответственно для характеристик типа люфт, так же как и для характеристик типа релейный гистерезис (см. рис. 1.18)
f z dx < 0,
(1.30)
34
тогда как для характеристики типа упор
f zdx>Q.
(1-31)
При стремлении коэффициентов усиления k в звеньях типа люфт и упор к бесконечности их характеристики становятся прямоугольными (рис. 1.21, а, б).
Примером характеристики типа у пор с бесконечно большим коэффициентом усиления может служить влияние сухого (кулоновского) трения в системе механической передачи, если входным воздействием х считать поворот зала, а выходной величиной—момент трения z, напри-
мер, в механизме, схематически
изображенном на рис. 1.21, в. В этом случае вращающий момент М уравновешивается моментами пружины ах, вязкого трения fidx/dt, сухого трения г(х) = ± zb и инерции yd^x/dt2. При этом
z — 2Ь sign х (1.32)
и
М—г = ах -\-$dx!dt -f-y d2x!dt2. (1.33)
Структурная схема, соответствующая последнему уравнению, имеет вид, изображенный на рис. 1.21, г.
Здесь
W(p)=--------!----. (1.34)
w <%+₽/>+ ур’
Цепь обратной связи, описываемая нелинейным звеном z(x), имеет характеристику, изображенную на рис. 1.21, б, и соответствует последовательному соединению дифференцирующего звена и нелинейности типа sign.
Звено типа магнитный гистерезис. При рассмотрении устройств магнитной памяти большое распространение получили нелинейные характеристики, в которых гистерезисные петли представлены в виде кусочно-линейных замкнутых кривых. Пример характеристики звена типа магнитный гистерезис показан на рис. 1.22, а. Здесь характеристика может быть описана следующими уравнениями:
2 = Ц1 (X±Xa),
Z = р2 X + С,
(1.35)
где —zij<C<zl), а pj и р2—постоянные коэффициенты. 2*
35,
—Zh ДО Z = Ц.2х + 2Ь.
При щ —>- оо и ц2 -> 0 гистерезисная петля имеет прямоугольную форму (рис. 1.22, б). Эта характеристика отличается от характеристики типа люфт при k оо (см. рис. 1.21, а) ограничением величины z, которая может лежать только в пределах от —zb до -f-zb.
§ 1.7. ВИБРАЦИОННАЯ ЛИНЕАРИЗАЦИЯ ТИПОВЫХ НЕЛИНЕЙНЫХ ЗВЕНЬЕВ
Одним из способов борьбы с отрицательным эффектом .производимым нелинейностями типов зона нечувствительности и люфт, служит наложение на сигнал на входе нелинейного звена периодической переменной составляющей и фильтрация этой составляющей на выходе звена. Так, если к постоянному или медленно изменяющемуся сигналу х0 прибавить быстро изменяющуюся периодическую переменную составляющую х, то результирующий сигнал на входе х = х0 + х
вызовет на выходе сигнал г, который, в свою очередь, может быть представлен в виде суммы постоянной или медленно меняющейся составляющей z0 и переменной составляющей z (рис. 1.23).
Так как в нелинейных си-
стемах принцип суперпозиции не применим, то переменная составляющая х влияет на зависимость между z0 и х0.
I, ; Рассмотрим, как изменится характеристика звена типа зона нечувствительности для постоянной составляющей х0 и z0 при введении дополнительного периодического сигнала х. Действие периодического сигнала зависит от его формы. Будем рассматривать два крайних случая, когда переменный сигнал имеет треугольную и прямоугольную формы. При синусоидальном сигнале решение лежит между результатами, получаемыми в случае треугольного и прямоугольного сигналов.
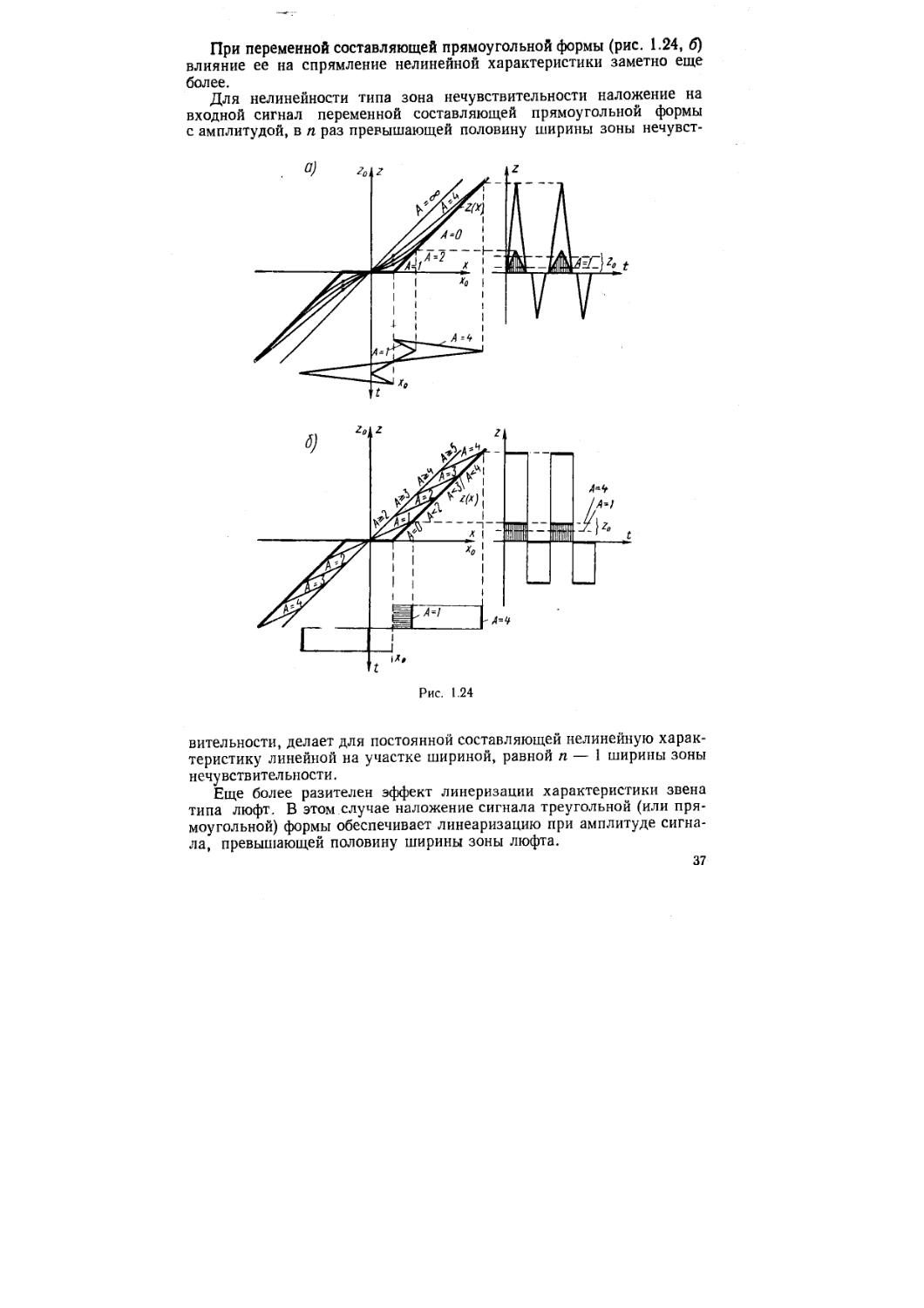
На рис. 1.24, а жирной линией показана нелинейная характеристика z(x), которая совпадает с характеристикой z0(x0) при х = 0.
При увеличении х характеристика z0(x0) изменяется, приближаясь по мере роста амплитуды А сигнала х к прямой линии. Построение, дающее зависимость z0(x0) для переменной составляющей треугольной формы, показано на рис. 1.24, а. Оно выполнено в наиболее существенной точке х0 = 1 для А = 1 и А = 4. Из построения видно, что с ростом А растет z0 вблизи зоны нечувствительности и при А оо зависимость z0(x0) принимает вид прямой, проходящей через начало координат.
36
При переменной составляющей прямоугольной формы (рис. 1.24, б) влияние ее на спрямление нелинейной характеристики заметно еще более.
Для нелинейности типа зона нечувствительности наложение на входной сигнал переменной составляющей прямоугольной формы с амплитудой, в п раз превышающей половину ширины зоны нечувст-
Рис. 1.24
вительности, делает для постоянной составляющей нелинейную характеристику линейной на участке шириной, равной п — 1 ширины зоны нечувствительности.
Еще более разителен эффект линеризации характеристики звена типа люфт. В этом случае наложение сигнала треугольной (или прямоугольной) формы обеспечивает линеаризацию при амплитуде сигнала, превышающей половину ширины зоны люфта.
37
Построение, соответствующее этому случаю, показано на рис. 1.25, а, характеристики z0(x0) при различных значениях А — на рис. 1.25, б.
Из построений видно, что наложение переменной составляющей уменьшает влияние нелинейности в характеристиках типа зона нечувствительности и люфт, а при определенных, достаточно больших значениях амплитуды А, придает нелинейным звеньям свойства пропор-
Рис. 1.25
циональных линейных звеньев. Такое придание нелинейному звену свойств линейного звена в результате наложения переменной составляющей носит название вибрационной линеаризации. Для нелинейностей типа ограничение и упор вибрационная линеаризация повышает ширину линейной зоны, что сопровождается уменьшением коэффициента усиления на этом участке.
Рассмотрение вибрационной линеаризации приводит к выводу о пользе применения схем управления, в которых существуют малые автоколебания. Наличие малых устойчивых колебаний в системе может повысить качество переходных процессов и нейтрализовать нежелательное влияние некоторых нелинейностей.
38
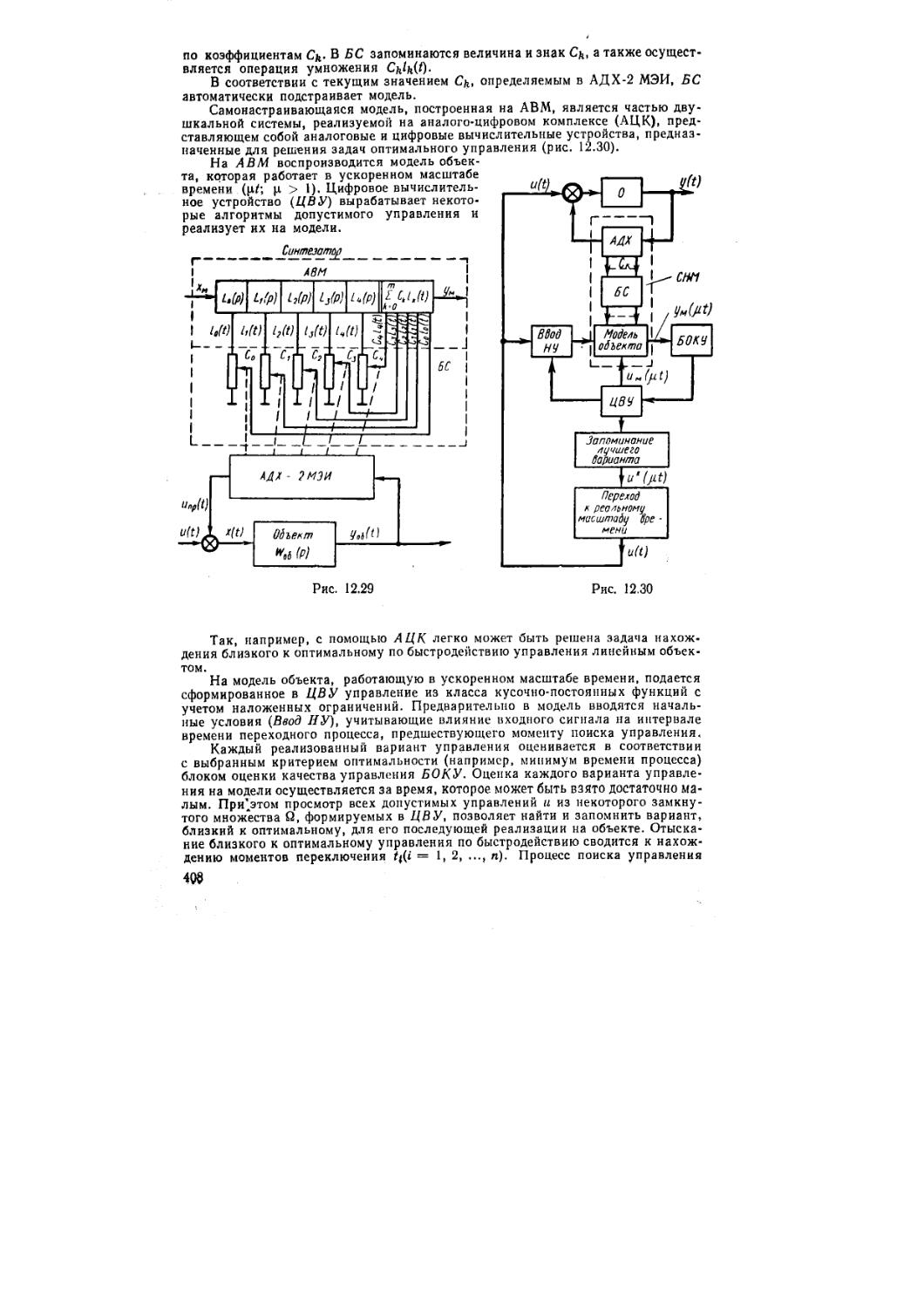
по коэффициентам С^. В БС запоминаются величина и знак Сд, а также осуществляется операция умножения Сд/д(/).
В соответствии с текущим значением определяемым в АДХ-2 МЭИ, БС автоматически подстраивает модель.
Самонастраивающаяся модель, построенная на АВМ, является частью двушкальной системы, реализуемой на аналого-цифровом комплексе (АЦК), представляющем собой аналоговые и цифровые вычислительные устройства, предназначенные для решения задач оптимального управления (рис. 12.30).
На АВМ воспроизводится модель объек-
Рис. 12.29
Рис. 12.30
Так, например, с помощью АЦК легко может быть решена задача нахождения близкого к оптимальному по быстродействию управления линейным объектом.
На модель объекта, работающую в ускоренном масштабе времени, подается сформированное в ЦВУ управление из класса кусочно-постоянных функций с учетом наложенных ограничений. Предварительно в модель вводятся начальные условия (Ввод НУ), учитывающие влияние входного сигнала на интервале времени переходного процесса, предшествующего моменту поиска управления.
Каждый реализованный вариант управления оценивается в соответствии с выбранным критерием оптимальности (например, минимум времени процесса) блоком оценки качества управления БОКУ. Оценка каждого варианта управления на модели осуществляется за время, которое может быть взято достаточно малым. Принтом просмотр всех допустимых управлений и из некоторого замкнутого множества S3, формируемых в ЦВУ, позволяет найти и запомнить вариант, близкий к оптимальному, для его последующей реализации на объекте. Отыскание близкого к оптимальному управления по быстродействию сводится к нахождению моментов переключения ?;(i = 1, 2, ..., п). Процесс поиска управления 408
§ 1.8. ОСОБЫЕ ЗВЕНЬЯ НЕЛИНЕЙНЫХ СИСТЕМ
Рассмотренные типовые звенья далеко не исчерпывают разнообразия звеньев нелинейных систем. Достаточно рассмотреть примеры, приведенные в § 1.2, 1.3 и 1.4, чтобы заметить много иных нелинейных звеньев, не рассмотренных в § 1.6.
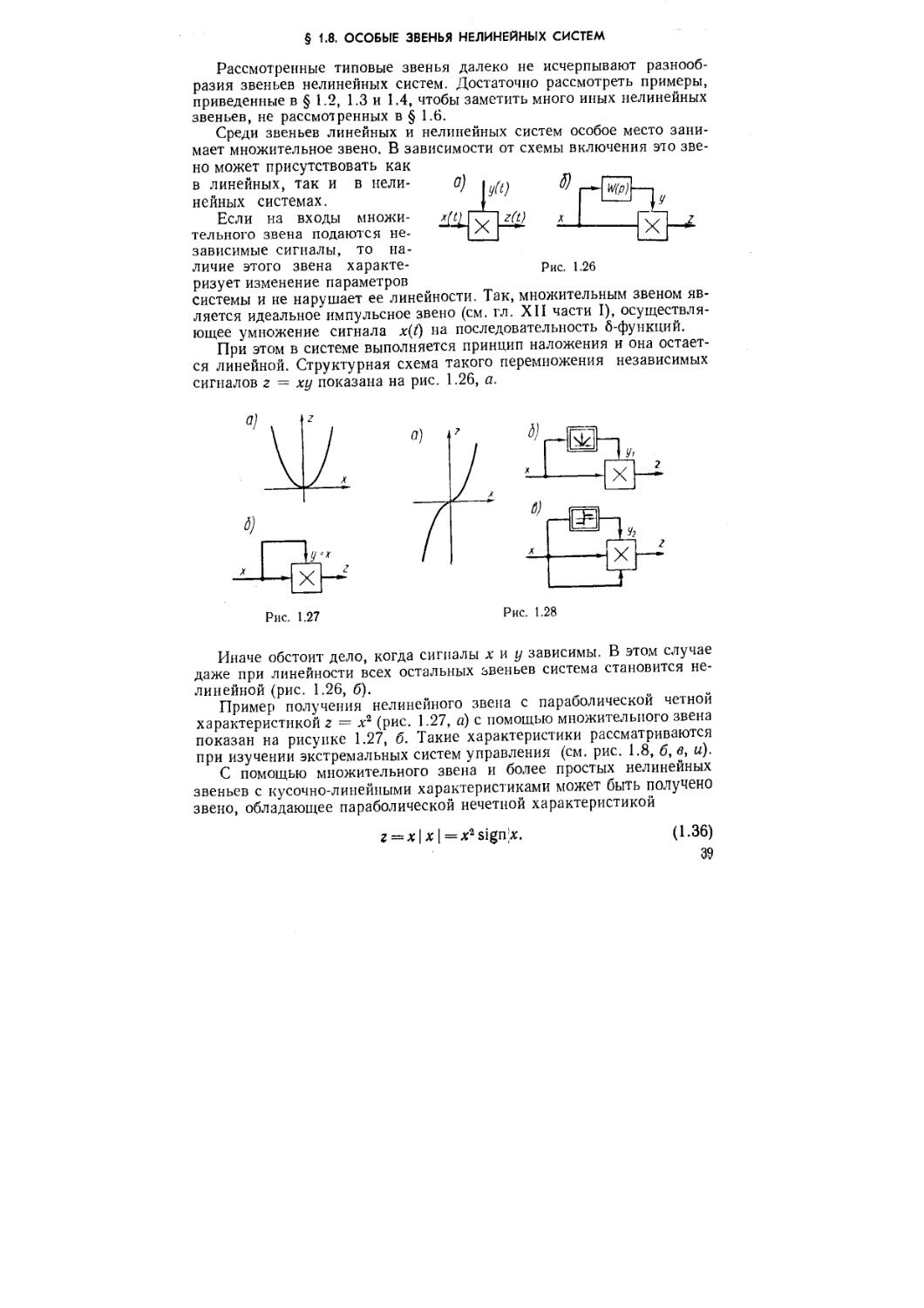
Среди звеньев линейных и нелинейных систем особое место занимает множительное звено. В зависимости от схемы включения это зве
но может присутствовать как в линейных, так и в нелинейных системах.
Если на входы множительного звена подаются независимые сигналы, то наличие этого звена характе-
Рис. 1.26
ризует изменение параметров
системы и не нарушает ее линейности. Так, множительным звеном является идеальное импульсное звено (см. гл. XII части I), осуществляющее умножение сигнала x(t) на последовательность 6-функций.
При этом в системе выполняется принцип наложения и она остается линейной. Структурная схема такого перемножения независимых сигналов z = ху показана на рис. 1.26, а.
Рис. 1.27
Рис. 1.28
Иначе обстоит дело, когда сигналы хну зависимы. В этом случае даже при линейности всех остальных звеньев система становится нелинейной (рис. 1.26, б).
Пример получения нелинейного звена с параболической четной характеристикой г = х2 (рис. 1.27, а) с помощью множительного звена показан на рисунке 1.27, б. Такие характеристики рассматриваются при изучении экстремальных систем управления (см. рис. 1.8, б, в, и}.
С помощью множительного звена и более простых нелинейных звеньев с кусочно-линейными характеристиками может быть получено звено, обладающее параболической нечетной характеристикой
г = х\ х | =x2sign;x. (1.36)
39
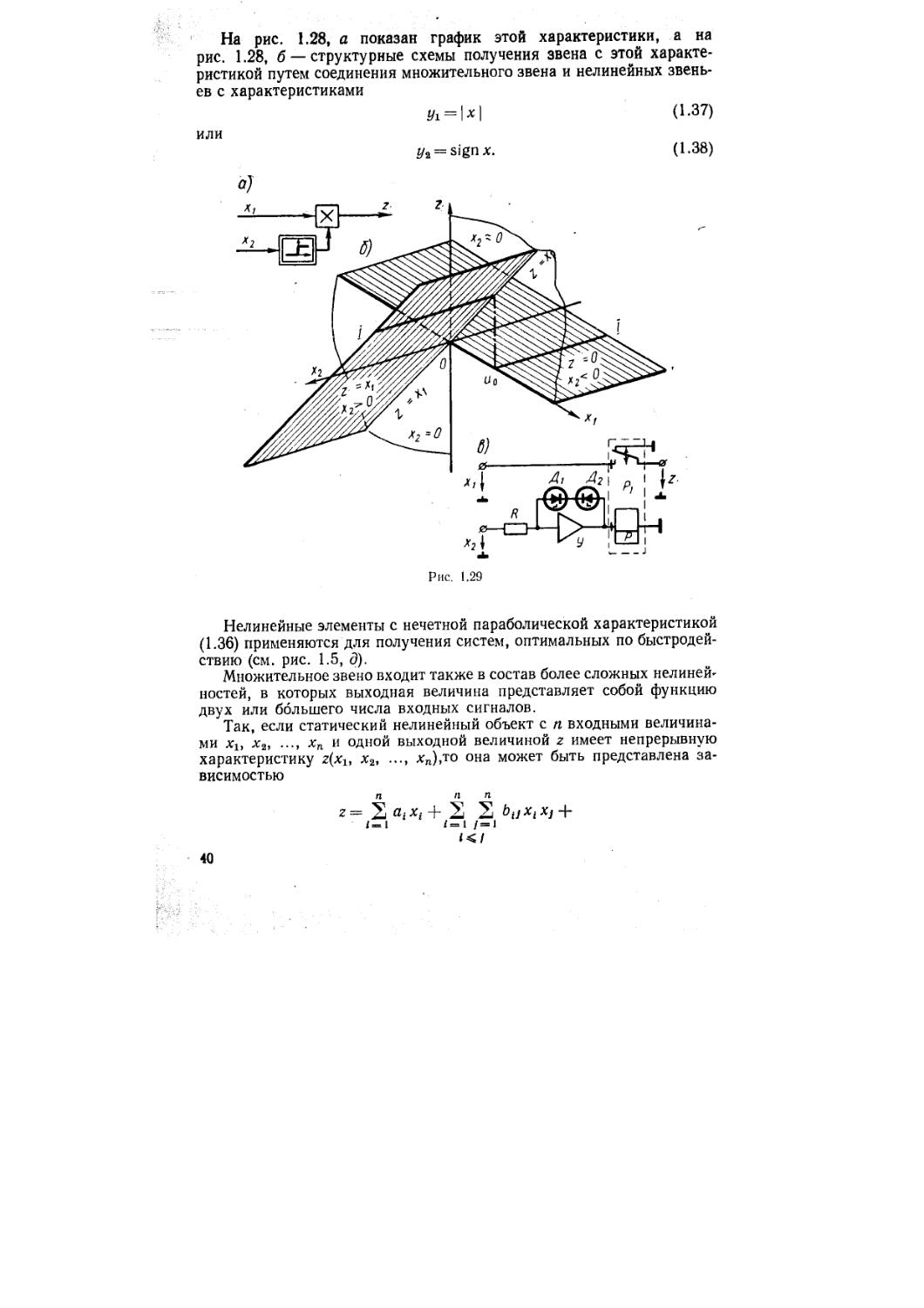
На рис- 1-28. а показан график этой характеристики, а на рис. 1.28, б — структурные схемы получения звена с этой характеристикой путем соединения множительного звена и нелинейных звеньев с характеристиками
Л = И (1-37)
или
z/2 = signx. (1.38)
о)
Нелинейные элементы с нечетной параболической характеристикой (1.36) применяются для получения систем, оптимальных по быстродействию (см. рис. 1.5, д).
Множительное звено входит также в состав более сложных нелинейностей, в которых выходная величина представляет собой функцию двух или большего числа входных сигналов.
Так, если статический нелинейный объект с п входными величинами хь х2, ..., хп и одной выходной величиной z имеет непрерывную характеристику z(xlt х2, , хп),то она может быть представлена зависимостью
п и п
z = 2 а,*,-+ 2 2 bi}xtx} +
i=i t=i /=i
к/
40
п п п
+ 2 2 2 cukxix] xki (i-39)
i.i/=1
/</<*
где ai,bij,cijk—постоянные коэффициенты, причем при i>j а при 1>/ или j>k cijk = O.
Такие объекты рассматриваются в многомерных задачах оптимизации. Уравнение (1.39) соответствует соединению пропорциональных, множительных и суммирующих звеньев.
Некоторые релейные звенья вместе с преобразованием сигнала выполняют функции умножения. Реализация таких звеньев часто бывает проще, чем построение независимого множительного звена.
Рассмотрим релейный преобразователь, структурная схема которого изображена на рис. 1.29, а.
Здесь
z = z(xx, Х2)=Х110(х2) (1.40)
и сигнал на выходе отличен от нуля и равен сигналу на входе только при положительном знаке сигнала х2. Пространственное изображение характеристики релейного преобразователя дано на рис. 1.29, б. Характеристика г(х1у х2) изображается двумя плоскими поверхностями z = Xi при х2 > 0 и z = 0 при х2 < 0. Если — const = £70, то сечение I — / этих поверхностей дает релейную характеристику z — t/0l0(x2).
Схема устройства, имеющего рассматриваемую характеристику, показана на рис. 1.29, в. На ней катушка поляризованного реле Д питается от управляемого сигналом х2 операционного усилителя У, величина сигнала на выходе которого ограничена двумя опорными диодами Дг и Д2, включенными в цепь обратной связи Таким
образом, ток, протекающий через обмотку реле Ръ пропорционален signx2 и реле замыкает нижний контакт при положительном значении х2. Сигнал г на выходе равен входному сигналу хг при лу > 0 и нулю при Ay < 0.
Несколько сложнее реализуется элемент со структурной схемой 1.30, а, имеющий характеристику
z = z(Xj, xa) = x1signx2. (1.41)
В этом случае для получения характеристики, изображенной на рис. 1.30, б, необходимо иметь два реле и Р2, замыкающие контакты при разных знаках сигнала х2 (рис. 1.30, в). Изменение знака сигнала xlt подаваемого в цепь z, в зависимости от знака сигнала х2 осуществляется переключающимися контактами реле Р± и Р2. Для исключения возможности короткого замыкания при ошибочном одновременном срабатывании двух реле в цепь последовательно включаются размыкающие контакты реле и Р2. При jq = const = Uo получаем на характеристике разрывную кривую I — I, соответствующую z = = {/0signx2(CM. рис. 1.30, б).
41
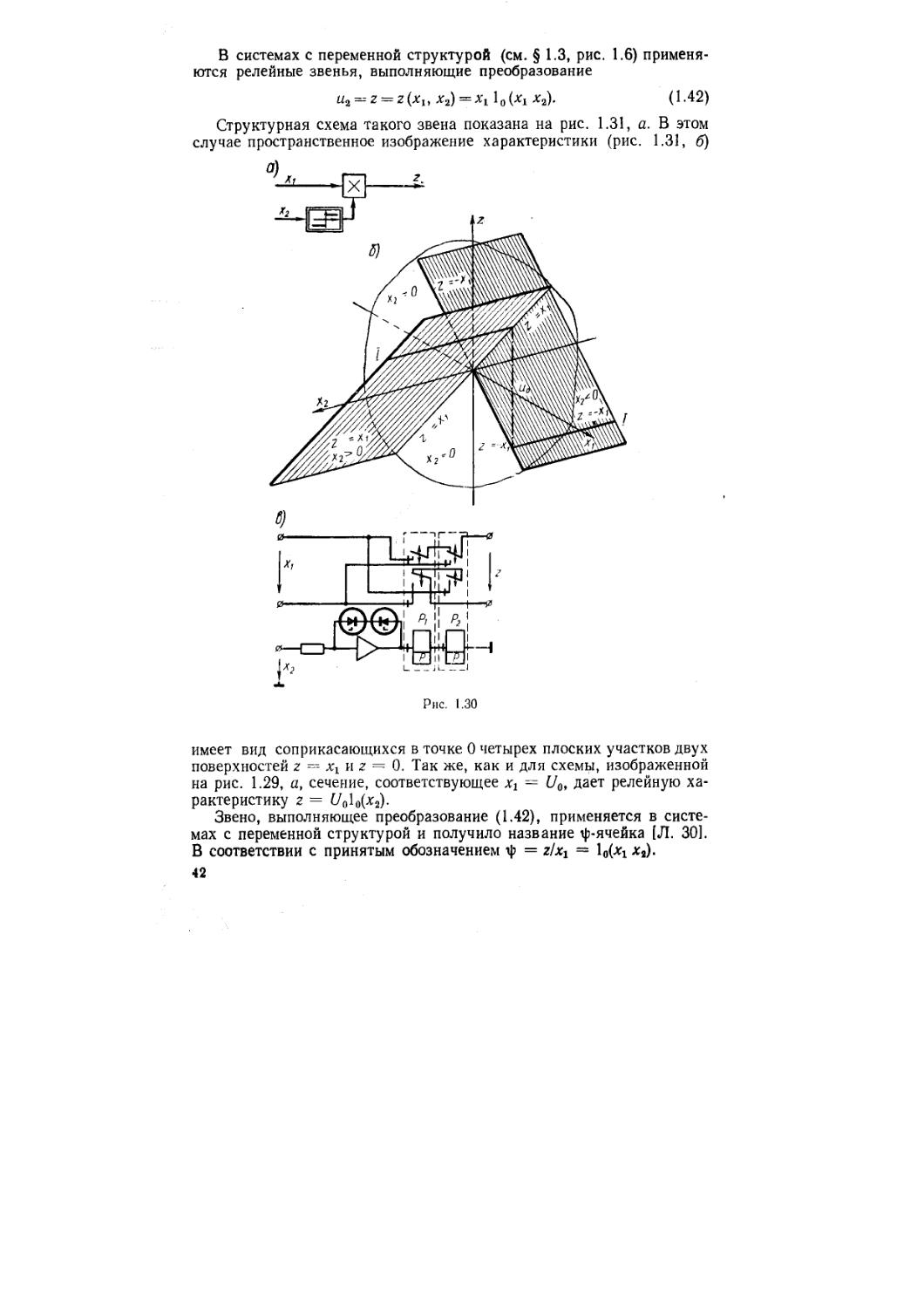
В системах с переменной структурой (см. § 1.3, рис. 1.6) применяются релейные звенья, выполняющие преобразование
u2 = z = z(xl, х2) = х110(х1 х2). (1-42)
Структурная схема такого звена показана на рис. 1.31, а. В этом случае пространственное изображение характеристики (рис. 1.31, б)
а) _________
Рис. 1.30
имеет вид соприкасающихся в точке 0 четырех плоских участков двух поверхностей z =-- xt и z = 0. Так же, как и для схемы, изображенной на рис. 1.29, а, сечение, соответствующее Xi = Uo, дает релейную характеристику z = [/010(х2).
Звено, выполняющее преобразование (1.42), применяется в системах с переменной структурой и получило название tp-ячейка [Л. 30]. В соответствии с принятым обозначением i|? = z/xj — 10(хг х2).
42
Существуют различные реализации ф-ячеек. Два простейших варианта выполнения ^-ячейки показаны на рис. 1.31, в и г.
Первый вариант (см. рис. 1.31, в) выполняется с помощью поляризованного реле Plt контакты которого включены в мостовую вентильную схему так, что при положительном знаке х± этот сигнал передается через нижний вентиль в цепь z только при х2 > 0, а при отрицательном знаке Xi связь с цепью z осуществляется с помощью верх-
а)
Рис. 1.31
него вентиля и имеет место только при х2 < 0. Второй вариант ijj-ячейки выполняется без релейно-контактных элементов и имеет еще более простую схему (см. рис. 1.31, г). В этом случае при положительном знаке сигнала хх его передача через сопротивление t\ и вентиль в цепь z может происходить только при положительном знаке сигнала х2. При этом вторая цепь замыкается через вентиль Bi. В противном случае цепь замыкается через вентиль Ва и z == 0. При отрицательном знаке сигнала его передача по нижней ветви через сопротивление г2 и вентиль В2 может происходить только при отрицательном знаке сигнала хг. Сопротивления г\ и г2 принимаются равными и ограничивают мощность, передаваемую в цепь z. Обычно на выходе z имеется усилитель мощности.
43
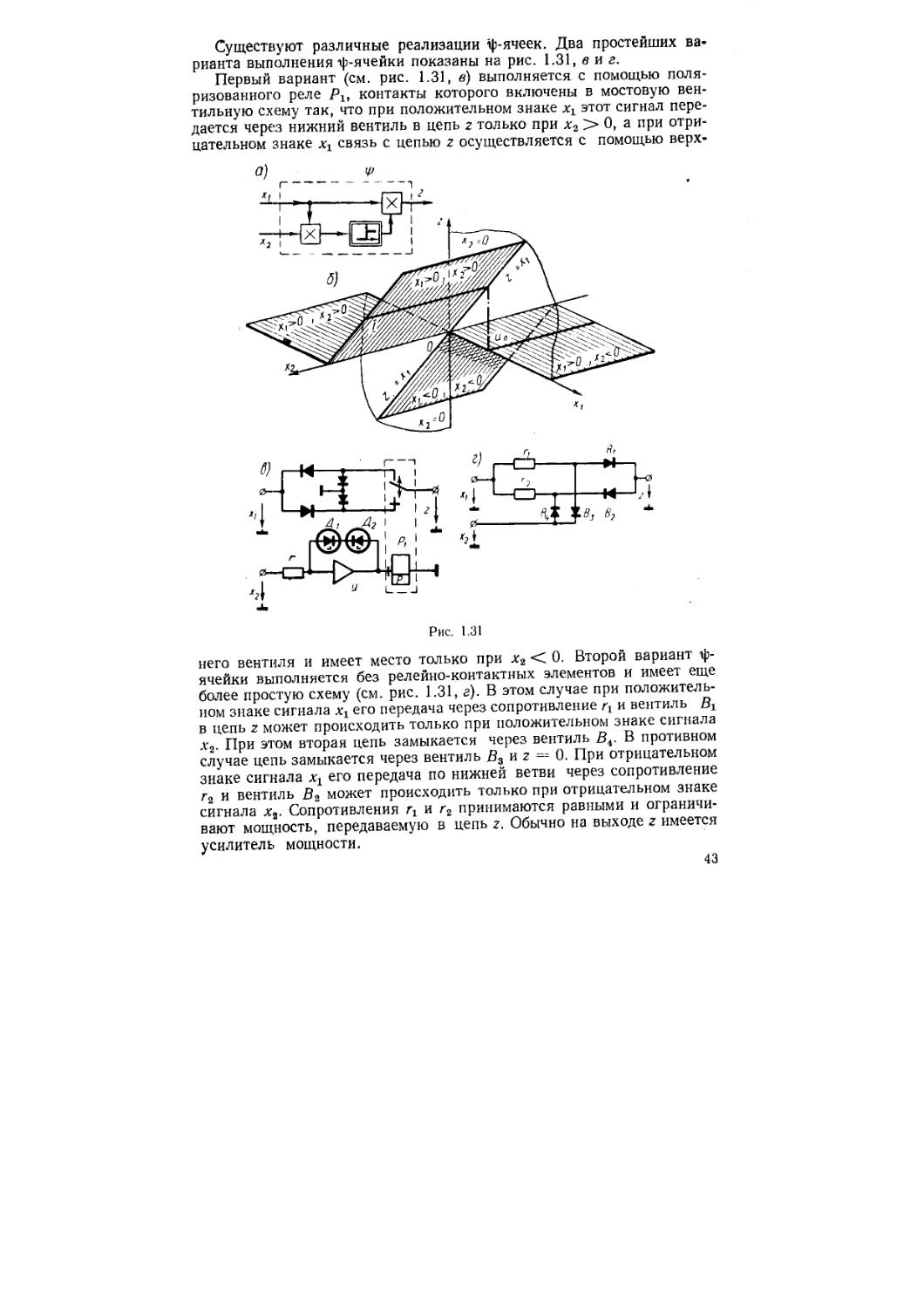
На рис. 1.6 показан один из примеров включения ф-ячейки в систему управления. Если в этой схеме принять = 0, то на вход ф-ячейки поступят сигнал хг и его производная х2 = dxjdt (рис. 1.32, а). В этом случае ф-ячейка вместе с дифференцирующим звеном образует нелинейное звено, преобразующее входной сигнал хх в сигнал z с ха-
рактеристикой, показанной на рис. 1.32, б. Здесь прямая z Xi соответствует условию х1х1>0, а прямая z = 0 — условию xtXi < 0. При х^ = 0 происходит скачок с одной прямой на другую.
Рис. 1.32 Рис. 1.33
Полученное звено z(xj с неоднозначной характеристикой, подобно звену типа упор, обладает обратным (отрицательным) гистерезисом, так как для этой нелинейности jzdXi > 0 (например, цикл абвг на рис. 1.32, б).
С помощью релейных элементов могут быть построены и другие нелинейные звенья с отрицательным гистерезисом. Например, в отличие от двузначной характеристики двухпозиционного реле с положительным гистерезисом, показанной на рис. 1.18, а, могут быть получены аналогичные характеристики, но с отрицательным гистерезисом.
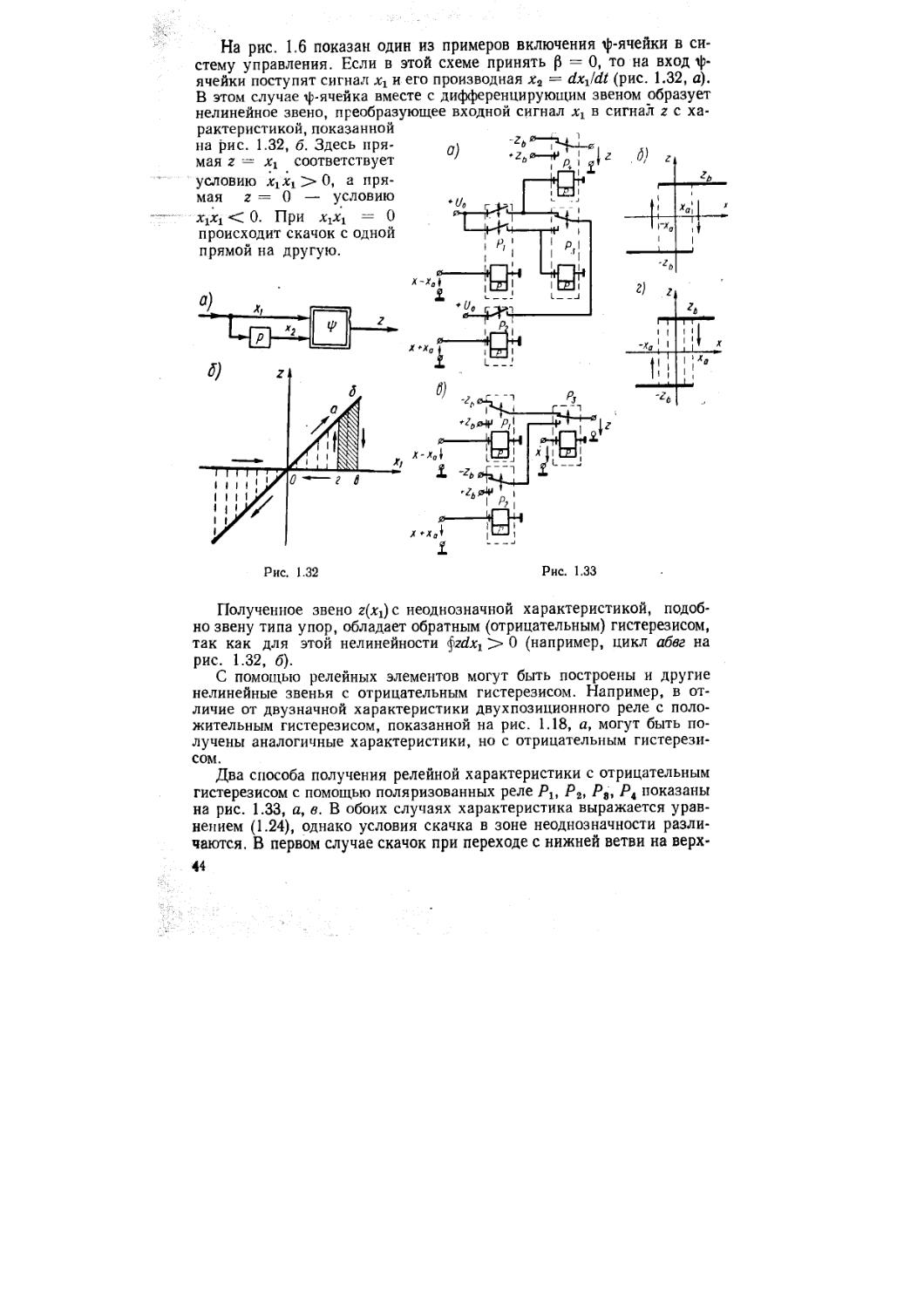
Два способа получения релейной характеристики с отрицательным гистерезисом с помощью поляризованных реле Plt Р2, Р3, Pt показаны на рис. 1.33, а, в. В обоих случаях характеристика выражается уравнением (1.24), однако условия скачка в зоне неоднозначности различаются. В первом случае скачок при переходе с нижней ветви на верх-44
нюю выражается условием х = -±2Ха, z — — гь и dxldt > 0, а с верхней ветви на нижнюю — условием х = ±ха, 2 = +zb и dxldt < О (рис. 1.33,6). Во втором случае скачок происходит также при перемене знака dxldt в любой точке зоны неоднозначности, переход с нижней ветви на верхнюю—при dtx/dt2 >0 и dxldt = 0, а при d2xldt2 <0 и dxldt = 0—в обратном направлении (рис. 1.33, г).
Обе рассмотренные схемы релейных элементов с отрицательным гистерезисом применяются для повышения качества регулирования [Л. 7, 24]. Аналогично могут быть получены и трехпозиционные релейные элементы с отрицательным гистерезисом.
В примерах нелинейных систем (§ 1.2, 1.3 и 1.4), кроме уже рассмотренных звеньев, встречались и другие. Например, в схеме реальной следящей системы (см. рис. 1.2) встречаются нелинейные звенья с синусоидальной характеристикой
2 = ^sin(2nx/x7), (1-43)
где хт — период синусоиды.
При рассмотрении систем экстремального управления встречаются многозначные звенья с пилообразной характеристикой (см. рис. 1.8, е), обеспечивающие запоминание экстремума, и симметричные триггеры с двузначной характеристикой (см. рис. 1.8, ж, з), обеспечивающие преобразование входного переменного сигнала в сигнал с частотой, в два раза меньшей, чем входной сигнал.
ГЛАВА fl
СТАТИКА НЕЛИНЕЙНЫХ СИСТЕМ. СОЕДИНЕНИЕ И ПРЕОБРАЗОВАНИЕ НЕЛИНЕЙНЫХ ЗВЕНЬЕВ
§ 2.1. ОСОБЕННОСТИ ХАРАКТЕРИСТИК СОЕДИНЕНИЙ НЕЛИНЕЙНЫХ ЗВЕНЬЕВ
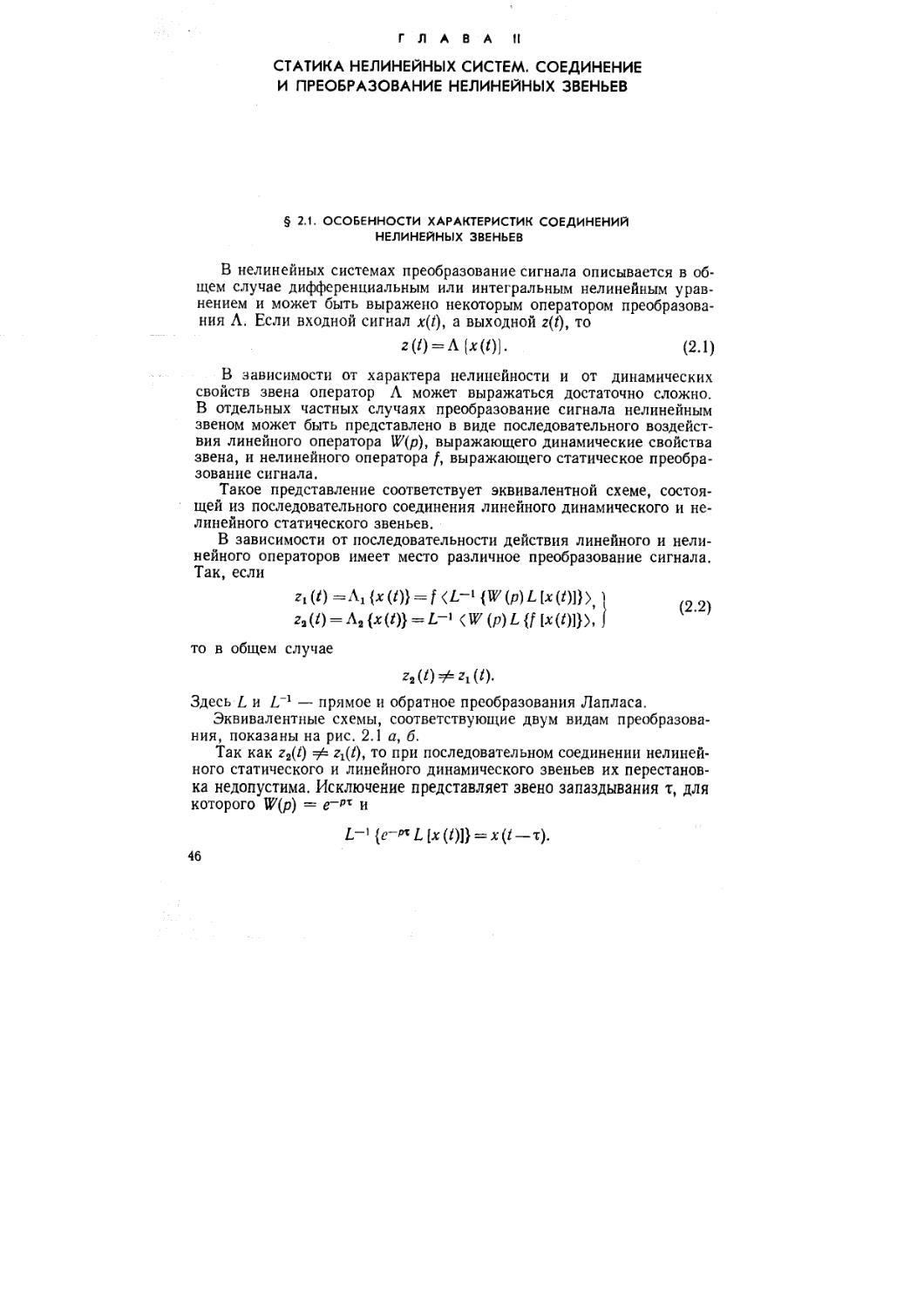
В нелинейных системах преобразование сигнала описывается в общем случае дифференциальным или интегральным нелинейным уравнением и может быть выражено некоторым оператором преобразования А. Если входной сигнал x(f), а выходной 2(f), то
z(Z) = A{x(0). (2.1)
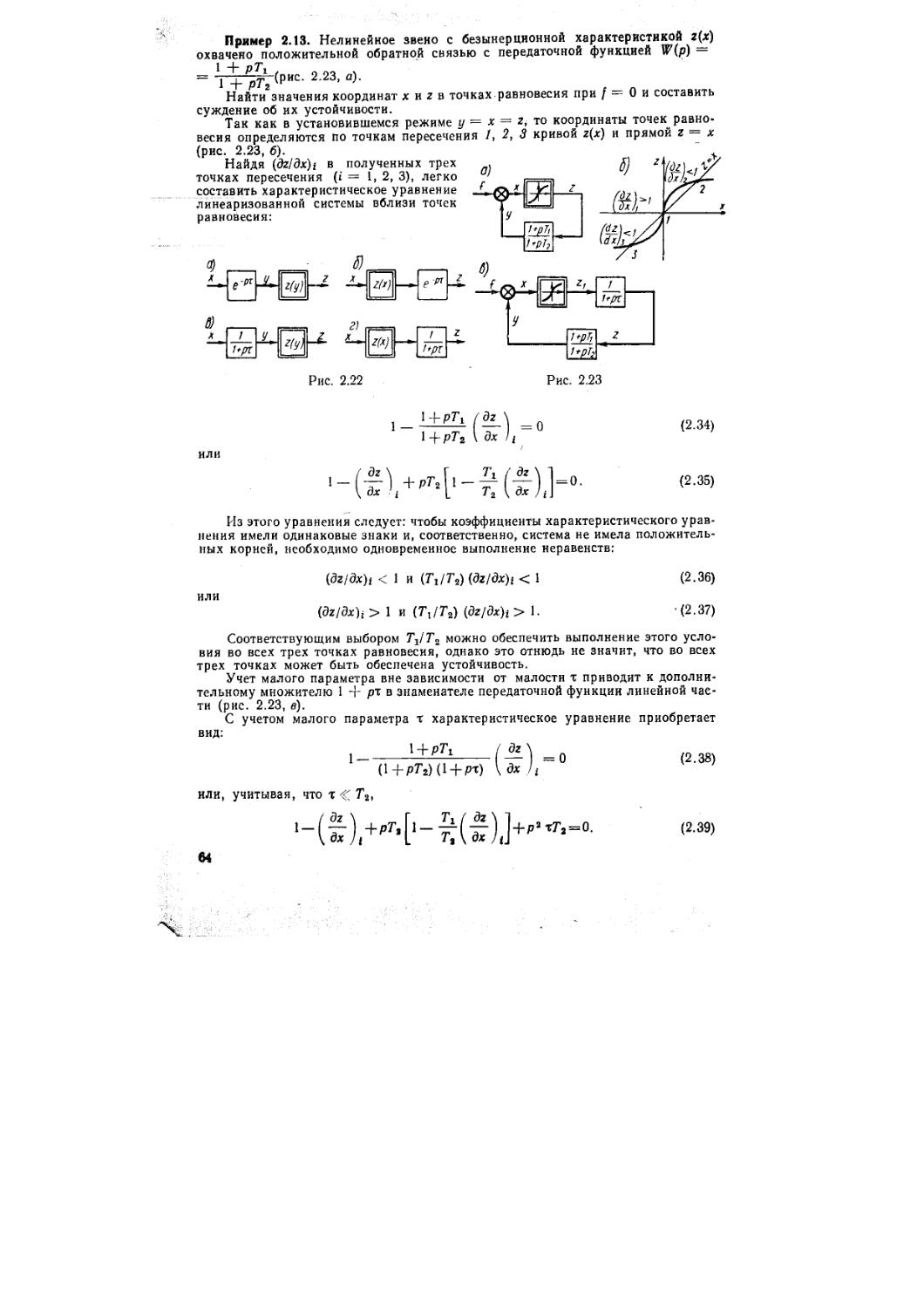
В зависимости от характера нелинейности и от динамических свойств звена оператор А может выражаться достаточно сложно. В отдельных частных случаях преобразование сигнала нелинейным звеном может быть представлено в виде последовательного воздействия линейного оператора W(p), выражающего динамические свойства звена, и нелинейного оператора /, выражающего статическое преобразование сигнала.
Такое представление соответствует эквивалентной схеме, состоящей из последовательного соединения линейного динамического и нелинейного статического звеньев.
В зависимости от последовательности действия линейного и нелинейного операторов имеет место различное преобразование сигнала. Так, если
(t) =AX {х (/)} = f <£-* {W (p) L [x (/)]}>, ) z2(/) = A2{x(/)} = £-> (W (p) L {f [x(t)]})>, j
то в общем случае
Z2 (0 zi (0-
Здесь L и Л-1 — прямое и обратное преобразования Лапласа.
Эквивалентные схемы, соответствующие двум видам преобразования, показаны на рис. 2.1 а, б.
Так как z2(t) zff), то при последовательном соединении нелинейного статического и линейного динамического звеньев их перестановка недопустима. Исключение представляет звено запаздывания т, для которого W(p) = е~рх и
{е-р* Д [х (/)]} = х (/ — т).
46
В этом случае
Zi(/)=f [*(/— т)] =z2(0
(2-3)
и перенос звена запаздывания через нелинейное статическое звено f(x) не изменяет свойств рассматриваемой системы.
Для записи решения уравнения (2.1) относительно переменной x(t) вводится обратный оператор Л-1, соответствующий условию
Тогда
А-1 {Л[х(01| =x(t).
x(t) = Л—1 (z(/)},
(2.4)
Рис. 2.1
если, конечно, решение уравнения (2.2) для заданного z(Z) существует. Если Лг — прямой оператор последовательного соединения линейного динамического и нелинейного статического звеньев
Al [x(0} = f<L-' |№ (р)Е[х(0П>, то обратный оператор
ЛГ> (z(/)} = |f-> [z(/)]j >• (2.5)
Здесь символом /-1 обозначена нелинейная функция, обратная f. При этом /-1|(/(х)} = х. Эквивалентные схемы, соответствующие прямому Л2 и обратному Ад1 операторам, показаны на рис. 2.1, а, в.
При рассмотрении статики нелинейных систем сигналы х и г не зависят от времени, а линейное звено может рассматриваться как пропорциональное IV'(O) и объединяться с нелинейным статическим звеном. Рассмотрение статических задач имеет большое значение в нелинейных системах и представляет основное содержание настоящей главы.
При выводе эквивалентных характеристик различных соединений нелинейных статических звеньев, аналогично рассмотрению соединений линейных звеньев (см. ч. I, гл. V) будем исходить из трех видов соединений:
а) последовательное соединение, ,
б) параллельное согласное соединение,
в) параллельное встречное соединение.
При этом во всех случаях предполагается, что звенья являются направленными и что соединение не изменяет их характеристик. Рассмотрим особенности каждого из этих видов соединения нелинейных звеньев на конкретных примерах.
47
§ 2.2. ПОСЛЕДОВАТЕЛЬНОЕ СОЕДИНЕНИЕ ЗВЕНЬЕВ
При последовательном соединении нелинейных звеньев, так же как и для линейных звеньев, выходная величина одного звена является входной величиной другого.
При последовательном соединении п звеньев (рис. 2.2) для каждого соединения
x/ + i=z; (2.6)
и так как z; = /г (х;), то
(2.7)
xi +
z = w = = zn(x,)
Рис. 2.2
Решая совместно п нелинейных уравнений вида (2.7), получим для последовательного соединения п звеньев следующую нелинейную функцию, выражающую характеристику г(х) = г,^):
п— 1
z(x)=fln(x) = fn{f„_i ... 1Л(х)]}. (2.8)
Определение общей характеристики г(х) может быть сведено к проведенному п — 1 раз нахождению эквивалентных характеристик двух последовательно соединенных звеньев и определению Za^), z3(xj) И Т. Д. ДО Zn(Xj).
Графическое построение характеристики /12(xi) при заданных характеристиках Д(хх) и /2(^2) показано на рис. 2.3. При построении, выполняемом в четырех квадрантах, удобно пользоваться вспомогательным третьим квадрантом с прямой z2(z2), облегчающим переход от оси za в характеристике г2(х2) к оси za в характеристике z2(xi). Производя такое построение п раз, можно найти результирующую характеристику Zn(Xj) = fm(Xi).
Путем построений для конкретных случаев легко убедиться в том, что при изменении последовательности соединений звеньев в большинстве случаев результирующая характеристика изменяется.
Пример 2.1. Найти характеристику последовательного соединения нелинейных звеньев типа зона нечувствительности z1 = fl(x-^ и ограничение z2 = = /2(х2) при различной последовательности их соединения.
На рис. 2.4 выполнены два варианта построения характеристик таких соединений. На рис. 2.4, б построена зависимость z2(xx) = для соединения,
изображенного на рис. 2.4, а. Соответственно на рис. 2.4, г — зависимость г1(ха) = Л.[^а(ха)1 Для соединения, показанного на рис. 2.4, в.
Из построения видно, что в обоих случаях получено звено типа ограничение с зоной нечувствительности, однако значения выходной величины, соответствующей ограничению zc, и входной величины, соответствующей зоне нечувствительности хе, оказываются различными.
48
В первом случае они совпадают со значениями для исходных нелинейностей: ге = гь и хс ха, а во втором случае они существенно отличаются: гс = гъ — — ха, а хс — ха//г2. При z& < ха второе соединение приводит к разрыву цепи
передачи сигнала.
Пример 2.2. В последовательном соединении нелинейного звена с однозначной характеристикой, интегрирующего звена и звена типа упор (рис. 2.5, а) необходимо два нелинейных звена привести к одному нелинейному звену. Такая задача может быть решена, если ввести понятие звена, характеристика которого выражает связь не только между сигналами, но и между их производными или
интегралами по времени.
Если характеристику звена типа упор представить в виде описанной ранее структурной схемы, показанной на рис. 1.20, г, то, заменяя звено z(x) на рис. 2.5, а схемой, изображенной на рис. 2.5, б, и учитывая, что соединенные последовательно интегрирующее и дифференцирующее звенья взаимно компенсируются, получим эквивалентную схему, показанную на рис. 2.5, в. Здесь нели-
нейные звенья х(у) и z(x, г) сое-динены последовательно и могут быть заменены одним нелинейным звеном с характеристикой z(y, z), показанным на рис. 2.5, г.
Построение характеристики z(y, z) выполнено на рис. 2.6.
Сравнивая рис. 2.5, а и рис. 1.3, г, легко убедиться, что полученная в результате преобразования схема (см. рис. 2.5, г) соответствует рассмотренной в § 1.2 рулевой машинке (см. рис. 1.3, б, в,г). Таким образом, приведенное па рис. 2.5, а последовательное соединение трех звеньев выражает связь между положениями заслонки и поршня в пневматической рулевой машинке.
При последовательном соединении двух нелинейных звеньев с характеристиками / и /-1 может оказаться, что
результирующая характери-
49
стика получается линейной, а коэффициент усиления системы равен единице. Два нелинейных звена, последовательное соединение которых образует пропорциональное звено с единичным коэффициентом усиления, будем называть взаимно обратными.
Для двух взаимно обратных нелинейных звеньев с характеристиками zx = /(хх) и г2 = /-1(х2) справедливо равенство
(2.9)
Рис. 2.5
Легко показать, что перемена местами таких звеньев не изменяет общей характеристики системы, т. е. что для них выполняется принцип коммутативности и
ПГ‘(Х2)] = Х2. (2.10)
Действительно, если выполнимо условие (2.9), то f (f-‘ If (*l)]}=f (Xi).
Но так как /(xx) = x2, то, следовательно, это выражение совпадает с (2.10).
Указанное свойство справедливо только для монотонных характеристик, не имеющих горизонтальных или вертикальных участков. Можно показать, что при наличии зоны, в которой dzjdx-i = 0 и dz^ldXi = оо, изменение мест нелинейностей /(хх) и / -1(х2) меняет общую характеристику соединения. 60
Пример}2.3. Найти характеристику нелинейного звена гг = fi(xi), которое необходимо включить последовательно с звеном типа люфт z2 = f2(x2) для того, чтобы результирующая характеристика последовательного соединения была линейной и выражалась прямой z2(xx) = хх.
Для этого из построения известных характеристик z2 = f2(x2) и z2(xx) = xr (рис. 2.7) обратным путем можно найти требуемую характеристику zx = fx(xx). Из приведенного на чертеже построения видно, что для выполнения условия z2(xx) = xi необходимо, чтобы две характеристики гх = /х(хх) и г2 = )2(х2) в Двух квадрантах координат хх, zx = х2, г2 представляли собой кривые, зеркально симметричные относительно оси zx = х2.
Полученная в результате построения кривая г1“/1(х1) является обратной по отношению к характеристике типа люфт и
21= fl (*l)=/2~‘ (Xi)-
Звено с такой характеристикой может быть применено для компенсации вредного действия нелинейности типа люфт.
§ 2.3. ПАРАЛЛЕЛЬНОЕ СОГЛАСНОЕ СОЕДИНЕНИЕ ЗВЕНЬЕВ
При параллельном согласном соединении нелинейных звеньев на их входы подается одна и та же величина, а выходные величины суммируются с соответствующими знаками.
Если параллельно соединены п звеньев, то входная величина
х = х} =х2= ... = хп, (2.11)
а выходная величина
z=fW=2 (2.12)
1=i
Из выражения (2.12) видно, что характеристика параллельного согласного соединения ряда нелинейных звеньев может быть получена
51
путем непосредственного суммирования соответствующих ординат составляющих характеристик.
Схема параллельного согласного соединения п нелинейных звеньев показана на рис. 2.8.
Пример 2.4. Найти характеристику параллельного согласного соединения нелинейных звеньев типа зона нечувствительности 2Х и z2 соответственно с зонами нечувствительности ха1 и ха2 и крутизной и й2 (рис. 2.9, а, б).
Рис. 2.9
На рис. 2.9, в построена характеристика z(x) = Zj+ г2 в случае, когда в суммирующем узле сигналы гг и z2 складываются с одинаковыми знаками (рис. 2.9, г). Соответственно на рис. 2.9, д построена характеристика г(х) = г2 — г2 для случая, когда в суммирующем узле сигналы z2 и z2 складываются с разными знаками (рис. 2.9, е).
Из рассмотрения участка характеристики (рис. 2.9, б) при х > ха2 видно, что если fej — k2, то наклон характеристики равен нулю и она соответствует звену типа зона нечувствительности с ограничением.
Пример 2.5. Звено с характеристикой 21(х1), полученное в примере 2.3 (см. рис. 2.7), представить в виде параллельного согласного соединения двух более простых типовых звеньев.
Рассматривая звено типа упор с прямоугольной характеристикой (см. рис. 1.21, б), легко заметить, что параллельное соединение этого звена с пропорциональным звеном, имеющим единичный коэффициент усиления, дает звено с требуемой характеристикой Zj^J.
При параллельном согласном соединении двух нелинейных звеньев и соответствующем выборе их характеристик может оказаться, что результирующая характеристика линейна и коэффициент усиления 52
системы равен единице. Такие два нелинейных звена, параллельное согласное соединение которых образует пропорциональное звено, будем называть взаимно дополнительными. Разумеется, что оба звена равноценны в этом соединении и перемена их местами ничего не изменяет.
Для двух взаимно дополнительных нелинейных звеньев справедливо равенство
!1(х) + ^(х) = х (2.13)
или
= (2.14)
Из равенства (2.14) следует, что условием взаимной дополнительности характеристик Zi=A(x) и гъ~Мх) является равенство расстояний
Рис. 2.11
а и b от этих характеристик по оси z до прямой г = х/2 (рис. 2.10). Это условие будем называть эквидистантностью по оси z относительно прямой z = х/2.
Если дана нелинейная характеристика f(x), то дополнительную характеристику будем обозначать 7(х). Уравнение (2.13), связывающее две взаимно дополнительные характеристики, в этом случае имеет вид:
f (*)+/(*) = *• (2.15)
Пример 2.6. Найти характеристику f(x), дополнительную по отношению к заданной характеристике f(x) типа ограничение с линейной зоной хъ = 1 /2 и единичной крутизной.
Проводя прямую z = х/2 (штриховая линия на рис. 2.11), из условия эквидистантности по оси 2 относительно этой прямой получаем требуемую характеристику f(x). Эта характеристика описывает звено типа зона нечувствительности с ха = хь= 1/2.
Таким образом, звенья типа зона нечувствительности и ограничение при ха — хъ и единичной крутизне имеют взаимно дополнительные характеристики.
§ 2.4. ПАРАЛЛЕЛЬНОЕ ВСТРЕЧНОЕ СОЕДИНЕНИЕ ЗВЕНЬЕВ
При параллельном встречном соединении двух звеньев (рис. 2.12) выходной сигнал первого звена (прямой связи) подается на вход второго звена (обратной связи), а выходной сигнал второго звена с соответствующим знаком суммируется сообщим входным сигналом и по-53
дается на вход первого звена. Общим выходным сигналом является выход звена прямой связи. Обратная связь в зависимости от знака сигнала, поступающего в суммирующий узел, может быть отрицательной или положительной.
Соответственно уравнения замыкания имеют вид:
Xj = х ± з2,
(2.16)
где знак плюс соответствует положительной обратной связи, а знак минус — отрицательной.
При этом
г = з1 = х2. (2-17)
Для построения общей ха-
рис 2.12 рактеристики параллельного
встречного соединения z(x) необходимо уравнения (2.16) и (2.17) рассматривать совместно с характеристиками нелинейных звеньев и /2(х2).
Тогда, преобразуя (2.16) с учетом (2.17), получим
x=fr'(z) ±^(г). (2.18)
В этом уравнении знак минус соответствует положительной, а знак плюс—отрицательной обратной связи.
Рис. 2.13
По уравнению (2.18)’легко построить общую характеристику г(х) или x(z).
Пусть характеристики ^(хг) и f2(x2) имеют вид графиков, построенных на рис. 2.13, а, б. Тогда для получения г(х) необходимо построить кривые/^(xj) = z(x1), f2~r(z^ =z(z2) и затем алгебраически сложить абсциссы этих кривых в соответствии с уравнением (2.18).
Для отрицательной обратной связи на рис. 2.13, в выполнено построение путем суммирования абсцисс.
Пример 2.7. Построить характеристику звена типа ограничение с зоной нечувствительности Zj = fiiXi), охваченного отрицательной (рис. 2.14, а) или положительной (рис. 2.14, б) жесткой обратной связью с коэффициентом усиления ka.
54
В этом случае характеристика обратной связи линейна z2 — fe0x2 или х2 = «= z2/kg. Построение результирующей характеристики для обоих случаев показано на рис. 2.14, в, г.
Как видно из построения, в первом случае результирующая характеристика однозначна и соответствует звену типа ограничение с зоной нечувствительности. Пределы линейной зоны усиления при этом возрастают с хь— ха до х^ — — ха, где хщ == хь + 2bk0. Во втором случае результирующая характеристика при k0Zb > хь — ха становится неоднозначной и соответствует трехпозиционному реле с гистерезисом (см. § 1.5). В этом случае ширина петли гистерезиса равна Ха Xfj‘2 ~ k0;'h X* хй.
Пример 2.8. То же, что и в примере 2.7, но только для звена типа двухпозиционное реле без гистерезиса с характеристикой, выражаемой уравнением (1.20).
В этом случае, производя построения, аналогичные примеру 2.7, легко убедиться, что при отрицательной обратной связи при —k0Zb <Z х <Z^ozb Для каждого значения х не существует определенного значения z.
Реле находится в режиме непрерывных переключений, частота которых зависит от паразитных параметров системы. При этом постоянная составляющая сигнала на выходе может с достаточной точностью совпадать с линейным законом z = x/k0.
Такой вибрационный режим носит название скользящего режима.
При положительной обратной связи общая характеристика становится двузначной и имеет вид зависимости, показанной на рис. 1.18, а, для которой ха = ~~ ^агЬ-
Подобно рассмотренным ранее соединениям звеньев можно поставить вопрос: какова должна быть нелинейность в цепи обратной связи г2(х2) для того, чтобы коэффициент передачи равнялся единице или 2(х) = х? Будем полагать, что знак обратной связи отрицателен.
Тогда уравнение (2.18) принимает следующий вид:
х = 2 = Л- (г) (2.19)
55
или в соответствии с (2.15)
/2(г) = 2-Л->(2) = Л->,(2). (2.20)
Пример 2.9. Пусть нелинейная характеристика прямой связи zx = ^(дц) выражается зависимостью (рис. 2.15, а)
( (2.21)
( кхг — 1) Ха при Xt > Ха- j
Найти характеристику нелинейной обраткой связи, компенсирующей нелинейность прямой связи, т. е. делающей систему линейной (г -- х).
На рис. 2.15, б согласно уравнению (2.20) построена характеристика х2 = = /2"’(г2). Как видно из построения, она получается нз характеристики fi(Xi) на основании условия эквидистантности но оси х относительно прямой z == 2х. Эта характеристика выражается уравнением
0 при Х2 ' ха', fe —1
—;----(х2—ха) при х2 > ха.
k
В отличие от параллельного согласного соединения перемена местами нелинейностей прямой и обратной связи существенно изменяет общую нелинейную характеристику системы. Если в рассматриваемом примере поменять местами нелинейности прямой и обратной связи и построить суммарную характеристику, то это построение изобразится графиками, показанными на рис. 2.15, в. Как видно из построения, результирующая характеристика z(x) существенно отличается от полученной ранее прямой z(x) = х (см. рис. 2.15, б).
§ 2.5. СТАТИЗМ НЕЛИНЕЙНЫХ СИСТЕМ РЕГУЛИРОВАНИЯ
С помощью описанных выше методов может быть легко построена зависимость между статизмом системы регулирования и внешним воздействием. Будем рассматривать построение этой зависимости на примере системы автоматической стабилизации напряжения генератора постоянного тока, рассмотренной в § 1.2 (см. рис. 1.1).
Статическая система непрерывного регулирования в установившемся режиме может быть описана соединением двух звеньев прямой и обратной связи. Для структурной схемы системы регулирования (см. рис. 1.1, д) такое соединение имеет вид схемы, показанной на 66
рис. 2.16, а. На ней г(х) представляет собой суммарную характеристику последовательного соединения нелинейных звеньев, соответствующих усилителю ну(х), возбудителю ев(иу) и генератору z = = ег(ев). Падение напряжения, обусловленное током нагрузки гягя = = /, представляет собой внешнее возмущение, которое вычитается из э. д. с. генератора z = ег. Разность z — f = ин представляет собой регулируемую величину, которая после делителя напряжения с коэффициентом k преобразуется в у = kutl и сравнивается с напряжением уставки Ео. Рассогласование х = Ео — у является входным сигналом цепи обратной связи.
Задачей расчета статизма системы регулирования по возмущающему воздействию является определение зависимости y(f), выражающей влияние нагрузки на регулируемую величину.
Эта' зависимость находится как характеристика параллельного встречного соединения линейного k и нелинейного z(x) звеньев.
Построение выполнено на рис. 2.16, б и в. Оно вытекает непосред-стенно из уравнений замыкания нп -- ylk = z(y) — / при у == Ео — х. График y(f) получен путем суммирования абсцисс характеристики прямой связи у = —kf и обратной связи y(z). При этом / определялось как г(у) — ylk. На рис. 2.16, г полученная зависимость y(f) вынесена отдельно.
Как видно из построения, величина рассогласования может быть существенной даже при отсутствии внешнего воздействия (/ ~ 0).
В этом случае соответствующим выбором уставки Ей или коэффициента k погрешность 6 между требуемым (эталонным) значением регулируемой величины уй и фактическим значением у может быть сни
57
жена и при некотором заданном значении f равняться нулю. Так, например, если поставить условие, чтобы при f = 0 величина у = уп, то это можно всегда обеспечить соответствующим выбором, k или Ео. На рис. 2.16, г показан график зависимости y(f) и обозначены величины статизма или рассогласования в установившемся режиме х = Ео — — у и погрешности 6 = у0 — у.
Выбором рабочей точки на характеристике z(x) при f = О (рис. 2.16, б) на участке с наибольшей крутизной можно обеспечить необходимую точность в определенных пределах изменения воздействия /.
Для уменьшения влияния воздействия f на регулируемую величину у можно применить воздействие по возмущению и включить в цепь сравнения дополнительный сигнал коррекции а/, показанный штриховой линией на рис. 2.16, а. Если выбрать а = k, то корректирующий сигнал нейтрализует влияние воздействия / в цепи объекта и регулируемая величина станет независимой от воздействия /. В этом случае характеристика y(j) принимает вид горизонтальной прямой у = у0 и статизм х = х0 не зависит от величины нагрузки. Такая коррекция по возмущению в схемах генераторов носит название компаундирования.
Если в цепи обратной связи имеется интегрирующее звено и при х = 0 коэффициент усиления цепи не равен нулю, то характеристика г(х) принимает вид вертикальной прямой, проходящей через точку х — 0.
В этом случае построение дает прямую у = Ео и величина статизма оказывается равной нулю. Этого и следовало ожидать на основании линейной теории, изложенной в гл. IX части I.
§ 2.6. ПРЕОБРАЗОВАНИЕ НЕЛИНЕЙНЫХ СТРУКТУРНЫХ СХЕМ
Для линейных систем преобразование структурных схем рассмотрено в § 6.2 части I. Введение в систему нелинейных звеньев несколько ограничивает возможности структурных преобразований. Однако и в этом случае они имеют большое значение для синтеза и построения моделей различных систем.
Рассмотрим правила преобразования линейных систем и возможность их распространения на нелинейные системы.
Описанные в части I правила сводятся к четырем видам преобразований:
1) перемещение суммирующего узла через узел разветвления;
2) перемещение линейного звена через узел разветвления;
3) перемещение линейного звена через суммирующий узел;
4) перемещение линейного звена через другое линейное звено.
Невозможность распространения правил структурного преобразования линейных систем на нелинейные системы связана с невыполнением в нелинейных системах двух принципов: принципа наложения (суперпозиции) и принципа коммутативности. Невыполнение принципа наложения исключает возможность применения третьего вида 58
преобразования, а невыполнение принципа коммутативности — применение четвертого вида преобразований. Что же касается первых двух видов преобразований, то они не противоречат этим двум принципам и, следовательно, вполне могут быть применены для преобразования нелинейных систем.
Для нелинейных систем полностью могут быть применимы два правила перемещения суммирующего узла через узел разветвления [Л. 33, стр. 1391.
Первое правило. При перемещении суммирующего узла через узел разветвления по направлению ветвления (или по направлению переда-
Рис. 2.17
чи сигнала) необходимо в отходящих от разветвления ветвях добавить такие же, как и перемещаемый узел, суммирующие узлы.
Второе правило. При перемещении суммирующего узла через узел разветвления против направления ветвления (или против направления передачи сигнала) необходимо в отходящих от разветвления ветвях добавить суммирующие узлы, отличающиеся от перемещаемого узла знаками суммируемых величин.
Оба эти правила не связаны с условиями нелинейности и их применение достаточно подробно описано при рассмотрении линейных систем.
Применительно к нелинейным системам правила перемещения звена через узел разветвления могут формулироваться следующим образом:
Третье правило. При перемещении звена через узел разветвления по направлению ветвления (по направлению передачи сигнала) необходимо в отходящих от узла ветвях добавить звенья с оператором перемещаемого звена.
Четвертое правило. При перемещении звена через узел разветвления против направления ветвления (против направления передачи сигнала) необходимо в отходящих от узла ветвях добавить звенья с обратными операторами перемещаемого звена.
59
Пример 2.10. Переместить безынерционное нелинейное звено г(х) через узел разветвления по направлению ветвления.
На рис. 2.17, а, б показано применение третьего правила для перемещения нелинейного звена с кусочно-линейной характеристикой.
Пример 2.11. Переместить инерционное нелинейное звено, состоящее из соединенных последовательно линейного W(p) и нелинейного z = f(y) звеньев, через узел разветвления против направления ветвления.
Применение четвертого правила для этой цели показано на рис. 2.17, в, г.
Здесь нелинейная характеристика у = обратная по отношению к z -== = Ку), а IV-*(Р) = 1/U7(p).
Рис. 2.18
На основе понятия обратных операторов можно показать, что схема с прямой Лг и обратной Л2 связями, изображенная на рис. 2.18, а, эквивалентна схеме (рис. 2.18, б), построенной из звеньев с обратными операторами Л^1 и Л2-1, если звено Л^1 включено вместо звена Л2, а звено Л2-1 — вместо звена AP
Действительно, записав уравнение замыкания
2 =Aj [х—Л2 (z)] (2.26)
Рис. 2.19
или
Ax-> (z) = x—Л2 (z), (2.27)
после элементарных преобразований получим
z = A2->[x-A1->(z)J, (2.28)
что соответствует схеме, показанной на рис. 2.18, б.
Таким образом на основе введения обратных операторов можно сформулировать еще одно правило преобразования, справедливое как для линейных, так и для нелинейных структурных схем.
Пятое правило. В системе с отрицательной обратной связью можно менять местами звенья, включенные в цепи прямой и обратной связи, с заменой операторов звеньев обратными.
Применение этого правила важно в том случае, когда необходимо перейти от нереализуемых или трудно реализуемых структурных схем к схемам реализуемым.
60
Пример 2:12. Для схемы (рис. 2.19, а), состоящей из пропорционального звена k, охваченного обратной связью по знаку производной, т. е. последовательным соединением дифференцирующего звена р и нелинейного звена z(tii), найти лучше реализуемую эквивалентную схему, состоящую из звеньев с обратными характеристиками.
Применение пятого правила приводит к эквивалентной схеме (рис. 2.19, б).
Нелинейные характеристики m(z) и г(ш) могут быть описаны кусочно-линейными зависимостями
аг при | г [ - z,t;
аго+Р(г— го) при г > га;
— ага + Р(г + га) при г < — га
(2.29)
при |ш|< ага;
(2.30)
При а -► 0 и Р -> оо эта характеристика переходит в г = zasign w.
Так как реализация интегрирующего звена осуществляется точнее, чем дифференцирующего звена, схема, изображенная на рис. 2.19, б, более удобна для выполнения.
§ 2.7. ЭКВИВАЛЕНТНЫЕ СХЕМЫ НЕОДНОЗНАЧНЫХ НЕЛИНЕЙНОСТЕЙ
В § 2.4 было показано, что для наиболее часто встречающихся двузначных нелинейностей может быть построена эквивалентная схема, представляющая собой параллельное встречное соединение безынерционных звеньев с линейными и однозначными нелинейными характеристиками. Для неоднозначных нелинейностей, например, типа люфт и упор, также могут быть построены эквивалентные схемы, состоящие из линейных и нелинейных звеньев с однозначными характеристиками. В этих случаях многозначность нелинейных характеристик приводит к повышению порядка дифференциального уравнения, описывающего звено, и к появлению лишней постоянной интегрирования, отражающей предысторию системы и выражающей неоднозначность нелинейной характеристики.
Так, в структурных схемах нелинейностей типа люфт и упор, показанных на рис. 1.19, г и 1.20, г, неоднозначность характеристики получила выражение в интегрирующих звеньях структурных схем. Однако представление нелинейных уравнений (1.26) и (1.29) этими структурными схемами отнюдь не единственное, тем более, что в таких схемах содержатся нелинейные звенья, выражающие функцию двух переменных, которые могут быть представлены в виде соединения более простых звеньев.
61
Рассматривая уравнения (1.26) и (1.29), можно для них составить ряд структурных схем, содержащих линейные и однозначные нелинейные звенья.
Схемы, показанные на рис. 2.20, а и 2.21, а, получены путем рассмотрения люфта и упора в виде соединения линейных пропорционального и интегрирующего звеньев и нелинейного звена asign х, коэффициент усиления dz/dx которого стремится к 0 или к оо в зависимости от величины сигнала, поступающего на вход.
В первом случае это нелинейное звено ведет себя как разрыв цепи, что соответствует неоднозначным участкам характеристики, обусловленным значением постоянной интегрирования С на выходе интегрирующего звена 1/р,
Для люфта (рис. 2.20, а)
zi
а для упора (рис. 2.21, а)
zx =k! (%!—С).
Рис. 2.20
Рис. 2.21
Во втором случае нелинейное звено вместе с линейной схемой образует идеальную следящую систему, которая в случае люфта следит за приращением входного сигнала — z-Jkx = ±хй, а в случае упора имеет выходной величиной рассогласование zx = ± Z* и обеспечивает отсутствие изменения сигнала на выходе при изменениях входного сигнала.
Путем применения пятого правила преобразования нелинейных структурных схем легко от схем а перейти к схемам б, показанным на рис. 2.20 и 2.21. Обе эквивалентные схемы точно соответствуют рассматриваемым нелинейностям только в идеальных условиях, когда можно с достаточной точностью принимать, что тангенс угла наклона на разных участках характеристики стремится к нулю или к бесконечности. Учет действительных значений коэффициентов усиления дает возможность оценить погрешности, имеющие место при переходе от идеальных к реальным схемам. При этом большое значение имеют малые паразитные параметры схем, влияние которых особенно важно учитывать при рассмотрении предельных случаев и при переходе от рассчитанных схем к их реализации.
62
§ 2.8. МАЛЫЕ ПАРАМЕТРЫ РЕАЛЬНЫХ БЕЗЫНЕРЦИОННЫХ ЗВЕНЬЕВ
При рассмотрении пропорциональных и дифференцирующих линейных звеньев в части I курса уже отмечалось, что всякие реальные направленные звенья всегда характеризуются некоторым отставанием сигнала на выходе по отношению к сигналу на входе. Если частота входного сигнала невелика, то этим отставанием можно пренебречь и считать, что в статических звеньях выходной сигнал мгновенно следует за входным. Однако при больших скоростях сигналов такое допущение перестает быть справедливым и неучет отставания сигнала на выходе звена может привести к ошибочным выводам.
В линейных системах правильный учет малых параметров обычно обеспечивается выполнением условия lim У7(/со) = О, показывающим, (0-* оо
что порядок числителя W(p) меньше порядка знаменателя и, следовательно, передаточная функция W(p) составлена с учетом отставания сигнала на выходе по отношению к входу.
При рассмотрении нелинейных систем обычно бывает нежелательно повышение порядка дифференциального уравнения и при составлении приближенного уравнения легко отбросить малые параметры, имеющие существенное значение.
Если нелинейное статическое звено описывается уравнением
z(t) = z[y(t)], (2.31)
то при учете малого запаздывания т между входом и выходом уравнение (2.31) следует представить в виде
z (t) = z [x(Z — т)]. (2.32)
Структурная схема, соответствующая этому уравнению, показана на рис. 2.22, а или б. Обе эти схемы равноценны (см. § 2.1) и выражают запаздывание на время т сигнала на выходе по отношению к сигналу, который был бы в случае статической нелинейности.
Если разложить в ряд
ерг=1+рт + (Р1)1 + ... (2.33)
и пренебречь более высокими степенями разложения, то учет запаздывания на время т можно приближенно выразить в виде инерционного звена с постоянной времени т, включаемого либо до безынерционного звена z(z/), либо после него (рис. 2.22, в, г).
Теперь уже схемы, изображенные на рис. 2 22, в и а, оказываются не эквивалентными, однако при достаточной малости величины т каждая из них может служить для необходимого учета малого параметра направленного звена.
Неучет малых параметров может привести к неверным выводам относительно устойчивости различных линейных и особенно нелинейных схем. Теоретический анализ влияния малых параметров на устойчивость нелинейных систем впервые был проведен А. А. Андроновым и С. Э. Хайкиным в 1935 г.
63
Пример 2.13. Нелинейное звено с безынерционной характеристикой г(х) охвачено положительной обратной связью с передаточной функцией W(p) =
= 1 + рТъ (Рис‘ о).
Найти значения координат х и г в точках равновесия при / = 0 и составить суждение об их устойчивости.
Так как в установившемся режиме у = х = z, то координаты точек равновесия определяются по точкам пересечения 1, 2, 3 кривой z(x) и прямой z = х
(рис. 2.23, 6).
Найдя (dz/dx)i в полученных трех точках пересечения (i = 1,2, 3), легко составить характеристическое уравнение линеаризованной системы вблизи точек равновесия:
Рис. 2.22
! 1+РЛ
или
+рТ’2[1-\ дх ' i
Из этого уравнения следует: чтобы коэффициенты характеристического уравнения имели одинаковые знаки и, соответственно, система не имела положительных корней, необходимо одновременное выполнение неравенств:
или
(dz/dx)t < 1 и (Г1/Т2) (dz/dx)i < 1
(dz/dx)i > 1 и (7\/Т2) (dz/dx)t > 1.
(2.36)
(2.37)
Соответствующим выбором 7\И\ можно обеспечить выполнение этого условия во всех трех точках равновесия, однако это отнюдь не значит, что во всех трех точках может быть обеспечена устойчивость.
Учет малого параметра вне зависимости от малости т приводит к дополнительному множителю 1 + рт в знаменателе передаточной функции линейной части (рис. 2.23, в).
С учетом малого параметра т характеристическое уравнение приобретает вид:
1 + р7\ ( дг\
1 —----------------- — = 0 (2.38)
(1 + рТг) (1 + Р^) \ дх I i
или, учитывая, что т« Т2,
( дг \ Г 71 ( dz \ 1
(2-з9)
64
В этом случае условием устойчивости является выполнение следующих двух неравенств, обеспечивающих положительный знак всех коэффициентов характеристического уравнения:
(дг/дх'ц < 1 и (Л/Л) (<Эг/5х)г < 1. (2.40)
Отсюда следует, что точка 1 всегда неустойчива, так как в ней не выполняется первое из этих неравенств. В зависимости от отношения T-JT^ точки 2 и 3 могут быть как устойчивыми, так и неустойчивыми.
Рассмотренный пример показывает, как, пренебрегая малым запаздыванием, можно сделать неверный вывод об устойчивости состояния равновесия, в действительности оказывающегося неустойчивым.
Если правильно учесть малые параметры в схемах, показанных на рис. 2.20, а, б и 2.21, а, б, то их эквивалентность нарушится. Учет малых параметров приводит к появлению звеньев с малой инерционностью в замкнутом контуре обратной связи, которые влияют на следящий режим на различных участках характеристик. С учетом малых параметров схемы (см. рис. 2.20, а, б и 2.21, а, б) описываются не взаимно обратными операторами и их поведение в реальных условиях несколько различается.
§ 2.9. МОДЕЛИ НЕЛИНЕЙНЫХ ЗВЕНЬЕВ
В части I (§ 5.7) были рассмотрены модели типовых линейных звеньев, получаемые с помощью включения различных линейных сопротивлений в цепь решающего (операционного) усилителя. Аналогичный принцип может быть применен и при моделировании нелинейных звеньев.
Если в цепь решающего усилителя (рис. 2.24, а) включить нелинейные двухполюсники / и 2, для которых зависимость между напряжением и током выражается некоторым оператором Л, в общем случае зависящим от протекания процесса во времени i(f) = Л[ц(/)1, то такая схема может быть применена для моделирования самых различных нелинейностей.
Так, если коэффициент усиления идеального решающего усилителя /г->оо, а его входное сопротивление бесконечно велико, то для токов входной цепи 1Х и цепи обратной связи iz (см. рис. 2.24, а) может быть записано следующее очевидное равенство:
t; = A1(x) = iz = A2(Z), (2.41)
откуда
г^Л^ЧАЛх)]. (2.42)
Таким образом, выбирая нелинейные двухполюсники с соответствующими характеристиками, можно получить операционный усилитель У, воспроизводящий заданную нелинейную функцию. Он обычно изображается на схемах так, как показано на рис. 2.24, б.
Пример 2.14. Пусть нелинейный двухполюсник имеет схему, показанную на рис. 2.24, в. Характеристика ix — f(x) зависит от опорных напряжений Xj и хг на потенциометрах Пг и Пг и имеет вид графика (рис. 2.24, г). Она состоит 3 Зак. 447 65
из трех участков, соответствующих различным условиям пропускания тока вентилями В, и Вг. -
Рассматриваемый двухполюсник включен в цепь 1 (см. рис. 2.24, о), а в цепь 2 обратной связи —сопротивление г«. , .„
Так как ix = f^x) = f(x) и iz = h(z) = z/r3, то по формуле (2.42) получим l=r,f(x) (2.43)
и, следовательно, характеристика соответствует звену типа зона нечувствительности.
Рис. 2.24
При хг = х2 и гг = г2 она симметрична и ее наклон в области пропускания dz/dx = k„=r3/r1 = г3/г2. (2.44)
При kH -* оо характеристика соответствует звену типа asign [см. (1.196)].
Если рассматриваемый двухполюсник включить в цепь 2 обратной связи, а в цепь 1 — сопротивление г3, то ix = х/г3 и i2 = f2(z) = f(z). По формуле (2.42) получим
г=Г'Ш (2.45)
При Xj = х2, г\ = г., и rt/r3 = r2/r3 -► 0 характеристика соответствует звену типа sign [см. (1.19а)].
С помощью различных нелинейных двухполюсников, включаемых в цепь операционного усилителя, могут быть получены модели самых различных нелинейностей.
Модели нелинейных звеньей получили широкое распространение при исследовании нелинейных систем управления с помощью аналоговой вычислительной техники.
66
ГЛАВА III
ДИНАМИКА НЕЛИНЕЙНЫХ СИСТЕМ. ФАЗОВАЯ ПЛОСКОСТЬ
§ 3.1. УРАВНЕНИЯ НЕЛИНЕЙНЫХ ДИНАМИЧЕСКИХ СИСТЕМ. ПРОСТРАНСТВО ИХ СОСТОЯНИЙ
К динамическим системам относятся такие физические системы, поведение которых в ходе времени t может быть описано системой дифференциальных уравнений
фДуб dyddt\ dy2ldt;...; dsy2/dts
...-,ym\ dym/dt;...-, dPym/dtP;t)=-O,
(3.1)
число которых m конечно.
В начале части I курса показано (см. § 1.1—1.4 и в особенности стр. 7—9), что система автоматического управления может рассматриваться как объект (рис. 3.1, а), т управляемых переменных которого Уй У2’, • ; Ут связаны с внешними воздействиями —управляющими сигналами и = (и^ и2; ....; ип), контролируемыми возмущениями (нагрузкой) z = (zx; z2; .... zr) и неконтролируемыми возмущениями (помехами) f=(A; f2,...; /й),—системой из т дифференциальных уравнений. Поскольку внешние воздействия u, z и f в каждом конкретном случае работы системы определенные, хоть и не всегда заранее известные функции времени, система автоматического управления удовлетворяет математическому описанию (3.1). Исключение, вообще говоря, составляют системы с распределенными параметрами и запаздыванием, однако в ряде практически важных случаев их анализ тоже удается свести к исследованию системы типа (3.1).
Систему (3.1) можно преобразовать в эквивалентную ей систему дифференциальных уравнений первого порядка
(Pj(dyj/dt- yr; у2‘,...; yN-,t)=Q; / = 1,2,
(3.2)
число уравнений которой N = r + s+ ...+p равно сумме порядков уравнений по каждой из т управляемых переменных. Такому представлению отвечает схема, изображенная на рис. 3.1, б.
Из многочисленных рассмотренных ранее примеров математического описания автоматических систем следует, что система уравнений (3.2) получается непосредственно по математическим описаниям элементов (звеньев) системы управления и просто согласуется с ее структурной схемой, а вывод нелинейной системы из т уравнений (3.1) сопряжен с известными трудностями [Л. 1]. Уравнения (3.2), как пра-3* 67
вило, удается разрешить относительно производных dyjldt и записать в форме
y}^dyjldt^P}(yi, у2;(3.3)
или в векторной (матричной) записи
v-= у =Р(у;О = Р(Ус). (3.3а)
где v = у — {yi, у2\ •••; Уи\ —вектор фазовой скорости; Р — векторная функция вектора состояния системы ус.
Такую форму записи уравнений называют нормальной формой Коши.
Ч
r*J
Рис. 3.1
В геометрической теории дифференциальных уравнений (динамических систем), часть результатов которой служит основой дальнейшего изложения, рассматривают именно системы типа (3.3). Такую форму записи мы и будем считать стандартной формой точного математического описания нелинейной системы управления.
Пример 3.1. На основании общего описания характеристик нелинейных элементов, приведенного в § 1.2 и структурной схемы рис. 1.3, вывести уравнения (3.3) для системы автоматической стабилизации курса (гирорулевого).
Введем стандартные обозначения основных переменных dipt
= —77 1 Ул = У at
и перейдем от передаточной функции линейного блока 1 (см. рис. 1.3) к его дифференциальному уравнению
d2 ф, ЛЬ,
+ М *1 17 (/) + 6 Ш
После этого, исходя из рис. 1.3, г, можно непосредственно записать
4- = Pi at
dy<>
68
ГДЙ
Р1ЛУг)~У2\ Ръ'ЛУъ’ Ул'< = { —щ + ^1 [/(0 + ^ (</з)1|1
1 1
Рз(У1,Уз'< t)=--v {—k2[yi_ — ^0 (t)] — k3y3- у3}-, N=3.
Многозначная нелинейность типа люфт z б(</3) подробно рассмотрена в §1.5, а сложная нелинейная характеристика гиродвигателя (см. рис. 1.3,6) v(y, Из); Т = У(У1'< Уз< 0 621Фо(О — И11 — кзУз Приведена на рис. 1.3, в.
Если правые части уравнений (3.3) Р^уй у2, , у/, ...; Ум', t) непрерывны и конкретно заданы, то состояние системы и дальнейшее протекание процесса управления может считаться однозначно определенным, если известны значения N зависимых переменных у^ в некоторый фиксированный момент времени t tt. Эти значения можно трактовать как координаты [у0 = I; уг; у2, ...; ум\ точки, называемой изображающей точкой в N + 1-мерном пространстве состояний исследуемой системы, или как положение вектора состояний ус. Изменение состояния в процессе управления соответствует изменению координат изображающей точки, т. е. ее перемещению по некоторой линии — траектории в пространстве состояний. Система (3.3) определяет связь между вектором состояния системы ус и компонентами dy^dt = dy^ldy^ вектора скорости его изменения v = dyjdt = dyjdyo. Решение (интеграл) системы (3.3), который всегда можно вычислить с помощью современных цифровых или аналоговых машин, дает численные значения координат траектории.
Основная и принципиальная трудность исследования нелинейных динамических систем состоит не в трудоемкости вычисления решений нелинейных дифференциальных уравнений, а в том, что эти решения могут качественно зависеть от начального состояния. Приведем простейший пример: если остановить маятник заведенных часов, то они будут стоять неограниченно долго, несмотря на малые вибрации поверхности, к которой они прикреплены. Но стоит отклонить маятник на некоторый конечный угол, больший чем некоторое граничное значение, и затем отпустить, как часы начнут работать и будут идти неопределенно долго при условии своевременного возобновления завода.
Такое поведение невозможно в случае линейной системы, и этот пример показывает, что механически вычислять конкретные процессы в нелинейной системе без ее предварительного обдуманного иссле -дования, вообще говоря, не имеет смысла. Далее, требование непрерывности функций Ру даже в примере 3.1 оказывается слишком жестким и условия перехода через точки их разрыва должны быть заданы по физическим соображениям.
В исследовании этих вопросов геометрическое представление решений системы (3.3) как траекторий изображающей точки в пространстве состояний обладает несомненными преимуществами. Первое и наиболее очевидное преимущество достигается при исследовании си-
69
ь(У1>у»г •••; Уы>'
стёмы 6 отсутствии переменных внешних воздействий и изменения ее параметров в зависимости от времени.
В этом случае исследования автономной динамической системы время не входит явно в правые части дифференциальных уравнений Pj = Pj(yi, t/a Ун) и переход к пространству позволяет уменьшить число уравнений системы (3.3) на единицу. Действительно, рассматривая координату уг как независимую переменную, можно перейти к системе
, d^н-1 р -
и =—=-—х----------------------=/•
dyi Р1(Уй Уг, •••; yN)
k= 1,2,... ,N — 1,
содержащей N — 1 дифференциальное уравнение первого порядка, простым делением второго и последующих уравнений системы (3.3) на первое.
В векторной записи системе (3.4) соответствует уравнение
У'=Р(У). (3.4а)
Систему (3.4) называют системой уравнений интегральных кривых в N-мерном фазовом пространстве, а след перемещения изображающей точки в этом пространстве, однозначно соответствующий изменению состояния системы в ходе времени, — фазовой траекторией.
Следующее, не менее значительное преимущество фазового пространства—возможность наглядного разграничения областей, в каждой из которых система ведет себя качественно одинаково и с течением времени достигает одного и того же установившегося режима работы. Установившиеся режимы не зависят от начального состояния. Положениям равновесия (покоя) соответствуют изолированные особые точки пространства, а периодическим режимам — замкнутые изолированные траектории, по которым изображающая точка может перемещаться неограниченно долго.
Следует также упомянуть, что все переменные, определяющие состояние реальной системы, физически ограничены. Поэтому нет практической необходимости рассматривать удаленные области фазового пространства. В то же время в процессе исследования системы можно наметить искусственные ограничения физических переменных (скоростей, ускорений, напряжений, токов и т. п.), требуемые по соображениям безопасности ее работы, и обеспечить выполнение этих ограничений устройствами защиты и блокировки.
Пример 3.2.• Вывести уравнения (3.4) интегральных кривых системы стабилизации курса (см. пример 3.1) в автономном режиме навигации ф0(/) = Фо = = const; f(t) = 0.
Определить размерность и конфигурацию ограничений фазового пространства.
При заданных условиях система дифференциальных уравнений фазовых траекторий, полученная в примере 3.1, примет вид
dyi/dt = y2,
dy2/dt =1/Т1[—у2-\- 6 (уз)];
dya/dl = v [fe2 (фо — уг) — ka ya, z/a].
70
Разделив второе и третье уравнения этой системы на первое, получим систему из двух уравнений:
dy? _ 1 [ — f/a +fei Д (Уз)1 .
dt/l Т\ У 2
dya_ v[k2 Сфо —У1) —fe3 Уз; Уз!
dyi У2
Фазовое пространство трехмерно у => (у^, у2, у3} (рис. 3.2). Поскольку отклонение от курса на целое число оборотов возвращает объект в первоначальное положение, можно рассматривать в фазовом пространстве полосу, ограничен-
ную вертикальными плоскостями у, = ф0 + л и у2 = ф0 — л, выйдя на одну из которых изображающая точка должна быть перенесена на другую без изменения координат i/г и Уз и затем продолжать дальнейшее движение.
