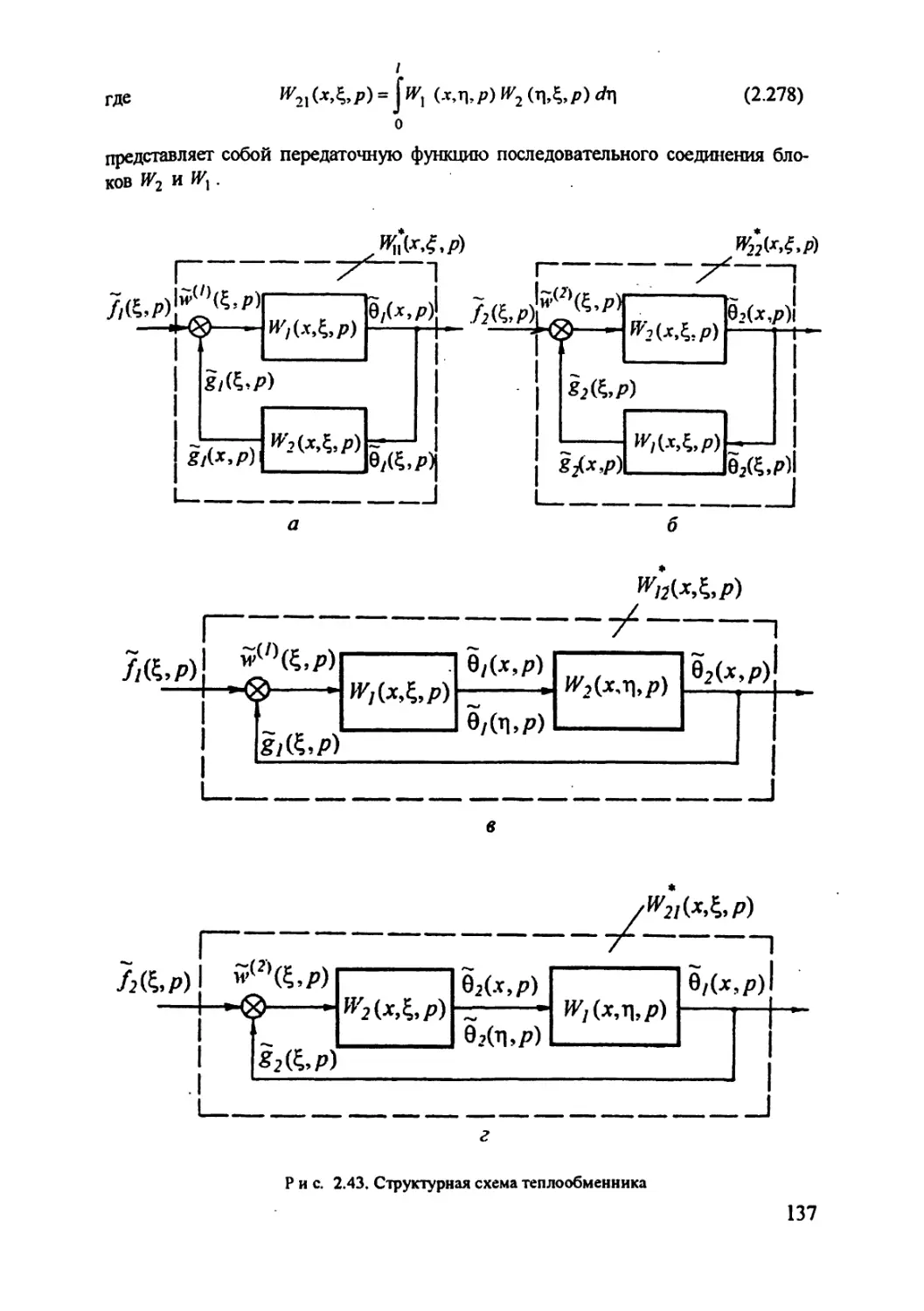
/




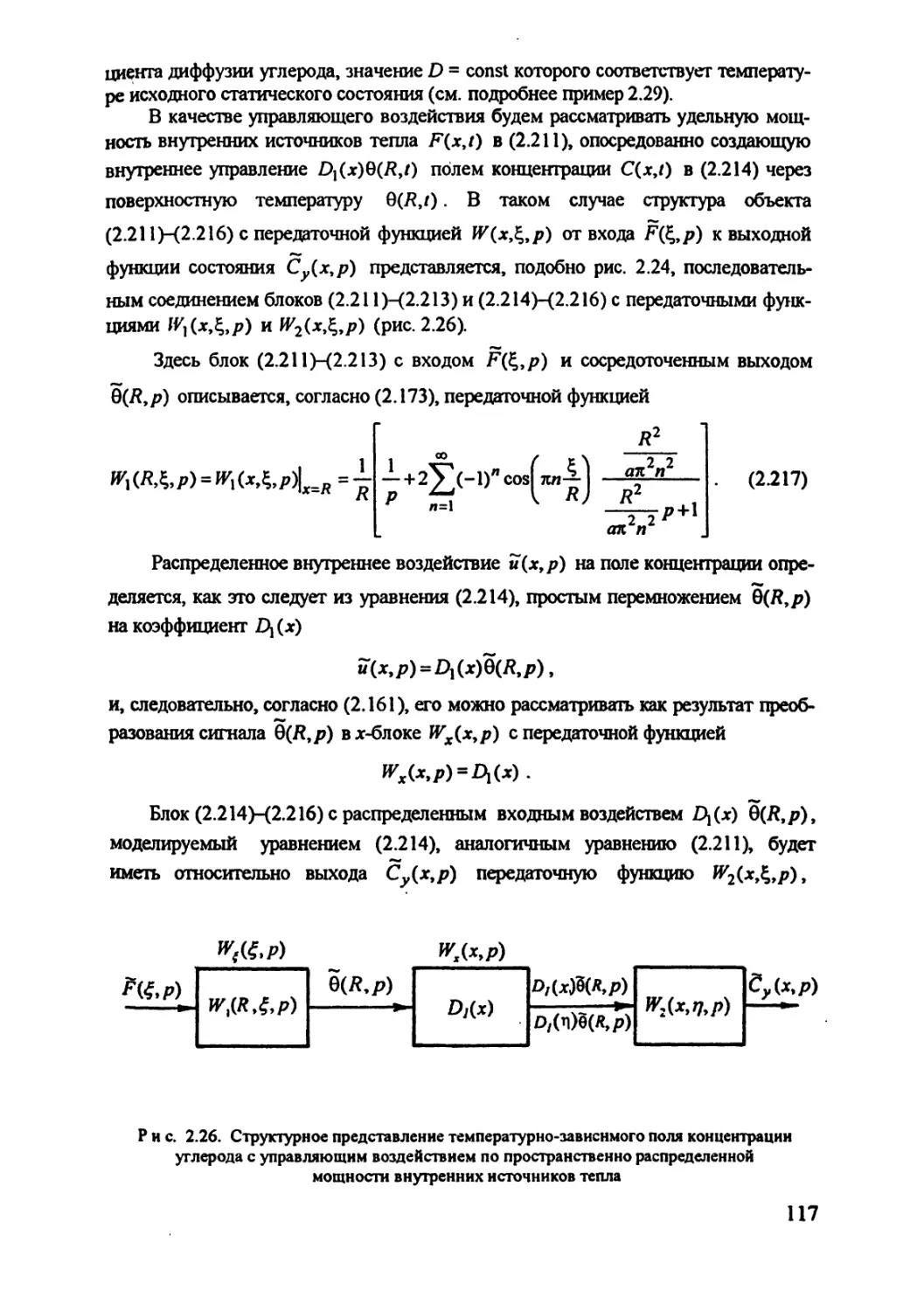
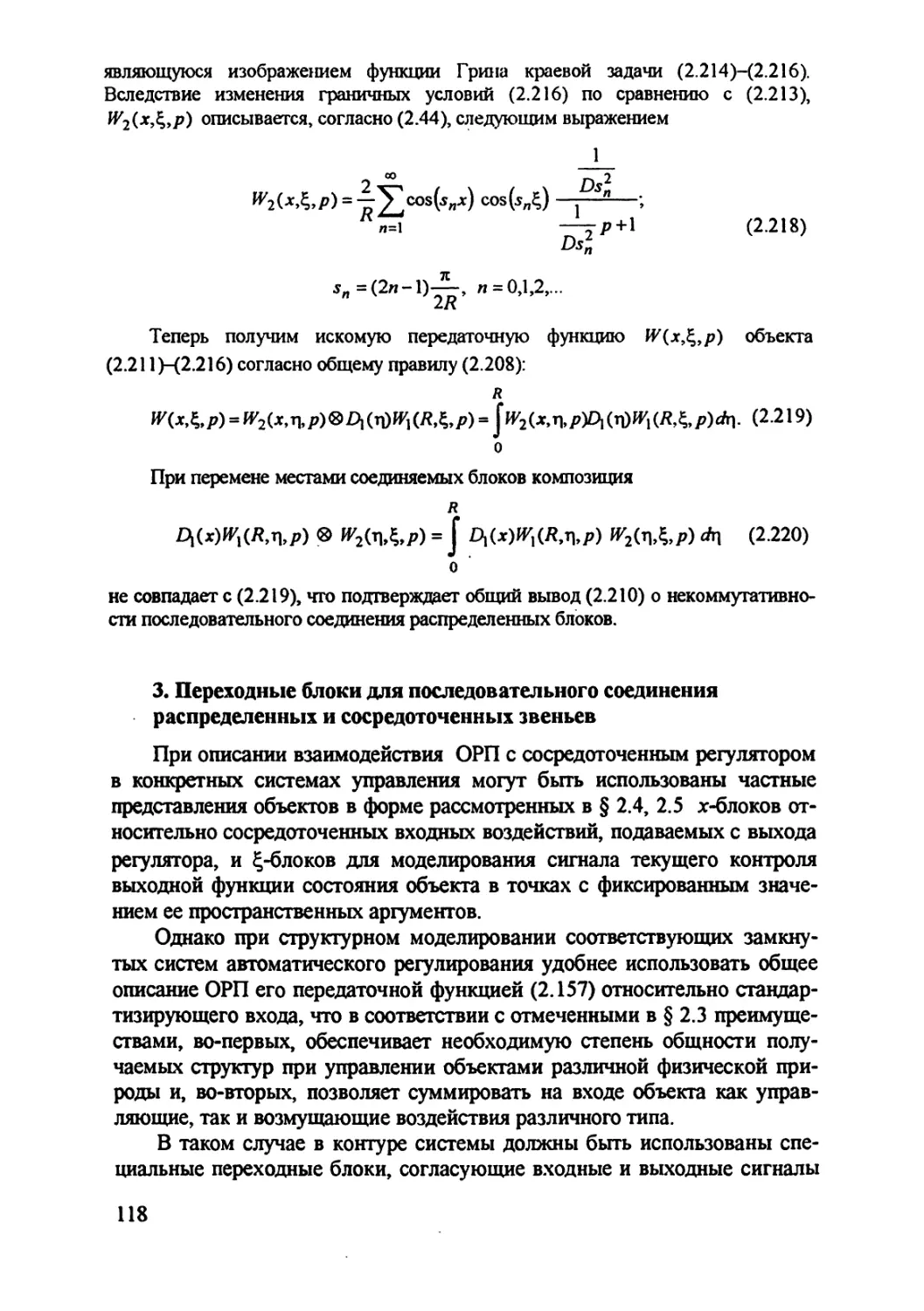
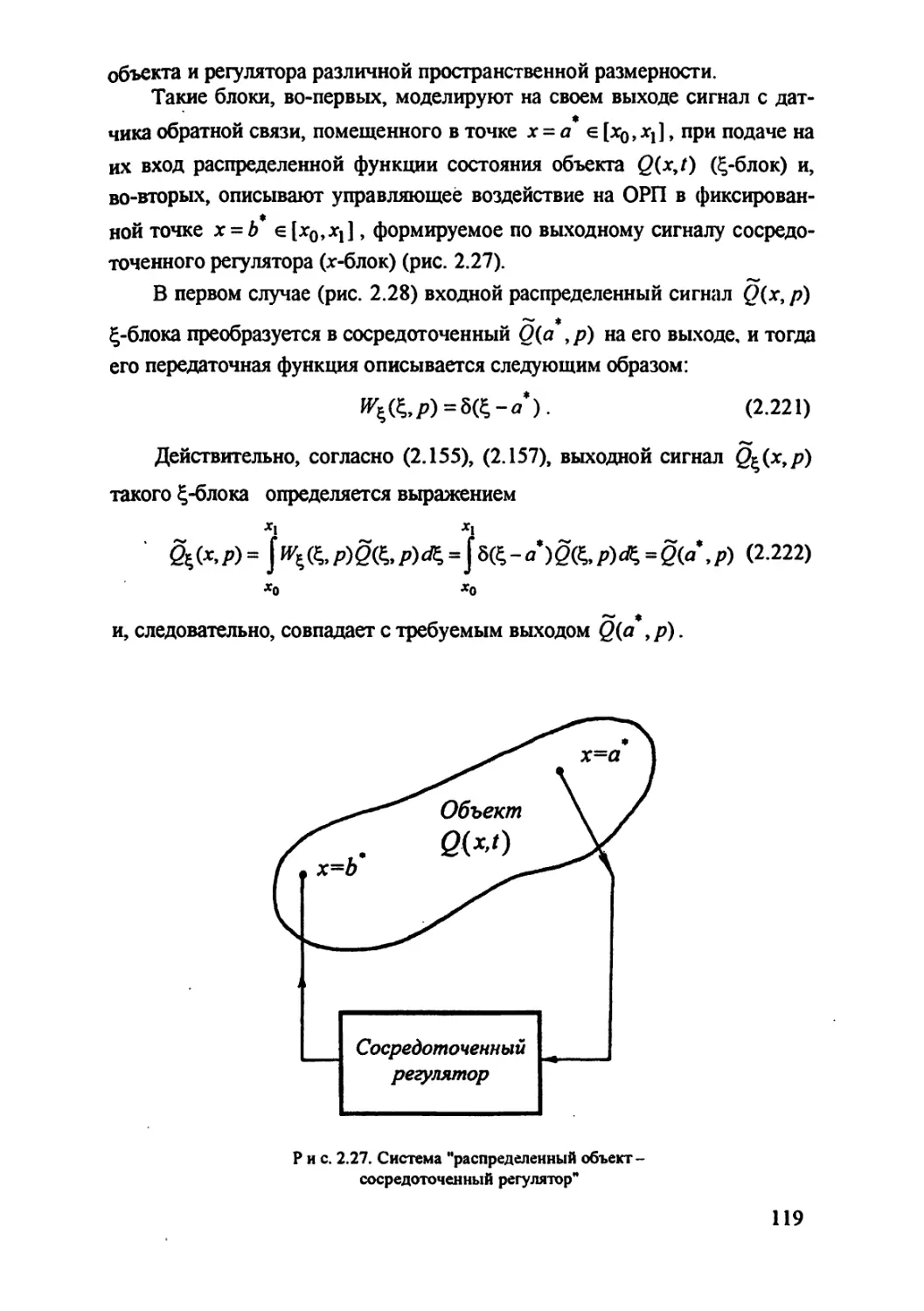
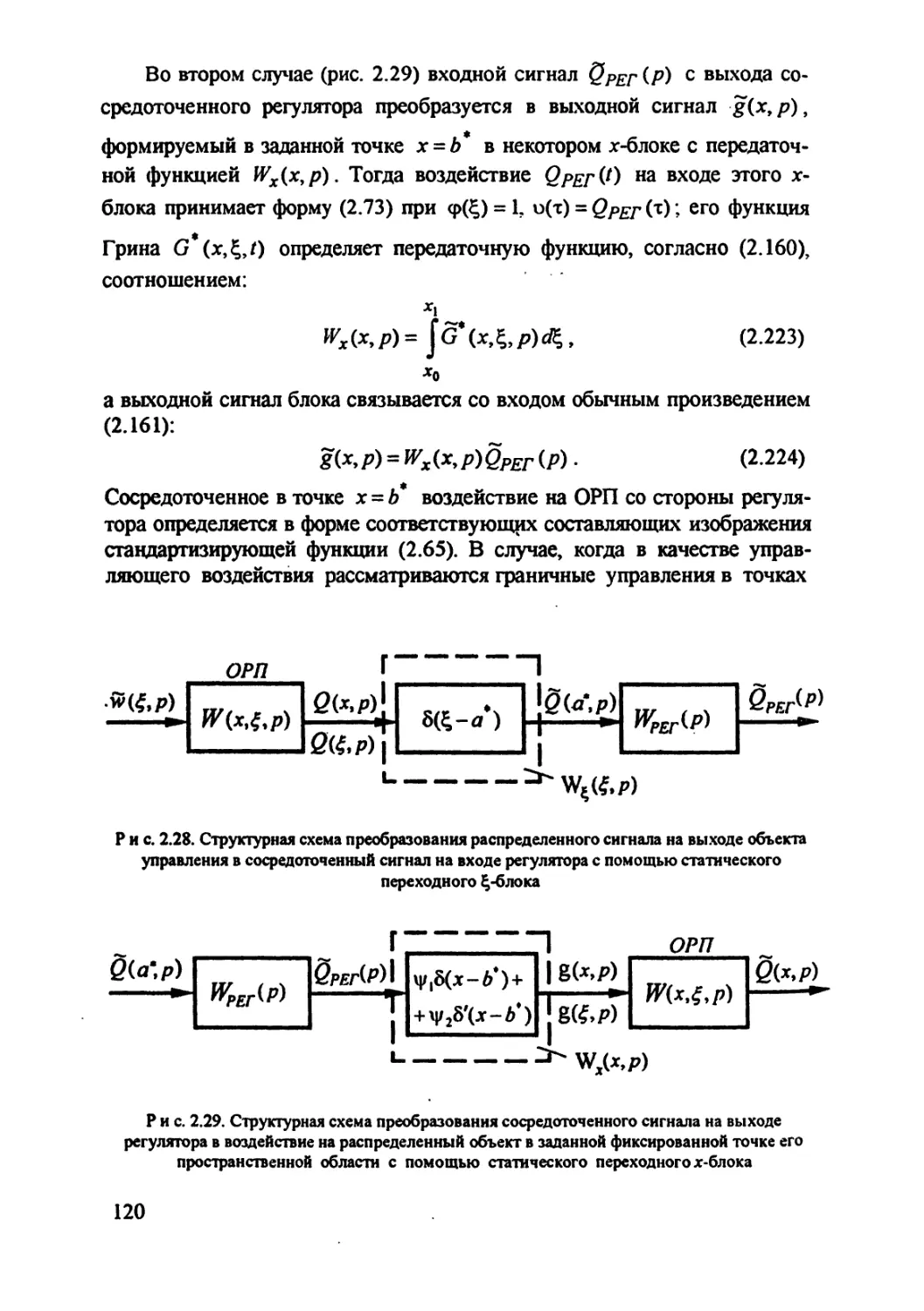











Текст
Э.Я. РАПОПОРТ
Структурное
моделирование
объектов
и систем управления
с распределенными
параметрами
Рекомендовано
УМО по образованию
в области радиотехники,
электроники,
биомедицинской техники
и автоматизации
в качестве учебного пособия
для студентов
высших учебных заведений,
обучающихся по специальности
«Управление и информатика
в технических системах»
МОСКВА
«ВЫСШАЯ ШКОЛА»
2003
УДК 681.5
ББК 32.965
Р23
Рецензенты:
кафедра «Автоматика и телемеханика» Южно-Российского государственного
технического университета (Новочеркасский политехнический институт), д-р
техн. наук, профессор Лачин В.И.; профессор кафедры «Автоматика и процессы
управления» Санкт-Петербургского государственного электротехнического
университета, д-р техн. наук Терехов ВЛ
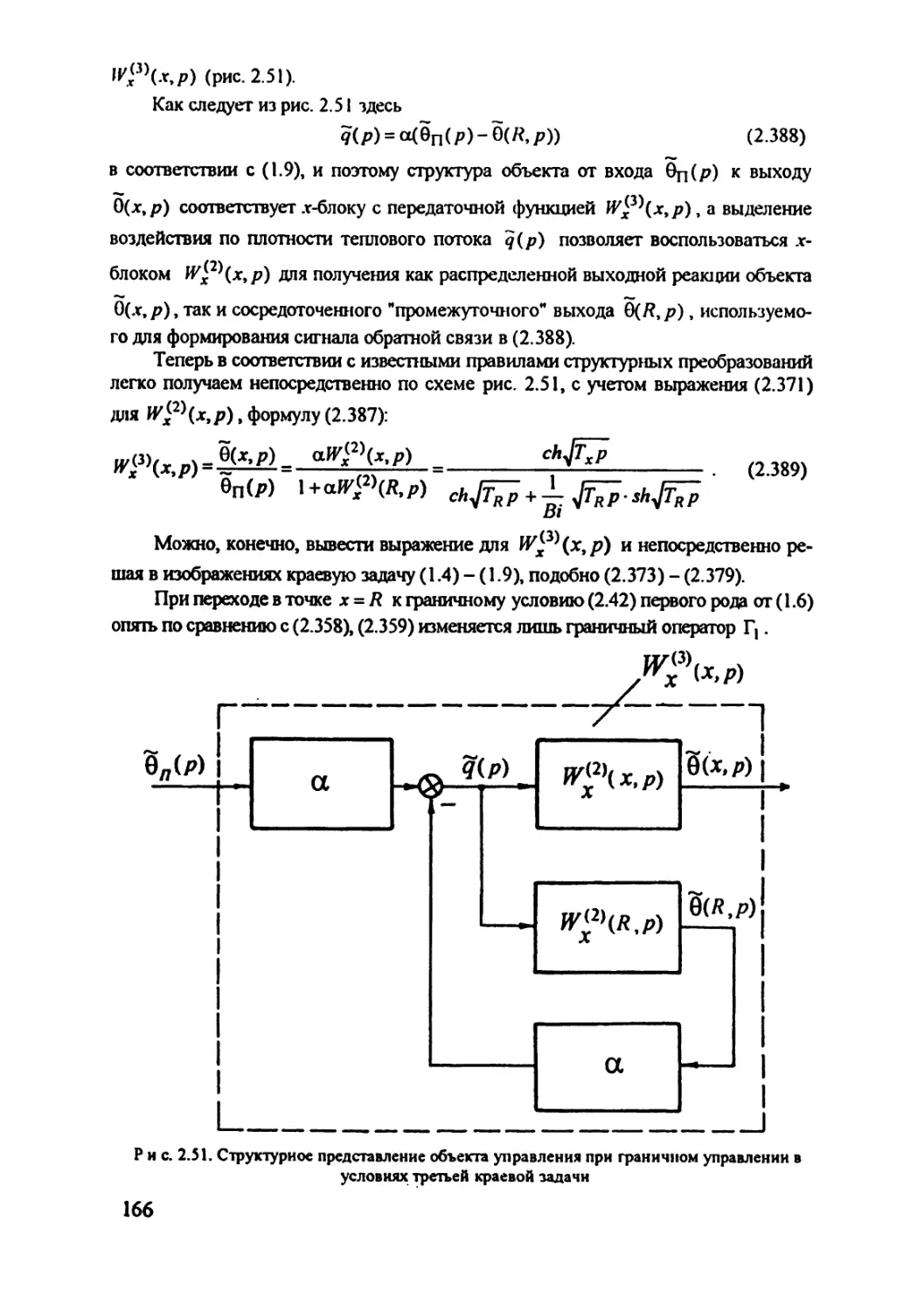
Рапопорт, Э.Я.
Р23 Структурное моделирование объектов и систем управления
с распределенными параметрами: Учеб. пособие/Э.Я.
Рапопорт. — М.: Высш. шк., 2003. — 299 с: ил.
ISBN 5-06-004694-Х
Учебное пособие посвящено систематическому изложению основных
методов построения математических моделей объектов и систем управления с
распределенными параметрами с общих позиций структурной теории
распределенных систем. Рассмотрены базовые характеристики типовых
распределенных блоков и методы их определения. Описаны наиболее употребительные на
практике способы построения приближенных моделей объектов управления с
распределенными параметрами. Приведены примеры, демонстрирующие
возможности применения предлагаемых методов для решения конкретных
инженерных задач моделирования управляемых процессов в различных технических
системах.
Для студентов вузов, обучающихся по специальности «Управление и
информатика в технических системах»,
УДК 681.5
ББК 32.965
ISBN 5-06-004694-Х © ФГУП «Издательство «Высшая школа», 2003
Оригинал-макет данного издания является собственностью издательства «Высшая
школа», и его репродуцирование (воспроизведение) любым способом без согласия
издательства запрещается.
ОГЛАВЛЕНИЕ
Предисловие 4
Введение 5
Список основных сокращений 9
Глава 1. Общая характеристика задач управления системами
с расиределенпыми параметрами 10
§1.1. Основные особенности задач управления системами с
распределенными параметрами 10
§ 1.2. Примеры задач управления СРП 13
Глава 2. Математические модели типовых объектов и
систем управления с распределенными параметрами 37
§ 2.1. Базовые уравнения объектов с распределенными параметрами 37
§ 2.2. Импульсные переходные функции и основные вход-выходные
соотношения для типовых линейных объектов управления с
распределенными параметрами 46
§ 2.3. Стандартные формы и стандартизирующие функции в задачах
моделирования объектов с распределенными параметрами, 58
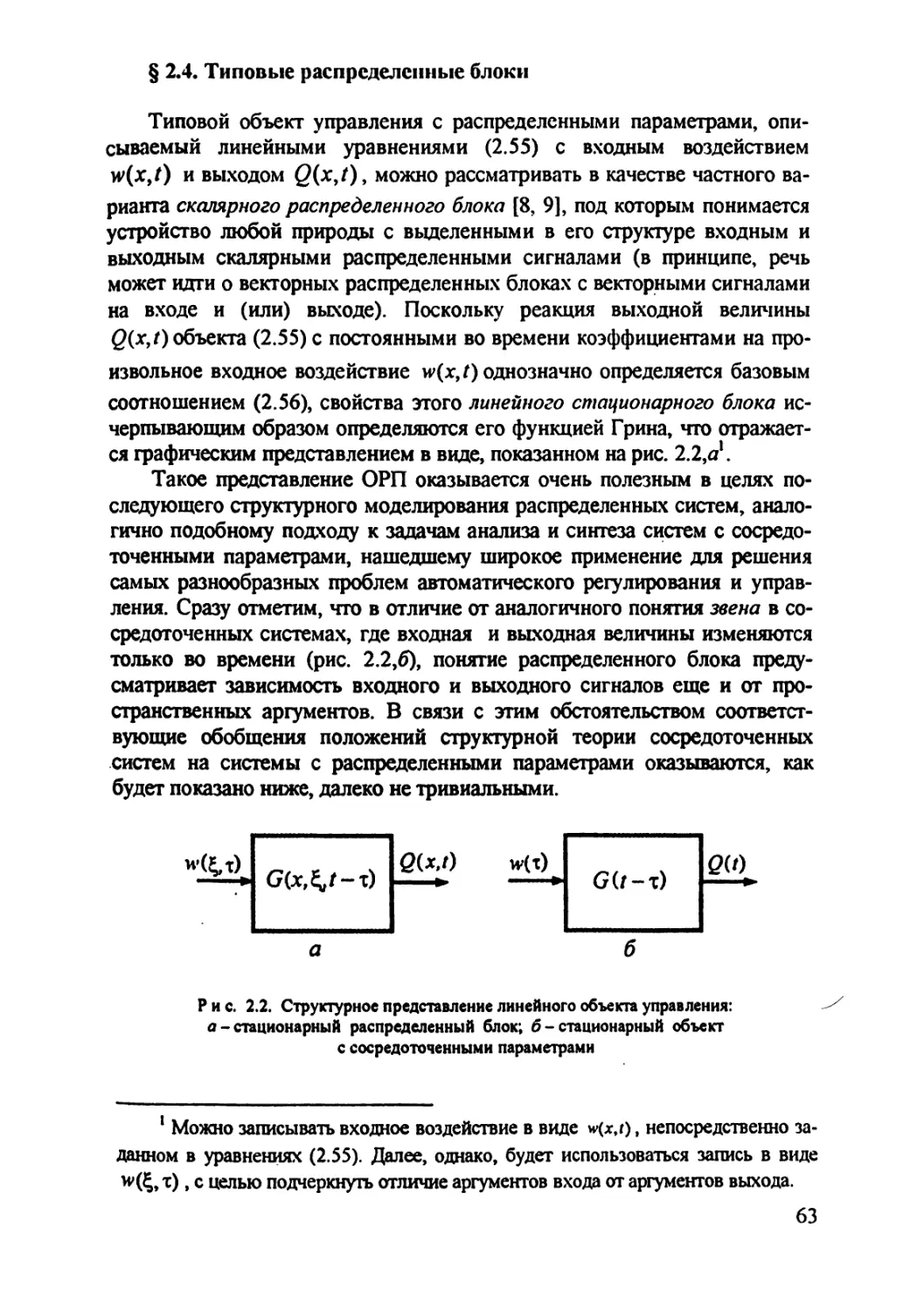
§ 2.4. Типовые распределенные блоки 63
§ 2.5. Передаточные функции объектов управления с
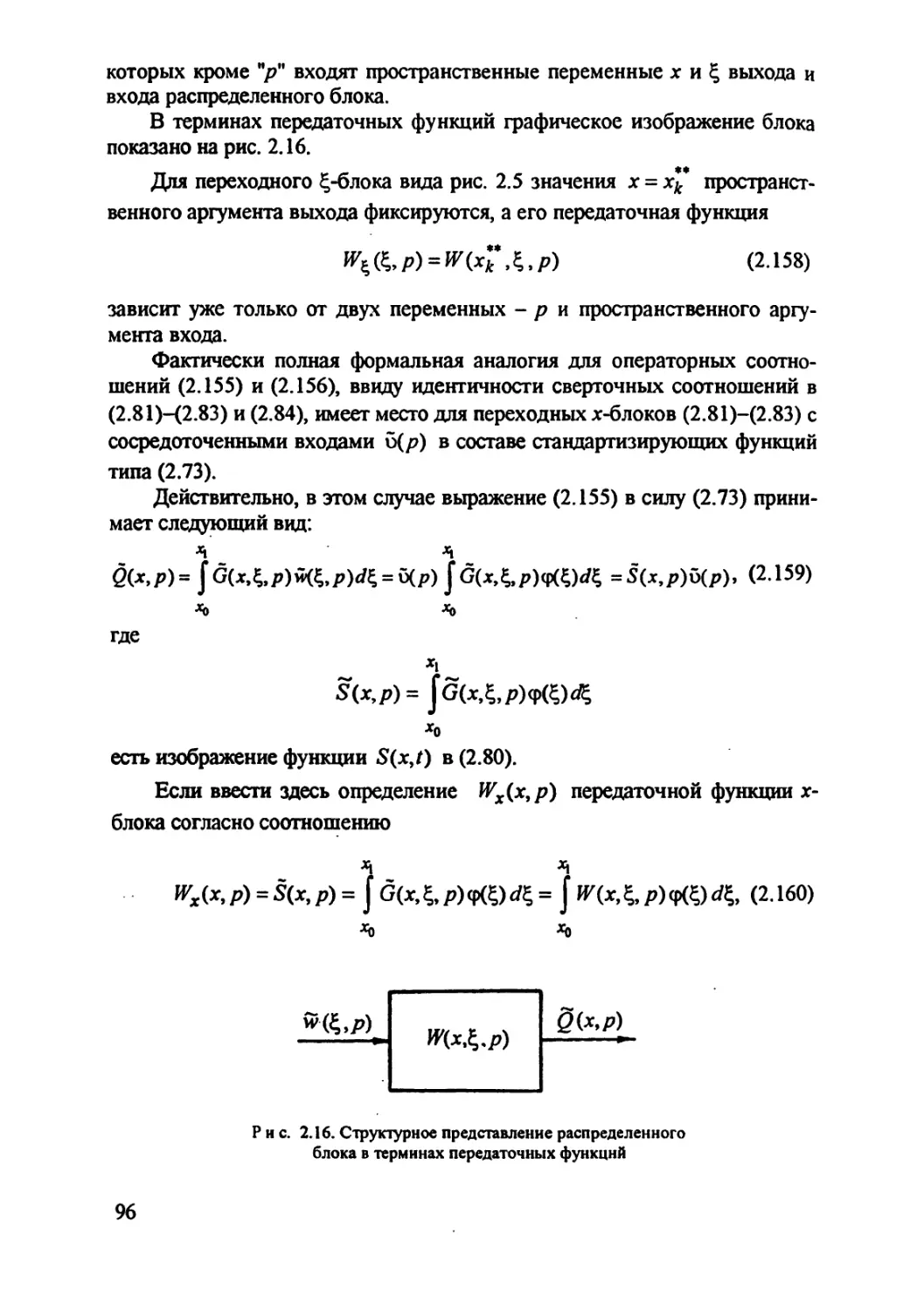
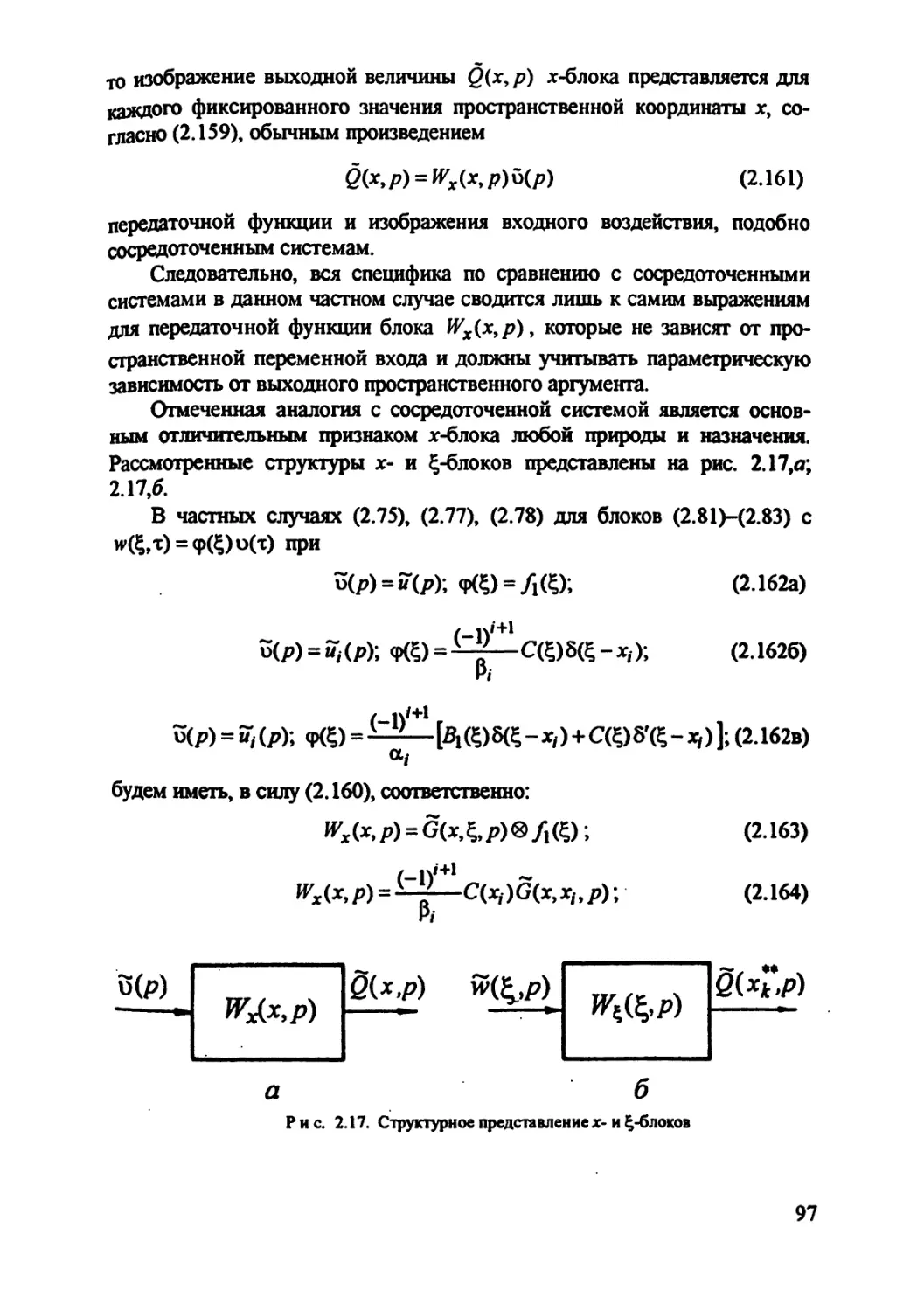
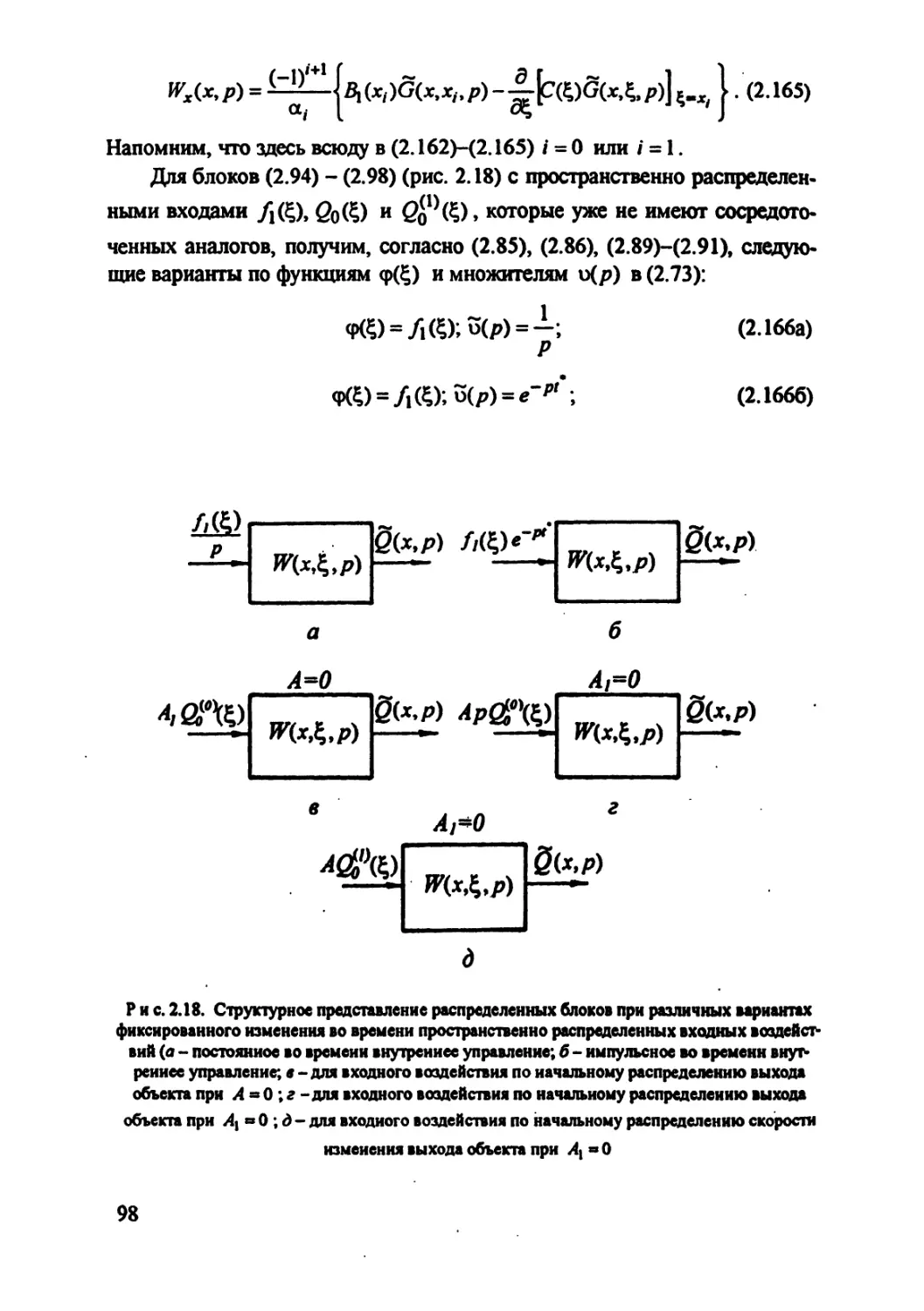
распределенными параметрами 94
§ 2,6. Соединения распределенных блоков 108
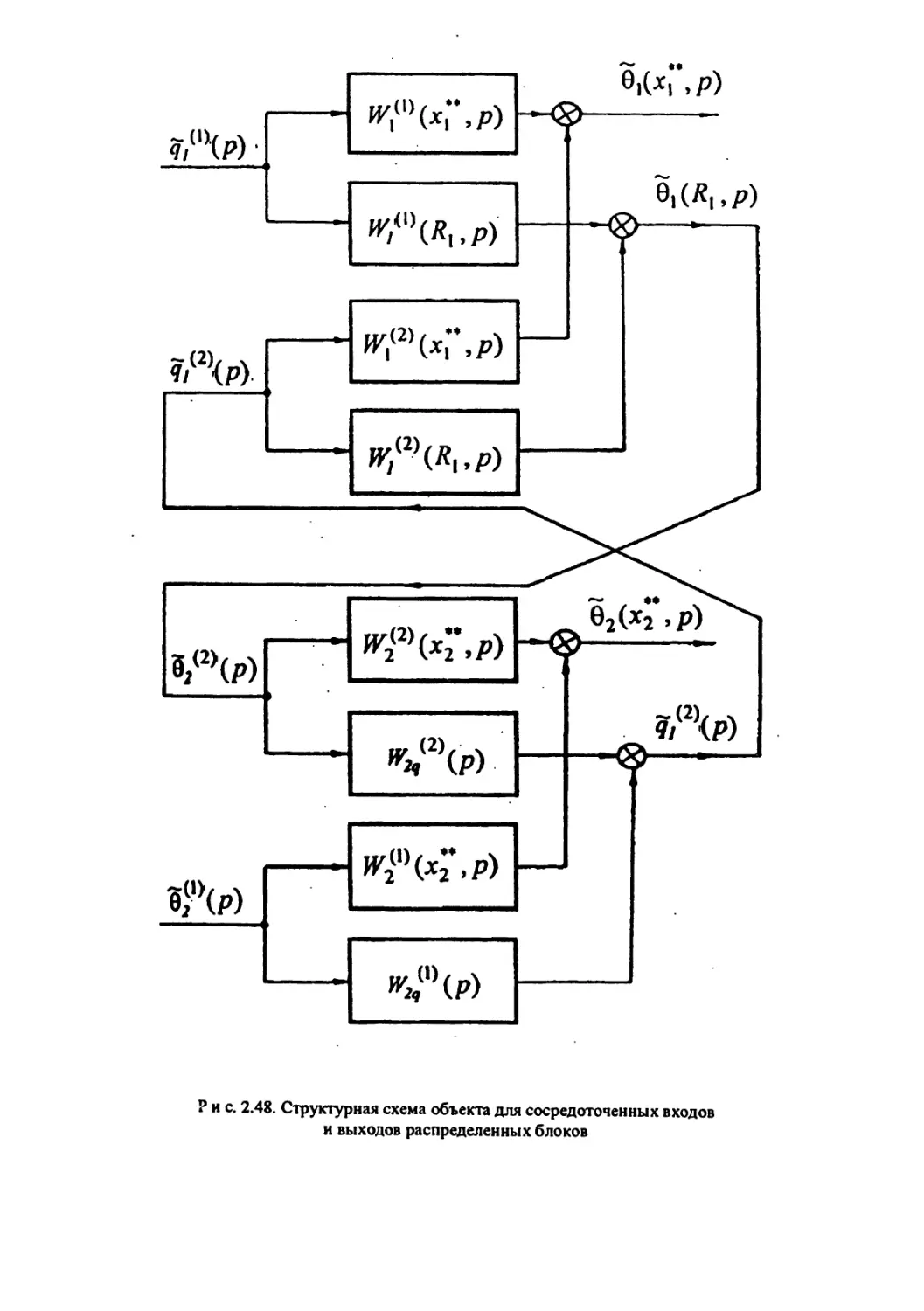
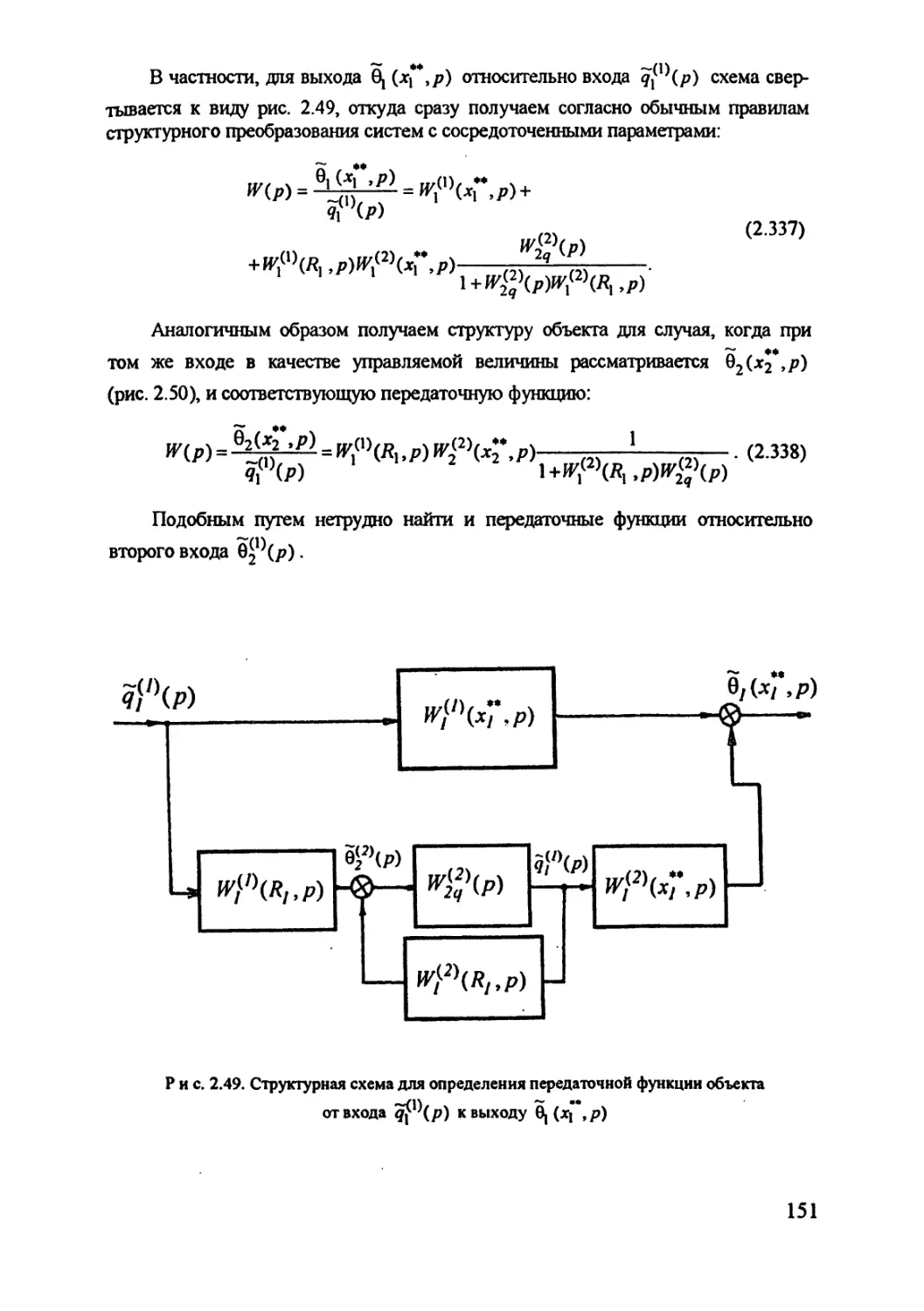
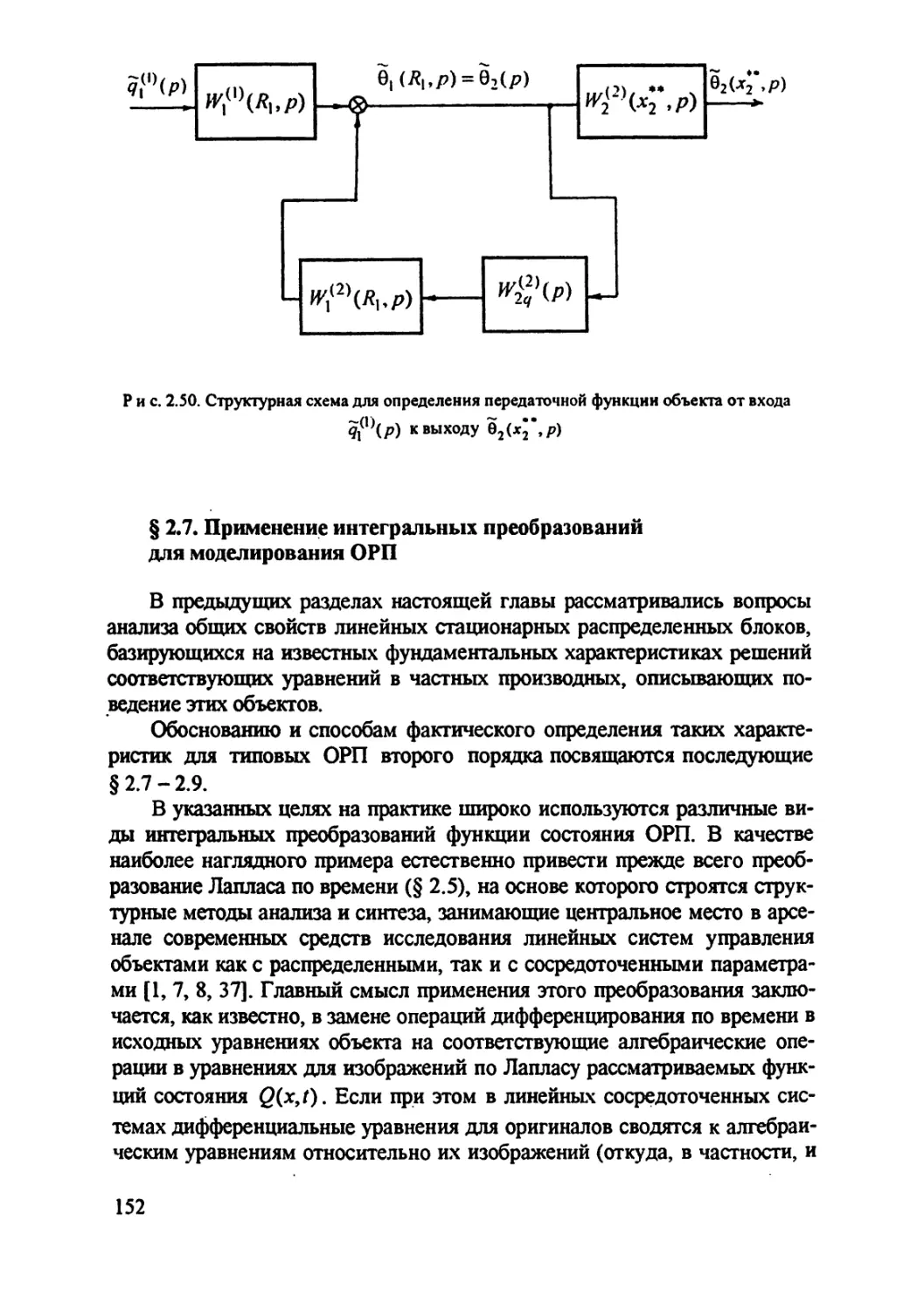
§ 2.7. Применение интегральных преобразований для
моделирования ОРП 152
§ 2.8. Применение операционного исчисления для построения
моделей объектов с распределенными параметрами 155
§ 2.9. Применение конечных интегральных преобразований для
построения моделей объектов с распределенными
параметрами 177
§ 2.10. Моделирование нелинейных распределенных объектов ... 217
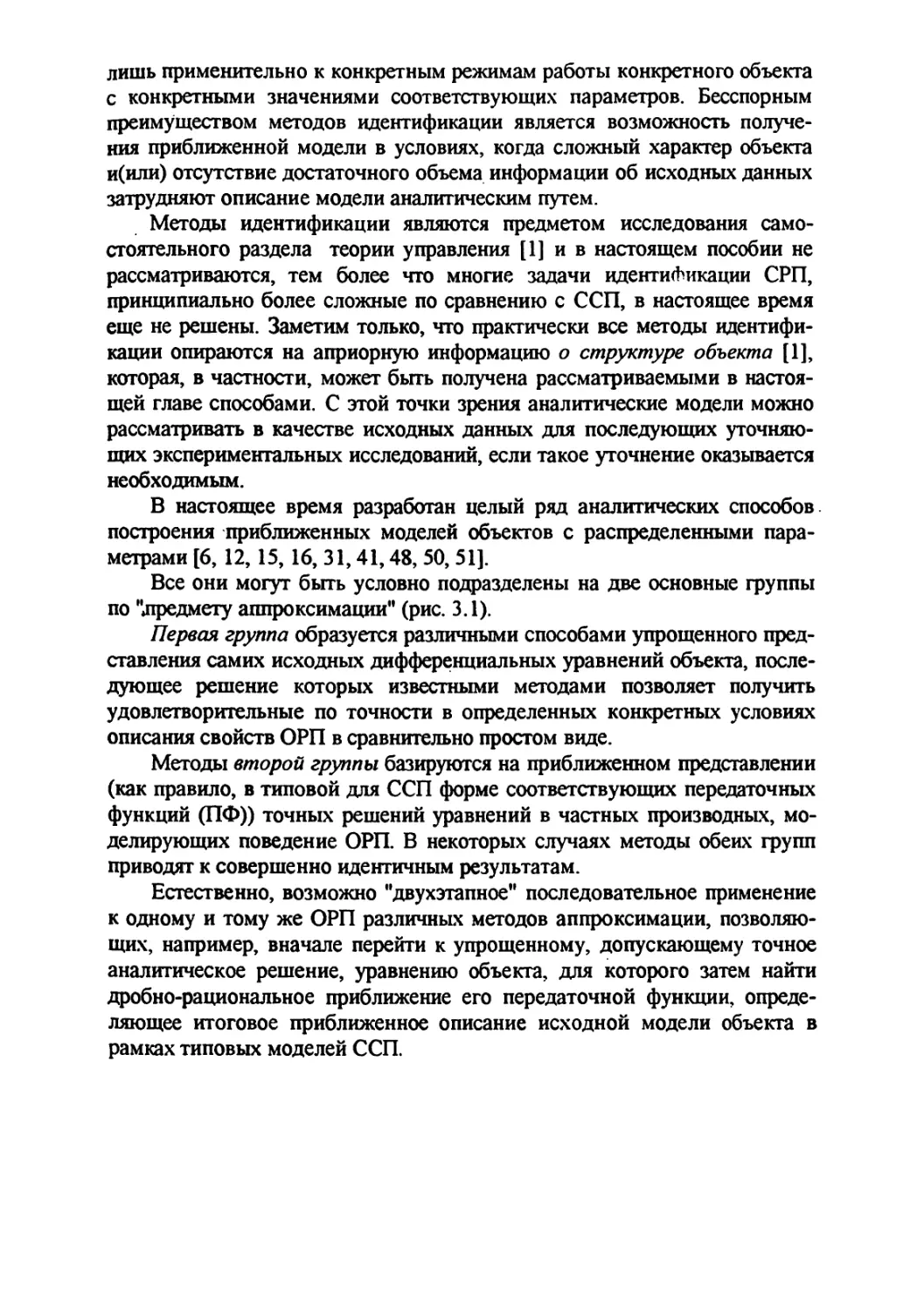
Глава 3. Приближенное моделирование ОРП 228
§ 3.1. Классификация и общая .характеристика методов
приближенного моделирования ОРП 228
§ 3.2. Методы перехода к распределенным блокам упрощенной
структуры 234
§3.3. Методы модального описания ОРП 243
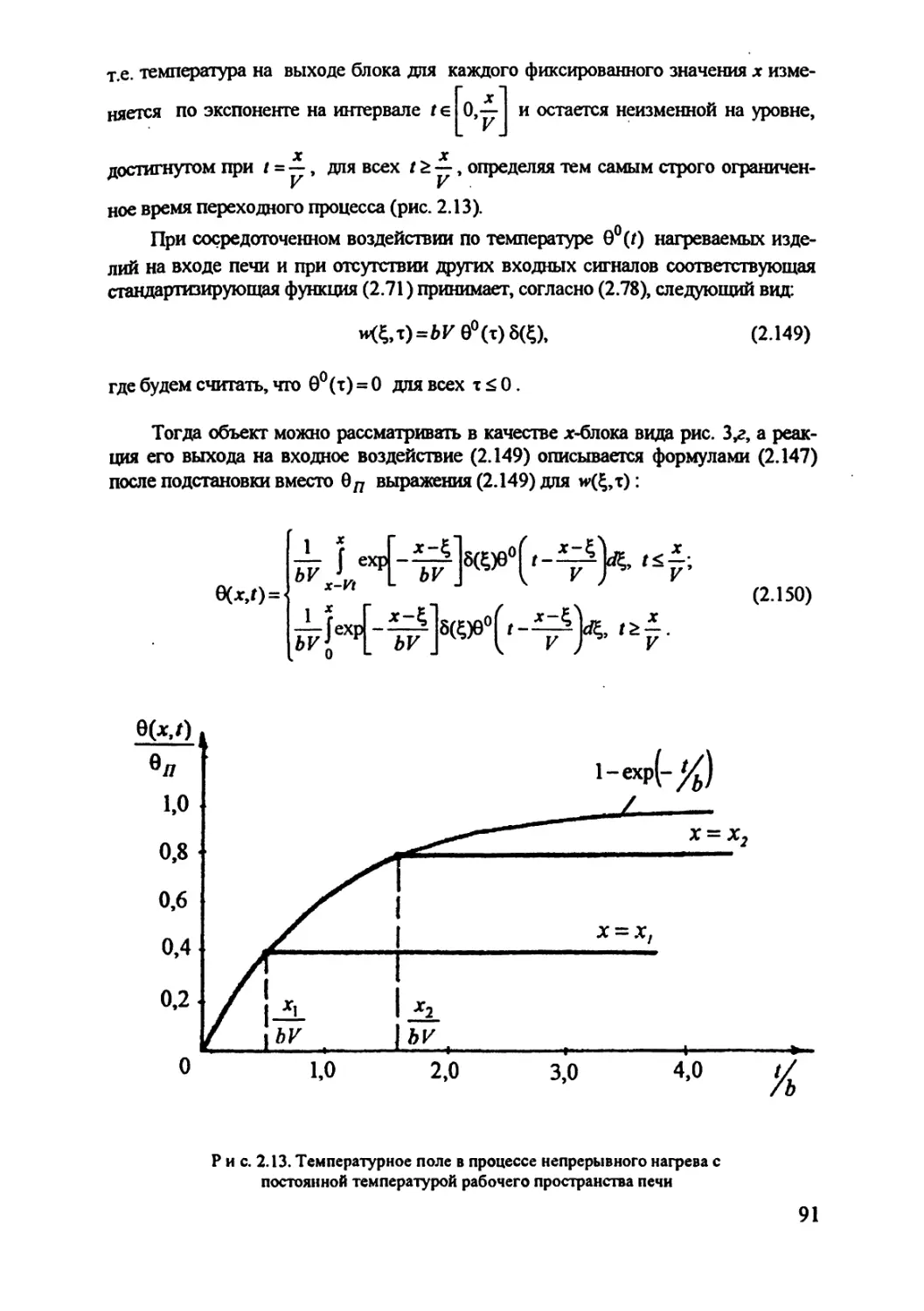
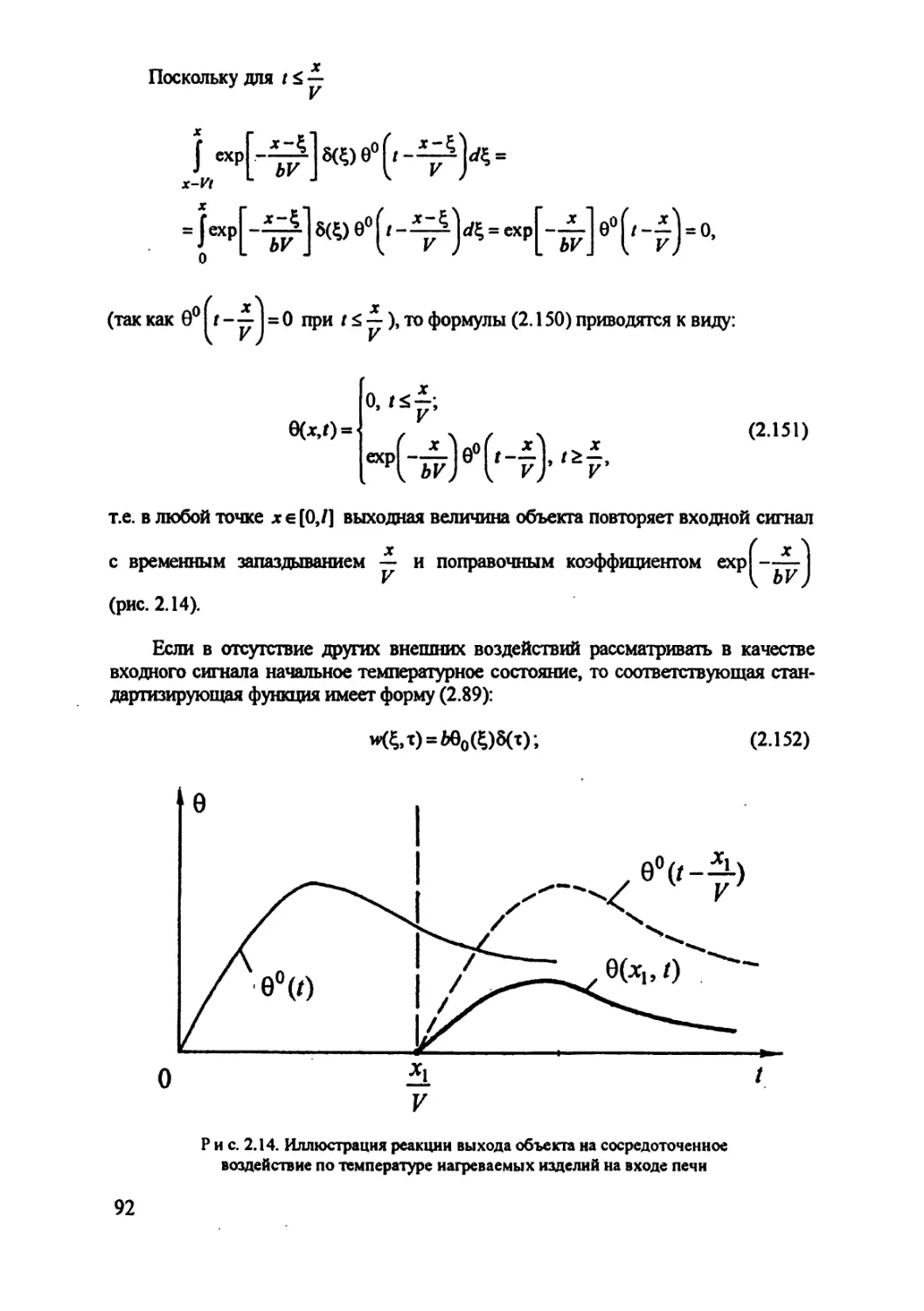
§ 3.4. Разностные методы приближенного моделирования ОРП . 250
§ 3.5. Методы разложения передаточных функций в бесконечные
ряды 270
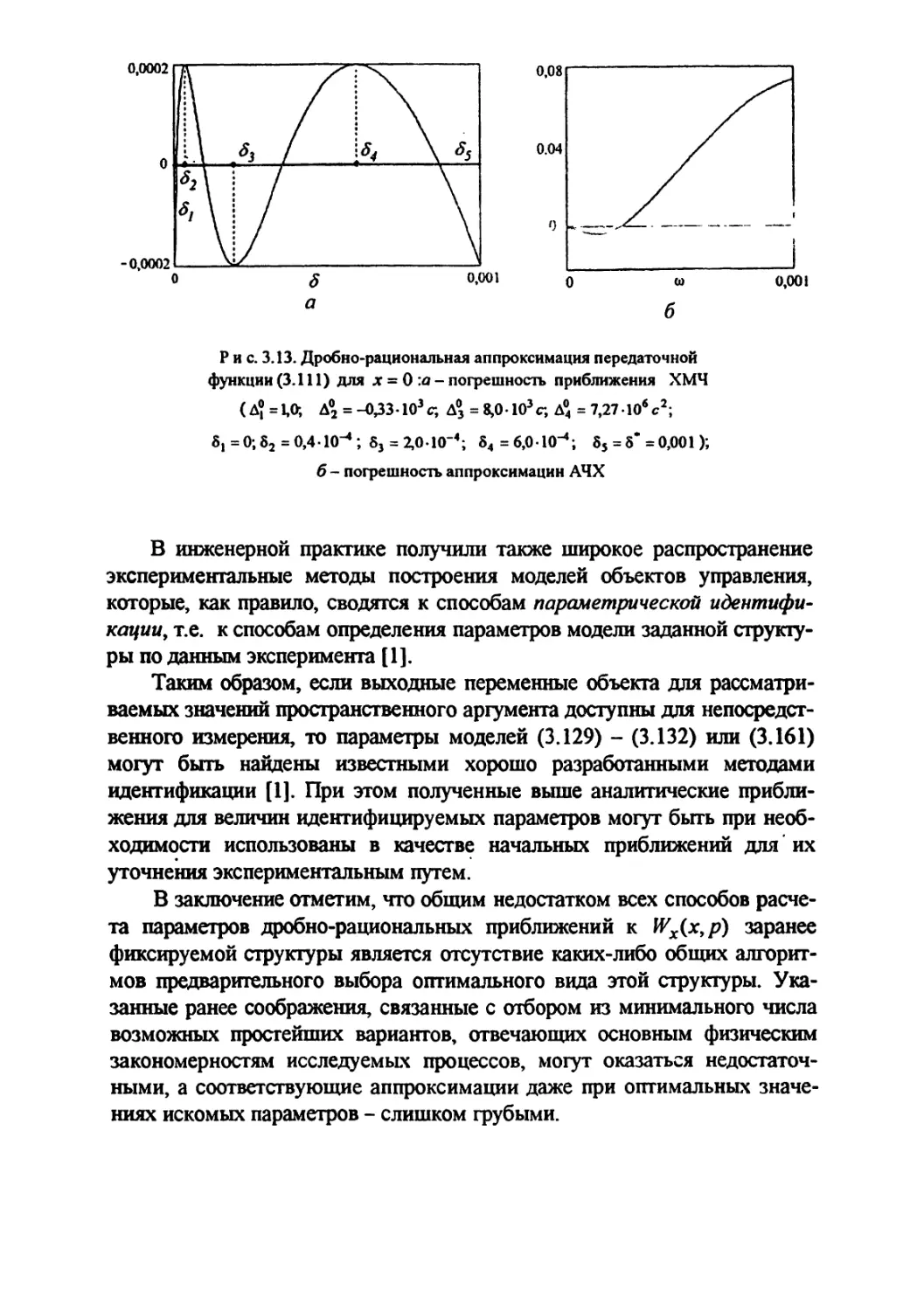
§ 3.6. Методы определения параметров дробно-рациональных
приближений передаточных функций заданной структуры 278
Приложение 292
Литерат>ра 297
ПРЕДИСЛОВИЕ
Управление системами с распределенными параметрами {СРП) -
это чрезвычайно обширная и труднообозримая часть кибернетики - науки
об управлении, информации и системах. Поэтому создать учебник по этой
дисциплине - задача очень трудная, и в мире, возможно, существует всего
несколько ученых, которые могли бы решить ее в более или менее полном
объеме. Однако с развитием науки и техники потребность в обучении
этой дисциплине постоянно возрастает, ибо и в природе, и в обществе
многие объекты с необходимостью, если мы хотим получить надлежащий
уровень точности и адекватности, надо рассматривать как объекты с
распределенными параметрами. Электромагнитные поля, теплопроводность
и ди(|)фузия, аэро- и гидродинамика, упругость и пластичность, квантовая
физика, экономика и демография и многое-многое другое - все это
объекты и системы с распределенными параметрами, их надо исследовать, ими
надо уметь управлять.
Задача управления СРП настолько широкая и глубокая, что не
случайно именно из нее в настоящее время проистекает дальнейшее
углубленное теоретическое осмысление кибернетики в целом в ее движении к
Единой теории управления наподобие современных Единых теорий всех
фундаментальных физических взаимодействий\
Трудность изучения СРП усугубляется еще и тем, что для их
теоретического описания, изучения и моделирования надо владеть довольно
продвинутым математическим аппаратом, большая часть которого часто
не входит в стандартные математические программы университетов.
Подготовка научно-технических специалистов должна отличаться глубокой
фундаментальностью, т.е. теоретичностью, а следовательно, глубоким
изучением именно математики как главного языка любой научной теории.
Данный учебник вносит большой вклад в разрешение всех этих
трудных проблем, стоящих перед высшей школой. Он может послужить
основой, исходным пунктом и стержнем, вокруг которого может
разворачиваться дальнейшая подготовка специалистов.
Профессор А.Г. Бутковский
' Бабичев А.В., Бутковский А.Г, Похволайнен С, К едашой геометрической
теории управления. - М.: Наука, 2001.
ВВЕДЕНИЕ
Классотеские результаты теории автоматического управления (ТАУ),
практически исчерпывающим образом отраженные в многочисленной
учебной литературе, получены применительно к системам с сосреОото-
чеииьши параметрами (ССП), поведение которых однозначно
характеризуется изменением во времени управляемых величин и описывается
соответствующими системами обыкновенных дифференциальных
уравнений. В то же время все реальные объекты управления характеризуются
определенной пространственной протяженностью и, как следствие
этого, не только зависимостью управляемых величин от времени, но и их
распределенностью по пространственной области, занимаемой объектом.
Иначе говоря, в действительности речь должна идти о системах с
распределенными параметрами (СРП), для которых изменение управляемых
величин как во времени, так и в пространстве описывается уже диф(|)е-
ренциальными уравнениями в частных производных, интегральными,
интегродифференциальными уравнениями или системами уравнений
самой различной природы.
Лишь в определенных, хотя и часто встречающихся на практике
частных случаях можно с приемлемой погрешностью пренебречь
зависимостью управляемььх величин от пространственных координат и отнести
объект управления к типу ССП.
Задачи управления СРП отличаются глубокой спецификой и
оказываются принципиально более сложными по сравнению с ССП. Начиная с
основополагающих работ проф. А.Г Бутковского, в нашей стране и за
рубежом уже более 40 лет успешно развивается теория управления СРП. Ее
становление характеризуется использованием сложного и
нетрадиционного для классической ТАУ математического аппарата, слабо
представленного в типовых учебных программах технических вузов. Полученные в
теории СРП результаты отражены в нескольких десятках монографий и
необозримом количестве журнальных статей, написанных на
высокопрофессиональном уровне и малодоступных для студентов технических
специальностей в силу указанных обстоятельств. В то же время наблюдается
острый дефицит в литературных источниках, пригодных для
первоначального ознакомления с предметом. Между тем бесспорная значимость
проблемы управления СРП для специалистов, работающих в области
теории и техники управления техническими системами, создает
настоятельную необходимость ее систематического изучения в учебниках,
специально ориентированных на стандартный уровень предварительной
подготовки читателя.
Настоящее учебное пособие, являющееся одним из первых в этом
направлении, посвящено вопросам математического моделирования СРП.
В первой главе кратко рассматриваются основные особенности
управляемых СРП по сравнению с ССП (§ 1.1) и приводятся иллюстри-
рующис их примеры постановок характерных задам управления СРП
(§1.2).
Вторая глава посвящена систематическому изучению
математических моделей типовых СРП с позиций структурной теории
распределенных систем, разработанной А.Г. Бутковским. В § 2.1 определены базовые
уравнения объектов с распределенными параметрами (ОРП) в (|юрме
линейных одномерных >равнений в частных производных второго порядка,
различные модификации которых приводят к основным уравнениям
математической физики.
Вход-выходные соотношения для типовых линейных ОРП, (|юрми-
русмыс с помощью функций Грина распределенных объектов, приведены
в § 2.2. Базовые понятия стандартных форм и стандартизирующих
функций при математическом описании ОРП поясняются в § 2.3. Основные
характеристики типовых распределенных блоков различного вида, в том
числе для случаев сосредоточенных сигналов на входе или выходе блока,
а также при неизменном во времени пространственном управляющем
воздействии, рассмотрены в § 2,4.
В § 2.5 вводится понятие передаточной функции (ПФ) линейного
распределенного блока в форме изображения по Лапласу его функции
Грина, приводятся выражения для типовых частнььх вариантов ПФ и
изображений выхода блока при стандартных видах входных воздействий.
Способы определения передаточных функций для параллельного и
последовательного соединений распределенных блоков, а также блоков,
охваченных распределенной обратной связью, юучаются в § 2.6.
