/








































































































































































































Текст
АКАДЕМИЯ НАУК СССР
Серия «Наука и технический прогресс»
И.Ф. Гончаревич
Вибрация-
нестандартный путь
Вибрация в природе
И технике
Ответственный редактор
доктор технических наук
Э. Г. ГУДУШАУРИ
Москва «Наука»
1986
ББК 22.251
Г 65
УДК 621.928.23
Рецензенты:
доктор технических наук
А. Л. БОРЩЕВСКИЙ,
доктор технических наук
А. Б. КОЗАЧЕНКО
Гончаревич И. Ф.
Г 65 Вибрация — нестандартный путь: вибрация в
природе и технике.— М.: Наука, 1986.— 209 с., ил.
Почти всем природным явлениям сопутствуют разно-
образные вибрационные процессы, эффективность кото-
рых значительно превосходит то, что достижимо для тра-
диционной техники.
В книге в популярной форме раскрываются секреты ви-
брации, которые объясняют встречающиеся нам порой не-
обычные явления и сенсации и позволяют создавать уди-
вительные по простоте и эффективности вибромашины —
основу технологии эпохи научно-технического прогресса.
Для широкого круга читателей, интересующихся про-
блемами техники будущего.
2701000000-440
Г~054(02)-86 "79-86 НП ББК 22,251
Игорь фомич Гончаревич
ВИБРАЦИЯ — НЕСТАНДАРТНЫЙ ПУТЬ
Вибрация в природе и технике
Утверждено к печати
Редколлегией серии научно-популярных изданий Академии наук СССР
Редактор Л. Ф. Данкова
Художник С. А. Резников. Художественный редактор Н. А. Фильчагина
Технический редактор А. М. Сатарова
Корректоры Н. Г. Васильева, Л. В. Л^кичева
ИБ № 31481
Сдано в набор 22.05.86. Подписано к печати 19.08.86. Т-01566
Формат 84хЮ8*/32. Бумага книжно-журнальная.
Гарнитура обыкновенная. Печать высокая. Усл. печ. л. 10,92.
Усл. кр. отт. 11,13. Уч.-изд. л. 11,5. Тираж 11300_экз. Тип. зак. 2608.
Цена 75 коп.
Ордена Трудового Красного Знамени издательство «Наука»
117864 ГСП-7, Москва В-485 Профсоюзная ул., 90.
2-я типография издательства «Наука»
121099, Москва, Г-99, Шубинский пер., 6
© Издательство «Наука», 1986
Предисловие
В явлении вибрации находит отражение диалектиче-
ский принцип единства противоположностей. С одной
стороны, применение вибрационных методов в различ-
ных сферах человеческой деятельности открывает боль-
шие перспективы для всестороннего ускорения науч-
но-технического прогресса на качественно новой
основе. С другой стороны, нежелательные, неуправляе-
мые проявления вибрации могут послужить причиной
серьезных аварий и катастроф, оказать вредное влия-
ние на здоровье человека.
Для социального развития нашего общества вопро-
сы рационального использования вибрации, а также
предотвращения вредных ее воздействий чрезвычайно
важны и всегда вызывают интерес. Так, академи-
ком К. В. Фроловым была опубликована в издатель-
стве «Наука» работа «Вибрация — друг или враг?»
(М., 1984), в которой всесторонней оценке подверга-
лось соотношение позитивных и негативных сторон
вибрации. А один из возможных ответов на поставлен-
ный в упомянутой книге вопрос дает настоящее изда-
ние — «Вибрация — нестандартный путь».
Итак, вибрационная техника и технология корен-
ным образом отличаются от традиционных прототипов.
Использование вибрационных принципов при создании
машин и освоении рабочих процессов уже в настоящее
время позволяет получать ощутимые результаты.
Дальнейшее же развитие этого принципиально нового
направления будет способствовать решению проблемы
создания экологически чистых ресурсосберегающих
технологий и резкого повышения производительности
труда.
Существуют определенные трудности на пути широ-
кого внедрения вибрационной техники и технологии в
народное хозяйство — прежде всего своеобразный пси-
хологический барьер недоверия и незнания. Дело в том,
что вибрационная техника строится в основном на со-
вершенно иной принципиальной основе, чем техника
3
традиционная. Специалисты, успешно создающие и
эксплуатирующие традиционные машины, во многих
случаях не справляются с вибрационными машинами.
Возникает положение, что очевидные в рамках тради-
ционной техники решения оказываются неэффектив-
ными или вообще неправильными в сфере вибрацион-
ной техники.
Можно сказать, что проявления вибрационной тех-
ники часто неожиданны, значительно более многооб-
разны и разносторонни, чем возможности тради-
ционной техники. Вибрационной технике посвящены
многочисленные труды различных исследователей.
С удовлетворением можно отметить несомненную веду-
щую роль отечественных ученых в развитии ее тео-
рии. Однако достаточно высокая сложность изучаемых
процессов, высокий уровень специализации и матема-
тизации имеющихся работ ограничивают круг лиц,
знакомых с устройством вибрационных машин, прин-
ципами действия и сферой их эффективного примене-
ния в промышленности.
Предлагаемая книга имеет целью ознакомить по
возможности более широкий круг читателей с новой
увлекательной областью знаний. Одновременно затра-
гивается один загадочный парадокс из области исто-
рии развития техники. Действительно, вибрационная
техника как самостоятельное направление начала фор-
мироваться сравнительно недавно. Между тем в ее
основе лежат принципы, широко распространенные в
природе. А традиционная техника, основанная на
принципе колеса, неизвестном в природе, имеет уже
достаточно внушительную историю.
В последние годы, когда слишком очевидным стало
то обстоятельство, что производственная деятельность
человечества не всегда гармонирует с природой, нача-
ли меняться установки во взглядах. Стремление без-
возмездно брать у природы и переделывать ее начало
постепенно переходить в более осторожное и бережное
отношение к окружающей среде. Более вдумчивое от-
ношение к природным явлениям позволяет увидеть,
что природа располагает блестящими и простейшими
решениями многих проблем, над которыми бьется
человечество. Так, в частности, выяснилось, что широ-
ко распространенный в природе принцип периодиче-
ского движения открывает принципиально новые пер-
спективы развития техники и технологии. И оказалось,
4
что вибрационная техника как раз и идет по этому
пути.
В книге делается попытка в доступной для неспе-
циалистов форме донести до читателя те новые для
нас, но всегда существовавшие в природе принципы,
на которых основана вибротехника, показать их при-
менение в конкретных машинах и рабочих процессах.
В разделе «Бермудский треугольник в вибротехнике»
рассмотрен ряд неожиданных явлений, продемонстри-
рованных вибротехникой, которые вызвали сенсацию
в широких кругах научно-технической общественности.
Автор надеется, что новая отрасль науки и техники
привлечет к себе внимание пытливых умов, которые
дадут ей новый импульс развития, что послужит уско-
рению научно-технического прогресса.
Техника традиционная
и техника вибрационная
В настоящее время в мире техники существуют два
типа машин — традиционные, основанные на исполь-
зовании вращательного движения, и вибрационные, со-
вершающие возвратно-поступательные движения.
Согласно имеющимся данным, в природе неизвес-
тен принцип колеса, и сегодня мы считаем, что наша
традиционная «колесная» техника исключительно тво-
рение ума и рук Homo sapiens. В то же время прин-
цип периодических движений, широко распространен-
ный в природе, достаточно долго не находил, во всяком
случае, широкого применения в человеческой деятель-
ности. Если исчислять дату развития нового направ-
ления в технике с начала разработки и широкого при-
менения вибрационных методов, то это произошло
всего несколько десятков лет назад.
Между тем простейшие механизмы с возвратно-по-
ступательными движениями, на первый взгляд неза-
метно, сосуществуют с нами уже не одну сотню лет.
Да и в традиционных машинах механизмы возвратно-
поступательного действия используются достаточно
широко. Однако, будучи построенными по принципу
механизмов с жесткими связями, они обладают недо-
статками, лишающими их дальнейших перспектив.
Машины традиционного принципа действия получили
право на будущее после того, как стали выполняться
по принципу вибрационных машин.
Но, так или иначе, в мире техники механизмы и
машины вращательного принципа действия имеют пре-
обладающее значение. В настоящее время традицион-
ная техника достигла таких вершин и такого совер-
шенства, что вряд ли кто позволит себе усомниться в
том, правильный ли путь был выбран в свое время.
Трудно ответить на вопрос, почему человечество
пошло по пути создания техники, принципы которой,
по крайней мере в доступных нам границах, нельзя
было позаимствовать у природы. И в то же время, как
6
говорится, лежавшие под ногами принципы нс были
использованы. Это величайшая и интереснейшая загад-
ка, решение которой, полагаю, имело бы не только
огромный познавательный, но и большой практический
интерес.
В мире известны цивилизации, не знавшие коле-
са,— это некоторые цивилизации на территории Аме-
рики. Но они погибли под «колесом» истории, пред-
ставшим в облике испанских конквистадоров. Кто
знает, может быть, развиваясь иным путем, американ-
ские индейцы и пришли бы к вибромашине, минуя
технику, основанную на колесе?
Не исключено, что принцип колеса было рроще во-
плотить в примитивных машинах древнего мира, чем
принцип периодических движений. Возможно, для его
использования был необходим более высокий уровень
технического развития, и, может быть, не случайно он
нашел применение только в последнее время.
Вибрационная техника начала формироваться срав-
нительно недавно. Поэтому совершенно естественно,
что в вибрационных машинах применяются элементы
традиционной техники. Однако нельзя сказать, что
такое сочетание механизмов, базирующихся на прин-
ципиально различных основах, всегда оказывается до-
статочно эффективным.
Так, например, использование двигателей враща-
тельного действия ведет к необходимости дополнитель-
ного применения промежуточных механизмов, преоб-
разующих вращательное движение в возвратно-посту-
пательное. Вращающий момент двигателя может быть
преобразован в периодическую возмущающую силу с
помощью дебалансного вибратора.
Основой дебалансного вибратора является уравно-
вешенный груз, при вращении которого создается вра-
щающаяся центробежная сила. Дебалансный вибратор
может быть непосредственно использован для привода
вибрационных машин. Конструкция получается про-
стой, однако опыт эксплуатации вибрационных машин
с дебалансными вибраторами показывает, что исполь-
зование привода вращательного принципа действия по-
рождает ряд проблем.
Большинство вибромашин с указанным выше при-
водом работают в эффективном по многим показателям
зарезонансном режиме. Для того чтобы машина вошла
в такой режим, она должна перейти через область ре-
7
зонанса. И вот с этого момента возникают проблемы.
В резонансной области при использовании деба-
лансного привода резко возрастают размахи колебаний.
G одной стороны, это может привести к поломке маши-
ны, а с другой, чтобы преодолеть область интенсивных
резонансных колебаний, нужно иметь двигатель, мощ-
ность которого в 5—6 раз превышает мощность, необ-
ходимую для работы в зарезонансном режиме. Для
решения этой проблемы требуется завышать устано-
вочную мощность двигателя, существенно усложнять
конструкцию вибратора и т. д.
Второй недостаток заключается в следующем.
Создаваемые при вращении дебаланса большие центро-
бежные силы нагружают подшипники, что снижает их
долговечность и влечет за собой большой непроизводи-
тельный расход энергии на преодоление сопротивле-
ний вращению вала в подшипниках. Есть и другие
неприятности.
Теперь посмотрим, как обстоит дело при исполь-
зовании вибровозбудителя возвратно-поступательного
принципа действия. Опыт показывает, что в этом слу-
чае упомянутых выше проблем нет. Так, например,
электромагнитный вибратор органически объединяет в
себе двигатель и возбудитель периодической возму-
щающей силы. В нем нет вращающихся деталей, а сле-
довательно, подшипников и потерь на трение. Вибра-
тор практически не имеет переходных режимов и легко
входит в резонансный режим.
Достижения современной техники огромны. Не да-
ром говорится, что мы живем в эпоху научно-техниче-
ской революции. Темпы прогресса настолько велики,
что их можно определить только как революционные.
Каждый день появляются сообщения о новых разра-
ботках. Создаются такие высокосовершенные системы,
как роботы.
На автозаводах роботы выполняют сложнейшие
операции, особенно на сборке автомашины. Механиче-
ские руки роботов способны совершать точнейшие дви-
жения, проникать в кабину, устанавливать сиденья,
осуществлять точечную сварку в десятках позиций
и т. д. Робот действует быстро. На сборке он заменяет
двух квалифицированных рабочих. Казалось бы, все
обстоит превосходно.
Однако расчеты показывают, что для дальнейшего
увеличения быстродействия роботов — а это необходи-
8
мо для дальнейшего развития производства — мощ-
ность приводов следует резко увеличить. При этом
двигатели оказываются настолько громоздкими, что их
негде уже устанавливать. Соответственно растет и рас-
ход энергии. Оказывается, что традиционные подходы
в создании роботов практически исчерпали свои воз-
можности.
И вот при создании роботов, пока простых цикло-
вых манипуляторов, использовали принцип вибротех-
ники. Уравновесили силы инерции движущихся частей
восстанавливающими силами пружин. Результат ока-
зался недвусмысленным, быстродействие повысилось
более чем в 2 раза.
Опыт неизменно подтверждает эффективность виб-
рационной техники и технологии. Давно уже стало
очевидным, что применение вибрационной техники
позволяет коренным образом усовершенствовать тради-
ционные и разработать новые технологические процес-
сы. В настоящее время большинство традиционных
технологий может осуществляться методами вибротех-
ники. При этом оказывается, что многие процессы
ускоряются в десятки раз. Вибрационные машины, как
правило, значительно проще и эффективнее обычных,
потребляют меньше энергии.
Очень широко в промышленности применяются
транспортно-технологические вибрационные машины.
Вот что говорят специалисты о таких машинах. Основ-
ными достоинствами вибрационных транспортирующих
машин являются:
возможность перемещения штучных и массовых
грузов, начиная от мелкодисперсных материалов и кон-
чая глыбами в поперечнике более метра;
незначительное измельчение перемещаемого груза
в процессе транспортирования;
ничтожный износ грузонесущего органа, даже при
перемещении таких высокоабразивных продуктов, как
корундовый порошок;
простота конструкции, почти полное отсутствие
трущихся и быстроизнашивающихся деталей, легкость
обслуживания и ухода;
невысокая энергоемкость, безопасность в эксплуа-
тации, простота загрузки и разгрузки в любой точке
става.
Возможность применения герметичных грузонесу-
щих органов делает их незаменимыми при перемеще-
9
нии ядовитых, радиоактивных, пылящих, газирующих,
горячих и других труднотранспортируемых грузов.
Производительность вибрационных транспортирующих
машин может составлять от нескольких килограммов
до нескольких тысяч тонн в час при расстоянии транс-
портирования до 50 м на одну установку.
Принципиальной особенностью вибрационных транс-
портных машин, выгодно отличающей их от всех про-
чих транспортирующих устройств, является возмож-
ность совмещения процесса перемещения с технологи-
ческой обработкой транспортируемого груза. Далеко не
полный перечень операций, которые могут осуществ-
ляться в процессе транспортирования, включает: суш-
ку, обезвоживание, классификацию, гранулирование,
охлаждение, химическую и физико-химическую обра-
ботку. При перемещении деталей могут производиться
их абразивная, упрочняющая или термическая обра-
ботка, а также ориентирование для подачи в автома-
тические станки.
Очень широко применяется вибрация при обработ-
ке дисперсных сред в различных технологических про-
цессах. Это прежде всего создание виброкипящего слоя
для ускорения массо- и теплообменных процессов при
ведении разнообразных физико-химических и химиче-
ский реакций. Сюда относятся каталитические и твер-
дофазные реакции, горение, экстрагирование, растворе-
ние и выщелачивание, восстановление металлов из руд
и многие другие. В обрабатываемых вибрацией дис-
персных системах осуществляются также смешение,
классификация по крупности и удельному весу, уплот-
нение и разрыхление, кристаллизация, закалка, сушка,
мойка, гранулирование, флотация, центрифугирование,
микробиологическая обработка и многие другие опе-
рации.
Вибрация достаточно широко применяется в про-
цессах резания и разрушения. Это вибрационное свер-
ление, точение, строгание, абразивная обработка. Сюда
же относятся дробление и измельчение горных пород,
смерзшихся грунтов, металлов для порошковой метал-
лургии. Вибрационные методы находят применение
при обработке металлов давлением: прокатке, прессо-
вании и волочении.
Новыми сферами приложения вибрации являются
виброустройства для просвечивания земной коры, сня-
тия напряжений и дегазации горных пород, вибра-
10
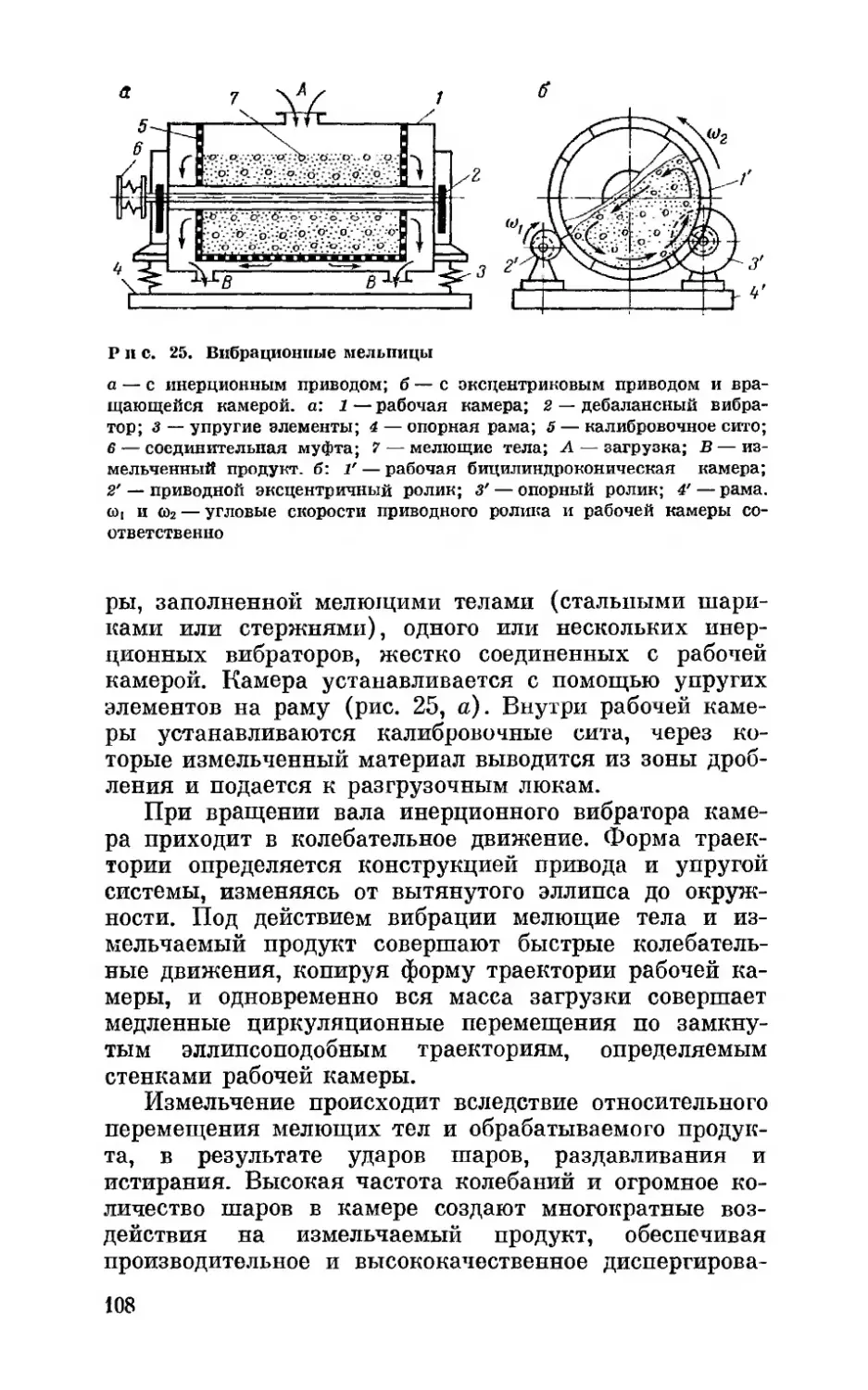
Рис. 1. Кривошипно-ползунный механизм
а — с жесткими звеньями; б — с упругими связями. 1 — кривошип
(коленчатый вал); 2— шатун; 3—направляющая (цилиндр); 4—пол-
зун (поршень); 5 — пружины, z — эксцентриситет кривошипа; жест-
кость пружины: Ло в шатуне, k — ползуна; т — масса ползуна
ционные микророботы и манипуляторы, вибродвигате-
ли и виброопоры, вибропозиционеры и многое другое.
Академик К. В. Фролов отмечает, что машины
вибрационного принципа действия расцениваются сей-
час как основа тсхпологии будущего.
Как устроена и работает
вибрационная машина?
Простота конструкции, отсутствие трущихся деталей,
пониженный расход энергии, высокая технологическая
эффективность вибрационных машин. Каким образом
это достигается?
Проще всего это понять, сравнив два простых близ-
ких по устройству механизма, один из которых обыч-
ный, а второй — вибрационный. В качестве примера
возьмем несложный, так называемый кривошипно-пол-
зунный, механизм, состоящий всего из трех подвиж-
ных деталей: вращающегося в подшипниках кривоши-
па, ползуна, перемещающегося в направляющих, п ша-
туна, соединяющего друг с другом кривошип и
ползун (рис. 1, а).
Этот механизм широко используется в технике.
По его схеме строятся двигатели внутреннего сгора-
11
пия и поршневые насосы. В насосе кривошип назы-
вается коленчатым валом, а роль ползуна играет пор-
шень, направляющей которого является цилиндр.
Как превратить механизм из обычного в вибра-
ционный? Сделать это очень просто. Нужны две пру-
жины. Первую пружину меньшей- жесткости вставим
в шатун, предварительно разрезав его на две части.
Второй пружиной соединим ползун с направляющей
(рис. 1,6). На первый взгляд кажется, что такое
простое преобразование исследуемого механизма не
может иметь каких-либо серьезных последствий. Одна-
ко в результате установки пружин механизм приобре-
тает многие не вполне очевидные свойства.
Как мы видим, в простом механизме все детали
жесткие, а в вибрационном есть упругие детали —
пружины. Поэтому принято делить все механизмы на
механизмы жесткие и упругие. Вибрационные машины
представляют собой устройства с упругими звеньями.
Для установления отличий вибрационной машины
от обычной проведем эксперименты с обоими механиз-
мами, представляющими собой насосы, и сопоставим
результаты. Начнем вращать кривошип простого меха-
низма на холостом ходу. Кривошип в своем движении
потянет за собой шатун, а шатун переместит поршень.
Перемещение поршня за один оборот будет точно рав-
но двойной длине кривошипа.
Выясним причину совпадения. Не потому ли это
происходит, что на поршень не действует рабочая на-
грузка? Для создания нагрузки на поршень заставим
его перекачивать воду. Замерим перемещение поршня
под нагрузкой. Оказывается, оно опять точно соответ-
ствует двойной длине кривошипа. Такой результат за-
меров позволяет утверждать, что в обычном механизме
перемещение деталей не зависит от действующей на
них нагрузки. Если нагрузка на поршень будет слиш-
ком большой и кривошип не сможет ее преодолеть, то
механизм остановится или сломается — в случае чрез-
мерной перегрузки.
Теперь займемся исследованием вибрационного ме-
ханизма. Будем вращать кривошип, меняя нагрузку на
поршень, и в каждом режиме нагружения измерять
величину его перемещения. В вибрационных механиз-
мах обычно измеряют перемещения элементов маши-
ны между их крайними положениями. Это перемеще-
12
ние составляет размах колебаний. Половина размаха
называется амплитудой колебаний.
Смысл амплитуды или размаха колебаний легко
понять на основе простого опыта. Поставим на колеб-
лющейся детали выделяющуюся на окружающем фоне
точку. Тогда при прямолинейных колебаниях детали
мы увидим вместо точки несколько размытую прямую
линию. Это траектория движения детали. Можно заме-
рить длину траектории — это и будет размах колеба-
ний, а амплитуда равна половине размаха. Амплиту-
да — это смещение детали от положения равновесия.
Глаз не различает последовательных положений
точки, каждого в отдельности, а видит именно конеч-
ный результат этих перемещений — траекторию дви-
жения точки. Если не учитывать устройство глаза и
механизм действия его рецепторов, то можно сказать,
что глаз выхватывает главное в процессе, без мелкой
детализации. Так же действует глаз и при наблюдении
за другими быстропротекающими процессами.
Например, когда мы смотрим за работой вибра-
ционного конвейера, мы не различаем, как отдельные
частицы ударяются о транспортирующую поверхность,
подпрыгивают, совершают свободный полет и т. д.
Зато мы видим конечный результат этих процессов —
массовый груз равномерно движется по грузонесуще-
му органу. Можно сказать, что периодические процес-
сы несвойственного нам масштаба времени остаются
за пределами нашего восприятия. Мы видим конечный
результат, представляющий процесс, развивающийся в
привычном нам ритме.
В нашем случае глаз фиксирует форму и размеры
траектории движения детали. Траектория необязатель-
но должна быть прямой линией, даже наоборот,
в реальных процессах она редко бывает прямой. Чаще
траектория имеет форму эллипса. Если эллипс вытя-
гивается, то он в конце концов превращается в пря-
мую. Если округляется, то — в окружность.
В ходе эксперимента нагрузку на поршень можно
регулировать, например, вентилем, соединяющим ци-
линдр насоса с нагнетающим трубопроводом. Оказы-
вается, что, чем больше нагрузка на поршень, тем
мепыпе его перемещение.
Таким образом, в вибрационном механизме переме-
щения его деталей зависят от действующих на них на-
грузок,
13
Если мы приложим к поршню очень большую на-
грузку, он вообще может перестать перемещаться. При
этом в отличие от простого механизма кривошип будет
беспрепятственно продолжать свое вращение. Посмот-
рим внимательно на работающий вибрационный меха-
низм и постараемся выяснить, почему кривошип при
перегрузке насоса не останавливается и не ломается.
Оказывается, если поршень неподвижен, то, вра-
щаясь, кривошип периодически сжимает и растягивает
пружину, которой мы соединили две половины разре-
занного шатуна. Установленная в шатуне пружина
делает возможным относительное перемещение криво-
шипа и поршня и исключает грозящие ему в случае
перегрузки поломки. Дальнейшее углубленное изуче-
ние закономерностей работы вибрационного механизма
показывает, что пружина сжимается и растягивается
и при небольших нагрузках на ползун, и даже при от-
сутствии нагрузок вообще.
Таким образом, мы обнаружили интересное и важ-
ное в практическом отношении свойство вибрационных
машин — они не ломаются при перегрузках, несмотря
на то что их рабочий орган полностью заторможен,
а привод продолжает работать. Это возможно потому,
что упругие элементы, в рассматриваемом случае пру-
жина, допускают относительное перемещение деталей,
из которых состоит вибромашина.
Не только эта особенность вибрационных машин,
но еще и многие другие связаны с тем, что в их кон-
струкции обязательно имеются упругие элементы в
виде пружин, резиновых деталей и т. д.
Для выявления других закономерностей работы
вибрационных машин будем измерять величину пере-
мещения ползуна между крайними его положения-
ми при различных скоростях вращения кривошипа.
Сопротивления движению поршня будем поддерживать
неизменными и очень небольшими. Исследования по-
казывают, что перемещения поршня не остаются по-
стоянными с изменением скорости вращения криво-
шипа. При больших скоростях вращения кривошипа
перемещения поршня возрастают, однако до опреде-
ленного предела. Дальнейшее увеличение скорости
вращения кривошипа приводит к уменьшению переме-
щений поршня.
Если по результатам экспериментов построить гра-
фическую зависимость между перемещениями поршня
14
(О
Р и с. 2. Амплитудно-частотная (7) и частотно-силовая (2) характе-
ристики вибрационной (а) и обычной (б) машин
<в — частота колебаний; А — амплитуда колебаний; Р — усилие в
приводе; — собственная частота колебаний на пружине ползуна;
р — собственная частота колебаний на обеих пружинах
и скоростью вращения кривошипа, то она будет иметь
вид, представленный на рис. 2, а. Обычно на графике
приводят половину максимального перемещения. Эта
величина называется амплитудой перемещения.
График зависимости амплитуды перемещения А
от частоты колебаний о называется аплитудно-
частотной характеристикой вибромашины. С возраста-
нием скорости вращения кривошипа перемещения
поршня увеличиваются вначале медленно, затем более
резко, достигая максимального значения при некото-
ром значении скорости. Дальнейшее повышение ско-
рости вращения кривошипа обусловливает сначала
резкое, затем более медленное уменьшение перемеще-
ний поршня. При высоких скоростях вращения изме-
нения перемещений практически не происходит.
Если измерить усилие, которое необходимо для
перемещения поршня при различных скоростях враще-
ния кривошипа (это- усилие можно определить по ве-
личине сжатия пружины в шатуне), то можно по-
строить график, подобный приведенному на рис. 2, а.
Зависимость усилия Р от частоты колебаний со на-
зывается частотно-силовой характеристикой виброма-
шины.
15
Сравнив график перемещений и необходимых для
этого усилий, заметим весьма примечательную их осо-
бенность. Максимальное перемещение в вибрационной
машине обеспечивается без существенного увеличения
прикладываемых усилий. Возможность обеспечения
при некоторой частоте вращения кривошипа макси-
мального перемещения рабочего органа без заметного
увеличения движущей силы является весьма важным
достоинством вибрационной машины.
Такие эффективные режимы работы отсутствуют в
машинах традиционного типа. Чтобы получить боль-
шие перемещения рабочих органов обычных машин,
нужно соответственно изменить плечо кривошипа и
увеличить движущую силу. В традиционной машине
при неизменном плече кривошипа перемещения порш-
ня не зависят от скорости вращения (рис. 2, б). Уси-
лия, необходимые для сообщения движения поршню с
увеличенной частотой, резко возрастают.
Если сравнить усилия, которые прикладываются в
обычной и вибрационной машинах для перемещения
поршня, то мы увидим, что вибрационные машины от-
личаются высокой эффективностью. Особенно велика
разница для высокоскоростных машин.
Таким образом, характеристика перемещений рабо-
чего органа традиционной машины представляет собой
всего-навсего один ничем не примечательный режим
из широкой гаммы режимов, в которых может рабо-
тать вибрационная машина, т. е. одна вибрационная
машина как бы содержит в себе бесконечное множе-
ство традиционных машин с различными характери-
стиками. И воспроизвести параметры каждой из этих
традиционных машин не представляет большого труда.
Для получения машины с заданной характеристикой
перемещений рабочего органа нужно просто сообщить
коленчатому валу соответствующую скорость вра-
щения.
Однако «странности» вибрационной машины на
этом не кончаются. Если соответствующими прибора-
ми зафиксировать одновременно направления переме-
щения ползуна и действия движущей силы и сопоста-
вить их между собой, то выяснится, что при различ-
ных скоростях вращения коленчатого вала направления
либо совпадают, либо смещены одно относительно
другого, либо даже направлены в противоположные
стороны. В общем, это полное нарушение общеприня-
16
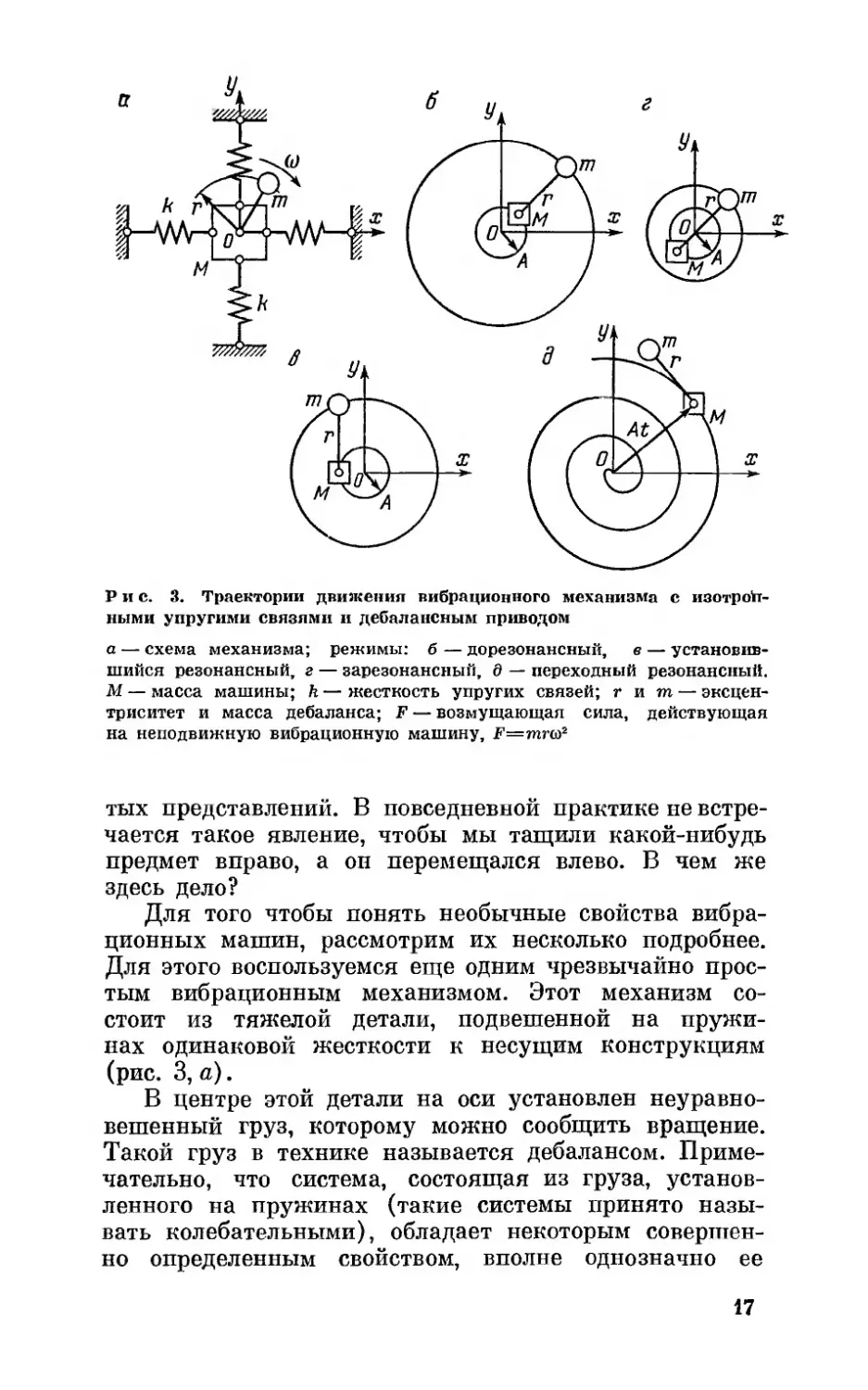
Р и с. 3. Траектории движения вибрационного механизма с изотроп-
ными упругими связями и дебалансным приводом
а — схема механизма; режимы: б — дорезонансный, в — установив-
шийся резонансный, г — зарезонансный, д — переходный резонансный.
М — масса машины; k — жесткость упругих связей; гигп — эксцен-
триситет и масса дебаланса; F — возмущающая сила, действующая
на неподвижную вибрационную машину, F=mra2
тых представлений. В повседневной практике не встре-
чается такое явление, чтобы мы тащили какой-нибудь
предмет вправо, а он перемещался влево. В чем же
здесь дело?
Для того чтобы понять необычные свойства вибра-
ционных машин, рассмотрим их несколько подробнее.
Для этого воспользуемся еще одним чрезвычайно прос-
тым вибрационным механизмом. Этот механизм со-
стоит из тяжелой детали, подвешенной на пружи-
нах одинаковой жесткости к несущим конструкциям
(рис. 3, а).
В центре этой детали на оси установлен неуравно-
вешенный груз, которому можно сообщить вращение.
Такой груз в технике называется дебалансом. Приме-
чательно, что система, состоящая из груза, установ-
ленного на пружинах (такие системы принято назы-
вать колебательными), обладает некоторым совершен-
но определенным свойством, вполне однозначно ее
17
характеризующим. Это частота собственных коло»
баний.
Установить частоту собственных колебаний просто.
Для этого нужно вывести систему из состояния равно-
весия, сжав или растянув пружины, и отпустить. Груз
начнет совершать колебания. Если сосчитать колеба-
ния, совершаемые за определенное время, и разделить
их число на значение времени, в течение которого под-
считывались колебания, то мы получим частоту соб-
ственных колебаний.
Повторим эксперимент несколько раз, меняя его
условия,— будем то сжимать, то растягивать пружи-
ны, смещать грузы в разные стороны, и т. д. Результа-
ты экспериментов будут оставаться неизменными —
частота собственных колебаний останется одной и
той же. Все это позволяет прийти к заключению, что
для системы, имеющей определенную массу, установ-
ленную на пружинах, при выведении ее из равновесия
свойственно стремление колебаться на одной вполне
определенной частоте. Система «предпочитает» одну
частоту колебаний всем прочим. В этом индивидуаль-
ность каждой колебательной системы.
Вспомним ранее проведенные эксперименты. Мы
изучали вибрационный механизм, состоявший из кри-
вошипа, ползуна, шатуна и пружин. Обладает ли такая
система собственной частотой колебаний, и если обла-
дает, то каким образом можно ее определить?
Такая система имеет даже не одну собственную
частоту колебаний, так как в ней есть масса и
две пружины. Для того чтобы определить эти соб-
ственные частоты, нужно отсоединить шатун от криво-
шипа и подвесить ползун на пружинах. Возможны
три варианта подвески ползуна: на пружине шатуна,
на пружине, соединяющей ползун с направляющей,
и сразу на двух пружинах.
Проведем измерения собственной частоты колеба-
ний системы во всех трех вариантах. Воспользуемся
проверенной ранее методикой. Во всех трех случаях
будем растягивать пружины и, отпустив ползун, счи-
тать его колебания. Разделив число колебаний на вре-
мя эксперимента, получим частоты собственных коле-
баний вибрационного механизма.
Все три частоты собственных колебаний оказы-
ваются различными. Ниже всего частота собственных
колебаний, когда ползун подвешен на пружине,
18
встроенной в шатун. Эта пружина мопсе жесткая.
Несколько больше частота собственных колебаний на
пружине, соединяющей ползун с направляющей.
Система, состоящая из ползуна и двух пружин, имеет
самую высокую частоту колебаний.
Может возникнуть вопрос: зачем определять соб-
ственные частоты системы на одной пружине? В меха-
низме же ползун всегда соединен с двумя пружинами
одновременно. Это замечание справедливое. Однако ха-
рактеристики вибрационного механизма оказываются
зависимыми от каждой из этих собственных частот.
В проведенном ранее эксперименте мы заставляли ра-
ботать механизм на самых различных частотах, зада-
вая скорость вращения кривошипа.
Анализируя полученные при этом эксперименталь-
ные данные, начинаем думать, не происходит ли уве-
личение перемещений ползуна и снижение приклады-
ваемых усилий в тех режимах, когда кривошип сооб-
щает колебательной системе перемещения на одной из
его собственных частот? Логично предположить, что
если внешние возмущения происходят с той частотой,
на которой механизм колеблется сам по себе, то дости-
гаемые результаты будут наиболее значительными.
Сравним частоты собственных и вынужденных ко-
лебаний в рассматриваемом режиме. Оказывается,
максимальное перемещение ползуна достигается в том
случае, когда частота колебаний равна частоте соб-
ственных колебаний на двух пружинах. Минимальные
усилия для сообщения механизму колебаний имеют
место на частоте, совпадающей с собственной частотой
системы на пружине, соединяющей ползун с направ-
ляющей. Таким образом, сделанное вами предположе-
ние оказывается правильным.
Режимы работы вибромашины, при которых она
работает на частотах собственных колебаний,— это
особые режимы. Совпадение частот собственных и вы-
нужденных колебаний называется резонансом, а режи-
мы работы вибромашины в этом случае называются
резонансными. Рассматриваемый механизм имеет два
резонансных режима.
Итак, вибрационная система «предпочитает» рабо-
тать в своих собственных, наиболее ей «нравящихся»
ритмах. Однако попробуем пойти дальше и установить
физические причины эффектов, наблюдающихся в ре-
зонансных реяшмах. Сначала выясним, от каких фак-
19
торов зависит частота собственных колебаний вибра-
ционной системы. Такая система состоит всего из двух
элементов — груза и пружины. В рассматриваемом
случае для нас имеют значение только величина мас-
сы и жесткость пружины.
Возьмем две одинаковые массы и подвесим их на
пружинах разной жесткости — малой и большой.
Не проводя эксперимента, попробуем оценить, у какой
массы собственная частота колебаний будет больше.
У той, что подвешена на мягкой пружине, или у той,
которая закреплена на жесткой? Интуитивно догады-
ваемся, что масса на мягкой пружине будет колебать-
ся с меньшей частотой. Руководствуемся мы тем сооб-
ражением, что более жесткая пружина должна вер-
нуть массу, выведенную из состояния равновесия,
в первоначальное положение быстрее, чем пружина
меньшей жесткости.
Проверим это предположение. Растянем обе пружи-
ны и позволим массам совершать свободные колеба-
ния. Проведя замеры и выполнив необходимые вычис-
ления, убедимся, что интуиция нас не подвела. Исполь-
зование жесткой пружины приводит к увеличению
частоты собственных колебаний, а мягкой — к ее
уменьшению.
Что мы, по существу, делаем, первоначально растя-
гивая пружину? Растянув пружину, мы создаем силу,
которая, когда мы отпустим массу, действует на нее.
Эта сила приводит массу в движение, ускоряя ее
и стремясь вернуть в первоначальное положение.
По мере приближения массы к исходному положению
растяжение пружины уменьшается и одновременно
уменьшается сила, с которой она действует на массу.
Свое действие пружина прекращает в момент возвра-
щения массы в исходное положение. В связи с тем что
сила пружины стремится восстановить исходное со-
стояние системы, ее называют восстанавливающей
силой.
Так как под действием силы, создаваемой пружи-
ной, масса ускоряется, то возникают сопротивления ее
движению — силы инерции, по величине пропорцио-
нальные ускорению, но направленные в противопо-
ложную ускорению сторону. Таким образом, если
масса движется в направлении своего первоначального
положения, то силы инерции действуют в противопо-
ложную сторону. Короче говоря, пружина возвращает
20
массу в исходное положение, преодолевая силы
инерции.
При отсутствии внешних воздействий в каждый
данный момент сила действия пружины и сила инер-
ции массы равны, но направлены в противоположные
стороны. Это взаимодействие сил и определяет особен-
ности свободных колебаний массы па пружине и в ко-
нечном итоге величину собственной частоты ее коле-
баний. Сила действия пружины пропорциональна ее
растяжению (перемещению массы) и жесткости; сила
инерции — ускорению движения и величине массы.
Следует отметить, что ускорение массы пропорцио-
нально ее перемещению и квадрату частоты колебаний.
Приравняв восстанавливающую силу пружины силе
инерции массы, можем определить частоту собствен-
ных колебаний системы. Оказывается, что частота соб-
ственных колебаний (обозначим ее буквой р) опреде-
ляется соотношением величин жесткости пружины
к и массы М по известной зависимости
p=fkiM~.
Таким образом, при свободных колебаниях вибра-
ционной системы па собственной частоте силы иперции
полностью уравновешиваются силами упругости пру-
жины.
Теперь посмотрим, как ведет себя вибрационный
механизм, если на него действует внешняя периодиче-
ская сила. Такая сила называется возмущающей. При
вращении дебаланса возникает вращающаяся центро-
бежная сила. Величина ее пропорциональна массе де-
баланса, расстоянию от центра масс дебаланса до цент-
ра вращения и квадрату угловой скорости вращения.
Ее проекции на вертикальную и горизонтальную оси
создают периодические возмущающие силы.
Скорости вращения дебаланса могут быть на часто-
тах ниже частоты собственных колебаний, равны ей
или быть больше нее. Режимы работы вибромашины
на соответствующих частотах получили название до-
резонансный, резонансный и зарезонансный.
Для наглядного изучения закономерностей движе-
ния такой вибрационной системы воспользуемся прибо-
ром, называемым стробоскопом. Основной частью стро-
боскопа является специальная лампа, которая может
включаться на короткие моменты через заданные про-
межутки времени. Если освещать какую-либо вращаю-
21
щуюся или колеблющуюся деталь стробоскопом через
промежутки времени, в которые она занимает одно и
то же положение, то наблюдателю эта деталь будет
казаться неподвижной.
С помощью стробоскопа можно не только «останав-
ливать» машину, но и «сообщать» ей движение с раз-
личными скоростями. Для этого нужно давать импуль-
сы лампе с частотой, несколько отличающейся от час-
тоты движения детали. При этом, чем больше частота
импульсов отличается от частоты движения, тем выше
скорость наблюдаемого движения.
Сообщим дебалансу небольшую скорость вращения,
такую, чтобы система работала в дорезонансном режи-
ме. Будем наблюдать за колебаниями в стробоскопиче-
ской освещении, отрегулированном таким образом,
чтобы наблюдаемое движение вибромашины было
очень медленным. Создающаяся при вращении деба-
ланса центробежная сила, преодолевая восстанавли-
вающие силы пружины, силы инерции и сопротивле-
ний от трения, приводит в движение основную массу
вибромашины.
В дорезонансном режиме масса машины и дебалапс
перемещаются по концентрическим окружностям: мас-
са по меньшей, а дебаланс — по большей. Причем
массы расположены на одной прямой, выходящей из
центра концентрических окружностей (рис. 3, б),
и смещены в одну сторону.
Будем постепенно увеличивать скорость вращения.
При этом мы увидим, что дебаланс начнет поворачи-
ваться по отношению к основной массе и между ними
возникнет некоторый угол. Этот угол характеризует
собой смещение, или, как принято говорить, сдвиг фаз,
между перемещением основной массы вибромашины и
направлением действия возмущающей силы.
При дальнейшем увеличении скорости вращения де-
баланса этот угол будет возрастать. Когда скорость
вращения дебаланса будет точно соответствовать соб-
ственной частоте колебаний вибрационной системы,
этот угол станет прямым (рис. 3, в). Таким образом,
в резонансном режиме работы вибрационной машины
возмущающая сила направлена перпендикулярно к
перемещению ее колеблющейся массы.
Дальнейшее увеличение скорости вращения деба-
ланса и переход машины в зарезонансный режим со-
провождаются возрастанием угла сдвига фаз между
22
перемощением и направлением действия возмущающей
силы. Когда скорость вращения дебаланса такова, что
частота колебаний машины значительно превышает
частоту ее собственных колебаний, тогда режим ее
работы называется далекозарезонансным. Перемеще-
ние основной массы машины происходит в сторону,
практически противоположную направлению действия
возмущающей силы (рис. 3, г).
Если внимательно посмотреть на траектории дви-
жения основной массы вибромашины и дебаланса, то
нетрудно заметить, что расстояние от центра масс де-
баланса до центра его вращения (эксцентриситет деба-
ланса), совпадающего с центром траекторий, меняется
в различных режимах. Больше всего оно в резонанс-
ном режиме, несколько меньше в дорезонансном. Уве-
личение фактического эксцентриситета дебаланса в ре-
зонансном режиме происходит вследствие значительно-
го возрастания перемещений основной массы. Так как
центробежная сила дебаланса пропорциональна расстоя-
нию до оси вращения, то, следовательно, возмущаю-
щая сила не остается постоянной в различных режи-
мах.
С чем связано изменение взаимного расположения
основной массы вибромашины и дебаланса и наличие
угла сдвига фаз между перемещением и возмущаю-
щей силой? На основную колеблющуюся массу вибро-
машины действуют силы упругости пружин, силы
инерции и сопротивления. Преодолевает их, обеспечи-
вая движение вибромашины, возмущающая сила. Ве-
личина и направление действий результирующей пер-
вых трех сил меняются в различных режимах ра-
боты.
Следовательно, и преодолевающая их возмущающая
сила (в нашем случае центробежная сила, создающая-
ся при вращении дебаланса) также должна меняться
по величине и направлению. Эти ее преобразования и
выражаются в изменении величины фактического экс-
центриситета дебаланса и угла сдвига фазы по отно-
шению к перемещению основной массы вибромашины.
Восстанавливающая сила пропорциональна смеще-
нию основной массы относительно ее статического поло-
жения и направлена в противоположную сторону, сила
инерции пропорциональна ускорению и направлена в
сторону смещения. Таким образом, эти две силы взаим-
но противоположны, поэтому компенсируют действие
23
друг друга. Сила сопротивления действует перпенди-
кулярно к ним. Рассмотрим теперь взаимодействие
этих сил с возмущающей силой.
Вибрационная машина дорезонансного типа харак-
теризуется высокой жесткостью пружин. Поэтому
при ее работе создаются большие восстанавливающие
силы, значительно превосходящие действующие в си-
стеме силы инерции. Эти две силы направлены на-
встречу друг другу, поэтому сила инерции частично
компенсирует восстанавливающую силу. Разность этих
сил, величина которой может быть весьма значитель-
ной, действует в системе. Следовательно, возмущающая
сила должна иметь составляющую, преодолевающую
избыток восстанавливающей силы. Кроме того, возму-
щающая сила имеет составляющую, преодолевающую
силы сопротивления. Эти две составляющие и форми-
руют величину и направление действия возмущающей
силы в дорезонансном режиме.
Вибрационная машина зарезонансного типа имеет
мягкие пружины. Действующие в ней восстанавливаю-
щие силы незначительны и не могут полностью ком-
пенсировать силы инерции. Поэтому возмущающая
сила должна икГеть, кроме составляющей, преодолеваю-
щей силы сопротивления, составляющую, действую-
щую против сил инерции.