Координата у3 ограничена жесткими упорами: —уь ‘С Уз < Уь (см. рис. 1.3, б), поэтому фазовое пространство заключено внутри горизонтальных плоскостей уя = Уй и Уз = —Уь, Дойдя до одной из которых изображающая точка может лишь перемещаться по ней до момента возврата внутрь ограниченного пространства.
Скорость поворота объекта у2 не имеет жестких ограничений, однако если рассматривать только его движение, обусловленное отклонением руля д(у3), то в силу ограничения у3 и эта координата окажется ограниченной /г16(—уь) < Уг < М(Уь)-
Эскиз ограниченного фазового пространства системы представлен на рис. 3.2.
Основы геометрической теории динамических систем как математической дисциплины заложены в знаменитых мемуарах Анри Пуанкаре «О кривых, определяемых дифференциальными уравнениями» 1881 г.
Инициатива применения ее методов (Л. 76, 91] к физическим системам принадлежит акад. Л- И. Мандельщтаму. Работы его учеников:
71
акад. А. А. Андронова, акад. Л. С. Понтрягина, А. А. Витта, Г. С. Горелика, С. Э. Хайкина [Л. 9,40,67), а также Б. В. Булгакова [Л. 22] обеспечили отечественной теории колебаний мировую известность. Многие из ее задач получили развитие в трудах Е. А. Леонтович, Н. Н. Баутина, А. Г. Майера, Ю. И. Неймарка, Н. А. Железнова и др.
Из- работ зарубежных ученых следует отметить Н. Минорского, С. Лефшеца [Л. 58], И. Флюгге-Лотц [Л. 120] и В. Каннингхэма [Л. 44].
В теории нелинейных систем автоматического регулирования заслуживают особого внимания работы А. А. Фельдбаума [Л. 114, 116, 119], А. И. Лурье [Л. 61], М. А. Айзермана и Ф. Р. Гантмахера [Л. 1, 2], В. В. Петрова [Л. 88], Г. М. Уланова [Л. ПО], В. В. Казакевича [Л. 41].
Существенно новые результаты по улучшению качества систем автоматики за счет применения специальных нелинейных методов управления и реализующих их элементов достигнуты А. А. Фельдбау-мом [Л. 117], Л. С. Понтрягиным и его учениками [Л. 90, 91], С. В. Емельяновым [Л. 39].
Наглядность геометрического представления быстро падает с ростом размерности исследуемого пространства. Одновременно возрастает трудоемкость самого анализа.
Классические [Л. 9, 10] точные исследования динамических систем, описываемых невырожденным дифференциальным уравнением третьего порядка N = 3, имеют большое теоретическое и познавательное значение, однако безусловный практический смысл представляет точное исследование динамических систем при N 2. При этом система уравнений интегральных кривых (3.4) вырождается либо в одно дифференциальное уравнение, либо в набор независимых дифференциальных уравнений первого порядка.
В следующих параграфах рассматриваются именно такие системы.
§ 3.2. ФАЗОВАЯ ПЛОСКОСТЬ И ЕЕ СВОЙСТВА
Существенные для инженерной практики результаты применения точных геометрических методов связаны с такими системами, исследование которых сводится к анализу набора дифференциальных уравнений первого порядка по одной независимой переменной:
у.' = ^ = Р^УйУ^.
dyt Рik (Ui, Уч)
(3.5)
В этом случае пространство состояний вырождается в г двумерных поверхностей (листов), границы которых заданным образом соединяются друг с другом. Такая поверхность называется двумерной многолистной поверхностью.
Закон движения изображающей точки в пределах каждого листа задается соответствующей номеру этого листа зависимостью из набора (3.5) — уравнением интегральных кривых, а геометрия поверхности, границы листов и условия перехода с одного листа на другой опреде-72
Ляются дополнительными уравнениями, введенными по физическим соображениям.
Простейший вид таких систем—системы, исследуемые на фазовой плоскости.
В пределах каждого плоского ее листа уравнение интегральных кривых имеет вид*
Р2 (У1'> у2) (3 6)
dyi Pl (У1, уг)
где Рг и Р2 — функции однозначные, непрерывные и дифференцируемые по обеим переменным z/x и у2 на всем листе плоскости.
К числу таких систем относятся системы, описываемые дифференциальным уравнением первого порядка (ух = /), и системы, описываемые дифференциальным уравнением второго порядка, которое не содержит заданных функций времени (автономные системы второго порядка).
При помощи специального выбора фазовых переменных к системам (3.6) могут быть приведены дифференциальные уравнения систем второго порядка в некоторых простых конкретно заданных неавтономных режимах работы при импульсном, скачкообразном, равномерном и мо-ногармоническом воздействиях.
Движение изображающей точки по фазовой траектории должно однозначно соответствовать изменению состояния исследуемой системы в функции времени yr = yi(t); у2 — уз (О-
В параметрической форме уравнение интегральных кривых (3.6) записывается как система дифференциальных уравнений фазовых траекторий:
dy1/dt=P1(y1,y2);)
dy2/dt = P2(y!, у2), J или в векторной форме
N = dytdt = Р(у), (3.7а)
где вектор фазовой скорости может быть задан своими компонентами
v = dy/dt = Рх (t/j; у2) i + Р2 (ух; у2) j
или модулем v = ds/dt = УРг2 + Р22 и направлением а = arctg х; к = Р21Р1-
Система (3.7) более информативна, чем уравнение (3.6). Она и ее решения (фазовые траектории) дают возможность однозначно и непосредственно оценить направление и характер движения изображающей точки и, следовательно, правильно судить об устойчивости и качестве процессов в системе.
Из уравнения (3.6) следует, что в любой обыкновенной точке фазовой плоскости направление касательной к интегральной кривой х =
* Исторически сложилось [Л. 10] несколько иное обозначение фазовых координат: х и у и, соответственно, Р(х, у) и Q(x, у).
73
— dy2ldyt имеет только одно определенное значение, поэтому фазовые траектории нигде не пересекаются друг с другом.
В особых точках фазовой плоскости обе функции Р± и Р2 одновременно обращаются в нуль. Их координаты (yla; у23) (s — а, Ь, ..., т) можно вычислить, решив систему алгебраических или трансцендентных уравнений:
РЛУГ,Уг) = 0-,] (38)
Р2(УъУ,) = 0.]
Количество особых точек т определяется конкретным видом уравнений (3.8) Для линейной системы
Р1 (Уit Уз) ~ У1 + ^12 Уч\ 1 (3 9)
Pi (У11 Уз) = ^2о+ ^21 У1 + ^22 Уз I
в ограниченной области фазовой плоскости существует только одна особая точка, координаты которой у13 и у2з вычисляются по формуле (3.67).
Из (3.7) следует, что в особых точках одновременно обращаются в нуль обе компоненты фазовой скорости dyjdt = dy2ldt = 0. Это значит, что изображающая точка оказывается неподвижной. Состояние системы в отсутствие внешних воздействий не может измениться.
Таким образом, особые точки соответствуют положениям (состояниям) равновесия исследуемой системы управления.
Каждая из особых точек представляет собой отдельное (как говорят—тривиальное) решение системы дифференциальных уравнений (3.7)
#1(0 = #13 = const,
#2(0 = #2S= const
и должна рассматриваться как отдельная фазовая траектория.
На фазовой плоскости сравнительно просто построить поле направлений касательной к интегральным кривым. Уравнение изоклины — геометрического места точек, в которых угол наклона вектора фазовой скорости а = arctg(dy2/dyi) имеет одно и тоже фиксированное значение и
х = dy2ldyt = [Р2 (уй y^VlPx (yr, #а)1 = const (3.10)
получается из дифференциального уравнения (3.6), если приравнять правую его часть численно заданному значению параметра семейства х. Для удобства, в нескольких точках построенной изоклины отмечают соответствующее ей направление касательной, проводя короткие отрезки прямой, расположенные под углом а = arctg х к оси абсцисс. Повторяя эту процедуру для последовательно задаваемых значений параметра, строят семейство изоклин и поле направлений, подробность (густота линий) которого зависит от конкретно поставленных задач исследования и требуемой точности их решения.
Из условия однозначности функций Р± и Р2 в пределах одного листа фазовой плоскости следует, что изоклины пересекаются только в его особых точках.
74
Обычно абсциссой фазовой плоскости считают основную переменную исследуемой системы, например, сигнал с выхода объекта управления, а ординатой у2 — скорость изменения этой переменной у2 = = dyjdt = у±. Пример характерных траекторий на фазовой плоскости этого типа изображен на рис. 3.3. При этом закон движения изображающей точки приобретает особенно простую форму:
у2' = dyi!dy1 =.[Р2 (г/ь г/2)]/у2 (3.11)
или
dy^/dt^y^, dy2ldi = P2(yi,y2).
(3-12)
Рис. 3.3
Для такой фазовой плоскости справедливы следующие простые правила (см. рис. 3.3):
1. Согласно уравнению (3.11) изоклина вертикальных касательных совпадает с осью абсцисс у2 = 0, фазовые траектории пересекают ее под прямым углом и отклонение уг(1) изображающей точки на этой оси принимает экстремальное значение.
2. Особые точки расположены только на оси абсцисс там, где ее пересекает изоклина горизонтальных касательных Р2(У1, у2) = 0.
3. Поскольку положительным значениям скорости у2 = у± > 0 соответствует рост переменной уъ а отрицательным — уменьшение, изображающая точка перемещается с ростом времени t в верхней полуплоскости (см. рис. 3.3) слева направо, а в нижней—справа налево. Замкнутые траектории или витки спирали она проходит по движению стрелки часов.
Эти правила устанавливают однозначное соответствие между интегральными кривыми у2 = /(г/j; yw\ у2а), полученными в результате интегрирования уравнения (3.11) и изменением состояния исследуемой динамической системы во времени.
75
Если же для удобства исследования системы управления, или по соображениям физической наглядности представления результатов этого исследования предпочтителен другой выбор фазовых переменных, то направление движения изображающей точки должно быть определено согласно системе дифференциальных уравнений (3.7). Ни уравнение (3.6) интегральных кривых с исключенным временем ни его решения y2(yi, у10; yw) этих сведений не дают.
Пример 3.3. Вывести уравнения, описывающие изменение состояния следящей системы, структурная схема которой и характеристики нелинейностей приведены на рис. 1.2, считая люфт редуктора пренебрежимо малым (0а ~ 0).
Определить, при каких управляющих воздействиях (S^f) система допускает анализ на фазовой плоскости. Найти особые точки.
Перейдем от передаточных функций линейных элементов к их дифференциальным уравнениям:
£д ид = Тд (dwn/d/) + шд; (Яд, = Мл/<Н, (3.13)
где <0д — угловая скорость и 6Д —угол поворота двигателя, приведенные к исполнительному валу нагрузки. Поскольку величина люфта 0а пренебрежимо мала, 0д — 02*
Введем безразмерное время т = ИТЯ, тогда
dtopjdt ~ (1/Т’д) (^<0д/(/т) и (0д= (1/Тд) (с10д/^т).
Выберем в качестве фазовых переменных рассогласование системы i/i = = 0=0! — 02 и нормированную безразмерную скорость его изменения:
1 de 1 dyt 1 / d0t
Uць 7д dx dx Qm \ dx
--&Д 7д--------<0дт 7д,
(3.14)
откуда
<0д=(1/Гд) (<Й1/(/т)—йд ияЬу2.
При этом первое дифференциальное уравнение фазовой плоскости dt/i/dT = Qm i/2 = 7i (j/2).
Запишем аналитические выражения для нелинейных характеристик измерительного устройства (см. рис. 1.2, б)
fi = «i = ^im sin 0=L/lm sin ух = Л. (щ) (3.15)
и электронного усилителя (см. рис. 1. 2, в) (-1; и2, 1;
ид _~ Т'д*
где при жесткой обратной связи по
U1—U1 m
2 ^Дб ^Д* ^дй
С учетом равенств (3.13) — (3.16)
Йд “д= — ^дЬ~ +
и2 < — 1;
— 1 < «2"
Н2 1,
скорости
('1ГП . КК ______ ^1Ш . . ,
= ~—sin ух— (Од — sin ух + кц.КдУа б'д* б'дй
^дь7д dx
(3.16)
1
7д
d2 0i . ,, , 1 d0j
— -кяияЬу2+ Гд-
76
или
. . ILL кд 1 d61
Л1 sin z/i + feK кя yt—
дЬ * д dx
dy2 1 / d2 6i </6i \
= ~~dx~yi+ kn Uab Тя\ dx2 + dx J ’
A\ = U im/С’д,,.
Разрешим полученное уравнение относительно производной
^{/2 с I л । l de2 \
=-—Уг — /2 Mi sm г/iН-fec у2 — ~ • —
dx \ “Hi dx I
1 /<ге1 </91 \ „ ,
+ „ I , « + j ) — Т’з (</i; </2; т), ЙП1 \ dx2 dx I
где
где
кои
+ — ^Д •
Таким образом, изменение угла рассогласования следящей системы с жест-корректирующей обратной связью по скорости при произвольном управляющем воздействии 0Х (т) = 01(-?/— tj соответствует изменению координат {</0 «" = т; ух\ у2\ изображающей точки в пространстве состояний, описываемом неавтономной системой из двух дифференциальных уравнений:
dtji/dx—P^ (угу, dy2/dx = P2 (t/j; у,-, т).
(3.17)
Для исследования системы уравнений непосредственно на фазовой плоеко-ти нужно, чтобы функция
1 ddi\ Pz=~Уг~/а (-41 sin </i + *c</2 — kc — — +
““П1 /
1 M29i d9i\
Qm \ dx2 dx !
явно не зависела от времени. Это условие выполняется при отработке заданного рассогласования с последующим равномерным слежением 0i = a0+QmaiT, поскольку в этом случае d291/dx2 = 0 и ddL/dx = Qm ar = const.
При этом
Р2 (1/1! У2, Т)= — (f/2 —°1)—Ml sin 1/1 +
+ *с (t/2 — ai)l = ^ (i/iitf-i).
Скорость задающей оси Qmai входит в дифференциальные уравнения фазовых траекторий как фиксированный параметр аг.
Система уравнений фазовых траекторий
</1/1
J = У2<
ах dy.> — (/2 [-41 sin i/i+*c (</а—«1)1 + (//а —«1)}. dx
(3.17а)
и уравнение интегральных кривых
dy2 f2 [-41 sin <л + kc (у2 — aj] + ((/а—fli) /0 17 1
dy-i Пщ У?
относятся к типу (3.11) и (3.12). Кроме того, правая часть (3.17а) периодична по координате ух, поэтому на фазовой плоскости (рис. 3.4) достаточно рассматривать
11
полосу —л ‘С У1 ’С п> перенося изображающую точку с одной из вертикальных границ на другую без изменения ординаты у2.
Изоклина горизонтальных касательных Рг = 0 (см. рис. 3.4)
Уг—= [ — Л1 sin t/j —/гс (у2 —аг)]
пересекает изоклину вертикальных касательных у2 — 0 в особых точках y19t определяемых из уравнения
al = f2(Alsin yls — kc Д1).
Функции /з и sin у1 ограничены и из этого равенства следует ограничение возможных скоростей равномерного слежения
I aL | <
Л1 . At
1 + kc 1 -Ь kc
1; Л>‘-
1 + ^с
(3.18)
На рис. 3.4 определены особые точки у1а и уь, а также построено семейство изоклин при At = 2, kc = 0,75, Йт = 2 в режиме слежения с безразмерной скоростью aj = 0,25.
Практически следящие системы делятся на два типа. Большая часть принадлежит к числу систем с высоким коэффициентом усиления (добротностью), для которых Удь « <71 щ и ограничение /2 соответствует малым отклонениям угла рассогласования от 0 и 180°. Эти системы можно рассматривать как кусочно-линейные, поскольку | sin у, j » Pi при | i/i + kn) < л/6. Их исследование при-вбдится в примерах-3.4 и 3.7.
•78
Ro второму типу относятся системы с низким Коэффициентом усилений йб напряжению (безусилительные или с усилением по мощности). Таковы системы медленной синхронной передачи угла и некоторые системы фазовой автоподстройки частоты. Их дальнейшее исследование дается в примере 3.5.
§ 3.3. ПОВЕДЕНИЕ СИСТЕМЫ ПРИ МАЛЫХ ОТКЛОНЕНИЯХ ОТ ПОЛОЖЕНИЙ РАВНОВЕСИЯ
Если условия, наложенные в § 3.2 на правую часть уравнения (3.6), соблюдаются, то работу системы в малой окрестности каждого из т положений равновесия, как правило, с достаточной точностью характеризуют линеаризованные дифференциальные уравнения. Это утверждение, доказанное применительно к оценке устойчивости еще Ляпуновым, обосновывает практическое применение теории линейных систем для того, чтобы оценить поведение нелинейной системы «в малом».
Рис. 3.5
При этом приходится выводить и анализировать по меньшей мере столько линеаризованных уравнений, сколько особых точек (z/ls; y2s) s=a, b, .... m получается в результате решения системы уравнений (3.8).
В каждом из этих т случаев производят замену фазовых переменных:
I/2 = l!/28+X2.
что равносильно переносу начала отсчета в рассматриваемую особую точку (рис. 3.5).
Разложив затем правую часть уравнений (3.7) и ограничившись линейными членами, как это изложено в § 2.3 части I курса, получают систему линейных дифференциальных уравнений для приращений фазовых переменных ух и у2 относительно особой точки:
dxjdt = kn Xj +&12 ха; dxajdt = kal Xi+k^Xg,
(3.19)
79
где
h _ 3pi l/i “ У1з .
,/гп — Il ’
tyi I Уг = Ум
ь _ дР21 уг = yls .
^21 — 7 1
дуг I Уъ — Уъ$
__ dPi I У1 = Уи .
12 ду2 I у2 = y2s
, _дР2\У1 = yls '22 — •
&У2 | У2 = У 25
Для систем типа (3.12) всегда kyy = 0, £12 = 1.
Решение линейной системы (3.19) при условии, что в начальный момент времени ty = t — /0 = 0 приращения фазовых координат принимают значения Хх(/0) = х10 и ха(/0) = х2о, удобно определять операторным методом. Преобразуем (3.19) с учетом начальных условий по Лапласу
рХу (р)—х10 = kyy Ху (р) + Л12 Х2 (р), 1
рХ2 (р) х20 = k21 (р) -|- Р22 Х2 (р), /
или
(Р~ 6ц) Xj (р) — 612 Х2 (р) = х10,
—k2yXy (р) + (р — k22)X2 (р) = х20,
откуда следуют два уравнения в изображениях
[Р® — (^11 + 622) Р + (6ц 622— 612 621)1 *1 (р) = (Р— 622) Х1о — &12 Х20;
(Ра -(6ц + 622)р+ (6ц 622 —612 62i)l Х2 (р) = (р —6ц)/20 —621 Х10,
свидетельствующие, что обе фазовые переменные х2 и х2 удовлетворяют однородному дифференциальному уравнению второго порядка
d2x/dt2 — a(dx/dt)-{- Ах= 0,
(3.20)
где
6ц; 612 621; 622
Изображение решений системы (3.19) в явном виде
/ s_(Р — feaal^io fei2X2o .
1 (Р —Р1)(Р —Ра)
(п) ~ *юН~(Р — ^11) *20
2 (Р —Р1)(Р —Рг)
a = kn+k22; А =
— 6ц 622 ky2k2y.
(3.21)
где ру и р2 — корни характеристического уравнения р2 — ар + А= 0, вычисляемые по формуле
О± — 4Д (^ii + ^aa) i 1^(611 — ^2a)24-4^12 ^21
Р1, 2 —-------2------ ----------------------------------
. (3.22)
2
В дальнейшем, для определенности, индексом 1 всюду обозначается меньший по модулю корень.
80
Переходя от изображений (3.21) к оригиналом, получим параметрическое уравнение фазовой траектории:
[(pi—k22) еР'«-‘<Р—(р2—/г22) ePHt-M] +
Pl — P2
| fcl2 *г0 [gPi(i—io)—gPiit—io)],
P1~p2 (3.23)
X2 = feat X10 [eP1(i-i0) _ep,(i-io)] +
Pi — P2
Pl — Pa
которое связывает текущее значение координат изображающей точки с ее начальными координатами.
„ . . о
Если pi и р2 комплексно-сопряженные; р\,2 = —а ± /со; а =--%>
со = 1/2]^4А—а2, то для систем (3.12) удобнее пользоваться выражением:
хх [х10 coso»(^ — /0) + аХ1°*2° sin ю (t —10)
со
x2 = e~“((--io) [х20 cos <о(/— ta)—Ах1о + «хао sjn й)
(3.23а)
Для нелинейной системы эти уравнения отражают ход фазовых траекторий в малом при небольших отклонениях от исследуемой особой точки. Для линейной системы они справедливы на всей фазовой плоскости, что будет применено далее в § 3.5 для анализа кусочно-линейных систем.
Устойчивость и качество системы в малом зависит от корней характеристического уравнения, которые согласно (3.22) определяются его коэффициентами о и Д.
Разобьем плоскость этих коэффициентов на области, соответствующие качественно различному поведению исследуемой системы (рис. З.б) и подробно рассмотрим процессы, характерные для каждой из этих областей.
Д = kuk22— k12H2i > 0 — правая полуплоскость (см. рис. 3.6). Обозначим в этом случае Д = соо2; о = —2£о>0, после чего дифференциальное уравнение (3.20) примет знакомую по § 3.4 части I курса форму уравнения колебательного звена:
d2x!dt2 + 2£соо (dx/dt) + <в02 х = 0.
Колебательному звену соответствуют значения степени затухания 0 1. В нашу задачу входит исследование решений этого урав-
нения при — оо < £ < оо.
Упростим анализ, введя безразмерное время т = ш0/, тогда
d2x/dx2 + 2^(dx/dT) + х = 0. (3.24)
81
Ё качестве фазовых переменных при исследовании в малом выберем отклонение Xi и безразмерную скорость его изменения х2 = dxjdx. Заметим, что *
da xjdx2 =• dx2/dx = dx2/dx1 dxjdx = x2 (dx^dx^.
Подставляя это значение второй производной в (3.24), получим
х2 (dx^dxj) + 2£ха Xi = 0.
Рис. 3.6
(3.26)
Таким образом уравнение интегральных кривых dx2/dxl = — (2^х2 + х1)/х2 (3.25)
и система дифференциальных уравнений фазовых траекторий
dx-Jdx = х2, dx2/dx = —Xi—2£х2
принадлежат к типу (3.11) и (3.12), поэтому все правила, приведенные в § 3.2 для таких систем, справедливы в рассматриваемом случае, а корни характеристического уравнения
q‘+Kq+ 1 =0; — р
со0
зависят только от степени затухания 82
Область 1. Начнем с больших положительных значений степени затухания £>1, откуда <J<Z — 2<о0 = —2 Д<0. Значения координат плоскости (о, Д) (см. рис. 3.6) принадлежат к области 1, расположенной в четвертом квадранте, ниже параболы о1 2 * = 4Д.
В этом случае корни характеристического уравнения
<7i = -e+rt2-i=-V и <7а= —v4s—1 =
J1
при этом, как показано в примере 5.2 части I курса, система эквивалентна последовательному соединению двух инерционных звеньев, отношение постоянных времени которых^
Тг ^С+П2-1 т2 Б-Па-1
быстро возрастает с увеличением С (рис. 3.7). При Z 1,75 постоянная времени 7\ превосходит постоянную времени Т2 более чем в 10 раз. Система при таких соотношениях ведет себя как одно инерционное звено с W(p) ~ М(7\р + 1).
Уравнение изоклин
Рис. 3.7
*14-
X
2
соответствует семейству прямых
1
х + 2£
(3-27)
проходящих через начало координат фазовой плоскости (jq; х2) (рис. 3.8).
Ось абсцисс представляет собой изоклину вертикальных касательных н = оо, ось ординат—изоклину с х = —2£, а изоклина горизонтальных касательных х2 = —(^)*i проходит через второй и четвертый квадранты. С ростом степени затухания угол, образуемый ею с осью абсцисс, уменьшается.
На рис. 3.8, а представлена фазовая плоскость для t, = 1,25; Л/Т2 = 4.
Поскольку корни t/j и q2 вещественны, изоклины x1 = q1 и n2—q2 являются одновременно и фазовыми траекториями системы (3.26). В этом нетрудно убедиться, подставив в (3.27) любое из этих особых значений, например Xj — qA. Действительно
1 1
Ха=-----— Х1 = — Х1 = 91Х1 = Х1Х1
91 + 2J 9а
83
и, следовательно, вектор фазовой скорости направлен вдоль такой изоклины.
На фазовой плоскости общего вида (3.19) также существуют аналогичные особые направления, значение углового коэффициента х которых должно одновременно удовлетворять уравнению изоклин
х = dx2/dx1 = (й21 х± + k22 x2)/(k11 х± + k12 х2) (3.28)
и уравнению прямой х2 = пх^
Решая эти уравнения совместно, получим квадратное уравнение
— (fen — ^22) (fen—fegg)3 —F~4feia fe2i
корни которого
(3.29)
связаны с корнями характеристического уравнения (3.22а) соотношением
fel2 fel2 fel2 fel2
Особые направления существуют, если корни и р2 вещественны.
Запишем решение дифференциальных уравнений (3.26) при начальных условиях Xj = х10; х2 = х20, т = 0 в параметрической форме:
х _ Хго—Xl° Хго—Яг Х1° е42
<71—<7 2 <71 <?2
х2=-я— (х20—</2 х10)е91Т----------— (х20 —<71 х10)е^т.
<71—?2 <71—<?2
(3.30)
Поскольку в этом случае корни qr и q2 отрицательны, отклонения %! и х2 при т -> оо стремятся к нулю, что определяет асимптотическую устойчивость рассматриваемого положения равновесия в малом.
Наклон вектора касательной
X = — = 1 ^2 = (х20 —<72Хю) eq,x — g22 (x^ — qt х10) еЧгХ (331)
dxi х2 'dx ?i(x2o —<?2Xio)e’*T —<7а(х20—
84
с ростом т, независимо от начальных условий х10 и х20, стремится к значению х1 = ^1. Таким образом, все фазовые траектории вблизи особой точки имеют общей касательной изоклину х2 = хру.
Исключение составляют точки, лежащие на втором особом направлении х2 = n2Xt, для которых согласно (3.31)
dx* ,
х — —= х2 —- q2 = const.
К этому значению асимптотически стремится наклон фазовых траекторий при удалении от особой точки (т-> — оо). Таким образом, в точках, удаленных от начала координат плоскости (х2; хх),фазовые траектории практически параллельны изоклине х2 = x2Xj.
Сходство получающейся картины (фазового портрета) (см. рис. 3.8, а) с перевязанным посредине пучком ниток побудило назвать особую точку этого типа узлом.
На рис. 3.8, б в функции безразмерного времени т построены процессы, соответствующие фазовым траекториям 1, 2 и 3 (см. рис. 3.8, а).
В результате изложенного следует, что область 1 плоскости (а, Д) соответствует устойчивым положениям равновесия с неколебательным протеканием переходных процессов. Такие особые точки называются устойчивыми узлами. '
Фазовый портрет вблизи точки, параметры которой удовлетворяют условию о = —2(о0 = —2]Ад, т. е. границе между областями 1 и 2 (см. рис. 3.6), приведен на рис. 3.9. При этом £ = 1 и корни qY = q2 = = — 1 — система эквивалентна последовательному соединению двух одинаковых инерционных звеньев.
Изоклина горизонтальных касательных проходит под углом а ~ = — arctgl/2, а особые направления х2 = х^у и х2 = х^у совпадают с биссектрисой второго и четвертого квадрантов. Фазовые траектории вблизи особой точки касаются этой прямой, а по мере удаления становятся ей параллельны. Такая особая точка, называемая вырожденным устойчивым узлом, соответствует условиям критического демпфирования динамической системы.
85
Переходные процессы при этом протекают, как показано на рис. 3.9, б. _
Область 2. При 0> о > —2соо = —2]^ Д, что соответствует области 2 (см. рис. 3.6), степень затухания 1 > £ > 0 и система становится эквивалентной колебательному звену, типовые процессы в котором, включая и их изображение на фазовой плоскости (/г, ш), рассмотрены в § 3.4 части I курса.
В этом случае корни характеристического уравнения—комплексносопряженные с отрицательной вещественной частью
Ч1=— £+/£2; Яг= — £ — /П; S2 = <0(/<00.
а (й( = 1 — С2 — круговая частота затухающих колебаний.
Рис. 3.10
Подставляя эти данные в параметрическое уравнение фазовых тректорий (3.30), после простых преобразований получим:
xt = fx,0 cos Пт + -2°^10 sin Пт;
L й
х2 = е~^х Гх20 cos Пт —sin ^т-
(3.32)
С ростом времени t = т/ш0 отклонение хт и скорость его изменения х2 = dxx!dx стремятся к нулю, совершая при этом затухающие колебания, период которых Т = 2n/®z соответствует изменению параметра т за полный оборот Д<р = Д(Нт) = 2п спиральных фазовых траекторий (рис. 3.10, а) вокруг их фокуса (xj = 0; х2 = 0).
Это — логарифмические спирали, поскольку логарифм относительного изменения отклонения за оборот постоянен:
. xj (2fen) I I .
In ———— = — = . -- = const.
xi[2(fe+l)n] 9 П.-p
86
Максимум ординалы ха достигается при пересечении изоклины горизонтальных касательных ха = —(1/2?)х1( проходящей по-прежнему через второй и четвертый квадранты (—1/2 > —1/2? > — оо).
На рис. 3.10, б представлены соответствующие переходные процессы Х1(т) при ? = 0,25.
Область 2 плоскости (ст, Д) соответствует устойчивым положениям равновесия с колебательным протеканием переходных процессов. Такие особые точки называются устойчивыми фокусами.
На правой полуоси абсцисс плоскости (ст, Д)степень затухания ? становится равной нулю. Корни характеристического уравнения чисто
мнимые 71 = /; 72=—/, система представляет собой идеальный колебательный контур, моделируемый замыканием двух интегрирующих звеньев отрицательной обратной связью.
Фазовая плоскость (хх; х2) представлена на рис. 3.11, а. Изоклина горизонтальных касательных совпадает с осью ординат хх = 0. Из уравнения (3.32) с учетом, что ? = 0, й = 1:
хх = Xi0cos т+ х20 sin т; 1 (3 33)
х2 = х20 cos т—х10 sin т. J
Фазовые траектории представляют собою семейство концентрических окружностей
Х12 + х22 = Хюа + ^2о2 = ''2, (3.34)
радиус которых определяется начальными условиями. Переход к фазовой плоскости типа (3.19) лишь деформирует окружности в эллипсы.
Особая точка xls = 0; x2s = 0, называемая в этом случае центром., соответствует нейтральному положению равновесия, расстояние изображающей точки x^t), х2(/) от центра при любых начальных отклонениях в ходе времени не меняется.
Таким образом правой полуоси абсцисс плоскости (см. рис. 3.6) ст = 0; Д > 0 соответствуют нейтральные особые точки типа центр.
87
Изменение отклонения хх(т) представлено на рис. 3.11, 6.
Следует заметить, что в этом случае об устойчивости и поведении исследуемой нелинейной системы нельзя судить по линеаризованному уравнению (3.19). В разложении функций Р^у-у, у2) и Р2(у^, у2) существенную роль начинают играть нелинейные члены. Такие системы по А. А. Андронову [Л. 10] относятся к негрубым системам, поведение которых качественно зависит от значения малых параметров.
Область 3. При 0 < ст < 2<оо = 2]/ Д степень затухания £ становится отрицательной. Поэтому в области 3 (см. рис. 3.6) вещест-
Рис. 3.12
венные части обоих комплексно-сопряженных корней характеристического уравнения положительны
^ = «+/£2; q2 = a — jQ; 1>а = —£>0. (3.35)
Уравнение фазовых траекторий
xt — еах [х10 cos Пт + Х2° ~ “Х11) sin Нт
х2 = еах х20 cos Пт + %1° sin
(3.36)
в этом случае геометрически изображается семейством расходящихся логарифмических спиралей (рис. 3.12, а). Изоклина горизонтальных касательных х2 = (1/2а)х1 проходит через первый и третий квадранты оо>1/2а > 1/2. С ростом времени / = т/ш0 фазовые траектории удаляются от своего фокуса (х3 = 0, х2 — 0). Положение равновесия системы неустойчиво. Переходные процессы представляют собой колебания с экспоненциально возрастающей амплитудой (рис. 3.12, б).
Особые точки, для которых значения коэффициентов о и А принадлежат к области 3, называют неустойчивыми фокусами.
Верхней ветви 0 < о = 2(о0 = 2 j А границы между областями 3 и 4 (см. рис. 3.6) соответствует неустойчивый вырожденный узел. Фа-68
Рис. 3.15
зовый портрет и графики переходных процессов представлены на рис. 3.13, а и б соответственно.
Область 4. Фазовый портрет в окрестности неустойчивого узла (рис. 3.14, а), для которого значения коэффициентов ст и Д лежат в области 4 (см. рис. 3.6), представляет собой зеркальное отражение окрестности устойчивого узла (см. рис. 3.8) относительно координатной оси Xi с одновременным изменением направления движения изображающей точки вдоль фазовой траектории. Значения степени затухания — 1 > С > — оо, корни характеристического уравнения вещественны и положительны:
Рис. 3.1G
<?! = « —У£2—1 ; q2 = a+yt,2— 1 ; а = —£>0.
Параметрическое уравнение фазовых траекторий получается при подстановке этих значений в (3.30). Нарастание отклонения Xj в функции времени представлено на рис. 3.14, б.
Область 5. Левая полуплоскость (см. рис. 3.6) Д — kuk22 — —k12k21<ZG. В левой полуплоскости (ст, Д) свободный член характеристического уравнения (3.22) становится отрицательным Д < 0. Обозначая — Д = (оо!>0и приводя к безразмерному времени, получим взамен (3.24)
daXj/dT2 4-2£(dx!/dT)—Xi =0.
(3.37)
Корни характеристического уравнения
ft = -? + v42+ 1 >0; + (3.38)
независимо от значения £ (а следовательно, и ст), вещественны и имеют разные знаки.
Положение равновесия (xj4 = 0, xit = 0) всегда неустойчиво.
90
Особые направления
х2 = ?1%1 = я1х1 и х2 — у2хг = н2хх (3.39)
проходят через разные квадранты фазовой плоскости (С > 0) (рис. 3.15, а), (£ = 0) (рис. 3.16, а) и (I < 0) (рис. 3.17, а). Изоклины горизонтальных и вертикальных касательных всегда- находятся по разные стороны от изоклин (3.39).
Фазовый портрет имеет характерный вид топографической карты горного перевала (седла), что послужило поводом назвать неустойчивые особые точки, в окрестности которых параметры ст и Д принадлежат к области 5 (см. рис. 3.6), седлами.
Из параметрического уравнения (3.30) фазовых траекторий с учетом значений (3.38) следует, что с ростом времени t = 1 /<лот любая фазовая траектория асимптотически стремится к прямой х2 = qpc^. При этом фазовые переменные неограниченно возрастают (Xj —► оо, х2 -* оо) или убывают (лу -> — оо, х2 -> — оо) в зависимости от того, находилась ли изображающая точка в любой момент времени (в частности при t = /0) по ту или другую сторону от особого направления х2 = = q^. Действительно, при больших т
. л20 — 92*10 е171Т, а х2 « —(х20—72x10)e‘?>'t, 91 — ?2 91 92
что положительно при х20 > <у2х10 (изображающая точка выше и правее прямой х2 = q2xY) и отрицательно при х20 < q2xia (изображающая точка левее и ниже прямой х2 = q^xd- Особое направление х2 = q2xv служит водоразделом — сепаратриссой фазовых траекторий, по обе стороны от которого изображающая точка удаляется от седла асимптотически по второй сепаратриссе в диаметрально противоположных направлениях х2 = q1xl > 0 и х2 = qpcx < 0. Вдоль самой сепаратрис-сы и2 = q2 изображающая точка приближается к положению равновесия
Y „ — *20 р-(г+ И?+ 1) Т .
A.J-— >
91 — 9а
91
*2 = —(9i*io—*го)^ (£ + 1/£2 1И,
<71 — ?2
но сама по себе эта сепаратрисса неустойчива, так как любое, сколь угодно малое, отклонение от нее с течением времени неограниченно возрастает.
В частном случае £ = О или при выборе координат и х2 системы (3.19) так, что kn = —k22, уравнение интегральных кривых принимает особенно простой вид dx2idxY = х±1х2, откуда
§ х3 dx2 = § xt dxx ^20 *10
и интегральные кривые строятся как семейство симметричных гипербол
х22—х/2 = х202—Хю2 = const,
изображенное на рис. 3.16, а. Апериодическое неустой-
чивое протекание переходных процессов в зоне справедливости линейного приближения показано на рис. 3.15, б, 3.16, б и 3.17, б.
Вырожденный случай А = 0. Осталось рассмотреть точки, лежащие на оси ординат диаграммы (см. рис. 3.6), когда по физическим соображениям А = kxlk22 — kl2k21 = 0.
Уравнение (3.20) в этом случае принимает форму
d2x/d/2 — ст (dx/dt) = 0.
(3.40)
Система эквивалентна последовательному соединению инерционного и интегрирующего звеньев, подробно рассмотренных в примере 5.1 части I курса.
Обозначив Xi = х; х2 = dxldt, запишем систему дифференциальных уравнений фазовых траекторий
dxd dt = x2, dx2/dt = ох2,
(3.41)
из которого следует, что ось абсцисс х2 = 0 в этом случае вся состоит из особых точек.
Поскольку Au = k21 = 0, k12 = 1 и k22 = а, то корни характеристического уравнения pY = 0; р2 = а.
Параметрическое уравнение фазовых траекторий (3.23) записывается В виде
xi - *юН--*2о [1—е° ];
а
(3.42)
*2 = *20 е° (' ~<с) •
92
Определив из второго уравнения = х2/х20, подставим
это значение в первое. При этом окажется, что фазовые переменные связаны уравнением прямой
х2 —х20=о(х1—х10). (3.43)
При g < 0 изображающая точка (рис. 3.18, а) перемещается к оси абсцисс и достигает ее в точке xls = х10 + (lAO-^o- Таким образом, точки этой оси представляют собой положение устойчивого равновесия (покоя) исследуемой системы.
При ст > 0 фазовые координаты неограниченно возрастают (рис. 3.18,6). Точки оси абсцисс в этом случае представляют собой положение неустойчивого равновесия.
Заметим, что исследование вырожденных динамических систем представляет практический интерес только в том случае, когда условие
А = k1Y k22— k12 k2l -=0
следует из физических соображений, а не определяется численным (и заведомо приближенным) соотношением коэффициентов Лп&22 = = ^12 ^21 ПРИ линейных членах разложения функций 7’1(х1; х2) и /’2(х1; х2) в степенной ряд.В этом, последнем, случае система принадлежит к числу негрубых и ее поведение необходимо оценивать при тех, ненулевых, значениях А, которые получатся с учетом возможных изменений параметров системы за счет схемного или эксплуатационного разброса.
Пример 3.4. Исследовать работу следящей системы, ранее рассмотренной в примере 3.3, при малых отклонениях от особых точек
• *с л
У is = arcsin —-— щ; y2s = 0-
Линеаризуем систему дифференциальных уравнений фазовых траекторий (3.17)
dy^jdx = Qm у2 = Pi (</2); )
dy2[dx =- — ((y2 — ад + f2 [Ax sin yi + kc (y2 — сц)]} = P2 (щ; y2) J
вблизи особых точек yls по формуле (3.19) с учетом ограничения скорости слежения аг, заданного (3.18)
*n = dPJdyi = 0; *i2 = dPildy2 = Qnl;
i. д?2 л л . 1 + *с
*21 = а,. = — Ai cos yis = — Ах cos arcsin —-— а, —
= Ai
= T KAi*-(l+*c)W,
где отрицательное значение соответствует особым точкам — л/2±2*л < у1п < л/2 ± 2*л; * = 0, 1,2, ..., а положительное—особым точкам
л/2 ± 2*л < у1Ь < 3/2 л ± 2*л.
Наконец,
*22 — дР 2 / ду2 — — (1 + *с).
93
Таким образом, система (3.19) примет вид
dxi/dx — Qm хг; 1
dx2/dr= Т V Лха—(1 Ч-Лс)а «ia *i -(1+ /гс)х2.)
В каждой полосе —л < < л следует различать две особые точки. Рас-
смотрим их порознь:
Л е 1 Zip л
1) — — <i/ie = arcsin—<-р
Рис. 3.19
Значение угла рассогласования (кинетической ошибки) при этом зависит от скорости равномерного слежения и обращается в нуль при отработке заданного постоянного угла (а± = 0). Подставляя значения kc и из примера 3.3, получим
Л . 1 + Лд kK
У1а = 0кин = arcsin ———
«до'ип 1 д
dQi dx
= arcsin
1 ~Ь fee kac
<B1,
где йас 1/сек — добротность следящей системы; Uj Мсек — скорость вращения задающей оси.
Корни характеристического уравнения вблизи этого положения равновесия
-u + fec) ±'/(l+fec)a-4Qm/Aa-(l + fec)2^ia = Гд Р„, = --------------Ъ-----------------
Система устойчива при отрицательной обратной связи по скорости £с > О-Переполюсовка обратной связи kc —1 может вызвать неустойчивость;
л
7
< У1Ь = я — arcsin
1 kc Ai
2
2
2)
94
Значение угла рассогласования близко к 180е. Корни характеристического уравнения при этом
<71,2 — 1 дР1,2 — 2
Особая точка — седло, угловой коэффициент сепаратрисе которого согласно (3.29)
1 -(1-F-fec) ±~К(1 -^fec)ii + 4Qmy ^?-(l 4-fec)2 Д?
Xl'2 От 91,2 2Qm
На рис. 3.19, а показан ход фазовых траекторий вблизи первой особой точки у1а, соответствующей устойчивому слежению. Значения параметров те же, что и в примере 3.3: А± = 2, kc = 0,75, Qm = 2 и (ц = 0,25. При этом yi — 0КИН = = 0,227, границы линейной зоны определяются прямыми | | л/6 и участ-
ками границ областей насыщения | /21 = 1 (см. рис. 3.4).
На рис. 3.19, б для тех же параметров построена линейная область в окрестности неустойчивой особой точки t/iь = 2,913.
Уравнения сепаратрисе для этого случая
1/2 = Xi (У1—у1ь) = — 1.9(1/1 —2,913) = — 1,9yi 4-5,52 и
Уч = Х2 (1/1 - f/ib) = 0,774 (1/1 - 2,913) = 0,774^1 - 2,25.
§ 3.4. ПОВЕДЕНИЕ СИСТЕМЫ ПРИ БОЛЬШИХ ОТКЛОНЕНИЯХ.
АВТОКОЛЕБАНИЯ
После того как на листе фазовой плоскости определены особые точки и выяснен характер протекания процессов вблизи каждого положения равновесия (в малом), можно приступить к постановке и решению следующей задачи исследования нелинейной системы, которая формулируется так:
определить, какие установившиеся процессы, кроме состояний равновесия, возможны в ее работе и каковы условия, обеспечивающие неизменность работы системы в каждом из этих устойчивых режимов.
Первый из этих вопросов выясняется определением периодических колебательных режимов, которым на фазовой плоскости соответствуют особые устойчивые замкнутые траектории—устойчивые} предельные циклы.
Для решения второго нужно выделить такие области значений координат изображающей точки, в каждой из которых с течением времени достигается лишь один из возможных установившихся режимов работы. Границы таких областей, называемых областями притяжения этих режимов, образуются особыми неустойчивыми траекториями— неустойчивыми предельными циклами и сепаратриссами седел.
Техническое затруднение на этом этапе исследования — трудоемкость построения и анализа хода больших дуг фазовой траектории. Аналитический подход применим тут практически только для кусочно-линейных систем, методы исследования которых излагаются в § 3.5.
В остальных случаях применяются графические и численные методы. Именно здесь большую помощь может оказать пользование
95
цифровыми вычислительными средствами и моделирование системы с применением решающих усилителей.
Остановимся на простых графических способах построения фазовой траектории и процесса в функции времени.
Метод изоклин. Параметр семейства изоклин х = dyjdyi = = Ar/a/Az/i (рис. 3.20, а), вычисленный по уравнению (3.10), равен тангенсу угла а наклона касательной к фазовой траектории при одинаковых масштабах обеих осей координат фазовой плоскости.
I 2 3^5 у,2р, см
Рис. 3.20
Однако такой выбор масштаба может оказаться недопустимым для графического построения. При соблюдении этого условия фазовый портрет получается сжатым по одной из осей и для построения фазовых траекторий системы приходится выбирать отличное от единицы соотношение масштабов ш.
Так как на графике z/lrp = т>У1 см и у2гр = m2z/2 см, то
tg а = Az/arp/Az/i.p = (m2 Az/2)/(m1Az/1) = m х. (3.44)
При графическом построении фазовых траекторий методом изоклин их семейство строится так, чтобы изменение угла между двумя соседними изоклинами было примерно одинаковым:
Аа2 = arctg m х1+1 — arctg in xf а const.
96
Выбор значения Да определяется требуемой точностью построения и зависит от масштаба графика, качества чертежных приспособлений, опыта, времени и сил, которыми располагает исследователь. Обычно выбирают 10° Да 30°.
Построив семейство изоклин (рис. 3.20, б), проводят из начальной точки Л40, лежащей на одной из них к = х0, два луча под углами а0 = = arctgmxo и ах = arctgmxp Угол Дах между этими отрезками делят пополам и точку Afi, лежащую на пересечении полученной биссектрисы со следующей изоклиной и = хъ считают новой расчетной точкой фазовой траектории.
Далее процесс построения повторяется, как показано на рис. 3.20, б. Точки Mi, i = 0, 1, 2, ..., N по лекалу соединяют плавной кривой.
Метод Льенара и дельта-метод. Для построения фазовых траекторий часто встречающихся систем, дифференциальное уравнение которых имеет вид
dPyJdt? + Fx (dihJdt) + <о02 yY = 0, (3.45)
Льенар в 1928 г. предложил удобный графический метод (рис. 3.21).
Перейдем для простоты к безразмерному времени т=<о0/ и, обозначив у2 = dyjdx, запишем уравнение интегральных кривых, эквивалентное исходному уравнению (3.45),
dy2ldyr = —[yi + F (у2)]/у2. (3.46)
Поскольку F(y2) — функция с ограниченной производной, то можно считать, что вблизи заданной точки с координатами у± = г/1г; Уз = Узб F(y2) « F(y2i) = const.
Разделим переменные и проинтегрируем уравнение (3.46)
ifi У1
$ Уз dy2 + $ [F (z/2i) + yr] dy1 = O, откуда
Уз* + [F (у2г) + У1]2 = y2i* + [F (y2i) + yu]* r?. (3.47)
Очевидно, что это уравнение дуги окружности, проведенной через заданную точку Mt из центра с координатами г/2ц = 0; У-щ = =—F(y2i). Заметив, что уг = —F(r/2) — уравнение изоклины горизонтальных касательных, получим последовательную графическую процедуру построения фазовой траектории, при подготовке к которой из всего семейства изоклин нужно построить одну только изоклину горизонтальных касательных х = 0. Далее, из заданной начальной точки Mo(i/io; у20) (см. рис. 3.19) проводят горизонтальную прямую до пересечения с этой изоклиной и, опустив из точки пересечения перпендикуляр на ось абсцисс, определяют центр дуги окружности д/1ц0 = = —F(y20), которую и вычерчивают из Мо в направлении движения изображающей точки при т > т0. Принимая конец этой дуги Mi за следующую заданную точку траектории, повторяют построение.
4 Зак- 447 97
Определяя длину отдельных дуг (Л/г; исходят из того,
' что угол Д<р;, стягиваемый каждой такой дугой, может быть тем больше, чем меньше соответствующий этому этапу построения наклон изоклины % = 0 к оси ординат.
Действительно, если F(y2) = const и dFldy2 = 0, то фазовые траектории уравнения (3.45) обращаются в семейство концентрических окружностей.
Удобство и изящество метода Льенара привели к тому, что с 1952— 1953 г. аналогичное построение применяется не только при исследовании фазовых траекторий уравнения (3.45).
Так называемый дельта-метод (6-метод) позволяет строить интегральные кривые систем, соответствующих уравнению (3.11), а также и неавтономных систем, для которых уравнение интегральных кривых может быть записано в форме
Луг । Т(щ; i/2; /) Q 4У1 У-2
Сущность этого метода состоит в том, что если функция F(yy, у2, t) однозначна, непрерывна и дифференцируема в любой точке рассматриваемого листа плоскости (jyy. у2) и непрерывна и дифференцируема по времени, то функция 8(у1; у2, /), полученная в результате тождественного преобразования уравнения (3.48)
dy^dy^ + yjy.^ — [Л(У1; у^ t'j + yj/y^
= Уг, ()1/У-2 (3.49)
в уравнение (3.49), тоже обладает этими свойствами. Исключение, разумеется, составляют состояния равновесия, особые точки y2s = 0; z/i, -= —8(уу, у2; t), но вблизи этих точек систему можно исследовать иначе, как показано в § 3.3. Из сказанного следует, что вблизи заданного неравновесного состояния yt = у];; у2 = у2у, t = ti функцию 6 можно считать примерно постоянной: 6 » 6; = const.
Разделив переменные и проинтегрировав (3.49)
и 2 Ut
^У2<1у2+ $ [6(«/к; y2i-, td + y^dy^Q, t'-ll «и
получим аналогичное (3.47) уравнение
М? + (6г + й)2 = Уи2 + (бг + Ук)2 = г? (3.50)
дуги окружности, проходящей через точку Мг, центр которой лежит в точке у1ц1 —6;; у2ц = 0.
Принципиальное отличие (3.50) от (3.47) состоит в том, что значение 6i4-i для следующего этапа построения вообще говоря не может быть непосредственно определено графически. Это значение вычисляют графо-аналитически по координатам конца проведенной дуги yt== yt(i+l), у2 =- //2(14-1) и соответствующему значению t = /i+1, которое можно определить так, как показано далее, поскольку у2 =-- dyjdt. Сложность вычислений зависит от конкретно заданной функции 6. Во многих слу
чаях здесь приходится применять метод последовательных приближений.
Определение времени движения изображающей точки. Построение процессов в функции времени. Связь между изменением координат изображающей точки и временем ее перемещения в общем случае определяется системой (3.7).
Уравнение дуги фазовой траектории, не содержащей особых точек
/ (f/iJ i/ioi Уг'г У-2о) — ^1 (3.51)
позволяет в принципе исключить переменную ух из правой части первого уравнения системы (3.7) или переменную z/2 из правой части второго, после чего интервал времени движения находится интегрированием
Д/ = /_/о =
У1
Г dyr
J Pi (f/i)
У1о
У, f dy2
J Р2 (Уг)
У 20
(3.52)
Для малых соотношение
изменений координат можно записать приближенное
Ayi Лу2 .
Pi (f/icp! Угср) Pityicp', Угср)
f(ylcp, y2cp) = 0. (3.53)
Решение существенно упрощается для систем (3.12), поскольку в этом случае dyjdt = Р^; у2) = у2. Фазовая траектория выражает у2 4* 99
Как явную функцию уи Поэтому Интеграл (3.52) может быть записйЦ в форме
/-4 = С—(3.54)
J ,У'. {У1> У ю,
и его определение сводится к вычислению площади под кривой /(yj = = l/ly2(z/i)l, перестроенной из фазовой траектории (рис. 3.22), что может быть выполнено и механически—планиметрированием.
Особенно просто опреде гяется время движения изображающей точки по дуге окружности. В этом случае, т. е. при £ = О, А = — fe12fe2i > > 0, как показано в § 3.3, компоненты безразмерной фазовой скорости
dyjdx — — (у2—у.,8); 1
dy2/dx =(yl—yls), J
где У1з, Уц— координаты центра, x — aot.
Уравнение интегральных кривых
dy2ldyt = — (t/x— yls)l(y2—y2s)
допускает разделение переменных и интегрирование, в результате которого
(У1—Уи)2 + («/2 —{/2J2 =г2 = const, (3.56)
где
г2 = (У ю—У1з)2 + (№0 — </2з)2-
Скорость перемещения изображающей точки j
ds/dt = w0 (ds/dx) = too V {dy^dxf + (dy2/dx)2 =
= ®0 /(1/1 — У13)2 + (у2—t/2s)2 = «o' = const
постоянна и пропорциональна радиусу этой окружности, а время движения
= (ds == — (<₽—Фо) = —
<й0Г J <£>0 <00
«о
пропорционально соответствующему приращению центрального угла
Д/ = (1/(в0) Atp. (3.57)
Время обхода полной окружности Аф = 2л, как и следовало ожи дать, равно периоду незатухающих колебаний
Т ~ 2л/соо. (3.58)
Покажем, что если на фазовой плоскости yL = mjzz; у2 m2(du/dt) (рис. 3.23, а) существует замкнутая траектория, близкая к эллипсу, 100
одна из осей симметрии которого АВ = 2у1т лежит на оси абсцисс, а другая CD = 2 у2т — шраллельна оси ординат, то приближенно
У1 — yi8 = i/imsina)o^ = in1t/msin(o0Z; 1
z/2=y2mcosco0/ = m2£o0{/mcosw0Z, J
откуда
ЙОЛ5---------
п12 У 1т
И
Т = — - х 2л = 2л т — . (3.59)
<йо П11 у2т CD
Рис. 3.23
Применяя соотношение (3.59), следует помнить, что оно справедливо для траектории, близкой именно к симметричному эллипсу, а не к любому овалу.
Так для траектории, составленной из двух параболических сегментов (рис. 3.23, б),
Ш1 Уят CD
а для прямоугольника (рис. 3.23, в)
Т = 4 1712 • У1т — 4т АВ , т1 Уят CD
что достаточно далеко от (3.59).
При исследовании динамической системы на фазовой плоскости заслуживают предпочтения простые графические способы, дающие возможность нанести на траекторию такие метки, дугу между которыми изображающая точка проходит за один и тот же заданный отрезок времени А/ = с = const. Имея размеченные таким образом траектории, по фазовому портрету легко, в частности, построить и графики yi(t) или t/2(Z), начиная от заданного значения у10 или у2й. При необходимости это построение можно вести одновременно с разметкой.
К числу удобных методов разметки фазовых траекторий систем (3.12) относится метод вписанных равнобедренных треугольников.
Из рассмотренных способов построения фазовых траекторий системы (3.12) следует, что дуга (Mit Af(-+l) может быть с достаточной
101
точностью представлена дугой окружности, центр которой расположен на оси абсцисс фазовой плоскости (рис. 3.24). Проведем из точек Л4; и Л4/+1 две секущие так, чтобы они пересеклись на оси абсцисс
симметрично перпендикуляру, восставленному из точки их пересечения. Из построения видно, что угол а,, образованный этими секущими, независимо от радиуса г аппроксимирующей окружности и смещения ylsii ее центра всегда равен центральному углу Дсрг, стягиваемому дугой (Л4;, Л4,4-1).
Это значит, что если между фазовой траекторией и осью абсцисс вписать последовательность равнобедренных треугольников с углом а = const при вершине (рис. 3.25, а), то в силу (3.57) время движения изображающей точки между вершинами соседних треугольников будет постоянно:
Д/г = (1/ы0) а = const. (3.60)
Остается дополнить процедуру разметки фазовой траектории так, чтобы время движения между вершиной последнего
треугольника по одну сторону от оси абсцисс и первой по другую ее сторону также определялось формулой (3.60).
Рассмотрим рис. 3.25, б, на котором детально изображен интересующий нас участок построения. Находящиеся по обе стороны от точки пересечения А дуги фазовой траектории допускают аппроксимацию соответствующими дугами окружностей МА и AN, стягивающими равные центральные углы а. Дуга между точкой А и Mit полученной в результате предыдущих этапов построения, опирается на центральный угол Д<рх < а. Из (3.57) следует, что нужно построить дугу АМщ так, чтобы Дф1 + Д<р2 — “•
Но отношение
Д<Р1 Mt А a MMi A-Mt А откуда
Дфа а — Дф1 MMj а а ММ, +М,А С другой стороны,
Дф2
~а~ = AN
AMi+x
MMj
MMi + MiA
(3.61)
102
Поэтому, доведя процесс построения до треугольника, основание которого выходит за точку пересечения оси абсцисс, следует: провести из этой точки А две секущие под углом а/2 к вертикали, найти отношение дуги MMj между концом секущей М и последней точкой Mt разметки к полной дуге МА сегмента и разделить дугу Л/V второго сегмента в этом отношении. Поскольку угол а выбирают достаточно малым (20—40°), при расчетах по формуле (3.61) дуги можно заменять хордами.
Полученная таким образом точка М,^ отвечает условию (3.60) и обеспечивает продолжение разметки, как показано на рис. 3.25. На рис. 3.26 построены графики уг (т) и г/2 (т), соответствующие рис. 3.25, а.
Рис. 3.25
Перейдем к анализу характерных режимов работы нелинейных систем на конкретных примерах.
Пример 3.5. Исследовать следящую систему низкой добротности (маятник с постоянным моментом [Л. 10]).
Из примера 3.3 следует, что в отсутствие обратной связи по скорости (kc — — 0) и при Лг 1 ограничение, вносимое нелинейным элементом /,2, не влияет на работу следящей системы и дифференциальные уравнения ее фазовых траекторий (3.17) принимают вид:
) (3 62)
dy2/dt = — Hjsinz/i—(уг— Qi). J
Шкала рассогласований системы ух — 0 выглядит, как показано на рис. 3.27. Совершив любое целое число оборотов, она возвращается в прежнее положение.
Однако цилиндрическая поверхность (см. рис. 3.27) неудобна для построения фазовых траекторий и, тем более, их разметки по времени. Обычно пользуются разверткой цилиндра на полосу фазовой плоскости, соблюдая при этом правило переноса изображающей точки, указанное в примерах 3.1 и 3.3.
При детальном изучении процессов отработки угла и слежения, линию разреза удобно проводить вдоль образующей ±180°, как показано на рис. 3.27.
Применим метод изоклин для построения фазовых траекторий при различных скоростях равномерного слежения
103
1 d0i Тд dBi
O211 dr fim dt
Приравняв уравнение интегральных кривых заданному
параметру
От У2
получим уравнение семейства изоклин
dy2 Al sin У! + (1/2 — ^)
-— = —-------------------------- - X,
di/i
Изоклины (рис. 3.28) представляют собой синусоиды, пересекающиеся в осо-точках у28 = 0; у1а = arcsin угъ = л — arcsin (см. пример 3.4),
бых
вблизи которых линеаризованные уравнения фазовых траекторий в отклонениях
*2 = Уг. Xi = {/! — у18:
dx2/dx— k±2 х2 — х2\
dx2/dx = k21x1 + k22x2= — A1cosz/lsx1— х2= Т а22 Xi—х2-
Отрицательное значение коэффициента k21 соответствует меньшему рассогласованию у1а, поскольку cos (arcsin j1) = — «Л а положительное —
рассогласованию Угь> так как
Ajcosl л—arcsin —j- j — — ,
104
Рис. 3.28
Экстремальные значения изоклин:
+ ,п ai—-Д1 „ ,п
|/2э= , -— при р1=—л/2 и у23=——--------------- при У1 = Л/Ч.
14-Qmx 1 + Qmx
При а2 = 0 (см. рис. 3.28) особые точки расположены диаметрально противоположно в нуле и ±л шкалы углов рассогласования системы .Семейство изоклин
У1 = —~ --sin У1 (3.63а)
14-ЙтХ
и фазовый портрет симметричны относительно начала координат. Отработка заданных рассогласований из положения покоя z/20 = 0, yt = у10, т. е. из точек, лежащих на оси абсцисс, происходит по кратчайшему направлению с поворотом исполнительного вала, не превышающим 180° + Д/1Ю, где ДЛт — максимальное перерегулирование.
40в
Сепаратриссы у1а и угь< b, с, d седла делят фазовую плоскость на
области I, II, III начальных значений угла рассогласования у10 и скорости его изменения //20. Из этих областей следящая система приходит в одно и то же устойчивое положение yls = y2s = 0 вследствие вращения исполнительного вала по движению стрелки часов соответственно на 021 —(л + А/г1П)‘, 0211 < —2л;
02iii —4л. Начальные условия из симметричных областей III', ... нижней полуплоскости система отрабатывает, вращаясь против движения часовой стрелки. Таким образом, при ах = 0, независимо от начальных условий, система приходит к началу координат, которое в этом случае называют устойчивым в целом.
Следует отметить, что для всякой реальной системы, значение начальных Уд d02o
скоростей //>() = — • ~— вращения привода ограничено. Вращаемая собствен-Qnl dt
ным двигателем разомкнутая система не может обеспечить начальную скорость большую, чем | у2а | = Аг, что соответствует амплитуде изоклины горизонтальных касательных (см. рис. 3.28).
Фазовые портреты (рис. 3.28—3.30) построены для Аг = 0,75, Qm = 1,75 при различных значениях ах.
При заданных скоростях Oj равномерного слежения, заметно меньших, чем граничное значение сц = Ах, работа системы (рис . 3 29, а) качественно не изменяется .
Количественные изменения характеризуются тем, что особые точки у1а и у^ сближаются друг с другом, стремясь к предельному значению | yls\—n/2 . Фазо -вый портрет становится асимметричным.
107
Вблизи устойчивой особой точки у1а поведение системы определяется корнями характеристического уравнения
?2 + q + Qm =0; д = Тлр,
-1±/ 1-4От/Л12-а12 '
2- 2
которые комплексны, если 4Qmp^A,—а,=4Л > 1.
Переходные процессы при этом колебательные, но показатель их затухания
5=----г ...2_____— = $0 —г 1
2 V Qm^A^-ai2 , / П?
V л?
медленно возрастает сравнительно с показателем затухания соответствующим отработке постоянного рассогласования аг = 0.
Неустойчивая особая точка — седло, начальный наклон сепаратрисе которого согласно (3.29) будет
-1 ±У~ l+4Qm/Л^-а?
2 Рис. 3.29, а построен для значения av = 0,5 = ~ At.
3
Сравнивая рис. 3.28 и рис. 3.29, а, отметим, что сепаратриссы i/jj а </1о (jq > > 0) и t/ib Ьс(и2 < 0) сближаются в зоне ab верхней фазовой полуплоскости у2 > 0. При некотором граничном значении параметра alt которое по А. А. Анд-роновуУназывается бифуркационным (а2 = ai6i), эти сепаратриссы сливаются (рис. 3.29, б).
Начиная с этой скорости вращения задающего вала, поведение системы качественно меняется. Начальные рассогласования, соответствующие точкам, лежащим выше границы с, а, угъ, с, система уже не может отработать и, как говорят, выпадает из режима слежения (из синхронизма).
Рассмотрим рис. 3.30, а, построенный для значения ж 0,739 = 0.985Л!, большего, чем a^i- Координаты особых точек
i/la = arcsin 0,985 = 8/18л = 80°; у1Ь = л—у1о = —- л= 100°.
18
Устойчивая особая точка у1а—узел, вблизи которого [см. (3.29)1 все фазовые траектории имеют общей касательной прямую с угловым коэффициентом
-1 + V l-4Qm/A12-a12
Второе особое направление вблизи узла xi2 = —0,372. Сепаратриссы седла обладают начальным наклоном
-1 + V l+4Qm /Л,2-a?
И
х22 = —0,639.
Область Sj синхронизации в пределах рисунка ограничена кривой abcdyibf. В ней'существует только одна асимптотически устойчивая особая точка у1а = у1а', уи =*0, к которой с течением времени стремится изображающая точка из любо-103
У|
Рис. З.ЗО.а
го начального положения, принадлежащего области Sx. Переходные процессы не колебательные.
Вне области ST все фазовые траектории стремятся к траектории АВА, соответствующей периодическому решению системы уравнений (3.62) — устойчивому предельному циклу.
Графики изменения рассогласования y^t), а также вращения задающего 01(т) и исполнительного 02(т) валов системы, построенные по двум размеченным
траекториям (см. рис. 3.30, а), представлены: на рис. 3.31, а для начальных условий / из области Sx и на рис. 3.31, б для начальных условий 2 вне этой области.
Наконец, если скорость задающего вала превзойдет предельное значение а1 — а1б2 : ^1> т0 система вообще теряет возможность следить за вращением задающего вала и единственный установившийся режим ее работы соответствует предельному циклу (рис. 3.30, б). Система вращается, непрерывно отставая от задающего вала, причем скорость этого вращения периодически меняется относительно постоянного среднего значения. Рис. 3.30, б построен для ах = 1 > Лх.
Рассмотренный пример показывает, что в зависимости от задаваемых значений скорости равномерного слежения (параметра щ) в системе (3.62) наблюдаются следующие характерные и для других нелинейных систем режимы работы:
НО
1. При |аг| < a16i < Ai на фазовой поверхности существует единственная устойчивая особая точка уг = у1а', у2 = 0, характеризующая синхронное равномерное слежение. Этот режим рано или поздно устанавливается при любых начальных отклонениях, таким образом область
его притяжения охватывает всю фазовую поверхность.
2. При п1б1 < | а± | < а102 = А± на фазовой поверхности одновременно существуют устойчивая особая точка у± = у1а\ у2 = 0, область S,
притяжения которой ограничена сепаратриссой седла (см. рис. 3.30, а), и устойчивая предельная траектория АВА, соответствующая циклическим колебаниям скорости вращения вокруг среднего значения. Амплитуда и период этих колебаний зависят от параметров системы и величины внешнего воздействия а±. Они не зависят от начальных условий, если эти начальные условия принадлежат к области S2 притяжения предельного цикла. Характер процессов установления обоих режимов представлен на рис. 3.31, а — синхронизация и на рис. 3.31, б—асинхронный периодический режим.
3. При | «11 > Н1б2 = = Ах на фазовой поверхнос-
0)
ти существует только устойчивая предельная траектория у^, у^ (цикл) АВА, область притяжения которой охватывает всю фазовую поверх-
ность (см. рис. 3.30, б).
Пример 3.6. Исследовать модель системы стабилизации курса (авторулевого [Л. 10]).
Рассмотрим работу модели системы стабилизации курса, описание которой дано в § 1.2, а структурная схема — на рис. 1.3. Модель собрана на решающих усилителях по схеме (рис. 3.32, а) так, что в ней считается несущественной нелинейность пневматического усилителя и учитывается нелинейность усилителя корректирующей обратной связи. Цель исследования — выяснить влияние коэффициента линейной обратной связи, задаваемого сопротивлением г на суммирующем входе А.
Характеристика z1(«BX) усилителей приведена на рис. 3.32, б, а характеристика z2(uBX) нелинейного блока НБ модели — на рис. 3.32, в,
Вследствие насыщения решающих усилителей |2Цс 100 в фазовые переменные жестко ограничены и фазовая плоскость представляет собой квадрат (рис. 3.33)<
На линейном участке 2Х коэффициент усиления | k | = 105 > 1 и, как показано в § 5.7 части I курса, с помощью таких усилителей можно интегрировать дифференциальные уравнения (моделировать звенья динамических систем).
111
Из схемы (см. рис. 3.32, а) непосредственно следует, что исследуемая модель решает уравнение
(3.64)
di* 2\ di ] Г di и г
при
Полученное уравнение сводится к (3.45), если положить F(y2) = z2(z/2) — — fet/2; <а0 = 1. Воспользуемся методом Льенара для построения фазового портрета.
При этом, если изображающая точка пересекает изоклину горизонтальных касательных раньше (позже), чем вертикальную ось = 0, то отклонение изображающей точки от начала координат уменьшается (увеличивается). Области, где это имеет место, на рис. 3.33 обозначены 1(11}.
При сравнительно больших значениях г прямая г = —fey2 пересекает кривую г2(уа) только в начале координат (см. рис. 3.32, в). В этом случае изоклина горизонтальных касательных t/2 = ky2 — z2(y2) целиком лежит во втором и четвертом квадрантах фазовой плоскости.
На рис. 3.33, а построен фазовый портрет для k = 0,75, г = 1,34 Мом, когда прямая z касается кривой z9 (положение а на рис. 3.32, в). Из построения следует, что единственный установившийся режим системы соответствует устойчивому 112
равновесию при t/ls = y2S = 0. Вблизи этого положения Система ведет себя согласно
линеаризованному уравнению
at at
Система аналогична устойчивому колебательному звену с сильным демпфированием.
Совершенно иная картина получается при k = 1, г = 1 Мом, что соответствует положению б прямой г (см. рис. 3.32, в). В этом случае изоклина горизонтальных касательных (рис. 3.33, б) многократно пересекает ось ординат фазовой плоскости. Из построения следует, что помимо устойчивого равновесного состояния (покоя) в точке у1в = у2в = 0, система может совершать незатухающие колебания, амплитуда и частота которых не зависят от начальных условий, если только эти начальные условия лежат в области притяжения устойчивого предельного цикла 1. Этот режим работы системы называется автоколебаниями, а сама система — автоколебательной. В рассматриваемом случае существенно то, что автоколебания не могут возникнуть, если системе не сообщено начальное отклонение, выводящее ее за пределы неустойчивого (водораздельного) предельного цикла 2, внутри которого лежит область притяжения положения равновесия Такое возбуждение автоколебаний называют жестким.
113
При дальнейшем уменьшении сопротивления г прямая 2 = —ky2 (см. рис. 3.32, в) поворачивается по движению стрелки часов, изоклина горизонтальных касательных (см. рис. 3.33) перемещается в первый и третий квадранты, амплитуды устойчивого 1 и неустойчивого 2 предельных циклов растут. После совпадения этой прямой с прямой z = ydz!dy | у==0 вся изоклина х = 0 переходит через ось ординат и нарушается устойчивость положения равновесия. Система ведет себя, как показано на рис. 3.33, в, построенном для k = 5, г = 0,2 Мом (положение в на рис. 3.32, в).
Модель автоколебательной системы с мягким возбуждением получается, если инвертировать сигнал, подаваемый на нелинейный блок z2 и сопротивление г, т. е. переключить их вход В на выход у2 в точку D (см. рис. 3.32, о).
При этом дифференциальное уравнение (3.G4) примет вид
d2 y1/dt2 = — z2 (dyi/dt)— ki (dy1/dt)—y1 (3.65)
и изоклина горизонтальных касательных yl = —F(y2) изменит знак. На рис. 3.33, г построен фазовый портрет для случая г = 1 Мом, k 1 (положение г на рис. 3.32, в). Особая точка — неустойчивый фокус, кривая 1 — устойчивый предельный цикл. Вне неустойчивого водораздельного цикла 2 система неустойчива и процессы в ней определяются ограничениями характеристик усилителей 2Х = 100 в.
Рассмотренный пример показывает, что в зависимости от параметров автономной нелинейной системы в ней могут возникать незатухающие колебания, форма и период которых определяются только характеристиками самой системы и не зависят от начальных условий, если они принадлежат к области притяжения этого режима. Такие режимы называют автоколебаниями, а системы, в которых они наблюдаются — автоколебател ьным и.
§ 3.5. КУСОЧНО-ЛИНЕЙНЫЕ СИСТЕМЫ
Из предыдущих параграфов и приведенных в них примеров следует, что процессы в нелинейной системе (3.6) при конкретных, численно определенных функциях Рг и Р2 можно построить с заданной точностью.
Принципиальные трудности возникают при решении основных задач проектирования и расчета систем управления:
задачи анализа системы, т. е. исследования зависимости режимов ее работы от параметров элементов системы;
задачи синтеза системы, т. е. обоснования выбора структуры схемы и значения параметров элементов, обеспечивающего требуемое или наилучшее в заданном смысле качество работы.
Реальные успехи достигнуты здесь для двух конкретных классов динамических систем:
1. Для генераторов незатухающих гармонических колебаний (к числу таких систем относится, в частности, система, рассмотренная в примере 3.6). Они подробно рассматриваются также в теории колебаний [Л. 10] и специальных технических дисциплинах, связанных с разработкой и применением генераторов периодических сигналов [Л. 121].
2. Для систем, нелинейные характеристики элементов которых могут быть представлены отрезками прямых линий (кусочно-линейных 114
систем). В теории автоматического управления и Практике создания автоматических систем их изучение представляет особый интерес.
В § 1.4 указано, что ломаная кусочно-линейная характеристика может быть получена при аппроксимации гладкой характеристики z(x). Так, из однозначной характеристики электронного усилителя получается нелинейность типа ограничение (см. рис. 1.2) и из семейства экспериментальных циклов перемагничения ферромагнитного сердечника—нелинейность типа магнитный гистерезис (см. рис. 1.22). Осуществляя подобную аппроксимацию следует помнить, что она не должна сказаться на результатах качественного анализа системы. Иными словами, количество и тип особых точек, качественная картина границ областей их притяжения, наличие и устойчивость предельных циклов не должны меняться при аппроксимации. Мощным средством проверки допустимости принятой кусочно-линейной аппроксимации служит сравнение результатов анализа с результатами контрольного моделирования исходной системы.
Важнее то, что в большинстве существенно нелинейных систем управления кусочно-линейное математическое описание получается не из аппроксимации гладких кривых, а следует из; самой физической природы элементов, применяемых в этих системах. Таковы устройства с внезапно меняющимся механическим (люфт, упор) или электрическим (реле, выключатель, контроллер) контактом, а также бесконтактные схемы с аналогичными характеристиками (полупроводниковое реле, ключ, триггер).
Разрывная кусочно-линейная характеристика — естественное представление экспериментальных свойств таких элементов (см. § 1.5).
Рассмотрим, как отразится кусочно-линейный вид характеристик элементов на фазовой плоскости системы. Каждому линейному участку характеристик z;((/j) и Zj(y2) элементов, входящих в систему, на котором ни одна из них не имеет изломов и разрывов, соответствует отдельная область или лист k = а, Ь, с, ..., в пределах которого правые части системы дифференциальных уравнений (3.7) линейны по обеим фазовым переменным.
Таким образом, можно записать:
--kjo-j-kjj у1-^к12Уз',) (3 66)
dy-Jdt = k20 + k2l yx k22 y2,)
где kl0^Plh (Ух =0; y2 0) = Pift (0) и fc2o = Луг’(0)-Координаты особой точки dyx! dt = dy2!dt = 0;
,, __—feio ^22~Ь ^20 ^12 ,, ,, fell) ^21 ^20 k
y^S----, , L L И C/2S L L h h
^11 ^22 — ^12 ^21 КЦ ^22 ^12^:
(3.67)
В силу ограниченности листа особая точка зачастую лежит вне его пределов, не является положением равновесия системы и ее окрестность недостижима в процессе перемещения изображающей точки по фазовой траектории.
115
Поскольку из (3.66) следует, что А1о = — (^иУь + ^хаУал) и
— —(^21У1Я + ^ааУа8)> то дифференциальные уравнения фазовых траекторий можно упростить в соответствии с (3.19):
dyi/dZ =fe11(y1—yle) + A12(y2—y2e); j (3
dy2/dt = k21(y1—yu)4-A!22(ya—y2s). /
Из сопоставления (3.68) и (3.19) следует, что единственное их от-
личие заключается в смещении
Рис. 3.34
особой точки из начала координат в точку с координатами (3.67) и, с учетом этого, весь анализ, проведенный в § 3.3, полностью применим для каждого листа фазовой плоскости кусочно-линейной системы.
Специфичным оказывается вырожденный случай Д = 0. В частности, при
dyjdt =уг‘, dy2/dl = о(у2~у2а),
(3.69)
что отличается от (3.41) только наличием постоянной компоненты й2о = = Р2(0) = —oz/2s, фазовый портрет не похож на рис. 3.20.
Уравнение интегральных кривых в этом случае имеет вид
dl/j __ Уг — Угз dyi уг
(3.70)
Изоклины представляют собой прямые
Уг—
дуга
X — я
(3-71)
параллельные оси абсцисс (рис. 3.34), причем изоклина горизонтальных касательных и = 0, у2 = у2а^является одновременно предельной фазовой траекторией системы.
Интегрируя сначала второе из уравнений (3.69), а затем первое, получим параметрическое выражение семейства фазовых траекторий 116
У1—У23 = (.У2ь~^)^(‘ Zfc);
У1 - Уik = -у {Угк-У^ - Ч) _ 1) 4- у2>(I_ tk).
Система (3.72) допускает исключение параметра t, после чего yi выражается как явная функция у2:
У1ь) = (Уъ~ йл)+&в1п Уз-~У\ • (3.73)
У2k —Уза L
Ход фазовых траекторий при о < О (нейтральная система) показан на рис. 3.34, а и при о > 0 (неустойчивая система)—на рис. 3.34, б.
При о=0 можно записать
dz/i/d/ = //a; j (3 74)
dy2/dt — С. J
В этом предельно вырожденном случае последовательного соединения двух интегрирующих звеньев фазовые траектории представляют собой семейство парабол, эквидистантных по оси абсцисс,
У1-У1к = -^(У2—У2к)2> (З-75)
представленное графически на рис. 3.35.
Излому или разрыву кусочно-линейной характеристики 2,(t/) при переходе к новому линейному участку соответствует граница листа фазовой плоскости.
При этом будут рассматриваться два типа переходов:
а) переход с сохранением непрерывности правой части дифференциальных уравнений (3.66) и, следовательно, компонент фазовой ско-рости, характерный для непрерывных кусочно-линейных систем;
б) переход с разрывом значений компонент фазовой скорости, но с сохранением непрерывности фазовых траекторий, характерный для кусочно-линейных систем с переключением.
Непрерывные кусочно-линейные системы. Поскольку функции Р1(У1, Уя) и Рг(У1'' У2) меняются с сохранением непрерывности, то и изоклины системы (3.66) также непрерывный представляют собой ломаные линии. Фазовые траектории лишены изломов. Характерным примером системы такого типа служит следящая система с1 ограничением скорости исполнительного двигателя.
Пример 3.7. Исследовать отработку заданного постоянного рассогласования — const следящей системой с Ах = 2; Qm = 1; kc = 0;
Из примера 3.3 следует, что в этом случае система дифференциальных уравнений фазовых траекторий
dj/i/dT =р2;
dy2/dx = — (2 sin уъ, |/21 < 1-
Фазовая плоскость делится на четыре листа (рис. 3.36).
Лист а. Линейная зона малых углов
117
Границы листа — вертикальные прямые у2 arcsin 1/2 л/6
= arcsinl/2 = л/6. В пределах этих значений аргумента приближенно положить sin i/j = уг, откуда
dyjdx^yi, 1
dy2/dx = —у1—уг-)
Рис. 3.36
Особая точка у13 = у2S =0 — устойчивый фокус, переходные процессы колебательные с показателем затухания £ = 1/2.
Лист Ь. Область положительного насыщения /2 = 1, л/6 < уг < л — — л/6 = 5/6л, откуда
dy1/dx — y2; |
dy2/dx = — уг — 1, j
.118
«^ответствует (3.69) при CT = —1; yw — —1.
р (3.71) следует, что семейство изоклин у2ь ~ — (1 + к)-*. Согласно (3.72) метричес ое уравнение фазовой траектории
У2+ 1 = (Угъ+ 1) е~ (т~ T&) 1 )
г /_ - \, / (<э.7и)
J/i —l/ib=(j/2b+l) [1 —е < хь)]~(т — тй) )
и из (3.73) получается уравнение с исключенным параметром т:
, I У 2 + 1 I
У1—УкЪ ~ УгЪ—Рг+'п ГТ ‘ (3.77)
I P2b+1 I
Фазовые траектории в области положительного насыщения усилителя, когда линейная часть системы находится под постоянным воздействием, эквидистантны по оси абсцисс и с течением времени стремятся к особой прямой уг = —1 = = const, что соответствует равномерному вращению двигателя.
Лист d. Линейная зона углов, близких к л, dsinpi I 2 sin pi | с 1; -------- < 0.
' dpi
Границы листа—вертикальные прямые
ух — arcsin 1/2 = л — л/6 = 5/6л и yl = arcsin — 1/2 = л-|-л/6 = 7/6 л,
В пределах этих значений ух приближенно можно положить sin ух х л — — ylt откуда
dy1/dx=y2', 1
dy2/dx=yx — р2 + л. )
Особая точка yxs = л; p2s = 0 — седло, угловой коэффициент сепаратрисе которого
-1 ± /5 х112 =-----------•
а уравнения сепаратрисе соответственно
14-/5
Уг = —-----£--(Pi —л) ——1,618 (р! —л)
и
/5 — 1
У г =------(Pi — л) ж 0,618 (pi — л).
Лист с. Область отрицательного насыщения
z2 =—1; —5/6л<р!<л/6.
При этом
dp1/dx = p2;
dy2/dx = —р2 + 1,
откуда ст = —1; у2в = 1- Соответственно уравнение изоклин у2 = —(1 — «)“’• Фазовые траектории листа с
Уг~\=(Угс~ 1)е~(т~тс); 1
Pi-Pic = (P2c-0 [1-е“^_тс)] + (т-тс), J
119
Рис. 3.37
Гладкость перехода фазовой траектории с листа на лист и непрерывность изоклин очевидна из рис. 3.36.
Кусочно-линейные системы с разрывными нелинейностями. Границы листов, при переходе через которые правая часть дифференциальных уравнени й (3 66)терпит разрыв, называют линиями переключения. 190
«Давление фазовой траектории по одну сторону от линии переключи вообще говоря не совпадает с ее направлением по другую сто-У-
На рис. 3.37, а изображен переход с одного лйста а на другой лист b фазовой плоскости, когда переключение происходит с гистерезисом 2е в соответствии с характеристикой (рис. 3.37, б) переключающего элемента.
Достигнув линии ч>(у1, t/а) = е < 0 на участке А В, изображающая точка в результате переключения переходит На лист Ь. Такой переход возможен, поскольку вектор va фазовой скорости до переключения направлен к линии переключения, а уь после переключения— от нее. При этом проекции векторов van и иЬп фазовой скорости на нормаль к линии переключения имеют один и тот же знак. Фазовая траектория покидает полосу гистерезиса и с изломом уходит на лист Ь.
Картина переключения меняется, если вектор vb фазовой скорости оказывается направленным к линии переключения, как это имеет место на участке ВС. При этом проекции van и vbn противоположны по знаку и векторы va и уь фазовых скоростей направлены навстречу друг другу. Изображающая точка после переключения перемещается внутрь полосы гистерезиса — е < фОа; у2) < е. Скорость ее перемещения по этой полосе определяется разностью перемещений ме|жду каждыми двумя переключениями или, приближенно, разностью тангенциальных проекций векторов фазовой скорости в точках переключения.
Если на концах полосы ВВ'СС векторы этой разности направлены навстречу друг другу, то на ней существует по меньшей мере один устойчивый предельный цикл SS', к которому стремится изображающая точка. Этот предельный цикл соответствует автоколебательному режиму, частота и амплитуда которого полностью определяются параметрами переключающего элемента (шириной петли гистерезиса) и его настройки (наклоном линии переключения). Заметим, что осью симметрии предельного цикла служит общая изоклина хо = кь листов а и Ь.
Если ширина петли гистерезиса пренебрежимо мала (е -> 0) и характеристика переключающего элемента может рассматриваться как идеальная (безгистерезисная) (рис. 3.37, в), то полоса —е < ф < е стягивается в линию переключения ф = 0 (рис. 3j37, г), на которой различают участки притяжения (переключения) АВ и CD и участки отталкивания—скользящего режима — ВС, на которых переключающий элемент (реле) работает в вибрационном режиме. Частота его переключений при этом определяется параметрами самого реле и оказывается настолько высокой, что объект управления реагирует только на изменение среднего значения сигнала. Предельный цикл SS' стягивается в особую точку S скользящего режима, которая лежит на пересечении линии переключения ф = 0 с общей изоклиной иа = х& листов фазовой плоскости. Если эта особая точка устойчива, как показано на рис. 3.37, г, то она соответствует устойчивой стабилизации объекта управления при вибрационном высокочастотном режиме переключения управляющего устройства.
121
Ранее в гл. I и II опиД^ вались возможные функМ| релейного переключающей^ устройства. Рассмотрим в начале его работу при переключении сигнала, действующего на объект управления с неизменными параметрами.
Пример 3.8. Исследовать процесс отработки заданного начального рассогласования—л/2< <0О < л/2 следящей системой, содержащей в качестве усилительного устройства трехпозиционное реле с гистерезисом, характеристика которого рассмотрена в § 1.6 и изображена на рис. 1.18, в. Структурная схема такой системы приведена на рис. 3.38, а.
В соответствии с (3.13), (3.15) и (1.25) можно записать
Ф<йд ^02
Ад“д = Гд_щ-+й,д: Шд=1Г: “1 = Л (0) = t/im sin 6 = t/]m Sin (01—62); U2 “ Ц1—
(гь sign u2 при ид — /2 (ua) — { n
(О при
I I > xb;
I «2 I < xa-
По заданию система отрабатывает ограниченное начальное рассогласование 0О. Кроме того, для реле достаточно высокой чувствительности ха < хь С Ulm. Эти ограничения позволяют считать, что 0=—02; и2 ~ ~ fi/im 0 + kK —— I. \ /
1
Введем безразмерное время т= —— t и фазовые переменные у1 — ‘д
= ---------0; Уъ = —после чего система дифференциальных уравнений
йдгьТд dr
фазовых траекторий примет вид
d^dx = ^ ) (з.8О)
dy^jdx——2(y1-[-kcy2)—у2, J
где функция
z_ ( sig” (f/1 + *С f/з); I f/i + *c f/a I > *-«’.
I о ; 1уг \-kcy.3 I .<£ ,
как изображено на рис. 3.38, б. С учетом выбранного масштаба, kc — kx/Uijn', е = ха/(кд t/im ZbTjj)-, X — xb/xa.
Каждому из трех постоянных значений 0, 1 и —1, которые принимает функция z, соответствует лист фазовой плоскости (рис. 3.39).
Зона нечувствительности реле (z = 0) представлена листом а, ограниченным двумя прямыми переключения
Уг= — ((/1—е)/йс и у2= — (yi + e.)/kc.
122
ЛСистема дифференциальных уравнений фазовых траекторий здесь
Т* dy1/dx = y2, )
% ( (3.81)
? dy2/dx = — у2 J
совпадает с (3.41) при о=—1. Фазовые траектории этого листа, согласно (3.42) и (3.43), представляют собой прямые, наклоненные под углом —45° к оси абсцисс, по которым изображающая точка стремится к отрезку покоя —е < у1 ' е. Вследствие гистерезиса на этот лист фазовой плоскости частично накладываются соседние листы.
Рис. 3.39
Лист b соответствует положительному значению 2=1, При этом дифференциальные уравнения фазовых траекторий
dyi/dx=y2, )
dy2/dx = — у2 — 1 J
совпадают с (3.69) при о = —1; y2s — —•• Семейство фазбвых траекторий удовлетворяет равенствам (3.76) и (3.77) и полностью аналогично построенному на листе Ь (см. рис. 3.36). Поведение релейной системы при включенном реле аналогично поведению непрерывной системы в зоне насыщения усилителя.
Линия переключения представляет собой прямую у2 = —(уг— Хе)//гс, которая параллельна правой линии переключения листа а и при 1 > X > О расположена между ней и началом координат.
Отрицательному значению г = —1 соответствует лист с, в пределах которого
dyi/dx = y2;
dy2/dx = — i/a+1
(3.83)
123
й фазовые траектории, вычисляемые по формулам (3.78) и (3.79), симметрией фазовым траекториям листа b относительно начала координат.
Рассмотрим несколько характерных случаев:
1. Система без обратной связи по скорости (рис. 3.40, а, б и в). <
Рис. 3.40
При /гс = 0 линии переключения вертикальны. В зависимости от соотношения между шириной е зоны нечувствительности и показателем А возможна устойчивая работа системы, когда все фазовые траектории оканчиваются на отрезке покоя (рис. 3.40, а), и автоколебательная, когда при достаточно больших начальных отклонениях (вне заштрихованной зоны S застоя) фазовые траектории стремятся к устойчивому предельному циклу АВА'В' (рис. 3.40, б).
Граничный случай между этими двумя режимами соответствует критическому соотношению параметров X = Хкр; е = екр, при котором предельный цикл и границы области S совпадают друг с другом (рис. 3.40, в).
124
. Определим граничное соотношение меЛДу Параметрами системы Непосредственно на рис. 3.40, в. Катет у 2а — АС равнобедренного прямоугольного треугольника АВС равен ^крекр + екр = 0 + ^кр)екр- О другой стороны, координаты точки А должны удовлетворять уравнению (3.79) фазовой траектории, начальная точка которой В' лежит на оси абсцисс у2С — О на расстоянии у1с = = —екр от начала координат. Подставим эти данные в уравнение (3.79)
. , 1,,1 (1 + 8кР ~1 |
— Лкр8.кр + 8кр——(Д“гЛкр)8кр 1П __1 »
откуда
— 2ккр —In [1 — (1 + ХКр) Екр!
или
1+^кр=—-(1-е-2^р). (3.84)
екр
2. При относительно слабой обратной связи по скорости картина качественно не меняется. Учтем отрицательный наклон линии переключения при определении критических значений параметров. На рис. 3.40, г представлен граничный случай при наличии обратной связи. Координаты точки А определяются из условия пересечения прямой АВ, уравнение которой
Уг~ —У1 + вкр
с линией переключения листа с
Уг~ 1/*с (У1 + ^-кр бкр)-
Совместное решение этих уравнений дает:
О)
_ ^Кр + fec
У la---» , 8кр»
1 —Яд
1 + 1кр
У2а— » , 8кр«
1 —«с
Подставляя эти данные в уравнение (3.79), получим:
^-кр + ^с , 1+^КР
1 -fec екр + Екр = _' !-fec екр~'П
1 Н~ ^кр 1-fec
екр — 1
(3.85)
откуда
—2екр— In 1
1 + ^кр l-k0 ЙНР
или
——(1~е 2е«р) = т^Т-(1 + Хкр). ькр I—«с
(3.86)
125
Очевидно, что выражение (3.84) — частный случай уравнения (3.86) при *с = 0.
Поскольку левая часть уравнения (3.86) зависит только от Евр, а правая — только от Лкр при параметре kc, то это уравнение допускает простое графическое решение, представленное на рис. 3.41, а. Из этого рисунка, в частности, следует, что при ka > 0,5 и 0 < 1 в системе не может существовать автоколебательный режим.
На рис. 3.41, б представлено семейство кривых для разных значений 0 < kc < < 0,5. Системы, параметры которых е и А. лежат ниже соответствующей граничной кривой, автоколебательные, выше — устойчивые.
3. При весьма сильной обратной связи (kc > 1) наклон линии переключения становится меньше, чем наклон фазовых траекторий листа а. Отработка отрицательных начальных отклонений ух < —е, у2 = 0 после первого переклю
чения на нуль идет в скользящем ре-
жиме одного контакта реле, а положительных ух > е, = 0 — другого. Переброс реле из положения г == 1 в положение z = —1 вообще не наблюдается. Фазовый портрет такой системы представлен на рис. 3.42.
В гл. I рассматривалась работа реле в качестве элемента, выполняющего более сложные функции — переключателя связей между элементами системы в зависимости от сигнала, поданного на его управляющую обмотку (см. § 1.8).
На таких элементах основаны системы с переменной структурой
(см. § 1.3).
Рассмотрим простую структурную схему, в которой реле с характеристикой (см. рис. 1.5, а) осуществляет переключение знака обратной связи, охватывающей два интегрирующих звена в функции линейной комбинации фазовых координат и2 = + а2^2 (Рис- 3.43).
При этом функция ф, подаваемая на множительное звено структурной схемы, принимает значения 4-1 или —1 так, как это показано на плоскости (t/jj t/2) (рис. 3.44, а), реализуя две линии переключения ух = 0 и у2 = —kyt, где k = а,/а2 — настраиваемый параметр ф-ячейки.
126
Первоначально положим k0 = 1, тогда при ф = — 1 дифференци альные уравнения фазовых траекторий системы
d^'di = ^ | (з,87)
dy2ldt=—y1. J
Как показано в § 3.3, в начале координат (рис. 3.44, б) лежит особая точка типа центр, система колебательная с нулевым затуханием.
При ф = 1 дифференциальные уравнения фазовых траекторий
(3.87а)
dy 1 /dt = у dy2/dt=y1.
Рис. 3.44
В начале координат (рис. 3.44, в) лежит симметричное седло с се-паратриссами у2 = —yY и уг = yv и система неустойчива.
На рис. 3.44, г представлена фазовая плоскость в условиях переключения ф-ячейки, при настройке коэффициента 0 < k < 1. В системе
127
наблюдается скользящий режим вдоль линии переключения у2 = kylt причем единственная устойчивая особая точка этого скользящего режима— начало координат фазовой плоскости. Переходные процессы в такой системе протекают тем быстрее, чем круче лежит линия переключения, т. е. чем k ближе к единице. Однако стоит настроить k > 1 и поднять линию переключения выше сепаратриссы у2 — —ylt как система станет колебательной (рис. 3.44, д) и переходный процесс, обеспечиваемый переменой структуры системы, резко ухудшится.
Но и при такой настройке устойчивость системы управления сохраняется.
;; Таким образом, система с переменной структурой дает возможность получить устойчивую систему управления, которая в различные промежутки времени описывается линейными уравнениями нейтральной (колебательная с нулевым затуханием) и неустойчивой систем.
Если коэффициент k0 отличен от единицы, то фазовые траектории (см. рис. 3.44, бив) будут представлять собой семейства эллипсов и несимметричных гипербол. При этом характер скользящего режима (см. рис. 3.44, г) не изменится. В этом случае изменение в определенных пределах практически не сказывается на переходном процессе и система оказывается нечувствительной к изменениям параметров. Это преимущество систем с переменной структурой обусловило распространение их на практике [Л. 39].
§ 3.6. МЕТОД ТОЧЕЧНЫХ ПРЕОБРАЗОВАНИЙ
При определении периодических режимов нелинейных систем и, в особенности, при точном исследовании устойчивости этих режимов и границ областей их притяжения важную роль играет метод точечных преобразований (отображений), разработанный А. А. Андроновым и его сотрудниками [Л. 9, 74].
Пусть на фазовой плоскости (рис. 3.45) можно найти отрезок кривой О А, не содержащий точки контакта (касания} с фазовыми траекториями, фазовые траектории пересекают отрезок ОА в одном и том же направлении.
Рассмотрим фазовую траекторию, проходящую через произвольную точку Af0 (см. рис. 3.45). Если удастся проследить ход этой траектории и определить точку Afxee возвращения к отрезку ОА, то под точечным преобразованием Т отрезка ОА будем понимать оператор, выражающий однозначную зависимость Alx = TfAfo). Таким образом, преобразование Т переводит точку отрезка, не содержащего точек касания и особых точек, в последующую точку того же отрезка. С помощью оператора Т можно точку Afx в свою очередь преобразовать в точку Af2:
Мг = Т {/Их) = Т2 [Af0] (3.88)
и т. д.
Если существует такая точка АГЦ, которую преобразование Т переводит самое в себя, не изменяя ее положение на линии ОА; А1ц = == /'(АР), то эта точка лежит на замкнутой фазовой траектории — предельном цикле,
Вопрос об устойчивости определенного таким образом периодического режима решается применением преобразования Т к точкам, соседним с неподвижной ЛР. Если повторное точечное преобразование приближает их к Л4Ц, то предельный цикл устойчив, а если удаляет, то нет.
Допустим, что в частном случае преобразование Т оказалось простым и зависимость координаты /х точки Л4Х от координаты 10 точки Ма удалось построить в виде графика
l=T(l0), (3.89)
который называют диаграммой Кенигса-Ламерея (рис. 3.46). Повторному применению преобразования Т согласно (3.88) соответствует наглядное построение.
Из начальной точки Мо на оси /0 восставляют перпендикуляр до кривой (3.89). Полученную ординату /х переносят на биссектрису Zx = /0 координатного угла и таким образом получают абсциссу следующей преобразуемой точки.
Предельным циклам на диаграмме Кенигса-Ламерея в этой и более сложных ее модификациях (см. далее примеры 3.9, 3.10) соответствуют точки, координаты которых при таком построении не изменяются. На рис. 3.46 это точки пересечения кривой (3.89) и прямой /х = /0. Неподвижные точки Л1ХЦ и Л43ц—устойчивы, а Л42ц — неустойчива, что определяется наклоном кривой (3.89) в исследуемой точке пересечения. Предельный цикл устойчив, если |^| < 1 и кривая пересекает прямую в заштрихованной на рис. 3.46 зоне, и неустойчив, если | | > 1 и пересечение происходит вне заштрихованной зоны.
Практическое применение этого метода сопряжено с рядом трудностей:
1. Аналитическая связь между двумя точками одной и той же фазовой траектории, вообще говоря, устанавливается только для кусочно-линейных систем.
5 Зак. 447
129
2. В случае кусочно-линейных систем преобразование Т распадается на несколько отдельных преобразований Т = ТаТь ... Тг, по числу листов, проходимых изображающей точкой в ходе ее перемещения от одной точки преобразуемой линии до другой ее точки.
3. На каждом листе связь между начальной и текущей точкой, как правило, выражается трансцендентной параметрической зависимостью.
4. Зависимость между координатами преобразуемой точки A4(z/ljW; ^2М), устанавливаемая уравнением <р(г/1Л1; z/2jW) =--0 линии ОА, должна допускать исключение одной из координат в ходе преобразования.
В силу изложенного, практическое применение находит точечное преобразование прямой в прямую при исследовании кусочно-линейных систем с типовыми нелинейностями, описанными в гл. I.
Более сложные задачи могут быть решены с применением средств вычислительной техники.
Перейдем к исследованию конкретных систем.
Пример 3.9. Определить параметры и устойчивость автоколебаний следящей системы без обратной связи по скорости с двухпозиционным релейным усилителем, характеристика которого приведена на рис. 1.18, а.