В § 2.7 дается общая характеристика методов интегральных
преобразований в задачах моделирования ОРП.
Техника применения операционного исчисления для вычисления
передаточных функций типовых ОРП рассматривается в § 2.8.
Принципы построения конечных интефальных преобразований и
методика их применения для определения базовььх характеристик линейных
ОРП излагаются в § 2.9.
Некоторым способам моделирования нелинейных распределенных
блоков посвящен §2.10.
В третьей главе рассматриваются основные методы приближенного
моделирования ОРП, нашедшие применение на практике.
Общая их характеристика и классификация приведены в § 3.1.
Основные понятия методов малого параметра и линеаризации
применительно к распределенным блокам рассматриваются в § 3.2. Способам
модального и псевдомодального представления ОРП посвящен § 3.3.
Разностные методы приближенного моделирования ОРП по схемам
дифференциально-разностной, конечно-разностной и конечно-элементной
аппроксимации изучаются в § 3.4. Способы дробно-рационального
приближения передаточных функций распределенных блоков различного
вида путем их разложения в бесконечные ряды излагаются в § 3.5. Мсто-
ды определения параметров аппроксимирующих ПФ заданной структуры
приведены в 3.6.
Перед автором стояла весьма сложная задача по отбору материала и
способов его представления для включения в книг>' в противоречивы.\
условиях существования огромного числа важнейших направлений в
теории моделирования СРП, с одной стороны, и ограниченного объема
учебного пособия - с другой.
Вряд ли такая задача имеет однозначное решение, и вариант,
выбранный автором, отражает его личную точку зрения по этому вопросу,
основанную на многолетнем чтении курса лекций по управлению СРП в
Самарском государственном техническом университете и результатах
научных исследований, выполненных в НИИ проблем надежности
механических систем при СамГТУ.
При изучении пособия не требуется специальная подготовка за
пределами типовых вузовских курсов высшей математики и теории
автоматического управления для студентов, обучающихся по направлению
"Автоматизация и управление**. Заинтересованный читатель, желающий
получить более подробное представление о различных аспектах
математического моделирования СРП, может воспользоваться приводимыми по
тексту литературными ссылками (которые, конечно, ни в коей мере не
претендуют на полноту).
Несмотря на неизбежный приоритег достаточно сложного
формально-математического аппарата применительно к рассматриваемым задачам
построения моделей СРП в поа)бии уделяется большое внимание
содержательной стороне рассматриваемых построений, их практической
интерпретации и связи с реальными инженерными проблемами. В
частности, именно в этих целях приводится большое количество достаточно
по;фобно разбираемых примеров, непосредственно демонстрирующих
возможности предлагаемых методик в представляющих самостоятельный
интерес задачах моделирования типичных объектов управления.
Настоящее учебное пособие является первой частью задуманного
автором учебника под общим названием '^Введение в теорию управления
системами с распределенными параметрами**. Вторая часть будет
посвящена изучению таких базовых свойств СРП, как управляемость и
наблюдаемость, и вопросам анализа и синтеза систем автоматического
регулирования распределенных объектов. В третьей, заключительной части
будут рассмотрены задачи оптимального управления СРП.
Научно-педагогические взгляды автора в течение более трех
десятилетий формировались под определяющим влиянием фундаментальных
трудов основоположника теории управления СРП Анатолия Григорьевича
Бутковского, которому принадлежит инициатива написания этой книги.
Автор глубоко благодарен А.Г. Бутковскому за исключительно ценные
замечания, рекомендации и неизменную многолетнюю поддержку в этой
нелегкой работе, оказываем>то с удивительным терпением и вниманием.
Автор искренне признателен И.Г. Минаковой за безупречно
выполненный огромный объем работы по подготовке рукописи к печати.
Автор, безусловно, отдает себе отчет в том, что, несмотря на
длительный и напряженный труд над данным пособием, ему вряд ли удалось
избежать спорных формулировок, неточностей, технических
погрешностей и отдельных ошибок, и будет признателен всем читателям за
соответствующие замечания и поправки.
список ОСНОВНЫХ СОКРАЩЕНИЙ
СРП - система с распределенными параметрами
ССП - система с сосредоточенными параметрами
ОРП - объект управления с распределенными параметрами
ОСП - объект управления с сосредоточенными параметрами
ПФ - передаточная функция
АФХ - амплитудно-фазовая характеристика
АЧХ - амплитудно-частотная характеристика
ХМЧ - характеристика мнимых частот
САР - система автоматического регулирования
П-регулятор - регулятор с пропорциональным законом
регулирования
ПИ-регулятор - регулятор с пропорционально-интегральным
законом регулирования
ПИД-регулятор - регулятор с пропорционально-интсфально-
дифференциальным законом регулирования
ГЛАВА 1
ОБЩАЯ ХАРАКТЕРИСТИКА
ЗАДАЧ УПРАВЛЕНИЯ СИСТЕМАМИ
С РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ
§ 1.1. Основные особенности задач управления системами
с распределенными параметрами
Первый этап в развитии теории и техники автоматического
управления был связан с управлением системами, состояние которых вполне
характеризуется поведением во времени / некоторого набора конечного
числа п функций одной переменной /:
e(o=(a(o,e2(o,...,e^(o).
Подобные системы обычно описываются обыкновенными
дифференциальными уравнениями (одним или несколькими) относительно 2(0 и
называются системами с сосредоточенными параметрами (ССП), или,
короче, сосредоточенными системами.
Модели большого числа самых различных объектов управления
могут быть с достаточной для практических целей точностью отнесены к
классу ССП.
Общей особенностью ССП является описание управляемых
процессов в терминах величин, не отражающих в явной форме влияние
пространственной протяженности объекта на его характеристики.
Поскольку на практике любой технический объект управления имеет
вполне определенные геометрические размеры, то функция,
характеризующая его состояние, вообще говоря, изменяется в пределах
пространственной области, занимаемой объектом, и, следовательно, зависит не
только от времени, но и от вектора jc пространственных координат, являясь
функцией Q{x,t) по меньшей мере двух аргументов (если х - скалярная
переменная).
Если зависимость Qotx пренебрежимо мала, то такой объект можно
отнести к типу ССП. В противном случае этого нельзя сделать без
существенных погрешностей в описании управляемых процессов или даже без
потери их качественных особенностей.
В роли управляемой величины в такой ситуации необходимо
рассматривать "целиком" все пространственное распределение функции
состояния объекта, т.е. ее значения во всех точках занимаемой объектом
пространственной области на всем протяжении процесса во времени. По
существу, здесь приходится иметь дело, в отличие от ССП, с бесконечным
числом управляемых величин (по числу точек в рассматриваемой
пространственной области) й(/), 62(0» бз(^)-' каждая из которых характе-
10
ризует поведение объекта в соответствующей фиксированной точке х.
Подобные системы, состояние которых описывается функциями
нескольких аргументов, зависящими как от времени, так и от пространственных
координат, получили название систем с распределенными параметрами
(СРП), или, короче, распределенных систем.
Строго говоря, практически любой реальный объект управления
представляет собой СРП, и лишь в частных (хотя и достаточно часто
встречающихся на практике) случаях его можно с некоторыми
малостеснительными допущениями и пофешностями отнести к тип^/ ССП.
Необозримое по своему разнообразию число реальных управляемых процессов,
описываемых пространственно-временными характеристиками
физических полей различной природы (электромагнитное и температурное поля,
поля конценфаций, перемещений, деформаций, напряжений, скоростей,
давлений, потенциалов и т.д.), относится к "собственно" СРП, для
которых пренебрежение просфанственной зависимостью функции состояния
приводит к потере принципиальных свойств объекта и следовательно,
становится невозможным.
В качестве типичного и весьма наглядного примера рассмофим
характерную и широко распросфаненную в самых различных офаслях
промышленности проблему управления нафевом массивных
металлических заготовок перед последующими технологическими операциями
обработки давлением (прокатка, прессование, штамповка и др.).
Состояние управляемого объекта характеризуется здесь переменным
во времени температурным полем по всему объему заготовки. При
интенсивном ее нафеве внешним тепловым потоком создается значительная
пространственная неравномерность распределения температуры, которую
необходимо учитывать ввиду достаточно жестких требований к точности
достижения заданных конечных температурных кондиций, определяемых
фебованиями последующего процесса пластической деформации нафе-
тых заготовок. Если нафев производится во время движения столба
заготовок через печь непрерывного действия, то сам принцип ее работы
базируется на неравномерном распределении температуры по длине нафева-
тельной установки. Адекватное моделирование температурного поля
возможно в таких случаях только в рамках его описания в качестве СРН.
Лишь в некоторых случаях, когда конкретные характеристики
процесса нафева в совокупности с технологическими фебованиями
позволяют пренебречь температурными фадиентами по объему заготовки,
можно офаничиться описанием только средней температуры нафеваемо-
го тела в терминах соответствующей ССП.
К числу СРП относится широкий круг типичных управляемых
объектов, охватывающих, в частности, как фадиционные, так и новейшие
технологии в самых различных областях техники, зачастую практически
нереализуемые с требуемыми качественными показателями без посфоения
соответствующих систем автоматического управления, что и явилось
11
главным стимулом к созданию теории и методов управления СРП.
Задачи управления СРП оказываются качественно более сложными
по сравнению с ССП ввиду целого ряда принципиальных особенностей.
Укажем некоторые из них.
1. Состояние СРП, определяемое функцией нескольких переменных,
описывается, соответственно, дифференциальными уравнениями не в
обыкновенных, а в частных производных (содержащими производные
функции состояния как во времени, так и по пространственным
координатам), интефальными уравнениями, а также "гибридными" системами
уравнений различной природы, включая в качестве дополнительных
соотношений и обыкновенные дифференциальные уравнения. Это
обстоятельство приводит к математическим моделям СРП, качественно
отличающимся от типичных представлений, используемых в ССП.
2. По сравнению с ССП принципиально расширяется класс
управляющих воздействий, прежде всего за счет возможности включения в их
число пространствено-временных управлений, описываемых подобно
управляемому состоянию СРП, функциями нескольких аргументов -
времени и пространственных координат.
Применительно к таким воздействиям становится непригодной
стандартная техника исследования ССП.
3. Формулируемые применительно к
пространственно-распределенным функциям состояния и управляющим воздействиям в СРП даже
традиционные в содержательном плане постановки задач управления
характеризуются рядом отличий, не имеющих аналогов в задачах управления
ССП.
4. Указанные выше особенности приводят к необходимости далеко не
тривиальных обобщений важнейших категорий теории управления на
случай систем с распределенными параметрами и по существу требуют
создания нового аппарата для их анализа и синтеза на базе
нетрадиционных для теории управления математических средств.
5. Задача реализации систем управления объектами с
распределенными параметрами резко усложняется по сравнению с ССП как за счет
необходимости осуществления пространственно-распределенного
контроля состояния объекта в целях наблюдения за результатами процесса
управления и использования соответствующих сигналов обратных связей,
так и за счет необходимости построения регуляторов с пространственно-
распределенными управляющими воздействиями.
Сказанное уже в достаточной степени отражает серьезные трудности,
возникающие при разработке методов анализа, синтеза и реализации
систем управления объектами с распределенными параметрами. Решение
этой, несомненно, весьма сложной и актуальной проблемы возможно
лишь путем сочетания фундаментальных исследований в области общей
теории управления и значительных усилий по поиску нестандартных
инженерных решений.
12
\ § 1.2. Примеры задач управления СРП
\ Приведем в качестве иллюстрации высказанных выше положений
некЬторые характерные примеры задач управления СРП.
Толчком к развитию общей теории СРП стали актуальные
практические задачи, в числе первых из которых были сложные проблемы
управления нестационарными температурными полями применительно, прежде
всего, к технологическим процессам нафева металла перед
последующими операциями пластической деформации [6]. В настоящее время это
направление в прикладной теории СРП является наиболее разработанным,
что находится в соответствии с большой практической значимостью и
широким использованием на производстве самых разнообразных
технологий, связанных с тепловым воздействием на обрабатываемые
материалы [6, 7, 10, 11,31].
При необходимости учета пространственной неравномерности
температурного распределения температурное поле 6(x,/) нагреваемого
твердого тела в зависимости от времени / и вектора пространственных
координат X описывается дифференциальным уравнением второго
порядка в частных производных, широко известным под названием уравнения
теплопроводности или уравнения Фурье [24,28, 30,45].
Для удовлетворительного по точности моделирования
рассматриваемого процесса в различных конкретных условиях могут использоваться
соответствующие различные по сложности модификации уравнения
Фурье.
Уравнение теплопроводности может содержать дифференциальные
операторы по пространственным переменным различного вида в
зависимости от формы нафеваемого тела и от характера его перемещения в
пространстве; оно может быть одно- или многомерным (в зависимости от
числа учитываемых координат неравномерного пространственного
распределения температур в составе вектора дс); линейным или нелинейным
(соответственно, если не учитываются или учитываются различные
нелинейности в описании температурного поля); однородным или
неоднородным (если отсутствуют или, наоборот, на исследуемый процесс
воздействуют внутренние источники тепла).
Наконец, это уравнение может дополняться различными условиями
однозначности определения его решений - краевыми условиями для
начального температурного состояния и на границах 5 пространственной
области D в пределах объема нафеваемого тела в соответствии с
различными возможными способами реализации внешнего теплообмена в нафе-
вательных афегатах.
В достаточно общем случае температурное поле 0(х,/) внутри
области D описывается (в терминах дивергенции (div) и фадиента (grad)
соответствующих векторов по пространственным переменным) много-
13
мерным, нелинейным и неоднородным уравнением Фурье следующего
вида:
С1 = div(?Lgradе(х,t))-ciVgrade(jc,/) + /,9), ^ I .
jceD, />0, !
которое получается из рассмотрения условий теплового баланса в
элементарном объеме нагреваемого тела [24, 26, 30]. Здесь с,у, А. - теплофизи-
ческие параметры нагреваемого материала, соответственно, удельная
теплоемкость, плотность и коэффициент теплопроводности, зависящие,
вообще говоря, от температуры; V - вектор скорости перемещения
заготовки в нагревательном агрегате; F - функция, характеризующая удельную
мощность внутренних источников тепла.
Уравнение (I) в частных производных описывает объект с
распределенными параметрами (ОРП) с функцией состояния Q{Xyt)^ Э(х,/),
подобно тому как объект с сосредоточенными параметрами (ОСП),
характеризуемый функцией состояния Q{t), описывается обыкновенным
дифференциальным уравнением дт-го порядка или системой п таких
уравнений первого порядка относительно Q{t).
Для получения однозначного решения уравнения (1) необходимо, как
и в случае описания ОСП обыкновенными дифференциальными ураЬне-
ниями, задать начальные условия
e(x,OUo=^(^'0)=QoW. ^€D, (1.2)
предполагающие, что распределение температуры 9(дс,0) в начальный
момент времени / = О по всей области Д включая ее границу (как
правило, поверхность нагреваемого тела), совпадает с заданной функцией
00 W.
Однако условия однозначного решения уравнения в частных
производных не исчерпываются, в противовес обыкновенным
дифференциальным уравнениям, только начальными условиями. Здесь необходимо
дополнительно задать еще и граничные условш [24,30]
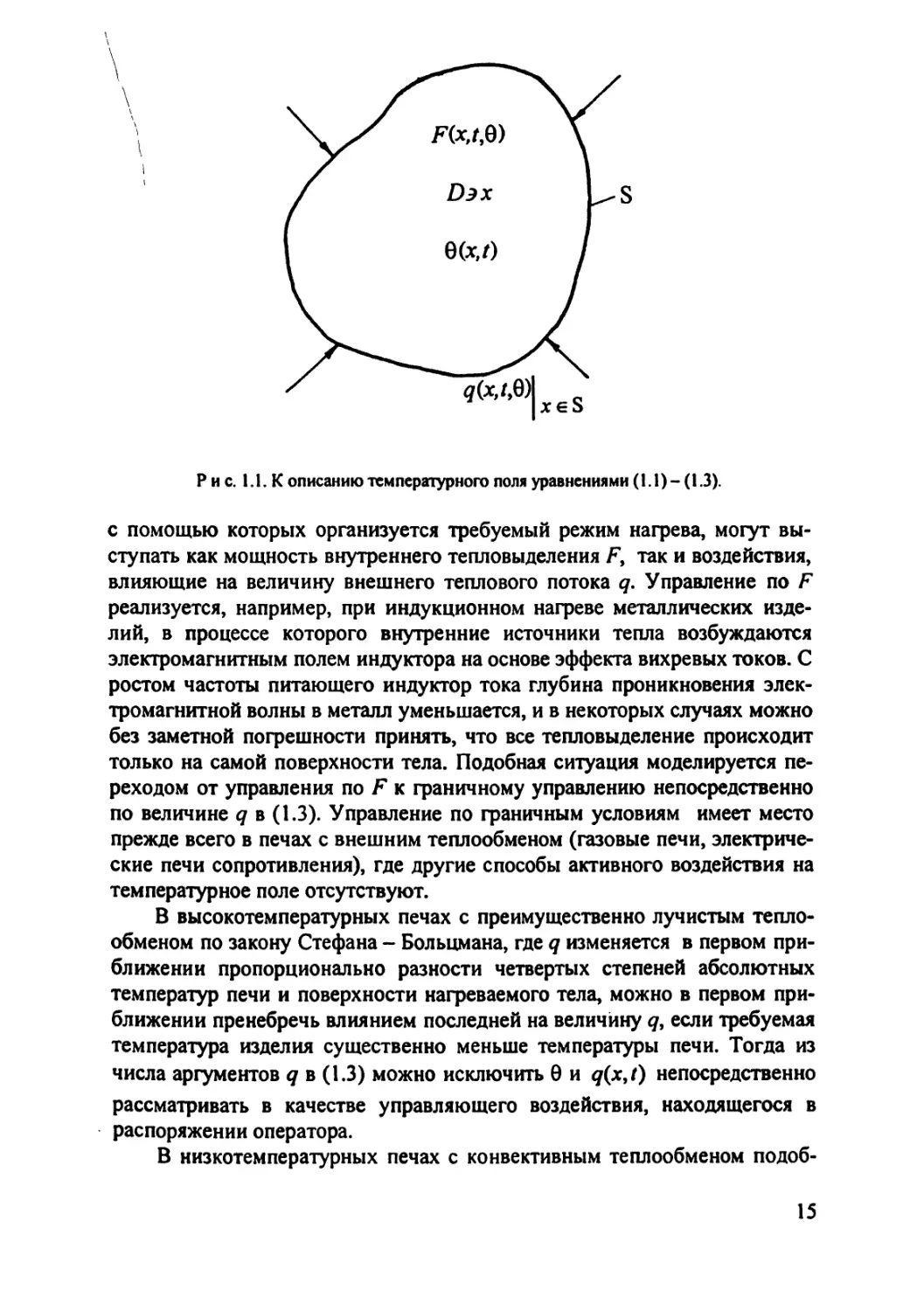
-Xgrade(x,/) = ^(e,x,/), х€5, />0, (1.3)
утверждающие, применительно к (1.1), равенство плотностей внешнего
(7(9, X,/) и внутреннего -Л. grad 9 тепловых потоков на поверхности S
нагреваемого тела (рис. 1,1).
Здесь q считается известной функцией своих аргументов.
В зависимости от типа используемых нагревательных установок в
роли находящихся в распоряжении оператора управляющих воздействий,
14
Р и с. 1.1. к описанию темперапурного поля уравнениями (1.1) - (1.3).
С ПОМОЩЬЮ которых организуется требуемый режим нагрева, могут
выступать как мощность внутреннего тепловыделения F, так и воздействия,
влияющие на величину внешнего теплового потока q. Управление по F
реализуется, например, при индукционном нагреве металлических
изделий, в процессе которого внутренние источники тепла возбуждаются
электромагнитным полем индуктора на основе эффекта вихревых токов. С
ростом частоты питающего индуктор тока глубина проникновения
электромагнитной волны в металл уменьшается, и в некоторых случаях можно
без заметной погрешности принять, что все тепловыделение происходит
только на самой поверхности тела. Подобная ситуация моделируется
переходом от управления по F к граничному управлению непосредственно
по величине q в (1.3). Управление по граничным условиям имеет место
прежде всего в печах с внешним теплообменом (газовые печи,
электрические печи сопротивления), где другие способы активного воздействия на
температурное поле отсутствуют.
В высокотемпературных печах с преимущественно лучистым
теплообменом по закону Стефана - Больцмана, где q изменяется в первом
приближении пропорционально разности четвертых степеней абсолютных
температур печи и поверхности нагреваемого тела, можно в первом
приближении пренебречь влиянием последней на величину если требуемая
температура изделия существенно меньше температуры печи. Тогда из
числа аргументов в (1.3) можно исключить в и q(Xyt) непосредственно
рассматривать в качестве управляющего воздействия, находящегося в
распоряжении оператора.
В низкотемпературных печах с конвективным теплообменом подоб-
15
ное пренебрежение влиянием температуры изделия на величину
теплового потока чаще всего недопустимо, и тогда в роли управляющего
воздействия следует рассматривать температурное распределение в рабочем
пространстве печи Qfj(Xyt\xeS при наличии явной зависимфти
q{Q,x,0 OTQfj{x,t) в (1.3).
Во многих случаях ^(0,;с,/) в (1.3) можно считать линейной
функцией разности температур печи и поверхности нафеваемого тела, и тогда
управление по Qp линейным образом включается в фаничное условие.
Если для рассмотренных управляющих воздействий в общем случае
предусматривается возможность различного характера их изменения во
времени в различных точках пространственной области локализации этих
воздействий, то такие управления следует рассматривать как
пространственно-временные, являющиеся функциями не менее двух переменных х
и /. При управлении по F здесь имеется в виду возможность варьирования
во времени произвольным образом в определенных пределах функции
распределения внутренних источников тепла по всему объему
нафеваемого тела (или определенной его части). При управлении по фаничным
условиям предполагается, что путем соответствующих воздействий
можно любым способом в допустимых пределах изменять во времени
распределение внешнего теплового потока q или температуры рабочего
пространства печи на границе S (на поверхности) нафеваемого тела.
Таким образом, пространственные области локализации F(x,i)
могут совпадать, а для q{x,t) и Qfj{x,t) - не совпадают с областью
определения пространственных переменных функции состояния 6(;с,/).
В частных, значительно более просто реализуемых и потому часто
встречающихся на практике вариантах могут использоваться
сосредоточенные управления по типу "обычных" переменных во времени
управлений в ССП, не предусматривающие пространственно-распределенного
воздействия на ОРП.
Так, выбор напряжения на индукторе в качестве управляющего
воздействия в процессе индукционного нафева означает переход к
сосредоточенному управлению во времени полной интефальной мощностью
F*(/) электромагнитных источников тепла, потребляемой от источника
питания нафеваемой в индукторе заготовкой при фиксированном
характере пространственного распределения этих источников, определяемом
закономерностями распространения в металле электромагнитной волны.
Равномерное распределение по поверхности S теплового потока q или
температуры приводит к соответствующим сосредоточенным
управлениям q{t) и 9/7 (/) по фаничным условиям.
Любые "точечные" воздействия на ОРП, осуществляемые в отдель-
16
\
\ibix фиксированных точках области его пространственной
протяженности, относятся к числу сосредоточенных. В частности, граничные
управления, локализованные в двух различных точках на границе 5, сводятся к
двум, вообще говоря, различным сосредоточенным управлениям вида
Я\\0уЯ2(0 или 6/71(0, 6я2(0> которые в частных ситуациях,
например, при симметричном относительно этих точек нагреве, могут
совпадать друг с другом. Неизменные во времени пространственно-
распределенные управления вит F(x), q{x\Qfj{x) представляют собой,
по существу, проектные решения нафевательных афегатов и не являются
управляющими воздействиями в обычном смысле этого слова,
подразумевающем по определению возможность их варьирования в
динамических режимах работы объекта.
Математическая модель процесса нафева (1.1) - (1.3) является
весьма сложной. Уравнение (1.1) с краевыми условиями (1.2) - (1.3) не имеет
в общем случае аналитического решения, и на практике, как правило,
используются с определенными допущениями упрощенные варианты
описания температурного поля.
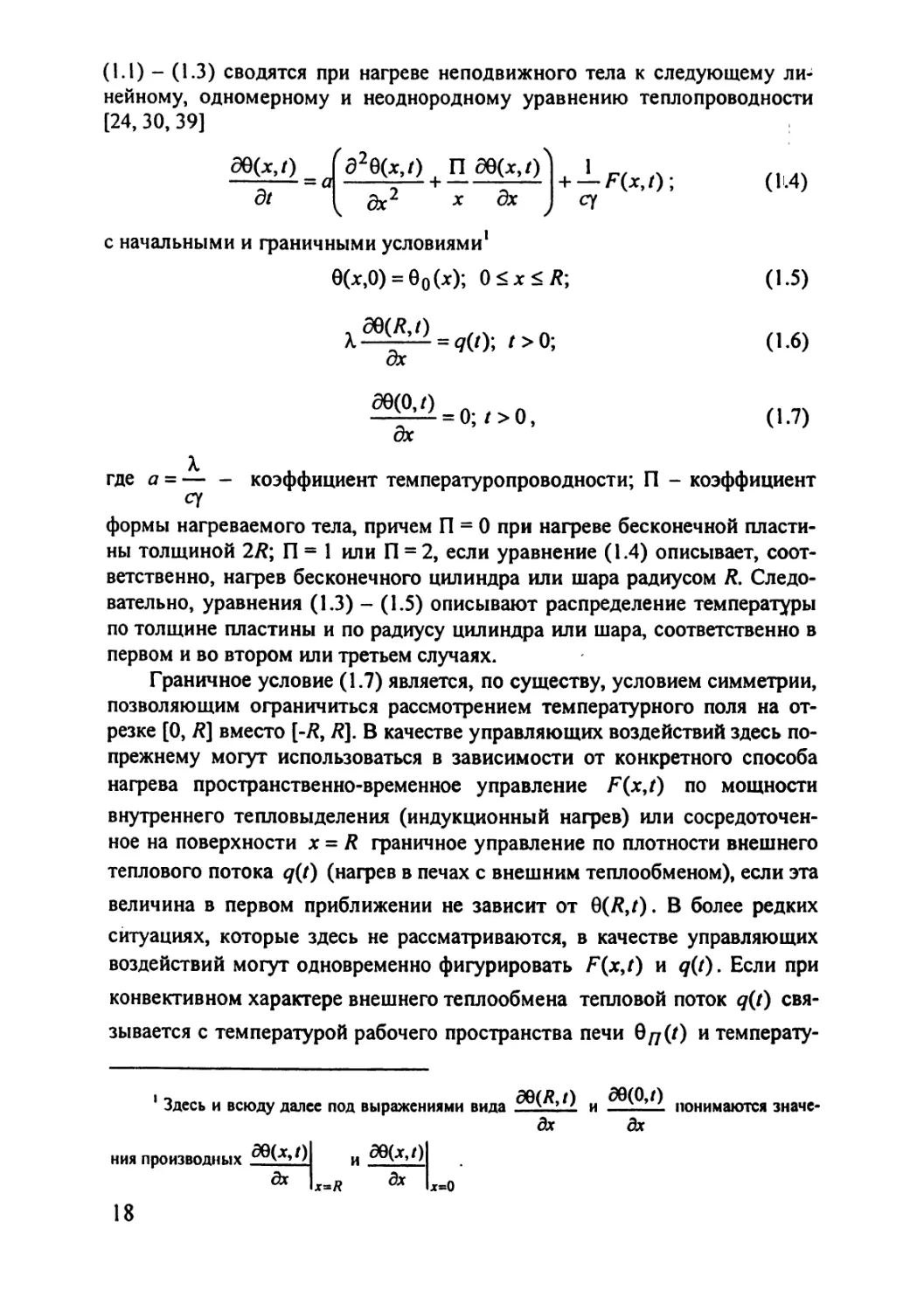
В простейших случаях часто можно офаничиться при нафеве тел
геометрически правильной формы моделированием одномерного
процесса распространения тепла на отрезке [-/?,/?]эх с симметричными
условиями на фаницах x = ±R (рис. 1.2), считая все параметры с,уД
постоянными; пренебрегая температурной зависимостью мощности
внутреннего тепловыделения и учитывая неравномерное распределение
температуры только по одной из пространственных координат. Тогда уравнения
q(t)
-Л
9
Рис. 1.2. к описанию температурного поля уравнениями (1.4)- (1.7)
17
(1.1) - (1.3) сводятся при нафеве неподвижного тела к следующему
линейному, одномерному и неоднородному уравнению теплопроводности
[24, 30, 39]
дв{х,0 ^
■ = а
а/
дЧ{х,1) ^ П dQ(x,t)
ас^ x дх
+ —F(x,0; (lU)
су
с начальными и фаничными условиями
е(х,0) = во(х); 0<л:<Л; (1.5)
X^^ = gity, ,>0; (1.6)
дх
^.0;,>0, (1.7)
дх
где а = — - коэффициент температуропроводности; П - коэффициент
формы нагреваемого тела, причем П = О при нагреве бесконечной
пластины толщиной 2/?; П = 1 или П = 2, если уравнение (1.4) описывает,
соответственно, нафев бесконечного цилиндра или шара радиусом Л.
Следовательно, уравнения (1.3) (1.5) описывают распределение температуры
по толщине пластины и по радиусу цилиндра или шара, соответственно в
первом и во втором или третьем случаях.
Граничное условие (1.7) является, по существу, условием симметрии,
позволяющим ограничиться рассмотрением температурного поля на
отрезке [О, R] вместо [-/?, Я]. В качестве управляющих воздействий здесь по-
прежнему могут использоваться в зависимости от конкретного способа
нагрева пространственно-временное управление F{xj) по мощности
внутреннего тепловыделения (индукционный нагрев) или
сосредоточенное на поверхности дг = /? граничное управление по плотности внешнего
теплового потока д{() (нагрев в печах с внешним теплообменом), если эта
величина в первом приближении не зависит от 6(/?,/). В более редких
ситуациях, которые здесь не рассматриваются, в качестве управляющих
воздействий могут одновременно фигурировать F(x,i) и q(t). Если при
конвективном характере внешнего теплообмена тепловой поток q{t)
связывается с температурой рабочего пространства печи 9/7(/) и температу-
' Здесь и всюду далее под выражениями вида ^^^'^^ и понимаются значе-
дх дх
dQ(x,t)
ния производных
дх
х=0
18
\рой 9(/?,/) поверхности нагреваемого тела известным линейным
соотношением
\ ^(0 = а{вя(0~в(/?,/)), (1.8)
где а - постоянный в первом приближении коэффициент теплопередачи,
то граничное условие (6) принимает вид
Х^?Ш + ае(Л,0 = авя(0, (1.9)
их
и вместо q(i) в качестве сосредоточенного граничного управления
следует рассматривать температуру 9/7. Когда в роли управления
фигурирует F(jc,/), чаще всего q(i) представляет собой плотноеть потока
тепловых потерь, а 9/7(/) - температуру внешней среды, относительно которой
эти потери определяются, согласно (1.8).
Очевидно, что реальные управляющие воздействия в технических
агрегатах с ограниченными энергетическими ресурсами и конструктивными
возможностями могут изменяться лишь в определенных пределах.
Соответствующие условия обычно выражаются в форме ограничении на
управления типа неравенству которые применительно к ОРП (1.4) - (1.9) в
простейшем случае принимают следующий вид:
<F{x,t)^F^^,xe[0,Rl ie[OJ];
или
<q(t)<q^, /€[0,Г]; (1.10)
в/7тш^вя(0^в/7^ах, ^€[0,7].
Здесь fn^in, F^ax. ^min. ^max И Qprnm^ ^Ятах характеризуют
предельно допустимые значения управлений, определяемые возможностями
конкретного производственного агрегата.
Основной технологической целью процесса нагрева металлических
изделий перед обработкой давлением, описываемого уравнениями (1.4) ~
(1.10), является получение в некоторый конечный момент времени / = Г
заданного, отличного от 9o(jc), распределения 9*(х) температуры по
объему нафеваемого тела, диктуемого, вообще говоря, технологией
последующих операций пластической деформации. Если пофебовать
точного выполнения этого условия, то задача нафева изделия до заданной
температуры формулируется в виде соответствующего соотношения для
конечного состояния QiXyT) рассмафиваемого ОРП:
19
0(jc,r) = e (xlO<x<R, (l.ll)
и речь, следовательно, идет о подборе таких конкретных управляющих
воздействий выбранного типа, которые и обеспечивают выполнение
этого равенства для всех д: е [О, R].
Подобные задачи получили в теории управления название задач с
фиксированным концом траектории, и возможности их решения прямо
связаны с проблемой управляемости объекта, т.е. с исследованием
условий существования управляющих воздействий заданного класса,
обеспечивающих перевод объекта из заданного начального в требуемое
конечное состояние за конечное время. Для ОРП данная проблема оказывается
намного сложнее, чем для ОСП. Применительно к рассматриваемому
примеру даже наиболее типичные по технологическим требованиям
конечные распределения температур 0*{х) часто оказываются
недостижимыми для реализуемых управляющих воздействий.
Так, при граничном управлении возможно получить лишь
приближенное решение задачи точного "попадания" в заданное равномерное
температурное распределение 9* s const > Bq , а при управлении по
мощности внутренних источников тепла такая задача неразрешима даже
теоретически, поскольку ОРП' (1.4) - (1.10) в большинстве практичерки
встречающихся ситуаций неуправляем в этом случае относительно такого
конечного состояния [39].
Поскольку условия реальных технологий всегда связаны с
существованием определенных допусков на отклонение от заданного
температурного поля 9*(х), можно существенно упростить задачу, офаничиваясь
заданием некоторой допустимой пофешности отклонения от 9*(x).
Наибольшее распространение на практике получили среднеквадратичные
оценки такой пофешности, и при допустимой ее величине, равной ,
требование (1.11) заменяется менее жестким условием
ix,T)-Q(x)
x"dx<^c^ . (1.12)
О
Однако достижение даже весьма малых значений р^^ не гарантирует
выполнение технологических требований, которые обычно
формулируются в виде допустимого максимума абсолютного отклонения конечной
температуры от заданной по всему объему нафеваемого тела, поскольку
минимизация не исключает локальных "выбросоёв" температуры в
отдельных точках. Этим требованиям прямо отвечает другой способ
оценки допустимой пофешности отклонения 9(д:,Г) от Q*{x) по задан-
20
ной величине 8 ошибки равномерного приближения к заданному
температурному состоянию:
max \q{xJ)-Q\x) <г. (1.13)
Х€[0./?]
Очень часто задача достижения конечного состояния ОРП,
диктуемого условиями (1.11) - (1.13), существенно усложняется дополнительными
требованиями к поведению температурного поля на протяжении всего
процесса управления, формулируемыми в виде соответствующих фазовых
ограничений. Эти требования обосновываются достаточно жесткими
технологическими инструкциями, гарантирующими получение конечной
продукции с заданными качественными показателями.
Наиболее характерным для процессов нагрева металла под обработку
давлением является фазовое ограничение на максимальную температуру:
max 6(дс,/)<едоп,/е[0,7']. (1.14)
Превышение температурного предела 9доп в процессе управления
ОРП может привести, в частности, к недопустимому по технологии
оплавлению поверхности нагреваемого изделия, а также к необратимым
структурным изменениям и снижению прочностных характеристик
нагреваемого материала.
Как правило, в процессе нафева во избежание трещинообразования
не должны быть превышены предельно допустимые значения Сд^п
растягивающих термонапряжений а(;с,/), весьма сложным образом зависящих
от температурного состояния объекта:
max а(дс,0^адоп, te[OJ], (1.15)
x£[0,R]
Часто требуется Офаничить в процессе нафева температурные фа-
диенты, скорости нафева и т.д.
Как правило, существует бесконечное множество допустимых по
условиям (1.10) - (1.15) управляющих воздействий, обеспечивающих
достижение требуемого конечного температурного состояния с заданной
точностью, согласно, например, соотношениям (1.12) или (1.13). В такой
ситуации естественным образом возникает проблема выбора на
множестве допустимых вариантов, гарантирующих получение требуемых
температурных кондиций нафеваемого изделия, такого режима нафева,
которому соответствуют наилучшие технико-экономические показатели
управляемого процесса в заранее обусловленном смысле.
В роли таких показателей чаще всего фигурируют длительность
процесса нафева, точность приближения к заданному температурному со-
21
стоянию 9 (х), расход энергии на нагрев, потери металла на
термохимические взаимодействия (потери металла в окалину), а также
характеризующие себестоимость процесса комплексные критерии, представляющие
собой, наряду с некоторыми другими составляющими, взвешенную сумму
указанных выше факторов со стоимостными коэффициентами.
В первом случае соответствующий критерий качества или критерий
оптимальности в типовой интефальной форме может быть записан в
виде
Т
У, = Jc// = r->min, (1.16)
о
а во втором, согласно (1.12) и (1.13), имеем
x^dr-^min; (1.17)
или
Л= max|e(jc,r)-e4x)|-^min. (1.18)
Х€[0,/?Р '
в случае необходимости минимизировать энергопотребление с
управлением u{t) по потребляемой мощности (внутренних источников
тепла при u{t) = F*{t) или поверхностного тепловыделения при w(/) =
= q{t) ) получим
т
•/4 = Jw(OA->min. (1.19)
о
Потери металла в окалину характеризуются функционалом
т
Уз = |/(0(/г,/))Л min , (1.20)
о
где f{Q{Ryi)) - заданная нелинейная функция температуры поверхности
нагреваемого тела [10,11].
Математическая модель ОРП, описываемая уравнениями (1.4) - (1.9);
требования к конечному состоянию объекта, заданные каким-либо из
способов (1.11) - (1.13); офаничения (1.10), (1.14), (1.15), стесняющие
поведение управляющих воздействий и температурного поля, и критерии
оптимизации процесса, выбираемые, например, в одном из указанных выше
вариантов (1.16) - (1.20), исчерпывают в совокупности все основные
исходные факторы, позволяющие сформулировать следующую характерную
22
задачу оптимального управления рассматриваемой системой с
распределенными параметрами.
Необходимо найти такое управляющее воздействие F^m-Cjc,/),
<7опт(0 или вяопт(0> называемое оптимальным управлением, и
соответствующее ему оптимальное пространственно-временное распределение
температуры Qomi^^O , которые обеспечивают перевод объекта (1.4) -
(1.7) или (1.4) - (1.9) из заданного начального состояния (1.5) в требуемое
конечное, согласно (1.11), (1.12) или (1.13), при минимально возможном
значении выбранного критерия оптимальности (например, одного из
критериев (1.16) - (1.20)) в условиях заданных офаничений вида (1.10) и
(1.14), (1.15).
При управлении по критериям (1.17) или (1.18) соответствующие
фебования (1.12) или (1.13) к конечному состоянию вообще не
предъявляются, поскольку они переводятся в сам критерий оптимизации (задача
со свободным концом траектории)
Применительно, например, к критерию (1.16) содержательная
постановка сводится к типичной задаче организации с помощью управляющих
воздействий, допустимых по заданным офаничениям энергетического,
консфуктивного и технологического характера, такого режима работы
нафевательной установки, который обеспечивает нагрев заготовок до
фебуемой температуры с допустимой точностью за минимально
возможное в этих условиях время.
Сформулированная задача оптимального управления заключается, по
существу, в определении такой профаммы изменения управляющих
воздействий во времени или во времени и просфанстве (для
сосредоточенных или просфанственно-временных управлений соответственно),
которая наилучшим в определенном смысле образом обеспечивает перевод
ОРП от одного его состояния к другому. Подобная проблема относится к
задачам оптимального программного управления, решение которых
оптимизирует программную траекторию движения управляемых систем.
При посфоении замкнутых систем оптимального управления возникает
значительно более сложная задача синтеза оптимальных обратных
связей, заключающаяся в определении оптимальных управляющих
воздействий как функции от просфанственно-временного распределения
температуры.
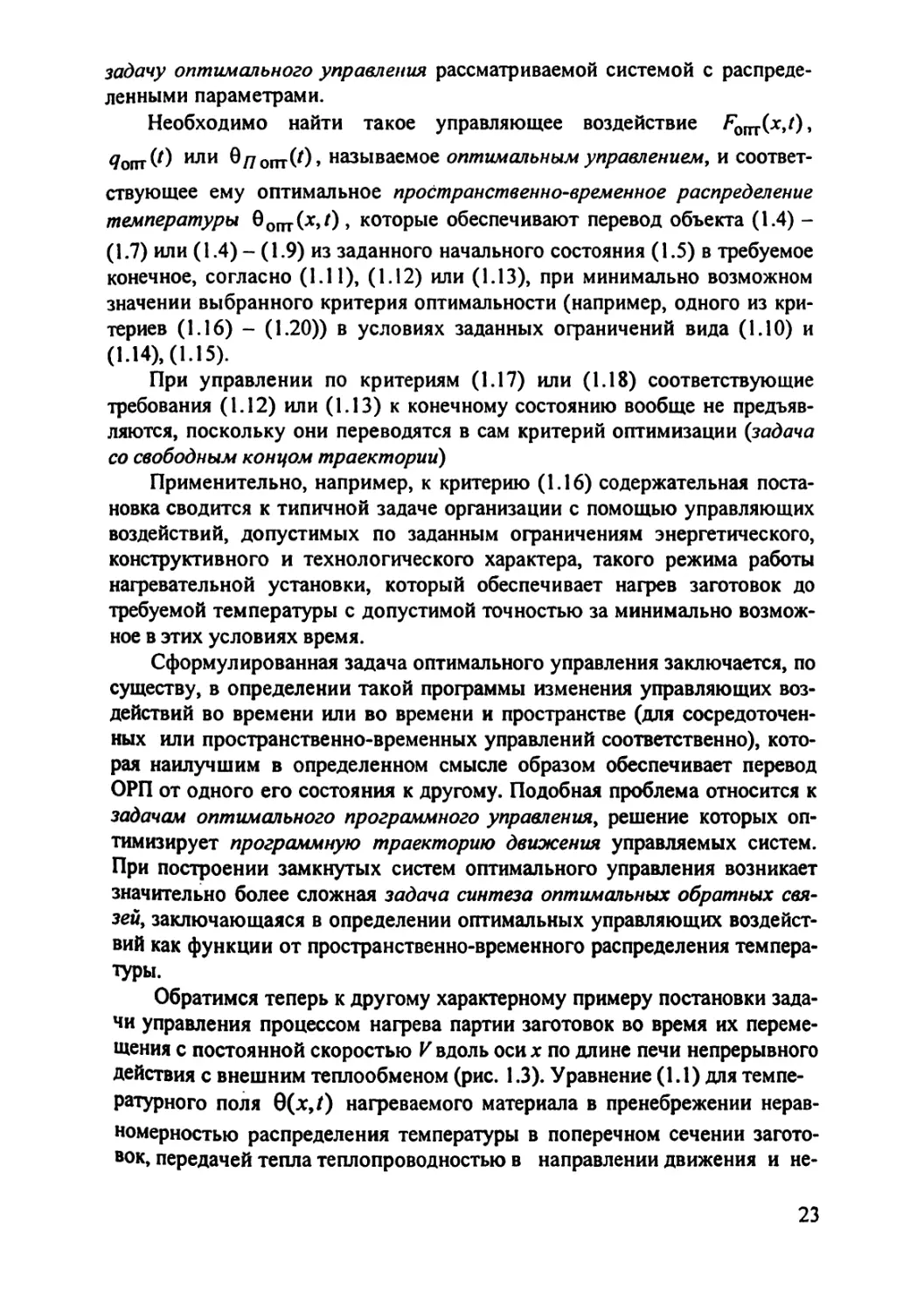
Обратимся теперь к другому характерному примеру постановки
задачи управления процессом нафева партии заготовок во время их
перемещения с постоянной скоростью ^ вдоль оси X по длине печи непрерывного
действия с внешним теплообменом (рис. 1.3). Уравнение (1.1) для
температурного поля 9(jc,/) нафеваемого материала в пренебрежении
неравномерностью распределения температуры в поперечном сечении
заготовок, передачей тепла теплопроводностью в направлении движения и не-
23
Рис. 1.3. Схема процесса нагрева металла в печи непрерывного действия:
/ - печь; 2 - партия нагреваемых заготовок
ПОСТОЯНСТВОМ параметров процесса предельно упрощается и принимает
при конвективном характере теплопередачи следующий вид [6, 7, 10, 31]:
0<д:</ , Г >0,
(1.21)
где Ъ - коэффициент, определяемый геометрическими и теплофизически-
ми характеристиками нагреваемого материала; / -длина печи, и в
качестве управляющего воздействия рассматривается пространственно-
временное распределение температуры Qfj(x,t) рабочего пространства
печи.
Уравнение (1.21) дополняется начальным для / = О и фаничным для
входа печи х = 0 условиями:
е(дс,0) = ео(:с),0<д:</;
9(0,0 = 6^0,/>0.
(1.22)
(1.23)
24
"Холодные" заготовки, поступая в печь с температурой 6^(0 на ее
входе (х = 0), нагреваются до требуемой температуры 9* по мере
продвижения к выходу дг = / за время х = / / F , создавая в установившемся
режиме работы агрегата с неизменной во времени температурой рабочего
пространства температурные градиенты по длине афегата,
обусловленные разной длительностью пребывания заготовок в печи на разном
удалении от ее входа. Таким образом, пространственная неравномерность
температурного распределения образуется в данном случае непосредственно
по самому принципу работы печи непрерывного действия, и пренебречь
ею даже в самом фубом приближении невозможно без потери основных
качественных особенностей процесса. В данном случае пространственная
распределенность функции состояния обусловливается самим способом
функционирования объекта, диктующим его описание именно в терминах
СРП.
Уравнения вида (1.21)-(1.23) моделируют в первом приближении
поведение целого класса широко распространенных в промышленности
"собственно" ОРП, характеризуемых взаимным перемещением потоков
энергоносителей и обрабатываемых материалов [6, 7, 16, 17, 31, 48, 50,
51]. Не случайно, что именно на примере ОРП (1.21) -(1.23) начались
инициированные практическими потребностями исследования в области
управления системами с распределенными параметрами [6].
В стационарном режиме работы нафевательной установки
непрерывного действия с неизменным во времени распределением температуры
по длине печи на ее выходе х = / устанавливается конечная температура
0(/), равная заданной 9*. Однако в реальных производственных
условиях стационарный режим часто нарушается глубокими возмущающими
воздействиями, связанными прежде всего с перерывами в работе афегата
или изменениями его производительности, т.е. с уменьшением до нуля
или вариацией в определенных пределах скорости движения V потока
нафеваемого материала, а также с изменением номенклатуры нафевае-
мых изделий по их размерам или значениям теплофизических параметров,
формально учитываемым соответствующей вариацией коэффициента b в
уравнении (1.21).
В таких условиях основная цель процесса управления
рассматриваемым ОРП заключается в снижении до допустимого уровня возникающих
отклонений выходной температуры 9(/,/) от заданной 9* путем
парирования указанных возмущений за счет соответствующей реакции
управляющего воздействия 9/7 (дг,/) . Подобно (1.12), (1.13), как правило, здесь
можно использовать формальные оценки этого отклонения по величине
квадратичной или абсолютной пофешности приближения на заданном
временном интервале [0,7] переходного процесса (вместо пространствен-
25
ного интервала [О, /?] в (1.12) и (1.13)):
т
[е(/,о-в*
2
c//->min; (1.24)
или
Jn = max е(/, О - б -> min . (1.25)
te[OJ]
На управляющее воздействие накладывается ограничение, например,
вида (1.10):
бятш <ея(ДС,/)<еятах> Х€[0,/], / €[0,П . (1.26)
При необходимости следует учесть фазовые ограничения, в
частности, на максимальную температуру типа (1.14):
тахе(х,0<едоп, /€[0,П. (1.27)
Х€[0,/]
Если теперь потребовать от системы управления минимизации
отклонений (1.24) или (1.25) в условиях (1.26), (1.27), то возникает
следующая постановка задачи оптимального управления рассматриваемым ОРП.
Для ОРП (1.21) - (1.23) необходимо найти такое управляющее
воздействие 9/7опт(^»05 стесненное офаничениями (1.26) -(1.27), которое
обеспечивает достижение минимального значения критерия
оптимальности (1.24) или (1.25) при воздействии возмущений по величине b и V в
уравнении (1.21).
Сформулированная проблема относится к числу задач оптимальной
стабилизации около заданного состояния ОРП в противовес задаче
оптимального программного управления с переводом ОРП из одного
состояния в другое, рассмотренной в предыдущем примере.
Каждому определенному виду из указанных возмущений
соответствует свое "профаммное" решение задачи оптимальной стабилизации в
форме явной зависимости ^пот^^у^) ^'^ своих аргументов, В условиях
недетерминированного по своей природе характера возмущений для ОРП
рассматриваемого типа задача оптимальной стабилизации ставится чаще
всего в форме синтеза оптимальных обратных связей и решается в
рамках построения соответствующей замкнутой системы управления СРП, в
определенной степени компенсирующей влияние различных помех.
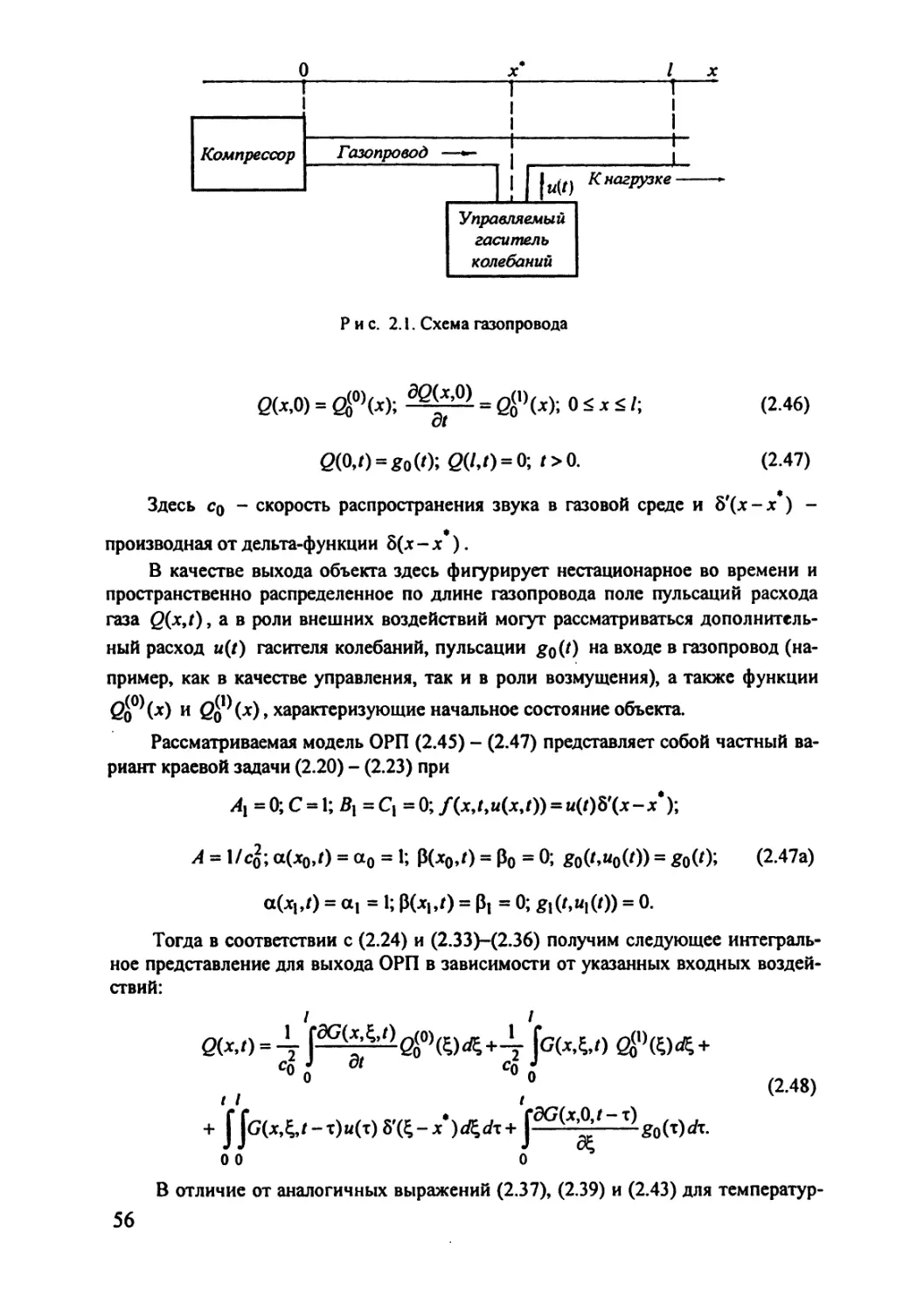
В качестве третьего примера рассмотрим ОРП другой физической
природы. Практически очень важной является проблема гашения
пульсаций давления и расхода газа в длинных трубопроводах, существенно
снижающих К.П.Д. газокомпрессорных установок, резко усложняющих их
наладку и эксплуатацию и часто являющихся причиной создания
аварийных ситуаций. В первом приближении распределение пульсации расхода
26
газа Q(xj) во времени / и вдоль оси х по длине трубопровода могут
быть описаны следующим волновым уравнением математической физики
второго порядка в частных производных [7, 8,28, 45]:
2!2М.^^^,„<,<,,>о. (1.2S,
дГ дх^
где Со - скорость распространения звука в газовой среде.
Пусть заданы начальные пространственные распределения пульсаций
и скоростей их изменения:
Qixfi):=Qo(xy, ^^ = а(;с), 0<х</. (1.29)
Пусть далее фаничные условия на входе в трубопровод при дг = О и
на его конце л: = / имеют вид
е(0,0 = «(0, е(/,/) = 0;/>0. (1.30)
Здесь величина пульсации во входном сечении трубопровода
рассматривается в качестве сосредоточенного управляющего воздействия г/(/),
стесненного офаничением
u^^<u{i)<u^^,te{OJ), (1.31)
а условие на выходе л: = / означает, что пульсации расхода на конце
трубопровода отсутствуют.
Теперь можно сформулировать задачу управления функцией
состояния Q{Xyt) рассматриваемого объекта как следующую задачу гашения
начальных отклонений в колебательной среде.
Требуется для ОРП (1.28) - (1.31) найти такое управляющее
воздействие !/(/), которое ликвидирует за заданное время Т создаваемые
начальными условиями (1.29) пульсации, т.е. обеспечивает выполнение
соотношений
е(х,Г) = Щ^ = 0, 0<х^1. (1.32)
ot
Если потребовать успокоения системы за минимально возможное
время Г^|„ , то соответствующая задача оптимального по
быстродействию управления сводщся к опрелелению управления Мо,п.(/),
переводящего объект (1.28) - (1.31) из заданного начального состояния (1.29) в
требуемое конечное (1.32) за минимальное в условиях (1.31) время.
В другом представляющем большой практический интерес варианте
можно в качестве управляющего воздействия рассматривать объемный
расход, создаваемый управляемым гасителем колебаний, подсоединен-
27
ным к газопроводу в некоторой фиксированной точке х g [О,/] [7, 8].
В целом ряде ситуаций адекватное реальным объектам
моделирование СРП приводит к ее описанию системой дифференциальных
уравнений, часть из которых может быть записана в обыкновенных
производных. Такое положение обычно создается в тех случаях, когда поведение
ОРП характеризуется векторной функцией состояния, т.е. определяется
пространственно-временными распределениями нескольких различных
величин либо при необходимости дополнить описание объекта
уравнениями связей с реализуемыми управляющими воздействиями.
Если, например, при управлении ОРП (1.4) - (1.7) можно, как
правило, без заметной погрешности пренебречь при индукционном нагреве
инерционностью электромагнитных процессов и рассматривать в качестве
реализуемого и произвольным образом изменяемого в пределах офани-
чения (1.10) управляющего воздействия непосредственно саму функцию
F{x,t) распределения элекфомагнитных источников тепла, то требуемые
алгоритмы управления для g{t) в (1.6) или 9/7 (/) в (1.9) часто не могут
быть реализованы в печах с внешним теплообменом, где скорости
изменения во времени теплового потока на поверхности нафеваемого тела и
температуры рабочего просфанства офаничиваются динамикой их связей
с регулируемым расходом энергоносителя w{t).
В таком случае следует считать действительным управляющим
воздействием w(t) и дополнить описание ОРП уравнениями указанных
связей, а также Офаничениями, накладываемыми на поведение н</) .
На практике широкое распространение получил приближенный
способ описания динамики процесса внешнего теплообмена обыкновенным
дифференциальным уравнением первого порядка с запаздыванием Tq,
постоянной времени В и коэффициентом передачи к:
^^+ея=М/-то).
at
Аналогичным образом температурное поле Ofj(x,t) в рабочем
просфанстве печи непрерывного действия (рис. 1.3), создаваемое
движущимся вдоль печи потоком теплоносителя, часто, в свою очередь, описывается
в первом приближении тем же уравнением вида (1.21), что и сам процесс
нафева перемещающегося в этом просфанстве материала. Если в
качестве реального управляющего воздействия w(/) можно принять, например,
температуру 9/7(0,/) теплоносителя на входе в печь (при необходимости
вместе с промежуточным звеном предыдущего типа), то при
конвективном характере теплообмена в печи с тепловыми потоками,
пропорциональными разности температур 0/7(х,/)-9(дс,/), математическая модель
28
ОРП представляется вместо (1.21) - (1.23) уже системой двух
взаимосвязанных уравнений для G(jc,/) и 6/7(х,/) с соответствующими значениями
параметров Ь, К и краевыми условиями [7,31]:
dt дх
0<л:</;/>0; (1.33)
е(х,о) = бо(х); e^(jc,o) = ЭяоW, о < ^ < /;
0(0,0=eV); вя(о,/) = 1/(0,О,
для случая одинакового направления движения греющей среды и
нагреваемого материала со скоростями и
Целый класс рассматриваемых в качестве ОРП процессов, в
частности, в теплообменных аппаратах самого различного технологического
назначения описывается подобными системами уравнений, в том числе
относительно более чем двух управляемых величин, распределенных во
времени и пространстве [6, 7, 15 - 17, 31,48, 50,51].
Требования системного подхода часто определяют необходимость
рассмотрения в качестве промышленного объекта управления целой
последовательности взаимосвязанных технологических процессов,
образующих единый производственный комплекс, характеризуемый
определенным видом конечной продукции и совокупными технико-
экономическими показателями качества.
Если в целях адекватного описания этих процессов используются
модели пространственно-временного распределения их функций состояния
Q\iXyt\Q2{x,t\,„,Qn{x,t)y п>2, то соответствующий ОРП с векторной
управляемой величиной 6(^>0 = (Qjt(^,0)» * = является характерным
примером сложной системы с распределенными параметрами,
оптимизация поведения которой по соответствующим критериям открывает
качественно более широкие возможности по сравнению с "обычными"
алгоритмами управления. В условиях максимального числа степеней свободы
для различных характеристик компонентов комплекса, оптимизируемых в
процессе поиска экстремума указанных критериев, здесь часто удается
выявить путем обоснованной декомпозиции (разделения общей задачи на
ряд отдельных для всех функций состояния ^^^(х,/)) локальные критерии
качества в отдельности для каждого из технологических процессов, найти
соответствующие оптимальные управляющие воздействия, определить
29
оптимальные параметры применяемых технологий и установить
оптимальные значения исходных данных для проектных решений
используемых производственных агрегатов. Получаемые при этом результаты
выводят возможности управляющих алгоритмов за рамки традиционных
задач "обслуживания" технологии, обеспечивая активное участие в ее
формировании путем попутного решения принципиальных проблем
разработки оптимальных технологических инструкций и оптимального
проектирования производственного участка с позиций его последующего
функционирования в оптимальном режиме.
Рассмотрим в качестве примера подобной постановки задачу
оптимизации режимов работы технологического комплекса обработки металла
давлением, предназначенного для предварительного нагрева в
индукционном нагревателе и последующего горячего прессования заготовок
цилиндрической формы на гидравлических прессах (рис. 1.4) [39]. Ввиду
определяющей роли температурного фактора комплекс "нагрев-
прессование" характеризуется прежде всего совокупностью процессов
тепловой обработки заготовок на всех стадиях технологического цикла,
включая нагрев в индукторе, передачу нафетой заготовки к прессу и
собственно процесс прессования.
X, 1
Транспортировка
—.^
Прессование
Рис. 1.4. Схема технологического пррцесса в производственном комплексе
"печь - пресс":
/ - нагреваемый слиток; 1а - нагретый слиток в процессе передачи от нагревателя к
прессу; 16 - слиток в процессе прессования; 2 - индукционный нагреватель;
3 - механизм подачи нагретого слитка в пресс; 4 - пресс; 3 - пресс-штемпель;
б - матрица; 7 - пресс-изделие
30
в данном случае, в условиях ярко выраженной пространственной
неравномерности распределения внутренних источников тепла как в
процессе нагрева, так и во время прессования, удовлетворительное по
точности описание управляемых процессов требует, как правило, перехода от
(1.4) - (1.9), по меньшей мере, к двумерным моделям температурных
полей 6(x,/), x = {yyZ),c учетом неравномерности распределения
температуры в радиальном (у) и осевом (z) направлениях.
Тогда температурное поле Q\{x,t) цилиндрической заготовки в
процессе ее нагрева в индукторе в условиях конвективного теплообмена с
окружающей средой может быть в линейном приближении описано,
вместо (1.4), следующим уравнением теплопроводности в цилиндрических
координатах [24, 30, 39]:
aOiOvM)^^
dt ^
+ -F(>;,z)F*(/);
су
ду'
ду
(1.34)
Q<y<R\ 0<z<l;0<t<ti\
с краевыми условиями
(1.35)
ду
X^5l%^ = a2(9,(/)-9,(>',/,0);
OZ
-х^^1^=аз(е,(0-9,(М0);
ду
Q^iy^zfi) = Oioiy^zX OuyuR;0^z^l. (1.36)
Здесь у HZ- соответственно радиальная и продольная пространственные
координаты; R и / - радиус и длина цилиндра; aj, аг, аз -
коэффициенты теплоотдачи, определяющие уровень тепловых потерь с боковой и
торцевых поверхностей цилиндра в окружающую среду с температурой
^с(0; Р(у*2) - функция, характеризующая распределение
электромагнитных источников тепла по объему заготовки; F*(0 - полная удельная
мощность внутреннего тепловыделения; бю - начальное распределение
температур и /j - длительность процесса нагрева заготовки в индукторе.
31
Конечное температурное состояние 9i(;;,2,/|) может существенно
измениться в результате интенсивного охлаждения заготовки за
фиксируемое конструктивными характеристиками комплекса время tj ее
передачи к прессу, начиная от момента выгрузки из нагревателя до подачи в
контейнер пресса. Соответствующее распределение температур 92(>',z,/)
в процессе транспортировки описывается в первом приближении на
последующем временном интервале [txJx-^t-p] в рамках той же модели
(1.34) - (1.35), но теперь уже для однородного уравнения
теплопроводности, вместо (1.34), при отсутствии нагрева (^*(г) = 0 , как правило, при
больших величинах тепловых потерь, характеризуемых увеличенными
значениями коэффициентов теплоотдачи а/-^^ >ajt,* = 1,2,3, и для
начального распределения температур ^i^y.z^tx), совпадающего с
конечным температурным состоянием предшествующей стадии процесса:
dt
ду
(1.37)
0<y<R; 0<z<l;ti<t<ti+lr;
X^^^^ = ar,(e,(/)-e2(«,z,/));
ду
x^^^^=an(eдo-в2(ллo);
(1.38)
Q2(y>z,t^) = Q^(y,z,tO. (1.39)
Линейная осесимметричная модель температурного поля бзО'.г.О
цилиндрической заготовки в процессе ее прессования на последующем
временном интервале [ti+t-p,t2] представляется в первом приближении
двумерным уравнением теплопроводности следующего вида [39]:
dt
d\{y,z,t) ^ 1 dQy(y,z,t) ^ d\(y,z,0
ду'
ду
dz'
-к,(,,...я)^^^-^'я(;'.^,^'я)^^^-ь
+^Fa(y.z.F^);
(1.40)
32
0<y<R; ^<z<l\tx+tj <t<t2\
с аналогичными (1.35), (1.38) граничными условиями
^^2(hLll = an2{0c2-hiyM); (1.41)
_,^№ао=аяз(е.з-ез(МО);
и начальным состоянием, совпадающим с температурным полем в конце
периода транспортирования:
03 {у, Z, t^+tr) = 02 (у, z.t^-^tr). (1.42)
Здесь в уравнении (1.40) три первых слагаемых правой части,
характеризующие дифференциальный оператор по пространственным переменным,
те же, что и в уравнениях (1.34) и (1.37); два последующих слагаемых
учитывают скорости К/ и V^^ течения металла при прессовании в осевом
и радиальном направлениях; - скорость прессования; 01пь^П2у^ПЗ
и 6сЬ^с2,9сЗ ~ соответственно значения коэффициентов теплоотдачи и
эквивалентной температуры окружающей среды для оценки тепловых
потерь с поверхности прессуемой заготовки; q(z,Vfj) - плотность
теплового потока контактного трения при прямом прессовании; FQ{y,ZyVjj) -
функция, характеризующая интенсивность и пространственное
распределение внутренних источников тепла, определяемых энергией
пластического формоизменения при прессовании; /2 - момент окончания процесса
прессования.
Выходным продуктом технологического комплекса "печь - пресс"
является пресс-изделие, длина А которого в процессе прессования
определяется уравнением
^ = кп^п'^ Kh + /г) = 0; h{t2) = Л*, (1.43)
at
где kfj - коэффициент вытяжки, и в конечный момент времени /2
фиксируется требуемая величина h = h*.
Процесс нагрева заготовки часто стесняется дополнительными офа-
ничениями вида (1.14), (1.15):
max Oi (у, 2, /) < Одоп; max а, {у, z, /) < Сдоп, О < / < /i. (1.44)
33
Поведение температурного поля в процессе прессования, как
правило, ограничивается заданным допустимым пределом G^p максимальной
температуры, достигаемой в очке матрицы пресса (рис. 1.4) (у = у^^^
2^1):
ез(уь/,0 < Экр, /I +/7- < / < /2, О < < . (1.45)
Выполнение условия (45) путем соответствующего ограничения
скорости прессования Vfj и, следовательно, интенсивности тепловыделения
FQ{y,z,V[j) за счет энергии пластического формоизменения
предотвращает при надлежащем выборе Э^р, появление основного вида
необратимого брака - трещинообразования на пресс-изделиях, и в то же время
является, согласно (1.43), одним из основных факторов, сдерживающих
производительность процесса прессования и связывающих ее с
температурным полем прессуемого металла.
Кроме того, возможность реализации процесса прессования лишь в
определенной области Q начальных температурных состояний, границы
которой определяются, в основном, силовыми возможностями пресса,
прочностью инструмента и температурным интервалом пластичности
прессуемого металла, создает ограничение на начальное температурное
состояние вида
ез(>;,2,/,+/7.)€П. (1.46)
В качестве управляющих воздействий для процессов нагрева и
прессования будем рассматривать мощность нагрева F*(/) и скорость
прессования Vfj, подчиненные офаничениям
где предельное значение Vfj^^ скорости прессования считается
известным. Уравнения (1.34) - (1.43) и офаничения (1.44) - (1.47) представляют
в совокупности математическую модель технологического комплекса "на-
фев - прессование", рассматриваемого в качестве ОРП сложной
структуры с векторной управляемой функцией состояния 6(jc,/) = (9i(y,r,0>
92(>',z,/), 9з(>^,г,0)> выходной величиной Л(/) и управляющими
воздействиями F*(/), ^^7(0» который характеризуется последовательной
сменой во времени периодов функционирования его отдельных звеньев,
связанных между собой, согласно (1.36), (1.39) и (1.42), равенствами
91(:и,2,/,) = 92(д^,2,/0; Ыу^^А +^г) = 6з(у,7,Г, +/7.) (1.48)
34
для граничных температурных распределений.
В рамках рассмотренных моделей можно сформулировать
следующую задачу управления технологическим комплексом "нагрев -
прессование".
Требуется найти оптимальные программы F*^(i)yte[0,t^^^] и
^Яоггг(^^'^^^^1опт "^^Г>^2опт1' изменения во времени мощности нагрева и
скорости прессования, а также оптимальные даительности /lo^. и
^2огтт "^1опт процессов нагрева и прессования, которые при
фиксированном времени /у- передачи заготовки от печи к прессу обеспечивают в
процессе управления объектом (1.34) - (1.43) получение пресс-изделия
заданной длины А* при экстремальном значении некоторого совокупного
критерия оптимальности в условиях ограничений (1.44) - (1.47).
В зависимости от конкретной производственной ситуации в качестве
такого критерия чаще всего рассматривается производительность
комплекса или себестоимость его продукции. Соответствующая задача
оптимального управления сводится, например, в первом случае к
минимизации длительности /* цикла обработки одной заготовки
/l=/*->min, (1.49)
где в зависимости от того, какой из элементов комплекса (печь или пресс)
сдерживает его производительность, совпадает с минимальным
временем нагрева или прессования (с учетом периода транспортирования).
Подобная постановка предусматривает свободу выбора конечных
температурных состояний 9i(>',z,/i) нагреваемой заготовки на
пересечении множеств достижимых в процессе нагрева и допустимых по условию
(1.46) вариантов для начальных распределений температуры
63(у,2,^1+/7-) перед прессованием, отличающихся от Q\{y,z,t{) только за
счет искажения температурного поля в процессе транспортирования
заготовки от печи к прессу.
Выделение оптимального состояния QionrCv^^'^l) ^ ходе поиска
^опт(0> ^^яопт(0 обеспечивает попутное определение оптимальных
значений основных параметров соответствующих технологических
инструкций (конезная температура, время нагрева и прессования заготовки),
открывая пути совместного решения задач оптимального проектирования и
управления технологическим комплексом.
Приведенные примеры наглядно демонстрируют особенности задач
управления, порождаемые пространственными зависимостями
управляющих воздействий и управляемых величин объектов с распределенны-
35
ми параметрами.
Очевидно, что для успешного решения подобных задач прежде всего
необходимо иметь достаточно полное представление о свойствах таких
объектов, во многих ситуациях принципиально отличающихся от свойств
ОСП.
При практически необозримом разнообразии конкретных видов ОРП
здесь должны быть
• выделены наиболее характерные представители, образующие
достаточно широкий класс типовых объектов и его практически
распространенных модификаций, предоставляющих
возможности их единообразного описания в рамках достаточно хорошо
изученных математических моделей;
• установлены основные свойства и способы вычисления вход-
выходных соотношений для таких моделей, связывающих
входные воздействия с соответствующей реакцией объекта;
• выявлены возможности структурного представления объектов и
систем управления с распределенными параметрами и их
описания в терминах передаточных функций;
• установлены способы расчета базовых характеристик ОРП;
• разработаны методы построения приближенных моделей
объектов управления.
Иначе говоря, необходимо прежде всего изучить свойства ОРП по
классической схеме их исследования для объектов с сосредоточенными
параметрами (проводя по возможности соответствующие аналогии),
причем этот путь должен быть проделан фактически заново, "от начала до
конца", в виду глубоких отличий ОРП от ОСП на "каждом шаге" такой
процедуры.
Последующие главы настоящего пособия посвящены методам
решения этой проблемы. Все описываемые ниже результаты общего характера
поясняются типичными примерами, большая часть которых
рассматривается применительно к объектам, рассмотренным в § 1.2.
ГЛАВА 2
МАТЕМАТИЧЕСКИЕ МОДЕЛИ
ТИПОВЫХ ОБЪЕКТОВ И СИСТЕМ УПРАВЛЕНИЯ
С РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ
§ 2.1. Базовые уравнения объектов с распределенными
параметрами
Для широкого класса ОРП его функция состояния Q{x,t) (выход
объекта), определенная по пространственной переменной xeD в
замкнутой области D , удовлетворяет уравнению
L\Q(x,OhfM,xeD,t>0, (2.1)
где D - открытая часть области D, не содержащая ее границы; L -
некоторый заданный линейный, вообще говоря, интегро-дифференциальный
оператор (линейная функция Q , частных производных от 2 по х и /
различных порядков и интегралов от g по х, / или (и) х и /), конкретный вид
которого целиком определяется содержанием описываемого процесса для
рассматриваемого выхода Q(x,t) с учетом принимаемых допущений;
f{x,t)- известная функция, характеризующая внешнее воздействие на
процесс, которая может рассматриваться в качестве входа ОРП,
Уравнение (2.1) называется однородным или неоднородным, если /(jc,0 = 0 или
/(jc,0^0 соответственно.
Если Q(x,t) - векторная функция состояния Q{x,t)^{Qi{x,t)),
/ = 1,«, в качестве которой рассматривается совокупность п различных
выходных величин Q\{x,t),Q2{x,t),„.,Q^(x,t), то соответствующее
векторное уравнение (2.1) представляет собой систему п операторных
уравнений относительно Qi{x,i).
Для большей наглядности и простоты всюду далее в настоящем
параграфе будем считать, что ОРП описывается единственным уравнением
(2.1) для одной функции Q{x,t),
Как уже отмечалось выше, в большинстве практических задач
управления поведение ОРП описывается в терминах дифференциальных
уравнений в частных производных, которые, по существу, являются
математической формой записи фундаментальных законов сохранения вещества
и энергии в элементарном объеме, и в таком случае L в уравнении (2.1)
представляет собой дифференциальный оператор.