В резонансной вибромашине, работающей на часто-
те собственных колебаний, силы инерции полностью
компенсируются восстанавливающими силами. Поэто-
му возмущающая сила должна преодолевать только
силы сопротивления. Следовательно, в резонансном ре-
жиме возмущающая сила, приходящаяся на единицу
перемещения основной массы, наименьшая и направ-
лена в сторону, противоположную действию сил сопро-
тивления.
Если вибромашину, работавшую ранее в дорезо-
нансном или зарезонансном режиме, путем соответст-
вующей регулировки пружин перевести в резонансный
режим работы, то отпадает необходимость преодоле-
вать восстанавливающие силы или силы инерции. Воз-
мущающая сила окажется большей, чем это необходи-
мо для преодоления действующих в системе сил сопро-
тивления. Куда пойдет избыток возмущающей силы?
Возмущающая сила начнет раскачивать вибрацион-
ную машину, увеличивая размах колебаний основной
массы до тех пор, пока возрастающие при этом силы
24
сопротивления не уравновесят избыток возмущающей
силы. Вибромашина перейдет опять на стационарный
режим работы, который будет характеризоваться воз-
росшими перемещениями рабочей массы. Траектории
движения основной массы вибромашины и дебаланса в
переходном резонансном режиме представляют архи-
медовы спирали (рис. 3, д). Возрастание со временем
перемещений является характерным проявлением осо-
бенностей работы вибромашины в резонансном режиме.
Особо нужно обратить внимание на то, что в резо-
нансном режиме величина размаха колебаний устанав-
ливается и ограничивается только значением дейст-
вующих в системе сопротивлений. Чем сопротивления
ниже, тем значительнее размахи колебаний. В частно-
сти, известные катастрофические проявления резонан-
са, приводившие к разрушению различных конструк-
ций, связаны были с тем, что в этих системах дейст-
вовали незначительные сопротивления.
В резонансном режиме работы вибромашины боль-
шие перемещения имеют место не только при совпаде-
нии собственной и вынужденной частот, айв некото-
рой области. Границы этой области установим скоро-
стями вращения дебаланса
(д = 1к/(М+2т) и =
при которых перемещения основной массы равны двой-
ному эксцентриситету дебаланса.
Интересно отметить, что резонансная область тем
шире, чем выше собственная частота колебаний систе-
мы. При уменьшении скорости вращения дебаланса
амплитуда перемещения стремится к пулю. При очень
больших скоростях она пропорциональна эксцентриси-
тету дебаланса и соотношению вращающейся и общей
масс вибромашины
A =rml(M+m).
Режимы работы вибромашины на граничных угло-
вых скоростях имеют некоторые особенности и поэто-
му заслуживают особого внимания. При работе вибро-
машины на низшей собственной частоте дебаланс
движется по окружности, радиус которой равен удвоен-
ному эксцентриситету дебаланса. В этом случае цент-
робежная сила, создаваемая при вращении дебаланса,
в 2 раза больше, чем центробежная сила дебаланса,
ось которого неподвижна.
25
При работе вибромашины в отсутствие сопротивле-
ний на верхней собственной частоте дебаланс движется
по окружности, радиус которой равен нулю. В этом
случае дебаланс вращается в абсолютном движении от-
носительно собственного центра масс. В это время ра-
бочая масса вибромашины движется по окружности,
радиус которой равен эксцентриситету дебаланса,
а центр совпадает с центром масс дебаланса. В таком
режиме центробежная сила, развиваемая дебалансом,
равна нулю. Таким образом, в этом случае возмущаю-
щая сила не влияет на движение основной массы виб-
ромашины.
При этом как бы имеет место синхронное движение
двух независимых масс: вращательное движение деба-
ланса относительно своего центра масс и поступатель-
ное движение по окружности основной массы вибро-
машины под действием центральной притягивающей
силы. Связь массы с дебалансом играет только син-
хронизирующую роль. Интересно отметить еще одну
особенность этого режима — в нем изменилась собст-
венная частота колебаний системы. Это происходит по-
тому, что масса дебаланса в колебаниях не участвует,
следовательно, она не может влиять и на частоту соб-
ственных колебаний системы.
Оба указанных режима могут быть реализованы
только при работе вибромашины на холостом ходу.
При работе под нагрузкой вследствие действия сил со-
противления будут происходить некоторые отклонения
от рассмотренной картины.
Мы рассмотрели вибрационный механизм, рабочая
часть которого подвешена па пружинах одинаковой
жесткости (жесткость пружины принято характери-
зовать усилием, которое нужно к ней приложить, что-
бы сжать или растянуть на заданную величину).
Эти пружины необязательно должны иметь одинако-
вую жесткость. Можно изготовить вибрационный меха-
низм, у которого, например, вертикальные пружины
значительно жестче горизонтальных. Нетрудно дога-
даться, что перемещения рабочей части вибромашины
в направлении этих пружин будут различными.
Эксперимент показывает, что жесткость пружины
оказывает различное воздействие на перемещение
вибромашины в различных режимах работы. Так, если
машина настроена на дорезонансный режим работы,
то рабочая часть вибромашины будет совершать боль-
26
гпие перемещения в направлении менее жёсткой пру-
жины.
При зарезонансной настройке все будет наобо-
рот: большие перемещения будут происходить в на-
правлении жесткой пружины.
Это происходит потому, что в дорезонансных режи-
мах восстанавливающие силы пружин велики и не
уравновешены силами инерции. Поэтому возмущающей
силе приходится их преодолевать. Естественно, что
мягкая пружина создает меньшие сопротивления, по-
этому перемещение в ее направлении больше. В заре-
зонансном режиме преобладают силы инерции, их-то
и приходится преодолевать возмущающей силе. Пре-
одолению этих сил помогают пружины. Естественно,
чем они жестче, тем меньшее сопротивление оказыва-
ют силы инерции перемещению вибромашины.
Разные перемещения рабочей части вибромашины в
различных направлениях изменяют траекторию движе-
ния. Вместо окружности получается эллипс. Причем
конфигурация эллипса меняется в зависимости от со-
отношения жесткостей пружин. Таким образом, уста-
навливая пружины различной жесткости, мы получа-
ем возможность менять траекторию движения рабочей
части вибромашины. А это очень важно с практической
точки зрения, так как создается возможность простого
регулирования технологического режима вибрационной
машины.
Проведем наблюдения за работой вибромашины,
имеющей пружины различной жесткости. В стробоско-
пическом освещении при незначительном рассогласо-
вании частоты вспышек лампы и скорости вращения
дебаланса мы увидим, что в дорезонансном режиме ра-
бочая масса вибромашины и дебаланс перемещаются
по эллипсам, оси которых совпадают, причем рабочая
часть вибромашины движется по внутреннему эллип-
су, а дебаланс —по внешнему (рис. 4,а).
В зарезонансном режиме картина резко меняется.
Движение также происходит по эллипсам, однако оси
их взаимноперпендикулярны и массы находятся по раз-
ные стороны от начала координат (рис. 4, б).
Наиболее разнообразные траектории можно полу-
чить в том случае, когда жесткость пружин подобра-
на таким образом, что собственная частота колебаний
вибромашины в одном направлении ниже, а в перпен-
дикулярном направлении выше частоты вынужденных
27
Рис.' 4. Траектории движения вибрационного механизма с анизо-
тропными упругими связями и дебаланспым приводом
Режимы: а — дорезонансный, б — зарезонансный
колебаний. Такой режим работы вибромашины назы-
вается межрезонансным.
Мы подробно рассмотрели закономерности колеба-
ний рабочего органа вибромашины, возбуждаемых при
вращении неуравновешенной массы. В ряде случаев
необходимо решить обратную задачу — преобразовать
периодическое движение одной части вибромашины во
вращение другой. Попробуем решить эту задачу.
Установим на вибрационную машину с инерцион-
ным приводом неприводной дебаланс. Сообщив машине
колебания, увидим, что дебаланс придет во вращение.
Значит, не только вращательное движение преобразу-
ется в периодическое, но и наоборот. Какие же силы
вращают дебаланс?
Так как ось подвеса дебаланса совершает колеба-
ния вместе с основной массой вибромашины, на него
начинает действовать вибрационный момент, пропор-
циональный кинетическому моменту (произведению
массы дебаланса на расстояние от точки его подвеса до
центра массива ускорение колебаний оси). Вибрацион-
ный момент стремится привести во вращение деба-
ланс, однако этому препятствуют силы тяжести, кото-
рые удерживают дебаланс внизу под точкой подвеса,
и силы трения в подшипниках оси дебаланса. Дебаланс
придет во вращение в том случае, если вибрационный
момент больше суммы моментов силы сопротивления и
силы тяжести.
28
На практике, однако, необходимо, чтобы эксцентри-
ситет дебаланса не превышал амплитуды колебаний
основной массы. Это связано с тем, что вследствие на-
хождения центра масс ниже оси подвеса при запуске
вибромашины не удается вывести дебаланс из состоя-
ния устойчивого равновесия. Если же дебалансу сооб-
щить начальный импульс — запас кинетической энер-
гии, достаточный, чтобы дебаланс мог выйти из со-
стояния устойчивого равновесия, то дальнейшее его
вращение будет обеспечиваться вибрационным мо-
ментом.
Для обеспечения легкого запуска ротор выполняет-
ся таким образом, чтобы точка его подвеса находилась
ниже центра масс. В этом случае отсутствует началь-
ный момент сил тяжести, препятствующий запуску.
Такой механизм выполнен в виде трубы, внутрь кото-
рой помещен тяжелый цилиндр. В этом случае центр
масс цилиндра находится выше точки опоры. Поэтому
нет никаких препятствий для возбуждения вращатель-
ных движений цилиндра периодическими силами.
Какие изменения происходят в системе, когда мы
устанавливаем на ней дополнительно неприводной де-
баланс? Ответить на это нетрудно. Масса системы уве-
личивается и, так как пружины остаются прежними,
происходит уменьшение собственной частоты колеба-
ний системы.
Вибрация низкочастотная
и высокочастотная
В промышленности используются вибрационные маши-
ны, работающие в широком диапазоне частот. Частота
колебаний измеряется в Герцах. Одно колебание в се-
кунду соответствует 1 Гц. Крупные вибромашины ра-
ботают в диапазоне механических колебаний, обычно
от 10 до 100, 200 Гц. Этот тип вибромашин наиболее
распространен. В большой группе вибромашин исполь-
зуется ультразвуковой диапазон частот от 20 тыс. до
20 млн. Гц. Некоторые вибромашины работают и в
промежуточном звуковом диапазоне. С увеличением
частоты уменьшается амплитуда колебаний.
Для привода вибромашин применяют различные
типы приводов, называемых возбудителями или вибра-
29
торами. Существующие вибраторы позволяют созда-
вать периодические силы различной величины в широ-
ком диапазоне частот, а также периодические моменты
или их различные комбинации. Для возбуждения коле-
баний в низкочастотном диапазоне используются инер-
ционные, эксцентриковые, гидравлические и электро-
магнитные вибраторы.
С двумя типами приводов мы уже познакомились —
это кривошипный, или, как принято называть в вибро-
технике, эксцентриковый, и дебалансный, относящийся
к классу инерционных приводов. Кроме этих типов
виброприводов, существуют еще гидравлические, элект-
ромагнитные и пневматические.
В инерционных вибраторах возмущающая сила со-
здается вследствие вращения одной или нескольких
неуравновешенных масс, называемых дебалансами.
Эта возмущающая сила в основе своей имеет центро-
бежную силу, которая возникает при вращении не-
уравновешенной массы. Центробежная сила постоянна
по величине, но непрерывно меняет свое направление,
завершая полный цикл за один оборот. Величина этой
силы пропорциональна массе дебаланса и расстоянию
ее центра от оси вращения, а также зависит от квад-
рата угловой скорости вращения. Направлена она по
оси, соединяющей центр вращения с центром массы.
Эту силу можно менять в широких пределах, изменяя
величину неуравновешенной массы или расстояние ее
от центра вращения, а также увеличивая или умень-
шая скорость вращения.
Если вращается одна неуравновешенная масса, то
возмущающая сила, как уже отмечалось, постоянно
меняет свое направление, оставаясь постоянной по ве-
личине. Вибратор с одной неуравновешенной массой
получил название дебалансного.
Зачастую необходимо, чтобы возмущающая сила
действовала по прямой, периодически меняясь по ве-
личине и знаку, т. е. по направлению. Оказывается,
такую силу нетрудно получить. Для этого достаточно
соединить два одинаковых вибратора с одной массой
шестернями, предварительно развернув дебалансы в
противоположные направления. Такой вибратор назы-
вается самобалансным (рис. 5, а).
Шестерни обеспечат движение дебалансов с одина-
ковыми скоростями, но в противоположные стороны.
Приведенные на рисунке схемы действия сил поясня-
30
a
P и с. 5. Самобалансный инерционный вибратор
а — схема; б — закономерности формирования возмущающей силы.
т и m — эксцентриситет и масса дебаланса соответственно; w — угло-
вая скорость вращения дебаланса; F — возмущающая сила, действую-
щая на неподвижную вибромашину, F=2mr(a2
ют, как работает самобалансный вибратор (рис. 5, б).
В первом положении силы действуют по одной прямой
в противоположные стороны и вследствие равенства их
по величине компенсируют друг друга. Результирую-
щая их равна нулю.
Повернув дебалансы на восьмую часть оборота, по-
лучим составляющие возмущающей силы, действую-
щие в одну сторону по вертикали и в разные — по
горизонтали. Горизонтальные составляющие компенси-
руют друг друга, а вертикальные складываются и дают
результирующую, действующую вверх.
Повернув дебалансы на четверть оборота, обеспе-
чим действие обеих центробежных сил. вертикально
вверх; величина результирующей силы также действу-
ет вертикально вверх и равна их сумме. В следующем
положении силы действуют навстречу, полностью ком-
пенсируя друг друга. Еще повернув дебалансы на чет-
31
a — схема; б — закономер-
ности формирования воз-
мущающей силы г', г", т' т" — эксцентриситеты и массы дебалансов
соответственно; г — передаточное отношение между скоростями вра-
щения дебалансов; <о( и со2 — угловые скорости вращения централь-
ного и боковых дебалансов соответственно
верть оборота, направим возмущающие силы верти-
кально вниз.
Таким образом, два дебалансных вибратора, вра-
щающихся с одинаковыми скоростями в противополож-
ные стороны, создают возмущающую силу, действую-
щую по одной прямой и меняющуюся лишь по величи-
не и знаку. Неуравновешенность пары дебалансов в
перпендикулярном направлении балансируется, поэто-
му такой вибратор называется самобалансным.
Если соединить шестернями дебалансные вибрато-
ры с различными массами, то можно получить возму-
щающую силу, меняющуюся по величине и направле-
нию. У такого вибратора годограф возмущающей силы
представляет эллипс, большая ось которого расположе-
на вертикально.
Большие возможности в части синтезирования раз-
нообразных по величине и направлению возмущающих
сил открывает вибратор, составленный из трех деба-
лансов, соединенных шестернями (рис. 6, а). Подбирая
передаточное отношение шестерен, массу дебалансов и
относительное их начальное расположение, можно ме-
32
Рис. 7. Двухвальный шестидебалансный вибратор
а — схема; б — закономерности формирования возмущающей силы и
возмущающего момента, тп', г1 и т", т" — эксцентриситеты и массы
дебалансов соответственно; F и М — возмущающие сила и момент со-
ответственно
нять характер возбуждающей силы, создаваемой таким
вибратором.
Трехдебалансный вибратор может создавать такие
же возмущающие силы, как и самобалансный. Вибра-
тор открывает возможности генерирования возмущаю-
щей силы, изменяющейся по сложному многолепестко-
вому годографу, который может вращаться вокруг
своего центра. Количество лепестков, которое форми-
руется за один оборот центробежного вала дебаланса,
на единицу больше передаточного отношения зубчатых
колес.
Так, например, если передаточное отношение колес
равно двум, то на дуге 360° сформируется три лепест-
2 И. Ф. Гончаревич
33
ка. Если передаточное отношение дробное, например
6,5, то формируется 7,5 лепестков и, кроме того, весь
годограф будет медленно вращаться вокруг своей оси,
поворачиваясь за каждый оборот центрального деба-
ланса на угол, соответствующий неполному лепестку
(рис. 6, б).
Таким образом, скорость вращения снижается с
увеличением числа лепестков и уменьшением сформи-
рованной доли неполного лепестка. Иными словами,
скорость вращения годографа возмущающей силы
уменьшается с увеличением числа полных лепестков и
уменьшением размера не полностью сформированного
лепестка.
Для работы некоторых вибрационных машин необ-
ходимы вибраторы, создающие одновременно возму-
щающую силу и возмущающий момент. Эти задачи ре-
шает двухвальный шестидебалансный инерционный
вибратор. Вибратор состоит из двух валов, вращаю-
щихся с одинаковыми скоростями в противоположные
стороны так же, как и в самобалансном вибраторе.
Однако, кроме дебаланса, установленного в середине
каждого вала, по концам валов располагаются еще по
два дебаланса, развернутых в противоположные сторо-
ны (рис. 7). Средние дебалансы создают возмущаю-
щую силу, действующую по вертикальной оси, а край-
ние — возмущающий момент вокруг нее. Такой вибра-
тор сообщает рабочему органу вибрационной машины
винтообразное движение вокруг продольной оси.
В ряде случаев эффективность технологического
процесса возрастает с использованием специальных за-
конов возбуждения. В вибрационных установках с то-
роидальным рабочим органом для обеспечения спира-
левидного движения обрабатываемой среды по стенкам
тора применяют одновальные трех- или двухдебаланс-
ные вибраторы, представляющие собой как бы полови-
ну только что рассмотренного вибратора.
Вал такого вибратора обычно устанавливается вер-
тикально. При работе вибратора создаются одновремен-
но вращающаяся возмущающая сила и момент. Регу-
лируя относительную их величину и сдвиг фаз между
ними, можно возбуждать в вибромашинах самые раз-
нообразные движения рабочих органов.
Величина возмущающей силы, создаваемой деба-
лансом, пропорциональна квадрату его угловой скоро-
сти. Если скорость вращения вала мала, то для полу-
34
чения достаточной возмущающей силы приходится
утяжелять дебаланс. При этом вибратор получается
громоздким и тяжелым. В связи с этим в тихоходных
вибромашинах нецелесообразно применять инерционный
привод. В тихоходных вибромашинах обычно использу-
ют эксцентриковые вибраторы. По устройству они ана-
логичны кривошипному приводу, но для сообщения
шатуну возвратно-поступательного движения вместо
кривошипа используют эксцентрик, вращающийся в
обойме.
Эксцентриковый привод может быть и без шатуна,
в этом случае обойма жестко или, чаще, через упру-
гие элементы крепится непосредственно к рабочему ор-
гану вибромашины. Если жесткость упругих элементов
одинакова во всех направлениях, то рабочий орган
вибромашины будет совершать круговые колебания,
в противном случае эллиптические. При установке ша-
туна колебания будут прямолинейными. Усилие, со-
здаваемое эксцентриковым приводом, тем выше, чем
жестче упругий элемент и больше эксцентриситет.
Эксцентриковый привод позволяет создавать коле-
бания па одной частоте (гармонические) и на двух
(бигармонические). Сообщение колебаний рабочему
органу вибромашины на нескольких частотах в ряде
случаев повышает технологический эффект. Так,
например, липкие грузы не перемещаются по
грузопесущему органу, совершающему гармонические
колебания. В режиме бигармонических колебаний уда-
ется предотвращать налипание.
Вибратор для создания бигармонических колебаний
состоит из двух эксцентриков, расположенных один в
другом и вращающихся с различными скоростями
(рис. 8). Обычно скорость вращения одного из валов
вдвое превышает скорость вращения второго. Переме-
щения эксцентриков суммируются на обойме, и шатун
сообщает рабочему органу колебания на двух часто-
тах. Колебания вибромашин могут возбуждаться и с
помощью гидравлических вибраторов. Исполнительным
органом гидравлического вибратора является цилиндр,
в котором перемещается поршень со штоком (рис. 9, а).
Цилиндр закреплен на раме вибромашины, а шток со-
единен с ее рабочим органом. Поршню рабочая жид-
кость сообщает возвратно-поступательные движения,
которые через шток передаются рабочему органу и со-
общают ему колебания. Возвратно-поступательные пе-
2*
35
3
Р и с. 8. Эксцентриковый бигармонический вибратор
1, 2 — эксцентрики; 3 — обойма; 4 — стойка; 5 — шатун с упругой
связью. Г|, г2, а>1, cos — эксцентриситеты и угловые скорости первого
и второго эксцентриков; h0 — жесткость упругой связи шатуна
Р и с. 9. Гидравлические вибраторы
а — пульсационный; б — с электромагнитными клапанами; в — авто-
колебательный
36
ремещения поршня создаются либо путем использова-
ния пульсирующего потока рабочей жидкости, либо
посредством прерывания потока рабочей жидкости по-
стоянного расхода с помощью золотниковых или кла-
панных устройств. Наличие механических золотников и
клапанов усложняет конструкцию вибратора, ограни-
чивает ее быстродействие.
С точки зрения уменьшения инерционности и уст-
ранения механических управляющих устройств пред-
ставляет интерес гидравлический вибратор, в котором
в качестве рабочей среды применяется магнитная жид-
кость. Используется способность этой среды мгновен-
но затвердевать при воздействии на нее электрического
поля. Механические клапаны в указанном вибраторе за-
менены электромагнитными. Такой гидровибратор со-
стоит из гидроцилиндра двухстороннего действия, гид-
ромагистрали с магнитной жидкостью, постоянное дав-
ление в которой поддерживается гидронасосом, и си-
стемы электрических клапанов (рис. 9, б).
При включении электрического управляющего уст-
ройства движение жидкости прекращается. Гидроси-
стема устроена таким образом, что при включении од-
ной пары управляющих устройств одна полость гидро-
цилиндра соединяется с напорной магистралью,
а вторая — со сливной. При переключении управляю-
щих устройств направление движения магнитной жид-
кости меняется.
Таким образом, частота колебаний гидровибратора
задается частотой переключения управляющих уст-
ройств, а величина возмущающей силы — давлением
рабочей жидкости в магистрали. Так как современные
гидросистемы могут работать при давлении 300—
400 атм, гидравлические приводы при небольших раз-
мерах способны генерировать значительные возмущаю-
щие силы.
Весьма просты по устройству автоколебательные
гидравлические вибраторы. В них периодическая воз-
мущающая сила создается при питании от магистрали
постоянного давления посредством специальной систе-
мы, осуществляющей автоматически периодический
подвод и отвод рабочей жидкости. Поршень гидроци-
линдра управляет движением распределительного кла-
пана, обеспечивая непрерывность возвратно-поступа-
тельного движения. В автоколебательных вибраторах
колебания возбуждаются при наличии в системе како-
37
го-либо нелинейного элемента — зазора в клапане,
ограничителя хода, зоны нечувствительности обратной
связи.
Чтобы понять, как работает автоколебательный
вибратор, рассмотрим одну из конструкций. В этом ви-
браторе роль поршня выполняет резиновая мембрана,
соединяющая цилиндр со штоком. На конце штока,
находящемся в цилиндре, установлен с помощью рези-
нового упругого элемента выпускной клапан. Так как
резиновый элемент имеет предварительный натяг,
клапан прижат к выпускному отверстию сливной ма-
гистрали (рис. 9, в). Впускное отверстие вибратора по-
стоянно соединено с напорной магистралью.
Автоколебательный вибратор работает следующим
образом. Из напорной магистрали рабочая жидкость
поступает в цилиндр. Под действием давления мембра-
на с завулканизированным в ней штоком начинает сме-
щаться; Однако клапан, вследствие того что он имеет
предварительный натяг, открывается не сразу. Шток
успевает переместить на нужную величину рабочий ор-
ган вибромашины, прежде чем клапан откроет отвер-
стие сливной магистрали. Так как пропускная способ-
ность сливной магистрали значительно выше напорной,
то давление в цилиндре быстро падает и мембрана воз-
вращает шток в исходное положение, перекрывая кла-
паном сливную магистраль. Следующий ход осуществ-
ляется аналогичным образом.
Почему в такой системе, соединенной с источником
постоянного давления, все-таки возбуждаются колеба-
ния? Это нетрудно установить — устройство клапана
обеспечивает периодическое отсоединение напорной ма-
гистрали от сливной, и в это время происходят дефор-
мация диафрагмы и перемещение штока. Такая работа
клапана оказывается возможной вследствие того, что
его упругий элемент имеет начальный затяг. Этот за-
тяг — нелинейность характеристики — приводит к
тому, что деформация упругого элемента при приложе-
нии усилия происходит не сразу, а с запаздыванием,
после того как сила достигает определенной величины.
Если бы пружина не имела предварительного затяга,
она начинала бы деформироваться сразу при приложе-
нии усилий. Поэтому поступление жидкости из напор-
ной магистрали в гидроцилиндр вызывало бы мгновен-
ное открытие клапана на слив и в системе не возбуж-
дались бы колебания. Таким образом, еще раз отмеча-
38
Рис. 10. Электромагнитные вибраторы
а — реактивный; б — с выпрямителем; в — с подмагничиванием по-
стоянным током, I—сила тока (1~—переменного, 1= — постоянного):
F — возмущающая сила
ем, что колебания возбуждаются лишь при наличии не-
линейностей в системе.
Рассмотренные типы вибраторов, кроме автоколе-
бательного, обладают одним принципиальным недо-
статком — во всех них осуществляется преобразование
вращательного движения в возвратно-поступательное.
Было бы более логично в вибромашинах иметь привод
непосредственно возвратно-поступательного действия.
Ведь вибрационная машина — это машина с возврат-
но-поступательным движением рабочих органов, а со-
четание двух видов движения, вращательного и воз-
вратно-поступательного, приводит к усложнению кон-
струкции. На первый взгляд может показаться, что
гидравлический привод отвечает поставленным требо-
ваниям. Однако во многих из них присутствуют узлы
с вращательным движением — золотники, гидропульса-
торы и т. д.
Без промежуточных элементов с вращательным
движением колебания возбуждаются в электромагнит-
ных вибраторах. С этой точки зрения электромагнит-
ные вибраторы в наибольшей степени подходят для
привода вибрационных машин. Электромагнитный виб-
ратор состоит из статора (электромагнита) и яко-
ря, соединенных между собой упругой системой
(рис. 10, а). В электромагнитном вибраторе ток, про-
текающий в обмотке, создает магнитный поток, кото-
рый, взаимодействуя с якорем, возбуждает электромаг-
39
нитную силу, стремящуюся уменьшить между ними
воздушный зазор.
Как же работает электромагнитный вибратор?
Обычно обмотки электромагнита подсоединяются к сети
перемепного тока промышленной частоты. Ток изменя-
ется по синусоиде и за один период дважды достигает
максимального значения. Поэтому в обмотке дважды за
цикл создается магнитный поток и дважды якорь
притягивается к статору. При переходе тока через ну-
левое значение электромагнитная сила пропадает и
восстанавливающая сила упругих элементов возвраща-
ет якорь в исходное положение.
Вибратор, устройство которого мы рассмотрели, со-
вершает колебания с удвоенной по сравнению с питаю-
щим током частотой, т. е. при частоте тока 50 Гц ко-
леблется с частотой 100 Гц. В тех случаях, когда не-
обходима меньшая частота колебаний, в цепь обмотки
электромагнита последовательно включается выпря-
митель. При этом за период действует один импульс
тока, поэтому частота колебаний вибратора снижается
до частоты тока (рис. 10, б).
Частоту колебаний вибратора можно уменьшить пу-
тем дополнительного питания электромагнита постоян-
ным током. При этом, подобрав силу тока возбужде-
ния, можно сместить синусоиду переменного тока в
сторону подмагничивающего поля настолько, чтобы
пропала отрицательная часть синусоиды. Создается
пульсирующий магнитный поток с частотой, равной по-
ловине частоты питающего тока (рис. 10, в). Подмагни-
чивание можно осуществлять и постоянными магнитами.
Рассмотренные типы вибраторов сообщают рабоче-
му органу вибромашины прямолпнейпые колебания.
Многие вибрационные машины должны работать в ре-
жиме круговых или эллиптических колебаний. Можно
ли для таких машин применять электромагнитные виб-
раторы, или это сфера приложения вибраторов других
типов? Долгое время именно для вибромашин с круго-
выми и эллиптическими колебаниями не удавалось ис-
пользовать электромагнитные колебания.
Однако в последнее время специально для этих ус-
ловий эксплуатации были разработаны электромагнит-
ные вибраторы с питанием от трехфазного тока. Ста-
тор такого вибратора образован тремя электромагнита-
ми, расположенными по окружности на равных рассто-
яниях друг от друга, т. е. под углом 120°. Якорь
40
вибратора находится между электромагнитами и со-
единен с ними упругой системой.
Питание каждого из электромагнитов осуществляет-
ся от своей фазы. Поэтому возбуждаемые в них маг-
нитные потоки также сдвинуты по фазе на 120°. Со-
здаваемая при этом электромагнитная сила возбужда-
ет круговые колебания якоря. Соединив якорь с рабо-
чим органом вибромашины, можно сообщить ему кру-
говые или эллиптические колебания.
Высокочастотные вибровозбудители работают в диа-
пазоне ультразвуковых колебаний от 20 тыс. до 20 млн.
колебаний в секунду. В связи с этим они получили на-
звание ультразвуковых излучателей. Излучатели ульт-
развука преобразуют в энергию звукового поля другие
виды энергии, чаще всего электрическую или механи-
ческую. Наиболее широко применяются электроакусти-
ческие преобразователи. В этих устройствах электриче-
ские колебания преобразуются в механические колеба-
ния какого-либо твердого тела, которое и излучает в
окружающую среду акустические волны. Находят при-
менение в различных отраслях промышленности сле-
дующие основные типы преобразователей электриче-
ских колебаний в механические: пьезоэлектрические,
магнитострикционные и электродинамические.
Пьезоэлектрические преобразователи основаны на
использовании пьезоэлектрического эффекта. Сущность
пьезоэффекта состоит в том, что при сжатии или растя-
жении некоторых природных кристаллов на их поверх-
ности появляются электрические заряды. Это явление
называется прямым пьезоэффектом. Если же кристалл
поместить в электрическое поле, то произойдет его де-
формация — обратный пьезоэффект. Механизм явле-
ния объясняется действием электрического поля на
элементарные заряды в ячейке кристаллической решет-
ки. Заряды перемещаются, и между ними изменяются
средние расстояния.
В настоящее время созданы искусственные мате-
риалы, которые обладают значительно более выражен-
ными пьезоэлектрическими свойствами. У этих мате-
риалов пьезоэффект создается искусственно в резуль-
тате специальной обработки электрическим полем.
Наиболее сильно пьезоэффект проявляется у пьезоке-
рамики. Способ приготовления пьезокерамики, ее меха-
нические свойства и структура аналогичны обычной
керамике. Основой этой керамики являются титанат
41
бария или титанат свинца в смеси с цирконием и мно-
гие другие композиции.
Из порошкообразного синтезированного материала
прессованием или литьем под давлением получают заго-
товки заданных размеров и формы. Заготовки обжи-
гают и затем подвергают финишной механической об-
работке. На готовое изделие наносят электроды из се-
ребра, никеля и других материалов. Для поляризации
керамики, придания ей пьезосвойств ее нагревают и к
электродам подводят высокое напряжение. Затем изде-
лие при наличии поля медленно охлаждают. Процесс
изготовления пьезоэлементов на этом заканчивается.
Пьезоэлектрический преобразователь в зависимости
от его назначения составляется из различных групп
электрически и механически связанных пьезоэлемен-
тов. Для решения конкретных технологических задач
пьезоэлектрические преобразователи конструктивно со-
единяются с механическими накладками, пластинами,
мембранами, концентраторами и т. д.
Пьезовибровозбудители настраиваются на резонанс
их механической системы. Поскольку механическая
часть вибровозбудителя представляет собой систему с
распределенными параметрами, то она имеет бесконеч-
ную дискретную последовательность собственных ча-
стот. Резонанс в такой колебательной системе возника-
ет при совпадении возмущающей силы с одной из соб-
ственных частот.
Резонансные режимы работы позволяют создавать
максимальные по амплитуде размахи колебаний. Воз-
буждение колебаний на различных собственных часто-
тах (модах) дает возможность синтезировать разнооб-
разные режимы работы виброустановок с высокоча-
стотными возбудителями.
Имеются пьезоэлектрические преобразователи раз-
личных типов для различных диапазонов частот и ус-
ловий работы. В диапазоне очень низких частот приме-
няют пьезопреобразователи в виде биоморфпых пла-
стин, совершающих поперечные изгибные или крутиль-
ные колебания. Свойства таких преобразователей суще-
ственно зависят от условий закрепления пластин. В об-
ласти низких частот ультразвукового диапазона ис-
пользуются составные пьезопреобразователи в виде
стержней с пассивными накладками.
При более высоких частотах применяют стержни,
совершающие продольные колебания. Для высоких ча-
42
стот пьезопреобразователи изготавливают в виде пла-
стин и оболочек, совершающих колебания по толщине.
Известны также преобразователи в виде полых пьезо-
керамических сфер, тоже поляризованных по толщине.
В них возбуждаются радиальные колебания, обычно в
дорезонансной области.
Эффективность работы высокочастотного вибровоз-
будителя в значительной степени зависит от дополни-
тельных устройств, согласующих характеристики виб-
ропреобразователя с конкретной нагрузкой. Во многих
технологических установках роль согласователя вы-
полняют механические трансформаторы скорости. Для
увеличения амплитуды колебаний вибрационных ин-
струментов используются концентраторы в виде стерж-
ней переменного сечения. Для обработки в жидких сре-
дах применяются излучающие диафрагмы.
Высокочастотные преобразователи колебаний в ряде
областей применения не обеспечивают необходимых
деформаций обрабатываемой среды и плотности энер-
гии в зоне обработки. Это связано с тем, что амплиту-
ды смещений собственно преобразователей незначи-
тельны и излучаемая с единицы поверхности мощ-
ность ограниченна.
Интенсивности излучаемой мощности и амплитуды
смещений могут быть значительно повышены с
помощью специальных устройств — концентраторов,
стержневых и фокусирующих. Стержневые концентра-
торы используют на установках, работающих в обла-
сти низких частот ультразвукового диапазона колеба-
ний. Фокусирующие концентраторы неэффективны
при значительных длинах волны, так как при отраже-
нии теряется значительная доля энергии волны. Их
используют в высокочастотных режимах ультразвуко-
вого диапазона.
Низкочастотный концентратор представляет собой
твердый стержень переменного сечения или перемен-
ной плотности. Принцип действия стержневого кон-
центратора основан на законе сохранения количества
движения. Количество движения пропорционально ве-
личине движущейся массы и ее скорости. Примени-
тельно к условиям прохождения упругой волны по
стержню количество движения для каждого сечения
стержня определяется его площадью, плотностью мате-
риала в рассматриваемом сечении и амплитудным
значением скорости упругой волны.
43
Руководствуясь законом сохранения количества
движения и использовав полученные сведения о про-
хождении волны деформации, можно сконструировать
концентратор. Мы хотим увеличить амплитуду смеще-
ний и повысить плотность излучаемой энергии. Каковы
у нас возможности?
Будем постепенно уменьшать поперечное сечение
стержня и его плотность. При этом автоматически бу-
дет возрастать скорость волны, т. е. количество движе-
ния должно оставаться неизменным. Значит, если вве-
сти энергию колебаний с широкого тяжелого конца
стержня, иначе говоря, прижать его к излучающей по-
верхности преобразователя колебаний, то с тонкого
легкого конца стержня можно снять энергию большей
плотности и получить большие смещения. Таким обра-
зом, концентратор действительно концентрирует выход-
ные параметры излучателя.
Устройства, служащие для передачи волн,— волно-
воды. Концентратор также является волноводом пере-
менного сечения, по которому распространяется волна,
характеризующаяся постоянной амплитудой по сече-
нию. Такие волны называются колебаниями нулевой
моды. Чтобы обеспечить распространение по концентра-
тору волн только нулевой моды, нужно, чтобы макси-
мальный размер его широкого конца был меньше по-
ловины длины волны в материале концентратора.
Значит, чтобы обеспечить достаточные прочностные
размеры концентратора, следует работать с достаточ-
но длинными волнами. Следовательно, волновые кон-
центраторы могут использоваться в ограниченном ча-
стотном диапазоне от 20 до 100 тыс. колебаний в се-
кунду.
Для обеспечения эффективной передачи энергии
концентраторы работают на одной из резонансных ча-
стот. Настройка концентратора на резонансную часто-
ту колебаний достигается тем, что длина его принима-
ется кратной половине длины волны.
Концентраторы могут иметь самую разнообразную
форму. В поперечном сечении они могут быть круглы-
ми, прямоугольными, сплошными и пустотелыми; в про-
дольном — ступенчатыми, коническими, экспоненци-
альными и ампульными — напоминать по форме меди-
цинскую ампулу (рис. 11).
Основной характеристикой концентратора является
коэффициент усиления, который определяется как от-
44
Рис. 11. Концентраторы высокочастотных колебаний
а — ступенчатый; б — конический; в — экспоненциальный; г — ампуль-
ный; д — составной, v — скорость колебаний
ношение смещений на его выходном и входном концах
и зависит в основном от соотношения размеров вход-
ного и выходного концов. Однако в концентраторах
различных типов изменения скорости волны по их дли-
не происходит по-разному. Наибольшее усиление до-
стигается в ступенчатых концентраторах.
Фокусирующий концентратор основан на других
принципах. Он служит для повышения интенсивности
ультразвука в ограниченной области газовой или жид-
кой среды — по сравнению с интенсивностью у по-
верхности излучателя. В концентраторе этого типа про-
исходит фокусирование волн, которое осуществляется
с помощью акустических рефлекторов и линз. Фоку-
сирующие концентраторы применяются на достаточно
высоких частотах, так как при этом невелико погло-
щение волн.
Обычно фокусировка осуществляется самим преоб-
разователем колебаний. Для этого его излучающая по-
верхность выполняется сферической или цилиндриче-
ской формы. При сферической форме излучателя мож-
но получить более высокие плотности энергии. Излуча-
тели цилиндрической формы создают меньшую кон-
центрацию энергии, но имеют большую фокальную
область. Плотность энергии в фокальной области мо-
жет достичь нескольких киловатт на квадратный сан-
тиметр.
Фокусирующие концентраторы изготавливаются в
виде цельных элементов из пьезокерамики и представ-
45
ляют собой часть сферической или цилиндрической по-
верхности. Применяются фокусирующие концентрато-
ры преимущественно для обработки жидких или твер-
до-жидких дисперсных систем, т. е. там, где есть сре-
да, достаточно хорошо передающая ультразвуковые ко-
лебания.
Высокочастотные вибровозбудители могут быть со-
зданы также на основе эффекта магнитострикции. Маг-
нитострикция проявляется в том, что стержень из фер-
ромагнитного материала, помещенный в направленное
вдоль него магнитное поле, деформируется. При этом
стержни из различных материалов могут удлиняться
или укорачиваться.
Это свойство ферромагнетиков открывает возмож-
ность'преобразования энергии магнитного поля в энер-
гию деформации. Если подвергнуть стержень из фер-
ромагнитного материала действию переменного магнит-
ного поля, то он будет подвергаться периодическим
деформациям. Таким образом, ферромагнетики могут
служить преобразователями электрических колебаний в
механические. Такие преобразователи получили назва-
ние «магнитострикционные».
Магнитострикционный преобразователь представ-
ляет собой сердечник из ферромагнитного материала с
обмоткой. Энергия переменного магнитного поля, со-
здаваемого в сердечнике протекающим по обмотке пе-
ременным электрическим током, преобразуется в энер-
гию механических колебаний сердечника. Ферромаг-
нитный стержень деформируется при любой направ-
ленности магнитного поля. Поэтому при возбуждении
его переменным магнитным полем стержень будет ко-
лебаться с удвоенной частотой.
Для того чтобы привести частоту механических ко-
лебаний в соответствие с частотой питающего тока,
в преобразователе создается дополнительно постоянная
составляющая магнитного поля. Постоянную состав-
ляющую магнитного поля подбирают таким образом,
чтобы она была несколько больше амплитуды пере-
менной составляющей магнитного поля. Суммируясь,
переменная и постоянная составляющие создают пуль-
сирующее магнитное поле, частота которого вдвое
ниже частоты переменной составляющей.
Преобразователь, работающий с подмагничивани-
ем, называется поляризованным. Постоянное подмаг-
ничивание создается постоянным током, протекающим
по обмотке, либо с помощью постоянных магнитов,
вставленных в магнитопровод сердечника.
Магнитострикционные преобразователи работают в
частотном диапазоне от нескольких сотен до десятков
тысяч колебаний в секунду. Как и пьезопреобразовате-
ли, они настраиваются обычно на резонансные режи-
мы. Выполняются магнитострикционные преобразовате-
ли стержневого и кольцевого типов. Сердечники стерж-
невых преобразователей состоят из нескольких стерж-
ней, соединенных накладками для образования замкну-
того магнитопровода. Обмотка стержней производится
таким образом, чтобы на соседних стержнях направле-
ние поля было противоположным. Для поляризации
поля между сердечниками вклеивают постоянные маг-
ниты.
Магнитострикционные преобразователи способны
создавать колебания большей амплитуды, отличаются
более высоким сроком службы и большей прочностью,
чем пьезоэлектрические. Поэтому их чаще применяют
в мощных крупных установках.
Кроме пьезо- и магнитострикционных преобразова-
телей в промышленности находят применение аэро- и
гидродинамические излучатели, которые дают излуче-
ния большой мощности и способны обрабатывать зна-
чительные объемы продукта. Аэродинамические излу-
чатели предназначены для работы в газовых средах,
в которых нельзя использовать излучатели с твердыми
колеблющимися поверхностями. Малое волновое сопро-
тивление газовых сред не обеспечивает передачи энер-
гии колебаний твердых излучателей.
Находят применение акустические излучатели двух
типов: газоструйные и динамические, основанные на
прерывании струи. В промышленности используются
газоструйные излучатели высокого давления, которые
позволяют создавать акустические мощности в несколь-
ко сотен ватт. Работа газоструйного излучателя осно-
вана на возбуждении автоколебаний сверхзвуковой
струи при ее торможении резонатором. Газоструйный
излучатель состоит из конического сопла и установлен-
ного перед ним соосно цилиндрического резонатора
(рис. 12).
Механизм действия таких устройств изучен недо-
статочно полно.
47
P ii с. 12. Газоструйный излучатель
1 — сопло; 2 — резонатор; 3 — отсоединенный скачок уплотнения
а — схема, б — распределение статического давления в свободной струе.
Р — давление на фазе сопла
Рис. 13. Газодинамические излучатели
а — осевой; б — радиальный. 1 — ротор; 2 — статор; 3 — рупор;
4 — камера высокого давления; 5 — рефлектор
Принцип же их действия заключается в следую-
щем. При сверхкритическом перепаде давлений в соп-
ле и в окружающей атмосфере выходящая из сопла
струя движется со сверхзвуковой скоростью и приобре-
тает ячеистую структуру. Это значит, что статическое
давление по длине струи в отсутствие резонатора
48
пульсирует — по выходе из сопла давление падает и
затем па некотором расстоянии вновь повышается до
прежнего уровня. Расстояние между срезом сопла и
первым максимумом давления определяет длину первой
ячейки.
В конце первой ячейки устанавливается резонатор.
При торможении струй перед ним возникает отсоеди-
ненный скачок уплотнения. Кинетическая энергия
струи в резонаторе переходит в потенциальную энер-
гию сжатого газа. Так как резонатор находится в кон-
це первой ячейки, где статическое давление газа по-
вышается, то процесс выхода газа из резонатора ста-
новится периодическим. Взаимодействие основной
струи и струи, вытекающей из резонатора, порождает
мощные колебания газа на участке между дном резона-
тора и скачком уплотнения.
Газоструйные излучатели обычно устанавливают в
рефлекторе для создания направленного излучения.
Параболический рефлектор создает плоскую волну, эл-
липтический — сходящуюся в фокусе. Газоструйные
излучатели применяются в акустических газовых и
мазутных горелках, для ускорения тепломассообмен-
ных процессов, диспергирования и в ряде других тех-
нологий.
Имеются также мембранные газоструйные излуча-
тели, которые работают по принципу возбуждения ко-
лебаний мембраны газовым потоком. Излучатель состо-
ит из цилиндрического сопла с фланцем, к которому
прижата эластичная мембрана. Под напором струи
мембрана деформируется, отходит от фланца. При этом
газ выходит в атмосферу и давление под мембраной
падает. Под действием сил упругости диафрагма воз-
вращается в исходное положение. Мембранные газо-
струйные излучатели работают в автоколебательном
режиме.
В аэродинамических излучателях создаются мощ-
ные акустические колебания вследствие периодическо-
го прерывания струй, вытекающих с большой ско-
ростью через отверстия. Прерывание струй произво-
дится вращающимся ротором с отверстиями или зубца-
ми. Ротор может приводиться во вращение от того же
источника энергии, от которого работает излучатель,—
от сжатого воздуха или электродвигателем. Для преры-
вания струи используются также различные золотни-
ковые устройства с возвратно-поступательными движе-
49
14. Гидродинамиче-
ские излучатели
a — с резонирующем пла-
стинкой;
б — с резонирующими ба
лочками.
1 — щелевое сопло;
2 — резонирующая пла-
стина;
3 — цилиндрический резо-
натор;
4 — резонирующие балочки;
5 — кольцевое сопло
пиями. Динамические газоструйные агрегаты выполня-
ются обычно в виде одного агрегата с рупором.
Существуют динамические излучатели осевого и ра-
диального типов. В осевых излучателях ротор и ста-
тор выполнены в виде дисков с отверстиями. Газовый
поток подается вдоль оси вращения ротора (рис. 13, а).
В излучателях радиального типа ротор и статор сдела-
ны в виде коаксиальных цилиндров или конусов, на
боковых поверхностях которых имеются отверстия для
выхода газовой струи (рис. 13, б). Струя газа подается
перпендикулярно к оси вращения ротора.
Частота пульсаций струи, создаваемых в динамиче-
ских излучателях, характеризуется скоростью враще-
ния и числом отверстий в роторе. Частоту пульсации
можно регулировать в пределах от сотен до десятков
тысяч колебаний в секунду.
В аэродинамических излучателях колебания воз-
буждаются импульсами газа, вытекающего из отвер-
стий. Характер колебаний зависит от формы этих им-
пульсов. Гармонические колебания возбуждаются при
использовании круглых отверстий, расстояние между
которыми равно их диаметру. Отверстия прямоуголь-
ной формы создают колебания не только основной ча-
стоты, но и высших. Широкий спектр частот можно по-
лучить, сделав на роторе отверстия разного размера и
расположив их неравномерно.
Динамические газоструйные излучатели могут из-
лучать значительную акустическую мощность — до де-
сятков киловатт.
50
Для осуществления вибрационных технологических
процессов в жидких и жидко-твердых дисперсных си-
стемах используются гидродинамические излучатели.
В гидродинамических излучателях происходит преоб-
разование энергии турбулентной затопленной струи
жидкости в энергию акустических волн. Преобразова-
ние энергии турбулентного потока в энергию колебаний
осуществляется при взаимодействии вытекающей из
сопла струи с упругой колебательной системой, находя-
щейся в жидкости. При набегании струи на колеба-
тельную систему в ней возбуждаются автоколебания,
которые передаются обрабатываемой жидкой среде. Под
действием этих колебаний в жидкости генерируются пе-
ременные поля скоростей и давлений.
Гидродинамический излучатель состоит из щелевого
сопла, погруженного в жидкость, и из пластинки, уста-
новленной заостренным ребром на некотором расстоя-
нии против сопла (рис. 14, а). Пластинка может кре-
питься в узлах колебаний или консольно. При набега-
нии струи она совершает изгибные автоколебания.
Для обеспечения достаточно интенсивных колебаний
пластинка должна быть настроена на резонансный ре-
жим работы. Акустические колебания излучаются пер-
пендикулярно к плоскости пластинки. Сопло может
быть и кольцевым (рис. 14, б). При этом резонансная
колебательная система выполняется из системы кон-
сольных балочек, установленных против кольцевого
сопла.
Акустические волны могут генерироваться и за
счет пульсации кавитационной области, образуемой
между соплом и специальным отражателем, установ-
ленным на упругой резонансной системе. Упругая си-
стема выполняется в виде стержней, соединяющих соп-
ло с отражателем. Рабочая поверхность отражателя мо-
жет быть выпуклой, плоской или вогнутой.
Лучше всего образование кавитационной области
происходит при вогнутой поверхности отражателя. Ко-
лебания в жидкости возбуждаются под действием пе-
риодических выбросов содержимого кавитационной об-
ласти, образующегося в зоне между соплом и отража-
телем. Пульсации кавитационной области создают
периодические поля скоростей и давлений, которые
возбуждают колебания отражателя на стержнях.
Колебания жидкости можно возбудить посредством
сопла и установленной против него па некотором рас-
стоянии мембраны. Между соплом и мембраной образу-
ется кольцевая щель. При протекании под ней жидко-
сти происходит падение давления вследствие преобразо-
вания статического напора в динамический. Затем в ре-
зультате давления окружающей жидкости мембрана
прижимается к соплу. Поток жидкости прерывается,
давление по обеим сторонам выравнивается, и мебра-
на возвращается в исходное положение.
Кроме того, используются гидродинамические из-
лучатели с принудительным прерыванием потока.
Устройство их аналогично газодинамическим излуча-
телям.
Виброкипящий слой —
основа эффективных технологий
Мы привыкли к тому, что кипеть могут жидкости. Од-
нако здесь речь пойдет не о жидкости, а о сыпучих
твердых материалах. Эти материалы называются дис-
персными. Оказывается, такие материалы также спо-
собны кипеть, но для этого к ним нужно подвести не
источники тепла, а источники вибрации. Если насы-
пать дисперсный материал в емкость и сообщить ей
вибрацию, то в нем произойдет ряд превращений, ха-
рактер которых зависит от интенсивности, направления
и вида вибрационных воздействий.
Рассмотрим поведение сыпучей среды под действи-
ем вертикальных прямолипейпых колебаний, интенсив-
ность которых будем постепенно изменять. С ростом
интенсивности воздействия вибрации на дисперсную
среду, в пределах амплитудных значений ускорения,
не превышающих величину ускорения силы тяжести,
среда начинает приобретать подвижность и, как гово-
рят, псевдотекучесть.
