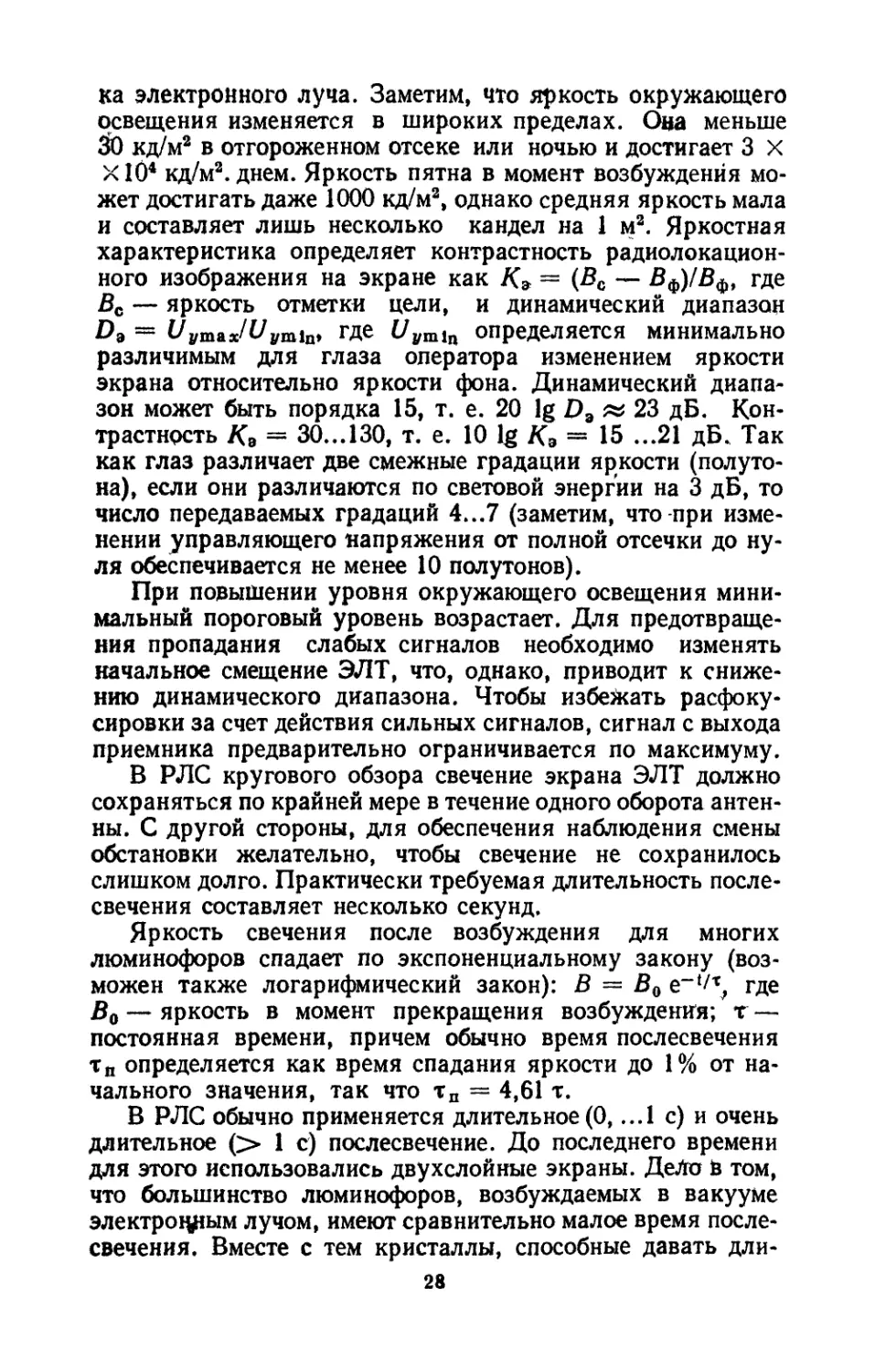
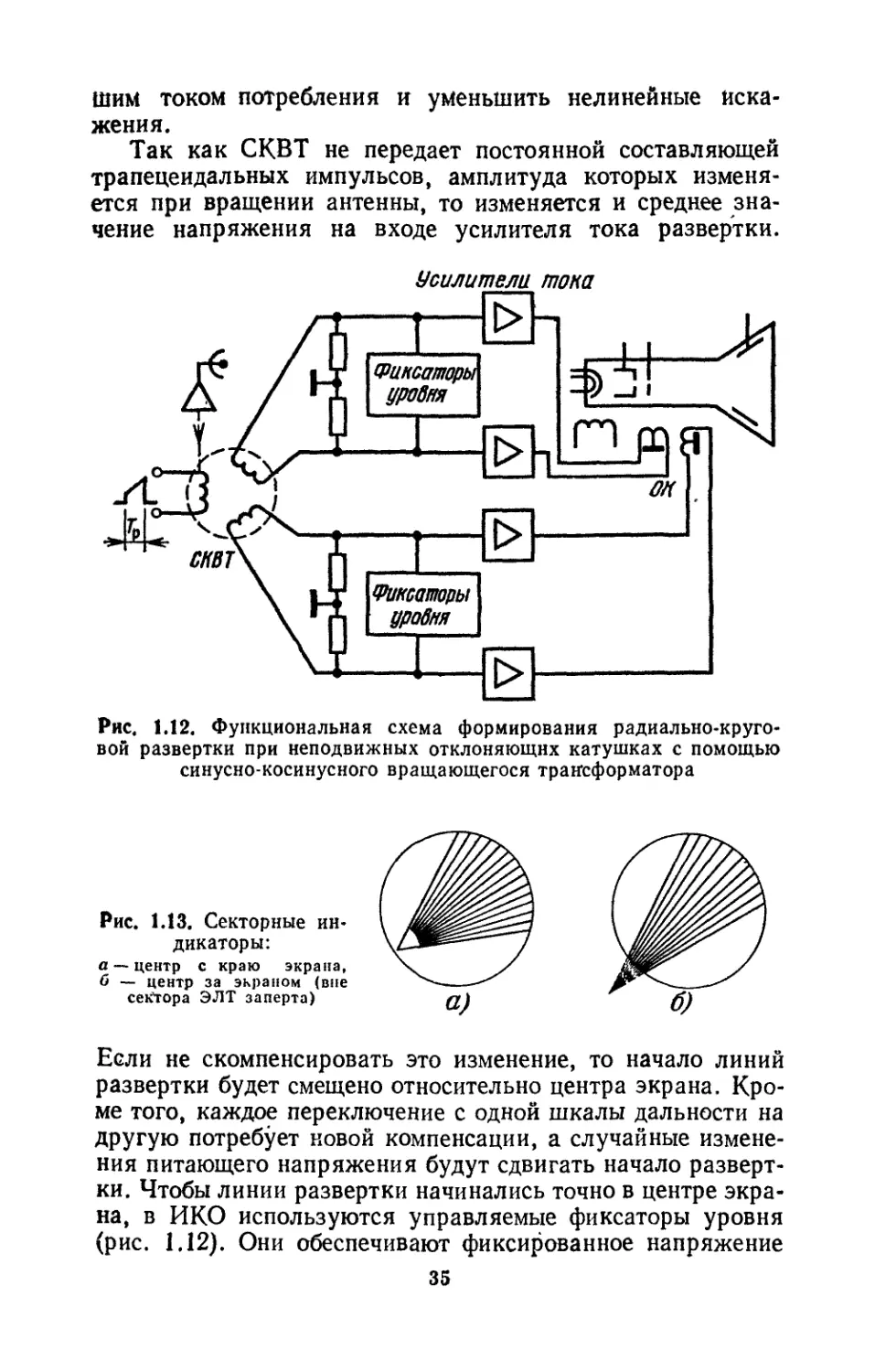
/











































































































































































































































































































































































































































































































Автор: Финкельштейн М.И.
Теги: электротехника радиолокация радиотехника радиосвязь серия радио и связь
Год: 1983




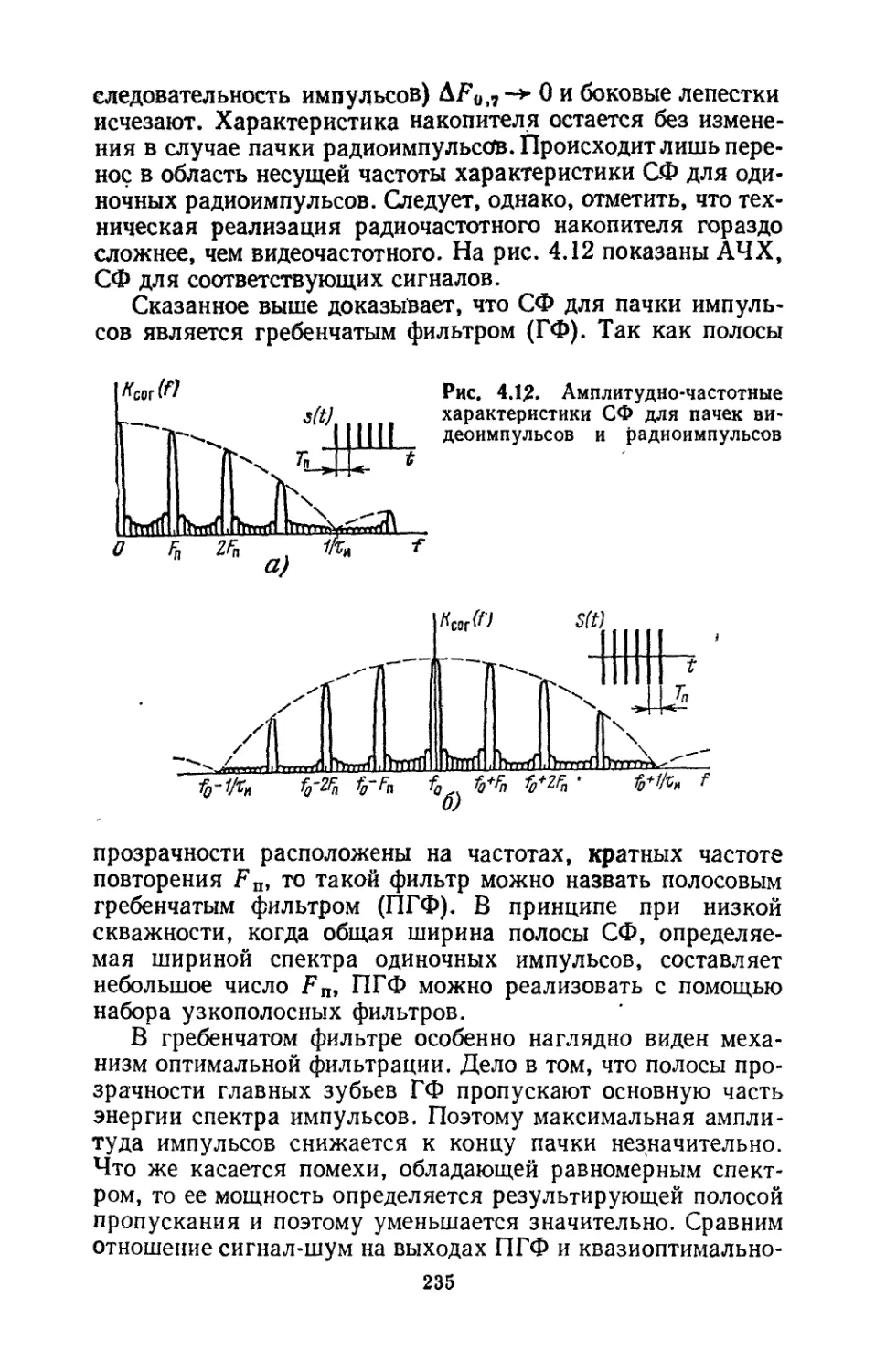
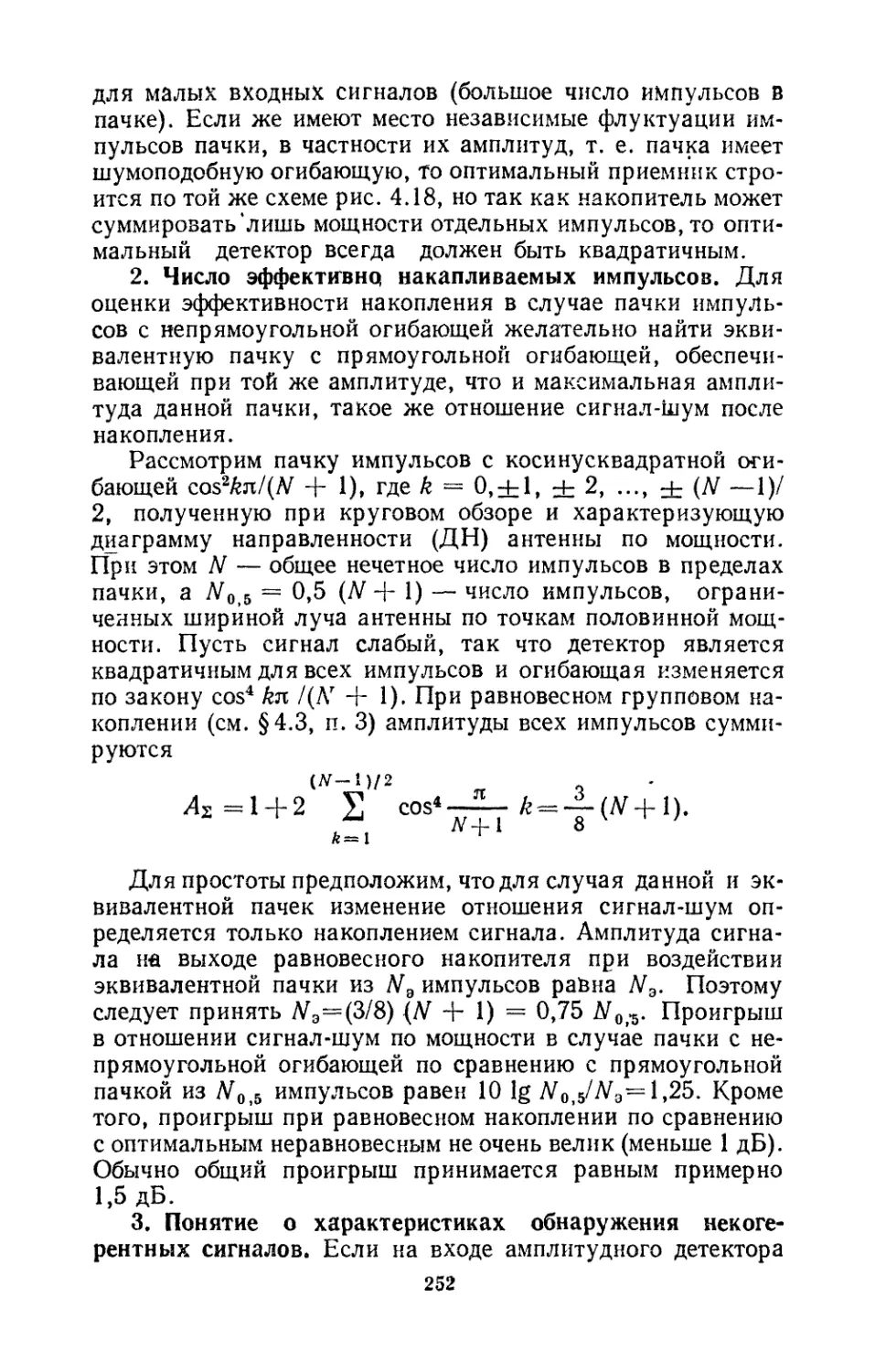
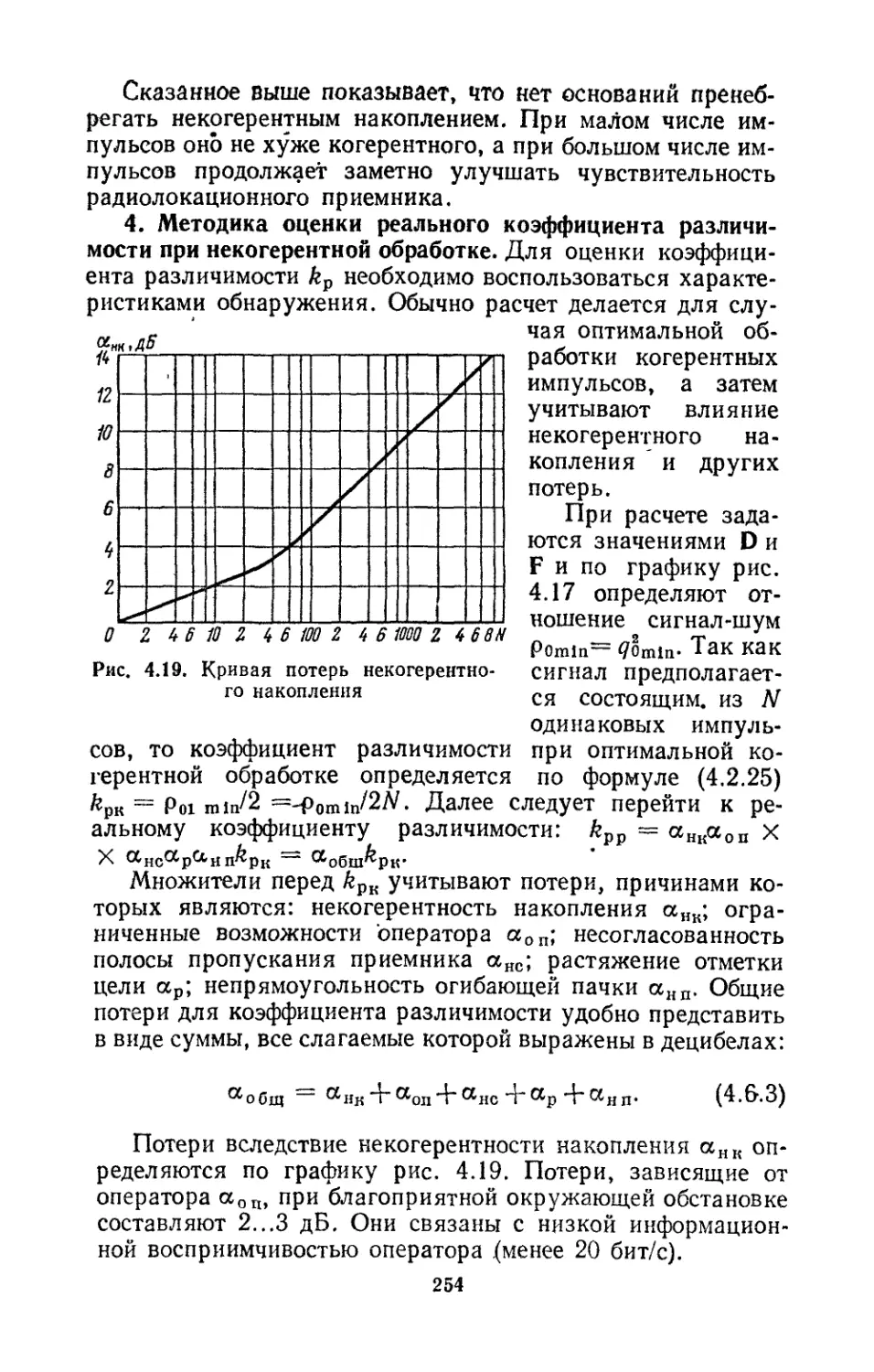
Текст
М. И. Финкельштейн
ОСНОВЫ
РАДИОЛОКАЦИИ
Издание 2-е, переработанное и дополненное
Утверждено Управлением учебными заведениями МГА
в качестве учебника для высших учебных заведений
гражданской авиации.