В соответствии с примером 3.8 дифференциальные уравнения фазовых траекторий
dy^dx-y^, )
dy.Jdx- —z(yi)~y.,J
где
Фазовая плоскость системы (рис. 3.47, а) состоит из двух листов b (z = 1) и с (г =—1), заполненных симметричными фазовыми траекториями (3.76) и (3.78) В качестве отрезка без контакта выберем вертикальную прямую переключения у± =- е; г/, > 0. Преобразование Т, переводящее точку у20 этой прямой в точку 1/22 той же прямой, состоит из двух последовательных преобразований: Th, преобразующего у.,,, в у.,, и Тс, преобразующего у2, в у22, Т — ТъТс. В силу симметрии фазовых траекторий листов b и <; вместо полного преобразования достаточно рассмотреть любое из его составляющих.
Рассмотрим преобразование Тъ, которое в параметрической форме выражается формулой (3.76), если подставить в нее
У1Ь — в; У1~ в; х ть = тх; Угь — Уяо-
Чтобы построить диаграмму Кенигса-Ламерея в первом, а не в четвертом квадранте, примем у21 = —у2с > 0. При этом
1—Ун = (1 + </го) е Т1 |
— 2е = (1 +//го) (1—е~т«)—тг /
Определив t/20 из второго уравнения и подставив его в первое, получим параметрическое выражение преобразования
Ун = 1 —
тх— 2е ”1 -с-г'
тх—2е
(3.90)
130
Минимальное значение параметра Tt — безразмерного времени движения по траектории листа b (см. рис. 3.47, а) — получается из условия у.,а = 0. При этом
Timln— 2е ----------—1 = 0 или 1 —,mln
Timln 2e— 1 £-T
1Ш1П
что графически соответствует абсциссе точки пересечения экспоненты 1 с прямой 2 (рис. 3.47, б). Очевидно, что т1тщ монотонно возрастает вместе с е; Tlmtn = 0 при е = 0. Подставив значения Tlmin в (3.90), убедимся в том, что
f/21 (Timin) - 1 — е~ Tiniln > 0.
5* 131
Далее, у20 при Ti -* 00 безгранично увеличивается, а у21 стремится к единице. Эти рассуждения поясняют построенную на рис. 3.47, в диаграмму Кенигса-Ламерея. Точка пересечения кривой (3.90) с прямой у21 — у2а определяет значение максимума безразмерной скорости у2 на предельном цикле (см. рис. 3.47, а). Автоколебания устойчивы.
Период автоколебаний Т = 2т^ можно найти, приравняв значения у20 и у21 в выражении (3.90). Полученное при этом трансцендентное уравнение, называют уравнением периодов. В этом конкретном примере оно имеет сравнительно простой вид:
Йт| с/ 1m
-i-^z(0H; <йд) —0. (3.91)
1 д
и выражает зависимость Т(е), представленную графиком рис. 3.47, г.
Пример 3.10. Исследовать следящую систему (см. рис. 1.2) при существенном люфте редуктора. Ограничиться анализом отработки малых начальных рассогласований | 0О | < л/6.
Как показано в примерах 3.3 и 3.7, в зоне малых рассогласований характеристики измерительного элемента (сельсинной пары) и усилителя можно считать линейными:
Ui = /i = t/jmsin0ss 7/1гг1 0; ил = (7Д?) f2 = t/im (0 kit <0д).
Выпишем уравнения системы. Согласно рис. 1.2 и (3.13)
Уд (б/сОд/Л) -}- Щд = &д ид; о>д~ dQa/dt.
Изменение угла 0 рассогласования по знаку обратно изменению угла 9Д поворота двигателя, приведенного к оси нагрузки, и связано с ним нелинейной характеристикой люфта в редукторе
О — —2 (0д; Щд)
Многозначная кусочно-линейная функциия z задана формулой (1.26). Выписанные зависимости сводятся к уравнению
Гд (а!20/Л3) +d^/dt -.£д Uim [2 (0д; d^/dt) + kK (d^/dt)] или
<Р0Д 1 4~ £д kK Оцц с/0д
dt2 + 7Д dt
Перейдем к безразмерному времени
т == (1 + йд kK Ulm) t/Тц, после чего уравнение (3.91) примет вид
, ^9д . ^im г _о
dx2 dx (1 + йд/гк 77jm)2
Приняв ширину люфта А = 2ха за базу нормирования, введем безразмерные фазовые переменные
i/1=(l/2xa) г; </2=(1/2ха) 0Д;
р3=(1/2ха) (d^ldx) = dy2/dx.
Запишем соответствующую систему уравнений фазовых траекторий
]
dya/dx — — Ayr— уз, J где
, _ Тл 1гл Ulm_ k (1 | /гд Him)2 0+Ма
132
Согласно (1.26) и рис. 3.48, а, в полосе — 1/2 < Уу *- у2 < 1/2 система выбирает люфт. При этом сигнал 0 рассогласования не меняется, откуда dyjdx = = 0 и й = ylh = const.
В режимах люфта, выбранного влево, у2 — уг + 1/2; уа > 0, или вправо У г = Щ — 1/2; уа < 0, механические связи не нарушаются, поэтому dy-Jdx = = dy2/dx = ys.
Рис. 3.48
Система входит в полосу люфта при изменении направления вращения (при реверсе): Уз = dy2/dx = dy-Jdx = 0. Начнем исследование с этого момента. Для определенности положим, что непосредственно перед реверсом у3 > 0. Это значит, что в начальном состоянии изображающая точка находится на прямой N (рис. 3.48, а), где у20 = f/io + К2! Узо = О-
Система (3.92) в полосе люфта принимает вид
dt/2/dT = </3;
dya!dx= —(уз Л(/10),
что соответствует (3.69). Согласуй индексы и подставляя значения а = —1; Узе = — Л//10; t — th = т; Узо = Ум + 1/2; Узо = О, получим из (3.72) параметрическое уравнение текущих координат фазовой траектории
!/з=—Л(/1о(1—е~г);
Уз~Ую + ДГ"—^У1о (с Т — !)•
(3.92а)
133
В момент т = т, при уг — уг1 = у13 — 1/2 система выберет люфт. Обозначив </3(Т1) = у31, получим зависимость между координатами конечных точек этого участка фазовых траекторий у31 и уп = уи от параметра тх:
//31 =
е~х'-1
1
//it—
Л(е т, + т1 —1)
(3.93)
Выражение (3.93) определяет точки кривой Л, на рис. 3.48, б.
Дальнейшее движение системы удовлетворяет (3.92) при уя — dy,,/dt — = dyi/dx:
dy1/dT = y3- |
dy3/di = — AyL — y3. I
(3.926)
Параметрическое уравнение фазовой траектории может быть записано согласно (3.23) при А < 1/4 или (3.23а) при А > 1/4. В данном примере к более наглядным результатам приводит непосредственное решение уравнения интегральных кривых
dysltyt = ~(Ау1 + у3)/у3.
Это — однородное дифференциальное уравнение. Подстановкой г ~ у^у^, dz/dy1 — [(dyn/dyj уг — уя]/у? оно приводится к уравнению
У1 (dz/dyt)^= — (г2-\-г-\-А)/г,
допускающему разделение переменных
dy}/У1 = — 2 dz/ (г2Ч-г + А).
Заметим, что точки, для которых z const, лежат на прямой = гуух, Проинтегрируем (3.94)
Ун 2 а
f dydyr= — J zdzHf + z + A).
Ун 2t
(3.94)
Уч —
При А > 1/4
1П 1011
Ун
У 4А — 1 > 0 и интегрирование приводит к выражению
1 1 2z-J-l
= — — In | га + г-ЬЛ | + г ___ arctg —-------
2 /4Л—1 ]/4Л —1
г2
Выберем в качестве верхнего предела интегрирования горизонтальную прямую М (см. рис. 3.48, б), в точках которой у22 = у12 — 1/2 < 0; у32 = z2 = 0 осуществляется реверс системы и она вновь попадает в полосу люфта. В качестве нижнего предела рассмотрим прямую i/31 -= Zji/ц для которой | у12 | = ,| уи |. Подставив эти значения, найдем, что
0 = —33333- arctg — —
У4А — 1 L V4A — 1
2zt +1 arctg —
V 4Л — 1
1 , zia А~г1А~А -- IП 1 ------
или, преобразуя разность арктангенсов, получим
, г^ + ^ + А 2
In ——----= ^=3^
А /4Л — 1
zj У4А— 1 arctg ——--------
2Л + г£
134
Потенцируя, получим трансцендентное уравнение
2 х г, Й4Л—1
г. : arctg --------
, , . . . У4А-1 2Л + -г, „
г12 + г1+Л = 4е • (3.95)
zi /4Л —1
первый отрицательный корень которого 0 < arctg ———---------< л определяет
2Д 4“
значение наклона прямой г1 в зависимости от параметра А.
Рассмотрим преобразование Т\ точки уг = Ую > О прямой N (см. рис. 3.48, б) н точку у2 = у12 < 0 прямой М.
Если исследуемая точка лежит левее перпендикуляра у{\), проходящего через пересечение прямой Zj и кривой Llt то к моменту реверса на прямой М окажется, что | у12 | > | у10 |. В силу симметрии каждое дальнейшее точечное преобразование Th будет увеличивать модуль координаты у^, приближая его к значению у1[0.
Если же у10 > у^0, то, как видно из рис. 3.48, б, в результате преобразования 7\ окажется, что | у12 | < уы. Дальнейшие преобразования Ту и здесь приводят к последовательности, сходящейся к у^0. Таким образом показано, если прямая zx пересекает кривую при уу > 0, то единственный устойчивый режим работы следящей системы с люфтом — автоколебания, амплитуда которых 0Ц = 2ау“0 пропорциональна величине люфта редуктора.
Пересечение и при yf0 > 0 имеет место, если гг > dy31/dylljZii=0 = — — А. Если же zt < —А, то единственной точкой пересечения (рис. 3.48, в) будет состояние покоя S(y1 у3 — 0; —1/2 < уг < 1/2). Система устойчива и автоколебаний в ней нет.
Найдем граничное значение Л гр, подставив ------Лгр в (3.95). Численное
решение полученного уравнения
2 _______
In Лгр = - =- arctg }/4Лгр—1
дает Лгр = 3,045.
График границы устойчивости в плоскости k, kG представлен на рис. 3.48, г.
Пример 3.11. Определить параметры установившегося режима работы экстремального регулятора, схема которого описана в §1.4 и изображена на рис. 1.8, и.
В соответствии со структурной схемой запишем уравнения системы управления
1 dx , ,,хч ( Uи; v < vm; dxldt > 0;
fej ’ dt ~~ L>’ X ~ I — Ua\ v < dx/dt < 0; z (x) =z0 — ka x2;
Г г (dyldt} ~T y = kzZ.
Из этих уравнений следует, что фазовая плоскость состоит из двух листов; соответственно значению и = Uq — сканирование вправо и и = —U№ — сканирование влево. Переключение с фазовой траектории одного листа на фазовую траекторию другого в соответствии с логикой переключения триггера происходит при ут ~ У = vm-
Перейдем к безразмерному уравнению в отклонениях
Т12±^1=-т1Л (3.96)
dT]!
где
_ х у —fe2 Zp
135
Во втором члене уравнения (3.96) знак меняется всякий раз, когда
От
112111 1,2 k0 k2 (Т2 fex i/0)2 s'
(3.97)
Таким образом, имеем двулистную фазовую плоскость, в которой переход с одного листа на другой происходит в момент, когда r|2m — т]2 = 6.
Уравнение первого листа (dx/dt = = const > 0)
1)2 + dT]2/dTli = — ’ll2- (3-98)
а уравнение второго листа (dx/dt = —ktU0 = const < 0)
т]2 —= —Г]!2. (3.99)
Рис. 3.49
В данном случае в отличие от ранее рассмотренных примеров связь между фазовыми координатами т]2 и т)! не выражается путем прямого дифференцирования, а носит более сложный нелинейный характер. Зависимость между т^ить следует из уравнения (3.96):
T2d x\2/dt = dx\2ldx = — тн2—т]2. (3.100)
В координатах тн и т]а фазовые траектории процессов могут быть легко получены с помощью изоклин, которые, как это следует из уравнений (3.98) и (3.99), представляют собой семейство эквидистантных парабол. Изоклина горизонтальных касательных для обоих листов представляет собой параболу
Л2=—Т]12.
Она совпадает с геометрическим местом точек экстремумов значений т)2, в которых Л|2/^г — driz/d^i — 0.
Примеры изоклин и фазовых траекторий для первого и второго листов показаны на рис. 3.49, а и б. Там же показаны точки Л и В, в которых т)2т —tj2 достигает значения 6 и, следовательно, происходит переход с одного листа на Другой.
В зависимости от начальных условий переходный процесс состоит из нескольких переходов с одного листа на другой и завершается установившимися автоколебаниями, описываемыми на фазовой плоскости замкнутой траекторией, имеющей вид лежащей восьмерки (рис. 3.49, в).
Для определения параметров установившихся автоколебаний необходимо проинтегрировать одно из уравнений (3.98) или (3.99) и решить уравнение периодов, устанавливающее соответствие между начальным и конечным положением изображающей точки на каждом из листов, имея в виду условия переключения триггера, 136
При этом симметричные установившиеся автоколебания могут быть характеризованы абсциссой т]1а точки максимума Лаш и максимальным значением отклонения Him при Паш — Ла = &
Уравнения, связывающие эти координаты, могут быть записаны следующим образом:
Т)а(П1т) = Пг( —Tlim) (3.101) и т]2 (т]1а) — Па (т]1т) =в. (3.102)
Для решения этих уравнений необходимо получить в явном виде зависимость Т)<(Л1) на основании интегрирования, например, уравнения (3.98).
Решение неоднородного линейного уравнения (3.98) можно представить в виде суммы свободной и принужденной составляющих соответственно:
Паев-Ие-’’-, П2пр--(111-1)2-1 (3.103)
Подставляя т]2 = т)2сп + Пгпр в уравнения (3.101) и (3.102) и имея в виду, что Т)2 (т]1а) = —i)ia2, после преобразований и исключения постоянной Л = 2-qtm/(sh Tjim). получим
nim/(sh Him) = (1 — Пю) е1,‘а;
nia^dlrm-l)2--^e^+l-S. (3J04)
sh Him
Графическое решение уравнений (3.104) для различных значений 6 приведено на рис. 3.50, а.
Рассматривал б, как аргумент, удобно полученное решение представить в виде кривой Him(^) (рис. 3.50, б). Зная Him, легко найти период колебаний в системе. Так как | dxldt I = kiUB = const, то для симметричных автоколебаний
7’ = (4xm)/(^^o)=4nimTa. (3.105)
Таким образом, зная Him, легко найти период и соответственно частоту колебаний
<оц = 2л/7’ = л/(2н1т Г2). (3.106)
По величине хт = Uo То п,т можно определить потери на рысканье вблизи экстремума
хт ’hm
дг/ср=— -— (x — k2zB)dx = —------------- 1 П2^Н1 =
ххт ,) ^im J
~хт “Чип
3 П1т’
Потери на рысканье ДуСр выражают уменьшение среднего значения регулируемой величины у относительно максимального значения в точке экстремума при отсутствии внешних воздействий f(t).
Определим значения шц и хт, если kB = 104 град/м1, k2 = b 10—4 м!всек, k2 = 1 в!град, Т2 = 1 сек, Uo = 36 в и = 1 в.
Определив
6=-------________ =________!_____=0 31
kBk2(T2klUB)i Ю4 (1.8.10-2)2 ’ '
по графику (см. рис. 3.50, б) находим Him = 1,23,
По формуле (3.106)
<вц = л/(2н1т Т2) = л/(2-1,23-1) = 1,28 1/сек, при этом
xm ~ ilim ^2 ~ 2,2-10 л<.
ГЛАВА IV
ГАРМОНИЧЕСКАЯ ЛИНЕАРИЗАЦИЯ
§ 4.1. ОБЩАЯ ХАРАКТЕРИСТИКА МЕТОДА ГАРМОНИЧЕСКОЙ ЛИНЕАРИЗАЦИИ
Наиболее широкое распространение для исследования нелинейных систем автоматического управления высокого порядка (п > 2) получил приближенный метод гармонической линеаризации (или гармонического баланса) с применением частотных представлений, развитых в теории линейных систем. Метод гармонической линеаризации, основанный на работах Н. М. Крылова и Н. Н. Боголюбова, был предложен Л. С. Гольдфарбом в 1940 г. [Л. 68] и применен им для анализа систем автоматического управления. Значительно позже к различным модификациям этого метода пришли ученые многих стран: Тастин в Англии, Оппельт в ФРГ, Дютиль во Франции и Кохенбургер в США. В СССР этот метод получил развитие и обоснование во многих последующих работах. Здесь следует указать работы Е. П. Попова и И. П. Пальтова [Л.94], Я- 3. Цыпкина [Л. 125], М. А. Айзермана и И. М. Смирновой [Л. 3], Ю. И. Топчеева [Л. 105], В. А. Тафта [Л. 109] и многих других.
Основная идея метода сводится к следующему. Пусть замкнутая автономная (без внешних воздействий) нелинейная система состоит из последовательно включенных нелинейного безынерционного звена НЗ и устойчивой или нейтральной линейной части ЛЧ (рис. 4.1, а).
Для суждения о возможности существования моногармонических незатухающих колебаний в этой системе предполагается,что на входе нелинейного звена действует гармонический синусоидальный сигнал х(/) = Хт sin<ju/ (рис. 4.1, б). При этом сигнал на выходе нелинейного звена z(t) = z!x(t)] содержит спектр гармонических составляющих с амплитудами Zml, Zm2, Zma и т. д. и частотами <о, 2<о, Зш и т. д. Предполагается, что этот сигнал z(t), проходя через линейную часть Ц7л(/а>), фильтруется ею в такой степени, что в сигнале на выходе линейной части y(f) можно пренебречь всеми высшими гармониками Ym2, Ym3 и т. д. и считать, что y(f) Kmlsin(<o/ + <р).
Последнее предположение носит название гипотезы фильтра и выполнение этой гипотезы является необходимым условием гармонической линеаризации.
Условие эквивалентности схем, изображенных на рис. 4.1, а и б, можно сформулировать в виде равенства
x(t) + y(t) = O.
(4.1)
139
При выполнении гипотезы фильтра //(/) = Vmlsin(co/ + ср) и уравнение (4.1) распадается па два
Xm = Yml (4.2)
и ср = л. (4.3)
Уравнение (4.2) и (4.3) носят название уравнений гармонического баланса’, первое из них выражает баланс амплитуд, а второе — баланс фаз гармонических колебаний. Таким образом, для того чтобы в рассматриваемой системе существовали незатухающие гармонические колебания, при соблюдении гипотезы фильтра должны выполняться условия (4.2) и (4.3).
Рис. 4.1
Для суждения о выполнении гипотезы фильтра'рассмотрим частотные спектры сигналов x(t), z(t) и y(t) в разомкнутой схеме (см. рис. 4.1, б). При моногармоническом сигнале х(/) спектры сигналов z(/) и y(t) кроме основной гармоники Zml и Yml содержат высшие гармонические Zmft и Ymh. В зависимости от вида нелинейности z(x) амплитуды высших гармоник в сигнале z(t) будут большими или меньшими. Сигнал y(t) на выходе линейной части имеет иное относительное содержание высших гармоник. Если предположить, что линейная часть обладает свойствами низкочастотного фильтра, то удельный вес высших гармоник в сигнале y(f) меньше, чем в сигнале z(/). Справедливости гипотезы фильтра соответствует такая характеристика линейной части 1Гл(/со), чтобы, проходя через нее, все гармоники, кроме первой, затухали до пренебрежимо малых значений.
Количественно это условие можно выразить следующим образом:
Z,nk I (/^м) I । (4 4)
Z„a I Гл(/м) Г' ’ V ‘ ’
где k — номер рассматриваемой гармоники.
В общем случае условие (4.4) должно выполняться для любого целого значения k 2. В том случае когда рассматриваются симметричные колебания, в сигнале //(/) отсутствуют четные гармоники и условие (4.4) должно рассматриваться для /г > 3.
С помощью метода гармонической линеаризации решаются две основные группы задач:
а) исследование автоколебаний в нелинейных замкнутых системах;
140
б) исследование условий отсутствия моногармонических автоколебаний в нелинейных замкнутых системах.
В первом случае условие (4.4) должно выполняться для частоты <в предполагаемых автоколебаний, во втором случае—во всем диапазоне частот 0 io < оо. Так как обычно Zmh!Zmi < 1 при k 2, то для приближенных расчетов условие (4.4) может быть смягчено и сформулировано так: наклон логарифмической частотной характеристики линейной части должен быть по крайней мере—20ч—40 дб!дек.
При наклоне характеристик—20 дб/дек
Гл(/2(о) (/(о)
Гл (/Зю) I 1
Гл(я) | 3 ’
а при наклоне—40 дб[дек
[ Гл(/2а>) I 1 и I Гл'(/3т) I _ 1
_ I Гл | 4 | Г л (/со) I 9 ’
Исследования автоколебаний несколько различаются в зависимости от симметрии или несимметрии рассматриваемых колебаний. При исследовании несимметричных автоколебаний большое значение имеет постоянная составляющая сигнала в системе. При нечетном характере нелинейностей и отсутствии внешнего воздействия lu(t) = 0 на рис. 4.1, а] наибольший интерес представляют симметричные автоколебания.
Выполнение гипотезы фильтра в форме сильного неравенства (4.4) встречается в практических задачах сравнительно редко. Поэтому применение гармонической линеаризации бывает строго обосновано далеко не всегда. Однако даже при отсутствии строгого обоснования этот метод во многих практических задачах является наиболее простым и дает удовлетворительное приближенное представление о процессах, протекающих в реальных устройствах. При этом в каждом случае невыполнения гипотезы фильтра полученное решение нуждается в экспериментальном или теоретическом подтверждении на математической или физической модели.
§ 4.2. КОМПЛЕКСНЫЙ КОЭФФИЦИЕНТ УСИЛЕНИЯ (ПЕРЕДАЧИ) НЕЛИНЕЙНОГО ЗВЕНА
Нелинейное звено при действии на его входе гармонического сигнала может быть описано комплексным коэффициентом усиления (или передачи), зависящим от амплитуды сигнала на его входе.
Эту характеристику нелинейного звена иногда называют описывающей функцией.
Рассмотрим безынерционное нелинейное звено со статической характеристикой z = z(x) (рис. 4.2, а). Если на входе нелинейного звена действует гармонический сигнал х = X,„sina>/ = то перио-
дический сигнал ?(/) на выходе нелинейного звена (рис. 4.2, б) может быть представлен в виде ряда Фурье
оо оо
2(0 = /0 + 2 ZpkS\nkat + 2 Z.Qkcoskat, (4.5) 4=1 4=1
J4l
i где коэффициенты Zpk и Zq* определяются по формулам
2Я
Zpk= — \ z(X ^in®/)sinfe®/ d(at), (4.6)
п о 2л
ZQk — — \ z (Х,п sin (О/) cos kat d(<at). (4.7)
Л ц
Будем пока рассматривать нелинейные характеристики, для которых постоянная составляющая в рассматриваемом режиме равна нулю (Zo = 0). Практически это условие выполняется достаточно ча-
сто, например, при нечетных характеристиках z(x). Таковы, в частности, типовые нелинейные характеристики, рассмотренные в гл. I.
Периодический сигнал ?(/) при гармонической линеаризации приближенно представляется своей первой гармоникой
z(t) as Zpi sin®/ + Zqi cos at, (4.8)
или в комплексной форме
z(t)^ Im (ZPl +jZQl)eial, (4.9)
где 2л
Zpi = — z (X sin ®/) sin ®/d («)/), (4.10)
n ’ 2Л
Zqi = — г (Xm sin w/) cosa>td(wt). (4.11)
Комплексным коэффициентом усиления нелинейного звена называют отношение основных гармоник выходного и входного сигналов, выраженных в комплексной форме:
142
7 Z ~
^н(*,п) = Л. (*,„) +iQu (* т) = ~ = I I <4-12)
лт лт
2л
Рн (Хт) = = ПТ" 5 2 5‘П 3]П d <4'1 3)
Л/а ЯЛт Q 2л
QH(*m)= -^- = -7- 5 z (Xmsin (Of) cos arid (СО0, (4.14)
Л™, КЛт о
I wn I = Z^L , <pH = arctg _^L . (4.15)
лт лт “Pl
Комплексный коэффициент усиления показывает соотношение амплитуд и фаз первой гармоники выходного и входног&гармонического сигналов и в этом смысле напоминает комплексный коэффициент усиления линейного звена. Однако зависит он в случае безынерционного нелинейного звена не от частоты, как это имеет место для линейного звена, а от амплитуды входного сигнала Хт. Составляющие комплексного коэффициента усиления Рн(Хт) и Qu(Xm) называют коэффициентами гармонической линеаризации.
Нетрудно показать, что гармонический сигнал претерпевает фазовый сдвиг при прохождении через нелинейное звено только в случае неоднозначной нелинейности. Для этого запишем мнимую составляющую lTn(Xm) в виде
2л
QH (Xm) = -4- $ 2 (хгп sin a/) cos (О/ d (®i) =
0 0
= "77 S z(Xmsin®O^(^msin®/)= $ z(x)dx. (4.16) лХ,„2 ч лХт2
На рис. 4.3 показана неоднозначная гистерезисная характеристика с направлением обхода ветвей против часовой стрелки. Интегрирование в выражении (4.16) ведется от х = 0 (/ = 0) до х — Xm(t = л/2ы), затем от х= Хт до х = —Xm(t ~ Зл/2®) и от х = —Хт до х = 0 (/ = 2 л/а). Нетрудно заметить, что результат интегрирования в соответствующем масштабе равен площади S петли гистерезиса, взятой со знаком минус (знак определяется направлением обхода неоднозначной кривой). Таким образом, мнимая составляющая комплексного коэффициента усиления имеет выражение
QH(4) = -5/№) (4.17)
и в случае однозначной нелинейности она равна нулю.
Пример 4.1. Определить комплексный коэффициент усиления релейного звена с неоднозначной характеристикой (рис. 4.4, а). Релейное звено имеет параметр срабатывания ха и параметр отпускания хь; выходной сигнал сработавшего релейного звена +га.
143
При малых входных сигналах Хт < ха выходной сигнал равен нулю, поэтому №н(Хт) = 0. При Хт > ха выходной сигнал имеет вид прямоугольных импульсов (см. рис. 4.4, б). Момент ta срабатывания определяется условием
Хт sin cota=xa (4.18)
или
sin v>ta = xaIXm. (4.19)
Момент отпускания определяется условием
/л \
Xmsin<o —— th =*ь (4.20)
или
sin (л— atb)=xblXm. (4.21)
Используя формулу (4.13) и учитывая нечетность характеристики z(x), получим для вещественной составляющей
'ь
рн(Х,„) = —— га sin atd (at) = [cos ata — cos со?ь]. (4.22)
лХп; [ лХгп
a
На основании (4.19) и (4.21) получим
COS cos <о/й = (4И’ "I/1-©’' <4М>
144
поэтому
Мнимая составляющая IVH(Xm) согласно (4.17) будет
2za(xa-xb)
<3п(Хт)~ ПХт* ' ( ’
Общее выражение для комплексного коэффициента усиления релейного звена имеет вид:
(4.27)
. 2za (ха хь)
1 лХт2
На рис. 4.5, а представлен характер зависимостей коэффициентов Ри и Qu гармонической линеаризации от амплитуды Хт. Они имеют разрывы при Хт = ха, поскольку при Хт = *а на выходе сразу получается импульс конечной длительности.
Для однозначной релейной характеристики ха = Хь, Он(Хт) = =- 0 и комплексный коэффициент усиления становится равным вещественному коэффициенту гармонической линеаризации
Вид зависимости И7И (Хт) для этого случая показан на рис. 4.5, в (кривая /).
При ха = 0 реле делается двухпозиционным, а формула (4.28) принимает вид
42
W„(Xm)=~^ (4.29)
/И
и ей соответствует кривая 2 на Рис. 4.5
рис. 4.5, в.
В ряде случаев бывает удобно перейти к нормированной форме выражения комплексного коэффициента усиления. Для этого на характеристике нелинейного элемента г(х) выделяются некоторые характерные значения входного и выходного сигналов, которые и используются для нормирования коэффициентов гармонической линеаризации. Для релейного звена в качестве таких значений можно выбрать ха и га, записав формулы (4.25) и (4.26) следующим образом:
145
Вводя обозначения:
^—хь/ха— коэффициент возврата; N = zalxa — нормирующий множитель; А =Хт/ха — безразмерная амплитуда; 1ГНО (Л) = Рн0 (Л) + jQm (Л)—нормированный комплексный коэффициент усиления, можно записать
ГП(Л)=АПГНО(Л), (4.32)
где _ о ___________________________ __________
«’'но (Л) = — [/Л2-1 + /Л2-Х2 - /(1-Х)]. (4.33)
2T/L
При Л = 1
1^но (1) = — -;/ (I - X)]
Л
и
Рпо(1) = —Qne(l)=--- — (1-Х), л л
Для коэффициентов гармонической линеаризации 4
^ho(1)+Qho2(1)=-—Qno(l). л или 2 ]2 Quo ( 1) + —
л |
Р3Н0 (1)+ [
Таким образом, геометрическое место точек годографов 1ГНо(Л), соответствующих Л = 1 при различных значениях X, представляет собой окружность (точнее, правую половину ее), центр которой лежит на мнимой оси в точке (0;
. 2\ » п
—/— и которая проходит через начало координат при А = 1).
Я 1
Семейство годографов 1ГНО(Л) при различных X для рассматриваемого примера показано на рис. 4.5, г. При графических расчетах нелинейных систем бывает удобно пользоваться обратными годографами с отрицательным знаком — ^То(Л) = 1/но(Л). Для рассматриваемого случая семейство таких годографов показано на рис. 4.5, г.
Так как
то при А = 1
W~l w нО
пЛ2
4
1^ РМ /Quo Рно + /QlIO Р2Н0 + Q3no
(/д2ГЛ+У>-Х2') + /(1-Х) Л2 — X2 + /(Л2—1) (Л2-X2)
(4.34)
~ । л
^’но (>) = т
1-Х
4
1+Х
1-Х
Таким образом, геометрическое место точек годографов —W'ho* (Л) для Л = 1 при различных значениях X представляет собой прямую, параллельную оси абсцисс и лежащую в третьем квадранте на расстоянии л/4 от оси абсцисс.
146
Габлица ч /
Аналог -цифра
Переменная структура Трехпозиционное ре- Аппозиционное реле Аппозиционное реле
Трехпозиционное реле оез гистерезиса ле с положительным гистерезисом с отрицательным гистерезисом переменной с отрицательным гистерезисом постоянной
ширины ширины
mab/t 41
Подобно примеру 4.1 могут быть найдены комплексные коэффициенты усиления для различных нелинейностей, рассмотренных в гл. I. Формулы и годографы №Н(А) и ]/„(Л) для различных нелинейностей даны в табл. 4.1. Можно отметить целесообразность применения логарифмического масштаба для коэффициентов гармонической линеаризации [Л. 25].
§ 4.3. АНАЛИЗ СИММЕТРИЧНЫХ АВТОКОЛЕБАНИЙ
В НЕЛИНЕЙНЫХ СИСТЕМАХ
Ранее была рассмотрена система автоматического регулирования, содержащая нелинейное звено и линейную часть (см. рис. 4.1), и было отмечено, что условием существования автоколебаний в системе является гармонический баланс колебаний на входе нелинейного звена и на выходе звена сравнения. Воспользовавшись комплексным коэффициентом усиления, можно записать уравнение гармонического баланса следующим образом:
= (4.35)
При этом предполагается, что исследуются симметричные автоколебания при отсутствии постоянной составляющей, а это получается при нечетных характеристиках нелинейного звена и при и = 0.
Записанное условие можно рассматривать как уравнение относительно неизвестных частоты и амплитуды автоколебаний (амплитуда определяется на входе нелинейного звена). Это уравнение распадается на два (оно записано для комплексных величин) и его действительные решения, если они существуют, дают частоту и амплитуду возможных автоколебаний в системе.
Согласно Л. С. Гольдфарбу уравнение автоколебаний удобно решать графически следующим образом*. Запишем уравнение (4.35) в виде
№л(» = -^— - -tn-,(/l) = V'nM). (4.36)
W'h И)
На рис. 4.6 изображены годографы частотной характеристики линейной части и инверсного коэффициента гармонической линеаризации, взятого со знаком минус: ГН(Л) = —WV’(Л). Они пересекаются в двух точках 1 и 2, определяющих искомые автоколебательные режимы. Частоты и амплитуды автоколебаний соД ЛГ1 и год Лч могут быть прочтены на соответствующих годографах в точках пересечения.
Не каждое из найденных решений соответствует устойчивым автоколебаниям, т. е. таким автоколебаниям, которые в случае вариации, вызванной кратковременным возмущением, восстанавливаются.
Для суждения об устойчивости автоколебаний будем рассматривать УН(Л) как некоторый комплексный параметр ZJ-разбиения (см. [Л. 68], а также § 8.4 части I). В таком случае уравнение (4.35) можно рассмат-
* Возможны другие способы решения уравнения автоколебаний (см., например, [Л. 94]).
149
рюягь как условие принадлежности годографа ЕН(Л) к той или иной облети D-разбиения плоскости
Vtt = WM = X+jY. (4.37)
Заштриховав плоскость \^л(/ю) по комплексному параметру Ун, будем рассматривать не только ось вещественных значений, как это имело место в § 8.4 части I, а всю плоскость X, Y. Если весь годограф УН(Л) лежит в области Е)(0),то в системе отсутствуют моногармониче-ские автоколебания. Если весь годограф УН(Л) лежит в области Dim)
при т 1, то система неустойчива и в ней могут возникать только бесконечно нарастающие процессы. Если же годограф УН(Л) пересекает границу области D(0), то в системе могут возникать близкие к гармоническим автоколебания и для суждения об устойчивости этих колебаний необходимо провести дополнительные рассуждения [Л. 68].
Рассмотрим например, точку 1 пересечения годографов VH(A) и И7Л(М) на Рис- 4.6. Допустим, что по какой-либо причине амплитуда автоколебаний увеличилась и мы переместились по годографу ]/п(Л) в сторону возрастания Л. При этом из точки 1 переходим в область £>(!). Наличие корня с положительной вещественной частью должно привести к дальнейшему увеличению амплитуды Л и нарушению режима, соответствующего точке 1 (см. стрелку на рис. 4.6). Если допустить, что амплитуда автоколебаний уменьшилась, то мы перемещаемся по годографу в область 0(0), где все колебания должны затухать и, следовательно, амплитуда должна уменьшаться.
Таким образом, при любых изменениях амплитуды колебаний в точке 1 имеет место процесс, характеризующийся возрастанием амплитуды или снижением ее до нуля. Это приводит к выводу о неустойчивости автоколебаний в точке 1.
Проводя аналогичные рассуждения, можно сделать вывод, что отклонение от режима в точке 2 в сторону возрастания Л приведет в область D(0) и будет сопровождаться уменьшением Л. Уменьшение Л, наоборот, приведет в область £)(1) и вызовет нарастание колебаний и 150
возврат в точку 2. Таким образом, точка 2 соответствует устойчивым автоколебаниям.
На основании проведенных рассуждений можно сформулировать следующие правило суждения об устойчивости автоколебаний: автоколебания устойчивы, если, двигаясь по характеристике нелинейного элемента в сторону возрастания амплитуды, переходим из неустойчивой в устойчивую область О-разбиения. Наоборот, автоколебания неустойчивы, если, двигаясь по характеристике нелинейного элемента в сторону возрастания амплитуды, переходим из устойчивой в неустойчивую область D-разбиения.
Точка 1 соответствует неустойчивому предельному циклу в фазовом пространстве, а точка 2 — устойчивому.
Рис. 4.8
Возможны случаи односторонне неустойчивых автоколебаний, в которых случайное возрастание амплитуды нарушает режим, а уменьшение ее на режиме не сказывается или, наоборот, уменьшение амплитуды нарушает режим, а возрастание ее па режиме не сказывается. Такие случаи соответствуют точкам касания амплитудного Иц (Л) и частотного годографов.
Все четыре возможных типа автоколебаний и соответствующие им фазовые портреты показаны на рис. 4.7
Пример 4.2. Найти параметры симметричных автоколебаний в релейной следящей системе со структурной схемой, изображенной па рис. 4.8 и имеющей следующие данные: коэффициент усиления измерительного звена йи — 1 в!град; напряжение срабатывания реле ха = 0,1 в; напряжение на выходе реле 2а = 6 в; коэффициент усиления и постоянная времени усилителя Ау = 5 и Ту = 0,2 сек; коэффициент усиления (по скорости) и постоянная времени двигателя Ад — --= 300 градЦсек-в) и Тд = 2 сек; передаточное отношение редуктора 1ред = = 7500.
Частотная характеристика линейной части записывается в виде
ь
Гл (jw) = ----------------------, (4.38)
]ш (1-Н®Ту) (I +ja>T„)
где k — АиАуАд(1/1ред) 0,2 1/сек — общий коэффициент усиления следящей с истемы.
Нормирующий множитель N = za/xa '= 60.
Произведение NWB(ja>) с подставленными значениями постоянных будет
1УП7Л(/Ш) =
(4.39)
151
]<£> (1 ф- j • 0,2 (о) (1 ф- /. 2,0 <о)
На рис. 4.9, а показано взаимное расположение годографов и
VHo(4). Годографы имеют две точки пересечения при одной и той же частоте (Oj1 == = щЦ’ которая может быть найдена из условия
arg Wj! (/'соц) = —л
отку;1а соц = 1,58 сек~1 -
Две амплитуды автоколебаний Af и А% удобно искать с помощью графика №но(4) (рис. 4.9, б), на котором проведена горизонтальная линия на уровне | NW (jtDv) | = чт0 соответствует записи уравнения автоколебаний в виде ^ноИ) = -у (/ш). (4.41)
Меньшая амплитуда 4^ = 1,10 соответствует неустойчивым, а большая амплитуда 4J} = 2,59 — устойчивым автоколебаниям, что следует из сформулированного выше правила для определения устойчивости автоколебаний. В перевод; на градусы амплитуда устойчивых автоколебаний составляет „ ха 0,1
42ц = 2,59 • — =0,259 град.
«и 1
152
Если в начальный момент автоколебания отсутствуют и х = 0, то для возбуждения в системе автоколебаний необходимо дать начальный импульс, превышающий значение меньшей амплитуды. Только после этого в системе возникнут устойчивые автоколебания. Такое возникновение колебаний называют жестким, возбуждением.
Для решения этой же задачи для двухпозиционного реле (ха = 0, все остальные данные сохраняются) можно обойтись без графических построений, воспользовавшись формулой (4.29). Условия баланса фаз и частота автоколебаний остаются прежними: <о11 = 1,58 секГ1. На этой частоте уравнение автоколебаний принимает вид
—Ц7Л (/шц)= — 1 (4.42)
ИЛИ
^(-0,0364) = -!,
Рис. 4.10
откуда
Х''т =0,278 в,
что в переводе на градусы составит
Х£/£и = 0,278 град.
Для проверки правомерности применения гипотезы фильтра в рассматриваемой задаче определим коэффициент фильтрации линейного звена при частоте <в11 автоколебаний. Так как характеристика реле нечетная симметричная, то в системе могут быть только нечетные гармоники. Тогда после подстановки <оц = = 1,58 сек~'1 в формулу (4.38) получим
^л(13ыц) гл(/0)‘9
_L ,/ [1 4-(0,2-1,58)g[ [ 1 -f- (2 -1,58)2] 3 V [1 + (0,6-1,58)2] [1+6.1,58)2]
что свидетельствует об удовлетворительном выполнении гипотезы фильтра (см. § 4.1).
Пример 4.3. Найти параметры автоколебаний в структурно-неустойчивой астатической системе второго порядка с нелинейностью типа упор. Структурная схема системы показана на рис. 4.10, а.
Линейная часть имеет характеристику
(/со)2 (I +/g>T,) (1+/соГ2) ’
(4-43)
где /е = 0,35 сек 2, 7’1 = 7’г = 0,2 сек.
153
Построив частотный годограф и7л(/<о) и амплитудный годограф VH(Xm) (рис. 4.10, б), находим точку пересечения годографов, для которой = l,25za и <о 1 — 0,55 Мсек.
Здесь 2za — зона перемещения входной координаты от упора до упора.
§ 4.4. АНАЛИЗ НЕСИММЕТРИЧНЫХ АВТОКОЛЕБАНИЙ В НЕЛИНЕЙНЫХ СИСТЕМАХ
Кроме рассмотренных симметричных автоколебаний, при которых постоянная составляющая отсутствует, в нелинейных системах возникают и несимметричные автоколебания, в которых существенную роль играет постоянная составляющая сигнала в нелинейном звене*. В этом случае также может быть произведена гармоническая линеаризация нелинейного звена; однако коэффициенты гармонической линеаризации теперь зависят нс только от амплитуды гармонической составляющей, но и от постоянной составляющей сигнала.
Если на вход нелинейного звена с характеристикой г(х) поступает сигнал х — Хо + Хт sin <о t, то в соответствии с гипотезой фильтра, пренебрегая высшими гармоническими составляющими и опуская индекс 1 для первой гармонической составляющей, можно аналогично (4.8i сигнал на выходе представить в виде
z(t) — Zo + Z,„ sin (<at + q>) Za -\-Zp sin at -\-Zq cos at (4.44) или в комплексной форме
z(/) = Z0 + Ini(Zp-H/Zp)e/M', (4.45)
где
‘2Я
Zo = — z (X0 + Xmsinco/)d((o/), (4.46)
2л
2л
Zp = — \ z (Хо+ sin со() sin с/(<Щ), (4.47)
л
2Л
Zq —— \ z (Хо sin оК) cos at d (co(). (4.48)
л
В этом случае для нелинейного элемента могут быть введены два коэффициента усиления:
для постоянной составляющей
^ = Z0/X0, (4.49)
для гармонической составляющей
®„=^±® = ₽„+й,= |1Г,1|А (4.50)
Л-т
" Постоянная составляющая может быть обусловлена как внешним постоянным сигналом, так и несимметрией характеристики нелинейного звена (см. § 1.5). 154
Рис. 4.11
При неоднозначной нелинейности Zq ф 0 и 1Г„ представляет собой комплексную величину.
Оба коэффициента усиления зависят от постоянной Хо и амплитуды гармонической Хт составляющих сигнала на входе:
АН = ЙН(ХО, Хт) и = (Хо, Хт). (4.51)
Зависимость коэффициентов гармонической линеаризации /гп, Рн и Qi от двух величии Хо и Хт несколько усложняет расчет автоколебаний в системе, однако при этом с некоторыми изменениями могут быть применены приемы, описанные при рассмотрении симметричных автсколебаний.
Рассмотрим структурную схему нелинейной замкнутой системы (рис. 4.11, а). Полагая на основании гипотезы фильтра, что сигнал х состоит из двух составляющих х = Хо + Xmsino)/, можно рассмотреть уравнения замыкания для каждой из составляющих:
для постоянной составляющей
Хо = (/о-7о(Хо,Хт)Гл(О), (4.52)
для гармонической составляющей
-Xm=XmlV;n(X(),Xm)W7JI(/(D). (4.53)
Составление различных уравнений для постоянной и гармонической составляющих соответствует расщеплению нелинейного звена на два параллельных различных квазилинейных звена с коэффициентами передачи kK(X0, Хт) и lFn(X0, Хт). По одному из этих звеньев проходит постоянная, а по другому — гармоническая составляющая. Структурная схема, соответствующая такому представлению, показана на рис. 4.11, б.
Совместное решение уравнений (4.52) и (4.53) может быть легко проведено графически. В этом случае (рис. 4.11, в) строится семейство кривых Z0(X0) при различных значениях Х,„. Это построение полностью аналогично вибрационной линеаризации нелинейных характеристик (см. § 1.7). Точки пересечения этих характеристик с прямой
—Хр
°~ Гл(0) ’
полученной из уравнения (4.52), дают зависимость Х0(Х'т).
С другой стороны, можно построить семейство годографов VH(X0, Хт) =—W/71 (Хо, Хт) при различных значениях Хо (рис. 4.11, а). Точки пересечения этих годографов с годографом в соответствии с уравнением (4.53), записанным в виде — -------= Ц7Л (;и),
н (Хо, Хт)
дают зависимость Хт(Х0). Совместное решение уравненийХщ= Хт(Х0) и Хо = Ха (Хга) дает искомые параметры автоколебаний: Хо = Х« и Хт == Х« (рис. 4.11, д).
Для однозначных нелинейностей построение семейства годографов Уи(Х), Xт) бывает затруднительно, так как все они лежат на оси вещественных значений. В этом случае удобно строить график — Vlt = 156
= 1^7* в зависимости от Хт при различных значениях Хо (рис. 4.11, е) и по точке пересечения этих кривых с прямой —№я(](ая) = С, где юя— частота пересечения (см. рис. 4.11, г), определить зависимость Хт(Х0).
Частота автоколебаний о>ц находится по точке пересечения 1^л (/со) с годографом Ун(Ао. Хт) для Хо = Xq- При однозначной нелинейности частота автоколебаний равна соя.
Устойчивость автоколебаний определяется на основании правила, приведенного в § 4.3 для симметричных колебаний.
Пример 4.4. Найти параметры автоколебаний вибрационного регулятора в системе стабилизации напряжения генератора постоянного тока (см. § 1.2), если несимметричная нелинейная характеристика усилителя z(x) соответствует двухпозиционному реле с гистерезисом (рис. 4.12, а). Параметры системы:
157
k
W n =---------------------<
(1 + /ЮЛ) (l+joTa)
где k =50, Т\ = 1 сек, Тг = 4 сек, Uo = 30 в, га = 1 в, ха = 2,0 в, Д = 0,5 в.
По формуле (4.46) определяется зависимость Z0(Xa, Xm) при различных значениях Хт. Графики этих зависимостей и точки их пересечения с прямой Zo = _ .^2 —- _ Q g — 0,01 показаны на рис. 4.12, 6.
k \ Д /
По найденным точкам пересечения на рис. 4.12, г построена кривая 2. Годографы 1/H(XO, -Хт), рассчитанные по выражениям (4.47) и (4.48) для значений Х„, найденных по рис. 4.12, б, изображены на рис. 4.12, в. Точки пересечения годографов Vi^Xi), X'm) с характеристикой 1Ул(/ы). дают зависимость 1, показанную на рис. 4.12, г.
Пересечение кривых 1 и 2 дает значения Х'Д = 2в и Х^ = 2в, характеризующие автоколебания в системе. Пересечения годографа I/a(2, Xm) (см. рис. 4.12 ,в) с го Догргф ом И7-(/Ы) дает значение частоты автоколебаний ш" = 3,15 Мсек. Так как с ростом амплитуды Хт точка годографа Мн(2, Хт) при этой частоте переходит из неустойчивой области в устойчивую, то полученные автоколебания ока-зывиотся устойчивыми. Поскольку найденная частота выше, чем 1/7’1 = 1 сек-1 и 1/7’,= 0,25 сек-1, то наклон логарифмической частотной характеристики линейного звена примерно равен — 40 дб!дек и, следовательно, условия фильтрации необходимые для гармонической линеаризации, выполняются.
§ 4.5. УСЛОВИЯ ОТСУТСТВИЯ МОНОГАРМОНИЧЕСКИХ АВТОКОЛЕБАНИЙ В НЕЛИНЕЙНЫХ СИСТЕМАХ
Как было указано ранее, условием отсутствия моногармонических автоколебаний в нелинейных системах автоматического регулирования (ограничим себя случаем систем с устойчивой или нейтральной линейной частью) является принадлежность годографа VH при 0
А < оо1 к области .0(0). При этом во всех точках границы области должна быть применима гипотеза фильтра. Так как выполнение гипотезы фильтра при всех частотах обеспечивается только при наличии по крайней мере одного интегрирующего звена, то только для астатических систем можно говорить об отсутствии моногармонических колебаний в нелинейных системах на основании указанных условий.
(^формулированное правило отсутствия автоколебаний представляет собой аналог критерия Найквиста, в котором критическая точка —/, ]0 трансформировалась в целую критическую кривую — годограф УН(Д) = —IV'T1 (Л). Не следует забывать, что это правило для нелинейных систем не является строгим критерием устойчивости, поскольку метод гармонической линеаризации является приближенным.
Пример взаимного расположения годографов И7л(/а») и УН(Д) для случая отсутствия автоколебаний показан на рис. 4.13, а. Вместо годографов №л(/<о) и УН(Д) могут быть взяты годографы NWn(j(a) и ?н0 (Я).
Пример 4.5. Найти условия отсутствия моногармонических автоколебаний в системе автоматического регулирования, показанной на рис. 4.13,6 при нелинейности типа трехпозиционное реле без гистерезиса (см. в табл. 4.1) и при отсутствии внешнего сигнала (и = 0) в двух случаях;
158
k,
а)Гл(/<й) (/fi)p(1+/toT) ;
6) + W •
На рис. 4.13, в изображено взаимное расположение годографов М'лО'и) и ун(Л): в случае а система неустойчива при любых значениях параметров; в случае б условием отсутствия моногармонических автоколебаний является неравенство
(4.54)
Пример 4.6. Пользуясь методом гармонической линеаризации, определить предельный коэффициент усиления /гпр линейной части с передаточной функцией
1Гл(р) -----------. если в качестве нелинейного звена взято звено типа люфт.
Тр(\+рТ)
Построив для нелинейного звена типа люфт характеристику ^Я(Л) и семейство характеристик Wn(ja>) при различных k (рис. 4.13, г), можно заметить, что при k < 3,5 все характеристики Ц7л(/'<о) не охватывают годограф УН(Л) и, следовательно, в системе отсутствуют моногармонические автоколебания. При k ~> > 3,5 характеристика пересекает годограф 1/а(Л) и, следовательно,
159
в системе могут существовать моногармоническце автоколебания. Таким образом ^пр =~ 3,5.
Если сравнить полученный результат с точным расчетом методом фазовой плоскости, дающим йпр = 3,04 (см. пример 3.12), то видно, что метод гармонической линеаризации приводит к некоторому завышению значения fenp- Это обгясняется недостаточно хорошими фильтрационными свойствами линейной части и существенным влиянием высших гармоник.
Пример 4.7. Исследовать условия отсутствия моногармонических автоколебаний в системе, состоящей из двухпозиционной релейной схемы с отрицательным гистерезисом постоянной ширины (см. рис. 1.33 и табл. 4.1) и линейной k
,асг" +
На рис. 4.13, д построены годографы Wn(ja>) и ЙН(Л) для этого случая. Ус-лоЕием отсутствия моногармонических автоколебаний является расположение пр5:мой 1/н(4) выше годографа Ц7л(/со). Однако более точный анализ показывает, что в этом случае в системе существуют полигармонические автоколебания, осциллограмма которых показана на рис. 4.13, е [Л. 24], т. е. система неустойчива, хотя весь годограф УН(Л) лежит в области 0(0).
§ 4.6. ПОВЫШЕНИЕ ТОЧНОСТИ МЕТОДА ГАРМОНИЧЕСКОЙ ЛИНЕАРИЗАЦИИ
Как уже указывалось, метод гармонической линеаризации является приближенным методом, в результате чего при его использовании неизбежно появление ошибок. Так, например, для систем с однозначными нелинейностями, для которых годографы КП(Л) располагаются на отрицательной действительной полуоси, согласно методу гармонической линеаризации частота автоколебаний остается постоянной при изменении коэффициента усиления линейной части системы (см. приме]) 4.2), тогда как на самом деле она при этом изменяется.
Количественное представление об ошибках при методе гармонической линеаризации могут дать графики, приведенные на рис. 4.14, а, б, где даны результаты расчета и моделирования на электронной модели автоколебаний в релейной следящей системе, рассмотренной ранее в примере 4.2.
На рис. 4.14, а показано изменение безразмерной амплитуды Лц, а на рис. 4.14, б — частоты соц автоколебаний при изменении произведения Nk — нормирующего множителя на коэффициент усиления линейной части. Сплошной кривой показана расчетная зависимость, точками—данные, полученные на модели. Крайние левые расчетные и экспериментальная точки соответствуют предельному значению (^;)Пр, левее которого происходит срыв автоколебаний: расчетное значение равно 8,6 сек-1, экспериментальное—6,3 сек-1.
При этом, к сожалению, расчет дает завышенное значение (А^)пр (см. также пример 4.6), т. е. в системе на самом деле могут возникать автоколебания (при достаточных начальных отклонениях), хотя метод гармонической линеаризации говорит об их отсутствии.
Из рис. 4.14 видно, что по мере увеличения Nk амплитуда и частота автоколебаний растут и расхождения между расчетными и действительными значениями Лц и заметно уменьшаются.
160
•Причиной ошибок метода гармонической линеаризации является влияние неучтенных высших гармоник на выходе нелинейного звена. Их влияние особенно увеличивается по мере уменьшения частоты автоколебаний, поскольку при этом уменьшается наклон логарифмиче- * ской амплитудной частотной характеристики линейной части и ослабевает ее фильтрующее действие. Именно по этой причине в рассмотренном выше примере наибольшие ошибки получились при предельном значении Nk, когда частота автоколебаний резко уменьшилась. При увеличении Nk частота автоколебаний повышается и ошибки уменьшаются.
Приведенный пример позволяет сделать выводы о степени достоверности результатов, получаемых с помощью метода гармонической линеаризации в различных случаях его применения. Наиболее надежные результаты получаются при определении параметров автоколебательных режимов в системах, которым эти режимы присущи rto характеру их работы, например, в системах экстремального регулирования или в системах с вибрационными регуляторами. Менее достоверные результаты получаются при определении условий отсутствия автоколебаний. Тем не менее, простота и наглядность метода гармонической линеаризации, связь его с привычными частотными представлениями приводят к широкому применению его в инженерной практике.
Точность метода гармонической линеаризации может быть повышена путем частичного учета влияния высших гармоник. В случае однозначных нечетных нелинейных зависимостей наиболее сильное влияние оказывает третья гармоника на выходе нелинейного звена. Ее влияние можно учесть следующим образом. Будем считать, что, пользуясь обычной процедурой метода гармонической линеаризации, мы нашли частоту со и безразмерную амплитуду А автоколебаний на входе нелинейного звена (см. рис. 4.1). Можно определить амплитуду и фазовый сдвиг третьей гармоники на выходе нелинейного звена как функцию амплитуды А гармонического сигнала на его входе. Пользуясь частотной характеристикой линейной части, найдем амплитуду и фазу третьей гармоники, пришедшей на вход нелинейного звена; при этом получившиеся амплитуда и фазовый сдвиг будут функциями не только амплитуды А, но и частоты <о. Добавим найденную третью гармонику к гармоническому сигналу на входе нелинейного звена и рассмотрим прохождение получившегося периодического сигнала через нелинейное звено. Первая гармоника сигнала на его выходе будет отличаться от первой гармоники, полученной в первом приближении с помощью обычной процедуры. Изменение параметров первой гармоники является функцией А и <о. Оно может быть учтено путем соответствующего изменения коэффициента гармонической линеаризации, который делается теперь уже функцией не только амплитуды А, но и частоты о.
Далее составляется уточненное уравнение гармонического баланса
Гн(/Ч А) 1F, (/«)= -1 (4.55)
или
^л (/<*) - - (/Ч А) = 17НШ Л), (4.56)
6 Зак. 447 161
лять параметры пластов и скважин. Определение параметров пластов по данным указанных исследований относится к так называемым обратным задачам гидродинамики, при решении которых по измеряемым велининам на скважинах (дебиты, давления, температура) устанавливаются параметры пластов и скважин (проницаемость, пористость, пьезопроводность пласта, несовершенство скважин и др.).
В настоящее время разработаны и в разной степени внедрены промышленностью следующие методы исследования скважин и пластов.
Гидродинамические методы, а) исследование скважин при установившихся 1 режимах работы (исследование на приток);
б) исследование скважин при неустано-вившихся режимах или со снятием кривых изменения давления на забое (после закрытия скважин на устье, смены режимов их работы или после изменения статического уровня в скважине);
в) исследование скважин на взаимодействие (одна или несколько скважин являются возмущающими, а другие — реагирующими), этот способ иногда называется методом гид-ропрослушивсния;
г) определение профиля притока (расхода) и параметров по разрезу пласта;
д) контроль за текущей нефтенасыщенно-стью пласта при вытеснении нефти водой.
Термодинамические методы. Определение профиля притока нефти и газа по разрезу пласта с помощью калориметрического эффекта.
1. ТЕХНОЛОГИЯ И ТЕХНИКА ИССЛЕДОВАНИЯ СКВАЖИН
Исследование скважин на приток должно осуществляться минимум на трех установившихся режимах работы (с целью обеспечения надежности результатов). На каждом из режимов должны измеряться величины дебитов жидкости (нефти, воды) и газа, забойных и пластового (статического) давлений. Дебиты жидкостей измеряются в сепараторе или в мерниках (после сепаратора), а дебиты газа — после сепаратора с помощью газовых расходомеров. Забойные давления на каждом режиме измеряются с помощью глубинных .манометров. Пластовое давление в случае ожидаемых депрессий по величине, значительно превышающих точность измерительных приборов, может измеряться на одном из режимов после оста-
1 Понятие «установившиеся режимы» предусматривает практическую неизменность показателей работы скважин в течение нескольких суток.
Рис. VI. 8. Схема эксцентричной планшайбы на устье скважины, оборудованной штанговым глубинным насосом.
новки скважины. При соизмеримости величин депрессий и точности приборов необходимо на каждом режиме снимать кривую восстановления на забое после остановки скважины и определять величины забойного и пластового давлений.
Типы и технические характеристики некоторых глубинных манометров представлены в таблице VI. 16.
Замеры забойных давлений в глубиннонасосных скважинах при небольшой глубине производятся малогабаритными глубинными манометрами, если устье их оборудовано эксцентричной планшайббй, а низ насосно-компрессорных труб—фонарем. При этом манометр опускается в затрубное пространство через отверстие в эксплуатационной планшайбе.
Планшайба (рис. VI. 8) создает односторонний увеличенный зазор между подъемными трубами и обсадной колонной. Рекомендуемые размеры планшайбы приведены в табл. VI. 17.
Глубиннонасосные скважины и скважины, оборудованные центробежными электронасосами, можно также исследовать с помощью лифтовых глубинных или дистанционных манометров.
169
Таблица VI. 16
Характеристика глубинн-ых манометров и дифманометров_______________
Технические данные Типы и модели глубинных манометров
геликсные пружинно-поршневые дифференциальные
МГГ—63/250 МГИ—1М МГН-2 мгп—зм МПМ—4 МГН—1 ДЛМП—2М ДГМ—4М Самотлор —1 | 1
Пределы измерения давления, МПа ..... 6,3 16; 25 10; 16 25 0,5н-12 0,3—6 10-20% 0,25—1,2
Приведенная погрешность, % 16 25 ±0,5 40; 60 80 ±0,5 25; 40 60; 80 100 ±0,25 40 ±1,5 1,0—18 1,0-25 ±0,5 0,5—10 1,0—20 1,5—30 ±0,1 — 1,5—25 ±0,35 от давления зарядки при 40
Наименьшее значение предела измерений МПа Рабочая температура, °C ... Габариты, мм: длина .... 0,01— —0,4 0,01 — 0,1- 0,02 —0,25 0,004— 0,01— 0,0005 0,0002
—0,05 100 —0,2 160 —0.2 130 60 —0,03 100 -0,02 70 80 100
1385 1500— 1660 1460 1800 1600 1000— 2000
диаметр . - - 36 36 —1800 32—36 33 25 32 88 —1400 36 36
Масса, кг .... 8,0 10,0 7,0 2,9 15 35 6,3 12,5
Разработчик • - . ВНИИКАНефтегаз УфНИИ ВНИИКА УфНИИ ВНИИКА
нефтегаз нефтегаз
Таблица VI. 17
Рекомендуемые размеры планшайбы в мм
—0Л—|
Размеры Отношение диаметра обсадной колонны к диаметру насоснокомпрессорных труб
168/89 168/73 146/73
.... 107 89,5 89,5
d М4Х1.5 М4Х1.5 М3х1,5
а ..... 25 25 23
ь 57 55 47
с 27 27 22
н .... 155 155 147
При снятии кривых восстановления давления обычными глубинными манометрами на забое скважин, оборудованных погружными центробежными насосами, используются специальные приспособления ВНИИ (рис. VI. 9) или ТатНИИ. Приспособления обеспечивают перекрытие проходного сечения в подъемных трубах над насосом (после его остановки) и сообщение рабочей части глубинного манометра с забоем через насос (в приспособлении ВНИИ) или с затрубным пространством (в приспособлении ТатНИИ).
170
Рис. VI. 9. Схема приспособления ВНИИ для снятия кривых восстановления давления в скважинах, оборудованных погружными центробежными насосами.
1 — посадочное гнездо; 1 — наконечник манометра; 3—манжета из нефтестой-кой резины; 4— направляющие лопасти на корпусе манометра.
Для определения профиля притока (в эксплуатационных скважинах) или расхода (в нагнетательных скважинах) по разрезу пласта применяются глубинные дебитомеры-рас-ходомеры. Эти приборы спускаются в работающие скважины и регистрируют распределение величин дебита или расхода жидкости по разрезу пласта (соответственно снизу вверх или сверху вниз). Общая величина дебита или расхода жидкости измеряется на поверхности либо с помощью мерников, либо поверхностных расходомеров. Минимальной мощностью интервалов разреза, в пределах которых измеряются дебиты или расходы, является несколько метров (не менее одного).
Типы и технические характеристики глубинных дебитомеров и расходомеров приведены в табл. VI. 18.
Из таблицы следует, что некоторые из де-битомеров-расходомеров могут быть опущены в скважину в насосно-компрессорные трубы (диаметром 63 мм и более), а другие— только в обсадные трубы. Последнее затрудняет применение указанных приборов.
Температуру по разрезу пласта в скважинах можно измерять электротермометрами, применяемыми при геофизических исследования;: скважин. Эти приборы спускаются на электрическом кабеле. Распределение температуры по разрезу пласта дистанционно передается на поверхность и фиксируется на бумажной ленте.
При избыточном давлении на устье скважин глубинные приборы (манометры, термометры и дебитомеры-расходомеры) спускаются через специальный лубрикатор — сальник, который предварительно устанавливается на буфере или на планшайбе.
2. ГИДРОДИНАМИЧЕСКИЕ ИССЛЕДОВАНИЯ СКВАЖИН
Исследование скважин при установившихся режимах работы
Для скважин, эксплуатирующихся при условии фильтрации по пласту однофазной ЖИДКОСТИ рзаб > ^нас) с постоянными де-битами нефти (в течение от нескольких часов до нескольких суток) на трех или более режимах работы, строится индикаторная кривая (рис. VI. 10). Индикаторные кривые, построенные по результатам качественных исследований, могут быть прямолинейными 1, выпуклыми к оси дебитов 2 и вогнутыми 3. Первые соответствуют линейному закону фильтрации на всем диапазоне дебитов, вторые — нелинейному закону и третьи — неус-тановившимся режимам притока либо подключению бездействующих ранее пропластков по мере увеличения депрессии на пласт.
171
кривые при фильтрации по пласту однофазной жидкости (^заб > %ас)
В первом случае коэффициент продуктивности скважины определяется из простого соотношения (для массового расхода дегазированной нефти)
Ч=Д^ (VI.9)
где QH£ — установившийся дебит скважины при соответствующей ему депрессии
Рпл Рзаб i *
По коэффициенту продуктивности определяются гидропроводность и проницаемость □ласта в зоне, примыкающей к скважине:
kh
Ни
(VI. 10)
k
(VI.I1)
где о>н, p’er — объемный коэффициент и плотность дегазированной нефти; /?к — радиус окружности, на контуре которой давление равно рпл (принимается условно как средняя половина расстояния до соседних действующих скважин); гс— радиус скважины по долоту; h — эффективная мощность вскрытого скважиной пласта; с — дополнительное фильтрационное сопротивление притоку жидкости к скважине, вызванное ее несовершенством (по степени или по характеру вскрытия).
Для смешанного несовершенства величина с выражается суммой
с — С1 4- <2,
(VI.12)
Рис. VI. II. Перестроение выпуклой к осп дебитов индикаторной линия для получения прямолинейной зависимости.
каждая из составляющих которой может быть определена по кривым В. И. Шурова,
исходя из степени вскрытия пласта
М
= 1» плотности перфорации и диаметра
скважины (nD), диаметра отверстий в ко-
лонне
и глубины
каналов в пласта
рис. VI. 10, ли-
при перфорации I = —) . Во втором случае (см.
ния 2) для гранулярного пласта инди-
каторная диаграмма должна быть пере-Др
строена в координатах Q, и если при
этом получается прямолинейная зависимость
(рис. VI. 11), то по отрезку з, . Др
прямой на оси находятся
отсекаемому
гидропровод-
ность и проницаемость пласта
(VI. 13)
(VI.14)
Основным уравнением для обработки индикаторных линий по скважинам, эксплуатирующим трещиноватый пласт при нелинейной фильтрации однофазной жидкости (при Рзаб >Рпас)’ является
е—
----=,bQ+.Q\ (VI. 15)
еде Др = рпл —рза3; а, Ь, с — постоянные коэффициенты для исследуемой скважины (а — характеризует изменение проницае мости пласта и упругость (Зж) жидкости при изменении давления; b — коэффициент, обратный продуктивности скважины;
172
б — учитывает роль инерционных сил при фильтрации):
а = ак + зж; (vi.ie)
v-н ( RK \
1
с = (VL18)
где kg — проницаемость пласта при начальном пластовом давлении.
Коэффициенты а, Ь, с находятся по трем точкам (замерам), расположенным равномерно на индикаторной линии.
По величинам дебитов и депрессий трех точек bpi, Q2, hp2; Q3, &p3 можно ориен-
тировочно оценить величину коэффициента по фор муле
2 (ВДр2 — ЛДр! — СДр3)
а — -----9------9----7--9~ » (VI. 19)
ВДр2 — ААр । — СДрд
где
Л = Q2Q3 (Дз —
в = Q1Q3 (£?з — Qi);
с = Q1Q2 (<2г Qi)-
Точнее величину коэффициента а можно определить графическим способом, исходя из уравнения
1 _ е—ас.рг । е— аЛр, । е—аАрз
Ю 20 30 40 50 60 70 80 90 100 Оигщт
Рис. VI. 12. Индикаторная линия, построенная по данным, полученным при эксплуатации трещиноватого пласта (₽заб > ₽нас).
Пример. Скважина, эксплуатирующая трещиноватый пласт мощностью 83 м, исследована при установившихся отборах нефти со следующими показателями.
Результаты исследования скважины
Режим QH. т/сут Др, Па
1 28 1,0-10»
2 67 3,0-10»
3 93 4,4 -105
4 104 6,0-10»
(VI. 20)
Левая и правая части этого уравнения рассчитываются независимо для произвольно заданных значений а, близких к ориентировочному значению (VI. 19), и величины их наносятся на график. По пересечению двух рассчитанных кривых определяется искомое значение а. Поскольку при этом получаются два значения коэффициента, из них выбирается ближнее по величине к ориентировочному.
Коэффициенты b и с (при найденном значении а] находятся путем совместного решения системы двух уравнений, например для двух первых точек:
1 __p—abPi
—-а------ =bQ1+< (VI.21)
1 — е_а4р”
--------- = bQ2 + CQ2. (VI.22)
Проницаемость трещиноватого пласта при начальном давлении определяется по фор-
муле
\1п ~7С
k4= 2xhb
Свойства нефти дегазированной и в пластовых условиях:
р^ег = 0,82 г/см3; рн — 0,3 мПа с; а>н = 1,9.
Скважину можно считать совершенной по степени и характеру вскрытия (гс = 0,128 м, Як = 312 м).
Индикаторная линия по скважине приводится на рис. VI. 12. Для расчетов выбираем точки 1, 2 и 4, лежащие на кривой. Для этих точек имеем
Номер точки на рис. VI. 12 <3Н. м’/с Др, П а
1 74,9.10-5 1,0-10»
2 179,5.10-5 3,0-10»
4 278,6.10-5 6,0-10»
Определяем вспомогательные коэффициенты Л, В и С:
А = 179,5 • 10-5 - 278,6 - 10~5 (278,6 —
(VI.23) — 179,5). 10-5 = 4,96. 10“у;
173
В = 74,9 10~5 - 278,6 • 10-5 (278,6 — — 74,9) • 10~5 = 4,25 • 10-9;
С = 74,9 10~5 • 179,5 • 10“5 . (179,5 —
— 74,9) • 10-5 = 1,41 • 10-9.
По формуле (VI. 19) рассчитывается величина коэффициента а:
2 (4,25 10~9 . 3 . 10“ — 4,96 . Ю~9х X1Q6 - 1,41 - 10~9 6 1Q6 ) _
° = 4,25 10~9 . 9 • 101“ — 4,96 . ю~9 х ~
X 101“ _ 141 . 10-9 . 36 101“
= 0,766. 10~6 м2/Н.
В соответствии с уравнением (VI. 20) при подстановке в правую и левую части а = = 0,766; 0,8; 0,9 и т. д. уточняем, что величина коэффициента а = 1,1 • 10-6 м2/Н (подстановка имено этого значения а обеспечивает равенство правой и левой частей уравнения).
Коэффициенты b и с находятся путем решения двух уравнений для первого и второго режимов работы скважины:
0,0943 Юн = 74 91, + 5 600 с;
0,255 - Юн = 179,5/, + 32 Ю0 с.
Отсюда
Н с Н • с2
Ь = 1,148 10“ ; с = 1,544 -
По величине коэффициента b рассчитываем гидропроводность и проницаемость
/М ь \ -пласта I и «0 I:
. Лк 312
/ой ° гс 2,3 /£'0,128
рн — 2пЬ — *2 -3,14 • 1,148 • 10“ =
= 1,08 - 10—8,т——; ’ г! • С
*0= 1,08 • 10~8-р = 1,08 10“8 X
0 3 10“3
X——по-------= 3,91 • Ю-14 м2 = 39 мД.
OU
Для скважин, эксплуатирующихся при фильтрации по пласту газированной нефти (Рзаб < Рнас)’ индикаторная кривая должна строиться в координатах QH, Д/7. Здесь ЛИ = (Дк — /7С) — депрессия на забое скважины, выраженная в функциях, учитывающих двухфазную фильтрацию по пласту (жидкости и газа):
₽к
О С (Р)
АД = \ ----77л---77Г dp, (VI.24)
J МР)“н(Р) »с
где FH (р) — относительная проницаемость пласта для нефти при наличии свободного газа; рн (р), <ин (р) — зависимости вязкости и объемного коэффициента пластовой нефти от давления.
Определяемый по прямолинейному участку коэффициент г]' является аналогом коэффициента продуктивности скважины (при однофазном потоке) и связан с ним соотношением
’1' = ’111н<“н (Рнас)- (VI.25)
Величины Д/7 рассчитываются для каждого установившегося режима работы скважины при рзаб < рнас по данным замеров в процессе ее исследования величин рмб рпл газового фактора Г и материалов лабораторных исследований зависимостей свойств нефти от давления (рн, <ин и растворимости газа в нефти S).
Функции Н определяются с помощью безразмерных зависимостей Н* от р* (рис. VI. 13), которые построены для семи значений коэффициента а, характеризующего соотношение свойств газа и нефти в пластовых условиях:
a = vx- (VI.26)
Гн
где 5 (Рнас)
Х Рнас
Безразмерные функции Н* и р* имеют следующие связи с функцией Н' и давлением
— г
Рат 9Н
(VI.27)
Р
₽ат н/
Р
(VI.28)
Для обработки результатов исследования скважин удобно пользоваться аналитическими зависимостями Д(р*) для соответствующих интервалов р* (см. табл. VI. 19).
Анализ методики расчетов А Н показал, что при снижении пластовых давлений до 40% ниже Рвас, а забойных —до 50% их можно производить упрощенно. С этой целью для каждой рассматриваемой залежи предварительно строятся прямолинейные графики Г(р) по формуле
11н(Рнас) Нг (Рнас) Рпер
Р.
(VI.29)
Г
где р*ер — значение безразмерного давления, которому соответствуют переломы зависимости Н* (р*) при данном а.
174
Рис. VI. 13. Зависимость Н* (д’) несцементированных песков
Аналитические формулы
зависимости Н* (р*) для несцементированных песков
а = - л Нн Интервалы р* «• (₽•)
aj = 0,005 аа = 0,010 а3 = 0,015 а4 = 0,020 а5 = 0,030 а, = 0,040 а7 = 0,050 0 < р* < 15 15 < р* < 50 50 < р* < 200 0 < р* < 15 15 < р* < 30 30 < р* < 100 0 < р* < 20 20 < р < 66,7 0 < р* < 13,8 13,8 < р* < 50 0 < р* < 7 7 < р* < 33,3 0 < р* < 7 7 < р* < 25 0 < р* < 7 7 < р* < 20 Я* = 0,375 • р* //* = 0,649 -р* — 4,175 Я* =0,852 • р* — 16,231 Я* = 0,390 р* Я* = 0,623 р* — 3,306 Я* = 0,814 . р* — 10,030 Я* = 0,428 -р* Я* = 0,784 • р* — 7,219 Я* = 0,383 • р* Я* = 0,751 . р* — 5,372 Я* = 0,278 • р* Я* = 0,697 - р* — 3,273 Я* = 0,285 р* Я* = 0,683 р* — 3,013 Я* = 0,301 • р* Я* = 0,678 р* — 2,746
Если точки для рассматриваемого режима работы скважины (рпл, Г и рззб> Г) располагаются в одной области зависимостей Г (р), т. е. не разделяются прямой, то величина ДН определяется по формуле лн- а . где а — угловой коэффициент зависимости И* (р*) в соответствующей области; р — среднее давление (между рпл и Рзаб). Если точки рпл, Г, и Рзаб» Г расположены по разным сторонам от разграничительной
Р) “р. (vi.зо) прямой, то величины Я* и ^зав необходимо рассчитывать по табл. VI.19 (или оп-
173
ределять по рис. VI. 13) в зависимости от Рпл и Рзаб- Величина ДЯ при этом определяется как
. „ £ (Нпл ~ ^заб)
Дп =------------~---
Рн“н (Р)
где
Величина проницаемости при этом рассчитывается по формуле
I RK \
fc =-----9^------• (VI.32)
Пример. Скважина эксплуатирует Пласт мощностью 8,2 м. Результаты исследования ее приводятся в табл. VI. 20.
Давление насыщения нефти газом равно 140-10s Па, следовательно скважина эксплуатировалась при фильтрации по пласту двухфазного потока (нефть и газ).
Для определения параметров пласта можно использовать следующие величины: RK = 200 м, гс = 0,124 м; при перфорации для 10 отверстий на 1 м pi = c= 10.
Свойства нефти и газа при рнас: р-н = = 1,5 мПа-c; рг = 0,016 мПа-c, о>н=1,25 и раег = 0,85 г./см3.
Значения произведения (р-ншн) при средних значениях давлений (между пластовым
Рис. VI. 14. Вспомогательный график для упрощения расчетов ЛИ (Ар) при а- = 0,005.
и забойным) на режимах приводятся в табл. VI.21.
В рассматриваемом случае
0,016 = ~ГДГ"
75 • IO3
• 140 106 = 0,0057.
Следовательно, для расчетов ДЯ необходимо использовать первые зависимости Я(р) табл. VI.19 для а = 0,005. Из вспомогательного графика на рис. VI. 14 вытекает, что все точки в координатах Г(р) располагаются в области р* < 15. Поэтому расчеты надо проводить по формуле (VI.30) при а = 0,375.
Подготовка данных для построения индикаторной кривой в координатах Qy , ДЯ приводится в табл. VI.22.
Таблица VI. 20
Результаты исследования скважины при установившихся режимах работы
Режим <Эж, Т/СУТ Он- т/сут Газовый фактор Давление Па
м8/т М8/Мв Рпл Рзаб
1 20,0 17,1 901 766 81 105 71,5 • 105
2 26,0 21,9 753 640 81 IO3 69,0 Ю5
3 32,0 28,7 663 564 81 - 105 65,8 • IO3
4 38,1 32,1 664 565 81 105 60,7 105
Таблица VI. 21
Значения (,%<%) при различных режимах работы скважины
Наименование Режим
1 I 2 | 3 4
Средние давления ^пл ^3a6j, па Произведение (бв“н), мПа - с ... 76,2 • 105 2,29 75,0 - Ю6 2,31 73,4 • 105 2,32 70,3 • 10» 2,34
176
Таблица Vf. 22
Расчет Д/7 (Др) и перевод фн в л/с в поверхностных условиях
Режимы Др, Па “нРн <Р). па • с акр аАр —1 = ojH'jh (Р> ’ С
1 2 3 4 5
1 9,5 • 106 2,29 • 10-3 3,56 • 106 1,54 • 108
2 12,0 106 2,31 • IO-3 4,50 • 106 1,95 10»
3 15,2 106 2,32 . IO-3 5,70 • 106 2,46 108
4 20,3 IO6 2,34 • IO-3 7,62 . 106 3,26 . 10s
Продолжение табл. VI. 22
Режимы он. т/сут Он = Сн —. л/с Рн 0в Л'С Ож = Он + 0в. л/с
1 6 7 8 9
1 17,1 23,4 10'= 3,36 . 10-5 26,76 . 10~5
2 21,9 29,9 . ю-5 4,8 10-5 34,7 • 10-5
3 28,7 38,4 10-5 3,82 . 10-5 42,22 . 10~5
4 32,1 43,7 ю-5 6,94 10-= 50,64 IO-5
По данным табл. VI. 22, исходя из граф 9 и 5, строится индикаторная кривая по скважине в координатах Q,„, Д Н (рис. VI. 15). По прямолинейному участку кривой определен коэффициент
34,7 • 10-5
т/=------------£ = 1,78 • 10 12ма/(с Па).
1 1,95.10-8 v ’
Проницаемость призабойной зоны пласта рассчитывается по формуле (VI. 32)
1,78 10—12 • 17,4
2 • 3,14 • 8,2 =
= 0,603 • IO-12 м2 = 0,603 Д.
Рис. VI. 15. Индикаторная кривая по скважине, построенная в координатах
Исследование скважин при неустановившихся режимах работы (со снятием кривых восстановления давления на забое)
Определение параметров пласта и скважины при данном методе исследования скважин основано на использовании процессов перераспределения давления после остановки или пуска скважины.
Методом восстановления (падения) давления можно исследовать фонтанные, глубиннонасосные (со штанговыми насосами или ЭЦН), периодически эксплуатируемые, пьезометрические и нагнетательные скважины.
Изменение давления прослеживается непосредственно на забое той же скважины, на которой изменяется режим (дебит). Для учета притока нефти после закрытия скважины на устье необходимо прослеживать изменение давления на буфере и в затрубном пространстве.
С достаточной для практики точностью изменение давления на забое после мгновенной остановки скважин (или изменения дебита) при отсутствии свободного газа в призабойной зоне может быть выражено уравнением
Доц 2,25х/
М0 = р(0-ро = 4^1п-;—. (VI. 33)
177
где &q — изменение дебита скважины в пластовых условиях; р (/) — текущее давление на забое скважины; рс —забойное давление до изменения режима работы скважины; х— коэффициент пьезопроводности пласта в районе исследуемой скважины; гс пр — приведенный радиус, учитывающий несовершенство скважины; t — время с момента изменения режима эксплуатации скважины.
Уравнение (VI. 33) можно представить в следующем виде:
2,Зар 2,Зар 2,25х
ЛР W = 4М lg 1 + 4М lg Т5 =
с пр
=ulg/ + B. (VI. 34)
Следовательно, в полулогарифмических координатах кривая восстановления давления является прямой линией с углом наклона <р к оси lg t (рис. VI. 16) и с отсекаемым прямой на оси Др отрезком В
&р2 — Apt . _ 2,3рр lg h — lg — — 4iMi '
(VI. 35)
B=/lg^. (VI. 36) r rc np
Обработка результатов исследования скважин со снятием кривой восстановления давления без учета притока жидкости к забою после ее остановки
При достаточном времени исследования скважины и большинстве случаев обработка кривой восстановления давления без учета притока жидкости дает надежные результаты. Одновременно методика обработки данных исследования является наиболее простой.
Рис. VI. 18. Кривая восстановления давления на забое скважины в полулогарифмических координатах.
Кривая восстановления давления после
остановки скважины строится в координатах Др, lg t. На прямолинейном ее участке выбираются две точки с координатами Дрь 1g/1 и Др2, lg G и определяется угловой коэффициент прямой
_ Др8 — Apt
~ 1g 6 — lg ij •
(VI. 37)
Начало и конец выбранного прямолинейного участка на кривой Др, lg t должны отвечать неравенствам
Як з
/1 > “ • 10—3; (VI. 38)
/2< —(1-н2) . IO”1, (VI. 39)
где RK — радиус условного контура питания (в расчетах обычно принимается равным половине расстояния между скважинами).
Указанные пределы (VI. 38), (VI. 39) при выборе прямолинейного участка способствуют отсечению области существенного влияния на кривую восстановления притока жидкости в скважину после ее остановки (в начале кривой) и взаимодействия скважин (в конце кривой),
При существенной неоднородности пласта в выделенной области (ограниченной пределами) может быть несколько участков, каждый из которых будет характеризовать определенную зону пласта.
Измеряется отрезок на оси Д р от нуля до точки пересечения этой оси с прямой В.
Гидропроводность пласта в районе исследуемой скважины определяется по формуле
kh 2,3AQ
р 4ги
(VI. 40)
Приведенный радиус несовершенной скважины
(VI. 41)
k k
где х= + М ; г-выделяется из комплекса (VI. 40); рж, Рс — коэффициенты объемной упругости пластовой жидкости и пористой среды.
Пример. Кривая восстановления давления на забое снята после остановки фонтанной скважины, эксплуатирующейся с дебитом 106 т/сут. Условный контур питания R = 300 м. Эффективная мощность пласта h =17,6 м, пористость га = 0,18. Свойства нефти; р"л = 2,6мПа с; рн = Их хЮ_|0Па_1(11.Ю~5 см2/кгс); <ан=1,16; 1п°в=0,8б; рв=1. Ю-к>Па-1(1 10-5см2/кгс).
178
Рис. VI. 17. Кривая восстановления давления на забое скважины (1 кгс/см2 *0,1 МПа).
___________213
1760 - (0,18 .114- 1). 10~5 = 4070см2^
Проверим правильность выбора прямолинейного участка кривой:
9-10в
4 = -4Q7Q- IO-3 = 221 ,cl< 2400с;
9 - 10s .
/2= -4Q7Q- • IO"1 = 22 100 с > 14 400 с.
Следовательно, участок заключен в указанных пределах.
Приведенный радиус несовершенной скважины
с пр
2,25 w 4070
102,15/1,42 =
2,25 4070
32,7
= 16,7 см.
Таблица VI. 23
Результаты исследования скважины со снятием кривой восстановления давления на забое
Время после остановки с 1g i Приращение забойного давления ДРзаб* кгс/см* Время после остановки о 1g t Приращение забойного давления лРзаб> кгс/см>
0 120,3 3000 3,477 7,15
120 2,080 1,50 3600 3,556 7,30
300 2,477 2,06 4200 3,623 7,40
600 2,778 3,55 4800 3,681 7,48
900 2,954 4,50 5400 3,732 7,55
1200 3,078 5,11 6000 3,778 7,65
1500 3,176 6,17 7800 3,891 7,70
1800 3,255 6,70 9600 3,982 7,85
2400 3,380 7,00 14 400 4,158 8,10
Принимаем на прямолинейном участке две точки на кривой (рис. VI. 17), по которым находим угловой коэффициент
8,10—7,00
1 = 4Д58 -3,380 = ’’42 кгс''см2-
Отрезок В, отсекаемый на оси Д р продолжением ассимлтоты кривой, соответствует значению 2,15 кгс/смл Дебит нефти в пластовых условиях по скважине
106 1,16 -10е
Д<?= 0,86-86 400 = 1650 ™3/с-
Гидропроводность и коэффициент пьезопроводности пласта
_ 2-3 • 1650 о.о
Рн~ 4 -3,14 1,42- 213 мПа-с’
Обработка результатов исследования со снятием кривой восстановления давления
и с учетом притока жидкости к забою после остановки скважины
В некоторых случаях при исследовании скважины не удается получить прямолинейный участок кривой восстановления давления в координатах Др, Igt. Чаще всего это объясняется существенным влиянием продолжающегося притока (или оттока) жидкости из пласта в скважину (или наоборот) после ее закрытия на устье. В указанных случаях необходимо обрабатывать данные исследования с учетом притока жидкости в скважину после ее остановки.
Для обработки кривых восстановления давления с учетом притока жидкости необходимо одновременно с фиксацией изменения давления на забое регистрировать изменение потока жидкости во времени либо измерять изменение давления на буфере и в затрубном пространстве во времени (для фонтанных и компрессорных скважин), а для насосных скважин определять изменение уровня жидкости в затрубном про-странстзе.
Имеется несколько методов обработки кривых восстановления давления в скважине с учетом притока жидкости с целью определения параметров пластов и скважин. На основании исследований (сопоставление методов с помощью гипотетической кривой и й'"- результатам исследований скважин высокоточными глубинными манометрами) большинство авторов рекомендуют применять при обработке кривых восстановления давления два метода.
При замедленном притоке жидкости предпочтительнее применять интегральный метод
179
Э. Б. Чекалюка, а при высокой скорости затухания притока следует использовать дифференциальный метод Ю. П. Борисова. Интегральный метод также применяют и в тех случаях, когда кривые восстановления давления имеют разброс точек.
Интегральный метод Э, Б. Чекалюка
В данном случае основной формулой является
lg tD (/)______________р_
п [<20/ — V (/)] ЧтМ
lg + lg t .
гс пр
(VI. 42)
где D(t}—интеграл Дюамеля; Qo— дебит скважины до ее остановки; V(i) —суммарный приток жидкости в скважину к моменту времени t после ее закрытия на устье.
Если ввести в уравнение (VI. 42) координаты х — lg t;
D (Г) lg t
У-n[Qot-V(t]\ ’
где n — масштабный коэффициент, получим прямую линию с угловым коэффициентом
., _ Apt — Др2_______р_
1 ~ lg 4 — ig t-г ~ 2nkh
(VI. 43)
и отрезком на оси у
I 11 X
= • (VL44> с пр
Изменение суммарного притока жидкости в скважину после ее закрытия на устье
v . _ [(^зат + М АРзаб (О РнЛ
^зат^рзат W ~ ^тр^Рбуф ,,,, --------------Лй--------------• (VI-45)
“н
где Fзат, FTp — плоцади сечений столбов жидкости в затрубном пространстве и в подъемных трубах, соответственно; Дрззб (О, Дрзат (0 и Дрвуф (0 — приращения давления на забое скважины, в затрубном пространстве и на буфере, начиная от момента ее остановки; г/'л—плотность нефти в пластовых условиях.
Для построения зависимости (VI.42) необходимо вычислить координаты трех-четырех точек. Предварительно кривая восстановления давления строится в специальных координатах [рзаб (/„ - /.); G (Г)] в пред-
fl I ! 3 t S I 1 I S IO* 1 i
US t ю5с/1з
О I 3 1 4 5 6 3 в Я Ю 'в'/
0.8 ' 15 tO^Glit
0 i 3 J 4 S 6 7 8 Я Ю I
I .................. ! 1,1 I |ll,. . | . I,, Ц11,,,,,, i,,,,,,,
' 45 3 <0 Gtii
0 I 2 J Я 5 6 7 8 8 ’0lt
| I | I,,^^.,.,,1.,. V|.....................1,11,1,,, i,< [, _
fl os < t.s з t.s tocth
Рис. VI. 18. Палетки для определения вспомогательной функции.
положении , что исследование скважины длилось заданное время
П = ~ = 13
и т. д. Величины G определялись с помощью палеток (рис. VI. 18), а интеграл Дюамеля — по предыдущим кривым путем графического интегрирования:
О (D = ДО (Г) 2 <Чаб (in - ii}- (VI- 46) <=i
Здесь ДО (1)—выбранный шаг по оси абсцисс при определении интеграла.
Пример. После установившейся работы скважины с дебитом нефти Qo = 200 т/сут на забое скважины дифференциальным гту-бинным манометром снята кривая восстановления давления, а также кривые восстановления давления на буфере (Д₽буф) и в затрубном пространстве скважины 0рзат), см. табл. VI. 24. Эффективная мощность пласта равна 10 м и коэффициент пористости — 0,2. Свойства нефти: р3л— 810 кг/м3 *; |лн = 2,2 мПа -с; <о„ = 1,38; = 10,5 X
X 10—1 см3/кгс; Рс = 1 • 10“5 см3/кгс. Площадь сечения столба жидкости в подъемных трубах frp = 30 см2, а в затрубном пространстве Рзат = 135 см2.
В последней графе табл. VI. 24 приведены результаты подсчета по формуле (VI. 45) притока в ствол скважины нефти V (/) после ее остановки. Например, для t= 600 с
[(135 -4- 30) 9,32—135 2,6—30 6,6] 1/<б00) = 0,00081
= 1,215 м3;
180
для t = 1200 с
[(135 + 30) - 12.08 — 135 X
41200) — 0,00081
X 3,6-30 7,6| 0,00081 — 1.585 м.
Таблица VI. 24
t, О дРза5> кгс/см’ дРбуф- KrctaM8 ДРзат’ кгс/см® v (f), м3
0 0 0 0 0
600 9,32 5,6 2,6 1,215
1200 12,08 7,7 3,6 1,585
1800 13,35 8,8 4,1 1,710
2400 14,10 9,5 4,4 1,79
3000 14,70 10,1 4,5 1,87
3600 15,10 10,7 4,5 1,93
4200 15,49 11,1 4,5 2,00
4800 15,70 11,5 4,5 2,02
5400 15,90 12,2 4,5 2,04
6000 16,09 12,7 4,5 2,06
7200 16,40 13,6 4,5 2,08
8400 16,75 14,7 4,5 2,12
9600 16,97 15,4 4,5 2,15
10 800 17,20 16,0 4,5 2,17
12 600 17,50 16,9 4.5 2,19
14 400 17,65 17,5 4,5 2.20
Примечание. |
кге/см® *0,1 мПа
Для построения кривой восстановления давления в координатах у, х определим координаты четырех точек при четырех значениях времени tn, например при = 1800 с, = 3600. <3 = 6000 и 14 = 10 800 с. 1Ти-
1
мем масштаб времени п = — . Тогда безразмерное время 7, будет равным
1800 _ 3600
п\ = -g- = 300; <4 = -g- = 600:
- 6000 , _ 10800
= — = 1000; <4 = —— =1800.
По данным табл. VI. 24 составл яем вспомогательную табл. VI. 25 для четырех принятых значений времени.
Значения величин G (7) находятся по величинам 7 с помощью палеток (см. рис. VI. 18).
Для каждого из безразмерных <( строятся кривые зависимости Дрс (<п — <) от G(t) (рис. VI. 19). По этим кривым находятся значения интегралов Дюамеля в соответствии с формулой (VI. 41). Площадь, заключенную между каждой из кривых и координатными осями, делят на вертикальные полосы принятой постоянной ширины,
Рис. VI. 19. Кривые зависимости о
G(7j для <7 = зоо: G = боо; 7? = юоо.
а интеграл определяют как произведение сумм средних ординат для каждой из полос на ширину полосы, например:
D (71= 300) = 10 (13,2 4- 13,0 + 12,6 +
+ 12,1 + 11,6 + 10,8 + 8,8 + 7,2 +
+ 4,5+ 0,4) = 1042.
Таким же образом получают О (7 > = = 600) = 2312;
D (Га = 1000) = 3956 и D (74 = 1800) = 7240.
Величины у,- (левая часть уравнения (VI. 42) рассчитываются следующим образом:
. 2.478 • 1042
71 (^=301) = ---------------------------=
-g- (3200-1800 — 1,71.10“)
= 0,00383;
уг = 600) = 0,00402; у3 {7а = 1000) =
= 0,00415; (74 = 1800) = 0,00435.
Величины х, определяются логарифмированием (,:
4 = lg 1 SCO = 3,26; хч = lg 3600 = 3,57-, x., = lg 6000 = 0,78; = lg 10800 = 4,04.
По точкам в координатах у,-, х, проводим прямую (рис. VI. 20), отсекающую на оси ординат отрезок :/0 =0,00158 и расположенную к оси абсцисс с уклоном
0,00158 f = ’ = 0,00067.
2.35
Рис. VI. 20. Зависимость V( от х^ построенная с учетом притока жидкости в скважину после остановки.
181
Таблица VI, 25
Зависимости для построения кривой восстановления давления в координатах у, х
(tt = 18оо о; 7, = зоо)
V, с 0 600 1200 1800
1 0 100 200 300
11-1 1800 1200 600 0
13,35 12,08 9,32 0
G(7) 0 42 74 104
(t, = 3600 с! 7, = 600)
t, 0 0 600 1200 1800 2400 3000 3600
1 0 100 200 300 400 500 600
tz t 3600 3000 2400 1800 1200 600 0
&pz (tt — о 15,10 14,70 14,10 13,35 12,08 9,32 0
G(7) 0 42 74 104 133 l£0 186
(<„ = 6000 с; 7, = юоо)
t, a 0 600 1200 1800 2400 3000 3600 4200 4800 5400 6000
7 0 100 200 300 400 500 600 700 800 900 1000
tt — t 6000 5400 4100 4200 3600 3000 2400 1800 1200 600 0
4 (ta - 0 16,09 15,90 15,70 15,49 15,10 14,70 14,10 13,35 12,08 9,32 0
G(7) 0 42 74 104 133 160 186 213 238 264 288
(t, =10 800 с; G = 1800)
t, c 0 600 1200 1800 2400 3000 3600 | 4200 | 4800 5400 6000 7200 8400 9600 10 800
7 0 100 200 300 400 500 600 700 800 900 1000 1200 1400 1600 1800
ti-t 10 800 10 200 9600 9000 8400 7800 7200 6600 6000 5400 4800 3600 2400 1200 0
дрс(\ - 7) 17,20 17,10 16,97 16,88 16,75 16,60 16,40 16,28 16,09 15,90 15,7 15,10 14,10 12,08 0
G(7) 0 42 74 10' 133 160 186 213 238 264 288 330 380 430 480
Отсюда проводимость пласта
Ы 1 _ 9ОО Д'СМ
|1Н = 6,28 • 0,00067 - м мПа-с’
а проницаемость 238 • 2,2
* = 1000 = 0,523 Д‘
Пьезопроводность пласта равняется 0,523
2,2 (0,2 . 10,5 10-5+ 1,0.10~&) = 7800 см’/с, а приведенный радиус несовершенной сква жины
1/ 7800 1/7800 _
а пр- У 10-(-2,35) = У 224 = 5,9см.
Дифференциальный метод Ю. Н. Борисова
Основной расчетной формулой в данном методе является
АРС (0 Z 2,3Q0(Ji 2,25х 2,3<20(х & г2 'с пр 1g в,
где (VI. 47)
(VI. 48)
2 “ Г (Др) ’
А П ЛПЛ QoPh
lge = igl-M0- (VI. 49)
В формулах (VI. 48) и (VI. 49):
где
t №р)а = FK (АРзаб п ^Рзат п) "Ь
+ Fm (ДРзаа п “ Д%ф о)’- <VL 51>
те . тга
PK=-(D2-^-, (VI. 52)
где D — внутренний диаметр обсадной колонны скважины; d1 — внешний диаметр колонны фонтанных труб; d — внутренний диаметр этой колонны; Д i — интервал вре-
мени между двумя соседними точками (одинаковый).
Г/(Др) 1
1>6 (ДД2_Г(Др) ₽ (0 = —--------------2- . (VI. 53)
2-3 [<ЭоРнЛ - Г (Др)]
По прямолинейному участку кривой, построенной в координатах (Дрсз), (Ig t — р), определяется уклон к оси абсцисс
(Дрсг)2- (Дрс2)1
(1g/-?)>-(1g <-₽)Х (VL54) и отрезок В", отсекаемый на оси ординат.
Параметры пласта и скважины определяются по формулам (VI. 40), (VI. 41).
Пример. Дебит нефти до остановки Qo = 42,9 т/сут. Плотность нефти в пластовых условиях и на поверхности равны РПнЛ = 794 кг/м3 и р”ов = 860 кг/м3. Объемный коэффициент <ан = 1,1. Поперечные проходные сечения кольцевого пространства F к = 133 см2 и фонтанных труб Ртр = = 30,1 см2. Эффективная мощность пласта h = 8 м, пористость — 20%. Вязкость пластовой нефти рн = 4,5 мПа-с; рн = 9,42 х X 10~5 см2/кгс; ра = 1,6 . 10-5 см2/кгс.
Таблица VI. 26
Данные гидродинамического исследования скважины
Точки t. с Давление, кгс/см1
д^заб Дрзат 4Лбуф
1 600 2,24 0,41 1,99
2 1200 3,60 0,82 2,49
3 1800 4,23 1,03 3,08
4 2400 4,61 1,13 3,27
5 3000 4,78 1,13 3,39
6 3600 4,93 1,03 3,49
7 4200 5,03 0,99 3,54
8 4800 5,13 0,93 3,59
9 5400 5,21 0,82 3,59
В табл. VI. 27 приводятся результаты обработки данных исследования скважины, а ниже даются примеры определения промежуточных функций.
Для первой точки (f, = 600 с):
f (ДР1) = 133 (2,24 — 0,41) + 30,1 (2,24 —
— 1,99) =250,9;
. ч 403,2 — 0
f (АР i) = 2 - 600 = °'336'
Для второй точки (1з = 1200 с) аналогично:
f (Др2) = 133 (3,60 — 0,82) + 30,1 (3,60 —
— 2,49) = 403,2;
460,2 — 250,9
Г (Дра) = 2 - 600 = 0,174 и т. д.
Величины 2, р вычисляются соответственно:
1
21 = 0,336 • 0,86 86400 = 3,26;
1 — 42,9 • 1,1 - 794
1
22 “ 0,174 0,86 86 400 = 1,57 и т‘ д-
1 ~ 42,9-1,1.794
183
, „ /250,9 „ \
1,6 ( 600 — 0,336)
₽1 = “2,3 (0,485 — 0,336) = 0,383;
z. /403,2 \
1,6 (1200 -°’174)
₽2 = 2,3 (0,485 — 0,174) = 0,362 и т- д-
В результате, например,
ДРзаб, 21 = 2,24 • 3,26 = 7,30 кгс/см2;
1 g 0j = lg ti — pj = lg 600 — 0,383 = 2,395.