Такое состояние дисперсной среды принято назы-
вать состоянием псевдоожижения. В этом состоянии
сцепление между частицами уменьшается, они ближе
подходят друг к другу, снижается объем пор (достига-
ется более плотная укладка частиц), среда уплотняет-
ся. Наибольшее уплотнение среды имеет место при зна-
чении амплитудного ускорения вибрации, близком к
ускорению силы тяжести.
При дальнейшем увеличении интенсивности колеба-
ний дисперсная среда начинает периодически терять
52
контакт с днищем емкости. Нарушаются связи между
частицами, в массе возникает циркуляционное движе-
ние, па поверхности происходит бурление — среда при-
ходит как бы в состояние кипения. Это состояние на-
зывают виброкипением. Оно характеризуется разрыхле-
нием дисперсной среды и уменьшением ее плотности.
В стадии виброкипения выделяются два характерных
состояния — разделение частиц по крупности (сегре-
гация) и интенсивное перемешивание, повышающее
однородность всей массы. Перемешивание идет при бо-
лее интенсивной вибрации.
Интересно отметить, что полученная псевдожид-
кость имеет необычные свойства. Если на дно емкости
с виброкипящей дисперсной средой поместить смесь
кусков различного удельного веса, то, опираясь на по-
вседневный опыт, можно было бы ожидать, что легкие
куски всплывут на поверхность, а тяжелые останутся
на дне емкости. Однако вопреки ожиданию все прои-
зойдет как раз наоборот. Тяжелые куски всплывут на
поверхность, а легкие еще плотнее улягутся на дне.
Правда, всплывшие тяжелые куски время от времени
ныряют в кипящую дисперсную среду, но неизменно
возвращаются на поверхность.
Это свойство виброкипящего слоя находит широкое
применение во многих технологических процессах. При
обогащении полезных ископаемых, например, произво-
дится разделение по удельному весу различных продук-
тов в тяжелых средах с участием вибровоздействий.
В виброкипящем слое ускоряются теплообменные и
массообмонныо процессы. Эффекты виброожижения и
виброкипения дисперсных сред широко и эффективно
используются и в других технологических процессах.
В ряде случаев для создания кипящего слоя приме-
няется комбинированное воздействие вибрации и про-
дувки (фильтрации) через него газа. Для сыпучих
тонкодисперсных продуктов, склонных к агрегирова-
нию, комбинированные воздействия позволяют осуще-
ствлять с достаточной степенью надежности требуемую
структуру кипящего слоя. Вибрационные воздействия
уменьшают силы сцепления частиц, разрушают обра-
зующиеся агрегаты и тем самым предотвращают воз-
никновение сквозных газовых каналов. Этим создают-
ся предпосылки для более равномерного распределения
газового потока во всей массе обрабатываемой среды.
Вибрация разрушает также образующиеся своды. При
53
комбинированном воздействии существенно снижаются
необходимые скорости газового потока и интенсивность
колебаний.
Состояние виброожижения и виброкипения сопро-
вождается сложными циркуляционными процессами в
дисперсной среде. Характер этих движений зависит от
многих факторов. Основными являются режим вибра-
ции и конфигурация рабочей камеры, в которой нахо-
дится дисперсная среда. Эти циркуляционные движе-
ния дисперсной среды используются в рабочих органах
многих вибрационных машин.
Проще всего проследить зарождение и развитие цир-
куляционных движений, сообщая рабочей камере с
дисперсной средой прямолинейные колебания. Для наб-
людения за закономерностями движения дисперсной
среды одна из стенок камеры должна быть прозрач-
ной. Дав стробоскопическое освещение со стороны
прозрачной стенки с частотой, близкой к частоте ко-
лебаний, можно наблюдать за движением дисперсной
среды.
Сообщим рабочей камере прямоугольной формы го-
ризонтальные колебания. Постепенно будем увеличи-
вать их интенсивность. Режим может меняться за счет
частоты или амплитуды колебаний. С возрастанием
интенсивности колебаний дисперсная среда приобрета-
ет подвижность, в ней начинаются медленные движения
отдельных слоев. Когда колебания станут достаточно
интенсивными, возникнут заметные деформации среды
и временами у стенок рабочей камеры будут образо-
вываться клинообразные полости. Эти полости расши-
ряются в верхней части стенки и сужаются книзу.
Иногда эти клинообразные полости не достигают дна,
а заканчиваются в середине камеры.
Полости возникают попеременно то у правой, то у
левой стенки (рис. 15). Когда рабочая камера нахо-
дится в крайнем левом положении своей траектории,
клиповая область образуется справа. При перемеще-
нии камеры в крайнее правое положение полость пере-
мещается к левой стенке.
Соблюдается определенная закономерность. Рабочая
камера смещена от своего нейтрального положения
влево — полость будет у правой стенки. Рабочая ка-
мера находится в правой области, клиповая полость —
слева. Полость у стенки тем больше, чем ближе к
крайнему положению находится камера. В нейтраль-
54
Рис. 15. Циркуляционные движения дисперсной среды в камере при
горизонтальных колебаниях
Положения дисперсной среды: а — крайнее левое; б, г — промежуточ-
ные; в — среднее; д — крайнее правое
ном положении ни у правой, ни у левой стенок сво-
бодных полостей нет.
Давайте попробуем дать объяснение, почему у
стенок рабочей камеры возникают свободные полости
и что определяет их клиновую, сужающуюся книзу
форму? Перемещения дисперсной среды внутри камеры
обусловливаются главным образом давлением, оказы-
ваемым на нее колеблющимися стенками. Когда начи-
нается перемещение из крайнего правого положения
влево, правая стенка давит на дисперсную среду.
Среда вследствие инерционности стремится сохранить
свое первоначальное положение. Причем этому пере-
мещению сопротивляется каждая частичка среды.
Таким образом, в дисперсной среде действуют рас-
пределенные в объеме силы инерции. Но сосуд про-
должает двигаться влево и, несмотря на сопротивление,
смещает контактирующие со стенкой частицы среды в
направлении своего движения. Дисперсная среда у
стенки уплотняется, частички теснее прижимаются
друг к другу. Начинается местная деформация среды.
Что же в этот момент происходит у противополож-
ной стенки? Среда там пока неподвижна, а стенка от-
ходит от нее. Но свободная полость у стенки не обра-
зуется. В среде действует статическое давление. Под
его действием частицы следуют за отодвигающейся
стенкой.
55
По мере перемещепия правой стенки влево все
больший объем дисперсной среды охватывается дефор-
мацией, все большая ее часть вовлекается в движе-
ние. Нужно отметить одно важное обстоятельство.
Движение среды из-за того, что она инерционна и
способна деформироваться, отстает от перемещения
стенки. Такое относительное перемещение стенки
приводит к тому, что среда деформируется. Имея это
в виду, будем наблюдать дальше за движением сосуда
и находящейся в нем среды. Представляет особый ин-
терес тот момент, когда сосуд окажется в крайнем
левом положении, остановится и затем начнет пере-
мещаться в противоположном направлении.
Как в это время движется среда? Не забывайте,
что среда движется с некоторым запаздыванием. В тот
момент, когда сосуд уже остановился, среда продол-
жает двигаться в прежнем направлении. Мы уже зна-
ем, что относительное перемещение среды возможно
только за счет ее деформации.
Когда в начале движения стенка давила на среду,
также происходили ее деформации. Однако условия
деформирования среды в этих двух случаях совершен-
но различные. Эти различия определяют особенности
деформирования при передаче стенкой усилия покоя-
щейся среде и набегании движущейся среды на стен-
ку. В первом случае среда неподвижная. При переме-
щении стенки скорость деформации постепенно пере-
дается от контактного слоя все более удаленным
областям среды. Поэтому результаты набегания стенки
на среду не сразу становятся заметными с противо-
положной сторопы.
При набегании среды на стенку картина совершен-
но другая. Каждая частичка среды движется по инер-
ции с определенной скоростью. Поэтому взаимодей-
ствие среды со стенкой будет происходить под дейст-
вием запасенной кинетической энергии. Когда первые
слои среды коснутся стенки, то следующие будут про-
должать движение в первоначальном направлении.
Скоростной напор набегающих частичек преобразуется
в статическое давление. Среда начнет сжиматься и
уплотняться. Вся масса среды сместится влево. Вот
это обстоятельство и поведет к тому, что у правой
стенки рабочей камеры образуется свободная полость.
Мы начали рассматривать процесс в тот момент,
когда рабочая камера только пришла в движение.
56
Этот режим является переходным от покоя к движению.
В установившемся движении, после того как рабочая
камера уже совершит несколько колебаний, картина
взаимодействий среды и стенки будет несколько дру-
гая. Однако все основные закономерности будут соб-
людаться. Дело в том, что колебательные системы,
подобно рассмотренной, как бы «помнят», что происхо-
дило в предыдущих циклах колебаний. Поэтому при
последующих колебаниях они ведут себя с учетом то-
го, что было в прошлом. Такие системы иногда назы-
вают наследственными.
Теперь попытаемся выяснить, почему свободные
полости у стенок имеют клиновую форму? Для этого
продолжим наблюдения за движением среды.
Мы замечаем, что при достижении определенной
интенсивности колебаний в рабочей камере начинают
формироваться два циркуляционных потока. Среда у
каждой из стенок начинает перемещаться вниз, про-
ходит у дна и в центре поднимается вверх. При этом
свободная поверхность дисперсной среды приобретает
выпуклую форму. Вверху поднимающийся поток разде-
ляется на две части, движущиеся у поверхности от
центра к стенкам. Далее поток вдоль стенок опять
опускается вниз.
На днище в центре рабочей камеры могут образо-
вываться застойные области. Движение частиц среды
в них протекает очень медленно. Застойные области
играют как бы организующую роль, направляя движе-
ние основных потоков. Они скругляют места, где про-
исходит поворот потоков, и тем самым способствуют
интенсификации основных циркуляционных движений.
Наблюдается, что в полости у стенок сосуда постоянно
происходит ссыпание частиц дисперсной среды, дви-
жущейся от центра к стенкам.
С учетом проведенных наблюдений можно попы-
таться объяснить причины возникновения клиновой
формы свободных полостей. Их, видимо, две. Смеще-
нию среды в нижней части рабочей камеры препятст-
вуют довольно значительные силы трения о дно.
Вследствие этого среда отходит от стенок на незначи-
тельное расстояние. Вверху таких сопротивлений среда
не испытывает, поэтому деформируется больше, обра-
зуя более широкие свободные полости. И второе, ссы-
паясь в свободную полость, частицы среды накаплива-
ются внизу у днища, уменьшая тем самым зазор у
57
Рис. 16. Управление циркуляцией дисперсной среды изменением
формы камеры
Камеры: а—с наклонным днищем; б — с двускатным днищем;
в — двухсекционная; г — трехсекционная
стенки. Так формируются двухконтурные циркуляци-
онные движения среды в рабочей камере при горизон-
тальных колебаниях.
Давайте изменим направление колебаний. Сооб-
щим рабочей камере колебания в вертикальном направ-
лении. Наблюдения показывают, что при достаточно
интенсивных колебаниях в камере также устанавли-
вается двухконтурная циркуляция среды. Вращаются
два потока: правый по часовой стрелке, левый — про-
тив часовой стрелки. В центре камеры также устанав-
ливается восходящий поток среды, а у стенок — нис-
ходящие потоки.
Характер движения дисперсной среды можно пре-
образовать, изменив форму рабочей камеры. Возьмем
прямоугольную камеру с наклонным днищем (рис.
16, а). Если сообщить вертикальные колебания, то в
ней установится одноконтурная циркуляция. Вдоль
длинной стенки формируется нисходящий поток, а у
58
короткой — восходящий. Такие изменения в характере
движения дисперсной среды происходят из-за того,
что наклонное днище преобразует однокомпонентные
вертикальные колебания сосуда в двухкомпонентные
колебания среды. На днище вертикальное перемещение
сосуда раскладывается на две составляющие. Одна
составляющая действует перпендикулярно к днищу,
а вторая — вдоль него.
Если соединить две камеры с наклонными днища-
ми и удалить соединяющую их длинную стенку, то в
такой рабочей камере при вертикальных колебаниях
установится двухконтурная циркуляция (рис. 16, б).
В центре камеры формируется нисходящий и у. стенок
восходящий потоки. Если рабочую камеру с наклонным
днищем разделить вертикальной стенкой на две сек-
ции, то циркуляционные движения обеспечат подъем
среды у короткой стенки. Интересно отметить, что вы-
соты столбов среды у короткой и у длинной стенок
будут примере одинаковыми (рис. 16, в). Такие про-
цессы протекают в камере как при горизонтальных,
так и при вертикальных колебаниях.
Если рабочей камере прямоугольной формы с тре-
мя вертикальными секциями сообщить прямолинейные
горизонтальные колебания, то произойдет перекачива-
ние среды из боковых секций в среднюю (рис. 16, г).
В трехсекционной камере в широкой средней секции
формируется обычная двухконтурная циркуляция.
В боковых секциях среда движется вниз, причем
уровень ее устанавливается ниже уровня в централь-
ной секции.
Следует отметить, что как при горизонтальных, так
и при вертикальных колебаниях в низкочастотном и
высокочастотном режимах направление циркуляции
среды может меняться на обратное. Например, нис-
ходящий поток среды может установиться в середине
сосуда, а восходящие — у стенок. Это открывает широ-
кие возможности управления технологическими про-
цессами, осуществляемыми в виброкипящем слое.
Рассмотрев закономерости формирования цир-
куляционных движений дисперсной среды при простей-
ших видах колебаний сосуда, изучим влияние вида
вибрационных воздействий на эти процессы.
Сообщим рабочей камере двухкомпонентные коле-
бания, при которых одновременно существуют горизон-
тальная и вертикальная составляющие. Двухкомпонент-
59
Рис., 17. Управление циркуляцией дисперсной среды колебаниями
рабочей камеры
Угол вибрации: а — угол вибрации 25°; б — угол вибрации 40°
ные колебания получить несложно. Проще всего пря-
молинейные колебания направить под углом к
горизонтальной оси. При этом дисперсная среда будет
одновременно подвергаться горизонтальным и верти-
кальным колебаниям.
Переходя постепенно от горизонтальных колебаний
камеры к направленным под углом, видим, что уже
при незначительном увеличении угла вибрации начи-
нает меняться характер циркуляционных потоков.
Один циркуляционный контур начинает уменьшаться,
второй увеличиваться. А при угле вибрации около
20° устанавливается одноконтурная циркуляция (рис.
17).
Среда у одной стенки поднимается, идет вдоль
свободной поверхности, опускается у второй стенки,
перемещается вдоль днища и вновь поднимается. При
этом в направлении вибрации у стенки происходит
подъем и свободная поверхность дисперсной среды
приобретает наклон. В массе дисперсной среды обра-
зуется застойная зона. Эта зона способствует уста-
новлению в сосуде кольцевой циркуляции потока.
По мере увеличения угла вибрации застойная зона
меняет свою конфигурацию и расположение в масси-
ве. Возрастает подъем среды у стенки, у которой
движется восходящий поток. Увеличивается наклон
свободной поверхности (рис. 17, б).
60
Особенно интенсивные двухконтурные циркуляци-
онные потоки создаются в рабочих камерах круглого
поперечного сечения при сообщении им круговых и
эллиптических колебаний. Если понаблюдать за от-
дельной частицей дисперсной среды при круговых или
эллиптических колебаниях, то можно заметить, что она
не только участвует в медленном циркуляционном дви-
жении со всей массой, но и совершает быстрые дви-
жения, копирующие траекторию движения сосуда.
Таким образом, каждая частица среды колеблется
по круговым или эллиптическим траекториям. Резуль-
тирующее движение каждой частицы складывается из
быстрых колебательных движений и медленных цир-
куляционных. Траектория движения частицы похожа
на растянутую пружинку, соединенную в кольцо.
Дисперсной среде можно сообщить и более сложные
циркуляционные движения, подобрав соответствующую
конфигурацию рабочей камеры и сообщив ей колеба-
ния по соответствующей траектории. В некоторых виб-
рационных машинах применяют рабочие камеры в ви-
де тора. Такой камере сообщают пространственное
движение, складывающееся из круговых колебаний в
горизонтальной плоскости и качаний вертикальной
оси. При этом дисперсная среда совершает винтовые
движения, перемещаясь вдоль кольцевой оси тора и
одновременно совершая круговые движения в попе-
речном сечении тора.
При организации циркуляционного движения дис-
персных сред в рабочих камерах различных вибраци-
онных технологических машин траектория частицы
среды складывается из быстрых колебательных движе-
ний по траекториям, подобным траектории колебаний
рабочей камеры, и медленных циркуляционных дви-
жений со всей массой. Так, например, траектория
частицы дисперсной среды в рабочей камере, колеб-
лющейся под углом к горизонту, будет складываться из
прямолинейных перемещений в направлении колебаний
сосуда, совершаемых с частотой привода, и медленно-
го движения в направлении циркуляции. Траектория
частицы будет похожа на растянутую пружинку, вы-
тянутую в направлении движения массива в данной
области рабочей камеры.
По сути, быстрые колебательные движения частиц
среды формируют коллективное медленное циркуляр-
ное перемещение среды. Поэтому для выяснения зако-
61
померностей медленных движений массивов следует
изучать закономерности движения составляющих мас-
сив частиц. В различных машинах циркуляционные
движения, создаваемые вибрацией, используются для
решения разнообразных транспортных задач.
В вибрационных конвейерах транспортный поток
создается соответствующим образом организованной
циркуляцией среды. Грузонесущий орган вибрацион-
ного конвейера можно рассматривать как рабочую ка-
меру, у которой есть боковые, но нет передней и зад-
ней стенок. Колебания грузонесущему органу сооб-
щаются под углом к его продольной оси. При вибра-
ционном транспортировании частицы дисперсной
среды, входящие в контакт с колеблющейся транспор-
тирующей поверхностью, получают от нее периодиче-
ские силовые импульсы.
Силовые импульсы, перпендикулярные к поверх-
ности грузонесущего органа, вызывают поперечные
деформации слоя груза. В слое возникают внутрен-
ние напряжения, которые действуют на грузонесущий
орган в виде сил сопротивления, препятствующих его
движению. В плоскости транспортирования действуют
периодические импульсы сил трения. От частиц, кон-
тактирующих с транспортирующей поверхностью, по-
перечные и продольные силовые импульсы в виде вол-
ны напряжений передаются всей массе груза.
По причине внутренних сил трения и необратимых
деформаций импульсы при распространении в слое
постепенно ослабляются. Энергия, необходимая па
ускорение транспортируемого груза, восполнение по-
терь при необратимых деформациях слоя и преодоле-
ние внутреннего трения, сообщается грузонесущим ор-
ганом.
Исследования показывают, что частицы среды, на-
ходящиеся в слое на различном расстоянии от тран-
спортирующей поверхности, движутся с различными
сдвигами фаз. По мере удаления от грузонесущего ор-
гана уменьшается также скорость частиц в направле-
нии транспортирования. При значительной толщине
слоя перемещаемого груза могут сформироваться от-
дельные монослои, перемещающиеся с различными ско-
ростями.
Когда грузонесущий орган перемещается в направ-
лении слоя транспортируемого груза, то прежде всего
движение сообщается частицам среды, находящимся в
62
контакте с транспортирующей поверхностью. Так как
вышележащие слои не сразу приходят в движение,
а некоторое время остаются неподвижными, то, пере-
мещаясь, грузонесущий орган деформирует находя-
щийся па нем слой груза. Происходит его уплотнение.
Постепенно деформация распространяется на вышеле-
жащие монослои и под действием внутренних напря-
жений вся масса вовлекается в движение. При этом,
чем дальше монослой находится от транспортирующей
поверхности, тем меньше, как правило, амплитуда
периодической составляющей его движения.
В режиме с подбрасыванием с течением времени
нижний монослой, передав всю свою кинетическую
энергию вышележащим слоям, начинает движение
вниз. При этом верхние слои продолжают переме-
щаться вверх. В этот момент начинается разрыхле-
ние слоя транспортируемого груза. Это может соп-
ровождаться потерей контактов между составляющими
его частицами.
Возможны режимы, когда верхние монослои нахо-
дятся еще в состоянии полета, а нижний слой после
падения на грузонесущий орган вновь получает им-
пульс вверх. При этом верхний и нижний монослои
встречаются во взвешенном состоянии, перемещаясь
навстречу друг другу. Верхний монослой, получив от
нижнего импульс, продолжает свое движение, а ниж-
ний, израсходовав свою кинетическую энергию, опять
возвращается на поверхность грузонесущего органа.
Встречаясь с транспортирующей поверхностью, слой
груза тормозится и уплотняется.
В процессе вибротранспортировапия из-за необра-
тимых деформаций и внутреннего трения в слое
транспортируемого груза, трения груза о транспорти-
рующую поверхность и аэродинамических сопротивле-
ний при свободном движении слоя затрачивается энер-
гия. Восполнение потерь энергии, а также сообщение
энергии на ускорение транспортируемому грузу обеспе-
чивается силами трения о транспортирующую поверх-
ность и внутренними напряжениями при деформации
слоя. Энергия от грузонесущего органа поступает в те
моменты, когда он находится в контакте со слоем,
и рассеивается на участке свободного движения груза.
Передача энергии силами трения и внутренними нап-
ряжениями необратимых деформаций связана с непро-
изводительными ее затратами. Мерой непроизводи-
63
тельных затрат энергии служит величина относитель-
ной скорости груза и грузонесущего органа.
Таким образом, способ вибрационного транспорти-
рования массовых грузов органически связан с поте-
рями энергии при передаче ее от грузонесущего органа
грузу. Энергия рассеивается на всех этапах движения
груза — в свободном движении, при соударениях и в
период перемещения совместно с грузонесущим орга-
ном. Однако интенсивность протекания этих процессов
различна на разных этапах движения.
Пропало трение
Специалисты подсчитали, что примерно половина вы-
рабатываемой энергии тратится на преодоление соп-
ротивлений от всевозможных видов трения. Теряемая
из-за трения энергия превращается в тепло. Это не
только потеря энергии. Специалисты всерьез обеспо-
коены тепловым засорением окружающей среды. Рас-
четы показывают, что огромные выбросы энергии, свя-
занные с промышленной деятельностью человечества,
могут повести к необратимым опасным изменениям
экологической системы.
В целом проблема снижения непроизводительных
затрат энергии сложна. Однако применение вибрацион-
ных воздействий при определенных условиях позволя-
ет существенно снизить сопротивления от сил трения.
Сейчас трудно определить, кто первым обнаружил
это свойство вибрации. Скорее всего, эта способность
вибрации была не раз открыта и пе раз находила
практическое применение, прежде чем была сформули-
рована сама проблема — вибрация как средство сниже-
ния сопротивлений от сил трения. Вибрация уже ус-
пешно работала па этом поприще, когда специалисты
по бионике заинтересовались способностью ряда био-
логических объектов успешно и с малыми потерями
энергии преодолевать сопротивления от сил трения.
Хорошо известна способность дельфинов двигаться
в воде при меньших потерях энергии по сравнению с
телами, которые имеют статические модели тела
дельфина. Обстоятельные исследования гидродинами-
ки дельфина обнаружили два механизма, способствую-
щие снижению гидродинамического трения. Это кожа
64
и хвостовой плавник дельфина. При взаимодействии с
набегающим потоком в коже дельфина возбуждаются
периодические пульсации, которые, как оказалось,
позволяют снизить вязкостное трение. Конструкция
кожи дельфина хорошо изучена, и в настоящее время
созданы искусственные покрытия такого типа. Обшив-
ка корпусов судов искусственной «кожей дельфина»,
действительно, дает возможность снизить сопротивле-
ния их движению.
Эффект снижения сил сухого трения под действи-
ем вибрации мы широко используем в быту. Например,
нужно пересыпать влажный сахарный песок из паке-
та. Мы потряхиваем пакет (это и есть вибрация),
и сахар при небольшом наклоне пакета начинает
ссыпаться в сахарницу.
В чем же здесь дело? Сахар перемещается по па-
кету под действием силы тяжести, которая действует
вертикально вниз. Если стенка пакета расположена
горизонтально, то силы тяжести прижимают к ней
сахар. При наклоне пакета сила тяжести на стенке
пакета раскладывается на две составляющие — пер-
пендикулярную и параллельную ей. Параллельная сос-
тавляющая стремится сдвинуть сахар, а перпенди-
кулярная образует силу трения, препятствующую
движению.
Увеличивая наклон пакета, мы снижаем силы соп-
ротивления и увеличиваем движущие силы. Если
наклон пакета невелик, сахар высыпаться не будет,
силы сопротивления больше движущих. Но если пот-
рясти пакет, сахар посыплется. Что же произошло?
Будем считать для упрощения, что мы колеблем пакет
перпендикулярно к его стенке.
Колебания пакета приведут к периодическим изме-
нениям давления сахара на стенку. Оно будет то боль-
ше, то меньше статического давления. Причем, если
трясти пакет сильно, сахар может даже терять контакт
со стенкой пакета. В эти моменты сила сопротивления
движению будет ьообще равна нулю и можно переме-
щать сахар любой ничтожно малой силой. В этом
случае даже небольшая составляющая сила веса обе-
спечит движение сахара. Поэтому когда мы трясем
пакет, то, даже при малом его наклоне, сахар будет
высыпаться.
Влияние параметров вибрации на величину коэф-
фициента трения исследуют обычно на специальном
3 И, Ф. Гончаревич
65
вибростенде. Платформе перпендикулярно к ее поверх-
ности сообщают колебания. На платформе находится
груз, который перемещают гибкой нитью, соединенной
с динамометром. Динамометр регистрирует силу
тяги. При перемещении по неподвижной платформе
сопротивление равно весу груза, умноженному на
коэффициент трения. Примем эту силу за единицу
и будем сравнивать с ней сопротивления перемещению
груза по вибрирующей платформе.
Будем перемещать груз по платформе, каждый раз
увеличивая интенсивность ее колебаний. Замеры по-
казывают, что с ростом интенсивности колебаний соп-
ротивления перемещению падают. При колебании плат-
формы с ускорениями, превышающими ускорение силы
тяжёсти, силы сопротивления снижаются в десятки
раз. Поэтому по вибрирующей поверхности при опре-
деленных условиях можно перемещать тяжелый груз,
прикладывая небольшие усилия.
Преобразование сил трения происходит и в том
случае, когда вибрация действует в направлении пере-
мещения тела. Однако механизм ее действия другой.
Вспомним, что силы трения направлены всегда в сто-
рону, противоположную направлению движения тела.
Знак сил трения противоположен знаку скорости. Ско-
рость положительна — силы трения отрицательны,
и наоборот.
Здесь имеется в виду скорость тела относительно
поверхности, по которой происходит перемещение.
Силы трения возникают и при движении тела по по-
верхности, и при перемещении поверхности относи-
тельно неподвижного тела. Важна лишь их относи-
тельная скорость. Следует учитывать, что относитель-
ные скорости тела и поверхности имеют разные знаки.
Поэтому силы трения на них действуют в противопо-
ложные стороны.
Сообщим платформе, по которой перемещается те-
ло, колебания в направлении транспортирования. Если
значение скорости колебаний платформы по амплиту-
де меньше скорости перемещения тела, то относитель-
ная скорость тела будет меняться по величине, остава-
ясь постоянной по направлению. При этом действую-
щие на него силы постоянно будут направлены в одну
сторону — противоположно перемещению, создавая
сопротивление движению. Таким образом, недостаточ-
но интенсивная вибрация в направлении транспорти-
66
рования пс меняет сил трения, действующих на пере-
мещающееся тело.
Сообщим платформе колебания с большой скоро-
стью так, чтобы амплитудные ее значения превыша-
ли скорость движения тела. В этом случае относитель-
ная скорость тела будет меняться не только по вели-
чине, но и по знаку. При этом сила трения будет
действовать на тело в различных направлениях. Ког-
да относительная скорость положительна, сопротивле-
ния действуют в сторону, противоположную его пере-
мещению, как при движении по неподвижной поверх-
ности. На тех участках движения, где относительная
скорость тела отрицательна (вибрирующая поверх-
ность обгоняет тело), сила трения будет действовать
в направлении транспортирования.
Таким образом, на некоторых участках движения
сила трения из силы сопротивления превращается в
движущую силу. Значит, для перемещения тела по
продольно колеблющейся поверхности нужно прикла-
дывать силы не на всем пути, на некоторых участках
груз перемещает сама вибрирующая платформа. Если
силу сопротивления движению груза равномерно расп-
ределить на весь путь — взять ее среднее значение,
то весьма условно можно говорить о снижении сил
трения.
Вообще говоря, нас интересуют не только силы тре-
ния, а главным образом затраты энергии на их прео-
доление. Экономим ли мы в данном случае энергию?
Давайте выполним расчеты.
Затраты энергии в единицу времени (мощность)
определяются произведением силы иа скорость. Груз
перемещается как по неподвижной платформе, так и
по вибрирующей с одинаковой скоростью, задаваемой
тяговым механизмом. А силы, которые должен прило-
жить тяговый механизм к грузу, при перемещении по
вибрирующей платформе, как мы уже убедились, мень-
ше. Значит, тяговый механизм будет перемещать груз
по вибрирующей платформе с меньшими затратами
энергии, чем по неподвижной.
В тяговой системе прямая экономия энергии. Но
нам важны общие затраты энергии. Энергию, которую
мы сэкономили в тяговом механизме, мы позаимство-
вали от вибрирующей платформы. Потому следует
учесть затраты энергии на сообщение колебаний плат-
форме. Таким образом, то, что при движении по непод-
3*
67
вижной платформе затрачивает только тяговый меха-
низм, при вибрации делится между ним и платфор-
мой. Произошло просто перераспределение затрат
энергии.
Нужно учитывать также, что на сообщение коле-
баний виброплатформе энергии тратится больше, чем
она отдает на перемещение транспортируемому грузу.
Затраты энергии па вибрацию платформы равны
двойному ходу, умноженному на величину силы тре-
ния. А полезно используется энергия, равная произ-
ведению силы трения на величину перемещения плат-
формы вперед относительно груза. Это перемещение
значительно меньше ее двойного хода.
Значит, не любые вибрации йозволяют эффективно
преодолевать силы трения, снижая энергозатраты.
В ряде случаев просто снижаются сопротивления дви-
жению одного из элементов системы. В целом же в
системе энергозатраты могут оказаться даже более
высокими.
Каковы же энергозатраты на преодоление трения
при колебаниях, перпендикулярных к контактной по-
верхности? Как показывают исследования, в этом слу-
чае при определенных условиях снижаются не только
сопротивления, но и затраты энергии на преодоление
трения. Но и здесь при подсчете энергетической эф-
фективности процесса не следует забывать про затра-
ты энергии на сообщение вибрации контактирующим
поверхностям.
Вибрация позволяет снизить не только внешнее
трение между контактирующими поверхностями твер-
дых тел, но и внутреннее трение, например, в диспер-
сных средах. Мерой внутреннего трения в дисперсной
среде служит угол откоса. Если насыпать штабель
дисперсной среды, то ее свободная поверхность имеет
с горизонтальной поверхностью вполне определенный
для данного продукта угол. Этот угол называется уг-
лом откоса. Он тем больше, чем больше трение между
частицами дисперсной среды.
Если насыпать кучку дисперсного материала на
виброплатформу и сообщить ей колебания, то она нач-
нет растекаться по платформе. При достаточном раз-
мере платформы на ее поверхности частицы лягут в
один слой. В этом случае угол откоса будет равен
нулю. Причем такой конечный результат достигается
как при перпендикулярных к поверхности, так и тан-
68
генциальных колебаниях. Эксперимент дает основание
говорить, что вибрация является эффективным сред-
ством снятия внутреннего трения в дисперсных сре-
дах.
Следует, однако, иметь в виду, что во всех рас-
смотренных случаях механизм трения не изменяется.
Коэффициенты трения и в этом случае определяются
свойствами контактирующих поверхностей. Меняется
лишь периодически характер взаимодействия контак-
тирующих поверхностей на отдельных этапах движе-
ния. Чтобы учесть это обстоятельство, введено поня-
тие эффективного коэффициента трения, который отра-
жает конечный результат взаимодействия контактиру-
ющих поверхностей, совершающих периодические или
пульсирующие поступательные перемещения.
Можно полагать, что и традиционные коэффициен-
ты трения, скорее всего, можно отнести к категории
эффективных. Микронеровности трущихся поверхно-
стей, молекулярные взаимодействия и другие факторы
вызывают микроавтоколебания контактирующих по-
верхностей. Поэтому можно предполагать, что тради-
ционно регистрируемые коэффициенты трения также
получены не без влияния вибрационных воздействий.
Не исключено, что зафиксированная в настоящее время
зависимость коэффициента трепия от относительной
скорости трущихся поверхностей, некоторое уменьше-
ние значений в определенном диапазоне скоростей
обусловливаются именно микроавтоколебаниями в зоне
контакта.
Надо сказать, что трение и колебания вообще очень
тесно взаимосвязаны. Правда, эта проблема всегда
дискутируется только в одном аспекте — трение как
источник автоколебаний. Но, видимо, совершенно
правомочна и обратная постановка проблемы: колеба-
ния — механизм, управляющий трением. Здесь имеют-
ся в виду непосредственно пара трения как источник
колебаний и возбужденные таким образом колебания
как механизм, управляющий и формирующий процесс.
Известны примеры, когда в системах с упругими
связями и трением возбуждаются автоколебания.
Такое классическое устройство представляет груз,
закрепленный на пружине и расположенный на дви-
жущейся ленте. При движении ленты за ней силами
трения увлекается груз. По мере перемещения на лен-
те груз натягивает пружину. В тот момент, когда сила
69
ПаТЯ/кения пружины превысит силу Трепня, груз нач-
пет проскальзывать по ленте. Скольм«ение будет про-
должаться до тех пор, пока сила трения не превзой-
дет силу действия пружины. С этого момента опять
начнется совместное движение груза с лентой. Затем
вновь срыв и т. д.
Силы трения порождают колебания груза на пру-
жине. При этом снова проявляется их двойственный
характер. На участке движения груза совместно с
лентой силы трения взводят пружину, выступая в роли
движущих сил. При скольжении груза по ленте они
рассеивают энергию, играя роль сил сопротивления.
Еще один пример взаимодействия вибрации и сил
трения возьмем прямо из производственного опыта.
Речь пойдет о работе скребковых конвейеров — тран-
спортных устройств, в которых перемещение насыпных
грузов производится тяговой цепью с установленными
на ней скребками.
Когда возникла необходимость создания более про-
изводительной транспортной установки, были постав-
лены специальные экспериментальные исследования,
целью которых являлось установление зависимости
между скоростью и сопротивлениями движению цепи.
Существовали известные опасения, что повышение
скорости движения цепи повлечет за собой резкое
возрастание сопротивлений движению.
При проведении экспериментов был получен нео-
жиданный результат. Когда скорость превысила значе-
ния, на которых работали серийные установки, сопро-
тивления движению цепи стали падать. Сначала этот
факт пытались объяснить уменьшением коэффициента
трения с повышением скорости скольжения цепи.
Однако сопротивления падали слишком сильно. Тогда
стали искать другие причины этого явления. В част-
ности, были проведены замеры вибрации желоба и
цепи. Оказалось, что повышение скорости движения
цепи способствовало возбуждению интенсивных колеба-
ний в системе и они способствовали снижению сопро-
тивлений движению.
Способность вибрации снижать сопротивления от
сил трения широко используется в различных устрой-
ствах и машинах невибрационного принципа действия.
Созданы вибрационные подшипники, вибропневмотранс-
портные, вибромагнитные и вибрационно-тяговые уста-
новки и ряд других машин.
70
Виброреология — что это такое?
Реология — это наука, занимающаяся изучением зако-
номерностей деформации и возникающих при этом
напряжений различных сред под действием приложен-
ных к ним усилий. Виброреология — наука о деформа-
ции сред под действием периодических нагрузок. По-
чему потребовалось разрабатывать новую область зна-
ний, нельзя ли удовлетвориться уже известными сведе-
ниями?
Когда в промышленности получили широкое распро-
странение методы вибрационной обработки различных,
преимущественно дисперсных, систем, оказалось, что
широко применяемый аппарат реологии дает слишком
большие расхождения с опытом, а потому малоприго-
ден для изучения реологических характеристик ве-
ществ в поле вибрационных воздействий. Начали раз-
виваться новые подходы, позволявшие более точно ре-
шать задачи динамики. Комплекс этих новых подходов
и методов, предназначенных для изучения закономер-
ностей изменения деформаций и напряжений при пе-
риодическом нагружении, получил название вибрацион-
ной реологии или просто виброреологии.
Основное отличие вибрационной реологии от реоло-
гии традиционной состоит в том, что все реологические
тела — упругие, вязкие и пластичные — рассматри-
ваются обязательно как носители двух свойств — своего
основного и инерционного. Например, пе просто упру-
гое тело, а упругоинерционпос, не просто вязкое,
а инерционное и т. д.
Необходимость дополнения реологических тел инер-
ционными свойствами при исследовании задач вибра-
ционной технологии обусловливается тем, что при
периодических воздействиях меняются ускорения и в
обрабатываемой среде, в результате этого возникают
значительные силы инерции. Инерционные нагрузки в
некоторых случаях могут значительно превышать дей-
ствующие силы тяжести, становясь соизмеримыми,
а иногда преобладающими над упругими, вязкими и
пластическими напряжениями.
Классические реологические тела формировались
постепенно на протяжении длительного времени. С тех
пор как были разработаны первые реологические тела,
прошла не одна сотня лет. Исследуя законы природы,
изучая поведение различных тел при действии на них
71
fsinoii
о*-------
P и c. 18. Фундаменталь-
ные реологические тела
a — упругоинерционное;
б — упруговязкое; в — уп-
ругопластичное. k — коэф-
фициент жесткости; т —
масса; с — коэффициент
вязких сопротивлений;
Fn — сопротивление пла-
стическому сдвигу; fen —
коэффициент пластиче-
ского упрочнения;
F sin cot — деформирующая
сила
сил, ученые установили закономерности проявления
ряда их фундаментальных свойств. На первых порах
тела характеризовали каким-нибудь одним его свойст-
вом. Причем открытие каждого нового свойства было
крупным научным событием. Это видно хотя бы из
того, что каждое новое свойство и закон, описывающий
его проявление, получали имя открывшего его иссле-
дователя.
С некоторого времени в практику вошел обычай
описывать реологические свойства тел математической
зависимостью и одновременно давать некий стилизован-
ный символ этого свойства — модель. Вот эти модели
и получили впоследствии названия реологических тел,
а раздел науки, занимающийся построением из этих
тел более сложных моделей, назвали феноменологией.
В классической реологии всего три фундаменталь-
ных реологических тела. Фундаментальными их назы-
вают потому, что они служат теми основными кирпи-
чиками, из которых строят более сложные модели.
Упругое фундаментальное реологическое тело, или
тело Гука, стилизованно изображается пружиной
(рис. 18, а). На рисунке изображено инерционное
упругое тело. В классическом упругом теле масса равна
нулю, т. е. остается только пружина.
Смысловое содержание этого символа дается мате-
матической зависимостью
Fy—kx,
из которой следует, что упругая сила, с которой тело
сопротивляется его деформации на величину X, пропор-
72
циональна коэффициенту его жесткости к. Зависимость
этой силы от деформации линейная, и на графике
изображается прямой линией, выходящей из начала
координат.
Вязкое реологическое тело, или тело Ньютона, изоб-
ражается в виде поршня в цилиндре (рис. 18, б). На
рисунке изображено инерционное вязкое тело. Чтобы
получить из него классическое вязкое тело, нужно от-
бросить массу. Такой символ вязкого реологического
тела принят в связи с тем, что подобные сопротивления
испытывает тело, движущееся в жидкости, например
поршень в цилиндре, заполненном жидкостью.
Математическая зависимость, описывающая вязкие
силы сопротивления, имеет вид
FB=ci>.
Из этого следует, что сила вязких сопротивлений
пропорциональна скорости и, с которой осуществляется
деформация тела, и зависит от коэффициента вязких
сопротивлений жидкости с. Зависимость этой силы от
скорости деформации линейная и на графике изобра-
жается прямой линией, выходящей из начала ко-
ординат.
И последнее классическое фундаментальное реологи-
ческое тело — это пластичное тело, или тело Сен-Ве-
нана. Его изображают в виде двух скользящих одна
по другой пластинок (рис. 18, в). На рисунке изобра-
жено инерционное пластичное тело. Здесь нужно по-
ступать так же, как и в предыдущих случаях,— отбро-
сить массу. Усилие, необходимое для деформации
классического пластичного тела, не зависит ни от ве-
личины деформации, ни от скорости деформации. Оно
определяется некоторым пределом, при достижении
которого начинается пластическая деформация тела.
График этой силы представляет собой линию, парал-
лельную оси деформаций.
Инерционные реологические тела
Рассмотрим реологические характеристики инерцион-
ных тел в условиях периодических нагружений. Нач-
нем с инерционного упругого тела. Не будем забывать,
что в классическом упругом теле напряжения пропор-
циональны деформациям. Деформации пропорциональ-
73
пн усилию, которое приложено к деформационному
телу.
Будем деформировать инерционное упругое тело
периодической силой, меняющейся по гармоническому
закону. Сопротивления деформированию будут оказы-
вать не только упругая сила, но и сила инерции. Так
же как у упругого тела характеристикой является его
жесткость, у инерционного тела — соотношение жест-
кости и массы. Это соотношение определяет частоту
собственных колебаний инерционного упругого тела.
Частоту этих колебаний найти несложно. Для этого
надо произвести деформацию тела, не превосходящую
предела упругости, и затем разгрузить. Тело начнет
совершать свободные колебания. Угловая частота этих
колебаний и является частотой собственных колебаний.
На собственной частоте упругоинерционное тело
деформируется наиболее «охотно». Деформирование
упругоинерционного тела с другой частотой, безразлич-
но большей или меньшей, всегда встречает определен-
ное сопротивление. Деформирование с частотой, не
соответствующей частоте собственных колебаний упру-
гоинерционного тела, требует приложения дополнитель-
ных усилий, которые в зависимости от частоты дефор-
мирования идут на преодоление либо сил упругости,
либо сил инерции тела.
Когда упругоинерционное тело деформирует с
частотой, равной частоте его собственных колебаний,
не приходится преодолевать ни сил инерции, ни сил
упругости. Нагружающая периодическая сила обуслов-
ливает увеличение амплитуд деформации и напряже-
ний в упругоинерционном теле. Происходит возраста-
ние его внутренней энергии.
В упругом теле соотношение между деформацией
х, жесткостью к и деформирующей силой Fsincot при
периодическом гармоническом нагружении определяет-
ся зависимостью
х= (F/kjsinat.
В упругоинерционном теле, собственная частота коле-
баний которого р, деформация определяется также чле-
ном 1/(1—со2/р2), так называемым коэффициентом
усиления
ж= [F/A:(l—о2/р2)]sin (ю£+ф),
74
и смещена на угол <р по отношению к деформирующей
силе.
Физический смысл коэффициента усиления состоит
в том, что он показывает, во сколько раз изменяется
величина деформации упругоинерционного тела по
сравнению с упругим при деформировании равными по
величине силами. Коэффициент усиления зависит от
соотношения со/р, называемого коэффициентом рас-
стройки, и может быть больше или меньше единицы.
Единице он равен при коэффициенте расстройки, рав-
ном нулю, т. е. когда масса упругоинерционного тела
равна нулю и оно превращается в простое упругое
тело. Таким образом, упругое тело — это частный слу-
чай более общего упругоинерционного тела.
При деформировании упругоинерционного тела с
частотой его собственных колебаний, т. е. при резонан-
се, коэффициент расстройки равен единице и коэффи-
циент усиления — бесконечная величина. Это соответ-
ствует бесконечному нарастанию деформации упруго-
инерционного тела с течением времени. С увеличением
деформации нарастают напряжения и в какой-то мо-
мент может произойти разрушение тела.
При больших значениях коэффициента расстройки
коэффициент усиления меньше единицы. В этом случае
упругоинерционное тело деформируется в меньшей
степени, чем простое упругое.
Если коэффициент расстройки меньше единицы, то
деформация и деформирующая сила находятся в одной
фазе. Деформация происходит в направлении действия
силы. Когда коэффициент расстройки больше единицы,
то сила и деформация находятся в противофазе. Де-
формация происходит в направлении, противоположном
действию деформирующей силы.
Таким образом, закономерности деформирования
периодической силой упругоинерционного тела неизме-
римо сложнее и проявления их гораздо разнообразнее
режимов деформирования простого упругого тела.
Упругое реологическое тело лишь частный случай
более общего упругоинерционного тела. Реакция упру-
гого тела на периодическое воздействие однозначна.
Упругоинерционное тело на такое воздействие реаги-
рует по-разному при различных частотах деформиро-
вания.
На основании изложенного можно констатировать,
что упругая реологическая модель не воспроизводит
75
всей палитры свойств реальных упругих тел, которые
обязательно обладают массой.
Рассмотрим теперь вязкоинерционные реологиче-
ские тела. Будем деформировать вязкоинерционное
тело периодическо!! силой, меняющейся по гармониче-
скому закону. Сопротивления деформации будут скла-
дываться из вязкой силы и силы инерции. В вязком
реологическом теле соотношение между скоростью де-
формации х, приведенным коэффициентом вязкости
п и единичной деформирующей силой F'sincoi опреде-
ляется зависимостью
<r=(F,/n)sinm£,
т. е. скорость деформации пропорциональна величине
деформирующей силы, обратно пропорциональна коэф-
фициенту вязкости, не зависит от частоты нагружения
и находится в одной фазе с нагружающей силой.
В вязкоинерционном теле скорость деформации
зависит также от частоты о, приложения деформирую-
щей нагрузки
х= (1/V ы2+п2) F'cos (о)£4-ф)
и смещена на угол <p=arctg(n/tt>) по отношению к
деформирующей силе.
Сравнивая закономерности деформации вязкого и
вязкоинерционного тел, видим, что скорость деформа-
ции вязкоиперционного тела меньше в n/Vci)2+n2 раз.
Разница в скоростях деформации возрастает с умень-
шением вязких сопротивлений и повышением частоты
приложения деформирующей нагрузки. Угол сдвига
фаз между деформацией и деформирующей силой воз-
растает при увеличении коэффициента вязких сопро-
тивлений и снижении частоты.
При деформации инерционно-пластичного тела со-
противления деформации складываются из силы сопро-
тивления пластическому сдвигу и силы инерции.
В инерционно-пластичном теле, характеризующемся
сопротивлением пластическому сдвигу Fa, соотношение
между деформацией и деформирующей нагрузкой дает-
ся следующим приближенным выражением:
1 / (kF \2
]/ i-(vr) №(*+»)•
Деформация смещена относительно деформирующей
76
нагрузки на угол
<р = arcsin (4Fn/j[F).
Из приведенной зависимости видно, что для обеспе-
чения деформации инерционно-пластичного тела перио-
дической силой необходимо, чтобы амплитудное значе-
ние этой силы превышало силу сопротивления пласти-
ческому сдвигу. Для получения более или менее
значительных деформаций необходимо, чтобы это
превышение было существенным. Угол сдвига фаз
между деформацией и деформирующей силой опреде-
ляется соотношением между величинами сопротивле-
ния пластическому сдвигу и деформирующей сидой.
Зависимость между периодической деформирующей
силой и смещением можно считать гармонической
лишь в первом приближении. На самом деле она носит
более сложный полигармонический характер. В каждом
специальном случае, требующем заданной точности
решения, предел пластического скольжения должен
быть разложен в ряд Фурье с таким числом членов
разложения, которое обеспечит получение желаемого
результата.
Вязкоупругость
Реальные тела редко характеризуются какой-либо
фундаментальной реологической зависимостью. Стрем-
ление дать более точное описание особенностей дефор-
мирования реальных объектов обусловило появление
целой гаммы более сложных реологических моделей.
Эти производные реологические модели были получены
на основе различных комбинаций фундаментальных
реологических тел. Основным методом их формирова-
ния является последовательное, параллельное или ком-
бинированное соединение в определенном порядке фун-
даментальных реологических тел. Таких моделей много,
и большинство из них также названо по имени их со-
ставителей. Использование этих моделей позволяет ре-
шать некоторые важные частные задачи.
Свойства большой группы реальных материалов
хорошо описываются различными комбинациями упру-
гого и вязкого реологических тел. Материалы, объеди-
няющие в себе упругие и вязкие свойства, получили
название упруговязких. Упруговязкие материалы зани-
мают промежуточное положение между упругими те-
77
лами и вязкими жидкостями. Номенклатура таких
материалов настолько велика и важна для промышлен-
ности, что в настоящее время развилось самостоятель-
ное важное направление в реологии, занимающееся
изучением их свойств,— теория упруговязкости или,
иногда говорят, вязкоупругости.
Широко используются так называемые стандартные
упруговязкие реологические модели. Стандартное уп-
руговязкое твердое реологическое тело образовано из
двух упругих и одного вязкого тела. Параллельно
соединены упругое и вязкое тола, и последовательно к
ним присоединено еще одно упругое тело (рис. 19, а).
На рисунке изображены инерционные упруговязкие
модели. Для получения простых моделей упруговязких
реологических тел массы следует отбросить. Стандарт-
ное упруговязкое жидкое реологическое тело содержит
два вязких тела и одно упругое. Одно вязкое и упругое
тела соединены параллельно, и последовательно к ним
подсоединено еще одно вязкое реологическое тело
(рис. 19, б).
И наконец, стандартное упруговязкое универсаль-
ное реологическое тело, объединяющее в себе свойства
твердого и жидкого упруговязких реологических тел,
составлено из двух упругих и двух вязких фундамен-
тальных реологических тел. Упругие и вязкие реологи-
ческие тела объединяются в две группы с параллель-
ным и последовательным соединениями. Затем эти
группы соединяются последовательно (рис. 19, е).
При деформировании инерционной упруговязкой
модели с параллельным соединением упругого и вязко-
го реологических тел силой, меняющейся по гармони-
ческому закону, зависимость между амплитудными зна-
чениями деформации и единичной деформирующей
силы устанавливается соотношением
х — —г- . - ,.F sin (tat -4- ср).
|/4n2(02_f-(J02_(02)2 V
Сила и деформация смещены друг относительно друга
на угол
<p=arctg(2n(L)/p2—о2).