Для получения единственного решения уравнение (2.1) необходимо
дополнить начальными условиями, подобно случаю описания ССП обык-
/
37
новенными дифференциальными уравнениями.
Аналогично (2.1), начальные условия в достаточно общем случае
описываются некоторым линейным оператором N
^ix,0]^QQ(xlxeD,t = 0 (2.2)
при заданной (возможно, векторной) начальной функции Qq{x) ,
описывающей с требуемой полнотой распределение в D состояния ОРП в
начальный момент рассматриваемого процесса управления. Начальные
условия (2.2) называются нулевыми или ненулевыми, если Qo{x) = 0 или
Qo{x)4^0 соответственно.
Условие (2.2) необходимо, но не достаточно для выделения
единственного решения уравнения (2.1), что является принципиальной
особенностью СРП по сравнению с ССП.
Полная система дополнительных соотношений, как правило, должна
содержать еще граничные условия для Q{x,t), которые характеризуя
взаимодействие Q{x,t) с внешней средой, должны выполняться для />0
на границе dD области D :
Ф(^>0]= gix,0, xedD,t>0, (2.3)
Здесь Г - соответствующий линейный оператор, а g(jc,/) - внешнее
воздействие, которое также можно рассматривать как второй вход объекта,
наряду с f(x,i).
Граничные условия (2.3) называются однородными или иеоднород-
ньши, если g(x,O = 0 или g{x,t)^Q соответственно.
Уравнения (2.1)-(2.3) с заданными линейными дифференциальными
операторами 1,МиГ, составляющие краевую задачу, можно
рассматривать в совокупности как базовую модель для математического описания
широкого класса ОРП с управляемой выходной функцией состояния
Q{x,t) и внешними входами /(дс,/) и g(A:,/), которые могут
фигурировать как в качестве управляющих, так и (или) возмущающих воздействий.
Иногда в качестве входа объекта фигурирует начальная функция Qo(x) .
В рамках модели (2.1)-(2.3) могут рассматриваться линейные
дифференциальные уравнения в частных производных различного порядка по
различным аргументам функции состояния с постоянными или
переменными во времени и пространстве коэффициентами, описывающие в
различных, в том числе, декартовой, цилиндрической или сферической,
системах координат пространственно одномерные и многомерные,
подвижные и неподвижные объекты в областях различной геометрической
формы при наличии любых реализуемых внешних воздействий, переменных
во времени и (или) пространстве.
38
в большинстве случаев управляемые функции состояния Q(x,t)
объектов с распределенными параметрами представляют собой
пространственно-временные характеристики полей различной физической природы и
поэтому во многих случаях с удовлетворительной точностью, по крайней
мере с точки зрения качественного поведения функции состояния,
описываются в первом приближении хорошо изученными линейными
дифференциальными уравнениями математической физики вида (2.1),
моделирующими основные физические явления.
В силу этих обстоятельств в качестве базовой модели ОРП
рассматриваются именно линейные краевые задачи (2.1)-(2.3), допускающие
максимальные возможности для их аналитического исследования и
получения фундаментальных результатов общего характера.
Далее везде будем рассматривать только детерминированные модели
ОРП в идеализированном варианте точно известных операторов в
(2.1>-(2.3), хотя на практике, как правило, можно говорить лишь о той или
иной степени точности их задания.
Чаще всего основные уравнения математической физики имеют
порядок не выше второго (по номеру старшей частной производной в
составе дифференциального оператора L).
Для простейшего случая пространственной распределенности Q(x,t)
по одной координате х, изменяющейся на отрезке [xo,xi] э х (одномерный
ОРП), линейное дифференциальное уравнение (2.1) второго порядка
достаточно общего вида записывается следующим образом:
дГ oxdt дх^
+ ^,(д^,0^ + В,(дс,о¥ + С,(дс,Ое = f{x,t),
ot ox
(2.4)
где Л,В,СуЛх,ВхуС\ - заданные достаточно гладкие функции отх и
которые, в частности, могут принимать постоянные значения. В последнем
случае получаем уравнение (2.4) с постоянными коэффициентами.
В зависимости от значения дискриминанта этого уравнения
различают уравнения (2.4) гиперболического (Д<0), параболического
(Д = 0), эллиптического (Д > 0) и смешанного типов (если Д меняет знак в
области допустимых изменений xwt) [28,45].
Уравнениями гиперболического типа, содержащими в наиболее
характерных случаях вторые производные функции состояния как по
времени, так и пр/координате, описывают, в частности, колебательные
процессы различной природы (механические, электромагнитные, звуковые и
др. колебания), связанные с конечной скоростью v распространения вол-
39
новых явлений. Простейшее уравнение этого вида, получаемое из (2.4)
при B = Ai=B^=Ci=0; f{xj) = 0; /I = 1; С = -v^; А <О:
^!g = v^^!£;v^=const>0,.er.o.x.;,/>0, (2.5)
dt дх
называемое волновым уравнением, моделирует процессы распространения
свободных колебаний (например, процессы распространения со
скоростью звука v = Cq пульсаций расхода газа в длинном трубопроводе,
согласно (1.28)) и относится к числу основных уравнений математической
физики. При f{xj)^0 уравнение
^ = ^ + ДхЛ x € (хо,х,), / > О; (2.6)
dt^ дх^
описывает вынужденные колебания под влиянием внешнего воздействия
f(x,t).
Распределение напряжения и тока вдоль длинной электрической
линии описывается телеграфным уравнением гиперболического типа при
Ay>0,Ci>0 в (2.4):
§ = ^ ^ 4- 6, ^ + b,Q; b,.b,= const >0,хе (х,.х, )J>0. (2^)
дх v dt dt
где в данном случае v является скоростью распространения
электромагнитной волны вдоль линии.
В частном случае для длинных электрических линий без потерь при
il = f>2 = О уравнение (2.7) сводится к волновому уравнению (2.5). При
^2 = О, bi^O уравнение (2.7) моделирует процессы механических
колебаний в сопротивляющейся среде.
Случаю А = С = 0; В = \/2 в (2.4) соответствует гиперболическое
уравнение
— ^fix,t)^A, — ^B,-^C,Q, (2.8)
которое вместе с так называемыми условиями Гурса, накладываемыми на
функции Q(x,t), образует задачу Гурса, описывающую процессы сорбции
и десорбции газов, процессы сушки и др. [45].
К уравнениям параболического типа, чаще всего, в форме,
содержащей лишь первую производную Qix,t) по времени и вторую - по
пространственной координате, приводят задачи, связанные с процессами
теплопроводности, диффузии, с распространением электромагнитных волн, с
движением вязкой жидкости и др. Простейшим и наиболее типичным
40
представителем параболических уравнений является уравнение
теплопроводности (уравнение Фурье) математической физики:
^ = а^; a = const>0,xe(xo,x^), />0' ^^^^
9/ дх
получаемое из (2.4) при ^ = ^ = 5, = с, = 0; f(xj) = 0; /4, = 1; С = -а < 0;
Л = О (см. также (1.4))
Уравнениями вида (2.9) описываются, например, в первом
приближении температурные поля процессов нестационарной теплопроводности,
нестационарные электромагнитные поля, поля концентраций в процессах
нестационарной диффузии, тепломассопереноса и др. Неоднородные
уравнения теплопроводности при /(x,t)^0 в (2.4)
¥ = ^^ + /(х,/); хе{хо,хО, />0, (2.10)
о( дх^
учитывают внешние воздействия от внутренних источников вещества и
энергии. Включение в правые части уравнений (2.9) и (2.10)
дополнительного члена с dQIdx при В\^\1х позволяет получить уравнение
теплопроводности в цилиндрической системе пространственных координат (см.
также (1.4)).
Уравнения эллиптического типа при /I = /Ij = О в (2.4) описывают, в
частности, при отсутствии производных от Q{Xyt) по /, статическое
состояние ОРП, характеризуя неизменное во времени пространственное
распределение Q{x) выходной переменной. При Л -Ах -В\-(^\
С = 1; Cj = 6^ > О получаем здесь вместо А) уравнение Гельмгольца
—~ + 6^e = /W; ^e(xo,xi), (2.11)
дх^
называемое неоднородным, если /{х)Фй,
В частном случае 6 = 0 неоднородное уравнение Гельмгольца
превращается в imoBOt уравнение Пуассона
^ = /(х); x€(jco,x,), (2.12)
дх
которое в свою очередь при /(;:) = О трансформируется к простейшему
уравнению Лапласа эллиптического типа:
^ = 0; ;cG(xo,xi). (2.13)
дх
Уравнения Лапласа и Пуассона моделируют стационарные распреде-
41
ления температуры, потенциала скоростей при стационарном течении
несжимаемой жидкости, потенциала электрического поля в задачах
электростатики и др. соответственно при отсутствии или наличии внешних
воздействий /(дс).
Стационарные состояния многих физических процессов
теплопроводности, диффузии в движущихся средах, комплексной напряженности
магнитного поля, установившихся колебаний различной природы
описываются в терминах уравнения Гельмгольца.
Можно показать, что с помощью замены переменных х и / уравнение
(2.4) приводится к каноническому виду, не содержащему смешанных
производных [28, 45].
В частном случае у4 = 5 = С = 0 в (2.4) мы получаем уравнение
первого порядка, в первом приближении описывающее (одним или системой
таких уравнений) поведение целого класса подвижных ОРП, к которым
можно отнести процессы нагрева металла в агрегатах непрерывного
действия, теплообменные процессы в движущихся средах, процессы
передачи жидкостей и газа по длинным трубопроводам, тепломассообменные
процессы в химических реакторах, распространение электромагнитных
волн в длинных электрических линиях и т.п. (см. также (1.21), (1.33)).
Приведенные примеры иллюстрируют лишь самые простые варианты
возможного описания ОРП в рамках общего уравнения (2.4), которые
сводятся к небольшому числу хорошо изученных типовых уравнений
математической физики, охватывающих, тем не менее, широчайший круг
самых разнообразных физических явлений и процессов.
Несмотря на целый ряд допущений и упрощений, эти уравнения,
учитывая основные качественные особенности анализируемых явлений,
во многих случаях с удовлетворительной для практических целей
точностью моделируют поведение ОРП. Уместно отметить здесь также, что
предельное упрощение модели объекта в рамках сохранения его основных
свойств, как правило, оказывается полезным на предварительном этапе
постановки и исследования задачи управления и в целях создания
максимальных возможностей для получения искомых решений известными
методами в сравнительно легко обозримой форме, позволяющей установить
главные закономерности управляемых процессов.
Конечно, адекватное реальности описание функции состояния ОРП
уравнением (2.1) далеко не всегда сводится к виду (2.4) даже в первом
приближении. Такое положение складывается, главным образом, в связи
со следующими обстоятельствами. Во-первых, в этих целях могут
потребоваться значительно более сложные модели с нелинейным оператором L
в (2.1); во-вторых, может оказаться необходимым учет пространственной
распределенности в двух- или трехмерных пространственных областях;
в-третьих, структура самого уравнения, описывающего поведение ОРП,
может не соответствовать виду (2.4), в частности, порядок этого
уравнения может быть больше второго; и, в-четвертых, как уже отмечалось в
42
§ 1.2, поведение ОРП сложной структуры часто моделируется не одним, а
целой системой уравнений в частных производных, т.е. описывается
векторным уравнением типа (2.1).
Так, многомерные волновые, телефафные уравнения, уравнения
теплопроводности, Лапласа, Пуассона, Гельмгольца и другие уравнения вида
(2.4) усложняются за счет замены ^-у^ на дифференциальный оператор
дх
d^Q d^Q d^Q
—+ ——Щ- при использовании декартовой системы координат
ду^ дг^ 5и^
^ = (:и,г,и).
в цилиндрической системе координат вид дифференциального
оператора еще более усложняется (см. также (1.34), (1.37), (1.40)). Далее,
например, поперечные (изгибные) колебания элементов упругих
конструкций описываются уравнением 4-го порядка
^2^.^ = Л.,-),«вД,>0, (2.14)
др- дх^
не укладывающимся в схему (2.4).
Нафев излучением по закону Стефана-Больцмана движущегося тела
в нафевательном афегате непрерывного действия описывается вместо
(1.21) нелинейным уравнением первого порядка
6^^н.^,К^1^ + 0\х,О = в^(:с,/),хб(;со,х,)./>О. (2.15)
Ot ох
Примеры ОРП, моделируемых системами дифференциальных
уравнений, уже приводились в § 1.2 (см., в частности, (1.33), (1.34)-(1.42)).
При одновременном учете нескольких усложняющих факторов функции
состояния ОРП могут описываться моделями весьма высокого уровня
сложности, например, системой взаимосвязанных многомерных
нелинейных уравнений электромагнитного и температурного полей при
индукционном нафеве ферромагнитных заготовок [35] или нелинейной системой
уравнений Навье-Стокса, моделирующей процесс течения вязкой
жидкости [46].
Решение краевых задач, описывающих поведение ОРП с учетом
отмеченных особенностей, может быть выполнено, вообще говоря, только
численными методами, и возможности их аналитического исследования
весьма Офаничены. Однако в целом ряде частных ситуаций такие
возможности сохраняются. Так, переход к линейным многомерным
уравнениям математической физики для канонических форм областей
пространственного определения Q{xj) (цилиндр конечной длины, прямоугольная
призма бесконечной протяженности, параллелепипед) не приводит, как
правило, к принципиальным затруднениям при описании ОРП. Во многих
43
случаях для нелинейных уравнений объекта, применительно к достаточно
малым отклонениям Q(xj) от некоторого заданного распределения
можно использовать широко применяемый в теории управления
ССП стандартный прием линеаризации, с удовлетворительной точностью
опять трансформирующий модель объекта к уравнениям вида (2.4) для
отклонений Q{x,t) - Q*(x,t) (уравнения в вариациях) путем разложения
нелинейных зависимостей в ряд Тейлора по степеням функции состояния
и ее производных в окрестности Q*(x,t) с последующим отбрасыванием
членов высшего порядка малости (см. подробнее § 2.10). Иногда удается
использовать другие приближенные или точные способы редукции к
эквивалентным линейным уравнениям, реализуемые, например, с помощью
специальной замены переменных [30,31].
На практике всегда встает вопрос о выборе разумного компромисса
между точностью моделирования ОРП, повышение которой неизбежно
приводит к усложнению модели, и возможностями последующего анализа
свойств объекта и решения соответствующей задачи управления,
возрастающими при упрощении математического описания ОРП. Решение этого
вопроса представляет собой самостоятельную весьма сложную проблему,
которая еще ждет своего решения.
Перейдем к общей характеристике условий однозначности (2.2),
(2.3). Начальная функция Qq(x) в (2.2) должна задавать начальные (при
/ = О) распределения во всей замкнутой области D эх самой функции
состояния Q(xj) и /W - 1-й ее производных по времени /, где т - порядок
старшей производной d'^QIdt'^ в уравнении объекта (2.1) (подобно
описанию ССП обыкновенными дифференциальными уравнениями).
Следовательно, начальные условия (2.2) записываются в виде
а'"-'е(;с,о)
x&D,
где (ef W,2(»(;c),....e('"-'>w)=eoW в (2.?).
При моделировании ОРП уравнением в частных производных вида
(2.4), здесь D =[xo,JCi],/w = l или т = 2 в зависимости от максимального
порядка производной d^Q/dt'". Так, для уравнений гиперболического
типа (2.5)-(2.8) имеем w = 2; QQ{x) = {g^^\x\Q^\x)]; для
параболического уравнения (2.9) достаточно задать начальное состояние Qq{x) =
44
= 6oW = 6(^»0) при /w = l, a для эллиптических уравнений
(2.11)-(2.13), описывающих статические состояния ОРП, начальные
условия, естественно, отсутствуют вообще.
Граничные условия (2.3) могут быть заданы различными способами в
зависимости от конкретного характера взаимодействия объекта с
окружающей средой.
В простейшем случае граничные условия вообще отсутствуют, и
соответствующая краевая задача Коши [13] с заданными начальными
условиями (2.16) может ставиться для уравнений гиперболического или
параболического типа для т -1 или m = 2 при исследовании, например,
процессов распространения колебаний или тепла в неофаниченном
пространстве.
При офаниченном объеме области D достаточно общей формой
представления линейного оператора Г в (2.3) при описании ОРП
уравнением со старшей производной второго порядка по просфанственным
переменным, в частности, одномерным уравнением (2.4), являются фанич-
ные условия следующего вида [13,28,45]:
o.{xj)Q{x,t) + р(х,0^^ = g(x,/), X€ 9D, / > О, (2.17)
дп
где а(х,0, Р(^,0 " заданные функции на фанице dD , принимающие, в
частности, постоянные значения, причем а>0,р>0, а + р>0,и dQIдп -
производная по нормали к dD {нормальная производная). Подобно
начальным условиям (2.16), при /и = 2 здесь учитывается поведение самой
функции состояния и (или) ее производных первого порядка на фанице
просфанственной области их определения. В частных случаях
а = 1,р = 0;а = 0,Р = 1;а>0,Р>0, получаем, соответственно, граничные
условия 1-го рода {первая краевая задача, или задача Дирихле):
Q{x,t)^g{x,i\xedD,t>0, (2.18)
когда должна быть задана сама функция состояния на фанице области
D ; граничные условия 2-го рода {вторая краевая задача, или задача
Неймана):
= g{xj), xedD,t>0; (2.19)
дп
с заданием фадиента функции состояния на фанице просфанственной
области ее определения, и граничные условия 3-го рода {третья краевая,
или смешанная, задача) при а >0,Р > О в (2.17).
В некоторых достаточно характерных ситуациях на различных участ-
45
ках границы dD мог>т задаваться фаничные условия различного типа.
Реализуемые в самых различных вариантах и весьма сложные в общем
случае граничные условия (2,17) значительно упрощаются для областей
D правильной (канонической) формы (пластина, цилиндр,
прямоугольник, шар, параллелепипед), особенно для одномерных уравнений вида
(2.4), где dD состоит из концов отрезка [Xo,Xil и dQ/dn = dQ/dx (см..
например, (1.6) - (1.9), (1.30), (1.35), (1.38), (1.41)). В частности,
граничное условие типа (1.7) можно рассматривать как условие симметрии
функции состояния ОРП на отрезке [-R,R] при задании воздействий на
границах x = -R и x = R, отличающихся только своими знаками. В таких
случаях характер краевой задачи определяется типом граничного условия
вида (1.6), (1.9) только на одной границе в точке x = R.
Для объектов, описываемых уравнениями с пространственной
производной первого порядка, всегда рассматривастся первая краевая задача
(см., например, (1.23), (1.33)).
§ 2.2. Импульсные переходные функции и основные
вход-выходные соотношения для типовых линейных объектов
управления с распределенными параметрами
Как было показано в предьадущем параграфе, типовое линейное
уравнение второго порядка, моделирующее поведение функции состояния
Q{x,i) пространственно одномерного объекта с распределенньш[и
параметрами, описывает в первом приближении широкий круг самых
разнообразных физических явлений и может рассматриваться в качестве
базовой модели ОРП достаточно общего вида.
После приведения к канонической форме записи, не содержащей
смешанных производных [13, 28, 45], это уравнение, подобно (2.4), может
быть представлено в форме:
„,.,)^.4(^.')f=c<,,,)0.^(..of.
+ Q(X,00 + f{xj.w(x,Г)); XQ<x<Xx,t>0;
с типовыми начальными и граничными условиями (2.16), (2.17), которые
приобретают в рассматриваемом одномерном случае следующий вид:
Q{x,0) = Q^hx); = (^\х)- хо S XS X,; (2.21)
ot
a(дro,0^(^o^O + P(Jfo.0^2^^^ = go('•''o(')). '>0; (2.22)
ах
46
a(A:i,/)O(Xb/) + P(x,,/)^2^^ = gi(/,w,(/)),/>0. (2.23)
дх
Естественно, что в общем случае значения коэ(1)(|)ициентов А, Л\, С,
В\ и Cj в (2.20) и (2.4) не совпадают.
Как следует из (2.20)-(2.23), поведение шрла/шелшго выхода объекта,
в качестве которого здесь рассматривается пространственно
распределенная функция 0{xj), описывающая состояние ОРП, однозначно
определяется при фиксированном начальном состоянии Оо(^) = (Qo^^(^).0^^\^))
входными воздействиями f,go^g\-^ свою очередь, в роли этих входных
воздействий могут фигурировать целиком или частично (например, в виде
аддитивных слагаемых) соответствующие ^/лрдйленг^я u{x,t), wq(/), wi(/).
Наряду с управляющими, в роли входов объекта могут рассматриваться и
возмущающие воздействия.
Управляющие воздействия w(x,/), формально включаемые в
уравнение объекта (2.20) в составе функции/( в частности, при /(jr,/,w(jf,/))s
sw(x,0) и реалюуемые обычно за счет внутренних источников энергии
или вещества, можно назвать внутренними управлениями, а управляющие
воздействия wo(/), ui{t) в составе функций go, g\, фигурирующие в
граничных условиях (2.22), (2.23) и характеризующие целенаправленное
влияние на Q{x,t), организуемое со стороны окружающей среды на
границе пространственной области, занимаемой объектом, - граничными
управлениями (управлениями по граничным условиям).
Граничные управления uq(t\ ui(t) для одномерного объекта
(2.20)-<2.23), сконцентрированные в точках xq и х^ на границах отрезка
[xo,Xi]3x, представляют собой сосредоточенные воздействия,
изменяющиеся только во времени /. Лишь при использовании многомерных
моделей ОРП, для которых граница дО пространственной области D ,
занимаемой объектом, не вьфождается в отдельные точки, граничные
управления могут иметь пространственно-временной .характер, причем
пространственные области изменения Q(xj) и g(xj) (D и dD
соответственно), конечно, не совпадают друг с другом.
Внутренние управления w(jr,r) в любом случае могут представлять
собой как независимые от пространственных координат управления,
которые мы опять будем называть сосредоточенными, так и
пространственно-временные воздействия, в зависимости от постановки конкретной
задачи. С тбчки зрения физического содержания, инженерной
интерпретации и практической реализации внутренние и граничные управления
обычно существенно отли^шются друг от друга.
47
Некоторые примеры управляющих вошействий обоих типов для
различных ОРП приведены в § 1.2.
При оценке свойств объекта по отношению к различным
управляющим или возмущающим воздействия мы не будем здесь априори
накладывать какие-либо конкретные ограничения на характер их
функциональных зависимостей от своих аргументов. Учет такого рода ограничений,
как правило, становится обязательным в соответствующих задачах
управления, которые в противном случае очень часто вообще теряют смысл или
не отвечают физически реализуемым ситуациям.
Для анализа характеристик и вход-вы.\одных соотношений ОРП
достаточной информацией о внешнем воздействии является его
принадлежность соответствующему функциональному пространству, т.е.
определение как элемента некоторого достаточно широкого класса функций. В
качестве такого класса может, в частности, рассматриваться класс
обобщенных функций, к которому в первую очередь относятся дельта-
функции, широко используемые в последующем анализе (см.
Приложение).
Основное соотношение, связывающее выход объекта при заданном
начальном состоянии с входными воздействиями, определяется общим
решением (понимаемом в обобщенном смысле) [13, 21, 24] краевой
задачи (2.20)~(2.23), которое, как известно, может быть представлено в
следующей интегральной форме [7,13, 28,45]:
6(^,0=J^o(^.4,oer(^)^+JA^i(^v,^,/)e^^>(^)d^+
/)G(x,^,M)/(^,x,w(^,T))ci^rfT+J^:o(x,/,T)go(T,t/o(x))rfx +
Одго о
t
^l(^,^x)gl(т,Wl(т))Л, xe(xo,Xi), />0, (2.24)
где ^ и т - переменные интегрирования, соответственно, по
пространственной координате и времени.
Здесь первые два интеграла по пространственной переменной
определяют составляющую общего решения, описывающую влияние на
Q{xj) начальных распределений Qq^Hx) и Qq\x) в (2.21); последние
два интеграла по времени учитывают сосредоточенные входные
воздействия go и gi в (2.22) и (2.23) по граничным условиям, а двойной интеграл
по пространственно-временной области изменения пространственного (^)
и временного (т) аргументов распределенного входного воздействия /от-
48
ражает его вклад в реакцию объекта.
Вы.ход объекта 0(xj) связывается с внешними воздействиями/, go»
g] и начальным состоянием Oq{x) , соглгсно (2.24\ соответствующими
ядрами линейных интегралы1ых операторов (функциями влияния) Nq ,
Ni, G, А'о, , отражающими внутренние свойства объекта по
отношению к соответствующим входам. Как следует из общей теории линейных
уравнений в частных производных, все эти ядра могут бьггь вьфажены в
конечном виде (с помощью лишь операций диф(1)еренцирования) только
через одну из них - функцию G(jc,^,/,x) (под знаком двойного интеграла
в (2.24)), назьгоаемую функцией Грина рассматриваемой системы с
распределенными параметрами, которая тем самым в соответствии с
выражением (2.24) с исчерпывающей полнотой описывает собственные
свойства ОРП, не зависящие от характера входных воздействий, и является его
основной фундаментальной характеристикой [7-9, 19,28, 32,45].
Заметим, что аналогичные по смыслу вход-выходные соотношения
для Q(x,i) и фундаментальная роль функции Грина сохраняются и для
ОРП, описываемых линейными уравнениями в частных производных
более общего вида, в частности, для пространственно многомерных
распределенных систем. В последнем случае интегралы по пространственной
переменной на отрезке [xo,Xi] в (2.24) заменяются в общем случае
интегралами по многомерным пространственным областям изменения
аргументов соответствующего входа, которые могут, вообще говоря, не
совпадать с областью изменения пространственных координат функции
состояния Q(x,t) [81.
Напомним также, что основное соотношение, связывающее выход
Q(t) линейного сосредоточенного объекта второго порядка с входным
воздействием /(/), принимает, вместо (2.24), следующий вид [7,32]:
t
е(0 = Л^о(ОеГ +Л^1(00?^ +|С(/,т)/(т)Л, (2.25)
о
где Q^^^ =Q(0):Q^^^ =О'(0) и Л^о(0. A^i(0, G(/,x), - счигающиеся
известными функции, подобные по смыслу Л^о(^»^>0, ^\(хЛ^О и
G(jc,^,/,T) в (2.24).
Сравнивая (2.24) и (2.25), видим, что соответствующие в.ход-
вььходные соотношения для ОРП принципиально усложняются по
сравнению с ОСП прежде всего именно за счет операций пространственного
интегрирован!!^ Если в краевой задаче (2.20)~(2.23) начальные условия
нулевые, а фаничные условия однородные, т.е. Qq^\x) = Q^\x) = 0,
49
xe[xo,xJ: go(^wo(0) = gl(^Wl(/)) = 0,/>0, и функция/в уравнении
(2.20) представляется произведением
/(x,/,w(x,/)) = S(x-4o) (2.26)
дельта-функций 5(х-^о) " 8(^~т^о)» зависящих от пространственной
переменной и времени соответственно, и сосредоточенных в точках
X = ^0 ^ [^o'-^ll и / = То ^ О, то в соответствии с известными свойствами
дельта-функций (см. Приложение) вьфажение (2.24) приводит к
соотношению:
t x^
6(^,0 = ^JG(x,^,^I)5(^-^o)5(x-тo)d^Л = G(x,^o,^xo). (2.27)
Таким образом, функция Грина G(x,^o>^^o) является решением краевой
задачи
+ С,(х,ое+б(х-^о)5(/-то); xo<x<Xi, />0;
ЯШ = = О, X 6 [хо, X,]; (2.29)
a(xo,Oe(^o,') + P(JCo,0^^§^ = 0, />0; (2.30)
их
a(xi.og(:c„0 + P(jr,,0^^^ = 0, />0; (2.31)
ох
и, следовательно, в соответствии с (2.26), описывает реакцию
управляемой распределенной системы (2.20)-(2.23) с нулевыми начальными и
однородными граничными условиями в любой точке xe[xQ,Xi] и любой
момент времени / ^ О на точечное импульсное воздействие вида дельта-
функции, приложенное в произвольной, но фиксированной точке
^o^l^O'-^il в момент времени / = tq>0. По этой причине функцию
Грина часто называет фундаментальным решением уравнения (2.20),
функцией точечного источника, функцией влияния или импульсной
переходной функцией по аналогии с подобными определениями в теории
систем с сосредоточенными параметрами, где функция Грина вида G(/,to) в
(2.25) представляет собой реакцию объекта на входное воздействие в виде
дельта-функции 5(т-то) [1]. В итоге мы получаем существенное
обобщение понятия импульсной переходной функции на случай ее зависимо-
50
сти не только от временных, но и пространственных аргументов,
распространяемое на системы с распределенными параметрами.
В общем в.\од-выходном соотношении (2.24) функция Грина
G(x,^,r,x) представляет собой реакцию объекта в точке х в момент
времени / при нулевых начальных и однородных граничных условиях на
импульсное воздействие, приложенное в каждой точке ^^[хо, xj] в
каждый момент времени х е [О,/].
Важно отметить, что для любой физической системы, как это следует
из(2.27), G(jr,^,/,x) = 0 при /<х.
Аргументы ^ и X функции G(ji:,^,/,x) естественно назвать входными
аргументами, или аргументами входа, а аргументы х и / ~ соответственно
выходными аргументами, или аргументами выхода [8].
Для более узкого, но очень важного в приложениях класса
стационарных (или автономных) систем, описываемых, в частности,
уравнениями вида (2.20) - (2.23) с не зависящими от времени параметрами,
импульсная переходная функция представляется в ввде
G(x,^,/,x) = G(r,^,r-x), (2.32)
т.е. функция Грина в этом случае является функцией уже не четырех, а
фактически только трех аргументов, в числе которых единственный
аргумент / - X характеризует ее временную зависимость.
Во многих частных случаях импульсная переходная функция ОРП
может быть найдена в явном виде путем непосредственного решения
краевой задачи (2.28) - (2.31) известными в математической физике
способами [28,32,45], некоторые из которых будут рассмотрены ниже.
В общем случае при произвольном характере изменения
коэффициентов дифференциального оператора в (2.28) эта задача оказывается
аналитически неразрешимой даже в одномерном случае, и здесь приходится
использовать приближенные методы.
Трудности пол)'чения явных вьфажений функций Грина для
многомерных распределенных систем многократно возрастают, в первую
очередь, для пространственных областей сложной геометрической формы.
Выражения, связывающие ядра Nq,Ni,Kq,Ki интегральных
операторов в (2.24) с функцией Грина G(,v,^,/,x), могут быть определены в
зависимости от конкретного вида коэффициентов дифференциального
оператора в уравнении (2.20) и в фаничных условиях (2.22), (2.23).
В частности, для стационарной системы с постоянными
коэффициентами АМ^ в (2.20) и afxo,/; = ao=consl>0; ^(XQ,t) = % = consi>0\
аГх,.0 = а, =const^0: Pf Jf^/; = р, = const > О в (2.22) и (2.23) при
51
«о Ро > 0> «1 + Р| > о имеют место следующие соотношения [32]':
No{x,l£„0=A^Gix,^,0 + A^^^^■, (2.33)
Ot
Ny{x,^J) = AGix,^,t); (2.34)
/:Д;с,/-т) = (-1)'^^ ^[C(^)G(x,^,/-i)]^^^ , / = 0,1, (2.35)
если Р, > О в (2.22) или (и) в (2.23), т.е. при граничных условиях 2-го или
3-го рода, и
/С,(х,/-т) = (-1)'^^—{[i?l(^)G(x,^,/-x)]^^^.-
''' (2.36)
~ —[C(4)G(x,^,/-T)]^^^j, / = 0,1,
если Р/ = О в (2.22) или (и) в (2.23), т.е. при граничных условиях 1-го рода
хотя бы на одной из границ jc = дс,.
Таким образом, влияние начального состояния Qq^Hx), q)^ в (2)
однозначно определяется, согласно (2.24) и (2.33), (2.34), самой функцией
Грина С(дс,^,/) и ее производной ^^^'^'^^ по времени, рассматривае-
9/
мых для частного случая импульсного воздействия (2.26), прилагаемого в
начальный момент времени tq = О, а управления по граничным условиям
однозначным образом учитываются в зависимости от их вида, согласно
(2.24), (2.35), (2.36), с помощью функции Грина G(x,jc,,/-x) и ее про-
dG
странственной производной —(дс,х,,/-т), определяемых для частного
случая импульсного воздействия (2.26), сосредоточенного в
соответствующей граничной точке = •
Пример 2.1. Рассмотрим ОРП, описываемый одномерным уравнением
теплопроводности (1.4) при Я = 0 (процесс нагрева массивной неограниченной
пластины с внуфенним тепловыделением) с краевыми условиями (1.5)-(1.7)
второго рода. В качестве выхода объекта фигурирует нестационарное температурное
поле 0(д:,/), а в роли внешних входных воздействий выступают удельная мощ-
' Эти соотношения легко получаются, в частности, из приведенного ниже в
§ 2.9 решения уравнений (2.20) - (2.23) с постоянными во времени
коэффициентами методом конечных интегральных преобразований.
52
ность внутреннего тепловыделения F(xj), плотность теплового потока q(l) на
поверхности х = R пластины и начальное распределение температур 9o(jf).
Каждое из этих воздействий может рассматриваться в качестве управления
(соответственно, внутреннего или граничного) или неуправляемого внешнего фактора
(возмущения). Общее решение вида (2.24) краевой задачи (2.20)-(2.23), частным
случаем которой при /I = 5, = Q = 0; ао = а| = 0; /I, = 1; С = а; Ро = Р| = X
является задача (1.4)-(1.7), приводит здесь, в соответствии с соотношениями
(2.33)-(2.35), к следующему выражению для реакции температурного поля на
указанные входные воздействия при заданном начальном температурном
состоянии:
R t R
е(х,/) = Jc(x,^,/)eo(^)^+~ J Ja(x,^,/ - x)F(^,z)d^dx +
о ^00
су J
(2.37)
где учтено известное соотношение а =^Х/су [24,30,39].
Здесь функция Грина G(jc,^,/-t) характеризует распределение
температуры, возбуждаемое точечным источником тепла вида дельта-функции,
сосредоточенной в момент времени / = т з точке jc = ^. Ее частные выражения G(jc,^,/) и
G{x,R,t-x) отвечают значениям т = 0 и ^ = /?. В итоге функции влияния
G(jr,^,/-T), G{x,^,t) н G{x,R,t-x) однозначно определяют с помощью
указанных в (2.37) интегральных операторов влияние на температурное поле 0(;с,/) в
любой точке xe[0,R] для всех /^0 соответственно, воздействия F(x,t) по
мощности источников тепла, начального температурного распределения Bq{x) и
воздействия q{t) по граничному условию на границе x = R,
Импульсная переходная функция G(jc,^,/-t) для ОРП (1.4)--(1.7),
являющаяся, согласно (2.28)-(2.31), решением задачи
а9(х,/)
dt
.а^е(х,о
дх^
+ 6(;с-^)б(/-т), 0<х</?, / >0;
0(.,0) = 0,0^.^/?; ^ = ^ = 0./>0;
ах дх
может бьггь найдена различными известными в теории уравнений математической
физики методами и представляется здесь в характерной форме разложения в
бесконечный ряд Фурье по тригонометрической системе функций с зависящими от
времени коэффициентами в виде экспонент с отрицательными показателями
степени, быстро возрастающими по абсолютной величине [8,9]:
G(x,^,/-T) = i
л
1 + 2^ cos
л=1
ппх
УТ)
cos
R
exp
(/-T)
(2.38)
Некоторые из способов определения функций Грина для типовых ОРП, в ча-
53
стности, в форме (2.38) для объекта (1.4) - (1.7), будут рассмотрены ниже.
Если теперь, вместо (1.6), рассматривается граничное условие 3-го рода (1.9)
на поверхности x-R пластины с выбором в качестве граничного управления
температуры рабочего пространства печи Qfj{t), в которой нафевается пластина
при конвективном характере внешнего теплообмена, то мы получаем другой
частный случай задачи (2.20)-(2.23), отличающийся от предыдущего соотношением
а| =а вместо aj = 0. Тогда температурное поле определяется в соответствии с
(2.24), (2.33)-(2.35) выражением
в(х,/) =
/Л
G(jc,^,/)eo(^)^ + —JJc(x,^,/-x)F(^,t)t^^ +
^00
,±JGix,R,t-x)Qni^)dT,
(2.39)
отличающимся от (2.37) только заменой q(t) на а6 я (О •
Однако сама импульсная переходная функция для ОРП (1.4), (1.5), (1.7), (1.9)
теперь уже является решением другой краевой задачи за счет нового фаничного
условия на поверхности пластины:
ot дк
е(х,0) = 0, Oix^R;
Ш1 = 0; x^^+aO{R,t) = О, / > 0;
дх дх
и принимает отличный от (2.38) вцц [8,9,24,30]:
С(х,4./-т) =
2Л„
—-. <^oslTi„4
exp
' R'
(,-t)
где r\„ - пронумерованные в порядке возрастания корни уравнения
П tgr\-Bi = 0
(2.40)
(2.41)
и Bi = aR/'>i. - широко применяемый в теплофизике безразмерный критерий Био
[24,30].
При достаточно больших значениях Bi температура поверхности пластины в
любой момент времени практически становится равной температуре печи и в
первом приближении фактически выступает в роли управляющего воздействия
вместо Од (г). В таком случае равенство
в(й,0 = 0/7(0.'>0;
(2.42)
54
можно рассматривать в качестве соответствующего граничного условия первого
рода (по типу (2.18)) на поверхности л = /? пластины вместо (1.9).
В этой ситуации имеем a{x\,t)^a\ =1; P(jf|,/)sp, = 0 в граничном условии
вида (2.23) в отличие от предыдущих вариантов, где Pi >0, и тогда, используя
соотношение (2.36) для / = 1 вместо (2.35), получим, подобно (2.37) и (2.39):
R i R
в(х,/) =
G(x,^,Oeo(^)^+- f fG(x,^,/-T)F(^,T)^t/T-
су J J
00
(2.43)
■aG(x,/?,/-T)
ея(т)(^т.
в отличие от (2.37) и (2.39), ядро интефального оператора в последнем
слагаемом (2.43), определяющем реакцию температурного поля на входное
воздействие по температуре поверхности нафеваемой пластины, характеризуется не самой
функцией Грина рассматриваемого объекта, а ее производной по
пространственному аргументу входа в фаничной точке 4 = ^ •
Сама функция Грина опять меняст свой вид, являясь теперь решением
краевой задачи
Щх,0 д\х,0
dt
+ 8(x-^)5(/-T),0<jc</?,/>0;
G(x,0) = 0; .Ё?М = 0; в(/?,0=0,
дх
и может быть представлена следующим выражением [8,9]:
G(x,^,/-T) =
2
л=1
|Zcos(2„-I)^
cos|(2n-l)^
схр
-а , (t-x)
(2.44)
Пример 2.2. В качестве второго примера рассмотрим процесс гашения
пульсаций расхода Q{x,i) в длинном трубопроводе (§1.2). При наличии
управляемого гасителя колебаний, создающего в точке х' его подключения к
газопроводу дополнительный объемный расход газа и{1) (рис. 2.1), обьеет моделируегся
в акустическом приближении неоднородным волновым уравнением
математической физики (2.6) следующего вида [7,8]:
J^d^i!l^^dl^u(tmx-x'), 0<х<1, / е[0,/1, />0; (2.45)
cq dt дх
С ненулевым начальным состоянием и фан1|чными условиями 1-го рода типа
(1.29), (1.30):
55
Компрессор
Газопровод
К нагрузке-
Управляемый
гаситель
колебаний
Рис. 2.1. Схема газопровода
Ot
(2.46)
6(0,0 = ^0(0; е(/,0 = 0; Г >0. (2.47)
Здесь Со - скорость распространения звука в газовой среде и ЬХх-х*) -
производная от дельта-функции Ь(х -х*),
В качестве выхода объекта здесь фигурирует нестационарное во времени и
пространственно распределенное по длине газопровода поле пульсаций расхода
газа Q(xj), а в роли внешних воздействий могут рассматриваться
дополнительный расход u(t) гасителя колебаний, пульсации go(/) на входе в газопровод
(например, как в качестве управления, так и в роли возмущения), а также функции
Qq^\x) и Qq\x), характеризующие начальное состояние объекта.
Рассматриваемая модель ОРП (2.45) - (2.47) представляет собой частный
вариант краевой задачи (2.20) - (2.23) при
^, = 0; С = 1; 5, = Ci = 0; /(xjMxJ)) = м(05'(^-^*);
А = 1/с^; a(xo,t) = = 1; Р(дго,0 = Ро = 0; ^о(^"о(0) = go(0; (2.47а)
а(дг,,0 = а, = 1; Р(дс1,0 = Pi = 0; g,(r,«i(/)) = 0.
Тогда в соответствии с (2.24) и (2.33)-(2.36) получим следующее
интегральное представление для выхода ОРП в зависимости от указанных входных
воздействий:
1 VaC(jc,4,/)^ro^... ^ I V^,
Qix,t)^^
t I
(2.48)
0 0 0
в отличие от аналогичных выражений (2.37), (2.39) и (2.43) для температур-
56
ного ПОЛЯ здесь появляется первое слагаемое с ядром интегрального оператора в
виде производной функции Грина по временному аргументу.
При этом сама функция Грина опять может быть представлена в характерной
форме бесконечного ряда [8,9]:
/1-1
sin
%п
sin
sin
соу(/-т)
(2.49)
с тригонометрическими зависимостями его членов от пространственных
координат, подобно (2.38), (2.40) и (2.44), отличающейся, однако, от (2.38), (2.40) и (2.44)
синусоидальным характером зависимости от времени всех членов ряда вместо
соответствующих экспонент в выражениях для функций Грина уравнений
теплопроводности.
Пример 2.3. Рассмотрим теперь в качестве объекта управления процесс
конвективного нафева партии заготовок, движущихся с постоянной скоростью У
вдоль оси д: по длине печи непрерывного действия с температурой рабочего
пространства 0/7(л,/) (рис. 1.3). В первом приближении управляемая величина -
температурное поле Q{x,t) нафеваемых изделий - описывается уравнением
первого порядка (1.21) с начальным и фаничным условиями (1.22), (1.23). В роли
внешних воздействий при постоянной величине b коэффициента,
характеризующего теплофизические и геомефические характеристики нафеваемого материала,
здесь фигурируют температуры Qfj{xj) и 0^(/) печи и нафеваемого материала
на входе в печь, а также начальное температурное состояние %{х) управляемого
процесса.
Реакция 0(л,О в зависимости от входов Qrj(Xyt), 0^(/) и во{х)
определяется общими соотношениями (2.24), (2.33)-(2.36) для частного случая
^ = С = 0; Ах =^Ь; 5, =-/>К;С, =-1; /(дг,М/(:с,0) = 9я(дс,0;
XX =/; e^H^)=0oW; «0 = 1; яоа,«о(0)=е^о;
Po=Pi=«i=0;g,(/,tt,(/))sO
в (2.23), к которому сводится краевая задача {\.2\у(\.23).
В итоге получаем выражение для 9(л:,/)
0(л,/) = b Jc(;c,^,/)0o(^)^ + ^JGix^j - т) 0^(^,t)^^ +
(2.50)
00
(2.51)
+ bV
С(х,0,/-т)0^т)Л,
полностью аналогичное по своей сфуктуре подобным формулам (2.37) и (2.39)
для объектов, моделируемых уравнением теплопроводности.
Функция Грина С(дг,^,/-т) в соответствии с ее общим определением
57
(2.27Н2.31) является здесь решением краевой задачи
^^^^^
e(x,0) = 0; 0(0,/) = о,
и может быть найдена в замкнутом виде [8,9]:
С(;с,^,/) = 1(д:-^)~^ехр
(2.53)
существенно отличающемся от представленных в форме разложения в
бесконечный ряд функций влияния для рассматривавшихся в примерах 2.1 и 2.2 краевых
задач, описываемых уравнениями в частных производных второго порядка.
Здесь l(jc-^) - единичная ступенчатая функция, равная единице для всех д:>^ и
нулю при JC < ^ .
§ 2.3. Стандартные формы и стандартизирующие функции
в задачах моделирования объектов
с распределенными параметрами
Описание ОРП в общей форме краевой задачи (2.1)-(2.3) порождает,
даже в частном случае (2.20)-(2.23) множество различных возможных
вариантов ее постановок для различных начальных состояний Qq{x) и
воздействий g(x,/) по граничным условиям в (2.2) и (2.3), учитываемых
общими решениями достаточно сложного вида, например (2.24).
Оказывается [8], что можно подобрать такую функцию w{Xyt) вместо f{x,t) в
(2.1), которая '^компенсирует" эффект влияния на выходную величину
ненулевых начальных и неоднородных граничных условий, обеспечивая
равенство решений Q{xJ) исходной системы (2.1>-(2.3) и краевой задачи
i [QM] = w{x,i\xeD,t>0;
N[Q(x,i)]^0;x€D^t^O; (2.54)
r[QM]^0,xedD,i>0;
с нулевыми начальными и однородными граничными условиями.
Тем самым, система уравнений (2.54) оказывается эквивалентной
исходной модели (2.1)-(2.3), но при этом, "собирая" в правую часть
уравнения (2.1) все входные воздействия, существенно упрощает описание
объекта, представляя его в максимально простой и в то же время
единообразной форме с единственным воздействием в правой части операторного
уравнения объекта (2.1) для любых вариантов конкретного задания этих
входов.
Система (2.54) называется стандартной формой задачи (2.1)-(2.3), а
функция w{x,t) - стандартизирующей функцией этой з?ш,?ти.
58
Зная общее решение системы (2.1)-(2.3), нетрудно найти и ее
стандартизирующую функцию.
Ограничимся далее рассмотренным в § 2.2 типовым случаем
описания ОРП линейной одномерной краевой задачей (2.20)-(2.23), общее
решение которой имеет вид (2.24), где ядра интегральных операторов для
варианта стационарной системы с постоянными коэффициентами
/4,/li,ao, Ро» Pi и "® зависящими от времени коэффициентами
С, В\ и С\ представляются выражениями (2.33)-(2.36).
Найдем стандартизирующую функцию н<дг,/) для соответствующей
стандартной формы (2.54), которая в данном случае записывается в виде
дГ dt дх^ дх
Xq<x<Xi, t>0;
Q(x,0) = 0; = 0; < x < x,; (2.55)
«06(^0.0+ Po^^ = 0; a,e(x,,/) + p,^^|^ = 0.
В соответствии с (2.24) решение этой задачи принимает предельно
простой вид
QM = J jG(x,i/-т) h<5,t)d^А. (2.56)
Таким образом, оператор, обратный по отношению к L в (2.55),
является интегральным, и выражение (2.56) можно рассматривать как
интегральную форму описания ОРП (2.55).
Используем интегральные формы представления функции Грина и их
производных при фиксированных значениях входных аргументов ^ = 4о
или X = То в (2.33)-(2.36) с помощью соответствующих свойств дельта-
функций 5 и их производных 5' (см. Приложение) [9]:
G{x,^,t) = Gix,^,t - т)|^^^^^„ = Jg(x,4,/ - т)6(т)Л; (2.57)
" О
dGix,^,t)_ ао(х.^,/-т)
dt дх
= |с(х.^,/-тМх)А; (2.58)
т=то=0 о
59
[Ci^)G(x,^,t-x)\^^^^^^ = |c(4)G(x,^,/-T)5(^-JC,)d^. / = 0,1; (2-59)
•»0
[m)G{x,^,t-x)\^^^^^^ = }B,(4)G(x,^,/-T)8(4-x,)d^,i = 0,l; (2.60)
'0
A[CK)C(x.t'-x)l,.,.„, .
(2.61)
= - C(^)G(x,^,/-T)5'(^-x,)d^, / = 0,1.
Заметим, что, как следует из (2.57)-{2.61), размерности всех дельта-
функций или их производных должны быть обратными размерностям
переменных интегрирования или квадратам этих размерностей
соответственно.
Подставляя соотношения (2.33)-(2.36) в общее решение (2.24)
рассматриваемой системы и записывая на основании (2.57)-(2.61) все его
составляющие, подобно третьему слагаемому в (2.24), в форме двойного
интефала по времени и области изменения пространственной
переменной, получим это решение в следующем виде:
QM = f Го(;с,^,/-т) (^i8(T)-h ^5'(х)) ej^>(^) +
0.; (2.62)
+ Abiz)QS^ (^) + wi т) - Wo (^, т) + /(^, т, и(^, т))
где
или
>v,(4,T) = ^5(^-x,)g,(T,t/,(T)), / = 0,1, если Р, >0, (2.63)
w,(^,x) = -[fii(^)5(4 - X,) -ь ОД5и - x,.)]g,(x,i.,(x)),/ = 0,1, (2.64)
если Р/ = О.
Сравнивая (2.56) и (2.62), видим, что задача (2.55) будет
эквивалентна соответствующей задаче (2.20)-(2.23) в смысле совпадения их
решений, если принять в качестве стандартизирующей функции выражение в
квадратных скобках под знаком двойного интефала в (2.62), т.е.
60
w(^, x) = U5(t) + A5Xx))Q^\i,) + Abix)Q^\^) + 65)
+ (w,a,x)-iVo(4.T))+/fex,«(iT)),
где функции Wi(^,t), Wo(^,t) определяются формулами (2.63), (2.64).
Как следует из (2.65), наряду с функцией /(^,x,t/(4,T)), по
определению представляющей собой аддитивную составляющую
стандартизирующей функции, первые два слагаемых >v(^,t) учитывают для
исходной задачи ненулевые начальные распределения Qix,0), dQ{xfi)ldt
самой функции состояния и ее производной, а третье - эффект внешних
входных воздействий по неоднородным фаничным условиям.
При этом, в полном соответствии с физическим смыслом рассмафи-
ваемых явлений, каждое из этих слагаемых "переводится" в класс
внутренних воздействий с помощью дельта-функций, учитывающих
сосредоточенность начального состояния в момент времени / = О и фаничных
условий в фаничных точках х^,хх отрезка [х^уХ{\ изменения
просфанственной переменной х.
Таким образом, описание стационарного ОРП второго порядка вида
(2.20)-(2.23) с независимыми от времени коэффициентами приводится к
универсальной стандартной форме (2.55) со стандартизирующей
функцией (2.65), что обеспечивает интефальное представление (2.56) выходной
функции состояния для любого входа h<jc,/) с помощью функции Грина
G(x, ^, / - т) распределенной системы.
Пример 2.4. Для объекта (1.4)-(1.7), рассмофенного в примере 2.1,
стандартизирующая функция (2.65) в условиях
Л = ^,=С, =0;ао=а,=0; ^,=1;С = а; Ро = р,=>.;
Хо =0; x, = /?; go(x.Wo(^)) = 0; ^,(т,1/,(т)) = ^(т); (2.66)
/(^,1,1/(^,1))= i.F(^,T)
су
в (2.20)-(2.23) принимает следующий вид:
w(^,T) = eo(5)6(T) + -i-(7(T)6te-/?) + -/^(^,T). (2.67)
су су
Аналогично выглядит н<^,т) при переходе от фаничного управления по
плотности теплового потока к управлению по температуре печи 8/7(0 с
соответствующей заменой фаничного условия (1.6) условием фегьего рода (1.9) (см.
пример 2.1). Этот случай отличается от (2.66) соотношениями
а, =а; g,(T,w,(T))=ae/7(T),
что, как это следует из (2.63)-(2.65), не меняет вида стандартизирующей функции:
61
4^,x) = eo(^)6(x)-f—ае;7(т)б(^-Л)+—F(^,T). (2.68)
ci су
При переходе к граничным условиям первого рода (2.42) с управлением по
температуре поверхности нагреваемой пластины имеем:
Р, =0;а^ =l;g,(T,iii(T)) = e;7(x)
вместо соответствующих вариантов в (2.66), и опять, согласно (2.63) - (2.65),
получим
Ч^л) = ео(^)б(т) + а5'(4 - R) 9^(1) +—Я^л) • (2.69)
су
Таким образом, если воздействия по граничным условиям второго или
третьего рода учитываются в составе н'(^, т) с помощью пространственных
дельта-функций, сосредоточенных на поверхности нагреваемого тела, то в условиях
первой краевой задачи такие воздействия **переводятся" в класс внутренних с
помощью производных этих функций.
Пример 2.5. Уравнения (2.45) - (2.47), моделирующие рассмотренный в
примере 2.2 процесс пульсаций расхода газа в газопроводе, соответствуют
частному случаю (2.47а) общей краевой задачи (2.20) - (2.23). Тогда в соответствии с
(2.63) - (2.65) будем иметь для данного объекта
>.'(^,х)=4<2Г(^)^'(х)+4ео^(^>^(^>-
4 ^0 (2.70)
-go(05'(^)+«(x)6'(5-/).
Как следует из (2.70), стандартизирующая функция для рассматриваемого
ОРП в отличие от (2.69) переводит начальное состояние Q^\Q в класс
внутренних воздействий с помощью производной дельта-функции по временному
аргументу.
Пример 2.6. Для объекта первого порядка (1.21>-(1.23), моделирующего
процесс нагрева движущегося тела в печи непрерывного действия,
стандартизирующая функция (2.65) в соответствующих данному частному случаю условиях
(2.50) принимает с учетом соотношений (2.63), (2.64) следующий вид:
4ix) = ^o(^)S(t)+^^f^^x)6(4)+0/7(ix), (2.71)
аналогичный выражениям (2.67) и (2.68) для объекта второго порядка,
описываемого уравнением теплопроводности при граничных условиях второго или
третьего рода.
§ 2.4. Типовые распределенные блоки
Типовой объект управления с распределенными параметрами,
описываемый линейными уравнениями (2.55) с в.ходным воздействием
w{xj) и выходом б(х,/), можно рассматривать в качестве частного
варианта скалярного распределенного блока [8, 9], под которым понимается
устройство любой природы с выделенными в его структуре входным и
выходным скалярными распределенными сигналами (в принципе, речь
может идти о векторных распределенных блоках с векторными сигналами
на входе и (или) вьгсоде). Поскольку реакция выходной величины
б(х, г) объекта (2.55) с постоянными во времени коэффициентами на
произвольное входное воздействие w(jc,/) однозначно определяется базовым
соотношением (2.56), свойства этого линейного стационарного блока
исчерпывающим образом определяются его функцией Грина, что
отражается графическим представлением в виде, показанном на рис. 2.2,а\
Такое представление ОРП оказывается очень полезным в целях
последующего структурного моделирования распределеннььч систем,
аналогично подобному подходу к задачам анализа и синтеза систем с
сосредоточенными параметрами, нашедшему широкое применение для решения
самых разнообразных проблем автоматического регулирования и
управления. Сразу отметим, что в отличие от аналогичного понятая звена в
сосредоточенных системах, где входная и вььходная величины изменяются
только во времени (рис. 2.2,6), понятие распределенного блока
предусматривает зависимость входного и выходного сигналов еще и от
пространственных аргументов. В связи с этим обстоятельством
соответствующие обобщения положений структурной теории сосредоточенных
систем на системы с распределенными параметрами оказываются, как
будет показано ниже, далеко не тривиальными.
H'(^t)
G(x,^/-T)
Рис. 2.2. Струюурнос представление линейного объекта управления:
а - стационарный распределенный блок; б - стационарный объект
с сосредоточенными параметрами
* Можно записывать входное воздействие в виде w(x,/). непосредственно
заданном в уравнениях (2.55). Далее, однако, будет использоваться запись в виде
Н'(^, т), с целью подчеркнуть отличие аргументов входа от аргументов выхода.
63
Можно показать, что вход-выходные соотношения типа (2.56)
сохраняются для значительно более общего случая описания линейных
многомерных ОРП системой уравнений вида (2.54), приобретая следующую
обобщенную форму интегрального представления объекта:
1
6(^,0= J
G(x,^,/,T)iv(^,x)d^A = G(x,^,/,T) о w(^,T). (2.72)
od
Здесь и далее операция двойного интегрирования произведения двух
функций по временной и пространственным переменным, называемая
пространственно-временной композицией, обозначается символом о .
Выражение (2.72) существенным образом отличается от (2.56) прежде всего
интефированием по многомерной пространственной области D для
многомерных объектов и увеличением для нестационарных систем, где не
выполняется соотношение (2.32), (в общем случае, до четырех) числа
аргументов функции Грина, вычисление которой для областей D
сложной формы представляет собой весьма трудную самостоятельную
проблему.
Соответствующее графическое представление линейного
распределенного блока более общего вида, описываемого равенством (2.72),
аналогично рис. 2.2 (рис. 2.3).
С другой стороны, в практических задачах чаще всего приходится
иметь дело с различными характерными частными случаями
представления стандартизирующих функций при изучении свойств распределенных
блоков относительно каждого в отдельности из типичных реализуемых
внешних воздействий на объект.
Один из наиболее распространенных на практике вариантов такого
представления сводится к виду
м<^,т) = ф(^)и(х) (2.73)
с сосредоточенными внешними воздействиями и(т) и фиксированными
законами ф(^) пространственного распределения входного сигнала.
В частности, полагая в (2.63)-(2.65)
w(^,t)
G(x.4,r,T)
Qix.t)
Рис. 2.3. Линейный распределенный
блок общего вида
64
(2Г(^) = Qo^(^) = 0; Жт,1/(^,т))= /,(^)и(т); ^2.74)
go(x."oW) = 0; gi(T,wi(T)) = 0,
получим для случая входного воздействия только по сосредоточенному
внутреннему управлению о(т) = w(x) с фиксированным законом ф(^) =
= /i(^) его пространственного распределения следующее выражение для
стандартизирующей функции
w(^,x) = /i(^)"(x). (2.75)
Если в (2.63Н2.65)
еГ(^) = Qo^(^) = 0; /fe,x,w(^,x)) = 0;
Р, =^ 0; gii'^^«, W) = w/(t); / = о или / = 1,
(2.76)
то система (2,55) описывает распределенный блок с граничным
управлением о(х) = ^Дт), сосредоточенном в точке jc = jc, на одной из границ
области [jcq^^i] определения пространственной переменной, при
отсутствии всех других входных воздействий.
В этом случае стандартизирующая функция (2.65) с учетом
соотношения (2.63) принимает характерный вид
>К^,т) = (-1)'^^ w,(^,T) = (-l)'-^* ^6(^ -;с,)1/Дт), (2.77)
отвечающий равенству (2.73) при ф(^) = Ф1(^) = (-1)''*"* ^^5(^-jc|).
Здесь / = О или / = 1.
Если, в отличие от (2.76), = О, то при соответствующем такому
варианту переходе от управления по фаничным условиям второго или
фетьего рода к фаничному управлению в условиях первой краевой
задачи, стандартизирующая функция (2.65), согласно (2.64), сводится вместо
(2.77), к виду
wil^,x) = t})^[B^(^)5(^^x^^^ (2.78)
опять согласующемуся с представлением >v(^,t) в форме (2.73) при
Ф(^) = Ф2(^)= ^^[^i(^)5(^-^,) + C(W^-x,)].
а,
65
Таким образом, если при управлении по граничным условиям
второго или третьего рода соответствующее управляющее воздействие
переводится в класс внутренних воздействий с помощью пространственной
дельта-функции - Д^,), то при фаничных условиях первого рода такой
перевод осуществляется с дополнительным использованием ее
производной. Подставляя равенство (2.73) в (2.56), найдем соотношение,
связывающее выход объекта с управлением и(т), используя возможность
выноса в этом частном случае управляющего воздействия за знак
пространственного интеграла:
6(^,0= J JC(x,^,/-t)9(4)o{x)d^A =
JG(x,§./-T)9(^)d^
Js(*,/-T)o(T) А = 5(х.0*о(0.
u(t)A= (2.79)
где
5(дс,/-т)= |о(лс.^,/-т)ф(0<^ = С(*.^./-т)®<р(0, (2.80)
и символами * и ® обозначены, соответственно, операция свертки по
временной переменной (интефирования по времени произведения
5(jc,/-t)o(t) ) и операция (2.80) пространственного интефирования
произведения С(дс,^,Г-х)ф(4), называемая пространственной
композицией.
При конкретном представлении стандартизирующей функции в
форме (2.75), (2.77) или (2.78) выражения (2.79) и (2.80) с учетом свойств
дельта-функций (см. Приложение) принимают, соответственно,
следующий вид:
5(х,/-т)=С(*,§,/-т)0/,(О; e(*,0 = S(x,0*«(0; (2.81)
8{х,1-х) = l^C(x,)G(x,5,, -т) |. = !4L_C(x,)G(x, - т);
(-1)'*'
Pi
(2.82)
бб
r-n'^' г 1
Six, / - т) = ^— [В^ (Xi) G(x, jf,, / - x) - C(x,) {x, , / - x)J;
e(x,/)= (2.83)
= [^1 ) G(x, x,, 0 - C(x,) G^ (x, jc,, /)]* (t),
.4 5G(x,^,/-x)
где G^(x,x„/-x) =
, и всюду в (2.82), (2.83) / = О или
/ = 1 в зависимости от того, какое одно из двух возможных фаничных
управлений рассмафивается.
Здесь последние два выражения (2.82) и (2.83) для Q{x,i),
естественно, совпадают в рассмафиваемых условиях с двумя последними
слагаемыми общего вход-выходного соотношения (2.24), поскольку они как
раз и определяют в форме интефалов по временной переменной реакцию
на выходе распределенного блока по входным воздействиям в виде
сосредоточенных фаничных управлений.
Принципиальное отличие выражения (2.79) и его частных вариантов
(2.81)--{2.83) от общего соотношения (2.56) заключается в том, что при
сосредоточенных входных воздействиях реакция объекта сводится к
форме интефала Дюамеля (свертки) только по временной переменной от
произведений этих воздействий и функций влияния S{Xyi-x),
образуемых с помощью функции Грина рассмафиваемой системы, в то время как
в общем случае просфанственно-временного воздействия такая реакция
находится, согласно (2.56), двойным интефированием по просфанствен-
но-временной области определения функции состояния .
Указанные функции влияния могут рассмафиваться как импульсные
переходные функции объекта по соответствующим сосредоточенным
входам (подобно самой функции Грина в общем случае воздействия по
w(jc,/)), а сама просфанственная переменная выходах в составе их
аргументов выступает лишь в роли парамефа.
Выражения (2.79), (2.81>-(2.83) для оценки реакции объекта в каждой
фиксированной точке х офезка [jcq,Xj ], по существу, ничем не
отличаются от соотношения между входом w(t) и выходом Q{i) линейной
сосредоточенной системы с соответствующей функцией Грина G{i) (рис.
2.2,6):
6(0 =
G(/ - х) w(x) dz = G(/) * w{i). (2.84)
67
Отмеченная аналогия поведения распределенных и сосредоточенных
систем при сосредоточенных воздействиях на входе распределенных
блоков позволяет существенно облегчить анализ их свойств в данном
частном случае, имеющем, однако, широкое практическое применение.
Вся специфика пространственной распределенности сказывается
здесь только в выражениях для функций Грина и соответствующих
функций влияния в (2.81Н2.83), зависящих от пространственной координаты
как от параметра. Распределенные блоки вида (2.81Н2.83) с
сосредоточенным входом и распределенным выходом называются переходными х-
блоками [8], и могут быть для характерных частных случаев фафически
представлены в виде, изображенном на рис. 2.4, где каждый блок
обозначается его функцией влияния.
К типовым распределенным блокам можно отнести также
"обратный" вариант с распределенным входным воздействием w(^,t) и
сосредоточенным скалярным или векторным выходом, в качестве которого
часто рассматриваются значения функции состояния Qixl*,t) водной
(х\*) или т>\ фиксированных точках jcj^* e[xQ,x| ], А = 1,/w,
используемые, например, в целях формирования соответствующих сигналов
обратной связи при построении систем управления ОРП (рис. 2.5).
w(t)
5(х,/-т)
с(-/У^;
G(x.XiJ-xy
Qixj)
Рис. 2.4. Структурное представление распределенных х-блоков:
а - х-блок с сосредоточенным внуфенним управлением; б - х-блок с сосредоточенным фа-
ничным управлением в условиях второй или третьей краевой задачи при с = const ^0; * ^ ~
х-блок с сосредоточенным фаничным управлением в условиях первой краевой задачи при
С = const 5t 0; Я, = О; г-дг-блок с сосредоточенным фаничным управлением в условиях
первой краевой задачи при (7 = 0;^= const ?ь О •
68
Подобный блок, описываемый в рассматриваемом случае по-
прежнему для задачи (2.55) основным соотношением (2.56), но для
фиксированных значений дс = jc^* , называется переходным ^-блоком,
В качестве сосредоточенного выхода ^-блока могут рассматриваться
и другие, в частности, интегральные оценки функции состояния
распределенной системы, например, среднее ее значение или соотношения,
характеризующие реальный результат измерения функции состояния в
окрестности точки расположения соответствующих датчиков.
Название "переходный" для блоков рис. 2.4, 2.5 связано в данном
случае с преобразованием сосредоточенного воздействия на входе
объекта в распределенный сигнал на его выходе или наоборот, а термины "х-
блок" или ^-блок, в соответствии с обозначениями пространственных
аргументов X и ^ выхода и входа, указывают, какой именно из этих сигналов
в таком преобразовании рассматривается как пространственно
распределенный.
Кроме того, переходные блоки специального вида применяются для
описания взаимодействия различных распределенных и сосредоточенных
блоков в структуре объединяющей их системы управления. В частности,
такие блоки используются для структурного моделирования локального
сигнала обратной связи по функции состояния ОРП, контролируемой в
определенной фиксированной точке пространственной области ее
определения (^-блок), а также для моделирования управляющего воздействия,
подаваемого с выхода регулятора на объект в другой фиксированной
точке этой области (дс-блок) [8] (см. подробнее § 2.6).
На практике очень часто встречаются распределенные блоки с
сосредоточенными входами и выходами, моделирующие поведение функции
состояния объекта Q(xl*,t) в фиксированных точках х1* e[xQ,xi],
Л = 1,;я, при сосредоточенном управлении о(т) в (2.73).
Будем называть такие блоки х^-блоками, поскольку они обладают
свойствами как х-, так и ^-блоков по сосредоточенному характеру
сигналов, соответственно на входе и на выходе блока. Указанные свойства, как
известно, характеризуют объекты с сосредоточенными параметрами,
однако, х^-блок принципиально отличается от ОСП видом своей функции
Грина.
w(4j)
Рис. 2.5. Распределенный стационарный ^-блок
69
Другая группа характерных частных вариантов представления вход^
выходных соотношений распределенного блока, уже не имеющих
аналогов в сосредоточенных системах, образуется при входных сигналах вида
(2.73) с их "обратной" интерпретацией, когда в роли управляющих
рассматриваются пространственные воздействия ф(^) , при фиксированном
характере и(т) изменения входного сигнала во времени.
Для случая внутреннего пространственного управления ф(^) = /,(^)
со стандартизирующей функцией (2.75) наиболее характерными являются
две ситуации:
и(х) = 1;т>0 (2.85)
и
u(t) = 5(T-/*),x>0, (2.86)
для первой из которых входной сигнал создает скачкообразное, а для
второй ~ импульсное воздействие на входе блока в фиксированный момент
времени,соответственно х = О (при и(т) = 0, т<0)и х = /*.
Если, в частности, в (2.63Н2.65) вместо (2.74) имеем
Qo\K) = о при л = о, ^1 ;t о или ^ 9t о, ylj = о; (2.87)
/fe,x,i/(4,x))= 0; go^^oW) = 0; g,{z,u,{x)) = 0; (2:88)
то стандартизирующая функция принимает вид
К4,х) = ^1еГ(4)5(т), если Л = о (2.89)
или
м<^,х) = ^!2Г(ВДх),если ^, =0, (2.90)
соответствующий (2.73) при
(p(^) = 4eS°>(^), и(х) = 5(т)
или
<m = AQ<^\k\ и(т) = 6'(т),
и в качестве воздействия на входе блока здесь можно рассматривать
начальное пространственное распределение Q^^{^ выходной функции
состояния.
Совершенно аналогичный (2.89) вид с заменой входного сигнала
бо^\^) на воздействие Qq^{^) по начальному пространственному рас-
70
пределению производной dQ{xfi)ldt принимает стандартизирующая
функция (2.65), если, наряду с (2.88), вместо условий (2.87) принять
g^0)(^) = 0; A^d:
>v(^^) = ^eJ*44)8(T). (2.91)
Подобно (2.79), найдем соотношения для распределенного блока,
связывающие функцию состояния Q{Xyt) на его выходе с
пространственным управлением ф(^) при стандартизирующей функции вида (2.73),
используя теперь уже возможность выноса управляющего воздействия за
знак интефала по времени:
е(х,/)= J|а(х,^,/-х)ф(^)и(т)^^ А =
Одго
|а(д:.^,/-.т)о(т)Л
L0
|5,(х.^,0ф(0^ = 5,(дг,^,/)® ф(^), (2.92)
'о
где
5,(х,^,/)= fG(x,^,/-T)u(T)A. (2.93)
о
В частности, для неизменного во времени внутреннего управления
Ф(^) = /|(^) при и(х) = 1, x > О, согласно (2.85), имеем отсюда
4x.%.t) = Jg(jc,§,/ - х)Л = Л(х,4,/); е(х,/) = Л(;с,4,/)®/,(^). (2.94)
о
где по аналогии с сосредоточенными системами интсфал Л(дг,4»0 по
времени от функции Грина можно назвать переходной функцией объекта'.
В случае импульсного воздействия (2.86) получим в соответствии с
(2.92). (2.93):
5i(x,^,0 = G(x,^,/-/); e(x,/) = G(x,^,/-/*)®/,(^). (2.95)
При входном сигнале (2.89) по начальному состоянию объекта соот-
Иногда под переходной функцией объекта мы будем понимать величину
Vi(x,^,/) при v(/) = vo = const * 1.
71
ношения (2.92), (2.93) принимают следующий вид:
5,(х,^,/) = G(x,iO; Q(xj) = >l,G(x,^.0® е^°\^). (2.96)
Для случая (2.90) аналогичным образом будем иметь:
S,ix,%,t)=^^'':y^=G',(x,^,t); Q{xj) = AG;ix^,i)®Q^^4^). (2.97)
ot
Наконец, при воздействии (2.91) на входе блока получим
5i(x,^,0 = G(x,^,0; QixJ) = AG{x,^J)®Q^'h^). (2.98)
Пространственные композиции (2.96)-<2.98) совпадают, конечно, в
рассматриваемых условиях с соответствующими частными вариантами
первых двух слагаемых общего вход-выходного соотношения (2.24),
определяющих как раз в форме пространственной композиции часть
выходной реакции распределенного блока на воздействие по начальному
состоянию объекта.
Графические изображения блоков (2.94)-(2.98) приведены на рис. 2.6.
и(т) = 7
A,Gix,c,.ty
u(T)=5(T-/ )
Qix,0 q!,\)
G{x.^,t-t)
б
A, = 0
Qix.ty
Q{x.t)
A*0
AG{x,i^,t)
Qix.t)
Рис. 2.6. Распределенные блоки с пространственными входными воздействиями:
а - блок с внутренним пространственным неизменным во времени управлением;
б - блок с внутренним пространственным и импульсным во времени управлением;
в, г - блоки с входным воздействием по начальному пространственному распределению
выходной величины при Л = О и Л] = О соответственно; д - блок с входным воздействием
по начальному пространственному распределению скорости изменения выходной величины
72
Таким образом, если в общем случае пространственно-временных
воздействий на входе линейного стационарного распределенного блока
его выходная величина описывается пространственно-временной
композицией (2.56) входа и функции Грина объекта, то при сосредоточенном
воздействии эта композиция сводится к свертке по времени вида (2.81)-
(2.83) с соответствующей функцией влияния, аналогично
сосредоточенным системам, а при "чисто" пространственном управлении - к
пространственным композициям типа (2.94)~(2.98).
Пример 2.7. Рассмотренный в примерах 2.1 и 2.4 объект с функцией
Грина (2.38) и стандартизирующей функцией (2.67) при пространственно-
распределенном воздействии по удельной мощности источников тепла F(xj)
представляет собой в условиях 0о(х) = О, g(i) = 0,н<х,0 = —F(x,0 распреде-
су
ленный блок, описываемый пространственно-временной композицией вида (2.56):
t R
1 Г Г
0(;г,/) = G(.x,^,t -1) о i-F(^,t) = — I - i)F(^,T)d^A =
1
cyR
co
t R
.0 0
+2 >^cos
л=1
nnx
R
tR
я
00
COS
exp
R^
(t-x)
(2.98a)
в некоторых случаях функция F{x,l) представима в форме (2.73)
произведения функций от одной переменной:
F(x./) = F,(*)M(/). (2.99)
где u(t) - удельная величина полной мощности (кВт/м^) источников тепла,
выделяемого в нагреваемом теле, а F^ (х) - закон их распределения по
пространственной координате, например, при индукционном способе нагрева (см. § 1.2).