Москва «Радио и связь» 1983
ББК 32.95
Ф59
УДК 621.396.96@75)
Финкельштейн М. И.
Основы радиолокации: Учебник для вузов. — 2-е
Ф59 изд., перераб. и доп. — М.: Радио и связь, 1983. —
536 с, ил.
В пер.: I р. 20 к.
Излагаются принципы построения когерентных и нскогерентных ра-
радиолокационных станций. Рассмотрены свойства целей, обработка сигна-
сигналов и борьба с помехами, методы обзора пространства, обработка к ото-
отображение информации. В отличие от 1-го издания 1973 г. введен матери-
материал о цифровой и пространственно-временной обработке, об адаптации
и др. Книга переработана в соответствии с современным состоянием ра-
радиолокации и тенденциями развития радиолокационной техники граждан-
гражданской авиации.
Для студентов вузов гражданской авиации. Полезен студентам ра-
радиотехнических факультетов других вузов, а также инженерам, работаю-
работающим в промышленности и связанным с эксплуатацией РЛС.
2402020000-165 ББК 32.95
Ф 046@1)-83 1Й"~^ 6Ф2.4
Рецензент: Кафедра Московского авиационно!о института
(зав. кафедрой проф. д-р техн. наук П. А. Бакулев)
Редакция литературы по конструированию и технологии
производства РЭА
© Издательство «Радио и связь-», 1983
ПРЕДИСЛОВИЕ КО ВТОРОМУ ИЗДАНИЮ
Как и в первом издании учебника автор при распо-
расположении и отборе материала исходил из особенностей
наземной и бортовой радиолокационной аппаратуры
гражданской авиации, которая изучается студентами, и
старался увязать требования первоначального изучения
курса на инженерном уровне с современным состоянием
вопроса. При этом учитывались особенности работы ин-
инженеров по эксплуатации, для которой вопросы анализа
более важны, чем вопросы синтеза.
Переработка касалась перераспределения материа-
материала (например, значительное увеличение вопросов циф-
цифровой обработки по сравнению с аналоговой, выделение
в отдельную главу устройств борьбы с помехами и др.),
включения ряда новых вопросов (например, пространст-
пространственно-временной обработки, ряда особенностей обработ-
обработки и отображения радиолокационной информации в со-
современных автоматизированных системах управления
воздушным движением и др.), методической перестрой-
перестройки книги (например, изложение с 'единых позиций всех
когерентных РЛС, в том числе использующих системы
СДЦ). Весь материал книги был пересмотрен под углом
зрения современного состояниа радиолокации, радиоло-
радиолокационной техники гражданской авиации и тенденций
ее развития.
Автор сердечно благодарит проф. П. А. Бакулева и
коллектив возглавляемой им кафедры за полезные заме-
замечания при рецензировании, проф. А. И. Козлова, доц.
В. И. Карпухина и канд. техн. наук В. Н. Метелкина,
внимательно прочитавших рукопись и давших многочис-
многочисленные советы, которые были учтены при доработке ру-
рукописи, а также М. М. Грунину и Л. П. Дмитриеву,
оказавших большую помощь при оформлении рукописи.
ВВЕДЕНИЕ
1. Предмет радиолокации.
Радиолокация — это область радиоэлектроники, решаю-
решающая задачи радиолокационного наблюдения различных объ-
объектов, т. е. их обнаружения, измерения координат и пара-
параметров движения, а также выявления некоторых структур-
структурных или физических свойств путем использования отражен-
отраженных или переизлученных объектами радиоволн либо их
собственного радиоизлучения (слово локация происходит
от латинского 1оса1ю — размещение, расположение).
Информация, получаемая-в процессе радиолокационного
наблюдения, называется радиолокационной. Устройства
радиолокационного наблюдения называются радиолокаци-
радиолокационными станциями (РЛС) или радиолокаторами. Сами же
объекты радиолокационного наблюдения именуются радио-
радиолокационными целями или просто целями. При использова-
использовании отраженных радиоволн радиолокационными целями яв-
являются любые неоднородности электрических параметров
среды (диэлектрической и магнитной проницаемостей^ про-
проводимости), в которой распространяется первичная радио-
радиоволна. Сюда относятся летательные аппараты (самолеты,
вертолеты, метеорологические зонды и др.), гидрометеообра-
зования (дождь, снег, град, облака и т. д.), речные и морс-
морские суда, наземные объекты (строения, автомобили, само-
самолеты в аэропортах и др.), всевозможные военные объекты
и т. п. Особым видом радиолокационных целей являются
астрономические.
Источником радиолокационной информации является
радиолокационный сигнал. В зависимости от способов его
получения различают следующие виды радиолокационного
наблюдения.
Радиолокация с пассивным ответом, основанная на том,
что излучаемые РЛС колебания—зондирующий сигнал —
отражаются от цели и попадают в приемник РЛС в виде
отраженного сигнала или, как его еще называют, эхо-сиг-
эхо-сигнала (рис. 1, а). Такой вид наблюдения иногда называется
также активной радиолокацией с пассивным ответом. Он
является наиболее распространенным. Важным требовани-
требованием к целям в этом случае является отличие их отражающих
свойств от отражающих свойств окружающей среды (радио-
(радиолокационный контраст).
Радиолокация с активным ответом, именуемая актив-
активной радиолокацией с активным ответом, просто активной
4
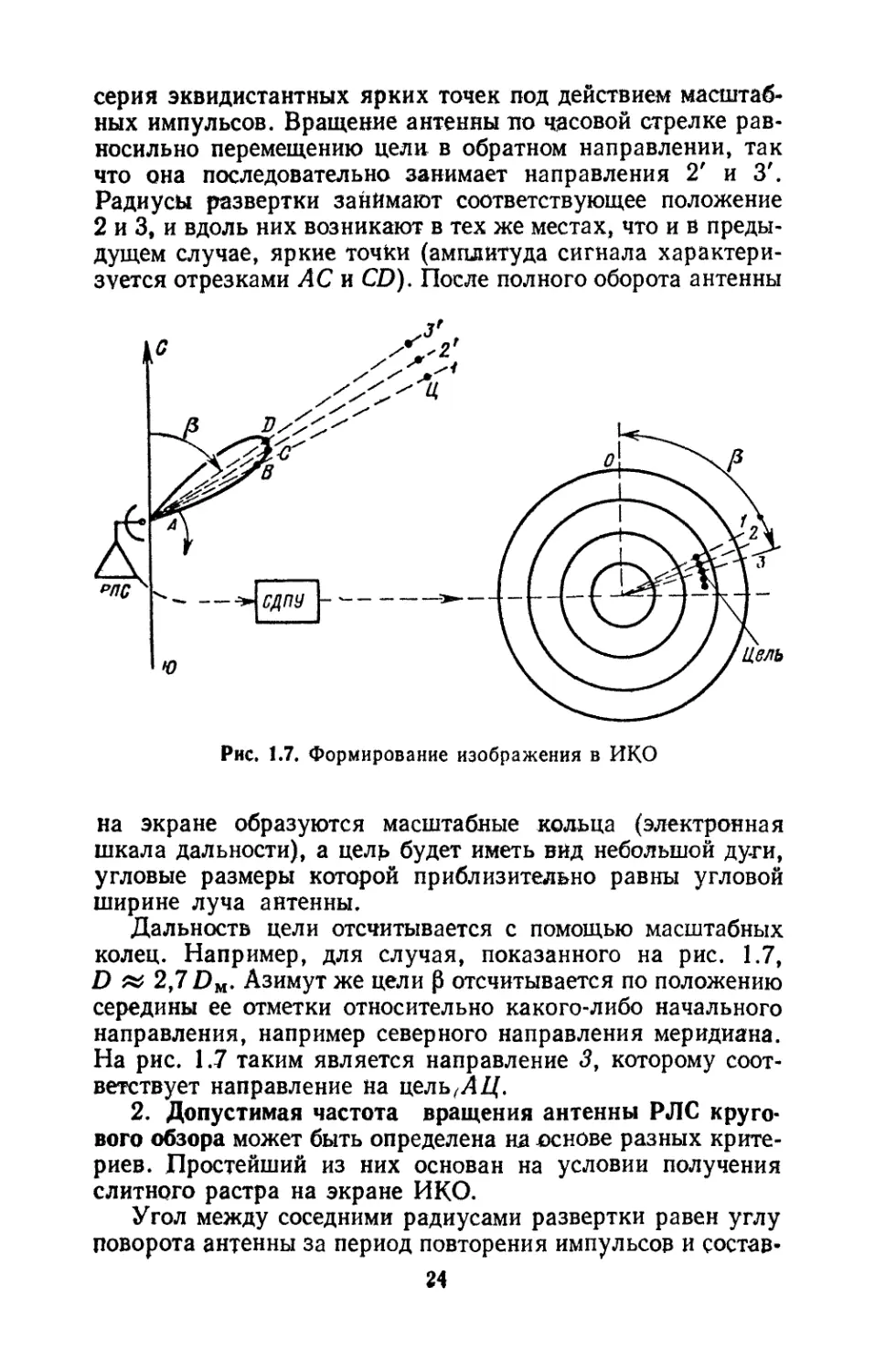
Рис. 1. Виды радиолокационного наблюдения:
а — радиолокация с пассивным ответом, б — радиолокация с активным отве-
ответом, в — пассивная радиолокация
ции метод активного ответа используется очень широко,
так как в ответный сигнал может быть внесено много допол-
дополнительной полезной информации (высота полета, определя-
определяемая бортовым высотомером более точно, чем наземными
РЛС, сведения о количестве горючего, номер самолета и
т. д.), необходимой для управления воздушным движением
(УВД), особенно при использовании автоматизированных
систем УВД (АС УВД).
Пассивная радиолокация (пассивное радионаблюдение)
основана на приеме собственного радиоизлучения целей
(рис. 1, б). Если зондирующий сигнал в двух предыдущих
случаях может быть использован как опорный, что обеспе-
обеспечивает принципиальную возможность измерения дальности
и скорости, то в данном случае такая возможность отсутст-
отсутствует. С помощью теплового радиоизлучения в миллиметро-
миллиметровом, сантиметровом, дециметровом диапазонах можно ре-
решать такие народнохозяйственные задачи, как наблюдение
за состоянием посевов, определение влажности почвы, об-
обнаружение лесных и подземных пожаров, ледовая разведка,
а также некоторые навигационные задачи (например, изме-
измерение путевой скорости). Известны также военные примене-
радиолокацией или вторичной радиолокацией, характери-
характеризуется тем, что ответный сигнал является не отраженным,
а переизлученным с помощью специального ответчика —
ретранслятора (рис. 1, б). При этом заметно повышается
дальность радиолокационного наблюдения, что позволяет
использовать данный вид радиолокации, например, для наб-
наблюдения искусственных спутников Земли. Он применяется
для определения государственной принадлежности самоле-
самолетов (с помощью специальных кодов). В гражданской авиа-
ния, связанные с обнаружением искусственных объектов.
Кроме того, разновидностью пассивной радиолокации яв-
является наблюдение за грозами (в длинноволновом диапазоне).
2. Общая характеристика радиолокационного канала.
Систему РЛС — цель можно рассматривать как радиолока-
радиолокационный канал наподобие радиоканалов связи и телемет-
телеметрии. Основными составными частями РЛС являются пере-
передатчик, приемник, антенное и оконечное устройства.
¦~ У большинства РЛС передающая и приемная антенны
расположены в непосредственной близости друг от друга, а
РЛС с импульсной модуляцией обычно имеет одну антенну,
снабженную специальным антенным переключателем для
перехода из режима передачи в режим приема и обратно.
Такие РЛС именуются однопозиционными (совмещенными
или моностатическими). Наряду с этим в некоторых случаях,
например, для слежения за космическими объектами, нахо-
находящимися на орбите, могут применяться РЛС с далеко раз-
разнесенными передающими и приемными устройствами. Эти
РЛС именуются многопозиционными (разнесенными или
бистатическими). Величина расстояния разноса должна зна-
значительно превышать величину ошибки определения даль-
дальности данной РЛС.
Передатчик РЛС вырабатывает высокочастотные (СВЧ)
колебания, которые модулируются по амплитуде, частоте
или фазе иногда весьма сложным образом. Эти колебания
подаются в антенное устройство и образуют зондирующий
сигнал. Наибольшее применение находит зондирующий
сигнал в виде последовательности равноотстоящих по вре-
времени коротких радиоимпульсов. Наряду с простымиД«глад-
кими») радиоимпульсами может применяться внутриим-
пульсная- частотная модуляция и фазовая манипуляция
(ФМ). Другим видом зондирующего сигнала является не-
непрерывный. Здесь наряду с гармоническими колебаниями
могут использоваться частотно-модулированные (ЧМ) и др.
После того как электромагнитная волна, падающая на
цель (первичная волна), вызывает в ее теле вынужденные ко-
колебания электрических зарядов, цель подобно обычной ан-
антенне создает свое электромагнитное поле. Это поле пред-
представляет собой вторичную, т. е. отраженную, электромаг-
электромагнитную волну, создающую в РЛС радиолокационный сиг-
сигнал, который является носителем информации о цели. Так,
амплитуда сигнала в определенной степени характеризует
размеры и отражающие свойства цели, время запаздывания
относительно начала излучения зондирующего сигнала ис-
используется для измерения дальности, а частота колебаний
благодаря эффекту Доплера несет информацию о радиаль-
радиальной скорости цели. Поляризационные параметры отражен-
отраженной волны также могут быть использованы для оценки
свойств цели (ее формы, соотношения между размерами).