Амплитуда деформации инерционного упруговязкого
тела пропорциональна величине деформирующей силы,
приходящейся на единицу массы тела. Она зависит
также от величины вязких сопротивлений и соотноше-
78
Рис. 19. Упруговязкие реологические модели
Стандартные упруговязкие тела: а — твердое; б — жидкое; в — уни-
версальное. ftj, k2 — коэффициенты жестких упругих тел; ct, сг —
коэффициенты вязкости; т — масса; F sin at — деформирующая сила
ния собственной и вынужденной частот колебаний.
При нагружении инерционного упруговязкого тела
периодической силой, так же как и в случае упруго-
инерционного тела, в различных режимах при неизмен-
ной величине силы происходят изменения величины
деформации. Однако в случае инерционного упруговяз-
кого тела коэффициент усиления деформаций зависит
не только от коэффициента расстройки, но и от вели-
чины вязких сопротивлений.
Величины деформации вязкоупругого и инерцион-
ного упруговязкого тел совпадают только в том случае,
если они деформируются с очень малой частотой, прак-
79
тически в статическом режиме. При очень высоких
частотах они также близки.
При повышении частоты величина деформации
простого вязкоупругого тола неизменно уменьшается.
Деформация инерционного упруговязкого тела с по-
вышением частоты возрастает, достигая максимального
значения при резонансе, и далее постепенно опять
падает.
Следует отметить, что величина деформаций в ре-
зонансных режимах ограничивается и определяется
значениями вязких сопротивлений. При очень больших
вязких сопротивлениях резонансный рост деформаций
может и не иметь места. В резонансе угол сдвига фаз
между деформирующей силой и деформацией состав-
ляет 90°.
Процесс деформирования инерционного упруговяз-
кого тела сопровождается затратами энергии, связан-
ными с гистерезисными потерями. Больше всего энер-
гии тратится в резонансном режиме. Это объясняется
тем, что в резонансном режиме резко возрастает амп-
литуда деформации. Следует отметить, что и удельная
мощность на единицу деформации наибольшая в ре-
зонансном режиме.
При периодическом деформировании инерционных
реологических тел напряжения в теле могут не совпа-
дать как по величине, так и по фазе с деформирующей
силой. В упругоинерционном теле, в котором напряже-
ния пропорциональны деформациям, коэффициент уси-
ления деформаций одновременно был и коэффициентом
усиления напряжений. Сдвиг между деформирующей
силой и напряжением тот же, что между ней и дефор-
мацией.
В инерционном упруговязком теле действуют те же
закономерности. Коэффициент усиления напряжений
равен коэффициенту усиления деформации. А сдвиг
фаз между деформирующей силой и напряжением ра-
вен сумме углов сдвига фаз между деформирующей
силой и деформацией в инерционном упруговязком
теле и простом вязкоупругом.
Дело в том, что при периодическом деформировании
обычного вязкоупругого тела деформирующая сила
сдвинута по фазе по отношению к деформации. В про-
стом вязкоупругом теле тот же сдвиг фаз устанавли-
вается между деформирующей силой и напряжением.
По величине напряжение равно деформирующей силе.
80
В инерционном упруговязком теле напряжения
совпадают по величине с деформирующей силой только
при очень низких частотах деформирования. При этом
устанавливается такой же сдвиг фаз, как при дефор-
мации простого вязкоупругого тела.
Удельные напряжения в инерционном упруговязком
теле, т. е. напряжения, отнесенные к единичной дефор-
мации тела, пропорциональны приведенной к единич-
ной массе тела динамической жесткости тела
V4n2o2+p2.
У пругопластичность
Большая группа реальных пластичных материалов об-
ладает и некоторой упругостью. Есть даже специаль-
ный термин, характеризующий свойства таких тел,—
упругопластичность. Деформация упругопластичного
тела начинается с упругих деформаций (рис. 20).
Напряжения, при которых деформация остается упру-
гой, ограничиваются пределом текучести. При нагруже-
ниях и разгрузках тела в области упругих деформаций
напряжения меняются по одному и тому же закону.
При достижении предела текучести начинаются
пластические деформации. В зоне пластичности процесс
нагружения и разгрузки протекает по-разному. Нагру-
жепие сопровождается незначительным ростом напря-
жений. Нагрузка почти не возрастает, а деформация
тела имеет место, т. е. как бы происходит течение жид-
кости. Это явление и получило название пластического
течения. Чтобы хорошо представлять, как происходит
процесс разгрузки пластически деформированного тела,
следует помнить, что суммарная деформация тела
складывается из упругой и пластической. А как мы
уже знаем, упругая деформация обратима. При раз-
грузке упругопластичного тела упругие деформации
снимаются, а пластические остаются.
При повторном нагружении упругопластичного тела
процесс вновь начинается с упругих деформаций, од-
нако предел текучести уже достигается при более вы-
соких напряжениях, чем в первый раз. Это гово-
рит о том, что произошло упрочнение упругопла-
стичного тела.
В большинстве случаев реальные, так называемые
пластичные, материалы, по существу, являются упруго-
81
Р и с. 20. Упругопластичные реологические модели
Соединения реологических тел: а — последовательное, б — параллель-
ное; в — стандартное; г — с взаимодействием напряжений, ft — коэф-
фициент жесткости; Fn и fen — предел пластичности и коэффициент
пластического упрочнения соответственно; т — масса; F, Fx, Fy —
деформирующие силы
пластичными упрочняющими. Можно еще сказать так,
что в области пластических деформаций напряжения
зависят от предшествующей истории деформирования,
исследуемый объект «помнит», что происходило ранее.
Для описания таких процессов используется теория
упругой наследственности.
Для описания свойств упругопластичных тел раз-
работаны различные упругопластичные реологические
модели.
Упругопластичная феноменологическая модель с
последовательным соединением упругого и пластичного
реологических тел при напряжениях, не превышающих
предел текучести, воспроизводит упругие деформации
(рис. 20, а). При достижении предела текучести моде-
лируются закономерности пластического деформирова-
82
ния без упрочнения. Такая деформация упругопласти-
ческой феноменологической модели с последовательным
расположением фундаментальных тел складывается из
упругой и пластической деформаций.
Работа, производимая напряжениями вплоть до
предела текучести, накапливается в виде энергии
упругой деформации и возвращается без потерь при
разгрузке. Работа, совершаемая сверх, предельного
значения работы упругой деформации, рассеивается
вследствие внутреннего трения. После разгрузки
упругопластичная модель с последовательным соедине-
нием фундаментальных тел имеет остаточную дефор-
мацию. Восстановленная упругая деформация равна
начальной упругой деформации.
В упругопластичной феноменологической модели с
параллельным соединением реологических тел деформа-
ции упругого и пластичного реологических тел одинако-
вы (рис. 20, б). Деформация модели начинается в тот
момент, когда напряжение достигнет предела текуче-
сти. По мере деформации напряжения возрастают,
складываясь из напряжения пластического течения и
упругого. При разгрузке модели упругие напряжения
снимаются не полностью. Модель остается в напряжен-
ном состоянии. Остаточное напряжение равно пределу
текучести.
В результате нагружения и разгрузки модель по-
лучает остаточную пластическую деформацию. Упру-
гая деформация частично восстанавливается, при пов-
торном нагружении деформация начинается после
преодоления предела текучести и остаточных напряже-
ний. Упругопластичная модель с параллельным распо-
ложением реологических тел воспроизводит процесс
упрочнения и остаточные напряжения.
Стандартная модель упругопластичного материала
состоит из двух упругих и одного пластичного реоло-
гических тел. Упругое и пластичное тела соединены
параллельно, а еще одно упругое реологическое тело
присоединено к ним последовательно (рис. 20, в).
В первом цикле нагружения стандартная упругопла-
стичная модель воспроизводит упругие деформации,
а при напряжениях, превышающих предел текуче-
сти,— упругопластические деформации.
Во втором цикле упругопластическая деформация
начинается при больших напряжениях с учетом оста-
точных напряжений после первого цикла нагружения.
83
По мере развития деформации напряжения возрастают,
складываясь из напряжения пластического течения,
остаточного и упругого напряжений.
При разгрузке в одном упругом реологическом теле
напряжения снимаются полностью, а во втором сохра-
няются остаточные напряжения, равные пределу теку-
чести. В результате нагружения и разгрузки стандарт-
ная упругопластичная модель получает остаточную
пластическую деформацию. Упругая деформация при
мпогоцикловом нагружении полностью восстанавли-
вается.
Таким образом, стандартная упругопластичная
модель воспроизводит начальную упругую деформацию,
процесс упрочнения и остаточные напряжения. Она
позволяет полностью описать все закономерности де-
формирования реальных упругопластичных материа-
лов.
При исследовании ряда процессов, осуществляемых
методами вибрационной технологии, следует учитывать
взаимодействие напряжений и деформации во взаимно
перпендикулярных направлениях. Это необходимо в тех
случаях, когда не представляется возможным рассмот-
реть объект в линейной постановке, а решаются плос-
кие или пространственные задачи. Многие важные виб-
рационные эффекты не могут реализоваться в линей-
ном теле. Для их объяснения используются двух- или
трехкоординатные модели.
Для решения таких задач разработаны феноменоло-
гические модели взаимодействия напряжений и дефор-
маций, которые получили названия клиновых.
Если при линейном напряженном состоянии пласти-
ческие деформации начинаются в тот момент, когда
напряжения достигают предела текучести, то в усло-
виях плоского напряженного состояния начало пласти-
ческого деформирования зависит от напряжений, дей-
ствующих в перпендикулярном направлении. В соот-
ветствии с теорией пластичности принимается, что
пластические деформации в условиях плоского напря-
женного состояния начинаются в тот момент, когда
разность напряжений, действующих в направлении
деформации и перпендикулярном к ней, достигает пре-
дела текучести.
В более общей постановке можно предположить, что
применительно к условиям нагружения вибрационными
воздействиями имеет место более сложная картина
84
взаимодействия напряжений. Эти особенности можно
учесть некоторым передаточным коэффициентом i при
одном из напряжений. Этот коэффициент моделируется
клиновым элементом.
В этом случае взаимодействие напряжений в упру-
гопластичном материале можно представить стандарт-
ной феноменологической моделью, состоящей из клино-
вого элемента с двумя взаимно перпендикулярными
упругими реологическими телами (рис. 20, г). Стан-
дартная модель плоского упругопластичного материа-
ла воспроизводит упругие деформации при напряже-
ниях в направлении деформирования, не превышающих
суммы напряжения, действующего в перпендикулярном
направлении, и напряжения предела текучести. При
достижении указанного предела напряжений начинает-
ся пластическая деформация с упрочнением. По мере
деформации напряжение возрастает, складываясь из
напряжения пластического течения и напряжения
упрочнения, моделируемого поперечным упругим рео-
логическим телом. При разгрузке модель будет иметь
остаточные пластические деформации. Упругие дефор-
мации снимутся.
Феноменология процессов
вибрационной технологии
При исследовании процессов вибрационной технологии,
связанных с деформациями различных тел, большую
помощь оказывают методы вибрационной реологии.
Общие принципы вибрациоппой реологии служат
той базой, на основе которой создаются феноменологи-
ческие модели процессов вибрационной технологии. Ис-
пользуя различные комбинации инерционных упруго-
вязкопластичных тел, можно достаточно точно смоде-
лировать любую реальную среду. Феноменологические
модели позволяют осуществлять эффективную оптими-
зацию технологических процессов.
Если есть достоверная модель процесса, то всегда
можно провести вычислительный эксперимент, исследо-
вав эффективность разнообразных технологических
режимов, и с помощью современных методов оптимиза-
ции отобрать из них лучшие. С другой стороны, меняя
параметры модели, можно изучать различные среды.
И наконец, модель дает возможность нагрузки на ра-
бочий орган вибрационной машины. Зная рабочие на-
85
грузки, можно квалифицированно проектировать высо-
коэффективные машины нового уровня.
При исследовании многих процессов вибрационной
технологии и объектов вибрационной техники, особен-
но в условиях их взаимодействия, встречаются слож-
ные явления. Исследуемые объекты могут не только
подвергаться деформациям, но и в некоторые моменты
реализации рабочего цикла совершать различные ме-
ханические движения. Нередко приходится иметь дело
со сложными переплетениями механических движений
на одних этапах и деформаций на других. Полное опи-
сание таких комбинированных систем может быть до-
стигнуто одновременным использованием методов ме-
ханики и реологии. Для решения таких задач эффек-
тивной является механореологическая феноменология,
разработка механореологических моделей реальных
объектов.
Определенные сложности создаются, когда реаль-
ная объединенная система временами распадается на
ряд частных, а затем вновь объединяется. В качестве
примера можно привести систему груз — грузонесу-
щий орган вибрационной транспортирующей машины.
Часть пути груз совершает в контакте с грузонесу-
щим органом, потом подбрасывается и движется неза-
висимо, а затем вновь падает на грузонесущий орган.
Связь грузонесущего органа с грузом называется не-
удерживающей, так как временами она может разры-
ваться.
Разрывные процессы могут иметь место не только
у механических движений. В рамках реологии процес-
сы деформации также претерпевают разрывы. Напри-
мер, на границе с упругой деформацией и пластиче-
ским течением закономерности деформации кардиналь-
но меняются. Таким образом, механореологическая
модель должна воспроизводить не только эволюцион-
ные процессы, но и разрывные.
Четкая работа механореологической феноменоло-
гии достигается созданием алгоритма с логической
управляющей системой, непрерывно анализирующей
ход процесса и определяющей начальные условия в
разрывных переходах. Как разработать механореологи-
ческую модель? В настоящее время уже сформирова-
лись некоторые общие принципы построения феноме-
нологических моделей. Разработаны методы опреде-
ления параметров составляющих их реологических тел.
86
Эту операцию называют идентификацией модели с
реальным объектом.
Тем не менее, чтобы разработать совершенную мо-
дель, необходимо достаточно глубоко понимать физи-
ческие основы моделируемого процесса. Однако не
всегда нужно знать в деталях тот процесс, для кото-
рого создается модель. Достаточно, чтобы исследова-
тель владел механикой определенного класса явлений,
к которому относится проектируемый процесс. Поэтому
механореологическая феноменология должна опирать-
ся на глубокие экспериментальные исследования фи-
зики вибрационных процессов вообще.
Если удается создать доброкачественную модель
процесса, то ее использование обеспечивает быстрый
прогресс в изучаемой области. Вычислительный экспе-
римент на ЭВМ позволяет исследовать широкий круг
вопросов, разработка которых экспериментально тру-
доемка и длительна. Перефразируя известное высказы-
вание насчет пользы теории, можно сказать: хорошая
феноменологическая модель процесса — это успех в
решении практических задач.
Об общих принципах построения
феноменологических моделей
Построение модели — это типичная задача многокрите-
риальной оптимизации. Задача ставится так: обеспечить
максимальную достоверность и точность характерис-
тик процесса при минимальной сложности структуры
модели. Другими словами, модель должна быть состав-
лена из наименьшего количества фундаментальных рео-
логических тел, которые должны иметь наиболее про-
стые связи. Желательно, чтобы не использовались
реологические тела с нелинейными характеристиками.
Проектирование модели идет следующим образом.
Исследователь, опираясь на знание существа процесса,
составляет достаточно полную исходную модель. Уста-
навливаются связи фундаментальных реологических
тел и задается диапазон изменения параметров каж-
дого из входящих в нее элементов. Указанная процеду-
ра получила название «установление параметриче-
ских ограничений».
В задании параметров модели есть одна тонкость.
Параметры надо трактовать прежде всего так: данное
реологическое тело есть в модели или отсутствует. Для
87
случая «есть» задаются конкретные величины, для
варианта «нет» параметр принимается равным нулю.
Затем задаются так называемые функциональные
ограничения. Для удобства применения ЭВМ, упроще-
ния программы и обеспечения высокой точности рас-
четов необходимо, чтобы разброс параметров модели,
т. е. отклонение максимальных значений от минималь-
ных, находился в допустимых пределах. По соотноше-
нию минимальных и максимальных значений парамет-
ров и устанавливают функциональные ограничения.
В соответствии с принятой постановкой задачи в
качестве локальных критериев качества приняты ми-
нимумы отклонения между расчетными и опытными
значениями наиболее существенных параметров моде-
лируемого процесса и минимум реологических тел в
модели. В качестве основных показателей вибрацион-
ного технологического процесса могут быть приняты:
нагрузка на рабочий орган, энергозатраты, траектории
движения среды и т. д. Это должны быть те парамет-
ры, которые достаточно точно можно определить на
реальном объекте. Критерии качества ранжируются по
их важности. В качестве исходных данных для иден-
тификации модели могут использоваться непосредствен-
но результаты экспериментов либо построенные на их
основе уравнения регрессии.
Когда говорится, что исследователь должен разра-
ботать структуру феноменологической модели, это
означает не только составление стилизованного графи-
ческого изображения модели, но и разработку матема-
тического описания и алгоритма решения с управ-
ляющей логической системой. ЭВМ по составленному
алгоритму проектирует варианты феноменологической
модели и дает им оценку по каждому критерию ка-
чества.
Варианты моделей представляются в виде таблиц
испытаний. На первом месте в таблице стоит лучшая
модель по данному критерию. Так как каждой модели
соответствует определенный набор параметров, зашиф-
рованный в номере- испытаний, то, просматривая таб-
лицу параметров моделей, исследователь видит, как
нужно изменить параметры, чтобы получить наилуч-
шую модель по тому или иному критерию качества.
Как правило не существует моделей, оптимальных
по всем критериям качества одновременно, поэтому
результаты анализа таблиц испытаний используются
88
для обоснования компромиссного решения. Принимают-
ся ограничения по каждому критерию качества. Далее
ЭВМ проверяет, существует ли модель, отвечающая всем
критериям одновременно.
Такие варианты и составляют допустимое множест-
во моделей. Из этих моделей исследователь выбирает
оптимальный вариант.
Рассмотрим несколько феноменологических моделей,
характерных для больших групп процессов вибраци-
онной технологии. Существует значительное количест-
во технологических процессов, которые выполняются
при вибрационном транспортировании. К ним относят-
ся сушка, гранулирование, разделение по крупности,
обеспыливание, завяливание, ферментация, микробио-
логическая обработка и др. Основой их является про-
цесс вибрационного транспортирования. Поэтому фено-
менологическая модель должна прежде всего отражать
закономерности вибрационного транспортирования
дисперсных сред.
В вибрационной транспортирующей машине гру-
зонесущий орган совершает колебания, направленные
под углом к его продольной оси. Причем грузонесущий
орган необязательно расположен горизонтально, а мо-
жет иметь наклон или подъем. Грузонесущий орган
может совершать колебания по любому закону. Обыч-
но это прямолинейные гармонические или бигармони-
ческие колебания. Могут быть также эллиптические
или другие двухкомпонентные колебания.
В алгоритме расчета процесса закон колебаний
грузонесущего органа записывается обычно в общем
виде. Это даст возможность при расчетах на ЭВМ ис-
следовать закономерности процесса транспортирова-
ния при любых законах колебаний грузонесущего ор-
гана. При этом удается подобрать наиболее эффектив-
ный для данного груза режим транспортирования.
Составляющие колебаний действуют вдоль грузоне-
сущего органа и перпендикулярно к нему. Перпенди-
кулярная составляющая управляет силами трения,
а продольная ответственна за скорость транспортиро-
вания. В общем случае вибротранспортирование груза
возможно в контакте с грузонесущим органом и в
отрыве от него. Находясь на грузонесущем органе,
слой груза может скользить по нему вперед или назад
или перемещаться совместно с ним без проскальзы-
вания.
89
Рис. 21. Феноменологическая модель процесса вибрационного
транспортирования дисперсных грузов
а — угол наклона грузонесущего органа; т, тх', ту' — массы слоев
транспортируемого груза; kx, hx', ky, ky', ex, су — коэффициенты
жесткости и вязкого сопротивления упруговязкого тела соответственно;
сх*, су*, hx*, ky* — коэффициенты упруговязких тел, моделирующих
окружающую среду соответственно
Процесс вибрационного транспортирования дисперс-
ного груза описывается феноменологической моделью
и системой дифференциальных уравнений, составлен-
ных для каждого режима деформации и этана дви-
жения. Алгоритм содержит управляющую систему с
логическими элементами, определяющими последова-
тельность решения дифференциальных уравнений.
Модель совершает перемещения и испытывает де-
формации в направлении продольной оси грузонесу-
щего органа и перпендикулярно к ней. Деформации
моделей в каждом из направлений воспроизводятся
стандартным инерционным упруговязкопластичным
твердым телом. Такое тело состоит из трех масс, двух
последовательно связанных упругих тел, одного вяз-
кого тела, соединенного параллельно с одним из упру-
гих тел, и пластического упрочняющего тела (рис. 21).
Параметры модели по разным осям могут быть различ-
ными.
Движение модели происходит в среде, оказывающей
аэродинамические сопротивления. Среда моделируется
по каждой оси двумя упруговязкими моделями с пос-
ледовательным соединением реологических тел. Одна
модель воспроизводит сопротивления, пропорциональ-
ные абсолютной скорости перемещения модели груза,
90
вторая — пропорциональные относительной скорости.
Аэродинамические сопротивления при движении мел-
кодисперсных грузов могут быть весьма значитель-
ными.
Рассмотрим перемещения и деформации феномено-
логической модели груза в направлении, перпендику-
лярном к поверхности грузонесущего органа. Сила
взаимодействия слоя груза с грузонесущим органом
определяется очень просто — она равна жесткости
упругого тела, умноженной на его деформацию.
Модель находится в контакте с грузонесущим органом
до того момента, пока эта сила не превратится в нуль.
В этот момент деформация упругого элемента также
отсутствует.
Оторвавшись от грузонесущего органа, груз совер-
шает свободное движение. Движение это поддержива-
ется за счет кинетической энергии, которую груз имел
в момент подбрасывания. Окружающая среда и сила
тяжести оказывают сопротивление движению груза.
Израсходовав запас энергии, груз падает на грузоне-
сущий орган. Момент падения определяется из усло-
вия, что перемещение нижнего упругоинерционного
тела равно нулю.
Таким образом, логическая система алгоритма ре-
шения определяет моменты отрыва и падения груза
на грузонесущий орган по одному условию — равенст-
ву нулю деформаций нижнего упругоинерционного
реологического тела. Как же узнать, является ли это
моментом отрыва или моментом падения? Нужно про-
анализировать знак скорости движения нижнего инер-
ционного тела. При отрыве скорость положительная,
при падении отрицательная.
В направлении транспортирования модель может
перемещаться без скольжения и со скольжением.
В каждом из режимов движения в общем случае слой
может подвергаться упруговязкопластичным деформа-
циям. Началу скольжения груза всегда предшествует
его упруговязкопластичная деформация. Упруговязко-
пластичные напряжения являются как раз той силой,
которая преодолевает силу трения и заставляет груз
скользить по грузонесущему органу.
Таким образом, логическая система алгоритма опре-
деляет момент начала скольжения из условия равенст-
ва напряжений в слое силе трения груза о грузонесу-
щий орган. Но груз может начать скользить в произ-
91
вольном направлении — вперед или назад. Чтобы
установить направление скольжения груза, следует
определить знак скорости инерционного элемента при
деформации модели. Если скорость положительна,
груз начнет скользить вперед, если отрицательная, то
в противоположном направлении.
Интересно отметить различную природу движения
груза вперед и назад. При движении вперед, опере-
жении грузонесущего органа, скольжение происходит
за счет энергии, которую груз имел в начале скольже-
ния. Израсходовав эту энергию, груз останавливается.
В случае скольжения назад груз отстает от грузоне-
сущего органа. При этом грузонесущий орган сообщит
грузу .ускорение и передает энергию до того момента,
пока скорости их движения не уравняются.
Логическая система алгоритма решения определя-
ет момент остановки груза по равенству нулю скоро-
сти движения груза относительно грузонесущего
органа.
Феноменологическая модель, включающая математи-
ческое описание процесса, алгоритм решения с логи-
ческой управляющей системой позволяют получить ис-
черпывающую информацию о процессе вибрационного
транспортирования дисперсного груза. Устанавлива-
ются продолжительности всех этапов движения: поле-
та, движения в контакте с грузонесущим органом,
скольжения, деформирования с подразделением по ви-
дам деформации (упругая, упруговязкая, упругопла-
стичная, упруговязкопластичная и т. д.).
Определяются моменты перехода от одних видов
движения и деформации к другим. Вычисляются уси-
лия взаимодействия с грузонесущим органом и на-
пряжения при деформациях, сопротивления окружаю-
щей среды движению транспортируемого груза. Ука-
зываются затраты энергии на осуществление каждого
из движений и каждого процесса деформирования —
полезные, непроизводительные и общие. Кроме пере-
численных текущих характеристик даются осреднен-
ные показатели процесса вибрационного транспорти-
рования — скорость, энергозатраты (общие, полезные и
непроизводительные).
Остается пояснить, как разделяются затраты энер-
гии на полезные и непроизводительные. Рассмотрим
пример. Груз скользит по грузонесущему органу в
направлении, противоположном направлению транс-
92
портирования. Какая здесь затрачивается энергия,
насколько полезно и непроизводительно?
В системе груз — грузонесущий орган можно ус-
мотреть три скорости движения. Скорость движения
грузонесущего органа, скорость груза и их относитель-
ная скорость. На груз и грузонесущий орган действу-
ют силы. По величине они одинаковые — это сила тре-
ния между грузом и грузонесущим органом. Направ-
лены эти силы в противоположные стороны. Одна
навстречу относительному движению грузонесущего
органа, вторая — грузу. Общие затраты энергии
(мощность) определяются произведением скорости дви-
жения грузонесущего органа на силу трения.
Часть этих затрат полезно используется на уско-
рение груза. Величина этих затрат равна произведе-
нию скорости груза на силу трения. Остальная энер-
гия расходуется непроизводительно, рассеивается в
виде тепла, выделяющегося при трении. Эта непроиз-
водительно затраченная энергия пропорциональна
относительной скорости движения груза и грузонесу-
щего органа.
Процесс отверждения расплава осуществляется в
кристаллизаторах. В машинах для непрерывного литья
кристаллизаторы выполняются прямолинейной формы
либо по дуге окружности. Прямолинейные кристалли-
заторы в машине могут располагаться как вертикаль-
но, так и горизонтально. Кристаллизатору сообщают-
ся колебания. Направление колебаний, форма и пара-
метры могут быть самыми разнообразными. Сообщая
кристаллизатору колебания, преследуют в основном
две цели — снизить сопротивления прохождению заго-
товки через кристаллизатор и улучшить структуру от-
ливки.
Феноменологическая модель расплава подвергается
деформациям в направлениях поперечной и продоль-
ной осей кристаллизатора. Кроме того, она перемеща-
ется вдоль продольной оси. Заготовка в кристаллиза-
торе представляет собой расплав, находящийся в тонкой
оболочке из затвердевшего металла. В соответствии с
этим принята плоская феноменологическая модель, ко-
торая составлена из взаимноперпендикулярных стан-
дартных инерционных упруговязких тел (рис. 22).
Стандартное упруговязкое инерционное тело сос-
тоит из двух упругих тел, связанных последователь-
но, вязкого тела, соединенного параллельно с одним
93
Рис. 22. Феноменологическая модель процесса непрерывного литья
в условиях вибрационных воздействий
т, тх, тх, — массы затвердевших и жидких слоев заготовки;
fex, Лх, Лу, fen, сх — коэффициенты жесткости упругого, пластичного
и вязкого сопротивлений упруговязкопластичного тела соответствен-
но; i — передаточный коэффициент
v — скорость движения заготовки; X',
лебаний стенок кристаллизатора
взаимодействия напряжений;
X", Y', Y" — составляющие ко-
Р и с. 23. Феноменологиче-
ская модель процесса вибра-
ционного дробления для ин-
женерных расчетов
fez — начальная жесткость дро-
бимого материала; р — коэф-
фициент пропорциональности
между жесткостью и сопро-
тивлениями вязкому деформи-
рованию дробимого мате-
риала: п — показатель нели-
нейности упруговязкого тела;
z — деформация дробимого ма-
териала
94
из упругих тел, и двух масс. Клиновой элемент моде-
лирует взаимодействие напряжений во взаимно пер-
пендикулярных плоскостях. В продольном направле-
нии на феноменологическую модель действует тяга,
которая приложена к упруговязкому телу и сообщает
ему постоянную скорость движения.
Под действием поперечных составляющих колеба-
ний кристаллизатора модель оказывает на стенки не
только статическое давление, но и динамическое. Сила
давления заготовки на каждую стенку кристаллизато-
ра равна произведению жесткости внешних упругих
тел на величину деформации соответствующего упру-
гого тела. Напряжения, действующие в поперечном
направлении, моделируются последовательно соеди-
ненными через центральную массу внутренними упру-
говязкими телами.
Сила вытягивания заготовки из кристаллизатора
равна произведению жесткости нижнего упругого тела
феноменологической модели на его деформацию. На-
пряжения в продольном направлении моделируются
инерционным упруговязким телом. Анализ напряже-
ний, действующих вдоль оси заготовки, в зависимости
от режима вытягивания и параметров вибрации позво-
ляет решить очень важную практическую задачу пре-
дотвращения разрывов затвердевшей поверхности
заготовки и выплескивания находящегося внутри
жидкого металла. Подбирая режим вибрации кристал-
лизатора в соответствии с заданной скоростью дви-
жения заготовки, можно снизить действующие в про-
дольном направлении напряжения.
Для решения второй задачи — повышения качества
отливки — нужна более сложная феноменологическая
модель. Какой параметр процесса, воспроизводимый на
модели, может характеризовать качество отливки.
Опытные исследования показали, что между механи-
ческими свойствами отливки и плотностью металла
существует определенная связь. С увеличением плот-
ности механические свойства улучшаются. О плотно-
сти отливки можно судить по изменениям ее объема.
Таким образом, нужна модель, которая позволяла бы
воспроизводить изменения объема отливки. Поскольку
изменения объема происходят только при необратимых
деформациях, а такими деформациями являются пла-
стические, модель должна содержать пластичные рео-
логические тела.
95
Для исследования изменений плотности отливки при
вибрационной обработке может быть использована
модель, составленная из стандартных инерционных
упруговязкопластичных тел.
В результате проведения исследований с помощью
феноменологической модели процесса непрерывного
литья удается определить деформации, скорости и
ускорения деформаций, напряжения (упругие, упру-
говязкие, пластичные и упруговязкопластичные) за-
готовки в продольном и поперечном направлениях,
траектории движения у противоположных стенок за-
твердевшей оболочки слитка, давления на стенки кри-
сталлизатора, сопротивления вытягиванию заготовки.
Кроме .того, вычисляются скорость движения заготов-
ки и энергозатраты па осуществление процесса непре-
рывного литья как в вибрационной, так и в тяговой
системах.
Вибрационное дробление представляет весьма слож-
ный технологический процесс. Для проведения точных
исследований использовались сложные многокомпо-
нентные инерционные упруговязкопластичпые модели.
Однако для выполнения инженерных расчетов, по точ-
ности вполне удовлетворяющих проектировщиков дро-
бильной техники, удалось разработать упрощенную
нелинейную упруговязкую модель дробимой массы
(рис. 23). При этом коэффициенты жесткости и вяз-
кости нелинейно зависят от деформации. Применение
этой модели, характеризующейся всего тремя парамет-
рами, позволяет обоснованно рассчитывать нагрузки
на дробилку от дробимой массы. Реакция модели на
рабочий орган (сопротивления дроблению) нелинейно
возрастает по мере его деформирования. Вследствие
того что между дробимой массой и рабочим органом
дробилки существует неудерживающая связь, реакции
горной массы могут иметь только один знак — отри-
цательный. Реакция действует в те моменты, когда
происходит деформация горной массы. Поэтому в
процессе движения рабочие органы дробилки то на-
гружаются, то совершают свободное движение.
Несмотря на свою простоту, нелинейная упруго-
вязкая модель дробимой массы позволяет получить
обширную информацию о процессе дробления и режи-
ме работы вибрационной дробилки. Вычисляются те-
кущие перемещения дробящих органов и деформации
дробимой массы, их скорости и ускорения, угловые
96
перемощения, скорости и ускорения вала вибратора.
Определяются реакции горной массы и упругой систе-
мы на рабочий орган: среднее, максимальное и мини-
мальное смещения дробящего органа; затраты энергии
привода машины на дробление материала, на преодо-
ление сил сопротивления в приводе и упругой системе.
Для оценки условий работы упругой системы дро-
билки, которая в значительной степени обеспечивает
надежность работы всей установки, могут быть найде-
ны отклонения дробящего органа от среднего положе-
ния. Недопустимая раздвижка дробящих щек являет-
ся основной причиной поломок упругой системы двух
щековых вибрационных машин.
Вибрация транспортирует,
поднимает грузы
и перекачивает жидкости
На выставках вибрационные транспортирующие маши-
ны — вибрационные конвейеры, питатели, виброподъ-
емники — обычно собирают многочисленных зрителей.
Работа этих машин, действительно, представляет со-
бой необычное зрелище. Виден желоб, установленный
на пружинах или рессорах на раме, незаметно каких-
либо движущихся устройств, и тем не менее по жело-
бу течет толстым слоем песок или какой-либо другой
груз.
Желоб установлен горизонтально, иногда с неболь-
шим подъемом, но груз по нему все же движется, бы-
вает, что с довольно большой скоростью. Внимательно
присмотревшись к желобу, а еще лучше коснувшись
его рукой, установим, что желоб дрожит. Причем пе-
ремещения его при этом дрожании настолько незначи-
тельны, что, не присматриваясь специально, их труд-
но заметить.
Возникает вопрос: как такое ничтожное дрожание
желоба (вибрации) может перемещать с достаточно
большой скоростью различные грузы? Что же за силы
создаются вибрирующим желобом? А силы действуют,
оказывается, значительные. В этом нетрудно убедить-
ся, посмотрев на работу вибрационного питателя, ко-
торый легко перемещает в карьере горную массу, вклю-
чающую отдельные куски размером до кубометра.
4 И. Ф. Гончаревич
97
Еще большее удивление вызывает вибрирующая
вертикальная труба, нижний конец которой опущен
в емкость с насыпным грузом, а из верхнего непре-
рывным потоком высыпается тот же груз, что недав-
но находился в расположенной внизу емкости. Все
эти устройства — виброконвейер, вибропитатель и
виброподъемник — основаны на одних и тех же прин-
ципах работы.
Транспортирующий эффект вибрирующей поверх-
ности обнаружен давно. Изобретатель неизвестен, но
существует легенда, что впервые этот эффект наблю-
дал скрипач, который, не стерев со своей скрипки пыль,
начал на ней играть. Якобы, проведя по струнам
смычком, скрипач увидел, как по освещенной солнцем
деке побежали пылинки пыли. Так это или не так,
утверждать трудно. Скорее всего, явление перемеще-
ния различных частиц по вибрирующей поверхности
наблюдалось многими и при разных обстоятельствах,
прежде чем получило практическое применение. Затем
множество ученых исследовали механизм этого явления
и разрабатывали все более совершенные теории, кото-
рые позволили бы со знанием дела проектировать
различные вибрационные транспортирующие ма-
шины.
Надо сказать, что пришлось решать много специ-
альных задач, поскольку в промышленности посредст-
вом вибротранспорта перемещаются глыбы скалы ве-
сом более тонны; мелкодисперсный порошок сажи или
графита, который распыливается даже от дыхания че-
ловека; шайбы и гайки, смазанные маслом и прили-
пающие к желобу; детали электронных схем, которые
нужно не только переместить, но выставить и сориен-
тировать в определенном месте с точностью до микро-
на; наконец, вязкие среды, более похожие на жидкость
или, наоборот, на твердое тело. Однако принципиаль-
ные основы процесса вибротранспортирования всех
этих совершенно различных объектов общие.
Как мы уже установили, перемещение создается
за счет дрожания или, как говорят специалисты, виб-
рации транспортирующей поверхности. И хотя эти
вибрации на первый взгляд малы и однообразны, одна-
ко на самом деле существуют десятки режимов, ха-
рактеризующихся неодинаковой эффективностью при
решении различных транспортных задач и при пере-
мещении грузов с разными свойствами.
98
Р и с. 24. Режимы колебаний
щих установок
грузонесущих органов транспортирую-
а—эллиптические; б—встречные эллиптические; в — бигармониче-
ские; г — прямолинейные гармонические; д — прямолинейные и кру-
тильные; е — с асимметрией, создаваемой клапаном; А, В и 0 — ам-
плитуды колебаний; со — частота колебаний; у — угол сдвига фаз
между составляющими колебаний; а и Р — угол наклона и угол виб-
рации соответственно; v — скорость груза
Если поставить на желоб, по которому перемеща-
ется груз, точку и наблюдать за ней в процессе рабо-
ты установки, то можно выявить ряд важных особен-
ностей ее движения. Существуют специальные прибо-
ры, которые позволяют спроектировать исследуемую
точку на экран, увеличить ее перемещения и по жела-
нию изменить скорость движения. Поэтому можно
легко заметить особенности движения точки, а следо-
вательно, и желоба. Просмотрев режим движений
грузонесущего органа вибрационной машины, придем
к следующим заключениям.
Грузонесущие органы совершают возвратно-посту-
пательные перемещения очень небольшой величины,
всего в несколько миллиметров, по прямой, наклонной
под углом 20—30° к его продольной оси. Таких пере-
мещений, колебаний в различных режимах совершает-
ся от 15 до 50 в секунду (рис. 24, а). Если мы зафик-
сируем путь, проходимый грузонесущим органом в
равные промежутки времени за одно колебание, т. е.
за то время, которое нужно грузонесущему органу,
4*
99
чтобы, выйдя из какого-то положения, в него же и
вернуться, и построим график изменения пути во вре-
мени, то увидим, что он представляет собой синусоиду.
Так что же перемещает груз? Под действием пере-
мещений грузонесущего органа находящемуся на нем
грузу сообщаются ускорения, которые, как и переме-
щения, имеют синусоидальный характер, т. е. перио-
дически меняют величину и направление действия.
Под влиянием этих ускорений в транспортируемом
грузе возникают периодические силы инерции.
Разложим ускорение грузонесущего органа на две
составляющие: одну, действующую в плоскости транс-
портирования, и вторую, перпендикулярную к ней.
Ускорения, действующие в плоскости транспортирова-
ния, созданы силами инерции, которые периодически
сдвигают груз вдоль грузонесущего органа. Перемеще-
ниям груза вдоль грузонесущего органа препятствуют
силы трения о транспортирующую поверхность. Эти
силы определяются величиной коэффициента трения и
силой прижатия к грузонесущему органу. Силы инер-
ции, действующие в вертикальном направлении, скла-
дываются или вычитаются (в зависимости от их на-
правленности) из силы тяжести. При этом меняется
давление груза на транспортирующую поверхность.
Мы уже выяснили, что от величины этого давления за-
висят силы трения. Следовательно, трение груза о виб-
рирующую поверхность также периодически меняется.
Таким образом, на вибрирующей поверхности груз
подвергается действию периодически меняющихся,
сдвигающих его сил и переменных сил трения. Направ-
ленное движение груза осуществляется вследствие
того, что смещение его в одном направлении происхо-
дит в условиях меньших сил трения, чем в другом.
Создается предпочтительное направление транспорти-
рования. Таким образом, направленное перемещение
груза под действием движущих, периодически меняю-
щих направление сил инерции возможно, если препят-
ствующим движению силам трения сообщить асиммет-
рию.
Возможны два режима движения груза — без поте-
ри контакта с транспортирующей поверхностью и с
подбрасыванием. В режиме с подбрасыванием груз пе-
риодически теряет контакт с транспортирующей по-
верхностью и большую часть пути совершает в полете.
Подбрасывание груза имеет место в том случае, когда
100
ускорения поперечных колеоании грузонесущего орга-
на больше ускорения силы тяжести.
Каким образом установить режим транспортирова-
ния без подбрасывания груза или с отрывом от грузо-
несущего органа? Дело в том, что каждый из режи-
мов имеет свою область целесообразного применения.
Если перемещаются тяжелые крупнокусковые грузы,
то транспортировать их с подбрасыванием явно не
имеет смысла. Падая на грузонесущий орган, огром-
ные глыбы могут вызывать серьезные повреждения.
В то же время перемещать, например, высокоабразив-
ный корундовый порошок, идущий на изготовление
точильных кругов, лучше в режиме с подбрасыванием.
Проходя большую часть пути во взвешенном состоянии
без контакта с транспортирующей поверхностью, он
почти не изнашивает грузонесущий орган.
Чтобы установить режим без подбрасывания груза,
нужно поддерживать ускорение поперечных колебаний
грузонесущего органа на уровне ниже ускорения силы
тяжести. При этом груз не потеряет контакта с транс-
портирующей поверхностью. Для создания режимов
транспортирования с подбрасыванием ускорения попе-
речных колебаний должны быть выше ускорений силы
тяжести.
Каким образом производить такую регулировку, ибо
большинство вибрационных транспортирующих машин
имеют неизменную частоту и амплитуду колебаний, ко-
торые и определяют уровень ускорения грузонесущего
органа? Такая возможность есть. Ускорение попереч-
ных колебаний можно увеличить или уменьшить, из-
менив направление прямолинейных колебаний грузо-
несущего органа по отношению к его продольной оси.
Надо иметь, однако, в виду, что, увеличивая угол на-
клона и повышая ускорения поперечных колебаний
грузонесущего органа, мы одновременно уменьшаем
амплитуду, а следовательно, и скорость продольных
колебаний.
Снижать скорость продольных колебаний нежела-
тельно, так как при этом уменьшается и скорость
транспортирования груза. Однако при использовании
прямолинейных колебаний грузонесущего органа из-
менение амплитуды колебаний в одном из направле-
ний обязательно влечет изменения и во втором на-
правлении. Увеличивая амплитуду продольных колеба-
ний, уменьшаем амплитуду поперечных колебаний,
101
и наоборот. Так как эффективный режим транспорти-
рования можно обеспечить только рациональным соче-
танием параметров продольных и поперечных колеба-
ний, то невозможность независимого их регулирования
существенно ограничивает перспективы синтезирова-
ния эффективных режимов вибротранспортирования.
Хорошо было бы независимо регулировать пара-
метры продольных и поперечных колебаний. Неогра-
ниченные возможности в этом отношении открывают-
ся при сообщении грузонесущему органу колебаний по
эллиптическим траекториям. Действительно, меняя от-
носительную величину составляющих колебаний вдоль
и поперек грузонесущего органа, преобразуем лишь
форму и поворот эллипса (рис. 24, б) по отношению
к транспортирующей поверхности.
Мы рассмотрели случай вибротранспортирования
грузов, обеспечиваемого симметричными, периоди-
чески изменяющими направление силами инерции.
Чтобы незначительные возвратно-поступательные дви-
жения груза на одном месте превратить в направлен-
ное транспортирование, мы создали асимметрию сил
трения, препятствующих движению. При этом за каж-
дый цикл колебаний груз стал смещаться в большей
мере в сторону меныпих сопротивлений движению. По-
этому в процессе непрерывных колебаний груз полу-
чил в своем движении определенную направленность,
организовался транспортный поток груза в заданном
направлении.
Возможно транспортирование груза и при постоян-
ных по величине силах трепия. Однако в целом в си-
стеме движущих сил и сил сопротивления должна
оставаться асимметрия. В противном случае периоди-
ческие силы не обеспечат направленного перемещения.
Вывод простой: если силы трения постоянные, то нуж-
но создать асимметричные силы инерции.
Вибрационная транспортирующая машина, в кото-
рой нет необходимости менять величину сил трения,
может не совершать поперечных колебаний. Мы уже
установили, что поперечные колебания грузонесущего
органа служат для периодического изменения сил
трения. Грузонесущему органу можно сообщить толь-
ко продольные колебания. Однако это должны быть
такие колебания, при которых возникают несиммет-
ричные ускорения. Асимметричные колебания могут
быть сообщены грузонесущему органу вибратором с
102
двумя эксцентриками, один из которых имеет удвоен-
ную скорость вращения. Такой вибратор создает уско-
рения со значительной асимметрией (рис. 24, в).
Направленное перемещение груза в вибрационной
транспортирующей установке с постоянным давлением
груза на грузонесущий орган достигается за счет того,
что силы инерции при движении в одну сторону мень-
ше сил трения и не обеспечивают смещения груза.
При движении грузонесущего органа в другую сторо-
ну силы инерции, превышающие силы трения, смеща-
ют груз по транспортирующей поверхности.
При каждом колебании грузонесущего органа про-
исходит незначительное относительное перемещение
груза, но каждый раз смещение производится в одном
и том же направлении. Суммируясь при непрерывных
колебаниях грузонесущего органа, перемещения гру-
за формируют непрерывный транспортный поток.
Таким образом, транспортирование груза обеспечи-
вается в обоих рассмотренных случаях. Но между
ними есть и определенные различия. В первом случае
перемещение груза вперед осуществляется при пони-
женных силах трения или вообще в их отсутствие,
во-втором — при постоянных силах трения. Естествен-
но, в первом случае на преодоление сил трения затра-
чивается меньше энергии, а следовательно, такой
принцип вибрационного транспортирования более со-
вершенный. Кроме того, перемещение груза за счет
скольжения его по транспортирующей поверхности,
что имеет место в установках с асимметричными ко-
лебаниями, вызывает интенсивный износ грузонесуще-
го органа.
Нетрудно прийти к выводу, что транспортировать
грузы в условиях переменных сил трения, а еще луч-
ше с подбрасыванием выгоднее, чем волочить его по
желобу. Однако имеется такой случай транспортирова-
ния, когда вибрационные транспортирующие машины
с асимметричными перемещениями грузонесущего ор-
гана оказываются не только эффективнее, но вообще
являются единственным вибрационным транспортным
устройством, способным обеспечить процесс транспор-
тирования.
Это в тех случаях, когда сопротивление перемеще-
нию груза не зависит от величины его прижатия к
транспортирующей поверхности, т. е. когда отсутству-
ет сухое трение. Чаще всего это среды, для которых
103
характерно вязкое трение. К таким средам относятся
бетон, глинистые породы, различные вязкие жидкости
и т. д.
Величина вязкого трения зависит от относительной
скорости смещения контактирующих поверхностей.
В установках с асимметричными ускорениями колеба-
ний одновременно имеет место и асимметрия скоро-
стей, поэтому создается возможность управления не
только движущими силами (силами инерции), но и
силами сопротивления (вязким трением).
Мы рассмотрим еще некоторые способы вибрацион-
ного транспортирования. Такое внимание этому вопро-
су мы уделяем в связи с тем, что принципы вибра-
ционного транспортирования являются основой многих,
не толь'ко транспортирующих, машин. Знание механи-
ки процесса вибрационного транспортирования позво-
ляет разбираться во многих весьма сложных вопросах
вибрационной техники и технологии.
В рассмотренных случаях грузонесущий орган рас-
полагался горизонтально или в крайнем случае с не-
большим подъемом. При транспортировании по гори-
зонтали необходимо преодолевать лишь силы трения.
Перемещение на подъем предполагает также преодо-
ление и сил тяжести Правда, при небольшом наклоне
грузонесущего органа их величина может быть значи-
тельно меньше сил трения. Все это должно осуществ-
ляться силами инерции. Ну а если речь идет о подъе-
ме груза по вертикальной трубе? В этом случае воз-
никает много дополнительных трудностей: необходимо
в полной море преодолеть силы тяжести, создать подъ-
емную силу, преодолеть сопротивления от трения. Су-
ществует несколько решений этих проблем.
Вибрационному подъемнику в виде трубы, откры-
той с обоих концов, сообщают одновременно продоль-
ные и поперечные колебания. Причем продольные ко-
лебания происходят с удвоенной частотой по отноше-
нию к поперечным. В результате труба движется по
траектории, напоминающей восьмерку (рис. 24, г).
Почему пришлось удвоить частоту продольных ко-
лебаний трубы? Ведь в ранее рассмотренных случаях
вибротранспортирование обеспечивалось и тогда, когда
колебания трубы в обоих направлениях происходили с
одинаковой частотой. Здесь сказалась специфика уст-
ройства грузоподъемного органа. В продольном сече-
нии грузонесущий орган в виде желоба имеет одну
104
стопку, труба — две. В процессе одного колебания груз
в желобе один раз взаимодействует с днищем, в тру-
бе — дважды, то с одной, то с другой стенкой. Таким
образом, удвоение частоты взаимодействия груза со
стенками грузоподъемного органа потребовало удвое-
ния частоты продольных колебаний трубы.
В виброподъемнике поперечные колебания, как и в
виброконвейере, управляют силами трения груза о
стенки грузоподъемного органа. Продольные колебания
осуществляют подъем груза. Для обеспечения функ-
ционирования установки необходимо обеспечить взаи-
модействие сил инерции и сил трения таким обра-
зом, чтобы создать предпосылки перемещения груза
вверх.
Рассмотрим закономерности взаимодействия столба
груза, находящегося в трубе, с ее стенками под воз-
действием поперечных колебаний. Действие сил инер-
ции заставляет столб груза поочередно прижиматься
то к одной, то к другой стенке. В те моменты, когда
он прижимается к одной из стенок, он деформируется
силами инерции и вследствие этого отрывается от вто-
рой стенки. Затем картина меняется. В процессе этих
поперечных перемещений груза в отдельные проме-
жутки времени теряется или существенно ослабляется
его контакт со стенками.
Следует подчеркнуть, что за один цикл поперечных
колебаний это происходит дважды. Дважды груз ока-
зывается также прижатым к стенкам. Ясно, что, когда
груз теряет контакт, его легко сместить относительно
грузонесущего органа, когда прижат к стенкам, он пе-
ремещается вместе с грузонесущим органом.
Режим колебаний подбирается таким образом, что-
бы перемещения груза происходили вверх. Как пока-
зал опыт, для этого грузоподъемному органу следует
сообщить колебания но траектории в виде опрокинутой
восьмерки. Микроперемещения груза происходят с ча-
стотой продольных колебаний грузоподъемного органа.
Суммируясь при большом числе колебаний, микропере-
мещения обеспечивают направленное перемещение
груза вверх.
Существуют выброподъемники и другого принципи-
ального устройства. Груз можно поднимать также в
трубе, которая продольно разрезана на две части.
Каждой половине сообщают колебания по эллиптиче-
ским траекториям (рис. 24, д). Колебания происходят
105
с одинаковой частотой, но эллипсы обегаются в проти-
воположных направлениях. Направления обегания эл-
липсов принимаются такими, чтобы половинки трубы
в моменты сближения двигались одновременно вверх.
При таких колебаниях половинки грузоподъемного ор-
гана, подхватывая груз, поднимают его вверх, а затем,
освободив его, опускаются в исходное положение. Из
таких микроперемещений груза складывается его на'
правленное перемещение вверх.
