/







































































































































































































































































































































































Автор: Соколов А.В. Потапов А.А. Быстров Р.П.
Теги: сельскохозяйственные машины и орудия сельскохозяйственное оборудование радиолокация радиотехника радиофизика
ISBN: 5-88070-064-X
Год: 2005


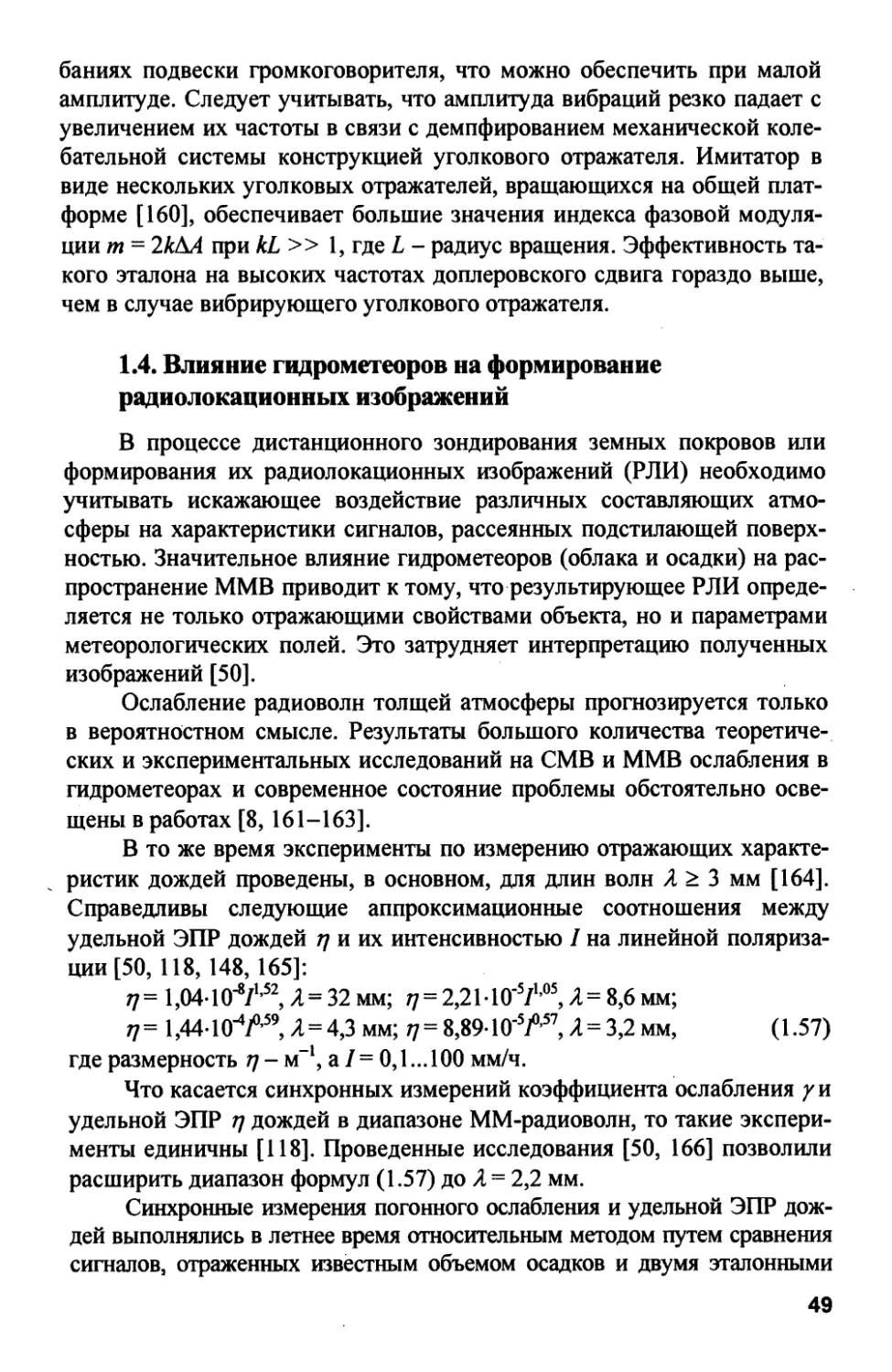
Текст
СЕРИЯ
j
4
IIIIIIIIIC PA A
'. . 'ЫСТ**:, 4.4. «T» • :,'.;. «К«Л»
«
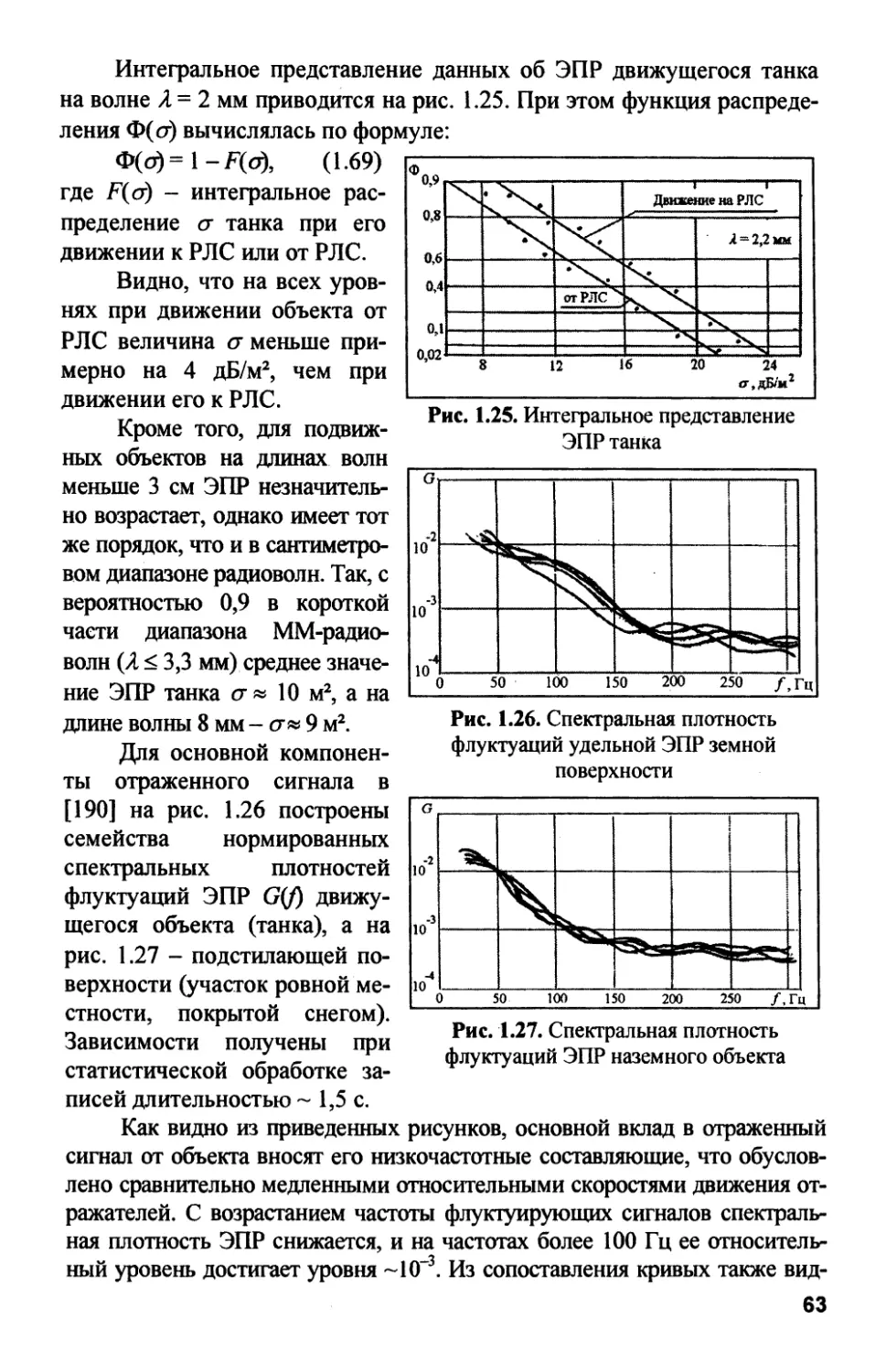
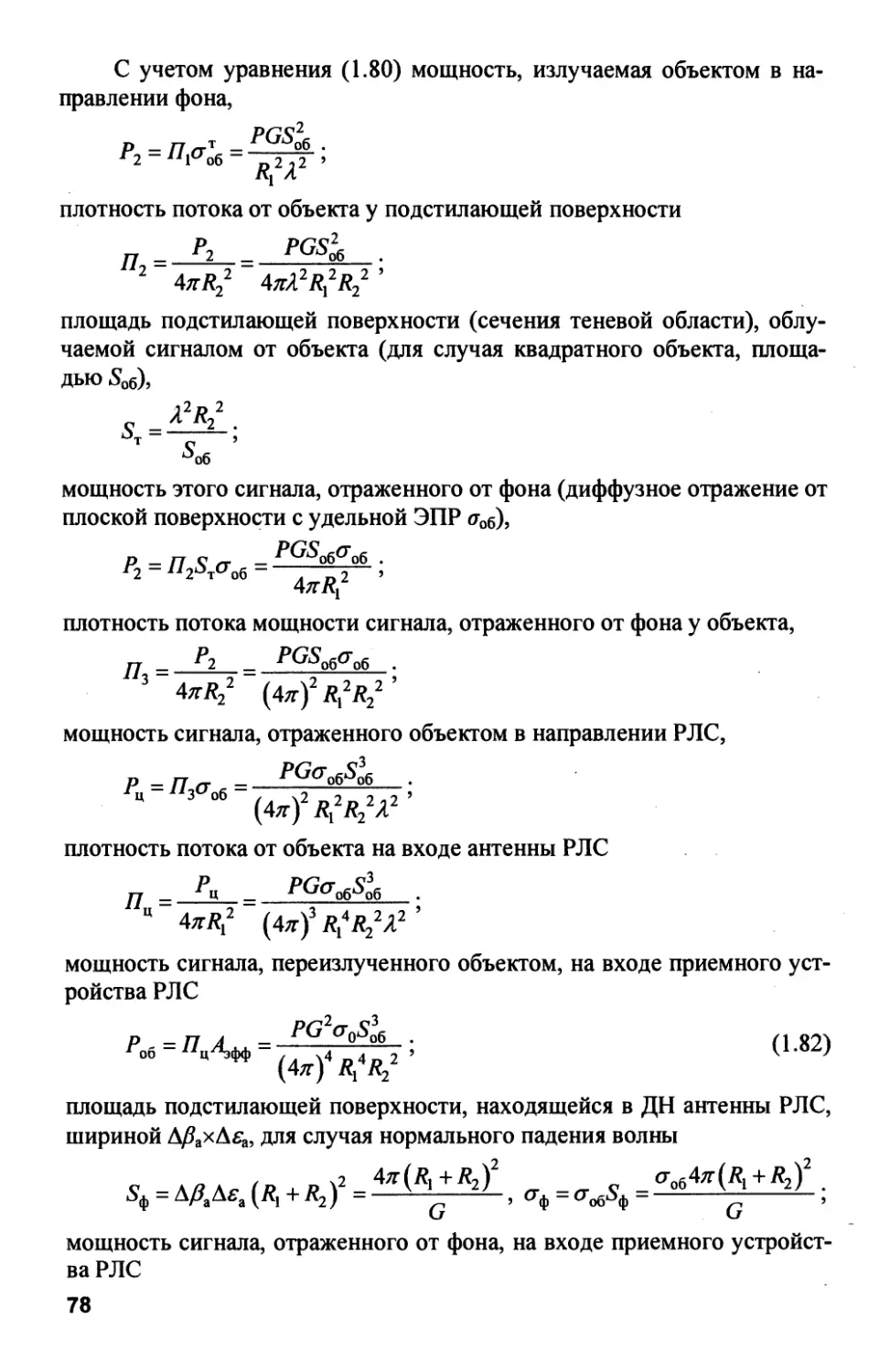
У* \
* 1* i
'*<:■.
- ^ч „ - ' : "^ "*~ \^ S :-™ r
-.-V- * -„ч£* >• :<> '■*■' .^ -v :. ::
.. vi;-» < l ^* ' --■ Г'/ V*' *
'•■*■'■■,. - -*> ■ * ■*. :
■' ' ,»,ll^f :*~
7Г**Ч ".
_'■•*'
i
Освещены вопросы распространения радиоволн миллиметрового
диапазона, возможности радиолокационных систем в короткой части
миллиметрового диапазона радиоволн. Особое внимание /делено
цифровой фрактальной обработке многомерных радиолокационных
* сигналов
Р. П. Быстрое, А. А. Потапов, А. В. Соколов
МИЛЛИМЕТРОВАЯ
РАДИОЛОКАЦИЯ
С ФРАКТАЛЬНОЙ ОБРАБОТКОЙ
Под редакцией
Р. П. Быстрова, А. В. Соколова
Москва, "Радиотехника", 2005
Б95
ББК 32.95
Библиотека журнала «Радиотехника»
Серия «Радиолокация»
Быстрое Р. П., ГГотапов А. А., Соколов А. В.
Б95 Миллиметровая радиолокация с фрактальной обработкой / Под
ред. Р. П. Быстрова и А. В. Соколова. - М.: «Радиотехника», 2005. -
368 с: ил. (Серия «Радиолокация»).
ISBN 5-88070-064-Х
Освещены вопросы распространения радиоволн миллиметрового
диапазона, характеристики отражения наземных объектов, а также
потенциальные возможности радиолокационных систем в короткой части
миллиметрового диапазона радиоволн. Показаны альтернативные варианты
построения и оценены параметры активных РЛС обнаружения наземных
объектов. Даны понятие информационных возможностей РЛС
обнаружения наземных объектов, характеристика перспективных методов
обработки радиолокационных сигналов. Особое внимание при этом уделено
фрактальной обработке многомерных радиолокационных сигналов. Приведен
анализ состояния элементной базы радиолокационной техники
миллиметрового диапазона.
Для научных работников, инженеров, преподавателей и студентов
вузов по общетеоретическим и прикладным вопросам радиотехники и
радиофизики.
УДК 631.396
ББК 32.95
ISBN 5-88070-064-Х
© «Радиотехника», 2005
© Авторы, 2005
Оглавление
Предисловие 7
Введение 9
Глава 1. Характеристики отражения наземных объектов 11
1.1. Распространение радиоволн 11
1.1.1. Распространение миллиметровых радиоволн в атмосфере 11
1.1.2. Ослабление миллиметровых радиоволн в гидрометеорах-.:..,*.,. 14
1.1.3. Вероятностные характеристики ослабления ;
миллиметровых радиоволн в атмосфере 19
1.2. Методы моделирования рассеяния радиоволн
земной поверхностью 21
1.2.1. Развитие методов моделирования процессов рассеяния 21
1.2.2. Метод возмущений 23
1.2.3. Метод касательной плоскости 26
1.2.4. Двухмасштабная модель 29
1.2.5. Другие подходы к проблеме рассеяния
электромагнитных волн 32
1.2.6. Взаимодействие радиоволн с растительным покровом 34
1.2.7. Когерентное и некогерентное рассеяние миллиметровых
и сантиметровых радиоволн в слое растительности 37
1.2.8. Применение метода Монте-Карло в задачах рассеяния 40
1.3. Методы калибровки измерительных систем.
Электродинамические и статистические характеристики
земных покровов 42
1.4. Влияние гидрометеоров на формирование
радиолокационных изображений 49
1.5. Характеристики отражения и рассеяния радиоволн
земной поверхностью 55
1.5.1. Рассеяние радиоволн от гидрометеоров 59
1.6. Характеристики отражения наземных объектов 62
1.6.1. Движущиеся объекты 62
1.6.2. Медленно движущиеся наземные объекты 64
1.6.3. Неподвижные наземные объекты с работающим
двигателем 83
1.6.4. Неподвижные наземные объекты и воздушные объекты
в наземных условиях 87
Глава 2. Потенциальные возможности радиолокационных
систем 99
2.1. Энергетическая оценка радиолокационных систем 99
2.2. Характеристики обнаружения радиолокационных
систем 104
2.3. Факторы, влияющие на точность пеленгования
наземных объектов 106
3
2.3.1. Флуктуации углов прихода и многолучевое
распространение радиоволн 106
2.3.2. Интерференция радиоволн при отражении от объектов 109
2.3.3. Влияние помех фоновых отражений 110
2.4. Помехозащищенность радиолокационных систем
обнаружения наземных объектов 113
Глава 3. Принципы построения и возможные параметры
радиолокационных систем обнаружения
наземных объектов 118
3.1. Общая классификация радиолокационных систем
обнаружения наземных объектов 118
3.2. Радиолокационные системы обнаружения движущихся
и неподвижных наземных объектов 119
3.2.1. Активные радиолокационные системы 119
3.2.2. Пассивно-активные радиолокационные системы 129
3.2.3. Особенности радиолокационных систем обнаружения
наземных объектов, расположенных на летательных
аппаратах 132
3.3. Радиолокационные системы специального назначения .... 135
3.3.1. Радиолокационные системы обнаружения объектов
с передачей информации по радиолучу 135
3.3.2. Радиолокационные системы обнаружения
и управления оружием 137
3.3.3. Радиолокационные датчики 140
Глава 4. Информационные свойства радиолокационных
систем обнаружения наземных объектов в миллиметровом
диапазоне радиоволн 143
4.1. Общие положения об информационных свойствах
радиолокационных систем 143
4.2. Информационные возможности радиолокационного
канала 148
4.2.1. Модель радиолокационного канала 148
4.2.2. Оценка количества информации радиолокационных
систем обнаружения наземных объектов в миллиметровом
и сантиметровом диапазонах радиоволн 152
4.3. Информационные свойства радиолокационных
систем обнаружения наземных объектов при обработке
сигнала и уровни информационных потерь в них 160
4.3.1. Математическая модель оценки уровня потерь
информации в радиолокационных системах обнаружения
наземных объектов с применением оптимальных
и непараметрических обнаружителей 160
4
4.3.2. Оценка уровня потерь информации в радиолокационных
системах обнаружения наземных объектов в миллиметровом
и сантиметровом диапазонах радиоволн 166
4.3.3. Особенность оценки информационных возможностей
радиолокационных систем обнаружения в процессе
распознавания 172
5. Фрактальная цифровая обработка одномерных
и многомерных радиолокационных сигналов 173
5.1. Перспективные методы обработки радиолокационных
сигналов 173
5.2. Текстурные меры и текстурные сигнатуры 175
5.3. Фрактальные меры и фрактальные сигнатуры 180
5.4. Избранные результаты первого этапа исследований
по обобщенной фильтрации малоконтрастных объектов
фрактальными методами 182
5.5. Конспект о фрактальной размерности и ее расчете 186
5.6. Элементы электродинамической теории волн,
рассеянных фрактальными земными покровами 191
5.6.1. Земные покровы как фрактальные поверхности 191
5.6.2. Основные методы решения задач дифракции волн
на фрактальной поверхности "... 194
5.7. Фрактальные модели изображений земной поверхности 196
5.8. Анализ и синтез цифровых фрактальных карт местности 199
5.9. Многоуровневая модель для характеристики объектов 205
5.9.1. Модифицированный метод покрытий для измерения
фрактальных сигнатур 205
5.9.2. Фрактальные сигнатры в задачах различения объектов
военной техники на фоне природных образований 209
5.10. Визуальное различение человеком-оператором
фрактальных текстур по изображению на экране
дисплея 214
5.11. Фрактальное обнаружение целей на изображениях
земной поверхности 218
5.11.1. Функциональное описание реальных оптических
и радиолокационных сложных изображений 218
5.11.2. Примеры фрактального обнаружения целей
на реальных оптических и радиолокационных
изображениях 223
5.12. Примеры фрактального распознавания целей
на изображениях земной поверхности 231
5.13. Стратегические направления приложений принципов
фрактальной радиолокации и фрактальной радиофизики
в новых информационных технологиях 235
5
6. Состояние элементной базы радиолокационной техники 239
6.1. Общая характеристика техники миллиметрового
диапазона радиоволн 239
6.2. Электровакуумные и полупроводниковые приборы
генерации 241
6.3. Антенно-фидерные устройства 248
6.4. Приемопередающий комплекс и его СВЧ-элементы 250
6.5. Возможности аппаратной реализации цифровых
вычислительных устройств для обработки
радиолокационных сигналов 255
Глава 7. Применение радиолокационных систем
миллиметрового диапазона радиоволн 265
7.1. Космические радиолокационные системы 265
7.2. Авиационные системы управления и навигации 269
7.3. Наземные (морские) системы навигации и безопасного
движения 277
7.4. Системы связи 279
7.4.1. Особенности применения миллиметровых радиоволн
в системах связи 280
7.4.2. Использование миллиметровых радиоволн для связи
искусственных спутников Земли 281
7.4.3. Применение миллиметровых радиоволн на сотовых
линиях связи в городе 285
7.4.4. Бортовые линии связи и передачи информации 290
7.4.5. Аппаратура для исследования систем связи 292
7.5. Радиоэлектронная аппаратура в медицине 297
7.6. Системы военного применения 303
7.6.1. Проблемные вопросы и направления совершенствования
радиолокационных систем обнаружения и распознавания
объектов 303
7.6.2. Радиолокационные системы наведения и управления 313
7.6.3. Радиолокационные системы противовоздушной обороны 315
7.6.4. Радиотехническая аппаратура радиоэлектронного
противодействия 317
7.6.5. Системы противодействия радиолокационному
распознаванию 324
7.6.6. Анализ работ по современным системам противодействия
распознаванию 332
Заключение 335
Литература 336
6
Светлой памяти академика
В. А. Котельникова посвящается.
ПРЕДИСЛОВИЕ
Особое место в настоящей монографии отводится проведенным
исследованиям короткой части миллиметрового (ММ) диапазона радиоволн в
сравнении с короткой частью сантиметрового (СМ) и длинноволновой
частью СМ-диапазонов, который длительное время представлялся многим
специалистам непригодным для практического применения. Результаты
поисковых исследований в этом диапазоне радиоволн, а также работ,
направленных на изыскание путей создания новых систем, главным образом
специального назначения, не публиковались в научно-технической литературе,
чем наносился ущерб приоритету наших отечественных исследований.
Необходимо отметить, что такая узкая направленность научно-
исследовательских работ, носивших в основном специальный характер, резко
стимулировала в нашей стране темпы научных исследований и в короткие
сроки позволила освоить новый более информативный диапазон радиоволн.
Монография имеет своей целью дать комплексное обоснование
целесообразного развития активных средств обнаружения наземных объектов в
ММ-диапазоне радиоволн и особенно в его короткой части, показать
перспективы в развитии методов фрактальной обработки радиолокационных
сигналов, а также изложить в доступной форме основные направления
развития, совершенствования и применения таких методов.
Монография рассчитана на научных работников и инженеров,
занимающихся вопросами исследований, проектирования и эксплуатации
радиолокационных систем обнаружения и наведения.
Предлагаемая монография состоит из семи глав.
Первая глава посвящена исследованиям характеристик отражения
наземных объектов. Рассмотрены особенности распространения радиоволн
ММ-диапазона и обосновывается выбор длин волн радиолокационных
систем обнаружения. Представлены модели рассеяния радиоволн земной
поверхностью и приведены результаты теоретических и экспериментальных
исследований характеристик типовых наземных объектов.
Систематизированы материалы теоретических и экспериментальных исследований отрат
жательных характеристик наземных движущихся и неподвижных объектов.
Во второй главе освещены потенциальные возможности активных
радиолокационных систем, работающих в короткой части
ММ-диапазона радиоволн.
В третьей главе дается общая классификация РЛС обнаружения
наземных объектов (РЛС обнаружения наземных объектов с
различными энергетическими потенциалами, пассивно-активные
радиолокационные устройства, системы наведения и радиолокационные датчики
обнаружения и др.).
В четвертой главе даны материалы по информационным свойствам
радиолокационных систем обнаружения наземных объектов.
7
Глава 5 посвящена перспективному методу обработки
радиолокационных изображений (многомерных сигналов и полей) - фрактальному
методу.
В шестой главе приведены результаты анализа состояния и
развития элементной базы техники радиоволн короткой части ММ-диапазона
на современном этапе ее развития.
В седьмой, заключительной, главе даны результаты анализа
отечественной и зарубежной научно-технической литературы в период
1996-2001 гг. по применению радиолокационных систем
миллиметрового диапазона радиоволн в народном хозяйстве и в интересах создания
военной техники.
Широкий круг теоретических и экспериментальных аспектов,
связанных с тематикой массового применения ММ-диапазона радиоволн в
системах гражданского и военного назначения, обусловил
многоплановость монографии.
В части экспериментальных материалов авторы стремились
выделить результаты, иллюстрирующие области использования техники
короткой части ММ-диапазона радиоволн в сравнении с более
длинноволновыми диапазонами и самые последние материалы, связанные с
фрактальной обработкой радиолокационной информации.
При изложении материалов были использованы результаты
многолетних исследований в освоении ММ-диапазона радиоволн
применительно к радиолокационным системам обнаружения наземных объектов.
Работа авторского коллектива над монографией распределилась
следующим образом:
главы 1 (параграфы 1.1, 1.5, 1.6), 2, 3, 4, 6, 7, предисловие и
введение написаны Р. П. Быстровым;
главы 1 (параграфы 1.2.-1.4), 5 написаны А. А. Потаповым;
главы 1 (параграфы 1.1, 1.5, 1.6), 2, 3, 6, введение, заключение
написаны А. В. Соколовым.
Авторы искренне признательны академику Ю. В. Гуляеву за
интерес к рассматриваемому в монографии научному направлению,
поддержку этих исследований и внимание к ним.
Авторы благодарны коллективу сотрудников ИРЭ РАН: А.Ю.
Зражевскому, Е.В. Сухонину, В.А. Герману и др., коллективу
сотрудников ИПФ РАН: Л.И. Федосееву, А.А. Швецову, И.В. Кузнецову и др.,
сотрудникам ИРЭ АН Украины: Г.П. Кулемину, В.Б. Разсказовскому,
В.П. Чурилову, Г.И. Хлопову и др., а также сотруднику МВТУ им. Н.Э.
Баумана А.Б. Борзову за результаты исследований, по которым
построены разделы о распространении радиоволн и определении
параметров вторичного отражения от наземных объектов сложной формы.
Авторы заранее благодарят читателей, которые захотят поделиться
своими предложениями и замечаниями о книге, а также сообщат об
ошибках и упущениях, которые могли остаться незамеченными в этом издании.
8
ВВЕДЕНИЕ
Бурное развитие современных радиосистем
народно-хозяйственного и военного назначения в ММ-диапазоне радиоволн как в странах
СНГ, так и за рубежом требует обобщения основных теоретических и
экспериментальных работ как базы для создания новых средств
радиолокации высокого разрешения и связи.
В настоящее время длинноволновая часть ММ-диапазона (волна
более 4 мм) достаточно хорошо изучена и освоена, находит массовое
применение в многочисленных образцах радиолокационной техники
народного хозяйства и военного применения, в том числе и для
обнаружения и наведения оружия. Коротковолновая часть ММ-диапазона
отличается от длинноволновой более значительным молекулярным
поглощением и полным ослаблением, и длительное время казалось
бесперспективным использовать эти волны для каких-либо практических
применений. Однако потребность в получении высоких точностей
обнаружения и наведения оружия заставили ученых и инженеров ряда
академических институтов, институтов Минвуза, НИУ МО и МООП
выполнить ряд фундаментальных работ по проблеме распространения
ММ- и субмиллиметровых (субММ) радиоволн, результаты которых
показали целесообразность освоения коротковолновой части ММ-
диапазона радиоволн и, в первую очередь, для создания систем разведки
наземных объектов и наведения высокоточного оружия (ВТО).
Под радиолокационными системами разведки наземных объектов
понимаются базовые РЛС, осуществляющие поиск, обнаружение,
сопровождение и распознавание объектов на фоне естественных и
искусственных помех, что предъявляет особые требования к техническим
возможностям таких систем.
Так как радиолокационная система является частью любого ВТО,
функционирующего на принципах подсветки излучением, наведения
или самонаведения, то основные достижения в освоении короткой части
ММ-диапазона радиоволн могут быть успешно использованы и в
других радиолокационных системах обнаружения, самонаведения и в том
числе в системах ПВО, а также в системах гражданского применения.
В связи с разработкой средств снижения радиолокационной и
оптической заметности объектов военной техники приоритетными видами
разработок становятся новые методы обнаружения и выделения слабых
полезных сигналов. Для успешного решения таких задач требуется
поиск и разработка нетрадиционных алгоритмов и новых адаптивных
прикладных решений обработки информации об интересующем объекте на
фоне мешающих сигналов.
Одно из таких основных направлений развития радиолокации связано
с широким применением методов оптимальной фильтрации. Наиболее
перспективными методами обработки сигналов являются: цифровая
адаптивная пространственно-временная обработка радиолокационных сигналов,
методы с использованием текстур и фрактальная обработка, основанная на
теории детерминированного хаоса и дробной топологии.
9
Адаптивная пространственно-временная обработка имеет в своей
основе структуру, которая изменяется под воздействием окружающей
радиообстановки, что широко применяется в фазированных антенных
решетках, цифровых следящих фильтрах, компенсаторах помех, а также
при многопозиционной радиолокации. Классические методы
фильтрации позволяют вести оптимальную обработку радиолокационных
сигналов от объектов лишь при гауссовских помехах. В реальности помехи
почти всегда негауссовские и имеют значительную интенсивность в
различных спектральных интервалах. Поэтому в реальных условиях
использование классических алгоритмов фильтрации не всегда возможно,
так как требует больших интервалов времени накопления сигнала.
Все это и определило развитие в Институте радиотехники и
электроники (ИРЭ РАН), начиная с середины 80-х гг. прошлого века,
нетрадиционных методов обработки радиолокационных сигналов при малом
отношении сигнал-фон. Идеологом постановки таких работ и их
научным руководителем является профессор А. А. Потапов.
В основе новых информационных технологий обнаружения и
распознавания (в общем случае — фильтрации) малоконтрастных целей в
сложной помеховой обстановке были заложены нетрадиционные методы,
использующие фрактальные, текстурные и другие топологические признаки.
При этом необходимо было исследовать потенциальные возможности
указанных методов для широкого класса изображений фона и целей.
Фрактальные методы используют дробную топологическую
размерность пространства сигналов и изображений, математический аппарат
дробных интегралов и производных и свойства самоподобия или скейлин-
га. Технический прорыв в данной области наметился в конце XX века.
Фрактальные методы следует отнести к «интеллектуальным» методам
обработки информации, и они исследуются во многих странах мира.
В ИРЭ РАН исследованы фрактальные характеристики как
синтезированных, так и реальных изображений местности. Подтверждена
эффективность разработанных методов фрактальной обработки
синтезированных, оптических и радиолокационных изображений.
Оказалось, что разработанные алгоритмы обнаружения
малоконтрастных целей, использующие фрактальные признаки, стабильно
функционируют при низких значениях сигнал-фон. Для целей в виде
прямоугольников различных размеров на изображениях в оптическом и
радиодиапазоне получено уверенное обнаружение при отрицательном
отношении сигнал-фон в децибелах. Гауссовские флуктуации площадей
прямоугольных целей со среднеквадратическим отклонением порядка
30% практически не влияют на качество обнаружения объектов. Это
дает основание утверждать, что реальные малоконстрастные цели будут
эффективно обнаруживаться в указанных диапазонах сигнал-фон.
Таким образом, настоящая монография подводит итог
многолетних исследований ученых и инженеров НИИ вместе с предприятиями
промышленности.
10
ГЛАВА 1
Характеристики отражения наземных
объектов
В данной главе приводятся результаты многолетних теоретических
и экспериментальных исследований характеристик отражения от
наземных объектов в миллиметровом и субмиллиметровом
диапазонах радиоволн.
1.1. Распространение радиоволн
1.1.1. Распространение миллиметровых радиоволн в атмосфере
В миллиметровом (ММ) и субмиллиметровом (субММ)
диапазонах радиоволн существует значительное количество линий поглощения
паров воды, кислорода и примесных газов, обладающих постоянными
электрическими и магнитными моментами, способными
взаимодействовать с электромагнитным излучением.
При функционировании радиотехнических систем (РТС) в
атмосфере энергия электромагнитных колебаний при распространении
ослабляется экспоненциально по закону Бугера. Поэтому для определения
реальной дальности действия РТС необходимы данные о коэффициенте
суммарного поглощения и ослабления, а также его распределения в
пространстве и во времени.
Рассмотрим оценку этого коэффициента на основе аддитивности
механизмов поглощения и ослабления электромагнитной энергии в
атмосфере.
Полный коэффициент поглощения и ослабления может быть
представлен в виде суммы
Гпол=Гн2о+Го2+Гд+Гт + Го+Гм.с+Гс) 0-0
где ущ0 - коэффициент поглощения в водяном паре; у02 - коэффициент
поглощения в кислороде; уД - коэффициент ослабления в дожде; уТ -
коэффициент ослабления в тумане; у0 - коэффициент ослабления в
облаках; /м с - коэффициент поглощения в мокром снеге; ус -
коэффициент поглощения в сухом снеге. Все коэффициенты выражаются в
децибелах/километр. Переход от величин у в децибел/километр к а 1/км (неперам)
осуществляется по формуле: у= 4,34а.
В настоящее время закономерности поглощения радиоволн
изучены теоретически и экспериментально достаточно хорошо на малых рас-
11
стояниях. Однако модели, лежащие в основе теоретических
исследований Ван Флека, Т. Роджерса, В. Вейсскопфа, С А. Жевакина, АЛ. Hay-
мова, Дж. Бастина и ряда других, не были адекватными процессам
резонансного поглощения, вследствие чего теоретически полученные
величины поглощения оказались в 1,5...2 раза меньше
экспериментальных значений, наблюдавшихся, в основном, в окнах прозрачности
спектра поглощения паров воды [1]. Сейчас процесс развития и
совершенствования теории квантово-механического поглощения еще далек от
своего завершения.
Наиболее результативными явились исследования ансамбля
невзаимодействующих полярных молекул кислорода в рамках модели
./-диффузии, обобщенные на квантовый случай, проведенные С. В. Титовым и
Ю. В. Калмыковым [2,3]. В этой модели учитывается инерционность
молекул, механизм интерференции линий и когерентность времени их
соударений. На основе такой модели и существенно более простого
математического аппарата по сравнению с ударными теориями перекрывающихся
линий удалось рассчитать поглощение и дисперсию показателя преломления
в парах воды и в кислороде, где интерференция линий уже существенна
даже при атмосферном давлении. Установлено, что модель J-диффузии
хорошо описывает поглощение в кислороде, нерезонансное поглощение в
широких интервалах изменения давлений и эффект смещения максимума
поглощения в диапазон более низких частот с ростом давления, а также
частотную зависимость поглощения в парах воды.
Из-за трудностей точного расчета поглощения широкое
распространение в научно-технической литературе получили
полуэмпирические методы определения ослабления в парах воды и кислороде,
предложенные впервые А. Ю. Зражевским, а позднее Г. Либе и хорошо
согласующиеся с экспериментом [4, 5]. С учетом результатов этих работ
величины поглощения в парах воды и кислороде могут быть
представлены в виде аналитических соотношений:
Уи2ок
Уо,*\
пл^7 9 7,33 4,4 Л
0,067+ = ^+ —=—+ ■—,
(я>-22,3)2+6,6 (я>-183,5)2 + 5 (я>-323,8)2 + 10у
(1.2)
в, в
л
аГ-10 , со < 57 ГГц,
Х+0,33 (^-57Г+1,96>
Го2*14,9,57<я><63ГГц, (1.3)
/о, 4 —г + °Л92 V-ltr3, a» 63 ГГц, (1.4)
°2 {(со-63)2+\Л (<y-118,7)2+2j
12
где со - частота излучения в гигагерцах; р- влажность воздуха в грамм/метр
в кубе при температуре 20°С.
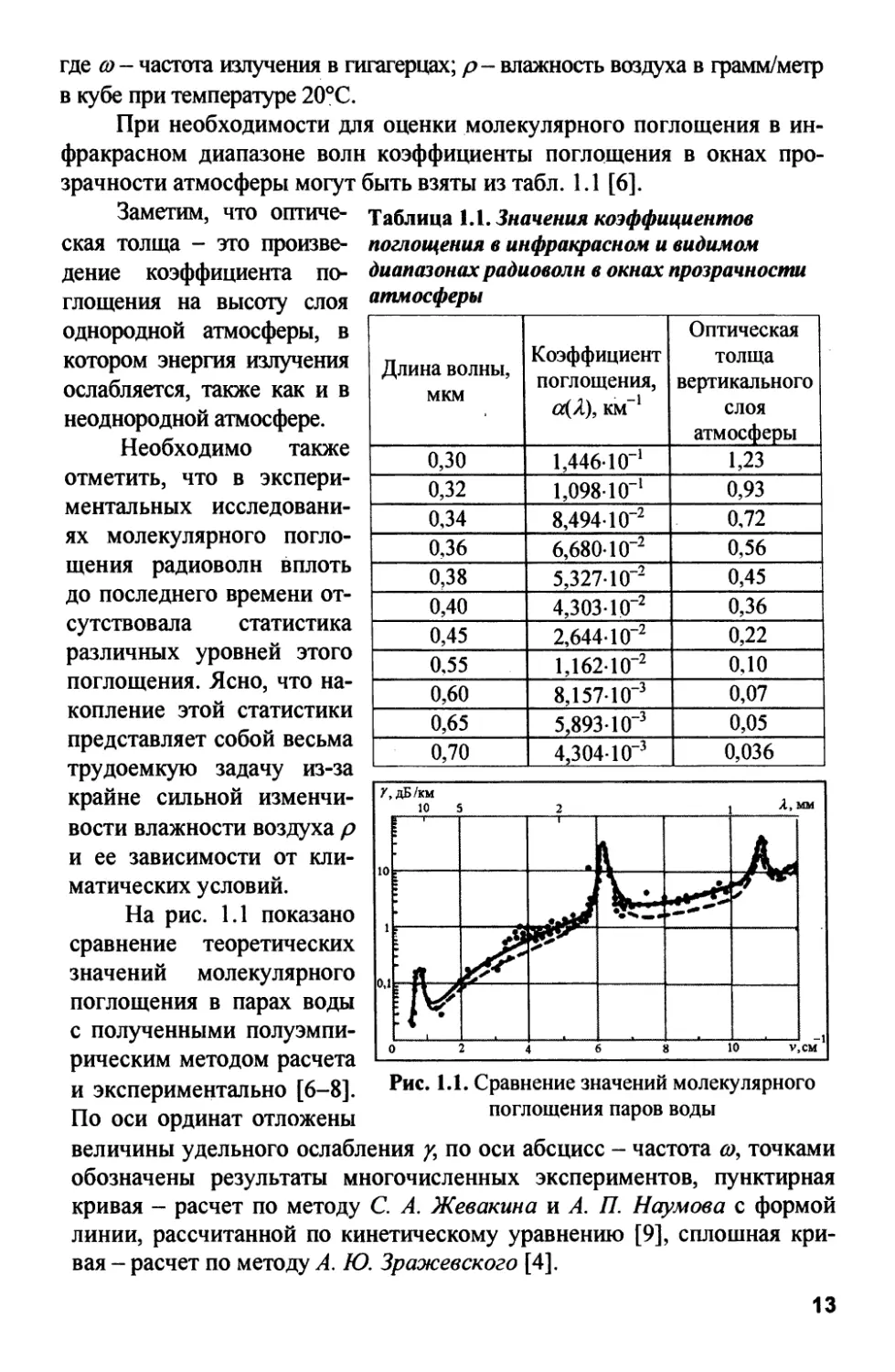
При необходимости для оценки молекулярного поглощения в
инфракрасном диапазоне волн коэффициенты поглощения в окнах
прозрачности атмосферы могут быть взяты из табл. 1.1 [6].
Заметим, что оптиче- Таблица 1.1. Значения коэффициентов
екая толща - это произве- поглощения в инфракрасном и видимом
дение коэффициента по- диапазонах радиоволн в окнах прозрачности
глощения на высоту слоя атмосферы
однородной атмосферы, в
котором энергия излучения
ослабляется, также как и в
неоднородной атмосфере.
Необходимо также
отметить, что в
экспериментальных
исследованиях молекулярного
поглощения радиоволн вплоть
до последнего времени
отсутствовала статистика
различных уровней этого
поглощения. Ясно, что
накопление этой статистики
представляет собой весьма
трудоемкую задачу из-за
крайне сильной
изменчивости влажности воздуха р
и ее зависимости от
климатических условий.
На рис. 1.1 показано
сравнение теоретических
значений молекулярного
поглощения в парах воды
с полученными
полуэмпирическим методом расчета
и экспериментально [6-8]. Рис-1Л- Сравнение значений молекулярного
По оси ординат отложены поглощения паров воды
величины удельного ослабления у, по оси абсцисс - частота со, точками
обозначены результаты многочисленных экспериментов, пунктирная
кривая - расчет по методу С. А. Жевакина и А. П. Наумова с формой
линии, рассчитанной по кинетическому уравнению [9], сплошная
кривая - расчет по методу А. Ю. Зражевского [4].
1
Длина волны,
мкм
0,30
0,32
0,34
0,36
0,38
0,40
0,45
0,55
0,60
0,65
1 0,70
Коэффициент
поглощения,
а(А), км-1
1,446-Ю-1 1
1,09810Ч
8,494-Ю-2
6,680- Ю-2
5,327-10"2
4,30310"2
2,64410"2
1,162-Ю"2
8,157-Ю-3
5,893-Ю-3
1 4,304-Ю-3
Оптическая 1
толща
вертикального
слоя
атмосферы
1,23
0,93
0,72
0,56
0,45
0,36
0,22
0,10
0,07
0,05
1 0,036
У, дБ/км
10 5 2
10
1
10,1
1 с
! '
' л *
'
W^
\
%г.
*£^>
я,
j\x*
/V
2 4 6 8 10 v
мм
см
13
1.1.2. Ослабление миллиметровых радиоволн в гидрометеорах
Наиболее сильное ослабление в ММ-диапазоне радиоволн
оказывают дожди, туманы и облака, в то время как снег, град и твердый
аэрозоль вызывают существенно меньше ослабление [6, 8].
Удельное ослабление в дождях теоретически изучено достаточно
полно на основе строгого решения задачи о дифракции
электромагнитной волны на водяной сфере для ансамбля частиц с заданным
распределением их по размерам.
При расчетах ослабления в ансамбле капель дождя для реальных
значений комплексного показателя преломления воды, заимствованных
из результатов экспериментов [10], факторы эффективности ослабления,
рассеяния и поглощения могут быть представлены в виде бесконечных
рядов, число членов которых должно иметь порядок X.
Обычно величина ослабления, рассеяния и поглощения в дожде
представляется в виде [ 1 ]:
00
r = 4,34N0 \q (X,mWf(Q)dQ. (1.5)
J ^ ОСЛ
о
В выражении (1.5) эти факторы могут быть представлены как
00
Qoc„(X,m) = Д- Z i2n+\)Re{a„ + bn) ;
X2„=l
00
eocn(x,w)=Al(2«+i)(kl2+W2);
Х2 И=1
оо
где N0 - полное число капель в объеме; X = InalX, a - радиус капли, Я -
длина волны; т - комплексный показатель преломления отдельной
капли; ап и Ьп - комплексные коэффициенты, пропорциональные
амплитудам электрических и магнитных мультиполей, которые, в свою очередь,
представляются функциями Рикатти-Бесселя; J[a) - функция
распределения капель по размерам.
При инженерных оценках дальности действия РТС Международным
Комитетом по Радио рекомендуется определять коэффициент % для разных
частот в диапазоне 10... 100 ГГц по эмпирическому соотношению:
Гд = Жв»Уд-В(а,), (1.6)
где А(о)) и В(со) - постоянные коэффициенты для данной частоты
излучения; Уд - интенсивность дождя в миллиметрах/час, определяемая
высотой столба жидкой воды в 1 см3 площади.
14
Значения коэффициентов A(<d) и В(а)), полученные в итоге
многочисленных и неоднократных измерений, приведены в табл. 1.2.
Таблица 1.2. Значения коэффициентов А(ф) и В(а>)
Частота,
ГГц
10(Я=Зсм)
30Ц=1см)
60(Л=5мм)
90(Л=Змм)
|з00(/1= 1мм)
Значения коэффициентов при различной поляризации |
А(о))
Вертикальная
0,0101
0,1871
0,7969
1,064
1,1164
Горизонтальная
0,0088
0,1674
0,6419
0,9992
1,059
В(о)) |
Вертикальная
1,2762
1,020
0,8261
0,7529
0,7484
Горизонтальная
1,2637
0,9997
0,8073
0,7537
0,7441
Коэффициент
ослабления в дождях можно
приближенно определить также
на основе результатов
теоретического расчета по
графикам, приведенным на
рис. 1.2 [8].
В табл. 1.3 даны
результаты расчетов и
экспериментов коэффициента
ослабления радиоволн ММ-диа-
пазона в дождях различной
интенсивности (результаты
экспериментов обозначены
звездочкой и приведены
через дробь только для волны
1 2 мм Г81 "I *>ис* *#^# Ослабдение радиоволн в дождях
Таблица 1.3. Коэффициенты ослабления радиоволн ММ-диапазона
в дождях различной интенсивности
Длина волны,
мм
8
3,2
2,2
1,24
0,98
Ослабление, дБ/км, при интенсивности дождя, мм/ч
моросящий
0,5
0,4
0,7
0,8
0,8
0,8
1,0
0,5
0,7/1,6'
1,3
1,3
1,3
слабый
2,5
1,0
2,0
2,6
2,6
2,6
средней силы
5
2,2
3,0/4,5'
4,1
4,0
3,9
10
3,0
5,0/7'
7,7
-
7,2
сильный
25
-
11/10,9'
13,8
-
12,8
У, дБ/км
15
Рис. 1.3. Распределение интенсивности
дождей в течение года
На рис. 1.3
представлены графики распределения
интенсивности дождей J„ от
ные по материалам
детального изучения статистики
дождей на земном шаре для
различных климатических
условий: 1 - морской
субтропический; 2 - континентальный
умеренный; 3 - морской
умеренный; 4 - для среднепере-
сеченной и возвышенной
местности; 5 - пустынной
местности [8, 10].
На рис. 1.4 приведены
результаты исследований,
проведенные в ИРЭ РАН,
зависимости среднегодовой
продолжительности дождей
от их интенсивности, где: 1 -
результаты измерений для
европейской территории
России; 2 - результаты расчета;
3 - результаты измерений
для северо-западной части
Германии.
Анализ материалов
детального изучения статистики
дождей на земном шаре в
результате изучения
распределения интенсивности дождей
во времени показал, что в средней части Европы дожди с интенсивностью
выше 5 мм/ч появляются в течение 0,15% времени всех дождей года.
Вероятность же появления дождей с интенсивностью меньше 5 мм/ч из
всего количества дождей года составляет 0,75% [11-13].
Для определения ослабления в дожде на волнах 0,63 и 10,6 мкм
может быть рекомендована простая эмпирическая формула:
/д = 1,07Уд°'63. (1.7)
Найденные таким образом коэффициенты ослабления в дожде
позволяют определять потери энергии излучения на трассе при условии
* /о
ю-1
.7
10 "
103
.о4
105
"*%. 1
2
3 1
/
Л, мм/ч
100
Рис. 1.4. Зависимость среднегодовой
продолжительности дождей
от их интенсивности
16
Длина
волны,
мм
3,2
1 2,15
1,3
1 0,98
Значения коэффициента
ослабления при
интенсивности осадков
Jc, мм/ч, |
1
0,5
1,2
1,5
2,8
2
1,1
2,2
4,1
4,8
3
2,1
3,8
11,3
'
выпадения однородного по пространству дождя. В случае его
пространственной неоднородности необходимо для оценки потери дальности
действия иметь данные о распределении его интенсивности либо
пользоваться существующими моделями пространственного распределения
дождей, основанными на многочисленных экспериментах.
Ослабление радиоволн в снегопаде не поддается строгой
теоретической оценке. Однако известно, что оно примерно вдвое меньше, чем в
дождях с интенсивностью Jc < 5 мм/ч. В мокром снеге ослабление оказывается
в 2...3 раза больше, чем в дожде Таблица \Л. Значения коэффици-
той же интенсивности, причем оно ентов ослабления мМ-волн
не поддается достаточно надежной е снегопаде
теоретической оценке.
Характерные значения
коэффициентов ослабления ММ-радио-
волн в снегопаде приведены в
табл. 1.4 [6].
Среднегодовая
продолжительность снегопада определенной
интенсивности Jc для средней
полосы европейской территории
России приведена на рис. 1.5
(кривая 7); кривая 2 - выпадение снега,
а кривая 3 - снежной крупы в
Японии [6, 8].
Анализ распределения
вероятностей выпадения снега для
средней полосы европейской части
Российской Федерации
показывает, что снегопады с
интенсивностью Jc = 1 мм/ч и более
составляют менее одних суток в году.
Ослабление
радиоизлучения в туманах и облаках может
быть найдено по графикам на
рис. 1.6 и рис. 1.7
соответственно. Для приближенных оценок
величина ослабления в таких
гидрометеорах может быть
вычислена по формуле:
v - /i/»1'95^-6.856(1+0,00457-)]
где q - водность тумана или облака в граммах на куб. метр; со - частота
излучения; Т- абсолютная температура в градусах Кельвина.
17
'год?
г'1
Г
Г
L4
0
%
\
,1
ч
ч
3
'Чч^ч
,/-
^
\v
\ \
-V
\\
0,5
2
\
\\
^
\v
\ 1
\
1 2 i
\.L, мм/ч
О'
>
Рис. 1.5. Зависимость среднегодовой
продолжительности снегопада от его
интенсивности
(1.8)
На рис. 1.6 под термином «Видимость» понимается оптическая
дальность видимости. На рис. 1.7 косыми линиями (от 20 до 1000 м)
обозначена оптическая дальность видимости в облаках.
R
Видимость, м
1000 S00 200 100 SO 2S 10 5
г
30
«
< 5
*\
1,0
0,5
03
0,1
0,01
»
Л = 1м
2мм/
"4ммУ
6мм/
8мм^,
А
УУ
А
X
V
А
у
А
i' ■
\А
У
А у
\/ ,
\Х/
ff/
\/
\л
1 У
К3.2с
J
/
А
А
/
/
/
i
L.
у
/Г
А
А
А
А
А
\/
V
1 '
/
V А
Р>
\/
У
у
у
'
А
А
/
А
/
*
Ч
/
[
/
л\
"Л\
0,01 0,03 0,1 03 0.5 1.0
Водность, г/м3
Рис. 1.6. Ослабление
миллиметровых волн в туманах
Рис. 1.7. Ослабление миллиметровых волн
в облаках
40
20
10
5
3 2
\ 1
I 0,5
1 0,2
Зол
0,05
0.02
III
-
уА^
_ у/^
Ау
- Jf
^~~Ts
0 2
7^-"t"
2 ^у^\
3S/3i
5У\
л7 *аЛ
U)sf\
9
\\s
ij |
-/7
0 50 100 200 3
50
Частота, ГГц
Рис. 1.8. Частотные зависимости
молекулярного поглощения
и ослабления в атмосфере
На рис. 1.8 приводятся частотные
зависимости молекулярного
поглощения и гидрометеорных ослаблений в
атмосфере [8], где кривая 1 - дождь
100 мм/ч (1<Г*%); 2 - дождь 50 мм/ч
(8-Ю"4); 3 - дождь 10 мм/ч (2-Ю-2); 4 -
дождь 5 мм/ч (10-1%); 5 - туман,
дальность видимости 200 м (5%) (в
скобках даются усредненные по
времени в течение года значения
продолжительности компонентов
поглощения для средней полосы России); 6 -
туман, облака, дальность видимости
50 м; 7 - пары воды при нормальных
условиях (30 %) (здесь под
нормальными условиями понимаются:
температура воздуха +20°С, атмосферное
18
давление 760 мм рт.ст. и абсолютная влажность 7,5 г/м3); 8 - кислород;
9 - нерезонансное поглощение кислорода на частоте менее 10 ГГц; 10 -
пыль; 11 - дым, видимость 200 м.
Анализ особенностей распространения радиоволн показывает, что
в короткой части ММ-диапазона радиоволн имеется ряд участков
спектра (в районах волн 8; 3,3; 2,3 и 1,3 мм), так называемых «окон
прозрачности», где ослабление невелико.
1.1.3. Вероятностные характеристики ослабления
миллиметровых радиоволн в атмосфере
Необходимо заметить, что существующие методы оценки основных
компонентов ослабления в атмосфере являются лишь первым
приближением к действительности, поскольку атмосфера - постоянно меняющаяся
среда, и распространение ММ-радиоволн происходит, вообще говоря, в
неоднородной атмосфере, так как ее параметры изменяются вдоль траектории
распространения от высоты над земной поверхностью и во времени. Таким
образом, в настоящее время требуется определение средних удельных
значений ослабления, зависящих от различных параметров атмосферы, а также
вероятности появления этих значений.
В [14] проведен анализ результатов указанных выше основных работ
по исследованию распространения радиоволн СМ-, ММ- и субММ-диа-
пазонов в атмосфере и гидрометеорах применительно к разработке
радиолокационных систем обнаружения наземных объектов. Такие
данные в виде таблиц усредненных значений с учетом вероятности
появления этих значений приводятся ниже.
Так, средние значения коэффициентов ослабления в атмосфере для
«окон прозрачности» в ММ- и субММ-диапазонах, которые
соответствуют нормальным погодным условиям, следующие:
Лмм 8 3,2 2,2 1,24 0,98 0,86
уЛ, дБ/км 0,06 0,4 0,7 2 7 13
Текущие значения коэффициента ослабления в атмосфере % связаны
с абсолютной влажностью, которая, как было сказано выше, является
определяющей характеристикой ослабления, поэтому для практических оценок
IX] часто используют следующую упрощенную формулу:
[y'J =0,133ГаА (1.9)
где р (г/м3) « 0,8/в (мбар) - абсолютная влажность; /в - упругость
водяного пара.
Известно, что величина р может меняться в широких пределах от
1,5 до 17 г/м3 и зависит от погодных условий. Как правило, в зимний
период величина р не превышает 4 г/м3 (табл. 1.5); в осенний и
весенний периоды, летом в сухую и жаркую погоду она может быть в преде-
19
лах 7... 10 г/м3, а в условиях тумана и осадков, а также в период
испарений значение р может быть выше 12 г/м3. В табл. 1.5 (в нижней строке)
также приведены результаты расчетов усредненных значений
коэффициента ослабления радиоволн в атмосфере с вероятностью появления
Ру= 0,8. Данные табл. 1.5 применимы для оценки энергетического
потенциала радиолокационных систем.
Таблица 1.5. Усредненные значения коэффициента ослабления
радиоволн в атмосфере
Сезон
Зима
Весна, осень,
| лето
[ Усредненный
за год /а
|сРу=0,8
Усредненные значения коэффициента ослабления /а
при длине волны, мм
8
0,034...0,1
0Д..Д2
0,09
3,2
0Д6..Д5
0,5...0,91
0,4
2,2
0,2...0,55
0,55... 1,44
0,47
1,24
0,6...1,5
1,5...3,4
1,4
0,98
1,2...6
6...11,3
4,75
0,86 1
7...12 |
10...13
10,7
Интересны для практики также результаты статистических
исследований, зависимости коэффициента ослабления радиоволн в короткой
части ММ-диапазона от вероятности их появления [14]. Так, в
результате исследования среднегодовых колебаний абсолютной влаж-ности в
Таблица 1.6. Коэффициенты ослабления приземной атмосфере, а
в атмосфере у* также ^я заданных
значений вероятности их
появления Рг в интервале
от 0,1 до 1 получено, что
значения коэффициента
ослабления в атмосфере
уа для длин волн 1,2 и 3
мм не будут превышать
значения, приведенные в
табл. 1.6.
Наибольшее ослабление в кислороде атмосферы за счет
молекулярного резонанса имеет место на волнах длиной 5 и 2,5 мм,
соответствующих максимумам линий молекулярного поглощения.
Таким образом, анализ особенностей распространения радиоволн
ММ- и субММ-диапазонов показывает, что в ММ-диапазоне радиоволн
имеется целый ряд участков спектра (в районах волн 8; 3,2; 2,3; 1,3 мм),
где ослабление невелико. Это позволяет утверждать о возможности широ-
Длина
волны Л,
мм
1
2
1 3
Значения коэффициентов %, дБ/км,
для заданных вероятностей появления
ОД
8
2,3
0,8
0,2
6
1,8
0,5
0,3
5
1,4
0,35
0,5
4,2
1
-
0,7
3,8
0,7
-
0,9
3,6
0,5
-
1
3,5
0,4
-
20
кого применения таких волн в радиолокационных системах обнаружения
особенно в ночных условиях, когда обнаружение с помощью визуального
наблюдения, в том числе и с использованием приборов ИК-диапазона,
сильно затруднено или невозможно.
1.2. Методы моделирования рассеяния радиоволн
земной поверхностью
Известно, что при разработке радиолокационных систем прежде
всего требуется знание эффективных коэффициентов отражения
объектов и подстилающей поверхности в исследуемом диапазоне радиоволн.
Другими словами, требуются данные по эффективной поверхности
рассеяния (ЭПР) объектов и фонов. Кроме того, необходимо также знать
характеристики отражения от гидрометеоров, вносящих значительное
ослабление в распространение радиоволн.
Если диэлектрические и металлические поверхности достаточно
гладкие, то, воспользовавшись формулами Френеля, несложно
рассчитать зависимости модуля и фазы отраженных волн как для
горизонтальной, так и для вертикальной поляризаций. Однако в случаях неровной
поверхности расчет характеристик рассеяния сопряжен с немалыми
математическими трудностями.
1.2.1. Развитие методов моделирования процессов рассеяния
Попытки моделирования радиолокационных сигналов, рассеянных
земной поверхностью, предпринимались буквально с момента
зарождения радиолокации. Поскольку типы земных покровов чрезвычайно
разнообразны, теория рассеяния не может быть единой для всех случаев.
Наиболее естественно поделить типы земной поверхности на два
класса: поверхность без растительности и растительные покровы.
Основной характеристикой поля рассеяния от реальной
поверхности является удельная ЭПР <т* или удельное сечение обратного
рассеяния. Удельная ЭПР определяется как отношение плотности потока
энергии, рассеянной единичной площадью поверхности в направлении
на антенну, к плотности потока при изотропном рассеянии. Однопози-
ционная ЭПР для узкополосного зондирующего сигнала равна
<
<
Е^
?о
Е<
2
>
0
р
где Е(^ - комплексный вектор напряженности поля падающей волны в
месте расположения зондируемого объекта; Е^ - комплексный вектор
21
напряженности поля отраженной волны в точке приема, удаленной от
объекта на расстояние г, индексы р и q образуют поляризационный
базис с ортами вертикальной В или горизонтальной Г поляризацией; S0 -
площадь облучаемого участка.
В случае широкополосной радиолокации необходимо
рассматривать величину удельной ЭПР как функцию частоты зондирующих
колебаний [15, 16], т.е.
<т*-> <j*((d).
Существенной новизной информационного содержания обладают
радиолокационные изображения (РЛИ) местности, которые
интерпретируются как карта удельных ЭПР или портрет (сигнатура) зондируемого
объекта в случае высокого разрешения. Применение фрактальной
концепции к таким задачам широкополосной радиолокации позволяет
сформировать адекватные модели радиолокационного канала и снизить порог
априорной неопределенности.
При зондировании подстилающей поверхности наибольшее
распространение получили следующие энергетические характеристики
поля рассеяния: удельная ЭПР, бистатическая ЭПР и индикатрисы
рассеяния. Характер рассеянного поля определяется многими факторами, и
поэтому точное решение задачи дифракции волн на хаотически
неровной или неоднородной поверхности в общем случае найти не
представляется возможным. В случае реальных земных покровов
целесообразность точного решения можно поставить под сомнение.
Известные модели рассеяния электромагнитных волн земной
поверхностью могут быть разделены на три класса [17-19]:
полуэмпирические, геометрические и статистические.
Полу эмпирические модели просты по форме и включают в себя
одну или две произвольные постоянные, которые являются функциями
характеристик рассматриваемых поверхностей и определяются
посредством согласования модели с результатами измерений [20]. Данные
модели получены из предположения рассеяния электромагнитных волн по
хорошо известному закону Ламберта или его обобщения. Затем с целью
объяснения возрастания величин удельных ЭПР при нормальном
падении волны были предложены комбинации таких моделей с учетом
явления зеркального отражения при угле падения 6= 0. Дальнейшее
развитие эти модели нашли в моделях второго класса.
В геометрических моделях поверхность представлялась в виде
совокупности элементов простой конфигурации (сфера, цилиндр,
точечные элементы и т. д.), расположенных произвольно на плоскости. Так
как рассеивающие свойства элементов известны, то обычно анализ
проводится методами многократного рассеяния или с помощью других тео-
22
рий. Эти модели позволяли упростить аналитическое решение сложной
проблемы. Однако часто бывает затруднительно установить связь
теоретических параметров с непосредственно наблюдаемыми свойствами
местности [20, 21]. Наиболее известная модель включала идеально
проводящие полусферы или полуцилиндры одинакового радиуса,
произвольно расположенные на идеально проводящей плоскости [22].
В [23, 24] поверхность состояла из набора идеально проводящих
полуплоскостей, наклоненных под одним и тем же углом к средней
плоскости. Ввиду слишком большой идеализации данная модель
применима только для искусственных поверхностей. Была также
предложена модель поверхности, включающая отдельные полные циклы
синусоид со случайными периодами и амплитудами [18, 25]. Так как в этой
модели применяются методы физической оптики, то ее выходные
результаты не зависят от типа поляризации.
Получили развитие также фацетные модели, когда поверхность
представляется в виде набора небольших плоских сегментов или граней
с произвольным наклоном [18, 20, 26]. Поверхность, состоящая из
произвольных граней, описывается марковским процессом с конечным
числом состояний и дискретными моментами перехода. Данная модель
была обобщена в [27] на конечную трехмерную поверхность с
непрерывными радиусами кривизны.
Наиболее общим является подход, основанный на
статистическом моделировании, трактующий высоту неровностей как случайную
переменную [18, 26, 28-41]. При этом подразумевается два способа
статистического описания поверхности - в виде непрерывных и
дискретных случайных процессов, одинаково применимых для представления
сложных отражающих рельефов.
Для хаотических покровов, описываемых непрерывным случайным
процессом, теоретически наиболее последовательному анализу поддаются
два крайних случая, определяемых величиной параметра Рэлея Р = Iko^x
xcos#, где к = 2л/А - волновое число, А - длина волны, а^- среднеквадра-
тическая высота неровностей, в - угол падения волны. Тогда возможно
применение асимптотических методов анализа: для Р«1 - метод
возмущений (MB), для Р»\ - метод касательной плоскости (МКП) с
использованием приближения Кирхгофа. Данные методы являются наиболее
распространенными в теории рассеяния волн хаотическими поверхностями.
1.2.2. Метод возмущений
В методе возмущений асимптотически используется
малость характерной высоты неровностей а^ по сравнению с длиной
падающей волны — «1, пологость
23
V^b=^<[vc(p)]2>«i (l.ii)
и мелкомасштабность
\~Х (М2)
в среднем плоской <^(р)>=0 рассеивающей поверхности z = фс,у).
Здесь \1<у2 > - среднеквадратическое значение тангенса угла наклона
неровностей, V - поперечный оператор Гамильтона, /^- радиус
корреляции поверхности, угловые скобки означают статистическое
усреднение по множеству реализаций.
Анализ экспериментальных данных [17, 42] показывает, что в
сантиметровом и длинноволновой части миллиметрового диапазона волн
практически квазигладкими являются бетонные и асфальтовые покрытия.
Для статистически изотропной поверхности с пространственным
коэффициентом корреляции R(p) удельная ЭПР в первом приближении
MB выражается формулой
(7«=|*V|cos4e|aJ2/, (1.13)
где индексы р и q обозначают вид поляризации рассеянной и падающей
волн соответственно; величины ат прямо пропорциональны элементам
матрицы рассеяния:
g-1
^ГГ - - . ^ v2»
«вг = <*гв = °> (1-14)
Uose + yIe-sm2e)
интеграл
со
/ = 2л [pR(p)Jo(2kps>m0)dp (1.15)
о
определяет пространственный спектр неровностей G(q±); J0 - функция
Бесселя 0-го порядка первого рода; s = s'-'\s" - относительная
комплексная диэлектрическая проницаемость, qx - вектор рассеяния.
Для гауссовского коэффициента корреляции
Л(р) = ехр(-/92/£)> (1.16)
24
<Ху
вв
интеграл
/ = nl\ exp {-k2l\ sin2 #). (1.17)
В случае другой, часто используемой функции
Я(р) = ехр(-|р|//,), (1.18)
значение интеграла
I = 2nll\\ + Ak2l2cSAVi2ey12. (1.19)
Доводы, что экспоненциальная функция не может использоваться в
качестве функции автокорреляции из-за недифференцируемости
случайного процесса, можно считать необоснованными, если в окрестности нуля
применить регуляризирующую функцию [43]. Заметим, что более глубокое
физическое обоснование применимости недифференцируемых функций
для описания процессов рассеяния электромагнитных волн появилось
только при использовании теории фракталов в радиофизике [20,25,199].
К настоящему моменту многочисленными исследованиями
научных коллективов из различных стран установлено, что большинство
природных ландшафтов, даже участки поверхности Луны, Венеры и
Марса, могут рассматриваться как фрактальные в различных диапазонах
пространственных масштабов (см., например, [44-47] и список
библиографических источников в них). Этот факт указывает на значительную
роль в природных процессах недифференцируемых функций,
называемых ранее «патологическими».
Расчеты показывают, что при увеличении длины волны от 8,6 мм
до 3,2 см коэффициенты apq для квазигладких поверхностей возрастают
на 1...4 дБ во всем диапазоне углов падения. При изменении значений в
от 10 до 80° наблюдается увеличение яггт ~ 6 дБ и аВв ~ 25 дБ (Д = 3,2
см), оггг « 10 дБ и #вв « 20 дБ (Я = 8,6 мм).
Теоретические и экспериментальные зависимости удельной ЭПР
асфальтового и бетонного покрытий, полученные с использованием
результатов [17, 41, 42, 48-50] приведены на рис. 1.9 для длин волн 8,6 мм
и 3,2 см и двух видов поляризаций. Погрешность измерений составляла
±1 дБ. Экспериментальные данные показывают, что значения сг*т > сг*гг
примерно на 10 дБ в области углов в> 60°. При дальнейшем
укорочении волны в диапазоне ММ-радиоволн величина удельной ЭПР
практически не изменяется в диапазоне больших углов падения.
Наличие водяной пленки на поверхности приводит к заметному
снижению а* на больших углах падения, достигающему величины,
примерно равной 10 дБ при 0= 70° и 8 дБ при 0= 20°.
25
<т,.дБ
20Г * х^ й #
зо "Т^Т
50|
80 В, град
40 60 80 0. град
6)
Рис. 1.9. Зависимость теоретических и экспериментальных значений удельной
ЭПР асфальта (а) и бетона (б) от угла падения на Я = 8,6 мм (7 - ВВ, 2 - ГГ),
Я = 3,2 см (3 - ВВ, 4 - ГГ), Я = 3,3...7,5 мм (5 - ВВ)
При анализе обратного рассеяния методом возмущений с учетом
величин 2-го порядка оказывается, что элементы авг и агв в (1.14) для
перекрестной поляризации не равны нулю. Соотношения для сг*вг = сг*гв
в этом случае приведены в [51].
В общем случае правосторонней (П) и левосторонней (Л) круговой
поляризации элементы apq с учетом (1.14) принимают вид
аш\ -аш\ - гу (агг +авв)> алл -ахт ~т(агг авв)-
(1.20)
В области значений углов падения, где параметр Рэлея близок к
единице и превышает ее, метод возмущений уже не применим, и
следует использовать другие методы рассеяния.
1.2.3. Метод касательной плоскости
В методе касательной плоскости
асимптотически используется крупномасштабность (-^»1), плавность
А
(— »1), пологость (>/< у1 > «1) в среднем плоской рассеивающей по-
А
верхности. Здесь
а =
■♦(О1
3/2
С
(1.21)
- локальный радиус кривизны поверхности £ Для радиуса кривизны
требуется выполнение условия kacos30 » 1 [32, 33] или kacosd » 1 [38].
Простота и наглядность предположений, позволяющих избежать ряд
математических трудностей при нахождении поля рассеяния, сделали
МКП широко применимым на практике.
26
С момента появления первых работ [28, 29] область применения
МКП значительно расширилась. Была показана возможность
расположения источника и приемника излучения не только в дальней зоне, но и
при менее жестких ограничениях [52], производился учет затенений
рассеивающей поверхности [32, 53-55]. Анализ показал, что при
характерных углах наклона неровностей поверхности, превышающих угол
скольжения, необходим учет механизма затенения.
В [56, 57] задача дифракции сведена к приближению
геометрической оптики и статистике точек зеркального отражения на случайной
поверхности. В последнее время возрос интерес к изучению рассеяния от
сильно неровных поверхностей, имеющих негауссовскую статистику
[44, 50, 56-59]. Данная проблема характерна для некоторых земных и
антропогенных покровов, в том числе и фрактальных.
Удельная ЭПР в приближении МКП имеет вид:
для гауссовской функции распределения вероятностей высот точек
поверхности
' ев л
а.гг=а.вв =
Ж2
2<r2>cos4d
ехр
2<у2>
(1.22)
для экспоненциальной функции распределения вероятностей
высот точек поверхности.
< у > cos в
2<г2>У
где
И<>)|=
(VH
(д+\)
(1.23)
(1.24)
- модуль френелевского коэффициента отражения при в = 0°.
Зависимость а* от длины волны заключена лишь в коэффициенте К(0) в силу
частотной зависимости диэлектрической проницаемости.
Угловые зависимости <т*, построенные на основе (1.22) и (1.23) для
различных значений л/</2 > , приведены на рис. 1.10 [18, 56]. Обе
указанные модели обратного рассеяния показывают, что значительная часть
мощности рассеивается вблизи средней нормали к поверхности, т. е. при
в » 0. Гауссовская модель является параболической при в « 0, в то время
как экспоненциальная модель - линейная. При более высоких углах
падения мощность в случае гауссовской модели уменьшается быстрее. По мере
увеличения </> меньшая часть мощности рассеивается вблизи
направления нормального падения. Одновременно увеличивается доля мощности,
рассеиваемой вблизи углов скользящего падения.
27
1 V(0)|2
зон
2ol
10F
T
Y
*,0r
-20b
-30[-
-4(*
,дн
?5<l 10" 15° \25 •
"5= \ \20-P0°
\ \\\\
1 l WW
\ \\\l
1Ш111.
20 40 60
1 e)
i V(0>!2 j
30
20
10
0
-10
-20
-30
-40
ДБ
h I \ \ \ \ A
: Ш
■ \ WW
■ 1 \ \ \\
■ \ \\\
A \A\\
80 0, град 20 40 60_
6)
\
\
L
80 6',W
Рис. 1.10. Зависимость удельной ЭПР в приближении МКП
от угла #для хаотической поверхности с гауссовской (а)
и экспоненциальной (б) плотностями вероятностей высот неровностей
при различных углах наклона неровностей arctg^< у1 > = 2,5...30°
Нетрудно показать [32, 38], что для неровностей, наклоны которых
распределены по гауссовскому закону, эффективная угловая полуширина
индикатрисы рассеяния А0, определяемая по уровню уменьшения в е раз,
равна
&e = 2J2^<y2x>. (1.25)
Эффективная угловая полуширина по азимуту
Ap=2V2^^/tg0. (1.26)
Из этого следует, что приближение МКП для радиолокационного
отражения выполняется в интервале углов, не превышающих указанные
выше величины.
В ранее выполненных работах предполагалось отсутствие
деполяризации радиолокационного сигнала, отраженного от идеально
проводящей шероховатой поверхности. В [60] значение тока на поверхности
не задается в геометрооптичеком приближении, а находится из решения
интегрального уравнения. Затем по току определяются дифракционные
поправки к поляризованной компоненте отраженного сигнала и
вычисляется деполяризованная компонента.
Относительная интенсивность последней не зависит от вида
плотности распределения вероятностей наклонов поверхности
28
а™ а?г <т\ cos4 в
^ВВ ГС ,2/4 ' У1-*')
С учетом дифракционных поправок получен критерий
применимости МКП в виде
к214
-f»l (1.28)
вС
который является более слабым, чем обычное неравенство ка cos#» 1.
Величина поправок для значений а* уменьшается с ростом угла падения.
Рассеяние радиоволн тонким слоем с шероховатыми границами
при произвольной корреляции между неровностями верхней и нижней
границ в приближении МКП рассмотрено в [61]. Было показано, что при
дистанционном определении толщины слоя по когерентной
составляющей наличие неоднородностей на верхней границе среды может при
малых е уменьшать влияние ложных отражений. При больших значениях е
лучшее ослабление дает метод оценки толщины слоя по некогерентной
составляющей. Отмечено, что при корреляции неровностей верхней и
нижней границ может наблюдаться эффект замирания рассеяния.
Влияние диаграммы направленности на значение удельной ЭПР
исследуемой поверхности вблизи малых углов падения рассмотрено в
[36, 62, 63]. Было показано,что при ширине диаграммы направленности
0а<у1<Г2>, (1.29)
влияние ее на величину принятой интенсивности рассеянного поля
незначительно.
В [64] на основе учета направленных свойств излучателя,
диаграмма направленности которого является функцией с ограниченным
пространственным спектром [65], показано в общем случае, что
корреляционная функция рассеянного поля пропорциональна
преобразованию Фурье квадрата модуля диаграммы направленности и простран-
твенному спектру неровностей поверхности. В зависимости от вида
антенны и расположения точек приема, в которых определяется
корреляция рассеянного поля, имеется некоторый критический масштаб, где
резко меняется характер корреляции.
1.2.4. Двухмасштабная модель
Значительная часть земных покровов не является однородной ни с
физической, ни с геометрической точек зрения, и имеет, как правило,
относительно широкий пространственный спектр неровностей. В этом
случае требуется более общая теория, которая учитывала бы этот факт.
Представление рассеивающей поверхности в виде совокупности
разномасштабных неровностей
29
£(r) = £,(r)+&(r)+...
(1.30)
достаточно крупных, чтобы рассеяние от них можно было определить в
приближении МКП [66], приводит к замене в формуле (1.22) <jh> на
Е,- <у 2>, но ввиду предполагаемой всегда малости наклонов оно
недостаточно для объяснения экспериментальных результатов.
Более широкие области применения имеет модель избирательного
рассеяния, иногда называемая двухмасштабной,
предложенная в [67] и примененная для рассеяния радиоволн морской
поверхностью в [68]. В [69] этот метод был распространен на
электродинамический случай рассеяния радиоволн поверхностью суши.
В основе двухмасштабной модели лежит предположение о
возможности разделения неровностей реальной поверхности на две компоненты -
мелко- и крупномасштабную. Такое разделение достигается посредством
замены реальной поверхности суперпозицией сглаженной средней
поверхности С,\ и малых нормальных отклонений £> от нее. Параметры случайных
поверхностей должны удовлетворять условиям [32,38]:
2ка<2 cos0'«l, <[V^(p)]2 >«1, ka{ cosd' »1, (1.31)
где а\ - средний радиус кривизны крупномасштабной поверхности; в'-
локальный угол падения, отсчитываемый относительно касательной
плоскости; Vt - градиент в касательной плоскости.
После разделения неровностей для рассеянного поля в качестве
нулевого приближения используется решение в приближении МКП,
отвечающее плавным крупномасштабным неровностям, а влияние
мелкомасштабных образований учитывается в первом приближении метода возмущений.
При этом оба типа неровностей считаются статистически независимыми, а
рассеянные поля - некогерентными. В [70, 71] использована форма
некогерентного сложения полей, рассеянных мелкомасштабными возвышениями
с учетом углов наклона крупных неровностей.
При выполнении условий (1.31) выражение для удельной ЭПР с
двухмасштабными неровностями без учета затенений является суммой
двух слагаемых
а;=<7м+а;2, (1.32)
где сг*1 - удельная ЭПР в приближении МКП; ет+2 - удельная ЭПР для
мелкомасштабной составляющей £>> наложенной на крупномасштабную
поверхность £i.
Влияние крупномасштабной состаляющей поверхности проявляется в
локальных изменениях углов, под которыми облучаются малые
неровности. Для нахождения а*2 необходимо локальные <тт усреднить по всем
возможным значениям наклонов крупномасштабной поверхности
30
<r.2=\<r.*W(r)<lr, (1.33)
где W(y) - двумерное распределение
наклонов крупномасштабной
составляющей.
Значения удельной ЭПР,
вычисленные в соответствии с теорией двух-
масштабной модели, сравнивались с
результатами измерений, выполненных на
искусственно созданной двухмасштаб-
ной хаотической поверхности (рис. 1.11)
[36]. Для крупномасштабной
составляющей плотность вероятностей высот
была близка к гауссовской. Остальные
параметры имели значения: а<{ =2,24 мм;
/й =23,4 мм; >/<7> = 0,123.
Для мелкомасштабной
составляющей с коэффициентом корреляции
Рис. 1.11. Зависимость
экспериментальных
и теоретических (сплошные
линии) значений удельной ЭПР
на длине волны 1,2 см:
1 - поляризация ВВ, 2 - поляризация ГГ
R2(p) = [l+{C/6,2)2]
-3/2
и пространственным спектром неровностей вида
G2=(6,2)2exp(-6,2|*|)
(1.34)
(1.35)
было получено сг = 0,85 мм; / = 6,2 мм; у]<у2 > = 0,34.
При двухмасштабной структуре поверхности рассеянное поле
вблизи диапазона малых углов падения определяется
крупномасштабными неровностями. С увеличением угла в квазизеркальная
составляющая резко уменьшается и при углах 2...30° становится сравнимой со
значением удельной ЭПР, обусловленной мелкой шероховатостью. При
доминировании рассеяния на малых неровностях спад о; становится
более плавным.
В соответствии с изложенным частотные и корреляционные
зависимости неодинаковы при различных углах визирования: при малых в
величина о; практически не зависит от частоты и поляризации, а при средних и
больших углах - аналогична закономерностям, полученным в рамках
метода возмущений. Таким образом, в зависимости а+(в) можно выделить три
области: квазизеркальных отражений (0< 10...30°), диффузного рассеяния
(85 > в> 30... 10°), и интерференции (90 > в> 85°) [18,40].
31
1.2.5. Другие подходы к проблеме рассеяния
электромагнитных волн
Векторный характер электромагнитного поля обусловливает
необходимость учета поляризационных особенностей при описании
отражательной способности земной поверхности. Параметры,
характеризующие поляризации радиолокационных сигналов, служат источником
дополнительной информации о свойствах подстилающей поверхности при
радиолокационном зондировании (поляризационные сигнатуры).
Основы теории поляризации и поляризационных преобразований
радиоволн в систематизированном виде изложены в [72], а
применительно к проблемам определения электрофизических и геометрических
характеристик земных покровов при изучении природных ресурсов
дистанционными методами - в [73]. Удобное описание рассеивающих
свойств поверхности при произвольной поляризации, позволяющее
избежать анализа громоздкого ансамбля а/4, возможно при помощи
матрицы Мюллера, давно и успешно применяемой в оптике [74].
Матрица Мюллера с помощью линейного преобразования
устанавливает связь между компонентами вектора-параметра Стокса рассеянной и
падающей волн. В [75] для поверхностей с малыми пологими
неровностями, описываемыми двухмасштабной моделью, определены все 16
элементов матрицы Мюллера и найдены степень поляризации и угол
эллиптичности рассеянного электромагнитного поля. Важно отметить, что степень
поляризации не зависит от пространственного спектра мелких неровностей.
Измеряя степень поляризации при фиксированном угле падения и априори
известном значении е подстилающей поверхности, можно определить
дисперсию наклонов сглаженной поверхности. Наличие эллиптичности в
рассеянном поле при зондировании поверхности вертикально поляризованным
излучением свидетельствует об анизотропии шероховатой поверхности.
Анализ индикатрис рассеяния [76, 77] показал, что многократные
рассеяния возникают не только при крутых неровностях, но и в случае
пологих неровностей при малых углах скольжения:
--0 = arctg>/<r>- (1.36)
Учет многократного рассеяния в общем случае сводится к решениям
уравнения Дайсона для средней функции Грина и уравнения Бете-Солпи-
тера для функции когерентности [32]. Для этого часто применяется
методика суммирования фейнмановских диаграмм [32,78]. Строгая
формулировка задачи рассеяния на импедансной неровной поверхности при
рассмотрении общей краевой задачи электродинамики в области с
флуктуирующими границами представлена в [79]. Получены точные
соотношения и разложения по малому параметру для операторов,
определяющих уравнения относительно двух первых моментов поля.
32
В [80] задача дифракции на статистически неровной границе
сведена к задаче объемного рассеяния с неоднородным обобщенным
показателем преломления, имеющим дельтаобразную особенность на
границе. Для гауссовских неровностей получена система функциональных
уравнений Дайсона.
Решение задачи рассеяния электромагнитных волн неоднородным
слоем с объемными флуктуациями диэлектрической проницаемости и
шероховатыми границами с любым распределением неровностей
проведено в [81] вариационным методом Швингера. В качестве примера
рассмотрено обратное рассеяние от слоя, образованного снежным
покровом на шероховатой подстилающей поверхности. Показано, что при
малых коэффициентах поглощения рассеяние от подстилающей
поверхности в присутствии снега имеет большее значение, чем рассеяние от
одной границы. Это обусловлено тем фактом, что удельная ЭПР слоя
определяется суммарной шероховатостью двух границ, которая
оказывается больше, чем от одной поверхности. Поскольку степень
шероховатости верхней границы снежного покрова невелика, угловой ход
удельной ЭПР зависит от шероховатости нижней границы. При
дистанционном зондировании наличие слабопоглощающего слоя вещества
может способствовать лучшему качеству изображения подстилающей
поверхности по сравнению с наблюдением этой поверхности без
неоднородного слоя. Уточнение зависимостей рассеивающих свойств слоя
на подложке рассмотрено в [82]. Определены условия усиления или
уменьшения рассеяния в зависимости от толщины слоя для двух видов
поляризации.
Аналитические выражения для матрицы удельной ЭПР 2-го
порядка хаотической поверхности получены модифицированным методом
малых возмущений в [83]. С помощью векторного аналога формулы
Грина [84] краевая задача о нахождении электромагнитного поля
сводится к интегральному уравнению для тензорной функции Грина. Для
замыкания уравнения используются импедансные граничные условия.
Данный метод, в котором существенно используется функция Грина,
эффективен при решении внешних и внутренних краевых задач
электродинамики и усиленно развивается в последнее время [85].
Для идеально проводящей статистически неровной поверхности
рассмотрен вопрос об устранении сингулярности матрицы удельной ЭПР.
Расчеты показали, что для разных компонент матрицы соотношение между
полными а* 1- и 2-го порядков различно. Например, основной вклад в
недиагональные компоненты вносит удельная ЭПР 2-го порядка а}2).
Отмеченное для ряда условий превышение <т*2) над сг*{1) свидетельствует о
необходимости анализа вкладов более высокого порядка или более
систематического учета эффектов многократного рассеяния.
2—3523
33
В [86, 87] предложен метод расчета, основанный на малости
наклонов (МН). В основе этого подхода лежит представление амплитуды
рассеяния в виде, в котором явно выделен фактор, отражающий ее
трансформационные свойства, а оставшаяся часть ищется в виде интег-
ростепенного ряда по наклонам поверхности. Построенное
приближение решает в значительной степени задачу описания рассеяния на
неровных поверхностях в рамках единого подхода, объединяющего метод
возмущений и приближение касательной плоскости.
Расчет индикатрис рассеяния [88, 89] и последовательный подход
к оценке точности этого метода [90, 91] показали, что метод МН
приближается к МКП и MB в областях их хорошей точности и дает
лучшую точность вне этих областей.
В [92] предложен метод локальных возмущений (ЛВ), который
позволяет для неровностей произвольной высоты получить
асимптотическое разложение рассеянного поля по двум малым параметрам: yj<y2 >
и некоторой безразмерной кривизне К = А*/а, где а = // - характерный
радиус кривизны, Д*= min (Я, 1$.
Использование итерационной схемы решения и формулы Грина
позволяет получить выражение для рассеянного поля. Найденное
решение также объединяет метод возмущений и МКП. Граничное условие в
методе ЛВ выполняется точно для каждого приближения. Для одно-
масштабной поверхности предложенная итерационная схема приводит к
разложению по малым наклонам.
1.2.6. Взаимодействие радиоволн с растительным покровом
Лесная и луговая растительности образуют специфический вид
подстилающей поверхности с динамическими сезонными изменениями.
Характеристики фитоэлементов и архитектура растительного покрова
существенно влияют на его рассеивающие свойства. Указанные обстоятельства
вызывают значительные затруднения в создании адекватного
математического описания поля рассеяния СВЧ электромагнитных волн.
Существующие модели растительного покрова в виде
совокупности рассеивателей простой геометрической формы или в виде
диэлектрического полупространства со случайно распределенными неодно-
родностями в основном применяются в диапазонах дециметровых и
сантиметровых волн [93].
Использование модели сплошной среды ограничивается условиями
малости расстояния между рассеивающими элементами по сравнению с
длиной волны. Считается, что флуктуации диэлектрической
проницаемости являются слабыми. Модель растительного покрова в виде сплошной
среды приведена в [94-101]. В [17, 98, 99, 101] наиболее последовательно
рассмотрено объемное рассеяние ММ-радиоволн слоем растительности и
34
определены все элементы матрицы Мюллера в первом и втором борнов-
ских приближениях. На волне 8,6 мм для двух сред с е = 1,1 - Ю,01
(трава) и е= 1,015 - Ю,002 (деревья), расположенных на поверхности с е =
= 6 - i0,6 для углов падения, примерно равных 80°, достигнуто хорошее
количественное совпадение экспериментальных и теоретических
значений aj* (табл. 1.7) [101].
Таблица 1.7. Сравнение экспериментальных и теоретических
(во втором борновском приближении) значений удельных ЭПР
растительности на волне 8,6 мм и в = 82°
Параметры
<г*, дБ
теор.
эксп.
Значения параметров для растительности
при различных видах поляризации
Трава
ГГ
-15,4
-15,0
ГВ
-23,6
-23,2
вв
~5,6
-14,2
Деревья
ГГ
-13,1
-13,0
ГВ
-26,7
-25,2
вв !
-13,1
-12,6
Флуктуации диэлектрической проницаемости среды травяной
покров-воздух толщиной 10 см описывались гауссовской трехмерной
функцией с дисперсией 0,1 е'2 и радиусом корреляции в горизонтальной
плоскости / = 1 мм, в вертикальной lz= 2 мм. Для среды деревья-воздух
толщиной 10 м дисперсия диэлектрической проницаемости была равна 0,01 е'1
для /= 1 мм, lz = 6мм соответственно.
Более общей является дискретная модель с рассеивателями разной
формы, учитывающая радиофизические и геометрические
характеристики фитоэлементов различных размеров и их взаимные затенения [35,
36, 97-109]. Рассеиватели моделируются диэлектрическими
цилиндрами с потерями [17], диэлектрическими или проводящими пластинами
[97, 98, 108], точечными отражателями [110] и т. п.
Полученные теоретические и экспериментальные оценки [106,
107] показали, что дискретная модель может применяться на длинах
волн 2...30 см. Дальнейшее развитие дискретной модели для диапазона
ММ-радиоволн требует детального изучения как отдельных
фитоэлементов, так и эколого-морфологической структуры растительного
покрова. В [111] приведены экспериментальные данные обратного
рассеяния волн длиной 3,2 и 8,6 мм отдельными листьями деревьев.
Измерения проводились в лабораторных условиях в безэховой камере.
При оценке эффектов объемного рассеяния слоем растительности
используют теорию переноса излучения [112, ИЗ] с различной степе-
35
нью приближения [114]. Характерные данные для диапазона ММ-радио-
волн, полученные в первом и втором приближениях, а также численным
решением уравнения переноса излучения, приведены на рис. 1.12 [115].
Рис. 1.12. Зависимости а* групп деревьев от альбедо (а),
оптического пути (б) и угла падения #для ели (в) и дуба (г, д):
а- 0=0, г= 1 Нп; б - 0= О, Л = 0,7; в - Я = 8,6 мм, Л = 0,6; г - Я = 3,2 мм, Л = 0,8; д -
Я = 2,2 мм, Л = 0.95; кривые 1-3 - совпадающие поляризации; 4-6 - ортогональные
поляризации; 2-5 - второе приближение; 3-6 - первое приближение
Результаты численного решения уравнения переноса излучения с
погрешностью около 1 дБ совпадают с результатами расчета в первом
приближении для альбедо Л < 0,4 и совпадающих видов поляризации
(рис. 1.12,а). Для второго приближения указанные расчеты согласуются
друг с другом с погрешностью около 1 дБ до Л « 0,85 и Л « 0,5 при
совпадающих и ортогональных поляризациях соответственно. Как следует
из данных (рис. 1.12,6) удельная ЭПР растительности не зависит от
оптического пути т при т > 1 Нп. Эти условия почти всегда соблюдаются
для групп деревьев в диапазоне ММ-радиоволн.
Сравнение экспериментальных (точки - поляризация ВВ, крестики -
ВГ) и теоретических данных а* представлено на рис. \А2,в-д при длине
волны 8,6 мм (ель), 3,2 и 2,2 мм (дуб). Модели, использующие второе
приближение, хорошо описывают экспериментальные результаты на
различных видах поляризации при углах падения до 70°. Деревья имели
36
высоту более 10 м и влажность покрова, достигающую 53 % для елей и
27 % для дуба.
Поле обратного рассеяния радиоволн для растительности, слой
которой в выбранном участке радиодиапазона полупрозрачный,
формируется за счет рассеяния волн почвой, растительностью, а также за счет
перерассеяния волн между почвой и растительностью. Функциональные
соотношения для этих трех компонентов приведены с учетом различных
приближений в [36, 100].
1.2.7. Когерентное и некогерентное рассеяние
миллиметровых и сантиметровых радиоволн
в слое растительности
Интерес с точки зрения распространения радиоволн и
дистанционного зондирования представляют эффекты, возникающие при
прохождении ММВ через растительность. В [116] исследовано
распространение когерентных радиоволн длиной 0,52, 1,04 и 3,13 см в растительном
покрове. Ширина диаграммы направленности передающей антенны
составляла 10° на всех частотах. Для приемной антенны ширина
диаграммы направленности равнялась 4,8° (3,13 см) и 1,2° (0,52 и 1,04 см).
Измерения проводились в летнее и весеннее время. Высота деревьев
составляла от 8 до Юм. Ветви имели длину до 13 м и полностью
заполняли пространство между деревьями. Трасса распространения пролегала
по направлению максимальной плотности растительности.
На рис. 1.13 приведены зависимости среднего ослабления Г от
количества деревьев п [116]. Все данные нормированы к ослаблению в чистой
атмосфере, а для волны 5,2 мм исключено атмосферное поглощение.
Рис. 1.13. Зависимость ослабления Г от числа деревьев п для высоты трассы
1 м (а), 4 м (б), 6 м (в) при наличии листьев (сплошные кривые) и без листьев
(штриховые кривые): 1 - Л = 3,2 см; 2 - 1,1 см; 3 - 5,2 мм
Особый интерес представляет поведение ослабления на высотах
4 и 6 м, когда линия визирования проходит через лиственный покров
деревьев. На всех кривых при этом можно заметить резкое изменение
37
крутизны. Этот эффект соответствует эволюции основного режима
прямого распространения с сильным ослаблением (/« 1,3...2,0 дБ/м для п < 3)
к режиму многократного рассеяния со значительно меньшим
ослаблением (у « 0,05 дБ/м для п > 3). У деревьев без листвы этот эффект
наблюдается после прохождения примерно через 8 деревьев, а у деревьев
с листвой - через 3, и четко прослеживается. Степень ослабления для
листвы составляла 12... 15 дБ на дерево для первых трех при трассе
высотой 4 м и 12.. .29 дБ на дерево при высоте 6 м.
Кривые для высоты 1 м показывают, что потери при прохождении
радиоволн сквозь стволы деревьев значительно меньше, чем для случая
прохождения радиоволн через крону. Полное ослабление возрастает с
частотой. Для деревьев без листвы это возрастание не очень сильно. С
другой стороны, при зондировании кроны деревьев с листвой наиболее
высокие потери наблюдаются на волне 0,52 и 1,04 см, причем Г(1,04 см)«
« Г(0,52 см). Причина такой частотной зависимости, возможно,
объясняется тем, что большинство элементов растительности имеют размеры,
соответствующие длине волны в сантиметровом диапазоне волн.
Все измерения (рис. 1.13) проведены на поляризациях ВВ и ГГ.
Поляризационные зависимости ослабления значительно меньше по
сравнению с зависимостью от длины трассы и угла сканирования. Это
объясняется хаотической ориентацией отражателей. Исследование
азимутальной зависимости рассеянного вперед сигнала показало
значительное уширение пучка с увеличением толщины слоя растительности.
Теоретические исследования выполнялись с позиций теории
переноса излучения [116, 117]. Поскольку отражатели, включая листья и
сосновые иглы, имеют гораздо большие размеры по сравнению с длиной
волны на ММ-радиоволн, растительная среда создает сильное рассеяние
во всех других направлениях.
Условия экспериментов позволили сформулировать проблему в
терминах задачи падения плоской волны из воздушного
полупространства на границу раздела лесного статистически однородного
полупространства, а именно: Ау0, а, сга и crs = const. Здесь Ау0 - ширина
переднего лепестка индикатрисы рассеяния; а - отношение мощности
рассеяния вперед к общей мощности рассеяния; ааи crs- сечения поглощения
и рассеяния единичного объема соответственно с альбедо
\ = <г,/{*, + *„). (1.37)
При решении полная интенсивность / разделялась на ослабленную
падающую /„ (когерентный компонент) и диффузную /д
(некогерентный компонент) составляющие.
В свою очередь
/д = /1 + /2, (1.38)
38
где 1\ определяется по рассеянию в направленном вперед лепестке
индикатрисы рассеяния, а 12 - через усеченное альбедо Л' по рассеянию в
пьедестале индикатрисы рассеяния.
Усеченное альбедо
A' = (l-a)A/(l-oA) = (l-a)ff,/[ffe+(l-a)o-I]. (1.39)
Когерентный компонент Iri преобладает на небольших расстояниях
и имеет четко определенное направление распространения.
Некогерентная составляющая (1.38) образуется в результате рассеяния
когерентного компонента. Интенсивность /д линейно нарастает при малых
расстояниях z и экспоненциально уменьшается при больших расстояниях.
Степень затухания 1Х уменьшается от
(<га+<т.) (1.40)
при небольших глубинах растительности до
aa+(l-a)as (1.41)
для больших z. Более того, в средах с сильным рассеянием в прямом
направлении (а -> 1 и crs» <ja) изменение степени затухания будет
существенным.
Компонент 12 имеет наименьшую амплитуду и самую низкую
скорость затухания, поэтому он является доминирующим на больших
расстояниях. При <ts » аа усеченное альбедо Л' близко к единице. Поэтому
степень затухания /2 будет значительно меньше степени затухания Iri и
1\. Кроме того, угол, в пределах которого распространяется 12, очень
широк. Поэтому при определенном расстоянии в растительном
полупространстве когерентный компонент исчезает, и возникает режим
распространения с многократным рассеянием, значительно уменьшенной
степенью затухания и увеличенной шириной луча.
Полученные результаты теоретических расчетов приведены на
рис. 1.14 [116, 117]. Здесь Q - отношение принятой мощности на рас-
0
-100
-200
. t
10
*- *—
30
а)
"-—-— 0.75
..._..„», % ——.
50 Г
0
-20
-40
-60
ДБ
* г°
1 й
3
—'
10
10
*****—* 0.3
г——Сол^
20 в,град
б)
Рис. 1.14. Теоретические зависимости нормированной принятой мощности
в растительной среде от оптического пути (а) и угла места (б)
при a = 0,8: а - <9= 0; б- Л = 0,9
39
стоянии z к мощности, принятой в случае z=0. Скорость затухания Q
изменяется от высоких значений при небольших T = (aa+as)z до
низких значений при больших г. Это явление особенно заметно для сильно
рассеивающей среды с <js » <ja. Теоретические кривые хорошо
согласуются с экспериментальными данными (см. рис. 1.13), хотя переход
между двумя областями высокой и низкой скоростей затухания намного
резче выражен в измерениях для деревьев с листвой.
Зависимости Q от угла места сканирования приемной антенны
приведены на рис. 1.14,6. Предполагалось, что антенна устанавливается
на разной глубине растительности и сканирует в пределах 0 < в < 20°.
При г = 0 антенна расположена в плоскости раздела, на нее падает
невозмущенная плоская волна, и Q(0) копирует гауссовскую диаграмму
направленности приемной антенны. С увеличением т происходит уши-
рение пучка. Для малых т= 0,1...0,3 когерентный компонент остается
доминирующим, о чем свидетельствует узкий максимум в области 0=0.
Некогерентная составляющая дает широкий «хвост» с пиком
умеренной высоты до в~ 10° и очень широкий пьедестал. Пик
определяется величиной /ь а пьедестал -12. Для т= 3 когерентный компонент еще
виден, но при т = 10 он полностью исчезает в некогерентной
составляющей. При т= 30 некогерентная составляющая доминирует, уровень
сигнала значительно падает, а луч становится очень широким. Общие
свойства кривых на рис. 1.14 типичны и для других значений а и А.
Параметры аа9 crS9 Д/о, ос, теоретически характеризующие среду,
определяются микро - и макроструктурой растительности и, в
принципе, могут быть получены при подробном физическом описании среды.
Но это - чрезвычайно сложная задача.
В заключение отметим, что аналитические соотношения при
теоретическом анализе рассеяния радиоволн растительным покровом
обычно очень сложны и труднообозримы. Для практических целей
обычно применяют эмпирические формулы для угловой и частотной
зависимостей удельной ЭПР растительности [50, 118, 119]. Здесь необходимо
проведение дальнейших экспериментальных исследований, особенно на
коротких ММ-радиоволнах, и интерпретация полученных результатов.
1.2.8. Применение метода Монте-Карло в задачах рассеяния
Как показано выше, для решения задач рассеяния волн на
поверхности с хаотическими неровностями применяют различные
аналитические методы. Эти методы справедливы для идеализированной
поверхности с заданным распределением высот неровностей, ограниченного
интервала углов падения и малости ряда параметров.
40
Альтернативным методом является метод машинного
вероятностного моделирования или метод Монте-Карло [120, 121]. В [76, 122]
машинное моделирование применялось для случаев рассеяния излучения
статистически неровной поверхностью, в [123, 124] - для описания
рассеяния средой с шероховатыми границами и дискретными рассеивате-
лями, в [125-127] - для определения характеристик рассеяния
фрактальной поверхности со степенным пространственным спектром
мощности неровностей.
В работе [128] метод Монте-Карло обобщен на случай трехмерной
рассеивающей геометрии. Это позволяет имитировать реальную
картину рассеяния. Расчеты заключались в построении траектории луча,
отраженного от каждой дискретной точки поверхности, представленной
двумерной матрицей чисел-высот неровностей. Практическая
организация вычислительных процессов открывает возможности для получения
индикатрис рассеяния в двух случаях: 1 - синтезированная машинным
способом поверхность с заданным распределением высот, 2 - реальный
земной покров. При этом снимаются ограничения, существующие в
аналитических методах решения задач рассеяния.
Моделирование траектории луча осуществлялось в приближении
МКП. Статистически изотропная поверхность заданного вида
синтезировалась на основе авторегрессионной модели [50], позволяющей
учитывать корреляцию высот неровностей. Моделировались поверхности с
гауссовским распределением высот и значением д/< у1 > = 0,2.
Результаты расчетов приведены на рис. 1.15,а. Сплошной линией изображена
индикатриса рассеяния, полученная методом Монте-Карло, а
пунктирной - аналитическая кривая. Расчеты соответствуют в = 40°, е = 5 - i2,
Я = 8,6 мм, угол азимута <р = 0. Суммирование лучей производилось в
телесном угле, размер которого определялся по азимуту и углу места х =
=10° (± 5° от рассматриваемого орта). Идентичный ход кривых дает
основания утверждать, что принятая модель верна и может быть
использована для расчета индикатрис рассеяния электромагнитных волн
реальным участком поверхности земли.
Для получения матриц высот неровностей использовались
стереопары выбранного участка почвы с последующей фотограмметрической
обработкой. Матрица высот размером 40x40 элементов затем была
расширена с помощью авторегрессионной модели до трех матриц 80x80
элементов [50].
На рис. 1.15,6 изображены индикатрисы рассеяния радиоволн
горизонтальной поляризации реальным земным покровом. Кривые построены
для угла падения в = 20°. Суммирование лучей производилось в
азимутальном угле -5...50 (кривая 3), 35...450 (кривая 4) и 85...950 (кривая 5).
41
ЛДБ
20
0
-20
-40
„
■^N<
2-\
\
1 1 1 1 1 1 1
20 60 100 140
I *>
/,ДБ
40
20
0
-20
-40
-^
\
-
' •
20
;Г,град
^
ч 0^
ХУ7
•5
1 л-л i i i i
60 100 140 160 ^фад
б)
Рис. 1.15. Индикатрисы рассеяния электромагнитной волны
с поляризацией ГГ синтезированной (а) и реальной (б) поверхностями:
7 - машинное моделирование, 0= 40°; 2 - приближение МКП, в= 40°; 3 - в= 20°,
-5 < <р< 5°; 4- в= 20°, 35 < <р<45°; 5- 0= 20°, 85 < <р< 95°
Полученные результаты показали достаточно хорошее совпадение
результатов вероятностного моделирования процесса отражения
радиоволн шероховатой поверхностью с результатами аналитических
решений, что позволяет применять метод Монте-Карло в расчетах
характеристик рассеяния ММ-радиоволн реальными земными покровами в
широком диапазоне углов падения, в том числе и для случаев фрактальной
геометрии.
1.3. Методы калибровки измерительных систем.
Электродинамические и статистические
характеристики земных покровов
Наибольшие трудности при экспериментальном определении
характеристик отражения подстилающих покровов возникают вследствие
необходимости точного знания параметров антенной системы, а также
уровней мощности передатчика и принятого сигнала. На практике
используют два основных метода измерений: прямой, когда значения
указанных выше параметров измеряют непосредственно, и
относительный, когда сравнивают сигналы, отраженные поверхностью и
эталонным отражателем [25, 36, 37, 39-41, 50].
Для прямого метода, использующего непосредственно уравнение
радиолокации, существенную ошибку вносят динамические
инструментальные погрешности, связанные с изменением параметров
измерительной установки с течением времени, особенно при размещении ее на
летательном аппарате. С помощью данной методики не удается получить
42
ошибки измерений менее 5...7 дБ [40, 41, 50]. Схемные решения
прямого метода калибровки РЛС широко представлены в [36].
Более точным является относительный метод калибровки, с
помощью которого получено подавляющее число экспериментальных
данных о характеристиках отражения земных покровов. В качестве
эталонных широко используют уголковые и сферические отражатели, теория и
техника которых разработаны достаточно полно [129, 130].
Погрешность метода сравнения сигналов существенно зависит от
ошибок определения ЭПР эталонных отражателей и от суммарных
фоновых отражений в месте их расположения. По данным [131]
погрешность калибровки лежит в пределах
&а/а = р2±р9 (1.42)
где/?2 = сг^/сго - отношение ЭПР фона к ЭПР эталона.
Таким образом, максимальная погрешность ±1 дБ соответствует
отражению (J^/gq = -20 дБ.
Эффективная поверхность рассеяния эталонного отражателя
простой формы обычно определяется теоретическим путем по известным
геометрическим размерам и характеристикам материала, из которого он
изготовлен. Систематическая погрешность будет определяться
неточностью изготовления отражателя. Измерения показывают [36], что
снижение уровня <т0 более чем на 5 дБ происходит, если один из трех углов
уголкового отражателя составляет 89°, а не 90°. Для уголкового
отражателя с треугольными гранями ЭПР
<70=4я74Ш2, (1.43)
где / - размер ребра.
Можно показать, что относительная погрешность S<t0 равна Sob = ASI.