Тогда при сосредоточенном входном воздействии по и(1) рассматриваемый
х-блок типа рис. 2.4^ описывается сверткой вида (2.81):
е(дг,0 = 5(х,0 *«(/) =
где в соответствии с (2.80)
S(jt,/-T)«(x)A,
S(x,t-z) = -^\G{x,^,t-x)F^(.^)d^.
(2.99а)
(2.100)
73
Если, например, задан экспоненциальный закон
^Д^) = е'"^ (2.100а)
распределения источников по координате с заданным показателем степени m > О,
то, принимая во внимание (2.38), получим, согласно (2.100), следующее
выражение для функции влияния S(x, / - т) после вычисления простых интегралов:
лг 00
5(;г,/-1) =
1
cyRj
l+22]cos
ппх
R
cos
к R J
exp -
an n
+J-ycos
nnx
R
exp
an n
r
«-t)
«-x)
\ R )
dt,:
f 4
\R\
exp
[-"-"J
где
При сосредоточенном граничном управлении 9(/) вида (1.6) в условиях
6o(Jf) = 0> /^(^,0=0 в (1.4), (1.5), когда станддртизирующая функция (2.67)
принимает вид (2.77):
>К^,х) = —8(^-Я)^(х),
(2.101)
объект представляет собой jc-блок типа рис. 2.4, б и описьшаегся совпадающей с
последним слагаемым в (2.37) сверткой в (2.82):
е(дг,0 = —ГС(х,Л,/-х)9(т)Л
(2.102)
для температурного поля 6(х,/) при произвольном воздействии по плотности
д(/) теплового потока на поверхности нагреваемого тела. Здесь на основании
(2.38) и равенства cos тш = (-1)" имеем:
0(х,Л,Г-х) = 1
А
l+22(-l)''cos
К R )
е.\р
2^2
ак п
-{t-x
. (2.103)
В частноста. при ^(х) s = const, т > О (^(х) = О, х < 0). получим, согласно
(2.102), (2.103), следующее выражение, описывающее переходную функцию
объекта по рассматриваемому каналу - реакщоо блока на скачкообразное воздействие
74
по граничному условию в точке x = R:
( 2 2л
•тх
1-ехр
an п t
\ R J
[ \
(2.104)
Вид переходной функции (2.104) для различных значений — е [0,1] иллюст-
R
рируетсярис. 1.1,а.
Как видно из рис. 1.1,а, в полном соответствии с физически: oi
закономерностями передачи тепла теплопроводностью при нагреве пластины постоянным
тепловым потоком, действующим на ее поверхности х = Л, температура в любой
момент времени / > О всегда оказывается меньше в той точке, которая
расположена ближе к центру х = 0.
/■
При достаточно больших значениях t — > 0,3
экспонентами в составе
коэффициентов членов ряда в (2.104) можно, как правило, в первом приближении
пренебречь, что приводит к линейному закону изменения температуры с
постоянной скоростью
дд{х,0 _ ago
для всех xe[0,R] на соответствующей стадии'
dt XR
процесса нагрева {регулярная стадия). Таким образом, относительно рассматрива-
Р и с. 2.7. Характеристики распределенного объекта, моделируемого уравнением
теплопроводности, при сосредоточенном граничном управлении в условиях второй краевой задачи: а
- переходные функции для температуры в различных точках; б - пространственное
распределение температур в различные моменты времени при постоянном во времени граничном
управлении
75
емого входа соответствующий jc-блок обладает астатическими свойствами; и
представляет собой объект без самовыравнивания для любого фиксированнбго
значения х е [О, Л].
Поскольку в (2.104) [30.39]
л=1
tovc
К R )
,-€[0,1],
что нетрудно проверить непосредственным разложением правой части последнего
равенства в ряд Фурье, на протяжении регулярной стадии создается неизменное во
времени параболическое распределение температур по пространственной
координате (рис. 2.7, б).
Совершегао аналогично соотношениям (2.101) и (2.102) выглядят общие
зависимости и для w(^,t) и 6(х,/) при граничном управлении по температуре
печи в/7(/), если граничное условие (1.6) заменяется условием третьего рода
(1.9). В частости, соответствующие выражения для w(^,t) и 0(jc,/) получаются
здесь, как это следует из (2.68), простой заменой ^(т) на а ^„{1) в формулах
(2.101), (2.102), однако сама фушщия Грина в (2.102), являясь решением другой
краевой задачи, определяется теперь, согласно (2.40) вместо (2.38):
2ЛпС08Лп
G(x,/?,/~x) = ly
^^Л,,+8тт1„.со8Т1,,
cos
exp
' R^
. (2.105)
В таком случае переходная функция объекта при в„{() = вп- const на
основании (2.102) и (2.105) записывается, вместо (2.104), в следующей форме
2cosTi„
^П«(Лп+5Ш11„С08Л„)
-cos
1-схр
(2.106)
где Bi = aRfX - безразмерный критерий Био (см. пример 2.1).
Поскольку на основашш (2.41) выполняегся равенство fS^Ik = £Н1!к, и
П. Bi
имеет место следующее разложение ед1шицы в ряд по фугащиям cos
[30,31]:
^_2sinTi,,
x
-cos
JC
.1. 0.-.,.
;;^Л«+8шл„-со8Лп
выражение (2.106) записывается в более удобной форме, содержащей быстрее
сходящийся ряд:
е(дг,о = ея
со 2sinTi„cos
x
R)
ехр
R'
(2.107)
76
Характер переходной функции (2.107), отличающийся асимптотическим
млением G(x,0 к 8/7 для всех значений дг, иллюстрируется рис. 2.8.
Как видно, при граничном управлении по температуре печи в условиях
краевой задачи рассматриваемый дг-блок обладает статическими свойст-
и представляет собой объект с самовыравниванием, в противовес угфавле-
по плотности теплового потока на поверхности нагреваемого тела при гра-
условиях второго рода (рис. 2.7). Заметим, что поведение переходных
фунЫий (2.107) существенно зависит от величины критерия Био В/ = ссЯ/Х,
определяющего значения корней Г{„ уравнения (2.41). С ростом Bi скорость
асимптотического приближения 9(х,/) к температуре печи возрастает.
' При переходе к управлению по температуре поверхности нагреваемого тела
Q(R,t) объект следует рассматривать в качестве jc-блока типа рис. 2.4, в;
стандартизирующая функция в соответствии с (2.69) принимает вид (2.78):
w(^,T) = fl5'(^-/?)e(/?,T); (2.108)
температурное поле описьшается вместо (2.102) сверткой вида (2.83), одинаковой
с последним слагаемым в (2.43):
в(дг,/) = -л|
dG(x,R,t-r)
вл(т)А,
(2.109)
2,0
Рис. 2.8. Переходные функции объекта, моделируемого уравнением
теплопроводности, при сосредоточенном граничном управлении
в условиях третьей краевой задачи
77
а функция Грина представляется решением (2.44) краевой задачи первого рода.
Тогда
aG(jc,/^,/-T)
00
^ ,1=1
(2,1-1)
кх
2R
sin
(2/1-1)
2R
ехр -
fl(2/?-l)^7C^
(/-т)
= ~2;(-l)''^V2,i-l)cos
Oux<R,
n=l
ехр
a(2/l-1)^71^
4/?2
(2.110)
и переходная функция объекта по рассматриваемому каналу внешнего
воздействия при в^7(г)нед =const определяется,согласно(2.109),(2.110),вьфажением
л=1
п+1
9(x,0 = ^e«2;i=^cos
05дг<Я.
1-ехр
^ д(2/1-1)^7С^
4R^ '
' (2.111)
Поскольку lim 9(jc,/) = 9^^ для всех jc < Л , то
Г->со
~/ \. , cos
7с^ 2м-1
,1=1
(2,1-1)
тсс
2R)
■ 1 0<x<R,
и переходная функция (2.111) записьшается в более компактном виде,
содержащем ряд с улучшенной сходимостью:
е(х,о=е;^
,1+1
,1=1
2,1-1
(2,1-1)
юс
2R)
ехр
^(2,1-1)^7С^ }
4R'
. (2.112)
Зависимости (2.112) для различных значений x/R (рис. 2.9) являются
предельными соотношениями для формул (2.107) (рис. 2.8) при В/ -> оо.
Из полученных выводов, в частноста, следует, что исследуемый объект
сохраняет статические свойства при переходе от граничного управления по
температуре печи к угфавляющему воздействию непосредственно по температуре
поверхности нагреваемого тела.
Если функция F|(x) пространственного распределения внутренних
источников тепла в (2.99) при постоянной во времени удельной мощности нагрева
НО - ^0 (кВт/м'), /> О, рассматривается в качестве управляющего воздействия,
то объект представляет собой распределенный блок типа рис. 2.6, а, а температур
ное поле на его выходе описывается пространственной композицией (2.94):
78
Здесь для уравнений (1.4)-(1-7) при граничных условиях 2-го рода в соотвегствии
с(2!38)и(2.94):
Л(дг.^/) =
0(дг.^,/-т)Л =
COS
cos
ехр
{t-x)
dx= (2.114)
cos
mx
К R )
1-exp
R^
Подставляя (2.114) в (2.113X приходим к следующему выражению для
в(х.О:
в(х,0 =
at
X
R^
^ R )
'1л
l~cxp
.(2.115)
0,4 0,8
1,6 2.0 «/я'
Рис. 2.9. Переходные функции объекта, моделируемого уравнением
теплопроводности, при сосредоточенном граничном управлении
в условиях первой краевой задачи
79
где
F,(4)cos
^,w = 0,1,2,..
/
(2.11^)
KR J
Очевидно, что переходная функция д:-блока (2.99а), (2.100) с сосредого^ен-
ным входом 1/(х) при любом фиксированном пространственном распределении
F,(^) источников тепла, получаемая согласно общему вход-выходному сос|тно-
шению (2.100) при и(т) = и^,х>0, совпадает с реакщ1ей (2.113) объекта
Н2^воздействие Fj (^) и также представляется формулами (2.115), (2.116).
При монотонно возрастающей фуюощи Fj(^) характер зависимости
температурного поля 9(х,/) от своих аргументов, согласно (2.115), аналогичен
показанному на рис. 2.7.
При импульсном воздействии (2.86), характеризуемом входным сигналом
K^,x) = ^F,(08(t-/*)
су
(2.117)
с заданной удельной энергией импульса щ (дж/м^), исследуемый объект можно
рассматривать как блок типа рис. 2.6, б, опять с распределенным управлением
Fj (^), но с другой фушщией влияния по сравненик) с предыдущим случаем.
Температурное поле описывается теперь в условиях второй краевой задачи
композицией (2.95) с той же фушщией Грина (2.38):
r
в(д:,/) =
G(;c,U-/ )F,(^)^:
cyR.
l + 2^cos
nnx
к R )
COS 2.
I R )
exp
<t-t)
_ "1
^10 +
COS
т.пх
,1=1
exp
в частности, 1фи импульсном воздействии с линейной функцией
F,o=f;
cos —^ =
\ R J
0, еслил = 2т;
w = l,2,...
2R
.если и = 2m-1;
формула (2.118) принимает следующий вид:
(2.118)
(2.119)
80
хехр -
скольку [14]
1
an\2n-lf
R
cos
-(/-/)
(2Л20)
7C тис
l" R)
x€[0,/?],
TO, как это следует из выражения (2.120), в начальный момент времени t = t со>
дается повторяющее пространственную зависимость (2.119) источников тепла
линейное распределение температур
e(.,/*)=iiL^,
су R
стремящееся при f ->оо к постоянной величине
lim 8(^,0 = ^
2су
для всех х€[0,Л] (рис. 2.10).
Рис. 2.10. Реакция объекта управления на импульсное внутреннее воздейсгеие,
линейно распределенное в пространстве ( / - распределение температур при
л(г-Г)/Л^=0,05; 2-при а(/-/*)/JR^ = 0,10)
81
Если, наконец, в качестве входного воздействия рассматриваегся начальное
температурное состояние Qoix) в (1.5), то, в условиях А=Ов (2.65) для уравне-
ния теплопроводности, стандартизирующая функция принимает вид (2.89); мы
получаем блок типа рис. 2.6,в, и, в соответствии с (2.96), будем иметь выражение
для 9(x,/) , совпадающее с первым слагаемым в (2.37), (2.39) и (2.43):
0(jr,O = G(jc,5,/)0eo(4)= G(x,^,OGo(4)^
(2.121)
Функции влияния блоков (2.118) и (2.121) совпадают при /*=0 в(2.117),и
в таком случае эти блоки отличаются только сигналами на их входах. Поэтому
вход-выходное соотношение (2.121) описывается в условиях второй краевой
задачи выражением вида (2.118) с заменой Fj^ на Qq„ :
«,.0-1
'00
л=1
On
cos
2 2
ппх
аж п
[ R J
ехр
(2.122)
где
eo(5)cos
К R )
d^,/i = 0,U,...
(2.123)
В частности, при линейном начальном распределении температур
9о(^) = ^/Л его изменение во времени описывается формулой (2.120) и
иллюстрируется кривыми, показанными на рис. 2.10.
При переходе к граничным условиям третьего или первого рода выражения
(2.114), (2.118) и (2.122), а также (2.116) и (2.123) видоизменяются за счег
изменения функций Грина соответствующей краевой задачи.
Пример 2.8. Продолжим начатое в примерах 2.2 и 2.5 рассмотрение
процесса гашения пульсаций расхода газа Q{x^t) в газопроводе. В условиях
е(х,0)= =ae(x,0)/a/ = 0,0^jc^/; 6(0,0 = 0,/>0, обьект (2.45)-(2.47)
представляет собой дс-блок (2.81) типа рис. 2.4,а, с внутренним сосредоточенным
управлением w(x) по дополнительному расходу управляемого гасигеля колеба-
нийпри /i(^)= =б'(^-х*) и
w(5,T) = «(x)54?-/). (2.124)
Тогда, согласно (2.81),
5(дг,/-т) =
С(дг,^,/ - х)б'(4 - /) ^ = -G'^{x,x\t - т).
и реакция блока на управление и{х) описывается соотношением, совпадающим в
82
ом случае с двойным интегралом в (2.48):
г
е(дс,0 = -|о^(х,/,/-х)1/(т)Л.
(2.125)
i| частности, при характерном гармоническом воздействии
и(т) = sin (DT, = const
(2.125а)
с частотой co;*■^^~^ для всех /? = 1,2,... , получим, используя заданную в форме
(2.49) функцию Грина и выполняя простые операции дифференцирования и
интегрирования тригонометрических функций и их произведешсй:
Q(xj) = -JG'^ix,x\t - z)uix)dx = - J G ixAJ - x)«(x)^x
0 L 0
0 L я=1
sin
лидс
sm|—r^. sm|co—^ -
I )
2^coV »
\ I )
nnx
2cou
0 «>
-COS
-COS
nnx
sin
nnx
sma)/ +
sm
nnx
. IJ
I
(2.126)
Как следует из (2.126), пульсации расхода газа в любой точке л е (О,/) по
длине газопровода складываются в рассматриваемом случае из вынужденной
гармонической составляющей, изменяющейся во времени с частотой ш входного
сигнала, и бесконечной суммы гармоник с собственными частотами объекта
с^пп
I
л = 1,2,..., и амплитудами, зависящими от пространственной координаты
также по гармоническому закону sin
ппх
I
Бесконечная сумма в скобках первого слагаемого в (2.126), характеризующая
пространственную зависимость амплитуды вынужденной составляющей, пред-
83
ставляет собой разложение на интервале (0,/) в ряд Фурье'
2 о *
cos
следующей функции F|,(.t):
(о
7Ш.Г
sm-
7ШХ
(2.127)
cos—{1-х )
^0
-sin—х, 0<jc<jc ;
CD
„о ^
CD *
cos X
(2.128)
-sin —(/ - х\ .t* < JC < /.
«^0
в этом можно убедиться непосредственно, используя известные правила
такого представления ^^(дс) [29]:
п=1
iU(z)sinfi^>z
sin-
TOtX
I
(2.129)
в итоге выражение (2.126) приводится к виду, содержащему вынужденную
составляющую в конечной форме
Q(xj) = F^(j:)sin (о/ + ^^5]
о «>
-cos
тшх
к / )
sm^. (2.130)
Характер изменения амплитуды /*J,(x) в зависимости от х иллюстрируется
рис. 2.11 ,а, а поведение первой гармоники 2ic(^J) ряда в (2.130) - рис. 2.11 ,б.
По отношению к внешнему сосредоточенному воздействию go (О по
расходу газа на входе в газопровод, которое, как правило, рассматривается в качестве
возмущения [7, 8], объект (2.45>-(2.47) в условиях Q{xfi) = dQ{xfi) / dt = О,
О < x ^ /;!/(/) = О, г > О, представляет собой jc-блок типа рис. 2.4,в. Это следует
из выражения (2.70) для стандартизирующей функции рассматриваемого ОРП,
' Равенство (2.127) выполняется для всех х е (О, /), исключая точку разрыва
первого рода х=х*, в которой сумма ряда в (2.127) равна полусумме
^ Ff, {х* - 0) + F^, (/ + 0) правого и левого пределов F^, в (2.128) [29].
84
К(л^рая принимает в указанных условиях вид (2.78):
\ vK(iT) = -go(')S'(^)-
(2.131)
Тогда функция состояния Q{x,t) определяется, на основании (2.83),
сверткой типа (2.125):
Qix,t) = Jg^(xA/ - т)^о(х)Л, (2Л 32)
о
представляющей собой последнее слагаемое общего вход-выходного соотношения
(2.48) для рассматриваемого объекта.
0.5
-0,5
. (0
sin jc
1
1
1
1
0,2
0.4 0.6 0.8
1
I
1
1
I
1
1
1
Рис, 2.11. Распределение по длине газопровода относительной амплитуды 7^ (jc)
«
вынужденной составляющей ^^,(дг) для £-=:0,3; —= — (о) и поведение первой гармони-
/ со 2/
ки d: i
/ \
2
CqK
[ / J
•
(DCOS
"T"
6fc(^.0 = ^ ^ ^ ^ Qic^Xy!) свободной составляющей (б) пулы:аций расхода
газа при синусоидальном входном воздействии по дополнительному расходу гасителя коле-
баний вточке д: = дг*(У-для/ = Ои
I /6/6 12
16 12
85
При гармоническом изменении сосредоточенного входного сигнала
с 7lf1
go(/) = gsin(ojt, g = const; C0| , w = 1,2,...
(2.133)
свертка (2.132) приводит, аналогично предыдущему варианту (2.124) с
внутренним управлением, к следующему выражению для управляемой величины Qix,0 ,
совпадающему (с точностью до знака) с формулой (2.126) при д:* = О:
e(^,o=g
Л=1
j2 Ь
-sin
л=1
СО,
-со?
■кпх
\ /)
sin СО)/ -
(2.134)
/ n
-<0?
-кпх
Нетрудно убедиться непосредственной проверкой по формуле вида (2.129),
что здесь бесконечная сумма в скобках представляет собой разложение в ряд Фу-
sm^(/-x)
рьефункщш _£Ь__.
Со
sin-J-(/-jc) _ 2 «
/2 Lu/
sin^/
^0
-sin-
imx
/1=1
/
-cof
(2.135)
и, следовательно, составляющая Q,(^>0 в (2.134), изменяющаяся с частотой 0,
входного воздействия, представляется в конечной форме синусоидального
колебания с синусоидальной зависимостью амплитуды от пространственной
координата (рис. 2.12):
sm^(/-jc)
G(jf,/) = g—^^ sin со,/
sin^/
^0
_2£b£Y_
-sin
CqTCW
/
sinf^. (2.136)
Из сравнения выражений (2.136) и (2.130) следует с учетом равенств (2.128), что
гашение пульсащй газа, вызванных гармоническим возмущением (2.133) по его
расходу на входе в газопровод, может быть осуществлено по основной их
составляющей на участке правее точки х , т.е. для всех х\ х* <х^1 ,с помощью
управляющего воздействия (2.125а) гасителя колебаний, изменяющегося с частотой
86
dj) = (Di входного сигнала и имеющего амплитуду и , определяемую в
зависимости от амплитуды g входа соотношением
cos x
Если в качестве входного воздействия рассматривается начальное состояние
g(jr,0) в (2.46), то в условиях А = ^,А^-0 в (2.65) для волнового
уравнено
ния (2.45), стандартизирующая фушщия при dQ{xfi)/dt = О, О < jc ^ /; u{t) = 0;
Qb(xJ)
sm
Рис. 2.12. Вынужденная составляющая (£(x,i) = ^F^ix)- sin со,/
пульсаций расхода газа при гармоническом возмущении на входе газопровода
(У-для/ = 0 и <Di/ = 7t;2-©,/ = "o>|/«5jj^;
87
go(') = о, / > о, принимает вид (2.90):
*Ч^х) = -1-еГ(4)8'(т).
(2.137)
Объект при таком входе можно рассматривать как распределенный блок
(2.97) типа рис. 2.6,г, выходная величина которого связывается со входом
пространственной композицией, совпадающей с первым слагаемым в (2.48):
1
е(л,о=-^|с;№)еГ(^)^.
ния
(2.138)
Реакция такого блока на синусоидальное распределение начального состоя-
(2.139)
б^-Ч^)=QT sin^. О ^ ^ ^ /, >=const;
определяется сверткой (2.138), вычисляемой при входном сигнале (2.139),
подобно выра)1№нию (2.126):
cl
dt.
2co'^l .
— 2 —sin
я=1
TOUT
sin
\ I)
. cq-mt
Поскольку здесь
sin
7C?
sin-y2.d^ = 0 длявсех n>\
(2.140)
I Sin
\ i J
Sin "у"^ ~J^*"^ ~ 2^ ^ = ^
0
TO после почленного интегрирования ряда в (2.140) остается лишь одно отличное
от нуля слагаемое его суммы для /? = 1, и в результате получим выходной сигнал
в форме незатухающего колебания.
e(x,o=e^^sin н
COS
(2.141)
содержащего только одну гармоническую составляющую с амплитудой
e<?>sini^ и частотой^.
Для другого варианта начальных условий Q{x,0) = О, dQ{x,Qi)ldt с нуле-
88
выми внешними воздействиями i/(/) = go(0 = 0, получаем стандартгизирующую
функцию (2.91):
h<^^) = -VQo'^(4)SW> (2.142)
и объект можно рассматривать в качестве распределенного блока типа рис. 2.6,Э с
входным сигналом по начальному распределению производной dQ{xfi)ldt
выходной функции состояния, описываемой, согласно (2.98), композицией
/
Q{xj) = \ fG(x,^,/) Q2\k)d^ , (2.143)
4
о
которая представляется вторым слагаемым в (2.48).
Свертка (2.143) при гармоническом воздействии типа (2.139):
е?^Й) = Q^c^ sin ^, О < ^ < /, 0!Р = const (2.144)
приводит, подобно (2.140), к выражению для выходной координаты, аналогично-*
му формуле (2.141):
sin^. (2.145)
= \ \ G(xA,t)Q^^ sin = ^sin
тис
Заметим в заключение, что уравнения объекта (2.45Н2.47) при «(0 = 0
одновременно моделируют распределение напряжения в длинной электрической
линии без потерь, замкнутой накоротко на одном из концов jr = /, если cq в (2.45)
представляет собой скорость распространения электромагнитной волны (см.
также §2.1) [46].
Поэтому выражение (2.136) описьюает, наряду с пульсациями расхода газа,
пространственно-временное распределение напряжения в такой линии при ее
включении на источник синусоидального питающего напряжения go (О вида
(2.133), расположенный на другом конце д: = 0, а формулы (2.141) и (2.145) -
электромагнитные процессы, вызванные гармоническими начальными
распределениями вдоль линии напряжения и скорости его изменения.
Пример 2.9. Рассмотренный в примерах 2.3 и 2.6 объект (1.21 Н1.23)
первого порядка представляет собой характеризуемый функцией Грина (2.53)
распределенный блок со стандартизирующим входом (2.71) и температурным полем
4x,i) движущегося в процессе нагрева изделия на его выходе. Если в качестве
управляющего воздействия рассматривается температура Bfjix,t) рабочего про-
^анства печи, то при нулевом начальном состоянии В{х,0) = 9о(дг) s О и
нулевой температуре 0(0,/) = 6^(0 S О нагреваемого материала на входе в печь
89
т.е. температура на выходе блока для каждого фиксированного значения х
изменяется по экспоненте на интервале te
и остается неизменной на уровне.
достигнутом при ' = . для всех ^ ^ , определяя тем самым строго
ограниченное время переходного процесса (рис. 2.13).
При сосредоточенном воздействии по температуре 0^(0 нагреваемых
изделий на входе печи и при отсутствии Дфугих входных сигналов соответствующая
стандартизирующая функция (2.71) принимает, согласно (2.78), следующий вид:
н<^т)=6Ке^х)5(а
где будем считать, что 0^(т) = О для всех т ^ О.
(2.149)
Тогда объект можно рассматривать в качестве jc-блока вида рис. 3,г, а
реакция его выхода на входное воздействие (2.149) описывается формулами (2.147)
после подстановки вместо 0 jj выражения (2.149) для w(^,t) :
в(х,0 =
1 ) Г дгЧ
x-Vl
1 ?
bv
Jexp
bV
8(4)9^
t-
(2.150)
Qix.t)
P И c. 2.13. Температурное поле в процессе непрерывного нафева с
постоянной температурой рабочего пространства печи
91
Поскольку для tuy
f ехр
x-Vt
x
= Jexp
(
(так как 9°
bV
_£zi
bV
8(4) e°
8(4)6°
^4 =
</4=exp
x
'W
V
= 0.
=0 при / 5 —), TO формулы (2.150) приводятся к виду:
в(*./) =
ехр
I, hV)
(2.151)
т.е. в любой точке х е [О,/] выходная величина объекта повторяет входной сигнал
с временным запаздыванием ^ и поправочным коэффициентом ехр
bV)
(рис. 2.14).
Если в отсутствие других внешних воздействий рассматривать в качестве
входного сигнала начальное температурное состояние, то соответствующая
стандартизирующая функция имеет форму (2.89):
>.<4.t)=Wo(4)8(t);
(2.152)
е°(/-^)
Р И С. 2.14. Иллюстрация реакции выхода объекта на сосредоточенное
во:щейс1Бие по температуре нагреваемых изделий на входе печи
92
объект представляет собой распределенный блок вида рис. 5,в, и, подобно (86),
будем в таком случае иметь вместо (2.147):
в(х.О =
1 f
х-У1
If
5dk
bV
bV
00 5
во (4) 8
V )
(2.153)
V J
Для первого из икгегралов в (2.153) получим, используя известные свойства
дельта-функций:
x-Vt x-Vt ^
x
7"
Х-У1
где Л4)=ехр
bV
Для второго интеграла находим, что
|/(^)5[^-(*-^'OИ=o./Sp
поскольку дельта-фушщия сосредоточена в точке % = x-Vt<0 вне интервала
интегрирования.
В итоге выражение (2.153) преобразуется следующим образом:
е(х.О =
ео(;с-К/)ехр
I b)
Если здесь, в частности, 9о(^) s 0^ = const, то реакция блока,
проявляющаяся только на ингервале
э/, представляет собой экспоненту ехр
I Ь)
коэффициентом % (рис. 2.15). В случае 0^(^) ф const этим коэффициентом
является начальная температура %{x-Vt) в точке, координата которой изменяется во
времени со скоростью V.
93
Рис. 2.15. Реакция на выходе распределенного блока в точке х = при
входном воздействии по равномерно распределенной начальной температуре
§ 2.5. Передаточные функции объектов управления
с распределенными параметрами
Применение преобразования Лапласа по временному аргументу t к
вход-выходным соотношениям вида (2.56) для линейных стационарных
блоков позволяет распространить на системы с распределенньп^и
параметрами важнейшее понятие передаточной функции и использовать
конструктивные методы структурного подхода, широко применяемые в
теории управления линейными сосредоточенными системами.
Ниже будет показано, что подобные обобщения приводят к
качественно новым по сравнению с ССП результатам.
В дальнейшем для простоты офаничимся рассмотрением
одномерной задачи (2.55), (2.56).
Обычные правила применения преобразования Лапласа для функций
состояния QiO сосредоточеннььх систем полностью переносятся на
распределенные функции состояния 0(х,/), где в этом случае
пространственная переменная х просто выступает в роли "постороннего" параметра.
Используя известное правило операционного исчисления, согласно
которому изображение по переменной / свертки функций равно
произведению изображений этих функций, получим, преобразуя по Лапласу обе
части соотношения (2.56):
94
L,{Qix,t)) = Qix,p) = L,
\\Gix^,t-T)w(^,x)dS,dx
i
jG(x,i/-x)>K^,T) dz
Lo
(2.154)
rf^=jG(Ar,ip)w(^,p) rf^,
где QiXyp)y G(x,5,p) и >i'(^,p) - соответственно изображения выхода
объекта S(x,0, функции Грина G(x,^,0 и стандартизирующей функции
н'(4?'с)»а р - комплексная переменная преобразования Лапласа.
Таким образом, равенство (2.56) в изображениях приобретает
следующий вид пространственной композиции д(х,^,р) и w(4,p):
Q(x,p) = J 6{хЛ, р)Щ, p)d% = G(x, t /7) ® w(^, p). (2.155)
По аналогии с сосредоточенной системой, для которой подобное
соотношение связывает изображения входа (w(/7)) и выхода {Q{p)) с
помощью передаточной функции W{p):
Q(p)^W{p)w{p), (2.156)
будем называть изображение функции Грина передаточной функцией
>F(x,^,/7) объекта с распределенными параметрами (распределенного
блока) (2.55):
W{x,%,p)^G{x^.p)- (2.157)
Указанная аналогия, по существу, заключается здесь лишь в том, что
передаточная функция как для сосредоточенной, так и для
распределенной системы является изображением ее импульсной переходной функции,
и исчерпывающим образом характеризует свойства объекта, позволяя по-
лучшъ изображение реакции выходной величины при произвольном
входном воздействии.
В то же время принципиальная специфика распределенной системы
заключается в том, что вместо обычного произведения передаточной
функции и изображения входа в (2.156) здесь используется операция
пространственной композиции, т.е. интегрирования по пространственному
аргументу входа, для получения изображения функции состояния
объекта.
Если W(p) в (2.156) зависит только от одной переменной р, то
передаточная функция в (2.157) является функцией трех аргументов, в число
95
которых кроме V" входят пространственные переменные д: и ^ выхода и
входа распределенного блока.
В терминах передаточных функций графическое изображение блока
показано на рис. 2.16.
Для переходного ^-блока вида рис. 2.5 значения х = х1*
пространственного аргумента выхода фиксируются, а его передаточная функция
(2.158)
зависит уже только от двух переменных - р и пространственного
аргумента входа.
Фактически полная формальная аналогия для операторных
соотношений (2.155) и (2.156), ввиду идентичности сверточных соотношений в
(2.81)-(2.83) и (2.84), имеет место для переходных х-блоков (2.81)-(2.83) с
сосредоточенными входами 6(/7) в составе стандартизирующих функций
типа (2.73).
Действительно, в этом случае вьфажение (2.155) в силу (2.73)
принимает следующий вид:
Qix,p)^ lGix^,p)<K^.p)dli = vip) JG(x^,p)md^ =5(x,p)u(/7), (2.159)
где
5(x,/7)= JG(jc,^,p)9(^)d^
есть изображение функции S{xj) в (2.80).
Если ввести здесь определение lV^{Xyp) передаточной функции х-
блока согласно соотношению
^xix.p) = S(x,p)= G{x,%,p)<mdl
^,p)(md^> (2.160)
Qix,p)
Рис. 2.16. Струюурное представление распределенного
блока в терминах передаточных функций
96
it> изображение выходной величины Q(x,p) х-блока представляется для
каждого фиксированного значения пространственной координаты х,
согласно (2.159), обычным произведением
Qix,p) = W^{x,p)v(p)
(2.161)
передаточной функции и изобрахюния входного воздействия, подобно
сосредоточенным системам.
Следовательно, вся специфика по сравнению с сосредоточенными
системами в данном частном случае сводится лишь к самим выражениям
для передаточной функции блока Wj^(x,p), которые не зависят от
пространственной переменной входа и должны учитывать параметрическую
зависимость от выходного пространственного аргумента.
Отмеченная аналогия с сосредоточенной системой является основ-
ным отличительным признаком х-блока любой природы и назначения.
Рассмотренные структуры х- и ^-блоков представлены на рис. 2.17,о;
2.17,6.
В частных случаях (2.75), (2.77), (2.78) для блоков (2.81)-(2.83) с
и'(§,г) = ф(5)о(х) при
о(р) = и(р); Ф(^) = /1(^);
ад=и/(Р); Ф(5)=
(-1У
-С(5)5(§-х,);
(2.162а)
(2.1626)
^(Р) = щ(рУ, Ф(0 = ^-^[5i(§)S(^-*i)+C(4)5'(5-^)l;(2.162b)
будем иметь, в сш^ (2.160), соответственно:
»'x(jf.p) = G(x,4,/7)®/,(^);
(-1)'*'
»'х(*. Я) = ^-Т—C(aci )G(x. x,, р);
Р/
(2.163)
(2.164)
а б
Рис. 2.17. Структурное представление х-н|-блою»
97
1+1
а.
5, (x, )G(x.x,. р) - A[::(4)G(x.4. р)
.(2.165)
Напомним, что здесь всюду в (2.162)-(2.165) / = О или / = 1.
Для блоков (2.94) - (2.98) (рис. 2.18) с пространственно распределен*
ными входами /i(^), боЙ) « Qo\^)> которые уже не имеют
сосредоточенных аналогов, получим, согласно (2.85), (2.86), (2.89)-(2.91), сле;г^ую-
щие варианты по функциям ф(^) и множителям о(р) в (2.73):
ф(?)=/1Й);о(/')=-;
р
ф(^)=/i (4);
(2.16ба)
(2.1666)
б
Л,=0
§ix,p)
й(х,р)
Q(x,p)
Р И С. 2.18. CipynypHoe представление распределенных блоков при различных вариантах
фиксированного изменения во времени пространстеенно распределенных входных воздейсг*
внй (а - постоянное во времени внутреннее управление; б - импульсное во времени внуг>
реннее управление; в - для входного воздействия по начальному распределению выхода
объет при Л » О; г - для входного воздейстаия по начальному распределению выхода
объекта при « О ; д - для входного воздействия по начальному распределению скоросга
изменения выхода объекта при А^шО
98
ф(^) = Ле(°>(^);о(р) = /7;
Ф(^) = у«е<'>(4);0(/>) = 1.
(2.16бв)
(2.166Г)
(2.166Д)
Входным воздействиям (2.166) отвечают на основании (2.155) и
(2.157), соответственно, следующие соотношения для юображений
реакций бС*»/') на выходе объекта:
Q(x,p) = W(x^,p)®
ш.
Qix,p) = lVix,^,p)0M^)e-P' ■
Q{x,p) = WixX,p)®AiQ^^\^);
Q^x,p) = W{x,^,p)®ApQ^\%);
Q(.x,p) = W{xX,p)®Ap(^\%).
(2.167a)
(2.1676)
(2.167b)
(2.167Г)
(2.167Д)
Распределенный блок с передаточной функцией (2.157) вцда W{x,^),
не зависящей от переменной "р", называется статическим блоком [8]
(рис. 2.19). Если, согласно (2.157), С(лг,^,/) = W(jr,^), то обратное
преобразование Лапласа приводит к следующей функции Грина такого блока:
G(x,%,t) = W{x,%)m. (2.168)
Тогда, согласно (2.S6), реакция на его выходе описывается в данном
случае соотношением (Приложение):
t X
W(x,mt-^MK,-c)d^dt =
0*0
= ]щх.
Хо
4) ]н'(^,х)5(х-0Л
.0
|М4.0</|= (2.169)
•«о
= Ж(х,4)®и'(^,0
вчвд пространственной композиции, подобно (2.92), (2.94)-(2.98) с той
разницей, что временная переменная здесь присутствует во входном
воздействии, а не в составе аргументов функций влияния. Это означает, что
блок (2.169) является "безынерционным". В соответствии с (2.169) его
вькодная величина зависит от г как от параметра, хотя характер ее
зависимости от времени не повторяет, вообще говоря, зависимости от t входа
99
w(^,t), как это имеет место для безынерционных звеньев в
сосредоточенных системах.
При статическом входе вида >у{^,т) = ф(^) на выходе статического
блока , как это следует из (2.169), сразу фиксируется статическое
состояние
7
(2.170)
Пример 2.10. Найдем передаточные функции ОРП, рассмотренного в
примерах 2.1,2.7. Для функции Грина объекта, определяемой выражением (2.38),
его передаточная функция в соответствии с (2.157) принимает следующий вид:
Ж(дг,5,я)=0(дс.5,/^) = -^
1^2Усо/^1
я=1 ^
COS
R
an п
^2 2
ССП п
(2.171)
Тем самым в соответствии с (2.171) данный ОРП допускает структурное
представление в виде параллельного соединения одного интегрирующего и
бесконечного числа типовых апериодических звеньев первого порядка с постоянными
времени
R'
и коэффициентами передачи, зависящими от х и ^ (рис. 2.20).
Именно наличием интегрирующего звена в составе передаточной функции
объясняется астатический характер объекта, как это следует из выражения (2.104) для
переходной функции и рис. 2.7, а. Ниже будет показано, что подобное
представление оказывается характерным для целого ряда типовых моделей
распределенных блоков.
Если в качестве управляемой величины рассматривается температура
0(дг**,г) в фиксированной точке jc,** е [0,jR], то ОРП можно рассматривать как
соответствующий ^-блок с передаточной функцией (2.158), которая, в силу
(2.171), принимает вид
Р и с. 2.19. Структурное представление статического распределенного блока
100
cos
R
I л J
. (2.172)
в частности, при х** = R, х** = у и х** =0 имеем, соответственно,
различные зависимости от 4:
^ ,1=1
I R )
^^2 2
an п
р + \
; (2.173)
к
1 + 2 Y
^ т=2л;л=1.2,...
COS
an ш
;(2.174)
WfJi%,p)^W{(i,%,p) = ^
к
-!-+22]cos
п=1
R )
an п
(2.175)
При сосредоточенном управлении по тепловому потоку qip) на
поверхности нагреваемого тела x = x^=R рассматриваемый ОРП с входным воздействием
видэ (2.73), (2.1626) представляет собой лг-блок с передаточной функцией (2.164):
W^ix,p,.fWix,R,P) = :^
R^
жпх
\ R )
ад и
. (2.176)
Если в качестве сосредоточенного управления рассматривается удельная
величина полной мощности внутренних источников тепла м(/) при фиксированном
характере (дг) их пространственного распределения, согласно (2.99), то, опять в
соответствии с (2.162а), (2.163):
r
Р
1
суЯ
,1=1
ппх
cos
\ R J
1 R \
R^ .
an п
(2.177)
Если, в частности, имеет место экспоненциальная зависимость /гд^) от
пространственного а1Я7мента вида (2.100а), то выражение (2.177) конкретизируется
102
W^(x,p) = -aG'^(x^p)'-
ак
.T(-ir{2«-l)cos (2,1-1)^
TtX
AR"
0<x<R,
(2.181)
ai2n-\fn^
p+1
Изображение реакции температурного поля на постоянное во времени
входное воздействие F|(4) вида (2.166а), (2.100а) выглядит, согласно (2.167а),
следующим образом:
е(:с,/7) = РГ(х,^,/7)0-^е< ^^W^{x,p), (2.182)
Р Р
где fV^(x,p) находится по формуле (2.178) для граничных условий второго рода.
Если вход F|(^) вида (2.100а) имеет характер точечного, импулы:ного во времени
воздействия типа (2.1666), сосредоточенного в момент / = г*, то на основании
(2.1676) получим, подобно (2.182):
(2.183)
В случае, когда в качестве входного воздействия рассматривается начальное
распределение температур в(:с,0) = Bq(x) в (1.5), будем иметь в условиях (2.166в),
согласно (2.167в) и (2.177), при <2о^^(У = 0о(5) случая экспоненциальной
зависимости 8о(^) вида (2.100а)
Чх.р) = ЩхЛ,р)^е'^ =Ж,(х,р).
(2.184)
Как уже неоднократно отмечалось выше, при переходе к граничным
условиям первого или третьего рода все выражения для передаточных функций и
изображений выхода блоков изменятся в связи с видоизменением соответствующих
функций Грина.
Пример 2.11. Передаточная функция объекта (2.45)-(2.47) в соответствии
с выражением (2.49) для его функции Грина принимает, согласно (2.157),
следующий вид:
■ ■ ■ (2.185)
л=1
/ n
1
I
и, следовательно, объект, описываемый волновым уравнением, представляется в
структурном отношении бесконечным числом параллельно соединенных
консервативных (колебательных) звеньев (рис. 2.21) вместо апериодических в структуре
блока, моделируемого уравнением теплопроводности (пример 2.10).
104
Если в качестве управляемой величины рассматриваются пулы:ации расхода
3 фиксированной точке jc**€[0,/], то объект можно рассматривать, подобно
(2.172), как 4-блок (2.158) с передаточной функцией
.2 •
sin
1
.. (2.186)
/
При управлении по дополнительному расходу и(т) управляемого гасителя
колебаний стандартизирующая функция (2.124) принимает вид (2.73) щ>и
«(/») = «(/>);<Р(4) = 8'(4-* ).
(2.187)
Р И С. 2.21. Структурное представление объекта, описываемого волновым
/ .... 2/ . (%пх\
уравнением (7„
К{х.\У'
sm-^ )
105
(2.193)
(2.194)
Относительно сосредоточенного управляющего воздействия 0^(г) по
температуре нагреваемого материала на входе в печь данный ОРП следует
рассматривать как дг-блок с входным воздействием (2.149) вида (2.73), (2.162в) при д:, = О и
передаточной функцией типа (2.165):
W^(x,p) ^bVGixAp) -bVWixAp) = ехр(^-^;с' .
Все сказанное сохраняется и для пространственно многомерных
объектов с распределенными параметрами с учетом необходимости перехода
к интегрированию по соответствующей области изменения
пространственных аргументов вместо интегрирования на отрезке [jcq.^iI в задаче
(2.55).
В теории линейных систем с сосредоточенными параметрами широко
используется понятие элементарных звеньев, под которыми понимается
набор небольшого числа простейших блоков (звеньев), описываемых
обыкновенными дифференциальнь»1и уравнениями с постоянными коэф-*
фициентами, обычно не выше второго порядка (усилительное,
интегрирующее, дифференцирующее, апериодическое 1-го и 2-го порядка,
колебательное и т.п. звенья).
С помощью различных соединений зтих звеньев часто удается
описать больпшнство реально функционирующих сосредоточенных систем.
Подобное определение элементарного распределенного блока можно
ввести и для систем с распределенньп^и параметрами, понимая под этим
понятием блок с известной импульсной переходной (или, в изображениях
по Лапласу, передаточной) функцией для некоторой "элементарной"
задачи, описьгоаемой хорошо изученньпл частным вариантом уравнений
математической физики вида (2.20)-(2.23), например, классическим
уравнением теплопроводности, волновым уравнением и др. (см. § 2.1) [8,9].
Однако и здесь такая аналогия с сосредоточенными системами
оказывается весьма условной, а понятие элементарности распределенного
блока весьма относительным.
Даже в одномерном случае число возможных сравнительно простых
вариантов постановок краевой задачи (2.20) -(2.23) по конкретному виду
.уравнения второго порядка (2.20) и типу начальных и граничных условий
(2.21)-(2.23) оказывается огромным, а каждый из этих вариантов можно
назвать "элементарным" лишь с некоторой "натяжкой", поскольку
соответствующая задача вычисления его функции Грина может оказаться
далеко непростой. При переходе для стационарной распределенной
системы к стандартной форме (2.55) все такие варианты различаются порядком
старших производных по / и дг, видом коэффициентов в уравнениях
объекта и граничных условиях и стандартизирующими функциями w{xj).
107
Проблема их систематизации, унификации, определения
передаточных функций и других основных характеристик элементарных распреде-
леннььх блоков, подобно изучению свойств типовых звеньев
сосредоточенных систем, представляет собой самостоятельную очень сложную, но
крайне актуальную задачу, решение которой будет кардинальным
образом способствовать практическому использованию теории управления
СРП.
В настоящее время эта работа значительно продвинута вперед,
собраны и систематизированы в специальных справочниках исчерпывающие
данные о более чем 700 распределенных блоках [8, 9, 32]. Некоторые из
подобных примеров приводились ранее и будут рассмотрены в
дальнейшем. Важно отметить, что представление (2.155) изображения выхода
распределенного блока в форме пространственной композиции
изображений входа и передаточной функции объекта возможно только для
линейных стационарных блоков, для которых вьшолняется базовое
соотношение (2.32). Для общего случая (2.72) преобразование по Лапласу не
приводит, как это сделано в (2.154), к переходу от операции интегрирования
по времени к алгебраической операции перемножения изображений, и
получшъ вьфажение вида (2.155), а следовательно, и ввести определение
передаточной функции, согласно (2.157), уже не удается.
§ 2.6. Соединения распределенных блоков
Системы управления объектами с распределенными параметрами, а
также и сами объекты сложной структуры (например, описываемые
системами дифференциальных уравнений), образуются путем различных
соединений **элементарных** распределенных блоков и их частных
модификаций. Для описания подобных комплексов взаимосвязанных блоков
необходимо в рамках структурного подхода определить, как и в
сосредоточенных системах, способы получения передаточных функций для таких
соединений, составляемых на основе параллельного и последовательного
соединений, а также охвата распределенных блоков обратной связью* [8].
L Параллельное соединение распределенных блоков
Пусть нам говестны передаточные функции Щ{х^^\^уР) и
Щ{х^^\^>Р)Д»У^ распределенных блоков вида (2.155), (2.157), выходные
* Очевидно, что какие-либо особенности по сравнению с сосредоточенными
системами здесь заведомо не возникают в случае, когда все участвующие в
соединении распределенные блоки можно рассматривать одновременно как "д:^-блоки'*,
имеющие сосредоточенные входы и выходы.
108
сигналы которых Qi(x^^\p) и Q2{x^^\p) определены на
пространственных Ьбластях Di э х^^^ и D2 э х^^) параллельном соединении этих
блоков с общим входом vv(^,p) их выходные сигналы складываются
(рис. 2.22) в каждой точке xeD пространственной области D, на
которой определена соответствующая сумма Q(x, р), рассматриваемая в
качестве выхода этого соединения, и, следовательно, Z) = Z)| П ^2 является
пересечением и />2-
Очевидно, что это пересечение должно быть не пустым. Ясно, что ее-
ля Di== D2, то и D = Di = D2 и можно положить х = х^^^ = х^^^.
В силу соотношений (2.155), (2.157) и определения пространственной
композиции двух функций будем иметь:
Q(x.p) = Qi(x^^\p) + Q2ix^^\p) =
= Щх^^\^. р) ® yi{\.p) + W2{x^^\i,.p) ® v?(^, р) =
Gi(xW,i/7)iv(^,p)^+jG2(x<2>,^,p)w(ip)^ =
Рис. 2.22. Параллельное соединение распределенных блоков
109
^1
Gi (x^^), i p) + G2 (x(2>, t p)] ® yv(^, p) =
где
e ; x(2> e D2; x = (x<^>, x<2>), x € D = Di П .
Таким образом,
e(x,p) = JF(x,^,p)®>?(ip),
(2.195)
(2.196)
и по определению (2.155), (2.157) отсюда следует, что передаточная
функция W{x,^,p) параллельного соединения от входа >v(^,p) к выходу
Q{x,p) может быть определена, согласно (2.195), в виде суммы
передаточных функций соединяемых блоков.
Данный вывод легко распространяется на любое их число /п > 2, и
правило (2.195) для т стационарных распределенных блоков в форме
W{xXp)^'^W,{x^'\^P\x^'^ ^D,,x^(x^'\k^^^^ x^D^[\d,; (2.197)
*=1
оказывается аналогичным подобной операции в стационарных системах
с сосредоточенными параметрами.
Исходная структура ОРП часто может быть существенно упрощена
путем ее представления в виде параллельного соединения
распределенных блоков достаточно простого вида [8,9].
Подобная структурная интерпретация с бесконечным числом
параллельно соединенных "элементарных" блоков соответствует типовому
представлению передаточных функций ОРП в форме суммы бесконечного
ряда (см. примеры 2.10, 2.11 и далее § 2.9).
Пример 2.13. Рассмотрим в качестве ОРП процесс нагрева прямоугольной
призмы бесконечной длины внешним тепловым потоком, описываемый в ее попе-
1)ечном сечении Е = {v,z: ve [0,Л], Z6[0,L]}, подобно (1.34)-(1.39), двумер-
шлм од1юродным нестационарным уравнением теплопроводности [24,28,30]
110
cyL
1 *
-+25^(-l)"cos
ак n
^2.204)
Передаточная функция W{y,z,p) объекта (2.198H2.200) определяется
теперь суммой
4{р)
%(у.р)
1
4y,z.p)
WiA'.P)
%(г,р)
I
б
Рис. 2.23. Структурное представление двумерного твмперат>рного поля
с граничным управлением в условиях второй краевой задачи
112
ny,z,p)^w,y(y,p)+h^2z(2,p\ (2,205)
ияющей собой частный случай общего соотношения (2.195), дпя
которого (1^ис. 2.23,а):
x = iy,zXx^^^=y,x^^^^r,
\ D, = {у,2: д; € [0,Я]; z € (-00,00)}; D2 = {v,z: >^ € (-^,оо); г е [0,L] };
D = D, ПD2 = Я = (y,z е [О,/?]; z е [0,L]};
щх,^,р) = lv{y,z,p)- w,ix^'\^,p) = ^^^(лр); W2(x^^\^,p) = и^2.(^,я);
и, следовательно, все передаточные функции в (2.205) описывают
соответствующие переходные дг-блоки.
В свою очередь, как следует из (2.203) и (2.204), можно утверждать, в
соответствии с общим правилом (2.197), что каждый из блоков щу(у,р) и lV2z(^yp)
представляется, как и в примере 2.10, параллельным соединением одного
интегрирующего звена и бесконечного числа апериодических звеньев с передаточными
функциями, соответственно
1
ах п
р+1
an п
с убывающими обратно пропорционально квадратам напурального ряда чисел
1}
постоянными времени
и коэффициентами передачи, зависящими
от пространственных координат по гармоническому закону.
1. Последовательное соединение распределенных блоков
При последовательном соединении двух блоков с передаточными
функциями wx{Xy\yp) и ^>2(х,^,р) (рис. 2.24) получаем, опять в силу
(2.155), следующие соотношения, связывающие вход и выход каждого из
них:
е(х,р)=^2(^,л,р)® а(л,р); (2.206)
а(х,р) = Wx{?:,\,p)%yi(%,p) . (2.207)
Здесь выход б(дг, р) второго блока рассматривается в качестве
выхода всего соединения, а выходной сигнал первого блока 61
является одновременно в.ходным сигналом Qi(ti,P) второго блока, чей про-
113
странственный аргумент обозначен через т| в отличие от входной
пространственной переменной ^ внешнего воздействия vP(§, р).
Отсюда следует, что рассматриваемое последовательное соединение
имеет смысл только в том случае, когда пространственные области
Определения выходного сигнала предьи^ущего блока и входного сигнала
последующего блока совпадают. Последнее требование называется >оов1/ем
согласованности [8].
Используя определение пространственной композиции в (2.155),
будем иметь, полагая x=ti в (2.207) и подставляя Qx в форме (2.207) в
равенство (2.206):
где
Щ^х,у\,р)
P)d^
W{.x,l,p)w{%,p) dS,^Щх,^р)(8>Щ,р),
*6
ЩхЛ.р) = ]w2ix,ri,p)Wiin.i.p)dr\ =fV2(x.n,p)i8>Wyin,i„p). (2.208)
Таким образом.
Q{x,p) = W(x,B„p)®w(%,p),
(2.209)
Щх,4,р)
Щ(х,г,,р)
Qix,p)
'Wix,^,p)
Рис. 2.24. Последовательное соединение двух распределенных блоков
114
и/согласно (2.155), (2.157), передаточная функция W^(x,^,p)
последовательного соединения определяется в форме пространственной компози-
щ»Г(2.208) передаточных функций составляющих блоков, взятых в
порядке, обратном по отношению к порядку их следования в схеме данного
соединения. Подчеркнем, что в соответствии с приведенным выше
выводом пространственные переменные выхода и входа имеют здесь
различные обозначения для каждого из соединяемых блоков, а именно, они
обозначаются, соответственно, через х и ц для первого из блоков в (2.208)
(^^2) и через л и ^ для второго блока (IV^). Вследствие этого операция
композиции (2.208), вообще говоря, некоммутативна, т.е.
^2(х,Ц.Р)®ЩМр)^Щх.ЯР)®Щ(цЛ.Р\ (2.210)
и менять сомножители местами в (2.210) нельзя, поскольку интеграл в
(2.208) после такой замены может изменить свое значение из-за
различного характера зависимостей W2 н on пространственных аргументов
входа и выхода.
Это означает адекватную некоммутативность последовательного
соединения, в котором нельзя менять местами соединяемые блоки.
Таким образом, полученное для стационарных распределенных
блоков правило (2.208) отличается от аналогичного правила в
стационарных* сосредоточенных системах появлением условия согласованности,
композиционным умножением вместо обычного и некоммутативностью
процедуры пространственной ком^юзиции, а следовательно, и самого
соединения.
Полученные выводы легко распространяются на любое число т>2
последовательно соединяемых распределенных блоков (рис. 2.25).
Здесь
ЩхЛ,р)=^1¥^{х,Ц^^иР) ®^^;п-1(Л;«-ЬЛт-2,Р) ®
Ч^.Р)]
Шк р)
QMi.p)
&-;(пш /. р)
А-
Рис. 2.2S. Последовательное соединение т> 2 распределенных блоков
115
m-1 раз
где т];^Д = l,/w-l, - пространственный аргумеет входа /г + 1-го блока,
являющийся одновременно пространственньп^ аргументом выхода к -го
блока.
В форме последовательного соединения распределенных блоков
сравнительно простого вида во многих случаях может бьтть, в частности,
выполнено структурное моделирование физически неоднородных систем,
состоящих из взаимосвязанных компонентов и рассматриваемых в
качестве ОРП, а также объектов с распределенными параметрами, оггасывае-
мых системами дифференщ1альных уравнений [8].
Пример 2.14. Рассмотрим в качестве объекта управления процесс
цементации (науглероживания) стальных изделий при их нагреве в среде с постоянным
углеродосодержащим потенциалом С„ = const [10,11]. В достаточно малых
отклонениях Cy(x,t) и 8(jc,/), соответственно, полей концентрации углерода и
температур от некоторого статического состояния, вызванных вариациями внещних
воздействий (например, в замкнутой системе автоматического регулирования),
объект моделируется в первом приближении связанной в условиях температурной
зависимости процесса цементации линейной системой уравнений
теплопроводности и диффузии типа (2.10), (1.4) с соответствуюпщми граничными и начальными
условиями следующего вида (см. также ниже гримеры в § 2.10) [11]:
ЩИ = ^^!?(£i£)+±F(x,0; 0<x<R,t>O, (2.211)
dt дх^ су г
Qixfi)^%ix);Oux<R; (2.212)
»0=,(0;^ = а,.>0; (2.213)
дх дх
dCJx,t) d^CJx^t)
^ = D ^^у—+D, (jc) 0(/?,/); О < jr < 7?, / > 0; (2.214)
dt dx
Cyixfi) = Co (x); 0 ^ x ^ i?; (2.215)
dx
yLll^(yXy(R,t)^Cn^ (2.216)
Здесь Dj (x) - заданный множитель, зависящий от пространственной координаты
и учитывающий в линейном приближении температурную зависимость коэффи-
116
циента диффузии углерода, значение D = const которого соответствует
температуре исходного статического состояния (см. подробнее пример 2.29).
В качестве управляющего воздействия будем рассматривать удельную
мощность внутренних источников тепла F(x,t) в (2.211), опосредованно создающую
внутреннее управление Di(x)Q{R,t) полем концентращш С(дг,0 в (2.214) через
поверхностную температуру 0(Л,/). В таком случае структура объекта
(2.211)-(2.216) с передаточной функцией W(x,B„p) от входа F(^,p) к выходной
функции состояния Су(х,р) представляется, подобно рис. 2.24,
последовательным соединением блоков (2.211)-(2.213) и (2.214)-<2.216) с передаточными
функциями lVy(x,^,p) и W2(x,^,p) (рис. 2.26).
Здесь блок (2.211)-(2.213) с входом F(^,p) и сосредоточенным выходом
8(Л,/7) описывается, согласно (2.173), передаточной функцией
W,iR,^,p)^W,(xA,P)l^j,=-^
R^
л=1
. R)
(2.217)
Распределенное внутреннее воздействие и{х,р) на поле концентрации
определяется, как это следует из уравнения (2.214), простым перемножением Q(R,p)
на коэффициент Д (х)
u{x,p)=D^ix)eiR,p),
и, следовательно, согласно (2.161), его можно рассматривать как результат щзеоб-
разования сигнала 0(й,/>) вдс-блоке Wj^{x,p) с передаточной функцией
W^(,x,p) = E\{x).
Блок (2.214)-(2.216) с распределенным входным воздействем Г\{х) Q(R,p),
моделируемый уравнением (2.214), аналогичным уравнению (2.211), будет
иметь относительно выхода Су{х,р) передаточную функцию Щ(х,%,р),
Щх,р)
Pi<S.P)
в(Л.р)
D,ix)
D,{x)mp)
Щх,т},р)
C,{x,p)
D,W{R,p)
Рис. 2.26. Структурное представление температурно-зависимого поля концентрации
углерода с управляющим воздействием по пространственно распределенной
мощности внутренних источников тепла
117
являющуюся изображашем функции Грина краевой задачи (2.214)-(2.216).
Вследствие изменения граничных условий (2.216) по сравнению с (2.213),
Щ(.хЛ,р) описывается, согласно (2.44), следующим выражением
1
"n=i —T^+l (2.218)
s„=(2n-\)^, ,1 = 0,1,2,..,
Теперь получим искомую передаточную функцию fV{x,^,p) объекта
(2.211)-(2.216) согласно общему правилу (2.208):
r
1Г{хЛ,р)^Щ{х,ц,р)^Вх{ц)ЩЯЛ,р)^ 1^^2(^,ЯРШп)ЩЯЛ>Р)^- (2-219)
о
При перемене местами соединяемых блоков композиция
r
r\MW^(R>n,p) ® ^^2(Л,^,Р) = J 0,{х)ЩЯ,ц,р) ж2(т1,5,/?) dn (2.220)
о
не совпадает с (2.219), что подтверждает общий вывод (2.210) о
некоммутативности последовательного соединения распределенных блоков.
Э. Переходные блоки для последовательного соединения
распределенных и сосредоточенных звеньев
При описании взаимодействия ОРП с сосредоточеннь»! регулятором
в конкретных системах управления могут быть использованы частные
представления объектов в форме рассмотренных в § 2.4, 2.5 дг-блоков
относительно сосредоточенных входных воздействий, подаваемых с выхода
регулятора, и ^-блоков для моделирования сигнала текущего контроля
выходной функции состояния объекта в точках с фиксированным
значением ее пространственных аргументов.
Однако при структурном моделировании соответствующих
замкнутых систем автоматического регулирования удобнее использовать общее
описание ОРП его передаточной функцией (2.157) относительно
стандартизирующего входа, что в соответствии с отмеченными в § 2.3
преимуществами, во-первых, обеспечивает необходимую степень общности полу-
чаемььх структур при управлении объектами различной физической
природы и, во-вторых, позволяет суммировать на входе объекта как
управляющие, так и возмущающие воздействия различного типа.
В таком случае в контуре системы должны быть использованы
специальные переходные блоки, согласующие в.\одные и выходные сигналы
118
объекта и регулятора различной пространственной размерности.
Такие блоки, во-первых, моделируют на своем выходе сигнал с
датчика обратной связи, помещенного в точке х^а* e[xQ,Xi], при подаче на
их вход распределенной функщ1и состояния объекта Q(xj) (^-блок) и,
во-вторых, описывают управляющее воздействие на ОРП в
фиксированной точке jc = й* е [xo,xi], формируемое по выходному сигналу
сосредоточенного регулятора (х-блок) (рис. 2.27).
В первом случае (рис. 2.28) входной распределенный сигнал Q(x, р)
^-блока преобразуется в сосредоточенный 0{а ,р) на его выходе, и тогда
его передаточная функщ{я описывается следующим образом:
f^^(^,p)=5(4-/). (2.221)
Действительно, согласно (2.155), (2.157), выходной сигнал Q^{x,p)
такого ^-блока определяется вьфажением
е^(х,/7)= j[f^^(^,/7)e(^,/7)./^=j5(^-a*)e(^,p)^=e(a\/>) (2.222)
и, следовательно, совпадает с требуемым вы.ходом Q{a*,p).
Сосредоточенный
регулятор
Рис. 2.27. Система "распределенный объект-
сосредоточенный регулятор**
119
Во втором случае (рис. 2.29) входной сигнал Qpep (Р) с выхода
сосредоточенного регулятора преобразуется в выходной сигнал g{x,p),
формируемый в заданной точке х = Ь* в некотором х-блоке с
передаточной функцией fFjc(x,p). Тогда воздействие QpsriO на входе этого х-
блока принимает форму (2.73) при ф(^) = L ^(.i) = Qpgp(x); его функция
Грина G*(x,^,0 определяет передаточную функцию, согласно (2.160),
соотношением:
*|
W^{x,p)= \G\x^,p)d^, (2.223)
а выходной сигнал блока связывается со входом обычным произведением
(2.161):
gix,p) = W^{x,p)QpEr (Р). (2.224)
Сосредоточенное в точке х = Ь* воздействие на ОРП со стороны
регулятора определяется в форме соответствующих составляющих изображения
стандартизирующей функции (2.63). В случае, когда в качестве
управляющего воздействия рассматриваются граничные управления в точках
•w(^.p)
ОРП Г
W{x,^.p)
\й(а'.р)
I ^
W,(^.P)
Рис. 2.28. Струюурная схема преобразования распределенного сигнала на выходе объекта
управления в сосредоточенный сигнал на входе регулятора с помощью статического
переходного 1^-блока
ЪЧх-Ь')+
+ у^,6\х-Ь')
1 $(х.р)
W(x,4,p)
1
1
jgC^.p)
Q(x,p)
• ^Щх,р)
Рис. 2.29. Структурная схема преобразования сосредоточенного сигнала на выходе
регулятора в воздействие на распределенный объект в заданной фиксированной точке его
пространственной области с помощью статического переходного х-блока
120
h* =Хо или b* =xi, эти составляющие, пропорциональные выходному
сигналу регулятора Qpgpip), согласно (2.63Н2.65), имеют вид
дельта-функций 5(х-Ь*), их производных Ь\х-Ь*) или линейной
комбинации таких сигналов.
В подобной форме могут быть непосредственно представлены и
пространственно-сосредоточенные внутренние воздействия / в (2.65) при
b*e{xQ,x^).
В итоге получаем
g(x,p) = ep^(p)Uw5(x-fe^ + v|/2(jc)8\x-fc*)),iKi4^^ (2.225)
где 4/1 и v|/2 - соответствующие коэффициенты в (2.63), (2.64),
зависящие в общем случае от х.
Сравнивая выражения (2.224) и (2.225), приходим к выводу, что
^xix,p) = 4fiM 5(х-й*) + 1|/2(х) 5'(х-6*). (2.226)
Переходные ^- и х-блоки вида (2.221), (2.226) по определению (§ 2.5)
являются статическими, так как их передаточные функции не зависят от
переменной "р".
Последовательные соединения ^-блока (2.221) с распределенным
блоком, описывающим объект управления (рис. 2.28), и х-блока (2.226) с
сосредоточенным регулятором (рис. 2.29^ характеризуют, как это сл^ет
из сказанного выше, передаточные свойства в замкнутой системе ,
соответственно, от входа объекта н'(^,/>) ко входу регулятора Q(a*,p) и от
входа регулятора Q{a ,р) ко входу объекта g(x, р).
Передаточная функция W*(l^,p) первого из этих соединений
находится, согласно (2.208), в виде
И^Ч?,р) = 5(т1-^')®»^(л,^,р) =
^ , . (2.227)
= 5(л-а)»^(л,^,р)Л1 = ^Г(а ,4,р),
'о
совпадающем с (2.158), а для второго, в силу (2.226) и рис. 2.29, будем
иметь
W^"(x,/7) = (v|/i(x) 5(х-6*) + м/2(х) b\x-b"))WpEp{p), (2.228)
Переходные блоки вида (2.221), (2.226), широко используемые как
при описании замкнутых систем регулирования, так и в целях
структурного моделирования сложных объектов с распределенными параметрами
[8,9], могут бьпъ отнесены к числу "типовььх" распределенных блоков.
121
Аналогично сосредоточенным системам, можно подобным образом
отдельно вьщелить такие частные виды распределенных блоков, как
усилительные, дифференцирующие и интегрирующие (по временным и
пространственным аргументам) [8].
В частности, для усилительного блока, осуществляющего умножение
входного сигнала w на числовой коэффициент "к'\ будем иметь
передаточную функцию
^Ус(^,^,Р) = *5(х-0 , (2.229)
откуда следует, что такой блок является статическим (§ 2.5).
Действительно, тогда для изображения Qy{x,p) выходного сигнала
такого блока будем иметь в соответствии с его назначением, согласно
(2.155), (2.157):
Qy (X, Р)-] Wye (X, ^, р) w(^, /^) =
[*6(^-jc)iv(^,p)d^=Aw(x,p).
При = 1 блок (2.229) описывает тождественное преобразование
входного сигнала в равный ему выходной сигнал.
Пример 2.15. Опять обратимся к ОРП, рассмотренному в примерах 2.1,
2.10. При структурном моделировании системы регулирования температуры
поверхности нагреваемого тела в точке x-R с помощью сосредоточенного
регулятора можно использовать ^-блок вида (2.221) при а* = Л:
W^{%.p)^b{l-R) (2.230)
для формирования выходного сигнала обратной связи по температуре 0(Я,/).
Тогда передаточная функция W„{x,%,p) последовательного соединения ^-блока
(2.230) и распределенного блока W{x,%,p), моделирующего ОРП, согласно
(2.171) (рис. 2.30), описывает передаточные свойства в системе от входа объекта
ко входу регулятора и определяется, в соответствии с (2.227), выражением
Wn{x^,p)^w\\,p)^W{R,\,p), (2.231)
совпадающим с передаточной функцией (2.173) вида (2.158) при x*j^ =R.
Если поменять местами блоки W{x,%,p) и 5(т1-Л) в последовательном
соединении рис. 2.30, то тогда, используя выражение для ^Г(дг,^,р) в форме (2.171),
получим на основании (2.208):
122
(2.232)
(.t.^.;7) = PF(x,ri, р)® =
Я я
= _ '{У(х,ц,рт - R)dr] =6(4 - R)jfV(x.n, p)dr\.
о о
Этот результат отличается от выражения (2.231), что и следовало ожидать в
связи с некоммутативностью последовательного соединения распределенных
блоков.
Если в качестве управляющего воздействия рассматривается тепловой поток
q{t) на поверхности тела, т.е. сосредоточенный регулятор воздействует на ОРП в
точке 6* = Я , то дс-блок (2.226) должен преобразовать сигнал на выходе
регулятора в требуемое воздействие
К4,х) = -1-9(х)6(4-Я) (2.233)
на выходе ОРП в форме стандартизирующей функции (2.101).
Сравнивая (2.233) с общими соотнощениями (2.225) и (2.226), получаем, что
в данном случае (рис. 2.31):
QpEriP) = Ч{Р)\ W^{x,p) = ■l5(x - R)
(2.234)
при v|/i = —; \i/7 =0; 6* = Л в (2.226).
су
-^^-блок
Рис. 2.30. Структурная схема формирования сигнала обратной
связи по температуре поверхности нагреваемого тела
Ш,р)
Г
Я{Р) I
—л
I
' ^х-блок
1 ОРП
11(х,р) г ;
g(^./') I I
Р и с. 2.31. Структурная схема формирования сигнала на входе объекта
при граничном управлении температурным полем по плотности
теплового потока на поверхности нагреваемого тела
123
Если вместо q{t) используется в качестве управляющего воздействия
температура печи в/7(/) при граничных условиях третьего рода, то при том же виде
(пример 2.7) с точностью до коэффициента теплопередачи а сохраняется и
передаточная функция (2.234)х-блока:
а
(2.235)
При управлении по мощности u(t) внутреннего тепловыделения в точке
х = Ь* e{0,R) выходной сигнал регулятора должен быть преобразован в дс-блоке
(2.226) во входное воздействие на объект вида
w(ix) = i-«(x)5(^-6*), (2.236)
су
т.е. в форме, подобной (2.233), откуда следует, что в соответствии с (2.234) в этом
случае (рис. 2.32)
W,(x,p)^—^x-b*), (2.237)
су
Пример 2.16. При структурном моделировании системы активного
гашения пульсаций расхода газа с сосредоточенным регулятором для объекта,
рассмотренного в примерах 2.2,2.11, опять, подобно примеру 2.15, следует использо-
ватъ 4-блок типа (2.230) с передаточной функцией (2.221) для формирования
сигнала обратной связи по расходу газа в некоторой точке х = а* по длине
газопровода (рис. 2.33) [8].
При этом, подобно (2.231), передаточная функция последовательного
соединения 4-блока и блока, описывающего объект управления, характеризует
соотношение между входными сигналами регулятора и объекта (рис. 2.34) и
определяется выражением (2.227)
где JF(a*,^,/7) находится по формуле (2.186) для х = а*:
W(a\^,p)Mf^sn{^a*^
sm
(2.238)
(2.239)
——г Щх,4.р) I
%{Ш I I
x - блок
Рис. 2.32. Структурная схема формирования сигнала на входе объекта при
управлении температурным полем по мощности внутреннего тепловыделения
124
Аналогично (2.232) показывается, что перестановка местами блоков
iV(x,^,p) и i^^(4,p) в их последовательном соединении недопустима.
При управлении процессом по дополнительному расходу м(/) гасителя
колебаний дг-блок (2.226) должен преобразовать выходной сигнал регулятора в во>
действие (2.124), откуда, в силу (2.225) и (2.226), следует, что в данном случае
этот блок должен иметь передаточную функцию (рис. 2.35)
W,ix,p) = b\x-x') (2.240)
в виде производной от пространственной дельта-функции, отвечающую частному
случаю (2.226) для у, = О, \j/2 = 1 (в отличие от примера 2.15 с .v-блоками в форме
самих дельта-функций, соответствующего вариаьпу с 4/2=0).
/ x
Компрессор
Z
Датчик
Источник
расхода
расхода
\
Регулятор
I и(0 К нагрузке-^
Рис. 2.33. Схема построения системы активного гашения пульсаций
расхода газа с сосредоточенным регулятором
ОРП
\
Рис. 2.34. Структурная схема формирования сигнала обратной связи
на входе регулятора пульсаций расхода газа
125
п
д\х-х)
1 S{x,p)\
\
блок
x -
ОРП
W(x,4,p) I
Рис. 2.35. Структурная схема формирования сигнала на входе объекта при
управлении по дополнительному расходу гасителя колебаний пульсаций газа
Qia.p)
W,er(p)
1
Ыр)1
-S'ix)
1
ОРП
\iix,p)\
] Щх,4,р)
I
Х'блок
Рис. 2.36. Структурная схема формирования сигнала на входе объекта
при управлении по расходу газа на входе газопровода
Если в качестве управляющего воздействия рассматривается расход
газа на входе в газопровод, то в соответствии с отвечающим этому воздействию
выражением (2.131) стандартизирующей функции w(^,t) получим, аналогично
(2.240) (рис. 2.36):
W^{x,p) = -b\x). (2.241)
4. Распределенные блоки, охваченные обратной связью
Рассмотрим типичную структурную схему замкнутой системы,
образуемой двумя распределенными блоками с передаточными функциями
Щ{х,^,р) и W2{xJ%,p), аналогичную типовой структуре звена,
охваченного обратной связью, в системах с сосредоточенными параметрами
(рис. 2.37). К такому виду приводятся структурнью схемы замкнутых
систем управления самыми различными ОРП [8].
Здесь блок W^(xX-,p) находится в прямом канале воздействия {канал
прямой связи), а блок ^{х,^,р) - в канале обратной связи.
Задача заключается в определении передаточной функции lV(x,^,p)
системы от входа f{^,p) к выходу Q{x,p) по заданным передаточным
функциям Щ{х,<^,р) и и^2(^ЛуР). ^ соответствии с общими вьфажения-
ми (2.155), (2.157) будем иметь следующую систему соотношений,
связывающих сигналы на входах и вы.\одах блоков (рис. 2.37), по-прежнему
126
обозначая для каждого из блоков пространственные переменные входа и
выхода через § и х соответственно:
(2.242)
e(x,p) = »',(x.5,p)®i?(^,p);
g(x,p) = ^2(x,^,p)®e(§,p);
Из (2.242) и (2.244) следует, что
Qix.p) = »^i(x,§,p)® (7(^,p)+g(5,/»)=
(2.243)
(2.244)
(2.245)
где используется свойство дистрибутивности пространственной
композиции.