Наконец, направление прихода отраженной волны содер-
содержит информацию об угловых координатах цели.
Приемник РЛС необходим для выделения полезного сиг-
сигнала яз помех (так называемая первичная обработка сигна-
сигнала). Оконечное (выходное) устройство служит для представ-
представления радиолокационной информации в нужной потреби-
потребителю форме. Если потребителем является человек-оператор,
то используется визуальная индикация. Для потребителя
в виде вычислительного устройства дискретного действия
(или современной электронной вычислительной машины —
ЭВМ) используется радиолокационная информация, пре-
преобразованная в двоичный код. При этом в ЭВМ происхо-
происходит дальнейшая, так называемая вторичная обработка сиг-
сигнала (подобная действиям человека-оператора).
Важной составной частью радиолокационного ка«ала,
как и любого радиоканала, являются помехи. Внутренние
шумы вызывают подавление полезного сигнала, а также по-
появление ложного сигнала и вносят ошибки в измеряемые
координаты. Наряду с этим флуктуации скорости и направ-
направления распространения радиоволн в атмосфере можно рас-
рассматривать как помехи. Такое же действие оказывают пас-
пассивные помехи — источники ложных отражений (например,
отражения от земной поверхности при наблюдении целей).
Другим источником помех являются флуктуации центра
отражения движущейся цели относительно траектории
движения. Это приводит к флуктуациям, в частности, к слу-
случайным пропаданиям отраженных сигналов, которые также
можно рассматривать как помехи. Источники мешающих
радиоизлучений образуют активные помехи (против РЛС
военного назначения могут специально создаваться орга-
организованные активные помехи, возможны также организо-
организованные пассивные помехи).
В условиях большой насыщенности радиосредствами
заметное влияние могут оказывать активные взаимные ло-
мехи. Меры, направленные на их подавление, обеспечива-
обеспечивают электромагнитную совместимость.
Главные этапы радиолокационного наблюдения — это
обнаружение, измерение, разрешение и распознавание.
Обнаружением называется процесс принятия решения
о наличии целей с допустимой вероятностью ошибочного
решения,
Измерение позволяет оценить координаты целей н пара-
параметры их движения с допустимыми погрешностями.
Разрешение заключается в выполнении задач обнаруже-
обнаружения и измерения координат одной цели при наличии другие,
близко расположенных по дальности, скорости и т. д. На-
Наконец, распознавание лает возможность установить некото-
некоторые характерные признаки цели; точечная она или группо-
групповая, движущаяся или неподвижная и т.д.
3. Диапазоны длин волн, используемые в радиолокации.
Важным фактором при выборе диапазона длин волн являет-
является характер отражения радиоволн от целей. Если размеры
цели и радиусы кривизны отдельных ее участков много
меньше длины волны, то интенсивность отражения мала.
При этом цель можно уподобить антенне с очень малой^дей-
ствующей высотой или малой эффективной площадью.
Другой крайний случай, когда размеры цели и радиусы
кривизны отдельных участков много больше длины волны,
близок к оптическому; интенсивность отражения достигает
заметной величины, мало зависит от длины волны и опреде-
определяется в основном отражающими свойствами и размерами
цели. В промежуточном случае соизмеримости размеров
цели или ее отдельных участков с длиной волны возможно
резонансное возбуждение участков поверхности цели, при
котором интенсивность отражения заметно возрастает
в некоторых направлениях.
Учитывая размеры реальных целей, приходим к выводу,
что для того чтобы длина волны была много меньше этих
размеров или соизмерима с ними, в радиолокации необхо-
необходимо использовать ультракороткие волны (УКВ). Другая
причина использования этого диапазона, особенно волн
более коротких, чем метровые, связана с размерами антенн.
Дело в том, что угловая ширина диаграммы направленности
антенны независимо от ее типа прямо пропорциональна
длине волны и обратно пропорциональна соответствующему
размеру.
Для зеркальной антенны в виде усеченного параболои-
параболоида ширина луча по точкам половинного значения мощности
(в градусах)
где % — длина волны, a d\ — максимальный линейный раз-
размер зеркала в плоскости луча, так что, например, при Я =
= 3 см для получения ширины луча в08 = 3° требуется
йа. = 65 см, а чтобы луч имел такую ширину при длине
волны К —3 м, размер зеркала d\ должен составлять 6,5 м.
Формула A) показывает, что острый луч, обеспечиваю-
обеспечивающий разделение нескольких целей по угловой координате
и высокую точность определения координат при заданных
размерах антенны, можно получить только при достаточно
короткой волне К.
Поэтому в ряде авиационных РЛС используют сантиметро-
сантиметровые радиоволны, а для обзора летного поли в аэропор-
аэропортах — миллиметровые.
С точки зрения повышения разрешающей способности
и точности {т. е. информативности радиолокационного сиг-
сигнала) необходимо расширять полосу частот зондирующего
сигнала, что, например, достигается уменьшением длитель-
длительности зондирующих импульсов либо применением специаль-
специальных сложных сигналов. Естественно, что расширение поло-
полосы передаваемых частот требует повышения несущей часто-
частоты сигнала.
При выборе диапазона волн важное значение имеют осо-
особенности распространения радиоволн в атмосфере, в част-
частности резонансное поглощение (например, для кислорода
на частоте 60 ГГц поглощение составляет около 14 дБ/км),
что вынуждает избегать применения соответствующих
частот.
В современных РЛС используются дециметровые, санти-
сантиметровые, миллиметровые радиоволны, а в лазерных лока-
локаторах — волны оптического диапазона. Согласно рекоменда-
рекомендациям Международной организации гражданской авиации
ДОАО), радиолокации отводится почти 30% диапазона ча-
частот 1...10 ГГц. Широко используются полосы частот, где
средняя длина волны А,ср = B0, 10, 5,3) см. В иностранной
литературе ширина частотного спектра часто уценивается
в октавах (интервал, для которого отношение граничных
частот f%lft = 2).
Обозначения участков частот, образующих октавы,
приведены в табл. 1.
Диапазон Обозначение Стапое Диапазон Обозначение Старое
частот, участков название частот, участков название
ГГц частот ГГц частот
В диапазоне 30..Л000 МГц для работы РЛС выде-
выделены определенные полосы частот (например, 137..Л44,
216.. .225,400.. .450,890.. .942 МГц). Следует отметить, что мет-
метровый диапазон в настоящее время сравнительно редко ис-
используется для целей радиолокации. Вместе с тем, так как
УКВ, как правило, распространяются лишь в пределах
прямой видимости, то для обеспечения загоризонтного
радиолокационного наблюдения могут найти применение
декаметровые волны.
Рис. 2. Положение цели в пространстве:
а — системы отсчета координат, б — линии положения при дальномерно-угло-
мерном методе определения положения цели
4. Радиолокационное наблюдение как средство решения
навигационных задач. Радиолокация широко используется
для определения местоположения летательных аппаратов
(ЛА), кораблей и других движущихся объектов.
На рис. 2, а показано местоположение цели Ц в прост-
пространстве, которое может быть отображено либо в сферичес-
сферической (D, р, е), либо в цилиндрической (Drt 0, Н) системе
координат. На рисунке обозначено: D — на'клонная даль-
дальность (или просто дальность); DT — горизонтальная даль-
дальность; E — азимут (угол между северным направлением и
проекцией направления на цель в горизонтальной плоско-
плоскости, отсчитываемый по часовой стрелке); е — угол места
(угол между проекцией направления на цель в горизонталь-
горизонтальной плоскости и направлением на цель); Н — высота Цели.
Для однопозиционных РЛС характерно, что весь про-
процесс определения координат производится из одной точки
(точка О на рис. 2, а).
Непосредственно определяемыми координатами являют-
являются наклонная дальность D, а также углы р ие. При этом
можно считать, что цель Ц расположена в точке пересече-
10
ния трех поверхностей: сферы радиусом й и двух плоскос-
плоскостей (вертикальной, проходящей через точку Ц, и наклон-
наклонной, расположенной под углом е к горизонту). Эти поверх-
поверхности являются геометрическим местом точек пространства,
в которых данный измеряемый параметр постоянен, и на-
называются поверхностями положения. На плоскости доста-
достаточно знать линии положения. В данном случае это окруж-
окружность радиуса В и прямая под углом {3 (рис. 2, б).
Рассмотренный метод определения положения цели мож-
можно именовать дальномерно-угломерным. В радионавигации
используются и другие методы: дальномерный, основанный
на измерении дальностей от двух различных точек (линии
положения — окружности); угломерный (пеленгационный),
когда пеленгаторы, расположенные в разных точках, опре-
определяют направления (линии положения — прямые); раз-
яостно-дальномерныи, когда измеряется разность расстоя-
расстояний от двух точек (линии положения — гиперболы), и др.
Заметным достоинством радиолокационного метода реше-
решения навигационных задач, связанных с определением ко-
координат самолета с земли, является возможность автоном-
автономного контроля траектории полета. Это обстоятельство при-
приобретает особое значение для гражданской авиации.
5. Краткие сведения о первых шагах отечественной ра-
радиолокации. Еще в опытах А. С. Попова наблюдалась воз-
возможность обнаружения кораблей по явлению экранирова-
экранирования ими радиоволн A897). В 1904 г. X. Хюльсмайер (Герма-
(Германия) получил патент на способ обнаружения металличе-
металлических объектов по отражению радиоволн. Однако техника
того времени не могла обеспечить реализацию этих идей.
В'30-х годах в связи с развитием авиации выявились не-
недостатки существовавших тогда средств обнаружения само1-
летов — звукоулавливателей. К этому времени относится
интерес, проявленный в ряде стран к радиолокационному
обнаружению самолетов.
В СССР радиолокация возникла и развивалась само-
самостоятельно, независимо от зарубежных стран. Подобные
идеи начали обсуждаться начиная с 1930 г. В частности,
в 1932 г. инициатором ряда работ явился военный инженер
П. К. Ощепков. В конце 1933 г. опыты под руководством
Ю. К. Коровина доказали возможность радиолокации не-
непрерывным методом в дециметровом диапазоне волн на
дальности 600 ... 700 м. В 1935—1936 гг. под руководством
Б. К. Шембеля испытывается радиоискатель «Буря» (не-
(непрерывный метод с частотной модуляцией.; максимальная
дальность обнаружения самолетов 10 11 км, а гор—на рас-
11
стоянии 100 км). В 1939 г. на вооружение войск ПВО были
приняты разработанные бод руководством Д. С. Стогова
разнесенные РЛС непрерывного действия на основе исполь-
использования эффекта Доплера РУС-1 (радиоулавливатель
самолетов). С помощью РУС-1 фиксировался факт пролета
самолета.
Важнейший вклад в отечественную радиолокацию внес-
внесла лаборатория Ленинградского физико-технического ин-
института (директор академик А. Ф. Иоффе), которой вначале
руководил академик Д. А. Рожанский. Здесь в 1935 г. на-
начал работу по импульсной радиолокации Ю. Б. Кобзарев
(ныне академик, Герой социалистического труда). Ю. Б. Коб-
Кобзарев с небольшой группой сотрудников создал в 1936—
1937 гг. первую импульсную РЛС. В 1938 г. была до-
достигнута дальность действия 50 км при высоте полета 1 500 м.
В 1941 г. была принята на вооружение импульсная РЛС
РУС-2, которая явилась основой для целой серии последую-
последующих образцов. За блестящее достижение в области радио-
радиолокации Ю. Б. Кобзарев и его сотрудники А. П. Погорелко
и Н. Я. Чернецов были удостоены* в 1941 г. Государствен-
Государственной премии. Деятельность Ю. Б. Кобзарева сыграла боль-
большую роль в дальнейшем развитии отечественной радиоло-
радиолокации.
6. Краткие сведения о применении радиолокации
в гражданской авиации. Выполнение регулярных и безопас-
безопасных полетов в условиях все возрастающей интенсивности
воздушного движения требует применения большого коли-
количества радиотехнических средств, в частности радиоло-
радиолокационных. Роль радиолокации возрастает еще больше
в связи с переходом к автоматизации самолетовождения
и управления воздушным движением.
Основным источником информации о воздушной обста-
обстановке в системах УВД являются импульсные РЛС. При этом
для УрД по трассам применяются РЛС с дальностью 350...
450 км, а в районе аэропортов с дальностью 100...200 км.
Так как используемые РЛС, как правило, двухкоординат-
ные (дальность, азимут), то третья координата транслиру-
*ется по «вторичному» каналу (РЛС с активным ответом).
Система, включающая РЛС с пассивным и активным ответа-
ответами и устройство трансляции радиолокационной информа-
информации по радиоканалу или по кабелю на пульт управления,
именуется радиолокационным комплексом.
Вводятся автоматизированные системы — АС УВД, в ко-
которых процессы сбора, обработки и отображения инфор-
информации, а также анализа воздушной обстановки произво-
12
дятся с помощью ЭВМ. Решение о необходимости изменения
параметров движения отдельных ЛА принимается пока че-
человеком-диспетчером, который может непосредственно вза-
взаимодействовать с вычислительным комплексом системы.
Навигация самолетов по трассе в значительной степени
обеспечивается теми же РЛС, которые применяются в си-
системах УВД. Они служат как для контроля выдерживания
заданной трассы, так и для определения местоположения
в процессе полета.
Для выполнения посадки и ее автоматизации наряду
с радиомаячными системами широко используются РЛС по-
посадки, обеспечивающие слежение за уклонением самолета
от курса и глиссады планирования, Посадочные РЛС ха-
рактериауются дальностью действия лишь в несколько
десятков километров, но зато они имеют высокую точность.
Ряд современных аэропортов оборудован РЛС обзора лет-
летного поля, работающими в миллиметровом диапазоне и об-
обладающими очень высокой разрешающей способностью, до-
достаточной для распознавания при любой погоде самолетов,
отдельных автомашин и т. д. Дальность их действия состав-
составляет несколько километров.
Большое значение приобретают метеорологические
РЛС. Они применяются для обнаружения облаков и осад-
осадков и могут быть использованы для штормового оповеще-
оповещения. Кроме того, с их помощью измеряют метеорологиче-
метеорологические параметры.
В гражданской авиации используют ряд бортовых радио-
радиолокационных устройств. К ним относится бортовая РЛС
для обнаружения опасных метеообразований и препятст-
препятствий. Обычно она же используется для обзора земли с целью
автономной навигации по характерным наземным радиоло-
радиолокационным ориентирам. Для обеспечения действия упомя-
упомянутого выше активного канала на борту имеются специаль-
специальные ответчики. Радиолокационные принципы используются
и в таких навигационных приборах, как бортовой радиовы-
радиовысотомер и доплеровский (использующий эффект Доплера)
измеритель путевой скорости и угла сноса (ДИСС). Боль-
Большой интерес представляют РЛС бокового обзора, обеспе-
обеспечивающие значительное повышение разрешающей способ-
способности при обзоре земной поверхности ло сравнению с обыч-
обычными РЛС. Они нашли применение в последнее время для
ледовой и геологической разведок.
7. Задачи настоящего курса. Технические особенности
РЛС связаны с диапазоном используемых радиоволн, фор-
формой зондирующего сигнала, видом оконечных (выходных)
13
устройств, в частности с методом индикации цели, и т. д.
Все это определяется свойствами радиолокационных целей
и задачами радиолокационного наблюдения.
В книге не рассматриваются подробно отдельные тракты
или цепи РЛС. Предполагается, что эти вопросы изучены
в соответствующих курсах.
Задачей настоящего курса является изучение физичес-
физических основ радиолокационного наблюдения, методов построе-
построения РЛС и соотношения их параметров, что позволяет
в дальнейшем правильно ориентироваться в конкретном
радиолокационном оборудовании. Таким образом, курс но-
носит системотехнический характер.
СПИСОК ЛИТЕРАТУРЫ
Общие пособия по курсу
1. Теоретические основы радиолокации/ Под ред. В.Е. Дуле-
вича. — 2-е изд., перераб. и доп. — М.: Сов. радио, 1978.
2. Теоретические основы радиолокации/ Под ред. Я. Д. Шир-
мана. — М.: Сов. радио, Г970.
3. Радиолокационные устройства (теория и принципы построе-
построения)/ Под ред. В. В. Грнгорина-Рябова. »— М.: Сов. радио, 1970.
4. Карпухин В. И., Финкельштейн М. И. Задачи и упражнения
по основам радиолокации. — М.: Машиностроение, 1979.
5. Васин В. В., Степанов Б. М. Справочник-задачник по радио*
локации. — М.: Сов. радио, 1977.
Дополнительные пособия
1. Справочник по радиолокации в 4-х т./ Под ред. М. Сколии-
ка: Пер. с англ. под ред. К. Н. Трофимова. — М.: Сов. радио,
1976—1979.
2. Ширмаи Я. Д.» Манжос В. Н. Теория и техника обработки
радиолокационной информации на фоне помех —М.: Радио и связь,
1981.