По данным табл. VI. 27 строится кривая восстановления давления в координатах (Ар3аб2)' *6 0 (рис. VI. 21). По прямолинейному участку кривой определяются В" = = 1,6 кгс/см2 и i = 1,143 кгс/см2.
Параметры пласта и скважины получаются равными
Рис. VI. 21. Кривая восстановления давления на забое скважины в координатах (Дрcz), — Р)
____________0,573_____________
4,5 (0,2 - 9,42 10-5+1,6 - 10~5)
Ай = 2,3 - 42,9 • 1,1-11,57 Д-см . рн= 0,86 - 4-3,14 - 1,143 = ,02мПГс’
102-4,5
800
= 0,573 Д;
k =
= 3660 см2/с;
гс пр
2,25 3660 / 7550
101,6/1,143 =|/ 101,4 =
= 17,4 см.
Таблица VI. 27
Обработка результатов исследования скважины с учетом притока (дифференциальный метод)
Показатели Данные по точкам в с
G = = 600 fo = = 1200 G — = 1800 G = =2400 — =3000 — = 3600 ^5 =4200 — = 480U t* = = 5400
/ (Др), кгс 250,9 403,2 460,2 503,2 527,3 562,4 582,2 604,9 632,6
)' (Др), кгс/с 0,336 0,174 0,083 0,056 0,049 0,046 0,036 0,042 0,052
Г (Др) ^оРпл 0,693 0,359 0,171 0,115 0,101 0,095 0,074 0,086 0,110
, _ Г (Др) ^оРпл 0,307 0,641 0,829 0,885 0,899 0,905 0,926 0,914 0,890
2 3,26 1,57 1,21 1,13 1,12 1,107 1,07 1,097 1,13
Дрза6г, кгс/см2 7,30 5,65 5,12 5,20 5,35 5,46 5,38 5,63 5,88
((Др) —— , кгс/с 0,418 0,336 0,257 0,210 0,176 0,156 0,139 0,126 0,117
Г/ (Др) 1 -у- — Г (Др) , кгс/с - - 0,082 0,162 0,174 0,154 0,127 0,110 0,103 0,084 0,065
<?0Рпл - f (Др) 0,149 0,311 0,402 0,429 0,436 0,439 0,449 0,443 0,433
₽ 0,383 0,362 0,301 0,250 0,203 0,174 0,160 0,132 0,105
igf— ₽ 2,395 2,717 2,954 3.130 3,274 3,382 3,463 3,549 3,627
Примечание. 1 кгс* ЮН ; 1 кгс/см 2 * 0,1 М la; 1 кг с/с* 1 ОН /с.
184
Экспресс-метод
Метод предназначен для исследования длительно или временно простаивающих скважин с целью определения их продуктивности (приемистости) и фильтрационных параметров пластов. С теоретической точки зрения этот метод является разновидностью метода восстановления давления. Он разработан для условий, когда давление на забое скважин равно или выше давления насыщения.
Для исследования скважины экспресс-методом применяются два способа возбуждения: подкачка газа и «мгновенный подлив».
При первом способе в скважину, устье которой герметично закрыто, с помощью компрессора или от баллона подкачивается сжатый газ (воздух) с тем, чтобы уровень жидкости был оттеснен на несколько метров или десятков метров.
Основной расчетной формулой при исследовании скважин экспресс-методом с подкачкой в нее газа является
Др (S) ц (. 1,26х \
(3) = ,$7(5) = °.183 —lgS)’
\ с пр /
(VI. 55) где
во
4p(S)=/Дрзаб(/)е^^; (VI. 56)
V (S) = f V (0 e-sldt. (VI. 57) о
Здесь S — постоянное число, рассматриваемое как параметр, который выбирается в зависимости от продолжительности периода исследования в 1/с.
В результате исследования скважины способом подкачки должны быть получены зависимости Дрзаб (0 и величины изменения объема жидкости в стволе скважины V (t).
Для построения зависимостей по уравнению (VI. 55) необходимо выбрать несколько значений параметра S. Обычно принимаются 3—4 значения, чтобы минимальная вели-2 — 3
чина S составляла —— (где Т — общая продолжительность исследований в с), а максимальная S равнялась бы (2,5-^3)5мин_ Промежуточные значения S определяются из приближенных равенств
^МИВ ,—, f\rr “Q\
-----------s . (VI. 58) О Од макс
Интегралы (VI. 56) и (VI. 57) вычисляются после выделения точек излома линий Дрзав(0
Рис. VI. 22. Зависимость Ф (S) от lgS, постооен. ная по данным исследования скважины с под качкой газа.
и V(/). Для точек излома выписываются значения координат t с индексами (0, 1, 2, • А /4-1......й) и Дрзаб, V с теми ж.е
индексами.
Интегрирование осуществляется по при-олиженным формулам
М
Др (S) = S2 У ^и+1- Дрзаб/ х г/+1 -‘/
7=0
X (е-«/_е-«/+!); (VI. 59)
i-k s L х
/=0
X (е-«/_е-Я7+1). (VI. 60)
По вычисленным значениям Др (S) и V (S) Др (S)
находятся отношения ф = т. е. полу
чаются исходные данные для построения графика ф(3), lgS (рис. VI.22).
Возбуждение непереливающих скважин осуществляется путем быстрого погружения под уровень специальных баллонов, в ре
зультате чего уровень «мгновенно» поднимается на величину Д/ = —? (где Ио — общий Г
объем погружаемых под уровень баллонов-, F — площадь внутреннего сечения обсадной колонны). Этот способ называется «мгновенным подливом».
Изменение уровня после подъема выражается величиной Д/(/) (рис. VI. 23).
При обработке результатов исследования кривая М (t) перестраивается в координатах 1g 1g г в том же масштабе, что и палетка (рис. VI. 24). Фактическая кривая переносится на кальку и накладывается на палетку таким образом, чтобы горизонтальная линия фактической кривой[Д/ (7) = д/0] совпала с осью абсцисс палетки.
185
Рис. VI. 23. Снижение уровня в скважине после «мгновенного подлива».
. А/(°)
1g • по которому потенциированием на-. Д/ (О)
ходится значение Д/ = . Отмечается
также величина параметра п кривой палетки» с которой совместилась фактическая кривая.
При исследовании скважины способом подкачки гидропроводность и приведенный радиус скважины определяются мулам
kh 0,183 р — i
с,<пр
по фор-
(VI. 61)
(VI. 62)
где i — уклон прямой в координатах ф (S) к оси lg t:
Добившись хорошего совпадения фактической кривой с одной из кривых палетки, с палетки на кальку переносится прямая, проходяшая под углом 45° к оси lg t. В точке пересечения последней с осью ординат фактического графика получается значение
A, S — произвольная ордината на прямолинейной зависимости ф (lg S) и соответствующее ей значение S.
Рис. VI. 24. Палетка для обработки результатов исследования скважин методом «мгновенного подлива». Параметром кривых являет» ся коэффициент в.
186
При исследовании скважин способом «мгновенного подлива» параметры пласта и скважины определяются по формулам
kh F 103
Iх 4тгуД/
(VI. 64)
(VI. 65)
где 7 — относительная (безразмерная) плотность жидкости в скважине.
Пример (по исследованию скважины способом «мгновенного подлива»). Результаты исследования представлены в табл. VI. 28.
Таблица VI. 28
Результаты исследования скважин способом «мгновенного подлива»
№ п/п в мм бланка в мм бланка А/ (1), мм А/(Л ^9
Wo
1 8 34,0 23,0 0,125 Г,097—0,903
2 13 25,5 14,5 0,078 2,892—1,108
3 18 21,5 10,5 0,057 2,756—1,244
4 25 18,5 7,5 0,041 2,613—1,387
5 30 17,2 6,2 0,034 2,632—1,468
6 39 16,0 5,0 0,027 2,432—1,568
7 47 14,2 3,9 0,021 2,322—1,678
8 109 12,5 1.5 0,0081 3,909—2,091
9 10 ,194 11,8 11,0 (Z//=0) 0,8 0,0 0,0043 0 3,633—2,367
Площадь поперечного сечения колонны исследуемой скважины F = 117 см2. Эффективная мощность пласта 86 м. ? = 1,0. Объем вытесняемой прибором жидкости V = 20 715 см3.
20715
Откуда Д/о = 117~ = 177 см. В мм бланка Д/о = 184 мм. Масштабные коэффициенты Mf = 11,09 с/мм; Л4( = 9,6 мм/мм.
По данным таблицы кривая восстановления давления строится на кальке в логарифми-
Д/ (/)
чески» координатах 1g -г-.—, lg t и сопос-
а‘О
тавляется с теоретическими кривыми, приведенными на палетке (рис. VI. 24).
Из сопоставления данных определяются параметры фактической кривой
Д/ (О)
'§-дГ = 0-10-
При потенциировании получаем:
Д1 = 1,26;
Параметр кривой п = 0,3.
Параметры пласта н скважины получаются из расчетов:
kh 117 • 10е
ц =4 • 3,14 -1,26-11,09
t 1,0 • 665 k = 860 ~
0,773
665 ^. мПа-с;
0,773 Д;
1,0 (0,2 • 4,5 • 10~5 + 1,5 • 10~5) = = 32200 см2/крс;
,спр=рЛ2-тдтрб7о7з =4(94см.
103
Обработка результатов исследования скважин со снятием кривой восстановления давления на забое при эксплуатации трещиноватых пластов
Методика ВНИГРИ основана на соотношениях ф(/) для неустановившихся процессов в стволе скважины после изменения режима ее работы, соответствующих начальным и более поздним периодам изменения давления:
ф(/ ) — In t
°Н-2теМ
S АРа (0 dt
w = —9,
Qoo
(VI. 68)
где kr — проницаемость трещиноватого пласта; а — удельная поверхность трещин
187
(с = 2 7'); Т — объемная плотность трещин; — пьезопроводность пористой среды.
Время регистрации показателей после изменения режима работы скважины должно быть не менее 4—8 ч.
В качестве исходных данных для расчета выбирают значения давления (и дебита) в моменты времени , составляющие (начиная с ti) геометрическую прогрессию со знаменателем 6, не превышающим двух. Удобнее принять б = У 2.
бру(Г2= 1); Др3 (Г3=/2); Др4 (/4=2) ...
и кривая строится в координатах ф. 1 n(to +' + т)-
Если кривая ф, In 10 имеет асимптотический прямолинейный участок с уклоном к оси абсцисс (;н), то, определяя и сопоставляя с выражением (VI. 67), получим
= 0,04
х. =_______k-l_______
Р- (трн + ₽с) ’
(VI. 71)
'cnp= l.’2/7e 4,«;
Значения давлений, не совпадающие для указанных моментов времени с замеренными, находятся линейным интегрированием между двумя имеющимися точками.
Далее определяются вспомогательные функции S t.
Alt
6i=e (i = 2, 3,. . ,,n— 1); S„= 0.
(VI. 69)
В координатах p, S проводятся прямые Др = Др, и 5 = 5,- до их попарного пересечения.
Через п указанных точек пересечения в точку (0,1) проводится кривая Др, = ДрДЗД
которая соответствует величине Zo=—.
Через (и — 1) ближайшие к построенной кривой узловые точки и точку (0,1) прово-^n—1 дится кривая, соответствующая t0 =—, и т. д. до кривой, соответствующее значение /0 для которой будет t0 = 4ft.
С помощью планиметра или по формуле Симпсона определяются площади, ограниченные каждой из построенных кривых и осями координат. Произведение величин этих площадей на соответствующее значение (е дает искомую величину интеграла в формуле (VI. 68).
Кривая восстановления давления строится в координатах ф, 1п /0.
Если кривая имеет начальный прямолинейный участок, то определяется ее уклон к оси абсцисс (г'н) и отрезок, отсекаемый на оси ординат (Вн). Выбирая два достаточно больших значения 1а, вычисляются
Л>п1 ^оп2е
Ф (^ОП1) — Ф ((оп?)
в =-------------21---------- ;
в
Пример. Кривая восстановления давления на забое скважины, эксплуатирующей трещиноватый пласт, снята после ее остановки. Дебит нефти до остановки 2599 сма/с. Эффективная мощность пласта равна 9,8 м;. коэффициент пористости блоков — 0,1. Вязкость нефти в пластовых условиях 7,34 мПа -с. рь=7,5 - 10—5 см2/кгс; рс= 1- 10—5 см'7кгс.
Таблица VI. 29
Результаты исследования скважины со снятием кривой восстановления давления на забое (1кгс/см2==0,1мГ1а)
L 1, мнн Др/ . К! С/СМ 2 t 1. мнь Др/ кгс/см2
1 0 0 10 16 7,99
2 1 2,11 11 16/^. 8,76
3 /2 2,60 12 32 9,67
4 2 3,31 13 32/f 10,51
5 2/2 4,05 14 64 11,60
6 4 4,98 15 64/2 12.80
7 4/~ 5,59 16 128 14,19
8 8 6,62 17 128/2 15,79
9 8/f 7,30 18 256 17,52
Притоком жидкости в скважину после ее остановки пренебрегается, так как не были сняты дополнительно кривые восстановления на буфере и в затрубном пространстве.
Для выбранных значений tt (с 6 до 14 точки) по формуле (VI.69) вычисляются значения S,- и изложенным выше способом наносится сетка прямых Др,-, S,-, Например, для tL = = 32 мин Др, = 9,67:
4 32 е"25б" = 0,606.
188
Рис. VI. 25. Вспомогательные зависимости дл/5/).
В координатах Др,-, S(. (рис. VI. 25) проводятся соответству юшие прямые до их пересечения. Через узлы построенной сетки проводятся кривые \р S, (с целью разгрузки графика нанесены кривые только для четных номеров I), и одним из указанных выше способов подсчитываются значения интегралов, входящих в выражение (VI. 68), а затем и самой функции ф (/0) при дискретных значениях (табл. VI.30).
Таблица VI. 30
Значения расчетных величин при обработке кривой восстановления давления
to. С Uo-H) 14.36 In t„ in((„+T) 4 (t„)
240 1670 5,481 7,421 3,963
339 1769 5,827 7,478 4,635
480 1910 6,174 7,555 5,338
679 2109 6,520 7,654 6,066
960 2390 6,867 7,779 6,823
1358 2788 7,214 7,933 7,619
1920 3350 7,560 8,117 8,468
2715 4145 7,907 8,330 9,389
3840 5270 8.253 8.570 10,252
По данным табл. VI. 30 кривая восстановления давления строится в координатах ф ((0), In t0 (рис. VI. 26). Поскольку пласт заведомо трещиноват, а кривая имеет выпуклый характер, используем начальный прямолинейный ее участок, который соответствует зависимости (VI.66).
Рис. VI. 26. Кривая восстановления давления в координатах Ф, In t0.
Определяем величины В,, и i'H из системы уравнений для двух точек на прямой, на-пр имер:
5,338= Вн-Нн 6,174;
3,963 = ВН + «Н. 5,481, откуда Вн = — 6,92: г'н = 1,985.
Выбирая два достаточно больших значения i0 = 64 мин и tg = 32, по формулам (VI. 70) находим
Ю 252 — 8,468
0= ------2~Й98-------= °'451;
3840 - 1920е0,451
z = ео.451_1 — 1430.
При известной величине т находятся значения In (70 + т) и строится кривая восстановления давления в координатах ф, 1п(104-т), рис. VI. 27. При больших значениях ia расчетные точки ф хорошо ложатся на прямую, соответствующую зависимости (VI.67).
Величина Ва определяется из системы уравнений для двух последних точек, лежащих на прямой
10,252 = Вп 4- in . 8,570,
9,389 = Вп + in 8,330, откуда Вп = —20,65.
Рис. VI. 27. Кривая вост анон ления давления в координатах
189
Календарное t,4
Рис. VI. 28. График гидропрослушивания (изменение забойного давления в наблюдательной скважине от изменения дебита в возмущающей).
По формулам (VI. 71) и (VI. 72) определяются параметры пласта и скважины:
. пп. 2599 • 7,34
Л, = 0.04----------1----О адо п-
т 980 1,985 ~ д’
0,392
х. = --------------? = 3050 см2/с;
7,34 1,75-10—5
20,66
ге нр = 1.121<Зб50е4 ' ‘’985 = 816 см =
= 8,16 м;
6,92
____________4 ' 3050__________ 4-1.985
8162 .3,16- /7>8. ю-з
= 1,58 1/см.
Метод гидропрослушивания
При методе гидропрослушивания используются результаты регистрации изменения давления в реагирующих (наблюдательных) скважинах, вызванные изменением дебита в возмущающей скважине. Метод применяется на залежах, эксплуатирующихся при давлениях выше давления насыщения.
Результаты исследований представляются в виде графика гидропрослушивания (рис. VI. 28). По оси ординат откладывается изменение забойного давления реагирующих скважин, а по оси абсцисс — время в часах. Время отсчитывается с момента изменения режима работы возмущающей скважины (точка В).
Изменение давления Др в момент времени tf, соответствующее вертикальному отрезку Д/,, берется между фоном (АА’) и фактической кривой в реагирующей скважине (BQ.
Фактическая кривая изменения давления на забое реагирующей скважины строится
жнн методом гндропрослушнвання.
в координатах IgAp, 1g t таким образом, чтобы она разместилась на бланке. С этой целью выбираются соответствующие мае-, штабы для оси времени и для оси давления.
На фактическую кривую накладывается эталонная, нанесенная на кальку (масштабы координатных осей у обеих кривых должны быть одинаковы), рис. VI. 29.
При совмещении кривых следует соблюдать параллельность координатных осей обеих кривых. Фиксируются значения совпадающих точек кривых эталонной и фактической по давлению и по времени (соответственно Др и — для эталонной кривой и Дрф, /ф — для фактической). Параметры пласта рассчитываются из соотношений
kh
В дРф
х = ЮТ?2,
(VI. 73)
(VI. 74)
где AQ — изменение дебита возмущающей скважины; R — расстояние между двумя взаимодействующими скважинами.
Пример. Дебит возмучающей скважины, расположенной на расстоянии в 375 м от реагирующей, был изменен на Д<2 = = 57,1м3/сут. При совмещении фактической и эталонной кривых (рис. VI. 29) совпадающей оказалась точка с координатами на фактической (/ф = 180 мин, Зф = 120 мм) и на эталонной (lj = 3,24 мин, SL = 12 мм), откуда
&Р1 Si
АРф Зф
= 0,1;
у- = 0,018. гФ
190
Параметры пласта оказываются равными
kh
— = 0,1 • 57,1.100 = 571 Д • см/(мПа.с);
х = 0,018 • 10 • 3752 = 25600 см2/с.
Определение параметров пластов по разрезу (в многослойной системе)
Если скважина эксплуатирует несколько пластов, вскрытых единым фильтром, то ее необходимо исследовать одновременно глубинными дебитомером (расходомером) и манометром.
На рис. VI. 30 в качестве примера приводится профиль притока жидкости в скважину по разрезу пласта, зафиксированный глубинным дебитомером на одном из режимов ее работы.
Снятие профилей притока на нескольких режимах работы скважины с одновременным замером забойного давления на каждом из них позволяет определить для каждого пласта (пропластка) величины коэффициента продуктивности (или приемистости — для нагнетательных скважин) и текущего пластового давления.
Если индикаторные кривые по скважинам и по пропласткам на исследуемом объекте получаются прямолинейными, то для указанных целей достаточно исследовать скважины на трех режимах работы. Если же можно ожидать нелинейности индикаторных кривых, то исследования следует проводить на пяти — семи режимах. Результаты исследования по пропласткам и для всего пласта в целом наносятся на общий
Ряс. VI. 30. Каротажная диаграмма (а) разреза пласта и профиль притока ((), снятый глубинным дебитомером на одном из режимов работы скважины.
Рис. VI. 31. Индикаторные линии по скважине с тремя пропластками в разрезе пласта и общая индикаторная линия по скважине.
график (рис. VI. 31). Коэффициенты продуктивности определяются для каждого /-того пропластка по формуле
PaaGi Р заб^_|_]
(VI. 75)
где Q{; Qi+l и Р„б/+]; рзаб.-дебиты пропластков и соответствующие им забойные давления на двух режимах работы скважины.
Пластовые давления в каждом из пропластков определяются путем экстраполяции индикаторных линий до пересечения с осью забойных давлений (при Q = 0 рза6 = рпл).
Величина общего коэффициента продуктивности по скважине должна быть равна сумме коэффициентов продуктивности всех действующих пропластков.
Параметры пласта по каждому из пропластков рассчитываются по формулам (VI. 10) и (VI. 11).
Пример. По скважине, эксплуатирующей одновременно три пропластка на трех режимах работы, с помощью глубинного манометра замерены забойные давления и с помощью глубинного дебитомера — величины дебитов по каждому из пропластков. Данные приведены в табл. VI. 31.
Таблица VI. 31
Режимы 0заб» кгс/см* Дебиты нефти, т/сут
4, ^скв
1 153 22,4 6,0 61,5 89,9
2 150 34,9 9,7 71,4 116,0
3 148 44,0 13,3 78,0 135,3
191
На рис. VI. 31 нанесены индикаторные линии для трех пропластков (/, II, III) и общая индикаторная линия (IV) по скважине.
В соответствии с формулой (VI.75) коэффициенты продуктивности по пропласткам и по скважине равны тц = 4,39; т|[| = 1,50; >,ш = 3,58 и т1СКВ = 9,47 м2/(сут кгс/см2), а величины пластовых давлений рПЛ[ = 158, PnJ>ll = 157> Рплш = 170иРпл= 162 кгс7см2-
Контроль за текущей нефтенасыщенностью при вытеснении нефти водой
По методике контроля за нефтенасыщенностью пласта при вытеснении нефти водой по результатам гидродинамических исследований скважин (В. Н. Васильевского) считается, что наиболее надежным путем для определения текущей нефтенасыщенности пласта является привлечение комплекса данных по скважинам: текущая обводненность добываемой продукции из скважин, изменение их коэффициента продуктивности и изменение гидропроводности пласта, определяемой по кривым восстановления давления.
При обработке результатов исследования скважин необходима диаграмма относительных проницаемостей пласта, соответствующая изучаемому объекту. Для удовлетворения этого условия желательно предварительное проведение лабораторных исследований по совместной фильтрации нефти и воды на модели пласта с использованием нефти и кернового материала из рассматриваемого объекта, а также с соблюдением условий подобия.
При отсутствии таких исследований можно использовать диаграммы относительных проницаемостей пласта, полученные для условий совместной фильтрации нефти и воды применительно к несцементированным пескам (Леверетта, Д. А. Эфроса или Перкинса и Коллинза), к сцементированным песчаникам (Перкинса и Коллинза или В. М. Березина). Кроме исходной диаграммы относительных проницаемостей, необходимы следующие дополнительные исходные данные для определения текущей нефтенасыщенности пласта:
Г) величины начальной водонасыщенности пласта (ов св ),а также вязкости нефти и воды в пластовых условиях (р.(1, ,лв);
2) обводненность продукции скважины (в пластовых условиях);
3) величины коэффициентов продуктивности скважины до обводнения и в процессе обводнения (на даты определения текущей нефтенасыщенности пласта);
/ kh \
4) величины гидропроводности пласта j 1 на те же даты, определенные по кривым восстановления давления. Эти данные необходимы в случае, если величина коэффициента продуктивности изменяется незакономерно (испытывает влияние изменения состояния призабойной зоны пласта или других факторов).
Расчет текущей нефтенасыщенности производится в следующем порядке.
Строится график зависимости функции § от нефтенасыщенности пласта с использованием диаграммы относительных проницаемостей:
k’
«(’н)=-т------(VI. 76)
Йи0 -
> k „ ' А? „ ' & ,л
где ka = _«. kg = Л и feH0 = kB-
фазовые проницаемости пласта для нефти и воды; 1ги0 — начальная фазовая проницаемость пласта для нефти; k — абсолютная (физическая) проницаемость пласта.
Строятся графики изменения во времени продуктивности, гидропроводности пласта (по кривым восстановления давления) и обводненности (процента воды) по скважине. Производится сглаживание кривых. Если колебания коэффициента продуктивности выходят за пределы погрешностей его определения, то в расчетах используются данные о гидропроводности пласта.
Намечаются даты (или дата) определения величины текущей нефтенасыщенности пласта, на которые по сглаженным кривым фиксируются значения продуктивности (или гидропроводности) и текущей обводненности продукции, которые приводятся к пластовым условиям.
По промысловым данным на выделенные даты т находятся значения
% W
5 (т) = ------т-т . (VI. 77)
^ЬнО—11н(х)1
Если продуктивность скважины в период обводнения изменяется незакономерно, то величина т]Но, входящая в формулу (VI. 77), определяется с привлечением данных, определенных по кривым восстановления давления:
(VI. 78)
В формулах (VI. 77) и (VI. 78):
^см. Др ’
Чв
^см
д^’
Др •
Др —депрессия на забое скважины.
192
= dr\Jdt, можно получить для каждой фазовой траектории y(t) соответствующую траекторию т](/) (рис. 5.2, б). Задавшись некоторой областью е, всегда внутри нее можно найти такую область 6, чтобы ни одно движение, начавшееся в б, не достигло границы области е. При этом все движения заканчиваются в начале координат и, следовательно, движение устойчиво по Ляпунову и при том асимптотически устойчиво. Область у представляет собой точку, лежащую в на-
чале координат.
Для второго случая (см. рис. 3.39) фазовые траектории невозмущенного £/н(/) и возмущенного y(f) процессов показаны на рис. 5.2, в. В качестве невозмущенного движения выбрана фазовдя траектория, при t оо приводящая в начало координат. Переходя к координатам Hi и т]2, получаем траектории, заканчивающиеся на линии покоя, соответствующей области у (рис. 5.2, а). Задаваясь об-
ластью е, всегда можно найти необходимую для устойчивости по Ляпунову область 6.
Области е, 6 и у (см. рис. 5.2, д) соответствуют случаю, когда в качестве невозмущенного движения принято состояние покоя, выражаемое точкой, лежащей в начале координат. В этом случае у" = у% = 0, а th = уг и т]2 = у„.
Таким образом, в рассматриваемом случае как движение, так и равновесие устойчивы по Ляпунову, но не асимптотически.
Пример 5.2. Составить суждение об устойчивости по Ляпунову точки равновесия типа центр линейной консервативной системы второго порядка и найти области 6 и у для области в, задаваемой неравенствами — а < уг < 2а и — 2а < уг < 2а, где а произвольное число.
Рассматривая фазовые траектории для этого случая (см. §3.3), можно убедиться, что если радиус-вектор точки, соответствующей началь-
Рис. 5.3
ным условиям, не выходит за пределы окружности с центром в начале координат, лежащей внутри области е, то движение никогда не достигает границы этой области е. Движение будет совершаться по этой окружности сколь угодно долго.
Таким образом, область 6 совпадает с областью у. Равновесие устойчиво по Ляпунову, но не асимптотически. Области е, 6 и у для рассматриваемого случая доказаны на рис. 5.3.
Пример 5.3. Составить суждение об устойчивости по Ляпунову для автоколебаний, выражаемых предельными циклами, показанными на рис. 3.33,6 и 3.33, г.
Принимая в качестве описания невозмущенных движений y"(t) определенные движения по предельному циклу и выбирая в качестве возмущенного движение*^/), отличающееся от возмущенного в начальный момент времени t = О на некоторую малую величину, можно заметить, что в координатах TJi> Иг для неустойчивых циклов процесс расходится, а для устойчивых циклов процесс сходится, но не к началу координат, а к определенной, зависящей от начальных условий орбите подобно тому, как это имеет место при нейтральном равновесии типа центр. В этом легко убедиться, рассматривая два сдвинутых во времени движения по устойчивому предельному циклу yK(f) и y{t) = ун(/ — т).
Изображение на фазовой плоскости вариации т](/) = y(t) — y*(t) дает пе-ридическое движение с амплитудой, зависящей от т. При т, равном половине периода автоколебаний, диаметр предельного цикла для т](/) в два раза превышает диаметр предельного цикла y(t) и yH(t).
Таким образом, устойчивые автоколебания представляют собой процессы устойчивые по Ляпунову, но не асимптотически. С другой стороны, возмущенные и невозмущенные движения завершаются движениями по одной и той же орбите, поэтому автоколебания относятся к орбитально асимптотически устойчивым.
186
Пример 5.4. Рассмотреть устойчивость вынужденных процессов в простейшей релейной следящей системе первого порядка с гистерезисом при внешнем сигнале u(t) == At. Структурная схема системы показана на рис. 5.4, а.
На рис. 5.4, б построены x(t) и </(/) для двух различных начальных условий: 1 — когда р(0) = 0 и 2 — когда у(0) = Цо- Первый из этих случаев принимается в качестве невозмущенного, а второй — в качестве возмущенного движения.
Оба эти процесса приводят к колебаниям с одинаковыми периодами. Так как колебания происходят в неавтономной системе и зависят от внешнего воздействия u(t), то они не могут быть названы автоколебаниями.
Период колебаний слагается из двух отрезков времени: Т = tY + G- Здесь Л. = (ха — хь)1А — время, в течение которого внешний сигнал изменяется на величину ширины петли гистерезиса, a t2 = (ха — хь)/(й — Л) — время, в течение которого следящая система отрабатывает это рассогласование при условии продолжающегося увеличения внешнего сигнала. Отставание возмущенного процесса от невозмущенного т = т]0/Л зависит от начальных условий возмущенного процесса. Для суждения об устойчивости рассматриваемого процесса определим вариацию т)(0 = 1/(0 — Цн(0- Эта зависимость построена на рис. 5.4, б. По истечении времени ta = (т]0 + ха)1А процесс становится периодическим с периодом Т = 0 + it = k(xa — хь)/Л (А — Л).
Диапазон изменения т](1) зависит от начальных условий т]0
Дт) < kx = йт]о/Л
и не может превышать величину kt2 = k(xa — хь)/ (k — Л).
187
На рис. 5.4, в построен фазовый портрет процесса л (t) в координатах — = 1) и Я» = Л1/Л
Координата Яа изменяется не непрерывно и фазовая траектория носит разрывной характер. Обозначив на кривой т] (/) точки a, b, с, d, е, f, g, h для различных моментов времени, можно нанести соответствующие точки на фазовом портрете. Процесс перемещения изображающей точки на фазовой плоскости можно описать следующим образом: неподвижность в точке ab, скачок b -> Ь, равномерное движение по линии Ьс, скачок с -> с, неподвижность* в точке cd, скачок d-> 4 равномерное движение d, скачок е -> е, непрерывное движение ef и т. д. Движение слагается из интервалов покоя, равномерного движения и скачков, а завершается разрывным предельным циклом шириной Д^. Так как рассматриваемая система описывается дифференциальным уравнением первого порядка (п = 1), то для суждения о ее устойчивости необходимо пользоваться не фазовой плоскостью, а фазовой прямой с одной координатой Th.
На этой прямой (см. рис. 5.4, г) при заданном участке е всегда можно выделить участок б, необходимый для суждения об устойчивости по Ляпунову.
Для рассматриваемого примера этот участок совпадает с участком у, в пределах которого происходят колебания в системе. Попытка обозначить область е и искать область б на фазовой плоскости для рассматриваемого примера (см. рис. 5.4, в) не может дать ответа об устойчивости системы по Ляпунову, так как вторая фазовая координата Л 2 не соответствует порядку уравнения и для суждения об устойчивости является излишней.
Все приведенные в этом параграфе определения, касающиеся устойчивости процессов в системах автоматического управления, распространяются и на случай импульсных систем, если рассматривать в них дискретные процессы.
§ 5.2. ПРЯМОЙ МЕТОД ЛЯПУНОВА
А. М. Ляпуновым предложен метод, позволяющий получать достаточные условия устойчивости нелинейных систем автоматического управления, получивший название прямого метода Ляпунова [Л.63, 56, 51]. Далее этот метод будет рассмотрен применительно к анализу устойчивости равновесия.
Рассмотрим автономную нелинейную систему, движение которой описывается системой (3.3) нелинейных дифференциальных уравнений первого порядка
~ = Л(У1> Уг, •••> У Л at
................................................... (5.8)
= Р„ (Ух, Ум Уп)<
или в более краткой записи
% = Pi(yi> •••> Уп) /=1,2, п. (5.9)
at
Здесь уъ уг......уп — переменные, описывающие состояние си-
стемы, & Pt — известные функции, заданные в пространстве этих переменных (фазовом пространстве).
188
Примеры записи уравнений движения в форме (5.3) были приведены в гл. III.
Положение равновесия определяется системой уравнений
ЗД1, 1/2> •••. 1/п) = 0; ‘ = 1> 2, .... п. (5.10)
Будем считать далее для простоты, что система уравнений (5.10) имеет единственное решение в начале координат уг = 0, у2 = 0, ..., уп = 0.
Согласно прямому методу Ляпунова в рассмотрение вводится специальная функция V (yi, у2, Уп), заданная в фазовом пространстве и обладающая следующими свойствами.
1. Эта функция непрерывна вместе со всеми своими частными производными первого порядка в некоторой открытой области, содержащей начало координат.
2. В начале координат функция V (ylt у2.у,) принимает нуле-
вое значение.
3. Всюду внутри этой области, кроме начала коррдинат, функция V (У1, У2, •••> Уп) отлична от нуля и имеет значения одного и того же знака. Такие функции называют знакоопределенными. Кроме этого, существует еще понятие знакопостоянной функции, которая может принимать в области нулевые значения не только в Начале координат, в остальных же точках она сохраняет постоянство знака.
А. М. Ляпуновым доказана справедливость следующего утверждения [Л. 63]: если дифференциальные уравнения (5.9) движения таковы, что можно найти знакоопределенную функцию V (уъ у2, , уп)> производная которой dV/dt в силу этих уравнений была бы или знакопостоянной функцией противоположного знака с V, Или тождественно равной нулю, то равновесие системы в начале координат устойчиво.
Если производная dV/dt — знакоопределенная функция противоположного знака с V, то равновесие системы в начале координат асимптотически устойчиво.
Устойчивость (или асимптотическая устойчивость) положения равновесия при выполнении условий теоремы Ляпунова связана с тем обстоятельством, что для V-функции, обладающей перечисленными выше свойствами, всегда можно построить в некоторой окрестности начала координат семейство замкнутых поверхностей равных значений У, описываемых уравнением
.V(ylt yit ..., уп) = С. (5.11)
и заключающих начало координат внутри себя. При этом по мере уменьшения | С | эти поверхности стягиваются к Началу координат (рис. 5.5).
На рис. 5.5 показано три типа фазовых траекторий: на траектории 1 производная dVldt знакоопределенна и имеет противоположный с V знак. Если все фазовые траектории относятся к типу /, то положение равновесия асимптотически устойчиво.
Фазовая траектория 2 соответствует случаю знакрпостоянства производной dV/dt и, следовательно, случаю устойчивости по Ляпунову
189
(но не асимптотической устойчивости). При этом фазовые траекторий могут «застревать» в тех точках фазового пространства, где производная dV/dt обращается в нуль, или даже замыкаться на поверхности V = С (см. рис. 5.5). При этом надлежащим подбором начальной точки всегда можно добиться того, что предельные точка или фазовая траектория размещалась в заданной окрестности положения равновесия.
Фазовая траектория 3 соответствует асимптотической устойчивости положения равновесия, хотя вдоль нее условия теоремы Ляпунова не выполняются. Возможность существования движения такого типа свидетельствует о том, что выполнение условий теоремы Ляпунова не является необходимым для устойчивости систем автоматического управления.
Рис. 5.6
Теорема Ляпунова относится к устойчивости положения равновесия в малом, однако если удается подобрать 1/-функцию, поверхности равных значений которой включают в себя начало координат • и имеют возрастающие по модулю по мере удаления от начала координат значения С, причем эти поверхности существуют в некоторой конечной области, то можно сделать вывод об асимптотической устойчивости в большом в пределах этой области, если dV/dt в ней знакоопределена и имеет обратный знак с V. Если эти условия выполняются во всем фазовом пространстве, то положение равновесия асимптотически устойчиво в целом. Как и в случае устойчивости в малом, условия, при которых такие V-функции Ляпунова существуют, являются достаточными условиями устойчивости.
Если Е-функция Ляпунова подобрана, то для определения знака ее производной нет надобности решать уравнения движения системы (5.9). Действительно, поскольку
dV (У1, У2....... уп) у дУ (У1, у2.............Уп) _ dyi
dt ду. dt ’
190
то на основании (5.9)
dV(yi, у2, , Уп)_"дУ(У1, у2, ...,_уп) 'Р ( } {5 13)
dt & dy.
Большие трудности представляет подбор У-функций при практическом использовании прямого метода Ляпунова. К сожалению, здесь нет однозначных способов построения этих функций и приходится в значительной степени полагаться на интуицию. Это обстоятельство существенно ограничивает практическое применение прямого метода Ляпунова.
Для систем автоматического управления, имеющих структуру, показанную на рис. 5.6, а, с характеристикой нелинейного звена, удовлетворяющей условиям Х2 (х) >0; z (0) = 0 (рис. 5.6, б), У-функции могут быть взяты в форме, предложенной А. И. Лурье, В. Н. Постниковым [Л. 61, 51].
X
V(yv //2... Ул) = Мл. №. •••> {/Л) + Р Jz(B)^, (5.14)
о
где L(yx, •••> z/J—квадратичная форма фазовых координат:
п п
ЦУ1, у2, ... ун)-- 2 2 аиУ1Ун (5.15)
<=1;=1
а;, и р — постоянные коэффициенты, причем аг-, = а;.£..
Можно показать, что поверхности равных значений функций Ляпунова, взятых в такой форме, содержат внутри себя начало координат и имеют значения С, возрастающие по модулю по мере удаления от начала координат. Эти поверхности заполняют собой все фазовое пространство и могут при соответствующем выборе коэффициентов аир служить для суждения об устойчивости равновесия системы «в целом».
С помощью У-функций такого типа удается решить многие практические задачи, связанные с анализом устойчивости нелинейных систем автоматического управления.
Пример 5.5. Проверить устойчивость равновесия в системе (см. рис. 5.6, а), содержащей в линейной части инерционное звено
Уравнения движения системы могут быть записаны в виде
dy
Т^- + у = г(х), at
х = и— у.
(5.17)
При и = 0 у=—х первого порядка движение системы можно описать одним уравнением dx х k . <5Л8)
19J
Возьмем функцию Ляпунова в виде
1 с V=-x2 + (g)dg, (5.19)
о тогда ее производная
dV dV dx dx [ x k
й=Тх-^ = [х+г(х)]7г -^+zW][F+FZ(x)]=
Гх2 k 14 k 1
= - [7 + 2 + ~T~ хг W j • (5-20)
При xz (x) > 0 производная отрицательна во всем фазовом пространстве, если k > > 0. Таким образом, достаточным условием асимптотической устойчивости в целом системы первого порядка с инерционным звеном является положительность коэффициента усиления линейной части. При этом характеристика нелинейного звена может иметь произвольный вид и лишь не должна выходить за пределы первого и третьего квадрантов (рис. 5.7). Она может иметь также разрывы, но должна быть однозначной*.
Пример 5.6. Проверить устойчивость равновесия в системе (см. рис. 5.6, а), имеющей передаточную функцию линейной части
^(P) = l/P2- (5.21)
Уравнения движения системы имеют вид
d2///d/2 = z(x); )
(5.22)
х = и —у J
или при и = 0
d2x/dt2 = —г (х). (5.23)
Переходим к нормальной форме, вводя новую переменную xt = dx/dt. Тогда (5.23) заменяется системой двух уравнений первого порядка
dxldt=Xi', dxjdt = —z (х).
Возьмем функцию Ляпунова в виде
V = |x12+Jz(g) dg.
b
Ищем производную V-функции
(5.24)
(5.25)
dV dt
dV dx dx dt
dV дхг
dxt dx dxt
~Z = г (x) —+xj — =Z(X)X!—x12(x) = 0. dt dt dt
(5.26)
Производная dVIdt тождественно равна нулю во всем фазовом пространстве, что является признаком устойчивости по Ляпунову (не асимптотической) положения равновесия. Рассматриваемая система на фазовой плоскости характеризуется семейством непересекающихся замкнутых кривых, вложенных одна в другую. Равновесие соответствует точке типа центр.
* Такие системы называются абсолютно устойчивыми (см. § 5.3)
192
Более сложные примеры применения прямого метода Ляпунова можно найти в [Л. 51,61].
Применение прямого метода Ляпунова для исследования устойчивости процессов в неавтономных системах рассмотрено, например в ]Л. 66].
§ 5.3. КРИТЕРИЙ АБСОЛЮТНОЙ УСТОЙЧИВОСТИ РАВНОВЕСИЯ
Абсолютной устойчивостью называют асимптотическую устойчивость равновесия системы «в целом» для нелинейностей, принадлежащих к определенному классу. Наиболее часто по предложению М. А. Айзермана, сделанному им в 1946 г., рассматривают нелинейные характеристики, заключенные внутри угла, образованного прямыми z = kx и z—rx (r<.k) в первом и третьем квадрантах (рис. 5.8, а). Про такие нелинейные характеристики будем говорить, что они заключены в секторе [г, k\.
Пример системы, абсолютно устойчивой в секторе [0, оо], т. е. для всех характеристик, заключенных в первом и третьем квадрантах, был получен в предыдущем параграфе (см. пример 5.5) путем применения прямого метода Ляпунова. Собственно говоря, задача об абсолютной устойчивости и возникла впервые в связи с использованием этого метода.
В 1959 г. румынским математиком В. М. Поповым [Л. 92] был предложен весьма простой и наглядный частотный критерий абсолютной устойчивости систем автоматического управления. Теория абсолютной устойчивости получила дальнейшее развитие в работах М. А. Айзермана ]Л. 2], В. А. Якубовича [Л. 137, 138], А. X. Гелига, Я. 3. Цыпкина [Л. 122, 123), Б. Н. Наумова [Л. 71, 73] и др. в СССР, Дж. Ла-Салля, С. Лефшеца, Р. Калмана в США и в ряде других исследований.
Критерий абсолютной устойчивости формулируется следующим образом; если замкнутая система (см. рис. 5.6, а) состоит из устойчивой линейной, части с передаточной функцией Wл (р), все полюса которой расположены в левой полуплоскости, и нелинейности г (х), лежащей в угле 0 z (х)/х k ^сектор [0, k\ рис. 5.8, б), то достаточным условием устойчивости является выполнение неравенства
Ke [(1 + /р<о) Гл (/<»)] +1 = > 0, ; (5.27)
Я
где q — произвольное вещественное число.
При этом имеется в виду, что k < оо, a lim 1ГЛ (/<о) = 0. Послед-
С1)>оо
нее условие вытекает из правильного учета малых параметров нели-нейности (см. § 2.8) или грубости рассматриваемой системы (см. § 3.4). к к Критерию абсолютной устойчивости можно дать Удобную для практики геометрическую интерпретацию. Подставив в| (5.27) выражение
^л(/®) = Рл(®)+/<?л(®), | (5.28)
7 Зак. 44? 193
получим
Рл((о)-^л(®) + 1 = 6>О. (5.29)
К
Введем понятие преобразованной частотной характеристики линейной части
^л.п(<й) = Рл(со)+>(2л(<о). (5.30)
Если построить годограф и?л.п(®) и здесь же провести прямую, описываемую уравнением
Л1(<°)= — + (5.31)
то условием выполнения неравенства (5.29) будет расположение годографа №л.п (со) справа от этой прямой (рис. 5.8, в).
Таким образом, для критерия абсолютной устойчивости. можно дать следующую формулировку: система абсолютно устойчива, если при устойчивой линейной части через точку —i/k, j0 можно провести прямую так, чтобы годограф ^л.п (“) лежал справа от нее. Прямую, удовлетворяющую этому условию, называют прямой Попова. 194
Отметим некоторые особые свойства характеристик11 И7л.п(со), отличающие ее от №л Во-первых, характеристика Ц7Л.П (со) имеет мнимую часть, которая является четной функцией со, поскольку Q„ (со)— нечетная функция частоты. Поэтому годограф №л п (<о) уже не будет симметричным относительно вещественной оси при частотах разных знаков. Во-вторых, если №7Л (р) имеет один нулевой полюс (вопрос о применении критерия абсолютной устойчивости для таких систем будет рассмотрен ниже), т. е.
^л(Р)4тГ’ <5-32>
pDi (р)
ТО
ж (,-ю) = j- Im - Re , (5.33)
U /coDj (i«) “ Di (jco) ш Di (ja)
откуда
P (co) = — Im } , (5.34)
1 co Dx(/w) v '
Q («) = -! Re^i . (5.35)
лК ' co РД/со)
Выражения для мнимой и действительно!) составляющих К (/со)/Дх (/со) могут быть получены путем стандартной процедуры умножения Di (/со) на сопряженную комплексную величину. При этом получаются дробно-рациональные функции со, у которых одинаковые знаменатели содержат четные степени со (включая обязательный свободный член, так как Wn (р) имеет лишь один нулевой полюс), а числи-т Ж/со) г, Ж/со)
тель у Im содержит нечетные степени со, а у Re д — четные степени со (включая обязательный свободный член).
Поэтому множитель 1/со, стоящий в (5.34) и (5Д5), сократится у Рл (со) и останется у Qn (со), так что годограф W„ (fat) при со -> 0 будет неограниченно удаляться от начала координат вниз. Годограф же Й7л.п(со) будет начинаться при со = 0 из конечной точки комплексной плоскости, поскольку
1тй7лп(“) = и(?л(ш)=-Ке^- (5.36)
л " £>х (/со) 4 ’
Проводя аналогичные рассуждения, можно показать, что если lim W7n(/co) = 0, то Гл.п (со) при со-> оо стремится также к нулю либо к конечному пределу.
Так как характеристики №л (/со) и 1ГЛ(со) имеют одинаковые вещественные части, они пересекают действительную ось в одних и тех же точках. Если годограф 1ГЛ.П (со) имеет выпуклую форму, то критерий абсолютной устойчивости совпадает с критерием Найквиста (см. § 7.3 части I) при замене нелинейной характеристики прямой z = = kx. ‘ Действительно, в этом случае условие неохвата годографом kW„ (/со) точки —1,/ /0 совпадает с условием абсолютной устойчивости.
7'
195
Такие нелинейные системы называют системами, устойчивыми в гурвицевом угле, понимая под гурвицевым углом угол, образованный прямой 2 = £прх, где kup — предельный коэффициент усиления линейной системы, и горизонтальной осью (в общем случае, прямой г = = гЦрх, где лПр — нижнее предельное значение коэффициента усиления линейной системы).
При более сложной форме годографа И7Л,П (ы) критерий абсолютной устойчивости более жёсток, чем критерий Найквиста (рис. 5.8, а). Из рисунка видно, что предельное значение 1/&пр по Найквисту (1/&пр1) меньше, чем по Попову (1/^прг)- Следовательно, £пр1 > knv2.
Л. П. Смольниковым [Л. 104] показано, что годограф й?л.п (ы) получается выпуклым для систем, у которых линейная часть содер-
жит любое число последовательно соединенных инерционных и колебательных и не более одного интегрирующего звена. При этом колебательные звенья должны иметь степень затухания не менее У 2/2.
k
Пример 5.7. Пусть Wa(P) = ~—— ——TT • Определить
(1 + р7\) (1 + рГ2) (1 + рТ3)
значение fenpi при котором система с любой однозначной нелинейностью, лежащей в секторе {0, 1], абсолютно устойчива. В качестве нелинейности может быть, например, и ограничение (кривая 1 на рис. 5.9, а), и зона нечувствительности (кривая 2), и релейная характеристика (кривая 3), и любая иная однозначная нелинейность.
Так как кривая 1ГЛ-П(й)) выпуклая (рис. 5.9, 6), то для рассматриваемой задачи может быть применен критерий Найквиста. Условием устойчивости является неравенство — Й7л(/соя) = —Рл(<вя) < 1. Воспользовавшись результатами примера 7.4 части I, получим
^пр— (7\ -\-Т2 + Т3) (\JT\ + l/T’a-f- i/T3)— 1. (5.37)
Если линейная часть нейтральна или неустойчива, критерий абсолютной устойчивости непосредственно не может быть применен. Однако в этом случае возможно преобразовать схему так, чтобы линейная часть системы была устойчива. Такое преобразование может быть осуществлено путем введения двух равных и противоположных по зна-196
ку прбпбрцибйалЬйых звёйкёй (рис. 5.10, а). Коэффициент- усиЛёнйй пропорционального звена г выбирается так, чтобы линейная часть №л (р), охваченная жесткой отрицательной обратной связью, стала устойчивой. В таком случае схема может быть представлена в виде устойчивой эквивалентной линейной части W„.a(p), содержащей внутреннюю обратную связь —г, и эквивалентной Нелинейной части, содержащей внутреннюю прямую связь —г. Для этой схемы условие принадлежности нелинейной характеристики z3 (х) — к сектору [0, k] соответствует принадлежности характеристики реального нелинейного звена 2 (х) к сектору [г, k + г] (рис. 5.10, б).
5.10
Рис.
При этом
1^л.э(р) =
(Р)
1+г^л (Р)
(5.38)
И
Z3 (x) = Z(x) — ГХ.
(5.39)
Если система нейтральна и имеет один нулевой корень, то добавление сколь угодно малой обратной связи г -> 0 приводит задачу к условиям, когда можно применить критерий абсолютной устойчивости.
Пример 5.8. Каким условиям должна удовлетворять нелинейная характеристика г(х) звена в системе с передаточной функцией ТГл(р) =
= ~ Для того, чтобы замкнутая система была абсолютно ус-
(Р'х — 1)(1 + рТг)
тойчива.
Найдем по формуле (5.38)
1
Ц7Л н (р) =----------------------- .
W ptT.Tz + piT.-TJ-l + r
Для устойчивости этой системы необходимо выполнение неравенств Tj > > Тг; г > 1.
Годограф И^л.э (/ш) системы второго порядка лежит Целиком в нижней полуплоскости. Так же в нижней полуплоскости лежит и годограф преобразованной частотной характеристики 1Гл.8.п(<о). Так как в этом случае прямую Попова можно провести через любую точку отрицательной действительной оси, вплоть
' 197
До начала косфЛйЙаТ, то условием абсолютной устойчивости при ti > слу^ жиг
О < г3/х < оо
и, следовательно, 1 < z/x < оо.
При Тг < Т2 система неустойчива при любой нелинейности.
Пример 5.9. Каким условиям должна удовлетворять нелинейная характе-
N
ристика в системе с передаточной функцией Ц7л(р) = ———М для то-
рг (1 +pJ)
го, чтобы замкнутая система была абсолютно устойчива? Рассматриваемая передаточная функция не соответствует условиям критерия абсолютной устойчивости по двум причинам: 1) она нейтральна, так как имеет один нулевой полюс и 2) она не стремится к нулю при <о -► оо.
Рис. 5.11
Для того чтобы было можно применить критерий абсолютной устойчивости, введем два малых параметра аир (см. § 2.8). Тогда
w = (Р) =___________N-MpT(l+pT)_____________
Л (1+ар)+рИ7л(р) р7’(1+ар)(1+р7’)+р[У-Мр7’(1+р7’)]'~
5.40)
~ М—МрТ (1 +рТ) ~ аГ р3 + Т2 р2 + рГ+рМ
Здесь учтена малость параметров а < Т и Р С 1.
Легко убедиться, что теперь оба препятствия к применению критерия абсолютной устойчивости сняты, так как система имеет все корни 1ГЛ 8 в левой полуплоскости и Ш'л.э (/со) -> 0 при <в -> оо.
Годограф Й'л.эО05) построен на рис. 5.11, а. Он состоит из трех четко выраженных 1 "
участков. При малых частотах, когда можно пренебречь высшими сте-
w и Ц7Л18 х , он имеет вид дуги окружности радиуса
Р •* ’ ~I / wJ
который при Р -> 0 стремится к бесконечности.
При средних частотах, когда можно пренебречь малыми членами, содержащими множители а и Р,
пенями
N л э (/еэ) ~ ,
/со? (I+jcoT)
198
и годограф имеет вид, характерный для инерционно-интегрирукмцего звена со сдвигом на —М. При высоких частотах, когда можно пренебречь низшими степенями <о,
М
Гл.в(/й) --- ,
1 -j- /coot
и годограф имеет вид полуокружности с радиусом 0,544, лежащей во втором квадранте.
Преобразованный годограф получается путем умножения мнимой состав-
ляющей IV л а (1м) на <в (рис. 5.11, б). При этом дуга окружности бесконечного
N
радиуса преобразуется в прямую, уходящую из точки —W — М, —j — в беско
нечность параллельно действительной оси. Характеристика инерционно-интегри-рующего звена принимает вид отрезка прямой, а окружность радиуса 0,5 М преобразуется в прямую, уходящую в бесконечность из точки —М, параллельно мнимой оси.
Прямую Попова можно провести только левее точки —М—N, j0. Таким образом, условием абсолютной устойчивости является
0 < гя/х < l/(44-f-AZ) или р < г/х < l/(44-|-7V), (5-42)
где Р — сколь угодно малая величина.
При решении задачи по Найквисту из рис. 5.11, а непосредственно следует, что
О < га/х <1/44,
так как годограф пересекает действительную ось в точке —44, /0. В
этом угле могут быть выбраны такие нелинейности, что система будет неустойчивой.
Интересно заметить, что если не учесть условия lim IV э (/ш) = 0, то можно со—>оо
сделать неверные выводы относительно устойчивости системы.
Критерий абсолютной устойчивости Попова и прямой метод Ляпунова связаны между собой. Показано, в частности, что если критерий Попова выполняется, то существует V-функция Ляпунова в форме Лурье—Постникова, имеющая во всем фазовом пространстве знакоопределенную производную dV/dt со знаком, обратным знаку V (Л. 2, 28]. Это дает основания для предпочтения критерия Попова при практическом анализе устойчивости нелинейных систем автоматического управления с одной нелинейностью, поскольку он имеет удобную частотную форму.
При практическом применении критерия абсолютной устойчивости удобно пользоваться логарифмическими представлениями [Л. 71, 73, 25].
§ 5.4. РАСПРОСТРАНЕНИЕ КРИТЕРИЯ АБСОЛЮТНОЙ УСТОЙЧИВОСТИ НА НЕКОТОРЫЕ НЕОДНОЗНАЧНЫЕ НЕЛИНЕЙНОСТИ
Рассмотрение критериев абсолютной устойчивости для систем с несколькими нелинейностями, с неоднозначными нелинейностями, а также с распределенными параметрами [Л. 137] выходит за пределы настоящего учебника. Однако некоторые задачи исследования систем
]9?
с неоднозначными нелинейностями могут быть сведены к задачам с однозначными нелинейностями путем структурных преобразований и могут быть легко исследованы описанными методами. Такое сведение более сложных нелинейностей к соединению линейных звеньев и однозначных нелинейностей было рассмотрено в § 2.7. Покажем на ряде примеров, как в этих случаях можно применять критерий абсолютной устойчивости для суждения о достаточных условиях устойчивости равновесия систем с типовыми неоднозначными нелинейностями.
Рис. 5.12
Пример 5.10. Определить условия устойчивости релейной системы с гисте" „ Л/
резисом. Пусть передаточная функция линейной части Ц7л (р) = ~ ~ '
а нелинейность относится к типу релейный гистерезис и показана на рис. 5.12, а.
Как было показано в § 2.7, нелинейность типа релейный гистерезис может быть представлена в виде эквивалентной схемы, содержащей однозначную релейную (рис. 5.12, б) нелинейность, охваченную положительной обратной связью, зависящей от ширины М гистерезисной петли. Общая схема системы с такой нелинейностью показана на рис. 5.12, в. Относя линейную обратную связь к линейной части, получим структурную схему, показанную на рис. 5.12, г.
В этой схеме нелинейность однозначна и лежит в секторе [0, 1/ха], а линейная часть имеет передаточную функцию
N рТ(1+рТ)~М'
(5.43)
Таким образом, рассматриваемая задача сводится к примеру 5.9. Используя результат предыдущего примера, можно сделать вывод, что устойчивость обеспечивается при
\KM + N) > \/ха (5.44)
или
N <ха — М=хь. (5.45)
При этом характеристика г (х) не должна заходить в бесконечно малую область вблизи оси абсцисс.
Итак, условие абсолютной устойчивости равновесия рассматриваемой системы сводится к условию принадлежности характеристики г (х) (см. рис. 5.12, а) к углу
Р = г/х < /г= 1/xj, < 1/N.
Отсюда можно записать
fenp=l/W. ' (5.46)
Эти условия значительно более жесткие, чем результаты анализа по Найквисту для заданного угла.
Пример 5.11. Рассмотреть устойчивость системы, содержащей линейное звено ^л(р) из примера 5.10 и нелинейность типа люфт.
Представляя нелинейность г (х) типа люфт с помощью эквивалентной схемы (см. § 2.7, рис. 2.21, а), получим схему, показанную на рис. 5.13, а. Выделяя линейную часть
№'Л1(Р) = 1/Р11 + И7Л(Р)] (5.47)
201
и Нелинейность типа asign (рис. 5.13, б), можно считать, что нелинейная часть однозначна и принадлежит к углу
Р < Za/xa < k = « .
При этом Mk=0 и условие абсолютной устойчивости сводится к требованию, чтобы через начало координат можно было провести прямую Попова.
Рис. 5.14
На рис. 5.13, в построен годограф №,л.п1(<й) Для случая, когда годограф 117 л + 1 лежит в правой полуплоскости, а на рис. 5.13, г, когда этот годо-
граф заходит в левую полуплоскость. Из построения видно, что только в случае в возможно построение прямой Попова.
Таким образом, условие абсолютной устойчивости для системы с люфтом сво-
дится к выполнению неравенства
Re [№л (/«) + !] >0
или
Re №л (/<в) > -1.
(5.48)
(5.49)
202
Пример 5.12. Определить условия устойчивости для системы с упором, содержащей линейное звено из примера 5.10. Для системы с упором могут быть применены те же рассуждения, что и для системы с люфтом. Эквивалентные схе-мы для этого случая показаны на рис. 5.14, а и б. Теперь для преобразованной схемы
№л1 (Р) = ~ Р
1
1+№л(р)’
(5.50)
и так как условия принадлежности к правой полуплоскости 1 + 1ГЛ (/<о) и 1/[ 1 + 1ГЛ (/<а)1 совпадают, то условия абсолютной устойчивости для системы с упором совпадают с условиями (5.48) и (5.49) для системы с люфтом.
В качестве конкретного примера рассмотрим передаточную функцию 1ГЛ (р), соответствующую скорректированной системе стабилизации курса (см. §1.2). Для этого случая Ц7Л (р) = — у р _j_—+ 44 j и положение годографа И7Л (/®) зависит от соотношения М и N. При .V > М годограф лежит во втором и третьем квадрантах, а при М > N—только в третьем квадранте. Достаточное условие (5.49) не выполняется. Оно оказывается слишком жестким.
Требуемые выводы можно сделать из построения преобразованных годографов Fji.ni (<и) Для различных отношений М/N. Такое построение выполнено на рис. 5.14, в. Как видно из годографов, только для MIN > 1 через начало координат можно провести прямую Попова и, следовательно, только в этом случае выполняются условия абсолютной устойчивости, выражаемые неравенством
N < М.
(5.51)
§ 5.5. АБСОЛЮТНАЯ УСТОЙЧИВОСТЬ ПРОЦЕССОВ
Абсолютная устойчивость положения равновесия во многих случаях оказывается недостаточной для обеспечения нормальной работы нелинейной системы автоматического управления при различных задающих и возмущающих воздействиях. Наряду с устойчивостью положения равновесия весьма важно обеспечить устойчивость процессов в нелинейной системе, вызываемых различными внешними воздействиями. Ранее в §5.1. асимптотически устойчивым был назван такой процесс в системе, который будучи возмущен, асимптотически возвращается к процессу, имевшему место в системе в отсутствие возмущений. Абсолютная устойчивость имеет место в том случае, если процесс получается асимптотически устойчивым для целого класса характеристик нелинейного звена в системе.
Б. Н. Наумовым и Я. 3. Цыпкиным [Л. 73] было найдено достаточное условие абсолютной устойчивости процессов в исходной системе при ограниченных входных воздействиях. Это условие для общего случая системы с неустойчивой линейной частью имеет вид
Re^W_+_l_
1+гГл(ущ) ' k-r
(5.52)
где г — коэффициент, обеспечивающий устойчивость линейной части, охваченной отрицательной обратной связью.
203
При этом производная нелинейной характеристики должна принадлежать полосе
г + Р dz(x)/dx k+ р,
(5,53)
где р — сколь угодно малая положительная величина.
В случае устойчивой линейной части, положив в (5.52) г = 0, получим
вых
ЕеГл(/<о)+1М>4, (5.54)
k Re (» +1 > 0. (5.55)
Для формулировки критерия абсолютной устойчивости процессов в общем случае преобразуем неравенство (5.52), вводя обозначениеklr=A, Re - fetl7jl + — >0, (5.56)
где
(/со) =6Рл'(<о) + № («)• (5.57)
Найдем на плоскости кРл !’и kQn геометрическое место точек, соответствующее замене (5.56) знака неравенства на знак равенства. Под-
ставляя (5.57) в левую часть (5.56), получим уравнение искомых кри-
ргРл + |(Д + 1)]2 + (Ш2=4<Л~1)2- <5-58)
L 2 j 4
Уравнение (5.58) определяет семейство окружностей, проходящих через точку —1, /0, имеющих радиус R = (А — 1)/2 и расположенных левее прямой kPn = —1 (рис. 5.15). Каждой из окружностей соответствует свое значение А = klr 1.
Неравенство (5.56) будет выполняться вне А-окружностей, что легко установить, полагая Рл = <2л = 0 при & > 0, г > 0. Условие (5.56), а вместе с ним и условие устойчивости эквивалентной линейной части, будет выполнено, если годограф частотной характеристики будет находиться вне соответствующей А-окружности.
Укажем на то, что сетки А-окружностей совпадают с круговыми диаграммами, используемыми при построении вещественных частотных характеристик замкнутых систем по амплитудно-фазовым характеристикам разомкнутых систем (см. часть I, § 9.5),
При А = оо (т. е. при k = оо, или при г = 0) соответствующая окружность на рис. 5.15 обращается в вертикальную прямую, проходящую через точку —1, /0. Если условие абсолютной устойчивости выполняется для А = оо, то оно выполняется и для любого А.
204
Заметим, если в системе с устойчивой линейной частью нелинейная характеристика г (х) такова, что dz (x)ldx > г + Р, то можно пользоваться критерием абсолютной устойчивости процессов в форме (5.56), сравнивая расположение годографа частотной характеристики kWa (/ю) с окружностью для А = k!r<. оо; при этом условие абсолютной устойчивости менее жестко.
При А = 1 окружность вырождается в точку —1, /О и достаточное условие абсолютной устойчивости нелинейной системы переходит в необходимое и достаточное условие устойчивости линейной системы при k = г.
Очевидно, что при выполнении частотного критерия абсолютной устойчивости процессов будет также устойчиво и положение равновесия. В этом смысле рассматриваемый класс нелинейных систем обладает свойством, подобным свойству линейных систем.
Условия абсолютной устойчивости процессов в нелинейных системах более жестки по сравнению с условиями устойчивости положения равновесия: с одной стороны, они накладывают дополнительные условия в виде ограничений на производную нелинейной характеристики, с другой стороны, соответствуют частному случаю условия В. М. Попова при q = 0 (вертикальная прямая Попова).
При анализе абсолютной устойчивости процессов в случае, когда задана нелинейная характеристика z (х), все сводится к проверке-расположения частотной характеристики ^1^л (/со) относительно окружности с А, определяемой по заданной нелинейной характеристике, и к такому выбору параметров линейной части, чтобы характеристика /г№л (/со) находилась вне этой окружности.
Если, наоборот, задана частотная характеристика №л (/со), то можно найти зависимость допустимого значения г как функции от k. Это можно сделать, задаваясь различными значениями k, строя 6№л (/со) и определяя окружность, которой kWn (ja) касается. По А для этой окружности, зная значение k, определяется г.
§ 5.6. АБСОЛЮТНАЯ УСТОЙЧИВОСТЬ ИМПУЛЬСНЫХ СИСТЕМ
Для нелинейной импульсной системы, у которой нелинейное звено НЗ включено перед импульсным звеном ИЗ (рис. 5.16, а), можно сформулировать достаточные условия устойчивости, основанные как на идеях прямого метода Ляпунова, так и на частотном критерии абсолютной устойчивости Попова. Более употребительными являются частотные формы достаточных критериев абсолютной устойчивости.
К числу первых работ на эту тему относится статья Я. 3. Цыпкина [Л. 122], в которой было доказано, что достаточным условием абсолютной устойчивости импульсной системы с нелинейной характеристикой, принадлежащей сектору [0, k\, является выполнение неравенства
КеИ7л*(/<о)4-1/А!>0,
(5.59)
205
где Щ7л* — частотная характеристика линейной импульсной части ЛИЧ системы, которая предполагается устойчивой. Нелинейная характеристика, принадлежащая сектору [0, k], может быть разрывной, неоднозначной и даже нестационарной.
Согласно этому критерию, абсолютная устойчивость обеспечивается, если годограф частотной характеристики №л* (/со) лежит целиком справа от вертикальной прямой, проходящей через точку —1/k, jO (рис. 5.16, б). Это условие будет не только достаточным, но и необхо-
димым в тех случаях, когда частотная характеристика Wn* (/со) такова, что ее действительная часть имеет минимум в точке пересечения с действительной осью (рис. 5.16,в). В этом случае предельное значение коэффициента k в линейной системе, в которой нелинейное звено заменено линейным с коэффициентом усиления k, определяемое по критерию Найквиста, совпадает с предельной границей сектора [0, k], определяемой по критерию Цыпкина.
Такие случаи, однако, сравнительно редки; в большинстве же случаев выполнение критерия (5.59) накладывает слишком сильные требования на параметры системы. Это связано с обязательной вертикальной прямой, относительно которой анализируется расположение частотной характеристики W*„ (jca). Напомним, что в основной формулировке критерия Попова для непрерывных систем прямая Попова, проходящая через точку —1/k, jO, может иметь любой наклон. Нетрудно увидеть, что предельные значения k для верхней границы сектора при этом получаются большими, чем при вертикальной прямой Попова.
206
Усиление критерия абсолютной устойчивости нелинейных импульсных систем в работах [Л. 96, 137] достигается за счет дополнительных условий, накладываемых на нелинейности в системе. Отметим среди этих критериев аналог критерия Попова, сформулированный я. 3. Цыпкиным [Л. 123] и справедливый для систем с монотонными нелинейными характеристиками. Согласно этому критерию достаточным условием устойчивости нелинейной импульсной системы с устойчивой линейной частью и монотонной нелинейной характеристикой, принадлежащей сектору [0, k], является выполнение неравенства
Re [1 +<7(1— е-/“ги)] ТГЛ*(»+ 1/6 = 6 > О, (5.60) где <7 — произвольное положительное число.
Оператор 1 — е~‘аТи соответствует взятию первой разности; он является аналогом множителя /со в неравенстве Попова для непрерывных систем.
Если ввести преобразованную частотную характеристику линейной импульсной части
^Л. П* (/“>) = ReHV(/со) +/ {Re [е~1^ №л* (»] - Re Ц7Л* (/со)]}, (5.61)
то критерий (5.60) получает такое же геометрическое истолкование, что и обычный критерий Попова для непрерывных систем. Нелинейная импульсная система устойчива, если при устойчивой линейной импульсной части через точку—1/6, /0 можно провести прямую с произвольным положительным наклоном 1/^так, чтобы годограф Ц7Л.П* (/со) лежал справа от нее.
В случае нейтральной или неустойчивой линейной импульсной части можно произвести структурные преобразования, сопровождающиеся охватом этой части системы внутренней отрицательной обратной связью так же, как это было сделано для непрерывных систем в § 5.3. При этом границы сектора, в котором может располагаться нелинейная характеристика, изменяются точно так же, как в случае непрерывных систем, а формулировка критерия сохраняется.
Для абсолютной устойчивости процессов в нелинейных импульсных системах автоматического управления Я. 3. Цыпкиным [Л. 122] получено достаточное условие, вполне аналогичное условию (5.52) для непрерывных систем
Re _+ _J_ = 6 > 0, (5.62)
1 + гГл*» k-r ' '
причем накладывается условие на производную нелинейной характеристики
г + Р <dz(x)/dx<6 + p, р->0, (5.63)
которая в отличие от непрерывного случая может быть нестационарной Примеры исследования абсолютной устойчивости нелинейных им-
пульсных систем можно найти, например, в [Л. 25].
207
§ 5.7. СРАВНЕНИЕ МЕТОДОВ АНАЛИЗА УСТОЙЧИВОСТИ НЕЛИНЕЙНЫХ СИСТЕМ
Из рассмотренных методов анализа устойчивости нелинейных систем только метод фазового пространства дает возможность получить точно необходимые и достаточные условия устойчивости. Приближенно с точностью реализации модели, соответствующей заданной системе уравнений, необходимые и достаточные условия устойчивости могут быть получены с помощью математического моделирования.
Достаточные, но не необходимые условия устойчивости дает частотный критерий абсолютной устойчивости, причем прямой метод Ля-
пунова при определенном виде V-функции может дать область достаточных условий устойчивости более узкую.чем критерий абсолютной устойчивости В. М. Попова. Однако оба эти метода гарантируют устойчивость в заданной области.
Метод гармонической линеаризации в зависимости от степени выполнения гипотезы фильтра дает приближенное значение области устойчивости,
однако он не гарантирует устойчивость в этой области, так как
полученная с помощью метода гармонической линеаризации область может выходить за пределы границы устойчивости. В этой области
иногда возможны полигармонические автоколебания.
Схематически границы области устойчивости, полученные различными методами, показаны на рис. 5.17. Здесь аг и а2 — некоторые обобщенные параметры заданной нелинейной системы. Штриховкой отмечены области устойчивости, полученные различными методами. Если кривая 1 — действительная граница устойчивости системы, то кривой 2 показана достаточная граница устойчивости, полученная с помощью критерия абсолютной устойчивости В. М. Попова. Кривые 3 схематически показывают примеры границы, полученной на основании прямого метода Ляпунова при различных V-функциях.
Метод гармонической линеаризации дает границу (кривая 4), которая может выходить за пределы действительной области устойчи-
вости.
Приведенные общие выводы можно иллюстрировать следующими примерами.
Примерз. 13. Определить с помощью критерия абсолютной устойчивости равновесия предельный коэффициент усиления (Мй)Пр релейной следящей системы, рассмотренной в примере 4.2, и сравнить с предельными значениями коэффициента усиления, полученными с помощью гармонической линеаризации и экспериментально (см. рис. 4.14). Линейная часть системы имеет передаточную функцию
р (1 +0,2р)(1 +2р) •
(5.64)
208
Частота Переселения годографа №л0ш) с отрицательной вещественной Полуосью, найденная в примере 4.2, равна 1,58 сек-1. На этой частоте модуль частотной характеристики Ц7Л (j<a) = 0,182ft. Считая, что релейная характеристика (табл. 4.1) заключена в секторе [г, JV], где г — сколь угодно малое положительное число, А' = 2а]ха — нормирующий множитель, фигурирующий в методе гармонической линеаризации, и принимая во внимание выпуклый характер годографа (/со) для данной системы, получим согласно критерию условие абсолютной устойчивости
0,182ft < \/N,
откуда
(Мг)пр= 1/0,182 = 5,5 сек *.
Согласно рис. 4.14 точное значение (/Vft)np = 6,3 сек *, по методу гармонической линеаризации (Nk)ap = 8,6 сек~ *.
Все полученные решения соответствуют параметру аг на рис. 5.17.
Пример 5.14. Определить различными способами предельное значение коэф-N фициента N в передаточной функции линейной части 1Гл(р) =--------—;------,
рТ (1 + рТ)
если нелинейная характеристика соответствует трехпозиционному реле с гистерезисом и лежит в секторе ft — Мхь при относительной ширине М петли гистерезиса (см. пример 5.10).
Решая эту задачу с помощью фазовой плоскости (см. пример 3.10), получим точное значение Npp, которое является решением трансцендентного уравнения
2
е 1 Afnp \+Mk •
Для частного случая, когда М — 0,5 и ft = 2, получим /Vnp =^3,15.
Решая эту задачу с помощью критерия абсолютной устойчивости (см. пример 5.10), получим условие
Anp=l/ft=0,5.
При решении задачи методом гармонической линеаризации (без его уточнений для релейных характеристик) можно получить для данных параметров Апр = = 6,4.
Все три полученные решения для Afnp соответствуют параметру dj на схематическом рисунке 5.17.
Пример 5.15. Определить предельное значение коэффициента W для Ц7л(р) = А
•= ~ > если нелинейность имеет характеристику типа люфт.
Точное решение этой задачи приведено в примере 3.12. Из графика 3.49, а видно, что для данного случая Nnp = 3,04.
Решение этой задачи методом абсолютной устойчивости (см. пример 5.11) дает условие (5.49), которое при вычислении lim Re Ц7Л (/и) = —N приводит СО—
к значению А'Пр = 1.
При решении задачи методом гармонической линеаризации после соответствующих построений №л (/со) и РН(Д) можно получить Апр = 3,5 (см. пример 4-6).
Все полученные решения для А/пр соответствуют параметру ах на рис. 5.17. Сравнение методов для более высокого порядка линейной части приведено в [Л.80].
ГЛАВА VI
КАЧЕСТВО ПРОЦЕССОВ УПРАВЛЕНИЯ В НЕЛИНЕЙНЫХ СИСТЕМАХ
§ 6.1. ОСОБЕННОСТИ КАЧЕСТВА НЕЛИНЕЙНЫХ СИСТЕМ
Задача достижения качества процессов в нелинейных системах автоматического управления является такой же важной, как и в линейных системах. Для суждения о качестве нелинейных систем можно использовать те же показатели, что и в случае линейных систем (см. гл. IX части I). Анализ качества процессов управления в нелинейных системах сопряжен с большими трудностями, чем в линейных (см. гл. III). С другой стороны, нелинейные системы обладают большими возможностями для достижения хорошего качества. В них можно обеспечить оптимальные с какой-либо точки зрения, например по быстродействию, процессы управления.
В настоящей главе рассмотрены основные методы анализа переходных процессов и качества нелинейных систем автоматического управления, а также отдельные вопросы, связанные с синтезом нелинейных систем.
Так же, как в случае линейных систем, методы анализа качества нелинейных систем автоматического управления можно разделить на прямые и косвенные. Прямые методы основаны на построении исследуемого процесса тем или иным способом. Основные прямые методы приведены в § 6.1—6.3. Косвенные методы оперируют с теми или иными косвенными показателями, связанными с характером процессов управления. Эти методы рассмотрены в § 6.4, 6.5.
Разработка методов анализа качества нелинейных систем автоматического управления связана с именами Е. П. Попова и И. П. Паль-това [Л. 94], Я. 3. Цыпкина [Л. 122, 125], Б. Н. Наумова [Л. 71, 72], Д. А. Башкирова [Л. 83], А. В. Башарина [Л. 13], а также Боксера, Талера и др.
§ 6.2. МЕТОД ПРИПАСОВЫВАНИЯ ДЛЯ ПОСТРОЕНИЯ ПЕРЕХОДНЫХ ПРОЦЕССОВ В НЕЛИНЕЙНЫХ СИСТЕМАХ
Если характеристика нелинейного звена в системе (рис. 6.1, а) может быть аппроксимирована ломаной линией (рис. 6.1, б), то поведение кусочно-линейной системы можно описать совокупностью линейных дифференциальных уравнений, сменяющих друг друга в точках сопряжения. Переходный процесс выражается на отдельных ин-210
тервалах времени решениями этих дифференциальных уравнений, причем конечные значения предыдущего решения и его производных являются начальными условиями для последующего решения [Л. 97].
Если линейная часть описывается дифференциальным уравнением второго порядка, то припасовывание решений при переходе от одного участка к другому удобно производить на фазовой плоскости так, как это выполнялось в примерах в гл. III.
Пример 6.1. Рассмотрим переходные процессы в системе с переменной структурой, схема которой была изображена на рис. 3.43, а фазовый портретца рис. 3.44. При этом пусть k0 = 1, а коэффициент наклона прямой переклю-
чения (см. рис. 3.44, г) имеет*два значения: a) k = 0,5; б) k = 1,0. Переходные процессы будем рассматривать при отработке начального рассогласования-, т = = 0, уг = уы, уг = Q (рис. 6.1, а).
Движение системы на первом участке (от горизонтальной оси до линии переключения) может быть описано во временной области на основании выражений (3.33)
У1 = Ую cost, У2= —У10 sint.
(6.1)
Уравнение линии переключения
Уг= —kyi. (6.2)
Поэтому относительное время переключения тп после подстановки (6.2) во второе равенство (6.1) и почленного деления результата подстановки на первое равенство (6.1) может быть найдено из уравнения
fe=tgTn
или
Tn=arctg k.
(6.3)
211
На втором участке движения системы имеет место скользящий режим на прямой переключения уг = —kylt описываемый согласно (3.42) в параметрической форме уравнениями
—k(x— г_) f/i=^in е п
Уя—Угпв v nh
(6.4)
где щп н у2п— значения фазовых координат системы при т = тп.
На р ис. 6.1, г показаны два варианта переходных процессов в системе (при k = 0,5 и k = 1). Время переключений соответственно будет 0,55 и п/4. Из этого рисунка видно, что при k < 1 время переходного процесса получается большим, чем при k = 1.
Рис. 6.3
Применение метода припасовывания к системам высокого порядка с нелинейными характеристиками, имеющими много участков, сопровождается в общем случае громоздкими вычислениями.
Наиболее просто в этом случае метод применяется к релейным системам В этих системах включение и выключение реле приводит к появлению в цепях управления импульсов постоянной высоты, переменной длительности и чередующейся полярности. Благодаря этому исследование процессов в релейной системе автоматического управления сводится к исследованию поведения линейной части системы при воздействии на нее указанных импульсов. Принцип суперпозиции позволяет при этом найти общую реакцию линейной части системы на 212
любое число импульсов простым суммированием реакций на каждое воздействие порознь.
Рассмотрим релейную систему автоматического регулирования, изображенную на рис. 6.2, а. Пусть релейное звено РЗ имеет характеристику, показанную на рис. 6.2, б, а линейная часть ЛЧ — переходную функцию Лл (/) (рис. 6.2, в). Пусть при t — 0 линейная часть находится в покое и у = 0 (нулевые начальные условия). Будем искать движение системы при действии на ее входе произвольного сигнала и (/) (рис. 6.3, а). При t = txx = ха, и реле срабатывает. На входе линейной части действует сигнал
z (0 = za 10 (* —G), (6.5)
и выходной сигнал начинает изменяться по закону
y(t) = y1(t) = zahil(f-tl), (6.6)
а рассогласование — по закону
x(0 = u(i) — y(t)=u(t) — y!(f)-=u(t)—zahn(t — ij. (6.7)
Графики изменения и (t) , у (/) и х (/) показаны на рис. 6.3, а. Рассогласование х (i) уменьшается и при t = t2 делается равным хь, в результате чего реле отпускает, что эквивалентно подаче на линейную часть системы отрицательного скачка —za 10 (/ — /2) при сохранении действия сигнала zal0 (t — /х) (рис. 6.3, б). Выходной сигнал начинает изменяться следующим образом:
P(0=-!/i(0 + i/2(0= zaha(t — /J—zahn(t — /2), (6.8)
а рассогласование определяется выражением
х (/)= и (/)—у (0 = и (t) — za [Лл G— ti)—h„ {t — ta)]. (6.9)
Построение графика x (/) позволит определить момент t3 следующего срабатывания реле, причем в зависимости от вида и (0 и у (t) реле может сработать как в положительную (х = хо), так и отрицательную (х = —ха) стороны. Общие выражения для у (t) и х (/) имеют вид
Н0 = 2±гЛл(*-^ (6.10)
i=l
А
x(t) =u(t)—y(f) = u(t)_ 2 ±zahn(t— it), (6.11)
i=i
где k — число переключений реле от t =0 до рассматриваемого момента времени t, знак плюс у слагаемых берется при срабатывании реле в положительном и отпускании в отрицательном направлениях, а знак минус — при срабатывании реле в отрицательном и отпускании в положительном направлениях.
По мере роста t число слагаемых увеличивается, однако это не затрудняет построений, так как в системах со статической линейной частью
213
hn (f) го мере роста t стремится к установившемуся значению, равному коэффициенту усиления линейной части k. Установившиеся значения с разными знаками взаимно уничтожаются, так что общее число слагаемых, зависящих от t, остается небольшим.
Если линейная часть
Рис. 6.4
системы содержит интегрирующее звено, и переходная функция йл (/) неограниченно возрастает с ростом времени t, то в этом случае нужно из нее выделить возрастающую линейную часть (рис. 6.4,а), соответствующую интегрирующему звену. Сумма возрастающей части йл1 (/) и оставшейся ограниченной части Лл2 (О равна переходной функции.
При построении процесса (рис. 6.4, б) в каждый момент переключения добавляются (с соответствующим знаком) две составляющие: 2ahnl (t — ti) н Za hui (t — td-
Общее выражение для сигнала у принимает вид к
//(0=2 ± 2а/гл1(/ — 1 = 1
к
— 0)+.2 ±zahSiz(t — ti).
(6.12)
Сумма смещенных линейных функций есть также линейная функция, это обстоятельство позволяет не строить бесконечно возрастающие составляющие, а сразу рисовать их сумму в виде ломаной линии, участки которой имеют наклоны 0, 4-зо£и — zak и меняют эти наклоны в моменты переключения. К этой сумме добавляются с соответствующими знаками ограниченные составляющие ±zahл2 (/ — 0), причем как и в случае статической линейной части, определение моментов переклютения производится по мере построения самого процесса (рис. 6.4, б и 6.4, в).
Метод припасовывания в рассмотренной форме пригоден для расчета переходных процессов не только в релейных, но и в цифровых системах с непрерывной передачей сигналов. Такие системы имеют ступенчатые нелинейности (см. рис. 1.17); примеры построения процессов в них рассмотрены в [Л. 12].
214
$ 6.3. РАЗНОСТНЫЕ МЕТОДЫ ПОСТРОЕНИЯ ПЕРЕХОДНЫХ ПРОЦЕССОВ В НЕЛИНЕЙНЫХ СИСТЕМАХ
Основная идея разностных методов состоит в приближенной замене нелинейного дифференциального уравнения разностным уравнением, которое само по себе можно рассматривать как готовое рекуррентное соотношение, позволяющее вычислять процессы последовательно, точка за точкой. Эти вычисления могут быть выполнены на цифровой вычислительной машине, причем составление программы для нее в случае разностных методов не представляет трудной задачи.
Простейшим среди разностных методов является метод Эйлера, рассмотрение которого начнем с примера нелинейного дифференциального уравнения первого порядка.
Пусть дано дифференциальное уравнение
dy/dt=f(y,i) (6.13)
с начальным условием у (0) = у0.
Выбрав достаточно малый шаг Д/, построим сетку равноотстоящих значений
tt=lM (/ = 0,1,2, 3,...). (6.14)
Заменим приближенно дифференциальное уравнение (6.13) на /-ом участке
_J/HL+llA£L-JL(£AfL =f [у (I bt), IА/], (6.15)
д/
ткуда
//[(/ + 1)Д/] = у(/а/)+Ну(/а/), 1М] А/. (6.16)
Последнее соотношение и является нелинейным разностным уравнением, с помощью которого можно последовательно вычислять дискретные значения
i/i=y(A/) = «/o + f(yo,O)A/,
Уг = У (2 А/) = У1 + f (yL, Л/) А/,
(6-17)
У1+1 = У КН I) Ы\=УгЧ (У1, /А/) А/.
Метод Эйлера легко распространяется на системы дифференциальных уравнений, записанных в нормальной форме и описывающих процессы в нелинейных системах автоматического управления при наличии внешнего воздействия,
dyddt^fityi, у2...yn,f) (/ = 1,2, ...,п). (6.18)
В этом случае вместо одного рекуррентного соотношения (6.16) нужно записать серию соотношений
уН(/+1) Д/] = yt(l А/), УЛ А/), - , уп{1 М)} А/, (6.19)
215
пб которым далее производить вычисления последовательных значений аналогично (6.17).
Имеется целая группа разностных методов решения нелинейных дифференциальных уравнений, основанных на той же идее, что и метод Эйлера, и отличающихся от него большей точностью: методы Рунге— Кутта, Адамса, А. Н. Крылова и др. [Л. 35]. Все они приводят в результате к рекуррентным соотношениям типа (6.19), по которым и производятся вычисления.
Для некоторых из них (например, для метода Рунге—Кутта) разработаны стандартные подпрограммы, что значительно упрощает задачу применения цифровых вычислительных машин.
Рис. 6.5
С методом Эйлера тесно связаны графоаналитические методы А. В. Башарина [Л. 13] и Д. А. Башкирова ]Л. 83, 97], в которых определение последовательных дискретных значений процесса сопровождается графическими построениями.
Переход от нелинейных дифференциальных уравнений к нелинейным разностным уравнениям может быть осуществлен путем приближенной замены исходной нелинейной непрерывной системы автоматического управления импульсной системой. Такая замена может быть выполнена различными способами. Прежде чем описывать их, рассмотрим построение переходных процессов в нелинейных импульсных системах.
Пусть нелинейная импульсная система изображается структурной схемой (рис. 6.5). Нелинейное звено НЗ с характеристикой г (х) включено перед идеальным импульсным звеном ИЗ. Приведенная непрерывная часть ПНЧ имеет передаточную функцию Wn н (р), ей соответствует передаточная функция линейной импульсной части системы
W * (0-)= - ^^ + few_lg(m~1)P7"+- + feo
Л (Р) 2*(р) dnenpr- + dn_^pT^...+da ' (620)
которая, в свою очередь (см. § 14.2 в части I), может быть переписана в виде разностного уравнения
^пУ[(^+п)^и] +^п-1 {/[(/+ п — 1)ГИЦ-
+ ...+<10//(/Ти) = ^г[(/+ш)Ти] +
216
z[(/+m-1) TJ + ... +Л, z(lTJ. (6.21)
Последнему соответствует рекуррентное соотношение
У К/ + п) Тя] [(l + m) Ти] + ... + k0 г(1Тя) -
ап I
-dn_ly[(l + n-l)Ta]-...~doy(lTa)y (6.22)
в котором
z(iT„) =z[x(iTa)] = z\[u\iTa)—y{iTa)]. (6.23)
Соотношения (6.22) и (6.23) позволяют вести последовательный расчет дискретных значений процессов в нелинейной импульсной системе при произвольном входном сигнале и (1ТЯ), начиная с I = —га, точно так же, как это делалось в линейных импульсных системах (см. пример 14.4 в части 1). Единственное отличие состоит в том, что в уравнение (6.22) входит нелинейная зависимость z (х).
В основу построения переходных процессов в нелинейных импульсных системах автоматического управления может быть положен также второй метод, использующий весовую функцию приведенной непрерывной части и)п н (/). Аналогично соотношению (14.41) из части I для нелинейной системы можно записать
//(/Ти)= 2 г 1« иТИ)-у(1ТИ)] т„] (6.24)
1=0
и далее рассчитывать последовательные дискретные значения у (1ТИ), начиная с I = 1, поскольку дап.н (0) =0 (при m < га). По этой же причине верхний предел в сумме взят равным / — 1.
Если весовая функция щп.н (0 не задана, то ее можно найти по реакции приведенной непрерывной части на единичный импульс или по передаточной функции Wn* (р) так, как это было показано в § 14.2 в части I.
Достоинства и недостатки обоих методов были отмечены в части I (§ 14.2). Естественно, что соотношения (6.22) — (6.24) могут быть легко использованы для составления программы цифровой вычислительной машины, применение которой желательно в случае большого объема вычислений (например, при малом Тя).
Промежуточные значения выходного сигнала в нелинейных импульсных системах тоже могут быть найдены аналогично линейным системам.
Таким образом, определение законов изменения сигналов в нелинейных импульсных системах принципиальных трудностей не представляют. Рассмотрим теперь способы приближенного перехода от непрерывных систем к импульсным.
Обратимся к нелинейной системе автоматического управления (рис. 6.6, а), содержащей-нелинейное звено НЗ и линейную часть ЛЧ Пусть под влиянием внешнего воздействия и (f) в ней существует процесс, который характеризуется временными диаграммами для сигналов z (f) и у (/) (рис. 6.6, б). Из этих двух сигналов второй у (t) является 217
следствием действия первого сигнала z (/) на линейную часть системы. Заменим непрерывно изменяющийся сигнал z (/) последовательностью периодически следующих мгновенных импульсов так, чтобы у (/) при этом не изменился (рис. 6.6, в). Площадь каждого импульса берется равной значению сигнала z (/) в момент действия импульса, умноженному на период Та. При малых 7И площади мгновенных импульсов приближенно равны площадям импульсов изменяющейся формы, на которые разбивается моментами съема действительный сигнал z (/) (на рис. 6.6, в показано для /-го момента схема). Малость Та является также условием приближенно одинакового действия, которое окажут
Рис. 6.6
на линейную часть системы действительные и мгновенные импульсы, вследствие чего у (/) почти не изменится. Чем меньше Та, тем более точным оказывается приближение.
Замена непрерывного сигнала последовательностью модулированных мгновенных импульсов соответствует переходу от непрерывной системы к импульсной (рис. 6.6, г). В ней Z* (р) л;~ Z (р), приведенная непрерывная часть системы имеет передаточную функцию №„,и (pl = Ти №л (р). Множитель Ти играет роль передаточной функции формирующего звена. Он должен измеряться в тех же единицах, в которых измеряются все постоянные времени в системе. .Для нахождения передаточной функции линейной импульсной части системы * (р), соответствующей Ти№л (р), можно пользоваться одним из способов, приведенных в части I (см. гл. XIII). Далее для расчета процессов в получившейся нелинейной импульсной системе нужно применить один из двух описанных выше методов.
Пример 6.2. Найти передаточную функцию Ц7Л (р) и рекуррентные соотно-k
шения для системы, у которой Wa (р) = —. Пользуясь формулой (12.45)
из примера 12.5 в части I и учитывая множитель Т^, получим
218
/ _£и\ / _f±\
>,(>)- tr^'7 T- - (6-26)
(е₽7и—11 е₽?и — е~У) е2рГи— \1+е~Т) ерТ* + е~Т
Соответствующее разностное уравнение имеет вид
I ——j ——
!/[(/ +2) Тя]-\1+< т J у 1(1+1) Ги]+е г//(/Ти) =
= ^и(1-е~У)г[/+1)Ги], (6‘26)
откуда
/ Ги\
«/[(/ + 2) Т1 г [(/+1)7^] +
( ~т) (6.27)
+ \1+е т ) у [(/ + 1) Ги]-е т у(1Ти),
г [(/+1) Ти] = г { и [(/+1) ТИ]-у [(/+1) Ти]}. (6.28)
а)
Рис. 6.7
Весовая функция приведенной непрерывной части может быть получена в виде дискретных значений реакции линейной части 7’и117л(р) на единичный импульс. Для рассматриваемого примера она была найдена в части I в примере 5.1, формула (5.11), из которой получим
/ т
I йп. и (/Т’и) = ^7’и\1 — е г
Подставляя (6.29) в (6.24), имеем
У ЦТп) = 2 1“ (*Ти)-У (<ТИ)] kTa [1 -е 1=0
(6.29)
(6.30)
Замену действительного сигнала 2 (t) последовательностью мгновенных импульсов целесообразно производить, если степень знаменателя передаточной функции Wn (р) превышает степень числителя не менее, чем на 2. В противном случае степени числителя и знаменателя
219
№л* (p) могут оказаться райнЫми (т — п). Это будет Означать, ЧТО В правой части соотношения (6.22) сигнал г должен браться в тот же момент времени, что и у в левой части. В результате рекуррентное соотношение обратится в нелинейное уравнение.
Осложнения при этом получаются и с соотношением (6.24), поскольку к?п.п (0)=/=0 при т = п. Оно также обращается в уравнение.
Вместо мгновенных импульсов при замене непрерывного сигнала можно взять импульсы более сложной формы, обеспечивающие более точную аппроксимацию. На рис. 6.7, а показана замена непрерывного сигнала прямоугольными импульсами с коэффициентом заполнения, равным единице (ступенчатая аппроксимация). Соответствующая этой замене линейная импульсная часть системы (рис. 6.7, б) имеет формирующее звено с передаточной функцией
1_e~pTl1
W*<P)= —--------,
Р так что | — РТ-щ
^п.н(р) = —------Гл(р). (6.31)
Р
Пример 6.3. Найти передаточную функцию Ш'* (р) и рекуррентные соотношения при ступенчатой аппроксимации для системы, рассмотренной в примере 6.2. Для линейной приведенной непрерывной части имеем передаточную функцию
Р Р(Д + рТ)‘
(6.32)
Соответствующая ей передаточная функция IT* (р) может быть получена на основании формулы (13.55) из примера 13.2 в части I
(6.33)
откуда
г GT’h) +
/ — —\ - Ги
+ 1+е т )yW+^TH]-e'T у(1Та),
(6.34)
где г(«Ги) получается из (6.23).
Сравним способы перехода от дифференциальных уравнений к нелинейным разностным уравнениям, основанные на методе Эйлера (и подобных ему упоминавшихся выше методах приближенных вычисле-220
НИЙ) и на приближенной замене непрерывной системы импульсной системой. Запись уравнений движения системы в нормальной форме (6.18), применяемая в методе Эйлера, соответствует структурному представлению ее в виде соединения интегрирующих звеньев с предварительно включенными нелинейными звеньями с многими входами, перекрестными связями и внешними воздействиями (рис. 6.8, а).
Переход от (6.18) к (6.19) соответствует включению импульсных и формирующих звеньев с прямоугольными
импульсами перед всеми не-
линейными звеньями (на рис. рИс. 6.8
6.8, б показано для одного звена).
Таким образом, метод Эйлера можно рассматривать как обобщение метода, рассмотренного в примере 6.2, на случай более сложной струк
туры.
Пример 6.4. Рассчитать переходные процессы в релейной следящей системе (рис. 6.9, а) с линейной частью, имеющей передаточную функцию
k
при k = 4 сек~!, Т= 1 сек.. Характеристика нелинейного звена приведена на рис. 6.9, б. Входное воздействие имеет вид и (/) = 10- 10(/). При расчетах воспользоваться двумя схемами импульсных систем (с мгновенными и прямоугольными импульсами).
Для нахождения рекуррентных соотношений можно использовать результаты, полученные в примерах 6.2 и 6.3. Возьмем Та = 0,1 Т = 0,1 сек. Для системы с мгновенными импульсами из (6.27) и (6.28) находим
У [(/ + 2) Ти] = 0,03808 z [(/ + 1) Ти] + 1,9048г/ [(/+1) Ги]—0,9048г/ (/Ти), (6.35)
z [(/+1) Ти] = г [и [(/+1) Тя]-у [(/+ 1) Ти]} =
= г {lO-lo [(/+ 1) Ти]-у [(/+ 1) Ти]}- (6.36)
Для системы с прямоугольными импульсами при Тп = 0,1 сек из (6.34) находим
у [(/ + 2) TH] = 0,0192г [(/+1) Ти] + 0,01888г (/Ти) +
+ 1, 9048г/ [(/ + 1)Ти]_0,9048г/ (1Та), (6.37)
где
z(iTu) = г [и (гТи) — у (г'Ти)] =z [ 10-10 (гТи) у (rTH)], (6.38)
(» = /, /+1).
221
На рис. 6.9, в приведены графики переходных процессов (начальные участки графиков, соответствующие разгону системы, не показаны), рассчитанные по полученным формулам на цифровой вычислительной машине «Днепр-1». Здесь же для сравнения приведен точный график переходного процесса при тех же условиях, полученный с помощью метода припасовывания. Из приведенных графиков видно, что процесс в системе с мгновенными импульсами имеет опережение. Это объясняется тем, что при замене управляющего сигнала z (/) (см. рис. 6.6, в) последовательностью мгновенных импульсов, последние действуют в начале действительных импульсов z(f). Для уменьшения погрешности расчетов в системе с мгновенными импульсами можно ввести в линейную часть последовательно запаздывающее звено с временем запаздывания 1/2Ти.
Процесс в системе с прямоугольными импульсами совпадает с точным процессом до момента вхождения в зону нечувствительности (9,5 < у < 10,5).
Увеличение разницы между действительным и вычисленными процессами с ростом времени свидетельствует о накоплении ошибки, что вообще характерно для разностных методов.
Повышение точности может быть достигнуто уменьшением Та.
Важным вопросом при использовании разностных методов является правильный выбор периода Тя: чрезмерное уменьшение его приводит к увеличению объема вычислительной работы, выбор недостаточно малого Тк приводит к увеличению погрешностей.
Полная эквивалентность схем, изображенных на рис. 6.6, а и г имеет место при выполнении условий обобщенной теоремы Котельникова (см. § 13.1 в части I)
®гр + ®гР1^сйи = 2л/Ти, (6.39)
222
у
где ®гр — граничная частота спектра z (/со) непрерывного сигнала z (I); ®гр1 — граница полосы пропускания частотной характеристики приведенной непрерывной части 1^п.н (/«).
Чтобы избежать анализа спектра сигнала г (7) (в общем случае это очень сложная задача) и построения частотных характеристик Гп.к (jw), можно рекомендовать следующую процедуру [Л. 35]. Производится построение процессов при периоде Та, во много раз (например, в 10 раз) меньшем, чем наибольшая постоянная времени линейной части системы. Затем повторно строят процессы при вдвое меньшем Та. Если построенные процессы близки, значит выбор Ти был сделан правильно.