Для сферы радиусом /, являющейся всенаправленным отражателем, в коро-
товолновой области Soirxl2, а относительная погрешность Sob = 2Sl.
Поэтому для обеспечения, например, Sa0 = 10~2 и / = 20Я
необходимо выдержать размеры с абсолютной погрешностью A/i = 0,05/1 и
А/2 = 0,1 Я в случае уголкового отражателя и сферы соответственно. Из
рассмотренного примера следует, что точность изготовления эталонов
должна быть высокой. В целом ошибка измерений удельной ЭПР
исследуемого покрова относительным методом оценивается величиной
2...3 дБ, а иногда составляет величину около 1 дБ [40,41, 50].
Для бортовых систем калибровка измерений должна решаться иначе,
чем в случае наземных систем, использующих сосредоточенные эталонные
отражатели. При этом используют калибровочные протяженные покровы с
неизменным во времени и пространстве характером рассеяния и плавно
меняющейся зависимостью удельной ЭПР а*(в) [50,132, 133].
43
В литературе упоминается об использовании в качестве эталонов
водной поверхности при слабо развитом волнении [40], а также районов
пустынь и лесных массивов [36]. Как показано в [36, 50, 63, 132-135] в
качестве эталонного покрова можно применить бетонную взлетно-
посадочную полосу (ВПП), менее подверженную влиянию сезона и
метеоусловий (зимой ВПП аэродромов регулярно очищается от снега).
Следует отметить, что электродинамические и статистические
характеристики бетонных покрытий достаточно хорошо изучены (табл. 1.8 и 1.9). В
таблицах систематизированы разбросанные по многим
библиографическим источникам [17, 36,41, 50, 93, 118, 132-148] необходимые данные.
Таблица 1.8. Средние электродинамические характеристики
различных сред
Тип покрова
или материала
Асфальт
Бетон
Песок+
Глина
Кирпич красный
Кирпич силикатный
Уголь^
Снег
Сосновая доска
Стекло
Я, мм
32
8,6
2,2 .
32
8,6
2,2
32
32
8,6
8,6
2,2
8,6++
2,2++
8,6
8,6+
8,6
2,2
32
32
32
8,6
2,2
2,2
2,22
e=e'-ie"
4,3-i 0,1
2,5 - i 0,6
2,25-i 0,18
6,5 -i 1,5
5,5-i 0,5
5,55-i 0,36
2,5 - i 0,03
4,0-i 0,7
2,5 - i 0,03
4,0-i 0,4
2,5 - i 0,06
6,0-i 3,0
2,5-i 0,09
4,2-i 0,13
3,7-i 0,2
3,4-i 0,09
3,3-i 0,14
2,6-i 0,1
2,0-i 0,06
10,8-i 3,0
2,0-i 0,004
1,4-i 0,008
2,0 - i 0,08
3,8-i 0,19
t,°c
18 '
18
18
20
18
18
18
20
20
20
20
22
22
22
-3,8
-39
20
20
p, г/см3
1,3
1,73
1,4
1,7
1,4
1,4
1,4
1,67
1,67
1,55
1,8
0,8
0,7
2,7
0,47
0,33
0,5
2,7
Примечание: + - весовая влажность образца 3%; ++ - весовая
влажность образца 15%; +++ - уголь различных марок.
44
Таблица 1.9. Статистические характеристики земных покровов
Тип покрова
Асфальт
Бетон
Песок
Снег
Пашня
боронованная
а ,мм
—0А+
0,36
1,5
-
0,3
0,5
0,9
2-6
2
1-3
-20
<т , мм
-
0,08
—
0,16"
0,16
—
—
0,2
—
0,3-2,0
-10
/ , мм
2,24+
2,2
5,0
-
90
4,0
5,0
6^25
10
<2000
-800
/ , мм
Ь2
-
0,12
—
1,4"
1,2
—
-
0,3-1,0
-
2-25
-100
V < у2 > 1
оХ
0,3
0,3
-
0,04
-
0,18
0,1-0,4
0,21
^0,2
0,5 1
Примечание: + - аппроксимация вида R(p) = (1+20/?2 [см2]) 3/2; ++ -
аппроксимация вида R(p) = exp(-7p [см])
С увеличением влажности значения е почвогрунтов возрастают. В
результате анализа известных формул смеси для диэлектрических
свойств почвогрунтов [93, 144] показано, что наиболее обоснована
формула Брауна дня рефракционной модели смеси в СВЧ-диапазоне [149]:
^ = рЖ + {1-Р*)у&- 0-44)
Здесь рв - относительная объемная концентрация воды; е, ^ ес -
диэлектрическая проницаемость смеси, воды и сухого грунта
соответственно. Для расчета ^ часто используют эмпирическую формулу [150]:
л£>1 + 0,5рс, (1.45)
где рс - плотность сухого грунта в граммах на кубический сантиметр.
Данные о диэлектрической проницаемости воды в диапазоне
частот до 1000 ГГц обобщены в [141, 151, 152]. Для льдов,
представляющих смесь кристаллов льда, капелек воды и пузырьков воздуха,
значение е зависит от температуры, степени увлажнения и пористости льда,
содержания соли в ледяных кристаллах и водных включениях. В
отличие от воды частота релаксации пресного льда находится в
длинноволновой части радиодиапазона. Поэтому при частотах выше 108 Гц
значение s* = = 3,15 ± 0,05 и практически не зависит от температуры.
Снег представляет собой сложную естественную среду из твердой,
жидкой и газообразной фаз. При описании s сухой снег представляют в
виде смеси лед-воздух. Для действительной части диэлектрической
проницаемости сухого снега имеется уравнение регрессии [153]:
45
*' = 1 + 1,8317a 0,09</><0,42 г/см3,
e' = 0,51 + 2,88/7, p> 0,5 г/см3, (1.46)
где р- плотность сухого снега.
Экспериментальная зависимость е" сухого снега
аппроксимируется функцией [154]:
^ = <(o,52p + 0,62p2), (1.47)
где s"n - мнимая часть комплексной диэлектрической проницаемости
пресноводного льда.
Для влажного снега имеются модели в виде смесей воздух-лед-
вода или вода-влажный лед. В соответствии с [153] для влажного снега
с р= 0,09...0,42 г/см3 и объемной влажности mv< 12,3% в диапазоне
частот 3...37 ГГц комплексная диэлектрическая проницаемость
описывается выражением
<-А*В < „ е- = тЩ, (,.48)
1+(/'/о) '+(/'/«)
Здесь эмпирические коэффициенты
А = 1 +\,ЪЗ р +0,02 А^^ + В^, В = 09073А1; С = 0,073Л2 (1.49)
при а = 1,31 и/0= 9,07 ГГц.
Для частот зондирования / < 15 ГГц коэффициенты Ау=А2=1\ и
£i=0. В области частот/ > 15 ГГц эмпирические коэффициенты
4=0,78 + 0,03/-0,58'10~3/2;
4>=0,97-0,39-10-2/ + 0,39-10-3/2; (1.50)
Вх =0,31-0,05/ + 0,87 Ю-3/2.
В соотношениях (1.48)—(1.50) частота выражается в гигагерцах.
Комплексная диэлектрическая проницаемость растительных
покровов определяется их биометрическими показателями и
относительным содержанием влаги. В зависимости от сезона и погодных условий
все эти параметры непрерывно изменяются.
При моделировании электродинамических характеристик
растительности используют приближение двух-, трех-, четырехкомпонентных
моделей фитоэлементов: сухой растительный материал - свободная
вода - связанная вода - воздух. Пока общепринятой модели
диэлектрической проницаемости растительности не существует. Для оценки е
листьев и веток деревьев предложена модель, проверенная в частотном
диапазоне 0,2...20 ГГц [105, 155]:
46
e = A + B
где
лп *г,-4,9 .22,74
4,9 + -^ —+ 1—-—
l-i///o /
+ C
55
l + [i//0,18f3
2^-77T^-^jh O-51)
* ,= 88,045 - 0,4147Г + 6,295-10"4Г2+ \9015\0~5f; /0= 1/(2ят);
2;rr= 1,1109-КГ10 - 3,82410"12Г+ б^Зв-Ю"14^ - 5,096- \<T{6f; (1.52)
размерность Т в градусах Цельсия,/- в гигагерцах.
Коэффициенты А, В, С в (1.52) равны
A = lJ + 392mv + 69Sn^9 B = mv(09l66+0,Z2mv)9C= 31'4/^ (1.53)
при объемном содержании
*,=: т^' (154)
связанном со значением влажности по весу mg и объемной плотности р
сухого растительного материала. Данная группа коэффициентов
применяется в модели е стволов и веток деревьев.
Для листьев деревьев коэффициенты в (1.51) рассчитывают
непосредственно по весовой влажности:
4 64/й2
,4=1,7-0,74/^+6,16/^, B = mJ0,55mр-0,07б), С=—- Ц-. (1.55)
g g s\ g / 1+7,36/и£
В [156] были приведены данные лабораторных измерений на волне
3,2 мм коэффициента отражения по мощности | У\2 следующих материалов:
Материалы | V\2
сухая сосновая древесина 0,030
сырая древесина 0,320
сосновая хвоя (сухая или мокрая) 0,031
гладкие воскоподобные листья кустарников (сухие или 0,016
мокрые) < 0,005
опавшие дубовые листья (сухие или мокрые) 0,007
сосновая кора сухая (мокрая) (0,036)
Коэффициент отражения элементов растительности при
поглощении ими воды увеличивается примерно в 10 раз.
В теоретические модели рассеяния радиоволн земными покровами
(1.13), (1.22), (1.23) и (1.33) входят усредненные характеристики
неровностей (см. табл. 1.9). В ней специально отмечены случаи аппроксимации
пространственного коэффициента корреляции неровностей, которые неяв-
47
но подразумевают фрактальность
земных покровов. Более
подробно фрактальность земных
покровов рассмотрена в [44, 47, 157].
На рис. 1.16 из [50, 133, 148]
приведены обобщенные угловые
зависимости удельной ЭПР сухого и
мокрого (спустя несколько часов
после дождя) бетонного покрытия
ВГШ на двух видах поляризации и
длине волны 8,6 мм, построенные
по данным работ [17, 42, 62, 63,
134,148,158]. Там же пунктиром и
сплошной линией показаны
аппроксимирующие кривые а* от
угла падения в. Погрешность
измерений не превышала значений
± (0,5... 1) дБ. Указанный метод
калибровки может обеспечить
точность измерений, сравнимую с
точностью метода на основе
уголковых эталонных отражателей, и
значительно упрощает
организацию натурных экспериментов.
I «VflS
20
10
0
-10
-20
-30
-40
I -50
1 - •
[ 2-0
\ 5-А
\*
.4 1~-~4
N. ^V
\ X
\
•
\
1 \
•
10 20 30 40 50 60 70 80
9, град
Рис. 1.16. Обобщенные угловые
зависимости удельной ЭПР сухого (1-3)
и мокрого (4-7) бетонного покрытия
взлетно-посадочной полосы,
используемой в качестве
калибровочной поверхности:
I, 4 поляризация ГГ; 2,5 - ВВ; Я = 8,6 мм;
[17,42,158]-7,2; [134]-3,7; [62]-45; [63]-б
Калибровка когерентных (доплеровских) измерительных
комплексов обычно осуществляется путем включения между передающим и
приемным каналами фазовращателя и калибровочного аттенюатора
[159]. С помощью фазовращателя создается искусственный доплеров-
ский сигнал, а с помощью аттенюатора производится калибровка
системы в единицах отношения принятой мощности к излученной. Часто для
калибровки используют доплеровские имитаторы, основанные на
поступательном, возвратно-поступательном или вращательном движении
эталонных отражателей [42]. В работе [160] описана конструкция
имитатора в виде вибрирующего уголкового отражателя, установленного в
раскрыве диффузора электродинамического громкоговорителя.
Значение ЭПР такого отражателя на первой гармонике частоты
вибраций при условии их гармонического закона записывается в виде
a{ = 4a0J^(2kAA)9 (1.56)
где J\ - функция Бесселя 1-го рода; АА - амплитуда вибраций; к = 2л/Л;
сто - ЭПР собственно уголкового отражателя. Условие применимости
данной формулы состоит в отсутствии нелинейных искажений в коле-
48
баниях подвески громкоговорителя, что можно обеспечить при малой
амплитуде. Следует учитывать, что амплитуда вибраций резко падает с
увеличением их частоты в связи с демпфированием механической
колебательной системы конструкцией уголкового отражателя. Имитатор в
виде нескольких уголковых отражателей, вращающихся на общей
платформе [160], обеспечивает большие значения индекса фазовой
модуляции т = 2кАА при kL » 1, где L - радиус вращения. Эффективность
такого эталона на высоких частотах доплеровского сдвига гораздо выше,
чем в случае вибрирующего уголкового отражателя.
1.4. Влияние гидрометеоров на формирование
радиолокационных изображений
В процессе дистанционного зондирования земных покровов или
формирования их радиолокационных изображений (РЛИ) необходимо
учитывать искажающее воздействие различных составляющих
атмосферы на характеристики сигналов, рассеянных подстилающей
поверхностью. Значительное влияние гидрометеоров (облака и осадки) на
распространение ММВ приводит к тому, что результирующее РЛИ
определяется не только отражающими свойствами объекта, но и параметрами
метеорологических полей. Это затрудняет интерпретацию полученных
изображений [50].
Ослабление радиоволн толщей атмосферы прогнозируется только
в вероятностном смысле. Результаты большого количества
теоретических и экспериментальных исследований на СМВ и ММВ ослабления в
гидрометеорах и современное состояние проблемы обстоятельно
освещены в работах [8, 161-163].
В то же время эксперименты по измерению отражающих
характеристик дождей проведены, в основном, для длин волн Я > 3 мм [164].
Справедливы следующие аппроксимационные соотношения между
удельной ЭПР дождей г\ и их интенсивностью / на линейной
поляризации [50, 118, 148, 165]:
7= 1,0410-8/1'52,Я = 32мм; 77 = 2,2Ы0-5/105,Л=8,6мм;
7= 1,44-10^/°'59,Я = 4,Змм; /;= 8,89-10"5/0'57, Д = 3,2мм, (1.57)
где размерность г\ - м~1, а /= 0,1...100 мм/ч.
Что касается синхронных измерений коэффициента ослабления /и
удельной ЭПР г\ дождей в диапазоне ММ-радиоволн, то такие
эксперименты единичны [118]. Проведенные исследования [50, 166] позволили
расширить диапазон формул (1.57) до Я = 2,2 мм.
Синхронные измерения погонного ослабления и удельной ЭПР
дождей выполнялись в летнее время относительным методом путем сравнения
сигналов, отраженных известным объемом осадков и двумя эталонными
49
уголковыми отражателями, установленными на расстояниях г2> г\.
Эталонные отражатели располагались на высоте, исключающей влияние
земной поверхности на процесс измерения. Уровень сигналов от
отражателей в среднем превышал сигнал от селектируемого объема на
25...50 дБ. Интенсивность дождя регистрировалась с помощью
плювиографа П-2, расположенного около эталонного отражателя. (
Импульсный отражающий объем V при коэффициенте заполнения
Ь=\ был равен
К = -сг2ги(9025*4...10м3. (1.58)
Здесь г - дальность до селектируемого объема дождя; ги - длительность
импульса излучения; в 0,5 - ширина диаграммы направленности по
уровню половинной мощности.
Записи сигналов проводились до нескольких десятков минут в
зависимости от интенсивности и продолжительности дождя.
Погонное ослабление, среднее по трассе, равно
у = &w u [дБ/км], (1.59)
г2-гх
а удельная ЭПР
( у
- К1], (1.60)
^1,2
10°М'2К
.1.2,
где А - выраженное в децибелах добавочное ослабление, вводимое в
приемный тракт для приведения уровня сигнала от первого отражателя
к уровню сигнала от второго отражателя; <т1?2 - ЭПР первого или
второго эталонного отражателя; ог12 =101gPi>2/>g"1; Л,2 - уровень принятого
сигнала от первого или второго отражателя; Pg - уровень сигнала от
селектируемого объема дождя V.
На рис. 1.17,а представлены результаты эксперимента [50, 148, 166] -
точки 5 и измеренные в [167] - точки 6 средние величины rj дождей на
круговой 5 и линейной 6 поляризациях излучения. Уменьшение
обратного рассеяния дождя Atj при круговой поляризации на волне 2,2 мм
составляет, по меньшей мере, 10 дБ при / = 0,5 мм/ч и уменьшается до
4 дБ при /= 10 мм/ч. На волне 3,2 см Arj = 20 дБ, а на Л = 3,2 мм Arj & 18 дБ
[163]. Как и следовало ожидать, на более высоких частотах компенсация
сигнала обратного рассеяния от дождя при круговой поляризации
ухудшается, поскольку размеры капель становятся сопоставимыми с
длиной волны. Степень подавления сигнала обратного рассеяния также
уменьшается при увеличении интенсивности дождя, что объясняется
возрастанием влияния несферичности капель. Обычно считают, что при
диаметре капли больше 2 мм необходимо учитывать ее несферичность.
50
Рис. 1.17. Теоретические и экспериментальные зависимости удельной ЭПР
дождя (а) и коэффициента ослабления (б) на волне 2,2 мм:
1 - расчет при распределении Беста; 2 - расчет по формуле (1.61);
3 - расчет при распределении Беста; 4 - расчет по формуле (1.62);
5 - круговая поляризация; 6 - линейная поляризация
Теоретические расчеты ослабления электромагнитных волн
атмосферными частицами проводятся на основе классической теории Ми
при различных распределениях частиц по размерам [168-172]. В нашем
случае при расчете (прямая 1) использовалось распределение Беста и
предполагалась линейная поляризация излучения.
С достаточной степенью точности удельная ЭПР дождей на волне
2,2 мм в интервале интенсивностей дождя / < 10 мм/ч описывается
выражением, полученным по методу наименьших квадратов (прямая 2):
//= 5-КГ6/1'2. (1.61)
Результаты измерений коэффициента ослабления на волне 2,2 мм в
сравнении их с данными других авторов [173-178] показаны на рис. 1.17,6.
Прямая 3 представляет теоретическую зависимость, рассчитанную по
теории Ми для линейной поляризации и распределения Беста.
Аппроксимирующее выражение, полученное по методу
наименьших квадратов, имеет вид (прямая 4):
Г[дБ/км] = 1,5/°'5мм/ч. (1.62)
Соотношение вида у= at широко применяется при описании
ослабления радиоволн дождями. Постоянные а и b зависят от частоты и
поляризации радиоволн, вида распределения по размерам капель дождя,
их температуры. В работе [176] вычислены аппроксимирующие
коэффициенты в диапазоне частот 1... 1000 ГГц. Для Л = 2 мм и
распределения Лоу-Парсонса при интенсивности дождя 1,27 </< 50,8 мм/ч
получены значения а = 1,25, b = 0,7 (t = 0°С) и а = 1,33, Ь = 0,69 (t = 20°С).
В [173] величины а = 1,3, b = 0,635; в [174] а = 1,7, b = 0,51. Сравнение
51
полученных экспериментальных данных среднего коэффициента
ослабления с результатами работы [174] показало их хорошее соответствие с
измеренным массивом коэффициентов у.
Уравнения (1.61) и (1.62) образуют замкнутую систему, решая
которую мы получаем соотношение, связывающее у с rjB виде:
^[m-^I^IO^'^aB/km]. (1.63)
Следовательно, при известной величине коэффициента ослабления
можно сразу же определить удельную ЭПР дождей и наоборот.
Наличие дробных степенных зависимостей в(1.57) и (1.61)—(1.63)
позволяет говорить о фрактальности рассматриваемых
радиофизических явлений, что подробно описано в [44, 47]. В этом направлении
исследования только еще развиваются.
Значительный практический интерес представляет спектральная
плотность мощности ММ-радиоволн, рассеянных гидрометеорами. Из
полученных экспериментальных данных [166] следует, что для несущей
частоты 135 ГГц средняя ширина спектра флуктуации составляет около
220 Гц при вариациях ± 20 Гц за 2 мин и интенсивности дождя 2 мм/ч.
Оценка работоспособности радиолокационных систем в различных
метеорологических условиях широко представлена в [50, 118, 166].
Влияние снегопадов, дождей, туманов, облаков, песчано-пылевых
образований на ослабление и рассеяние ММВ и СМВ подробно
рассмотрено и обобщено в [118].
При формировании РЛИ местности важное значение имеет
пространственно-временная структура метеорологических полей, изучение
которых далеко не завершено [179]. Рассмотрим модель формирования
РЛИ как динамическую систему «земной покров - слой осадков».
Считаем, что мощность принимаемого сигнала обусловлена двумя
компонентами, пропорциональными удельным поверхностным о; и объемным
tj рассеянием с учетом интегрального ослабления радиоволн.
Используя методику вычислений, подобную [50, 180, 181] для
анализа влияния метеоусловий на РЛС бокового обзора, получаем в общем
случае выражение для суммарной удельной ЭПР о? динамической
системы «земной покров - неоднородные осадки» в виде [50, 118,181,182]:
т -0,2(*/(/• Wr f00 , ч -0,2Г y[r\dr
<tJ = ov10 Jo п} + [т](г)Ю Jo u dr. (1.64)
Для однородного слоя гидрометеоров высотой h при зондировании
под углом #из (1.64) имеем
а} = а.ЛО^2уИ,м0+^^(\'\О^гИ,мв). (1.65)
0,46/V ■ '
52
Из (1.65) легко получить аналитические граничные условия,
позволяющие определить, когда зоны осадков на РЛИ будут выглядеть
более светлыми (<jJ:> о;) или более темными (<т*Е< <т*) по сравнению с
РЛИ того же участка земной поверхности без осадков
7JCOS0
а? > а* при о-* <
at < <J+ при а* >
0,46/
7] COS в
0,46/ '
(1.66)
7cos0
0,46/
2
0
-2
■4
-6
-8
-10
. _^_
-
-
о? < о;
0? > а.
20 40
'2 \
60
80 0, град
Рис. 1.18. Область граничных
условий наблюдения РЛИ
земных покровов на волне
8,6 мм в осадках:
1 -/= 16 мм/ч, 2 - 1 мм/ч
Граничные условия (1.66)
приведены на рис. 1.18 для двух интенсив-
ностей дождя 1\=\ мм/ч и 12 = 16 мм/ч.
В области сг*Е < о; РЛИ земной
поверхности в дожде 1 мм/ч < / < 16 мм/ч
всегда будут более темными по
сравнению с РЛИ поверхности без дождя,
в области (a* >cr*) - более яркими,
а в промежуточной области между
кривыми 7 и 2 в большинстве
случаев crj'ttcr*.
В реальных условиях всегда имеются пространственные
распределения /(г) и /7(г). Примеры сезонных пространственных структур
метеорологических полей представлены на рис. 1.19 и 1.20 [50, 118, 148,
181, 182]. Отчетливо видна структура зон осадков и их изрезанность.
Цифрокарты вертикальных и горизонтальных сечений распределений
интенсивности осадков и их радиолокационной отражаемости получены
на волне 3,2 см. Использовался разработанный в Центральной
аэрологической обсерватории автоматизированный комплекс сбора, обработки
и представления радиолокационной информации на базе
метеорологического радиолокатора МРЛ-5 и ЭВМ типа СМ-4 [183]. Основные
параметры МРЛ-5 следующие: длительность импульса 2 мкс, частота
повторения 250 Гц, поляризация вертикальная, ширина диаграммы
направленности антенны 0,5°, диаметр антенны 4,5 м, мощность излучения 170
кВт, энергетический потенциал 293 дБ.
Для пересчета отражаемости z в интенсивность осадков I
использовалось известное корреляционное соотношение, применяемое в
радиолокационной метеорологии [184, 185]:
/[мм/чНО^]-101^10*), (1.67)
результаты приведены в правой части рис. 1.19.
53
Рис. 1.19. Пространственное распределение интенсивности
в вертикальном сечении зоны дождя;
масштаб по оси X: 1 дел - 2 км, по оси Y: 1 дел - 0,5 км
Рис. 1.20. Пространственное распределение интенсивности
в горизонтальном сечении зоны осадков;
масштаб по осям Хи Y: 1 дел - 2 км, высота сечения - 700 ± 100 м
Для центральной территории России средние значения
коэффициентов в (1.67) равны: А = 250, В = 1,6 - дождь; А = 1000, В = 1,6 - снег.
Пересчет ослабления и удельной ЭПР на волну 8,6 мм производился по
методу, рекомендованному МККР (см., например, [186]). Метод основан на
связи между коэффициентом ослабления и интенсивностью дождя.
В соответствии с общими соотношениями вида (1.64) и (1.65)
определены величины у{т) и т](т) на волне 8,6 мм, которые даны внизу
правой части рис. 1.20. Для дождей коэффициенты а и Ъ соотношения
y^af* выбирались в соответствии с данными [162, 178]. В случае
снегопадов у (г) = ml (г), где коэффициенты m при различных типах
снегопада приведены в [162].
Проведенные расчеты пространственных распределений у и т] с
учетом граничных условий (1.66) позволяют определить суммарную
54
удельную ЭПР для характерных земных покровов с учетом осадков, а
также предельные дальности обнаружения.
Отметим, что применение теории фракталов к рассмотрению
пространственно-временной структуры гидрометеоров приведет к
качественно новым концепциям в традиционных разделах теории
распространения и рассеяния радиоволн [44,47].
1.5. Характеристики отражения и рассеяния радиоволн
земной поверхностью
Характеристики отражения от различных видов земной поверхности
хорошо исследованы в работах [185-188]. В них суммарное поле вблизи
обнаруживаемого объекта представлялось в виде регулярной и случайной
составляющих, каждая из которых по разному влияет на обнаружение и
пеленгование объекта. В формировании регулярной компоненты главную
роль играет зеркальное отражение от границы раздела. На величину
зеркального отражения влияют высота подъема антенны РЛС, ширина ДНА и
отражательные свойства поверхности.
Результаты исследований
частотных зависимостей коэффициентов
отражения покровов Ротр от длины волны
излучения при ВП и угле места в =
= 5. ..10° из [187] показаны на рис. 1.21,
где кривая 1 - для слежавшегося
снега; 2 - почвы для растительности; 3 -
пашни. На этом рисунке для случаев
почвы без растительности и пашни
отчетливо видна зависимость ротр от
длины волны излучения.
В целом, согласно [186-188],
величина коэффициента отражения рц,
может изменяться в довольно широ- рис. \и2\. Зависимость
ких пределах. Так, например, «глад- коэффициента отражения
кие» поверхности (асфальт, бетон, лед, некоторых земных покровов
слежавшийся снег и др.) обладают вы- от длины волны
соким коэффициентом отражения - в пределах от 0,7 до 0,8; неровности
почвы приводят к уменьшению коэффициента отражения до 0,4...0,6,
увеличивая долю диффузной компоненты; наличие же растительного
покрова дополнительно снижает уровень коэффициента отражения до 0,3.
С укорочением длины волны зеркальная составляющая уменьшается, при
этом горизонтально поляризованная составляющая преобладает над
вертикально поляризованной при прочих равных условиях.
млр
0,8
0,6
0,4
0,2
0
1
2
—^
/
Л
2
0 = 5°
\ 6
Л,
мм
55
Что касается диффузной компоненты, то можно привести
обобщающие результаты экспериментальных исследований [188,189]:
энергия диффузной составляющей в пределах не более 3% от
зеркальной;
коэффициент диффузного рассеяния на трассах, покрытых степной
растительностью, не более чем 0,1...0,15;
густой травяной покров при длине волны 2 мм практически
полностью подавляет зеркальную компоненту, а коэффициент диффузного
рассеяния не более 0,25...0,3.
Ниже в таблицах приведены наиболее характерные для ММ-диапа-
зона радиоволн результаты экспериментов удельных ЭПР различных
покровов.
Так, в табл. 1.10 из [188,189] приведены результаты исследований
удельной ЭПР подстилающей поверхности, а в табл. 1.11 - результаты
зарубежных исследований [190, 192].
Таблица 1.10. Величины удельной ЭПР подстилающей поверхности
Вид подстилающей поверхности
Луговая трава (неровности, A/i<0,2 м)
Луговая трава (неровности, Д/*<0,5 м)
Степная трава (неровности, Ah<0,5 м)
Кустарник
Лиственный лес
| Заснеженная местность
Значение ЭПР для длины волны, мм,
при различных в, град |
8,15
1
-25,7
-20,8
-23,9
-21,1
-8,2
2...5
-13,5
-14,6
4,1
1
-30
-22,5
-23,2
-21,5
-9,6
-25,8
2...5
-21,2
-13,2
-17,0
1,3
1
-16,8
Таблица 1.11. Величины удельной ЭПР подстилающей поверхности
Вид подстилающей
поверхности
Листва
Трава
Мокрый снег
1 Снежный наст
Значение ЭПР для длины волны, мм
при различных в, град
8,6
2
-22
-28
-
-
8
-19
-
-20
-10
15
-15
-
-18
-8
U 1
3,2 |
2
-22
-
-
-
8
-14
-
-
-
15
-
-
-10
-10
В табл. 1.12 из [14] приведены величины удельных ЭПР
антропогенных покрытий на длине волны 3 мм для ВП при различных углах
места, а в табл. 1.13 - результаты расчетов удельных ЭПР растительных
покровов в зависимости от угла места для различной поляризации и для
длин волн 8,6; 3,2 и 2,2 мм.
56
Таблица 1.12. Величины удельных ЭПР антропогенных покрытий
Вид покрова
Асфальт:
сухой/ мокрый
Бетон:
сухой / мокрый
Гравий:
| сухой / мокрый
Значение ЭПР при углах места, град |
10
-27/-30
-33/-
30
-18/-22
-31/-
50
-12/-13
-26/-33
-23/-20
70
3/0
-10/-20
-20/-10
90
12/13
14/17
20/17
Таблица 1.13. Величины удельных ЭПР растительных покровов
Вид покрова
Трава
(АЛ<0,25 м)
Трава (АЛ<0,5
м)
Сухая трава
Лес
лиственный
Лес
лиственный после
ДОЖДЯ
Лес с
опавшим листом
Трава
(А/*<0,25 м)
Сухая трава
Дерн:
сырой/сухой
Лес
лиственный
Лес
лиственный после
дождя
Лес с опав-
1 шим листом
Длина 1
волны,
мм 1
8,6
3,2
Значения ЭПР для углов места, град 1
5 | 10 | 30 | 50 | 70 | 90 |
гп|
-20
-25
-29
-30
-21
-23
-
-
-
-
-
-23
вп
"
-21
-28
-22
-20
-18
-
-
-
-
—
-20
гп
-17
-23
-27
-27
-18
-18
-
-
-
-27
-
-18
ВП
"
-19
-27
-20
-17
-17
-
-
-
-
-13
-4
гп
-12
-18
-20
-20
-14
-15
-
-
-
-
-
-
ВН
-
-22
-18
-13
-14
-
-
-
-
-9
-11
ГП
-10
-15
-19
-18
-
-
-
-
-
-
-
-
ВП
|
-
-18
-17
-10
-13
-18
-16
12/-
14
-6
-9
ГП
-10
-15
-18
-
-
-
-
-
-
-
-
-
1 -
ВП
"
-
-14
-13
-11
-12
-13
-15
11/-
-12
-
-
ГП
-10
-15
-18
-
-
-
-
-
-
-
-
-
ВП
-
-22
-17
-
-14
-14
-13
12/-
13
-
-
57
Продолжение табл. 1.13
Трава
(АЛ<0,25 м)
Сухая трава
Лес
сосновый
после дождя
Лес сосновый
сухой
Лес
лиственный после
дождя
2,2
-26
-35
-12
-17
1 ~3
Круговая 1
-20
-30
—
-
-15
-26
—
-
поляризация
-12
-20
—
-
-10
-18
—
-
-
-12
—
-
|а0,дБ
-10
-20
-30
А = з
Экспериментальные зависимости удельных ЭПР земной поверхности,
покрытой травой, от угла места и длины волны излучения для случая ВП
приведены на рис. 1.22. Видно,
что с укорочением длины волны
ЭПР возрастают на ММ-радио-
волнах на 6... 15 дБ в
зависимости от угла места по сравнению с
длиной волны 3 см.
Вероятность того, что
значение ЭПР равно или меньше
заданного, существенно зависит
от высоты неровностей земной
поверхности, как это следует из
рис. 1.23, полученного в
результате измерений ЭПР на волне
4,1 мм на почве без
растительности при угле места в= 10° и
ВП излучения. Характер
изменчивости удельной ЭПР
различных видов земной поверхности
может быть аппроксимирован
формулой
Вертикальная
поляризация
10 30 50 0,град
Рис. 1.22. Результаты исследований
зависимости удельной ЭПР некоторых
земных покровов от угла наблюдения
58
a =-20 + -
lOlgfl
25-l,51gA*
(1.68)
В настоящее время на ММ-радио-
волнах изучено воздействие ветра на ЭПР
покровов с растительностью, а также
получены данные о зависимости удельной
ЭПР от времени суток и сезона.
Результаты измерений диапазона флуктуации
величины <т0 в зависимости от длины волны и
совместных влияний факторов (вида
покрова, с учетом влияния времени сезона,
неровностей поверхности и ветра)
приведены в табл. 1.14.
Рис. 1.23. Результаты
измерений удельной ЭПР
земной поверхности
Таблица 1.14. Амплитуды изменчивости ЭПР земных покровов
Тип покрова
Пашня
Редкая сухая трава
Редкий кустарник
Луговая трава
Смешанный лес
Лиственное дерево
Значения амплитуд изменчивости ЭПР
при длине волны, мм
2
4,0
7,5
15,2
16,0
14,8
26,0
3
6,0
12,3
17,0
21,0
20,0
27,0
Анализ приведенных материалов указывает на значительную
зависимость характеристик отражения в короткой части ММ-радиоволн от
различных видов земных покровов и сопутствующих факторов,
приведенных выше. Поэтому при расчетах энергетических параметров и
точности пеленгования конкретными радиолокационными системами
наземных объектов необходимо иметь в виду, что все приведенные здесь
данные носят ориентировочный характер, т.е. при разработке РЛС
обнаружения объектов всегда потребуются дополнительные исследования
отражательных характеристик, в том числе путем моделирования и,
особенно, экспериментально.
1.5.1. Рассеяние радиоволн от гидрометеоров
Рассмотрим характеристики отражения мешающих
распространению радиоволн фонов в виде гидрометеоров (дождь, снег, туман и т.д.),
видов земной подстилающей поверхности и типовых наземных
объектов (колесная и гусеничная техника).
59
Отражающие характеристики от гидрометеоров, как правило,
определяются удельной ЭПР, величиной отношения ЭПР гидрометеоров к
занимаемой ими локальной площади в метрах в квадрате на метр в
квадрате (иногда в децибелах), или к занимаемому объему, в метрах в
квадрате на метр в кубе.
Зависимость удельной ЭПР от длины волны определяется
частотной зависимостью диэлектрической проницаемости при определении
френелевского коэффициента отражения, а зависимость ЭПР от углов
наклона поверхности показывает, что основная часть мощности
рассеивается вблизи средней нормали к поверхности. Корреляционная
функция рассеянного поля пропорциональна преобразованию Фурье от
квадрата модуля диаграммы направленности антенны (ДНА) и
пространственному спектру неровностей поверхности [193].
Многократное рассеяние шероховатой поверхности может быть
рассчитано на основе решения уравнения Дайсона для случая средней
функции Грина и уравнения Бете-Солпитера для функции
когерентности. Случаи рассеяния от неоднородных слоев с шероховатыми
границами и практически любым распределением неровностей обычно
исследуются с применением вариационного метода Швингера [14].
Поскольку исследования моделей шероховатых поверхностей в
короткой части ММ-радиоволн достаточно трудоемкие и представляют
собой самостоятельные научные направления, здесь можно
ограничиться изложением только результатов многолетних теоретических и
экспериментальных исследований приема рассеянных сигналов как от
объектов наблюдения, так и от реальных подстилающих поверхностей. Такие
данные к настоящему времени появились в литературе и были
получены рядом отечественных и зарубежных НИИ и вузов (НИРФИ, ИПФ
РАН, ИРЭ РАН, МГТУ им. Баумана, ИРЭ АН Украины и др.).
Представляют интерес результаты экспериментальных и
теоретических исследований интегральных коэффициентов отражения и
пропускания слоем случайной однородной среды толщиной А [194]. При
использовании частиц с различными минимальными частями комплексной
диэлектрической проницаемости и с разными размерами обнаружены случаи,
когда когерентное излучение полностью трансформируется в некогерентное
при толщине слоя порядка длины волны.
Большой объем экспериментальных материалов содержится в
работе [8, 14]. Результаты измерений обратного рассеяния от дождя
частично представлены в табл. 1.15.
Экспериментальные зависимости ЭПР от длины волны и
поляризации излучения для дождей с интенсивностями 1 и 5 мм/ч (как
наиболее вероятными из всего количества годовых дождей) приводятся на
рис. 1.24 (по оси ординат отложены значения ЭПР дождей в м2/м3, по оси
абсцисс - длина волны в мм), где кривые 1 - круговая поляризация (КП),
60
Таблица 1.15. Удельные ЭПР дождя
Длина
волны,
мм
8,6
4,15
3,2
2,15
Интенсивность
дождя,
мм/ч
1
5
10
20
1
5
10
20
1
5
10
20
1
5
10
20
Удельная ЭПР, м2/м3,
для поляризации
горзонт.
ю-5
8-Ю-5
210"*
3,5-10"*
-
210"*
2,6-10"*
4-Ю"4
610"*
5-Ю"5
210"*
310"*
4-10"*
вертик.
10"6
ю-5
7-Ю-5
210"*
3-10"5
1,810"*
410"*
6,510т4
ю-5
6,5- 1<Г5
210"*
410"*
-
круг.
3,5-Ю-8
8,5-10"7
3,5-10"6
1,5-Ю-5
2,6-Ю-6
2-Ю-5
4-Ю"5
ю-4
2 10"6
1,5 1(Г5
3 Ю-5
j 610"5
5,5-Ю-6
410"5
9-Ю"5
2-10"*
Среднеквадратическое
отклонение, дБ,
для поляризации
вертик.
3,0
3,2
-
3,2
3,0
-
круг. 1
2,7
2,5 1
-
3,0
1 2'9
-
интенсивность дождя / = 1 мм/ч; 2 -
вертикальная поляризация (ВП), / =
= 1 мм/ч; 3 - КП, / = 5 мм/ч; 4 - ВП,
1=5 мм/ч; 5 - горизонтальная
поляризация (ГП), / = 1 мм/ч; 6 - ГП, / =
= 5 мм/ч; 7 - расчет, ГП, / = 1 мм/ч;
8 - расчет, ГП, / = 5 мм/ч.
Из приведенных данных нетрудно
сделать заключение о зависимости
удельной ЭПР от поляризации
излучения. Прежде всего необходимо
отметить, что величина удельной ЭПР при
круговой поляризации на 10... 15 дБ
меньше, чем для линейной независимо Рис. 1.24. Результаты исследований
от длины волны. ЭПР от длины волны
Как следует из рис. 1.24, результаты теоретических расчетов хорошо
согласуются с данными экспериментов для горизонтальной поляризации
излучения. В ММ-диапазоне удельные ЭПР оказываются в 2... 10 раз
больше, чем в СМ-диапазоне для дождей различной поляризации.
м2/м3
61
В [194] также приведены результаты измерений ЭПР от
падающего снега. Показано, что удельная ЭПР снегопада с интенсивностью 1С =
=1.. .2 мм/ч при ВП на длине волны 3,2 мм составляет примерно 2.. .6 м2/м3.
1.6. Характеристики отражения наземных объектов
1.6Л. Движущиеся объекты
Практический интерес представляют результаты измерений в ММ-
диапазоне радиоволн находящихся в движении объектов. В качестве
исследуемых объектов использовалась бронетанковая, автотракторная
техника и автомашины. Результаты измерений ЭПР во время движения
техники со скоростью 20 км/ч приведены в табл. 1.16 [14]. Для
сравнения в этой таблице приведены результаты исследований ЭПР в
сантиметровом диапазоне из [191]. Величина Р в таблице определяет
вероятность уровня значения ЭПР не менее указанного.
Таблица 1.16. Величины ЭПР движущихся наземных объектов
Объект
Танк, Т-54:
различные
ракурсы;
ракурс 45°;
движение
на РЛС;
движение
от РЛС
АТС:
движение
на РЛС;
движение
от РЛС;
боковое
движение
УРАЛ-375:
движение
на РЛС;
движение
от РЛС;
боковое
УРАЛ-375
с кузовом
типа КУНГ:
движение
на РЛС;
движение
от РЛС;
боковое
ЗИЛ-151:
на РЛС
ГАЗ-69наРЛС
Значения ЭПР на различных длинах волн [
Д = 3,2см |
/М),5|
-
-
-
-
20
10
20
12
10,5
11,8
28
3,7
7
—
Р=0,8
-
-
-
-
20
5
6
10
4,5
8,5
10
2
2,8
—
Р=0,9
-
-
-
-
10,5
3
4
5
2,4
4,5
! 6,5
1,3
1,8
—
Я = 8 мм
Р=0,5|
20
12
10
17
20
17
20
18
Р=0,8
18
4
8
6
20
8
20
—
/М),9
18
4
8
6
18
6
18
—
Я=3 мм
7М),51
34
-
-
30
-
30
34
18
12
Р=Ю,8|
22
6
-
9
-
9
9
28
12
Р=0,9
8
1
-
5
-
8
5
16
—
Х-13 мм|
/М),5 1
-
-
-
22
-
-
-
10
15
62
Интегральное представление данных об ЭПР движущегося танка
на волне Л = 2 мм приводится на рис. 1.25. При этом функция
распределения Ф(сг) вычислялась по формуле:
Ф(о)=1 -F(o), (1.69)
где F(o) - интегральное
распределение а танка при его
движении к РЛС или от РЛС.
Видно, что на всех
уровнях при движении объекта от
РЛС величина а меньше при-
0,9,
0,8
0,6{
0,4|
0,lj
0,02
Г"
[хЯ
• S»v
44*v/'
, j 1
Движение на РЛС
Х/1Ч
от РЛС ^
■ Я = 2,2мм
>v\l
V
V
*>>L >.
::.?*..:..:.: ::s
16 20 24
<х,дБ/м2
Рис. 1.25. Интегральное представление
ЭПР танка
Рис. 1.26. Спектральная плотность
флуктуации удельной ЭПР земной
поверхности
мерно на 4 дБ/м2, чем при
движении его к РЛС.
Кроме того, для
подвижных объектов на длинах волн
меньше 3 см ЭПР
незначительно возрастает, однако имеет тот
же порядок, что и в
сантиметровом диапазоне радиоволн. Так, с
вероятностью 0,9 в короткой
части диапазона ММ-радио-
волн (Я < 3,3 мм) среднее
значение ЭПР танка а » 10 м2, а на
длине волны 8 мм - сг* 9 м2.
Для основной
компоненты отраженного сигнала в
[190] на рис. 1.26 построены
семейства нормированных
спектральных плотностей
флуктуации ЭПР G(f)
движущегося объекта (танка), а на
рис. 1.27 - подстилающей
поверхности (участок ровной
местности, покрытой снегом).
Зависимости получены при
статистической обработке
записей длительностью ~ 1,5 с.
Как видно из приведенных рисунков, основной вклад в отраженный
сигнал от объекта вносят его низкочастотные составляющие, что
обусловлено сравнительно медленными относительными скоростями движения
отражателей. С возрастанием частоты флуктуирующих сигналов
спектральная плотность ЭПР снижается, и на частотах более 100 Гц ее относитель-
Из сопоставления кривых также вид-
63
ПТ"
-2
10
10
10
(
) 50 100 150 200 250 /,Гц
Рис. 1.27. Спектральная плотность
флуктуации ЭПР наземного объекта
ный уровень достигает уровня -10
но, что зависимости спектральной плотности радиолокационных
отражателей от объекта (танка) в диапазоне частот 10... 150 Гц спадают медленнее,
чем аналогичные зависимости для подстилающей поверхности. Это может
быть использовано при разработке радиолокационных систем обнаружения
наземных объектов.
1.6.2. Медленно движущиеся наземные объекты
В настоящее время одной из сложнейших задач в радиолокации
является обнаружение медленно движущихся объектов (со скоростью
меньше 4...5 км/ч).
Селекция медленно движущихся объектов осложняется помехами,
возникающими за счет флуктуации сигналов, отраженных
растительностью, гидрометеорами, и шумов передающего и приемного устройств РЛС,
что в конечном итоге может привести к срыву автосопровождения и потере
объекта. Сложность решения этой задачи однозначно определяется в
основном трудностями при создании систем селекции движущихся объектов.
В литературе предлагаются методы обнаружения слабо
рассеивающих (отражающих) медленно движущихся малоразмерных
объектов, основанные на методе многопозиционной радиолокации [192, 195].
В качестве таких методов можно отметить следующие: метод
определения характеристик обнаружения слабо рассеивающих объектов по
усредненному во времени отраженному когерентному сигналу [196],
метод обнаружения слабо отражающих объектов на фоне подстилающей
поверхности на основе использования свойств вторичного излучения в
направлении распространения электромагнитных волн [197]. Ниже
приведены основные результаты таких исследований.
Метод определения характеристик обнаружения
слабо рассеивающих объектов по усредненному во
времени отраженному когерентному сигналу
Из теории радиолокации известно, что при оценке характеристик
обнаружения объектов, определяемых характером их
функционирования, размерами и формами, используется очень сложная
пространственно-временная обработка изображений, основанная на знании априорной
информации об этих объектах, а также о характеристиках
подстилающего фона [198-200]. Однако в ряде практических задач, в которых не
требуется детального определения параметров объектов, эта обработка
может быть существенно упрощена [201-203].
Одним из таких методов обнаружения движущихся объектов
(определения их характеристик) является метод использования принципа
усреднения во времени энергии отраженного сигнала от фона, промоду-
лированного за счет функционирования объекта [201]. Сущность этого
метода основывается на обработке усредненной по времени энергии
когерентного сигнала от подстилающего фона, ограниченного площадью
64
облучения диаграммой направленности антенны (ДНА) и
промодулированного отраженным сигналом от движущегося объекта с небольшими
линейными размерами в элементе разрешения по сравнению с размерами
фоновой площадки. Такой метод позволяет в значительной степени упростить
процесс обработки при приеме слабого сигнала, отраженного от объекта,
при наличии более мощного фонового отражения. Этот метод
обнаружения таких объектов (слабо рассеивающих) и определения их угловых и
линейных координат именуется методом фоновой локации [202].
Рассмотрим этот метод применительно к задаче обнаружения
движущихся малоразмерных наземных объектов (макеты бронетанковой и
автомобильной техники, человек) на фоне земной поверхности. Для
этого воспользуемся следующими теоретическими положениями.
Известно, что при обнаружении объекта на фоне местности в радиолокации
используются три следующих информативных признака отраженного
поля излучения [199]:
первый - уменьшение мощности усредненного во времени
промодулированного когерентного сигнала (такую мощность в импульсной
радиолокации определяют мощностью, усредненной за длительность
импульса, а иногда интенсивностью);
второй - расширение спектра, связанное с наличием движущегося
объекта;
третий - смещение максимума спектра промодулированного поля
относительно его нулевой частоты. Однако необходимо отметить, что в
реальных условиях такое смещение, как правило, редко используется.
С учетом сказанного, для определения характеристик обнаружения
слабо рассеивающего объекта воспользуемся методом сравнения
энергии отраженного сигнала, поочередно принимаемого во время
перемещения диаграммы направленности антенны по участкам местности
(«чистого» фона), и объекта с фоном и с последующим усреднением
энергии отраженного когерентного сигнала во времени.
В этом случае усредненная во времени энергия отраженного
когерентного сигнала от фона, промодулированного характером движения
объекта, может быть представлена в виде [204]:
/0+г
Ext= J^(Jf,0*, (1.70)
'о
где EH(X,t) - мгновенная энергия отраженного от объекта сигнала на
фоне подстилающей поверхности; t - текущее время; t0 - начальный
момент времени наблюдения объекта; Г- время усреднения; Х- величина,
определяющая изменение энергии отраженного сигнала от объекта,
меняющего свои параметры или координаты (динамические
характеристики) при функционировании во время его обнаружения.
3—3523
65
Путем математических преобразований несложно получить, что
при усреднении во времени энергии отраженного сигнала величина Ext
в (1.70) будет определяться через измеряемую РЛС мощность,
усредненную за длительность импульса (или за требуемое время облучения)
отраженного сигнала от фона и движущегося объекта, как
интенсивность-/(X,/) = |jy2.
Воспользуемся результатами работы [202], где показано, что при
достаточно большом размере площади облучения S измеряемая
интенсивность t(Xtf) пропорциональна ее усредненному по времени
значению <I(X,t)> и определяется формулой:
2 tQ+TtQ+T
</(*,0>=-£з- J J[VM2> + *o6(M2)]*l*2, 0-71)
где
ЛЯГ
'о 'о
/ /
ДфМг) = < J j4P(*i)2 ехР[Кб.Р(*|)(*1 - *2)] A(*p0*(*2»0>
х[1 - П(хх - vf,) - П{х2 -vt2) + П{хх - vtx)TI(x2 - vt2)] dxxdx2)\
i i
вы>(*1>*г) = < j J4>c(*i)2 «p["<6.c(*i)(*i ~x2-vt\ + v'2)]x
xh(xlt)h(x2t)IJ(xl - vtx)TI{x2 - vt2)dxdx);
Eq - амплитуда отраженного когерентного сигнала от фона, промодулиро-
ванного движением объекта; Я- длина волны излучения; R - расстояние от
источника излучения до облучаемой площадки; / - линейный размер
облучаемой площадки; т^ и т^ - регулярная и случайная составляющие
модуляции амплитуды отраженного от фона сигнала, соответственно; m^v и
>Иоб.с - регулярная и случайная составляющие модуляции амплитуды
отраженного объектом сигнала соответственно; V- скорость перемещения
объекта; Щх) - прямоугольная функция отраженного сигнала:
Щх) =
1, х < d9
0, x>d;
d - линейный размер объекта; h(x,t) - импульсный сигнал на выходе
приемной системы; < > - скобки, означающие операцию усреднения по
функциям /и0б.р и /я0б.с; tuh- первый и последующий моменты времени
при усреднении.
В (1.71) под регулярными составляющими модуляции
отраженного когерентного сигнала понимаются флуктуации сигнала,
возникающие за счет различного рода ошибок, имеющих место в радиолокацион-
66
ном канале при обнаружении объектов. Случайные составляющие
модуляции отраженного сигнала от наземного объекта являются
следствием функционирования этого объекта, перемещающегося с определенной
скоростью в радиальном или тангенциальном направлении.
Отраженный когерентный сигнал от фона, промодулированный сигналом от
движущегося объекта, принимается, обрабатывается и накапливается
РЛС в виде прироста в общую усредненную во времени интенсивность
отраженного сигнала. Такая обработка сигнала с помощью
разработанных специальных алгоритмов позволяет обеспечивать выделение
слабых отраженных сигнало, в сравнении с сигналами от фона, и дает
возможность с достаточно высокой вероятностью подтвердить гипотезу о
наличии объекта. В основу структуры функционирования алгоритмов
обнаружения слабо рассеивающих объектов по методу фоновой
локации входят приведенные соотношения (1.71). Они позволяют
определить величину интенсивности сигнала I(X,t) движущегося объекта на
подстилающей поверхности даже при относительно низком
пространственном разрешении радиолокационной системы (например, для РЛС
сантиметрового диапазона при обнаружении малоразмерных наземных
объектов типа автомобиль). Однако следует отметить, что приведенные
зависимости для определения интенсивности отраженных сигналов
объекта и фона справедливы лишь для случаев, когда движущийся
объект перемещается в непосредственной близости от фоновой
поверхности, которую можно принять в среднем как плоскую. Для условий
нахождения наземного малоразмерного объекта на расстоянии, когда сама
фоновая поверхность имеет неплоскую форму, приведенные
зависимости будут иметь уточненный вид. Для получения таких зависимостей, а
также для обоснования алгоритма обнаружения и определения
динамических характеристик движущегося объекта воспользуемся
доказательствами, приведенными в работе [202].
При определенном угловом положении объекта ср в отсутствие
уверенного пространственного разрешения, т.е. когда объект слабо
рассеивающий (малозаметный на фоне земной поверхности), и при
пренебрежении краевыми дифракционными явлениями усредненная
интенсивность принимаемого локатором отраженного сигнала в момент времени
t0 будет описываться следующим выражением:
'0+Гн
E(t0)= J £и(*,0ехр
С-'о)2
Т2
А, (1.72)
где
EH(X,t) = E0j
- - rt
J m^<p)H^(<p,t)d<p+ jmo6U-^\HZb(<P,t)d(p
-П' -oo
67
A - размер приемопередающей апертуры антенны; Тн - усредненное
время (окно) наблюдения объекта;
#ф(«М) = ехр
Яо6(<г»,0 = ехр
■21
Я
'1—%(.<Р)
'уоб(^)
exp[iif^toO02(p-no] l-n'L-Щ ;
expfiWoecC^^'^-no]
"I*-*
r$(<P)> гоь(Ф) - расстояния до поверхностей фона и объекта; m$0 /иобс -
случайные составляющие модуляции амплитуды отраженного
излучения от фона и объекта соответственно; в - ДНА приемопередающей
системы; Q - угловая скорость сканирования радиолокационной
системы; V - тангенциальная скорость объекта в момент времени t = t0; Rf -
расстояние до объекта в момент времени t = t0;
П(х) =
1, ур -ср\<Ad,
О, L*-J>Ad;
<р'- угловая координата объекта в момент времени t = t0; Ad- угловой
линейный размер объекта в момент времени t = t0.
Тогда выражение для усредненной по времени интенсивности
отраженного сигнала будет иметь вид:
r(x,t) = <\£\2) =
t2
&\dt2,
(1.73)
где г2 = {(dm^jdt)2) - время корреляции сигнала от фоновой поверхности.
Для малых угловых размеров объекта при локации их на
сравнительно больших дальностях, что соответствует реальной ситуации, т.е.
V't (V')2T
когда выполняются условия Ad « —f- и -——^-, величины Вф и Воб
R AR
в (1.73) могут определяться как:
» 00 00 П
йф=<]£ф(р)|2 — { J f^(^-n^2(^-nr2)x
L-n'^p-^^l-n'^-^ldpdt^),
<ехр
68
где /ф, /об - радиусы корреляции высот неровностей фона и объекта;
0ф, сгоб - среднеквадратические отклонения высот неровностей фона и
объекта; Кф(р\ К(ф)о6 - средние значения коэффициента отражения от
фона и объекта.
Аппроксимируя функцию П* экспоненциальной функцией с
угловым линейным размером объекта равным Ad, можно, наконец, получить
основные соотношения, с помощью которых определяются
интенсивности отраженного сигнала как от движущегося объекта, так и от фона в
момент времени fa
Л(*Л) = 'ф(*>'о) + А,б(*>'о)> (1-74)
где
-/|1Г .2*06^.
*о6*
ч**\Щ«
Л0,5
ехр
(ПЧ2г2
(V'T)A+X2(R')A
Задаваясь значениями величин усредненного времени Т по
формулам (1.74), можно определить величину вклада 1Ев интенсивность
отраженного сигнала от движущегося слабо рассеивающего объекта на фоне
отражающей поверхности:
lB=h{Tx)-Ix(T2\ (1.75)
где Т\ и Г2 - значения времени усреднения в различные заданные моменты.
Проведя необходимые математические преобразования выражений
(1.74) и (1.75) с учетом параметров функционирования объекта
(скорость движения, дальность до объекта, угловое его положение), а также
относительных линейных размеров объекта и фона, характеризующихся
ДНА РЛС, можно получить формулу для расчета величины вклада от
медленно движущегося и слабо излучающего объекта в общую
интенсивность суммарного сигнала от объекта на фоне подстилающей
поверхности:
1 AAd
МЕ=\Е0\2вА
£-""-
^\кл<р)\2
1-1 +
(уут2
(R')2Ad2
+-Цкоб(^)|
'об
(1.76)
где Ad- угловой линейный размер объекта.
Таким образом, ЫЕ может служить мерой вклада (откликом) в
интенсивность отраженного сигнала при обнаружении движущегося объ-
69
екта и позволяет при обработке когерентного сигнала определить
величину сигнала от фона, промодулированного движением объекта, в виде
радиолокационного сигнала, пропорционального интенсивности
I(X, t) = |Е(ЛТ,0| • На практике такой сигнал регистрируется с помощью
измерительно-регистрирующего комплекса в условиях работы с целью
обнаружения слабо рассеивающих объектов на фоне подстилающей
поверхности. При проведении натурных экспериментов признаком
наличия в зоне радиолокационного наблюдения такого движущегося объекта
служит характерное изменение спектра сигнала на выходе фазового
детектора приемного устройства РЛС.
По формулам (1.74)—(1.76) могут быть определены и другие
параметры движущегося объекта. Так, измеряя 1Е для различных Т\ и Т2 и
определяя их отношение S, можно найти угловой линейный размер
объекта по формуле
(1.77)
Для подтверждения результатов проведенных теоретических
исследований обнаружения слабо рассеивающих объектов на
подстилающей поверхности на основе метода усреднения по времени
интенсивности отраженного когерентного сигнала, была разработана методика
проведения натурных испытаний на штатных РЛС сантиметрового
диапазона радиоволн [ 196].
Для этого представим два следующих алгоритма обнаружения.
Первый алгоритм обнаружения заключается в вычислении
величины Z,b определяющей характерное изменение спектра сигнала на
выходе фазового детектора РЛС (алгоритм Lx)\
Щ
щ
1 О 1 JYU
Второй алгоритм (алгоритм L2):
(1.78)
£,=
II*
/=1
2
^0
i=0,5W0
'2 0,5N0 N0
(1.79)
/=0
/=0,5W0
где N0=ToFa - количество накапливаемых импульсов (отсчетов); Г0 -
время одного цикла зондирования; Fn - частота повторения импульсов
РЛС; Et= I(X,t) = \EXit\ - комплексное значение амплитуды отраженного
70
сигнала, пропорциональное интенсивности отраженного сигнала от
фона, промодулированного сигналом от движения объекта и измеряемого
как характерное изменение энергии спектра сигнала с выхода фазового
детектора приемного устройства РЛС.
Экспериментальная проверка возможности обнаружения объектов по
указанному методу проводилась по результатам записи сигналов,
отраженных от медленно движущихся перпендикулярно направлению облучения
человека и автомобиля (радиальная скорость была практически равна
нулю, т.е. скорость движения была гораздо меньше 3...4 км/ч). Для
получения слабо рассеивающего характера обнаруживаемых медленно
движущихся объектов они при проведении экспериментов покрывались
материалами, поглощающими электромагнитную энергию. Накопление и затем
усреднение энергии отраженного сигнала для различных временных
интервалов производилось до величин отношения сигнал-фон -100... 150 и при
количестве накапливаемых импульсов от 100 до 2500. Испытания
проводились с использованием РЛС 1РЛ133 и 1РЛ136, которые наиболее полно
удовлетворяли требованиям, накладываемым методом фоновой
радиолокации обнаружения объекта по методике усреднения во времени
интенсивности отраженного когерентного сигнала. Радиолокационные системы
имели высокую внутреннюю когерентность, высота фазового центра
антенны была на уровне 20.. .25 м, имели однозначность разрешения по
дальности; станции излучали монохроматические импульсные сигналы в
сантиметровом диапазоне радиоволн.
В ходе натурных экспериментов исследовался спектр сигнала,
отраженного от фона и промодулированного движением слабо
рассеивающего (укрытого радиопоглощающим материалом) движущегося
объекта, как уже было сказано выше, регистрируемый на выходе
фазового детектора РЛС. Позиция, на которой должна находиться РЛС,
должна быть пригодна для проведения натурного эксперимента по
приему отраженного от фона излучения, подвергшегося воздействию
наземного движущегося объекта. Такое условие было выполнено путем
обеспечения с помощью РЛС под небольшими углами места (<р =
= 0...0,6°) облучения открытого пространства, по которому
перемешались объекты на фоне естественного отражателя в виде кромки леса.
Движение автомобиля на фоне кромки
леса
Схема расположения РЛС 1РЛ136, маршрута движения автомобиля
«Жигули», укрытого радиопоглощающим материалом «Ворс», и вид
отраженного сигнала на выходе приемного устройства и после обработки с
использованием алгоритмов L{ и L2 приведены на рис. 1.28. По условиям
испытаний (рис. 1.28,а) автомобиль двигался вдоль леса с высотой деревьев
до 15 м, а облучаемая площадь кромки леса составляла А5Ф= 450 м2, пло-
71
! ii i 1 i 1 1 1 1 i 1 1 1 ! i !
LMMiiJi АцJijiiuii 1:: ..I A„iLu lAj}
'ШШкЛШкШ
J_LL J...
_L
4c
m
\кЩЩ
в)
ltc
Рис. 1.28. Результаты измерений
отраженного сигнала от автомобиля
на фоне леса
щадь поперечного сечения
автомобиля Д£0б= 4...5 м2,
отношение Д£ф/Д50б= 100.
На рис. 1.28,б,в приведены
примеры вида отраженного
сигнала на выходе приемного
устройства РЛС и после
обработки его по алгоритмам LinL2
соответственно. Оказалось, что
обработка сигнала по алгоритму
L2 недостаточно эффективна,
поэтому в дальнейшем
обработка производилась только по
алгоритму L\.
В табл. 1.17 приведены
полученные на отрезке времени
t статистические параметры
сигнала, отраженного от кромки
леса (t = 0...6 с, 8... 10 с), а в
табл. 1.18 - параметры сигнала
при прохождении автомобиля в
диаграмме направленности РЛС
(t = 6... 8 с) после обработки.
Таблица 1.17. Параметры сигнала, отраженного от кромки леса
Значения
ЩТ0)
100 (0,1с)
200 (0,2с)
300 (0,3с)
400(0,4 с)
500 (0,5с)
/Иф
0,6
0,6
0,6
0,6
0,6
Оф,М2
0,2
0,1
0,1
0,1
0,1
<Тф/Шф
0,3
0,2
0,2
0,2
0,2
MVcr4
4,4
3,1
3,2
3,2
3,3
М(/&6
33
15
18
16
16
Пороговые значения Ц (1.78)1
при значениях Pm \
1<Г*
1,0
0,9
0,87
0,87
0,805
ю-3
0,12
1,05
0,98
0,94
0,91
ю-4
1,28
1,33
1,06
1,0 1
0,96
Таблица 1.18. Параметры сигнала при прохождении автомобиля
в диаграмме направленности РЛС
Значения
No(T0)
100 (0,1с)
200 (0,2с)
300 (0,3с)
400 (0,4с)
1 500 (0,5с)
moQ
3,3
3,5
3,65
3,8
4,0
0Ьб
2,82
2,62
2,4
2,2
1,96
Вероя
П1
ю-2
0,79
0,84
0,88
0,91
0,95
тность обнаружения 1
эй значениях Fm \
Ю-3
0,78
0,83
0,87
0,9
0,94
КГ4 1
0,76
0,82
0,86
0,89
0,93
72
В таблицах приняты условные обозначения: /иоб, юф - среднее
значение случайных составляющих модуляции амплитуд отраженного
сигнала от объекта и фона, пропорциональные соответствующим
комплексным значениям амплитуды (см. формулы (1.71) и (1.79)); сг0б> сгф-
среднеквадратические отклонения амплитуды отраженного сигнала от
объекта и фона соответственно; //4, Мь - центральные моменты 4-го и 6-
го порядков.
Учитывая, что полученные значения //4/04 и fa/оь близки к
соответствующим параметрам нормального закона распределения (//4/04 = 3,
jug/сгь = 15), закон распределения значений величины L\ принят
нормальным.
В соответствии с принятым законом распределения в табл. 1.17
приведены результаты расчета пороговых значений величины L\ для
различных вероятностей ложной тревоги (Fm), а в табл. 1.18 - значения
вероятности обнаружения автомобиля при заданном значении
вероятности ложной тревоги.
Оценка влияния отношения tsS^tsS^ на вероятность обнаружения
проведена путем моделирования в предположении, что амплитуда
сигнала, отраженного от местности, пропорциональна облучаемой
площади. При моделировании каждое значение отсчета сигнала, отраженного
от фона местности на отрезке времени t- 0...5 с (рис. 1.28,6),
умножалось на величину к (что соответствует увеличению Д5Ф в к раз) и
складывалось со значениями отсчетов сигналов на отрезке времени t= 5... 10 с.
Уровень порога определялся по полученным в результате сложения
амплитуд на отрезках времени 5...6си8...10с, вероятность обнаружения
рассчитывалась по параметрам сигнала на отрезке времени 6...8 с.
Полученные зависимости W вероятности обнаружения автомобиля
с радиопоглощающим покрытием, движущегося на фоне кромки леса,
от отношения AS^/AS^ приведены на рис. 1.29 и 1.30.
Рис. 1.29. Зависимость Рис. 1.30. Зависимость
вероятности ff обнаружения вероятности W обнаружения
от отношения А5ф/А5об при F^l О"3 от отношения Д£ф/Д5об при ^=1 (Г4
73
Движение автомобиля на фоне зеленой травы
Схема расположения РЛС 1РЛ133, маршрута движения
автомобиля ГАЗ-66К на фоне зеленой травы и вид отраженного сигнала на
выходе приемного устройства и после обработки приведены на рис. 1.31
(t = 12.. .26 с - фон, t = 0,5... 12 с - движение автомобиля). По данным
наблюдения на маршруте движе-
отношение
0
а)
Mill
WIWlf'I^WPJWWIWPP'l^li'fH'^?
1
II !
W ^чрряряц
1 1
•■"- J—
1
ния автомобиля
ЛуД£об= 100.
В табл. 1.19 приведены
статистические параметры
сигнала, отраженного от фона
местности на выходе приемного
устройства РЛС и после
обработки. Пороговые значения
величины Lx определены из
предположения нормального закона
распределения.
Учитывая, что закон
распределения отраженного
сигнала при движении автомобиля
отличается от нормального,
вероятность обнаружения
определялась методом
статистического моделирования как
отношение количества отсчетов
величины 1Ь превысивших
пороговое значение, к общему
количеству отсчетов за время
прохождения автомобиля в ДНА РЛС. Результаты расчетов представлены в
табл. 1.20. Полученные значения вероятности обнаружения автомобиля
на фоне травы при AS^/AS0q = 10 близки к вероятности обнаружения
автомобиля на фоне кромки леса при AS$/ASo6 = 100.
Таблица 1.19. Статистические параметры сигнала, отраженного
от фона местности
****п
Рис. 1.31. Результаты измерений
отраженного сигнала от автомобиля
на фоне травы
Значения
No(T0).
500 (0,1с)
1000(0,2)
2500 (0,5)
/Яф
2,1
2,3
2,7
Оф, М2
0,2
0,3
0,3
0ф/!Яоб
0,1
0,1
0,1
//4/0-4
3,5
2,8
1,8
М</<?6
20
16
4
Пороговое значение Lx (1.78)
при значениях Fm
ю-2
2,79
3,06
3,09
ю-3
3,026
3,34
3,32
10^
3,22
3,58
3,52
74
Таблица 1.20. Результаты расчетов
Значения
No(TQ)
500 (0,1с)
1 1000(0,2)
1 2500(0,5)
Юоб
6,04
6,24
6,46
<тоб, м2
4,05
3,64
3,12
<W>w06
0,67
0,58
0,48
Вероятность обнаружения
при значениях Fm
ю-2
0,86
0,87
0,87
ю-3
0,85
0,86
0,86
10^ 1
0,84 |
0,85
0,86
а)
ш=
Движение человека на фоне зеленой травы
По условию наблюдения для маршрута движения человека (рис. 1.32)
площадь его на фоне местности составила Д£об = 7...8 м2, площадь
разрешаемой площадки РЛС на земной поверхности 85ф = 800 м2,
отношение Д£ф/Д£об «ЮО.
Значение ЭПР человека
составляет 0,1...0,2 м2,
оценочное значение ЭПР фона
местности в разрешающей
площадке РЛС примерно
равна 10... 20 м2. В соответствии с
этими условиями на маршруте
движения радиолокационный
контраст человека на фоне
местности (отношение мощности
полезного сигнала к мощности
сигнала от фона, Р0б/Рф)
составлял примерно -20 дБ.
В табл. 1.21 приведены
значения статистических
параметров сигнала, отраженного от
фона местности (луг с зеленой
травой, t = 1...3 с и 6...13 с,
рис. 1.31,6), в табл. 1.22 -
вероятность обнаружения человека
при его движении на фоне
зеленой травы (t = 3... 6 с).
Достоинством, показан-ного метода усреднения во времени отражен-
ноого когерентного сигнала (фоновой локации) является то, что он
позволяет обнаруживать слабо рассеивающие объекты при небольших скоростях
движения, в том числе и при движении объекта по нормали к направлению
РЛС. Обнаружение же таких объектов методом доплеровской фильтрации
на сильно отражающем фоне местности практически невозможно.
Рис. 1.32. Результаты измерений
отраженного сигнала от движущегося
человека на фоне земной поверхности
75
Проведенные экспериментальные исследования полностью
подтвердили результаты теоретических исследований. При этом показана
возможность обнаружения на фоне местности слабо рассеивающих
объектов и движущихся с малой скоростью в любом направлении
относительно РЛС.
Таблица 1.21. Значения статистических параметров сигнала,
отраженного от фона местности
Значения
No (То)
50 (0,01с)
100 (0,02с)
500 (0,1с)
| 1000 (0,2с)
Юф
0,2
2,5
21
39
Оф, М2
2,3
1,9
15
22
(Тф//Иф
10
0,8
0,7
0,6
//з/оз
1,4
0,6
2,4
1,3.
//4/04
5,8
4,3
11
А4
ММ
69
33
23
1 34
Пороговое значение Lx (1.78) 1
при значениях Fm |
10"Г
4,15
8,15
75
106
КГ*
4,8
9,5
101
109
10"4
4,9
9,9
101 !
109
Таблица 1.22. Вероятность обнаружения человека
при его движении на фоне зеленой травы
Значения
No (То)
50 (0,01с)
100 (0,02с)
500 (0,1с)
1000 (0,2с)
ГПо&
0,6
5,0
33
64
<Тоб, М2
4,6
5,9
20
37
ОЬб/Юсб
7,9
1,2
0,6
0,6
//з/оз
1,2
3,4
1,2
1,6
//4/04
9,8
20
4,8
67
/4/06
293
951
42,1
80
Вероятность обнаружения
при значениях FaT
10"Г
0,1
0,2
0,1
0,1
io-J
0,1
0,2
0
0,1
10"4
0,11
0,11
0
0,08
С увеличением отношения A^AS^ вероятность обнаружения
снижается. Так, при отношении AS^AS^ = 100... 150 вероятность обнаружения
движущегося автомобиля на фоне кромки леса и равнинной местности с
зеленой травой составляет не менее 0,8, а с увеличением отношения
Д5ф/А5об Д° 200.. .250 вероятность обнаружения уменьшается до 0,2.
Метод обнаружения слабо отражающих объектов
на фоне подстилающей поверхности на основе
использования свойств вторичного излучения в направлении
распространения электромагнитных волн
Рассмотрим возможность обнаружения слабо отражающих
объектов с использованием радиолокационного (РЛ) сигнала, отраженного от
участка местности, находящегося за объектом. Из теории
электромагнитного поля известно, что если на пути распространения волн
поместить абсолютно черное тело (поглощающее всю падающую на него
энергию), размеры которого больше длины волны, то позади тела
появится поле рассеяния (теневое поле). При этом амплитудные
характеристики поля рассеяния не зависят от формы тела и определяются только
его поперечным сечением.
76
Эффективная поверхность рассеяния такого тела при рассеянии в
направлении распространения волны (вперед) определяется следующим
уравнением (в некоторой литературе определяют как «теневая» ЭПР с
обратной стороны объекта ):
*i=4*(Vl > - (J-80)
где Зоб - площадь поперечного сечения объекта; Я - длинн^волны
излучения РЛС.
Следует отметить, что «теневую» ЭПР нельзя уменьшить,
применив радиопоглощающие покрытия и другие специальные меры, которые
эффективно снижают ЭПР объекта со стороны облучения. В
трехсантиметровом диапазоне волн такая ЭПР объекта, имеющего площадь
поперечного сечения 1 м2, составляет 13960 м2.
Величина а^ сохраняется в секторе углов за объектом, ширина
которого в азимутальной и угломестной плоскостях по уровню -3 дБ равна:
A/3As = -*—, (1.81)
'об^об
где /об, Аоб -размер поперечного сечения в соответствующей плоскости
объекта (по длине поперечного сечения и высоте). В работе [195] проведена
оценка отношения мощности сигнала, отраженного от элемента
разрешения, находящегося за объектом, с учетом «теневой» ЭПР, к мощности
сигнала, отраженного от подстилающей поверхности (фона местности). В
соответствии с геометрическими соотношениями, приведенными на рис. 1.33,
использованы известные уравнения радиолокации [197] и получено
следующие выражения для плотности потока мощности у объекта
PG
П{ =
4xR/
где Р - мощность излучения РЛС; G - коэффициент усиления антенны.
Рис.1.33. Схема геометрических соотношений для определения
отношения сигнал-фон
77
С учетом уравнения (1.80) мощность, излучаемая объектом в
направлении фона,
р-П(тг -™к-
Рг-П<тл- ^2 t
плотность потока от объекта у подстилающей поверхности
п-_^^-.^§к
2 AnR2 AnX2R2R2 '
площадь подстилающей поверхности (сечения теневой области),
облучаемой сигналом от объекта (для случая квадратного объекта,
площадью 5о6),
k2R2
S =-
s*
мощность этого сигнала, отраженного от фона (диффузное отражение от
плоской поверхности с удельной ЭПР ао6),
PGSnRanl
Pi=n0S„anl
Jo6uo6
плотность потока мощности сигнала, отраженного от фона у объекта,
п _ Рг _ PGS*P* .
3 ЛжЯ2 {An)2R2R2'
мощность сигнала, отраженного объектом в направлении РЛС,
р-П(т - PG<T°6Srt •
* 3*-{An)2R?R2A2'
плотность потока от объекта на входе антенны РЛС
п = Ра _ PGa«$« .
Ц 4Щ2 (4я)гЪ%2А2'
мощность сигнала, переизлученного объектом, на входе приемного
устройства РЛС
'--л-^-(@^! (ь82)
площадь подстилающей поверхности, находящейся в ДН антенны РЛС,
шириной A/?axAfa, для случая нормального падения волны
S -KBteiR ,/М2-4;Г(*'+^)2 а -а S _^об^К + /?2)2.
Ьф-&Рй&£йуЩ + К2) ~ ^ ?аф-аоблф- >
мощность сигнала, отраженного от фона, на входе приемного
устройства РЛС
78
/> ф
—
PGA2a,
об
(4я)3(л,+/г2)4 (4*)2(л1+л2):
2 '
(1.83)
радиолокационный контраст - отношение сигнал-фон при Sl« Бф
^Ф (4я)2л2л,4л22'
При условии, когда Ri»R2, уравнение (1.84) преобразуется к виду
(1.84)
4 =
GS.
об
(4/г)2 Л2Д,2Л22
.(1.85)
На рис. 1.34 приведена
рассчитанная зависимость РЛ
контраста от расстояния до
отражающей площадки (элемента
разрешения) за объектом для
значений G = 33 дБ, 5об= 4,5 м2,
#i = 600m,A = 3cm.
В этом случае возможно
обнаружение на небольшой
дальности только подвижных
объектов с использованием
режима селекции движущихся це-
лей(СДЦ).
При обнаружении
неподвижных целей в режиме
синтезирования апертуры при
Яоб-Яф, получаем
ДБ
-ю
-15
20 0
20 30 40 50""
Рис. 1.34. Зависимость
радиолокационного контраста
от расстояния до отражающей площадки
(элемента разрешения) за объектом
при5т«5ф
4 =
30б
2,2
4?rR2zA
(1.86)
ДБ |
■5
10
20
1
3
0 4
) 5
М
)
Рис. 1.35. Зависимость
радиолокационного контраста
от расстояния до отражающей площадки
(элемента разрешения) за объектом
при5т« 5ф
На рис. 1.35 приведена
зависимость РЛ контраста при
высокой разрешающей
способности РЛС (режим
синтезирования апертуры при So6 ~
5ф, обнаружение неподвижных целей). В этом случае
радиолокационный контраст не зависит от дальности обнаружения, а определяется
только расстоянием между объектом и подстилающей поверхностью.
Для экспериментальной проверки на испытаниях использовался
автомобиль «Жигули», укрытый радиопоглощающим материалом
79
(РПМ) «Ворс», обеспечивающим снижение ЭПР не менее чем на 10 дБ.
Измерения проводились с помощью переносной РЛС 1РЛ136 и
малогабаритного макета РЛС типа «Искра». Эксперименты с использованием
макета 1РЛ136 выполнялись в летний период 1997 г. в полигонных
условиях, а с макетом РЛС проводятся с начала сентября 2001 г. и до
настоящего времени на выбранных удобных участках (см. ниже) в районе
г. Москвы. Основные параметры макетов РЛС приведены в табл. 1.23.
Таблица 1.23. Основные параметры экспериментальной аппаратуры
Параметры макета РЛС
1 Рабочий диапазон, см
Излучаемая мощность, мВт
Тип излучения
Дальность действия (автомоб.), м
1 Масса, кг
Значения параметров для макета РЛС
типа
1РЛ136
3
100
непрерывный
2500
5
«Искра»
1,2
20
непрерывный
800 |
0,5
Позиция для проведения экспериментов в полигонных и городских
условиях выбиралась из условия пригодности проведения натурного
эксперимента, чтобы обеспечивалась возможность приема отраженного
от фона излучения, подвергшегося воздействию наземного
движущегося объекта. Такое условие эксперимента может быть наилучшим
образом выполнено, если РЛС облучает открытое пространство, по
которому может двигаться объект на фоне естественного отражателя
(например, лес). В городских условиях эксперименты с РЛС «Искра»
проводятся с балкона на втором этаже жилого здания с видом на открытую
площадку с фоном от леса (лиственный лес высотой до 10... 15 м). На
опушке леса на удалении от него 25...30 м проходит грунтовая дорога,
пригодная для движения автомобильного транспорта. Расстояние до
дороги около 300 м. Легковые и грузовые автомобили различных типов
двигались в противоположных направлениях.
В процессе эксперимента на полигоне автомобиль (ЗИЛ-131,
«Жигули») двигался вдоль кромки леса (высота деревьев 15 м),
находящегося на удалении 10... 15 м за трассой движения. Для получения слабого
отражения объекта использовались радиопоглощающие покрытия
(РПП), изготовленные из ворсового материала ТМ-401 («Ворс»),
ослабляющего радиоизлучение на 25 дБ.
Определялось изменение параметров сигналов при появлении
возмущающего «слабо отражающего» объекта на линии «излучатель-
участок подстилающей поверхности». Регистрация отраженного от
подстилающей поверхности (фона) сигнала производилась с использовани-
80
ем указанных РЛС и аппаратуры обработки экспериментальных
измерений. Признаком наличия в секторе обнаружения подвижного объекта
служило характерное изменение спектра сигнала на выходе фазового
детектора РЛС.
Вид сигнала, отраженного от кромки леса без автомобиля и в
момент прохождения автомобиля в диаграмме направленности антенны
РЛС, приведен на рис. \36,а.
Достоинством метода является то, что он позволяет обнаруживать
слабо отражающие объекты на фоне местности при малых радиальных
скоростях движения, в том числе и при движении объекта по нормали к
направлению облучения. Обнаружение таких целей методом доплеров-
ской фильтрации реализуется с малой вероятностью.
Алгоритм обнаружения заключается в вычислении величины L в
соответствии с преобразованным из (1.79) следующим уравнением:
1 т+к - L
Р=к
* т+к
р=к
(1.87)
где Ц, - комплексная амплитуда отраженного сигнала; т = FnAT-
количество суммируемых импульсов отраженного сигнала; Fn - частота
дискретизации при повторения импульсов РЛС; AT - интервал обработки;
к = FaAt- шаг обработки в количестве дискретных отсчетов.
Результаты обработки сигнала при движении автомобиля вдоль
кромки леса приведены на рис. 1.36,6. Они получены при Fn = 1000 Гц,
т = 1000 (АГ= 1с), к = 100 (Д> = 0,1 с).
После обработки в соответствии с приведенным алгоритмом (1.87)
получено отношение сигнал-фон более 10 дБ (рис. 1.36,в). Следует
отметить, что такая обработка приводит к сглаживанию флуктуации
сигнала, отраженного от фона местности, что обеспечивает обнаружение
при малых значениях порога. Как показано на рис. 1.36,в, значение
порога/?, превышающего на 2...3 дБ средний уровень сигнала,
отраженного от фона местности, обеспечивает обнаружение практически при
отсутствии ложных тревог.
Вид отраженного сигнала на выходе приемного устройства РЛС и
результат обработки при движении объекта на открытом участке при
отсутствии за ним кромки леса приведены на рис. 131,а,б соответственно.
Отсутствие за объектом подстилающей поверхности приводит к
существенному уменьшению уровня принимаемого сигнала и
возможности обнаружения движущегося объекта.
В соответствии с результатом обработки (рис. 1.37,в) отношение
сигнал-фон при нахождении объекта только в максимуме ДНА
составляет ~2 дБ.
81
25C,
125| ■
°Шш
125;
I ° 1
6000
4500
1500
°T^
ДБ
30
2So—-
2 3
2
_
3
3
4 5 6
a)
!
4 5 6
6)
4 5 6
«)
7
7
7
8
8
8
9 10 I
P
с
9 10
*'
<S
С
9 10
100
50 •" •
о ■ -
-50;
-100-
0 1
300
250
200
150 ;
100
0 1
ДБ25
24
23
22 —
21 " — ^
20
0 1
2
--1--.
2
.,_.- :. ..
2
3
" T.^
3
3
4
a)
.-4.v ■
4
6)
--..'
4
в)
>•
5
5
5
6
6
6
7
"j"
7
_„
7
8C
P
ec
P'
8C
Рис. 1.36. Вид отраженного сигнала
на выходе приемного устройства
РЛС и результат обработки
(движение вдоль кромки леса,
/ = 0...5,5си8,5...10с-фон,
1= 5,5... 8,5 с-автомобиль
в ДН антенны РЛС)
Рис. 1.37. Вид отраженного сигнала
на выходе приемного устройства РЛС
и результат обработки
(t = 5... 8 с - автомобиль в ДНА РЛС,
движение на открытом участке
при отсутствии за объектом
кромки леса)
Следовательно, экспериментальные данные подтверждают наличие
отраженного от подстилающей поверхности сигнала, превышающего на
8 дБ по мощности сигнал, отраженный от объекта.
Для сравнения рассмотрим следующий алгоритм обработки с
использованием дискретного преобразования Фурье (ДПФ) [104]:
с,=— У ^.exp^W^/l, (1.88)
т *г?к \ т )
по-
где Cjг-комплексная амплитуда j-й спектральной составляющей; А
рядковый номер последовательной выборки сигнала.
На рис. 1.38 представлены результаты ДПФ сигнала, отраженного
от фона местности в момент нахождения движущегося объекта в ДН
антенны РЛС (см. вид отраженного сигнала на рис.1.36,а).
Сравнение результатов обработки, приведенных на рис. 1.36 и 1.38,
показывает, что использование уравнения (1.87) обеспечивает более
эффективное обнаружение медленно движущихся объектов (скорость
движения менее 4 км/ч) по сравнению с применением дискретного
преобразования Фурье (1.88).
82
f = 5c
'О 50 100 150 200'
а)
Гц
/ = 6с
ММ]
/ = 7с
Гц 0 УЦШШИ^тм.^^ г О
О 50 100 150 200 0 50 100 150 200 ц
б) в)
IX
/ = 7,6с
„.., л
О 50 100 150 200
г)
Рис. 1.38. Результаты последовательной обработки сигнала, отраженного
от объекта с использованием ДПФ (движение вдоль кромки леса)
Следует отметить также, что при расчетах получено меньшее
значение радиолокационного контраста по сравнению с экспериментальными
данными. Так, по данным расчета (см. рис. 1.34) при расстоянии до
подстилающей поверхности, равном 10 м, q = -7 дБ, а по результатам
эксперимента (см. рис. 1.36,а) получено q « -2 дБ.
1.63. Неподвижные наземные объекты с работающим двигателем
В короткой части ММ-диапазона радиоволн в сравнении с
длинноволновыми диапазонами (8 мм и 3 см) появляется превосходная
возможность обнаружения неподвижных объектов с работающим
двигателем. Решению этих задач посвящены работы [205-207]. Рассмотрим
данный вопрос более подробно.
Для решения задачи обнаружения неподвижных объектов с
работающим двигателем была разработана модель неподвижного
осциллирующего объекта, сущность которого заключается в следующем.
В случае остановки объекта с работающим двигателем полный
отраженный сигнал от него будет частично замодулирован
механическими колебаниями переотражателей. Однако характеристики подобного
сигнала и эффективность системы селекции движущегося объекта
(СДО) в данном случае сильно зависят от длины рабочей волны РЛС и
особенностей переотражателей на объекте радиолокационного
наблюдения. Решение задачи не является простым, так как необходимо
учитывать сложный характер дифракции электромагнитных излучений
многочисленных переотражателей.
Для выявления общих закономерностей отраженного сигнала от
состояния обнаруживаемого объекта можно воспользоваться
упрощенной моделью.
Допустим, что сигналы от объекта гармонически осциллируют в
радиальном направлении и дальность до объекта меняется по закону
D(t) = D0+ADsmQt, (1.89)
где D0 - дальность до объекта; AD -амплитуда осцилляции; Q - частота
осцилляции.
83
Если предположить, что объект облучается доплеровской РЛС с
измерителем непрерывных монохроматических колебаний, то можно
показать, что на выходе линейной части приемника отраженный сигнал
запишется в виде:
Uc(t) = Um cos(2kADsmQt + Ф0), (1.90)
где Um и Ф0 - амплитуда и начальная фаза сигнала соответственно;
к=2я/А- волновое число.
Использовав периодичность в (1.90) и представив спектр сигнала в
виде ряда Фурье, можно получить для спектра следующее выражение:
Щт) = 2яит £ J2p{x)S(m-2fCl\ (1.91)
где x = 2kts£)\ J2P(x) - функция Бесселя 1-го рода; S(x) -дельта
функция Дирака.
Проведенный анализ расчетов по формуле (1.91) показал, что при
некотором критическом значении амплитуды колебаний AD = 1 / к
происходит качественное изменение огибающей спектра. При этом значении AD =
= ADjt появляется максимум на второй гармонике частоты колебаний
отражателя - 2Q, а дальнейшее увеличение амплитуды приводит к смещению
этого максимума вдоль оси частот и расширению спектра. Необходимо
также отметить, что максимальная амплитуда Um уменьшается с
увеличением AD/A. На рис. 1.39,1.40 и 1.41 приведены расчетные зависимости
огибающей спектра сигнала от частоты вибраций отражателя, ширины спектра
сигнала и амплитуды сигнала от амплитуды колебаний отражателя
соответственно. На рис. 1.40 кривая 7 - зависимость ширины спектра на уровне
к-
К
ДО/А=0,(Х
0,16
Г^
8
/
Kf
2,6
W,
32
Рис. 1.39. Зависимость Рис. 1.40. Зависимость
огибающей спектра сигнала огибающей спектра сигнала
от частоты вибраций отражателя от ширины спектра
a>07/Q
/
V
J
f
1
2 ^
//
/
*/
7—1
0,8 1,6 2,4 3,2 AD/A
84
0,7 как функция амплитуды колебаний отражателя; 2 - кривая,
аппроксимированная выражением А#0,7= 2Q„(k-AD), n = 1,2,3,....
Для оценки эффективности работы системы СДО требуется знать
долю мощности полезного сигнала, попадающего в полосу пропускания
фильтра СДО q = PiQJ/Pz, где Q0 - частота среза фильтра СДО; Л: -
полная мощность полезного сигнала.
Записывая мощность полезного сигнала на выходе фильтра в виде
P(Q0) = lP((o)da), получаем
"о
00
P(Q0) = 4rV2^J22/,(4^AD/A),
где Р0 = пПо/П («=1,2,3....).
Полная мощность полезного сигнала находится с помощью
продольного перехода Q0 -» 0.
На рис. 1.42 показана зависимость дм для различных частот среза
фильтра СДО. Видно, что частота среза может значительно превышать
частоту колебаний отражателя Q0 => Q, если AD соизмерима с длиной волны
облучаемого сигнала. Это решающим образом сказывается на
энергетическом потенциале доплеровской РЛС, так как основная мощность помех,
связанная с особенностями СВЧ-генераторов и собственными вибрациями
носителя РЛС, лежит в низкочастотной области спектра. Поэтому
проведенный анализ подтверждает перспективность создания РЛС для селекции
наземных объектов с включенным двигателем, работающей в короткой
части ММ-диапазона радиоволн. Оценки показали, что по сравнению с ло-
кацией в сантиметровом диапазоне, мощность сигнала вблизи гармоник
\*г< 41
0,8
0,6
0,4
0,2
0
0,8 1,6 2,4 3,2 ДО
/Я
Рис. 1.41. Зависимость
огибающей спектра сигнала
от амплитуды
Рис. 1.42. Зависимость qM
для различных частот среза фильтра
СДЦ
85
доплеровской частоты для вибрирующих объектов техники в короткой
части ММ-диапазона возрастает более чем на 30 дБ.
Проведенный анализ выполнен в предположении идеальной
монохроматичности излучаемых сигналов РЛС, в то время как реальные
СВЧ-генераторы обладают вполне конечной стабильностью колебаний.
В этом случае фаза сигнала на выходе приемного устройства РЛС
является функцией времени в соответствии с флуктуациями частоты
передатчика coif): Ф0= (2D/c)cd (0 + q>m, где ^ = % -(fc - начальный сдвиг
фаз передатчика и гетеродина.
Чтобы техническая нестабильность частоты передатчика не влияла
на способность РЛС эффективно выделять сигналы от осциллирующего
объекта, необходимо, чтобы приращение фазы АФ0 за период колебаний
отражателя T=l/Q было существенно меньше модуля |ф(7)|« 2kAD.
Допускаемая величина относительного ухода частоты СВЧ-генератора
Au)(T) = co(t + T)-(ot\ \Aco(T)/(D0\«\AD/D0\. (1.92)
Численная оценка по этим выражениям показывает, что при реально
достижимых амплитудах колебаний AD = 0,1...0,5 мм у объектов РЛ
наблюдения и расстояниях локации 3...5 км, требуемая кратковременная
стабильность частоты передатчика РЛС Af/f0 « ЮЛ.. 10~9, что возможно
обеспечить, используя передатчик на базе генератора с дифракционным
излучением (ГДИ) [206].
С применением существующих РЛС длинноволновых диапазонов
и макетов когерентных РЛС в ММ-диапазоне волн были проведены
эксперименты. В качестве наземных объектов выбраны автомобили
(колесная техника) различных марок (ГАЗ-66, ЗИЛ-151 и 157, БМП) и
гусеничная техника (АТТ, МТЛБУ, БРДМ-2, Т-62). Для измерения
характеристик вибраций использовались электрические датчики типа 4366
фирмы Брюль и К°, а для обработки спектров отраженного сигнала
применялся низкочастотный анализатор спектра А-51А (США) с
полосой анализа 200 Гц и разрешающей способностью 1 Гц. В ходе
экспериментов установлено:
1) при работе двигателя в спектре сигнала появляются
дополнительные частотные составляющие. Изменения режима работы двигателя
приводит к смещению центральной частоты спектра в пределах 12.. .25 Гц,
а амплитуда механических колебаний находится в диапазоне 20...200 мкм.
Увеличение частоты вращения вала двигателя приводит к возрастанию
основной частоты и появлению второй и третьей гармоник;
2) превышение сигналов (контраст) от объекта с работающим
двигателем на фоне сигналов от местности и местных предметов в
диапазоне частот 25...27 Гц составляет не менее 6 дБ;
3) эффект амплитудных пульсаций сигнала, отраженного от
наземного объекта с работающим двигателем, наблюдается в короткой
86
части ММ-диапазона гораздо лучше, чем в длинноволновой.
Аналогичные опыты, проведенные на волне 8 мм, позволили с большим трудом
выделить сигнал от автомобиля с работающим двигателем.
Как уже отмечалось, несмотря на указанное достоинство
коротковолновой части ММ-диапазона, для решения задач обнаружения и
сопровождения как медленно движущихся, так и неподвижных с
работающим двигателем наземных объектов требуется применение
когерентной обработки сигналов. Передатчик такой РЛС должен обладать
высокой стабильностью.
С целью разработки высокостабильной когерентной РЛС в
короткой части ММ-диапазона в [205, 206] были проведены теоретические и
экспериментальные исследования. Эксперименты выполнялись с
использованием макета доплеровской РЛС, где в качестве передающего
устройства применялся генератор дифракционного излучения (ГДИ),
который обеспечивал стабильность радиолокационной системы в
пределах 10"9...10~10. Это позволяет, по утверждению авторов, реализовать
техническую возможность создания РЛС обнаружения как медленно
движущихся, так и неподвижных с работающим двигателем объектов.
1.6.4. Неподвижные наземные объекты и воздушные объекты
в наземных условиях
Возможность обнаружения неподвижных объектов на коротких ММ-
радиоволнах зависит, как это и следовало ожидать, только от разрешающей
способности РЛС, ЭПР объектов и удельных ЭПР фонов. Теоретические
исследования радиолокационных контрастов проводились для объекта типа
танка, для чего определялась величина контраста излучения К:
К= ^ , (1.93)
0-з.пЛ)0>Л0сг„
где (тоб, <т3 п - ЭПР объекта и земной поверхности соответственно в
метрах в кадрате; (р - угол места объекта в градусах; ги - длительность
импульса передатчика РЛС в микросекундах; Д0- ширина ДНА РЛС в
градусах; Д, - дальность от РЛС до объекта.
Из формулы (1.93) видно, что основными составляющими, дающими
наибольший вклад в формирование радиолокационного контраста,
являются величины ЭПР объектов и фонов, а также такие параметры самих РЛС,
как рабочая длина волны и апертура, структура антенной системы.
Результаты расчета зависимости радиолокационного контраста
танка с (Т0б = 9 м2 для РЛС наземной артиллерийской разведки (CHAP),
работающей в длинноволновой части ММ-диапазона и переносной
станции наземной разведки (ПСНР), работающей в короткой части СМ-
диапазона, представлены на рис. 1.43 (прямые / и 2 соответственно).
Там же приведены значения радиоконтраста К (в децибелах) для аль-
87
Рис. 1.43. Значения контраста объекта на фоне отдельных
земных покровов
тернативной РЛС с рабочей длиной волны 3 мм (прямая 3). Значения К
приведены на фоне: а - луговой травы с Ай < 0,5 м; б - сухой травы с
Ай < 0,5 м; в - кустарника с Ай < 1 м; г - лиственного леса; д - снежного
покрова. Видно, что радиоконтраст существенно зависит от фона
подстилающей поверхности: Анализ приведенных зависимостей
показывает, что при одинаковой апертуре антенны (усеченный параболлойд
1000x600 мм2), контраст объекта относительно фона местности по
сравнению с данными более длинноволновых РЛС на 5... 10 дБ больше в
случаях а~в или сравним и меньше на 1...2 дБ в случаях гид. Таким
образом, при обнаружении неподвижных объектов на фоне
подстилающей поверхности РЛС в короткой части ММ-диапазона волн могут
иметь преимущество по сравнению с РЛС на СМ-волнах.
Из сказанного становится очевидным, что одним из интересных
направлений в исследованиях является изучение отражающих свойств
объектов различной формы на фоне подстилающих поверхностей.
Этому направлению в период 1997-2000 гг. был посвящен целый ряд
отечественных и зарубежных научных работ. В них большое внимание уде-
88
ляется теоретическим проработкам, и особенно, связанным с
компьютерной обработкой по специальным методикам.
К числу оригинальных исследований, посвященных анализу
радиолокационных характеристик объектов сложной пространственной
конфигурации, относятся работы [208-212].
Вопросы проектирования и оценки заметности современных
летальных аппаратов, а также наземных и морских объектов практически
невозможно решить без априорного знания характеристик полей рассеяния при
локации этих объектов. Здесь приводятся результаты исследований нового
уникального подхода к решению научной проблемы определения
радиолокационных характеристик объектов сложной пространственной
конфигурации, предложенного А. Б. Борзовым и его коллективом.
Известно, что экспериментальные методы изучения
электромагнитных полей рассеяния при моделировании объектов и натурные измерения
полей реальных объектов требуют значительных материальных затрат и
практически не применимы на ранних стадиях проектирования новых
аэродинамических объектов и систем локации. Наиболее перспективным в
настоящее время является метод математического моделирования
рассеивающих свойств объектов на основе физической теории дифракции и
физической оптики, способных решать такие задачи. Ниже излагаются
возможности определения радиолокационных характеристик на примере
аэродинамического объекта достаточно сложной формы.
Как поясняется в [212], существует два основных способа получения
необходимой информации - это экспериментальные исследования,
связанные с измерениями полей рассеяния реальных объектов на полигонах, в
безэховых камерах и т.п., и теоретические исследования, основанные на
строгом или приближенном методе решения задачи. Поскольку первый
метод предполагает наличие реального объекта или его достаточно хорошего
макета, он, наряду со своими значительными материальными затратами,
практически неприменим на ранних стадиях проектирования как новых
аэродинамических объектов, так и систем локации. Поэтому методы
математического моделирования, с помощью которых можно решить такую
задачу, находят все большее применение.
Основой практически всех математических моделей
электромагнитного взаимодействия является строгая математическая формули-ровка
физического явления в виде системы дифференциальных уравнений
Максвелла. Градация математических моделей вытекает из методологических
различий в решении этой системы или использовании ее решений.
Поскольку чисто аналитические решения (теоретически точные) удается
получить лишь для сугубо ограниченного класса простейших объектов,
поверхность которых можно описать в специально выбранной системе
координат, для анализа полей рассеяния объектов сложной пространст-
89
венной конфигурации необходимо применять различные упрощения и
допущения при интегрировании системы уравнений. Сочетание этих
математических допущений и достаточно очевидный физический смысл
конкретных электродинамических процессов привело к появлению так называемых
физических моделей в ММ-диапазоне длин волн [211,212].
Наибольшее распространение получили два основных метода -
геометрическая (ГТД) и физическая (ФТД) (или токовый метод) теории
дифракции.
В задачах синтеза радиолокационных сигналов от объектов
сложной формы, при их самых общих условиях локации на фоне
подстилающей поверхности, наиболее рациональными являются расчетные
методы, основанные на методе ФТД и его развитии - токовом методе. С
помощью этих методов удается учесть в общем поле рассеяния вклад
как от различных дифракционных компонент (от гладкой части, острых
кромок, взаимодействий элементов конструкции), так и от отдельных
конструктивных элементов, что особенно важно при оценке
радиолокационной заметности.
Общим недостатком всех физических моделей является
неконтролируемая точность результатов математического моделирования
РЛХ. Поэтому основными критериями адекватности таких моделей
служат специальные методики сопоставления (идентификации)
результатов моделирования либо с результатами достоверного
(стандартизованного) эксперимента, либо с результатами точного (или
асимптотически точного) аналитического решения, в котором погрешность
вычислений - это функция относительной длины волны L/Я, где L -
характеристический размер рассеивателя (радиус корреляции).
В рамках токовых методов для расчета отраженных сигналов и РЛХ
объектов локации необходимо проинтегрировать по всей отражающей
поверхности источники вторичного излучения. Особенность метода состоит в
том, что электродинамическая задача сводится к оценке интегралов по
поверхности объектов локации, имеющих сложную пространственную
конфигурацию. В случае радиолокационных систем источники вторичных
волн имеют векторный и существенно осциллирующий характер.
Для объектов сложной пространственной конфигурации эта
оценка может быть получена только численными методами. Поэтому
внешняя поверхность объектов локации должна быть представлена
аналитически, т.е. в виде геометрической модели (ГМ). Создание ГМ сложных
объектов локации представляет творческий процесс, в результате
которого создается 3£>-образ реального объекта. Степень адекватности
образа оригиналу достигается, обычно, в процессе создания (синтеза) ГМ
при решения альтернативных проблем, например какова необходимая
степень детализации геометрического образа цели чтобы вычислитель-
90
ные затраты и ресурсы ЭВМ
были приемлемыми.
В результате решения этой
проблемы сотрудниками МГТУ
им. Н. Э. Баумана была
разработана кусочно-аналитическая
модель объекта сложной формы. В
рамках этой модели объект
аппроксимирован совокупностью
дискретных элементов (прими- Рис. 1.44. Кусочно-аналитическая
тивов), представляющих собой модель объекта типа МИГ-29
участки плоскостей двух типов и
поверхностей 2-го порядка, алгоритмически пристыкованных
(«припасованных») друг к другу. Эта модель успешно использовалась для
решения прямых задач радио и оптической локации, т.е. когда по
известной (заданной) геометрии рассеивающего объекта необходимо
определить его отражательные характеристики. В качестве иллюстрации, на
рис. 1.44 изображена геометрическая модель объекта типа МИГ-29.
Поскольку в лазерном диапазоне, где впервые была использована эта
модель, несущественны такие эффекты, как рассеяние на ребрах,
переходных областях на границе «свет-тень», взаимодействия элементов друг с
другом, в радиолокационном диапазоне, где эти эффекты могут иметь
доминантный характер, набор примитивов (базовых пространственных
элементов) из состава кусочно-аналитической модели оказывается
недостаточным. Кроме того, разработка единой расчетной методики оценки
рассеивающих свойств объекта сложной формы на фоне мешающих объектов
естественного и антропогенного характеров в условиях его локации
бортовыми радиолокационными системами требует использования такой
геометрической модели, которая одинаково бы подходила для аппроксимации
как объектов сколь угодно сложной формы, так и подстилающих
поверхностей. Такие модели позволяют синтезировать современные системы
автоматизированного проектирования и визуализации. Эти системы условно
можно разделить на две большие группы.
1. Инженерные системы, предназначенные в основном для создания
виртуальной модели объекта, которая непосредственно используется для
его дальнейшего изготовления. К наиболее мощным и развитым следует
отнести системы Pro/Engineer, UniGraphics, MatraDV и Catia. Поскольку
именно эти системы используются для изготовления как отдельных
конструктивных элементов, так и объекта в целом, точность аппроксимации
виртуальной модели объекта локации ее оригиналу будет наивысшей.
2. Системы, ориентированные на создание анимационных фильмов
и графической визуализации. Наиболее известным (для IBM
PC-компьютеров) представителем этих систем является программа 3DMAX
91
компании Kinetix. К таким системам с определенными оговорками
можно отнести системы SolidThink и SpotLight.
Отличительной особенностью ЗО-моделей объектов, созданных в
этих современных системах, является возможность их представления
(конвертации) в полигональную или «фацетную» модель,
представляющую собой конечную совокупность однотипных плоских элементарных
отражателей с определенным набором свойств, количество и форма
которых определяется разработчиком. Однако анализ показал, что
использование какой-либо одной системы для создания геометрической
модели как объекта локации (ОЛ), так и сложного рельефа оказывается либо
нерациональным, либо невозможным вследствие того, что
анимационные системы, не предназначены для решения серьезных расчетных
задач вообще и локационных задач в частности.
Примером такого утверждения служит фрагмент модели эталонной
сферы (рис. 1.45), изображенной средствами машинной графики на рис. 1.46,
выполненной в среде 3DMAX и представленной для ее дальнейшего
использования в виде текстового файла формата ase. Особенность 3DMAX
состоит в том, что эта система не различает физические и виртуальные
острые кромки (рис. 1.47). Кроме того, направление (а иногда и величина!)
экспортированных векторов нормалей к элементарным «фацетам» также
подвержена ошибкам при его экспортировании в текстовый формат. Также
серьезные проблемы возникают при конвертации в областях, близких к
острым вершинам. Однако эта система может быть с успехом использована
для генерации 3/)-моделей ландшафтов и объектов растительного
происхождения с учетом дополнительной коррекции исходных данных.
Примером может служить изображение объекта стратегического
бомбардировщика типа В2, приведенное на рис. 1.47.
Рис.1.45. Триангуляционная модель Рис. 1.46. Полигональная модель
сферы и вставленного в нее сферы 3DMAX
цилиндра. Система Pro/Engineer
92
Избежать указанных
трудностей при генерации
«фацетной» 31>модели
удается в рамках наиболее
прогрессивной
автоматизированной системы Pro/Engineer.
Здесь «сетка» формируется Рис. 1.47. Геометрическая модель объекта В2,
правильно и корректно. При- полученная в среде 3DMAX
мер изображения
триангуляционной модели сферы и вставленного в нее цилиндра приведен на рис.
1.45. Здесь, в отличие от 3DMAX, виртуальных кромок не образуется.
Однако в рамках этой системы осуществлять генерацию рельефа (ландшафта)
подстилающей поверхности неудобно.
В рамках этих систем ОЛ может быть представлен совокупностью
либо плоских элементарных отражателей (ЭО) типа треугольник,
элементарная острая кромка, четырехугольник, либо пространственных -
тетраэдров. Такие модели ОЛ получили название «фацетных». Тип и
количество отражателей выбираются разработчиком в зависимости от
точностных требований к результатам моделирования и от
возможностей вычислительных средств.