3. Бакулев П. А. Радиолокация движущихся целей.—М.: Сов.
радио, 1964.
4. Лезин Ю. С. Оптимальные фильтры и накопители импульс-
импульсных сигналов. — М.: Сов. радио, 1969.
5. Поиск, обнаружение и измерение параметров сигналов в ра-
радионавигационных системах/ Под ред. Ю. М. Казаринова. —М.:
Сов. радио, 1975.
6. Свистов В. М. радиолокационные сигналы и их обработка. —
М.: Сов. радио, 1977.
7. Финкельштейн М. И. Гребенчатые фильтры. — М.: Сов. ра-
радио, 1969.
8. Кобак В, О. Радиолокационные отражатели. — М.: Сов.
радио, 1975.
9. Фельдман Ю. И., Гидаспов Ю. Б., Гомзин В. Н. Сопровожде-
Сопровождение движущихся целей. — М.: Сов. радио, 1978.
10. Лихарев В. А. Цифровые методы и устройства в радиолока-
радиолокации. — М.: Сов. радио, 1973.
П. Вакман Д. Е. Сложные сигналы и принцип неопределенно-
неопределенности в радиолокации.—М.: Сов. радио, 1965.
12. Радиолокационные станции бокового обзора/ Под ред.
А. П. Реутова. — М.: Сов. радио, 1970.
13. Автоматизация обработки, передачи и отображения радио-
радиолокационной информации/ Под общей ред. В. Г. Корякова. — М.:
Сов. радио, 1979.
14. Автоматизация самолетовождения и управления воздушным
движением. — М.: Транспорт, 1980.
15. "^итвак И. И., Ломов Б. Ф., Соловейчик И. Е. Основы по-
построения аппаратуры отображения в автоматизированных системах/
Под ред. А. Я. Брейтбарта. — М.: Сов. радио, 1975.
F. Радиолокационные методы исследования Земли/ Под ред.
Ю. А. Мельника. — М.: Сов. радио, 1978.
529
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Автокорреляционная функция
сигналов 213, 223, ЗвЗ, 385
Автоматическое сопровожде-
сопровождение по дальности 414
угловым координатам
423
Азимут цели 10
Активный ответ 4, 12, 497
Анализ спектральный 121, 275
Антенная решетка 440
Антенный переключатель 15,
16
Аппаратура первичной обра-
обработки информации (АПОИ)
264, 510
Аттенюатор помех адаптивный
347
Барабан магнитный 283
Баркера код 403
БАРУ 413, 422
Бесселя функция 139, 158
Блестящая точка 141, 146, 152,
155
Бофорта шкала 185
Вероятность априорная 207
— ложной тревоги 207, 244,
247, 253
— обнаружения нарастающая
248
— правильного необнаруже-
необнаружения 207
— правильного обнаружения
207, 243, 248, 358
— пропуска 207
Вибратор 129, 130, 131
Время запаздывания отражен-
отраженного сигнала 16
— измерения 120
— наблюдения 73
— накопления 267
— обзора 26, 435, 436
— облучения 26
— послесвечения 9
Временная развертка 17
Выигрыш в отношении сигнал-
шум 236, 268
Высотомер 13, 119, 124, 367,
463
Генератор масштабных им-
импульсов 23
— развертки 23
Гетеродин когерентный 91, 103
— местный 97, 323
Гидрометеообразования 4, 199
Голография 493
Графекон 516
Гюйгенса—Кирхгофа принцип
133
Дальность действия РЛС в
свободном пространстве 355
с активным ответом
500
с учетом влияния Земли
371
затухания в ат-
атмосфере 364
обнаружения низколетящих це-
целей 373
прямой видимости* 378'
Детектирование 249
Диаграмма видимости 375, 377
Диаграмма направленности ан-
антенны 38, 376
веерообразная 21, 438
иглообразная 436, 438
косекансная 376, 377
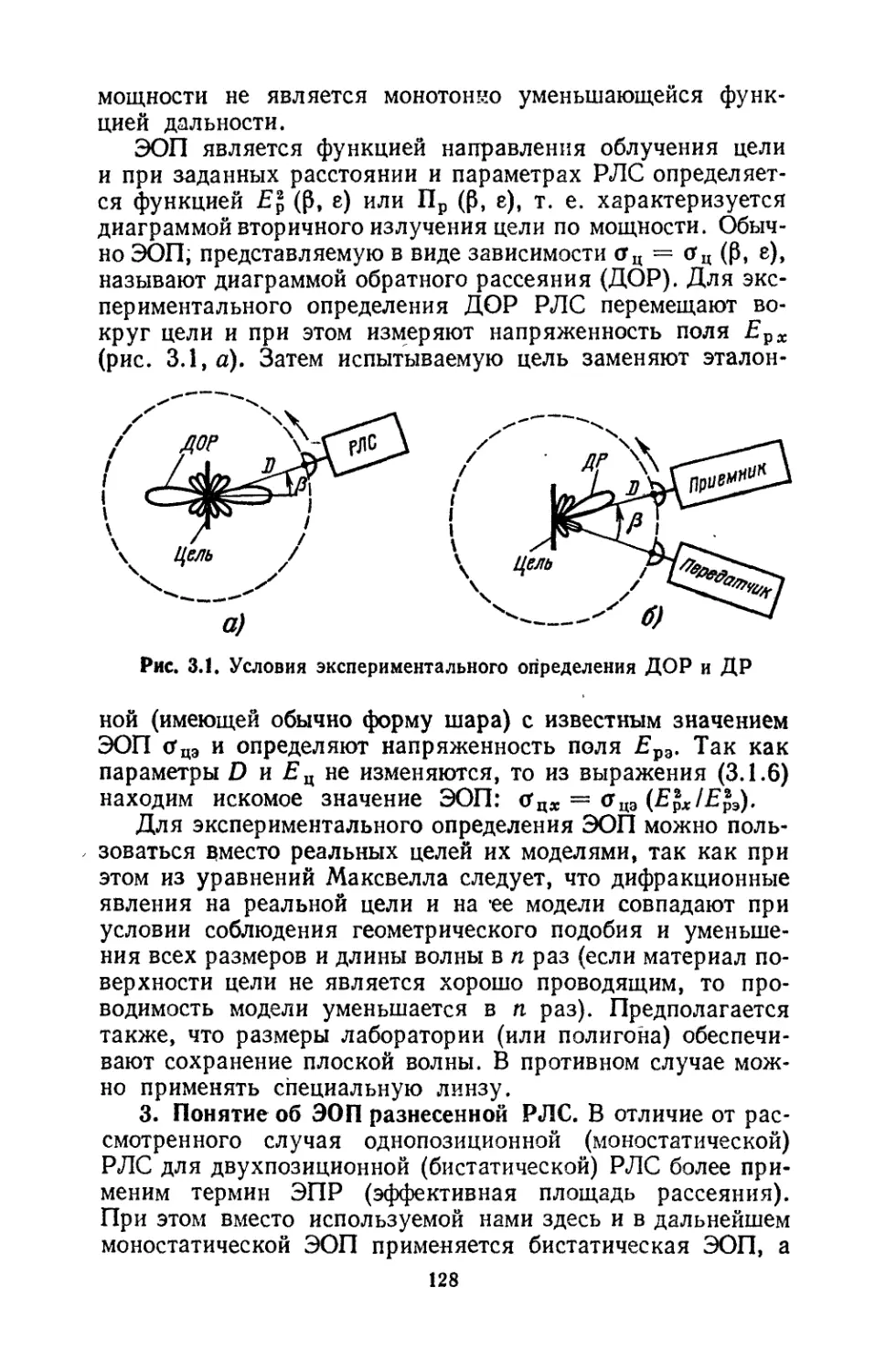
обратного рассеяния 128,
137, 186
парциальная 467
— рассеяния 129, 186
Дискриминатор временной 414
Дисперсия фильтра 3991