Рассматривая здесь второе слагаемое, согласно выражению (2.243),
как составляющую сигнала, получаемого при входном воздействии
Qi^yP) на выходе последовательного соединения блоков fVy и W2 с
передаточной функцией W^2i(^»5»P)» можно записать (2.245) в следующем
ваде:
6(x,p)=»^i(x,^,/7)®7(^,/7)+»F2,(x,5,p)®6(ip), (2.246)
где, подобно (2.208) и рис. 2.24,
Рис. 2.37. Распределенный блок, охваченный распределенной обратной свюью
127
^21и.^,Р) = ^^1(^.Л,Р)®^2(лЛр)= 1щ(х,п,р) fF2(n.4,P)^ (2.247)
есть передаточная функция последовательно соединенных блоков W2 и
Ж| в схеме рис. 2.37 с обратным порядком их включения по отношению
к рис. 2.24.
Заметим теперь, что если
f{^,p) = -ala = const е [Хо,х, ], (2.248)
то пространственная композиция lV*(x,^,p)® f{%,p) для любой
передаточной функции ^*{хХуР) становится равной по определению
W*{x,a,p), а если формально положить здесь
7(?,р) = 5(^-<=5, (2.249)
то И^*(х,§,р)®7(^,/7)= W\x^.p). (2.250)
Тогда в частном случае (2.249):
Fi(x,^,p)®7(ip) = fFi(x,4,p); (2.^51)
е(х,/7) = Ж(х,^р)®7(?,р) = PF(x,i/7), (2.252)
и если обозначить пространственную переменную входа блока W2 через v
вместо ^, то входное воздействие этого блока Q{v,p) запишется в виде
(2.252) с заменой х на v:
e(v,p) = fF(v,^,p).
Подставляя эти соотношения при входном сигнале (2.249) в
равенство (2.246), приходим к следующему уравнению относительно искомой
передаточной функции W{xX.p) замкнутой системы:
W(x^,p)^W^{xA.p)^W2x(x,v,p)®W(v,i,,p). (2.253)
В развернутом ввде равенство (2.253) принимает форму
интегрального уравнения
W(x^,p)-\w2x(x,y.p)W{vX.p)dv^Wx{x^.p) (2.254)
Xq
относительно W{xXyP)^ называемого >paeweHi/eA# Фредгольма второго
рода с ядром lV2\(x,v,p), определяемым равенством (2.247). Вообще
128
говоря, это уравнение не может быть решено в явном виде.
Таким образом, по сравнению с сосредоточенными системами, где
аналогичное (2.253) равенство
Wip) = ^ip)+^ipW2ipWip) (2.255)
легко разрешается алгебраически относительно W(p):
lV(p) =
Щр)
\-Щр)1У2{р)
(2.256)
для распределенных блоков задача определения передаточной функции
замыкания обратной связью оказывается качественно более сложной.
Однако в целом ряде частных, но практически важных случаев
интегральное уравнение (2.254) сводится к алгебраическому типа (2.255) [8].
Это относится прежде всего к распространенной на практике ситуации,
при которой блок обратной связи является вырожденным, т.е. его пере-
даючная функция представляется в виде суммы произведений функций,
каждая из которых зависит только от одного из пространственных
аргументов входа или вьгхода:
(2.257)
/=1
Если, в частности, этот блок состоит из последовательно соединенных
сосредоточенного регулирующего устройства с передаточной функцией
^РЕг(Р) и переходных ^- и х-блоков (2.221), (2.226), моделируюгцих
измерение фующии состояния в точке х^а* и подачу управляющего
ОРП
—^^^^
g{x,p)
Рис. 2.38. Структурная схема замкнутой системы управления ОРП с сосредоточенным
регулятором
129
воздействия в точке х = Ь*, в частном случае ч/^ =1, \j/2 = 0 в (2.226)
(рис. 2.38), то в соответствии с соотношениями (2.222), (2.224) и (2.226)
получим следующее вьфажение для выходного сигнала g(x,p) блока
обратной связи
g(x, /7) = 5(х -6*) WpEf (р) j5(^ - а*) е(^, p)d^^
= J5(x-ft*) IVpEr(P) S(^-^*) Q(^^P)d^'
Сравнивая этот результат с общим выражением (рис. 237):
получаем в таком случае вырожденный блок обратной связи типа (2.257)
в простейшем варианте т=1:
W2ix^.p)^b(x-b*)WpEripm-'a*). (2.258)
Тогда в соответствии с (2.247) и (2.258)
Щ1(хЛ.Р)^ \Щх,ц,р) Hr\-b*)WpEr(P) 5(5-^*)rfn =
J (2.259)
= WpErip)8i^-a")W^ix,b\py,
и в таком случае интеграл в (2.254) вычисляется следующим образом с
учетом (2.259):
Jw^2i(^>v,/7)fF(v,tp)A; =
= )»>£Г(Р) 5(v-a*) W^(x,b\p) W{v,^,p)dv^ (2.260)
хо
-^PEriPWi(xy,p)W{a\^,p),
Теперь интегральное уравнение сводится к алгебраическому
соотношению
ЩхЛ,р)' WpEripW^(xy,p)W(a\^,p)^W,(x,^,p), (2.261)
которое можно ра^зешить относительно (а*, ^,/7), полагая х = а* в (2.261):
130
Wia^,p)^ . . (2.262)
\-^Er(PWxici ,Z> ,я)
Подставляя этот результат опять в (2.261), получим окончательно для
искомой передаточной функции ^(.г,^,/?) в рассматриваемом случае
(2.258):
Wi.X.P) = W,i.^,P)^'^^^ (2.263)
Это вьфажение уже имеет "типовую" структуру; содержит только
обычные произведения известных передаточных функций, хотя и не
совпадает, вообще говоря, с аналогичным представлением (2.256) звена с
обратной связью в сосредоточенных системах.
Для значения х-а пространственного аргумента выхода объекта
передаточная функция (2.263) для точки контроля функции состояния
ОРП упрощается и принимает подобный (2.256) вид ^-блока с
сосредоточенным выходом:
WiaA^p)^ . . (2.264)
1-^РЕг(Р)Щ^ ,Р)
Аналогичио, для ^ = 6* получаем из (2.263) передаточную функцию
такой же структуры в форме х-блока с сосредоточенньпл входным во:шей-
ствием:
Wix,b\p)^ ^^^^-^^-^i . . (2.265)
^-Wp^ripWii^ >b ,P)
Если же X = a*,4 = , то передаточная функция системы для
фиксированных значений пространственных аргументов выхода и входа
описывается выражением, уже полностью совпадающим с соответствующим
результатом (2.256) для сосредоточенной системы:
Wia\b\p) = . . (2.266)
\-WpEr{p)Wx{a ,fe ,р)
Здесь х^-блоки W{a,b*,p) и fFi(fl*,6*,/7), характеризуя локальное
поведение распределенной системы для соответствующего
сосредоточенного выхода относительно сосредоточенного входного воздействия, по
существу, ничем не отличаются в структурном отношении от звеньев с
сосредоточенными параметрами, о чем и свидетельствует идентичность
вьфажений (2.256) и (2.266). Существенная разница, заключающаяся в
131
различном характере зависимости передаточных функций
распределенной системы от комплексного аргумента (даже в частном варианте
(2.266)) по сравнению с типичными дробно-рациональными вьфажения-
ми, свойственными системам с сосредоточенными параметрами,
проявляется обычно на этапах анализа и сикгеза систем управления [31,48].
Пример 2.17. Выполним применительно к ОРП, рассмотренному в
примере 2.15, структурное моделирование системы автоматаческого регулирования
(САР) температуры поверхности массивного тела, нагреваемого в печи с внешним
теплообменом, при сосредоточенном граничном управлении процессом нагрева по
тепловому потоку q{t) в (1.6) в той же точке x = R . Для построения системы
используется датчик обратной связи по температуре d{R,i), стандартный
сосредоточенный регулятор (П-, ПИ- или ПИД- типа) и исполнительный
регулирующий орган с общей передаточной функцией IVpgp(p). На вход регулирующего
устройства IVpgpip) подается сигнал, пропорциона1п>ный разности в(Л,0-в*(0
измеряемой и заданной температур поверхности нагреваемого тела, а на его
выходе формируется управляющее воздействие q(p) на объект (рис. 2.39). Гфи
граничном управлении начальное температурное состояние 9o(jc) и внутренние
источники тепла F(jc,0 в (1.4), (1.5) могут рассматриваться как внешние
возмущения/(^,р).
Используя передаточную функцию ОРП W^{x,l^,p) для температурного поля
0(x,p) относительно распределенного входа w(^,p) в форме (2.171);
переходные 4-и х-блоки (2.230), (2.234 при а* =Ь* =R, моделирующие,
соответственно, преобразование распределенной функции состояния объекта в(х,/) в
сосредоточенный сигнал обратной связи по температуре 0(/?,О и формирование
HS)
и.
t-R)
cr
qip)
ОРП
Ъ{х,р)
в(^.р)
S(.4-R)
QiR.p)
-eip)
132
Рис. 2.39. Структурная схема системы регулирования температуры
поверхности массивного тела с граничным управлением по
плотности теплового потока
распределенного воздействия на ОРП в виде 6-функции по сосредоточенному
выходному сигналу регулирующего устройства, получим структурную схему рис.
2.38 для рассматриваемой САР в виде рис. 2.39.
Здесь, согласно (2.67), изображение стандартизирующей функции на входе
объекта имеет вид:
(упсудд следует, что
i(^,P) = —?(Р)5(4-Л),
а внешнее возмущение /(^,/?) определяется суммой
7(^,Р) = —F(4,p)+eo(4).
Ci
(2.267)
(2.268)
(2.269)
Если задающее воздействие G*(p) привести к внешнему входу объекта, то
структурная схема системы сводится к более удобному виду рис. 2.40,
где
7*(ip) = 7(ip) - —^рег^р^ъ\рШ - R) • (2.270)
су
Передаточная функция системы от входа 7*(^,р) к выходу в(л:,р) задается
выражением (2.263) при а* =Ь* = Я, а в частных случаях фиксированных
значений л = Я и (или) - формулами (2.264) - (2.266). Здесь 1^,(Л,^,/7) и
ffi(x,^,/7) находятся согласно выражещоо (2.171).
В частности, будем иметь для W^{R,R,p):
ОРП
fU.p) ^ Шр)
—6{x-R)
су
Шр)
gip)
Шр)
Рис. 2.40. Структурная схема системы регулирования с приведением
задающего воздействия к внешнему входу объекта
133
1 ^
р it ^
/7+1
(2.271)
Пример 2.18. Применительно к ОРП, рассмотренному в примере 2.16,
выполним структурное моделирование системы активного гашения пульсаций
расхода газа в газопроводе. Для построения системы используется датчик расхода
газа в точке jc = а* по длине газопровода, сосредоточенный регулятор и гаситель
колебаний в роли исполнительного регулирующего органа с общей передаточной
функцией IVpgp(p) всего регулирующего устройства от его входного сигнала к
дополнительному расходу гасителя ?(/?) в точке jc = дг* (рис. 2.33). На вход блока
Wpg;p{p) подается сигнал, пропорциональный пульсациям Q{a,p) расхода газа
в точке контроля х-а* (заданная величина этих пульсаций может бьпъ принята
равной нулю), а на его выходе формируется сосредоточенное управляющее
воздействие и{р) (рис. 2.35).
При управлении по дополнительному расходу и{р) начальное состояние
Q^^{x\Q^^^{x) и расход g^ip) на входе в газопровод, согласно исходной
краевой задаче (2.45)-(2.47), играют роль внешних возмущений.
Используя передаточную функцию объекта W^{x,l,,p) для пульсаций
расхода газа Q{x^p) относительно стандартизирующего входа >v(^,/?) в форме (2.185),
переходные ^- и х-блоки (2.221) и (2.240) (рис. 2.34, 2.35), получим, подобно рис.
2.40 для примера 2.17, следующую структурную схему рассматриваемой САР
(рис. 2.41):
ОРП
?{^.Р) ^Щ.р)
нЗ>
g(^,p)
Q{^.P)
Рис. 2.41. Структурная схема замкнутой системы активного гашения
пульсаций газа в газопроводе
134
Здесь изображение tK^.p) стандартизирующей функции может быть,
согласно (2.70), представлено в виде:
Ч'^,Р) = 4еГ(4)+Л-бо ^(^)-^o(p№+«(p)8U-**) . (2.272)
4
откуда внешнее возмущение /(^,/?) определяется выражением
с1
с1
(2213)
при управляющем воздействии на объект
1Й,р) = «(р)5и-/). (2.274)
Передаточная функция системы от входа f{^,p) к выходу Q(x,p), опять
как и в примере 2.17, имеет вид (2.263) при 6* = дс*, а в частных случаях
фиксированных значений х = а* и (или) 4 = -^* находится согласно формулам (2.264) -
(2.266). Соответствующие передаточные функции объекта Wi(a*,J^yp) и
Щ (х,х*,р) могут быть получены на основании (2.185). В частаости.
W,ia\x\p)^^Y.'^
л=1
.2 л
(теп 0
/• \
теп Ф
sin
—x
и J
1/ )
(2.275)
/
'Приведеннью правила вывода передаточных функций различных
соединений распределенных блоков позволяют в итоге изучить базовые
характеристики распределенных систем весьма сложной структуры по
известным характеристикам "элементарных" блоков [8].
Пример 2.19. Используем найденные правила соединения
распределенных блоков для определения передаточных функций прямоточных
теплообменных аппаратов, описьгеаемых в простейшем случае системой (1.33)
дифференциальных уравнений первого порядка. Структурная схема такого объекта
представлена на рис. 2.42.
——.
в,(дг.р)
Ых,р)
Рис. 2.42. Структурная схема твплообменного аппарата
135
Здесь описываемые уравнениями первого порядка вида (1.21) блоки с
передаточными функциями и , которые рассматривались выше в примерах
2.3, 2.6, 2.9, 2.12, моделируют поведение по отношению к стандартизирующим
входам w^^\^,p) и w^^H^yP), соответственно, температурных полей
Э](д:,р)= Qfj(x,p) и в2(лс,/7) = 0(д:,/7) теплоносителя и нагреваемого материала,
перемещающихся с одинаково направленными скоростями Fj и ^2. Каждый из
указашых входных сигналов содержит воздействие с выхода другого блока,
отражающее, в соответствии с уравнениями (1.33), взаимное влияние блоков И^, и
IV2 друг на друга в процессе конвективной теплопередачи от теплоносителя к
нагреваемому материалу и обратно. Другие составляющие /\{^,р) и /2(^,/?),
которые могут рассматриваться в качестве управляющих или возмущающих
воздействий, определяются остальными слагаемыми стандартизирующей функции
(2.71), полученной в примере 2.6 для блоков типа Ж, и .
В частности, это могут бьпъ воздействия по температурам §1(0,^) и
^2(0,/?) на входе теплообменника или по начальным состояниям 6|(jc,0) и
92(jf,0). Задача заключается в определении матрицы передаточных функций
(2.276)
при известных передаточных функциях lV^{x,lE„p) и ^>2(дг,4,/>), приведенных
вьш1еввиде(2.192).
.Здесь Wjj(XyBj,p) - передаточная функция теплообменника от входа fii^yp) к
выходу ёу(х,/7) при /,У € {1,2}.
Структурные схемы блоков с искомыми передаточными функциями
получим на основании рис. 2.42.
Как видно из рис. 2.43, W*^ {х,^,р) (или ^^2*2(-^>4»Р)) образуется путем
охвата блока обратной связью с передагочной функцией W2 (или наоборот), а
^*2(хЛуР) (или lV2\(x,l^,p)) представляется последовательным соединением
блоков FF| и W2 (или W2 и Wy с обратным порядком их следования, что, как
было показано в п. 2, вообще говоря, не одно и то же!), охваченным обратной
связью с единичным коэффициентом передачи.
Вычислим сначала Wy\(x,t„p). Согласно (2.247), (2.254), искомая
передаточная функция является решением интегрального уравнения
/
<i(^,^,P)-J^2i(^>^>/') К(^Л.Р) dv^W^ (х,^,р\ (2.277)
136
где
о
(2.278)
Представляет собой передаточную функцию последовательного соединения
блоков ^2 и Jf,.
' —~7^—
gAx,p)
Шх,%>р)
ОЛх,р)\
82(.^,Р)
Щх,^,р)
т,р)
нЯ) ^
^12(ХЛ,Р)
Ых,р)
Щх,^,р)
e/(jc,p)
^2(х.г],р)
Ыг\,р)
w^'\^,p)
нЗ^ .
^2{Х,^,Р)
Q2(X,P)
^,{х,ц,р)
Ш,Р)
f^2lix^,P)
п
Q,ix,p)
Рис. 2.43. Структурная схема теплообменника
137
Здесь, в соответствии с (1.33) и (2.192):
{2.П9)
»'2(jr,4,p) = l(.v-4)-—exp
(2.280)
и тогда, поступая аналогично вьшоду выражения (2.147), будем иметь:
И',,(х,^р) =
1(лс-Л)х1(л-^)
= f _1
1
exp
exp -
Л1 =
Л), если л > 4,
или
(2.281)
И'2,(дг,5,р) = 0.,если jc<^.
Вычисляя здесь последний интеграл, находим
ехр
fF2,(jf,ip) = l(x-^)-
^2Р + 1
-ехр
(J(-^)
V2(»'2-»'l)/'+(*2f'2-*lf1)
(2.282)
jjpjj .^!£ii^*2£il в протавном случае, когда 6, =*,f'i = = К, ингефи-
рование приводит к более простой формуле
ехр
Ьр+\
' bV
2г/2
b^V
ix-l).
(2.283)
Подставляя полученное выражение (2.282) в равенство (2.277) и используя
представление (Г, в форме (2.279), получаем следующее интегральное уравнение
огаосительно W,*(at,^,/>):
Щх(хЛ,Р)-
ехр
I(AC-v)-
^2Р + 1
*2^'2
(Jt-v)
-ехр
Ь\Р + \
ЬхУх
(AC-v)
b,b2iV2-yx)pHb2V2-b^V,)
(2.284)
1
138
точное решение которого может быть получено в явном виде за счет вырождешю-
го характера блока (2.280) обратной связи типа (2.257).
Можно показать [8], ^п^о -jro решение описывается следующим вьфажением:
62P + i
!хр[а,(дг-4)]-
^2Р + 1
ехр[а2(дс-^)]
6,F,(a,-a2)
-,(2.285)
где
«2 = 2
f>ip + l ^ Ь2Р+\
i
-i2
I b,V, b2V2 )
b,b2V,V2
Аналогичным образом, "меняя местами", согласно рис. 2.43 а,б, б;юки IV^ и
, можно наши передаточную функцию ^22^х,1^,р).
В силу симметрии задачи W22 можно получить из круговой сменой
индексов "1" на "2" и обратно в формуле (2.285):
W22(x^P) = Kx-^)
b^p+l
+ «2
Gxp[a2{x-^)]-
*2^^2(«2-«l)
.. (2.286)
Перейдем к определению передаточной функции lV*2ix,<E,,p). Как следует из
рис. 2.43 в, структурная схема объекта по соответствующему каналу воздействий
представляется в виде блока ^j2(jc,^,;?) , охваченного "стопроцентной" обратной
связью (рис. 2.44).
Здесь lV^2^Xy^yp) - передаточная функция последовательного соединения
^^20г>#.Р)
L
gii4,p)
Рис. 2.44. Эквивалентиое представление структурной схемы рис. 2.43, в
139
блоков iv^ и ^2, определяемая вьфажением (2.208):
/
^n(x^P) = \^2(x.n.pW^ (r\A,P)dn. (2.287)
о
Подставляя сюда формулы для Щ и iv2, согласно (2.279) и (2.280),
получим:
хехр -
о ■ " '^^ (2.288)
Как следует из сравнения подынтегральных функций в (2.288) и (2.281), они
приводяггся друг к другу круговой заменой индексов "Г на •*2" и обратно у
коэффициентов и "Р, в связи с чем ^^^^(лг,^,/?) находится в итоге по формуле
(2.282), т.е. в данном случае И^|2(х,^,/7) = ^г2,(х,^,/?), хотя, вообще говоря,
последнее равенство не соблюдается в виду некоммутативности последовательного
соединения распределенных блоков (см. примеры 2.14 - 2.16). Теперь, на
основании (2.247), (2.2Я), получаем, подобно (2.277), следующее интегральное
уравнение относительно W*2{x,B,yp):
I
<2(^,^,P)-J»'**(^,v,p)JF;2(v,^,/7)^.=fF,2(x,^,/>), (2.289)
о
где, аналогично (2.278):
W"\x,%,p) = |»^,2(х,л,/7)б(т1 -§)Л1 = Ж,2(х,4,;?). (2.290)
о
В соответствии со структурными схемами рис. 2.43, в и 2.44 здесь блок,
охватываемый обратной связью, имеет передаточную функцию W^^^x^^^p) вместо
(jc,4,/7) в (2.277), (2.278), а вместо w2 используется блок обратной связи,
осуществляющий тождественное преобразование входного сигнала в равный ему
выходной, т.е. представляющий собой усилительный блок с передаточной
функцией (2.229) при = 1, откуда и следуют уравнения (2.289), (2.290) вместо (2.277),
(2.278).
Подставляя (2.290) в (2.289), приведем (2.289) к виду:
<2(^.^./')-J^i2(^>^'P) <2(v,^>/')^v = ^,2(x,^,p). (2.291)
о
Подобно (2.277), запишем интегральное уравнение для W^22(-^>^»P) (^"^
формально, в силу симметрии схем рис. 2.43, а, 2.43, б, получается опять из
(2.277) простой взаимной заменой индексов "Г на "2"):
140
\
W^,2Uv,p) H^22i^A.P)dv = W^{x,^.p). (2.292)
Теперь сравним уравнения (2.277), (2.291) и (2.292). В условиях lV^2^x,^,p) =
=: W2\(x,%yp) они имеют одинаковые ядра, а их правые части в соответствии с
(2.279), (2.280) и (2.282) связаны линейным соотношением
Тогда в силу линейности уравнений (2.277), (2.291), (2.292) аналогичным
соотношением связаны их решения, откуда находим искомую передаточную
функцию
b^b2 (^2 - F, )р+(г»2^2 - Ь^Щ )
Подставляя сюда найденные выше выражения (2.285) и (2.286) для W^] и
, получим окончательно:
^1^2М^2(^1 -^2)
Опять круговой перестановкой индексов и всех коэффициентов найдем из
(2.295) четвертую передаточную функцию матрицы (2.276):
^^2M^2(^2"^l)
совпадающую в данном случае с W*2(x,^,p).
Пример 2.20. Рассмотрим в качестве ОРП температурное поле физически
неоднородной системы, образуемой при идеальном тепловом контакте двух
соприкасающихся своими поверхностями тел с различными теплофизическими
свойствами. Подобные системы являются базовым элементом различных
многослойных конструкций, нашедших широкое применение в технологической
теплофизике [24,25,49].
Пусть в линейном одномерном приближении объект моделируется системой
уравнений теплопроводности вида (1.4) при П = О для неограниченных пластин с
температурами 9, и 82 (рис. 2.45):
<'<R,'>^. (2.297)
dt дх^
:^2
= а, ^ЖМ) JLf2(.,/), О г > о (2.298)
dt дх^ С2У2
с начальными состояниями
141
условиями
e,(jf,0) = e,o(jr);
в2(л:,0) = в2оМ;
ох
(2.299)
(2.300)
(2.301)
в2(0,/) = е(2^)(/); (2.302)
на границах x = R ид: = 0, и условиями неразрывности температур и тепловых
потоков в точке д: = Л, контакта {граничныеусловия четвертого рода [24,30]):
е2(Я„0 = в,(/?„0; (2.303)
(2.304)
Пусть распределенные блоки с выходами 6] и 82, описьгааемые
уравнениями (2.297), (2.299), (2.301) и (2.298), (2.300), (2.302), характеризуются их
передаточными функциями (дг,^,р) И 1^2 (^>^>^) соответственно, причем fV^
определена для граничных условий второго, а - первого рода в соответствии с
видом этих условий в (2.301) и (2.302) на границах x^R и д: = 0.
Недостающие условия на границе x^R^ можно формально представшъ в
142
Рис. 2.45. К описанию температурного поля неоднородной
системы уравнениями (2.297) - (2.304)
вйд\(2.304) для первого блока и (2.303) для второго, считая для блока
известной щотность теплового потока ^[^\/) точке = Т?,
■ Х,^^1^ = ,Р>(0. (2.305)
вычисляе\!ую по температурному полю 02(jf,/) второй пластины:
,1^\о=х,^^А!1, (2.306)
дх
а для блока -температуру 02"^(/) в точке x = Ri
О2(Л„/) = 0<2^ЧО, (2.307)
вычисляемую по температурному полю ОДдг,/) первой пластаны:
0^2^>(/) = O,(i?i,/). (2.308)
Если теперь указанные граничные воздействия, создаваемые
температурными полями на выходах блоков, учесть в качестве соответствующих слагаемых в
составе стандартизирующих функций на входе другого блока, то в образуемой
таким образом взаимосвязанной системе будут автоматически учтены условия
сопряжения (2.303) и (2.304).
В результате структурная схема рассматриваемого ОРП, в которой
требуемые сигналы связей между блоками Wy и IV2 формируются с помощью
соответствующих переходных блоков, принимает вид, показанный на рис. 2.46.
Здесь fV^ ix,^,p) определяется для граничных условий второго рода
выражением (2.171), а ^2 (Ху^,р) находится, подобно (2.180), для граничных условий
первого рода на обеих поверхностях пластины, в частности, согласно выражению
[8.9]:
(хЛр) = -У sinf ^] sinf^] —О £ x < Л; О ^ ^ < Л. (2.309)
R^
p + l
В соответствии с общими соотношениями (2.63Н2.65) и граничными
условиями (2.301), (2.305) и (2.302), (2.307) получим, подобно (2.67) и (2.69), сгандар-
тизирующие функции w^^\^yp) и w^^\l^,p) на входах блоков и PFj:
^^'\^,Р) = 01о(^) +—5(4 - R)ql'4p) - —5(4 - Юя^^Чр) +
'^^^ (2.310)
+—F, (^,/7);
143
w^^\%,p) = e2o(^) + 02844 - i^f^Pl - а28\ф^^\р) + I
1 ... (2.311)
Составляющие этих фушщий
^Г(^,Р) = в1о(^)+—(2.312)
и
F;(^,p) = e2o(^)-t.2S'(^)e^^4p)+—(^,/7) (2.313)
рассматриваются на структурной схеме рис. 2.46 в качестве внешних воздействий
по начальным состояниям и 02о, пространственно-временным распределени-
—нЗ>
g2(x,p)
е,(х,р)
Г
^2ПМ,Р)
48(11-/?,)
б'(дг-4)
вег(л.я)
W\x,^,p)^^ Г. 1
дх
Щ(.х,Е„р)
Рис. 2.46. Структурное представление обглкта управления, описываемого
уравнениями (2.297)-(2.304)
144
ям внутренних источников тепла и F2 , плотности теплового потока ^[^^ на
гранЦе x = R и температуре 6^2^ на поверхности jc = 0.
Оставшиеся слагаемые
g, (4,Р) = -—8(^-/^1 (2.314)
g2(^'/') = «25'(^-^i)^f (Я); (2-315)
представляют собой дополнительные сигналы, формируемые, согласно (2.306) и
(2.308), в зависимости от выходных величин блоков Щ и соответственно.
При этом, подобно (2.233), (2.240), находим, чго эти сигналы создаются на
выходах переходных дг-блоков с передаточными функциями
f^ix(^,P) = -—S(^-^i); (2-316)
и
W2Ax.P>a2bXx-R^), (2.317)
и входными воздействиями ql^\p) и ^2^^{р).
в свою очередь, на основании равенства (2.308) температуру В^\р) можно
рассматривать, согласно (2.221), в качестве выхода переходного ^-блока с
передаточной функцией
^2^(^,p)=S(^-^i). (2.318)
преобразующего распределенный сигнал 0i(jc,/?) на его входе в сосредоточенный
^liRuP)^
Аналогичным образом, плотность теплового потока q{^\p) в форме (2,306)
можно получить на выходе переходного ^-блока
^i^i^,p) = m^-Ri), (2.319)
на вход которого подается распределенный сигнал, моделируюпдш поле темпера-
д%{х,р)
турного градиента — - второй пластины.
дх
В последнем случае структурная схема формирования воздействия (^,/7)
усложняется блоком пространственного дифференцирования с передаточной
функцией W^(x,^,p) [8], осуществляющим операцию дифференцирования
температурного распределения б2(^с.р) по пространственной координате. Нетрудно
видеть, что в данном случае
^F^(x,^,p) = 5V-^). (2.320)
145
Действительно, для изображения Q{x,p) выхода такого блока со входом
^2(^*р) будем иметь, согласно общим выражениям (2.155), (2.157) и известным
свойствам дельта-функций (Приложение):
JC, JC, ^
Qix.P)= \^Л^Л,р)Ш^р)^^-1^Х^-^)Шр)с1^=^^^
что и требовалось показать.
Используя правило (2.208) и свойства 5-функций, найдем выражение для
передаточной функции lV*{x^,p) последовательного соединения блоков
^д(^Л>р) и ^\^{^,р) в структурной схеме рис. 2.46:
^^„(П,Л(Л,^,Р)^Л=^{(^,Р) =
(2.321)
= |Ц6(Л-Я1)5'(Л-^)^Л = >^2«'(Л1 -4)-
о
Теперь в соответствии с общими соотношениями (2.155), (2.157) и (2.161)
получим следующие зависимости сигналов g^(x,p) и g2ix,p) от выходных
величин блоков и ^2:
(л:,/7) = ---1-6(лг-;?,)?/2)(^)^^
о
^ {хЛ,р)-
1
•d(x--ROlV\x^,p)
4f
_^8(x-fi,)8'(«i-0
L ^1у1
(2.322)
g^{x,p) = a2SXx-R^ )ef (р) = а28'(*-Л, )f 8(4-^,) Ш^РЖ =
[а28'(дг-Я,)5а-й,)]в,(^.р)^^.
(2.323)
Согласно определениям (2.155). (2.157), выражения в квадратных скобках
под знаком интегралов (2.322) и (2.323) представляют собой передаточные функ-
146
uhhW,/7(-^>^>P) и lV2fj{x,^,p) блоков обратных связей, реализующих эти зави-
\
(2.324)
W,jjix,^,p)^a2bXx-R0H^-R0. (2.325)
Соответствующая упрощенная структурная схема ОРП приведена на рис.
2.47. По сравнению с подобной структурой объекта со "стопроцентными"
обратными связями, рассмотренного в предыдущем примере (рис. 2.42), данная схема
устожняется лишь вырожденными блоками ^ » отличающимися от
статических блоков вида (2.229) с единичным коэффициентом передачи k = \.
Поступая так же, как в этом примере, здесь можно, разрешая соответствую-
шие интегральные уравнения, найти передаточные функции объекта от обоих
входов Fi(^,p) и ^2(4,/7) к каждому из выходов Bi(x,/7) и 92(jc,p).
В типичных частных случаях, когда в роли внешних воздействий
рассматриваются только сосредоточенные граничные управления д^^Нр) и В^\р) в
составе стандартизирующих функций (2.310) и (2.311), а в качестве управляемых
величин - лишь температуры В^{х**,р) и Э2(д:^,р) в фиксированных точках
хГ € [R\yR], и jf^ е [0,/?|], объект можно рассматривать в виде двух
взаимосвязанных''jf^''-блоков с сосредоточенными входами и выходами, и все структурные
Рис. 2.47. Приведеииая структурная схема объекта управления
147
•гочершй сигнал д^^^(р) со входами В^\р) и В^^{р) в составе w^^^(J^,p) на
схеме рис. 2.46, определяются вход-выходными соотношениями, подобными
(2.322), (2.323).
В соответствии со структурной схемой объекта (рис. 2.46) получим,
используя передаточную функцию (2.321) блока IV*(x,B„p):
«, л.
ч1^Чр) = \fV\x^,p) Ы^р)*^ = J ^2«'(Л, -4) в2(4./')^. (2.332)
Подставляя сюда выражения для B^d^tP) в виде простых произведений
передаточных функций (2.330Х (2.331) с изображениями входных воздействий
ef (/>), Щ^\р), будем иметь:
* /(2)/
«P4/')=fx^,-4)»F«(4.p)e«(p)d^=X2.!5l^i:^ef(^)
о
или, подобным образом
,p)(p)=x,:?5i^^ef)(p). (2.334)
откуда сразу находим искомые передаточные функции w!^^{p) и W^{p)\
Теперь, используя принцип суперпозиции для суммирования выходных
сигналов блоков, создаваемых различными входными воздействиями, получаем для
рассматриваемого типичного частного случая структурную схему объекта,
содержащую лишь звеш,я W^\x\\p), W^'^\x\\p), W^^\R^,p),
^2^(<х2,р), W^^\x2,p), IVJ^^ip), ^2^(.Р) с сосредоточенными входами и
выходами (рис. 2.48).
По структурной схеме рис. 2.48 элементарным путем определяются
передаточные функции объекта по любому из внешних входов qj;^\p) или Щ\р) для
любого из выходов 9j (х**,р) или 62(^Г>Я)-
149
е,(л,,р)
Рис. 2.48. Структурная схема объекта для сосредоточенных входов
н выходов распределенных блоков
в частности, для выхода (х**,/?) относительно входа ql^\p) схема свер-
тьшаегся к виду рис. 2.49, откуда сразу получаем согласно обычным правилам
структурного преобразования систем с сосредоточенными параметрами:
(2.337)
\+fV^l\pWl^\Ri,p)
Аналогичным образом получаем структуру объекта для случая, когда при
том же входе в качестве управляемой величины рассматривается &2^х1*,р)
(рис. 2.50), и соответствующую передаточную функцию:
1
ff^iP)=^^-wr(Rupw^'\4\p)—
i+w^M>pw^l\p)
. (2.338)
Подобным путем нетрудно найти и передаточные функции относительно
второго входа Щ\р).
^—-
Рис. 2.49. Структурная схема для определения передаточной функции объекта
от входа qj^\p) к выходу О, (х]'*,/?)
151
е,(л,,р) = в,(р)
Рис. 2.50. Структурная схема для определения передаточной функции объекта от входа
ql^\p) к выходу Ъ^{х\\р)
§ 2.7. Применение интегральных преобразований
для моделирования ОРП
В предьщущих разделах настоящей главы рассматривались вопросы
анализа общих свойств линейных стащюнарных распределенных блоков,
базирующихся на известных фундаментальных характеристиках решений
соответствующих уравнений в частных производных, описьшающих
поведение этих объектов.
Обоснованию и способам фактического определения таких
характеристик дпя типовых ОРП второго порядка посвяпщются последующие
§2.7-2.9.
В указанных целях на практике широко используются различные
виды интегральных преобразований функции состояния ОРП. В качестве
наиболее наглягщого примера естественно привести прежде всего
преобразование Лапласа по времени (§ 2.5), на основе которого строятся
структурные методы анализа и синтеза, занимающие центральное место в
арсенале современных средств исследования линейных систем управления
объектами как с распределенными, так и с сосредоточенными
параметрами [1, 7, 8, 37]. Главный смысл применения этого преобразования
заключается, как известно, в замене операций дифференцирования по времени в
исходных уравнениях объекта на соответствующие алгебраические
операции в уравнениях для изображений по Лапласу рассматриваемых
функций состояния Q{x,t), Если при этом в линейнььх сосредоточенных
системах дифференциальные уравнения для оригиналов сводятся к
алгебраическим уравнениям относительно их изображений (откуда, в частности, и
152
вытекает возможность получения их передаточных функций
элементарным образом в простейшей дробно-рациональной форме), то для систем с
распределенными параметрами, описываемььх уравнениями в частнььх
производных (§ 2.1), результат получается принципиально иным.
Поскольку преобразование Лапласа по времени сохраняет пространственные
производные, его применение приводит к дифференциальным уравнениям
по пространственным переменным относительно изображения
(обыкновенным для пространственно одномерных или в частных производных
для многомерных моделей объекта управления), решение которых уже не
удается получить в столь же простой форме, как для сосредоточенных
систем.
В таком случае логично попытаться использовать другое
интегральное преобразование, теперь уже по пространственным аргументам с
аналогичной целью исключения дифференциальных операций по этим
переменным в уравнениях объекта. Оказывается, что такая задача, как
правило, разрешима, по крайней мере, для достаточно простых моделей ОРП,
причем не только для прямого, но и для обратного преобразования,
обеспечивающего элементарную процедуру обратного перехода к оригиналам.
Если преобразование Лапласа определяется известнь»!
соотношением
00
Q{x.p) = lQixJ)e'-P'dt, (2.339)
о
то здесь речь идет об изображениях вида
QM^JQ{x,t)K{ii,x)dx, (2.340)
Xq
где x - переменная преобразования (подобно t в (2.339)); АГ(ц, jc) - ядро
преобразования {подобно е"^' в (2.339)), отрезок [xq.xi] - промежуток
преобразования и ц - параметр преобразования (подобно комплексной
переменной в (2.339)), которые должны быть выбраны, исходя из
основного условия исключения операций дифференцирования по jc в
исходные уравнениях объекта при переходе к изображениям.
Если в (2.339) x играет роль "постороннего" параметра, то, наоборот,
в (2.340) в таком качестве выступает время /.
В результате становится возможным, в зависимости от конкретного
характера задачи и целей исследования, последовательно гфименять
такого рода преобразования (т.е. осуществлять кратное интегральное
преобразование) по всем или части пространственнььх переменных для
многомерных моделей; в любом порядке последовательно находить преобразо-
153
вания функции состояния объекта по времени и
пространственным аргументам или любое одно из них, и, таким образом,
трансформировать исходную модель к виду алгебраических или дифференциальных
уравнений относительно соответствующих изображений по какой-либо
одной или части переменных в пространственно-временной области
определения 6(^,0.
Построение интегральных преобразований Q(xj) по
пространственным переменным вида (2.340) существенно отличается от преобразования
Лапласа, хотя и преследует, по сути дела, те же цели. Если модель ОРП
рассматривается в пространственной области бесконечной
протяженности, например, при ху -» оо в (2.340), то следует рассматривать
соответствующее интегральное преобразование (2.340) с бесконечными пределами,
подобно (2.339). Однако в большинстве реальных ситуаций эта область
ограничена, ингегрирование производится в конечных пределах, и тогда
соответствующая операция типа (2.340) называется конечным
интегральным преобразованием [7, 24,28,32].
Аппарат интегральных преобразований обладает целым рядом
существенных преимуществ при исследовании ОРП. С его помоп^ью удается
построить физически прозрачные модельные представления ОРП;
предложить единообразную, технически предельно упрощенную методику
расчета всех основных характеристик для широкого класса объектов,
сводимую к применению ряда стандартных рецептов с использованием
готовых справочных данных по заранее вычисленным прямым и обрат-
ньт преобразованиям и их ядрам для наиболее типичных моделей, что
исключает для пользователя самые трудоемкие этапы исследования.
Наконец, этот аппарат оказывается весьма полезным для
последующего решения задач управления ОРП.
Однако эффективность метода интегральных преобразований
ограничивается, как и большинство других методов, классом линейных
моделей ОРП с линейными граничными условиями для простых
(канонических) форм областей изменения пространственных аргументов.
Ниже, в § 8 и 9 настоящей главы, рассматриваются основные аспекты
применения интегральных преобразований для построения моделей ОРП.
§ 2.8. Применение операционного исчисления для построения
моделей объектов с распределенными параметрами
Применение преобразования Лапласа вида (2.339) к функциям
состояния Q{x,t) распределенной системы, где пространственная
переменная формально выступает лишь в роли некоторого дополнительного
параметра, производится по обычным правилам операционного исчисления
[8, 18, 24, 30, 32]. Ограничимся, как и ранее, рассмотрением стандартной
формы типовой модели ОРП, записанной в виде линейного уравнения
(2.55) в частных производных второго порядка с нулевыми начальными и
однородными граничными условиями при постоянных коэффициентах
Более сложные объекты с распределенными параметрами во многих
случаях можно представить в виде некоторого соединения такого рода
"элементарных" блоков, передаточные функции которого можно тогда
найти по передаточным функциям типовых моделей, используя правила
структурной теории, приведенные в § 2.6 (см., в частности, примеры 2.13,
2.14,2.19,2.20).
Перейдем в (2.55) к изображениям, имея в виду, что все функции в
самом уравнении объекта и краевых условиях, как правило,
удовлетворяют требованиям применимости преобразования Лапласа, а
соответствующие операции интегрирования по времени и дифференцирования по
пространственным переменным перестановочны:
dx "X (2.341)
+ Ci (x)g(x, р) + wix, р); Xo<x<Xi;
аое(хо,Р) + Ро^^ = 0;
ах
а,е(х.,р)^Р.%^ = 0.
ах
(2.342)
Здесь w(x,p) - изображение стандартизирующей функции w(jc,/); в
соответствии со свойствами преобразования Лапласа исключаются
производные по времени функции состояния; изображения пространственных
производных превращаются в производные по пространственным
переменным от изображения Q{x, р), и учитываются нулевые начальные
условия в (2.55).
В итоге уравнения (2.55) в частных производных для функции
состояния 0(x,t) ОРП трансформируются в обыкновенное линейное
неоднородное дифференциальное уравнение (2.341) второго порядка по про-
155
странственной переменной относительно ее изображения Q(x, р) с
однородными граничными условиями (2.342).
Поскольку при воздействии w(x,0 вида (2.26):
w(x,/) = 5(/)5(jc-^) (2.343)
выход объекта Qix,t) совпадает с его функцией Грина G(jc,^,/) в
условиях (2.32) (см. § 2.2), а ее изображение представляет собой, согласно
(2.157), передаточную функцию lV(x,E,yP) рассматриваемого
распределенного блока, то W(x^,p) = Q(x,p), если >?(х,/?) в (2.341) есть
изображение по Лапласу входного сигнала (2.343):
v?(x,/;) = 5(x-4). (2.344)
Следовательно, передаточная функция описывается краевой задачей,
образующейся после указанных подстановок в (2.341) и (2,342):
dx^ ox
+Ci(x)W(x^,p)+4x-S,y,
r,W = c.,WM, P) H- Po = 0;
ax
ax
(2.345)
(2.3^6)
(2.347)
Ее решение (получаемое, например, классическим методом вариации
произвольных постоянных) имеет следующий ввд [32]:
^ -<hiP^)<f2iP>x)r(^), Xq^I^x;
ЩхЛ,р) =
аЛ(р)
1
аМр)
Ф1(А*)Ф2(РД)''Й). хй^йх^.
Здесь
г(х) = -
-ехр
{^dx
3 С(х)
С(х)
а s const = С(х)г(х)[ММ1 - А/Я/,];
Ф1(р,х) = (/-оМОм - (ГоА/)М,;
Ф2(А*) = (AA^i)A/ - (Г,М)М,;
(2.348)
(2.349)
(2.350)
(2.351)
(2.352)
Л(р) находится в форме определителя:
156
А(/7) =
(2.353)
(ГоМ) (ГоМ,)
(Г,Л/) {Г,М,)
М(РуХ) и Mi(p,x) - любые два линейно независимые решения
однородного уравнения второго порядка, образуемого при отсутствии в правой
части (2.345) дельта-функции 5(х-^) (штрихом в (2.350) обозначены
производные от м и Mi по х); Tq и - линейные операторы вида
(2.346), (2.347).
Таким образом, если известны М{р,х) и Mi{p,x), то передаточная
функция объекта сразу определяется в замкнутом виде вьфажением
(2.348), после чего изображение реакции объекта на произвольное
воздействие ^(х,/?) находится в форме пространственной композиции (2.155).
При этом следует иметь в виду, что М{р,х) и А/|(р,х) легко
находятся при постоянных коэффициентах С, fij и С| в (2.345) и могут бьпъ
определены в замкнутой форме путем аналитического решения
соответствующего однородного уравнения лишь в некоторых (хотя и достаточно
многочисленных) частных случаях зависимости этих коэффициентов от
пространственной координаты. Заметим, что трудности аналитического
решения уравнений ввда (2.345) - (2.347) много!фатно возрастают для
многомерных моделей объектов со сложной геометрией областей
изменения пространственных переменных. На практике вычисления значительно
облегчаются наличием обширных справочных данных с заранее
найденными функциями (р\{р,х\ Ф2(р,^), г{х\ Л(/?) и числами а для широкого
класса типовых моделей ОРП вида (2.345) -(2.347) [8,9,32].
Для объектов, описываемых уравнениями (2.345) первого порядка
при C(jc) = 0c единственным нулевым граничашм условием
^(^о»5> Р) = О, задача значительно упрощается, и теперь уже при
произвольных кусочно-непрерьюных зависимостях В|(х)э^О и С\{х)у в
соответствии с известной формой представления общего решения уравнения
первого порядка [27], будем иметь:
x
«о
B,(v)
(2.354)
(exp
_|с1(л)-У-Я1Р
^Ci(n)-V-/tip
Bl(n)
157
где:
1(^-4) = 1 для всех х>1,
и
1(:с-^) = 0,если х<^.
Передаточные функции Wx(x,p) х-блоков (§ 2.5) с сосредоточенным
воздействием v{p) в составе стандартизирующей функции w{x, р) типа
(2.73) определяются, как было пока:>ано выше, в форме пространственной
композиции (2.160).
При этом для случая сосредоточенного управления по граничным
условиям второго или третьего рода будем иметь, согласно вьфажениям
(2.164) и (2.348):
х(^, Р) = %^ = lcix,)G(x,x,yp) =
Щ{Р) Pi
= lc(xO^F(x,Xi,p) = --^^9,(p,x)92(AxOr(xi);
(2.355а)
^х(х,р) = = ~C{xo)G(XyXQ,p) =
Ро (2.3556)
= "-^С(хо)^Г(х,Хо,р) = ^^^Ф2(Р,^)Ф1(Р,^о)К^о).
При переходе к граничному управлению в условиях первой краевой
задачи подобным образом, на основании соотношений (2.165) и (2.348),
получим, вместо (2.355), следующие обпще выражения для ^х(^>Р)'-
Щ(Р)
1
в, (XI )Wix,Xi,p)-^ (С(^) 1¥{хЛ, Р%
= \—<^х{р,х)-к (2.356а)
x [Bj (дг,) 92 (/?, xj) r(Xi) - Ф2 (р, X,) C(xi) r(Xi) -
- Ф2 ^1) (С(х,) г'(х,) + С'(х,) /-(х,))];
158
"oiP)
ao
1
Bi (xo) Щх, xq,p)-^ (C(^) W{x, ^, p)\
Ф2(ах)х
(2.3566)
X [^1 (xq)(Pi (p, Xq ) r(xo) - Ф1 {P,Xq) С{хо ) r(xo) -
- Ф1 (P, ^0) (C(xo) '•'(^o)+C\xq ) r(xo))],
где штрихом отмечены производные по переменой ^.
. При сосредоточенном внутреннем управлении '^(р) = и(р) с
фиксированным характером /,(^) его пространственного распределения,
согласно (2.75), вьфажение для W^ix^p) представляется пространственной
композицией (2.163), которая в силу (2.348) приобретает следующий вид:
x
Ф2(А^)|ф1(А^)К^)/1(^)^ +
(2.357)
1
сМр)
Хо
,x)j<P2(pл)f^
Как следует из (2.349) - (2.357), вид искомых передаточных функций
ОРП определяется, в первую очередь, решениями дифференциального
уравнения (2.345) с краевьпли условиями (2,346), (2.347), вследствие чего
характер зависимости этих передаточных функций от комплексной
переменной р резко усложняется по сравнению с сосредоточенными
системами, для которых они представляются решениями простейших
алгебраических уравнений и имеют поэтому элементарную дробно-рациональную
структуру.
Указанное обстоятельство вообще формально исчерпывает всю
специфику распределенной системы применительно к х-блокам, для которых
изображение Q(x,p) выхода находится, подобно сосредоточенным
системам, в соответствии с базовым соотношением (2.161), простым
перемножением передаточной функции W^(x,p) с изображением и(/7)
входного воздействия, а пространственная координата играет просто роль
параметра в выражении для fT^ (х, р).
Сложный характер вьфажений для lV(x,^,p) и IV^^x^p) значительно
159
затрудняет анализ свойств объекта по виду его передаточной функции, не
позволяя использовать привьпные приемы, базирующиеся на аналогиях
со свойствами типовых динамических звеньев систем с
сосредоточенными параметрами. Тем не менее возможность определения точных вьфаже-
ний для передаточных функций в замкнутой форме является
несомненным преимуществом метода преобразования Лапласа применительно к
рассматриваемым объектам. Даже если эти выражения оказьгоаются
слишком сложными и "трудноанализируемыми" для непосредственного
применения в целях моделирования систем управления с
распределенными параметрами, они, в частности, могут быть использованы в качестве
эталонов для оценки точности приближения в частотной области с
помощью более простых и удобных аппроксимаций.
Другой путь нахождения передаточной функции ОРП, в соответствии
с ее определением (2.157) состоит в непосредственном применении
преобразования Лапласа к предварительно вычисленной другими способами
функции Грина объекта.
При этом достаточно часто функции Грина типовых ОРП
описываются в форме разложения в бесконечный ряд, образующий в
пространстве изображений передаточную функцию объекта в отличной от найденной
выше форме бесконечной суммы передаточных функций элементарных
динамических звеньев. Тем самым проводится весьма удобная и
наглядная аналогия с сосредоточенными системами и одновременно вскрьтает-
ся принципиальная особенность ОРП, заключающаяся в бесконечном
числе таких звеньев при точном моделировании распределенной системы
(см. примеры 2.10, 2.11). Подобный подход описывается подробнее в
следующем параграфе настоящей главы.
Заметим, наконец, что преобразование Лапласа может применяться
не только по времени, но и по пространственной переменной, если можно
считать полуограниченной область ее изменения, полагая, в частности,
0<х<оо [24].
При этом преобразование (2.339) принимает вид
о
В частности, для подвижных объектов, описываемых, например,
уравнением (1.21) или системой таких уравнений вида (1.33), можно
считать полуограниченной пространственную протяженность объекта в
направлении его перемещения. Кроме того, подобные модели с
удовлетворительной точностью описьгеают реальные процессы в ОРП, если в
рассматриваемых конкретных условиях функция состояния объекта
практически не изменяется относительно начальных условий на достаточном
удалении от границы х = О.
160
Рассмотрим далее некоторые характерные примеры.
Пример 2.21. Для уже рассматривавшегося ранее объекта, описывающего
процесс нагрева неограниченной пластины уравнением теплопроводности (1.4)
при Я = 0 в условиях (1.5X1.7) второй краевой задачи, обыкновенное
дифференциальное уравнение для передаточной функции сводится к виду (2.345) - (2.347)
при А = 0, =1; с = а; =0; Q =0; ао =ai =0; Pq =Pi =0;
pWix,^, p) = а^^^^^Ц^ + Ь{х - ^); (2.358)
dx
dx dx
Однородное уравнение (2.358) второго порядка с постоянными коэффициентами*
^'-pW\xyp)^0 (2.360)
d^'lV^xyp)
dx^
имеет известное общее решение вида взвешенной суммы гиперболических
функций (гиперболического косинуса c/iz = i(expz+cxp(-z)) и гиперболического
синуса sh 2 = ~(expz -exp(-z))) комплексного аргумента z^J^x [27, 30]:
2 \ а
W'(x.p) = D,(p) ch^x +D,(p) sh^x <2.361)
с произвольными постоянными интегрирования D] и D2, и, следовательно,
можно принять в качестве его линейно независимых частных решений М{р,х) и
М\{р,х) слагаемые в (2.361):
М{р,х) = ch^x, М,{р,х) = sh^x . (2.362)
Теперь в соответствии с (2.349)
а
на основании (2.350), (2.362) и (2.363)
r(jc) = i; (2.363)
(2.364)
' W{x,%, р) в (2.358) зависит от 4, как от параметра, фигурирующего в
качестве аргумента дельта-функции 8(дг - 4). В однородном уравнении (2.360) для
^*ip>x) эта зависимость отсутствует вместе со свободным членом.
161
где используются известные соотношения -^ch z^sh z\ -^sh z^chz , и, как
dz dx
нетрудно видеть.
ch\\^x-sh\\£-x^\.
(2.365)
Как следует из (2.351), (2.352), где операторы Г(, и Г|, в силу граничных
условий (2.359), имеют вид
dx
dx
(2.366)
получим следующие выражения дня функций ф, и ф2:
Ф1(/',Дг) = Х^сА^дг,
^ip,x)^y.^ch^R.ch^x-\^sh^R.sh^x =
= ch^iR-x),
и по соотношению (2.353) вычислим
(2.367)
а \а
(2.368)
В итоге передаточная функция рассматриваемого объекта определяется,
согласно (2.348), выражением
W{x,%,p):
1
Kip)
1
Ло{р)
1ч^рЛШр,х), 0^%йх,
hi(.p,x)h2(.p,%)> xu^uR,
где
h,(p.x) = ch^(R-x).
(2.369)
(2.370)
Передаточная функция объекта относительно управления F(x,p) по
мощности внутреннего тепловыделения в (1.4) с учетом кшожигепя — его приведения к
стандартизирующему входу, согласно (2.67), образуется простым умножением
выражений (2.369) на этот множитель.
162
При сосредоточенном управлении щ(р) = д{р) по величине теплового
потока на фанице x = R передаточная функция lvP\x,p) соответствующего
распределенного х-блока от этого входа к температурному распределению G(jr, р)
на его выходе находится согласно (2355а), с учетом соогаошений (2.364) -
(2.368) по значигельно более простой формуле
«.(^)(,,^,) = |£i£)=_^iI^ = _^5E^. (2.371)
сохраняющей, тем не менее, сложный трансцендентный характер зависимости от
комплексной переменной р.
Здесь для соответствующих постоянных времени вводятся обозначения
7-0=—;7i= —;Г;?=—. (2.372)
а а а
Передаточная функция (2.371) "непохожа" на типичные передаточные
функции сосредоточенных систем, обычно представляемые в дробно-рациональной
форме, и изучение свойств объекта непосредственно по выражению (2.371) на
основании базовых характеристик стандартных динамических звеньев становится
затруднительным. В данном случае требуется самостоятельный анализ, нагфимф,
путем исследования поведения частотных характеристик ОРП, определяемых
прямым их вычислением по формуле (2.371) как трансцендентньпс функций
мнимого аргумента в области существенньЬс частот, где подобные аналогии с
сосредоточенными системами уже оказываются возможными [31]. Поскольку объекты
типа (2.371) не могут быть в структурном отношении представлены комбинацией
конечного числа типовых элементарных динамических звеньев, они иногда
называются конечно непредставимыми.
Получить с помощью обратного преобразования Лапласа конечное
выражение для оригиналов, соответствующих изображениям (2.369), (2.371), не удается.
Однако с помощью обобщенной теоремы разложения операционного исчисления
[24, 30] можно, раскладывая в ряд Тейлора по степеням числители и
знаменатели в (2.369), (2.371), найти эта оригиналы, т.е. функции Грина рассматриваемых
задач, в форме бесконечного ряда (2.38) [30]. Как было показано в примере 2.10,
применение преобразования Лапласа непосредственно к бесконечной сумме (2.38)
приводит к передаточным функциям (2.171), (2.176) также в отличной от (2.369),
(2.371) форме бесконечного ряда, непосредственно свидетельствующей о
возможности структурного моделирования объекта в виде параллельного соединения
бесконечного числа простых апериодических и одного интегрирующего звена, что
уже позволяет провести соответствующие аналогии с сосредоточенными
системами. Общий способ получения передаточных функций объекта (2.341), (2.342) в
виде бесконечных рядов открывает, как будет показано в следующем параграфе,
метод конечных интегральных преобразований.
Заметим, что передаточную функцию (2.371) относительно граничного
управления для объекта (1.4) - (1.7) можно получить и минуя общий способ вы-
163
числения, более простым путем непосредственного решения в изображениях
системы уравнений (1.4) - (1.7).
Дейсгоигельно, применяя щ)еобразование Лапласа к этим уравнениям при
П = а, F(x,/) в О, GqW S О, будем иметь:
р0(ж.р) = а^!^; (2.373)
Х^^ = д(р); (2.374)
ах
Х^^ = 0. (2.375)
ах
Уравнение (2.373) вида (2.360) имеет то же общее решение (2.361). Его
подстановка в граничное условие (2.375) определяет постоянную интегрирования
D2(p) = 0. (2.376)
Вторая постоянная находится из граничного условия (2.374):
D^(p)^^sh^R = qip). (2.377)
В итоге решение задачи (2.373) - (2.375) с учетом (2.376) и (2.377) принимает
следующий вид
Q(x,p) = q(p), (2.378)
откуда сразу получаем искомую передаточную фугащию
fVm^^^p^^^^ Va (2.379)
При переходе от (1.6) к граничному условию третьего рода (1.9) для того же
уравнения (2.358) относительно lV(x,^,p) будем иметь вместо (2.359):
х'^^''^'РК^,Х^Ш^.а1У^ЯЛ,Р) = 0, (2.380)
dx dx
и, следовательно, данную задачу, в отличие от предь1дущей, следует
рассматривать в условиях tti = а 9t О в отличие от (2.359).
В таком случае, по сравнению с соотношениями (2.362) - (2.368) вследствие
изменения только граничного оператора Г|, меняются лишь выражения для ф2:
164
<Р2(р.х) = -x) + ash^{R-X) (2.381)
и Д(Р):
(2.382)
Тогда вместо (2.369), (2.370) получим следующее вьфажение для W{x,E„ р):
1
KxiP)
1
hi(p,k)hi(p,x), 0^45г.
(2.383)
где
Ыр) = ^ Х^^А^Л+осА^Л ; (2.384)
hi(p,x)-chJ-E-x;
(2.385)
(2.386)
При сосредоточенном управлении QriiP) температуре внешней среды
передаточная функция IV^^^{x,p) дг-блока по этому входу опять, как и (2.371Х
представляется в виде (2.355а). Тогда в соответствии с (2.355а) и (2.383Х найдем,
подобно (2.371), передаточную функцию W^^\x,p) при воздействии по Q^iiP)'
опт используя равенство (2.365):
(2.387)
oR
где Bi = критерий Био (см. пример 2.1).
Заметим, что последний результат можно сразу получить с помощью
соотношения (2.371), не прибегая к общему методу вычислегай!, если воспользоваться
структурным представлением объекта при граничном условии (1.8), (1.9) третьего
рода и определениями дг-блоков с передаточными фугащиями lV^^\x,p) и
165
Il'f>(.r,p) (рис. 2.51).
Как следует из рис. 2.51 здесь
д{р)^а1Ыр)-'^и1р)) (2.388)
в соответствии с (1.9), и поэтому структура объекта от входа Эп(/?) к выходу
О(-^.Р) соответствует .v-блоку с передаточной функцией УУх^^{х,р), а выделение
воздействия по плотности теплового потока д{р) позволяет воспользоваться .г-
блоком ^х^Нх.р) для получения как распределенной выходной реающи объекта
0(.t./7), так и сосредоточенного "промежуточного" выхода 0(/?,р),
используемого для формирования сигнала обратной связи в (2.388).
Теперь в соотвегствии с известными правилами структурных преобразований
легко получаем непосредственно по схеме рис. 2.51, с учетом выражения (2.371)
;У1Я ff'i2>(jc,/;).формулу(2.387):
ЖСЗ)(.,;,) = |(£:Я), a^i^\x,p) ^ сИ^ ^^^^^^
Ыр) l^aW^'4R.p) ch^^j:^-sh^
Можно, конечно, вывести выражение для ^х^\х,р) и непосредственно
решая в изображениях краевую задачу (1.4) - (1.9), подобно (2.373) - (2.379).
При переходе в точке х = Я к граничному условию (2.42) первого рода от (1.6)
опять по сравнению с (2.358), (2.359) изменяется лишь граничный оператор Г|.
Р и с. 2.51. Структурное представление объекта управления при граничном управлении в
условиях третьей краевой задачи
166
Тогда вместо (2.359) будем иметь
Х^Ш^^О;ЩЯ,!„р).0 , (2.390)
dx
т.е. исходную задачу надо рассматривать в условиях Pj = О, а, = 1, и снова по
сравнению с (2.362) - (2.368) меняются лишь выражения для ф2:
Ф2(А^) = ^Л^^(/?--^)-- (2.391)
иД(р):
В итоге, аналогично (2.369), (2.370), получим следующую передаточную
фушщию объекта:
'^^^^ (2.393)
^ MP^x)hs(pA\xul^uR,
fblip)
где h^(p) = ^ ch^R, h^{p,x) = <p2{p,x), и /f,(p,x) вычисляется согласно
(2.370).
При сосредоточенном управлении по температуре поверхност нагреваемого
тела в(Я,р) передаточная функция WJi^\x,p) дг-блока от входа Q{R^p) к выходу
G(jf,p) определяется выражением (2.356а).
После подстановки в (2.356а) соотношений (2.363Х (2.364), (2.392) и
функций ф, и ф2, согласно (2.367) и (2.391 X будем иметь тогде1, используя равенство
(2.365):
в(Л,р) ^^[1^ ch^
(2.394)
Как видно из (2.387), при Bi -> оо передаточная функция W^^{x,p)
стремится к виду (2.394), что и должно иметь место в соответствии с физическими
закономерностями процесса конвективной теплопередачи.
Подобно случаю второй краевой задачи, возможно получение функций
Грина в форме бесконечных рядов (2.40) и (2.44) при граничных условиях
соответственно третьего и первого рода в точке х = /^.
Последующий переход по их изображениям к передаточным фугаащям в
виде рядов (2.179), (2.180) опять допускает структурное представление
рассматриваемых объектов параллельным соединением бесконечного числа типовых
апериодических звеньев.
167
Как уже отмечалось выше, зависимость коэффициентов уравнения (2.341) от
пространственной переменной значительно усложняет аналитическое решение
задачи, которое становится возможным лишь в отдельных случаях.
В частности, широко используемое в приложениях уравнение
теплопроводности (1.4), описывающее при П = 1 процесс нагрева цилиндра бесконечной
длины, сводится к виду (2.341) при Л = а, Л, = 1; С{х) = а; (х) = Q (;с) = О .
x
В этом случае решения М(р,х\Му{р,х) однородного уравнения (2.345)
выражаются через функции Бесселя от комплексного аргумента [24,28,30].
П р и мер 2.22. Выражения для передаточных функций ОРП часто
существенно упрощаются в случаях, когда область изменения пространственной
переменной можно считать полуограниченной, полагая, например, что jcq ^ < -^i» где
JCj ->оо.
Пусть объект управления так же, как в примере 2.21, описывается
уравнением теплопроводности (1.4) при П = О, но для нагреваемого тела
полуограниченной пространственной протяженности в условиях второй краевой задачи
следующего вида:
ae(jc,/) d^Qixj) 1
dt
дх^
су
(2.395)
О < jr < 00, / > 0;
e(jc,0) = 9o(:c),0<^<oo;
хвО=_,(0;Нш^ = 0.
дх
х-уоо дх
(2.396)
(2.397)
В отличие от подобной задачи, рассмотренной в примере 2.21 для пластины
ограниченной толщины R, здесь граничный оператор Ц, согласно (2.347),
определяется в (2.359) при Я -> 00 . В таком случае общее решение уравнения (2.360)
удобнее записать в эквивалентном (2.361) виде
W\xyp)^D,(p)cxv
откуда вместо (2.362), будем иметь
+ Р4(р)ехр
М{р,х) = ехр
Р-х
; М,(р,х) = ехр
-.1^х
(2.398)
(2.399)
Тогда, при прежней зависимости г{х) по (2.363) найдем, подобно (2.364),
(2.367) и (2.368), новые выражения для a,<f^{p,x),<^2^p,x) и Д(/>):
(2.400)
168
Ф2(Р»'^) = -(П^)- exp
( IT )
exp
+exp
Д(р)=Ч-(Г,М).
(2.401)
(2.402)
(2.403)
Подставляя (2.400) - (2.403) в (2.348), получим, аналогично (2.369), (2.370):
1
ехр
1
2^ар
ехр
[if"
( Г ^
+ ехр
-J^(x-b^)
1 ь J
(2.404)
Передаточная функция jc-блока, характеризующая свойства объекта
относительно сосредоточенного воздействия q(p) на его входе, находится по
выражению (2.3556) с учетом перемены его знака, согласно знаку в правой части
граничного условия (2.397) для jc = О:
^i2)(x,p)=f^F(jc,0,p) = ~,
Подстановка соотношений (2,363), (2.400) - (2.403) приводит здесь к
следующему результату, вместо (2.371):
жа)(,.,) = %^ = (2.405)
где Го и по-прежнему определяются формулами (2.372).
Подобно (2.383) и (2.393), можно получить передаточные функции объекта
полуограниченной пространственной протяженности при граничных условиях
третьего и первого рода на поверхности jc = О. При этом для соответствующих
сосредоточенных воздействий на границе jf = О по температуре внешней среды
Ofiip) и температуре поверхности 6(0,р) нагреваемого тела передаточные
функции образуемых этими входами х-блоков принимают, вместо (2.387) и
(2.394), следующий вид:
ехр(-У7>)
Ыр)
(2.406)
(2.407)
169
где
Тохара
(2.408)
Отметим, что для изображений (2.405) - (2.407) можно найти точные
выражения в замкнутой форме для их оригиналов при применении обратного
преобразования Лапласа [18, 24, 30]. В частности, переходная функция Л^^^дг,г) (реакция
на единичное входное воздействие при нулевом начальном условии) объекта
(2.406) вьфажается через функцию Лапласа {интеграл вероятности, интеграл
ошибок)
Ф(2) = ег/ 2 = f е"-^'dy, (Ф(0) = 0; Ф(а)) = 1):
(2.409)
tS^{xJ)^erfc
-ехр
а act
—jc+——г
erfc
e^y'dy, (ф*(0) = 1; Ф*(оо) = о).
Аналогичным образом имеем для блока (2.407)
и (2,405):
Л^Р(дг,/)=:ег/с
(2.410)
(2.411)
(2.412)
(2.413)
где
ierfc z = erfc у dy .
(2.414)
Из приведенных выражений, в частности, следует, что
lim \^l^{x,t) = -V^; lim K^l^{x,t) = 1; lim K^]^{x,t) = 1
(2.415)
для всех X: О < .v £ 00, т.е. по отношению к входу q{p) объект характеризуется
астатическими свойствами, а при управлении по граничным условиям третьего
или первого рода он обладает свойствами самовыравнивания, что полностью
согласуется с физической природой рассматриваемых тепловых процессов.
В структуре х-блоков (2.405) - (2.407) можно выделить в качестве
"элементарных** полуинтегрирующее звено с передаточной функцией
»'ш(Р) = -Д=; (2.416)
170
На рис. 2.52 - 2.54 приведены годографы амплитудно-фазовых
характеристик (АФХ) элементарных звеньев (2.416) - (2.418), построенные, в сравнении с
АФХ соответствующих типовых динамических звеньев сосредоточенных систем,
с учетом равенства ^7 = -т^»следующего из формулы Муавра [31].
v2
Как видно из рис. 2.52, годограф АФХ полуинтегрирующего звена является
прямой, отличающейся от АФХ интегрирующего звена вдвое меньшим сдвигом
по фазе, равным -я/4.
Jm
Oi
Рис. 2.53. Амплитудно-фазовые характеристики полуапериодического
и апериодического (пунктир) звеньев
1
/
/
/
( г
Jm
\
(0 = 00 co = o\/?e
\
-/
■ "^f
Рис. 2.54. Амплитудно-фазовые характеристики звеньев
затухания и чистого запаздывания (пунктир)
172
Годограф АФХ полуапериодического звена (рис. 2.53) представляет собой
четверть окружности с центром в точке (0,5;0,5) вместо полуокружности АФХ
дпя апериодического звена, описанной на единичном отрезке оси абсцисс, как на
диаметре. При этом предельный фазовый сдвиг при © -> оо, равный -7с/4, здесь
также составляет половину этой величины для апериодического звена.
Годограф звена полузапаздывания (рис. 2.54) характеризуется резким
уменьшением ("затуханием") амплитуды с ростом частоты, в противовес
обычному звену "чистого" запаздывания, сохраняющему амплитуду, равную единице,
при любых частотах.
Таким образом, Тфмин "полу-" в гфименении к звеньям (2.416) и (2.417)
оправдывается еще и тем обстоятельством, что некоторые их базовые щ>акщялстки огфеделя-
кхгся величинец^ вдвое меньшими, чем для их аналогов в сосредоточенных системах.
Пример 2.23. Для рассматривавшегося ранее в примерах 2.2,2.11
процесса гашения пульсаций Q(x,t) расхода газа в газопроводе, описываемого волновым
уравнением (2.45) с граничными и начальными условиями (2.46), (2.47), краевая
задача (2.345Н2347) при y4 = -i-; =0; С = 1; J5, =0; Q =0; ао =а, =1;
Со
Pq =Pj =0; xq =0; jcj =/принимаетследуюпщйвид >
±p^W(xM=^^^^ +S(x - ^); (2.421)
Со Л:
Г^ = ЩО,^,р)=0; (2.422)
r^W=fVil,^,p) = 0. (2.423)
При этом однородное уравнение вида (2.421) второго порядка с постоянными
коэффициентами
d^w\x,p) р^
dx'
W'ix,p) = 0 (2.424)
имеег общее решение вида (2.361):
W\x,p) = Diip)ch-^-x + D2(p)sh-^x (2.425)
«•о ^0
с постоянными интегрирования £>|(р) и D2(p), откуда так же, как в (2.362),
получаем в качестве его линейно независимых частных решений слагаемые в
(2.425):
М(р,х)=ch-^x, М, ip.x)^sh-^x. (2.426)
Теперь можно найти все компоненты общей формулы (2.348) для
рассматриваемого примера.
В соответствии с (2.349) имеем:
г{х) = \; (2.427)
173
на основании (2.350), (2.426) и (2.427) получим с учетом равенства (2.365)
о = -^. (2.428)
В силу соотношений (2.351) и (2.352) вычислим в условиях (2.422), (2.423)
первой красой задачи для частных решений (2.426) функции ф, и в (2.348):
Ф, {р,х) = -sh-^x, if2{p.x) = sh-^l- ch^x - ch-^l sh-^x = sh^{l - x), (2.429)
Cq Cq Cq Cq Cq Cq
И no формуле (2.353) найдем
&ip) = sh-!^l.
^0
(2.430)
В итоге, согласно (2.348Х будем иметь следующее выражение для
передаточной функции объекта:
Щх,1^,р):
---sh^i,sh-^il-x), Ой%йх^1;
5 sh-^-x- sh^(J-%), х<.%й1.
P.shP-1 «^0 Cq
(2.431)
\с0 Cq
]
При сосредопгоченном воздействии по расходу газа на входе в газопровод,
включаемом в граничное условие (2.47) при х = О, получим, согласно (2.3566),
для передаточной функции дг-блока от входа g^ip) к выходу Q(x,p):
WAx,P>^—^shI-il-x).
Co
(2.432)
В случае, когда в качестве сосредоточенного управляющего воздействия
рассматривается внутреннее управление и{р) по дополнительному расходу гасителя
колебаний, включаемое непосредственно в правую часть уравнения объекта (2.45)
с фиксированным законом /,(дг)=5'(д:-д:*) его пространственного
распределения, соответствующая передаточная функция х-блока по этому входу
определяется выражением (2.357), которое в данном случае приобретает следующий вид:
»'хГх.р; = -
X
(2.433)
= —:7-:Фг('р.х>'ф'1СЛ*'Л «ели а<х'<.х;
ощр)
174
\
(2.434)
1
-<fl(p,x)<p'2(p,x'). если XUx'ul.
Используя здесь формулы (2.429) для функций ф, и ф2, будем иметь на
основании (2.433). (2.434):
и(р)
sh^x
Su^ch-L^l-'x*), x<xuL
(2.435)
Co
Существенной особенностью передаточных фунищй рассматриваемого
объекта по сравнению с примерами 2.21, 2.22 5тляегся их представление в форме
трансцендентных функций, аргументом которых является сама комплексная
переменная вместо ^ в выражениях для передаточных функций ОРП (1.4) - (1.7)
и (2.395)-(2.397).
• Как и в примере 2,21, здесь найдены замкнутые выражения (2.432Х (2.435)
для рассматриваемых передаточных функций, оригиналы которых могут бьпъ
получены с помощью обобщенной теоремы разложения операционного
исчисления в форме бесконечных рядов. Последующее почленное применение к этим
рядам преобразования Лапласа приводит данные передаточные функции к
другому виду (2.188), (2.190).
Пример 2.24. Рассмотрим ОРП первого порядка (1.21) - (1.23),
моделирующий процесс нагрева партии заготовок, перемещающихся с постоянной
скоростью К в печи непрерывного действия с конвективным внешним теплообменом.
Передаточная функция такого объекта от стандартизирующего входа (2.71) к
распределению температуры 6(дс,/7) на выходе непосредственно определяется
выражением (2.354) при ^ = 0; ylj = 6; Б, = -bV\ С, = -1; jcq = О:
W{xX.P>
-.l(.-^)exp^-^(x-^)
(2.436)
Функция Грина, получаемая переходом к оригиналу от изображения (2.436),
принимает вид
^-0
G(x,£„0 = j^Kx-£,)exi\-
bV
t—
(2.437)
Формулы (2.436) и (2.437) использовались ранее в примерах 2.3,2.9,2.12.