В силу линейности интегралов, величина компоненты вторичного
излучения определяется как векторная сумма вторичных полей ЭО,
которыми являются фацеты и элементарные острые кромки:
е„=1х о-94)
где N - количество ЭО, освещенных со стороны передатчика и незате-
ненных другими элементами ОЛ со стороны приемника.
Таким образом, задача сводится к определению вторичных полей ЭО.
Использование такой полигональной аналитической модели
позволяет полностью алгоритмизировать, с точки зрения
объектно-ориентированного подхода, наиболее мощный и универсальный, среди всех
эвристических, метод ФТД и сделать качественный шаг в исследовании полей
рассеяния ММ-волн на сложной формы аэродинамических объектах.
Здесь основной целью исследования являлся анализ
радиолокационных характеристик рассеяния предложенного аэродинамического
объекта сложной пространственной конфигурации методом цифрового
моделирования на ЭВМ в соответствии с предложенными исходными
данными. Поскольку исследование носит в некоторой степени
демонстрационный характер, была выделена задача расчета (оценки) ЭПР
предложенной сложной цели в коротковолновом диапазоне длин волн на
разных ракурсах ее наблюдения при моностатической локации с учетом
нескольких типов поляризации передающей и приемной антенн.
93
/
h
V
у
p
у—*
rU
\21xi
50 см
** >-
x\
Рис. 1.48. Проекции сложной цели
на плоскости системы координат
Геометрическая модель предлагаемой сложной цели представлена
в файле large-model.3ds. Для анализа геометрической модели цели
использовался пакет 3DStudioMax 2.O. На рис. 1.48 приведены проекции
цели на плоскости системы
координат сцены с
указанием направления осей
системы координат.
Предлагаемая
радиолокационная цель состоит
из шести элементов,
каждый из которых обладает
уникальным текстовым
обозначением. Имя каждого
элемента указано в исходном файле геометрической модели. В
соответствии с данными этого файла используются следующие обозначения
всех составляющих цель элементов:
COL134-01 - основной корпус объекта; COL142 - все пять
крыльев объекта; COL121 - диэлектрический обтекатель антенны; COL052 -
крепление антенны внутри основного корпуса; COL040 - вырезка из
параболоида вращения; COL080 - гироскопическая платформа.
Элемент с именем COL121 образуется из материала, являющегося
идеальным диэлектриком. Вклад такого элемента в полное рассеянное
поле цели будет пренебрежимо мал по сравнению с вкладами других
элементов цели. Поэтому в дальнейшем при расчете характеристик
рассеяния цели элемент с именем COL121 будет исключен, а сама цель
будет образована из пяти элементов, которые при расчете ее ЭПР
считаются идеально проводящими.
При открытии исходного файла геометрической модели цели в
программном пакете 3DStudioMax 2.0 все линейные размеры цели
оказались увеличены в 106 раз по сравнению с ее реальными размерами,
выраженными в метрах. Поэтому при формировании цифровой
геометрической модели цели координаты всех образующих ее вершин были
уменьшены в соответствующее число раз. При этом линейный размер
цели в плоскости XOZ составил 50 см (рис. 1.48).
При расчете характеристик рассеяния цели в качестве длины
волны падающего излучения берется значение Я= 3 см. Расчет
осуществляется методом цифрового моделирования и проводится в несколько этапов.
На первом этапе формируется цифровая геометрическая модель
цели. При этом в качестве исходных данных используется текстовый
файл геометрической модели, который формируется 3DStudio. В
результате ряда вычислительных процедур выполняемых 3DStudio,
геометрическая модель сложной цели представляется набором простейших
94
геометрических примитивов, образующих поверхность объекта. Любой
сложный объект, формируемый в 3DStudio, - это совокупность
отдельных элементов, каждый из которых является деталью сложного объекта.
В единой структуре данных геометрической модели цели каждому ее
элементу присваивается свой индекс, характеризующий данный объект
как уникальный элемент радиолокационной сцены, имеющий вполне
конкретное текстовое наименование. В свою очередь, каждый элемент
цели состоит из конечного числа базовых геометрических примитивов,
называемых локальными элементами цели. Пакет 3DStudio
конвертирует поверхность элемента цели в виде триангулированной сетки, т. е.
локальными элементами сцены считаются плоские треугольные пластины,
вершины которых лежат на поверхности объекта. Описание локальных
элементов сцены осуществляется с использованием объектно-ориентро-
ванных структур. В рамках единой структуры данных цифровой
геометрической модели сцены создаются три структуры основных
геометрических примитивов: структура «точка», структура «треугольник» и
структура «ребро». В каждой структуре определяются локальные
параметры геометрического примитива. Единая цифровая модель цели
формируется из массивов экземпляров этих структур. Размерность массивов
определяет соответственно общее количество точек, треугольных
пластин и ребер модели, а индекс элемента массива представляет собой
порядковый номер геометрического примитива в общем списке.
На втором этапе разрабатывается модель траектории движения
носителя РЛС. При расчете данной цели наиболее удобно моделировать
траекторию движения в одной из плоскостей системы координат. На
втором этапе осуществляется анализ структур исходных данных
цифровой геометрической модели сцены для каждого положения траектории
движения РЛС, а также происходит инициализация
электродинамических и статистических свойств отдельных элементов сцены.
Третий этап характеризуется непосредственным расчетом
характеристик рассеяния цели. При этом ЭПР объекта определяется с помощью
известного соотношения:
I I2
^J-^-^R2, (1.95)
где ЕраС - полное поле рассеяния сложного объекта; Епад - падающее на
цель электромагнитное поле; R - расстояние от приемопередающей
системы до центра масс облучаемого объекта.
В соответствии со структурами данных геометрической модели,
полное рассеянное поле рассматриваемой радиолокационной цели
определяется путем когерентного суммирования трех компонент:
£рас! = £пад£ + ^пр! + ^nepZ » (1 -96)
95
где £Пад£ - полное поле рассеяния гладкой части объекта; E^v - полное
поле рассеяния острых кромок (ребер) модели; £nepi - полное поле
рассеяния, обусловленное двукратными переотражениями волн между
отдельными треугольными элементами поверхности объекта.
Первая компонента в (1.96) вычисляется путем когерентного
суммирования полей рассеяния всех плоских треугольных элементов,
образующих поверхность сложного объекта и видимых с данного ракурса
наблюдений. Элементарные поля рассеяния плоских треугольников
рассчитываются методом физической оптики (ФО) с использованием
интеграла Стрэттона-Чжу.
Расчет £пр2 в (1.96) осуществляется путем когерентного
суммирования дифракционных полей рассеяния острых кромок (ребер) объекта,
видимых РЛС на данном ракурсе наблюдения. Расчет вкладов
элементарных ребер объекта выполняется методом эквивалентных токов,
который позволяет определить поле рассеяния от неравномерной части
тока, текущего на ребре.
Как отмечалось ранее, 3DStudio конвертирует два типа ребер.
Первый тип представляет собой реальные ребра, образуемые в результате
действительно имеющего место излома гладкой поверхности объекта.
Другой тип ребер образуется в результате наложения плоской
треугольной сетки на гладкую поверхность объекта и образования так
называемых «мнимых» или «виртуальных» изломов, которые при расчете
полного вклада всех кромок использоваться не должны. При этом основной
проблемой является определение
характерного признака, позволяющего различить
реальные и мнимые ребра. В качестве такого
признака наиболее рационально
использовать внешний угол а плоского ребра
(рис. 1.49). Будем считать, что для
рассматриваемой радиолокационной цели
Рис. 1.49. Внешний угол виртуальными являются кромки, у кото-
плоского ребра рЫХ ВНешний угол а < 200°.
Соответственно при расчете полного поля кромок будут учитываться только те
ребра, у которых внешний угол превышает указанное значение.
Третья компонента полного поля в (1.96) £пер1 характеризует
вклады двукратных переотражений между отдельными треугольниками,
принадлежащими поверхности цели. Расчет проводится путем
комбинированного применения метода геометрической оптики,
используемого для построения лучевых трубок, и метода физической теории
дифракции, позволяющего вычислить поле рассеяния в дальней зоне.
Физический смысл этого явления состоит в том, что поле, падающее на
некоторый треугольный элемент поверхности, не рассеивается в окружающее
пространство, а переотражается по законам геометрической оптики в на-
96
Рис. 1.50. Схема
радиолокации цели
в плоскостях XOY и XOZ
правлении другого треугольного элемента и служит источником
возбуждения на нем вторичных электромагнитных волн. Эти электромагнитные
волны, рассеиваясь в направлении приемной системы, создают в апертуре
приемной антенны дополнительное поле Enepi-
На заключительном этапе происходит
анализ и обработка полученных данных.
Одним из элементов такой обработки является
построение диаграммы обратного рассеяния
(ДОР) цели, т.е. зависимости ее ЭПР от
ракурса наблюдения. Обычно ДОР строится
для различных типов поляризации
передающей и приемной систем. Кроме того,
представляется возможным построение ДОР
отдельных элементов, образующих цель, и
определение их вклада в полное поле.
Расчет ЭПР цели проводился в двух плоскостях системы
координат XOY и XOZ, приведенных на рис. 1.50. Направление обхода
приемопередающей системы относительно цели в каждой из плоскостей
задается углом Д. Расстояние от приемопередающей системы до центра
масс цели R = 1000 м. При расчете используется несколько типов
поляризаций приемной и передающей систем.
Для определенности, диаграммы обратного рассеяния (ДОР) в
горизонтальной плоскости рассматривались в области передней
полусферы, т.е. в секторе планёра малозаметного самолета В2, полученной
методом цифрового моделирования.
При расчетах полагалось
следующее:
зондирующий сигнал является
гладким монохроматическим с длиной
волны 3,0 см;
поляризации приемной и
передающей (совмещенных в пространстве)
антенн - линейной, в общем случае они
не совпадали (например, при
ортогональном приеме);
проводимость всех элементов ОЛ
идеальная (металл).
На рис. 1.51 приведены когерентные
ДОР объекта в поперечной плоскости,
полученные для различных условий поляризации (Я = 3 см, совмещенный
прием, шаг 1°, радиальная ось - 101g(o) в децибеллах), где 1,2- ДОР при
£- и Я-поляризации, а 3 - ДОР при орто-гональном приеме.
Рис. 1.51. Диаграммы
обратного рассеяния объекта
локации в поперечной плоскости
4—3523
97
Как видно из рисунка ЭПР на Я- и ^-поляризациях практически
совпадают, а максимальное значение ЭПР на согласованных
поляризациях не превышает 10 дБ. На ортогональной поляризации ЭПР
значительно меньше значений ЭПР на согласованной поляризации, причем
разность значений составляет примерно 20...30 дБ. Представляет
интерес рассмотрение статистических характеристик и параметров ДОР
сдожной цели.
В табл. 1.24 приведены значения средней ЭПР и ее среднеквадра-
тического отклонения, полученные на основе данных, представленных
на рис. 1.49.
Таблица 1.24. Значения средней ЭПР и ее среднеквадратического
отклонения сложной цели
Статистический
. параметр
Среднее значение
Среднеквадратическое
| отклонение "
Значение ЭПР, м2
^-поляризация
0,86
1,4
Я-поляризация
0,86
U5
Ортогональная
поляризация
0,0022
0,0036
Полученные результаты позволяют сделать следующие выводы.
1. Разработан объектно-ориентированный метод исследования
взаимодействия коротких радиоволн с совокупностью объектов
сложной формы естественного и антропогенного характеров.
2. Приведены расчетные характеристики рассеяния типовых
эталонных отражателей, которые в целом совпадают с зависимостями,
полученными при тех же условиях с использованием аналитических методов. При
этом средняя погрешность расчета ЭПР различных объектов составляет
0,02.. .4% по сравнению с теоретическими значениями.
3. Проанализирована зависимость точности вычислений ЭПР
объектов и затрат машинного времени от размера элементарного
отражателя по сравнению с длиной волны. В результате проведенных
исследований доказано, что оптимальная точность расчета ЭПР достигается при
размере отражателя / = 0,5 Я.
Таким образом, сравнение зависимостей обратного рассеяния
сложных объектов, полученных с помощью представленной методики и
натурных измерений, показало, что предложенный метод расчета
интенсивностей обратного рассеяния сложных объектов является
хорошей альтернативой дорогостоящим натурным испытаниям.
98
ГЛАВА 2
Потенциальные возможности
радиолокационных систем
При разработке РЛС обнаружения наземных объектов
обосновываются их параметры: дальность действия, возможности
обнаружения, точности пеленгования и сопровождения объектов, а также
их скрытность и помехоустойчивость, которые в целом и
определяют эффективность работы любой радиолокационной системы.
Для рассмотрения возможностей РЛС обнаружения наземных
объектов, работающих в короткой части ММ-диапазона радиоволн, в
качестве конкурирующих рабочих длин волн выберем 1,3; 2,15;
3,3; 8 мм и 3 см.
2.1. Энергетическая оценка радиолокационных систем
Энергетическую оценку проведем по мощности передатчика,
требуемой для обеспечения дальности действия РЛС в стандартной
атмосфере (абсолютная влажность - 7,5 г/м3, давление 760 мм рт.ст.,
температура 293 К) и дожде средней интенсивности (~5 мм/ч). Указанная
интенсивность дождя выбрана как неблагоприятный случай, когда
вероятность появления таких дождей в течение года составляет 0,75...0,8.
Мощность передатчика Рпер? обеспечивающая заданную дальность
действия Z)0, определяется формулой радиолокации:
P^PrfD° '10-°^D% (2.1)
Лф^о
где Лф.тт - чувствительность приемника; Аэ$ - эффективная площадь
антенны; L - коэффициент потерь в волноводном тракте и за счет
неоптимальности обработки сигнала; <т0 - ЭПР объекта; уа - коэффициент
ослабления радиоволн в атмосфере.
Для расчета принимались исходные данные, приведенные в табл. 2.1,
при ЛЭф = 0,6 м2; <т0 = 10 м2; L = - 10 дБ.
На рис. 2.1 представлены графики зависимости относительной
мощности передатчика Рт/Ро от длины волны РЛС на различных
дальностях их действия. При построении данных графиков величина Р0,
являющаяся мощностью передатчика на волне 32 мм, принималась за
единицу и затем определялось соответствующее отношение значений
мощностей Лтер/Ро для заданной длины волны. Графики построены с
учетом затухания радиоволн в атмосфере. Сплошные кривые - для
погоды без дождя, а штриховые - с дождем.
99
Таблица 2.1. Исходные данные для расчета
Параметры
[Затухание уа, дБ/км:
без дождя
в дожде
[Чувствительность
^np.min, l*T
Значения параметров для длины волны, мм |
1,3
2,5
4
81011
2,15
1,0
3,5
3-КГ11
3,3
0,3
3
1,3-НГ11
8,15
0,06
1,25
5-Ю"12
32 |
0,0018
0,08
0,8-10"12
Рис. 2.1. Зависимость отношения Рпер/Ро Рис. 2.2. Графики расчета
от длины волны мощности передатчика
С целью определения возможных значений Р0, которые требуются на
длине волны 32 мм для достижения заданной дальности действия РЛС
обнаружения, на рис. 2.2 приведены расчетные графики Лр(Ц). Здесь также
как и на рис. 2.1 сплошные кривые - для атмосферы, свободной от дождя,
штриховые - в дожде средней интенсивности. Данные графики в сочетании
с данными табл. 2.1 могут быть использованы для оценочных расчетов
мощности передатчика ^пер.
Для инженерной и достаточно быстрой оценки энергетического
потенциала РЛС обнаружения наземных объектов разработана
специальная модель [1]. С этой целью формула радиолокации (2.1) была
преобразована в логарифмическую форму (в децибелах) через
безразмерный параметр Я:
я
2J;K£)^ + 401g£> + 71 = tf, (2.2)
о
Я = Я0-2?сш-2/,-2Л'+2£"э+<т', (2.3)
где уф) - коэффициент погонного ослабления излучения на трассе
распространения в децибелах на километр; 71 и 40 - коэффициенты, полу-
100
ченные в результате логарифмирования уравнения; П0 = Рпе^/РПр.тт -
энергетический потенциал; qcm - отношение сигнал-шум на входе
приемника; L - суммарные потери в СВЧ-трактах; Я'- относительная длина
волны; 5"э - относительная эффективная площадь антенны и <т'-
относительная ЭПР объекта, приведенные к 1 м2.
Зависимость y(D) в общем виде является достаточно сложной, но с
погрешностью в пределах 10... 15% эту величину можно представить как
усредненное значение коэффициента ослабления на трассе «РЛС-объект»
1 D
Xo*-\r(D)dD.
о
Расчет дальности действия РЛС обнаружения ММ-диапазона
радиоволн с учетом ослабления в дождях различной интенсивности в
данном случае можно проводить по номограмме на рис. 2.3, рассчитанной
по (2.2) и (2.3). Здесь диагональная ось П^ соответствует значениям
энергетического потенциала РЛС в децибелах и величине П (2.2), слева
и справа от этой оси нанесены шкалы П' - отрицательных и
положительных поправок к величине П*0.
D, км
Интенсивность
дождя
Рис. 2.3. Номограмма для расчета дальности действия РЛС
101
Для определения дальности действия РЛС по номограмме
необходимо, задавшись параметрами станции и значениями qQm и а, вычислить
по формуле (2.3) величину П. Затем для выбранного значения
ослабления уа на диагональной оси номограммы П*0 найти точку,
соответствующую заданному ослаблению, и затем определить величину поправки
по зависимости П' = П-П*0, на которую необходимо переместиться по
перпендикуляру от оси П^ вправо (положительные поправки) или
влево (отрицательные поправки). Полученная точка на диагональной линии
значений П\ определяемая ординатой номограммы, является
дальностью действия РЛС.
Пример. Выбираем на оси абсцисс диапазон длин волн X = 3...4 мм
й интенсивность дождя 5 мм/ч, что на номограмме соответствует точке А.
От точки А поднимаемся вверх до пересечения диагональной линии III,
что соответствует точке М, в которой П*0 = 86 дБ. Теперь, задаваясь
параметрами РЛС, находим по (2.3) величину П и затем находим значение
поправки #'. Допустим, что эта величина оказалась равной +30 дБ.
Далее из точки М перемещаемся влево до диагонали поправок,
соответствующей величине + 30 дБ (получаем точку М*). Проекцией точки М на
ось ординат будет точка Б, которая и определяет искомую дальность
действия РЛС для выбранных параметров, что соответствует дальности
действия РЛС равной 2,5 км. Таким образом, по приведенной
номограмме можно сравнительно
быстро определить дальность
действия РЛС ММ-диапазона
радиоволн в том числе и в
дождях различной
интенсивности. По данной
номограмме может решаться и
обратная задача. Были проведены
расчеты дальности действия
РЛС на длинах волн 2, 3 и 8
мм, в том числе и для дождя
средней интенсивности (5
мм/ч), результаты которых в
виде графиков /70 = f(D)
приведены на рис. 2.4.
Анализируя возможности радиолокационной техники ММ-диапазона
для максимально допустимой на настоящее время величины
энергетического потенциала Я0 = 160 дБ, дальности их действия для различных
метеоусловий могут достигать величин, указанных в табл. 2.2.
Я, дБ
150
130
ПО
90
\Х = 2, 2 n
8 10 £>,км
Рис. 2.4. Графики для энергетической
оценки РЛС
102
Таблица 2.2. Исходные данные для расчета энергетического
потенциала РЛС
я,
мм
8
3
2
8
3
1 2
Характер
объекта
движущийся
неподвижный
Дальность действия РЛС, км, для различных метеоусловий
Ясное
небо
более 16
до 10
до 7
до 8
5-6
до 4
Туман
(плотность 0,1 г/м3)
более 16
8,5
6,5
7
5,5
1 3,5
Умеренный
дождь
(интенсивность
5 мм/ч)
8-10
5-6
до 4
до 5,5
до 3,5
до 2
Сильный
ДОЖДЬ
(интенсивность
16 мм/ч)
3-4
2,5
1-1,5
1,5-2
1 ■ 1
0,5-0,7
Из приведенных на
рис. 2.4 графиков видно,
что в диапазоне волн 3 мм
можно полностью
реализовать дальность действия до
7 км в неблагоприятных
условиях (дождь средней
интенсивности) и до 10 км в
благоприятных условиях
как в дневных, так и в
ночных условиях.
С использованием
модели энергетической оценки
по специальным
номограммам (рис. 2.5 и 2.6) можно
также определять дальности
обнаружения сигналов,
отраженных от подстилающей
поверхности и от
гидрометеоров соответственно. Та- Рис. 2.5. Номограмма для расчета дальности
кие номограммы могут обнаружения сигналов, отраженных
быть применены для оценки от подстилающей поверхности
энергетического потенциала РЛС обнаружения, находящихся на
летательных аппаратах.
Параметр Я в этих случаях вычисляется следующим образом:
для подстилающей поверхности
П = П0 - 2qcul -2L+\ ,5S'9 + а*ш +Sp'-1\ (2.4)
103
где <тзп - удельная ЭПР
подстилающей поверхности в
децибелах; Spf -отнесенная к
ёр = 1 м проекция на
поверхность элемента разрешения
РЛС по дальности;
для гидрометеоров
n = n0-2qcul-2L-
-2A' + Sl + TjvSp-A'9 (2.5)
где rjv - погонная ЭПР
гидрометеоров в объеме 1 м3; 8р -
разрешающая способность
РЛС по дальности в метрах.
Остальные параметры,
входящие в формулы (2.4) и
(2.5), соответствуют
параметрам в формуле (2.3).
На рис. 2.5 нанесены
дополнительные оси для высот в
случае облучения
подстилающей поверхности с
летательного аппарата, а на рис. 2.6 - для коэффициента ослабления радиоволн в
дожде для усредненных метеоусловий июня месяца.
од
X = 8,6 ммгтттглпт
т—гттгтгг]—1—гттптг]
О 1,0 Ю 100
Д = 3,3 ММ ( 1 )|41(>1| I I 1 UH.'I—rrnni'll J , ММ/Ч
0 1,0 10 100
Д = 2,2 мм | m»i| I .имц I nintj J у мм/ч
0 1,0 ю 100
Рис. 2.6. Номограмма для расчета дальности
обнаружения сигналов, отраженных
от гидрометеоров
2.2. Характеристики обнаружения радиолокационных
систем
Наиболее информативной и удобной для сравнительного анализа
характеристикой обнаружения РЛС является зависимость вероятности
правильного обнаружения объекта от дальности действия станции Рп0 =
= f (D) при фиксированном значении вероятности ложной тревоги Fm за
один цикл обзора, оценочная сущность которой сводится к
определению отношения мощности полезного сигнала к мощности шума
приемника Рс/Р*ош для РЛС, работающих в свободном пространстве. Однако
при работе РЛС на вероятность правильного обнаружения влияют не
только собственные шумы приемной системы, но и шумы в виде помех
(мощности отражения) от земной поверхности и дождей. Суммарная
мощность «шума» РЛС обнаружения в данном случае, согласно [2],
определяется как
■pZ=№+rt+p'"> (2-6)
104
где Рф и Рд - мощности отражений от фона (земной поверхности) и
дождя соответственно.
В [2] была проведена оценка зависимости отношения Рс/Р^ от
дальности действия РЛС в условиях дождя средней интенсивности и без
дождя. Результаты расчетов в виде графиков приведены на рис. 2.7, где
сплошными линиями обозначены графики для условий без дождя,.
штриховыми - для дождя, а линии / - для РЛС, работающей на длине
волны 2 мм, 2 - для РЛС на длине волны 3 мм и 3 - для РЛС на длине
волны 8 мм. В дальнейшем эти РЛС будем называть РЛС-1, РЛС-2 и
РЛС-3 соответственно.
Рис. 2.7. Графики зависимости отношения Рис. 2.8. Графики зависимости
мощности полезного сигнала к мощности вероятности правильного
суммарной помехи от дальности обнаружения от дальности
На рис. 2.8 для аналогичных погодных условий и тех же трех
видов РЛС приведены зависимости вероятности правильного
обнаружения объекта от дальности его расположения Рп0 =/(/)) при вероятности
ложной тревоги Fm = 10"3 (при числе импульсов в пачке Nn = 8).
Чувствительности приемных систем РЛС приравнивались к величинам,
приведенным в табл. 2.1, мощность передатчика РЛС-3 принималась равной
мощности штатной РЛС типа CHAP (в импульсе не менее 10 кВт), а
мощности в импульсе РЛС-1 и 2, т.е. для коротковолновой части
ММ-диапазона - равными 3. ,.5 кВт. Такие величины мощностей можно ожидать в
ближайшей перспективе. Апертуры антенных систем предполагались
одинаковыми: форма усеченный - параболоид и размеры 1000x600 мм.
Анализ полученных результатов показывает, что при одинаковых
размерах антенн станции, работающие в короткой части ММ-диапазона
радиоволн, обеспечивают более высокую вероятность правильного
обнаружения объекта по сравнению со станцией на длине волны 8 мм (в любых
105
погодных условиях). Это объясняется их более высокими разрешающими
способностями по угловым координатам и соответственно меньшими
интегральными величинами ЭПР фонов. Однако достаточно быстрое снижение
дальности таких РЛС объясняется большим затуханием радиоволн
короткой части ММ-диапазона в атмосфере и тем более в дождях.
2.3. Факторы, влияющие на точность пеленгования
наземных объектов
На точность пеленгования, а следовательно, и на точность
определения координат наземных объектов влияют такиие факторы:
1. Прохождение радиоволн через неоднородную атмосферу,
обусловливающее возникновение как регулярных, так и случайных
изменений углов прихода;
2. Многолучевое распространение радиоволн, т.е. приход в точку
наблюдения волн с различными амплитудами и фазами из-за различных
путей распространения вследствие отражений от поверхности Земли и
различных объектов;
3. Интерференция волн, отраженных от различных элементов
объекта («шум объекта»);
4. Появление помех, обусловленных приемом отражений от
поверхностей раздела Земли, гидрометеоров и местных предметов.
Влияние этих помех тем значительнее, чем меньше ЭПР объекта.
Анализ результатов исследований, проведенных в [2, 3], позволяет
оценить ожидаемый вклад каждого из указанных выше внеаппаратур-
ных факторов в типовых условиях работы РЛС обнаружения малой
дальности действия (до 10 км) следующим образом.
25./. Флуктуации углов прихода и многолучевое
распространение радиоволн
Значения ошибок пеленгования за счет флуктуации углов прихода
радиоволн, обусловленных атмосферной рефракцией (прохождением
радиоволн через неоднородную атмосферу), на трассах протяженностью
до 10 км не превышает 0,1 д.у. (1 д.у. (деление угломера) равно 3,6 угл.
мин), а в линейных размерах это не превышает ±0,25 м в самых
неблагоприятных условиях.
При рассмотрении ошибок, связанных с многолучевым
распространением, следует отметить, что при укорочении длины волны до
короткой части миллиметрового диапазона в излучении, падающем на
поверхность раздела, возрастает удельный вес диффузной компоненты.
Основные характеристики диффузной компоненты при оценке ее
влияния на точность пеленгования - коэффициенты диффузного рассеяния и
распространения потока мощности средней плотности в точке приема.
106
Лэф
1
0,9
0,8
0,7
Об
0,5
0,4
0,3
0,2
0,15
0,1
\
i.... V-
К
0
о - пашня, покрытая снегом
• - песок
D ~ снег с настои
Л - ровная площадка под снегом
* - снежный покров
ft v
IV
\ V
^
\
\
fi0= 8 си4
\
\
>
д
\
>
vl
ч
ТГ7 \
1 N
\£о=4сн
\
ч
ffl
V
ч Щ
fi„-2c« ^ -
Ml
30 6 3 2 Я
, MM
Необходимо отметить, что эти величины являются функциями многих
переменных величин и их расчет представляется трудным и
громоздким. Поэтому оценка коэффициента диффузного рассеяния, как
правило, производится экспериментально путем измерения коэффициентов
отражения Яэф.
На рис. 2.9 и 2.10
приведены усредненные
экспериментальные данные для
коэффициентов отражения,
сгруппированных для
поверхностей: «гладкой» (лед,
слежавшийся снежный
покров, гладкий песок) и
«шероховатой» (грунтовые
дороги, пашня, степь, луг и
т.п.), где еь - величина,
характеризующая неровности
покрова, ДА - высота
растительного покрова) [4,5]:
Из рисунков видно,
что для «гладких»
поверхностей эффективный
коэффициент отражения
остается достаточно высоким
вплоть до длин волн
короткой части ММ-диапазона* в
то время как для остальных
видов поверхностей имеет
место быстрое его
снижение с укорочением длины
волны, и на волнах
короткой части ММ-диапазона он
уменьшается до значений
0,1. Штриховыми линиями на этих рисунках показаны зависимости
коэффициента отражения сут длины волны для зеркальной компоненты при
различных значениях высоты неровностей, полученные из соотношения:
Рис. 2.9. Экспериментальные данные
коэффициента отражения для «гладких»
поверхностей
О- груиг без растительности £д= 3 см
+ " картофельное пояе с «асояшаю ветвями
Л- грунт с травянистым покровом £q=0,2,, 0,5 мм
в- всходы травы Д А = 3, . 15 м
~<Ж - грунтовая дорога
- fc. - кочковатый луг
4,-2 с
-^ч-
2Я.
Рис. 2.10. Экспериментальные данные
коэффициента отражения
для «шероховатых» поверхностей
*(Рнабл)
Ro(p)
набл^ _
= ехр
(2.7)
где Д(#>набл) - коэффициент отражения от «шероховатой» поверхности;
R0(<p) - коэффициент Френеля; ап - среднеквадратическая величина
высоты неровностей; рнабл - угол наблюдения (угол места).
107
/0316
/0,623
/0,836
/*-«
i00 3000 4500 D,\
a)
Для определения возможных ошибок пеленгования при
формировании равносигнальной зоны в [6-8] были проведены расчеты видов
диаграмм направленности антенны. При этом предполагалось, что
антенна с апертурой 600 мм установлена на высоте 1,5 м над уровнем
земной поверхности.
На рис. 2.11,а и б приведены зависимости отношения А0 ширины
ДНА с апертурой 600 мм к ширине ДНА в свободном пространстве от
дальности при различных коэффициентах отражения Яэф Для длин волн
3 и 30 мм соответственно. Из рисунков следует, что величина Д0 носит
монотонный характер с максимумом на дальности 1500 м для короткой
части ММ-диапазона волн и на дальности 450 м для волны 30 мм.
На рис. 2Л2,а и б представлены расчетные зависимости ошибок
пеленгования дв методом равносигнальной зоны от дальности для
коэффициентов отражения 0,3 и 0,8 соответственно, причем кривые 1 на обоих
рисунках соответствуют диапазону с длиной волны 30 мм, а 2 - диапазону с
длиной волны 3 мм. Из
рисунков видно, что в короткой
части ММ-диапазона волн
ошибки пеленгования
примерно в 4 раза меньше для
широкого интервала
изменений коэффициента отражения.
Ошибки пеленга точечного
источника составляют
примерно 0,1 д.у. для ЯЭф = 0,3 ,что
соответствует поверхности
почвы с травяным покровом, и
не превышает 1 д.у. для R^ =
= 0,8, что имеет место,
например, для зимы при
наличии слежавшегося снега.
Характер указанных
зависимостей определяется
особенностями интерференционной
структуры поля вблизи
поверхности раздела.
На рис. 2.13,я показано
положение первых
интерференционных минимумов для
длины волны 3 мм, а на
рис. 2.13,6 - для длины вол-
« л „„ „ , ны 30 мм (сплошные линии).
Рис. 2.13. Положение интерференционных ^
минимумов Положение п-х минимумов
1500 3000 4500 D, км
б)
Рис. 2.11. Зависимость относительной
ширины ДНА от дальности
[Ж]
да'.лу.
з(-
1500 3000 4500 О.км
а)
\А
«"-"""■Ч
^—/
ч 2
1500 3000 4500""Ь,*
б)
Рис. 2.12. Зависимость отклонения пеленга
от дальности
К м ft, м 1
1 1 1 Н^3 ]/
в \ А А \ л\
|« //И
\щ\^
\\КУт
/нТ111
HtfTF
8 ir/\l
* iN\j
ш
\¥\
VMM
/к
Г 1234 5 6 D, км " 1 234 5 6 D,km
1 а) ' б)
108
определены как hxxh2 = AD/12 (пунктирные линии); hu h2 ^ высоты
установки передающей и приемной антенн.
Если предположить, что высота подъема антенны РЛС равна 1,5 м,
то на рис. 2.13 можно видеть, что влияние интерференции на работу
РЛС будет сказываться на дальностях свыше 2000 м для короткой части
ММ-диапазона и на дальностях свыше 500 м для длины волны 30 мм.
Интерференция волн прямого и отраженного лучей обусловливает
плавный характер кривых (см. рис. 2.11), максимумы в районе 1500.. .2000 м
дня короткой части ММ-диапазона и 450...500 м для длины волны 30 мм,
а также малую ошибку на больших расстояниях (см. рис. 2.12). Меньшие
ошибки пеленга для РЛС в короткой части ММ-диапазона объясняются
более высокой направленностью антенны этих систем в сравнении с более
длинноволновыми.
Проведение теоретических исследований по количественной оценке
влияния интерференции на точность пеленгования РЛС объекта типа танк
на фоне различных покровов почвы все же требует разработки
математической модели сложного объекта, максимально краткой для большей
наглядности описания физических явлений и достаточно адекватной с точки
зрения числовых характеристик или проведения экспериментов.
Создание такой модели в настоящее время представляет собой
очень сложную задачу. Вместе с тем проведенный анализ, а также
приведенные выше графики позволяют качественно судить о тенденциях
изменения и сравнительном влиянии различных факторов,
обусловленных интерференцией прямого и отраженного лучей.
Очевидно, что укорочение волны приводит к уменьшению ошибок
пеленгования за счет увеличения коэффициента направленного
действия (КНД) антенны. Кроме того, как видно из рис. 2.13, на дальности
5000 м высота объекта (танка) равна 0,67 высоты первого
интерференционного лепестка, что свидетельствует о возможном уменьшении
ошибок пеленгования в вертикальной плоскости за счет усреднения
интерференционной структуры поля по габаритным размерам объекта и,
как следствие, снижение углового шума.
Что касается ошибок пеленгования в азимутальной плоскости, то
они всегда значительно меньше соответствующих ошибок в
вертикальной плоскости и обусловлены диффузной компонентой рассеянного
подстилающей поверхностью сигнала, что гарантирует малую величину
ошибки. Поэтому основной вклад в ошибку пеленгования по азимуту
дают «угловой шум» объекта и шумы приемного канала РЛС.
2.3.2. Интерференция радиоволн при отражении
от объектов
Объекты практически всех классов имеют линейные размеры,
существенно превосходящие рабочую длину волны РЛС. Вследствие это-
109
го их индикатрисы рассеяния являются многолепестковыми и при
взаимном перемещении объекта и РЛС возникают флуктуации амплитуды,
частоты и направления прихода сигнала, которые называют «шумами
объекта», соответственно амплитудными, доплеровскими,
дистанционными и угловыми.
Согласно [8, 9] величина угловых флуктуации положения
мгновенного радиолокационного центра (МРЦ) пропорциональна
соответствующему угловому размеру отражающей области объекта. В частности,
при равномерном распределении интенсивности переизл'учателей по
угловой координате, например, по азимуту, в пределах области с
горизонтальным размером /# среднее значение абсолютной величины
отклонения МРЦ от геометрического центра равно: (|Ав\) = —%=— и аналогич-
h
ное соотношение имеет место
и для дистанционного шума (|AD|) = —j=,
где lD - размер объекта вдоль луча РЛС.
Из приведенных выражений видно, что величина углового шума
убывает с ростом дальности и это необходимо иметь в виду при сравнении ее с
другими составляющими ошибок. В частности, для наземных объектов,
например, объектов бронетанковой техники (БТТ), имеющих горизонтальные
размеры порядка 2,5 м, при дальностях менее 3 км величина (| Д#|>
превосходит 0,24 д.у., что превышает значение ошибки, обусловленной
многолучевым распространением при ДНА шириной около 1°.
В отличие от углового, дистанционный шум объекта не зависит от
расстояния до объекта.
2.3.3. Влияние помех фоновых отражений
Влияние аддитивных помех обусловливается тем, что высокая
точность измерения координат движущегося объекта возможна лишь
при условии получения больших отношений уровней полезного сигнала
и помехи на входе приемника РЛС. Например, ошибка измерения
угловой координаты точечного объекта на фоне распределенных отражений
от поверхности составляет
&s_^_. (2.8)
к'Тп'У,
где А0О,5 - ширина ДНА по уровню 3 дБ; Кт - нормированная крутизна
пеленгационной характеристики; пе - количество независимых выборок;
PJPn - отношение мощности сигнала к мощности помехи в
селектируемом объеме.
110
Условием того, что преобладающей составляющей ошибок измерения
угловых координат будут величины, обусловленные Многоцелевым
распространением, является соотношение
Рп~2К2тп\ а у
Таким образом,
потенциальная точность
измерения угловых
координат движущегося объекта,
ограничиваемая влиянием
многолучевого
распространения, может быть
достигнута лишь при высо- i ^ — : inrj
ких отношениях мощности Рис 2 14 результаты расчета ошибок
полезного сигнала к мощ- измерения угловых координат
ности помехи.
На рис! 2.14 из [8] приведены результаты расчета составляющих
ошибок измерения координат для короткой части ММ-диапазона, где
представлены зависимости от дальности для угла места в случаях:
рефракции (Ар)- кривая 7; для многолучевого распространения при Дэф =
= 0,6 и 0 - кривые 2 и 3 соответственно и для азимута - многолучевого
распространения - кривая 4, а также для угловых шумов объекта с
линейными размерами объектов 3 и 0,2 м - кривее 5 и 6 соответственно.
Полученные результаты исследований позволяют сделать
следующие выводы.
Во-первых, ошибки, обусловленные рефракцией (кривая 7), на любой
дальности не играют существенной роли по сравнению с другими
составляющими.
Во-вторых, для малоразмерных объектов БТТ (кривая б)
основными составляющими на всех дальностях являются ошибки а9 и Go,
обусловленные многолучевым распространением (кривые 2, 3, 4).
В-третьих, для объектов больших размеров типа колонны техники
(кривая 5) на удалении до 1000 м основной вклад в точность измерения
координат вносят собственные шумы объектов, а на дальностях свыше 1000 м
имеют место ошибки, обусловленные многолучевым распространением.
Собственные угловые шумы остаются главной составляющей ошибок
определения азимута вплоть до расстояний 4000 м.
Таким образом, при измерении угловых коррдинат движущегося
объекта основной причиной снижения точности пеленгования РЛС
малой дальности действия будет влияние многолучевого распространения,
которое тем меньше, чем короче рабочая длина волны РЛС.
111
(т09<г99Ав
^
|. _SL/-'
|
I
^у/
г-6
t
:„JSVL.
:At z
г-*
\
_ Г "11
t п
3
;~\
ЪС
t2~
У
j^v
и
Особый интерес представляют результаты экспериментальных
исследований пеленгования танка Т-54, проведенных в [2]. На рис. 2Л5,а
приведены данные пеленгования танка.на волне 30 мм в зимнее, а на
рис. 2.15,6- в летнее время на дальности 500 м. На рис. 2.16 приведены
аналогичные данные на волне 3 мм в летнее время на дальности 2000 м.
Рис. 2.15. Результаты экспериментов Рис. 2.16. Результаты
измерения пеленга танка экспериментов
на длине волны 3 см измерения пеленга танка
на длине волны 3 мм
На рис. 2.15,а заметно «сползание» МРЦ в зимнее время под центр
силуэта (1,05 д.у.)? а на рис. 2.15,6 - некоторое повышение центра
рассеяния (0,6 д.у.) в летнее время для волны 30 мм. Это явление обусловлено
влиянием зеркальной компоненты и полностью согласуется с
результатами изложенных выше теоретических исследований.
В целом исследования ошибок пеленгования малоразмерных
объектов показывают, что существует очень сложная картина зависимости
ошибок пеленгования от многих факторов, в том числе от ракурса
движения объекта, его наклона, типа подстилающей поверхности,
характера трассы и времени года.
В результате сравнительного анализа большого количества
результатов теоретических исследований и экспериментальных данных
измерений ошибок пеленгования были получены графики (рис. 2.17)
разброса вероятности «попадания» пеленгования
в силуэт объекта (танка Т-54) в
зависимости от дальности при различных ракурсах,
трассах, типах подстилающей
поверхности и времени года.
Значительное количество данных,
полученных в самых различных условиях,
укладываются в две непересекающиеся
области. При этом вероятность
«попадания» в условиях, соответствующих короткой
Рис. 2.17. Вероятность части ММ-диапазона волн (область /) как в
«попадания» пеленга среднем, так и по отдельным реализациям
в силуэт танка выше, чем для волны 30 мм (область 2).
112
1000 2000 D
Таким образом, это еще раз подтверждает реализацию более высокой
точности пеленгования наземных объектов с помощью РЛС короткой части
ММ-диапазона по сравнению с РЛС сантиметрового диапазона радиоволн.
Увеличение точности пеленгования РЛС в короткой части ММ-диапазона
радиоволн можно объяснить уменьшением влияния отражений от
подстилающей поверхности, повышением направленности антенного луча и
уменьшением высоты интерференционного лепестка по сравнению с
вертикальным размером объекта.
2.4. Помехозащищенность радиолокационных
систем обнаружения наземных объектов
Помехозащищенность РЛС в общем случае определяется
факторами, основными из которых являются скрытность работы,
помехоустойчивость и возможности по постановке помех.
Для оценки помехоустойчивости РЛС обнаружения требуется
сравнить уровни помех, которые могут быть созданы на различных
участках СВЧ-диапазона, при фиксированных внешних условиях и
соблюдении необходимых для постановки помех требований. Наибольший
уровень прицельных по направлению и частоте помех для РЛС могут
создавать станции помех. Конкретных данных о наличии станции помех
для РЛС, работающей в короткой части ММ-диапазона, не имеется.
Поэтому оценка помехоустойчивости проводится по аналогии с
диапазонами, в которых такие станции существуют.
Мощность помехи Л, на входе приемника РЛС определяется как
р - ^nepGnnePGnpA L nLkAf ^_оЛУаЛ. ^2 9)
4ttDI
где р^ - мощность передатчика помех; G%, Gnp - коэффициенты
усиления антенн станции помех и РЛС соответственно; £(п), L - потери в трактах
станции помех и РЛС; ktsf - множитель потерь на расширение полосы,
необходимой для определения частоты подавляемого сигнала.
Для оценки принято наиболее вероятное удаление передатчика
помех от РЛС £)п = 5000 м, подавление осуществляется по боковым
лепесткам прицельной по частоте и направлению помехой. Так как
направление на РЛС определяется с ошибкой, то эта ошибка должна
перекрываться ДНА передатчика помех. При достигнутой в настоящее
время точности пеленгования и прицеливания считается, что коэффициент
усиления антенны передатчика помех це должен превышать G% =
= 2000 [10]. Эта величина принимается одинаковой и постоянной для
всех длин волн. Считается также, что средняя величина коэффициента
113
усиления антенны по боковым лепесткам составляет 10 дБ по отношению к
уровню излучения изотропной антенны. Примем запас на несовершенство
антенны РЛС равным 3 дБ, тогда коэффициент усиления антенны РЛС в
направлении боковых лепестков G^k = 0,2, что соответствует 7 дБ.
Необходимая полоса частот прицельной помехи А/п должна
составлять ± 0,05 % относительно несущей частоты подавляемой РЛС [10].
Полоса частот сигнала РЛС А/с определяется длительностью импульса ти по
известному соотношению А/с = 1/ти и составляет около 0,02% несущей
частоты. Таким образом, потери на расширение необходимой полосы
частот передатчика могут быть приняты одинаковыми для всех волн и
равными kAf = ^ = М?Л = 0? 2 « -.7 дБ.
А/п Wo
Принятые для расчетов значения мощностей передатчиков помех
Gn?p > коэффициентов ослабления радиоволн в атмосфере уг и потерь в
трактах £(п) даны в табл. 2.3.
Таблица 2.3. Данные для расчетов значения мощностей
передатчиков помех
Параметры
р(п) DT
-г пер 9 °1
7а, дБ/км
[■L^ = L,дБ
Значения параметров для длины волны,, мм
2
20
1
10
3
40
0,3
9
4
50
0,3
9
8
90
0,06
7
20
200
0,04
5
30
300
0,018
3
Принятые для расчетов мощности передатчиков помех
соответствуют имеющимся в настоящее время для основных диапазонов.
Ожидаемая мощность помехи Л, в зависимости от длины волны,
рассчитанная при перечисленных исходных данных по формуле (2.9), приведена
на рис. 2.18, где для
сравнения даны и уровни шума
Лн.пр приемников РЛС. На
этом же графике приведены
значения мощностей
передатчиков помех р($р в'
рассматриваемом диапазоне
волн, принятые для расчета
зависимости РП = ДЯ), и
требуемые мощности передат-
Рис. 2.18. Графики
энергетических показателей РЛС
чиков Ртр, которые
необходимы для создания на входе
114
приемника такого же уровня помехи, как на волне 32 мм. Из графика
видно, что ожидаемые уровни помех на входе приемников РЛС в короткой
части ММ-диапазона радиоволн существенно ниже мощности собственных
шумов приемников.
При работе РЛС в режиме секторного поиска коэффициент
усиления ее антенны в направлении на передатчик помех будет
изменяться в соответствии со структурой ДНА, характеризующейся
областями основного и не основного направлений приема.
Область основного направления приема, соответствующая ширине
главного лепестка ДНА на уровне 10 дБ, для РЛС составит не более
1...3% ширины сектора сканирования ДНА, что позволяет с
погрешностью 3...7% исключить значение составляющей ширины ДНА из
величины общего сектора сканирования.
В табл. 2.4 приведены значения мощности помех на входе приемника,
рассчитанные при указанных выше исходных данных и G„p ¥ G = 0,2. Там
же приведены реальные значения уровня шума Ршпр приемника РЛС. Из
анализа данных в табл. 2.4 видно, что с ускорением длины волны
снижаются абсолютное значение мощности помех в приемнике РЛС.
При известном законе распределения уровня боковых лепестков
данные табл. 2.4 позволяет оценить часть сектора поиска РЛС,
подверженную эффективному воздействию помех, в зависимости от дальности
обнаружения.
Таблица 2.4. Значения мощности помех на входе приемника
Характеристики
антенны
Коэффициент усиления
антенны станции помех
\g$p = 2Q00
Эффективная
поверхность антенны
(типа CHAP), А,ф = 0,2 м2
Параметры
Л,
Л,
Р
1 ш.пр
Значения параметров, Вт,
для длины волны, мм
2
5-Ю-14
2,5-10"11
З-Ю"11
3
710"13
1,ыо-10
1,8-КГ11
4
1,5-10"12
1,410-10
1,4-НГ10
8 1
4-Ю-11
8-Ю-10
5-Ю-12
На рис. 2.19 представлены графики зависимости относительных
потерь сектора поиска от отношения дальности от объекта к максимальной
дальности действия РЛС, где сплошные линии соответствуют станции
помех с Grep = 2000, штриховые Аэ$ = 0,2 м2, а кривая / - для волны 2 мм; 2 -
для волны 3 мм и 3 - для волны 8 мм. Здесь Oq - угол основного сектора
поиска; ап- угол сектора эффективного воздействия помех).
115
0,2
"~t *-
J—f I-
4 b
У
/
У
у
s'
'S yS"
L —■""
>
У
У
3
"Л,
X*
^
у" "
- ^
*".
2
^ .,
•*-
x* ^,
Ci
1 -+"
*-*•
^
■ """ 1
- d
ли;
и
2
i
j7
0,2
D/DOT
a"/a° I Из графиков видно, что
имеется явное преимущество в
помехоустойчивости РЛС,
работающей в коротковолновой
части ММ-диапазона по
сравнению с РЛС, работающими в
диапазоне длин волн 8 мм.
Повышение скрытности
РЛС достигается такими
известными способами, как
снижение спектральной
плотности потока мощности
зондирующего сигнала,
перестройка частоты передатчика,
запрограммированная работа
передатчика с определенными паузами «замирания» и др. [9, 11].
Последние два способа адекватны для РЛС на любой рабочей волне, поэтому
здесь остановимся только на способе снижения спектральной плотности
потока мощности.
Снижение спектральной плотности при заданной мощности
передающего устройства достигается расширением спектра зондирующего
сигнала, что также повышает разрешающую способность РЛС по дальности.
За количественную меру скрытности в данном случае, согласно [11], мокно
взять среднюю радиояркость источника зондирующего сигнала
Рис. 2.19. Графики зависимости
отдельных потерь сектора поиска
от отношения D/Дпах
Вер-'
_ г пер.ср'
Обо]
(2.10)
ЛэфД/с
где /^р ср - средняя мощность передающего устройства.
Исходные данные и результаты расчета средней радиояркости по
(2.10) приведены в табл. 2.5.
Таблица 2.5. Исходные данные и результаты расчета
среднего значения радиояркости
Параметр РЛС
Средняя мощность
передачи Рпер ср, Вт
Эффективная площадь
слежения ^эф, м2
Полоса пропускания
А/с,МГц - '
Средняя радиояркость
зондирующего сигнала
Вср, Вт/м2-Гцстерад
РЛС
Я = 8 мм
3
0,126
3
8-Ю"6
РЛС
Я = 3 мм
8,6
0,28
10
310^
РЛС «Startle»,
Я = 3 мм
0,05 (для ги =100 не)
0,25 (для ги =500 не)
0,126
300
0,6710~8(дляги=500нс)
0,1310-8(длягн=100нс)
116
Из приведенных данных следует, что увеличение ширины спектра
снижает среднее значение радиояркости зондирующего источника.
В заключении следует отметить, что помехозащищенность РЛС
обнаружения наземных объектов в короткой части ММ-диапазона
несомненно лучше по сравнению с РЛС более длинноволновых
диапазонов. Кроме того, целесообразно привести и другие основные
технические пути, позволяющие повысить помехозащищенность РЛС ММ-
диапазона:
для обеспечения помехоустойчивости РЛС в условиях воздействия
интенсивных помех от подстилающей поверхности необходимо
использовать когерентно-импульсный метод радиолокации;
для снижения радиояркости источника зондирующего сигнала
следует применять широкополосные сигналы. При одновременном
уменьшении мощности передающего устройства до единиц ватт за счет
применения методов когерентной обработки принимаемых сигналов
скрытность РЛС может быть повышена не менее чем на два порядка;
для повышения помехозащищенности пеленгационных каналов
РЛС обнаружения целесообразно использовать моноимпульсный метод
пеленгации.
117
ГЛАВА 3
Принципы построения
и возможные параметры
радиолокационных систем
обнаружения наземных объектов
В соответствии с требованиями [1], которые предъявляются к
перспективным радиолокационным системам (РЛС) обнаружения
наземных объектов, работающим в короткой части ММ-диапазона
радиоволн, такие системы могут представлять собой типовые РЛС
обнаружения и распознавания движущихся и неподвижных
наземных объектов.
обнаружения назсиныж объектов]
К
. Системы обнаружения
движущихся и неподвижных
Активные РЛС
Пассивно-активные РЛС
и РЛС на летательных аппаратах
Системы специального
ШРЛС с передачей информации
по радиолучу
3.1. Общая классификация радиолокационных
систем обнаружения наземных объектов
Обобщив результаты последних работ по радиолокационной
технике и сгруппировав все основные радиолокационные системы по их
назначению и решаемым с их помощью задачам, можно получить
структурную схему
классификации РЛС обнаружения
движущихся и неподвижных
(замаскированных и укрытых)
наземных объектов (рис. 3.1).
Предполагается также, что
все такие радиолокационные
системы являются типовыми
РЛС обнаружения
(распознавания) движущихся и
неподвижных объектов.
Несомненные достоинства типовых РЛС
обнаружения в короткой части
ММ-диапазона, в сравнении с РЛС длинноволновых диапазонов, - их
высокое разрешение по трем координатам (дальность, азимут и угол места) и
более высокая помехозащищенность от активных помех. Кроме того, они
позволяют с более высокой точностью выполнять ряд других задач, таких
как целеуказание, управление и наведение летательных и баллистических
объектов, а также могут быть составными частями различного рода
автоматизированных радиолокационных комплексов военного назначения [2].
118
НРЛС управления и наведения]
►{Радиолокационные датчики
Рис. 3.1. Схема классификации РЛС
На этих, как наиболее типовых, вариантах радиолокационных систем
обнаружения наземных объектов и остановимся в данном разделе.
Определим их возможные основные параметры и структуру построения.
3.2. Радиолокационные системы обнаружения
движущихся и неподвижных наземных объектов
В качестве альтернативных образцов радиолокационных систем
обнаружения объектов рассмотрим активные и пассивные РЛС, обладающие
различными дальностями действия. В связи с этим они отличаются друг от
друга своими массогабаритными параметрами и конструкцией.
Предположим, что активные РЛС обнаружения наземных объектов
бывают трех типов:
РЛС-1 ближнего обнаружения с дальностью действия не более
5 км, которая может быть в дух разновидностях - переносной и возимой
в транспорте;
РЛС-2 малой дальности действия до 10 км, смонтированная на
подвижном транспорте (автомобиль, бронетранспортер) с
подъемно-мачтовым устройством (ПМУ) и высотой подъема антенны 10... 15 м;
РЛС-3 дальностью действия свыше 10 км на подвижном
транспорте с привязной вертолетной платформой (ПВП) и подъемом антенны на
высоту 250...500 м.
Дальности действия этих РЛС отвечают потенциальным
энергетическим возможностям техники, работающей в короткой части ММ-диа-
пазона радиоволн, и могут сравниваться с РЛС такого же типа,
находящимися в настоящее время в эксплуатации.
В качестве пассивных РЛС выберем следующие станции:
пассивно-активная РЛС (ПА РЛС) с дальностью действия 3...4 км,
которая, как и в случае активной РЛС ближнего действия, может быть
переносной или возимой в транспорте;
пассивная РЛС (пассивный радиолокационный модуль) с
дальностью действия до 2 км для размещения на беспилотных и дистанционно-
пилотируемых летательных аппаратах (БЛА и ДПЛА соответственно).
Предположим, что на летательных аппаратах (ЛА) можно размещать и
активный радиолокационный модуль с дальностью действия до 3 км.
3.2. L Активные радиолокационные системы
Известно, что активные РЛС обнаружения наземных объектов во
время функционирования обеспечивают сопровождение движущихся
объектов обнаружения, определяют их координаты, передают информацию
потребителю, а также могут управлять процессами функционирования.
Размещение антенн РЛС на ПМУ и ПВП существенно расширяет
возможности радиолокационных систем по обеспечению большей площади
радиолокационной видимости. Это иллюстрируется фафиками на рис. 3.2,
119
Рис. 3.2. Зависимость относительной доли
площади полей радиолокационной видимости
где приведены зависимости
относительной доли (в %)
площади полей видимости SB
на участках местности,
незамаскированных
растительностью So, от дальности
наблюдения h для различных высот
наблюдения. Графики
построены на основе
моделирования на ЭВМ условий
радиолокационной видимости для
равнинной (сплошные линии)
и холмистой (отмечено
крестиками) местности, на 20%
покрытой лесом (кривые 1 -
для дальности наблюдения от 1 до 10 км и 2 - от 10 до 20 км). Из рисунка
видно, что с высоты 30 м (возможная высота подъема РЛС с ПМУ) на
дальности 10 км обеспечивается радиолокационная видимость примерно
20% площади открытых участков на равнинной (РМ) и примерно 15% - на
холмистой (ХМ) местности. Это показывает, что в сравнении с РЛС, у
которых высота подъема антенны h < 2 м, станции с ПМУ имеют
несомненный выигрыш по величине контролируемой площади обзора. На
дальностях наблюдения от 10 до 20 км зона радиолокационной видимости при
высоте подъема антенны до 30 м снижается примерно в 3.. .4 раза.
При высоте подъема РЛС на 250...500 м (на ВПП) на дальностях
наблюдения до 20 км обеспечивается радиолокационная видимость не
менее 60...80 % площади открытых участков на РМ и 30...55 % на ХМ.
Для обоснования дальности обнаружения движущихся и
неподвижных объектов РЛС-1, 2 и 3 воспользуемся следующим условием.
С учетом ограничений по инструментальным погрешностям РЛС,
определяющим точность измерения координат объекта, а также
ориентируясь на достигнутые энергетические уровни развития техники
коротковолновой части ММ-диапазона, наиболее оптимальной рабочей длиной
волны для исследуемых РЛС выберем волну 3 мм.
Предельное пороговое отношение
сигнал-шум для заданной дальности
действия РЛС обнаружения объектов
Приближенную оценку дальности РЛС обнаружения наземных
объектов можно производить по номограмме на рис. 2.3. Однако для
исследования дальности действия не только движущихся, но и
неподвижных объектов, а также для определения точности сопровождения
объектов по дальности и угловым координатам воспользуемся формулой ра-
120
диолокации с текущими и пороговыми значениями отношения сигнал-
шум [3]:
Ч
~ Ч пор '
(3.1)
Р УЛ^о^обр^дна^аз^ум
где q и qnop - текущее и пороговое значения отношения сигнал-шум
соответственно; Гобщ = *„(0аз>0ум)/0да " вРемя наблюдения объекта в
заданном секторе; ^н=(АЛ/А/с)(Гп/^обр) - время накопления сигнала в
приемнике; ^з, вум - секторы обзора в режиме обнаружения объекта по
азимуту и углу места соответственно; 0^a - ширина диаграммы
направленности антенны (ДНА); А/ш = Р^^ /N0 - шумовая полоса
пропускания приемника; N0 - коэффициент шума; Рпорср = Ри(г1/Гп) = PJQ -
средняя мощность передатчика; Ри - мощность передатчика в импульсе;
гп и Тп - длительность и период повторения импульса; Q - скважность;
L06V=LymL0^LmK - потери обработки сигнала в приемнике; Lym - потери в
усилителе промежуточной частоты (УПЧ) вследствие рассогласования
частотной характеристики усилителя и спектра принимаемого сигнала;
10б - потери обработки, обусловленные временной дискриминантой
принимаемого сигнала при его цифровой обработке; LmK - потери при
накоплении сигнала (при когерентной обработке 1Нак~ 0, при некоге-
«нак = — » 1; Яо - отношение сигнал- шум
рентной Lm
Топселе обработки сигнала.
В формуле (3.1), по аналогии с зависимостью (2.6), значение q
может определяться или как отношение мощности полезного сигнала к
мощности шума приемника q = Pc/P^ , или как отношение, где
указанное отношение учитывает не только собственные шумы приемника, но
й помехи, обусловленные отражениями от поверхности раздела и от
гидрометеоров, т.е q = Рс/р^ .
Проведенные по формуле
(3.1) расчеты дальности действия
для объекта типа «автомашина»
(ЭПР на уровне 0,9 равна 10 м2)
приведены в виде графиков.на рис.
3.3, где сплошными кривыми
обозначены данные для PJIC-3,
пунктирными - для РЛС-2 и
пунктирными с крестиками - для РЛС-1. Рис. 3.3. Дальность действия объекта
Здесь же кривые 1 получены для (автомобиль)
121
атмосферных условий без осадков, 2 - для условий наличия тумана с
видимостью 200 м и 3 - для условий наличия дождя средней
интенсивности (5 мм/ч). Графики на рис. 3.3 позволяют определить дальности
действия РЛС-1, 2 и 3, движущихся и неподвижных объектов типа
«автомашина» и для указанных погодных условий. Для этого необходимо принять
условие, что для движущихся объектов требуемая величина порогового
отношения сигнал-шум - qnop = 10 дБ, а для неподвижного объекта - qnop =
= 20 дБ [1, 3]. Был проведен анализ возможностей дальности действия
РЛС-1,2 и 3 по обнаружению движущихся и неподвижных объектов.
Для атмосферных условий без осадков и при указанных величинах
порогового отношения сигнал-шум можно получить следующие
дальности действия (для неподвижных объектов данные в скобках): для
РЛС-1 - до 6 (4,5) км; для РЛС-2 - до 10 (6) км; для РЛС-3 - до 13
(8) км. При этом энергетические параметры станций должны быть не
хуже, указанных в табл. 3.1.
Таблица 3.1. Энергетические параметры РЛС обнаружения
наземных объектов
Параметры РЛС
Импульсная мощность, кВт
Частота повторения импульсов, кГц
[ Длительность импульса, мкс
Чувствительность приемника, Вт/Гц
Сектор поиска, град:
оо азимуту;
по углу места
Значения параметров для
РЛС-1
1
20
0,35
31012
30
6
РЛС-2
7
15
0,3
310"12
20
6
РЛС-3
15-20
10
0,25
310"12
30...40 !
15
При исследовании формулы (3.1) представляется возможность
определить при каких предельных величинах отношения сигнал-шум
будут получены ориентировочные
значения дальности обнаружения
движущихся и неподвижных объектов для
выбранных РЛС. Такие оценки по
методике, изложенной в [3], проведены
для РЛС-1, 2 и 3 в [1]. Их результаты в
виде графиков зависимостей величины
требуемого (но не менее) порогового
отношения сигнал-шум q'H (для
неподвижного объекта) и q'a (для
движущегося объекта) от дальности действия
Рис. 3.4. Дальность действия РЛС- РЛС-1, 2 и 3 приведены на рис. 3.4,
1
122
\Ян>Ял>пЪ
I I Т- -J : >
0 5 10 £>,км
\Яш'1л
D, км
Рис. 3.5. Дальность действия
РЛС-2
<?н><?д>ДБ
3.5 и 3.6 соответственно. На этих
рисунках кривые / получены для неподвижных
объектов, а 2 - для движущихся объектов.
Здесь же сплошные кривые -
зависимости для атмосферных условий без
дождя, пунктирные - в дожде средней
интенсивности.
В качестве исходных данных
предполагаемого наблюдения
наземного объекта были выбраны наиболее
вероятные для летних условий: углы
наблюдения ^набл. < 30°; удельная ЭПР,
соответствующая лиственному
мелколистному и травянистому покровам,
о0 = -10... 15 дБ; вероятность
правильного обнаружения Рпх) = 0,9 и
вероятность ложной тревоги FnT = 10~5.
Приведенные графики позволяют
определить предельное значение отношения
сигнал-шум для заданной дальности
действия РЛС.
Ранее отмечалось, что наиболее
сложной задачей в радиолокации
является обнаружение медленно
движущихся объектов, а также рассматривались
новые методы решения такой задачи. В
данном разделе предлагается еще одно
направление решения задачи обнаружения медленно движущегося объекта.
Для обеспечения обнаружения объектов, движущихся со
скоростью менее 1,5 км/ч, как известно, метод доплеровской селекции
является неэффективным. Вместе с тем результаты исследований «тонкой»
структуры отраженного сигнала от объекта типа «автомобиль» с
использованием макетов РЛС, работающих в короткой части ММ-диа-
пазона и имеющих разрешающую способность по угловым
координатам, обеспечивающих сканирование поверхности объекта ДНА с
диаметром пятна 8.. .9 см, показывают, что ЭПР при всех ракурсах
радиолокационных «блестящих» точек будут в пределах от 0,02 до 0,2 м2 [3]. х
Наличие таких «блестящих» точек дает принципиальную
возможность обнаружения и измерения координат медленно движущихся
объектов за счет увеличения разрешающей способности по дальности до 1 м.
Для определения возможностей реализации в РЛС обнаружения
наземных объектов в короткой части ММ-диапазона радиоволн высоких
10 D,km
Рис. 3.6. Дальность действия
РЛС-3
123
разрешающих способностей по дальности, равных 0,5... 1 м, в [3]
проведен синтез параметров зондирующих сигналов станций.
В табл. 2.5 и 3.1 показано, что длительности импульсов РЛС при
условии максимальной скрытности работы станций и при заданной
скважности раной 100 для РЛС-1, 2 и 3 соответственно равны ти = 0,35;
0,3 и 0,25 мкс.
Поскольку требуемая ширина спектра зондирующего сигнала опреде-
с
ляется требуемой разрешающей способностью по дальности А/т > ,
значения величин А/т для рассматриваемых РЛС при AD < 30 м будут
равны 5 МГц и при М) = 0,5 м - 300 МГц. При этом значения баз функций
неопределенности (ФН) сигнала зондирующих импульсов П = тиА/т будут
соответствовать величинам, приведенным в табл. 3.2.
Таблица 3.2. Значения базы функции неопределенности
зондирующих импульсов РЛС
Разрешающая способность
по дальности АД м
0,5
30
Значения базы /7, МГц, для РЛС типа
РЛС-1
105
1,75
РЛС-2
90
1,5
РЛС-3
75.
1,25
Для обеспечения требуемой разрешающей способности РЛС
обнаружения по дальности периодическую радиолокационную
последовательность зондирующего сигнала необходимо дополнительно
модулировать по определенным параметрам.
Из [4] известно, что одним из наиболее технически простых
способов такой модуляции является внутриимпульсная линейная частотная
модуляция (ЛЧМ). Однако для получения удовлетворительной формы
ФН сигнала необходимо, чтобы выполнялось условие П > 10.
В связи с изложенным для обеспечения разрешающей способности
Д£> > 30 м необходимо или уменьшить длительность импульса РЛС до
0,2 мкс при увеличении импульсной мощности передатчика, или
увеличить разрешающую способность РЛС по дальности за счет внутриим-
пульсной ЛЧМ настолько, чтобы величина П ~ 10, что соответствует
AD = 4...5 м и потерям сжатия сигнала примерно 17 дБ [3], а также
требует повышения мощности в 2...3 раза.
В режиме с разрешением по дальности AD = 0,5... 1 м требуется
внутриимпульсная девиация частоты («мгновенный спектр») Д/т.ср> 300 МГц.
Если проблему внутри- и межпериодной обработки такого
сверхширокополосного сигнала и можно решить, то решение задачи
обеспечения требуемой межпериодной когерентности сигнала весьма пробле-
124
матично вследствие наличия проблемы формирования сигнала
синхронизации и собственно качества синхронизации передатчика.
Указанные трудности отсутствуют, если требуемую ширину спектра
сигнала «синтезировать» череспериодным изменением частоты заполнения
зондирующих радиоимпульсов с монохроматическим заполнением на
некоторую известную величину. При этом «мгновенная» ширина спектра
зондирующего сигнала определяется длительностью зондирующих
радиоимпульсов. Допустим при этом длительность зондирующих импульсов [4]
гк3< Ье— (3.2)
27Жср
где тК > 2tc - коэффициент корреляции отраженного от объекта сигнала;
tc - допустимое время синтеза, определяемое тк (fc ~ 4 мс); Тп - период
повторения.
Тогда по (3.2) значения величин тиз для РЛС-1, 2 и 3 будут
соответственно равны 0,3; 0,2 и 0,15 мке, а необходимое число разночастот-
ных импульсов Nx < тп А£.ср = 90, 60 и 45 соответственно.
Оптимальный вариант реализации согласованного фильтра с
череспериодным изменением частоты заполнения - использование
процессов дискретного преобразования Фурье.
Функция неопределенности зондирующего сигнала определяется
зависимостью:
ОО
Х(т,Ф)= Js(05*(/ + Ar)e-i2^'^, (3.3)
-оо
где Ат - разность между фактической задержкой отраженного от
объекта сигнала и доплеровским сдвигом, с которым согласован фильтр; Ф -
разность между доплеровской частотой принимаемого сигнала и допле-
ровской частотой, на которую настроен фильтр.
В режиме высокого разрешения по дальности сигнал описывается
выражением:
S(t) = £rect —^ еЬ+*(")Д4 9 (3.4)
гдеЛ(я)е[0,ЛГ-1].
Подставив (3.2) в (3.3), получим выражение для ФН сигнала в
пределах ее однозначности **- < г < —, < Ф < — с учетом Aw = 2я/ти:
*(г,Ф) = гн 1 ИГ
V Ги ) н=0
где 0 < т < ти и 0 < Ф < Фп.
e-i2,|
г Ф
к(п)—+п-£-
(3.5)
125
В случае т = 0 и Ф = 0 выражения для ФН сигнала запишутся в виде
sin—°-
1--L
J.
sin-
ЛТ
; ^(г,Ф) = ги
sin
Ф
. Я"Ф
sin
Ф
(3.6)
Область боковых лепесткоз ^(г,Ф) при Ф Ф О и т ^ 0
определяется правилом к(п) череспериодного изменения частоты в пределах пачки.
Так как регулярный алгоритм синтеза правил (кода сигнала) к(п\
обеспечивающего требуемую ФН сигнала, отсутствует, то в качестве
критерия оптимальности при синтезе сигнала к(п) используется
критерий минимума среднеквадрати-
ческого уровня боковых
лепестков ФН сигнала с
ограничением уровня максимальных
выбросов. На рис. 3.7 из [1, 3]
приведены различные сечения
ФН сигнала, полученной в
результате синтеза численным
методом на ЭВМ, для
наилучшего кода сигнала к{п) с числом
различных частот для
обеспечения требуемой разрешающей
способности РЛС обнаружения
наземных объектов по
дальности с Nz = 32 и
удовлетворяющим вариантам с рабочей
длиной волны 2, 3 и 8 мм.
На рис.3.7 сплошной кривой обозначена зависимость ФН сигнала
при Ф = О, пунктирной - для Ф = я1ЪТи и штрихпунктирной - средний
уровень боковых лепестков. Из рисунка следует, что может быть
получен сигнал с достаточно хорошим поведением ФН сигнала в области
боковых лепестков: средний уровень не более - 21 дБ, небольшое число
«выбросов», превышающих уровень - 13 дБ.
Для примера по методике, изложенной в [3, 5], проведены расчеты
и на рис. 3.8 представлены графики зависимости порогового отношения
сигнал-шум q'nop от дальности при разрешающей способности РЛС по
дальности AD = 1 м. Кривые 1 приведены для РЛС-1 и 2 - для РЛС-3,
сплошные кривые - для нормальных условий атмосферы, пунктирные
для дождей средней интенсивности.
Рис. 3.7. Функция неопределенности
сигнала
126
На макете РЛС с длиной
волны X = 2,1...2,3 мм, с
импульсной мощностью
передатчика 1 кВт, чувствительностью
приемника 3 10"12 Вт и
промежуточной частотой 60 МГц
были реализованы дальности
обнаружения неподвижного
объекта (грузовой автомобиль) в
режиме горизонтального
сканирования ДНА РЛС в
пределах до 4 км и в режиме
конического сканирования - в
пределах 5 км [3]. Эти результаты
Зжнсимосп» дпог ■? /(£>) д
риршюжсы Д£> =
/ дляРЛС-1
> дляРЛС-Э
D, км
Рис 3.8. Графики зависимости
порогового отношения сигнал-шум
. от дальности при разрешении AD=1 м
вполне подтверждают результаты теоретических исследований.
Таким образом, результаты проведенных исследований позволяют
сделать следующие основные выводы.
Для обеспечения дальностей обнаружения РЛС-1, 2 и 3
соответственно З...5;7...10и более 10 км в атмосфере в условиях дождя средней
интенсивности, в случае использования в станции когерентного сигнала
и когерентной обработки требуемая средняя мощность передатчиков
должна приблизительно составлять 7, 30 и 60 Вт соответственно.
Указанные дальности обнаружения движущихся наземных
объектов обеспечиваются за счет доплеровской обработки (системой
селекции движущихся объектов), а медленно движущихся и неподвижных
объектов для таких же дальностей - за счет повышения разрешающей
способности станций по дальности не менее 1м.
Пороговое отношение сигнал-шум канала
автосопровождения наземного объекта по угло-
вым координатам
Канал определения угловых координат обнаруживаемого
наземного объекта и в дальнейшем при его сопровождении, также как и канал
дальности, характеризуется пороговым отношением сигнал-шум:
~ ^°'5 (3 7}
<7пор.ас ~ 2 ' "
2<Тщ
где (Тш - допустимая шумовая ошибка измерения угловых координат;
9nop ас - пороговое значение отношения сигнал-шум измерения,
дальности объекта при автосопровождении его по угловым координатам; ft>5 -
ширина ДНА по уровню 0,5.
Для того, чтобы можно было пользоваться графиками q = J{D) (см.
рис. 3.3-3.6) для определения порогового отношения сигнал-шум авто-
127
сопровождения дтрж, необходимо определить его значение с учетом
точности обработки сигнала в канале обнаружителя. В соответствии со
сказанным будет справедливо выражение [3]:
Ч пор. ас — "пор.ас (А/ш.аЛ^ак)? ' (3.8)
где А/шас - шумовая полоса контура автосопровождения по угловым
координатам; /н - время накопления сигнала; Ь'нш - дополнительные, по
сравнению с каналом обнаружителя, потери накопления сигнала в
канале измерения угловых координат.
При использовании в контуре автосопровождения кальмановского
фильтра время переходного процесса соответствует А/ш ас = 0,3 Гц.
Величина L'mK при условии q -> ^порас и для птк = (I/А/шас%
определяется из (3.8) и равна Ц^. « 3 дБ, а величина q'nopac « 13 дБ.
Анализ величин #порас, вычисленных для рассматриваемых типов
РЛС обнаружения, показывает, что определяющим энергетическим
требованием в станциях является обеспечение порогового отношения сигнал-
шум в канале обнаружителя. Точности же определения координат
наземных объектов с применением в РЛС короткой части ММ-диапазона в
сравнении с диапазоном СМ-радиоволн повышается в 1,4... 1,7 раза [1].
Проведенные исследования позволили обосновать основные
параметры РЛС-1, 2 и 3, работающих на длине волны 3 мм, а также
определить вариант их общего облика и функциональной схемы.
Основные параметры РЛС, предназначенные для обнаружения,
сопровождения и определения координат наземных объектов в условиях
плохой видимости, приведены в табл. 3.3, а схема альтернативного варианта
РЛС обнаружения наземных объектов представлена на рис. 3.9 [1]. -
Таблица 3.3. Основные параметры РЛС обнаружения наземных
объектов
Параметры РЛС
Дальность действия, км
Импульсная мощность, кВт
Средняя мощность, Вт
Частота повторения, кГц
Чувствительность приемника, Вт/Гц
Длительность импульса, мкс
Коэффициент шума приемника, дБ
Потери в трактах, дБ
Сектор сканирования антенны, град:
по азимуту / по углу места
Разрешающая способность:
по дальности, м;
J по угловым координатам, мин
Значения параметров для |
РЛС-1
до5
1
7
20
3-Ю"12
0,35
15
10
20/6
10...15
.5
РЛС-2
5...7
7
30
15
310-12
0,3
15
10
20/6
25
7
РЛС-3 1
10 и более 1
15...20
60
10
3-Ю-12
0,25
* 15
10
±30/15
20
10
128
Рис. 3.9. Схема альтернативного варианта РЛС обнаружения
Функционирование активной РЛС хорошо описывается в
технической литературе и нет смысла здесь описывать.
3.2.2. Пассивно-активные радиолокационные системы
Одним из перспективных направлений обнаружения объектов
считается создание пассивно-активные (ПА) РЛС [1].
В [1] показано, что ПА РЛС является комплексным устройством,
состоящим из пассивного радиолокационного устройства (ПРЛУ) и
активного радиолокационного дальномера (РЛД). Такое комплектование
позволяет получить новые положительные качества станции, в частности, в
пассивном режиме возможен обзор пространства (без излучения СВЧ-энер-
гии), а в активном режиме - измерение дальности до обнаруживаемого
объекта. Активный РЛД - это радиолокационное устройство, которое
можно представить как аналог активной РЛС, рассмотренной в 3.2.1.
Оценки рационального рабочего диапазона ПА РЛС показывают, что
для небольших дальностей действия (до 3 км - в пассивном режиме работы
и 5...7 км - в активном) он находится в окне прозрачности 94 ГТц (длина
волны 3 мм).
Из анализа полученных в [1] результатов видно, что в секторе
обзора 30° на дальности 4 км время обзора Г0бз не менее 4,6 мин. Такое
сравнительно большое время обзора в значительной степени может
быть скомпенсировано системой индикации с микропроцессорами,
выполняющими функции обработки, анализа и коммутации сигналов по
гибкой программе, обеспечивающей выбор оптимального режима
индикатора в различных условиях.
5-3523 129
Если предположить, что такие системы позволяют реализовать
интервал времени обзора, равный 5 мин, то за это время на дальностях
действия ПРЛУ до 4 км может обеспечиваться обзор в секторе 30°
только в зимний период за счет более низкого уровня коэффициента затухания
радиоволн в атмосфере. В летний период такой режим можно обеспечить
при уа = 0,4 дБ/км на дальностях до 2,5 км, при уй = 0,8 дБ/км - до 2 км и
в дождях средней интенсивности при уа = 3 дБ/км - до 1 км.
Из сказанного следует, что при отсутствии дефицита времени,
когда фактор скорости обзора не имеет существенного значения,
например, в ночных условиях в период обзора переднего края
противоборствующей стороны, такие ПРЛУ могут применяться достаточно
эффективно. Самые благоприятные условия применения ПРЛУ - ночные при
минусовых температурах и в дождях. Для сохранения на достаточном
уровне эффективности такой станции в неблагоприятных условиях, как
это уже указывалось выше, требуется применения радиолокационного
дальномера в активном режиме работы ПА РЛС.
Несомненным достоинством такой пассивно-активной системы
является обеспечение высокой помехозащищенности. Это достигается
как за счет скрытности работы станции при пассивном режиме, так и за
счет применения в ПА РЛС короткой части ММ-диапазона. Кроме того,
поиск и обнаружение объектов, а также измерение угловых координат
будет проводиться в пассивном режиме, а измерение дальности
(скорости) - с применением дальномера, работающего короткое время для
обеспечения скрытности работы.
На рис. 3.10 приведена предполагаемая схема ПА РЛС [1], а в табл. 3.5
- возможные параметры ПА РЛС обнаружения объектов.
радиотепловой
4 г*
1 Совмещай»
1 акгенв
11
71
сигнал (РТс)
Циркулятор |«
радиолокационный сигнал
(РЛс)
РТс
РЛ
Переключатель
-модулятор
[РТс |РЛс
Сумматор
1
1 Диодный
смеситель
с
РТс
РЛс
Устрв
регул
МОЩ1
нзлуч
сип
йство I
фОВКИ 1
аемого 1
ала р-1
Переключающий II
генератор Н
Радиотеплоаой Г|
канал \—
\ 1
Радиолокационный!
Хроншатор L
1 Напра
1 ответ
минный
внтель
1 Елокуправления
1
""*] Пороговое
. 1 устройство
1*1 Блок обработки
—*\ информации
СВЧ-генератор
♦
Генератор эталонны)
напряжений
а |
1 II!
1 Счетно-решающее
1 устройство и блок
| индикации
1 Ч
Рис. 3.10. Схема пассивно-активной РЛС
130
Таблица 3.5. Параметры ПА РЛС обнаружения объектов
Параметры ПА РЛС
1 Рабочий диапазон (длина волны), мм
Дальность действия (автомашина), км:
неподвижная / движущаяся
Мощность передатчика в импульсе, Вт
Чувствительность приемника:
радиометрический прием, К
радиолокационный прием, Вт
Полоса пропускания на промежуточной
частоте, МГц
Сектор автоматического сканирования, град:
по азимуту /по углу места
Время наблюдения в секторе поиска, с
1 Диаметр антенны (параболоид), мм
Значения параметров
при режимах работы |
пассивный
3
2...3/-
0,01
1000
30/6
300
900x500
активный 1
3
-/4
500
3-Ю"12
20...40
30...40/6
з 1
900x500
Принцип работы ПА РЛС Радиолокационная система сканирует
ДНА в заданном секторе поиска. Радиотепловой сигнал излучения
обнаруженного объекта проходит через циркулятор, модулируется по
амплитуде при помощи переключателя модулятора и поступает на один из
входов сумматора. На другой вход от СВЧ-генератора через
направленный ответвитель, устройство регулировки мощности сигнала,
циркулятор и переключатель-модулятор, работой которого управляет
переключающий генератор, поступает высокочастотный сигнал. С выхода
сумматора сигнал, представляющий аддитивную смесь части сигнала СВЧ-
генератора и замодулированного по амплитуде радиотеплового
излучения объекта, поступает на вход диодного смесителя.
С выхода смесителя преобразований сигнал от объекта поступает
на вход радиотеплового канала, настроенного на разностную частоту по
несущей частоте СВЧ-генератора и средней частоте анализируемого
радиотеплового сигнала. В зависимости от уровня радиотеплового
сигнала от объекта на входе радиотеплового канала присутствует сигнал
соответствующего уровня. Этот сигнал подается на вход блока обработки
информации и далее в блок индикации, а также на пороговое
устройство, на другой вход которого поступает сигнал с выхода генератора
эталонных напряжений, соответствующих величинам излучений
различных типов разведываемых объектов.
При превышении выходным сигналом радиотеплового канала
заданного уровня, на выходе порогового устройства появится сигнал, который
поступает на вход блока управления. Сформированный на блоке
управления сигнал поступает на устройство регулировки уровня мощности прини-
131
маемого сигнала и переводит его в открытое состояние для излучения СВЧ-
сигнала. Радиотепловой канал в этот период временно закрыт.
В этом случае сигнал СВЧ-генератора через направленный ответ-
витель, открытый блок регулировки мощности и циркулятор подается
на вход антенны и излучается в пространство в направлении на объект.
Отраженный от объекта сигнал, пройдя через последовательно
соединенные циркулятор, переключатель-модулятор, сумматор и
смеситель, поступает на вход радиолокационного и радиотеплового каналов.
Разделение сигналов осуществляется за счет разноса частот настройки
радиотеплового и радиолокационного каналов.
С выхода радиолокационного канала сигнал от объекта поступает
на вход блока обработки счетно-решающего устройства для
определения координат объекта.
В целом синхронизация процессов работы ПА РЛС
осуществляется хронизатором. После получения координат объекта
радиолокационный канал закрывается через определенное время сигналом с хрониза-
тора или оператором, который снова может продолжать поиск
очередного неподвижного объекта.
В случае обнаружения движущегося объекта ПА РЛС работает по
изложенной программе, но при этом моментом для отключения
радиотеплового канала может быть момент времени выхода объекта из ДНА.
Это ведет к тому, что устройство регулировки мощности закрывается и
ПА РЛС сновалерщщит в пассивный режим работы.
Процесс работы ПА РЛС в активном режиме состоит из тех же
этапов, что и любая активная РЛС обнаружения наземных объектов.
3.2.3. Особенности радиолокационных систем обнаружения
наземных объектов, расположенных на летательных аппаратах
В последнее время для поиска наземных объектов в
труднодоступных районах, в том числе и в военных целях для разведки на территории
противника, а также для выполнения других задач военного я
гражданского применения все более приоритетное место стали занимать
средства обнаружения, распознавания, наблюдения и сопровождения,
располагающиеся на летательных аппаратах (ЛА): на вертолетах,
беспилотных (БЛА) и дистанционно-пилотируемых (ДПЛА) самолетах.
Исходя из приоритетности указанных задач, возлагаемых на средства
обнаружения, располагающихся на борту ЛА, важными и актуальными
являются вопросы, связанные с обоснованием технического облика и
возможных параметров радиолокационных средств обнаружения наземных
объектов. Если рассматривать этот вопрос с точки зрения военного
применения, то в этом случае, очевидно, целесообразно рассматривать РЛС
обнаружения на БЛА и ДПЛА в виде радиолокационных модулей,
применяемых для решения задач по обнаружению, разведке и доразведке наземных
132
объектов на глубину до 100... 150 км. Применение таких
радиолокационных модулей считается особенно эффективным, когда использование
оптико-электронных и телевизионных средств ограничено или невозможно в
связи с неблагоприятными погодными и суточными условиями.
Совершенно понятно, что размещение РЛС на борту ЛА связано с
габаритными размерами и массой аппаратуры. С освоением нового
СВЧ-диапазона короткой части ММ-диапазона этот вопрос в
значительной степени упрощается.
Для получения информации о наземных объектах могут быть
использованы РЛС переднего обзора (РЛС ПО), работающие как в
активном (АРЛС ПО), так и в пассивном (ПРЛС ПО) режимах [1].
Для обоснования основных параметров ПРЛС ПО обнаружения
малоразмерных наземных объектах воспользуемся методикой,
изложенной в [1], которая позволяет определить некоторые важные параметры
радиометрической аппаратуры, устанавливаемой на ЛА.
В качестве исходных данных для оценки возможностей ПРЛС
используем характеристики приемников, которые на практике чаще всего
применяются в радиометрической аппаратуре, а также требования,
предъявляемые при расчетах к параметрам различных гипотетических
радиометрических систем, располагающихся на самолетах и вертолетах
[1, 5]. В качестве требований функционирования Л А примем
следующие: скорость полета ЛА - 50 м/с; ширина полосы обзора на высоте
200 м - 40... 50 м (ширина ВПП); перекрытие - 50% (для идеального
получения изображения заведомо без пропуска объекта); геометрическое
разрешение -2м (при максимальном угле отклонения ДНА от
направления полета).
Принцип действия РЛС
ПО, расположенной на ЛА,
схематично показан на рис. 3.11.
Такие РЛС, работающие в
длинноволновой части ММ-
диапазона, имеются за рубежом.
Это станции типа «WX»,
которые используются на вертолетах
и самолетах для
картографирования местности и обнаружения
малоразмерных объектов.
На основе результатов исследований короткой части
ММ-диапазона, анализа зарубежной технической литературы была сделана оценка
возможностей активной РЛС на ЛА. Такой радиолокационный модуль
может быть использован, как модуль ПРЛС ПО, в качестве
дополнительного средства обнаружения в комплексе с оптико-электронными
или телевизионными средствами, когда работоспособность последних
Направление полета
Угол наклона ДНА
сканирования
Рис. 3.11. Принцип действия РЛС ПО,
установленной на летательном аппарате
133
будет ограничена. В настоящее время становится очевидным, что такие
радиолокационные средства обнаружения объектов могут найти
применение в самолетных радиотехнических системах самолетовождения при
полетах на малых высотах и при посадке на аэродром.
Основные параметры активных и пассивных радиолокационных
модулей (АРЛС ПО и ПРЛС ПО) приведены в табл. 3.6 [1, 6].
Таблица 3.6. Основные параметры активных и пассивных
радиолокационных модулей
Параметры
Высота полета ЛА, м
Скорость полета ЛА, м/с
Дальность обнаружения, км
Сектор обзора, град
Разрешающая способность,
дальн., м /угл.коорд., д.у.
Температурная чувствительность
приемника, К
Чувствительность приемника, Вт
Полоса пропускания на промежуточной
частоте, ГГц
Импульсная мощность передатчика, Вт
Частота повторения, кГц
Ширина ДНА, град
Диаметр антенны, мм
1 Масса, кг
Значения параметров 1
радиолокационных систем |
АРЛС ПО
400
50
2
±30
20...25/1...2
—
10 п
1
15
50
-
1 35...40
1 10...15
ПРЛС ПО
200
50
1
±15
-/1
не хуже 0,3
—
2...3
-
—
1
30
i Ю
Возможный вариант схемы АРЛС ПО из [1] изображен на рис. 3.12.
Блок обработки сигнала на ПЧ
Блок
фнпыров
низкой и
высокой
частоты
Гибридная
матрица ПЧ
II Блок цифровой I
■ обработки I
]Ш^
выборки и
хранения
Схема
обработки
координат
.__» , IJ
Блок управления АРУ
ЦифрО-
аНаЛОГОВЫЙ
преобразователь |
-Jj
АЦП
и обработки
информации!
Елок управления и
обмена информации
Рис. 3.12. Схема активной РЛС переднего обзора
134
Антенна РЛС представляет собой параболоид с четырьмя
облучателями, обеспечивающаими моноимпульсную работу станции. Приемник
содержит моноимпульсную схему сравнения, смесители-предусилители,
местные гетеродины и процессоры сигнала, работающие на промежуточной
частоте (ПЧ).
Отраженные от объекта сигналы, принятые по четырем лепесткам
ДН, обрабатываются в схеме сравнения для получения суммарного и
разностного сигналов по азимуту и углу места. Разностные сигналы
подаются на широкополосные интегральные схемы смесителей-предуси-
лителей, где происходит переход на ПЧ, и далее поступают в блок
обработки на ПЧ, где через блок фильтров направляются на разветвитель и
гибридные матрицы. С выхода разветвителей в каждом канале один из
сигналов подается на гибридную матрицу, а другой - на схему
обработки координат и далее в блок обработки.
Выходные сигналы гибридной матрицы поступают в блок
цифровой обработки на схемы выборки и хранения. Суммарный сигнал
прежде чем попасть на гибридную матрицу разветвляется на четыре канала,
что обеспечивает наличие суммарного сигнала для схемы слежения по
дальности, детектирования и опорного сигнала для детекторов ошибок
по азимуту и углу места.
Все сигналы (координатные и суммарные) со схем выборки и
хранения поступают в блок аналого-цифровых преобразователей и далее в
блок управления и обмена информацией для управления схемой РЛС и
передачи информации потребителю.
В качестве генератора используются твердотельные диоды. Все
составные элементы передающего устройства традиционные.
Таким образом, одним из перспективных направлений применения
РЛС обнаружения является использование их в качестве небольших
локационных модулей на ЛА.
3.3. Радиолокационные системы специального
назначения
3.3.1.Радиолокационные системы обнаружения объектов
с передачей информации по радиолучу
Одно из интересных направлений расширения функциональных
возможностей активных РЛС ближнего действия (3...4 км) -
использование радиолокационного луча для передачи информации [7, 8].
Целесообразность постановки такой задачи определяется прежде
всего необходимостью скрытно, оперативно передавать информацию
потребителю. Однако при практической реализации таких систем требуется
решение ряда научных проблем, в частности, уменьшение уровня взаимных
помех в «радиолокационном» и «связном» каналах. Рассмотрим возмож-
135
ность реализации локационной системы связи (ЛСС) на базе РЛС
обнаружения наземных объектов, работающей в короткой части ММ-диа-
пазона с фазокодо-манипулированным (ФКМ) зондирующим сигналом
и амплитудно-модулированным в связном канале. Возможный схемный
вариант построения такой РЛС приведен на рис. 3.13 [8].
При гомодинном
построении РЛС (рис. 3.13,а)
сигнал от генератора СВЧ-
энергии (ГСВЧ) после
прохождения через феррито-
вый вентиль, фазовый
манипулятор ФМ, первый
направленный ответвитель,
амплитудный модулятор
AM и циркулятор Ц
излучается антенной.
Отраженный от объекта сигнал
поступает на СВЧ-смеситель,
куда с одного из плеч
первого направленного ответ-
вителя через
развязывающий аттенюатор и
регулируемый фазовращатель
установочного типа также
подводится гетеродинный
| о) | сигнал. Для получения тре-
Рис. 3.13. Вариант схемы РЛС обнаружения бУем0Г0 РЧ*™ по
с передачей информации дальности фазовый
манипулятор управляется
кодированной последовательностью двоичных символов (-1,1) от генератора кода
ГК, опорный сигнал с выхода которого через регулируемую линию
задержки ЛЗ подается на один из корреляторов. На другой вход коррелятора
поступает знакопеременная последовательность видеоимпульсов с выхода
СВЧ-смесителя, образующаяся за счет перемещения отраженного от
объекта сигнала и сигнала от гетеродина. В результате корреляционной
обработки на выходе коррелятора появляется сигнал, достигающий своего
максимального значения при совпадении времени задержки опорного и
отраженного сигналов.
Исследования показывают, что такая система характеризуется
слабой чувствительностью к амплитудной модуляции излучаемых
колебаний, что также обеспечивается наличием специальных ограничителей в
схеме приемного устройства РЛС. Кроме того, установка в передающем
тракте РЛС амплитудного модулятора на основе pin-диода, который
HHS+^®Hg)-<
ф
а)
C2R2
НК=з
C4f1 к4
"И"
с7
1ш
Еп с9,
!Н Ск
fl-«|
136
электрически связан с передающим каналом линии связи,
незначительно сказывается на результате обработки ФКМ сигнала, особенно для
неглубокой (при коэффициенте модуляции, не превышающем 30%)
амплитудной модуляции. При этом полоса пропускания связного сигнала
оказывается вполне достаточной для передачи узкополосных речевых
сообщений (не более 500 Гц), поскольку частота повторений кодовой
последовательности ФКМ сигналов обычно составляет 2...4 кГц.
Подобное использование радиолокационного канала позволяет
реализовать простое приемное устройство, представляющее собой АМ-прием-
ник, практически нечувствительный к фазовой манипуляции
передаваемого по радиолокационному каналу сигнала за счет применения квадра-
тичного детектора на выходе (рис. 3.13,6).
На основе видеодетекторного
приемника, работающего в короткой части ММ-
диапазона, был создан макет приемного
устройства (рис. 3.14), содержащий линзовую
антенну с облучателем, СВЧ-детектор и
полосовой низкочастотный усилитель [8]. Рис*3*1^* Макет РЛС РНЦ
Возможные характеристики такой с передачей информации
pjjQ по радиолучу
Дальность обнаружения объекта
(техника/человек), км 2,5...3/1...1,5
Дальность передачи информации, км 3...4
Диаметр антенны, мм 80... 100
Масса, кг 1,5.
Теоретические и экспериментальные исследования макета
показали принципиальную возможность создания помехозащищенной
локационной системы в ММ-диапазоне волн с передачей информации и
дальностью действия 4... 5 км
3.3.2. Радиолокационные системы обнаружения
и управления оружием
Для выполнения задачи обнаружения малоразмерных и
малоконтрастных наземных объектов, а также для последующего воздействия
по ним управляемым оружием (самонаводящимися снарядами или
малогабаритными ракетами) целесообразно рассмотреть возможность
создания специальных радиолокационных систем, работающих в короткой
части ММ-диапазона радиоволн.
В качестве альтернативных образцов РЛС обнаружения и управления
оружием (военного применения), в которых наиболее вероятно применение
короткой части ММ-диапазона, выберем следующие: радиоуправляемые
противотанковые комплексы и комплексы обеспечения стрельбы
средствами для ближнего боя в небольших охраняемых районах.
137
к^Ц
Противотанковые радиолокационные
комплексы
Одним из важнейших направлений развития противотанкового
вооружения является расширение диапазона условий боевого применения
(обеспечение стрельбы в любое время суток и в сложных
метеорологических условиях). Решение этой задачи может быть возможно за счет
создания комплексов с радиолокационными системами управления.
Однако их боевое применение в условиях отсутствия оптической
видимости связано с решением таких сложных задач, как выделение в
районе поиска на фоне местности из группы наиболее опасных
движущихся объектов (ведение разведки). В этом случае:
при работе комплексов в составе боевого подразделения необходимо
обеспечить целераспределение и целеуказание для каждого комплекса;
необходимо обеспечить скрытность огневых позиций и
параметров излучения комплексов до открытия огня;
эффективность комплексов при использовании внешнего
целеуказания должна быть не хуже, чем при использовании собственной РЛС
комплекса.
Решение этих вопросов вызывает необходимость применения в
подразделениях противотанковых средств РЛС разведки в короткой
части ММ-диапазона, а также обусловливает ряд требований как к РЛС
разведки, так и к системе целеуказания.
Очевидно, что в качестве РЛС общей разведки и целеуказания, как
это и имеет место в подразделениях противотанковых комплексов,
можно использовать менее точные РЛС СМ-диапазона (типа ПСНР), а в
качестве прицельного инструмента - всепогодные противотанковые
радиолокационные комплексы (ПТРК), т.е применение РЛС
коротковолновой части ММ-диапазона.
Основные параметры РЛС ПТРК могут быть аналогичные
параметрам РЛС-1 или РЛС-2 , приведенным в табл. 3.3, а схема
альтернативного варианта РЛС может быть аналогична схеме на рис. 3.9.
Основные характеристики РЛС ПТРК:
Дальность действия, км до 5
Импульсная мощность, кВт 1
Средняя мощность, Вт 7
Частота повторения, кГц 20
Чувствительность приемника, Вт/Гц 3-Ю"12
Длительность импульса, мкс 0,35
Сектор сканирования антенны, град:
по азимуту/по углу места 20/6
Разрешающая способность:
по дальности, м 10... 15
по угловым координатам, мин 5
138
Радиолокационные системы обеспечения
стрельбы средствами ближнего боя
По мнению военных специалистов для выполнения таких боевых
задач, как обеспечение высокой плотности огня в зоне охраны или
обороны и снижение потерь личного состава, очень злободневным является
создание дистанционно-управляемых автоматизированных систем
стрелкового оружия и противопехотных средств ближнего боя.
В качестве аппаратуры обнаружения объекта и управления огнем
оружия для радиолокационных прицелов (РЛП) стрелкового оружия и
противопехотных средств ближнего боя могут успешно применяться
малогабаритные РЛС обнаружения и прицеливания, работающие в
короткой части ММ-диапазона.
Боевой опыт использования стрелкового оружия показывает, что
наибольшие ошибки стрельбы связаны с неточным определением
стреляющим положения целей на местности и параметров их движения,
особенно в плохих погодных условиях и ночью. Следовательно, одна из
важнейших боевых задач при построении дистанционно-управляемых
автоматизированных систем стрелкового оружия и противопехотных
средств ближнего боя - автоматизация процессов обнаружения цели и
точного определения ее координат.
Схема управления огнем оружия ближнего боя представлена на
рис. 3.15 [9]. Здесь изображен район охраняемого участка переднего
края в непосредственном боевом соприкосновении с противником.
Участок, полностью оборудованный в инженерном плане, включает центр
автоматизированного управления с РЛС разведки и целеуказания
(обозначен индексом «А»), а также пять постов (огневых точек) с РЛП,
которые при поступлении на них целеуказания из «центра» автоматически
ведут прицельный огонь в заданном секторе обстрела.
Рис. 3.15. Схема системы управления огнем оружия ближнего боя
139
В настоящее время в качестве РЛП к огневым средствам ближнего
боя применяются РЛС сантиметрового диапазона радиоволн (типа СБР-3).
Однако было установлено, что эти станции не обеспечивают в полной
мере боевых возможностей сопрягаемого с ней оружия (пулемет,
гранатомет). В частности, недостаточная точность определения азимута цели
приводит к увеличению расхода боеприпасов и времени выполнения
боевой задачи, а отсутствие возможности определения угла места цели
не позволяет осуществлять маневр огня по дальности. Кроме того,
существующие РЛС ближней разведки имеют значительные массу (в 3...4
раза большую) и габаритные размеры.
Исследования показывают, что реализация РЛС в качестве
требуемых более эффективных РЛП возможна с переходом на короткую часть
ММ-диапазона радиоволн.
Характеристики РЛП:
Дальность обнаружения, м:
техника (танк)/ человек до 3000/1000
Сектор обзора по азимуту в автоматическом
режиме, град:
по азимуту 60. ..90
по углу места до 10
Срединные ошибки определения координат цели:
по дальности, м 10... 15
по азимуту, д.у 2...5
по углу места, д.у 2
Масса, кг 4...5
Переход в короткую часть ММ-диапазона позволит также
реализовать и принципы пассивно- активной локации, при которой после
обнаружения (распознавания) цели, определения ее угловых координат с
использованием пассивного канала, и далее, для определения координат
по дальности и выполнения функций прицеливания включается
активный канал РЛС. Использование таких систем охранного типа с
автоматизированным огневым воздействием позволит также обеспечить и
высокую скрытность расположения огневых средств до начала активных
действий.
3.3.3. Радиолокационные датчики
Радиолокационные датчики отнесем к РЛС специального
назначения, которые могут быть включены в состав существующих и
достаточно широко применяемых в настоящее время в системе технических
средств разведки комплексов разведывательно-сигнализационных
средств (КРСС).
140
Основная задача КРСС - обнаружение (распознавание,
классификация) движущихся объектов в контролируемом районе и передача
информации на наземные пункты приема. Отсюда важными требованиями,
предъявляемыми к КРСС, являются определение количественного состава
движущихся объектов и определение их координат. Однако эти требования
недостаточно, эффективно выполняются существующими сейсмическими,
акустическими, магнитными и другими датчиками, входящими в состав
КРСС. Этот недостаток можно устранить путем включения в состав
комплекта датчиков КРСС радиолокационных датчиков (РЛД), которые, имея
высокую направленность антенных систем, могут производить подсчет
одиночных объектов, практически следующих друг за другом буквально на
дистанции 1.. .2 м. Предполагается, что РЛД могут входить в состав КРСС
как дополнительные к существующим и включаться в работу по сигналу от
«дежурных» сейсмических или акустических датчиков. Достоинством РЛД,
в сравнении с существующими датчиками, является то, что с их помощью
можно с высокой точностью измерять координаты движущегося объекта.
Расчеты показали, что радиолокационные устройства с апертурой антенны
равной 100 мм могут иметь срединные ошибки определения координат (без
учета топопривязки) примерно 5... 10 м.
Схемный вариант РЛД представлен на рис. 3.16.
Антенна
V
Радиолокацион-1
ный приемо- Г
передающий 1
модуль П
t.t t
Блок питания г
| Блок электронной
обработки
W
Схема
обнаружения и
распознавания
А
г ^
i A
т
Схема
защиты от
помех
w\
Формирователь |
кода
-W
}
Г 1
}
\
г
Радиотехнический
приемопередающий
1
г
Устройство
самоликвидации
\
(
\
(
Рис. 3.16. Схема радиолокационного датчика
Предполагаемые параметры активных и пассивных РЛД
приведены в табл. 3.7 [1].
141
Таблица 3.7. Параметры активных и пассивных РЛД
Параметры
Дальность действия, м
Длина волны, мм
Средняя мощность передатчика, мВт
Чувствительность приемник,
Диаметр антенны, мм
Линейная разрешающая способность
по угловым координатам на дальности
100 м,м
Разрешение по дальности, м
Значения параметров
для типов датчика |
активный
500... 700
1,3 и 3,3
30
КГ11 Вт
не более 100
| 2...3
5
пассивный |
до 300...400
1,3 и 2,2
0,1 К
не более 100
2...3
В целом, приведенные в данном разделе материалы показывают на
высокие потенциальные возможности радиолокационных средств
обнаружения наземных объектов, работающих в короткой части ММ-диа-
пазона радиоволн и их возможные многоплановые применения.
142
ГЛАВА 4
Информационные свойства
радиолокационных систем
обнаружения наземных объектов
в миллиметровом диапазоне радиоволн
В настоящее время пока отсутствуют работы по оценке
информационных свойств радиолокационных систем (средств)
обнаружения (разведки) наземных объектов в ММ-диапазоне радиоволн, и
особенно в его коротковолновой части. В ряде работ [1-8] дается
общая теория радиолокационной информации, а также
рассматриваются частные вопросы теории информации при поиске,
обнаружении и захвате объекта применительно к радиолокационным
системам обнаружения воздушных объектов. Из указанных
источников следует, что теоретическое обобщение «сложившихся» и
новых направлений в обработке радиолокационных сигналов в
условиях помех является важной, но трудной задачей. Это связано как
с развитием новых направлений в радиоэлектронике, так и с
совершенствованием теории и техники обработки информации.
4.1. Общие положения об информационных свойствах
радиолокационных систем
В силу специфики процессов формирования и обработки сигналов
теория радиолокационной информации развивается на основе методов
статистической радиотехники. В отличие от теории связи и телеметрии,
где исходными данными являются некоторые последовательности
символов, несущих подлежащую передаче информацию, в задачах
статистической радиотехники объект исследования - радиосигналы.
Большую роль для развития теории информации в статистической
радиотехнике сыграли труды В.А. Котельникова по проблеме
потенциальной помехоустойчивости, направленные на развитие широкого круга
вопросов, связанных с анализом и синтезом радиолокационных систем
различного назначения. При этом главное внимание уделяется теории
радиолокационного наблюдения, проблемам формирования
радиолокационных сигналов и исследованию процессов выделения
радиолокационной информации.
143
В последнее время особое место среди радиолокационных систем
начали занимать системы, работающие в осваиваемых миллиметровом и
субмиллиметровом (субММ) диапазонах радиоволн.
Как было показано в предыдущих разделах, ММ- и субММ-волны
обладают высокой помехоустойчивостью, крайне высоким разрешением
по угловым координатам и по дальности, обеспечивают высокую
скрытность передачи информации при небольших габаритных размерах
приемопередающей аппаратуры и антенн. Перечисленными
достоинствами ММ-радиоволны привлекают разработчиков радиолокационных
систем. Однако эти радиоволны в отличие от СМ и ДМ испытывают при
своем распространении в атмосфере значительное молекулярное
поглощение, а также ослабляются в различных гидрометеорах, вследствие
чего дальность распространения сигналов оказывается существенно
меньше общепринятой в диапазоне СВЧ.
Сейчас в значительной мере уже завершился процесс освоения
ММ-диапазона радиоволн. Итогом многих исследований и
конструкторских разработок явилось создание и освоение в промышленности
элементов и узлов новых приемопередающих комплектов.
Все это положило начало широкому использованию ММ- и
субММ-волн в реальных системах.
В этой связи возникает необходимость в изучении свойств
радиолокационных источников информации в этих диапазонах, исследовании
методов повышения эффективности выделения информации,
переносимой радиолокационными сигналами, и возможностей анализа ее
использования.
В [9-11] проведены исследования возможностей РЛС разведки
наземных целей в короткой части ММ-диапазона радиоволн, проведена
качественная оценка их информационных свойств, получаемая при
обработке радиолокационного сигнала. Такая информация может быть об
объекте или группе объектов, о дальности и скорости их передвижения,
об угловых координатах, о их размерах и форме и др.