Дифференцирование высоко-
высокочастотное 491
Доплера эффект 67, 69
«Дружно» флуктуирующая
пачка импульсов 154, 247
Закон распределения вероят-
вероятностей гауссовский 157, 212
равновероятный 60
Рэлея обобщенный 158,
246
Запросчик 498
Затухание радиоволн в атмос-
атмосфере 362, 363
Знакогенерирование 518
Зона видимости 375
Зондирующий радиолокаци-
радиолокационный сигнал 6, 15
Зона «мертвая» 20
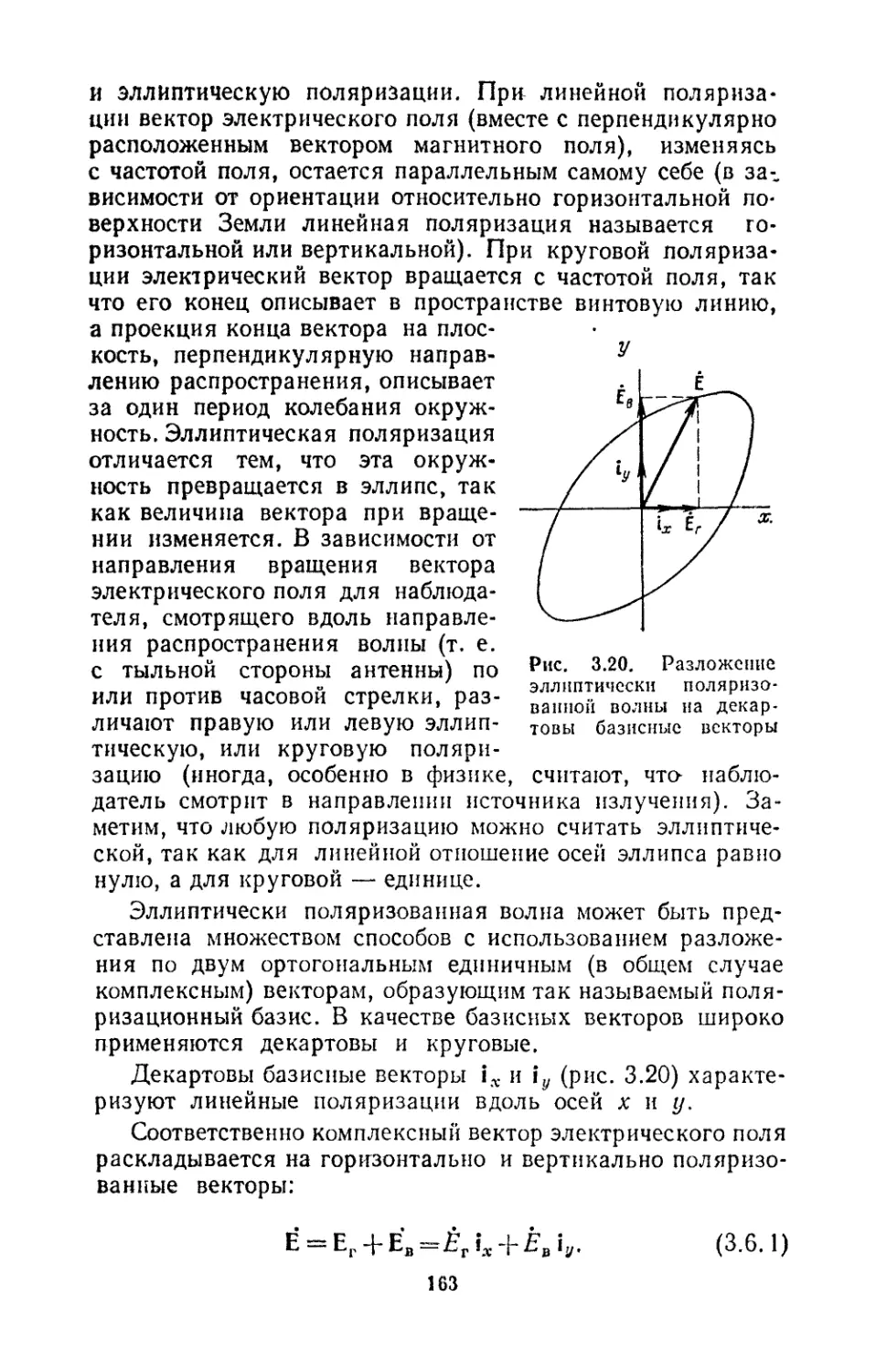
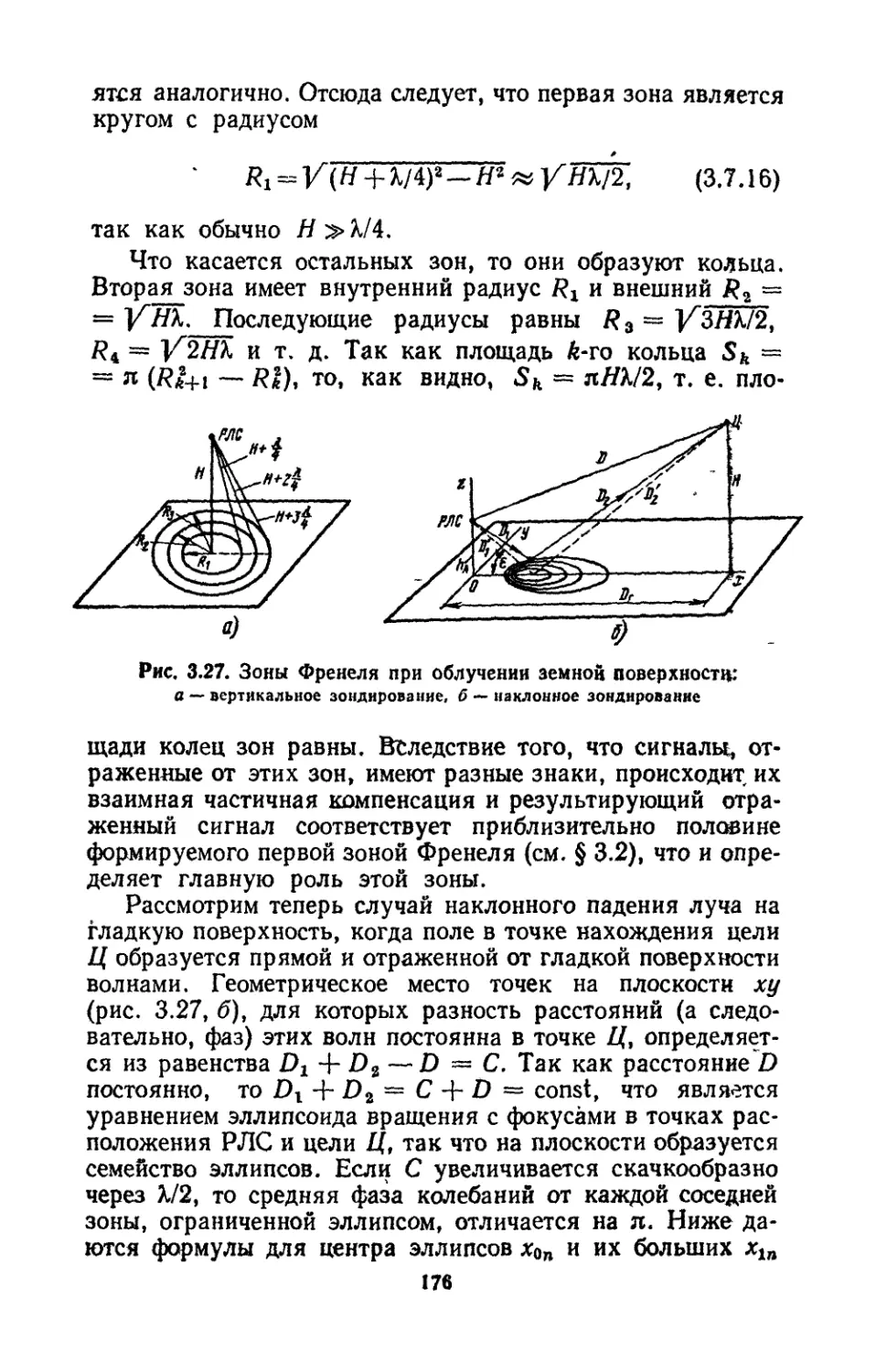
Зоны Френеля 140, 176
Измерение дальности, импульс-
импульсный метод 15, 17
фазовый метод 108
частотный метод 111
— радиальной скорости 65, 76
— угловых координат 9, 21,
416
530
Импульсная характеристика
295
Импульс с дискретным измене-
изменением частоты 395
— с линейной частотной моду-
модуляцией (ЛЧМ) 390
— фазоманипулированный 401
Индикатор электронно-лучевой
с амплитудной отметкой 17,
18
— азимут — дальность с пря-
прямоугольным растром 39
— кругового обзора 24, 30
— совмещенный 521
— угол места — дальность 464
Интеграл вероятности 159, 244
— свертки 219
Интегратор 215, 280
Информационная способность
при радиолокационном обзо-
обзоре 530
Искривление радиолуча в ат-
атмосфере 54
Калибровка РЛС по дально-
дальности 63
— камера безэховая 145
Квадратурные каналы 239, 261
— с объединением по модулю
240
— системы СДЦ 308, 336
Квантование 325
— двоичное 283
Когерентность 72
— внешняя, истинная, псевдо
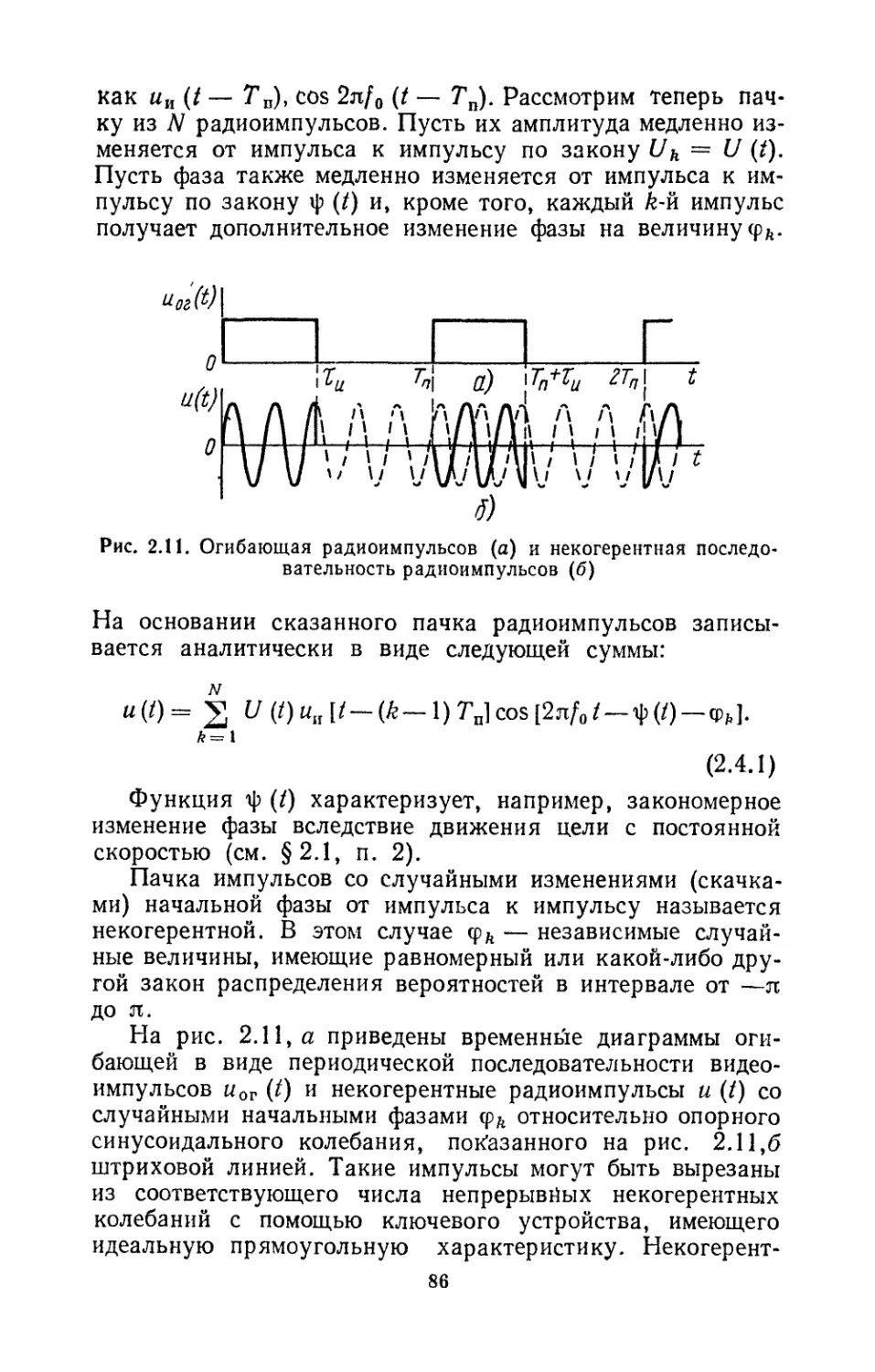
85, 91, 103
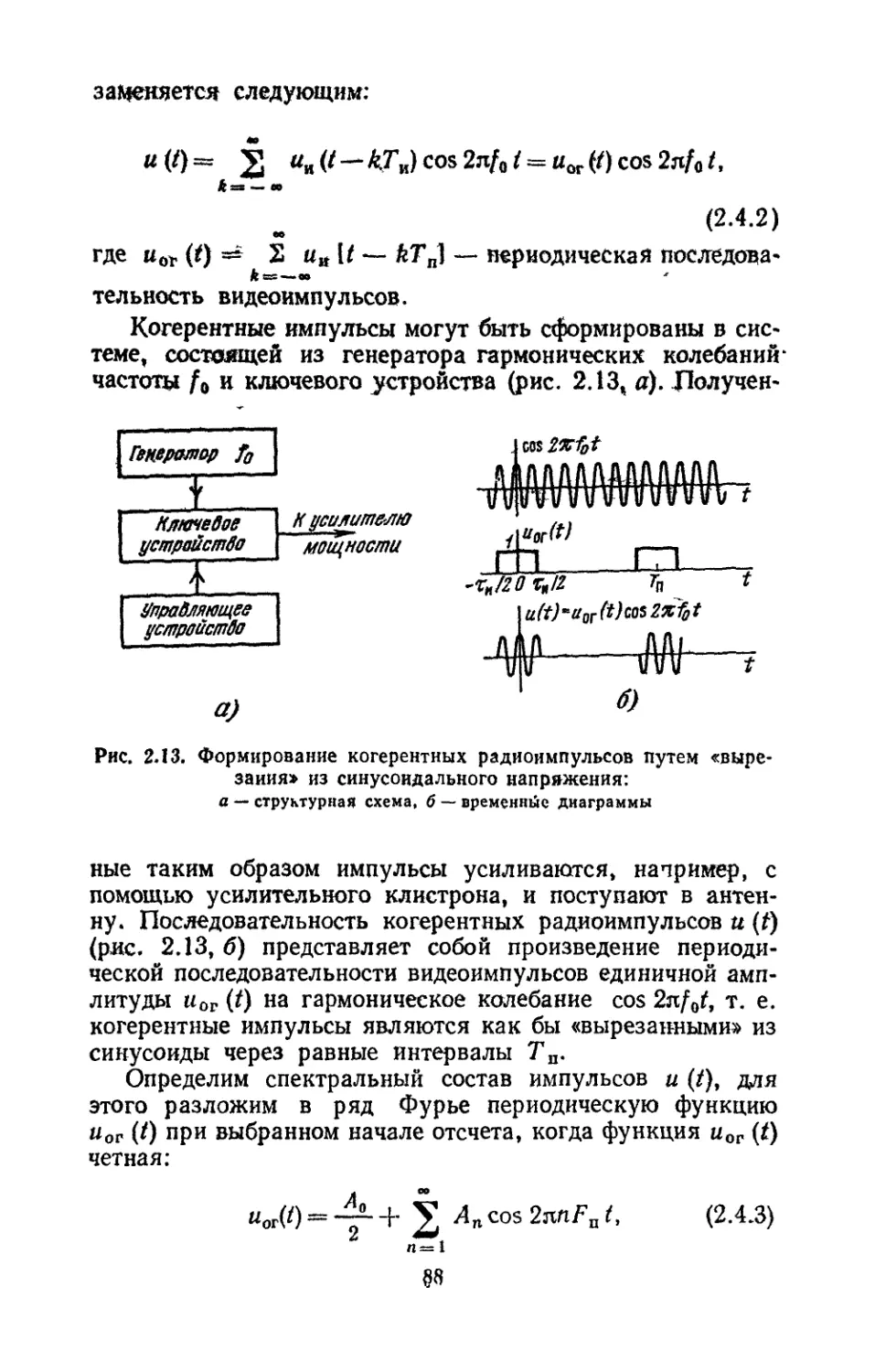
Когерентные радиоимпульсы
88
Кодирование 403
Компенсация помехи череспе
риодная 297
двукратная 300, 302
цифровая 333
— собственного движения РЛС
108
Контраст радиолокационный
373
Контрастность радиолокаци-
радиолокационного изображения на эк-
экране 28
Корреляционный приемник 216,
218
Корреляционная функция 73,
213
Коэффициент весовой 227, 232,
418
— затухания радиоволн 362
— использования диаметра эк-
экрана 47
площади. раскрыва ан-
антенны 359
— компенсации пассивной по-
помехи 319
— обратного отражения 183
— обратной связи 267, 274, 377
— отражения Френеля 171
— подавления пассивной поме-
помехи 314
— подпомеховой видимости
318
— полезного действия антен-
антенны 356
— преломления среды 361
— сжатия 392
— различимости 225, 251, 255
— улучшения подавителя 315
— усиления антенны 126
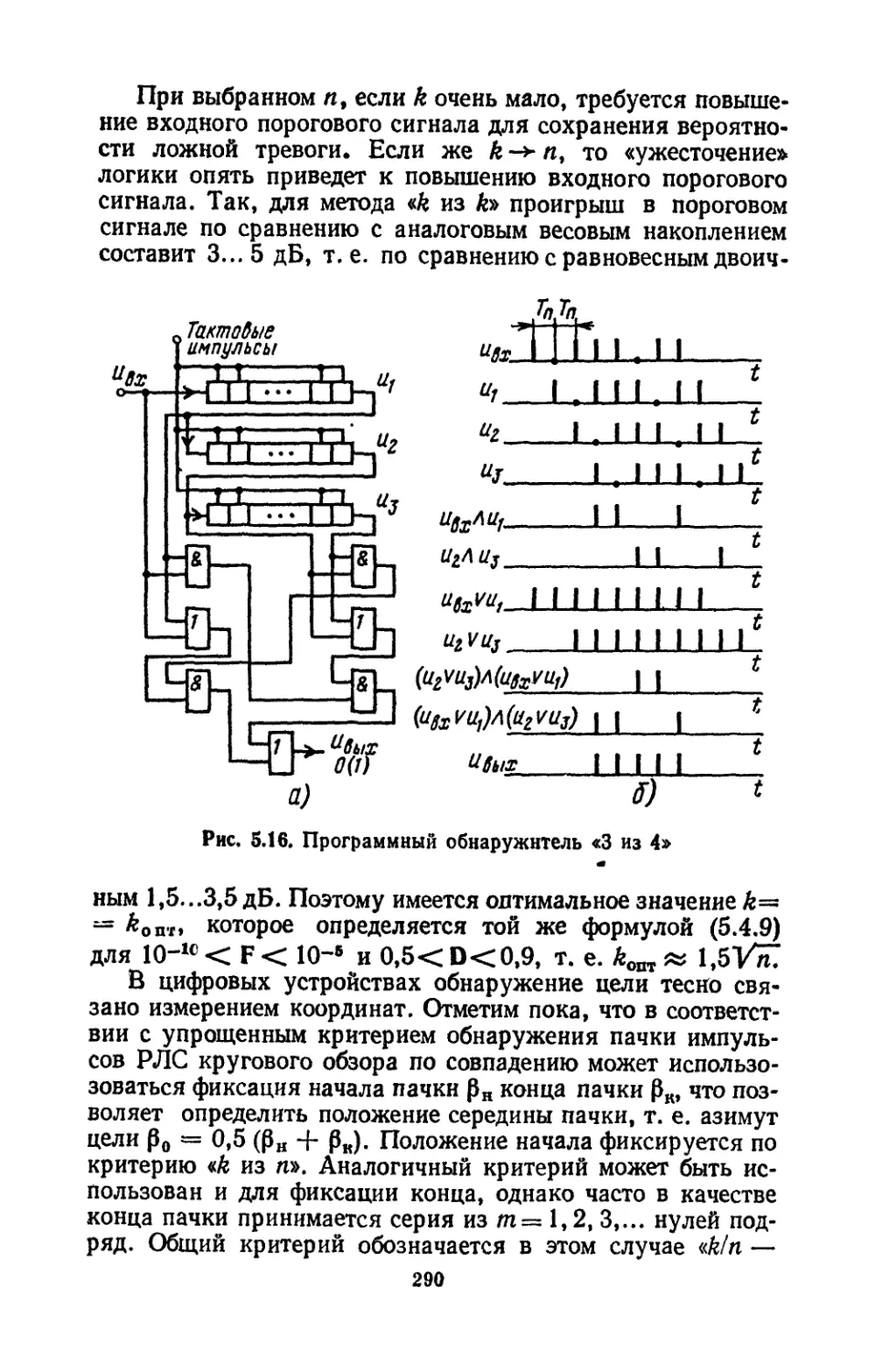
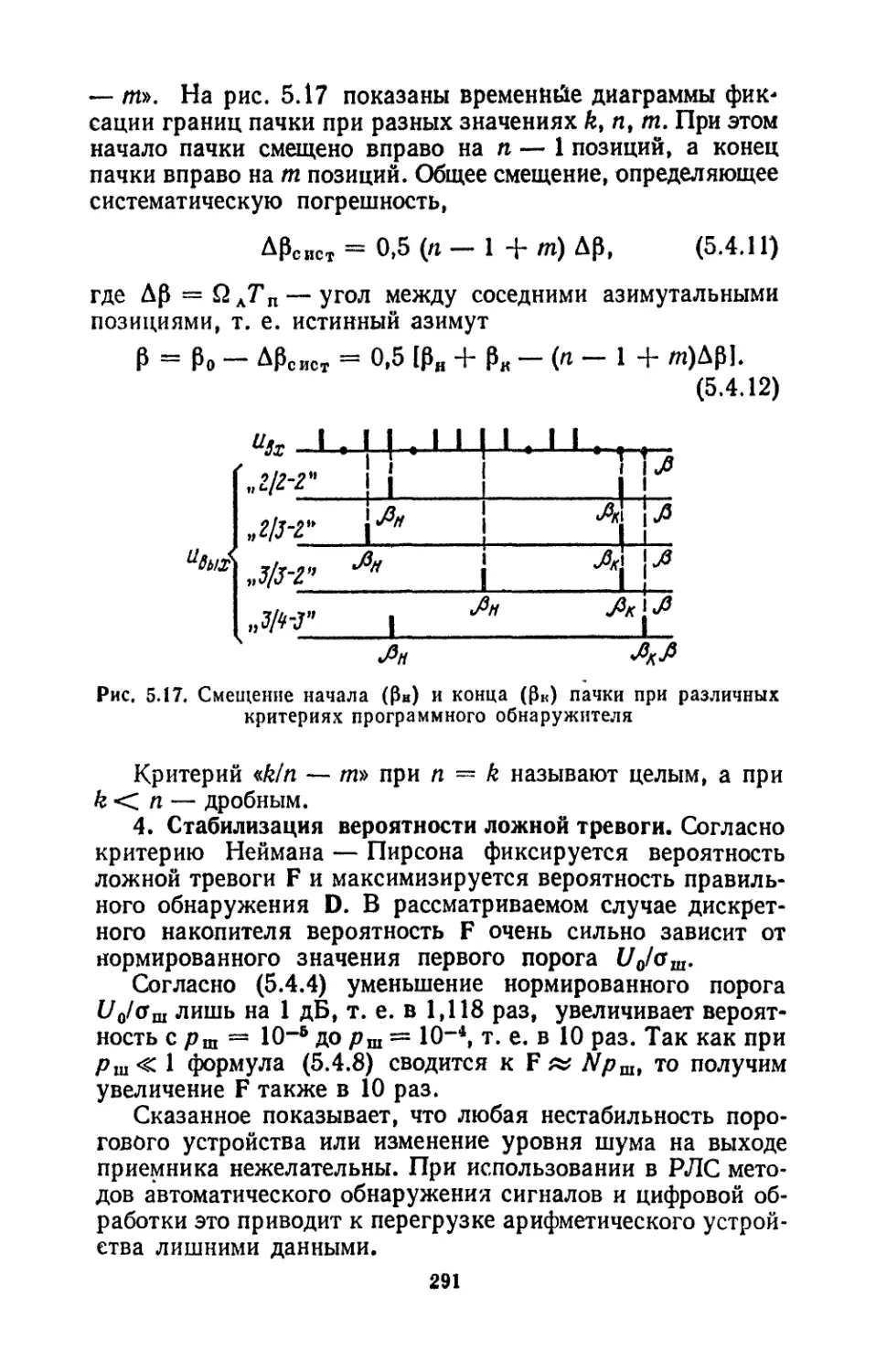
Критерий весовой 209
— идеального наблюдателя 209
— к/п 289
— Неймана — Пирсона 210
Ламберта закон 183
Линия положения 11
— задержки дисперсионная
399
ультразвуковая 277
на ПАВ 277, 400
на ПЗС 277
Люнеберга линза 144
Масштаб шкалы дальности 17
азимута 51
Матрица радиолокационного
отражения (поляризацион-
, ная) 164, 166
Множитель земли интерферен-
интерференционный 173
Метод трех тонов 474
Мощность импульсная (пико-
(пиковая) 40
М-последовательность 404
Навигационный треугольник
скоростей 198
Накопитель со статической па-
памятью 279
— с коммутацией конденсато-
конденсаторов 281
Направление равносигнальное
420
Неоднозначность измерения
дальности 19
скорости 103
Обзор земной поверхности бо-
боковой 477
531
— — — Круговой 469
— пространства круговой 23,
437
одновременный (парал-
(параллельный) 435
последовательный одно-