Виброподъемник можно сделать и из виброконвей-
ера. Для этого грузонесущий орган нужно навить на
центральную трубу и сообщить ей винтовое колеба-
тельное движение вдоль ее оси. Такие колебания вин-
тового грузонесущего органа создаются путем сумми-
рования прямолинейных колебаний вдоль центральной
трубы и крутильных колебаний вокруг ее оси. Вибра-
тор, который создает такие колебания, мы рассматри-
вали ранее. Груз перемещается по винтовому грузоне-
сущему органу так же, как в вибрационном конвейе-
ре, установленном с подъемом.
Для подъема жидкостей и суспензий используются
выброподъемники, состоящие из трубы, которая совер-
шает продольные колебания с клапаном в заборной
части (рис. 24, е). Продольные колебания трубы через
силы вязкого трения, действующего по стенкам, пере-
даются находящейся в ней жидкости. Жидкость также
приходит в колебательное движение, происходящее с
некоторым сдвигом фазы по отношению к колебаниям
трубы. При смещении под действием сил инерции жид-
кости вверх относительно трубы давление в трубе пе-
ред клапаном становится ниже давления за клапаном.
Клапан открывается внешним напором, и жидкость
засасывается в трубопровод.
При ходе столба жидкости вниз давление повы-
шается, клапан перекрывает всасывающее отверстие,
предотвращая вытекание жидкости, содержащейся в
трубе. Последовательное повторение этих операций с
частотой колебаний трубы создает необходимый для
подъема жидкости напор. Такие насосы называются
инерционными.
Находят применение вибрационные насосы с колеб-
лющимися гибкими поршнями. Насос состоит из кор-
пуса с всасывающим отверстием и клапаном, над ко-
торым установлен приводимый в колебательное движе-
ние вибратором гибкий поршень.
106
При ходе поршня вверх его эластичные края при-
жимаются к объему находящейся над ним жидкости.
Под поршнем давление понижается, вследствие чего
открывается всасывающий клапан и в подпоршневое
пространство засасывается жидкость. Одновременно
верхняя часть поршня сообщает жидкости, находящей-
ся над ним, импульс давления. Когда поршень дви-
жется вниз, всасывающий клапан закрывается и вода
через зазор между эластичными краями поршня и кор-
пусом вытекает в надпоршневую полость. Высокочас-
тотные колебания поршня создают непрерывный пуль-
сирующий поток жидкости.
Породу можно раздробить
и измельчить вибрацией
В нашей стране ежегодно дробятся и измельчаются
сотни миллионов тонн различных материалов. Это
дробление и измельчение горных пород и полезных
ископаемых, строительных материалов, пищевых про-
дуктов и т. д. Ни одна отрасль промышленности не об-
ходится без дробильно-измельчительного оборудова-
ния. И в данной области технологии успешно исполь-
зуются вибрационные дробилки, мельницы, дисперга-
торы.
Многие технологические процессы в ряде отраслей
промышленности для эффективного их осуществления
требуют особо тонкого измельчения продукта. Измель-
чение способствует повышению скорости протекания
межфазовых процессов и получению лучшей структу-
ры конечного продукта. Это объясняется тем, что при
уменьшении размера частиц увеличивается их удель-
ная поверхность, повышается однородность. По указан-
ным причинам ускоряется протекание реакций, сни-
жаются температуры, необходимые для нормального
хода технологического процесса, сокращается расход
дефицитных материалов, а в ряде случаев и потребле-
ние энергии.
Наиболее эффективным и в настоящее время шире
всего применяющимся является вибрационный метод
измельчения, осуществляемый в вибрационных мель-
ницах, в среде мелющих тел. Вибрационная мельница
проста по конструкции, она состоит из рабочей каме-
107
Р п с. 25. Вибрационные мельницы
а — с инерционным приводом; б — с эксцентриковым приводом и вра-
щающейся камерой, а: I — рабочая камера; 2 — дебалансный вибра-
тор; 3 — упругие элементы; 4 — опорная рама; 5 — калибровочное сито;
6 — соединительная муфта; 7 — мелющие тела; Л — загрузка; В — из-
мельченный продукт, б: Г — рабочая бицилиндроконическая камера;
2'— приводной эксцентричный ролик; 3'— опорный ролик; 4'— рама.
coi и ©2 — угловые скорости приводного ролика и рабочей камеры со-
ответственно
ры, заполненной мелющими телами (стальными шари-
ками или стержнями), одного или нескольких инер-
ционных вибраторов, жестко соединенных с рабочей
камерой. Камера устанавливается с помощью упругих
элементов на раму (рис. 25, а). Внутри рабочей каме-
ры устанавливаются калибровочные сита, через ко-
торые измельченный материал выводится из зоны дроб-
ления и подается к разгрузочным люкам.
При вращении вала инерционного вибратора каме-
ра приходит в колебательное движение. Форма траек-
тории определяется конструкцией привода и упругой
системы, изменяясь от вытянутого эллипса до окруж-
ности. Под действием вибрации мелющие тела и из-
мельчаемый продукт совершают быстрые колебатель-
ные движения, копируя форму траектории рабочей ка-
меры, и одновременно вся масса загрузки совершает
медленные циркуляционные перемещения по замкну-
тым эллипсоподобным траекториям, определяемым
стенками рабочей камеры.
Измельчение происходит вследствие относительного
перемещения мелющих тел и обрабатываемого продук-
та, в результате ударов шаров, раздавливания и
истирания. Высокая частота колебаний и огромное ко-
личество шаров в камере создают многократные воз-
действия на измельчаемый продукт, обеспечивая
производительное и высококачественное диспергирова-
108
ние. Основное влияние на характер процесса измельче-
ния оказывают частота, размах и форма траектории
колебаний, а также размеры и материалы мелющих
тел, конструкция рабочей камеры.
Качество измельчения зависит от соотношения
между количеством мелющих тел и продукта, степени
заполнения камеры. В зависимости от решаемых тех-
нологических задач дробление может быть одностадий-
ным и многостадийным, т. е. измельченный в одной
камере продукт может подвергаться дополнительной
обработке в последующих. В соответствии с технологи-
ческими требованиями и потребной производительно-
стью вибромельницы имеют до пяти камер.
Рабочая камера вибромельницы может располагать-
ся не только горизонтально, но и вертикально. Коле-
бания такой камеры обычно происходят в горизонталь-
ной плоскости. Известна даже вибромельница, в кото-
рой камеры выполнены в виде тора. Камере сооб-
щаются комбинированные крутильно-поступательные
колебания, под действием которых наполнитель совер-
шает круговые циркуляционные движения в попереч-
ном сечении тора и одновременно медленно переме-
щается в горизонтальной плоскости по кольцу.
В стремлении усовершенствовать традиционное ре-
шение конструкторская мысль предложила не только
эти установки. Во всех рассмотренных конструкциях
колебания сообщаются рабочей камере. Это представ-
ляет определенные неудобства: с одной стороны, нужно
подвергать вибрированию тяжелые конструкции, а с
другой — защищать от вибрации несущие элементы
зданий. Такой проблемы нет в вибрационной мельнице
с погруженным вибратором. Она состоит из высокой
цилиндрической вертикальной камеры, внутри которой
на упругих элементах подвешена труба значительно
меньшего диаметра.
Находящийся внутри трубы дебалансный вибратор
сообщает ей круговые колебания вокруг продольной
оси камеры. Свободное пространство в камере запол-
няется измельчаемым материалом. Измельчение проис-
ходит под действием колебаний внутренней трубы.
В такой мельнице значительно меньше колеблющие-
ся массы. Корпус, установленный на несущих конст-
рукциях, практически не колеблется. В некоторых
конструкциях, правда, колеблется и корпус, и внутрен-
няя труба.
109
Существуют и уравновешенные вибрационные мель-
ницы с вертикальными рабочими камерами. Такая
вертикальная вибрационная мельница состоит из двух
одинаковых взаимозаменяемых помольных камер, рас-
положенных одна над другой и установленных на раме
с помощью амортизаторов. Привод— двухвальный
эксцентриковый вибровозбудитель — установлен сим-
метрично относительно оси мельницы между помоль-
ными камерами на раме. Каждая помольная камера
соединена с тремя шатунами эксцентрикового вибро-
возбудителя: верхняя — с двумя шатунами правого
вала и одним левого; нижняя — с одним шатуном пра-
вого и двумя левого вала.
Эксцентриковый вибровозбудитель приводится во
вращение электродвигателями через упругие муфты.
Помольные камеры разделены перфорированными пе-
регородками на ряд секций, в каждой из которых на-
ходятся мелющие тела с зазором между верхним слоем
и расположенной выше перфорированной перегородкой.
При работе мельницы мелющие тела взаимодействуют
с перфорированными перегородками дважды за каждый
цикл колебаний: один — с нижней, второй — с верх-
ней. Рама установлена с помощью амортизаторов на
основании. При работе мельницы помольные камеры
совершают прямолинейные колебания в противофазе и
силы инерции, возникающие во время движения, вза-
имно уравновешиваются.
Прямолинейная траектория колебаний помольной
камеры в вертикальной плоскости, двойное ударное
взаимодействие мелющих тел с перфорированными
перегородками при оптимальной высоте их слоя по-
зволяют обеспечивать высокую энергонапряженность
и, следовательно, эффективно вести помол крепких ма-
териалов. Исходный материал поступает в помольную
камеру сверху, равномерно распределяется по площа-
ди ее поперечного сечения и, проходя последовательно
сквозь слои мелющих тел рабочих секций помольных
камер, измельчается вследствие их соударений.
В вибрационных мельницах производится не только
измельчение, но иногда и специальная технологическая
обработка различных смесей. Так, например, в элект-
роугольной промышленности в целях активации и
обеспечения равномерности состава производится сов-
местная обработка мелкодисперсной сажи и пека.
Разработаны виброизмельчители и других конструк-
110
ций, решающих специальные задачи. Более равномер-
ное распределение измельчаемого продукта в массе
мелющих тел, а следовательно, повышение качества
измельчения могут быть достигнуты в вибромельнице
с вращающейся камерой. Камера такой вибромельницы
имеет бицилиндроконическую форму. Конические кон-
цы камеры опираются на пневмобаллонные катки, а ци-
линдрическая часть — на приводной эксцентричный
ролик. Диаметр ролика значительно меньше диаметра
цилиндрической части камеры, поэтому, обеспечивая
высокую частоту колебаний, он сообщает ей медленное
вращение (рис. 25, б).
Существует виброизмельчитель с одним мелющим
телом. Он представляет собой цилиндрическую камеру,
в которой находится тяжелый цилиндр несколько
меньшего диаметра. Измельчение продукта происходит
между стенкой камеры и поверхностью цилиндра, вра-
щение которому сообщается за счет колебаний рамы,
на которой монтируется вся система. На раме с обеих
сторон от рабочей камеры установлены инерционные
дебалансные вибраторы. Рама смонтирована на упру-
гих элементах; синхронное вращение обоих вибраторов,
необходимое для обеспечения заданного закона дви-
жения рабочей камеры, обеспечивается действием на
дебалансы вибрационного момента, возбуждаемого ко-
лебаниями общей рамы. Механизм возникновения виб-
рационного момента мы рассмотрели ранее.
Для крупного дробления различных материалов
разработаны вибрационные дробилки. Существует три
типа вибрационных дробилок: конусные, щековые и
роторные.
Вибрационные дробилки представляют собой срав-
нительно новое, прогрессивное направление развития
вибрационной техники. Их отличительными особенно-
стями являются как принципиальное устройство, так
и режим работы. По принципиальному устройству
они представляют собой механические системы с не-
полными связями. Поэтому закономерности движения
их рабочих органов определяются не кинематическими
параметрами, а формируются в результате совместного
действия сил, создаваемых приводом, и рабочих сопро-
тивлений (усилий, возникающих при дроблении мате-
риала) .
Существенную роль в формировании закона движе-
ния щек играет настройка колебательной системы
111
Р п с. 26. Вибрационные дробилки —
конусная (а), щековая (б), ротор-
ная (в)
а: 1 — дробящий конус; 2— деба-
лансный вибратор; 3 — корпус; 4 —
подвески; 5 — карданный приводной
вал. б: 1 — рама; 2 — дробящие щеки;
з — инерционные самобалансные виб-
раторы; 4 — упругие элементы, в: 1 —
корпус; 2— упругий ротор; 3— экс-
центриковый вибратор
(собственная частота, соотношение собственной и вы-
нужденной частот, сопротивления упругой системы).
В вибрационных дробилках, работающих под больши-
ми нагрузками, рабочие сопротивления соизмеримы с
возмущающей силой и могут превосходить силы
инерции колеблющихся частей дробилки и восстанав-
ливающие силы упругих связей.
По существу, рабочая нагрузка содержит в себе
компоненты сил сопротивления, инерции и упругости,
которые суммируются с соответствующими силами са-
мой машины. В связи с этим, исследуя процессы виб-
рационного дробления, следует рассматривать комп-
лексную систему, включающую в себя собственно виб-
родробилку, двигатель и нагрузку.
Конусная вибрационная дробилка имеет корпус с
конической дробильной камерой. Корпус подвешен или
опирается на фундамент с помощью мягких амортиза-
торов. Внутри корпуса на шаровом подшипнике уста-
новлен дробящий конус, в котором расположен де-
балансный вибратор. Вибратору электродвигателем со-
общается вращение через карданный вал (рис. 26, а).
112
Дробление материала осуществляется в кольцевой
полости между стенками дробильной камеры и дробя-
щего конуса. Под действием центробежной силы деба-
ланса конус отклоняется от оси дробилки и входит в
контакт с корпусом либо непосредственно, либо через
слой материала, находящегося в камере дробления.
При этом он обкатывается по стенкам корпуса, осу-
ществляя дробление материала.
В вибрационных щековых дробилках в отличие от
обычных дробление осуществляется не статическим
раздавливанием, а более эффективно — ударом. Удар-
ное дробление реализуется вследствие периодического
возникновения зазора между щекой и дробимым мате-
риалом. Зазор возникает от того, что при высокочас-
тотных колебаниях щек порода не успевает следовать
за движением расходящихся щек и теряет с ними кон-
такт.
Разработанные в настоящее время вибрационные
щековые дробилки можно разделить на два основных
вида: с шарнирным сочленением щеки с рамой и со-
единенные при помощи упругих элементов.
Вибрационные дробилки с шарнирной подвеской
могут иметь одну или две качающиеся щеки. Свобод-
ный конец щеки упирается в упругую систему. Привод
осуществляется инерционным дебалансным вибрато-
ром. При вращении дебалансов щеки совершают коле-
бания относительно шарнира, причем амплитуда кача-
ний щеки возрастает от оси подвеса к подпружинно-
му концу. Возникающие при дроблении усилия пере-
даются раме дробилки в основном через ось подвеса и
отчасти через упругий элемент. В однощековой дро-
билке это вызывает колебания рамы и требует ее виб-
роизоляции. В двухщековой дробилке в силу симмет-
ричности конструкции передаваемые усилия в значи-
тельной мере уравновешиваются.
Наиболее совершенными являются двухщековыо
дробилки, щеки которой соединяются с рамой упруги-
ми элементами. Привод щек осуществляется инерцион-
ными самобалансными вибраторами (рис. 26, б). Рама
виброизолируется от несущих конструкций амортизато-
рами. Вибраторам сообщается синхронное вращепие в
противоположные стороны, вследствие чего щеки ко-
леблются в противофазе. Они то сближаются, дробя на-
ходящийся между ними материал, то расходятся, обес-
печивая разгрузку раздробленного продукта.
ИЗ
Принципиальным достоинством такой конструкции
является то, что дробящие усилия замыкаются на дро-
бимой массе и их передача на раму ограничивается
жесткостью упругой системы. Реакции упругой систе-
мы на раму вследствие ее зарезонансной настройки не-
велики и от каждой щеки направлены в противопо-
ложные стороны. Вследствие этого они практически
полностью уравновешиваются.
Разработана дробилка с эластичными щеками. Она
состоит из корпуса, в котором закреплены щеки, вы-
полненные из эластичного материала с завулканизиро-
ванными в нем металлическими вставками. Колебания
щек осуществляются путем периодического нагнетания
под них рабочей жидкости или впуска сжатого воздуха
с помощью управляющего устройства.
Достоинством эластичных щек является малый вес,
а следовательно, пониженные динамические нагрузки,
возможность совершения больших ходов. Главное пре-
имущество заключается в замене сил трения щек о
дробимый материал в месте образования разрушающей
трещины силами упругой деформации эластичного ма-
териала щеки. Устранение сил трения снижает уси-
лия, возникающие в процессе разрушения дробимого
материала, т. е. в конечном счете повышает эффектив-
ность дробления.
Для устранения сил трения дробимого материала о
поверхность щеки при образовании разрушающей тре-
щины предложено использовать композитные упругие
покрытия для обычных дробящих щек. Покрытие со-
стоит из эластичного материала, в котором завулкани-
зированы шары. Эластичное покрытие крепится на
дробящей поверхности щеки. Шары могут быть завул-
канизированы таким образом, что они касаются по-
верхности щеки или между ними остается зазор. При
наличии зазора в процессе дробления происходит удар
шаров о поверхность щеки. Ударный импульс переда-
ется дробимому материалу, повышая эффективность
процесса дробления.
В чем особенность работы вибрационных дробилок
по сравнению с режимами обычных вибрационных ма-
шин, не подверженных действию особо больших нагру-
зок? Объем материала в камере дробилки значителен,
его масса соизмерима с массой подвижных частей дро-
билки — щек — и намного превосходит массу упругих
элементов. В процессе дробления происходят значи-
114
тельные деформации дробимого материала, вызываю-
щие в нем упругие, упруговязкие и пластические на-
пряжения. Вследствие периодического характера дробя-
щих усилий и достаточно высоких ударных скоростей в
материале возникают также силы инерции, которые
меняют характер процесса дробления.
Все эти усилия, возникающие в дробимом материа-
ле и действующие на щеки дробилки, имеют тот же
порядок, что и соответствующие усилия в элементах
конструкции. Упруговязкие сопротивления в породе
даже превышают аналогичные усилия в упругих эле-
ментах дробилки. Поэтому роль их в формировании ре-
жима работы дробилки велика и в ряде случаев ока-
зывается решающей. Действительно, опыт эксплуата-
ции вибрационных щековых дробилок подтверждает
влияние дробимой массы на формирование режимов
работы дробилки.
Собственная частота колебаний щек на упругих
элементах дробилки в 2—3 раза ниже частоты приво-
да. Поэтому на холостом ходу дробилка работает в
далеко зарезонансном режиме. При этом амплитуда
колебаний щек пропорциональна суммарной массе де-
балансов и их эксцентриситету и обратно пропорцио-
нальна общей массе дробящих щек и установленных
в них вибраторов. Составляет она на холостом ходу
обычно 4—5 мм. Перемещения, скорости и ускорения
щек при работе дробилки цод нагрузкой имеют синусо-
идальный характер.
При подаче в камеру дробления материала харак-
тер движения существенно изменяется. Перемощения
возрастают, щеки раздвигаются, расширяя камеру
дробления. Максимальное смещение каждой щеки на-
ружу при дроблении крепких пород и высокой степе-
ни загрузки камеры могут более чем вдвое превышать
амплитуду колебаний щек на холостом ходу. Графики
скорости и особенно ускорения щек приобретают пико-
образный характер. Увеличение размахов колебаний
щек обычно сопровождается возрастанием потребления
энергии в 2— 3 раза.
Приведенные закономерности работы вибрационной
дробилки позволяют объяснить механизм ее действия.
При подаче дробимой массы в камеру увеличивается
приведенная жесткость упругой системы машины про-
порционально крепости и количеству материала. Одно-
временно растут приведенные сопротивление и масса,
115
однако в меньшей степени, чем общая жесткость упру-
гой системы.
Рост сопротивлений зависит от свойств породы.
Хрупкие породы дают меньший прирост сопротивле-
ний, чем пластичные. Вследствие увеличения общей
жесткости упругой системы собственная частота увели-
чивается, приближаясь к частоте привода. Машина пе-
реходит на режим работы, близкий к резонансу. При
высокой крепости породы он может стать даже доре-
зонансным. При достаточном запасе мощности приво-
да, что всегда имеется у щековых вибрационных дро-
билок, колебательную систему, состоящую из щеки,
распертой между амортизаторами дробилки и породой,
начнет переходить энергия привода. Размах колебаний
щеки будет возрастать.
Вследствие того что основная жесткость системы
сосредоточена в дробимом материале, большая часть
энергии будет накапливаться в материале, вызывая в
конечном итоге его разрушение. Разрушение будет
происходить в результате как повышения напряжений
сверх предела прочности, так накопления в породе
микродефектов и раскрытия трещин под действием
циклических нагрузок.
Весьма перспективны роторные вибродробилки.
Дробление материала в них производится эксцент-
ричным ротором, установленным между подпружин-
ными щеками (рис. 26. в). В корпусе дробилки имеется
эксцентриковый вал, на котором с помощью подшип-
ника качения смонтирован подвижной ротор, имею-
щий сверху износостойкую футеровку. Такое устройст-
во допускает свободное вращение ротора в любом на-
правлении. Так как ротор смонтирован на эксцентри-
ке, он одновременно совершает поступательные пере-
мещения с ходом, равным эксцентриситету ротора.
С обеих сторон ротора на корпусе установлены —
с шарнирами в верхней части и пружинами в ниж-
ней — отбойные щеки. Материал подается сверху в
пространство между отбойными щеками и самотеком
поступает к ротору, заполняя свободное пространство
между ним и щеками. При сближении ротора со щекой
находящийся между ними материал дробится. При от-
ходе ротора происходит разгрузка дробленого матери-
ала. Колебательные движения ротора улучшают посту-
пление загружаемого материала в камеру дробления и
П6
облегчают последующую разгрузку дробленого про-
дукта.
Возможно различное исполнение привода роторной
дробилки. Соблюдаться должно только одно условие —
в системе всегда должен присутствовать упругий эле-
мент. Упругий элемент необходим для реализации до-
стоинств вибрационных систем и для предотвращения
поломок при попадании в камору дробления педро-
бимых предметов. В рассмотренной конструкции упру-
гий элемент установлен между корпусом дробилки и
отбойной щекой.
Упругий элемент в виде резинового кольца может
быть помещен между эксцентриком и подвижным коль-
цом ротора.
В третьей модификации приводной вал не имеет
эксцентриситета, а на нем устанавливается резиновый
эксцентрик. Так как эксцентрик имеет различную тол-
щину резины в разных местах, то жесткость его пере-
менная в разных направлениях. Поэтому за одип обо-
рот приводного вала происходит изменение жесткости
упругой системы дробилки. Меняется периодически
значение одного из параметров системы, в данном слу-
чае — жесткости упругой системы. В таких колеба-
тельных системах возбуждаются параметрические
колебания. В нашем случае имеется эксцентрик и одно-
временно меняется жесткость упругой системы. По-
этому в такой дробилке будут возбуждаться вынужден-
ные и параметрические колебания. Такие колебания
характеризуются высокой устойчивостью.
Литье и кристаллизация
в вибрационном поле
Вибрационная высокочастотная и низкочастотная тех-
нология получает применение в литейном производстве
для улучшения качества отливок. Вибрационная обра-
ботка позволяет осуществлять дегазацию расплава, по-
вышать эффективность процесса рафинирования, уп-
равлять процессом кристаллизации. Качество литого
металла и сплавов сильно зависит от содержащихся в
нем неметаллических примесей и газов. Даже неболь-
шие количества вредных примесей значительно ухуд-
шают свойства готовой продукции. Качество изделий
117
в большей степени зависит также от характера кри-
сталлической структуры слитков.
Дегазация отливок использует общий механизм де-
газации жидкостей в вибрационном поле. Процесс идет
как при низкочастотных, так и высокочастотных коле-
баниях. При высокочастотных колебаниях, кроме об-
щей вибрации среды, определенное значение имеют
также кавитационные воздействия.
В жидкости, в том числе и в расплавах металлов и
сплавов, в зародышевой форме содержатся пузырьки
газа. Они настолько стабильны, что могут существо-
вать даже при высоких давлениях. В расплавах, в ко-
торых имеются твердые несмачиваемые примеси, газо-
вая фаза содержится в микроскопических неровностях
на их поверхности.
При воздействии вибрации в расплаве формируются
интенсивные циркуляционные движения. При высоко-
частотных колебаниях происходят волновые деформа-
ции обрабатываемой среды. Пузырьки газа участвуют
в медленных циркуляционных и быстрых колебатель-
ных движениях расплава, перемешиваются, сталкива-
ются друг с другом. Не исключено, что происходит ре-
зонансное усиление колебаний пузырьков, частота соб-
ственных колебаний которых совпадает с частотой
вибрационных воздействий.
Во всяком случае, установлено, что при некоторых
частотах виброобработки ускоряется процесс перекачки
растворенного газа в пузырьки. Между ними и други-
ми фазами жидкотвердой системы ослабляются связи.
Вследствие диффузии в них растворенного в жидкой
фазе газа увеличиваются размеры пузырьков. Изменя-
ются соотношения между подъемной силой, пропор-
циональной объему пузырьков, и силами сопротивле-
ний, действующими по поверхности пузырьков, поэто-
му последние начинают подниматься к поверхности
расплава.
В режимах высокочастотных интенсивных колеба-
ний, превосходящих порог кавитации, могут действо-
вать и некоторые дополнительные механизмы. Кавита-
цией называется процесс образования в жидкости
пульсирующих пузырьков, заполненных паром, газом
или их смесью. Явление кавитации возникает при про-
хождении в жидкости высокочастотной волны звукового
или ультразвукового диапазона. В интенсивной волне
деформации во время полупериодов разряжения могут
118
происходить разрывы среды и возникновение кавита-
ционных пузырьков. В полупериоды сжатия среды пу-
зырьки резко захлопываются, порождая сильные гид-
родинамические возмущения. Эти импульсы порождают
интенсивные акустические волны.
Интенсивные импульсы при захлопывании кавита-
ционных пузырьков и порождаемые ими акустические
волны способствуют формированию в среде в боль-
ших количествах дополнительных зародышей пузырь-
ков. Дальнейшее развитие этих пузырьков идет по рас-
смотренной ранее схеме. В области интенсивных
высокочастотных вибрационных воздействий процесс
дегазации расплавов идет весьма интенсивно.
Дегазация сопровождается обычно рафинированием
расплава — очищением его от неметаллических твер-
дых включений. Поднимаясь вверх, пузырьки газа за-
хватывают с собой частички включений и выносят на
поверхность отливки. Этот процесс называется флота-
цией. Повышение чистоты металлов при дегазации спо-
собствует увеличению пластичности отливок, что облег-
чает их дальнейшую обработку давлением.
Вибрационная обработка расплавов радикально
меняет процесс кристаллизации. Преобразуются усло-
вия зарождения и роста кристаллов. Управляя процес-
сом кристаллизации, вибрационные воздействия позво-
ляют формировать поликристаллическую структуру
отливки с заданными свойствами. В стадии, когда в
отливке существуют одновременно жидкие и затвердев-
шие фазы, изменение температуры в различных частях
происходит не одновременно. Вследствие этого кристал-
лизация развивается постепенно от охлаждаемых по-
верхностей к центру слитка, где температура более
высокая.
Между твердой и жидкой фазами существует чет-
кое разграничение. Эта граница называется поверх-
ностью раздела или фронтом кристаллизации. При кри-
сталлизации сплавов твердая и жидкая фазы разграни-
чиваются промежуточной двухфазной зоной, в которой
находится смесь кристаллов в жидкости. В этом слу-
чае фронтом кристаллизации служит граница между
жидкой фазой и двухфазной зоной.
Процесс фазового перехода из жидкого в твердое
состояние — кристаллизация — начинается на вкрапле-
ниях твердой фазы, называемых центрами кристалли-
зации, и сопровождается их развитием и увеличением
119
в объеме. Процесс образования новой фазы связан с
затратой энергии на создание межфазной границы
раздела. Скорость превращения жидкой фазы в твер-
дую определяется двумя основными факторами — теп-
ловыми условиями и числом центров кристаллизации,
возникающих в единицу времени в- единице объема
расплава. С увеличением скорости зарождения центров
кристаллизации и снижением скорости их роста умень-
шаются размеры зерна.
Центры кристаллизации формируются либо в объ-
еме жидкой фазы, либо па посторонних твердых части-
цах, имеющихся в жидкости. Наиболее эффективное
каталитическое действие оказывают находящиеся в
расплаве твердые частицы, отвечающие принципу
физического, структурного и размерного соответствия
кристаллизирующемуся веществу. Уменьшению работы
образования зародыша способствуют снижение в усло-
виях вибрационных воздействий поверхностного натя-
жения на границе кристалл—жидкость и понижение
краевого угла смачивания.
Обработка расплава может производиться в пред-
кристаллизационный период. Вибрационные воздейст-
вия на жидкую фазу приводят к дополнительному ее
нагреву и активации нерастворимых примесей. Вслед-
ствие этого твердые примеси, которые без вибрацион-
ной обработки обычно не участвуют в процессе кри-
сталлизации, смачиваются жидкостью и превращаются
в активные центры кристаллизации. Перегрев устраня-
ет возможность кристаллизации расплава по всему
объему. Зона зарождения и роста кристаллов переме-
щается непосредственно к фронту кристаллизации, где
существует избыток активированных центров кристал-
лизации.
Такое изменение условий зарождения и роста кри-
сталлов при непрерывном литье легких сплавов позво-
ляет сформировать измельченную сверхтонкую струк-
туру. В такой структуре отсутствуют дендритные обра-
зования. Слитки имеют большую плотность, малое
содержание водорода и характеризуются повышенной
пластичностью и вязкостью.
Воздействие вибрации на тверую фазу приводит к
обламыванию ветвей растущих дендритов и распреде-
лению обломков циркуляционными потоками в объеме
жидкой фазы. При этом резко возрастает количество
центров кристаллизации и происходит переохлаждение
120
расплава. Структура отливки также измельчается. Это
достигается расширенной объемной кристаллизацией в
условиях переохлаждения и избытка центров кристал-
лизации.
В отсутствие вибрационных воздействий в кристал-
лизующемся металле, залитом в форму, у стенок
вследствие переохлаждения образуются центры кри-
сталлизации. На первом этапе рост кристаллов проис-
ходит в основном у поверхности в различных направ-
лениях. Со временем растущие из различных центров
кристаллы смыкаются друг с другом. При этом у по-
верхности отливки образуется область мелких рав-
ноосных кристаллов. Затем начинается развитие кри-
сталлов внутрь расплава, образование столбчатых
вытянутых кристаллов — дендритов. Кристаллы ориен-
тированы в направлении теплоотвода и развиваются
навстречу движению теплового потока. По мере раз-
вития процесса растущие кристаллы входят в контакт
друг с другом.
Так возникает столбчатая структура слитка. Обыч-
но он состоит из наружного слоя мелких равноосных
кристаллов, области столбчатых кристаллов и цент-
ральной зоны равноосных кристаллов. В отливках со
столбчатой структурой центральная часть слитка обыч-
но обогащена примесями, что ухудшает ее механиче-
ские свойства. Область столбчатых кристаллов также
характеризуется пониженной прочностью. С точки зре-
ния повышения механических свойств металла жела-
тельна равноосная структура с зернами, имеющими
равные размеры в разных направлениях и случайную
ориентировку в пространстве.
Решающую роль в решении основных проблем
улучшения структуры отливок играет интенсификация
тепло-массообмепных процессов в расплаве при обра-
ботке его вибрацией. Вследствие этого выравниваются
условия кристаллизации по всему объему слитка, со-
здаются условия для образования благоприятной с
точки зрения служебных свойств структуры отливки.
Вибрационные воздействия позволяют не только со-
вершенствовать существующую технологию литейного
производства. С применением вибрации можно решать
также задачи, которые не решаются традиционными
плавильно-литейными методами.
Вибрационная технология позволяет создавать но-
вые композиционные материалы из несплавляемых в
121
обычных условиях компонентов. Вибрационная акти-
вация частиц порошка упрочняющей фазы позволяет
достичь их смачивания расплавом металла — матрицы.
Циркуляционные и быстрые колебательные движения
частиц расплава позволяют обеспечить равномерное
распределение в обрабатываемой среде вводимых при-
садок. Такими методами созданы совершенно новые
антифрикционные металлы, не нуждающиеся в смаз-
ке,— сплавы алюминия и свинца и бронзы с графитом.
У подшипников, изготовленных из алюминиево-
свинцового сплава, срок службы в 10 раз больше, чем
у обычных. Однако изготовить их обычными методами
не удается. Свинец, введенный в сплав, хотя и в очень
ничтожных концентрациях, не вступает в реакции с
алюминием и сохраняет самостоятельность в смеси.
Вибрационными же методами его удается равномерно
распределить по всей массе алюминия.
Еще сложнее обстоит дело с получением компози-
ции бронза—графит. Обычными методами ее создать
вообще нельзя. В интенсивных вибрационных полях
два несоединяемых в обычных условиях компонента
дают новый прочный материал, обладающий прекрас-
ными антифрикционными свойствами и не нуждаю-
щийся в смазке. Эти функции выполняет графит, на-
ходящийся в составе композита.
Вибрационная технология позволяет получить так
называемые синтетические дисперсные сплавы, кото-
рые состоят из несплавляемых компонентов. Созданы
металлообразные композиции на основе алюминиевых,
цинковых и медных сплавов с добавкой синтетических
алмазов, карбидов и других высокотвердых компонен-
тов. Удается получить многие другие композиции, об-
ладающие необычными, в ряде случаев уникальными,
свойствами.
В машинах непрерывного литья заготовок, которые
позволяют внедрять наиболее прогрессивные поточные
методы в литейное производство, наряду с решением
задач улучшения служебных свойств литых заготовок
методами вибротехники можно улучшить условия
прохождения слитка через кристаллизатор. При про-
хождении заготовки через кристаллизатор возникают
довольно значительные сопротивления движению, обус-
ловленные трением ее о поверхность кристаллизатора.
Вследствие этого в закристаллизовавшейся, но
сравнительно тонкой части слитка тяговым устропст-
122
вом создаются значительные напряжения, нередко яв-
ляющиеся причиной разрыва затвердевшей оболочки
заготовки и выплескивания находящегося внутри жид-
кого металла. Значительные сопротивления движению
заготовки кладут предел скорости литья. Это ограничи-
вает производительность по литью и затрудняет согла-
сование литейной машины с прокатным станом. Из-за
этого возникают трудности в реализации прогрессивной
поточной технологии в металлургическом производстве.
Сообщая кристаллизатору колебания в определен-
ных режимах, можно сразу решить обе задачи — улуч-
шить структуру заготовки и снизить сопротивления
прохождению слитка через кристаллизатор. Прохожде-
ние слитка через кристаллизатор является своеобраз-
ной транспортной задачей. Перемещение слитка про-
изводится тяговым органом, которым служит часть
самого же слитка, а управление силами трения осуще-
ствляется наложением вибрационных воздействий на
источник сил сопротивления — кристаллизатор.
Управляя силами трения за счет вибрационных воз-
действий, удается значительно снизить напряжения в
опасных сечениях слитка. Ускорение теплообменных
процессов в водоохлажденном вибрационном кристал-
лизаторе позволяет снизить время для достижения по-
требной по условиям прочности толщины затвердевше-
го металла. Снижение сопротивлений движению и
ускорение процесса кристаллизации дают возможность
повысить скорость движения заготовки. Может быть
увеличена производительность литейной машины. Все
это открывает перспективы создания литейпо-прокат-
ных агрегатов.
Вибрация уплотняет бетон
и погружает сваи в грунт
Основой целого ряда технологических процессов явля-
ется вибрационное уплотнение и формование различ-
ных дисперсных систем с разнообразными реологиче-
скими свойствами и характеристиками. Сюда относятся
уплотнение бетона в формах и в массиве и трамбование
грунтов. Производится уплотнение различных насып-
ных грузов при погрузке в железнодорожные вагоны и
автосамосвалы. Вибрация обеспечивает плотную уклад-
123
ку расфасованных продуктов в таре. Даже газеты в
типографиях раскладываются в пачки с помощью ви-
брации.
Вибрационное уплотнение позволяет повысить каче-
ство изделий, например бетонных или железобетонных.
Более плотная укладка различных продуктов повыша-
ет эффективность использования тары и различных
транспортных средств.
Вибрационная обработка бетона основана на том,
что под действием периодических деформаций бетон-
ная смесь приобретает повышенную текучесть, в ней
происходит более плотная укладка частиц заполнителя
и дегазация. В виброактивированном состоянии смесь
лучше заполняет формы. Вибрационные воздействия
возбуждают инерционные объемные силы, сообщаю-
щие смеси колебательные и медленные циркуляцион-
ные движения. При высокочастотной обработке суще-
ственное влияние на поведение смеси оказывают также
ее периодические упругие деформации. Разрушая
структуру бетонной смеси, вибрационные и волновые
воздействия значительно ослабляют внутренние связи,
поэтому сравнительно слабые гравитационные силы
обеспечивают плотную укладку массы.
Бетонную массу обрабатывают, сообщая ей вибра-
ции с поверхности, внутри объема или всему бетонно-
му изделию подлостью. Внутренняя обработка, полу-
чившая название глубинной, так как вйбраторы
действительно опускаются в бетонную массу на значи-
тельную глубину, применяется при обработке больших
объемов монолитных конструкций. Поверхностное виб-
роунлотнение также применяется на монолитных кон-
струкциях. Колебания всему изделию сообщаются при
изготовлении строительных железобетонных конструк-
ций на виброплощадках, на которых устанавливается
форма. Кроме виброплощадок, для формирования бе-
тонных изделий применяют вибропггампы и вибропро-
тяжные устройства.
Вибрационные площадки состоят из рабочего стола,
на котором устанавливается форма с бетонной смесью,
упругой системы и вибровозбудителя. Столу вибропло-
щадки обычно сообщаются либо горизонтальные, либо
вертикальные прямолинейные колебания. В некоторых
типах виброплощадок стол колеблется по круговой или
эллиптической траектории. При этом есть как горизон-
тальные, так и вертикальные составляющие колебаний.
124
a
P и c. 27. Вибрационные площадки для уплотнения бетона
Площадки: а — вертикальная, б — виброформа с упругими панелями.
а: 1 — амортизаторы; 2 — пружины; 3 — пригруз; 4 — форма; 5 — стол;
6 — реактивная масса; 7 — эксцентриковый вибратор; з — буферы;
б: Г — панель; 2' — инерционный вибратор
Наиболее простыми являются виброплощадки с
инерционным дебалансным приводом. Площадка име-
ет одну колеблющуюся массу — стол, который установ-
лен на пружинах опорной рамы. Дебалансный вибра-
тор закреплен на столе снизу. Стол площадки соверша-
ет эллиптические колебания. Поэтому на формуемую
смесь действуют как горизонтальные, так и вертикаль-
ные колебания.
Особенно эффективное уплотнение бетонной смеси
достигается при сообщении ей вертикальных несиммет-
ричных или ударных' колебаний. Причем ударный им-
пульс должен быть направлен вниз так, чтобы бетон-
ная смесь Прижималась к днищу формы. В этом слу-
чае достигается наилучшее уплотнение. Вертикальная
виброударная площадка состоит из тяжелой реактив-
ной массы, служащей рамой для установки эксцентри-
кового привода (рис. 27, а).
На реактивной массе с помощью пружин установ-
лен стол, к которому крепится шатун вибратора. Меж-
ду рамой и столом с зазором установлены резиновые
буфера. На столе, обычно с помощью электромагнитов,
крепится форма с обрабатываемой бетонной смесью.
Рама виброизолируется от строительных конструкций
125
амортизаторами. Привод обеспечивает относительные
перемещения стола и рамы. Размах этих перемещений
больше, чем зазор между буферами. Поэтому при ра-
боте виброплощадки буфера периодически соударяются
и на стол направлен импульс, прижимающий бетонную
смесь к днищу формы.
Принципиальным недостатком всех виброплощадок
является необходимость сообщать колебания тяжелым
конструктивным элементам — столу, раме, форме. Ве-
дутся работы по созданию принципиально и конструк-
тивно более совершенных устройств. Величину колеб-
лющихся масс конструкции удается коренным образом
уменьшить в формах с упругими панелями. В такой
форме боковые стенки выполняются достаточно элас-
тичными, чтобы им можно было сообщить упругие ко-
лебания.
Форма устанавливается вертикально и заполняется
бетонной смесью (рис. 27, б), на боковых стенках фор-
мы закреплены вибраторы. При работе вибраторов бо-
ковые стенки формы совершают колебания, как упру-
гие мембраны. При этом бетонной смеси по всей пло-
щади контакта сообщаются вибрации. Такая форма не
требует применения виброплощадок, колеблющиеся мас-
сы резко уменьшаются. По существу, колеблется толь-
ко легкая мембранная стенка формы. Правда, недо-
статком такого устройства является неравномерность
проработки бетонной смеси. В центре стенки амплиту-
да максимальна и убывает к краям формы.
Для улучшения уплотнения бетонная смесь на виб-
роплощадках дополнительно нагружается статической
силой. Обычно на свободную поверхность смеси накла-
дывают тяжелые грузы, дополнительная нагрузка мо-
жет быть создана также прижимными пружинами или
пневматическим баллонами (рис. 27, а), В некоторых
случаях на пригрузочную плитку устанавливают виб-
ратор. Применение нагрузочных приспособлений поз-
воляет формовать изделия из жестких бетонных
смесей.
Наряду с виброплощадками применяют виброштам-
пы и вибропротяжные устройства. Виброштампы уста-
навливаются на верхнюю свободную поверхность фор-
муемого изделия. Виброштамп оказывает на бетонную
смесь не только вибрационное воздействие, но и стати-
ческое. Вибропротяжные устройства укладывают пред-
варительно обработанную бетонную смесь.
12G
Глубинное уплотнение бетонной смеси производится
при строительстве различных сооружений из монолит-
ного бетона. В качестве погружаемого рабочего органа
глубинного виброуплотнителя могут служить корпус
вибратора, плита или специальная пространственная
конструкция. В двух первых конструкциях используют
погружаемые в бетон вибровозбудители. Находят при-
менение вибраторы с электрическим, пневматическим и
гидравлическим приводами. Двигатель может быть
скомплектован непосредственно с вибратором или со-
единяться с ним гибким валом.
Чаще всего применяют вибровозбудители, встроен-
ные в цилиндрический кожух небольшого диаметра.
Возмущающая сила генерируется дебалансом, располо-
женным на неподвижной оси, или дебалансом плане-
тарного типа, облегчающего внутреннюю поверхность
кожуха и приводимого во вращение шарнирным валом.
Для уплотнения бетонной смеси в небольших объемах
и в труднодоступных местах применяются ручные глу-
бинные виброуплотнители различных размеров с диа-
метром корпуса от 25 до 140 мм. Частота создаваемых
вибраций составляет от 100 до 400 в секунду. При этом
создаваемые ускорения колебаний могут превышать в
140 раз ускорения, создаваемые силами тяжести.
Для обработки больших объемов бетонной смеси
применяют подвесные глубинные виброуплотнители.
Подвесные виброуплотнители компонуются в виде па-
кетов, составленных из большого числа цилиндриче-
ских виброуплотнителей. В процессе работы пакеты
опускаются в бетон, вытаскиваются и переносятся на
новые места с помощью кранов или специально обору-
дованных тракторов. Отдельные виброуплотнители
обычно располагаются в пакете вертикально.
Для выполнения некоторых видов работ находят
также применение горизонтально расположенные виб-
роуплотнители типа «торпеда». Такой виброуплотни-
тель протягивается в массиве бетона на заданной глу-
бине специально оборудованным трактором. Из
горизонтальных виброуплотнителей также могут ком-
поноваться пакеты. С помощью пакетных виброуплот-
нителей существенно повышается производительность
обработки бетонной смеси.
Излучающая поверхность цилиндрических вибро-
уплотнителей невелика. Вследствие этого ограничива-
ются объемы бетонной смеси, которые можно обрабо-
127
тать с одной установки. Значительно эффективнее про-
изводится обработка бетонной смеси, когда виброуплот-
нители устанавливаются на стальном листе. При этом
возрастает излучающая поверхность. В стальной плите
можно возбудить волновые колебания разных форм,
что позволяет более полно согласовать параметры виб-
рации и характеристики обрабатываемого массива.
К проблемам уплотнения бетонных смесей близко
примыкают задачи трамбования и уплотнения грунтов,
дорожных оснований и покрытий. Механизм уплотне-
ния грунтов тот же, что и у бетонных смесей. Однако
большее разнообразие свойств грунтов, в ряде случаев
худшая уплотняемость, требует применения более мощ-
ного, работающего в интенсивных режимах и разнооб-
разного по параметрам оборудования. Это различные
типы вибрационных трамбовок и катков.
Большие объемы работ выполняются с помощью
передвижных, самоходных и накладных вибрационных
трамбовок. Вибрационные трамбовки по принципиаль-
ному устройству сходны с вибрационными площадками
для уплотнения бетонной смеси. Вибротрамбовка со-
стоит из поддона, на котором непосредственно или че-
рез пружины укрепляются инерционные вибраторы.
Применяются дебалансные и маятниковые вибраторы.
Для мощных установок используют многовальные
вибраторы направленного действия. Для обеспечения
интенсивного режима трамбования груйта возмущаю-
щая сила вибратора подбирается таким образом, чтобы
периодически происходил отрыв поддона с последую-
щим падением и ударом по грунту. Поддон может пе-
ремещаться по обрабатываемой поверхности тяговым
устройством за канат.
Возможно и самопередвижение. Для этого вибратор
устанавливают с наклоном в сторону движения или со-
единяют дебалансные валы вибратора таким образом,
чтобы возмущающая сила была направлена под углом
к направлению транспортирования. При этом установ-
ку ориентируют так, чтобы в момент подскока на нее
действовала составляющая возмущающей силы в на-
правлении транспортирования.
В самопередвигающихся вибротрамбовках преду-
сматривается возможность изменять направление дей-
ствия возмущающей силы. Это позволяет регулировать
скорость перемещения вибротрамбовки и направление
транспортирования. В наиболее совершенных конструк-
128
Р и с. 28. Вибротрамбовки
а — самоходная; б — перемещаемая трактором; в — виброударная;
г — вибрационный каток
циях можно плавно менять кинетический момент де-
балансов и скорость их вращения. Такая виброустанов-
ка небольшими скачками перемещается в заданном
направлении (рис. 28, а). Для увеличения статической
нагрузки на грунт сверху вибратора иногда на пружи-
нах устанавливают дополнительные грузы.
Применяют самоходные установки, в которых виб-
ротрамбовка подвешивается на пружинах к консоли,
установленной на тракторе. Тяговое усилие вибротрам-
бовки сообщается трактором через сцепное устройство
(рис. 28, б). Для уплотнения тяжелых грунтов ис-
пользуют виброударные трамбовки. В такой установке
применяется многомассная колебательная система
(рис. 28, в).
Одна масса жестко крепится на поддоне. На нее
устанавливается на пружинах вторая подвижная мас-
са. Между обеими массами располагаются бойки. На
подвижной массе также на пружинах монтируется
вибратор, при работе которого колебания через пружи-
ны передаются подвижной массе. Колебания от нее
сообщаются через пружины поддону. Кроме того, на
поддон действуют ударные импульсы, возникающие
при взаимодействии бойков.
Виброударное трамбование во многих случаях ока-
зывается более эффективным, так как грунт подвер-
гается воздействию колебаний не только на частоте
работы вибратора, но и более высокочастотных. Выс-
шие гармоники колебаний возбуждаются при соударе-
нии бойков. Вибротрамбовки перемещаются тяговыми
5 И. Ф. Гончаревич
129
устройствами волоком. Если встроить вибратор во
вращающееся колесо, то получится вибрационный ка-
ток. В вибрационном катке суммируются два механиз-
ма уплотнения грунта — укатывание и вибротрамбова-
ние. Такое сочетание разнородных воздействий на
грунт дает хорошие результаты.
Вибрационные катки могут быть прицепными и са-
моходными. Прицепные катки имеют обычно один
валец, в который встроен дебалансный вибратор.
Самоходные вибрационные катки могут иметь два или
три вальца. Вибраторы обычно встраиваются в ведущие
вальцы (рис. 28, г).
Если присоединить к стержню вибратор и поставить
его вертикально на почву, то при включении он под
действием собственного веса начинает погружаться в
грунт. На этом явлении основан вибрационный метод
погружения свай. Использование вибрации для умень-
шения сопротивлений грунта внедрением в него раз-
личных жестких элементов было одним из первых ши-
роких применений метода в промышленных масштабах.
В настоящее время этим методом погружают в грунт
не только сваи. В песчаные грунты производится по-
гружение пустотелых оболочек диаметром в несколько
метров и весом в сотни тонн.
Сущность метода вибрационного внедрения жестких
элементов в грунты состоит в том, что под действием
периодических движений происходит изменение усло-
вий взаимодействия внедряемого элемента с силами
сопротивления по контактным поверхностям. Здесь
находит применение известное свойство вибрации
снижать сопротивления перемещению. Однако в рас-
сматриваемом случае возникающие на контактных по-
верхностях явления сложнее, чем при классическом
взаимодействии движущегося тела с силами сухого
трения.
Дело в том, что разнообразные встречающиеся грун-
ты представляют собой сложные физико-химические
дисперсные системы. Поведение их в условиях вибра-
ционных воздействий весьма разнообразно. Этим опре-
деляется различная эффективность метода при погру-
жении свай в разные грунты.
Какие же сопротивления испытывает погружаемый
элемент и как они преобразуются под воздействием
вибрации? Сопротивления грунта внедрению свай
включают лобовые, действующие на торец погружаемо-
130
го элемента, и боковые — на его стенках. Эти сопро-
тивления формируются в результате взаимодействия
погружаемого элемента с окружающим его грунтом.
В значительной степени они определяются реологиче-
скими свойствами грунта, режимом вибрации и пара-
метрами погружаемого элемента.
В выявлении закономерностей этих непростых взаи-
модействий неоценимую помощь оказывает виброреоло-
гия. Различные виды грунта методами виброреологии
могут быть представлены обобщенной инерционной
упруговязкопластичной моделью.
Для конкретных разновидностей грунтов на основе
обобщенной модели могут быть получены более про-
стые модели. Из общего набора реологических свойств
упругости, вязкости и пластичности в модели должны
быть оставлены только те, которыми характеризуется
данный грунт. В большинстве случаев считают, что по
боковой и лобовой поверхностям погружаемого элемен-
та действуют силы сухого трения, т. е. принимается
чисто пластичная модель грунта. Для некоторых грун-
тов лобовые сопротивления моделируют упругопластич-
ной моделью.