В табл. 4.1 приведено качественное сравнение информационных
свойств активных и пассивных РЛС обнаружения наземных объектов на
длинах волн 3 и 8 мм. Данные таблицы обобщают ранее высказанные
выводы в предыдущих разделах о более высоких возможностях РЛС,
работающих в короткой части ММ-диапазона радиоволн, по
обнаружению и распознаванию наземных объектов. Очевидно, что это, в свою
очередь, обусловливает и более высокую информативность
радиолокационных сигналов таких систем. Из сказанного следует, что
первоисточником, несущим информацию об объекте, является
радиолокационный сигнал, что поясняется следующими доводами.
144
Таблица 4.1. Качественное сравнение информационных свойств
активных и пассивных РЛС
Тип РЛС
обнаружения
1 Активные 1
РЛС
(Я=8мм)
1 Активные
РЛС
(Я=3 мм)
1 Пассивные
(радиометрические)
РЛС
Информационные параметры объекта
Возможности
обнаружения
1. Групповые 1
и одиночные
объекты,
движущиеся со
скоростью V\.
2. Неподвижные
объекты с
вероятностью Р'о-
1. Групповые
и одиночные
объекты,
движущиеся со
скоростью У"л<¥'л.
2. Неподвижные
объекты с
вероятностью Р'о < Р'о
1. Движущиеся
и неподвижные
объекты не хуже
активных РЛС в
соответствующих рабочих
диапазонах.
2.
Замаскированные объекты
штатными и
подручными
(ветками, листвой и
т.д.) средствами
лучше, чем
активные РЛС.
Дальность
Сразреше- 1
нием
AD'
С
разрешением
Д/Г<Д£>'
Грубая
с
использованием
разнесенных
антенн на
расстоянии
не менее
1000 Я
Скорость
С разреше- 1
нием
С
разрешением
АГ<А V
Определяется
с
использованием
активного
радиолокационного
дальномера
Угловые
координаты
Сразреше- 1
нием
по азимуту
А/Р и углу
места А ц>1
соответственно.
С
разрешением
по азимуту
и углу места
А 9п< А (р\
Как
активные
РЛС
Возможности!
распознавания
Движущиеся 1
объекты
с
вероятностью Р рд
и
неподвижные
с
вероятностью Ррн.
Движущиеся]
объекты
с
вероятностью
Р" < Р'
г рд -• рд
и
неподвижные с
вероятностью
Р" < Р'
i рн ^ Г рН
Возможно 1
лучшее
распознавание
неподвижных
объектов
Известно, что радиолокационный сигнал для измерения дальности
представляет собой короткий импульс, и чем он короче, тем точнее
можно измерять дальность, т.е. такой импульс считается более
информативным. Другой путь решения повышения информативности основан,
например, на применении метода сжатия импульсного сигнала. В
данном случае излучается радиоимпульс большой длительности, но с ши-
145
роким спектром, что достигается внутриимпульсной модуляцией по
частоте и фазе. Этот метод позволяет при ограниченной пиковой
мощности передатчика получить сигналы с большей энергией, чем при
использовании коротких импульсов, при этом также сохраняются и
характеристики разрешения по дальности в случае одинаковых по ширине
спектров. В РЛС, работающих в короткой части ММ-диапазона, имеется
принципиальная возможность получения более коротких импульсов, так
как здесь появляется возможность реализации импульса с более
широкой базой А/ти по сравнению с РЛС, работающих в более
длинноволновых диапазонах. В данном случае, расширение базы влечет за собой
повышение информативности радиолокационного сигнала.
Также можно сказать и про другие параметры РЛС. Так, точность
измерения угловых координат РЛС, работающих в короткой части
ММ-диапазона радиоволн, в сравнении с РЛС, работающими в более
длинноволновых диапазонах, также выше за счет более узких ДНА при одинаковых
размерах антенн. Возможности по распознаванию таких РЛС тоже лучше.
Здесь можно определять формы, размеры объектов, т.е. появляются
характеристики, позволяющие получить дополнительную информацию.
Цель данного раздела - исследование информационных
возможностей РЛС обнаружения наземных объектов, работающих в короткой
части ММ-диапазона радиоволн, в зависимости от их рабочих
параметров. Возможности РЛС, как будет показано ниже, можно уяснить на
основе количественных оценок и рассмотрения так называемых
информационных систем.
Согласно работе [4], информационная система (типовая
радиотехническая система) предназначается для передачи, обработки,
извлечения и отображения информации, а также в целях управления,
автоматического регулирования и анализа состояния наблюдаемых объектов. В
зависимости от выполняемых функций информационные системы
применяются для передачи информации, обработки информации, хранения
и отображении информации и регулирования и управления. Системы,
которые предназначены для обработки принятого сигнала и
дальнейшего его применения в зависимости от интересов потребителя,
определяются как метрические. Радиолокационные средства в большей степени
относятся к метрическим системам, основная функция которых состоит
в получении количественных данных о движении, ориентации и
физических свойствах наблюдаемых объектов.
В отличие от систем связи и телеуправления, где основная задача
заключается в передаче готовой формы сигнала по возможности с
меньшими искажениями, в метрических системах формирование
радиолокационного сигнала осуществляется в результате отражения
электромагнитной энергии от наблюдаемого объекта и ее распространения в
146
атмосфере до РЛС. Этот процесс достаточно сложный, так как он связан
с изменением многих параметров отраженной волны, таких как
амплитуда, фаза, поляризация, временное запаздывание прихода сигнала и др.,
обусловленных характером функционирования наблюдаемого объекта и
условиями распространения радиоволн.
Важной особенностью радиолокационного сигнала является то,
что сам сигнал есть продукт пространственно-временного процесса, т.е.
определяется совокупностью параметров изменения этого сигнала в
пространстве, во времени и в энергетике. Все эти параметры несут
определенную информацию
В этом случае объект наблюдения, трасса распространения радиоволн
и сама РЛС составляют так называемый радиолокационный канал (РК).
Необходимо также отметить, что особая роль в РЛС принадлежит
антенной системе, выполняющей функцию обработки сигнала по его
пространственным параметрам (ориентация фронта отраженной волны,
поляризация). После этого сигнал должен передаваться по волноводно-
му тракту с возможно малыми потерями, и далее в качестве
заключающего элемента обработки сигнала применяется приемная система, к
выходу которой подключается потребитель информации.
На всех этих этапах происходит соответствующее преобразование
сигналов, которые и являются предметом исследований.
Таким образом, радиолокационный сигнал - это функция ряда
параметров, характеризующих информацию об объектах, и, по сути,
является многопараметрическим носителем информации, многомерная
обработка которой и осуществляется в радиолокационном канале.
Отметим еще ряд важных определений, принятых в теории и
практике обработки радиолокационной информации, которые часто
используются в исследованиях информационных свойств. Прежде всего дадим
определение основному термину в теории информации, что такое
«радиолокационная информация».
Под радиолокационной информацией понимаем совокупность
сведений об интересующем нас объекте, извлекаемых в результате приема
и анализа радиоволн, отраженных от данного объекта.
Радиолокационная информация, прежде всего, является результатом наличия или
отсутствия объектов в районе радиолокационного наблюдения, и при
наличии объекта в секторе поиска определяется его местонахождением, а
также параметрами движения (функционирования) и физическими и
отражающими характеристиками.
Поступающая на РЛС информация «закодирована» во временной и
пространственной структуре электромагнитных волн, приходящих от
объекта. Задачей обработки информации в РЛС является
«декодирование» приходящих отраженных сигналов от объекта на фоне помех,
147
обобщение извлекаемых сведений и представление их в наиболее
удобном для исследования виде.
Для количественного изучения информационных возможностей
РЛС обнаружения можно применить математическое моделирование.
Всю совокупность вопросов обработки радиолокационной
информации из-за сложности и их большого объема, безусловно, трудно
изложить в одном разделе. Поэтому остановимся на наиболее важных
характеристиках информационных возможностей РЛС обнаружения:
получение возможно максимального количества потенциальной
информации об обнаруживаемом объекте с использованием указанных видов
РЛС, а также определение возможных потерь информации в таких РЛС
на этапах обработки полезного сигнала.
Мерой максимального количества потенциальных возможностей
радиолокационной информации является уровень получения
предельного или максимально-возможного количества полезной информации об
объекте в процессе приема, обработки и передачи сигналов от объекта с
минимальными потерями. Чем выше в данном случае возможности
радиолокационной системы в получении полезной информации, тем она
считается эффективнее.
Как было сказано выше, объект наблюдения, трасса распространения
радиоволн и сама РЛС составляют так называемый радиолокационный
канал. Поэтому основным инструментом (элементом) в моделировании будет
также модель радиолокационного канала соответствующей РЛС, где в
качестве показателей эффективности по информационным возможностям
будут приняты потенциальное количество информации радиолокационного
канала и уровень возможных потерь информации.
4.2. Информационные возможности радиолокационного
канала
4.2.1. Модель радиолокационного канала
Статистическая модель оценки информационных возможностей
радиолокационного канала как метрической системы, включает в себя
все основные этапы передачи радиолокационной информации от
объекта до потребителя.
В качестве такой модели, согласно [2-4], можно представить
общую модель радиолокационного канала (рис. 4.1).
1 Область
чара *стер и стик,
1 я*
Область
сигналов,
Да
Область 1
решений, [
1 я, |1
Рис. 4.1. Модель радиолокационного канала
148
Модель включает в себя основные этапы получения информации
об объекте: область множества объекта Rx\ область множества сигналов
Ла; область множества решений Rr
Область множества характеристик объектов включает в себя
все физические параметры объектов наблюдения в процессе их
функционирования, которые определяют закономерности формирования
отраженных (излученных) сигналов.
Область множества сигналов является совокупностью сигналов,
сформированных в РК в процессе переноса их от источника (объекта) до
РЛС с учетом воздействия на них помех.
Область множества решений объединяет в себе результаты
обработки отраженных и преобразованных в антенной системе и приемнике
сигналов от объектов наблюдения в информацию, готовую к выдаче
потребителю.
Модель позволяет также проанализировать свойства РК и
определить количественные характеристики информационных процессов.
Для определения области множества характеристик в модели РК
воспользуемся результатами исследований статистической теории
обнаружения радиолокационных сигналов и теорией вероятностей [4,12-14].
Запишем все возможные характеристики объектов наблюдения в
виде независимых параметров xh x2,..., */,...,*„, которые определяются их
физическими свойствами. При этом область характеристик
представляется в виде множества Rx возможных значений параметров объекта,
состоящего, в свою очередь, из ряда подмножеств rx e Rx. Тогда для
каждого из параметров лс, множества Rx (подмножества гх) может быть
определен закон распределения плотности вероятности р(хг), который
представляет собой априорную вероятностную меру информации Р(х,).
Для моделирования области сигналов Rx воспользуемся
формализованной записью отраженного от объекта радиолокационного сигнала
в виде [4, 14]:
u = U(t,bl,b2,b3;*), (4.1)
который является функцией независимых переменных времени t,
относительных пространственных координат b{,b2,b3 и совокупности а = аот
из т параметров а,. Поскольку радиолокационный сигнал u=f(t,bi9bm)
является «изображением» объекта наблюдения, в его параметрах ат
содержится информация о характеристиках объекта хи.
Чтобы для математического представления области сигналов не
писать их в виде линейной алгебраической системы уравнений,
воспользуемся теорией матричного исчисления. В этом случае изменения
характеристик сигнала можно выразить зависимостью векторов-
столбцов приращений а, и xt
149
Ia^
Aa2
\\Aam
= W
АхЛ
\Ax2\
kl
(4.2)
где
\Aa{
Aa2
\\Aam
и
**'
Ax2
к
векторы-столбцы приращений характеристик
объекта и сигнала соответственно; W =
L21 Л22
Mm
Чп
L/iil
*",
ml
информаци-
- элемент мат-
(л d0)a
онная матрица РК в матричном исполнении; к „ = —гт
рицы; af.=am(x,.).
Матрица W представляет собой характеристику связи между
изменениями (приращениями) параметров в области характеристик
объекта и в области сигналов.
Далее для представления прохождения сигнала на этапе от области
сигналов в область решений полагаем, что сигнал на трассе «объект -
PJIC» претерпевает изменения вследствие воздействия на него
различного рода искусственных и естественных помех, т.е информация
приходит к РЛС в искаженном виде.
Для оценки характеристик радиолокационного сигнала с учетом
воздействия помех воспользуемся теорией конечного числа состояний
объекта, определяемой числом градаций измеряемой характеристики
сигнала Mk, которая математически выражается как [4]:
Л/
Мк=±-
(4.3)
где Цк - коэффициент достоверности по параметру сигнала а;; Е(ц) -
максимальное значение среднеквадратической ошибки оценки характе
ристиких,; (xj,...,x]1) - диапазон значений характеристик xt.
150
Из выражения (4.3) следует, что измерения характеристик объекта
даже при идеальном приемном устройстве на выходе РЛС можно
зафиксировать с заданной достоверностью вполне определенное количество
состояний объекта. Поэтому при оценке информационных возможностей
радиолокационного канала необходимо это помнить и учитывать.
Остановимся на рассмотрении третьего (последнего) этапа в
модели РК - на формировании информационных характеристик сигнала от
объекта к области принятия решения. Для этого проведем
преобразования с использованием энтропийного метода, который позволит более
качественно оценить происходящие здесь преобразования. Далее,
анализируются условия моделирования по всем этапам формирования от
характеристик объектов до исходной информации. Тогда все значения
параметров преобразования РК (общую процедуру преобразования
радиолокационного сигнала) при переходе к энтропийному методу удобно
представить в виде следующей информационной цепочки:
Xj-+aj-+yi. (4.4)
Поскольку между параметрами xh ah yt существует
непосредственная связь, то информацию в смежных этапах модели РК между
параметрами jc/ и ah а также между а, и у, можно соответственно
представлять в виде [3]:
Aahxb = H{xb-H{aJxd (4.5)
и
J(yhal) = H(ai)-H(ai/y,l (4.6)
где #(*,), H(xi/ai), #(д,) и #(#,/>>/) - значения энтропии сигналов о
обнаруживаемом объекте, в соответствии с информационной цепочкой
(формула 4.4).
Соотношения (4.5) и (4.6) для описания информации об объекте в
районе радиолокационного наблюдения можно обобщить на всю
совокупность параметров сигнала. Представим, что наблюдаемый объект в
области характеристик объекта обозначается случайным вектором х, а
соответствующие параметры сигнала в области сигналов представим в
виде случайного вектора а. Если каждая из характеристик объекта лс,
связана только с одним из параметров сигнала а„ то в этом случае
характеристическая матрица объекта для РК (см. (4.2)) примет
диагональную форму и информация об объекте, содержащаяся в оценках
параметров сигнала, будет описываться зависимостью:
У(у,х) = £./(>>,*,). (4.7)
В описываемом случае для каждого из параметров yh естественно,
будут справедливы и соотношения (4.5) и (4.6). Тогда зависимость для
полного объема информации об объекте можно записать в виде
151
/г
J(y,x) = £[tf(a,)-tf(a,/^)].
(4.8)
Выражение (4.8) дает общее представление о информационных
возможностях многопараметрического РК. Однако для практической
оценки эта зависимость неудобна, поэтому необходимо ее видоизменить
к более практичному виду для расчета. Поскольку процесс
формализации информационных возможностей находится в прямой зависимости
как от характеристик РЛС, так и от параметров объекта, преобразование
зависимости (4.8) производилось через детерминированные
зависимости основных параметров объекта и характеристик РЛС. Здесь также
требуется учитывать потери информации, имеющиеся при обработке
радиолокационных сигналов в приемной системе РЛС. Однако данный
вопрос является не только одним из интересных и важных в теории
статистической обработки радиолокационных сигналов, но и требующим
дополнительных достаточно объемных исследований, поэтому
отнесемся к нему как к самостоятельному вопросу и остановимся на нем более
подробно в последующих исследованиях настоящего раздела.
Но пока учет потерь информации в приемной системе РЛС будет
осуществляться через зависимость точности измерения параметров
отраженного сигнала (4.3).
С учетом сказанного, путем математических преобразований из
формулы (4.8) можно получить зависимость для определения
предельного количества информации РК в следующем виде [4,9]:
т
•Аллах =£1°8
Jfc=l
j4 (*■/)**
1+-
Ик
л/ад
(4.9)
4.2.2. Оценка количества информации
радиолокационных систем обнаружения наземных объектов
в миллиметровом и сантиметровом диапазонах радиоволн
На основе (4.9) возможна оценка информативных возможностей
РК в различных диапазонах радиоволн. Такие расчеты были проведены
в [9] по следующей методике.
1. Допустим, что с помощью РЛС обнаружения наземных объектов
можно определить следующие параметры объекта: дальность до него
Х\ = D; радиальную скорость движения объекта х2 = dD / dt = V\ азимут
152
*з = в и угол места х4 = <р, а также связанные с этими параметрами
пространственно-временные характеристики, так как временное
запаздывание сигнала а\ = тс = 2D/c, доплеровский сдвиг частоты а2 - F = 2Vf0 /с
(/о - несущая частота) и угловые перемещения а3 = Л0 и а4 = = А<р.
Параметры дальность, скорость и угловые координаты в модели РК
относятся к области характеристик объекта, а вторая группа
пространственно-временных характеристик - к области сигналов.
В этом случае элементы матрицы в выражении (4.2) могут быть
записаны в следующем виде:
к _^L-2. к _да1_У±. _сЦ_1. _^i_i (4т
дх2 с дх2 с дх3 дх4
2. Представим, что в PJ1C применяется зондирующий сигнал, как
наиболее часто встречающийся в практике с колоколообразной
огибающей
и,(1) = ит^Лш, (4.11)
где ав - вещественная величина, характеризующая форму сигнала.
Предположим, что длительность сигнала тс взята на уровне 0,5,
тогда среднеквадратическая величина ширины его спектра Д/= tcv#/2,
а среднеквадратическая длительность сигнала tc = тс/2 4п .
В этом случае потенциальная разрешающая способность по
дальности и скорости будет характеризоваться соотношением
неопределенности тсА/= 1, а в случае гауссовского распределения поля по апертуре
антенны соответственно будут равны:
A#i = тс; Аа2 = 1/тс; Аа3 = Xldv\ Aa4 = A/dB, (4.12)
где dr, dB - размер апертуры антенны в горизонтальном и вертикальном
измерениях соответственно.
3. Потенциальная точность измерений отраженных от объекта
сигналов, входящих в зависимости (4.3) и (4.9), будет определяться
дисперсиями ошибок:
ад=м? ад=^; т)=ш: Е{а«)=ш (413)
где Э - энергия спектра; Бш - спектральная плотность шума; 23/Sm -
удвоенное отношение, представляющее собой классическую форму
отношения сигнал-шум qc.m [1].
Расчетная формула с учетом изложенных исходных условий
запишется так
153
_2(А-Д)1о1
1+
2(Д,-Д)
щ^Щ)
l°g
1+
2(F2-^)
cii^Efa)
ctSa^
log
1+
KMz^)log,
сДд4
1+
c^4yJE(a4)
(4.14)
где (D2-A)= AD, (^r-^i) = AK, {6r-6\) = A 0 и {<pi-<p\) = A<p- возможные
диапазоны изменения объекта по дальности расположения, скорости
движения, азимуту и углу места соответственно.
Если для слагаемых в формуле (4.14) ввести обозначения, то ее в
обобщенном виде можно представить как
^Smax ~ JlD '
'Ъв ^'•'Ъф •
где J^DiJ^viJieiJitp - составляющие суммарного (предельного)
количества информации РК по дальности, скорости, азимуту и углу места
соответственно.
4. Коэффициент достоверности у.к определяется при заданной
вероятности того, что ошибка оценки
соответствующего параметра
сигнала Зак превзойдет заданный
уровень:
ю2
ю4
106
{
Зак\>е<)]
) 2 4 6 8
Мк'
^|&4|><1=1-Ф^].(4.15)
Рис. 4.2. График определения
коэффициента достоверности
Если задаться вероятностью
правильной фиксации
функциональных изменений параметра
P\\Sak\ >£o], то по графику на рис. 4.2
можно определить значение //* [4].
5. Расчеты проводились для РЛС в диапазоне СВЧ на
«конкурирующих» длинах волн 2, 3, 8 мм и 3 см. Обозначим соответствующие
станции как гипотетические РЛС-1г и РЛС-2г и существующие РЛС-Зс
и РЛС-4с. Выбираем характеристики указанных станций: для
гипотетических в соответствии с параметрами РЛС обнаружения наземных
объектов, работающих в короткой части ММ-диапазона радиоволн, а для
существующих - РЛС типа CHAP (длина волны 8 мм) и РЛС типа
ПСНР (длина волны 3 см). Основные характеристики этих РЛС
приведены в табл. 4.2.
154
Таблица 4.2. Основные параметры РЛС для сравнения
информационных возможностей
Характеристики РЛС
Форма антенны
1 Размеры антенны, мм:
по горизонтали dr;
по вертикали dB
1 Длина волны, мм
1 Длительность импульса
тс, мкс
1 Минимальная дальность
действия (мертвая зона)
Д,м
1 Минимальная измеряемая
скорость движения объекта
| Pmin,KM/4
Значения параметров для РЛС типов
РЛС-1г
РЛС-2г 1
РЛС-Зс
РЛС-4с |
Усеченный параболоид |
700
400
2
0,2
30
2
700
400
3
0,3
50
2,5
1700
400
8
0,4
70
3,5
700
400
30
0,5
100
| 5
Остановимся более подробно на оценке количества информации
РК в соответствии с формулой (4.14) для указанных типов РЛС и
анализе ее результатов.
Рассмотрим первую составляющую суммарного количества
информации РК (формула (4.14)) по дальности действия РЛС, но при этом
подставим туда исходные данные, приведенные в указанной выше
методике для этих расчетов.
В данном случае расчетная формула для дальности действия РЛС
будет выглядеть в следующем виде:
•'ю —
2AD
стг
log
1+-
2AD
Wc
?с-ш
(4.16)
Анализируя формулу (4.16), можно видеть, что величина J^
определяется, прежде всего, такими параметрами, как диапазон
измеряемых дальностей АД длительность импульса сигнала тс и отношение
сигнал-шум qc.m.
Необходимо также отметить, что влияние величины qc.w не так
сильно сказывается на изменении количества информации, но оказывает
решающее значение на качество приема радиолокационного сигнала, а
значит и на уровень потерь находящейся в этом сигнале информации.
На этом вопросе остановимся более подробно в последующем
параграфе настоящего раздела.
155
Для проведения расчетов по формуле (4.16) примем следующие
числовые значения: /и{ = 5, что соответствует по графику на рис. 4.2
точности измерения сигнала /'[(Л**! > £0] = Ю"3, отношение сигнал-шум
<7с-ш =Ю, что соответствует уверенному приему сигнала в современных
РЛС обнаружения наземных объектом.
На рис. 4.3 приведены расчетные зависимости количества
информации Jm (в логарифмах при двоичном основании) от величины
диапазона изменения дальностей при работе РЛС обнаружения, где кривые
1-4, соответствуют РЛС-1г, РЛС-2г, РЛС-Зс и РЛС-4с, с
характеристиками из табл. 4.2.
Анализируя зависимости на рис. 4.3, можно видеть, что
количество информации, представленное в логарифмическом масштабе, для
РЛС, работающих в короткой части ММ-диапазона радиоволн, может
быть выше в 5... 10 раз, чем для РЛС, работающих в более
длинноволновых диапазонах радиоволн (8 мм и 3 см).
С увеличением диапазона измеряемых дальностей AD количество
информации для РЛС обнаружения всех рассматриваемых диапазонов
волн увеличивается.
На рис. 4.4 приведены зависимости количества информации РК с
изменением длительности импульса для указанных РЛС обнаружения и
различных диапазонов измеряемых дальностей от D{ до D2, равных 1, 3, 5, 7 и
10 км. Полученные данные позволяют сделать вывод, что при всех
диапазонах измеряемых дальностей AD при увеличении длительности импульса
Рис. 4.3. Зависимость количества Рис. 4.4. Зависимость количества
информации Jjj) от диапазона информации JU) от длительности
измеряемых дальностей импульса
156
сигнала количество информации РК снижается, т.е. для получения большей
информации в РЛС обнаружения, что также соответствует более высокой
точности измерения дальности до объекта, необходимо стремиться к
применению в станциях более коротких импульсов.
Рассмотрим вторую составляющую суммарного количества
информации РК по измерению скорости движения объекта с применением
РЛС обнаружения:
С
При проведении расчетов, как и в предыдущем случае, приняты
исходные данные для параметров: //2 = 5и <7с-ш=10.
На рис. 4.5 приведены
зависимости Jlv от величины
интервала измеряемых скоростей, AF,
где кривые /, 2, 3 и 4
соответствуют станциям РЛС-1г, РЛС-2г,
РЛС-Зс и РЛС-4с. Минимальные
значения скорости движения
объекта, определяемые каждой РЛС,
даны в табл. 4.2.
Из рис. 4.5 видно, что с
увеличением интервала (диапазона)
измеряемой скорости движения
объекта количество информации
возрастает, причем для станций,
работающих в более короткой
части ММ-диапазона радиоволн, эта
величина может быть выше более
чем на порядок.
На рис. 4.6 представлены за- Рис. 4.5. Зависимость количества
висимости величины Лу от дли- информации J1V от диапазона
измеряемых скоростей движения объекта
тельности импульса тс для
различных значений А V. На рис. 4.6,(7 введены следующие обозначения:
сплошные кривые - для РЛС-1 (длина волны 2 мм) и пунктирные - для РЛС-Зс
(длина волны 8мм), а на рис. 4.6,6 сплошные кривые - для РЛС-2 (длина
волны 3 мм) и пунктирные - для РЛС-4с (длина волны 3 см). На этих же
рисунках зависимости 7-5 получены для интервалов скоростей движения
объекта А К, равных 10,30, 50, 70,90 км/ч соответственно.
1, 2АК/Ог0
сы—
(4.17)
, log
г::::
........
...........
г -"-г -■
i Ъ
1 • II
]
[
1
у
/
L
•;-;;■
{::...
2
, и
:.':"."
—7
---
::.".'":
yL
£?
;_":.
—
г.:-
—
..._....
"77"
-
,
3
.]
JZ'j
—
~-W
20
ДГ, км/ч
157
Рис. 4.6. Зависимость количества информации J^v от длительности импульса
K.log
42
\
52
6
72
iA
<
S?
:-~
—
¥:
У:...
-■
, —
:~~
__—
^>>-
... -*%.
-~~
^ -
.£--'""
—
:гЁг
гт.;:
. ~£Г~1
^ *
^^=Чг
■^а
^^.™.;г->
2
3S4^_:"
1
"'.. "'..":!.
"т^Щ
::-г~) :|
5 ill
i
Е^ъцЬц
Trri^v'hs»
^
•■„• i'-j
fT^Ti
ОЦ]
VlN
~-=^И
..Л^Ы^Й
i "^ 1
! ]ч
■■-г-.-г--
150 100
15
/о, ГГц
На рис. 4.7 приведены
зависимости Jlv от изменения несущей
частоты станции при заданных
значениях А К, соответственно равных
А К! =10 км/ч (кривая 7), AV2 =
= 30 км/ч (кривая 2), АК3 =50 км/ч
(кривая 5), АК4 = 70 км/ч (кривая 4)
и АК5 = 90 км/ч (кривая 5).
Анализируя вид кривых на
рис. 4.6 и 4.7, можно подтвердить
сделанный выше вывод, что
станции, работающие в более короткой
части СВЧ-диапазона при
измерении скорости движения объекта,
могут иметь более высокие
информационные возможности.
Расчетные формулы для третьей и четвертой составляющих в
формуле (4.14) после преобразований в удобный для расчетов вид за-
Рис. 4.7. Зависимость количества
информации JxV от несущей
частоты
пишем как:
/ 2*4, I
Ji0=—T^l°g|
2A0dr
(4.18)
158
2^B 1 I
1+
2AK
(4.19)
Результаты расчетов по формулам (4.18) и (4.19) приведены на
рис. 4.8 и 4.9, где кривые 1,2,3и4 соответствуют станциям РЛС-1г, РЛС-
2г, РЛС-Зс и РЛС-4с с параметрами исходных данных, согласно табл. 4.2.
8
б
4
3-
2
юб
6
4
3
2
105
8
б
3
4
10
8
6
4
3
2
ю3
8
б
4
3
2
in2
10|
•=i
i
}
(
ч
1
1
^
Ц
2
^
«
й
Щ
3
s
б!
4
—г
=
!
—1—j—1
1 1 '
-UU
p-*S^5H-"^
d=
1
}
10 30 50 70 90
А0,град
Рис. 4.8. Зависимость J^e
от точности измерения азимута
Рис. 4.9. Зависимость Js
от точности измерения угла места
На рис.4.8 представлены зависимости количества информации при
измерении азимута объекта Jie от величины сектора обзора по азимуту
А0, а на рис. 4.9 - при измерении угла места объекта 3Ъ(р от величины
сектора обзора по углу места А^. Из рисунков видно, что с увеличением
сектора обзора по угловым координатам количество информации в РК
увеличивается. Следует также отметить, что РЛС, работающие в
короткой части ММ-диапазона и в однотипных условиях (параметрах), в
сравнении с РЛС, работающими в более длинноволновом ММ- и в СМ-диапа-
зонах радиоволн, на порядок и более выше.
Расчетные данные показывают, что количество информации как мера
информационных возможностей зависит от статистических свойств РК.
Максимум информации может соответствовать максимуму априорной
159
энтропии и связан с вполне определенным законом распределения
вероятностей сигналов об обнаруживаемом объекте. Отыскание таких
распределений проводится путем решения различных вариационных задач.
Исполнительный инструмент по выделению информации, в свою
очередь, определяется структурой сигнала, помех и видом обработки
сигнала и помехи в тракте приемного устройства.
4.3. Информационные свойства радиолокационных
систем обнаружения наземных объектов
при обработке сигнала и уровни информационных
потерь в них
4.3.1. Математическая модель оценки уровня потерь
информации в радиолокационных системах обнаружения
наземных объектов с применением оптимальных
и непараметрических обнаружителей
Для нормальной работы радиолокационных систем при
обнаружении сигналов в случае поступления с выхода приемника смеси сигнала
и помехи используются автоматические обнаружители. Наибольшее
распространение в современных РЛС нашли оптимальные,
непараметрические, а также последовательные обнаружители.
Для проведения оценки информационных возможностей РЛС
обнаружения наземных объектов, с точки зрения минимизации потерь
информации, предположим, что в них могут быть применены
оптимальные и непараметрические обнаружители.
Известно, что количество информации J(aly) радиолокационной
системы, которое определяет результат измерения у, о измеряемой
величине а может быть оценено с помощью зависимости
J(a/y) = Hcp(a)-Hcp(a/yl (4.20)
где #ср(я) - средняя энтропия измеряемой величины параметров; Нср(а/у) -
средняя совместная энтропия измеряемой величины и эксперимента.
К наиболее важным факторам, оказывающим влияние на величину
энтропии, относятся количество информации и качество процедуры
обработки в области решений Ry (см. рис.4.1). К таким факторам можно
также отнести число состояний принимаемого сигнала, априорные
вероятности этих состояний, ограничения, налагаемые на процесс
получения отсчетов (выборок) самой радиолокационной системой и
радиолокационной обстановкой, а также стоимости (цены) правильных и
неправильных решений.
При наличии достаточных сведений об априорных вероятностях,
ограничениях, налагаемых на процесс получения выборок, радиолока-
160
ционной обстановке и на основе стоимости правильных и неправильных
решений обнаружители могут быть оптимизированы путем подбора
критериев стоимости [1]. Так, простая функция расчетной стоимости
ожидаемых потерь может быть записана в виде:
Е(с) = СтР(а)(\-РП0) + Ср[\-Р(а)]Рлт, (4.21)
где С„„ Ср - стоимости пропуска объекта и ложной тревоги соответственно.
Считается также, что объем выборки (количество импульсов в
пачке) Nn заранее определен, а стоимость правильных решений нулевая.
Дальнейшая процедура заключается в том, чтобы минимизировать
функцию Е(с). Для испытания статистических гипотез минимизации
вероятности пропуска объекта (1-Р„.о) при заданной вероятности ложной
тревоги Рлт применим критерий Неймана-Пирсона.
Представим, что РЛС обнаружения наземных объектов
обеспечивает ведение наблюдения в заданном секторе радиолокационного
наблюдения (РН), где число элементов разрешения (сигналов) составляет
N, а число элементов, занимаемых в них объектами, - N0. Тогда
плотность объектов в пространстве N</N при достаточном статистическом
уровне может приближаться к априорной вероятности Р(а). Задаваясь
законом распределения вероятностей по формуле (4.20), можно
определить значение J(a/y\ так как составляющие его слагаемые есть не что
иное, как энтропии равные
tfcp(a) = lgiV; Н^а/у) = ^РХа)1вР^а). (4.22)
/=i
Приведенные пояснения позволяют на основе метода энтропии
формулу (4.21) с учетом зависимости (4.20) преобразовать к
следующему виду [9]:
l-2^(l-0-2(l--^)F„
JZ = N
Потери информации
(4.23)
AJZ = N-JZ-N
2 + 2^(1-РП0)-(1-^К.т
а относительный уровень потерь
^ = 2^(1-Р,0) + 2(1-^лт. (4.24)
N N N
В выражении (4.24) первое слагаемое обусловливает потери
информации, связанные с пропуском объекта, а второе - с ложными тревогами.
Для определения условий, при которых потери радиолокационной
информации минимальны, потребуется отыскание оптимального соот-
6—3523
161
ношения вероятности ложной тревоги ^л°т и вероятности правильного
обнаружения Р°0. Тогда формула (4.24) примет следующий вид:
[т] =2^(1-/>п(о) + 20-^)Гл<°т). (4.25)
Допустим, что потери информации AJ во всем секторе РН
заложены в одной ложной тревоге или в одном пропуске объекта. Первая часть
формулы (4.25) в этом случае Меньше или равна MN. Если
предположить, что минимальные значения потерь радиолокационной
информации соответствуют значениям отношения сигнал-шум, то формулу (4.25)
можно преобразовать:
K(q^a) = \-(p$-—F%i\<^, (4.26)
V a J 2N
где <7С_Ш - отношение сигнал-шум; а = NJN.
Выражение (4.26) является основной зависимостью, дающей
сравнительную оценку информационных свойств РЛС обнаружения
наземных объектов в случае использования как оптимального, так и
непараметрического обнаружителей.
В общем случае при обработке последовательности
флуктуирующих сигналов вероятности правильного обнаружения и ложной тревоги,
согласно формуле (4.24), определяются выражениями [15]:
со со
/>по = J/>(Z)</Z, F„=jp0(Z)dZ, (4.27)
z* z*
где Р0{2) и Pt(Z) - плотности распределения вероятностей квадрата
модуля корреляционного интеграла при условии отсутствия и наличия
отраженного сигнала.
Эти распределения являются ^-распределениями с 2и0 и 2л,-
степенями свободы:
po{zJ-ikJ0 2^^_;^\
оУ [e0[Z]) Г(и0)
(4.28)
( v —"-H2
УФ\) Г(ц)
где Г() - гамма-функция.
Вычисление по формулам (4.27) и (4.28) представляется
несложным в случае использования в приемнике РЛС обнаружения наземных
объектов когерентного накопителя.
162
Вероятность правильного обнаружения выражается через
вероятность ложной тревоги, которая вычисляется с помощью уравнения:
dF\ N
= 0, F=Fopt.
(4.29)
Для решения уравнения (4.29) необходимо также использовать
уравнение
dZ'{N ' °'Z 0D"
^opt'
(4.30)
определяющее оптимальный порог обнаружения Zopt, при котором
потери информации минимальны. С учетом сказанного, выражения (4.27)
можно написать в виде:
AF =_ё_
at ят ez'
СО
\P0(Z)dZ
.31
= -PoV ),
(4.31)
дгл ™} dt
00
1- [WW
dZ
=W\
На основании формулы (4.30) с учетом зависимостей (4.24) и (4.31)
запишем
_8_
#L =4^>/Л)}=о,
и с учетом формулы (4.28) можно получить уравнение
\-а
( \"*
а
№].
"о
•ч-1_1_ :*wf* =
^opt
Ци0)
»' I Z4-i_LP_£;H *
E\Z\) * Г(ц)
Логарифмируя обе части этого уравнения, имеем
(«,-«0)lnZ*pt-
"/ "о
Ф\ E0[Z]j
opt ' E\Z] ° E0[Z]
-In Г(ц) + In Д w0) - In — = 0.
or
вида:
(4.32)
Используя приближение In x « 2X+1 при х > 0, придем к уравнению
163
Mz\ Ео[А)
-In
%+•
Mz] EAZ\
-2(и,-«о)-
Y*
МЛ.
EAZ\
\"o
"0 J
Г(^ а
-Дй).1-«
-In
w,
\>h
MZV
Г(«,)1-а
Z +2(ni-no)-
=0,
решением которого является величина оптимального порога
обнаружения для конкретного случая. Для быстро флуктуирующего сигнала
количество импульсов в пачке (выборка) п0 = щ = N„, и уравнение (4.32)
будет иметь вид:
N.
1
1
Л
Z*+NXnE\Z] lnE0[Z] a j
= 0
Mz\ EAZ\)
Так как £,[Z]/£0[Z] = 1 + ^C.1U, а относительный оптимальный
порог обнаружителя Aopt = Aopt/E0[Z], получим
''opt
t + gc-rc
Nn4cu,
-In
(l + ^fO-g)
a
(4.33)
Исследование формулы (4.33) на экстремум приводит к выражению:
*7с-штах л.т
1
-In
\-а
2^Лс-ш «г
1 +
8JV„
1-a
In
a
(4.34)
Используя это выражение, а также формулы (4.34) и (4.33),
получаем выражение для оптимальной вероятности ложной тревоги и
правильного обнаружения:
^п.о(0И)=еХР1~
"ош
xy_LR^
^1п(1 + ^ш) + 1п
\-а
а
Nn\n(\ + qc_J + \n
\-а
а
(4.35)
Согласно [1,15], для непараметрического обнаружителя
относительные потери информации при больших п0 и и,- определяются выражением:
{pE0-c)^p0V0 (pE0-c)Jt
= 2(\-a)-^==r f t-t2i2dt + 2a-j= f
2/2.
164
Тогда
8 (AJz
дс{ N
1
= 2а .
C=Copl 4l7tPVo
\-а
а
-(pbo-Cppt)2 -(pb0-ropt)2
е 2pVo +е 2Pv0
= 0.
Отсюда Copt =
а
2V0\n — -р(Е20-Е?)
2(£0-£,)
метрическом обнаружителе критерия Манна-Уитни
, а при использовании в непара-
С* = т
2 + ^с-ш1п1"^ ,^(3qM,+4)
_ 3^с.ш а 4(2 + яс_ш)
Оптимальные значения вероятностей ложной тревоги и
правильного обнаружения для непараметрического обнаружителя будут:
*Um) =O(-0,614V^-^^-0,817-^^^Inb^, (4 36)
2 + <7с-ш 9с-ш>/^ а
^о(н„) = Ф(0,614л/лГ
.csn^i^in-1-"
2 + ?с.ш ' ЗсшТ^п «
(4.37)
Подставляя формулы (4.34) и (4.35) для оптимального
обнаружителя и формулы (4.36) и (4.37) для непараметрического обнаружителя в
выражение (4.26), соответственно, можно получить расчетные
зависимости для оценки потерь радиолокационной информации:
для оптимального обнаружителя
^(9с-ш'«. WJopt =* ~\ exPi
JV„ln(l + gc.J + ln
\-а
а
1 1
fo ml l««
N„ln{l + qc.J + \n
\-a
a
^"lexpJ-liS*
^й1п(1 + дио) + In
1-ar
a
F 1 l + ^c.
^ w!
3w!l «
/и=0
W„ln(l + 4c_J + ln
1-or
(2
(4.38)
165
для непараметрического обнаружителя
Ф
К(дс_ш,#,Л^)нп=1-
2 + 4с-ш
0,б14^^-0,817-2 + ^
\-а
Ф
а
0,614
-0,817
(4.39)
4.3.2. Оценка уровня померь информации в радиолокационных
системах обнаружения наземных объектов
в миллиметровом и сантиметровом диапазонах радиоволн
По формулам (4.36}-(4.39) проводились расчеты, результаты
которых приведены на рис. 4.10 и 4.11 в виде зависимостей вероятностей
ложной тревоги и правильного обнаружения от величины отношения
сигнал-шум при различных N„ и а в случаях применения оптимального
и непараметрического обнаружителей.
Рис. 4.10. Зависимость вероятности Рис. 4.11. Зависимость вероятности
ложной тревоги правильного обнаружения
от отношения сигнал-шум от отношения сигнал-шум
Для проведения расчетов количество импульсов в пачке (выборке)
N„ и относительная плотность заполнения (распределения) объектами в
зоне РН а выбраны в допустимых пределах, чтобы определить общий
характер зависимости FnT, Pn0=fliqc-ui) и для ориентации в дальнейших
расчетах по указанным формулам. На рис. 4.10 и 4.11 зависимости /
получены для N,=3 и а = 10~3, 2 - для N„=10 и а = 10"2 и 3 - для N„=30 и
а = Ю-1; сплошные кривые приведены для оптимального обнаружителя,
а пунктирные - для непараметрического.
Анализ кривых на рис. 4.10 и 4.11 позволяет сделать следующие
выводы:
166
с возрастанием отношения сигнал-шум вероятность ложной
тревоги для оптимального обнаружителя быстрее достигает своего
минимального значения нежели в случае применения непараметрического
обнаружителя (аналогичное заключение можно сделать и для
зависимости вероятности правильного обнаружения от изменения отношения
сигнал-шум);
в случае применения непараметрического обнаружителя для
достижения высоких значений вероятности правильного обнаружения
необходимо иметь q^m > 6, при этом для минимизации потерь информации
очевидно, что для оптимального обнаружителя потребуется более
точное измерение величины qc.m.
На рис. 4.12 представлены зависимости уровня потерь информации от
отношения сигнал-шум для оптимального обнаружителя при различных
значениях параметров Nm а. Из графиков видно, что величина К в
зависимости от qc.m изменяется в
довольно широких
пределах. Так, в районе значений
<7с-ш =5... 10 величина К
вначале резко снижается, а
далее с увеличением qc,m
монотонно увеличивается.
Это указывает на то, что
минимальный уровень
потерь информации для
оптимальных обнаружителей
находится при q^ = 3...20.
При увеличении количества
импульсов в пачке уровень
потерь информации резко
снижается.
На рис. 4.13
приведены зависимости уровня
потерь информации от
изменения отношения сигнал-
шум для
непараметрического обнаружителя при
различных значениях
параметров Nm а. Обозначения на
этом рисунке такие же как и
на рис. 4.12. Из графиков
видно, что с увеличением
отношения сигнал-шум при
всех исходных данных по
167
Рис.4.12. Зависимость уровня потерь
информации от величины отношения
сигнал-шум для оптимального обнаружителя
0,9
0,8
0,7
0.6
0,5
0.3
0,2
0,1
^
\ ^
У-*
\
\
\
\ S
Vjv
7\
' 1
\
\1,
V
1 \л
\
Г*
\
\
\
ч
N
чк
\
N
к К 1
щ\
\\ы
\\)
\У
Кк1
2 3 4 5 6 7
Ч 11
\| 11
1
14
и
U
Ш\
\
Ч,
>
5 |
Ч
Н
Крите:
1 дп»#„=2.а-
2 ди W, =6, —1
3 для N„-10,— II
4 ДЛ» N.-20,-11
5 ДЛ» N. =2,а=0
t «п/»,-6, -II
; для N. -10.-//
н для N.=20,—II
дшРЛСсХ-Jw»
дшРЛОсХ-Яии
тН ■
N
П
>.04
002
8 910 20 30 40 50 70 100 ""'
Рис. 4.13. Зависимость уровня потерь
информации от величины отношения
сигнал-шум для непараметрического
обнаружителя
параметрам Nm а путем увеличения количества импульсов в пачке можно в
значительной степени снизить потери информации при обработке
радиолокационного сигнала. В отличие от оптимального обнаружителя,
где надо выбирать определенный интервал в отношении сигнал-шум,
при применении непараметрического обнаружителя можно
остановиться на каком-то предельном значении отношения сигнал-шум qcm = q^^.
Из рис. 4.12 и 4.13 видно, что выбор параметров автоматических
обнаружителей, чтобы избежать недопустимых потерь информации,
необходимо в каждом конкретном случае делать, исходя из выбранных условий и
задаваемых параметров РЛС обнаружения наземных объектов.
В дальнейшем остановимся на оценке возможностей применения
автоматических обнаружителей в РЛС обнаружения, работающих в
конкурирующих диапазонах радиоволн.
Исходные данные для расчетов следующие:
1. В качестве РЛС обнаружения наземных объектов будем
рассматривать РЛС-1г, РЛС-2г и РЛС-Зс, работающие на длине волны 2, 3
и 8 мм соответственно;
2. Сектор радиолокационного наблюдения характеризуется
величинами: по азимуту АО = 30°; по углу места А<р = 4°; по дальности
действия-до 10 км;
3. Разрешающая способность РЛС соответствует данным,
приведенным в табл. 4.3.
Таблица 4.3. Исходные данные по параметрам разрешения
Тип РЛС
РЛС-1г
РЛС-2г
РЛС-Зс
Значения параметров разрешения
ОД Д.У.
1,5
2
5
<5р, Д-У.
6
9
24
<5Дм
15
20
60
4. Количество элементов разрешения N = —, где 3D, дв, 8ф -
Р F дБдвдср *
разрешающая способность станций по дальности, азимуту и углу места
соответственно.
5. В табл. 4.4 приведены значения отношения сигнал-шум в чистой
атмосфере и в дождях средней интенсивности до 5 мм/ч (через дробь),
различной дальности действия станций.
На рис. 4.14 (для чистой атмосферы) и 4.15 (для дождя средней
интенсивности) представлены зависимости уровня потерь информации от
изменения количества импульсов в пачке для оптимального обнаружителя,
используемого в рассматриваемых РЛС обнаружения при различных
дальностях действия, где сплошные кривые соответствуют значению а = КГ1,
пунктирные - а = 10~2 и штрих-пунктирные - а = 10~3.
168
Таблица 4.4. Исходные данные отношения сигнал-шум
в чистой и замутненной атмосфере
| Тип РЛС
РЛС-1г(А=2мм)
РЛС-2г (А =3 мм)
1 РЛС-Зс (А =8 мм)
Отношения сигнал-шум в чистой и замутненной
атмосфере при различной дальности, км |
1
110/100
110/70
45/25
3
40/40
39/10
17/3
5
23/0,5
22/4
10/1,25
10
7/0
5/0
4,5/0,1 '
Рис. 4.14. Зависимость уровня потерь информации от изменения
количества импульсов в пачке для оптимального обнаружителя
(«чистая» атмосфера)
Анализируя характер изменения этих кривых можно сделать
вывод, что для РЛС-1г и РЛС-2г, т.е. для станций, работающих в
коротковолновой части ММ-диапазона, потери информации в случае
применения оптимального обнаружителя больше, чем для РЛС-Зс более
длинноволнового диапазона.
На рис. 4.16 и 4.17 (для чистой атмосферы) представлены
зависимости уровня потерь информации от изменения количества импульсов в
пачке для непараметрических обнаружителей в РЛС обнаружения при
различных дальностях действия. Значения величин а и их обозначения
для а аналогичны приведенным на рис. 4.14 и 4.15.
169
50 100 vl 2 4 6 10
2 4 6 10
\^
$ц
V
D = 3km
D-5cm
bs.
50 100 1 2 4 6 10
N„ o,
50 100 1 2
г)
д)
e)
Рис. 4.15. Зависимость уровня потерь информации от изменения количества
импульсов в пачке для оптимального обнаружителя
(дождь средней интенсивности)
К-
0,8
0,6
0,4
I 0,2]
О
1
г
1-1
«;
i!
i t
1 1
■-
РЛС-1г Г i
D=2km|
— дня а = Oil,
— дня Ое = 0,01
—для а = 0,001
1 2 4 б 10
0.2]
\
0,6 j-Vj
0.4L—I
РЛС-2г
£ = 2км
К
0,8
0,6
0,4
0,21
а)
50 100 12 4 6 10
б)
Nn о
К
1
ч Г
\\\
•
1 »3
1 1\
if
РЛС-Зс
D=2km
—
Nn
РЛС-1г
£ = 4км
1 2 4 6 10
г)
РЛС-2г
£ = 4км
50 100 12 4 6 10 50 100
в)
0,8
0,6
4.4
0.2!
50 100 12 4 6 10
Nn
\\
\
\
1 1 l
1 \
<
л
1
\
v.:
\
i РЛС-Зс
£ = 4км
1 2 4 6 10
Nn
50 100
0)
*)
Рис. 4.16. Зависимость уровня потерь информации от изменения количества
импульсов в пачке для непараметрического обнаружителя
170
°' гчГт
°'6rv
<>
Л
РЛС-1г
Л = 6км
0,8^-4
о,би_и
0,6
ОД
Nn
2 4 6 10
't
^
РЛС-2г
Д = 6км
Jj Ml I
2 4 6 10
50 100 ul 2
a)
6)
в)
H
iv
РЛС-lr
Z)=9km
6 10
г)
50 100 °
1 2 4 6 10
РЛС-2Г
■*» 0
2 4 6 10
Nn
d)
e)
Рис. 4.17. Зависимость уровня потерь информации от изменения количества
импульсов в пачке для непараметрического обнаружителя
Из графиков (рис. 4.16 и 4.17) видно, что для неоптимального
обнаружителя потери информации для РЛС обнаружения, работающих в
коротковолновой части ММ-диапазона, примерно на 0,15 К меньше, чем
для оптимального. Это объясняется тем, что для непараметрического
обнаружителя величина Fn T менее критична к изменениям q(>m по
показателю К, а следовательно использование непараметрических
обнаружителей в РЛС обнаружения, работающих в коротковолновой части
ММ-диапазона, является в значительной степени предпочтительным.
Кроме того, анализ полученных данных позволяет заключить, что в
случае использования в РЛС непараметрических обнаружителей потери
информации в РЛС обнаружения, работающих в коротковолновой части
ММ-диапазона, в сравнении с длинноволновыми РЛС значительно
меньше, а необходимая точность измерения отношения сигнал-шум
может быть ниже, чем в случае использования в РЛС оптимальных
обнаружителей. Количество импульсов в пачке может быть меньше (не
более 10-15), так как дальнейшее увеличение их числа не повышает
общей информативности РЛС.
171
4.3.3. Особенности оценки информационных возможностей
радиолокационных систем обнаружения в процессе
распознавания
Дня оценки информационных возможностей РЛС обнаружения
наземных объектов в процессе распознавания, согласно работы [1], можно
пользоваться приведенной выше методикой в процессе обнаружения, где в
качестве критерия распознавания используется отношение правдоподобия.
Основой такого решения может явиться сравнение совокупности
выбранных параметров сигнала U (аи а2, ... , ат) или
последовательности сигналов с априорно известными характеристиками сигналов
объектов данного класса.
Сама процедура сравнения в этом случае сводится к реализации
следующего алгоритма:
если Л7 > Кпор и Л7 > Л, при всех / Ф у, то принимается решение о
наличии у-го объекта;
если Л7 < Кпор при всех у, то принимается решение о наличии
только шума.
Здесь А'пор - пороговое значение решения, а Л7 и Л,- - отношение
правдоподобия для у-го и /-го объектов соответственно.
В качестве вероятностных показателей используются вероятности
правильного и неправильного распознавания, а также вероятность
ложной тревоги.
Алгоритм показателей можно представить в виде:
1. Вероятность правильного распознавания у-го объекта р\$ = Р
[решение су (/ присутствует)] = P[Aj < Knop (j присутствует)] * Р[ЛУ > Л,
при всех у Ф 1 (/ присутствует) и Л7 > Кпор], если распределения данных
для различных объектовых ситуаций достаточно отчетливо
разделяются, то P[Aj > Л,- при всех у = / (/ присутствует и Л7- < Кпор] ~ 1 и тогда
Рщ>~ [Л, > > Кпор (/' присутствует)].
2. Вероятность ложной тревоги f{J] < P[Aj > Кпор (присутствует
шум)] х P[Aj > Л, при всеху Ф i (присутствует шум и Л, > Ктр)]. Кроме того
может быть и Гл.? < Р [Л7 > Кпор (присутствует шум)]. Полная вероятность
к,
ложной тревоги F{".l = /^ Р(Л>гДе £Р- число распознаваемых объектов.
7=1
3. Вероятность неправильного распознавания объекта:
Рт = ^[решение у ( присутствует /)] = Р [Л, > КПор (присутствует /)] х
х P[Af > Ап при всех п Ф} (присутствует / и Л,- > А'пор)]. При условии, что
распределения данных, полученных об объектах, отчетливо разделены,
величина р\$ может быть достаточно малой.
172
ГЛАВА 5
Фрактальная цифровая обработка
одномерных и многомерных
радиолокационных сигналов
В этой главе изложены некоторые оригинальные идеи и синерге-
тические методы, использующие теории дробной меры, скейлинга,
фракталов и детерминированного хаоса, которые лежат в основе
новых информационных технологий по радиолокационному
обнаружению и распознаванию объектов (целей) при различных, в том
числе и малых, отношениях сигнал-фон.
5.1. Перспективные методы обработки
радиолокационных сигналов
Формирование статистической теории обнаружения
радиосигналов связано с фундаментальными
работами академика В. А. Ко-
тельникова по теории
потенциальной помехоустойчивости, т.е.
теоретически предельно
достижимой помехоустойчивостью [1,
2]. К современным
радиолокационным системам предъявляются
жесткие требования по
обеспечению таких показателей, как
способность функционирования в ус- Рис. 5.1. Тенденции изменения
ловиях сильных помех, высокое радиолокационной заметности
пространственное разрешение и
т.д. [3, 4]. С другой стороны, в
последние годы ведущие страны
мира интенсивно работают над
уменьшением радиолокационной
заметности объектов с помощью
перспективных стелс-технологий
(рис. 5.1 [5]). По данным
зарубежной литературы уменьшение
ЭПР С 10... 15 М2 ДО 0,3 М2 значи- Рис. 5.2. Потери самолетов
тельно снижает боевые потери при преодолении ПВО в зависимости
(рис. 5.2 [5]). от их ЭПР
ЭПР. м2
!6г
14 Г
Год принятия на вооружение
Относительные потери
1.0
0.8
0.6
0.4
0.2
♦
" ^—*-**" ^^
'•it» 1
0.1 0.5 1.0 2.0
3.0
4.0 5.0
ЭПР,*2
173
Для успешного выполнения таких задач требуется поиск и
разработка нетрадиционных алгоритмов и новых адаптивных прикладных
методов обработки информации об интересующем объекте на фоне
мешающих сигналов. Можно выделить несколько перспективных
направлений обработки, таких как цифровая адаптивная пространственно-
временная обработка радиолокационных сигналов, методы с
использованием текстур и фрактальная обработка, основанная на теории
детерминированного хаоса и дробной топологии.
Адаптивная пространственно-временная обработка имеет в своей
основе структуру, которая изменяется под воздействием окружающей
радиообстановки, что широко применяется в фазированных антенных
решетках, цифровых следящих фильтрах, компенсаторах помех, а также
при многопозиционной радиолокации. Классические методы
фильтрации позволяют вести оптимальную обработку радиолокационных
сигналов от объектов лишь фактически при гауссовских помехах. В
реальных условиях помехи почти всегда негауссовские и имеют
значительную интенсивность в различных спектральных интервалах.
Следовательно, в реальных условиях использование классических
алгоритмов для фильтрации малоконтрастных целей (малые отношения
сигнал-фон q\) не всегда возможно, так как необходимы большие
интервалы времени накопления отраженного радиолокационного сигнала.
Указанные причины требуют принципиально новых подходов к
решению традиционных задач радиолокации.
Назрела насущная необходимость рассматривать современные
радиолокационные системы в совокупности с каналом зондирования с
точки зрения эволюции сложных неравновесных систем, открытых для
потоков энергии, энтропии и информации. Все это и определило
развитие в ИРЭ РАН новых информационных технологий в радиолокации и
радиофизике с использованием текстурных (середина 80-х годов XX в.
[6-24]) и фрактальных (середина 90-х годов XX в.[20, 25-138]) мер на
основе принципов нелинейной динамики. По результатам этих
исследований в [25] были впервые введены понятия текстурных и
фрактальных сигнатур, а данное научное направление было кратко обозначено
как фрактальная радиолокация и фрактальная радиофизика. По сути
дела, развивается новое направление в радиофизике и радиотехнике -
применение теории динамических систем и фрактальной топологии в
задачах повышения информативности радиосистем различного
назначения. При написании данной главы автор существенно использовал
свои публикации и совместные работы с коллегами [4, 6-138, 198, 199],
в которых отражено его видение рассматриваемых проблем.
174
В основу новых информационных технологий обнаружения и
распознавания (в общем случае- фильтрации) малоконтрастных целей в
сложной помеховой обстановке были заложены нетрадиционные
методы, использующие фрактальные, текстурные и другие топологические
признаки. При этом необходимо исследовать потенциальные
возможности указанных методов для широкого класса изображений фона и целей
при отношении сигнал-фон q02 порядка единицы или меньше единицы.
В последующем изложении всегда подразумеваются радиофизические
исследования в оптическом и миллиметровом диапазонах длин волн.
5.2. Текстурные меры и текстурные сигнатуры
Вокруг цели всегда присутствуют участки фоновых отражений,
объединенные общим понятием текстуры. Это предоставляет
возможность предложить новые подходы к обнаружению малоконтрастных
протяженных целей на фоне земных покровов в полученных
радиолокационных изображениях (РЛИ).
В отличие от тона и цвета, которые относятся к отдельным
фрагментам изображения, текстура связана более чем с одним фрагментом.
Общий метод описания текстур изображения земных покровов
предполагает ее связи с пространственными распределениями и
взаимозависимостью значений яркости локальной области изображения или блока.
Поэтому текстурные признаки основаны на статистических
характеристиках уровней интенсивности элементов изображения и относятся к
вероятностным признакам, случайные значения которых распределены
по всем классам природных объектов. Решение о принадлежности
текстуры к тому или иному классу может приниматься только на
основании конкретных значений признаков данной текстуры.
В таком случае принято говорить о сигнатуре текстуры. С нашей
точки зрения, сигнатура - это распределение генеральной совокупности
измерений для данной текстуры в сценах такого же типа, как данная.
Как хорошо известно, радиолокационные сигнатуры включают в себя
временные, спектральные и поляризационные особенности отраженного
сигнала. Применение оптических и радиолокационных изображений
земной поверхности позволяет дополнить традиционные признаки
новыми, весьма существенными, позволяющими уменьшить перекрытие
сигнатур [6, 19,20].
Пространственная организация текстуры может быть структурной,
функциональной и вероятностной [19, 20, 139, 140]. Признаки текстуры
описывают характерные свойства, общие для данного класса текстур.
Анализ текстур проводится структурными и статистическими методами.
В последнем случае используют статистики 1-го или 2-го порядка. При
175
использовании статистик 2-го порядка непосредственно текстурные
признаки извлекаются с помощью матриц распределения вероятности
пространственной зависимости градации яркости Р, называемой
также матрицей распределения градиентов. Данный метод был предложен
в [139]. Экспериментально показано [141], что признаки, основанные на
параметрах корреляционных функций, не так хорошо оценивают
текстуру, как признаки, определенные по матрице градиентов Р.
Кратко рассмотрим классический подход к получению текстурных
признаков. Пусть анализируемое изображение является прямоугольным
и имеет Nx элементов разрешения по горизонтали и Ny элементов по
вертикали. При этом G = {1,2,...,Л/} - множество N квантованных
значений яркости. Тогда изображение / описывается функцией значений
яркости из множества G, т.е. /: ^х^-> G, где Lx = { 1,2,..., Nx } и Ly =
= {1,2,..., Ny} - горизонтальные и вертикальные пространственные области
соответственно. Набор Nx и Ny есть набор элементов разрешения в
растровом изображении. Матрица распределения градиентов содержит
относительные частоты ру наличия на изображении соседних элементов,
расположенных на расстоянии d друг от друга, с яркостями ij e G. Обычно
различают горизонтальные (а = 0°), вертикальные (а = 90°) и поперечно-
диагональные (а = 45° и а = 135°) пары элементов. Соотношения,
определяющие исходный набор текстурных признаков, представлены в табл. 5.1
[139], где введены следующие обозначения:
N N N
P{ij) = p(ij)iM\ S и Z ^Z и Z ; Лг(0 = £/Чи);
/ j /=1 у=1 у=1
N N N
PyU) = YdP(Uj)\ />+(") = ЕЕ/?(/'7)' i + J = n и л = 2Д...,2#;
/=1 /=1 у=1
N N
/>-(*) = ЕЕ *(/'Л' \*-1\=» и « = 0Л JV-1; (5.1)
/=1 у=1
N N
ЩХ) = -£ рх (0 logpx (0; Н(У) = -£ pY (j) logpY (У);
М 7=1
N
Q = Yj PiU k)p{j, k) I [Px (i)pY (j)l
<rx и ау- средние значения и среднеквадратические отклонения для
px(i) и py(j) соответственно.
176
Таблица 5.1. Пространственные текстурные признаки ff
Наименования
Формулы
Второй угловой
момент
/,-EI^-y)
n-i
Контраст
/2=2У
л=0
Е5>'Л
» 1'-У"1 =л
Коэффициент
корреляции
/з=^/Х 2[^(/'Л_т^т^
Дисперсия
л=ЕХ^-т>2^л
Момент
обратной разности
/5=XXh+(w)2J~W)
2tf
Суммарное среднее
/e = XW/?+(w)
и=2
Суммарная дисперсия
/7=2>-/б)2р+(«)
Суммарная энтропия
Л = Хр+(Л)1оеР+(Л)
Энтропия
Л=~Х Z р(/' Л 1о§ р0"> /)
Дифференциальная
дисперсия
Л.=Ё
п— i
Р-("), 1'-У1 =«
Дифференциальная
энтропия
W-1
/ii="-Xp-(w)logp-(w)
Информационная
мера корреляции
^2 = | А + X£p(U)[logPx(0/V(Л] /***{ЩХ)Н(¥)}
Информационная
мера
/13 =
1-ехр^-2
~Х S ^ ^ ^?)log Px ^Ру ^ " Л
Максимальный
коэффициент
корреляции
/м = (второе наибольшее собственное значение Q)
Дисперсии/!-^
f\5-flS
177
Большой объем вычислений при нахождении текстурных признаков
затрудняет определение их полного ансамбля (табл. 5.1). Впервые расчет
всего ансамбля текстурных признаков и детальный синхронный анализ
признаков /г- /28 для реальных (оптических и радиолокационных в
диапазоне миллиметровых волн), а также синтезированных текстур проведен в
1985 г. в ИРЭ РАН совместно с Воронежским госуниверситетом и
представлен полностью в [20]. При этом была поставлена и решена задача
расчета текстурных признаков с учетом дрейфа сигнатур при изменении
времени года. Частично статистические характеристики текстур - прототипов
и их внешний вид были приведены в [6, 19] и полностью, как отмечалось
выше, с базой данных из 84 значений для каждого текстурного признака в
[20]. Отметим также, что в [139, 140] не рассмотрены вопросы
информативности всех 28 текстурных признаков и нет оценки влияния размера окон
на точность определения текстурных признаков. Выбор размеров окна
обусловлен тем, что текстура определяется окрестностью точки изображения.
В [20] проведено исследование влияния размера окна на
правильную интерпретацию численных значений текстурных признаков.
Показано, что в окнах размером 3x3 или 5^5 пикселей статистические
текстурные меры больше действуют как обнаружители или детекторы
перепадов яркости, а не как измерители текстуры, хотя при этом
сокращается время вычислений. Слишком большие размеры окон могут
исказить результаты из-за влияния краев структур и границ изображений.
Однако большое окно позволяет достигнуть высокой статистической
достоверности. Как оказалось, окна 20x20 пикселей наиболее
эффективны для текстурной обработки аэрокосмических фотографий
сельскохозяйственных угодий, пастбищ, лесных массивов и других сходных
объектов. В [20] показано, что при изменении размеров окна от 80x80
до 20x20 пикселей численные значения текстурных признаков
изменялись на 5... 10%. Дальнейшее изменение размера окон приводило к
значительному искажению текстурных признаков.
В качестве исходных текстур использовались оптические (в виде
аэрофотоснимков (АФС)) и радиолокационные изображения (РЛИ) на длине
волны 8,6 мм и линейной поляризации излучения. Эксперименты по
формированию изображений проводились совместно с НПО «Алмаз» в летнее
и зимнее время года с борта вертолета Ми-8 при средней скорости полета
60 км/ч и высоте от нескольких десятков до сотен метров (см. подробнее [8,
19, 20, 22]). Анализ полученных данных позволил отметить очень важную
особенность [20]: одномерные области существования текстурных
признаков РЛИ в диапазоне миллиметровых волн (мноэюество R) почти
полностью вкладываются в соответствующие области признаков АФС
(мноэюество A): R еА. Таким образом, области признаков РЛИ как бы
сжимаются по сравнению с областями признаков АФС. Это происходит из-за
178
сглаживания в РЛИ тонкой структуры исследуемых покровов, характерной
для АФС. Следовательно, со значительной степенью достоверности
множество R можно прогнозировать по множеству А. Тонкая структура
радиоимпульсов, отраженных земными покровами в ММ-диапазоне, была
обстоятельно исследована в [18].
При возможности осуществления декомпозиции текстуры
выявляются два основных фактора. Первый соотносит текстуру с
непроизводными элементами, из которых составлено изображение в целом, а
второй служит для описания пространственной зависимости между
ними. Тоновые непроизводные элементы представляют собой области
изображения, характеризуемые определенными значениями яркости,
пропорциональной интенсивности отраженного сигнала, в свою
очередь, зависящей от значений удельной эффективной площади рассеяния
(ЭПР) сг„ земной поверхности. Так как понятие удельной ЭПР значимо
только для пространственно однородного объекта, то, следовательно,
текстура изображения реального земного покрова определяется
пространственными изменениями <т„.
Все сказанное выше позволяет установить взаимные связи между
понятиями удельной ЭПР подстилающего покрова и его текстурой.
Когда небольшой участок изображения характеризуется малым
изменением типовых непроизводных элементов, то преобладающим свойством
этого участка является значение удельной ЭПР. При заметном
изменении яркости этих элементов преобладающий признак заложен в
текстуре. Иначе говоря, при уменьшении числа различимых типовых
непроизводных элементов в изображении роль энергетических признаков (в
частности, <тф) возрастает. Фактически для одного элемента разрешения
единственными признаками являются энергетические Если число
различимых типовых непроизводных элементов растет, то начинают
доминировать текстурные признаки.
Ранее А.А. Потаповым были впервые предложены и реализованы с
коллегами следующие нетрадиционные эффективные методы
обнаружения сигналов при малых q02: дисперсионный метод на основе
/-статистик [6, 10-12,19, 20], метод обнаружения при помощи линейно
моделированных эталонов [13, 19, 20] и метод прямого использования
ансамбля текстурных признаков [14, 19, 20]. Наиболее полно
потенциальные возможности текстурных методов обработки оптических и
радиолокационных изображений были изложены в [20], где впервые была
доказана перспективность использования текстурных признаков при
обнаружении слабых радиолокационных сигналов, когда отношение
сигнал-фон q02 порядка единицы или меньше единицы. В результате
теоретических и экспериментальных исследований было так же показа-
179
но, что определение текстурных признаков ослабляет действие
пассивных помех от земной поверхности и улучшает выделение и обнаружение
слабых сигналов. Кроме того, важным достоинством текстурных методов
обработки является возможность нейтрализации спеклов на когерентных
изображениях земной поверхности, полученных с помощью РСА.
5.3. Фрактальные меры и фрактальные сигнатуры
Методы фрактального анализа [20, 25] находят все большее
применение в различных сферах науки. Наука о фракталах молода, ей чуть
больше четверти века. Основные понятия теории фракталов, носящей
междисциплинарный характер, пока еще находятся в процессе
становления, но поле их приложений непрерывно расширяется. Теория
фракталов рассматривает вместо целочисленных мер - дробные и базируется
на новых количественных показателях в виде дробных размерностей D
и соответствующих фрактальных сигнатур.
Фрактальные дробные размерности D не только характеризуют
топологию объектов, но и отражают процессы эволюции динамических
систем и связаны с их свойствами. Теория фракталов и нелинейность
составляют геометрию хаоса. По-видимому, фракталы - это не только
язык хаоса, но и язык природы. По своему содержанию контуры всех
природных объектов суть динамические процессы, внезапно застывшие
в физических формах и объединяющие в себе устойчивость и хаос.
Как отмечено выше, фрактальная концепция заняла прочное место
во многих областях естествознания, но только в последнее время она
стала очевидной для актуальных задач радиофизики в приложении к
радиолокации, связи, распространению радиоволн и дистанционному
зондированию [20, 25-138, 198, 199]. Фракталы относятся к множествам с
крайне нерегулярной разветвленной или изрезанной структурой. Можно
отметить, что одним из важнейших вопросов фрактальной геометрии
является связь фракталов и текстуры.
Большой интерес к фракталам связан с тем, что их, как впервые
показано в [20, 25-27], можно успешно применять в радиолокации и
радиофизике, в том числе и в задачах фильтрации малоконтрастных
целей. При этом необходимо использовать дробную топологическую
размерность пространства сигналов и изображений, математический
аппарат дробных интегралов и производных и свойства самоподобия или
скейлинга.
Понятие фрактала, введенное в научный обиход Б. Мандельбротом
[142-144], пока не имеет строгого определения. Разработанная автором
на основе результатов [25] классификация фракталов, опубликованная в
[108, 116, 117], приведена на рис. 5.3, где кратко описаны их свойства
при условии, что Д) - топологическая размерность пространства, в ко-
180
тором рассматривается фрактал с дробной размерностью D.
Существующие в реальном мире фракталы называются физическими и имеют
конечный интервал масштабов. Исходя из структуры данных на рис. 5.3
и базируясь на [25], можно дать следующее формализованное
математическое определение фрактала: «Фрактал - это функциональное
отображение или множество, получаемое бесконечным рекурсивным
процессом и имеющее следующие свойства: 1) самоподобие или
масштабную инвариантность (бесконечный скейлинг), т.е. фракталы на малых
масштабах выглядят в среднем так же, как и на больших; 2) их
размерность (называемая размерностью Хаусдорфа) дробная и строго больше
топологической размерности; 3) недифференцируемость и
оперирование дробными производными и интегралами».
ФРАКТАЛЫ
у/
Математич еские
Число итераций
я-*»
Др о бная р азмерность
Хаусдорфа D>Dt
Бес к онечно е число
масштабов, самоподобие
(скейлинг)
Дробные производные
и интегралы
-
-*
Физические
Число итераций п
конечное
1
Дробная р азмерность
Хаусдорфа D>Dt
Конечный интервал
масштабов, самоподобие
(скейлинг)
Кусочно-дифференцируемая функция
Рис. 5.3. Классификация и морфология фрактальных множеств (сигнатур)
Физическое определение фрактала следующее: «Фракталы - это
геометрические объекты (линии, поверхности, тела), имеющие сильно
изрезанную структуру и обладающие свойством самоподобия в
ограниченном масштабе». Подобно всем геометрическим понятиям, фрактал -
это прежде всего абстракция, теоретическая модель, результат предельного
перехода, недостижимый в действительности. Как отмечено в [146]:
«Любой портрет фрактала - не более чем условное, выполненное с конечной
181
разрешающей способностью и потому огрубленное изображение
основной тенденции - тренда, своего рода карикатура, обладающая
портретным сходством с оригиналом, но отличающаяся от портрета,
выполненного в реалистической манере».
Как отмечено в п. 5.1, в России с 90-х годах XX века в ИРЭ РАН
были впервые в мире развернуты теоретические и экспериментальные
работы по применению теории фракталов при обработке, выделении и
распознавании слабых радиолокационных сигналов в оптическом и
миллиметровом диапазонах волн [20, 25-138, 199]. Необходимо
отметить, что в работах ИРЭ РАН, в отличие от зарубежных, с самого
начала была заложена идея фрактальной обработки малоконтрастных
изображений, в том числе и фрактальных объектов на фрактальном фоне.
Теория фракталов прекрасно вписывается в методы адаптивной
обработки сигналов когерентной и некогерентной радиолокации (на-
пример,синтез фрактальных непараметрических обнаружителей
радиосигналов в условиях сильного радиопротиводействия). Обзор
литературных источников показывает огромный интерес в мире к
фрактальным методам обработки изображений земных покровов и атмосферных
образований с детерминированными объектами (см., например, [25]).
5.4. Избранные результаты первого этапа
исследований по обобщенной фильтрации
малоконтрастных объектов фрактальными методами
В настоящее время в ИРЭ РАН развиваются работы по созданию и
развитию новых информационных технологий для решения современных
задач радиолокации и радиофизики. Условно здесь можно проследить два
этапа. На первом этапе акцент был сделан на экспериментальной проверке
фрактальности различных природных и искусственных образований, что
позволило применить к ним понятия дробной размерности и масштабной
инвариантности и начать разработки методов фрактальной фильтрации
объектов в различных помехах. Второй этап целиком посвящен
усовершенствованию алгоритмов фрактальной обработки сигналов и
изображений, фрактальным методам обнаружения, распознавания, повышения
контрастности, т.е. фрактальной обобщенной фильтрации, и синтезу на их
основе макетных образцов новых радиоволновых систем, в том числе и
фрактальных непараметрических обнаружителей радиолокационных
сигналов -ФНОРС[116, 117, 127,130, 135, 199].
Если текстурные методы [6-24] формально использовали условие
превышения обобщенным функционалом некоторого заданного порога
(в том числе и адаптивного), то рассматриваемые фрактальные методы,
как отмечено выше, основаны на принципиально ином подходе, а имен-
182
но дробной фрактальной размерности D природных процессов. Ряд
избранных экспериментальных результатов был впервые опубликован в
[26-28]. Под сложными изображениями в дальнейшем будем понимать
РЛИ местности с расположенными на ней объектами. Предлагаемые
методы обработки сложных изображений базируются на понятиях
фрактальной размерности и соответствующих фрактальных сигнатур.
Многочисленными исследованиями научных коллективов из различных
стран было установлено, что большинство природных ландшафтов и
даже участки поверхности Луны, Венеры и Марса могут
рассматриваться как фрактальные в различных диапазонах пространственных
масштабов (подробнее см., например, [25, 26,43, 115-117, 126, 135].
Установление определенной инвариантности фрактальной
размерности D изображений природных образований от их яркости [25-28, 32,
36, 39, 43, 44, 50, 53, 57] явилось основной предпосылкой для перехода
к фрактальной обработке малоконтрастных изображений. Один из
возможных подходов к формализации данной задачи состоит в следующем.
Любой детерминированный объект в пределах физически охватываемых
масштабов наблюдения остается неизменным, и оценка его характерных
размеров или площади всегда стремится к определенному пределу, а в
идеальном случае является величиной постоянной. В то же время при
изменении масштаба изображения местности площадь фрактальных
образований также изменяется. Поэтому появление на любом изображении
некоторого искусственного объекта (или другого фрактала) изменит
величину фрактальной размерности D сложного изображения в целом.
Варьирование масштаба можно производить рамочной
фильтрацией исходного изображения А в изображение А\ Пусть fa - элементы
изображения fH (x,y) размером Nx и Ny, которое подвергается рамочной
фильтрации, a fmn - элементы получающегося при этом изображения
/н(х,у) размером NxxNy . Тогда для фильтрации с рамкой или окном
(2M+1)(27V+1) элементов, получаем
* т+М n+N
Л->Л':/'„ L,= У У fu. (5.2)
Разумеется, описываемый подход является лишь пояснением основ
разработанных и разрабатываемых в ИРЭ РАН фрактальных методов
обработки сложных изображений. Повторим, что обнаружение объектов
может быть основано на таких признаках, как полная фрактальная
сигнатура, ее часть или наклон.
Основные результаты, полученные по данному фундаментальному
направлению на первом этапе исследований, представлены в известных
работах [25-138] и кратко суммированы ниже.
183
Автором впервые показано, что такие понятия, как «фрактал» и
«фрактальный анализ» вместе со своим нетрадиционным
математическим аппаратом позволяют значительно продвинуться в изучении
многих явлений, включая прикладные задачи радиолокации. Объективное
наличие у фракталов дробной размерности и масштабной
инвариантности - скейлинга позволяет рассмотреть вопросы радиолокационного
обнаружения и распознавания целей с новой точки зрения, особенно при
малых отношениях сигнал-фон.
В ИРЭ РАН разработаны алгоритмы построения
детерминированных и стохастических фракталов. Показана эффективность
моделирования фракталов с помощью L-функций, итерационных процедур и
фрактального морфинга. Описание пакета программного обеспечения
алгоритмов фрактальной обработки одномерных и многомерных сигналов
(полей) дается в работах [28, 32, 120, 121, 135, 147]. Предложена и
исследована модель анализируемых радиосигналов и изображений с
учетом аддитивных и мультипликативных фоновых помех при обработке
сложных (наличие объектов и целей) двумерных сцен. Применение
фрактальной обработки обычно требует большого числа изображений
местности в различных масштабах и значительных массивов данных.
Созданные алгоритмы используют операции конволюции, позволяют
обходиться только единичными изображениями и практически
работают в режиме реального времени. Следует отметить, что
разработанный пакет программ с самого начала был ориентирован на общие задачи
распознавания фрактала на фрактале по значениям дробной
размерности D и соответствующего ансамбля фрактальных сигнатур.
Исследованы фрактальные характеристики как синтезированных,
так и реальных изображений местности. Подтверждена эффективность
разработанных методов фрактальной обработки синтезированных,
оптических и радиолокационных изображений. В большинстве случаев
фрактальная обработка оптических и радиолокационных (в
миллиметровом диапазоне радиоволн) сигналов и изображений дает практически
одни и те же по качеству результаты.
Впервые показано, что плотность изображения не фрактальной
цели влияет на изменение размерности слабее, чем отношение площадей,
занимаемых объектами и фрактальным изображением. Данное свойство
особенно ценно в задачах обнаружения малоконтрастных объектов и
выявления «подозрительных» областей. Зависимости фрактальной
размерности синтезированных и реальных радиолокационных
изображений от относительной площади объектов имеют схожий характер.
Оказалось, что разработанные алгоритмы обнаружения
малоконтрастных объектов, использующие фрактальные признаки, стабильно
функционируют при низких значениях сигнал-фон. Результаты
начальных компьютерных экспериментов показывают, что фрактальные мето-
184
ды эффективны для фильтрации модельных объектов на изображениях
в оптическом и радиодиапазоне при отрицательном (в децибелах)
отношении сигнал-фон. Отметим, что в данной главе величина сигнал-фон
q\ экспериментально определяется через отношение среднего значения
яркости сложного изображения (т.е. фон + цель) к среднеквадратиче-
скому значению гауссовского шума. Гауссовские флуктуации площадей
прямоугольных объектов со среднеквадратическими отклонением
порядка 30 % практически не влияют на качество их обнаружения.
Кроме того, построенные в ходе компьютерного моделирования
эмпирические распределения вероятностей фрактальной размерности
реализаций «изображение + фон» и «изображение» часто имеют одно-
модовый характер с резко различающимися средними значениями. Это
позволяет производить синтез различных фрактальных обнаружителей,
в том числе и непараметрических.
Анализ влияния количества объектов на изображение и их
топологию проведен с помощью двух методов: классического (скользящее
окно) и локально-дисперсионного. Была доказана инвариантность
фрактальной размерности сложных изображений относительно ориентации
объектов. Выявлена функциональная зависимость величины
фрактальной размерности сложного изображения от количества искусственных
объектов. Проведенные компьютерные эксперименты показали связь
наиболее эффективного размера окна с интервалом корреляции
исходного изображения. Острые кромки объектов всегда увеличивают
фрактальную размерность, а сглаживание их форм способствует ее
уменьшению. С увеличение общего периметра объектов фрактальная
размерность растет почти пропорционально их количеству. По периодичности
амплитуд пространственного фрактального кепстра можно оценить
размеры объектов.
Параметры распределений яркости оказывают лишь слабое
влияние на среднее значение и дисперсию спектра фрактальных
размерностей изображения. Это вполне объяснимо, исходя из самого
определения фрактальной размерности. Спектр размерностей более сложных
целей более широк. Ширина спектра фрактальных размерностей растет в
прямой зависимости от количества одинаковых целей. По амплитудам
спектральных составляющих в среднем и высокочастотном участках
частот также можно оценить общее количество целей на изображении.
Это позволяет говорить о высокой чувствительности спектральных
составляющих фрактальных размерностей к изменениям текущих
радиолокационных изображений. Ряд примеров обобщенной фрактальной
фильтрации оптических и радиолокационных (в диапазоне ММВ)
изображений приведен в п.п. 5.11 и 5.12, а для объектов военной техники
наиболее полно представлен в работах [116, 117, 126, 135, 199].
185
5.5. Конспект о фрактальной размерности и ее расчете
Термин «фрактал» (производное от латинских «frangere» -
«ломать» и «fractus» - «дробный») был введен в 1975 г. Б. Мандельбротом,
фундаментальные междисциплинарные книги которого лежат в основе
фрактального описания природы [142-144].
К основным свойствам фракталов относится нецелое значение их
размерности. В теории размерности различают два определения
размерности множества А: индуктивную размерность ind А и размерность
Лебега dim A [25, 148-152].
Множество А имеет ind А < л, где п - целое, если ко всякой
окрестности Ох точки хе А можно найти окрестность 0, хе Ох, граница G
которой имеет размерность ind G < п - 1.
Размерность Лебега для множества А определяется посредством
кратности покрытий. Размерность dim А множества А есть наименьшее
число п такое, что при любом числе е > 0 найдется замкнутое покрытие
кратности < п +1.
Для любого множества справедливо неравенство
dim (A u В) < dim A + dim В + 1, (5.3)
и любое «-мерное множество может быть представлено как сумма
меньшего числа нульмерных множеств.
Основная теорема размерности гласит, что индуктивная и лебегова
размерности одного и того же множества совпадают:
dim Л = ind A (5.4)
Любое метрическое со счетным базисом множество А размерности
dim < п можно топологически включить в евклидово пространство Е с
dim(2w + l). Число (2« +1) невозможно понизить, т.е. включить
произвольное п -мерное пространство в евклидово пространство Е2п. Между
топологическим понятием размерности и метрическим понятием меры
существует тесная связь, так как пространство размером п должно
иметь положительную п -мерную меру. Обратное, однако, неверно.
Понятие дробной размерности опирается на анализ понятия целой
евклидовой Е или топологической D0 размерности. Развитие теории
размерности началось с работ Пуанкаре, Лебега, Брауэра, Урысона и
Менгера. Понятие фрактальной или дробной меры и фрактальной
размерности множеств, характеризующих их в целом, базируется на
определениях, введенных Хаусдорфом и Безиковичем (см., например, [25,
148-153]). Для характеристики фрактальных множеств были
предложены различные определения данного типа размерности. Их можно под-
186
разделить на две группы: характеристики меры, полученные из чисто
геометрических соображений, и характеристики, связанные с понятиями
теории информации. Данные вопросы подробно изложены в
монографии [25]. Отметим только, что размерность Хаусдорфа - Безиковича
или фрактальная размерность Д в общем случае, не есть целое число и
D не является топологическим инвариантом, так как она зависит от
метрики, введенной на рассматриваемом множестве. Однако нижняя грань
(inf) для всех £>, соответствующих всем метрикам на данном множестве,
есть его топологическая размерность:
MD(A) = dim А. (5.5)
На практике фрактальную размерность часто определяют через
клеточное разбиение. Для этого полностью покроем данное множество
А конечной системой замкнутых множеств Д с диаметрами diam At<s.
Определяя минимальное число N (е) таких множеств для каждого е,
можно увидеть, что N(s)>0 для всех е > 0 и неограниченно
возрастает, если только А не состоит из конечного числа точек.
Далее считаем, что существует такое положительное число С, для
которого справедливо неравенство
N{e)>Clsr (5.6)
для любого е > 0, где г - некоторое целое число. Тогда фрактальная
размерность D рассматриваемого множества
D = lim inf
logs
(5.7)
Фрактальная размерность, рассчитанная с использованием (5.7) для
некоторых известных фрактальных множеств, приведена в табл. 5.2 [25].
На рис. 5.4 показаны процедуры образования элементов построения
некоторых классических фрактальных множеств, указанных в табл. 5.2.
Таблица 5.2. Хаусдорфова D и топологическая Do размерности
некоторых фрактальных множеств
| Фрактальное множество
Канторово множество
| (канторова пыль)
1 Триадная кривая Коха
| Кривая Мандельброта-Гивена
| Салфетка Серпинского
J Ковер Серпинского
1 Кривая Госпера
1 Универсальная кривая Менгера
D
In 2/In 3 «0,63
In 4/In 3 * 1,26
In 8/In 3 « 1,89
In 3/In 2 « 1,58
In 8/In 3 * 1,89
ln3/ln V7* 1,13
In 20/ In 3 * 2,73
Do 1
0
187
Рис. 5.4. Элементы построения канторова множества (а),
кривой Коха (б), кривой Мандельброта-Гивена (в), салфетки (г)
и ковра Серпинского (д)
Определение фрактальной размерности D требует предельного
перехода к бесконечно малым объемам. При физических измерениях такое
определение использовать невозможно, так как различные физические
системы обладают минимальными характерными размерами. Поэтому
предельный переход в формуле (5.7) заменяется измерением углового
коэффициента или наклона графика In N(e) как функции от \пе . В одной из первых
работ по фрактальной геометрии [154] именно так и определялись
размерности длин L{e) береговой линии. Длина границ измерялась как функция
раствора циркуля. Граница N аппроксимируется при этом прямоугольными
отрезками дливдй е . При уменьшении раствора циркуля е число отрезков
возрастает. Общая длина аппроксимирующей ломаной
L = N(e)e. (5.8)
Длина обычной кривой Ncce~l или N = a/e, поэтому а - мера
длины границы. Но для фрактальных кривых
188
N = ae~D. (5.9)
Следовательно,
L(e) = aex-°. (5.10)
Вопрос измерения фрактальной размерности D заслуживает
отдельного рассмотрения. На практике в численных и физических
экспериментах фрактальные размерности D находят посредством
дискретизации сигналов с последующей обработкой данных на компьютере. В
цифровых алгоритмах для вычисления D используются ансамбли из
103—10б точек, что требует больших вычислительных затрат, хотя могут
быть применены и более рациональные программы, оперирующие
примерно с 500 отсчетами. Часто используют один из трех основных
методов: временную дискретизацию переменных в фазовом пространстве,
вычисление отображений Пуанкаре, одноразовые измерения
временного ряда (метод вложения пространства) [25]. Одновременное измерение
всех переменных состояния не всегда возможно. Здесь на помощь
приходит теорема Такенса [155], по которой можно сконструировать
пространство вложения или псевдофазовое пространство, затем вычислить
корреляционный интеграл, а далее - значение фрактальной размерности
по измерениям временной последовательности лишь одной
составляющей. Корреляционный интеграл также часто используется как средство
разделения динамического хаоса и внешнего белого шума.
Математически корреляционный интеграл определяется для
последовательности точек соотношением
c('H™iL*Hx.-*,l)> <5-»>
/,7=1
где х, - х J - расстояние между парами точек х, и \j\9- функция Хе-
висайда. Для фракталов корреляционный интеграл также зависит от
расстояния г при г -> 0 по степенному закону
C(r)«rD. (5.12)
Все применяемые алгоритмы расчета D можно подразделить на
три класса [25]. Первый основан на топологии точечного множества
фракталов и непосредственно вытекает из определения размерности
Хаусдорфа. Данный алгоритм измеряет «массу» фрактального
образования внутри окна разрешения. Второй подход использует значение
дисперсии процесса, который определяется степенным законом с
показателем коразмерности Я, и гипотезу скейлинга. Связывая значение
дисперсии с масштабами переменных, можно определить величину D.
При третьем подходе значение D может быть получено из
пространственного спектра Gif). При этом необходимо усреднить линейную рег-
189
рессию log [G(J)] от log(/) для получения степени спектрального
затухания а. Первый алгоритм - самый быстрый. Третий - самый точный.
Основным недостатком первого алгоритма является возрастание
ошибки при определении больших значений D. В 2000 г. нами было
предложено вычислять фрактальную размерность и фрактальные сигнатуры с
помощью локально-дисперсионного метода [47, 50, 51,135].
С точки зрения экспериментатора естественен вопрос, нельзя ли
измерять фрактальные размерности непосредственно, используя
аналоговые устройства. В общем случае для динамической системы со
многими степенями свободы ответ неизвестен. В некоторых простых
задачах фрактальная размерность двумерного отображения Пуанкаре может
быть измерена экспериментально. Так, использование методов
радиооптической параллельной обработки [156] позволяет быстро определить
корреляционный интеграл (5.11) для больших значений N в виде:
c(')=iii*('-h-*y|)- <5-13)
Как видно из (5.13), ячейки в фазовом пространстве описываются
вокруг каждой точки х,, а затем подсчитывается число таких точек в
каждой сфере. Это позволяет более эффективно, чем в формуле (5.11),
вычислять значение корреляционного интеграла. Радиооптический
метод [156], положенный в основу экспериментальной установки,
позволяет сразу находить число точек в окрестности всех точек фрактального
множества. Сравнительная оценка результатов оптических и численных
методов, проведенная в [156], показала хорошее их совпадение. Для
примера в табл. 5.3 приведены данные сравнительных измерений
оптического и численного методов определения D для колебаний продольно
изогнутой балки. В данной серии экспериментов фаза сечения
отображений Пуанкаре изменялась. Видно, что фрактальная размерность не
зависит от фазы отображения Пуанкаре. Все подробности данного
метода измерения D описаны в [25].
Таблица 5.3. Сравнение измеренных и вычисленных фрактальных
размерностей D для отображений Пуанкаре
Фазовый угол, град
0
45
90
135
180
Фрактальная размерность D \
Вычисленная
1,74 Г 1,628"
1,751 1,627
1,742 1,638
1,748 1,637
1,730 1,637
Измеренная 1
1,678
1,671
1,631
1,676
1,635 1
при четырех наименьших In г; ** при семи наименьших In г
190
При анализе пространственных частот фрактального процесса
достаточно эффективным методом является также оптическое
преобразование Фурье, позволяющее непосредственно измерить значение
фрактальной размерности [25].
Перспективным математическим аппаратом является также вейвлет-
преобразование, хорошо приспособленное для исследования структуры
неоднородных процессов. Термин «вейвлет» - «маленькая волна» ввели в
середине 80-х годов XX в. Гроссман и Морле. В отличие от традиционного
преобразования Фурье, вейвлет-преобразование имеет базис из солитоно-
подобных функций, локализованных и по времени, и по частоте. В этом
случае сигнал можно анализировать одновременно в физическом (время,
координата) и частотном пространствах. Вейвлет-преобразование
представляет собой как бы непрерывный континуум оконных преобразований
Фурье с различными окнами для каждой частоты.
Характерным признаком базиса вейвлет-преобразования является
его самоподобие. Поэтому вейвлет-преобразование широко
применяется для анализа фрактальных и мультифрактальных множеств, а также
для вычисления спектра их размерностей. С признаками вейвлета,
свойствами и возможностями вейвлет-преобразования при обработке
физических данных можно ознакомиться по работам [157-162].
Таким образом, приведенные выше материалы вместе со ссылками
на доступную литературу, позволяют читателю получить достаточно
хорошее представление о дробной мере фракталов, которая является
одним из основных элементов в общей теории фракталов. Это позволит
нам использовать данные положения при рассмотрении вопроса
дальнейшей цифровой фрактальной обработки информации.
5.6. Элементы электродинамической теории волн,
рассеянных фрактальными земными покровами
5.6.1. Земные покровы как фрактальные поверхности
В связи с интенсивным развитием радиолокации, радионавигации и
дистанционного зондирования особенно актуальной становится проблема
рассеяния волн на статистически неровной поверхности. К таким
поверхностям относятся земные покровы. В последние годы было опубликовано
много исследований по фрактальной структуре природных и
антропогенных образований: от галактик до танковых полигонов и от поверхности
тазобедренного сустава человека до различных шлифованных деталей
механизмов (см., например, [25, 37,43,115-117,126-135]).
Подобия в структуре таких поверхностей, в корне различных
масштабов, приводят к мысли о существовании общей природной
закономерности, лежащей в основе этого явления. Фрактальная природа поверхно-
191
стей в приложении к проблемам радиолокации и радиофизики должна
иметь важные последствия при решении задач дифракции
электромагнитных волн на поверхности (так называемые задачи фрактальной
электродинамики). Большинство реальных поверхностей не может быть отнесено к
классу стационарных случайных процессов, как предполагалось ранее.
Как известно [16, 17, 19, 20, 25], при радиооптическом
исследовании протяженных поверхностей широко применяют их
пространственные спектры мощности. Пространственная частота/связана с
пространственной длиной волны (не путать с длиной волны электромагнитного
излучения радиолокатора!) равенством / = 1/Л. Для физических систем
с конечной протяженностью /0 минимальная пространственная частота
Уо=1//о- При экспериментальных исследованиях различных образцов
выяснилось [25], что среднеквадратическая высота неровностей являлась, в
определенных масштабах, функцией длины образцов. Исследуемые
процессы скорее соответствуют нестационарным процессам Винера-Леви,
примером которых является броуновское движение. Как известно, такой
процесс непрерывен, но нигде не имеет производных. В приложении к
рельефу это означает, что наклоны, кривизна и распределение
экстремумов не являются, как считалось в большинстве случаев,
существенными свойствами поверхностей.
В спектральной форме рассматриваемые эффекты связаны через
константу Lq с высшей пространственной длиной волны отсечки А<>:
. c?=Uk=Lo/f<r27rLo/cDo, (5.14)
где о2 - дисперсия высоты неровностей рельефа.
Многочисленными экспериментами [25] было показано, что
пространственный спектр мощности поверхности обратно пропорционален
квадрату угловой пространственной частоты со = 2nf. Это означает,
что образец конечной длины рассматриваемой поверхности никогда не
будет настолько длинным, чтобы в совершенстве представлять ее
свойства. В общем случае
G(6)) = 2kL0/g)2=A2L0/27t. (5.15)
Экспериментальные нормированные пространственные спектры
мощности неровностей для десятков различных типов поверхностей
приведены в [25]. При охватывании восьми декад по пространственной длине
волны была получена удивительная сходимость результатов для всех
структур поверхностей. Величину L0 в (5.14) и (5.15) называют топотезой
поверхности, ее значения для различных поверхностей приведены также
в [25]. Значения Z,0 однозначно определяют статистические и
геометрические свойства изотропной поверхности для рассмотренного диапазона
пространственных волн Л. Топотеза измеряется в единицах длины.
192
Статистически изотропные поверхности, на которых не выделен
какой-либо масштаб и уровень которых хорошо определен, но
недифференцируем, действительно могут иметь пространственный спектр
фрактального вида
G(f)=V/" = А./-2"-1 = V~7+2D • (5-16)
В формуле (5.16) спектральный параметр а (1<<я<3) связан с
показателем Херста или фрактальной коразмерностью Н (0<#<1)
соотношением
а = 2Н + \. (5.17)
Для трехмерного пространства фрактальная размерность поверхности
D=3 -К (5.18)
Для броуновских поверхностей при гауссовской статистике Я = 0,5 и
Z) = 2,5.
В общем случае топотезу следует определять [163] в виде длины
Г = 4/(3-"\ (5.19)
пропорциональной горизонтальному расстоянию I, на котором средне-
квадратические наклоны неровностей поверхности близки к единичным:
((г2))1/2*1. (5.20)
Аппроксимация показала, что спектральный параметр а
группируется около гауссовского значения а =2, но распределен в диапазоне
от 1 до 3. Надежные оценки степенных показателей по опыту можно
получить в основном из набора данных, охватывающем не менее трех
декад. Это жесткое ограничение до сих пор не преодолено в
большинстве экспериментов по исследованию ландшафтов и параметров
окружающей среды. Оценка фрактальной размерности позволяет установить
степени самоподобия или скейлинга в различных масштабах природных
образований и явлений, что имеет огромное практическое значение.
Одновременно значения D служат полезным индикатором окружающей
среды для выявления природных процессов.
Случайность присуща всем природным явлениям. Имеются веские
основания считать, что многие природные явления наилучшим образом
описываются как случайные фракталы. Статистика многих природных
явлений лучше всего описывается на языке обобщенного броуновского
движения, введенного Б. Мандельбротом в 1968 г.
Морская поверхность может служить одним из примеров
фрактальных структур, наблюдаемых в природе. Фрактальное решение
задачи о форме взволнованной поверхности невязкой воды показало [164,
165], что гравитационные волны могут обладать фрактальной размерно-
7—3523
193
стью D = D' + \ = 2- и 2—. Для капиллярных волн существуют суб-
3 4
фрактальные поверхности с размерностью 2. Для временной
последовательности высот подъема воды в фиксированной точке ситуация
меняется на противоположную. Решение для капиллярных волн генерирует
последовательность с фрактальной размерностью 1—, а
последовательность для гравитационных волн - с размерностью 1.
Использование фрактального описания волн связано с интервалом,
в котором применим степенной вид спектра аГа. Установлено, что для
гравитационных волн степенной вид спектра соблюдается в диапазоне
пространственных длин волн 0,1... 15 м (масштаб ~ 27), а для
капиллярных волн - в диапазоне 2... 16 мм (масштаб 23). Более подробно
исследование разнообразных фрактальных поверхностей представлено в [25],
а также в п. 5.13.
5.6.2. Основные методы решения задач дифракции волн
на фрактальной поверхности
Теория рассеяния волн статистически неровной поверхностью
является синтезом теории дифракции волн на произвольной поверхности
и теории вероятностей. Кратко коснемся двух фрактальных моделей
рассеяния, их наиболее существенных особенностей и отличий от
традиционных методов. В частности, фрактальная поверхность, как
показано в п. 5.6.1, предполагает наличие неровностей всех масштабов
относительно длины рассеиваемой электромагнитной волны. В случае
фрактальных моделей часто вместо автокорреляционных функций
используют структурную функцию для неровностей. Подробное физическое и
математическое изложение всех существующих на данный момент
моделей рассеяния волн фрактальными поверхностями представлено в
монографии [25], к которой мы и отсылаем заинтересованного читателя.
Одна из первых моделей рассеяния - модель с фрактальными
высотами неровностей. Особенности рассеяния волн такой фрактальной
поверхностью обусловлены ее недифференцируемостью. Тем самым
исключаются понятия нормали к фронту волны, лучевой траектории и
эффектов геометрической оптики.
Для этой модели структурная функция А имеет вид:
^ = 2As\n[я(2-a)|2]Y(2-■a)\x\'~l /(а-\), (5.21)
где а - показатель пространственного спектра неровностей; Г(...) -
гамма-функция; А - постоянная величина.
194
При рассеянии обычной шероховатой поверхностью угловое
распределение интенсивности рассеянной волны в дальней зоне определяется
распределением наклона неровностей. Предположение о фрактальности
приводит к тому, что угловое распределение интенсивности зависит в
степенном виде от величины фрактальной размерности. Поведение второго
нормированного момента интенсивности в зоне Фраунгофера и в зоне Френеля
отражает отсутствие эффектов геометрической оптики. Величина удельной
ЭПР фрактальной поверхности может изменяться в довольно
значительных пределах, определяемых значением фрактальной размерности D.
В приложениях к радиолокации и радиосвязи вблизи земной
поверхности важно знать искажения импульсного сигнала. Средняя
мощность 1(f) импульсного сигнала, рассеянного фрактальной
поверхностью, описывается степенным законом, зависящим от фрактальной
размерности поверхности. В общем виде интенсивность в хвосте
отраженного импульса спадает, как
7(0*l/(f3~D). (5.22)
Другая наглядная иерархическая модель рассеяния - модель с
фрактальными наклонами неровностей. В отличие от первой модели
данная субфрактальная модель приводит к элементарной
геометрической оптике и эффектам, описываемым с помощью понятия луча. Для
этой модели структурная функция наклона
A = \x\*2-D)/l{2-D\ (5.23)
где К D< 2.
Поверхность, обладающая свойством (5.23), однократно
дифференцируема и имеет наклон, изменяющийся от точки к точке
непрерывно. Рассеиватели такого рода широко исследовались ранее в связи с
распространением радиоволн в ионосфере.
Поведение второго нормированного момента интенсивности
рассеянной волны подчиняется степенному закону, зависящему от
показателя фрактальной размерности. Флуктуации плотности луча не
усредняются даже на больших расстояниях распространения. Считается, что
в рассматриваемой модели интенсивность имеет приближенное
^-распределение в значительном диапазоне расстояний.
Эти две модели привели к ряду характерных результатов при
изучении рассеяния волн оптического и радиодиапазона, которые
подтверждены экспериментально. Для подробного ознакомления с методами
решения задач дифракции на фрактальной неровной поверхности и
распространения волн во фрактальных средах необходимо использовать,
как отмечено выше, монографии [25, 199].
195
5.7. Фрактальные модели изображений
земной поверхности
При решении задач тематической обработки данных часто
приходится анализировать пространственную структуру поля интенсивности
изображений. При статистическом описании изображений с учетом их
информативности различают два типа изображений: детальный и
текстурный [18-20, 25, 139-141]. Для детальных изображений характерно
наличие целей и стохастического фона. Для текстурных изображений с
точки зрения информативности необходимо учитывать параметры всего
изображения. Практически в любых изображениях земных покровов
можно выделить области, относящиеся к текстурным изображениям.
Анализ текстур, как отмечено в п. 5.2, проводится обычно
статистическими и структурными методами. Статистические методы состоят из
вычисления автокорреляционных функций, оптических и цифровых
преобразований, использования структурных элементов, статистик 1-го и 2-го
порядков (матрицы распределения градиентов). Структурные подходы
основываются на представлении текстуры множеством непроизводных
элементов, размещенных по заданным правилам. Наиболее универсален метод
анализа текстурных изображений с помощью ансамбля из 28 признаков,
определяемых по матрице распределения градиентов в пространственной
области [139]. Затем была предложена также система из 28 текстурных
признаков в области пространственных частот.
В последние годы для анализа природных объектов все чаще
применяют методы фрактальной геометрии. Так, в [166] измерение локальной
фрактальной размерности изображений D проводилось с помощью
радиолокатора с синтезированной апертурой (РСА). Радиальное разрешение
составляло 30 см на расстоянии 7 км. Система обеспечивала разделение
поляризаций не хуже чем на 30 дБ. Отношение сигнал-шум <^=-Ю дБ при
ЭПР цели сг, = 30 дБ/м2. Цифровое изображение состояло из 512x512
пиксел.
В [167-170] фрактальная размерность оценивалась при простой
текстурной сегментации природных сцен и сегментации медицинских
изображений. Алгоритмы сегментации используются для создания
алгоритмов с фиксированным значением вероятности ложной тревоги
(CFAR), для обнаружения границ рассеивателей, для обнаружения
протяженных искусственных целей на фоне природных образований.
Адаптивные алгоритмы CFAR для РСА определяют локальную область —
домен, по которому оценивается некоторый функционал кластера.
Статистическая модель броуновского фрактального процесса
играет важную роль в компьютерном моделировании [171-173]. Она также
представляет основу для анализа и описания масштабно инвариантных
196
текстур. Фрактальный броуновский процесс описывается случайной
функцией вида:
(^V(x,y)-V(x + Ax,y + Ay\2\ = \Ax2+Ay2\H , (5.24)
где 0 < Н< 1 - показатель Херста.
При Н = 1 поверхность рассеяния гладкая, а при #=0 она
соответствует очень неровной текстуре. Энергетический спектр такого процесса
(G{f))*rP- (5.25)
Аналитическое выражение для спектра обобщенного броуновского
процесса получено в [173, 174]. При этом величины D, Н и (3 связаны
между собой соотношениями
0 = 2H + DQ, D = 3-H, (5.26)
где D0 - топологическая размерность.
При знании параметров Н и /} можно вычислить фрактальную
размерность случайного процесса. Напомним, что для измерения
фрактальной размерности используется, в основном, три алгоритма: во-
первых, это метод покрытия поверхности эталонами; во-вторых,
дисперсионное масштабирование, основанное на оценке закона функции
распределения средних квадратов (5.24); в-третьих, оценка D по степени
аппроксимирующего полинома для спектра мощности процесса. В
настоящее время первый способ наиболее распространен.
В [167] предложено применять локальный спектр мощности для
оценки D. В экспериментах использовалось окно 8x8 пиксел, для
которого вычислялся двумерный пространственный спектр. Затем
определялся показатель (5.26). В предположении изотропности броуновской
функции была получена линейная аппроксимация logG(/) от log/ по
двум ортогональным направлениям в дискретной фурье-плоскости, а
затем производилось усреднение.
В экспериментах [175] осуществлялась проверка указанных выше
трех методов. Локальная фрактальная размерность вычислялась с
помощью окна 9x9 пиксел, выборка составляла 61 504 измерений. Среднее
таких отсчетов рассматривалось как значение D. Первый метод был
самым быстродействующим. Метод использования спектра мощности —
наиболее точен, к нему приближается по точности второй метод. Метод
покрытия отличается большими ошибками. Для диапазона D = 2...3
имеем [175] следующие значения среднеквадратического отклонения:
первый метод - 0,364; второй - 0,234; третий - 0,233.