Заметим, что рассмотренные разностные методы, основанные на включении импульсного звена, могут применяться для построения переходных процессов не только в нелинейных, но и в линейных системах автоматического управления. Импульсное звено можно включать в цепь входного сигнала, описывая замкнутую часть системы единой передаточной функцией Wa (р). При этом пропадает уравнение замыкания
х = и — у (6.40)
и вычисления упрощаются. Переход от дискретных изображений к оригиналам можно выполнять с помощью любого из методов, изложенных для линейных импульсных систем в гл. XIV части I.
§ 6.4. ОЦЕНКА ВЛИЯНИЯ НЕЛИНЕЙНОСТЕЙ НА ПЕРЕХОДНЫЕ ПРОЦЕССЫ В СИСТЕМАХ
В данном параграфе рассмотрен метод, который позволяет найти верхнюю оценку разницы между переходными процессами в нелинейной и некоторой линейной системах. Последняя получается из исходной нелинейной системы путем замены нелинейной характеристики на близкую к ней линейную. Метод может применяться как к непрерывным, так и к импульсным системам автоматического управления.
Рассмотрим непрерывную нелинейную систему автоматического регулирования (рис. 6.10, а). В ней нелинейное звено z (у) включено в середине цепи управления между линейными звеньями с передаточными функциями (р) и IV 2 (р), а выходной сигнал поступает на сравнение не непосредственно, а через звено с передаточной функцией lVa (р). Таким образом, рассматриваемая структурная схема имеет довольно общий характер.
На рис. 6.10, б изображена статическая характеристика нелинейного звена z (р). Заменим нелинейное звено с этой характеристикой параллельным соединением линейного звена с характеристикой гл (р) = = kuy (см. рис. 6.10 б), нелинейного звена с разностной характеристикой ад (р) — z (р) — kn у (рис. 6.10, в). Максимальное (по абсолютной величине) значение разности равно гд тах; линейная характеристика должна проводиться таким образом, чтобы гд тах было минимальным.
223
На рис. 6.11, а изображено параллельное соединение двух звеньев, а на рис. 6.11, б эта часть схемы системы перерисована по-новому с разорванной нелинейной связью между сигналами у и zA. Это означает, что далее не будем интересоваться реальным характером изменения сигнала 2д (/) во времени. Будем лишь иметь в виду, что по абсолютной величине этот сигнал всегда меньше 2Дтах.
В результате всех выполненных преобразований получается экви---- валентная j схема системы (рис. 6.11, в). Это линейная система, на которую помимо основного сигнала и (t) действует дополнительный сигнал 2д (0, который и отражает влияние нелинейности г (у)
Рис. 6.10
на динамические процессы в системе автоматического регулирования. Найти влияние нелинейности можно, если, пользуясь принципом суперпозиции, определить составляющую зд (/) выходного сигнала системы, возникающую при действии дополнительного сигнала 2д (/). Определить полный вид этой составляющей нельзя, поскольку неизвестен характер изменения zA (t). Но можно оценить величину этой составляющей по модулю, так как она возникает при действии сигнала, ограниченного по абсолютной величине.
Оценка влияния ограниченных сигналов на линейные системы была выполнена Б. В. Булгаковым; он дал этой проблеме название задачи о накоплении [Л. 1] (смысл этого названия станет ясным далее).
Рассмотрим решение задачи Б. В. Булгакова применительно к данному случаю. Будем считать, что и — 0 (принцип суперпозиции) и система находится при нулевых начальных условиях. Будем также считать, что полученная линейная система устойчива. Для изображения выходного сигнала имеем
(5д(Р) = ^3д(Р)2д(Р),
(6.41)
224
где
^ад(Р)
^г(Р)
1 + Ъ(₽) ’
Wp(p) = kBW1(P>W2(p)Wa(p).
(6.42)
(6.43)
Передаточная функция И73д (р) связывает выход системы с дополнительным сигналом 2д (р).
В выражении (6.41) можно перейти к оригиналам, если воспользоваться теоремой свертывания и вспомнить, что оригиналом передаточной функции №зД (р) является соответствующая весовая функция да3д(0-
<1
Зд(0 = $а'зд(т)2д(/— т) dr. (6.44)
о!
Рис. 6.11
Возьмем модуль от правой и левой частей (6.44), переходя к неравенствам
| 5д (I) I = ^шаД(/ —т)гд(/—t)Jt) о
t t
< J | йУзд (т) I • I 2д (t~т) I dr sC 2д max 51 ©зд (т) I dr. (6.45) 0 Q
Рассмотрим последний интеграл, заменив в нем весовую функцию на производную соответствующей переходной функции
t t
Z\ max J | ^аД (т) | dr — Z^jnax о о
^зд£2 dt
dr.
(6.46)
He будь символа модуля под знаком интеграла, он в каждый момент времени был бы равен /гад (/). Из-за знака модуля интеграл 8 Зак. 447 225
(6.46) приходится брать раздельно по участкам знакопэстоянства производной (у->0, рис. 6.12,а)
Ы зХ?) dx
М 3Ат)
J dx о
С и №
J dx v
Рис. 6.12
+ (^2------/11)---- ,
к p(hpT)
Рис. 6.13
<1
в результате чего в общем случае интеграл (6.46) можно выразить через разность соседних экстремальных значений йзД (t)
t
J | I= I Ло I + I Л1-Ло I +1 h.-h, I +... + I йзД (t)-hr I, (6.47) о
где hr — последний экстремум переходной функции перед рассматриваемым моментом времени i.
Итак, в любой момент времени t влияние нелинейности не превышает по модулю оценки, определяемой формулой
8 (0 = 2Д max [ | ft ol + |fti—Ло 1 +1 Ла—fti 14- - - - ч-1 Лзд (t)~hr I ]. (6.48)
График верхней оценки показан на рис. 6.12, б. Он монотонно растет; это означает, чтр рлиярие недаейнортр может накапливать^ №
с ростом времени, стремясь к верхнему пределу б,», который может служить верхней оценкой для любого момента времени
б-=гДтах 2j [|Ло1 + |Л«—hi-t |]. (6.49)
i=i
Оценка 6» может быть просто получена из графика переходной функции /1зД (/) (см. рис. 6.12, а) путем суммирования модулей последовательных разностей экстремумов. В некоторых случаях она может быть выражена в замкнутой форме через параметры системы.
Описанный метод позволяет оценить разницу между динамическими процессами в нелинейной и близкой к ней линейной системе, получаемой путем замены нелинейной характеристики на линейную. Когда найденная оценка достаточно мала, можно анализировать процессы в системе, пользуясь хорошо развитыми линейными методами теории автоматического управления.
Оценки, определяемые по формулам (6.48), (6.49), получаются достаточно малыми только в тех случаях, когда величина гДтах мала, т. е. для нелинейных характеристик, мало отличающихся от линейных. Такие нелинейные характеристики получаются для люфта, гистерезиса, проволочного и секционированного потенциометров или аналого-цифрового преобразователя (см. рис. 1.17, 1.19, 1.22). Величина суммы, стоящей в выражениях (6.48), (6.49), зависит от перерегулирования и колебательности системы в линейном приближении.
Пример 6.5. Оценить влияние люфта на переходные процессы в следящей системе с линейной частью второго порядка (рис. 6.13, а). Замена нелинейного звена линейным с коэффициентом усиления Ан = 1 дает эквивалентную схему с дополнительным сигналом (рис. 6.13, б). Дополнительный сигнал действует прямо на выход системы. При этом аДтах = уа, как это следует из характеристики люфта (см. рис. 6.13, а).
Передаточная функция 1ГзД (р) выражается согласно (6.42) и (6.43)
1+р(1 + рТ)
Р(1+РГ) 1
Р(1+РП+*
(6.50)
Переходная функция в соответствии с (3.94) из части I имеет вид
__L Г /4^7—1 1 /4йГ —1
й,Л(/) = е 2г cos --------<-|- г-_----• sin --—-----<]. (6.51)
зДК ' L 2Т /4kT— 1 27
На рис. 6.14, а представлен график переходной функции ЛаД (0 для следующих значений параметров системы: k = 14,14 сект1-, Т = 0,1 сз/. Эти значения обеспечивают запас по фазе 45° в линейной системе. На рис. 6.1а4, б показаны переходные процессы в следящей системе с этими значениями параметров при скачкообразном изменении u(t) от 0 до 5 при t = 0 и нулевых начальных условиях. Величина зазора 2t/o принята равной 0,5. Цифрой 1 на рис. 6.14, б обозначен процесс в линейном приближении системы, цифрой 2 — переходный процесс в действительной системе (он рассчитан методом припасовывания). На рис. 6.14, в даны графики изменения разности процессов 2 и 1 (т. е. величины 2Д(() и оценок 6 (0 и —6 (0, построенных согласно рис. 6.14, а при 2Дтах •=• уа = 0,25. Между кривыми б и —6 заключена область возможного изменения разности гд (7). Из последнего рисунка видно, что величина 6 (0 в данном примере позволяет доста
8* 227
точно точно оценить максимальное значение модуля разности между действительными переходными процессами и переходными процессами в линейном приближении, т. е. достаточно точно оценить сверху влияние нелинейного звена (в данном случае люфта) на переходные процессы в системе автоматического регулирования.
Выражение для максимальной оценки 6^ может быть найдено в данном примере в замкнутой форме. Для переходной функции (6.51) моменты времени для 2яТ 4яТ
экстремумов tlt t2, t3, ... соответственно будут
бяТ
—, .Начальное значение
У 4kT — 1
экстремальные значения
— 1 ’ У 4kT — 1 ’ переходной функции равно 1, последующие
Рис. 6.14
ft л
й1=-е“2?=-е :
t, 2Я
h2 = e 2Т =е VikT-1 ;
G Зя
й3 = -е 2^=-е .
Их модули образуют убывающую геометрическую прогрессию с начальным членом 1 н знаменате-
лем е 1
Максимальная оценка 6^ сог. ласно (6.49)
^оо = гД maxima + (йо~й1) + (й2— Й1)4-
-^(^2 —^з)+ •••]= 2гд тах 2 I hi I • i=o
(6.52)
Она вычисляется по формуле суммы членов геометрической прогрессии
®оо= д тах •
I _ g V4kT-l (6.53)
Прн k= 14,14 сек-1, Т = 0,1 сек, max = 0,25 получается
«оо= 0,67 = 2,68уа,
т. е. относительное влияние люфта, определяемое коэффициентом 2,68, в этой системе невелико.
Метод оценок позволяет делать некоторые выводы о свойствах автономной (без внешних
228
бездействий) нелинейной системы с характеристикой, близкой к Лй-нейной. Если соответствующая ей линейная система устойчива, то это означает, что в нелинейной системе отсутствуют расходящиеся процессы. Если в ней при этом имеются автоколебания, то их амплитуда не превышает б«,.
Рис. 6.15
Рассмотрим теперь нелинейную импульсную систему автоматического управления, у которой нелинейное звено НЗ включено после сравнивающего звена перед импульсным элементом (рис. 6.15, а). В других более сложных вариантах включения нелинейного звена нужно стремиться привести схему путем эквивалентных преобразований к рассматриваемому случаю. Замена нелинейного звена линейным плюс дополнительный сигнал (см. рис. 6.11) приводит к эквива-лентнойсхеме (рис. 6.15, б). Оценка влияния дополнительного сигнала (т. е. влияния нелинейности) выполняется в эквивалентной схеме (рис. 6.15, в), в которой и положено равным нулю, импульсное звено ИЗ из цепи рассогласования перенесено во входную цепь и цепь об-
229
ратной связи, и кроме того, вЬедено фиктивное Импульсноё звёнб (показано штрихами) в цепи выходного сигнала.
Передаточная функция замкнутой линейной импульсной системы (см. рис. 6.15, в)
^•(Р) = (6-54)
1 + *н®р (Р)
Соответствующая ей весовая функция ау3д (1ТВ) может быть найдена одним из способов, рассмотренных в части I (гл. XIV). Имея весовую функцию пу3д (1ТВ), выходной сигнал системы (см. рис. 6.15, е) можно получить при нулевых начальных условиях на основании принципа суперпозиции
[(I-i)TJ. (6.55)
Оценка выходного сигнала по модулю получается в виде серии
неравенств
|УД(^И)1 =
I
2 аУздО'ЛЛгд [/ — i)TB] 1=0
i i
< 21 ^зд (iTH) 112д[(1—i) Ти] I sC 2дтах 21 йУзд (iтл)\ = 6 (ITи). (6.56) 1=0 1=0
Последняя формула аналогична (6.45) для непрерывных систем. Поскольку
t
2 ^зд (iT и) = /13д (IT и),
i=i
то, как и в случае непрерывных систем, оценка 6 (1ТВ) может быть выражена через экстремальные значения переходной функции замкнутой системы, взятые в моменты съема (рис. 6.15, г):
6 (ТТВ)= гдтах [| h01 +1 ht—h01 + | /i2—hi | +... + | А3д (ТГИ)—hr |], (6.57)
где hT — последний экстремум й3д (ITB) перед рассматриваемым моментом съема 1ТВ.
Положив / ->- оо, получим общую верхнюю оценку для любого момента времени
6М = гДтах2 IIЛо I + 1 hi-h^ |]. (6.58)
<=1
Эта оценка легко получается из графика переходной функции замкнутой системы (см. рис. 6.15, г), которая, в свою очередь, может быть получена одним из способов, рассмотренных в части 1 (гл. XIV).
Замечания, сделанные ранее по поводу применения метода оценок для нелинейных систем с непрерывной передачей сигналов, справедливы и в случае нелинейных импульсных систем.
Пример 6. 6. Оценить влияние квантования по уровню на переходные процессы в цифровой следящей системе (рис. 6.16, а). Эта система была рассмот-230
рена в примерах 13.2 и 13.4 части I. Ее непрерывная часть содержит интегрирующее звено, импульсы имеют прямоугольную форму с коэффициентом заполнения 1. Передаточная функция ее (см. (13. 59) в части I].
Нелинейное звено имеет ступенчатую характеристику аналого-цифрового преобразования (рис. 6.16,6). Замена нелинейного звена линейным «с добавлением шума квантования» (t) приводит к линейной эквивалентной схеме (рис. 6.16,в), причем (/Дтах = 0,5 уа. Передаточная функция
Весовую функцию а/3д (/Ти) == —а»э (2ТИ) можно найти по формуле (14.51) части I, имея в виду, что характеристическое уравнение системы имеет один корень, определяемый уравнением
23!
epT^=\-kTa, (6.61)
поэтому а>зД (/Ги) = - 1ЬТВ (1 - кТл)‘ - 11 . (6.62)
Модули дискретных значений u^UTh) образуют геометрическую прогрессию при 1=1, 2, 3,...
ЛТИ, ЙТИ11 — ЙТИ I, feTH| 1—£Ти|а..
Их сумма определяет
боо = Удтах j_| ‘ (6’63)
При уДтах = 0,5уа и АТИ=1,5 (заметим, что kTu<2 из условий устойчивости линейного приближения системы)
бос = 1, 5уа.
В реальных системах величина кванта уа бывает очень малой, поэтому и влияние квантования по уровню на динамические процессы мало.
§ 6.5. АНАЛИЗ КАЧЕСТВА ПРОЦЕССОВ УПРАВЛЕНИЯ С ПОМОЩЬЮ МЕТОДА ГАРМОНИЧЕСКОЙ ЛИНЕАРИЗАЦИИ
Для линейных систем автоматического управления наиболее употребительными методами косвенного определения качества являются частотные методы, основанные на вычислении показателя колебательности, запасов устойчивости по фазе и усилению, частоты среза (см. гл. X части I). Гармоническая линеаризация позволяет распространить эти методы и на нелинейные системы. При этом сложность процессов в нелинейных системах, не только количественно, но и качественно зависящих от амплитуды входных воздействий, а также приближенный характер метода гармонической линеаризации препятствуют установлению столь же ясной связи между косвенными частотными показателями и прямыми показателями качества, определяемыми на графиках переходных процессов. Из всех частотных методов, основанных на гармонической линеаризации, наибольшее распространение получил метод, основанный на вычислении показателя колебательности.
Рассмотрим поведение нелинейной замкнутой системы (рис. 6.17, а) при воздействии на нее гармонического входного возмущения. Частотная характеристика замкнутой системы, равная отношению комплексных амплитуд Yml и Um, записывается в виде
W3 (jd), А) = (/ю) (6.64)
1 + (А) 1ГЛ (/co)
или
Г3 (/co, A) = ^н0 (Л) NWn (/M) , (6.65)
1 + ^й0(Л)АП17л(/й)
232
где А — безразмерная амплитуда первой гармоники сигнала х на входе нелинейного звена НЗ-, N — нормирующий множитель.
Выражение (6.65) удобно переписать следующим образом:
W3 (j<a, Д) =--------Л^д(/<о)---------=------------------- (6.66)
aV ’ ^1Гл(/со)-Уво(Л)
На рис. 6.17, б показано взаимное расположение годографов МИ7Л (/®) и Уя0 И)- При некоторой частоте со и амплитуде А числитель отношения (6.62) изображается комплексным вектором СО, а знаменатель — вектором СВ.
Если зафиксировать частоту со и менять амплитуду А, то максимум модуля частотной характеристики IF3 (/со, А) будет иметь место при минимальной длине вектора СВ. Эта длина равна радиусу окружности, имеющей центр в точке С и касающейся годографа Ун0 (Д) (отрезок СВ' на рис. 6.17, б). Если таких окружностей может быть проведено несколько, то следует брать минимальный радиус. Определяя таким образом | U7a(/co, Д) |юах при различных со, можно построить график | 1У3(/со, А) |шах = / (со) (рис. 6.17, в). Показатель колебательности М определяется по графику в точке, где зависимость достигает максимального значения со = сом. №
Установлено [Л. 68], что нелинейные системы автоматического управления имеют удовлетворительное качество, если М <2.
Для определения показателя колебательности нелинейных систем автоматического регулирования можно найти на комплексной плоскости jV!Fn (/со) и Ув0 (Д) линии равного значения |1^а (/со, Д) |. Если вести обозначения
УГл(/со) = Рл(со)+/<2л(со), (6.67)
^но(Л) = /?вО(Д)+/5вО(Д), (6.68)
то модуль W3 (/со, А) может быть согласно (6.66) записан
1/р2 i q2
| W а (/со, Д) | = -- -л л = — . (6.69)
а 1 /(Рл-Яно)а + (Зл-8во)2
Полагая | Й7а(/со, Д) | = с, находим после преобразования уравнение окружности
( р Rhoc2 । / z) 8но с2 \2_______ (j?Ho2 SB0)2 с2 /л 70'1
\ Л С2 —1 ) с2_1 у (С2 —I)2 ’ ' *
имеющей центр в точке с координатами
q (6.71)
л с2—1 с2 —1
и радиус
R. = V Кио+3|о1<^
233
При Z?B0 = —1, SB0 = 0 система делается линейной и (6.70) совпадает с уравнением (10.13) части I, полученным для линейных сис
тем.
Задаваясь некоторым с, для каждой нелинейности можно построить семейство окружностей, соответствующих различным значениям /?н0 и 5в0, т. е. различным значениям А. Нетрудно заметить, что согласно (6.71) и (6.72) центры окружностей У располагаются на кривой, подоб-ной кривой VH0 (Д) (коэффициент подобия с2/(с2 — 1), а их радиусы
Рис. 6.18
пропорциональны расстояниям точек годографа Ув0 (А) до начала координат (коэффициент пропорциональности с/(с2 — 1)]. При с—>- оо центры окружностей ложатся на годограф Уи0)] (Д), а их радиусы становятся равными нулю.
На рис. 6.18, а изображено семейство окружностей (их центры отмечены крестиками) для случая однозначной релейной характеристики (см. годограф Уя0 в табл. 4.1) при с = 1,5. Здесь же проведена огибающая этих окружностей. Показатель колебательности М нелинейной системы будет равным с (в данном случае с = 1,5), если годограф частотной характеристики NWa (ja) коснется огибающей в какой-либо точке. Касание, а также пересечение NWa (/<в) и (Д) дают 234
показатель колебательности М = оо. Это соответствует существованию автоколебаний в системе.
На рис. 6.18, б показаны огибающие для однозначной релейной характеристики при различных с. Эти семейства удобно использовать при синтезе линейных корректирующих устройств, обеспечивающих такую форму (/со), чтобы показатель колебательности нелинейной системы был равен заданному. При этом можно пользоваться логарифмическим представлением характеристик NWa (/со) и огибающих, что облегчает определение частотных характеристик корректирующих устройств [Л. 851.
§ 6.6. АНАЛИЗ КАЧЕСТВА ПРОЦЕССОВ УПРАВЛЕНИЯ С ПОМОЩЬЮ КРИТЕРИЯ АБСОЛЮТНОЙ УСТОЙЧИВОСТИ
Критерии абсолютной устойчивости положения равновесия и процессов нелинейных систем автоматического управления, рассмотренные в гл. V, могут быть использованы для оценки качества процессов в нелинейных системах. Эта возможность заключается в рассмотрении достаточных условий, при которых затухание вариаций возмущенного (за счет изменения начальных условий) и невозмущенного процессов происходит быстрее, чем Мое~^. Здесь Л40 — константа, зависящая от величины начального возмущения, а Хо имеет смысл степени устойчивости. Параметр Хо может служить оценкой длительности переходных процессов в системе, не превышающей три постоянные времени затухающей экспоненты
*р<ЗД0. (6.73)
Для вариации т] выходного сигнала системы при этом справедливо lim —- 0.
t->ao
Умножение оригинала на экспоненциальный множитель сопровождается смещением комплексного оператора р в изображении на величину —Хо (см. табл. П. 4 части I), поэтому в формулировках условий абсолютной устойчивости для степени устойчивости Хо вместо частотной характеристики линейной части (До) должна фигурировать смещенная частотная характеристика Wn (ja — Хо). Если говорить о положении равновесия, то достаточным условием того, чтобы система, изображенная на рис. 5.6, а (и = 0), обладала степенью устойчивости Хо, является выполнение неравенства
Re (1 + /»1Гл(/<о-Х0)+1/А:>0. (6.74)
Это неравенство аналогично неравенству (5.27) в основной формулировке критерия абсолютной устойчивости. Оно рассматривается при тех же условиях: кусочно-непрерывная нелинейная характеристика z (х) лежит внутри сектора, ограниченного осью абсцисс и прямой z = kx\ линейная часть с передаточной функцией Н7Л (р) устойчива; q — некоторое положительное или отрицательное число. Этот
235
заданной.
результат распространяется на случай нейтральной или неустойчивой линейной части с помощью структурных преобразований, аналогичных преобразованиям в § 5.3.
Вместо неравенства (6.74) при оценке степени устойчивости удобно пользоваться смещенной преобразованной характеристикой линейной части системы
^л.п(/®-М=Кеи7л(/<й-
-Х0) + /ш1тИ7л(/Со-Х0). (6.75)
Для обеспечения заданной степени устойчивости она должна лежать правей прямой Попова, проведенной через точку — 1 /Л, /0, с наклоном 1/д(см. гл. V).
Для определения степени устойчивости некоторой действительной системы нужно построить семейство характеристик №л.п ()® — М при различных Хо. Степень устойчивости определяется той характеристикой, которая пересекает все прямые Попова с различными наклонами 1/q, кроме одной (1/б70), с которой она имеет одну или несколько точек касания (рис. 6.19, а). Может быть по-
Рис. 6.19 ставлена и обратная задача: оп-
ределить области значений параметров системы, обеспечивающие степень устойчивости, не меньше
Пример 6.7. Определить области со степенью устойчивости, не меньше заданной, в пространстве параметров системы с передаточной функцией
Ar (1 Д-рТ) ^(Р)=(Т^- (6-76)
Нелинейное звено является звеном типа люфт (см. табл. 4.1). Согласно результатам, полученным в примере 5.11 [см. (5.49)], можно написать условие смещенной характеристики
Ие1Гл(/ш—Хо)>—1.
(6.77)
236
Подставляя в (6.76) р = — Хо и выделяя действительную часть,
найдем при Т\ = 1 сек
k Гш2 (27—По—1)—ПЛ1
Re Ц7Л (>—%.)= -J—:------?—’-----«1
°' [(1 — Х0)2 + ш2]2
fe[X2(2T+l)-l0(2 + T) + l]
(6.78)
(6.79)
[(1-1*) + ш2]2
Приравнивая нулю производную (6.78) по со, найдем <о0, ПРИ котором (6.78) минимально
2 Тк30—ЗХ’ + (6—37) Хо — 3 + 27
<0п = ----------------------.
27 —7Х0—1
Подставляя (6.79) в (6.78) и далее в (6.77), получим условие
. (6.80)
[7(2-%0)-1]2
На рис. 6.19, б приведены в полулогарифмическом масштабе границы областей, обеспечивающих различные степени устойчивости при разных Т.
Достаточным условием обеспечения степени устойчивости процессов в нелинейных системах является выполнение неравенства, аналогичного (5.52) и рассматриваемого при тех же условиях [Л. 73]
Re ----—1 = б^0. (6.81)
1+гП7л(/й)-%0) k-r
Здесь использованы те же обозначения, что и в (5.52).
При синтезе линейных корректирующих устройств, обеспечивающих выполнение условий (6.74) и (6.81), можно пользоваться логарифмическими частотными характеристиками [Л. 71].
Естественно, что рассмотренные в данном параграфе методы оценки качества процессов аналогичным образом могут быть применены и для импульсных нелинейных систем автоматического управления. При оценке степени устойчивости импульсных систем ные условия устойчивости (5.59) и (5.60) принимают вид
Re Х0) + 1/А>0,
Re [ 1 + q (1 - е~(г“)] (/со -Хо) +1 /k > 0.
достаточ-
(6.82)
(6.83)
Интересно заметить, что частотный критерий абсолютной устойчивости может быть использован также для оценки интегральных показателей качества непрерывных и импульсных систем автоматического управления [Л. 92], [Л. 126], [Л.28].
§ 6.7. ОБ ОСОБЕННОСТЯХ СИНТЕЗА НЕЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
При синтезе нелинейных систем автоматического управления с процессами, удовлетворяющими заданным показателям качества, имеются следующие возможности.
237
1. Синтез корректирующих устройств в линейной части системы, видоизменяющих ее частотную характеристику так, чтобы удовлетворить некоторым косвенным показателям качества, например показателю колебательности М или степени устойчивости 10. Методы синтеза линейных корректирующих устройств аналогичны методам, рассмотренным в части ! для линейных систем, с учетом тех особенностей, которые вносят нелинейные звенья в систему. Эти особенности были рассмотрены в § 6.3—6.5. При синтезе корректирующих устройств можно пользоваться логарифмическими частотными характеристиками [Л. 711.
После того как схема и параметры корректирующего устройства найдены, целесообразно воспользоваться одним из прямых методов, основанных на построении переходных процессов, с целью расчетной проверки действия корректирующих устройств. Такая проверка должна выполняться и для линейных систем автоматического управления. Тем более она необходима для нелинейных систем, косвенные методы анализа качества которых либо приближенны, либо основаны на проверке выполнения достаточных условий. Естественно, что вместо расчетов переходных процессов может быть использовано моделирование, которое в настоящей книге не рассматривается.
2. Синтез нелинейных корректирующих устройств, который сводится либо к ослаблению влияния вредных нелинейностей, имеющихся в системе, либо к включению полезных нелинейностей, улучшающих качество процессов в системе. Компенсация влияния нелинейностей может достигаться, например, с помощью отрицательных обратных связей, охватывающих нелинейные звенья.
Включение полезных нелинейностей дает большие возможности при синтезе нелинейных систем автоматического управления. Собственно говоря, здесь речь идет о формировании нелинейных законов управления. К числу систем такого рода относятся системы с переменной структурой, примеры которых были рассмотрены в гл. III. К ним же можно отнести обширный класс оптимальных систем автоматического управления, которые будут детально рассмотрены далее в гл. VII и VIII.
ГЛАВА VII
ОБЩАЯ ХАРАКТЕРИСТИКА ЗАДАЧ И МЕТОДОВ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
§ 7.1. ПОСТАНОВКА ЗАДАЧИ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
Под оптимальной системой автоматического управления понимается наилучшая в некотором определенном смысле система. Критерии оптимальности, на основе которых строится система, могут быть самыми разными и зависят от специфики решаемой задачи. В практике автоматического управления в качестве критериев оптимальности встречаются: точность САУ (системы автоматического управления) при изменяющихся входных сигналах, время переходного процесса, интегральные критерии переходного процесса, экономичность, производительность, сложность системы управления и другие технико-экономические показатели.
К настоящему времени наибольшее развитие получили два направления в теории оптимальных САУ. Первое — это теория оптимального управления движением системы с полной информацией об объекте и возмущениях, а второе — это теория оптимального управления при случайных возмущениях.
Нужно отметить, что в развитии первого направления теории много сделано советским ученым А. А. Фельдбаумом [Л. 117], которому принадлежит заслуга в постановке и решении многих важных задач в этой области.
Принципы оптимального управления получают все большее распространение на практике. Они позволили создать новые автоматические регуляторы, следящие системы и другие устройства, которые существенно повышают эффективность промышленных систем автоматики.
Рассмотрим задачи оптимального управления при полной информации об объекте и возмущениях. Будем полагать, что объект управления линейный, полностью описан математически и его свойства менять нельзя, а управляющее устройство можно выбирать в определенных пределах. Возможности управляющего устройства, конечно, ограничиваются, исходя из специфики задачи. Как правило, ограничения наложены на управляющие воздействия и на фазовые координаты системы. Чаще всего ограничения задаются в виде систем неравенств. Для •управляющих воздействий такие неравенства можно записать в виде
М1{и) = М1{и1,...,иг)^О, (7.1)
0 = 1.....г),
239
где
dk 1 и dtk~'
(7-2)
В дальнейшем часто будем использовать обозначения типа (7.2).
Вектор управления и, подчиненный неравенствам (7.1), принадлежит некоторой области Q (и), ограниченной гиперповерхностью
Mi (и) = О U = 1, г), что будем обозна-
чать
и £ Q (и). (7.3)
Управления, удовлетворяющие условиям (7.1) или (7.3), называют допустимыми.
Например, если управление ограничено только по величине а и Ъ, то областью допустимых управлений будет отрезок ab (рис. 7.1, а). Если ограничены величина и производная управления системой неравенств
^i,
Oj ^2 ^2»
то областью допустимых управлений будет прямоугольник (рис. 7.1,6). Когда ограничена только величина управления снизу и сверху, то для последующих задач будет удобно полагать, что ограничение на управление имеет вид неравенства
|«|<1. (7.4)
К такой записи ограничений, как правило, можно перейти, сдвигая начало отсчета и изменяя масштаб величины и.
Ограничению типа (7.4) могут удовлетворять функции, имеющие разрывы первого рода. Если на всем интервале времени [О, Т], в течение которого осуществляется управление, число разрывов функции и (I) конечно, то такую функцию называют кусочно-непрерывной (рис. 7.1, в) . Практически важным частным случаем кусочно-непрерывных функций являются кусочно-постоянные функции, для которых и (/) поочередно равняется +1 или —1 (рис. 7.1, г). Когда хотят охарактеризовать куЬочно-постоянную функцию, то указывают число интервалов, в течение которых функция постоянна. Например, функция, показанная на рис. 7.1, г, имеет 4 интервала постоянства.
Ограничения на управления вызваны в большинстве задач ограниченностью энергетических ресурсов системы. Фазовые координаты ограничиваются чаще всего из соображений безопасности, прочности и. т. п. Например, угол и скорость поворота руля самолета ограничи-240
ваются из соображений прочности конструкции и допустимой перегрузки экипажа, а ускорение поворота руля определяется предельным вращающим моментом рулевой установки.
Ограничения на фазовые координаты будем записывать, как и для управлений, в виде неравенств типа (7.1)
лгДу)=лгЛ1/1.<7-5) где
или в виде условий типа (7.3)
уег(у), (7.6)
где Г(у)—область, ограниченная гиперповерхностью
^Ду) = о. (/ = 1.«)•
Фазовые координаты, удовлетворяющие условиям (7.5) или (7.6), называют допустимыми.
Наиболее важным моментом при создании оптимальных САУ является задание критерия оптимальности. Критерий Q должен представлять собой величину, зависящую от функции управления. Основной задачей при разработке оптимальной системы является обеспечение экстремального значения критерия. Например, при разработке систем, оптимальных по быстродействию, где к системе предъявляется требование наибыстрейшего перехода из одного положения в другое, в качестве критерия оптимальности можно взять время переходного процесса. В этом случае, естественно, критерий должен минимизироваться. Примером задачи, где критерий оптимальности должен достигать максимума, может быть расчет программы изменения тяги двигателей ракеты, когда при заданном количестве топлива требуется пролететь наибольшее расстояние.
Таким образом, для оптимальной системы необходимо
Q [и, у, t\ ~ extremum при и 6 й, у Е Г. (7.7)
Условие (7.7) показывает, что критерий Q зависит от выходной координаты системы, управления и времени, азадачей оптимального управления является отыскание допустимого управления u £ й (и), доставляющего экстремум критерию Q при соблюдении ограничений на фазовые координаты у £ Г (у).
Заметим, что значение критерия Q определяется законом изменения функций у (0 во времени. Такие величины, значения которых зависят от функций, называют функционалами. Математические методы отыскания функций, доставляющих экстремальное значение функционалу рассматриваются в вариационном исчислении. Функции у (t), u (t), для которых выполняется условие (7.7), называют экстремалями.
Таким образом, критерий оптимальности представляет собой функционал Q[y (/), и (01, а задача оптимального управления заключает-
241
ся 6 нахождении экстремалей у (/), u (t) при соблюдений ограничений u (fi(u) и у ( Г (у). ГМ -- J
Наиболее часто функционал задается в виде определенного интеграла, т
(?=4б[и(/),у(0]Л. (7-8)
о
Для задачи о максимальном быстродействии, например Gsl, и требование Q min „<,) обращается в требование Т = min.
Наиболее распространенной в оптимальном управлении является задача определения оптимальных процессов и (/) и соответственно у (/) в функции времени при заданных граничных условиях у (0) и у (Т).
Рис. 7.2
Определение оптимальных процессов управления и (/) и последующая их реализация возможны в системах двух типов. В разомкнутой системе (рис. 7.2, а) управляющее устройство У У по заданным граничным условиям реализует требуемый закон управления. При этом текущие фазовые координаты не участвуют в формировании управления. В замкнутой системе в УУ (рис. 7.2, б) вводятся текущие фазовые координаты х = у0 — у, где у0 = у0 (0 — заданный закон управления. Управляющее воздействие при этом зависит только от фазовых координат, т. е.
u(/) = u[x(0J. (7.9)
Конечной целью при разработке системы является установление закона (7.9) для построения замкнутой системы оптимального управления, т. е. синтез УУ. При этом находят оптимальные процессы и (/) и х (/), а затем, исключая время, получают зависимость и (х), из которой находят структуру и параметры УУ.
§ 7.2. ПРИМЕРЫ ПОСТАНОВКИ ЗАДАЧ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
Управление двигателем постоянного тока. Допустим, что имеется возможность управлять током якоря двигателя постоянного тока с независимым возбуждением (рис. 7.3, а). Примем, что магнитный поток Ф неизменен. В этом случае угол а поворота двигателя связан с током через дифференциальное уравнение равновесия моментов на валу
/сФ = J ^-+МС, (7.10
842
где i — ток якоря — управляющее воздействие; с — коэффициент; Ф —магнитный поток; J —момент инерции якоря и нагрузки, приведенный к валу двигателя; Мс — момент сопротивления; а — угол поворота вала двигателя—управляемая координата; t — реальное время.
Для простоты дальнейших выкладок примем, что моментом сопротивления можно пренебречь, т. е. Мс = 0. Кроме того, вместо реального времени t введем относительное время т= t . В этом случае уравнение (7.10) примет вид
dtajdx2 —-1. (7.11)
Учитывая принятые обозначения: у — управляемая координата, а и — управляющее воздействие введем замену I = и, а = у. С учетом такой замены окончательно запишем уравнение управляемого о) fi)
объекта (рис. 7.3, б)
d2y/dx2 = u. (7.12)
Можно сформулировать несколько задач оптимального управления двигателем, которые будут отличаться критериями оптимальности и видом ограничений.
Оптимальное быстродействие. В этом случае критерием оптимальности является время переходного процесса Т, т. е. функционал имеет вид
Рис. 7.3
т Q=$dt = T. о
Задача 1. Найти оптимальные процессы управляющего воздействия и (t) и скорости у (/), удовлетворяющие уравнению (7.12) и доставляющие минимум функционалу (7.13), при условиях: 1) на управление наложено ограничение вида (7.4), т. е. | и | 1, 2) требуется
отработать угол а0, т. е.
(7.13)
f у (t) dt =ав, О
3) граничные условия по скорости вращения вала имеют вид
й(0) = ао, |
y(T) = fflr. i
(7.14)
Для простоты выкладок примем, что начальная и конечная скорости вращения вала равны нулю, т. е.
^(0)=^(Т) = 0.
(7.15)
243
Принимая в качестве цели управления отработку угла а0, следует указывать и граничные условия по координате у. Примем для всех примеров управления двигателем, что у (0) = —сс0, у (Т) = 0, т. е. у изменяется на величину а0, заканчивая движение в точке у (/) = у (Т)=* = 0.
Задача 2. В этой задаче ограничения накладываются на нагрев двигателя или на расход энергии, т. е. задана величина интегра-т
ла Ju2 (f)dt. о
Итак, найти оптимальные процессы и (/) и у (/), удовлетворяющие уравнению (7.12) и доставляющие минимум (7.13) при условии, что заданы значения интегралов.
т т
^y(t)dt = a0; ^u2(t)dt = q0 (7.16)
о о
и граничные условия по скорости нулевые.
Оптимальная производительность. В этом случае критерием оптимальности является угол а поворота вала за определенное время Т, т. е. функционал имеет вид
т
Q=^y(t)dt. (7.17)
о
Задача 3. Найти оптимальные процессы и (f), у (f), удовлетворяющие уравнению (7.12) и максимизирующие (7.17), при условии, что на управление наложено ограничение вида (7.4), т. е. | и | 1, и гранич-
ные условия по скорости нулевые.
Если задан предельный расход энергии, а величина и не ограничивается, то можно сформулировать другую задачу на оптимальную производительность.
Задача 4. Найти оптимальные процессы и (t) и у (/), удовлетворяющие уравнению (7.12) и доставляющие максимум (7.17), при условии, что задано значение
т ^u*(t) dt =qQ о
и граничные условия по скорости нулевые.
Оптимальная экономичность. В этом случае критерием оптимальности является расход энергии за определенное время. Функционал имеет вид
г
Q=^u2(t)dt. (7.18)
о
В данном случае имеется в виду расход энергиии на нагрев двигателя. 244
Задача 5. Найти оптимальные процессы u(t) и у (/), удовлетворяющие уравнению (7.12) и минимизирующие (7.18) при условии, что задано т ^y(t) dt =а0,
и граничные условия по скорости нулевые.
Можно, варьируя условия, поставить еще ряд задач, например, когда одновременно наложены ограничения на управление и расход энергии. Однако ограничимся сформулированными задачами по управлению двигателем, так как они вполне отражают встречающиеся на практике требования к оптимальному управлению.
Оптимальная по быстродействию встреча движущихся объектов. Пусть объект А совершает равномерное прямолинейное движение в соответствии с уравнением
yA = a + bt, (7.19)
где у а — координата объекта А; а, b — постоянные; t — время.
По той же прямой в пространстве за ним движется объект В, изменение координаты ув которого описывается уравнением второго порядка
„ d2 dyR
T-^~ + ^-=U <7’20) dt* dt
с начальными условиями
Увт=Ув (0) = 0,
(7.21)
где T — постоянная времени объекта В, характеризующая его инерционные свойства.
На управление наложено ограничение вида (7.4), т. е. |u| 1.
Ставится задача так изменять управление и (f), чтобы за минимальное время положение и скорости объектов Л и В в пространстве совпали. Изменение координат у а и у в в функции времени показано на рис. 7.4, а.
245
На практике подобная задача возникает, например, при заправке в воздухе самолетов, когда заправщик движется с постоянной скоростью и на параллельный курс к нему пристраивается заправляемый самолет. Управляющим воздействием при этом является тяга Р двигателя самолета, заходящего на заправку.
Предельные значения тяги Рш1п и Ртах положительны, поэтому для того, чтобы записать ограничения на управление в виде (7.4), вместо Р будем рассматривать управление
______2Р______^тахН" Рmln
Р max—Р mln ^тах—Р mln
Для решения задачи удобно ввести в рассмотрение рассогласование между координатами объектов
*=УВ~УА- (7.22)
Подставляя ув из (7.22), а уА из (7.19) в уравнение (7.20), получим
— (7.23)
dt* dt ' '
Начальные условия для уравнения (7.23) находим по известному закону движения объекта из уравнения связи (7.22) с учетом нулевых начальных условий для движения объекта В
х(0)=Ув(0)—УА(0) = — а,
(7.24) х(0) = //в(0)-ул(0) = -й.
Если теперь ввести фазовую плоскость для переменной х, обозначив х = хъ х == х2, то задачу управления движением объекта В можно сформулировать как задачу наибыстрейшего перевода точки на фазовой плоскости из исходного положения (хх = —а, х2 = —Ь) в начало координат (рис. 7.4, б).
Задача 6. Найти оптимальные процессы и (f) и х (/), удовлетворяющие уравнению (7.23) и доставляющие минимум интегралу т
(7.13), т. е. Q = §\dt, при условии, что на управление наложено огра-о
ничение (7.4), т. е. | u| 1, начальные условия на координату х заданы равенствами (7.24), а конечные условия на координату х — нулевые, т. е. х (Т) = х (Т) = 0.
Оптимальное по быстродействию управление консервативным объектом. Пусть уравнение объекта управления имеет вид
dayldta + y = u. (7.25)
Все коэффициенты в данном уравнении равны единице, чего всегда можно добиться нормировкой переменных и, у и t. На управление наложено ограничение | и | 1. Ставится задача нахождения оптималь-246
кого по быстродействию упрайЛёййй и (i), переводящего коорДийаТу у из начального положения
= -1,
£(0)=0 в конечное положение
у(Т) = у(Т)=0. (7.27)
Если ввести фазовую плоскость с координатами у = уг, у — у2, то задача будет заключаться в наибыстрейшем переводе изображающей точки из исходных условий (—1, 0) в начало координат.
Примером такой задачи может служить перемещение мостовым краном груза, подвешенного на длинном тросе (рис. 7.5).
Пусть лебедка мостового крана, положение которой определяется координатой и, может перемещаться с любой скоростью в пределах — 1^ и +1. К лебедке па тросе подвешен груз т, положение которого определяется координатой у. Если пренебречь силами, демпфирующими колебания груза (трение и упругие деформации троса, сопротивление воздуха и пр.), то уравнение, связывающее у и и, имеет вид (7.25). Задача заключается в таком управлении положением и лебедки, чтобы груз наибыстрейшим образом перешел в точку у — 0 и скорость его в конце движения также должна стать нулевой.
Важно отметить, довольно необычный характер задачи. Попытка хотя бы неоптимально перевести груз из положения у = —1 в у = 0 путем перемещения лебедки из и — —1 в и = 0 с любой (малой или большой) скоростью приведет к незатухающим колебаниям координаты у. Действительно свободное решение уравнения движения консервативного объекта, т. е. уравнения (7.25), имеет вид
y(t) = A sin t,
где А — амплитуда колебаний, определяемая начальными условиями движения (в нашем примере скоростью перемещения лебедки из и = = —1 в и = 0).
Задача 7. Найти процессы и (t) и у (t), связанные уравнением т (7.25) и доставляющие минимум интегралу (7.13), т. е. Q== f \dt, о при условии, ч.то на управление наложено ограничение | и \ 1, и гра-
ничные условия
1/(0) = -1, у(Т) = 0,
у(0) = 0, у(Т) — 0.
Аналитическое конструирование регуляторов. Во всех рассмотренных выше примерах ставилась задача найти оптимальный процесс изменения управляющего воздействия и (1), при котором конечная цель управления (время переходного процесса, производительность, экономичность) приобретает требуемые экстремальные свойства. Теперь рассмотрим задачу нахождения оптимального регулятора.
247
При исследовании качества переходных процессов в линейных системах (см. часть I, гл. X) вводились различные интегральные критерии качества, оценивающие переходный процесс на бесконечном интервале времени. Там же было показано, что интегральные критерии качества позволяют определить оптимальные параметры регуляторов, если структура регулятора задана.
Можно поставить более общую задачу. Найти закон регулирования, т. е. аналитическую функцию, связывающую управляемую координату и управляющее воздействие и доставляющую минимум интегральному критерию качества. Такое оптимальное конструирование дифференциального уравнения регулятора средствами математического анализа получило название аналитического конструирования регуляторов. Основ
Рис. 7.5
Регулятор Объект
Рис. 7.6
ные результаты по аналитическому конструированию получены советскими учеными А. М. Летовым [Л. 57] и Н. Н. Красовским [Л. 50]. Задача'аналитического конструирования'по методам решения [и постановке родственна уже рассмотренным. Это — такая же вариационная задача, в которой в_качестве экстремали ищется функция, связывающая х (f) и u(t).
Рассмотрим постановку задачи"7аналитического конструирования. Объект управления задан с помощью дифференциальных уравнений для отклонений, что в операторной форме и соответствует заданию передаточной функции И7 (р) (рис. 7.6). Будем считать, что на систему не действуют внешние возмущения и в ней происходит переходный процесс, вызванный начальными условиями
х0== (xi(0), х2(0, ..., хп(0)} и u(0) = {u(0), й(0)} J (7.28) где
В устойчивой линейной системе в результате переходного процесса все фазовые координаты должны сходиться к нулевому значению, т. е. в установившемся режиме должно выполняться равенство
Х1(со) = ...=хп(оо)=ц(оо)=0. (7.29)
248
В качестве критерия оптимальности выберем интеграл
^Vdt (7.30)
О
от положительно-определенной квадратичной формы вида
V (7.31)
Л = 1
Интеграл (7.30) характеризует квадратичную ошибку системы. Кроме того, член и2 (/) в (7.31) характеризует стоимость управления при отработке переходного процесса (затраты энергии, нагрев и пр.), а член и2 (/) гарантирует отсутствие нереализуемых в линейных регуляторах законов, при которых скорость управляющих воздействий обращается в бесконечность.
Как уже отмечалось ранее (см. гл. II), существование интеграла (7.30) гарантирует устойчивость системы. При аналитическом конструировании задача состоит в том, чтобы найти в аналитической форме
Ф(и, и, Xj, .... хп) =0 (7.32)
закон регулирования, который с учетом уравнений объекта и при граничных условиях (7.28), (7.29) доставляет минимум интегралу (7.30).
Для дальнейшего решения в качестве примера поставим задачу аналитического конструирования регулятора в системе с объектом первого порядка.
Задача 8. Пусть объект управления описывается уравнением dx/dt -j-x+u =0. (7.33)
Все коэффициенты уравнения приняты равными единице, чего всегда можно добиться нормировкой переменных х, и, t.
Требуется отыскать такое дифференциальное уравнение, связывающее переменные х и и, удовлетворяющие уравнению объекта (7.33), чтобы интеграл
оо
Q = \[u2(t) + ii2(t) + x2(t)]dt (7.34)
о
достигал минимума.
§ 7.3. СИНТЕЗ ПРОСТЕЙШЕЙ ОПТИМАЛЬНОЙ ПО БЫСТРОДЕЙСТВИЮ СИСТЕМЫ ВТОРОГО ПОРЯДКА
Рассмотрим решение задачи отыскания оптимальных процессов и синтеза управляющего устройства на примере задачи 1 § 7.2, где для объекта с уравнением(7.12) d2ytdt2 = и, ограничением | u | 1 и гра-
ничными условиями
£/(0)=— ар, у(Т) = 0,
г/(О)=о, у(Л=о требуется обеспечить оптимальность по быстродействию.
Оптимальные процессы управления. Естественно предположить, что для наибыстрейшей отработки величины а0 следует вначале разгонять систему с предельно допустимым ускорением, а затем в определенный момент времени управление следует переключить с разгона на торможение также с предельно допустимым, но уже отрицательным, ускорением. При точно выбранном моменте переключения с разгона на торможение скорость изменения координаты у станет равной нулю как раз тогда когда, у переместится на величину а0. Поскольку максимальное и минимальное значения управления равны по модулю, то отрезки времени, затраченного на разгон и торможение, равны между собой и будут 772, где Т — время переходного процесса. График такого процесса управления и (/) показан на рис. 7.7, а.
При движении системы с положительным ускорением (и =+1, О t 772) скорость нарастает по закону (рис. 7.7, б) dyldt = t.
Координата у (рис. 7.7, в) к моменту t = 772 достигнет половины отрабатываемой величины, т. е.
Т/1 Т/2
\ y^dt~ao = ^ -«0=v-ao = —v- (7-35) \ * J d . А О 2.
о о
Отсюда найдем общее время оптимального переходного процесса
Г = 2]/^. (7.36)
Для реализации оптимального процесса в разомкнутой системе необходимо вычислительное устройство, которое по заданной величине а0 определит Т из (7.36) и осуществит по программе управление и = +1 на интервале 0 < t < TI2 и и = — 1 на интервале TI2 < t С
Т и далее и — 0 при t>T. Оптимальность рассмотренного управления можно доказать путем простых рассуждений.
Заметим, что площадь под линией у (/) при любом управлении должна быть одной и той же и равняться заданной величине а0.
Пусть, например, на отрезке времени [О, Т/2] в течение интервала т не выполнялось равенством—~Ы. Такое неоптимальнре управление 2бо
йойазайо на рис. а пункттфом й обозначейо через uR(t). Соответствующая управлению u„(t) линия изменения скорости yn(f) при t £ [О, 772] будет проходить ниже прямой Оа оптимального процесса скорости, поэтому площадь под линией уп (t) на отрезке [О, 772] окажется меньше величины а0/2. Чтобы покрыть требуемую площадь а0 при дальнейшем движении системы, линия i/H (/) должна на каком-то участке проходить выше линии ab. Это значит, что для t Z> Т/2 линии у (/) и г/н(/) должны пересечься. Второй раз пересечься внутри отрезка {TI2, TJ, или хотя бы встретиться при t = Т, линии ув (/) и у (0 не смогут, так как для этого уп (t) должна снижаться круче, чем у (t), что недопустимо из-за ограничения величины и. Отсюда следует, что время для отработки величины а0 при управлении ив (?) будет больше, чем Т.
Таким образом, любое отклонение от управления
при О^^^Т/2,
при Т/2 <Zt ^Т,
(7.37)
приводит к увеличению времени переходного процесса, следовательно, управление (7.37) является оптимальным. Напомним, что функцию и (0, определяемую в виде (7.37) , называют кусочно-постоянной.
Синтез оптимального управляющего устройства. Введем в рассмотрение фазовую плоскость с координатами
dy _dyi _ „
dt dt У2'
(7.38)
Тогда рассматриваемая задача может быть сформулирована как задача наибыстрейшего перевода точки на фазовой плоскости (ylt у2) из положения (—а0, 0) в начало координат. С учетом обозначений (7.38) можно записать
dyi = dyi и
dt2 dt dyi dt dyi
Подставляя это равенство в уравнение (7.12) объекта, получим
(dyjdyjy^u. (7.39)
Оптимальное управляющее воздействие, как видно из (7.37), может принимать только два значения и = —1 или и = 4-1. Подставляя эти значения в (7.39), можно найти уравнение для фазовых траекторий системы. При и == 4-1
yl/2 =У1± с. (7.40)
Здесь с — постоянная интегрирования, величину которой можно найти, задав координату точки, находящейся на требуемой траекто-
251
рии. Например, для траектории семейства (7.40), проходящей через начало координат, с = 0, и уравнение этой траектории имеет вид
Уг2/2 = //1. (7.41)
Семейство фазовых траекторий (7.40) для различных с показано на рис. 7.8, а. Траектория с уравнением (7.41) выделена. При и = —1
у22/2 = — t/j + c. (7.42)
Траектория, проходящая через начало координат, определяется уравнением
^/2=-У1. (7.43)
Семейство траекторий (7.42) показано на рис. 7.8, б, а траектория (7.43) выделена.
Поскольку целью управления является перевод точки на фазовой плоскости в начало координат, то заключительный этап движения может проходить только по траектории (7.41), если и — +1, или по траектории (7.43), если и = — 1.
252
Следует уточнить, что не вся траектория (7.41) приводит систему в начало координат, а только часть ее, расположенная в четвертом квадранте, для которой у2 <Z 0. Эта часть траектории может быть описана уравнением, эквивалентным (7.41) при у2<0,
= </2/2)(—sign у2). (7.44а)
Аналогично для и = —1 к началу координат ведет часть траектории (7.43) при у2 > 0. Этот участок можно описать уравнением, эквивалентным (7.43) при р2 > 0,
t/i =---|^-signy2. (7.446)
Сравнивая (7.44а) и (7.446), заметим, что эти уравнения совпадают. Таким образом, движение системы на последнем отрезке времени описывается уравнением
Л+ у sign 1/2 = 0. (7.44)
Для попадания на завершающий участок движение должно проходить по траекториям (7.40), когда начальные координаты точки лежат под линией, соответствующей уравнению (7.44), и по траекториям (7.42), когда начальные координаты изображающей точки лежат над линией, соответствующей уравнению (7.44) (рис. 7.8, в). Например, в рассматриваемой задаче перевод изображающей точки из положения (—а0, 0) начинается при и = +1 (участок АВ на рис. 7.8, в). В точке В управление должно сменить знак, т. е. для дальнейшего движения и = —1 (участок ВО).
Поскольку при попадании изображающей точки на линию (7.44) в управляющем воздействии происходит переключение с одного предельного значения на другое, кривую (7.44) можно назвать линией переключения.
Введем в рассмотрение функцию
2
О= — ^i + -y-signf/2) - (7.45)
На линии переключения, как это следует из (7.44), она обращается в нуль. Для точек фазовой плоскости, расположенных правее линии переключения, т. е. там, где и = —1, v <Z 0. В этом просто убедиться, переместившись с любой точки линии переключения вправо без изменения у2. Слагаемое yt при этом получит положительное приращение, a (#22/2)sign у2 останется неизменным. Следовательно, с учетом знака минус перед скобкой в (7.45) правая часть этого выражения получит отрицательное приращение. А так как на линии переключения v = 0, наше утверждение доказано. Аналогично можно убедиться, что для точек, расположенных левее линии переключения, где и = +1, функция v > 0.
253
Если с учётдм Рдвёдения функций b ПрЙняТь ЗйКбн управления й виде
u=sigfiv, (7.46)
то полученное управление будет совладать с оптимальным. Техническая реализация закона (7.46) относительно проста. Управление и должно формироваться с помощью идеального двухпозиционного реле, переключения которого происходят при смене знака функции v. Так как функция v управляет переключениями реле, то ее можно назвать пе-
реключающей функцией. Заметим, кстати, что выражение для переключающей функции (7.45) отличается от левой части уравнения линии переключения (7.44) только знаком.
Зная уравнения (7.45) и (7.46) , можно построить управляющее устройство для реализации оптимальной системы.
В целом структурная схема синтезированной оптимальной системы показана на рис. 7.9, где управляющее устройство УУ обведено штриховым контуром. Знак минус, стоящий перед скобкой в (7.45), учитывается знаком органа сравнения. Рассогласование (в нашем случае х = —yi) проходит на суммирующий узел, на второй вход которого подается величина —(i/22/2) sign у2, формируемая из сигнала производной у2 с помощью трех нелинейных преобразователей. Производную определяет дифференциатор р. Выходной сигнал суммирующего узла управляет положением реле, воздействующего на объект.
На основе рассмотренной задачи можно сделать следующие выводы:
1. Оптимальное управляющее воздействие представляет собой кусочно-постоянную функцию, принймающую предельные значения (±1).
254
2. Для реализации оптимального управления может быть использовано двухпозиционное реле, положение которого определяется знаком переключающей функции.
3. Техническая реализация оптимальной переключающей функции v даже для простейшей системы довольно сложна, поэтому при решении практических задач оптимального управления целесообразно найти эквивалентную переключающую функцию va, совпадающую с v по знаку, но более простую для технической реализации.
§ 7.4. СПОСОБЫ УПРАВЛЕНИЯ, БЛИЗКОГО К ОПТИМАЛЬНОМУ
Хотя в вопросах теории оптимального управления к настоящему времени получены существенные результаты, практическое применение этой теории для синтеза реальных САУ пока сравнительно ограничено. Это объясняется тем, что построение систем, у которых объекты описываются уравнениями высокого порядка и имеют сложный характер ограничений, весьма затруднительно.
Возникает задача синтеза просто реализуемых на практике приближенных законов управления (квазиоптимальных), незначительно в смысле избранного критерия отличающихся от строго оптимальных. Ориентация на построение квазиоптимальных систем может быть практически обоснована еще по следующим причинам.
1. Любое управляющее устройство строится из элементов, которые имеют ограниченные возможности, и следовательно, на свободу выбора управляющего устройства наложены определенные ограничения.
2. Математическая модель объекта, на базе которой синтезируется управление, зачастую является приближенной, так как структура и параметры объекта не всегда известны полностью.
3. При реализации строго оптимальных САУ необходима полная информация о координатах системы, входных сигналах и их производных. Получение такой информации в реальных системах связано со значительными трудностями. Например, измерение высших производных от управляемой координаты не может проводиться без погрешностей, причем вносимые искажения во многих случаях настолько велики, что они исключают возможность использования высших производных в законе управления.
Способы разработки квазиоптимальных систем можно разбить на две группы. К первой относятся способы, в которых применяется приближенная модель объекта и не используется знание строго оптимальных законов управления для точной модели. Ко второй группе относятся способы, в которых с помощью простых технических средств осуществляется приближение к известным заранее строго оптимальным управлениям, полученным для точной модели объекта.
Упрощение математического описания объекта управления. В качестве примера такого способа квазиоптимального управления можно рассмотреть следующую широко распространенную на практике задачу. Некоторый технологический процесс содержит систему автомати-
355
ческого регулирования параметра у. На пульте управления имеются только индикатор величины у и устройство для задания уставки регулятора и со своим индикатором. Уставка в данном случае является управляющим воздействием. Для удобства в эксплуатации все регуляторы выполняются так, что показания индикатора у индикатора и в установившемся режиме совпадают. Допустим, что возникла необходимость изменить регулируемую величину: вместо у а установить у в- Простейшим решением такой задачи будет задание уставке значения ив вместо ил, соответствовавшего величине у а (рис. 7.10). По истечении времени переходного процесса установится у — ув-
Однако опытный оператор, желая ускорить переход на новый режим, поступает следующим образом. Сразу в момент /0, когда возникла задача изменения режима, задается максимальное значение уставки u = птах (рис. 7.10, а). При этом начинает форсированно увеличиваться у (/). В момент времени tr, когда у достигнет требуемого значения, т. е. у (4) — у в, уставка переводится на значение и = ив- Момент переключения управления в рассмотренном примере заранее не рассчитывается, а определяется временем попадания в заданную точку у — = У в-
Управляющее воздействие такого вида является строго оптимальным для системы первого порядка. Действительно, изменение координаты у (t) для t0 t <Z 1 происходило под действием наибольшего значения управления, а задание в момент значения уставки и = ив = у в остановило процесс изменения у (/) , т. е. у (/) = ув для
tt. В этом просто убедиться, если в уравнение системы
Td±+y = u dt а
подставить и = у. Тогда dyldt = 0, т. е. изменение координаты у (/) прекратилось.
Для объектов более высокого порядка с апериодическими переходными процессами управление описанного типа уже не является строго оптимальным, так как после установления и = ив координата у (/) может продолжать изменяться (пунктирная линия на рис. 7.10, б). Тем не менее, благодаря форсировке на отрезке времени [/0, переходный процесс в такой системе будет устанавливаться быстрее, чем при обычном управлении в виде ступеньки от ил к ив-
Применение управления строго оптимального для систем первого порядка к системам более высокого порядка можно толковать следующим образом: заменить действительное уравнение системы более простым, разыскать для этого простого уравнения экстремаль и реализовать ее для управления исходной системой. Такой подход к задачам квази-оптимального управления и составляет суть способа упрощения математического описания.
Конечно, не всегда упрощение приводит к уравнению первого порядка . В [Л.4] описаны примеры, когда в качестве упрощенной системы используется система второго порядка.
В этом случае экстремаль является кусочно-постоянной функцией, принимающей предельные значения пщах и цвд1ц, а моменты переклю-256
чения находятся из решения соответствующей вариационной задачи строго оптимального управления.
Квазиоптимальное управление колебательным объектом. Рассмотренный выше способ квазиоптимального управления, когда управляющее воздействие принимает предельные значения, а моменты переключения находятся для упрощенной математической модели, может дать неудовлетворительные результаты на колебательных объектах, так как даже незначительные ошибки в моментах переключения могут привести к большим перерегулированиям в переходном процессе.
Рис. 7.11
Для квазиоптимального управления колебательными объектами можно предложить следующий способ [Л. 103]. Если уравнение объекта имеет вид
^ + 2S®+^-«. <7.47>
то для перевода выходной координаты у из уд в ув на вход объекта в момент /0 подается скачок из положения ид в ис
ис=иАЛ
иВ~иА
I -}-т
(7.48)
где т — величина перерегулирования переходной функции при отработке единичной ступеньки.
Величина у (/) изменяется при этом с перерегулированием и в момент tv достигает значения ув, т. е. у (it) = у в (рис. 7.11, б). Момент соответствует максимуму функции у (/), поэтому у (4) = 0. При t = ti на вход объекта подается вторая ступенька, в результате которой и = ив- Поскольку для t = tr у = и = ив я у (ii) = 0, то из уравнения (7.47) следует, что у (/х) = 0. Равенство нулю первой и второй производных для системы второго порядка означает, что процесс изме. 9 Зак- 447 257
нения у (t) установился, т. е. при t > 4 у (/) = const = у в- Длина отрезка времени [4 — 41 соответствует половине периода колебаний, показанных штрихом на рис. 7.11, о и равна
'-‘. = 7=^- Р.49)
Таким образом, управляющее воздействие и (t) вида, показанного на рис. 7.11, позволяет обеспечить переходный процесс без перерегулирования за конечное время (7.49) в колебательном объекте.
В задаче 7 управления консервативным объектом £ = 0, а перерегулирование т = 1,так как при единичном воздействии в объекте возникают незатухающие колебания. Подставляя эти значения в (7.48) и (7.49), найдем закон квазиоптимального управления консервативным объектом: в момент 4 на вход объекта подается ступенька, высота которой равна половине отрабатываемой величины, а в момент 4 = = t0 + л подается вторая ступенька такой же величины. Время переходного процесса при этом Т = л.
Аппроксимация оптимальной переключающей функции. Как отмечалось в § 7.3, для линейных задач оптимального управления (где объект и функционал линейны) и для ограничений в виде неравенств [типа (7.4)] оптимальное управляющее воздействие является кусочнопостоянной функцией, принимающей предельные значения. Реализа-, ция такого управляющего воздействия осуществляется с помощью реле, на вход которого подается величина v, формируемая в соответствии с выражением для переключающей функции.
Переключающая функция, как правило, представляет собой сложную нелинейную функцию фазовых координат, и для ее реализации необходимо применять вычислительные устройства. Даже для простейшей оптимальной системы второго порядка устройство, реализующее функцию v (уъ у2) (см. рис. 7.9) , содержит три нелинейных преобразователя. Для систем, где объект описывают более сложными уравнениями, форма линий переключения v (ylt у2) = 0 на фазовой плоскости может быть весьма причудливой и трудной для реализации.
Для систем выше второго порядка уравнение вида
v{yi, .... Уп) = О. (7.50)
определяет в фазовом пространстве с координатами ylt ..., уп некоторую гиперповерхность переключения, степень сложности реализации которой определяется ее формой.
Если найдена оптимальная переключающая функция р0 (ylt уп), то задачей разработчика системы является аппроксимация этой функции удобными для технической реализации функциями ор. Главным вопросом при аппроксимации функции п0 (Уъ Уп) является простота последующей реализации.
Наиболее удобной в этом смысле является, конечно, линейная переключающая функция. В фазовом пространстве ей соответствует гиперплоскость, а для технической реализации необходимы лишь ли-258
иейные у to ли тел й й сумматор. К числу простых для реализации относятся также кусочно-линейные и релейные функции.
Осуществляя аппроксимацию оптимальной переключающей функции v0, важно оценить качественные отклонения процессов в системе, возникающие при этом. Иными словами, критерием качества аппроксимации должен быть характер процессов в САУ, а не какой-либо показатель близости функций v0 и vp. Поясним это на следующем примере.
Пусть предложено два варианта аппроксимации оптимальной переключающей функции (7.45) для простейшей оптимальной системы второго порядка в ограниченной области фазовых координат —а
«Л а; —b у г Ь. На рис. 7.12 показаны оптимальная линия переключения с уравнением ц0 = 0 (штрихом) и предложенные для сравнения линии переключения с уравнением ур1 = 0 (рис. 7.12, а, линия ABCD) и цр2 = О (рис. 7.12, б, линия ABCD). Допустим, что в качестве критерия близости линий и0 = 0 и лрг = 0 (г = 1,2) взят
интеграл
а b
Л = $ $ Уг)~ ^pi (У1. Z/г)]8 dy2, — a—b
(7.51)
оценивающий площадь между линиями. Допустим, кроме того, что аппроксимация функцией г>р1 менее удачна с точки зрения критерия (7.51) , т. е. Д > /2. Тем не менее процессы при аппроксимации цр1 могут оказаться более качественными, чем при аппроксимации ор2.
Убедимся в этом, полагая, что в простейшей оптимальной системе, структурная схема которой показана на рис. 7.9, а фазовые портреты— на рис. 7.8, реализована не оптимальная функция переключения, а upi. Действительно, из рис. 7.12, а видно, что после того, как изображающая точка, выйдя из Мг, например, достигнет линии переключения, в системе возникнет скользящий режим. Дальнейшее движение идет по линии CD, пока изображающая точка не попадает на оптималь-9* 259
ную Линию переключения. После этого движение идет по Оптимальной траектории с0 = 0 от точки С до начала координат. Если начальным условиям соответствовала точка М2, то после попадания на линию переключения система движется в скользящем режиме по участку прямой ВО, Во всех случаях для переключающей функции цр1 переходные процессы проходят без колебаний, причем точка на фазовой плоскости движется, как правило, в скользящем режиме по линии переключения цр1 = 0.
Для переключающей функции ир2 переходные процессы по отработке начальных условий сопровождаются колебаниями, что очевидно из рис. 7.12, б.
Г Л АВА Vflt,
МЕТОДЫ ТЕОРИИ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
§ 8.1. КРАТКАЯ ХАРАКТЕРИСТИКА МЕТОДОВ
Задача оптимального управления в гл. VII была сформулирована как задача достижения экстремума функционала Q [у (/), и (/)] путем выбора управления u (t) при соблюдении необходимых ограничений на управления и фазовые координаты. Математическим аппаратом для нахождения экстремалей является вариационное исчисление.
Можно выделить три основных метода в вариационном исчислении, используемых для решения задач оптимального управления: применение уравнения Эйлера, принцип максимума и динамическое программирование.
Исторически первым появился метод, использующий уравнение Эйлера. Основные задачи, для которых и была развита Эйлером теория, имели экстремалями гладкие функции, а экстремизируемый функционал и дополнительные условия задавались нелинейными функциями координат. Поэтому уравнение Эйлера целесообразно применять для решения оптимальных задач управления, где по физическому смыслу трудно ожидать решения в виде разрывных функций и где функционал и уравнения связи существенно нелинейны.
К середине пятидесятых годов XX в. практикой автоматического управления была доказана целесообразность применения во многих линейных задачах кусочно-непрерывных управляющих воздействий. Новые задачи обусловили появление нового метода — принципа максимума, который наиболее эффективно дает решение для линейных оптимальных задач при ограничениях на управление в виде неравенств.
Метод динамического программирования, в основу которого положен принцип оптимальности, развился как аппарат исследования многошаговых оптимальных решений в различных отраслях науки и техники, в том числе в автоматическом управлении, также в пятидесятые годы. Этот метод наиболее удачно применяется в задачах с дискретным временем и уравнениями в конечных разностях благодаря удачному сочетанию принципа оптимальности и возможностям современной вычислительной техники.
261
$ 8.5. уравнение Эйлера и его применение ДЛЯ РЕШЕНИЯ ЗАДАЧ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
Уравнение Эйлера для нахождения функции х (Z), доставляющей экстремум функционалу
т
G[x(t), x(t)]dt, (8.1)
о имеет вид
Gx-jG-=0, (8.2)
где Gx = dGldx, G^ =dG/dx.
В большинстве технических приложений вариационного исчисления функции, доставляющие экстремум функционалу, подчинены некоторым дополнительным условиям (уравнениям связи).
Для задач управления — это уравнения управляемого объекта вида
<рг [x(Z), x(Z)] = O (/ = 1, ..., п). (8.3)
Для решения вариационной задачи в этом случае используется метод неопределенных множителей Лагранжа, суть которого состоит в том, что уравнение Эйлера составляется для вспомогательной функции
F=Glx(f),i(/)l+ ЗМОФЛт *(0], (8-4)
1= 1
где (Z) — множители Лагранжа, подлежащие определению.
Функция х (Z) и множители Лагранжа (Z), .... (Z) находят-
ся из системы (п + 1) уравнений: уравнения Эйлера для функции (8.4) и п уравнений (8.3) связи. Сформулированную задачу на условный экстремум называют общей задачей Лаграцрка.
Если условия, которым подчинены искомые функции, заданы в виде определенных интегралов вида
$ Kt\x{t), x(t)]dt = Qi (i = l.и), (8.5)
о
где Qi — заданные величины, то для решения задачи также составляется вспомогательная функция
F = G[x(Z), x(Z)] + 2 ^^[x(Z),x(Z)]. (8.6)
4=1
Здесь — неопределенные множители Лагранжа, не зависящие от времени. Вариационная задача при условиях вида (8.5) носит название изопериметрической задачи. Для нахождения функции x(t) и множителей используются, как и в общей задаче Лагранжа, уравнение Эйлера для функции (8.6) и п уравнений связи (8.5).
Рассмотрим примеры применения уравнений Эйлера для решения задач оптимального управления.
262
Пример 8.1. Рассмотрим задачу 5 § 7.2 об оптимальном управления-»-приводом при минимальных затратах энергии, когда уравнение объекта имеет вид
dst//d/s = u, (8.7а)
граничные условия по скорости нулевые
Р(0) = НТ)=0, (8.8а)
и задана величина отрабатываемого угла
т у (i) di = a,0. (8.9а)
о
Если ввести обозначения
У~У1< 1
dyl/dt=y=y2, )
то (8.7а), (8.8а), (8.9а) можно переписать
Уг — и, (8-7)
№(0) = 1/2(Л=0, (8-8)
т
\у2 (0 df = a0. (8-9)
о
Функционалом, который нужно минимизировать выбором функций u(t) и у2 (/), является интеграл
т
Q = ^u*(t)dt. (8.10)
о
Подставляя и (/) из (8.7) в (8.10), запишем
т
Q^iyiYdt. (8.11)
о
Получим изопериметрическую задачу минимизации функционала (8.11) при условии, что интеграл (8.9) имеет заданное значение.
Подынтегральная функция в минимизируемом функционале
G = W.
Подынтегральная функция в функционале, значение которого задано,
ЛГ1 = </2-
Образуем функцию F [см. (8.6)]:
F= G 4- Лц Ki =( i/a)8 Уг> (8.12)
где Z,! — неопределенный множитель Лагранжа.
Составим уравнение Эйлера для функции (8.12)
Fy2 — ^ii
dr*
263
Окончательно запишем
d
Fvi Ру2 = ^\. — ^Уг = ^
или
1/2 = Х1/2. (8.13)
После первого интегрирования уравнения (8.13) находим закон изменения управляющего воздействия
%!
« = = + (8.14)
Повторно интегрируя, найдем оптимальный процесс
А,.
= 2 + С^ + С2. (8.15)
Для нахождения трех неизвестных в (8.15) (неопределенного множителя и постоянных интегрирования С1( С2) используем два уравнения для граничных условий (8.8) и равенство (8.9). Подставив в (8.15) t — 0 и учитывая, что у2 (0) = = 0 [в соответствии с (8.8)], находим Са = 0.
Подставляя в (8.15) t = Т и учитывая, что уа (Т) = 0 [в соответствии с (8.8)], получим первое уравнение для определения А; и С\:
Та + С1 Т = 0. (8.16)
Интегрируя (8.15) в пределах 0 < t < Т и учитывая равенство (8.9), получим второе уравнение для определения и С2:
Т к С
«о= \y2(t)dt = ^ Т*+^-Т*. (8.17)
о
Решая совместно (8.16) и (8.17) относительно Сг и находим
24а0
,
1 73 ’
6« (8J8)
6а0 с1“ Т2
Учитывая (8.18) и С2 = 0, можно окончательно записать уравнения для опти мальных процессов u*(f) и y*(f)
бар 12а0
“* - -уг t-,
6а0 6ар „
4/*Ю = ^г<—уг <2-
(8.19)
Графики, соответствующие формулам (8.19), приведены на рис. 8.1. Как видно из рис. 8.1 а, управляющее воздействие и* (/) (ток якоря двигателя) должно меняться по линейному закону, а скорость у\ = dy*!dt — по параболе (рис. 8.1, б).
После того как найдены оптимальные процессы, целесообразно оценить степень оптимальности полученного управления. Для этого сравним затраты энергии при оптимальном управлении с затратами энергии при управлении в виде прямоугольной диаграммы (разгоц и торможение двигателя при постоянном токе 264
Якоря). Найдем параметры управления с прямоугольной диаграммой (рис. 8.2, а)-. обеспечивающего отработку угла а0 за время Т. Пусть управление принимает значения ип = а для 0 < t < 772 и ип = —а для 772 < г < Т. Очевидно, что изменение выходной координаты за время Т будет определиться площадью под линией i/ап (0 (рис. 8.2, б), причем в силу равенства по модулю положительного и отрицательного значений управления
т/2
а0 = 2 у2п (/) dt.
о
Для 0 < t < Т/2 У2а — а1, следовательно,
Т/2 Т,
С . аТ2 а0— 2 \ at dt —-----,
Й 4
откуда находим
(8.20)
Окончательно запишем закон управления при прямоугольной диаграмме, который кажется более естественным для задач оптимального управления, чем линейный закон:
4- —° для 0 < Г < Т/2;
~^7ДЛя T!2<t<T.
(8.21)
Подставляя (8.19) и (8.21) в выражение (8.10) для функционала, находим для оптимального управления
т
(8.22) о
266
ДЛя управления по пряйоугоЛьноА диаграмме
р 16а0а
(2п=\«па^=-^Г- (8-23)
О Г
Степень оптимальности
Подставляя сюда значения для затрат энергии из (8,22) и (8. 23), находим
х = 1,33,
т. е. процесс при прямоугольной диаграмме приводит к расходу энергии на 33 Уа большему, чем расход при оптимальном управлении.
Пример 8.2. Рассмотрим задачу 2 § 7.2 об оптимальном по быстродействию управления двигателем при условии, что заданы отрабатываемый угол а0 и до-. пустимые потери <70, т. е. заданы интегралы
т
<2i=f Уз dt=a0, о
Г
<2a = jG/2)2d< = <7o, о
а граничные условия по скорости нулевые. Требуется найти и (I) и у3 (/), доставляющие минимум функционалу
Т
Q = T=jldL
О
Вновь встречаемся с изопериметрической задачей, где подынтегральная функция экстремизируемого функционала G = 1, а подынтегральные функции функционалов с заданными значениями равны соответственно Ki = у%> Кг = = (</г)2-
Образуем функцию F [см. ( 8.6)]:
2
F=G+ 2 ^2C,- = 1+l1ys+X2(i;2)a. (8.24)
r=i
Составляем для (8.24) уравнение Эйлера d Fyi = ^i> = 2^з Уг< ~ Руг=^гУг.
Окончательно запишем
—2Х2 у 2 — О или
Уа = Яо1 (8.25)
где обозначено а0 = Х2/2Х2.
После первого интегрирования находим
«(0 = J/2 = ae/ + a1. (8.26)
Повторно интегрируем
V1 (0 --у *2+«1 <+*«• (8.27)
ЯМ
Постоянные во, aj, аа в (8.27) находим из граничных условий для и по величине интеграла Qlt как в примере 8.1.
Из (8.26) и (8.27) видно, что форма оптимального процесса в этой задаче такая же, как и в предыдущем примере.
Пример 8.3. Рассмотрим задачу 4 § 7.2 оптимального по производительности управления двигателем постоянного тока, когда требуется обеспечить максимум функционала
т a=\y2(t) dt о
при заданной величине интеграла
т
Qi = i^2)2dt = qQ (8.28)
о
и известных граничных условиях по скорости.
Как и в предыдущих примерах поставленная вариационная задача является изопериметрической. Для решения ее образуем функцию F = G + XjKj, где G = у2\ Kj = (j/a)2; Xj — неопределенный множитель Лагранжа.
Таким образом
Г^ + Мг/г)2- (8.29)
Составляем для (8.29) уравнение Эйлера:
d
F^-^Fi.==X~^^ = Q- (8.30)
Дифференциальное уравнение (8.30) для экстремали в данной задаче совпадает с уравнениями для экстремалей (8.25) и (8.13) в примерах 8.2 и 8.1 соответственно. Отсюда, следует, что и формы экстремалей для всех трех задач одинаковы. Различие может быть только в коэффициентах, которые находятся из граничных условий и по заданной величине интеграла а0 или qa.
Одинаковая форма оптимальных процессов для всех трех примеров объясняется родственностью задач, в которых рассматриваются одинаковые функционалы, а индивидуальность задачи проявляется только в выборе одного из трех функционалов для экстремизации и фиксации двух других.
В рассмотренных примерах при формировании функции F, для которой составлялось уравнение Эйлера, не использовались в явном виде в качестве условий связи уравнения объекта. Это объясняется простым характером соотношений между координатами объекта и управлением в рассмотренных задачах, благодаря чему удалось просто представить все функционалы как функции от у2 (/), относительно которых и решалась вариационная задача.
Когда связь между координатами объекта более сложная или когда необходимо искать оптимальные процессы по фазовым координатам и управлению одновременно, уравнения объекта должны входить в состав функции F. В этом случае встречаемся с общей вариационной задачей Лагранжа, примеры решения которой рассмотрены ниже.
267
Пример 8.4. Рассмотрим задачу 8 § 7.2 об аналитическом конструировании регулятора. Требуется найти оптимальную передаточную функцию Й7р(р) регулятора, который в замкнутой системе с объектом, имеющим передаточную функцию W(p) = -J _|_ р (см. рис. 7.6), для переходных составляющих х я и удовлетворяет уравнению
х+х+« = 0. (8.31)
Условием оптимальности является минимум интеграла
Q = f [х» (/) + «“ (П+«а (01 dr, (8.32)
о
при граничных условиях
х(О)=хо, х(оо) = 0;
u(O)=uo, u(oo) = 0.
Для вариационной задачи минимизации функционала (8.32) дифференциальное уравнение (8.31) является уравнением связи и может быть записано в виде (8.3)
<р [и, х, х] = х+* + « = 0. (8.33)
Образуем фунцию (8.4)
Г=6 + Х(0 ф = х» + и»-|-и2 + М0 (* + * + «), (8.34)
где А, (/) — неопределенный множитель Лагранжа, который в отличие от изо-периметрической задачи уже не является постоянной величиной.
Поскольку для синтеза регулятора важно знать оптимальные процессы на его входе и выходе, составим уравнения Эйлера относительно переменных х (/) и и (/) для функции F
2« +А—2u=0,
2* + 1—X =0.
Дополняя эту систему уравнением (8.33) объекта и располагая переменные в соответствующем порядке, получим систему уравнений вариационной задачи
2 (и — и) 4-А =0,
2х +(А— X) =0, и +(*+*) =0-
(8.35)
Для решения системы дифференциальных уравнений (8.35) необходимо най-и х арактеристическое уравнение, получаемое путем приравнивания характеристического определителя нулю, т. е.
2 (1—р«)
0
1
0
2
(1+р)
1
(1-р) о
= 0.
Раскроем определитель, тогда
р4—2р2 + 2 = 0.
(8.36)
Характеристическое уравнение (8.36) имеет четыре корня, соответствующих различным сочетаниям знаков плюс и минус в следующем выражении:
Pi. г. з. 4 = ±У 1 Т /•
(8.37)
268
Схема расположения корней в комплексной плоскости показана на рис. 8.3.
Для простых корней характеристического уравнения общим решением системы будет сумма экспонент. Например, для рассогласования можно записать
4 ,
• <8-38) /=1
Постоянные Ct могут быть найдены из граничных условий. Кстати, из того факта, что на бесконечности х -> 0, следует равенство нулю коэффициентов при экспонентах, показатели которых имеют положительную вещественную часть. Из рис. 8.3 видно, что Re ра = Re р4 > 0, следовательно, в (8.38) необходимо принять С3 = С4 = 0. С учетом этого равенства перепишем (8.38).
*=<?! ер1‘+С2ер1‘.
Дифференцируя и подставляя х в уравнение объекта (8.31), можно найти и.
При дифференцировании также можем найти и. Запишем совместно выражения
для процессов в системе и их производных
x~Ct ePlt +C2epl,t;
x=PlCieplt+ p2C2ep,t, (8.39)
— u=(l +Р1)С! еР1< + (1+р2) (W”*;
— “=Pi (1 +Pi) Ci ер'1-\~р2 О+Рз) С2 ер'1-
Проанализируем полученное решение. Во-первых, процессы в оптимальной системе соответствуют линейным дифференциальным уравнениям. Отсюда с учетом линейности объекта можно
заключить, что оптимальный регуля-
тор также должен быть линейным. Во-вторых, полученное решение соответст-
вует уравнению системы второго порядка.
Так как объект описывается уравнением инерционного звена, то получение уравнения второго порядка для системы требует, чтобы передаточная функция регулятора имела знаменатель первого порядка. Числитель при этом может иметь любой порядок от 0 до 2.
Предположим, что регулятор описывается уравнением
Ax-)-Bx = Cu-}-Du. (8.40)
Подставим в (8.40) выражения (8.39) для всех координат и произведем простейшие преобразования. В результате получим
Cj ePli [^pj + B-J-Cp! (1 +pi) 4-0(1 4-pi)l 4-
4-С2 ep,t [Ap2-j-B-j-Cp2 (1 4-Ра)4-О (1 4"Рз)] = 0. (8.41)
Функции С1еР1* и С2ерг< не могут быть одновременно тождественно равны нулю, в противном случае было бы х = 0, а это означало бы невыполнение задачи управления. Отсюда следует, что должны равняться нулю обе квадратные скобки в (8.41), т. е.
ЛР14-54-СР1(14-Р1) + О(14*Р1) = 0, (8 42)
Яр24-В4-Ср2 (14~Ра) 4- О (14-р2) = 0.
Полученная система уравнений позволяет найти параметры оптимального регулятора, т, е. параметры оптимального закона управления.
269
Поскольку уравнений только два, а неизвестных четыре, то для двух неизвестных могут быть приняты любые значения. Отсюда очевидна неоднозначность получаемого решения. Важно подчеркнуть, что неоднозначность имеется только в выборе параметров (а отсюда и структуры), но оптимальный процесс единственный и определяется системой (8.39). »
Рассмотрим некоторые важные решения, вытекающие из (8.42). Проще всего задавать пару неизвестных равными нулю. При этом получаем следующие структуры регуляторов:
1) д = £ с= 0 или В = D = О — пропорциональный регулятор с уравнением Вх = Du или Ах = Си-, 2) В — С = 0 — идеальный дифференцирующий регу-
А
лятор с уравнением и = р-х; 3) А = D = О — интегрирующий регулятор
(И -регулятор) с уравнением
и =
В С
-J x(x)dT.
(Сочетания А = В — 0 или С = D = 0 лишены здравого смысла.) Не вдаваясь в подробности применения перечисленных регуляторов, сразу заметим, что при задании любой пары неизвестных нулями и остальные неизвестные при решении системы (8.42) обращаются в нули. Это говорит о том, что рассмотренные структуры регуляторов 1—3 не могут быть взяты в качестве оптимальных.
Рассмотрим еще два сочетания произвольно задаваемых неизвестных:
4) А = О, D = 1. При таком выборе параметров получим регулятор с уравнением
Вх — {Си + и),
передаточная функция которого имеет вид ^р(Р)=У(р)/Х(р) = В/(Ср+1). (8.43)
Из (8.43) видно, что полученный регулятор описывается инерционным звеном, требуется определить его коэффициент усиления и постоянную времени. Очевидный недостаток этого регулятора заключается в том, что получаемая при этбм система является статической;
5) если задать С = 1 и D = 0, то получим регулятор с уравнением Ах + + Вх = и, передаточная функция которого имеет вид
W'p (Р) =
и (р) Ар-\-В Х(Р) ~ Р
1
(Л/В) р
(8.44)
1 +
Регулятор с такой передаточной функцией называют пропорционально-интегральным (ПИ-регулятор), причем параметр А трактуется как коэффициент усиления, А/В — как время изодрома. Система с таким регулятором является уже астатической. Поэтому целесообразно в качестве оптимального принять регулятор с передаточной функцией (8.44).
Определим параметры Л и В, подставляя в систему уравнений (8.42) С = 1 и D = О
Api + B + Pi (1 +Р1) = О,
Лр2 + В + Pj (1 +р2) = 0.
Из (8.45) с учетом числовых значений [см. рис. 8.3 и (8.37)] находим
Л= —(1+pi + p2)=1,°8, б = Р1Рг=Р/2 •
Полученный результат по аналитическому конструированию оптимального регулятора для инерционного объекта имеет большое при-270
кладное значение. Из решения вариационной задачи с функционалом общего вида
Q = J (jc2-f-ua + ua) dt, О
учитывающим качество процессов (слагаемое х2 под знаком интеграла), стоимость управления (слагаемое и2), возможность технической реализации (и2), установлено, что оптимальным регулятором является ПИ-регулятор и найдены его параметры. Этот результат является теоретическим обоснованием широкого применения в промышленной автоматике именно ПИ-регуляторов при управлении инерционными объектами.
Применение уравнения Эйлера при ограничениях на управление. В рассмотренных примерах на искомые функции оптимальных процессов не накладывалось никаких ограничений. Между тем на управление (иногда и на фазовые координаты) могут быть наложены ограничения. Наиболее часто встречаются ограничения, задаваемые в форме неравенств, например, вида (7.4) | х) 1.
Такое неравенство ограничивает свободу варьирования функции при отыскании экстремалей. Основное необходимое условие экстремума — уравнение Эйлера — выводится в предположении, что если х (0 — экстремаль, то х + г| и х - т] (где т] > 0) — допустимые функции. Тогда можно сравнить значение функционала на экстремали со значениями его на функциях х + т] и х — т]. Если же область изменения х (0 замкнута и х (/) проходит по границе, то одна из функций X — Т] или х + т] выходит из допустимой области.
Рассмотрим возможный путь преодоления этой трудности, положив для простоты, что экстремаль ищется вблизи одной из границ допустимой области, определяемой неравенством
х>ф(/). (8.47)
Например, для ограничения |х| 1 условие (8.47) запишется как
х > —1, т. е. <р (/) = —1. Произведем замену переменных, введя в рассмотрение координату z, определяемую как
z2=x—<р. (8.48)
На новую переменную z уже не наложено ограничений, а границе области для переменной х соответствует z = 0. Запишем функционал т
Q = [х, х, t]di в новых переменных. Из (8.48) следует, что х =
^0
= z2 + ф, откуда
X =222 +ф.
Подставляя эти выражения в функционал Q, запишем т
<?=$6[г, + ф; Szi+ф; t}dt. (8.49)
t.
271
Поскольку на г уже не наложено ограничений, то экстремум функционала (8.49) можно искать с помощью уравнения Эйлера
Gz— — Gz =0. (8.50)
zdt
Вычислим составляющие уравнения (8.50), используя замены для х и х через г:
Gd(j дх । dG дх л > , л *
2 =-— =— .----1—г----= ux2z +их2 г ;
dz дх дг дх дг
п dG dG дх , dG дх п о
(j г — —- = — • —г Ч-г • —- -= (j £ 2Z‘.
дг dx dz dx dz
— Gi =2z( — gA+G£ 2z.
dt ‘ \dt j
С учетом проведенных вычислений запишем уравнение (8.50)
Gs 2z + G£2z —2z — G£—G£2z = 0 dt
или
2Z(Gx-4M=0- (8-51)
\ dt )
Уравнение (8.51) фактически распадается на два уравнения: 1) z = 0, что соответствует границе допустимой области, и 2) уравнение Эйлера для исходного функционала
Gx— — G'x =0. х dt ‘
Таким образом, из (8.51) следует, что экстремум функционала при ограничениях в виде неравенств может достигаться лишь на кривых, составленных из кусков экстремалей и кусков границы допустимой области.
К сожалению, уравнение (8.51) указывает лишь на допустимость использования в качестве экстремалей граничных значений управляющей функции и (f), но не позволяет доказать, что для линейной задачи, например, при ограничении |и|1 управление принимает только граничные значения. Такие доказательства можно просто получить с помощью принципа максимума в следующем параграфе, а иногда, как для простейшей оптимальной системы второго порядка (§ 7.3), это следует из физических соображений.
Если же заранее известно, что управление является кусочно-постоянной функцией, принимающей граничные значения и = +1 и и = —1, то с помощью уравнения Эйлера удается найти параметры такой управляющей функции, т. е. число интервалов постоянства управления и моменты переключения.
272
Для этого условие | и | = 1 запишем с помощью следующего интеграла
т
5 U2mdt = T, (8.52)
о
где /и—> оо (целое число).
Если хотя бы на малом участке времени | и | > 1, то и2п -> оо при оо, и интеграл превзойдет заданное значение Т. Если же, наоборот, хотя на небольшом участке |u|< 1, то и2т -> 0, и значение интеграла будет меньше Т. При замене условия | и | = 1 условием (8.52) вариационная задача отыскания экстремали и (t) становится изопериметрической задачей, пути решения которой уже изучали.
Пример 8.5. Рассмотрим задачу 1 § 7.2 об оптимальном быстродействии для объекта с уравнением у = и при ограничении на управление | и| <, 1. Уравнение объекта удобно записать в виде системы уравнений первого порядка, которые в дальнейшем используем как уравнения связи. Обозначив ух = у, у2,= Уг имеем
У1—Уз>
у2 = и, или
(8.53) 4>2=j/2— U—Q.
Полагая, что экстремалью является кусочно-постоянная функция | и (/) | = = 1, введем еще условие (8.52)
т
| u2mdt = T, где m -> оо. о
Подынтегральная функция в экстремируемом функционале в задаче об оптимальном быстродействии 6=1.
Подынтегральная функция в функционале, являющемся условием, будет Ко “ “2т-
Составляем функцию
F = G + X0Ko + A.i (О Ф1 + Х2 (()Ф2= 1 + А.о «2/п4-
+М (О (У1—Уз)~1- Ха (0 (Уз—и)- (8.54)
Поскольку в функцию F входят дифференциальные уравнения связи (8.53), то поставленная задача относится к общей вариационной задаче Лагранжа. Отметим, что в (8.54) Хо = const является неопределенным множителем Лагранжа в изопериметрической задаче, a Хх (/) и Х3 (/) — функциями времени. В качестве экстремалей должны разыскиваться функции и (/), yt (t) и у3 (/), поэтому составляем уравнения Эйлера для каждой из неизвестных
Fu—F- =Х02ти2'я~1—Х3 = 0, (8.55)
dt
(8.56)
F,. - Х1-Х3=0. (8.57)
327
Из уравнения (8.65) следует, что
М)
2тХо
(8.58)
Заметим, что при целом т -* °о для любого числа А справедливы следующие равенства (введенные ранее в гл. II)
2m—1 у— ( + 1. если А > 0; у А — 1 , „
(—I, если Л<0.
Эти равенства по определению функции sign А можно переписать в виде
2m—1 /— у А = sign Л, где т-»оо,
С учетом этого запишем закон оптимального управления (8.58):
(8.59)
'Гак как m и Ло постоянные.числа, то поведение функции и (t) определяется только изменением Х2 (I). Из (8.56) следует, что Xj = const, а из (8.57) находим
Ха (i) = C2-Cj. i,
(8.60)
где Cj и С2 — постоянные интегрирования, которые можно найти из граничных условий задачи.
Подставляя (8.60) в (8.59), получим окончательно
и (Z) = sign [1/ш (а2—“101.
(8.61)
Из (8.61) видно, что управление и (I) может сменить знак не более одного раза, т. е. может содержать не более двух интервалов постоянства. Этот результат совпадает с результатом § 7.3.
§ 8.3. ПРИНЦИП МАКСИМУМА
И ЕГО ПРИМЕНЕНИЕ ДЛЯ РЕШЕНИЯ ЗАДАЧ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
f Принцип максимума. Рассматриваемый метод решения вариационных задач был разработан коллективом советских ученых под руководством академика Л. С. Понтрягина в период 1956—1960 гг. Центральным стержнем метода является принцип максимума, высказанный впервые Л. С. Понтрягиным в виде гипотезы, поэтому указанный метод решения вариационных задач широко известен как принцип максимума Понтрягина [Л. 90, 21, 117].
Нужно отметить, что принцип максимума разрабатывался специально для решения задач оптимального управления, поэтому и постановка задачи и терминология в принципе максимума гораздо ближе специалистам по управлению, чем в методах, основанных на уравнении Эйлера. Но главным достоинством этого метода является то, что класс искомых экстремалей включает в себя кусочно-непрерывные функции. 274
Теоремы принципа максимума справедливы для систем управления, поведение которых можно описать системой дифференциальных уравнений первого порядка:
yi = fi(yi. .... Уп. Ui. .... Ur) (i=l, .... n). (8.62)
где i/t — фазовые координаты объекта; uj — управления.
Ставится задача — отыскать управления и (/), переводящие систему за время Т из положения у (/0) в положение у (Г) и доставляющие экстремальное значение функционалу
т
Q = f G(y, u, t) dt.
Переход к описанию объекта управления в виде системы уравнений вида (8.62) от линейного уравнения n-го порядка, например, осущест-dk~ ly
вляется путем замены переменных yk = и подстановки нх в исходное уравнение. Пусть уравнение объекта с одним управляющим воздействием и
dn у , dn~l у , .
а0 ~т^- + а1 —+ апУ = «>
din~x
Тогда, обозначая y-t = у, y2 = у, уа = у, .... 'можем записать систему п уравнений первого порядка
У1=У2.
У2=Уз,
Уп—.1 Уп>
Уп~ — - 1а1Уп + ••• +ап У1—и1-
а0
В число фазовых координат объекта включают еще величину у0, характеризующую текущее значение функционала, т. е.
go(O = $G[«. У. {y0(T) = Q\.
I о
Дифференциальное уравнение для координаты г/0 записывается
y0 = G[zj, у, t}=fa{u, у, t). (8.63)
Добавляя уравнение (8.63) в (8.62), запишем окончательно систему уравнений задачи оптимального управления
y0 = f<Au> У> 0 = G У. И;
yJ);
yn = fn(u, у, 0.
275
или в общем виде
^=А(«. У. О (» = 0......«)• (8--64)
Важную роль в принципе максимума играют вспомогательные переменные "Фо (0..фп (0 и функция
д = 2 ф/(О/г(«. у. О- (8-65)
I = 0
Функции фг (0 определяются из дифференциальных уравнений
= — (г=0..........п). (8.66)
dt dyt
Важно подчеркнуть, что уравнение (8.66) является определением функций фг (if), и на вопрос «что такое функции фг (/)?» — исчерпывающим ответом будет: «Это — функции, которые удовлетворяют уравнению (8.66)». Если в (8.66) подставить функцию Н (8.65), то получим
= ~ УфА(0-^Ц^^ (1=0,..., п). (8.67)
dt *=о
Это равенство можно использовать как иную формулировку определения функций ф((()
Кстати, из (8.64) и (8.65) следует, что
dy^dt =дН/дх^ (г =0, .... п). (8.68)
Действительно, так как dHIdfy = ft, то уравнения (8.68) эквивалентны уравнениям (8.64).
Если уравнения (8.68) и (8.66) записать со&местно
d^Jdt = —dHIdyi, dyjdt = dHldtyit
то можно заметить определенную симметрию в этой системе уравнений. Уравнения такого вида называют канонически сопряженными.
Теперь сформулируем основную теорему рассматриваемого метода (принцип максимума):
для оптимальности управления и (f) и траектории у (f) с Koopduna-тами соответственно щ (/),..., иг (/) и у! (t).yn(f) HeodxoduMO суще-
ствование такой ненулевой непрерывной функции ф (/) с KOopduHamaMU ф! (/), ..., фп (/), соответствующей функциям и (/) и у (/) в силу уравнений (8.66), что при любом t (t0 t Т) функция Я[ф (/), у (/), и] переменного и £ Q docmueaem в точке и = и (/) максимума-.
у(0, u]=maxu6fl.
Доказательство этой теоремы и геометрическую интерпретацию принципа максимума для задачи оптимальности по быстродействию проведем'в следующем параграфе (используя уравнение Веллмана). Здесь же укажем лишь отличительную особенность вывода принципа максимума его авторами, Ограничимся одним управляющим воздействием и (/).
276
Как и при выводе уравнения Эйлера, к предполагаемой экстремали и (Л добавляется вариация г) (0, вычисляется соответствующая первая вариация функционала 6Q, и из равенства этой вариации нулю выводятся необходимые условия оптимальности и (0. Характерна форма вариации при выводе принципа максимума (рис. 8.4). Это импульс в момент т бесконечно малой длительности 8, но конечной, произвольной высоты и(т). Единственное условие, которое наложено на величину ц(т) — это требования ограничения и(т) £ Й. Например, если | и | < < 1,то—1 < и(т) < -4-1. Вариация такого вида названа игольчатой вариацией.