175
При сосредоточенном управлении по температуре 0п(р) печного пространг
ства, равномерно распределенной по длине печи, передаточная функция дс-блока,
моделирующего свойства объекта по такому входу, представляет собой
пространственную композицию (2.163) при /i(^) = 1 и, следовательно, здесь с учетом
(2.436):
bp+l
-ехр^-
ехр|—
(2.438)
bV)
ехр
X
Как видно из (2.438), рассматриваемый объект первого порядка в отличие от
рассмотренных ранее примеров можно назвать конечно представимым [31], так
как в структурном отношении он представляется соединением конечного числа (в
данном случае, всего трех), типовых звеньев - апериодического с постоянной
времени, равной статического с коэффициентом передачи ехр
bV
и звена
чистого запаздьшания, равного времени x-x/V прохождения нагреваемого тела
от входа в печь до местоположения, соответствующего рассматриваемому
значению координаты х (рис. 2.55). В частности, передаточная функция W^{l,p) для
температуры в(/,/7) на выходе из печи определяется для jc = /, и тогда
запаздывание x = llV равно времени пребывания нагреваемого тела в печи.
Переходные функции объекта (2.438), иллюстрируемые рис. 2,13, были
получены ранее в форме (2.148).
вл(Р)
—
ехр
ехр
-ур
\ ^ J
Vbv]
Рис. 2.55. Структурное представление объекта управления процессом непрерывного
нагрева движущейся партии заготх)вок с сосредоточенным входным воздействием по равномерно
распределенной температуре печного пространства
§ 2.9. Применение конечных интегральных преобразований
для построения моделей объектов с распределенными
параметрами
1 1. Принципы построения конечных интегральных
преобразований
В предьщущем параграфе неоднократно отмечалось, что точные
выражения для передаточных функций типовых ОРП 2-го порядка
позволяют получить их оригиналы, т.е. функции Грина рассматриваемой задачи,
как правило, лишь в форме бесконечного ряда, каждый член которого, как
это видно на примерах, приведенных ранее в § 2.2, 2.5, представляет
собой произведение двух функций одной переменной - времени или
пространственной переменной. Уже отсюда, в частности, следует, что можно
сразу искать функцию состояния Q(xj), описываемую уравнением (2.20),
ввиде^
00
Q(xJ) = Y,z„it)<f„{x), (2.439)
,1=1
где априори неизвестные функции z„(t) и (р„(х) должны быть выбраны
таким образом, чтобы управляемая величина Q(x,t), представляемая в
подобной форме, являлась решением краевой задачи (2.20) - (2.23).
Подобный путь определения Q(xj) представляет собой широко
применяемый в математической фюике достаточно общий и весьма
эффективный метод разделения переменных (метод Фурье) [28, 45]. Для
наглядности рассмотрим сначала в основных чертах метод Фурье
применительно к частному случаю однородного уравнения теплопроводности с
постоянными коэффициентами при ^, = С = 1; ^4 = В, = Cj = 0; /(х,/) = О
в (2.20):
' =—^ \ 0<дг<1, t>0;
dt дх^
(2.440)
с однородными граничными условиями 1-го рода
2(0,0 = 0; д(1,/)=0;/>0 (2.441)
и начальным условием
e(x,0) = e<^>(jc); O^jc^l. (2.442)
^ В некоторых случаях, как это будет показано ниже, ряд (2.439) может
начинаться с /7 = О.
177
Будем искать решение краевой задачи (2.440) - (2.442) вида
д(х,/) = 2(0ф(х). (2.443)
Подстановка (2.443) в (2.440) приводит к равенству
Ф(х)^ = 2(0^, (2.444)
которое после деления обеих его частей на произведение г(г)ф(х)
превращается в уравнение
_L^^_l_rfi^>0 0<^<1 (2.445)
z{t)dt <p(x)rfr2' '
Поскольку кажцая часть этого уравнения зависит только от одной
переменной, изменение которой никак не сказывается на поведении другой
функщш, равенство (2.445) может выполняться только в том случае, когда
обе его части равны одной и той же постоянной величине к , не
зависящей ни от Г, ни от х:
dz{t)
dt
-^kz{t\ />0; (2.446)
^ = fap(x), О < л: < 1. (2.447)
dx
В итоге приходим к двум уравнениям (2.446) и (2.447) относительно
каждой из искомых функщш одной переменной, соответственно z(r) и
Ф(х). Подобное **рааделение** задачи поиска искомого решения в форме
(2.443) на две различных задачи определения каждой из двух функций
z(t) и ф(х) в отдельности и составляет главную идею метода разделения
переменных.
Уравнение (2.446) имеет общее решение
z(/) = D*expJt/, (2.448)
откуда сразу следует, что постоянная к должна иметь отрицательное
значение, так как в противном случае решение (2.443) краевой задачи
(2.440) - (2.442) будет неофаниченно возрастать во времени, что
невозможно применительно к процессу распространения тепла
теплопроводностью по физическим соображениям.
Полагая тогда
* = -ц^ <0, (2.449)
получим уравнение (2.447) в виде
-^^5^ + цV^) = О, О < X < 1. (2.450)
178
Подставляя (2.443) в граничные условия (2.441), будем иметь
! z(t) ф(0) = О, 7(/) ф(1) = 0; / > О, (2.451)
откуда следует, что
Ф(0) = 0;ф(1) = 0, (2.452)
так как в противном случае z(t) = О, Q(x,() = О, и мы получаем
тривиальное (тождественно равное нулю) решение задачи, не удовлетворяюшее
начальным условиям (2.442).
Найдем теперь решение краевой задачи (2.450), (2.452).
В хорошо известном общем решении
Ф(х) = Д sin +D2 cos цдг (2.453)
уравнения (2.450) первое из условий (2.452) сразу определяет одну из
постоянных интегрирования
£>2=0, (2.454)
после чего второе краевое условие при любом D, О приводит к
равенству
8шц = 0, (2.455)
которое выполняется при всех
ц = ц,,=7ш,л=1,2,... (2.456)
Значение ц = О исключается, так как оно приводит к тривиальному
решению ф(х) s О, а отрицательные значения \i„ = -тш не учитываются,
так как они приводят к решениям того же вида.
Таким образом, задача (2.450), (2.452) имеет бесконечное множество
решений
Ф„(ц„,х) = Di sm\i„x, п = 1,2,... (2.457)
для бесконечного множества чисел (2.456) при произвольной постоянной
D,.
При этом каждому значению ц„ в (2.456) соответствует своя
функция г„(/) в (2.448):
z„(/) = D*exp(-^2o, (2.458)
и в итоге - свое решение Q„{x,t) в (2.443):
Q„(x,t) = оГехр(-ц^0 5шц„х, (2.459)
179
каждое из которых удовлетворяет уравнению (2.440) и граничным
условиям (2.441). В силу линейности задачи (2.440), (2.441) ее решением будет
также и вся бесконечная сумма функций Q„(xj):
00
е(х,0 = 2^Гехр(-ц^08шц„х (2.460)
при условии сходимости и дифференцируемости (дважды по х и один раз
по/) ряда (2.460).
Если теперь выбрать постоянные интегрирования D*„* так, чтобы
функция состояния Qix.i) в форме (2.460) удовлетворяла начальному
условию (2.442), то этот ряд и является (при указанных допущениях)
решением исходной краевой задачи (2.440) - (2.442). Полагая в (2.460) / = О
и приравнивая результат заданной в (2.442) функции бо^Ч^), будем
иметь
6rW = Z^rsin^,x, (2.461)
,1=1
т.е. постоянные должны представлять собой коэффищ1енты
разложения в обычный ряд Фурье по синусам начального пространственного
распределения функции состояния объекта. Как известно [29], эти
коэффициенты вычисляются по формуле:
D*; = 2^Q^°\x)sinimxdx, п = 1,2,...
Таким образом, мы получили методом разделения переменных
решение задачи (2.440) - (2.442) в форме его разложения в ряд Фурье
2
V о
Q^\x)smKnxck
ехр(- %^n^t) sin теш:, О < х < 1; / > 0. (2.462)
Запишем этот ряд в виде
Q{x,t) = Y,Q„ (ц„,08тц„г, О < дг < 1, о О,
(2.463)
я=1
JGr(^)sin кхск] ехр(- li'j). (2.464)
V.0 /
С самого начала можно искать Q{x,t) в форме (2.463), где априори
180
неизвестные коэффициенты Q„{^„J) разложения Q(xj) в ряд (2.463)
определяются, согласно теории рядов Фурье, соотношениями
Q„([i„J) = 2JQix,t)sm^„xdXy п = 1,2,... (2.465)
о
Будем рассматривать теперь соотношение (2.465) как конечное
интегральное преобразование вида (2.340) с ящюм ЛГ;,(ц„,дг) = sin|x„ х и
параметром преобразования ц,, = тш .
Применим это интегральное преобразование к уравнению (2.440), т.е.
проинтегрируем обе его части по х от О до 1, предварительно умножив на
sin тех:
Пользуясь в левой части этого равенства правилом
дифференцирования по параметру под знаком интеграла [29], согласно которому можно
"вьшести" производную по / за знак интеграла, и дважды применяя
правило интегрирования по частям [29] в его правой части, будем иметь с
учетом обозначения (2.465):
1
2
^2^sinnnxdx = А {iQix^Osinnnxdx=
dt dt J dt
о
^smnnxdx = 2^1 ' ^simmA^-
Яг 'О
= 2
-2яп
дх^ дх
и
^6(y>0^Qg тшх^г = -271/7 f-^^^^^cos nnxdx =
дх i дх
о
= -27W Q(x, t) cos 7шjc|J^ - 271^л ^ Q(x, t) sin nnx dx =
= 2яф(0,/)-(-1)"е(1,/))-7с2л2еп(Ц,„0. (2.467)
Используя здесь граничные условия (2.441), получим окончательно
на основании (2.467) уравнение (2.440) в пространстве изображений
(2.465) для каждого из коэффициентов 0„ (ц„,0 в (2.463) в виде
дифференциального уравнения первого порядка по переменной /:
181
f^^4^=-дVa(ц„,o. (2.468)
at
Это уравнение не содержит производных по пространственному
аргументу подобно тому, как преобразование Лапласа приводит к
уравнениям по пространственной переменной, не содержащим временных
производных (см. § 2.8). При этом частная производная функщяи состояния
по времени в исходном уравнении объекта превращается в обыкновенную
производную от ее изображения.
Решение уравнения (2.468) относительно бл(Цл»0 с начальным
условием в форме изображения (2.465) равенства (2.442):
а,(^1«,0) = ео^^>(ц,,) (2.469)
приводит к результату, совпадающему с (2.464), после него оригинал
Q(Xyt) сразу находится в форме ряда (2.463) без каких-либо
дополнительных вычислений.
Таким образом, применение метода конечного интегрального
преобразования к задаче (2.440) - (2.442) оказьюается тесно связанньпл с
методом разделения переменных в том смысле, что функщш ф„(дг) в (2.457),
найденные этим способом, могут быть приняты в качестве ядра
интегрального преобразования (2.465), с помощью которого как раз и удается
вьшолнигь его главное назначение - исключить пространственные
производные в уравнениях объекта для изображений (§ 2.7). Нетрудно понять,
что такая возможность возникает, в первую очередь, именно потому, что
Ф,,(х) являются решениями уравнения вида (2.450) и, следовательно, их
вторые производные по гфостранственному аргументу можно заменить
значениями самой функщ1и, согласно равенствам
^^ = -ц^Ф„(х),« = 1,2,... (2.470)
dx
Действительно, если при априори неизвестных параметре ц,, и
удовлетворяющем условиям (2.452) ядре ф,,(ц,„х) интегрального
преобразования
1
Ш\^пЛ = |е(д:,ОФл(Цл,^)^^ (2.471)
о
записать уравнение (2.440) объекта в юображениях, аналогично (2.466),
то интеграл в правой части равенства (2.466) после интегрирования по
частям, подобно операциям в (2.467), приводит к следующему
соотношению:
182
^Ф.О.,Л-^Ф.<Ц..О)
о
1
- Ь2(иоФ;(цп Л) -е(о.ОФ;(ц..о)]+|д(х,/)ф'(ц„,х) ^х.
(2.472)
о
Здесь первое слагаемое в квадратных скобках равно нулю в соответствии
с краевыми условиями (2.452), которым должна удовлетворять функция
Ф„(ц„,х); второе слагаемое содержит взвешенную сумму заданных
граничных условий в (2.441), и в данном случае оно также равно нулю,
согласно этим условиям; а третье слагаемое в форме интефала в (2.472)
именно после замены (2.470) превращается в изображение искомой
функции (2.471) (с коэффициентом - ):
1 1
1д(х,1)ц,\11„,х)сЬс = -iillQix,tMvi„,x)dx = -iilQ„(ix„,t). (2.473)
О о
в итоге юображение второй производной d^Q{xj)/dx^ сводится к
изображению самой функции QixJ):
1^-ГГ^ <P„(lin,x)dx = -p.lQ„(vi„,t), (2.474)
о ^
исключая вторую производную по пространственному аргументу в
уравнении объекта, подобно тому, как преобразование Лапласа исключает
производные Q{x,t) по времени. Важно подчеркнуть, что соотношение
(2.474) достигается не только по причине равенства (2.470), но и в
результате вьшолнения граничных условий (2.452).
Описанные в (2.463) - (2.474) процедуры и составляют основную
идею метода конечных интегральных преобразований.
Поскольку стандартная форма описания ОРП приводит к
неоднородному уравнению объекта со стандартизирующей функцией в его правой
части (§ 2.3), принципиальный интерес представляет возможность
распространения рассматриваемого подхода на этот слумай.
Легко видеть, что такое обобщение не вьпывает затруднений.
Действительно, если вместо (2.440) объект при прежних начальных и гранич-
HbLX условиях (2.441), (2.442) описывается неоднородным уравнением
Mf^ = :E!%0.,,-(,.O,0<x<U>0, (2.475)
dt дх^
то, применяя к (2.475) рассмотренное конечное интегральное преобразо-
183
вание, получим после вычислений, аналогичных (2.466) - (2.468),
уравнение первого порядка
"^^^^l""'^^ =-^VQ,(Ki,,/) + Hr;(^,,0, ^7 = 1,2,... (2.476)
dt
отличающееся от (2.468) только последним слагаемым правой части,
представляющим собой, подобно (2.465), изображение функции w'(x,t)\
1
нг;(ц„,0 = 2jw*(x,Osin^,,xrfx, п = 1,2,... (2.477)
о
Решение этого уравнения с начальными условиями (2.469):
t . -
е„(ц,„0=ео^^^(ц„) ехр(-ц2^) + |ехр|-ц^(/-х))нг;(ц„,т)^1,
о
,1 = 1,2,...,
позволяет сразу получить оригинал Q{x,t) для функции состояния
объекта в форме ряда (2.463), который после подстановки формул (2.465) и
(2.477) для изображений бо^Чц,,) и ^*(ц„,г) может бьггь записан в
следующем виде:
00 м - •
e(x,/) = 25^sin(7wx) jJw*(^,t)sin(7cw^) ехр[-ц$(г-т)]^^х +
о о (2.479)
1
+ 2j;sin(7^) j(2^^40exp(-n20sin7CM^ ^.
л=1
2. Вычислительные процедуры метода конечных интегральных
преобразований
Метод конечных интегральных преобразований, основные идеи
построения которого продемонстрированы выше на простом примере,
может быть распространен на широкий класс типовых линейных объектов с
распределенными параметрами, описываемых краевыми задачами вида
(2.20) для стационарных, пространственно одномерных и определенных
на Офаниченном отрезке [х^,х^] изменения пространственного аргумента
x систем с постоянными коэффициентами А, ^4|, aQ, а^, Pq, и
независящими от t коэффициентами с, и :
184
(2.480)
<х<х,; />0;
Qim = Qi'\x)^,^^^ = Q^'\x)■ х,<х^х,; (2.481)
аоб(хь,0 + Ро^^^ = Яо(^"о(0); t>0; (2.482)
ОХ
aie(x,./) + р, = г1(Ли,(0); ^ > о. (2.483)
ох
При этом удается построить единообразную методику применения метода
на практике, сводимую к определенной последовательности стандартных
вьршслительных процедур применительно к самым различным
модификациям таких задач в рамках рассматриваемых моделей. В совокупности с
обширными таблицами заранее вычисленных ядер интегральных
преобразований и других расчетных характеристик для большого числа типовых
ситуаций эта методика оказывается достаточно простой, что способствует
ее широкому использованию в инженерных расчетах.
Опишем основные этапы реализации метода конечных интегральных
преобразований применительно к отысканию решений краевых задач для
указанного выше класса объектов, поясняя их на рассмотренном ранее
примере и опуская обоснования общего характера, которые можно найти
в специальной литературе (7, 24, 28,32].
1®. В общем случае конечное интегральное преобразование
изначально рассматривается в виде
ОМ = |д(л:,/)ср(ц,х)г(х)Л:, (2.484)
с заранее неизвестными ядром ф(ц,х), параметром ц и весовой функцией
г{х), наличием которой выражение (2.484) отличается от (2.340) и (2.471),
где в последнем случае следует считать, что г(х) = 1. Весовая функция
используется в дальнейшем при выборе ядра преобразования.
2®. Для того чтобы после применения конечного интегрального
преобразования вида (2.484) уравнение объекта (2.480) не содержало в
пространстве изображений операций ди4к1)еренцирования по пространственной
переменной X, необходимо, как можно показать, чтобы ядро преобраювания
Ф(ц,х) являлось решением уравнения
185
a весовая функция определялась вьфажением
Cix)^L^^^B,{x)^^^^ (2.485)
rW = ^exp
CM
(2.486)
Как следует из (2.485), дифференциальный оператор по переменной х в
левой части этого уравнения имеет тот же вид, что и в уравнении объекта
(2.480).
Именно это требование, позволяя "заменить" такой оператор
алгебраической операцией (умножением на - ) над самой
дифференцируемой функцией, приводит к возможности исключения производных по jc в
уравнении объекта в пространстве изображений вида (2.484), подобно
равенству (2.470) в рассмотренном ранее примере.
В частности, как следует из (2.486), при Bi(jc) = 0; С(х) = 1 всегда
имеем г{х) н 1, что и объясняет отсутствие весовой функции в
выражениях (2.465) и (2.471).
Далее, для того чтобы преобразованное в соответствии с (2.484)
уравнение (2.480) содержало в своей правой части только изображения Q,
у; производных dQ/dt, d^Q/dt^ и заданнььх в (2.482), (2.483) функций go
и g,, необходимо, чтобы ядро ф(ц,х) удовлетворяло однородным
граничным условиям, соответствующим (2.482) и (2.483):
аоФ(Ц,Хо) + Ро ^^^^^ = 0; (2.487)
ах
а,ф(Ц,х,) + Р,^^^^^ = 0. (2.488)
ах
Это требование иллюстрируется в частном случае (2.440), (2.441)
условиями (2.452), которые приводят, вместе с (2.470), к соотношениям
(2.472)-(2.474).
Краевая задача (2.485), (2.487), (2.488) {задача Штурма-Лиувилля [19,
28, 32], спектральная задача) имеет, как ювестно ю общей теории таких
задач, отличные от тождественного нуля решения только при определенных
вещественных значениях параметра , которые называются собственными
значениями или собственными числами, а сами соответствующие таким
числам решения - собственными функциями этой задачи Штурма-Лиувилля.
Собственные числа ц^, л = 1,2,... образ>тот бесконечную
возрастающую последовательность - спектр собственных чисел
186
Ц?<Ц2<« <••• (2.489)
Каждому собственному числу соответствует одна собственная
функция ф„(|1я,д:),/7 = 1,2,..., определяемая решением задачи (2.485), (2.487),
(2.488) с точностью до постоянного множителя (в силу однородности
уравнения (2.485) и краевых условий (2.487), (2.488)), который можно
выбирать из соображений удобства нормирования ф,,(ц„,х).
Собственные функции обладают следующими принципиально
важными свойствами [24, 28, 32]:
а) Система {ф„} собственных функций образует полную систему
функций в смысле среднеквадратичного приближения, т.е. такую систему,
которая обеспечивает сколь угодно малую среднеквадратичную ошибку
приближения к любой интегрируемой с квадратом на отрезке [xq,jcJ
функции с помощью линейных комбинаций конечного числа функций
этой системы.
б) Система {ф„} собственных функций ортогональна с весом г(х)
на промежутке [xq, Xj ] э т.е.
Ф«(Цт.^)ф,,(^^,,>^)Кл:)йЬг = 0 длявсех тФп\ (2.490)
|ф^(ц^,х)ф„(ц„,х)г(х)^х= |ф201„,х)г(х)^х = Я„2 ДЛЯ = (2.491)
'о 'о
где Е]^ - квадрат нормы собственных функций.
Если постоянный множитель, с точностью до которого ф„ определяется
при решении 1д)аевой задачи (2.485), (2.487), (2.488), принять равным \/Е„ ъ
(2.491), т.е. если считать, что ф„(ц,„х) = -^-ф*(ц,„х), где Ф*(ц,„х) есть
решение этой задачи с единичным множителем, а Е„ определяется, согласно
(2.491), при ф^ = ф*, то система {ф„ } становится ортонормированной:
^- fО, т^п
4>m{\i,n>x)<Pni^n.xMx)dx = \ (2.492)
[1,/7/=/7.
в) Всякая функция состояния Q{xj) рассматриваемого объекта при
некоторых (практически малостеснительных) доп>'щениях может бьтть
представлена ее разложением в сходящийся в среднем ряд по
ортонормированной системе собственных функций (ряд Фурье):
187
Qix.t)-^Qni\^n^O 4>niy^„>x), (2.493)
где Q„{\i„,i) - изображение Qixj), согласно (2.484), для ц = ц„ и,
следовательно, Q„i\^„>0 можно рассматривать как коэффициенты
разложения Qix,i) в бесконечный ряд по системе {cp„(|i„,x)}, а форк1улу (2.493) -
как правило перехода к оригиналу (правило обратного преобразования).
Сходимость в среднем означает [28], что
^ - f
QM-Y,Q'^^^n^^^'^'^(\^'^>''^ ^ = 0, (2.494)
я=1
lim
Xq
и, следовательно, функция состояния Q(x,t) может отличаться от ее
разложения в ряд (2.493) лишь в отдельных точках отрезка [хо,х,], число
которых столь мало (как правило, это границы отрезка), что эти отличия
не влияют на величину интефала в (2.494).
Обычно соотношение (2.494) просто записывают в виде (2.493),
оговаривая, что равенство здесь понимается в смысле (2.494). Некоторые
практически важные следствия из возможности, в связи со сказанным,
неравномерной сходимости ряда (2.493) отмечаются ниже.
Для рассмотренного ранее примера задача Штурма-Лиувилля
(2.485), (2.487), (2.488) принимает вид (2.450), (2.452); собственные числа
\il = п^п^ определяются равенствами (2.456); собственные функции
Ф*(|а„,х) = sinnnx у находятся согласно (2.457), причем, известно, что, как
и требуется в соответствии с (2.490),
i
sin{nnx) sin(7W2x) rfr = о для всех т^п ,
Множитель Е; в (2.491) при г(х) = \ равен
f 1
= sin^ nnxdx = —,
о
откуда получаем нормированные собственные функции
9,,(Ki„,x) = V2sin7CA?x,
и оригинал (2.493) для функции состояния 0(х,0 в форме (2.463),(2.464).
3®. Решение краевой задачи (2.485), (2.487), (2.488) может быть
найдено (с точностью до постоянного множителя) в виде
188
Ро^^^^+аоЛ/,(ц.хо)}л/(ц.х)-
dx
(2.495)
А/,(ц.х).
а собственные значения (в соответствии с граничными условиями
(2.488))- из характеристического уравнения
Pi ^2 +^M\^Xi) = 0,
(2.4%)
где Л/(н,дг) и Л/,(>цх) - какие-либо линейно-независимые частные
решения уравнения (2.485) [32].
Так, для задачи (2.450), (2.452) можно принять, согласно (2.453),
1 .
М (ц, х) = cos цг. А/, (ц, X) = - sin цх
(2.497)
(включая сюда формально возможный вариант ii = 0, для которого
UmA/i(n,x) = l).
Тогда в соответствии с (2.495) характеристическое уравнение (2.496)
принимает в условиях = Pj = 0; aQ = = 1 следующий ввд
— 5ШЦ = 0,
Ц
совпадающий с (2.455) для й > О, откуда и находятся собственные числа
(2.456).
Теперь выражение (2.495) приводит к ранее полученному при
D** = 1 результату (2.457) для собственных функций
ф*(Ц„,Х) = 8ШЦ,,Х.
Можно показать, [32], что при любых краевых условиях ввда (2.487),
(2.488)
1/2
lim =71^/7^
г 1 ]
«
(2.498)
откуда, в частности, следует, что при равном единице интеграле в (2.498)
собственные числа задачи (2.485), (2.487), (2.488) становятся для
достаточно больших п как угодно близкими к собственным числам (2.456).
4°. Применение интегрального преобразования (2.484) к уравнению
объекта (2.480) с краевыми условиями (2.482), (2.483) приводит, на
основании вышесказанного, подобно (2.476) для задачи (2.440), (2.441), к
189
обыкновенному дифференциальному уравнению второго порядка по
переменной / в пространстве изображений, которое принимает, как можно
показать, следующий вид:
^тш1^А, =-ц^агц„./м/„гц„./;+лгц„а (2-499)
at at
п = 1.2
где 7„(ц„,0 - изображение функции/в (2.480), а Л(ц„,/) - слагаемое,
определяемое аналогично (2.467). граничными значениями функций
Q{x,t), dO{x,t)ldx. ф„(ц„.л-), d(p„{x)/dx при х = х^ и х = х,. Если при
этом ф„(ц„,дг) удовлетворяет однородным краевым условиям (2.487),
(2.488), то
Л(ц„,0 = й,(ц„.0-Ло(ц„,0, (2.500)
где
Л*(Ц„,0 = ^А(х,)ф„(ц„,х,), / = ОХ если р, * О;
Р,
(2.501)
Rii4n,t) = -^h{x,)^^^n^^^, / =0,1; если =0, а, *0.
а, dx
Здесь g,(0 - заданные функции в краевых условиях (2.482), (2.483) и
Н(х) = С{х)г{х), (2.502)
В частности, для примера (2.440), (2.441)
h{x) = 1; Ро = Pi = 0; ао = ai = 1; go(0 = g\iO = О,
и по (2.501) й(ц,„0 = Ло(^^«»0 = /^|(Цп.О = 0, откуда при Л=0,>1, =1
7^(ц„,0 = ^п(^пуО уравнение(2.499) принимаетввд(2.476).
5®. В итоге исходная краевая задача (2.480) - (2.483) сводится в
пространстве изображений к решению уравнения (2.499) относительно
функции Q„(\i„J) переменной / с преобразованными, согласно (2.484),
начальными условиями (2.481):
ё„(Ц„.0) = ёо^°Чц„); ^^"^^"'"^ =Ш'ЧЦп)> " = и,..., (2.503)
аналогично тому, как с помощью преобразования Лапласа (2.339) она
трансформируется к краевой задаче (2.345) ~ (2.347) относительно
функции lV(x,^,p) переменнойX
Соответствующая задача Коти (2.499), (2.503) с постоянными
коэффициентами Л и Л] в (2.499), значительно более простая по сравнению с
190
исходной, имеет известное решение следующего вида [7.32]:
QniV^n>n=j 1М\х„,х) + Н(ц„,х)] G*„(ii„,t-z)dx +
at
(2.504)
+ Q^^\li„)AGU\i„,t),
где G*(n„,/) - функция Грина такой системы, являющаяся, в свою
очередь, решением уравнения (2.499) при 7„(ц„,/) + Л(ц„,0 = 5(0:
dt^ ' dt
+ Л,^ + ц^С:=5(0
(2.505)
с нулевыми начальными условиями.
Применяя к уравнению (2.505) преобразование Лапласа lio времени t,
получим
vg;(^„, р)+Ард:т„, р)+ц$д:(ц„, я)=i.
Отсюда найдем изображение G*(\x„,p) функции Грина
G*„(il.„, р) = —2 \ 2"
Ap^+A^p + iil
(2.506)
и ее оригинал
Gl{ii„,t) = -5-1ехр(Р,„0 -ехр(/»2„01. (2.507)
где Д„ = p^-4Aiil , и - корни
2А ' 2А
(2.508)
(2.509)
уравнения
Ap^+A^p + \l.l=0.
В частном случае уравнения (2.499) первого порядка при
^ = О, i4, ?* О из (2.507) сразу получаем
g:m=±J-^\
А {Л}
(2.510)
Если в (2.499) отсутствует член с первой производной (^4 О, >1, = О),
то изображение (2.506) при комплексных корнях уравнения (2.508) при-
191
водит к гармонической функции Грина
(2.511)
В общем случае А^О, А^^О для монотонно возрастающей
последовательности собственных чисел найдется такой номер Л^, что
\il^A^/4Ay как только n>N . Тогда, как можно показать [32], из
(2.507) следует с учетом перехода от действительных к комплексным
корням уравнения(2.509) для n>N , что
-ехр
—i-r
2А
-ехр
^ А \
2А
sm-
2А
(2.512)
2А
г, n>N,
гдеЛ;=д/4^„-^'.
Таким образом, в итоге решение задачи Коши (2.499), (2.503)
окончательно находится в форме (2.504), (2.507).
В частности, полученное ранее решение (2.478) уравнения (2.476)
совпадает с (2.504) при Л = О, = 1 и G*(/) = ехр(- ц^/) согласно (2.510).
6®. Теперь решение исходной задачи (2.480) - (2.483) определяется по
найденному изображению (2.504) без каких-либо дополнительных
вычислений прямым применением формулы (2.493) перехода к оригиналу.
Элементарный характер процедуры обращения изображений является
несомненным преимуществом метода конечных интегральных
преобразований по сравнению с методами операционного исчисления, где
отыскание оригиналов по заданным изображениям связано с достаточно
трудоемкими вычислительными процедурами (см. § 2.8).
Представляя в (2.504) изображения 7,,(ц„,0, бо^^Чц„), бо^Чц,,)
непосредственно в форме интегральных преобразований вида (2.484),
соответственно, функций / (x,t\0^\xXQ^\x), приходим в итоге к
следующему вьфажению для искомой функции состояния Q{x,t):
00 f f t
/1=1
192
dt
n=\ 0 Xo
CO ' 00
+X ^P" ' J ^(^^«' (^^/.'' - •^)'^'^+Z 'P" '
/1=1
1
хф«(Ц,„^)г(^)^^. (2.513)
Итоговая формула, таким образом, с помощью собственных функций
и функций Грина соответствующей краевой задачи может бьтгь
представлена в виде суммы трех слагаемых, первое из которых учитывает в форме
двойных интегралов по пространственно-временной области реакцию
объекта на распределенное воздействие /(х,/), включаемое в правую
часть уравнения (2.480); второе определяет в форме свертки по времени
составляющую выхода, реализуемую за счет внешних воздействий ^^(0
и gi(t) по граничным условиям (2.482) и (2.483), а третье, в виде
интегралов по пространственной переменной, позволяет учесть влияние
ненулевых начальных условий (2.481). Как видно, полученный результат
соответствует общей форме (2.24) решения уравнений ОРП вида (2.20) -
(2.23).
В частности, полученное ранее решение (2.479) задачи (2.440) -
(2.442) совпадает с (2.513) 1фи /(jc,m/(jc,0)=w (л,0;К^)=1; /^„,/)=0, Л=0,4=1;
Ф,,(ц„,х) = yflsinimx; и С*(ц„,/) = ехр(-ц^О,согласно(2.510).
Таким образом, решение краевой задачи (2.480) - (2.483) методом
конечных интегральных преобразований фактически сводится к
последовательному выполнению следующих этапов:
а) путем решения задачи Штурма-Лиувилля (2.485), (2.487), (2.488)
находятся в форме (2.495) ее собственные функции, нормируемые с
множителем \/ Е;^ в (2.491), которые и являются искомыми ядрами
требуемого интегрального преобразования вида (2.484), после чего из уравнения
(2.496) устанавливаются собственные значения , определяющие
параметры этого преобразования, а его весовая функция вычисляется согласно
(2.486);
б) вычисляется вьфажение для R(\x„,t) в правой части уравнения
+^iG,,(^„/)
193
(2.499), согласно соотношениям (2.500) - (2.502);
в) определяется конкретный вид функции Грина (2.507) задачи Коши
(2.499), (2.503) в соответствии с возможными вариантами (2.510) - (2.512);
г) находится окончательное вьфажение для решения исходной
краевой задачи (2.480) - (2.483) в форме (2.513).
Трудности при реализации этой процедуры могут возникнуть лишь
на первом ее этапе, на котором требуется найти аналитические линейно-
независимые решения М{\х„,х) и M^(\i„,x) уравнения (2.485), известные
далеко не при всяких допустимых коэффициентах С(х), В, (х), С, (х)
дифференциального оператора. Имеющиеся таблицы заранее
вычисленных собственных функций и собственных чисел для многих сотен
наиболее .характерных вариантов по значениям этих коэффициентов и
конкретным типам краевых условий (2.487), (2.488) [8, 9, 24, 32] существенно
облегчают решение этой задачи на практике.
Отметим также, что многие базовые модели ОРП соответствуют
достаточно простым модификациям уравнения (2.480) в форме одного из
основных уравнений математической физики, для которых задачи Штур-
ма-Лиувилля подробно исследованы, и здесь остается лишь
воспользоваться известньпли результатами.
Аналогичные затруднения, как отмечалось в § 2.8, возникают и при
использовании метода операционного исчисления в процессе решдния
однородного уравнения в (2.345), однако здесь значительно усложняется
процедура перехода от изображений к оригиналу.
Описанная технология метода конечных интегральных
преобразований принципиально не изменяется применительно к пространственно-
многомерным объектам, описываемым более сложными уравнениями по
сравнению с (2.480).
Новым обстоятельством здесь является необходимость
осуществления последовательного (кратного) интегрального преобразования по
каждой из пространственных координат в отдельности для редукции
исходной краевой задачи к задаче Коши типа (2.499), (2.503) [24, 28] с целью
исключения гфостранственных изображений дифференциальных
операций по любой из этих переменных.
При переходе к изображениям по одной ю просфанственнььх координат
остальные выступают в роли параметров (подобно времени в одномерных
задачах). Поэтому частные производные от функции состояния по этим
"посторонним" аргументам, входящие в уравнение многомерного объекта с
коэффициентами, не зависящими от переменной преобразования,
превращаются в соответствующие производные от изображения функции состояния
(подобно частной производной по времени при преобразовании уравнения
(2.480) к виду (2.499)). Много1д)атно могут увеличиться также трудности
вычисления собственных функций в многомерных задачах со сложной
геометрией пространственных областей определения функций состояния объекта.
194
в заключение данного раздела сделаем некоторые замечания об
обоснованности предлагаемой техники применения метода конечных ин-
тегральнььх преобразований.
Речь прежде всего идет об условиях сходимости и дифференцируе-
мости требуемое число раз по переменным х и / бесконечных рядов, в
форме которых представляются, согласно этому методу, искомые
решения рассматриваемой краевой задачи (2.480) - (2.483).
Известная теорема Стекпова [24, 28, 32] гарантирует возможность
представления такого решения в форме его разложения в бесконечный схо-
дшщйся в среднем ряд по полной системе собственных функций зада^ш
Штурма-Лиувилля (2.485), (2.487), (2.488), который сходится абсолютно и
равномерно во всей области изменения пространственных переменных,
включая ее границу, т.е. везде на отрезке [xq,X| ], при однородных
граничных условиях (go(^Wo(0) = 0; g,(/,Wi(/)) = О в (2.482), (2.483)), и только во
внутренних точках этой области^ т.е. на открьггом промеидтке (Хо,х,),
если iq>aeBbie условия неоднородны (go "о (0) ^ 0; (/)) ;б О).
Этим объясняется ювестный "парадокс", согласно которому в
последнем случае из-за неравномерной сходимости ряда вида (2.493) в фаничных
точках отрезка [хо,дг,] нельзя, вообще говоря, проверить вьшолнение
неоднородных iqweBbix условий путем прямой подстановки координат дг = jcq и
x = дг, в ряд (2.493), поскольку каждый член такого ряда удовлетворяет
именно однородным краевым условиям (2.487), (2.488) по самому
определению собственной функции. Все дело здесь заключается как раз в том, что
при неравномерной сходимости ряда (2.493) его сумма уже не представляет
собой функцию состояния Q{x,t) на концах отрезка [xq^xJ .
Сказанное является хорошей иллюстрацией практической
значимости так называемых "математических тонкостей", игнорирование которых
может привести к неправильному истолкованию получаемых результатов.
В подобной ситуации можно, например, использовать известные
способы улучшения сходимости рядов Фурье до абсолютной и равномерной
всюду на [хо,х,] [24].
Последующая проверка найденных в форме (2.513) выражений для
функции состояния объекта, как правило, подтверждает требуемые
свойства дифференцируемости рядов, которыми они должны обладать как
решения краевой задачи (2.480) - (2.483).
3. Определение базовых характеристик ОРП методом
конечных интегральных преобразований
Полученное выше методом конечных интегральных преобразований
общее вьфажение (2.513) для функции состояния объекта, моделируемой
195
краевой задачей (2.480) - (2.483Х по существу, содержит описание все.х
его базовых характеристик.
Стандартизирующая функция
Решение эквивалентной исходной краевой задаче системы уравнений
объекта (2.55), записанной в стандартной форме, принимает вид (2.513) в
условиях Я(ц,„/) = 0;еГ(^) = 0;б^^ЧО = 0; /(^,x,i/(^,x)) = w(^,x):
Q{xj) = Хф,(ц,„х)] J w(^,t)9;,(P.,^)K^)G,(n„,/ -х)^^Л .(2.514)
Представим в подобной форме общее соотношение (2.513), заменяя
все интегральные составляющие двух последних рядов в (2.513)
двойными интегралами по ^ и х с помощью соответствующих дельта-функций
или их производных (подобно вьфажениям (2.57) - (2.61)). В условиях
(2.500) - (2.502) получим здесь :
|л(ц,„х)С*(ц„,/-х)Л =
о
t t
= Л1(ц„,х)0;(ц„,г-х)Л-|Ло(ц^,х)0*(Ц;„/-х)Л =
О
"н'1(^,х)фДц„4)К^)0;(ц^,/-х)./^Л-
)
I
x) i^riM) т Gr,{yi„. t - x) d^A,
о
t X
*
(2.515)
где
«'/(4.x)=
я,(0
С(^)8(^-д:,),«=0.1. ec««p,*0;
.=0.1.если p, =0;a, *0.
(2.516)
Здесь иприх обозначает операцию дифференцирования по переменной ^.
Справедливость выражений (2.516) легко проверяется их прямой
подстановкой в двойные интегралы в правой части равенства (2.515),
вычисление которых с учетом известных соотношений (Приложение):
196
|ф(т1)5(л-/)^П = Ф(/); у* 6 [уо,л1;
У\
|ф(л)5'(л - / = -Ф'(/); / € [уо,^ ]
Уо
для любой непрерьюной и дифференцируемой функции Ф(т|) приводит
при л = ^; Ф(Л) = >*',(^,х); / = д:,; = х^; у, = х, к результату в виде
интегралов в левой части (2.515).
Аналогично будем иметь в силу (2.517) при ц = х; у' = 0;jvo = 0;yi = /
дм функции Ф(г|), представляемой вьфажением в квадратнььх скобках
под знаком интеграла в последней сумме в (2.513):
1
at
хф„(ц„.^)гЙ)^^ = j] {еГй)И5'(г)+/1,5(х)]+0(»>(4)/«8(х)}х (2.518)
Од:о
где штрихом обозначена операща дифференцирования по переменной т.
Подставляя полученные соотношения (2.515) и (2.518) в (2.513),
приходим к следующему выражению для Q{x,t):
со "if
е(х.о = Xфп(^^-^)J J I /^'^."й.'^))+н^й.'^)-и'о^х)ч5<^>(^)х
x {АЬХх) + ^i5(x))+(2^^>(^) Л5(т)]ф„(ц„Д)г(0С;(ц„,/ - х)с^х.
Из равенства npaBbLX частей формул (2.514) и (2.519), описывающих одну
и ту же функцию состояния ОРП, получаем в явном виде
стандартизирующую функцию
>v(^, x) = /(^, x, t/(^, x)) + wi (^, x) - Wo (^, x) +
+е^^>(4)й8'(т)+^15(х))+д^^>(?)>15(х), ^^"^^
совпадающую с вьфажением (2.65).
Функция Грина
Очевидно, что по определению (2.26), (2.27) функция Грина
197
G(x,^o,/,To) краевой задачи (2.480) - (2.483), записанной в стандартной
форме (2.55), находится, согласно (2.514), при
w(^,x)=5(^-^o)5(T-xo),
и, следовательно, в таком случае
00
Q{x,t) = G(дr,^o.^'Co) = Gix^oJ - Ч) = ^Ч>п(У^п^х) х
,7=1
(2.521)
X
^ J5(^ -^o)S(x-To) ip„i\i„AM^)GU^„J'X) d^dz.
Oxo
Отсюда сразу получаем в соответствии с (2.517), полагая после
интегрирования в (2.521) ^0 = "^0 > следующее вьфажение в явном виде для
искомой функции Грина
G„(x,^,t-x) = f^G*„iii„,t-x)^„(li„,x)<f„iix„,^M^). (2.522)
Если теперь подставить (2.522) в (2.514), то в результате будем иметь
базовое вход-выходное соотношение (2.56), (2.72) для линейной
стационарной системы с распределенными параметрами в форме
пространственно-временной композиции функции Грина объекта и
стандартизирующей функции на его входе:
е(х,/) = j Jg(x,^,/-t)w(^,t)^^=G(x,^,/-x) о н.(^,х). (2.523)
Передаточная функция
Преобразование функции Грина (2.522) по Лапласу сразу приводит к
определению передаточной функции объекта, согласно (2.157) и (2.506),
в форме ряда по собственным функциям, отличной от конечных
соотношений вида (2.348):
00
W{x.%,p) = G(x,%,p) = 2^С*(ц„.р)ф„(ц„,х)ф„(м„,|)/'(^) =
(2.524)
°° 1
=Хт1—: 2■Ф,.(^^л.^)ф/,(^l/..^)'•(^)•
t:{Ap^+AiP+v.i
в отличие от сложных трансцендентных зависимостей передаточных
функций ОРП типа (2.348) от комплексной переменной "р" выражение
(2.524) означает, что рассматриваемый ОРП в структурном отношении
198
представляется параллельным соединением (рис. 2.56) бесконечного
числа стандартных динамических звеньев второго порядка
к„{хЛ)
Ap^+Aip+iil '
(2.525)
с коэффициентами передачи
к„(хЛ) = Ц>Л\^„,х)с(>„(11„Л)г('^), (2.526)
зависящими от пространственных аргументов как от параметра:
и^{хЛ,Р) = ^^К(хЛ,р).
(2.527)
п=1
Тем самым устанавливаются наглядные аналогии с линейными
сосредоточенными системами, принципиальное отличие от которых
заключается в структурном моделировании объектов с распределенными
параметрами с помощью именно бесконечного числа таких звеньев.
Wix.4.p)
-7^ 1
I
w(^,P)
е(х.р)
L
Рис. 2.56. Структурное представление ОРП второго порядка в форме параллельного
соединения бесконечного числа элементарных динамических звеньев
199
Данную структурную схему можно представить в несколько ином
виде, используя пространственную композицию (2.155), связьшающую
изображения по Лапласу >?(^,р) и Q{x,p) стандартизирующего входа и
выхода объекта. Подставляя в (2.155) передаточную функцию W{x,%,p) в
виде (2.524), будем иметь
Qix,p)=\wix^.p)wi^,p)crq =
^1 Г 00
= J 2^С;(ц„,р)ф,(ц„д:)ф,(ц„^)г(^) wi^,p)d^ =
00
я=1
л=1
с;(ц„р)|>?(^,Я)Ф.(Ц.,^)К^)^
4>n(\^n^x).
Здесь Q(x,p) можно записать в форме изображения по Лапласу
суммы (2.493), а интефалы в квадратных скобках представляют собой,
согласно (2.484), изображения по Лапласу yv^{\^„,p) коэффициентов
vr,,()i„,0 разложения стандартизирующего входа в ряд по собственным
функциям. Тогда последнее соотношение приводится к виду:
00 °о
^(^,р) = 2^С*(ц„,/?)^„(ц,„р)Ф„(ц,„х) = ^д„(ц„,р) Ф,,(ц„,дг),
где Qn i\in^p) есть изображение по Лапласу функции Q„{\i„,t) в (2.493).
Это, в свою очередь, означает, что каждый из коэффициентов
Qn (М^,!» Р) можно рассмафивать в качестве вы.ходной величины
"элементарного" сосредоточенного звена (2.506) с передаточной функцией
G*n(\^n-P) и "индивидуальным" входным воздействием w„ (ц,,,р) ,
однозначно определяющим поведение Q„{^„j) во времени независимо от
других входов и выходов этих звеньев. Заметим, что эта передаточная
функция как раз соответствует дифференциальному уравнению (2.499),
описывающему динамику изменения Q„ (ц„,0 . При этом сама
управляемая функция состояния объекта Q{x, р) представляется взвешенной
бесконечной суммой вы.\одных величин 0„([i„,p) с коэффициентами
А„(дг) = ф„(|1^,дг), /7 = 1.2,..., при бесконечном числе в.ходов (|д.„,р) .
200
рассматриваемых в качестве "самостоятельных" воздействий,
образующих в совокупности (по определению коэффищ1ентов w„ ([i„,p) )
требуемую стандартизирующую функцию w(^, р). В итоге получаем
структурную схему ОРП, изображенную на рис. 2.57.
Дисперсионные уравнения и собственные частоты
Характеристическое уравнение (2.509) звена второго порядка (2.525)
называется дисперсионным уравнением. Его корни (2.508),
представляющие собой собственные временные , вообще говоря, комплексные
частоты рассматриваемой распределенной системы, определяют конкретный
тип звена и характер его поведения в динамике в зависимости от
конкретных значений коэффициентов^, Ах и собственных чисел \i\.
В частности, при Л^^О {параболический случай) получаем (в
соответствии с (2.510)) простые апериодические звенья (2.525) для всех
1
W2(<«2.P)
Ap-+A,p+[i^,
1
Ap^+A,p+^l
1
а,(цл./')
Ap-+A,p+iil
Рис. 2.57. Структл'рное представление ОРП второго порядка с
управляющими
201
п = 1,2,... с постоянными времени, обратно пропорциональными
собственным числам
W„ix^,p) = ^"^^'^^^^\ п = \Х.. (2.528)
Если у4 ^ О, ^, = О {гиперболический случай), то объект для всех
л = 1,2,... представляется (согласно (2.511)) консервативными
(колебательными) звеньями, постоянные времени которых обратно
пропорциональны -^ц^:
^F„(x,4,p) = ^"f п = 1,2,... (2.529)
^ 2 1
В общем случае АфО, А^^О собственные частоты могут бьггь как
действительными, так и комплексными, в зависимости от знака разности
А^ -у которая при некотором n>N>\обязательно становится
отрицательной для монотонно возрастающей последовательности
собственных чисел . При этом для всех п <N звено (2.525) является
апериодическим (если > 1), а для n>N- колебательным (см. (2.512)), т.е.
различные звенья в структуре объекта (2.527) имеют различный характер.
4. Модальное представление объектов с распределенными
параметрами
Описание функции состояния Q{x,t) в форме ряда (2.493) является
типичным для широкого класса объектов с распределенными
параметрами. Как следует из изложенного выше, здесь собственные функции
Фя(ц„,х), являясь решениями задачи Штурма-Лиувилля (2.485), (2.487),
(2.488), определяются только внутренней структурой объекта (видом
дифференциального оператора по пространственным переменным в
уравнении объекта и конкретным характером граничнььх условий), а функции
времени Q„ (ц^,,/) при известнььх собственнььх числах, наоборот, зависят
только от входных воздействий (внутренних или граничных) и начального
состояния объекта.
Поэтому знание в любой момент времени всех коэффициентов
Qn (!^п>0 у п = 1,2,... ряда Фурье (2.493) исчерпывающим образом
определяет, согласно (2.493), выходную величину объекта Q{x,t) в любых
конкретных ситуациях при "раз и навсегда" найденной системе его
собственных функций и собственных значений.
202
Ранее было показано, что эти коэффициенты описываются задачей
Коши для бесконечной системы обыкновенных диф(1)еренциальных (по
времени) уравнений второго порядка (2.499) с начальными условиями
(2.503). (Гледовательно, моделирование ОРП краевой задачей
(2.480)-(2.483) оказывается, в итоге, эквивалентным его представлению
задачей Коши (2.499), (2.503) в том смысле, что их решения определяют
одну и ту же функцию состояния 0{x,t) и каждое из этих решений может
быть однозначным образом получено из другого.
В подобной интерпретации собственные функции, зависящие только от
координаты X получили название пространственных мод, иногда называемых
гармониками по аналогии с простейшими, но достаточно типичными
ситуациями, когда эти моды представляют собой синусоиды или косинусоиды, а сам
рад (2.493) - обычное разложение Qix, t) в рад Фурье по тригонометрическим
функциям (подобно (2.457), (2.460) для примера (2.440)^(2.442)).
Сами коэффициенты (ц„,0 в таком случае называются
временными модами (или амплитудами гармоник), а описание ОРП системой
уравнений (2.499), (2.503) (или отвечающей этой системе структурной
схемой рис. 2.51) -модальным представлением исходной модели объекта
с распределенными параметрами [8, 32, 41]. Вследствие диагональности
матрицы коэффициентов системы (2.499) все ее уравнения разрешаются
по отдельности, как это непосредственно следует из рис. 2.57, независимо
друг от друга, что существенно упрощает технику вычисления временных
мод непосредственно по выражениям (2.504).
При этом граничные входные воздействия go(^^o(0) и gi(/,tti(0) (в
том числе действующие на границах х = х^ и х = дг, сосредоточенные
управления u^it) и w,(/)) непосредственно фигурируют в составе
функций Л(ц„,0 (согласно (2.500), (2.501)), включаемых в качестве адгцггив-
ной составляющей в правые части уравнений (2.499). Внутренние
воздействия /(x,r,w(x,/)) (в том числе распределенные управления w(x,/))
аналогичным образом входят в эти уравнения в форме коэффициентов
/„(ц,,,/) разложения /(x,r,w(x,/)) в рад по собственным функциям.
Если, в частности, /„(х,/,м(х,0) = w(x,/), то 7„(ц„,0 = "„(ц,,,/), и
распределенное управление w(x,/) при модальном описании объекта
заменяется его эквивалентным представлением в виде бесконечного числа
независимых сосредоточенных воздействий u„([i„,t), образующих w(x,0
в форме ряда типа (2.493) (рис. 2.57):
00
203
Модальное представление ОРП, формально исключающее из
рассмотрения пространственные координаты, отличается от типовых моделей
систем с сосредоточенными параметрами только бесконечным порядком
указанной системы, как раз и учитывающим "косвенным образом"
пространственную распределенность функции состояния. Во многих (хотя далеко не
во всех!) ситуациях известные методы теории управления ССП,
разработанные применительно к моделям объектов, описываемых конечной
системой уравнений типа (2.499), могуг быть распространены и на
бесконечномерный случай, чго и приводит в результате к целесообразности
использования модального представления ОРП. Широко распространенный на
практике интуитивно напрашивающийся прием отбрасывания
"несущественных" гармоник в связи со сходимостью радов вида (2.493) и
соответствующий переход к конечномерной системе уравнений (2.499) для л = 1,Л^,
где //-достаточно большое конечное число, ведет уже к полной аналогии с
сосредоточенными системами, но, несмотря на его кажущуюся
очевидность, может привести к потере качественных особенностей ОРП [8, 19].
Этот вопрос будет освещен подробнее ниже, в частности, при рассмотрении
способов приближенного моделирования ОРП (гл. 3).
Заметим в заключение, что подобное описание ОРП типа (2.499),
(2.503) (не обязательно с диагональной матрицей коэффициентов)
возможно, в хфинципе, и относительно коэффициентов разложения функции
состояния объекта по общим правилам вида (2.484), (2.493) в
бесконечный рад по некоторой ортогональной системе пространственных мод
ф„{\1„,х), не являюпшхся, вообще говоря, собственными функциями
соответствующей краевой задачи (например, в обычный
тригонометрический рад Фурье по синусам или косинусам) [25].
Такое представление объекта может оказаться более простым и
удобным в случаях, когда возникают трудности в нахождении аналитического
решения задачи Штурма-Лиувилля (2.485), (2.487), (2.488), в частности,
при сложных функциональных зависимостях коэффициентов уравнения
(2.485) от пространственной координаты, а также в случаях, когда объект
управления описьюается уравнениями более сложного вида, чем (2.480),
например, системами таких уравнений [25].
Рассмотрим далее некоторые примеры применения метода конечных
интефальных преобразований для посфоения моделей ОРП.
Пример 2.25. Найдем методом конечных интегральных преобразований
базовые характеристики ОРП, описываемого уравнением теплопроводности (1.4) с
начальными и фаничными условиями (1.5) - (1.7) для случая П = 0.
Краевая задача (2.480) - (2.483) (жодщся к виду (1.4) - (1.7) щзи Qix,t) = B(xj)\
/(д:,/,|/(д:,/)) = F(x,/)/cy; Q^^\x) н eo(x); go(^wo(0) ^ О, g,(/,«,(0)ai?(0/X;
xq = 0; jc| = л и постоянных коэффициентах Л = О, Л, = 1; С{х) ~ а\ В, (л) =
204
= Ci(jr) = 0;ao=a, =0;Po=Pi=».
Используем далее расчетную схему п.З настоящего параграфа, действуя в
соответствии с ее этапами а) - г).
а) Прежде всего следует найти собственные функции задачи
Штурма-Лиувилля (2.485), (2.487), (2.488), которая в данном случае выглядит
следующим образом:
dx ' dx '
(2.530)
(2.531)
при весовой функции интегрального преобразования
г{х)^^,
а
(2.532)
согласно (2.486).
Аналогично примеру, приведенному в п.1 настоящего параграфа, в качестве
линейно-независимых решений уравнения (2.530) можно принять, подобно
(2.497):
М(ji, jc) = cos -~r X, (ц, х) = — sin JC.
(2.533)
Тогда выражение (2.495) для определения собственных функций и
характеристическое уравнение (2.496) для отыскания собственных значений ц^,/! = 1,2,...
принимают, соответственно, следующий вид:
(р(ц,лг) = соз-=г.
откуда находим
\х„-^1ш, ,i = 0,U,...
9*(H„,jc) = cos7w^, ,1 = 0,1,2,...
При этом для коэффициентов Е„ в (2.491), равных
Фл(^Ап'^) rix)dx =
If 2 x ,
— I cos^ m—dx =
^,/1 = 0,
f..-u...^
(2.534)
(2.535)
(2.536)
(2.537)
(2.538)
будем иметь систему нормированных собственных функций
205
1 ♦ 1 JC
4>n(\^n>x) = —ф*(ц,„д:) = —cosтем--, n = 0,1,..
(2.539)
В итоге получаем искомое конечное интегральное преобразование (2.484) с
ядром ф,,(ц,,,л:) и весовой функцией г(х) = —:
о
е(ц„,/) = f e(jc,/)—cos—с/х, п = 0,1,2,...
J аЕ„ R
(2.540)
б) На следующем этапе вычислительного алгоритма находим определяемую
1раничиыми условиями (1.6), (1.7) функцию R{\i„,i), согласно (2.500) - (2.502):
Л(ц..0 = /?,(Ц.0 = ^^ФДц../е)=-1^соз.« = <^^ , (2.541)
,1 = 0,1,2....
в) Функция Грина (2.507) в условиях А = 0 принимает в данном случае вид
(2.510):
-JC-/I
R4
,1 = 0,1,2,...
(2.542)
г) Находим в форме (2.513), принимая во внимание формулы (2.532), (2.538),
(2.539), (2.541) и (2.542), окончательное выражение для выходной величины
объекта - реакции температурного поля на внешние воздействия F(.x,i\g(.0 и
ненулевые начальные условия:
't R i R
'Г-Я^.х)^Л+ №л+ feo(Qd^
Loo
/Я
+ —y^COS 7C/I~
R^
00
X) COS
R
exp
(/-X)
1 ^
COS
x
nn—
. R)
—^(T) exp
Jcy
R-
+— > cos
x
ш —
exp
во(^)с05
(2.543)
Здесь в качестве отдельного слагаемого выделена составляющая решения,
соогветствующая значению ц,, = О при п = О.
В случае q{t) г О, 0q(.x) s О получаем из (2.543) ранее приведенную формулу
(2.98а). При этом, согласно (2.522), (2.532), (2.538), (2.539) и (2.542), функция
206
Грина описывается выражешсм
G(x.^.f-T) = l
А
COS
/1=1
ю1х
R
cos
к R )
ехр
(/-I)
, (2.544)
которое и было использовано ранее в готовом виде в (2.38).
Здесь, как и в (2.543), единичное слагаемое в квадратных скобках
соответствует значению |Д.„ = О при а? = О.
Как легко заметить, функция состояния объекта (2.543) с учетом (2.544)
записывается через функцию Грина в форме (2.37).
В соответствии с (2.532), (2.536), (2.538), (2,539) сразу определяется в виде
(2.524) приведенная ранее в (2.171) передаточная функция объекта
1
^ /1=1
COS
ппх
R
COS
R
(2.545)
свидетельствующая, как уже отмечалось в примере 2.10, о его структурном
представлении параллельным соединением одного интегрирующего и бесконечного
числа апериодических звеньев с постоянными времени
d2
ап^п^
, w = l,2,....
убывающими обратно пропорционально квадратам натурального ряда чисел,
причем интегрирующее звено "порождается", как и единичное слагаемое в функции
Грина (2.544Х собственным числом = О для я = О. Конечное выражение для
передаточной функции lV(x,^,p) получено ранее в виде (2.369), (2.370).
Модальное представление объекта определяется бесконечной системой
уравнений (2.499) с начальными условиями (2.503). Для рассматриваемого
примера с учетом соотношений (2.541) эта система уравнений первого порядка
принимает следующий вид:
л ^" " су • Е„ X '
в.(0) = ё,(цД ,1 = 0.1.2.....
(2.546)
где е„ = е(ц„./); F„ = F(n„.0; в„(0) = е(р„.0), и е(ц„.0. F{)x„j ), ео(ц„) -
изображения температурного поля В(х,<), функции внутреннего тепловыделения
F[x,l) и начального температурного распределения Qq(x) вида( 2.540).
Решения этих уравнений непосредственно вычисляются по формуле (2.504).
Если на границе x = R вместо (1.6) задается краевое условие третьего рода
(1.9), то отличие от рассмотренной выше задачи заключается лишь в том, что
здесь в1(/,И|(0) = 7-вп(0; «1
Тогда, согласно (2.485) - (2.488), при том же уравнении (2.530) для опреде-
207
ления собственных функций будем иметь вместо граничных условий (2.531):
(2.547)
dx dx X
откуда следует, что при сохранении собственных функций в виде (2.534),
собственные числа определяется корнями уравнения
__^sin-H.i?+^cos-^«=0,
у/а ^а ^ -Ja
которое удобнее записать в более компактной форме
yja X
где Bi - безразмерный критерий Био [24, 30].
Тогда на основании (2.534)
Фл(^Ап.-^) = созл„-^, /1 = К2,...
(2.548)
(2.549)
(2.550)
где т1„, W = 1,2,..., - бесконечная возрастающая последовательность корней
трансцендентного уравнения (2.549). Теперь в соответствии с (2.491) имеем при
прежней весовой функции (2.532):
R R
^^Д Л„+зшл„созг1„. 5
а 2т,„
" а) -"R 2а
1+со82л„ —
система нормированных собственных функций выглядит следующим образом:
Ф„(ц„,лг) = -^ф'(ц„,дг) = к ^'^^ — созл^, п = (2.552)
Еп yjR ц„+шц„совц„ R
и искомое конечное интегральное гфеобразование принимает вид
е(ц„,0= Q{x,l)—cosr\„^dx, ,, = 1,2,... (2.553)
J аЕ„ R
Далее в условиях g] (/,«!(/)) = —9^(0 будем иметь с учетом (2.552), соглас-
X
но (2.500) - (2.502), следующее вьфажение для R{\x„,i):
Ri^„,t) = R,(^„,t) = ^еп(ОФп(И„,/^) =
a
4v
2Ц„
(2.554)
R Ля+ЯПЛ„С0811
a фунидая Грина (2.507) сохраняется в форме (2.542):
еп(/)со5л^, и = 1,2,...,
208
G*„i\i„j) = exp(-nJo = expl -r\l^
, /« = 1,2,....
(2.555)
Теперь на основании (2.513), получим, подобно (2.543), решение краевой
задачи (1.4), (1.5), (1.7), (1.9) для температурного поля с учетом соотношений
(2.532), (2.552), (2.554) и (2.555):
« 2л„со8л„^
R^r\. +зтл- cos
^^Лп+8'"ЛпС0$Л„
'[—F(4,t)cos
L1
R
хехр
2 \ ' (2
-^(/ -X) d^dx + (- 8п(т) cosn„ • ехр -^(t - т)
R ) [ R
dx +
( 1Л
во(^)СОЗ Ли^
v Rj
ехр
R^
d^
(2.556)
В соогееплвии с (2.522), (2.524), (2.532), (2.552) и (2.555) найдем фушщию
Грина этой задачи:
G(x,u-x)4|;—^—
хехр --^(/-х)
-cos
COS
(2.557)
представленную ранее в (2.40), и передаточную функцию объекта
1у 2л„ хл_(_ п т:
Т* =-^; ,1 = 1,2,...
приведенную в (2.179), Как уже отмечалось в примере 2.10, в данном случае,
структура объекта, согласно (2.558), представляется, в отличие от (2.545), только
апериодическими звеньями с постоянными времени Т*, Замкнутое выражение
для lV{x,^,p) получено вьиие в форме (2.383) - (2.386).
Модальное описание объекта, аналогичное (2.546), представляется системой
уравнений (2.499), (2.503), которая принимает здесь следующий вид:
^ = --^вп +—+t|-«>sц„0п(/); е„(0) = 0о(ц,,),,1 = 1,2,... (2.559)
dt су ХЕ„
Наконец, рассмотрим случай перехода к краевому условию первого рода
(2.42) на границе х = , для которого, в отличие от предыдущих вариантов, име-
209
ем gi(/.w,(0) = en(0;a, =1;Р, =0.
Следуя прежней схеме вычислительного алгоритма, будем иметь здесь
вместо (2.530), (2.531) систему уравнений
dx
:0;<р(ц,Л) = 0,
опсуда получаем, подобно (2.534), (2.535):
<р(Ц,дс) = С08-^Г,
77^
cos-t^ = 0.
И, следовательно:
t^n=-7;——-л,и = и,...
(2.560)
(2.561)
(2.562)
Ф;(ц„,дг) = со8(2я -1)—, п =
(2.563)
При этом в данном случае при прежней весовой функции г(х) по (2.532)
коэффициент Е„ определяется соотношением (2.538):
= Л^.« = и,...;
ИНЬ
система нормированных собственных функций принимает вид
cos(2w-l)—,л = 1,2,...;
(2.564)
(2.565)
и в итоге находим требуемое интегральное преобразование
е(Цп.О = \Q{xj)^coK2n - \)^dx. (2.566)
о
Далее вместо (2.541) будем иметь, согласно (2.500) - (2.502),
видоизмененное в условиях = О, а, = 1 выражение для /?(ц„,/):
Л(ц„,0=Л,(Ц„./) = ^^ 'св„(0, (2.567)
а функция Грина (2.507) по-прежнему сохраняется в форме, подобной (2.542):
210
С;;(ц„,/) = ехр(-ц2,) = ехр -
—
1 2 ;
, // = 1,2,.... (2.568)
Теперь из (2.513), аналогично (2.543), (2.556), опять получаем, подставляя
(2.532), (2.565), (2.567) и (2.568), искомое выражение для температурного поля при
рассматриваемом варианте краевых условий:
хехр -
хехр -
R
К 2 )
2и-1
R'
jjlF(ix)cos((2«-.)f)
О о
t
^Л + |^71^0П(Т)Х
hj0o(^)cosj^(2;i-l)^jexp
r2/i-lf
(2.569)
V 2 j
2 at
Заметим, что по решению (2.569) уравнения теплопроводности (1.4) нельзя
непосредственно проверить выполнение краевого условия 9(Л,/) = 9п(/), по-
скога>ку все члены ряда (2.569) в соответстъю! с (2.560) равны нулю при х = Я,
так как
cos(2,i-l)^
= cos(2w-l)- = 0,w = l,2,...
Данное обстоятельство является следствием отмеченного в а2 настоящего
параграфа факта неравномерной сходимости ряда (2.569) на границе x = R при
неоднородных краевых условиях.
В соответствии с (2.522), (2.524) и (2.532), (2.565), (2.568) определим
функцию Грина и передаточную функщдо объекта (2.569):
тсс
GixA,t-x) = ±'^a>s\(2n-l)^^
/1=1
COS
хехр
f2„-\^
^axHt-x)
[ 2 J
R'
t:
(2.570)
(2.571)
4R^
211
Выражение (2.570) использовалось ранее в (2.44).
Задача Коши (2.499), (2.503) для модального представления объекта вьп^ля-
дит здесь, подобно (2.546), следующим образом
cit
ц'е,, +^^ц,еп(г), е,,(0)=: eo(^x„),г, = 1,2,... (2.572)
Выражения для стандартизирующих функций применительно ко всем трем
рассмотренным видам краевых условий на границе дг = /? получены ранее,
согласно общему выражению (2.520) в виде (2.67), (2.68) и (2.69).
Пример 2.26. Рассмотрим опять краевую задачу для ОРП (1.4) - (1.7),
описываемую, в отличие от примера 2.25, уравнением теплопроводности (1.4) в
цилиндрических координатах для случая П = 1. Эгот случай отличается от
предыдущего только тем, что он соответствует переменному по jc коэффициенту B^ix) в
(2.480), равному
i?,(^) = -,
(2.573)
вместо Bi(jr) = 0.
Тогда, согласно (2.486), при C(jc) = а имеем отличную от (2.532) весовую
функцию
r(Jf)=-exp
а
Cdx^
x
= ~exp[lnjr]=-.
(2.574)
а задача Штурма-Лиувилля (2.485), (2.487), (2.488) приводится к уравнению
Бесселя
i2„
JC dx
с прежними краевыми условиями (2.531).
Общее решение (2.575) имеет, как известно, следующий вид [52]
ср(ц,лг) = /),./о
•fOjr.
(2.575)
(2.576)
где Jq{z) и 7q{z) - функции Бесселя первого и второго рода нулевого порядка.
Поскольку lim)o(z) = -oo [51], ограниченные при х = 0 решения (2.575) будут
содержать лишь первую составляющую в (2.576), и сразу можно принять
Ф (ц,дг) = Jo
(2311)
не используя общш^о соотношения (2.495). При этом граничное условие в (2.531) для
х = 0 автоматически удовлетворяется в силу известного соотношения
^^^^^ = -7,(0) = О, где Jx(z) = - ^Q^^^ - функция Бесселя первого рода первого
dz dz
порядка.
212
Тогда из второго граничного условия для .x = R имеем:
■ = —
--7-^1 -7=/? =0. (2.578)
И, следовательно, собственные числа
Цп=-^;'' = 0,1,2,... (2.579)
определяются бесконечной возрастающей последовательностью неотрицательных
корней г\„, /I = 0,1,2,..., трансцендентного уравнения
./i(n) = 0, (2.580)
включая Ло = О , а ф*(ц,лс) , согласно (2.577), (2.579), принимают вид
Ф„(ц,дс) = 7о
x
./1=0.1....
(2.581)
Теперь дня нормы Е„ в (2.491) получим вместо (2.538), используя известные
свойства бессеяевых функций [28,52]:
1
Г 12 1
о г
x
v RJ
R
■ .— J
,1 = 0,1,2,...
Соответствующая система нормированных собственных функций
\
x
<Рп(\^п^х) = .^ф* (ц,,, лс) = ^ Jq
,« = 0,1,2,...
(2.582)
(2.583)
определяет с учетом (2.484Х (2.574) и (2.583) требуемое конечное интегральное
преобразование
я
е(ц„,0 = ]е(лг,/)—|=J
x
xdx, /» = 0,1Д.....
(2.584)
Функция Л(ц„.0 опять вычисляется в соответствии с (2.500) - (2.502).
(2.574) и (2^583) в виде, ^алогичном (2.541):
R(M„,t) = Я,(И„.0 = ^'f„(M„,R)KR) = ^9(0. . (2.585)
а функция Грина (2.507) снова находится по выражению (2.510) в условиях
(2.579):
G:(p„,0 = ехр(-ц2,)= ехр^- -^].« = 0.1.2... (2.586)
Теперь после подстановки (2.574Х (2.583), (2.585) и (2.586) в (2.513) будем
213
иметь, подобно (2.543), искомое решение рассматриваемой краевой задачи в
форме разложения температурного поля в ряд Фурье по бесселевым функциям:
е(;с,0 =
/ R
2 Г Г 1
R
00 ^0
■—У—
J,
о о
X
00 wAq
J су Л J су R
о
(2.587)
— 9(х) ехр
00 -'о
f x
где ошпъ отдельным слагаемым выделены члены рядов, соответствующих
значению t]q = О.
Функция Грина (2.522) рассматриваемого объекта описывается с учетом
(2.574), (2.583) и (2.586) выражением:
0{х,%,1-м) = Щ:
R'
00 «^0
Jo пЛ
i+y_L_4l_L_«Zexp
, (2.588)
a его передагочная функция (2.524) находится, соответственно, в форме
W{xA,p)^G(xJE,,p)^^
подобной (2.545).
( i') 1
•^0 Лп-Х -2
(2.589)
Пример 2.27. Используем метод конечных интегральных преобразований
для моделирования ОРП, описываемого волновым уравнением (2.45) с
начальными и граничными условиями (2.46), (2.47), что соответствует краевой задаче
(2.480) - (2.483) в частном варианте /(х,1,Ф.1) = иОШх-х*); д<) =0; л:, =/ с
постоянными коэффициентами
А=4-; А = 0; с{х)=i; в, (х)=с, (х)=о-,
Со
214
ao = tti = 1; Po = Pi = 0; go(^wo(0) = go(0\ g\Oy^(0) ^ 0.
Очевидно, что при том же виде дифференциального оператора по простран-
ствегаой переменной, что и для уравнения теплопроводности, получаем здесь то
же уравнение (2.530) для собственных функций, те же его линейно-независимые
решения (2.533) и ту же весовую функцию интегрального преобразования (2.532),
что и в примере 2,25, для случая а = 1.
Тогда за счет однородных краевых условий первого рода
(р(ц,0) = 0;(р(ц,/) = 0, (2.590)
которым, в отличие от (2.531), должны удовлетворять собствешсые функции
ф(|л,х), согласно (2.487), (2.488), при ао = а, = 1; ро = Pj = О, в силу cooino-
шений (2.495) и (2.496) будем иметь вместо (2.534), (2.535):
'ср(ц,д:) = 8шилг,
-5-sin |i/ = 0.
откуда находим
тел
Ф„(ц^,дг) = sin п = 1,2,...
(2.591)
/
Теперь, вычисляя норму в (2.491):
I [фп(1А„,
r{x)dX:
sin^ Ttw
и = и,... (2.592)
получаем систему нормированных собственных функций:
Фп(Цп.^с) = •^ф'(р„,х) = ^sin яя J, и =
которые и являются ядршл искомого интегралыюго преобразования
(2.593)
(2.594)
Функция R{v.„,t) в данном случае в соответствии с (2.500) - (2.502Х (2.593)
описывается при Л(л) = С(х)г(д:)в1 выражением
Л(ц„,0 = -Ло(р„,0 = «о(0
/Г ли
(2.595)
1
В отличие от примеров 2.25 и 2.26, условия Ai=Q,A = —r>0 приводят, со-
4
215
гласно (2.507), (2.511) и (2.591), к гармонической функции Грина в*(ц„,/):
G:(^i„,o=^sin£^^. (2.596)
В итоге получаем в форме (2.513) с подстановкой (2.593), (2.595) и (2.596)
при г{х) = 1 искомое решение краевой задачи (2.45) - (2.47):
m(t)cos
(/-X)
(2.597)
+e(')(^)-Lsinf^
Со
\ I )
В соответствии с (2.522), (2.524), (2.593) и (2.596), находим представленные
ранее в (2.49) и (2.185) функцию Грина изучаемого объекта:
G(*.U-x) = ^y-sin
— sm
sm
(f-T)
и его передаточную функцию:
.2^
sm
( ^^
1
(2.598)
(2.599)
согласно которой объект представляется в структурном отношении параллельным
С0СДИНС1ШСМ бесконечного числа колебательных (консервативных) звеньев.
Выражешедля W{x^.p) в замкнутой форме получено выше в виде (2.431).