В [166] рассмотрены синтезированные изображения деревьев,
травы и т.д. при различных типах поляризации на длине волны 8,6 мм. Для
когерентного изображения РСА при высоком разрешении взята
мультипликативная модель для рассеивателей, когда
197
JT = S(/ + i0, (5.27)
где S - текстурная компонента; (/ + \Q) - спекл-компонента,
представляющая собой комплексную случайную переменную. Такая модель
была приведена ранее в [19, 20].
Текстурная компонента традиционно моделируется как
квадратный корень из логнормальной величины, но также можно применить и
распределение Вейбулла. Спектры рассчитаны для окон 64 * 64 пиксела.
Реальные изображения были
схожи с модельными на основе
(5.27). Гистограммы
показателей пространственных спектров
приведены на рис. 5.5 для
изображений травы и деревьев.
Затем были определены
локальные D растительности.
Результатом исследований явилось
доказательство четкого
сегментирования по значениям
фрактальной размерности
изображений травы, деревьев и
непосредственно шума.
В общем случае изображения земной поверхности с
расположенными на ней антропогенными и природными объектами обладают
значительной неоднородностью и разнообразием. Поэтому достаточно
трудно сопоставить фрактальную модель броуновского движения таким
изображениям, так как гауссовское распределение не учитывает
действительную статистику [6, 9, 20, 25, 112-114, 116, 117, 130]. В качестве
адекватной модели предлагается в ряде случаев использовать
фрактальную модель движения Леви [176]. В ее основе лежит симметричное
стационарное распределение приращений яркости. Характеристическая
функция а-распределения имеет вид [177]:
Рис. 5.5. Гистограммы показателей
пространственных спектров
двух растительных покровов
Ф(о))--
ехр
ехр
Н 2 .
\дсо-\асо\(\- Р^-\п\ш\)
\б)\Я
аФ\\
а = \,
(5.28)
где а - экспоненциальная характеристика стационарности, 0< а < 2; р -
коэффициент симметрии, -1 < 0 < 1; а - параметр протяженности, а > 0;
3 - параметр положения. Если а = 2 и Р = 0, то имеем гауссовский закон
распределения, при а = 1 и Р = 0 получаем распределение Коши.
198
Во фрактальной модели движения Леви используется упрощенная
запись выражения (5.28) с учетом симметрии
Ф(со) = cxp(\So)-\(то)\а . (5.29)
Применимость фрактальной модели Леви к космическим
изображениям проверена экспериментально в [176] на выборке из 17
изображений размером 512 х 512 пиксел с 256 градациями яркости.
Изображения выбирались в соответствии с требованиями устранения влияния не-
однородностей из-за различий ландшафта, освещенности и альбедо
зондируемой поверхности. В последующем анализе снимки
подразделялись на две группы - с отличным и средним качеством. Для первой
группы были получены значения а= 1,73, Я =0,58, а для второй -
а= 1,51 и Н= 0,60. Значение сгдля всех снимков оказалось равным 127.
Фрактальная размерность определялась как
£> = £ + 1-Я, (5.30)
где Е - число независимых координат; Н - параметр Херста.
Полученные распределения приращений яркости хорошо аппроксимировались
^-распределением.
5.8. Анализ и синтез цифровых фрактальных
карт местности
Процесс синтеза оптических и радиолокационных изображений
относится к области обратных задач. При этом решается вопрос, как по
заданным значениям признаков синтезировать изображение земного
покрова, соответствующие статистики которого будут близки к
характеристикам аналогичного изображения естественной поверхности. Интерес к
созданию и совершенствованию алгоритмов синтеза изображений
постоянно растет. Это связано с решением актуальных задач
радиолокации, радионавигации, дистанционного зондирования, картографии,
распознавания образов. Существует несколько подходов к решению задач
синтеза текстурных полей - на основе моделей Юлеша, линейного
программирования, авторегрессионных рядов и условных математических
ожиданий [6, 19, 20, 25, 140, 141].
Методы фрактального анализа и синтеза цифровых
топографических карт описаны в [25, 178]. Методы фрактального анализа учитывают
различия между самоподобными и самоаффинными природными
фракталами. Линейный профиль топографического рельефа является примером
самоаффинного фрактала. Рассмотрим вначале одномерный
спектральный подход. Как известно, пространственный спектр мощности имеет
степенную зависимость вида
G(K)ocK~a. (5.31)
199
Для одномерного топографического профиля h(x) дисперсия
определяется в виде
a\L) = j\[h(x)-h0fdx, (5.32)
о
где L - длина профиля со средней высотой неровностей h0=<h> .
Необходимым условием фрактальности профиля является степенная
зависимость <т2(Ь) от длины
a2(L)ocL2H (5.33)
при среднеквадратическом отклонении
a(L) = [cr2(L)J2ocLH. (5.34)
При определении фрактальной размерности вводится эталон
покрытия. Для самоподобных фракталов эталоном является куб, для
самоаффинных фракталов — параллелепипед со сторонами L и высотой а.
Рассмотрим набор эталонов со сторонами Ln = Lln и высотой h(ri) = <т/п, где п -
целое. Тогда число Nn эталонов п-го порядка, требуемых для покрытия
области L с высотой aN = a{LIN), равно
ДА сг
п п
что позволяет, с использованием (5.34), записать
(5.36)
a„=<T(L/n)= 1
a a{L) пи '
При сопоставлении (5.35) и (5.36), получаем
N„ = n2-H=(L/Ln?-H . (5.37)
Сравнивая (5.37) с определением фрактальной размерности, имеем
£' = 2-Я. (5.38)
Пространственный спектр мощности G(L) связан с переменной
o(L) соотношениями вида (5.35) и (5.36). Тогда
G(L) = La(L) ос Г ос Ll+2H , (5.39)
откуда с учетом (5.38) получаем
D' = ~ (5.40)
Для одномерного профиля 1 < D' < 2 , тогда 3 > а > 1. Для
одномерной модели броуновского движения а= 2, Н= 0,5 и D = 1,5.
200
Рядом авторов было использовано одномерное фурье-преобразование
для измерения глубины океана [179]. Исследования показывают
хорошее соответствие с соотношением (5.31) при а = 2 и длинах
пространственных волн от 0,1 до 10J км. Броуновский процесс в ряде случаев
хорошо моделирует топографию местности.
Спектральный метод фурье-преобразования для одномерных
фрактальных профилей может быть распространен на двумерные
изображения. Рассмотрим решетку N х N равномерно расположенных точек в
квадрате с линейным размером L. Данные N2 точек обозначим через hnm,
причем пит определяют их расположение по направлениям х и у
соответственно. Сначала [178] выполним двумерное дискретное
фурье-преобразование массива hnm от N2 точек данных. Решетка NxN комплексных
коэффициентов Hsl определяется в виде
/V-l /V-1
"*=Х ХА«
"/,шеХР
«=0 ш=0
2ж\ .
(sn +tm
N
(5.41)
где s - преобразование в направлении х (s = 0, 1, 2, ..., /V-l); / -
преобразование в направлении у (/ = 0, 1, 2 /V - 1).
Каждый коэффициент преобразования Hsl определяется
эквивалентным радиальным числом r = (s2+r)l/2. Для каждого радиального
волнового числа Ki средний пространственный спектр мощности
2
L
°2у=7г5Н|2' (5-42)
./ 1
где N ■ - число коэффициентов, удовлетворяющих условию j < г < j +1, и
суммирование выполняется для коэффициентов Hsl в этой области.
Двумерный эквивалент выражения (5.3 1) выглядит, как
G2j ос К~{-а . (5.43)
Тогда пространственный спектр мощности
G2(L) ос L2a(L) ос Ll+a ос L2+2H , (5.44)
откуда для двумерного случая
D = 3-H = ^Z^-. (5.45)
2
Анализ цифровых топографических данных проводился в [178] для
рельефной местности штата Орегон (США) при разрешении 7 точек/км.
Для проверки фрактального поведения данных сначала выполнялся
одномерный спектральный анализ на трех участках с различными
геометрическими и тектоническими характеристиками. Например, долина
Уилламетта (Willamette) сформирована под влиянием осадочных
процессов; горы Уоллова (Wallowa) образованы, главным образом, текто-
201
ническим поднятием; область Кламат-Фолс (Klamath-Falls)
принадлежит бассейну и области тектонического режима.
Для каждой из трех местностей анализировалось 20 одномерных
профилей длиной 512 точек, ориентированных в разных направлениях.
На рис. 5.6 приведено по восемь спектральных зависимостей для
долины Уилламетта (а), гор Уоллова (б) и области Кламат-Фолс (в). Все
графики достаточно хорошо подчиняются степенной зависимости, что
говорит о их фрактальности. Средние одномерные фрактальные размерности
(см. табл. 5.4 [178]) близки к значению D' = 1,5. Их небольшие изменения
во взаимно перпендикулярных направлениях дают основание считать, что
топография штата Орегон относительно изотропна. В табл. 5.4 приведены
также данные о высотах неровностей в относительных единицах.
Рис. 5.6. Пространственные спектры мощности G(K) для различных местностей
Таблица 5.4. Фракталъностъ одномерных профилей штата Орегон
1 Область
Долина Уилламетта:
широта
долгота
Горы Уоллова:
широта
долгота
I Кламат-Фолс:
широта
| долгота
D'
1,436
1,507
1,499
1,485
1,492
1,500
/г, отн. ед. |
5,948
6.354
6,549
6,830
5,825
5,963 1
202
На следующем этапе экспериментов была поставлена задача
синтеза фрактальной карты местности. Для этого использовались области
размером 32 х 32 пиксел. В данном случае фрактальные размерности и
амплитуды неровностей получены для участков 4,5 х 4,5 км. Для
меньших областей ошибки в определении D и h становятся большими. Для
больших областей пространственное разрешение топокарты падает.
Основные этапы синтеза карт значений фрактальной размерности и
амплитуды неровностей следующие. Выбирается набор из 32 х 32
оцифрованных участков местности, т.е. N=32. Устраняются средние значения и
линейные тренды. Выполняется двумерное фурье-преобразование, и с
помощью (5.41) создается решетка из NxN комплексных коэффициентов Hst.
Для каждого значения Hst определяется радиальное волновое число
г = (г2 +s2)1/2. На основе (5.42) для каждого волнового числа К,
рассчитывается среднее значение пространственного спектра мощности Gy. С
использованием формул (5.43) и
(5.45) по среднему наклону
графика спектра в двойных
логарифмических координатах
определяется фрактальная
размерность D. Выделение
значений при Kj = 1 км-1 дает
амплитуду неровностей.
Полученные
спектральные зависимости для четырех
типовых областей штата
Орегон (США) приведены на рис.
5.7 [178]. Линейный наклон
графиков говорит о фрак-
тальности процессов.
Итоговые значения средних D
приведены в табл. 5.5 [178].
Среднее значение
фрактальной размерности для всего
штата Орегон близко к
среднему значению D штата
Аризона, полученному ранее.
Видно, что результаты
хорошо согласуются с
выражением D=D'+\. В работе [178]
приведены также изображения
карт фрактальной размерности
и высот неровностей. Как и
203
Рис. 5.7. Теоретические (линии)
и экспериментальные (точки) значения
пространственного спектра мощности
в логарифмических координатах
Таблица 5.5. Средние фрактальные
размерности топографических карт
местности
Объект
Штат Орегон
(США)
Синтезированная
карта местности
Одномерный
анализ
П
1,487
1,580
1,650
1,910
GD'
0,149
0,167
0,192
0,205
Двумерный
анализ |
D
2,586
2,600
2,700
3,000
ад 1
0,123
— |
— |
— 1
ожидалось, значение D мало изменяется относительно среднего значения и
находится в интервале 2,4<D<2,9. Изменения амплитуды неровностей
более чувствительны к текстуре изображения.
Значительный интерес в практических методах мониторинга, как
отмечено выше, представляет синтез изображений местности и их
фрактальный анализ. В [178] синтез изображений происходил по
следующему алгоритму.
Каждой точке изображения сопоставляется значение, основанное
на гауссовской статистике
р№*У = 7^Лт7ТехР(-^2/2)ф. (5.46)
(2л-)
Используя (5.41), получаем набор двумерных коэффициентов Фурье
Hst из данного набора N2 случайных значений. Находим значения D и а из
выражения (5.45). Новый набор комплексных коэффициентов равен
11* _J±si_
(5.47)
С помощью обратного фурье-преобразования получаем итоговое
изображение.
Примеры синтезированных изображений для модели белого шума без
фрактальной фильтрации (or = 0), при фильтрации с параметрами а = 1 и
D = 3, а также при а= 1,8 и D = 2,6 приведены на рис. 5.8 [178].
Синтезированное изображение при D = 2,6 выглядит очень реально для типовой
топографической карты. Данный результат хорошо согласуется с результатами
картографирования штата Орегон, для которого D = 2,586.
Рис. 5.8. Синтезированные фрактальные изображения на решетке 512 х 512:
а - белый шум без фрактальной фильтрации; б — фильтрация при а = 1 и D = 3;
в — фильтрация при а = 1,8 и D = 2,6
Таким образом, на основе двумерного фрактального анализа
цифровых топографических данных можно утверждать, что любая текстура по^
204
верхности может количественно анализироваться в терминах фрактальной
размерности и амплитуды неровностей. Данный метод может быть
применен и к другим цифровым изображениям, если они удовлетворяют
фрактальной статистике. В этом направлении автором, с учетом полученных
ранее результатов [20,25, 199], проводятся интенсивные исследования.
5.9. Многоуровневая модель для характеристики объектов
5.9.1. Модифицированный метод покрытий для измерения
фрактальных сигнатур
Как отмечено выше, используя вариации фрактальной размерности
D различных процессов в общем случае можно говорить о синтезе
фрактальных сигнатур для практических задач радиолокации и
дистанционного зондирования. В качестве примера, рассмотрим результаты
работы [180] по универсальному описанию естественных и
антропогенных объектов с учетом их фрактальной геометрии. Фрактальные
сигнатуры, полученные с помощью морфологического фильтра, были
использованы для идентификации ландшафтов и объектов военной
техники на фоне земных покровов и достаточно больших отношениях сигнал-
фон. Оценка фрактальной размерности проводилась
модифицированным методом покрытий, разработанным для анализа текстурных
изображений [181].
Суть данного метода оценки D состоит в том, что квантованные
значения интенсивности двумерного сигнала помещают между двумя
функциями, называемыми верхней и нижней поверхностями. Верхняя
поверхность U содержит множество точек, значения которых всегда по
крайней мере на один квант превышают интенсивность входного
сигнала. Нижняя поверхность L имеет значения точек, которые всегда ниже
по крайней мере на один квант интенсивности входного изображения.
Верхняя и нижняя поверхности при нулевой шкале масштабов
определяется как
t/(i,y,0) = l(i,y,0) = g(i,y), (5.48)
где g(i,j) — входное изображение.
В общем случае
U(i, j, e +1) = max {£/(/, j, e) +1, max[t/(A, m, €)]},
Me* (549)
L(iJ,e + \) = mm{L(iJ,e)-\, min [L(k, m, e)]},
k,merj
где г) = |(л, т) | расстояние [(k,m),(ij)]<i) •
Сконструированное покрытие, образованное двумя указанными
функциями, имеет толщину 2е. Для двумерного сигнала (или поля) пло-
205
щадь поверхности есть объем, занятый покрытием, деленный на величину
2s. Площадь «поверхности» интенсивности А(г) в пределах окна
наблюдения R рассчитывают вычитанием точки за точкой нижней
«поверхности» из верхней с дальнейшим суммированием по всему окну:
Yu(i9j9s)-L(i9j9s)
A(s) = -
(5.50)
2s 2s
Фрактальную размерность определяют как обычно по наклону
log A(s) от logs . В [181] измеряемая «поверхность» A{(s) определяется
разностью объемов при последовательных масштабах:
V(s)-V(s-\)
А(е) = -
(5.51)
На основе (5.50) получаем
V(s) = 2sA(s). (5.52)
Тогда, исходя из способа практического измерения фрактальной
размерности, имеем
V(s) = 2Ks3~D9 (5.53)
где К- постоянная величина.
Рассчитанное значение A\(s) является аппроксимацией
производной V(s) no s и равно:
Me)*±-^ = (3-D)Ke-2-D. (5.54)
2 os
Реальные изображения всегда имеют шумовую составляющую.
Поэтому расчет A{(s) по (5.54) может дать оценку шума. В качестве
примера на рис. 5.9 [180] приведено изображение дерева размером
32x32 пиксел (а) и соответствующие фрактальные сигнатуры (б),
рассчитанные по формулам (5.50) - кривая / и (5.51) - кривая 2. Значения
Рис. 5.9. Изображение дерева (а) и фрактальные сигнатуры (б), определенные
по (5.50) - кривая 1 и (5.51) - кривая 2
206
Д соответствующие (5.50), находятся в ожидаемом диапазоне от 2 до 3,
при котором D=2 соответствует плоской поверхности. Фрактальная
сигнатура, рассчитанная по (5.51) превышает допустимую верхнюю
границу, равную 3. Следовательно, расчет по производной дает сильную
шумовую составляющую.
Фрактальная размерность D(i, j) при нахождении пиксела (/, J) на
всех масштабах оценивается в [182], как взвешенная сумма локальных
фрактальных размерностей F£(iJ) в виде
£>(/,;) = -£-_- (5.55)
£
при
с ^logg-log(g-l) F = log Л(/, у, е) - log Д/, h g -1) (556ч
log2 ' £ log£-log(£-l)
Вследствие свойства масштабирования фракталов величина
F£(iJ) является результатом деления Л(ij, e) mA(iJ, е- 1):
A(i,j,e) _ Ке>-° J еГ (5 5?)
A(i,j,e-\) K{e-\f-D \e-l
Логарифм1фуя (5.57), имеем
log^yfg)-log^(/J>g-l) = 2MDas a (558)
l0g£r-l0g(£T-l)
Локальные фрактальные размерности Fs(i,j) рассчитывают
только на промежуточных этапах. Затем последовательные значения F£{iJ)
накапливаются с определенными весами по всему диапазону шкал для
получения оценки фрактальной размерности £>(/,/). Соотношение (5.55)
является функцией только первой и последней шкал масштабов.
Покажем это. Элемент суммы числителя в (5.55)
C£A£(i, j) = {log[A{e)]- \og[A(e-1)]}/log2 (5 59)
Тогда
]Г C£F£ (/, j, e) = {log[A{i, j, e)] - \og[A(i, j, e-\)] +
€
+log[A(i, j, e-l)]- log[A{i, j, e-2)] + log[A(i, j,e-2)]-...-
-\og[A(i,j,l)]}/log2 = {\og[A(i,j,e)]-log[A(i,j,l)]}/2, (5.60)
207
а сумма
£ Ce = [log s - log(* -1)+log(*r -1) - log(f - 2) +
£
+ log(*-2)-...-log(l)]/log2. (5.61)
Уравнение (5.60) показывает, что оценка фрактальной размерности
определяется наклоном, порождаемым только первым и последним
масштабами, в то время как промежуточные масштабы не дают вклада в
расчеты.
Рассматриваемый метод покрытий для определения D прост и
одновременно эффективен в реализации. Он определен в рекурсивной
форме, позволяющей вести расчеты при больших массивах данных. К
тому же метод имеет морфологическое осуществление, что дает
возможность использовать расчетные преимущества морфологической
обработки некоторого образа g. Расчеты верхней и нижней поверхностей
по (5.49) эквивалентны морфологическому расширению и разрушению
[183]. Данные операции определяются как:
разрушение:
(gQk)(xy) = rmn{g(x+n,y+m)-k(n,m)}, ^meR^k), (5.62)
расширение:
(g$к)(х,у) = max{g(x+w,у+т) + к(п,т)},«,те^(к). (5.63)
В (5.62) и (5.63) символом к обозначен набор двумерных фигур,
размер, форма и пространственная ориентация которых определяют
фильтрующие свойства; Ros(k) — область содержания к. Данные о выходной
точке получаются расположением ядра к на определенной доле входного
образа и действием min-оператором 0 (при разрушении) или тах-
оператором Ф (при расширении) на массив данных, покрытых ядром.
Данная операция повторяется при перемещении ядра по всему образу g.
Разнообразие функциональных морфологических операций может
быть достигнуто использованием простейших действий вида (5.62) и
(5.63). На рис. 5.10 [180] показано создание верхней (У и нижней L
«поверхностей» для одномерного сигнала (а) при различных масштабах.
Можно считать, что изображения являются комбинацией различных се-
роуровневых «поверхностей», которые самоподобны в определенном
диапазоне масштабов, и поэтому их соответствующие фрактальные
размерности стабильны на малом числе шкал. Схема расчета
фрактальной сигнатуры по формуле (5.50) морфологическим фильтром
приведена на рис. 5 в [180] и на рис. 53 в [43].
208
1
и
rw
Ч/Л|
V М
о)
S?\l
f JM
6)
И
LI
pV/
л
Hi
•)
w
iw/ ^
г)
Рис. 5.10. Конструирование верхней U и нижней L поверхностей
при различных масштабах: а - истинный одномерный сигнал;
б - масштаб е=1; в - е = 2; г - г = 3
Каждая точка изображения (к, /) определяется оценкой площади
при масштабе е. Для начальной нулевой шкалы верхние и нижние
«поверхности» идентичны и равны истинному изображению (см.
соотношение (5.48)). Для конечного числа масштабов оценка А(к, 1, е) следует
из соотношения
/г+И' 1+W
£ £ U{i,j,e)-L(?,j,e)
A{k,l,e) = **"WJ-'-~ „ -, (5.64)
где окно размером (2w + 1) х (2w +1) имеет переменные размеры,
устанавливаемые нижней и верхней шкалами масштабов.
5.9.2. Фрактальные сигнатуры в задачах различения объектов
военной техники на фоне природных образований
Неровности природных объектов могут меняться в различных
масштабах. В [180] рассматривается четыре ИК изображения (размером
256x190) двух классов облаков, обозначаемых как «1 (а, б)» и «2 (а, б)».
Соответствующие фрактальные сигнатуры приведены на рис. 5.11 [180].
Можно отметить, что текстуры одной и той же категории дают в
результате подобные сигнатуры.
209
При использовании фрактальных сигнатур для идентификации
объекта или природных текстур важно установить условия независимости
данных сигнатур от размеров окна. В исследованиях применялись три
природные сцены в ИК и
оптическом диапазонах: два
класса облаков и лесной
массив размером 64x64 [180].
Класс изображений облаков
1(6) был разделен на две
равные части по вертикали.
Соответствующие сигнатуры
целого изображения и
половинок (залитые квадраты)
показаны на рис. 5.12,а. Все три
сигнатуры достаточно точно
совпадают друг с другом.
Рис. 5.11. Фрактальные сигнатуры
четырех изображений двух классов
облаков
-1(б)-а
ю
а)
2(6) —С
10
б)
3,0-
2,8-.
2,6.
2,4 ■
2,2-
2,0-
3,0'
2,8.
2,6.
2,4.
2,2
2,0.
'2(6).
■ 2(6).
•2(б)„
е)
ч
Е
-л—•—i—•—I—»—г-
4 5
г)
Рис. 5.12. Последовательность фрактальных сигнатур:
а - класс 1(6) изображений облака; 6- класс 2(6) изображений облака
с их правыми и левыми половинами; в - класс 2(6) изображений облака
с их верхними и нижними половинами; г - изображение лесного массива
210
Далее класс изображений облаков 2(6) был разделен на две
вертикальные и две горизонтальные половины. Рассчитанные сигнатуры
показаны на рис. 5.12,6 и в соответственно. Фрактальные сигнатуры
половинок изображений расположены вокруг сигнатуры полного изображения.
Однако сигнатуры левой и правой половинок изображения (рис. 5.12,6)
гораздо ближе к сигнатуре целого изображения, чем сигнатуры, приведенные
на рис. 5.12,в. Следовательно, левая и правая половинки изображения
имеют более схожие текстуры, чем другие половинки. Сигнатуры полного
изображения леса и верхней левой четверти изображения приведены на
рис. 5.12,г. Во всех примерах фрактальные сигнатуры относительно
постоянны и слабо меняются при изменении масштаба.
В предшествующих исследованиях считалось, что в окне имеется
только интересующая нас единственная текстура и нет кромок или
антропогенных объектов. В [184] предложен адаптивный алгоритм, основанный
на концепции кромкосохраняющего сглаживания для правильной оценки
фрактальной размерности в окрестности краев. Для двух однородных
областей в [167] экспериментально показано, что измеренная фрактальная
размерность при всех масштабах меньше топологической размерности.
В то же время в [180] получено с использованием метода покрытий
(см. п. 5.9.1), что при больших масштабах кромки проявляют себя как
неровные поверхности и имеют
фрактальную размерность, превышающую
топологическую. Для иллюстрации этого
факта были проведены эксперименты с
синтезированными и реальными
изображениями.
На рис. 5.13,а [180] приведено
изображение квадрата с
геометрическим размером 32x32 пиксел на черном
фоне с соответствующей фрактальной
сигнатурой (рис. 5.13,в). Изображение
ступенчатой кромки и ее фрактальной
сигнатуры дано на рис. 5.13,6 и в
соответственно. Для обоих случаев
неровности увеличиваются с возрастанием
масштаба, и всегда значения
фрактальной размерности D больше топологиче- Рис. 5.13. Изображение квадрата
ской размерности D0. Аналогичные ре- на черном фоне (а), ступенчатой
зультаты получены для реальных изо- кромки (6) и их фрактальные
бражений горной местности. сигнатуры {в)
В приведенных экспериментах условие D<D0 может иметь место для
аномально малых образований. Иллюстрацией данного положения являют-
211
ся результаты исследования фрактальных сигнатур узких перепадов
яркости на изображениях 32x32 пиксел, приведенные на рис. 5.14 [180]. Вся
сигнатура для узкого перепада яркости (рис. 5.14,а) состоит из значений
ZK2, а для более широкого перепада яркости (рис. 5.14,6) это происходит
только на некоторых масштабах. Для изображения дерева (рис. 5Л4,г)
значение D < 2 наблюдается только при е> 6 (рис. 5.14,д).
Рис. 5.14. Изображения узкого (а) и широкого (б) перепадов яркости,
а также дерева (г), с их фрактальными сигнатурами (в, д)
Искусственные объекты состоят из относительно гладких частей,
поэтому их фрактальные сигнатуры будут отражать гладкость на малых
масштабах и неровность при больших е. С учетом того, что
фрактальные сигнатуры земных покровов относительно постоянны, возможно
создание эффективных алгоритмов идентификации целей на фоне
земной поверхности. Эксперименты в [180] проводились с тремя классами
изображений (32x32 пиксел): растительный покров, деревья и средства
передвижения -машина и два танка. Соответствующие фрактальные
сигнатуры приведены на рис. 5.15 [180].
Образцы изображений фона имели почти постоянные неровности в
большинстве масштабов. Два из трех образцов обладали относительно
большими значениями D. Для изображений деревьев фрактальная
сигнатура имела слегка увеличивающийся наклон. Для изображений танков
было отмечено резкое возрастание значений D при увеличении е.
Сигнатура машины более похожа на сигнатуру деревьев, чем на сигнатуру
танков. Поэтому танки на фоне растительных покровов эффективнее
обнаруживать по изменениям наклона фрактальных сигнатур.
212
Распознавание, основанное на использовании единственного
масштаба, иллюстрируется в [180] на изображении зданий на склоне горы.
Объекты типа зданий на изображении имеют более высокую яркость.
Из-за «гладкой» структуры яркостного поля они обладают низким
значением фрактальной размерности. При пороге разделения, равном 2,2 на
шкале £=2, результаты фрактальной обработки позволяют выделить
здания, ранее замаскированные фоном.
Одношкальное обнаружение танков между деревьями также было
проведено в [180]. Результаты фрактальной обработки показали, что
большинство образов танков сохранено на изображении при значительном
снижении влияния земных помех. Фон частично сохранился, вследствие
многомасштабности его характерных неровностей и размеров. Таким
образом, использование фрактальных сигнатур для задач обнаружения и
идентификации различных целей является основой многообещающих методов.
В [185, 186] рассмотрен метод распознавания искусственных
объектов на фоне природного пейзажа, также основанный на модели фрак-
тальности, т.е. системы характерных геометрических признаков.
Представлено описание модели в форме набора уравнений плоскостных
кривых и показано, что такие признаки целей, как прямые линии,
образующие силуэты, могут быть использованы для обнаружения объектов.
Приведены результаты экспериментальных исследований по выделению
танков и морских судов на естественном фоне с помощью ИК датчика
изображений и алгоритма фрактального оценивания.
213
Применение методов детерминированного хаоса для обработки
радиолокационных сигналов при определении параметров цели и ее
идентификации продемонстрировано в [187]. Методом
корреляционного интеграла получены оценки размерности эхосигналов от
множественных целей. Рассчитаны показатели Ляпунова для пяти различных
плоскостей, характеризующих сходимость результатов вычислений.
Экспериментальное сравнение результатов распознавания
радиолокационных целей показало, что применение теории динамического хаоса
весьма перспективно при обработке радиолокационных сигналов и
идентификации радиолокационных целей.
Использование аналогичных независимо разработанных методов
позволило автору впервые предсказать [26] динамическую модель рассеяния
миллиметровых радиоволн растительным покровом на основе
экспериментальных данных на длине волны 2,2 мм [9]. Доказательства наличия
странного аттрактора, формирующего радиолокационное рассеяние ММВ от
растительности, а также все его характеристики приведены в работах
[71-73, 76, 80, 94, 100, 107-109]. Отметим, что такая динамическая модель
рассеяния электромагнитных волн земными покровами имеет
принципиальное отличие от существующих моделей. Следует сказать, что
учет фрактальности земных покровов позволяет резко уменьшить
расхождения между экспериментальными и теоретическими значениями
удельных ЭПР и индикатрис рассеяния различных природных образований
(более подробно см. монографии [25,199] и ссылки в них).
5.10. Визуальное различение человеком-оператором
фрактальных текстур по изображению на экране дисплея
Ряд экспериментов по различению человеком фрактальных текстур
был выполнен в [188]. В исследованиях применялись изображения,
синтезированные на основе модели
обобщенного броуновского
движения. Пространственный
спектр мощности G(f)
двумерного изотропного процесса
записывается в виде
G(f) = K/f\ (5.65)
где К - постоянная;
f = (f*+f2yf2\ a = S-2D -
спектральный параметр; fx
Рис. 5.16. Проекция пространственного и / - пространственные час-
спектра мощности обобщенного
броуновского процесса при а = 2 и а= 3 тоты-
214
|logG(/)
4:
2-
о-
-2-
-*
-6-
-8-
-10-
-12-
-14-
^=Ц
kli'" S'-* •
♦ ''^ЗДЯ1
. •* ** *'и-£ВЯЯВш « = 2
* : ^''УЙяЗЖ
'•W^=3
♦ •-'.
log/
На рис. 5.16 [188] в логарифмических координатах показаны
пространственные спектры мощности (вернее, их проекции) двух
фрактальных процессов с £>=2,5 (а = 3) и D=3 (a = 2). Видно, что спектры
спадают линейно с наклоном, задаваемым спектральным параметром
а. Реализации отдельных хаотических синтезированных изображений
из выборок представлены в [188] (см. также [25]). Наблюдаемое
различие в текстурах дает дополнительное свидетельство о связи текстурных
характеристик с фрактальными сигнатурами.
Изображения размером 64 х 64 пиксел и диапазоном
пространственных частот в пять октав отображались на экране дисплея с
разрешением 1152x900 точек. Среднеквадратическая величина контраста
ансамбля текстур равна
С =
00
l\G(fx,fy)dfxdfy-m2
т
1/2
(5.66)
где т - среднее по ансамблю.
Для пространственно-изотропных текстур преобразуем (5.66) к виду
С =
2л-
00
\fG(f)df-m2
1/2
(5.67)
где/определено в (5.65).
Синтезированные изображения масштабировались так, чтобы
значение среднеквадратического контраста равнялось 35%. При экспериментах
ставилась задача, в которой три оператора должны были ответить на
вопрос, какой из двух образов относится к ансамблю с более высокой
размерностью. Для оценки порога различимости спектрального параметра
использовалась усовершенствованная процедура лестничного типа QUEST.
Пороги были определены для десяти значений: а= 0,8; 1,2; 1,6; 2,0; 2,4; 2,8; 3,2;
3,6; 4,0; 4,4. Пороги различимости выбирались для трех ситуаций: 1 -
высококонтрастная близкая (ВБ), 2 — низкоконтрастная близкая (НБ), 3 -
высококонтрастная далекая (ВД). Условию ВБ соответствовало расстояние
1 м до экрана дисплея и среднеквадратический контраст 35%; для НБ сред-
неквадратический контраст был уменьшен до 17,5 %, а ВД условия
соответствовали среднеквадратическому контрасту 35 % и дистанции 1,5 м.
215
Эксперимент был организован из 12 серий, включающих десять
блоков по 50 испытаний. Результирующие данные состояли из
первоначальных откликов и 12 оценок порога для каждого значения а.
Приращения между эталоном и тестовым изображением изменялись от -10 до
19 дБ, причем 1 дБ соответствовал 12% возрастанию в спектральной
расходимости. Изображения отображались в течение 250 ± 50 мс с
интервалом 500 ±50 мс. Подробности применения критерия идеального
наблюдателя для автоматизированной оценки а приведены в [188].
На рис. 5.17 [188] показаны оценки порога различимости как
функции спектрального параметра а для первого (а), второго (б) и
третьего (в) операторов соответственно в трех ситуациях: 1 - ВБ, 2 - НБ, 3 - В Д.
Значения среднеквадратического отклонения оценок показаны на правой
стороне каждого рисунка. Горизонтальные линии над кривыми
характеризуют границы диапазона спектрального параметра, определяющего
фрактальные ансамбли. Кривые порогов имеют общие черты, а именно:
спад во фрактальной области и, при некоторых условиях, второй спад
для наименьшего спектрального параметра.
216
Указанная задача различения может быть выполнена и несколько
иначе. Как видно из рис. 5.16, спектры мощности ансамблей с различными
значениями спектрального параметра, но равными среднеквадратическими
контрастами, имеют точку пересечения на определенной частоте f0. Этот
факт предполагает еще одну стратегию для решения задачи различения в
низкочастотном (НЧ) или высокочастотном (ВЧ) диапазонах.
При моделировании заранее имелась информация о частоте
пересечения fo для каждого значения спектрального параметра а. Первая группа
НЧ моделей использовала переменное решение, даваемое соотношением
с,
т>)
т.
/о
\mfw-
тх
/о
\JG2(JW-
т\
1/2
(5.68)
Модель выбирает изображение первое, если А< 1, и изображение
второе, если А > 1. Вторая группа ВЧ моделей основана на выражении
-П1/2
А=^
*!
]wfw-»i
00
/о
(5.69)
В данном случае, модель
выбирает изображение первое,
когда А > 1, и изображение
второе в обратной ситуации. Пороги
различения обеих моделей резко
снижаются, когда спектральные
параметры изображений
уменьшаются. Кривые порогов
различения для НЧ модели показаны
на рис. 5.17 (кривые 4).
Усредненные значения
порогов различения для трех
операторов (кривые /, 2, 3
соответственно) при условии обнаружения
текстур со значением а > 2
приведены на рис. 5.18 [188]. Видно, что самое лучшее различение текстур
операторами выполняется для а= 2,8.. .3,6.
Да, дБ
7-.
б.
5.
i 4*
3-
2-
1-
0«
•1-
-2-
-3«
*
Т \~";
% 1
0,8 1Д 1,6 2,0 2,4 2,8 3,2 3,6 4,0 4,4 4,8
Рис. 5.18. Усредненные кривые
порогов различения для первого,
второго и третьего операторов
217
Таблица 5.6. Пороги для критерия
идеального наблюдателя при а= 3,2
Размер изображения,
пикселы
J 16х16(ЛГ = 256)
J 32x32(^=1024)
1 64x64(^ = 4096)
1 128x128 (N =16384)
Порог, 1
дБ
0,17 (Д«= 0,204) |
-5,6 (Аа =0,106) |
-12,2 (Аа =0,50) |
-18,7 (Аа= 0,024) |
Моделирование
показало, что абсолютный порог
при использовании критерия
идеального наблюдателя
обратно пропорционален
корню квадратному из размеров
изображения (табл. 5.6) [188].
Поэтому можно определить
приемлемую меру
эффективности как возведенное в
квадрат отношение порога идеального наблюдателя Accq к порогу
наблюдения оператора, т.е.
Е = (Аа0/Аа,)2. (5.70)
Следовательно, первый оператор имел эффективность £i=10%,
второй Е2=1%, третий Е3= 13%.
5.11. Фрактальное обнаружение целей на изображениях
земной поверхности
5.11.1. Функциональное описание реальных оптических
и радиолокационных сложных изображений
Как отмечено в начале главы, существует множество
фундаментальных и прикладных задач, которые могут быть сформулированы как
проблемы обнаружения или фильтрации малоконтрастных протяженных
целей на фоне местности. Такие задачи возникают в радиофизике и
радиолокации, при обработке изображений и дистанционном зондировании
окружающей среды. Применяемые алгоритмы обычно используют
корреляционный и контурный подходы. Они реализуются с помощью методов
согласованной фильтрации и дифференциальных методов. При
согласованной фильтрации возникают трудности при обработке протяженных
перепадов яркости. Дифференциальные методы характеризуются низкой
помехоустойчивостью.
Применение для анализа изображений спектральных и
корреляционных характеристик целей часто оказывается малоэффективным при
малоконтрастных изображениях. В радиолокации малая контрастность целей
чаще всего проявляется при сканировании антенны в диапазоне
скользящих углов. В этом случае спектральные характеристики помеховых
сигналов от подстилающей поверхности перекрывают спектры полезных
сигналов, отраженных целями.
При выборе информативных и устойчивых признаков для
распознавания целей на изображениях помимо радиолокационных сигнатур
чрезвычайно перспективны фрактальные сигнатуры, о чем свидетельствует опыт
218
их разработки [20, 25-138, 199]. Обнаружение целей может быть основано
на таких признаках, как полная фрактальная сигнатура, ее часть или
наклон. Во всех экспериментах использовались синтезированные, оптические
(аэрофотосъемка) и радиолокационные изображения земных покровов.
При радиолокационном и оптическом зондировании полезный
двумерный сигнал от цели (ее образ) S(x,y) является частью общего
изображения, создаваемого всеми отражающими элементами наблюдаемых
фрагментов окружающего цель фона. Поэтому на практике сигналы от
этих элементов образуют помеховую составляющую. Для реальных
неоднородных изображений ландшафтов, как отмечено в п. 5.2,
целесообразна концепция текстуры. Искомая цель затеняет участок фона,
поэтому предположение об аддитивности полезного сигнала S(x,y) и
текстурного фона оправдано тогда, когда цель занимает незначительную часть
изображения [6,19,20, 23,25, 140, 189, 190].
На анализируемые изображения оказывают влияние случайные
шумы приемника п(Хуу). Случайный шум обычно считается
стационарным гауссовским шумом с нулевым средним и спектральной
плотностью мощности NQ. Кроме того, изображение должно описываться
неотрицательной функцией, в отличие от входного знакопеременного
сигнала. Поэтому модель реальных изображений должна быть сложнее
простой радиотехнической модели аддитивного сложения сигнала и шума
вида /(*,у) = S(x,у) + п(х,у).
Будем считать, что в области анализа А заданы: функция f(x,y)
анализируемого изображения (х,уеА); функция S(x,y) цели (x,yeAs, AsczA);
текстурная функция g(xyy) вокруг цели (x,yeA-As); функция п(х,у)
случайного шума (х,у еЛ). Реальная нестационарная помеха р(х,у) имеет вид:
P(x,y) = g(x,y)n(x,y) (5.71)
при
[>0, х9уеА-Аа,
[=0, x,yeAs,
где g(x,y) = y]gi(xiy); / - число текстур; gt{x,y) - реализация случай-
»
ного поля, описывающего /-текстуру.
Тогда модель анализируемого изображения с учетом среды
распространения формально сводится к виду
/(*> У) = 4£о + S(x, У)] + g(x, y)n(x, у), (5.73)
где е - уровень атмосферных (из-за вариаций коэффициента преломления
среды) мультипликативных помех; g0 - постоянная составляющая,
определяемая средним уровнем контраста и обеспечивающая условие/;*:, у) > 0.
219
В этом случае задачу фильтрации можно сформулировать
следующим образом. Приемное устройство анализирует функцию /(*, у) и
производит выбор одной из двух гипотез. В качестве нулевой гипотезы
Н0 примем наличие лишь помехи, а в качестве альтернативы Н\ -
помехи и сигнала. С точки зрения теории статистических решений выбор
той или иной гипотезы основан на вычислении интегральных
функционалов, зависящих от выбранных условий оптимизации.
Как правило, практическая реализация непрерывной по
пространству А обработки fix, у) затруднительна. Цифровая обработка требует
перевода непрерывных функций в дискретный массив чисел. Процесс
дискретизации описывается произведением исходной функции fix, у) на про-
странственно-дискретизирующую функцию [25, 140, 191]. В идеальном
случае пространственно-дискретизирующая функция является
пространственной решеткой с расположенными в узлах дельта-функциями
00 00
н{х,У) = £ £ 5<<х -ш> y-lt& > <5-74)
А=-О0 /=-00
где АхиАу- шаг решетки по координатам х и у соответственно.
Тогда дискретизированное изображение
fH(^y) = f(x,y)H(x,y) (5.75)
можно рассматривать как проекцию непрерывной реализации fix, у) на
линейную оболочку системы функций пространственных координат:
Ы*,У) = Z Z /(ЛЛ*> /A>W*-*Дх, У-1ЬУ) • (5-76)
В реальных системах дискретизирующая решетка имеет конечные
размеры. В итоге получаем дискретизированное растровое изображение в виде
массива точек яркости ft , где / = 0,1,..., Nx и j = 0,1,..., Nv. В приводимых
далее результатах компьютерного моделирования i = 0.. .600, j = 0.. .400.
В экспериментах обрабатывались АФС и РЛИ реальных природных
ландшафтов с лиственным лесом, рекой, лугом и т.д. (см. п. 5.2). В
видимом диапазоне аэрофотосъемку производили фотоаппаратом АФА-41/7,5 с
объективом «Ортогон-4» на пленку «Изопанхром-17» со светофильтром
ОС-14. Разрешение по центру кадра составляло примерно 47 лин/мм.
Время экспозиции 350"1 с. При формировании РЛИ использовался
радиолокатор с косекансной диаграммой направленности антенны шириной 0,4x10°.
Длительность зондирующего импульса была 100 не, частота сканирования
антенны 0,5 Гц, поляризация излучения - вертикальная при импульсной
мощности излучения 40 кВт. Угол обзора земной поверхности равнялся
80°. Наклонная дальность изменялась до 10 км при угле падения 80°.
Съемку РЛИ производили с экрана электронно-лучевого индикатора на пленку
220
типа КН-4 [8, 19, 20, 22]. Из-за малых высот учет мультипликативной
составляющей ев модели сигнала не проводился, т.е. полагалось е=\. После
цифровой фильтрации с помощью изменяющихся рамок или окон в
соответствии с выражением (5.2) получаем необходимые масштабированные
массивы данных. Начиная с 90 годов XX века, также проводились работы
по фрактальной фильтрации изображений планет и различных структур
Вселенной [25,43, 108, 115-117, 125, 126, 135, 147]. В качестве примера на
рис. 5.19 [25, 43] приведены фрагменты фрактальной обработки РЛИ
поверхности планеты Венера, полученные на длине волны Л = 8 см.
Рис. 5.19. Примеры радиолокационных изображений
поверхности Венеры с фрактальными размерностями 2,26343 (а),
2,24932 (б), 2,24893 (в), 2,27376 (г)
Различные алгоритмы синтеза фрактальных одномерных и
многомерных сигналов (полей), в том числе и цветных, с кратким описанием пакета
их программного обеспечения дается в работах [28, 32, 37, 120, 121, 135,
147]. За.прошедшее десятилетие программное обеспечение неоднократно
улучшалось, и были проведены обширные компьютерные эксперименты по
моделированию фракталов (в том числе классических множеств Жюлиа и
Мандельброта) и измерению их сигнатур. Основные результаты,
полученные на первом этапе исследований сложных фрактальных оптических,
радиолокационных и синтезированных изображений, кратко изложены в п.
5.4, а также в оригинальных работах [20,25-138, 147].
Изображения природных ландшафтов, как правило, получают с
помощью оцифровки фотографий, и они представляют собой растровые
картины. Для измерения фрактальных сигнатур желательно иметь
изображение местности в различных масштабах. Однако это не всегда воз-
221
можно не только из-за очень большого объема информации, но иногда и
из-за его отсутствия. Поэтому для анализа чаще всего используется одна
фотография. Для получения других изображений необходимо
генерировать их из данного изображения.
Наиболее просто эта операция осуществляется при загрублении
масштаба исходного изображения. Каждой точке нового изображения
присваивается некоторое значение, представляющее собой, сравненную
с определенным порогом, линейную комбинацию значений соседних
точек исходного изображения. Для получения более детального
изрбражения следует применять известные методы деконволюции [192].
Такой подход более трудоемок и не всегда применим из-за отсутствия
необходимой информации. Таким образом, при измерении фрактальной
размерности природных образований используются черно-белые
изображения, полученные с помощью аэрофотосъемки или РЛС. Далее
проводится загрубление масштаба и строятся зависимости 5(8), по
которым определяется размерность изображения (см. п. 5.5). Для
загрубления применяется метод конволюции исходного изображения с
помощью сканирующего окна. Отклик окна сравнивается с некоторым
пороговым значением и затем принимается решение о видимости точки
с координатами, соответствующими центру окна.
Фрактальные стохастические сцены (в том числе и трехмерные)
синтезировались по методу, предложенному в [28, 147]. В первом
варианте (рис. 5.20,я) на нулевом шаге от точки 0 под равномерно
распределенными углами проводились пять лучей со средней длиной 1. На
следующих шагах из конца каждого луча строились пять отрезков длиной
1/3, затем 1/9 и т.д. Размерность данного фрактала £> = 1п5/1пЗ.
Минимальный размер «ветки» был равен двум точкам на экране. Второй
фрактал (рис. 5.20,6) строился аналогично первому, за исключением
того, что вместо лучей использовались круги.
Рис. 5.20. Стохастические фракталы, полученные с помощью алгоритмов,
использующих лучи (а) и окружности (б)
222
Несмотря на то, что фракталы,
приведенные на рис 5.20, имеют стохастический
характер, вид их зависимостей \gS = f(\gS)
практически одинаков. Это свидетельствует о
важной особенности стохастических
фрактальных изображений, а именно, достаточно слабой
зависимости размерности от вида конкретной
реализации. Для данных рис. 5.20 было
получено £>=2,2545 и D=2,2601. На рис. 5.21 в
качестве примера показан синтез сцены
«листок папоротника» с помощью алгоритма
итерирующих функций,
т.е. совокупности
сжимающих аффинных
преобразований. В случае
комплексной переменной
z для итераций вида
**+!=*;!+* (5-77)
при п->оо получаем
множество Мандельброта или
М-множество [144].
По данным [20]
были измерены размерности
предполо-жительно фрактальных
РЛИ и АФС реальных природных
ландшафтов (рис. 5.22 [20]). На РЛИ
приведены лиственный лес и река, на
АФС - лес, луг и дорога.
Фрактальные размерности изображений
оказались равными D=2,0974 и D=2,1299
для РЛИ и АФС соответственно.
Сигнатуры \gS=f(\gS) для РЛИ и
АФС приведены на рис. 5.23 [25,44].
Рис. 5.21. Синтез листка
папоротника на основе
алгоритма итерирующих
функций
Рис. 5.22. Типовые примеры АФС с высоты 50 м (а)
и РЛИ с высоты 250 м на длине волны 8,6 мм (б)
Рис. 5.23. Функциональные
зависимости lg S - f(\g S)
5.11.2. Примеры фрактального обнаружения целей
на реальных оптических и радиолокационных изображениях
Большое различие в размерностях (сигнатурах) фрактальных и
нефрактальных объектов и явилось первоосновой для наших первых
экспериментов по разработке фрактальных методов фильтрации
малоконтрастных сложных изображений. Затем проводились эксперименты,
когда часть изображений (АФС, РЛИ) была закрыта прямоугольной обла-
223
стью. В частности, площадь прямоугольного объекта равнялась 32" от
общей площади изображений. Полученные результаты для АФС и РЛИ
представлены на рис. 5.24 [25, 44]. Как и следовало ожидать, вариации
фрактальной размерности изображения тем значительней, чем большая часть
поверхности покрыта искусственным объектом, иначе говоря, чем больше
точек, составляющих фрактальное изображение, покрыто нефрактальным
объектом. Для повышения чувствительности алгоритма целесообразно
разбивать первоначальное изображение на части, что приведет к резкому
изменению значений размерности D при появлении нефрактального объекта.
IgS
0,6
0,5
0,4
0,3
0,2
0,1
-
0 0,143 0,286
1 Q)
IgS
0;6
0,5
0,4
0,3
0,2
0,1
'8* ° 0,143 0.286 Igd
б)
Рис. 5.24. Зависимость фрактальной размерности АФС (а) и РЛИ (б) от числа
искусственных детерминированных объектов:
а - нижняя кривая при отсутствии объекта; верхняя - для пяти объектов;
б - кривая 1 - для двух объектов; кривая 2 - без объектов
Результаты обнаружения искусственных объектов на фоне
синтезированной фрактальной поверхности (рис. 5.25,а,б) представлены на
рис. 5.25,в [25, 44]. Видно, что размерность D синтезированных
изображений выше, чем у реальных изображений. Это связано с размытостью
изображений (АФС, РЛИ) земных покровов. Для уменьшения размытости
таких изображений можно использовать различные методы деконволюции.
В задачах обнаружения полезный объект (цель) всегда имеет
некоторую случайную (в том числе и фрактальную или многомасштабную)
составляющую в любом из его параметров. В данном случае таким
меняющимся параметром считалась площадь, покрываемая
нефрактальным объектом. Была проведена серия экспериментов, при которых
площадь, покрытая нефрактальным объектом, имела гауссовское
распределение со средним Ю-1 от общей площади изображения и среднеквадра-
тическим отклонением порядка 30%. Примеры таких изображений
представлены на рис. 5.2в,а-г, а изменения их фрактальной размерности
показаны на рис. 5.26,д [25, 44]. Для рис. 5.26,6-г фрактальные
размерности D = 2,5476, D = 2,5502 и D = 2,5502 соответственно.
224
Рис. 5.25. Изменение размерности синтензированной фрактальной
сцены (а, б) при размещении на ней детерминированных объектов (в):
кривая 1 - без объектов, D = 2,4663; 2 - для одного объекта, D = 2,3625;
3 - для двух объектов, D = 2,2627
Рис. 5.26. Примеры изображений при обнаружении объекта в шумах (а-г)
и вариации их фрактальных сигнатур (д): а - исходный фон;
б-г - различные флуктуации изображения объекта;
кривые 1—4 соответствуют позициям (а-г)
8—3523
225
Для получения статистических
данных о значениях фрактальных
размерностей изображений
поверхности были проведены измерения
размерностей участков изображения.
По полученным значениям строились
эмпирические распределения
фрактальной размерности. В ходе
экспериментов синтезированное
фрактальное изображение, имеющее размер
1600x1200 точек, разбивалось на ряд
элементарных изображений размером
200x100 точек. Затем в центр
каждого элемента помещался объект -
прямоугольник от 20x20 до 60x60 точек
(рис.5.27,а)[25,44].
По ансамблям значений
размерностей (рис. 5.27,6), полученных
таким способом, были построены
эмпирические распределения (рис.
5.27,в), которые могут быть
использованы для синтеза обнаружителей
радиолокационных сигналов.
Гистограмма, максимум которой находится
вблизи значения £>«2,5,
соответствует серии, полученной для чисто
фрактального изображения. Другая
серия со средним, равным D«2,2,
получена для изображения с
объектом. Построив такие гистограммы
для различных классов изображений
реальных поверхностей, можно
синтезировать и фрактальные
непараметрические обнаружители различной сложности.
При определении размерностей можно использовать не только
описанный алгоритм, но и алгоритм, основанный на связи спектральных
характеристик текстурных изображений с их фрактальными
характеристиками. Так как фрактальные характеристики не содержат информации
о конкретном виде объекта, а являются показателем его топологической
сложности и связности, то данный алгоритм может быть эффективен в
задачах, связанных с обнаружением «подозрительных областей» при
радиолокационном зондировании зондируемых объектов.
Рис. 5.27. Флуктуирующий
фрактальный фон с объектами (а),
вариации фрактальной размерности (б)
и эмпирические распределения
размерностей (в): кривая 1 -
фактальное изображение + объект;
2 -фрактальный фон
226
В итоговой серии экспериментов на первом этапе рассматривалось
влияние контрастности изображения полезного объекта на значение
фрактальной размерности изображения. Яркость объекта определялась по его
цвету, т.е. по 256 градациям яркости. Относительная яркость ///0
прямоугольников изменялась от белой (/ / /0 = 0) до черной (/ / /0 = 100 %).
Площадь прямоугольника S0
в первом эксперименте равнялась
1/20 от общей площади
изображения S, а во втором площадь
объекта составляла 1/5 от общей площади
S (рис. 5.28 [25,44]). Поведение
кривых подтверждает слабую
зависимость фрактальной размерности
изображения от яркости объекта.
Это свойство очень полезно при
обнаружении малоконтрастных целей. Рис- 5-28- Зависимость фрактальной
Наибольшее влияние на значение размерности D изображения
фрактальной размерности оказывает от ЯРК0СТИ °^е™5при S° =S/2°
доля площади цели на АФС и РЛИ. °
В компьютерных экспериментах, описываемых далее,
использовались синтезированные и реальные оптические и радиолокационные
сложные изображения. Для синтезированных изображений была
измерена их фрактальная размерность D почти по 100 реализациям. В результате
были построены экспериментальные распределения значений
фрактальной размерности. Полученные распределения имеют максимум в точке
D=2,79384 со среднеквадратическим отклонением 5=0,02. При этом
черному цвету соответствовала яркость 1=0, а белому - /= 1 в отн. ед.
При измерении фрактальной размерности масштаб менялся от 1:1
до 1:20. Фрактальная сигнатура строилась в виде вертикальных отрезков
для каждого окна. Данная зависимость, как обычно, строилась в
логарифмическом масштабе. Фрактальная сигнатура в данном случае, как
впервые показано в [36], характеризует пространственный фрактальный
кепстр изображения. На рис. 5.29 [25] в левой части показан вид экрана
компьютера до проведения экспериментов. В правой части представлено
изображение на экране компьютера после окончания эксперимента, а
также фрактальная сигнатура, дающая оценку D = 2,7940.
Затем на фрактальный фон помещалась протяженная цель в виде
прямоугольника. При проведении экспериментов изменялись размеры и
яркость цели. Относительные вариации яркости составляли 0... 1, а
размеры цели - 1/3... 1/64 общей площади изображений. Соответствующие
результаты компьютерных экспериментов приведены на рис. 5.29.
227
Рис. 5.29. Изображение на экране компьютера до эксперимента (слева)
и после окончания эксперимента (справа) с синтезированными изображениями:
а - при отсутствии цели, D = 2,7940; б -для 5ц /S - 25" , D = 2,4983;
в - для Su / S = 64"1, D = 2,5543
По результатам проведенных исследований были построены
зависимости фрактальных размерностей от контраста цели относительно фона
по интенсивности К и от отношения площади протяженной цели 5Ц к
площади всего изображения S (рис. 5.30 [25]). Кривая на рис. 5.30,6 была
построена для одной реализации фрактала, когда цель черная, т.е.
интенсивность сигнала стремится к нулю. Данные на рис. 5.30,а позволяют
говорить о возможности обнаружения цели при отношении сигнал-фон,
меньшем -10 дБ. В дальнейших экспериментах наблюдалось устойчивое
обнаружение цели и при более низких отношениях сигнал-фон.
Наибольшее влияние на вероятность обнаружения цели оказывают ее
размеры. Поэтому при фрактальной обработке изображений вместо отношения
сигнал-фон целесообразно использовать отношение площади цели к
площади всего изображения.
228
Аналогичные данные для РЛИ
местности с изгибами реки, лугом и
лесом приведены на рис. 5.31. При
отсутствии цели (рис. 5.31,а)
фрактальная размерность D = 2,8379.
Когда на РЛИ находится цель при
отношении Su/S = 1/25 значение
фрактальной размерности падает до
D = 2,5533, а при Sn/S = 1/64
значение D = 2,6809. Для каждого
изображения на рис. 5.31 [25, 43] были
получены разрезы
пространственной яркости (интенсивности), по
которым можно судить об
отношении сигнал-шум.
Зависимости фрактальной
размерности РЛИ от контраста цели
и отношения Su/S имеют вид,
аналогичный кривым на рис. 5.30.
Однако, в отличие от данных рис. 5.30,
для РЛИ наблюдается переход от
более крутого участка кривой
D=D(SU/S) к более пологому при
значении параметра S„/S=0,5. Данное значение Sn/S аналогично
полученному в [10, 20] для случая обнаружения детерминированных объектов
в текстурных полях РЛИ дисперсионным методом.
Рис. 5.30. Зависимости фрактальной
размерности D синтезированных
сложных изображений
от контраста цели К (а)
и отношения Sn / S (б)
Рис. 5.31. Фрактальные сигнатуры при обнаружении цели на РЛИ:
а - при отсутствии цели, D = 2,8379; б - для 5ц / S = 25"1, D = 2,5533
229
Соответственно экспериментальные данные для АФС местности с
дорогой, лиственным лесом и травой представлены на рис. 5.32 [25,43]. В
отсутствие цели (рис. 5.32,а) фрактальная размерность D=2,8235. При
наличии цели с относительными размерами Su/S=l/25 Z)=2,5502 (рис. 5.32,6),
при отношении Su/S=\/64 D=2,5809 (рис. 5.32,в). Следует отметить
почти одинаковые значения фрактальной размерности для РЛИ и АФС с
типовыми подстилающими покровами.
Рис. 5.32. Фрактальные сигнатуры при обнаружении цели на АФС:
а - при отсутствии цели, D = 2,8235; б - для 5ц / S ~ 25" , D = 2,5502;
в - для 5ц /S = 64"1, D = 2,5809
Таким образом, приведенные характерные данные по первому этапу
исследований показали высокую эффективность предложенных
фрактальных методов фильтрации как синтезированных, так и реальных
изображений местности. С помощью компьютерного моделирования были
построены эмпирические распределения фрактальной размерности D.
Предложенный метод измерения фрактальной размерности и
фрактальных сигнатур имеет простую реализацию. Однако применение
прямоугольного окна приводит к естественным ошибкам при измерении.
Эксперименты, проведенные с изображениями реальных земных
поверхностей, полученных с помощью аэрофотосъемки и
радиолокационного зондирования миллиметровым цифровым радиолокатором [8, 20,
22], показывают реальную возможность применения фрактальных
сигнатур при реализации устройств вторичной обработки сигналов. По
измеренным фрактальным сигнатурам сложных изображений можно по-
230
строить базы данных, содержащие информацию о разнообразных
классах природных покровов и характерных целях [25, 107, 108, 116, 117,
123, 127, 130, 135]. При дальнейшей модернизации разработанных нами
фрактальных методов фильтрации можно коренным образом увеличить
быстродействие алгоритмов [100, 107, 108, 116, 120, 123, 135, 147]. В
общем случае они, например, легко могут быть распараллелены.
5.12. Примеры фрактального распознавания целей
на изображениях земной поверхности
Распознавание образов представляет собой задачу преобразования
входной информации в выходную, в результате решения которой можно
сделать вывод о том, к какому классу относится распознаваемый образ
[193-195]. Распознавание любых объектов или явлений требует
создания специальных систем распознавания, поскольку универсальных
систем распознавания для всех объектов не существует.
Все методы распознавания можно разделить на две большие
группы. Первая использует понятие пространства признаков и обработку в
данном пространстве, вторая основана на исследовании конструкции
рассматриваемых образов.
Понятие фрактального распознавания образов в литературе
вводится впервые. Алгоритмы фрактального распознавания образов
основаны на использовании парадигмы «топология цели - ее фрактальная
размерность» [25, 38, 47, 50, 51, 107, 108, 123, 135]. Методической
основой алгоритмов является отказ от топологических констант и описание
классов целей на языке признаков в виде фрактальных размерностей по
D или их фрактальных сигнатур. Априорное пространство
детерминированных или вероятностных признаков определяется с помощью
динамического теста.
Как отмечено в [189], выбор и подготовка тестового материала для
экспериментального исследования процесса распознавания
существенно влияют на достоверность результатов исследования. В качестве
универсального тестового материала для исследования вопросов
распознавания образов на изображениях любой природы удобно использовать
набор игры «Танграм», известной в Китае под названием чи-чао-тю
(«хитроумный узор из семи частей»).
Игра «Танграм» состоит из семи элементов («танов») особым
образом разрезанного квадрата, окрашенного с двух сторон в черный цвет.
В каждой фигуре должны быть использованы все семь элементов «Тан-
грама». В проведенных компьютерных экспериментах исследовались
16 фигур «Танграма» [25] (рис. 5.33). Выбор такого универсального
динамического теста определялся тем, что все фигуры при разных конфи-
231
[Jf
к
p-
-■
^
7
Ф
V
V
*n
*1
"W
ЧП
5 M
1 ^
Таблица 5.7. Распределение фигур
no кнастерам и фрактальным размерностям
в зависимости от числа уголков или от числа
граней
№
фигуры
1
2
3
4
5
6
1 7
1 8
I 9
I 10
1 11
I 12
13
1 14
15
I 16
Значение
о
2,34567
2,32546
2,54983
2,12143
2,34028
2,28672
2,11721
2,42878
2,43682
2,24856
2,09813
2,74953
2,72222
2,33933
2,35132
1 2,29562
Число
уголков
N 1
18
12
23
3
23
16
4
17
16
8
4
10
(4 внутри)
17
(3 внутри)
20
19
1 16
Число
граней
М
18
12
23
3
23
16
4
17
16
8
4
10
(4 внутри)
(3 внутри)
20
19
1 16
Кластер 1
1-5 1
3
3
4 1
1
3
2
1
4
4
2
1
5
5
3
3
1 2 1
Рис. 5.33. Китайский «Танграм»
(вверху слева) и 16 фигур,
составленных из семи «танов»
гурациях имеют одинаковую площадь. Поэтому нет необходимости в
центрировании и нормировке различных функционалов сравнения.
Результаты первоначального «грубого» измерения фрактальных
размерностей D и кластеризации на
пять кластеров (рис. 5.34) тестовых
изображений приведены в табл. 5.7
[25], где указано также число граней
М и уголков N для каждого «тана».
Полученные данные позволили
[25] построить усредненные
регрессионные зависимости D =f(N,M) для
силуэтов искусственных сооружений
(«таны» № 2, 4, 7-11) в виде
D*0,03JV + 2,0 (5.78)
и силуэтов биологических объектов
(«таны» человека и животных № 1,3,
6, 14-16) в виде
D*0,04W + 1,6, (5.79)
где2<£><3.
Силуэты самолета (№12) и
корабля (№13) образуют отдельный
кластер (рис. 5.34).
232
D .
2,8
2,7
2,6
2,5
2,4
2,3
2,2
2,1
2
■ Й?>
D 5-
|'.7Л-- v
- 13 V
'"0
^.'.-Л'ЙГ})т
1Ч0_ ^ ^ - П
I кластер
10 15 20 25 N.M
Рис. 5.34. Результаты кластеризации
в зависимости от фрактальной
размерности D и числа уголков N
или граней М
В дальнейших исследованиях усилия были направлены на
увеличение информативности пространства признаков с применением
методов фрактальной топологии. Использование понятия текстуры
изображений, фрактальных характеристик (фрактальная размерность Д
фрактальная сигнатура, ее наклон, пространственный фрактальный кепстр,
дробные показатели пространственного спектра) и понятий
интегральной геометрии позволяет повысить размерность вектора измерений и
более четко выделить классы естественных и антропогенных объектов.
При компьютерном моделировании применялись
радиолокационные изображения на вертикальной поляризации для дельты р. Волга.
Рассматривались карты подтопления района с определением уровня
грунтовых вод с точностью 0,5 м до глубины 2,5 м в диапазонах длин
волн: 4 см (рис. 5.35,а), 68 см (рис. 5.35,6) и 2,5 м (рис.5.35,в).
Рис. 5.35. Серия радиолокационных изображений, полученных
радиолокатором с синтезированной апертурой
Программа производит вычисление локальных фрактальных
размерностей для каждого пиксела изображения. Для этого необходимо
иметь, по крайней мере, два изображения одного и того же участка
земной поверхности, полученные на разных частотах радиолокаторов. При
этом изображения, полученные на больших длинах волн, окажутся
более «грубыми» (крупный масштаб), а изображения, соответствующие
малым длинам волн будут детальными (мелкий масштаб). Предполагая,
что большинство природных образований могут описываться фрактала-
233
ми, можно ожидать, что на изображениях появятся области с близкими
по значениям фрактальными размерностями.
Данная программа вычисляет так называемую дисперсионную
фрактальную размерность. При этом в каждом пикселе изображения
оценивается дисперсия величины сигнала (цвета). Если изображение нефрактально,
то дисперсия инвариантна масштабу. Результаты показаны на рис. 535,е-г
для всех длин волн радиолокатора при различных измерительных окнах
31x31, 15x15 и 5x5 точек соответственно. Естественно, что чем больше
окно, тем монотонней значение дисперсии для любого изображения, что
приводит к уменьшению числа кластеров.
Распределение фрактальных размерностей для изображения на рис.
5.35,а представлено на рис. 5.36. Данное эмпирическое распределение
получено при размере окна 31x31. Отчетливо выделяются три группы точек с
близкими фрактальными размерностями, соответствующие участкам с
определенными текстурами. После анализа первичной информации и
установления типов поверхностей была произведена обработка изображения
(рис. 5.37,а) с размером окна 15x15 точек. Обработка позволила выделить
около 10 кластеров. На рис. 5.37,6 показано поле полученных фрактальных
размерностей, соответствующее трем
приведенным РЛИ одного участка
местности. Интересно отметить, что на
обработанных изображениях, кроме
устойчивого разделения по типам,
отмечаются невидимые до фрактальной
обработки особенности (участок
отмели). Это позволяет говорить о
возможности применения фрактального
распознавания для идентификации участков
изображения, «невидимых» при
классических методах кластеризации по яр-
костному полю.
Рис. 5.36. Распределение фрактальных
размерностей D для РЛИ дельты
р. Волга с площадью изображения
640x480 пиксел и размером окна 31x31
Рис.5.37. Кластеризация земных покровов по полю локальных фрактальных
размерностей: а - исходное изображение; б - поле фрактальных размерностей D
234
5.13. Стратегические направления приложений
принципов фрактальной радиолокации и фрактальной
радиофизики в новых информационных технологиях
Впервые предложенные и развиваемые в ИРЭ РАН новые
информационные технологии для решения современных задач радиолокации и
радиофизики с использованием текстурных (первые публикации - середина
80-х годов XX века) и фрактальных (первые публикации - середина 90-х
годов XX века) мер на основе принципов нелинейной динамики показали их
перспективность и дали обнадеживающие результаты. В частности на рис.
5.38 конкретизированы виды различных поверхностей, для которых по
современным оригинальным (разработанным в ИРЭ РАН) фрактальным
методам и алгоритмам были измерены их ансамбли фрактальных размерностей
D и фрактальных сигнатур [25,28,37,43,99,116-138,147,199].
Тип изображения
| Синтезированные (1996-1998)
Оптические АФС( 1996-1997)
РЛИ земной поверхности (Я= 8,6 мм, 1996)
РЛИ поверхности планеты Венера {Я = 8,0 см, КА
«Венера-15,16», поляризация - ГГ)
Оптические изображения планеты Марс
(КА - «Opportunity», январь 2004)
1
Нанокерамические материалы (март 2003)
Образцы металлических поверхностей для РКТ
при различных видах обработки (сканирующий
зондовый микроскоп (SPM) компании NT-MDT,
г. Зеленоград, апрель 2003)
%
k#SJfc^S%|
Значения D\
2,50.
2,55.
2,55.
2,20.
2,40.
2,35.
1
2,10.
.2,90
• 2,75
2,65
.2,50
..2,55
-.2,55
..2,40
Рис. 5.38. Характерные диапазоны значений фрактальной размерности D
для природных и искусственнных поверхностей: КА - космический аппарат,
РКТ - ракетно-космическая техника
235
На рис. 5.39 схематически показаны основные направления
«фрактальных исследований», а также приведены краткие сведения о начале
соответствующих работ и первых публикациях.
ФРАКТАЛЫ В РАДИОЛОКАЦИИ И РАДИОФИЗИКЕ
Фрактал>ные и текстурные
сигнатуры изображений
ИРЭРАН,
1987 г.
Рассеяние волн фрактальной
поверхностью
ИРЭРАН,
1997 г.
Обнаружение малоконтрастных
целей (текстуры + фракталы)
Распознавание контуров целей
(текстуры + фракталы)
ИРЭРАН,
1987 г.; 1997 г
ИРЭРАН,
1987 г.; 1997 г.
Синтез изображений местности
ИРЭРАН,
1996 г.
Кластеризация изображений
ИРЭРАН,
1997 г.
Динамические модели рассеяния
радиоволн на основе теории
детерминированного хаоса
ИРЭРАН,
1997 г.
Фрактальное кодирование
радиолокационной информации
ИРЭРАН,
1ЦКБ "Алмаз",!
1988 г.
Фрактальные селективные
и радиоволновые системы
Фрактальные антенны
и их конструирование
ИРЭРАН,
МИРЭА,
2003 г.
л
ИРЭРАН,
ЦКБ "Алмаз"
1989 г.
гЙрэран,
МИРЭА,
2000 г.
9
Рис. 5.39. Эскиз развития новых информационных технологий на основе
фракталов, текстур и детерминированного хаоса
На основе [6-138] можно указать следующие перспективные
направления:
1. Исследование возможностей текстурных (пространственных и
спектральных), фрактальных и энтропийных признаков для
радиолокационных задач обнаружения.
236
2. Синтез новых моделей рассеяния радиолокационных сигналов
земными покровами на основе теории детерминированного хаоса,
странных аттракторов и фрактальных вероятностных распределений -
устойчивых паретианов.
3. Исследование волновых явлений (распространение и рассеяние
волн, процессы диффузии) во фрактальных неоднородных средах на
основе операторов дробного интегродифференцирования.
4. Синтез моделей каналов радиолокационных и
телекоммуникационных систем на основе пространственных фрактальных обобщенных
корреляторов и фрактальных частотных функций когерентности.
5. Исследование возможностей распознавания формы или контуров
целей с помощью фрактальных, текстурных и энтропийных признаков.
6. Исследование потенциальных возможностей и ограничений
фрактального метода обработки радиолокационных и связных сигналов,
в том числе фрактальной модуляции и демодуляции, фрактального
кодирования и сжатия информации, фрактального синтеза изображений,
фрактальных фильтров [198].
7. Исследование адаптивной пространственно-временной
обработки сигналов на основе дробной топологической размерности.
8. Поиск и исследование новых комбинированных методов
обнаружения и распознавания классов малоконтрастных целей.
9. Исследование возможностей создания новых сред для передачи
информации, многодиапазонных фрактальных поглощающих
материалов, конструирование фрактальных антенн и фрактальных частотно -
селективных поверхностей и объемов.
10. Синтез новых классов фракталов и мультифракталов с
обобщением понятия меры множеств.
11." Изучение вида или топологии выборки одномерного и/или
многомерного сигнала для задач искусственного интеллекта с целью
создания словаря фрактальных признаков на основе фрагтапьных
примитивов, являющихся элементами фрактального языка с фрактальной
грамматикой, т.е. исследование проблемы «размерностного склероза»
физических сигналов и сигнатур [123]. Это понятие, введенное автором,
предполагает исследование топологических особенностей каждой
конкретной индивидуальной выборки, а не усредненных реализаций,
имеющих зачастую совершенно другой характер.
12. Развитие фрактальной неинерциальной релятивистской
радиолокации в искривленном пространстве - времени связанных структур,
т.е. фрактальной геометрии пространства - времени
детерминированных структур [92, 98, 106].
13. Прогноз механизмов формирования и характеристик
шероховатости с целью управления геометрическими параметрами микрорельефа для
получения заданных физико-химических и эксплуатационных свойств из-
237
делий при современных неравновесных технологиях обработки их
поверхностного слоя [99, 134, 136-138]. Данное направление тесно смыкается с
магистральным научным направлением - фрактальным
материаловедением, успешно развиваемым в Институте металлургии и материаловедения
им. А. А. Байкова РАН (см., например, [196, 197]).
Подробно и обстоятельно все полученные результаты по данным
направлениям изложены автором в монографиях [25, 199].
В заключение можно отметить, что развитие и внедрение новых
информационных технологий на основе принципов фрактальной
радиолокации и фрактальной радиофизики необратимо связано с подготовкой
высококвалифицированных специалистов по данным научным
направлениям. В первую очередь, необходима (см. рис. 5.3) постановка в ряде
институтов и университетов РФ курсов лекций по параллельному
изучению основ теории фракталов, теории детерминированного хаоса,
теории дробных операторов и их физико-технических приложений.
Методологическая база для этого уже достаточно хорошо проработана. Для
этой же цели был создан в 2003 г. научно-технический теоретический
журнал «Нелинейный мир», отражающий фундаментальные
направления физики, математики и других естественных и гумманитарных наук
с междисциплинарных позиций синергетики и нелинейной динамики
(см., например, [109]).
238
ГЛАВА 6
Состояние элементной базы
радиолокационной техники
Известно, что состояние и развитие элементной базы (техники)
любого вновь осваиваемого диапазона радиоволн зависит от
особенностей распространения в атмосфере, а также от применения в
конкретной разрабатываемой технике.
Чтобы дать характеристику основным направлениям развития
техники короткой части миллиметрового диапазона радиоволн
вначале коротко остановимся на общей характеристике этого диапазона
в сравнении с соседними длинноволновыми и коротковолновыми
диапазонами электромагнитного излучения.
Прежде всего необходимо отметить, что в последнее годы все
большее внимание зарубежных специалистов, особенно в области
военной радиолокации, привлекает диапазон миллиметровых волн
(30...300 ГГц). Указанные частоты соответствуют диапазону длин
волн от 10 до 1 мм.
Занимая промежуточное положение между двумя классическими
диапазонами - сантиметровым (СМ) и оптическим, ММ-диапазон
радиоволн нередко позволяет находить компромиссные
технические решения, которые в наибольшей степени отвечают
требованиям конкретных вариантов применения.
6.1. Общая характеристика техники миллиметрового
диапазона радиоволн
Как уже указывалось выше применение ММ-волн в
радиолокационной технике, например, в сравнении с техникой СМ-радиоволн, также
позволяет при одинаковой апертуре антенны получать более узкую
диаграмму направленности (ДНА) и большой коэффициент усиления
антенны с целым рядом вытекающих отсюда преимуществ: более высокой
точностью и разрешающей способностью по угловым координатам;
снижением эффекта многолучевого распространения и возможностью
сопровождения целей под малыми углами места; меньшей уязвимостью
РЛС от радиоэлектронного подавления (РЭП) и влияния отражений от
местных предметов, большей скрытностью работы; лучшей
электромагнитной совместимостью. Общие качественные характеристики
возможностей аппаратуры различных диапазонов волн приведены в табл. 6.1.
239
Таблица 6.1. Сравнительные параметры возможностей
аппаратуры различных диапазонов радиоволн
Параметры
1 Точность сопровождения
1 Способность распознавания
I Скрытность работы
1 Обеспечение поиска цели
| Работоспособность в непогоду
1 Работоспособность в пыли
1 и дыму
Возможность аппаратуры 1
различных диапазонов волн 1
сантиметровые
Средняя
Низкая
Низкая
Высокая
Высокая
Высокая
миллиметровые
Средняя
Средняя
Средняя
Средняя
Средняя
Высокая
оптические 1
Высокая 1
Высокая
Высокая
Низкая
Низкая
Низкая
Миллиметровые РЛС обладают большой полосой пропускания
приемопередающих трактов, что позволяет за счет использования
широкополосных импульсных и частотно-модулированных сигналов с
различными видами кодирования увеличить скорость съема
радиолокационных сигнатур цели и существенно повысить разрешающую
способность по дальности. Они характеризуются также большей
чувствительностью к радиальной скорости целей. Так, если на частоте 10 ГГц (Я =
= 3 см) изменение радиальной скорости объекта на 1 м/с вызывает
дополнительный сдвиг на 66,7 Гц, то на частоте 35 ГГц (Я = 8,6 мм) сдвиг
составляет уже 233,3 Гц, а при 95 ГГц (Я = 3,16 мм) - 633,3 Гц.
Следствием этого является более высокая вероятность обнаружения
движущегося или неподвижного с работающим двигателем объекта и улучшение
возможности распознавания объектов за счет анализа тонкой структуры
отраженного сигнала. В дальнейшем для удобства изложения материала
рабочий диапазон (особенно в таблицах) указывается в единицах
частоты (в герцах), что, как правило, свойственно для иностранной
(переводной) литературы. В отечественной литературе чаще рабочий диапазон
дается в размерностях длины волны. При необходимости перехода к
рабочей длине волны можно пользоваться известным соотношением I =
=с I f(c - скорость распространения радиоволн в атмосфере).
При использовании ММ-радиоволн становится возможным также
существенно уменьшить физические размеры и массу аппаратуры РЛС,
что делает ее пригодной для размещения на борту самолетов,
вертолетов, ракет и даже на снарядах и минах.
По сравнению с оптическими и ИК системами миллиметровые
РЛС имеют большую дальность действия в дыму, пыли, тумане, во мгле
и при сухом снегопаде.
240
В то же время использование ММ-радиоволн для РЛС сопряжено с
преодолением ряда ограничений постоянного и временного характера.
К ним относятся: общий рост затухания сигналов в атмосфере с
повышением их частоты, что обусловливает, как правило, небольшую
дальность действия станций этого диапазона; относительная неразвитость
компонентной базы, что приводит к чрезмерно высокой стоимости
производства аппаратуры миллиметровых РЛС.
К настоящему времени в нашей стране и за рубежом проведен
большой объем прикладных и фундаментальных исследований по
созданию элементной базы для разработки аппаратуры ММ- и
субмиллиметровых (субММ) радиоволн. В последнее время созданы приемные
устройства в короткой части ММ-диапазона волн, которые по
чувствительности практически не уступают устройствам в СМ-диапазоне.
Успехи, достигнутые в разработке когерентных гетеродинных приборов и
антенно-фидерных устройств, дают основания ставить вопрос о
создании автоматизированных РЛС обнаружения объектов. Такие РЛС
различного назначения могут располагаться на наземных, надводных и
воздушных носителях, а также функционировать в космосе [1].
6.2. Электровакуумные и полупроводниковые
приборы генерации
В [1-3] приведен обзор отечественных и зарубежных работ,
исследований и разработок электровакуумных приборов СМ-, ММ- и субММ-диа-
пазонов, выполненных за последние 10-15 лет. Показано ключевое
значение развития вакуумных приборов, которое привело к прогрессу в
области спектроскопии газов и радиотехнических материалов, а также к
созданию новых устройств в области вакуумной, полупроводниковой и
квантовой электроники, приведены результаты исследований спектров
поглощения атмосферы, а также жидких и твердых диэлектрических
материалов и ферритов в ММ- и субММ-диапазонах; определены
основные направления решения проблемы создания измерительных
устройств в короткой части ММ- и частично субММ-диапазонов.
Совершенствование методов выращивания кристаллов и структур
построения твердотельных приборов на основе использования
гетеропереходов, а также технологии производства позволили поднять их
граничную частоту до 350...450 ГГц (длина волны 0,86 мм и 0,67 мм
соответственно). Это приборы типа MESFET, НЕМТ, РМ-НЕМТ, LM-HEMT, НВТ
на подложках GaAs и InP.
Одним из определяющих параметров любой РЛС является
мощность передатчика. На современном этапе развития технологической
базы ММ-диапазона волн твердотельные приборы позволяют
генерировать сигналы небольшой мощности - от 0,5... 1 Вт на частоте 35 ГГц и
до 5... 8 мВт на частоте 300 ГГц.
241
Для получения больших мощностей используют либо
суммирование сигналов нескольких маломощных твердотельных излучателей,
либо прибегают к ламповым генераторам, обеспечивающим на 3-5
порядков большие уровни мощности излучения (табл. 6.1).
Наиболее часто в компактной аппаратуре применяются генераторы
на лавинно-пролетных диодах (ЛПД). Устройства на ЛПД позволяют
генерировать сигналы мощностью до 0,5 Вт (10 Вт в импульсе) на
частоте 90 ГГц, 78 мВт на частоте 185 ГГц и 7,5 мВт на частоте 285 ГГц.
Однако они имеют неудовлетворительные шумовые характеристики и
требуют очень тщательного согласования с резонаторами. В противном случае
не удается получить максимальную мощность, возрастают шумы и
отмечается нестабильность в работе. Для нормальной работы также требуется
поддержание постоянной температуры прибора порядка 50.. .70°С.
За счет совершенствования механизма инжекции носителей и
горизонтальной и вертикальной структуры построения прибора
разработчики пытаются уменьшить коэффициент шума, поднять КПД (более
15%) и выходную мощность (более 2 Вт в непрерывном режиме и 50 Вт
в импульсном на частоте 95 ГГц).
Низкий уровень шума, однако, и меньшую мощность излучения
имеют генераторы на диодах Ганна на частотах до 200 ГГц. Лучшие
образцы диодов позволяют получать мощности сигнала до 340 мВт на
частоте 31 ГГц, 80... 100 мВт - на 34 ГГц, 1 ...2 мВт - на 68 ГГц.
Для увеличения мощности выходного сигнала используют СВЧ-уси-
лители (табл.6.2).
Таблица 6.2. Твердотельные усилители мощности ММ-диапазона
радиоволн .
1 —
Тип
прибора
Монолитный
однокаскад-
ный на
MESFET
I Монолитный
I двухкаскадный
на MESFET
| Дискретный
на РМ-НЕМТ
I Дискретный
I на DH-PM-
НЕМТ
I Монолитный
iHalnP-MISFET
Частота,
ГГц
35
50
42,5
35
44
60
94
30
Выходи.
мощн.,
Вт
0,22
0,17
0,175
0,42
0,79
0,125
0,057
0,43
Коэфф.
у сил.,
дБ
6
6
6
6
5,1
5,5
3
6,5
кпд,
%
21
25
22
20
41
32
16
27
Длина
затвора,
мкм
0,25
0,35
0,35
0,25
0,25
0,15
0,15
0,80
III
0,42
0,64
0,47
0,79
0,83
0,38
0,50
Страна, 1
фирма и год 1
разработки 1
США, «Тексас 1
инструменс», 1
1989
США, «Аван-
тренктек» 1989
США,
«Комсат»,
1998
США,
«Дженерал
электрик», 1989
Япония, 1
«Тошиба», 19891
242
Достигнутый предел мощности транзисторных усилителей на
частотах до 45 ГГц составляет 0,79 Вт.
По прогнозам западных специалистов в ближайшее время уровни
мощностей усилителей в монолитном исполнении на транзисторах с
высокой подвижностью электронов (НЕМТ-транзисторах) могут быть подняты
до 1,5 Вт на частоте 35 ГГц; 0,5 Вт - на частоте 60 ГГц и 0,25 Вт - на
частоте 94 ГГц, а через пять лет до нескольких ватт - на частоте 35 ГГц и до
1 Вт - на частоте 94 ГГц.
Многообещающим твердотельным прибором для генерации ММ-
волн вляется Quantum Well-диод, обладающий отрицательным
сопротивлением в широком диапазоне частот. На частоте третьей гармоники
(175 ГГц) удалось получить мощность сигнала 1 мкВт; на основной
частоте 90 ГГц мощность составила 80 мкВт, на частоте 130 ГГц - 10 мкВт.
Следует подчеркнуть, что работы по использованию таких диодов
находятся только в начальной стадии.
Для приемных устройств основными параметрами являются
уровень шума и коэффициент усиления. Исходя из того, что общий уровень
шума приемника определяется коэффициентом шума первых каскадов,
особое внимание разработчиков аппаратуры ММ-диапазона уделяется
созданию малошумящих усилителей, в том числе на базе НЕМТ-тран-
зисторов (табл.6.3).
Таблица 6.3. Малошумящие транзисторы ММ-диапазона
радиоволн
Тип
прибора
MESFET
НЕМТ
РМ-НЕМТ
LM-HEMT
Частота,
ГГц
40
60
60
40
60
93
Содержание
In, %
0
0
35
53
53
Подложка
GaAs
GaAs
GaAs
InP
InP
InP
Коэфф.
шума,
дБ
1,9
1,8
1,6
0,5
0,8
1,4
Коэфф.
у сил.,
дБ
6,5
6,4
7,0
5,0
8,7
6,7
Длина
затвора,
мкм
0,20
0,25
0,15
0,10
0,10
0,15
Страна, 1
фирма и год I
разработки 1
Франция, |
«Томсон», 1
1989
США,
«Дженерал 1
электрик», I
1988
-"-,1990
США,
«Вариан»,1991
США,
«Хьюз», 1989
США,
«Дженерал
электрик»,
1990 1
243
Американскими фирмами созданы гибридные и монолитные ма-
лошумящие усилители с коэффициентом шума 2...4 дБ на частотах до
95 ГГц (табл. 6.4).
Таблица 6.4. Твердотельные малошумящиеусилители
ММ-диапазона радиоволн
Тип
прибора
1 Монолитный
4-каскадный
на РМ-НЕМТ
1 Монолитный
однокаскадный
на РМ-НЕМ
1 Гибридный
на РМ-НЕМТ
1 Монолитный
2-каскадный
| на РМ-НЕМТ
Частота,
ГГц
57-60
43
92
94
94
Подложка
GaAs
GaAs
GaAs
InP
InP
Коэфф.
шума,
дБ
3,7
1,32
3,8
3,0
3,0
Коэфф.
усил.,
дБ J
0,25
0,1
0,1
0,10
Длина
затвора,
мкм
20,7
6,7
4,8
17,0
| 13,3
Страна,
фирма
и год
разработки
США,
«Комсат»,
1990
США,
«Вариан»
1990
США,
«Дженерал
электрик»,
1990 1
США,
TPB,
1990
Остановимся на наиболее интересных результатах развития
отечественной техники ММ-диапазона радиоволн.
Благодаря технологическому освоению элементной базы, особенно с
появлением надежных, компактных твердотельных приборов
ММ-диапазона, в частности, ЛПД, диодов Ганна, диодов с барьером Шоттки,
полевых транзисторов наметились заманчивые перспективы реализации
уникальных свойств ММ-радиоволн [4].
Внедрение в народное хозяйство радиотехнических систем
ММ-диапазона определяется как экономическими показателями, так и
техническими характеристиками системы (принципом построения, несущей
частотой излучаемых колебаний, мощностью излучения,
чувствительностью приемного устройства и т.п.), которые непосредственно зависят
от параметров активных устройств: усилителей, генераторов,
преобразователей частоты. Системный анализ, проведенный в [4] и
последующее проектирование твердотельных устройств показали, что их
наиболее целесообразно использовать для решения задач в области прямой
видимости.
Представленные в табл. 6.5 отдельные результаты исследований
могут позволить разработчикам радиолокационных систем принять ряд
решений при проектировании аппаратуры.
244
Таблица 6.5. Основные области применения устройств
ММ-диапазона на диодах Ганна (сравнение результатов
с устройствами наЛПД, транзисторах,
электровакуумных приборах)
Область применения
I Гетеродины, в том числе 1
I стабильные (с диэлектри-
1 ческими резонаторами)
1 в псевдокогерентных
I системах
I Широкополосные пере-
8 страиваемые генераторы,
| на замену генераторов
| на ЛОВ, стохастические
1 генераторы (измерительная
1 аппаратура)
1
1 Генераторы с линейной час-
I тотной модуляцией для сис-
J тем непрерывного действия
В (транспорт, строительство,
I промышленность и т.д.)
1 Автодин для систем желез-
1 нодорожного транспорта
1 Широкополосные линей-
| ные усилители, заменяю-
I щие маломощные ЛБВ
[ с умеренным коэффициен-
I том шума (примерно
17...20 дБ)
| Передатчики для
В маломощных импульсных
О систем
Достоинства
Высокая относительная
стабильность несущей частоты
(КГ9), низкий уровень шумов
(с AM примерно 160 дБ/Гц и
с ЧМ примерно 110 дБ/Гц на
10 кГц от несущей частоты),
низкие рабочие напряжения
(единицы вольт у диодов из
GaAs) и простые источники
питания
Электрическая перестройка
(сотни МГц с помощью ва-
рактора) при почти
постоянном уровне выходной
мощности (десятки мВт),
большая долговечность (не
менее 100000 ч) и высокая
надежность
Малые габаритные
размеры, масса
Низкая стоимость при
серийном производстве
1 Низкие
интермодуляционные искажения, линейные
фазовые характеристики
Недостатки 8
Низкие КПД 1
(единицы %) и мощность 1
(десятки - сотни милливатт) 1
по сравнению 1
с ЛПД и лампами I
Низкая мощность 1
в короткой части В
ММ-диапазона I
(не менее 20 мВт на 140 Гц) I
в сравнении с оротроном 1
(примерно 1000 мВт) 1
Невысокая мощность I
(примерно 100 Вт |
на 35 ГГц)
Низкий энергетический |
потенциал (не более I
100 дБ), температурная I
стабильность |
(примерно 10"4 на ГС) 1
1 Большой коэффициент шума!
в усилителях 1
на GaAs по сравнению 1
с УПТ (менее 6 дБ) 1
1 Большая длительность |
импульса
(до сотен микросекунд)
245
Появление приемников с нетрадиционным - радиооптическим
(РО) входом связано с поиском конструкций, адекватных укорочению
длины волны, и со стремлением использовать опыт оптических
разработок при создании многолучевых приемников с независимой индикацией
в каждом из лучей. В большинстве случаев [5] такие приборы
сконструированы на основе диэлектрической иммерсионной линзы
гиперполусферической формы, на тыльной плоской стороне которой методами
интегральной технологии выполнены планарные антенны, нагруженные
смесителями, цепи смещения и цепи промежуточной частоты.
В работах [5] дается обзор состояния проблемы супергетеродинов
при построении многолучевых систем: приводятся параметры и
особенности существующих РО приемников (табл. 6.6, где X - длина волны;
Гупч -шумовая температура усилителя промежуточной частоты (УПЧ);
A F -полоса пропускания УПЧ; Гпр - шумовая температура приемника;
L - потери в трактах; Гсм - шумовая температура смесителя.
Таблица 6.6. Параметры супергетеродинных приемников
гг
мм
Число
лучей
Гупч, К
AF,
ГГц
i пр,
К
L
ДБ
■* см,
к
Примечание 1
Неохлаждаемые приемники б
3,3
3,3
48
3,0
I 2'4
I 1?6
1 2,1
0,8
1,4
1,8
2,4
I 0>!
0,2
1 0,3
I 0,7
9
9
3x2
9; 5x2
1
1
1
-
106
-
500
-
120
115
-
0,2
-
1
-
0,2
0,04
-
5170
7900
35000
14000
-
1740
2500
1500
4900
12100
7600
4450
1 2700
16,4
14,4
9,5
17,4
13,2
12,8
11,2
10,4
11,0
7,2
9,1
-
7500
3370
-
7800
2800
-
1480
1660
510
1000
-
Линза-кварц, монолитная схема 1
на GaAs-подложке с ДБШ-сме-1
сителями 1
Просветленная линза, монолит-1
ная схема с ДБШ на GaAs-под- в
ложке 1
2-разрядная матрица двойных |
диполей, на входе интерфе-1
рометр 1
Линза, подложка кварцевая, |
планарные ДБШ. Излучение I
гетеродина подается с тыль-1
ной стороны линзы матрицы 1
Просветленная линза. Логопе-|
рическая антенна. Субгармони-1
ческий ДБШ-смеситель. На 1
входе дихронический фильтр 1
Балансный ДБШ-смеситель с
монолитной схемой, волновод
стандартного сечения
Уголковый ДБШ-смеситель,
нтерферометр на входе
246
Продолжение табл. 6.6
Охлаждаемые приемники 1
0,4
0,6
0,9
| 1
1,3
2,6
W
0,9
1,2
I !>3
1 2>6
1,2
_,.
2
2,0
-
14
5,2
0,5
0,5
0,05
-
1
1100
115
35
116
800
190
85
70
48
11
-
-
-
5,6
-
-
-
-
38
Линза-кварц. Антенна - лога- 1
рифмическая спираль. SIS-сме-1
ситель [
7^ =3,8 К
Асферическая линза из кри-1
сталла кварца. SIS-смеситель. I
Граб=3,8 К |
Волноводный SIS-смеситель.
7^=3 К
Волноводный SIS-смеситель.
Гоаб=4,2К 1
На основании проведенного анализа делаются выводы о том, что:
в ММ-диапазоне созданы многолучевые супергетеродины с
радиооптическим входом;
в субММ-диапазоне разработаны неохлаждаемые и охлаждаемые од-
нолучевые приемники с радиооптическим входом;
в ММ-диапазоне радиооптические приемники уступают по
чувствительности традиционным
гетеродинным приемным
устройствам, поэтому предпочтительно
создание многолучевых систем
на базе волноводньгх
монолитных балансных смесителей;
проблема мощности
гетеродина снимается практически
полностью при использовании
охлаждаемых SIS-смесителей;
в субММ-диапазоне
радиооптические SIS-смесители
почти не уступают волноводным
SIS, технологичность
радиооптических приборов делает их
предпочтительнее при создании
многолучевых систем.
На рис. 6.1 приведены
сравнительные характеристики
мощностей вакуумных, полу- Рис.6.1. Зависимость мощности излучения
проводниковых, релятивист- 0т частоты и типа генераторов
247
ских приборов и лазеров ММ- и субММ-диапазонов [1,3], где А - ОКГ;
® - генератор Калашникова; 0 - тиратроны; □ - клистроны; А - ЛПД;
Л - генераторы на переходе Funnet; ■ - генератор Ганна;
♦ - ЛОВ; 0 - малогабаритные ЛОВ с магнитной фокусировкой (мини-
троны); ф - клинотроны, ЛОВ (ИРЭ НАН Украины); О - оротроны; • -
генераторы дифракционного излучения (ГДИ); О - магнетроны (ИРЭ
НАН Украины); + - ЛОВ; S - генератор Джозефсона.
Подробный анализ состояния и перспектив развития средств
генерации, а также и остальной элементной базы диапазона коротких ММ-
радиоволн за последние годы дан в работе [6]. Там обращается внимание на
характеристики излучения миниатюрных низковольтных клистронов и
широко диапазонных ЛОВ разработки М. Б. Голанта, Н. Д. Девяткова и
Н. В. Синицына, которые открывают новые перспективы применений
ММ-радиоволн. Здесь же приведены достижения фирм Thomson-CSF,
Plessey и Flan microwave instruments Ltf в области вакуумной
радиоэлектроники, а также даны уровни излучения полупроводниковых диодов со
структурой р+пп+ на основе кремния или арсенида галлия, работающих на
переходах типа Mittag и Tundet в диапазоне частот 100...800 ГГц.
Представляют интерес работы С. Г. Калашникова и его коллег в области
генерации СВЧ-колебаний на частоте выше пролетной в режиме движущихся
доменов при наличии ограничения накопления объемного заряда, а также
работы А. Н. Выставкина и его коллег на приборах с генерацией ММ-диа-
пазона на джозефсоновском переходе.
6.3. Антенно-фидерные устройства
Разработка антенных систем миллиметрового диапазона
радиоволн, прежде всего, ведется в виде масштабного моделирования
антенных систем сантиметрового диапазона радиоволн (табл.6.7).
Таблица 6.7. Особенности конструкции антенн ММ-диапазона
радиоволн
Тип антенны
Рефлекторные
Линзовые
| Рупорные
I Диэлектрические
стержневые и волновод-
| но-щелевые
1 Микрополосковые
1 и бегущей волны
Особенности конструкции I
Параболическая с облучателем в фокусе парабалойда. 1
Двухзеркальная по схеме Кассегрена с облучателем в фокусе 1
дополнительного зеркала и с профилированными зеркалами 1
Металлопластичные, зонированные диэлектрические, лин-1
зы Люниберга 1
С расширенным раскрывом, многорежимные,
гофрированные (ребристые), с корректрующей линзой
Со щелями на широкой и узкой стенках волновода
С замедляющей и ускоряющей структурами
248
Ниже из [1] со ссылкой на первоисточники, приведены ряд
отечественных и зарубежных работ, которые направлены на развитие
антенных устройств.
1. Описывается антенная решетка из диэлектрических
резонансных антенн, содержащая 2+2 элементов, каждый из которых
представляет две скрещенные под углом 90° диэлектрические резонансные
антенны с круговой поляризацией и фидерным питанием от микрополос-
ковой структуры через апертуру. Размеры элементов выбраны из
условий возбуждения колебаний в квадратуре на 11,5 ГГц. Полоса частот
расширена за счет последовательного поворота этих элементов вдоль
окружности, проходящей через их центры с углами 0, 90, 180 270°.
Потери на отражение не превышали 10 дБ в 25%-ной полосе частот
антенной решетки (АР).
2. Предложен новый тип миниатюрной 8-миллиметровой антенны
для слежения за объектами с электрическим сканированием. В состав ее
входят параболический отражатель и облучатель, имеющий вид рамки с
pin-диодами по ее краям. Возбуждение облучателя осуществляется
двухслойной структурой с переходами на прямоугольных волноводах, а
изменение положения диаграммы в пространстве достигается
изменением напряжения смещения на этих диодах. Выведены уравнения
управления напряжением смещения и найдены ограничения постоянной
распространения, определяющей уровни боковых лепестков излучения
такой антенны. Эксперименты на частоте 35, 2 ГГц показали, что для
антенны с диаметром 135 мм и фокусом 68 мм подавление боковых
лепестков составило не менее 19 дБ при ширине ДНА 10... 12°.
3. Микрополосковые антенны привлекают разработчиков своей малой
массой, конформностью заданной поверхности, возможностью
интегрального исполнения и низкой стоимостью. На ММ-радиоволнах возрастает
толщина диэлектрической подложки антенны, что приводит к
распространению поверхностных волн в ней, к снижению коэффициента полезного
действия (КПД) и искажению ДН такой антенны. По мере перехода в ММ-
диапазон радиоволн КПД антенны падает с ростом толщины
диэлектрической подложки, что заставляет искать новые конструкции антенн.
4. Описана перспективная антенна ММ-диапазона с фидерным
питанием через щель, размещенной на задней стороне полусферической линзы-
подложки с малой относительной диэлектрической проницаемостью ег = 4.
Такая антенна работает на частоте 70 ГГц, имеет симметричную ДНА,
малый коэффициент кроссполяризации -26 дБ и усиление 30,4 дБ. Ширина
ДНА по уровню -ЗдБ на частотах 60.. .80 ГГц составляет 6° и 5°
соответственно. Отмечается низкий уровень заднего фона даже при отсутствии
заземленного металлического экрана, достигающий 50 дБ на частоте 70 ГГц
по отношению к уровню главного лепестка ДНА.
В [1] также даны наиболее интересные результаты по
исследованию волноводных элементов.
249
6.4. Приемопередающий комплекс и его СВЧ-элементы
Впервые комплексно рассмотрена многогранная проблема
создания различных приемопередающих устройств, предназначенных для
измерения полей в дальней зоне, а также для ближней радиолокации
сверхвысокого разрешения [1]. Здесь же определены параметры
приемопередающих систем на современном этапе их развития.
На рис. 6.2 приведена схема приемопередающего устройства для
короткой части ММ-диапазона (а - общий вид устройства, б -
функциональная схема).
Ориентировочные характеристики приемопередающего устройства:
Импульсная генерируемая мощность, кВт 5
Частота повторения, Гц 5000
Потери «прием-передача», дБ 4,5
Развязка «прием-передача», дБ 55
Время восстановления по уровню 3 дБ, мкс 2,5
Потери преобразования смесителя, дБ 10,5
Относительная шумовая температура смесителя 1,2
Мощность гетеродина, мВт 70
Масса, кг:
магнетрона 2,5
гетеродина 2,05
общая 5,15
Ю "ГН
W
10
<V}noTanot^hi
ьвЦ-
б)
Рис.6.2. Приемопередающее устройство: а - общий вид;
б - функциональная схема
250
В устройстве использованы элементы, разработанные в ИРЭ НАН
Украины, ИПФ РАН, ХГУ и ГИФТИ, в том числе модернизированный
магнетрон ЦМИ-220 и клинотрон ЛОВ-2ПГ-М. Тракт выполнен на
сверхразмерных волноводах круглого сечения (диаметр 20 мм).
На рис. 6.2: 1 - полупроводниковый лазер ЛПИ-15; 2 - антенный
вход; 3 - твердотельный коммутатор оптоэлектронного типа; 4,6,7,8-
возбудители сверхразмерных волноводов; 5 - магнетрон; 9 -
полупроводниковый аттенюатор; 10 - смеситель (канал приемника); 77 -
смеситель (канал АПЧ); 12 - ЛОВ - 2ПГ-М.
Для создания магнетронного генератора в ИРЭ НАН Украины был
проведен цикл работ по модернизации ранее разработанного прибора
типа ЦМИ-220, включая следующие: исследования теплового режима;
изучение влияния разброса допусков на параметры при изготовлении
прибора; разработка малогабаритной магнитной системы на основе
самарий-кобальтовых сплавов.
Проведенные исследования показали, что небольшие
конструктивные доработки внешней поверхности анодного блока позволят
создать прибор, надежно работающий при воздушном охлаждении. На рис.
6.3 показана эволюция магнетронного генератора в ходе выполнения
этой работы. Магнетронные генераторы предназначены для генерации
импульсов РЛС. Их особенности состоят в следующем: режим
генерации с поверхностной волной; возможность применения малогабаритной
магнитной системы на основе сварки - кобальтовых сплавов;
охлаждение воздушное.
Рис. 6.3. Магнетронные генераторы:
1 - ПМИ-220; 2 - МИ-2П с магнитной системой;
3 - разработанный магнетрон с малогабаритной магнитной системой
251
Характеристики магнетронных
генераторов
Параметры ПМИ-220 МИ-2П Ho*M
разработка
Импульсная мощность,
кВт 5 5 5
Длительность импульса,
мкс 0,05 0,05 0,05
Частота повторения
импульса, Гц 5000 5000 5000
Масса прибора, кг 20,15 6,5 2,5
Наработка на отказ, ч 50 50 50
В настоящее время можно говорить о создании такого генератора для
генерации зондирующих импульсов РЛС с импульсной мощностью до
5 кВт, длительностью импульса 0,05 мкс и частотой повторения 5000 Гц.
Генератор непрерывного излучения ММ-диапазона для гетеродина
(клинотрон) создавался на базе имеющегося прибора типа ЛОВ-2П (рис.
6.4), в котором получена генерация в короткой части ММ-диапазона при
напряжении анодного питания не более 2000 В и мощность до 100 мВт.
Масса такого прибора составила 1,5 кг, т.е. снижена почти в 10 раз,
габаритные размеры снижены почти в 4 раза, а энергопотребление - в 2 раза.
Это показьшает, что имеется реальная возможность на основе клинотрона
создать прибор для использования в качестве гетеродина в
супергетеродинных приемных устройствах РЛС ММ-диапазона.
Рис. 6.4. Клинотроны типа ЛОВ:
1 - ЛОВ-2П; 2 - ЛОВ-2ПГ; 3 - ЛОВ-2ПГ-М
Характеристики клинотронов
Параметры ЛОВ-2П ЛОВ-2ПГ ЛОВ-2ПГ-М
Мощность, кВт 500 500 100
Анодное напряжение, кВ.... 3...4 3...4 2
Анодный ток, мА 150...200 150...200 70
Масса прибора, кг И 11 1,5
Наработка на отказ, ч 180 180 180
252
Клинотроны типа ЛОВ-2П предназначены для использования в
качестве гетеродинов в супергетеродинных приемных устройствах СВЧ.
Особенности их следующие: отличаются от «классических» ЛОВ на
порядок большим уровнем генерируемой мощности; возможно
применение малогабаритной системы (самарий - кобальт); охлаждение водяное.
На рис.6.5 показан смеситель ММ-диапазона (с устройством
подвода смещения дроссельного типа), разработанный в ИРЭ НАН
Украины. Смеситель предназначен для преобразования СВЧ-сигнала в сигнал
промежуточной частоты. Особенности его заключаются в следующем:
связь по СВЧ осуществляется пружинящей иглой; конструкция -
проходного типа. Схема смесителя (рис. 6.5,6) включает: 1 - волновод
основного сечения; 2 - КЗ-поршень; 3 - держатель; 4 -
полупроводниковый кристалл; 5 - пружинная игла).