В зависимости от вида грунта сопротивления внед-
рению вибрирующей сваи могут существенно умень-
шаться. На боковых поверхностях сопротивления могут
уменьшаться приблизительно в десять раз, а на лобо-
вой — вдвое. Наибольшее снижение сопротивлений
имеет место в водонасыщенных песчаных и глинистых
грунтах. Воздействие вибрации на такие грунты
изменяет их физико-химическое состояние, происходит
потеря устойчивости структуры, и грунты разжи-
жаются.
В плотных глинистых и маловлажных песчаных
грунтах, физико-химические свойства которых мало
меняются под действием вибрации, по контактным по-
верхностям действуют силы сухого трения. Эффектив-
ный способ управления силами трения путем приложе-
ния вибрационных воздействий в направлении, перпен-
дикулярном к контактной поверхности при погружении
свай, применить трудно. Сложно и не всегда допустимо
сообщать поперечные колебания погружаемым элемен-
там. Однако можно применить способ управления тре-
нием путем приложения вибрационных воздействий
перпендикулярно к направлению движения погружае-
мого элемента. Это достигается приданием ему кру-
5*
131
Р и с. 29. Вибропогружатели
а — с продольными колебаниями; б — с крутильными колебаниями;
в — виброударный
тильных колебаний вокруг продольной оси. Перемеще-
ние происходит за счет осевых вибраций.
Вторым способом преодоления сил сухого трения,
действующего на погружаемый элемент, является созда-
ние несимметричных колебаний. Несимметричные коле-
бания возбуждаются виброударными односторонними
вибровозбудителями. Удар по свае создается вибрато-
ром, установленным на свае с зазором. При колеба-
ниях вибратор периодически выбирает зазор и бьет по
бойку, установленному на свае. При этом на сваю дей-
ствует в направлении погружения большее усилие, чем
в противоположную сторону. При ударе возбуждаются
также высшие гармоники, которые благоприятно дей-
ствуют на изменение физико-химических свойств грун-
та в желаемом направлении.
Продольные колебания погружаемому элементу
сообщаются инерционным вибратором направленного
действия (рис. 29, а). Для сообщения ему продольно-
крутильных колебаний дебалансы в вибраторе устанав-
ливаются на противоположных концах каждого вала
(рис. 29, б). Такой вибратор создает возмущающую
силу, действующую по продольной оси сваи, и возму-
щающий момент вокруг нее. Виброударный механизм
состоит из вибратора, соединенного со сваей направ-
ляющей и пружинами ударников, один из которых
установлен на свае, а второй — на корпусе вибратора
(рис. 29, в). В процессе работы вибратор перемещает-
ся относительно сваи. При выбирании зазора происхо-
дит соударение бойков, благодаря чему свая получает
импульс в направлении движения.
132
Вибрация обрабатывает деталь
со всех сторон сразу
Можно ли обрабатывать сразу всю поверхность детали
сложной конфигурации? На металлообрабатывающих
станках это практически сделать невозможно. Резец с
одной режущей кромкой или даже фрезы, имеющие
несколько режущих кромок, могут одновременно обра-
батывать поверхность какой-нибудь одной формы.
А вот вибрационные машины позволили решить эту
задачу очень просто и эффективно. На деталь одновре-
менно действует большое количество режущих инстру-
ментов, столько, сколько можно разместить по всей
поверхности детали. Весь инструмент самостоятельно
приспосабливается к поверхности детали, как бы слож-
на она ни была.
Правда, вибрационные машины используются толь-
ко на финишных операциях, таких, как шлифование и
полирование, упрочнение поверхности и выравнивание
напряжений в поверхностных слоях и т. д. Для виб-
рационной обработки деталь помещается в закреплен-
ном или свободном состоянии в вибрирующую камеру.
Камера заполнена наполнителем и рабочей жидкостью.
В качестве наполнителя используются гранулы аб-
разива или стальные шарики. Рабочие жидкости при-
меняются для интенсификации процесса обработки,
сущность которого состоит в том, что наполнитель под
действием вибрации рабочей камеры совершает слож-
ные медленные циркуляционные и быстрые колебатель-
ные движения.
Если обрабатываемая деталь закреплена, то на нее
воздействует абразив в своем абсолютном перемещении.
Если деталь свободно помещена в наполнитель, то
между ними все равно существует относительное дви-
жение и деталь подвергается воздействию наполнителя.
При абразивной обработке на съем металла с детали
оказывает влияние величина сил взаимодействия и ско-
рость относительного перемещения. В упрочняющей
обработке решающей является сила соударения с
заполняющими камеру шариками.
Каждое элементарное взаимодействие детали с
гранулой абразива или шариком весьма незначитель-
но. Однако надо учитывать, что за каждый цикл коле-
баний с деталью одновременно взаимодействует огром-
ное количество гранул или шариков. И все это ну лото
133
помножить на большое число таких взаимодействий за
время обработки.
В результате получаются очень высокие эффекты
виброобработки за сравнительно короткое время, обыч-
но менее 1 ч. После виброупрочнения выносливость
детали повышается в 2—8 раз, возрастает износостой-
кость. Виброшлифование и полирование позволяют
получить высокое качество поверхности у детали самой
сложной формы.
Эффективность объемной вибрационной обработки
во многом определяется характером движения напол-
нителя. Для повышения производительности установки
в конце процесса должно осуществляться отделение
обработанных деталей от наполнителя. Для повышения
интейсивности виброобработки и создания возможности
разделения деталей и наполнителя рабочие камеры вы-
полняются самой разнообразной формы.
Широко используются камеры ^/-образного попереч-
ного сечения. Камера устанавливается на пружинах,
и ей сообщаются колебания инерционным дебалансным
вибратором. В установках непрерывного действия иа
днище рабочей камеры под углом к ее продольной оси
привариваются направляющие ребра. Вследствие этого
при колебаниях рабочей камеры наполнитель начинает
совершать винтовые циркуляционные движения. Эти
движения складываются из поперечных циркуляций
по замкнутым траекториям и медленного перемещения
вдоль камеры.
Вследствие этого оказывается возможной организа-
ция поточного процесса виброобработки. Детали не-
прерывно подаются с одного конца рабочей камеры и
разгружаются вместе с наполнителем на противополож-
ном конце. На вибрационном сите производится отделе-
ние наполнителя от деталей. Наполнитель конвейером
вновь подается в рабочую камеру с загрузочного кон-
ца, а детали идут на упаковку.
Более интенсивные движения наполнителя имеют
место в рабочих камерах круглого поперечного сечения,
особенно в тех случаях, когда они колеблются по слож-
ным многолепестковым траекториям (рис. 30, а).
В рассмотренных машинах происходит плоское цирку-
ляционное движение наполнителя. В то же время из-
вестно, что удельный объем металла с детали возраста-
ет с усложнением траектории движения наполнителя.
В этом отклонении более совершенными являются
134
a — с цилиндрической камерой; б — с торо-
идальной камерой; в — с притирочным дис-
ком. 1 и 2 — притирочные диски; з — инер-
ционный вибратор с регулируемыми деба-
лансами; 4 — рабочие пружины; 5 — амор-
тизаторы
Р и с. 30. Виброустановкн для объемной обработки деталей
установки с пространственными движениями абразива.
Пространственное движение абразива осуществляется
в вибрационных установках с вертикальной цилиндриче-
ской, тороидальной и винтовой камерами, совер-
шающими крутильно-поступательные перемещения
(рис. 30, б). Такие колебания возбуждаются дебалапс-
пым вибратором с вертикальной осью, на концах
которой установлены дополнительные смещенные де-
балансы. Этот вибратор создает одновременно вращаю-
щую силу и момент.
Для объемной обработки наряду с инерционным
приводом в виброустановках находят применение
электромагнитные вибраторы. В установке с винтовой
рабочей камерой также можно организовать поточный
процесс обработки деталей. Для этого детали загру-
жаются в нижнем конце рабочего органа. В верхней
части рабочий орган оборудован разделительной ре-
шеткой. Детали поднимаются по ней и выходят из
камеры, а наполнитель просыпается через ячейки ре-
шетки и ссыпается вниз в загрузочную часть рабочей
камеры.
Вибрационная обработка применяется также для
шлифования плоских, конических и подобных поверх-
ностей. При этом может обрабатываться одна или
сразу несколько деталей. Притирочная установка со-
стоит из инерционного вибратора, создающего вращаю-
135
шуюся возмущающую силу и возмущающий момент
(рис. 30, в).
На вибраторе расположен диск, опирающийся на
основание с помощью упругих элементов. На диск
укладывается партия деталей и накрывается вторым
притирочным диском. Верхний диск связан с нижним
пружинами. В зависимости от характеристики пружин
он может быть неподвижен в процессе работы машины
либо колебаться в противофазе к нижнему диску.
При соответствующей настройке вибратора нижнему
диску можно сообщить сложное движение, формирую-
щееся из поступательных круговых колебаний и дви-
жения его оси по образующей конуса. При таких коле-
баниях обрабатываемые детали на притирочном диске
перемещаются по спиральным траекториям относитель-
но оси диска.
Принцип обработки свободным абразивом в вибра-
ционном поле получает и ряд других применений.
Созданы разнообразные высокочастотные, работающие
в ультразвуковом диапазоне станки для обработки сво-
бодным абразивом особо твердых материалов.
Для снятия заусенцев с деталей применяют высо-
кочастотные установки, близкие по устройству к рас-
смотренным выше. Процесс обработки при высокоча-
стотных вибрациях получил название кавитационно-
абразивной эрозии. Это объясняется тем, что при
высокочастотной обработке в обрабатывающей среде
возникают кавитационные явления, которые оказыва-
ют большое влияние на ход процесса.
Установка состоит из рабочей камеры, днищу кото-
рой высокочастотный вибровозбудитель сообщает ко-
лебания. Камера заполнена суспензией, состоящей из
жидкости и взвешенных в ней частиц абразива. Под
действием высокочастотных колебаний возникают кави-
тационная эрозия и абразивная обработка под дейст-
вием зерен абразива, циркулирующих в акустических
течениях. Обрабатываемые детали в суспензии находят-
ся во взвешенном состоянии, что обеспечивает их
равномерную обработку со всех сторон. При этом
сохраняется форма и обеспечиваются точные размеры
деталей.
Наряду с объемной находит применение высоко-
частотная размерная обработка деталей свободным
абразивом. Этот метод позволяет вырезать пластины
из различных высокотвердых материалов, выполнять
136
отверстия сложного профиля, изготавливать фасонные
детали. При высокочастотной размерной обработке
между инструментом и обрабатываемой поверхностью
подается суспензия абразива. Рабочий инструмент
может совершать продольные, поперечные или кру-
тильные колебания. Для осуществления процесса рабо-
чий инструмент должен быть прижат с достаточной
силой к обрабатываемой поверхности.
Механизм высокочастотной размерной обработки
деталей состоит в следующем. Амплитудные значения
усилий, создаваемых вибрирующим инструментом,
в несколько раз превышают силу его статического
прижатия к обрабатываемой поверхности. Вследствие
этого инструмент периодически теряет контакт с обра-
батываемой поверхностью. В образовавшийся зазор
засасывается суспензия абразива.
При ходе вперед инструмент ударяет по находящим-
ся между ним и обрабатываемой поверхностью части-
цам абразива. При этом вершины зерен вдавливаются
в поверхностные слои обрабатываемой детали и инст-
румента. Внедрение частиц абразива в поверхность
инструмента сопровождается только его пластическими
деформациями, так как инструмент изготавливают из
вязкого материала.
В поверхностном слое обрабатываемой детали, кото-
рая изготовлена их хрупкого материала, возникает
сеть микротрещин. Микротрещины зарождаются в
перенапряженных местах. Под влиянием пульсирую-
щих напряжений в поверхностном слое обрабатываемой
детали имеют место расширение и дальнейшее развитие
микротрещип. В те моменты, когда максимальные каса-
тельные напряжения в зоне вдавливания превзойдут
сопротивления сдвигу, происходит выкалывание частип
материала с обрабатываемой поверхности.
Вода и поверхностно-активные вещества, входящие
в состав суспензии, расширяют трещины и облегчают
образование выколов. Точность обработки и шерохова-
тость получаемых поверхностей пропорциональны сред-
нему размеру зерен абразива.
В процессах резания большие энергозатраты связа-
ны с преодолением сил трения. Резец задней гранью
трется об обрабатываемую деталь. Снимаемая стружка
трется о переднюю грань резца. Сообщая вибрацию
резцу, удается снизить непроизводительные затраты.
137
Высокочастотное вибрационное резание нашло ши-
рокое применение в машиностроении. Главным образом
его используют для улучшения процесса резания
труднообрабатываемых материалов, таких, как жаро-
прочные, титановые и тугоплавкие сплавы. При вибра-
ционном резании повышается качество обрабатываемой
поверхности. Вибрирующий инструмент используют
при точении, строгании, сверлении отверстий, нареза-
нии резьб и в других операциях. Режущему инструмен-
ту могут сообщаться самые разнообразные колебания:
в направлении резания, перпендикулярно, прямолиней-
ные колебания, крутильные, эллиптические и т. д.
Обработка ведется на обычных металлорежущих
станках, дополнительно оборудованных приспособле-
ниями, сообщающими колебания режущему инструмен-
ту. В качестве вибровозбудителей используются гидрав-
лические и пневматические вибраторы, а также магни-
тострикционные и пьезопараметрические преобразова-
тели.
Вибрация рабочего инструмента не только снижает
сопротивления от сил внешнего трения, но и облегчает
пластическое деформирование срезаемого слоя. Вибра-
ционные воздействия вызывают знакопеременные на-
пряжения, что способствует разрушению материала при
более низком среднем уровне разрушающих напряже-
ний. Снижаются сопротивления сходу стружки.
Вибрация позволяет также снизить сопротивления
упруговязкому деформированию. При обработке реза-
нием вязких материалов на рабочей поверхности режу-
щего инструмента имеет место торможение стружки,
образуется нарост, резко возрастают силы трения.
На вибрирующем инструменте стружка из вязкого ма-
териала сходит легко, резко снижаются силы трения.
Пластическое деформирование материалов возника-
ет в технологических операциях, где производится из-
менение формы обрабатываемого изделия. Сюда отно-
сятся прокатка, волочение, прессование, выдавливание
и т. д.
Пластическое деформирование начинается в тех
случаях, когда в материале создаются напряжения,
превышающие предел текучести. По мере развития
процесса возрастают напряжения, необходимые для
обеспечения дальнейшей деформации. Наблюдается
упрочнение материала в процессе деформирования.
138
Если деформирование осуществлять при наложении
вибрационных воздействий, то снижается предел теку-
чести. Деформирование в условиях пульсирующего или
знакопеременного нагружения не сопровождается силь-
ным упрочнением. С повышением интенсивности виб-
рации предел текучести резко снижается. Причем про-
цесс деформирования практически не сопровождается
упрочнением.
Изменение характеристик технологических процес-
сов обработки материалов давлением обусловливается
комплексным воздействием вибрации как на характер
пластического деформирования, так и на внешнее тре-
ние между обрабатываемым изделием и рабочим ин-
струментом. Особенности вибрационной обработки по
сравнению с обычной обработкой давлением можно
наглядно проиллюстрировать на примере свободной
осадки металлов. При обычной свободной осадке мак-
симальная деформация образца имеет место в наиболее
удаленных от его торцов зонах. При этом обрабатывае-
мый образец приобретает бочкообразную форму.
При осадке в условиях вибрационных воздействий
характер формирования торцевых поверхностей образ-
ца кардинально меняется. В этом случае металл интен-
сивно скользит по торцам с наибольшей деформацией
образца в центре торца. Материал из центральных час-
тей образца течет к торцам.
Указанные особенности деформации образца обус-
ловливаются проявлением его инерционных свойств
при динамическом нагружении. Так как деформация
осуществлялась в виброударных режимах, то в прикон-
тактной зоне формировались максимальные динамиче-
ские напряжения, которые постепенно затухали при
распространении в глубь образца.
Отражением этих взаимодействий и является рас-
клепывание торцов образца. Сказывается также эффект
снижения сопротивления от сил трения на контактной
поверхности между образцом и рабочим инструментом.
Небольшие силы внешнего трения не могут воспрепят-
ствовать тенденции расползания торцов в стороны.
В условиях вибрационных и виброударных воздей-
ствий существенно снижаются усилия пластического
деформирования при свободном осаживании образца.
В виброударных режимах деформирование образца
происходит без статического нагружения. Отмечается
также увеличение степени деформации.
139
Управляя вибрацией,
можно повысить эффективность
машин
Применение вибрации часто позволяет значительно
повысить эффективность машин традиционного типа.
Вибрационные воздействия используются главным об-
разом для снижения внешнего и внутреннего трения
в обрабатываемых продуктах или элементах машин.
К числу таких комбинированных устройств относят-
ся вибропневмотранспортные установки, которые харак-
теризуются рядом положительных свойств. Эти уста-
новки были изготовлены на базе пневмотранснортных
систем путем дополнительного оснащения их вибраци-
онными механизмами. При этом удалось не только по-
высить, но и устранить принципиальные недостатки
каждой из систем — пневматической и вибрационной.
В настоящее время сформировались два основных
типа пневмотранспортных установок — для перемеще-
ния мелкодисперсных порошков и кусковых материалов.
В обоих случаях перемещение груза происходит под
действием потока воздуха или другого газа, с большой
скоростью движущегося по транспортному трубопрово-
ду. Энергию, необходимую для преодоления сопротив-
лений, груз получает от газовой струи, действие кото-
рой на транспортируемый груз определяется двумя
составляющими — динамической и статической.
При перемещении крупнокусковых грузов коэффи-
циент заполнения трубопровода невелик, поэтому
незначителен и статический напор. Движущая сила
создается в основном динамическим напором. Динами-
ческий напор пропорционален площади поперечного
сечения слоя груза и квадрату скорости воздуха по
отношению к грузу. Имеют значение также форма и
состояние поверхности груза. Более неровная и ше-
роховатая форма лучше взаимодействует с газовым
потоком.
В этом взаимодействии твердой и газовой сред за-
ложено одно противоречие. Оно состоит в том, что
сила воздействия потока тем значительнее, чем медлен-
нее движется груз. Тогда больше их относительная
скорость. Но если скорость груза мала по сравнению
со скоростью струи, то груз использует лишь неболь-
шую часть из запаса энергии, которым располагает
140
газовый поток. Это значит, что мы выбрасываем
энергию в буквальном смысле слова на ветер. Коэф-
фициент полезного действия передачи энергии от пото-
ка к грузу в этом случае незначителен.
Для того чтобы улучшить использование энергии
воздуха, нужно, чтобы груз двигался с возможно боль-
шей скоростью, желательно соизмеримой со скоростью
потока. Но в этом случае будет ничтожна сила воздей-
ствия потока на груз и может оказаться недостаточной
для преодоления сопротивлений перемещению груза.
Значит, нужно снижать сопротивления транспортиро-
ванию. Помогает вибрация. Сообщив трубопроводу ко-
лебания, можно значительно снизить сопротивления
транспортированию. При этом установка будет рабо-
тать с меньшими расходами энергии.
При транспортировании мелкодисперсных порошко-
вых грузов сила воздействия струи в большей степени
определяется статической составляющей давления. Это
связано с тем, что слой груза в значительно большей
степени перекрывает поперечное сечение трубопровода.
Такой слой в какой-то мере напоминает поршень, на-
ходящийся в цилиндре. Статический напор пропорцио-
нален площади этого «поршня» и действующему на
него давлению.
Откуда берется статическое давление на слой груза,
если он находится не в цилиндре, где давление дейст-
вует только с одной стороны, а в трубопроводе, где
напор действует со всех сторон? Если рассматривать
слой груза, находящийся в трубопроводе, как некий
«поршень», длина которого равна протяженности трубо-
провода, то силу статического напора, действующего на
этот слой, можно определить, взяв разность давлений
в начале и конце трубопровода и умножив на площадь
поперечного сечения слоя груза. А такая разность
давлений существует — в начале трубопровода давле-
ние максимальное, а на выходе равно атмосферному.
С чем связано падение давления по длине трубопрово-
да? Расходуя энергию на преодоление сопротивлений
груза и сопротивлений собственному движению, уско-
рения груза и самого себя, сжатый воздух теряет дав-
ление.
Мелкодисперсный порошок движется по трубопро-
воду не так, как крупнокусковой груз. Он не скользит
по нижней стенке трубопровода, а взвешивается в
струе за счет вертикальных пульсационных составляю-
141
щих скорости потока. Как же в этом случае вибрация
может способствовать улучшению процесса транспор-
тирования?
В данном случае используется эффект виброкипе-
ния слоя. Хотя мелкодисперсный груз и взвешивается
в некоторой степени аэродинамическими силами, одна-
ко распределение его по сечению трубопровода остается
неравномерным.
Концентрация груза значительно выше у нижней
стенки, чем у верхней. Поэтому эффективность дейст-
вия статического напора уменьшается в верхней части
трубопровода. Кроме того, велико внутрислоевое тре-
пне, что приводит к дополнительным затратам энергии.
Сообщение трубопроводу колебаний способствует вы-
равниванию концентрации и снижает внутрислоевое
трение. При этом оказывается возможным обеспечи-
вать процесс транспортирования при меньших расхо-
дах энергии.
Особенно эффективно применение такого виброаэро-
кипящего слоя при высоких концентрациях транспорти-
руемого материала. Так как в любом сечении трубо-
провода расход материала одинаков, то максимальные
его концентрации имеют место на тех участках трубо-
провода, где груз перемещается с наименьшей ско-
ростью. Это загрузочная часть трубопровода, где груз
еще не успел приобрести скорость, и устройство, вво-
дящее груз в трубопровод-питатель. В этих местах
груз идет практически полным потоком по всему сече-
нию трубопровода. Здесь особенно велики сопротивле-
ния транспортированию и чаще всего возникают заку-
порки. Поэтому вибрации обычно сообщают питателю
и разгонному участку трубопровода.
В разных местах по длине трубопровода имеются
участки, где концентрация смеси резко повышается,—
это изгибы трубопровода, так называемые колена.
Снижение скорости тем больше, чем значительнее тру-
бопровод меняет направление. В этих местах слой
груза ударяется в степку трубопровода, резко теряет
скорость, что приводит к повышению концентрации
смеси. В местах изгибов целесообразно сообщать тру-
бопроводу вибрацию.
Часть питателя, непосредственно соединенная с тру-
бопроводом, обычно представляет собой цилиндриче-
скую камеру, оборудованную на конце кольцевым соп-
лом. Вибрация камеры обеспечивается эффективным
142
смешением материала с воздухом и получением одно-
родной аэросмеси. Такая смесь хорошо проходит через
разгонный участок трубопровода.
Виброаэрокипящий слой находит применение во
многих технологических и транспортно-технических
установках. Примером такого применения может слу-
жить топка с вибрирующими колосниками для сжига-
ния твердого топлива. Совместное воздействие вибра-
ции колосников и проходящей через них струи воздуха
создает эффекты кипения слоя сжигаемого топлива.
При этом обеспечивается равномерный подвод воздуха
по всему объему горящего топлива, улучшается про-
цесс горения, снижается вынос несгоревших твердых
частиц и газообразных горючих компонент. Эффектив-
ное сгорание топлива достигается при меньшей подаче
воздуха, что уменьшает потери тепла.
К числу комбинированных транспортных устройств
относятся вибрационно-магнитные установки, которые
используются в промышленности для перемещения
магнитных грузов. В этих установках вибрация приме-
няется как средство снижения сопротивлений транспор-
тированию. Вибромагнитная транспортирующая уста-
новка состоит из вибрирующего грузонесущего орга-
на, вдоль которого расположены тяговые электромаг-
ниты.
При вибромагнитном транспортировании в зависи-
мости от характера работы электромагнитов могут реа-
лизоваться различные режимы движения груза. Пред-
ставляет интерес случай перемещения груза пульси-
рующим потоком. Порционный, или пульсирующий,
грузопоток формируется электромагнитной тяговой
системой.
Если на грузонесущем органе находится непрерыв-
ный слой магнитного груза, то при включении тяговой
системы его частички попадают в зону действия
электромагнитов и втягиваются внутрь последних.
Поскольку электромагниты располагаются вдоль гру-
зонесущего органа на таком расстоянии, чтобы зоны
их действия смыкались, но не перекрывали друг дру-
га, то при включении электромагнитов непрерывный
слой груза разрывается и группируется отдельными
порциями. Электромагниты устанавливаются на таком
расстоянии, чтобы разрывы между порциями груза
имели минимальную величину, исключающую попада-
ние элементарных порций в зону действия поля, на-
143
правленного противоположно направлению транспор-
тирования.
Для исключения тормозящего влияния магнитного
поля электромагнит работает в режиме прерывистого
питания. Система коммутации настраивается на вы-
ключение электромагнита в момент, когда в его центре
оказывается середина элемента груза (т. е. когда дви-
жущая сила становится равной нулю). Возможен так-
же режим работы, когда электромагнит выключается
с некоторым запаздыванием. Тогда груз несколько
притормаживается и движение его носит более выра-
женный пульсирующий характер.
Повторное включение происходит при попадании
груза в зону действия соседнего (по направлению дви-
жения) электромагнита. При таком режиме работы
сила притяжения действует на груз только в направ-
лении транспортирования. Работа вибрационной систе-
мы синхронизируется с тяговой системой таким обра-
зом, чтобы сила магнитного притяжения действовала
в тот момент, когда груз не имеет контакта с транс-
портирующей поверхностью. При таком режиме вибро-
магнитной установки снижаются затраты энергии в
тяговой системе и уменьшается интенсивность износа
грузонесущего органа. Вибрирование грузонесущего
органа позволяет существенно снизить сопротивления
движению тяговой цепи скребковых конвейеров.
Вибрационные воздействия применяют и для повы-
шения эффективности работы погрузочных машин.
В ковшевых погрузочных машинах колебания сооб-
щаются всему ковшу или только его зачерпывающей
части. В погрузочных машинах с нагребающими лапа-
ми колеблется носок плиты, на которую производится
нагребание груза. В гребковых машинах с верхним
захватом вибрирующим органом является сам гребок.
В грейфере колебания сообщаются челюстям.
Во всех погрузочных машинах применение вибра-
ции способствует снижению рабочих усилий и повы-
шению производительности. У машин с ковшевым за-
черпывающим рабочим органом производительность
повышается на 20%, У нагребающих — на 10—15,
у гребковых — примерно на 40—60%.
Правильно подобранные режимы вибрации рабочих
органов многих других традиционных машин позво-
ляют заметно снижать рабочие усилия и повышать
производительность.
144
Волновые устройства
заявляют свои права
Все вибрационные высокочастотные машины, работаю-
щие в диапазоне ультразвуковых колебаний, в качестве
вибровозбудителей используют устройства, в которых
происходят волновые колебания. Рабочие органы высо-
кочастотных вибрационных машин также иногда со-
вершают волновые колебания. Для того чтобы тело
могло совершать волновые колебания, оно должно быть
практически деформируемым в режиме этих колеба-
ний. О волновых колебаниях тела имеет смысл гово-
рить в тех случаях, когда на его длине укладывается
хотя бы половина волны. Но даже это скромное требо-
вание далеко не всегда выполняется.
Дело в том, что между размерами волны, скоростью
ее распространения в материале, из которого изготов-
лена деталь, и частотой колебаний существует опреде-
ленное соотношение. Длина волны равна скорости ее
распространения, деленной на частоту колебаний.
Попробуем оценить, какова длина волны при частотах
работы большинства вибрационных машин.
Скорость распространения волны в стали состав-
ляет несколько тысяч метров в секунду. Возьмем виб-
ромашину, совершающую пятьдесят колебаний в се-
кунду. При этом длина волны будет составлять около
100 м. Если мы ее наложим на рабочий орган вибро-
машины длиной 5—10 м, то, естественно, мы не заме-
тим ее действия. Поэтому мы и рассматриваем колеба-
ния рабочих органов вибромашины как колебания пе-
деформируемого твердого тела. И теперь мы видим,
что это вполне допустимо.
По-другому обстоит дело в высокочастотных маши-
нах, работающих при частотах 20 000—1 000 000 Гц и
даже выше. В них длины волн уже составляют мил-
лиметры, и на длине рабочего органа укладывается
уже не одна волна. Но и в высокочастотных виброма-
шинах не всегда проявляются волновые эффекты. Если
рабочий орган мал, например представляет собой
шарик в установке для вибронаклепа, а частота коле-
баний не очень высока, то и здесь его можно рассмат-
ривать с позиций обычных вибрационных движений.
В этом разделе речь пойдет в основном не о высо-
кочастотных вибрационных установках, а об установ-
ках, работающих в диапазоне обычных частот вибра-
145
ционных машин. Однако рабочий орган этих мащин
все же совершает волновые или волнообразные движе-
ния. Волновые колебания рабочих органов можно со-
здать и на низких частотах с помощью специальных
устройств и даже обычных вибраторов.
Такое устройство может быть даже чрезвычайно
простым. Широко известно транспортное устройство
типа виброленты. Оно представляет собой стальной
лист длиной в несколько метров, один конец которого
закреплен на какой-нибудь опоре, а на втором свобод-
ном конце установлен инерционный вибратор. Лист
может лежать на резиновых подкладках или просто на
почве. Под действием возмущений вибратора свободный
конец его перемещается и совершает волнообразные
движения.
Если расположить его с наклоном, то находящийся
на нем насыпной материал под действием встряхива-
ний листа и сил тяжести сползает вниз. В данном
случае вибрации листа лишь снижают трение, а дви-
жение происходит самотеком. Это простейшее устрой-
ство, в котором создаются периодические упругие де-
формации рабочего органа, что позволяет говорить о его
волнообразных движениях. Одпако разработаны и
более совершенные механизмы, рабочий орган которых
способен совершать волновые движения.
В общем случае в деформируемом рабочем органе
возбуждаются продольные и поперечные волпы. Эти
волны могут быть стоячими и бегущими. В первом
случае горб и впадина волны постоянно находятся в
одном месте, переходя только друг в друга. Во втором
горбы и впадины волн распространяются вдоль рабо-
чего органа. Скорость их движения получила название
фазовой скорости движения волны.
Необходимо отметить следующее. Хотя мы видим,
что горбы и впадины волны бегут по поверхности рабо-
чего органа от одного его конца к другому, на самом
деле никакого поступательного движения с переносом
материальных объектов нет. Эта картина создается в
результате колебаний точек поверхности рабочего ор-
гана относительно некоторого центра в продольном и
поперечном направлениях. При этом каждая точка
перемещается относительно соседней с некоторым
сдвигом по фазе.
Если бы этого сдвига не было, то мы получили бы
не волновое движение, а обычное вибрационное, харак-
146
терноо для жестких недеформируемых рабочих орга-
нов. Таким образом, вибрационная установка является
частным случаем волновой установки. Это такая уста-
новка, у которой отсутствует сдвиг в колебаниях со-
седних точек рабочего органа. Иначе можно сказать
так: в вибрационной установке длина волны бесконеч-
но большая.
Поскольку процессы транспортирования лежат в
основе многих транспортно-технологических машин,
рассмотрим закономерности работы волнового конвейе-
ра. В общем случае процесс транспортирования груза
формируется как поперечными, так и продольными
волнами на транспортирующей поверхности грузоне-
сущего органа. Поперечные волны в основном ответ-
ственны за характер взаимодействия транспортирую-
щей поверхности с перемещаемым грузом. Ими опре-
деляются периодические изменения давления груза на
транспортирующую поверхность. От продольных волп
зависит скорость транспортирования. Эффект транс-
портирования может быть достигнут как при стоячих,
так и при бегущих волнах. Однако бегущие волны со-
здают возможность реализации более эффективных и
разнообразных режимов.
Конфигурация бегущей волны и ее транспортные
возможности обусловливаются параметрами продоль-
ных и поперечных волн в их взаимодействии (рис. 31).
Изменение волны во времени t и по длине грузонесу-
щего органа х характеризуется соотношениями:
для поперечных волн
y=Avcos((f)t—kx);
для продольных волн
х=Лхсо8 (at—кх+у),
где Ау и Ах — амплитуды поперечных и продольных
волн; со и у — круговая частота и угол сдвига фаз
колебаний; к — волновое число; /с=со/рф; — фазовая
скорость волны, 17ф=Асо/2л; к — длина волны.
Изменяя размахи поперечных и продольных коле-
баний транспортирующей поверхности и угол сдвига
фаз между ними, можно возбуждать волны различного
вида. Меняя их длину, можно делать их более круты-
ми или пологими.
Для каждой точки транспортирующей поверхности,
находящейся на поверхности волны, стрелкой показана
скорость ее перемещения вдоль грузонесущего органа.
147
Рис. 31. Бегущие волны
Смещения х, у и скоро-
сти vx поверхности вол-
ны:
а — при уС90“; б — при
у=90°. в: смещения х, у
и приведенные скорости х
поверхности высокочастот-
ной волны; у — ускорение
волны в направлении
оси у; ъф — фазовая ско-
рость волны; Ах=Ау=1;
у=90°; fe=0,l
Видно, что на разных участках волны точки, находя-
щиеся на ее поверхности, движутся с различными,
меняющимися по величине и направлению скоростями.
Поэтому задача проектирования режима транспортиро-
вания груза при волновых колебаниях транспортирую-
щей поверхности сводится к тому, чтобы за счет попе-
речных волн изменять силу трения груза о поверхность
грузонесущего органа на различных участках волны.
Необходимо, чтобы трение груза было больше на
тех участках волны, где транспортирующая поверх-
ность движется вперед. На участках волны, движу-
щихся в противоположную сторону, необходимо умень-
шить или вообще устранить сцепление груза с транс-
портирующей поверхностью. Так для движения вправо
волной, приведенной на рис. 31, а, следует увеличивать
сцепление на участке 1, 2 и уменьшить в области 23.
Рассмотрим, каким образом происходит транспор-
тирование штучных грузов волновой транспортирую-
щей установкой. Если положить на транспортирую-
щую поверхность одиночный груз, длина которого
148
примерно в 2 раза больше длины волны, то он распо-
ложится на ее горбах. Перемещаясь по транспорти-
рующей поверхности, он будет касаться только горбов
волны.
Какова же будет скорость перемещения одиночного
длиномерного груза? Такая же, как у участков транс-
портирующей поверхности, находящейся на горбе
волны.
Теперь проведем эксперимент. Положим линейку
на транспортирующую поверхность, конфигурация
бегущей волны которой приведена на рис. 31, а. Ли-
нейка останется неподвижной, хотя по транспорти-
рующей поверхности бегут волны. В чем же дело?
Внимательно изучив график продольных скоростей
волны, увидим, что на горбе скорость равна нулю.
Естественно, что линейка не движется.
Зато на волне, конфигурация которой приведена на
рис. 31, б, линейка будет быстро перемещаться.
У такой волны участок транспортирующей поверх-
ности на гребне волны движется с максимальной ско-
ростью.
Нужно ли для длиномерных грузов заботиться
о регулировании величины его прижатия к грузонесу-
щему органу? Нужно. Если величина прижатия к
транспортирующей поверхности недостаточна, груз
может частично проскальзывать. При этом скорость
его будет ниже скорости движения грузонесущего
органа в местах контакта.
Иначе обстоит дело при перемещении массового
груза, коэффициент передачи скорости от грузонесу-
щего органа перемещаемому грузу будет определяться
эффективностью управления трением его о транспор-
тирующую поверхность. Практически затруднительно
обеспечить передачу скорости массовому грузу с коэф-
фициентом, близким к единице. Всегда будет иметь
место некоторое отставание. И на разных участках
волны груз перемещается с несколько различными
скоростями. При неизменном расходе по длине транс-
портирующей машины это приводит к тому, что проис-
ходят периодические деформации слоя транспортируе-
мого груза. Толщина слоя будет различной на различ-
ных участках волны.
Следует иметь в виду одну особенность процесса
волнового перемещения: наклон транспортирующей
поверхности по длине грузонесущего органа периоди-
149
чески меняется. Величина наклона определяется кон-
фигурацией волны. Углы наклона тем больше, чем мень-
ше длина волны и больше амплитуда поперечных коле-
баний. Вследствие этого возникает скатывающая сила,
которая либо способствует движению груза в направ-
лении транспортирования, либо препятствует ему. При
правильно подобранных параметрах продольных и по-
перечных колебаний за счет наклона транспортирую-
щей поверхности можно создать дополнительную дви-
жущую силу.
В волновых транспортирующих установках с высо-
кочастотными колебаниями, в которых длина волны
соизмерима с амплитудами составляющих колебаний
или даже меньше их, конфигурация волн на транспор-
тирующей поверхности будет иметь несколько иной
вид (рис. 31, в).
Еще об одной особенности волновой установки.
В ней отсутствуют периодические перемещения огра-
ниченных масс, как например, в вибрационных маши-
нах, а происходят лишь периодические изменения
формы деформируемого рабочего органа. Вследствие
этого в целом он полностью уравновешен. В волновых
установках нет необходимости заниматься вопросами
уравновешивания или виброизоляции сил инерции
для предотвращения их передачи на окружающие кон-
струкции.
Рабочий орган волновой транспортирующей маши-
ны может быть выполнен из упругого материала, на-
пример резины, или более сложной деформируемой
конструкции с резиновой оболочкой, имеющей поло-
сти, заполненные воздухом. В качестве привода вол-
новой транспортирующей установки могут быть исполь-
зованы гидравлические и пневматические вибраторы,
электромагнитные вибраторы, магнитострикционные
возбудители и др. Такая приводная система может
быть завулканизирована непосредственно в ленту.
Находят также применение различные механические
приводные устройства.
Весьма просто привод реализуется в высокочастот-
ных установках с помощью пьезопреобразователей.
Некоторые сложности возникают только при возбуж-
дении бегущих волн. В установках с механическим
приводом грузонесущему органу чаще сообщаются вол-
нообразные движения, т. е. обычно воспроизводятся
только горбы и впадины волны. Грузонесущий орган
150
таких установок состоит обычно из отдельных элемен-
тов, которые совершают колебания со сдвигом по фазе
но отношению друг к другу.
В некоторых конструкциях между противофазно
колеблющимися элементами натягиваются эластичные
деформируемые поверхности. При этом удается полу-
чить волновые колебания, правда, очень ограниченного
класса.
Волнообразные движения транспортирующей по-
верхности создаются в установках различного кон-
структивного исполнения. Грузонесущий орган может
быть выполнен из продольных колосниковых решеток,
расположенных таким образом, что колосники одной
решетки располагаются между колосниками другой.
Решетки могут совершать противофазные относитель-
ные поступательные движения. В общем случае эти
движения могут происходить как в продольном, так и
в поперечном направлении.
В установках другого типа грузонесущий орган со-
ставлен из двух чередующихся комплектов пластин,
установленных поперек транспортирующей поверх-
ности таким образом, что пластины каждого комплек-
та могут поворачиваться в противоположные стороны
на некоторый угол относительно друг друга. И нако-
нец, имеются устройства, в которых грузонесущий
орган скомпонован из двух чередующихся систем экс-
центриковых валов, вращающихся в одну сторону, по
имеющих по отношению друг к другу сдвиг по фазе.
В зависимости от характера движения транспорти-
рующих элементов каждой системы на транспорти-
рующей поверхности грузонесущего органа форми-
руется, подобие стоячих волн, которые могут быть по-
перечными, продольными или их комбинацией. При
этом гребень волны располагается поперек грузопесу-
щего органа или вдоль него.
В транспортирующих машинах с волнообразными
движениями, использующимися для перемещения
крупнокусковых грузов, грузонесущий орган которых
выполнен из совмещенных колосниковых решеток,
могут быть реализованы как прямолинейные, так и
эллиптические колебания каждого из транспортирую-
щих элементов (рис. 32). При этом рабочей частью
траектории, на которой происходит взаимодействие с
крупными кусками груза, является верхняя часть
траектории каждой решетки.
151
Рис. 32. Режимы волнообразных движений грузонесущих органов
транспортирующих машин
Колебания: а — продольные прямолинейные; б — продольные эллипти-
ческие; в — крутильные; г — с вращением эллиптических валов
Вследствие наличия двух решеток частота взаимо-
действий с грузом удваивается по отношению к часто-
те колебаний колосниковых решеток. При этом про-
дольная и поперечная составляющая перемещения
транспортирующей поверхности определяется законо-
мерностями движения колосниковых решеток выше их
нейтрального положения. В случае прямолинейных ко-
лебаний поперечная и продольная составляющие пере-
мещений находятся в одной фазе (рис. 32, а). При
эллиптических колебаниях между ними имеется сдвиг
фаз, величина которого обусловливается конфигура-
цией эллиптической траектории колосниковых решеток
(рис. 32, б).
Установки с волнообразными движениями транс-
портирующей поверхности, грузонесущий орган кото-
рых выполнен из совмещенных колосниковых реше-
ток, не говоря уже о динамических достоинствах
конструкции, оказываются более эффективными при
перемещении кусковых грузов толстым слоем, чем
обычные вибрационные транспортирующие машины.
В транспортирующих машинах с волнообразными дви-
жениями грузонесущего органа максимальная эффек-
тивность процесса транспортирования достигается при
меньших углах полета груза, чем в вибрационных.
В результате этого создается возможность эффектив-
ного перемещения трудно транспортируемых грузов
при меньших ускорениях колебаний грузонесущего
органа. Вследствие воздухопроницаемости грузонесу-
щего органа устранена опасность возникновения аэро-
динамических сопротивлений в слое груза, затрудняю-
152
щих его перемещение и снижающих скорость транс-
портирования.
В установках с волновыми перемещениями транс-
портирующей поверхности, колосниковые решетки ко-
торых совершают эллиптические колебания, грузонесу-
щий орган на рабочем участке траектории движется
только в направлении транспортирования. Таким об-
разом, у этого типа машин на рабочем участке траек-
тории отсутствует характерное для всех видов вибра-
ционных транспортирующих машин периодическое
движение грузонесущего органа в сторону, противопо-
ложную направлению транспортирования.
Вследствие однонаправленного движения грузоне-
сущего органа на рабочем участке траектории может
быть повышена скорость транспортирования. Отпадает
необходимость управлять силами трения груза о транс-
портирующую поверхность. Создается также возмож-
ность перемещения груза без подбрасывания при до-
статочно высокой эффективности передачи ему ско-
рости.
Эта особенность транспортирующих машип с волно-
образными движениями рабочей поверхности, созда-
ваемыми эллиптическими колебаниями колосниковых
решеток, делает их применение весьма желательным
при перемещении крупнокусковых грузов. При транс-
портировании скальных крупнокусковых грузов в от-
сутствие подбрасывания снижаются динамические на-
грузки на грузонесущий орган и увеличивается долго-
вечность всей конструкции.
Передвижной питатель-грохот, предназначенный
для погрузки горной массы, подаваемой экскаватором
на магистральный ленточный конвейер, с волнообраз-
ными движениями рабочего органа представляет собой
уравновешенную двухмассовую колебательную систе-
му, опертую в неподвижной точке. Рабочий орган вы-
полнен из двух отдельных совмещенных колосниковых
решеток, колеблющихся в противофазе. Он опирается
на резинометаллическую упругую систему, состоящую
из внешнего и внутреннего стальных цилиндров, со-
единенных резиновыми кольцами.
Внешние и внутренние цилиндры крепятся к раз-
личным системам колосниковых решеток. Так как ци-
линдры разделены резиновыми кольцами, каждый
комплект колосниковых решеток обладает подвиж-
ностью относительно другого. В резиновое кольцо за-
153
вулканизирована неподвижная опора системы реше-
ток. Благодаря такому соединению колосниковые ре-
шетки могут совершать независимые колебания.
В качестве привода применены инерционные вибра-
торы, возмущающая сила которых меняется по эллип-
тическому закону. Каждый комплект колосниковых ре-
шеток приводится в колебательное движение своей
парой вибраторов. Дебалансы вибраторов на различ-
ных комплектах колосниковых решеток смещены на
угол 180°.
Вследствие этого колосниковые решетки колеблют-
ся в противофазе, поэтому реакции от опорных упру-
гих элементов уравновешиваются на опорной раме.
Это устраняет необходимость применения тяжелых
фундаментов.
Основными элементами рабочего органа грохота с
волнообразными движениями рабочего органа, предна-
значенного для подачи породы в дробилку, являются
автономные колосниковые решетки-секции, связанные
с неподвижными балками короткими рессорами из ре-
зинокордной конвейерной ленты. Колосники приводят-
ся в движение инерционными самобаланспыми вибра-
торами, установленными па их торцах.
Расчетная производительность грохота 3000 т/ч при
ширине рабочего органа 4,5 м. Волнообразные движе-
ния колосников разрыхляют горную массу и повы-
шают эффективность процесса классификации. Исполь-
зование резины для футеровки колосников и в упругой
подвеске и связанное с этим значительное демпфиро-
вание в колебательной системе в известной мере спо-
собствуют снижению динамических нагрузок и обеспе-
чивают их более равномерное распределение по колос-
никам. В некоторой степени подавляется также шум,
возникающий при ударах породы по колосникам.
Рабочий орган питателя-грохота (с волнообразными
движениями), предназначенного для подачи горной
массы из бункера на магистральный ленточный кон-
вейер, выполнен из двух колосниковых решеток, вхо-
дящих одна в другую и колеблющихся в противофазе.
Для сообщения колебаний колосниковым решеткам со
сдвигом по фазе используются два установленных по
бокам и соединенных общим валом инерционных виб-
ратора со смещенными дебалансами.
Дебалансные валы вращаются в одном направле-
нии, создавая возмущающий момент. Вибраторы кре-
154
пятся к колосниковым решеткам в резиновых втулках.
Колосниковые решетки соединены между собой ре-
зиновой упругой системой. При полном уравновешива-
нии колеблющихся масс и равных сопротивлениях на
обоих колосниковых решетках опорный кронштейн не
совершает колебаний. Такая конструкция упругой си-
стемы эффективно предотвращает передачу динамиче-
ских нагрузок на опорные конструкции.
Интенсивное воздействие волнообразных движений
колосниковых решеток на материал, находящийся в
бункере, улучшает его поступление на рабочий орган
и повышает производительность установки.
Для загрузки магистральных ленточных конвейеров
применяют питатели с волнообразными движениями
рабочего органа другой конструкции. Днище этого пи-
тателя состоит из двух комплектов поперечных плит,
частично перекрывающих друг друга. Плиты закрепле-
ны на валах, расположенных поперек рабочего органа.
Смежным валам с помощью эксцентрикового привода
сообщаются крутильные колебания в противополож-
ные стороны на угол от 5 до 18°. При этом соседние
плиты перемещаются в противофазе и транспортирую-
щая поверхность совершает волнообразные движения
(рис. 32, ‘в).
Перемещение материала по транспортирующей по-
верхности обусловливается рядом факторов: дей-
ствием составляющей силы тяжести в направлении
транспортирования, создаваемой общим наклоном уста-
новки, скатыванием с наклонной пластины и подталки-
ванием поворачивающихся пластин. Производитель-
ность питателя около 3000 т/ч при ширине рабочего
органа 1,6 м.
Для выгрузки материала из бупксров может быть
использована еще одна конструкция питателя с волно-
образными движениями транспортирующей поверх-
ности. Питатель имеет рабочий орган, составленный
из валов, расположенных поперек движения груза
(рис. 32, а). На валах имеются установленные с про-
межутками кулаки эллиптической формы, располо-
женные таким образом, что кулаки каждого вала вхо-
дят во впадины соседнего. Кулаки соседних валов по-
вернуты относительно друг друга таким образом, что
при вращении валов транспортирующая поверхность
представляет собой подобие волновой (рис. 32, а).
Такое движение поверхности рабочего органа создает
155
интенсивное шевеление перемещаемого материала и
сообщает ему достаточно высокую скорость транспор-
тирования.
Наряду с транспортными устройствами, рабочий
орган которых совершает волнообразные движения,
находят применение машины с чисто волновыми дви-
жениями транспортирующей поверхности. Принцип
волнового транспортирования привлекает к себе вни-
мание в силу ряда его достоинств. При волновом
транспортировании грузонесущий орган не совершает
возвратно-поступательных перемещений как единое
твердое тело, а лишь испытывает упругие деформа-
ции. Поэтому силы инерции движущихся масс уравно-
вешиваются внутри установки, что снимает заботы по
ее уравновешиванию и виброизоляции.
Принципиальное устройство волновых установок
открывает возможности создания исключительно ком-
пактных и простых транспортных машин. Наметились
два направления в создании грузонесущих органов
волновых транспортирующих машин со специальными
механическими устройствами, формирующими волно-
вые движения на резиновом рабочем органе и с реак-
тивным возбуждением упругих колебаний.
К первым относятся грохоты-питатели с упругоде-
формируемой рабочей поверхностью. Установка пред-
ставляет собой двухмассную колебательную систему,
содержащую раму грузонесущего органа и располо-
женную ниже, соединенную с ним шатунами реактив-
ную массу, на которой установлен вибратор типа де-
баланса.
Концы упругодеформируемой транспортирующей
поверхности жестко закреплены в раме грузонесущего
органа.
Средняя, свободно провисающая часть транспорти-
рующей поверхности опирается и крепится на попе-
речные балки, имеющиеся как в раме грузонесущего
органа, так и на реактивной массе. Балки грузонесу-
щего органа и реактивной массы попеременно чере-
дуются. Расстояние между всеми балками в исходном
положении одинаковое.
Установка работает следующим образом. Под воз-
действием возбуждающей силы вибратора реактивная
масса и грузонесущий орган совершают противофаз-
ные колебания. Вследствие таких колебаний расстоя-
ние между соседними балками с одной стороны умень-
156
шается, например слева, а со второй, справа, увели-
чивается.
Во второй половине цикла картина меняется: слева
расстояние между балками увеличивается, а справа
уменьшается. Так как эластичная упругодеформируе-
мая поверхность закреплена па балках, в зоне сбли-
жения она провисает, а в зоне расхождения балок рас-
тягивается. Поэтому зоны растяжения и сжатия
каждые полцикла меняются местами, на транспорти-
рующей поверхности формируется своеобразная попе-
речная волна. Такие движения рабочей поверхности
обеспечивают перемещение и одновременное интенсив-
ное разделение по крупности обрабатываемого мате-
риала.