Модальное описание объекта представляется, в отличие от предыдущих
примеров, бесконечной системой уравнений (2.499), (2.503) второго порядка:
4 d,^ Е„
жпх
I
«(0+^go('); w = U...
(2.600)
а.(О) = 0?(ц«);^ = Ш'^«Х
at
r^eQoiV-„) и ео'\ц„) - изображения вида (2.594) функций Q^(x) и Q^^^x)
в (2.597).
Общее решение этой системы при произвольных кусочно-непрерывных
входных воздействиях u{t) и g^il) опять находится в форме (2.504).
216
Заметим в заключение, что в рассмотренных здесь примерах
функция Грина имеет простой вид экспоненты (2.510) или
синусоиды (2.511) в условиях, когда один из коэффициентов, соответственно >i
или.41 характеристического уравнения (2.509), равен нулю. В общем
случае А^О, А^^О формула для вычисления G*(^,,,0 приобретает более
сложную "составную" форму (2.512), что приводит к более сложным
выражениям для базовых характеристик ОРП [9]. Такое положение
складывается, в частности, для объектов, описываемых телеграфными
уравнениями типа (2.7), например, применительно к электромагнитным
процессам в длинных электрических линиях с учетом потерь в ее активных
сопротивлениях [8].
§ 2.10. Моделирование нелинейных распределенных объектов
В случаях, когда дифференциальные уравнения ОРП в общем виде
(2.1) и (или) граничные условия (2.3) оказываются существенно нелиней-,
ными, приходится учитывать соответствующие нелинейности для
описания моделей объекта с приемлемой точностью.
Если в качестве выхода ОРП рассматриваются достаточно малые
отклонения функции состояния объекта и ее производных от некоторого
стационарного режима, вызванные, соответственно, малыми вариациями
внешних воздействий, то при гладких функциональных зависимостях,
описывающих нелинейные эффекты, можно при моделировании объекта
применить широко используемый в теории управления прием
линеаризации. Этот прием сводится, как известно, к разложению нелинейных
зависимостей в ряд Тейлора около стационарного режима с последующим
учетом только его линейных членов в силу высшего порядка малости
отбрасываемого остатка ряда. В результате получаем линейное уравнение, в
первом приближении с удовлетворительной точностью моделирующее
поведение нелинейного объекта управления в указанных условиях, и
далее можно использовать все выше описанные способы описания
линейных ОРП применительно к линеаризованной модели. Рассмотрим,
подобно (2.20), в качестве базовой модели ОРП одномерное дифференциальное
уравнение второго порядка с нелинейным оператором
L
дГ dl дх^ дх
= 0,
(2.601)
<Jf <xi, / >0,
описывающее функцию состояния объекта
Q{,xJ) = 0\x,l)л■^0(.xJ) (2.602)
217
с малой вариацией ^Q(x,t) относительно некоторого распределения
Q*ixj). отвечающего внешнему воздействию u*{xj) и
удовлетворяющего уравнению (2.601):
dt
дх
= 0.(2.603)
Если функция L дифференцируема (по меньшей мере дважды) по
совокупности своюс аргументов, то процедура линеаризации с учетом
(2.603) приводит к следующему линейному дифференциальному
уравнению вида (2.20) относительно LQ{x,t), шяхваетщ уравнением в
вариациях:
dL
(dL)
dL
\8Q)
d^AQ(x,0
dx^
d^JjQjxJ) ^ ( dL
dt^ \dQ)
dt
dL
dx
(2.604)
Ди(х,О = 0.
Здесь использованы обозначения Q = —^; Q = -^,Q' = —^,0"= ^ ,
dt-"'^ dt'^ dx^
^u^u-u* и учитываются очевидные соотношения д^^=^^^ Jt = U;z=/
или z = x.
Нижние ицдексы в (2.604) означают, что соответствуюпще
производные рассматриваются при Q = Q*, и тем самым выполняют роль
коэффициентов ^,B,i4i,Bi,Ci в (2.20).
Подобным образом гфи аналогичных допущениях можно
линеаризовать и привести к В1щу (2.22), (2.23) и нелинейные граничные условия.
Пример 2.28. Пусть одномерное температурное поле d(xj) в процессе
нагрева массивного неподвижного тела описывается однородным нелинейным
уравнением теплопроводности, учитывающим, в отличие от (1.4), темперапурные
зависимости с(9), 7(G), Хф) теплофизических характеристик и являющимся
частным случаем (1.1) [24,26,30]:
дх)
= 0,0<x<R,t>0.
(2.605)
При нагреве тела излучением с теплопередачей на его поверхности x = R по
закону разности четвертых степеней температур печи Од(/) и Q(R,t), граничные
условия также становятся нелинейными и в соответствии с (1.3), подобно (1.6) -
(1.8), могут быть записаны в следующем виде:
218
= 0; Х(в(Л./)) = 9(е(Л,/).е„(/)) = а„(е^(/)-в\я,о). / >о. (2.606)
дх ОХ
где а„ - постоянный коэффициенг.
в совокупности с начальным условием
е(.г,о) = eo(jc), о < .г < я.
(2.607)
краевая задача (2.605) - (2.607) представляет собой модель нелинейного ОРП с
управляемой величиной 9(jr,/) и управляющим воздействием BfjO).
Если в качестве выхода объекта можно рассматривать достаточно малые
отклонения Д0(д:,/) от некоторой установившейся температуры Q''(xj; = О' = 0^ = const
под воздействием малых вариащш А9/7(/) температуры печи, то при достаточно
гладких зависимостях с(0), у(0), ^(0), уравнения (2.605) и (2.606) можно
линеаризовать в окрестности стшщонарного режима. Полагая в (2.605)
L 50 d^Q aol
dt дх^ дх
= с(0)у(0)^-А
ot дх
т
ее ,_а^е dkfmf
(2.608)
=с(9)у(в)—-х.(е)—-—
dt ' ее
получим для соответствующих производных в (2.604), имея в виду, что
е9'(х,0^е9*(:с,0_эУ(дг,0^р.
dt Ьх QjP- '
(2.609)
^dL\
1ёё
=^(с(в)у(е))
9=в
[ ^ ex'L'
56^
{дх)
= 0; (2.610)
J9=e
Кдё)
= с(0 )у(е );
{дв-)
veev.
дцв) ее
= 0.(2.611)
На основании (2.609) - (2.611) линеаризованное уравнение объекта (2.604)
принимает в рассматриваемом случае следующий вид:
^е-)у(0-)^=Мв*)^,
совпадающий с линейной моделыо (1.4) при F(jc) s О, Я = 0.
Аналогичным образом, полагая в граничном условии (2.606)
(2.612)
ох
= Х(е(Л,0)^^-а„^?,(/)-9'*(Я,/)). (2.613)
будем иметь с учетом соотношений (2.609):
219
боты агрегата с постоянной скоростью v продоижспия столба заготовок и
постоянной равномерно распределенной температурой печи е'^^(х,1)^В'„ = const-
В таком случае пространственное распределение 9*(дг,г) температуры по
длине печи в стационарном режиме описывается в соответствии с (1.21)
уравнением
dx
откуда легко получаем, что при 9 (О,/) = О
в (Jc,/) = 9^
1-ехр
и тогда в правой части (2.621) будем иметь
{дх)
= --^ехр
(2.622)
(2.623)
(2.624)
Таким образом, линеаризованное уравнение (2.621), описывающее реакцию
объекта на возмущение по скорости движения столба заготовок, не отличается по
виду дифференциального оператора от уравнения (1.21), моделирующего
поведение температурного поля в зависимости от управляющего воздействия по
температуре печи Qfj(x,t). Однако данные входные сигналы отличаются, согласно
(2.621), (2.624), характером их пространственного распределения.
Даже при равномерном распределении температуры печи ^п(0 по длине
нагреваемого агрегата имеет место, как это видно из (2.624), ярко вьфаженная
экспоненциальная зависимость воздействия по AV от пространственной
координаты.
Если передаточная функция объекта (1.21) при сосредоточенном воздействии
по равномерно распределенной температуре печи описывается выражением
(2.438), то при воздействии по AV{t) аналогичным образом будем иметь,
используя пространственную композицию (2.163), вьфажения (2.436) и (2.624):
^-("^'^^ = 7^4= к(^'^'Я)/1(^)^ = -К^'^'Я)Чехр ^ =
1
hV
exp
bV
(2.625)
6/7 exp
bV
bV p
Как видно из (2.625), объект в данном случае содержит в своей структуре
интегрирующее звено вместо апериодического при управлении по 9/; в (2.438).
222
в случаях, когда огран»г1иться уравнениями объекта в вариациях
нельзя, хотя бы в виду необходимости изучения управляемых процессов
**в большом", т.е. в полном диапазоне изменения его входов и выходов, в
частности, при переводе объекта из одного состояния в другое, следует
непосредственно учитывать нелинейности в структуре соответствующих
нелинейных распределенных блоков. Если общее соотношение между
выходом и стандартизирующим входом линейного распределенного блока
определяется в форме пространственно-временной композиции (2.72)
Q(xj) = j{ОГх.^./д;Ч^,тМЛ = С(х,%Лл) о wrix;. (2.626)
0/5
ТО в достаточно общем случае подобное соотношение для нелинейного
блока принимает вид следующего нелинейного интегрального оператора
[8]:
6(^,0 =
P(jf,^,/,t,w(^,t))d^^
(2.627)
0D
С ядром P(jc,§,r,x, w), являющимся заданной нелинейной функцией
входного воздействия w(^,t). Графическое изображение такого блока
(рис. 2.58) использует обозначение ядра вместо функции Грина в
линейном варианте (см. рис. 2.2)
Если, в частности, ядро Р оператора (2.627) образуется
произведением
Р{хЛ.их, w) = 5(x,^,/,x)M^,x,w), (2.628)
где сомножитель S играет, в сравнении с (2.72), роль аналога функции
Грина относительно нелинейной функции h от входа н^(^»х) после
подстановки (2.628) в (2.627), т.е. если оператор (2.627) приводится, подобно
(2.72), к композиции
Q(xA)-^\\S(x.%AA)ha^.yf)de^dx = 8(х,%лл) ок^л.^). (2.629)
0d
Рис. 2.3S. Графическое изображение
нелинейного распределенного блока
223
то такой блок называется нелинейным блоком Гаммерштейна (по
наименованию оператора (2.627) с ядром (2.628)) [8] и изображается в виде,
показанном на рис. 2.59.
Как следует из (2.627) и (2.628), блок Гаммерштейна представляется
последовательным соединением линейного распределенного блока,
характеризуемого "функцией Грина" S{x,^j,x) и блока с нелинейностью /?,
который чаще всего оказывается статическим, если h не зависит от
временного аргумента т. Тем самым осуществляется вьщеление в
нелинейном блоке линейной динамической части, подобно тому как это часто
делается в теории нелинейных систем с сосредоточенными параметрами.
Нелинейные блоки могут включаться в общую структуру
распределенной системы, и хотя здесь уже нельзя говорить о ее передаточных
функциях, в целом при наличии нелинейностей задачу определения
выхода Q{xj) нелинейной системы по заданному входу w(§,x) часто удается
свести к решению относительно Q{x,t) некоторого нелинейного
интегрального уравнения.
Пусть, например, структурная схема ОРП образуется линейным
стационарным блоком с функцией Грина G(x,^,/ ~х), охваченным обратной
связью в виде нелинейного блока Гаммерштейна (рис. 2.60).
Здесь, согласно рис. 2.60,
>v(^,T) = /(^,i) + g(^,x); (2.630)
5(х,4./.т)
Рис. 2.59. Нелинейный распределенный блок Гаммерштейна
Н»^
G(x,%,t-x)
Qix.t)
Рис. 2.60. ОРП с нелинейной распределенной обратной связью
224
в силу (2.630) и (2.72)
Q{xj) = j Jg(x,^,/ -x)MyT)d^ch -f j JGixAJ -^)g{^,T)ci^dx , (2.631)
OD OD
и на основании (2.627), (2.628) и рис. 2.60:
t
g(xj) = j jS(x,^,r,T) /7(^т, 0(^,т))^Л. (2.632)
CD
Для приведения в соответствие обозначения аргументов функции g в
(2.631) и (2.632), положим х = т],/ = v в (2.632) и соответственно
^ = т|, X = V для аргументов подынтефальных функций во втором
слагаемом вьфажения (2.631). Тогда вместо (2.631), (2.632) будем иметь
: ^ Jg(x,4,/-x)f{^,x)dE,dz + J |с(х,л,/-У)^(л,у)с/лt/v, (2.633)
OD OD
V
gM = J j5(n,^,v,T) Л(^,т, Q)d^dx. (2.634)
CD
Подставляя (2.634) в (2.633), получим интегральное уравнение
относительно Q{Xyt):
g(x,o=J
GfdE,dx +
OD
OD
ShdE^dx
OD
dr\dv.
(2.635)
где правая часть зависит от Q через функцию Л(^, х, Q).
Представим это уравнение в более простой форме. Используя
известные правила вычисления кратных интегралов [29], запишем второе
слагаемое его правой части следующим образом:
t V
*Jg jjShd^di dT]dv= jd^jdr\jdvJGShdz =
OD OD
D D 0 0
t t
de,jdr]jdxJGShdv.
(2.636)
D D 0 t
Здесь
\GShdv =
GShdv,
(2.637)
поскольку в соответствии с (2.627), (2.628)
225
S(n.iv,t) = 0 при \'<т,
и тогда равенство (2.636) преобразуется к виду:
(2.638)
f
Л'
0D
t
v
OD
t
GShdv =
D D 0 0
OD
I
GShdi\dv
OD
(2.639)
d^dx.
После подстановки этого результата в (2.635) интегральное
уравнение относительно функции состояния рассматриваемого нелинейного
объекта записывается в следующей форме:
Qixj) = J JG(x,4,/-z)f{%,i)de,dx + j\м{хЛ,глт.^Ш<^х, (2.640)
od od
где
^/(x,^,^x,g(^.т)) = Л(^,т,^(4,x))JJG(x,л,/~v)5(л,^,v.т)Jл^v.(2.641)
od
Решение уравнения (2.640) можно получить в общем случае только
численными методами.
Пример 2.31. [8]. Пусть ОРП описывается нелинейным уравнением
теплопроводности для температурного поля в(дг,/)
^EgiO=a.^^+lF(x,^ 0<:г</?,/>0, (2.642)
с граничными условиями
су
^(0>/)
дх
=а,е(Л,/)=о,/>о,
(2.643)
моделирующими процесс нагрева теплопроводящего стержня [8].
Нагрев происходит за счет внутреннего тепловыделения, характеризуемого
функцией F(jf,/) распределения источников тепла, а нелинейное слагаемое
а„[0(д:,/)]* учитывает теплоотдачу излучением по всей длине стержня в
окружающую среду с нулевой температурой по закону Стефана-Больцмана.
Структурная схема объекта приведена на рис. 2.61.
Здесь функция Грина G{x,^j - х) рассматриваемого объекта определяется-
получе1Шьш ранее в примере 2.25 выражением (2.570), а воздействие g(^,T), учи-
226
тьшающее нелинейный эффеет тепловых потерь по закону четвертых степеней
температуры, должно быть равно
g(:c,/) = -aj0(:c,Or. (2-^4)
Тогда на рис. 2.61, согласно (2.642):
/(4,т) = —F(^,t); vK^,t) = -F(4,t) - а, [0(^,t)f. (2.645)
Используя свойства 5-функций, можно представить выражение (2.644) в
виде:
tR
g(^:,/) = -JJa„5(x~^)6(/-T) [0(^,T)f ,
00
и, следовательно, нелинейный блок в обратной связи на рис. 2.61 является,
согласно (2.629), блоком Гаммерштейна, для которого в данном случае
S(x^,t,t) = -a„5(jc-^)5(/-t), (2.646)
Л(^т,^) = [е(4,1)Г. (2.647).
Вычисляя функцию А/в (2.641) с учетом (2.646) и (2.647):
tR
М(дг,4,/,х,е) = -[e(t t)f J Jg(j:,ti,/ - v)a„5(n " ^)S(v -T)dndv =
0 0
= -aJe(^,x)fG(:c,?,/-t)
и подставляя полученный результат в (2.640), получим основное интегральное
уравнение, связывающее вход F(4,t) и выход 0(jc,/) рассматриваемого
нелинейного объекта:
tR tR
е{х,0 = I Jg(;c,^,/ -1)—F(4,T)^ Л - a J J G(jc,4,/ - x)[0(^,x)]^ ^ ch. (2.649)
00 ^ 00
Решение этого уравнения можно найти известными численными методами.
(2.648)
Gix.^j-т)
eixj)
-a,5(jr-i^)6(/-T)
в'
P и с. 2.61. Структурная схема объекта управления, описываемого
нелинейным уравнением теплопроводности
227
ГЛАВA3
ПРИБЛИЖЕННОЕ МОДЕЛИРОВАНИЕ ОРП
§ ЭЛ. Классификация и общая характеристика методов
приближенного моделирования ОРП
Как показано в предыдущих разделах, даже в наиболее простых
ситуациях, допускающих представление ОРП в форме "элементарных"
линейных распределенных блоков с известными вход-выходными
соотношениями, системы с распределенными параметрами описываются
точными математическими моделями достаточно сложного ввда. При этом
типичным следствием моделирования поведения ОРП дифференциальными
уравнениями в частных производных является трансцевдентный характер
зависимости соответствующих передаточных функций от комплексной
переменной (либо описание этой зависимости в форме бесконечных
рядов) даже относительно сосредоточенных входных воздействий, что
резко усложняет их анализ и использование в целях последующего
синтеза систем управления по сравнению с дробно-рациональными
передаточными функциями систем с сосредоточенньпли параметрами (ССП). В
более сложных случаях, например, для пространственно многомерных
объектов со сложной формой границы области изменения пространственных
координат или при необходимости учитывать существенные нелинейные
эффекты, как правило, вообще не удается получить аналитическое
решение уравнений объекта.
Указанные обстоятельства привели к широкому распространению на
практике приближенных моделей ОРП упрощенного вида, описьгеающих
их поведение с требуемой точностью.
При этом преобладающей тевденцией является вполне понятное
стремление к построению таких моделей в форме соответствующих ССП,
что, во-первых, диктуется "физически прозрачными" соображениями о
возможности описания СРП с любой желаемой точностью правильно
подобранной более простой ССП и, во-вторых, возможностью применения
после такой аппроксимации всего "привычного" фундаментального
аппарата теории управления ССП.
Сразу отметим, что всюду в данной главе имеются в виду
аналитические методы получения искомььх приближений по известным точным
описаниям рассматриваемых распределенных блоков. В инженерной
практике широко распространены в этих целях достаточно хорошо
разработанные применительно к ССП экспериментальные методы (методы
идентификации [1]), которые естественно отнести к способам
приближенного моделирования объектов управления.
К очевидным недостаткам экспериментальных методов относится,
прежде всего, частный характер получаемых результатов, правомерных
228
лишь применительно к конкретным режимам работы конкретного объекта
с конкретными значениями соответствующих параметров. Бесспорным
преимуществом методов идентификации является возможность
получения приближенной модели в условиях, когда сложный характер объекта
и(или) отсутствие достаточного объема информации об исходных данных
затрудняют описание модели аналитическим путем.
Методы идентификации являются предметом исследования
самостоятельного раздела теории управления [1] и в настоящем пособии не
рассматриваются, тем более что многие задачи иденти(!)икации СРП,
принципиально более сложные по сравнению с ССП, в настоящее время
еще не решены. Заметим только, что практически все методы
идентификации опираются на априорную информацию о структуре объекта [1],
которая, в частности, может быть получена рассматриваемыми в
настоящей главе способами. С этой точки зрения аналитические модели можно
рассматривать в качестве исходных данных для последующих
уточняющих экспериментальных исследований, если такое уточнение оказывается
необходимым.
В настоящее время разработан целый ряд аналитических способов,
построения приближенных моделей объектов с распределенными
параметрами [6, 12, 15, 16, 31,41,48, 50, 51].
Все они могут быть условно подразделены на две основные группы
по ".предмету аппроксимации" (рис. 3.1).
Первая группа образуется различными способами упрощенного
представления самих исходных дифференциальных уравнений объекта,
последующее решение которых известными методами позволяет получить
удовлетворительные по точности в определенных конкретных условиях
описания свойств ОРП в сравнительно простом виде.
Методы второй группы базируются на приближенном представлении
(как правило, в типовой для ССП форме соответствующих передаточных
функций (ПФ)) точных решений уравнений в частных производнььх,
моделирующих поведение ОРП. В некоторых случаях методы обеих групп
приводят к совершенно идентичным результатам.
Естественно, возможно "двухэтапное" последовательное применение
к одному и тому же ОРП различных методов аппроксимации,
позволяющих, например, вначале перейти к упрощенному, допускающему точное
аналитическое решение, уравнению объекта, для которого затем найти
дробно-рациональное приближение его передаточной функщ1и,
определяющее итоговое приближенное описание исходной модели объекта в
рамках типовых моделей ССП.
ОС
s
X
«в
а
s
Ё.
н
о Ц
it
I
8 о
и
X
1. Методы аппроксимации исходных уравнений объекта
Способы приближенного описания ОРП, связанные с упрощением
самих уравнений объекта, в свою очередь, могут быть реализованы либо
путем перехода к более простым уравнениям в частных производнььх,
сохраняющим пространственно-временной характер функции состояния
объекта и допускающим, по возможности, точное аналитическое решение,
либо непосредственным преобразованием к конечномерной системе в
рамках моделей ССП путем использования подходящей процедуры
дискретизации (см. рис. 3.1),
Из методов редукции к упрощенным уравнениям в частных
производных отметим прежде всего методы линеаризации и малого параметра,
а из конечномерных приближений - описание на базе модального
представления объекта и разностные модели.
Методы перехода к упрощенным распределенным блокам позволяют
сохранить при их корректном использовании все основные качественные
особенности исследуемььх объектов с распределенными параметрами в
рассматриваемых условиях, и в этом состоит их несомненное
преимущество.
Методы конечномерной аппроксимации связаны с переходом к
классу моделей совсем другой природы по сравнению с исходными
объектами, что порождает существенные особенности этого способа
моделирования ОРП. Несомненным преимуществом такого подхода является его
универсальность, позволяющая получить приближенное описание даже
весьма сложных ОРП в аналитической или цифровой форме с помопц>ю
современных методов вычислительной математики.
Однако при этом возникает целый ряд проблем качественного
порядка.
Во-первых, конечномерные приближения могут привести к потере
сущностных свойств, определяемых пространственной
распределенностью управляемых процессов. При использовании конечномерных
моделей могут оказаться "незамеченными** свойства неуправляемости объекта,
означающие, в частности, невозможность осуществить его перевод в
требуемое конечное состояние из заданного начального в заданном классе
управляющих воздействий; свойства ограниченности во времени такого
перевода; свойства нереализуемости оптимальных по ряду критериев
алгоритмов управления; неправомерность применения в ряде случаев
аппарата теории управления сосредоточенными системами и др.
Во-вторых, при использовании дискретных аппроксимаций моделей
ОРП всегда возникают вопросы оценки ошибок соответствующих
приближений и их сходимости к исходным моделям, исследование которых,
как правило, сопряжено со значительными трудностями.
В-третьих, при численном решении уравнений аппроксимирующих
моделей часто оказывается весьма актуальной сложная проблема обеспе-
231
чения ycTOihmBOCTH относительно погрешности промежуточных
вычислений.
Во многих случаях некоторые схемы аппроксимации приводят к
неограниченному возрастанию ошибок вычислений из-за накапливания по
ходу вьиисл1ггельной процедуры погрешностей и оказываются в
результате практически неприемлемыми.
Сказанное в первую очередь означает, что в каждом конкретном
случае необходимо получить четкое представление о качественных и
количественных последствиях аппроксимации распределенной системы
сосредоточенной и ее приемлемости с рассматриваемой точки зрения. Подобный,
зачастую весьма тонкий, анализ должен быть выполнен средствами
сравнительного исследования принципиальных возможностей и реализуемых
средств разрешимости поставленных задач моделирования и управления
исходной и аппроксимирующей системами.
В некоторых сшуациях такой анализ может привести к выводу о
нецелесообразности конечномернььх приближений (и тогда надо
использовать другие способы, например, перехода к упрощенным описаниям в
рамках моделей распределеннььх систем). В других достаточно типичных
случаях потери могут оказаться несущественными и дискретная
аппроксимация приводит к вполне удовлетворительным результатам. Некоторые
способы и примеры такого рода исследований рассматриваются ниже.
2. Методы аппроксимации точных решений уравнений объекта
В инженерной практике получили широкое применение различные
методы приближенного моделирования передаточных функций ОРП (как
правило, применительно к передаточным функциям х-блоков с
сосредоточенным входом (§2.5)), пpeдcтaвляeмьLX в типичной для систем с
сосредоточенными параметрами дробно-рациональной форме, иногда
дополняемой звеньями чистого запаздьгоания [15, 16, 31,44,48,50, 51].
В частности, широко используются разложения точных вьфажений
для передаточных функций или их отдельных составляющих различными
способами в бесконечные сходящиеся ряды, позволяющие, в принципе,
найти такое дробно-рациональное представление с любой требуемой
точностью, хотя практически для получения возможно более простых
приближений обычно учитываются не более трех (чаще всего, один или два)
первых членов ряда, образующих в совокупности типовые динамические
звенья ССП первого, второго или третьего порядка.
Передаточные функции могут быть при этом изначально найдены в
форме бесконечного ряда, например, при использовании метода конечных
интегральных преобразований (§ 2,9) либо представлены их
разложениями в ряды Тейлора, а также в ряде случаев и в ряды по изображениям
различных ортогональных функций, например, в форме рядов Бурма-
на-Лагранжа (в форме разложения ПФ по степеням другой аналитической
функции) [15, 16].
232
Последний путь, базирующийся на интегральных оценках
аппроксимируемых зависимостей, обеспечивает, вообще говоря, более
равномерное распределение погрешностей используемых конечных приближений
по рассматриваемым аргументам в сравнении с рядами Тейлора,
построенными на основе информации только о производных приближаемой ПФ
в точке разложения и гарантирующими малую ошибку при отбрасывании
неучитываемых членов рада только в окрестности этой точки. В
некоторых случаях используется также разложение ПФ в дробный рад Паде (15,
31].
Широко применяется и другой метод аппроксимации, при котором,
базируясь на физических представлениях, экспериментальных данных,
опыте работы с аналогичными объектами, грубых аналитических
описаниях и т.д., аппроксимирующие передаточные функции априори задаются
с точностью до значений коэффициентов в типовой для ССП (|юрмс,
конкретный вид которой диктуется указанными соображениями.
В таком случае задача сводится к выбору этих коэффициентов из
условий минимизации ошибки приближения. Здесь также могут
применяться различные вычислительнью алгоритмы, использующие как оценки
аппроксимации самих передаточных функций, так и соответствующих
переходных функций объекта.
Первый способ можно реализовать путем приближения по
различным критериям непосредственно в комплексной или частотной области,
например, с помощью кусочно-линейной аппроксимации
логарифмических амплитудно-частотных характеристик объекта [44].
Достаточно эффективный путь состоит в выборе искомых
параметров после замены комплексной переменной на действительную "S**, из
условий минимизации ошибки равномерного приближения к точной ПФ в
заданной области изменения действительного аргумента [40].
Второй способ заключается, в частности, в приравнивании
коэффициентов разложения в ряды Тейлора по степеням переменной
преобразования Лапласа точной и приближающей передаточных функций [31, 50].
Равенство этих коэффициентов соответствующим интегральным оценкам
переходного процесса [15, 16] обеспечивает минимизацию по этим
оценкам ошибки аппроксимации во временной области.
Отметим, наконец, возможность непосредственной минимизации
критерия приближения (если он определяется в форме явной, достаточно
гладкой зависимости от идентифицируемых коэффициентов) путем
редукции такой задачи к решению системы уравнений, образуемой
равенствами нулю частных производных от этой зависимости по искомым
параметрам.
Все указанные методы приводят к приближенным выражениям для
ПФ с коэффициентами, параметрически зависящими от
пространственных переменных. Во многих случаях при этом не удается в
единообразной форме найти приемлемое по точности приближенное представление
233
объекта в широком диапазоне изменения пространственной переменной,
поскольку для разли^1ных точек области ее изменения (например, на
разных фаницах области) могут понадобиться аппроксимирующие ПФ раз-
ли^шого вида. Это обстоятельство может вызвать затруднение при поиске
простых аппроксимаций передаточных функций W{x,^,p) линейных
распределенных блоков общего вида, зависящих сразу от двух
пространственных аргументов входа (4) и выхода (jc) (§ 2.5, 2.8, 2.9). Как правило,
известные инженерные решения задачи аппроксимации передаточных
функций ОРП относятся к распределенным х-блокам с сосредоточенными
фаничными управлениями, для которых эти фудности исключаются и
большинство излагаемых далее результатов относится именно к этому
случаю.
В последующих разделах настоящей главы приводится краткое
описание некоторых из отмеченных выше способов приближенного
моделирования ОРП, нашедших применение в инженерной практике.
§ 3.2. Методы перехода к распределенным блокам
упрощенной структуры
1. Метод малого параметра
Во многих конкретных ситуациях знание базовых закономерностей
предметной области позволяет значительно упростить уравнения моделей
ОРП без существенной потери в точности описания объекта за счет
обоснованного пренебрежения отдельными составляющими
дифференциальных операторов или их представления в упрощенной форме.
Пусть, например, двумерное уравнение теплопроводности (1.34) для
моделирования температурного поля 9i(>',z,/) в цилиндре конечной
длины рассмафивается в условиях достаточно малых тепловых потерь на
торцах цилиндра (при достаточно малых аз в (1.35)) и слабой
зависимости F(y,z) и начального температурного состояния, а значит, и
9i(>>,z,/) от продольной просфанственной координаты z. Тогда,
пренебрегая членом d^Qi Idz^, полагая F{y,z)« F^{y) и не учитьюая
фаничные условия для 2 = 0 и Z = /, можно без большой погрешности перейти
к одномерному уравнению Фурье, описывающему радиальное
распределение температуры Q\{yyt) в цилиндре бесконечной длины:
dt
'd\{y,t) ^ 1 SQ^{y,t)
ду^ У dy
0<y<R;0<t<ty\
су (3.1)
234
Х^^51^ = а,(еЛ0-в(Л,0); Х^^ = 0,/>0; (3.2)
оу оу
ei(v,o) = eioW, о ^ (3.3)
Наоборот, если продольные перепады температуры за счет ярко
выраженной зависимости F{y,z) от Z значительно превышают радиальные,
в частности, в условиях F{y,z) ^ F2(z);ai « aj; « аз; Q(y,z,0) « Q^q{z) ,
то температурное поле с достаточной точностью может описываться
одномерным процессом распределения тепла в бесконечной пластине
толщиной /, моделируемым уравнениями (1.34), (1.35) в пренебрежении
членами 9^91 /ду^ , 901 /5у, и фаничными условиями для = О, >/ = :
"-^^^^'^'^'^'^ (3.4)
0<z</;0</^/j;
Х^М:^ = а2(е,(0 -в(/,0) = аз(еД0-в,(0.0Ь > 0; (3.5)
02 oz
0i(z,o)=eio(z),o<z</. (3.6)
Очень часто подвижные объекты с распределенными параметрами,
например, вида (1.40), могут быть приближенно представлены широко
используемым на практике базовым уравнением первого порядка типа
(1.21) при возможности пренебрежения в первом приближении всеми
эффектами, кроме эффекта переноса субстанции в направлении движения,
определяемого членом F/—5. в (1.40).
dz
Подобные рассмотренным выше приближения, широко
распространенные на практике и в большинстве случаев приводящие к
удовлетворительным результатам при правильной предварительной оценке
качественных закономерностей исследуемых процессов, являются, тем не менее, в
значительной степени интуитивными и не позволяют количественно
оценить погрешности используемььх аппроксимаций. По существу, такого
рода упрощения обосновываются малостью сокращаемььх членов в
уравнениях (а также в граничных и начальных условиях), которая формально,
как правило, может бьпъ учтена вводом в структуру математических
моделей соответствующих малых множителей {малых параметров\
моделирующих физически обоснованную степень влияния рассматриваемых
факторов на поведение функции состояния объекта.
Пусть, в частности, дифференцируемая требуемое число раз по своим
аргументам функция F{y,z) в (1.34) представляется ее разложением
235
/i(y,2,zo) В ряд Тейлора по степеням z в некоторой точке Zq е [О,/]:
Fiy^z) = F0;,zo) + /i(y,2,zo), z € [О,/]. (3.7)
Слабую зависимость F(y,z) от z можно учесть вводом малого
параметра е в виде множителя перед Д, полагая
ny,z) = F^iy.z) = F(>;,Zo) + s/i(>/,z,Zo), (3.8)
где e характеризует степень малости всех производных , —,
в составе /,(y,z,zo).
При е = О приходим к правой части в (1.34), независящей от z:
F{y.z)^F{y,zo). (3.9)
а при е = 1 - к точному вьфажению исходной функции F(y,z) в форме
(3.7).
Полагая длятфостоты аг =аз =0 в (1.35) и G,oCy,2)=const в
(1.36), получаем в случае (3.8) краевую задачу (1.34) - (1.36) с малым
параметром е в составе функции (у, г):
&
(3.10)
+ F^{y,z)F (/), 0<>'<Л, 0<г</, 0«^/,;
ду ' ду
a9,cv,/,o _ a9eCv,o,0 _^
ееСи,2,о)=е1о, (3.12)
где через 6gCv,^.0 обозначено искомое температурное поле при
пространственном распределении внутренних источников тепла,
описываемом выражением (3.8).
Очевидно, что для 8 = 0 в соответствии с (3.9), (3.11) и (3.12)
краевая задача (3.10) - (3.12) сводится как раз к виду (3.1) - (3.3) при
Fi(y) = F(>',zo), поскольку в таком случае "нулевое приближение"
0cCv,2,O не зависит OTZ и d^Q^{y^z,t)ldz^ =0, если 8 = 0. Если 8>0,
то необходимы соответствующие уточнения для описания функции со-
236
стояния объекта, которые нельзя непосредственно получить только из
уравнений (3.1)-(3.3).
Совершенно аналогичным образом можно рассмотреть случай слабой
зависимости F{y,2) от у, приводящий к уравнениям для нулевого
приближения типа (3.4) - (3.6).
Ь4алый параметр может искусственно вводиться в уравнение объекта
и граничные условия, подобно приведенным примерам, или
непосредственно фигурировать в этих уравнениях, в зависимости от конкретного
смысла рассматриваемых множителей.
Первый способ достаточно часто используется также для учета слабо
вьфаженных нелинейностей распределенных блоков [26], а второй, как
правило, связан с рассмотрением в качестве малого параметра одного или
нескольких аргументов функции состояния объекта [12,26].
Если, например, в уравнении (1.34) перейти к относительным
единицам, полагая, в частности,
/ = —г,у = Яуу,ууе [0,1]; z = fej, е [0,1],
а
то это уравнение примет вид
a9iO>,.2i.t) _a^eiOi.zi.t) ^ i aeiQ/i.zi.o , зАси^^ь^),
5т ду1 л * 8zf (3.13)
+ F(y,,z,)F*(x), О <л < 1. О < zj < 1, т >О,
где квадрат коэффициента х = у> представляющего собой отношение
радиуса цилиндра к его длине, можно рассматривать в качестве малого
параметра е, если Л «/.
После представления краевой задачи, моделирующей ОРП, в форме,
содержащей малый параметр, вся дальнейшая проблема сводится к
исследованию зависимости ее решений от величины е.
Имея в распоряжении эту зависимость в достаточно простой форме,
можно построить строгую алгоритмическую процедуру поиска
приближенного решения для нулевого значения малого параметра, оценить
погрешности, связанные с его конечной величиной, и перейти, если
потребуется, к соответствующим уточнениям.. При этом в целом ряде случаев
такой способ приводит к существенной коррекции приближенных
моделей, описываемых "укороченными" уравнениями, образуемыми путем
простого отбрасывания малых членов из "чисто физических"
соображений [12].
Методы, реализующие подобную формальную схему поиска
приближенных моделей, получили название методов малого параметра,
представляющих собой крупное самостоятельное направление в области
237
математического моделирования, широко и эффективно используемое в
прикладных исследованиях [12, 26, 34].
Члены уравнений, содержащие малые параметры, обычно
называются возмущениями, а сами эти уравнения - возмущенными уравнениями.
Уравнения, не содержащие возмущений, т.е. отвечающие нулевому
значению малого параметра, назьшаются иевозмущенными. Так, для случая
представления F(,y,z) в (1.34) в форме (3.8), составляющая e/i в (3.8)
является возмущением, а возмущенные и невозмущенные уравнения
принимают вид, соответственно, (3.10) - (3.12) и (3.1) - (3.3).
Применительно к возмущенному уравнению (3.13) роль возмущения
играет составляющая дифференщ«ального оператора у} ^ ^1(Л^>^ь'^) ^
если можно принять в качестве малого параметра е, а невозмущенное
уравнение в таком случае образуется из (3.13) при 8 = 0. В рамках этой
терминологии методы малого параметра могут бьпъ названы методами
возмущений [12, 34].
Рассматривая далее для определенности краевую задачу вида (2.20) -
(2.22), назовем ее возмущенной или невозмущенной задачей,
соответственно при наличии или отсутствии возмущений в уравнениях объекта (2.20)
или (и) граничных и начальных условиях (2.21), (2.22).
Обозначим решение невозмущенной и возмущенной задач (2.20) -
(2.22) соответственно через Q*(x,t) и Qz{x,t). Очеввдно, что основная
проблема применительно к этой модели состоит в исследовании разности
" б*(^>0 при стремлении к нулю малого параметра е.
Если при этом имеет место предельный переход
max
xJeD
► о при 8-» о (3.14)
в области
D* = {c,t:xeD,t>0} (3.15)
определения функции состояния ОРП, то возмущенная задача называется
регулярно возмущенной.
Напомним, что D в (3.15) представляет собой замкнутую область
изменения пространственной переменной х, включая ее открьттую часть D
и границу dD (§ 2.1), и тогда D*, согласно (3.15), есть замкнутая область
изменения л- и /, включая начальный момент времени / = О.
В случае, когда условие (3.14) не выполняется, возмущенная задача
называется сингулярно возмущенной.
Из приведенных определений следует, что Q*(xj) при малых значе-
238
ниях е будет достаточно близким в смысле (3.14) к решению &(х,/)
регулярно возмущенной задачи во всей области D*, а для сингулярных
возмущений такая близость не будет иметь место по крайней мере в
какой-то части D , Типичный случай регулярно возмущенной задачи
соответствует наличию малого параметра только в правых частях уравнений
(2.20) - (2.22), т.е. в составе функций/или (и) Qq, g в (2.20) - (2.22),
подобно краевой задаче (3.10) - (3.12).
Наиболее характерными представителями сингулярно возмущенных
задач являются дифференциальные уравнения (а также граничные
условия) с малыми параметрами при производных (например, типа (3.13) при
Обычно Q*{x,t) в этих случаях не являются близкими при малых е к
6g(x,/) лишь в малой окрестности границы йО* ={xJ:xedD,t = 0}
области D*, назьгоаемой пограничным слоем.
Явления в пограничном слое легко объясняются тем
обстоятельством, что в рассматриваемой ситуации решение невозмущенной задачи
Q*(xj) совсем не обязательно должно удовлетворять начальным и
граничным условиям, задаваемым на дО* для Q^{x,t).
Основной проблемой при этом является построение приближений
Q(x,t,z) к Q^(xJ), пригодных по точности как вне пофаничного слоя,
так и в его пределах, т.е. опять-таки во всей области D*. Как правило,
Q(x,/,8) ищутся как асимптотические приближения к Q^{x,t) по
параметру в области D*, т.е. такие тфиближения, для которых выполняется
предельное соотношение
maxjee(jr,0-6(^,r,s)|->0 при8->0. (3.16)
xjeD*
Если максимум в (3.16) является величиной О(е^) того же порядка
малости, что и , /: > 1, то 0(дг,/,е) называется асимптотическим
приближением для Q^ix^t) в D* с точностью порядка .
Из сказанного, в частности, сразу следует, что Q*{xJ) является
асимптотическим приближением к Q^ixJ) в случае регулярно
возмущенной задачи и не является таковым для задачи сингулярно возмущенной.
Известные конструктивные способы построения асимптотических
приближений 0(x,r,8) (асимптотический метод), как правило, сводятся к
239
решению более простых задач по сравнению с исходной возмущенной
задачей.
Возможность эффективного определения Q(x,/,8) с их помощью и
определяет практическую ценность асимптотического метода.
Как правило, при вьшолнении некоторых, обычно
малостеснительных, допущений относительно свойств операторов и функций в (2.20) -
(2.22) Q(xj,z) ищется в форме л-й частичной суммы
п
Q4xJ,e):=J^z^{Qf,{xJ) + nkixJ.z)) (3.17)
Jt=0
такого бесконечного ряда по степеням 8
00
28^((2И^,0 + ЯИх,/,8)) (3.18)
Jt=0
С априори неизвестными функциями QkixJ) и Flj^ix^t^z), что Q'^(x,t,z)
является асимптотическим приближением к Q^(x,t) в областиD* с
точностью порядка 8""*"^, т.е.
тах^
x,teD*
Q^xJ)-Q"iW) =0(г"^^), (3.19)
Рад (3.18), удовлетворяющий условию (3.19), называется асимпто-
тическим рядом ддя фушщш Q^{x,t) или асимптотическим
разложением функции Q^(x,t) в области D* при е -> О . Поскольку условие (3.19)
позволяет оценить точность конструируемых приближений, на практике
всегда достаточно ограничиться вычислением конечной суммы (3.17) при
некотором п без построения всего асимптотического ряда (3.18), под
которым в таком случае понимают указание алгоритма, позволяющего
найти члены рада для любого п. Очень часто удовлетворительным оказьгеает-
ся уже нулевое приближение Q^(x,r,8) к Q^(xj) с точностью порадка 8,
согласно (3.19).
Заметим, что асимптотический рад может вообще не сходиться к
функции бе(х,/) и даже может быть расходящимся. Действительно,
сходимость ряда (3.18) к Qe(x,0 означает, что
max
xjeD
Qsix^O-Q^ix^t^^) ^0 при /1->оо. (3.20)
В то же время условие (3.19), которому удовлетворяет
асимптотический рад, по определению означает лишь, что существует такое конечное
число С > О, зависящее, вообще говоря, от что при 8 > О выполняется
240
неравенство
max
xjeD'
Q^i^.t)-0\x,t,z) <C(/7)e''^V (3.21)
Хотя e''"*'^ в правой части (3.21) стремится к нулю при /? оо, если
0<е<1, тем не менее из неравенства (3.21) не следует условие (3.20),
поскольку зависимость С{п) может быть такой, что произведение
С{п)г'^^^ не стремится к нулю при п-^со .
Итак, задача конструирования асимптотических приближений к
решению возмущенной задачи с требуемой точностью сводится к
построению частичной суммы (3.17) асимптотического ряда (3.18), т.е. к выбору
соответствующих функций Qkix^t) и nf^(x,t,z) в (3.17). Для регулярно
возмущеннььх задач достаточно, как правило, ограничиться поиском
составляющих Qkix,t), принимая все П]^{х,1,г) равными нулю. В
сингулярно возмущенном случае функции Qkixj) обеспечивают
асимптотическое приближение к Q^{x,t) лишь вне пограничного слоя в окрестности
ао*, а соответствующие '^невязки'\ обусловленные несоблюдением
граничных и начальных условий краевой задачи соответствующей частью
ряда (3.18), компенсируются пограничными функциями Uf^ixJ^z),
обеспечивающими в совокупности с Qf^{xJ) вьшолнение условия (3.19) уже
во всей области D*. Эти функции обычно строются в отдельной системе
координат, вводимой в пределах пограничного слоя (пограничная
система координат) путем "растяжения" переменных х и t с помощью малого
параметра [12], за счет чего в числе их аргументов и фигурирует е. В
типичных для приложений случаях, когда граница дО* не является гладкой
и содержит угловые точки (например, вершины x = XQ,f = 0;x = xi,r = 0
прямоугольника D* = (xq < х < лг^) х (О < / < /j)), структура пограничных
функций усложняется.
Они конструируются в виде суммы отдельных слагаемых, каждое из
которых служит для описания пофанслоя в окрестности "своей" отдельно
взятой гладкой части дО* (например, каждой стороны прямоугольника).
Поскольку данные слагаемые в свою очередь вносят невязки в
окрестности угловььх точек (в окрестности вершин прямоугольника), их сумма
дополняется отдельными компенсирующими составляющими {угловыми
пограничными функциями) для каждой из этих точек [12].
Часть ряда (3.18), образуемая пофаничными функциями nj^{x,t,z),
называется погранслойным рядом или погранслойной частью
асимптотики, а главная его часть, порождаемая функциями Qk{x,Oy - регуляр-
241
иым рядом или регулярной частью асимптотики.
Общий способ поиска составляющих регулярной и погранслойной
частей асимптотики сводится к подстановке искомого решения Q^{x,t) в
форме рада (3.18) в уравнения (2.20) - (2.22) исследуемой краевой задачи,
правые части которых, если они зависят от малого параметра,
предварительно раскладываются в бесконечные ряды по степеням е.
Приравнивание коэффищсеетов при одинаковых степенях в в левых и
правых частях этих уравнений, причем отдельно зависящих от
переменных X, / и переменных погранслойной системы координат, приводит к
линейным уравнениям реккурентной структуры относительно искомых
функвдга Qicix.t) и /7j^(x,r,e), и следовательно, они могут быть
последовательно разрешены каждое в отдельности с подстановкой решений пре-
дьщущих уравнений в последующие. На первом шаге этой процедуры
решается замкнутое уравнение относительно нулевого приближения
Qoix.i). В итоге, реализация такой процедуры представляет собой
гораздо более простую задачу по сравнению с исходной, а рад (3.18),
образуемый получаемь»1и составляющими регулярного ряда и погранслойной
части асимптотики, как правило, является асимптотическим, удовлетворяя
условию (3.19) [12].
Данное oi5cтoятeльcтвo позволяет практически простым путем
построить асимптотическое приближение вида (3.17) к искомому решению
бе(х,/) возмущенной задачи с требуемой точностью. Очень часто здесь
оказывается достаточным учесть всего один или в крайнем случае два
члена ряда (3.18), принимая /7 = 0 или л = 1.
Мы ограничимся здесь приведенным выше кратким содержательным
изложением основных понятий метода малого параметра. Подробное его
обоснование и описание техники применения для построения
приближенных моделей объектов, описываемых уравнениями в частных
производных, приводится в специальной литературе [12, 34] и выходит за рамки
настоящего учебного пособия.
2. Метод линеаризации
Если нелинейные уравнения ОРП используются для описания
достаточно малых отклонений его функции состояния от некоторого
известного режима функционирования, то при гладких зависимостях
дифференциального оператора от его аргументов в качестве модели объекта с
удовлетворительной точностью можно рассматривать принципиально более
простое линейное уравнение в вариациях, получаемое с помощью
стандартной процедуры линеаризации нелинейностей (§ 2.10).
В частности, от исходного нелинейного уравнения вида (2.601)
можно перейти к линейной модели (2.604) вида (2.20) с известными точными
решениями во многих частных случаях (см. также примеры 2.28, 2.29).
242
§ 3.3. Методы модального описания ОРП
Как было показано в § 2.9, моделирование ОРП краевой задачей вида
(2.480) - (2.483) эквивалентно его модальному представлению
бесконечной системой (2.499), (2.503) обыкновенных дифференциальнььх
уравнений в форме Коши, где в роли переменных состояния фигурируют
временные моды - бесконечное число коэффициентов бл(М-,1>0 разложения
функции состояния объекта g(x. г) в сходящийся в ряд (2.493) по системе
собственных функций соответствующей задачи Штурма-Лиувилля.
Подобное представление объектов с распределенными параметрами
возможно и для более широкого круга моделей ОРП [7,8, 25, 32,41].
Ввиду сходимости указанных бесконечных рядов во многих случаях
можно получить удовлетворительное по точности описание объектов
управления с распределеннь»1и параметрами, учитьшая лишь достаточно
большое, но конечное число N уравнений в системе (2.499), (2.503), т.е.
пренебрегая остатком ряда, начиная с N + l-n гармоники. В таком случае
подобная модель объекта сводится, в соответствии с (2.499), (2.503), к ее
приближенному описанию в типичной для систем с сосредоточенньпли
параметрами форме
* '^^ _ (3.22)
ё„(ц„.о)== т^^п), п = 1,2....,;^,
которую, по существу, можно рассматривать и как результат применения
метода малого параметра, если в его роли фигурирует величина 1W,
обратная удерживаемому числу гармоник [38].
Напомним, что сосредоточенные граничнью управления и
возмущения непосредственно фигурируют в уравнениях (3.22) в составе функций
-'^(Р'л'О» а пространствено-временные внутренние воздействия - в форме
коэффициентов /„(ц^,/) их разложения в ряд по собственным функциям,
в частности, в виде А/ соответствующих сосредоточеннььх управлений,
если функция /, характеризующая эти воздействия, совпадает с
распределенным управлением w(x,0 (см. § 2.9, п.4).
Простота перехода к моделям вида (3.22) с любой требуемой
точностью; наличие аналитического решения каждого в отдельности уравнения
системы (3.22) с диагональной матрицей коэффициентов в замкнутой
форме (2.504); ясный содержательный смысл переменных состояния
б/|(Ц,,,0 и возможность последующего использования традиционного
аппарата теории управления ССП относятся к очевидным преимуществам
243
аппарата теории управления ССП относятся к очевидным преимуществам
метода модального описания ОРП, обусловившим его широкое
практическое применение [6, 7, 10, 11, 25, 32,41].
К видимым недостаткам метода, наряду с отмеченной выше общей
"опасностью" методов конечномерных приближений, относятся
трудности, связанные с определением минимального числа А^, необходимого для
получения допустимой ошибки моделирования в смысле, диктуемой
формулировкой каждой конкретной задачи управления ОРП, а также
сложности отбора возможнььх вариантов удерживаемых гармоник в рамках
заданного Л^, возникающие применительно к пространственно
многомерным ОРП, функщш состояния которых описываются кратными рядами
вида (2.493) [10].
В частности, зависимости получаемых погрешностей от N могут бьггь
оценены величиной потерь по стандартньгм квадратичным или
минимаксным функционалам качества в соответствующих задачах оптимизащги
относительно их значений при огггимальном управлении точной моделью
ОРП [10,38].
Возможен и ггростой перебор вариантов с последовательно
увеличивающимися значениями и последующей оценкой каждого из этих
вариантов по требуемьгм показателям.
При представлении ОРП (2.480) - (2.483) приближенной моделью
(3.22) его функция состояния Q^i^J) описывается суммой первых
членов разложения Q(x,t) в бесконечньгй ряд (2.493) по системе
собственных функций (р„(^„,х):
N _
QAM = j;^QnM4>n(\^„.x), (3.23)
Существует целый ряд различных методов (иногда называемых псев-
домодальными [41]), обобщающих этот способ аппроксимагщи путем
подобного представления Q^ixj) для объектов различного уровня
сложности в виде квазимодального разложения по некоторой заранее выбираемой
системе базисных функций ф„(х) {базис разложения), вообще говоря,
отличных от ф„(|1„,д:) [6, 25,41]^
ы
ОлМ^^йМп^х). (3.24)
в этом случае задача сводится к определению системы уравнений
типа (3.22) для описания переменных состояния Q^it), обьгчно, исходя из
' В некоторых случаях, подобно тому, как это отмечалось в § 2.9, первое
слагаемое суммы (3.24) может соответствовать /7 = 0.
244
условий минимизации в определенном смысле погрешностей
применяемой аппроксимации (3.24), и исследованию сходимости Q^(jf,0 к Q(xj)
при N ->со,
Формально в качестве ц>„{х) может фигурировать любая полная (и
чаще всего ортогональная) система функций^ с помоиц>ю линейной
комбинации конечного числа которых можно получить приближение б^(х,0
к Q(Xyt) с любой требуемой точностью. Однако практически имеет смысл
использовать систему ф„(х), отличную от собственных функций, лишь в
том случае, когда соответствующая краевая задача Штурма-Лиувилля
(например, вида (2.485), (2.487), (2.488)) не имеет аналитических
решений относительно ф„(х), или они оказываются слишком сложными; либо
предпочтительно из тех или иных соображений выбирать функции Фя(х)
в заданном априори классе (например, в вцде многочленов при сплайн-
аппроксимации или простейших тригонометрических функций), либо,
наконец, если объект описывается уравнениями, более сложными по
сравнению с типовым вцда (2.480).
Во многих ситуациях в качестве ф„(х) целесообразно рассматривать
систему собственных функций более простой задачи, "физически
родственной" исходной. л
В некоторых частных вариантах представление функции состояния
ОРП в форме разложения в бесконечный ряд типа (2.493) по
ортогональной системе функций (р„(х) с коэффициентами ^,7(0, непосредственно
определяемыми по общим соотношениям вида (2.484), приводит после
подстановки этого ряда в уравнение объекта к точному его описанию
бесконечной системой обыкновенных дифференциальных уравнений
относительно Q„(0, усложняемой, вообще говоря, по сравнению с (2.499),
недиагональной матрицей коэффициентов [25].
Первые N из этих уравнений и представляют собой искомую модель
поведения q„{t), n = l,N ,в вьфажений (3.24) для Qa(xJ)
(спектральная форма описания ОРП [25]).
В более общем случае уравнения для Q„(t) на.\одятся из условий
наименьшей погрешности приближенного моделирования функции
состояния ОРП в форме (3.24).
Конкретный выбор критериев качества аппроксимации (3.24) и
отвечающих им способов определения коэффициентов Q„ квазимодального
* Полнота и ортогональность рассматриваемой системы функций
соответствуют определениям, введенным в § 2.9 (п.2).
245
разложения приводят к различным модификациям псевдомодальных
методов.
Очень часто при этом используются условия
Ч/^(х)Я(х,ОЛ = 0,п = 1,Л^ (3.25)
минимизации средних взвешенных отклонений б^(х,г) от Q(x,t) при
точном выполнении граничных условий каждой из функций ф„(х)
применительно к краевой задаче (2.20) - (2.23)^.
Здесь
H{xJ) = L{Q^{x,t)yf(xJ), (3.26)
представляет собой отличную от нуля невязку, образуемую за счет
приближенного характера решения бл(^»0 уравнения объекта (2.20);
ij/;,(x), n = \,N - весовые функции, подлежапще предварительному
выбору, и L - дифференциальный оператор в (2.20).
После подстановки 6/1 О в форме (3.24) в вьфажение (3.26)
условия (3.25) сохраняют производные Q„(t) по времени в составе оператора
L и приводят к конечной системе N обыкновенных дифференциальных
уравнений (линейных или нелинейных, соответственно, для линейного
или нелинейного оператора L в (3.26)) относительно Q„(t), n=^\,N ,
подобной (3.22), которая и является искомым приближенным описанием
обьекта управления с распределенными параметрами.
При совпадении
4>„(х) = ф„(х), n = l,N; (3.27)
весовых функций с функциями базиса разложения (3.24) мы получаем
метод Гаперкиио. Можно показать, что если ф„(х) совпадают с
собственными функциями ф,,(|д,„,х) соответствующей линейной краевой
задачи, описывающей поведение ОРП, то метод Галеркина приводит к
модальному представлению объекта вида (3.22).
Выбор vi>,,(x) в форме 5-функций {метод коллокаций)
Ч/„(х) = 5(х-х„), /7 = 1,Л^, (3.28)
' Возможен вариант, когда заранее на выбор ф,,(д:) не накладьшаюпгся
довольно стеснительные требования по удовлетворению граничных условий (2.22) -
(2.2.1). В таком случае >равнения (3.25) дополняются уравнением для невязок на
границах [22].
246
преобразует условия (3.25) к равенствам
Я(л:„,0 = 0,,1 = 1,^ (3.29)
невязок нулю при задании Лоточек х„ в области D .
Возможны и другие способы выбора весовых функций [22, 41].
Сходимость наиболее распространенного на практике метода Галеркина
установлена для достаточно широкого класса объектов [33, 41]. Исследование
сходимости других методов квазимодальных разложений представляет
собой трудную и до конца нерешенную в общем случае задачу.
Пример 3.1 [41]. Пусть объект описывается нелинейным уравнением
теплопроводности
= (1 + +F(x,0,0 < x < 1, г > О (3.30)
с граничными условиями
mo=m£)=o. (3.31).
dt дх
Уравнение (3.30) отличается от (1.4) при П = О, а = 1; су = 1; Я = 1 линейной
зависимостью от температуры (к = const) коэффициента при д^О/дх^ . К такому
виду часто можно привести уравнение Фурье, описывающее в первом
приближении температурное поле нагреваемого тела с температурно зависимым
коэффициентом температуропроводности при управлении F(xj) по мощности внутренних
источников тепла.
Будем искать приближенное описание объекта (3.30), (3.31) сосредоточенной
системой по методу Галеркина.
В качестве базиса разложения ^„(х), n = \,N, приближенного решения
возьмем собственные функции Ф„(ц,,,х) "физически родственной" линейной задачи,
получающейся из (3.30), (3.31) при к = 0, которые бьши найдены ранее в виде
(2.539), (2.538) (см. пример 2.25):
<р„(^„,х)^\ (3.32)
[V2cos7c«jc,w = l,2,....
Тогда в соответствии с (3.24) искомое решение уравнений (3.30), (3.31)
аппроксимируется суммой
Ы 00
е^(^,О = Х^"(^)^'»(^-^) = ^о(О + л/2 20,,(г)со87^х, (3.33)
/1=0 л=1
заведомо удовлетворяющей при любых 6^(0 граничным условиям (3.31).
Подставляя Q^^ixj) в форме (3.33) в уравнение объекта (3.30), вычислим
невязку Hixj), согласно (3.26). Здесь
247
(;.,/))=L(e^(.r,/))= :^tei> -(1 +Лв^ )^!0ф^); = FCc,,). (3.34)
Ot дх"
Я(.м) = ^ -о + Ав, )^^ -F(../). (3.35)
Имеем в (3.35), согласно (3.32), (3.33):
%^=-|;в„(o-Vф„(ц„..x
а^9^(дг./) _
( N
(3.36)
Е
ш=0
Тогда
J7(jc,0 = -F(x,r)+
л=0
+ ;С Ve,, + 2;ёт(0 • Я2т2ф„(ц,,Х)
т=0
Ф«(Ц«>^)-
(3.37)
Теперь условия (3.25) при <i'„{x) = <p„{\i„,x) приводят к равенствам
H(x,t)(p,(ii,,x)dx =
w=0 4
Е
|И=0
Л = 0,(3.38)
5=0,М
Поскольку собственные функции (3.32) оргонормированы и удовлетворяют
соотношениям (2.492), эти равенства принимают следующий вид:
^Ч-Л^е, -#,(/) + *£ £в„в„(1Ш.)2|ф,(ц,.лс)<р„(ц„.дг)ф„(ц„.лг)Л = 0.
N N
II
я=0 т=0
(3.39)
5 = 0.ЛГ,
где переменные во времени величины
248
1
^ hms
= 2V?
Ф^(ц^,л:) Ф,,(ц„,х) <^^{\x„,x)dxr.
qos{%sx) qos^nnx) COS(7tW.t) dx =
0, еслиs = n=m или n-s :^m,n + s 1^т\ либо один из индексов 5,w,m
равен нулю, а остальные не равны друг другу;
1, если один из индексов s,n,m равен нулю, а другие одинаковы;
;j2/2, если n-s-m или w + 5 = /я.
Полученная система дифферегащальных уравнений (3.39) в форме
^ + 7cVe,-F,(0+*f; 2^„М'™)'/«™=0. ^ = OJV; (3.41)
,1=0 111=0
и представляет собой искомую модель сосредоточенной системы, приближенно
описывающей объект (3.30), (3.31) с распределенными параметрами. Она должна
бьпъ дополнена начальными условиями, соответствующими заданному
начальному температурному состоянию
e(x,0) = eo(x),0^jc^l. (3.42)
Полагая в соответствии с общим правилом (2.484) определения коэффищ1ен-
тов 0о„ разложения %{х) в бесконечный ряд вида (2.493) по ортогональной
системе {ф^(ц„,д:)}:
во^(')=2]ёопФп(м.>^); %n-]%ix)i^^{M„,x)dx (3.43)
я=0 О
и исходя из согласующихся с (3.33) равенств
N
е^(д^,0) = 2;ё„(0)ф„(ц„.дг) =2^0о„Ф„(ц,„дс) = %^{х), (3.44)
,1=0 л=0
получим отсюда для начальных условий системы (3.41):
^,(/) = |ядг,/)фДц„дг)^х, 5 = 0,1,2,... (3.40)
о
можно рассматривать как + 1 сосредоточенных управляющих воздействий,
аппроксимирующих в конструируемой модели распределенное управление
F(xj).
Для значений интегралов в (3.39) будем иметь, в силу (3.32), следующие
соотношения:
249
e,(0)=:eo„5=o,N.
Заметим, что система уравнении (3.41) является нелинейной за счет
последнего слагаемого в виде двойной суммы в левой части каждого из них, что является
естественным следствием нелинейности исходной модели ОРП. При к = 0 (т.е.
при переходе к линейной модели) система (3.41) сводится к модальному
представлению объекта в форме (3.22) для рассматриваемого частного случая
Л = 0, ^1=1.
§ 3.4. Разностные методы приближенного моделирования ОРП
Все известные разностные методы приближенного описания ОРП
используют различные способы пространственного, временного или
пространственно-временного квантования области изменения аргументов
входа и выхода рассматриваемого распределенного блока [4, 5, 6, 22, 23,
33,42,45].
Если вся указанная область представляется конечным множеством
точек (узлов) с заданными координатами, называемым разностной сеткой
(или просто сеткой), то выходная величина становится функцией
дискретного аргумента (сеточной функцией), а ее частные производные
приближенно вьфажаются через разности соответствующих значений
сеточной функции, т.е. через конечные разности. В результате
дифференциальные уравнения объекта и его граничные условия заменяются
соответствующей системой алгебраических уравнений, и мы получаем конечно-
разностную аппроксимацию модели ОРП, осуществляемую с точностью,
которая обычно возрастает с уменьшением расстояния между отдельными
точками (шаг сетки),
В случае, когда дискретизация используется лишь по
пространственным переменным, а время остается непрерывной величиной, производные
по времени от функций состояния объекта сохраняются в его исходных
уравнениях, а пространственные производные заменяются их конечно-
разностными приближениями. Описанная процедура приводит в итоге к
дифференциально-разностной аппроксимации исходной модели в
типичной для ССП форме описания объекта управления системой
обыкновенных дифференциальных уравнений относительно значений сеточной
функции в узлах пространственной сетки.
Подобный способ аппроксимации уравнения в частных производных
называется л^г/подол/ прямых.
Аппроксимирующие системы обьпсновенных дифференциальных или
алгебраических уравнений, которые находятся с помощью конечно-
разностного представления частных производных функции состояния
ОРП только по некоторым или всем переменным, получили название
разностных схем.
Метод конечных элементов [22, 23] использует дискретизацию
области изменения пространственных переменных путем разбиения с неко-
250
торой погрешностью на ряд неперекрывающихся подобластей простой
формы (элементов), в пределах каждого из которых функщгя состояния
объекта приближенно описывается однотипным образом (с точностью до
определяемых впоследствии весовых множителей) линейной комбинащ!-
ей конечного числа заранее выбранных базисных функций. Погрешность
приближения уменьшается с ростом числа элементов, уменьшением их
размеров и увеличением числа базисных функщий. Если при этом
применяется разностная аппроксимавд1я временных производных, то в итоге
конечно-элементная модель объекта опять сводится к системе
алгебраических уравнений относительно указанных весовых множителей,
отличающейся, однако, от системы уравнений конечно-разностной
аппроксимации.
В случае сохранения этих производных в дифференциальной форме
метод конечных элементов приводит, подобно методу прямых, к
приближенному описанию ОРП системой обыкновенных дифференциальных
уравнений, отличающейся от дифференциально-разностной модели
способом вычисления пространственных производных.
Наконец, метод граничных элементов [3] позволяет для целого ряда
пространственно многомерных объектов с распределенными параметрами
перейти к аппроксимирующей системе алгебраических уравнений,
используя дискретизацию лишь границы области изменения
пространственных переменных.
Таким образом, применение различных способов квантования
приводит к приближенным разностным моделям ОРП различного типа либо
непосредственно в типичном для ССП виде конечной системы обьпсно-
венных дифференциальных уравнений, либо в форме системы
алгебраических уравнений, к которой часто сводится и аппроксимируемая система
дифференциальных уравнений при необходимости ее численного
решения.
Применение любой из таких моделей всегда сопровождается
необходимостью исследования точности используемых аппроксимаций,
устойчивости вычислительной процедуры и сходимости конечномерных
приближений.
Ниже кратко рассматриваются лишь в основных чертах некоторые из
наиболее употребительных на практике разностных методов
приближенного моделирования ОРП,
1. Методы дифференциально-разностной и консчно-раз1ШСтной
аппроксимации
Разностная аппроксимация пространственных производных
Как и в предыдущих разделах, ограничимся далее рассмотрением ти-
251
повой модели ОРП, описываемой пространственно одномерным
уравнением второго порядка (2.480) при начальном и граничных условиях
(2.481)-(2.483).
Выполняя дискретизацию по пространственной переменной х,
разобьем отрезок ее изменения [xq^x^] на Л^равных интервалов при
^^£Llfo. (3 45)
точками
jcW =хо, х<>> =5 + Хо, х(2> =25 + Хо,..., х(^> =Х1, (3.46)
образующими равномерную пространственную сетку с шагом (рис.
3.2):
х^''>=л5 + Хо,л=0,Л^. (3.47)
Пользуясь разложением функции состояния объекта Q{xj) в ряд
Тейлора по переменной х в точке х^"^ в ввде, содержащем
дополнительный член в форме Лагранжа, получим для значений соответствующей
сеточной функции в точках х^""^^^ = х^"^ + 5 и х^""^^ = x^"^-s при л > 1,
считая, чгто Q(xj) дважды дифференцируема по х :
е(.'»",о=е(»'-'.о.ь»^^4''^"'""Г""'"-.
дх 2 дх
№'-".,).б(.'-'.,)-»г«^4^^е"^'",-"'''"; (3.49,
дх 2 дх
где Til ,Л2 ~ некоторые числа, такие, htoO^tii^UO^tij:^!.
Пренебрегая здесь при достаточно малом s членами с , найдем
соответствующие приближенные вьфажения для вычисления первых
производных через разности самой функции:
ли
* i I
Рис. 3.2. Пространственная сетка для одномерных моделей ОРП
' В принципе возможно использование и неравномерной сетки.
252
(3.50)
(3.51)
ag(^^"\o^g(^^^\o-e(^^"^^\o
ЙГ s
Первое из этих вьфажений называется правой разностной
производной (аппроксимация ^'разностью вперед''), а второе - левой разностной
производной (аппроксимация ''разностью назад").
Погрешности Е такого представления определяются пренебрегаемы-
ми членами разложения (3.48) и (3.49) и оцениваются, как следует ю
(3.48), (3.49), соотношениями
d^Qixj)
max
2 1;с("\х<"^»>1
Е^- max
2 [х<-^х(''>1
(3.52)
(3.53)
для правой и левой разностных производных соответственно.
Отсюда следует, что E = 0(s), т.е. рассматриваемые погрешности
имQЮт тот же порядок малости, что и s.
Если же записать разложения (3.48) и (3.49) в форме, содержащей
значения вторых производных в точке jc = х^"^ (предполагая трехкратную
дифференцируемость Qixj) тх):
дх 2 дх^
(3.54)
дх"
Oix^"-^0 = Oix^"\0-s^^^.^^Щ^-
дх 2 дх^
„2 я2/
(3.55)
5^g(y<">-Tl4y,0
"б дх'
0<Пз^иО<П4^1.
то более точное вьфажение для приближенного вычисления первой
производной, называемое центральной разностной производной
(аппроксимация "центральной разностью"), можно получить, вычитая равенство
(3.55) из (3.54) и пренебрегая дополнительными членами с третьей
производной:
253
(3.56)
dx 2s
Погрешность ее вычисления E = 0(s^) имеет уже порядок малости,
одинаковый с , и определяется, подобно (3.52), (3.53), соотношением
£ <— max
6 гг<"-')
d^Q{x,t)
(3.57)
Естественно определить теперь приближенное выражение для второй
производной 1^к отношение разности первых производных к шагу сетки.
Если при этом вычислить та!^ разность с помопц>ю правой и левой
разностных производных (3.50), (3.51), то будем иметь:
d^Q{x^"\t) ^ 1
g(x<''^'>,o-e(x<"\<) g(x<''>,o-e(x^"-'>,o
s s
g(x<"^'),o- 2e(x^">,o+e(x<"-'>,o
J (3.58)
Предполагая, что функция Q(x,l) имеет четвертую производную по х,
можно записать вместо разложений (3.54) и (3.55):
дх 2 дх^
6 дх^ 24 cbf"
(3.59)
(3.60)
Q^x^"-^o=Qix^"\o-s^^^^^^^^^-
дх 2 дх^
"т-р———
Складывая эти равенства и учитывая, что при этом взаимно
уничтожаются члены с первой и третьей производными, получим:
d^Q{x^"\t) _ g(x^"-^'),/)-2e(x<">,o+e(y<"-'>,/)
дх^
S
24
d'^0(x+x\iS,t) ^ d^Qjx-W)
дх'*
дх'
(3.61)
Сравнивая это выражение с (3.58), видим, что, подобно (3.57),
погрешность
254
\E\ < — max
(3.62)
вьписления второй производной по формуле (3.58) имеет порядок .
Найденные соотношения позволяют с удовлетворительной
точностью при достаточно малом шаге сетки вьфазить пространственные
производные функции состояния ОРП через разности значений
соответствующей сеточной функции Qix^"Kt).
Дифференциально-разностная аппроксимация уравнений ОРП
Используя приближенное представление пространственных
производных их разностными аналогами в уравнениях (2.480) - (2.483) объекта
и сохраняя там производные по времени в дифференциальной форме,
можно получить различные варианты аппроксимации исходной модели
ОРП соответствующей системой обьпсновенных дифференциальных
уравнений относительно Q{x^^\t).
Введем далее для краткости обозначения:
Q{x^"\t) = Qn(f\n^'0ji, (3.63)
и Офаничимся для простоты двумя типичными частными случаями
модели (2.480) - (2.483).
Рассмотрим сначала линейное одномерное уравнение
теплопроводности вида (2.10) с постоянными коэффициентами, получаемое из (2.480)
щи 0; Ах = 1; С{х) = а; B^ix) = Ci(x) s О .
Заменяя в этом уравнении для всех точек x^"\n = l,N-\, вторые
производные d^Q/dx^ приближенным выражением (3.58) и полагая в его
правой части
nx^"\tMx^"\t)) = Ut), (3.64)
получим следующую дифференциально-разностную аппроксимацию
модели данного объекта:
^ = ^(6^+1 -26, +е„.0+/.(О; /7 = IaTi ; (3.65)
в типичной для ССП виде системы обыкновенных дифференциальных
уравнений первого порядка, разрешенных относительно первой
производной (нормальная форма записи уравнений объекта; описание в
пространстве состояний). Характерной особенностью этой системы
является трехдиагональная матрица ее коэффициентов, содержащая в каждой
строке только три отличных от нуля элемента при любом значении N. За-
255
метим, что в систему (3.65) не в.\одят уравнения для Qo и (2дг, поскольку
для них не определены значения второй производной согласно (3.58). Эти
величины должны быть найдены с помощью граничных условий (2.482) -
(2.485).
Для первой краевой задачи при ао = а] = 1; Pq = Pi = о в (2.482),
(2.483) они непосредственно задаются, в соответствии с (3.46) и (3.63), на
границах отрезка (xo,xi] внешними воздействиями go(^wo(0) и
gi(^wi(0):
Qo(0 = goi(^"oiO); ^л^(0=gl(^Wl(0). (3.66)
Для второй краевой задачи (ао = aj = 0; Ро = Pi = 1) граничные
условия (2.482) - (2.483) (после замены в них первых производных правой и
левой разностями (3.50) и (3.51) соответственно для п = 0 и n^N)
принимают следующий вид:
^'^^=go(^^o(0); ^^ '^^-^ =gi(/,^i(0), (3.67)
s s
откуда следует, что
бо (О = а(0 - ^go(^"o(0); Qn{0 = Qn^\(0 + sg^itMO). (3.68)
Аналогичным образом для третьей краевой задачи при ао ^ О,
^1 '^О, Ро ^0, Pi 7^0 будем иметь вместо (3.67):
^oQo +—(а -ео) = Яо(^"о(0);
s
^Qn +-iQN -6jv-i)=giO,"i(0);
5
И следовательно:
QoiO = -
(3.69)
1
Po,
1
go('."o(o)-^a(o
s
s
gi(/,wi(0)+^eN-i(o
(3.70)
Подстановка вьфажений (3.66), (3.68) или (3.70) с заданнь»1и
внешними воздействиями go и gi на границах области изменения
пространственной переменной в первое и последнее уравнения системы (3.65)
приводит к ее замыканию относительно -1 значений сеточной функции
е,(/), п=ип.