лучевой 436
секторный 437
Обнаружение радиолокацион-
радиолокационных сигналов 205
Обнаружитель автоматиче-
автоматический 264
— непараметрический 292
— по совпадению 289
— с движущимся окном 287
— последовательный 295
Обработка радиолокацион-
радиолокационных сигналов внутрипери-
одная 232
— вторичная 512
— дискретная» 283*
— межпериодная 232
— некогерентная 249
— оптимальная 205
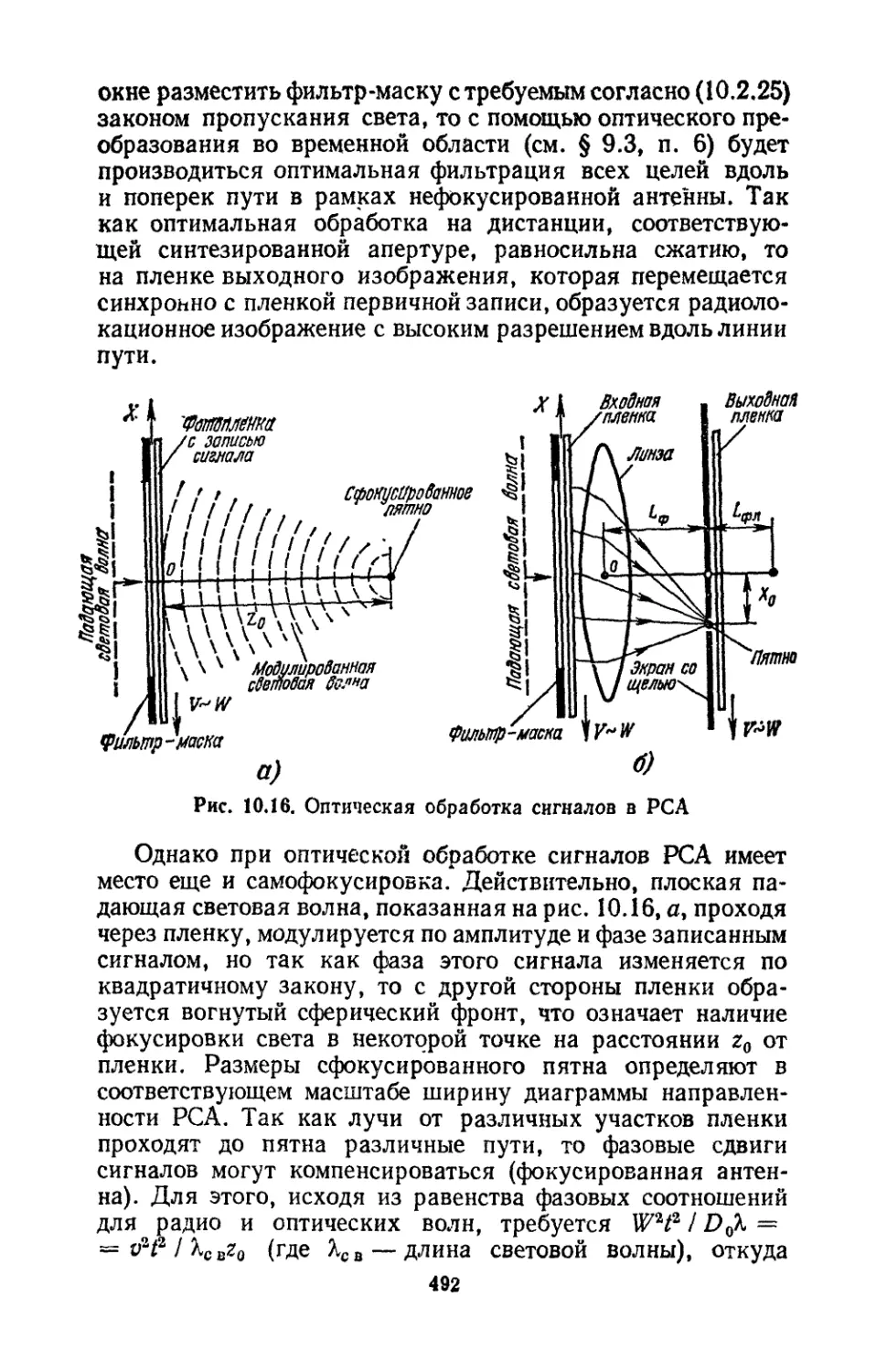
— оптическая 461, 492
— первичная 263
Объем разрешаемый (импульс-
(импульсный) 51
Отметка амплитудная 18
— яркостная 21, 27
Отношение правдоподобия 211
— сигнал-помеха 223, 258, 318
— сигнал-шум 57, 225, 230
Отоажатель искусственный
142
Отражение диффузное (некоге-
(некогерентное) 179, 183
— зеркальное (когерентное)
177, 179
Парсеваля теорема 224, 412
Пеленгация амплитудная по
максимуму 4116
— с помощью метода сравне-
сравнения 420
Пеленгация фазовая 424
Поглощение радиоволн в ат-
атмосфере (см. затухание)
Погрешность внешняя 53
— дискретности 63, 429, 434
— из-за флуктуации кажуще-
кажущегося центра отражения1 54,
151
— интерполяции 59
— систематическая 52, 61
— скорости 81'
— фиксации 60
Подавитель 29?
— цифровой 329
Покрытия противорадиолока-
ционные 145
Поляризация 163
Помеха аддитивная 206
— активная 7
—взаимная 351
— «второго хода развертки»
314
— импульсная 352, 354
— мультипликативная 206
— несинхронная 289, 352
— от гидрометеообразований
349
— пассивная 91, 107, 297
Потенциалоскоп 283, 304
— с видимым изображением
514
Приемник оптимальный 214
Принцип неопределенности 387
Радиолокационная станция 4
бокового обзора 477
—*— доплеровская 76, 78
—— двухчЪстотная 109
импульсная 21
истинно когерентная 85,
90
многопозиционная (раз-
(разнесенная) 6
пассивная 5
с активным ответом 4,
497
псевдокогерентная 103
частотная 111
Разрешение 8
Разрешающая способность
РЛС 42
— по дальности 43, 122
скорости 80
угловым координатам
49
Распознавание 8
Рассеяние рэлеевское 141
Рециркулятор 265
Рециркулятор цифровой 336
Сверхрефракция 362
Селектор дальности 280, 284,
305, 415
Селекция сигналов движущих-
движущихся целей 91, 297
поляризационная 203
Сжатие сигнала 392, 401
Сигнал когерентный 71, 87
—• некогерентный 72, 85
532
— отраженный 5, 15
— радиолокационный 4
— сложный 382
— с полностью известными па-
параметрами 212
Синтезированная антенна 480
Синтезированное радиолока-
радиолокационное изображение 522
Система с активным ответом
автономная, комбинирован-
комбинированная, совмещенная 497
Сканирование 436, 439
Скважность 41
Скоростная характеристика
309, 311
Слепая скорость 98, 310
— фаза 316, 335
Совместимость электромагнит-
электромагнитная 351
Спектр когерентной последова-
последовательности импульсов 98
движущейся цели 95
— преобразованного сигнала в
частотном методе 115
Строб 241, 280, 305
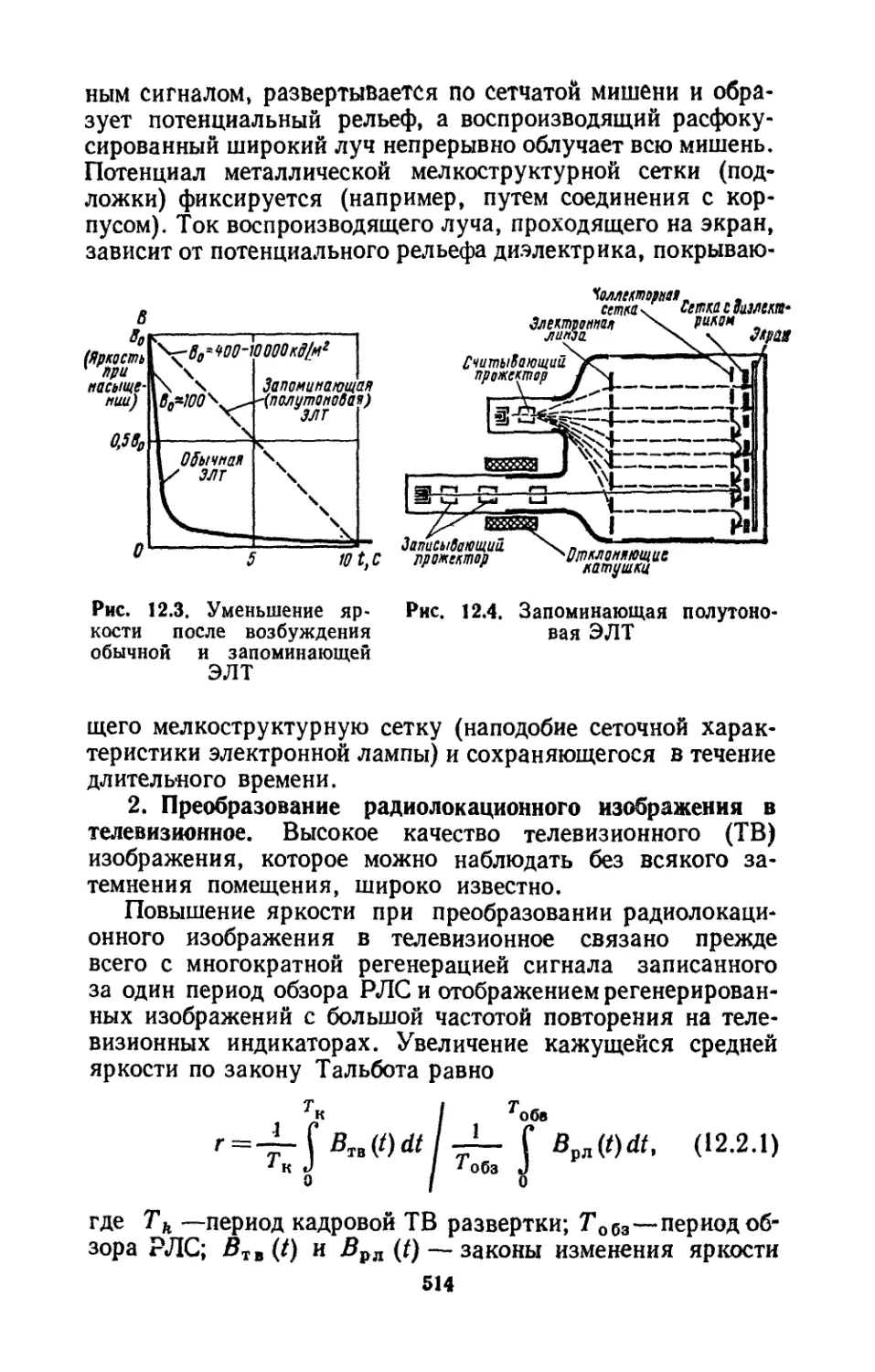
Тальбота закон 29, 515
Трансляция радиолокацион-
радиолокационной информации 528
Транспарант 455
Угловые шумы 150
Угол места 10
— падения 170
— скольжения 170
Удельная эффективная отража-
отражающая площадь поверхност-
поверхностно-распределительных целей
182
— — — — объемно-распреде-
объемно-распределенных целей 199
Фазовый детектор 91, 105, 237,
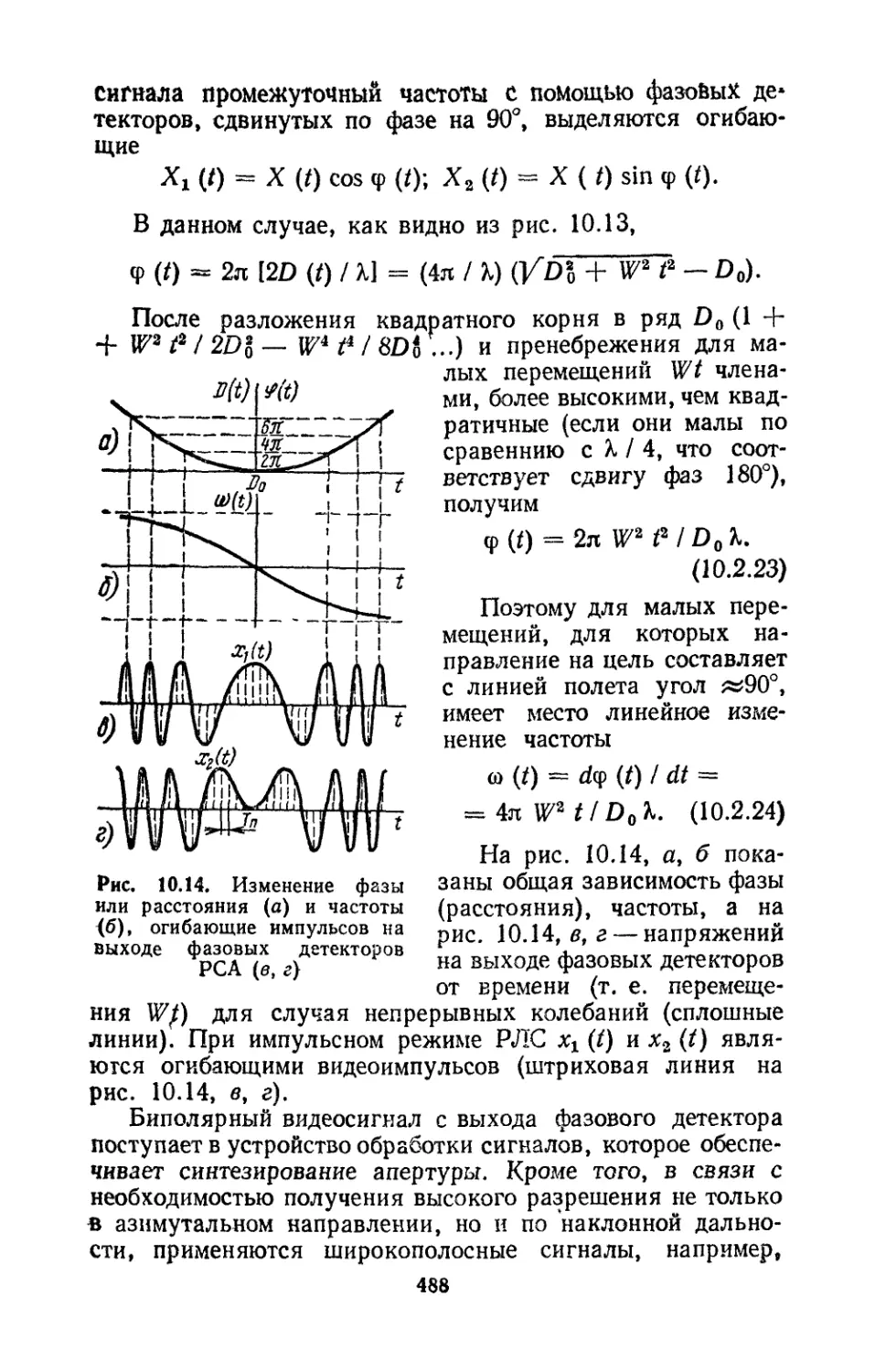