К этому же типу волновых устройств относятся
моечные машины, применяемые в обогащении и строи-
тельстве, например, для отмывки щебня. Днище такой
машины выполнено из эластомера, натянутого на раме.
Оно разделено по длине на три равных участка, каж-
дому из которых сообщаются с помощью специального
механизма поперечные перемещения, сдвиг по фазе в
каждом механизме составляет 120°.
В установках второго типа применяются упруго-
деформируемые резонирующие рабочие поверхности.
Это может быть сито в грохоте или сплошной резино-
вый лист в конвейере. В такого рода установках упру-
годеформирующая рабочая поверхность закрепляется
в жесткой раме грузонесущего органа. Раме сообщают-
ся колебания с частотами, близкими к собственным
частотам колебаний упругодеформируемой транспор-
тирующей поверхности. При этом на ней возбуждают-
ся волновые колебания, амплитуда которых в несколь-
ко раз превышает амплитуду колебаний жесткой рамы
грузонесущего органа.
К волновым установкам относятся также устрой-
ства типа «вибролента», применяемые для выпуска
руды из горных выработок и бункеров. Грузонесущий
орган такой установки выполняется из одного или не-
скольких сложенных в пачку наподобие рессоры сталь-
ных листов, одному из концов которого, обычно более
тонкому, сообщаются колебания с помощью дебаланс-
ного вибратора.
Второй конец грузонесущего органа с помощью
троса закрепляется с наклоном в сторону выпуска.
Под действием колебаний свободного конца в гибком
157
грузонесущем органе возбуждаются стоячие волны,
которые под навалом обрушенной руды постепенно за-
тухают у завального конца. При действии этих волн
происходит уменьшение трения материала о транспор-
тирующую поверхность и руда самотеком поступает из
выпускной выработки.
Для предотвращения зависания насыпных мате-
риалов в бункерных устройствах находят применение
побудители с волновыми колебаниями рабочей поверх-
ности. Один из них выполнен в виде закрепленного по
контуру на стенке бункера резинового листа, под ко-
торый в режиме пульсаций подается сжатый воздух.
Под действием этих импульсов резина совершает вол-
новые колебания.
Вибропобудитель второго типа представляет собой
стальную ленту, которая подвешена вертикально в
верхней части бункера. Нижний конец ленты находит-
ся над разгрузочным отверстием. На нем крепится
вибратор. При его работе стальной лист совершает
волновые действия. Находящемуся в бункере вокруг
листа материалу сообщаются колебания. Такое устрой-
ство является эффективным средством против сводооб-
разования.
Волновые процессы чрезвычайно эффективны во
многих сферах приложения. Для их генерирования
обычно используются разнообразные по устройству
вибровозбудители. Однако в некоторых машинах тра-
диционного типа существуют естественные источники
волновых возбуждений. И если подойти к ним с точки
зрения возможности полезного применения, то можно
создать много полезных устройств.
Рассмотрим один из весьма поучительных примеров
такого подхода. В настоящее время широко распро-
странен наддув двигателей внутреннего сгорания. Сущ-
ность его состоит в том, что в цилиндры двигателя по-
дается предварительно сжатый воздух. Это позволяет
значительно повысить литровую мощность двигателя,
дает некоторую экономию топлива. Особенно важны
экологические аспекты метода — в отработавших газах
уменьшается содержание вредных примесей.
На большинстве двигателей используются нагнета-
тели с газотурбинным приводом. Находят применение
и устройства с механическим приводом. Однако основ-
ным их недостатком являются дополнительные энерге-
тические затраты на приведение в движение.
158
27
Рис. 33. Волновоп обмепник
давлением
1—ротор с продольными каналами;
2 — привод ротора от коленчатого
вала. А — сжатый воздух, подавае-
мый в цилиндр; В — очищенный воз-
дух из фильтра; С — отработавшие
газы из обменника; D — отработав-
шие газы из цилиндра
По I-I
И вот автомобилестроители вспомнили известный
уже более сорока лет принцип волнового обмена дав-
лением. Был разработан и успешно опробован ряд си-
стем наддува двигателей с волновыми обменниками
давления. Наддув с применением обменника давлени-
ем существенно повышает мощность двигателя в экс-
плуатационных режимах. Так, например, наличие вол-
нового обменника давлением на четырехцилиндровом
двигателе внутреннего сгорания с рабочим объемом
1,7 л повышает мощность до величины эквивалентной
мощности 2,5-литрового двигателя. Дизельный двига-
тель, оборудованный волновым обменником давлением
на легковом автомобиле, позволяет снизить на 35,4%
расход топлива в городских условиях по сравнению с
обычным бензиновым двигателем. Одновременно наблю-
даются меньшая дымность выбросов и уменьшение со-
держания в них других вредных веществ.
Как устроен волновой обменник давлением? Очень
рационально. Волна в устройстве формируется под дей-
ствием импульса от выброса отработавших газов. Ос-
новным узлом устройства волнового обмена давлением
является вращающийся барабан, состоящий из сег-
ментных каналов, расположенных параллельно оси
159
вращения и открытых с обоих торцов (рис. 33). Ба-
рабан приводится во вращение ременной передачей от
коленчатого вала. К барабану с одной стороны подво-
дится патрубок выпуска отработавших газов из ци-
линдра, а с другой — выпускной трубопровод.
Работает устройство так. Сегментйый канал (запол-
ненный атмосферным воздухом, предварительно про-
шедшим через фильтр), поворачиваясь с барабаном,
соединяется с патрубком выброса отработавших газов.
Вырвавшись из цилиндра через выпускной клапан,
газы с большой скоростью распространяются по па-
трубку, воздействуют на воздух, находящийся в сег-
ментном канале, и сжимают его.
В результате прохождения волны по патрубку и
сегментйому каналу воздух оказывается сжатым,
а отработавший газ слегка расширенным. Происходит
передача энергии сжатия от газа к воздуху, т. е. вол-
новой обмен давления.
Поворачиваясь далее с барабаном, сегментный канал
соединяется другим концом с впускным трубопроводом.
Сжатый воздух по трубопроводу через впускной канал
поступает в цилиндр. Таким образом, здесь полезно ис-
пользуется на сжатие часть внутренней энергии отра-
ботавших газов.
Не попадут ли при этом отработавшие газы вновь
в цилиндр? Нет. Скорость вращения барабана рассчи-
тана таким образом, что, как только сжатый воздух
выйдет из сегментного канала, барабан повернется и
отсоединит сегментный канал от впускного патрубка.
Одновременно сегментный канал противоположным
концом соединяется с выпускной системой и вновь за-
полняется атмосферным воздухом. Цикл повторяется
дважды за один оборот барабана.
Волновые процессы происходят не только в маши-
нах, созданных руками человека, но и в природе. И их
тоже можно использовать на благо общества. Огромная
волновая энергия сосредоточена в морях и океанах.
Ее можно утилизировать с помощью различных
устройств. Предложено очень простое устройство, ко-
торое за счет энергии волн перекачивает воду.
Механизм представляет собой гофрированную тру-
бу, нижний конец которой закреплен на дне посредст-
вом груза или якоря, а верхний с помощью поплавков
удерживается над уровнем воды. К этому нужно еще
добавить, что нижний конец трубы оборудован всасы-
160
вающим клапаном, а верхний — нагнетающим. Подни-
маясь на волне, поплавок растягивает трубу, объем ее
уменьшается, и находящаяся внутри вода выжимается
через нагнетающий клапан.
При попадании поплавка в провал между волнами
происходит укорачивание трубы, сопровождающееся ее
расширением, а также увеличением внутреннего объе-
ма. Уровень воды в трубе понижается, и вода из моря
через впускной клапан поступает в трубу. Затем про-
цесс повторяется. Таким образом, вода сама себя пере-
качивает. Возможны и другие режимы работы такого
устройства.
Еще один пример. Мы с вами привыкли, что вол-
нение в море препятствует движению корабля. Оказы-
вается, это на первый взгляд вредное явление можно
обратить себе на пользу — использовать энергию волн
для движения корабля. Согласитесь, неожиданное и
смелое предложение? Однако эта идея уже опробована
и оказалась вполне практичной. Волны дают энергию
для движения судна, одновременно уменьшается его
качка. Это неудивительно, так как, потеряв часть сво-
ей энергии, они уже не могут сильно раскачивать ко-
рабль. В настоящее время в ряде стран разработаны
различные модификации устройства для использования
энергии волн на кораблях.
Все эти устройства функционируют на основе ис-
пользования единого принципа. Под корпусом судна
устанавливается подводное крыло. Обычно оно распо-
лагается горизонтально под поверхностью воды и со-
единяется с корпусом судна стойками. Если крыло от-
клоняется от горизонтального положения, то на него, со
стороны воды действуют усилия, стремящиеся вернуть
его в исходное положение. Энергия для создания до-
полнительной движущейся силы получается в резуль-
тате взаимодействия крыла и перемещающейся воды.
Происходит взаимодействие волны с колебаниями под-
водного крыла, обусловленными продольной, попереч-
ной и вертикальной качкой корабля. Профиль и место
установки крыльев подбираются таким образом, что при
взаимодействии колеблющегося крыла с водой возни-
кают гидродинамические силы, действующие в направ-
лении движения судна.
Установлено, что на эффективность работы такой
системы большое влияние оказывает форма крыла. По
данным университета Чалмерса в Швеции, наилучши-
6 И- Ф. Гончаревич
161
ми характеристиками обладают крылья с закругленны-
ми передней и задней кромками. По форме они напо-
минают хвост быстроплавающих рыб и млекопитаю-
щих. Большие надежды в отношении повышения
эффективности действия системы возлагаются на
крылья с асимметричным профилем. Предполагается,
что они позволяют поддерживать эффективные режимы
работы при различной вертикальной качке корабля.
Ходовые испытания устройства на рыболовном
судне водоизмещением 180 т показали, что система,
разработанная норвежскими специалистами, дает воз-
можность сократить требуемую мощность двигателей
на 20%. Это эквивалентно 32 кВт при скорости судна
6 узлов. Японские специалисты предполагают провести
испытания подводных крыльев на более крупном
судне.
Эксперименты на моделях показали, что эффектив-
ность устройства зависит от соотношения параметров
судна и подводных крыльев, а также характеристик
волн. Поэтому суда, в конструкции которых имеются
устройства для использования энергии морских волн,
должны проектироваться с учетом особенностей мар-
шрутов эксплуатации.
Исследования показывают, что такая система может
быть использована и на крупных судах. Согласно рас-
четам, для судна длиной 70 м на скорости 9 узлов
расход горючего может сократиться на 42%. Однако
чем выше скорость судна, тем меньше экономия. Спе-
циалисты считают, что корабль длиной 100 м при пла-
вании в Северной Атлантике сможет экономить 35%
топлива на скорости 17 узлов и 9% — при повышении
скорости до 21 узла.
Искусственно созданные в атмосфере волны также
могут помочь в решении весьма важных задач. Фран-
цузские специалисты разработали волновое устройство
для борьбы с градом. Они предложили выстреливать
в облака газовую волну, образующуюся от взрыва
смеси ацетилена с кислородом. Газовая волна форми-
руется в виде тора наподобие тех колец из дыма, кото-
рые умеют пускать некоторые курильщики. Газовое
кольцо выстреливается из трубки высотой свыше 4 м.
Поднимаясь вверх, газовое кольцо непрерывно расши-
ряется, образуя огромную воронку.
Верхний край воронки на уровне облаков достигает
в диаметре 3 км. Действие газовой волны на облаке
162
складывается из двух факторов. Аэродинамический
удар волны по содержимому облака приводит к обра-
зованию многочисленных зародышей кристаллизации.
Интенсивные циркуляционные и колебательные движе-
ния зародышей во всем объеме облака приводят к бы-
строму образованию мелких ледяных зерен и препят-
ствуют возникновению крупных градин. Волновые ко-
лебания облачных масс способствуют быстрому выпа-
данию легких кристаллов льда на землю. Дополнитель-
ное действие оказывает бомбардировка охлажденных
частиц в облаках ионами, которые несет ударная вол-
на. В результате же всех этих действий на землю вме-
сто града выпадает мелкий снег.
Двигатели и подшипники
могут быть вибрационными
В наше время особые требования предъявляются к
точности осуществляемых процессов. В этом отноше-
нии вибротехника предоставляет исключительные воз-
можности. Например, там, где требуется точное весо-
вое или объемное дозирование насыпных грузов —
компонентов лекарств в фармацевтической промыш-
ленности, цемента при производстве бетона, сахара в
кондитерской промышленности и др., незаменимыми
являются вибрационные питатели-дозаторы с электро-
магнитным приводом. Точная дозировка в них дости-
гается за счет того, что при включении привод мгно-
венно возбуждает колебания рабочего органа.
То же происходит и при выключении вибратора.
Переходные режимы укладываются в период одного
колебания. Так, перемещения рабочего органа после
выключения привода не превышают 2—3 мм. Подача
продукта и ее прекращение осуществляются практи-
чески мгновенно. Отсюда высокая точность дозирова-
ния. Электромагнитный вибропривод и в других сфе-
рах применения гарантирует высокую точность.
Но такая достаточно высокая точность не в полной
мере удовлетворяет запросам практики. В некоторых
устройствах нужны значительно более высокие точно-
сти — например, иногда требуется создать перемеще-
ния в одну сотую часть миллиметра. Этого можно до-
стичь средствами вибротехники, если рабочий ход виб-
ропривода меньше указанной величины. Но с умень-
шением хода пропорционально уменьшается и скорость
6*
163
перемещения. Значит, падает и производительность.
А это крайне нежелательно. Выход есть — следует
увеличить частоту колебаний.
Различные вибрационные устройства работают при
малых перемещениях рабочего органа, составляющих
от сотых до десятых долей миллиметра, при частотах
колебаний свыше 20 тыс. колебаний в секунду. Осно-
вой таких устройств являются вибродвигатели. Они
могут совершать как поступательные, так и вращатель-
ные движения.
Вибродвигатели — разновидность вибрационно-им-
пульсных механизмов — работают при значительно бо-
лее высоких частотах, чем механические вибрационно-
импульсные механизмы. У них иное устройство и
другая область применения — в основном приборо-
строение. Но структура вибродвигателя та же — вибро-
возбудитель плюс механизм преобразования периоди-
ческого движения в импульсное поступательное.
Вибродвигатели базируются на тех же принципах
работы, что и вибрационные и волновые транспорти-
рующие установки. Посмотрим, каким же образом эти
принципы воплощены в механизмах, работающих в вы-
сокочастотных режимах. В простейшем случае вибро-
двигатель может состоять из двух элементов — вибро-
возбудителя и ротора. Мы знаем с вами, что еще дол-
жен присутствовать механизм преобразования движе-
ния. Его роль состоит в том, чтобы колебательное дви-
жение вибровозбудителя преобразовать в прерывистое
вращение ротора.
Чтобы было легче найти преобразователь движения
в вибродвигателе, вспомним, какое устройство выпол-
няет эту роль в обычной вибрационной транспортирую-
щей машине. Роль ротора в транспортирующей маши-
не выполняет груз, роль вибровозбудителя — грузоне-
сущий орган. А преобразователем движения служит
зона контакта грузонесущего органа с грузом. Точно
так же обстоит дело и в вибродвигателе — зона кон-
такта вибровозбудителя с ротором является преобразо-
вателем движения.
Но в зоне контакта, как мы уже знаем, может быть
несколько различных механизмов преобразования дви-
жения. Первый из них — это управление силами тре-
ния.
Сила трения должна быть больше при передаче
движения в нужном направлении. Вибровозбудитель
164
двигателя вращательного принципа действия чаще все-
го совершает крутильные колебания. Чтобы преобразо-
вать их в однонаправленное движение ротора, в зоне
контакта создают вспомогательные управляющие коле-
бания, например осевые или радиальные.
В первом случае вибровозбудитель передает движе-
ние ротору через торцовую поверхность. К этой
поверхности он периодически прижимается, одновре-
менно поворачивая ротор в заданном направлении
(рис. 34, а). При радиальных управляющих колебани-
ях вращение передается через боковую поверхность
ротора (рис. 34, б).
Управляющие колебания можно получить и от ос-
новного колебания, как в вибрационной транспорти-
рующей машине с прямолинейными колебаниями грузо-
несущего органа. Для этого прямолинейные колебания
впбровозбудителя должны быть направлены под углом
к направлению вращения ротора (рис. 34, в). Основ-
ные и управляющие колебания могут создаваться от-
дельными вибровозбудителями.
Так же как и в вибрационных транспортирую-
щих машинах, в вибродвигателе можно сообщать вра-
щение ротору, применив асимметричные колебания
вибровозбудителя. При этом возможно преобразование
движения при постоянных силах трения в зоне кон-
такта. Силы трения могут быть сухими и вязкими, на-
пример контакт через масляную пленку. Причем вяз-
кие силы оказываются предпочтительными, так как ве-
личина их зависит от скорости и при этом полнее реа-
лизуются преимущества асимметричной скоростной
диаграммы вибровозбудителя.
При асимметричном возбуждении создавать управ-
ляющие колебания пет необходимости. Однако упро-
щения конструкции привода не происходит, так как
для создания асимметрии колебаний в вибровозбудите-
ле приходится возбуждать двухчастотные колебания.
При асимметричных колебаниях схемы вибродвигате-
лей не меняются. Зона контакта может быть органи-
зована как на торцовой, так и на боковой поверхности
ротора.
В вибродвигателях нашли применение также и спе-
циальные приемы управления параметрами преобра-
зующей контактной зоны, которые могут иметь в обыч-
ных вибрационных транспортирующих машинах толь-
ко ограниченное применение. Это введение в зону кон-
165
Р и с. 34. Вибрационные двигатели вращательного принципа действия
Колебания вибровозбудителя: а — крутильно-осевые; б — крутильно-
радиальные; в — продольные, направленные под углом к касательной
ротора
Р и с. 35. Вибрационные позиционеры и кругломеры
а — с двухкоординатными линейными перемещениями; б — прецизион-
ный кругломер. а: 1 — столик; 2 — стяжная пружина; 3 — первая
пйра подвижных вибровозбудителей; 4 — вторая пара подвижных
впбровозбудителей; 5 — неподвижные вибровозбудители; б: 6 — вибро-
возбудитель крутильных и радиальных колебаний
такта прослойки пз электровязких и магнитовязких
жидкостей.
Электровязкие жидкости еще называются электро-
реологическими. Эти жидкости (первая под действием
электрического поля, вторая — магнитного) меняют
свои реологические характеристики — вязкость и пла-
стичность. Управляя свойствами этих жидкостей, мож-
но менять силы взаимодействия вибровозбудителя с
ротором. Принципиальные схемы вибродвигателей при
этом остаются прежними.
В качестве вибровозбудителей в вибродвигателях,
работающих в высокочастотных режимах, используют-
166
ся генераторы и различные преобразователи электриче-
ских колебаний в механические. В основном это пьезо-
электрические и магнитострикционные преобразовате-
ли, питаемые генераторами электрических колебаний.
Принцип действия этих устройств нами рассмотрен
ранее.
Вибропреобразователи выполняются самой разнооб-
разной формы: в виде пластинок, стержней, колец
и др. Чаще всего применяются пластинки. Для того
чтобы усилить колебания преобразователей, частоту
возбуждения настраивают в резонанс с собственной
частотой колебаний пластинки. Собственных частот у
пластинки много.
Первая собственная частота соответствует тому
случаю, когда на длине пластинки укладывается одна
волна. На второй частоте укладываются две волны
и т. д. Наибольшие перемещения достигаются на пер-
вой, основной собственной частоте колебаний. Элект-
рическое напряжение подводится к пластинке с по-
мощью электродов, которые накладываются на ее бо-
ковые грани. При этом получаются продольные колеба-
ния.
В тех случаях, когда даже резонансные режимы ра-
боты преобразователя не обеспечивают заданных ско-
ростей колебаний, применяют концентраторы колеба-
ний. Концентратор колебаний является продолжением
пластинки преобразователя колебаний. Он выполняет-
ся из упругого материала, например стали, в виде су-
жающегося к выходу стержня.
В концентраторе входящие с его широкого конца
волны упругих колебаний как бы спрессовываются и
на выходном, суженном конце получаются большие
смещения и скорости. Это преобразование характери-
зуется коэффициентом усиления колебаний, под кото-
рым понимается соотношение амплитуд смещений на
выходе и на входе в концентратор.
Использование вибродвигателей линейного и враща-
тельного движения позволяет при разнообразных их
комбинациях создавать позиционирующие устройства,
приводные устройства микроманипуляторов, микрона-
сосы, микродозаторы и многое другое.
В ряде областей применения возникает необходи-
мость точной установки детали в плоскости по двум
координатам. В позиционере с двухкоординатными ли-
нейными перемещениями в качестве вибропривода ис-
167
пользуется комплект из шести линейных преобразова-
телей — вибровозбудителей (рис. 35, а). Вибровозбуди-
тели объединены попарно, и каждая пара устанавли-
вается перпендикулярно друг относительно друга. На
первой паре вибровозбудителей в узловых точках уста-
новлен столик. В узловой точке амплитуда деформа-
ции вибровозбудителя равна нулю, поэтому на столик
колебания не передаются.
Первая пара вибровозбудителей с укрепленным на
них столиком располагается внутри второй пары виб-
ровозбудителей, упираясь торцами в их боковые по-
верхности. Для обеспечения между ними постоянного
контакта служит стяжная пружина. Две пары вибро-
возбудителей обеспечивают перемещение столика в
одном из* заданных направлений — вдоль наружной
пары вибровозбудителей.
Посмотрим, как такое перемещение создается. Воз-
будители совершают продольные колебания. Поэтому
наружные вибровозбудители возбуждают колебания в
направлении желаемого перемещения столика. Одна-
ко, для того чтобы столик начал направленное переме-
щение, нужно обеспечить управление силами трения и
необходимую асимметрию движущих сил. Эти функ-
ции осуществляют внутренние пары вибровозбудите-
лей. Совершая продольные колебания, они изменяют
силу прижатия их к внешним возбудителям, а следова-
тельно, и управляют силами трения. В зависимости от
величины сдвига фаз между внутренними и внешними
возбудителями столик будет перемещаться в одну или
другую сторону. Таким образом, система реверсивная.
Перемещение в перпендикулярном направлении
производится с помощью второй и третьей пар впбро-
возбудителей. В этом случае внешние вибровозбудите-
ли опять выполняют роль движущих, а внутренние —
управляющих. Первая пара возбудителей в обеспече-
нии этого движения не участвует и отключается.
Движение и в этом направлении реверсируется. Если
одновременно работают все вибровозбудители, столик
будет перемещаться под углом к осям координат. На-
правление перемещения столика обусловливается ско-
ростями движения по каждой из координатных осей.
Для прецизионных кругломеров созданы устройст-
ва, которые после центровки перед измерением сооб-
щают вращение детали. В таком устройстве использу-
ются два линейных вибровозбудителя и один возбуди-
168
тель крутильных и радиальных колебаний (рис. 35, б).
Центровка детали по одной координате осуществляет-
ся так же, как и в рассмотренном ранее позиционере.
Затем с помощью вибровозбудителя крутильных и ра-
диальных колебаний, зажатого в узловых точках двух
линейных вибровозбудителей, происходит вращение из-
меряемой детали.
Вибрационные двигатели вращательного действия
используются для вращения магнитного диска в за-
поминающих устройствах на гибких магнитных носите-
лях. Успешно могут применяться вибродвигатели в
сканирующих устройствах, предназначенных для обес-
печения заданного по определенному закону движения
в пространстве излучения.
Вибрационные опоры появились сравнительно не-
давно, однако по принципиальному устройству и кон-
структивному исполнению они характеризуются чрез-
вычайным разнообразием. Все их можно разделить на
две основные группы. Это вибраторы, в которых коле-
бания действуют перпендикулярно и по касательной к
контактной поверхности. Как мы уже выяснили, коле-
бания, действующие на нормали к контактным поверх-
ностям, более эффективны в отношении снижения со-
противлений от сил трения. Вибровозбудители этих
опор при меньшем потреблении энергии обеспечивают
значительное снижение сопротивлений от сил трения.
В вибраторах, у которых колебания действуют по
касательной к контактным поверхностям, снижение со-
противлений перемещению подвижного элемента дости-
гается в основном за счет частичного преобразования
сил трения в движущие силы. Преодоление сопротив-
лений от сил трения достигается за счет энергии источ-
ника вибрации. Устройства этого типа менее эконо-
мичны.
Контакт подвижной части с опорой может происхо-
дить непосредственно или через сжатую под воздейст-
вием вибрации газовую пленку. Виброопоры применя-
ются для вращательных и поступательно-перемещаю-
щихся пар. Во вращательных парах виброопоры могут
воспринимать как осевые так и радиальные нагрузки.
Вибровозбудители опор работают преимущественно
в высокочастотных режимах. Ввиду ограниченной мощ-
ности таких вибровозбудителей высокочастотные виб-
роопоры используются преимущественно в небольших
механизмах и приборах. Рассмотрим устройство неко-
торых наиболее характерных виброопор, используемых
в прецизионных малогабаритных устройствах.
Вращательная опора для восприятия осевых на-
грузок, основанная на принципе создания колебаний
в направлении, перпендикулярном к силам трения, со-
держит камневый подпятник, на который опирается
торцом ось ротора. В системе действуют силы трения
верчения, так как торец оси выполнен сферическим.
Чтобы сообщить колебания опоре перпендикулярно к
силам трения, их нужно направить вдоль оси ротора.
Проще всего это достигается при установке подпятника
на пьезокерамический вибровозбудитель, совершаю-
щий линейные колебания перпендикулярно к опорной
поверхности подпятника.
Если расположить вибровозбудитель непосредствен-
но на основании виброопоры, то такая система уже
сможет функционировать. Подав переменное напряже-
ние на вибровозбудитель, мы создадим его поперечные
деформации сжатия—удлинения. При этом располагаю-
щийся на нем подпятник колеблется в направлении оси
ротора. Давление ротора на подпятник периодически
меняется, а это, как мы уже установили, ведет к сни-
жению сопротивлений вращению оси в подпятнике.
Такая система работоспособна, однако считать ее во
всех отношениях совершенной нельзя.
Какие же у нее недостатки? Их несколько. Один из
них связан с тем, что вибровозбудитель лежит непо-
средственно на жестком основании. Вследствие этого
при его работе основанию передаются колебания. А это
пежелательпо как с точки зрения того, что сотрясается
все устройство, так и в отношении непроизводительных
затрат энергии, связанных с сообщением всему основа-
нию нежелательных колебаний. Второй недостаток со-
стоит в том, что ротору передаются колебания незна-
чительной амплитуды. Пьезокерамические вибровозбу-
дители не способны создавать колебания с достаточно
большой амплитудой.
Чтобы уменьшить передачу вибрации вовне, меж-
ду основанием и вибровозбудителем с подпятником
нужно установить пружину. Чем мягче будет пружина,
тем более эффективно основание защищено от виб-
рации.
Для увеличения амплитуды колебаний подпятника
можно испльзовать резонансные режимы работы. Жест-
кость пружин подпятника должна быть подобрана та-
170
Рис. 36. Вибрационные опоры
а — для восприятия осевых нагрузок; б — для линейных перемещений,
а: 1 — подпятник; 2— ось; 3—мембрана; 4— кольцевой вибровозбу-
дитель; 5 — основание, б: Г — подвижная часть; 2' — направляющая;
3' — впбровозбудитель; 4' — опорные шарики
ким образом, чтобы полностью уравновесить силы
инерции колеблющихся частей. В резонансном режиме
резко возрастает интенсивность колебаний. При этом
может оказаться, что подпятник будет периодически
отрываться от оси ротора. Установится виброударный
режим работы опоры.
В качестве упругой системы резонансных виброопор
широко используются упругие мембраны. Вертикаль-
ный вал со сферическим торцом опирается на камневый
подпятник и фиксируется от радиальных смещений
камневой втулкой (рис. 36, а). Втулка и подпятник
расположены в корпусе, который с помощью мембраны
установлен на кольцевом пьезокерамическом вибровоз-
будителе. Самоцентровка опоры достигается путем за-
крепления вибровозбудителя на сферическом подпятни-
ке. Вследствие того что колебания передаются от виб-
ровозбудителя подпятнику, в нем также снижаются
силы трения. Это способствует точной самоустановке
опоры. Так как опора соединена с вибровозбудителем
упругим элементом, мембраной, создается возможность
путем соответствующего подбора соотношения жестко-
сти мембраны и величины массы колеблющихся частей
171
реализовать околорезонансные режимы работы. Амп-
литуда колебаний опоры может в несколько раз пре-
вышать амплитуду деформаций вибровозбудителя.
Для восприятия радиальных нагрузок может быть
применена виброойЬра, в которой пьезокерамические
вибровозбудители включаются последовательно со
сдвигом по фазе. При этом в опоре получается подобие
бегущей волны. Колебания оси ротора могут переда-
ваться либо непосредственно, либо через газовую или
жидкостную пленку.
Радиальная виброопора состоит из корпуса, в кото-
ром установлены пьезокерамические вибровозбудители
в виде сегментов. Их рабочие части, на которые опи-
рается вал, имеют износостойкие покрытия. Если опора
должна работать на сжатой пленке, то корпус заполня-
ется жидкостью. Сегменты совершают радиальные ко-
лебания со сдвигом по фазе. Вследствие этого между
валом и рабочими поверхностями создается сжатая
жидкостная пленка в виде кольца. Под действием по-
следовательных переключений вибровозбудителей коль-
цевой пленке сообщается вращательное движение.
Меняя скорость переключения вибровозбудителей,
можно регулировать скорость вращения пленки. Если
направление вращения пленки совпадает с направлени-
ем вращения ротора, то относительная скорость между
ними уменьшается и снижаются затраты энергии на
преодоление сил сопротивления от трения. В этом слу-
чае, когда скорости вращения ротора равны п направ-
лены в одну сторону, в опоре на ось ротора не дейст-
вуют нпкакие сопротивления.
Есть конструкции виброопор, в которых колебания
контактным поверхностям сообщаются в плоскости
скольжения. Осевая виброопора с тангенциальными
колебаниями и настройкой на околорезонансный ре-
жим работы в качестве источника колебаний содержит
пьезокерамический вибровозбудитель крутильных коле-
баний. Подвижная часть опоры подвешена на упругой
системе в виде консольных пластин и опирается на
вибровозбудитель крутильных колебаний. Вал ротора с
помощью двух кампевых подпятников и опорного ша-
рика устанавливается на подвижной части виброопоры.
В вибрационных опорах с газовой несущей пленкой
опорные части должны иметь увеличенные размеры
для обеспечения достаточной несущей способности га-
зовой пленки. При восприятии осевых нагрузок опор-
172
ная часть с целью центрирования выполняется в виде
конуса. Пьезокерамический вибровозбудитель также
имеет коническую форму и совершает прямолинейные
колебания перпендикулярно к образующей конуса.
В контактных поверхностях обязательно должны
быть отверстия для подсоса газа. Режим колебания
вибровозбудителя подбирается таким образом, чтобы
между контактными поверхностями периодически об-
разовывался зазор. В момент увеличения зазора в меж-
контактную зону засасывается газ. При сужении зазо-
ра между контактными поверхностями создается сжа-
тая газовая пленка, исключающая непосредственный
контакт скользящих поверхностей.
Вибрационные опоры применяются и для поступа-
тельно вращающихся пар. Вибрационная опора для
линейных перемещений состоит из опорной направляю-
щей, которой пьезокерамический возбудитель сообщает
колебания перпендикулярно к направлению перемеще-
ния (рис. 36, б). На направляющей с помощью опор-
ных шариков устанавливается подвижная часть опоры.
Под действием колебаний снижаются сопротивления от
трения качения между опорными шариками, направля-
ющей и подвижной частью линейной опоры.
Виброимпульсный привод
повышает эффективность машин
В настоящее время преобладающими являются маши-
ны традиционного типа. Но одновременно с ними ус-
пешно развиваются новые прогрессивные вибрацион-
ные машины.
Оба направления в технике мирно сосуществуют,
дополняя друг друга. Так, например, большинство ти-
пов виброприводов создают периодические возмущения,
преобразуя вращательное движение. Могут быть раз-
личные точки зрения о целесообразности этого сочета-
ния. Однако в настоящее время в большинстве случаев
такое положение оказывается оправданным. Видимо,
поскольку реально существуют два принципа, то их со-
четание в различных конструкциях неизбежно. Произ-
водится не только преобразование вращательного дви-
жения в периодическое, но и обратная процедура.
Чаще всего это имеет место в тех случаях, когда на
173
вибрационной машине необходимо использовать какой-
либо вспомогательный механизм вращательного прин-
ципа действия.
Механизмы, преобразующие периодические движе-
ния в однонаправленное, называются вибрационно-
импульсными механизмами, так как получаемое в
процессе преобразования однонаправленное движение
неравномерное, импульсное. Для преобразования пе-
риодического движения в однонаправленное исполь-
зуются различные устройства, называемые механизма-
ми свободного хода. Принцип их действия состоит в том,
что они пропускают движение только в одном направ-
лении. Это своего рода механические полупроводники.
Муфты свободного хода имеют широкое применение
в обычных вибрационных механизмах. В частности, та-
кой механизм установлен во втулке заднего велосипед-
ного колеса. При вращении педалей в направлении
прямого хода колесо свободно проворачивается на оси.
Но стоит немного повернуть педали в противоположном
направлении, колесо затормозится. Такой механизм и
позволяет преобразовывать периодическое движение,
т. е. движение, меняющее направление,— превратить в
однонаправленное. Как и полупроводник, он пропуска-
ет движение одного знака и отсекает движение друго-
го знака.
Давайте посмотрим, как происходит такое преобра-
зование движения? Пусть у нас есть источник перио-
дических движений, например конец шатуна эксцент-
рикового вибратора. Шатун за одну половину цикла
перемещается в одном направлении, а за вторую —
ровно на столько же — в противоположном. Преобра-
зуем периодические движения шатуна в прямолинейные
однонаправленные. В качестве механизма свободного
хода используем реечный домкрат. Такой домкрат
прикладывается с комплектом инструмента к легковым
автомашинам.
Соединим шатун с рукояткой домкрата, установим
переключатель для движения в желаемом направлении
и включим эксцентриковый вибратор. Шатун сообщит
рукоятке возвратно-поступательное движение, а рейка
домкрата начнет перемещаться в одном заданном на-
правлении. Перемещение рейки создается собачкой,
соединенной со свободным концом рукоятки.
Когда рукоятка перемещается в заданном направле-
нии, собачка упирается в зубья рейки и перемещает
174
2
3
4
Р и с. 37. Впбропмпульсная система хода
1 — муфта свободного хода; 2 — ходовые колеса; 3 — упругие эле-
менты; 4 — рама; 5 — инерционный самобалансный вибратор
ее на величину хода рейки. При движении в обратном
направлении собачка откидывается и свободно прохо-
дит над зубьями, а рейка остается неподвижной.
Таким образом, мы используем одну половину хода
рукоятки и теряем вторую. Выгодно ли это? В боль-
шинстве случаев такие потери, конечно, нежелательны.
Можно ли их избежать? Можно, если применить
принцип устройства вибрационного механизма, т. е.
ввести в рассматриваемую систему упругий элемент.
Давайте немного переконструируем наш реечный дом-
крат. Для этого соединим собачку с пружиной таким
образом, чтобы в режиме свободного хода при откиды-
вании собачки имело место сжатие пружины.
Что при этом произойдет? В обычном домкрате
энергия, сообщаемая рукояти домкрата на участке
свободного хода, безвозвратно теряется. В модернизи-
рованном домкрате она не пропадет, а будет аккуму-
лирована в пружине. При совершении рабочего хода
пружина отдает энергию на выполнение полезной ра-
боты. Таким образом, принципы вибрационной техники
позволяют усовершенствовать механизм свободного
хода. Механизм свободного хода с упругим элементом
применен в системе виброимпульсного хода.
Виброимпульсный самоходный механизм состоит из
рамы, опирающейся на ходовые колеса, имеющие муф-
ты свободного хода. Колеса соединены с рамой упру-
гими элементами. Может быть применена такая же
муфта, как в заднем велосипедном колесе. На раме
установлен самобалансный инерционный вибратор та-
ким образом, что возмущающая сила действует вдоль
тележки (рис. 37).
175
Чтобы выяснить закономерности работы механизма,
включим вибратор и понаблюдаем за взаимодействием
его частей. Муфты свободного хода установлены таким
образом, что они разрешают движение только вправо.
Когда возмущающая сила вибратора будет действо-
вать вправо, тележка сместится в том же направлении,
так как муфты не препятствуют такому движению ко-
лес. При изменении направления действия силы, соз-
даваемой вибратором, тележка начнет смещаться обрат-
но в противоположном направлении. Однако колеса
затормозятся и, перемещаясь назад, рама будет сжи-
мать упругие элементы, которые соединяют ее с коле-
сами.
С началом следующего цикла на раму будут дейст-
вовать сила вибратора и сила сжатых пружин, упира-
ющихся в заторможенные колеса. Перемещение тележ-
ки будет уже происходить под действием этих двух
сил и должно быть большим.
Каков вклад упругих элементов? К концу прямого
хода пружины распрямятся и переместят раму ровно
на столько, на сколько они были предварительно сжа-
ты, т. е. на величину обратного хода рамы. Таким об-
разом, пружины преобразуют откат рамы в прямой ход
тележки и при этом удваивают ее перемещение за
цикл колебаний. Упругие элементы в данном случае
играют двойную роль — накапливают перемещения от-
рицательного знака и преобразуют их в перемещения
в заданном направлении. Из этого видна важная роль
упругих элементов в вибрационно-импульсных меха-
низмах.
Для полного преобразования отката в перемещение
нужно, чтобы пружины имели специально подобранную
жесткость. Рассмотренная картина работы механизма
здесь несколько упрощена. Не при всех параметрах
упругих элементов направление перемещения совпадает
с направлением возмущающей силы. Между ними мо-
гут быть различные сдвиги по фазе. Эти явления мы
уже проанализировали ранее на примере простейших
вибромашин. В рассматриваемой машине действуют те
же закономерности.
Возникает вопрос, зачем нужны вибрационно-
импульсные системы хода? Например, они могут быть
применены на вибрационной машине, которая должна
время от времени перемещаться. Вместо того чтобы
устанавливать на ней дополнительный ходовой меха-
176
низм, перемещения можно обеспечить от одного вибро-
привода.
Виброимпульсные системы хода могут иметь и
самостоятельное применение. Для установления области
их целесообразного применения рассмотрим механизм
взаимодействия колеса виброимпульсного механизма с
почвой и сопоставим с закономерностями работы обыч-
ного приводного колеса.
Прежде всего постараемся вспомнить, видели ли
Вы когда-нибудь, чтобы неприводные колеса, т. е.
передние колеса неполноприводного, т. с. обычного,
автомобиля буксовали? Думаю, что Вам этого видеть
не доводилось. В виброимпульсной системе хода коле-
са неприводные. Поэтому при движении машины впе-
ред условия их работы подобны условиям работы не-
приводных передних колес обычной автомашины. При
откате назад имеется определенная специфика в рабо-
те колес виброимпульсного хода.
Особенности работы ходовых колес виброимпульсно-
го механизма связаны с тем, что они установлены на
оси с помощью муфты свободного хода. В отличие от
свободно установленных колес в течение каждого полу-
цикла они работают в режиме торможения. Для меха-
низма работы колеса решающим является то, что коэф-
фициент трения качения при ходе вперед заменяется
значительно большим коэффициентом трения сколь-
жения.
Таким образом, виброимпульсный механизм пере-
мещается не путем отталкивания от почвы, как в
обычном ходовом механизме, а силой, приложенной к
самому механизму. Так перемещается тележка, кото-
рую толкают руками. Взаимодействие с почвой лишь
предотвращает откат тележки. Следует иметь в виду
также, что, подобрав параметры и режим работы виб-
ратора, а также параметры упругой системы, можно
уменьшить максимальные усилия взаимодействия ко-
леса с почвой при откате.
На основании этого мы приходим к выводу, что
виброимпульспая система хода создает меньшие нагруз-
ки на почву, а движение в направлении транспортиро-
вания происходит вообще без отталкивания от почвы.
Значит, такие механизмы могут иметь применение на
труднопроходимых почвах. Приведем второй пример
использования виброимпульсного механизма. В про-
мышленности широко распространены смесители, вко-
7 И. Ф. Гончаревич
177
торых смешение осуществляется шнеком. Перемеши-
ваются компоненты бетона, кондитерских масс и многое
другое. Смесители обеспечивают хорошее перемешива-
ние, однако витки шнека испытывают большое трение
о перемешиваемую смесь, для преодоления которого
приходится устанавливать на смеситель двигатель вы-
сокой мощности.
Для снижения усилий от трения смесителю сообщи-
ли вибрацию. При этом не только снизились сопротив-
ления вращению шнека, но улучшилось качество и
сократилось время перемешивания. Однако усложни-
лась конструкция — добавился второй вибрационный
привод. Вот здесь и решили использовать вибрацион-
но-импульсный привод.
На валы шнеков на муфтах свободного хода с по-
мощью рычагов навесили грузы. Оставили только
вибрационный привод. Под действием вибрации корпу-
са смесителя грузы начинают качаться. При этом
отклонение груза в одну сторону приводит к провора-
чиванию шнека, в другую сторону благодаря установ-
ке на муфте свободного хода шпек не поворачивается.
Выяснилось, что импульсное вращение повело к даль-
нейшему снижению сопротивлений вращению.
Применен вибрационно-импульсный механизм и в
вибробункерах. Вибробункера представляют собой раз-
новидность виброподъемника с винтовым грузонесущим
органом. Рабочий орган вибробункера выполняется в
виде конической чаши, на внутренней поверхности ко-
торой павит желобок. В чашу загружаются различные
Мелкие детали: болты, гайки, шайбы и т. д. Под дей-
ствием колебаний бункера эти детали поступают на
желобок и постепенно перемещаются по нему вверх,
расположившись в один ряд.
С загрузочного конца желобок может иметь ориен-
тирующее устройство, да и сама его конфигурация
может быть такой, что детали на нем устанавливают-
ся в определенном положении. Например, болты или
заклепки можно установить шляпкой вверх, гайки —
ребром, шайбы — плашмя и т. д. Применяют вибробун-
кера в автоматических линиях для ориентирования и
подачи к станкам заготовок. Это позволяет механизи-
ровать многие трудоемкие вспомогательные операции,
обеспечивая большую экономию ручного труда.
В обычной установке дпище бункера представляет
собой единое целое с чашей. Для улучшения подачи
178
деталей па винтовой желобок днищу бункера решили
сообщить дополнительное вращение и сделали это с
помощью вибрационно-импульсного привода. Устрой-
ство получилось простым и компактным. На днище
бункера наклеили резину, в центре бункера верти-
кально установили ось и свободно насадили на нее
конический диск. Снизу к диску прикрепили несколько
плоских пружинок, один конец которой отогнут вниз.
Когда диск насажен на ось, свободные концы пружи-
нок упираются в резину на днище бункера. Вследст-
вие наклона пружинок, отогнутых под углом к поверх-
ности диска, резина на днище бункера допускает
свободный поворот диска в одном направлении и пре-
пятствует повороту — в противоположном.
Пружинка и резина на днище бункера представля-
ют собой своеобразную муфту свободного хода. Поэто-
му, когда бункер вибрирует, совершая крутильные ко-
лебания, днище бункера через резину и пружинки
сообщает диску толчки. При этом диск получает на-
правленное импульсное движение. Находящиеся на нем
детали более равномерно подаются на транспортный
желобок.
Во многих машинах используются вибрационные
импульсные механизмы. Эффективность их применения
обусловливается тем, что в большинстве случаев
импульсное движение способствует снижению сил со-
противления, оказываемых обрабатываемой средой
рабочему органу машины.
С импульсным движением рабочего органа разрабо-
таны горные комбайны для добычи полезных ископае-
мых, вибрационные дробилки и другие машины для
разрушения и дробления горных пород.
Применение вибрационно-импульсного привода в
щековых дробилках позволило получить, по существу,
новый тип механизма, сочетающий особенности работы
обычных и вибрационных щековых дробилок. Щека
такой дробилки подвешивается в корпусе наподобие
маятника с помощью эксцентриковой оси и муфты сво-
бодного хода. При такой подвеске качания щеки вызы-
вают импульсные направленные вращения эксцентри-
кового вала.
При этом верхняя часть щеки получает возвратно-
поступательные перемещения, как в обычной дробил-
ке. Нижний конец щеки, на котором установлен инер-
ционный вибратор, соединен с корпусом пружиной.
7*
179
Вибратор возбуждает высокочастотные качания щеки
относительно точки подвеса, а импульсный механизм
преобразует их в медленные возвратно-поступательные
перемещения от подвеса. Суммируясь, эти движения
вызывают тихоходные качения щеки с большой ампли-
тудой, на которые наложены колебания высокой час-
тоты. Такое комбинированное движение щеки повыша-
ет эффективность процесса дробления.
«Бермудский треугольник»
в вибротехнике
Развитие вибротехники способствовало созданию мно-
гих машин и технологий, основы устройства и действия
которых не всегда были ясны для неспециалистов.
Методы вибротехники позволили получить ряд замеча-
тельных и не вполне очевидных эффектов. Здесь мож-
но упомянуть рассмотренные ранее эффекты увеличения
перемещений рабочего органа вибромашины при одно-
временном снижении требующихся для этого усилий,
уменьшения сил сопротивления от трения, возникнове-
ния свойств текучести в дисперсных средах, усиления
капиллярного подъема жидкости в капиллярах и мно-
гие другие не совсем очевидные с традиционных по-
зиций явления.
Как обычно бывает в подобных случаях развития
нового научного направления, возникает состояние
первооткрывательской эйфории и наряду с истинными
открытиями рождается ряд необоснованных предполо-
жений.
Например, в течение какого-то времени в несколь-
ко завуалированной форме бытовали представле-
ния, что вибрационные машины — в принципе менее
энергоемкие, особенно в резонансных режимах,—
потребляют ничтожное количество энергии, несоизме-
римо меньшее, чем традиционные. Такие представле-
ния на каком-то этапе развития вибротехники довольно
долго удерживались даже в кругах специалистов.
Это был период, когда создавались миниатюрные
маломощные вибромашины, выполняющие легкие транс-
портные и технологические операции. И эти машины
действительно потребляли мало энергии. Однако, когда
стали строить высокопроизводительные тяжелые мощ-
180
йые машины, несостоятельность упомянутых представ
лепий быстро обнаружилась. Еще раз подтвердилось
не очень приятное, но неизменно подтверждающееся
положение, что для выполнения определенной работы
надо затрачивать энергию, будь то обычные машины
или вибрационные.
Сразу хотелось бы подчеркнуть, что автор не про-
тив поиска новых эффектов. Опыт показывает, что в
ряде случаев даже погоня за невозможным в конечном
счете оказывается полезной, так как в процессе разра-
ботки нерешаемых проблем делаются открытия реаль-
ных эффектов, имеющих большое теоретическое или
практическое значение.
Таким образом, разговор о различных устройствах
и эффектах, для объяснения которых их авторы фор-
мулируют новые законы, имеет целью обсудить воз-
можность объяснения по существу,— а не формально
по известному утверждению чеховского персонажа,
«что этого не может быть, потому что этого не может
быть никогда»,—на основе известных сегодня законов.
Есть в вибротехнике свой «Бермудский треуголь-
ник». В нем существуют инерцоиды, машина Н. Дина и
другие чудесные устройства, которые приводятся в
действие инерционными вибраторами. Почему вокруг
них вспыхивают острые дискуссии, в которые иногда
вовлекаются крупные ученые различных профилей?
Дело в том, что в этих спорах заметна попытка опро-
кинуть один из фундаментальных законов механики.
Этот закон гласит, что нельзя вызвать направленное
движение за счет внутренних сил.
В чем проблема инерцоидов? В том, что им нужно
сообщить однонаправленное движение от привода
инерционного вибратора, который создает силу, пе-
риодически меняющую свое направление. Для инерцои-
дов речь идет преимущественно о движении по гори-
зонтали, следовательно, вибратор должен преодоле-
вать преимущественно сопротивления в ходовом меха-
низме.
В устройствах типа машины Н. Дина дело обстоит
сложнее. В них предполагается безопорное движение,
а следовательно, должны преодолеваться не только со-
противления перемещению, но и действие силы тя-
жести. Ставится действительно интригующая проблема,
над такой задачей и не жалко поломать голову.
И кое-кто упорно этим занимается. Между тем в на-
181
стоящее время такое движение можно осуществить
только одним способом — реактивным, па котором
основано устройство ракет.
Привод машин для безопорного движения также
предполагалось осуществлять от устройств типа инер-
ционных вибраторов, только более хитроумно устроен-
ных, чем те, которые используются в промышлен-
ности. Проблема здесь та же, что и в инерцоидах:
каким-то образом преобразовать вибратор, чтобы он
создавал асимметрию переменных по направлению сил
и обеспечивал преимущественное перемещение объек-
та в одном направлении. В попытках решить эту проб-
лему было предложено много весьма замысловатых
устройств.
Видимо, наиболее целесообразно ознакомиться с
устройством, которое предназначалось не для частич-
ного решения задачи, т. е. придания асимметрии дви-
жущим силам, а для создания хотя и переменной
по величине силы, но постоянно действующей в одну
сторону.
Чтобы уяснить себе соображения, которыми руко-
водствовался автор этой разработки, вернемся еще раз к
инерционному вибратору самобалансного типа. Если
линия, соединяющая оси вращения дебалапсов, распо-
лагается горизонтально, то сила будет действовать
в вертикальном направлении. Это как раз совпадает
с направлением силы тяжести. В промежуток времени,
когда дебалансы, поворачиваясь вокруг своих осей,
находятся над горизонталью, соединяющей центры их
вращения, равнодействующая центробежных сил деба-
лансов направлена вверх и действует против силы
тяжести.
Если сила, создаваемая вибратором, больше силы
тяжести, действующей па вибратор, и соединенные с
ним части устройства для безопорного движения, то
механизм начнет перемещаться вверх. Казалось бы, мы
на правильном пути. Создать центробежную силу
значительной величины, существенно превышающую
силу тяжести, совсем нетрудно. Для этого нужно
только взять побольше эксцентриситет дебалапсов и
увеличить скорость вращения валов. Если продолжить
вращение дебалансов в том же направлении, то они
перейдут в зону, расположенную ниже горизонтали.