Важно отметить, что игольчатая вариация существенно отличается от вариаций, с помощью которых выводится уравнение Эйлера. Последние должны были представлять собой гладкие функции, в то время как игольчатая вариация является «скачкообразной». Использование скачкообразных вариаций позволяет включить в класс отыскиваемых экстремалей кусочно-непрерывные функ-
ции. А между тем, именно кусочнонепрерывные функции являются экстремалями во многих задачах оптимального управления, как это мы увидим из последующих примеров.
Прежде чем перейти к примерам, наметим план решения задачи с помощью принципа максимума.
F" 1. Записываем уравнения объекта в виде системы уравнений первого порядка (8.64), не забыв уравнения для функционала (8.63):
!h = fi(u, у, 0 (i = 0, л).
2. Составляем функцию Н:
ФДОШ у.О-1=0
3. Определяем значение и, максимизирующее функцию Н, из системы уравнений
dH/dut = Q (i = г). (8.69)
Возможно, что максимум Н достигается на границе допустимой области управлений, тогда для некоторых / равенство (8.69) может не выполняться при ненулевой функции ф (0.
В уравнениях (8.69) для определения и (t) содержится (2п + г + + 2) неизвестных: (n -J- 1) функций yt (t), (п + 1) функций фг (0 и г функций uj (0. Для их определения имеются г уравнений (8.69), (л + 1) уравнений исходной системы (8.64) и осталось составить еще (п + 1) уравнений для функций фг (0 вида (8.66).
4. Составляем уравнения (8.66) для определения фг (0
dtyjdt — -—।dH/dyi (i=0, л).
Из совместного решения названных (2п + г + 2) уравнений находим оптимальное управление и (0,
277
Особенностью принципа максимума является то, что вариационная задача нахождения функции и (0, экстремйзирующей функционал Q, заменена гораздо более простой задачей математического анализа нахождения параметра и, доставляющего максимум вспомогательной функции Н (и). Отсюда понятно и название метода — принцип максимума.
Пример 8. 6. Решим с помощью принципа максимума задачу 1 § 7.2 об оптимальном по быстродействию управлении объектом с уравнением у = и при ограничении на управление | и | < 1.
Составим систему уравнений первого порядка, описывающих объект, вводя обозначения уг = у, у2 = у:
У1 = У2, У2 = и. (8.70)
Т
Функционалом является время процесса Q = Т = f id/, поэтому дифферен-о
циальное уравнение для функционала (8.63) имеет вид
Уо=1. (8.71)
Добавляя (8.71) к (8.70), получим полную исходную систему уравнений объекта
1/0=1.
У1 = У2,
У2 = и.
Составляем функцию
2
Я= 2 "Ф*/* = Ч’о • l+'I’il/o + ’I’a “• (8.72)
1 = 0
В (8.72) только последнее слагаемое зависит от и, поэтому можно обеспечить максимальное значение Н, добившись максимума этого слагаемого, т. е. необходимо, чтобы
ta(0« = max|ul к . (8.73)
Для определения и, удовлетворяющего условию (8.73), составим уравне-
ЭЯ/д« = ф2(/) = 0,
которое удовлетворяется только при ф2 (/) = 0. Однако в формулировке принципа максимума требуется существование ненулевой функции ф(/), т. е. не допускается равенство ф2 (0 = 0 Для всех t. Отсюда следует, что значения и, максимизирующие (8.73), следует брать на границах, т. е. и = +1 или и = —1. Очевидно, что при фа (/) > 0 следует брать и = +1, а при ф2 (/) < 0 необходимо и = —1. Этот закон управления можно записать с помощью функции sign:
и = sign ф2 (/). (8.74)
Для определения функций ф, (/) составим дифференциальные уравнения типа (8.66)
г/ф0/<// = — дН/дуа — £>, d^/dt = —дН/ду! = 0,
</ф2/Л= —дН!дуг = — ф1
278
Решения 9tH)f ураЬнеНий имеют ййД
фо = const = Со,
Ф1 = const = <?!, (8.75)
Фа — Сд—Ci t.
Подставляя (8.75) в (8.74), получим окончательно
u = sign (Са—СД). (8.76)
Так как функция"фа'= С2 — C2t может^менять знак не более одного раза, то оптимальное управление (8.76) представляет собой кусочно-постоянную функцию, принимающую предельные значения +1 или —1 и имеющую не более двух интервалов постоянства.
Это решение полностью совпадает с полученным в примере 8.5 с помощью уравнения Эйлера, причем в данном случае не понадобилось никаких предположений относительно вида оптимального управляющего воздействия. Такое же решение было получено в гл. VII при синтезе простейшей оптимальной системы.
На основе рассмотренного примера можно заметить, что функцию г/0 = f0, а следовательно, и ф0 (/) можно не включать в выражение для Н, если функционал не содержит в явном виде управления и, так как в этом случае слагаемое ф0/0 не влияет на максимизацию Н.
Пример 8.7. Рассмотрим задачу 3 § 7.2 об оптимальном по производительности управления объектом с уравнением у == и при ограничении | и | < 1. Функ-
Т.
ционал, в данном случае Q = у» (Г) = \у не зависит в явном виде от уп-о
равления и, поэтому уравнение у0 = /0 можно не включать в систему уравнений задачи, которую с учетом этого можно записать
У1 = Уг,
Уг = и.
Составляем функцию
2
н= 2 ф|Л='Ф1^+ф2“-
Z=1
Дальнейшее решение полностью (с совпадением обозначений) проводится аналогично предыдущему примеру, т. е. оптимальное управление вновь является кусочно-постоянной функцией, принимающей предельные значения 1 или — 1 и имеющей не более двух интервалов постоянства.
Пример 8.8. Рассмотрим задачу 6 § 7.2 об оптимальной по быстродействию встрече двух движущихся объектов. Закон сближения объектов описывается уравнением второго порядка (7.23)
Тх -\-х = и—Ь
с начальными условиями (7.24), которые записываются
х(0)=— а, х(0)=—Ь.
Здесь Т — постоянная времени управляемого объекта; b — скорость движения неуправляемого объекта; а — начальное рассогласование между объектами. Все три величины: Т, Ь, а — заданные постоянные числа.
Поскольку функционалом является время процесса, то уравнение хв = = /0 не включается в число уравнений задачи.
Запишем систему уравнений типа (8.64), обозначив х1 = х, х2 = х:
Х1 = Х»,
*1=(1/П(-*»+и-6)- (8-77)
279
Составим функцию
2
н= 2 Ф* А=Ф1 «я+Фг О/Л (—*я+“—6) =
L~ 1
1 , 6 1
— ФЛ у, Фгх2—Фг j, + у, фги- (8.78)
От управления и в (8.78) зависит только последнее слагаемое, поэтому Н = = шах |Ы|^1 > когда (угф2и) = max । „ । ^ , . Откуда получаем очевидный закон управления
u = sign [ф2 (/)], (8.79)
Составим дифференциальные уравнения для функций ф,- (/):
dtyy/dt = —дН/дху = 0,
d^ldt= -дН1дхь= -ф1 + (1/Г) ф2.
Из первого уравнения следует
Ф1 = const, (8.80)
а из второго с учетом (8.80)
ф2(0 = С1+С2в‘/7'. '(8.81)
Подставляя (8.81) в (8.79), запишем окончательно закон оптимального уп-равления
u = sign (Ci+Cj ettT)'. (8.82)
На рис. 8.5 показаны графики функции ф2(0 Для различных сочетаний постоянных интегрирования: кривая 1 — для Су >0, С2 > 0; кривая 2 — для Су >0, С2 < 0; кривая 3 — для Су < 0, Са > 0 и кривая 4 — для Су < 0 и Са < 0. Как видно, функция ф2 (/) не более одного раза меняет знак, следовательно, оптимальное управление содержит не более двух интервалов постоянства.
Из физического смысла задачи (см. траектории объектов А и В на рис. 7.4, а) ясно, что в начале управление должно обеспечить разгон объекта В, а затем его торможение. С учетом результата (8.82) и физического смысла задачи можно утверждать, что управление должно состоять из двух интервалов (рис. 8.6): на первом, для 0 < t и-+1,’ана втором для ty < t /2 управление^ — " —1. Момент переключения ty и окончания процесса сближения (2 составляет неиэвестиые параметры вакона управления. Для t > G движение объектов бу-280
дет проходить одинаково, если положить и = Ь. При этом, как следует из закона сближения объектов (7.23), х = х = 0.
Определим tx и /2, используя уравнения системы и граничные условия. Принимая за единицу времени постоянную Т, т. е. вводя нормированное время т = = ИТ, перепишем дифференциальное уравнение (7.23) закона сближения
dx2/dx-[-x2 = u — b. (8.83)
Граничные условия примут вид
*1(0)=— а, х1(х2) = 0, х2(0)= — Ь, х2(х2) = 0. (8.84)
Подставляя для отрезка времени [0, т±] управление и = +1 в (8.83), имеем
х2 + х2 = 1 —Ь, откуда
х2 = (1-6) + Се~х (0<т<Т1). (8.85)
Постоянную С интегрирования найдем из начального условия х2 (0) = —Ь. Подставляя в (8.85) х = 0, получим С = —1, а закон изменения х2 (х) можно записать в виде
х2 = (1-6)-е-т (0 < х < тг). (8.86)
Интегрируя (8.86), с учетом начальных условий хх (0) = —а определим за кон изменения х2 (т) на отрезке [0, xj:
*1 (х) = -(а+ 1) + (1—6) т + е~г (0<т<т1). (8.87)
Подставляя в уравнения (8.86) и (8.87) х = хъ вычислим значения Xj (хх)
и х2 (х2), являющиеся начальными условиями для дифференциального уравнения движения н^втором интервале Xj < х + х2, где и = —1:
*i (Ti)= — (а+!) + (1 —b) Xj-fe т*; 1 ? (о.оо)
х2(Х!) = (1—6)—е-т'. I
Запишем уравнение движения для хг < х + х2: х2 + х2=-(1 + 6). (8.89)
Интегрируя (8.89) с учетом начальных условий (8.88) , получим
*2 (Т) = - (1 +6) + (2-е-(‘) (х1<т<т!). (8.90)
Закон изменения Xj(x) для отрезка времени xt < х < х2 найдем, проинтегрировав (8.90) с учетом начальных условий (8.88),
х1(х) = (1—a + 2Xi)—(1+6)х —(2 —е-т‘)е_<т~Т1) (хх < х < т2). (8.91)
По условию задачи в момент окончания процесса хг (х2) = х2 (х2) = 0, поэтому, подставляя в (8.90) и (8.91) х = х2, получим систему уравнений для определения моментов времени Xj и х2:
—(1 + 6) + (2 — е~х‘) ё~ <Tj_г1) = 0, (1—a + 2xj) —(1 + &) х2 — (2— е-х>) е~ <Тг“Т1) = 0.
Путем несложных преобразований от этой системы уравнений можно перейти к другой более простой паре уравнений
2хх— а—Ь
2 1+6
2-й~т‘ Xj-^Xj + ln— . (8.92)
ж
281
Рассматривая эти уравнения как функции вида та = Ф1 (тг) и т, = <р, (ti), можно построить на плоскости с координатами тг и та соответствующие графики (рис. 8.7,), точка пересечения которых и определяет искомые моменты времени ‘Писк» таиск*
Теорема об л интервалах. Особенность оптимальных управлений в рассмотренных примерах 8.6—8.8 состоит в том, что управляющее воздействие является кусочно-постоянной функцией, принимающей граничные значения и имеющей не более двух интервалов постоянства. При этом важно заметить, что все три рассмотренные задачи линейны, т. е. линейны уравнения системы и функционал, а кроме того, во всех трех задачах характеристические уравнения системы имеют вещественные корни. Действительно, для примеров 8.6 и 8.7 характеристическое уравнение имеет вид р2= О, и соответствующие корни Pi = р% = О, а для примера 8.8 характеристическое уравнение р (рТ + 1) = 0 имеет корни Pi = 0, р2 = — МТ.
Отмеченная особенность управления (число интервалов постоянства не больше двух) является частным случаем
закона оптимального управления для линейных задач с вещественными корнями характеристического уравнения n-го порядка. Этот закон формулируется в виде следующей теоремы, получившей наименование «теоремы об п интервалах».
Для линейной системы n-го порядка, у которой все корни характеристического уравнения действительны, а на управление наложено ограничение в виде неравенства | и | 1, оптимальное управление и (t),
доставляющее экстремум линейному функционалу, представляет собой кусочно-постоянную функцию, принимающую граничные значения ±1 и имеющую не более п интервалов постоянства.
Теорема об п интервалах была впервые сформулирована и доказана А. А. Фельдбаумом в 1949 г. без привлечения вариационных методов с помощью рассуждений, подобных тем, которые приводили в § 7.3, доказывая оптимальность кусочно-постоянного управления для простейшей системы второго порядка. В формулировке Фельдбаума на корни характеристического уравнения системы было наложено дополнительное ограничение. Кроме вещественности требуется еще, чтобы корни были неположительны. Это ограничение исходит из предпосылки, что управляемая система устойчива, хотя теорема остается в силе и для случая положительных корней.
Докажем теорему об п интервалах с помощью принципа максимума. Пусть система описывается линейным уравнением с вещественными корнями характеристического уравнения
dn у dn~l у a°~dt^ + ai~dtn~l +---+апУ = Ьи’
где а0, .... ап и b — коэффициенты, а и подчинено ограничению | и |
2Ы
Пусть, кроме того, функционал Факэйе Лйнеен и ДЛя проСтбты не За&йёйТ от управления. В этом случае систему уравнений задачи, обозначив у = у2, можно записать
dy/dt = у2 = у2,
d2y/dta = y2= уз,
dn y/dtn = уп — — u — I/Oq (а2уп + а2 уп_, + ... + ап у2). (8.93)
аа
Составим функцию п
Н= 2 Ф/// = ф1^а + Ф2«/з + ...+ФП_1 Уп — l= 1 1 b
—Фп— (Л1«/п+ аг уп_ 1 + .. .4-ап 1/1) + фп — и. (8.94)
а0 а0
От управления и зависит только последнее слагаемое в (8.94), поэтому Н примет максимальное значение, когда
b
Фп—u = max|u|<1. (8.95)
ао
Из условия (8.95) следует очевидное равенство, определяющее закон оптимального управления
и (/) = signipn (0, (8.96)
т. е. функция u(t) принимает только два значения + 1 или —1 и меняет знак столько же раз, сколько фп (0 пересекает ось времени.
Для нахождения функции фп (0 составим соответствующие дифференциальные уравнения (8.66)
thpi дН ап
dt ду2 аа
dty2 дН ап—1
dt ~ ~ ду2 ~ я0
(8.97)
а,
'п ав
Вычтем из первого уравнения системы (8.97) все остальные, продифференцировав предварительно второе уравние один раз и умножив на (—I)1, третье — два раза и умножив на (—1)а и так далее до последнего, продифференцировав его (п — 1) раз и умножив на (—I)"-*;
(-1)"-
dt
-...-(-If-1
а2 dn 'фп
аа dtn 1
dtn dtn~l
+ (-!)* а„_1^--Япфп = 0. (8.98)
283
Корйи соответствующего Ха рактёрисТйчёСкоГо уравнений
(- 1)"аор« + (—.!)«-* а1Рп~ 1 +...+(-1)Ч-Ц Р-ап = 0, (8.99)
в силу теоремы Виета, отличаются от корней характеристического уравнения системы управления только знаком, т. е. являются также вещественными. Предположим для простоты, что корни уравнения (8.99) простые, тогда
^(0= 2 ciePit • (8-10°)
t=1
Из (8.100) очевидно, что функция фп (/) как сумма и экспонент с вещественными показателями степени изменит знак не более (п — 1) раз, поэтому управление и (t) = sign фп (/) имеет не более п интервалов постоянства.
Если корни характеристического уравнения комплексно-сопряженные или задача управления нелинейна, то теорема об п интервалах не применима. Убедимся в этом на примерах.
Пример 8.9. Рассмотрим задачу 7 § 7.2 об оптимальном по быстродействию управлении консервативным объектом с уравнением
у + у = и,
где | и | < 1, а граничные условия заданы равенствами
£/х(0)=—1, yi(T) = 0i y2(0) = 0, </2(7’) = 0.
Здесь Т — длительность оптимального процесса, и введены обозначения уг = = Уг Hi = У- Таким образом, задача заключается в оптимальном по быстродействию переводе изображающей точки у2, (/2 из положения —1, 0 в начало координат.
Запишем систему уравнений задачи управления
У1 = У1, Уъ = и—У1- (8.101)
Составим функцию
2
Н= 2 "Ф»/«=’ФхХ/а — Фэг/г + ФаИ- (8.102)
*= 1
Из выражения (8.102) очевидно, что Н достигнет максимального значения, если
u = signip2- (8.103)
Для вспомогательных функций фх, ф2 составим систему уравнений
* </фх/dt = — дН/дУ1 = ф2,
dy2l'dt=—дН/ду.2=—tyy (8.104)
Перейдем в (8.104) от оригиналов к изображениям
P'Iri(p)-^i(0) = Y2(p), (8.105)
Р^ (Р)^ЫО) = Ч'1 (р).
284
Йэ (8.105) находим
Vs (р) =
~Ф1 (Ф-Ь'Фа (0)
Ра + 1
Переходя к оригиналу, получим
(8.106)
ф2 (0 = A sin (/ + «0),
Рис. 8.8
а из первого уравнения (8.104)
4’1 (0= —Л cos (< + а0).
Здесь А и а0—постоянные, удовлетворяющие соотношениям A sin а0 = ф2 (0),
—Л cos a0 = 4’i (°)-
Подставляя (8.106) в (8.103), запишем окончательно оптимальный закон управляющего воздействия
u = sign [sin (/-f-a0)]. (8.107)
Таким образом, функция u(t) получается из функции sign (sin/), равной поочередно +1 и —1 на интервалах длиной л при помощи сдвига на отрезок а0 (рис. 8.8).
Рассмотрим фазовые траектории системы при оптимальном управлении. Пусть и = +1, тогда, подставляя это значение в систему уравнений объекта (8.101), запишем
У1 = Уг, ya=t—yi-
(8.108)
285
Первое уравнение в (8.16$) не ийменйтбя. ебЛи в Небо йбДбтавить (yt —iy вместо yv При этом получим систему уравнении
(d/dt) (0-1) = 02,
(d/dt)y2 = —(0i — l),
идентичную по записи системе (8.104), решение которой уже известно, Таким образом
У1 —1=4 sin (/ + «0), 02 = — A cos (Z + ao),
откуда
(01-1)2+02 = л2-
(8.109)
Уравнение (8.109) определяет на фазовой плоскости с координатами у2, у2 семейство концентрических окружностей с центром в точке +1,0 (рис. 8.9, а).
.Изображающая точка равномерно движется по фазовой траектории ( и за время я пробегает ровно половину окружности).
При и — —1 путем аналогичных рассуждений получим уравнение фазовых траекторий
(01 +1)2 + 0г = 42, (8.110)
которые также являются концентрическими окружностями, но с центром в точке —1, 0 (рис. 8.9, б).
Допустим, что на заключительном отрезке времени длительностью 0 управление и = +1. Поскольку целью управления
является попадание в начало
Рис. 8.10 координат, то движение системы
может быть отображено дугой АО окружности (8.109), проходящей через начало координат (рис. 8.10). Дуга Л О не превышает половины окружности, так как р л.
В положение А изображающая точка попала, двигаясь в течение отрезка времени длиной л под действием управления другого знака, т. е. при и = —1. Это значит, что соответствующий кусок фазовой траектории представлял собой полуокружность В А с центром в точке —1,0, кончающуюся в точке А. Очевидно, что точка В симметрична точке А относительно точки —1, 0 и расположена на полуокружности N1Ni< симметричной полуокружности МгО с тем же центром
симметрии.
Аналогично дуга ВС, предшествующая дуге В А, и соответствующая отрезку времени длиной л, на котором и = +1, равна полуокружности с центром в точке +1, 0, потому точка С лежит на полуокружности Л42Л43, симметричной полуокружности N^N2 с центром симметрии в точке +1, 0.
Точно также можно построить фазовые траектории системы, когда управление на заключительном интервале будет и = —1 (а не +1). Объединяя обе возможности (когда и = +1 и —1 на заключительном отрезке времени), получим всю картину поведения фазовых траекторий (рис. 8.11). На этом рисунке возле траекторий надписаны соответствующие значения управления +1 или —1. Из рис. 8.11 видно, что для всех фазовых траекторий, расположенных выше линии... M3M2M10NlN2N3..., составленной из бесконечного числа полуокружностей радиуса 1, управление и = —1, а для траекторий, расположенных ниже линии ...A13A42M1ON1W2WS..., управление и - +1, 286
Следовательно, на линии происходит перекладе-^
ние управления с одного знака на противоположный Такую линию услошлись (см. §7.3) называть линией переключения.
В рассматриваемом примере ставились две задачи: во-первых, найти оптимальное управление, переводящее систему из точки —1, 0 в начало координат, и во-вторых, убедиться в неправомерности теоремы об п интервалах в случае комплексных корней характеристического уравнения.
Характеристическое уравнение системы р2 + 1 = О имеет пару чисто мнимых корней р1)2 = ±/. А число интервалов постоянства оптимального управления для данной системы второго порядка может быть больше двух и определяется лишь начальными условиями. Например, из рис. 8.11 следует, что оптимальные процессы, переводящие систему из точки Ai или А2 в начало координат состоят из четырех интервалов постоянства.
Оптимальное управление, переводящее систему из точки —1, 0 в начало координат фазовой плоскости (рис. 8.12, а), состоит из двух интервалов длительностью ?! (и = +1) и т2 (и = —1) соответственно. Длительность интервалов определяется простым замером углов 0j и 02, соответствующих дугам и т2 окружностей с центрами в точках +1, 0 и —1, 0. При этом тг = 0,52 (0] = 30°), т2 = 1,28 (Р2 = 73°), общее время оптимального процесса т = + т2 = 1,8.
Интересно сравнить полученное оптимальное управление (рис. 8.12, б) с близким к оптимальному, описанному в § 7.4 и изображенному на рис. 8.12, в. Штриховые линии для I < 0 показывают, что исходному положению соответствовало значение управляющего параметра и = —1. Длительность близкого к оптимальному процесса равна л единиц времени. Таким образом, оптимальное управление позволяет решить задачу перевода системы из начального состояния в конечное в л/1,8 ж 1,74 раза быстрее, чем близкое к оптимальному.
Пример 8.10. Рассмотрим задачу 5 § 7.2 об оптимальном по экономичности управлении объектом с уравнением у= и, которую уже решали в примере 8.1 Т
с помощью уравнения Эйлера. В данном случае функционал Q = fu2 (i)dt b
является нелинейной функцией управления. Вводя в рассмотрение координаты т
У1 = у, У2 = У н у» — Su2 (t)dt, запишем систему уравнений, описьшающих задачу:
287
Уо = и*.
У1 = Уг. (8.111)
1/з = «
Составим функцию
2
Я = 2 Уг = 'Фо«а+'|>1 Уа+Ф»»- (8.112)
I =о
Определим значение и, доставляющее максимум функции Н, из решения уравнения
дЩди = 2ф0 и + фа = 0,
отсюда
фз (/) 2фо(0 Составляем уравнения для нахождения функций ф, (f):
<4ф0/й/ = — дН/дуо = 0,
d^l/dt = —дН/ду^О,
dty2/dt = —дН/ду2 = —ф1,
отсюда
фо = const = Со,
ф! = const = Ci, (8.114)
фа = С2—C2t.
Подставляя выражения для ф0 и ф2 из (8.114) в закон оптимального управления (8.113), находим
С,—С, t
u(t)= —-----—----= а2—a2t. (8.115)
Со
Этот результат совпадает с ответом (8.14), полученным в примере 8.1, где, кроме того, рассмотрена методика определения постоянных интегрирования.
Важно отметить, что задачи с нелинейными уравнениями могут иметь в качестве экстремалей функции, отличающиеся от кусочно-постоянных, т. е. теорема об п интервалах действительно не применима-
Как можно было видеть из примеров, принцип максимума наиболее эффективно и просто позволяет найти закон оптимального управления в линейных задачах при ограничении в виде неравенств. Еще более проявляется эффективность этого метода в линейных задачах с несколькими управляющими воздействиями, решение которых другими методами затруднительно.
Пример 8.11. Рассмотрим линейную систему второго порядка с двумя управляющими параметрами и и2, подчиненными ограничениям | u2 | а, ] и2 |
Ь. Пусть уравнения системы могут быть представлены в виде
= 1/2) + “!.
(8.116)
Уг = (1/1, 1/2)+ u2-Составим функцию
2
Н— 2 Ф1 !/i = Ф1 ^1+ Ф1 “а + Фз/2 + Ф2 и2- (8.117)
1=1
Из (8.117) очевидно, что Н достигнет максимума, когда
Ф1 «1 + ф2«1 = тах|а11 <а.
I Ч, I < b
Отсюда находим закон оптимального управления
и1 = аз1§пф1,
и2 = b sign ф2. (8.118)
Из (8.118) следует, что оптимальному управлению соответствуют вершины прямоугольника, ограничивающего область допустимых управлений на плоскости с координатами ult u2. Моменты перехода из одной вершины в другую мо гут быть определены после нахождения функций ipj и ф2.
Нахождение начальных значений функций фг (/). Во всех рассмотренных примерах на применение принципа максимума удалось установить оптимальный закон управления. При этом управляющее воздействие определялось через функции фг (/). Однако значения коэффициентов в формулах дляфг (/) не были найдены. Определив в общем виде форму оптимального управления, мы обращались к исходным уравнениям задачи и физическому смыслу, с помощью которых находили параметры управляющих функций.
Но поступали таким образом не ради наглядности решения, а потому, что, к сожалению, в настоящее время не известны замкнутые (т. е. заданные в виде формул) способы нахождения начальных значений фг (0) функций фг (/). В то же время для полного решения системы уравнений dtyjdt = —dH!dyt, определяющих функции фе (/), необходимо знать начальные условия ф; (0).
Все известные в настоящее время процедуры [Л. 21] нахождения ф; (0) основаны на последовательных приближениях (итерациях) от некоторого исходного набора значений ф,®(0) (первое приближение) к окончательной совокупности фг* (0), дающей решение оптимальной задачи.
10 Зак. 447 289
Рассмотрим один из возможных способов определения вектора -ф* (0) с координатами ф,*(0). Взяв произвольное нулевое приближение ф°(0), находим соответствующие ему управление и0 (/) и траекторию у0 (t) в фазовом пространстве (рис. 8.13). Если ф° (0) взято наудачу, то мало шансов, что траектория у0 (t) попадет в начало координат. Полагаем, что целью управления является переход из точки М в начало координат. В'качестве меры близости полученной траектории к искомой примем расстояние г° от начала координат до этой траектории. Последующие приближения ф' (0) выбираем таким образом, чтобы расстояние г> уменьшалось от итерации к итерации. Очевидно, что искомому значению ф* (0) соответствует г* = 0. Приемы нахождения значений параметров [в нашем случае ф1 (0) = 0], позволяющих минимизировать зависящую от них функцию (в нашем случае г), рассмотрены в гл. XII.
Связь принципа максимума с уравнением Эйлера. Принцип максимума относится к числу вариационных методов и для задач, решаемых с помощью уравнения Эйлера, дает те же ответы (сравни примеры 8.1 и 8.10 или 8.5 и 8.6). Более того, принцип максимума позволяет включить в число экстремалей разрывные (кусочно-непрерывные) функции. Естественно предположить, когда на класс искомых экстремалей не наложено ограничений, принцип максимума даст те же условия оптимальности, что и уравнение Эйлера. Убедимся в этом.
Допустим, что управляемый объект описывается уравнением
У —и.
(8.119)
т
Функционалом Является определенный интеграл Q = fG[u, у, t]dt. Бродя о
t
обозначения Уп = jG[u, у, t]dt, yt = у, запишем систему уравнений задачи 0
y0 = G[u, у, /],
(8.120)
У1=и-
Составим функцию Н и систему уравнений для функций ф,:
Я = фоО [и, у, /] +фх и,
4фо дН _0
dt дув
dip! _ _ дН _ дН _ дв[у, и, И dt дух ду ду
(8.121]
(8.122)
Определим значение и, доставляющее максимум функции И:
дН 3G [и, у, /]
= Фо---------------
ди ди
+ фт = О.
(8.123)
Из первого уравнения (8.122) следует, что ф0 = const. Примем ф0 = —1 и подставим это значение в (8.123), тогда
дй [и, у, / ф1 =-------л-------
т ду
(8.124)
290
тегрир%УГна> оМР6НЬ1' по^йав,йяя Фе —1 во второе ураййенйе (8.122) и Ий1
= С1 + J dGlJ^y'— («•125>
Приравнивая правые части (8.124) и (8.125), получим уравнение Эйлера в интегральной форме
ЛЭ [и. У, Ц ( dG [и, у, t]
-----; =Ci + 1 ----dx. (8.12b ди------------------------------------------------J ду
о
Продифференцируем обе части (8.126) по времени, учитывая, что и = у
(см. 8.119), и вводя принятые в § 8.1 обозначения dQ/dy = Gy; dG/dy= О у, тог-d
да получим Gy — ~цСу = °-
Это выражение с точностью до обозначений совпадает с уравнением Эйлера (8.2), что и требовалось показать.
§ 8.4. ДИНАМИЧЕСКОЕ ПРОГРАММИРОВАНИЕ И ЕГО ПРИМЕНЕНИЕ ДЛЯ РЕШЕНИЯ ЗАДАЧ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
Принцип оптимальности. Уравнение Веллмана. Вариационное исчисление можно рассматривать как обобщение дифференциального исчисления для N переменных. Действительно, функцию и (t) в функ-т
ционале Q = jGlu, у, t\dt можно заменить ломаной линией с вершило
нами и0 = и (Zo), Ui = и (tB + А/), .... uN = и (t0 + NM), а функционал суммой
м
<2= 2 G[«i. Уь tt]M,
I =0
•и
где 7V и А/ связаны соотношением Nkt = Т — t0, it = t0 + i'At
После этого вариационную задачу можно приближенно считать обычной задачей на отыскание экстремума функции Q (4, ..., /л,) от М переменных. Очевидно, что при увеличении N решение этой задачи будет все более приближаться к решению исходной вариационной задачи. Сам процесс решения при этом рассматривают как единичный акт и называют одношаговым..
Классические методы нахождения экстремума функции многих переменных при большом числе переменных могут оказаться неприменимыми, и поэтому более целесообразно принимать решение о значениях функций и (t() не сразу (за один шаг), а постепенно, шаг за шагом. Такие процессы решения называют многошаговыми.
Многошаговые процессы позволяют получать решения оптимизационных задач в различных отраслях науки, техники и хозяйства. Математическим аппаратом изучения многошаговых оптимальных ре-10* 291
шений является динамическое программирование, созданное в значительной мере Р, Веллманом и его учениками в пятидесятых годах XX в.
Р. Веллман так объясняет название метода [Л. 14, стр. 12]: «Название принято на основании следующих соображений. Пользуясь популярной ныне терминологией, можно сказать, что рассматриваемые нами задачи являются задачами программирования (Т. е. задачами принятия решений). При этом прилагательное «динамический» указывает на то, что мы интересуемся процессами, в которых существенную роль играет время и в которых порядок выполнения операций может оказаться решающим».
Рассмотрим идею метода динамического программирования на примере задачи об оптимальном (в смысле быстродействия) переходе из фазового состояния у0 в фазовое состояние ук. При этом конечную фазовую точку ук будем считать фиксированной, а в качестве начальной точки у0 — различные точки фазового пространства.
Будем полагать, что для любой точки у, отличающейся от точки ук, существует оптимальное управление иу (/), под действием которого объект попадает в ук. Время, в течение которого происходит оптимальный переход из у в ук, обозначим через Т(у), причем переход за время, меньше чем Т (у), невозможен, так как это противоречило бы предположению об оптимальности ий (/). Если положить Т (у) = const, то это уравнение определяет в фазовом пространстве у (ylt у2, ..., ум) геометрическое место точек, из которых время оптимального перехода в ук, постоянно. Такие геометрические места точек называют изохронами.
В дальнейших рассуждениях будет удобно вместо Т (у) ввести функцию S (у), отличающуюся от нее только знаком:
5(У) = -Т(у). (8.127)
Предположим, что функция S (у) непрерывна и всюду/кроме точки ук, имеет непрерывные частные производные
dSldyu ..., dS!dyn.
*»
j ; Если объект начал движение из точки у0 в момент /0 по произвольной фазовой траектории, то для попадания в некоторую точку у (/) было затрачено время (t — /0). Если от точки у (/) объект движется к ук по оптимальной траектории, то на движение затратится время Т [у (/)]. В результате на переход из у0 в ук затратится время (t — /0)+ + Иу (01- Но так как оптимальное время движения от у0 до ун рав-
но Т [у (/0)], то
Лу(У]<(/-/о)+7’[У(О1. (8.128)
Заменив функцию Т через S [см. (8.127)] и разделив обе части неравенства на положительную величину (t — /0), получим
Д [У (Q] —-S [у (/р)] j
t-to
292
или, переходя к пределу при / 4. найдем
(8.129)
Производная в левой части этого неравенства существует, поскольку функции S (у) и у (0 дифференцируемы, и вычисляется по формуле полной производной:
4s[y(/)] = di dyt
Полагая, что движение объекта описывается системой уравнений первого порядка вида yt = ft (и, у), перепишем неравенство (8.129)
)<L
<-1 а!"
Точки и0 и у0 здесь были произвольными, поэтому для любой точки у фазового пространства (отличной от у0) и любой точки и области управления выполнено соотношение
2ф?Ц(и,УК1. (8.130)
& dyi
Пусть теперь [и (/), у (/)] — оптимальный процесс, переводящий объект из фазового состояния у0 в состояние ук, a t0 t tK — отрезок времени, в течение которого это оптимальное движение происходит, так что у (4) = у0, у (/„) = ук и tK = t0 + Т (у0). Уравнение соответствующей оптимальной траектории находится по уравнениям объекта yt = fi (и, у). Движение по этой траектории от точки у0 до точки у (/) осуществляется в течение времени (t — 4)> а движение от у (/) до ук — в течение времени Пу (/)]. Поскольку общее время движения от у0 до ук по оптимальной траектории равно Т (у0), то можно записать
Пу(4)1 =(t~ 4)+Т[у(0]. (8.131)
Это равенство кажется простым и очевидным. В то же самое время это равенство служит формальной записью принципа оптимальности, являющегося основным положением в методе динамического программирования. В формулировке Веллмана принцип оптимальности выглядит следующим образом: «Оптимальное поведение обладает тем свойством, что каковы бы ни были первоначальное состояние и решение в начальный момент, последующие решения должны составлять оптимальное поведение относительно состояния, получившегося в результате первого решения». Иначе говоря, в текущий момент надо принимать такое решение, чтобы достигнуть наилучших результатов за оставшееся время.
293
Отсюда следует равенство (8.131): если у (/) оптимальная траектория для /0 =С in, то Для любой промежуточной точки t0 < t <Z t„ заключительный участок траектории на отрезке t, tK также является оптимальной траекторией. Принцип оптимальности и равенство (8.131), в частности, легко доказываются от противного. Действительно, пусть существует траектория (штриховая линия на рис. 8.14), для которой переход из точки у (/) в точку ук осуществляется за время меньшее, чем Т (у0)— (t — t0). Тог-9(t) да, переместившись из у0 в у (/) за
время (/ — /0), а из'у (/) в ук быст-„ рее, чем за время Т (у0) — (/ —
— t0) = T[y (/)], осуществился бы
Рис. 8.14 переход из точки у0 в точку ук за
время, меньшее чем Т (у0), что противоречит оптимальности процесса [у (/), и (/)].
Итак, равенство (8.131) доказано. Заменяя Т на —S в (8.131) •S[y(Ol=S[y(/o)I + i-/o и дифференцируя по времени, находим п у u(0] = l. (8.132)
ду‘
Введем обозначение
Н (U, У) = У fi [У (П, U (/)]. (8.133)
< = 1 дУ1
с учетом которого запишем соотношения (8.130) и (8.132):
(Я (и, у)^1—для произвольного допустимого процесса;
(Я(и, у) = 1—для оптимального допустимого процесса.
Сопоставляя эти условия, запишем
niaxu р п Н (и, у) — 1 или с учетом обозначения (8.133)
maxu(.a У^“/;(у, и) — 1 (8.134j
z = i dyi
для любой ТОЧКИ у Ф у„.
Это выражение называют уравнением Веллмана.
В качестве первого применения уравнения Веллмана рассмотрим доказательство принципа максимума Понтрягина и его геометрическую интерпретацию.
Доказательство принципа максимума. Продолжим рассуждения предыдущего пункта, предположив функцию S (у) дважды непрерывно дифференцируемой (всюду, кроме Ук). Отсюда следует, что функция И (и, у) [см. (8.133)] имеет всюду, кроме точки уи, непрерывные производные по переменным 294
дН(у, U) у a*S(y) у aS (У) . df<(y’ U)
dyj dyi dyi 1 ’ i = 1 dyi dyi
(8.135)
(/= 1,..., n).
Поскольку на оптимальной траектории функция Н (у, и) достигает максимума [см. (8.134)], то ее частные производные по yj в точке у(0 на оптимальной траектории обращаются в нуль:
п
2
dytdy}
^dS[y(t)]
“ дУ*
af.iy <о. - mi (8136)
Продифференци руем yi = fi[y(t), «(0] =
d [dS[y(t)]
. dS [у (0] функцию --------
ду}
по времени, учитывая, что
£ a’s [у (oi .
7. ---й-------У1 0 =
“ dyjdyi
и
2ф*Ж|у<«,и(о1.
— dyjdy.
С учетом этого равенства перепишем соотношение (8.136)
d Г 3S [у (011 ydS[y(0] ,df1[y(0, 11(01
dt L ^У) J dyi dyj
(8.137)
Заметим теперь, что в формулу (8.137) сама функция S [у(0] не входит, а входят только ее частные производные dS/dyi..dS/dyn, поэтому введем следующие
обозначения:
dS [У (0]
, =Ф/(0 (/=!,...,«). (8.138)
С учетом этих обозначений перепишем (8.137)
d^i v , а/Иу(0, «(01
(8.139)
Учитывая (8.138), выражения (8.133) для функций Н и (8.139) для dtyj/dt, можем записать
п
W = ФИ0А[У(0, и(01. (8.140)
1 = 1
d^i/dt= —дН/дуг (8.141)
Обращаясь вновь к соотношениям (8.130) и (8.132), сформулируем условия, которым удовлетворяет функция Н:
п
W[y(0, u(0]= 2 ''I’i (0/1 [У (0. и(0]<1 —для произвольного допустимого 1=1 процесса;
п
Я[у(0, и(0]= У, ф1 (0 Л [у (0, и(0]=1—для оптимального допустимого 1=1 процесса;
295
откуда следует, что для оптимального процесса
Я[У(0- “(Cl = maxueQ. (8.142)
Итак, если [и (/), у (/)] (где t0 < t iB) — оптимальный процесс, то существуют такие’функции ф( (/), что выполняются соотношения (8.142) и (8.141), где функция Н определяется по формуле (8.140). Это и есть принцип максимума, который был рассмотрен в предыдущем параграфе.
Теперь рассмотрим геометрическую интерпретацию принципа максимума. Если считать и компонентами соответствующих векторов f и ф, то функция Н --= f-ф представляет собой их скалярное произведение. Вектор f (рис. 8.15), компо-
Рис. 8.15
нентами которого являются первые производные по времени фазовых координат yit характеризует скорость движения изображающей точки в фазовом пространстве. Вектор
ф, компонентами которого являются частные производные — =
= —~Гсм- (8.138)], равен по величине градиенту функции Т [у (/)] и направлен в сторону убывания времени перехода от у (/) в ук (знак минус перед —, т. е.
4(0 = —grad 7 [у (/)].
Требование максимума скалярного произведения Н = Тф при заданных величинах скорости | ffy (/)] | и градиента | gradTIy (/)] | соответствует требованию предельной близости направлений векторов
Итак, для задач оптимальных по быстродействию принцип максимума рекомендует так выбрать управление u (/), чтобы точка в фазовом пространстве двигалась в направлении, противоположном градиенту к изохронам, т. е. в направлении наибыстрейшего уменьшения времени процесса Т (у).
Используя уравнение Веллмана, доказали принцип максимума Понтрягина. В качестве другого примера применения уравнения^Бел-лмана возьмем задачу оптимального управления в простейшей системе второго порядка.
296
Пример $.12. Рассмотрим задачу 1 §7.2 оптимального по быстродействий управления объектом с уравнением у = и при ограничении на управление | и | < 1-
Система уравнений первого порядка, описывающих объект, при обозначениях 1/1 <= у, уг = у имеет вид
1/1 = 1/2=Л (У. и), у2 = и = /а(У. “)
Подставляя уравнение объекта (8.143) в (8.134), запишем
( 3S («/к t/a) , 3S (У1, У->)
'-----------Уз +-----------и
дУ1 дуз
откуда получаем очевидный ответ
._ dS(ylt у г)
и = s ign---------.
дуг
таХцм!
(8.143)
(8.144)
(8.145)
Как следует из (8.145), оптимальный процесс должен представлять собой кусочно-постоянную функцию, принимающую предельные значения ±1, а мо-dS[y (0]/di/a менты переключения определяются поведением функции-------------.
Для дальнейшего решения этой задачи необходимо знать функцию S {ylt yt) или выражение для изохрон Т (ylt у2) = —S (ylt у2). *
Обратимся к фазовой плоскости простейшей оптимальной системы (см. § 7.3). Пусть точка у0 (рис. 8.16), из которой начинает движение система, расположена выше линии переключения. Обозначим координаты этой точки через а, Ь. Чтобы парабола (7.42), соответствующая и = —1 (уравнение 1/2у22 = —yt + С), проходила через точку ув, необходимо иметь координаты этой точки, удовлетворяющие уравнению (7.42)
1/2 62= — а + С.
Отсюда находим С •= а + 1/2Ь2. Таким образом, парабола (7.42), проходящая через Уо, имеет уравнение
y1=-l/2y2i + a+l/2bi. (8.146)
Точка М переключения (см. рис. 8.16) может быть найдена как точка пересечения параболы (8.146) с линией переключения, уравнение которой [см. (7.41)]
{/1=1/2у22. (8.147)
Для нахождения точки пересечения нужно решить уравнения (8.146) и (8.147) совместно как систему уравнений. Вычитая (8.147) из (8.146), найдем у22 = а + 1/262, откуда у2 = а. + 1/262. Для точки М следует взять знак минус, так как она расположена ниже оси абсцисс. Итак, ордината точки М
Узм = - Va+l/2b\ (8.148)
(Абсцисса точки М не понадобится).
Так как при движении от точки у0 до точки М управление и = —1, то уравнение движения имеет вид у2 = —1, и потому, интегрируя, получим
/ t
У2М~Ь= j'y2(t)^T = f ( — 1) dx = tB — t, (8.149)
где t — момент переключения, т. е. момент прохождения траектории через точку М.
297
Аналогично йри движений от точки М. До наЧала координат и — +1, +. 0. у2 = +1, и потому
*к . 'к
°-У1М = ) y2(i:)dt.= j ( + 1)йт = /к — I,
(8.150)
где iK — момент окончания процесса, т. е. попадания в начало координат. Вычитая (8.149) из (8.150) и подставляя у2М из (8.148), найдем
7’(у„) = /к-/0 = 6-21/2Л|=6 + 2/а+1/2д».
(8.161)
Эта формула выведена для точек у0, расположенных выше или на линии переключения.
Для точек, расположенных ниже линии переключения, формулу для изохроны можно получить аналогичными рассуждениями, но еще проще рассмотреть точку с координатами —а, —Ь, симметричную точке у0 относительно начала координат. Заменяя в (8.151) а на —а и 6 на —Ь, запишем
Т(у0) = —6 + 2/ —а+1/262 . (8.152)
5 <4/1. Уъ) =
Учитывая, что Т (у0) = —S(y0), и, кроме того, в силу произвольности исходной точки у0, заменяя а == ylt b = у2, запишем окончательно
— Уг—2 /(/1+ 1/2 у22, если точка ({/1,1/4} лежит выше или на линии переключения;
у2—2/ —1/1 +1/2у22 , если точка (yt, у2) лежит ниже или на линии переключения.
Семейство изохрон, построенных для различных значений Т (Т = 1, 2, 3, 4), показано на рис. 8.17. Теперь осталось только подставить найденное выражение для S (t/i, у2) в закон управления (8.145) и завершить расчет.
Однако тот факт, что функция S (уг, у2) определяется разными формулами (8.151) и (8.152), требует некоторых дополнительных исследований. А именно, необходимо убедиться, что S(y2, у2) непрерывна и имеет непрерывные частные щюизводные dS/dyi, так как при этих предположениях выводилось уравнение Веллмана. 298
Заметим, что если точка ув = (а, Ь) лежит на линии переключения, причем й < 0, т. е. справедливо равенство а= 1/62, то выражение (8.151) принимает вид Г(у0) =6+2 уФ" = b + 2 | Ь |. Поскольку & <0, то | Ь | = —Ь, и поэтому Т (Уо) = 6+ 2(—Ь) = —Ь. Выражение (8.152) для этого же участка линии переключения (где а = 1/2&2) также дает Т (у0) = —Ь. Иначе говоря, на участке линии переключения, где b < 0, обе формулы для Т (уо), а значит и для S (у«) дают одинаковый результат. Аналогично можно убедиться, что и на участке линии переключения, где Ь > 0, обе формулы для S (у0) дадут одинаковый результат.
Это показывает, что хотя выше и ниже линии переключения функция Т (у0) определяется разными формулами, на самой линии переключения эти формулы совпадают, и потому функция S (у0) непрерывна на всей плоскости.
Имея выражения для функции Т (у0), можно теперь решить вопрос о ее дифференцируемости. Ясно, прежде всего, что вне линии переключения функция Т (у0) имеет непрерывные производные по а и 6, так как вблизи любой точки, не лежащей на линии переключения, функция Т (у0) определяется какой-либо одной формулой (8.151) или (8.152) и легко может быть продифференцирована. Что же будет в точках самой линии переключения? Сейчас увидим, что ни в одной точке этой линии функция Т (у0) не имеет непрерывных производных по а и Ь.
Пусть М — некоторая точка линии переключения (см. рис. 8.17) и а0, Ьо — ее координаты. Для взятой точки ордината Ьо < 0, поэтому, как следует из формулы (7.41), а = 1/26’ и
/а0+1/2 602 = /V = | Ьо |
Найдем в точке М производные функции (8.151):
^1 _| .»____I =_±.
да ]лг | У++ I/2 Ь2 la», ь, Ьй
— I -1 ь I -1 о db + /а+ 1/2 &2 |0„ ь~ + -Ьо~ ‘
А теперь найдем в точке М производные функции (8.152), учитывая, что й0 = 1/2 &о2,
-I -1 I
да /-а+1/2 62 |я„ ь„
дТ I , —1 .1
дь |лг К—й+1/262 |а0, Ьа
Таким образом, в точке М (см. рис. 8.17) частные производные функции Т (,У1< Уг)> а значит и функции S (ylt у2) терпят бесконечный разрыв. Аналогично можно показать разрывность производных dS/dyi для участка линии переключения, где b > 0.
Итак, функция S (у) не оказалась всюду дифференцируемой, и нужно признать, что не удалось получить с помощью уравнения Веллмана законченного и обоснованного решения задачи.
Как было доказано, даже в простейших задачах предположение о дифференцируемости функции S (у) во всех точках фазового пространства не всегда выполняется, поэтому применение уравнения Веллмана может оказаться не обоснованным. Дополнительно к этому заметим, что уравнение Веллмана является трудным для решения: во-первых, в него входит заранее неизвестная функция S (у), во-вторых, это— уравнение в частных производных и, наконец, уравнение осложнено символом максимума. В силу указанных трудностей практическое применение метода динамического программирования для решения непрерывных задач оптимального управления ограничено.
299
С другой стороны, метод динамического программирования успешно применяется в импульсных системах. Это объясняется тем, что в задачах с дискретным временем, описываемых уравнениями в конечных разностях, удается успешно сочетать принцип оптимальности и возможности современной вычислительной техники. При введении дискретного времени вариационную задачу оптимизации удается свести, используя принцип оптимальности, к N простым задачам минимизации (или максимизации) функций малого числа переменных (управлений). Здесь N —число подынтервалов времени, на которые разбит отрезок общего времени управления. При этом полагается, что внутри каждого интервала управляющий параметр и координаты системы не меняются, т. е. используется такой же подход к системе, как в импульсных системах. Основные затруднения при этом вызывает большой объем вычислительной работы на минимизацию функций от управляющих параметров. Эти трудности удается преодолеть лишь при использовании для вычислительных операций современных быстродействующих и обладающих большим объемом памяти вычислительных машин.
§ 8.5. СРАВНЕНИЕ МЕТОДОВ ТЕОРИИ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
Все три рассмотренных нами метода (метод, основанный на уравнении Эйлера, принцип максимума и динамическое программирование) относятся к числу вариационных и тесно связаны между собой. Действительно, с помощью динамического программирования был доказан принцип максимума, а с помощью принципа максимума удалось вывести уравнение Эйлера.
Однако каждый метод имеет свою специфику и целесообразен для приложений к определенному кругу задач, в чем можно было убедиться при рассмотрении примеров этой главы.
Уравнение Эйлера наиболее целесообразно применять для решения задач управления с нелинейными функционалами и условиями в виде нелинейных функций, когда по физическому смыслу задачи решение ожидается в виде гладких непрерывных функций.
Принцип максимума наиболее эффективен при решении линейных задач, когда на управления (или координаты) наложены ограничения в виде неравенств.
Динамическое программирование целесообразно применять для систем, сводимых к импульсным. При этом благодаря сочетанию принципа оптимальности и возможностей современной вычислительной техники удается получить решение для весьма сложных задач. Для систем непрерывных применение этого метода ограничено из-за трудностей решения уравнения Веллмана. Кроме того, до окончательного решения задачи неизвестно — выполняются ли условия, при которых это уравнение выводилось.
ГЛАВА IX
СЛУЧАЙНЫЕ ВОЗДЕЙСТВИЯ
В СИСТЕМАХ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
§ 9.1. ОБЩАЯ ХАРАКТЕРИСТИКА СЛУЧАЙНЫХ СИГНАЛОВ В СИСТЕМАХ УПРАВЛЕНИЯ
В предыдущих главах рассматривались системы автоматического управления при совершенно определенных, детерминированных внешних воздействиях, описываемых заданной функцией времени.
Однако такие воздействия далеко не исчерпывают все возможные условия функционирования систем управления. Более того, необходимость построения систем регулирования вызвана наличием заранее неизвестных случайных воздействии, которые никогда не могут быть заранее предсказаны и математически полностью описаны. Такие воздействия называют случайными и для их описания применяются случайные функции времени.
Так, например, ток нагрузки генератора, к которому подключено параллельно множество различных индивидуально управляемых потребителей, представляет собой некоторую случайную функцию времени. Положение ведущего вала следящей системы при возможности переброски цели с одного на другой из множества объектов слежения является также случайной функцией. Различные помехи и наводки в электрической системе управления, колебания параметров источников питания при переходе от одного образца устройства к другому, шумы элементов устройств, порывы ветра в аэромеханических системах, удары волн в гидродинамических системах — все это представляет собой различные примеры случайных воздействий, и их влияние на систему управления требует особого рассмотрения.
Учет случайных воздействий в простейшей замкнутой системе регулирования приводит к схеме, показанной на рис. 9.1. Здесь, как сам отрабатываемый сигнал х, так и помехи h и g, а так же вариации параметров регулятора и объекта 6К2 представляют собой случайные величины, которые не могут быть описаны определенными функциями времени.
Случайной функцией описываются как полезные воздействия (например, колебания нагрузки), так и нежелательные воздействия (например, помехи). Кроме того, в более сложных, самонастраивающихся системах для изучения отдельных звеньев системы применяются специально вводимые в систему случайные воздействия. Такие воздействия, хотя и носят случайный характер, используются для настройки системы и являются полезными сигналами, предназначенны
30 L
ми для получения дополнительной информации, используемой для повышения качества функционирования системы. В этих случаях ставится вопрос о синтезе сигналов, обладающих определенными свойствами случайных функций, хотя сами эти сигналы и могут быть детерминированными. В последнем случае сигналы называют псевдослучайными.
Для исследования систем при случайных воздействиях рассматривают множество записей каждого воздействия в виде функций времени на интервале 2Т, называемое ансамблем реализаций этих воздействий. Ансамбль реализаций описывается некоторыми среднестатистическими зависимостями, которые, характеризуя случайную функцию, сами по себе являются уже неслучайными зависимостями.
Методы описания случайных сигналов можно разделить на две группы:
1. Методы усреднения по множеству, основанные на представлении различных распределений случайных величин в различные моменты времени. В этом случае ансамбль процессов характеризуется средними по множеству величинами, которые могут быть функциями времени.
2. Методы усреднения по времени, основанные на определении различного рода среднестатистических величин, дают возможность получить оценку корреляционной функции и спектральные плотности процесса по одной, достаточно длинной, его реализации.
Для исследования линейных систем наибольшее применение получили методы усреднения по времени. При исследовании нелинейных систем преимущественное распространение получили методы усреднения по множеству.
Развитие вероятностных и статистических методов и их применение к теории управления обязаны работам А. Н. Колмогорова (1941 г.), А. Я. Хинчина (1938 г.), Б. В. Гнеденко (1950 г.), В. С. Пугачева (1953 г.), В. В. Солодовникова (1950 г.)., И. Е. Казакова (1956 г.) и других в СССР, Н. Винера (1949 г.) в США, А. М. Пелегрена (1953 г.) во Франции и др. [46, 98, 106, 43, 86].
Хотя все изучаемые реальные процессы и являются нестационарными, при исследовании систем управления широко применяют выводы, вытекающие из гипотезы стационарности процесса, когда предполагают, что на исследуемом интервале времени изменение времени на некоторую величину не изменяет статистических характеристик сигналов. В этих случаях речь идет о стационарных случайных сигналах 332
Процессы, дЛя которых усреднение по времени и nd множеству ДШ
одни и те же результаты, носят название эргодических.
Все методы описания случайных функций времени излагаются в курсе математики и их краткая сводка приведена в приложении. Здесь ограничимся лишь рассмотрением различных методов математик ческого описания наиболее типичных сигналов, носящих случайный характер. Первоначально будем рассматривать детерминированные сигналы, зависящие от одного случайного параметра, а затем перейдем к описанию случайных сигналов, выражаемых случайными функциями времени, для которых отсутствуют аналитические выражения, описывающие весь ансамбль отдельных реализаций.
Для характеристики сигнала х будем пользоваться следующими функциями: одномерной плотностью распределения (х), корреля-ционной функцией по множеству (т) или по времени Rx (т) и спектральной плотностью (б)).
§ 9.2. ПРИМЕРЫ СЛУЧАЙНЫХ СИГНАЛОВ И ИХ ХАРАКТЕРИСТИК
Не зависящая от времени случайная величина
х = а, (9.1)
где а — случайная величина с заданной одномерной плотностью распределения р± (а).
Плотность распределения рг (х) не зависит от времени.
Для определения корреляционной функции необходимо знать двумерную плотность распределения р2 (хь х2). При независимости различных значений а [см. (П. 3)1
Р2(х1-,х2)=--р1(х1)р2(х2). (9.2)
Тогда корреляционная функция по множеству
оо оо
Кх= 5 5 xix2pi(.xi)p2(x2)dx1dx2=m'2x=(a)2. (9.3)
—00 —00
Если теперь все реализации х = а на интервалах 2Т представить следующими одна за другой во времени и затем принять Т-* оо, то корреляционная функция по времени
( т 1
= М { [im — х(/)х(/ + т)Л? =М (а2) =а5. (9.4)
[т-юо 2Т J
Таким образом, для рассматриваемого сигнала корреляционные функции по множеству и по времени не совпадают. В частном случае, когда сигнал детерминирован и все его реализации имеют одно и то же значение а = а0, имеем
р2(х1х2)=6(х1—а0)6(ха—а0) (9.5)
зоз
и
Kx = Rx = a0*. (9.6)
Для определения спектральной плотности сигнала воспользуемся преобразованием Фурье корреляционной функции по времени [см. (П. 44)1.
(9.7)
Рис. 9.2
Так как
§ dr = 2лб (со),
2ла2 6(ы)
(9.8)
и
О
то
5Ж (со) = 2лаа S (<о).
(9.9)
На рис. 9.2 показаны графики pt (х), Rx (т) и Sx (со) для рассматриваемого сигнала. Здесь рис. 9.2, а соответствует случайному сигналу, а рис. 9.2, б — детерминированному. Этот сигнал, являясь стационарным, эргодичен только при р2 (хх, х2) = 6 (xt — а0)8 (хг — ао)> т. е. только когда он не случаен, а детерминирован. Во всех остальных случаях эргодическая гипотеза не выполняется, и сигнал должен быть отнесен к неэргодичным.
Обычно при рассмотрении статистических характеристик случайного стационарного эргодического сигнала из него вычитается детерминированная постоянная составляющая х и характеристики Rx и Sx вычисляются для центрированного сигнала х — х — х.
Синусоидальный сигнал со случайной фазой
x = Xmsin(co0/-|-a), (9.10)
304
где фаза сигнала имеет равномерный закон распределения
Pi (а) =
при 0^а^2л, О при а>2л.
(9.П)
Как следует из графика х(®0/) (рис. 9.3, а), вероятность того, что х лежит в интервале dx,
P1(x)dx = d-^. (9.12)
Я
Из (9.10)
со0t = arcsin (х/Хт)—а. (9.13)
После дифференцирования (9.13) и подстановки в (9.12) получим
Корреляционная функция по времени находится с помощью интеграла
т
Rx(x) — lim — \ Xmasin(®0<H-a)sin[(o0(^-f-T)+a]d/ = т-*оо 2Т _т
= ^y-cos®0x. (9.15)
Полученное выражение не зависит от случайной величины а и, следовательно, усреднение по ансамблю его не изменяет. Корреляционная функция по множеству (т) для заданного распределения а сов-
305
падает с Rx (т) и, Следовательно, рассматриваемый стационарный сиг* нал относится к эргодическим.
Для определения спектральной плотности найдем преобразование ’Фурье от Rx (т):
Л
(со) — J cos со0 dx = —оо
оо
= — 1 [e-z («+«.) t] fa_ (9.16)
4 J
—00
Подставляя значение интегралов согласно (9.8), получим
Ss(co) = [(лаг)/2] [б (со +<оо) + 6 (со-соо)]. (9.17)
Графики рх (х), Rx(x) и Sx(co) приведены соответственно на рис. 9.3, б виг.
Одиночный импульс заданной продолжительности То в случайный момент времени 10. Импульс
x = a[l0(Z-/„)- 1O(Z-То-/„)] (9.18)
при равномерном законе распределения моментов начала импульса •4 на интервале —Т < t<Z Т — То, т. е.
p1(i0)=l/(27’-T0). (9.19)
В этом случае плотность распределения рх (х) отлична от нуля только в двух точках при х = 0их = аи может быть выражена следующим образом:
Pi(x)= |1-^]б(х) + ^б(х-а). (9.20)
При То С Т вероятность того, что х=/= Оих = а составляет ничтожную величину TJ2T, стремящуюся к нулю при Т -> оо.
Для’определения корреляционной функции воспользуемся усред-нением_по времени на интервале от —Т до 4-Т произведения х (Z)x(Z + + т)-
Это произведение отлично от нуля только при | т | < То, что легко заметить из построения, выполненного на рис. 9.4, а, б, в. В этом случае
т
лЪ С
Яхт-(т) = — J x(t)x(t + x)dt =
2/ __ J.
= ^_('Г0—|т| при |т|<Т01 2Г I 0 при | т | > То.
Преобразование Фурье от этого выражения дает
ЗОб
Если воспользоваться выражением спектральной плотности через преобразование Фурье Хт (/<о) от реализации случайного сигнала на интервале 2Т;
Sxt(<o)=M1/2T)|Xt(/W, (9.23)
то, подставляя
Хг(/®)= — sin^, (9.24)
<о 2
получим после преобразований ту же формулу (9.22).
Графики (т) и Sxt (<о) приведены на рис. 9.4, г и д.
Рис. 9.4
Из рассмотрения (9.21), (9.22) и (9.20) видно, что в каждом из этих выражений случайная величина /0 отсутствует и, таким образом, полученные функции pt (х), Rxt (т) и Sxt (ш) представляют собой неслучайные характеристики случайного сигнала.
Идеальные импульсы. Если в предыдущем примере принять а — = 1/То при То —0, то получим единичный импульс, действующий в случайный момент времени t0:
x = 8(t —10). (9.25)
При То-> 0 из выражений (9.21) и (9.22) получим для случайного сигнала в виде единичного импульса, действующего в случайный момент времени, следующие характеристики:
/?хт(т) = (1/2Т)б(т), (9.26)
5*т(со) = 1/2Т. (9.27)
На рис. 9.5, а, б приведены соответственно графики этих характеристик.
307
Так как в полученном выражении спектральная плотность не зависит от частоты, то этот сигнал соответствует белому шуму, в котором энергия сигнала распределена равномерно по всему спектру.
Рассмотрим случайный сигнал, представляющий собой не один идеальный импульс, а совокупность случайных импульсов, амплитуды которых представляют собой случайные величины, а интервалы между соседними импульсами также случайны.
Производя для такой случайной совокупности импульсов аналогичные выкладки, получим следующие выражения для корреляционной функции и спектральной плотности:
(928)
sx(<o)=:a
(9.29)
°)
б)
Рис. 9.5
S,r(oj) 1 2T
01
О
где с? = М (а21 — среднеквадратичное значение площади каждого из импульсов, a f = - l/T’j.p = М {/} — средняя их частота.
Закон распределения амплитуд импульсов при этом может быть самым различным.
Выражения (9.28) и (9.29) с достаточной для практики точ-
ностью описывают многие реальные процессы. Так, полезный сигнал слежения за целью системы управления орудия или пулеметной турели при переброске цели с одного объекта на другой может быть приближенно представлен кусочно-линейной ступенчатой зависимостью, в которой как моменты переброски tlt так и положения цели Xt представляют собой случайные величины.
На рис. 9.6, а показан пример реализации этой случайной зависимости.
При этом производная сигнала у = dxldt (рис. 9.6, б) представляет собой последовательность импульсных функций, следующих одна за другой со случайными амплитудами af через случайные интервалы времени Т{
al = xi + l—xi, Ti = ti+\—tl.
(9.30)
При равномерном законе распределения xt на интервале —a <_ < х, < +a (рис. 9.6, в)
. . ( 1/2а при
Pi(*i)= .
[ 0 при
I Xi | < а, I xt | > а.
(9.31)
Плотность распределения (аг) (рис. 9.6, а) может быть получена как плотность распределения разности двух случайных величин с равномерными плотностями распределения [см. (П.Юа)]: 308
Pi(at)
l/2fl Г1 _
\ 2e /
0
при | at | < 2a, при \ai\>2a.
(9.32)
При этом закон распределения интервалов рг (Тможет быть любым.
Определяя средние значения аг2 и 7\ как соответствующие математические ожидания для случайного сигнала
и спектральную плотность
найдем корреляционную функцию
Ry (т) = а? А6(т) =Л4 (аЛ1 М 6(т), (9.34)
$>) = а?7>М[<^)ЛШ}. (9.35)
Здесь ft Tt = 1. Эти выражения соответствуют (9.28) и (9.29).
Двоичный белый шум. Статистической характеристикой, близкой к белому шуму, могут обладать не только сигналы, мгновенные значения которых распределены в некоторой области (например, от —а до -|-а), но и сигналы, приобретающие только два значения. Такие сигналы носят название двоичных.
309
Рассмотрим сигнал, который может иметь только два значения (+а и —а), а его скачкообразное изменение может происходить только через равные интервалы времени То. Пусть в некоторый момент времени, принимаемый за начало отсчета, этот сигнал равен 4-а. Через время Т0/2 с равной вероятностью он может либо остаться равным +а, либо изменить знак и стать равным —а. На интервале времени Т0/2 < < t <z. 3/2Т0 он остается прежним, а в момент 3/2Т0 он снова с равной вероятностью может остаться прежним или изменить знак на противоположный.
Рис. 9.7
Аналогично обстоит дело и в моменты времени, предшествующие t = 0. В моменты времени — Т0!2, —3/2Т0, — 5/2Т0 и т. д. с равной вероятностью значение сигнала могло оставаться прежним и изменяться на противоположный знак.
Граф-схема вероятности изменения знака сигнала в моменты tK = = То (1/2 + k) показана на рис. 9.7. Здесь же соответствующими дугами отмечены k вариантов того, что длительность при t = 0 импульса составляет kT0.
На схеме рассматривается некоторый момент времени t = 0, соответствующий середине интервала между двумя моментами переключения /_г и 10. Знак сигнала х на этом интервале принимается положительным.
Вероятности изменения знака этого импульса с положительного на отрицательный в моменты времени /0, /2 и т. д. соответственно
будут 1/2, 1/4, 1/8 и т. д. Вероятности изменения знака с отрицательного на положительный в моменты времени /_ь /_2, /_3 и т. д. так же 310
райнЫ 1/2, 1/4, 1/8 и t. д. Знайёйий этих вероятностей указаны й верхней части чертежа. В нижней части чертежа дугами схематически показаны возможные варианты импульсов различной длительности. Так, импульс длительностью То имеет один вариант с переключениями в моменты времени и /0. Импульс длительностью 270 имеет два варианта с переключениями в моменты времени и i0, !_\ и tY. С увеличением продолжительности импульса увеличивается число возможных вариантов (см. на рис. 9.7 случаи 37’0 и 4Т0).
Степень зачернения на временной диаграмме соответствует вероятности того, что х = +а или —а в момент времени !.
О Т, 2Т0 ЗТ0 iiT„
Рис. 9.8
Вероятность того, что импульс имеет продолжительность kT0, может быть выражена следующей формулой:
P1(kT0)=k(\/2)l‘+^ (9.36)
и, следовательно, плотность распределения длительности импульса р1(^) = ^(1/2?+16(/-А-7’0). (9.37)
На рис. 9.8, а и б показаны плотности распределения Рх (х) для значения сигнала х и рх (Т,) для продолжительности импульса Tt.
Найдем теперь корреляционную функцию рассматриваемого сигнала. Выражая
т
Рх(т) = 1/2Т х(!)х(! +т)Л,
-т
легко определить, что при т = О
Я*(0) = а2, (9.38)
так как х2 (!) = а2 в любой момент времени.
При | т | То вероятность того, что х (!) и х (/ + т) имеют одинаковый знак в любой момент времени, равна 1/2 и, следовательно, Rx (1) = = 0. При | т | < То, рассматривая среднее значение произведения х (f)x (! + т) на интервале То для четырех возможных равновероятных вариантов, когда переключение происходит при /0 и (рис. 9.9, а), /-1 и i > 10 (рис. 9.9, б), /0 и t < /_! (рис. 9.9, в), t<t_i и t > !0 (рис. 9.9, г), легко заключить, что оно убывает с ростом |т| по линейному закону. Стало быть
311
R,(r)=a>f 1_'t/T’1 П|И1 <939>
v I 0 при |т|>Т0 j
График Rx (т) аналогичен рис. 9.4, г и отличается только масштабом по оси ординат. Таким образом, вид корреляционной функции одинаков для одиночного импульса продолжительностью То и двоич-ного/сигнала с равновероятным изменением знака сигнала через интервалы То.
Рис. 9.9
Соответственно спектральная плотность выражается аналогично (9.22)
Sx(<o)=a’TJSin^/^y.' (9.40)
\ * / * J
График Sx (со) отличается от рис. 9.4, д только масштабом по оси ординат. Если ®7’0< 1, то Sx (со) лежит в пределах 100—95% и в этом диапазоне частот сигнал с достаточной для практики точностью соответствует белому шуму.
Псевдослучайный двоичный белый шум. Осуществление источника двоичного белого шума с чисто случайными равновероятными переключениями встречает технические затруднения. Значительно проще построить источник детерминированных двоичных сигналов, по своим 312
свойствам приближающихся к двоичному белому шуму. Такие генераторы могут быть основаны на различных принципах: 1) коды, задающие моменты переключения, могут быть заранее рассчитаны и введены в магнитное или фотоэлектрическое программное устройство и 2) моменты переключения могут формироваться в самом генераторе.
В качестве генератора, работающего по второму принципу, рассмотрим кольцо регистров сдвига, замкнутое через ячейку суммирования по модулю 2 (рис. 9.10).
Рис. 9.10
Здесь ячейками 1,2, ..., k, ..., п показаны элементы регистра сдвига, в котором в каждой ячейке может быть записан 0 или 1 и через каждый интервал То запись из i-й ячейки переводится в (i + 1)-ю. Замыкается кольцо регистра через ячейку суммирования по модулю 2, в который записан 0, если в ячейках k и п записаны одинаковые значения (0 и 0 или 1 и 1), и 1, если в ячейках k и п записаны различные значения (0 и 1 или 1 и 0).
На выходе имеется линейный преобразователь П, преобразующий входной сигнал у по закону х = 2у — 1.
Рассмотрим, например, работу генератора для простейшего случая п — 3, k = 2.
Пусть в начале во всех трех ячейках регистра записаны 1. Тогда в ячейке суммирования записан 0. Через интервал То этот 0 переместится в ячейку 1, а в суммирующей ячейке появится снова 0, как сумма по модулю 2 двух 1, записанных в ячейках 2 и 3. Так с каждым тактом То будет происходить перезапись в ячейках памяти и в первой ячейке будет появляться результат суммирования по модулю 2 значений, записанных в ячейках 2 и 3.
313
В таблице на рис. 9.10 приведены значения, записан ные в ячейках 1, 2, 3 и Х2 в моменты времени О, То, 2Т0, ЗТ0 и т. д. Из рассмотрения таблицы и графика видно, что через интервал 7Т0 запись начинает повторяться и время 7Т0 является периодом сигнала у (f), снимаемого с ячейки п — 3, а соответственно и х (t). График х (/) для этого случая показан на рис. 9.10, б.
При большем количестве ячеек этот период возрастает. Можно показать, что при я ячейках памяти общий период последовательности импульсов
(9.41)
Гц =МТ0 = Т0(2п—1).
За период Та число положительных тактов п+ = (Л( + 1)/2, а число отрицательных
о_ = (М—1)/2.
Среднее значение сигнала за период Тп
(9.42)
(9.43)
(9.44)
Чем больше М, тем сигнал х ближе к двоичному белому шуму.
Корреляционная функция такого периодического псевдослучайного двоичного сигнала представляет собой симметричную относительно оси ординат периодическую кривую, состоящую из импульсов треугольной формы, следующих один за другим через период Тп (рис. 9.11, а).
На участке | т | < Тп/2
J (1 + 1/М)(1-Нт/Т0|)-1/^ при |т/Т0|<1,
а \ —\/N при 1^|т/Г0|<М/2.
ЗН
(9.45)
После разложения в ряд Фурье по гармоникам кшв, где ш0 = 2л/Тп, получим для симметричного относительно k = 0 спектра
*,(*)=£ -1
+ (1 + у) (sin У / У У cos • (9.46)
Определив спектральную плотность для каждой из гармонических составляющих корреляционной функции, включая и постоянную составляющую по формулам (9.9) и (9.17), получим
S.(») - {(1 + i) (sin 1 • w - (I -1) S (»)}, (9.47)
где
!*(«)= У б(®-Ып), а -^- = Т0.
*=-« Na>a
При N=Tn/T0^>l, произведя упрощения, получим
«х(®)= {(sin^/фуИМ-б^)}. (9.48)
Выражение (9.48) представляет собой дискретный спектр мощности с огибающей, аналогичной спектральной плотности единичного импульса продолжительностью То с интервалом между частотами <оп = = 2л/(Лг7'0) и с пропущенной полосой, соответствующей постоянной составляющей (для k = 0 в фигурных скобках две б-функции взаимно компенсируются).
При ®7'0 •< 1 спектральная плотность такого сигнала с достаточной для практики точностью (5%) соответствует белому шуму.
На рис. 9.11, б показан график спектральной плотности рассматриваемого периодического псевдослучайного сигнала.
Наряду с генераторами двоичного псевдослучайного белого шума применяются и другие генераторы с плотностью распределения, отличной от двоичного закона. В качестве примера таких генераторов можно привести источник, в котором замыкание электрической цепи усилителя производится случайным касанием шариков, содержащихся во вращающемся барабане (рис. 9.12, а), или разбрызгиванием проводящей жидкости (рис. 9.12, б).
В этих случаях источник Хб.ш имеет спектр частот, близкий к белому шуму, и плотность распределения, которая в зависимости от вида осуществления контакта и схемы соединения может соответствовать нормальному закону.
Произвольные сигналы. В большинстве случайных сигналов, наблюдаемых в технических устройствах, в биологических, астрофизических, космических и других системах сам сигнал настолько сложен, что его реализацию непосредственно не удается выразить аналитически. Однако при этом возможно получить его статистические характеристики, например, корреляционную функцию и спектральную плотность.
315
Наиболее распространенные корреляционные функции, описывающие случайный сигнал, выражаются следующими уравнениями: (т) = ае~а1 т 1 (9.49)
и
(т) = ае_“1 т । cos 0т. (9.50)
Первая из этих корреляционных функций соответствует типовому случайному сигналу на входе следящей системы, а вторая может характеризовать, например, стационарный случайный сигнал нерегулярной качки корабля или результаты обработки электроэнцефалограммы.
Рис. 9.12
Переходя от корреляционных функций к спектральным плотностям путем прямого преобразования Фурье, получим:
И
S_2 (<о) = аа(------1---------. (9.52)
Va2+(P—а2 + (р+<вр/ 1 '
Характеристики сигналов, выражаемые уравнениями (9.49)— (9.52), встречаются часто при рассмотрении прохождения случайного сигнала через линейные системы.
§ 9.3. СРЕДНЕЕ ВРЕМЯ КОРРЕЛЯЦИИ И СРЕДНЯЯ ПОЛОСА ЧАСТОТ СЛУЧАЙНЫХ СИГНАЛОВ
Для приближенной характеристики случайных сигналов иногда пользуются некоторыми прямоугольными эквивалентными характеристиками, аппроксимирующими корреляционную функцию и спект-316
ральную плотность сигнала. В этом случае принимается, что на интервале I т I < т0 RaK (т) = R (0), а'при | т | > т0, RBK (т) = 0. Аналогично для спектральной плотности принимается" SaK' (<о) = S (0) при |<о | < < ш0 и 5ЭК (со) = 0 при | со | > соо. Величины т0 и соо могут быть выражены через известные значения R (0) и S (0). Действительно,
оо]
R (0) - $ S3K (со) dco = S (0) (9.53)
и соответственно
оо
Из этих выражений находим
то=$(О)/2Я(О) (9.55)
и
со0 = (0)/S (0), (9.56)
при этом
т0со0 =л/2 = const. (9.57)
Из последнего равенства непосредственно следует, что чем шире и положе область, ограниченная корреляционной функцией, тем уже и острее кривая, выражающая спектральную плотность. И, наоборот, чем острее корреляционная функция, тем положе график спектральной плотности. Эта взаимная связь кривых, соответствующих прямому и обратному преобразованиям Фурье, уже была ярко выражена при рассмотрении постоянного сигнала и белого шума. В первом случае корреляционная функция имела вид горизонтальной прямой (максимальная пологость) (см. рис. 9.2, в), а спектральная плотность (см. рис. 9.2, г) имела вид б-функции (максимальная заостренность). Во втором случае (см. рис. 9.5, а и б) имеет место обратная картина.
Пример 9.1. Найдем <оо и т0 для сигнала с корреляционной функцией и спектральной плотностью, выражаемыми уравнениями (9.49) и (9.51). В этом случае 7?(0) = а и S (0) = 2а/а.
Таким образом по формулам (9.55) и (9.56)
т0 = 1/а и <в0 = ла/2. (9.58)
Графики Rx (т), Явк(т) и Sx (w), S3K (w) для этого примера показаны на рис. 9.13, а и б соответственно.
317
' § 9.4. ВЗАИМНЫЕ КОРРЕЛЯЦИОННЫЕ ФУНКЦИИ
И СПЕКТРАЛЬНЫЕ ПЛОТНОСТИ СЛУЧАЙНЫХ СИГНАЛОВ
При наличии двух и более случайных сигналов необходимо знать Взаимную связь между двумя сигналами, которая может быть выражена совместной плотностью распределения рху = р2 (хъ 4; у2, t2), взаимной корреляционной функцией Кху (т) и взаимной спектральной плотностью Sxy (j(&) (см. Приложение).
Если взаимная корреляционная функция двух случайных сигналов равна нулю ,то сигналы называют некоррелированными .При отличии взаимной корреляционной функции от нуля сигналы называют коррелированными.
Некоррелированность сигналов является показателем различной природы их возникновения и часто свидетельствует об их статистической независимости, выражаемой следующим образом:
p2(^i. Ул, tt) = Px(Xi, t2).
Для стационарных случайных сигналов
Х1 = Х(^),
Уг=У(.^+х).
В этом случае взаимная корреляционная функция, определяемая как среднее по множеству по совместной плотности распределения
оо оо
/сжу(т)=-. J dxj J x^tPtfxL, y2)dy2. (9.61)
—“ОО —00
Взаимная корреляционная функция, определяемая как среднее значение по времени, для стационарных случайных сигналов х и у
т
Rxy(x) ==lim $ x(t)y(t+x)dt. (9.62)
Т“*оо 2/ _?
Для эргодических процессов вычисление по формулам (9.61) и (9.62) дает один и тот же результат: Rxy (т) = Кху (т).
Пример 9.2. Пусть стационарный случайный сигнал х (I) эргодического процесса записан на магнитную ленту и воспроизводится с задержкой на время t0. Обозначив воспроизводимый сигнал у (/) = х (/ — /0), можно рассмотреть некоторые свойства взаимных корреляционных функций двух коррелированных сигналов х и у.
По формуле (9.62)
т
1
Яж!/(т) = Ит —
Т-*оо
В этом случае взаимная корреляционная функция представляет собой автокорреляционную функцию, сдвинутую во времени на величину t0 вправо. Так как автокорреляционная функция имеет максимум при аргументе, равном нулю, то взаимная корреляционная функция имеет максимум при х = t0.
318
(9.59)
(9.60)
5 x(t)x(t + z-t0)dt = Rx(x-t0). (9.63)
—т
Если поменять местами функции х и у и определить взаимную корреляционную функцию Ryx (т), то т т
RyX(x)=\im х (i— iB) х (f + т) d/=Iim — J x (/) x (f + т-Но) Л = T-*oo 27 ________y- T-*oo 2/ _j-
— Rx (т + M = Rxy (—t). (9.63a)i
Теперь взаимная корреляционная функция представляет собой автокорреляционную функцию, сдвинутую на ta влево. В этом случае максимум кривой будет при т = —/0.
Таким образом, для взаимных корреляционных функций имеет место неравенство
Rxy (т) =/= Ryx (т) •
Переходя от корреляционных функций к спектральным плотностям для этого случая, получим
Sxy№) = e-W>Sx(M, (9б4)
51/зс(/<о)=е/“/’Зя(<о).
Пример 9.3. Рассмотрим два синусоидальных сигнала со случайными начальными фазами и различными частотами coj и <о2: >
x=xmsin (<»i / + £ , y = yms\n (<о2/ + Р).
По формуле (9.62) получим
Rxy С1) — Ryx СО =о и, следовательно,
§ху (/ш) =$ух G40) =0.
Последние равенства показывают, что два синусоидальных сигнала с различными частотами не коррелированы.
Так же оказываются -некоррелированными два сигнала типа белый шум, представляющие собой совокупности импульсов (см. § 9.2), если интервалы между ними случайны и статистически независимы.
Если известны автокорреляционные и взаимные корреляционные функции двух сигналов х и у, то с их помощью могут быть также выражены корреляционные функции суммы или’разности этих функций.
Пусть
2(t)=x(t)±y{t). (9.65)
Тогда по формуле (П.30) после преобразований легко получить
R. (т) = Rx (т) + Ry (т) ± Rxy (т) ± Rys (т). (9.66)
Соответственно
$2 (й) — Sx (®) + $у (®) ± Sxy (/со) ± Syx (/со) =
= SJffl)4^(a)±2ReSxp(M (9.67)
Пример 9.4. Найти спектральную плотность суммы двух сдвинутых во времени на величину t0 сигналов х (I) и у (Г) = х (I + <0), если известна Sx (со). По формуле (9.67) с учетом (9.64) получим
319
1
2
= 2SX (co) [1 +cos co/0].
(9.68)
sz (co) = 2Sx(co)
Пример 9.5. Найти корреляционную функцию суммы двух некоррелированных сигналов х (/) = a cos (<oat + а) и у (/) с корреляционной функцией Rv(x) = 62в-01 х । .
По формуле (9.66) с учетом (9.15) получаем
Rz (x) = Rx (x) + Rv (т) = — cosco0T-|-62e~P''t|. (9.69)
Из этого выражения видно, что с ростом т второй член затухает, тогда как амплитуда первого осциллирующего члена остается без изменений. Если х (/) выражает полезный сигнал, а у (<) — помеху, то из уравнения (9.69) видно, что, измеряя автокорреляционную функцию суммы z при больших значениях т, можно выделить малый полезный сигнал х на фоне больших помех у.
§ 9.5. ОПРЕДЕЛЕНИЕ СТАТИСТИЧЕСКИХ ХАРАКТЕРИСТИК СЛУЧАЙНЫХ СИГНАЛОВ ПО ИХ РЕАЛИЗАЦИЯМ НА ИНТЕРВАЛЕ ДЛИНОЙ Тр
Ограничимся рассмотрением характеристик стационарных случайных эр-годич’еских процессов, для которых известны одна или несколько реализаций на интервале времени 0 < t < Тр. По этим реализациям могут быть приближенно определены основные характеристики случайного процесса: функция распределения, корреляционная функция и спектральная плотность.
Для расчета характеристик необходимо непрерывный сигнал заданной реализации представить в дискретной форме, заменив гладкую кривую ступенчатой и'произведя, как говорят, квантование сигнала. Различают два основных вида преобразования непрерывного сигнала в дискретную форму, называемых квантованием по времени и квантованием по уровню.
В первом случае сигнал задается последовательностью его ординат, следующих одна за другой через равные промежутки времени Д/, во втором случае — рядом последовательностей моментов времени, соответствующих равенству сигнала определенным значениям kAx.
Начало отсчета х удобно выбрать так, чтобы в любой момент времени соблюдалось условие х > 0.
При квантовании по времени (см. рис. 9.14, а) сигнал представляется в виде решетчатой функции, выражающейся последовательностью ординат Хд для моментов времени /гД/. Если аппроксимировать сигнал ступенчатой функцией, для которой постоянное значение сигнала на протяжении интервала Д< равно истинному его значению в середине этого интервала времени, то
При квантовании по уровню (рис. 9.15, б) сигнал представляется в виде п последовательностей времен пересечения кривой х (/) и прямых х = &Дх. Эти моменты времени можно обозначать txMj, где k определяет уровень прямой х =• = /гДх, i соответствует порядковому номеру пересечения, а / = 1, если пересечение происходит снизу вверх и / = 2, если пересечение происходит сверху вниз. Очевидно, что j = 1 и / = 2 чередуются.
Если для каждого уровня представить булеву временную функцию
здМ=1ок(0-*^1. (9-71)
то ступенчатый сигнал, аппроксимирующий заданную функцию х (/),
х (t) х Лх
(9.72)
п
*=1
320
Представляя сигнал в виде (9.70) или (9.72) , можно с помощью ЦВМ рассчитать необходимые его статистические характеристики.
Для определения статистических характеристик могут быть применены и специализированные вычислительные устройства: анализаторы функций распределения, корреляторы и спектральные анализаторы.
Определение функций распределения. Для определения функций распределения удобнее пользоваться представлением сигнала в дискретной форме при квантовании его по уровню. В этом случае вероятность того, что х (f) > k\x,
Рис. 9.14
и соответственно функция распределения или вероятность того, что х (I) < k&x, т
1 с”
₽! (k Ьх) = 1 —Р1 (х (/) > k Дх] — \ (1 — xOft) dt. (9.74)
7Р о
Для среднего значения плотности распределения на интервале Дх соответственно получим
Picp [(& + 0,5) Дх]= ——
1 Р
1 С
(*0/г— *04+ 1) dl- (9.75)
о
При квантовании сигнала по времени расчет функций распределения несколько усложняется, так как в этом случае для каждой области Дх необходимо подсчитывать число ординат решетчатой функции, лежащих в этом интервале, и относить их к общему числу [Л. 69, 23].
Получение (АДх) и р1ср (х) может быть осуществлено с помощью анализаторов функций распределения различных систем.
Структурные схемы простейших анализаторов функции распределения и плотности распределения показаны на рис. 9.15, а и б соответственно. Обе эти схемы автоматически выполняют вычисления по формулам (9.74) и (9.75). Задавая различные значения /гДх, легко получить на выходе схемы Рг и рхср — = ^1Дх^,
Определение корреляционных функций. Для расчета корреляционных функций наибольшее распространение получило представление сигнала в дискретной форме при квантовании его по времени. Если известна реализация двух сигналов х и у на интервалах времени Тр/^и 7’ру, то для расчета РхуТ (т) необходимо, чтобы
Т’Рх = 27' и Тру = 2Г + тта
(9.76)
321
11 Зак. 447
при совпадении моментов начала этих интервалов.
Только в этом случае возможно определение
1 С
RxyT J х Юу (*+г)dt
— т
(9-77)
в необходимом диапазоне изменения т при 0 < т < ттах.
Из условий стационарности сигнала путем подстановки t = - т можно
интегралу (9.77) придать следующий вид:
1 ?
RxUr(x')='^ х (i^x) у dti. (9.77а)
В этом случае для вычисления корреляционной функции по формуле (9.77а) необходимо, чтобы
7’рх — 271 + ттах и Тру— 2Т.
(9.76а)
При вычислении Ryxr (т) во всех выражениях (9.76), (9.76а), (9.77) и (9.77а) х и у соответственно меняются местами.
Чтобы при расчете корреляционной функции были учтены все высокочастотные составляющие сигнала, необходимо выбирать шаг квантования по времени Ai заведомо меньше, чем /т|П — минимальное расстояние между двумя соседними экстремумами сигналов х (/) или у (/) (рис. 9.16). Для учета всех высокочастотных составляющих рекомендуется, чтобы А/ < 0,5Zmin.
Выбрав величину Л/, можно подсчитать на характеристике Rxy (т) количество точек
Чпах
п~~ М
(9.78)
и в формуле для расчета корреляционной функции число слагаемых
Л7=(2Г)/(А/). (9.79)
Значительно сложнее обстоит дело с учетом низкочастотных составляющих сигнала. При выборе длины реализации Тр необходимо быть уверенным, что учтены все низкочастотные составляющие, а для этого требуется иметь реализацию сигнала на интервале, значительно превышающем величину Тр, или иметь априорные данные о виде определяемых корреляционных функций.
Если таких данных нет, то сначала длину реализации выбирают приближенно, по ней рассчитываются корреляционные функции, а затем уточняют выбранную длину реализации.
U-> Однако и при этом легко упустить необходимую информацию, особенно при определении взаимной корреляционной функции. Так, например, если х и у — два одинаковых сигнала, сдвинутых один относительно другого на время ta, зна
322
чительно превышающее период самой низкочастотной составляющей этих сигналов, то, выбираяттах < /0, можно не обнаружить взаимной корреляции между сигналами.
Тем не менее, если априорная информация отсутствует, то при приближенном расчете корреляционной функции для учета низкочастотных составляющих сигнала обычно выбирают время реализации так, чтобы Т > 27’о,где TQ период наибольшей низкочастотной составляющей. При этом ттах выбирается так, чтобы N > 5п.
Одним из способов проверки правильности выбора времени реализации является проведение вспомогательного расчета при увеличенном, например в 2 раза, времени реализации. Если при этом уточнение результата незначительно, то значит время реализации выбрано удовлетворительно.
Рис. 9.16
Зная N ординат xt и N + п ординат yi и переходя в формуле (9.77) от интеграла в сумме, получим
Для центрированных сигналов х (/) = х(1) — х и у (f) = у (<) — у корреляционная функция
1 N
= 77 .2 ХгУ1 + Ь-хУ- (9.80а)
Здесь
1 N
11
323
По формулам (9.80) и (9.80а) обычно рассчитывают собственные (х = у) и взаимные (х =/= у) корреляционные функции сигналов по их реализациям на интервале 2Т + тгаах.
Если сигнал квантован не по времени, а по уровню, то для расчета его корреляционной функции так же могут быть получены удобные расчетные формулы Л.23]. В обоих случаях расчет корреляционных функций легко производится с помощью ЦВМ.
Для автоматического вычисления корреляционных функций применяются
специализированные устройства, носящие название корреляторов или коррелометров. Основными элементами корреляторов являются блок регулируемого запаздывания (на величину т), блок умножения и блок вычисления среднего зна-
чения за время 2Т.
В зависимости от реализации этих блоков корреляторы бывают магнитные, электронные и электромеханические. Так как для вычисления одной ординаты корреляционной функции требуется время 2Т,
Рис. 9.18
Рис. 9.17
то корреляторы по своему принципу являются импульсными приборами с периодом повторения Та = 2Т.
Структурная схема простейшего аналогового коррелятора показана на рис. 9.17. Так как упреждение сигнала Нереализуемо и возможно осуществление только запаздывания сигнала, то схема соответствует вычислению по формуле (9.77а). При наличии п подобных схем для различных значений т за время 2Т могут быть определены п ординат корреляционной функции, необходимых для ее построения, и она может быть автоматически представлена на экране электроннолучевой трубки. Кроме корреляторов аналогового типа существует множество систем цифровых корреляторов, реализующих различные алгоритмы вычисления корреляционных функций по дискретным значениям сигнала.
Определение спектральных плотностей. Если известны корреляционные функции случайных сигналов, то их спектральные плотности могут быть найдены путем вычисления прямого преобразования Фурье от этих функций. Это вычисление может производиться специальными анализаторами, автоматически осуществляющими необходимые математические операции.
Так, если известна взаимная корреляционная функция Rxll (т), то согласно (П.44)
ОО оо
Sx;/(/'«•)= j RXy (т) cos сот dt — j J Rxy (t) sin сот dt =
—oo —oo
— GXy{(o) iQxytod). (9.81)
Вычисление Gxy (св) и Qxy (co) может быть произведено с помощью аналогового или цифрового прибора. Блок-схема простейшего аналогового прибора для автоматического вычисления Gxy (со) и Qxy (со) по заданной в виде функции времени корреляционной функции Rxy (т) приведена на рис. 9.18. Здесь принято, что Rxy (т) дг 0 при |т| > tm и интегрирование по т может производиться на конечном интервале времени 2тт. Сигналы Hi и v2 определяют путем умножения Rxy (т) на получаемые от генератора Г синусоидальные сигналы sin сот и cos сот.
324
Так как в собственной спектральной плотности Sx (<о) мнимая составляющая отсутствует, то для определения ее по /?х(т) достаточно одного канала 0х(ш).
Если в корреляторе имеется запись ряда дискретных значений 7?ху (т), то для получения функции времени, вводимой в спектральный анализатор, применяется система считывания, преобразующая решетчатую функцию RXy (яДт) в ступенчатую квантованную по времени кривую Rxv (/) Определение спектральной плотности по корреляционной функции дает наиболее точные результаты .
Однако по реализации случайного сигнала х (t) на интервале Тр его спектральная плотность может быть получена и непосредственно. При этом для однозначного нахождения спектральной плотности необходимо доопределить сигнал во всей области времени вне интервала Тр. Возможно два подхода к решению этой задачи. В первом случае предполагается, что х (/) = О вне интервала Тр,
Рис. 9.19
т. е. сигнал имеет непрерывный частотный спектр. Во втором случае предполагается, что сигнал х (/) = х(/ + kTp), т. е. он периодически повторяется с периодом Тр. В этом случае сигнал имеет дискретный спектр с частотой основной гармоники f0 = 1/Тр.
В зависимости от принятого подхода как расчет, так и автоматический анализ различаются. Рассмотрим оба подхода применительно к определению собственных спектральных плотностей.
В первом случае исходят из представления мощности сигнала в виде суммы парциальных мощностей [см. (П.43)]
1
х2 (!)
л
ОО
Sx (to) du. о
(9.82)
Если спектр сигнала ограничить частотами (o>i = w — Дю/2 и <о2 ~ ш Н" + Ды/2, то средняя мощность в полосе Дш окрестности частоты ш будет
, Лео
“+-г ___________
------ 1 f Sx (со, Дсо) Дш
V (0 = — Sx (со) dco = ----. (9.83)
JT Л
Дсо т
При достаточно малом значении Дсо
___________ "VCO
Sx (со) ~ Sx (со, Дсо) = --—---. (9.84)
Из полученной формулы следует, что спектральную плотность можно определить путем измерения средней мощности сигнала в известной узкой полосе частот, т. е. вырезая узкую полосу спектра исследуемого процесса и измеряя среднюю мощность полученного стационарного случайного сигнала.
Прибор, осуществляющий эту операцию, должен содержать узкополосный фильтр с регулируемой частотой пропускания, квадратичный детектор и ин
325
тегратор, выделяющий постоянную составляющую сигнала за время интегрирования 2Т (рис. 9.19). Здесь Ф — узкополосный фильтр, выделяющий полосу шириной До) в окрестности частоты о). Применяя п таких устройств, настраиваемых на частоты со = йД<о, при 1 < k < п за время 2Т, получим п дискретных значений спектральной плотности 5х(/гДсо, Лео), необходимыхдля характеристики сигнала.
При выборе полосы частот Дсо и времени реализации обычно руководствуются условием 2ТДш > 1, вытекающим из анализа точности работы устройства.
Чем больше 27’Дй), тем выше точность определения Sx (to, Дсо). Соображения по выбору времени интегрирования 2Т при этом остаются теми же, что и при вычислении корреляционной функции.
Более подробно этот вопрос рассмотрен, например, в [Л. 69].
Во втором случае записанный, например, на магнитную ленту и многократно повторяемый сигнал х (/) заданной реализации образует перио-
дический сигнал х (/ + 2пТ) с частотой ш0 — л/Т, который с помощью спектрального анализатора может быть разложен на гармонические составляющие Хт^ и представлен в виде:
ОО
x(i + 2nT)= sin (feoo/+фА). (9.85)
k = — оо
Для каждой из гармонических составляющих в соответствии с (9.18) получаем
nXmk
S«ft(<o) = [6(co + fea>o)+fi(co-fecoo)]. (9.86)
Так как взаимная корреляционная функция различных гармоник равна нулю, то также и SXhi (со) — 0 [см. (9.67)] и сумме различных гармоник соответствует сумма их спектральных плотностей. Таким образом для сигнала х (/)
л 00
SxH=— 2 ^lS(“ + fe“o) + 6(co-feco0)]. (9.87)
- k -= — оо
Если от дискретной спектральной плотности перейти к непрерывной путем усреднения дискретного значения на всем интервале со0, к которому оно относится, то получим ступенчатую функцию
На рис. 9.20 показан график Sx (со) для дискретного и непрерывного представления спектральной плотности.
326
Прибор для определения Sx (со) по описанному методу должен содержать спектральный анализатор, например, типа синхронного детектора с фильтром и квадратичный детектор. Схема такого прибора для одного канала fecoo показана на рис. 9.21.
Сравнивая оба метода автоматического определения спектральной плотности, можно заметить, что первый способ позволяет получить текущую информацию о спектральной плотности значительно быстрее, чем второй, однако при втором способе спектральная плотность может быть получена точнее. Кроме
Рис. 9.21
описанных аналоговых спектральных анализаторов, существует ряд дискретных приборов, позволяющих по известной реализации сигнала получить его спектральную плотность с заданной точностью. Расчет Sx (со) по известным дискретным значениям х (t) может быть так же проведен с помощью ЦВМ.
Определение Ssy (/со) производится аналогичным образом, однако, как и при расчете Sxy (/со) по корреляционной функции RXy< в этом случае необходимо учитывать фазы гармонических составляющих сигналов и находить, кроме вещественной, также и мнимую составляющую Sxy (jo).
ГЛАВА X
ЛИНЕЙНЫЕ СИСТЕМЫ ПРИ СЛУЧАЙНЫХ СТАЦИОНАРНЫХ ВОЗДЕЙСТВИЯХ
§ 10.1. ПРОХОЖДЕНИЕ СЛУЧАЙНОГО СИГНАЛА ЧЕРЕЗ ЛИНЕЙНОЕ ЗВЕНО
В части I курса рассматривались различные методы исследования преобразования детерминированных сигналов линейными системами. Все эти методы могут быть применены и к определенным реализациям случайных сигналов.
Так, если известен сигнал х (/) на входе линейного звена (рис. 10.1, а) с весовой функцией то сигнал у (/) на выходе линейного звена может быть получен как реакция звена на совокупность импульсов х (t — Tj) продолжительностью dx1 (рис. 10.1,6). В этом случае сигнал на выходе линейного звена
оо
//(/)=: ^ 02.'(тх)х(/ — TjdTj. (Ю-1)
о
Для частотного спектра сигнала на выходе
У(/(о) = Г(/<о)Х(М (10.2)
где X (/®) и Y (/©) — преобразования Фурье от х (/) и у (/).
Если на входе системы действует случайный стационарный сигнал с известными статистическими характеристиками Rx (т) и Sx (т), то с помощью выражений (10.1) и (10.2) могут быть найдены статистические характеристики сигнала на выходе.