260, 488
— балансный 308
Фазовая манипуляция 41
Фильтр гребенчатый 235
полосовой 235, 259
режекторный 259, 297,
329
— дисперсионный 398
— нерекурсивный 325
— пространственно-временной
456
— рекурсивный 325
— сжатия 398
— согласованный 219
— цифровой 324
Фильтров «гребенка» 79
Фурье-преобразование 221
Характеристика обнаружения
242, 252
— пеленгационная 416
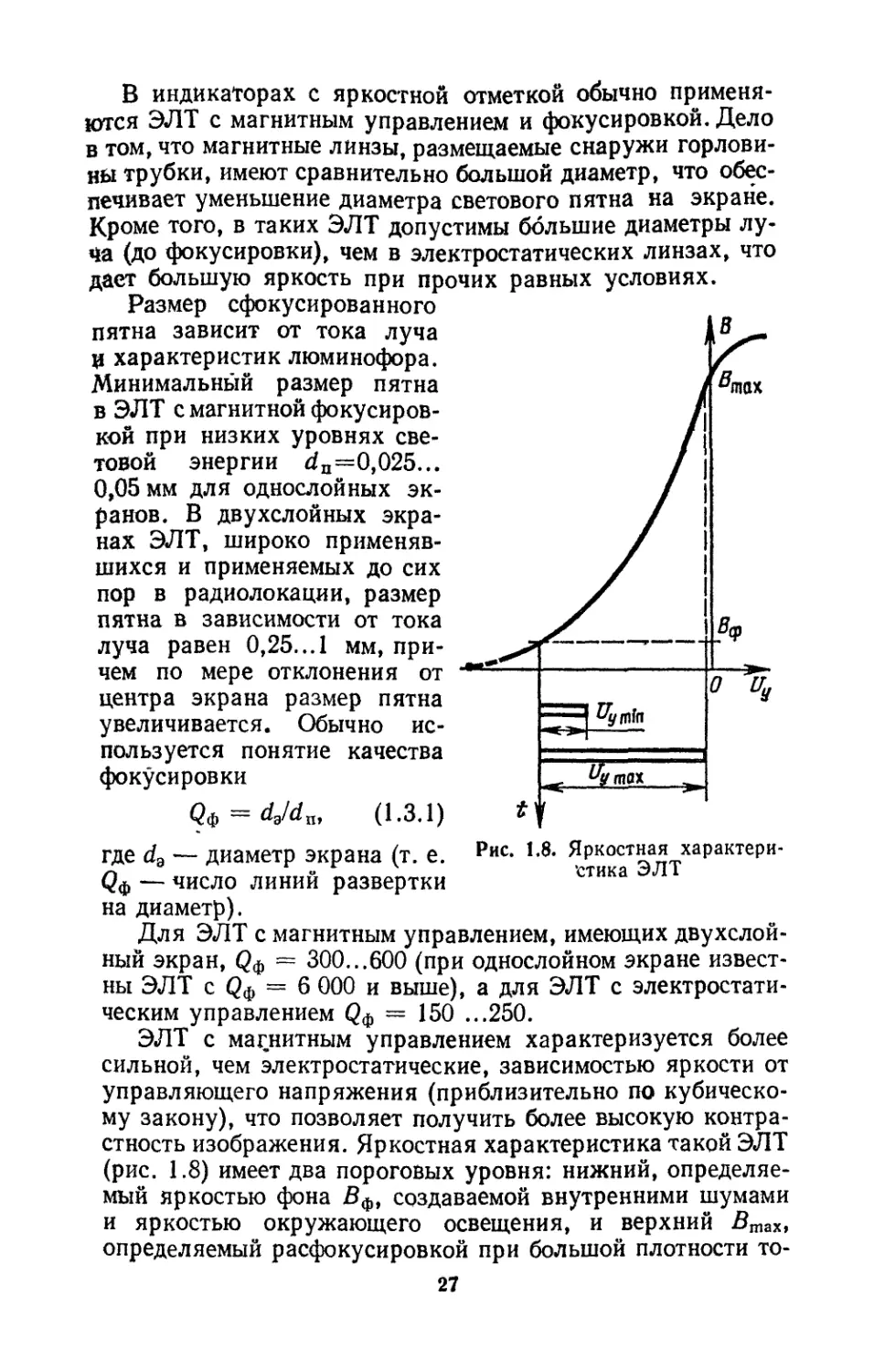
— яркостная ЭЛТ 27
Характрон 519
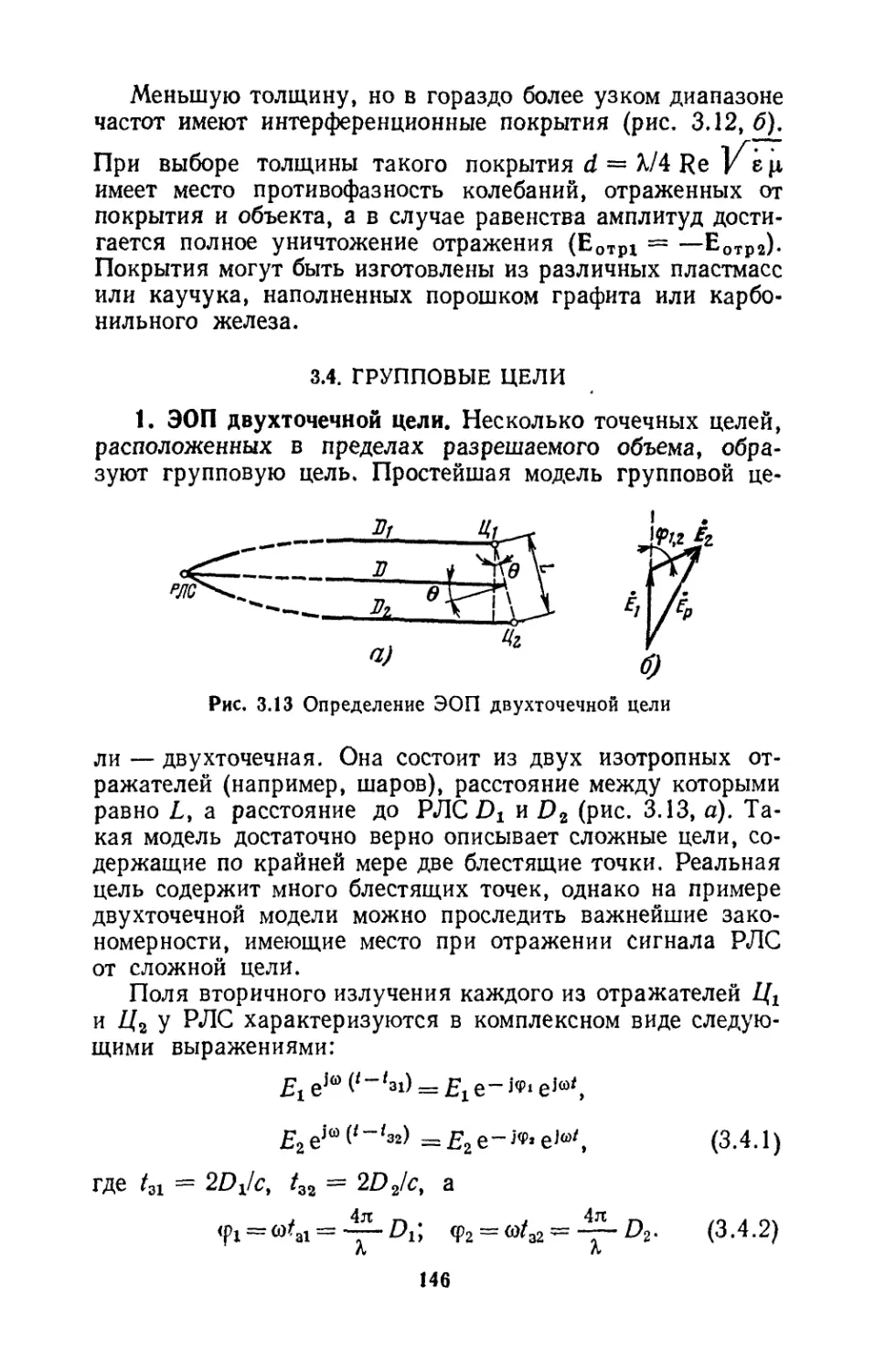
Цель групповая 146
— объемная 199
— поверхностно-распределен-
поверхностно-распределенная 182
— радиолокационная 4
— сложная, сосредоточенная,
точечная 125
Центр отражения кажущийся
150
Частота биений 112
вращения антенны 24
— модуляции 113
— повторения 12
— пространственная 452
— —угловая 455
Частотная модуляция Ш, 389
Частотный метод измерения
дальности 112
Чувствительность пеленгацион-
пеленгационная 417, 420
Шеннона формула 531
Ширина луча антенны 8
— спектра 57, 382
эффективная 58, 412
Шкала дальности электронная
26
Шум «белый» 206, 223
— «небелый» 256
Электронно-лучевая трубка 26,
477, 514
ЭЛТ знакопечатающая 519
Эффективная отражающая
площадь цели 125
выпуклых тел 137
двухпозиционный (би-
статической) РЛС 128, 505
— двухточечной цели 147
— линейного вибратора 129
— морской поверхности 192
— объемно-распределенных це-
целей 201
— самолетов 161
— пластины 135
— уголковых отражателей 144
— шара 138
— шероховатой земной поверх-
поверхности 188
Яркость свечения экрана ЭЛТ
28, 514
533
ОГЛАВЛЕНИЕ
Предисловие ко второму изданию . 3
Введение . , 4
Глава 1.
ПРИНЦИП ДГЙПВИЯ И ОСНОВНЫГ ПАРАМГТРЫ
ИМПУЛЬСНЫХ РЛС С ВИЗУАЛЬНОЙ ИНДИКАЦИЕЙ
1.1. Импульсный метод измерения дальности 15
1 2. Принцип действия импульсной РЛС кругового обзора . 21
1.3. Визуальные индикаторы РЛС кругового обзора ... 26
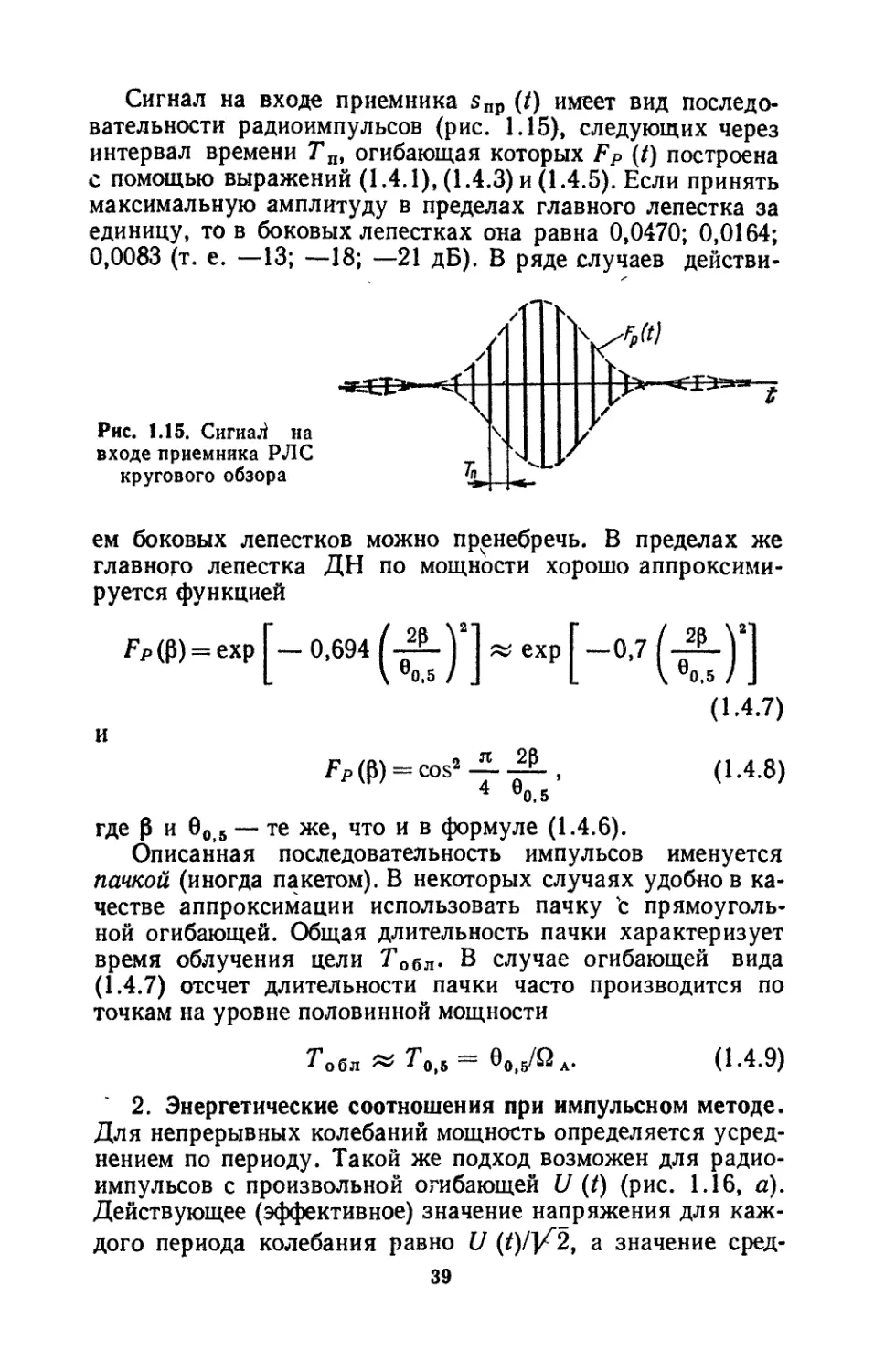
1.4. Некоторые характеристики сигнала импульсной РЛС кру-
кругового обзора 37
1.5. Разрешающая способность РЛС . . . 42
1.6. Точность измерения координат целей . .52
Глава 2.
ПРИНЦИП ДЕЙСТВИЯ КОГЕРЕНТНЫХ РЛС
2.1. Эффект Доплера в радиолокации 64
2.2. Когерентные доплеровские РЛС с непрерывным излуче-
излучением радиоволн ... 71
2 3. Вторичный эффект Доплера 82
2 4. Когерентно-импульсный метод (истинно когерентные С1К
стемы) 85
2 5. Когерентно-импульсный метод (псевдокогерентные систе-
системы) 103
2.6. Особенности когерентно-импульсной РЛС при наличии
взаимных перемещений РЛС и мешающего объекта . . 107
2.7. Фазовый метод измерения дальности 108
2.8. Частотный метод измерения дальности 111
2.9. Некоторые сравнительные характеристики импульсного и
непрерывного методов .124
Глава 3.
РАДИОЛОКАЦИОННЫЕ ЦЕЛИ
3.1. Эффективная отражающая площадь целей . . . 125
3.2. Эффективная отражающая площадь тел простой формы . 129
3.3. Искусственные отражатели 142
3.4. Групповые цели . 146
3 5. Вероятностная оценка ЭОП 155
3.6. Поляризационные характеристики целей . ... 162
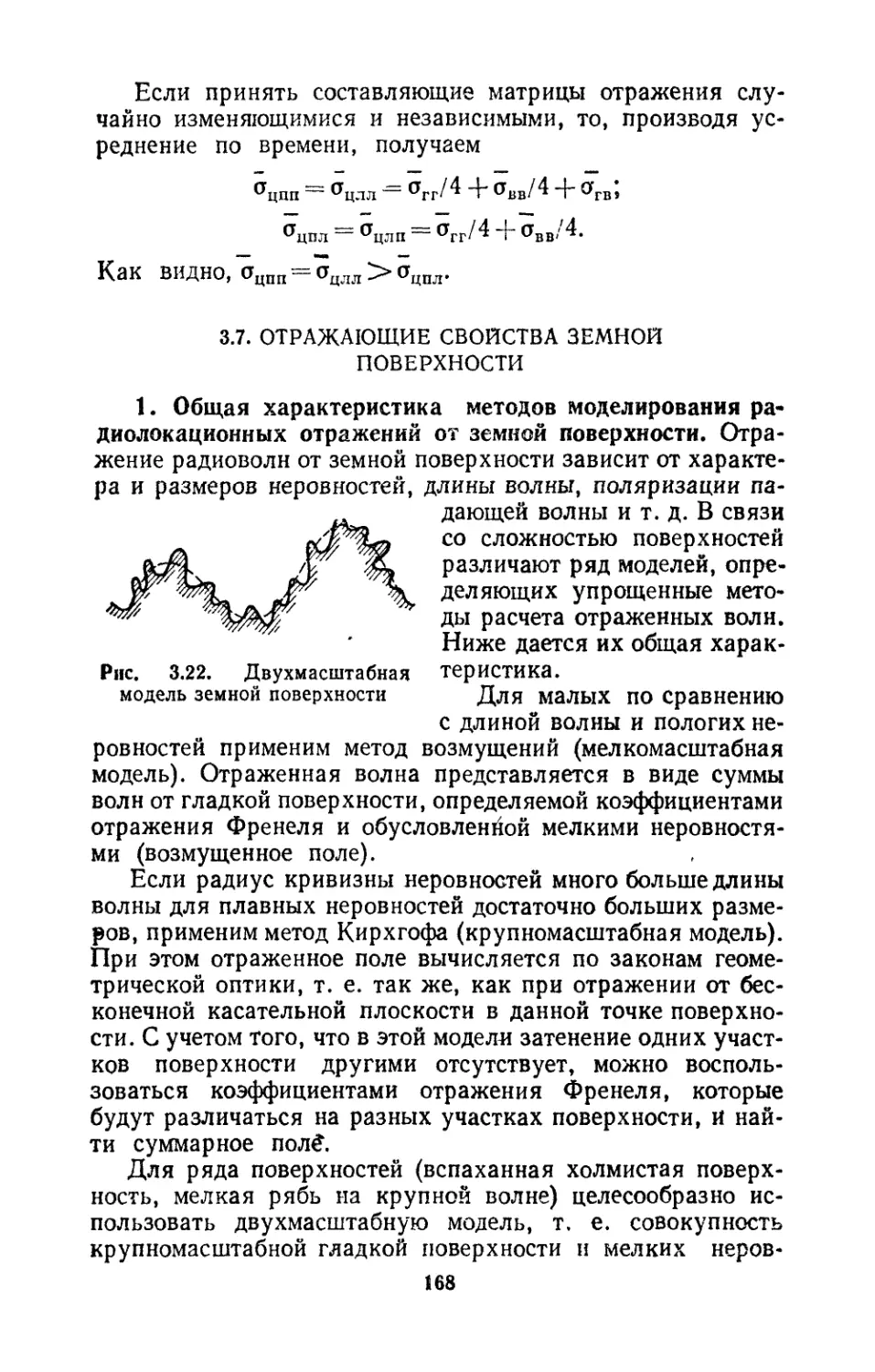
3.7. Отражающие свойства земной поверхности . . . . 168
3.8. Поверхностно-распределенные цели . 182
3.9. Влияние эффекта Доплера в случае поверхностно-распре-
поверхностно-распределенных целей 194
3.10. Объемно-распределенные цели 199
Глава 4.