L *) в) |
Рис. 6.5. Смеситель ММ-диапазона: а - общий вид; б - схема смесителя
в - зависимости активной R и реактивной X составляющих импеданса
и КСВ со стороны тракта ПЧ от промежуточной частоты
253
Основные характеристики смесителя
Потери преобразования дБ 10,5
Потери сигнала ПЧ за счет шунтирования
цепи смещения, дБ 1
Относительная шумовая температура 1,2
На рис. 6.6 для сравнения показан смеситель, разработанный ИПФ
РАН, с другими параметрами. Смеситель также предназначен для
преобразования СВЧ-сигнала в сигнал промежуточной частоты.
Особенность его в следующем: 2-петлевая связь по СВЧ с коаксиальным
выходом по ПЧ. Схема смесителя (рис. 6.6,6) состоит из петель связи (/, 2),
корпуса смесителя (3), полупроводниковой структуры (4), держателя
(5), изолятора (6).
Рис. 6.6. Смеситель, разработанный ИПФ РАН: а - общий вид;
б - схема смесителя
Основные характеристики смесителя
Потери преобразования дБ 7,5...9
Выпрямленный ток, мА 0,5... 1
Сопротивление по ПЧ, Ом 150. ..200
Шумовое отношение 1,5
КСВН по входу 2
В [6] сформулированы основные требования к комплектующим
изделиям при создании предполагаемых радиолокационных устройств
обнаружения объектов и наведения оружия, которые представлены в
табл. 6.8.
Данные в таблице требования, а также анализ приведенных примеров
по результатам разработок и создания элементной базы (генераторов,
приемников, элементов канализации высокочастотной энергии, интефальных
модулей и др.) позволяют сделать вывод, что в настоящее время есть все
возможности развернуть широкомасштабные работы по созданию нового
поколения РЭС в короткой части ММ-диапазона радиоволн.
254
Таблица 6.8. Основные требования к комплектующим изделиям
РЛС короткой части ММ-диапазона радиоволн
Наименование
Импульсный
магнетрон
ЛОВ
1 Смеситель
1 диодный
1 с барьером Шоттки
1 Полупроводниковый
1 аттенюатор
1 Циркулятор
Назначение
Генератор
передатчика
Гетеродин
приемника
Преобразователь
частоты
приемника
Устройство защиты
приемника
Переключатель
прием-передача
Основные 1
технические параметры 1
Диапазон перестройки частоты 1%, моща 1
ность в импульсе 10 кВт, длительность им-1
пульса 20... 100 не, скважность 2000...5006,1
масса не более 3 кг 1
Диапазон перестройки частоты 2%, мощность 1
50 мВт, изменение мощности по диапазону 1
4 дБ, масса 1 кг 1
Потери преобразования 6 дБ, диапазон пе-1
рестройки частоты ±3%, коэффициент шума 1
14дБ
Диапазон перестройки частоты ± 2%, потери
5 дБ, быстродействие 0,5 мке 1
Диапазон перестройки частоты ±3%, потери
приблизительно 0,5 дБ, развязка не менее
40 дБ J
За последние годы достигнут также большой прогресс и в
разработке методов и средств новой измерительной и вычислительной
техники, позволяющей проводить измерения и расчеты параметров СВЧ-сиг-
налов в ближней, промежуточной и дальней зонах излучения.
6.5. Возможности аппаратной реализации
цифровых вычислительных устройств
для обработки радиолокационных сигналов \
В последние годы в области создания средств обработки
информации имеются определенные достижения. Они во многом обязаны той
трезвой оценке создавшейся ситуации, которая была осуществлена на
уровне органов, ответственных за заказы вычислительной техники.
Было признано, что сложившееся отставание в области компьютерных
технологий от развитых в промышленном отношении стран преодолеть
в обозримой перспективе не удастся. Поэтому было принято решение о
допущении в разрабатываемых образцах средств обработки данных,
построенных на базе покупных компонентов.
Такое решение позволило оценить требования к информатике,
вычислительной технике и автоматизации, а также практически поставить вопрос
о производстве средств электронно-вычислительной техники (ЭВТ) для
различного применения, сравнимых с зарубежными аналогами.
Основные требования к информатике, вычислительной технике и
автоматизации, например, в интересах военного применения, следующие:
255
повышение эффективности АСУ специального назначения на
30.. .40%;
обеспечение решения 40% ранее не решаемых задач;
повышение на 25...30% достоверности распознавания и
классификации целей;
повышение эффективности боевого управления оружием;
совершенствование системы наведения и самонаведения;
повышение надежности и долговечности вооружения и военной
техники (ВВТ);
повышение на 20...30% надежности и качества программного
обеспечения;
сокращение сроков ввода в эксплуатацию ВВТ;
повышение эффективности боевых действий в экстремальных
условиях, снижение потерь личного состава;
создание новых информационных технологий.
Работы, проводимые с целью создания средств ЭВТ,
удовлетворяющих предъявляемым требованиям, являются наиболее реальными
[7]. В табл. 6.9. представлены базовые модели вычислительных средств,
реа-лизуемых в настоящее время. Анализируя данные таблицы
необходимо также помнить, что технические средства, обусловленные рядом
дополнительных требований по повышению устойчивости к
воздействию факторов внешней среды, а также более жесткими требованиями по
энергетике и т.п., по своим функциональным характеристикам обычно
заметно уступают на заданном временном интервале коммерческим
образцам. '
Вместе с тем следует заметить, что развитие компьютерных
технологий военного применения с учетом некоторого временного сдвига,
как правило, повторяет этапы, пройденные коммерческой техникой.
Иными словами, то что сегодня достигнуто в коммерческих образцах,
только завтра будет реализовано в военных. Причем, как показывает
опыт, временной разрыв при этом постоянно сокращается.
Поэтому целесообразно рассмотреть развитие компьютерных
технологий в целом.
Основу средств обработки и передачи информации составлют
микроэлектронные компоненты - большие и сверхбольшие интегральные
схемы, являющиеся главными компонентами современных ЭВМ и
аппаратуры передачи данных. В своем развитии электронные микросхемы
прошли ряд этапов, характеризующихся степенью интеграции
компонентов на одном кристалле схемы: от схем с малой и средней
интеграцией (МИС и СИС) до сверхбольших интегральных схем (СБИС),
количество элементов на кристалле которых измеряется тысячами. Один из
основателей фирмы «Intel» Г. Мур еще в 1965 г. предсказал, что
плотность размещения (степень интеграции) транзисторов на одном
кристалле микросхемы будет увеличиваться вдвое каждые два года. Эта
тенденция выполняется достаточно строго до наших дней.
256
Таблица 6.9. Классификация ЭВМ «Багет»
| Наименование
1 ЭВМ
1 БАГЕТ-11-05
| БАГЕТ-11-06
I БАГЕТ-01-09
| БАГЕТ-11-05
В БАГЕТ-11-06
I БАГЕТ-11-07
I БАГЕТ-01-10
В БАГЕТ-21-02
I БАГЕТ-23В
1 БАГЕТ-33
1 БАГЕТ-53
I БАГЕТ-62-03
БАГЕТ-83
БАГЕТ-25
БАГЕТ-55-04
БАГЕТ-56
БАГЕТ-41
БАГЕТ-43
Краткая техническая характеристика
Тип
микропроцессора
486DX4
1В579
486DX4
1В578
1В578
486DX4
1В578
1В578
1В578
1В578
1В578
1В577
1В578
1В577
1В578
486DX4
1В578
Шина
ISA
VME
ISA
VME
VME
ISA
VME
VME
VME
VME
PCI
спец.
VME
спец. VME
ISA
PCI
Объем ОЗУ(РПЗУ)ВЗУ,
не менее
32 Мб/-/2000 Мб
128 Мб/-/6000 Мб
32М6/-/1600-М6
16 Мб 1-1 1600 Мб
16 Мб/32 Мб/-
32 Мб /48 Мб/-
16М6/32М6/-
16М6/32М6/-
16М6/32М6/-
16 Мб/32 Мб/-
4 Мб /1,5 Мб/-
8М6/8М6/-
8М6/8М6/-
32 Мб/-/1600 Мб*
2М6/2М6/-
1 Используемые
операционные
1 системы
MS DOS 6.22
MS Windows 3.1
ОС типа UNIX
ОС типа UNIX
MS DOS 6.22
MS Windows 3.1
ОС типа UNIX
ОС реального времени
ОС реального времени
MS DOS 6.22
MS Windows 3.1
ОС реального времени
ОС реального времени
ОС реального времени
ОС реального времени
ОС реального времени
Специализированное
ПО
Специализированное 1
ПО
MS DOS 6.22
MS Windows 3.1
ОС типа UNIX
Специализированное 1
ПО
Возможность базирования 1
Стационарно
+
+
+
+
+
+
+
+
-
+
+
-
+
+
+
На
колесных шасси
-
-
+
+
+
+
+
+
-
+
+
-
+
+
+
1 На
гусеничных
1 шасси
-
-
-
+
+
+
+
+
-
+
+
-
+
+
+
Наж/д
платформах
-
-
+
+
[ +
+
+
+
-
+
+
-
+
+
+
1 На дозвуко-
1 вых
1 самолетах
-
-
-
-
+
+
+
+
+ j
+
+
+
+
+
+
I На
плавучих
1 объектах
-
-
+
+
+
+
-
+
-
+
+
-
+
-
+
1 На лета- 1
тельных 1
| аппаратах |
-
-
-
1
1
1
1
+ 1
+ В
+ 1
+ 1
+ 1
1
1
ю * вместо НЖМД может устанавливаться «электронный диск» емкостью до 100 Мбайт
ел
На практике это означает, что с ростом степени интеграции
микросхем увеличивается быстродействие процессоров, возрастает емкость
оперативных запоминающих устройств, а также улучшается надежность
устройств. Последнее обстоятельство связано с тем, что с ростом
степени интеграции элементов все большее число межсоединений
электронных устройств реализуется на внутреннем уровне (внутри
кристалла), где они существенно более надежны, чем межсоединения на
внешнем уровне (между кристаллами).
В качестве иллюстрации в табл. 6.10 представлены результаты
анализа развития персональных ЭВМ за последние два десятилетия [8].
Таблица 6.10. Развитие персональных ЭВМ
Элементы
ЭВМ
Процессор
1 Оперативное
J ЗУ
1 Внешняя
1 память
Характеристики ЭВМ для различных лет 1
1981
Intel
8088
4,77
МГц
64
Кбайт
нгд
64
Кбайт
1083
Intel
8088
8
МГц
256
Кбайт
НЖД
10
Мбайт
1986
Intel
80286
10
МГц
649
Кбайт
нжд
20
Мбайт
1088
Intel
80386
20
МГц
2
Мбайт
нжд
40
Мбайт
1093
Intel
80486
33
МГц
16
Мбайт
нжд,
20
Мбайт,
CD-ROM
4Х
1996
Pentium
200
МГц
32
Мбайт
нжд,
2
Гбайт,
CD-ROM
8Х
1998
Pentium
II
400
МГц
64
Мбайт
нжд,
8,4
Гбайт,
CD-ROM
32Х
1999
Pentium
III
500
МГц
256
Мбайт
нжд,
20,4
Гбайт,
CD-ROM
50Х
2002* |
Pen- I
tium ivl
1500
МГц
512
Мбайт
нжд,
30
Гбайт,
CD-ROM
60Х
Прогнозная оценка на 2010 г. для микропроцессора (при условии, что закон Мура будет
выполняться): тактовая частота - 10 ГГц, уровень технологии (число транзисторов) -
100 000 MIPS и быстродействие - 0,07 мкс.
В данной таблице помимо процессоров и оперативной памяти,
характеристики которых связаны с прогрессом в области
микроэлектронных схем, присутствует и массовая (внешняя) память, развитие которой
имеет свои особенности. Как видно из табл. 6.10, за относительно
короткий промежуток времени достигнуты весьма значительные успехи в
плане увеличения емкости внешних запоминающих устройств (ЗУ)
(накопителей на жестком диске). Этих успехов удалось добиться во
многом благодаря переходу к магниторезистивным головкам, обладающим
более высокой чувствительностью по сравнению с прежними
тонкопленочными седуктивными головками. По оценкам специалистов в данной
технологии возможно повышение плотности записи информации
(емкости накопителя) к 2005 г. еще в несколько раз.
Дальнейший прогресс в части этого вида массовой памяти
связывается с переходом на более чувствительные головки на основе эффекта
258
спин-клапан, которые способны обеспечить дальнейшее увеличение
емкости ЗУ примерно на порядок.
Физическое ограничение на плотность записи информации,
называемое супермагнитным пределом, соответствует поверхностной
плотности 50... 100 Гбит/дюйм2. Однако ряд специалистов считает, что этот
предел будет преодолен с появлением новых материалов и новых
структур дискового покрытия [9].
Особого внимания заслуживает вопрос перспективы развития
оптических дисков, связанных с обработкой цифровой картографической
информации. Существующие CD-ROM и CD-R диски уже позволяют
оперировать емкостью информации в несколько гигабайт. Ожидается, что в
ближайшей перспективе в этой области будут доминировать более
совершенные DVD-диски, емкость которых может быть доведена также до
нескольких гигабайт. В качестве дальнейшей перспективы можно назвать, по-
видимому, голографическую массовую память, вызывающую наибольший
интерес у разработчиков внешних запоминающих устройств (ВЗУ).
Обратимся теперь к анализу вопросов развития средств связи и
передачи данных на примере военных АСУ. В данном случае
целесообразно выделить два уровня информационного воздействия в
автоматизированных системах: локальный и территориальный.
Под локальным уровнем будем понимать информационное
воздействие в рамках командных пунктов (КП) и пунктов управления (ПУ)
войсковых формирований и штабов.
Территориальный уровень характеризуется информационным
обменом между КП (ПУ) подчиненных, вышестоящих и
взаимодействующих формирований.
На локальном уровне в стационарных условиях возможно
развертывание кабельной сети для организации информационного обмена. Это
помимо прочего позволяет упростить многие проблемы, связанные с
обеспечением скрытности управления.
Кабельные сети передачи
данных позволяют обеспечивать
весьма высокие скорости
передачи информации. На рис. 6.7
представлена диаграмма,
характеризующая динамику роста ско- Рис< 6Jt дИНамика роста скорости переда-
рости передачи инфор-мации в чи информации в ЛВС, построенных
локальных вычислительных се- на кабельных каналах
тях (ЛВС), построенных на кабельных линиях.
В настоящее время уже достаточное распространение получили сети
на волоконно-оптических линиях с быстродействием в несколько мегабит в
секунду. На подходе сети, построенные на новых принципах с
быстродействием, измеряемом в гигабитах в секунду (Gigabit Ethtrnet).
Мб/с
iooo|
100 I 1
ю1 i—i 1 U L
1985 1990 1995 Годы
259
Передача информации между КП (ПУ) формирований (равно как и
в рамках КП в тактическом звене) по оперативно-тактическим
соображениям не может быть ориентирована только на кабельные линии.
Использование же беспроводной связи, в том числе и космической,
позволяет обеспечить скорости передачи информации по одному каналу,
измеряемые десятками килобит в секунду, в отдельных случаях -
единицами мегабит в секунду. Ожидать значительного прогресса в этом
отношении в ближайшей перспективе достаточно проблематично.
В качестве подтверждения актуальности решаемых задач по
развитию способов и методов обработки радиолокационных сигналов и
передачи информации потребителю в реальном масштабе времени
интересно привести две работы, выполненные за последнее время.
В [10] дается описание архитектуры и программной реализации
сигнального процессора, предназначенного для первичной обработки
радиолокационной информации в режиме реального времени. Обработка
сигналов в процессоре включает: адаптивное усиление и фильтрацию сигнала с
режекцией помех, некогерентное накопление сигнала и многоканальное его
обнаружение с адаптацией порога к уровню помех, а также обработку
сигнала в CFAR-фильтре. Программная реализация процессора представляет
собой систему программ, включающую программы моделирования
радиолокационных данных и программы обработки данных. Получена оценка
параллелизма программной реализации процессора.
Реконфигурируемая архитектура мультипроцессорной системы
обработки сигналов сверхширокополосной РЛС в реальном времени
освещается в [11]. Здесь приводится полный анализ параметров системы обработки
сигналов в реальном времени сверхширокополосной (UWB) РЛС.
Обработка сигналов UWB РЛС является многоцелевой задачей и требует
интенсивной вычислительной процедуры с применением параллельной сети
мультипроцессоров, способных эффективно завершать поставленные
задачи. В результате сравнения преимуществ и недостатков различных типов
мультипроцессоров предложена реконфигурируемая архитектура системы
обработки сигналов в реальном времени UWB РЛС. Проверка
применимости предложенной архитектуры в реальных системах подтвердила ее
высокие показатели, гибкость и реконфигурируемость.
Таким образом, последние два десятилетия характеризуются
весьма существенным прогрессом в области компьютерных технологий,
обусловившем значительное возрастание функциональных
возможностей средств обработки и передачи информации. Более того, на
сегодняшний день не существует сомнений в том, что этот прогресс
продолжится как в ближайшей, так и более отдаленной перспективе.
Потребности (предъявляемые требования) в вычислительных
ресурсах для решения большого объема задач как гражданского, так и
военного назначения, оцененные даже с учетом сегодняшних представле-
260
ний о применении электронной техники, не могут быть в полной мере
удовлетворены за счет создаваемых средств ЭВМ. Положение может
еще более усугубится, если учесть появление новых применений ЭВМ в
военном деле.
Отсюда становится ясной актуальность исследований,
направленных на поиск новых путей и способов удовлетворения потребностей в
обработке информации в реальном масштабе времени.
Поскольку в РЛС ММ-диапазона предполагается цифровая
обработка, представляет интерес оценка возможностей реализации ЦВУ для
обработки сигналов, например, с фазо-кодоманипулироавнными (ФКМ)
сигналами.
Проведем оценку применительно к характеристикам РЛС с
дальностью действия до, 20 км, с мертвой зоной порядка 200 м,
приравненных к характеристикам для базового варианта [12].
Возможности перспективных ЭВМ и многоразрядных АЦП даны в
материалах, приведенных ранее. При использовании двоичных ФКМ-сиг-
налов, где фаза сигнала принимает только два значения 0 и л,
возможно использование высокочастотного усилителя-ограничителя. Такой
усилитель может быть построен на высокоскоростных компараторах
типа AD9696 или AD96685 фирмы ANALOG DEVICES. Компаратор
AD9696 имеет ТТЛ-выход и время задержки распространения сигнала
(Propagation Delay) 4,5 не, a AD96658 - ЭСЛ-выход и 2,5 не.
Для того чтобы не предъявлять высоких требований к
быстродействию ОЗУ согласованного фильтра, оцифрованные выборки входного
сигнала целесообразно запоминать сначала в быстродействующем
регистровом файле с временем доступа не более 5 не и емкостью 4 слова, а
затем параллельно перегружать в ОЗУ согласованного фильтра (СФ).
Структура такого ОЗУ представлена на рис. 6.8.
1
М ультиплексор
1
Регистр
1111
"*
1
Регистр
1111
Селектор
1111
О ЗУ С Ф
1111
<—
Схема
управления и
синхронизации
Рис. 6.8. Схема сверхоперативного ОЗУ
261
Таким образом возможно снизить требования к времени доступа
ОЗУ до 20 не, что является приемлемым для современных интегральных
схем статического ОЗУ.
Для реализации СФ, структура которого представлена на рис. 6.9,
цифровое устройство должно выполнить N-M операций умножения и
сложения.
ZN J 1 1 2 1
1 м 1
'•—•ФА
I
*V£/
1 R<
1—►
Рис. 6.9. Схема согласованного фильтра
При количестве элементов дальности N = 20000 и длине кода М =
= 8000 эта величина составит 160 млн. базовых операций. Если учесть,
что такое количество операций необходимо выполнить за 100 мкс, то
приведенная производительность вычислительной системы должна быть не
менее 2-Ю12 базовых операций в секунду (8000 операций за 5 не). Эта
цифра слишком велика с точки зрения прямой реализации согласованного
фильтра в цифровом виде. Например, цифровая схема HSP43891 фирмы
HARRIS SEMICONDUCTOR, представляющая собой фильтр 8-го порядка,
имеет тактовую частоту 30 МГц. Решение задачи с помощью данных
микросхем привело бы к использованию 6000 корпусов.
Современные программируемые логические устройства (PLD),
например, EPF81500A фирмы ALTERA позволяют упаковывать в одном
кристалле до 16000 вентилей. Задержки распространения сигнала в
данных устройствах определяются архитектурой каждого конкретного
функционального узла и взаимным расположением узлов на кристалле.
Так, например, тактовая частота 16-разрядного загружаемого
счетчика составляет 95 МГц (при использовании PLD с уровнем скорости А-3),
16-разрядного счетчика со входами предустановки - 232 МГц,
дешифрация 16-разрядного адреса выполняется за 4,9 не. Максимальное
количество используемых входов\выходов составляет 208.
Более реально в цифровом виде реализовать СФ с двоичной
фазовой манипуляцией без умножения на весовые коэффициенты.
Структурная схема такого фильтра представлена на рис. 6.10.
262
w
w
Синхр
Схема
сравнения
осигнал
w
р>
Счетчик
+\-
CLK 1
Рис.6.10. Схема согласованного фильтра с двоичной фазовой
манипуляцией
Здесь на схему сравнения поступают двоичные значения фазы
принимаемого сигнала Z и кода К. Выход схемы сравнения управляет
направлением счета двоичного реверсивного счетчика, счетный вход
которого синхронизирован с частотой поступления входного сигнала.
При совпадении значений N-yq элемента фазы входного сигнала и М-го
элемента кода счетчик переводится в режим суммирования, при
несовпадении - в режим вычитания. На выходе счетчика, таким образом,
формируется корреляционная функция /?,-.
Программируемое логическое устройство EPF81500A позволяет
реализовать 16-разрядный двоичный реверсивный счетчик с тактовой
частотой 95 МГц с задействованием 16 логических элементов
устройства. Всего на кристалле возможно использовать 1296 логических
элементов. Исходя из этого можно предположить, что на одном кристалле
данного устройства расположится не более 50 схем, аналогичных
представленной на рис. 6.9, а вся задача будет решена на 320 логических
устройствах типа EPF81500А.
В настоящее время фирмой ALTERA начато производство
логических устройств серии FLEX 10K. Программируемое логическое
устройство EPF10K100 содержит до 158000 вентилей и допускает
использование 4992 логических элемента. Таким образом, возможно уменьшение в
4 раза количества логических устройств для решения задачи в реальном
масштабе времени.
Еще один способ ускорения решения задачи - вычисление
корреляционной функции с помощью алгоритма быстрого преобразования Фурье
(БПФ). При этом на первом этапе находят БПФ от последовательности
входного сигнала и БПФ от зондирующего сигнала. Затем полученные
спектры перемножаются и выполняется обратное БПФ. Таким образом,
при обработке 65536 отсчетов с использованием алгоритма БПФ с
основанием 2 полное число комплексных операций будет равно
(ЛГ / 2) log2 (ЛГ) + Л^ -ь (Л^ / 2) log2 (ЛГ) -1114112,
т.е. каждые 5 не нужно будет выполнить 35 базовых операций. Эта
величина в 230 раз меньше, чем при вычислении согласованным фильтром без
263
БПФ. При использовании специализированного процессора БПФ ТМ66
фирмы TEXAS MEMORY SYSTEMS, выполняющего 1024-точечное
БПФ за 61 мкс, задачу можно решить с использованием 70 процессоров.
При этом ориентировочный объем аппаратуры цифровой
вычислительной системы (ЦВС) будет порядка 8... 10 литров.
Проведенная оценка возможности аппаратной реализации
цифрового вычислительного устройства (ЦВУ) для обработки сигналов с
ФКМ-сигналами по предложенной методике показывает, что в
настоящее время имеется необходимая элементная база для создания
процессоров ЦВУ, способных выполнить цифровую обработку информации с
использованием в ТРЛС ММ-диапазона паратронов.
Большие успехи в области цифровой техники в части увеличения
быстродействия и расширения объема памяти при существенном
снижении габаритных размеров позволит реализовать конкретные образцы
РЛС с минимальными массогабаритными характеристиками.
264
ГЛАВА 7.
Применение радиолокационных
систем миллиметрового диапазона
радиоволн
Анализ опубликованных материалов по изготовлению образцов
радиоэлектронной техники в ММ-диапазоне радиоволн для
различных народно-хозяйственных применений и в интересах
обороны показывает, что, начиная с 50-х годов, за рубежом и в России
интенсивно проводились такие работы [1]. В первую очередь
создавались активные и пассивные системы обнаружения наземных и
воздушных объектов, управления воздушным движением и
системами вооружения, контроля сельскохозяйственных угодий,
аппаратура связи и навигации, медицинская аппаратура и др.
К системам гражданского применения (хотя иногда трудно
разделить отдельные направления на гражданское и военное), которые
достаточно полно освещаются в научно-технической литературе,
можно отнести радиоэлектронные системы космической
навигации, управления воздушным движением и навигации, связи,
аппаратуру экологического контроля, технику медицинского
назначения и др.
Ниже представлены основные направления развития и
совершенствования по материалам отечественной и зарубежной
научно-технической литературы.
7.1. Космические радиолокационные системы
Страны европейского сообщества, организация Eurocontrol и
Европейское космическое агентство образовали специальную
тройственную группу (ETG), целью которой является обеспечение европейского
вклада в развитие глобальной космической навигационной системы
(GNSS), удовлетворяющей требованиям гражданских и военных
пользователей и не подчиняющейся какой-либо одной стране, как это имеет
место с системами GPS (США) и ГЛОНАСС (Россия). Группа ETG
намерена участвовать в организации и развитии общеевропейской сети
транспортных коммуникаций, систем связи и энергетической
инфраструктуры Европы. Космическая навигационная система
рассматривается как часть общей транспортной сети Европы. Намечены этапы
наращивания GPS и ГЛОНАСС в процессе формирования GNSS.
265
По мнению специалистов Федерального авиационного агентства
(FAA) США развитие системы глобальной навигации сдерживается
нерешенным вопросом выбора рабочей частоты для гражданских
пользователей системы «Навстар» [2]. Военные ведомства США, владеющие
этой системой, из соображений безопасности хотели бы сохранить уже
имеющиеся частоты и выделить для гражданских целей отдельный
диапазон. В настоящее время глобальная навигационная система «Навстар»
занимает диапазоны L1 (1575 МГц) и L2 (1227 МГц). Специалисты FAA
предлагают для гражданских пользователей установить диапазон L5,
выделив его в районе 1145 МГц (т.е. ниже чем L2). Военные
специалисты США считают целесообразным сделать L5 на частоте 1309 МГц
(т.е. выше чем L2). Существует мнение, что L5 должно быть на частоте
1258 МГц, что практически совпадает с частотой системы ГЛОНАСС.
Из сказанного следует, что в современных системах навигации как
отечественных, так и зарубежных применяются дециметровый (ДМ) и
СМ-диапазоны. Хотя в данной книге делается основной упор на анализ
техники ДМ- и СМ-диапазонов, системы навигации более
коротковолновых диапазонов также представляют большой интерес для
разработчиков радиотехнических систем. Миллиметровый диапазон радиоволн
интенсивно осваивается и, несомненно, в перспективе найдет достойное
место при выполнении отдельных навигационных задач в системе
глобальной навигации. Остановимся на публикациях, посвященных
основным направлениям развития радиотехнических систем, в которых
ставятся задачи по применению систем ММ-диапазона.
Важнейшим направлением развития глобальных навигационных
систем в XXI веке остается необходимость расширения возможностей
системы GPS и дополнительных систем для воздушной навигации [3].
Переход от разнообразных наземных систем воздушной навигации
к единой спутниковой навигационной системе потребует кооперации
структур гражданской авиации, правительств стран и их
промышленности. Федеральная авиационная администрация США (FAA) начала
такой переход в 1994 г., ориентируясь на спутниковую систему GPS.
Следующим шагом было введение в действие спутниковой системы
навигации с ответом на частоте запроса, обслуживающей большую площадь
WAAS. Она отвечает стандарту привода самолетов Category I, но не
соответствует стандартам Category II и III. По этой причине FAA
планирует ввести в действие местную систему навигации с ответом на частоте
запроса LAAS, которая будет обладать повышенной точностью привода
самолетов в заданную точку. Опыт работы FAA будет использован в
других странах и на основе спутниковых технологий позволит создать
единую систему, обеспечивающую непрерывную глобальную
навигацию самолетов с минимальным составом бортового навигационного
оборудования.
266
В [4] сообщается о планах модернизации глобальной
навигационной системы «Навстар», обозначенных в совместном заявлении
министерств обороны и транспорта США. Согласно этим планам
предлагается реализация дифференциального режима с помощью 20 наземных
станций в северном полушарии и обеспечение данных по ионосферной
задержке спутниковых сигналов для гражданских пользователей, что
позволит им корректировать ошибки измерения координат (до 100 м).
При этом с целью повышения точности определения координат
предлагается способ нахождения местоположения мобильных объектов с
помощью дифференциальной глобальной навигационной системы DGPS,
когда применяется опорная станция, а истинные географические
координаты точно известны. С помощью DGPS-приемника определяется
псевдодальность станции, формируются данные для коррекции
дифференциальной системы, передаваемые по радиоканалу на мобильный
объект. С учетом данных коррекции формируются координаты объекта.
Одновременно для сохранения санкционированного пользования
системой рассматривается введение дополнительной частоты передачи
зашифрованного сигнала (в военном применении). Отмечается, что
такие планы могут быть выполнены практически в 2005-2007 гг. после
вывода в космос 15-20 ИСЗ «Навстар» 3-го поколения.
Такие системы навигации предполагается широко использовать
также в гражданском строительстве и фотограмметрии. В работах [5,6]
описывается ряд областей применения разрабатываемых и выпускаемых
фирмой Trimble (США) автоматизированных комплексов на базе
приемников сигналов глобальной навигационной системы «Навстар».
Характеризуются возможности подобных комплексов в таких областях,
как топографические измерения, возведение мостовых сооружений,
контроль вертикальности конструкций большой высоты, выбор трасс
для прокладки кабельных сетей и трубопроводов и установка опорных
конструкций типа пилонов. Приводятся общие сведения о созданных
совместно с фирмой Catepillar информационных систем на базе
технологии «Навстар» в интересах эксплуатации рудников и горных
выработок. Намечаются перспективы применения данной технологии для
управления строительной техникой. Анализируются проблемы,
связанные с применением глобальной навигационной системы «Навстар» в
фотограмметрии и, в первую очередь, в интересах высокоточного
определения координат точек выполнения аэрофотосъемки. Дается общая
характеристика системы «Навстар», принципов и режимов работы
приемной аппаратуры. Подробно рассматриваются возможности и
ограничения пакетов ПО фирмы Sercel (Франция), обеспечивающих
автоматическое измерение координат по сигналам системы «Навстар», при этом
основное внимание уделяется проблеме устранения неоднозначности
определения фазы спутниковых сигналов.
267
Интересные сведения приводятся в иностранной
научно-технической литературе за последние годы об аналогичной системе в России
[7], где сообщается о достоинствах и недостатках российской
спутниковой глобальной навигационной системы ГЛОНАСС, развертывание
которой было закончено в начале 1995 г. Немецкие, французские и
английские специалисты считают, что ГЛОНАСС представляет собой
более совершенную систему по сравнению с известной американской
GPS, при эксплуатации которой у пользователей возникают проблемы,
связанные с селективным доступом. В ГЛОНАСС проблема
селективного доступа успешно разрешена. Она находит все более широкое
практическое применение в таких областях, как геодезия и навигация,
однако практически не используется государствами, находящимися за
пределами бывшего СССР.
В перспективе ГЛОНАСС будет эффективно внедрена в
гражданскую авиацию. В настоящее время ГЛОНАСС уже работает совместно с
американской глобальной навигационной системой GPS и обеспечивает
высокую точность, доступность и надежность навигационной
информации. Система полностью введена в строй в конце 1995 г. [8]. В нее
входят 24 спутника, равномерно распределенные на круговых орбитах с
радиусом до 100 км и наклонением 64,8°. Период обращения спутников 11
ч 15 мин. Российская промышленность работает над созданием
самолетных приемников, которые будут работать одновременно с системами
ГЛОНАСС и GPS.
Далее остановимся на отдельных работах, использующих технику
ММ-диапазона радиоволн в области навигации [9-11].
В связи с созданием глобальных навигационных систем прежде
всего встает вопрос о целесообразности дальнейшей эксплуатации
микроволновых систем посадки самолетов. Исследования, проведенные в
лондонском аэропорте «Хитроу», отличающемся плохими условиями
видимости, показали, что как навигационная система, так и связанные с
ней комплексы инструментальной посадки не обеспечивают требуемой
точности: система GPS включает в себя только 24 спутника, что
недостаточно для экстренного определения координат ЛА. Попытки
объединения системы GPS с российской 24-спутниковой системой ГЛОНАСС
не дали положительных результатов. В связи с этим Международный
союз гражданской авиации считает необходимым дальнейшие
эксплуатацию и усовершенствование ММ-системы посадки.
В [12] сообщается о завершении испытаний низковысотной
системы предупреждения столкновений CAS, основой которой является
локатор (частота 35 ГГц) переднего обзора. Данные отображаются на
лобовом стекле с использованием трехмерной синтезированной графики.
Вместе с тем национальный консультативный комитет по
аэронавтике США (НАСА) ведет исследовательскую работу по использованию
268
достижений современных технологий в увеличении надежности и
эффективности передвижений самолетов на земной поверхности (на
аэродромах) [13]. Проведены летные испытания и демонстрации
возможностей исследовательского самолета Boeing 757-200 в условиях слабой
видимости при посадке и работе на земной поверхности (LVLASO). В
состав разработанной LVLASO включены: система предупреждения
столкновений (TCAS), оборудование обнаружения на поверхности
аэродрома (ASDE-3), аппаратура коррекции передвижений с
использованием дифференциальной глобальной навигационной системы (DGPS),
радиовещательная аппаратура системы наблюдения (ADS-B),
аппаратура связи передачи данных для информации пилотов (CPDLC) и др.
Обсуждаются особенности работы существующих наземных и
летных систем LVLASO, результаты полетов и предстоящие трудности
реализации системы безопасного передвижения самолетов по земной
поверхности.
Необходимо отметить, что здесь охвачены далеко не все
направления в сфере космических исследований за последние годы, но,
несомненно одно, что ММ-радиоволны найдут достойное место в данной
области исследований.
7.2. Авиационные системы управления и навигации
Вначале отметим некоторые концептуальные направления
развития авиационной радиоэлектронной аппаратуры, предназначенной для
гражданского назначения.
Европейский самолетостроительный консорциум (Тулуза,
Франция), выпускающий 300 самолетов в год, планирует оборудовать
большие транспортные самолеты аппаратурой усовершенствованной
системы предупреждения о близости земной поверхности (EGPWS),
разработанной фирмой Allied Signal [12]. Федеральное авиационное управление
США, выдавшее сертификат качества на аппаратуру EGPWS, будет
требовать оснащения этой аппаратурой всех турбовинтовых самолетов,
перевозящих шесть и более пассажиров. Аппаратура EGPWS кроме
традиционных функций, выполняет задачи определения
местоположения и траектории самолета при помощи информации, получаемой от
глобальной системы выдачи данных о территории и аэропортах. В
состав EGPWS входят высотомер и РЛС обзора, позволяющие пилотам
увидеть на дисплее предупреждение о резких изменениях рельефа
местности. Фирма Allied Signal получила до 4300 заказов от различных
авиакомпаний на аппаратуру EGPWS, стоимость одного комплекта
которой составляет 65 тыс.дол.
Фирма Simens Plessey Radar (Великобритания) рекламирует
характеристики семейства РЛС Watchman, предназначенных для широкого
гражданского и военного применения (обзорные аэродромные РЛС для
269
посадки самолета, маршрутные РЛС управления воздушным
движением, контроль воздушного пространства в системе ПВО) [13]. В
диапазоне 2750...3050 МГц РЛС Watchman-T имеет ламповый передатчик и
обладает дальностями обнаружения ПО, 150 и 220 км. В твердотельном
исполнении передатчика РЛС работает в диапазоне 2700...2900 МГц с
дальностью 126 км.
В [14] описываются основные характеристики, состав аппаратуры
и особенности аэродромной импульсно-доплеровской РЛС Rapsodie,
разработанной и установленной фирмой Dassault Elektronique (Франция)
в 1993-1997 гг. в аэропорту Орли для контроля за движением на
рулежных дорожках и взлетно-посадочных полосах. Описываемая РЛС,
развернутая на высоте 60 м, работает в Х-диапазоне (короткая часть СМ-радио-
волн) с линейной поляризацией, обеспечивает обнаружение объектов с
ЭПР, равной 1 м2, в секторе обзора по азимуту 170° и имеет ширину ДНА
1,5°, мощность в импульсе не менее 100 Вт, длительность импульса 0,5 мкс
и разрешение по дальности менее 10 м. Среди конструктивных
особенностей РЛС отмечаются антенны в виде ФАР с электронным сканированием
ДНА и передатчик на твердотельных элементах. Рассматриваются рабочие
режимы РЛС и ее эксплуатационные возможности.
В [15-17] обоснован способ и алгоритм управления ЛА при
автономном заходе на посадку на необорудованный аэродром по данным бортовых
многофункциональных РЛС и инерциальной навигационной системы.
Приведенные ниже работы по разработке и созданию авиационной
радиоэлектронной аппаратуры не во всех случаях относятся к ММ-диа-
пазону, но они дают возможность определить основные тенденции
развития такой техники и могут использоваться при разработке и
совершенствовании радиолокационных устройств (систем) безопасного
самолетовождения. В ММ-диапазоне радиоволн возможно решить задачу
безопасного самолетовождения на малых и предельно малых высотах,
при посадке и функционировании ЛА на аэродроме в условиях плохой
оптической видимости.
Опыт разработки и совершенствования радиотехнических средств
управления воздушным движением (УВД) гражданской авиации
показывает, что выполнение такой объемной задачи невозможно без
широкого применения РЛС различного назначения. Среди них особое место
занимают бортовые РЛС, являясь одним из основных источников
информации, выдаваемой непосредственно экипажу. Бортовая РЛС
обеспечивает обзор пролетаемой местности независимо от оптической
видимости, намного облегчает самолетовождение в различных условиях
аэронавигационной обстановки.
Однако существующие станции, например, РЛС предупреждения
столкновений и навигации (ПРСН) при решении отдельных важных задач
270
таких, как обзор наземного пространства во время захода летательного
аппарата (ЛА) на посадку; обнаружение объектов во время полета на малых и
предельно малых высотах на небольших дальностях (5... 10 км); обзор
летного поля при функционировании самолетов и специальной техники на
аэродромах в условиях плохой видимости, недостаточно эффективны.
Становится очевидным, что важной и актуальной научно-технической задачей
является задача по разработке новых или по совершенствованию
существующих РЛС, способных эффективно обеспечивать безопасное
самолетовождение на малых высотах и небольших дальностях действия в
неблагоприятных метеоусловиях. Такие станции должны быть малогабаритными,
иметь высокие разрешающие способности по дальности и угловым
координатам, а также обеспечивать высокий уровень вероятности правильного
обнаружения наземных объектов.
В работе [18] проведен анализ задач и требований к
радиолокационным системам самолетовождения в условиях плохой оптической
видимости при посадке, полетах на низких и предельно низких высотах, а
также РЛС обзора летного поля (ОЛП) при функционировании
летательных аппаратов на аэродромах и при взлете.
Заход ЛА на посадку характеризуется следующими особенностями:
в отсутствии препятствий угол наклона глиссады (УНТ) равен 2°40', а
при наличии препятствий он может достигать значений до 4...5°;
при УНТ равном 2°40' и расположении первого контрольного пункта
- дальнего приводного радиомаяка (ДПРМ) на дальности до ВПП - 4000 ±
± 200 м и второго контрольного пункта - ближнего приводного радиомаяка
(БПРМ) на дальности до ВПП - 1100 ± 100 м высота полета соответственно
равна 200 и 60 м при скорости полета около 200 км/ч (50 м/с).
Исходя из этого, для обеспечения безопасного самолетовождения
ЛА с помощью радиолокационных систем в условиях плохой
оптической видимости должны обеспечиваться:
при скорости полета самолета < 300 м/с (80 м/с) дальность действия
РЛС обнаружения наземных объектов должна быть в пределах 6...7 км, а
при скорости полета < 200 м/с - не превышать 4 км;
для обнаружения наземных объектов (с линейными размерами:
спецмашина, по боковой проекции 10 м и самолеты - 20...30 м) при
обзоре аэродрома на дальностях до 4000 м потребуется угловое
разрешение радиолокационной системы в пределах 5 д.у. (-20');
сектор обзора РЛС для охвата площадного участка типового
аэропорта на дальности примерно 4000м должен быть в пределах 60° (±30°).
Результаты исследований показали, что при создании
перспективных РЛС ОЛП основными требованиями являются:
зона действия: по дальности - от 150 до 4500 м, по высоте - от
поверхности до 30...60 м;
271
размеры объектов - начиная от малоразмерных наземных
транспортных средств и небольших самолетов до воздушных лайнеров
максимальных размеров;
скорость движения объектов — от нулевой до взлетной скорости
самолета;
технические характеристики РЛС на максимальной дальности
4500 м: разрешающая способность по дальности 10... 15 м
(длительность импульса должна быть ~ 50 не); линейная разрешающая
способность по азимуту - не более 15м (угловое разрешение должно быть не
хуже чем 3,5 д.у., что соответствует 0,25°); сектор обзора по азимуту -
±30°; сектор обзора по углу места - от +5 до -30°; возможность
определения направления движения объекта, обнаружения с высокой
вероятностью наземных объектов на фоне ВПП (не ниже 0,9) при вероятности
ложной тревоги Ю-6;
погодные условия - дымка, туман, дождь средней интенсивности
до 16 мм/ч;
высота подъема антенны (башни) - от 15 до 90 м.
Проведенный в работах [15, 18] анализ результатов отечественных
и зарубежных научных исследований в области разработки
радиолокационной техники обнаружения показал, что такими
радиолокационными системами могут быть РЛС короткой части ММ-диапазона
радиоволн, которые более эффективны по сравнению с РЛС типа ПРСН
сантиметрового диапазона. При этом миллиметровые РЛС могут входить в
состав существующей радиотехнической системы безопасного
самолетовождения для выполнения указанных задач для небольших
дальностей и высот полета ЛА.
Разработанные в [19] методики позволяют определить основные
параметры новых РЛС самолетовождения (их технический облик),
работающих в ММ-диапазоне радиоволн и оценить их эффективность в
выполнении самостоятельных задач. Структурная схема применения
коротких частот ММ-диапазона в радиолокационных системах
самолетовождения представлена на рис. 7.1 [15, 18].
РЛС обеспечения посадки
ЛА (РЛС-1) со скоростью
полета:
- до 80 м/с;
- до 50 м/с.
Радиолокационные системы
самолетовождения в ММ
диапазоне радиоволн
<
г
РЛС обеспечения полета |
ЛА (РЛС-2) на малых
высотах; 1
- до 200 м; I
- до 400 м. 1
1 РЛС обзора легиого
{детиопо поля (РЛС-3).
1 - однопозиционные;
I - многопозиционные
Рис. 7.1. Схема применения короткой части ММ-диапазона радиоволн
в радиолокационных системах самолетовождения
272
Здесь приведены альтернативные варианты РЛС для посадки ЛА
(РЛС-1), полетов Л А на малых и предельно малых высотах (РЛС-2), а
также при обзоре летного поля (РЛС-3), где успешно может быть
применен ММ-диапазон радиоволн.
С учетом предъявляемых требований определены дальности
обнаружения наземных движущихся и неподвижных объектов с использованием
альтернативных вариантов РЛС-1 (станция для посадки ЛА), РЛС-2
(станция обеспечения полетов ЛА на низких и предельно низких высотах) и
РЛС-3 (станция обзора летного поля). Для оценки дальности использована
формула радиолокации, выраженная через отношение сигнал-шум [19].
На рис. 7.2 в виде графиков приведены результаты расчетов
дальности действия РЛС,
работающей на длине волны 3 мм при
обнаружении объекта типа
«спецавтомобиль» (ЭПР на
уровне 0,9 равна 10 м2), где
сплошными кривыми
обозначены данные для РЛС-3,
пунктирными - для РЛС-2 и
пунктирными с крестиками - для
РЛС-1; кривые 1 - для
атмосферных условий без осадков,
2 - для туманов с видимостью
до 200 м; 3 - для дождей
средней интенсивности (5 мм/ч).
Результаты исследований показывают, что при обеспечении
порогового отношения сигнал-шум qnop = 10 дБ для движущегося объекта и qnop =
= 20 дБ для неподвижного объекта дальности действия РЛС-1,2,3 можно
получить (для неподвижных объектов данные в скобках): до 9 (5) км, до
7 (4,5) км и до 6 (3,5) км соответственно.
В работе определены основные параметры РЛС обнаружения для
выполнения требуемых задач самолетовождения, а также предложена
структура построения варианта однопозиционной РЛС, работающей в короткой
части ММ-диапазона. В качестве основных параметров РЛС определены:
импульсная мощность, частота повторения, длительность импульса,
разрешающая способность по дальности и угловым координатам.
Возможные основные характеристики РЛС самолетовождения
РЛС-1
Рабочая длина волны, мм 3
Дальность действия, км 8... 10
Импульсная мощность, кВт 10
Частота повторения, кГц 10
Рис. 7.2. Расчетные дальности действия
РЛС-1, 2,3
>ЛС-2
3
5...7
4
15
РЛС-3
3* или 8
5
1
20
273
РЛС-2
3-Ю"12
0,3
15
20
6
25
7
РЛС-3
310"12
0,35
15
20
6
10...15
5
РЛС-1
Чувствительность приемника, Вт/Гц 3 • 10-12
Длительность импульса, мкс 0,25
Коэффициент шума приемника, дБ 15
Сектор сканирования антенны, град:
по азимуту; ±30
по углу места 15
Разрешающая способность:
по дальности, м 20
по угловым координатам, угл. мин 1 о
Значения параметров для РЛС-3, обозначенные звездочкой,
приведены ддя рабочей волны 3 мм. Однако в случае использования длины волны 8
мм энергетический потенциал РЛС можно получить экономнее
(выигрышнее), но в данном случае габаритные размеры и масса аппаратуры
увеличивается, и поскольку РЛС-3 (РЛС ОЛП) подразумевается стационарной,
очевидно целесообразнее применять в таких РЛС длину волны 8 мм.
Исследования особенностей функционирования и оценка
основных параметров многопозиционной РЛС ОЛП показали, что дальности
действия их примерно такие же, как и однопозиционных РЛС, и зависят
от отражательных способностей и ракурсов движения
функционирующих объектов.
На основе разработанного методического аппарата проведена
оценка других основных параметров многопозиционной РЛС, таких как
рабочая длина волны - 8 мм; дальность действия 5...6 км; мощность в
импульсе - 0,6 кВт; длительность импульса - 0,2 мкс; частота
повторения - 20 кГц; разрешающая способность: по дальности - 10... 15 м и по
азимуту — 5 угл. мин; вероятность правильного обнаружения
наземных объектов типа «спецавтомобиль и самолет» с заданной
вероятностью ложной тревоги FnT = 10"6 - не ниже 0,9.
Для обеспечения дальности действия 5...6 км - чувствительность
приемного устройства на приемных позициях (на ЛА) должна быть не
хуже 210"12 Вт/Гц.
В целом результаты исследований показали, что полученные
характеристики РЛС-1, 2 и 3 по основным параметрам, как дальность
действия станций, разрешающая способность по дальности и угловым
координатам, а также сектор радиолокационного обзора находятся в
пределах требований, предъявляемых к исследуемым РЛС. Это позволит
обеспечить самолетовождение ЛА (заход на посадку и полеты на малых
и предельно малых высотах, не выше 400 м) и требуемые скорости
полета самолета < 300 м/с (80 м/с) и < 200 м/с.
Необходимо также отметить, что уровень техники ММ-диапазона
радиоволн в России дает возможность создавать такие системы уже сейчас.
274
Блок-схема альтернативного типового варианта РЛС обнаружения
наземных объектов для обеспечения безопасного самолетовождения при
посадке, на малых и предельно малых высотах, а также при
функционировании ЛА на аэродроме в условиях плохой оптической видимости
может быть такой, как это представлено на рис. 3.9. Оценка
эффективности альтернативных вариантов РЛС самолетовождения в короткой
части ММ-диапазона радиоволн по критерию относительного
количества своевременно обнаруженных наземных объектов ^Гобн [19] показала
следующее: относительное количество обнаруженных объектов с
помощью РЛС самолетовождения в короткой части ММ-диапазона
радиоволн может быть на 10...20% выше, чем с применением РЛС аналогов в
СМ- и длинноволновой части ММ-диапазона радиоволн.
Решение указанных задач имеет важное значение дня повышения
безопасности полетов самолетов в условиях плохой оптической видимости
и снижения затрат на изготовление радиоэлектронной аппаратуры.
Сделанный вывод подтверждается разработками РЛС в ММ-диа-
пазоне радиоволн, обеспечивающими безопасность полетов вертолетов
на малой высоте от земной поверхности [15, 19,20].
Немецкой фирмой AEF разработана вертолетная РЛС
предупреждения столкновения с линиями электропередачи. Она имеет высокие
разрешающие способности по дальности и угловым координатам [20].
Основные характеристики РЛС
Дальность, м:
действия 1000
обнаружения ЛЭП с проводами
диаметром 3 мм 250
диаметром 30 мм 600
Несущая частота, ГГц 66
Мощность излучения в импульсе, Вт 1
Длительность импульса, не 50
Частота повторения импульсов, кГц 125
Коэффициент усиления антенны, дБ 37
Ширина ДНА (антенна параболоид ), град 2
Несущая частота радиовысотомера, ГГц 4,3
Потребляемая мощность, Вт 400
Масса приемопередающего блока, кг 18
Частота вращения системы, об/мин 1800
Сектор обзора (азимут/угол места), град 180/30
Период обзора, с 0,5
Французской фирмой «Томпсон-ЦСФ» разрабатывается РЛС
ММ-диапазона радиоволн «Ромео-П», предназначенная для
предупреждения столкновения ЛА с препятствиями. Она характеризуется
высокой вероятностью обнаружения сравнительно малоразмерных целей
типа проводов, опор ЛЭП, антенн, мостов, деревья, вышек и др. Малые
размеры РЛС позволяют ставить ее на любой вертолет и самолет.
275
Основные характеристики РЛС
Дальность действия, км 3
Рабочая частота, ГГц 95
Излучаемая мощность, Вт 0,4
Французской фирмой «Сименс» разрабатывается вертолетная
РЛС, предназначенная для получения на борту трехмерного
изображения рельефа местности впереди по курсу полета в интересах
пилотирования ночью и в сложных метеоусловиях.
Основные характеристики РЛС
Рабочая частота, ГГц 35
Мощность передачи на магнетроне, кВт 20
Длительность импульса, не 100
Ширина луча (антенна в виде 3-х горизонтальных
волноводных линеек со щелевыми излучателями)
по азимуту/углу места, град 0,7/60
Сектор обзора, град 40
Большое внимание в научно-технической литературе за последнее
время уделяется такому важному научному направлению, связанному с
радиолокационной аппаратурой на ЛА, как картографирование. В целях
коммерческого картографирования поверхности фирма Lookheed Martin
разработала новую самолетную РСА (DTEMS), обладающую цифровой
системой картографирования и измеряющую высоту рельефа местности [5, 6].
Радиолокационная система с синтезированной апертурой (РСА) размещена
на высотном самолете ER-2 (NASA) и предназначена для получения
изображений поверхности, дополняемых космическими фотоснимками.
Антенны и приемники находятся в контейнерах под крыльями самолета. В
данном случае прием сигналов производится от обеих антенн в качестве
двух боковых полос обзора, что позволяет реализовать интерферометриче-
ский метод измерения высоты рельефа, а также формировать трехмерное
изображение. После компьютерной обработки сигналов от четырех
приемников GPS получается трехмерное цифровое изображение с точной
привязкой к местности. Сообщается, что данные о трехмерном изображении
местности поставляются потребителям по сети Internet. Здесь же рассмотрены
основные проблемы, возникающие при использовании РСА бокового
обзора для создания и обновления топографических и специальных карт.
Отмечается, что современные РСА дают разрешение на местности порядка 5 м
при съемке с самолета и порядка 10... 15 м при съемке из космоса, что
сопоставимо с разрешением оптической и ИК аппаратуры.
В [21-23] сообщается о разработке РСА для цифрового
картографирования местности DTEMS (фирма Lookheed Martin, США). Эта система
будет использоваться на самолетах ER-2 (NASA). Вместе с фотоснимками
земной поверхности, получаемыми с ИСЗ, система позволяет создавать
276
цифровые матрицы местности с точными прямоугольными координатами с
интервалом между ними, равными 3 м. Точность определения положения
отдельных точек на матрице составит 0,5 м. Самолет ER-2 может
произвести картографирование местности в полосе шириной 94 км за два прохода.
При высоте полета 20 км в 90% случаев получаются изображения с
хорошей геометрией независимо от погодных условий. Данные системы
DTEMS будут передаваться заказчикам через сеть Internet или
записанными на гибких или жестких компакт-дисках.
7.3. Наземные (морские) системы навигации
и безопасного движения
Интересным направлением в развитии радиолокационных систем
ММ-диапазона радиоволн является их применение для обеспечения
безопасности дорожного движения [24, 25], систем морской и речной
навигации [26], службы метеообеспечения [27, 28] и др.
В [24] описывается локатор ММ-диапазона ЧМ-сигнала для
автомобильной интеллектуальной системы управления (ICC),
предназначенной для управления в любую погоду, правильного выбора маршрута
и траектории движения (предотвращения столкновений),
предотвращения ошибочных действий водителя в управлении автомобилем.
Обсуждаются результаты испытаний локатора для ICC. Представлены
технические характеристики, типы основных узлов и схема разработанного
локатора. Описан процесс генерации сигнала, его характеристики,
приведена 7-лепестковая ДНА локатора. Представлена архитектура
цифрового сигнального процессора. Приведены зависимости уровней сигнала
и помех от дальности (на дистанциях до 1 км), спектры сигналов,
отраженных от различных объектов, вид дисплея, работающего в реальном
масштабе времени. Представлена диаграмма эволюции локаторов для
ICC до 2005 г.
Целесообразность использования доплеровской РЛС короткой части
ДМ-диапазона (1,16 ГГц) радиоволн на транспорте для предупреждения
столкновений отмечается в [25]. Для этого предлагается разработать
дисплей со стробированием с целью определения средней скорости движения
объектов в пределах от 2 до 85 м/с. В работе описывается принцип
действия подобной РЛС, рассматриваются задачи создания блока-вычислителя
средней скорости движения, приводятся результаты испытаний блока,
показавшего высокую точность определения средней скорости.
Известно, что максимальное число аварий судов морского и
речного флота происходит в прибрежных зонах на подходе к портовым
сооружениям.
Перед навигационными РЛС и радиометрическими комплексами
ставятся следующие задачи [26]:
277
проводка судов при подходе к портам, проходе проливов при
отсутствии видимости;
определение координат целей, идентификации морских объектов, а
также контроль характеристик их движения;
проводка ледоколов и судов через северный морской путь по
данным собственного теплового излучения ледовых покровов.
Для повышения безопасности плавания судов намечается
применение РЛС, работающих на волнах 8 и 3,3 мм, хотя на малых
расстояниях при навигации судов в портах применение ММ-радиоволн может
быть расширено за счет использования волн 1,64, 2,5 и 5 мм. Кроме
того, возможно применение радиометрических систем на волнах 25,5 и
8 мм. Теоретические оценки дальности действия активных РЛС в
однородной среде при мощности излучения передатчика 310~3 Вт,
чувствительности приемника 310~13 Вт, в полосе пропускания 1 МГц
приведены ниже:
Длина волны, мм Дальность действия, км
1,64 1,1/0,7
2,5 7,5/1,6
3,3 14/1,6
5 1,8/1,1
8 30/2,2
Расчеты проводились для РЛС с параболической антенной
диаметром 40 см и объекта с ЭПР, равной 5 м2. Дальность действия системы: в
числителе дана для чистой атмосферы, в знаменателе - при
одновременном воздействии молекулярного и гидрометеорного ослаблений.
В работе [29] приведены данные моделирования работы двухлуче-
вой РЛС (для службы метеообеспечения) с частотой излучения 95 ГГц,
лучи которой направлены в надир и под углом 40° вперед от него. В
модели принято во внимание ослабление на траектории большой
протяженности при наличии реального шума. Обработка данных выполняется
по двум алгоритмам, позволяющим определить отражающую
способность облачности и ослабление сигналов при распространении.
Измеренные флуктуации ослабления составили ± 1 дБ/км. Алгоритм
стереоскопической обработки восстанавливает информацию только о вершине
облачности. Для извлечения всей информации, содержащейся в
отражениях, принимаемых обоими лучами, применяют гибридные алгоритмы
обработки. Последние позволяют определить микрофизические
свойства кучевых облаков, интенсивность отражения от них как без учета, так
и с учетом ослабления, а также различать зоны облачности и дождя.
В [28] проводится сравнительное исследование метода доплеров-
ского качания ДНА и метода пространственно разнесенных антенн для
278
определения профиля скорости ветра, используемого в метеорологии и
атмосферных измерениях. При втором методе применяют одиночную
передающую ДНА и, например, четыре приемных. Дифракционные
ДНА формируются за счет энергии обратного рассеяния от
гидрочастиц, движущихся под влиянием ветра. Вектор скорости ветра строится
на основе автокорреляционной и взаимной корреляционной функций за
счет временного запаздывания сигналов на приемных позициях.
Описываются результаты теоретического моделирования и испытаний РЛС
типа Radian LAP-3000, работающей на частоте 915 МГц. Приводятся
характеристики РЛС и статистический анализ измерений.
7.4. Системы связи
Международная конференция по радиосвязи WRC-97, состоявшаяся в
1997 г. в Женеве, рассмотрела вопрос распределения частотного диапазона
между многочисленными системами (глобальной навигационной GPS,
низкоорбитальной (LKO) скоростной передачи данных, глобальной системой
передачи видеоизображений, Teledesic, по проекту Sky Bridge, космической
группировкой ИСЗ Celestri и др.) [29]. Делегации США удалось отклонить
предложения консорциума Inmarsat, поддерживаемые европейскими
странами, по предоставлению космической службе для мобильных объектов
возможности использования частотного диапазона, занимаемого GPS и
другими космическими навигационными системами. Участки Ка-диапазона
(28,6. ..29,1 ГГц для радиолиний Земля-ИСЗ и 18,8... 19,3 ГГц для
радиолиний ИСЗ-Земля) будут использоваться исключительно низкоорбитальными
системами для высокоскоростных линий передачи данных Internet по всему
земному шару.
В настоящее время мы являемся свидетелями бурного прогресса в
развитии систем и средств связи как в нашей стране, так и за рубежом.
Миллиметровый диапазон радиоволн довольно молод по сравнению с
другими. Однако сегодня общепризнано, что ММ-радиоволны - это
новый огромный по занимаемой полосе частот диапазон, намного
превышающий все то, что находилось до сих пор в распоряжении
человечества. Длительное время ММ-радиоволны считались непригодными для
практического использования из-за отсутствия совершенных средств
генерации, приема, канализации СВЧ-колебаний, а также из-за незнания
законов распространения этих волн в неоднородной земной атмосфере.
Представляет несомненный интерес рассмотрение тенденций развития и
применения миллиметровых систем связи различного назначения по
данным многочисленных отечественных и зарубежных публикаций. Однако
созданию систем связи в миллиметровом диапазоне волн предшествовали
многочисленные научные исследования особенностей распространения
этих волн в земной атмосфере, а также разработки средств генерации и
приема СВЧ сигналов на частотах больших 30 ГГц.
279
Ниже по материалам отечественных и зарубежных публикаций за
последние годы приводятся результаты исследований, которые нашли и
находят применение в технике и системах связи на ММ-радиоволнах.
7.4.1. Особенности применения миллиметровых радиоволн
в системах связи
К числу преимуществ применения ММ-радиоволн в технике и
системах связи следует отнести прежде всего увеличение объема и
скорости передачи информации, распространение ММ-радиоволн в
неблагоприятной окружающей среде, высокое усиление антенн при малой их
апертуре и повышенная помехозащищенность.
Особенность при использовании для связи ММ-радиоволн состоит
в том, что при их распространении возникает ослабление в
атмосферных газах и гидрометеорах, а также деполяризация излучения и
амплитудные и фазовые осциляции. Это ослабление в атмосфере имеет
общую тенденцию возрастать с повышением частоты и зависит от
погодных условий. Полосы интенсивного поглощения радиоволн в атмосфере
обусловлены наличием кислорода и водяного пара на частотах 22,2
(Н20), 60 (02), 118,8 (02) и 180 (Н20) ГГц. В условиях умеренной
влажности атмосферы (-7,5 г/м3 у поверхности Земли) полное ослабление
при однократном вертикальном распространении радиоволн в
атмосфере на линиях поглощения кислорода может превышать 200 дБ.
Интерес представляют «окна прозрачности» на частотах около 35, 94,
140 и 220 ГГц, где наблюдается минимальное затухание по сравнению с
соседними участками ММ-радиоволн. На средних широтах при умеренной
влажности и температуре у земной поверхности 20°С полное ослабление
невелико и при однократном вертикальном распространении через
атмосферу на частотах 94 ГГц составляет 1,3 дБ. За последние годы анализ
теоретических и экспериментальных исследований в России и за рубежом был
проведен в работах [1, 30]. Из них известно, что в экспериментальных
исследованиях молекулярного поглощения вплоть до последнего времени
отсутствовала статистика различных уровней поглощения сигналов,
основанная на данных о концентрациях паров воды, кислорода в гидрометеорах и
атмосфере. Накопление этой статистики представляет собой весьма
трудоемкую задачу из-за крайне сильной изменчивости значений влажности р и
ее зависимости от климатических условий.
С учетом статистики различных гидрометеоров, влажности в
атмосфере, а также многолетних исследований распространения
ММ-радиоволн, известно, что полное удельное ослабление ММ-радиоволн в
99,98% времени не будет превосходить значений, указанных в табл. 7.1.
При этом предполагалось, что молекулярное поглощение и ослабление
в дожде и мокром снеге воздействует на распространяющееся
излучение одновременно, хотя это и не всегда имеет место.
280
Таблица 7.1. Полное удельное ослабление ММ-радиоволн
Атмосфера
Н20 + 02+ дождь (10 мм/ч) +
1 + мокрый снег (1 мм/ч), дБ/км
j or, км"1 (непер)
Полное удельное ослабление 1
при длине волны, мм |
1,64
55,6
12,8
2,5
52,0
5,5
5,0
31,7
7,3
12,5 1
12,0
2,76
В настоящее время в значительной мере изучена проблема
распространения ММ-радиоволн, результаты экспериментальных
исследований и теоретических расчетов молекулярного поглощения гидромеор-
ного ослабления в атмосфере вполне удовлетворительно совпадают.
Ниже дается обзор возможных применений ММ-радиоволн в системах
спутниковых линий связи, радиорелейных линиях, сотовых линиях
связи небольшой протяженности, бортовых линиях связи и
автоматизированных системах управления, а также в измерительной аппаратуре при
исследованиях новых перспективных применений ММ-радиоволн.
7.4.2. Использование миллиметровых радиоволн для связи
искусственных спутников Земли
Наметившаяся в последнее время тенденция использования
диапазона ММ-радиоволн для решения различных прикладных задач
приобрела, в отличие от прошлых лет, устойчивый характер. Это объясняется
не только успехами в разработке элементной базы ММ-радиоволн и
создании технически совершенных устройств на ее основе, но и
преимуществами, которые дает использование радиоволн этого диапазона.
В настоящее время с уверенностью утверждается, что увеличение
объема обрабатываемой информации в развитых странах примерно
пропорционально квадрату роста их промышленного потенциала.
Необходимость в передаче на большие расстояния все возрастающих
потоков информации способствует прогрессу в развитии систем
спутниковой связи. К примеру, в 1982 г. в составе систем спутниковой связи
США имелось около 150 стволов ретрансляторов с шириной полосы
пропускания 36 МГц каждый, причем темпы запуска спутников были
настолько велики, что к началу 90-х годов выделенные для связи
диапазоны частот 6/4 и 14/12 ГГц оказались полностью занятыми [31].
Как видим, актуальной задачей является освоение диапазона
ММ-радиоволн, в котором отведенная для спутниковой связи полоса частот
намного превышает суммарную полосу частот, используемую в более
длинноволновых диапазонах волн, что позволяет увеличить объем
информации, передаваемой по линиям спутниковой связи.
281
Согласно работы [31], в период с 1970 г. по 1974 г. в США было
выведено на геостационарную орбиту два искусственных спутника
Земли (ИСЗ), на борту которых имелась аппаратура, работающая в
диапазоне частот 16...40 ГГц, в течение 10 лет с 1975 г. было запущено уже
около 15 таких спутников.
Узкие диаграммы направленности антенн ММ-радиоволн
способствуют скрытности связи и ослаблению интерференционных помех, а
большой коэффициент усиления позволяет уменьшать мощность
передатчика и улучшать массогабаритные характеристики аппаратуры
спутника. Благодаря применению узконаправленных многолучевых
бортовых антенн можно осуществлять коммутацию лучей для расширения
зон покрытия, а также увеличивать надежность связи при плохих
погодных условиях за счет разнесенного приема.
К числу наиболее приоритетных ИСЗ, ретрансляторы которых
работают на частотах свыше 20 ГГц, разработанных в конце 80-х и начале
90-х годов за рубежом, можно отнести следующие:
спутник L-SAT/OL YMPUS (Западная Европа) имеет общую
ширину полос рабочих частот в диапазонах 14/11 и 30/20 ГГц около 6,8 ГГц.
Полоса пропускания ствола составляет 240 МГц, что обеспечивает
передачу информации со скоростью 360 Мбит/с, достаточную для
организации 5500 телефонных каналов;
спутник MILSTART (США) с широкополосным ретранслятором в
диапазоне частот 44/20 ГГц. Предусмотрены использование шумоподоб-
ных сигналов, псевдослучайная перестройка частот в полосе 2 ГГц и
коммутация сигналов на борту. Межспутниковая связь в системе MILSTART
осуществляется в диапазоне частот 60 ГГц, в котором большое затухание в
атмосфере делает практически невозможным создание активных
преднамеренных радиопомех с Земли для работы бортовой аппаратуры;
спутники ECS-2 и ACTS-E (Япония), работающие в диапазонах
частот 30/20 и 50/40 ГГц при полосе пропускания ствола 250 МГц со
скоростью передачи данных не менее 400 Мбит/с. Для последнего типа
спутника фирма NTT разработала проект системы со сверхвысокой
пропускной способностью 7920 Гбит/с (на один ИСЗ), где бортовые
антенны должны иметь коэффициент усиления 76 дБ и формировать 4950
лучей с точностью наведения 0,005°. Для частот 20 и 40 ГГц диаметры
антенн равны соответственно 36,5 и 18,8 м. Включение в состав
перспективной системы 15 больших связных ИСЗ позволит получить общую
пропускную способность систем спутниковой связи (ССС) до 119 Гбит/с. Как
считают японские специалисты, накопленный в процессе
экспериментов опыт позволяет приступить к созданию рабочих линий
межспутниковой связи, функционирующих в диапазоне ММ-радиоволн.
Одна из возможных областей применения таких межспутниковых
линий - международная связь, когда наличие прямой связи между дву-
282
ч
мя ИСЗ устраняет необходимость использования промежуточных
земных станций (ЗС). С помощью межспутниковых линий можно также
осуществлять связь между несколькими ИСЗ, находящимися на
расстоянии в несколько десятков километров друг от друга в каком-либо
одном районе космического пространства.
Отношение мощности сигнала к мощности шума на входе
приемника можно определить по известной формуле:
I "перАер^Лф 1 /у jx
1кТшА/Мшк2]л2'
где Pnep - мощность передатчика; Лпер и Апр - эффективная площадь
передающей и приемной антенн соответственно; к - постоянная Болыдма-
на; Тш - шумовая температура; А/- полоса пропускания; Nm -
коэффициент шума; R - расстояние между передатчиком и приемником; Л -
длина волны.
Основные характеристики межспутниковых линий связи при скорости
передачи информации 1 Гбит/с и использовании двукратной фазовой
манипуляции для различных частот
94 ГГц 180 ГГц
Произведение кТшА/ при А/= 1,15 ГГц, дБмВт -83,4 -83,4
Коэффициент шума, дБ 8 9
Требуемое значение q для идеального детектора
при вероятности ошибки на символ 10"6, дБ 10,5 10,5
Энергетический запас для линии связи, дБ 3,2 3,2
Мощность на входе приемника, дБмВт -58,7 -58,7
Потери на затухание в свободном пространстве
при расстоянии между спутниками 72000 км, дБ -228,5 -234,3
Коэффициент усиления передающей и приемной
антенн, дБ .., 63,5 69,2
Мощность передатчика, дБмВт 46,8 43,9
Потери в антенно-волноводном тракте, дБ -4 -5,5
Видно, что при переходе от частоты 94 ГГц к частоте 180 ГГц
потери в антенно-волноводном тракте увеличиваются на 1,5 дБ, а
коэффициент шума ухудшается на 1 дБ, в то время как увеличение q за счет
укорочения длины волны равно примерно 6 дБ. В итоге суммарный
выигрыш в величине q составляет около 3 дБ.
В настоящее время известен ряд отечественных систем
спутниковой связи с космическими аппаратами на геостационарной,
эллиптических и низких круговых орбитах аналогичных зарубежным системам
связи [31]. В этих работах в том числе показано, что низкоорбитальные
спутниковые системы связи (НОССС) наиболее эффективно могут быть
283
использованы для организации телефонной связи и обмена
дискретными сообщениями между абонентами по принципу «каждый с каждым» в
глобальном масштабе или в крупных регионах с использованием
персональных малогабаритных абонентских станций.
В общем случае в состав низкоорбитальной системы входит
группировка космических аппаратов (КА) и ЗС различного назначения.
Особенностью таких систем является то, что связь КА с ЗС в них
принципиально ограничена по времени, поскольку КА и ЗС могут находиться в
зоне взаимной радиовидимости лишь в определенное время. Связь
между КА группировки, организованная с помощью межспутниковых
линий связи, может быть как постоянной, так и периодической и
существовать между всеми КА или только между некоторыми из них, а связь с
помощью наземных ретрансляторов - только периодической.
Если группировка КА обеспечивает сплошное покрытие
обслуживаемой поверхности Земли зонами радиовидимости КА, а связь между всеми
КА поддерживается постоянной, то такая система может обеспечивать и
телефонную связь, и обмен сообщениями между абонентами в реальном
масштабе времени. Однако эти системы весьма сложны и дороги.
Если же КА появляются в зоне радиовидимости абонента
периодически, а связи между всеми КА не поддерживается постоянно, то
такие системы могут обеспечивать лишь обмен сообщениями между
абонентами с задержкой по времени. Время ожидания КА определяется их
числом в группировке и ее структурой и будет тем меньше, чем больше
спутников в системе. Варьируя числом КА в группировке, ее
структурой и организацией межспутниковых связей можно добиться того, что
время задержки в доставке сообщений не будет превосходить заданной
величины. В работе [31] проведена оптимизация структуры, оценены
возможности таких систем и сделан вывод, что такие
оптимизированные низкоорбитальные системы могут найти применение для обмена
между абонентами с портативными персональными станциями
телеграммами, факсами, данными ЭВМ и другой документальной
информацией, а также для пейджинговой связи.
С учетом особенностей функционирования рассматриваемой
низкоорбитальной системы в структуре ее рабочие частоты связи выбраны
в диапазоне 0,3...0,4 ГГц. Так как в этом диапазоне работает большое
число различных радиоэлектронных средств и необходимую полосу
частот на первичной основе получить невозможно, то в такой системе
предлагается использовать широкополосные сигналы в виде
псевдослучайных последовательностей, позволяющих осуществлять связь в
присутствии помех от других систем. Скорость передачи в парциальном
канале составляет 4,8 Кбит/с, а с учетом помехоустойчивого
кодирования - 2,4 Кбит/с. Рассматривается вопрос о применении в таких
системах диапазона ММ-радиоволн.
284
Таким образом, необходимость увеличения пропускной
способности и общей эффективности систем спутниковой связи явилось одной из
причин освоения диапазона частот 30/20 ГГц. Потенциальные
возможности систем в указанном диапазоне частот оцениваются в 10 тыс.
каналов связи с минимальной скоростью передачи информации в каждом
канале не менее 2 Мбит/с. Предполагается также, что в ближайшей
перспективе система ССС INTELSAT должна обеспечить работу около
750 тыс. телефонных каналов, что в 15 раз превышает возможности
системы в диапазонах 6/4 и 14/12 ГГц.
Технические условия использования диапазона ММ-радиоволн в
спутниковой связи включают изучение методов организации
разнесенного приема на наземных станциях при передаче цифровой информации
со скоростью 1 Гбит/с, разработку надежных ферритовых
переключателей и коммутационных матриц для бортовых ретрансляторов, а также
создание усовершенствованных многолучевых антенн с повышенной
точностью изготовления элементов конструкции. Решение указанных
задач позволит достичь высокой эффективности спутниковых систем
при работе в диапазоне 50/40 ГГц.
Хотя при организации межспутниковой связи большой интерес
представляет также и диапазон частот до 60 ГГц, в будущем возможно
использование и других более высокочастотных участков спектра.
7.4.3. Применение миллиметровых радиоволн на сотовых
линиях связи в городе
В последние годы в наиболее развитых странах мира наблюдается
значительный прогресс в области исследований и создания новых
систем связи в городских условиях и сельской местности между
подвижными и стационарными объектами. Это стало возможным благодаря
развитию твердотельной электроники, микроэлектроники, фотоники,
акустоэлектроники, а также систем связи на УКВ с применением
синхронных и низкоорбитальных искусственных спутников Земли [32].
Однако массовое использование дециметровых и метровых
радиоволн в системах городской связи создает ряд трудностей при
конструировании приемопередающих и антенно-волноводных систем, увеличивает
уровень взаимных электромагнитных помех и ограничивает полосу
передаваемых частот, что приводит к росту искажений при передаче информации.
В работах [32,33] приведены результаты исследований
использования участков спектра ММ-радиоволн, соответствующих линиям
поглощения паров воды и кислорода для сотовых систем связи небольшой
протяженности. Дается систематическое изложение достигнутых к
началу 90-х годов результатов по проблеме распространения
ультракоротких радиоволн в городах, пригородной и лесопарковой зонах, показаны
285
возможности их применения при расчетах и проектировании городских
линий радиосвязи, в том числе систем связи между подвижными и
стационарными объектами, а также оценены направления и перспективы
дальнейших исследований. Здесь же освещаются еще два направления,
исследования по которым интенсивно ведутся в настоящее время.
Первое направление связано с изучением влияния метеорологических
условий на распространение радиоволн в городе и на эффективность работы
подвижных систем связи; второе - с организацией радиосвязи на УКВ
внутри производственных помещений.
Систематизация и анализ результатов исследований
распространения радиоволн УКВ-диапазона в условиях города приводят к
оптимистичному выводу о том, что в столь сложных условиях возможен
прогноз наиболее важных характеристик электромагнитного поля на
расстояниях от нескольких сотен метров до десятков километров от
источника излучения. Такой прогноз может выполняться статистическими
методами по топографической карте города на основе данных о
плотностях застройки, высотах и горизонтальных размерах зданий,
строительных материалах, из которых изготовлены стены, планировке городских
районов, а также рельефе местности и расположении антенных систем.
В работе [33] предложены методики расчета характеристик поля
при проектировании линий связи в условиях города с применением
компьютерных баз данных, которые позволяют произвести расчеты
энергетических характеристик, распределений поляризационных
параметров поля, а также классифицировать статистические характеристики
радиопомех в каналах городской радиоподвижной связи.
Расчет энергетических характеристик поля УКВ-диапазонов по
топографическим картам городских районов предполагает аналитическую
и численную оценки следующих параметров:
среднего значения ослабления поля УКВ, создаваемого в условиях
города у поверхности Земли (на высоте 3...5 м) ненаправленным
неподвижным источником излучения, антенна которого поднята на заданную
высоту над городской застройкой;
среднего значения ослабления поля УКВ, создаваемого в городе у
поверхности Земли ненаправленным подвижным источником
излучения, антенна которого также имеет высоту 3...5 м;
коэффициента пространственной корреляции поля УКВ в городе и
спектра флуктуации сигнала при подвижной радиосвязи.
Исходными данными для расчета являются: d - длина трассы
распространения УКВ, км; Нх - высота подъема антенны подвижного
пункта над Землей, м; Н2 - высота подъема антенны центральной станции
(или другого подвижного пункта) над Землей, м; v- среднее число
зданий в одном квадратном километре; L - средний периметр зданий, км;
Яср - средняя высота зданий в районе расположения приемного пункта, м;
286
Рпз ~ среднее значение коэффициента отражения волны по мощности от
поверхности зданий; /в - масштаб корреляции коэффициента отражения
волны от поверхности зданий; Л- длина волны излучения, м.
Параметры у, L, Яср вычисляются путем обработки
топографического плана застройки района города, причем v определяется как n/S,
где п - количество зданий, расположенных в районе площадью S, км2;
*ri п v *-? п
/=i i=\
где Lit hj - периметр и высота отдельного здания.
Среднее значение ослабления поля УКВ в городе рассчитывается
для текущих параметров задачи Л ,Ни Н2, d:
F = 101g\2р—-- ^- Я2-^ср _52 (73)
В случае, когда антенна центральной станции поднята над
городской застройкой, так что Н2 - Яср > (М)т, расчет коэффициента
пространственной корреляции быстрых интерференционных замираний
предлагается проводить по формуле
Ri(l,<Po) = hikl) + Ux(kl) cos^0, (7.4)
где / - величина пространственного разноса, м; к - волновое число, 1/м;
% - угол между направлением пространственного разноса двух
приемных антенн на подвижном средстве.
При связи между двумя подвижными пунктами коэффициент
корреляции
Ri(!> ^o)=exp[i£/cos(^0 - is)] - lS\in exp[in7r<p0]Jn(kl)shn£, (7.5)
/=i
при этом безразмерный параметр е, учитывающий дальность и
плотность застройки, определяется соотношением chs = (d+p) / d, где J„(kl) -
функция Бесселя (быстро убывает с ростом порядка, как только
становится п > (Л/ + 1)).
Если зададимся исходными условиями: мощность передатчика
равна 5... 10 мВт, чувствительность приемника в полосе 1 МГц
примерно равна 10~12 Вт, а усиление антенн около 15 дБ, и примем отношение
сигнал-шум около 10, то можно оценить минимальную дальность
действия связи R на волнах миллиметрового диапазона, соответствуюших
центрам резонансного поглощения паров воды и кислорода, по
известному уравнению дальности распространения:
287
In
a = -
np
4A
0,5
-21пД
(7.6)
где R - дальность линии связи, км; Я - длина волны, мм; d - диаметр
приемопередающих антенн, м; Ртл - мощность, излучаемая в антенну,
Вт; Рпр - мощность сигнала на входе приемной антенны, Вт.
Результаты оценок протяженности линии связи при значениях
полного ослабления (см. табл. 7.1) в центрах линий поглощения паров воды или
кислорода показаны на рис. 7.3.
На основании данных рис. 7.3
можно сделать вывод о
перспективности применения ММ-радио-
волн, соответствующих центрам
резонансного поглощения в парах
воды и в кислороде. Также видно,
что при наихудших условиях
распространения на волне 5 мм
протяженность линии связи всегда
больше 0,5 км, что отвечает
требованиям, предъявляемым к таким
линиям связи.
Учитывая современный уро-
Я,км
1,0
0,8
0,6
0,4
0,2
/.'N. ^ ' Рт1Ж-10-2Вт
. t \ ч <*'
j 1 N#-" Л,1Ж-510-3Вт
н2о о2 н2о
1.1 1 i 1 «
2 4 6 8 10 12 14 х
,мм
Рис. 7.3. Протяженность линии связи при
значениях полного ослабления
в центрах линии поглощения паров
воды и кислорода
вень развития полупроводниковой технологии и состояние разработок
микроэлектронных схем, имеется реальная возможность использования
различных отечественных приемопередающих систем, а также антенно-
волноводных устройств создания необходимой элементной базы в целях
применения в линиях передачи информации небольшой протяженности
в городских условиях. Такие линии, как это уже предлагалось в России
и за рубежом, могут стать надежными составными частями сотовых
систем связи с базовыми станциями отдельных регионов. При массовом
производстве стоимость подобных систем на ММ-радиоволнах могла
бы быть вполне сравнимой с существующими системами на
дециметровых и метровых волнах.
Кроме того, в условиях города организация таких линий передачи
информации может быть целесообразной по ряду причин. В частности,
это могло бы полностью решить проблему тесноты в эфире и создать
реальную возможность увеличения полосы передаваемых сообщений по
крайней мере на порядок и более.
С другой стороны, по результатам исследований использование
ММ-радиоволн в приемопередающих системах в помещениях с
работающим персоналом не будет оказывать такого вредного влияния на
биологические объекты и человека, как в случае дециметровых и метро-
288
вых волн. В работе [33] приведены примеры применения микро- и пи-
косотовых систем связи в городских и пригородных районах.
Использование длин волн, соответствующих центрам молекулярного
поглощения в диапазоне ММ-радиоволн, привело бы к массовому
применению одних и тех же волн для многократных ретрансляций сообщений.
На рис. 7.4 представлен вариант применения линий связи в городе.
Базовая станция «А» осуществляет связь по макросотовым сетям Б, В, Г, Д,
обеспечивающим обмен информацией с объектами подвижной связи.
Однако, как видно из рисунка, в городе имеются микросоты бив,
предназначенные для связи со стационарными объектами, и пикосоты
производственного здания «Ж» № 1,2,3,4,..., функционирующие на отдельных этажах.
Рис. 7.4. Вариант применения линий связи в городе
На рис. 7.5 показаны два
варианта (а и б) применения ММ-радиоволн
с использованием слабонаправленных
антенных систем для связи с
подвижными объектами на отдельных
магистральных улицах города.
Таким образом, лабораторные и
промышленные приемопередающие
устройства и состояние элементной
базы вселяют сегодня уверенность
в возможности практического
использования ММ-радиоволн в сотовых
системах передачи информации
небольшой протяженности в условиях
города.
Рис. 7.5. Варианты применения
ММ-радиоволн в линиях связи
в городе с использованием
слабонаправленных антенн
10—3523
289
7.4.4. Бортовые линии связи и передачи информации
В последнее время возникла большая потребность в организации
высоконадежных однопролетных линий связи, предназначенных для
передачи многоканальной телефонии, а также обмена данными между ЭВМ и
периферийными устройствами. Для этих целей в наибольшей степени
подходят радиорелейные линии диапазона ММ-радиоволн,
достоинствами которых являются высокая помехозащищенность, малые
габаритные размеры и масса, высокая пропускная способность и малое
потребление энергии.
Обеспечение пропускной способности радиолинии 3...5 Гбит/с,
которое требуется в перспективе, возможно за счет использования
миллиметровых и более коротких диапазонов длин волн, где может быть
получена высокая надежность работы радиолинии 0,99998 [34].
Энергетические показатели, требования к аппаратуре такой радиолинии при
современном состоянии техники ММ-радиоволн вполне реализуемы.
Так, для наклонной радиолинии с углом наклона 30°, пропускной
способностью 3 Гбит/с, дальности 20 км, при размерах параболических
антенн на борту летательного аппарата 0,2...0,5 м и на Земле в пункте
приема 1 м, коэффициент шума наземного приемника -15 дБ, малой
массе и объеме бортовой аппаратуры, потребуются мощности бортового
передающего устройства в пределах (0,1... 100) Вт.
Подобные радиолинии будут иметь высокую скорость передачи
информации, всепогодность, а также высокую надежность работы
радиолинии при малых массах и габаритных размерах бортового
передающего устройства и антенной системы.
В работе [35] рассмотрены результаты разработки дуплексной
приемопередающей станции (ППС), работающей в диапазоне 42,5...43,5 ГГц и
предназначенной для организации однопролетных цифровых
радиорелейных линий, протяженностью до 5 км со скоростью передачи
информации 8,448 Мбит/с (129 телефонных каналов). Диапазон рабочих
частот ППС соответствует регламенту радиосвязи для данного класса
аппаратуры. Для передачи информации выбрана частотная модуляция с индексом
модуляции равным 1. Разнос частот между каналами приема и передачи, а
также значение промежуточной частоты составляют 480 МГц, что
позволяет, с одной стороны, обеспечить необходимую величину развязки между
каналами, а с другой, - организовать автоматическую подстройку частоты
относительно стабилизированного гетеродина приемника.
Требования к отдельным функциональным узлам ППС могут быть
определены из выражения
201gf^Wa+^<2Ga+101g
^пер
(Nm-l)kT0Afq
(7.7)
290
где /а - затухание сигнала в атмосфере; уА - затухание сигнала в дожде;
Ga - коэффициент усиления антенны; Nm - коэффициент шума
приемника; к - постоянная Больцмана; Т0 - абсолютная температура; А/-
полоса пропускания приемного тракта; q - отношение сигнал-шум,
обеспечивающее заданное значение вероятности ошибки.
При общем затухании 170 дБ на радиолинии, протяженностью 5 км,
приведенное выше неравенство выполняется при следующих условиях:
коэффициент усиления приемопередающей антенны не менее 40 дБ,
мощность передатчика 30...50 мВт, коэффициент шума приемника не
более 13 дБ.
Структурная схема ППС приведена на рис. 7.6. В состав станции
входят: параболическая двухзеркальная антенна 1 диаметром 300 мм
(/прд и Д, - частоты передающей и приемной антенн соответственно);
волноводные полосовые приемные 2 и передающие 4 СВЧ-фильтры;
разделитель поляризаций 3 (горизонтальной Е и вертикальной Н)\
смесители приемного канала 5 и канала АПЧ 6 на диодах с барьером Шот-
ки, работающие на четвертой гармонике гетеродина; СВЧ-генератор на
диоде Ганна 7 с варакторной перестройкой частоты; предварительный
УПЧ на кремниевых биполярных транзисторах 8; транзисторный СВЧ-
генератор 9, стабилизированный диэлектрическим резонатором;
частотный детектор канала АПЧ 10\ видеоусилитель модулятора передатчика
Ни модуль частотного детектора 72, выполненный на единой стекло-
текстолитовой печатной плате и состоящий из главного УПЧ с
автоматической регулировкой усиления 13, частотного детектора на
расстроенных контурах 14 и видеоусилителя 15. Источник вторичного
электропитания 16 обеспечивает преобразЬвание постоянного напряжения +60
В в стабилизированные напряжения +12 В, -12 В и +5 В, необходимые
для питания функциональных узлов станции.
/ирдУ/Ч
Е(Н)
Ч \ 1
ЩЕ)
i ИЧ ;
| 12
t
f М /М. + 12 В
| -12 В
1 Вх0д ^
Гь*-П7 Н
1 1 1 + 5 В >/^
Вых.
т
tf= + 60B
1
1
Рис. 7.6. Схема приемопередающей станции
291
Параболическая антенна, приемопередающие устройства и источник
вторичного питания конструктивно размещены в герметическом
цилиндрическом контейнере диаметром 300 мм и длиной 250 мм. Малые массога-
баритные характеристики ГШС дают возможность в большинстве случаев
отказаться от строительства специальных мачтовых сооружений.
7.4.5. Аппаратура для исследования систем связи
Пути совершенствования современных СВЧ-устройств для
радиорелейных линий. В работе [36] обсуждаются пути уменьшения габаритных
размеров, массы и стоимости, а также увеличения надежности СВЧ-узлов
для радиорелейных линий и спутниковых систем связи СМ- и ММ-диа-
пазонов радиоволн. Трудности, встречающиеся при постановке таких
требований, побудили к разработке гибридно-монолитных, монолитных
устройств, к внедрению зарубежных транзисторов и интегральных схем
и к оптимальному выбору материала подложек.
Для уменьшения габаритных размеров СВЧ-узлов аппаратуры
предлагается два пути: максимальная интеграция в одном моноблоке
узлов различного назначения и переход к монолитным и гибридно-
монолитным интегральным схемам (МИС и ГМИС).
Первый путь позволяет уменьшить число переходных разъемов и
кабелей; рациональное использование его возможно до тех пор, пока
увеличение числа интегрированных узлов не войдет в противоречие с
ремонтопригодностью.
Второй путь предусматривает рациональный выбор
технологических реализаций между МИС и ГМИС в зависимости от их дальнейшего
внедрения в ту или иную аппаратуру путем исключения их
индивидуальных недостатков. В качестве общих решений можно назвать микро-
полосковую реализацию пассивной части и использование в качестве
подложки пассивной части арсенида галлия.
В настоящее время указанные приборы и приборы других
рациональных конструкций уже получают выход на промышленный рынок. Такие
приборы получили распространение в ГНПП «Исток» (г. Фрязино Моск.
обл.) и в АО «МНИИРС» (г. Москва). Имеется еще несколько фирм в
России, в которых также проводятся работы по изготовлению и применению
подобных изделий (Зеленоград, Москва, Санкт-Петербург и др.).
На 5-й Крымской конференции в Севастополе 25-27 сентября 1995 г.,
около 10 докладов были посвящены СВЧ-технике и спутниковой
телекоммуникационной технологии, а также были довольно широко
представлены материалы по разработке узлов СВЧ-аппаратуры, содержащей
ГМИС и МИС. Эти материалы охватывали устройства для линейных
трактов преобразования частоты, усилители средней мощности и др. В
них используются усилители, смесители, генераторы, делители частоты,
перекрывающие диапазон частот от 100 МГц до 18 ГГц.
292
Оценка габаритных размеров аппаратуры при построении
усилителей мощности с использованием ГМИС в сравнении с гибридной
реализацией ГМИС в сочетании с МИС показывает, что в этом случае
уменьшение объема аппаратуры возможно до 4.. .6 раз.
Перспективы развития устройств ММ-диапазона в большей
степени связаны с созданием радиорелейных линий телефонной связи.
Казалось бы в диапазоне ММ-радиоволн нет смысла говорить об
уменьшении габаритных размеров, однако оказывается, что масса
приемопередающей части станции составляет 70...80 кг. Существенная
часть ее включает в себя массу волноводных фланцев и корпусов
приборов, выполненных на основе волноводного фланца. Сюда, в первую
очередь, относятся циркуляторы и вентили. Используя технологию
гальванопластики, удается интегрировать в одном корпусе несколько
таких изделий, при этом уменьшаются габаритные размеры и
существенно снижается масса изделий. Примером могут служить работы,
получившие развитие в Днепропетровском институте точной механики.
Примененный Яцуненко А.Г. в аппаратах КВЧ-терапии метод
гальванопластики обеспечил массу камеры с диодом Ганна около 5 г, что на
порядок меньше аналогичного изделия в традиционном исполнении. Еще
больший выигрыш в массе и габаритных размерах можно ожидать,
соединяя в одном тракте, изготовленном по методу гальванопластики,
например, цепочку из трех каскадов усилителей на ЛПД, включающих два
вентиля и три циркулятора. Кроме выигрыша в массе существенно
снижаются затраты на настройку узлов, поскольку повышается точность их
изготовления.
Весьма привлекательными представляются линейные
приемопередающие тракты для радиорелейных линий, в которых элементы ММ-диа-
пазона радиоволн дополняются необходимыми каскадами СМ-диапазона в
гибридно-монолитном исполнении. Этим достигается компактность,
снижение стоимости аппаратуры и повышение надежности за счет высокой
повторяемости параметров и уменьшения числа соединений.
Таким образом, в диапазоне ММ-радиоволн перспективно
использование гальванопластики для построения волноводных интегральных
схем. Представляется существенным правильный выбор материала
подложек для СВЧ-узлов.
Широкодиапазонные перестраиваемые гибридно-интегральные
генераторы КВЧ-диапазона. В предыдущем разделе, где описывается
приемопередающая станция, работающая в диапазоне 42,5...43,5 ГГц,
указано, что СВЧ-генератор станции создан на диоде Ганна с варактор-
ной перестройкой частоты. Генераторы такого вида являются
достаточно перспективными и могут широко использоваться в системах
радиосвязи и на других частотах ММ-радиоволн.
293
Так, в работе [37] сообщается о создании параметрического ряда
широкодиапазонных генераторов на ЛПД с варакторной перестройкой
частоты в диапазоне 25... 120 ГГц. Генераторы предназначены для
широкодиапазонной радиоизмерительной аппаратуры различного
назначения. Широкое применение их обусловливается благодаря их небольшим
массам и габаритным размерам, низкому питающему напряжению, а
также отсутствию потребления мощности в цепи управления частотой и
др. Для исследований был выбран наиболее перспективный вариант
построения генераторов на бескорпусных диодах и квазисосредоточенных
элементах колебательного контура с применением в качестве теплоот-
вода медной полированной подложки. На ней методами гибридной
интегральной технологии сформированы фильтры цепей питания диодов.
Созданные генераторы имели полосу варакторной перестройки
частоты не менее 20%. Максимальное значение полосы перестройки 35%.
Минимальная выходная мощность генераторов зависела от диапазона частот и
достигала следующих значений: в диапазоне 25...37 ГГц - 15...20 мВт, в
диапазоне 53...80 ГГц- 5...10 мВт, в диапазоне 78...120 ГГц- 3...5 мВт.
Генераторы непрерывно перекрывали весь указанный диапазон частот.
Максимальное напряжение на варакторе находилось в пределах до 25 В.
Перепад выходной мощности генератора не достигал 10 дБ. Чаще всего
это значение составляет 3...6 дБ. Крутизна перестройки менялась с
изменением напряжения на варакторе от десятков до сотен мегагерц на
вольт. Потребляемая генератором мощность не превышала 5 Вт.
Разработка и применение связных приемопередающих систем
ММ-диапазона радиоволн, С освоением диапазона ММ-радиоволн
открываются возможности для систем связи, обусловленные прежде всего
таким преимуществом аппаратуры, как большая информационная
емкость [33]. При этом аппаратура связи может выполняться для
функционирования как в «окнах прозрачности», так и в Центрах линий
поглощения в зависимости от требований помехозащищенности. Однако
при значительном затухании MGVl-радиоволн в гидрометеорах и аэрозолях
основным требованием, предъявляемым к аппаратуре связи, является
обеспечение гарантированного запаса по потенциалу на линии. Проектирование
систем связи диапазона ММ-радиоволн, прежде всего, предполагает выбор
необходимого диапазона частот работы приемопередающих модулей ММ-
радиоволн и необходимого запаса по потенциалу, который определяет
надежность связи и, в конечном итоге, качество радиолинии.
Запас по потенциалу можно повысить путем применения
приемопередающих антенн с большим коэффициентом усиления. Для
диапазонов длин волн 10 мм и менее берется раскрыв антенн не более 0,5 м, что
также позволяет применить современную менее трудоемкую
технологическую базу. Запас по потенциалу можно также увеличить за счет
уменьшения шумовой температуры входа приемника и увеличения
выходной мощности передатчика.
294
Коэффициент шума приемника в диапазонах длин волн 6... 10 мм
составляет 5... 10 дБ, причем меньшее значение характерно для
приемников, использующих усилители на полевых транзисторах Шотки при
нормальной температуре, а большее - для преобразователей Шотки.
Выходная мощность твердотельных передатчиков диапазона ММ-
радио-волн достигает 0,5 Вт.
В качестве активных компонентов применяют в задающих
генераторах диоды Ганна, а в выходных - ЛПД. По комплексу параметров выходная
мощность, амплитудные и частотные шумы генератора Ганна превосходят
известные активные твердотельные устройства ММ-радиоволн и являются
незаменимыми для систем связи. Запас по потенциалу можно увеличить,
применяя эффективные виды модуляции при передаче сообщений.
Наиболее эффективным видом модуляции является однополосная модуляция, при
которой достигается максимальный выигрыш по потенциалу, однако при
этом аппаратурные затраты становятся значительными, что ведет к
усложнению, удорожанию системы и ухудшению ее надежности.
Основные преимущества систем связи, работающих в диапазоне
ММ-радиоволн, - их малые габаритные размеры и энергопотребление,
которые сохраняются при достижении требуемой надежности даже при
применении энергетически невыгодного режима амплитудной модуляции. При
этом потери по запасу потенциала можно в какой-то мере компенсировать
выбором коэффициента шума приемника и характеристик антенны.
Амплитудная модуляция дает следующие преимущества по
сравнению с другими видами модуляции: не требуются высокостабильные
задающие генераторы; упрощается схема построения
приемопередатчика; уменьшается энергопотребление; повышается надежность; для
передачи сообщений с помощью транспонации спектра может быть
использован практически весь парк связной аппаратуры вплоть до УКВ-диа-
пазона; не требуется дополнительно создавать аппаратуру каналообра-
зования и уплотнения.
Связные приемопередающие системы диапазона ММ-радиоволн
ввиду малых массогабаритных характеристик особенно эффективны для
использования в городах и на сильно пересеченной местности, где
организация других видов связи потребует значительных материальных
затрат, а также на подвижных средствах .
В связи с этим при проектировании систем связи ММ-радиоволн
необходимо решать вопросы юстировки и выбора местоположения
приемопередатчиков, регулировки запаса по потенциалу в зависимости
от условий применения (сменные антенны, управление мощностью
передатчика), стыковки однотипной каналообразующей аппаратуры.
Структурная схема приемопередающего модуля диапазона
ММ-радиоволн, использующего транспонирование спектра приведена
на рис. 7.7.
295
^c
1
\10
U
12
Рис. 7.7. Схема приемопередающего модуля диапазона ММ-радиоволн
Сигнал с генератора Ганна б, стабилизированного внешним
высокодобротным резонатором поступает на вход амплитудного модулятора
3, выполненного на /?ш-диоде. Часть мощности сигнала через циркуля-
тор 4 поступает на балансный смеситель Р, работающего в качестве
гетеродина. Мощность в те моменты времени, когда модулятор открыт,
поступает на один из входов поляризационного селектора 7, а когда
закрыт - через фазовращатель 7 на ортогональный вход
поляризационного селектора. Промодулированные при взаимно ортогональной
поляризации сигналы излучаются антенной ^ассегрена в пространство.
Принятые сигналы корреспондента, сдвинутые по частоте на величину
промежуточной частоты, принимаются антенной в одной из плоскостей
поляризации и через циркулятор 2 и фильтр 8 зеркального канала
поступают на балансный смеситель Р, далее усиливаются усилителем
промежуточной частоты 11 и демодулируется блоком 12.
Основные характеристики приемопередающего модуля
Выходная мощность, мВт 50
Нестабильность частоты генератора, Гц/°С (2...4)10~6
Диапазон частот, ГГц 30...40
Коэффициент модуляции не менее 0,8
Мощность модулирующего сигнала, мВт 10...30
Частота модуляции, МГц не более 200
Вид модуляции * амплитудная
Коэффициент шума приемника, дБ 11
Коэффициент шума УПЧ, дБ 1,4
Полоса частот УПЧ, МГц 3400...3900
Подавление зеркального канала, при отстройке на 3,6 ГГц, дБ 50
Диаметр зеркала антенны, мм 300
Фокусное расстояние, мм 106
Мощность потребления по цепи постоянного тока 12 В, Вт 20
Масса модуля, кг 10
Габаритные размеры, мм 250x250x300
296
Приемопередающий модуль диапазона ММ-радиоволн в свое
время был испытан с оборудованием частотно-модулированного тракта
радиорелейной линии «Восход-3». Проведены стыковки линейного
оборудования аппаратуры ИКМ-30 с частотно-модулированной
радиорелейной линией «Восход-3» и приемопередающим модулем. Дальность
действия линии связи составила 8 км.
Указанные применения ММ-радиоволн в системах связи и
научных исследованиях далеко не исчерпывают проблему использования
этих диапазонов волн.
Таким образом, все более широкое применение ММ-радиоволны
находят в системах широкополосной связи наземных пунктов с ИСЗ, в
системах межспутниковой и бортовой связи, а также для организации
широкополосной связи в городах и населенных пунктах, включая пико-
сотовые линии передачи информации.
Контроль за экологической обстановкой. В научно-технической
печати все чаще стали появляться работы, посвященные вопросам контроля
за экологической обстановкой на земном жизненном пространстве.
В [38] подробно описан метод расщепленного окна для индикации
малых вариаций излучательной способности на морской поверхности
при радиометрическом зондировании нефтяных пятен с ИСЗ; показана
возможность обнаружения вариаций радиояркостной температуры
менее 1°С; рассмотрено применение метода для анализа изображений,
полученных радиометром высокого разрешения: доказана возможность
регистрации излучения пятен на морской поверхности ночью.
В [39] дано описание принципа действия, эксплуатационных
возможностей радиолокационного комплекса «Атмосфера» для обзора
воздушного пространства с целью дистанционного обнаружения его
загрязнения радиоактивными, химическими и другими веществами;
приведены технические характеристики и сравнительный анализ
эффективности работы комплекса.
В последние годы широко обсуждается вопрос о существовании
негармонических электромагнитных предвестников [40]. Здесь поясняется,
что экспериментально обнаружены предвестники землетрясений -
радиоизлучения со спектром 5... 10 кГц. Описано также, что радиолокатор
высокого разрешения без синусоидальной несущей при зондировании толщи
Земли импульсами длительностью 1 не обнаруживал металлические
предметы, трубы и электрические кабели. В итоге предложены новые методы
активной и пассивной регистрации предвестников землетрясений.
7.5. Радиоэлектронная аппаратура в медицине
В последние годы в научно-технической литературе появилось
очень много статей о возможности применения радиоэлектронной
аппаратуры в интересах медицины. Особое место занимают ММ- и субММ-
радиоволны.
297
Из [41] известно, что физические поля современных модификаций
терапевтического аппарата МИЛТА включают постоянное магнитное
поле и переменные электромагнитные поля различных длин волн, а
именно - квазикогерентное узкополосное оптическое лазерное и
широкополосное оптическое светодиодное излучение ближнего
инфракрасного (ИФ) и красного диапазонов волн, а также крайне высокочастотное
(КВЧ) излучение радиодиапазона ММ-радиоволн. В основе
биомеханизмов взаимодействия лазерного и светодиодного излучений малой
мощности с биотканями организма лежат фотофизические и
фотохимические реакции, связанные с резонансным поглощением света
биотканью на молекулярном и клеточном уровне, на уровне отдельного органа
и организма в целом. Воздействие производится излучением малой
интенсивности, почти на уровне квантового порога возбуждения молекул,
на биологически активные точки (БАТ) и зоны, функционально
связанные с больными органами. Показано, что организм человека способен
селективно, с высокой избирательностью выделять частоты
электромагнитного излучения, совпадающие с резонансными частотами
соответствующих молекул и клеток, что обеспечивает эффективное их
возбуждение при очень малой мощности излучения. Показано, что доза
облучения может регулироваться изменением уровня мощности либо
плотности потока мощности и длительности экспозиции. Высокая
эффективность и полная безопасность практического применения более 8000
аппаратов МИЛТА подтверждена статистически достоверными
результатами широких клинических исследований в ведущих медицинских
учреждениях России и 15 зарубежных стран.
Естественно возникает вопрос, влияют ли на здоровье человека
низкочастотные магнитные поля малой интенсивности, типичные для
окружающей среды? Ряд работ, результаты которых не опровергнуты до
сих пор, отвечают положительно на этот вопрос. В связи с этим недавно
стали рассматривать иррегулярные магнитные поля УНЧ (0...10 Гц)
диапазона со сложным спектральным составом [42]. Такие поля
характерны для естественных геомагнитные возмущений, а также для
современного электротранспорта. Последние результаты свидетельствуют о
том, что эти поля могут влиять на нервную систему и, возможно,
вызывать инфаркты миокарда.
При существующих проблемах в медицине с большим вниманием
рассматривается вопрос о влиянии электромагнитного излучения (ЭМИ)
антропогенного происхождения на окружающую среду и на человека.
Сделан вывод относительно особенностей патогенного влияния СВЧ
[43]. Последним открытием является влияние СВЧ на психическое
состояние человека. Так, психические расстройства, обусловленные
влиянием СВЧ, наблюдаются даже в первой возрастной группе 0-14 лет.
Они достигают максимума в период перехода от детства к половому со-
298
зреванию, что может быть обусловлено влиянием СВЧ на
гормональную систему организма. Второй максимум наступает в возрасте 40-49
лет, что также может быть обусловлено гормональной перестройкой
организма в климактерический период. Обусловленные влиянием СВЧ
заболевания эндокринной системы и возникновение новообразований
наступают в третьей и последующих временных подгруппах с той
разницей, что заболевания эндокринной системы плавно нарастают и не
имеют тенденции к спаду у людей пожилого возраста. Полученные
результаты позволяют допустить снижение обшей резистивности организма
людей, проживающих в условиях длительного ЭМИ СВЧ-диапазона, на
что указывает возрастание общей заболеваемости.
К 90-м годам прошлого столетия приобрело актуальность
воздействие радиочастотного излучения на биологические объекты,
обнаруженное в сороковые годы, и потребовало создания дозиметрии и
стандартов, ограничивающих влияние радиоизлучения на здоровье человека
[44]. Исследования проводились в натурных и лабораторных условиях,
включая эксперименты на людях с последующей экстраполяцией.
Наибольший объем исследований в области НЧ-излучений был выполнен
путем клинического контроля за здоровьем рабочих радиотехнических
производств, показавший увеличение риска возникновения рака мозга.