Преобразование корреляционных функций. Собственная корреляционная функция стационарного случайного сигнала на выходе линейного звена
т
Яу(т)--= lim -i- $ y(t)y(t + r)dt
1 ~+са 27
— Т
после подстановки y(t) из (10.1) и изменения последовательности интегрирования выражается следующим образом:
7' оо оо
= lim -i- \ \w(x1)x(t—x1)dxSw(x2)x(t—x2 + x)dx2dt = т-оо 2Т J J
328
00 00
§ w(x1)dx1 § w (т2) Rx (r + Tj — x2)dr2, о о
(10.3)
Здесь собственная корреляционная функция входного стационарного случайного сигнала
т
ЯДтДт,— т2) -- Jim
7 —► оо
— 5 x[(t— xJx’JJ+x—x2)dt. (10.4) /.I _ -Г
Рис. 10.1
Для взаимной корреляционной функции аналогично получим
Т оо
Rxy (т) = 1 i m — § x(t)dt^ w (x^xtt Дт — xjdx^
т->oo 2T q- q
oo
= w(x1)Rx(r—x1)dx1. (10.5)
0
Выражения (10.3) и (10.5) дают возможность найти корреляционные функции сигнала на выходе по известной корреляционной функции входного сигнала.
Из выражения (10.5) вытекает общий очень важный для практики вывод. Если на вход линейного звена подать единичный белый шум, то взаимная корреляционная функция Rxy (т) равна весовой функции линейного звена w (t). Действительно, в соответствии с (9.29), подставляя Rx (т — Tj) = б (т — в формулу (10.5), получим
А?ху(т) = щ(т). (10.6)
Пример 10.1. Найти Rv (т) и Rxy (т) сигнала на выходе инерционного звена с
1
— е '° при t > О,
® = То н
о при t < о.
если на вход его подан белый шум с автокорреляционной функцией Rx (т)=а2б (т). В этом случае по формуле (10.3)
2 » _11 ? _51
= е T*dxii е б (T-hTj—r2)dT2 =
'о о о
329
*1 + т
е т‘ при t + ti > О I
( ^Ti =
О при t + Tj < О J
оо _2»1±1
Г е г’ dTi при т>0 а2 о
Т02 оо 2Т1+ т
е г° dti при т < О —г
а2
2Т0
е г° при т>0 г
eTl> при т<0
(Ю.7)
Для взаимной корреляционной функции по формуле (10.5) или (10.6) получим
ОО п л М а *
и С т» а.
^(т)=—- j е г» 6(т——- е г° . (10.8)
'«о ‘ о
Графики 6 (t + ti—t2) и w (т2) для случаев т + тх >0 и т + тх<0 пока заны соответственно на рис. 10.2, а и б.
Таким образом, измеряя взаимную корреляционную функцию сигналов на входе и выходе линейного звена при подаче на его вход сигнала, близкого к белому шуму, можно определить весовую функцию звена.
Пример 10.2. Найти Rv(t) сигнала на выходе инерционного звена с весовой функцией
( ae~at при t > 0 1
'J11 = ( } ,
[0 при t <0 j
если на вход инерционного звена подан сигнал с корреляционной функцией
По формуле (10.3) для случая т>0 получим
^y(T) = pZ>a2f е~aXl dTi J e“aTa 1 t + 1 dx2 =
b о
oo T-f-Tt
= Р6а2е~0т( е—(a + P) T’ c(Ti j e(a — 3)11^Т2_|_ о 0
oo oo
+ (Wa2e0TJ e—г/Tj J e~(a + ₽>T! dt2.
о t4-ti
График Лх(т + Т1 — т2) в функции т2 для этого случая при т + т!>0 по казан на рис. 10.3.
Производя интегрирование, после преобразований получим
(т) —
_^-[е-Рг_±е-ах a»-p’ [ a .
330
Для т < О, производя аналогичное вычисление, получим, что выражение Ry (т) отличается только знаками в коэффициентах при т. Таким образом, для — эо < т < оо можно записать
<W-9>
При 0 -» оо, т. е. при стремлении Rx (т) к S-функции, получим
/?у (т) = айе—“|т|, (10.10)
что соответствует решению (10.7) в примере 10.1. Здесь Ь=аг/2, а а = = 1/Го.
Большой практический интерес имеет случай, когда 0 > а.
Для анализа этого случая выражению (10.9) удобно придать следующий вид:
/?у(т)=а6е “|т|
“ е-(3-а)1т|
0
(10.11)
Первый множитель перед фигурными скобками представляет собой автокорреляционную функцию сигнала на выходе при подаче на вход схемы белого шума. Второй множитель (в фигурных скобках) выражает поправку, обусловленную отличием входного сигнала от идеального белого шума; при 0 > а этот множитель стремится к единице. Таким образом при 0 > а можно с достаточной для практики точностью реальный сигнал на входе аппроксимировать белым hivmom. Если 0/а = 100, то ошибка при этом не превышает 1%.
Преобразование спектральных плоскостей. Пусть частотные спектры сигналов х (f), у (/), и (/) и f (/) связаны уравнениями:
y(/(o)=UZ1(/£o)X(M)
Для каждого сигнала известен ансамбль его реализаций на интервале 27, обозначенный соответственно xT{t), yT{t),uT(t) и fT(t) или XT(ja>), YT(j(d), И FtU®).
Взаимная, спектральная плотность сигналов у и и, заданных на интервалах 2Т, может быть выражена через корреляционную функцию
331
оо
SyuT (/®) = 5 е-/“Т Ryu (Х) dx =
—00
е-/<от Jtf
Т 1
Ут (t)ur(t +т) dt\ dx.
— т 1
(10.13)
Syur(j<») = ^M
Внося интеграл под знак математического ожидания и изменив очередность интегрирования, после умножения подынтегрального выражения на е~>ш1 elai = 1 получим
Т оо
J ут (/) е/м/ dt J иг(< + т)е-'“<;+г)с/(/-|-т) = —Т —оо
= ±М{Ут(-^ит(!^}. (10.14)
Выражая Ут (—/®) и Ut (fa) согласно (10.12) и имея в виду справедливость (10.14) для сигналов хи/, получим
SyuT (j®) = W. (-/со) «72 (/со) {Хг (~уЛ) FT{j(i))} =
== ^(-/co^J/co^H/co). (Ю.15)
Так как lim Sxi/t (j®)= Sxy (fa), то
SyM(/®) ^(-/co) r2(/®)Sx/(/®). (10.16)
Выражение (10.16) может быть получено более строго путем представления корреляционной функции Ryu (т) в (10.13) в виде, аналогичном (10.5), и последующего преобразования интегралов.
Полагая (/со) = W2(ja) — W (/со), x(t) = f(t) и y(t) = u(t), получим
S„(co> | WSX(®). (10.17)
Принимая ITj (/со) = W (/со), и (t) —x(t), W2{j(a)^ 1 / (/) =x (t), получим
^(/®) = r(-/®)Sx(co)
ИЛИ Sxy (/co) = Syx (~ja>) =W(/®)Ss (co).
В выражениях (10.17) и (10.18) имеется в виду, что 5Я(®) = = 5як(/со) и S!/(co) = Sya(/co).
Средняя мощность сигналов на входе и выходе линейного звена при этом
оо оо
/?х(0)=: J- f Sx(®)cico = -1 fsx(co)dco, (10.19)
2л J л J
—ОО О
y*(t)= Rfi(0) = ^- f Sa(co)dco= lfsx(®)|r(/co)|Mco. (10.20) —CO 0
332
Последнее выражение имеет большое значение для вычисления среднеквадратичных ошибок в различных системах управления. В этом случае W (/ы) связывает входной сигнал системы и сигнал рассогласования.
Пример 10.3. Требуется найти Sy (<о) и Sxy (/<*>) на выходе инерционного звена с W (j<o) = t , если на вход его подан белый шум со спектральной плотностью (со) = а2. В этом случае по формулам (10.17) н (10.18) получаем а2 а2
S„ (со) ------- и Sx„ (/со) =------
J ! 1+со2То2 v ’ I + jcoTo
(10.21)
Применяя к (10.21) обратное преобразование Фурье, получим выражения (10.7) и (10.8).
Для определения мощности сигналов воспользуемся (10.20). Тогда
^7?) = Rx (0) = а2 б (0) - со ,
---- а2 с/2 (/) = /?, (0) = — .
2 С о
Отсюда видно, что мощность идеального белого шума бесконечно велика. Это связано с тем, что белый шум с корреляционной функцией в виде б-функции представляет собой математическую абстракцию, к которой в большей или меньшей степени могут приблизиться реальные сигналы. Однако мощность сигнала, получающегося при прохождении белого шума через инерционное звено, так же как и его средняя полоса частот, оказывается конечной и соответствует реально наблюдаемым на практике сигналам.
§ 10.2. ЗАДАЧИ ИССЛЕДОВАНИЯ ЛИНЕЙНЫХ СИСТЕМ ПРИ СТАЦИОНАРНЫХ СЛУЧАЙНЫХ ВОЗДЕЙСТВИЯХ
Рассмотрим линейную систему (рис. 10.4) с передаточной функцией W (р), на вход которой подается сигнал х (f), представляющий собой сумму основного рабочего сигнала и ((), связанного с нормальным функционированием системы и дополнительной помехи / (/). При этом на выходе системы получается сигнал у (/).
Перед системой могут быть поставлены различные задачи. Наиболее распространенными являются две постановки задачи: а) идентификация объекта и б) фильтрация помехи с преобразованием сигнала.
Идентификацией называют определение математической модели объекта с целью оценки его характеристик (статических и динамических).
В случае идентификации динамических характеристик объекта задача сводится к следующему: как при заданном /(/) по y(f) найти W)?
В случае фильтрации помехи с преобразованием рабочего сигнала постановка задачи сводится к выбору параметров линейного звена, при которых сигнал на выходе у (t) минимально отличается от заданного по условию задачи преобразованного рабочего сигнала. При частотном спектре рабочего сигнала £7(/со), требуемый закон преобразования может быть записан в виде
2(/<o) = ^T(/<o)[/(/(o),
333
где Z (/со) — частотный спектр требуемого сигнала на выходе, а Ц7ЭТ (/“) — оператор заданного эталонного преобразования.
Если решается только задача фильтрации и не требуется преобразовывать сигнал, то WaT (/со) = 1. Если требуется получить производную рабочего сигнала, то 1Гвт (/со) =/со. При интегрирующем преобразовании Ц78Т (/со) = 1/(/со). Для получения сигнала на выходе, опережающего сигнал на входе на время т0, необходимо принять 1ГЭТ (/со) = е'“т«. Могут быть заданы и другие законы преобразования.
При решении задачи идентификации динамических характеристик «помеха» /(/), подаваемая на вход системы, является полезным сигналом, а рабочий сигнал и (/) вносит погрешность в определение параметров системы. Поэто-
Рис. 10.5
Рис. 10.4
му при идентификации желательно уменьшить влияние рабочего сигнала.
При фильтрации и преобразовании рабочий сигнал является полезным, а помеха вносит дополнительную погрешность в преобразование сигнала, поэтому в данном случае желательно уменьшить влияние помехи.
Рассмотрим каждую из поставленных задач и пути ее решения.
Идентификация динамических характеристик линейного объекта. Для идентификации линейного объекта можно использовать два пути: 1) непосредственное определение весовой функции объекта и 2) получение весовой функции объекта в виде коэффициентов разложения ее по ортогональным функциям.
В первом случае [Л. 37] в основу определения весовой функции положено выражение (10.6), согласно которому при подаче на вход системы белого шума взаимная корреляционная функция входа и выхода с точностью до постоянного множителя совпадает с весовой функцией объекта. Таким образом, для идентификации объекта может быть применена разновидность коррелятора (см. рис. 9.17), схематически показанная на рис. 10.5, а. Для устранения влияния сигнала и (I) на результат определения w (f) необходимо, чтобы сигнал «помехи» f (/) представлял собой белый шум, не коррелированный с рабочим сигналом и (О-334
В качестве такой искусственно сознаваемой «помехи» /(/) может быть применен псевдослучайный двоичный белый шум.
Так как в этом случае f (t) и соответственно f (t — т) могут принимать только два значения ±а, то устройство множительного звена в корреляторе оказывается весьма простым и может быть выполнено в виде реле, переключающего полярность сигнала у (/). Запаздывание двоичного сигнала на величину т = kT0 может быть выполнено путем снятия сигнала с одного из п — 1 регистров схемы (см. рис. 9.11).
Во втором случае [Л. 38] для получения весовой функции, разложенной по ортогональным составляющим, необходимо остановиться на определенном виде ортогональных gh функций. Если такие функции выбраны, то, применяя звенья Gft(p), формирующие эти функции при подаче на вход импульсных сигналов, можно с помощью схемы (рис. 10.5, б) автоматически вычислить коэффициенты Ch разложения w (t) по этим ортогональным функциям. Здесь, как и в предыдущем случае, f (/) представляет собой двоичный белый шум, а интегрирование ведется в течение периода 2Т = Тп = NT0.
При идентификации объектов с инерционными характеристиками в качестве таких ортогональных функций удобно выбрать функции Лагерра. Функция Лагерра k-ro порядка 4 (у/) выражается следующим образом:
к .
(10.23)
Zo (yt) при k =0, 4 (у/) —1] при k—1,
здесь у — масштабный коэффициент.
Графики функций Лагерра для k = 0, 1, 2, 3 показаны на рис. 10.6, а. Из рассмотрения этих функций видно, что: они описывают апериодический процесс при кратных вещественных корнях; при t — —оо стремятся к нулю в области положительных значений, а число перемен знака функции при этом равно k\ ортогональны и абсолютно интегрируемы.
Прямое преобразование Фурье от функции Лагерра [см. (10.23)] дает
оо
= = f lh(yt)e^dt=
\ yi (v+y&J)*+i
= | Lo (/£2)| exp {(2k +1) j arg Lo (/£2)), (10.24)
что соответствует неминимально-фазовому инерционному звену (&4-1)-го порядка. Годографы Lh(jQ) = | Lo (/£2) | ехр{(2& ф 1)/argLox X (/£2)} при 0 <£2 <оо показаны на рис. 10.6,6.
Принимая в схеме 10.5, б в качестве формирующих звеньев Gk (р) звенья Лагерра с передаточными функциями L* (p/у), можно на выходе этой схемы получить непосредственно коэффициенты разложения весовой функции по функциям Лагерра. Представим неизвестную передаточную функцию в виде ряда
335
W(P)=%CkLM
4=0
и, соответственно, весовую функцию
т
w(t)^^Chlk (yt).
k=0
(10.25)
(10.26)
Допустим, что сигнал / (у/) имеет вид единичного импульса, не коррелированного с рабочим сигналом и (/). Тогда составляющая сигнала у (/), не коррелированная с и (/), выражается функцией w (t), описываемой уравнением (10.26). При этом с формирующего звена Gh (р) на множительное звено поступает сигнал lh (yt).
-о,5
-0,6
-0,1 -
-fl.s - 17
-0,9 - / *
- i L
Рис. 10.6
336
Из условия ортогональности функций Лагерра следует, что
оо
2^ w(T)lh(yt)dt =Ch О
(10.27)
и, следовательно, при достаточно большом времени усреднения сигнал, снимаемый с множительного звена схемы (см. рис. 10.5, б), пропорционален соответствующему коэффициенту Ck.
Если сигнал f (/) представляет собой совокупность импульсов со спектральной плотностью Sf (ы) = а2, как это имеет место при двоич-" с множительного звена после
ном белом шуме, то сигнал, снимаемый интегрирования, пропорционален а?Ск. Таким образом, имея т формирующих звеньев, соответствующих различным значениям k для функций Лагерра, можно получить после интегрирования значения т коэффициентов Ch разложения весовой функции по функциям Лагерра.
Сравнивая два метода идентификации объекта (см. рис. 10.5, а и б), можно заметить, что оба они дают возможность определить динамические характеристики объекта в условиях нормальной эксплуатации при номинальном значении «(/). При этом первый метод дает ряд ординат весовой функции при различных значениях т, а второй — коэффициенты Ск
разложения весовой функции по функциям Лагерра.
Последнее весьма удобно для построения модели объекта, которая описывается уравнением (10.25) и может быть легко осуществлена по известным значениям Ch. Практическая приборная реализация устройств идентификации, основанных на этих принципах, и результаты их применения описаны в [Л. 5, 38].
Фильтрация помехи с преобразованием сигнала. Для рассмотрения задачи фильтрации помехи и преобразования сигнала так же, как и при рассмотрении качества линейных систем (см. гл. IX части I) может быть составлена структурная схема (рис. 10.7, а), состоящая из реально существующей анализируемой системы W(р) (верхняя ветвь схемы) и идеальной желаемой эталонной системы 1СЗТ (р) (нижняя ветвь схемы), существующей только в нашем воображении.
Разница между желаемым результатом z (t) и реально существующим на выходе системы сигналом у (J) и характеризует ошибку системы.
В гл. XI части I эта задача рассматривалась в том случае, когда помеха / (/) и рабочий сигнал и (/) были детерминированы. Рассмотрим теперь случай, когда эти сигналы носят случайный характер и известны только их статистические характеристики. При этом возможны две
337
постановки задачи в зависимости от степени детерминированности характеристик объекта W (р).
В первом случае известно выражение W (р) и требуется по известным 1^ат (р) и статистическим характеристикам сигналов и (/) и f (/) определить среднеквадратичное значение ошибки б2(/) и, варьируя, параметры объекта, минимизировать значение б2 (I).
Во втором случае характеристика объекта W (р) может быть произвольной и необходимо так синтезировать W (р), чтобы при известных Й7ЗТ (р) и статистических характеристиках сигналов и (/) и f (Z) величина б2 (/) была минимальной.
Первая постановка связана с задачей анализа, а вторая — с задачей синтеза.
В настоящем параграфе ограничимся рассмотрением первой постановки задачи и найдем выражение для б2 (/).
Погрешность системы б (/) (см. рис. 10.7) можно записать в операторной форме
А (р)= Z (р) - Y (р) == №зт (р) U (р) - W (р) [U (р) + F (р)] =
= [^эт (P)~W (р)] U(p) — W (р) F (р). (10.28)
Уравнению (10.28) соответствует схема, показанная на рис. 10.7, б.
Рассматривая спектр сигнала А (/<о) согласно (10.28) , как разность двух спектров сигналов V (/со) = [№зт (/со) — W (/й))Ш (/со) и Е(До) = = W (ja)F (Joi), согласно формуле (9.67) можно записать спектральную плотность
Se (со) = Sv (со) + Se (со) - 2ReSve (/со). (10.29)
Выражая S^co), Se(co) и Sae(/co) через Su(co), S, (со), Su;(/co), №зт(До)—W(До) и W (/со) в соответствии с (10.28), по формулам (10.16) и (10.17) получим
Se (<о)= | №зт (/со)- W (/со) |2 Su (со) +1 W (fa) |2 Sf (со)--2Ре[Гэт(/со)-Г(/со)] W(-/со)S,u(ja). (10.30)
Если сигналы u(t) и f(i) не коррелированы, то S/u (/со) =0 и
Sfl (со) = Su (со) | №зт (До)- W (/со) |2 + S, (со) | W (/со) |2. (10.31)
Здесь первый член вызван искажением сигнала звеном W (fa) вследствие отличия этого звена от эталона, а второй — помехой.
Если Ц7ат (До) = 1, то первый член выражения (10.31) представляет собой спектральную плотность составляющей сигнала рассогласования, обусловленной рабочим сигналом и (/), а второй — спектральную плотность составляющей сигнала на выходе, обусловленной помехой f (t).
Выражения (10.30) и (10.31) дают возможность достаточно просто подсчитать среднеквадратичное значение погрешности при преобразовав
вании и фильтрации сигнала
оо
бф)= _L J
—оо
(10.32)
Так как для линейных систем (со) обычно представляет собой дробно-рациональную вещественную функцию, то вычисление интеграла (10.32) сводится к определению суммы интегралов вида
1 7 *(/и)/>( —/св)
2л J с (/со) с (—/со) —ОО
(10.33)
приведенных в табл. П.8 математического приложения части I.
Пример 10.4. Найти среднеквадратичную погрешность 62 (/) для случая, когда Sf (со) = а2, Su (со) = 1/(1 + со2), 1ГЭт = 1, W =/г/(1-f-/аТд) при условии, что Sju (/со) = 0.
По формуле (10.31) получим
1 I k ' 2 о k 2
= 1 _|_Ш2 | 1 " 1 + /ШГ0 + й 1 + /<оГ0 ~
= [(l-fe)+jcoT0][(l-fe)-/coT[,l a2 fe2
[(1 +/со) (1 +/соГо)] [(1 —/со) (1 —/соТ0)] (1 +/со70)(1 —/соТ0) ' ‘ ’
Первое из этих слагаемых представляет собой произведение двух сопряженных дробей с знаменателем второй степени
cl(i<») = c2 (/со)2 + с! /со-|-с0 = Т0 (/со)2 + (Т’о-г 1) /со+ 1
и числителем первой степени
(fa) — Ч" = То + (1 —^)*
Интеграл (10.33) от первого слагаемого
_ Vco + 6o2c2 To2+(l-fe)ar0 TQ + (\-ky
01 2соС1с2 2Т0(Т0+1) 2(70+1) ‘ ( '
Второе из слагаемых (10.34) представляет собой произведение двух сопряженных дробей с знаменателем первой степени
СцО’40) — ci /со + со = То ja> + 1
и числителем нулевой степени
*н (i4>) = b0 = ak.
Интеграл (10.33) от второго слагаемого дает
&02 a2 k2 Joll=2coc1= 2Г0
Окончательно получим
---- To + ll-fe)2 а2 Л2
62 (л =/ +т -----L. г ---
! 01 0,1 2(Т0 + 1) 270
(10.36)
(10.37)
Первое слагаемое погрешности вызвано инерционностью звена и непропуска-нием им высоких частот сигнала, а второе — помехой.
339
Пример 10.5. Для условий примера 10.4 найти значения То и k, соответствующие минимуму среднеквадратичной ошибки.
Так как при k < 1 с ростом k первый член (10.37) убывает, а второй растет, то существует оптимальное значение fe, при котором ошибка минимальна.
Значение feonT определяется из выражения (10.37)
откуда
д6а(0_п_ _ 1 —fe , fl2fe dk 1 + Tq То
h_b Т°
°пт а2(1 +Т0) + Т0 ‘
(10.38)
(10.39)
Значение То опт определяется аналогично из выражения
дб2(О 0 М2~fe) _ a2 fe2
дТ0 (1+То)2 То2
Решая вто уравнение относительно То, получим
То-Тоопт-y^^_ak •
(10.40)
Оптимальные значения То и k определяются путем совместного решения уравнений (10.39) и (10.40). После преобразований получаем
^ОПТ “ 1--Tq опт» (10.41)
где а 7 о опт — ’
Для частного случая, когда уровни помехи и полезного сигнала совпадают, т. е. а=1, получим
^опт=1 — l/K2 = 1/(2 +), То опт 1/I 2-
При отсутствии помехи а=0 и
^ОПТ = 1 и То ОПТ = 0,
что соответствует пропорциональному звену с единичным коэффициентом усиле^ НИЯ.
§ 10.3. ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ СЛЕДЯЩЕЙ СИСТЕМЫ, ОПТИМАЛЬНОЙ ПО МИНИМУМУ СРЕДНЕКВАДРАТИЧЕСКОЙ ОШИБКИ
Выражения, полученные для определения среднеквадратичной ошибки (10.32) и (10.30), дают возможность производить анализ точности следящих систем при заданных статистических характеристиках управляющего сигнала и (/) и помехи f(t).
Действительно, структурная схема следящей системы после приведения помехи к ее входу (см. §9.1 части I) может быть представлена, как показано на рис. 10.8, а, участком, выделенным штрихом.
Так как основным требованием, предъявляемым к следящим системам, является по возможности точное воспроизведение управляющего сигнала на ее выходе, то для следящей системы I^8T = 1 и струк-340
турная схема для расчета ошибки может быть изображена в виде рис. 10.8, а, или после преобразований, аналогичных рис. 10.7, а и б — в виде схемы рис. 10.8, б.
В этом случае для расчета ошибки системы могут быть непосредственно применены формулы (10.32) и (10.30), в которых 1F0T = 1, W = W3 = W-J (1 + W^U^), и известны статистические характеристики управляющего воздействия и (/) и помехи f (/).
Если, как это часто имеет место в следящих системах, заданы статистические характеристики не самого управляющего сигнала и (/), а его производной v (t) = diMt, то соответственно структурную схему для расчета ошибки преобразуют к виду, изображенному на рис. 10.8, в и спектральная плотность ошибки запишется следующим образом:
Se (®) = S„ (со) | |2 + Sf (со) | W, (/со) | а-
-2Re[^^|lF3(_/<o)S/B(/<o). (Ю.42)
L 1«о J
Здесь первый член характеризует ошибку системы, второй член — ошибку, вызванную помехой, а последний член — ошибку, вызванную взаимосвязью сигнала помехи и сигнала управления.
Если на основании (10.42) по формуле (10.32) определить среднеквадратичную погрешность системы, то, варьируя параметры системы (например, k и Т) и находя условия минимума среднеквадратичной погрешности
^Н5 = 0 (Ю.43)
dat ’
можно определить оптимальные по точности значения параметров at следящей системы.
Пример 10.6. Следящая система имеет = fet/p и W2 = ^z- Найти оптимальные значения fej и /г2 из условия минимума 6а (/), если спектральные плотности помехи и управляющего воздействия те же, что и в примерах 10.4 и 10.5.
Передаточная функция замкнутой системы
и, следовательно, для
W3=W=k/(l+pT0)
имеем k = l/fe2 и То = 1/ (ktk2) или k2 = 1/fe и = klTa.
Таким образом, условия сводятся к примеру 10.5, для которого найдены оптимальные значения k и Та, выражаемые (10.41).
Подставляя эти значения в выражения k2 и klt получим
^2 опт = 1 /^опт= 1 + а* + a yi+a2, опт = ^опт/^о ОПТ “ 4“ 1 •
Для случая, когда а = 1, /г10Пт = 1^2 — 1 и й20ПТ= 2 + УУ.
При а = 0 получим kiom -» оо и /г20ПТ = 1 •
341
fe<
Пример 10.7. Следящая система имеет W'i = и 1Г2 = 1. Найти
оптимальное значение из условия минимума б2 (/), если помеха имеет характеристику белого шума Sf (<о) = а2, а скорость изменения управляющего воздействия v — du/dt характеризуется спектральной плотностью Sv (<о) = а2/ (а2 + + ш2). Помеха и управляющее воздействие некоррелированы Sfu (/<а) = 0.
По формуле (10.42) получим
___________«2 (1 +<Р2 Л2) a2 fei2_______ ' (а2 + <о2) [(/?! —Лео2)2+ со21 + (fet —Лсо2)2 + <о2 -
с»2(1 + /й>Г1)(1-/иТ1)___ (“+» К*! —_________________________________________(а—/со) [(fej — Tfco2) — /со] +
_______________CZ2fei2 ' —
+ [(fej- 7\со2) + /со][(fei-7\ со2)—/со] (10.45)
Рис. 10.8
Производя вычисления (интегралов вида (10.36) по формулам табл. П. 8, приведенной в части I, получим:
Рис. 10.9
Здесь первый член представляет собой (/) —ошибку, обусловленную управляющим воздействием, которая с ростом уменьшается, а второй член выражает б2 (/) — ошибку, вызванную помехой, которая с ростом fej увеличивается. Определение оптимального значения в общем виде путем дифференцирования (10.43) оказывается достаточно громоздким, так как связано с необходимостью решать уравнения четвертой степени. Поэтому решение задачи обычно производится численно для конкретных значений параметров. Пример зависимости б^, б^ и б2 от k± для czj = а = 1 и 7\ = 2 показан на рис. 10.9.
§ 10.4. СИНТЕЗ ОПТИМАЛЬНЫХ ПО ТОЧНОСТИ СИСТЕМ ПРИ СТАЦИОНАРНЫХ СЛУЧАЙНЫХ ВОЗДЕЙСТВИЯХ
До сих пор рассматривалась задача определения оптимальных параметров линейной системы в первой постановке, когда структура выражения W (р) была известна и значения параметров определялись на основании анализа среднеквадратичной погрешности.
342
Рассмотрим теперь более общую задачу синтенза, когда заданы статистические характеристики сигналов и 1ГЭТ(]ш) и требуется найти выражение W (/со), обеспечивающее минимум S2 (t).
Эта задача впервые была поставлена и решена советским ученым академиком А. Н. Колмогоровым [Л. 461. Независимо от него эта задача несколько иным путем была решена американским ученым Н. Винером [Л. 27]. В последующие годы результаты, полученные А. Н. Колмогоровым и Н. Винером, работами Г. Боде и К. Шенона [Л. 20], Д. X. Ленинга и Р. Г. Беттина [Л. 62], В. С. Пугачева [Л. 98], В. В. Солодовникова [Л. 106], А. А. Фельдбаума [Л. 119] и других были доведены до широкого практического применения и изложены в доступной для инженеров форме.
Далее дается изложение основных результатов теории А. Н. Колмогорова — Н. Винера применительно к задаче фильтрации помехи с преобразованием сигнала.
Рассматривая схему, представленную на рис. 10.7, а, для частотного спектра Д (]<л) аналогично (10.28), получим
Д (/со) = Гэт (/со) U (ju) X (/со). (10.47)
Переходя к спектральным плотностям аналогично (10.33), получим:
Se(co)= | Г|(/со) |2 Sx (со)-2Re Г эт (/со) W (-j^x
X Sxu (/со) +1 WgT (/со) I 2 Su (со). (10.48)
Дополнив первые два члена до квадрата модуля разности двух комплексов путем добавления слагаемого
|Гат(/со)|2^^^2, Sx (со)
после преобразования получим
S6 (со) = I W (/со)-Уат-(/^ Sxu (i<0) |2 Sx (co) +
1 Sx (co) I _
+ |№эт (/co) I 2 (1 - su (co). (10.49)
\ $x (to) (®)/
Для минимизации Sf, (co) и, соответственно, 62 (/) необходимо так выбрать W (/со), чтобы первое слагаемое было минимальным.
Второе из этих слагаемых вещественно и положительно, не зависит от W (]&>), и на него нельзя повлиять выбором W (/со).
Так как первое слагаемое представляет собой положительное вещественное число, то условием минимума является равенство его нулю.
Таким образом, оптимальное значение
^(» = ^опт(Я^ . (10.50)
5>х (<о)
Если помеха и сигнал некоррелированы и S/a(/co) = 0, то S*u (/со) = Su (<я)> з Sx(co) = S„ (со)-|- 5Дсо).
343
В этом случае (10.50) принимает следующий вид:
W(i«) = W'one О) = ^т/714цГ!-Su (w) + S/ (со)
(10.51)
Итак, если на выбор W (/со) не наложено никаких ограничений, то для того, чтобы система была оптимальной по минимуму среднеквадратичной ошибки, необходимо выбирать W (/ш) в соответствии с формулой (10.50) или (10.51). Однако здесь математическое решение ока
зывается в противоречии с условиями физической реализуемости. В большинстве практических задач определение W по формуле (10.50) или (10.51) приводит к физически нереализуемым значениям параметров.
Пример 10.8. Найти оптимальное значение 1Г (/со), если
Ц7эт(/со) = 1, Зц (<о) = 1
1 -(-со2
S/(co)=l, S/u(/co) = 0.
По формуле (10.51) получим
1
WОПТ (/<>) — „ , 2 =
2Ц-со2
_________1_______
(|/ 2+/со)(1/У-/«) ‘
(10.52)
Это выражение соответствует последовательному соединению двух инерционных звеньев, одно из которых неустойчиво и в практических устройствах не может быть реализовано.
Невыполнимость условия (10.52) становится особенно ясна при переходе от IVопт О’ш) к весовой функции
ОО
alonT(/) = J_ ( —!— eiatda =—J—е'ч/1’<2. (10.53)
2я J 2ф(|)! 2 | 2
График реакции системы у (/) ~ а>опт (0 на единичный импульс х = 6 (/) (рис. 10.10, а) в этом случае показан на рис. 10.10, б. Как видно из графика, для реализации требуемой весовой функции необходимо, чтобы сигнал нт выходе начал нарастать задолго до появления импульса па входе.
Разумеется, что в физических системах реализация таких процессов, в которых следствие опережает причину, невозможна.
Для нахождения оптимального значения W Цы) с учетом условий физической реализуемости применяется вытекающий из теории А. Н. Колмогорова — Н. Винера определенный прием разделения полученного выражения 1^опт (/со) на два слагаемых, одно из которых реализуемо, а второе нереализуемо и выражает составляющую спектральной плотности ошибки.
Далее этот прием приводится без доказательства.
344
Пусть известно Ц70ПТ (/со), выражаемое формулой (10.50), тогда Sx (со) можно представить в виде произведения двух сопряженных функций Т (/со) и V (—/со), первая из которых имеет полюсы в верхней полуплоскости, а вторая — в нижней:
5х(со)=Т(/со)Т(-/со). (10.54)
Функция V (/со) соответствует реализуемому устойчивому линейному звену, которое преобразует белый шум в сигнал х (/) на входе синтезируемой линейной системы. Функция Т (—/со) соответствует нереализуемой части.
Представление Sx(co) в виде произведения Т (/со)1? (—/со) и выделение множителя Т (/со) обычно называют факторизацией.
Таким образом
ц/ (/со) (/со) Sxu (№ 1() 55
опт-' 1 W(ja) ’Р(-М) v 7
Выделение множителя 1/Чг(/со) соответствует приведению сигнала на входе к белому шуму и рассмотрению воздействия белого шума на нереализуемое звено с характеристикой — •
Вторая операция носит название расщепления и представляет собой разделение функции Т (/со)Н7опт (/со) на два слагаемых R (fa) и N (—/со) с полюсами, лежащими в верхней и нижней полуплоскостях:
^О) ^опт(» = —ЗТу^(/(0) = *(>)+#(->). (10.56)
Первое из этих слагаемых соответствует реализуемой передаточной функции, а второе — нереализуемой. Отбрасывая нереализуемую часть, получим для реализуемой характеристики системы
^опт. реал (ja) = R(ja)/W(ja). (10.57)
Эта формула известна, как формула Колмогорова—Винера и при меняется для определения оптимальных параметров системы.
Если W (fa) выбрано согласно формуле (10.57), то спектральная плотность ошибки, определяемая по формуле (10.49), выражается следующим образом:
I АП — /со) 12 г | Sxu (/со) |21
S6(co) = ш/- < ' И + I » 1 2 -SU (со) — 1 *ц ' ; . (10.58)
I Y (/01) | (СО) J
Пример 10.9. Найти оптимальное значение IV' (/со) в примере 10.8 с учетом условий реализации.
По формуле (10.54) производим факторизацию и определяем
5Х М - S„ (и) + S, (») - ) - V </«) V (-/•»
(10.59)
По формуле (10.56) производим расщепление
^вт (/<о) Sxu (/со) = (1 — /со)____________1_______=
W(-ia) ~ (1+ш)2 (|/2 -/со)= (1+/<о) (у 2-/(о)
345
AB
= «(/to) + N(-/a)) = —-+—-----(Ю.60)
1 +/ш у 2 — jto
Для определения коэффициентов А и В решим уравнение
Я(/2“— /ш)+В(1+/ш) = 1, (10.61)
откуда
А=В =----- — и А?(/Ш) = —.----7=1------• (10.62)
1 + У2 (1 +/2 ) (1+/W)
Окончательно по формуле (10.57) получим
U7 /,71й_________!__________________!________ (10.63)
Сравнивая найденное решение с результатами примера 10.5 для а = 1, получаем полное совпадение.
Таким образом, принятая в примере 10.5 структура инерционного звена является оптимальной для рассматриваемых условий задачи.
§ 10.5. ПРЕОБРАЗОВАНИЕ ЗАКОНА РАСПРЕДЕЛЕНИЯ ЛИНЕЙНЫМ ЗВЕНОМ
При прохождении через линейное динамическое звено меняются не только спектральные характеристики случайных сигналов, но и их функции распределения. Установить закон распределения вероятностей выходного сигнала при известных статистических характеристиках входного, вообще говоря, чрезвычайно сложно [Л. 87].
Только в двух частных, хотя и практически важных, случаях эта задача имеет простое решение.
1. Сигнал х (/) распределен по нормальному закону. В этом случае, как будет показано далее, линейное преобразование приводит также к нормальному распределению. Параметрами, полностью определяющими это распределение, являются первые два момента: первый момент М[у (1)] определяется умножением на коэффициент усиления звена первого момента /И [%(/)] входного сигнала, а второй момент М[у2 (t)] — по формуле (10.20).
2. Сигнал х (t) является гармоническим сигналом со случайной фазой. В этом случае выходной сигнал у (Z) также является гармоническим, т. е. форма закона распределения сохраняется, а изменению подвергается лишь числовой параметр — амплитуда
Ym = \ W (j®) I *т, (10-64)
где ш — частота гармонического случайного сигнала; W (;<о) — комплексный коэффициент усиления звена; Хт — амплитуда входного сигнала.
Остановимся теперь на одном свойстве линейного преобразования, существенно упрощающем задачу во многих важных для теории автоматического управления случаях. Рассмотрим интеграл свертки (10.1)
ОО
y(t)= w (т)х (i — T)dx. b
Разобьем интервал интегрирования на подынтервалы (0. ii).................(ты т2)......(Ч, тл+1),
346
и воспользуемся теоремой о среднем, тогда
ОС t*+ 1
y(t) = У хЦ-х^) w(x)dx = У gA, (10.65)
k=o i А=о
тл
де
lk = x(t — xh*) ay(T)dr, (10.66)
ТД
Xk ' Тд* < , To = O.
Пусть подынтервалы выбраны так, что случайные величины х (t — xk), а следовательно, и величины Zu являются статически независимыми. Тогда у (I) представляет собой сумму бесконечного числа статистически независимых случайных величин.
Из'(10.65), в частности, следует высказанное выше утверждение, что если х (1) распределен по нормальному закону, то и процесс у (t) нормален, так как. сумма нормально распределенных случайных величин распределена нормально [Л. 26].
Более того, центральная предельная теорема (теорема Ляпунова) утверждает, что распределение суммы большого числа некоррелированных случайных величин приближается к нормальному закону, даже если распределение каждой величины отлично от нормального.
Условия, при которых это положение справедливо, сводятся, в основном, к требованию, чтобы суммируемые величины были приблизительно равноправны, т. е. дисперсия любого слагаемого не должна значительно превышать дисперсии других слагаемых. Эти условия, очевидно, выполняются, если можно выбрать достаточно большое число N подынтегралов статистической независимости (Дтл = тд+1—тд), таких, что за время от 0 до xN значение весовой функции не упадет до слишком малой величины.
Иными словами, при прохождении через линейное звено сигнала с произвольным распределением рх (х) происходит нормализация выходного распределения р± (у), т. е. приближение pi(y) к нормальному закону, если весовая функция объекта ш (т) затухает медленно, а корреляционная функция входного сигнала Rx (т), напротив, — быстро.
Проиллюстрируем нормализацию закона распределения случайного сигнала на выходе линейного звена примером.
Пример 10.10. Входной сигнал инерционного звена с передаточной функцией
представляет собой двоичный белый шум с амплитудой а и длительностью такта т0.
Если 7=0, то функция плотности вероятности выходного сигнала (у) представляет собой две 6-функции (рис. 10.11, а), так как в этом случае у (г) = = х (/).
Если в (10.67) 7 =/= 0, то у (/) уже не может изменяться скачкообразно от одного уровня к другому, как изменяется входной сигнал, а проходит все значения в интервале (—а, а). В этом случае для всего интервала —а < у < а распределение вероятности pi (у) отлично от нуля.
Для нахождения закона распределения pt (у) при различных значениях постоянной времени 7 процесс прохождения двоичного белого шума через инерционное звено моделировался на электронной цифровой вычислительной машине. Функция pi(y) при этом вычислялась в соответствии с методикой, определяемой формулой (9.75).
347
На рис. 10.11,6 показано распределение сигнала у (/) для случая, когда Т = То. Это распределение еще далеко от нормального, что объясняется малым числрм слагаемых в сумме (10.65) при такой постоянной времени. Рис. 10.11, в иллюстрирует образование этих слагаемых. Как следует из (9.39), для т > Та значения двоичного белого шума х (1) и х (i — т) уже некоррелированы, поэтому
ось переменной т разбита на подынтервалы Дт = То. Значениях (I + tJ.x (t — — т2), ... входного сигнала, умноженные на площади Slt S2, .... ограниченные
Xk
весовой функцией на соответствующих подынтервалах (S^ = J ш (т)^т), и со-— 1
ставляют слагаемые gj, £2, ... суммы (10.65). На рис. 10.11, в даны только три величины 1й(£1, £2, |3), так как последующие по модулю меньше первой уже более чем в 20 раз.
348
На рис. 10.11, а приведено распределение Р1 (у) при Г = 4Т0. По виду оно ближе к равномерному. На рис. 10.11, д показано уже 12 величин £&. Начиная с k — 13, значения составляют меньше 5% от Вх.
При Г = 8Г0 распределение Р1 (у) дано на рис. 10.11, е. На этом рисунке отмечена величина среднеквадратичного отклонения Оу, определяемая из выражения (10.20) по известному комплексному коэффициенту усиления [см. (10.67)] и известной спектральной плотности двоичного белого шума [см. (9.40)] [Л. 34]
а)
X
Для
а у2 = f I-’-1 2 а2 Т° Х
J I 1 +/ШГ I
2
| dw =
1 —е
Т \ 1 л \
Го
Г=8Г0 из (10.68) находим ау = 0,43а.
(10.68)
этого значения оу штрихом
Для
жен нормальный закон распределения Р1Норм' Как видно из рисунка, распределение Рх (у) для Г = 8Г0 уже относительно близко к нормальному.
Для нормализации распределения сигнала при прохождении через линейное звено необходимо, чтобы величины Z,k [см. (10.66)], из которых складывается выходной сигнал, были действительно случайными. В противном случае возможно даже удаление закона распределения от нормального. Для разъяснения этого положения обратимся к примеру.
Пример 10.11. На входе интегрирующего звена (рис. 10.12, а) сигнал изменяется по пилообразному закону (рис. 10.12, б): Гх— период сигнала, а Л — амплитуда. Распре-очевидно, интервале Выходная ко-
изобра-Р1НОРМ'
б)х
г) у
(10.69)
47, _ S
PH
t
47,
S
О
47,| 47, в
У
деление пилообразного сигнала, равномерное Pi(x) = 1/2Л на — А < х < А (рис. 10.12, в).
ордината у (/) находится интегрированием сигнала х 0 и t < T,.2 и Гх 2 < t < Гх:
Рис. 10.12
1/(0 =
2Я „
- t2—At
Гх
для 0 - t
. 2Л
ЗЯ/- — /а —ЛГХ для Гх/2
1 1
(0
на интервалах
Л/2,
ГР
времени
(10.70)
График у (/) показан на рис. 10.12, г.
349
Плотность распределения pj (у) в соответствии с (9.75) можно находить как относительное время пребывания в интервале (у, у + Ду). Учитывая периодический характер у (/) и то, что каждый интервал (у, у + Ду) пробегается за половину периода дважды, можно записать
Р1('/)ДУ=-7^7Г = ’ (10.71)
/1/2 / 1
где А/— время, соответствующее интервалу &у.
Устремляя Ду к нулю, получим из (10.71)
4 dt
Р1(У) = — -~Г~- (10.72)
Ti dy
Выражая t через у из (10.70) и учитывая, что у < 0 для 0 / t < Т\/2 и у > 0 для 71/2 < t < 7Ь с помощью (10.72) получим
8
ПРИ — <У
8 (Ю.73)
при -дуг>у > 0.
4
Г/ 8
4
Р1(У)=
АТ,.
8
АТ
к функций (10.73) показан на
10.12, д.
Из сравнения рис. 10.12, в и 10.12, д видно, что сигнал у (/) на выходе линейного звена (кстати, с незатухающей весовой функцией w (/) = 1) при действии детерминированного сигнала х (/) на входе имеет распределение ух(у) еще более далекое от нормального, чем распределение рг (х) входного сигнала.
Г Л А В A XI НЕЛИНЕЙНЫЕ СИСТЕМЫ ПРИ СЛУЧАЙНЫХ СТАЦИОНАРНЫХ ВОЗДЕЙСТВИЯХ
§ 11.1. ПРОХОЖДЕНИЕ СЛУЧАЙНОГО СИГНАЛА ЧЕРЕЗ НЕЛИНЕЙНОЕ ЗВЕНО
Если при рассмотрении прохождения случайного сигнала через линейное звено применялись методы усреднения по времени (корреляционные функции и спектральные плотности), то для нелинейных звеньев основой являются методы усреднения по множеству (законы распределения).
Так же как и при рассмотрении нелинейных систем при детерминированных воздействиях, методы исследования прохождения случайного сигнала через нелинейное звено существенно отличаются от методов исследования линейных систем; они сложнее и разнообразнее.
При этом из-за сложности или невозможности получения точных решений наибольшее распространение получили приближенные методы. В зависимости от одно- или многозначности нелинейной характеристики, ее инерционности или безынерционное™, наличия в системе обратных связей эти методы существенно различаются. Наиболее разработаны методы исследования прохождения случайного сигнала через нелинейное звено с однозначной безынерционной характеристикой.
Первоначально будем рассматривать изменение закона распределения случайного сигнала в фиксированный момент времени и соответственно изменение его математического ожидания и дисперсии (моментов первого и второго порядков). Затем рассмотрим, как при этом преобразуется корреляционная функция сигнала и соответственно изменяется его спектральная плотность, как применить полученные результаты к приближенному расчету' процессов в системах автоматического управления.
§ 11.2. ПРЕОБРАЗОВАНИЕ ПЛОТНОСТИ РАСПРЕДЕЛЕНИЯ
Рассмотрим безынерционное нелинейное звено (рис. 11.1, а) с монотонно возрастающей характеристикой г (х) (рис. 11.1,6), на вход которого подается случайный сигнал х (/) с ансамблем 1, 2, 3, ..., п, характеризуемый в любой момент tY плотностью распределения pY (х) (рис. 11.1, в).
В этом случае плотность распределения pr (г) сигнала z (t) на выходе с ансамблем 1, 2, 3 и т. д. в тот же момент (рис. 11.1, г) может быть
351
найдена из условия равенства вероятностей принадлежности сигнала на входе к области xt < х < Xt + dx и сигнала на выходе к области гх < z < + dz (рис. 11.1, б), где ?! = z (хх), a dz = (dzldx)dx\ тогда
р! (х) dx = щ (z) dz (H.l)
и p1(z)=(dx/dz)p1[x(z)]. (11.2)
Это выражение дает возможность, зная pL (х) и z (х), получить pt (z) при монотонно возрастающей зависимости z (х).
Рис. 11.1
Пример 11.1. Сигнал х с равномерным распределением (1/2 а при | х | ' а, PiU)= п . .
1 0 при | х | > а
проходит через нелинейное звено с характеристикой z = х3 или х ~ z1'3. Определить pi (z).
Для области |z| < а3 по формуле (II.2) получим
dx _ 1 2 —2/3
dz 6а
1
Pi (г) =
2а
Для области |z| > а:1 соответственно рг (z) -- 0.
Графики р, (х), z (х) и Px(z) приведены на рнс. 11.2, а, б, в.
Пример 11.2. Сигнал х с нормальным распределением (рис. 11.3, о)
z 1 Г (х — тх)2 1
проходит через нелинейное звено типа ограничение с характеристикой (рис. 11.3, б)
( X при Jx’l £ Xb = Zb, Z = - '
(XbSlgnX при |x| > xb = zb.
Определить pt (z), 352
Для области |z| < хь по формуле (11.2) найдем
1 Г
Р1 (г>3 „ • ехр -
г “ L
(г — тх)г 2о2
Для | г | = хь имеем dzldx = 0 и, следовательно, рг (г) -> оо. Таким образом, в точках г = ±гь плотность распределения рг (z) (рис. 11.3, в) выражается ИМПУЛЬСНЫМИ ФУНКЦИЯМИ (Z — Zb) И S26(z + Zb).
Величины Si и S2 определяются из условий
Оо
Si= f Pi (х) dx
хь хъ
и S2 = j p1(x)dx, (11.4) — 00
следующих непосредственно из уравнения (11.1) после его интегрирования.
Здесь Si и 32 представляют собой вероятности равенства г величинам +z* и —гь, которые равны площадям, ограниченным кривой pt (х) на участках —оо < х < —Хь и Хь < х < оо (см. рис. 11.3, а).
Для нормального закона распределения (11.3)
Pi<х) dx
С 1
p1(x)dx = —
тх
и эти вероятности соответственно будут
(П-5)
(Н.6)
353
Ф I —) = f Pio(«) dx. (11.7)
\ ax / J
i t' 1 2
Интеграл Ф (t) = — I e dt представляет собой интеграл вероятности, 2л J
о
таблицы которого широко распространены.
График Ф(<) представлен на рис. 11.4.
Пример 11.3. Тот же сигнал х, что и в примере 11.2, проходит через нелинейное звено с релейной характеристикой
z=2bsignx. (11-8)
В этом случае p!(z) = 0 при |г|=£гь, а при |г| = гь плотность распределения pi (г) выражается импульсными функциями Sj6(z —г*) и 5а6(г-|-гь), где
ОО
S1= frpi(x)rfx = 4-+®f —У (11.9)
J \ /
О
О
S2= J P1(x)dx = ~- -Ф — оо
Графики Р1 (л), z (х) и pj (г) для этого случая показаны соответственно на рис. 11.5, а, б, в.
Когда нелинейная характеристика неоднозначна, определение плотности распределения сигнала на выходе нелинейного звена значительно усложняется. Для нелинейных звеньев типов реле с гистерезисом, люфт, упор нет таких простых методов как для нелинейностей с однозначной характеристикой.
Плотность распределения сигналов на выходе нелинейных звеньев с неоднозначной характеристикой зависит не только от плотности рас-354
пределения сигнала на входе, ио и от вероятностных характеристик его производной по времени. Для случайного сигнала должна быть задана плотность распределения рг (х) самого сигнала, его производной pi (х) и двумерная плотность распределения сигнала и его производной р2 (х, х). Рассмотрим получение плотности распределения сигнала на выходе нелинейного звена с неоднозначной характеристикой на примере нелинейности z (х) типа двухпозиционное реле с гистерезисом (рис. 11.6).
Для этой нелинейности
+ гь при —ха<х< оо, — 2Ь При — ОО<Х<4-Ха
(11.10)
и при любых характеристиках входного сигнала плотность распределения сигнала на выходе может быть 'выражена зависимостью, аналогичной примеру 11.3,
Pi (z) =5l6(z-zb)+526(z + z6). (11.11)
Рис. 11.6
Рис. 11.5
Однако теперь определение вероятностей Si и S2 сложнее.
Вероятность того, что z = -j-zb, выражаемая величиной Si, складывается из Su — вероятности принадлежности х к области х > ха и Slo = SoPi — вероятности принадлежности х к области —ха < < х < ха, умноженной на весовой коэффициентах, равный вероятности попадания на верхний участок неоднозначной характеристики z = +zb. Аналогично величина S2 складывается из 321 — вероятности того, что х < ха, и S20 = S0p2 — вероятности принадлежности х к области —хо<х<хо, умноженной на весовой коэффициент р2, равный вероятности попадания на нижний участок неоднозначной характеристики 2 = —2Ь:
Si = + S10 — Sxx + Pl So,
S2 =S21 + S20 =S21 -f- PaS0,
(11.12)
12*
355
где
00 ~ха ха
$11 = $ Pi (х) dx, Sal = Pi (х) dx м. So — Pi (x) dx.
xa - ” ~xa
Наибольшую трудность представляет вычисление весовых коэффициентов Ц! и ц2, которые зависят от вероятностных характеристик не только сигнала х, но и его производной х.
Для решения этой задачи в зависимости от предположений о характере сигнала предлагается ряд приближенных методов [Л.87]. Остановимся на одном из них.
Попадание на верхний или нижний участок характеристики в зоне ее неоднозначности зависит от вероятности положительного или отрицательного знака х при х = ±ха.
Плотность вероятности при х = —ха для х > 0 может быть выражена следующим образом:
оо
p±(x>0, x^—xa)=[p2(—xa,x)dx.
О
Аналогично
о
Pi(x<0, х=+ха)=$ Р2(+*а, x)dx. (11.13) .— ОО
Можно предположить, что
Рх (х < О, х = +%а)
Г1 — . »
Pi (х < 0, х ~ + х0) + Pi (х > 0, х = — ха)
Pi (х > 0, х = — ха)
Р1(х<0, ха~ + ха) ~\-рх(х > 0, х = — ха)
(И-14)
В частном случае, когда распределения х и х независимы и р2(х, х) = рх (х) рх (х), выражения (11.13) упрощаются
о
Pi(x<0, х= + ха) = Рх(ха) 5 Pi(x)dx,
— 00
оо
Pl {х > О, X = —ха) = Pi (—ха) 5 Pl (х) dx, о
а уравнения (11.14) приобретают вид
о
Pi(xa) (i Pi(x)dx
Pi (Ха) Pl (X) d X + Pi (— ха) Рх (х) dx — оо Q
366
л
Р1(—х0) Pi(*)dx'
(11.15)
Pl (xa) 5 Pl (*) dx + Pl (— xa) Pl (x)dx — oo 0
Пример 11.4. Пусть стационарный случайный эргодический сигнал имеет вид пилообразной кривой со случайной шириной зубца Tt и постоянным отношением времени подъема к времени спада а/(1 — а) (рис. 11.7, а).
Найти плотность распределения сигнала z (t) на выходе нелинейного звена z (х) типа двухпозиционное реле с гистерезисом (см. рис. 11.6).
Рис. 11.7
При известной реализации х (t) непосредственно по характеристике z (х) может быть найдена реализация г (?) и по ней определена плотность распределения pi (z). На рис. 11.7, б построена кривая z (t) для заданных х (!) и z (х). Так как z может принимать только значения +гь или —гь, то р2 (а) выражается уравнением (11.11), в котором и S2 равны относительным временам, в течение которых z = Ч-Zf, и z = —if,.
По построению, выполненному на рис. 11.7, а и б, легко определить эти относительные времена
Sj= а^3——+(1-а) Х1 ~Ьх2
Х1 + ха _ Xi+Xg—2«xa ^1 + ^2
с , с х2—хо + 2ахо
02 — * —,
Xj 4“ «^2
(11.16)
Те же результаты могут быть получены с помощью более общих выражений (11.12) —(11.15). Действительно, для пилообразных кривых (см. рис. 11.7, а) с любым законом распределения Ti плотность распределения р2 (х) имеет равномерный закон (рис. 11.7, в).
Pi (х) =
1
Х1 + х2
О
при
— х2 < X < xlt
при
X < х2
X > Х1.
(11.17)
357
В этом случае по формулам (11.12)
Xj—Xg Xj—Xg ixa
*i+*2 Xi + xa
Для определения щ и ра необходимо знать р2(х, х). Так как в рассматриваемом случае х и х независимы и для любого закона распределения Ti сохраняется условие " 0
Jpi(x)<ii = a и J px(x)<ix=l—a,
О — оо
то по формулам (11.15)
Р1=1—а и (i2 = а.
Подставляя найденные значения в (11.12), получим значения St и Sa, совпадающие с (11.16). Закон распределения Pi (?) выражается формулой (11.11) (см. рис. 11.7, г).
§ 11.3. ПРЕОБРАЗОВАНИЕ СРЕДНЕГО ЗНАЧЕНИЯ (МОМЕНТА ПЕРВОГО ПОРЯДКА
ИЛИ МАТЕМАТИЧЕСКОГО ОЖИДАНИЯ)
Если известна плотность распределения сигнала на выходе нелинейного звена, то легко определить и его математическое ожидание или момент первого порядка
ОО со
z =mz = M {z(t)} = ^zpi(2)dz= г (х) (х) dx. (11.18) — оо — оо
Так как при этом известен момент первого порядка сигнала на входе
00
x = mx — M{x(t)} = ^xp!(x)dx, (11.19)
— 00
то таким образом определяется преобразование момента первого порядка нелинейным звеном.
Связь между моментами первого порядка сигнала на входе и выходе нелинейного звена неоднозначная и зависит от характера функции распределения сигнала на входе.
Наиболее распространенной задачей является рассмотрение преобразования сигнала с нормальным распределением (11.3). В этом случае закон преобразования момента первого порядка зависит только от нелинейной характеристики г (х) и ах, как от параметра
mz = mz(mx, ох), (11.20)
причем все эти величины могут зависеть от времени i или не зависеть от него (стационарный процесс). Характеристика (11.20) выражает закон преобразования момента первого порядка.
Пример 11.5. Найти закон преобразования момента первого порядка нелинейностью типа ограничение при нормальном распределении сигнала на входе.
Подставляя результаты примера 11.2 в выражение (11.18), найдем 358
где
~zb
Xb~\~mx \ ф / xb mx
Ox j \ ax
После интегрирования и преобразований получим
_ <**+?*Ll_exp 2а«а J
+ (хь + тх) Ф I *»+,?*-] - (хь - тх; \ ах /
Sj —S% — Ф
Ох (
mz~ /2? ГХР
хь—отх)а 2axa
(11.21)
(11.22)
(11.23)
В относительных единицах эту зави
симость можно представить в виде
^=ЧгД_^> (ц.24)
хь \ хь хь /
На рис. 11.8 построена зависимость ’FJmjc/xb) для различных ах/х&. Из этого графика видно, что с ростом случайной составляющей ох сглаживается нелинейность исходной характеристики ах = 0 и увеличивается линейная зона. При этом коэффициент усиления по постоянной оставляющей на линейном участке k0 = = тг1тх сростом ох уменьшается.
Роль случайной составляющей аналогична влиянию переменной составляющей
при вибрационной линеаризации (см. § 1.6).
Пример 11.6. Условие то же, что и Для примера 11.5, но для однозначной релейной нелинейности z = z& sign х.
Подставляя результаты примера 11.3 в формулу (11.18), получим
тг = 2гьФ(тх/ах).
(11.25)
Эта зависимость выражена графиком (см. рис. 11.4). Из графика видно, что при тх < 0,5ах характеристика практически линейна.
§ 11.4. ПРЕОБРАЗОВАНИЕ ДИСПЕРСИИ (МОМЕНТА ВТОРОГО ПОРЯДКА)
Моменты второго порядка сигналов на выходе и входе нелинейного звена определяются следующим образом: оо оо
z2 = M {z2(/)j = z2pi(z)dz= z*(x)Pi(x)dx (11.26)
— 00 — оо
и
00
Х2 = М (х2(0) = $ x*P1(x)dx. (11.27)
-’-op
?59
Дисперсия сигналов на выходе и на входе выражается через момен' ты первого и второго порядков:
Dz = M{(Z-m^) = ?-mA 1 8
Dx = М {(х — тх)2} = х2 — тх2. J
На основании известных плотностей распределения по формулам (11.26)—(11.28) могут быть получены выражения для преобразования дисперсии случайного сигнала нелинейным звеном.
Преобразование дисперсии нели-
нейным звеном зависит от значения тх и характера функции распределения сигнала х.
При нормальном распределении входного сигнала (11.3) закон преобразования момента второго порядка зависит от Од. и тх, как от параметра
Dz = az2 = Dz(P тх) = Dz(ax2, тх\
(11.29)
Все эти величины могут как зависеть от времени, так и быть по-
стоянными.
Пример 11.7. Требуется найти закон преобразования дисперсии для условий примеров 11.2 и 11.5. Подставляя результаты примера 11.2 в формулу (11.26), получим
гъ
г2 = + /п2а =---^-~=r f z2 ех р
ох V 2 л J
~гЬ
__(г — тх)2 1
2а«2 ]
Jz-)-2b2 (S1H-S2),
(11.30)
где
„ „ I Xh~\-tnx \ I хь—тх \
Sx + Sa=® — + Ф —--------- .
\ ®х / \ !
Вычисление полученного интеграла громоздко и результат интегрирования содержит ряд членов, выраженных через специально табулированные функции [Л. 119].
Однако расчет может быть сведен к пользованию удобными для практики графиками, выражающими зависимость (11.30) в относительных единицах:
^2 (Х^/Од;, Щх/Хь). (11.31)
Эти графики [Л. 87] приведены на рис. 11.9.
Пример 11.8. Найти закон преобразования дисперсии для условий примеров 11.3 и 11.6.
Подставляя результаты примера 11.3 в формулу (11.26), получим
Dz + mz2 = zb2,
откуда на основании (11.25)
D? = zb2_m?s = 2(,2[l-4O2(/n3e/a3f)]. (11.32)
360
Здесь, как и ранее, Ф(тх/бх) выражается графиком (см. рис. 11.4).
Для вычисления закона преобразования дисперсии нелинейным звеном используют так же формулы для преобразования корреляционных функций, рассматриваемые далее.
§ 11.5. ПРЕОБРАЗОВАНИЕ КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ
Рассмотрим общий случай (рис. 11.10), когда имеется два сигнала х (/J и у (/2), которые преобразуются двумя однозначными нелинейностями 2Х (х) и 2У (у). Двумерная плотность распределения сигналов хи у задана функцией р2 (х, у). Тогда взаимная корреляционная функция сигналов zx и Zy на выходе
ОО оо
Кгхгу^х, (2) = A4(zx(/1)2y(/2)}= $ $ zx(x)Zy(z/)p2(x, y)dxdy. (11.33)
Определяя взаимную корреляционную функцию сигнала на входе
Kxy(tlt ^) = ЛЦх(Л)уО =
5 хУРг (х> У)dx dH> — ОО—ОО
(11.34)
можно найти закон преобразования корреляционной функции нелинейными звеньями.
В частном случае, когда х(() = !/(/) и гх (х) = гу(у) = = z (х), выражения (11.33) и (11.34) дают автокорреляционные функции сигналов
рЛу)
Рис. 11.10
на выходе и входе нелинейного звена г (х).
Будем рассматривать случай, когда сигналы х и у имеют нормальное распределение, выражающееся двумерной плотностью
Pi (х, У) =-------г ~ -----exp 1--------!----Г ——
2лаяау/1-р2Жу Ч 2(1 —р2Ху) L а2я
(у —Оту)2 _ 2рЖу (х — тх) (у — ту) ]]
I- п2 ° V
(11.35)
ажа.
где ржу представляет собой центрированную нормированную взаимную корреляционную функцию входных сигналов х и у.
РХуЦ1, (2)=-±-1(Ху^,^= ~^Х тХ]{У ту}} . (11.36)
Ох Ох Оу
Для стационарных процессов тх, ту, ах и ау не зависят от времени. При стационарности только случайной составляющей мате-
361
Магическое оМдание in х Может быть функцией времени. В этбМ случае
mx = mx(/1), ту = ту (/а).
Для упрощения вычисления интеграла (11.33) удобно применить разложение ра (х, у) в ряд по полиномам Чебышева—Эрмита. В этом случае уравнение (11.35) принимает следующий вид:
где /7П(/)—полиномы, определяемые соотношением
Нп (0 = (— 1 у exp (Z2/2) (dn/dt«) exp (—/2/2). (11.38)
Для определения Нп (0 удобно пользоваться рекуррентным соотношением
Ял+)(0 = ^п(Л-пДп_1(0, (11.39)
имея в виду, что Но (0 = 1, Ях (/) = t.
Полиномы Чебышева-Эрмита Нп (!) обладают свойством ортогональности с весом ехр (—/2/2) на прямой —оо •< t < оо, т. е.
( Я.(0«»(Оехр(-<)-/ ”Р» (11.40)
J \ 2 / ( о при т^=п.
— оо
Это свойство дает возможность, подставляя (11.37) в (11.33), получить достаточно простое выражение для определения взаимной корреляционной функции сигналов zx и гу
Kzxzy{tu ta)= f Рпхуахпауп, (11.41)
n =0 где 00
axn = ахп (тх, стж) — -72=- С z (х) Нп ( х хп хп \ х> х> у2пп1 J \ ах /
Коэффициент ауп выражается аналогично и может быть получен из (11.42) путем замены х на у. Коэффициенты ахп и ауП с ростом п убывают и при расчете корреляционной функции иногда можно ограничиться несколькими членами ряда (11.41).
При определении автокорреляционной функции стационарных Процессов X — у, Zx 2yt Рху Рх* Шу И @уп В этом случае формула (11.41) приобретает следующий вид 362
КгЮ= 2ряхА- (11-43)
п= О
Так как Но (/) = 1 и рх° = 1, то первый член ряда (11.43) представляет собой квадрат математического ожидания сигнала на выходе нелинейного звена
т2 = а02. (11.44)
В этом случае центрированная корреляционная функция
^(т) = 7Сг(т)-/п/= 2 Рхпа\- [(П-45)
п = I
С помощью выражений (11.41)—(11.45), зная характеристику нелинейного звена и функцию распределения сигнала на входе, можно найти зависимость между корреляционными функциями сигналов на входе и выходе нелинейного звена.
Выражение (11.45) дает возможность определить дисперсию сигнала на выходе нелинейного звена
Ог = ога=К2(0)= (11.46)
л= 1
Пример 11.9. Для нормального закона распределения (11.35) и корреляционной функции рх| т | = = е~сигнала на входе нелинейного звена с
характеристикой г = signx найти корреляционную функцию сигнала на выходе.
Зная Нв (0=1 и Ях (I) = t, по формуле (11.39) определим значения следующих полиномов Чебышева-Эрмита
Ht (0 = /2 — 1, На (1) = Р _ 3/1 я4 (/) = /4 — 6? + 3 и т. д.
Подставляя эти выражения в (11.42), после интегрирования получим а0 = 2гьФ(тх/ах), ^1 = г6 /2/лехрГ —-^-(/Пх/Ох)2].
(11-47)
(11.48)
а2= — Дь (11.49)
°х V 2
а3= 1/^6 [(тх/ах)2 — 1] ох (11.50)
и т. д.
Графики an/zb(/nx/ox), построенные по выражениям (11.47)—(11.50), изображены на рис. 11.11, а. Очевидно, что т2 = а0 и _(11.47) совпадают с результатом (11.25) примера 11.6.
Представляет интерес сопоставление расчета дисперсии Dz по формуле (11.46) для трех членов суммы с расчетом по (11.32)
Dz = z2b—a02. (11.51)
Результаты расчетов показаны на графике рис. 11.11,6. Из графика видно, что если расчет Dt производить только по трем членам ряда, 363
то Dz получится меньше истинного значения и расхождение относительно возрастает с увеличением тх.
При известных коэффициентах ап согласно (10.45) корреляционная функция
^(т) = а02 + а?е-а1т|+а22е-2“|т'+а32е-3а|х1 + ... • (11.52)
Зная корреляционные функции сигналов на входе и на выходе нелинейного звена, легко с помощью прямого преобразования Лапласа определить спектральные плотности этих сигналов.
§ 11.6. ВЗАИМНАЯ КОРРЕЛЯЦИОННАЯ ФУНКЦИЯ СИГНАЛОВ ВХОДА И ВЫХОДА НЕЛИНЕЙНОГО ЗВЕНА
Рассмотрим теперь случай, когда нелинейному преобразованию подвергается только сигнал и It), т, е. когда z„ (х) = х = х (А), а 2у(у) =2 (у) =Z (/2) = 2 (рис. 11.12).
В этом случае с помощью (11.41) может быть получена взаимная корреляционная функция сигналов х и z при нормальном законе распределения сигналов х и у
где
^2) 2 РхуП &хп Gyn’
п = 0
(11.54)
[(11.53)
а ауп выражается уравнением (11.42) с заменой х на у. Коэффициенты ахп для данного случая с учетом равенств
ГР / X — \ 1 Т Г /X ttlx \
Яо (-----— = 1 и ОхНА-------------\ = х—тх
\ у \ °х '
364
имеют следующие значения; axo*=mx, ах1 = ах и ахп — 0 при п^-2.
Таким образом, уравнение (11.53) принимает следующий вид: Кхг (ti, /2) = тх ау0 + ахау1 рху. (11.55)
Так как согласно (11.44) ay0 = mz, то
= М— mxmz~
~ ^хау^Рху (11.56)
ИЛИ
^жу(/1, <2) = (oy/a!/i)^xzGi. *2)- (Н-57)
Полученное выражение имеет большое практическое значение, так как показывает, что при определении взаимной корреляционной функции двух сигналов с нормальным законом распределения любое однозначное
Рг('.У)
Рис. 11.12
нелинейное преобразование одного из сигналов не приводит к изменению вида взаимной корреляционной функции, а изменяет только масштабный коэффициент.
Рис. 11.13
Этот результат положен в основу построения релейных корреляторов, в которых роль множительного звена играет поляризованное реле, изменяющее знак сигнала, проходящего по одному каналу в зависимости от полярности второго сигнала. Структурная схема релейного коррелятора изображена на рис. 11.13. Замена множительного звена (см. рис. 9.18) поляризованным реле (см. § 1.8) весьма упрощает устройство коррелятора.
Пример 11.10. Взаимная корреляционная функция между выходом и входом нелинейного звена с характеристикой г = г*sign х имеет вид |т| = = Ве~а1т1, где Виа — постоянные.
Определить автокорреляционную функцию входного сигнала, если известно, что он имеет нормальное распределение.
Находя по формуле (11.48) коэффициент цу1 = и подставляя его в (11.57), для у = х получим
Kx(^=(Jx(Blzb')Vnj2eyLp[ll2(mx/ax)i]exip(— а|т|). (11.58)
365
§ 11.7. СТАТИСТИЧЕСКАЯ ЛИНЕАРИЗАЦИЯ НЕЛИНЕЙНЫХ ЗВЕНЬЕВ
Так же как и при рассмотрении регулярных процессов, при изучении случайных процессов в нелинейных системах очень важно найти такое приближенное описание нелинейной системы, чтобы для ее исследования можно было применить хорошо разработанные методы линейной теории. Так при рассмотрении регулярных процессов получил широкое распространение метод гармонической линеаризации (см. гл. IV), при котором нелинейные звенья заменяются квазилинейными с параметрами, зависящими от амплитуды входного сигнала. При этом условиями эквивалентности является совпадение первой гармоники на выходе при гармоническом сигнале на входе.
Эти же идеи получили развитие в теории случайных процессов и нашли свое выражение в статистической линеаризации нелинейных звеньев. Методы статистической линеаризации были развиты в работах советских ученых И. Е. Казакова (1954), А. А. Первозванского (1958), американских ученых Р. Бутона (1953), Дж. Экслби (1959), японских ученых И. Савраги, и Н. Сугаи, И. Сунахора (1958), и др. [Л. 43, 101, 103].
Сущность метода статистической линеаризации заключается в такой замене нелинейного звена линейным, чтобы некоторые вероятностные характеристики сигнала на выходе оставались без изменения. В качестве таких вероятностных характеристик чаще всего принимают среднее значение и дисперсию. Иногда в качестве критерия эквивалентности принимают минимум среднеквадратичной ошибки, при вычислении которой задаются законом распределения сигнала на входе нелинейного звена. Обычно считают, что распределение подчиняется нормальному закону. Иногда к этому имеются определенные основания, но чаще их нет, однако условно принимают закон нормальным и производят приближенный расчет.
Получающиеся в результате такой замены параметры линейного звена зависят от вероятностных характеристик сигнала на входе и от нелинейной характеристики звена.
Пусть нелинейное звено имеет характеристику
г = г(х) (11.59)
и на его вход подается сигнал
x(t) = mx + x(t). (11.60)
Здесь тх представляет собой в общем случае зависящее от времени математическое ожидание сигнала х (/), а х (/) — его центрированную составляющую, для которой математическое ожидание равно нулю.
С целью линеаризации нелинейной характеристики представим себе, что составляющие тх и х (/) разветвляются по двум различным каналам (рис. 11.14) с коэффициентами усиления kQ и klf а сигнал на выходе является суммой двух линейно преобразованных сигналов
366
y = kQmx+k1x(f),
(11.61)
Для выбора параметров k0 и линейной схемы можно воспользоваться двумя условиями эквивалентности.
В первом случае критерий эквивалентности формулируется следующим образом:
ту = k0 тх = тг, Dy = k1iDx—ki2<jx2 = Dz. (11.62)“
Во втором случае условием эквивалентности служит минимум среднеквадратичной ошибки б2 (см. рис. 11.14)
d6Wo = O и dV/dk^O, (11.63)
где б = 2 — у.
Рис. 11.14
При выборе k0 и ki принимают также средние значения величин, рассчитанных с помощью двух условий эквивалентности.
Пример 11.11. Определить эквивалентные параметры k0 и kt линеаризованного звена г — 2ъ sign х, если сигнал на входе х имеет нормальное распределение (11.3).
Решение по первой схеме. Воспользовавшись результатами примеров 11.6 и 11.8, получим
тг = 2гь Ф (тх/ох) и О2 = гь2 [1 — 4 Фа (тх'/0х)]. (11.64)
В таком случае из уравнения (11.62) следует, что
k0 = т2/тх = (2гь/тх) Ф (тх/ах) (11.65)
и
ki = VD2/Dx = гь/ах К1-4Фа(т1/ох). (11.66)
Решение по второй схеме. Так как
S = 2—y — (rn2—~ k0 тх) + (г*—Al х) = то
6*=me»+De, где
mb = m2—komx. D6=M {(г—k± x)}s »
= DI-|-A1aDx—2А(Л1 Izx’}.
367
Из уравнений (11.63) следует, что k0 = m2/mx и его значение совпадает с решением (11.65), а
М {г х°|
Dx '
Для определения М (г х] воспользуемся выражением (11.56) для 1г = it и х = у. Тогда
Л1 (г х} = kXz (0) = &х axi Рх (0) =0» axi‘
При заданной нелинейной характеристике по формуле (11.48)
axi = гь /2/л ехр [ —1/2 (тх/ах]2] и, следовательно,
k1 = zb/ax /2/л ехр [ — 1/2 (лгж/ох)2]. (11.67)
Как видно из сравнения (11.66) с (11.67) решение по второй схеме дает значение /гх меньшее, чем по первой схеме.
§ 11.8. СТАТИСТИЧЕСКАЯ ЛИНЕАРИЗАЦИЯ НЕЛИНЕЙНЫХ СИСТЕМ С ОБРАТНОЙ СВЯЗЬЮ
Для исследования нелинейных систем управления наибольший интерес представляет рассмотрение нелинейных систем с обратной связью, содержащих наряду с нелинейными безынерционными звеньями линейные динамические, обычно инерционные, звенья.
Рис. 11.15
/ Структурная схема такой системы (рис. 11.15, а) соответствует следящей системе с нелинейным звеном г (х) и линейной частью 1Г (р), на входе которой действуют рабочий сигнал и (/) и помеха f (t).
Будем рассматривать случай, когда рабочий сигнал (рис. 11.15, б) детерминирован и изменяется во времени сравнительно медленно [и (t) = ти (()].
Помеха /(/) (рис. 11.15, в) не содержит постоянной составляющей (/«У = 0) и изменяется достаточно быстро. Она является стационарной случайной величиной и характеризуется корреляционной функцией 368
Kf (т), спектральной плотностью Sf (со) и имеет нормальный закон распределения.
Таким образом, сигнал, поступающий на вход следящей системы, и (0 + f (/) также имеет нормальный закон распределения, а математическое ожидание ти представляет собой заданную функцию времени.
Применяя статистическую линеаризацию рассматриваемой схемы, получим структурную схему (рис. 11.16). Здесь нелинейному звену соответствуют два канала с коэффициентами передачи k0 и ku зависящими от вероятностных характеристик сигнала х = и + f — у. По первому каналу проходит медленная регулярная составляющая, а по второму каналу — быстрая случайная составляющая.
Для правомерности статистической линеаризации необходимо, чтобы сигнал х на входе нелинейного звена имел нормальный закон распределения. Но этот сигнал является разностью сигнала и + / с заведомо нормальным законом распределения и сигнала у, получившегося в результате прохождения сигнала z через линейное звено 1Г(р). Так как сигнал на выходе нелинейного звена имеет отличное от нормального распределение, то возникают сомнения в нормальном распределении сигнала у. Степень приближения закона распределения сигнала у к нормальному зависит от частотных характеристик линейного звена W(p). Порядок числителя передаточной функции всегда меньше порядка ее знаменателя и линейная часть обладает свойством фильтра низких частот. В этом случае сигнал на входе линейной части W(p), имеющий закон распределения, отличный от нормального, вызывает сигнал на выходе с законом распределения, близким к нормальному (см. § 10.5).
Последнее дало возможность по аналогии с методом гармонической линеаризации высказать гипотезу фильтра применительно к статистической линеаризации. Гипотеза формулируется следующим образом: при отличном от нормального законе распределения сигнала на входе линейной части сигнал на ее выходе имеет нормальный закон распределения.
Будем рассматривать только случаи, когда Ц7 (р) соответствует гипотезе фильтра. Тогда сигнал х представляет собой разность сигналов, удовлетворяющих нормальному закону, и, следовательно, он также имеет нормальный закон распределения.
369
Таким образом, к схеме с обратной связью (см. рис. 11.15, а) могу! быть полностью применены рассмотренные выше правила статистической линеаризации, основанные на принятии нормального закона распределения для сигнала на входе, и, следовательно, переход к схеме 11.16. обоснован.
Рассмотрим теперь уравнения детерминированного низкочастотного и статистического высокочастотного каналов эквивалентной схемы, полученной после статистической линеаризации.
Для первого канала передачи детерминированного сигнала
Х(Р) = УИ^(р)=т?ЩЙ-, (11.68)
где U (р) — операторное изображение сигнала u(t), а Ц7а0 (р) — передаточная функция замкнутой системы по первому каналу.
По теореме о предельном значении (см. п. 9 табл. П.4 части I) установившееся значение тх (i) при t -> оо
/пя(оо)= IimpX(p)= lim '
Р“*0 1+^0 W (р)
Так как W (р) обычно содержит интегрирующее звено и U7 (р)->оо при р -> 0, то единицей в знаменателе этого выражения можно пренебречь и для стационарного процесса записать
тх = limp - —. (11.69)
р-*о k0 W (р)
Для второго канала передачи случайного сигнала уравнение спектральных плотностей сигналов
5Д(о) = 5Д®)|Га1(/<<. (11.70)
Здесь S° и Sf — спектральные плотности случайных сигналов х и f, а №31 (р) = ~ пеРеДаточная функция замкнутой
системы по второму каналу.
Дисперсия сигнала х определяется по его спектральной плотности:
= = i $ S,(o)dco. (11.71)
—ОО
Таким образом, уравнения (11.69) и (11.71) дают возможность получить два уравнения
= ^х №)> 1 у2)
ох = СТЯ (^1). /
Так как в этих двух уравнениях имеется четыре неизвестные величины тх, ох, kQ и ki, то для решения задачи необходимо иметь еще два уравнения.
Они получаются из рассмотрения прохождения сигнала х с нормальным законом распределения через нелинейное звено г (х). Приме-370
няя один из рассмотренных ранее способов статистической линеаризации (11.62) или (11.63), получим два уравнения:
ko~ ko{mx, стх), 1 (И ygj
= ajj
Решая совместно уравнения (11.72) и (11.73), получим значения тх и сгх, выражающие вероятностные характеристики рассогласования х в следящей системе.
Так как помеха f не имеет постоянной составляющей (mf = 0), то найденная величина тх выражает установившуюся ошибку следящей системы при наличии помехи /(/).
Случайная составляющая ошибки определяется аналогично (10.34) по спектральной плотности составляющей сигнала на выходе, обусловленной помехой
ss^=st^)\wh^\\
(11-74)
где
fei У (Р)
1 + *1 W(P)
Определив с помощью интеграла (11.71)2?у = <туа, легко найти среднеквадратичную ошибку системы
Уа(0 = /пха+оуа. (11.75)
Формула (11.75) показывает, что ошибка следящей системы при детерминированном полезном сигнале и случайной стационарной помехе с математическим ожиданием, равным нулю, может быть аналогично выражению (10.31) представлена в виде суммы составляющей рассогласования х, обусловленного полезным сигналом и (/) и составляющей сигнала у, обусловленной помехой f (/).
Пример 11.12. Определить установившуюся ошибку следящей системы 6а (!) при следующих условиях: и = Bt,
5/(“) = (2a/2“o)/(“2 + wo2)- z = гь sign*, В7(р)=й/р.
Сигнал f (/) имеет нормальный закон распределения. При этом
a0/k=l, В/(Лаь) = 0,5, ау/аь = 2.
По формуле (11.69) для U(p) = В/р2
рВ В
тх = Нт —— = — . (11.76)
р->0 2 Др fe «о к
Р
По формуле (11.70)
S. (со) = [(2^ <оо)/(со®4-<о%)] | (/со)/(/со+fefej) |а
и после подстановки в (11.71) и интегрирования получим
Рас = = (о/2 ®о)/(Мо + kkx)
ИЛИ
371
Два уравнения (11.73) совпадают с результатами примера 11.11. Принимая первую схему расчета, по формулам (11.65) и (11.66) получим
ка=^ф('ъл тх \ах J (11.78)
&х F Wx / Решая совместно уравнения (11.76) — (11.79), получим (11.79)
ах==-а/2+ ]/О/2 + (а/2)2, где (11.80)
Vfe2zb2-B2 (D0 И (11.81)
Ф = (тх/ох) =В/(2гь k). Из уравнения (11.82) по графику (см. рис. 11.4) определим (11.82)
Р = тх/ах и по известному из (11.80) значению ах найдем (11.83)
/Их = . По формуле (11.74) (11.84)
S° (<в) = S_o (со) | (fei k)/(j<£>) I2 = (2а/ соо)/(ш2 + coo2)x 1 (k± k)/(ja + kt fe) и после подстановки в (11.71) и интегрирования получим |2 (11.85)
Dy = ау2 = (°/2 kkj) /(соо + kk1) И (11.86)
б2 (/) = щх2 + ау2. (11.87)
Подставим в полученные формулы (11.76) — (11.87) численные значения а/гь = /1—0,25 = 0,866,
аж/дь = -а/(2гь) + К(о//гь)2 + («/2гь)2 = 1,6, Ф (тх/ах) = B/(2fezb) = 0,25,
а по графику (см. рис. 11.4) р = щх/ах = 0,71 и тх/гь = (Рах)/гь = 1,16. Тогда по (11.79) и (11.86) й, = (1/1,6)/1—0,25 = 0,54, аг/2/гь2= 1,4. Относительная среднеквадратическая ошибка б2 (?)Дь2 = 1,162+ 1,4 = 2,74.
В установившемся режиме на выходе релейного элемента имеется постоянная составляющая тг = B/k. Для поддержания этой величины даже при отсутствии помехи реле находится в состоянии периодических переключений. Такие переключения рассмотрены в примере 5.4. Наличие помехи еще усложняет этот процесс. Тем не менее проведенный приближенный расчет позволяет правильно оценить характер наблюдаемых при этом зависимостей. Более точный анализ рассматриваемой задачи описан в [Л.43].
ГЛАВА XII
САМОНАСТРАИВАЮЩИЕСЯ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
§ 12.1. ОСНОВНЫЕ ПОНЯТИЯ, ОПРЕДЕЛЕНИЯ, КЛАССИФИКАЦИИ
Множество важных процессов и объектов в технике (скоростные самолеты, некоторые типы ракет, химические реакторы с катализатором и др.) отличается тем, что динамические и статические характеристики объектов изменяются в широких пределах заранее непредвиденным образом. Недостаточная предварительная (априорная) информация о свойствах объекта привела к задаче создания адаптивных (приспосабливающихся) автоматических систем. Развитие новых технических средств радиоэлектроники, вычислительной техники, быстрое развитие теории управления и изучение современных систем управления в живых организмах способствуют прогрессу этого нового направления.
Адаптивными системами автоматического управления называют системы, в которых параметры управляющих воздействий или алгоритмы управления автоматически и целенаправленно изменяются для осуществления в каком-либо смысле наилучшего управления объектом, причем характеристики объекта или воздействия внешней среды могут изменяться заранее непредвиденным образом [Л. 118].
Исходя из того, что основным назначением всякой системы автоматического управления является достижение требуемой цели управления в условиях, заранее не определенных, т. е. при неполной априорной информации, необходимой для управления в заданном смысле, все автоматические системы управления можно разделить на два класса.
Класс I. Системы, в которых неполнота информации, необходимой для управления в заданном смысле, существенно не мешает достижению цели управления, и поэтому можно не предусматривать автоматического пополнения информации в системе. Системы без пополнения информации известны давно — это обычные системы стабилизации, программного регулирования, следящие, которые были рассмотрены в предыдущих главах.
Класс II. Системы, которые не могут достигнуть цели управления при первоначальном уровне информации. Естественным путем преодоления этого препятствия является автоматическое пополнение недостающей информации в процессе работы. Этот класс систем и получил название адаптивных. Процесс пополнения информации, необходимой для управления в заданном смысле, называют адаптацией.
373
Будем считать, что адаптивная система может достичь цели управления когда достигнута необходимая полнота информации. О степени достижения этой полноты можно судить по некоторому критерию 'качества, который характеризует степень достижения системой поставленной цели. Обычно критерий качества непосредственно связан с теми характеристиками, по которым происходит адаптация системы.
В качестве одного из классов в адаптивных системах выделяют обучающиеся системы, в которых пополнение недостающей информации осуществляется в процессе обучения. Как правило, обучение проводится путем внешней корректировки алгоритма системы человеком или специальным автоматическим устройством по заранее известному закону оптимального функционирования системы в текущей ситуации.
Наиболее распространенным классом адаптивных систем являются самонастраивающиеся системы (СНС), не содержащие элементов обучения. В данной главе рассматриваются некоторые самонастраивающиеся системы (СНС), получившие наибольшее распространение в автоматическом управлении.
Работу СНС в общем виде можно представить как процесс автоматического измерения основных показателей работы объекта управле
ния и автоматической настройки характеристик управляющего устройства для достижения системой требуемой цели. Блок-схема СНС показана на рис. 12.1, где в отличие от обычных систем, кроме объекта О и управляющего устройства УУ, появляется блок определения характеристик и настройки БОХН. Входными переменными БОХН могут служить все контролируемые координаты системы х, у, и.
В приведенной на рис. 12.1 обобщенной схеме СНС имеются контур управления / и контуры настройки //. В конкретных системах некоторые контуры могут отсутствовать, а блоки управляющего устройства, определения характеристик и настройки сами могут представлять, СНС, внутри которых можно наметить те же основные блоки.
Блоки определения характеристик и настройки производят вычисление критерия качества системы при наличии помехи f и сопоставляют его с требуемым или найденным ранее, после чего выдается рекомендация v на изменение параметров УУ, например, изменение уставок, параметров или структуры У У и другие операции. При этом весьма существенным является способ, каким можно осуществить настройку в СНС. По виду настройки можно выделить три типа систем: п о -исковые, беспоисковые и комбинированные. Поисковые системы характеризуются в большинстве случаев специальными пробными движениями, в ходе которых выясняются пути улучшения работы системы. Беспоисковые системы характеризуются применением динамических моделей объектов. Комбинированные системы сочетают применение динамических моделей и пробных движений.
374
§ l).2. ббЩАЙ ХАРАКТЕРИСТИКА
ПОИСКОВЫХ ЭКСТРЕМАЛЬНЫХ СИСТЕМ
Поисковыми самонастраивающимися системами называют системы, в которых для решения задачи оптимального управления в условиях неполной априорной информации используется автоматический поиск. Под автоматическим поиском понимают [Л. 135] процесс в замкнутой системе автоматического управления, при котором управляющее устройство производит пробные воздействия на объект, анализирует их результаты и приводит управляемый объект к требуемому режиму. При автоматическом поиске заранее не известна полностью зависимость требуемых управляющих воздействий от управляемой величины и контролируемых возмущений, в то время как в обычных САУ информации о состоянии объекта бывает достаточной для определения необходимых управляющих воздействий.
Наиболее часто автоматический поиск применяется в системах управления, где статические характеристики объектов имеют экстремальный характер и задачей управления является нахождение и поддержание управляющих воздействий, обеспечивающих экстремальное значение управляемой величины. Когда автоматический поиск применяется для управления объектами с экстремальными характеристиками, соответствующие поисковые системы обычно называют экстремальными системами (ЭС). Основополагающие работы по экстремальным системам выполнены советским ученым В. В. Казакевичем [Л. 42].
Идею автоматического поиска можно рассмотреть на примере определения управляющего воздействия и — и*, обеспечивающего экстремум (для определенности примем максимум) выходной величины у = у* одномерного объекта со статической характеристикой у (и). По значению у в. одной точке статической характеристики объекта (рис. 12.2) нельзя определить направление изменения и, соответствующее желаемому направлению изменения у. Когда текущему состоянию системы соответствует левая ветвь характеристики—точка А, величину и следует увеличить, а если текущему состоянию системы соответствует точка В, то и следует уменьшать. Пусть система находится в точке А. Для определения правильного направления движения управляющее устройство может, например, выполнить следующие операции: вначале автоматически измерить и запомнить величину у (ил), изменить и на величину Ди и вновь измерить и запомнить у при и =
= ил + Ди. После этого, определяя Ау = у (ил + Ди) — у (ил),
375
управляющее устройство вырабатывает рабочее воздействие, изменяю* щее состояние объекта в желаемом направлении.
В практике автоматического управления [Л. 6] существует большое число задач, где требуется автоматически поддерживать экстремальное значение выходной величины объекта. Рассмотрим некоторые из них.
Пример 12.1. Довольно распространенной является задача настройки контура в резонанс (см. рис. 1.14 и стр. 31—32 части I) при автоматической настройке приемников по максимуму усиления, автоматической настройке передатчиков по максимуму к. п. д. [Л. 81], настройке контура куметра, измеряющего добротность катушки индуктивности [Л. 31]. Здесь настраиваемым параметром является емкость конденсатора, а управляемой величиной — напряжение на контуре. При резонансном значении емкости напряжение на контуре максимально.
Рис. 12.3
Пример 12.2. В радиолокационных системах слежения СС за движущимися целями [Л. 11] управляющими координатами для антенны (рис. 12.3, а) являются углы места и азимута и2, управляемой величиной — интенсивность принимаемого радиолокационного сигнала у. Зависимость у (ult и2) имеет ярко выраженный максимум (рис. 12.3, б). При движении цели значения Uj и и2, максимизирующие у, меняются. Вид у (ult и2) также зависит от изменения расстояния до цели. Кроме того, значение у, определяемое системой слежения, изменяется случайным образом под действием естественных или искусственных помех, принимаемых антенной.
Пример 12.3. В газовых печах (рис. 12.4, а) интенсивность горения, а следовательно, температура О' в зоне нагрева при заданном расходе топлива q зависит от расхода воздуха и. Зависимость управляемого параметра — показаний термометра у — от управляющего параметра и имеет максимум при и = и* ]Л. 64] (рис. 12.4, б). На форму зависимости у (и) и положение максимума значительное влияние оказывают возмущающие параметры: калорийность топлива, температура воздуха и нагреваемых предметов и т. д. Управляемый параметр измеряется с ошибками, т. е. у может изменяться случайным образом, а не только при изменениях и. В данном объекте управления, в отличие от предыдущих, уже существенно сказываются динамические свойства объекта; во-первых, процесс перемешивания топлива и воздуха носит инерционный характер, во-вторых, нагреваемый объект и термометр также обладают инерционными свойствами.
Пример 12.4. Значительное распространение получили задачи, в которых управляемой величиной является показатель качества функционирования какой-либо системы автоматического управления, а управляющими величинами — настроечные параметры этой САУ. На рис. 12.5, а изображена система управления 376
толщиной проката. Толщина Н прокатываемой полосы перед валками измеряется датчиком Д1( входящим в качестве измерительного органа в систему управления по возмущению, которая включает в себя, кроме Дг, корректирующее устройство КУ и исполнительный двигатель ИД, перемещающий с помощью винта В валок стана. Толщина h полосы на выходе валков измеряется датчиком Дг, а результаты измерений обрабатываются в вычислительном устройстве ВУ
Выходной величиной у вычислительного устройства служит дисперсия а2Л от клонений h от требуемого значения. Величина у поступает на вход управляющего устройства У У, выходная величина которого и определяет настройку коррек тирующего контура. Статическая зависимость у(и) для данной системы имеет минимум (рис. 12.5, б). Положение минимума, т. е. значение и*, существенно за-
Рис. 12.5
висит отряда возмущений (механических свойств, температуры, дисперсии о2н по толщине Н прокатываемой полосы) и может меняться в процессе работы стана. На величину у могут влиять погрешности датчика и вычислительного устройства. В структурной схеме, описывающей динамическую связь между изменением и и у, кроме интегрирующего и инерционного звеньев, соответствующих двигателю (ИД), необходимо учитывать транспортное запаздывание, величина которого зависит от изменения скорости v движения прокатываемого материала.
Обобщая рассмотренные примеры, можно экстремальную систему изобразить с помощью структурной схемы (рис. 12.6). Объект управления может иметь несколько управляющих входов, поэтому управляющее воздействие обозначено как вектор и. Воздействие и подвер-
377
гается динамическим преобразованиям, описываемым матрицей весовых функций || W! (/)||, и в виде вектора v с координатами Oj, v2, ..., vlt .... vn поступает на вход безынерционного нелинейного элемента с экстремальной характеристикой г (v). Выходная величина нелинейного элемента проходит через динамическое звено с весовой функцией w2 (/). К выходному сигналу этого звена добавляется помеха Д, обусловленная погрешностью измерительных приборов и различными шумами. Результирующий сигнал у представляет собой управляемую величину, поступающую на вход управляющего устройства.
Кроме на объект управления действует помеха Д, обусловленная случайными возмущениями, вызывающими дрейф экстремальной
характеристики объекта. Из-за существования неконтролируемых возмущений, уводящих объект из оптимального режима, и появились экстремальные системы, основной задачей которых является отыскание и поддержание экстремальных значений управляемого параметра. К третьему виду возмущений Д будем относить неконтролируемые изменения динамических свойств линейных звеньев, например, изме-няющиееся транспортное запаздывание.
Заметим, что в качестве управляемого параметра, имеющего экстремальную зависимость от управляющего, в реальных системах могут быть самые различные физические и технико-экономические показатели: напряжение, температура, производительность, коэффициент полезного действия и многие другие [Л. 6]. В большинстве случаев значения этих показателей отражают достигнутую оптимальность управляемых объектов, поэтому часто выходной параметр объекта экстремального управления называют показателем оптимальности.
Также важно знать, что на область изменения управляющих параметров могут быть наложены некоторые ограничения, которые в общем виде задаются неравенством
H(ult и2... «п)<0. (12.1)
Методы автоматического поиска в большинстве своем берут начало в вычислительной математике [Д 112Jt где одной из наиболее распро-379
страиениых задач яйляется задача минимизации функции, называемой целевой функцией, одной или нескольких переменных. Как известно, необходимым условием экстремума функции у — у (иь ..., ип) является равенство
grad у = 0, (12.2)
где
grady = ^u1°+ ... +-^-u2; дих оип
Uj0 — единичные векторы пространства координат щ, в котором определена функция у.
Для выполнения условия (12.2) необходимо определять градиент целевой функции у и осуществлять управляющие движения в соответствии с измеренным градиентом в сторону экстремума (рабочие движения). Воздействия на объект с целью определения градиента называют пробными воздействиями.
§ 12.3. МЕТОДЫ ОПРЕДЕЛЕНИЯ ГРАДИЕНТА ЦЕЛЕВОЙ ФУНКЦИИ
При определении градиента координатное разделение реакции объекта, вызванной пробными воздействиями, может осуществляться за счет разделения пробных воздействий либо по времени, либо по частоте.
Оценка градиента с разделением по времени пробных воздействий. В системах такого типа изучающие воздействия могут осуществляться в виде пробных шагов, подаваемых поочередно по каждой из входных переменных. Пусть в исходном положении вектор и имеет координаты Ui,..., ип. Дадим приращение первой координате сх. Измерив и запомнив у (цх + Ci, и2, «п), дадим этой же координате приращение —сх и
измерим у (их — сх, и2.un). Отношение
ypZt + d, “г..Un) ——Cj, иг, ип} ~ду_ (12 3)
2с, дих
тем ближе к истинному значению производной, чем меньше q. Аналогично поочередно могут быть определены все остальные частные производные. Величины пробных шагов по каждому из каналов (сг) определяются в основном чувствительностью устройств, измеряющих показатель оптимальности, и интенсивностью помех.
Пробные шаги в качестве изучающих воздействий получили наибольшее распространение из-за простоты технической реализации и простоты фильтрации помех, наложенных на показатель оптимальности. Когда величина у (/), поступающая в экстремальный регулятор, содержит, кроме показателя оптимальности, еще высокочастотную помеху /2, для фильтрации помех можно использовать обычное усреднение величины у с помощью фильтра низких частот.
Пробные воздействия могут иметь различную форму. На рис. 12.7 показаны пробные воздействия в виде линейных функций, поочередно 379
подаваемых па вход безынерционного объекта [Л. 49]. Полная производная по времени для такого объекта
dy__dy_ dui . , ду dun (12 4)
dt dUi dt ' " dun ' dt \ • )
В каждый момент времени все производные управляющих переменных, кроме одной, равны нулю. А производная, отличная от нуля, имеет вполне определенное постоянное значение bt. Например, для (j < t <Z /2 (см. рис. 12.7)
dujdt --- dujdt =: 0; du2/dt = b2. (12.5)
При подстановке условия (12.5) в (12.4) для < t < t2
dy/dt = {dyldu^ b2.
Рис. 12.7
Таким образом, измеряя производную показателя оптимальности по времени, легко найти соответствующую частную производную.
Рассмотренные способы достаточно просты в реализации и в этом их большое достоинство, однако они связаны со значительными затратами времени на поиск. Кроме того, в основу этих способов оценки составляющих градиента положено дифференцирование, что в любом случае приводит к снижению помехоустойчиво
сти метода.
Оценка градиента с разделением пробных операций по частоте. Наибольшее распространение среди этих методов получило синхронное детектирование — способ оценки составляющих градиента, позволяющий одновременно выполнять рабочие изменения управляющих параметров. Его применение возможно лишь тогда, когда выход объекта непрерывно контролируется, а на входе допускается подача непрерывных пробных сигналов.
Пусть на входе одномерного безынерционного объекта экстремального управления (рис. 12.8, а) пробный сигнал, создаваемый генератором Г, имеет вид
Uap(t) = XmSinaot.