ОПТИМАЛЬНАЯ ОБРАБОТКА ПРИ ОБНАРУЖЕНИИ
РАДИОЛОКАЦИОННЫХ СИГНАЛОВ
4.1. Обнаружение радиолокационных сигналов как статисти-
статистическая задача , 205
531
4.2. Согласованный фильтр (общие свойства) 219
4.3. Согласованные фильтры для некоторых сигналов . . 226
4.4. Когерентное накопление 237
4.5. Характеристики обнаружения когерентного приемника . 242
4.6. Некогерентное накопление , . 249
4.7. Оптимальная обработка радиолокационных сигналов при
наличии смеси пассивной помехи и шумов .... 256
Глава 5.
УСТРОЙСТВА ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ
СИГНАЛОВ И БОРЬБЫ С ПОМЕХАМИ
5.1. Общие сведения о первичной обработке радиолокацион-
радиолокационных сигналов 263
5.2. Накопители с динамической памятью 265
5.3. Аналоговые накопители со статической памятью . . 279
5.4. Автоматические дискретные (цифровые) обнаружители . 283
5.5. Подавители пассивной помехи системы СДЦ . . . 297
5.6. Влияние внешних и внутренних факторов на качество ра-
работы системы СДЦ 314
5.7. Цифровая фильтрация при обработке радиолокационных
сигналов 324
5.8. Адаптивные устройства, улучшающие работу системы
СДЦ 344
5.9. Устройства борьбы с помехами от гидрометеобразований 349
5.10. Электромагнитная совместимость в радиолокации . . 351
Глава 6.
ДАЛЬНОСТЬ ДЕЙСТВИЯ РЛС
6.1. Дальность действия РЛС в свободном пространстве для
сосредоточенных целей 355
6.2. Влияние распространения радиоволн в атмосфере на
дальность действия РЛС . ....'.... 361
6.3. Энергетические соотношения при облучении распределен-
распределенных целей 366
6.4. Влияние отражения радиоволн от земной поверхности
на уравнение дальности 371
6.5. Зона видимости РЛС 375
6.6. Логарифмическая форма уравнения дальности . . . 380
Глава 7.
СЛОЖНЫЕ РАДИОЛОКАЦИОННЫЕ СИГНАЛЫ
7.1. Обобщенная характеристика радиолокационных сигналов 382
7.2. Частотно-модулированные импульсы 389
7.3. Фазоманипулированные импульсы 401
Глава 8.
ИЗМЕРЕНИЕ КООРДИНАТ ЦЕЛИ
8.1. Оптимальные методы измерения ....... 406
8.2. Методы измерения угловых координат цели . . . . 416
8.3. Моноимпульсные системы измерения угловых координат 424
8.4. Цифровые методы съема координат цели 428
Глава 9.
РАДИОЛОКАЦИОННЫЙ ОБЗОР ПРОСТРАНСТВА
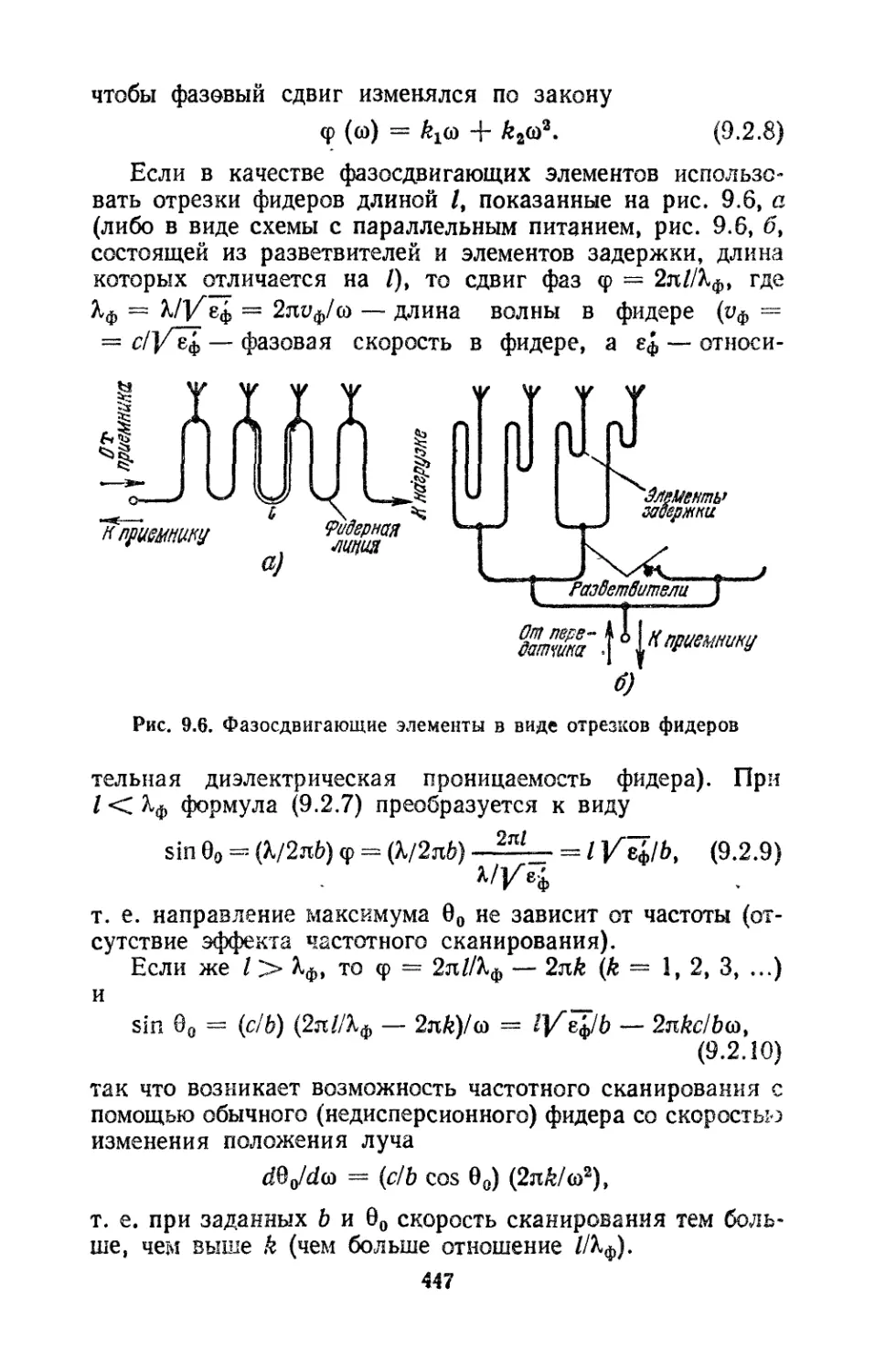
9,1. Общая характеристика радиолокационного обзора . , 435
595
9.2. Электрическое сканирование луча антенны .... 439
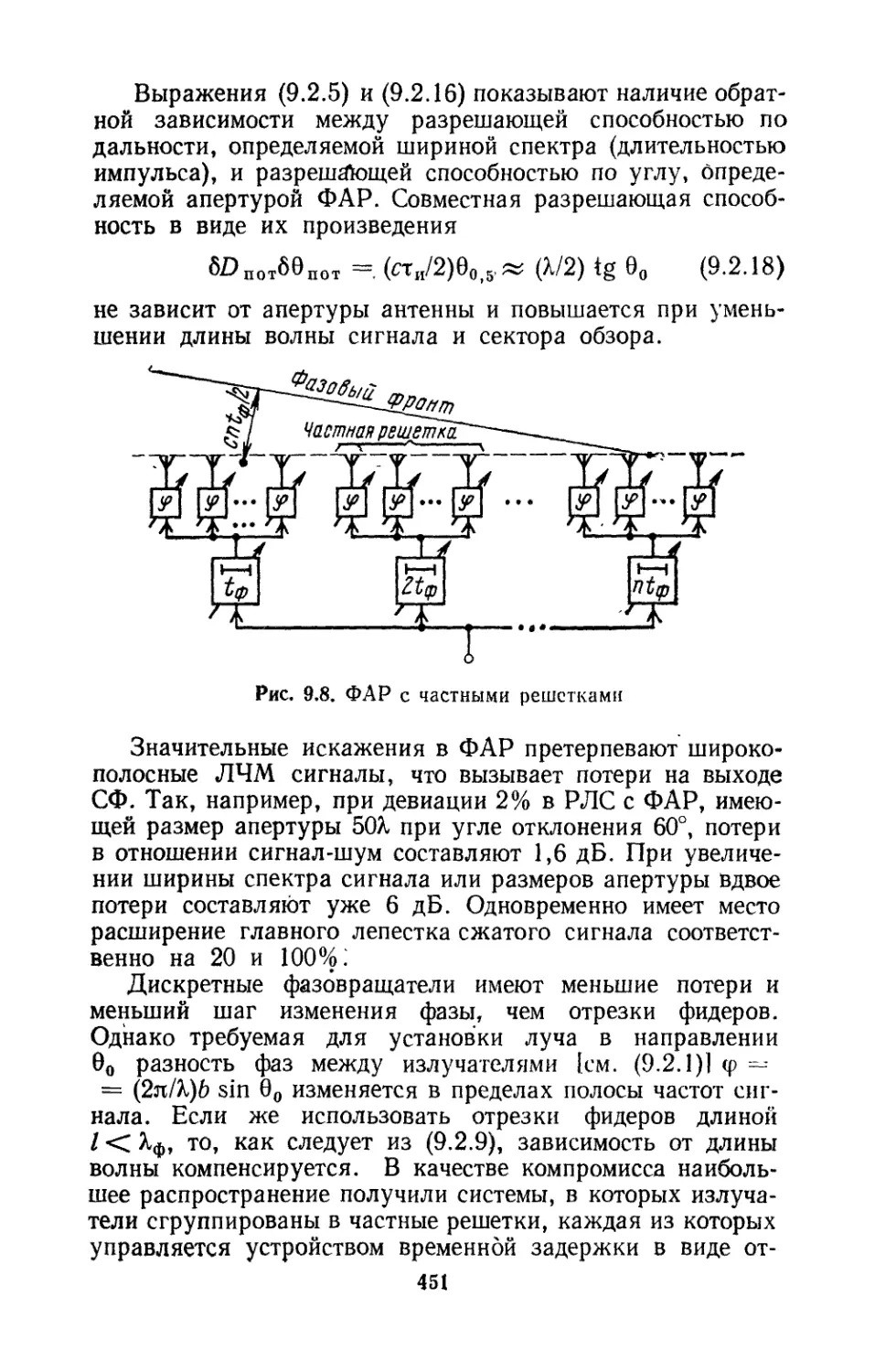
9.3. Пространственно-временная обработка радиолокационных
сигналов 452
9.4. Особенности определения угла места (высоты) цели . 463
Глава 10.
РАДИОЛОКАЦИОННЫЙ ОБЗОР ЗЕМНОЙ ПОВЕРХНОСТИ
10.1. Радиолокационное изображение земной поверхности
в РЛС кругового обзора 468
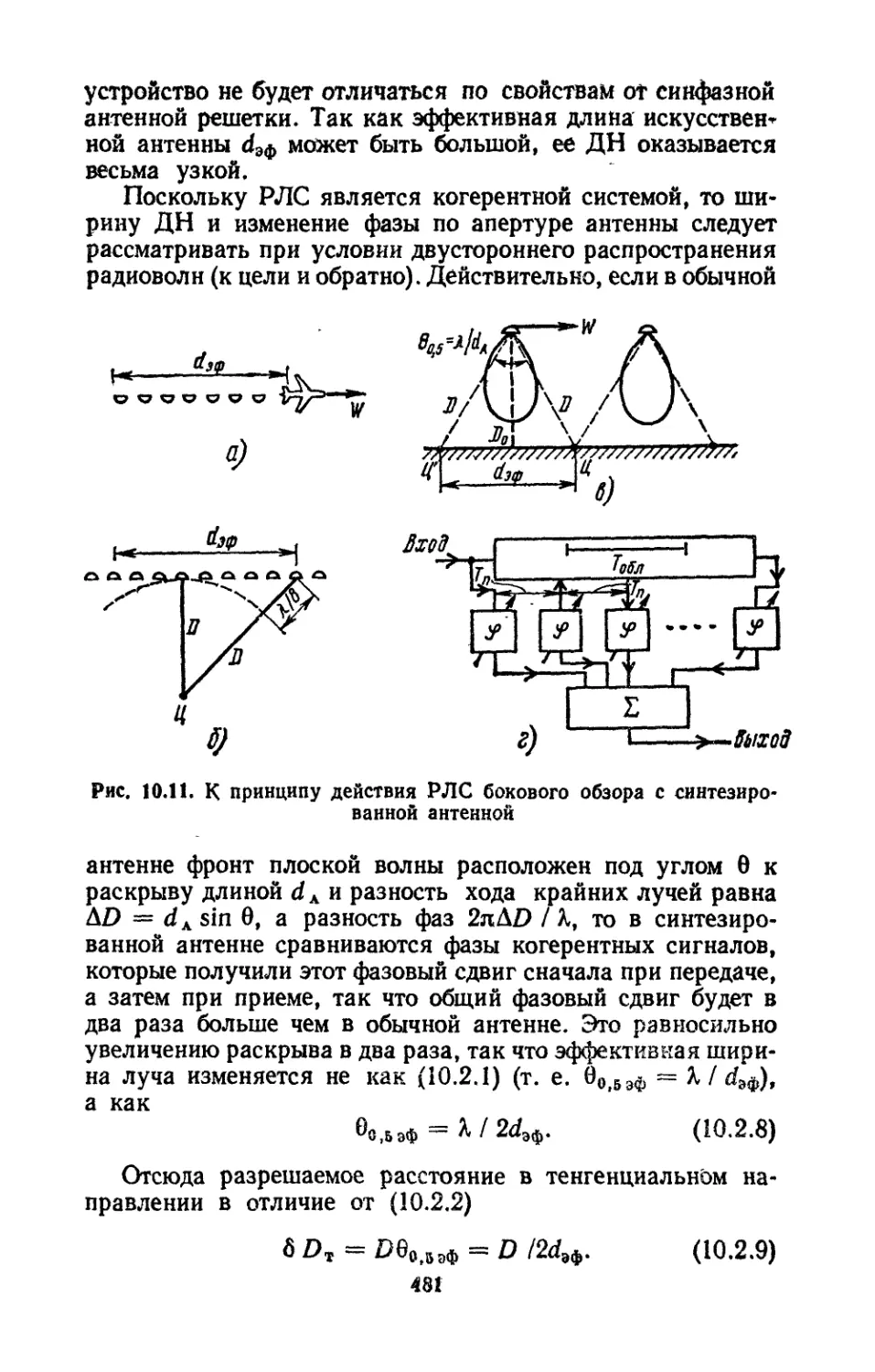
10.2. РЛС бокового обзора 477
Глава 11.
РАДИОЛОКАЦИЯ С АКТИВНЫМ ОТВЕТОМ
11.1. Общая характеристика РЛС с активным ответом . . 497
11.2,- Некоторые особенности построения систем с активным
ответом 501
Глава 12.
ОСНОВЫ ОБРАБОТКИ И ОТОБРАЖЕНИЯ
РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ
В АВТОМАТИЗИРОВАННЫХ СИСТЕМАХ
12.1. Автоматизация обработки радиолокационной информа-
информации 509
12.2. Способы повышения яркости радиолокационного изобра-
изображения .... 513
12.3. Отображение знаковой информации ... . 516
12.4. Совмещенные индикаторы 519
12.5. Трансляция радиолокационной информации .... 525
Список литературы 529
Предметный указатель 530
МОИСЕЙ ИОНОВИЧ ФИНКЕЛЬШТЕЙН
ОСНОВЫ РАДИОЛОКАЦИИ
Редактор Ю. И. Суханов
Художник В. А. Козелков
Художественный редактор Л. Н. Сильянов
Технический редактор Г. 3. Кузнецова
Корректор Т. В. Покатова
ИБ № 541
Сдано в набор 08 04 83. Подписано в печать 08.08.83. Т-13658
Формат 84ХЮ8'/з2. Бумага типографская № 3. Гарнитура литературная.
Печать высокая. Усл. печ. л. 28,14. Усл. кр.-отт. 28,56. Уч.-нзд. л. 29,46.
Тираж И 000 экз. Изд. К» 19765. Зак. № 1579 Цена 1 р. 20 к.
Издательство «Радио и связь>. 101000 Москва, Почтамт, а/я 693
Московская типография № 4 Союзполиграфпрома
при Государственном комитете СССР
по делам издательств, полиграфии и книжной торговли
139041, Москва, Б. Переяславская ул., д. 4,6,