Были проведены исследования влияния дальних и ближних полей, в
частности, излучения сотовых телефонов, на здоровье человека. Принято,
что передозировка на частотах ниже 10 ГГц соответствует плотности
мощности 50 Вт/см2.
Изучение воздействия радиочастотного излучения на организм
человека началось после создания РЛС с мощными передатчиками на
магнетронах. Подверглись изучению взаимодействие излучаемого поля и
человеческого тела, диэлектрические свойства тела и тепловой эффект, а также
воздействие поля на молекулярном уровне, включая трансмембранный
потенциал. Были проведены широкие исследования канцерогенных свойств
излучения тела на частотах до 2,45 ГГц при воздействии на него
мощностей до 0,016 Вт/кг. Наличие достаточного объема данных о воздействии
радиоизлучения требует разработки стандартов, ограничивающих
напряженности поля значениями, безопасными для человека [45].
В [46] говорится, что продольные электромагнитные волны
(ПЭМВ) предполагаются одним из основных носителей биоинформации
в перцептивном канале. В связи с этим встает ряд вопросов,
важнейшими из которых являются регистрация ПЭМВ и мутагенное воздействие
на живой организм.
На основе проведенных теоретических проработок сделаны
следующие выводы:
на опытах подтверждено существование продольных и поперечных
ЭМВ, причем подтверждается вывод о том, что ПЭМВ низкой интенсивно-
299
ста практически не взаимодействуют с материальными средами неживой
природы, но воздействуют на геном живого организма, что отвечает
концепции об особой роли этих волн в биоинформированном обмене;
поперечные ЭМВ в диапазоне 35...37 ГГц не вызывают мутагенного
эффекта у Drosophila melanogaster (плодовые мушки Дрозофила), о чем
свидетельствует достоверная оценка соматического мозаицизма в опытах;
поскольку системы репарации ДНК, а также системы образования и
окисления промутагенов у насекомых и млекопитающих отличаются,
продолжение цикла исследований целесообразно провести в виде
тестирования на мутагенность на высших млекопитающих и на культуре человека;
метод «биологического индикатора» является единственным
практическим способом регистрации физических полей низкой интенсивности.
В [47] представлены результаты экспериментальных исследований
реакций центральной нервной системы (ЦНС) человека на
периферическое воздействие низкоинтенсивных (нетепловых) электромагнитных
полей инфранизкочастотного (ИНЧ) и КВЧ-диапазонов; для
исследования использованы психофизические (сенсорная индикация) и
психофизиологические методы, а также запись биопотенциалов коры головного
мозга - электроэнцефалография (ЭЭГ); экспериментально обнаружены
различия в реакциях ЦНС здорового человека на ИНЧ и КВЧ-поля,
которые позволяют говорить о различных физиологических механизмах,
обеспечивающих эти реакции.
В [48] предметно аргументируется актуальность трех новых клинико-
физиологических направлений, возникших из традиционной ММ-терапии
(КВЧ-терапии): первичной или биофизической рецепции, связанной с
активностью внеклеточного вещества (коллагена) и внутриклеточных белков
(белков теплового шока); эффектов и механизмов КВЧ-воздействия на
аксиальные структуры тела, имеющие отношение к непосредственному
выживанию человека (реанимационные точки и зоны); эффектов и
механизмов КВЧ-воздействия на латеральные структуры тела (область крупных
суставов), определяющие высокую курабельность больных с особыми
состояниями сознания, а именно, больных с фантомными синдромами и
предположительно больных с вегетативными состояниями.
В [49] рассматриваются особенности и перспективы применения в
биологии и медицине оптико-микроволнового информационного
воздействия — одновременного воздействия на живые организмы слабых
электромагнитных полей оптического и КВЧ-диапазонов. Большая
эффективность лечения достигается путем объединения положительных
свойств лазерного (большая глубина проникновения и малая область
облучения) и микроволнового (информационное воздействие на
биологическую среду) излучений. Микроволновый сигнал модулирует
несущее лазерное излучение, которым облучаются точки акупунктуры
человека. Предполагается, что основным механизмом, обусловливающим
300
нелинейные эффекты в живом организме, является вынужденное
комбинационное рассеяние света. Возбуждение определенного
колебательного (вращательного) спектра молекул обусловливает лечебный эффект
КВЧ-терапии. Наряду с ним дополнительно будет проявляться
лечебный эффект от лазерного излучения.
Все приведенные работы представляют собой концептуальный
характер, касающийся общих вопросов влияния широкого спектра
электромагнитного излучения на биологические организмы.
Теперь приведем наиболее важные результаты научных
исследований влияния на биологические организмы электромагнитного
излучения ММ- и су6ММ-диапазонов, проводимых с 1996 г. Сейчас уже
известно, что электромагнитные волны ММ-диапазона достаточно
широко применяется в клинической практике. Уже в течении 20 лет их
используют при заболеваниях гастроэнтерологического профиля, в
онкологии, гинекологии, травматологии, кардиологии, урологии, для
лечения туберкулеза и саркоидоза легких. Миллиметровые волны могут
применяться в качестве метода монотерапии, ММ-терапия не имеет
побочных эффектов и отдаленных неблагоприятных последствий,
прекрасно сочетается с лекарственными, физиотерапевтическими методами
лечения. Эти волны обладают антистрессовым действием, нормализуют
имунный статус организма, снимают болевой синдром, оказывают седа-
тивное действие, обладают полилечебным эффектом. Рассматривается
применение ММ-радиоволн для достижения стабилизации дегенеративно-
дистрофических изменений в суставном хряще при деформирующем ос-
теоартрите. Доказана стабилизация дегенеративно-дистрофических
изменений в суставном хряще под влиянием ММ-радиоволн [50].
Тенденцией развития современных исследований по биологическим и
терапевтическим эффектам электромагнитных излучений КВЧ-диапазона
является поиск и клиническая проверка новых по отношению к
известным (42, 53 и 61 ГГц) терапевтических частот [51]. Наличие ощутимых
биологических эффектов установлено на опытах для длин волн ЭМИ
2,5 мм; также предполагается, что терапевтическими могут являться
ЭМИ с длинами волн 1,7; 0,9; 0,77 мм. Биоинформационная значимость
ЭМИ должна возрастать с увеличением частоты, поскольку снижается
уровень помех, наиболее естественными биоинформационными
частотами являются частоты УФ, ИК и коротковолновой части КВЧ-диапазона.
Авторами сделана попытка создания малогабаритного высококогерентного
генератора ЭМИ КВЧ, работающего в диапазоне 100... 160 ГГц на базе
серийно выпускаемых МЭП-диодов и диодов с барьером Шотки с
использованием результатов исследований по умножению частоты на
запредельных волноводах. Приводится конструкция генератора. Проведенная
апробация аппарата КВЧ-терапии в опытных исследованиях
подтвердила его эффективность. В клинических условиях применялся аппарат с
301
ЭМИ частотой 94 ГГц при лечении больных бронхиальной астмой, где
аппараты с «традиционными» частотами излучения не являются
достаточно эффективными.
Значительный объем экспериментов в области многорезонансного
взаимодействия миллиметровых волн с колониями живых клеток,
выполненный с помощью спектроскопических методов, позволил разработать
несколько моделей такого взаимодействия [52]. В их основе в большинстве
случаев лежит явление электромеханического резонанса, определяемое
внутриклеточными процессами, и зависящее от поляризации
возбуждающего поля. Для ряда объектов введено понятие критической длины волны и
радиационного эффекта, связанного с длительностью временного
интервала. Описаны явления когерентных электромагнитных вибраций, абсорбции
волн микроорганизмами и формирование клеточных мембранных каналов,
наблюдающиеся в диапазоне частот 70.. .73 ГГц.
В процессе лечения важное значение имеет динамика изменений ин-
тенсивностей, а в приложении к КВЧ-терапии — использование более чем
одной частоты электромагнитного излучения. Методика двухчастотного
пунктурного КВЧ-воздействий клинически апробировалась для случая
лечения стоматологических заболеваний и различных клинических форм ос-
теохандроза [53]. Использовался КВЧ-аппарат с двухчастотной генерацией
модулированного излучения с длинами волн 5,6 и 7,1 мм. Подача ЭМИ на
объект осуществлялась либо в статическом режиме, либо в динамическом.
Модуляция ЭМИ выполнялась на частотах основных биоритмов,
подстраиваемых под конкретного пациента, или на частотах, соответствующих
низкочастотной электропунктуре. Сравнительный анализ результатов лечения
парадонтоза показал высокую эффективность двухчастотной пунктуры.
Лечение остеохандроза было также достаточно эффективным.
Из всего большого объема информации, относящейся к области
примения ММ-радиоволн в медицине и биологии, приведем краткое
содержание отдельных важных статей, относящихся к лечению различных
органов человека.
Методы диагностики зубов на основе облучения волнами
сантиметрового и миллиметрового диапазонов с успехом могут заменить
широко применяемые рентгеновские лучи, приводящие к повреждению
тканей. Исследования, проведенные в диапазоне частот 0,04...40 ГГц,
показывают, что благодаря значительному росту потерь при зубном
кариесе наиболее эффективное выявление испорченных и здоровых зубов
может быть достигнуто на частоте порядка 35 ГГц [54]. Исследования
проводились с помощью двух волноводов, в зазор между которыми
помещался зуб, уплотняемый силиконовой резиной. Получены данные,
что зубная пульпа подвержена воздействию электромагнитного
излучения, что может привести к разработке новых методов лечения.
302
В [55-58] Н. Д. Девятков и его коллеги проанализировали
методологические особенности ММ-радиоволн при лечении и реабилитации
онкологических больных, наболыном клиническом материале (802 больных)
изучены эффективность протекторного и противометастатического действий
результатов реабилитационной и паллиативной терапии.
В [56] дается обзор новых результатов по взаимодействию
радиоволн ММ-диапазона с водными и биологическими средами. В [57]
обсуждаются проблемы КВЧ-терапии применительно к заболеваниям
сердечно-сосудистой системы. В [58] приводятся оригинальные данные о
механизмах взаимодействия ММ-радиоволн и обсуждаются основные
закономерности в обнаруженных биологических эффектах.
Анализируя материалы раздела, необходимо еще сказать, что ММ-
радиоволны в радиотехнических системах и научных исследованиях
далеко не исчерпывают проблему этих диапазонов. В настоящее время
они находят также широкое применение в радиоастрономии,
дефектоскопии, исследованиях полупроводниковых материалов, а также в ряде
отраслей промышленности и сельского хозяйства [26].
7.6. Системы военного применения
Системы военного применения СМ- и ММ-диапазонов радиоволн,
получившие развитие за последние годы в мировой практике, - это
радиолокационные системы обнаружения и распознавания объектов,
наведения управляемого оружия, частично противовоздушной обороны,
устройства радиоэлектронной борьбы, а также радиотехническая
аппаратура противодействия радиолокационному распознаванию.
Рассмотрим подробнее результаты отечественных и зарубежных исследований.
7.6.1. Проблемные вопросы и направления
совершенствования радиолокационных систем
обнаружения и распознавания объектов
Известно, что основной, не решенной до сих пор в радиолокации,
остается проблема эффективного распознавания обнаруживаемых
объектов. Доказано, что радиолокационные системы в ММ-диапазоне
радиоволн при решении подобных задач имеют ряд преимуществ по
сравнению с СМ-диапазоном радиоволн, однако эта проблема еще пока
далека от своего разрешения. Существующие РЛС обнаружения объектов
в интересах военного применения, можно сказать, достаточно эффективны.
Однако с изменением характера боевых действий, совершенствованием
средств и методов маскировки требуется повышение эффективности РЛС
особенно в условиях плохой видимости, в ночных условиях, при
выпадении осадков и наличии пыледымовых помех (ПДП). Требуется также
повышение точности определения координат объектов и снижение массога-
баритных размеров радиолокационной аппаратуры и др.
303
Кроме того, анализ загрузки рабочих диапазонов волн
существующих РЛС в армии показал, что в ходе боевых действий они будут
функционировать в сложной радиоэлектронной обстановке, поэтому
при выборе рабочего диапазона РЛС, наряду с необходимостью
выполнения предъявленных к ним требований, важно обеспечить их
электромагнитную совместимость (ЭМС).
Опыт показывает, что лучшим выходом для повышения
разрешающей способности по угловым координатам, помехоустойчивости и
скрытности РЛС является переход к использованию ММ-диапазона радиоволн.
Обзор публикуемых материалов по созданию образцов РЛС
ММ-диапазона радиоволн в армиях ряда стран показывает, что, начиная с 50-х
годов, за рубежом и в России также интенсивно проводятся работы в этой
области. В первую очередь создавались активные и пассивные
радиолокационные системы обнаружения и автоматического распознавания
наземных и воздушных объектов, системы картографирования, аппаратура
связи и передачи информации и др.
Примеры приоритетных зарубежных РЛС, находившиеся в стадии
разработок до 90-х годов, большая часть которых относится к
обширному классу РЛС обнаружения, распознавания, определения координат
и наведения управляемого оружия, приведены в [1, 20, 26]. Здесь
представлена лишь часть образцов разрабатываемой радиолокационной
техники за рубежом, которые до настоящего времени еще серийно не
выпускаются, однако достижения последних лет в совершенствовании
технологии элементной базы создают предпосылки для выпуска таких
высокоэффективных систем в ближайшее время. >
Указанные информационные материалы позволили заключить, что
основные направления разработки зарубежной техники военного
назначения по классификации и параметрам совпадают с разработками
аналогичной техники в нашей стране.
В третьей главе приведены основные направления применения
ММ-диапазона радиоволн (длина волны 3 мм) для создания РЛС
обнаружения, располагающихся на наземных и воздушных носителях, а
также в качестве радиолокационных датчиков для обнаружения
объектов на небольших дальностях (100...500 м) при контроле на путях
передвижения техники и личного состава.
Для сравнения направлений развития зарубежных и отечественных
(альтернативных) образцов радиолокационных систем обнаружения
наземных объектов в табл. 7.2 приведены предполагаемые обобщенные
данные для отечественных образцов РЛС, а в табл. 7.3 - примеры
приоритетных зарубежных и отечественных радиолокационных систем,
находящихся в стадии разработки и относящихся к обширному классу
радиолокационной техники обнаружения (разведки) объектов [26].
304
Таблица 7.2. Сводные обобщенные данные по параметрам
отечественных альтернативных радиолокационных систем
обнаружения наземных объектов
Параметры РЛС
1 Дальность действия, км
Мощность в импульсе, кВт
Длителность импульса, мкс
Частота повторения, кГц
Флуктационная
чувствителность,К
Разрешающая способность:
по дальности, мм
по угловым координатам, д.у.
1 Масса, кг
РЛС обнаружения |
Переносные
3...5
1
0,3
5
-
10
1
15
С подъемом
антенны
на высоту
10...20 м
10
7
0,3
15
-
15...20
1,5
-
Пас-
сивно-
актив-
ные
3
1...2
0,3
5
0,1
5...10
1
10
На
вертолетах
10
30
0,25
10
-
25
1 2
1 50
На
ДПЛА
1..2
5...10
0,1
15
-
-
-
1 ю
Датчики
до 0,5
-
-
-
0,1
| Ю
1
1...2
Таблица 7.3. Разрабатываемые РЛС обнаружения
Наименование системы
Характеристики РЛС
РЛС обнаружения и распознавания
Радиолокационная система
радиовидения и обнаружения
объектов в сложных
метеоусловиях (дождь, туман).
Бортовая РЛС обнаружения
и сопровождения наземных целей
и картографирования местности
«WX-50».
Цифровая твердотельная РЛС
со сложным сигналом.
Пассивно- активный самолетный
локатор наблюдения за полем боя.
Активно-пассивная система
наблюдения за полем боя
(всепогодная).
Дальность действия 1...2 км с разрешением по
дальности 0,5 м. Диапазон рабочих частот 300.. .400 ГГц
Исследования продолжаются в США
РЛС разработана на фирме «Westinghaus», США.
Рабочая частота 35 ГГц. Передатчик с импульсной
мощностью 100 кВт, длительностью импульса 200 не
и частотой повторения 2кГц, сканирование лучом
антенны диаметром 38 см в пределах 35° по
азимуту и по углу места 24°, скорость сканирования
антенны 60° /с, масса без контейнера 63,5 кг и
потребляемая мощность 1000 ВА
Частота 35 ГГц, возможны широкодиапазонные
варианты РЛС на ряде частот миллиметрового и
сантиметрового диапазонов волн. Импульсная
мощность - десятки милливольт, база фазоманипулиро-
ванного сигнала > 10, длительность парциальных
импульсов 10... 15 мс, дальность действия - до 100
км, масса (без антенны) < 20 кг, объем (без антенны)
< 20 дм, потребляемая мощность 150 Вт.
Разработана ИРЭ РАН и НПО «Алмаз», Россия
Рабочая частота 35 ГГц. Разработан НПО «Алмаз»,
Россия
Рабочая частота 220 ГГц. Проводятся эксперимен-
тальные исследования на фирмах США
11—3523
305
Продолжение табл. 7.3
РЛС другого назначения
Измерительная РЛС.
Измерительная РЛС
Вертолетная РЛС предупреждения
столкновения с проводами
высоковольтных линий передач.
Когерентно-импульсная доплеровская станция для
исследования возможных областей применения
коротковолновой части миллиметрового
диапазона. Возможно изменение параметров сигнала по
частоте повторения, поляризации, длительности
излучаемых импульсов. Диапазон перестройки
частоты 144 МГц, импульсная мощность 500 мВт,
коэффициент шума приемника 11,5 дБ. Разработка
ведется на фирме «Texas Instrument», США
Рабочие частоты 140 и 225 ГГц. Разработана на
фирмах США для исследования отражательных
характеристик наземных целей и условий
распространения радиоволн
Рабочая частота 94 ГГц. Разработка ведется на
фирме «Telefunken», ФРГ
Поскольку технический облик альтернативных образцов РЛС
обнаружения как зарубежных, так и отечественных достаточно хорошо
представлен, остановимся на наиболее проблемных вопросах, решение
которых тесно увязывается с существенным совершенствованием РЛС
обнаружения и распознавания.
Известно, что основной проблемой в радиолокации до сих пор
остается проблема эффективного обнаружения и распознавания объектов.
Доказано, что радиолокационные системы ММ-диапазона радиоволн при
решении подобных задач имеют преимущество перед РЛС СМ- и ДМ-диа-
пазонов радиоволн, однако эта проблема еще далека от своего решения.
Основными направлениями разработок РЛС для распознавания
объектов в ММ-диапазоне радиоволн в настоящее время являются:
1. Изыскание новых принципов создания систем радиовидения.
Ожидается, что такая аппаратура с диаметром параболической антенны
1 м, мощностью передатчика 1 Вт и чувствительностью 10"20 Вт/Гц в
дождях и туманах может обеспечивать получение изображений с
разрешением 0,5 м на дальности 1 ...2 км;
2. Изучение предельного сверхразрешения по дальности методом
перестройки несущей частоты передатчика (применение в РЛС
широкополосных сигналов);
3. Использование возможности применения в радиолокационных
системах на ЛА антенных систем с синтезированной апертурой;
4. Использование различий в спектрах флуктуации амплитуд, фаз
и поляризационных характеристик отраженного сигнала объекта;
5. Развитие многочастотного и многопозиционного
радиолокационного обнаружения, позволяющего получить информацию о форме
306
объекта, его размерах, особенно в случаях, когда длина волны
соизмерима с размерами элементов объекта.
Это подтверждается приведенными ниже техническими
решениями, отраженными в современной научно-технической информации.
В настоящее время в развитие указанных направлений
исследуются пути решения задачи компенсации искажений изображений объектов
с одновременным повышением разрешения до 10 раз и более.
Так, на физическом факультете МГУ проводятся
экспериментальные исследования действующих макетов систем радиовидения на
основе ФАР и радиооптических систем с решетками сенсоров [59].
Разработан и реализован цифровой метод синхронной последетекторной
обработки радиометрического сигнала, значительно повышающий точность
измерений. Развита и инструментально реализована универсальная
методика оценивания аппаратных функций широкого класса пассивных
систем радиовидения методом пробного точечного широкополосного
источника. Создана математическая модель формирования изображений
в пассивных системах радиовидения в режиме приема широкополосного
сигнала. Сделан вывод, что наиболее перспективными направлениями в
пассивном радиовидении являются: создание многолучевых систем
радиовидения на основе ФАР, развитие новых методов анализа,
математическое моделирование и оптимизация этих систем. В современных
РЛС применяют ФАР достаточно широко. Это связано с тем, что с
помощью таких антенн хорошо реализуется высокая разрешающая
способность по угловым координатам принимаемого сигнала [59,60].
В [59] представлены качественные результаты повышения отношения
сигнал-шум и разрешения по угловым координатам в радиотехнических
синтезированных системах (РСА) переднего обзора. Высокую
разрешающую способность по азимутальному углу у таких РСА можно достичь
только более сложными методами, чем РСА бокового обзора. Эта
трудность связана с тем, что симметричные относительно линии движения
точки обзора земной поверхности имеют одинаковые доплеровские
зависимости по времени и малые градиенты доплеровских частот в направлении
полета. Перспективным путем увеличения разрешающей способности РСА
переднего обзора является применение минимальной несмещенной
дисперсионной оценки (MVU) в приемном канале. Использование MVU-
оценки требует детального изучения способа повышения отношения
сигнал-шум. Для этого предложена специальная форма облучателя антенной
системы. Функция облучения такого облучателя обеспечивает ДНА,
которая позволяет оптимизировать распределение энергии в угловой плоскости
и одновременно хорошо структуирована.
Изобретение, представленное в [60], предназначено для аппаратурной
реализации известного способа получения двумерных радиолокационных
изображений сопровождаемых воздушных целей с прямолинейной траек-
307
торией полета. Цель изобретения - получение двумерных изображений при
помощи РЛС с инверсным синтезированием апертуры, использующих
узкополосные зондирующие сигналы и обеспечивающих своевременное
достоверное распознавание классов воздушных целей.
Практически для всех современных пользователей
радиолокационных систем необходимо увеличение количества и повышение
качества информации, получаемой из наблюдаемого пространства. Однако
традиционные РЛС с шириной полосы, не превышающей 10% от
несущей частоты, имеют недостаточные информационные возможности.
Одним из перспективных направлений, позволяющих существенно
увеличить информативность РЛС, является применение
сверхширокополосных (СШП) сигналов с шириной спектра, достигающих 1 ГГц и
более. В СШП локации повышение информативности происходит
благодаря уменьшению импульсного объема РЛС по дальности. Так, при
изменении длительности зондирующего импульса с 1 мкс до 1 не глубина
импульсного объема уменьшается с 300 м до 30 см.
Применение СШП в РЛС позволяет [61]:
повысить точность измерения расстояния до объекта и
разрешающую способность по дальности и угловым координатам, эффективность,
устойчивость РЛС к воздействию внешних и узкополосных
электромагнитных излучений и помех;
распознать класс и тип объекта;
упростить аппаратуру защиты от всех видов пассивных помех;
устранить интерференционные провалы в ДНА при наблюдении за
объектом под низкими углами места, лепестковую структуру вторичных
ДН облучаемых объектов.
Все перечисленные преимущества достижимы. Для их реализации
необходима теоретическая база, позволяющая рассчитать
характеристики СШП РЛС. К сожалению удовлетворительной и
систематизированной теории СШП РЛС до сих пор не создано. В [61] рассмотрены
отличия СШП РЛС от традиционных, показаны особенности генерации,
излучения и обработки сигналов, которая в принципе, является
обобщением, проведенных до настоящего времени работ в области применения
СШП сигналов в радиолокации.
С 1996 г. научное направление применения СШП сигналов
получило развитие применительно к РЛС ММ-диапазона радиоволн.
Приведем несколько примеров такого практического применения.
В [62] рассматривается аппаратура измерения радиолокационной
структуры для системы автоматического распознавания объектов,
работающей в ММ-диапазоне радиоволн и применяющей широкополосные
поляризованные сигналы, обеспечивающие высокую разрешающую
способность. Здесь же представлены характеристики трех видов
измерительной аппаратуры и двух типов ортогональной поляризации излу-
308
чаемых и отраженных сигналов; предложены инструкции по
пользованию автоматизированными программами измерений; приведены
результаты некоторых измерений.
Интересное практическое применение СШП сигналов по
использованию в РЛС для обнаружения закопанных мин показано в [63].
Военная исследовательская лаборатория Army Research Lab. (США)
разрабатывает самолетные системы обнаружения минных полей и
автоматической идентификации подвижных объектов, скрытых растительностью.
Применение РСА с СШП сигналами, установленной на 50-метровой
штанге, закрепленной на медленно двигающемся вертолете, позволяет
определять положение мин с точностью до 15 см. Лаборатория создала базу
данных, позволяющую учесть метеоусловия при определении
параметров земной поверхности и растительности. Скорость перемещения
существующих средств обнаружения мин не превышает 1 км/ч, обработка
сигналов проводится не в реальном масштабе времени, что не может
удовлетворить требованиям систем. Приведены и обсуждены
параметры некоторых опытных образцов обнаружителей скрытых целей.
Международная конференция EUREL/IEE, проходившая в октябре
1996 г., привлекла внимание общественности к использованию
сверхширокополосных РЛС дня подповерхностной локации и обнаружения
противопехотных мин. С минимальным количеством металлических
деталей пластиковые мины обнаруживаются с помощью коротких
импульсов (несколько наносекунд), спектр которых занимает полосу от
десятков мегагерц до нескольких гигагерц. Обычно спектральные
характеристики импульсов представляют собой ряд отдельных частот,
излучаемых с заданной частотой повторения, и имеющих форму коротких
волновых пакетов. Излучаемая мощность составляет несколько
микроватт на одну спектральную линию, а отраженные сигналы на входе
приемного канала - несколько нановатт. Антенна РЛС, размещаемая на
дистанционно управляемом аппарате, располагается в
непосредственной близости от земной поверхности и позволяет получить на
индикаторе (цветном или черно-белом) в реальном времени картину
исследуемого места (в виде вертикального профиля на несколько сантиметров в
глубину или в виде плана). Длины волн излучаемых колебаний
соизмеримы с размерами мин, что определяет существенно меньшую
разрешающую способность сверхширокополосных РЛС по сравнению с
оптическими приборами.
Фирма ELTA Electronics Industries (Израиль) получила от Турции
заказ на современный подповерхностный локатор (IGPR),
разрабатываемый на основе модели EL/M-2190, имеющий высокую
разрешающую способность [64]. Предполагается использование IGPR армией
Турции для обнаружения пластиковых и металлических мин. Локатор
устанавливается на транспортном средстве дистанционного управления,
309
способного передвигаться по пересеченной местности, обнаруживать и
отмечать места зарытых мин. Локатор IGPR имеет малую магнитную и
акустическую сигнатуру, что позволяет проходить через минные поля.
Возможно его использование IGPR для обнаружения неразорвавшихся
артиллерийских снарядов.
Испытания образца портативного статического
радиолокационного обнаружителя подтвердили возможность определения
местонахождения подземных труб и других крупных объектов, зарытых на глубине
до 1,5 м. Прибор способен обнаруживать пластиковые и металлические
предметы, определять наличие утечки воды из трубопроводов в
песчаной почве при глубине до 0,3 м. Мощность сигнала РЛС около 200 мВт,
рабочая частота 2 ГГц.
Система с СШП излучением образует новый класс маломощных
систем обнаружения подвижных объектов [65]. Она отличается тем, что
на частоту повторения зондирующих сигналов или на частоты
задержанных стробов приемника накладывается одна или несколько
дополнительных частот, меньших частоты повторения зондирующих сигналов.
Эти промежуточные частоты (ПЧ) гомодинного приема позволяют
реализовать ряд преимуществ классических РЛС в СШП системах.
Дополнительные частоты можно ввести с помощью фазовой, кодовой или
амплитудной модуляции. Предложена и методом численного эксперимента
продемонстрирована возможность использования для сжатия импульсов
длинных линий, в которых с помощью внешнего воздействия или за счет
интегрирующей нелинейности самой линии, фазовая скорость волны при этом
увеличивается в процессе распространения сжимаемого импульса. При
этом для видеоимпульсов длительность уменьшается с квадратичным или
пропорциональным относительно его сжатия увеличением мощности, а для
импульсов с высокочастотным заполнением возникает еще и
пропорциональное преобразование частоты заполнения вверх.
Для развития работ на начальном этапе продолжена адаптивная
процедура подстройки спектра импульса при моноимпульсной локации
в соответствии с частотными диапазонами максимального значения
ЭПР объекта. Применение такой процедуры позволяет улучшить
точность определения параметров объекта без соответствующего
увеличения мощности передатчика. Предложены и проанализированы
алгоритмы определения частотных диапазонов с максимальным значением
спектральных амплитуд ЭПР объекта, позволяющие реализовать
адаптивную процедуру подстройки спектра лоцирующего импульса;
исследованы возможности применения ограниченной пачки импульсов
вместо одиночных при моноимпульсной локации малозаметных объектов.
Это позволяет существенно улучшить характеристики обнаружения и
оценки параметров объекта. Так, увеличение дальности обнаружения
может быть более чем в 3 раза для 100 импульсов в пачке. Одновременно с
310
этим уменьшаются ошибки при оценке параметров объекта, повышается
эффективность адаптивной процедуры локации.
Система идентификации движущихся объектов, основанная на
использовании пассивного отражателя зондирующего сигнала в виде
электронной лицензионной карты, формирует кодированные
последовательности [66]. Объект, на котором размещена электронная карта, облучается РЛС
с узкой ДН, работающей в режиме ЧМ. Приемное устройство карты
содержит антенну, вращающуюся с частотой 600 оборотов в минуту. К
антенне подсоединены два циркулятора и набор ЛЗ на поверхностной
акустической волне (ПАВ) или отрезках световода. Модулированный с
помощью линий сигнал переизлучается в виде кодовой последовательности.
Предполагается, что мощность излучения РЛС диапазона ММ-радиоволн,
обладающей сверхразрешением по дальности, не должна превышать 0,1 Вт.
Схема импульсно-доплеровской когерентной РЛС позволяет
одновременно определять дальности до нескольких целей и их скорости
путем максимального снижения величины функции неопределенности
[67]. В РЛС имеется импульсный передатчик с переменной частотой
повторения импульсов, когерентный смеситель и система стробирования
импульсов, отраженных целями. Определение скорости цели по
значению частоты Доплера, производится с помощью быстрого
преобразования Фурье (БПФ) для разностного сигнала, проинтегрированного для
нескольких последовательных импульсов, для частоты повторения,
соответствующей расстоянию до цели и радиальной скорости.
Доплеровская РЛС, в которой прием сигналов в нескольких точках
пространства позволяет определить положение, скорость и ускорение
движущейся цели, рассмотрена в [68]. Патентуемый способ работы можно
применять не только в радиолокаторах, но и в акустических локаторах. В
отличие от существующих доплеровских РЛС, анализирующих смещение
частоты эхосигналов, в патентуемой РЛС анализируются фазовые
соотношения в доплеровском сигнале. Алгоритм обработки, основанный на
фазовых соотношениях, дает более высокое отношение сигнал-шум для
некоторых направлений прихода сигналов. Последнее упрощает и удешевляет до-
плеровскую РЛС с трехмерным сопровождением.
В настоящее время в радиолокации интересной задачей становится
задача обнаружения неподвижных объектов с работающим двигателем.
Трудность ее решения определяется трудностям в создании
чувствительной системы селекции медленно движущейся цели (СДЦ).
Обнаружение неподвижных объектов с работающим двигателем в
ММ-диапазоне радиоволн исследован и достаточно подробно изложен в
подразделе 2.3.2. Теоретически и экспериментально подтверждены
преимущества при решении таких задач в короткой части ММ-диапазона.
В [69] предложена радиолокационная установка, способная
измерять вибрации тела, смещение которого намного меньше (до одной
311
миллионной части) длины волны излучаемого сигнала.
Радиолокационная установка включает в себя передающую и приемную антенны,
смесители принятого сигнала с квадратурными составляющими
передаваемого сигнала для получения доплеровского сигнала. Для обнаружения
малых вибраций часть принятого сигнала, не подверженная
воздействию вибраций отражающего тела, исключается из принятого сигнала до
того, как он достигает приемного устройства, с помощью цепи отбора
сигнала (ОС) между передатчиком и приемной антенной. Это
достигается подстройкой фазы и амплитуды сигнала в петле ОС и может быть
выполнено автоматически. Оставшаяся часть принятого сигнала
пропорциональна смещениям вибрирующего тела и, таким образом, может
быть использована непосредственно для их измерения.
Согласно информации из последних зарубежных источников, в
заключение настоящего подраздела и дополнительно к табл. 7.3 приведем
еще вариант инструментальной радиолокационной системы обнаружения и
распознавания объектов «Хипкор-95», разрабатываемой в США [19,20,26].
Система предназначена для проведения исследований в области
передовых технологий обнаружения, распознавания и классификации целей, а
также сбора статистики по радиолокационным сигнатурам целей и
отражательным свойствам различных типов отражающих поверхностей.
Исследовались следующие задачи: возможность изучения
импульсных сигналов мощностью 2 кВт в рабочей полосе 350 МГц или сигналов
мощностью 80... 100 Вт в полосе 2 ГГц; использование четырех видов
поляризации сигналов с возможностью их переключения от импульса к
импульсу; двухканальный приемник, позволяющий одновременно
принимать и обрабатывать сигналы основной и поперечной поляризации;
регулирования частоты повторения импульсов; возможность выбора
одного из двух значений длительности импульсов; когерентный и
некогерентный режим работы.
Благодаря широкополосному (2 ГГц) сигналу, обеспечивающему
разрешающую способность по дальности порядка 7,5... 10 см, и режиму
синтезирования апертуры при обработке радиолокационной
информации РЛС могут использоваться для получения радиолокационного
изображения объектов.
Основные характеристики РЛС
Диапазон рабочих частот, ГГц 93...95
Импульсная (средняя) мощность излучения (в полосе 350 МГц), Вт 2000
Длительность импульса, не 50 и 100
Частота повторения импульсов, кГц до 10
Поляризация излучаемых сигналов вертикальная, горизонтальная,
круговая (правого и левого вращения)
Коэффициент усиления антенны, дБ 53
Коэффициент шума приемника, дБ 8
Мгновенная ширина полосы пропускания приемника, МГц 10
312
7.6.2. Радиолокационные системы наведения и управления
В [1, 19, 20, 26], а также в четвертой главе приведены параметры
применения короткой части ММ-диапазона радиоволн для создания
радиолокационных устройств наведения оружия. В табл. 7.4 даны
предполагаемые обобщенные данные для отечественных образцов РЛС
наведения, а в табл. 7.5 приведены примеры приоритетных зарубежных
радиолокационных систем, находящихся в стадии разработки и
относящихся к классу радиолокационной техники наведения оружия.
Таблица 1.4. Данные отечественных образцов РЛС наведения
Параметры систем
1 Дальность действия, км
Дальность действия ГСН, км
Мощность в импульсе, кВт
Средняя мощность, мВт
Разрешающая способность:
по дальности, м
по углу места, д.у.
Частота повторения, кГц
Масса, кг
Радиолокационные системы
РЛС
подсвета
ген
5.. .7
1,5
5...7
15
Прицел
ближнего
действия
1...2
100
15...25
1
10
4...5
Противо- 1
танковые
комплексы
6
1
10
10
300
Таблица 7.5. Обобщенные данные зарубежных образцов РЛС
наведении
Наименование системы
Характеристики системы
РЛС обнаружения и управления оружием
Моноимпульсная РЛС
управления огнем
противотанковых ракет.
1 Танковая РЛС «Startle»
обнаружения наземных
целей и целеуказания.
1 Радиолокационная система
наведения противотанковых
ракет третьего поколения
типа «Апач».
1 РЛС стрельбы артиллерии,
| радиолокационный прицел.
РЛС с повышенной скрытностью за счет управления мощ-1
ностью излучения, оптимального подбора параметров
сигнала и его поляризации. Рабочие частоты 94 и 140 ГГц
Разработка ведется с 1981 г. фирмой «Sperry», США.
РЛС со сжатием импульсов и ЛЧМ. Рабочие частоты 94 и 1
230 ГГц Дальность действия по танку 3... 5 км при
мощности излучения передатчика 1...5 Вт и чувствительности
приемника 10"12 Вт/Гц. Сканирование лучем антенны
диаметром 35 см в пределах 3.. .45° по углу места и 20° по
азимуту. Диапазон измерения скорости цели 2...50 км/ч,
количество одновременно обрабатываемых целей - 20.
Разработка ведется с 1983 г. фирмой «Rockwell», США.
Рабочая частота 240 ГГц. Разрабатывается фирмой 1
«Rockwell», США.
Рабочая частота 94 ГГц. Разработка ведется фирмой
«Standard Electric Lorens», ФРГ.
313
Продолжение табл. 7.5
Системы на летательном аппрате
Твердотельная РЛС
наведения оружия.
Рабочая частота 94 ГТц. Передатчик на импульсном 1
IMPATT диоде мощностью 5 Вт и длительностью
импульса 100 не. Исследования проводятся по программе
обнаружения наземных целей с вертолетной платформы
фирмами «Lincoln Lab. Massachusetts Inst.», США. |
Головки самонаведения
1 РЛС на ракетах класса
«воздух-земля».
1 РЛС для установки на
противотанковых ракетах.
Рабочая частота в диапазоне 90... 100 ГГц. Проводятся лет-1
ные испытания фирмами «Hughes» и «Rockwell», США.
Рабочая частота 94 ГТц. Разработка ведется фирмами
«Hughes» и «Rockwell», США.
РЛС другого назначения
1 РЛС в системе противора-
1 кетной обороны
Рабочие частоты 35 и 95 ГГц. Разработка ведется
фирмой «Lincoln Lab. Massachusetts Inst.», США
По материалам зарубежной печати приводятся еще ряд примеров
применения техники ММ-диапазона радиоволн в РЛС обнаружения и
распознавания.
Авиационная РЛС. С 1981 г. в США ведутся работы по созданию
всепогодной вертолетной противотанковой системы, основанной на
использовании РЛС ММ-диапазона радиоволн обнаружения и наведения. Система
состоит из миллиметровой РЛС обнаружения и целеуказания и
противотанковой ракеты с радиолокационной ГСН ММ-диапазона (95 ГГц).
В отличие от используемой в настоящее время лазерной системы
«подсветки» цели лучом лазера с вертолета или с Земли вплоть до
момента ее поражения, новая РЛС активного самонаведения будет
работать по принципу «выстрелил-забыл».
В разработке участвуют фирмы: «Мартин Мариетта» и «Вестингауз».
Радиолокационная система «Маркони». Она принята на
вооружение с 1976 г. в составе ЗРК «Рапира».
Основные характеристики системы
Дальность действия по цели с ЭПР= 2 м2, км 9
Диапазон рабочих частоты, ГГц 35
Мощность в импульсе, кВт 40
Длительность импульса, мкс 0,1
Частота повторения импульса, Гц 4000
Полоса пропускания приемника, МГц 12
Коэффициент усиления антенны, дБ 48
Ширина диаграммы направленности, град 0,65x0,5
Поляризация круговая
В конце 80-х годов разработана РЛС «Блайндфайр-2000»,
отличающаяся регулируемой мощностью излучения и возможностью авто-
314
магического измерения рабочей частоты, что повысило живучесть РЛС в
условиях радиоэлектронной борьбы. Использование в ней современного
процессора обработки данных позволяет путем анализа радиолокационных
сигнатур определять тип невзаимодействующих воздушных целей.
Серия самолетных РЛС, предназначенных для управления стрельбой.
Эту серию РЛС разработала фирма Elta Electronics Industries (Израиль).
Серия самолетных РЛС типа EL/M-2032 для управления стрельбой нашла
применение на нескольких боевых самолетах. Обзорная РЛС EL/M-2022A
морской авиации доработана для установки на вертолетах и способна
обнаруживать и следить за малыми целями. Среди других разработок фирмы
Elta отмечаются: компактная аппаратура серии 2160 предупреждения
ракетного нападения для транспортной авиации и вертолетов; аппаратура
засекречивания типа ARC-740 для самолетных связных систем; РЛС с ФАР
для самолетов предупреждения; РЛС EL/ M-8233 для систем
предупреждения в легком (бортовом) исполнении.
Головки тактических ракет. В [70] исследована передача точности
наведения головок тактических ракет от среднего участка траектории к
конечному участку. Для анализа зависимости ошибок в определении
параметров головки наведения от источника ошибок применен метод малых
возмущений. Приведен расчет параметров головки на конечном участке
траектории, основанный на уравнении движения ракеты «поверхность-
воздух» и уравнении движении цели. Дан расчет неточности наведения
головки, обусловленной ошибками радиолокационных измерений системы
командного наведения. Показано, что ошибки быстро возрастают, если
ракета близка к цели. Из этого сделан вывод, что нужно избегать
запаздывания в передаче головки от системы наведения на среднем участке к
системе наведения на конечном участке траектории.
Радиолокационная система поиска и сопровождения для
наведения средств поражения на конечном участке траектории. Эта система
обладает повышенными возможностями по выделению целей (танков,
/тягачей) на фоне отражений от подстилающей поверхности [71].
Улучшение характеристик достигнуто специальной обработкой эхосигналов
с использованием эффекта Доплера и двухмерного преобразования
Фурье. При обработке учитывается не только скорость цели, но и разность
скоростей соседних целей, а также их ускорения.
Анализ состояния работ по освоению ММ-диапазона радиоволн
показывает, что в начале третьего тысячелетия следует ожидать поступления на
вооружение стран блока НАТО высокоэффективных систем оружия,
основанных на использовании техники ММ-диапазона радиоволн.
7.6.3. Радиолокационные системы противовоздушной обороны
Новые возможности по обеспечению скрытного преодоления
системы ПВО и поиску перемещаемых стратегических целей открываются
315
при использовании станций ММ-диапазона радиоволн, в том числе и на
самолетах стратегической авиации и др.
Одной из самых мощных (30 кВт) станций ММ-диапазона является
американская РЛС траекторных измерений, расположенная на полигоне
ПВО Кваджелейн [1, 19, 20, 26]. Она предназначена для обнаружения и
сопровождения баллистических целей на заключительном участке
полета, определения параметров их траекторий и классификации на основе
полученного двухмерного изображения. Кроме того, она может быть
использована для сопровождения космических объектов. Станция
работает в моноимпульсном режиме одновременно в двух частотных
диапазонах (35 и 95,5 ГГц) и характеризуется высокой разрешающей
способностью по дальности, скорости и высокой чувствительностью и
точностью углового сопровождения, разнообразием форм сигналов и
способностью выдавать комплексную информацию по целям в реальном
масштабе времени. Для обнаружения и сопровождения цели
использовалась частота 35 ГГц, для радиолокационных сигнатур целей - 95,5 ГГц.
Основные характеристики системы
Диапазон рабочих частот, ГГц 35 и 95,5
Дальность действия по цели с ЭПР = 1 м2, км 1000
Импульсная мощность передатчика, кВт 30 и 3
Длительность импульсов, мкс 50
Частота повторения импульсов, Гц 50...2000
Вид внутриимпульсной модуляции линейная частотная
(с увеличением частоты)
Ширина спектра импульсов, МГц 6, 12, 500, 1000, 10000
Разрешающая способность по дальности, м:
при ширине спектра 1000 МГц 0,28
при ширине спектра 500 МГц 0,5
при ширине спектра 12 МГц 20
при ширине спектра 6 МГц 40
Мгновенный динамический диапазон приемника, дБ 63
Шумовая температура, К 1600 и 2600
Отношение сигнал-шум, дБ
(дальность до цели 1000 км, ЭПР=1 м2 и угол места 30°) 17 и -3
Тип и размеры антенной системы рефлекторная с диаметром
антенны 13,7 м
Тип облучателя одно- и четырехрупорные
Коэффициент усиления антенны, дБ 70,1 и 77,3
Ширина луча ДНА, град 0,044 и 0,017
Поляризация сигналов:
излучаемого круговая правого вращения
принимаемого круговая правого и левого вращения
Максимальная скорость углового
сопровождения, град/с 12
Максимальное ускорения углового
сопровождения, град/с 2
Пределы поворота антенны по углу места, град от -5 до +86
316
Другой ММ-станцией, приоритетной на настоящее время, является
РЛС сопровождения «Игл» шведской фирмы «Эриксон», которая
используются в мобильных наземных и морских системах ПВО. Она представляет
собой когерентно-импульсную станцию, работающую на частоте 35 ГГц.
Основные характеристики системы
Дальность сопровождения, км до 20
Мощность излучения в импульсе, кВт 100
средняя, Вт до 20
Частота повторения импульсов, кГц 45
Ширина диаграммы направленности, град 0,96
Уровень боковых лепестков, дБ < -40
Коэффициент шума приемника, дБ 9
Масса, кг 130
7.6.4. Радиотехническая аппаратура радиоэлектронного
противодействия
Известно, что радиоэлектронная борьба (РЭБ) представляет собой
комплекс мероприятий, проводимых для выявления и последующего
радиоэлектронного подавления (РЭП) радиотехнических систем (РТС)
различного назначения, а также в целях радиоэлектронной защиты
(РЭЗ) своих РТС.
Радиоэлектронное подавление представляет собой комплекс
мероприятий и действий по нарушению работы или снижению
эффективности применения РТС, а РЭЗ - это комплекс мероприятий по
обеспечению работы РТС в условиях противодействия и их взаимного влияния
(электромагнитная совместимость).
Электромагнитная совместимость - это способность
функционировать нескольких РТС одновременно не создавая друг другу помех, что
обеспечивается проведением различных технических мероприятий
(рациональный выбор диапазонов частот, снижение уровней побочных
излучений передатчиков, уменьшение чувствительности по побочным
каналам приемников, использование узких ДНА и др.) и организационных
мероприятий (целесообразное распределение частот для РТС,
регламентация режимов работы по частотам, времени и направлениям, частотно-
территориальный разнос и др.).
Возрастание внимания к разработке средств РЭБ в настоящее время
вызвано, прежде всего, острой необходимостью повышения эффективности
радиоэлектронного оборудования, средств радиолокации и систем
обработки и передачи информации. В финансовых кругах ведущих зарубежных
стран практически ежемесячно заключаются контракты на производство
систем, приборов, блоков и узлов для системы РЭБ. Так, суммарные
расходы в США за последние 20 лет возрастали с 1716,9 млн. дол. в 1980 г. до
3628,2 млн. дол. в 1986 г. и к концу 90-х годов общий рынок сбыта средств
РЭБ уже увеличился не менее чем на 200%.
317
Известно, что эти средства РЭБ в зависимости от назначения
комплектуются из тех или других средств (приемные устройства,
передатчики активных помех, антенные устройства и др.) и представляют собой
самые разнообразные радиоэлектронные системы (РЭС), которые
постоянно совершенствуются.
Наиболее интересные работы, которые выделяются своей
актуальностью, приводятся ниже.
Для эффективной работы радиотехнической разведки в системе
РЭБ требуется, прежде всего, правильно определиться с параметрами
поиска источника излучения (направление прихода сигнала, частота,
вид модуляции, сила и время принимаемого сигнала) и их влиянием на
вероятность перехвата сигнала. В [71-73] представлены данные о
возможном компромиссном выборе таких параметров приемной системы
РЭБ. Для определения параметров излучающих средств и
классификации их характеристик часто используются поляризационные свойства
принимаемых радиолокационных сигналов (в том числе и в пассивной
радиолокации, где подразумевается разнесенный прием сигналов при
многопозиционной локации).
В случае применения пассивной локации в [72] рассматриваются
методы идентификации и классификации характеристик излучения РЛС
военного назначения, основанные на использовании пассивных
поляриметров и поляризационных свойств станций и условий распространения
сигналов. Оценка параметров включает определение наличия линейной,
круговой или эллиптической поляризации, расположения плоскостей
поляризаций и осей эллипса. При анализе сигнала производится
измерение внутриимпульсных поляризационных характеристик с целью
определения возможности использования в РЛС доплеровского смещения
частоты для измерения скорости пели. Приводятся результаты оценки
параметров на основе поляризационных измерений для РЛС,
работающей на частоте 5200 МГц. Отмечается влияние деполяризации сигнала
вследствие воздействия атмосферных явлений.
В [73] в явной форме получено точное, неитеративное и расчетное
эффективное решение системы нелинейных уравнений, применимое для
определения местоположения источника радиоизлучения на основе
измерений разности времен прихода (TDOA) сигналов в многопозиционной
пассивной радиолокационной системе. Дан анализ точности метода
определения местоположения цели. Рассмотрено влияние внешних помеховых
факторов на уменьшение точности определения параметров
местоположения излучающей цели в пассивной радиолокационной системе,
использующей TDOA метод измерений.
Одно из направлений совершенствования приемников для
предупреждения об излучении описывается в [74], где предлагается
устройство регулирования, которое с помощью блока слежения контролирует
318
число участков, облучаемых РЛС. Устройство регулирования содержит
блок расчета уровня риска облучения каждого участка по многим
данным для такого участка. В устройстве используют блоки фильтрации,
которые передают в блок слежения параметры, наблюдаемые при
предыдущих проходах сканирования антенны РЛС, а также те, у которых
новые участки имеют меньший или больший уровень допустимого
риска. Устройство предлагается использовать в обзорных РЛС.
Развитие систем РЭБ характеризуется постоянным повышением
требований, предъявляемых к приемным устройствам. В настоящее
время такие требования к приемникам СМ- и ММ-диапазонов
радиоволн обоснованы. Для обеспечения эффективного противодействия
систем РЭБ современным РТС параметры их могут быть следующие [75].
Основные характеристики
Диапазон частот, ГГц 0,5... 100
Мгновенная полоса частот, ГГц ~ 1
Тип сигналов непрерывные и импульсные
(длительностью более 50 не)
Чувствительность в режиме, дБ:
непрерывном -70
импульсном -60
Динамический диапазон, дБ:
мгновенный 50
с переключением 90
Разрешение по частоте в режимах, МГц:
непрерывном 1
импульсном 5
Точность измерения амплитуды, дБ 1
Точность измерения пеленга, град 5
Разрешение по длительности импульса, не 25
Точность измерения времени прихода, не 50
Вероятность перехвата сигнала, % 100
Постановщик помех для РЛС, имеющий дополнительную антенну
для когерентного подавления боковых лепестков ДН, рассмотрен в [76].
Принцип действия патентуемого постановщика базируется на трех
факторах: наличии задержки между приемом сигналов основной и
дополнительной антеннами РЛС; зависимости коэффициента усиления
боковых лепестков от поляризации сигнала помехи; ограниченности
ресурсов РЛС по помехоподавлению. Реализация постановщика помех
предполагает использование в нем передатчика, сигнал которого поступает в
два канала, каждый канал с усилителем и антенной, но с разными
видами поляризации излучения. При этом в одном из каналов с помощью
управляемой ЛЗ производится более быстрое по сравнению с указанной
задержкой изменение параметров излучения во времени.
К другому методу постановки помех относится создание ложных
объектов. Здесь приводятся примеры, близко увязанные с проблемой
319
РЭБ. Более подробно этот вопрос будет рассматриваться в следующем
подразделе, посвященном противодействию распознавания объектов. В
[77] предложено изобретение - способ создания комбинированной
ложной цели, относящейся к технике противодействия самонаводящимся
ракетам. Он позволяет создать комбинированную ложную цель как в
ИК, так и в радиодиапазонах. Для достижения этого технического
результата при формировании ложной цели в стороне от защищаемого
объекта в струю газов, направленную в сторону от защищаемого
объекта, вводят воспламеняющуюся жидкость для распыления, поджигают
полученную газовую смесь и поддерживают ее горение в течение
заранее заданного времени. В случае реализации способа на движущемся
объекте, например, самолете гражданской авиации, не имеющем ни средств
тепло- или радиопротиводействия (шумовых излучающих станций или
сбрасываемых контейнеров с отражателями в требуемом диапазоне
излучений), ни тем более противоракет, в качестве воспламеняющейся
жидкости можно использовать топливо этого объекта, а в качестве окислителя -
кислород воздуха, засасываемый в газовую смесь.
Эффективность систем радиоэлектронного противодействия зависит
от качества активных имитационных помех. Поскольку такие помехи
создаются преимущественно тогда, когда информация о параметрах сигнала
средств противника отсутствует на входе системы противодействия,
выполнить эту задачу помогают устройства, запоминающие ВЧ-сигналы
средств противника. В [78] рассматриваются методы и средства
запоминания несущей частоты подавляемой РЛС - основного параметра,
требующего запоминания в системах радиоэлектронного противодействия.
В [79] получены выражения для расчета характеристик
обнаружения цифрового некогерентного обнаружителя пачки независимо
флуктуирующих сигналов радиоэлектронного средства с управляемой
мощностью передатчика в условиях провоцирующей помехи; показано, что
при адаптивном управлении порогом обнаружения импульсов, логикой
обнаружения пачки и временем «провокации» потери цифрового
обнаружителя в сравнении с аналоговым составляют примерно 1 дБ.
В [80] рассматривается метод реализации активных помех РЛС
при введении в отраженный сигнал ложного доплеровского смещения,
приводящего к появлению на мониторе метки движущейся цели.
Предложен фазовращатель (ФВ), обладающий широкой полосой
пропускания и обеспечивающий значительные фазовые сдвиги. Фазовращатель
основан на использовании фотонного управления фазой и включает в
себя два источника излучения на лазерных полупроводниковых
генераторах с интерферометрами Фабри-Перо. Сигнал, излучаемый
передатчиком, делится на синфазную и квадратурную составляющие, которые
используются для модуляции света. Такая структура обеспечивает
получение доплеровского смещения в диапазоне частот 2... 18 ГГц при фа-
320
зовом сдвиге до 90°. Приведены результаты фазового сдвига спектра
сигнала для системы, работающей на частоте 10 ГГц.
В последнее время большое внимание в научно-технической
литературе уделяется помехозащищенности, которая определяется показателем
надежности работы технического устройства в условиях помех и
достигается проведением различных технических и организационных
мероприятий. Технические мероприятия - снижение (исключение) влияния помех;
применение помехозащищенных методов кодирования при передаче
сигналов и их обработке во время приема; использование различных методов
селекции, в последнее время именуемое помехоустойчивостью РЭС.
Организационные мероприятия - регламентация рабочих частот и
взаимное территориальное расположение РЭС, времени, мощности и
направленности их излучений; смена позиций и проведение работ,
снижающих влияние помех, в последнее время именуемое скрытностью РЭС.
В [81] исследована потенциальная помехоустойчивость РЛС,
применяющих в качестве меры защиты от активных помех случайную
смену зондирующих сигналов, в условиях радиоэлектронного
противодействия; потенциальная помехоустойчивость находится при условии, что
ограничена только полоса занимаемых частот и время когерентного и
некогерентного накопления; предложен ансамбль сигналов, для
которого эта потенциальная помехоустойчивость достигается.
В [82] рассмотрен новый способ повышения помехозащищенности
РЛС, основанный на использовании случайного изменения структуры
информационных каналов. В процессе повышения
помехозащищенности в первую очередь устанавливается вид помеховых сигналов, их
параметры, а затем выполняется оптимизация измерительных систем,
структура которых изменяется таким образом, чтобы действие помех
было наименее эффективным. Например, может быть оптимизировано
расположение отдельных информационных датчиков, узлов антенных
систем. Разработанные алгоритмы изменения структуры системы
существенно уменьшают эффективность действия помех, увеличивают
устойчивость РЛС. Проведено моделирование работы РЛС со случайной
структурой в соответствии с разработанными алгоритмами. Было
установлено, что эффективность рассмотренного метода повышения
помехозащищенности оказалась достаточно высокой.
В [83] предлагается методика уменьшения влияния помех,
постановщик которых совмещен с радиолокационной целью.
Неэффективность подавления помех методами, основанными на пространственном
разнесении, объясняется тем, что в этом случае существенно снижается
уровень сигнала от радиолокационной цели. Традиционным подходом к
решению задачи подавления помех является использование
продолжительного интегрирования, в процессе которого выделяется сигнал и
321
сглаживается уровень помех, поступающих по основному лепестку ДН
антенны. Такой подход существенно снижает возможности РЛС в
слежении за несколькими целями. Предложена методика использования
когерентности отраженных от земной поверхности помех
многолучевого распространения, приходящих в РЛС с различных углов, для
подавления помех, поступающих по основному лепестку ДН. Когерентность
помех, приходящих с различных направлений, объясняется тем, что они
созданы одним и тем же постановщиком помех. Методика обеспечивает
частичное подавление помех при сохранении уровня
радиолокационного сигнала от цели.
Другой метод, основанный на подавлении прямого сигнала в
многочастотных доплеровских РЛС непрерывного излучения, описывается
в [84]. Предлагается использовать в многочастотных доплеровских РЛС
непрерывного излучения метод квадратурной компенсации и
подавления проникающего в приемник прямого сигнала. Суть метода состоит в
том, что формируется компенсирующий ВЧ-сигнал, равный по
амплитуде и фазе проникающему прямому сигналу. Этот компенсирующий
сигнал вычитается из поступающего на вход приемника суммарного
сигнала. Для формирования компенсирующего сигнала определяются
квадратурным методом амплитуды и фазы прямого сигнала, что
осуществляется при помощи фазового детектирования в синфазном и
квадратурном каналах. В качестве опорного напряжения на фазовые детекторы
подается часть излучаемого сигнала. Полученные значения
квадратурных составляющих используются для формирования компенсирующего
сигнала. В результате вычитания проникающего сигнала на
дальнейшую доплеровскую обработку подается только сигнал, отраженный от
цели. Полоса подавления может быть порядка 0,01% от несущей, что
достаточно для разделения доплеровского сигнала. Степень подавления
прямого сигнала может быть более 40 дБ.
В [85] описан радиовысотомер для военных летательных аппаратов,
обеспечивающий повышение их скрытности. Указанное достоинство
патентуемого радиовысотомера достигается благодаря использованию в нем
раздельных приемной и передающей щелевых антенн, встраиваемых в
обшивку аппарата и работающих в диапазоне 55...65 ГГц. При этом
скрытность от средств радиотехнической разведки обеспечивается значительным
поглощением излучения радиовысотомера молекулами кислорода
атмосферного воздуха, а от средств ИК обнаружения и РЛС - конформным
размещением его антенной системы, что к тому же упрощает нанесение на
обшивку аппарата радиопоглощаюших покрытий.
Обеспечение скрытности работы РЛС является одной из главных
задач защиты от помех и наведения противорадиолокационных ракет. В
[86] для уменьшения заметности излучения и предотвращения
обнаружения своих работающих РЛС предлагается формировать специальные
322
псевдошумовые сигналы, структура которых и энергетические
характеристики не позволяют средствам радиотехнической разведки
противника обнаружить излучение РЛС, определить параметры модуляции
сигналов, виды кодов и частот повторений или переключений сигналов.
Предлагаемая РЛС с псевдошумовыми сигналами сохраняет, вместе с тем,
высокую эффективность при обнаружении целей и измерении их
координат и параметров движения. Псевдошумовой сигнал формируется в РЛС
путем использования преобразования случайных импульсных
последовательностей совместно с различными видами кодирования или изменения
фазы или частоты. Специальные фильтры до момента излучения сигналов
подавляют все возможные демаскирующие признаки применяемых видов
модуляции. Обработка отраженных от цели сигналов осуществляется
методом формирования взаимно корреляционных функций принимаемого
сигнала и специальной опорной функции, создаваемой в аппаратуре РЛС.
В первой главе книги приведены результаты исследований
помехозащищенности РЛС обнаружения наземных объектов в короткой части
ММ-диапазона радиоволн в сравнении с РЛС в более длинноволновых
(ММ- и СМ-) диапазонах волн. Ожидаемые мощности помехи в
зависимости от длины волны в ММ- и СМ-диапазонах радиоволн приведены на
графиках в разделе «Помехозащищенность радиолокационных систем
обнаружения наземных объектов» (глава 2), где для сравнения также даны
уровни шума приемников. Показано, что ожидаемые уровни помех на
входе приемников РЛС короткой части ММ-диапазона радиоволн
существенно ниже мощности их собственных шумов.
В итоге сделаны следующие выводы.
Помехозащищенность РЛС обнаружения наземных объектов в
короткой части ММ-диапазона радиоволн несомненно лучше по
сравнению с РЛС более длинноволновых диапазонов.
Для обеспечения лучшей помехоустойчивости РЛС в условиях
воздействия интенсивных помех от подстилающей поверхности
требуется использование когерентного метода радиолокации.
Для снижения радиояркости источника зондирующего сигнала
необходимо использование ШПС. При одновременном уменьшении
мощности передающего устройства до единиц ватт за счет применения
метода когерентной обработки принимаемых сигналов скрытность РЛС
может быть повышена не менее чем на 2 порядка.
Для повышения помехозащищенности пеленгационных каналов
РЛС обнаружения целесообразно использование моноимпульсного
метода пеленгации.
Известно, что к параметрам помехозащищенности относится также
иЭМС.
Для селекции радиолокационного сигнала на основе вращения
антенны для обеспечения ЭМС нескольких РЛС предложен способ умень-
323
шения взаимных помех множества РЛС, использующий следующую
последовательность действий: определение направления, в котором
ориентирован луч антенны РЛС; выбор одного из множества
радиолокационных сигналов, не создающих помех для других РЛС при каждой
ориентации луча антенны таким образом, чтобы каждому направлению
луча антенны соответствовал свой «беспомеховый» сигнал; использование
при сканировании антенны выбранных радиолокационных сигналов
[87]. Направленные друг на друга в процессе сканирования антенны
различных РЛС не создают взаимных помех, поскольку каждая из РЛС
использует различные сигналы, выбранные указанным способом и не
создающие друг другу помех.
Конфликт между РЛС и системами радиоэлектронного
противодействия в значительной мере имеет однократный характер. Поэтому
целесообразно дополнить традиционные методы исследования
помехозащищенности РЛС системным подходом к проблеме помехозащиты. В
[88] рассмотрен один из вариантов такого подхода, при котором задача
управления ресурсами помехозащиты РЛС рассмотрена с позиций
развивающихся информационных систем. На основе разработанной модели
конфликта сформулированы основные принципы и правила
функционирования РЛС в условиях радиоэлектронного противодействия.
Использование таких закономерностей создает предпосылки для
минимизации общих затрат при проектировании перспективных РЛС.
В [89] предлагается гомодинный приемник, чувствительность
которого сравнима с чувствительностью гетеродинного приемника РЛС и
который значительно снижает уровень шума такого приемника. В
устройстве используются блоки разделения принятых сигналов не менее
чем по двум каналам. Если при этом цель отмечена при излучении
сигнала с одной частотой, то принятый сигнал соответствует определенной
выборке и поступает в первый канал; если же цель отмечена при
излучении сигнала с другой частотой, то принятый сигнал вводится во
второй канал. Используются блоки линейного объединения сигналов этих
каналов, что обеспечивает фильтрацию шума. Устройство подавляет
аддитивный тепловой шум антенны, смесителя СВЧ и усилителя.
7.6.5. Системы противодействия радиолокационному
распознаванию
Как показывает опыт локальных войн на Ближнем Востоке, Южной
Атлантике, в районе Персидского залива, на Балканах, а также анализ
научно-технической и патентной литературы, вопросам противодействия
радиолокационному распознаванию уделяется большое внимание.
Методы противодействия радиолокационному распознавания
могут быть активные и пассивные.
324
Активные методы - это методы уменьшения ЭПР целей, которые
можно реализовать формированием СВЧ-излучения на борту летательного
аппарата, амплитуда и фаза СВЧ-излучения подстраиваются так, чтобы
максимально скомпенсировать отраженный в сторону РЛС сигнал. Они
включают постановку маскирующих шумовых помех, имитацию большой
ЭПР малоразмерными целями, имитацию спектральных характеристик
реальных целей, имитацию временной структуры радиолокационных
портретов реальных целей и комплексную имитацию излучений (ИК,
оптического, радиолокационного). Имитация спектральных характеристик реальных
целей может состоять из имитации различных ЛА или имитации гидроме-
теообразований и турбулентных неоднородностей атмосферы.
Пассивные методы включают: постановку маскирующих помех
(дипольные отражатели), уменьшение ЭПР целей и искажение
диаграммы обратного вторичного излучения целей. Уменьшение ЭПР целей
осуществляется путем выбора соответствующей формы цели, путем
применения слабо отражающих композиционных материалов и
поглощающих покрытий.
Рассмотрим более подробно указанные методы.
Активные методы и техника
противодействия
А. Имитация большой ЭПР малоразмерными ложными целями.
Необходимо отметить, что при имитации реальных целей
радиолокаторами, использующими частоты ниже 1 ГГц, пассивные средства, например,
уголковые отражатели, должны иметь очень большие размеры, и их
использование на малоразмерных ложных целях (ЛЦ) невозможно. Поэтому
для имитации крупноразмерных целей в области частот 50... 1000 МГц
предполагается применять активные средства имитации, т.е. передатчики
ответных помех с сигналами, отраженным от реальных целей [90].
В качестве ЛЦ для имитации объектов с большой ЭПР, например
кораблей, может использоваться также устройство, конструктивно
представляющее собой палубное средство, заполненный легким газом
синтетический баллон из майлара, на поверхности которого по типу
антенной решетки Ван-Атта равномерно расположены дипольные отражатели
[91], которые выполнены в виде печатных схем и соединены кабелями
связи. Такая ЛЦ вследствие своей цилиндрической формы является все-
направленной. За счет ортогонального расположения диполей не
создается помехи между самими диполями.
Достоинством такой ЛЦ по сравнению с обычными пачками диполь-
ных отражателей является также то, что время ее развертывания гораздо
меньше времени при применении способа разлета облака диполей.
Известны и другие конструкции, например, надувные резиновые
армированные стеклотканью ЛЦ в форме головной части
баллистической ракеты, на которых для увеличения ЭПР установлены коронооб-
разные отражатели из медной проволоки [92].
325
Известно также устройство для создания ЛЦ, уводящих по
дальности [93].
Б. Имитация спектральных характеристик реальных целей. В
качестве цели, имитирующей большую ЭПР, которая изменяется в полете по
закону, близкому к реальному, предлагается использовать специальную
ЛЦ [94]. Для ее запуска применяется дистанционно пилотируемый
летательный аппарат-носитель (ДПЛАН), несколько ложных
радиолокационных целей. Ложные цели в исходном состоянии на ДПЛАН укрыты
съемными радиопоглощающими кожухами, которые удаляются перед пуском.
Это исключает их преждевременное обнаружение. На хвосте ЛЦ
устанавливаются направляющие стабилизаторы со скошенными плоскостями,
обеспечивающих ее продольное вращение вокруг оси для изменения ЭПР
в полете. Внутри ЛЦ расположены крестообразные уголковые
отражатели из алюминия, которые ограничены в продольном направлении
поперечными круглыми дисками. Вращение таких отражателей обеспечивает
изменение величины ЭПР во время полета ЛЦ.
В [95] предложена пассивная ЛЦ в виде ракеты для имитации
бомбардировщика, которая движется со скоростью бомбардировщика. Она
имитирует рысканья, вращения, линейные продольные размеры
имитируемого бомбардировщика.
В [96] дано описание ЛЦ с рулевыми и несущими винтами,
буксируемой вертолетом с помощью троса. Цилиндрический корпус обычно
выполняется из армированного пенопласта, покрытого стекловолокном.
В результате отражения от корпуса очень малы по сравнению с
отражениями от винтов.
Применение беспилотных дистанционно-пилотируемых ЛА (ДПЛА)
в качестве ЛЦ, имитирующих средства постановки помех, противора-
диолокационные ракеты и другие реальные воздушные цели, позволит
по мнению зарубежных специалистов противодействовать
радиолокационному распознаванию отвлечь значительную часть активных
средств ПВО для борьбы с ЛЦ. Это подтвердил опыт войн на Ближнем
Востоке, Южной Атлантике и на Балканах [97].
Для имитации таких целей, как бомбардировщики, могут
использоваться специальные беспилотные ЛЦ дальнего и ближнего радиуса
действия. По мнению зарубежных специалистов требуется 3...5 ложных
целей - ловушек, имитирующих бомбардировщик. Такое количество
ЛЦ вынуждает рассредоточивать истребители-перехватчики вдоль
рубежа перехвата.
Из анализа данных [98, 99] следует, что все применяемые ЛЦ могут
иметь различные модификации, большинство из них является мало
скоростными (для ведущих имитаторов - примерно скорость вертолета).
В настоящее время появляются сведения об устройствах,
имитирующих сигналы, отраженные от гидрометеообразований и турбулент-
326
ных неоднородностей атмосферы [100]. К таким устройствам можно
отнести следующие.
Имитация ложных целей естественного происхождения. По
мнению иностранных специалистов спектр сигналов ЛЦ естественного
происхождения [100] (отражения от Земли, гидрометеообразований,
«ангелов», птиц) находится в диапазоне частот AF = 0.. .500 Гц.
В [101] дана структурная схема генератора радиолокационных
целей естественного происхождения (рис. 7.8). Генератор шума /
формирует шум в диапазоне от «нулевой» частоты до нескольких мегагерц. С
выхода фильтра низких частот 2 с полосой пропускания AF сигнал
поступает на усилитель низкой частоты (УНЧ) 3 с регулируемым
коэффициентом усиления. При этом коэффициент усиления УНЧ подбирается в
соответствии с результатами визуального контроля спектра шума по
анализатору спектра 5, подключенного на выход усилителя мощности
на ЛБВ 4. На второй вход ЛБВ поступает СВЧ-сигнал, который
модулируется по частоте так, чтобы на выходе ЛБВ имитировались сигналы
ЛЦ. Предполагается использовать данное устройство для срыва
наведения ракет. Известно аналогичное устройство, отличающееся тем, что через
ФНЧ-2 пропускаются только частоты в диапазоне AF= 0...5 кГц, создавая
спектр, плотность распределения спектральных составляющих которого
изменяется по случайному закону [93].
Выход
на антенну
ДР=(0...500)Гц '
Рис. 7.8. Схема генератора радиолокационных объектов
естественного происхождения
В [93, 102] описаны устройства для имитации реальных
отражательных сигналов, имитирующие сигналы от атмосферных осадков.
Комбинированная ложная цель (оптическая и пассивная
радиолокационная). Известны комбинированные ЛЦ, содержащие, в частности,
источник видимого света для противодействия оптическим системам
обнаружения и распознавания и металлический светопрозрачный
отражатель для радиолокационной имитации цели - противодействия
радиолокационным системам [103]. Радиолокационный отражатель
выполнен из проволочной сетки с плотностью восемь ячеек на 2,54 см2,
т.е. с размерами ячеек с/« 0,1 Д. Величина ЭПР отражателя
а=4тг(а2)2/ЗЛ2,
327
Приемная
антенна
>
Устройство задержки
IHC
где а - размер ребра тетраэдра радиолокационного отражателя; Я -
длина волны РЛС.
Ширина главного лепестка диаграммы обратного вторичного
излучения отражателя как в вертикальной, так и в горизонтальной плоскостях
составляет ± 20°. Вместо пассивного излучателя в подобной ЛЦ может
использоваться активный переизлучатель в виде ретранслятора на ЛБВ.
При имитации ИК-излучения для более достоверной имитации
бомбардировщика предлагается использовать сжигание топлива для
реактивных двигателей. Пламя может быть и невидимым, так как оно
может нагревать поверхность с высокой эмиссионной способностью,
например, нержавеющую сталь.
Я Имитация временной структуры радиолокационных портретов
реальных целей. Один из способов имитации временной структуры
радиолокационных портретов реальных целей предлагается в [104]. Он
позволяет имитировать дально-
стные радиолокационные
портреты целей для РЛС с
широкополосными сигналами, в
которых осуществляется сжатие
сигналов по длительности. На
рис. 7.9,д показана структурная
схема устройства,
реализующего этот способ, а на рис. 7.9,6 -
вариант размещения
нескольких антенн в точках (А, В, С, Д
Е) для имитации заданного
контура цели (самолета).
Зондирующий импульс от
РЛС, для которой создается
имитируемый радиолокационный
портрет, поступает через
приемную антенну, усилитель 7,
устройство грубой задержки 2 на
устройство точной задержки 3.
Устройство грубой задержки
обеспечивает задержку по
времени t, соответствующую
расстоянию R до ближайшей
блестящей точки имитируемой
цели: t = 2R/c, где с - скорость
распространения
электромагнитных волн. Линия задержки с от-
х/4
Рис. 7.9. Схема устройства для имитации
радиолокационных портретов
реальных объектов (а) и контур
имитируемого объекта с антеннами
А,В,С,Е(б)
328
водами обеспечивает имитацию остальных блестящих точек цели.
Амплитудная и фазовая модуляции обеспечиваются с помощью
модуляторов 4, на вторые входы которых через цифроамплитудные
преобразователи 5 поступают соответствующие управляющие напряжения из блока
эталонов характеристик целей. В блоке эталонов записаны коды
радиолокационных дальностных портретов имитируемых целей на всех
ракурсах от 0 до 360°. С выхода модуляторов сигналы, имитирующие
соответствующие блестящие точки, поступают на сумматор б и затем с
помощью передающих антенн излучаются в направлении на РЛС.
Автор [104] считает, что данное устройство позволяет
имитировать не только одномерные, но и двумерные, а также и трехмерные
радиолокационные портреты целей. Для этого необходимо иметь на
платформе несколько разнесенных в пространстве антенн, (например, в
точках А9 Я, С, Д £, рис. 7.9,6).
Пассивные методы и техника
противодействия
А, Уменьшение величины ЭПР реальных целей. Этот метод
реализуется по пограмме Stealts выбором формы ЛА, исключающей наличие
«блестящих точек», которые образуются стыками, острыми кромками,
уголковыми отражателями, большими участками малой кривизны, а
также применением композиционных и поглощающих материалов.
В [105] высказывается предположение, что внутренняя структура
корпуса и крыльев ЛА, разрабатываемых по программе Stealts,
спроектирована по принципу, аналогичному «безэховым камерам». При этом
сами покрытия элементов крыла и фюзеляжа изготовляются из
композиционных материалов.
Для уменьшения ЭПР наземных объектов в широком диапазоне
излучения электромагнитных волн в качестве поглощающих покрытий
используются специальные маскировочные покрытия. Они
предназначены для маскировки военных объектов в диапазоне волн от
ультрафиолетовых до СВЧ, включая ИК-диапазон. При этом затухание
достигает 20 дБ [100, 106].
Такие покрытия представляют собой многослойные структуры с
металлизированными поверхностями, причем каждый слой
обеспечивает маскировочный эффект для своего диапазона. Уменьшение ИК
излучения достигается не только с помощью соответствующих покрытий, но
и продуванием горячих газов по специальным каналам, окруженным
ламинарными потоками холодного воздуха.
Однако применение таких композиционных материалов, как
кевлар, стекловолокно, графито-кевларовое волокно и др., имеет ряд
недостатков. В частности, ухудшается экранировка бортового электро- и
радиооборудования от внешнего электромагнитного поля и атмосферного
329
электричества, а также электромагнитного импульса, образующегося
при ядерных взрывах. Это важно, так как на борту ЛА имеется большое
количество устройств цифровой обработки сигналов. К недостаткам
композитов также относятся: высокая стоимость изготовления и
обработки, недостаточная прочность, малая термостойкость, в результате
чего происходит их выгорание на сверхзвуковых скоростях полета;
высокий коэффициент трения и большая удельная масса покрытия. Кроме
того, в метровом диапазоне волн сигналы от планеров - самолетов
будут иметь большую величину, несмотря на применение композитов
[106]. Это обусловлено резонансными явлениями.
Необходимая толщина поглощающих покрытий зависит от несущей
частоты РЛС. При уменьшении мощности отраженного сигнала до 1% от
падающей мощности толщина покрытий d определяется как [106]:
d = 1,15//8= 0,279//$
где /3- постоянная затухания;/- несущая частота; е - диэлектрическая
постоянная поглощающей среды.
В области высоких частот при/= 94 ГГц для 1%-го отражения
мощности требуемая толщина поглощающего покрытия d = 3 мм, а при / =
= 35 ГГц d= 1 см. Таким образом, использование поглощающих покрытий
в области высоких частот эффективно. Для более низких частот при/ =
= 10 ГГц d = 3 см, а при/= 1 ГГц d = 30 см, что уже сделать практически
нереально.
Из рассмотренного следует, что многочастотные или
широкополосные сигналы наряду с низкочастотными узкополосными могут быть
применены в РЛС для повышения качества обнаружения
радиолокационных целей с поглощающими покрытиями.
Б. Искажение диаграммы обратного вторичного излучения
реальных целей. Такой метод противодействия распознаванию может
осуществляться с помощью нанесения на ЛА проводящих и поглощающих
покрытий, образующих распределенный колебательный контур с
управляемыми параметрами [107]. Эти покрытия располагаются так,
чтобы параметры полученного колебательного контура не зависели от
поляризации зондирующих сигналов РЛС. Подключая дополнительно
регулируемые элементы в такой колебательный контур, осуществляют
регулировку затухания контура по определенному закону. При этом
изменяются величина и закон флуктуации ЭПР реальной цели, что
противодействует ее распознаванию.
Имеющиеся на борту ЛА устройства также искажают диаграмму
обратного вторичного излучения (ДОВИ) по определенному закону. В
[108] изложена следующая конструкция устройства искажения ДОВИ
самолета. На несущей оси укреплены радиопрозрачные
газонаполненные контейнеры с боковыми стенками, образующими уголковые отра-
330
жатели 1-4 (рис. 7.10). Число таких контейнеров может быть больше
четырех. Эти контейнеры с помощью проводников соединены с
выходами соответствующих модуляторов 7, каждый из которых
предназначен для модуляции с определенной частотой коэффициента отражения
поверхности раздела между уголковыми отражателями и ионизируемым
газом. Частоты модуляторов отличаются друг от друга. Информация,
которая определяет закон изменения коэффициентов отражения,
снимается с задающих устройств системы управления самолетом 10 и через
мультиплексор 9 и шифратор 8 передается на соответствующие
модуляторы. Зондирующие колебания, излученные наземной РЛС-5,
поступают на один или несколько уголковых отражателей. В результате
отражений импульс будет дополнительно промодулирован изменением
коэффициента отражения поверхности раздела. На рис. 7.10 обозначено б
устройство обработки информации. Считается, что можно осуществлять
фазовую (тогда ионизированный газ должен находиться в контакте с
отражающей поверхностью уголкового отражателя) и амплитудную
(ионизированный газ должен находиться от отражающей поверхности на
расстоянии не более чем 0,175А) модуляции.
/i
Несущая ось
fn
8 V
9
ГГ.
Н б
-=Е=~-
10
Систе
ма управление
10
амолето
м
Рис. 7.10. Устройство искажения диаграммы обратного вторичного
излучения самолета
Таким образом, имеющиеся в настоящее время активные
(имитации большой ЭПР ложным целям, спектральных характеристик
реальных целей, имитация временной структуры радиолокационных
портретов целей и др.) и пассивные (уменьшение величины ЭПР целей, иска-
331
жение диаграммы обратного вторичного излучения целей и др.) методы
и техника противодействия радиолокационному распознаванию нашли
широкое применение при защите военной техники. При этом
необходимо отметить, что все эти методы и технологии пока являются
дорогостоящими и не в полной мере эффективными, поэтому требуют
дальнейшего изучения.
Практика применения современных методов и техники
противодействия радиолокационному обнаружению воздушных целей показывает, что
можно снизить ЭПР таких целей практически на порядок. Так, например,
не обладающие такой защитой отечественный самолет Миг-21 имеет ЭПР
а= 2 м2, американский самолет F-16 - а= 2,5 м2 и американский
самолет «невидимка» F-117 -<т= 0,2 м2.
7.6.6. Анализ работ по современным системам
противодействия распознаванию
В научно-технической литературе за последние годы много
уделяется внимания методам активного и пассивного противодействия
радиолокационному распознавания, а также особенно анализу тонкой
структуры сигнала, его спектру флуктуации ЭПР с ракурсом целей,
поляризационных характеристик и т.д.
В [109] исследуются характеристики рассеяния и излучения антенн
при диэлектрическом покрытии с металлическими включениями.
Установлено, что ЭПР антенн ракет управляемых снарядов с диэлектрическим
теплозащитным покрытием уменьшается в ближней зоне при внесении в него
металлических включений различной формы. Численными методами
решена система уравнений для наведенных токов на поверхности этих
включений. Показано, что при расширении диаграммы направленности антенны
на 3... 5° по половинной мощности ЭПР падает на 10 дБ.
Для снижения ЭПР используются специальные поглощающие
материалы. Массивные и громоздкие традиционные поглощающие
материалы неудобны для уменьшения радиолокационных отражений от
объектов на низких частотах (в М- и ДМ-диапазонах). Наиболее
эффективен метод уменьшения отражений с помощью импедансной линии или
струны, который представляет собой двухмерную версию одномерного
экрана Salisbry [110]. Характеристики струны как средства подавления
радиолокационных отражений от тел элементарной формы исследованы
методом моментов. Было показано, что оптимальное расстояние между
струной и телом всегда меньше расстояния, требуемого одномерным
экраном. При этом можно получить эффективное подавление
отражений в рабочей полосе частот 80%.
В [111] представлена интерпретация, составленная с помощью полей
поляризации и намагничивания в виде идеально согласованного слоя
Berenger'a - интерпретации радиопоглощающего материала, удовлетво-
332
ряющего уравнениям Максвелла. Такой материал является пассивной
электромагнитной средой с потерями, отличающейся особой проводимостью и
характеристиками рассеяния Debye'a. Отмечается, что в условиях
физической нереализуемости среды со свойствами идеально согласованного слоя
предложенная интерпретация позволяет определять необходимые
характеристики радиопоглотителя с идеальными поглощающими свойствами.
Рассмотрен пример проектирования подобного широкополосного поглотителя
с коэффициентом поглощения импульсной электромагнитной волны
70... 110 дБ в широком диапазоне углов ее падения.
В [112] проведено исследование возможностей применения
аналоговых цепей для формирования структуры поглощающих материалов,
используемых для улучшения характеристик отражения при воздействии
плоской падающей волны с ТЕ-поляризапией. Показано, что включение
индуктивной сетки в материал поглощающего покрытия существенно
увеличивает входной импеданс поглотителя. Приведена методика выбора
параметров индуктивной сетки. Получен образец спроектированного
покрытия, подтверждающий возможность улучшения параметров поглощения.
В [113] описываются свойства и принципы конструирования двух
новых видов поглощающих материалов и структур для радиодиапазона
электромагнитных волн: пирамидальные структуры поглощения ТМ-серии и
плоские поглощающие структуры типа FP и Emfader. В настоящее время
имеются в наличии поглощающие материалы и структуры для всего
практически используемого диапазона радиоволн от частот порядка мегагерц до
гигагерц (миллиметровых волн). Приводятся данные о свойствах
поглощающих материалов в зависимости от степени наполнения материала фер-
ритовыми или углеродными элементами. Показана зависимость
коэффициента поглощения от угла падения радиоволн на ту или иную структуру, а
также от частоты облучающего электромагнитного колебания.
В [114] предложен способ нанесения на стены объектов защитного
радиопоглощающего покрытия, представляющего собой металлическую
пленку толщиной от 5 до 1000 мкм. Способ эффективен для радиоволн
длиной от 0,8 до 1000 м. Предлагаются различные варианты нанесения
этого покрытия: напыление, наклейка металлизированных пленок и т. д.
В отличие от аналогов этот способ обеспечивает минимальный уровень
отражений СВЧ-излучения от покрытия из-за поглощения радиоволн.
В [115] рассмотрена конструкция широкополосного СВЧ-погло-
тителя, который состоит из набора полосок из индуктивного
поглощающего материала. Полоски содержат магнитные частицы, связанные
органическим веществом (смолой). Ширина, толщина и композиция полосок
выбрана таким образом, что каждая из них поглощает определенный
участок спектра. Полоски размещены в суппорте, в котором имеется ряд
канавок различной глубины и ширины. Крепящий поглощающую структуру
торцевой лист прозрачен для СВЧ-энергии.
333
В [116] представлены результаты исследования новой формы
дисперсионного соотношения для коэффициента отражения от
расположенной на металлической подложке магнитодиэлектрической
многослойной структуры. Получено соотношение связывающего интеграл от
логарифма коэффициента отражения по длине волны в пределах от нуля
до бесконечности с общей толщиной структуры и ее усредненной
статической магнитной проницаемостью. Из полученного соотношения
выведено ограничение, связывающее ширину рабочего диапазона и
толщину радиопоглощающих покрытий.
Работы по снижению ЭПР в настоящее время ведутся очень
интенсивно. Подтверждением к сказанному могут служить литературные
источники, опубликованные за последние несколько лет. Наиболее
интересными являются работы, приведенные ниже.
В США по заданию ВВС были проанализированы перспективы
развития самолетов с точки зрения их оснащения новейшими
техническими достижениями [117]. Основными направлениями такого развития
являются создание малозаметных самолетов новейшего поколения с
мощным СВЧ и лазерным оружием, а также использование
беспилотных аппаратов с уменьшенными на 25% ЭПР, что приведет к снижению
вероятности их обнаружения. Внедрение новейших технических
достижений облегчает работу пилота, который может в полете пользоваться
системой дистанционного управления.
В [118] сообщается о выполнении в КНР разработок
многоцелевого истребителя типа «Стеле». Окончательный вариант должен быть
принят на вооружение к 2015 г. Кроме того, в КНР разрабатываются
локатор для наведения на цель ракет класса «воздух-воздух», истребитель
FC-1, истребителя F-7MG (для экспорта) и перехватчик типа F-8IIM. В
настоящее время на вооружении ВВС КНР имеется около 4 тыс.
истребителей, из которых не более 100 можно считать вполне современными.
Контроль качества радиолокационной маскировки наземных
объектов чаще всего проводится с помощью специальных устройств
(портативных приборов). В [119] перечислены причины, диктующие
необходимость контроля качества маскировки в радиолокационном
диапазоне. К параметрам, определяемым в процессе контроля, относятся
среднее значение интегральной ЭПР объекта, ЭПР локальных участков,
среднее значение ЭПР фона. Предложены способы измерения этих
параметров непосредственно в местах дислокации объектов.
Необходимо отметить, что не все обнаруживаемые объекты являются
«невидимками» за счет используемых современных методов и средств
противодействия распознаванию. Например, существует аппаратура, с
помощью которой обнаруживаются «невидимки», - это радиолокационная
система «Тамара» [1]. В этом направлении ведутся работы и сейчас, и
очевидно, что говорить о полной невидимости объектов сейчас преждевременно.
334
Заключение
Судя по многочисленным публикациям ММ-радиоволны находят
широкое применение в различных радиотехнических системах как в
России, так и за рубежом. В первую очередь усилия ученых и
инженеров направлены на создание активных и пассивных систем обнаружения
наземных и воздушных объектов, управления воздушным движением,
управления высокоточным оружием, а также на разработку систем
космической навигации и корреляционных систем, аппаратуры контроля
сельскохозяйственных угодий и медицинской аппаратуры и др.
Значительный прогресс в последние годы наметился также в развитии
методов обработки радиолокационной информации, при этом получил
широкое развитие перспективный метод фрактальной обработки слабых
радиолокационных изображений.
Значительные успехи наблюдается также и в использовании ММ-диа-
пазона волн для целей широкополосной и скрытой связи.
Сегодня уже общепризнанно, что ММ-радиоволны - это огромный
по занимаемой полосе частот диапазон, намного превышающий все то,
что находилось до сих пор в распоряжении человечества, открывший
новые возможности в практическом применении различных
радиотехнических систем.
Следует отметить, что тенденция к использованию ММ-диапазона
для решения различных прикладных задач приобрела в отличие от
прошлых лет устойчивый характер. Это объясняется не только успехами в
разработке элементной базы ММ-радиоволн и создании технически
совершенных устройств с параметрами, близкими к характеристикам
приемопередающих устройств на сантиметровых и дециметровых
волнах, а также рядом новых преимуществ, которые дает использование
радиоволн этого диапазона.
В настоящей монографии сделана попытка изложить
теоретические и практические основы построения и обоснования параметров
радиолокационных систем обнаружения наземных объектов и наведения
высокоточного оружия, работающих в ММ-диапазоне, с фрактальной
обработкой радиолокационной информации, обеспечивающей
повышение эффективности разрабатываемых радиолокационных систем
обнаружения и наведения.
Авторы не претендуют на полный и всеохватывающий объем
материалов для решения проблемы разработки перспективных РЛС
обнаружения и наведения в ММ-диапазоне и были бы признательны
читателям за все замечания и предложения, которые могут быть сделаны при
изучении материалов, содержащихся в монографии.
335
ЛИТЕРАТУРА
Литература к главе 1
1. Быстрое Р.П., Потапов А.А., Соколов А.В. и др. Проблемы
распространения и применения миллиметровых волн в радиолокации. - Зарубежная
радиоэлектроника, № 1, 1997, с. 4-20.
2. Kalmykov, Yu. P. and Titov S. V.4 Advances in Chemical Physics, Ed. by W.
Coffey, N.Y., 1994, vol. 87,pp. 31-123.
3. Калмыков ЮЛ.,Титов СВ. - Радиотехника и электроника, 1989, т. 34,
с. 13-20.
4. Зражевский А.Ю. - Радиотехника и электроника, 1976, т. 21, № 5, с. 951.
5. Liebe, H.J., ENF properties of air, NTZ, 1977, vol. 30, pp. 76-84.
6. Birnbaum, J., Quant Spectr, Radiant, Transfer, 1979, vol. 21, p. 597.
7. Соколов А.В., Сухонин КВ. Исследование распространения миллиметрового
диапазона волн в атмосфере и его применение для связи и локации. - II
Всес. школа-семинар по распростр. ММ- и СММ-волн в атмосфере. -
Фрунзе, Илим, 1988, с. 3-10.
8. Соколов А.В., Сухонин КВ. Ослабление миллиметровых волн в толще
атмосферы. - Итоги науки и техники, 1980, т. 20, с. 107-205.
9. Жевакин С А., Наумов АЛ. - Изв. Вузов. Сер. Радиофизика, 1976, № 10,
с. 1213.
10. Соколов А.В. Диссертация доктора технических наук. - М.: ИРЭ АН СССР,
1971.
11. Johnson, S.L., Radio and Elektronic Engineer, 1979, vol. 49, p. 718.
12. Preissner, Z, Flugwiss Weltraumforsch, 1981, Heft 6, p. 403.
13. Быстрое Р.П., Соколов А.В. Применение миллиметровых и
субмиллиметровых волн. - Тр. IY Всес. Школы по распространению ММ- и СММ-волн в
атмосфере. -Н.-Новгород: АН СССР, 1991, с. 229-235.
14. Быстрое РЛ. Радиолокационные системы обнаружения наземных объектов
в короткой части миллиметрового диапазона радиоволн. В 2-х томах.Т. 1. -
М.: Изд-во «Технология», 2002.
15. Кондратенков Г.С, Потехин В.А., Реутов АЛ., Феоктистов Ю.А.
Радиолокационные станции обзора земли/ Под ред. Г.С Кондратенкова. - М.:
Радио и связь, 1983.
16. Peake, W.H., Theory of Radar Return from Terrain, IRE National Convention
Record, 1959, vol. 7, pt. 1, pp. 27-41.
17. Zuniga, M.S., Kong, J.A., and Tsang, L., Depolarization effects in the Active
Remote Sensing of Random Media, J. of Applied Physics, 1980, vol. 51, no. 5,
pp. 2315-2325.
18. Ruck, G.T., Barrick, D.E., Stuart, W.D., and Krichbaum, C.K., Radar Cross
Section Handbook, N.-Y.: Plenum Press, 1970, vol. 1,2.
19. Орлов Р.А., Торгашин Б.Д. Моделирование радиолокационных отражений
от земной поверхности/ Под. ред. А.А. Капустина. - Л.: ЛГУ, 1978.
20. Katz, J. and Spetner, L.M., Two Statistical Models for Radar Return, IRE Trans.
1960, vol. AP-8, no. 3, pp. 242-246.
21. Spetner, L.M., A Statistical Model For Forward Scattering of Waves of a Rough
Surface, IRE Trans., 1958, vol. AP-6, no. 1, pp. 88-94.
336
22. Twer sky, V., On the Scattering and Reflection of Electromagnetic Waves by
Rough Surfaces, IRE Trans., 1957, vol. AP-5, no. 1, pp. 81-90.
23. Ament, W.S., Forward and Back Scattering from Certain Rough Surfaces, IRE
Trans., 1956, vol. AP-4, no. 3, pp. 369-373.
24. Ament, W.S., Reciprocity and Scattering by Certain Rough Surfaces, IRE Trans.,
1960, vol. AP-8, no. 1, pp. 167-174.
25. Propagation of Short Radio Waves, Ed. by D.E. Kerr (M.I.T. Rad. Lab. Ser.
vol.13). - N.-Y.: McGraw-Hill, 1951. В русском переводе: Распространение
ультракоротких волн/ Пер. с англ. под ред. Б.А. Шиллерова. - М.: Сов.
радио, 1954.
26. Весктапп, P. and Spizzichino, A., The Scattering of Electromagnetic Waves
from Rough Surfaces, Ed. by V.A. Fock andJ.R. Wait, Oxford: Pergamon Press,
1963.
27. Du Castel, F. and Spizzichino, A., Reflexion en Milieu in Homogene, Annales
des Telecommunication, 1959, vol.14, no. 1,2, pp. 33-40.
28. Исакович М.А. Рассеяние волн от статистически шероховатой поверхности.
- ЖЭТФ, 1952, т.23, №3(9), с. 305-314.
29. Бреховских Л.М. Дифракция электромагнитных волн на неровной
поверхности. - ДАН СССР, 1951, т. 81, № 6, с. 1023-1026.
30. Исакович М.А. Рассеяние волн от статистически шероховатой поверхности.
- В кн.: Труды Акустического института АН СССР. - М.: АИ АН СССР,
1969, вып. V, с. 152-251.
31. Rice S.O., Reflection of Electromagnetic Waves slightly Rough Surfaces,
Communications on Pure and Applied Mathematics, 1951, vol. 4, no. 2/3, pp. 351-378.
32. Басе Ф.Г., Фукс ИМ. Рассеяние волн на статистически неровной
поверхности. -М: Наука, 1972.
33. Шмелев А.Б. Рассеивание волн статистически неровными поверхностями.-
УФН, 1972, т. 106, № 3, с. 459-475.
34. Рытое СМ., Кравцов Ю.А., Татарский В.И Введение в статистическую
радиофизику. В 2 частях. Ч.И. Случайные поля. - М.: Наука, 1978.
35. Tsang, L., Kong, J.A., and Shin, R.T., Theory of Microwave Remote Sensing,
N.-Y.: John Wiley and Sons, 1985.
36. Uiaby, F.T., Moore, R.K., and Fung, A.K, Microwave Remote Sensing: Active
and Passive, Massachusetts: Addison-Wesley, 1981, vol. 1; 1982, vol. 2; Artech
House, 1986, vol. 3.
37. Жуковский А.П., Оноприенко Е.И., Чижов В.И Теоретические основы ра-
диовысотометрии / Под ред. АЛ. Жуковского.- М.: Сов. радио, 1979.
38. Бреховских Л.М., Лысанов Ю.П. Теоретические основы акустики океана. -
Л.: Гидрометеоиздат, 1982.
39. Зубкович С.Г. Статистические характеристики радиосигналов, отраженных
от земной поверхности. - М.: Сов. радио, 1968.
40. Мельник Ю.А., Зубкович С.Г., Степаненко В.Д. и др. Радиолокационные
методы исследования Земли / Под ред. Ю.А. Мельника. - М.: Сов. радио, 1980.
41. Кулемин ГЛ., Разсказовский В.Б. Рассеяние миллиметровых радиоволн
поверхностью земли под малыми углами. - Киев: Наукова думка, 1987.
42. Taylor, R., Terrain Return Measurements at X, Ku and Ka Band, IRE National
Convention Record, 1959, vol. 7, pt.l, pp. 19-26.
12—3523
337
43. Fung, A.K. and Moore, R.K., The Correlation Function in Kirchoffs Method of
Solution of Scattering of Waves from Statistically Rough Surfaces, J. Geophys.
Res., 1966, vol .71 pp. 2939-2943.
44. Потапов А.А. Фракталы в радиофизике и радиолокации. 1-е изд. - М.:
Логос, 2002.
45. Mandelbrot, B.B., The Fractal Geometry of Nature, N.Y.: Freeman, 1982.
46. Федер Е. Фракталы. - M.: Мир, 1991.
46. 47. Потапов А.А. Фракталы в дистанционном зондировании. - Зарубежная
радиоэлектроника. Успехи современной радиоэлектроники, 2000, № 6, с. 3-65.
48. King, H.K, Zamites, C.I., Snow, D.E., and Coiliton, R.I., Terrain Backscatter
Measurements at 40 to 90 GHz, IEEE Trans., 1970, vol. AP-18, no. 6, pp. 780-784.
49. Greene, A.K, Fordon, W.A., and Bartlett, J.E., Results of Terrain Reflectivity
Measurements at EFR (40-90 GHz), In: Proc. IEEE NEREM-70 (Boston), N.-Y.,
1970, pp. 228-229.
50. Потапов А.А. Синтез изображений земных покровов в оптическом и
миллиметровом диапазонах волн: Дис..доктора физ.- мат. наук. - М.: ИРЭ РАН, 1994.
51. Valenzuela, G.R., Depolarization of EM Waves by Slightly Rough Surfaces,
IEEE Trans., 1967, vol. AP-15, no. 4, pp. 552-557.
52. Кравцов Ю.А., Фукс KM., Шмелев А.Б. Последовательное применение метода
Кирхгофа к задаче рассеяния звуковой волны на поверхности со случайными
неровностями. - Изв. вузов. Сер. Радиофизика, 1974, т. 14, № 6, с. 854-864.
53. Павельев А.Г. О функции освещенности статистически неровной
поверхности. - Радиотехника и электроника, 1968, т. 13, № 5, с. 811-817.
54. Пономарев Г.А., Якубов В.Л. Геометрооптическое приближение и метод
Кирхгофа в задаче рассеяния волн на неровной поверхности. - Изв. вузов.
Сер. Радиофизика, 1976, т. 19, № 8, с. 1202-1207.
55. Виноградов Н.А., Михайлюк В.М., Ровный СЛ. Метод расчета
геометрических затенений при рассеянии волн шероховатой поверхностью. -
Радиотехника и электроника, 1992, т.37, № 5, с. 934-938.
56. Barrick, D.E., Rough Surface Scattering Based on the Specular Point Theory,
IEEE Trans., 1968, vol. AP-16, no. 4, pp. 449-454.
57. Barrick, D.E., Unacceptable Height Correlation Coefficients and the Quasi-
Specular Component in Rough Surface Scattering, Radio Science, 1970, vol. 5,
no. 4, pp. 647-654.
58. Beckmann, P., Scattering by Non-Gaussian Surfaces, IEEE Trans., 1973, vol. AP-21,
no. 2, pp. 169-175.
59. Ксмагилов Ф.М., Кравцов Ю.А. Зеркальная и антизеркальная компоненты
рассеянного поля для модели сильно неровной поверхности в виде системы
открытых плоских волноводов. - Изв. вузов. Сер. Радиофизика, 1992, т. 35,
№8, с. 671-677.
60. Белобров А.В., Фукс КМ. Деполяризация радиолокационного сигнала от
случайной поверхности. - Изв. вузов. Сер. Радиофизика, 1986, т. 29, № 12, с. 1447-1453.
61. Пименов С.Ф., Руденко М.А. Рассеяние радиоволн двухслойной средой с
шероховатыми границами. - Изв. вузов. Сер. Радиофизика, 1992, т. 35, № 3,4,
с. 275-284.
62. Fung, A.K. and Eom, К, Coherent Scattering of a Spherical Wave from an
Irregular Surface, IEEE Trans., 1983, vol. AP-31, no. 1, pp. 68-72.
338
63. Андреев Г.А., Черная Л.Ф. Интенсивности миллиметровых волн, рассеянных
хаотическими поверхностями. - Радиотехника и электроника, 1981, т. 26, № 6,
с. 1198-1206.
64. Арманд Н.А. О корреляционной функции волн, рассеянных шероховатыми
поверхностями. - Радиотехника и электроника, 1985, т. 30, № 7, с. 1307-1311.
65. Хургин Я.И., Яковлев В. П. Методы теории целых функций в радиофизике,
теории связи и оптике. - М.: Физматгиз, 1962.
66. Бекманн П. Рассеяние на сложных неровных поверхностях. - ТИИЭР, 1965,
т. 53, №8, с. 1158-1162.
67. Курьянов Б. Ф. Рассеяние звука на шероховатой поверхности с двумя
типами неровностей. - Акустический журнал, 1962, т. 8, № 3, с. 325-333.
68. Bass, F.G., Fuks, I.M., Kalmykov, A.I., et. ai, Very High Frequency Ratio Wave
Scattering by a Disturbed Sea Surface (Pt. 1. Scattering from a Slightly Disturbed
Boundary), IEEE Trans., 1968, vol. AP-16, no. 5, pp. 554-559.
69. Bass, F.G., Fuks, I.M., Kalmykov, A.I., et. ai,. Very High Frequency Ratio Wave
Scattering by a Disturbed Sea Surface (Pt. 2. Scattering from an Actual Sea),
IEEE Trans., 1968, vol. AP-16, no. 5, pp. 560-568.
70. Семенов Б.И. Приближенный расчет рассеяния электромагнитных волн
поверхностью типа шероховатого рельефа. - Радиотехника и электроника,
1966, т. 11, №8, с. 1351-1361.
71. Семенов Б.И. Расчет рассеяния электромагнитных волн поверхностью типа
шероховатого рельефа для произвольных углов наблюдения. -
Радиотехника и электроника, 1970, т. 15, № 3, с. 595-598.
72. Канарейкин Д.Б., Павлов Н.Ф., Потехин В.А. Поляризация
радиолокационных сигналов / Под ред. В.Е. Дулевича. - М: Сов. радио, 1966.
73. Богородский В.В., Канарейкин ДБ, Козлов А.И Поляризация рассеянного и
собственного радиоизлучения земных покровов. - Л.: Гидрометеоиздат, 1981.
74. Шерклифф У. Поляризованный свет/ Пер. с англ. под ред. КД Жевандрова.
-М.:Мир, 1965.
75. Белобров А.В., Фукс ИМ. Матрица Мюллера статистически неровной
поверхности при радиолокационном зондировании. - Изв. вузов. Сер.
Радиофизика, 1989, т. 32, № 10, с. 1232-1237.
76. Копилович Л.Е., Фукс ИМ. Индикатрисы рассеяния и альбедо
сильношероховатых поверхностей. - Изв. вузов. Сер. Радиофизика, 1981, т. 24, № 7,
с. 840-850.
77. Михайлова Д.В., Фукс ИМ. Излучательная способность статистически
неровной поверхности с учетом многократных отражений. - Радиотехника и
электроника, 1993, т. 38, № 6, с. 1016-1025.
78. Маттук Р. Фейнмановские диаграммы в проблеме многих тел / Пер. с англ.
под ред. В.Л. Бонч-Бруевича. - М.: Мир, 1969.
79. Жук Н.П. Уравнение для статистических моментов электромагнитного поля
в области с флуктуирующими свойствами границы. -Радиотехника и
электроника, 1990, т. 35, № 9, с. 1863-1871.
80. Теохаров А.И. Дифракция электромагнитных волн на сильно шероховатой
границе раздела. - Радиотехника и электроника, 1987, т. 32, № 8, с. 1594-1602.
81. Басе Ф.Г., Тимченко А.И. Применение вариационного метода Швингера в
задачах рассеяния электромагнитных волн неоднородными слоями с шероховатыми
границами. - Изв. вузов. Сер. Радиофизика, 1989, т. 32, № 4, с. 461-467.
339
82. Жук Н.П., Шульга С.Н., Яровой СГ Обратное рассеяние волн шероховатой
поверхностью однородного слоя на проводящей подложке. - Изв. вузов.
Сер. Радиофизика, 1990, т. 33, № 10, с. 1189-1190.
83. Светличный В.А. Матрица удельного сечения рассеяния второго порядка
морской поверхности в КВ-диапазоне. - Изв. вузов. Сер. Радиофизика,
1992, т. 35, №5, с. 381-397.
84. Морс Ф.М., Фешбах Г. Методы теоретической физики / Пер. с англ. - М.:
ИЛ, 1958, т. 1; 1960, т. 2.
85. Хижняк Н.А. Интегральные уравнения макроскопической
электродинамики. - Киев: Наукова думка, 1986.
86. Воронович А.Г. К теории рассеяния звука на неровной свободной
поверхности. - Акустический журнал, 1984, т. 30, № 6, с. 747-753.
87. Воронович А.Г. Приближение малых наклонов в теории рассеяния волн на
неровных поверхностях. - ЖЭТФ, 1985, т. 89, № 1(7), с. 116-125.
88. Кузнецова ЕЛ. Приближение малых наклонов в задаче рассеяния звука на
неровной жесткой поверхности. - Акустический журнал, 1986, т. 32, №2, с. 272-274.
89. Галактионов М.Ю. Применение новых подходов для расчета коэффициента
рассеяния скалярного волнового поля статистически неровной
поверхностью сложного спектрального состава. - Акустический журнал, 1991, т. 37,
№ 2, с. 270-276.
90. Дунин С.З., Максимов ГА. О вычислении звуковых полей, рассеянных на
неровных абсолютно отражающих поверхностях. - Акустический журнал,
1990, т. 36, №2, с. 276-282.