Дополняя полученное описание объекта, в соответствии с (2.481),
начальными условиями
256
Q„iO) = Q^^\x^"b,n = \,N'^U (3.71)
окончательно получим приближенную модель объекта в форме
соответствующей задачи Коши.
Сосредоточенные управляющие воздействия wo(0 и t/j(/) на
границах x = xq и x = xi включаются в уравнения объекта через граничные
условия, согласно (3.66), (3.68) или (3.70), а управление u(x,t) в правой
части f{x,t,u(x,t)) уравнения (2.480) входит в состав f„{t) в (3.65). В
силу соотношения (3.64) распределенное управляющее воздействие
заменяется здесь сеточной функцией
u^"Hi) = u(x^"\t),n = \J7^h (3.72)
т.е. совокупностью сосредоточенных управлений u^"\t) на
рассматриваемой пространственной сетке.
Совершенно аналогично, для волнового уравнения вцда (2.6) (при
А = 1; Ai = 0; С(х) s v^; B^ix) = Ci(x) s О в (2.480)) получим
дифференциально-разностную модель объекта, описываемую системой обыкновенных
дифференциальных уравнений второго (в отличие от (3.65)) порядка
^^^iQn^i-^Qn +e.-i)+/«(0; п=йП- (3.73)
dr
замыкаемой граничными соотношениями (3.66), (3.68) или (3.70) и
дополняемой, в соответствии с (2.481), начальными условиями
QA0) = Qi'4x<"h^-QS\x^"hn^ljr\. (3.74)
Несомненным преимуществом описанного метода моделирования ОРП
(метод прямых), свидетельствующим о высокой степени его
универсальности, является возможность получения подобным образом
приближенного описания объекта не только для общего случая краевой задачи
(2.480) - (2.483), но и для более широкого класса ОРП, в том числе опи-
сьтаемьос пространственно многомерньп^1и, нелинейными и
нестационарными уравнениями в частных производных [5, 23, 33,42,45].
Конечно-разностная аппроксимация уравнений ОРП
Если дискретизация производится не только по пространственной, но
и по временной переменной, с последующим использованием разностных
аналогов, подобных (3.50), (3.51), (3.56) и (3.58) для всех частных
производных функции состояния объекта, то в итоге получаются конечно-
разностные аппроксимации исходной модели уже в форме системы ал-
257
гебраических уравнений относительно значений этой функции на
пространственно-временной сетке.
К подобному виду сводятся и дифференциально-разностные
описания типа (3.65) или (3.73) при разностном представлении производных по
времени в целях численного решения соответствующих задач Коши.
Пусть, в частности, наряду с (3.46), вводится аналогичным образом
равномерное квантование временной переменной на интервале [0,Г] э /:
/W=o,r<^)=A, г(^)=2А,...,/<^»>=Г;Л=-^,
(3.75)
где Ni - заданное число, и таким образом, образуется пространственно-
временная сетка на прямоугольнике [jcq <x^jci]x[0^/<r] изменения
аргументов функции Q{xJ) (рис. 3.3):
х^''^ = /15 + jco, /I = М^; t^'^^ =mh,m = . (3.76)
В зависимости от выбора комбинации узлов сетки (3.76) {шаблон
сетки\ используемой для разностного представления производных,
возможны различные схемы конечно-разностной аппроксимации.
Используем в дальнейшем, подобно (3.63), следуюпще обозначения:
/(х(«)./('"),|/(х(">,/<«))) = /;'; ,, = 0j7, /W=0^
Если теперь функции Qn+\{t\ Q„{t\ Qn-\(t), например, в правых
частях уравнений (3.65), заменить значениями сеточной функции при / =
от'
q:
о
q
er
xo x^"-'^x^"^3*-"*'^ X, xo x^"-'^x^"h^"*^ X,
a б
Рис. 3.3. Сеточные шаблоны для конечно-разностной аппроксимации одномерного
уравнения теплопроводности по явной {а) и неявной (б) схемам
258
(рассматривать их на слое г = а производную по времени определить
ее правой разностью по типу (3.50), т.е. если выбрать шаблон, согласно
рис. 3.3,а, то конечно-разностная модель объекта (3.65) принимает вид
следующей разностной схемы:
Если же разностные приближения вторых пространственных
производных рассматриваются на слое t = ^'"^^ с выбором шаблона, согласно
рис. 3.3,6, то получаем вместо (3.78) другую разностную схему:
Число Л^-1 уравнений систем (3.78) и (3.79) на каждом от-м слое
меньше числа + 1 неизвестных Q^, n = 0,N. Недостающие уравнения
задаются начальными (согласно (3.71)) и граничными (согласно (3.66),
(3.68) или (3.70)) условиями.
Нагфимер, для наиболее общего случая третьей 1фаевой задачи со
смешанными граничными условиями будем иметь в соответствии с (3.70)
и (3.71):
(3.80)
Л =•
«0-
Ро
go
(3.81)
s s
где k = m или k = m + l соответственно для схем (3.78) или (3.79), и
go*=go(^^*\«o('<*^));^f=g,(/^*\",(/<'^>)).
Управляющие воздействия wo(^^^^), wi(^^^^) и w(x^"\/^^^)
фигурируют в (3.78), (3.79), (3.81) в качестве аргументов сеточных значений
Для решения систем алгебраических уравнений (3.78), (3.80), (3.81)
или (3.79) - (3.81) применяют послойный алгоритм вычислений.
В схеме (3.78) на исходном слое w = 0 каждое из уравнений
содержит только одну неизвестную О],, поскольку остальные его члены
известны в силу начальных условий (3.80).
259
в итоге можно найти с учетом граничных условий (3.81) все
значения qIj, n = 0,N, сеточной функции на слое w = 1. По ним, полагая в
(3.78) /w = l, можно определить аналогичным образом Q^yn^Q.N, на
втором слое и т.д., вплоть до требуемого значения т = Ni \ Таким
образом, в схеме (3.78) каждое из уравнений содержит только одно
неизвестное значение сеточной функции на следующем слое, которое явно
вьфажается через ее известные значения на рассматриваемом слое. Поэтому
подобные разностные схемы называются явными.
Разностная схема (3.79) содержит в каждом из уравнений уже три
неизвестных значения сеточной функции на новом /w+1-м слое, и для
вычисления всех Qn^\ п = 0,М, требуется решать всю систему уравнений
(3.79) - (3.81) с трехдиагональной матрицей коэффициентов, где все
л = 0,Л/^, на т-м слое уже найдены на предьщущем этапе послойного
решения этой системы для всех начиная с m = О. Подобные
разностные схемы получили название неявных.
Аналогично (3.78), можно получить конечно-разностную модель
волнового уравнения (2.6), используя вьфажение вида (3.58) для
представления второй производной по времени ^ в (3.73). В частности,
dr
на шаблоне '*крест'\ показанном на рис. 3.4, система уравнений (3.73)
сводится к следующей разностной схеме:
л = 1,Л^-1;/п>1.
Эта схема отгносится к явным, так как позволяет с учетом конечно-
разностной аппроксимации начальных и граничных условий вьфазить
Q^^^ для всех л = О, через значения Q на двух предьщущих слоях.
Подобный послойный алгоритм реализуется начиная со второго слоя.
(/W = 2). Решения на нулевом и первом слоях могут быть навдены по
начальным данным известными способами [23].
Приведенные примеры далеко не исчерпывают все множество
возможных вариантов разностных схем, которые, в частности, могут быть
построены с помощью линейных комбинаций значений сеточной функции
в узлах шаблонов различного вида [23,45].
^ Все значения в (3.78) и (3.79) полагаются известными при заданной
функции /(д:,г,г/(х,0).
260
0
q:
cr'
Xo
Рис. 3.4. Сеточный шаблон для конечно-разностной
аппроксимации одномерного волнового уравнения
Подобные разновидности конечно-разностной аппроксимации на
сеточных шаблонах сложной формы, как правило, используются для
приближенного моделирования пространственно многомерных объектов с
распределеннь»1и параметрами.
Анализ качества приближений
При использовании дифференциально-разностных или конечно-
разностных аппроксимаций для описания ОРП принципиальное значение
приобретают вопросы качества получаемых при этом приближений,
главный из которых заключается в оценке степени близости решений
аппроксимирующих систем уравнений к точным решениям уравнений исходных
моделей, и, вообще, в оценке возможности путем измельчения
применяемых сеток при 5 О, -> со; А -> О, -> 00 получить приближенные
решения, сколь угодно близкие к точным.
Естественно, что практический интерес представляют только такие
разностные схемы, которые реализуют указанные возможности, т.е.
сходящиеся разностнью схемы.
Разностная схема назьшается сходящейся при заданном способе
стремления к нулю шагов сетки, если решения соответствующей этой
схеме аппроксимирующей системы обыкновенных дифференциальнььх
или алгебраических уравнений стремятся к точному решению исходной
краевой задачи для рассматриваемого ОРП.
В частности, применительно к дифференциально-разностным
моделям, сходимость решений типичных задач вида (3.65) и (3.73) к точным
261
решениям исходных уравнений типа (2.10) и (2.6) с учетом
соответствующих краевых условий, как правило, имеет место при некоторых,
обычно малостеснительных, ограничениях, накладываемых на свойства
функш1й /(х,/), Q{xj) и их производных, хотя доказательство этого
факта и получение оценок погрешностей метода прямых в общем случае
связаны со значительными трудностями [5].
Для достижения удовлетворительной точности дифференциально-
разностных приближений часто приходится использовать системы
дифференциальных уравнений (3.65) и (3.73) достаточно высокого порядка
(выбирать достаточно большое число Л^, соответствующее, согласно
(3.45), малому шагу s), что можно отнести к недостаткам метода прямых.
Для конечно-разностных моделей практически приемлемыми
оказываются только такие разностные схемы, для которых малые погрешности
промежуточных вычислений, неизбежно возникающие на различных
этапах численного решения алгебраических систем уравнений по послойным
алгоритмам, не приводят к большим искажениям окончательного
результата.
Так как ошибки вычислений можно рассматривать как возмущения
входных данных (функция/в правых частях уравнений, граничные и
начальные условия), подобными свойствами обладают так называемые
устойчивые разностные схемы, обеспечивающие непрерывную зависимость
решений системы разностных уравнений от этих данных. Устойчивость
здесь называют безусловной или условной в случае, когда указанная
непрерывность обеспечивается, соответственно, при любых соотношениях
между достаточно малыми шагами по различным переменным или только
при выполнении некоторььх дополнительных условий согласования между
ними.
Существует целый ряд методов исследования и признаков
устойчивости разностных схем по различным входным данным [23,45].
В частности, явная разностная схема (3.78) для уравнения
теплопроводности (2.10) оказывается условно устойчивой при выполнении
соотношения
А<^ (3.83)
2а
меаду шагамиh ns по времени и пространственной координате, а
неявная схема (3.79) - безусловно устойчива. Поэтому явные разностные
схемы вида (3.78) сравнительно редко используются на практике из-за
необходимости выбора, согласно (3.83), шага по времени слишком малой
величины порядка , что при заданном фиксированном времени процесса
Т значительно увеличивает суммарное число временных шагов и
общий требуемый объем вычислений.
Явная разностная схема "крест" (3.82) для волнового уравнения так-
262
же условно устойчива, но соответствующее условие согласования шагов
по обеим переменным
Л<~, (3.84)
v
требующее их выбора одного порядка малости, не препятствует
использованию этой схемы в практических расчетах.
Устойчивость конечно-разностной схемы является, как нетрудно
убедиться, необходимым условием ее сходимости.
Опуская строгие определения, можно сформулировать в
содержательном плане достаточное условие сходимости следующим образом.
Если
а) решение исходной краевой задачи, моделирующей ОРП,
существует;
б) разностная схема аппроксимирует эту задачу на данном решении,
т.е. невязка между левой и правой частями уравнений разностной схемы
при подстановке в них сеточной функщш точного решения стремится к
нулю при стремлении к нулю шагов сетки;
в) разностная схема корректна, т.е. решение разностной системы
уравнений существует и единственно при любых входных данных,
принадлежащих заданным классам функщ1й, и эта схшг устойчива, то
решение конечно-разностной системы уравнений сходится к точному
решению рассматриваемой краевой задачи.
Короче говоря, из аппроксимации и устойчивости конечно-
разностной схемы следует ее сходимость. Таким образом, сама по себе
малая погрешность аппроксимащяи, характеризующая различие между
уравнениями исходной модели и разностной схемы, не ведет
автоматически к сходимости, т.е. к малой погрешности разностного решения,
характеризующей различие между решениями этих уравнений. Для того чтобы
такое следствие действительно имело место, достаточно чтобы разностная
схема бьша еще и устойчивой. При этом чаще всего погрешность
приближения разностного решения к точному имеет одинаковый порядок с по-
грепгаостью аппроксимащ1и разностной схемой исходной модели.
Более подробное и строгое изложение рассматриваемых методов
построения дифференщ1ально-разностных и конечно-разностных описаний
ОРП, а также многочисленные примеры их применения можно найти в
спещ1альной литературе [5, 33,42,45].
2. Метод конечных элементов
Псевдомодальное представление функщ1и состояния ОРП
выражением для вида (3.24) основывается на использовании базиснььх функш1Й
^пМу одинаковых во всей области D изменения пространственной
переменной X, что за счет трудностей вычисления интегралов (3.25) в преде-
263
лах D часто не позволяет получить простую систему
аппроксимирующих уравнений типа (3.41), особенно в задачах, где D имеет сложную
форму.
Вычислительная процедура значительно упрощается
предварительным разбиением D на ряд непересекающихся элементов (подобластей) с
последующим приближенным представлением функции состояния в виде
суммы (3.24) составляющих, каждая из которых определяется вкладом
соответствующего элемента со "своей" базисной функцией.
Если при этом, во-первых, элементы имеют сравнительно простую
форму (для чего требуется лишь разбить область с необходимой
точностью на достаточно большое число таких элементов) и, во-вторых,
базисные функции определяются на них однотипным образом также в виде
простейших зависимостей (что всегда можно сделать при
удовлетворительном описании с их помощью функции состояния на элементе малого
размера), то интегралы (3.25) представляются простым суммированием
элементарно вычисляемых поэлементных вкладов.
Если, кроме того, используемая система базисных функций
оказывается полной, то, как правило, обеспечивается сходимость вычисляемых по
методу Галеркина значений к точному решению исходной задачи [33]
при стремлении к нулю размеров всех элементов.
Наконец, если определить базисные функции на каждом элементе
кусочным образом, полагая их равными нулю за пределами данного
элемента и непосредственно примыкающих к нему подобластей (т.е.
рассматривать их в качестве так назьгоаемых финитных функций с малым
носителем), то аппроксимирующие системы уравнений, получаемые,
например, по методу Галеркина, будут иметь ленточные матрицы их
коэффициентов с минимальным числом ненулевых элементов (подобно
трехдиагональным матрицам коэффициентов систем (3.65) и (3.73)
уравнений дифференциально-разностной аппроксимации), что существенно
облегчает процедуру их численного решения.
Описанный способ моделирования решений сложных краевых задач
называется методом конечных элементов, получившим широкое
применение на практике [22, 23]. Очевидно, что псевдомодальное
представление ОРП в виде (3.24) можно теперь рассматривать как наиболее "грубый"
частный случай такого метода лишь с одним элементом, совпадающим со
всей областью D . Таким образом, функция состояния ОРП при
использовании метода конечных элементов по-прежнему приближенно
описывается суммой вида (3.24), где теперь только под надо понимать число
таких элементов, а под cp„(^), n = l,Nих финитные базисные
функции.
В качестве ф„(х) здесь чаще всего выбираются кусочно-постоянные
либо кусочно-линейные системы функций с малым носителем [22, 33].
264
Ограничимся далее рассмотрением характерного примера с выбором
системы непрерывных кусочно-линейных финитных базисных функций
Сфуикции - крышки", "функции - домики"), нашедших широкое
применение на практике при построении разностных схем по методу конечных
элементов в пространственно-одномерных задачах. Разбивая отрезок
Ixq,Xi] в краевой задаче (2.480) - (2.483) на частей (элементов), введем
в рассмотрение в этих целях равномерную (для простоты)
пространственную сетку (3.45) - (3.47). Поставим в соответствие каждому ее узлу
х^"^ "свою" базисную функцию (i>„(x) следующим образом (рис. 3.5):
9„W =
х-х
,хе{х^"-^Кх^"Ъ;
, хе(х'-"\х^"*\ л = 1,Л'-1; (3.85)
О, xi(x<'"-^\x^"*\
9oW =
--,хе(хо,х^^^у, .
5 9//W =
О, хй{хо,хЩ,
.:сб(х<^-'),х,);
(3.86)
О, xi{x^^-^\xi).
Как видно из (3.85), (3.86) и рис. 3.5, каждая из функций ф„(х)
отлична от нуля лишь на интервале длиной, не превышающей 2s; все Ф„(х)
S
1
S
1 ^1
-I
J . .
1 °|
.___]!
\ 1 Ф,-,(х)-/
ViV
Ф,-,(*) I /
ДФ»<')Д
/
Рис. 3.5. Кусочно-линейные базисные функции в пространственно-одномерных разностных
схемах метода конечных элементов
265
определены одинаковым способом и, за исключением щ(х) и <pj\/(x),
отличаются друг от друга лишь разными носителями (интервалами
неравенства нулю). Система базисных функций (3.85), (3.86), как можно
показать [33], является полной (см. §2.9, п.2), что обеспечивает сходимость
Qa{xJ) в форме (3.24), (3.85), (3.86) с определением б,,(г) по методу
Галеркина, к точному решению Q{x,t) исходной задачи при s-^O.
Теперь искомые переменные Q„{t) в выражении типа (3.24)
N
e^(^.0 = X6«^^>*''W (3.87)
получают ясный "физический" смысл: каждая из них равна значению
QAixJ) в точке х=^х^"\ так как ф„(х^''^) = 1, (р,,(х^'"^) = 0 для всех
т^п, согласно (3.85), (3.86), т.е.
QAix^"\0 = Qn(0.n=^0,N. (3.88)
При этом, опять-таки в соответствии с (3.85), (3.86),
QAM-Qn-imn-\M^Qn(0^nM.^ (3.89)
l^n^N,
т.е. на любом из открытых промежутков {х^"''^\х^^^) функция Q^ixj)
фактически определяется лишь двумя слагаемыми суммы (3.87)
вследствие финитного характера базисных функций ^„{х).
Обозначая через часть дифференциального оператора в
уравнении (2.480) краевой задачи (2.480) - (2.483), зависящую только от
пространственных производных и самой функции состояния:
C(x)^^B,ix)^^C,{x)Q
дх^ дх
(3.90)
запишем это уравнение в виде
LiQixj)) = л ^ + ^1 ^ + LAQ(xj)) = /(x,/,t/(x,/)):
Xq<X<Xi, / >0.
Теперь невязка (3.26) с подстановкой (3.87), (3.91) определяется
следующим вьфажением:
266
H(x,t) = LiQA)-f =
N
-I
w=0
dt
N
(3.92)
/7=0
откуда условия (3.25) ее минимизации для случая (3.27), т.е. по методу
Галеркина, приводят в итоге к следующей дифференциально-разностной
форме коиечиоэлемеитиой системы уравнений типа (3.22) относительно
Qnit) для приближенного моделирования рассматриваемого объекта:
N
л=0
dt'
dt
N
n=0
(3.93)
m = 0,N;
где
= J4>n,M^n(x)dr, = j^„ix)LA4>„(x))dx;
Xq Xq
fmiO = jfix,tMxJ))^rnM)dx,
(3.94)
^0
тпт
Здесь интегралы /"'"и 7^'" (при постоянных коэффициентах С, и Ci в
(3.90)) вьписляются элементарным образом в силу соотношений (3.85),
(3.86), причем функции ф„(х) почти ортогональны, т.е. I"'" отличен от
нуля только для "соседних" функций и определяется вкладом в интеграл
на всем интервале [xo,a:i] лишь соответствующих соседних элементов:
(x)(p„ix)dx =
IО при\т-п\>\\
ф О при
т-п
<1.
(3.95)
В результате все суммы в первом слагаемом левой части в каждом из
уравнений (3.93) (и во втором слагаемом при постоянных коэффициентах
оператора (3.90)) содержат не более трех составляющих, определяя
ленточный .характер матрицы коэффициентов системы (3.93).
Граничные условия могут бьггь при этом учтены либо
непосредственным заданием Qq м Qf^ (в сл>^1ае первой краевой задачи), либо
дополнением условий (3.25) подобными уравнениями для невязок на
границах ДГ= JCq и ДГ = Х| [22].
В соответствии с (3.85) - (3.87) начальные условия (2.481) для сис-
267
темы (3.93) задаются в виде:
e.(0) = gf(xW);^ = e^^)(x<'')).
(3.96)
В целях исключения особенностей при вычислении интегралов /J*'" в
(3.93) желательно обеспечить существование кусочно-непрерывных
производных высшего (обычно второго) порядка в составе от функций
ц>п{х). Поскольку это условие не соблюдается для вторых производных
кусочно-линейных функций (3.85), (3.86), интегралы путем интегри-
рования по частям приводятся к виду, не содержащему cl^^„{x)/dx^ [22].
С наибольшим эффектом метод конечных элементов применяется в
пространственно многомерных краевых задачах, где в роли элементов
используются (вместо отрезков в одномерном случае) фигуры и тела
различной, обычно правильной (канонической) формы [20, 22].
Чаще всего, например, в двумерных задачах применяется разбиение
области изменения пространственных координат x,yeD на
треугольники, все вершины которых лежат в узлах соответствующей
пространственной сетки и не лежат на сторонах других треугольников (рис. 3.6).
В качестве базисных функций здесь рассматриваются непрерывные
финитные линейные функции ^^J^\x,y), которые, подобно ф(х) в (3.85),
во-первых, равны 1 в/?-музле {х^"\у^"Ъ сетки;
во-вторых, равны нулю во всех остальных узлах сетки;
в-третьих, меняются по линейному закону
(3.97)
„(«)
S
/к
т д
X
Рис. 3.6. Разбиение на треугольные конечные элементы заданной
области на плоскости пространственных координат
268
в пределах любого ^-го треугольника, содержащего узел (х^^^^"^) в
качестве его вершины, и
в-четвертых, равны нулю в пределах всех других треугольников, не
содержащих вершину (х^'^\у^'*^).
Коэффициенты a^^\bj/^\c^^^ дня любого к-го элемента с одной
вершиной (х^''\/"^) и двумя другими {{х^"'\у^'"ЪЛх^'\у^'Ь) (рис. 3.7)
определяются, исходя из первых двух условий. В итоге функция
состояния QA(x,y,t) определяется, подобно (3.89), взвешенной суммой
QA(x.y>0-Qnm^n\x,y)-^QAt)4^^^^^ (3.98)
в пределах каждого к-то треугольника с вершинами в л-м, s-m и т-м узлах.
При этом для любого кип
QAix^''\/"\n-Qn(0. (3.99)
т.е., как и в одномерном случае, искомые функции Q(t) представляют*
собой искомую аппроксимацию функции состояния объекта в я-м узле
пространственной сетки.
Последующий переход к системе дифференциальных уравнений
относительно Q„ типа (3.93) производится по общим правилам
псевдомодальных методов, причем пространственные интегралы в (3.25),
сводимые, подобно (3.94), к интегрированию линейных зависимостей ввда
(3.97) или их произведений в пределах отдельных подобластей
треугольной формы, вьписляются элементарным образом.
О
п
./ф
1
1
1 1
1 U-
1
X
-1
y(s) j^{n) у^{т)
Рис. 3.7. Треугольный конечный элемент на плоскости
пространственных координат
269
§ 3.5. Методы разложения передаточных функций
в бесконечные ряды
Превде всего напомним, что при использовании метода конечных
интегральных преобразований (§ 2.9) точные вьфажения для передаточ-
HbLX функций lV{x,^,p) по стандартизирующему входу для типового
ОРП, описываемого краевой задачей (2.480) - (2.483), изначально
получаются безо всяких дополнительных преобразований в форме разложения
(2.524) в бесконечный ряд по собственнь»! функциям, которое
соответствует представлению (2.525) - (2.527) объекта в виде параллельного
соединения бесконечного числа типовых динамических звеньев первого
(при .4 = О) или второго порядка:
lVix^.p)-f^ /"^""'^^ к,{хЛ) = га) Ф„(Ця.^)Ф«(Ип.^). (3.100)
Коэффициенты передачи к„(х,^) этих звеньев параметрически
зависят от пространственных координат л: и ^ выхода и входа распределенного
блока. Учет здесь только конечного числа N членов этого ряда сразу
приводит к искомому дробно-рациональному прибли}1^нию для W^(x,^,/>),
очевидно, полностью эквивалентному конечномерному модальному
описанию объекта системой уравнений (3.22)\
Поскольку выход Q{x,p) линейного объекта связывается со
стандартизирующим распределенным входом w(4,p) интегральньп^
соотношением (2.155), (2.157):
^1
Q(x.P)= \ЩхЛ,Р)^(^,р)^, (3.101)
то, вообще говоря, следует искать аппроксимацию lV{x,^,p) конечным
числом членов ряда (3.100), удовлетворительную по точности при всех
^е[дго,Х|] даже для 4-блоков с фиксированной вы.ходной координатой
X = X**, что может потребовать выбора достаточно большой величины.
Для х-блоков с управлением по граничным условиям второго или
третьего рода, в частности, с управлением u^ip), сосредоточенным в
точке Jc = jci, соответствующая передаточная функция объекта ^х(^уР)
этому входу принимает вид (2.164):
* Аналогичное представление передатошшх фу1пс1хий возможно и при
псевдомодальном представлении объекта типа (3.24) [25].
270
^'х(х.р) = §'ЩхЛ,Р±^^ =f (3,102)
Pi ^" » Pi
и, следовательно, с учетом (3.100) получим представление объекта в
форме параллельного соединения типовых динамических звеньев не выше
второго порядка с коэффициентами передачи, зависяицсми отх:
^х(^>Р) = Е, ^/У^ ^;/:„(х,х,) = ^Кх1)фЛЦ.>^1)фЛ^^.,^)> (3-^03)
^хЛр^+АхР^\х1 Pi
а вместо (3.101) будем иметь в соответствии с (2.161)
Q(x.p) = ^x(x.p)ui{p). (3.104)
Таким образом, в данном случае координата ^ в (3.100) принимает
фиксированное значение, равное х^, и достаточно найти приближение для
^xiXyP) в форме конечного числа членов ряда (3.103) в отдельности для
каждого из требуемых значений пространственной координаты выхода х
(или для определенных интервалов ее изменения). Очень часто здесь,
можно ограничиться одним или двумя членами этого ряда^.
Задача аппроксимации передаточных функций для х-блоков вида
(3.102) имеет достаточно простые и эффективные решения, нашедшие
применение в инженерной практике, и мы в дальнейшем ограничимся ее
рассмопгрением.
Разложения трансцендентных выражений вида (2.355) - (2.357) для
передаточных функций распределенных х-блоков (или их различных
составляющих по отдельности) в сходящиеся рят Тейлора позволяют
получить дфобно-рациональные приближения этих ПФ, учитывая лишь
первые N членов данного ряда (как правило, не более трех).
Если, в частности, IV^ix, р) представляется в характерной форме
^х^^>Р)^^гТ^. (3.105)
Ф2(Х,/7)
отношения двух трансцендентных функций Ф1(х,р) и ^lix.p)
аргумента "р", то общее выражение для дробно-рационального приближения
W^{x,p) при разложении Ф] и Фг по отдельности в ряд Тейлора по
степеням "р", принимает следующий типичный вид:
^ Отметим, что при сосредоточенном enyhtpeHueM управлении и{р)
передаточная функция х-блока Wj^{x,p) имеет, вместо (3.102), вид (2.163), подобный
(3.101), и здесь проблема поиска однотипной аппроксимации W{x,%,p) во всем
диапазоне изменения 4 не снимается.
271
dp"
^ 1 д''Ф2(х,0) „
(3.106)
Здесь
с"Ф(х,0)
dp"
д"Ф(х,р)
dp"
л=0
p->0
dp""
= Ф(^,0).
Поскольку коэффициенты ряда Тейлора представляют собой
производные передаточной функции в точке разложения (обычно = О ),
погрешность такого приближения отличается неравномерностью ее
распределения в области изменения комплексного аргумента и оказывается
минимальной в окрестности именно этой точки.
Разложение передаточных функций ОРП в ряды по изображениям
различных ортогональных функций с коэффициентами, определяемыми
интегральными оценками приближаемых зависимостей, позволяет в ряде
случаев получить дробно-рациональные приближения с более равномер-
нъш распределением погрешности и, следовательно, более точно агшрок-
симир>тощие динамические характеристики объекта.
В частности, на практике наиши применение представления ПФ в
форме их разложений в ряды по степеням другой аналитической функции
©(р) (ряды Бурмана-Лагранжа) следующего вида [15,16, 50]:
/1=0
где коэффициенты d„ вьггисляются по формуле
(3.107)
rf,(jc) = l lim
П\ р-^Ро dp"
1Ух(х,Р)(^Шр-'РоГ^^
Ыр)Г'
и ро "Уль функции ©(р) .
в частности, для описания ограниченнььх и монотонных переходных
функций, характерных для целого ряда типичных ОРП, здесь можно
принять
р+р
(3.108)
где р -положительноечисло, определяемое равенством [15,50]
272
dp
В таком случае соответствующая переходная функция объекта
Л(дг,/) представляется ее разложением в бесконечный ряд по
ортогональным полиномам Лагерра [27]
L„(/0 = H)t(-ir ^f^^ :
k(xj) = Нх,со) + е-Р 'J^d,L„^,{pt). (3.110)
,1=1
При выборе сй(р), согласно (3.108), практически приемлемые дробно-
рациональные приближения к точным выражениям Wj^{x,p) часто
получаются для указанного класса переходных функций объекта уже при
учете не более трех первых членов ряда (3.107) [15,50].
Преимуществом метода разложения ПФ в бесконечные ряды
является его простота и принципиальная возможность получения сколь угодно
большой точности дробно-рациональной аппроксимации. Очевидным
недостатком метода является отсутствие каких-либо общих правил
предварительного выбора минимального числа N членов ряда,
обеспечивающего допустимую ошибку приближения. Как правило, оценка получаемой
точности производится для каждого фиксированного N по абсолютным
отклонениям приближаемой и аппроксимирующей переходных функций
объекта на всем протяжении переходного процесса или соответствующих
частотных характеристик в области существенных частот. Число
учитываемых членов ряда последовательно увеличивается до тех пор, пока эти
отклонения не становятся достаточно малыми с точки зрения конкретных
требований, предъявляемых к данному объекту.
Пример 3.2. Рассмотрим задачу дробно-рационального приближения
трансцендентной передаточной функции (2.387) для температурного поля Э(дг,/)
массивной пластины толщиной R, нагреваемой в печи с конвективным
теплообменом, относительно сосредоточенного воздействия по температуре O/jC/)
греющей среды:
«.i'.p>ff-- ^ ^,г..4.г,.^.(з.М1,
Передаточная функция рассматриваемого объекта по каналу воздействия
273
Щ(р) = ^^п(<Р) " коэффициент теплопередачи) может быть представлена в
форме разложения в бесконечный ряд (3.103), где в данном случае дг, = Л .
В соответствии с (3.102) и (2.558) получим тогда следующее выражение для
fVj,(x,p) вместо (3.111):
^Г,(.,р) = |м2 = ^^(,,Я,я) =
^п(Р) Pi
2л,, cos л,,
-cos
^Лп+81ПЛиС08Л«
aR
п-\
У2
1
(3.112)
♦ R Т
где учтено, что Т*-—2" = '^-
Поскольку, согласно уравнению (2.549) для определения собственных чисел
созЛи зшЛи „ olR
Л„,здесь -^—^ и J5i = —,то
jF,(x,p) = Bf^ = y4^;D„(x)= созл„4- (З.МЗ)
Ыр) Л„+«пл,.со8Л„ '"R
Ограничиваясь здесь конечным числом N членов ряда, получим дробно-
рациональное приближение W^{x,p) ддя ^^(дг,/') в форме суммы передаточных
функций типовых апериодических звеньев с постоянными времени и
коэффициентами передачи D„(x), параметрически зависящими от пространственной
координаты х-
N
(3.114)
Точность приближения увеличивается с ростом N.
Согласно содержательному определению И^х(х,р), в рассматриваемой задаче
что так же формально следует из (3.111).
Тогда в силу (3.113) имеем
|;d„(x)=i.
(3.115)
(3.116)
«=|
в таком случае ряд (3.113) преобразуется к виду
274
(3.117)
,1=1
1--
отличающемуся большей скоростью сходимости, и вместо (3.114) удобнее
воспользоваться аппроксимацией
Т„р+1
(3.118)
обеспечивающей большую точность приближения к fP^(jt,/») при том же JV.
В частности, первое приближение для N = 1 приводит здесь к выражению
7, р + 1
(3.119)
Раскладывая гиперболические функции в числителе и знаменателе
выражения (ЗЛИ) в ряд Тейлора по степеням их аргументов, получим на основании
(3.105), (3.106) другую форму представления lV^(x,p) в виде отношения
бесконечных рядов:
24
720
+...
I 2 } Bi 6 120
(3.120)
позволяющую получить дробно-рациональную аппроксимацию с требуемой
точностью.
Ограничиваясь здесь учетом только членов, содержащих V** ^ первой
степени, будем иметь простейшее дробно-рациональное приближение lV*^(x,p) в виде
типового динамического звена первого порядка:
1 +
Т,р
2+5/
l+vTj^p" 2Bi
(3.121)
отличающегося от (3.119) только значениями коэффициентов.
Анализ точности получаемых приближений может бьпъ выполнен, как это
часто делается в инженерной практике, путем сравнения соответствующих
переходных функций, легко получаемых по известным дробно-рациональным
выражениям для ПФ, соответственно, (3.117), (3.119) и (3.121), с помощью
стандартных правил обратного преобразования Лапласа:
275
.P
P
-1
p
= 1-А(дс)в .
(3.123)
A„(x,0 = L-
-1
IP
=1-
1-^
2vT,
RJ
(3.124)
Некоторые qiaBHmenbme результаты расчета переходных функций по
формулам (3.122) - (3.124) для В/ = 3,0 с вычислением г\„ как корней уравнения
(2.549) приведены в табл. 3.1 и на рис. 3.8.
Точные значения Axix^t) по (3.122) рассчитывались с погрешностью, не
превышающей 5-10"^ [31].
Таблица 3.1.
4Tr
xIR^O
Л,(х./)
л;,(д:,0
Л,(дг,/)
Л„(х./)
Л*„(х,0
0.00
0,0000
0.4530
0.6000
0,0000
-0,2102
0
0.05
0,4625
0,5830
0.6230
0,0006
-0.1284
0,0582
0.10
0,5580
0,61100
0.6452
0,0163
-0,0529
0,1131
0.20
0,6512
0,6620
0,6854
0,1050
0.0920
0,2134
0,30
0,7053
0,7100
0.7202
0Д137
0,2100
0,3023
0,40
0,7269
0,7500
0,7525
0,3156
0,3160
0,3812
0.50
0,7803
0,7800
0.7826
0,4057
0,4060
0,4512
1,00
0.8922
0,8910
0,8800
0.7081
0,7080
0,6988
1.50
0.9470
0,9470
0,9340
0,8566
0.8566
0,8347
2,00
0,9739
0.9740
0,9637
0.9295
0,9295
0,9093
00
1,0000
1,0000
1,0000
1,0000
1.0000
1,0000
Здесь для рассматриваемого значения Bi^3fl конкретные выражения для
^х\(х,0 и A^|(jc,0 принимают следующий вид при т]| =1,1925:
Л„(Л,0 = 1-0.447е ;
(3.125)
-1.422—
Л„(0.0 = 1-1.2102в ;
-1.2-^
Л;,(Л,0 = 1-0.4е ^« ;
(3.126)
(3.127)
Л;,(0,г) = 1-е (3.128)
Как следует из приведенных данных, аппроксимация (3.119) во многих
случаях может считаться приемлемой в инженерных расчетах для дг/Л = 1 при
погрешности по переходным функциям для //7)^ ^ 0,1, не превышающей 9,4%.
Значительно большие ошибки имеют место, если выражение (3.119) используется для
x/R = 0 . Аппроксимация (3.121) оказывается менее точной как при дг/Л = 1, так и
для x/R = 0.
При необходимости уменьшения погрешностей аппроксимации следует учи-
тьшать большее число членов бесконечных рядов в (3.118) и (3.120).
§ 3.6. Методы определения параметров дробно-рациональных
приближений передаточных функций заданной структуры
В инженерной практике значительное распространение получил
способ моделирования линейных х-блоков ОРП путем поиска их ПФ в
априори заданном классе типовых дробно-рациональных приближений
фиксированной структуры, отвечающей заведомо известным основным
физическим закономерностям исследуемых процессов. В такой ситуации
искомые приближения заранее определены с точностью до коэффициентов
аппроксимирующих вьфажений, и проблема сводится к их выбору из
условий минимизации неизбежно возникающих ошибок такого
представления объекта.
В частности, для х-блоков с офаниченными переходньпли
функциями в целом ряде случаев с удовлетворительной для инженерных целей
точностью применяется описание ^Г^(х,р) в одной из следующих
типовых форм [31]:
W,{x,p)=!^^^£^ ; (3.129)
\+f^T„{x)p + l
^.„,p,^2i<M£±l), (3.130,
/7=1
CO значениями времени запаздывания Xj и постоянных времени Г, Т„,
подлежащими определению в каждом конкретном случае.
Передаточная функция чаще выбирается в виде (3.130) или (3.129)
при Хз > О, если объект, соответственно, обладает или не обладает
"форсирующими" свойствами.^ Уже первые приближения, согласно (3.129),
(3.130) при = 1, использующие простейшие динамические модели
M'xim T^ix)p+\
fVxix,P)_ Пх)р + \
И^(^,0) r,(x)p + l'
' В некоторых случаях выбор И''^(х,р) в форме (3.130) для N > 1 дает
хорошие результаты и для "гачерцио1шых" объектов, не обладающих форсирующими
свойствами.
278
где второе вьфажение совпадает по структуре с W^i(Jf,p) и W^iix.p) в
(3.119), (3.121), во многих случаях оказываются удовлетворительными по
точности аппроксимации.
Для определения Хз(х), Г(х), Т„{х) могут быть использованы
различные способы. Один из распространенных приемов заключается в
решении относительно искомых параметров систем уравнений, образуемых
приравниванием коэффициентов разложения в ряд Тейлора по степеням
комплексной переменной точного и аппроксимирующего выражений для
ПФ объекта (31J.
В частности, такие разложения в точке р = 0 для передаточных
функций (3.131) и (3.132) принимают следующий ввд':
е-1"Лх) «
— = l + Yi-lfM„{x)p"; (3.133)
Г, (х)р+1 ;^
М„(х) = Т{Чх) +Ti"-\x)b^ + Tr\x)i^+.
...H-71(x)im^llW.
' (я-1)! я!
(3.134)
^^^>^-^^ ^1 + Т(-1Гм*„{х)р" ■ (3.135)
Mlix) = {Ti(x)-nx))Tr4x). (3.136)
Для определения двух неизвестных параметров x^ix) и 7|(дг) или
Т(х) и Щх) ограничимся учетом лишь двух членов рядов (3.133) и
(3.135), полагая
= l-Mi(x)p+M2(x)p^, (3.137)
7\ {х)р + 1
М,(дг) = Г,(дг) + х,(х)- Kijix) = 7\2(х)+71(дг)т,(х) +^ (3.138)
IS^UP±L = 1-м\{х)рШ1{х)р-'; (3.139)
Г, (х)р + 1
' Выражения (3.133) и (3.134) получены прямым делением числителя на
знаменатель (после разложения экспоненты в ряд Тейлора в случае (3.133)) по
правилу деления многочленов.
279
Ml (jc) = T^ix) - T(x); M2(x) = Ц(х){Т^{х) - Г(х)). (3.140)
Выполним разложение в ряд Тейлора точного вьфажения для
передаточной функции объекта
00
^^ = У(-1)"8„{х)р" =l-Si{x)p + S2(x)p^-... (3.141)
'д'ЧУ,{х,р)
и=0
lit,
п\ IVAxfi)
dp"
(3.142)
Jp->0
и приравняем коэффициенты S\(x) и S2{x) в (3.141), соответственно,
значениям Mi{x) и М2{х) или м1(х) и М2{х) в соотношениях (3.138)
или (3.140) при аппроксимациях (3.137) или (3.139).
Разрешая полученные после такой замены системы квадратных
уравнений (3.138) или (3.140) относительно искомых параметров, будем иметь
в случае (3.131):
Г,(х) = ^252(х)-S?(x); х,{х) = 5i(x)-д/252(х)-Si^jc) >О (3.143)
и для варианта (3.132):
Г,«.|^;Г« = -.,<.,.|И. ,,,44,
Здесь Si{x) и S2(x) при заданном точном выражении для IV^^x.p)
рассчитываются по формуле (3.142). Конкретный выбор подходящей
аппроксимации из вариантов (3.131) и (3.132) может быть сделан по знакам
получаемых расчетных значений и Г в (3.143) и (3.144). Если здесь
>0 и Г <0, то следует использовать приближение вида (3.131), а в
"обратном" случае <0, Г>0 - вариант (3.132). Для некоторой
координаты х = х„р в разложении (3.142), определяемой равенством
S2(Xnp) = Sh-^np)^ (3.145)
получаем в соответствии с (3.143), (3.144)
Ь(Хпр) = Пхпр) = 0, (3.146)
и, следовательно, в этой точке оба приближения (3.131) и (3.132) сводятся
к передаточной функции обычного апериодического звена первого
порядка с постоянной времени 7\(x„p) без запаздывания и форсирования:
1 . (3.147)
WAx„pfi) Ых„р)р + 1
280
Данная точка, называемая промежуточным слоем [31], разделяет
область изменения пространственной координаты на две части,
характеризующиеся наличием запаздывания в структуре объекта вида (3.131) (при
Xq ^ X < х„р) или форсирующих свойств при псрсдаточной функщ1и вида
(3.132) (при х^р <x<xi). В некоторых случаях характеристики объекта
для промежуточного слоя являются определяющими в задачах
управления ОРП [31].
Аналогичным образом могут быть навдены параметры
аппроксимирующих передаточных функций ввда (3.129) или (3.130) и в случаях
Л^>1.
Можно показать, что для х-блоков с ограниченными переходными
функциями Л(х,/) коэффициенты разложения S^ix) в (3.141)
представляют собой для каждого фиксированного значения х интегральные оценки
переходного процесса, определяемые вьфажениями [15, 16]:
00
1
Si(x) = /,(x) =
Д(х,оо)-Л(дг,/)1Л;
(3.148)
о
52(х) = /2(х) = f [Si{x)-Sx(x,t)\dt;
(3.149)
S„ix) = l„(x) =
[S„_i(x)-S„_i(x,0]rf/;
(3.150)
где
5 (jc,/) = f U(x,00)-Л(х,/)]dt;
Sg(xj)=\ [s^M'S^.iixJ)]dt, q>2.
(3.151)
Оценка /i(x), согласно (3.148), обобщает понятие постоянной
времени Т простейшего инерционного звена (которой она оказывается
равной при А(х,г) = И^д.(х,0)(1-е.хр(-//Г)) и поэтому назьгоается
инерционностью процесса (инерционностью l-ao порядка) [15]. Остальные оценки
/„(х), л > 1, аналогичные, согласно (3.150), по геометрическому смыслу
/l(x), получили название инерционностей высших порядков.
Докажем справедливость соотношений (3.148) - (3.150). Перейдем в
281
(3.148) к юображениям Л(дг,/7), учитывая, что Л(х,оо) - постоянная во
времени величина, равная IV^ixfi) по теореме операционного исчисления
о предельных значениях [18]. Тогда
Л(х,оо) = = , Л(х,р) = ,
Р Р Р
и будем иметь, согласно (3.148) и (3.142), используя вьфажение (2.339)
для преобразования Лапласа:
|[Л(х,оо)-Л(х,о1е-^'Л
.0
Л(х) =
1
lim
= — -lim Л(х,оо)-Л(х,р)]= ^— lim
W^{x,0)-WAx,p)
1
'dw^(x,py
W^ixfi)
dp
= Sdx).
(3.152)
p-»0
Аналогично, применяя правило Лопиталя для раскрытия
неопределенности типа ^, получим для /2(х) в соответствии с (3.148), (3.149),
(3.151) и (3.142) (символом L здесь обозначается преобразование
Лапласа):
00
/2(x)=lim f [Si{x)-Siixj)]e-P'dt\^
I о
= lim{L[Si(x)-5i(x,/) ] }=(используя изображение константы (во вре-
мени) Si(x) по (3.152) и интеграла Syix^t) по (3.151)) =
1
1
( dW^ixfi)
Л(х,оо)-Л(х,р)
W^ixfi)
[ Ф .
^ J
1
dW^{x,0)\
>Г^(х,0)-»',(х,я)"
Р
. Ф J
р'
1
Р
Г 5Ж,(х,0)]
1 Ф ;
-W^(x,0) + W^{x,p)
Р'
=(правило Лопиталя)=
282
1
dp
dp
-W^(x,0) + W^(x,p)
p-»0
1
bW^ix,p) ЭЖ(х.О)
^ dp.
2p
1 1
2! »',(x,0)
Продолжая подобным образом, найдем для всех л ^ 1:
4W =
1
(-1)"
п\ W^{xSi)
d"W^ix,p)
dp"
чго и утверждают равенства (3.150).
Из сказанного следует, что описанный способ определения
параметров передаточных функций заданной структуры минимизирует
погрешности аппроксимации, оцениваемые по разностям учитьюаемых инерцион-
ностей переходного процесса.
Инерционности 1„(х) и их зависимости от определяющих
параметров объекта могут рассматриваться как самостоятельные содержательные
характеристики ОРП, непосредственно вычисляемые на основании
интегральных соотношений (3.148) - (3.150) даже при отсутствии точных
выражений для передаточных функций, в частности, по экспериментальным
данным соответствующих переходных процессов [15,16].
Пример 3.3 [31 ]. Рассмотрим задачу аппроксимации описанным способом
передаточной функции (3.111) (см. пример 3.2).
Имея в виду, что в данном случае ^^,^(^,0) = 1, О < дг < , и используя
представление lV^{x,p) в форме (3.120), получим разложение lV^(x,p) в ряд вида
(3.141) прямым делением числигеля на знаменатель дроби (3.120) по правилу
деления многочленов.
В результате будем иметь следующие выражения для коэффициентов Si(x)
и :
(3.153)
283
j2
24 245/
(3.154)
где коэффициент v определяется значением критерия BU согласно (3.121).
Подставляя эти выражения в формулы (3.143) и (3.144), найдем следующие
явные зависимости параметров аппроксимаций (3.131) и (3.132) от постоянной
времени Tj^=R^/a , значения Bi и относительной координаты x/R:
а) для передаточной функции (3.131):
2 1 1
1-
JC ^
4"
+—
3Bi Bi^ 6
J.
(3.155)
1 -
x
+
в, <
2 1 1
1 -
4'
+ + —
3Bi Bi^ 6
6) для передаточной фушщии (3.132):
1 + A+J_+1
12 в/2 ЗВ/ 12
/ \
x
4 ✓
v
\
■4-
/ \2
UJ
; (3.156)
(3.157)
Пх) = Т„.
1 1
ЗВ/ 12
5_
12
x
x
(3.158)
На рис. 3.9 представлены результаты расчета по формулам (3.155) - (3.158)
при 5/ = 3 [31].
Как видно из приведенных данных, здесь для координаты х„р
промежуточного слоя имеем д:,,^//? =0,519 , и следует использовать аппроксимации (3.131) и
(3.132), соответственно, для 0<х<х„р и x„p<x<R . Ошибки получаемых
приближений, оцениваемые по погрешностям переходных функций, иллюстрируются
табл. 3.2 и рис. 3.10 [31], где точные значения опять, как и в примере 3.2,
вычисляются с помощью ряда (3.122).
о 0,2 0.4 0,6 0,8 Уп
Рис. 3.9. Зависимости параметров аппроксимации от значений
пространственной координаты ( В/ = 3 )
Л
1,0
0.8
0,6
0,4
0,2
О
-0,2
0,2 0,4 0.6 0,8 1,0 1,2 1.4 1,6
Рис. 3.10. Сравнение точных и приближенных (пунктир) переходных
функций объекта (J - ^ = \;2- ^ = о)
285
Таблица 3.2
t
x/R:=\
x/R
= 0
Tr
ТОЧНО
приближенно
точно
приближенно
0,00
0,0000
0,5000
0,0000
0,0000
0,05
0,4625
0,5361
0,0006
0,0000
0,10
0,5580
0,5696
0,0163 •
0,0000
0,20
0,6512
0,6296
0,1050
0,0991
0,30
0,7053
0,6812
0,2137
0,2180
0,40
0,7269
0,7043
0,3156
0,3210
0,50
0,7803
0,7638
0,4057
0,4106
1,00
0,8922
0,8884
0,7081
0,7094
1,50
0,9470
0,9473
0,8566
0,8567
2,00
0,9739
0,9751
0,9295
0,9293
00
1,0000
1,0000
1,0000
1,0000
Соответствующие аппроксимирующие переходные функции АхА^х,р) для
приближений (3.131), (3.132) с расчегаыми параметрами (3.155) - (3.158)
определяются, подобно (3.125)-(3.128), следуюпщми выражениями для J5i = 3:
-1.5-
Л^(/?,0 = 1-0,5е ;
(3.159)
л^(0,0 =
0,0^ — ^0,126;
1-1,197е , — > 0,126.
(3.160)
Сравнение данных табл. 3.1 с данными табл. 3.2 и выражений (3.125) -
(3.128) с (3.159), (3.160) показывает, что приближение (3.132) оказьгоается для
— = 1 несколько более точным, чем (3.119) и (3.121), хотя переходные функции
R
(3.125) и (3.159) мало отличаются друг от друга. Приближение (3.131) для — = 0
R
описьшает передаточную функцию объекта с гораздо меньшими погрешностями
по сравнению с (3.119) и (3.121).
Параметры Л1,А2,...,Адг аппроксимирующих передаточных функций
W^{x,p) вида
286
Л = (Ль Л2, Ал/); ^1; N>N^ +1;
могут быть найдены и другими способами, например, из условий
минимизации погрешности приближения к точному вьфажению для ПФ в
существенной области изменения комплексного аргумента. В частности, здесь
могут быть использованы отвечающие типовым динамическим звеньям
кусочно-линейные аппроксимации логарифмических амплитудно-
частотных .характеристик минимально-фазовой части аппроксимируемых
ПФ [44].
Достаточно эффективным может оказаться способ, заключающийся в
переходе от передаточных функций fVy^(x,p) к вещественным
изображениям W^p(x,5) (характеристикам мнимых частот (ХМЧ) [2, 36]) путем
простой формальной замены комплексной переменной на
действительную переменную ^Ъ"* в выражениях для точной и аппроксимирующей
ПФ с последующим решением относительно искомых параметров Л„
n^\,N, задачи минимизации абсолютной ошибки /(jc,A) приближения
Ж^(х,5,А) к Wj^(x,b) (задачи равномерного приближения) в области
существенных значений 5 € [0,5*] для каждого фиксированного значения
координаты xe[xQ,x{\ [40]:
/(х,А)= max
5€[0,б'1
ж/(дг,5,А)->Г^(х,5)
min . (3.162)
Д=(А„)
Переход от ПФ к ХМЧ существенно упрощает задачу равномерного
приближения, а правомерность такого перехода обосновывается
однозначно устанавливаемой связью между амплитудно-фазовыми
характеристиками (АФХ) и ХМЧ, обеспечивающей малые погрешности
аппроксимации АФХ при достаточной близости соответствующих ХМЧ.
При этом минимизация именно абсолютной ошибки приближения
обеспечивает по сравнению с аппроксимацией на основе интегральных
оценок (3.1S0) (по площадям) более равномерное распределение
погрешности по кривым переходного процесса.
Задача дробно-рациональной аппроксимации (3.162), (3.161)
представляет собой классическую задачу чебышевского приближения [4, 23,
40].
Ее решение А^ (т.е. оптимальные значения А^, А2,А^^ искомььх
287
параметров) обладает следующим замечательным свойством. При А = А
разность W;^{x,d, А^) - ^F^(x,5) в (3.162) достигает чередующихся по
знаку максимальных значений, равных ±/(х,А^), в последовательно
расположенных на отрезке [0,5*] и образующих так называемый чебышевский
альтернанс точках 82, 5д^+1: 0<5i <82 <-.. <5д^+1 ^5* , общее
число которых оказывается на единицу большим числа искомых
параметров и, следовательно, равно +1 (рис. 3.11).
Указанное свойство приводит к системе +1 равенств
ж/(х,8^,А^-Ж^(х,5^) = (-1)^Ч//(х,А^),(7 = 1,2,...,Л^ + 1, (3.163)
где v|/ = 1 или v|/ = ~l.
Вместе с условиями существования экстремума во внутренних
точках 8^ отрезка [0,8*], в которых
^[fF,^(x,8^,A^~^,(x,8,))
= 0 для всех 8^ 6 (0,8 ), (3.164)
эта равенсгеа при известной форме кривой W^{x,b,l!i)-W^(x,b) на отрезке
[0,8 ] превращаются для каждого из рассматриваемых фиксированных
значений д: в систему уравнений, которая может бьпъ решена относительно искомых
параметров А^, /? = 1, ; величины /(х, А^ ) и промежуточных неизвестных -
Рис. 3.11. Чебышевские свойства погрешности ^Г^(х,5,Д^)-^Гу(х,6)
приближения характеристик мнимых частот точной и аппроксимирующей
передаточных функций объекта управления
288
координат экстремальных точек из числа 5^. Чаще всего, при хорошем
качестве приближения, в число точек 5^ входят как гранищл отрезка
5 = 5j =0; 5 = 5д^^| =5*, так и все точки >0, 83, .,8^^ <8*
экстремума разности lV^(x,8,dP)-Wj^{x,d) у общее число которььх тогда равно
N-\, Тогда соотношения (3.163), (3.164) образуют систему
(N-¥\)'¥{N-\)=^2N уравнений с 2Л^ неизвестными А^,Л^2.--.Ад^;
82,83,..., 8^ и/(х,А^).
Пример 3.4. Проиллюстрируем возможности способа дробно-ращюнальной
аппроксимащси передаточных фушщий jc-блоков ОРП путем построения чебы-
шевских приближений ХМЧ опять на примере передаточной фующии (3.111) [40].
Положим N^=2,N = 4 в (3.161), и будем искать приближение (3.111) в виде
--^(х,р,А)= ^^(^^-^2МР ^
1 + Аз(дг)р + А4(х)р^
(3.165)
Тогда задача (3.162) конкретизируется следующим образом:
/(дг,А)= max
б€(0.5 ]
A,(jr) + A2(x)8
1 + Аз(лг)5 + А4(х)5^ ch^^^^^^sh^
Bi
Д = (Д„Д2.Дз,Д4)-
> mm;
(3.166)
Ее решение при 0=8, <8з <85 =8* сводится к решению системы
восьми уравнений типа (3.163), (3.164):
Д^(лс) + Д°2(л:)8,
1 + Д^(х)8,-нД»(х)85 ck^.l^sh^,
=(-1)Ч/(д^.Д**); (3.167)
9 = 1,23,4.5.
д_
55
Д^(х)+Д^2(х)8,
1+Д»з(х)8,+Д«4(х)85 chjF^^l:^sh^
9 = 23,4
= 0; (3.168)
относительно восьми неизвестных - оптимальных значений Д^,Д^,Дз,Д4
четырех искомых параметров аппроксимации; трех точек максимума 82,83,84 абсо-
289
0,0002
-0,0002
1
s, \
5
а
0.001
0.08
0.04
0,001
Р и с. 3.13. Дробно-рациональная аппроксимация передаточной
функции (3.111) для ДГ = О :а - погрешность приближения ХМЧ
( Л? = UO, Д^2 = -033-10^с; Д^з = 8,0-10^с; Д°4 = 7,27 10*с^;
5, =0;§2 =0,4-10^; 63 = 2,0.10-*; 64=6,010"*; 65 =5* =0,001);
6 - погрешность аппроксимации АЧХ
В инженерной практике получили также широкое распространение
экспериментальные методы построения моделей объектов управления,
которые, как правило, сводятся к способам параметрической
идентификации, т.е. к способам определения параметров модели заданной
структуры по данным эксперимента [1].
Таким образом, если выходные переменные объекта для
рассматриваемых значений пространственного аргумента доступны для
непосредственного юмерения, то параметры моделей (3.129) - (3.132) или (3.161)
могут бьпъ навдены известными хорошо разработанными методами
вдентификации [1]. При этом полученные вьппе аналитические
приближения для величин идентифицируемых параметров могут бьтгь при
необходимости использованы в качестве начальных приближений для их
уточнения экспериментальным путем.
в заключение отметим, что общим недостатком всех способов
расчета параметров дробно-рациональных гфиближений к W^ix^p) заранее
фиксируемой структуры является отсутствие каких-либо общих
алгоритмов предварительного выбора оптимального вида этой структуры.
Указанные ранее соображения, связанные с отбором из минимального числа
возможных простейших вариантов, отвечающих основным физическим
закономерностям иccлeдyeмьLx процессов, могут оказаться
недостаточными, а соответствующие аппроксимации даже при оптимальных
значениях искомых параметров - слишком грубыми.
ПРИЛОЖЕНИЕ
Некоторые определения и свойства дельта-функций
Ввиду широкого применения аппарата дельта-функций при
исследовании моделей объектов управления с распределенными параметрами
ниже приводятся основные сведения об их свойствах, используемых в
настоящем учебном пособии [9, 13, 18,45].
С целью описания ограниченных по расходу энергии импульсных
воздействий достаточно малой длительности, но очень большой величины
на объекты различной физической природы (в пределе - бесконечно
больших воздействий, сосредоточенных в фиксированные моменты
времени), вводится понятие дельта-функции (Ь-функции) от временного
аргумента ty относящейся к классу обобщенных функций [18].
Дельта-функцией 5(/~/*) называется функция, равная нулю при
всех /, кроме значения / = /*, при котором она обращается в
бесконечность, причем
8(/-Л)Л = 1, (1)
5-функцию можно рассматривать как предел по некоторому параметру
какой-либо непрерывной функции, удовлепгворяющей при предельном
переходе указанному определению. Например, полагая
5л(0 = -?-е'*' , (2)
получим при /? -> 00, раскрывая неопределенность по правилу Лопиталя
для всех t^O:
lim 5;,(0 = -T^lim —тт"= lii^ ^~гг = 0-
В то же время, производя замену переменной u-ht и используя
известное равенство
00
■
-во
будем иметь:
292
h
CO 00
1.2,2 1
e""' dt =
2
e"" du = \.
-00
Vti л/я
— GO —oo
Следовательно,
lim -^6"^^^^ =5(0 при /* = 0.
В силу приведенного определения, b(t-t*) обладает рядом
специальных интегральных свойств.
Если /(/) - любая ограниченная и непрерывная функция на
интервале [/o,/i],TO
*
/а'), если Ге[/о,/1];
^0
О, если / ^[toJil
т.е. интеграл на отрезке [/q.^iI от произведения /(/) на 5-функцию,
сосредоточенную в момент времени / = , равен значению /(/) в точке
/ = /*, если она принадлежит интервалу интегрирования, или равен нулю
в противном случае.
Удобно ввести в рассмотрение производную 5'(г-/*) от 5-функции в
точке / = под которой, в частности, можно понимать предел при
А -> 00 производной б';^(/) в (2).
При этом 5'(^-/*) равна +оо при / - О (стремление к /* слева),
равна -00 при t ->t* + О (стремление к /* справа) и равна нулю при всех
остальных /.
Аналогичное (3) интегральное свойство 5'(^-/*) записьшается для
всякой ограниченной, непрерывной и непрерывно-дифференцируемой
функции /(/) в следующем виде
ч
jfm\t-t*)dt=
-fit ),если / €[^o.'i];
(4)
о, если / «[Го,/,],
т.е. интеграл в (4) оказывается равным при г е [Го,/,] значению не самой
функции, а ее производной /'(/') при /* е [/o»'il с обратным знакам.
Важно заметить, что при изменении знака аргумента у 5-функцнй инте-
293
грал в (3) не меняет своего значения, а в (4) изменяет знак на обратный:
/(/)5(/ -t)dt =
f(tm -t)dt =
'о
/(/ ),если / е[/о,/,];
О, если /* e[fo.'i].
О, если t* i[to,ti].
(5)
(6)
Огмегим здесь еще одно свойство 5-функции, соблюдающееся при
изменении масштаба ее аргумента:
М
Аналогично (4), можно ввести определения и для к-тк производной
б<*)(/ -/*) применительно к /(/), имеющей непрерывную Л-ю проювод-
ную. Тогда соотношения (3) - (6) обобщаются следующим образом:
[(-l)'/'^('*);^'eUo,/il;
o,/%[Mil;
/(/)5<*^(/-/*)Л =
'о
(7)
/(/)5<*>(/*-0Л =
(8)
/«(г*);Геио,Г1];
[о,/* «[Го,/,],
где Л^О -целоечисло,и /°\/*) = /(/');б(°)(/-^*)=5(/-/*).
Совершенно аналогично "временной" 5-функщ1и b{f-t*) и ее
производным, можно ввести понятие "пространственной" 5^ункции 5(х- х*),
аргументом которой является пространственная координата х,
рассматриваемая как скалярная величина в пространственно одномерной задаче или
как векторная - для многомернььч пространственных областей. Здесь
5(х-х') равна нулю в пределах всей занимаемой объектом
пространственной области, кроме точки х*, в которой б(х-х*) принимает
значение, равное бесконечности. Для функций /(х), распределенных на
отрезке [xo,xj], вместо равенств (7) и (8) будем иметь:
/(x)5^*4jc-x*)f/x =
0,хг[хо,х,1;
(9)
294
/(х)5(^)(/-.)^ = / 7^*'^^'^^'^^^^it.O. (10)
в частности, при /: = О, здесь, подобно (5),
|/(х)5(х*-х)Л: = /(х*),если x*e[xo,Xil. (11)
В случае /(х) = 5(^ - х), ^ е [xq,xj, получим отсюда значение
интеграла от произведения двух пространственных 5-функций,
сосредоточенных в точках X* и^ на отрезке [xo,xi]:
J5(^-X) 5(х* -x)dr = 5(^ -X*), X* 6 [xo,Xi]; ^ 6 [xo,Xi], (12)
'о
Для /(х), распределенных в многомерной области D при
х = (х^^^х^^^х^*^^) € D , соответствующие интегралы на отрезке [xo,xi] в
(9) и (10) заменяются на кратные интегралы по области D .
Например, вместо (9) для /: = О получим:
|/(х)5(х-х*)Л = /(х*), x eD. (13)
D
Здесь векторная 5-функция 5(х~х*) представляется произведением
одномерных ("обычных") 5-функций скалярного аргумента:
б(х-х*) = 5(х(^> -х(^>*) 5(х<^) -х<2>*) 5(х<^> -х(^>*),
х*=(х(^>*,х(2).^^(3).) )
Аналогично, применительно к функции /(х,/) двух переменных -
скалярной пространственной координаты х и времени t , векторная 5-
функция, моделирующая импульсное воздействие, наносимое в момент
времени /* е [/q^^iI в точке х* € [xo,Xi], описывается произведением
5(х-х*)5(/-/*),
а интегральное соотношение (13) видоизменяется следующим образом:
295
Xnti
f(xj)8{x-x )5(/-r )dxdt = f{x ,/ ).
(15)
0*0
в типичном случае /(x,0 = /i(j<^)/2(О представления /(jc,/) в виде
произведений функций одного аргумента, двойной интефал в (15)
заменяется произведением однократных интегралов, к которым можно приме-
нигь соотношения (9):
*о^о
/i(^)/2(05(x-x )5(Г-Г )dxdt =
(16)
= Jfi(xnx-X*)dx J/2(0 8(/-/*)rf/ = /i(/)/2(r*).
Подобным образом можно поступить и в случаях А' > О в (9) и (10), а
также в ситуациях с векторным аргументом х
ЛИТЕРАТУРА
1. Алексеев Имаев ДJC., Кузьмин Н.Н., Яковлев В,Б. Теория
управления /Под ред. Яковлева. - СПб.: ГЭТУ, 1999.
2. Анализ и оптимальный синтез на ЭВМ систем управления / Под ред.
АА.Воронова и ИЛОрурка. - М.: Наука, 1984.
3. Бенерджи П., Баттерфилд Р. Метод граничных элементов в
прикладных науках. - М.: Мир, 1984.
4. Березин КС, Жидков Н.П. Методы вычислений. Т. 1. - М.: Наука,
1966.
5. Березин КС, Жидков ИЛ. Методы вычислений. Т. 2. - М.: Наука,
1962.
6. Бутковский А.Г. Теория оптимального управления системами с
распределенными параметрами. - М.: Наука, 1%5.
7. Бутковский А.Г. Методы управления системами с распределенными
параметрами. ~М.: Наука, 1975.
8. Бутковский А.Г Структурная теория распределенных систем. - М.:
Наука, 1977.
9. Бутковский А.Г Характеристики систем с распределенными пара-'
метрами. -М.: Наука, 1979.
10. Бутковский А.Г, Малый СЛ., Андреев Ю.Н. Оптимальное
управление нагревом металла. - М.: Металлургия, 1972.
И. Бутковский А.Г, Малый С А., Андреев Ю.Н. Управление нагревом
металла. М.: Металлургия, 1981.
12. Васильева А.Б, Бутузов В.Ф. Асимптотические методы в теории
сингулярных возмущений. - М.: Высшая школа, 1990.
13. Владимиров B.C. Уравнения математической физики. - М.: Наука,
1981.
14. Градштейн КС, Рыжик И.М. Таблищ^ интегралов, сумм, рядов и
произведений, - М.: Наука, 1971.
15. Девятое Б.И. Теория переходных процессов в технологических
аппаратах с точки зрения задач управления. - Новосибирск: Сиб.
отделение АН СССР, 1964.
16. Девятое БК, Демиденко НД. Теория и методы анализа управляемых
распределенных процессов. - Новосибирск: Наука, 1983.
17. Демиденко КД Управляемые распределенные системы. -
Новосибирск: Наука, 1999.
18. Деч Г. Руководство к практическому применению преобразования
Лапласа и z-преобразования. - М.: Наука, 1971.
19. Дидук ГА., Золотое O.K., Пустыльников Л.М. Специальные разделы
теории автоматического регулирования и управления (теория СРП).
С предисловием А.Г Бутковского. Учебное пособие. - СПб.: СЗТУ,
2000.
297
20. Дульиев Г.Н., Парфенов В.Г„ Сиголов Л.В, Применение ЭВМ для
решения задач теплообмена. - М.: Высшая школа, 1990.
21. Егоров А.И. Оптимальное управление тепловыми и диффузионными
процессами. - М.: Наука, 1978.
22. Зенкевич О., Морган К Конечные элементы и аппроксимация. - М.:
Мир, 1986.
23. КалиткинМ.Н. Численные методы. - М.: Наука, 1978.
24. Карташов Э.М. Аналитические методы в теории теплопроводности
твердых тел. - М.: Высшая школа, 2001.
25. Коваль ВА. Спектральный метод анализа и синтеза распределенных
управляемых систем. - Саратов: СГТУ, 1997.
26. Коздоба ЛЛ Методы решения нелинейных задач теплопроводности.
-М.: Наука, 1975.
27. Корн Г., Корн Т. Справочник по математике для научных работников
и инженеров. - М.: Наука, 1978.
28. Котляков Н.С, Глинер Э.Я, Смирнов М.М. Уравнения в частных
производных математической физики. - М.: Наука, 1970.
29. Кудрявцев Л.Д, Курс математического анализа. Т. 1-3. - М.: Высшая
школа, 1988 (т. 1,2), 1989 (т.З).
30. Лыков А.В, Теория теплопроводности. - М.: Высшая школа, 1967.
31. Маковский В А. Динамика металлургических объектов с
распределенными параметрами. - М.: Металлургия, 1971.
32. Мартыненко НА., Пустыльников Л.М. Конечные интегральные
преобразования и их применение к исследованию систем с
распределенными параметрами. - М.: Наука, 1986.
33. МарчукГ.И. Методы вычислительной математики. -М.: Наука, 1989.
34. HaйфэAJC. Введение в методы возмущений. - М.: Мир, 1984.
35. Немков B.C., Демидович В.Б. Теория и расчет устройств юадукцион-
ного нагрева. - Л,: Энергоатомиздат, 1988.
36. Орурк И А. Новые методы синтеза линейных и некоторых
нелинейных динамических систем. - М.; Л.: Наука, 1965.
37. Первозванский А.А. Курс теории автоматического управления. - М.:
Наука, 1986.
38. Первозванский А.А., Гайцгори В.Г. Декомпозиция, агрегирование и
приближенная оптимизация. - М.: Наука, 1979.
39. Рапопорт Э.Я. Оптимизация процессов индукционного нагрева
металла. - М.: Металлургия, 1993.
40. Рапопорт Э.Я. Альтернансный метод в прикладных задачах
оптимизации. - М.: Наука, 2000.
41. Рей У. Методы управления технологическими процессами. - М.:
Мир, 1983.
42. Самарский А.А. Теория разностных схем. - М.: Наука, 1977.
43. Сиразетдинов Т.К. Оптимизация систем с распределенными
параметрами. -М.: Наука, 1977.
298
44. Тарасов B.C., Вереиинов И А., Ерунов В.Я. Моделирование
технологических процессов с распределенными параметрами. - Л.: ЛПИ,
1978.
45. Тихонов A.M., Самарский А.А. Уравнения математической физики. -
М.: Наука, 1966.
46. Фельдбаум А.А., Бутковский А.Г. Методы теории автоматического
управления. - М.: Наука, 1971.
47. Фурсиков А.В. Оптимальное управление распределенными
системами. Теория и приложения. - Новосибирск: Научная книга, 1999.
48. Чермак Я., Петерка Я. Заворка И. Динамика регулируемых систем в
теплоэнергетике и химии. - М.: Мир, 1972.
49. Шаткое А.Г Системночггруктурный анализ процессов теплообмена
и его применение. - М.: Энергоатомиздат, 1983.
50. Шевяков А.А., Яковлева Р.В. Инженерные методы расчета динамики
теплообменных аппаратов. -М.: Машиностроение, 1968.
51. Шевяков А.А., Яковлева Р.В. Управление тепловыми объектами с
распределенньБ^и параметрами. -М.: Энергоатомиздат, 1986.
52. Янке Е. Эмде Ф.. Леш Ф. Специальные функции. Формулы, графики,,
таблицы. - М.: Наука, 1964.
Учебное издание
Рапопорт Эдгар Яковлевич
СТРУКТУРНОЕ МОДЕЛИРОВАНИЕ ОБЪЕКТОВ
И СИСТЕМ УПРАВЛЕНИЯ
С РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ
Редактор Е.Н. Рожкова
Художник Л.>4. Лукьяненко
Художественный редактор Л.Л?. Войткевт
Лицензия ИД № 06236 от 09.11.01.
Изд. № РЕНТ.139. Сдано в набор 08.04.03. Подо, в печать 19.06.03.
Формат 60x88Vi6. Бум. офсетная. Гарнитура «Тайме». Печать офсетная.
Объем 18,62 усл. печ. л., 19,12 усл. кр.-отт.
Тираж 3000 экз. Заказ №
ФГУП «Издательство «Высшая школа», 127994, Москва, ГСП-4,
Неглинная ул., 29/14.
Тел.:(095)200-04-56.
E-mail: info@v-shkolaru http:/Avww.v-shkola.ru
Отдел реализации: (095) 200-07-69,200-59-39, факс: (095) 200-03-01.
E-mail: sales@v-shkola.ru
Отдел «Книга-почтой»: (095) 200-33-36.
E-mail: bookpost@v-shkola.ru
Отпечатано в ГУП ПИК «Идел-Пресс».
420066. г. Казань, ул. Декабристов, 2.
Издательство
^^Высшая школа''
Адрес издательства: 127994, г. Москва, ул. Неглинная, 29/14
Тел.: (095) 200-04-56
E-mail: info@v-shkola.ru
http://www.v-shkola.ru
Отдел реализации: (095) 200-07-69, 200-59-39
факс: (095) 200-03-01
E-mail: sales@v-shkola.ru
Отдел «книга-почтой»: (095) 200-33-36
E-mail: bookpost@v-shkola.ru
Отдел рекламы: (095) 200-33-70, факс: (095) 200-06-87
E-mail: reklama@v-shkola.ru
Телефон магазина: (095) 200-30-14
Схема проезда
Проезд:
до станции м. "Цветной бульвар", "Пушкинская",
"Тверская", "Кузнецкий мост".
Вход в издательство со стороны Петровского бульвара.
мы БУДЕМ РАДЫ ВИДЕТЬ ВАС!
Для заметок