И как только этот переход произойдет, возмущающая
сила изменит свое направление и будет действовать с
182
силой тяжести в одну сторону, помогая ей опускать
наше устройство для безопорного движения.
Таким образом, за один полный оборот дебалансов
наше устройство вначале сместится вверх, подпрыгнет,
затем опустится вниз, вернувшись в исходное положе-
ние. Та же картина будет наблюдаться и при после-
дующих поворотах дебалансов. Кроме того, если ме-
ханизм не имеет опоры, то под действием силы
тяжести он будет падать вниз, ускоряя свое движение.
Значит, применив простой самобалансный вибратор,
достичь желаемого результата не удается.
Это понимаем не только мы с Вами, читатели, по
и автор устройства для безопорного движения с инер-
ционным приводом. Поэтому он предлагает, прямо ска-
жем, радикальное решение вопроса. Вот ход его рас-
суждений.
Когда дебалансы находятся выше горизонтали, сила
действует в нужном нам направлении. А нельзя ли
переконструировать вибратор таким образом, чтобы де-
балансы никогда не опускались ниже горизонтали?
Автор находит такое решение. Надо отдать должное,
конструктивно оно осуществлено весьма квалифициро-
ванно. Идея также весьма радикальна. Вот в чем она
состоит.
В тот момент, когда дебалансы доходят до горизон-
тали, не ожидая, пока они опустятся вниз, повернуть
вибратор вокруг оси, перпендикулярной к осям деба-
лансов на пол-оборота. Такой поворот вибратора при-
водит к тому, что меняются местами его низ и верх,
и поэтому дебалансы, которые должны были опускать-
ся ниже горизонтали, начинают над ней поднимать-
ся. Таким образом, движение их опять будет происхо'
дить выше горизонтали, а следовательно, и равнодейст-
вующая центробежная сила должна быть направлена
вверх.
Вроде бы задача решена, возмущающая сила, дейст-
вующая в вертикальном направлении, хотя и меняется
периодически от пуля до некоторого максимума, но не
меняет своего направления, действует постоянно вверх.
Такая сила, меняющая периодически величину, но
имеющая неизменное направление, называется пульси-
рующей. Пульсирующая сила вполне пригодна для
обеспечения безопорного движения. Автор не останав-
ливается па теоретических рассуждениях, а, преодоле-
вая значительные трудности, воплощает конструкцию
183
своего привода в металле. Я видел фотографию этого
механизма и должен отметить, что он спроектирован
и изготовлен безукоризненно.
Началась опытная проверка устройства. При этом
опять приходилось преодолевать значительные труд-
ности, возникла необходимость в достаточно мощном
приводе, обеспечении его автономного питания и т. д.
Но эксперименты все-таки были начаты. Механизм
подпрыгивал, на короткие моменты времени отрывал-
ся от опоры, но неизменно падал обратно. Автор по-
лагал, что причина этого заключалась в недостаточной
мощности двигателя, несовершенстве трансмиссии и т. д.
Так в чем ясе дело? В некоторых конструктивных
несовершенствах или в том, что оказались неучтенны-
ми некоторые принципиальные обстоятельства, которые
не позволяют все время направлять создаваемую силу
в одну сторону? Дело в том, что повороты корпуса
вибратора приводят к тому, что дебалансы вовлекают-
ся также и в это движение, а оно неизбежно приво-
дит к созданию знакопеременной периодической силы.
Оказывается, что дебалансы вращаются одновременно
вокруг двух взаимно перпендикулярных валов с оди-
наковой скоростью. Следствием этого является просто
изменение траектории движения. Таким образом, рас-
смотренная конструкция привода не позволяет создать
однонаправленную движущую силу.
Можно было бы просто констатировать, что законы
механики предсказывают вообще невозможность созда-
ния направленного движения за счет внутренних сил.
Однако в нашу задачу входил анализ определенной
конструкции и установление конкретных причин, пре-
пятствующих получению желаемого результата.
Инерцоид еще один механизм, временами привле-
кающий к себе пристальное внимание специалистов и
неспециалистов. По поводу механизмов подобного
типа неоднократно возникали дискуссии, которые
чаще велись не по конкретному предмету обсуждения,
а в рамках обсуждения общих физических законов и
различных предлагаемых по этому поводу философ-
ских концепций. Сторонники существующих физиче-
ских законов резонно утверждали, что движение за счет
внутренних сил невозможно, а сторонники инерцоидов
придерживались противоположной точки зрения. Между
тем «ииерцоиды», как правило, хотя и плохо, по пере-
184
мещались. В большинстве случаев участники дискус-
сий оставались при своем миопии.
Дискуссии на тему, может двигаться или не может
двигаться механизм, впоследствии названный инерцои-
дом, выступления в достаточно солидных изданиях
признанных ученых и крупных представителей техни-
ки у нас и за рубежом получили широкий размах
после сенсационных сообщений, имевших место в кон-
це 50-х — начале 60-х годов XX в., о механизме, якобы
перемещающемся и висящем в воздухе без воздейст-
вия внешних сил (машина Н. Дина, США).
Десятилетием позже возник феномен инерцоида,
который и сегодня все еще привлекает многих поклон-
ников и провоцирует разоблачения специалистов,
твердо стоящих на позициях современной механики.
Временами дело доходит до того, что формируются
новые механические концепции, призванные объяснить
механизм действия инерцоидов на основе математиче-
ской модели, в которой действуют только внутренние
силы. Не будем забывать, что инерцоиды все-таки
передвигаются. И это дает их сторонникам определен-
ную уверенность в отстаивании своих позиций.
Попробуем разобраться во всей этой непростой
истории. Прежде всего постараемся соотнести между
собой машину Н. Дина и инерцоиды. Когда поступили
сообщения о машине Н. Дина, специалисты прежде
всего обратились к патентному фонду США. Было
найдено несколько патентов на имя Н. Дина, но к
тому механизму, который вызвал сенсацию, они имели
весьма отдаленное отношение. В основном каждый из
сторонников и оппонентов машины Н. Дина давал ей
свою интерпретацию, а затем защищал ее или опро-
вергал, в зависимости от того, относится ли он к сто-
ронникам или противникам.
Однако сама постановка задачи была достаточно
ясная — речь шла о механизме, как уже отмечалось,
конструктивное выполнение которого нигде однозначно
не фигурировало, перемещающемся якобы под дейст-
вием одних внутренних сил. В то время среди разно-
образных точек зрения бытовало мнение, что, возможно,
в связи с особой важностью изобретение засекречено
Но несмотря на то что новое устройство не было об-
народовано, тем не менее считалось, что оно переме-
щается за счет внутренних сил. Поэтому, хотя отсут-
185
ствовала возможность обсуждения и критики устройст-
ва конкретного механизма, можно было перевести
дискуссию в сферу обсуждения принципиальной воз-
можности реализации способа, в силу того что он был
достаточно четко сформулирован.
Хотя з-акопы физики категорически отрицали воз-
можность движения за счет внутренних сил, тем не
менее некоторые достаточно известные инженеры и
ученые пытались отыскать механизмы действия такой
машины. Так, журнал «Изобретатель и рационализа-
тор» сообщал, что известный американский авиакон-
структор видит возможность реализации такого прин-
ципа за счет действия третьей производной перемеще-
ния механизма. Мы знаем, что первая производная
перемещения — это скорость, вторая — ускорение (или
скорость изменения скорости), а третья —это скорость
изменения ускорения. Были и другие теории. Дискус-
сии о машине Н. Дина давно прекратились, так
как каких-либо сведений о ее реализации так и не по-
явилось.
Между тем инерцоиды существуют и перемещают-
ся. Они неоднократно демонстрировались, приводили в
состояние шока тех, кто твердо знал, что этого быть
не может, и в восторг — поклонников инерцоидов.
Попробуем показать, что факт существования инер-
цоидов и неоспоримое положение механики, что дви-
жение за счет внутренних сил невозможно, отнюдь не
противоречат друг другу. Просто это разные вещи.
Добавим, что механизмы такого же, по существу,
принципиального устройства, как те, которые получили
названия инерцоидов, известны давно, еще до сообще-
ния о создании машины Н. Дина. Это было в конце
40-х — начале 50-х годов XX в., когда обнаружился
эффект перемещения механизма самобалансным вибра-
тором.
Сенсации не было, авторы машины проанализиро-
вали обстоятельства, в которых машина перемещалась,
и сравнительно быстро нашли причину явления. Речь
идет об испытаниях в шахте вибрационного угольного
струга, который использовался для отбойки угля.
Струг не рассчитывался на самоходный режим работы,
в процессе эксплуатации он должен был перемещаться
тяговым канатом. Однако при предварительных испы-
таниях выявилась способность его перемещаться само-
стоятельно.
186
Более того, уже давно имеются и серийно выпуска-
ются вибрационные механизмы, которые осуществляют
предопределенный им технологический процесс и пере-
мещаются по обрабатываемому изделию посредством
инерционного вибратора. Это самоходные вибрацион-
ные трамбовки для уплотнения грунта или бетона.
Они находят применение при строительстве дорог.
Читатель, который хотя бы бегло просмотрел эту кни-
гу, с ними знаком.
И наконец, добавим следующее. Давно известна
чрезвычайно глубоко разработанная теория, которая,
не опровергая законов механики, исчерпывающим об-
разом объясняет передвижение механизмов рассматри-
ваемого типа. Это теория процесса вибрационного
транспортирования, знакомая уже читателю. Мы при-
ложим эту теорию к инерцоидам и рассмотрим возмож-
ные механизмы их движения. Этих механизмов не-
сколько больше, чем практически используется винер-
цоидах.
Прежде всего выясним, какие силы действуют в
инерцоидах? Это периодически меняющаяся возмущаю-
щая сила привода, сила сопротивления от трения ко-
лес о поверхность, по которой происходит перемеще-
ние, от трения в осях колес или вообще от трения в
любом опорном механизме, который может быть исполь-
зован вместо колес. В направлении движения могут
действовать и составляющие силы тяжести, если дви-
жение происходит по наклонной поверхности. Привод
создает силу, периодически меняющую свое направле-
ние, поэтому он может обеспечить лишь возвратно-
поступательное движение механизма относительно не-
которого его среднего положения.
Но, как мы уже отметили, на механизм действуют
еще силы сопротивления. Можно попытаться создать
асимметрию равнодействующей движущих сил и сил
сопротивления. В этом случае будет обеспечено направ-
ленное движение механизма. В механизме действуют
силы сухого трения. Эти силы зависят от коэффициен-
та трения, силы прижатия друг к другу контакти-
рующих тел, направления скорости их относительного
движения (силы трения направлены всегда противопо-
ложно относительно скорости движения взаимодейст-
вующих тел) и в небольшой степени от величины ско-
рости их относительного движения. Есть несколько
возможностей организации взаимодействия сил трения
187
Р и с. 38. Бпгармонический
инерционный вибратор
а — возмущающая сила;
б — схема; со( и ы2 — угло-
вые скорости вращения де-
балансов первой и второй
ступеней соответственно
с движущей силой в целях создания асимметрии их
равнодействующей.
Хотя приводной механизм не может создавать сил,
величина которых в среднем была бы различной при
действии в противоположные стороны, однако можно
менять максимальные значения этих сил. Первая воз-
можность — использовать приводной механизм с асим-
метричной возмущающей силой. Такой привод может
Р н с. 39. Инерцоид
а — угол наклона основания; В — угол наклона вибратора; Ftp — воз-
мущающая сила; FB и Fr — вертикальная и горизонтальная состав-
И и
ляющие возмущающей силы соответственно
188
быть выполнен в виде четырехдебалансного вибратора,
у которого одна пара дебалансов вращается с удвоен-
ной угловой скоростью (рис. 38, а). В этом случае мак-
симальные значения сил, действующих в противопо-
ложные стороны, будут различными по величине,
средние же их значения за цикл будут одинаковыми
(рис. 38, б). Иначе говоря, большая сила действует
в продолжение меньшего промежутка времени, чем
меньшая.
Для обеспечения движения механизма в желаемом
направлении нужно таким образом подобрать соотно-
шение между силами трения и движущими силами,
чтобы максимальное значение движущей силы, дейст-
вующей в сторону, противоположную направлению
движения, не превосходило силы трения. В этом слу-
чае перемещения механизма в нежелаемом направле-
нии не происходят. Механизм будет перемещаться
только вперед в те моменты времени, когда движущая
сила больше силы трения.
Возможно перемещение и при наличии привода,
создающего симметричную возмущающую силу. Для
этого также используют силу трения, периодически
меняя ее по величине. Управлять периодическим изме-
нением величины возмущающей силы чрезвычайно
просто. Для этого нужно несколько наклонить привод
по отношению к горизонтали. Надо сказать, что такой
незначительный наклон привода может возникнуть при
сборке механизма. При этом человек, изготовивший
инерцоид, может и не подозревать о его наличии, что
в дальнейшем и может привести к необъяснимым ре-
зультатам, если исходить из того, что сила действует
горизонтально. Наклон привода к горизонту может воз-
никнуть и в том случае, когда поверхность, по кото-
рой перемещается механизм, имеет наклон.
Так что же дает наклон вибратора? При наклоне
вибратора по отношению к горизонту в направлении
силы тяжести начинает действовать составляющая воз-
мущающей силы (рис. 39). Но так как возмущающая
сила периодически меняет направление, то эта состав-
ляющая то складывается с силой тяжести, то вычита-
ется из нее, поэтому сила трения периодически меняет-
ся по величине.
Теперь поступим, как и в предыдущем случае. Со-
размерим силу трения и движущую силу таким обра-
зом, чтобы сила трения была больше движущей силы
189
в те моменты, когда движущая сила действует в на-
правлении нежелательного перемещения. При этом
механизм будет перемещаться только в желаемом на-
правлении.
Как же подобрать необходимый режим работы ме-
ханизма? Очень просто. Нужно увеличивать угол уста-
новки привода по отношению к горизонтали до тех пор,
пока механизм не начнет перемещать устройство в за-
данном направлении, т. е. в сторону подъема.
Перемещение инерцоида может осуществляться за
счет более тонких и менее очевидных явлений. Если
по каким-либо причинам колебания механизма в раз-
ных направлениях происходят с несколько отличными
скоростями, то направленное движение может созда-
ваться вследствие зависимости коэффициента трения
от относительной скорости поверхностей трения. Одна-
ко с повышением скорости в некоторых пределах
коэффициент трения падает, поэтому механизм будет
перемещаться в сторону, в которую действует большая
скорость.
В принципе возможен такой случай, что механизм
тем пли иным способом получит начальный импульс
в каком-либо произвольном направлении. И если дви-
жение в этом направлении начнется, то в дальнейшем
оно будет поддерживаться именно за счет того, что
сопротивления движению именно в направлении пере-
мещения меньше, чем в противоположную сторону.
Может влиять также некоторая неравномерность дви-
жения приводного механизма, а еледовательнот и флюк-
туации возмущающей силы.
Следует отметить, что движения, обусловленные
такими эффектами, неярко выражены и механизм бу-
дет перемещаться довольно неуверенно. Однако, если
он хоть как-то перемещается, при желании можно при-
нять участие в дискуссиях, связанных с проблемой
инерцоидов.
Хотелось бы еще раз подчеркнуть, что все здесь
изложенное ни в коей мере не подрывает интерес к
устройствам типа инерцоидов, которые в силу не всег-
да достаточно ясного механизма их действия вызывают
вокруг себя острые споры. Наоборот, исследования в
новых направлениях должны продолжаться и быть на-
правлены на выявление возможных механизмов дейст-
вия инерцоидов, что может быть весьма полезным в
некоторых технических приложениях.
190
Один из таких механизмов, основанный на управ-
лении величиной коэффициента трения, рассматривал-
ся ранее. Это механизм, приводимый в действие инер-
ционным вибратором и установленный на колесах,
имеющих муфты свободного хода, подобные втулке в
заднем колесе велосипеда. Такая муфта допускает сво-
бодное вращение колеса в одном направлении и затор-
маживает его при попытке вращения в противополож-
ную сторону.
Как поведет себя механизм на таких колесах? При
действии силы привода в разрешенную сторону меха-
низм покатится на колесах. При этом действует сила
трения качения. При изменении направления движу-
щей силы колеса затормозят и механизм можно будет
сдвинуть, только заставив колеса перемещаться «юзом».
В этом случае будет действовать большая сила — сила
трения скольжения, которая на 1—2 порядка выше
силы трения качения. Вследствие больших различий в
условиях перемещения механизма в разных направле-
ниях такие устройства перемещаются стабильно и
способны создавать большую тяговую силу.
Зачем такой механизм нужен? Дело в том, что у
него есть принципиальные отличия от прочих колесных
экипажей — движущая сила создается в нем не оттал-
киванием колеса от почвы, а прикладывается приводом
непосредственно к корпусу машины. Такое приложение
движущих сил имеет место также у гоночных автома-
шин с реактивными двигателями. Колесо передает на
почву лишь реакцию отката. Используя различные
методы вибротехники, можно существенно уменьшить
силу отката по сравнению с силами, действующими на
почву от приводных колес. Следовательно, рассмотрен-
ный механизм может перемещаться по слабым почвам.
В промышленности широко распространен метод
вибрационного уплотнения бетона, грунтов. При строи-
тельстве дорог уплотнение бетона осуществляют вибро-
площадками. Такое устройство представляет собой
металлическую плиту, на которой установлен вибратор.
Площадку перемещают по уложенному бетону, который
под действием вибрации приобретает свойства теку-
чести и хорошо уплотняется. Таким же образом уплот-
няют и грунты. Поскольку перемещение виброплощад-
ки вручную с помощью троса представляет собой трудо-
емкую малопроизводительную операцию, то были
разработаны самоходные вибротрамбовки.
191
Такая вибротрамбовка не имеет специального меха-
низма для перемещения. Медленное ее движение осу-
ществляется посредством того же вибратора, который
служит для выполнения основной технологической опе-
рации — уплотнения бетона или трамбования грунта.
Перемещение вибротрамбовки достигается за счет соз-
дания колебаний под углом к горизонтали. Предусмот-
рена также возможность регулирования скорости дви-
жения путем изменения угла наклона вибратора.
Таким образом, инерцоиды успешно работают в
промышленности. Дальнейшее разнообразие их прин-
ципов и создание новых конструкций может открыть
новые сферы для приложения механизмов, движение
которых совершается с помощью вибраторов. Единст-
венное, что они не смогли сделать,— это нарушить фун-
даментальные законы механики.
Вибрационные роботы
Во многих производствах, таких, например, как сборка
узлов интегральных схем радиоэлектроники, необходи-
мы микроманипуляторы и роботы, совершающие не-
большие перемещения и имеющие невысокую грузо-
подъемность. Однако к ним предъявляются повышен-
ные требования в части быстродействия и точности.
В этих условиях применения особые преимущества
приобретают вибрационные механизмы.
Особо следует подчеркнуть возможность создания
виброманипуляторов со многими степенями подвижно-
сти. Дело в том, что возможности робота неизмеримо
возрастают с увеличением степени подвижности его
исполнительного механизма. Но для получения высо-
ких степеней подвижности с использованием традици-
онных схем приходится применять многочисленные
кинематические пары. Это снижает точность системы и
приводит к определенной громоздкости.
В системе самоходного микроманипулятора могут
быть использованы самоходные тележки, построенные
на базе линейных высокочастотных двигателей. Тележ-
ка имеет три степени подвижности: независимые пря-
молинейные перемещения в двух взаимно перпендику-
лярных направлениях и вращение вокруг центральной
оси. Возможное число схем таких тележек на базе вы-
192
Р и с. 40. Вибрационная система хода микроманипулятора
1 — платформа; 2—вибровозбудитель с асимметричными колебаниями;
3 — ударник; 4 — пружина
Рис. 41. Микроманипулятор с шестью степенями подвижности
1 — сферический вибровозбудитель; 2 — линейные вибровозбудители;
з — линейный вибровозбудитель выдвижения механической руки;
4 — захват
сокочастотных вибродвигателей велико. Рассмотрим в
качестве примера один из возможных вариантов
(рис. 40).
В тележке применены восемь вибровозбудителей с
асимметричными колебаниями. Вибровозбудители ском-
понованы попарно, каждый вибровозбудитель в паре
имеет противоположную направленность асимметрич-
ных колебаний. Иначе говоря, вибровозбудители раз-
вернуты в противоположные стороны. Пары вибровоз-
будителей расположены по сторонам платформы. Для
усиления асимметрии колебаний каждый вибровозбу-
дитель соединен с платформой с одной стороны пружи-
ной, а другая сторона, оснащенная ударником, непо-
средственно прижата к платформе. Вследствие этого
при достаточно интенсивных колебаниях вибровозбуди-
тель периодически отрывается от платформы, а затем
ударяет по ней.
Работа самоходной тележки основана на известном
принципе взаимодействия сил трения с несимметрич-
ными инерционными воздействиями. Движение проис-
ходит по реактивному принципу. При работе вибровоз-
будителей на платформу реактивно передаются усилия.
Усилия эти асимметричные и подобраны таким обра-
193
зом, чтобы при действии в заданном направлении они
преодолевали силы трения и смещали платформу. При
действии в противоположном направлении силы трения
не преодолеваются и платформа остается неподвижной.
Для обеспечения прямолинейных движений плат-
формы в направлении одной из взаимно перпендику-
лярных осей включаются вибровозбудители, направлен-
ные вдоль соответствующих осей. Работает одна пара
вибровозбудителей одинаковой ориентации. Для из-
менения направления движения включается пара виб-
ровозбудителей противоположной ориентации.
Система хода допускает прямолинейное движение
платформы в произвольном направлении. При надле-
жащем согласовании работы четырех вибровозбудите-
лей, расположенных по противоположным сторонам
платформы, можно обеспечить перемещение по произ-
вольной траектории.
Каким образом это достигается? Для этого сообща-
ют движение платформе одновременно по обеим осям,
включив четыре вибровозбудителя. Суммарное движе-
ние платформы будет формироваться в результате гео-
метрического сложения этих движений. Если скорость
составляющих будет постоянна па всем участке движе-
ния, то перемещение платформы будет происходить по
прямой, направленной под углом к координатным осям.
Чем больше скорость по одной из осей, тем под мень-
шим углом к ней будет направлено движение плат-
формы.
Меняя соотношение скоростей составляющих в про-
цессе движения, можно заставить двигаться платформу
по любой траектории. Платформа может также вра-
щаться в любом направлении вокруг своей централь-
ной оси. Вращение платформы происходит при одно-
временной работе четырех вибровозбудителей, сориен-
тированных в направлении вращения в одну сторону.
Направление вращения меняется включением четырех
вибровозбудителей противоположной ориентации. Ро-
бот или манипулятор, смонтированный на такой плат-
форме, обладает высокой степенью подвижности.
Если на самоходной платформе смонтировать ис-
полнительный орган (робота или манипулятора), так-
же обладающий значительным числом степеней под-
вижности, то можно получить весьма гибкий
манипулятор или робот. На базе высокочастотных виб-
родвигателей вращательного и линейного действия пе-
194
трудно создать микроманипулятор с шестью степенями
подвижности, основой устройства которого является
сферический вибровозбудитель с механической рукой
с захватом (рис. 41).
Сферический вибровозбудитель установлен между
тремя линейными вибровозбудителями. Контакт между
ними обеспечивается предварительным натяжением
стяжных пружин. Два линейных вибровозбудителя
жестко закреплены в вертикальном положении в кор-
пусе, и один поджимается пружиной. Вибровозбудите-
ли крепятся в корпусе в узлах колебаний, что устра-
няет передачу на него вибрации. Сферический вибро-
возбудитель совершает радиальные колебания,
линейные вибровозбудители могут работать в режиме
продольных и изгибных колебаний в плоскостях, ка-
сательных к сферическому вибровозбудителю.
Манипулятор перемещается в вертикальном направ-
лении при совместной работе сферического и линей-
ного вибровозбудителей. Движение обеспечивается про-
дольными вибровозбудителями, а управление — сфери-
ческим трением. В результате такой комбинации
колебаний в местах контактов сферического и линейно-
го вибровозбудителей создаются соударения. Под дей-
ствием возникающих при соударении сил происходит
перемещение сферического вибровозбудителя относи-
тельно линейных вибровозбудителей — вверх или
вниз — в зависимости от угла сдвига фаз между коле-
баниями.
Линейные вибровозбудители в режиме подъема и
опускания манипулятора колеблются в одной фазе.
Перемена движения на противоположное достигается
за счет изменения фаз колебаний всех линейных виб-
ровозбудителсй па 180°.
Поворот сферического вибровозбудителя вместе с
закрепленной на нем механической рукой в вертикаль-
ной плоскости вокруг одной из горизонтальных осей
осуществляется путем изменения направленности коле-
баний линейных вибровозбудителей. Один из линейных
вибровозбудителей колеблется в противофазе с осталь-
ными. При этом на сферическом вибровозбудителе соз-
дается вращающий момент. Под действием этого мо-
мента происходит поворот механической руки.
Для поворота вокруг второй горизонтальной оси,
в направлении которой вытянута механическая рука,
используются только два линейных и сферический виб-
195
ровозбудители. Для поворота руки косые соударения
в местах контакта сферического вибровозбудителя с
линейными также направляются в противоположные
стороны.
Поворот вокруг вертикальной оси обеспечивается
при совместной работе сферического и всех линейных
вибровозбудителей. Линейные вибровозбудители рабо-
тают в режиме изгибных колобанш! в плоскости, ка-
сательной к сферическому вибровозбудителю в точке
контакта. При одинаковой фазировке всех линейных
вибровозбудителей они сообщают крутильные колеба-
ния сферическому вибровозбудителю вокруг верти-
кальной оси.
Управляя силами трения радиальными колебания-
ми, можно обеспечить однонаправленный поворот ме-
ханической руки вокруг вертикальной оси. Меняя фа-
зировку колебаний сферического и линейных вибро-
возбудителей, управляют направлением вращения
руки вокруг вертикальной оси манипулятора.
Установив линейный вибровозбудитель на механи-
ческой руке, можно обеспечить ее удлинение и укоро-
чение. Вибровозбудитель вращательного действия обес-
печивает хватательные движения захватов.
Самым распространенным типом робототехнических
систем являются простейшие устройства — цикловые
роботы или манипуляторы. Среди всех робототехниче-
ских систем на их долю приходится 80—85%. У цик-
ловых манипуляторов закон движения исполнительно-
го органа определяется их конструктивным исполнени-
ем. Система управления предусматривает лишь изме-
нения цикла движения.
Может меняться последовательность включения
звеньев, имеющих собственную степень подвижности и
продолжительность этих включений. Кинематические
параметры механизма, величина и скорость перемеще-
ний определяются соответствующей установкой ограни-
чителей движения и регулировкой привода. Элементы
указанного манипулятора в процессе работы постоян-
но меняют направление движения — вперед-назад,
вверх-вниз, вправо-влево и т. д. В тихоходных уста-
новках этот характер движения элементов манипулято-
ра особых неприятностей не создает.
По-другому обстоит дело в быстроходных машинах.
Изменение достаточно высоких скоростей движения
элементов машины приводит к возникновению огром-
196
ных сил инерции. Для их преодоления приходится при-
менять двигатели высокой мощности. Соответственно
возрастают не только циркуляция энергии в системе,
но и ее затраты. Это связано с тем, что энергия, сооб-
щаемая двигателем манипулятору на участке разгона,
безвозвратно теряется при его торможении, необходи-
мом для изменения направления движения системы. То
есть проявляется органический недостаток механизмов
с жесткими звеньями и возвратными движениями, ког-
да они переходят недозволенный для них скоростной
барьер.
Средство борьбы с этим недостатком известно. Нуж-
но переходить к механизмам с упругими звеньями. Уп-
ругие звенья позволяют частично при зарезонансной
настройке или полностью в резонансном режимах
скомпенсировать силы инерции восстанавливающими
силами других связей. В резонансной машине привод
полностью защищен от действия сил инерции. И он
выполняет только свою основную задачу — преодоле-
вает силы сопротивления в системе и совершает по-
лезную работу по перемещению деталей.
Запросы производства по увеличению быстродейст-
вия цикловых манипуляторов привели к тому, что ме-
тоды вибротехники стали применяться и в робототех-
нических системах. Для компенсации сил инерции
звеньев, совершающих возвратно-поступательные пря-
молинейные перемещения, находят применение самые
разнообразные упругие элементы, например винтовые
пружины растяжения-сжатия. При маятниковых дви-
жениях можно использовать также пружины кручения.
Разработана интересная конструкция циклового ро-
бота, в котором силы инерции подвижных частей ском-
пенсированы восстанавливающими силами упругих
связей. Робот имеет всего два подвижных звена-рыча-
га (рис. 42). Первый рычаг установлен на основании
с помощью шарнира и упругого элемента, создающего
на нем восстанавливающий момент. В среднем поло-
жении рычага восстанавливающий момент равен нулю.
В крайних положениях рычага он имеет максимальное
значение.
На конце первого рычага шарнирно смонтирован
второй рычаг. Оси обоих рычагов соединены друг с
другом посредством шкивов и зубчатого ремня. На сво-
бодном конце второго рычага имеется механический
захват. Передаточное отношение между шкивами пе-
197
Рис. 42. Цикловой робот с упругими связями
1 — перемещаемая деталь; 2 — второй рычаг; з — основной рычаг;
4 — пружина; 5 — основание; 6 — захват
редачи подобрано таким образом, чтобы при осуществ-
лении рабочего цикла механический захват перемещал-
ся по горизонтали. Это очень важно, так как при этом
не приходится затрачивать энергию на подъем детали.
Привод робота может осуществляться электрическим
или каким-либо другим приводом.
При эксплуатации такого манипулятора в конце ра-
бочего хода накопленная кинетическая энергия не те-
ряется из-за преобразования демпферами в тепло и
рассеяния в пространстве, а переходит в энергию сжа-
тия пружин. При обратном ходе энергия возвращается
механизму. Двигатель добавляет в систему лишь не-
много энергии, необходимой для компенсации потерь
от трения. Быстродействие робота зависит от его соб-
ственной частоты колебаний вследствие значительного
сокращения потребления энергии и скомпенсированно-
сти сил инерции и восстанавливающих сил упругих
связей.
Вибрация
не должна вредить человеку
Широко известно, что воздействие вибрации, основны-
ми источниками которой являются средства современ-
ной техники, оказывает неблагоприятное воздействие
на здоровье человека. При высокой интенсивности в
некотором диапазоне частот действие ее является про-
сто губительным. Вибрации с частотой 7—8 Гц, блцз-
198
кой к собственным частотам внутренних органов, при-
водят к серьезным нарушениям важнейших систем
жизнедеятельности человека и при достаточной интен-
сивности могут вызвать необратимые изменения в ор-
ганизме и даже смерть.
Не следует думать, что воздействие вибрации на
организм человека в другом диапазоне частот и при
невысоких интенсивностях происходит бесследно.
Шум и вибрация ухудшают самочувствие, вызывают
усталость. Регулярное воздействие вибрации па про-
тяжении длительного времени приводит к накоплению
вредных последствий и в результате может повести к
серьезным заболеваниям.
В настоящее время уделяется чрезвычайно серьез-
ное внимание разработке мер защиты человека от виб-
рации и шума. Многие наиболее виброактивные, а сле-
довательно, опасные для операторов машины и руч-
ной инструмент подверглись коренной переработке,
что позволило существенно снизить, а в ряде случаев
привести в соответствие с допустимыми нормами созда-
ваемые ими вибрационные воздействия.
Защита обслуживающего персонала от вредного
воздействия вибрации и шума, создаваемых вибрацион-
ными машинами, представляет собой совершенно осо-
бую задачу виброзатциты. В машинах обычного невиб-
рационного принципа действия (в которых вибрация и
шум возникают вследствие конструктивных несовер-
шенств или возбуждаются внешними нагрузками) виб-
рация и шум — чисто паразитные явления и могут
быть теми или иными известными методами уменьше-
ны до допустимых порм или при удачном решении во-
обще устранены.
В машинах вибрационного действия вибрация рабо-
чих органов является основным фактором осуществ-
ления рабочего процесса, параметры ее задаются со-
ответственно с требованиями оптимального ведения
технологического процесса. Естественно, не может
быть и речи, чтобы эти колебания как-то задемпфиро-
вать или уменьшить.
Таким образом, к вибрационным машинам со сто-
роны технологии и техники безопасности предъявляют-
ся противоположные требования. По условиям эффек-
тивного ведения технологического процесса необходи-
мо интенсифицировать колебания рабочих органов
вибромашины, а с точки зрения снижения вредных
199
вибрационных воздействий и шума на обслуживающий
персонал следует всеми способами устранять коле-
бания.
Можно выделить два основных источника вибра-
ции и шума при работе вибрационной машины, небла-
гоприятно воздействующих на обслуживающий персо-
нал. Это колеблющиеся части машины и обрабатывае-
мая среда, взаимодействующая с рабочими органами.
Вибрации, создаваемые самой вибрационной машиной,
характеризуются определенным уровнем виброскоро-
стей и виброускорений. Вибрации и шум, возникающие
при взаимодействии с рабочей нагрузкой, носят случай-
ный характер, характеризуются широким диапазоном
частот и резкими колебаниями интенсивности.
Для защиты обслуживающего персонала от упоря-
доченной вибрации подвижных частей вибрационной
машины применяются традиционные методы виброза-
щиты: виброизоляция машины от несущих конструк-
ций зданий, уравновешивание подвижных частей, ус-
тановка динамических гасителей колебаний на опорных
конструкциях и опирание вибромашины в неподвиж-
ной точке колебательной системы.
Борьба с вибрациями, возбуждающимися в процес-
се взаимодействия рабочего органа с нагрузкой, пред-
ставляет несравненно более сложную задачу. Арсенал
методов, предназначенных для решения этой задачи,
несравненно более скромный. Здесь следует упомянуть
метод замыкания рабочих нагрузок непосредственно на
обрабатываемой среде, это обеспечивает уравновеши-
вание рабочих нагрузок на машину и устраняет ее
паразитные колебания. Сюда относится также способ
активной компенсации рабочей нагрузки возмущающей
силой специального регулируемого привода.
В целях снижения шумообразования разрабатыва-
ются режимы работы, исключающие генерацию шумов
в наиболее неблагоприятных для восприятия обслужи-
вающим персоналом диапазонах, снижается уровень
циркуляционной энергии, излучающие поверхности по
возможности обращаются в сторону обрабатываемой
среды. Широко применяются общие методы снижения
уровня и подавления шума, такие, как повышение
жесткости и обребрение вибрирующих конструкций,
покрытие звукопоглощающими материалами (резина-
ми, полимерами, мастиками), применение многослой-
ных панелей, кожухов и т. д.
200
Как же сформулировать задачу защиты обслужи-
вающего персонала от вибрации, создаваемой вибра-
ционными машинами? Мы уже знаем, что режим виб-
рации рабочих органов установлен требованиями
технологического процесса. Общая тенденция интен-
сификации производства не только не допускает ка-
ких-либо послаблений, но требует дальнейшего повы-
шения напряженности режимов вибрационных машин.
Таким образом, простые пути перехода па спокойные
режимы закрыты.
Надо искать более прогрессивные решения. Коротко
можно сформулировать проблему так: интенсивные ре-
жимы колебаний рабочих органов, слабо колеблющиеся
или вообще неподвижные опорные конструкции. Об-
ласть действия интенсивной вибрации надо ограничить
зоной, в которой осуществляется технологический про-
цесс. Все, с чем соприкасается обслуживающий пер-
сонал, в идеале не должно быть подвержено вибрации
или в крайнем случае должно вибрировать в пределах
допустимых норм.
Рассмотрим арсенал методов, в той или иной степе-
ни допускающих достижение желаемых результатов.
Попробуем защитить оператора от вредного воздейст-
вия вибрации, которую создает вибрационная машина
с широко распространенным эксцентриковым приво-
дом. Принципиальная схема такой машины проста.
Она состоит из рабочего органа, установленного на
упругих элементах на раме, привод также установлен
на раме и соединен упругим шатуном с рабочим орга-
ном. Следует добавить, что рама жестко соединена с
несущими конструкциями здания.
Вид, амплитуды и частоты колебаний рабочего ор-
гана заданы по технологическим соображениям. Коле-
бания в целом интенсивные. Рама жестко соединена
с несущими конструкциями здания, поэтому ее ко-
лебания в полной мере будут передаваться перекрытию.
Находящийся в здании персонал через перекрытие бу-
дет подвергаться вибрации.
Значит, основной нашей целью должно быть уст-
ранение колебаний рамы. Какими путями колебания
рабочего органа вибромашины передаются раме? Это
происходит через упругие элементы и подшипники
привода. Сила давления упругих элементов пропорцио-
нальна их жесткости и деформации. Деформация рав-
на перемещению рабочего органа, а поэтому изменить
201
ее мы не можем. Таким образом, остается уменьшить
их жесткость.
Об этой возможности мы поговорим в свое время.
Усилие, которое привод сообщит рабочему органу,
в полной мере передается на раму через его подшип-
ники. Общее усилие, действующее на раму, равно сум-
ме усилий упругих элементов и привода.
На рабочий орган также действуют усилия приво-
да упругих элементов, а кроме того, рабочие нагруз-
ки от обрабатываемой среды и силы инерции. Так как
вся система сил находится в равновесии, то мы можем
заключить, что силы привода и упругих связей точно
равны по величине, но, естественно, направлены в сто-
рону, противоположную силам инерции и рабочим со-
противлениям.
Отсюда следует очень важный вывод: усилия, дей-
ствующие па раму, формируются рабочей нагрузкой и
силами инерции. Рабочие сопротивления определяют-
ся технологическим режимом, и с ними ничего сделать
нельзя, а силами инерции следует запяться. Произве-
дем уравновешивание сил инерции.
Силы иперции можпо уравновесить центробежны-
ми силами вращающейся массы. Установим на валу
привода неуравновешенную массу, подобрав величи-
ну ее таким образом, чтобы создаваемая при ее вра-
щении центробежная сила точно соответствовала мак-
симальной силе инерции рабочего органа вибромаши-
ны, по была направлена в противоположную сторону.
Таким способом мы полностью уравновесим силу инер-
ции, действие ее на раму будет компенсировано дейст-
вием центробежной силы.
Однако пока преждевременно считать задачу ре-
шенной, так как полное уравновешивание сил, дейст-
вующих на раму, будет достигаться только в верти-
кальном направлении. Центробежная сила неуравно-
вешенной массы сама создаст неуравновешенную
составляющую в горизонтальном направлении.
Посредством неуравновешенной одиночной массы
производят обычно лишь частичное уравновешивание
сил инерции рабочего органа. Для этого величину
центробежной силы принимают меньше максимально-
го значения силы инерции рабочего органа. Достига-
ется определенный компромисс — снижают вертикаль-
ную составляющую сил, действующих на раму, но зато
создают колебания вдоль рамы. Целесообразность тако-
202
Рис. 43. Средства виброзащиты
Уравновешивание сил инерции массами: а — вращающимися, б — ко-
леблющимися. Виброизоляция: в — амортизационными упругими свя-
зями, г — реактивными массами. Применение: 0 — упругих рабочих
органов, е — динамического гасителя колебаний, ж — опирание в не-
подвижной точке колебательной системы; з — замыкание рабочей
среды между противофазно колеблющимися рабочими органами
го решения должна рассматриваться особо в каждом
конкретном случае.
Однако с помощью вращающихся масс можно пол-
ностью компенсировать силы инерции рабочего орга-
на, не создавая никаких колебаний в горизонтальном
направлении. Для этого несколько изменим конструк-
цию привода. Соединим шестерней два эксцентриковых
вала и оба шатуна закрепим с помощью одной оси на
рабочем органе (рис. 43, а). Неуравновешенные массы
расположим, как в вибраторе типа самобаланса.
Мы уже знаем, что таким способом мы уравнове-
сим боковые составляющие центробежных сил и по-
лучим одну силу, действующую навстречу силе инер-
ции грузонесущего органа. Такой комбинированный
эксцентриково-самобалансный привод предотвращает
203
передачу колебаний на раму и перекрытие, обеспечи-
вая защиту обслуживающего персонала от вредного
воздействия вибрации.
Хотя эксцентриково-самобалансный привод и спо-
собствует защите обслуживающего персонала от вред-
ного воздействия вибрации, но конструкция его слож-
ней, чем у приводов обычного типа, поэтому изыски-
ваются и более простые способы решения задач
виброзащиты. А что если привод не соединять с рамой?
Тогда, естественно, он не будет передавать на раму
вибрацию. Можно выполнить вибромашину таким об-
разом, чтобы она не опиралась на раму. Разрежем
вдоль рабочий орган вибромашины на две части и ус-
тановим привод таким образом, чтобы на одной части
находился эксцентриковый вал, а на второй крепился
шатун (рис. 43, б).
При' таком устройстве привода части рабочего ор-
гана перемещаются в противоположные стороны. Это
создает возможность скомпенсировать реакции гори-
зонтальных упругих элементов на раму. Машина пе-
редает вибрацию на раму только через вертикальные
упругие элементы. Обычно эти реакции значительно
меньше горизонтальных.
При такой схеме вибрационной машины можпо по-
пытаться и далее снижать вибрации на раму. Самый
простой путь — это уменьшить жесткость вертикаль-
ных упругих элементов. Если этого сделать нельзя по
каким-либо причинам, то можно поступить так же,
как и с приводом. Соединим рабочие органы, минуя
раму, друг с другом упругими элементами. Установим
вибромашину на раму на упругих элементах малой
жесткости. При этом значительно уменьшается неже-
лательная передача вибрации на опорные конструкции.
Таким образом, идея рассмотренных схем вибро-
защиты состоит в том, чтобы элементы машины, пере-
дающие усилия, привод и пружины, без опирания на
раму замкнуть в системе рабочих органов. Это сравни-
тельно просто достигается, однако для этого нужно
иметь два рабочих органа, перемещающихся навстречу
друг другу или, как говорят специалисты по вибротех-
нике, колеблющихся в противофазе.
В вибрационных машинах инерционного типа, в ко-
торых возмущающая сила создается центробежными
силами, привод может быть установлен непосредствен-
но на рабочем органе (рис. 43, в). Таким образом,
204
устраняется один из путей передачи вибрации на не-
сущие конструкции. В инерционной вибромашине рас-
пространение вибрации от рабочих органов может про-
исходить только через упругие элементы. Мы знаем,
что в этом случае снижение передаваемых усилий мо-
жет быть обеспечено уменьшением их жесткости.
Для пружин, рессор, резиновых элементов предел
снижения жесткости зависит от их прочности при на-
гружении весом вибрационной машины. В этих услови-
ях применения весьма эффективны пневмобаллонные
упругие элементы. Обладая высокой несущей способ-
ностью, они имеют малую жесткость. Этот тип упру-
гих элементов отличается также высокими шумопогло-
щающими свойствами.
Проведены опыты по установке инерционных виб-
ромашин на воздушной подушке. Такие вибромашины
практически не передают вибрации. Вибромашины
рассматриваемого устройства называют виброизолиро-
ванными, а мягкие упругие элементы, на которых они
устанавливаются,— амортизаторами.
Вибрационные машины, выполненные с простейшей
виброизоляцией, обеспечивают достаточно эффектив-
ную виброзащиту и отличаются простотой конструк-
ции. По существу, они состоят из одного рабочего ор-
гана, привода и амортизаторов. Однако такие вибро-
машины, имеющие упругую систему невысокой жест-
кости, могут работать только в зарезонансных режи-
мах. Значит, это большие нагрузки на привод,
органиченные амплитуды колебаний, повышенная ус-
тановочная мощность двигателей. Эти недостатки осо-
бенно нетерпимы, если машина тяжелая и быстро-
ходная.
Для высокопроизводительных вибрационных ма-
шин, работающих с большими амплитудами колебаний,
более подходит резонансный режим работы. Однако для
этого нужно иметь жесткие упругие связи. При рабо-
те со значительными амплитудами это означает пере-
дачу больших усилий на несущие конструкции и созда-
ние неблагоприятных условий работы для обслуживаю-
щего персонала.
Виброизоляция таких машин осуществляется по-
средством реактивной массы, опираемой на раму через
амортизаторы. В такой вибромашине рабочий орган ус-
тановлен с помощью упругих элементов большой жест-
кости (обеспечивающих резонансный режим работы)
205
аа реактивную массу с амортизаторами (рис. 43, г).
Привод может быть расположен как па рабочем орга-
не, так и на реактивной массе. Эта вибромашина слож-
нее и более металлоемка, но при обеспечении высокой
степени виброизоляции она позволяет реализовать ре-
зонансные режимы.
Таким образом, принципы виброизоляции машин
можно сформулировать так. Для снижения передачи
вибрационных нагрузок па несущие конструкции и
лучшей защиты обслуживающего персонала от вибра-
ционных воздействий следует по возможности умень-
шать жесткость амортизаторов и повышать частоту
колебаний рабочего органа. Для изготовления аморти-
заторов необходимо использовать упругие элементы,
имеющие высокую несущую способность при понижен-
ной жесткости.
Очень эффективное снижение передачи вибрации
на рабочее место оператора достигается при выполне-
нии рабочего органа вибромашины в виде упругих си-
стем (натянутая резина, пневмоподушка и т. д.), по-
мещенных в жестком каркасе. Каркас опирается на
раму с помощью амортизаторов (рис. 43, д).
Машина настраивается таким образом, чтобы уп-
ругая система под нагрузкой работала в околорезонанс-
ном режиме. В этом случае при ограниченных ампли-
тудах колебаний каркаса можно создавать интенсив-
ные режимы вибрации нагрузки. При этом опорные
амортизаторы будут передавать на рабочее место опе-
ратора незначительные вибрации.
Если возникла необходимость снижения передачи
вибрации па рабочее место оператора от вибрационной
машины, не имеющей никаких средств виброзащиты,
то можно применить динамические гасители колебаний.
Динамический гаситель колебаний представляет собой
груз, установленный на пружине. Собственная частота
колебаний груза на пружине должна быть равна ча-
стоте колебаний вибромашины.
Если динамический гаситель установить на раме
вибромашины, то он начнет колебаться и реакции его
на раму будут направлены противоположно усилиям,
действующим на нее через упругие элементы рабочего
органа (рис. 43, е). Эти усилия компенсируют друг
друга, вследствие чего вибрация рамы уменьшается,
а в благоприятных случаях вообще может быть
устранена.
206
Наиболее низким уровнем передачи вибрации на
несущие конструкции характеризуются вибромашины,
опирающиеся на раму в неподвижной точке колеба-
тельной системы. Такая вибромашина имеет два рабо-
чих органа, соединенных жесткими и упругими свя-
зями. Привод сообщает рабочим органам колебания в
противофазе. В такой системе на жесткой связи име-
ется точка, которая при работе машины остается не-
подвижной, ее амплитуда равна нулю (рис. 43, ж).
В этих точках и осуществляется опирание рабочих
органов на рабочую раму. Поэтому при работе без на-
грузки она не совершает колебаний. При работе под
нагрузкой опорные точки совершают некоторые коле-
бания. Для снижения передачи рабочих нагрузок на
раму в опорных точках устанавливаются амортизирую-
щие упругие элементы.
В вибрационных машинах, в которых значитель-
ный вклад в колебания конструкции вносится рабочи-
ми нагрузками, рассмотренные методы защиты рабоче-
го места оператора от вибрации оказываются малоэф-
фективными. Рабочие нагрузки возбуждают случайные
колебания вибромашин, содержащие широкий спектр
частот. Рассмотрим два метода, пригодных для защи-
ты от вибрации в подобных ситуациях.
Чтобы предотвратить распространение вибрацион-
ных возмущений, создаваемых рабочими нагрузками
на опорные конструкции вибромашины, можно замк-
нуть действующие усилия между противофазпо ко-
леблющимися щеками, замыкаются на находящемся
между ними дробимом материале (рис. 43, к). Коле-
бания, возбуждаемые инерционными вибраторами и ра-
бочими нагрузками, передаются в равной степени на
каждую щеку и через упругие элементы далее на раму.
Так как усилия, передаваемые упругой подвеской щек,
равны и противоположно направлены, то они уравно-
вешиваются на раме.
Для предотвращения передачи случайных возмуще-
ний на несущие конструкции рама монтируется на
амортизаторах. Несмотря на то что в камере дробле-
ния действуют исключительно большие усилия, такая
система позволяет достаточно надежно защитить рабо-
чее место оператора от вибрационных воздействий.
Второй метод заключается в активной компенсации
колебаний, возбуждаемых рабочими нагрузками. Для
этого могут быть применены специальные поличастот-
207
ные вибраторы, создающие наряду с основной возму-
щающей силой дополнительные усилия, направленные
противоположно реакциям среды.
Если рабочие нагрузки имеют упорядоченный ха-
рактер, может быть применен вибратор с заранее по-
добранными параметрами (величины и сдвиги фаз
составляющих возмущающей силы). Возмущающие
силы, создаваемые вибратором, должны обеспечивать
максимальную возможную компенсацию колебаний,
возбуждаемых нагрузкой, и поддержание расчетных
колебаний рабочего органа.
Когда реакции среды носят случайный характер и
не могут быть заранее точно оценены, должна быть
применена управляющая вибратором система с обрат-
ной связью. Автоматическая система управления по-
стоянно регулирует возмущающую силу вибратора для
предотвращения нарушения колебаний рабочего органа
под действием реакции обрабатываемой среды. Полу-
чив расчетный режим колебаний вибромашины, можно
использовать один из рассмотренных методов вибро-
защиты рабочего места оператора.
Содержание
Предисловие........................................... 3
Техника традиционная и техника вибрационная ... 6
Как устроена и работает вибрационная машина? ... 11
Вибрация низкочастотная и высокочастотная............ 29
Виброкипящий слой — основа эффективных технологий 52
Пропало трение....................................... 64
Внброреология — что это такое?....................... 71
Вибрация транспортирует, поднимает грузы и перекачи-
вает жидкости........................................ 97
Породу можно раздробить и измельчить вибрацией . . . 107
Литье и кристаллизация в вибрационном поле .... 117
Вибрация уплотняет бетон и погружает сваи в грунт 123
Вибрация обрабатывает деталь со всех сторон сразу 133
Упр&вляя вибрацией, можно повысить эффективность ма-
шин ................................................ 140
Волновые устройства заявляют своп права............. 145
Двигатели и подшипники могут быть вибрационными 163
Впброимпульсный привод повышает эффективность ма-
шин ................................................ 173
«Бермудский треугольник» в вибротехнике............. 180
Вибрационные роботы..................................192
Вибрация не должна вредить человеку..................198