91. Михеев А.Г, Шамаев А.С. Об одном методе расчета дифракции
электромагнитной волны на волновой поверхности. - Радиотехника и электроника,
1992, т. 37, №9, с. 1565-1572.
92. Исерс А.Б., Пузенко А.А., Фукс И.М. Рассеяние волн на поверхности с
пологими и плавными неровностями произвольной высоты. Метод локальных
возмущений. - Тез. докл. X юбилейного Всесоюзного симпозиума по
дифракции и распространению волн «Волны и дифракция - 90» (Винница, 18-
21 сент. 1990). - М.: Физ. общ-во СССР, 1990, т. 2, с. 175-178.
93. Арманд Н.А., Башаринов А.Е., Бородин Л.Ф., Зотова Е.Н., Шутко A.M.
Радиофизические методы дистанционного изучения окружающей среды. -
В кн.: Проблемы современной радиотехники и электроники / Под ред.
В.А. Котельникова.-Ы.: Наука, 1980, с. 95-138.
94. Fung, A.K.andFung, H.S., Application of First-order Renormalization Method to
Scattering from a Vegetation-Like Half-Space, IEEE Trans., 1977, vol. GE-15,
no. 4, pp. 189-195.
95. Parashar, S.K., Fung, A.K., and Moore, R.K., A Theory of Wave Scatter from an
Inhomogeneous Medium with Slightly Rough Boundary and its Application to
Sea Ice, Remote Sensing of Environment, 1978, vol. 7, no. 1, pp. 35-50.
96. Zuniga, M.A., Habashy, T.M., and Kong, J.A., Active Remote Sensing of Layered
Media, IEEE Trans., 1979, vol. GE-17, no. 4, pp. 296-302.
97. Fung, A.K., Scattering a Vegetation Layer, IEEE Trans., 1979, vol. GE-17, no. 1,
pp. 1-6.
98. Zuniga, M.S. and Kong, J.A., Active Remote Sensing of Random Media, J. of
Applied Physics, 1980, vol. 51, no. 1, pp. 74-79.
340
99. Lang, RH. and Saleh, H.A., Microwave Inversion of Leaf Area and Inclination
Angle Distributions from Backscattered Data, IEEE Trans., 1985, vol. GE-23,
no. 5, pp. 685-694.
100. Deane, J.M., Modeling Radar Backscatter from Vegetation, The GEC Journal of
Research, 1987, vol. 5, no. 3, pp. 182-188.
XOX.Fung, A.K. and Ulaby, F.T., A Scatter Model for Leafy Vegetation, IEEE Trans.,
1978, vol. GE-16, no. 3, pp. 281-286.
\02.Eom, H.J. and Fung, A.K., A Scatter Model for Vegetation up to KU-Band,
Remote Sensing of Environment, 1984, vol. 15, no. 2, pp. 185-200.
103. Richards, J.A., Sun, G.-O., andSimonett, D.S., L-Band Radar Backscatter
Modeling of Forest Stands, IEEE Trans., 1987, vol. GE-25, no. 5, pp. 487-498.
\04.Karam, M.A. and Fung, A.K., Electromagnetic Scattering from a Layer of Finite
Length, Randomly Oriented, Dielectric Circular Cylinders Over a Rough
Interface with Application to Vegetation, Int. J. of Remote Sensing, 1988, vol. 9, no.
6, pp. 1109-1134.
105. Ulaby, FT., Sarabandi, K., McDonald, K, Whin, M., and Dobson, M.C, Michigan
Microwave Canopy Scattering Model, Int J. of Remote Sensing, 1990, vol. 11, no. 7,
pp. 1223-1253.
106. Чухланцев А.А. О моделировании растительности совокупностью рассеива-
телей. - Радиотехника и электроника, 1989, т. 34, № 2, с. 240-244.
107. Чухланцев А.А., Головачев СП. Ослабление СВЧ-излучения в растительном
покрове. -Радиотехника и электроника, 1989, т. 34, № 11, с. 2269-2278.
10$. Павельев А.Г. Эффект затенения при рассеянии радиоволн на движущихся
отражателях. - Радиотехника и электроника, 1975, т. 20, № 7, с. 1513-1516.
109. Hess, L.L., Melack, J.M., and Simonett, D.S, Radar Detection of Flooding
Beneath the Forest Canopy: A Review, Int. J. of Remote Sensing, 1990, vol. 11,
no. 7, pp. 1313-1325.
110.Андрианов В.А., Кибардина И.Н. Рассеяние радиоволн подстилающей
поверхностью с растительным покровом. - Радиотехника и электроника, 1976,
т. 21, №9, с. 1816-1821.
XW.Borel, С.С. and Mcintosh, R.E., Millimeter Wave Backscatter from Deciduous
Trees, IEEE Trans., 1990, vol. AP-38, no. 9, pp. 1391-1398.
\\2.Исимару А. Распространение и рассеяние волн в случайно-неоднородных
средах / Пер. с англ. - М.: Мир, 1981, т. 1; т. 2.
\ 13. Росс Ю.К., Князихин Ю.В., Кууск А.Э. и др. Математическое
моделирование переноса радиации в растительных средах. - Л.: Гидрометеоиздат, 1992.
114. Перенос радиации в рассеивающих и поглощающих атмосферах.
Стандартные методы расчета / Под ред. Ж. Ленобль: Пер. с англ. под ред. КС. Шиф-
рина. - Л.: Гидрометеоиздат, 1990.
115. Ulaby, F.T., Haddock, Т.Н., and Kuga, Y., Measurement and Modeling of
Millimeter- Wave Scattering from Tree Foliage, Radio Science, 1990, vol. 25, no. 3,
pp. 193-203.
\\6.Schwering, F.K., Violette, E.J., andEspeland, R.H., Millimeter-Wave Propagation
in Vegetation: Experiments and Theory, IEEE Trans., 1988, vol. GE-26, no. 3,
pp. 355-367.
1 Xl.Schwering, F.K. and Johnson, RA., A Transport theory of millimeter Wave
Propagation in Woods and Forests, J. of Wave - Material Interaction, 1986, vol. 1, no. 2,
pp. 205-235.
341
118. Потапов А.А. Радиофизические эффекты при взаимодействии
электромагнитного излучения миллиметрового диапазона волн с окружающей средой. -
Зарубежная радиоэлектроника, 1992 № 8, с. 36-76; № 9, с. 4-28; № 11,
с. 23-48; 1993, № 3, с. 36-48; №№7-9, с. 32-49; 1994, № 7-8, с. 11-30; 1995,
№ 1, с. 27-36 (журнальный вариант монографии).
119.Потапов А.А. О статистических характеристиках поля рассеяния
миллиметровых радиоволн растительным покровом. - Тез. докл. Всесоюзного
совещания по приземному распространению радиоволн и электромагнитной
совместимости (Улан-Удэ, 24-27 июля 1990). - Улан-Удэ: БНЦ СО АН
СССР, 1990, с. 169-170; Потапов А.А. Исследование влияния
растительного покрова на обратнорассеянное поле миллиметровых волн. -
Радиотехника и электроника, 1991, т. 36, № 2, с. 239-246.
120. Соболь КМ. Численные методы Монте-Карло. - М.: Наука, 1973.
\2\.Биндер К, Хеерман Д.В. Моделирование методом Монте-Карло в
статистической физике. - М.: Наука, 1995.
122. Garcia, N. and Stoll, E, Monte Carlo Calculation for Electromagnetic Wave
Scattering from Random Rough Surfaces, Physical Rewiew Letters, 1984, vol. 52,
no. 20, pp. 1798-1801.
123. Chuan, H.T. and Tan, KS., A Monte Carlo Method for Radar Backscatter from a
Half-Space Random Medium, IEEE Trans., 1989, vol. GE-27, no. 1, pp. 89-93.
124.Chuan, KT. and Tan, K.S., A Monte Carlo Backscatter Model for a Layer of
a Mixture of Discrete Scatter, Int. J. of Remote Sensing, 1991, vol. 12, no. 7,
pp. 1425-1440.
125. Bahar, E., Barrick, D.E., and Fitzwater, M.A., Computations of Scattering Cross
Sections for Composite Surfaces and the Specification of the Wawenumber
where Spectral Splitting Occurs, IEEE Trans., 1983, vol. AP-31, pp. 698-709.
126. West, J.C, O'Leary, B.S., and Klinke, J., Numerical Calculation of
Electromagnetic Scattering from Measured Wind-Roughend Water Surfaces, Int. J. Remote
Sensing, 1998, vol. 19, no. 7, pp. 1377-1393.
\21.Chou, KT. and Johnson, J.T., A Novel Acceleration Algorithm for the
Computation of Scattering from Rough Surfaces with the Forward-Backward Method,
Radio Sci., 1998, vol. 33, pp. 1277-1287.
128. Потапов А.А., Галкина Т.В., Колесников А.И. и др. Расчет методом Монте-
Карло рассеяния миллиметровых волн земными покровами с хаотическими
неровностями. - Тез. докл. Всесоюзной школы по распространению
миллиметровых и субмиллиметровых волн в атмосфере (Нижний Новгород,
3-10 сент. 1991). - Нижний Новгород: НИРФИ, 1991, с. 106-107.
129.Кобак В.О. Радиолокационные отражатели. - М.: Сов. Радио, 1975.
130.Павельев В.А., Хаминов Д.В. Шероховатые уголковые отражатели
радиолокационных сигналов. - Нелинейный мир, 2003, т. 1, №1-2, с. 64-68.
\3\.МагЪельс Е.К, Торгованов В.А. Измерение характеристик рассеяния
радиолокационных целей / Под ред. М.А. Колосова. - М.: Сов. Радио, 1972.
132. Потапов А.А. Статистика пространственно-временных характеристик
рассеяния земной поверхности на миллиметровых волнах. -
Электромагнитные волны и электронные системы, 1997, т. 2, № 1, с. 77-80.
133.Потапов А.А., Опаленов Ю.В. Многолетние измерения в диапазоне
миллиметровых волн характеристик рассеяния земных покровов с вертолета. -
Электромагнитные волны и электронные системы, 1997, т. 2, № 3, с. 71-74.
342
134. Васильев Ю.В., Замараев БД., Колесников ВТ. Использование бетонного
покрытия в качестве эталона при измерениях удельных ЭПР с борта
летательного аппарата. - В кн.: Распространение и дифракция радиоволн в
миллиметровом и субмиллиметровом диапазонах. - Киев: Наукова думка, 1984,
с. 49-52.
135. Андреев Г.А.ь Потапов А.А. Влияние хаотических неровностей поверхности
на отраженный импульсный сигнал миллиметровых волн. - Радиотехника и
электроника, 1986, т. 31, № 7, с. 1405-1414.
ХЪб.Лещанский Ю.И., Ульянычев КВ. Расчет диэлектрических характеристик
кирпича и цементного камня при переменной влажности. - Дефектоскопия,
1980, №7, с. 34-39.
137. Stuchly, S.S., Dielectric Properties of Some Granular Solids Containing Water,
J. of Microwave Power, 1970, vol. 5, no. 2, pp. 62-68.
138.Андреев Г.А., Мериакри В.В., Рубцов С.Н., Ушаткин Е.Ф. Исследования
диэлектрических свойств земных покровов на миллиметровых волнах, -
Радиотехника, 1979, т. 34, № 5, с. 84-85.
139. Шанда Э., Шаерер Г., Хафер Р. Характеристики рассеяния и излучения
природной среды в 3-миллиметровом диапазоне волн. - Радиотехника, 1976, т. 31,
№ 9, с. 3-9.
НО.Nelson, S.O., Beck-Montgomery, S.R., Fanslow, G.E., and Bluhm, D.D., Fre-
quensy Dependence of the Dielectric Properties of Coal. Pt. 2, J. of Microwave
Power, 1981, vol. 16, no. 3,4, pp. 319-326.
HX.Lieble, H.J., Hufford, G.A., andManabe, T.A., A Model for the Complex
Permitivvity of Water at Frequencies Below 1 THz, Int. J. of Infrared and Millimeter
Waves, 1991, vol. 12, no. 7, pp. 659-675.
142. Hufford, G., A Model for the Complex Permitivvity of Ice at Frequencies Below
1 THz, Int. J. of Infrared and Millimeter Waves, 1991, vol. 12, no. 7, pp. 677-682.
143.Fung, A.K. and Chen, K.S., Dependence of the Surface Backscattering
Coefficients on Roughness, Frequency and Polarization States, Int. J. of Remote
Sensing, 1992, vol. 13, no. 9, pp. 1663-1680.
144.Шутко A.M. СВЧ-радиометрия водной поверхности и почвогрунтов - М.:
Наука, 1986.
\\Ь.Башаринов А.Е., Тучков Л.Т., Поляков В.М., Ананов Н.И. Измерение
радиотепловых и плазменных излучений в СВЧ-диапазоне / Под ред. А.Е. Баша-
ринова и М.А. Колосова. - М.: Сов. радио, 1968.
146.Андреев Г.А., Потапов А.А. Миллиметровые волны в радиолокации. -
Зарубежная радиоэлектроника, 1984, № 11, с. 28-62.
147.Андреев Г.А., Черная Л.Ф. Рассеяние миллиметровых волн шероховатыми
поверхностями. - Радиотехника, 1980, т. 35, № 3, с. 78-81.
НЪ.Подосенов С.А., Потапов А.А., Соколов А.А. Импульсная электродинамика
широкополосных радиосистем и поля связанных структур / Под ред. А.А.
Потапова.-М:. Радиотехника, 2003.
\\9.БирчакД.Р., Гарднер КД, ХиппДЕ., Виктор ДМ. Определение влажности
грунта с помощью СВЧ-датчиков из диэлектрика с большой
диэлектрической проницаемостью. - ТИИЭР, 1974, т. 62, № 1, с. 115-121.
150. Кротиков В.Д. Некоторые характеристики земных пород и их сравнение с
характеристиками поверхностного слоя Луны. - Изв. вузов. Сер.
Радиофизика, 1962, т. 5, № 6, с. 1057-1062.
343
151. Розенберг В.И. Рассеяние и ослабление электромагнитного излучения
атмосферными частицами. - Л.: Гидрометеоиздат, 1972.
152.Айвазян Г.М. Распространение миллиметровых и субмиллиметровых волн в
облаках. - Л.: Гидрометеоиздат, 1991.
153. Hall'ikainen, M.T., Ulaby, F.T., and Aldelrazik, M., Dielectric Properties of Snow in
the 3 to 37 GHz Range, IEEE Trans., 1986, vol. AP-34, no. 11, pp. 1329^-1340.
154.77w/, M.E., Sihvola, A.K, Nyfors, E.G., and Hallikainen, M.T., The Complex
Dielectric Constant os Snow at Microwave Frequencies, J. Ocean Engineer.,
1984, vol. 9, no. 5, pp. 377-381.
155. Ulaby, F.T. and El-Rayes, M.A., Microwave Dielectric Spectrum of Vegetation. Pt. 2:
Dual - Dispersion Model, IEEE Trans., 1987, vol. GE-25, no. 5, pp. 550-557.
156. Alexander, P.M., Reflectivity of Some Materials at 94 GHz. - Proc. 6-th Int. Conf.
Infrared and Millimeter Waves (Miami Beach, Fla., 2-12 Dec). - N.Y., 1981,
p.4.12/1-4.12/2.
\51.Кулемин ГЛ., Зердев ИГ Использование многоканальных
радиолокационных методов для определения параметров почвы. - Электромагнитные
волны и электронные системы, 1997, т. 2, № 5, с. 82-92.
\5S.Long, М. W., Radar Reflecttivity of Land and Sea., Ma.: Lexington Books, 1975.
159. Grant, C.E. and Yaplee, B.S., Backscattering from Water and Land at Centimeter
and Millimeter Wavelengths, Proc. IRE, 1957, vol. 45, no. 7, pp. 976-980.
160.Коростелев B.C., Кучеренко СИ., Хлопов Г.И., Якимчук Ю.В. Применение
вращающихся уголковых отражателей для калибровки доплеровских РЛС
миллиметрового диапазона - Харьков: Изд. Основа при ХГУ, 1990, № 92, с. 17-23.
161. Колосов МЛ, Пожидаев В.И Статистические модели гидрометеорного
ослабления. Тез. докл. Всесоюзной. шк.-симпозиума по распространению
миллиметровых и субмиллиметровых волн в атмосфере (Москва, 10-17 февраля 1982). -
М.: ИРЭ АН СССР, 1983, с. 101-121.
162.Пожидаев В.К, Соколов А.В. Методики оценки вероятности ослабления
миллиметровых волн в атмосфере при наличии осадков и водных
аэрозолей. - М., 1987 (Препринт/ИРЭ АН СССР; № 1 (460)).
163. Сухонин ЕВ. Прогнозирование ослабления миллиметровых волн в толще
атмосферы. - ВИНИТИ. Итоги науки и техники. Сер. Радиотехника. - М.:
ВИНИТИ, 1990, т. 41, с. 3-68.
WA.Trebits, R.N., Hayes, R.D., and Bomar, L.C., Mm-Wave Reflectivity of Land and
Sea, Microwave Journal, 1978, vol. 21, no. 8, pp. 49, 52, 53, 83.
165. Richard, V. W., Kammerer, J.E., and Wallace, Y.B., Rain Backscatter Measurements at
Millimeter Wavelengths, IEEE Trans., 1988, vol. GE-26, no. 3, pp. 244-252.
166.Кадыгров Е.Н., Потапов А.А. Некоторые результаты использования
радиоволн миллиметрового диапазона при наличии осадков. - Тр. Центр, аэрол.
обсерватории, 1990, вып. 168, с. 76-82.
167. Чурилов В.И, Шарапов Л.И. Измерение радиолокационных отражений от
дождя на частоте 140 ГГц. - Тез. докл. XIII Всесоюзной конф. по распространению
радиоволн (Горький, июнь 1981). Ч. 2. - М.: Наука, 1981, с. 105-106.
\6%.Шифрин КС. Рассеяние света в мутной среде. - М.- Л.: ГТТИ, 1951.
169. Хюлст Г. Рассеяние света малыми частицами. - М.: ИЛ, 1961.
НО.Дейрменджан Д. Рассеяние электромагнитного излучения сферическими
полидисперсными частицами. - М.: Мир, 1971.
МХ.Мак-Картни Э. Оптика атмосферы. - М.: Мир, 1979.
344
ХИ.Борен К., Хафмен Д. Поглощение и рассеяние света малыми частицами. -
М.: Мир, 1986.
173. Гущина И.Я.. Зражевскии А.Ю., Малинкин ВТ. и др. Ослабление радиоволн
коротковолновой части миллиметрового диапазона в дождях. -
Радиотехника и электроника, 1980, т. 25, № 7, с. 1522-1524.
174. Окамура С, Сонохара А. Атмосферное ослабление сигнала частотой 140 ГГц в
дожде (яп.). - Дэнси цусин гаккай ромбунси, 1977, т. В-60, № 4, с. 267-273.
175.Sander, J., Rain Attenuation of Millimeter Waves at Я = 5.77, 3.3 and 2 mm,
IEEE Trans., 1975, vol. AP-23, no. 2, pp. 213-220.
176.Nemarich, J., Wellman, R.J., and Lacombe, J., Backscatter and Attenuation by
Falling Snow and Rain at 96, 140 and 225 GHz, IEEE Trans., 1988, vol. GE-26,
no. 3, pp. 319-329.
177. Wallace, H.B., Millimeter-Wave Propagation Measurements at the Ballistic
Research Laboratory, IEEE Trans., 1988, vol. GE-26, no. 3, pp. 253-258.
US.Olsen, R.L., Rogers, D.V., and Hodge, D.B., The aRb Relation in the Calculation
of Rain Attenuation, IEEE Trans., 1978, vol. AP-26, no. 2, pp. 318-329.
\19.Алибегова Ж.Д. Пространственно-временная структура полей жидких
осадков. - Л.: Гидрометеоиздат, 1985.
180. Спиридонов ЮТ., Пичугин А.П. Влияние метеоусловий на характеристики
радиолокационных изображений земной поверхности из космоса. -
Исследование Земли из космоса, 1984, № 6, с. 21-27.
ХЪХ.Кадыгров Е.Н., Ожерельев А.В., Потапов А.А. Влияние пространственной
структуры метеорологических полей на радиолокационные изображения
земных покровов в диапазонах СМВ и ММВ. - Тез. докл. XI Всесоюзного
науч.-техн. семинара секции «Теория информации» ЦП ВНТО РЭС им. А.С.
Попова «Статистический синтез и анализ информационных систем»
(Ульяновск, 31 мая - 2 июня 1989). 4.2. - Ульяновск: УлПИ, 1989, с. 5-6.
182. Потапов А.А. О метеорологическом дешифровании мезоструктур
микроволновых изображений. - Тез. докл. Международной науч.-техн. конференции
«Статистические методы в теории передачи и преобразования информационных
сигналов» (Киев, 25-27 февраля 1992). - Киев: КНИГА, 1992, с. 106-107.
183. Беликов СТ., Мелъничук Ю.В., Ожерельев А.В. и др. Программное обеспечение,
способы и аппаратура отображения информации для автоматизированного
радиолокационного комплекса АКСОПРИ. - Тез. докл. 7-го Всесоюзного
совещания по радиометеорологии. - М.: ВНИИГМИ-МЦЦ, 1986, с. 56.
184. Брылев Г.Б., Гашина СБ., Низдойминога ГЛ. Радиолокационные
характеристики облаков и осадков. - Л.: Гидрометеоиздат, 1986.
IS5. Довиак Р., ЗрничД Доплеровские радиолокаторы и метеорологические
наблюдения / Пер. с англ. под ред. А.А. Черникова. - Л.: Гидрометеоиздат, 1988.
\S6.Davies, P.G. and Lane, J.A., Review of Propagation Characteristics and
Prediction for Satellite Links at Frequencies of 10-40 GHz, IEE Proc, 1986, vol. F133,
no. 4, pp. 420-428.
\Sl.BaKcep И.Х. Характеристики отражений земной поверхности. - Труды ИРЭ
АН УССР, т. 10. - Харьков: ИРЭ АН УССР, 1962.
ХЪЪ.Кулемин ГЛ., Разсказовский В.Б. Рассеяние миллиметровых радиоволн
поверхностью Земли под малыми углами. - Киев: Наукова думка, 1987.
189. Разсказовский В.Б. Распространение радиоволн миллиметрового и
субмиллиметрового диапазонов. - Сборник трудов ИРЭ АН УССР, 1989.
345
190. Кулемин Г.П. Обратное рассеяние сантиметровых и миллиметровых волн от
земной поверхности при малых углах скольжения. - Сборник трудов ИРЭ
АН УССР. - Киев: Наук, думка, 1994, с. 17-34.
191. Чурилов В.П. - Сборник трудов ИРЭ АН УССР, 1961, т. 15, с. 41-59.
192. Петров А.В. Радиолокационные устройства самолетовождения
миллиметрового диапазона радиоволн. Диссертация кандидата техн. наук. - М.: 2000.
193. Черняк B.C. Многопозиционная радиолокация. - М.: Радиосвязь, 1993.
\9\.Голунов В.А., Короткое В.А., Соколов А.В. Отражение и пропускание
миллиметровых волн в случайных дискретных средах. - Электромагнитные
волны и электронные системы, 1997, № 1, т. 2.
195. Болдин В.Л. Многопозиционные радиолокационные системы. -М.: Итоги
науки и техники. Сер. Радиоэлектроника, 1990, № 40.
196.Борзое А.Б., Быстрое Р.П., Петров А.В., Самойлов СИ. ^Соколов А.В.
Определение характеристик обнаружения слабо рассеивающих объектов по
усредненному во времени отраженному когерентному сигналу. -
Электромагнитные волны и электронные системы, № 6, 2000, с. 17-26.
197. Бурцев В.А., Лапаев КГ. Обнаружение слабо отражающих объектов на фоне
подстилающей поверхности на основе использования свойств вторичного
излучения в направлении распространения электромагнитных волн. - Тезисы докл.
X Международной конференции по Спиновой электронике и Гировекторной
электродинамике. - Москва, Фирсановка, 16-18 ноября 2001.
\9S.Anuashvili, A.N. and Maklakov, V.V., A New Method of Blood Cells Dynamic
Characteristics Measurement, In "Measurements in clinical medicine", Publ. The
Institute of Measurement and Control, London, UK, 1986, pp. 263-268.
199.Kymuiuee С.Н., Михайлов Г.Д., Преображенский А.П. Рассеяние
электромагнитных волн на полостях сложной формы. - Зарубежная
радиоэлектроника, № 10, 1998, с. 26-38.
200. Антифеев В.К, Борзое А.Б., Быстрое Р.П., Исаев Ш.И, Соколов А.В.
Математические модели рассеяния электромагнитных волн на объектах
сложной формы. - Зарубежная радиоэлектроника, 1998, № 10, с. 39-4.
201. Прангашвили И.В., Ануашвили А.Н., Маклаков В.В. Открытие
"Закономерность проявления подвижности объекта" (Постановление РАН № 10 от 18
февраля 1992 г.).
202.Ануашвили А.Н. Разработка нового принципа и технических решений для
восприятия изображения подвижного объекта. Дис. докт. техн. наук. - М.:
ИПУАНСССР, 1990.
203. Мандросов В.И, Бакут П.А., Матвеев КН., Устинов Н.Д. Теория
когерентных изображений. - М.: Радио и связь, 1987.
204. Справочник по радиолокации / Под. ред. М.Сколника: Пер. с англ. в 4-х
томах под общей ред. К.Н. Трофимова. Т. 1. Основы. - М.: Сов. радио, 1976.
205.Шестопалов В.П. Физические основы миллиметровой и субмиллиметровой
техники. В 2-х томах. - Киев: Наукова думка, т. 2, 1985.
206.Хлопов Г.И., Шестопалов В.П. Исследование кратковременной
нестабильности СВЧ-генераторов миллиметрового диапазона. - ВСРЭ, РТЛ, т.23. -
М.: 1983, с. 123-131.
207. Алексеев А.Ф., Быстрое Р.П., Самойлов СИ. и др. Обнаружение
осциллирующего объекта РЛС миллиметрового диапазона. - Электромагнитные
волны и электронные системы, 1997, № 2, т. 2, с.74-77.
346
208. Борзое А.Б. Анализ радиолокационных характеристик объектов сложной
формы методом математического моделирования. - Боеприпасы, 1994,
№3-4, с. 32-38.
209. Борзое А.Б. Анализ вкладов отдельных элементов объекта сложной формы
в общем поле рассеяния коротких радиоволн методами цифрового
моделирования. - Вопросы защиты информации, 1995, вып. 3 (30), с. 20-22.
210.Антифеев В.Н., Борзое А.Б., Быстрое Р.П. и др. Математические модели
рассеяния электромагнитных волн на объектах сложной формы. -
Электромагнитные волны и электронные системы, 1998, № 10, с. 38-54.
211. Борзое А.Б., Быстрое Р.П., Дмитриев ВТ. и др. Научно-технические
достижения и проблемы развития техники миллиметрового диапазона радиоволн. -
Электромагнитные волны и электронные системы, 2001, № 4, с. 18-80.
212.Подосеное С.А., Потапое А.А., Соколов А.В. Импульсная электродинамика
широкополосных радиосистем и поля связанных структур. - М.:
Радиотехника, 2003.
Литература к главе 2
1. Быстрое Р.П., Потапое А.А., Соколов А.В. и др. Проблемы
распространения и применения миллиметровых волн в радиолокации. - Зарубежная
радиоэлектроника, 1997, № 1, с. 4-20.
2. Быстрое Р.П. Радиолокационные системы обнаружения наземных объектов
в короткой части миллиметрового диапазона радиоволн. В 2-х томах. Т. 1. -
М.: Изд-во «Технология», 2002.
3. Бабкин ЮС. Экспериментальные исследования отражательных свойств
подстилающих поверхностей в миллиметровом диапазоне волн. - Докл. на
II Симпозиуме по распространению миллиметровых и субмиллиметровых
волн. - Харьков, ИРЭ АН УССР, 1978.
4. Чурилов В.П. Некоторые особенности радиолокационного отражения от
отдельных участков поверхности танка. - Сборник трудов ИРЭ НА УССР,
1967, №1, т. 15, с. 41-59.
5. Jonston, S.L., Quelques aspekts du radar millimetrque colloque international sur
le radar Paris, Dec.,1978, pp. 148-221.
6. Ваксер И.Х. Характеристики отражений земной поверхности. - Труды ИРЭ
АН УССР, т. 10. - Харьков: ИРЭ АН УССР, 1962.
7. Кулемин ГЛ., Разсказоеский В.Б. Рассеяние миллиметровых радиоволн
поверхностью земли под малыми углами. - Киев: Наукова думка, 1987.
8. Разсказоеский В.Б. Распространение радиоволн миллиметрового и
субмиллиметрового диапазонов. - Сборник трудов ИРЭ АН УССР, 1989.
9. Skolnik, A/., Proc. Symph. on Submillimeter wawes, March 31-Apr. 1,2, 1970,
N.-Y, pp. 9-25.
10. Быстрое Р.П., Меркин А.А., Садыкое P.P., Серебряков О.П.
Помехозащищенность радиолокационных систем обнаружения движущихся и
неподвижных объектов в миллиметровом диапазоне радиоволн. -
Электромагнитные волны и электронные системы, 1997, № 3, т.2, с. 63-65.
11. Зубков А.Н. Радиолокационная система обнаружения наземных целей в
коротковолновой части ММ-диапазона. - Докл. на НТК по миллиметровой
технике, Львов, ЛНИРТИ, 1986.
347
Литература к главе 3
1. Быстрое Р. П. Радиолокационные системы обнаружения наземных объектов
в короткой части миллиметрового диапазона радиоволн. В 2-х томах.Т.2. -
М.: Изд-во Технология, 2002.
2. Быстрое Р.П., Потапов А.А., Соколов А.В. и др. Проблемы
распространения и применения миллиметровых волн в радиолокации. - Зарубежная
радиоэлектроника, 1997, № 1, с. 4-20.
3. Зубков А.Н. Радиолокационная система обнаружения наземных целей в
коротковолновой части ММ-диапазона. - Докл. на НТК по миллиметровой
технике, Львов, ЛНИРТИ, 1986.
4. Справочник по радиолокации / Под. ред. М.Сколника: пер. с англ. в 4-х
томах под общей ред. КН. Трофимова. Т. 1. Основы. - М: Сов.радио, 1976.
5. Акиншин Н.С., Быстрое Р.П., Петров А.В., Садыков P.P.
Радиолокационные системы обнаружения наземных объектов в миллиметровом диапазоне
радиоволн на летательных аппаратах. - Научный вестник МГТУГА, сер.
Радиофизика и радиотехника, 2000, № 24, с. 94—111.
6. Elektronikcs Worfare, Defence Elektronikcs, 1979, vol. 10, no. 11, p. 68-69.
7. Быстрое РЛ., Меркин А.А., Хлопов Г.И., Шестопалов В.П. Активные
радиолокационные системы обнаружения наземных объектов с передачей информации.
- Электромагнитные волны и электронные системы, 1997, т. 2, № 3, с. 75-77.
8. Быстрое Р.П., Коростелев B.C., Хлопое Г.И., Шестопалов В.П.
Приемопередающий модуль СВЧ-радиолокационного координатора в
двухмиллиметровом диапазоне радиоволн. - Тр. ИРЭ АН УССР. - Харьков: ИРЭ АН
УССР, 1981, т.27, с. 17-24.
9. Быстрое РЛ., Илюха А.А., Симоненко И.И. и др. Система управления огнем
оружия ближнего боя. Авторское свидетельство № 234949 от 1.04.1986 г.
Литература к главе 4
1. Справочник по радиолокаци / Под. ред. М.Сколника: Пер. с англ. в 4-х
томах под общей ред. КН. Трофимова. Т. 1. Основы. - М: Сов. радио, 1976.
2. Селякин Н.М. Элементы случайных импульсных потоков. - М.: Сов. радио,
1965.
3. Вудеорд Ф.М. Теория вероятностей и теория информации с приложением к
радиолокации / Пер. с англ. под ред. Г.С. Горелика. - М: Сов. радио, 1955.
4. Дулееич В.Е. Информационные свойства радиолокационных систем. - Л.:
ЛВИКА, 1970.
5. Аверин Б.А. Теория приема радиолокационных сигналов. - Киев: КВИАУ,
1961.
6. Светов Б.Я. Теория информации. - Л.: Изд-во ЛГУ, 1977.
7. Харкевич А.А. Избранные труды в 3-х т. — М.: Наука, 1973.
8. Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной
информации на фоне помех. - М: Радио и связь, 1981.
9. Быстрое РЛ. Радиолокационные системы обнаружения наземных объектов
в короткой части миллиметрового диапазона радиоволн. В 2-х томах.Т.2. -
М.: Изд-во Технология, 2002.
10. Быстрое РЛ., Заболотнев А.О., Кузъмичев В.Е., Соколов А.В. Уровень
потери информации в РЛС обнаружения наземных объектов. -
Электромагнитные волны и электронные системы, 1997, № 1, т. 2, с .89-93.
348
11. Быстрое Р..П., Жуковский В.В., Садыков P.P., Соколов А.В.
Информационные свойства пассивных РЛС обнаружения наземных объектов. -
Электромагнитные волны и электронные системы, 1997, № 4, т. 2, с. 104-107.
12. Милдстон Д. Статистическая теория обнаружения сигналов. В сб. : Прием
сигналов при наличии шума / Под ред. Л.С. Гуткина. - М: Иностр. лит., 1960.
13. Бакут П. А., Большаков К А., Тартаковский Г. П. Вопросы статистической
теории радиолокации, в 2-х т. - М: Наука, 1969.
14. Кофман М. Методы и модели исследования операций. - М: Мир, 1966.
15. Современная радиолокация /Перевод с англ. под ред. Ю.Б. Кобзарева. - М.:
Сов. радио, 1969.
Литература к главе 5
1. Котельников В.А. Теория потенциальной помехоустойчивости. - М.-Л.:
Госэнергоиздат, 1956.
2. Котельников В.А. Сигналы с максимальной и минимальной вероятностями
обнаружения. - Радиотехника и электроника, 1959, т 4, № 3, с. 354—358.
3. Ширман Я.Д., Лосев Ю.И., Минервин Н.Н и др. Радиоэлектронные системы:
основы построения и теория / Под ред. ЯД. Ширмана. - М.: МАКВИС,
1998.
4. Бункин Б.В., Реутов А.П., Потапов А.А. и др. Вопросы перспективной
радиолокации (Коллективная монография) / Под ред. А.В. Соколова. - М.:
Радиотехника, 2003.
5. Лагарьков А.К, Погосян М.А. Фундаментальные и прикладные проблемы
стелс-технологий. - Вестник РАН, 2003, т. 73, № 9, с. 779-787.
6. Потапов А.А. Статистический подход к описанию изображений текстур
земной поверхности в оптическом и радиодиапазоне. - Тез. докл. Всес.
конф. «Математические методы распознавания образов (MMPO-IV)» (Рига,
24-26 октября 1989). - Рига: Изд. МИПКРРиС, 1989, ч. 4, с. 150-151.
7. Потапов А.А. Применение модулированных ММВ для формирования и
идентификации изображений. - Радиотехника, 1989, № 12, с. 61-64.
8. Опаленов Ю.В., Потапов А.А., Федюнин СЮ. Радиофизический
измерительный комплекс со сложным ФМ сигналом в диапазоне миллиметровых
волн. - Радиотехника, 1991, № 11, с. 67-70.
9. Потапов А.А. Исследование влияния растительного покрова на обратно
рассеянное поле миллиметровых волн. - Радиотехника и электроника, 1991,
т. 36, № 2, с. 239-246.
10. Потапов А.А., Галкина Т.В., Орлова Т.И., Хлявич Я.Л. Дисперсионный
метод обнаружения детерминированных объектов на текстурных оптических
и радиолокационных изображениях земной поверхности. - Радиотехника и
электроника, 1990, т. 35, № 11, с. 2295-2301.
11. Галкина Т.В., Орлова Т.И., Потапов А.А., Хлявич Я.Л. Выделение
детерминированных объектов на текстурном фоне дисперсионным методом. - Тез.
докл. II Всес. конф. «Искусственный интелект-90» (Минск, 21-24 октября
1990 г.). - Минск: Изд. ИТК АН БССР, 1990, с. 116-119.
12. Потапов А.А., Галкина Т.В., Орлова Т.К, Хлявич Я.Л. Метод выделения
контуров протяженных детерминированных объектов в стохастических
полях. - Радиотехника и электроника, 1991, т. 36, № 11, с. 2240-2242.
349
13. Потапов А.А., Галкина Т.В., Колесников А.К, Орлова Т.П., ХлявичЯ.Л.
Линейно моделированные эталоны в корреляционном опознавании
статистических текстурных полей. - Тез. докл. X Всес. науч.-техн. конф.
«Статистические методы в теории передачи и преобразования информационных
сигналов» (Львов, 4-6 октября 1988.). - Киев: КНИГА, 1988, с. 143-144.
14. Галкина Т.В., Орлова Т.Н., Потапов А.А., Хлявич Я.Л. Машинный метод
обнаружения искажений текстурных картин. - Тез. докл. I Всес. конф.
«Физика и конверсия» (Калининград МО, 3-5 января 1991). - М.: Изд. Физ.
общества СССР, 1991, с. 97.
15. Потапов А.А., Галкина Т.В., Орлова Т.И. Цифровой статистический анализ
радиоизображений природных сред. - Тез. докл. II Республ. семинара
«Проблемы создания систем обработки, анализа и распознавания
изображений» (Ташкент, 6-8 июня 1989). Ч. 1. - Ташкент: Изд. ИК и ВЦ НПО
«Кибернетика» АН УзССР, 1989, с. 3-4.
16. Потапов А.А., Колесников А.И. Корреляционные характеристики
изображений земной поверхности. - Радиотехника и электроника, 1993, т. 38, № 7,
с. 1270-1279.
17. Потапов А.А., Колесников А.И. Спектральные характеристики
изображений земной поверхности. - Радиотехника и электроника, 1993, т. 38, № 10,
с. 1851-1862.
18. Павельев В.А., Потапов А.А. Влияние земной поверхности на структуру
импульсного сигнала в диапазоне миллиметровых волн. - Радиотехника и
электроника, 1994, т. 39, № 4, с. 573-582.
19. Потапов А.А. Радиофизические эффекты при взаимодействии
электромагнитного излучения миллиметрового диапазона волн с окружающей средой.
- Зарубежная радиоэлектроника, 1992, № 8, с. 36-76; № 9, с. 4-28; № 11,
с. 23-48; 1993, № 3, с. 36-48; № 7-9, с. 32-49; 1994, № 7/8, с. 11-30; 1995,
№ 1, с. 27-36 (журнальный вариант монографии).
20. Потапов А.А. Синтез изображений земных покровов в оптическом и
миллиметровом диапазонах волн. Дис. ... доктора физ.-мат. наук. - М.: ИРЭ
РАН, 1994.
21. Потапов А.А. Статистика пространственно-временных характеристик
рассеяния земной поверхности на миллиметровых волнах. -
Электромагнитные волны и электронные системы, 1997, т. 2, № 1, с. 77-80.
22. Потапов А.А., Опаленов Ю.В. Многолетние измерения в диапазоне
миллиметровых волн характеристик рассеяния земных покровов с вертолета. -
Электромагнитные волны и электронные системы, 1997, т. 2, № 3, с. 71-74.
23. Потапов А.А. Радиофизическая модель формирования эталонных
радиолокационных карт неоднородной местности в диапазоне миллиметровых волн. -
Электромагнитные волны и электронные системы, 1997, т. 2, № 4, с. 31-34.
24. Opalenov, U. V., Potapov, А.А., and Sokolov, A. V., Solid Digital Millimeter Wave
Radar with Phasemanipulated Signal, Final Programme PIERS - Workshop on
Advances in Radar Methods (Italy, Baveno, July 20-22, 1998), European
Commission: Joint Research Centre, 1998, p. 96.
25. Потапов А.А. Фракталы в радиофизике и радиолокации (1-е изд.). - М.:
Логос, 2002.
26. Потапов А.А. Детерминированный хаос в радиолокационных изображениях
земной поверхности и фрактальные сигнатуры распознавания. - Тез. докл.
350
LII Научной сессии, поев. Дню Радио (Москва, 21-22 мая 1997). - М: Изд.
РНТО РЭС им. А.С. Попова, 1997, т. 1, с. 169.
27. Потапов А.А. Фракталы в радиофизике и радиолокации. - Тез. докл.
Региональной XXIII конф. по распространению радиоволн (Санкт-Петербург,
28-29 октября 1997). - СПб.: Изд. СПГУ, 1997. С. 25.
28. Потапов А.А., Герман В.А. Обнаружение искусственных объектов с
помощью фрактальных сигнатур. - Тез. докл. 3-й Всероссийской с участием
стран СНГ конф. «Распознавание образов и анализ изображений: новые
информационные технологии» (Нижний Новгород, 1-7 декабря 1997). -
Н. Новгород: Изд. НИИ ПМК при ННГУ, 1997, ч. 1, с. 213-217.
29. Потапов А.А., Чеканов Р.Н. Рассеяние волн фрактальными поверхностями.
- Тез. докл. LII Научной сессии, поев. Дню Радио (Москва, 21-22 мая
1997). - М.: РНТО РЭС им. А.С. Попова, 1997, т. 1, с. 171-172.
30. Потапов А.А., Соколов А.В., Чеканов Р.Н. Применение теории фракталов к
изучению флуктуации на ММВ. - Тез. докл. LII Научной сессии, поев. Дню
Радио (Москва, 21-22 мая 1997). - М.: РНТО РЭС им. А.С. Попова, 1997,
т.1, с. 167-168.
31. Потапов А.А. Фракталы в радиофизике, радиолокации и дистанционном
зондировании. - Тр. VII Всероссийской школы-семинара «Физика и
применение микроволн» (Красновидово МО, 24-30 мая 1999). - М.: Изд. МГУ,
1999, т. 2, с. 140.
32. Герман В.А., Потапов А.А. Об измерении фрактальных характеристик
радиолокационных и оптических изображений. - Там же, с. 185.
33. Опаленов Ю.В., Потапов А.А. Радиолокационные стохастические сигналы и
преобразование Радона. - Там же, с. 186.
34. Потапов А.А.} Герман В.А. Детерминированный хаос в изображениях
природных сред. - Там же, с. 196-197.
35. Опаленов Ю.В., Потапов А.А. Цифровые радиолокаторы со сложным сигналом
и фрактальной обработкой информации. - М.: Изд. МГУ, 1999, т. 2, с. 199.
36. Потапов А.А., Герман В.А. Фрактальные сигнатуры в методах обнаружения
малоконтрастных объектов на радиолокационных и оптических
изображениях земной поверхности. - Там же, с. 200.
37. Потапов А.А., Герман В.А. Фрактальные размерности изображений
природных ландшафтов. - Тез. I Междисциплинарного семинара «Фракталы и
прикладная синергетика» (Москва, 18-21 октября 1999). - М.: Изд-во
«Классика», 1999, с. 51-53.
38. Потапов А.А. К вопросу о перспективных приложениях теории фракталов в
радиофизике и радиолокации. - Труды VII Всероссийской школы-семинара
«Волновые явления в неоднородных средах» (Красновидово МО, 22-27 мая
2000). - М: Изд-во МГУ, 2000, т. 2, с. 57-58.
39. Потапов А.А., Герман В.А. Концептуальные аспекты фрактального
обнаружения целей на радиолокационных, оптических и синтезированных
изображениях земной поверхности. - Там же, с. 58-62.
40. Потапов А.А., Герман В.А., Чеканов Р.Н. Теории катастроф и фракталов в
волновой физике. - Там же, с. 62-66.
41. Потапов А.А. Фрактальное кодирование изображений. - Там же, с. 67-69.
351
42. Опаленов Ю.В., Потапов АЛ, Реутов В.Ф. Аппаратно-методический базис
фрактальной радиолокационной многофункциональной измерительной
системы характеристик потоков и материалов. - Там же, с. 69-72.
43. Потапов АЛ Фракталы в дистанционном зондировании. - Зарубежная
радиоэлектроника. Успехи современной радиоэлектроники, 2000, № 6, с. 3-65.
44. Потапов А.А., Герман В.А. Применение фрактальных методов для
обработки оптических и радиолокационных изображений земной поверхности. -
Радиотехника и электроника, 2000, т. 45, № 8, с. 946-953.
45. Потапов АЛ. Фракталы в радиофизике и радиолокации. Элементы теории
фракталов. - Радиотехника и электроника, 2000, т. 45, № 11, с. 1285-1292.
46. Потапов А.А., Герман В.А., Соколов А.В. Радиолокационное обнаружение
цели на фоне земной поверхности фрактальным методом. - Радиотехника,
2000, № 8, с. 57-63.
47. Потапов А.А., Герман В.А. Концептуальные аспекты фрактального
обнаружения и распознавания целей. - Докл. 3-й Международной конф.
«Цифровая обработка сигналов и ее применение» (Москва, 29 ноября - 1 декабря
2000). - М: РНТОРЭС им. А.С. Попова, 2000, т. 2, с. 44-46.
48. Опаленов Ю.В., Потапов АЛ, Реутов В.Ф. Аппаратно-методический базис
многофункционального фрактального измерителя характеристик потоков и
материалов. - Там же, с. 99-101.
49. Opalenov, Yu., Potapov, A.A., and Reutov, V.F., Hardvare - Methodical Base of a
Fractal Multifunction Meter of the Characteristics of Flows and Materials, Book
of Abstracts Second Int. Conf. «Modern Trends in Computational Physics»
(Russia, Dubna, July 24-29, 2000), Dubna: JINR, 2000, p. 124.
50. Potapov, A.A. and German, V.A., Fractal Method of Detection of Weak Signals
from Complex Images, Ibid., p. 132.
51. Potapov, A.A. and German, УЛ., Chines «Tangram» in Problems of Fractal
Resolution, Ibid, p. 133.
52. Опаленов Ю.В., Потапов АЛ. Стохастические сигналы и преобразование
Радона при получении растровых радиолокационных изображений
микроволновым цифровым радиолокатором с фрактальной обработкой
информации. - Радиотехника и электроника, 2000, т. 45, № 12, с. 1447-1458.
53. Potapov, A.A. and German, УЛ., Fractals, Fractal Target Selection and Fractal
Antennas, Proc. Ist Int. Workshop on Mathematical Modeling of Physical
Processes in Inhomogeneous Media (Mexico, Mars 20-22, 2001), Guanajuato, 2001,
pp. 44-46.
54. Bistrov, R.P., Zasovin, E.A., Potapov, A.A., andSokolov, A.V., Millimeter Radar
of a High Resolution with the Use of a Fractal Method for Detection, Ibid,
pp. 99-101.
55. Опаленов Ю.В., Потапов АЛ Фракталы, преобразование Радона в
радиолокаторах с обработкой на несущей частоте и перспективы их применения. -
Зарубежная радиоэлектроника. Успехи современной радиоэлектроники,
2001, №4, с. 3-15.
56. Потапов А.А. Фракталы в радиофизике и радиолокации. Фрактальный
анализ сигналов. - Радиотехника и электроника, 2001, т. 46, № 3, с. 261-270.
57. Potapov, A.A. and German, УЛ., Fractal Selection of Artificial Objects from
Radar Images on Inhomogeneous Baskground, Proc. the Fourth Symp. «Physics and
352
Engineering of Millimeter and Sub-Millimeter Waves» (Ukraine, Kharkov, June
4-9, 2001), Kharkov, Kharkov State University, 2001, vol. 1, pp. 268-270.
58. Bistrov, R.P., Potapov, A.A., Sokolov, A. V., and Sokolov, S.A., Fractal Methods of
Selection of Objects and Millimeter Wave Radar Imaging of the High
Resolution, Ibid, p. 286.
59. Kravchenko, V.F. and Potapov, A. A., Nev Class of Atomic - Fractal Functions and
Their Applications, Ibid, pp. 102-107.
60. Kravchenko, V.F. and Potapov, A.A., Atomic - Fractal Antenna Arrays, Proc.
URSI Int. Symp. on Electromagnetic Theory (Canada, Victoria, May 13-17,
2001), Victoria: University of Victoria, 2001, pp. 660-662.
61. Кравченко В.Ф., Потапов А.А., Масюк В.М. Атомарно-фрактальные
функции в задачах синтеза антенн. - Зарубежная радиоэлектроника. Успехи
современной радиоэлектроники, 2001, № 6, с. 4-40.
62. Засовин Э.А., Бармотин В.Я., Потапов А.А., Соколов А.В. Фрактальные
антенны на основе салфетки Серпинского. - Тр. X Международной конф. по
спиновой электронике и гировекторной электродинамике (Фирсановка МО,
16-18 ноября 2001). -М.: Изд. УНЦ-1, МЭИ (ТУ), 2001, с. 208-214.
63. Опаленов Ю.В., Потапов А.А. Радиолокационная радонометрия и
фрактальная топология. - Там же, с. 226-258.
64. Засовин Э.А., Борзое А.Б., Быстрое Р.П., Ильясов Е.И, Потапов А.А.,
Соколов А.В. Радиотехнические и радиооптические системы: Учебное пособие. -
М.: Круглый год, 2001.
65. Потапов А.А., Герман В.А. Фракталы в кластеризации радиолокационных
изображений поверхностных и подповерхностных объектов. - Докл. 4-й
Международной конф. «Цифровая обработка сигналов и ее применение»
(Москва, 27 февраля - 1 марта 2002). - М.: Изд. РНТО РЭС им. А.С.
Попова, 2002, т. 1, с. 217-219.
66. Потапов А.А., Чеканов Р.Н. Обобщенный фрактальный коррелятор полей
обратного рассеяния. - Тр. VIII Всероссийской школы-семинара «Волновые
явления в неоднородных средах» (Красновидово МО, 26-31 мая 2002). -
М.: Изд. МГУ, 2002, т. 2, с. 69-70.
67. Опаленов Ю.В., Потапов А.А. Статистическая структура фрактальной
радиолокационной радонометрии. - Тез. докл. второго Международного
конгресса «Нелинейный динамический анализ (НДА-2)» (Москва, 3-8 июня
2002). - М.: Изд. МАИ, 2002, с. 230.
68. Потапов А.А. Фракталы и нечеткие множества. - Там же, с. 234.
69. Потапов А.А., Герман В.А. Классификация и распознавание объектов
фрактальными методами. - Там же, с. 235.
70. Потапов А.А. Фракталы в радиофизике и радиолокации. Основы теории
рассеяния волн фрактальной поверхностью. - Радиотехника и электроника,
2002, т. 47, №5, с. 517-544.
71. Потапов А.А., Герман В.А. Эффекты детерминированного хаоса и странный
аттрактор при радиолокации динамической системы типа растительного
покрова. - Письма в ЖТФ, 2002, т. 28, № 14, с. 19-25.
72. Potapov, А.А. and German, V.A., Effects of Deterministic Chaos and Strange At-
tractor in the Radar of Dynamics Systems of the Vegetative Cover Type, Techn.
Phys. Lett., 2002, vol. 28, no. 7, pp. 586-588.
353
73. Потапов А.А., Герман В.А. Возможность применения теории
детерминированного хаоса в моделях каналов радиолокационных и
телекоммуникационных систем. - Тез. докл. IV Межд. науч.-техн. конф. «Электроника и
информатика - 2002» (Зеленоград, 19-21 ноября 2002). - М.: МИЭТ, 2002,
т. 2, с. 219-220.
74. Потапов А.А., Чеканов Р.Н. Частотная функция когерентности
фрактального радиоканала. - Там же, с. 221-222.
75. Потапов А.А. Топология фрактальных множеств, индуцированная на
нечеткие подмножества. - Тр. XI Международной конф. по спиновой
электронике и гировекторной электродинамике (Фирсановка МО, 20-22 декабря
2002). -М.: Изд. УНЦ-1, МЭИ (ТУ), 2002, с. 281-297.
76. Потапов А.А., Герман В.А. Странные аттракторы, детерминированный хаос
и устойчивые паретианы как элементы новой модели отраженного
радиолокационного сигнала. - Там же, с. 263-280.
77. Потапов А.А. Фракталы на нечетких множествах. - Электромагнитные
волны и электронные системы, 2003, т. 8, № 1, с. 26-35.
78. Быстрое Р.П., Дмитриев ВТ., Потапов А.А., Соколов А.В. Проблемы
радиолокационного обнаружения малоконтрастных объектов // Вопросы
перспективной радиолокации (Коллективная монография) / Под ред. А.В.
Соколова. - М.: Радиотехника, 2003, с. 20-48.
79. Потапов А.А. Формализм нечетких множеств и нечетких интегралов в синтезе
новых классов фракталов и мультифракталов для задач радиолокации. -
Вопросы перспективной радиолокации (Коллективная монография) / Под
ред. А.В. Соколова. - М.: Радиотехника, 2003, с. 64-82.
80. Потапов А.А., Герман В.А. Реконструкция странного аттрактора в
отраженных радиолокационных сигналах. - Там же, с. 83-102.
81. Потапов А.А., Герман В.А., Соколов А.В. Фрактальная классификация и
кластеризация оптических и радиолокационных изображений
поверхностных и подповерхностных объектов. - Там же, с. 103-118.
82. Опаленов Ю.В., Потапов А.А. Эффективность нового метода радиолокации
на основе радоновского преобразования. - Там же, с. 132-147.
83. Опаленов Ю.В., Потапов А.А. Фрактальные и радоновские преобразования
в радиолокаторах нового поколения с обработкой на несущей частоте. -
Там же, с. 148-177.
84. Реутов В.Ф., Озерецковский И. В., Потапов А.А. Операторный метод
обработки информации в двухканальных поляриметрических радиолокаторах. -
Там же, с. 319-332.
85. Потапов А.А., Соколов А.В. Перспективные методы обработки
радиолокационных сигналов. - Тр. IX Всероссийской школы-семинара «Физика и
применение микроволн» (Звенигород МО, 26-30 мая 2003). - М: Изд. МГУ,
2003, т. 1, с. 71-72.
86. Потапов А.А., Потапов А.А. (мл.), Потапов В.А., Соколов С.А.
Радиолокационное обнаружение малоконтрастных целей с помощью топологических
признаков. - Там же, с. 73-74.
87. Потапов А.А. Фракталы, текстурные меры и динамические системы как
основа перспективных информационных технологий бортовых и наземных
радиосистем. - Тр. V Междунар. науч.-техн. конф. «Перспективные техно-
354
логии в средствах передачи информации - ПТСПИ' 2003» (Владимир, 1-4
июля 2003). - Владимир: Изд. ВлГУ, 2003, с. 230-231.
88. Потапов А.А. Фракталы, хаос, рекурсия. - Высшее образование сегодня,
2003, т. 4, с. 18-26.
89. Потапов А.А., Соколов А.В. Перспективные методы обработки
радиолокационных сигналов на основе фрактальных и текстурных мер. - Изв. РАН.
Сер. Физическая, 2003, т. 67, № 12, с. 1778-1781.
90. Потапов А.А. Фракталы, текстуры и динамический хаос как основа новых
информационных технологий в радиолокации: Часть I. Полученные результаты. -
Тез. докл. I НТК «Радиооптические технологии в приборостроении» (Сочи,
9-12 сентября 2003). - М.: Изд. МГТУ им. Н.Э. Баумана, 2003, с. 58-59.
91. Потапов А.А. Фракталы, текстуры и динамический хаос как основа новых
информационных технологий в радиолокации: Часть II. Перспективные
направления. -Там же, с. 60-61.
92. Подосенов С.А., Потапов А.А. О фрактальной геометрии пространства -
времени детерминированных структур. - Там же, с. 62-63.
93. Засовин Э.А., Потапов А.А. Анализ и синтез лакунарных фрактальных
антенн на основе классических множеств. - Там же, с. 64-65.
94. Потапов А.А., Герман В.А. Экспериментальные исследования странных
аттракторов в реальных радиолокационных процессах отражения
миллиметровых волн. - Там же, с. 66-67.
95. Потапов А.А. Методы обработки сигналов и полей на основе теории
фракталов. - Тр. I Всероссийской НТК «Методы и средства обработки
информации» (Москва, 1-3 октября 2003). - М.: Изд. МГУ, 2003, с. 559-565.
96. Потапов А.А. Фракталы, текстурные меры и динамические системы как
основа новых информационных технологий в современных задачах
радиофизики и радиолокации. - Тр. Международного междисциплинарного
симпозиума «Фракталы и прикладная синергетика» (Москва, 17-20 ноября 2003).
- М.: Изд-во МГОУ, 2003, с. 165-168.
97. Потапов А.А., Герман В.А. Влияние топологии, размеров и количества
объектов на фрактальные характеристики сложных изображений. - Там же,
с. 218-221. v
98. Подосенов С.А., Потапов А.А. Фрактальная геометрия пространства-времени
детерминированных структур. - Там же, с. 227-229.
99. Булавкин В.В., Потапов А.А., Вячеславова О.Ф., Герман В.А. Перспективы
применения теории фракталов для решения задач формирования и оценки
качества поверхности изделий. - Там же, с. 250-253.
100. Потапов А.А. Фракталы в задачах искусственного интеллекта: подходы,
модели, некоторые результаты. - Тр. Третьего расширенного семинара
«Использование методов искусственного интеллекта и
высокопроизводительных вычислений в аэрокосмических исследованиях» (Переславль-
Залесский, 26-27 ноября 2003). - М.: Физматлит, 2003, с. 76-90.
101. Потапов А.А. Перспективные информационные технологии бортовых и
наземных радиосистем на основе фракталов, текстурных мер и динамических
систем. - Тез. докл. Третьей НТК «Перспективы использования новых
технологий и научно-технических решений в изделиях ракетно-космической
техники разработки ГКНПЦ им. М.В. Хруничева» (16-18 декабря 2003). -
М.: Изд-во ИПУ РАН, 2003, с. 272-275.
355
102.Гуляев Ю.В., Никитов С.А., Матвеев Е.Н., Потапов А.А. Математика и
физика фракталов: теоремы, модели, некоторые результаты. - Тр. XLVI науч.
конф. «Современные проблемы фундаментальных и прикладных наук»
(Москва-Долгопрудный, 28-29 ноября 2003). - М.: Изд-во МФТИ, 2003, Ч.
V «Квантовая и физическая электроника», с. 103-104.
103. Гуляев Ю.В., Никитов С.А., Матвеев Е.Н., Потапов А.А. Фракталы в новых
средах передачи информации. - Там же, с. 105-107.
104. Гуляев Ю.В., Никитов С.А., Потапов АЛ, Матвеев Е.Н Фракталы в фотонных
и магнонных кристаллах. - Труды 12-й Международной конф. по спиновой
электронике и гировекторной электродинамике (Фирсановка, Московской обл.,
19-21 декабря 2003). -М: Изд. УНЦ-1, МЭИ (ТУ), 2003, с. 7-42.
105. Засовин ЭЛ, Потапов АЛ Исследования лакунарных фрактальных антенн на
основе классических множеств. - Там же, с. 523-527.
106. Подосенов СЛ, Потапов АЛ, Соколов АЛ Импульсная электродинамика
широкополосных радиосистем и поля связанных структур / Под ред. АЛ
Потапова, -М.: Радиотехника, 2003.
107. Потапов А.А. Фрактальный анализ в современных задачах радиолокации и
радиофизики. - Радиотехника, 2003, № 8, с. 55-66.
108. Потапов А.А. Новые информационные технологии на основе
вероятностных текстурных и фрактальных признаков в радиолокационном
обнаружении малоконтрастных целей. - Радиотехника и электроника, 2003, т. 48,
№9, с. 1101-1119.
109. Реутов А.П., Потапов А.А., Герман В.А. Странные аттракторы и фракталы
как основа новой динамической модели радиолокационных сигналов,
рассеянных растительным покровом. - Нелинейный мир, 2003, т. 1, № 1-2,
с. 12-27.
1 Ю.Потапов АЛ. Краткое историческое эссе о зарождении и становлении
теории дробного интегродифференцирования. - Нелинейный мир, 2003, т. 1, №
1-2, с. 69-81.
111. Потапов АЛ., Матвеев Е.Н. Фрактальная аномальная диффузия и
операторы дробного интегродифференцирования. - Тр. IX Всероссийской школы-
семинара «Волновые явления в неоднородных средах» (Звенигород МО,
24-29 мая 2004). - М.: Изд. МГУ, 2004, с. 23-24.
\\2.Потапов АЛ, Матвеев Е.Н Диффузионные уравнения дробных порядков
для описания волновых процессов во фрактальных средах. - Тр. IX
Всероссийской школы-семинара «Волновые явления в неоднородных средах»
(Звенигород МО, 24-29 мая 2004). - М: Изд. МГУ, 2004, с. 25-26.
113. Потапов АЛ., Герман В.А. Распределения фрактальных размерностей
синтезированных и реальных изображений. - Тр. IX Всероссийской школы-
семинара «Волновые явления в неоднородных средах» (Звенигород МО,
24-29 мая 2004). - М.: Изд. МГУ, 2004, с. 45-46.
114. Потапов АЛ., Герман В.А. Параметрический анализ распределений
фрактальной размерности изображений с помощью диаграммы Пирсона. - Тр.
IX Всероссийской школы-семинара «Волновые явления в неоднородных
средах» (Звенигород МО, 24-29 мая 2004). - М: Изд. МГУ, 2004, с. 47-48.
115. Потапов АЛ., Герман В.А. О применимости фрактальной концепции к
структурам во Вселенной. - Труды Государственного астрономического
356
института им. П.К. Штернберга (Тез. докл. Всероссийской
астрономической конф. ВАК - 20Q4 «Горизонты Вселенной» (Москва, 2-10 июня 2004).-
М.: Изд. ГАИШ МГУ, 2004, т. 75, с. 176-177.
116.Потапов АЛ, Герман ВЛ Фрактальная радиолокация и фрактальная
радиофизика: Этапы становления, результаты, перспективы. - Тр. X Межд.
НТК «Радиолокация, навигация, связь» (Воронеж, 13-15 апреля 2004). -
Воронеж: Изд. НПФ «Саквоее», 2004, т. III, с. 1869-1896.
Ml.Potapov, A.A. and German, V.A., Fractal Radiolocation and Fractal Radiophys-
ics: Stage in the Making, Results, Perspectives, Proc. X Int. Scientific - Research
Conf. "Radiolocation, Navigation, Communication" (Russia, Voronezh, April
13-15, 2004). - Voronezh: NPF "Sakvoee", 2004, pp. 318-341.
118. Потапов A.A. Фракталы, текстуры и детерминированный хаос в новых
информационных технологиях: синергетические подходы, модели и
результаты. - Сб. материалов Международной научн. конф. «Перспективы
синергетики в XXI веке» (Россия, Белгород, 3-5 декабря 2003 г.). - Белгород: Изд-
во БГТУ им. В. Г. Шухова, 2004, т. III, с. 5-58.
119. Потапов АЛ Фракталы и динамический хаос в современных проблемах
дистанционного зондирования. - Сб. докл. Второй Всероссийской научн.
конф. «Дистанционное зондирование земных покровов и атмосферы
аэрокосмическими средствами» (Санкт-Петербург, 16-18 июня 2004 г.). - СПб.:
Изд-во РГГМУ, 2004, т. 3, с. 51-56.
120.Герман ВЛ, Потапов АЛ Программное обеспечение алгоритмов
фрактального выделения контуров. - Тез. докл. Международной научн. конф.
«Интеллектуализация обработки информации (ИОИ 2004)» (Крым, Алушта,
14—19 июня 2004 г.). - Симферополь: Крымский научный центр НАН
Украины, 2004, с. 47.
121. Потапов АЛ, Герман В.А. Фрактальное распознавание образов. - Там же, с. 130.
122. Потапов АЛ Синергетика и радиофизические процессы в радиолокации. -
Мат. Первой Международной научно-практической конф. «Стратегии
динамического развития России: единство самоорганизации и управления» (Москва,
16-18 июня 2004 г.). - М.: Изд-во «Проспект» Российской академии
государственной службы при Президенте РФ, 2004, т. III, ч. 3, с. 129-135.
123. Потапов А. А. Топология выборки. - Нелинейный мир, 2004, т. 2, № 1, с. 4-13.
\24.Potapov, АЛ, Fractals, Texture and Deterministic Chaos in New Information
Technologies: Synergetic Approaches, Models and Results. - Proc. 2nd IEEE Int.
Conf. Circuits and Systems for Communications "ICCSC - 2004" (Russia, 30
June - 2 July 2004). - M.: MTUCI, 2004 (149. pdf).
125. Потапов АЛ Идеи синергетики, фрактальной геометрии и
детерминированного хаоса в радиолокационных технологиях: фрактальная
радиолокация и фрактальная радиофизика. - Мат. Международной
научно-практической конф. «Фундаментальные проблемы радиоэлектронного
приборостроения (INTERMATIC-2004)» (Москва, 7-10 сентября 2004 г.). - М.: МИРЭА-
ЦНИИ «Электроника», 2004, ч. 2, с. 20-25.
Мв.Потапов АЛ, Герман ВЛ Фрактальные сигнатуры: от нанометров до
парсеков. - Там же, с. 77-82.
127. Потапов АЛ, Герман ВЛ Опыт разработки первого эталонного словаря
фрактальных признаков классов целей. - Тез. докл. II науч.-техн. конф. «Радиоопти-
357
ческие технологии в приборостроении» (Сочи, 13-17 сентября 2004 г.). - М:
Изд-во МГТУ им. Н.Э. Баумана, 2004, в печати.
\2&.Опаленов Ю.В., Потапов А.А., Струков A3. Экспериментальные исследования
РЛС с полным цифровым поляризационным зондированием и фрактально-
радоновской фильтрацией. - Там же, в печати.
129. Потапов А.А. Идеи синергетики, фрактальной геометрии и
детерминированного хаоса в современных технологиях радиотехнических систем. - Сб.
докл. 2-й Всероссийской научной конф. «Управление и информационные
технологии (УИТ - 2004)» (Пятигорск, 21-24 сентября 2004 г.). -
Пятигорск: Изд-во «Спецпечать», 2004, т. 1, с. 235-242.
130. Потапов А.А. О теории и методах цифровой фрактальной обработки слабых
радиолокационных сигналов. - Тез. докл. 10-й Юбилейной межд. научн. конф.
«Теория и техника передачи, приема и обработки информации» (Туапсе,
28 сентября-1 октября 2004 г.). - Харьков: ХНУРЭ, 2004, ч. 1, с. 155-156.
131. Потапов А.А. Геометрия хаоса и фрактальная топология выборки как
основа технологий современных радиосистем. - Сб. трудов Международной
научн.-техн. конф. «Прикладная синергетика - II», посвященной памяти Ильи
Пригожина (Уфа, 20-22 октября 2004 г.). - Уфа: Изд-во УГНТУ, 2004, т. 2,
с. 100-106.
132. Потапов А.А. О стохастичности и фрактальности в современных
радиолокационных задачах. - Proc. Int. Conf. "Mode Conversion, Coherent Structures
and Turbulence - MSS-04" (Russia, November 23-25, 2004). - M.: SRI RAS -
POXOC, 2004, pp. 508-513.
133. Potapov, A.A. Fractal Radiolocation and Fractal Radiophysics: New Information
Technologies. - Proc. 13-th Int. Conf. Computational Electromagnetics and Its
Applications (ICCEA - 2004) (China, November 1-4). - Beijing: Beijing
Institute of Technology, 2004.
134.Потапов А.А., Вячеславова О.Ф. Качественная и количественная оценка
поверхности деталей машин на основе фрактальной размерности и
фрактальных сигнатур. - Обозрение прикладной и промышленной математики, 2004,
т. 11, №4, с. 901-903.
135.Потапов А.А., Герман В.А. О методах измерения фрактальной размерности
и фрактальных сигнатур многомерных стохастических сигналов. -
Радиотехника и электроника, 2004, т. 49, № 12, с. 1468-1491.
136.Потапов А.А., Булавкин В.В., Герман В.А., Вячеславова О.Ф. Исследование
микрорельефа обработанных поверхностей с помощью методов
фрактальных сигнатур. - Журнал технической физики, 2005, т. 75, №5, с. 28-45.
137.Булавкин В.В., Потапов А.А., Герман В.А., Вячеславова О.Ф. Теория
фракталов в проблеме формирования и оценки качества поверхности изделий. -
Тяжелое машиностроение, 2005, № 4-5.
138.Булавкин В.В., Потапов А.А., Вячеславова О.Ф. Синергетический подход на
основе фрактальных сигнатур в задачах качественной и количественной
оценки микрорельефа обработанных поверхностей изделий. - Нелинейный
мир, 2005, т. 3, № 1-2, с. 128-145.
139.Haralick, R.M., Shanmugan, К., and Dinstein, I., Textural Features for Image
Classification, IEEE Trans., 1973, vol. SMC -3, no. 6, pp. 610-621.
358
140. Винклер Г. Анализ изображений, случайные поля и динамические методы
Монте-Карло. Математические основы: Пер. с англ. - Новосибирск: Изд.
СО РАН, филиал «Гео», 2002.
\\\.Харалик P.M. Статистический и структурный подходы к описанию текстур.
- ТИИЭР, 1979, т. 67, № 5, с. 98-120.
142. Mandelbrot, В.В., Les Objects Fractals: Forme, Hasard et Dimension, Paris:
Flammarion, 1975.
143.Mandelbrot, B.B., Fractals: Forme, Chance and Dimension, San-Francisco:
Freeman, 1977.
144. Mandelbrot, B.B., The Fractal Geometry of Nature, New York: Freeman, 1982;
Русс, пер.: Мандельброт Б. Фрактальная геометрия природы: Пер. с англ. -
М.: Институт компьютерных исследований, 2002.
145. Mandelbrot, B.B., Fractals. - Encyclopedia of Physical Science and Technology,
New York: Academic Press, 1987, vol. 5, pp. 579-593.
146. Данилов Ю.А. Лекции по нелинейной динамике - М.: Постмаркет, 2001.
147. Герман В.А. Обнаружение малоконтрастных радиолокационных целей,
основанное на фрактальных параметрах сигналов. Дис. кандидата физ.-мат.
наук.-М.:ИРЭ РАН, 2001.
ЫЪ.Гуревич Г., Волмэн Г. Теория размерности: Пер. с англ. - М.: ИЛ, 1948.
149.Александров П.С, Пасынков В.А. Введение в теорию размерности. - М.:
Наука, 1973.
150. Федорчук В. В. Основы теории размерности. - Итоги науки и техники. Сер.
Современные проблемы математики. Фундаментальные направления. - М.:
ВИНИТИ, 1988, т. 17, с. 111-224.
\5\.Песин Я.Б. Теория размерности и динамические системы: современный
взгляд и приложения: Пер. с англ. / Под ред. Б.М. Гуревича. - М.-Ижевск:
Институт компьютерных исследований, 2002.
152. Rogers, С.A., Hausdorff Measures, Cambridge: Univ. Press, 1970.
153. Classics on Fractals, Ed. by G.A. Edgar, N.Y.: Addison-Wesley, 1993.
154. Mandelbrot, B.B., How Long Is the Coast of Britain? Statistical Self-Similarity
and Fractional Dimension, Science, 1967, vol.156, no. 3775, pp. 636-638.
\55.Takens, F., Detecting Strange Attractors in Turbulence. - Dynamical Systems
and Turbulence, Lecture Notes in Mathematics. - Berlin: Springer-Verlag, 1981,
vol. 898, pp. 366-381.
\ 56. Lee, C.-K. and Moon, F.C., An Optical Technique for Measuring Fractal Dimensions
of Planar Poincare Maps, Phys. Lett. A., 1986, vol. 114, no. 5, pp. 222-226.
157.Астафьева Н.М. Вейвлет-анализ: основы теории и примеры применения. -
УФН, 1996, т. 166, № И, с.1145-1170.
158. Новиков И.Я., Стечкин СБ. Основные конструкции всплесков. -
Фундаментальная и прикладная математика, 1997, т. 3, № 4, с. 999-1028.
159.Новиков И.Я., Стечкин СБ. Основы теории всплесков. - УМН, 1998, т. 53,
№6 (324), с. 53-128.
160. Чуй К. Введение в вэйвлеты: Пер. с англ. - М.: Мир, 2001.
161 .Добеши И. Десять лекций по вейвлетам: Пер с англ. / Под ред. АЛ. Петухова. -
М.-Ижевск: НИЦ «Регулярная и хаотическая динамика», 2001.
162. Столниц Э., де Роуз Т., СалезинД Вейвлеты в компьютерной графике: Пер.
с англ. - М.-Ижевск: НИЦ «Регулярная и хаотическая динамика», 2002.
359
\63. Berry, M.V. and Hannay, J.H., Topography of Random Surfaces, Nature, 1978,
vol. 273, no. 5663, p. 573.
\64. Stiassnie M., Agnon Y., Shemer L. Fractal Dimensions of Random Water
Surfaces, Physica D, 1991, vol. 47, no. 3, pp. 341-352.
\65.Angon, Y. and Stiassnie, M., Remote Sensing of the Roughness of Fractal Sea
Surfaces, J. Geoph. Res., 1991, vol. 96, no. C7, pp. 12773-12779.
\ 66. Stewart, C.V., Moghaddam, В., Hintz, К J.,and Novak L.M., Fractional
Brownian Motion Models for Synthetic Aperture Radar Imagery Scene
Segmentation, Proc. IEEE, 1993, vol. 81, no. 10, pp. 1511-1522.
167'. Pentland, A.P., Fractal - Based Description of Natural Scenes, IEEE Trans.,
1984, vol. PAMI-6, no. 6, pp. 661-674.
168.Keller, J.M., Chen, S., and Grownover, R.M., Texture Description and
Segmentation through Fractal Geometry, Comput. Vision, Graph., Image Process, 1989,
vol. 45, no. 2, pp. 150-166.
169. Peleg, S., Naor, J., Hartley, R, and Avnir, D., Multiple Resolution Texture
Analysis and Classification, IEEE Trans.,1984, vol. PAMI-6, no. 4, pp. 518-523.
170. Chen, C-C, Daponte, JS.,andFox, M.D., Fractal Feature Analysis and Classification
in Medical Imaging, IEEE Trans., 1989, vol. MI-8, no. 2, pp. 133-142.
17I.Mandelbrot, B.B. and Van Ness, J.W., Fractional Brownian Motions, Fractional
Noises and Applications, SI AM Rev., 1968, vol. 10, pp. 422-437.
172.Mandelbrot, B.B. and Wallis, JR., Computer Experiments with Fractional
Gaussian Noises. Part 1. Averages and Variances, Water Resour. Res., 1969, vol. 5,
no. 1, pp. 228-241.
173. Wornell, G. W. and Oppenheim, A. V., Estimation of Fractal Signals from Noisy
Measurements Using Wavelets, IEEE Trans., 1992, vol. SP-40, no. 3, pp. 611-623.
\14.Flandrin, P., On the Spectrum of Fractional Brownian Motions, IEEE Trans.,
1989, vol. IT-35, no. 1, pp. 197-199.
\15. Moghaddam, В., Hintz, K.J., and Stewart, C.V., A Comparison of Local Fractal
Dimension Estimation Methods, Pattern Recogn. Image Anal., 1992, vol. 2,
no. 1, pp. 93-96.
\16. Маркое ЕЛ. Фрактальная модель космических оптико-электронных
изображений. - Исследование Земли из Космоса, 1996, № 1, с. 56-61.
Xll.Kogon, S.M., Fractal - Based Modeling and Interpolation of non Gaussian
Images, SPIE, 1994, vol. 2308, pp. 467-477.
MS.Huand, J. and Turcotte, D.L., Fractal Image Analysis: Application to the
Topography of Oregon and Synthetic Images, J. Opt. Soc. Am. A., 1990, vol. 7, no. 6,
pp. 1124-1130.
179.Barenblatt, G.I., Zhivago, A.V., Neprochov, Y.P., andOstrovskiy, A.A., The
Fractal Dimension: A Quantative Characteristic of Ocean - Bottom Relief, Oceanol-
ogy, 1984, vol. 24, pp. 695-697.
\S0.Peli, Т., Multiscale Fractal Theory and Object Characterization, J. Opt. Soc. Am.
A., 1990, vol. 7, no. 6, pp. 1101-1112.
181. Peleg, S., Naor, J, Hartely, R, and Avnir, D., Multiple Resolution Texture Analysis
and Classification, IEEE Trans., 1984, vol. PAMI-6, no. 5, pp. 518-523.
182. Car lotto, M.J. and Stein, M.C, Detecting Man-Made Change in Imagery, Proc.
Soc. Photo - Optical Instruments Engineering, 1985, vol. 1002, no. 1, pp. 6-11.
\S3.Serra, J., Image Analysis and Mathematical Morphology, London: Academic
Press, 1982.
360
\S4.Arduini, F., Dambra, С, Dellepiane, S., et. al, Fractal Dimension by Adaptive
Mask Selection, Proc. IEEE Intern. Conf. on Acoustics, Speech and Signal
Processing, N.-Y., 1988, pp. 1116-1119.
\S5.Zhao, Y. and Zhu, H., A New Feature Based on Fractal Models and its
Applications in Automatic Target Recognition, J. Infrared and Millimeter Waves
(China), 1997, vol. 16, no. 3, pp. 215-220.
186. Du Can, Zhang Qun, and Zhang Shou-Hong, Радиолокационное обнаружение
надводных кораблей, основанное на анализе фрактальных параметров
высокого порядка, J.Xidian Univ, 1999, vol. 26, no. 6, pp. 724-727.
\Sl.Xion, M, Zhuang, Z. Xiao, S., and Guo, G, The Analyse and Recognition of
Radar Targets Scattering Signal with Chaos Multifractal Theory, J. National
University of Defense Technology (China), 1998, vol. 20, no. 2, pp. 60-64.
188. Knill, D.C, Field, D., and Kersten, D., Human Discrimination of Fractal Images,
J. Opt. Soc. Am. A., 1990, vol. 7, no. 6, pp. 1113-1123.
189. Василенко Г.К Голографическое опознавание образов. - М.: Сов.радио, 1977.
190. Trabca, E.A. and Roelting, P.G., Shape Detection Using Incoherent Illumination,
J. Opt. Soc. Am., 1967, vol. 57, no. 1, pp. 108-110.
\9\.Прэтш У.К. Цифровая обработка изображений: В 2 т.: Пер. с англ. / Под
ред. Д. С. Лебедева. -М.: Мир. 1982.
192. Реконструкция изображений / Под ред. Г. Старка: Пер. с англ. / Под ред.
Б. С. Кругликова. - М.: Мир, 1992.
193.Горелик А.Л., Скрипкин В.А. Методы распознавания. - М.: Высш. шк., 1989.
194. Фор А. Восприятие и распознавание образов: Пер. с франц. / Под ред. Г.П. Ка-
тыса. - М.: Машиностроение, 1989.
195. Селекция и распознавание на основе локационной информации./ Под ред.
А.Л. Горелика. - М.: Радио и связь, 1990.
196.Иванова B.C., Баланкин А.С., Бунин И. Ж, Оксогоев А.А. Синергетика и
фракталы в материаловедении. - М.: Наука, 1994.
197.Иванова B.C., Новиков В.У. Фракталы и прикладная синергетика (Итоги
Международного симпозиума «ФиПС-03»). - Нелинейный мир, 2004, т. 2,
№3, с. 197-202.
198. Потапов А.А. Фрактальные методы передачи информации. - Тез. Докл. III
Всеросс. конф. «Необратимые процессы в природе и технике» (24-26
января 2005 ). - М.: Изд-во МГТУ им. Н.Э. Баумана, 2005, с. 252-253.
199.Потапов А.А. Фракталы в радиофизике и радиолокации: Топология
выборки. - М.: Изд-во Университетская книга, 2005.
Литература к главе 6
1. Быстрое Р.П., Потапов А.А., Соколов А.В. и др. Проблемы
распространения и применения миллиметровых волн в радиолокации. - Зарубежная
радиоэлектроника, 1997, № 1, с. 4-20.
2. Борзое А.Б., Быстрое Р.П., Дмитриев ВТ. и др. Радиолокационные системы:
научно-технические достижения и проблемы развития техники
миллиметрового диапазона радиоволн. - Зарубежная радиоэлектроника. Успехи современной
радиоэлектроники, 2001, № 5, с. 3-49.
3. Быстрое Р.П., Выставкин А.Н., Голант М.Б. и др. Миллиметровые и
субмиллиметровые радиоволны: электровакуумные приборы, газовая и лучевая спек-
361
троскопия, элементы и устройства сверхпроводниковой электроники. -
Зарубежная радиоэлектроника, 1997, № 11, с. 3-31.
4. Воробьев Ю.П., Муравьев В. В. Активные устройства ММ-диапазона и их
применение в радиотехнических системах. - Межгосуд. НТК по
радиотехническим системам ММ-диапазона волн. - Тула, 1992, с. 32-34.
5. Лебский Ю.В., Федосеев Л. И. Супергетеродинные приемные устройства с
радиооптическим входом и проблема многолучевого приема. - Межгосуд. НТК
по радиотехническим системам ММ-диапазона волн. -Тула, 1992, с. 35-37.
6. Акиншин Н.С., Борзое А.Б., Быстрое Р.П. и др. Радиоизмерительные и
электронные системы в короткой части миллиметрового диапазона радиоволн. -
Зарубежная радиоэлектроника, 1999, № 5, с. 22-66.
7. Багет. Семейство ЭВМ для специализированных применений. - М.: КБ
«Корунд», 2000.
8. Питерз Л. Будущее микропроцессоров. - PC-magasine, 1997, № 6, р. 58-62.
9. Стоун ДМ. Будущее массовой памяти. - PC-magasine, 1997, № 6, р. 78-85.
10. Даскалов Я.. Янева Д., Гешева Е. Информационные технологии, 1998, № 1,
с. 37-41.
11. Chen Nuxing, Deng Ge, and Su 17., Guofangkeji daxue xuebao, J. Nat. Univ.
Def. TechnoL, 1998, vol. 20, no. 1, с 68-72.
12. Опаленов Ю.В., Потапов А.А., Соколов А.В. Цифровые когерентные
радиолокационные станции со сложным сигналом в диапазонах сантиметровых и
миллиметровых волн. - Электромагнитные волны и электронные системы,
1996, т. 1,№1,с. 103-107.
Литература к главе 7
1. Борзое А.Б., Быстрое Р.П., Дмитриев ВТ. и др. Радиолокационные системы:
научно-технические достижения и проблемы развития техники
миллиметрового диапазона радиоволн. - Зарубежная радиоэлектроника, 2001, № 5, с. 3-49.
2. Not on the same wavelength, Air Traftiq Manag., 1997, vol. 6, no. 3, pp. 64-65.
3. Johns, J.C., Enhanced capabilety of GPS and its augmentation systems meets of
the 2 1st century, ICAO Journal [ICAO bull], 1997,vol. 52, no.9, pp. 7-10.
4. Klass} Ph.J., New GPS policy attempts to resolve key user issues, Aviat. Week
and Space TechnoL, 1997, vol. 146, no. 24, pp. 42-43.
5. Logeais, E. and le, G.P.S., Dans le monde du genie civil et de la construction,
XYZ: Rev. Assoc, fr. topol, 1997, vol. 19, no. 72, pp. 55-57.
6. Million, C, Taerotrianqulacion appuyee sur des mesures GPS: Le traitement des
mesures, XYZ: Rev. Assoc, fr. topol, 1997, vol. 19, no. 72, pp. 58-61, 63.
7. Zarraoa, Nestor, Maif Wolfgang, and Jungstand, Arne, Das russische
satelitengestzte Navigationsystems GLONASS, ein Uberblik, Z. Veremessugsw.,
1997, vol. 122, no. 9, pp. 425-432.
8. Kuranov, Viktor and Lovenko, Yuri, Capability and perfomance make GLONASS
suitable for navigation in all phafes of flight, ICAO Journal [ ICAO Bull.], 1997,
vol. 52, no. 9, pp. 11-12,26.
9. Krammer, D., Microwaves's comeback, Air Traffic Manag., 1997, vol. 6, no. 3,
pp. 14-18.
362
10. Иностранная печать об экономическом, научно-техническом и военном
потенциале государств - участников СНГ и технических средствах его
выявления. Сер. Технические средства разведывательных служб
капиталистических государств. - ВИНИТИ, 1998, № 1, с. 24-25.
11. Young, Steven, Jones, Denise, Bryant, Wayne and Eckhardt, Dave, Savely import
surface capacity, Aerosp. Amer., 1998, vol. 36, no. 5, pp. 22-27,27.
12. Aribus gives nod to EGPWS, Aviat. Week and Space Technol., 1998, vol. 148,
no. 17, p. 50.
13. Иностранная печать об экономическом, научно-техническом и военном
потенциале государств - участников СНГ и технических средствах его
выявления. Сер. Технические средства разведывательных служб
капиталистических государств. -ВИНИТИ, 1998, № 3, с. 7-10.
14. Cjllard, В., Rev. techn., Serv techn. navig. aer., 1997, no. 52. pp. 3-20.
15. Акиншин КС, Быстрое Р.П., Петров А.В., Садыков P.P.
Радиолокационные системы обнаружения наземных объектов в миллиметровом диапазоне
радиоволн на летательных аппаратах. - Научный вестник МГТУГА. Сер.
Радиофизика и радиотехника, 2000, № 24, с.94-111.
16. Добырн В.В., Катин А.Ю., Немое А.В. -Изв. ГЭТУ, 1997, № 508, с.13—18.
17. Быстрое Р.П., Петров А.В., Соколов А.В. Радиолокационные системы
обнаружения и связи в миллиметровом диапазоне волн. - Тр. VII
Всероссийской школы-семинара «Волновые явления в неоднородных средах», т.З. -
М.: ИРЭ РАН, 21-22 июня 2000, с. 9-11.
18. Быстрое Р.П., Петров А.В. Радиолокационная система обзора летного поля
в ММ-диапазоне радиоволн. -Там же, с. 11-13.
19. Быстрое Р.П. Радиолокационные системы обнаружения наземных объектов
в короткой части миллиметрового диапазона радиоволн. В 2-х томах.Т.2. -
М.: Изд-во «Технология», 2002.
20. Еетихеее КН., Засовин Э.А., Мировицкий ДМ, Прозоровский Ю.С.
Бортовое радиоэлектронное и оптоэлектронное оборудование современных и
перспективных летательных аппаратов. -М: МИРЭА, 1994.
21. Aviat, Week and Space Technol, 1996, vol. 144, no. 14, p. 46.
22. Масловский Э.Б., Троицкий В.Н, Козлов А.И. Методы и средства
дистанционного радиозондирования. - Hayчн. вестник МГТУ ГА, 1995, с. 96-98.
23. Иностранная печать об экономическом, научно-техническом и военном
потенциале государств - участников СНГ и технических средствах его
выявления. Сер. Технические средства разведывательных служб
капиталистических государств. -ВИНИТИ, 1996, № 6, с. 14-16.
24. Russell, Mark E., Crain, Arthur, Curran, Anthony, et al, Millimeter-wave radar
seneor for automotive inteligent cruise control (ICC), IEEE Trans. Microwave
Theory and Techn., 1997, vol. 45, no. 12, pp. 2444-2453.
25. IETE Techn. Rev., 1995, vol. 12, no. 5-6, pp. 383-386.
26. Быстрое Р.П., Потапов А.А., Соколов А.В. и dp. Проблемы
распространения и применения миллиметровых волн в радиолокации. - Зарубежная
радиоэлектроника, 1997, № 1, с. 4-20.
27. Correcting for anttenuation with a dual beam cloud radar [Part. 1 Workshop
Synergy Act. Instrum. Earth Radiat. Miss.,Geesthacht], 12-14 Nov. 1997, Guvot
Anne,Testud Jacques, GKSS. [Rert.], 1998, e 10, pp.111-114.
363
28. Radio Sci., 1997, vol. 32, no. 3, pp. 1279-1296.
29. Anseimo Joseph С and Nordwall Bruce D., GPS threataverted.LEOs win big at
WRC, Aviat. Week and Spact Technol., 1997, vol. 147, no. 22, pp. 30-31.
30. Быстрое Р.П., Самойлов СМ., Соколов А.В. Применение миллиметровых
волн в системах связи. - Зарубежная радиоэлектроника, 1999, № 3, с.60-71.
31. Лившиц И. К, Рожков В.М., Рябов Б.А. Использование ИСЗ связи в
диапазоне ММВ. - Зарубежная радиоэлектроника, 1987, № 5, с.41-50.
32. Бирюков В.А., Гуляев Ю.В., Соколов А.В. Применение миллиметровых волн
на сотовых линиях связи небольшой протяженности в городе. -
Радиотехника, 1995, № 11, с. 3-5.
33. Куликов А.Н.^Лаврентьев Ю.В., Сильвинский СВ. и др. Распространение
ультракоротких волн в городе / Под ред. Г.А. Пономарева и А.В. Соколова. -
Радиотехника, 1991, т. 42, с. 166-180.
34. Денисов Ю.И., Киселев В.Д., Мягков В.Ю., Щербина A.M. Модели и методы
решения задач проектирования и испытания АСУ. -М: Изд-во ВПК, 1997.
35. Халкин.В.Н. Приемопередающая станция в диапазоне 42,5-43,5 ГГц для
цифровых радиорелейных линий. - Междунар. научн.-техн. конф. по
радиотехническим системам миллиметрового диапазона радиоволн. - Тула,
1992, с. 25-26.
36. Алыбин ВТ. Пути построения СВЧ-устройств для радиорелейных линий и
спутниковых средств связи. - Матер. 5-й Крымской конф. - Севастополь,
1995,с.11-15.
37. Ледов.В.Н. Негирев А.А. Королев Л.С. Параметрический ряд
широкодиапазонных электрически перестраиваемых гибридно-интегральных
генераторов КВЧ-диапазона. - Междунар. НТК по радиотехническим системам
миллиметрового диапазона радиоволн, Тула, 1992, с. 37.
38. IntJ, Rem. Sens., 1996, vol. 17, no.7, pp. 1279-1292.
39. Гилъман В.Г., Асанов ВД. Обзор информации по проблеме окружающей
среды и природных ресурсов. - ВИНИТИ, 1998, № 1, с. 82-92.
40. Вопросы проектирования и опыт разработки современных
радиотехнических систем и приборов. - Махачкала: Изд-во Даг. ГТУ, 1996, с.84-90.
41. Пашков Б. А. Квантовая электроника в медицине и биологии. - Матер.
2-й Всеросс. научн.-практ. конф. по МИЛ-терапии. - Москва, 1995, с. 20-23.
42. Птицына Н. Г., Виллорези Дж., Дорман Л. И. и др. Успехи физ. наук, 1998,
т. 168, №7, с. 767-791.
43. Мовчан Л. Н., Виленчик Л. С, Киева Ф. В. - Докл. 3-й Междунар. конф.
«Спутниковая связь» (ICSC98, Москва, 22-24 сентября 1998), т. 2
-Москва, 1998, с. 250-254.
44. De Seze, R., Epidemiology, Human Experiments and Overexposures to Assess
Health Risk, Meas. + Contr., 1998, vol. 31, no. 6, с 176-179.
45. Gabriel, C, Biological Effects of RF and Microwaves, Meas. + Contr., 1998, vol. 31,
no. 6, с 166-169.
46. Афромеев В. И., Богданов В. П., Колондар Е. А. и др. - Электродинамика и
техника СВЧ и КВЧ, 1998, т. 6, № 1-2, с. 6-15.
47. Лебедева К Н. - Биомедицинская радиоэлектроника, 1998, № 1, с 24-36.
48. Родштат И.В. - Биомедицинская радиоэлектроника, 1998, № 3, с. 11-16.
364
49. Гвоздев В. И., Подковырин СИ. Электроника и информатика-97. - Тез.
докл. 2-й Всерос. НТК с междунар. участием (Зеленоград, 25-26 ноября
1997), ч. 2. — Москва,1997, с. 111.
50. Арзуманов Ю. Л., Бецкий О. В., Девятков К Д., Лебедева И. Н - Тез. докл. 52-й
Науч. сессии, посвящ. Дню радио, ч. 2. — Москва, 1997, с. 139-140.
51. Афромеев В.И., Загуральский Н.Ф., Кругликов И. Т. - Электродинамика и
техника СВЧ и КВЧ, 1997, т. 5, № 4, с. 22-25.
52. Axeyel, С, Electromagnetic Waves and Rebonant Type Interactions with Living
Cells: A Growth Rate Modelization. - Тр. ИИЭР-Рос. конф. «1997 микроволн,
электрон, больш. мощн.; измерения, идентифик., применение»
(Новосибирск ИИП-МЭ'97 23-25 сентября 1997). - Новосибирск, 1997, с. 169-175.
53. Афромеев В. И., Житник Н Е, Крысь В. В. и др. - Биомедицинская
радиоэлектроника, 1998, № 2, с. 67-69.
54. Hoshi Naoya, Nikawa Yoshio, Kawai Keiji, and Ebisu Shigevuki, Application of
Microwaves and Millimeter Waves for the Characterization of Teeth for Dental
Diagnosis and Treatment, IEEE Trans., Microwave Theory and Techn., 1998,
vol. 46, no. 6, с 834-838.
55. Кабисов P.K. - Биомедицинская радиоэлектроника, 1998, № 1, с. 48-55.
56. Синицын НИ. , Петросян В.И., Елкин В.А. и др. - Биомедицинская
радиоэлектроника, 1998, № 1, с. 5-23.
57. Лебедева А.Ю.- Биомедицинская радиоэлектроника, 1998, № 2, с. 49-54.
58. Бецкий О.В., Девятков Н.Д., Кислое В.В. - Биомедицинская
радиоэлектроника, 1998, № 4, с. 13-29.
59. Lohner, A.K., Improved Asimuthal Resolution Offorwardlooking SAR by
Sophistikated Antenna Illumination Function Desing, IEE Proc. Radar, Sonar and
Navig. [IEE Proc. F.], 1998, vol. 145, no. 2, pp. 128-134.
60. Пат. 2129286 (Россия), МКИ6 G 01 S 13/90/ Митрофанов ДГ.
61. Иммореев И.Я. Сверхширокополосная радиолокация: основные
особенности и отличия от традиционной радиолокации. - Электоромагнитные волны
и электронные системы, 1997, т. 2, № 1, с. 81-88.
62. Xiao, Hiai-Tie,Zhuang. Zhao-Wen, Guo, Xiu Huango, et al., Hongwai yu haomibo
xaomibo xuebao. -J., Infrared and Millimeter Waves [яныцзю], 1998, vol. 17,
no. 4, pp. 262-266.
63. Nordwall and Bruce, D., Ultra-Wideband Radardetects Buried Mines,
Aviat.Week and Space Technol., 1997, vol. 146, no. 13, pp. 63-64.
64. Jane's Def. Weekly, 1997, vol. 27, no. 9, с 6.
65. Phase Coded, Micro-Power Impulse Radar Motion Sensor. Пат.5519400 (США),
МКИ6 G 01 S 13/58/ Т.Е. McEwan.
66. Electronic License Plate Apparatus and Method: Пат. 5579008 США, МКИ6 G
01 S 13/80 / Hulderman Carry N, Hagelberg Alien С
67. Precede et dispositif d'integration coherente multi-rafales pour radar doppler a
impulsions: Заявка 2736161 Франция, МПК6 G 01 S 13/52 / Poinsard Henri,
Zolesio Jean Luc.
68. Three Dimensional Tracking- by Array Doppler Radar: Пат. 5570094 США,
МКИ6 G 01 S 13/72 / Armstroog B. S. R.
365
69. Radar for Vibration Detection: Заявка 2310099 Великобритания, МКИ6 G 01 H
9/00 / Harper M. F. L.; Mecon Ltd.
70. Zhao Hongliang, Mao Shiyi, and Li Shaohong, Beijing hangkong hangtian daxue
xuebao=J. Beijing Univ. Aeron. and Astronaut, 1998, vol. 24, no. 2, pp. 153-156.
71. Иностранная печать об экономическом, научно-техническом и военном
потенциале государств - участников СНГ и технических средствах его
выявления. Сер. Технические средства разведывательных служб
капиталистических государств. -ВИНИТИ, 1998, № 9, с. 25-32.
72. Hanuska J., Kail L. Polarizacia radiolokacneho signalu ako klasifikacny parameter v
pasivnej radiolokacii. - Sb. Vojen. akad. Bme. B, 1995(1996), № 1, s. 83-92 (Чеш.).
73. Yanglin, Zhou Yiyu, and Sun Zhongkang, Guofang keji daxue xuebao=J. Nat.
Univ. Def. Technol., 1998, vol. 20, no. 2, p. 4953.
74. Systeme et precede de regulation du пощЬге de plots a traiter dans un radar:
Заявка 2741956 Франция, МКИ6 G 01 S 13/52 / Brethes A.; Thomson CSF.
75. Баландин B.C., Головинский КВ., Дорофеев В.В., Куц В.А. Перспективы
развития приемных устройств систем радиоэлектронной борьбы. - Зарубежная
радиоэлектроника, 1987, № 12, с. 78-92.
76. Precede dc brouillage perfectionne: Заявка 2740226 Франция. МПК6 G 01 S
7/38 / Morand Jean Francois; Dassault Electronique — № 8710591.
77. Пат. 2108678 Россия, МПК6 Н 04 К 3/00 / Антонов О.Е., Антонов М.О.,
Салютов В.П.
78. Юдин Л., ФомичевК - Электроника: Наука, технология, бизнес, 1999, № 1,
с. 48-51.
79. Юдин Л., Фомичев К - Электроника: наука, технология, бизнес, 1999, № 1,
с. 48-51.
80. Кузьмин Г. В., Самушкин А. И., Шевчук В. И., Игольников С. В. -
Радиотехника, 1998, №2, с. 84-85.
81. Winnall, S.T., Lindsay, A.C., and Knight, G.A., A wideband microwave photonic
phase and freqyenqy shifter, IEEE Trans. Microwave Theory and Techn., 1997,
vol. 45 no. 6, pp. 1003-1006.
82. Родионов В.В. - Радиотехника, 1999, № 3, с. 9-14.
83. Wu Sentang, Xu Guangfei, and Tang Yong, Beijing hangkong hangtian daxue xue-
bao=J. Beijing Univ. Aeron. and Astronaut., 1999, vol. 25, no. 4, pp. 410-413.
84. Kogon, SM, Williams, D.B., and Holder, EJ., Exploiting Coherent Multipath
for Mainbeam Jammer Suppresson, ЛЕЕ Proc. Radar. Sonar and Navig., 1998,
vol. 145, no. 5, pp. 303-308.
85. Poly-Frequency CW Doppler Radar System with Leakage Cancellation and
method: Пат. 5861837 США, МПК6 G 01 S 7/285 / Richardson David L,
Szmurlo Thomas £.; Northrop Grumman Corp.
86. Radioaltimetre protege contre diverses detections: Заявка 2741958 Франция,
МКИ6 G 01 S 13/88 / Dalle Michel, Pouit Christian: Aerospatiale Soc.Nationale
Industrielle7.
87. Virtual noise radar waveform for reduced radar detectability: Пат. 5861834
США, МПК6 G 01 s 7/38 / Sauer Mark P., Kremer Larry R, Ziegler John A.;
Esco Electronics Corp.
88. Radar signal selection based upon antenna bearing: Пат. 5497162 США, МКИ6
G 01 S 13/00/ Kaiser S.G.; Northrop Grumman Corp.
366
89. Жибуртович НЮ. - Радиотехника, 1998, № 4, с. 59-68.
90. Dispositif de reduction de bruit dans in recepteur radar: Заявка 2760535
Франция, МПК6 G 01 S 7/02 / Kemkemian Stephane, Lacomme Philippe; Thomson
CSF SA.
91. Небабин ВТ., Белоус О.И. Методы и техника противодействия
радиолокационному распознаванию. - Зарубежная радиоэлектроника, 1987, № 2, с. 38-47.
92. Пат. 3938151 /США/. НКИ 343/18.
93. Пат. 4115775 /США/. НКИ 343/18.
94. Пат. 3852747 /США/. НКИ 343/18.
95. Пат. 3866226 /США/. НКИ 343/18.
96. Пат. 4199166 /США/. НКИ 343/18.
97. Пат. 3010103 /США/. НКИ 343/18.
98. Пат. 4005424 /США/. НКИ 343/18.
99. Wanstal, Д., InteraviaJ984, vol. 33, no. 7.
100. Grahnam. IV., Flight Intern, 1982, vol. 122, no. 3830.
\0\.Хайкин С, Кес.чер С, Карри С - ТИИЭР, 1979, т. 67, № 2.
102. Пат. 3774208 /США/. НКИ 343/18.
103. Пат. 4037228/США/. НКИ 343/18.
104. Пат. 2134740 /Великобритания/. НКИ Н4Д.
105. Brosselin, S.f Science & Vic, 1985, vol. 8, no. 815.
106. Небабин В.Г.,Сергеев В.В. Методы и техника радиолокационного
распознавания. - М.: Радио и связь, 1985, с. 82.
107. Wanstall, Я., Interavia, 1884, vol. 33, no. 7.
108. Пат. 3371345 /США/. НКИ 343/18.
109.8-я Межд. школа-семинар «Электродинамика и техника СВЧ и КВЧ» (Охо-
тиио, 26 авг.-7 сент. 1996), 1996, с. 177.
110. Knotl, Е./\, Suppression of Efge Scattering with Impedance Strings, IEEE Trans.
Antennas and Propag., 1997, vol. 45, no. 12, pp. 1768-1773.
11 \.Ziolkowski Richard, The Desing of Maxvvellian Absorbes Fornumerical
Boundary Condicions and for Practical Applications Using Engineered Artificial
Materials, IEEE Trans. Antennas and Propag., 1997, vol. 45, no. 4, pp. 656-671.
Wl.Gao Zhengping and Rao Li, Dianzi keji daxue xuebao=J. Univ. Electron, and
Technol. China, 1998, vol. 27, no. 2, pp.* 136-139.
\\3.Kudo, Т., Mitsui, Т., and Kariya, Г., Mitsubishi densen kogyo jiho=Mitsubishi
Cable Ind. Rev., 1998, no. 94. pp. 48-57.
,114. Verfahren zum Schutz von Objekten vor einfallenden elektromagnetischen Wel-
len: Заявка 19543283 Германия, МПК6 Н 01 Q 17/00 / Nimtz Gunier, Enders
А с him.
115. Broadband microwave absbrber: Пат. 5543796 США, МПК6 Н 01 L 17/00 /
Thomas Gerald F., H of/her James A., Loral Vought Systems Corp.
116. Розанов К.Н. - Радиотехника и электроника, 1999, т. 44, № 5, с. 526-530.
117. Aviat. Week and Space Technol.. 1996, vol. 114. no. 6, pp. 26-28.
118. Jane's Def. Weekly, 1997, vol. 27, no. 9, с 3.
\\9.Малай И.М. Вопросы защиты информации. — Докл. паучого семинара
«Средства и способы защиты техники и информационных систем» (Москва,
1996), 1997, № 1-2, с. 53-54.
367
Библиотека журнала «Радиотехника»
Серия «Радиолокация»
Миллиметровая радиолокация
с фрактальной обработкой
Авторы
Быстров Рудольф Петрович
Потапов Александр Алексеевич
Соколов Андрей Владимирович
Зав. редакцией Л. А. Разум
Изд. № 9. Сдано в набор 01.10.2004.
Подписано в печать 01.03.2005. Формат 60x90 1/16.
Бумага офсетная. Гарнитура Тайме.
Печать офсетная
Печ. л. 23. Тираж 600 экз. Зак. № 3523.
Издательство «Радиотехника».
10703 1, Москва, К-31, Кузнецкий мост, д. 20/6.
Тел./факс: 921-48-37; 925- 78-72, 925-92-41.
E-mail: info@radiotec.ru
www, radiotec.ru
Отпечатано в ООО ПФ "Полиграфист".
160001, г. Вологда, ул. Челюскинцев, д. 3.
ми л JVtEPO;A-v*аи л kV "С"-^к>л.н й б-*б#т;#
вт**ы:
Быс ров Рудоль»* Петрович (1938 г. р.)-докт. техн. наук,
рофессо», зас уженный деятель науки РФ, советник Российской
Академии рак-тных и артиллерийских наук (РА РАН).
Область научных интересов: радиолокационные системы!
отапов Александр Алексеевич (1951 г. р.)-докт. физ.-мат. наук,
член-корр. Академии инженерных наук им. А. М. Прохорова и
"оссийской Академии естественных наук, главный научный
сотр а ник ИРЭ РАН.
Область научных интересов: радиофизика, рассеяние и дифракция
электромагнитных волн, радиолокация, распознавание,'и обработка
изображений, детерминированный хаос, современная топология,
фрактальный анализ. ^
Соколов Андрей Владимирович (1921 г. р.)-докт. техн наук,
профессор, действительный член Академии инженерных наук
им. А. М. Прохорова и Международной Академии информатизации,
ведущий научн. сотр. ИРЭ РАН, лауреат двух Гос. премий СССР и
премии СМ СССР.
Область научных интересов: распространение миллиметровых
радиоволн, волоконно-оптические системы и устройства, обработка
радиолокационных сигналов.
ISBN 5-88070-064-Х
Р 'ИОТЕХНИКА
Тел./факс: (095) 925-9241
E-mail: info@radiotec.ru
Http://www. radiotec.ru
7Q^RRn 7 ППЛ4<ч