Представляя выход у = у (х) объекта в окрестности рабочей точки х = и рядом Тейлора, имеем для малых Хт
y(u + Xmsinaot) = y (и) + ду/дх |х=и Хт sin ю01 +
+1/2 (d2 у;дх1) \х=и (Хт sin о0 /)2 4-...,
т. е. амплитуда первой гармоники на выходе объекта пропорциональна производной dy/dx в рабочей точке. При изменении знака производной с положительного на отрицательный первая гармоника сдвигает-380
ся по фазе на угол <р = л. На рис. 12.8, 6 показаны графики сигналов на выходе объекта при разных положениях рабочей точки ut относительно экстремума и*. При и* > ult как видно, фазы гармоник ыпр(0 и у (/) совпадают, а при u* < и2, когда dy/dx 0, разность фаз этих гармоник равна л.
Когда и = и*, выходной сигнал изменяется с частотой 2<о0.
Рис. 12.8
Если характеристика у (х) объекта может быть описана кривой второго порядка
у = а0 + tZj х + а2 х2,
то амплитуда первой гармоники на выходе объекта точно пропорциональна производной dyldx. В этом легко убедиться, найдя коэффициент при первом члене разложения функции у (t) в ряд Фурье:
t
= ю0/л J
, 2 л
Yi
у [и + Хт sin ю01) sin a>otdt —
381
^Xm(ai+2a2u)=Xm-^ . (12.6)
OX XtssU
Как следует из (12.6), производную dyldx можно найти путем текущего усреднения за период произведения выходного сигнала у (/) объекта на гармонику sin <о0 t.
Процедуру, определяемую выражением (12.6), называют синхронным (или когерентным) детектированием. Технически синхронное детектирование реализуется с помощью множительного звена, на входы которого поступают сигнал у (/) с выхода объекта и опорный сигнал и0„ = sin (aot + ф), снимаемый с фазосдвигающего устройства ФСУ. Выход множительного звена соединен с входом фильтра Ф см. рис. 12.8, а), осуществляющего текущее усреднение. Выходной
Рис. 12.9
сигнал 2 (/) фильтра, являющийся выходной величиной синхронного детектора СД, управляет работой исполнительного двигателя ИД, который осуществляет рабочие изменения координаты и до тех пор, пока не будет выполняться условие 2 (/) = 0.
Заметим, что в процессе выполнения рабочей операции экстремальная система ведет себя как обычная система управления, сводящая ошибку к нулю, в качестве которой в нашем случае является величина 2 = dyldx. Специфика экстремальной системы проявляется при этом только в наличии операции поиска, т. е. операции определения производной.
Фильтр, осуществляющий текущее усреднение, имеет весовую функцию w (/) (сплошная линия на рис. 12.9, а) и может быть реализован с помощью устройства, структурная схема которого показана на рис. 12.9, б. Как видно из структурной схемы, для реализации идеального фильтра необходимо звено чистого запаздывания, а техническая реализация таких звеньев вызывает значительные трудности.
При практической реализации синхронного детектирования достаточную фильтрацию осуществляет обычный фильтр низких частот, например, инерционное звено, весовая функция которого показана на рис. 12.9, а штриховой линией.
Фильтр низких частот выполняет задачу выделения сигнала, пропорционального производной dyldx, благодаря тому, что на выходе множительного звена имеется только одна постоянная составляющая и совокупность гармоник с частотами, кратными (о0, которые подавляются фильтром. Постоянная составляющая в выходном сигнале множитель-382
кого звена пропорциональна dyldxlx^.u, в чем можно убедиться путем простых тригонометрических преобразований функции v (/) = = У (0«оп 0- х
Если объект экстремального управления не является безынерционным, то первая гармоника в его выходном сигнале, несущая информацию о первой производной, сдвигается по фазе относительно пробного сигнала на некоторый угол <р (<о0). Если опорный сигнал на втором входе синхронного детектора совпадает с поисковым по фазе, т. е. uon = sin <о0 t, то выходной сигнал СД определяется выражением z = Xm(dj//dx)cos<p(<o0). (12.7)
Как видно из (12.7) , при фазовом сдвиге, близком к л/2, выход синхронного детектора близок к нулю. При л/2 <2 <р (соо) < л меняется знак обратной связи в системе,в результате чего система будет уходить от экстремальной точки. Для устранения вредного влияния фазового сдвига в тракт опорного сигнала вводят фазосдвигающее устройство ФСУ (см. рис. 12.8, а). При этом опорный сигнал иоп = sin (соо t + ф), а выход синхронного детектора зависит от косинуса разности фаз, т. е.
z = Хт (dy/dx) cos [<р (<о0)—ф].
(12.8)
Рис. 12.10
Очевидно, что наилучшему режиму работы соответствует условие
<р(<о0)—ф = 0. (12.9)
Все формулы (12.6)—(12.8) для выходной переменной синхронного детектора были выведены в предположении, что рабочая составляющая и (/) изменяется значительно медленнее, чем пробный сигнал. Такой режим, когда частотные спектры сигналов и (/) и ипр (/) существенно разнесены, называют квазистационарным [Л. 49].
Большим достоинством метода синхронного детектирования является простота поиска экстремума в многомерных объектах О. В этом случае поисковые сигналы имеют разные частоты для разных каналов (рис. 12.10), благодаря чему на каждом из синхронных детекторов СД вычисляется частная производная по соответствующей переменной.
В методе синхронного детектирования в качестве поисковых (пробных и опорных) сигналов могут использоваться, кроме синусоидальных, другие периодические сигналы. Например, удобным для технической реализации является меандр
цпр4 == Л sign [sin со,-/],
383
uoni = sign [sin (со41 + <Pi)]• (12.10)
При таком поисковом сигнале выход синхронного детектора определяется выражением
Z/ = А (ду/дх} | л/2 — [<р (<ог)—tpil |. (12.11)
Также в качестве поисковых можно использовать случайные, контролируемые изменения входных координат объекта. В этом случае синхронный детектор представляет собой коррелятор, определяющий коэффициент взаимной корреляции Ryx выхода у (/) объекта и в входной переменной x(f).
Отметим, что в синхронном детекторе по существу вычисляется коэффициент взаимной корреляции входной и выходной гармоник объекта
dyldx = kRyx,
где k — коэффициент, определяемый статистическими свойствами случайных изменений х (I).
Синхронное детектирование обладает большой помехоустойчивостью благодаря операции усреднения в противоположность способам с разделением пробных воздействий во времени, где осуществляется дифференцирование выходного сигнала объекта.
§ 12.4. МЕТОДЫ ПОИСКА С РАЗДЕЛЕНИЕМ ПРОБНЫХ И РАБОЧИХ ОПЕРАЦИЙ
После определения частных производных, когда известно направление и величина градиента, система осуществляет рабочее движение (рабочий шаг). Способов движения к экстремуму при известных частных производных существует достаточно много [Л. 112]. Рассмотрим лишь некоторые из них.
Метод градиента. При этом методе рабочий шаг Ди пропорционален градиенту
Ди = a grad у (и), (12.12)
где а — коэффициент, т. е. по каждому из управляющих каналов рабочее воздействие пропорционально соответствующей частной производной.
Идею этого метода удобно рассмотреть для случая двух управляющих параметров на плоскости, где нанесены линии постоянного значения (линии уровня) оптимизируемой функции. Линии уровня представляют собой замкнутые кривые, причем линии, соответствующие большему значению у (для случая экстремума—максимума) находятся внутри линий, соответствующих меньшему значению у. На рис. 12.11 показана траектория поиска по методу градиента (/—2—3—4} в плоскости управляющих переменных иу и ы2. В каждой из точек 1, 2, 3 производится вычисление градиента и делается рабочий шаг: 1—2, 2—3, 3—4. Направление рабочего шага совпадает с нормалью к линиям уровня, а величина шага тем больше, чем больше модуль градиента. Как вид-384
но из рис. 12.11, бдльшему значению градиента соответствует более близкое расположение друг к другу линий уровня (см. шаги 1—2 и 3—4).
Метод наискорейшего спуска (крутого восхождения). Рабочий шаг при этом проводится в направлении градиента, однако величина его определяется не модулем градиента, а условием достижения экстремума в направлении градиента. На рис. 12.11 показана траектория поиска по методу наискорейшего спуска (5—6—7—8). Направление рабочего шага 5—6, например, совпадает с нормалью к линии уровня, а заканчивается этот шаг в точке экстремума поданному направлению,
что соответствует касанию линии рабочего шага с соответствующей линией уровня. Из рис. 12.11 видно, что шаг 6—7 значительно больше, чем шаг 5—6, хотя модуль градиента для точки 5 больше, чем для точки 6, о чем можно судить по расстоянию между линиями уровня.
Метод покоординатной оптимизации (Гаусса-Зайделя). Этот метод наиболее
часто применяется в систе-
мах, где для многопара- Рис. 12.11
метрической оптимизации
(поиска экстремума для объектов с несколькими управляющими входами) используются одноканальные экстремальные регуляторы, позволяющие находить экстремум функции одного переменного. При таком методе поиска изменяется один из управляющих параметров (при всех остальных неизменных) до тех пор, пока не будет достигнут экстремум по этому параметру. После этого начинается аналогичный поиск экстремума по другой переменной при всех остальных неизменных. Траектория поиска по методу Гаусса—Зайделя показана на рис. 12.11 (9—10—11—12—13). Как видно, вначале изменяется и2 при их = const до точки касания линии движения с линией уровня (точка 10), где выполняется условие dyldu2 = 0. Затем анало
гично изменяется переменная и± и т. д.
Нужно заметить, что метод Гаусса—Зайделя не является градиент-
ным, так как движение при поиске осуществляется не в направлении градиента, однако этот метод рассматривается здесь для удобства сравнения его с градиентными методами.
При сравнении трех описанных методов установлено, что наименьшее число шагов для попадания в какую-либо окрестность экстремальной точки требуется при применении метода наискорейшего спуска. Речь идет о числе шагов, получаемом путем усреднения для различных траекторий поиска по какой-либо области начальных условий.
13 Зак. 447
385
Метод стохастической аппроксимации. Случайнее возмущения, представляющие собой помеху при измерении частных производных, требуют применения для автоматического поиска помехоустойчивых методов. Существуют процедуры поиска, обеспечивающие отыскание оптимума в присутствии помех. Они известны под общим названием «Методы стохастической аппроксимации» [Л. 112, 127]. Термин «аппроксимация» в данном случае означает, что экстремум находится приближенно по результатам предыдущих опытов, а слово «стохастическая» указывает на случайный характер ошибок измерений. В самой общей постановке задача стохастической аппроксимации заключается в отыскании точки и* в пространстве переменных иъ ..., ип, для которой выполняется условие
М {ф(и*)]=0, (12.13)
где М — символ математического ожидания; ip — функция, определяемая содержанием задачи.
Для задач поиска экстремума функция ф определяется равенством (12.2): ф (u) = grad у (и), т. е. применительно к экстремальным системам метод стохастической аппроксимации сводится к условию
М [grad у (и*)] = 0. (12.14)
Идею метода стохастической аппроксимации рассмотрим на простом примере нахождения значения постоянного параметра, измеряемого со случайной ошибкой. Пусть и* — истинное значение некоторой величины, a щ (где i = 1, ...,£) — последовательность экспериментально определенных значений этой величины, отличающихся от истинного из-за аддитивной помехи ft, т. е.
При этом задача стохастической аппроксимации формулируется в виде
М [и—и*} = 0, а функция
ф(и) = и—и*. (12.15)
Если помеха имеет среднее значение, равное нулю, то, как известно, наилучшим приближением к истинной величине параметра после k измерений будет среднее арифметическое
. k
^*=4 2 «о (12.16)
Я /== 1
где uk* — величина и* после k опытов.
Проведем простые преобразования над (12.16) с тем, чтобы выразить u*h через предыдущую оценку и*ь-\ и очередное экспериментальное значение ufe:
«л* =
л-i
л * * —1 4=1 *
386
^*=1 uk_l+LUk. (12.17)
k К
Как видно из (12.17), предыдущая оценка входит с весом (k — l)/k, а новое экспериментальное значение uh имеет вес l/k, т. е. с ростом числа наблюдений влияние новой информации уменьшается. Эта идея взвешивания новых измерений пропорционально l/k выражает правила рационального поведения в условиях помех: чем больше накоплено данных, тем меньшие изменения в окончательный результат должны вносить новые измерения. Запишем несколько иначе выражение (12.17)
uk* = uk-i 4- \/k\uh— iZL)]. (12.18)
Схема реализации алгорит- ч
ма (12.18) дискретным интег- '
ралом Д «дигратором» показана на рис. 12.12, а. Нужно заметить, что суммирующий узел, куда поступают очередное зна- л чение uh и текущая оценка ' u*k-1, формирует текущее зна- г чение функции в соответст- iL». вии с выражением (12.15).
От этой схемы просто перейти к общей схеме стохастической аппроксимации (рис. 12.12, б)
мА* = uj—i Ч-Тй'Ф («а). (12.19)
где yh — последовательность чисел, зависящих от номера k эксперимента.
Применительно к экстремальным системам с учетом (12.14) выражение (12.19) запишется как
uh* = ul_i -ЬТа grad t/(ufc). (12.20)
Этот алгоритм отличается от рассмотренного ранее метода градиента [алгоритм (12.12)] тем, что коэффициент yk при градиенте зависит от номера шага. Рассмотрим условия, которым должна удовлетворять последовательность чисел yk, для того, чтобы uft* стремилось к а* с вероятностью, равной единице при k -> оо:
а) 7й>0- (12.21а)
условие правильности направления коррекции, а для структурных схем стохастической аппроксимации это — условие правильного знака обратной связи;
б) limyft = 0 — (12.216)
условие, обеспечивающее асимптотическую точность метода. Так как из-за случайных помех оценки градиента даже при больших k отличны 13* 387
от нуля, то величина коррекций будет уменьшаться до нуля за счет уменьшения fh:
в) S Ya2<°° или Пт У Тй2 = 0— (12.21в)
k = 1 т-^со k = m
условие, гарантирующее фильтрацию помех, если помехи имеют конечную дисперсию. Для доказательства запишем (12.20) в виде
uft*— u*A_i =yAgradi/(uA). (12.22)
При наличии помех оценка градиента состоит из двух составляю* щих: регулярной grad у0 (иА) и случайной 6А, т. е.
grad у (uA) = grad у0 (иА) + 6А.
С учетом этого перепишем (12.22)
иА*—^*-,=7,, grad i/0 (uft)+ уА6А. (12.23)
Подставляя в формулу (12.20) k=oo и k = m с учетом (12.23), получим оо оо
Uoo* — um*= 2 Уй grad r/o(uA) + 2 yA6A. (12.24) k~tn
Второе слагаемое в этом выражении определяет случайную составляющую отклонения асимптотического положения точки экстремума на m-шаге. Дисперсия этой составляющей
2 (уА6А)2! = ав2 2 Ya2- (12.25)
= j k = m
Если дисперсия (T42 ошибок при измерении градиента конечна, то из условий (12.21в) и (12.25) вытекает, что при пг -> оо влияние ошибок из-за помех стремится к нулю:
оо
Г) 2ya=°° — (12.21г)
k - 1
условие, обеспечивающее сходимость процесса поиска к истинному положению оптимума даже тогда, когда начальная точка удалена от экстремума достаточно далеко, так как общая величина коррекции может быть любой величины.
Всем перечисленным условиям (12.21а) — (12.21г) отвечает последовательность
Ya=1/^> (12.26)
которая появилась в примере об оценке среднего значения из общих физических представлений [см. (12.17)]. Эту последовательность (1, 1/2, 1/3, ...) называют гармонической и широко применяют в самых разных итерационных процедурах. 388
До сих пор при рассмотрении метода стохастической аппроксимации применительно к задаче поиска экстремума оставался в стороне вопрос о способе измерения составляющих градиента. Основным способом является использование пробных шагов, т. е. оценка частных производных по приращениям оптимизируемой функции в соответствии с выражением (12.3). Особенностью стохастической аппроксимации является то, что величина пробного шага не остается постоянной, а зависит от номера шага. Причем с течением времени, т. е. при k -> оо, величина шага cik -> 0 (/ = 1, ..., п), чтобы обеспечить установившийся режим поиска сколь угодно близко к точке экстремума. В то же время для сходимости к точке экстремума с вероятностью единица [Л. 127, 129] величина шага cih должна убывать медленнее, чем коэффициент yk, что отражается условиями:
00
S с(А?й< °°-1
(12.27а)
(12.276)
Если принять yk = \/k, то условиям (12.27) удовлетворяет последовательность
з,— clk = \/Vk.
(12.28)
§ 12.5. МЕТОДЫ ПОИСКА С СОВМЕЩЕНИЕМ ПРОБНЫХ И РАБОЧИХ ОПЕРАЦИЙ
Существует большое число методов автоматического поиска, где рабочее движение одновременно играет роль пробного. Один из них — метод запоминания экстремума — был описан в § 1.4 при рассмотрении системы экстремального регулирования. В этой системе недостающая информация о положении экстремума пополняется благодаря автоколебаниям, параметры которых (амплитуда и частота) зависят от свойств объекта и регулятора (см. примеры 3.11 и 4.8). По динамическим свойствам с методом запоминания экстремума сходен шаговый метод с дифференцированием выходного сигнала объекта и постоянной скоростью изменения управляющей переменной.
Шаговый метод. Система, сделав шаг Auh по управляющей переменной, где k — номер шага, проводит измерение выходного параметра yh и сравнивает его с запомненным значением ук—\ на предыдущем шаге. В зависимости от знака приращения Дг/* = г/* — г/*— i следующий шаг Дщ-f-i производится в соответствующую сторону. Например, при поиске максимума
uk+i = с sign (Д t/h),
(12.29)
где с — шаг.
389
На рис. 12.13, а показано, как изменяются координаты в системе, где частота шагов задана заранее и не зависит от характеристик объекта; на рис. 12.13, б — те же диаграммы для системы, в которой частота следования шагов определяется крутизной статической характеристики объекта [Л. 59]. Структурная схема системы, реализующей этот метод поиска, показана на рис. 12.13, в. Величина ДуА = ук — уь-\ формируется путем вычитания из текущего значения ук величины уь — \, получаемой на выходе звена задержки 33. На интегратор И, выход
Рис. 12.13
которого связан с логическим устройством ЛУ, поступает Ayk. Логическое устройство управляет шаговым двигателем ШД, отрабатывающим шаги ДыА по следующему закону:
+ с, если
—с, если
ДуА dt > S, r*-i
Tk
J \yhdt<— 8,
(12.30)
Th—I
где 6 — порог срабатывания логического элемента; (Тк — Th-1) — длительность интервала времени между (k — 1)-ым и fe-ым шагами.
Из (12.30) видно, что очередной шаг в системе проводится, когда | f \ук dt | достигает величины 6. Чем более удалена система от экстремума, тем больше ДуА и тем меньше (Тк — Tk-О, поэтому чаще производятся шаги. 390
Достоинством этой системы является большая помехоустойчивость, достигаемая за счет интегрирования приращения Дуь: чем ближе к экстремуму подошла система, тем меньше &ук и тем более существенно сказывались бы помехи. Однако в данном случае при уменьшении Ayh возрастает время интегрирования Тк, что и позволяет успешно бороться с помехами.
Симплекс-метод. В рассмотренных шаговых методах поиска процедура изменения управляющей координаты была простейшей: очередная координата un+i определяется положением конца отрезка прямой линии, второй конец которого находится в текущей точке ик. Ори-
Рис. 12.14
ентация отрезка на (k + 1)-ом шаге определяется значениями экстре-мивируемой функции на концах предыдущего шага Uk-i и ик в соответствии с алгоритмами (12.29) или (12.30).
С геометрической точки зрения отрезок прямой является простейшей фигурой (симплексом) в одномерном пространстве. Использование симплексов для организации поиска в многомерных пространствах позволяет избежать определения градиента, что существенно упрощает процедуру поиска. На рис. 12.14 показаны симплексы: одномерный— отрезок прямой (рис. 12.14, а), двумерный—треугольник (рис. 12.14, б), трехмерный—четырехгранная пирамида (рис. 12.14, в).
Идея симплекс-метода поясняется на примере двумерной задачи (рис. 12.15, а) [Л. 40]. Как и раньше, оптимизируемая функция, имеющая максимум, изображается на плоскости с помощью линий уровня. В исходной области в трех точках (/, 2, 3), являющихся вершинами симплекса, определяются соответственно значения оптимизируемой функции: ylt у2, у3. Следующая точка 4 находится как зеркальное отображение вершины симплекса с наименьшим значением функции относительно противоположной грани. При этом образуется новый симплекс.
На рис. 12.15, a J/1 < у2 < i/з (это следует из расположения точек относительно линий уровня), поэтому очередной симплекс использует точки 2, 3, а точка 4 — зеркальное отображение точки 1. Следующая вершина 5 — является зеркальным отображением вершины 2, так как Ун < Уя < У*- Аналогичным образом далее идет поиск, и точка 12
391
приводит систему достаточно близко к экстремуму. В дальнейшем на шаге 13 система уходит от оптимума, а на шаге 14 попадает в точку, в которой находилась на шаге 10. Следующим шагом (15) система перейдет в точку, где находилась на шаге 13, и в системе возникнут автоколебания — (от точки 13 в точку 10 и обратно) вблизи оптимума. Для устранения автоколебаний можно, например, после первого же циклического движения (попадания из точки 13 в точку 10 и снова в точку 13) начать уменьшать длину с ребра симплекса по закону гармонической последовательности, т. е.
ck = c0/(k-l) (k>l), (12.31)
где ck — длина ребра симплекса на Л-ом шаге; с0 — длина ребра симплекса в начале поиска; I — номер шага, с которого принято решение об уменьшении размеров симплекса.
Рис. 12.15
Одной из вершин при этом для новых симплексов должна оставаться вершина с наибольшим значением у.
На рис. 12.15, б показана картина поиска с учетом (12.31), начиная * с 10-го шага. Эта модификация поиска использует идеи симплекс-метода и стохастической аппроксимации.
Симплекс-метод позволяет решать задачи оптимизации в самых сложных ситуациях, когда количественная оценка оптимизируемой функции затруднена и удается получать лишь качественные суждения типа: «в этой точке значение у — наихудшее», так как для дальнейшего движения важно указать лишь одну наихудшую точку.
Недостатком симплекс-методов является относительно сложная техническая реализация в многомерных задачах, когда необходимо применение вычислительных устройств для нахождения вершин симплексов.
Случайный поиск. Последняя группа методов, которые мы рассмотрим в данном параграфе, объединяет методы случайного поиска. Эти методы целесообразно применять [Л. 99] лишь в задачах с большим числом переменных (п > 5).
392
В одном из методов случайного поиска, например, система делает шаг в пространстве переменных постоянной длины в случайном направлении. Если оптимизируемая функция в результате этого шага возрастает, то система проводит аналогично очередной шаг. Если же оптимизируемая функция уменьшилась, то система возвращается в точку, откуда был сделан шаг, и снова в случайном направлении изменяет вектор управляющих координат. В многомерных системах число шагов для достижения оптимума при случайном поиске сравнимо с числом шагом при наискорейшем спуске и методе градиента, относящихся к регулярным методам поиска.
В заключение заметим, что число известных методов автоматического поиска, учитывающих особенности объектов управления и технической реализации, всевозможные ограничения, очень велико, поэтому были рассмотрены лишь наиболее распространенные.
§ 12.6. ДИНАМИКА ЭКСТРЕМАЛЬНЫХ СИСТЕМ
Правильно рассчитанная система в установившемся режиме должна совершать в окрестности экстремума колебательные движения (иногда довольно сложной формы). Колебания собственные или вынужденные отражают специфику поисковых систем и необходимы для пополнения информации о положении системы относительно экстремума. Часто амплитуду установившихся колебаний вектора управляемых координат называют величиной рыскания.
Поисковые системы являются нелинейными САУ, задача которых состоит в отслеживании в пространстве управляющих координат точки, для которой градиент оптимизируемой функции равен нулю [условие (12.2)1. Задачи исследования динамики в этих системах (устойчивость установившегося движения, качество переходных процессов) могут решаться при помощи методов исследования линейных и нелинейных систем. Например, определение параметров автоколебаний для непрерывной системы с запоминанием экстремума методами фазовой плоскости и гармонической линеаризации рассмотрено в гл. III и IV.
В некоторых случаях две нелинейности, соответствующие объекту и устройству, вычисляющему градиент, взаимно компенсируют друг друга и вся система сводится к линейной. Так, например, если статическая характеристика объекта выражается квадратичной параболой у = Ьх2, а вычисление градиента сводится к определению dyldx = = 2Ьх, то последовательное соединение объекта и блока вычисления градиента эквивалентно линейному пропорциональному звену с входной переменной х и выходной dyldx. Для большинства практических задач в установившемся режиме, когда поисковая система находится в окрестности экстремума, статическая характеристика объекта может быть достаточно точно аппроксимирована параболой, поэтому такое допущение достаточно обосновано.
Пример 12.5. Пусть объект управления имеет экстремальную статическую характеристику у (х Ьх2 + у9 (рис. 12.164 а) [Л.77]. В процессе поиска си
393
стема после определения производной dy/dx “ z(x) совершает рабочий шаг Дх по закону (12.6), т. е.
Дхь-=—az(xh).
Предположим, что интервал времени Т между рабочими шагами достаточно велик для успокоения переходных процессов в динамических частях объекта и регулятора. При выполнении этого предположения процесс поиска будет определяться только параметрами статической характеристики и коэффициентом а усиления. Поскольку в данном примере г (х) = dy/dx = 2bx, то в исходной структурной схеме последовательное соединение объекта и блока вычисления производной может быть заменено линейным эвеном. При этом получаем линейную импульсную систему первого порядка (рис. 12.16, б), процессы в которой описываются уравнением Ах* = —2аЬх^. Очевидно, что оптимальному условию поиска, при котором система попадает в экстремум за один шаг, будет соответствовать равенство Дх^ = хд, тогда
2Ьа = 1. (12.32)
При 0 < 2ba < 1 поиск будет иметь монотонный характер, т. е. система будет приближаться к экстремуму без перерегулирования. На рис. 12.17, а в плоскостях с координатами dy/dx, хи х, t проведено построение процесса поиска для этого случая. Если система в начале поиска находилась в точке х0, то
после первого рабочего шага Axj она перейдет в точку xlt т. е. Axj = хг — х0. Прямые 1—2, 3—4 н т. д. на рис. 12.17, а образуют с вертикалью угол а, где а •= aretg а. Следующий шаг | Дх21 < | Дхх |, так как \dy/dx\ Xt\<\dy/dx \ Xi\.
При 1 < 2ba < 2 поиск имеет колебательный характер и система устойчива. Соответствующее построение приведено на рис. 12.17, б.'Как и в предыдущем случае, вспомогательные прямые 1—2, 3—4 и т. д. образуют с вертикалью угол а, где а = aretg а.
Если 2Ьа = 2, то в системе существуют колебания, причем амплитуда их определяется начальными условиями (рис. 12.17, а). При 2Ьа > 2 поиск становится неустойчивым: система совершает колебательные расходящиеся движения (рис. 12.17, г).
В данном примере для выполнения условий устойчивости коэффициент а должен удовлетворять неравенству
а<1/&. (12.33)
Умножая числитель и знаменатель правой части неравенства (12.33) на 2х и учитывая, что 2Ьх = г (х), можем записать
| г (х) | < | 2х/а |. (12.34)
Условие (12.34) справедливо для любого вида г (х) и позволяет выбирать коэффициент а усиления градиентной системы, гарантирующий устойчивость поиска. Рис. 12.18 иллюстрирует способ определения а, обеспечивающий устойчивость системы при характеристике у (х) (рис. 12.18, а), отличной от параболы. На плоскости, где построена характеристика объекта dy/dx — г (х) (рис. 12.18, б), проводим прямую fex так, чтобы г (х) оказалась в секторе между осью абсцисс и этой прямой. Из неравенства (12.34) следует, что
а < 2/k. (12.35)
394
В примере 12.5 рассматривался стационарный случай поиска, когда характеристика объекта считалась неизменной и известной. В большинстве же случаев задачи исследования поисковых систем в установившихся режимах связаны с анализом систем при случайных возму-
щениях, изменяющих характеристики объекта. Было указано несколько основных возмущений (см. рис. 12.6). Это прежде всего неконтролируемые изменения координат экстремума Д. Для поисковых систем эти изменения являются своего рода задающим сигналом, так как за-
395
дача системы состоит в отыскании и отслеживании экстремума. Кроме того, могут случайно изменяться параметры статической и динамической характеристик объекта. На управляющее устройство также могут воздействовать случайные возмущения, например, помеха f2, нало-
женная на оптимизируемую координату.
Целью исследований систем при случайных возмущениях является, как правило, определение оптимальных параметров или структур управляющей части. Содержание типовых задач рассмотрим на двух примерах, где предметом исследования будет одномерная система с синхронным детектором
Рис. 12.19
Рис. 12.18
(см. рис. 12.8), работающая в квазистационарном режиме. Напомним, что квазистационарный режим имеет место [Л.49], когда частота поисковых периодических сигналов много выше частоты рабочих сигналов. При этом влияние пробных сигналов на динамику поиска не учитывается.
Пример 12.6. Пусть в системе с синхронным детектором (рис. 12.19, а) объект безынерционный с экстремальной характеристикой вида
z/ = l/2(x-A)2, (12.36)
где fi — случайное возмущение, вызывающее дрейф характеристики, с автокорреляционной функцией
/?fi(T)=/?1(0)e-“lTl. (12.37)
396
Здесь 7?i(0) — дисперсия дрейфа экстремума; а — статистическая характеристика дрейфа.
Пусть на выходную величину объекта наложена помеха /2, представляющая собой высокочастотный белый шум со спектральной плотностью So при й) > со2 и 0 при w < и>2. Также предположим, что Д и f2 не коррелированы. На вход синхронного детектора СД поступает, таким образом, сумма у + /2. Помеха /2 приводит к искажениям величины производной dyldx, вычисляемой в СД. В синхронном детекторе после множительного звена для усреднения установлен фильтр Ф низких частот с передаточной функцией
W(p)= —. (12.38)
' ' 1+Тр
Исполнительный двигатель ИД на структурной схеме (рис. 12.19, 6) представлен интегрирующим звеном.
Кроме подавления высших гармоник поискового сигнала, фильтр снижает влияние помехи /2 на точность поиска: чем больше постоянная времени Т фильтра, тем лучше будет фильтроваться помеха и тем меньше величина составляющей от /2 в общей ошибке системы. С другой стороны, чем больше Т, тем медленнее следит система за дрейфом экстремума и тем больше величина составляющей от fi в общей ошибке системы.
Таким образом возникает задача о выборе оптимальной постоянной времени фильтра. Критерием оптимальности является при этом минимум общей ошибки системы, в качестве которой можно принять дисперсию отклонения от экстремума 8 = А — х в процессе поиска.
Рассмотрим структурную схему системы (см. рис. 12.19, б). Объекте характеристикой у (х) и синхронный детектор заменим звеном с характеристикой dy!dx= г (х) = fi — х, которое изображается в виде узла вычитания. Фильтр Ф сохраняется в структурной схеме в виде инерционного звена, так как он влияет на динамику системы. Генератор Г поисковых сигналов и множительное звено опущены, так как они необходимы только для определения dyldx. Помеха л(0 = ч>о С прошедшая через множительное звено, по-прежнему будет
иметь характер белого шума, только изменится величина спектральной плотности пропорционально квадрату амплитуды опорного сигнала. Преобразованная помеха N (р) при <оо < <о2 имеет спектральную плотность при <о > со2
(Xm)2 S„/2. (12.39)
Множитель Х^/2 в (12.39) отражает изменение удельной мощности помехи /2 ПРИ умножении на опорный сигнал в множительном звене синхронного детектора (Xmsin <оо0.
Отклонение от экстремума е = — х носит случайный характер из-за слу-
чайности сигналов fr (0 ил (0. В этом случае характеристикой точности системы может служить дисперсия а^. В силу некоррелированности f± и /2 и линейности полученной задачи дисперсия ошибки о^ может быть определена как сумма двух составляющих
ffea = <h’+<72a. (12.40)
где а? — дисперсия составляющей, вызванной дрейфом flt —дисперсия составляющей, вызванной помехой /2. Слагаемое Oj определяется по известным ста-тистическим характеристикам сигнала fr и передаточной функции №'1(р)= ,
связывающей дрейф и ошибку, с помощью формулы (10.15)
1 <•"
а2 = — | №,(/<») |» SiWda. (12.41)
о
Из рис. 12.19,6 следует, что
(/со) = fo^+fo71) (12.42)
U ’ /<о(1 + >Г)+1 1 ’
397
Спектральная плотность для сигнала с корреляционной функцией (12.37) [см. (9.49) и (9.51)] имеет вид
(а) = -Rt (0) ”. (12.43)
а2 + <о2 '
Подставим (12.42) и (12.43) в (12.41)
„ , m - 2R1 (0)а "
1 ( л J [(! —со27’)2-|-ш2] (а2 + со2) “ ‘
о
»?(0)=Л (°)7тЧ ПР« т = °'< 1 -f- сс
О12 (оо) =7?1 (0) (1+1/а) при Г-> оо.
Характер зависимости а22 (Т") показан на рис. 12.19, в (кривая 1\. Найдем дисперсию составляющей ошибки, вызываемой помехой
1 С
аг2 = — \ | IF2 (/ш) |2 S2 (со) dco, л J
о
где Е (/со) 1
№г О) = .
М ЛЦ/со) ja(l + jaT) + l
(12.44)
(12.45)
a S, (а) определяется выражением (12.39). Подставляя (12.45) и (12.39) в (12.44), получим
о? (Т) =
Х„ С_______________da _________
2л J а4 7’24-со2 (1 —2Т)+1* а,
а22 (0) ~ (So^m)/4 ПРИ 7’ = 0, со2 <.<: 1
ст22 (оо) = 0 при 7 - оо.
Характер зависимости (Т) показан на рис. 12.19, в (кривая 2). Суммарная дисперсия ошибки (Т) = о? (Г) + (Л имеет, очевидно, минимум (кривая 3 на рис. 12.19, в). Значение Т = Топт, при котором о^ = min, можно найти с помощью методов вычислительной математики из условия (da^)/(dT) = 0.
Пример 12.7. Рассмотрим способ автоматической настройки оптимального параметра в системах с синхронным детектированием, в которых динамические свойства объекта существенно меняются под действием неконтролируемых возмущений. Если объект управления не является безынерционным, то выходной сигнал 2 (/) синхронного детектора зависит от сдвига фаз [ф (соо) — ф] между поисковой составляющей сигнала на выходе объекта (первой гармоникой) и опорным сигналом «оп! в соответствии с выражением (12.8), т. е.
г1 = Хт (ду/дх) cos [ф'соо) — ф].
Здесь <в0 — частота поискового сигнала. Как указывалось в § 12.3, для обеспечения наибольшего уровня выходного сигнала синхронного детектора при заданном значении производной dy/dz, нужно поддерживать разность фаз [<р(и0)_ — ф] равной нулю'[условие (12.9)].
При изменении динамических свойств объекта под действием возмущений меняется и фазовый сдвиг поисковой’составляющей сигнала на выходе объекта [<р (<оо)]. Для выполнения условия (12.9) необходимо автоматически контролировать величину <р (соо). Это может^быть сделано, например, с помощью дополнительного синхронного детектора,” на один вход которого подается выходной 398
сигнал объекта, а на другой — опорный сигнал удвоенной поисковой частоты. Выходная величина дополнительного синхронного детектора определяется выражением
г2 = В (6*у/Эх2) sin2q> (<вв), (12.46)
где В — коэффициент, зависящий от амплитуды сигналов, подаваемых на СД.
Рис. 12.20
Убедимся в этом на простейшем примере, когда объект имеет квадратичную статическую характеристику у — av1, причем линейное динамическое звено ЛЧ с передаточной функцией W (р) = V (р)!X (р) расположено перед нелинейным (рис. 12.20, а). Параметры линейной части изменяются под действием случайных возмущений ft. Пробный сигнал «пр = Хт sin ш0 t, проходя через динамическое звено, изменяется по амплитуде и фазе, поэтому на входе нелинейности поисковый сигнал можно записать в виде
»пр = Vm (<в0) sin [шп7 + <р («Во)],
399
где
Vm(<o,) = Xm|U7(/w0)|,
Ф (<в0)= arg U7 (jto0).
Полагая опорный сигнал на СД2 равным uon2 = sin 2<в01, а фильтрацию идеальной, т. е. фильтрация проводится усреднением за период (2п)/<о0, определим выходную величину z2 второго синхронного детектора
2я
1 1* 2аУ2тп (и>л)
гг=— I a {Vm (<оо) sin (<оо/ + ф))* sin 2щоЩ<оо/ =----------- sin 2ф. (12.47)
л J 4
о
Как видно из (12.47), выходной сигнал СД2 действительно содержит множителем функцию sin 2ф, другим множителем является 2а = (dP/dtflyfav2).
Когда статическая характеристика объекта известна, форма ее не меняется, амплитудно-частотная характеристика объекта также известна и постоянна, по величине выходного сигнала z2 второго синхронного детектора можно определить значение фазового сдвига ф (<о0) в объекте. По найденной величине ф (<а0) можно осуществлять настройку фазосдвигающего устройства ФСУ в тракте опорного сигнала, добиваясь равенства ф = ф. На рис. 12.20, а показан вариант такого использования сигнала с выхода СД2. Здесь ВУ — вычислительное устройство, определяющее по величине z2 необходимое воздействие на фазосдвигающее устройство ФСУ. Такая схема настройки нулевой разности фаз требует значительной информации о характеристиках объекта, так как для вычисления Ф [см. (12.46)] необходимо знать вторую производную d2yldx2 и коэффициент В, зависящий от амплитудно-частотных свойств объекта.
Можно предложить другой способ настройки нулевой разности фаз. Как следует из формулы (12.46) выходной сигнал z2 синхронного детектора с удвоенной опорной частотой обращается в нуль при ф = (/пл)/2, где т — целое число, при любых значениях В и d2y/dx2. Если увеличивать частоту поискового сигнала too с малых значений, когда ф (<оо) близок к нулю, то z2 обратится в нуль при частоте <оо, для которой ф (<о0) = л/2 (предполагается, что cPyldx1 0).
Таким образом, поддерживая z2 — 0 путем управления частотой поискового сигнала, можно сохранить постоянным фазовый сдвиг в объекте ф (<о0) = л/2. При этом для обеспечения нулевой разности фаз остается задать постоянный фазовый сдвиг в тракте опорного сигнала ф = л/2. Структурная схема системы, реализующей описанный алгоритм, приведена на рис. 12.20, б. Здесь объект, синхронный детектор СДг с опорной частотой и0 и исполнительный двигатель ИДг образуют основной контур адаптации, обеспечивающий в установившемся режиме условие dyldx = 0. Синхронный детектор СД2 с опорной частотой 2to0 через исполнительный двигатель ИД2 управляет частотой генератора Г, обеспечивая в установившемся режиме условие ф — ф = 0, при котором основной контур адаптации имеет наибольший коэффициент усиления.
§ 12.7. ОБЩАЯ ХАРАКТЕРИСТИКА СИСТЕМ С МОДЕЛЯМИ
При применении самонастраивающихся систем для оптимизации динамических режимов в САУ необходимо определять динамические характеристики объекта (его динамическую модель), и, кроме того, определять на основе заданного критерия качества необходимые настройки управляющего устройства и обеспечивать их реализацию.
Важным моментом при построении такой СНС является получение динамической модели объекта управления, т. е. задача идентификации динамических характеристик объекта (системы) управления, которая должна решаться в режиме нормального функционирования. 400
В настоящее время наметились два пути использования моделей для решения задач управления: в качестве корректирующего устройства; в качестве датчика динамического состояния объекта.
На рис. 12.21 приведена обобщенная схема СНС с использованием модели. Здесь в целях наглядности схема СНС изображена таким образом, что модель М, входящая в управляющее устройство У<У, вынесена за его пределы.
На рис. 12.21 приняты такие обозначения: вектор управляющих моделью воздействий цм, вектор выходных величин модели ум, вектор
настроек модели vM, вектор внешних воздействий на объект х.
Применение модели в качестве корректирующего устройства позволяет изменять характеристики системы в желаемом направлении, а в качестве датчика динамического состояния объекта — полу-чать действительное или желаемое динамическое состояние системы в настоящем или будущем времени и использовать эти данные для установления оптимальных
Рис. 12.21 параметров управления.
Пример 12.8. Примером применения модели как датчика динамического состояния объекта является использование ее для компенсации вредного влияния запаздывания в объекте управления на устойчивость процесса регулирования (рис. 12.22). Параллельно объекту с запаздыванием включается его динамическая модель и элемент запаздывания 33; выходы объекта и модели с запаздыванием при этом взаимно компенсируются, а для замыкания системы используется выход модели до элемента запаздывания. Устойчивость системы обеспечивается при выполнении условий W'm (р) = W'oO (р) = (р)^—рт* при равенстве запаздываний Тоб объекта и тг модели.
При изменении характеристик объекта Wog (р) необходимо подстраивать модель для обеспечения IV м (р) = IVO6 (р).
Весьма перспективным является применение моделей как датчиков динамического состояния, связанное с использованием их для прогнозирования поведения системы при заданных возмущениях и различных формах управления, что позволяет выбрать оптимальные управляющие функции. Для этой цели могут быть использованы дву-шкальные системы (рис. 12.23). На основе априорной информации или в результате идентификации строится модель объекта, которая работает в ускоренном масштабе времени по сравнению с объектом. Все данные идентификации объекта автоматически вводятся в модель через блок «Ввода данных». Функция управления объектом отнесена к «быстрой» части системы, которая включает в себя модели объекта управления и управляющего устройства, работающих в режиме периодического решения задачи управления. Найденный с учетом будущего поведения объекта закон текущего управления (наилучший в каком-либо смысле) передается через блок «Вывод данных» для реализации на объекте.
14 Зак. 447 401
Интересные возможности открывает принцип двушкальной системы с моделью при управлении объектом с недоступным для оперативного измерения выходом. К таким объектам можно отнести процессы, выходные характеристики которых контролируются или оцениваются с помощью приборов, выдающих информацию лишь в дискретные мо-
Рис. 12.22
менты времени и с большой задержкой. Например, некоторые анализаторы газовой смеси в химических и теплотехнических установках, инфракрасные спектрографы, измерители влажности твердых и сыпучих продуктов и др. В таких системах модель объекта строится на ос-
Рис. 12.23
нове априорной информации и периодически подстраивается к изменяющимся условиям. На модели можно находить оптимальное управление и затем его реализовать на объекте [Л. 5].
В настоящее время практически реализуемые САУ с моделями можно разделить на два класса: СНС с моделью эталоном и СНС с подстраиваемой моделью,
403
$ 11а. СИСТЕМЫ С МОДЕЛЬЮ-ЭТАЛОНОМ
Такие системы обычно содержат (рис. 12.24) модель замкнутой САУ, к которой желательно приблизить характеристики рассматри’ еаемой системы (модель-эталон), вычислитель критерия соответствия модели объекту ВКС и управляющее устройство УУ для изменения параметров (а может быть структуры) корректирующего устройства КУ системы. Критерий соответствия обычно должен содержать информацию о динамических характеристиках объекта управления, поэтому его вычисление связано с относительно сложным анализом. В некоторых случаях определение этих характеристик (идентификация) мо-
Рис. 12.25
Рис. 12.24
жет быть осуществлено с помощью дополнительных изучающих сигналов (см. гл. IX). Основное требование к изучающим сигналам заключается в том, чтобы они не нарушали нормального функционирования системы. Следовательно, их интенсивность должна быть достаточно малой. Рассмотрим некоторые примеры СНС с моделями.
Пример 12.9. Рассмотрим систему с параллельно включенной моделью. На рис. 12.25 показана схема включения модели-эталона параллельно объекту. Эта схема широко известна в различных модификациях. Она обеспечивает нечувствительность передаточной функции системы в целом к изменению динамических характеристик объекта. Такая задача встает, например, при проектировании скоростных высотных самолетов. С точки зрения пилота самолет при всех условиях полета должен обладать неизменной управляемостью. Это достигается введением в контур управления самолетом модели-эталона, которая соединена с основной системой управления самолетом. Передаточная функция модели WM(p) выбирается так, чтобы она была оптимальной с точки зрения удобства пилотирования. Выходная координата самолета (например, угол тангажа) измеряется и сравнивается с выходным сигналом модели. Разность между ними вводится в цепь обратной связи и вычитается из выходного управляющего сигнала, действующего па самолет.
Передаточная функция всей системы (см. рис. 12.25)
. = У(Р) = ^0б(Р)[1 + ^м(Р) ^О.С(Р)]
(Р> Х(р) i + ^o.UpIUWp)
где IP об (р) — передаточная функция объекта; 1РО.С (р) — передаточная функция цепи обратной связи.
При большом коэффициенте усиления звена обратной связи
1Р(Р)^М(Р)
14*
403
й выходная координата самолета определяется лйШь Динамическими свойствами модели.
Пример 12.10. Рассмотрим систему с автоматической настройкой коэффициента усиления корректирующего устройства КУ (рис. 12.26). В системе для настройки используется пробный сигнал иПр незначительной амплитуды, создаваемый генератором Г и изменяющийся по синусоидальному закону
Нпр — Um sin too t, где Um — амплитуда пробного сигнала; ш0 — частота пробного сигнала.
Сигнал подается одновременно на замкнутую САУ и в модель М объекта. На выходе замкнутой САУ включен резонансный фильтр Ф, который выделяет из выходной величины реакцию системы на изучающий сигнал (поисковую составляющую) в виде
Уп = Ут sin (ш0/ Н-ф),
где q> — сдвиг фазы; Ym — амплитуда выходного сигнала.
На выходе модели-эталона также появится сигнал вида
Уа.з — Уma sin (“о^ + ф») •
Рис. 12.27
Вычислитель критерия соответствия ВКС в данном случае формирует управляющее коэффициентом усиления замкнутой САУ воздействие v, пропорциональное разности
у = Уп~ Уп.о-
§ 12.9. СИСТЕМЫ С ПОДСТРАИВАЕМОЙ МОДЕЛЬЮ
СНС с подстраиваемой моделью находят применение для оптимального управления динамическими объектами. Эффективным способом решения указанной задачи является применение двушкальной системы, предполагающее наличие динамической модели объекта управления. Поскольку динамические характеристики объекта могут изменяться с течением времени, то для обеспечения качественного управления такими объектами необходимо периодически следить за изменением характеристик и автоматически корректировать параметры модели 404
для поддержания соответствия модели объекту. Таким образом возникает необходимость создания самонастраивающихся моделей (СНМ). СНМ могут быть двух типов: поисковые и беспоисковые. Принцип построения СНМ часто определяется характером выбранного критерия соответствия модели объекту.
В поисковых СНМ таким критерием может быть минимум среднеквадратичного отклонения между реакциями модели и объекта на один и тот же входной сигнал.
Поисковые СНМ реализуются обычно по схеме (рис. 12.27, а), где управляющее устройство УУ так варьирует параметры модели, чтобы получить наименьшее значение критерия. Такие СНМ являются замкнутыми. В беспоисковых самонастраивающихся моделях самонастройка проводится вычислительным устройством ВУ на основе анализа входного и выходного сигналов объекта (рис. 12.27, б). Такие СНМ относятся к разомкнутым.
Самонастраивающиеся модели поискового типа, обладая рядом ценных качеств (высокая точность настройки, помехозащищенность), имеют тот существенный недостаток, что требуют для настройки значительного времени, которое возрастает с ростом числа настраиваемых параметров.
В беспоисковых СНМ необходимые для настройки данные получаются в результате отработки значительно большей информации об объекте, чем в поисковых СНМ. Однако время настройки здесь меньше и не зависит от количества настраиваемых параметров.
Задачу построения СНМ можно разбить на два этапа;
1) анализ, т. е. получение в реальных условиях функционирования информации о параметрах объекта;
2) синтез, т. е. реализация полученной модели на элементах вычислительной техники (в частности на элементах аналоговой техники).
Для простоты изложения в дальнейшем будем рассматривать линейные объекты только с одним входом и одним выходом.
Задача анализа динамических характеристик объекта формулируется следующим образом: по результатам измерения входного х (Z) и выходного у (/) сигналов объекта определить модель импульсной характеристики wM (/), минимизирующую квадратичную ошибку е2, при ограниченном времени анализа и наличии помех, причем информация о динамической характеристике должна быть получена в виде, удобном для решения задачи синтеза модели на аналоговой вычислительной машине (АВМ):
оо
е2= рш(0-юм(/)]2^, (12.48)
о
где w (/) — весовая функция объекта.
Пример 12.lt. Рассмотрим анализатор динамических характеристик (АДХ-2 МЭИ). В § 10.2 был рассмотрен метод идентификации динамических характеристик объекта, использующий разложение неизвестной весовой функции объек-та^по системе ортогональных функций. Там же было показано, что когда моделируемый объект имеет апериодический или слабоколебательный переходный про
405
цесс, то в качестве базисных ортогональных функций удобно применить функции Лагерра. Представление весовой функции модели в виде (10.26), т. е.
wM(0= ^Chlk (/),
А=0
где /й (0 — импульсные характеристики звеньев Лагерра, удовлетворяет требованию простой реализации на элементах аналоговой вычислительной техники, так как звенья Лагерра описываются простыми передаточными функциями [см. (10.24)]. Кроме того, такое представление шм (0 обеспечивает хорошую точность для большинства производственных объектов при небольшом числе т членов разложения.
Наиболее простая схема оценки коэффициентов Cj была рассмотрена в гл. X (см .рис 10.5, б). На вход объекта подается двоичный белый шум. ьВсодной сигнал у (0 объекта подается на вход множительного звена, а на второй вход его— реакция на двоичный &лы й шум с соответствующего зве ж Лагерра (?.) После усреднения произведения фильтром получается оценка коэффициента С^с точностью до постоянного множителя а3, т. е.
1 Т
Ch=lr^ (12.49)
—т
где 2Т — время усреднения.
Практическая реализация такого способа вычисления для объектов с длительными переходными процессами осложняется трудностью реализации звеньев Лагерра с большими постоянными времени и множительных звеньев.
Алгоритм (12.49) вычисления С& может быть упрощен, если zft (0 имеют распределение вероятностей, близкое к нормальному. Учитывая, что при Г со коэффициент Ck представляет собой значение взаимнокорреляционной функции у (0 и г,, (0 при нулевом сдвиге, выражение (12.49) можно на основании (11.57) заменить эквивалентным
т
Ch = Bh-^- Jt/(0signzft(/)d0 (12.50)
—т
где Bk — коэффициент, зависящий от дисперсий сигналов у и (см. § 11.6).
Из (12.50) следует, что операцию умножения на (0 можно заменить умножением на ±1, т. е. для нахождения Сь необходимо лишь интегрировать у (0 с учетом знака (0.
Напомним, что (12.50) справедливо при нормальном распределении z^ (0. Закон распределения г& (0 будет близок к нормальному, если длительности такта двоичного белого шума То значительно меньше постоянных времени звеньев Лагерра (см. § 10.5).
Алгоритм (12.50) легко реализуется, если в качестве изучающего сигнала использовать псевдослучайные двоичные последовательности максимального периода (ПСДП). Свойства ПСДП подробно рассмотрены в гл. IX.
Частотные свойства ПСДП определяются длительностью такта Тв и числом тактов на периоде Тп. Спектр ПСДП расположен в основном в полосе частот
wmax —
шт1п = (2л)/7’п. (12.51)
При анализе объектов с передаточными функциями вида
К
»4p)=-jv----------
П(1 + рТ0
1=1
406
необходимо задать такие параметры изучающему сигналу типа ПСДП (длитель-ность такта Та, длину периода Тп), чтобы полоса частот сигнала [см. (12.51)] перекрывала полосу пропускания объекта.
При использовании ПСДП в качестве изучающего сигнала дисперсия оценок Ch получается наименьшей для алгоритма [см. (12.50)], если считывать оценки в моменты времени Tj, кратные периоду изучающего сигнала, т. е.
Tj = jTn, (/=1.2,...).
При этом величина дисперсии оценки не превосходит 5%, если выполняются следующие условия:
Гп=1О23Го; Га л (15 4-25) Л
где Т — время переходного процесса в объекте; Та — время непрерывного анализа.
Рис. 12.28
Алгоритм (12.50) с использованием ПСДП с периодом 1023 То реализуется в приборе-анализаторе динамических характеристик АДХ-2 МЭИ [Л. 38]. АДХ определяет динамические характеристики сложных объектов по двум зависимым каналам с временем переходных процессов от 2 до 300 мин. Для упрощения конструкции АДХ в нем отсутствует генератор, реализующий изучающий сигнал, и звенья, реализующие функции Лагерра. Сигнал получается в АДХ путем считывания реализации ПСДП конечной длины, записанной в программном блоке АДХ (рис. 12.28). Использование ПСДП позволило осуществить дальнейшее упрощение технической реализации алгоритма (12.50). Так необходимые значения sign 2^ ((), представляющие собой знаковые реакции элементов th на пробный сигнал, предварительно рассчитываются и записываются вместе с ПСДП в программный блок АДХ.
Программный блок АДХ выполнен в виде кодирующего диска КД с оптическим считыванием информации с помощью фотодиодов ФД. Интегрирование выходной величины в соответствии с алгоритмом (12.50) осуществляется в АДХ на цифровом интеграторе И. На базе АДХ-2 создана система, позволяющая автоматически в режиме нормальной работы получать самонастраивающуюся модель, работающую в ускоренном масштабе времени (рис. 12.29). В систему, помимо АДХ, входит аналоговая вычислительная машина АВМ и блок связи БС, которые и позволяют производить синтез динамической модели. Необходимая для синтеза быстрой модели система динамических элементов Lh (р) легко реализуется на АВМ. Блок связи обеспечивает автоматическую настройку модели
407
по коэффициентам С^. В БС запоминаются величина и знак Сд, а также осуществляется операция умножения Сд/д(/).
В соответствии с текущим значением определяемым в АДХ-2 МЭИ, БС автоматически подстраивает модель.
Самонастраивающаяся модель, построенная на АВМ, является частью двушкальной системы, реализуемой на аналого-цифровом комплексе (АЦК), представляющем собой аналоговые и цифровые вычислительные устройства, предназначенные для решения задач оптимального управления (рис. 12.30).
На АВМ воспроизводится модель объек-
Рис. 12.29
Рис. 12.30
Так, например, с помощью АЦК легко может быть решена задача нахождения близкого к оптимальному по быстродействию управления линейным объектом.
На модель объекта, работающую в ускоренном масштабе времени, подается сформированное в ЦВУ управление из класса кусочно-постоянных функций с учетом наложенных ограничений. Предварительно в модель вводятся начальные условия (Ввод НУ), учитывающие влияние входного сигнала на интервале времени переходного процесса, предшествующего моменту поиска управления.
Каждый реализованный вариант управления оценивается в соответствии с выбранным критерием оптимальности (например, минимум времени процесса) блоком оценки качества управления БОКУ. Оценка каждого варианта управления на модели осуществляется за время, которое может быть взято достаточно малым. Принтом просмотр всех допустимых управлений и из некоторого замкнутого множества S3, формируемых в ЦВУ, позволяет найти и запомнить вариант, близкий к оптимальному, для его последующей реализации на объекте. Отыскание близкого к оптимальному управления по быстродействию сводится к нахождению моментов переключения ?;(i = 1, 2, ..., п). Процесс поиска управления 408
и*, близкого к оптимальному, может быть организован на АЦК следующим образом.
На модели объекта определяется время переходного процесса. Для задан ных ограничений (например, |u| < 1) и заданных координат начальной и конечной точек в фазовом пространстве объекта устанавливается некоторый интервал поиска длительностью Р (0 < t° <Т) так, чтобы
t*<ta<T, (12.52)
где t* — длительность строго оптимального управления; Р — начальная оцен ка длительности управления; Т — время переходного процесса при единичном возмущении.
Интервал поиска Р делится на m дискретных моментов переключений. На интервале (12.52) формируются все возможные допустимые управления и оцениваются на модели. Число их будет N = 2'”+1.
Так как моменты переключений дискретны с шагом Д/ = Р/m, то погрешность поиска каждого оптимального момента переключения будет
6/i < P/(2m), где
SG = Hi*-GI.
a tj — дискретный момент переключения управления.
Как видно, число подлежащих просмотру вариантов зависит от точности оцен ки интервала Р и допустимой погрешности. Так как получение точной оценки Р весьма сложно, то можно организовать последовательную процедуру формирования допустимых управлений, которые обеспечивали бы последовательное уточнение оценки Р с одновременным уменьшением погрешности поиска.
ПРИЛОЖЕНИЕ
МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ СЛУЧАЙНЫХ СИГНАЛОВ (ОПРЕДЕЛЕНИЯ И ОБОЗНАЧЕНИЯ)
Случайный сигнал характеризуется множеством (ансамблем) экземпляров (реализаций) на заданном интервале времени. Для математического описания случайного сигнала применяются следующие его характеристики, представляющие собой не случайные функции: а) функция и плотность распределения, б) корреляционная функция, в) спектральная плотность.
Законы распределения случайных сигналов. Одномерный интегральный закон распределения Рг (xlt tj) случайного сигнала или функция распределения представляет собой вероятность того, что в момент t = величина х <
Одномерный дифференциальный закон распределения dP2 случайного сигнала представляет собой вероятность того, что в момент t = tt' величина х находится между х2 и х2 + dxi
dPi=Pi(x1,tl)dxi. (П.1)
Здесь pj = (dP1)/(dxi) — одномерная плотность вероятности или одномерная плотность распределения.
Соответственно
Pi(*i.G)!= j ti)dxt. (П.1а)
—00
Так как lim Рх (х1( ^) — 1, оо
ТО оо у₽1(*1. <1)4X1=1. —□о
Двумерный интегральный закон распределения Р2 (хь t2, х2, f2) случайного сигнала или двумерная функция распределения представляет собой вероятность того, что х < хг в момент времени flt а х < х2 в момент времени t2. Дву-мерный дифференциальный закон распределения <РР2 случайного сигнала представляет собой вероятность того, что в момент времени величина х находится в пределах между х2 и Xj + dxlt а в момент t2 — между х2 и х2 + dx2:
d2P2 = Pi (хь <i; х2, /2) 4xi 4ха. (П.2)
Здесь р2 = ((PPJ/fdxidx^ — двумерная плотность вероятности или двумерная плотность распределения двух случайных процессов х и у.
Соответственно
Xi Xi
Pt (*i. <15 *i. <!)= J J Pi (*ь <15 *а> <1) 4*14х,. (П.2а)
410
Так как
HmP2(jCi, G: х2, G) = h
JCt -*« Xt -*00 то и oo co J J P2 (Xi. *1; xa, <2) rfxi dx2 = 1. —co —co
Аналогично вводятся л-мерные функции и плотности распределения Рп (Xi, ti", ха, /а;...; хп, tn), Рп (xi> ty, х2, G; • ’ Xn, tn)-
Простейшие примеры процессов. 1. Независимый процесс. Его полностью характеризует одномерная плотность вероятности
Рп (xj, ty, х2, t2,...; хп, tn)= Pi (Xi. ti) Pi (x2> t2).. - Pi (xn> tn)- (П.З)
2. Стационарный случайный процесс — аналог установившегося процесса Рп (xi> ty, ха, t2,...; хп, tn) = рп (xi> ti + to', х2, ^2 +12',• •; хп, /д + to) (П.4) для одномерной плотности распределения
Pi(xi,ti)=Pi(xi), (П.5)
для двумерной плотности распределения
P2(XiJi; х2, t2) = p2(x1,t1 + t0; х2, /2+<о)>
при /2 — ti — X и t2=—ta
P2(xi, ty, x2, t2) = p2(xi, x2, t). (П.6)
При наличии двух случайных сигналов х (t) и у (t)
d2Pa = pa(xi, ty, у2, t2)dxidy2— (П.7)
вероятность того, что в момент времени величина х находится между Xj и хх + + rfxn а при t2 величина у — между у2 и у2 + dy2.
Если
Р2 (Xi, ty, у2, t2)=p2(xi, ti-f-to', У2, t2 + to) = P2 (Xi, y2, x), (П.8)
то процессы стационарносвязанные.
Примеры плотности распределения. 1. Наиболее распространенный закон распределения: нормальный закон распределения (закон Гаусса)
1 Г (х—х0)а "I
ехр --Г (П,9)
ах у 2 л L "aJx J
2. Равномерное (прямоугольное) распределение
, . ( 1/(х2— Xi) при Хг < X < Х2,
Pl (х) = п
( 0 при х < х2 и х > ха.
3. Экспоненциальное распределение
( ае ах при х >0, 7’iW= п
( 0 при х < 0.
(П.Ю)
(П.11)
(П.12)
4. Распределение Релея
Р1 (х) =
х ехр (—х2/2) при х>0,
0 при х<0.
411
5. Распределение Коши
1 Рг w = — ла
J_______
— Хр\2
(П.13)
6. Распределение Лапласа
0
Pi<x) = ^e
7. Распределение Пуассона
Pi (х) — е~£ 'о (•')•
(П.14)
(П.15)
♦ 00
где х — целое положительное число. Только в этом случае 10 (х) = 5$ (х— k) к—о
отлично от нуля (см. гл. XII, часть I).
8. Двумерный нормальный закон распределения 1 ( 1
2
( 2(1 р2ху)
(х —Хр) (у—уа)'
а о I-
\ Оу ! Ох Оу JJ
где
1
jc=Jc(Zx); y = y(t2), pxV==pxy^i, h)= „ „ M {(x—хр) (у—уо)}.
(П.9а)
где
Ох Оу
Для независимых процессов х и у рху = 0.
9. Распределение суммы (разности) двух независимых процессов г(0=х(/)±у(0
а) нормальное распределение
1
Pi (*) = —
<1Х V 2 Л
(х—М2'
2аж2
P1(y)=a7F^
(У—Уо)2 I
2V J
(2—Zp)2 I
2o? J’
Zo = xo±yo. о? = аж2 + Оу2;
6) равномерное (прямоугольное) распределение
— при Хр—Дж<х<Хр-|-Дх,
(П.96)
Pi (*) =
Pi (У)=
~~ при у»—Ду<у<у0 + Ду, ь У<Уй—^у, У>Ув + Ду.
О
о
412
Pi (г) =
О
——— (г—г0 + Дг) Дг2
1
. , (го + Лг —г) Д22
при z< z0 —Дг>
при г0 —Дг<г<г0,
при г0<г<г0 + Дг,
при г>г0 + Дг,
(П.Юа)
где Zo = *oi</o> А2 = Дж-|-Ду.
Распределение суммы (разности) двух зависимых сигналов с нормальным законом распределения (П. 9а) имеет так же нормальный закон распределения.
Среднее значение по множеству (ансамблю) или математическое ожидание функции х (4) (начальный момент первого порядка)
m.v(G)='x(G) = A4 {х (G)| = fxiPi(XiJi)dxi- (П.16)
— <30
Центрированный сигнал
х (Ji)=x (4)— тл (4). (П.16а)
Для законов распределения (П. 9), (П.10), (П.13), (П.14)
тЛ. ((1)=х0-
Среднее значение по множеству квадрата функции х (0 (начальный момент второго порядка)
"х2 (4) = [VO2 = М (х2 (G))= p2!Pi(xi, /i)dxi. (П.17)
Для стационарных случайных процессов х и х2 не зависят от времени. Дисперсия (центральный момент второго порядка)
(х°)2 = <т,га = О {х (/)) =М {[х (О-М (х (О)]2} =М {х (/)}, (П. 18)
при тх = М {х (t)} = О
ax2 — D (х (0) = М {х2 (0); (П.19)
при пгх =£ О
аж2 = х2 — (х)2 = М (х2 (/)} —тх2.
Для нормального закона распределения а2 = D (х) и тх — ха х2 = а2х + т2х-Центральный момент n-го порядка
(х)" = (х—х )п = М {(х- х)"} = J (х -х)" рг (x)dx. (П.20)
Среднее значение по времени. На конечном интервале 2Т 1 Т
xT=-~-\x{t)di. (П.21>
413
На бесконечном интервале
т
x = lim (П.22)
Средняя мощность сигнала ___________________________ , т
х2 (t) = lim — i х2 (t)dt. (П.23)
Т-оо 2Т
Среднее по времени от произведения двух функций
т
х (О У (< + т)= Нт х (О У (I + т) dt. (П.24)
Эргодическими называют процессы, для которых среднее по множеству равно среднему по времени:
х=х=М {*(/)) =шх = х0 или
Xi Pi (xj) dx,.
\x(t)dt. (П.25)
Для эргодических процессов один экземпляр процесса на интервале Т-+ оо эквивалентен всему ансамблю экземпляров (реализаций) процесса.
Для эргодических процессов
iT2‘(7)_] = Af {х2(Г)} =Х2 (п-26)
ИЛИ
оо 7'
Cx2p1(x)dx = lim —— [x2(t)dt V Т-*оо 2Т J
— сю —Т
И
Г(7)^(7+т) = Л4 {x(0//(/ + t)} = x(/)z/(Z + t) ИЛИ оо оо j Т
\ x1y2p2(xlty2tT;)dx1\dy2^=\im — ( х (/) у (t +т) dt. (П.27)
J J т^оо 2Т J
—оо —оо —Т
Корреляционные функции случайных сигналов. Корреляционные функци и выражают связь между случайными сигналами в различные моменты времени
ОО оо
КхуЦъ*2) = М y(ts)} = J jxi//2p2(Xi, (1; уь t2)dxidy2 (П.28) — 00 —оо
называют взаимной корреляционной функцией сигналов х и у. Она выражает зависимость между сигналом х в момент времени и сигналом у в момент времени
414
Если х (fl и у (fl стационарно связаны |см. (П. 8)], то Кху зависят толЬкб от т
Кху(х)=М {x(G)!/(/i + -t)) = j Jxi!/aPa(x3, у2, х) dxt dy2. (П.29)
Центрированная корреляционная функция kxy (tlt i2) представляет собой математическое ожидание произведения центрированных сигналов х (fl) и у (fl):
Wfl, <а) М (1 (fl) у (fl)} = М ([X (tx)-mx (fl)] [у (tj-my (fl)]} =
оо оо
= J J (*1— тХ1)(№— тУ2)р2(хх, fl; у2, t2)dxxdy2. (П.28а)
—00 —-00
Для стационарно связанных сигналов
Rxy (т) = М {х (fl) у (fl + т)}. (П.29а)
Корреляционная функция по времени для стационарно связанных сигналов х (0 и у (fl
1 т-
RXy(x) = lim —- \x(t)y(i + x)di = Rxy(—x). (П.30)
Т.оо XI jJ
Центрированная корреляционная функция по времени
. 1 с
/?яу(т) = Нт — [x(O-x][p(( + x)-p]d(. (П.ЗОа)
Т -»оо 2Г
Для эргодических процессов
Rxy (t)=RXy (т)»
Rxy (T) = Rxy (т)-
Если х (/) = у (fl, то корреляционную функцию называют автокорреляционной [Кжя (т) или Кж(х)-, Rxx(x) или /?я(т)].
Нормированная автокорреляционная функция
. ______Rx h)_________________Rx (A. _________ (П ЗП
Px b 2,== G) ГЛ1{х’(Ц)}Л1{х«(/2)} '
Для стационарных случайных процессов
Rx (т)
р‘(т)—ОТ- (п-32)
Нормированная взаимная корреляционная функция
рзд (/1, t2) = - (П. 33)
Рздм, (<1> /1} (<2 <2)
Для стационарных случайных процессов
Рзд( )= VRx(O)Ry(O) •
415
Некоторые свойства корреляционных 1. К* (ii, h) = Kx (t-i, h)- 2. Четность характеристики Кх (т) = Кх (—т). 3- Рх (^ii < 1; Ржу (h, ^2) < 1- 4. Для стационарных случайных эргодических процессов функций. (П.35) (П.36) (П.37)
Кх(О) = Лх (0)=12= (П.38)
5. х’==х = /7?х(оо) = /Лх(<х>). (П.39)
6. D{x}='x2-(x)2 = Rx(0)-Rx(<x>). (П.40)
Спектральная плотность случайных сигналов. Спектральной плотностью называют преобразование Фурье от корреляционной функции
ОО
Sv(<o) = J Rx(т) e~laxdr. (П.41)
—оо
Обратное преобразование
1
= “ Sx (ы) е'“т Ао, 2л J
(П.42)
где Sx (со) — действительная четная функция <о.
Среднее квадратичное значение х (7) по времени
х2 (/) = Iim
Т^ОО
(П.43)
Спектральная плотность выражает парциальную мощность сигнала — Sxda.
Взаимной спектральной плотностью называют преобразование Фурье от взаимной корреляционной функции
ОО
sxy (/«) = J Rxy (T) e-lmxdx. (П.44)
—oo
Обратное преобразование
1 *
RxlJ (Т) = 2^ j Sxy dW‘
(П.45)
(/со) и Rxy (т) могут быть нечетными функциями шит; Sxv (/со) в отличие от Sx (со) может содержать мнимую часть. Последнее отражено в обозначении аргумента (/со).
Для сигналов хну
Т оо
------- 1 С if
x(t)y(t) = lim — \x(t)y{t)dt = Rxy{fi)=.-—- \ Sxy d<o. (П.43а)
Т-ьОО £1 J J
— T —oo
Спектральная плотность может быть выражена через частотный спектр сигнала Хт (ja>).
416
ТАБЛИЦА П.1
CD
Продолжение табл. П-1
№ пп. Кх ('>=«» (’> Sx (<o)
Формула Гра фнк Формула Графкк
5 Д!б (Т) < R, t а» S, аг
w
0 0
6 / \ во / 81П \ £ V I N 1cos “р W N 1 1 Л»-—оо\ "" ~ / X N / 2л р NT, А j £ 4 , , . a>T, x 2 . яд» / ®1П 2 \ N 1 wr, 1‘W^) l\ 2 / l*(w)= 2 6(®-*®p) k= —во - /«>
0 NT," w - J
7 в»в-°1 т 1 R, 2ад* a* 4- <o’
7
8 аге~в 1 т 1 cos рт 1 Яд \ ✓ t ад1 ад* s.
«* 4- (P — и)» * а» + (P 4 ш)а
X Q
0 0>
Продолжение табл. ITJ
С с 2 М“>
Формула График Формула График
аг (Р + со) а2 4- (Р + со)2
а2 (Р — <о) а2 + (р-<о)2
•SqCOq
л
s in <оет соот
So, | со | < соо
О, | а> | > а>0
Примечание. Корреляционные функции н спектральные плотности, приведенные в п. 4 и 9. относятся к составляющим игах функций и встречаются только в сумме с функциями вида п. 3. 5, 7, 8 и др. Для результирующего сигнала всегда S* (о») >0.
При известных реализациях сигнала х (/) на интервале 2Т и их частотных спектрах Хт (jai)
Sx (со) = Пт — М {| Хг (ja) р),
(П.46)
где
Xr(/co) = j х (t) е ,<л1 dt —
(П.47)
частотный спектр каждой из реализаций ансамбля. Из (П. 46) следует, что Sx (со) не может быть отрицательной.
Для двух сигналов х (t) и у (I) взаимная спектральная плотность выражается через Хг (/со) и YT (ja) следующим образом:
Sxy (/<□) = lim —-М (XT( — j(o) YT(j(o)] = Syx (— j<o).
Г-*оо х/
(П.48)
Примеры корреляционных функций и спектральных плотностей детерминированных н случайных сигналов приведены в табл. П. 1.
ЛИТЕРАТУРА
1. Айзерман 3-е, «Наука», 1966.
2. Айзерман
М. А. Теория автоматического регулирования. Изд.
М. А., Гантмахер Ф. Р. Абсолютная устойчи-
вость регулируемых систем. Изд-во АН СССР, 1963.
3. Айзерман М. А., Смирнова И. М. О применении методов
малого параметра для исследования периодических режимов в системах автоматического регулирования, которые малого параметра не содержат. Сб. «Памяти А. А. Андронова». Изд-во АН СССР, 1954.
4. Александровский Н. М. Элементы теории оптимальных систем автоматического управления. «Энергия», 1969.
5. Александровский Н. М., Егоров С. В. Некоторые вопросы создания самонастраивающихся систем. Труды МЭИ, вып. 59, 1965.
6. Александровский Н. М., Кузин Р. Е. Экстремальные системы управления сложными технологическими объектами. Сб. «Поиск экстремума». Изд. Томский ГУ, 1969.
7. А л е к с е е в А. С. Двухпозиционный регулятор с зоной опережения. Сб. «Памяти А. А. Андронова». Изд-во АН СССР, 1955.
8. Аналитические самонастраивающиеся системы автоматического управления. «Машиностроение», 1965.
9. А н д р о н о в А. А. Собрание трудов. Изд-во АН СССР, 1956.
10. А н д р о н о в А. А. [и др.] Теория колебаний. Физматгиз, 1959.
И. Бакулев П. А. Радиолокация движущихся целей. «Советское радио», 1964.
12. Б а л т р у ш е в и ч А. В. [и др.] Динамика цифровых автоматических систем. Труды ТЭИ, «Автоматика и телемеханика», вып. 44, 1962.
13. Б а ш а р и н А. В. Расчет динамики и синтез нелинейных систем управления. М.-Л., ГЭИ, 1960.
14. Б е л л м а н Р. Динамическое программирование. М., ИЛ, 1960.
15. Б е л о в а Д. А., Н е т у ш и л А. В. Об абсолютной устойчивости систем регулирования с неоднозначными нелинейностями типа люфт и упор. «Автоматика и телемеханика», 1967, № 12,
16. Бесекерский В. А., Попов Е. П. Теория систем автоматического регулирования. Физматгиз, 1966. Сборник задач по теории автоматического регулирования и управления. Под ред. Бесекерского В. А. М., «Наука», 1969.
17. Боголюбов Н. Н., Крылов Н. М. Введение в нелинейную механику. Изд-во АН УССР, 1937.
18. Б о г о л ю б о в Н. Н., Крылов Н. М. Новые методы нелинейной механики. Изд-во АН СССР, 1934.
19. Б о г о л ю б о в Н. Н., Митропольский Ю. А. Асимптотические методы в теории нелинейных колебаний. Физматгиз, 1958.
20. Боде Г., Шеннон К. Упрощенное изложение линейной минимально-квадратичной теории сглаживания и предсказания в сборнике «Теория информации и ее приложения». Под ред. А. А. Харкевича. Физматгиз, 1959.
421
21. Болтянский В. Г. Математические методы оптимального управления. «Наука», 1969.
22. Б у л г а к о в Б. В. Колебания. Гостехиздат, 1954.
23. Б у р л я е в В. В., Н е т у ш и л А. В. Применение временных последовательностей к расчету характеристик случайных сигналов. Известия ВУЗов СССР, «Радиоэлектроника», 1968, №11.
24. Бурляев В. В. Условия возникновения полигармонических колебаний в двухпозиционных регуляторах с отрицательным гистерезисом. Известия ВУЗов «Электромеханика», 1970, № 6.
25. В а в и л о в А. А. Частотные методы расчета нелинейных систем. «Энергия», 1970.
26. В е н т ц е л ь Е. С. Теория вероятностей. «Наука», 1969.
27. В и н е р Н. Нелинейные задачи в теории случайных процессов. ИЛ, 1961.
28. Воронов А. А. Основы теории автоматического управления. Ч. II. «Энергия», 1966. Ч. Ill, 1970.
29. Г а р б е р Е. Д., Розенвассер Е. Н. Об исследовании периодических режимов нелинейных систем на основе гипотезы фильтра. «Автоматика и телемеханика», 1965, № 2.
30. Гельфанд И. М., Фомин С. В. Вариационное исчисление. Физ-матгиз, 1961.
31. Г й с е к М. Одноканальный оптимизатор с системой грубого и точного поиска. Известия ВУЗов. «Радиотехника», 1962, № 3.
32. Гольдфарб Л. С. О некоторых нелинейностях в системах регулирования. «Автоматика и телемеханика», 1947, т. 8, № 5.
33. Г о л ь д ф а р б Л. С. [и др.]. Теория автоматического управления. Под ред. Нетушила А. В. Ч. I. «Высшая школа», 1968.
34. ГрадштейнИ. С., Рыжик И. М. Таблицы интегралов, сумм, рядов и произведений. М., Физматгиз, 1963.
35. Д е м и д о в и ч В. П. [и др.). Численные методы анализа. «Наука», 1967.
36. Джеймс X., Николс Н., Филипс Р. Теория следящих систем. ИЛ, т. 1, 1951; т. 2, 1953.
37. Доценко В. И., Чхарташвили Г. С. Применение псевдослучайных двоичных сигналов для идентификации линейных объектов автоматического управления. Известия ВУЗов, «Электромеханика», 1969, № 4.
38. Е г о р о в С. В. Метод анализа динамических характеристик объектов в режиме нормальной эксплуатации. «Автоматика и телемеханика», 1966, № 12.
39. Емельянов С. В. Системы автоматического управления с переменной структурой. «Наука», 1967.
40. Ермуратский П. В. Симплексный метод оптимизации. Труды МЭИ, вып. 67, 1967.
41. Казакевич В. В. и Островский Г. М. К вопросу о непрямом регулировании при учете кулоновского трения в чувствительном элементе. «Автоматика и телемеханика», 1963, т. XXIV, № 8.
42. К а з а к е в и ч В. В. Об экстремальном регулировании. Сб. «Автоматическое управление и вычислительная техника», вып. 6, Машгиз, 1964.
43. Казаков И. Е. Статистические методы проектирования систем управления. «Машиностроение», 1969.
44. Каннингхэм В. Введение в теорию нелинейных систем. ГЭИ, 1962.
45. Коган Б. Я. Электронные моделирующие устройства и их примене. ние для исследования систем автоматического регулирования. Физматгиз, 1959,
46. Колмогоров А. Н. Интерполирование и экстраполирование стационарных случайных последовательностей.'Известия'АН СССР. «Математика», 1941.
47. К о р ш у н о в Ю. М. О построении эквивалентного комплексного коэффициента усиления нелинейного импульсного элемента. «Автоматика и телемеханика», 1962, Xs 5.
422
Л евшецС. Исследование устойчивости прямым
48. Коршунов Ю. М. Анализ периодических режимов, вызванных квантованием сигналов по уровню в цифровых автоматических системах. «Автоматика и телемеханика», 1961, № 7.
49. К р а с о в с к и й А. А. Динамика непрерывных самонастраивающихся систем. Физматгиз, 1963.
50. К р а с о в с к и й Н. Н. Теория управления движением. «Наука», 1968.
51. * Л а С а л л ь Ж., методом Ляпунова. «Мир», 1964.
52. Л а у э р Г., Лесник Р., М а д с о н Л. Основы теории сервомеханизмов. Госэнергоиздат, 1948.
53. Л е в и н Б. Р. Теория случайных процессов и ее применение в радиотехнике. «Советское радио», 1960.
56. Летов А. М. Устойчивость нелинейных регулируемых систем. Гос-техиздат, изд. 1. и 2-е, 1955, 1962.
57. Л е т о в А. М. Аналитическое конструирование регуляторов. «Автоматика и телемеханика», 1960, № 4, 5, 6.
58. Л е ф ш е ц С. Геометрическая теория дифференциальных уравнений. ИЛ, 1961. г
59. Либерзон Л. М., Родов А. Б. Системы экстремального регулирования. «Энергия», 1965.
60. Л и в ш и ц Н. А., Пугачев В. Н. Вероятностный анализ систем автоматического управления. «Советское радио», 1963.
61. Л у р ь е А. И. Некоторые нелинейные задачи теории автоматического регулирования. Гостехтеоретиздат, 1951.
62. Л э и и н г Дж. X., Б э т т и и Р. Г. Случайные процессы в задачах автоматического управления, ИЛ, 1958.
63. Л я п у н о в А. М. Общая задача об устойчивости движения. Харьков, 1892, см. также: Академик А. М. Ляпунов. Собрание сочинений, т. 2, Изд-во АН СССР, 1956.
64. Макаровский С. Н. [и др.]. Применение оптимизаторов типа ЭРА-1 на нагревательной печи. «Приборостроение», 1963, №4.
65. М а к к о л Л. Основы теории сервомеханизмов. ИЛ, 1947.
66. М а л к и и И. Г. Теория устойчивости движения. «Наука», М., 1966.
67. М а н д е л ь ш т а м Л. И. (и др.]. Новые исследования в области нелинейных колебаний. Радиоиздат, 1936.
68. Метод Гольдфарба в теории регулирования (сборник статей). Госэнергоиздат, 1962.
69. Мирский Г. Я- Аппаратурное определение характеристик случайных процессов. «Энергия», 1967.
70. М о р о з о в А. А. Исследование установившихся движений релейноимпульсной системы. «Автоматика и телемеханика», 1967, № 7.
71. Н а у м ов Б. Н. Исследование абсолютной устойчивости положения равновесия в нелинейных системах автоматического управления при помощи логарифмических частотных характеристик. «Автоматика и телемеханика», 1965, т. 26, № 4.
72. Н а у м о в Б. Н. Переходные процессы в линейных системах автоматического регулирования. ГЭИ, М.-Л., 1960.
73. Н а у м о в Б. Н., Цыпкин Я. 3. Частотный критерий абсолютной устойчивости процессов в нелинейных системах автоматического управления. «Автоматика и телемеханика», 1964, т. 25, № 6.
74. Н е й м а р к Ю. И. Метод точечных преобразований в теории нелинейных колебаний. Известия ВУЗов, «Радиотехника», т. I, 1958, № 1, 2, 5—6.
75. Нелинейные системы автоматического управления (шеститомник). Под ред. Попова Е. П. «Машиностроение», 1970—1971.
76. Н е м ы ц к и й В. В., Степанов В. В. Качественная теория дифференциальных уравнений. Гостехиздат, 1949.
77. Н е т у ш и л А. В. Об автоколебаниях в дискретных экстремальных системах. «Автоматика и телемеханика», 1962, № 3.
423
78. Нету ши л А. В. О нелинейностях типа «упор». Известия ВУЗов, «Электромеханика», 1966, № 4.
79. Нету ши л А. В. Структурные преобразования нелинейных систем. Известия ВУЗов, «Электромеханика», 1969, № 8.
80. Н е т у ш и л А. В., Белова Д. А. Сравнение методов исследования устойчивости положения равновесия автоматических систем с неоднозначными нелинейностями. Известия ВУЗов, «Электромеханика», 1967, №11.
81. Н ор к и н К. Б. Система автоматической подстройки передатчика с применением автоматического оптимизатора. Сб. «Автоматическое управление и регулирование». Изд-во АН СССР, 1961.
82. Олейников В. А. [и др.]. Основы оптимального и экстремального управления. «Высшая школа», 1969.
83. Основы автоматического регулирования (теория). Под ред. Солодовникова В. В. Машгиз, 1954.
84. Основы автоматического управления. Под ред. Пугачева В. С. Физматгиз, 1963.
85. П а л ь т о в И. П., Цветков В. И. Применение показателя колебательности для оценки качества процессов в нелинейных системах. Известия АН СССР, «Техническая кибернетика», 1966, № 1.
86. П е л е г р е н М. Статистический расчет следящих систем. ИЛ, 1957.
87. Первозва некий А. А. Случайные процессы в нелинейных автоматических системах. Физматгиз, 1962.
88. Петров В. В. Устойчивость «в большом» и автоколебания одно-и двухкаскадных нелинейных сервомеханизмов. Сб. «Автоматическое управление и вычислительная техника». Вып. 3. Машгиз, 1960.
89. Петров Ю. П. Вариационные методы теории оптимального управления. «Энергия», 1965.
90. Понтрягин Л. С. [и др.]. Математическая теория оптимальных процессов. «Наука», 1969.
91. Понтрягин Л. С. Обыкновенные дифференциальные уравнения. М., Физматгиз, 1961.
92. Попов В. М. Критерий качества нелинейных регулируемых систем. Труды Первого международного конгресса ИФАК по автоматическому управлению, т. I, Изд-во АН СССР, 1961.
93. Попов Е. П. Динамика систем автоматического регулирования. Гостехиздат, 1954.
94. Попов Е. П., Пальтов И. П. Приближенные методы исследования нелинейных автоматических систем. Физматгиз, 1960.
95. Приспосабливающиеся автоматические системы. Под ред. Мишкина Э. и Брауна Л. ИЛ, 1963.
96. Проблемы теории импульсных систем управления. Итоги науки. М., «Наука», 1966.
97. Проблемы теории нелинейных систем автоматического регулирования и управления. Итоги науки. М., Изд-во АН СССР, 1957.
98. П у г а ч е в В. С. Теория случайных функций и ее применение к задачам автоматического управления. Физматгиз, 1960.
99. Ра с с т р и г и н Л. А. Случайный поиск. Рига, «Зинанте», 1965.
100. Рябов Б. А. Автоколебания в некоторых системах, обусловленные наличием сухого трения. ДАН СССР. 1950, т. 73, JM° 2.
101. Савараги И. [и др.]. Статистические методы анализа и синтеза нелинейных систем автоматического регулирования при случайных воздействиях. Труды I Международного конгресса ИФАК- Изд-во АН СССР, 1961.
102. Серебрянников М. Г. Гармонический анализ. М., Гостехиздат, 1962.
ЮЗ. Смит Отто Дж. М. Автоматическое регулирование. Физматгиз, 1962.
104. Смольников Л. П. Об одном классе систем, абсолютно устойчивых в гурвицевом углу. Известия ЛЭТИ, 1968, вып. 73, ч. 2.
105. Современные методы проектирования систем автоматического управления. Под общей ред. Б. Н. Петрова, В. В. Солодовникова, Ю. И. Толчеева. «Машиностроение», 1967.
424
106. Солодовников В. В. Статистическая динамика линейных систем автоматического управления. Физматгиз, 1960.
107. Стокер Дж. Нелинейные колебания в механических и электрических системах. ИЛ, 1952.
108. Таран В. А. Применение нелинейной коррекции для улучшения динамических свойств систем автоматического регулирования (обзор). «Автоматика и телемеханика», 1964, № 1.
109. Тафт В. А. Устойчивость нелинейных систем регулирования с идеальным фильтром. «Автоматика и телемеханика», 1968, № 7.
НО. Техническая кибернетика. Теория автоматического регулирования. Под ред. Солодовникова В. В. Кн. 1—3. «Машиностроение», 1967—1969.
111. Т р а ксел Дж. Г. Синтез систем автоматического регулирования. Машгиз, 1959.
112. У а й л д Д. Дж. Методы поиска экстремума. «Наука», 1967.
113. У л а н о в Г. М. Статистические и информационные вопросы управления по возмущению. «Энергия», 1969.
114. Ф е л ь д б а у м А. А, Введение в теорию нелинейных цепей. Гос-энергоиздат, 1948.
115. ФельдбаумА. А. Электрические системы автоматического регулирования. Оборонгиз, изд. 1-е, 1954; изд. 2-е, 1957.
116. Ф е л ь д б а у м А. А. Вычислительные устройства в автоматических системах. Физматгиз, 1959.
117. Ф е л ь д б а у м А. А. Основы теории оптимальных автоматических систем. «Наука», 1966.
118. Ф е л ь д б а у м А. А. Проблемы самоприспосабливающихся (адаптивных) систем. Сб. «Самонастраивающиеся системы». «Наука», 1965.
119. Ф е л ь д б а у м А. А. [и др.]. Теоретические основы связи и управления. Физматгиз, 1963.
120. Флюгге-Лотц И. Метод фазовой плоскости в теории релейных систем. Физматгиз, 1959.
121. X а р к е в и ч А. А. Нелинейные и параметрические явления в радиотехнике. М., ГИТТЛ, 1956.
122. Цыпкин Я- 3. Абсолютная устойчивость положения равновесия и процессов в нелинейных импульсных автоматических системах. «Автоматика и телемеханика», № 2, 1963.
123. Цыпкин Я- 3. Критерии абсолютной устойчивости импульсных автоматических систем с монотонными характеристиками нелинейного элемента. ДАН СССР, 1964, т. 155, № 6.
124. Цыпкин Я. 3. Теория линейных импульсных систем. М., Физматгиз, 1963.
125. Цыпкин Я. 3. Теория релейных систем автоматического регулирования. Гостехиздат, 1955.
126. Цыпкин Я- 3. Основы теории нелинейных импульсных систем. Труды II Международного конгресса ИФАК по автоматическому управлению, т. 3. «Наука», 1965.
127. Цыпкин Я- 3. Адаптация, обучение и самообучение в автоматических системах. «Наука», 1968.
128. Цянь Сю э-С е н ь . Техническая кибернетика. ИЛ, 1956.
129. Чанг Ш. С. Л. Синтез оптимальных систем автоматического управления. «Машиностроение», 1964.
130. Ч е г о л и н П. М. Автоматизация спектрального и корреляционного анализа. ««Энергия», 1969.
131. Честнат Г. и Майер Р. В. Проектирование и расчет следящих систем и систем регулирования. Госэнергоиздат, 1959.
131. Четаев Н. Г. Устойчивость движения. Гостехиздат, 1946.
133. Шаталов А. С. Структурные методы в теории управления и электроавтоматике. Госэнергоиздат, 1962.
134. Ш о м л о Я. Обобщенный метод для исследования систем с кусочнолинейными характеристиками. Уточнение первого приближения периодического решения. «Автоматика и телемеханика», 1966, № 10.
425
135. Энциклопедия современной техники. Автоматизация производства и промышленная электроника. Под ред. А. И. Берга и В. А. Трапезникова. М., «Советская энциклопедия», 1962—1965.
136. Юревич Е. И. Теория автоматического управления. «Энергия», 1969.
137. Якубович В. А. Абсолютная устойчивость импульсных систем с несколькими нелинейными или линейными нестационарными блоками. «Автоматика и телемеханика», 1967, № 12 и 1968, № 2.
138. Якубович В. А. Метод матричных неравенств в теории устойчивости нелинейных регулируемых систем. Абсолютная устойчивость вынужденных колебаний. «Автоматика и телемеханика», 1964, № 7.
1
ОГЛАВЛЕНИЕ
Стр.
Предисловие....................................................... 3
Глава I. Общая характеристика нелинейностей в системах автоматического управления .................................................. 5
§ 1.1 Введение................................................. 5
§ 1.2 Примеры учета нелинейностей в реальных системах .... 7
§ 1.3 Примеры систем со специально введенными нелинейностями 13
§ 1.4 Примеры систем управления объектами с немонотонными (экстремальными) характеристиками.............................18
§ 1.5 Нелинейные звенья систем управления.....................22
§ 1.6 Типовые нелинейные звенья.............................. 24
§ 1.7 Вибрационная линеаризация типовых нелинейных звеньев . 36
§ 1.8 Особые звенья нелинейных систем.........................39
Глава II. Статика нелинейных систем, соединение и преобразование нелинейных звеньев....................................................46
§ 2.1 Особенности характеристик соединений нелинейных звеньев 46
§ 2.2 Последовательное соединение звеньев.....................48
§ 2.3 Параллельное согласное соединение звеньев...............51
§ 2.4 Параллельное встречное соединение звеньев...............53
§ 2.5 Статизм нелинейных систем регулирования.................56
§ 2.6 Преобразование нелинейных структурных схем..............58
§ 2.7 Эквивалентные схемы неоднозначных нелинейностей .... 61
§ 2.8 Малые параметры реальных безынерционных звеньев .... 63
§ 2.9 Модели нелинейных звеньев...............................65
^Глава III. Динамика нелинейных систем. Фазовая плоскость...........67
§3.1. Уравнения нелинейных динамических систем. Пространство их состояний..................................................67
§ 3.2 Фазовая плоскость и ее свойства..........................72
§ 3.3 Поведение системы при малых отклонениях от положений равновесия ......................................................79
§ 3.4 Поведение системы при больших отклонениях. Автоколебания 95
§ 3.5 Кусочно-линейные системы................................114
§ 3.6 Метод точечных преобразований...........................128
427
Стр.
V Глава IV. Гармоническая линеаризация..............................139
§ 4.1 Общая характеристика метода гармонической линеаризации 139
§ 4.2 Комплексный коэффициент усиления (передачи) нелинейного звена..........................................................141
§ 4.3 Анализ симметричных автоколебаний в нелинейных системах 149
§ 4.4 Анализ несимметричных автоколебаний в нелинейных системах 154
§ 4.5 Условия отсутствия моногармонических автоколебаний в нелинейных системах..............................................158
§ 4.6. Повышение точности метода гармонической линеаризации . 160
§ 4.7 Применение метода гармонической линеаризации при наличии нескольких нелинейностей.......................................165
§ 4.8 Применение метода гармонической линеаризации для исследования нелинейных импульсных систем.............................170
Глава V. Устойчивость нелинейных систем...........................182
t§ 5.1. Понятия устойчивости в нелинейных системах..............182
♦"§ 5.2 Прямой метод Ляпунова...................................188
з § 5.3 Критерий абсолютной устойчивости равновесия.............193
§ 5.4 Распространение критерия абсолютной устойчивости на некоторые неоднозначные нелинейности...............................199
§ 5.5 Абсолютная устойчивость процессов........................203
§ 5.6 Абсолютная устойчивость импульсных систем...............205
§ 5.7 Сравнение методов анализа устойчивости нелинейных систем 208
Глава VI. Качество процессов управления в нелинейных системах . . 210
§6.1 Особенности качества нелинейных систем...................210
§ 6.2 Метод припасовывания для построения переходных процессов в нелинейных системах..........................................210
§ 6.3 Разностные методы построения переходных процессов в нелинейных системах................................................215
§ 6.4 Оценка влияния нелинейностей на переходные процессы в системах ........................................................223
§ 6.5 Анализ качества процессов управления с помощью метода гармонической линеаризации ...................................... 232
§ 6.6 Анализ качества процессов управления с помощью критерия абсолютной устойчивости........................................235
§ 6.7 Об особенностях синтеза нелинейных систем автоматического управления.....................................................237
Глава VII. Общая характеристика задач и методов оптимального управления .............................................................239
§7.1 Постановка задачи оптимального управления................239
§ 7.2 Примеры постановки задач оптимального управления .... 242
§ 7.3 Синтез простейшей оптимальной по быстродействию системы второго порядка................................................249
§ 7.4 Способы управления, близкого к оптимальному..............255
428
Стр.
Глава VIII. Методы теории оптимального управления................261
§ 8.1 Краткая характеристика методов.........................261
§ 8.2 Уравнение Эйлера и его применение для решения задач оптимального управления..........................................262
§ 8.3 Принцип максимума и его применение для решения задач оптимального управления...........................................274
§ 8.4 Динамическое программирование и его применение для решения задач оптимального управления...................... 291
§ 8.5 Сравнение методов теории оптимального управления.......300
Глава IX. Случайные воздействия в системах автоматического управления .............................................................301
§ 9.1 Общая характеристика случайных сигналов в системах управления .......................................................301
§ 9.2 Примеры случайных сигналов и их характеристик........303
§ 9.3 Среднее время корреляции и средняя полоса частот случайных сигналов.....................................................316
§ 9.4 Взаимные корреляционные функции и спектральные плотности
случайных сигналов.....................................318
§ 9.5 Определение статистических характеристик случайных сигналов по их реализациям на интервале длиной Тр......................320
Глава X. Линейные системы при случайных стационарных воздействиях 328
§ 10.1 Прохождение случайного сигнала через линейное звено . . 328
§ 10.2 Задачи исследования линейных систем при стационарных случайных воздействиях..........................................333
§ 10.3 Определение параметров следящей системы, оптимальных по минимуму среднеквадратичной ошибки...........................340
§ 10.4 Синтез оптимальных по точности систем при стационарных случайных воздействиях.......................................342
§ 10.5 Преобразование закона распределения линейных звеном . 346
Глава XI. Нелинейные системы при случайных стационарных воздействиях ............................................................351
§ 11.1 Прохождение случайного сигнала через нелинейное звено . 351
§ 11.2 Преобразование плотности распределения................351
§ 11.3 Преобразование среднего значения (момента первого порядка или математического ожидания)................................358
§ 11.4 Преобразование дисперсии (момента второго порядка) . . . 359
§ 11.5 Преобразование корреляционных функций.................361
§ 11.6 Взаимная корреляционная функция сигналов входа и выхода нелинейного эвена............................................364
§ 11.7 Статистическая линеаризация нелинейных звеньев ...... 366
§ 11.8 Статистическая линеаризация нелинейных систем с обратной связью.......................................................368
Глава XII. Самонастраивающиеся системы автоматического управления 373
§ 12.1 Основные понятия, определения, классификации..........373
§ 12.2 Общая характеристика поисковых экстремальных систем . . 375
429
Стр.
§ 12.3 Методы определения градиента целевой функции......... . . 379
§ 12.4 Методы поиска с разделением пробных и рабочих операций . 384
§ 12.5 Методы поиска с совмещением пробных и рабочих операций 389
§ 12.6 Динамика экстремальных систем...........................393
§ 12.7 Общая характеристика систем с моделями ;................400
§ 12.8 Системы с моделью-эталоном..............................403
§ 12.9 Системы с подстраиваемой моделью .......................404
Приложение. Математическое описание случайных сигналов (определения и обозначения).................................................410
Литература.................................................... . 421
Лев Семенович Гольдфарб, Наум Моисеевич Александровский, Анатолий Васильевич Балтрушевич, Валерий Викторович Бурляев, Рудольф Евгеньевич Кузин, Анатолий Владимирович Нетушил, Евгений Борисович Пастернак
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЧАСТЬ II
Редактор Смирницкая О. М. Художественный редактор Н. К. Гуторов Переплет художника В. 3. Казакевича Технический редактор Н. М. Яшукова Корректор М. М. Малиноаская
Т—0 1924. Сдано в набор 29/VII — 71 г. Подп. к печати 18/1 — 72 г.
Формат 60Х90/1в. Объем 27 печ. л. Уч.-изд. л. 25,87. Изд. Ns СТД—133.
Заказ Ns 447. Тираж 33 000 экз. Цена 1 руб. 07 коп.
План выпуска литературы для вузов и техникумов изд-ва «Высшая школа» на 1972 г. Позиция Ns 90.
Издательство «Высшая школа», Москва, К-51, Неглинная ул., д. 29/14.
Московская типография Ns 4 Главполиграфпрома Комитета по печати при Совете Министров СССР Б. Переяславская, 46.